/









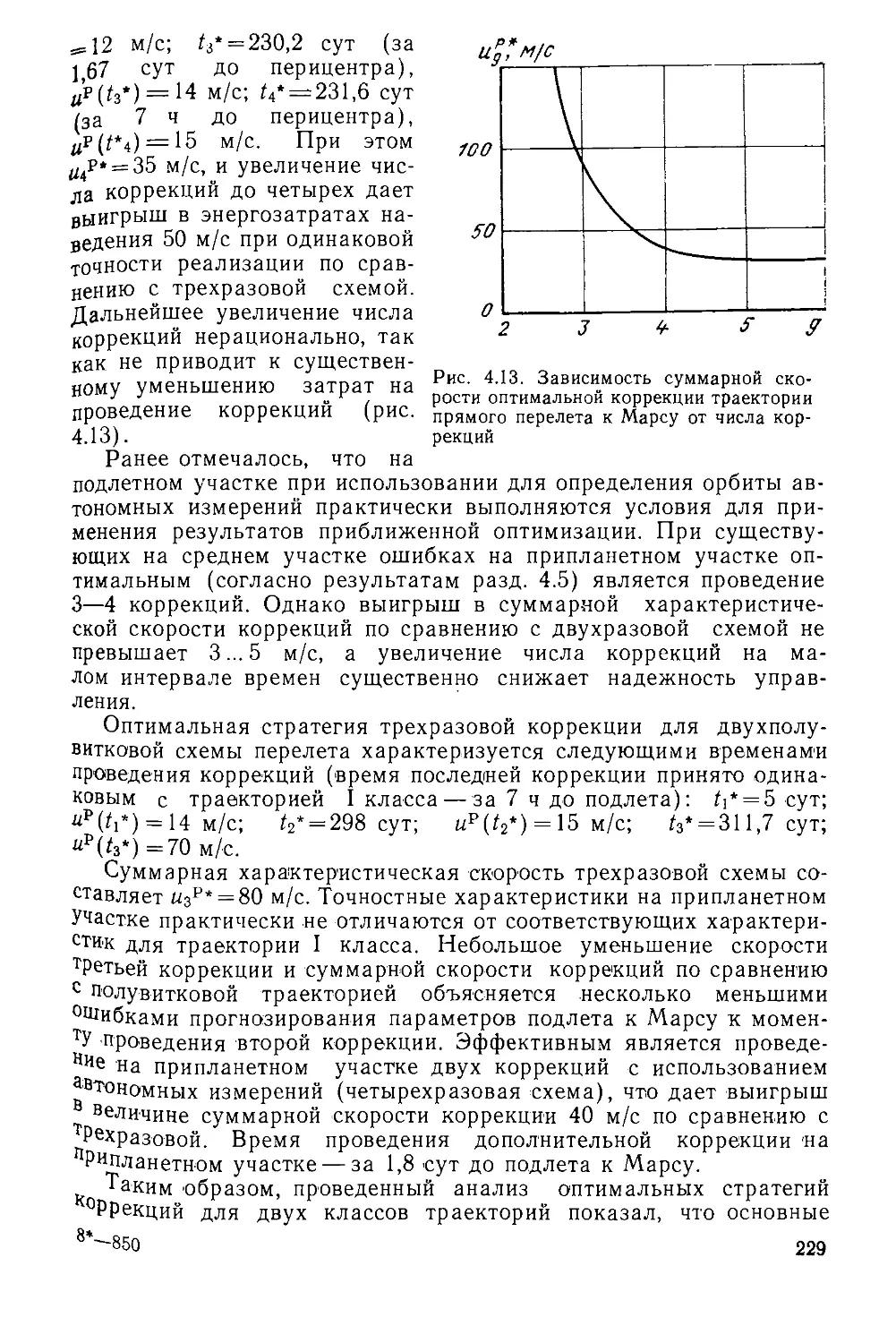




Текст
и
Москва
«МАШИНОСТРОЕНИЕ»
1987
УДК 629.785
Рецензент профессор В. А. Ярошевский
УДК 629.785
Иванов Н. М-, Поляков В. С. Наведение автоматических
межпланетных станций. — М.: Машиностроение, 1987. — 312 с.
С единых методических позиций освещена вся совокупность задач наведения,
связанных с проектированием и полетом автоматических межпланетных станций
(АМС). Приведена общая постановка проблемы, сформулированы критерии оптималь-
ности и определен состав корректируемых параметров. Даны модели движения ап-
паратов при различных предположениях о характере действующих в полете возмуще-
ний и погрешностей функционирования бортовых систем. Разработаны универсальные
методы решения задач наведения, оценки энергетических затрат и погрешностей реа-
лизации управления. Значительное внимание уделено выбору оптимальной стратегии
наведения, основанной на использовании обобщенного принципа максимума и чис-
ленных методов поиска экстремума. Рассмотрены приближенные способы исследова-
ния закономерностей наведения. Применение рекомендованных алгоритмов проиллю-
стрировано примерами из практики полетов автоматических станций «Венера» и
«Вега». Приведены результаты оптимизации стратегии коррекций траекторий движе-
ния перспективных АМС, предназначенных для полетов к Марсу, включая станции,
оснащенные электрореактивными двигателями малой тяги.
Для научных работников, занимающихся управлением и навигацией космических
аппаратов.
Библиогр.: 50 назв. Ил. 60. Табл. 6.
3607000000-125
И ----------------125-87
038(01)-87
© Издательство «Машиностроение», 1987
ПРЕДИСЛОВИЕ
Автоматические межпланетные станции, оснащенные ком-
плексами научной аппаратуры, являются эффективным средством
решения ряда фундаментальных научных проблем. С их помощью
в последнее десятилетие проведены уникальные исследования
Марса и Венеры как на поверхности планет, так и с орбит их
искусственных спутников. В настоящее время разрабатываются
аппараты для исследования малых небесных тел, таких как асте-
роиды, естественные спутники Марса — Фобос и Деймос; изу-
чаются возможности доставки образцов грунта с планет, пило-
тируемых полетов к соседним планетам.
Успех космических полетов, особенно таких, когда для реше-
ния поставленных научных проблем используется несколько взаи-
мосвязанных модулей или станций, в большой степени зависит
от развития теории и методов управления полетом, составной
частью которых являются задачи наведения. Правильный выбор
стратегии наведения, надежная оценка энергетических затрат и
ошибок проведения маневров и коррекций сказываются не только
на основных характеристиках проектируемой АМС, но и сущест-
венным образом определяют возможности управления ее движе-
нием в реальном полете. Одновременно большое значение приоб-
ретает синтез оптимальной стратегии управления движением, в
котором компромиссным образом учитываются результаты реше-
ния задач навигации и наведения АМС. Экспериментальный ха-
рактер полетов и ограниченное число запусков АМС по каждой
программе приводят к тому, что синтез стратегии наведения дол-
жен осуществляться при неполном знании фактических характе-
ристик бортовых систем, обеспечивающих проведение запланиро-
ванных маневров и коррекций. Поэтому исследование вопросов
наведения отличается большой сложностью.
Рассматривая проблему наведения, необходимо учитывать сле-
дующие два обстоятельства. Во-первых, как показал опыт косми-
ческих полетов, несмотря на общность целей и задач наведения,
имеются большие отличия в организации и способах управления
Движением космических аппаратов различного назначения, об-
ладающих различными техническими возможностями, среди кото-
рых следует выделить особый класс аппаратов — автоматические
межпланетные станции. Им присуще большое разнообразие схем
3
полета к планетам, и необходимо выбрать такие, которые обеспечи-
вают минимальные ошибки наведения и минимальные энергетичес-
кие затраты. Проведение всестороннего анализа наведения АМС
требует исследования значительного числа вариантов, что невоз-
можно без создания специализированных методов расчета маневра
и коррекций траекторий. Во-вторых, на АМС появились новые сред-
ства, обеспечивающие проведение навигационных измерений (сис-
темы автономной навигации), а также электрореактивные двигате-
ли малой тяги. Повышаются также требования к эффективности
наведения. Достаточно отметить, что за последнее десятилетие точ-
ность наведения современных АМС была повышена более че,м
на порядок практически без увеличения энергетических затрат
на управление. Реализация новых требований невозможна без
совершенствования методов наведения.
Разработка удобных, достаточно надежных и оперативных ме-
тодов решения задач наведения имеет большое практическое
значение. В последние годы издан ряд работ, касающихся прямо
или косвенно вопросов управления движением АМС. Однако
среди них нет такой, в которой содержалось бы систематическое
изложение методов анализа и синтеза стратегии наведения, свя-
занных со всеми этапами проектирования и обеспечения полетов
АМС. Авторы попытались в некоторой степени восполнить су-
ществующий пробел. В книге на основе анализа многолетнего
опыта разработки и создания АМС сформулирована проблема
баллистического обеспечения наведения с учетом ограниченных
возможностей наземных и бортовых систем. В рамках этой по-
становки с единых методических позиций рассмотрены приклад-
ные задачи расчета маневров и коррекций, приведены результаты
исследований основных закономерностей стратегии наведения АМС.
Несмотря на специфику наведения АМС, изложенные методы
решения основных задач и принятые допущения являются доста-
точно общими и могут использоваться при исследовании вопросов
управления различными космическими аппаратами.
Авторы считают своим долгом поблагодарить д-ра техн, наук
проф. В. А. Ярошевского за ценные замечания, высказанные при
рецензировании рукописи. Большую помощь в проведении числен-
ных расчетов оказали А. П. Гаврилов, Г. М. Дорда, Т. А. Ивано-
ва, Г. Ф. Конькова, В. П. Кореневич, М. Г. Мартиросов, Л. И. Ру-
сина, Ж. И. Христофоров. Материалы гл. 5 получены совместно
с А. Г. Воробьевым, а гл. 6 — с А. В. Добровым. Всем этим то-
варищам авторы также выражают свою искреннюю признатель-
ность.
Глава 1
НАВЕДЕНИЕ АВТОМАТИЧЕСКИХ
МЕЖПЛАНЕТНЫХ СТАНЦИЙ
1.1. Схемы полета АМС
Целевые задачи, стоящие перед АМС, в значительной мере
влияют на выбор схемы полета, под которой понимают совокуп-
ность характеристик, определяющих структуру станции и траек-
торию перелета к планете. Отличительной особенностью АМС
является большое количество разнообразных схем полета, кото-
рые могут использоваться для решения определенной научной
задачи или некоторого комплекса задач. В качестве примера
рассмотрим схемы полета советских автоматических станций
«Венера», предназначенных для непосредственного изучения пла-
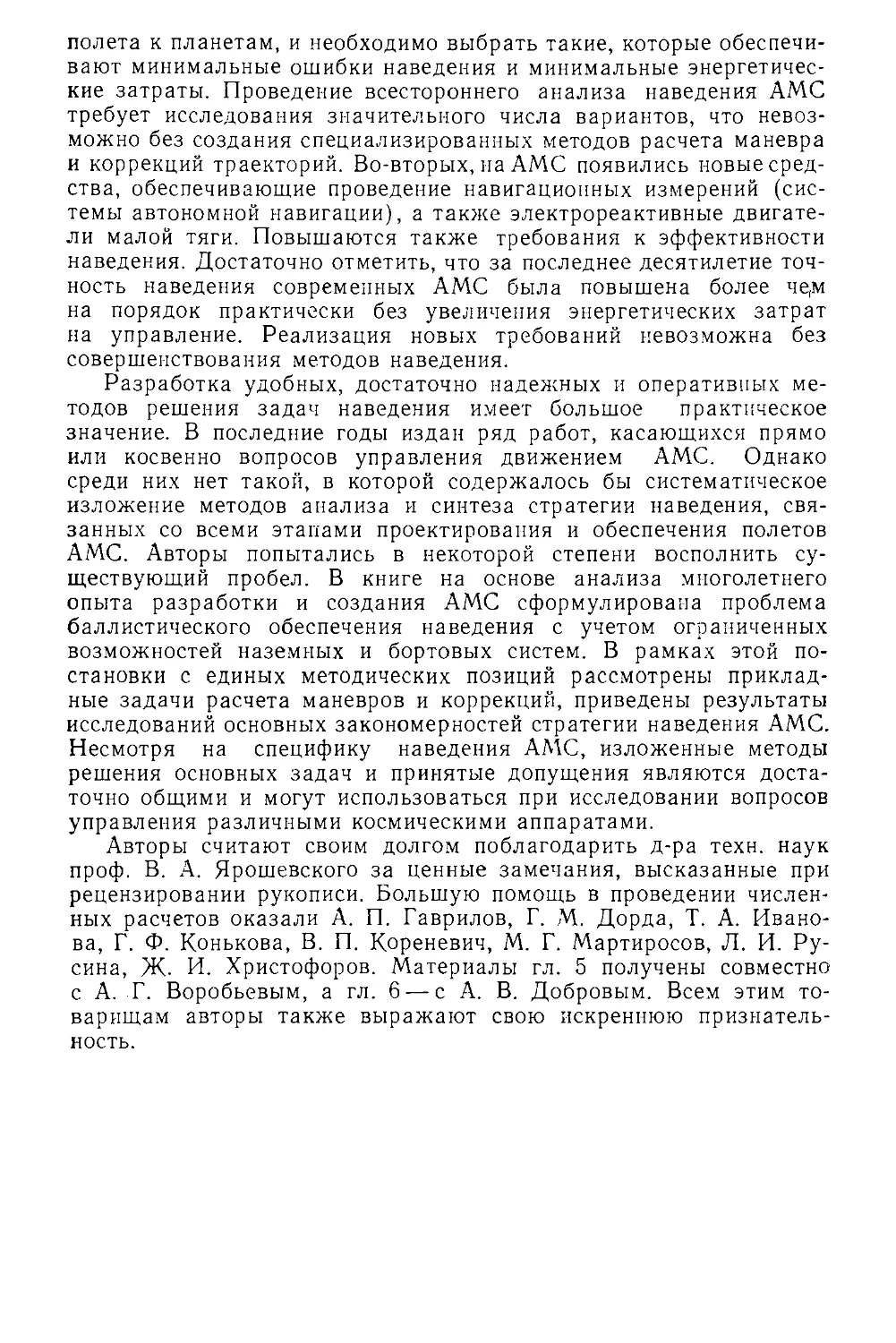
неты. Аппараты первого поколения («Вепера-4...-8») имели срав-
нительно простые схемы полета: выведение ракетой-носителем
АМС и разгонного блока на промежуточную орбиту ИСЗ; старт
с орбиты ИСЗ в конце первого витка и переход на межпланет-
ную орбиту перелета; отделение разгонного блока и полет АМС
по межпланетной траектории, обеспечивающей попадание в пла-
нету Венера; вход спускаемого аппарата (СА) в атмосферу,
спуск и посадка его на поверхность планеты. Во время спуска
СА осуществлялись исследования атмосферы Венеры и непосред-
ственная передача их результатов на Землю, что и являлось
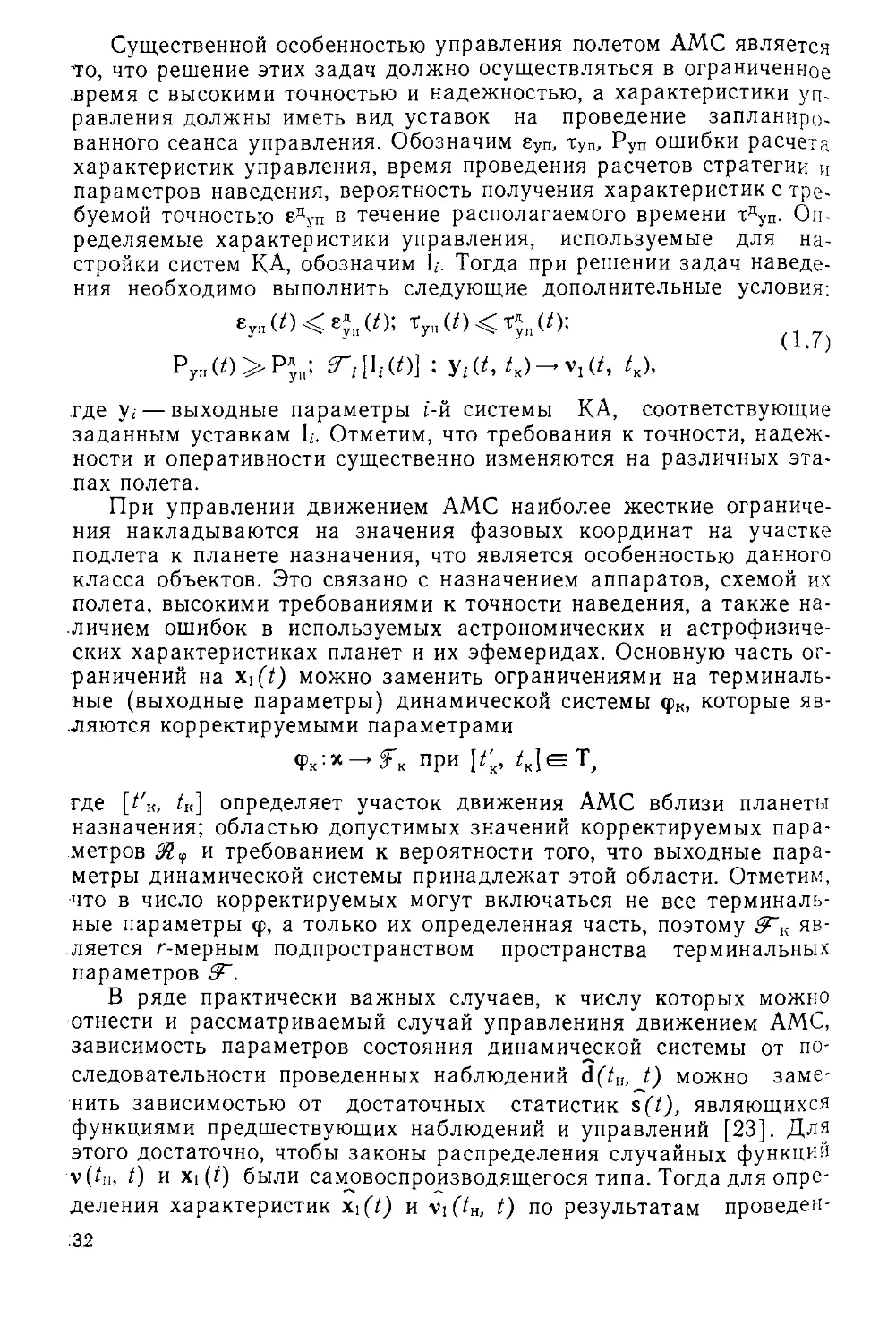
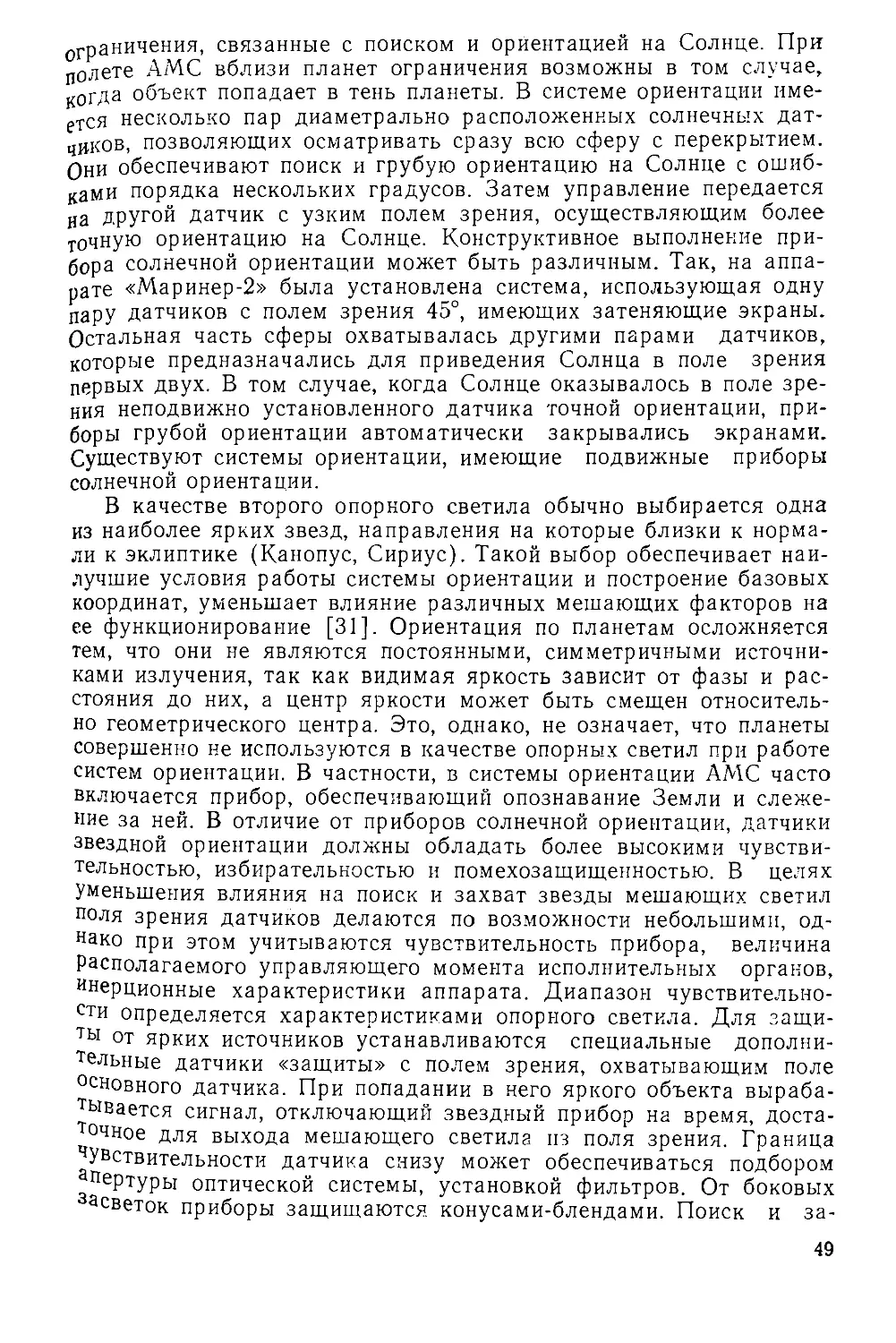
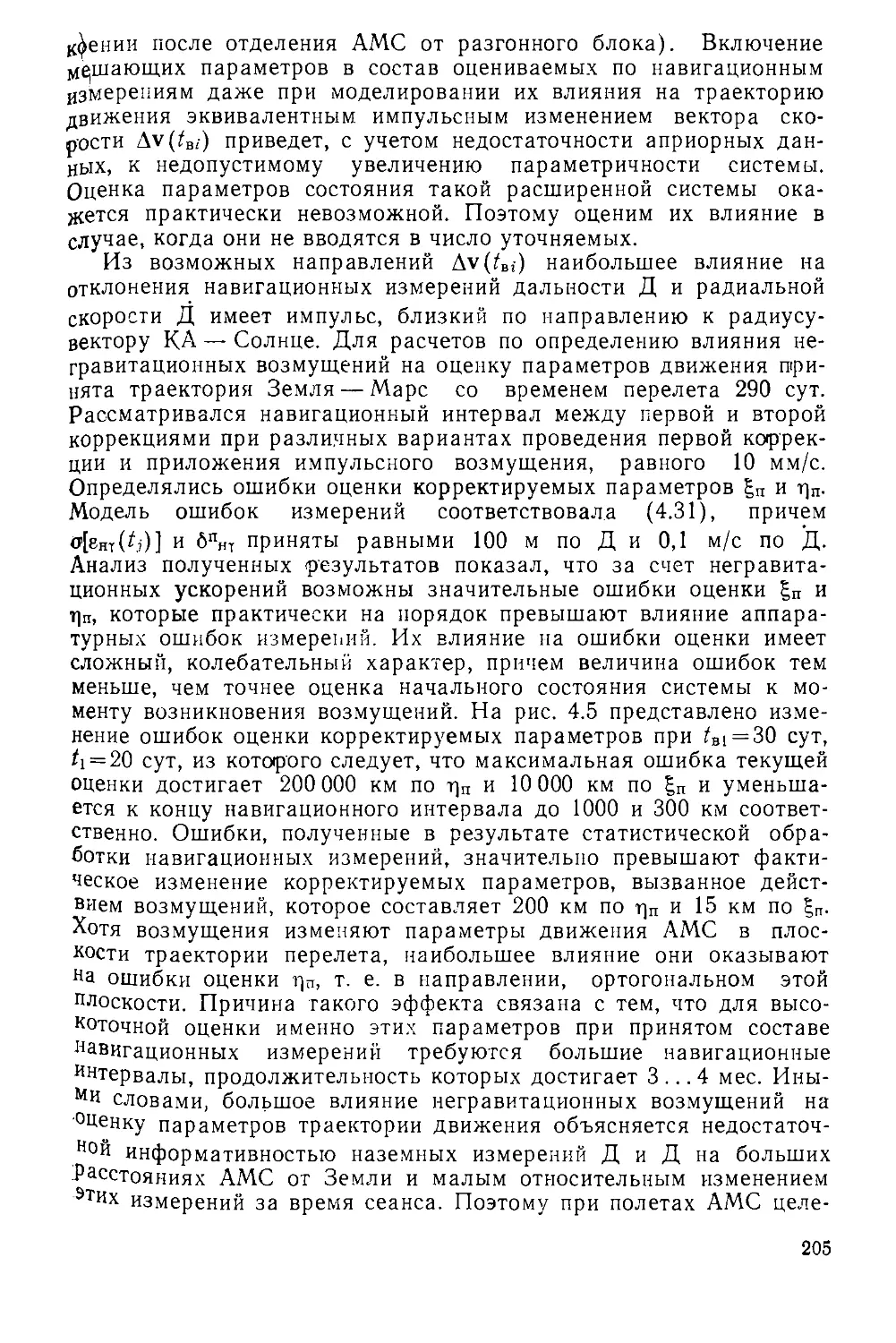
основной научной задачей полета этих КА (рис. 1.1).
Аппараты нового поколения («Венера-9...-14»), более совер-
шенные, решали и более сложные научные задачи: детальное
исследование атмосферы, особенно верхних ее слоев, получение
панорам поверхности планеты, а также дистанционное изучение
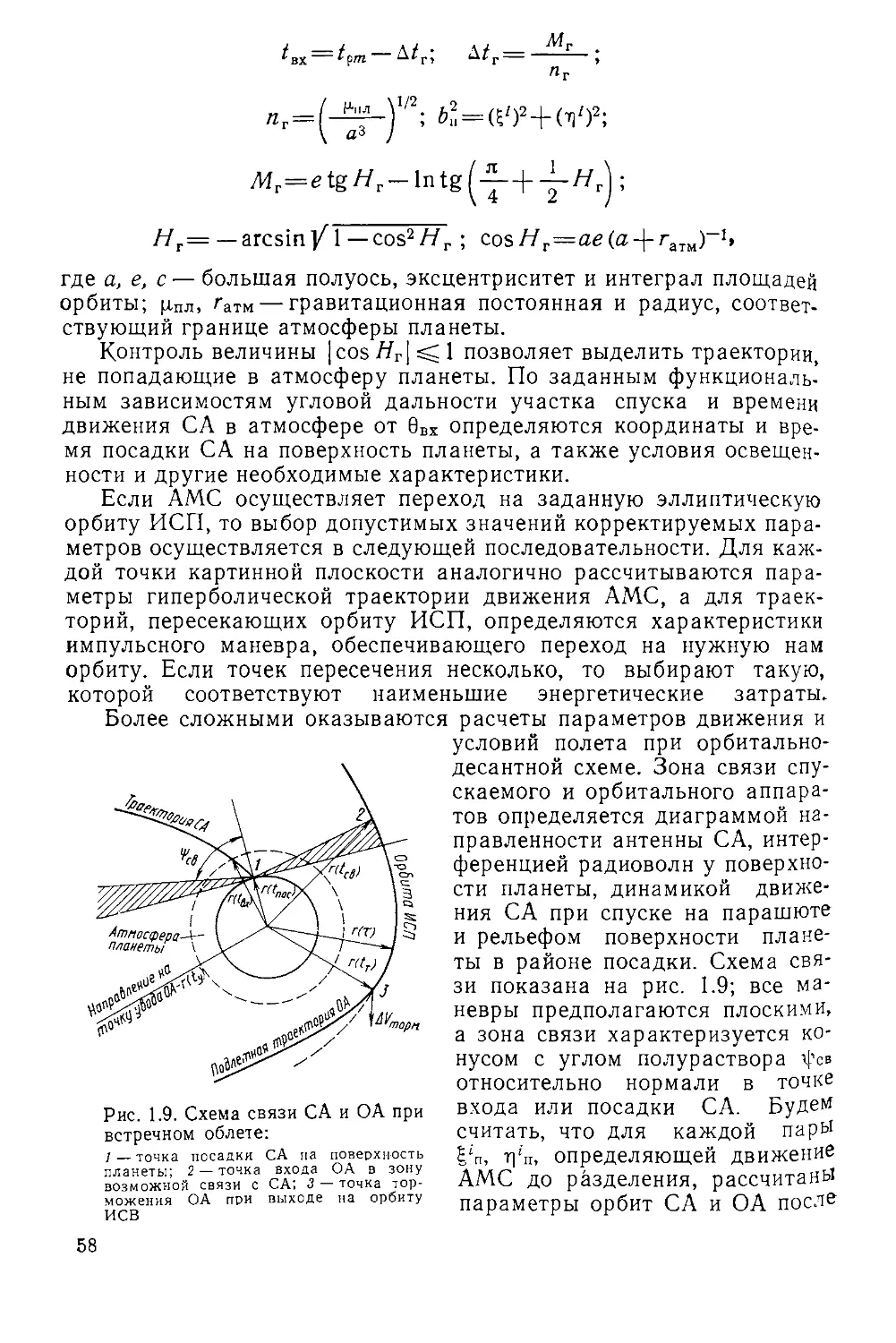
Венеры с орбиты искусственного спутника (ИСВ). Схемы полетов
этих АМС также были более сложными, особенно на участке
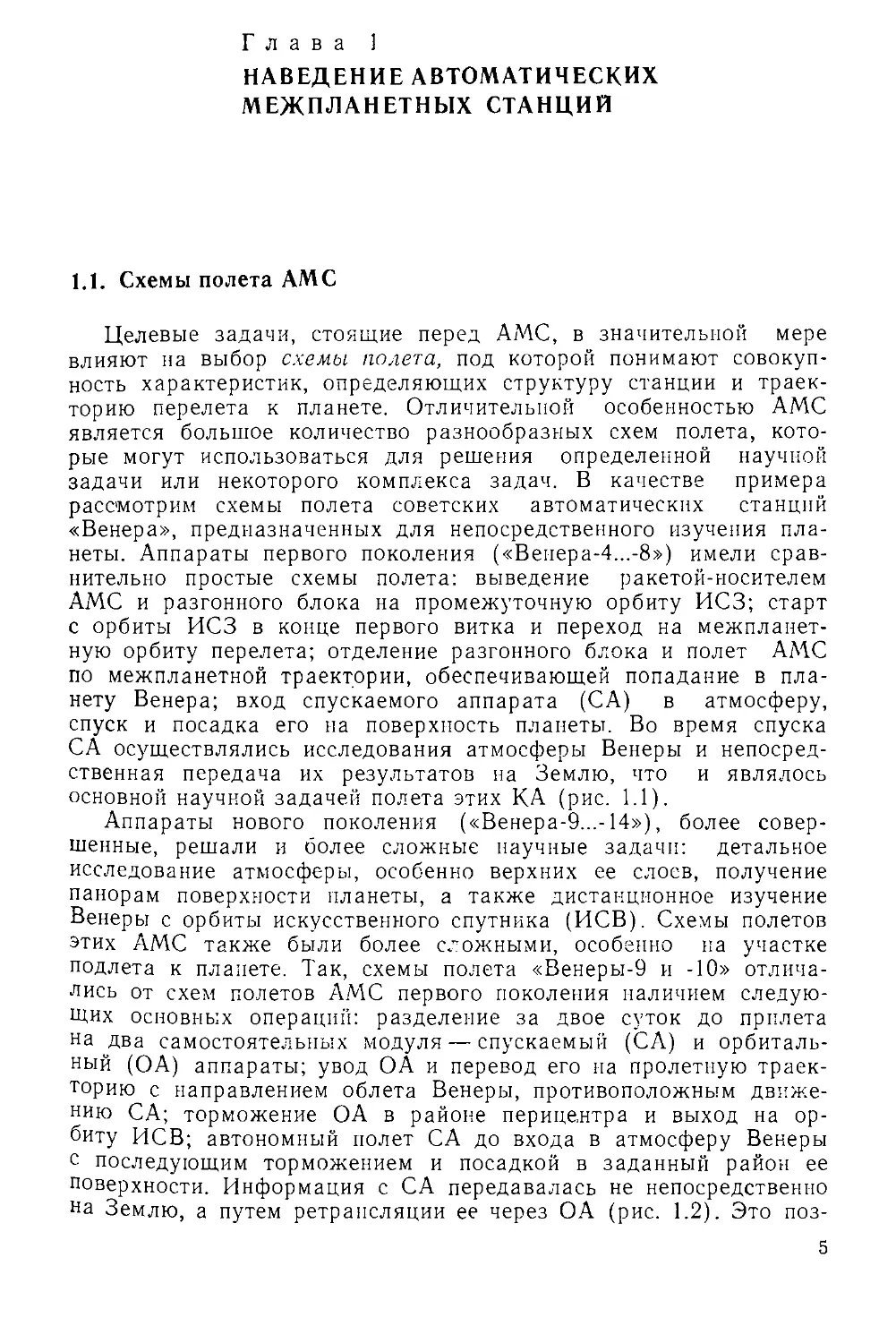
подлета к планете. Так, схемы полета «Венеры-9 и -10» отлича-
лись от схем полетов АМС первого поколения наличием следую-
щих основных операций: разделение за двое суток до прилета
на два самостоятельных модуля — спускаемый (СА) и орбиталь-
ный (ОА) аппараты; увод ОА и перевод его на пролетную траек-
торию с направлением облета Венеры, противоположным движе-
нию СА; торможение ОА в районе перицентра и выход на ор-
биту ИСВ; автономный полет СА до входа в атмосферу Венеры
с последующим торможением и посадкой в заданный район ее
поверхности. Информация с СА передавалась не непосредственно
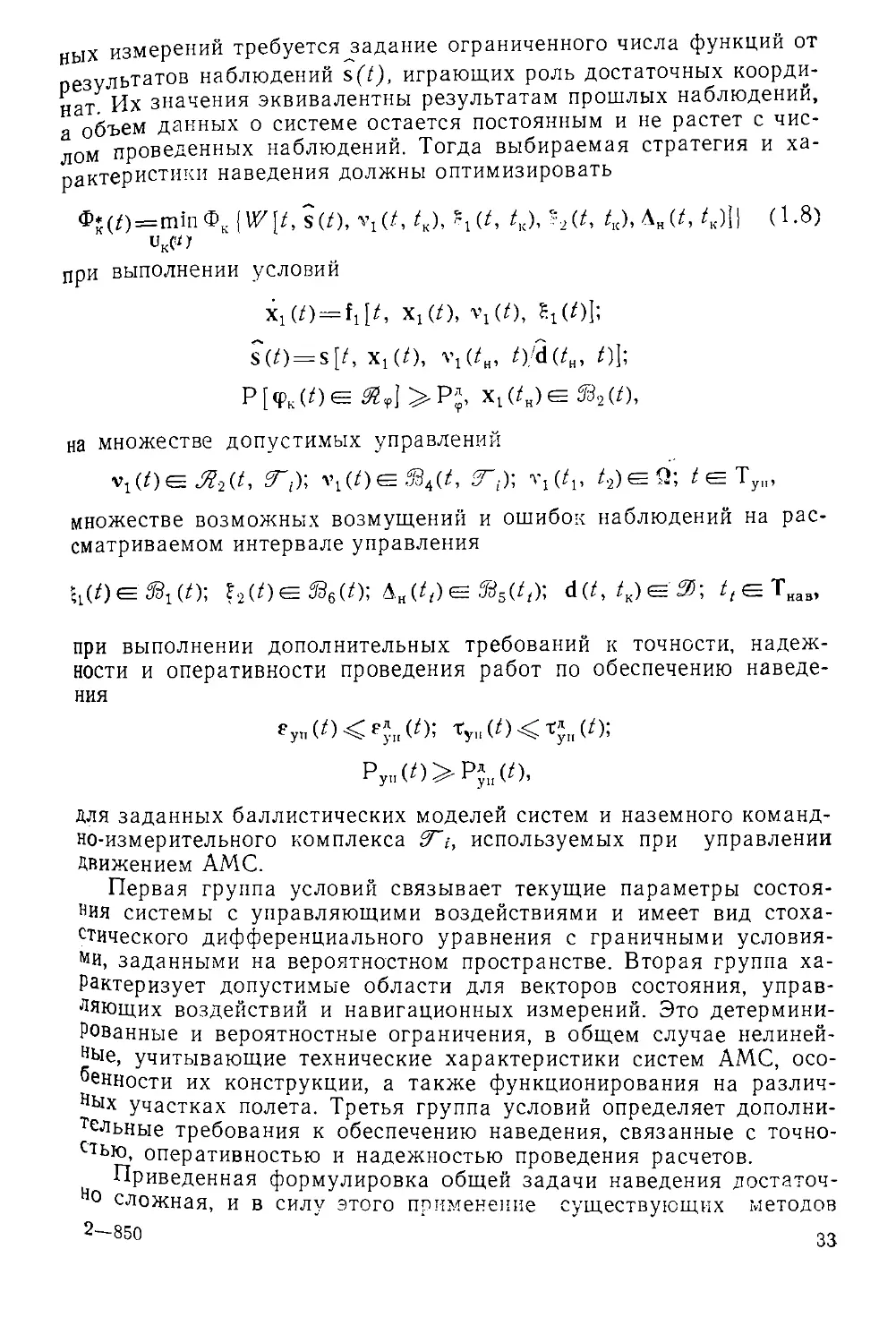
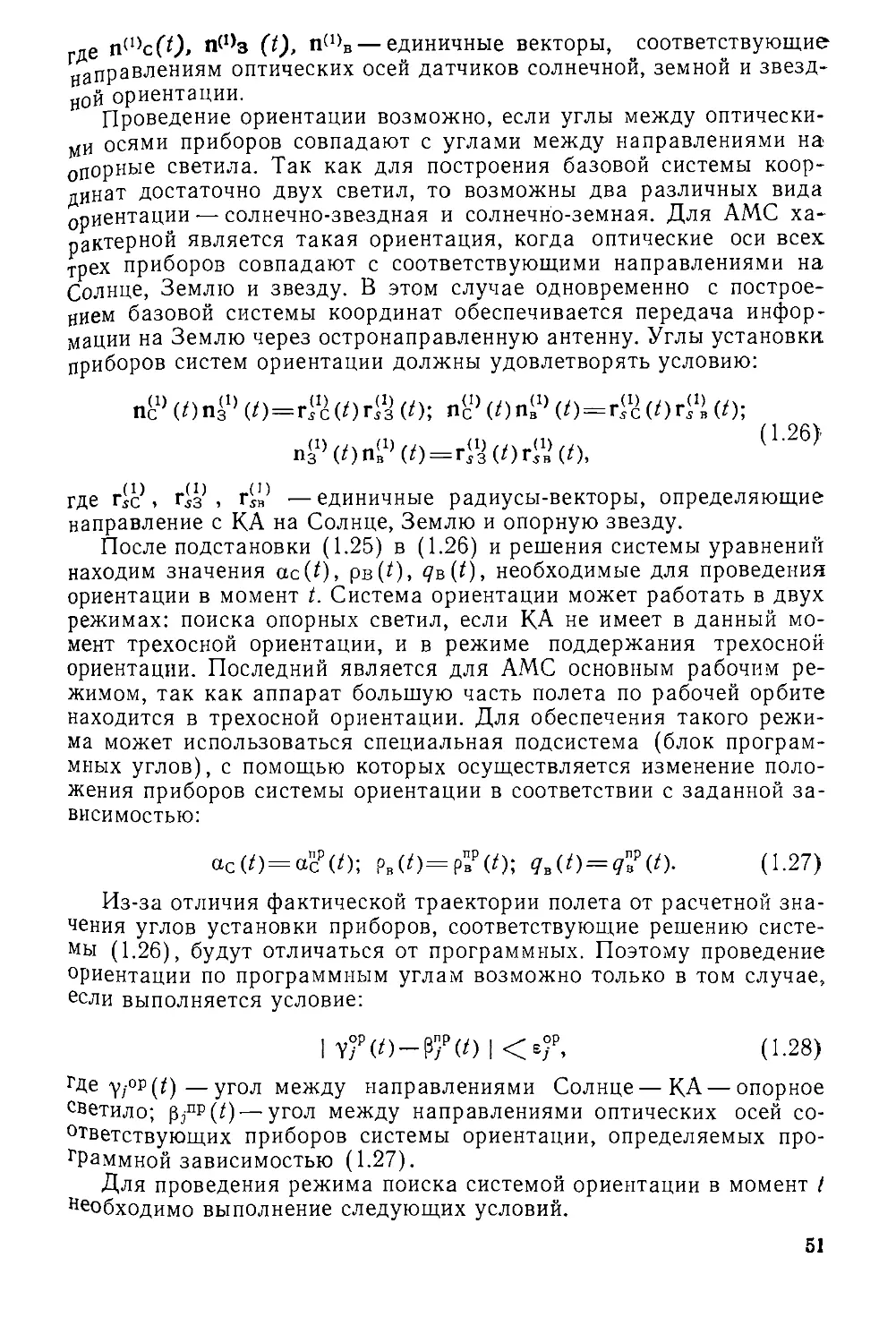
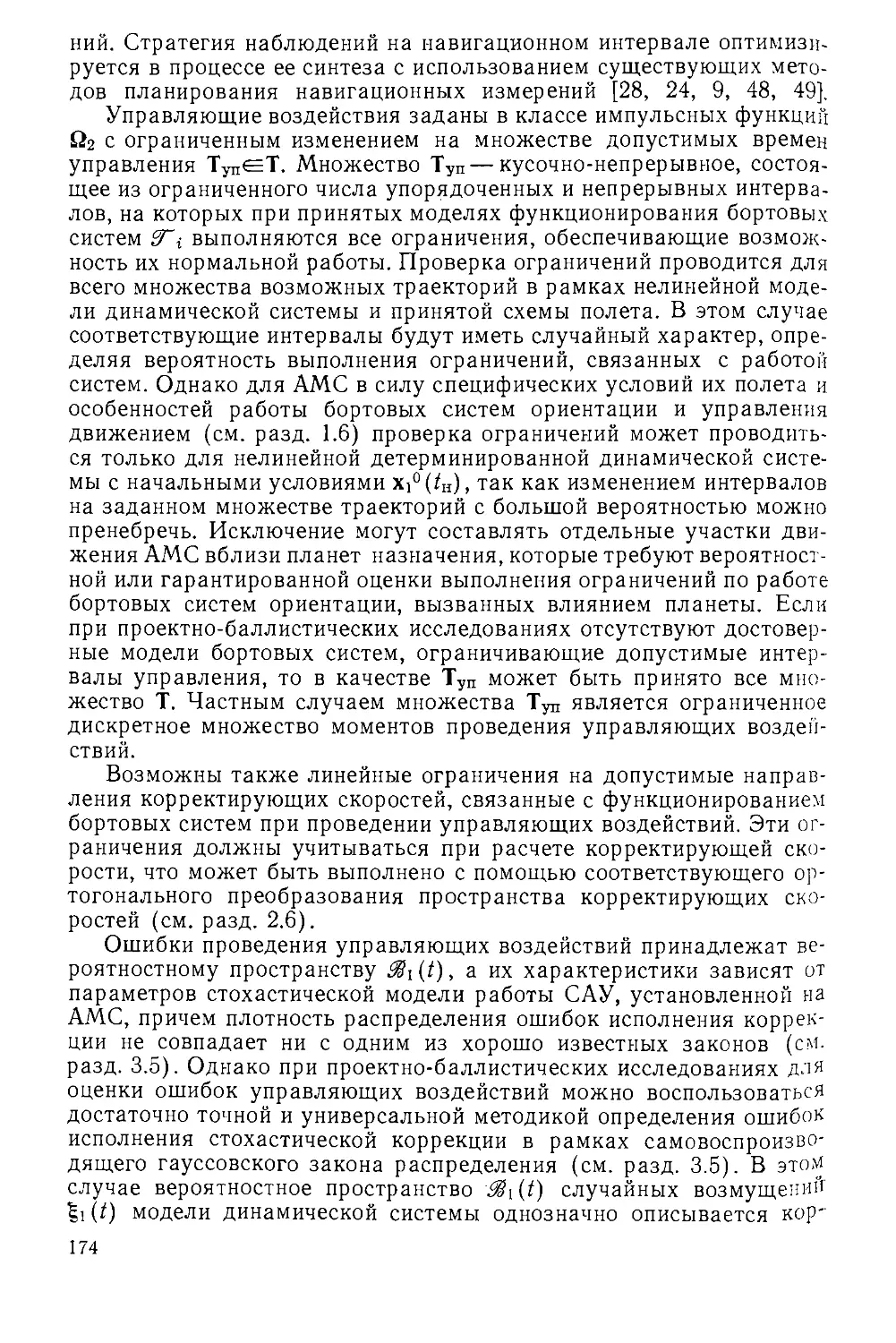
на Землю, а путем ретрансляции ее через ОА (рис. 1.2). Это поз-
5
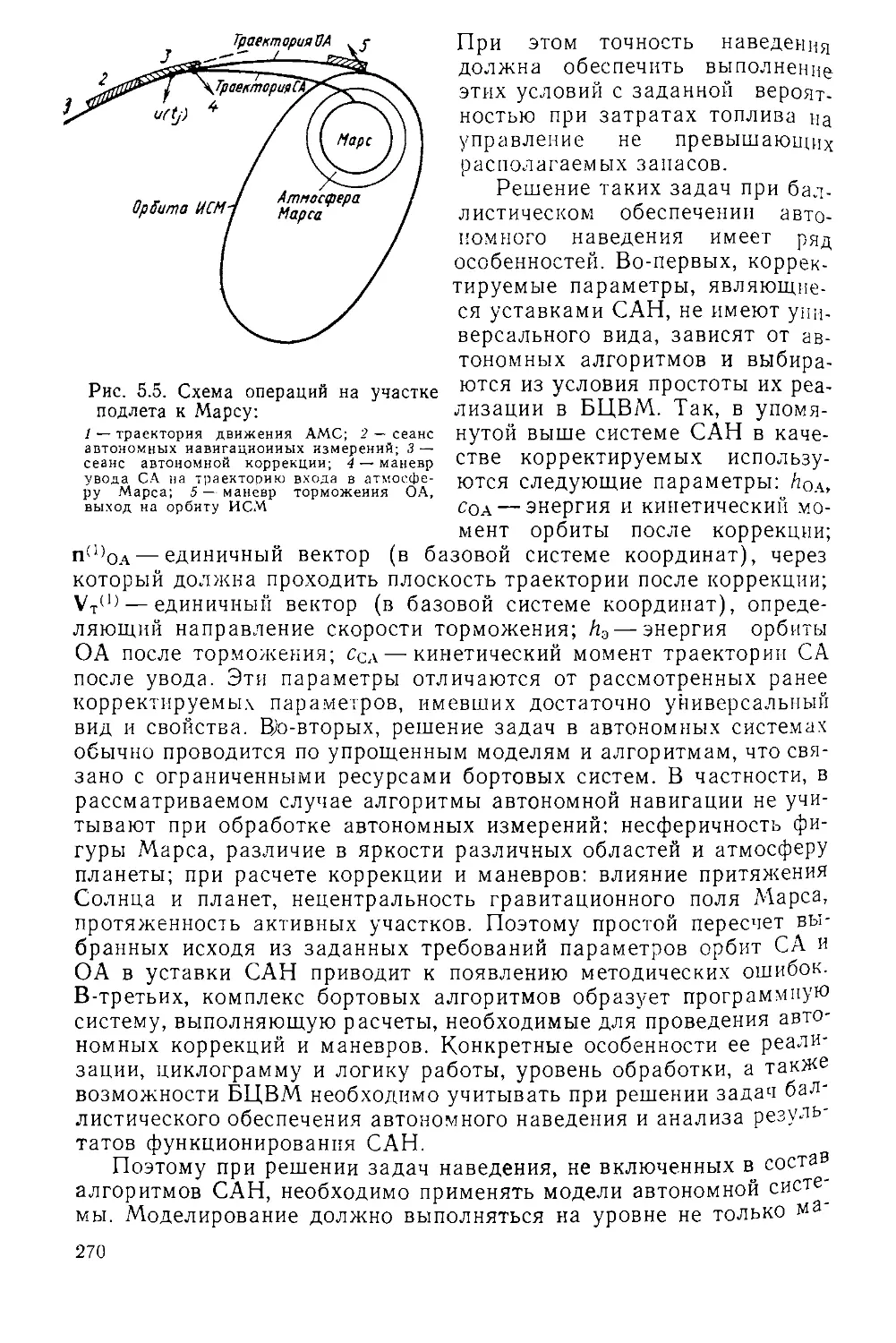
подлета к Венере; 6 — граница атмосферы Венеры;
7 — траектория спуска и посадки на планету; 8— пе-
редача информации по линии СА— Земля
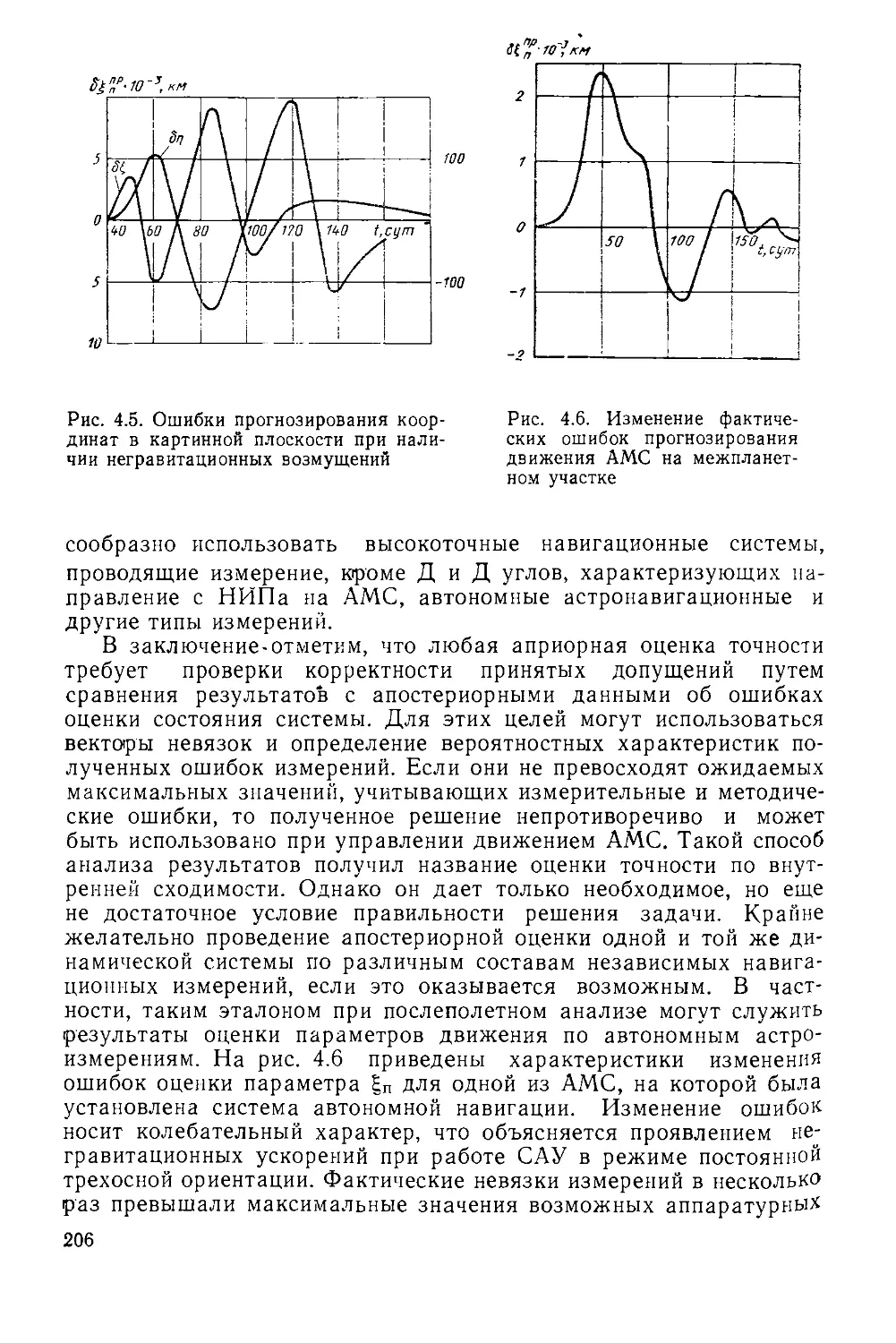
волило повысить информативность радиолинии и объем переда-
ваемой с СА информации на участке спуска в атмосфере и во
время работы на поверхности при достаточно малой массе радио-
аппаратуры и источников энергопитания.
Одной из основных особенностей межпланетных полетов яв-
ляется существенная зависимость энергетических затрат, связан-
ных с реализацией схемы полета, от цикла полета. Как известно
[40], циклы полетов характеризуют опорные даты старта опти-
мальных по энергетике перелетов к планетам и связаны с сино-
Рис. 1.2. Схемы припланетных операций (а) и связи С А и ОА (б) при полетах
АМС «Венера-9, -10»:
/ — разделение и увод ОА; 2 — орбита Венеры; 3 — орбита ИСВ; 4 — облетная траектория
ОА; 5 — участок связи СА —ОА; 6 — торможение и перевод ОА на орбиту ИСВ; 7 —радио-
тень от Венеры; 8 — посадочная траектория СА
6
дическими периодами обращения планеты. Для Венеры он состав-
ляет 470 сут (~1,29 года). В различные циклы полета характе-
ристики энергетически оптимальных траекторий имеют существен-
ные отличия, причем период их изменения составляет около 8 лет.
При этом наиболее значительно изменяется энергетика торможе-
ния для выхода ОА на орбиту ИСВ, связанная с изменением
условий подлета к планете Венера от цикла к циклу перелета и
соответствующим изменением скорости входа в сферу действия
Венеры Е®.Так, если характеристическая скорость старта с ор-
биты ИСЗ ДУст изменяется за 8 лет не более чем на 300 м/с,
то суммарная характеристическая скорость, необходимая для
вывода аппарата на орбиту ИСВ, изменяется на 1000 м/с за счет
увеличения характеристической скорости торможения. Оптималь-
ным для создания спутника Венеры был цикл полета 1975 г.,
когда осуществлен успешный запуск АМС «Венера-9, -10». Полет
к Венере в последующие циклы требовал существенно больших
энергетических затрат, что не позволило в полном объеме реали-
зовать рассмотренную выше схему с выходом ОА на орбиту ИСВ.
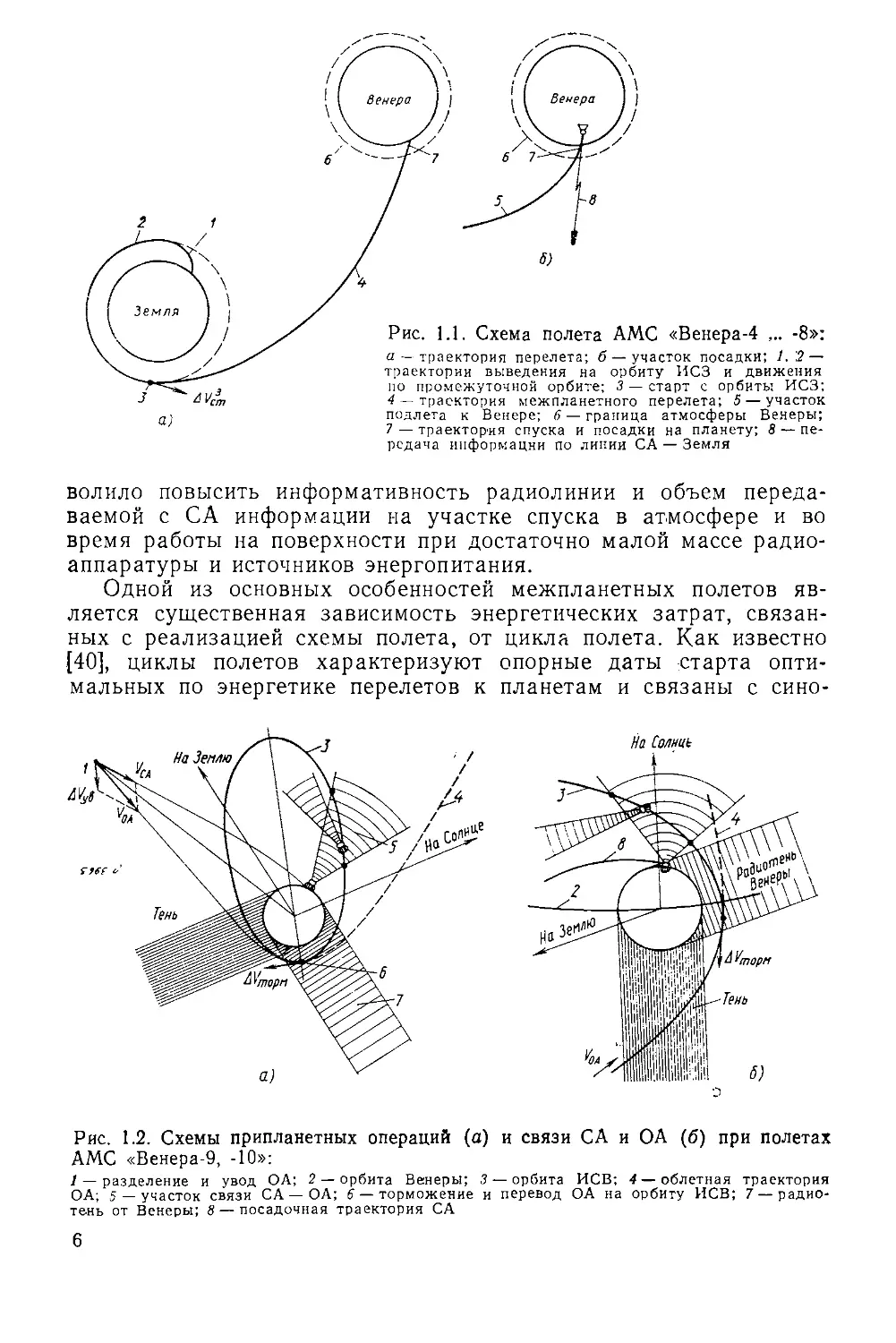
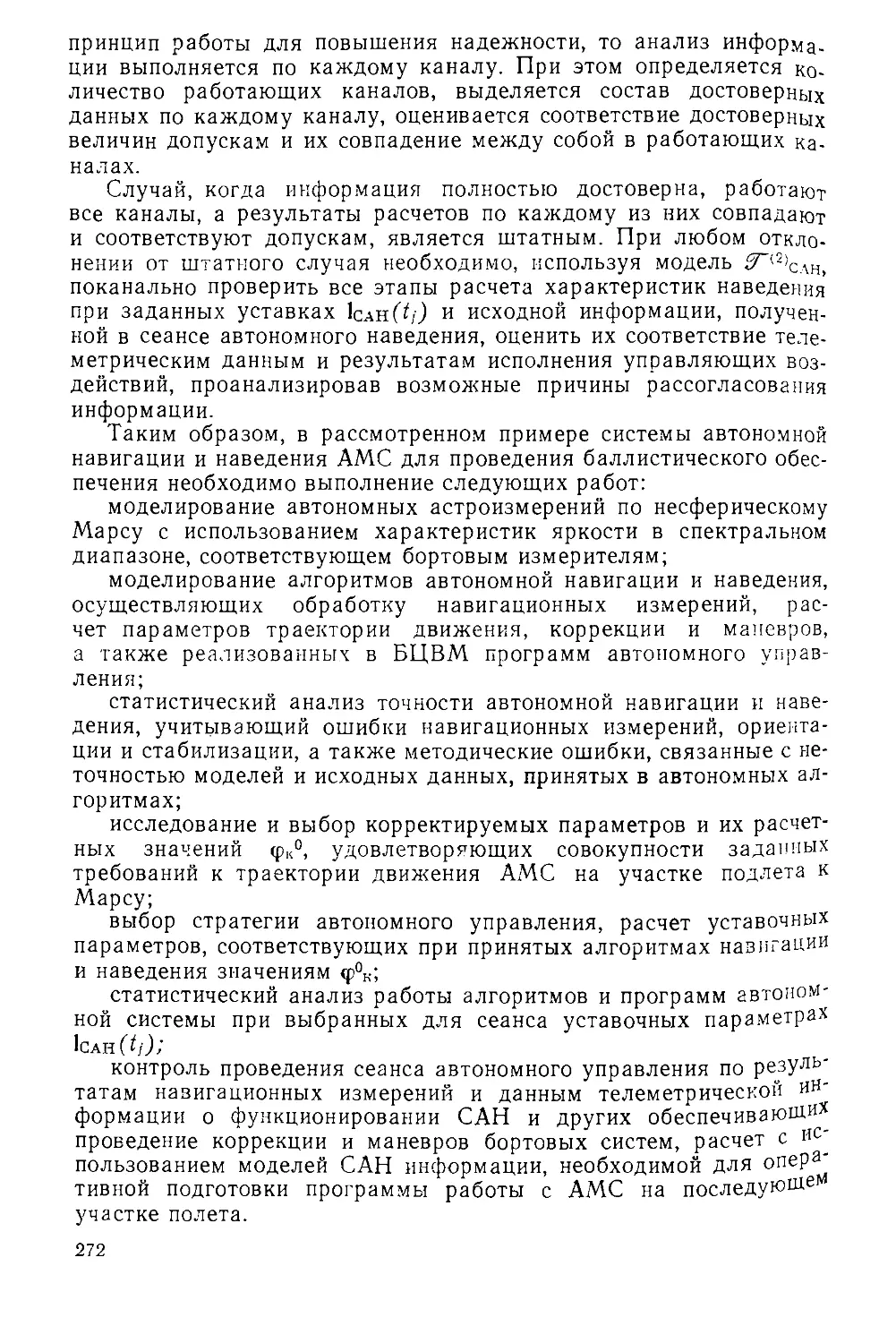
Поэтому в отличие от станций «Венера-9, -10» на станциях «Ве-
нера-11...-14» (циклы 1978 и 1981 гг.) после разделения модулей
и увода одного из них на пролетную траекторию, второй (про-
летный аппарат — ПА) совершил облет Венеры и снова вышел
на межпланетную траекторию. На участке сближения ПА с пла-
нетой с его помощью, как и ранее, осуществлялась ретрансляция
на Землю научной информации с СА при его движении в атмо-
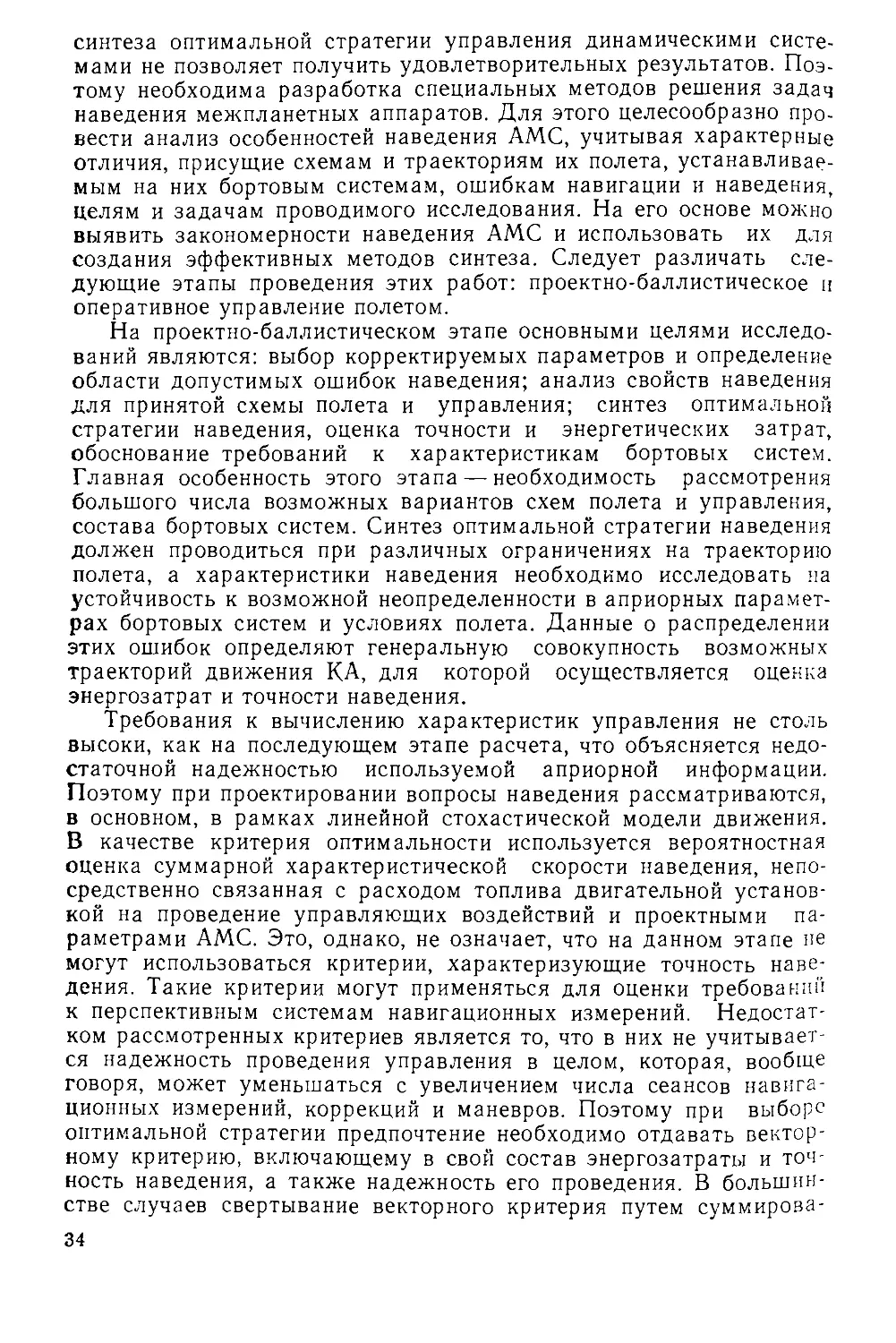
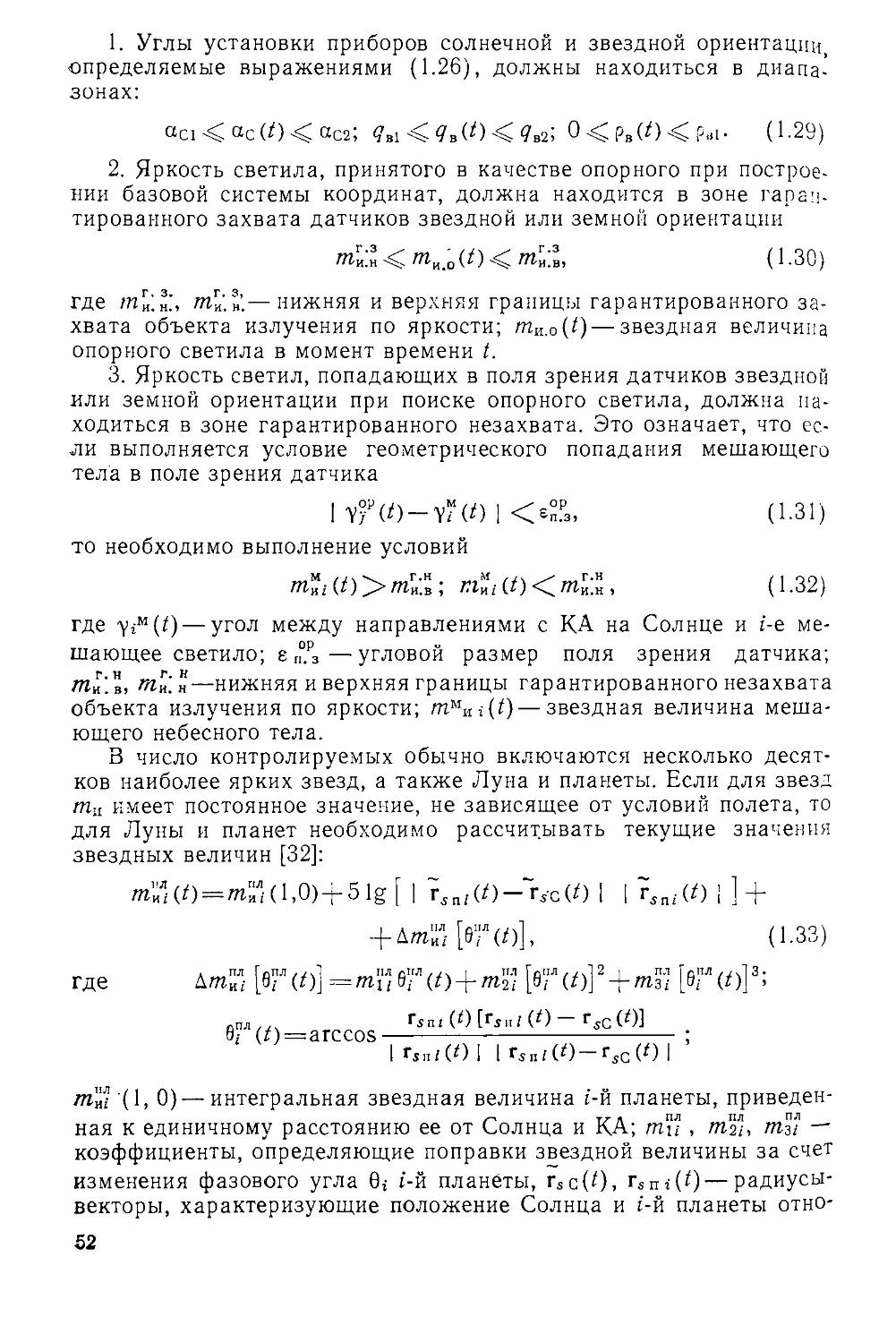
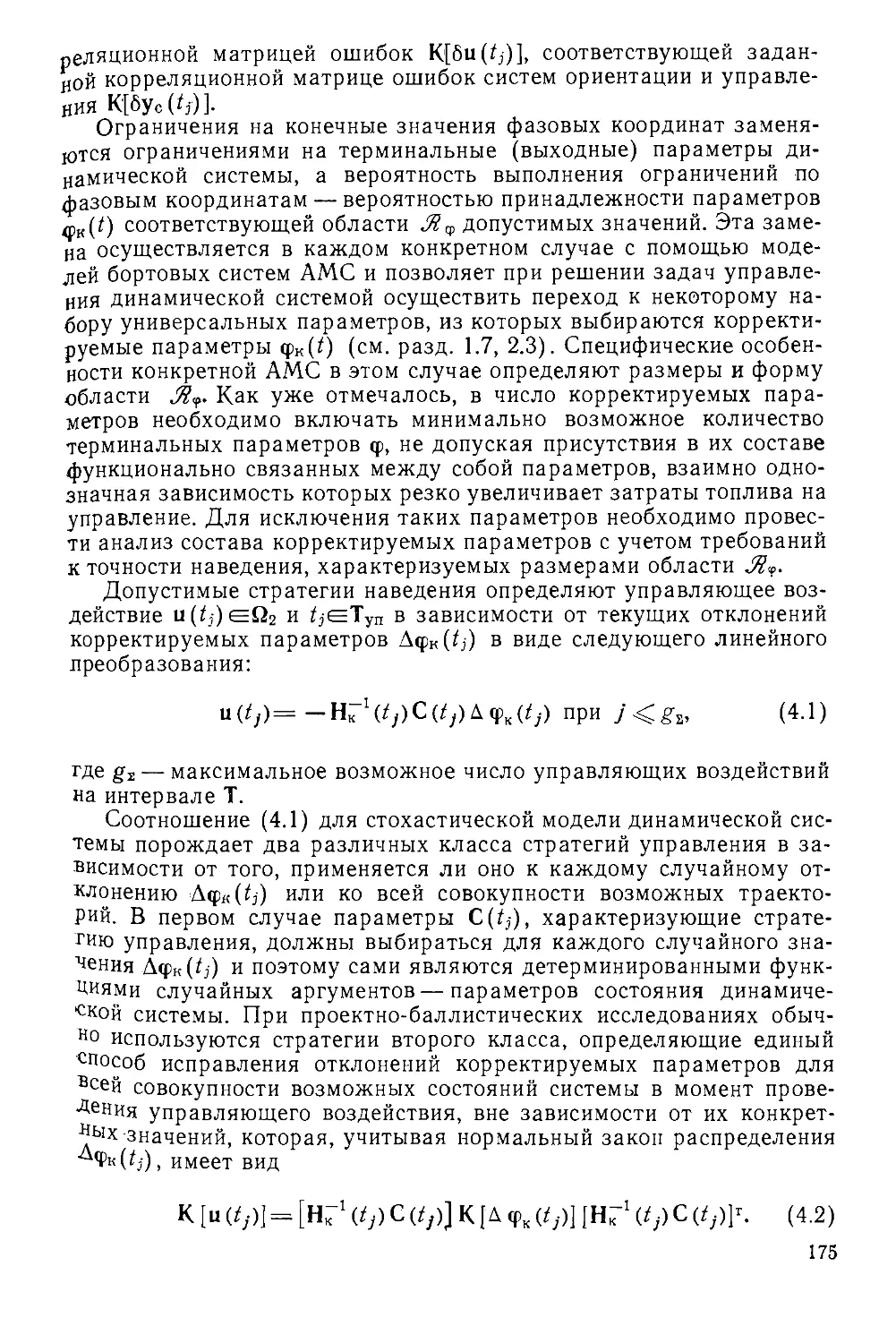
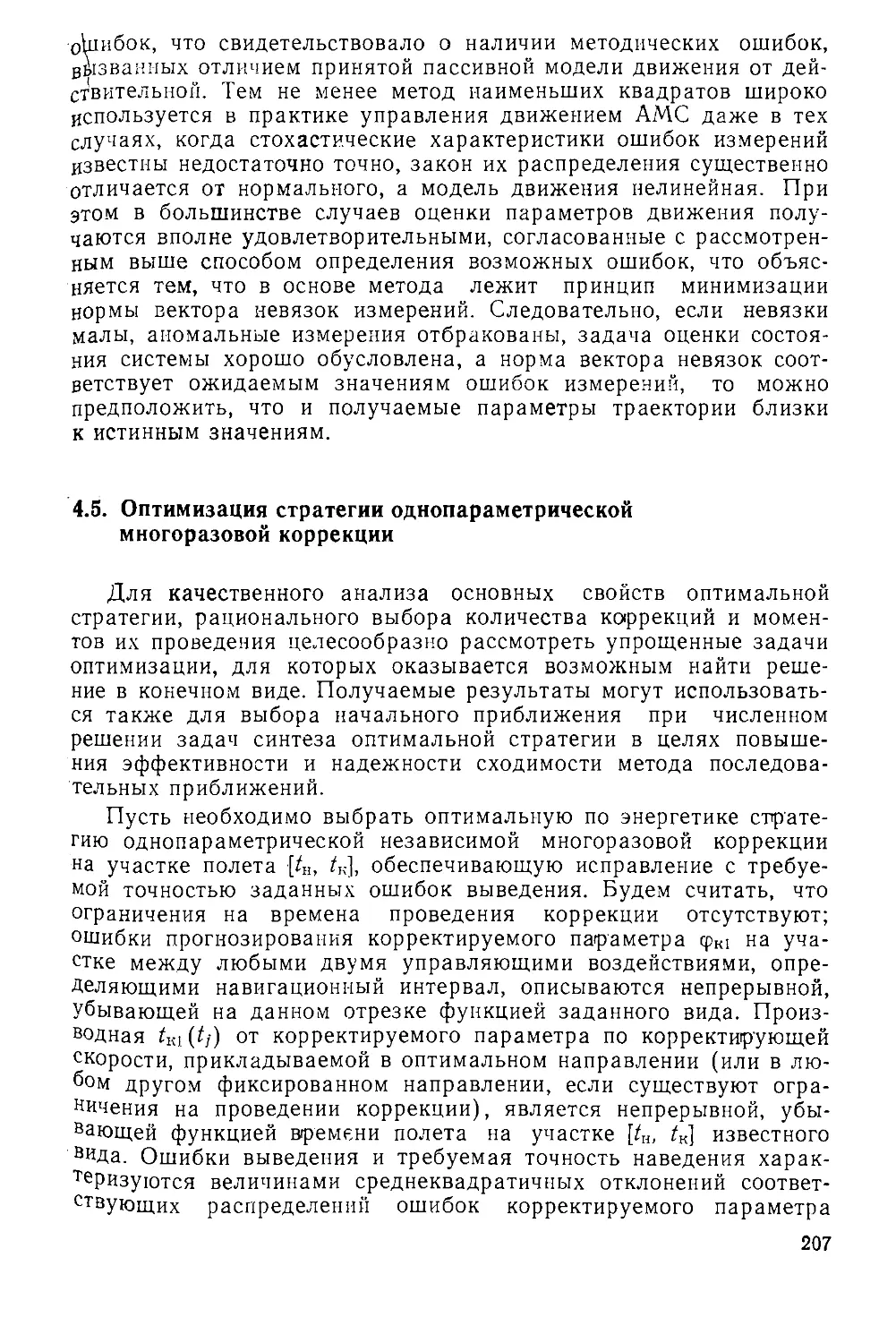
сфере планеты и функционировании на поверхности (рис. 1.3).
Еще большим разнообразием отличаются схемы полета АМС,
предназначенных для исследования планет с последующей достав-
кой с них образцов грунта или полученной информации на Землю.
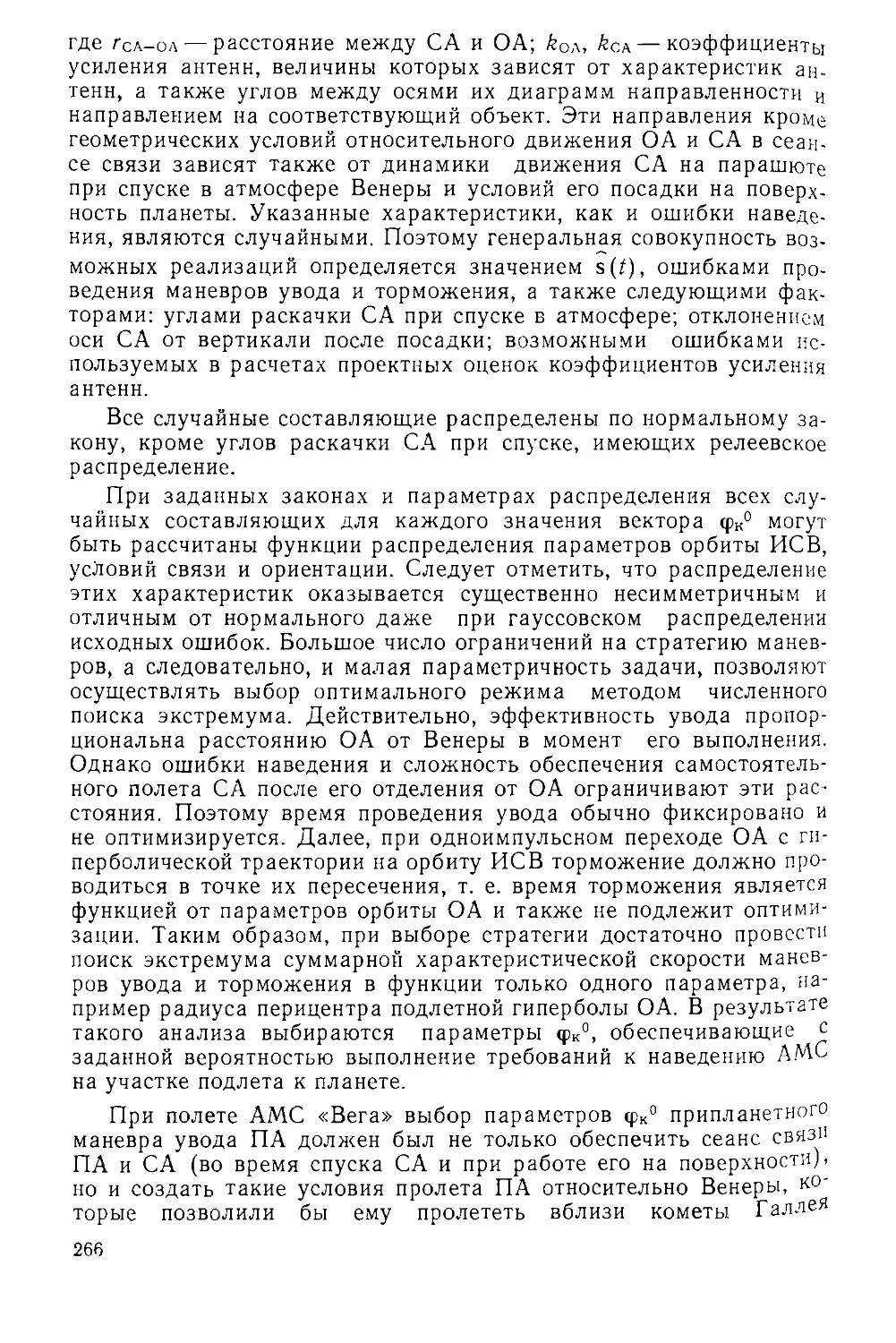
Рис. 1.3. Схема припланетных операций АМС «Венера-11 ... -14»:
; — орбита Венеры; 2 —пролетная траектория ПА; .3 — траектория СА
7
В связи с этим целесообразно провести классификацию возмож-
ных схем полета и определить состав характеристик, необходи-
мых для однозначного их описания. Такое описание может быть
особенно полезным в том случае, если оно используется для фор-
мализованного представления при проектно-баллистическом
исследовании схем полета и управления движением АМС в автома-
тизированных проблемно-ориентированных программных систе-
мах. В основу классификации положим цели и способ исследова-
ния планет. Тогда схемы полета межпланетных аппаратов можно
разделить на два типа: без возвращения и с возвращением на
Землю.
В рамках каждого типа целесообразно выделить классы схем
полета в соответствии со способом исследования планеты назна-
чения:
десантные — непосредственные исследования в атмосфере и
на поверхности планеты с помощью СА («Венера-1...-8»);
орбитальные — дистанционное исследование планеты с помощью
ОА («Венера-15...-16»);
орбитально-десантные — дистанционное и непосредственное ис-
следования планеты с помощью СА и ОА («Венера-9...-10»);
пролетно-десантные — дистанционное и непосредственное ис-
следования планеты с помощью СА и ПА («Венера-11...-14»);
облетные (пролетные)—дистанционное изучение планеты с
помощью КА («Марс-4»),
По способу доставки полезного груза можно выделить одно-
пусковые и двухпусковые схемы полета. При двухпусковой схеме
запускаемые каждой ракетой-носителем аппараты могут быть вы-
полнены либо в виде двух конструктивно независимых модулей
и проводить научные исследования во взаимодействии, либо со-
стыковываться на орбитах искусственных спутников Земли или
планеты назначения. Возможна также стыковка на пролетных
или межпланетных траекториях. Примером двухпусковой схемы
могут служить полеты АМС «Марс-5 и -6». Первый из этих
аппаратов был предназначен для проведения дистанционных ис-
следований с орбиты ИСМ, а также для приема и ретрансляции
научной информации с СА «Марс-6», который осуществил посадку
в заданном районе поверхности планеты. Орбита ИСМ выбира-
лась таким образом, чтобы ОА проходил над районом посадки
СА в момент входа последнего в атмосферу Марса.
По виду траекторий перелетов схемы полетов можно разде-
лить так: схемы с траекториями прямого перелета к планете наз-
начения; схемы с выходом на промежуточную орбиту искусствен-
ного спутника планеты (орбиту ожидания); схемы с активным
маневром на траектории для уменьшения времени перелета или
скорости входа в атмосферу, а также создания необходимых
условий облета планеты. Распространенными являются схемы
полетов с попутным облетом другой планеты, назначением кото-
рого может являться улучшение энергетических характеристик
траектории перелета за счет использования гравитационного поля
8
облетаемой планеты или одновременное исследование нескольких
объектов космического пространства. В последнем случае одна
из научных задач условно принимается в качестве основной, а
другая — дополнительной. Основной задачей, как правило, яв-
ляется та, которая определяет выбор траектории полета, особен-
н0 в сфере действия облетаемой планеты. Примером такой схемы
может служить схема полета АМС «Вега-1, -2», предназначенных
для исследования планеты Венера и кометы Галлея с пролетной
орбиты. Основной задачей условно считается полет к комете, а
дополнительной — исследование планеты. За двое суток до под-
лета к Венере АМС разделялись на СА, осуществлявший полет
по попадающей в планету траектории, и ПА, который был пере-
веден на пролетную относительно планеты траекторию. Кроме
того, на участке спуска СА от него отделилась плавающая аэро-
статная станция (ПАС), предназначенная для исследования цир-
куляция атмосферы Венеры.
В отличие от схем полета АМС «Венера-13, -14», траектория
облета планеты обеспечила не только доставку СА в заданный
район поверхности Венеры и передачу информации с СА на ПА,
но также позволила осуществить перелет ПА к комете Галлея
путем изменения траектории объекта гравитационным полем пла-
неты. Это, естественно, привело к ухудшению условий связи по
линии СА — ПА и уменьшению продолжительности передачи на-
учной информации с СА, так как одним из основных условий для
выбора параметров увода после разделения АМС на СА и ПА
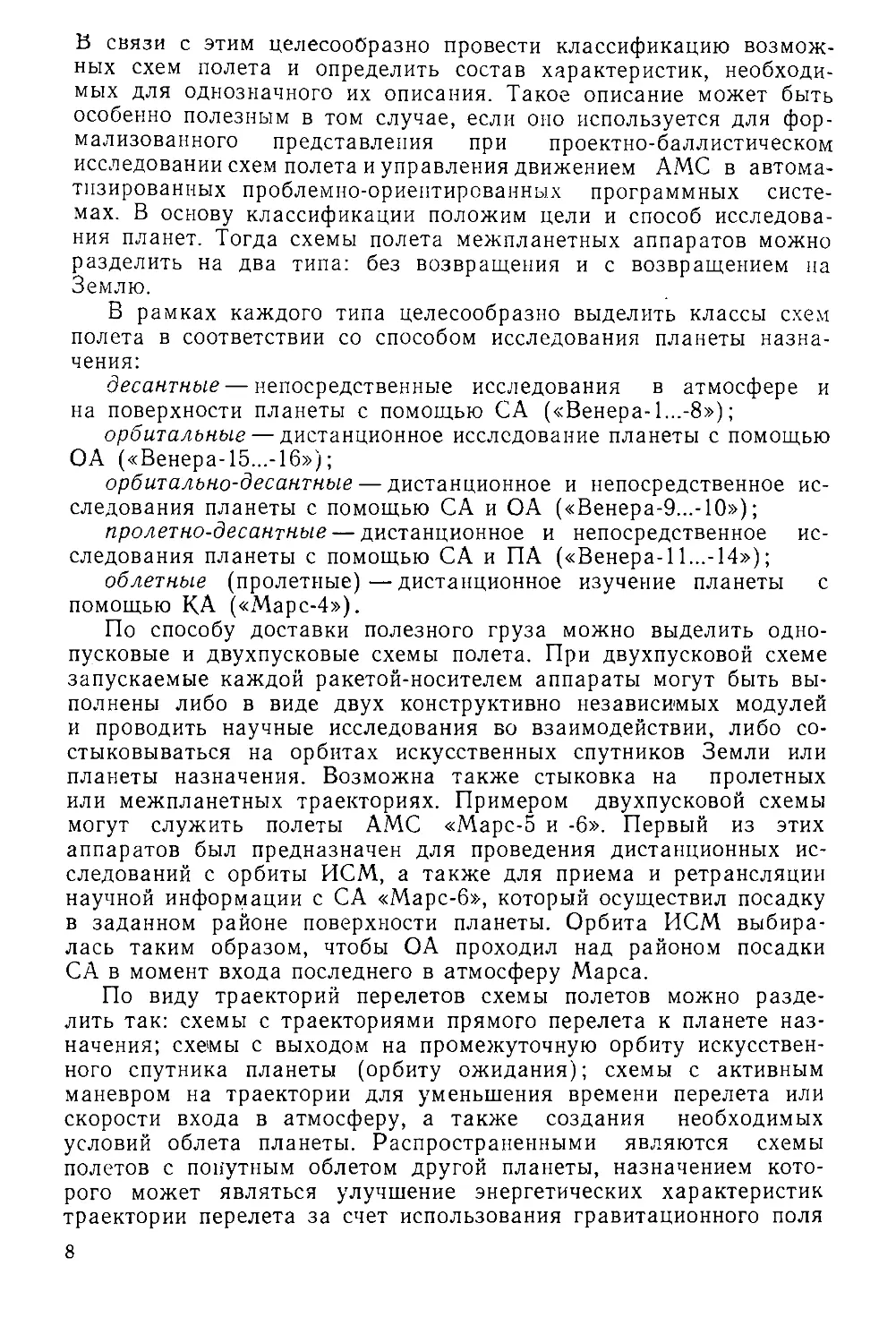
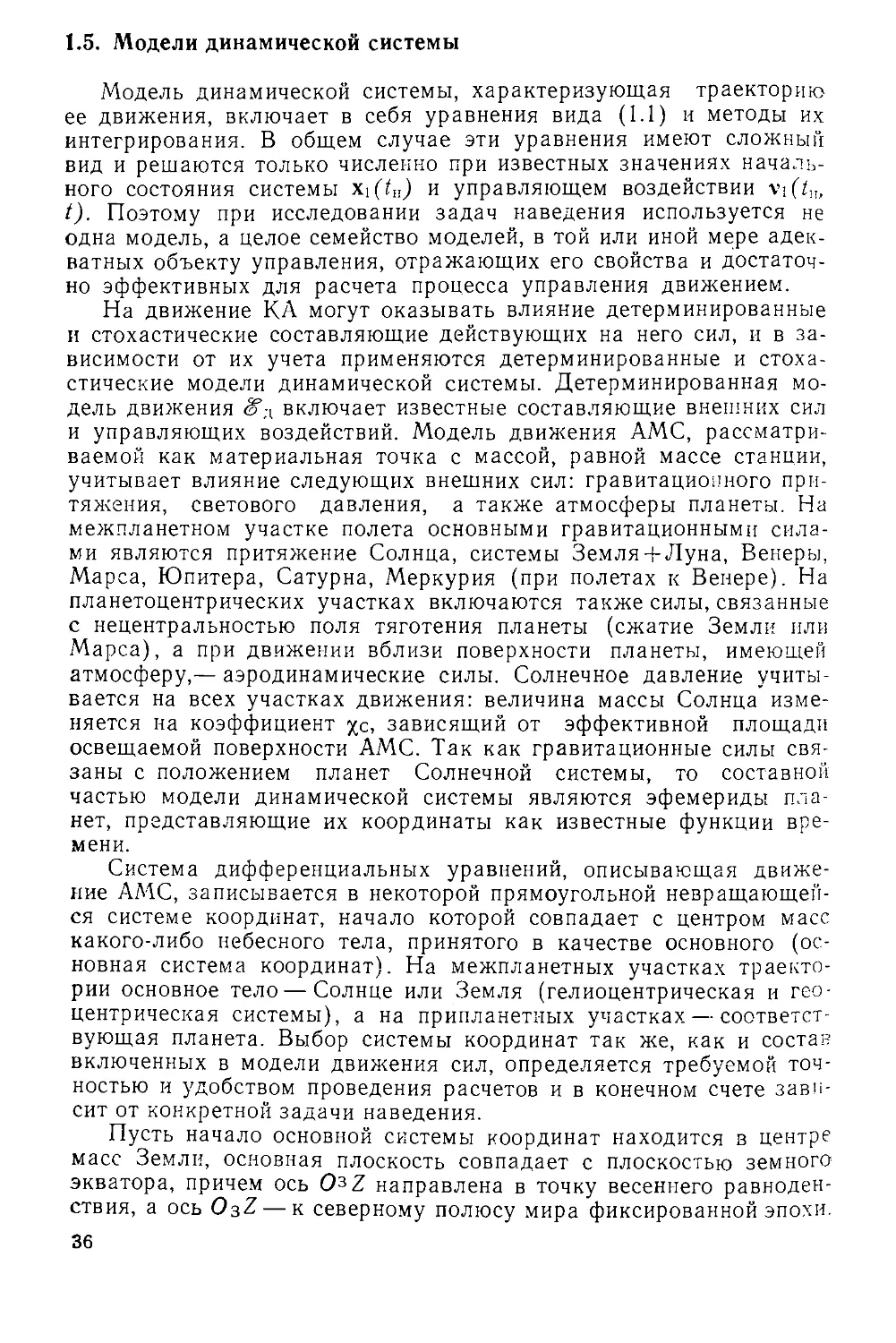
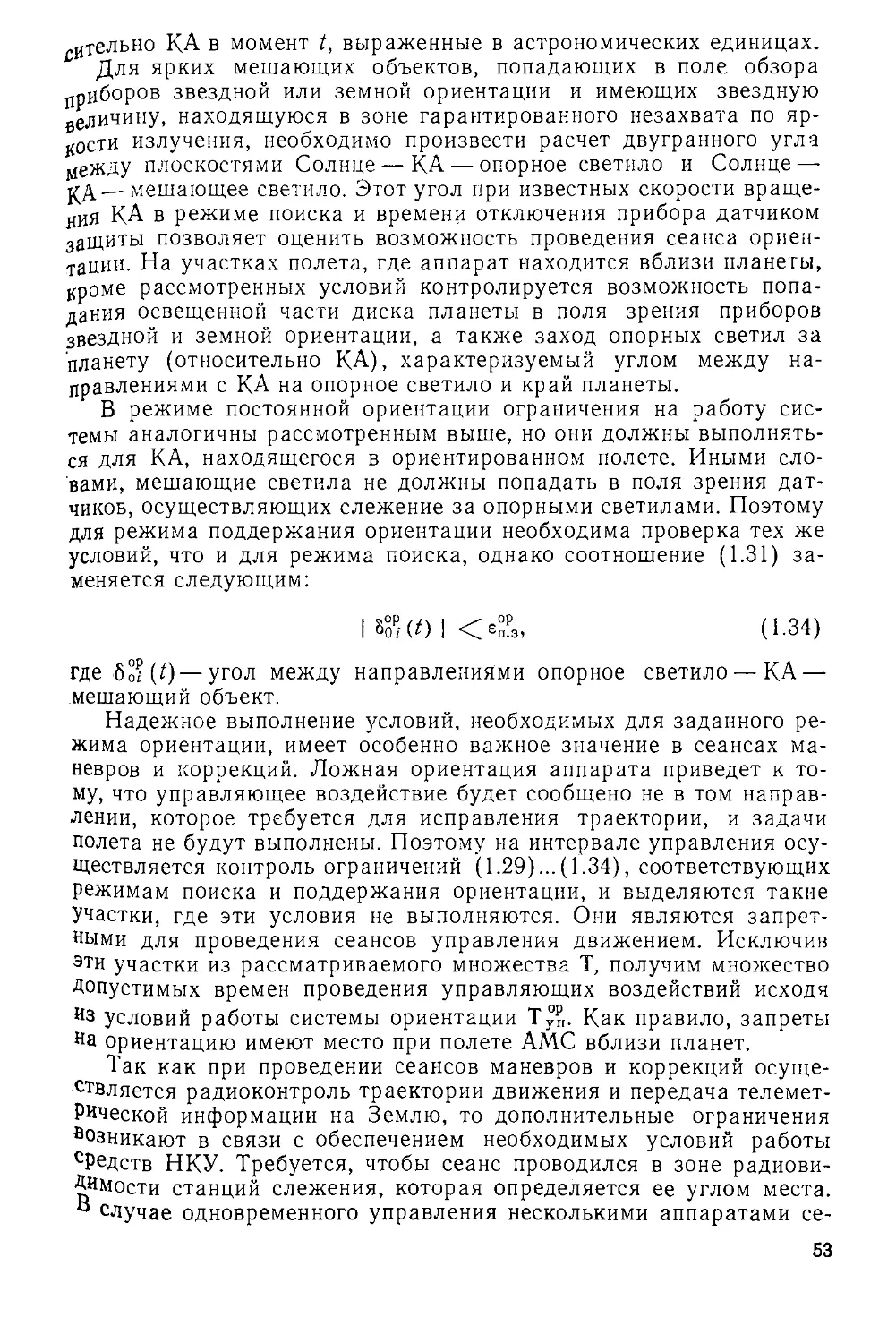
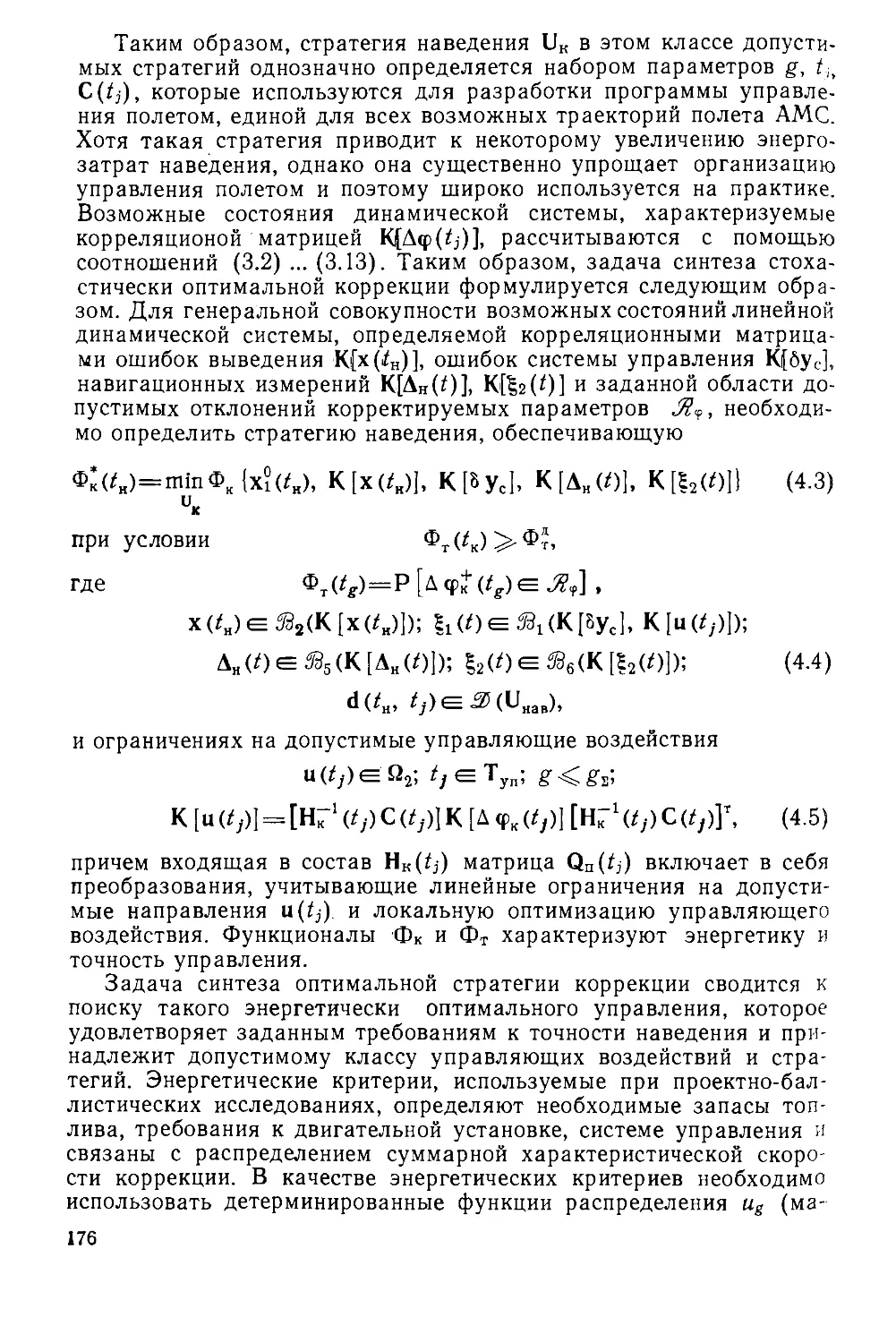
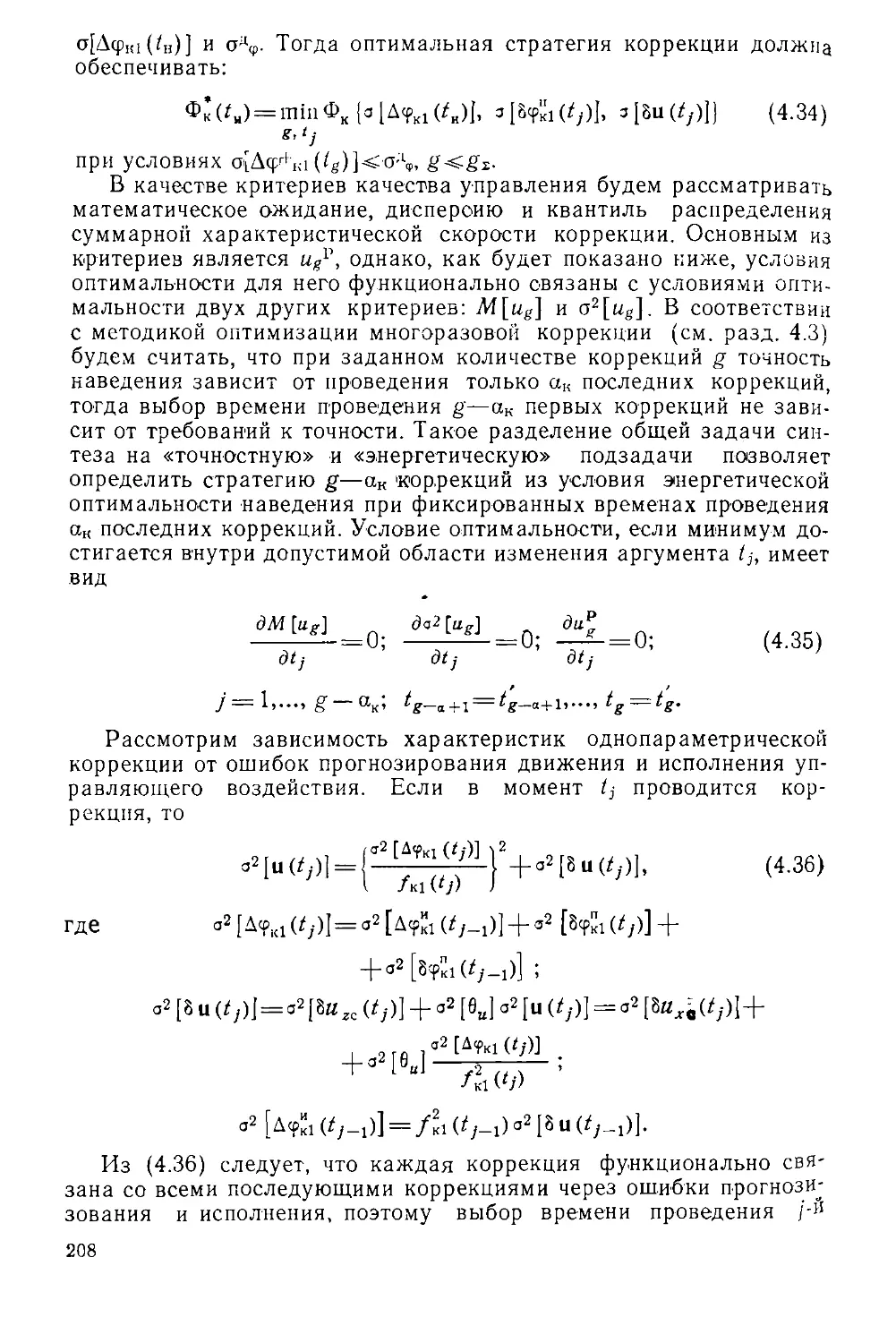
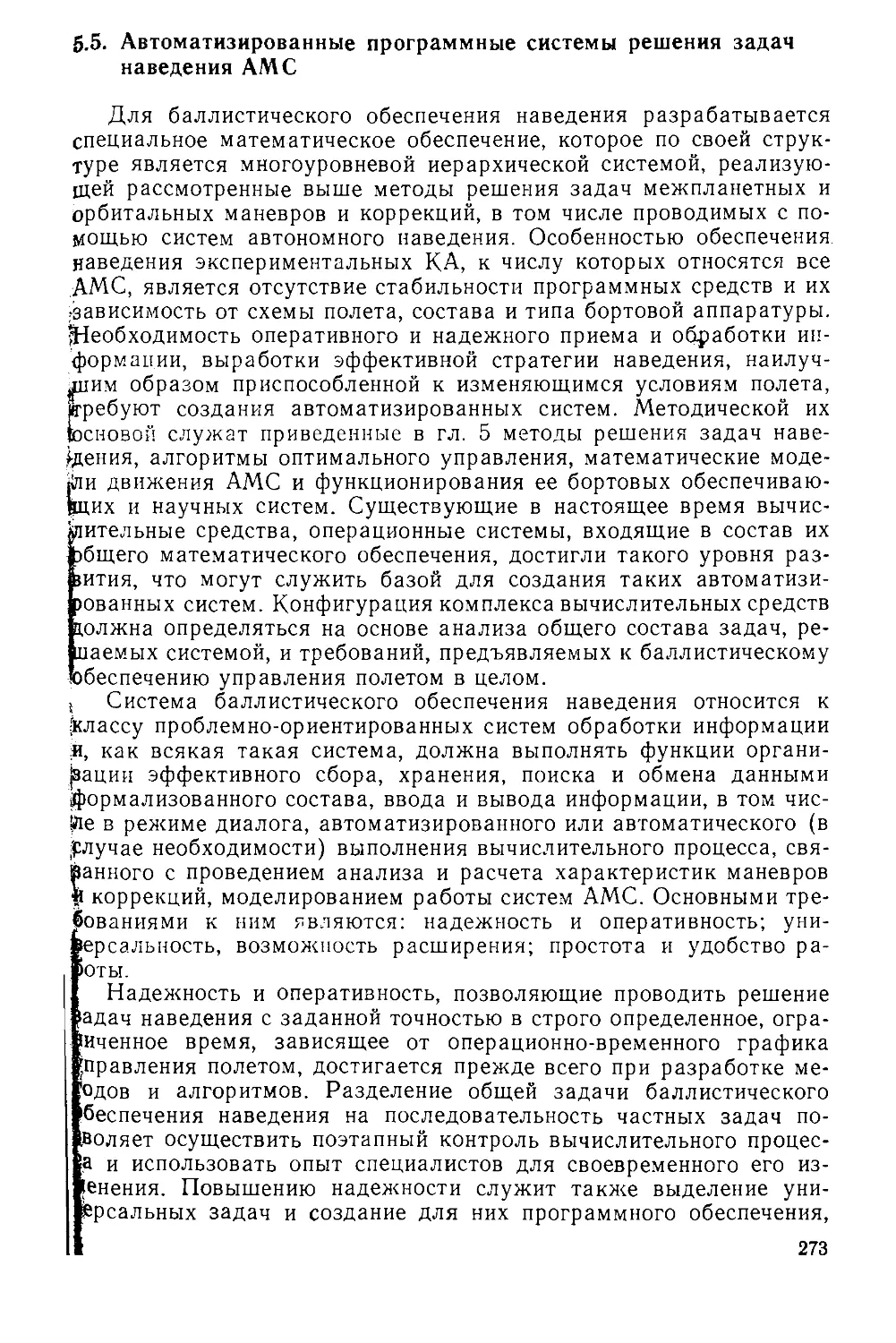
являлась встреча ПА с кометой Галлея. Межпланетные участки
траектории полета АМС «Вега-1» в проекции на плоскость эклип-
тики представлены на рис. 1.4. Для реализации полета могут
быть выбраны также траектории с различным числом витков на
участке межпланетного перелета (траектории первого или второго
полувитка, многовитковые траектории). Иными словами, полет
АМС к планете назначения или другому космическому объекту
(комете, астероиду, естественному спутнику планеты) может осу-
ществляться по различным маршрутам и траекториям пере-
лета.
Таким образом при описании схемы полета необходимо ука-
зать: основную цель полета и исследуемую планету; цикл полета;
маршрут и параметры траектории перелета; количество ракет-
носителей, необходимых для реализации схемы полета; состав
самостоятельных модулей, используемых для проведения иссле-
дований; совокупность основных динамических и структурных
операций на различных участках полета.
В описание схемы включаются только такие динамические
операции, которые приводят к изменению в полете расчетной
траектории самой АЛ4С или ее отдельных модулей (старт, тормо-
жение, увод и др.). Под структурными понимаются такие опера-
ции, которые приводят к изменению в полете состава основных
конструктивных элементов или модулей (стыковка, разделение
и т. д.)_
9
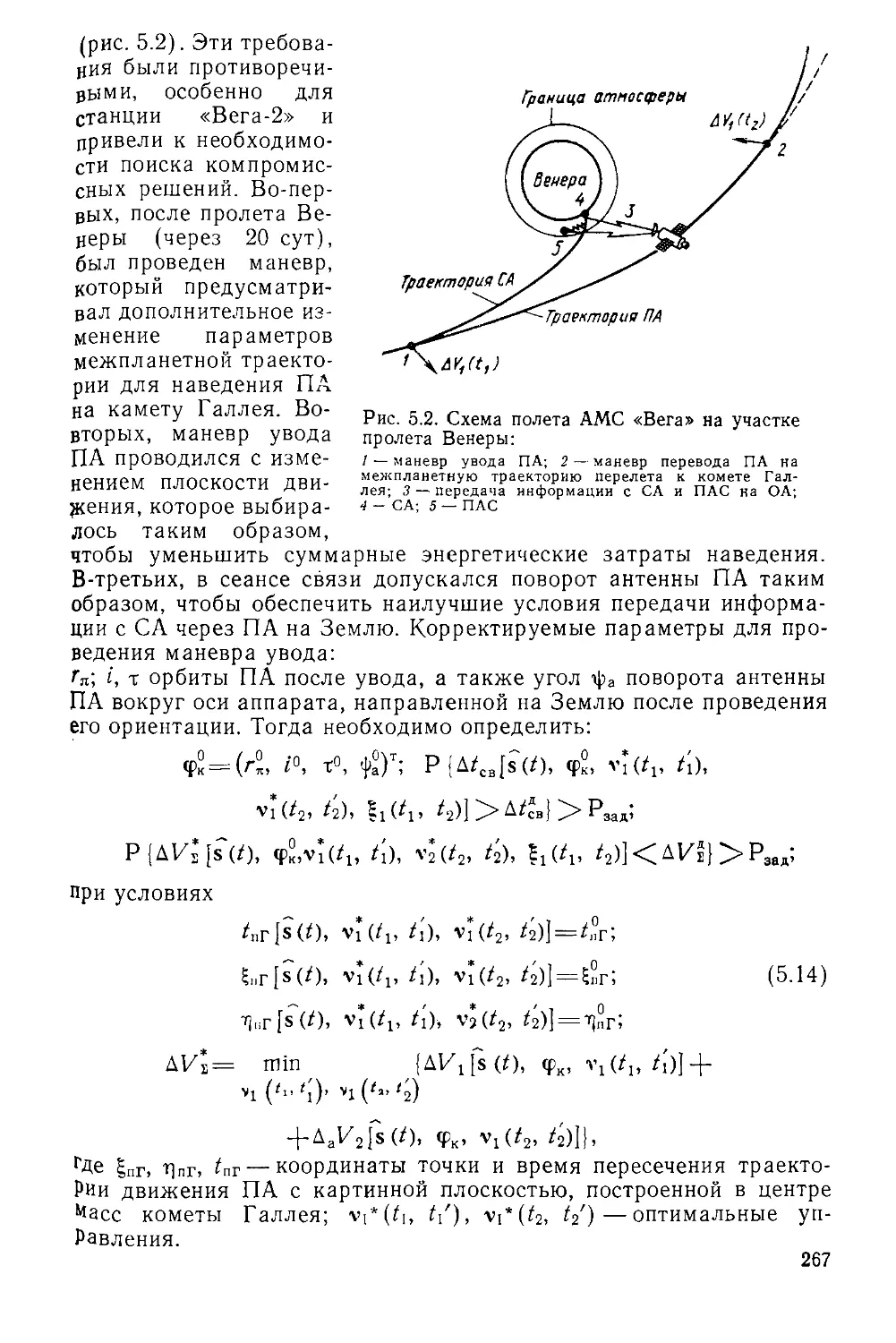
Направление на комету
. Галлея Ь момент старта АМС
Земля г
узлов
Рис. 1.4. Схема полета АМС «Вега-1»
Многообразие возможных схем полета, которые могут быть
использованы для решения целевой задачи, позволяет осуществ-
лять выбор оптимальной схемы. В качестве критерия оптималь-
ности обычно используются суммарные энергозатраты, необходи-
мые для реализации принятой схемы, или масса полезного груза.
В отличие от КА, предназначенных для исследования околозем-
ного пространства, оптимальная схема полета АМС зависит не
только от цели полета, но и от цикла, в котором решается по-
ставленная задача.
При усложнении основной задачи полета возможные измене-
ния оптимальных схем и траекторий полета возрастают. В каче-
стве примера рассмотрим схемы полета к Марсу с возвращением
к Земле АМС, предназначенной для доставки образцов марсиан-
ского грунта, и их изменение в зависимости от цикла перелета в
период 1985—2000 гг. Это одна из наиболее интересных задач,
решение которой позволит ответить на вопрос о существовании
биологической активности на Марсе, так как исследования, про-
веденные с помощью автоматических аппаратов «Викинг» непо-
средственно на поверхности планеты, не дали однозначных ре-
зультатов ,[1]. При проектировании таких АМС наиболее часто
рассматривается десантная схема полета, обеспечивающая выпол-
нение задач полета с использованием энергетически оптимальных
траекторий прямого перелета с Земли на Марс и с Марса па
Землю. Такие схемы имеют наиболее простой состав динамиче-
ских операций, основными из которых являются старт с орбиты
10
ИСЗ аэродинамическое торможение и посадка на поверхность
Марса, старт с Марса и выход на траекторию возвращения к
Земле,’ аэродинамическое торможение в атмосфере Земли и по-
садка’на ее поверхность. Выбор траекторий перелета осуществ-
ляется по критерию минимума энергетических расходов на осу-
ществление старта с орбиты ИСЗ и поверхности Марса при учете
возможных ограничений на скорости входа в атмосферы Марса
и Земли Уых, Им и суммарное время полета Тп^. Недостатком
схемы является то, что СА находится на планете назначения в
течение всего времени, пока не наступят оптимальные условия
для старта к Земле (время ожидания). Оно может быть велико
(более -400 сут) и значительно превышать необходимый для про-
ведения исследований на Марсе интервал времени, причем по
таким схемам составляет 900...1100 сут. Характеристики десант-
ной схемы существенно изменяются от цикла к циклу полетов
в течение синодического периода, а также от вида траектории
(встреча с планетой на первом или втором полувитках межпла-
нетной орбиты). Наилучшим с точки зрения энергетических за-
трат в рассматриваемый период времени является цикл полета
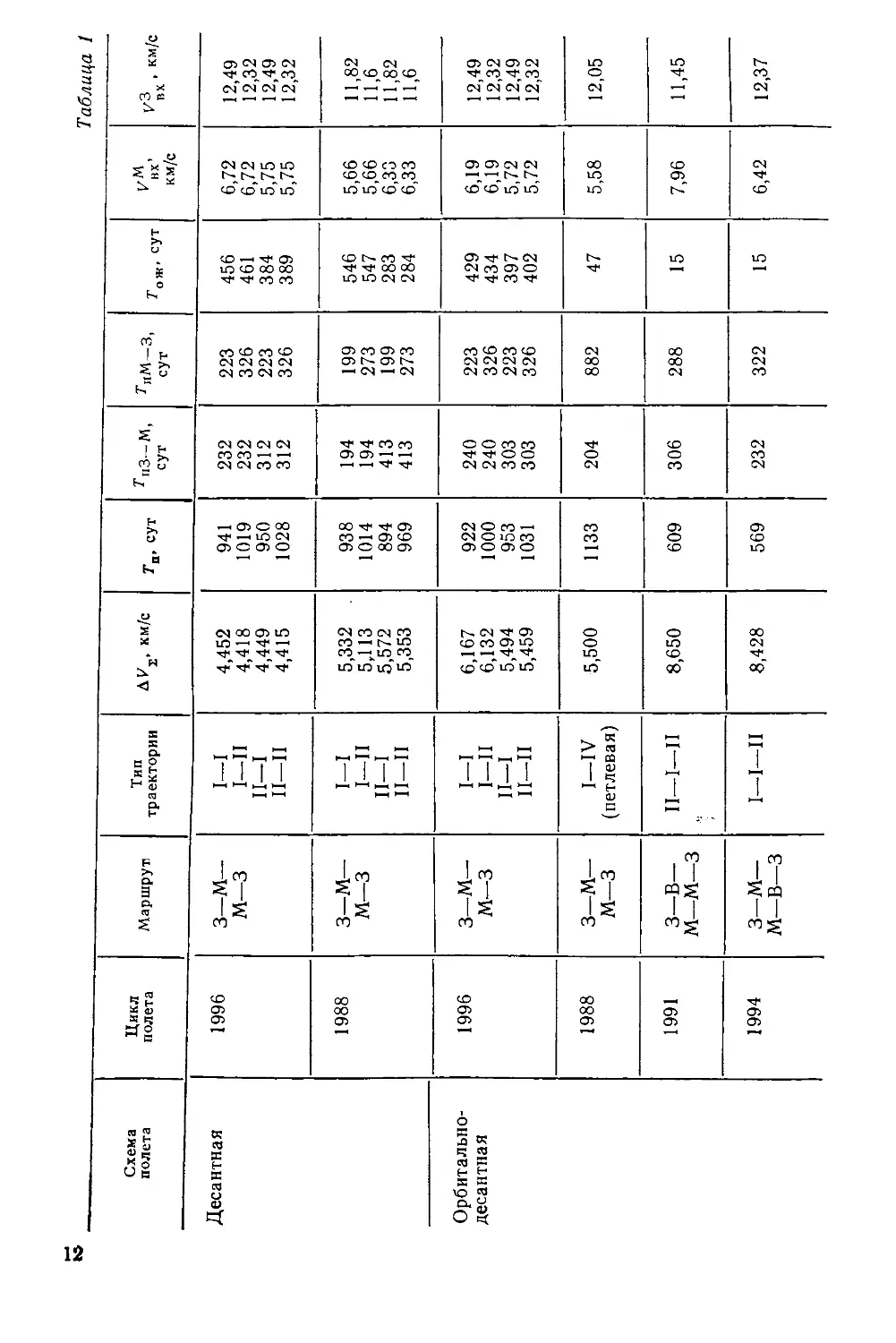
к Марсу в 1996 г., а наихудшим — цикл 1988 г. Характеристики
десантной схемы для различных видов траекторий (I — встреча с
планетой на первом и II — втором полувитках) в указанных цик-
лах представлены в табл. 1, где 7'„з-м, Лм-зи Тож— времена
перелета от Земли до Марса, от Марса до Земли и ожидания;
ДУБ — суммарная характеристическая скорость, необходимая для
проведения старта с круговой орбиты ИСЗ высотой 200 км и с по-
верхности планеты назначения.
Обеспечение длительного активного существования СА на
Марсе является сложной технической проблемой из-за специфи-
ческих условий на поверхности планеты: низкая среднесуточная
температура (около —30°С) и >малое атмосферное давление (в
среднем 6-102 Па). Одним из способов сокращения времени пре-
бывания СА на поверхности Марса является переход к орбиталь-
но-десантной схеме, при которой большую часть времени ожида-
ния аппарат находится на орбите спутника планеты (кроме вре-
мени, необходимого для проведения исследований). Орбитально-
десантные схемы по своим характеристикам близки к десантным.
Возможны различные варианты такой схемы: вход в атмосферу
с перелетной траектории или орбиты ИСМ, применение аэроди-
намического или ракетодинамического торможения для выхода на
орбиту ИСМ, использование стыковки взлетной ракеты (ВР),
содержащей контейнер с образцами грунта, с ОА, находящимся
на орбите ожидания, и др.
В табл. 1 представлены соответствующие данные для опти-
мальных траекторий однопусковой орбитально-десантной схемы.
Конечно, обеспечение существования ОА на орбите ИСМ значи-
тельно проще, чем СА на поверхности планеты, однако управле-
ние орбитальным полетом более насыщено различными динами-
Таблица 1
Схема полета Цикл полета Маршрут Тип траектории км/с Та, сут тпЗ~ М, сут ЛтМ-З, сут Гож. СУТ »х’ км/с I73 , км/с
Десантная 1996 з—м— М—3 I—I I—II II—I II—II 4,452 4,418 4,449 4,415 941 1019 950 1028 232 232 312 312 223 326 223 326 456 461 384 389 6,72 6,72 5,75 5,75 12,49 12,32 12,49 12,32
1988 з—м— М—3 I—I I—II II—I II—II 5,332 . 5,113 5,572 5,353 938 1014 894 969 194 194 413 413 199 273 199 273 546 547 283 284 5,66 5,66 6,33 6,33 11,82 И,6 11,82 11,6
Орбитально- десантная 1996 з—м— М—3 I—I I—II II—I II—II 6,167 6,132 5,494 5,459 922 1000 953 1031 240 240 303 303 223 326 223 326 429 434 397 402 6,19 6,19 5,72 5,72 12,49 12,32 12,49 12,32
1988 з—м— М—3 I—IV (петлевая) 5,500 1133 204 882 47 5,58 12,05
1991 3—в— М—М—3 II—I—II 8,650 609 306 288 15 7,96 11,45
1994 з—м— М—В—3 I—I—II 8,428 569 232 322 15 6,42 12,37
рскими операциями, чем управление полетом, на трассе
ржпланетного перелета. Сложной задачей является также обес-
ечение оптимальных условий возвращения к Земле при длитель-
ном нахождении ОА на орбите ожидания, что связано с влиянием
кавитационного поля планеты на движение ОА и неточным зна-
нием его параметров. Поэтому более экономичным является дру-
гой способ сокращения времени пребывания СА на поверхности
планеты, при котором используются такие траектории перелета с
Марса на Землю, что осуществляется более одного оборота во-
круг Солнца. В этом случае время пребывания аппарата в
окрестности планеты в основном определяется программой науч-
ных исследований, а остальное время, связанное с ожиданием
оптимальных условий встречи с Землей, возвращаемый аппарат
(ВА) находится на траектории межпланетного перелета. Это
позволяет в некоторых случаях снизить энергетические затраты
на старт с Марса и существенно повысить полезную массу ВА
за счет уменьшения запаса расходуемых средств на обеспечение
его активной работы в период времени ожидания. Такие траекто-
рии, у которых время межпланетного полета более одного периода
обращения, получили название петлевых. Характеристики такой
схемы ,в цикле полетов к Марсу в 1988 г. представлены в табл. 1.
Следует отметить, что схемы с петлевыми траекториями возвра-
щения к Земле имеют преимущество в энергетических затратах
по сравнению с оптимальными траекториями прямого перелета
в период до 1992 г., причем наибольший выигрыш достигается в
1988 г. Суммарное время полета для таких схем возрастает на
150...250 сут.
В десантных и орбитально-десантных схемах полета к Марсу
с возвращением на Землю используются также траектории с по-
путным облетом Венеры. Облет Венеры может осуществляться
либо при полете к Марсу, либо при возвращении к Земле. С энер-
гетической точки зрения первые траектории предпочтительнее
вторых до цикла 1991 г. Реализация таких схем осуществляется
следующим образом. Старт у Земли осуществляется так же, как
и в описанных выше схемах, однако если необходимо обеспечить
пролет у Венеры, то время старта и условия движения относи-
тельно Венеры выбираются таким образом, чтобы под действием
ее притяжения и дополнительного маневра АМС переводилась
бы на траекторию перелета к следующей планете. Время старта
и условия пролета Венеры подбираются так, чтобы затраты топ-
лива на все необходимые маневры незначительно превышали за-
траты для соответствующих схем без попутного облета Венеры.
Аналогичным образом осуществляется выбор траекторий для схемы
полета с пролетом Венеры на возврате к Земле. Такие схемы
позволяют сократить время ожидания аппарата у Марса, умень-
шить суммарное время полета до 550...650 сут. Несомненным их
преимуществом является также возможность проведения исследо-
вания Венеры при ее облете с помощью отделяемых зондов, спу-
скаемых или орбитальных аппаратов. Для реализации этих воз-
13
можностей первые схемы с траекториями пролета у Венеры на
участке перелета к Марсу естественно являются предпочтительнее
вторых.
Каждая схема полета имеет свой состав динамических опера-
ций и требований к точности их реализации. Характеристики уп-
равления зависят и от траектории движения. Следовательно, для
каждой схемы полета необходимо выбрать наиболее подходящую
для нее схему управления, которая зависит от целей и задач по-
лета, возможностей используемых наземных и бортовых систем, а
также принятой организации управления движением АМС.
1.2. Управление полетом АМС. Навигация и наведение
Управление движением любого космического аппарата—-это
сложный процесс, в котором участвуют различные бортовые си-
стемы, комплексы наземных технических средств и многочислен-
ные специализированные наземные службы. Они оперативно ана-
лизируют работу всех звеньев контура управления и обеспечи-
вают проведение динамических операций.
Для выполнения намеченной программы исследований аппарат
необходимо вывести на заранее выбранную рабочую орбиту, на
которой выполняются основные требования, обеспечивающие
функционирование всех бортовых систем. В частности, для АМС
может потребоваться выполнение следующих условий: формиро-
вание орбиты спутника планеты заданной формы и ориентации,
посадка в выбранном районе планеты или пролет над ним, обес-
печение связи СА с ОА и др. Ракета-носитель выводит межпла-
нетный аппарат не на заданную рабочую, а на некоторую про-
межуточную орбиту. Для формирования рабочей орбиты выпол-
няется ряд маневров. Примерами таких маневров являются пере-
вод станций «Венера» с начальной орбиты ИСЗ на траекторию
перелета к планете, выведение их на рабочую орбиту около пла-
неты для проведения фотографирования, радиолокационной съем-
ки или других исследований. В целях уменьшения расхода
топлива формирование рабочей орбиты может осуществляться с
помощью ряда последовательных маневров. Выбор наиболее эф-
фективных способов их проведения является одной из наиболее
сложных задач баллистического проектирования схемы полета.
Маневры, как и всякий реальный процесс управления объек-
том, выполняются с погрешностями. Эти погрешности, а также
воздействие различных возмущающих факторов в полете, неточ-
ности в расчете траектории и моделировании работы бортовых
систем приводят к тому, что фактическая траектория движения
космического аппарата отличается от заданной (номинальной).
Поэтому, какой бы совершенной ни была выбранная схема поле-
та, как бы точно ни рассчитывалась номинальная траектория
движения, необходимо предусмотреть возможность проведения не-
посредственно в полете анализа движения и работы бортовых
систем, выполнения дополнительных динамических операций.
14
Целью этих динамических операций является устранение выявлен-
ных рассогласований между фактической и номинальной траекто-
риями движения, которое осуществляется с помощью проведения
дополнительных коррекций. Для этого на аппарате должны уста-
навливаться системы для проведения измерений параметров дви-
жения и предусматриваться дополнительный запас топлива. Оцен-
ка количества коррекции, энергозатрат и времени их проведения
является одной из главных задач проектирования схемы управ-
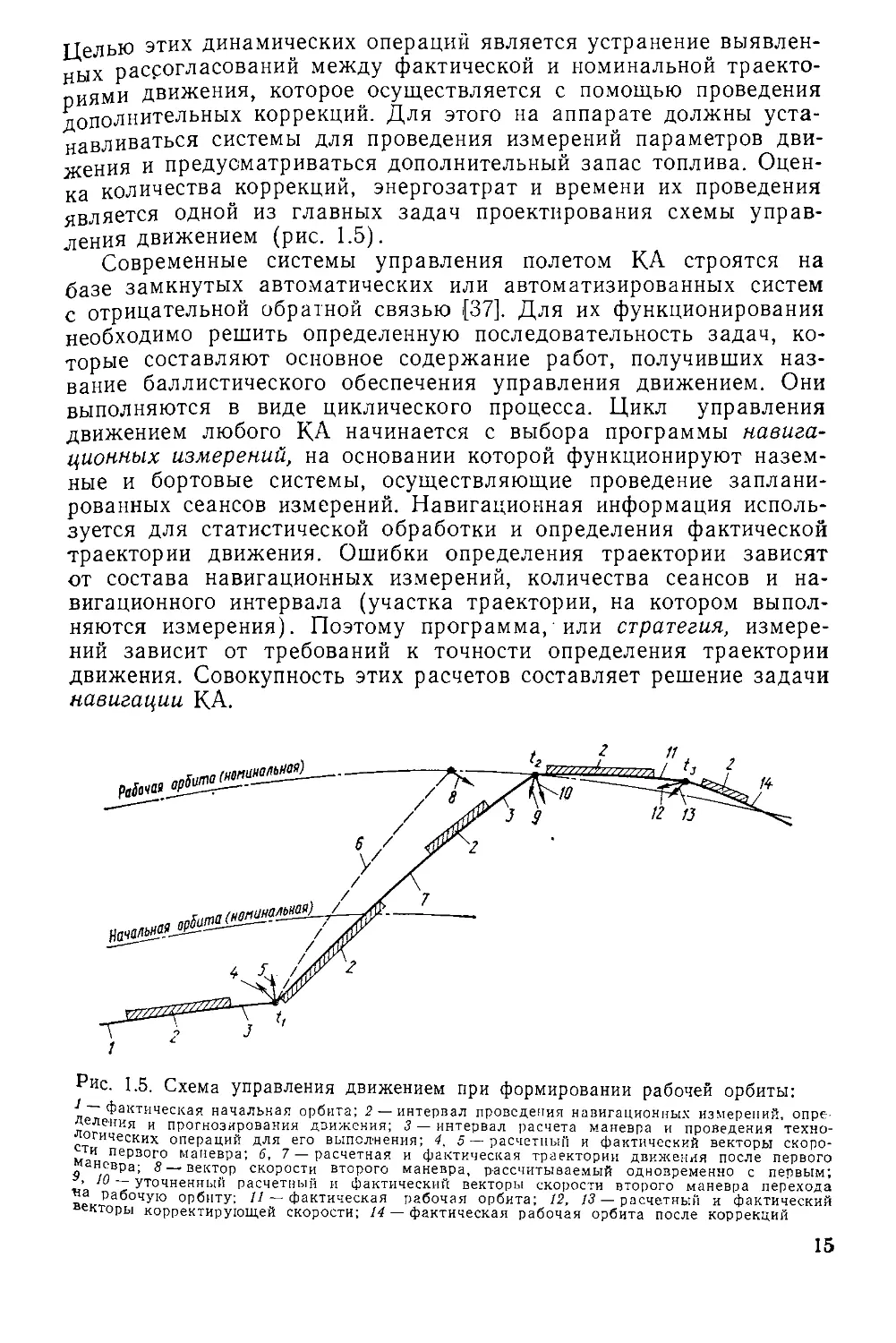
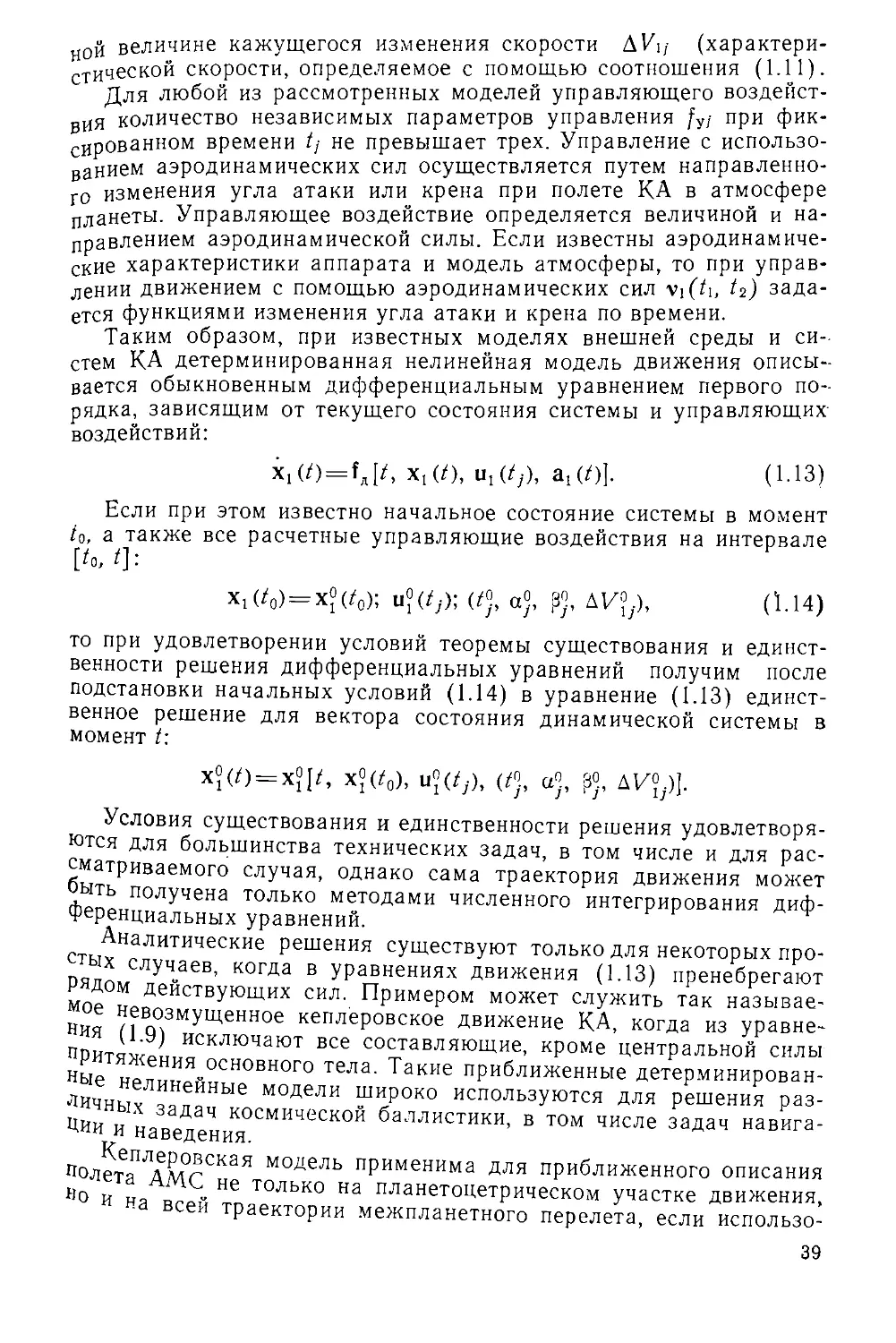
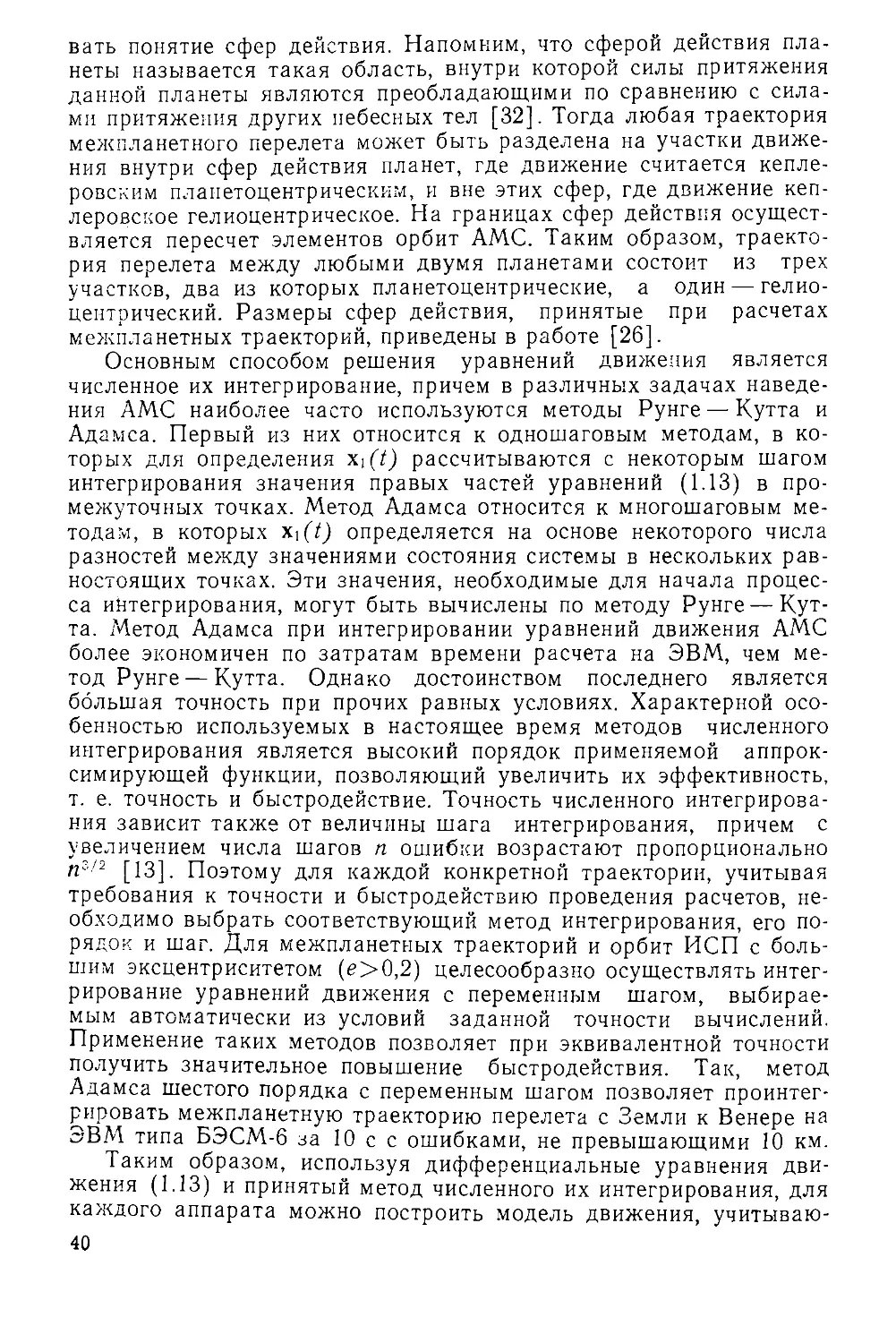
ления движением (рис. 1.5).
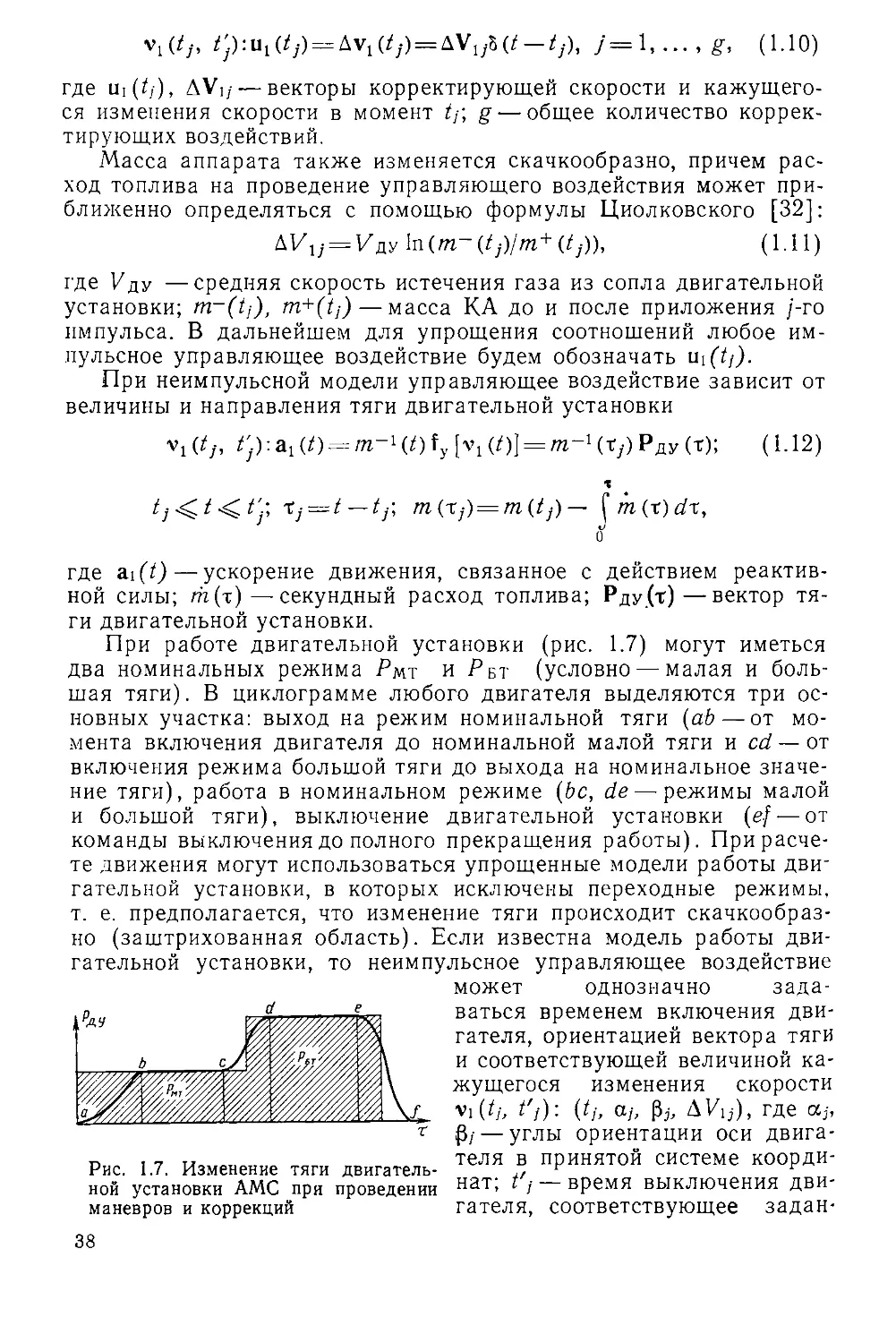
Современные системы управления полетом КА строятся на
базе замкнутых автоматических или автоматизированных систем
с отрицательной обратной связью (37]. Для их функционирования
необходимо решить определенную последовательность задач, ко-
торые составляют основное содержание работ, получивших наз-
вание баллистического обеспечения управления движением. Они
выполняются в виде циклического процесса. Цикл управления
движением любого КА начинается с выбора программы навига-
ционных измерений, на основании которой функционируют назем-
ные и бортовые системы, осуществляющие проведение заплани-
рованных сеансов измерений. Навигационная информация исполь-
зуется для статистической обработки и определения фактической
траектории движения. Ошибки определения траектории зависят
от состава навигационных измерений, количества сеансов и на-
вигационного интервала (участка траектории, на котором выпол-
няются измерения). Поэтому программа, или стратегия, измере-
ний зависит от требований к точности определения траектории
движения. Совокупность этих расчетов составляет решение задачи
навигации КА.
Рис. 1.5. Схема управления движением при формировании рабочей орбиты:
( — фактическая начальная орбита; 2 — интервал проведения навигационных измерений, опре-
лп?Й1Ия и пР°гнозиР°ваиия движения; 3 — интервал расчета маневра и проведения техно-
ст ических операций для его выполнения; 4,5 — расчетный и фактический векторы скоро-
и первого маневра; 6,7 — расчетная и фактическая траектории движения после первого
евра; 8 — вектор скорости второго маневра, рассчитываемый одновременно с первым;
’ ~~ уточненный расчетный и фактический векторы скорости второго маневра перехода
на Рабочую орбиту; // — фактическая рабочая орбита; 12, 13 — расчетный и фактический
акторы корректирующей скорости; 14 — фактическая рабочая орбита после коррекций
15
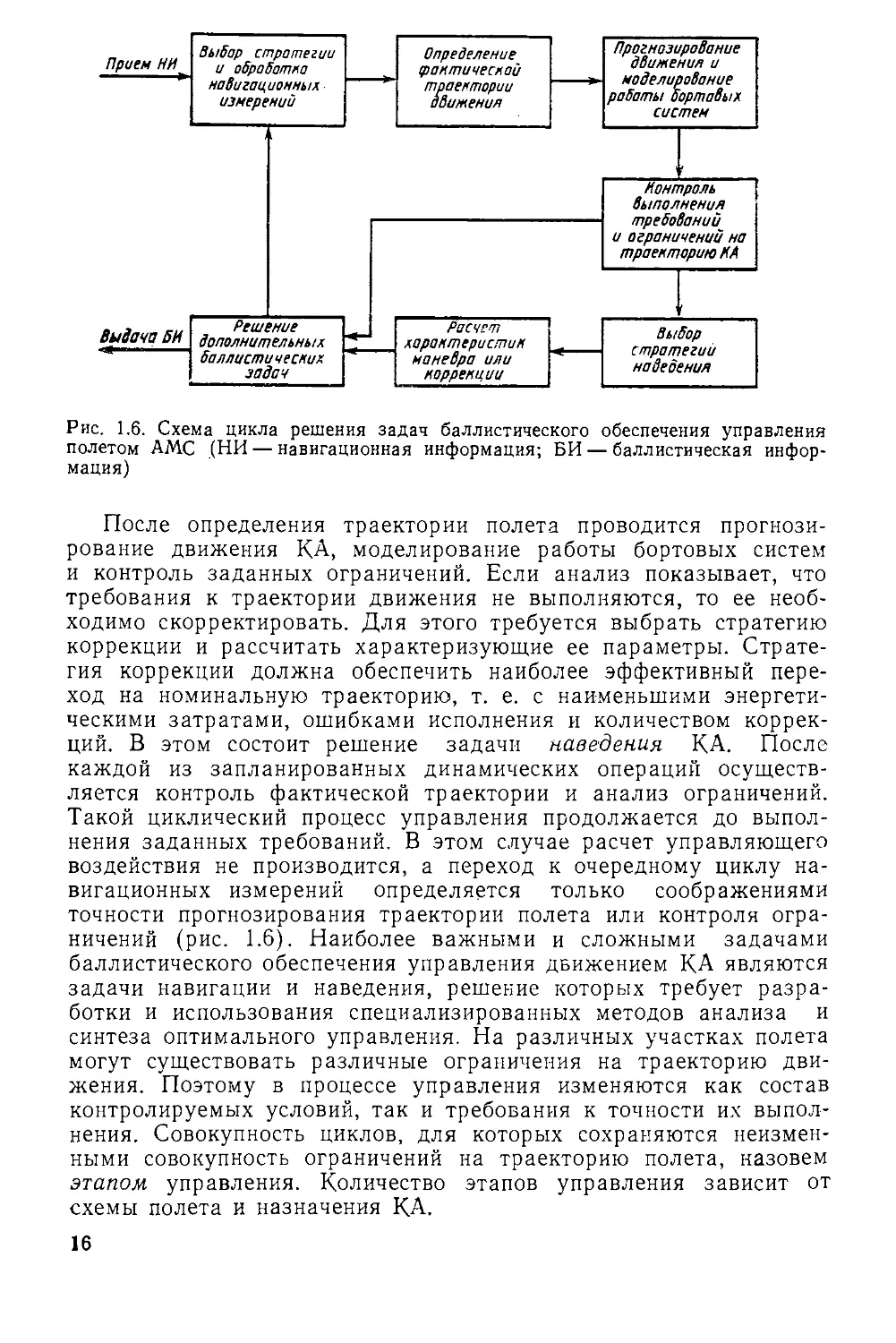
Рис. 1.6. Схема цикла решения задач баллистического обеспечения управления
полетом АМС (НИ — навигационная информация; БИ — баллистическая инфор-
мация)
После определения траектории полета проводится прогнози-
рование движения КА, моделирование работы бортовых систем
и контроль заданных ограничений. Если анализ показывает, что
требования к траектории движения не выполняются, то ее необ-
ходимо скорректировать. Для этого требуется выбрать стратегию
коррекции и рассчитать характеризующие ее параметры. Страте-
гия коррекции должна обеспечить наиболее эффективный пере-
ход на номинальную траекторию, т. е. с наименьшими энергети-
ческими затратами, ошибками исполнения и количеством коррек-
ций. В этом состоит решение задачи наведения КА. После
каждой из запланированных динамических операций осуществ-
ляется контроль фактической траектории и анализ ограничений.
Такой циклический процесс управления продолжается до выпол-
нения заданных требований. В этом случае расчет управляющего
воздействия не производится, а переход к очередному циклу на-
вигационных измерений определяется только соображениями
точности прогнозирования траектории полета или контроля огра-
ничений (рис. 1.6). Наиболее важными и сложными задачами
баллистического обеспечения управления движением КА являются
задачи навигации и наведения, решение которых требует разра-
ботки и использования специализированных методов анализа и
синтеза оптимального управления. На различных участках полета
могут существовать различные ограничения на траекторию дви-
жения. Поэтому в процессе управления изменяются как состав
контролируемых условий, так и требования к точности их выпол-
нения. Совокупность циклов, для которых сохраняются неизмен-
ными совокупность ограничений на траекторию полета, назовем
этапом управления. Количество этапов управления зависит от
схемы полета и назначения КА.
16
Рассмотрим кратко основные особенности управления движе-
нием межпланетными аппаратами на примере АМС «Венера-15-
и -16», предназначенных для радиолокационного исследования
северных полярных областей Венеры с орбиты ИСВ. Схема по-
лета каждой АМС предусматривала проведение двух маневров,,
обеспечивающих формирование рабочей орбиты: разгон для пе-
ревода станции с орбиты ИСЗ на траекторию межпланетного-
перелета и торможение для выхода на орбиту ИСВ. Поэтому про-
цесс управления включал в себя два этапа: межпланетный пе-
релет по маршруту Земля — Венера и полет по рабочей орбите
ИСВ.
Целью управления на первом этапе являлось обеспечение сле-
дующих условий подлета к планете Венера: положения плоскости
движения АМС относительно планеты, высоты перицентра под-
летной гиперболы и времени его прохождения. Номинальная
траектория перелета выбиралась таким образом, что выполнение
этих условий при управлении движением на участке межпланет-
ного перелета позволяло осуществить маневр торможения для
перехода на заданную рабочую орбиту ИСВ с энергетическими
затратами, не превышающими располагаемых запасов топлива.
На трассе межпланетного перелета проводились радиотехнические
измерения дальности и радиальной скорости АМС относительно
наземных станций слежения и их статистическая обработка для
определения фактической орбиты, а также две коррекции, обес-
печившие движение АМС по заданной межпланетной траектории
с требуемой точностью. На начальном участке полета траектор-
ные измерения выполнялись ежесуточно несколькими станциями
слежения, расположенными в разных районах СССР. Высокая
информативность измерений позволила на сравнительно корот-
ком навигационном интервале определить параметры движения,
рассчитать и провести первую коррекцию не позднее десятых
суток полета. После этой коррекции измерения параметров дви-
жения выполнялись в среднем с частотой 1—2 раза в неделю,
однако для достижения необходимой точности определения орбиты
навигационный интервал был увеличен до ста суток, а вторая
коррекция проведена за неделю до подлета к планете. Навига-
ционные измерения, выполненные после второй коррекции, поз-
волили проконтролировать ее и подтвердить возможность пере-
вода станции на рабочую орбиту — орбиту ИСВ. На этом закон-
чился первый этап управления.
Основной задачей второго этапа управления было формиро-
вание и поддержание рабочей орбиты станции, с которой должна
была проводиться радиолокационная съемка поверхности планеты.
Формирование орбиты осуществлялось с помощью одного маневра
(торможения) и двух коррекций, исправлявших ошибки наведе-
ния станции на траектории межпланетного перелета, проведения
маневра и определения параметров движения по навигационным
измерениям. Параметры орбиты регулярно контролировались.
t-сли их отклонения от номинальных оказывались больше допу-
17
•стимых для радиолокационной съемки, то проводилась коррекция.
Учитывая высокие требования к точности формирования и под-
держания параметров орбиты ИСВ, в первую очередь высоты
перицентра и аргумента его широты, периода и времени прохож-
дения станции над районами съемки, радиотехнические измере-
ния со станций слежения выполнялись ежесуточно. Коррекции
поддержания рабочей орбиты проводились периодически в тече-
ние всего интервала радиолокационной съемки. Второй этап
управления продолжался до конца съемки.
Характерной особенностью управления полетом межпланетных
станций являются сравнительно большие временные интервалы
между проведением динамических операций. В силу этого в авто-
матизированной. системе управления широко используются назем-
ные измерительные и вычислительные средства для решения раз-
личных задач, а само управление осуществляется программно-
временным способом. В его основе лежит использование типовых
сеансов, определяющих последовательность функционирования
бортовых систем. Временная привязка их работы обеспечивается
с помощью функциональных и числовых команд, которые исполь-
зуются для включения в заданные моменты бортовых программно-
временных устройств, настройки бортовых систем на выполнение
тех или иных операций с учетом конкретных условий полета.
К числу типовых сеансов относятся: сеанс траекторных измере-
ний и получения телеметрических данных, сеанс проведения кор-
рекции или маневра, сеанс включения научных приборов или
радиолокационной съемки и др. Числовые команды, обеспечиваю-
щие настройку бортовых систем, как правило, объединяются в
массивы командно-уставочной информации (уставки), которые
должны быть переданы на борт в сеансах связи перед проведением
соответствующих операций. Остальное время КА и его системы
функционируют в так называемом дежурном режиме (31].
В автоматизированный контур управления полетом входят сле-
дующие основные элементы: командно-измерительный комплекс
(КИК), образуемый сетью станций слежения (командно-измери-
тельных пунктов — КИПов), Центр управления полетом (ЦУП),
бортовой комплекс управления (БКУ), линии передачи данных.
КИПы, ЦУП и линии связи образуют наземный комплекс управ-
ления (НКУ). Коротко рассмотрим назначение каждого элемента
и их взаимодействие, обратив особое внимание на взаимосвязь
бортовых и наземных средств.
НКУ предназначен для измерения навигационных параметров,
характеризущих движение КА, а также для контроля функцио-
нирования бортовых систем и условий их работы с помощью
радиотехнических командно-измерительных систем (КИС), обес-
печивающих проведение траекторных и телеметрических измере-
ний, а также передачу на борт различных команд управления.
Принятая с борта информация передается по линиям связи в
ЦУП. Каждый КИП оснащается необходимыми радиотехниче-
скими системами, средствами автоматизации и передачи данных.
18
Современный космический аппарат — сложная система дина-
мического типа. Контроль состояния и управление его функцио-
нированием требуют оперативной обработки больших потоков
информации различного вида, которые осуществляются ЦУПом.
Поток телеметрической и навигационной информации, поступаю-
щий со станций слежения, вводится по каналам в информацион-
но-вычислительный комплекс (ИВК), в котором проводятся ее
обработка, автоматизированный анализ результатов, отображение
на коллективных и индивидуальных средствах. Результатом обра-
ботки телеметрической информации являются данные о работе
постоянно функционирующих и динамических систем КА, выпол-
нении ими заданных режимов работы, запасах и расходах раз-
личных ресурсов (электроэнергии, топлива), проведении научных
экспериментов. Задачи, решаемые при обработке навигационной
информации, описаны выше (см. рис. 1.6).
На основе полученных данных и программы полета, в которую
включены основные операции по управлению полетом, разраба-
тываются детальные программы сеансов связи и формируется
командно-уставочная информация. Непосредственная выдача
команд осуществляется через станции слежения автоматически
из ЦУПа или персоналом станций. Решение всей совокупности
задач, возлагаемых на ЦУП, невозможно без использования
сложного комплекса технических средств и прежде всего инфор-
мационно-вычислительного комплекса. Суммарная производитель-
ность такого ИВК может достигать нескольких десятков миллио-
нов операций в секунду, объем памяти — нескольких тысяч
мегабайт, а объем используемого для проведения расчетов спе-
циального программно-математического обеспечения (СМО) —
нескольких десятков миллионов команд (в зависимости от слож-
ности полета). Так, программное обеспечение, разработанное в
США для программ пилотируемых космических полетов, состав-
ляло: 10 млн. команд — «Меркурий», «Джемини»; 20 млн.
команд—«Аполлон», «Скайлэб»; 40 млн. команд — «Спейс
Шаттл» [37]. Большая сложность и трудоемкость разработки про-
граммного обеспечения приводит к тому, что расходы на его соз-
дание составляют основную часть (до 80%) стоимости вычисли-
тельных систем. Поэтому накопление программного фонда СМО
должно происходить постепенно и основываться на использова-
нии универсальных математических моделей и методов, типовых
решений, обеспечивающих высокую преемственность СМО. Это
требование является главным при разработке методов решения
задач навигации и наведения АМС.
Сформированная ЦУПом командно-уставочная информация
по командной радиолинии поступает на борт в память БЦВМ и
осуществляет настройку соответствующих систем аппарата на про-
ведение необходимой типовой операции. По функциональному наз-
начению бортовые системы, участвующие в автоматизированном
Управлении полетом, можно разделить на следующие: ориента-
ции и стабилизации на пассивном и активном участках полета,
19
радиотехнических измерений (навигационных и телеметрических)
и др.
При полетах АМС в контуре управления для повышения опе-
ративности и точности наведения могут использоваться системы
автономной навигации. Как правило, они применяются при под-
лете к планете, когда станция находится на больших расстояниях
от Земли и эффективность радиотехнических измерений может
быть недостаточна для выполнения программы полета. В этом
случае решение задач навигации и наведения полностью или
частично перекладывается на БЦВМ, что значительно повышает
оперативность управления. Совокупность установленных на аппа-
рате приборов и систем, обеспечивающих проведение ориентации
и стабилизации углового положения КА и движения его центра
масс на активных и пассивных участках полета, а также решаю-
щих задачи автономной навигации и наведения, составляет си-
стему автономного управления (САУ).
На примере сеанса проведения коррекции траектории движе-
ния рассмотрим последовательность функционирования бортовых
систем. В этом случае на борт аппарата должна быть передана
командная и уставочная информация, определяющая: тип
сеанса и время его начала; условия работы системы ориентации
(режим, опорные светила, углы, характеризующие положение
приборов системы в сеансе); условия работы системы автоном-
ного управления на активном участке (углы разворотов объекта
для выставки оси двигательной установки (ДУ) в нужном на-
правлении и величину приращения кажущейся скорости, сообщае-
мой аппарату).
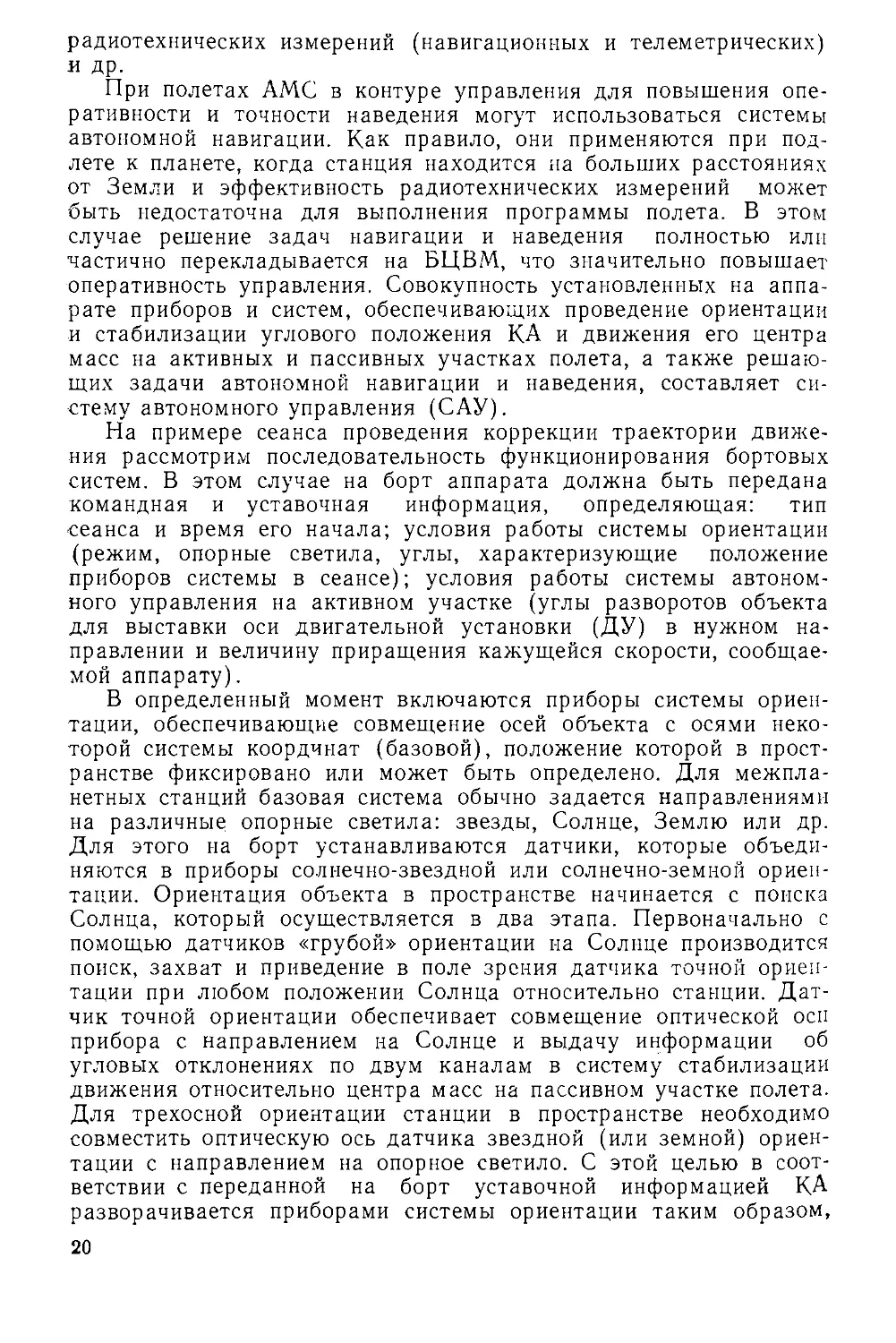
В определенный момент включаются приборы системы ориен-
тации, обеспечивающие совмещение осей объекта с осями неко-
торой системы координат (базовой), положение которой! в прост-
ранстве фиксировано или может быть определено. Для межпла-
нетных станций базовая система обычно задается направлениями
на различные опорные светила: звезды, Солнце, Землю или др.
Для этого на борт устанавливаются датчики, которые объеди-
няются в приборы солнечно-звездной или солнечно-земной ориен-
тации. Ориентация объекта в пространстве начинается с поиска
Солнца, который осуществляется в два этапа. Первоначально с
помощью датчиков «грубой» ориентации на Солнце производится
поиск, захват и приведение в поле зрения датчика точной ориен-
тации при любом положении Солнца относительно станции. Дат-
чик точной ориентации обеспечивает совмещение оптической осп
прибора с направлением на Солнце и выдачу информации об
угловых отклонениях по двум каналам в систему стабилизации
движения относительно центра масс на пассивном участке полета.
Для трехосной ориентации станции в пространстве необходимо
совместить оптическую ось датчика звездной (или земной) ориен-
тации с направлением на опорное светило. С этой целью в соот-
ветствии с переданной на борт уставочной информацией КА
разворачивается приборами системы ориентации таким образом,
20
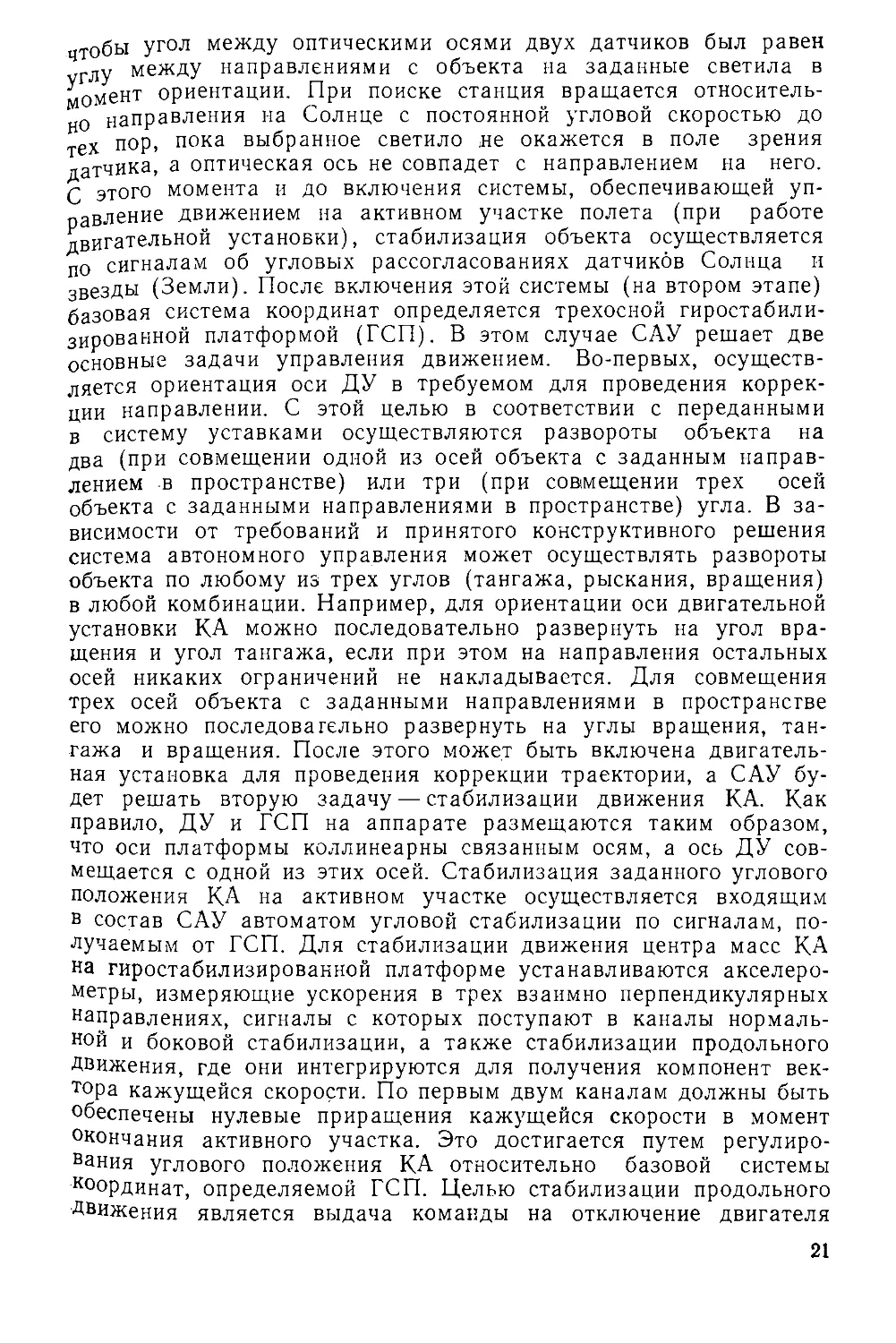
чтобы угол между оптическими осями двух датчиков был равен
лу между направлениями с объекта на заданные светила в
Момент ориентации. При поиске станция вращается относитель-
но направления на Солнце с постоянной угловой скоростью до
тех пор, пока выбранное светило не окажется в поле зрения
датчика, а оптическая ось не совпадет с направлением на него.
q этого момента и до включения системы, обеспечивающей уп-
равление движением на активном участке полета (при работе
двигательной установки), стабилизация объекта осуществляется
по сигналам об угловых рассогласованиях датчиков Солнца и
звезды (Земли). После включения этой системы (на втором этапе)
базовая система координат определяется трехосной гиростабили-
зированной платформой (ГСП). В этом случае САУ решает две
основные задачи управления движением. Во-первых, осуществ-
ляется ориентация оси ДУ в требуемом для проведения коррек-
ции направлении. С этой целью в соответствии с переданными
в систему уставками осуществляются развороты объекта на
два (при совмещении одной из осей объекта с заданным направ-
лением в пространстве) или три (при сов(мещении трех осей
объекта с заданными направлениями в пространстве) угла. В за-
висимости от требований и принятого конструктивного решения
система автономного управления может осуществлять развороты
объекта по любому из трех углов (тангажа, рыскания, вращения)
в любой комбинации. Например, для ориентации оси двигательной
установки КА можно последовательно развернуть на угол вра-
щения и угол тангажа, если при этом на направления остальных
осей никаких ограничений не накладывается. Для совмещения
трех осей объекта с заданными направлениями в пространстве
его можно последовательно развернуть на углы вращения, тан-
гажа и вращения. После этого может быть включена двигатель-
ная установка для проведения коррекции траектории, а САУ бу-
дет решать вторую задачу — стабилизации движения КА. Как
правило, ДУ и ГСП на аппарате размещаются таким образом,
что оси платформы коллинеарны связанным осям, а ось ДУ сов-
мещается с одной из этих осей. Стабилизация заданного углового
положения КА на активном участке осуществляется входящим
в состав САУ автоматом угловой стабилизации по сигналам, по-
лучаемым от ГСП. Для стабилизации движения центра масс КА
на гиростабилизированной платформе устанавливаются акселеро-
метры, измеряющие ускорения в трех взаимно перпендикулярных
направлениях, сигналы с которых поступают в каналы нормаль-
ной и боковой стабилизации, а также стабилизации продольного
Движения, где они интегрируются для получения компонент век-
тора кажущейся скорости. По первым двум каналам должны быть
обеспечены нулевые приращения кажущейся скорости в момент
окончания активного участка. Это достигается путем регулиро-
вания углового положения КА относительно базовой системы
координат, определяемой ГСП. Целью стабилизации продольного
Движения является выдача команды на отключение двигателя
21
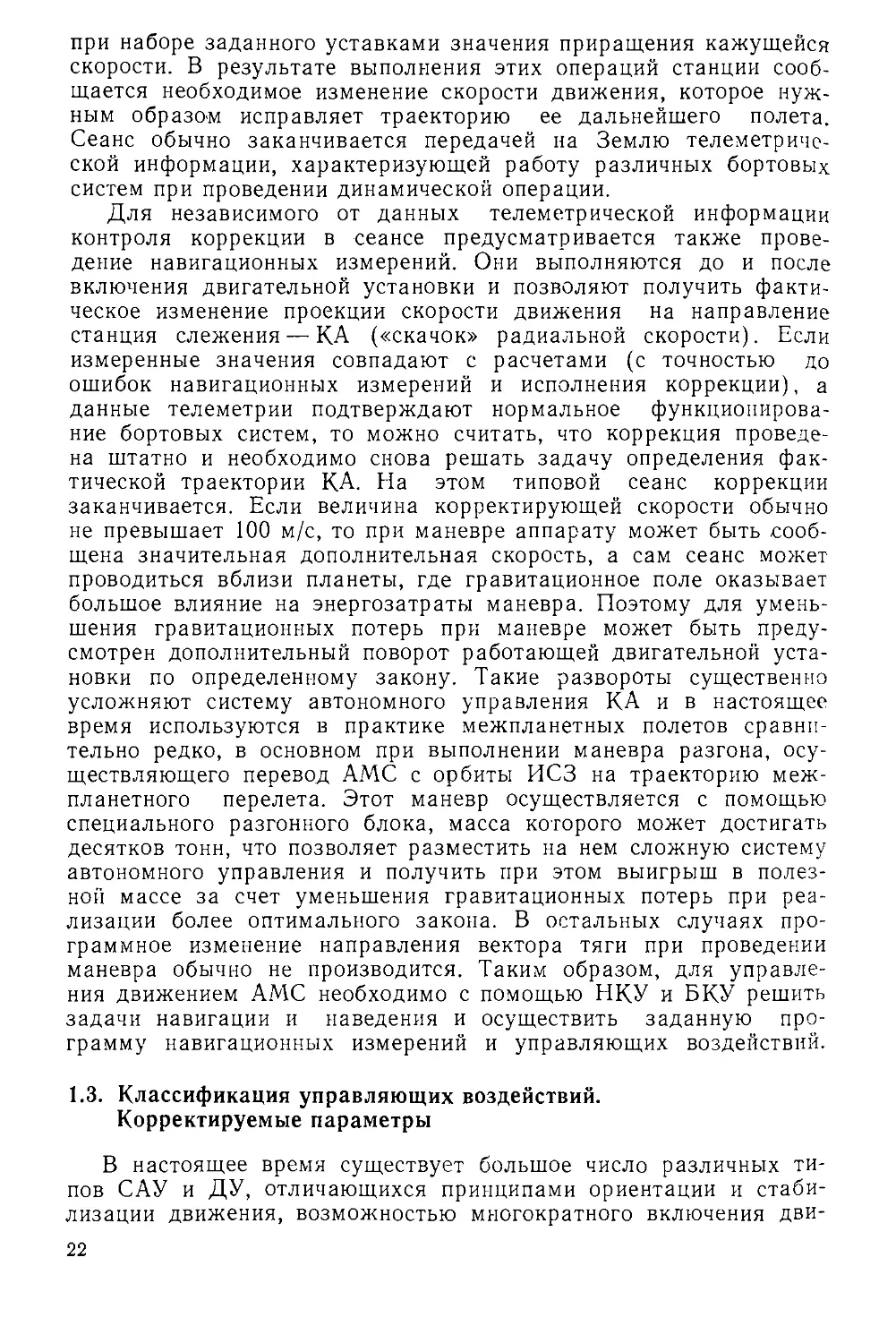
при наборе заданного уставками значения приращения кажущейся
скорости. В результате выполнения этих операций станции сооб-
щается необходимое изменение скорости движения, которое нуж-
ным образом исправляет траекторию ее дальнейшего полета.
Сеанс обычно заканчивается передачей на Землю телеметриче-
ской информации, характеризующей работу различных бортовых
систем при проведении динамической операции.
Для независимого от данных телеметрической информации
контроля коррекции в сеансе предусматривается также прове-
дение навигационных измерений. Они выполняются до и после
включения двигательной установки и позволяют получить факти-
ческое изменение проекции скорости движения на направление
станция слежения — КА («скачок» радиальной скорости). Если
измеренные значения совпадают с расчетами (с точностью до
ошибок навигационных измерений и исполнения коррекции), а
данные телеметрии подтверждают нормальное функционирова-
ние бортовых систем, то можно считать, что коррекция проведе-
на штатно и необходимо снова решать задачу определения фак-
тической траектории КА. На этом типовой сеанс коррекции
заканчивается. Если величина корректирующей скорости обычно
не превышает 100 м/с, то при маневре аппарату может быть сооб-
щена значительная дополнительная скорость, а сам сеанс может
проводиться вблизи планеты, где гравитационное поле оказывает
большое влияние на энергозатраты маневра. Поэтому для умень-
шения гравитационных потерь при маневре может быть преду-
смотрен дополнительный поворот работающей двигательной уста-
новки по определенному закону. Такие развороты существенно
усложняют систему автономного управления КА и в настоящее
время используются в практике межпланетных полетов сравни-
тельно редко, в основном при выполнении маневра разгона, осу-
ществляющего перевод АМС с орбиты ИСЗ на траекторию меж-
планетного перелета. Этот маневр осуществляется с помощью
специального разгонного блока, масса которого может достигать
десятков тонн, что позволяет разместить на нем сложную систему
автономного управления и получить при этом выигрыш в полез-
ной массе за счет уменьшения гравитационных потерь при реа-
лизации более оптимального закона. В остальных случаях про-
граммное изменение направления вектора тяги при проведении
маневра обычно не производится. Таким образом, для управле-
ния движением АМС необходимо с помощью НКУ и БКУ решить
задачи навигации и наведения и осуществить заданную про-
грамму навигационных измерений и управляющих воздействий.
1.3. Классификация управляющих воздействий.
Корректируемые параметры
В настоящее время существует большое число различных ти-
пов САУ и ДУ, отличающихся принципами ориентации и стаби-
лизации движения, возможностью многократного включения дви-
22
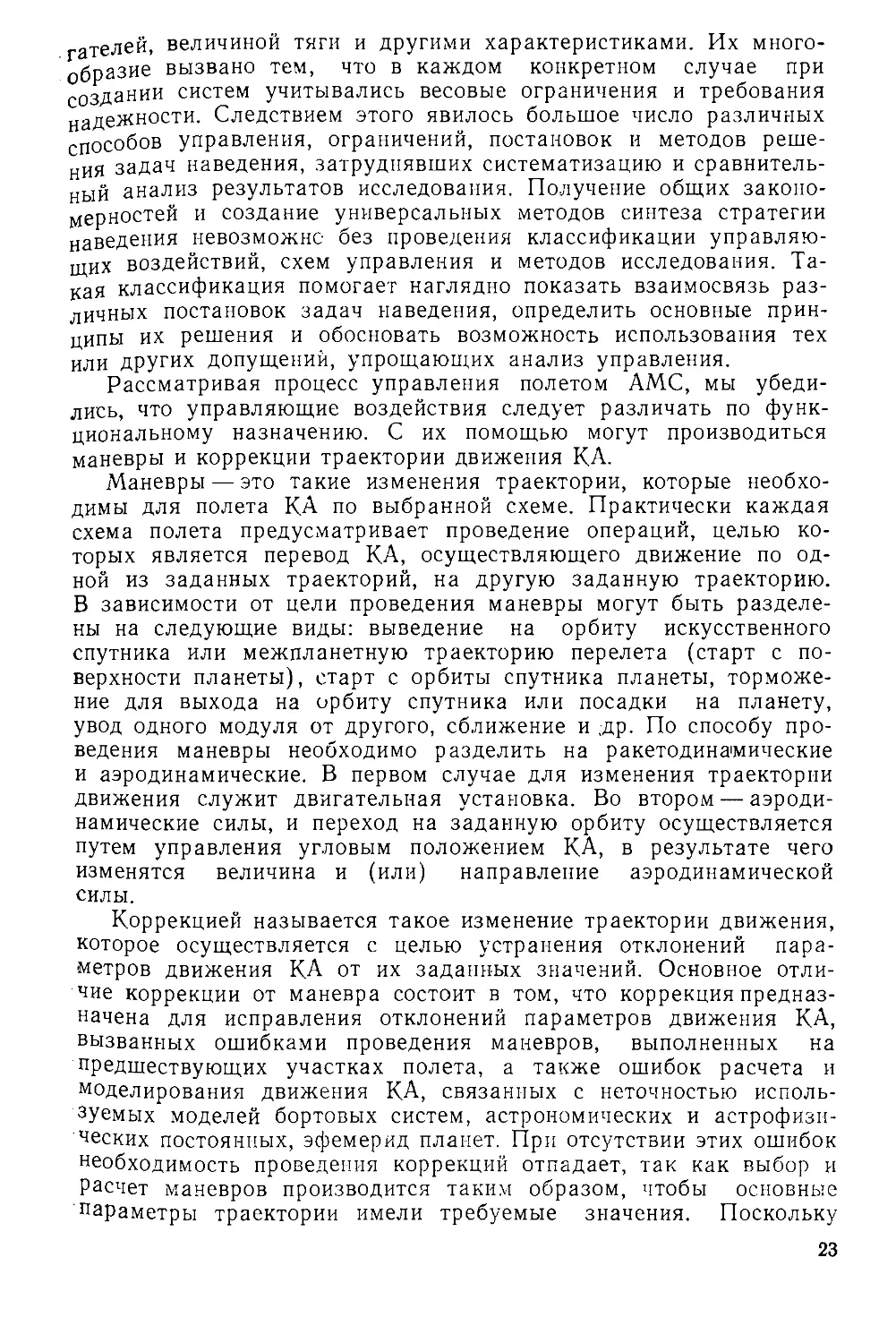
гателей, величиной тяги и другими характеристиками. Их много-
образие вызвано тем, что в каждом конкретном случае при
создании систем учитывались весовые ограничения и требования
надежности. Следствием этого явилось большое число различных
способов управления, ограничений, постановок и методов реше-
ния задач наведения, затруднявших систематизацию и сравнитель-
ный анализ результатов исследования. Получение общих законо-
мерностей и создание универсальных методов синтеза стратегии
наведения невозможно без проведения классификации управляю-
щих воздействий, схем управления и методов исследования. Та-
кая классификация помогает наглядно показать взаимосвязь раз-
личных постановок задач наведения, определить основные прин-
ципы их решения и обосновать возможность использования тех
или других допущений, упрощающих анализ управления.
Рассматривая процесс управления полетом АМС, мы убеди-
лись, что управляющие воздействия следует различать по функ-
циональному назначению. С их помощью могут производиться
маневры и коррекции траектории движения КА.
Маневры — это такие изменения траектории, которые необхо-
димы для полета КА по выбранной схеме. Практически каждая
схема полета предусматривает проведение операций, целью ко-
торых является перевод КА, осуществляющего движение по од-
ной из заданных траекторий, на другую заданную траекторию.
В зависимости от цели проведения маневры могут быть разделе-
ны на следующие виды: выведение на орбиту искусственного
спутника или межпланетную траекторию перелета (старт с по-
верхности планеты), старт с орбиты спутника планеты, торможе-
ние для выхода на орбиту спутника или посадки на планету,
увод одного модуля от другого, сближение и др. По способу про-
ведения маневры необходимо разделить на ракетодинамические
и аэродинамические. В первом случае для изменения траектории
движения служит двигательная установка. Во втором — аэроди-
намические силы, и переход на заданную орбиту осуществляется
путем управления угловым положением КА, в результате чего
изменятся величина и (или) направление аэродинамической
силы.
Коррекцией называется такое изменение траектории движения,
которое осуществляется с целью устранения отклонений пара-
метров движения КА от их заданных значений. Основное отли-
чие коррекции от маневра состоит в том, что коррекция предназ-
начена для исправления отклонений параметров движения КА,
вызванных ошибками проведения маневров, выполненных на
предшествующих участках полета, а также ошибок расчета и
моделирования движения КА, связанных с неточностью исполь-
зуемых моделей бортовых систем, астрономических и астрофизи-
ческих постоянных, эфемерид планет. При отсутствии этих ошибок
необходимость проведения коррекций отпадает, так как выбор и
расчет маневров производится таким образом, чтобы основные
параметры траектории имели требуемые значения. Поскольку
23
ошибки имеют случайный характер, то корректирующее воздей-
ствие также является случайным и не имеет постоянной состав-
ляющей. Фактическая траектория движения КА на каждом участке
полета, полученная в результате реализации управления, отли-
чается от рассчитанной заранее номинальной траектории пассив-
ного полета. Следовательно, соответствующие параметры маневра,
осуществляющего перевод КА на заданную траекторию, также
будут отличаться от априорных данных, полученных при выборе
схемы полета. Таким образом, характеристики маневров также
имеют случайные составляющие наряду с обязательными постоян-
ными составляющими. Однако в отличие от коррекции, преду-
смотренный схемой управления маневр проводится даже в том
случае, если КА движется по номинальной траектории.
Управления отличаются количеством исправляемых парамет-
ров (однопараметрические, двухпараметрические коррекции и
маневры), а также числом независимых параметров управления,
которые могут быть реализованы с помощью установленных на
КА бортовых систем. Максимальное число исправляемых пара-
метров не превышает шести, так как траектория движения одно-
значно определяется шестью независимыми параметрами. В то же
время количество независимых параметров при каждом управле-
нии у современных межпланетных аппаратов не превышает че-
тырех: это времена включения и выключения ДУ и два угла ее
ориентации в пространстве. Остальные характеристики активного
участка, такие как тяга ДУ и ее регулирование, программное
изменение углов тангажа и рыскания на активном участке, обыч-
но выбирают заранее, исходя из оптимизации энергетики управ-
ления, массы обеспечивающих систем и простоты конструктив-
ного решения.
По способу изменения параметров движения управляющие воз-
действия можно разделить на независимые и связанные. При не-
зависимом управлении одновременно исправляются все основные
параметры движения, и поэтому их число не должно превышать
количества параметров управления. Связанное управление отли-
чается от независимого тем, что при каждом управляющем воз-
действии исправляется только часть известных отклонений пара-
метров таким образом, чтобы в результате последовательного
проведения нескольких управляющих воздействий обеспечить ис-
правление всех параметров. Связанное управление применяется
в том случае, когда количество исправляемых параметров пре-
вышает количество параметров управления. Кроме того, для
уменьшения энергозатрат связанное управление целесообразно
использовать даже в том случае, когда в принципе возможно про-
ведение независимого управления. Будем считать, что в первом
случае имеет место неоднородно-связанное управление, а во вто-
ром— однородно-связанное. Эти два типа управляющих воздей-
ствий имеют ряд особенностей, которые определяются не только
целью их использования, но также методами расчета и исследо-
вания. Однако для всех связанных управлений характерна взаим-
24
ная зависимость между последовательно проводимыми маневра-
ми или коррекциями траектории, которая выражается в виде соот-
ветствующего условия связи.
Следует отметить, что для современных АМС наиболее ти-
пичным является проведение независимых управляющих воздей-
ствий. Это объясняется длительным циклом накопления измери-
тельной информации, необходимой для определения параметров
движения, медленным изменением эффективности управления на
участках межпланетного перелета и другими особенностями поле-
та АМС. Только на орбитах ИСП, где режимы связанной коррек-
ции наиболее эффективны, а число исправляемых параметров
может превышать возможности независимого управления, связан-
ные коррекции получили распространение.
По способу исправления отклонений параметров движения
коррекции можно разделить на одноразовые и многоразовые. При
одноразовых коррекциях параметры движения изменяются один
раз, при многоразовых — цикл управления повторяется много-
кратно. Использование многоразовых коррекций, как правило,
связано с необходимостью обеспечения высокой точности наве-
дения при приемлемых затратах топлива на управление. При
запусках АМС «Венера» первого поколения использовался
режим одноразовых независимых коррекций траектории межпла-
нетного перелета. Повышение требований к точности наведения
для следующего поколения АМС «Венера», обеспечение посадки
СА в заданные районы поверхности планеты и создание ИСВ
привели к переходу к двухразовой независимой коррекции, кото-
рая почти на порядок эффективнее одноразовой.
Дальнейшая классификация связана с выбором моделей дина-
мической системы и управляющих воздействий, используемых
при решении задач наведения.
В зависимости от требуемой точности исследований приме-
няются следующие две модели управляемого объекта: линейная;
нелинейная, учитывающая основные воздействия на движение
КА. Следует отметить, что в современной теории управления ли-
нейные системы занимают особое место, так как они позволяют
получить важные качественные и количественные закономерно-
сти. При исследовании линейных моделей физических объектов
можно воспользоваться хорошо развитым и эффективным аппа-
ратом математического и корреляционного анализа, линейной
алгебры и теории дифференциальных уравнений. Кроме того,
методы расчета характеристик управления линейной динамиче-
ской системой могут служить основой для создания соответст-
вующих итерационных методов решения задач наведения нели-
нейной динамической системы.
Модели управляющих воздействий по характеру влияния на
Движение аппарата можно разделить на импульсные и неимпульс-
ные, т. е. с протяженным активным участком. Под импульсным
обычно понимается такое воздействие, которое приводит к мгно-
венному изменению вектора скорости движения КА при практи-
25
чески неизменных его координатах. Это, как правило, кратко-
временные включения ДУ с большой тягой. Многие задачи ис-
следования маневров и коррекций на этапе проектирования
решаются в предположении импульсного воздействия. В то же
время в процессе полета для повышения точности решения тех
же самых задач необходимо учитывать протяженность активного
участка. Следует отметить, что количество независимых пара-
метров управления практически не зависит от модели управляю-
щего воздействия.
В зависимости от характера допущений, принимаемых отно-
сительно действующих на КА сил, возможных ошибок определе-
ния состояния динамической системы и управления ею, целе-
сообразно рассматривать следующие модели: детерминированную
и стохастическую. При использовании детерминированной модели
предполагается, что в каждом случае, когда рассчитывается оче-
редное управление, известны с некоторой точностью те-
кущие отклонения параметров, которые необходимо исправить
или изменить. Ошибки оценки состояния системы и исполнения
очередного управляющего воздействия малы или неизвестны,
причем отсутствуют надежные априорные характеристики их рас-
пределения, что исключает возможность применения статистиче-
ских методов исследования. После проведения очередного управ-
ления проводится новая оценка состояния системы и расчет оче-
редного управляющего воздействия без учета возможных ошибок
последующего управления. Частным случаем детерминированной
модели является наиболее простая — идеальная модель, при ко-
торой предполагается отсутствие ошибок навигации и наведения.
При использовании стохастической модели предполагается,
что конкретные значения исправляемых параметров неизвестны,
однако существует оценка возможных ошибок их определения и
проведения управляющих воздействий. Это позволяет использо-
вать статистические методы исследования систем для решения
задач наведения. Необходимые для расчета характеристик управ-
ления зависимости могут быть получены из соответствующих
соотношений детерминированной модели с учетом априорных и
апостериорных данных о распределении возможных ошибок оцен-
ки состояния и управления. Если известен закон и параметры их
распределения, то такую модель назовем вероятностной. Она поз-
воляет получить вероятностные характеристики любых выходных
и управляющих параметров системы. Если вероятностные харак-
теристики ошибок известны недостаточно точно, то используется
гарантирующая модель [48]. В этом случае предполагается задан-
ным некоторое множество возможных вероятностных характери-
стик случайных ошибок и определяются свойства управляемой
системы в предположении наихудшей их реализации. Выбор
вероятностной или гарантирующей модели зависит от того, на-
сколько она соответствует решаемой задаче и насколько надежна
имеющаяся информация о работе бортовых систем автономного уп-
равления. При проектировании и отработке систем осуществ-
26
пяется математическое и физическое моделирование их работы,
оцениваются возможные ошибки функционирования и их распре-
деление. Эти данные, полученные, как правило, при наиболее
неблагоприятных внешних воздействиях на систему автономного
управления, используются в качестве априорных данных выход-
ных характеристик системы и по своему содержанию являются
предельными оценками. Поэтому использование их в гаранти-
рующей модели может привести к значительному завышению
ошибок и энергозатрат наведения.
В практике управления полетом АМС наиболее часто приме-
няются вероятностные модели, которые и используются в данной
книге. Что касается методов гарантированной оценки характе-
ристик наведения, то они для наиболее распространенного в су-
ществующей литературе случая задания возможных ошибок их
предельными значениями могут быть получены непосредственно
из детерминированной модели путем максимизации оцениваемых
характеристик на множестве возможных ошибок. Поэтому боль-
шое внимание будет уделено нами решению задач наведения в
детерминированной постановке. Следует также выделить предпо-
летную и полетную модели динамической системы. В первом слу-
чае считаются неизвестными фактические ошибки выведения КА
на траекторию полета, но известны их априорные оценки, и ис-
следование управления должно производиться для всей совокуп-
ности возможных траекторий. Во втором — известно текущее
состояние динамической системы и неизвестно ее будущее пове-
дение.
Однако априорные характеристики распределения воз-
можных ошибок работы систем управления и навигационных
измерений на последующем участке полета могут быть исполь-
зованы для выбора рационального режима управления. Таким
образом, полетная модель имеет черты как детерминированной,
так и стохастической модели. Такая модель, как и следует из
ее названия, используется для решения задач наведения во время
полета КА.
Согласно принятому нами определению управляющее воздей-
ствие осуществляется с целью изменения или исправления откло-
нений некоторых основных параметров траектории движения, ко-
торые будем называть корректируемыми параметрами. В качестве
корректируемых должны выбираться такие параметры, которые
определяют возможность выполнения главных целей и задач
полета на каждом этапе управления. Выбором маневров и номиналь-
ной траектории движения на каждом участке полета обеспечи-
ваются необходимые номинальные значения корректируемых
параметров. В дальнейшем управление движением космического
аппарата должно проводиться таким образом, чтобы результирую-
щие отклонения корректируемых параметров не превышали вели-
чин, при которых возможно нормальное функционирование борто-
вых систем, выполнение целевых задач или других ограничений.
1акие отклонения корректируемых параметров будем называть
27
допустимыми отклонениями или допустимыми ошибками наведения.
На основании анализа условий движения можно выделить
основные параметры орбиты КА, от которых зависит выполне-
ние целей полета. Например, для АМС, предназначенной для
прямой посадки на поверхность планеты, в качестве корректи-
руемых можно выбрать ее координаты относительно планеты
назначения. Допустимые ошибки при этом не должны превышать
размеров планеты (для попадания на ее поверхность) или зна-
чений, определяющих посадку в заданный район. Если КА нахо-
дится на траектории возвращения с планеты и должен осущест-
вить аэродинамический спуск и посадку на поверхность Земли,
то основным параметром, определяющим безопасный спуск, яв-
ляется угол входа в атмосферу или высота условного перигея
орбиты (перигей орбиты без учета влияния атмосферы Земли
на движение КА). Если задан еще и полигон посадки на поверх-
ность, то географические координаты точки входа спускаемого ап-
парата в атмосферу должны также иметь заданные значения.
Более подробно вопросы выбора корректируемых параметров
для АМС будут рассмотрены в разд. 1.7. Однако следует отме-
тить, что в число корректируемых не всегда необходимо вклю-
чать все те параметры, которые влияют на выполнение задач по-
лета. Часть из них функционально зависит от параметров,
выбранных в качестве корректируемых, и вследствие этого они
могут при проведении управляющих воздействий изменяться та-
ким образом, что их отклонения от номинальных значений не
будут превышать допустимых. В частности, при возвращении
АМС с планеты на Землю от величины скорости входа СА в
атмосферу существенным образом зависят траектория спуска,
максимальные перегрузки, тепловой режим конструкции СА и
район посадки. Однако если на траектории перелета управляю-
щие воздействия мало изменяют энергию орбиты, то при обес-
печении заданной высоты условного перигея одновременно вы-
полняется требование малого отклонения скорости входа от
номинальной ее величины. Поэтому вопрос о выборе корректи-
руемых параметров и допустимых ошибок их реализации доста-
точно сложен и может быть решен только после проведения сов-
местных исследований работы бортовых систем КА, их конструк-
тивных особенностей и надежности, а также навигации и наведе-
ния на каждом участке полета.
В число корректируемых всегда следует включать минимальное
количество параметров, связанных с движением космического ап-
парата, без которых невозможно выполнение целевых задач поле-
та. Необходимо подчеркнуть, что нерациональный выбор корректи-
руемых параметров может существенным образом сказаться на
стратегии и характеристиках наведения, привести к значительному
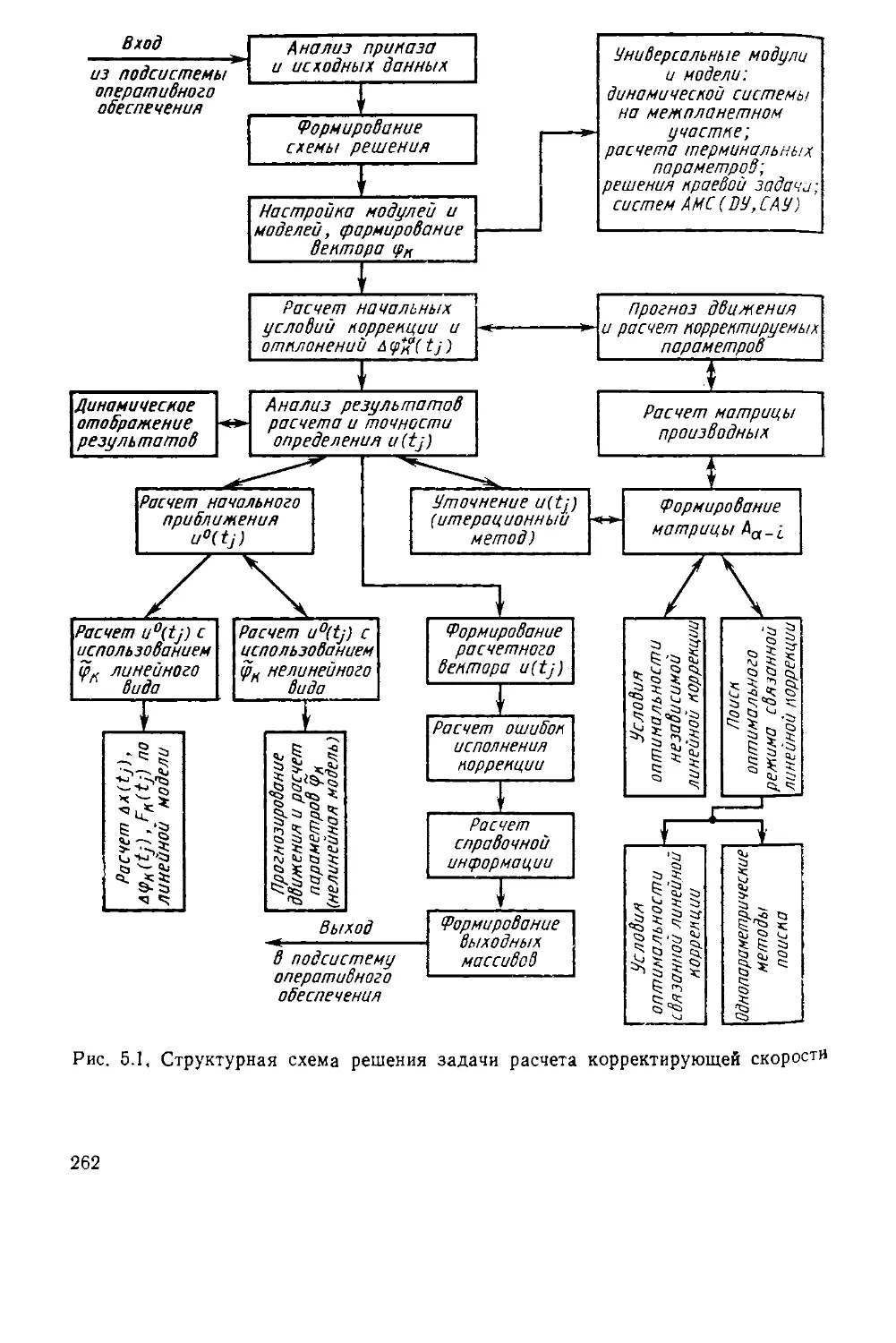
увеличению расхода топлива на управление движением.
28
1 4. Формулировка общей задачи наведения.
Критерии оптимальности
Пусть траектория управляемой динамической системы, которая
служит математической моделью движения КА, описывается обык-
новенным стохастическим уравнением первого порядка
x1(O = fi(A Xi(Z), V1(0, (1.1>
где t— текущий момент времени; Xi(Q —вектор текущего состоя-
ния системы шестимерного пространства кинематических парамет-
ров х; vi(0, li(0 — Pi- и Рг-мерные вектора управляющего воздей-
ствия и случайных возмущений, связанных с ошибками работы
систем КА при выполнении управляющего воздействия, функцио-
нированием исполнительных органов системы ориентации и травле-
нием ее рабочего тела, разгерметизацией объекта, неточностью ис-
пользуемой модели динамической системы или ее констант, а так-
же другими факторами.
Множество значений {xi(Q} на множестве моментов времени
Т= [^н, А-], где и tK— начало и конец участка полета, на кото-
ром рассматривается наведение КА (интервал управления), явля-
ется фазовым пространством ТХх динамической системы <S. На-
чальные условия движения определяются вектором Х1(7Н/ в общем
случае случайным, принадлежащим заданному вероятностному
подпространству. Случайный характер вектора начального состоя-
ния системы связан с ошибками проведения управления на участке
полета, предшествующем рассматриваемому, в том числе с ошиб-
ками выведения на траекторию перелета к планете. Такая дина-
мическая система является вероятностной, если для входящих в
нее случайных функций! и случайных величин известны соответст-
вующие функции илц моменты распределения.
Пусть заданы вероятностные подпространства ^2 (О, ха"
рактеризующие распределение начальных условий движения и слу-
чайной функции возмущений динамической системы:
?!(/)(= х (/„)<= ®2(/). (1.2>
На систему накладываются ограничения, вызванные особен-
ностями функционирования систем КА в полете, располагаемыми
ресурсами, организацией управления полетом. Ограничения на
рассматриваемую систему могут быть детерминированного, стоха-
стического или условно-стохастического вида. Будем считать, что
Для любого КА существуют баллистические модели } наземных
и бортовых систем, используемых при управлении движением, ко-
торые характеризуют зависимость их функционирования от пара-
метров движения АМС. С их помощью пространство выходных па-
раметров этих систем ^/г- может быть отображено в фазовое про-
странство и пространство управляющих воздействий Л’
’Т Хх; °Гу.Щ >Т х jf, (1.3)
где i=l, ... , п — номера систем КА.
29
Используя (1.3), все ограничения, связанные с работой систем
КА при баллистическом обеспечении наведения, можно преобразо-
вать в ограничения на фазовые координаты и управляющие воз-
действия. Тогда траектория и управление динамической системой
считаются допустимыми, если
хДДе^ДД, ^Д); хД/)(=^3Д, ^Д);
(ЕТуп; тД/)ей2(/. ^;): (1.4)
v1(/)e®4(/, Туг.еТ,
где Туп — множество допустимых времен управления; 91 —
заданные подмножества евклидового и вероятностного пространств
соответственно.
Ограничения типа (1.4) на допустимое состояние и управление
системой <S зависят от возможностей установленных на КА систем
автономного управления, навигационных измерений, комплексов
научных приборов, назначения КА и других требований. Множест-
во допустимых управлений может зависеть от фазовых координат.
Управляющее воздействие на любом интервале времени [6, Д]
должно принадлежать допустимому классу Й. Будем считать, что
управляющее воздействие vi(() задается в классе кусочно-непре-
рывных функций Й1 и импульсных функций с ограниченным изме-
нением Йг, тогда
^ДД, /2)ей,
где Й=Й!ий2; vi (Д t2): Дь А]->ТупХУГ.
Для стохастической динамической системы текущее состояние
Х1(7Д и управляющее воздействие vi(ti, t), где t>ti, определяют
вероятностное состояние в момент t даже при известных значениях
Xi(ti) и vi(ti, t), так как связано с ними с помощью стохастическо-
го дифференциального уравнения (1.1), следовательно,
хД/)(= S3[t, хДД), уДД, /)],
где ^[-]—вероятностное подпространство, определяемое решени-
ем системы (1.1) при заданных Х1ДД; vi(7i, t). Пусть стратегия уп-
равления U(7) задана в классе допустимых решающих правил [4],
определяющих управляющее воздействие на оставшемся интервале
полета vi(t, tK) в зависимости от фазовых координат системы x\(t),
проведенного управления vi(7H, t), а также возможных случайных
возмущений и ошибок управления, характеризующих поведение уп-
равляемой системы, тогда
ик(/)=ик[/, хДД; ЕД/, /к); уД/н, /)J, (1.5)
где ^Д, tE) ={^,i(i), /к]}— множество случайных возмуще-
ний на интервале управления Д, („].
Для определения в общем случае неизвестных фактических зна-
чений вектора состояния xf Д) и реализованного управляющего воз-
действия vi(7n, t), необходимых для выбора в момент t стратегии
30
управления, на траектории проводятся измерения навигационных
параметров d(t), причем уравнения наблюдений имеют вид
d(/,)=d[/„ хд/); |2(/)L (l-6>
где d(tt); Ан(Д); l2(t)— p3, Pt, Ps-мерные векторы навигационных
измерений и их ошибок, а также ошибок модели системы ё" с из-
вестными вероятностными характеристиками &e(t)', ft —
времена проведения измерений, принадлежащие допустимому мно-
жеству Тцав, причем
(AH(/Z), tt ее Тнав} ЗЭ5(/); (|2(/), ' = Т е
Будем полагать, что управляемая система стохастически наблю-
даема [23]. Тогда для каждой последовательности измерений d(7i,
/2), проведенных на заданном навигационном интервале [Л, /2]г
образующей заданное множество, такое что d(7b /2) = {d(7J; tt<^
еТнав; df/i, t2)^S>, где S) — множество навигацион-
ных параметров, существует оптимальная оценка вектора состоя-
ния Xi(t) = M[x.i(t)/d(h, t2)} и управляющего воздействия vi(7i,
t2)/d(t\, /2)], а также оценка точности их определе-
ния, характеризуемая
K[Xi(/)] = K[ X! (/)/<!(/!, /2)];
KfvjC/i, /2)[ = K[v1(/1, /2)/d(/15 /2)],
где М[-] и К[-] — математическое ожидание и корреляционная
функция.
Если оценка фазового вектора не принадлежит допустимой об-
ласти евклидового и вероятностного пространств, а система стоха-
стически управляемая [23], то необходимо найти такие стратегию-
и характеристики управляющих воздействий, чтобы удовлетворя-
лась вся совокупность детерминированных и вероятностных огра-
ничений, обеспечивающих выполнение целевой задачи полета на
множестве возможных траекторий, соответствующих ошибкам на-
вигации и наведения, а также ошибкам расчета траектории полета
и характеристик управления. Управление должно принадлежать
допустимому классу Q и быть по возможности оптимальным по за-
данному критерию качества управления Фк, который определим
следующим образом.
Пусть W(t)— функционал, зависящий в общем случае от уп-
равления и поведения системы на всем рассматриваемом участке-
[-. У. Для стохастической системы W(t) отображает хХ^ХЛ5 во
множество случайных чисел, поэтому в качестве критерия Фк си-
стемы примем детерминированные функции от W(t), выбор кото-
рых зависит от решаемой задачи и возможных законов распределе-
ния случайных аргументов. Будем предполагать, что область оп-
ределения Фк — компактное непустое множество, тогда функ-
ция качества достигает глобального максимума (минимума) на
инутренней или граничной точке этого множества [15].
ЗГ
Существенной особенностью управления полетом АМС является
то, что решение этих задач должно осуществляться в ограниченное
время с высокими точностью и надежностью, а характеристики уп-
равления должны иметь вид уставок на проведение запланиро-
ванного сеанса управления. Обозначим еуп, туп, РУп ошибки расчета
характеристик управления, время проведения расчетов стратегии и
параметров наведения, вероятность получения характеристик с тре-
буемой точностью едуп в течение располагаемого времени тдуп- Оп-
ределяемые характеристики управления, используемые для на-
стройки систем КА, обозначим 1/. Тогда при решении задач наведе-
ния необходимо выполнить следующие дополнительные условия:
еуп(О<е;„(О; туп(О<тду11(О; (1
Руп м > Рду11; ST; п,- (О] : Уг (Л Д) - V! (/, /к),
где у,- — выходные параметры i-й системы КА, соответствующие
заданным уставкам I/. Отметим, что требования к точности, надеж-
ности и оперативности существенно изменяются на различных эта-
пах полета.
При управлении движением АМС наиболее жесткие ограниче-
ния накладываются на значения фазовых координат на участке
подлета к планете назначения, что является особенностью данного
класса объектов. Это связано с назначением аппаратов, схемой их
полета, высокими требованиями к точности наведения, а также на-
личием ошибок в используемых астрономических и астрофизиче-
ских характеристиках планет и их эфемеридах. Основную часть ог-
раничений на хД/) можно заменить ограничениями на терминаль-
ные (выходные параметры) динамической системы <рк, которые яв-
ляются корректируемыми параметрами
<рк:х^ при [/'к, ЦеТ,
где [/'к, /к] определяет участок движения АМС вблизи планеты
назначения; областью допустимых значений корректируемых пара-
метров йД и требованием к вероятности того, что выходные пара-
метры динамической системы принадлежат этой области. Отметим,
что в число корректируемых могут включаться не все терминаль-
ные параметры ср, а только их определенная часть, поэтому яв-
ляется r-мерным подпространством пространства терминальных
параметров
В ряде практически важных случаев, к числу которых можно
отнести и рассматриваемый случай управлениня движением АМС,
зависимость параметров состояния динамической системы от по-
следовательности проведенных наблюдений d(7n, t) можно заме-
нить зависимостью от достаточных статистик s(t), являющихся
функциями предшествующих наблюдений и управлений [23]. Для
этого достаточно, чтобы законы распределения случайных функций
v(/n, t) и Xi(^) были самовоспроизводящегося типа. Тогда для опре-
деления характеристик x.i(t) и vi(tu, t) по результатам проведен-
:32
НЫХ измерений требуется ^задание ограниченного числа функций от
результатов наблюдений s(t), играющих роль достаточных коорди-
нат Их значения эквивалентны результатам прошлых наблюдений,
объем данных о системе остается постоянным и не растет с чис-
лом проведенных наблюдений. Тогда выбираемая стратегия и ха-
рактеристики наведения должны оптимизировать
ф*(/)=пнпфк\W\t, s(/), тт(/, /к), ?!(/, /к), ЗД 4),ЛН(Л U11 (1-8)
иксо
при выполнении условий
x1(/) = f1[/, Xj(/), ?!(/)];
s(/)=s[/, хД/), vy(/H, /)/d(/H, /)];
Р[фк(/)е >PJ, xt(/H)e
на множестве допустимых управлений
vy(/)e J?2(/, £TZ); v1(/)e.®4(/, т^, /2)еЙ; / еТу1„
множестве возможных возмущений и ошибок наблюдений на рас-
сматриваемом интервале управления
«!(/); Т2(/)е ®6(О; Лн(^)е Ж^/): d(/,tt е= Тнав,
при выполнении дополнительных требований к точности, надеж-
ности и оперативности проведения работ по обеспечению наведе-
ния
(О < (О; V (/) < т*п (/);
ру..(О>р’п(/),
для заданных баллистических моделей систем и наземного команд-
но-измерительного комплекса t, используемых при управлении
Движением АМС.
Первая группа условий связывает текущие параметры состоя-
ния системы с управляющими воздействиями и имеет вид стоха-
стического дифференциального уравнения с граничными условия-
ми, заданными на вероятностном пространстве. Вторая группа ха-
рактеризует допустимые области для векторов состояния, управ-
ляющих воздействий и навигационных измерений. Это детермини-
рованные и вероятностные ограничения, в общем случае нелиней-
ные, учитывающие технические характеристики систем АМС, осо-
бенности их конструкции, а также функционирования на различ-
ных участках полета. Третья группа условий определяет дополни-
тельные требования к обеспечению наведения, связанные с точно-
стью, оперативностью и надежностью проведения расчетов.
Приведенная формулировка общей задачи наведения достаточ-
0 сложная, и в силу этого применение существующих методов
2 850 оо
синтеза оптимальной стратегии управления динамическими систе-
мами не позволяет получить удовлетворительных результатов. Поэ-
тому необходима разработка специальных методов решения задач
наведения межпланетных аппаратов. Для этого целесообразно про-
вести анализ особенностей наведения АМС, учитывая характерные
отличия, присущие схемам и траекториям их полета, устанавливае-
мым на них бортовым системам, ошибкам навигации и наведения,
целям и задачам проводимого исследования. На его основе можно
выявить закономерности наведения АМС и использовать их для
создания эффективных методов синтеза. Следует различать сле-
дующие этапы проведения этих работ: проектно-баллистическое и
оперативное управление полетом.
На проектно-баллистическом этапе основными целями исследо-
ваний являются: выбор корректируемых параметров и определение
области допустимых ошибок наведения; анализ свойств наведения
для принятой схемы полета и управления; синтез оптимальной
стратегии наведения, оценка точности и энергетических затрат,
обоснование требований к характеристикам бортовых систем.
Главная особенность этого этапа — необходимость рассмотрения
большого числа возможных вариантов схем полета и управления,
состава бортовых систем. Синтез оптимальной стратегии наведения
должен проводиться при различных ограничениях на траекторию
полета, а характеристики наведения необходимо исследовать на
устойчивость к возможной неопределенности в априорных парамет-
рах бортовых систем и условиях полета. Данные о распределении
этих ошибок определяют генеральную совокупность возможных
траекторий движения КА, для которой осуществляется оценка
энергозатрат и точности наведения.
Требования к вычислению характеристик управления не столь
высоки, как на последующем этапе расчета, что объясняется недо-
статочной надежностью используемой априорной информации.
Поэтому при проектировании вопросы наведения рассматриваются,
в основном, в рамках линейной стохастической модели движения.
В качестве критерия оптимальности используется вероятностная
оценка суммарной характеристической скорости наведения, непо-
средственно связанная с расходом топлива двигательной установ-
кой на проведение управляющих воздействий и проектными па-
раметрами АМС. Это, однако, не означает, что на данном этапе не
могут использоваться критерии, характеризующие точность наве-
дения. Такие критерии могут применяться для оценки требований
к перспективным системам навигационных измерений. Недостат-
ком рассмотренных критериев является то, что в них не учитывает-
ся надежность проведения управления в целом, которая, вообще
говоря, может уменьшаться с увеличением числа сеансов навига-
ционных измерений, коррекций и маневров. Поэтому при выборе
оптимальной стратегии предпочтение необходимо отдавать вектор-
ному критерию, включающему в свор! состав энергозатраты и точ-
ность наведения, а также надежность его проведения. В большин-
стве случаев свертывание векторного критерия путем суммирова-
34
его компонент с соответствующими весовыми коэффициента-
нйЯ осуществить не удается и выбор рационального числа коррек-
и маневров, требований к бортовым системам АМС приходит-
цй проводить путем анализа зависимости критерия энергетической
СЯтимальности стратегии наведения от количества сеансов нави-
гационных измерений, коррекций, маневров и ошибок наве-
^Основными задачами наведения при оперативном управлении
являются: выбор рациональной стратегии наведения; оценка веро-
ятности выполнения заданных условий и ограничений; определение
характеристик наведения и расчет уставок для настройки борто-
вых систем на проведение сеанса маневра или коррекции в соот-
ветствии с принятой стратегией. На этом этапе наиболее высокие
требования предъявляются к точности вычисления параметров оче-
редного управления и оценке вероятности выполнения основных
задач полета. Их решение осуществляется в рамках нелинейной
модели динамической системы, учитывающей также протяженность
активного участка при работе двигательной установки. Что каса-
ется стратегии наведения, то она должна обеспечить надежное
проведение всех запланированных управляющих воздействий с ис-
пользованием имеющихся на борту запасов топлива. В отличие от
проектно-баллистических исследований, где для решения задач на-
ведения используются только априорные данные, при оперативном
управлении в каждый момент времени t считаются известными те-
кущее состояние динамической системы, определяемое по навига-
ционным измерениям, выполненным на интервале |7Н, /], а также
уточненные статистические характеристики возможных ошибок уп-
равления на последующем участке полета от t до tK. В качестве
критерия при выборе стратегии наведения используется вероят-
ность выполнения заданной совокупности требований на множестве
возможных траекторий полета при условии, что энергозатраты на-
ведения не превышают располагаемых.
Отличительной особенностью этапа являются высокие требова-
ния к надежности и оперативности решения задач наведения; все
расчеты в этом случае должны проводиться в строго определенное
и ограниченное время, обусловленное организацией работы служб,
осуществляющих управление полетом. Ограничения на располага-
емое время и высокие требования к надежности заставляют идти
на определенные компромиссы при организации решения задач на-
ведения. Используемые методы могут быть приняты только после
оценки их реальных характеристик в части оперативности, точно-
сти и надежности получения результатов в условиях, максимально
приближенных к управлению полетом.
Таким образом, учитывая существенные различия, присущие ре-
шению задач наведения при проектно-баллистических исследова-
ниях и баллистическом обеспечении управления, для каждого эта-
па разрабатываются модели и методы, учитывающие присущие им
особенности и специфические требования и наилучшим образом к
ним приспособленные.
2*
35
1.5. Модели динамической системы
Модель динамической системы, характеризующая траекторию
ее движения, включает в себя уравнения вида (1.1) и методы их
интегрирования. В общем случае эти уравнения имеют сложный
вид и решаются только численно при известных значениях началь-
ного состояния системы Xi(7n) и управляющем воздействии vi(7n,
t). Поэтому при исследовании задач наведения используется не
одна модель, а целое семейство моделей, в той или иной мере адек-
ватных объекту управления, отражающих его свойства и достаточ-
но эффективных для расчета процесса управления движением.
На движение КА могут оказывать влияние детерминированные
и стохастические составляющие действующих на него сил, и в за-
висимости от их учета применяются детерминированные и стоха-
стические модели динамической системы. Детерминированная мо-
дель движения сГд включает известные составляющие внешних сил
и управляющих воздействий. Модель движения АМС, рассматри-
ваемой как материальная точка с массой, равной массе станции,
учитывает влияние следующих внешних сил: гравитационного при-
тяжения, светового давления, а также атмосферы планеты. На
межпланетном участке полета основными гравитационными сила-
ми являются притяжение Солнца, системы Земля + Луна, Венеры,
Марса, Юпитера, Сатурна, Меркурия (при полетах к Венере). На
планетоцентрических участках включаются также силы, связанные
с нецентральностью поля тяготения планеты (сжатие Земли или
Марса), а при движении вблизи поверхности планеты, имеющей
атмосферу,— аэродинамические силы. Солнечное давление учиты-
вается на всех участках движения: величина массы Солнца изме-
няется на коэффициент %с, зависящий от эффективной площади
освещаемой поверхности АМС. Так как гравитационные силы свя-
заны с положением планет Солнечной системы, то составной
частью модели динамической системы являются эфемериды пла-
нет, представляющие их координаты как известные функции вре-
мени.
Система дифференциальных уравнений, описывающая движе-
ние АМС, записывается в некоторой прямоугольной невращающей-
ся системе координат, начало которой совпадает с центром масс
какого-либо небесного тела, принятого в качестве основного (ос-
новная система координат). На межпланетных участках траекто-
рии основное тело — Солнце или Земля (гелиоцентрическая и гео-
центрическая системы), а на припланетных участках — соответст-
вующая планета. Выбор системы координат так же, как и состав
включенных в модели движения сил, определяется требуемой точ-
ностью и удобством проведения расчетов и в конечном счете зави-
сит от конкретной задачи наведения.
Пусть начало основной системы координат находится в центре
масс Земли, основная плоскость совпадает с плоскостью земного
экватора, причем ось O^Z направлена в точку весеннего равноден-
ствия, а ось O3Z — к северному полюсу мира фиксированной эпохи.
36
Такая система координат называется абсолютной геоцентрической
еоэкваториальной. В этой системе уравнения движения АМС име-
следующий вид (собственное гравитационное поле аппарата не
учитывается):
. г (О । . ч J гсО — г(0 г 1 4~
v(/)=-ti° ] r(0)3' + Н (1~7-с। гс(О-г(О13 |гс(ОР1
Гх(О-г(О
I г,-(О-г (С р
I Г,-(/) ]3 J
+ fa[r(/), v(/)] + fr[r(/)I},
(1.9)
где r(t), rc(t), rt(t)—радиусы-векторы, определяющие положение
КА, Солнца и k планет (кроме Земли), притяжение к которым учиты-
вается при решении задачи; v (/) =d г —вектор скорости АМС;
dt
цо. Нь !•*<— гравитационные параметры Земли, Солнца и планет;
m(t) — масса АМС; fyfviff)] — сумма управляющих сил; fa[r(7)'
v(7)]—аэродинамическая сила, действующая на АМС (сила со-
противления среды); fr[r(()]—сумма дополнительных гравитаци-
онных сил, за исключением притяжения к центрам рассматривае-
мых небесных тел (несферичность гравитационного поля Земли,
притяжение Луны и др.).
Правая часть уравнения (1.9) зависит от значительного числа
параметров, которые являются одинаковыми для различных объек-
тов и определяются моделью окружающей среды. Это параметры
модели внешней среды: элементы орбит (или эфемериды) притя-
гивающих тел, гравитационные параметры и коэффициенты разло-
жения гравитационных потенциалов этих тел в ряды по сфериче-
ским функциям, параметры фигуры планет и их атмосферы, свето-
вое давление. Однако движение КА существенным образом зави-
сит от его конструкции и характеристик бортовых систем—пара-
метров моделей КА и его систем: аэродинамических коэффициен-
тов, тяги двигателей, эффективной площади освещаемой поверхно-
сти, площади миделя, массы и др. Эти данные рассчитываются для
каждого конкретного аппарата и используются при исследовании
его движения. Совокупность векторов параметров моделей внешней
среды, КА и его систем является вектором параметров модели ди-
намической системы рм.
В случае импульсной модели управляющих воздействий счита-
ется, что время работы двигательной установки при проведении
маневра или коррекции мало и возможен предельный переход в
Управляющем воздействии vx(tj, t',) при t'r+tj (t, и /'/ — начало и
онец управляющего воздействия), а управление движением сво-
дится к скачкообразному изменению вектора скорости в момент //
ектВе"пИЧИНУ ПРИ сохранении неизменными координат объ-
г а> Для представления управляющих воздействий этого типа вос-
1 ьзуемся импульсной 6-функцией, тогда
37
v^tj, /'):u1(/;) = Av1(/;) = AVi;8(/ — /;), 7=1,..., g, (1.10)
где Ui(/y), AVi/ — векторы корректирующей скорости и кажущего-
ся изменения скорости в момент t,; g— общее количество коррек-
тирующих воздействий.
Масса аппарата также изменяется скачкообразно, причем рас-
ход топлива на проведение управляющего воздействия может при-
ближенно определяться с помощью формулы Циолковского [32]:
Д1/1;- = 1/ду In (111)
где Уду —средняя скорость истечения газа из сопла двигательной
установки; m~(tj), m+(tj) — масса КА до и после приложения /-го
импульса. В дальнейшем для упрощения соотношений любое им-
пульсное управляющее воздействие будем обозначать щ (tj).
При неимпульсной модели управляющее воздействие зависит от
величины и направления тяги двигательной установки
/]•):at(/) = т-1 (/)fy [(/)] = т~1 (г,)Рду (г); (1.12)
= tn(Xj)=tn(tj)— J tn(x)dx,
о
где ai(7)— ускорение движения, связанное с действием реактив-
ной силы; т(т)—секундный расход топлива; Рду(т)—вектор тя-
ги двигательной установки.
При работе двигательной установки (рис. 1.7) могут иметься
два номинальных режима Рмт и Рбт (условно — малая и боль-
шая тяги). В циклограмме любого двигателя выделяются три ос-
новных участка: выход на режим номинальной тяги (аЬ— от мо-
мента включения двигателя до номинальной малой тяги и cd — от
включения режима большой тяги до выхода на номинальное значе-
ние тяги), работа в номинальном режиме (be, de — режимы малой
и большой тяги), выключение двигательной установки (ef —от
команды выключения до полного прекращения работы). При расче-
те движения могут использоваться упрощенные модели работы дви-
гательной установки, в которых исключены переходные режимы,
т. е. предполагается, что изменение тяги происходит скачкообраз-
но (заштрихованная область). Если известна модель работы дви-
гательной установки, то неимпульсное управляющее воздействие
Рис. 1.7. Изменение тяги двигатель-
ной установки АМС при проведении
маневров и коррекций
может однозначно зада-
ваться временем включения дви-
гателя, ориентацией вектора тяги
и соответствующей величиной ка-
жущегося изменения скорости
V1 (//, f/): (th dj, Pj, AVij), где ад
Р/ — углы ориентации оси двига-
теля в принятой системе коорди-
нат; t'j — время выключения дви-
гателя, соответствующее задан-
38
ой величине кажущегося изменения скорости AVi/ (характери-
НтИческой скорости, определяемое с помощью соотношения (1.11).
С Для любой из рассмотренных моделей управляющего воздейст-
вия количество независимых параметров управления /у;- при фик-
сированном времени tj не превышает трех. Управление с использо-
ванием аэродинамических сил осуществляется путем направленно-
го изменения угла атаки или крена при полете КА в атмосфере
планеты. Управляющее воздействие определяется величиной и на-
правлением аэродинамической силы. Если известны аэродинамиче-
ские характеристики аппарата и модель атмосферы, то при управ-
лении движением с помощью аэродинамических сил vi(7I( t2) зада-
ется функциями изменения угла атаки и крена по времени.
Таким образом, при известных моделях внешней среды и си-
стем КА детерминированная нелинейная модель движения описы-
вается обыкновенным дифференциальным уравнением первого по-
рядка, зависящим от текущего состояния системы и управляющих
воздействий:
X!(/) = fn[/, xt(/), Uj(/7), аД/)]. (1.13)
Если при этом известно начальное состояние системы в момент
t0, а также все расчетные управляющие воздействия на интервале
[/о, ф
Х1(/0) = х?(/0); и0(ф; (ф а°, pj, ДУ°у), (1.14)
то при удовлетворении условий теоремы существования и единст-
венности решения дифференциальных уравнений получим после
подстановки начальных условий (1.14) в уравнение (1.13) единст-
венное решение для вектора состояния динамической системы в
момент t:
Х°(/) = хф, Х°(/о), и0(/Д (ф а", ро, дуо.)].
Условия существования и единственности решения удовлетворя-
ются для большинства технических задач, в том числе и для рас-
сматриваемого случая, однако сама траектория движения может
быть получена только методами численного интегрирования диф-
ференциальных уравнений.
Аналитические решения существуют только для некоторых про-
стых случаев, когда в уравнениях движения (1.13) пренебрегают
рядом действующих сил. Примером может служить так называе-
мое невозмущенное кеплеровское движение КА, когда из уравне-
ИЯ (1.9) исключают все составляющие, кроме центральной силы
Ритяжения^основного тела. Такие приближенные детерминирован-
л е нелинейные модели широко используются для решения раз-
п»„НИх заДач космической баллистики, в том числе задач навига-
ции и наведения.
Полет ПЛд лл°ДСКая модель применима для приближенного описания
Но и Э « не только на планетоцетрическом участке движения,
на всей траектории межпланетного перелета, если использо-
39
вать понятие сфер действия. Напомним, что сферой действия пла-
неты называется такая область, внутри которой силы притяжения
данной планеты являются преобладающими по сравнению с сила-
ми притяжения других небесных тел [32]. Тогда любая траектория
межпланетного перелета может быть разделена на участки движе-
ния внутри сфер действия планет, где движение считается кепле-
ровским плапетоцентрическим, и вне этих сфер, где движение кеп-
леровское гелиоцентрическое. На границах сфер действия осущест-
вляется пересчет элементов орбит АМС. Таким образом, траекто-
рия перелета между любыми двумя планетами состоит из трех
участков, два из которых планетоцентрические, а один — гелио-
центрический. Размеры сфер действия, принятые при расчетах
межпланетных траекторий, приведены в работе [26].
Основным способом решения уравнений движения является
численное их интегрирование, причем в различных задачах наведе-
ния АМС наиболее часто используются методы Рунге — Кутта и
Адамса. Первый из них относится к одношаговым методам, в ко-
торых для определения Xi(t) рассчитываются с некоторым шагом
интегрирования значения правых частей уравнений (1.13) в про-
межуточных точках. Метод Адамса относится к многошаговым ме-
тодам, в которых хД/) определяется на основе некоторого числа
разностей между значениями состояния системы в нескольких рав-
ностоящих точках. Эти значения, необходимые для начала процес-
са интегрирования, могут быть вычислены по методу Рунге — Кут-
та. ?4етод Адамса при интегрировании уравнений движения АМС
более экономичен по затратам времени расчета на ЭВМ, чем ме-
тод Рунге — Кутта. Однако достоинством последнего является
большая точность при прочих равных условиях. Характерной осо-
бенностью используемых в настоящее время методов численного
интегрирования является высокий порядок применяемой аппрок-
симирующей функции, позволяющий увеличить их эффективность,
т. е. точность и быстродействие. Точность численного интегрирова-
ния зависит также от величины шага интегрирования, причем с
увеличением числа шагов п ошибки возрастают пропорционально
ns/2 [13]. Поэтому для каждой конкретной траектории, учитывая
требования к точности и быстродействию проведения расчетов, не-
обходимо выбрать соответствующий метод интегрирования, его по-
рядок и шаг. Для межпланетных траекторий и орбит ПСП с боль-
шим эксцентриситетом (е>0,2) целесообразно осуществлять интег-
рирование уравнений движения с переменным шагом, выбирае-
мым автоматически из условий заданной точности вычислений.
Применение таких методов позволяет при эквивалентной точности
получить значительное повышение быстродействия. Так, метод
Адамса шестого порядка с переменным шагом позволяет проинтег-
рировать межпланетную траекторию перелета с Земли к Венере на
с-’ВМ типа БЭСМ-6 за 10 с с ошибками, не превышающими 10 км.
Таким образом, используя дифференциальные уравнения дви-
жения (1.13) и принятый метод численного их интегрирования, для
каждого аппарата можно построить модель движения, учитываю-
40
,иую схему полета и управления АМС, а также требования к
точности моделирования, исходя из решения конкретной задачи на-
ведения. В модель движения включаются также управляющие воз-
действия, характеризующие особенности принятой схемы полета
(расчетные маневры увода, разделения, торможения, возмущения
за счет работы системы ориентации и др.).
Еще одна модель динамической системы, используемая при ре-
шении задач наведения,— линейная детерминированная Ли-
неаризация осуществляется относительно номинальной (опорной)
траектории движения и используется для упрощения анализа влия-
ния различных возмущений, связанных с изменением параметров
движения, управляющих воздействий или внешних сил, на движе-
ние аппарата. Пусть начальные условия (1.14) получают некото-
рые малые отклонения от своих расчетных значений, причем в
дальнейшем будем обозначать
х Ио) = X, (/0) — х; (/0); х (/) = X; !t) — xj (/);
u(/7) = UjC/y) — ui'(:;); a(/) = a1(/)— aj(/),
где x(to), u(t), a(t) — возмущения начального состояния системы
и управляющих воздействий; x(t) — соответствующие возмущения
траектории движения. Тогда при условии малости изменения x(t)
для малых отклонений начальных условий уравнения в вариациях
относительно «опорной» траектории имеют вид
х (/) = Af (/) х (/)4- Ba(/)a(/) + Bu(/;-)u (/;), (1.15)
где Af(Z), Ва(0, BU(Z)—матрицы частных производных вектор-
функции tn[t, Xi(Z), Ui(^), а^)] по компонентам векторов состоя-
ния и управляющих воздействий.
Решение линейного дифференциального уравнения (1.15) оп-
ределяется формулой Коши, распространенной на случай возму-
щающих воздействий общего вида (кусочно-непрерывных и им-
пульсных с ограниченным изменением):
t
х(/) = Х(/, /q)x(/q)-|- ^Х(т, /q)Ba (т)а(т)dx-|-
t о
g
+ V Х(/, /y)Bu(/7)U(/y), (1.16)
7 = 1
ГДе Х(Х — фундаментальная матрица, каждый из столбцов ко-
торой есть линейно независимое решение однородного дифферен-
циального уравнения вида ха(Z) = Af(Z)x(Z) при начальном усло-
вии, равном единичному вектору натурального базиса.
В свою очередь, отклонения любых терминальных параметров,
в том числе корректируемых, от их номинальных значений на опор-
ной траектории в линейном приближении могут быть выражены с
41
помощью решения уравнений движения (1.16) в некоторый фикси-
рованный момент времени tv:
Дф = Ф (/т)х(/<р), (1.17)
где Д<р — вектор отклонений терминальных параметров от их рас-
четных значений, соответствующий изменению x.(tv); ф(^) — мат-
рица частных производных от терминальных параметров по пара-
метрам состояния системы.
Таким образом, для исследования в линейном приближении за-
дач наведения необходимо проводить вычисление фундаменталь-
ной матрицы на интервалах времени, соответствующих кусочно-
непрерывным управляющим воздействиям, или в моменты времени,
соответствующие импульсным управяющим воздействиям. Наибо-
лее распространенными методами расчета фундаментальной мат-
рицы являются: численное интегрирование уравнений движения в
вариациях, вычисление «конечных разностей» и использование ана-
литических соотношений.
Схема расчета фундаментальной матрицы интегрированием
уравнений в вариациях непосредственно следует из самого опре-
деления этой матрицы и уравнений в вариациях. Действительно,
введем наряду с уравнениями (1.13) вспомогательную систему,
соответствующую «невозмущенному» движению
x1(O = f~[C х?а0), а?(ОЬ (1-18)
Невозмущенное движение должно быть, с одной стороны, по
возможности близким к возмущенному, чтобы выполнялось усло-
вие малых отклонений (вариаций), с другой стороны, правые час-
ти уравнений (1.18) могут отличаться от правых частей исходных
уравнений движения (1.13); в них могут отсутствовать или иметь
более простой вид отдельные слагаемые, входящие в состав функ-
ции fA. Выбор модели (1.18) имеет существенное значение, так как
ее упрощение может облегчить поиск решения. Невозмущенная мо-
дель должна отвечать целям исследований и свойствам управляе-
мой динамической системы. Ей соответствует невозмущенная тра-
ектория, описывающая движение центра масс КА при заданных
значениях начального состояния и управляющих воздействий, па-
раметров модели динамической системы при упрощенных уравне-
ниях. Движение КА, описываемое исходными уравнениями (1.13)
при возмущенных значениях начального состояния, управляющих
воздействий или параметров модели, называется возмущенным
движением, которому соответствует возмущенная траектория. Вы-
ражение (1.16) определяет возмущенную траекторию движения
первого порядка. Если х0] — некоторое частное решение (1.18) при
заданных начальных условиях x°i(/0), u°i((3), a°i (/), то возмущен-
ную траекторию движения будем определять в виде
Xi(0 — xi (/)-|-х(/)-
(1.19)
42
Проведя линеаризацию уравнений (1.13), используя (1.18) и
(1.19), получим после некоторых преобразований следующую си-
стему уравнений, решение которой определяет фундаментальную
матрицу:
Xa(/)=Gf (/) Ха (/); Gf(/) =
<4(0
<1X1(0
х°(0=*’д[0 х~! (О, х°(i0), ui(fj), a°i(Ol-
(1-20)
Решение системы (1.20) для рассматриваемых динамических
систем в общем случае возможно только одним из рассмотренных
нами методов численного интегрирования дифференциальных урав-
нений. Если движение КА описывается системой из k уравнений,
то для определения фундаментальной матрицы приходится сов-
местно интегрировать k(k+\) уравнений. Метод расчета Х(Т, to)
универсальный, но трудоемкий. Вид системы (1.20) зависит от вы-
бора невозмущенного движения, а реализация его на ЭВМ требу-
ет большой оперативной памяти.
Частным случаем приведенного выше метода является способ
расчета фундаментальной матрицы с помощью приближенных ана-
литических соотношений. В качестве невозмущенного движения
выбирается такая модель, для которой существует общее решение
системы (1.18). Известно, что в задаче двух тел уравнения движе-
ния интегрируются до конца, причем получено несколько различ-
ных видов решения однородной системы, входящей в состав (1.20)
и определяющей фундаментальную матрицу. Наибольшее распро-
странение при исследовании управления движением КА получили
способы расчета фундаментальной матрицы, основанные на ис-
пользовании следующих матриц частных производных:
изохронных производных координат и скоростей в момент t2 по
координатам и скоростям в момент Л в орбитальной системе коор-
динат, оси которой — радиус-вектор, нормаль и бинормаль траек-
тории [46];
производных от элементов орбиты q по координатам и скоро-
стям в момент t в прямоугольной невращающейся системе [17].
Тогда невозмущенное движение характеризуется элементами
орбит в соответствующих сферах действия, а фундаментальная
матрица, необходимая при определении возмущенного движения
Равна
Х(/, /0) = Х(/, /СП)Х(/СП, /СП—1)Х(/сп_15 /сп_2)... X(/с2, /0);
Х4, /₽) = Ахг(/а)Аг(/а, /₽)А-1 (/р) = А~1 4)Aqx(/p),
*Ае Ar((a, (s)—матрица изохронных производных; Aqx((a)—мат-
рица производных от элементов орбиты по координатам и скорос-
Ям; Axr (ta) — матрица перехода от орбитальной к основной си-
43
стеме координат; ta, — моменты времени, соответствующие дви-
жению КА в одной сфере действия; — моменты входа в
последовательно проходимые сферы действия невозмущенной ор-
биты. Преимущество такого расчета фундаментальной матрицы в
том, что не требуется численного интегрирования системы (1.20),
время расчета минимальное, однако при этом не учитывается влия-
ние целого ряда факторов на возмущенное движение КА.
В методе конечных разностей фундаментальная матрица полу-
чается приближенно численным интегрированием уравнений дви-
жения опорной и шести возмущенных траекторий
X (/2, Л)-------
Х1 (/2) - X? (/2)
Xl(H)-X^i)
Метод конечных разностей, как и интегрирование уравнений в
вариациях, позволяет учитывать все необходимые силы, действую-
щие на КА, но при этом не требует составления дополнительной
линейной однородной системы, что упрощает вычислительную схе-
му. Однако необходим специальный подбор такой величины прира-
щения начальных условий, которая позволяет определить с нужной
точностью линейную часть изменения состояния возмущенной си-
стемы. Величину приращения, с одной стороны, ограничивают слу-
чайные ошибки расчета, а с другой — методические ошибки, свя-
занные с нелинейностью модели динамической системы.
Рассмотрим теперь стохастические модели управляемой систе-
мы. В этом случае при известных начальных условиях и управляю-
щем воздействии в любой момент t определяется вероятностное
множество возможных состояний системы, которое зависит от
характеристик случайных возмущений. В общем случае для его
расчета необходимо использовать метод статистических испытаний
в сочетании с численным решением стохастических дифференци-
альных уравнений движения.
Для системы с импульсным управляющим воздействием и воз-
мущениями, выраженными как случайные ошибки параметров мо-
делей систем КА и внешней среды, стохастическая модель (нели-
нейная и линейная) может быть получена из соответствующей де-
терминированной модели путем добавления случайных слагаемых
с известными законами распределения в вектор начального состоя-
ния системы, импульсные управляющие воздействия и параметры
Рм:
x1(/)=fJl[/, Xi(/0)—[—8 х(/0), ui (/у)—8 u(/y-); рм-|-8 рм, ai(/)];
(1.21)
Х(/) = Х(/, /0) Jx (/0) —8 X (/0)] —X (/, t j) Bu (/;)[u (t j)
/-1
n
+ 8 u (/,-)]+ Vw,.(/),
/ = 1
44
ne Wi(t) — вектор отклонений параметров системы в момент t, со-
путствующий i-му дискретному случайному возмущению. Вектор
лхб/о) может характеризовать начальные ошибки выведения на за-
панную траекторию полета; 6и(7/_)— ошибки импульсного управ-
ления; w,(7) — влияние различных ошибок параметров модели дви-
жения, включая случайные возмущения, связанные с работой бор-
товых систем в процессе полета, ошибки эфемерид планет и др.
Для систем с кусочно-непрерывным управляющим воздействи-
ем и возмущением, описываемым случайным процессом, постро-
ить стохастическую модель на базе детерминированной аналогич-
ным образом невозможно, так как такая модель может не совпа-
дать в среднеквадратичном с детерминированной моделью. Для
корректной стохастической модели с непрерывным временем вос-
пользуемся стохастическим дифференциальным уравнением вида
х1(/) = Тд[/, хД/), иД/Д, аД/Я-НиЛ хД/)]ув(/), (1.22)
где vB(0 — случайный процесс с единичной дисперсией и нормаль-
ным распределением. Решением уравнений (1.22) является следую-
щее выражение:
t
хД/) = хД/0)+ | Тд[т, хДт), иД/Д, аДт)]б/г +
^0
t
-4- j [г, хДт)]ув(т)Л,
причем определение интегралов в правой части может проводиться
в симметризованном виде методом Ито или Стратоновича [41].
Численное интегрирование уравнений (1.22) удобно выполнять ме-
тодом Рунге — Кутта, в процессе применения которого учитывают-
ся случайные изменения при расчете правых частей.
В отличие от детерминированных систем линеаризация стоха-
стической системы выполняется не единственным способом и зави-
сит от принятого критерия, определяющего статистические харак-
теристики ошибок линеаризации. Уменьшение этих ошибок имеет
важное значение, так как операции дифференцирования функций,
входящих в выражение (1.22), связанные с разложением в ряд Тей-
лора относительно опорной траектории, могут усиливать влияние
случайных составляющих на движение аппарата. В настоящее вре-
мя используются следующие два критерия: равенство математиче-
ских ожиданий и дисперсий истинной и аппроксимирующей функ-
ций; минимум усредненного квадрата ошибки линеаризации. Хотя
критерия позволяют получить линейные стохастические моде-
ли, близкие по точности, линеаризация уравнений движения (1.22)
по второму критерию более приспособлена для исследования воп-
росов управления полетом КА. Пусть функция Тд системы (1.22)
Удовлетворяет условиям Липшица [18] и ее можно представить в
виде
45
fn (/) = сд (/) + Сд (/)[Х1 (/) - Х1 (/)] + ел (/),
где ел(0 — ошибки линеаризации; Xi(0 — математическое ожида-
ние Xi(O при заданном множестве навигационных измерений d(70<
t). Вектор сд(Т) и матрица Сд(7_) определяются из условий, соот-
ветствующих принятому критерию минимума усредненного квад-
рата ошибки |ел2(Д) |, которые приводят к следующим соотноше-
ниям:
c„(/)=M[f,(/)/d(/, хд/), ах(/)];
СД(/) = М {f,(/)[X1 (/)— (O]/d(/0,
где M[(J/d(70, 0]—условное математическое ожидание вектора
()', K[xi(0] — ковариационная матрица условного распределения
Xi(l) на заданном множестве навигационных измерений, зафикси-
рованных к моменту t. Для нахождения элементов матрицы Сд(7)
необходимо знать условную плотность распределения p[Xi(t)/d(t0,
/)]. Если предположить, что вектор xx(t) распределен по нормаль-
ному закону, то, продифференцировав ся(1) по Xi(t), получим
г дсл(() д [Л X! (О, «1 Gj), aj (/)]
~---------------------------’
<ЭХ!(О дхг(Г)
а модель возмущенного движения относительно опорной траекто-
рии будет иметь вид стохастического линейного дифференциально-
го уравнения:
X(/)==Af(/)X(/) + Ba(/)a^) + Bu(/;)u(/;) + fc4zI, X(/)JvB(/). (1.24)
Сравнивая (1.16) и (1.24), нетрудно видеть, что они имеют оди-
наковую структуру (кроме случайного члена), однако в качестве
опорной при стохастической линеаризации необходимо принимать
траекторию, определяемую по результатам навигационных изме-
рений, так как в этом случае x(t)—Xi(t)—Xi(i).
Применение линейных моделей имеет важное значение для ана-
лиза навигации и наведения КА, особенно при решении задач сто-
хастического управления. Действительно, если для нелинейных
стохастических динамических систем необходимо использовать
численные методы (численное интегрирование уравнений движе-
ния и метод Монте-Карло), то линеаризация позволяет проводить
расчет вероятностных характеристик в пределах корреляционной
теории.
Таким образом, движение управляемой динамической системы
целесообразно определить семейством детерминированных и стоха-
стических моделей, отражающих влияние различных факторов на
траекторию полета АМС, которые описывают те или иные свойст-
ва исследуемой системы и с известным приближением соответству-
ют реальному физическому процессу управления полетом. Тогда
46
каждой конкретной задачи наведения выбирается наиболее
родящая модель требуемой точности, позволяющая получить
° обходимое решение с наименьшими затратами времени расчетов
и ЭВМ
1 6. Ограничения на управление движением,
связанные с работой бортовых систем
Высокие точность и надежность, малые габариты и масса, про-
стота и удобство в работе — главные требования, которые предъ-
являются к бортовым системам. Эти требования противоречивы и
для каждого конкретного аппарата, исходя из решения целевой
задачи полета, функций отдельных систем, используемых при уп-
равлении движением, их можно упростить. Чтобы учесть реальные
возможности обеспечивающих систем, необходимо разработать со-
ответствующие им баллистические модели. Эти модели должны
характеризовать связь между входными и выходными параметра-
ми систем и их зависимость от траектории движения, параметров
модели внешней среды. Многочисленные связи между системами,
траекторией, схемой полета и управления, конструкцией аппарата
существенно усложняют решение задач наведения. Однако деталь-
ный анализ этих зависимостей необходим для выбора оптимальной
стратегии управления, отвечающей возможностям данного аппа-
рата.
Рассмотрим наиболее характерные для АМС модели обеспечи-
вающих систем иограничения, связанные с их работой, которые при-
водят к соответствующим ограничениям на управляющие воздей-
ствия и на множество возможных времен их проведения. К ограни-
чениям первого типа относятся различные дополнительные усло-
вия, которые накладываются на величину или количество управ-
ляющих воздействий, ориентацию их в пространстве. Они связаны
с конструктивными особенностями ДУ и САУ. Действительно, за-
пасы топлива на КА всегда ограничены. Они определяют макси-
мальную располагаемую величину суммарной характеристической
скорости, которая может быть использована при проведении ма-
невров и коррекций. Существующие в САУ задержки в прохожде-
нии команд на включение и выключение двигательной установки
приводят при заданных циклограммах работы САУ и ДУ к ограни-
чениям на минимальную величину характеристической скорости
каждого управляющего воздействия. Необходимо также иметь в
виду проблемы обеспечения устойчивого горения топлива, охлаж-
дения конструкции ДУ и ряд других, которые могут привести к ог-
раничению максимальной величины характеристической скорости
аждого управления. С другой стороны, в современных жидкост-
ных двигательных установках широко используются комбиниро-
ванные схемы подачи топлива, включающие контур подачи топли-
а под давлением сжатого газа при запуске двигателя и второй
°Нтур подачи топлива турбонасосным агрегатом, обеспечивающий
а оту установки в основном режиме. Чрезмерная масса конструк-
47
тивных элементов вспомогательного первого контура ограничива-
ет запасы топлива, используемые для запуска двигателя, а следо-
вательно, и возможное количество его включений или, что то же
самое, суммарное количество управляющих воздействий.
Для повышения надежности САУ на АМС может быть исполь-
зован упрощенный ее вариант, который не позволяет осуществить
ориентацию тяги ДУ в любом необходимом направлении. Извест-
ны системы, позволяющие направить ось двигателя только вдоль
гелиоцентрического радиуса-вектора (на Солнце или от Солнца)
или планетоцентрического радиуса-вектора (на планету или от
планеты), либо ортогонально плоскости Солнце — КА—планета
[26]. Существуют системы, которые могут ориентировать тягу дви-
гателя только в некоторой заданной плоскости, например ортого-
нальной направлению на Солнце или планету. Аналогичные огра-
ничения могут возникать в полете в связи с отказами систем АМС,
невозможностью передачи на борт в полном объеме необходимой
для проведения сеанса командно-уставочной информации.
Итак, будем считать, что управляющее воздействие является
допустимым, если выполнены следующие условия:
Bop[x1(i!)]v1(2!)= 0;
vi^ Zk)
/=1
где В0р[хДО] —матрица преобразования, определяющая допусти-
мые направления /-го управляющего воздействия; gz— макси-
мально возможное число включений двигательной установки;
A/(i)(7J, — минимальная и максимальная величины до-
пустимого изменения кажущейся скорости в каждом сеансе;
АУг — максимальное ее изменение на интервале управления.
Ограничения второго типа (на времена управления) связаны
с работой системы ориентации и НКУ. Для проведения сеансов
коррекций, маневров и навигационных измерений необходима
предварительная ориентация объекта в пространстве (см. разд.
1.2). При полетах к планетам наибольшее применение получили
оптико-электронные схемы ориентации с активными управляющи-
ми моментами, создаваемыми тягой бортовых реактивных двига-
телей. Опознание небесных тел при построении базовой системы
координат осуществляется путем контроля интенсивности его из-
лучения. Это самый простой, достаточно надежный и точный спо-
соб. При ориентации используется несколько следящих подсистем,
совмещающих оптические оси своих датчиков с направлениями на
выбранные опорные светила. В качестве одного из них принимает-
ся Солнце, так как оно является самым мощным излучателем при
полетах к планетам. Большая мощность его излучения позволяет
применять достаточно простые и надежные датчики ориентации, к
которым не предъявляется требование высокой чувствительности.
Поэтому на межпланетных траекториях практически отсутствуют
48
ограничения, связанные с поиском и ориентацией на Солнце. При
полете АМС вблизи планет ограничения возможны в том случае,
когда объект попадает в тень планеты. В системе ориентации име-
йся несколько пар диаметрально расположенных солнечных дат-
чиков, позволяющих осматривать сразу всю сферу с перекрытием.
Они обеспечивают поиск и грубую ориентацию на Солнце с ошиб-
ками порядка нескольких градусов. Затем управление передается
на другой датчик с узким полем зрения, осуществляющим более
точную ориентацию на Солнце. Конструктивное выполнение при-
бора солнечной ориентации может быть различным. Так, на аппа-
рате «Маринер-2» была установлена система, использующая одну
пару датчиков с полем зрения 45°, имеющих затеняющие экраны.
Остальная часть сферы охватывалась другими парами датчиков,
которые предназначались для приведения Солнца в поле зрения
первых двух. В том случае, когда Солнце оказывалось в поле зре-
ния неподвижно установленного датчика точной ориентации, при-
боры грубой ориентации автоматически закрывались экранами.
Существуют системы ориентации, имеющие подвижные приборы
солнечной ориентации.
В качестве второго опорного светила обычно выбирается одна
из наиболее ярких звезд, направления на которые близки к норма-
ли к эклиптике (Канопус, Сириус). Такой выбор обеспечивает наи-
лучшие условия работы системы ориентации и построение базовых
координат, уменьшает влияние различных мешающих факторов на
ее функционирование [31]. Ориентация по планетам осложняется
тем, что они не являются постоянными, симметричными источни-
ками излучения, так как видимая яркость зависит от фазы и рас-
стояния до них, а центр яркости может быть смещен относитель-
но геометрического центра. Это, однако, не означает, что планеты
совершенно не используются в качестве опорных светил при работе
систем ориентации. В частности, в системы ориентации АМС часто
включается прибор, обеспечивающий опознавание Земли и слеже-
ние за ней. В отличие от приборов солнечной ориентации, датчики
звездной ориентации должны обладать более высокими чувстви-
тельностью, избирательностью и помехозащищенностью. В целях
уменьшения влияния на поиск и захват звезды мешающих светил
поля зрения датчиков делаются по возможности небольшими, од-
нако при этом учитываются чувствительность прибора, величина
Располагаемого управляющего момента исполнительных органов,
инерционные характеристики аппарата. Диапазон чувствительно-
сти определяется характеристиками опорного светила. Для защи-
ты от ярких источников устанавливаются специальные дополни-
тельные датчики «защиты» с полем зрения, охватывающим поле
основного датчика. При попадании в него яркого объекта выраба-
тывается сигнал, отключающий звездный прибор на время, доста-
точное для выхода мешающего светила из поля зрения. Граница
Увствительности датчика снизу может обеспечиваться подбором
Пертуры оптической системы, установкой фильтров. От боковых
асветок приборы защищаются конусами-блендами. Поиск и за-
49
Рис. 1.8. Схема системы ориентации АМС:
1, 2, 3 — приборы звездной, солнечной и земной
ориентации; 4 — остронаправленная антенна; 5, 6,
7—поля зрения приборов
хват второго опорного све>
тила производится путем
разворота аппарата вокруг
оси, направленной на Солн-
це, причем угол между оп-
тическими осями звездного
и солнечного датчиков дол-
жен быть равен углу между
направлениями с КА на
Солнце и светило (под по-
следним понимаются звез-
ды и другие достаточно яр-
кие небесные объекты, на-
пример, планеты и их спут-
ники). Для каждой системы
ориентации разрабатывает-
ся математическая модель,с
помощью которой выполня-
ется расчет условий работы
системы и определяются со-
ответствующие ограничения
на допустимые времена про-
ведения сеансов маневров,
коррекций и навигационных измерений.
Рассмотрим систему ориентации, имеющую в своем составе
приборы солнечной, звездной и земной ориентации (рис. 1.8). Сол-
нечный и земной приборы находятся в плоскости ysOszs, причем
первый из них подвижен и может перемещаться в этой плоскости,
занимая любое положение, ограниченное диапазоном значений уг-
лов ac=aci—асг. Земной датчик неподвижен, расположен под уг-
о
лом аз к оси osys, и соосно с ним установлена остронаправленная
антенна, обеспечивающая прием и передачу информации на Зем-
лю. Положение звездного датчика, который может перемещаться
внутри конуса с осью, совпадающей с осью Osxs и вершиной в нача-
ле связанной с объектом системы координат, характеризуется уг-
лами рв и 7В, где рв — угол между оптической осью датчика и осью
Osxs, a qB — угол между осью Oszs и проекцией оптической оси на
плоскость zsOsys. Перемещение звездного прибора также может
быть ограничено диапазоном допустимых углов: pB=O...pBi и qB =
=q-B\...qBi. Таким образом положения приборов системы ориента-
ции в связанной с объектом системе координат однозначно опреде-
ляется углами аз , рв, 7в:
Пс)(^)={0, cosac(/), sin ctc(^)}T; n(31)(/)={0, cos аз, sin а3}т;
(1.25)
nB1)(if)={ — cospB(/), sin pB(/)sin ?B(/), sin pB(/)cos ?a(/)}T,
50
не п(1)с(О> п(1)з (t)> пС1)в — единичные векторы, соответствующие
управлениям оптических осей датчиков солнечной, земной и звезд-
ной ориентации.
Проведение ориентации возможно, если углы между оптически-
ми осями приборов совпадают с углами между направлениями на
опорные светила. Так как для построения базовой системы коор-
динат достаточно двух светил, то возможны два различных вида
ориентации — солнечно-звездная и солнечно-земная. Для АМС ха-
рактерной является такая ориентация, когда оптические оси всех
трех приборов совпадают с соответствующими направлениями на
Солнце, Землю и звезду. В этом случае одновременно с построе-
нием базовой системы координат обеспечивается передача инфор-
мации на Землю через остронаправленную антенну. Углы установки
приборов систем ориентации должны удовлетворять условию:
пс) (Опз1’(0=rjc(/)rp3 (О; Пс1)(/)п11)(г') = гГс(ОгРв(О;
(L26>
где rlc, 1$з , г^в’ —единичные радиусы-векторы, определяющие
направление с КА на Солнце, Землю и опорную звезду.
После подстановки (1.25) в (1.26) и решения системы уравнений
находим значения ас (О, рв(О> 7в(0, необходимые для проведения
ориентации в момент t. Система ориентации может работать в двух
режимах: поиска опорных светил, если КА не имеет в данный мо-
мент трехосной ориентации, и в режиме поддержания трехосной
ориентации. Последний является для АМС основным рабочим ре-
жимом, так как аппарат большую часть полета по рабочей орбите
находится в трехосной ориентации. Для обеспечения такого режи-
ма может использоваться специальная подсистема (блок програм-
мных углов), с помощью которых осуществляется изменение поло-
жения приборов системы ориентации в соответствии с заданной за-
висимостью:
ас(0 = апср(/); Рв (/)= Рпвр (/); <7в(/) = <7вР(О. (1.27)
Из-за отличия фактической траектории полета от расчетной зна-
чения углов установки приборов, соответствующие решению систе-
мы (1.26), будут отличаться от программных. Поэтому проведение
ориентации по программным углам возможно только в том случае,
если выполняется условие:
| у-р(/)-₽7(0 I <е°Р, (1.28)
где у;-ор(/)—угол между направлениями Солнце—КА — опорное
светило; р;пр(0— угол между направлениями оптических осей со-
ответствующих приборов системы ориентации, определяемых про-
граммной зависимостью (1.27).
Для проведения режима поиска системой ориентации в момент /
Иеобходимо выполнение следующих условий.
51
1. Углы установки приборов солнечной и звездной ориентации
определяемые выражениями (1.26), должны находиться в диапа-
зонах:
aci < аС(/)< аС2; <7Bi < <7в(0 < <7в2; 0<pB(/)<p,.i- (1.29)
2. Яркость светила, принятого в качестве опорного при построе-
нии базовой системы координат, должна находится в зоне гаран-
тированного захвата датчиков звездной или земной ориентации
/«И.Н /«И.О (О ^и.в,
(1.30)
где Ии'.’в’.— нижняя и верхняя границы гарантированного за-
хвата объекта излучения по яркости; ти.о(0— звездная величина
опорного светила в момент времени t.
3. Яркость светил, попадающих в поля зрения датчиков звездной
или земной ориентации при поиске опорного светила, должна на-
ходиться в зоне гарантированного незахвата. Это означает, что ес-
ли выполняется условие геометрического попадания мешающего
тела в поле зрения датчика
| у^(/)-у“(/) | <е°₽, (1.31)
то необходимо выполнение условий
(0>/Пи:в;
(1-32)
где у?1 (i)— угол между направлениями с КА на Солнце и i-e ме-
шающее светило; е г°₽з—угловой размер поля зрения датчика;
Оти1в, Пи'.н—нижняя и верхняя границы гарантированного незахвата
объекта излучения по яркости; —звездная величина меша-
ющего небесного тела.
В число контролируемых обычно включаются несколько десят-
ков наиболее ярких звезд, а также Луна и планеты. Если для звезд
та имеет постоянное значение, не зависящее от условий полета, то
для Луны и планет необходимо рассчитывать текущие значения
звездных величин [32]:
т'Л — (1,0)-|- 5 1g [ I rs n i ) — rvc (О I I rini- (0 1 ] 4"
4-Д/п'^ [б"л(/)],
(1.33)
где
Д/n™, [Ию] =/пиеГ(О+/п2л №л(<+^ [6Н<;
6™(O=arccos
г$ П! (0 [Г5 п I (О rsC (01
I rillZ(O | | rJnZ(0—riC(O 1
m'ni (1, 0)-—интегральная звездная величина i-й планеты, приведен-
ная к единичному расстоянию ее от Солнца и КА; mt, , тц, т-ц —
коэффициенты, определяющие поправки звездной величины за счет
изменения фазового угла 9, i-й планеты, rsc(i), rsni(i)—радиусы-
векторы, характеризующие положение Солнца и i-й планеты отно-
52
сйтельно КА в момент t, выраженные в астрономических единицах.
Для ярких мешающих объектов, попадающих в поле, обзора
приборов звездной или земной! ориентации и имеющих звездную
ведичину, находящуюся в зоне гарантированного незахвата по яр-
кости излучения, необходимо произвести расчет двугранного угла
меЖДУ плоскостями Солнце — КА — опорное светило и Солнце—•
КД— мешающее светило. Этот угол при известных скорости враще-
ния КА в режиме поиска и времени отключения прибора датчиком
защиты позволяет оценить возможность проведения сеанса ориен-
тации. На участках полета, где аппарат находится вблизи планеты,
кроме рассмотренных условий контролируется возможность попа-
дания освещенной части диска планеты в поля зрения приборов
звездной и земной ориентации, а также заход опорных светил за
планету (относительно КА), характеризуемый углом между на-
правлениями с КА на опорное светило и край планеты.
В режиме постоянной ориентации ограничения на работу сис-
темы аналогичны рассмотренным выше, но они должны выполнять-
ся для КА, находящегося в ориентированном полете. Иными сло-
вами, мешающие светила не должны попадать в поля зрения дат-
чиков, осуществляющих слежение за опорными светилами. Поэтому
для режима поддержания ориентации необходима проверка тех же
условий, что и для режима поиска, однако соотношение (1.31) за-
меняется следующим:
I 8°0Р- (/) | < е°р3, (1.34)
где б о? (О — угол между направлениями опорное светило — КА —
мешающий объект.
Надежное выполнение условий, необходимых для заданного ре-
жима ориентации, имеет особенно важное значение в сеансах ма-
невров и коррекций. Ложная ориентация аппарата приведет к то-
му, что управляющее воздействие будет сообщено не в том направ-
лении, которое требуется для исправления траектории, и задачи
полета не будут выполнены. Поэтому на интервале управления осу-
ществляется контроль ограничений (1.29)...(1.34), соответствующих
режимам поиска и поддержания ориентации, и выделяются такие
участки, где эти условия не выполняются. Они являются запрет-
ными для проведения сеансов управления движением. Исключив
эти участки из рассматриваемого множества Т, получим множество
Допустимых времен проведения управляющих воздействий исходя
Из условий работы системы ориентации ТуР. Как правило, запреты
на ориентацию имеют место при полете АМС вблизи планет.
Так как при проведении сеансов маневров и коррекций осуще-
ствляется радиоконтроль траектории движения и передача телемет-
рической информации на Землю, то дополнительные ограничения
возникают в связи с обеспечением необходимых условий работы
средств НКУ. Требуется, чтобы сеанс проводился в зоне радиови-
димости станций слежения, которая определяется ее углом места.
° случае одновременного управления несколькими аппаратами се-
53
ансы должны быть разнесены по времени. На припланетных участ.
ках полета АМС контролируется также условие радиозахода, т.
угол между направлениями с аппарата на Землю и край планеты.
Если станции слежения находятся на территории СССР, то зона
радиовидимости для них не превышает 20 ч. Это означает, что ог-
раничения на времена управления существуют в каждые сутки
полета. К некоторым сеансам маневра или коррекции могут предц.
являться более высокие требования с точки зрения надежности пе-
редачи информации, что приводит к необходимости их проведения
в зоне совместной радиовидимости нескольких станций слежения и
еще больше сокращает допустимый интервал. Множество возмож-
ных времен проведения управления с точки зрения обеспечения
условий работы средств НК.У обозначим Тнуу-Тогда для проведе-
ния управляющего воздействия в момент t необходимо, чтобы
геТуп; Туп : T°i: П Т«ку, причем Туп= |_| Ту„, (1.35)
k
где Руп — 1-й из k непересекающихся временных интервалов, на ко-
тором выполняются условия, обеспечивающие работу бортовых
систем.
Все рассмотренные требования на допустимые управляющие
воздействия и времена их проведения должны выполняться на каж-
дой из возможных траекторий полета. Так как это множество при
синтезе оптимальной стратегии наведения является вероятностным,
то характеристики, определяющие условия работы систем АМС,
являются функциями случайных аргументов. Поэтому в общем
случае следует говорить только о вероятностном их выполнении.
Однако для упрощения задачи синтеза некоторые из ограничений
могут рассматриваться как детерминированные. Так, характеристи-
ки коррекции могут вычисляться при фиксированных количестве и
времени их проведения, выбор которых определяется какими-либо
требованиями, зависящими от организации управления полетом.
Ограничения на Туп, связанные с условиями работы системы ориен-
тации и НК.У, на межпланетных участках полета могут рассчиты-
ваться только для невозмущенной траектории движения, так как
возможное изменение границ интервалов Тгуп на соответствующем
вероятностном множестве возмущенных траекторий невелико. Од-
нако на планетоцентрических участках полета интервалы ограни-
чений зависят не только от вектора состояния xt (^), но и от воз-
можных ошибок его оценки, которые оказывают значительное влия-
ние на геометрические характеристики движения АМС вблизи
планеты (заход опорных светил, радиозаход, попадание освещен-
ного диска планеты в поле зрения приборов системы ориентации).
Поэтому при расчете интервалов Т'уп баллистическое моделирова-
ние системы ориентации необходимо проводить для всего вероят-
ностного множества возмущенных траекторий полета, причем
необходимые условия работы системы должны выполняться с за-
данной вероятностью или гарантированно.
54
Таким образом, для решения задач наведения необходимо раз-
работать баллистические модели i всех обеспечивающих управ-
ление движением бортовых систем и определить соответствующие
ограничения на управляющие воздействия vi (0 и допустимые вре-
мена Туп.
1,7. Выбор корректируемых параметров
и допустимой области их реализации
Одной из задач анализа наведения, результаты решения кото-
рой имеют исключительно важное значение при синтезе оптималь-
ной стратегии управления, является выбор состава корректируемых
параметров и определение допустимой области их значения^?,,, вну-
три которой выполняются требования, предъявляемые к траектории
движения АМС. Эти требования, зависящие от назначения аппарата
и участка полета, могут быть взаимосвязанными или противоречи-
выми, когда целенаправленное выполнение одних условий приво-
дит к вынужденному, в том числе нежелательному, изменению дру-
гих. Поэтому требуется выбрать минимально необходимое количе-
ство корректируемых параметров. Однако желательно в число <рк
включать такие параметры, которые непосредственно связаны с
основными ограничениями на траекторию полета и однозначно их
определяют (при принятых допущениях), а также являются диф-
ференцируемыми функциями от управляющих воздействий, по воз-
можности взаимно независимыми и наиболее простого вида.
Расчет корректируемых параметров и построение области допу-
стимых значений ф требует отображения ограничений и условий
работы бортовых систем на пространство корректируемых парамет-
ров &"к, которое проводится с помощью соответствующих баллисти-
ческих моделей этих систем i для множества возможных траек-
торий полета. Наиболее наглядным результатом такого расчета
является построение изолиний в &"к, позволяющих выделить наи-
большую область, где выполняются соответствующие ограничения,
которая определяет область допустимых значений корректируемых
параметров. Если <рк и выбраны, то в дальнейшем в задачах
наведения можно не учитывать конкретные требования к траекто-
рии движения, связанные с работой различных систем, а также кон-
структивные особенности и назначение КА. При таком подходе
требования к точности наведения определяются только вероятно-
стью выполнения условия фке^?<р. Если конфигурация области
окажется чрезвычайно сложной, то ее целесообразно уп-
ростить. Для некоторых задач наведения внутри области
необходимо также выбрать номинальные значения корректируе-
мых параметров <рк°, которые должны быть такими, чтобы
Р* {[<р° + Д<рк(/к)]<= ^f}=maxP<pK[(/K)(= Я Д. (1.36)
«о
55
Вероятностные характеристики распределения фк(0 или Дфк(/)
получаемые в результате управления движением, зависят от ошц,’
бок функционирования обеспечивающих систем АМС и стратегии
наведения. Иными словами, задачи выбора фк° и стратегии наве-
дения должны рассматриваться совместно. Решение их в такой по-
становке (см. разд. 5.1) целесообразно проводить на наиболее от-
ветственных заключительных этапах оперативного баллистического
обеспечения наведения в целях повышения точности формирования
рабочей орбиты. При проектно-баллистических исследованиях до-
пустимы приближенные способы выбора фк°. В частности, в качест-
ве номинальных значений корректируемых параметров может при-
ниматься, например, центральная точка области 5? ф, если плотность
распределения Дфк(0 является симметричной относительно фкэ
функцией. Для многих практических задач наведения АМС такое
допущение приближенно выполняется в некоторой окрестности но-
минальной траектории движения, и задача выбора фк° решается
независимо от более сложной задачи оптимизации стратегии наве-
дения.
В общем случае выбор корректируемых параметров и области
допустимых их значений является сложной и трудоемкой задачей.
Однако многолетняя практика управления движением АМС раз-
личного назначения, специфические особенности траекторий, ис-
пользуемых при полетах к планетам, позволили определить такие
фк, которые вполне отвечают сформулированным выше требованиям
и вместе с тем являются достаточно универсальными, что дает
возможность использовать их при решении задач наведения различ-
ных АМС.
На участке межпланетного перелета в качестве терминальных
параметров динамической системы удобно принять следующие:
вектор скорости движения на бесконечности Voo, ортогональный ему
вектор прицельной дальности Ьп и время прилета к планете, напри-
мер время пролета на минимальном от нее расстоянии /рт. Они мо-
гут быть рассчитаны по известным кинематическим параметрам
движения АМС или элементам ее орбиты, оскулированным на мо-
мент tpm, что позволяет наиболее полно учесть влияние различных
факторов на движение аппарата. Эти параметры обладают следую-
щими достоинствами. Во-первых, одним из главных источников не-
линейной зависимости параметров движения вблизи планеты-цели
является ее гравитационное поле. Влияние притяжения планеты па
параметры и Ьп практически исключается. Во-вторых, для мно-
жества возмущенных межпланетных траекторий, попадающих в
окрестность планеты, можно приближенно считать, что Vx = const
и соответствует невозмущенной траектории. Поэтому такое множе-
ство является трехпараметрическим, а каждая принадлежащая ему
траектория при заданном однозначно определяется тремя пара-
метрами: tpm, |п, т)п, где gnJin — координаты вектора прицельной даль-
ности Ьп в картинной плоскости, т. е. плоскости, ортогональной Voo-
Они имеют ясный и наглядный физический смысл, сравнительно
простую зависимость от управляющих воздействий. Вблизи пла-
56
еТы (за 2 месяца до сближения с Марсом и 0,5 месяца до сбли-
жения с Венерой) зависимость ^pm, gn, Цп от корректирующей ско-
рости можно считать приближенно линейной, а сами параметры —
Независимыми [32]. И, в-третьих, любые ограничения пры выборе
траекторий движения АМС, предназначенных для близкого проле-
та создания ИСП, или посадки СА на поверхность планеты, могут
быть однозначно выражены через совокупность параметров /ртп, £п,
^0. Таким образом, эти параметры целесообразно выбрать в каче-
стве универсальных корректируемых, причем при наведении АМС
на участках межпланетного перелета общее число исправляемых па-
раметров траектории не превышает трех. Это одно из важнейших
свойств межпланетных траекторий, которое позволяет при управле-
нии полетом АМС на этих участках ограничиваться проведением
независимых трехпараметрических коррекций, существенно упро-
щая тем самым решение задач анализа и синтеза стратегии на-
ведения.
Координаты |п и тщ — однонзачные аналитические функции,
характеризующие траекторию движения АМС относительно пла-
неты, а — определяет привязку ее движения ко времени. Это
позволяет во многих случаях поиск допустимой области в картин-
ной плоскости отделить от выбора времени прилета, так как их до-
пустимые значения зависят от различных требований. Тогда трех-
параметрическое пространство корректируемых параметров можно
заменить двухпараметрическим при фиксированном ^рт, а для по-
строения изолиний использовать различные графоаналитические
методы. Время прилета к планете выбирается таким образом, что-
бы обеспечить прием информации с аппарата одной или нескольки-
ми наземными станциями, наилучшие условия для управления по-
летом или выполнение других аналогичных требований.
Выберем в картинной плоскости систему координат таким об-
разом, чтобы
(1) _ ГСп (Zpm) X>Voo . f(l)_ 4° Х VO» М 47)
Ди — , «in — >
I rcu (zfm) x V J I n° x v; [
где Т1П<’) — единичные орты системы координат; Гсп(^Рт) —ра-
диус-вектор, определяющий направление из центра планеты на
Солнце в момент tpm.
Тогда для каждой пары r]n(i) можно определить соответст-
вующие элементы планетоцентрической гиперболы и рассчитать
Различные контролируемые параметры, состав которых зависит от
схемы и задач полета. Так, для.СА, осуществляющего посадку на
Поверхность планеты, угол, скорость и время входа в атмосферу
при известных элементах орбиты q равны
57
= Д/г=——;
"г
^=а')2+О1')2:
\ д3 /
Mr=etg//r —Intg^+^-^r);
Hr= — arcsin /1 — cos2 Hr ; cos Hт=ае (a -]- гатм)-1,
где a, e, с — большая полуось, эксцентриситет и интеграл площадей
орбиты; цпл, Гатм — гравитационная постоянная и радиус, соответ-
ствующий границе атмосферы планеты.
Контроль величины ] cos Яг| 1 позволяет выделить траектории,
не попадающие в атмосферу планеты. По заданным функциональ-
ным зависимостям угловой дальности участка спуска и времени
движения СА в атмосфере от 0ВХ определяются координаты и вре-
мя посадки СА на поверхность планеты, а также условия освещен-
ности и другие необходимые характеристики.
Если АМС осуществляет переход на заданную эллиптическую
орбиту ИСП, то выбор допустимых значений корректируемых пара-
метров осуществляется в следующей последовательности. Для каж-
дой точки картинной плоскости аналогично рассчитываются пара-
метры гиперболической траектории движения АМС, а для траек-
торий, пересекающих орбиту ИСП, определяются характеристики
импульсного маневра, обеспечивающего переход на нужную нам
орбиту. Если точек пересечения несколько, то выбирают такую,
которой соответствуют наименьшие энергетические затраты.
Более сложными оказываются расчеты параметров движения и
Рис. 1.9. Схема связи СА и ОА при
встречном облете:
/ — точка посадки СА па поверхность
планеты; 2 — точка входа ОА в зону
возможной связи с СА; 3 — точка тор-
можения ОА при выходе на орбиту
ИСВ
условий полета при орбитально-
десантной схеме. Зона связи спу-
скаемого и орбитального аппара-
тов определяется диаграммой на-
правленности антенны СА, интер-
ференцией радиоволн у поверхно-
сти планеты, динамикой движе-
ния СА при спуске на парашюте
и рельефом поверхности плане-
ты в районе посадки. Схема свя-
зи показана на рис. 1.9; все ма-
невры предполагаются плоскими,
а зона связи характеризуется ко-
нусом с углом полураствора фев
относительно нормали в точке
входа или посадки СА. Будем
считать, что для каждой пары
£;п, три, определяющей движение
АМС до разделения, рассчитаны
параметры орбит СА и ОА после
58
Проведения маневра разделения с заданными характеристиками.
Известно время маневра увода ty, а также некоторые основные па-
раметры рабочей орбиты ИСП (Тор, гп, шит. д.). Суть расчетов
состоит в выборе радиуса-вектора ОА г(/т) в момент торможения
/т и последующем решении уравнения Ламберта при фиксирован-
ных значениях г(/у) и г(/т). Векторы положения и скорости ОА в
момент ty пересчитываются затем в элементы орбиты ОА после
увода и характеристики маневров. К параметрам орбиты ИСП или
времени торможения могут предъявляться дополнительные требо-
вания, связанные, например, с организацией сеанса передачи ин-
формации с СА, максимизацией интервала связи, минимизацией
энергетических затрат на проведение маневров и т. д. В этих слу-
чаях нахождение экстремума по соответствующему критерию про-
водится одним из численных методов с использованием описанной
выше методики определения параметров орбит СА и ОА на каж-
дой итерации.
Как уже отмечалось, существенное влияние на выбор траекто-
рии движения оказывают ограничения, связанные с работой систе-
мы ориентации. Поэтому после определения параметров орбит СА
и ОА, соответствующих рассматриваемой точке в картинной плос-
кости, вычисляются минимальные значения углов, определяющих
условия функционирования системы ориентации. Обычно это углы
между направлениями на опорные навигационные светила (Солнце,
Землю, звезду) и на освещенный край планеты. С помощью таких
характеристик выделяются в картинной плоскости области, где
возможна реализация требуемого режима ориентации. На рис. 1.10
приведены результаты расчетов изолиний некоторых параметров,
характеризующих условия движения и посадки СА на поверхность
РИс- 1.10. Изолинии ограничений, отображенные в картинную плоскость:
ПГ~----— угол входа СА в атмосферу;_________________— угол терминатора СА в точке
Малад,Ки’ __________—минимальный угол Земля — ОА — край Венеры;---------------мини-
Жй!ЬНый Угол Солнце — ОА —край Венеры на подлете к планете; в — продол-
Тельность связи СА и ОА
59
планеты и продолжительность связи СА и ОА в цикле полета к Be-
нере в 1975 г. Условно показаны области допустимых значений в
картинной плоскости по этим параметрам и выбранная в результа-
те анализа точка прицеливания. Допустимая область <йф обеспечи-
вает посадку СА на освещенную сторону Венеры в заданный рай-
он поверхности с углами входа в диапазоне 18...22°, продолжи-
тельность интервала связи не менее 120 мин, а также необходимые
условия для проведения ориентации аппарата при подлете к Ве-
нере.
Наведение на орбитах ИСП отличается от наведения на участ-
ках межпланетного перелета количеством и составом корректируе-
мых параметров. Число корректируемых параметров может дости-
гать шести. Ими могут быть радиусы перицентра и апоцентра ор-
биты, их планетографические долгота и широта, условия и времена
прохождения вад заданными районами, а также элементы орбиты
на одном или нескольких витках. Если на орбитах ИСП находятся
два аппарата, которые должны осуществить сближение и стыковку,
то корректируемыми параметрами являются их относительные ко-
ординаты и скорости, определяемые в момент, когда аппараты на-
ходятся на наименьшем расстоянии друг от друга. В этом случае
число корректируемы?; параметров равно шести, а множество воз-
можных траекторий зависит от двенадцати параметров двух орбит
ИСП. Однако наиболее часто корректируемыми параметрами слу-
жат элементы орбиты ИСП, так как е их помощью можно рассчи-
тать различные условия и ограничения, связанные с выполнением
задач полета. В известном смысле их можно рассматривать как
универсальные корректируемые параметры, однако они не обла-
дают свойствами, упрощающими решение задач коррекции, как
ранее выбранные корректируемые параметры на участках межпла-
нетного перелета. Поэтому на орбитах ИСП наряду с ними могут
использоваться в качестве корректируемых такие терминальные па-
раметры, которые непосредственно связаны с ограничениями, оп-
ределяющими возможность функционирования различных систем
АМС.
Рассмотрим в качестве примера выбор корректируемых пара-
метров для ОА, находящегося на орбите ИСМ, в случае трехпуско-
вой орбитально-десантной схемы полета. Целью проведения коррек-
ций орбиты ИСП является обеспечение условий связи для передачи
научной информации на ОА с двух СА, осуществляющих посадку с
интервалом в четверо суток в заданные районы поверхности Марса,
Корректируемые параметры должны выбираться таким образом,
чтобы для множества возможных траекторий после проведения се-
ансов коррекций орбиты ОА выполнялись следующие условия:
длительность непрерывной связи в каждом сеансе передачи ин-
формации с СА — не менее 20 мин;
с каждым СА проводятся последовательно два сеанса связи
интервалом между ними 1 сут;
расчетное время начала первого сеанса связи с каждым СА
фиксировано (соответствует времени посадки С А на поверхность),
60
а высота Солнца над горизонтом в месте посадки СА в течение всех
сеансов связи должна быть не менее 10° (определяется условиями
съемки панорамы).
Эти условия являются функциями всех шести параметров ор-
биты ОА при заданных траекториях движения СА и разбросах мест
их посадки на планету. Анализ влияния каждого из параметров
фактической орбиты ИСМ на выполнение приведенных выше усло-
вий, а также ограниченность запасов топлива позволяют сократить-
число корректируемых параметров, которое в рассматриваемом
случае не превышает трех. Вектор <рк может состоять из следующих
параметров орбиты ОА: п, 7'opi, Gu на витке, соответствующем пер-
вому сеансу связи с СА-1; Ть гл1, т2 на витке, соответствующем пер-
вому сеансу связи с СА-2, где т — время перицентра; Тор—-период,
орбиты.
Для выбора номинальных и допустимых значений корректируе-
мых параметров необходимо провести математическое моделирова-
ние условий связи ОА и СА с учетом возможных разбросов точек
посадки СА и параметров орбиты ОА после коррекций. Способы ре-
шения этой задачи могут быть аналогичны рассмотренным ранее
для межпланетных коррекций, так как состав параметров <рк/ не
превышает трех. На рис. 1.11 представлены зависимости условий
связи СА и ОА от выбора корректируемых параметров, анализ ко-
торых показывает: перицентр орбиты ИСМ должен находиться в
диапазоне значений 4900 ...5200 км, причем его изменение в этом
интервале незначительно влияет на продолжительность сеансов,
связи; продолжительность первого сеанса связи с СА-1 определя-
ется, в основном, значением т1( а последующих — 7ор1 или тг, при-
чем допустимое изменение т; не превышает ±10 мин, а Тор —
±12 мин, если в качестве номинальных значений этих параметров
1л1- Зависимости продолжительности связи Д/св (-------) и угла Солнпа
А горизонтом бф (-------) от Ti и ГСр:
первый сеанс связи; 2 — второй сеанс связи
6!
приняты ТОр i — 24 ч 12 мин, ti=16 мин (время перицентра отсчи-
тывается относительно номинального времени посадки СА-1).
Рассмотрим пример выбора корректируемых параметров в слу.
чае проведения коррекций поддержания параметров рабочей ор-
биты ИСП. Для АМС, предназначенной для радиолокационной
съемки поверхности Венеры, рабочая орбита ИСВ должна обеспе-
чивать: проведение сеансов радиолоцирования и передачу информа-
ции на Землю ежесуточно в фиксированное время, определяемое
зоной видимости наземных станций; сплошное (с перекрытием) ра-
дислоцирование северной полярной области, определяемой задан-
ными значениями венерографических широт и долгот, в определен-
ном диапазоне изменения дальности от АМС до подспутниковой
точки на поверхности планеты; ограниченную продолжительность
захода АМС в тень на каждом витке.
Полученная после торможения и проведения коррекций орбита
ИСВ имеет параметры, обеспечивающие оптимальные условия ра-
диолокационной съемки, которые в основном зависят от значений
следующих элементов орбиты: со, ТОр, т, гп. Коррекции поддержания
предназначены для периодического исправления отклонений этих
параметров, возникающих под действием возмущающих сил, в пер-
вую очередь гравитационного притяжения Солнца, и ошибок пред-
шествующих управляющих воздействий. При этом число корректи-
руемых параметров может быть меньше четырех. Это объясняется
тем, что влияние возмущающих сил на параметры движения ИСВ
различно и необходимость их коррекции возникает неодновременно.
Кроме того, при имеющихся на АМС ограниченных запасах топлива
исправление со практически не отражается на изменении условий
радиолокации, а т можно изменить нужным образом путем коррек-
ции Тпр. Таким образом, в качестве корректируемых параметров
следует принять ТОр, гл, причем последний изменяется под действи-
ем возмущений больше, а потому и требует более частого исправле-
ния. Так, если принять, что область допустимых отклонений коррек-
тируемых параметров составляет ±100 км по гл и ±60 мин по т,
то за 60 сут полета по орбите ИСВ гп изменится на 125 км, ат —
на 4 мин.
Однако на время прохождения перицентра большое влияние
оказывают ошибки исполнения коррекций формирования, которые
могут приводить к отклонениям периода орбиты от расчетного на
1 ...2 мин. Поэтому в зависимости от фактических ошибок исполне-
ния предшествующих коррекций очередная коррекция поддержания
параметров орбиты ИСВ должна проводиться с интервалом 1 ...
2 мес. Условием ее проведения будет являться превышение текущих
отклонений параметров т или гя допустимых значений.
В заключение рассмотрим еще один пример выбора корректи-
руемых параметров и их номинальных значений, связанный с поле-
том АМС к комете Галлея. Основные ограничения на допустимые
траектории пролета АМС относительно кометы определяются сле-
дующими требованиями. Во-первых, станции «Вега» должны были
пройти через голову кометы на таких расстояниях от ядра, чтобы
‘62
с высокой вероятностью сохранилась работоспособность научных
й обеспечивающих систем при воздействии на них кометной пыли.
Во-вторых, в течение всего сеанса научных исследований, общая
продолжительность которого составила 3 ч, в том числе 2 ч до-
встречи с кометой, должны выполняться условия, позволяющие осу-
ществлять наведение комплекса научных приборов на комету и
телевизионную съемку.
Для обеспечения живучести станции и возможности телевизи-
онной съемки пролет должен был осуществляться на расстоянии
6000 км со стороны, освещенной Солнцем. Наведение научных при-
боров на комету выполнялось автономно с помощью специальной
гиростабилизированной платформы (АСПГ) и установленной на
ней телевизионной системы (ТВС). На борту станции осуществля-
лись съемка кометы, анализ изображения и определение отклоне-
ний центра ядра от направления оптической оси ТВС. На основе
этих данных проводились решение навигационной задачи и расчет
углов поворота комплекса приборов для обеспечения слежения за
кометой. Развороты и стабилизация платформы выполнялись по-
трем каналам, соответствующим осям АСПГ.
Для упрощения будем считать, что оси АСПГ совпадают по на-
правлению с осями базовой системы координат, определяемой САУ.
В течение всего сеанса АМС находились в режиме трехосной ори-
ентации, которая обеспечивалась первые 80 мин с помощью САУ
в режиме постоянной солнечно-звездной ориентации (по Солнцу и
Канопусу), а затем — в режиме стабилизации движения на актив-
ном участке. Переход на второй режим работы САУ осуществлялся
на расстоянии около 200 тыс. км, так как предполагалось, что при
дальнейшем сближении с кометой и пролете через ее голову воз-
можна потеря ориентации за счет воздействия на станцию и при-
боры солнечно-звездной ориентации частиц пыли. В режиме стаби-
лизации движения на актив-
ном участке базовая система
координат определяется ГСП,
а эффективность ее исполни-
тельных органов рассчитана на
парирование больших возму-
щающих моментов. Повороты
комплекса научных приборов
характеризуются двумя угла-
Ми: ₽аг (0—углом между
осью Osys АСПГ и проекцией
вектора АДГ С — комета Гал-
лея на плоскость ysOszs, адг (О
"Углом между этим же век-
т°Р°м и плоскостью ysOszs (по-
ложение связанных с аппара-
том и АСПГ осей показано на
РИс- 1.8). Основными ограни-
ениями на выбор корректиру-
Рис. 1.12. Область допустимых изме-
нений углов АСПГ:
1, 2, 4, 6, 7, 9 — концевые выключатели по
углу а АГ; 3, 5, 8, /0 — концевые выклю-
чатели по углу ЭаГ» Н— ограничение 'т
блика конструкции АМС; 12 — зона изме-
нений углов а дг (t), Рдг (О для трубки
возможных траекторий АМС «Вега-1»
63
Рис. 1.13. Изолинии ограничений и область
допустимых траекторий для коррекции АМС
«Вега», отображенные в картинную плос-
кость:
емых параметров и их до-
пустимых значений, обе-
спечивающими возмож-
ность наведения комплек-
са приборов на комету,
являются: диапазон из-
менения углов адг(^),
₽аг(0 с учетом погреш-
ности установки концевых
выключателей и зоны их
срабатывания, ограничи-
вающие перемещение
АСПГ, имеет вид, пока-
занный на рис. 1.12; мак-
симальная угловая ско-
рость слежения АСПГ по
каждому каналу не долж-
на превышать 0,75°/с, а
максимальное угловое ус-
корение — 0,025°/с2.
Эти ограничения свя-
заны с особенностями
----------минимальное расстояние от ядра коме-
ты; — •--максимальное значение угловой ско-
рости слежения АСПГ; —значения угла
аАГ 2— фактические значения коорди-
нат АМС «Вега-1 и -2»; <?—точка с координа-
тами £ ° т|°, принятыми для последней коррекции
АМС «Вега-1»
конструкции платформы
и ее размещения на АМС,
где элементы конструк-
ции самой станции и воз-
можные блики от них оп-
ределяют диапазон и ди-
намику поворотов комплекса научных приборов. Они должны вы-
полняться для всей трубки возможных траекторий полета АМС к
комете и в течение всего сеанса исследования кометы. Анализ ог-
раничений, связанных с работой бортовых систем, будем прово-
дить так же, как и при решении аналогичной задачи коррекции
траектории полета к планетам. В данном случае картинной пло-
скостью будет служить плоскость, проходящая через центр ядра
кометы и ортогональная скорости V0TH ее движения относительно
АМС в момент их максимального сближения. При расчете VOth и
tpm могут использоваться номинальные параметры кометы и траек-
тория движения АМС, «попадающая» в комету в расчетное время,
выбираемая из условий работы наземных станций слежения, обе-
спечивающих управление полетом и прием научной информации в
рассматриваемом сеансе. На всем интервале сеанса, учитывая ма-
лое гравитационное влияние кометы на траекторию АМС и сравни-
тельно малое перемещение их относительно Солнца, движения
АМС и кометы можно считать равномерными и прямолинейными.
В этом случае множество возможных траекторий полета в некото-
рой ограниченной области относительно номинальной точки встре-
чи, размеры которой составляют десятки тысяч километров и впол-
не достаточны для выбора корректируемых параметров, допусти-
«4
jjo считать двухпараметрическим, образованным параллельным
переносом Vотн в соответствующую точку кяртиннои плоскости.
Определим, как и ранее, в картинной плоскости систему коорди-
цат с единичными ортами sn(1), т]п(1), тогда £п(1) совпадает по на-
правлению с проекцией радиуса-вектора комета — Солнце на кар-
тинную плоскость. Следовательно, для обеспечения пролета АМС
относительно кометы со стороны, освещенной Солнцем, координа-
та 1'п должна иметь положительное значение для всех возможных
траекторий.
Из рис. 1.13 следует, что на область допустимых значений ока-
зывают определяющее влияние ограничения ко максимальной уг-
ловой скорости слежения АСПГ, лимитирующие минимальное рас-
стояние от ядра кометы, а также значения угла адг(/р)п), характе-
ризующие допустимый выход АМС из плоскости движения кометы
при их встрече. Остальные ограничения практически не влияют на
выбор корректируемых параметров АМС «Вега». Так как эффек-
тивность научных исследований кометы зависит от минимального
расстояния станции от ее ядра в момент пролета, то при определе-
нии £п°, Цп° находилась такая точка в картинной плоскости, которая
с требуемой надежностью обеспечивала выполнение всех ограниче-
ний на работу бортовых систем и пролет АМС на минимально до-
пустимом расстоянии от ядра кометы. Область Л<$, соответствую-
щая возможным ошибкам наведения АМС на комету, приближенно
представлена в виде круга с радиусом 2000 км и центром в точке
gn°=8000 км, Цп° = 3000 км (см. рис. 1.13), причем вероятность по-
падания в нее при пролете кометы — не менее 0,997 с учетом оши-
бок прогнозирования движения кометы и АМС, а также исполне-
ния последней коррекции. На рис. 1.12 показана область изменений
значений углов аАг(0 и |Заг(0 при слежении АСПГ за кометой в
течение всего трехчасового сеанса для всех возможных траекторий,
принадлежащих области J?ff. -Таким образом, удачный выбор кор-
ректируемых параметров позволил осуществить построение допу-
стимой области Л^ и определение фк° с помощью графических пре-
образований, а сравнительно простой вид изолиний существенно
Упростил решение сложной задачи контроля ограничений, связан-
ных с работой бортовых систем станций «Вега».
3-850
Глава 2
ЛИНЕЙНАЯ ДЕТЕРМИНИРОВАННАЯ
КОРРЕКЦИЯ
2.1. Формулировка задачи линейной коррекции
Рассмотрим линейную модель динамической системы, уп-
равление которой осуществляется с помощью проведения коррекций
траектории движения. Управляющие воздействия определены в
классе Q2 (импульсных функций), характеризующих мгновенное из-
менение вектора скорости АМС на и(^). В качестве критерия опти-
мальности управления примем величину суммарной характеристи-
ческой скорости наведения. При коррекции критерий оптимальности
функционально связан со всеми параметрами управления и опре-
деляет суммарный расход топлива двигательной системы на про-
ведение запланированных коррекций. Это объясняется тем, что ли-
неаризация динамической системы осуществляется относительно
компонент вектора корректирующей скорости, а расчет производ-
ных от корректируемых параметров по параметрам управления про-
водится для номинальной траектории полета с нулевым управляю-
щим воздействием. При построении линейной модели управляемой
динамической системы в случае проведения маневра необходимо
использовать номинальные значения параметров управления, соот-
ветствующие принятой схеме полета, включающей расчетные ма-
невры на невозмущенной траектории движения. Поэтому при зна-
чительных энергозатратах на маневр линейная модель может быть
построена в том случае, если в качестве параметров управления ис-
пользуются изменения времени включения двигательной установки
\tj, величины характеристической скорости маневра АГ/ и углов
ориентации ДУ Да/, Д₽/ относительно расчетного маневра. Таким
образом, управляющее воздействие при проведении маневра в мо-
мент tj задается вектором v(^) ={А0, Да/, Ард АГ/]Т в классе функ-
ций Q2 или вектором v(^/, tj') в классе функций Ор Критерий опти-
мальности маневра однозначно связан только с одним параметром
управления динамической системы АГ/ и определяет изменение
энергозатрат на управление в зависимости от отклонений коррек-
тируемых параметров, реализованных в процессе полета.
На управляющие воздействия могут накладываться различные
ограничения, вызванные функционированием бортовых систем КА
при проведении управления. Наиболее типичными для АМС явля-
ются ограничения на допустимые направления корректирующий
скоростей. Такие ограничения являются линейными по отношению
к параметрам управления и определяют направление или плос-
66
которой должны принадлежать допустимые скорости /-й кор-
Кркпии. Пусть ф5[и<» (//),..., ио) (/^) ] =0, U = 1,...,р)-линейное
Ре аничение на параметры управления g последовательно проводи-
°ГР коррекций рассмотренного в разд. 1.6 вида, а /у/ — число не-
М исимых параметров управления /-го управляющего воздействия.
Зп полнительные требования могут накладываться также на допу-
имую величину характеристической скорости коррекции. Отличи-
ельная особенность таких ограничений — нелинейный характер по
отношению к параметрам управления
ди(1)(^-) < ««(^)= И (^)+(^-)] 1/2>
где u(h)—величина изменения скорости при /-Й коррекции.
Пусть известен вектор состояния системы х(/н), определенный
по навигационным измерениям. Выбраны корректируемые пара-
метры, их номинальные значения и задана область Я их допусти-
мых изменений в пространстве корректируемых параметров ^~к.
Если текущие значения любого из корректируемых параметров вы-
ходят за пределы области допустимых значений, то необходимо
определить такие параметры управления, которые обеспечивают
исправление корректируемых параметров с наименьшей возможной
энергетикой наведения.
Для рассматриваемой динамической системы справедливо:
Д ф^ (tj) = А фк (tj) + Дфк [ч (^-)] — 8 ф" (tj) + 8 фк (tj);
Д Фк(6') = Д фГ(//) + 8.фк(/Д Д фк[и(/y)I = FK(/у)и(/у); (2.1)
8 и (/у) = и+ (/;) — и (/у); 8 ф“ (/у) = FK (tj) 8 u (tj),
где Дфк(/;) — вектор отклонений корректируемых параметров перед
/-Й коррекцией, определяемый по результатам навигационных из-
мерений, выполненных к моменту tj; Дфк_(^), Дфк+(//)— отклоне-
ния (фактические) вектора корректируемых параметров до и после
проведения /-й коррекции; Дфк[и(П)] — изменение вектора коррек-
тируемых параметров, вызванное проведением коррекции в момент
ч; 6фп(^) — вектор ошибок прогнозирования терминальных пара-
метров в момент tj; u(/j), u+(/;)— векторы расчетной и действитель-
ной корректирующих скоростей в момент t,; 6<ри (£/) — вектор откло-
нении терминальных параметров, обусловленных ошибками
проведения коррекции; FK(i;)—матрица размерности (гхЗ), со-
ставленная из градиентов г корректируемых параметров.
Наиболее общим случаем одноразовой коррекции заданного те-
кущего отклонения корректируемых параметров, как следует из
классификации управляющих воздействий, является g-импульсная
°Ррекция, при которой должны выполняться условия:
А Фк (Л) + 2 Fk u е 31
/=1
3*
67
, u(I)(/g)] = 0; р\ (2.2)
ДИС1)(/;) <«(/;)'< ДУ(2)(/у),
частным случаем которых являются условия типа равенства на от-
клонения корректируемых параметров после проведения g коррек-
ций
g
Дфк 0j) + FK (//)и(/;) = Дф^ (fg);
j-i
(2.3)
<Ми(1)(Л), uO)(^)] = 0.
Расчет и анализ свойств детерминированной коррекции линей-
ной динамической системы имеют ряд особенностей, зависящих от
типа управляющего воздействия.
Поэтому ниже основное внимание уделяется вопросам анализа
свойств оптимальных параметров управления; разработке универ-
сального метода расчета характеристик управляющих воздействий
и их оптимизации; рациональному выбору состава корректируемых
параметров и анализа их влияния на энергетику управления.
2.2. Одноимпульсная коррекция
Для анализа особенностей и основных свойств коррекции рас-
смотрим наиболее простой вид управления—-идеальную независи-
мую одноразовую коррекцию, обеспечивающую одновременное ис-
правление заданных отклонений корректируемых параметров.
В зависимости от числа корректируемых параметров независимая
коррекция может быть одно-, двух- или трехпараметрической.
Для случая трехпараметрической коррекции основное соотно-
шение, характеризующее зависимость вектора корректирующей ско-
рости u(Z'j) ОТ ОТКЛОНеНИЙ Дфк(^) =[Дфк1 (^) , Дфиг^у), Дфкз(^)]т
корректируемых параметров имеет вид
Д?К1 = (^-) ч (^); Дфк Ov)=FK (/;) u (tj);
ИЛИ FK(/;) =
(2.4)
^кЗ(^y)
где fKS — градиент s-го корректируемого параметра по составляю-
щим корректирующей скорости.
Уравнения (2.4) однозначно определяют вектор корректирую-
щей скорости для любых заданных отклонений корректируемых па-
раметров, если соответствующая матрица FK(/j) невырожденная:
и(/7) = РГ1(/7)Дфк(/у). (2.5)
68
Если матрица FK(//)—вырожденная,
п это означает, что в выбранной на тра-
ттории точке коррекции между коррек-
тируемыми параметрами существует вза-
имно однозначная зависимость, которая
геометрически выражается в том, что
градиенты корректируемых параметров
лежат в одной плоскости. В этом случае
трехпараметрическая коррекция в приня-
тый момент времени невозможна, и для
ее проведения необходимо изменить вре-
мя коррекции. При неудачном выборе
корректируемых параметров такая зави-
Линия
) оптимальной
/ "коррекции
grad
у
Рис. 2.1. Эффективность од-
нопараметрической коррек-
ции
симость может существовать не в отдель-
ных точках, а на всей траектории. Это означает, что такая динами-
ческая система при выбранных режиме коррекции и корректируе-
мых параметрах является неуправляемой и необходимо изменить
либо корректируемые параметры, либо класс управляющих воз-
действий и использовать связанную коррекцию. Кроме того, трех:-
параметрическая коррекция в заданный момент невозможна, если
один из градиентов корректируемых параметров имеет нулевое зна-
чение. Следует отметить, что такие случаи вырождения трехпара-
метрической коррекции широко распространены в практике управ-
ления полетом АМС, и их необходимо учитывать при проведении
расчетов.
При уменьшении числа корректируемых параметров вектор
корректирующей скорости уже не имеет однозначной зависимости
от исправляемых отклонений и существует бесчисленное множест-
во решений для u(С). В силу этого для одно- и двухпараметриче-
ской коррекции возможно выбрать такое решение, которое удовле-
творяло бы дополнительным требованиям. Такими дополнительны-
ми требованиями могут быть различные ограничения на возможные
направления или величину корректирующей скорости, связанные с
конструктивными особенностями системы управления. Наиболее ча-
сто встречающееся требование — проведение коррекции с мини-
мально возможными энергозатратами, т. е. обеспечение локальной
энергетической оптимизации независимой коррекции.
Для однопараметрической коррекции исходное соотношение
имеет наиболее простой вид:
д= (2.6)
Минимально возможная величина характеристической скорости
Коррекции заданного отклонения корректируемого пар-аметра соот-
ветствует направлению и (Л,) вдоль его градиента (рис. 2.1). Это
следует непосредственно из свойства линейной коррекции, согласно
которому приложение корректирующей скорости в направлении,
ортогональном градиенту, не вызывает изменения корректируемо-
о параметра. Поэтому эффективность коррекции тем больше, чем
еныпе угол ак[ между ц(/;) и fKi(t): Acp«i (tj) =/ki (tj) и (/,) cosaKi-
69
Таким образом, оптимальным направлением однопараметрической
коррекции является направление градиента fKi(^j), а вектор скоро-
сти энергетически оптимальной коррекции равен:
(2.7)
Если условия оптимальности добавить к уравнению (2.6), то
u(f,) можно определить, решая систему, аналогичную рассмотрен-
ной ранее для трехпараметрической коррекции:
Дфк(0) =FK (^-)u(/;);
О^пТг'ри (/у);
0 = n2(/;-)u(/;)
ИЛИ
Fk(z;) =
fK1 (G)
tli (/;)
П2(/у)
(2.8)
где П1(/;) и n2(^j) — два произвольных вектора, ортогональных гра-
диенту корректируемых параметров; Дфк(^) =[Дфк1 (^), 0, 0]т—
вектор трехмерного пространства корректируемых параметров. Век-
торы n](fj) и n2(/j) должны выбираться таким образом, чтобы со-
ответствующая матрица FK(£/) была невырожденной, что всегда
возможно, если fKi(fj) ¥=0. Тогда для определения корректирующей
скорости необходимо выполнить
U(/;) = FK '(/у) А фк(^)-
(2.9)
Если /к1 (^j) =0, то устранить отклонения корректируемых пара-
метров в заданный момент времени невозможно. При отсутствии
ограничений на возможные направления корректирующей скорости
условие fKi(/;) =0, как правило, может выполняться только в от-
дельных точках траектории полета. Поэтому при однопараметриче-
ской коррекции траектории полета КА является управляемой ди-
намической системой (за исключением ограниченного числа особых
точек).
При двухпараметрической коррекции основное условие для оп-
ределения корректирующей скорости имеет вид
Д'РкП/у) = ГК1(г'у)и(/;.);
(2.10)
Д?к2(^) = ^2(^)11(г'у)-
Два уравнения (2.10) не разрешаются однозначно относительно
компонент вектора u(fi). Из возможных решений выберем то, для
которого величина корректирующей скорости будет наименьшей.
Применяя условия оптимальности однопараметрической коррекции
последовательно к каждому из корректируемых параметров, не-
трудно убедиться, что энергетически оптимальной двухпараметри-
ческой коррекции соответствует такой вектор скорости, который ле-
жит в плоскости, натянутой на градиенты корректируемых пара-
метров.
70
Действительно, множество возможных решений (2.10) должно удовлетво-
рять условию:
/к2 (О') Д<Ск1 (^') /q . . Y
cos ак1 = ак cos ак2; ак = ———— •
/к1 (Гу) ДТк2 (ч)
Из сферического треугольника АВС (рис. 2.2) следует, что
cos aKi = cos ак2 cos С + sin ак2 sm С cos В. (2.12)
Тогда после подстановки (2.11) в (2.12) получим
tg ик2 = (ак — cos C)/(sin С cos В). (2.13)
Соотношение (2.13) определяет множество допустимых векторов корректи-
рующих скоростей двухпараметрической коррекции, обеспечивающих выполнение
основного условия (2.10), причем независимым переменным этого множества
является угол В. Затраты на исправление любого корректируемого параметра
тем меньше, чем меньше угол между вектором корректирующей скорости и гра-
диентом корректируемого параметра. Для двухпараметрической коррекции, как
следует из (2.13), наименьший угол с градиентами корректируемых параметров
составляет такой вектор корректирующей скорости, который лежит в плоскости.
АОВ, т. е. угол В должен быть равен нулю.
Следовательно, при двухпараметрической коррекции существует
плоскость оптимальной коррекции, которая является плоскостью,
натянутой на градиенты корректируемых параметров, а условие
оптимальности коррекции имеет вид
u(/;)[fK1(/y)X fK2 (/,)] = 0. (2.14)
Таким образом, вектор корректирующей скорости определяется
из решения системы (2.10), дополненной! условием оптимальности
(2.14):
u(/y) = FCI Д<рк(/у);
(2.15)
Fk(^)=
fKl О')
W0)
fKi(/;)XfK2(/;)
где Дфк(0) =[Д<рк1 (tj), Д<рк2(0), 0]т — вектор-столбец трехмерного
пространства корректируемых параметров. Двухпараметрическая
коррекция в выбранный момент возможна, если
/к2(/у)^0; fK1(/7) х fK2(/;)^0,
следовательно, для управляемости КА при проведении двухпара-
метрической коррекции необходимо, чтобы градиенты корректируе-
мых параметров не были коллинеарными.
Особые случаи независимой коррекции. Требования к надежно-
сти работы обеспечивающих бортовых систем и их массам привели
тому, что в практике межпланетных полетов, особенно на ранних
ДДиях их осуществления, на АМС устанавливались простые сис-
Мы автоматического управления. Они не позволяли проводить
71
Рис. 2.2. Эффективность двухпараметри-
ческой коррекции
трехпараметрическую кор-
рекцию или устранять от-
клонения корректируемых
параметров с минимальны-
ми энергозатратами, если их
число меньше трех. Такие
ограничения, связанные с
работой бортовых систем,
необходимо соответствую-
щим образом сформулиро-
вать и использовать сов-
местно с основной системой
при расчете коррекции. Рас-
смотрим некоторые системы,
которые использовались в
практике межпланетных по-
летов.
Пусть система ориентации обеспечивает проведение коррекции
только в некотором заданном направлении. Это, например, системы,
позволяющие ориентировать ось двигателя по гелиоцентрическому
радиусу-вектору (на Солнце или от него) или ортогонально плоско-
сти Солнце— К.А — Земля (или планета). Первая из них является
наиболее простой системой управления, а коррекцию называют
«солнечной». С помощью таких систем одноимпульсная коррекция
может проводиться только в однопараметрическом варианте, при-
чем для расчета корректирующей скорости необходимо к уравне-
нию (2.6) добавить следующие два условия:
u(/7) = 0; п2с(^)и(^-)=0, (2.16)
где гр0(С), n2c(/j) — два произвольных вектора, ортогональных на-
правлению на Солнце или нормали к плоскости Солнце — КА—
Земля.
Решая совместно (2.6) и (2.16), однозначно определим вектор
корректирующей скорости, обеспечивающий исправление известно-
го отклонения в корректируемом параметре A<pKi и имеющий задан-
ное направление в пространстве, если при этом градиент корректи-
руемого параметра не коллинеарен этому направлению, а П1С(/..)
и п2с(//) выбраны таким образом, что nic(//) Хп2с (?/) =#0.
Другим частным случаем проведения коррекции является ис-
пользование системы управления, обеспечивающей ориентацию
вектора скорости в плоскости, ортогональной некоторому заданному
направлению, например, на Солнце, Землю или другую планету.
Примером такой системы может служить рассмотренная ранее сис-
тема, в состав которой входят приборы ориентации на Солнце и
Землю (планету). Двигательная установка должна устанавливать-
ся таким образом, чтобы ее ось была ортогональна оси чувстви-
тельности прибора, который обеспечивает ориентацию аппарата на
заданное направление. Второй прибор системы ориентации должен
быть выполнен таким образом, чтобы его конструкция позволяла
72
только изменять угол между осями чувствительности, но и осу-
1 гествлять поворот его в плоскости, ортогональной оси чувствитель-
ности первого прибора. Это более сложная система управления, с
помощью которой может проводиться двухпараметрическая кор-
рекция. Для определения вектора корректирующей скорости необ-
ходимо к (2.10) добавить условие пС(/,)а(/,) =0, где nc(rj) —задан-
ное направление (на Солнце, Землю или другую планету). Такая
система управления достаточно эффективно может использоваться
на участке подлета к планете назначения для обеспечения посадки
на ее поверхность, так как плоскость, ортогональная направлению
с АМС на планету, близка к плоскости оптимальной кор-
рекции.
Коррекция избыточного числа параметров. Рассмотрим такую
однопараметрическую коррекцию, когда корректируемый параметр
является квадратичной формой отклонений терминальных парамет-
ров. Такой случай может иметь место, если число параметров,
которые необходимо исправить для выполнения задач полета, пре-
вышает количество независимых параметров одноимпульсной кор-
рекции с учетом возможных ограничений на допустимые направле-
ния корректирующей скорости. Пусть срк1, .... cpKV—исправляемые
терминальные параметры движения КА; у>3. Если ограничения на
u(/j) отсутствуют, то число независимых переменных вектора кор-
ректирующей скорости /у, равно трем. Одновременное исправление
всех выбранных терминальных параметров с помощью одноим-
пульсной коррекции обеспечить невозможно. Поэтому в качестве
основного требования к проведению такой коррекции целесообраз-
но принять условие минимизации модуля вектора, определяющего
отклонения исправляемых параметров (в некотором пространстве)
от заданных, соответствующих выбранным номинальным значениям
терминальных параметров. Пространством, в котором определяется
расстояние между двумя векторами, характеризующими состояние
динамической системы до и после проведения управляющего воз-
действия, может служить как пространство самих терминальных
параметров, так и любое его линейное преобразование. Конкретный
вид линейного преобразования зависит от физических особенностей
решаемой задачи. Так, при стыковке двух КА, находящихся на ор-
битах искусственных спутников, энергетические затраты на ее осу-
ществление зависят от относительных расстояний и скоростей этих
аппаратов в момент начала сближения. Иными словами, на энерго-
затраты оказывают влияние три компоненты относительного поло-
жения и три компоненты вектора относительной скорости, т.
Щесть параметров. Однако влияние каждой компоненты различно,
для его учета можно воспользоваться матрицей линейного пре-
рывания, определяющей относительный вес каждого отклоне-
ия в суммарных энергозатратах.
Пусть Пк(г;)—матрица линейного преобразования, осуществля-
РамГ° пеРеход в пространство преобразованных терминальных па-
етров, тогда корректируемый параметр для рассматриваемого
СлУчая будет иметь вид
73
Фк1 (/7.) = | Д <рк+т (/,) Рк (/;) Д ф+ (tj)]1/2 = [Д ф+Т (/,) Д ф+ (/у)]1/2;
(2.17)
Л фк (/у) = Д <pK(/7)4-FK(/7)u(/y);
ЛФкО7) = ПкО7)Д Фк (z/);
Рк(/у) = П^у)Пк(^),
где Дфк(^) — отклонения преобразованных терминальных пара-
метров.
Таким образом, исправление терминальных параметров траек-
тории с помощью перехода к обобщенному параметру сведено к
однопараметрической коррекции фК1(^), которая допускает локаль-
ную оптимизацию режима коррекции, так как число независимых
параметров управления больше одного. Однако в отличие от рас-
смотренных ранее случаев оптимизации коррекции по энергетике,
необходимо определить такой вектор корректирующей скорости,
чтобы величина фк1(^) после коррекции была минимальной:
®*1(/;) = т1п[Д ф+т(/у) РК(^;-)Д ф+ (^)]'/2. (2.18)
ЧЦ j)
Дифференцируя (2.18) по компонентам вектора корректирующей
скорости, получим после некоторых преобразований условие для
расчета оптимальной коррекции
u (/7) = [Fk (/;) Рк--(^) Fk(^)Pk (^) Л Фк (G) (2.19)
аналогичное решению, получаемому при оценке параметров по ме-
тоду наименьших квадратов, что объясняется одинаковым видом
минимизируемой функции, обеспечивающей наименьшее отклоне-
ние в заданном пространстве параметров.
Коррекция при ограничениях на величину скорости. К числу
особых можно отнести также случай, когда необходимая для ис-
правления траектории движения величина характеристической ско-
рости коррекции находится вне допустимого диапазона ее измене-
ния, т. е. либо превышает предельно допустимое значение, либо
меньше минимально возможного. Так как обеспечить равенство
нулю отклонений корректируемых параметров при проведении та-
кой коррекции в заданный момент времени невозможно, то в каче-
стве критерия выбора оптимального и (/у) примем приведенное вы-
ше условие обеспечения минимальной величины этого отклонения,
причем, как и ранее, корректируемые параметры могут быть ли-
нейно преобразованы с помощью матрицы Пк(ij), характеризующей
влияние каждого из них на выполнение требований к точности на-
ведения. Обозначим
Д ф* (/у) = Дфк(/у) + Рк(/у)ц(/7.)и<1>(/;);
74
<рД/у) = [А (/у)Р,. (/у) А фк+ (/;)j1/2, (2.20)
где u<n(/j)—единичный вектор корректирующей скорости.
Тогда для выбора u(Z;) можно воспользоваться выражением вида
(2.18). Однако в рассматриваемом случае неизвестным является
только направление корректирующей скорости, так как
w(/.) = ( ес-ли и(/;) >
1 1 Al/(i)(/;), если и (/у) < А1/(1)(/у);
«Wy) = Н-’ (/у)]2 4-[«? (/;-)Р + «"> (/7)2}1/2= 1.
Дифференцируя (2.20) по независимым переменным, получим
необходимые условия, определяющие оптимальное направление
корректирующей скорости. Так как компоненты вектора и(1)(^) ог-
раничены и связаны между собой нелинейной зависимостью, то со-
ответствующие условия будут иметь более сложный вид, чем ана-
логичные условия (2.19) при отсутствии ограничений на величину
корректирующей скорости. Поэтому для расчета оптимального
и‘»(/у) необходимо использовать численные методы решения сис-
темы нелинейных уравнений или поиска экстремума функции
?к+1 (/;) = min {A (щ) Рк (г'у)Д <₽+ (^у)]172-
На практике вместо формального перехода к корректируемому
параметру cpHi(Zy) целесообразно изменить номинальные значения
одного или нескольких корректируемых параметров таким образом,
чтобы выполнялись основные требования к траектории движения,
а величина корректирующей скорости находилась в допустимых
пределах. На траектории межпланетного перелета можно, напри-
мер, изменять номинальное время прилета к планете, так как к
этому параметру предъявляются, как правило, менее жесткие тре-
бования, чем к двум другим корректируемым параметрам gn, Tin-
Особенности расчета маневра. При проведении маневра основное
условие для определения параметров управления имеет вид:
Д(рк (/;-) = FK (/;-) v (/;-), (2.21)
где FH(Zy)—матрица частных производных от корректируемых
параметров по параметрам управления маневра: Д/{, Дау, Дру,
Д Vy.
Уравнения (2.21) однозначно определяют параметры маневра
только при г = 4 и невырожденной матрице FK(/y) эффективности
маневра. При г>4 возможна оптимизация режима маневра. Как
УЖе отмечалось, из четырех параметров управления маневра
только один параметр ДУу характеризует качество управления.
Следовательно, локальные условия оптимальности маневра, в от-
личие от коррекции, требуют выполнения условия ДКу = О, т. е.
исправление корректируемых параметров должно проводиться пу-
Тем изменения ориентации вектора тяги двигательной установки
75
или времени ее включения. Это возможно при г<4, если FK(^);
•составленная для всех параметров /-го управляющего воздей-
ствия, кроме AVj, имеет ранг, равный г. В этом случае обеспечи-
вается проведение маневра с энергозатратами, не превышающими
энергозатрат номинального маневра. Возможность ее уменьшения
при благоприятном сочетании исправляемых отклонений коррек-
тируемых параметров не используется, так как расход топлива не
превышает располагаемых запасов.
Следует подчеркнуть, что рассмотренные особенности расчета
маневра связаны с тем, что принятые параметры управления ма-
невра отличаются от параметров управления при коррекции. При
линеаризации динамической системы это имеет место в том слу-
чае, когда номинальное значение характеристической скорости та-
ково,' что зависимость корректируемых параметров от Д^-, Да,, Др;,
Д’/j имеет более линейный вид, чем от составляющих «T((J,
Uy(tj), uz(tj) (в диапазоне возможных изменений характеристик
маневра).
2.3. Некоторые задачи коррекции траектории движения АМС
Рассмотрим ряд примеров расчета одноразовой независимой
коррекции, которые являются наиболее типичными для управле-
ния движением АМС, и проанализируем их основные свойства.
Пример 1. Пусть АМС, предназначенная для мягкой посадки
на планету, находится в сфере ее действия. Выбор корректиру-
емых параметров определяется требованиями к траектории спус-
ка. Если посадка на планету осуществляется с помощью аэроди-
намического торможения, то основной задачей управления явля-
ется выполнение заданных ограничений по допустимым перегруз-
кам и рассеиванию точек посадки. Исследования участка аэроди-
намического спуска и посадки на различные планеты [20, 32] по-
казали, что реализация этих требований эквивалентна обеспече-
нию с некоторой необходимой точностью высоты h„ (или радиуса
гл) условного перицентра орбиты (без учета влияния атмосферы
на движение АМС). Соответствующие ограничения на корректи-
руемый параметр hn зависят от скорости входа в атмосферу, допу-
стимых перегрузок и рассеивания точек посадки на поверхности
планеты, а также располагаемого аэродинамического качества,
если спуск управляемый. В зависимости от типа и назначения ап-
парата, предъявляемых к нему требований, допустимый коридор
входа может изменяться от десятка до сотен километров. Действи-
тельно, как показано в [32], для обеспечения посадки СА, возвра-
щающегося с Марса или Венеры на Землю и осуществляющего
прямой вход в атмосферу с гиперболическими скоростями, допу-
стимый коридор входа составляет 10 ... 20 км. Для современных
межпланетных аппаратов, осуществляющих посадку в заданные
районы поверхности Венеры, требуемые коридоры входа составля-
ют 200...300 км [6, 7]. Зависимость производной корректируемо-
го параметра от составляющих, корректирующей скорости в орби-
76
льной системе координат можно получить из интегралов площа-
T3ft и энергии при условии, что составляющая и (/у), перпендику-
лярная плоскости орбиты, в линейном приближении не влияет на
отклонение по высоте перицентра:
г
----— =----------------(/.);
(/Д _ /2
('Д - tA2 ('Д
(2.22)
tgaA(/;) =
df\
где Vn— скорость в условном перицентре орбиты; гп — радиус ус-
ловного перицентра; Vr(tj) •—трансверсальная и радиаль-
ная составляющие вектора скорости у(/Д в момент проведения
коррекции.
Из (2.22) следует, что grad/zJX((), лежащий в плоскости орби-
ты, составляет с трансверсалью угол аА(/Д:
*АДД W))
Соответствующее направление оптимальной по расходу топли-
ва коррекции условного перицентра орбиты совпадает с трансвер-
салью, если коррекция проводится в апоцентре, и с радиусом — в
перицентре орбиты. При этом модуль градиента корректируемого
параметра, характеризующий эффективность управляющего воз-
действия, монотонно уменьшается с приближением к перицентру и
в самом перицентре равен нулю
| grad А Д/Д | =-----------——
I I
Г(/;) +
.2
где r(tj) —расстояние KA от планеты в момент коррекции.
Таким образом, для любой эллиптической орбиты наиболее эф-
фективна коррекция hn в апоцентре, а перицентр — особая точка,
где коррекция этого параметра невозможна.
Траектории АМС на участке подлета к планете являются ги-
перболическими. Для этих орбит с хорошей точностью справедли-
ва линейная зависимость эффективности коррекции условного пе-
рицентра от расстояния до планеты. Из рис. 2.3 видно, что на рас-
стоянии более 20 тыс. км от Венеры исправление отклонений
целесообразно проводить в направлении, ортогональном радиусу-
вектору г(^). Для АМС, возвращающейся на Землю при скоро-
ях входа порядка 12 км/с, выполняется соотношение
Л.Д//) «0,14-10-3 г((/) км/(м/с). Как известно, траектория
• возвращающегося от Луны к Земле, близка к параболической.
77
Рис. 2.3. Зависимость градиента ра-
диуса перицентра и угла ah от рас-
стояния до Венеры
Для этого случая при расчете
коррекции перицентра можно
использовать приближенную
зависимость
grad (/;-) = 2г
(2.23)
которая с высокой точностью
справедлива для любого близ-
кого к параболическому дви-
жения. Из (2.23) следует, что
эффективность коррекции па-
дает с увеличением энергии
траектории. Для траекторий
возврата с Луны эффектив-
ность коррекции перицентра
на одинаковых расстояниях от
Земли на 20...30% выше, чем
для межпланетных траекто-
рий.
Пример 2. Пусть АМС находится на эллиптической орбите ИСП
с большой полуосью а и эксцентриситетом е. Если необходимо
обеспечить периодическое выполнение некоторых условий (про-
хождение над заданным районом, поддержание стационарной ор-
биты для спутников связи, нахождение перицентра в зоне радио-
видимости наземных пунктов радиоконтроля и управления), то це-
лесообразно в качестве корректируемого параметра выбрать пери-
од обращения Тор. Величину и направление градиента корректиру-
емого параметра можно получить из интеграла энергии орбиты и
выражения для периода в следующем виде:
^ор ЗлТ'ор
dV {tj} Р-
(2.24)
Из (2.24) следует, что оптимальным при коррекции периода яв-
ляется направление, коллинеарное вектору скорости в точке кор-
рекции, а эффективность коррекции, определяемая модулем гради-
ента корректируемого параметра, прямо пропорциональна вели-
чине скорости. Таким образом
/у ч Р hT
и (/ .•) = —— ----— ДТ0„,
1 ЗаТор °₽
где ДТор — отклонение периода обращения от заданного значения.
Наименьшая величина корректирующей скорости соответствует ис-
правлению периода в перицентре орбиты, а наибольшая — в апо-
центре.
Пример 3. Пусть АМС находится на участке подлета к планете
и необходимо исправить параметры ее движения относительно
78
ланеты назначения. Как уже отмечалось, совокупность возмож-
ных траекторий на конечном участке полета в первом приближе-
нии можно рассматривать как трехпараметрическое семейство,
образованное параллельным переносом ¥«,. Таким образом, с по-
мощью коррекции можно исправить только три параметра относи-
тельного движения. Если в качестве корректируемых параметров
принять координаты вектора прицельной дальности в картинной
плоскости Еп, Лп и время полета до нее tn, то зависимость коррек-
тирующей скорости от исправляемых отклонений и времени кор-
рекции имеет наиболее простой вид. Это объясняется тем, что в
принятых корректируемых параметрах, в основном, исключено
нелинейное влияние гравитационного поля планеты на движение
аппарата, и приложение корректирующей скорости приводит к из-
менению корректируемых параметров, пропорциональному време-
ни полета от места проведения коррекции до картинной плоскости.
Выберем в качестве основной плоскости системы координат — кар-
тинную плоскость, тогда проекции u(Z/) на направления^1*, т]п(1),
&х(1) Равны:
1О3ДЕп/(/„ — tj) м/с;
и1(/;)=103Д7]„/(/п — tj) М/с; (2.25)
1031/«,Д/п/(/„ — tj) м/с,
где £п(1), Цп(1) — единичные векторы, определяющие направления
осей в картинной плоскости; a gn(1)—единичный вектор, ортого-
нальный картинной плоскости; Д|п, Дт)п, Д/п—исправляемые отк-
лонения корректируемых параметров (в километрах и секундах
соответственно).
Из (2.25) следует, что свойства коррекции не зависят от плане-
ты назначения, а затраты на коррекцию отклонений в картинной
плоскости равны для любых траекторий, если коррекции прово-
дятся за одинаковое время до пролета картинной плоскости. Про-
стота оценки характеристик коррекции является важным достоин-
ством выбранных корректируемых параметров и системы коорди-
нат. Если основная плоскость системы не совпадает с картинной
плоскостью, то выражения для расчета скорости коррекции можно
получить с помощью соответствующей ортогональной матрицы пре-
образования базовых систем координат. При этом градиенты кор-
ректируемых параметров останутся взаимно ортогональными, что
обеспечивает возможность одновременного или независимого исп-
равления любого числа корректируемых параметров (от одного
До трех).
Пример 4. Пусть КА осуществляет перелет между двумя орби-
тами и требуется обеспечить попадание в заданную точку одной
из орбит. Для этого необходимо провести в общем случае трехпа-
Раметрическую коррекцию для исправления координат перелетной
орбиты. В качестве перелетной орбиты может рассматриваться,
Например, межпланетный участок траектории движения АМС.
Налогичные требования могут появляться и при управлении
79
движением спутника планеты, предназначенного для посадки на
ее поверхность или сближения и стыковки с другим аппаратом
осуществляющим взлет с поверхности планеты, а также в ряде
других случаев. Если заданы номинальная орбита КА и точка
через которую он должен пролететь, то свяжем с этой точкой орби-
тальную систему координат и в качестве корректируемых парамет-
ров выберем координаты КА в этой системе в фиксированный мо-
мент времени /н: гк, пк, Ьк. Наиболее простой вид выражения для
производных от корректируемых параметров по составляющим
корректирующего импульса в орбитальной системе имеют для окс-
локруговых орбит [47]:
дгк sin [0 (/х) — 0 (/у)] дгк 1 _ cos [в (А) — 6 (</)]
(/у) ХОр dun(tj) Хор
dub(tj) ’ диг (tj) Хор
dnk 3[0(/к)-6(/у)-4 sin [6(/к)-6(/у)]
^ип у) лор
__________Q. А _____Q. __Q.
dub(tj) ’ dur(tj) ’ dun(tj)
dbK _ sin [6(A) —6(^)1
dub у) Хор
(2.26)
где лОр = 2л/7’ор — средняя угловая скорость движения по орбите;
6(A), 0(A) —угловое положение КА в точках встречи и коррек-
ции; щ(А), ««(А), «в(А)—составляющие корректирующей скоро-
сти в орбитальной системе.
Из (2.26) следует, что grad6K(A) имеет направление, ортого-
нальное плоскости орбиты, a gradrK(A), gradnK(A) лежат в пло-
скости орбиты, и угол между ними во всех возможных точках,
проведения коррекции отличен от нуля. Величина коректирующе-
го импульса при исправлении отклонений Дгн минимальна п"И
проведении коррекции в точке, отстоящей от точки встречи на 18и",
и увеличивается по мере приближения к tK. При коррекции А';;
скорость минимальна в точках, для которыхб(А)—9 (А) =«л/2, где
а=1, 2,..., и увеличивается по мере приближения к точке встречи,
или противоположной ей точке. При 0(A)—0(A) =°л исправле-
ние ДА; невозможно. Градиент корректируемого параметра Щ
имеет периодическую и вековую составляющие, причем эффектив-
ность коррекции уменьшается по мере подлета к точке встречи.
Таким образом, система (2.26)—невырожденная, за исключени-
ем некоторых особых точек, в которых невозможно одновременное
исправление всех трех корректируемых параметров, в этих точи л<
6(A)—0(A) =a^- На конечном участке подлета к точке встречи
углы между градиентами корректируемых параметров близки -<
90°, а их модули равны между собой и пропорциональны времени
полета до заданной точки (или углу между точками встречи и кор-
80
лекции), т. е. аналогичны рас-
смотренному в примере 3 слу-
чаю коррекции вектора при-
цельной дальности и времени
полета. Следует отметить, что
рассмотренные
мые параметры
корректируе-
и выражения
производных для околокруго-
вых орбит могут быть исполь-
зованы при качественном ис-
следовании свойств коррекции
межпланетных аппаратов: на
гелиоцентрическом участке их
орбиты — эллипсы с малым
эксцентриситетом.
Пример 5. Пусть АМС,
предназначенная для доставки Рис. 2.4. Зависимость изменения гради-
на поверхность Марса СА и ентов корректируемых параметров и ха-
1 г,гп рактеристическои скорости коррекции от
создания ИСП, выведена на Времени ее проведения на межпланет-
траекторию межпланетного пе- ном участке траектории Земля — Марс
релета. Корректируемыми па-
раметрами в этом случае будут координаты вектора прицельной
дальности в картинной плоскости gn, т]п и время прохождения на
минимальном расстоянии от Марса tpm (см. разд. 1.7). Зависимость
изменения градиентов корректируемых параметров от времени про-
ведения коррекции в данном случае может быть рассчитана на
ЭВМ для каждой заданной траектории полета в рамках принятой
модели движения с использованием одного из рассмотренных в
разд. 1.5 методов вычисления фундаментальной матрицы, причем
матрица Фк(/Ф) производных от корректируемых параметров по па-
раметрам состояния в момент может определяться методом ко-
нечных разностей.
На рис. 2.4 показана зависимость изменения градиентов кор-
ректируемых параметров от времени полета, а также изменение
характеристической скорости коррекции, обеспечивающей исправ-
ление некоторых заданных отклонений корректируемых параметров
ОТ их номинальных значений, вызванных ошибками выведения
АМС на траекторию перелета. Данные получены для случая, когда
траектория движения АМС определена элементами орбиты в соот-
ветствующих сферах действия, а фундаментальная матрица рас-
считывалась с использованием аналитических соотношений. Рас-
сматривается энергетически оптимальная траектория прямого пе-
релета с Земли на Марс при условии встречи с планетой на пер-
вом полувитке. Сравнение с результатами расчетов, основанных
На применении более сложной модели невозмущенного движения
и вычислении фундаментальной матрицы методом конечных раз-
ностей, показывает, что различие в оценках величин градиентов и
корректирующей скорости для линейной модели динамической си-
стемы не превышает 5%. Из рис. 2.4 следует, что эффективность
81
коррекции в первые 50 сут полета изменяется немонотонным об-
разом, а на оставшемся интервале уменьшение эффективности и
увеличение величины корректирующей скорости на рассматрива-
емой траектории имеет более плавный, близкий к линейному ха-
рактер.
2.4. Связанная коррекция
Рассмотрим более общую задачу одноразовой линейной детер-
минированной коррекции — связанную коррекцию. При анализе
независимой коррекции было показано, что эффективность исправ-
ления корректируемых параметров существенно изменяется по
траектории полета. Поэтому, выбрав такие точки на траектории
полета, в которых проведение коррекции приводит к наибольшему
изменению каждого из корректируемых параметров, можно обес-
печить уменьшение суммарной характеристической скорости кор-
рекции. Это свойство используется при связанной коррекции.
Необходимость проведения связанной коррекции может возник-
нуть также в том случае, когда принятый состав корректируемых
параметров превышает возможности их исправления с помощью
однократного включения двигателя КА (неоднородно-связанная
коррекция). Так, в рассмотренном в разд. 2.2 примере коррекции
движения АМС с использованием системы солнечной ориентации
при одноимпульсной коррекции можно исправить только один па-
раметр. Коррекция двух параметров, например координат векто-
ра прицельной дальности в картинной плоскости, выполняется
только двумя импульсами, направленными на Солнце (или от
Солнца). В задаче стыковки аппаратов для обеспечения «мягкого»
контакта может потребоваться коррекция пяти—шести параметров
движения (относительных координат и скоростей), которая невоз-
можна с помощью одного управляющего воздействия. Поэтому
связанная коррекция является необходимым и практически важ-
ным развитием возможностей одноразовой коррекции. Кроме то-
го, если в разд. 2.2 рассматривались только задачи исправления
отклонений корректируемых параметров от некоторой заданной
точки, т. е. случай попадания в заданную точку, то ниже будет
рассмотрено более общее условие — попадание в заданную об-
ласть
Пусть задан r-мерный вектор отклонений Афк(^н) корректиру-
емых параметров (г=Сб) и область допустимых их отклонений;
— выпуклое множество пространства В заданные моменты
Л, •••, tg проводится g-импульсная связанная коррекция траектории
полета, причем и (Л,)—трехмерный вектор евклидова простран-
ства Л7, ^еТуп, {и(^), ^еТуп}еЙ2. Необходимо найти такие па-
раметры импульсного управления, при которых с минимальными
энергетическими затратами
g
U^*(/H)= min V[ur (/7-)u(M1/2 (2-27)
и('л^
«2
ВЫПОЛНЯЮТСЯ условия
Дф+ (/g)e= ФДи<1)(/1), ... , и*1’(/р] = 0;
g (2.28)
ДФК+ = Д<Рк (Zh) + 2 FK (/7)U (//)’
/=1
где ФеН — линейные ограничения на допустимые направления кор-
ректирующих импульсов (см. разд. 1.6).
Для проведения коррекции при произвольных значениях ком-
понент вектора Д<рк(/н) необходимо выполнение условия
g
r + p<3g или г<2Лд
/=1
где fVj — количество независимых параметров /-го управляющего
воздействия.
В частном случае, когда r + p = 3g, решение задачи связанной
коррекции, если оно существует, однозначно и может быть полу-
чено в следующем виде:
и//1(... , /g) = F“1(/1, ... , /g)A<pKi(/H);
up/j, ... , /g) = [ur(/1), ... , uT (/Д]г; (2.29)
ДФк//к) = [Д'Рк1(^)> > ЧД)>
О, ... , 0]\
где us(/b..., /g) —вектор З^-мерного пространства компонент кор-
ректирующих скоростей; Д<рк$ (/н) — вектор r + р-мерного прост-
ранства, составленный из отклонений корректируемых параметров;
и дополненный правыми частями р линейных ограничений (2.28)
на u0)(/3.); Fks(/i, •••> /g)—матрица производных от корректиру-
емых параметров и линейных ограничений по составляющим g;
корректирующих скоростей. Для существования решения необхо-
димо, чтобы матрица FKS(/b ..., tg) была невырожденной.
Порядок системы уравнений (2.29) равен 3g, однако при ли-
нейных ограничениях компоненты векторов корректирующих ско-
ростей можно выбрать таким образом, что они будут независимы-
ми переменными. Тогда порядок соответствующей системы будет
Равен г, а матрица FKS(/b .... tg) уже не будет содержать условий,
ограничивающих проведение коррекций. Такой переход упрощает
систему, однако она теряет универсальный вид и оказывается за-
висящей от конкретных условий задачи коррекции.
Если r + g<3g, то решения для и(/3) получаются неоднознач-
ными и из множества допустимых управляющих воздействий мож-
но выбрать такие, которые обеспечивали бы проведение коррек-
ции траектории полета с минимальными энергозатратами. Незави-
симая коррекция является частным случаем связанной, поэтому
полученные локальные свойства оптимальности независимой кор-
83
рекции при r<3 справедливы и для связанной коррекции. Иными
словами, при связанной двухпараметрической коррекции, как и
при независимой коррекции, в каждый момент t, существует опти-
мальная плоскость коррекции. Что касается однопараметрической
коррекции, то для нее не требуется режима связанной коррекции.
Рассмотрим некоторые свойства оптимального управления, прису-
щие связанной коррекции при отсутствии ошибок ее исполнения
(идеальная связанная коррекция).
Одно из основных свойств определяет оптимальное количество
управляющих воздействий. Докажем следующую теорему.
Теорема 2.1. Если существует оптимальная стратегия наведе-
ния, обеспечивающая выполнение условий (2.28), то соответствую-
щее число корректирующих импульсов не превышает размерности
пространства корректируемых параметров.
Предположим противное: существует оптимальная
которой g*>r, и* (Л,)—оптимальные параметры
Тогда
дт.:
стратегия, у
управления.
(2.30)
2и(^
Ь=1
=
/“1
g*
причем Дф+*(/р = Дфк(/н)Д- 2рк(^)и*(^) = Л<Рк(и +
7 = 1
7 = 1
ДдЛ*(/г)е U7*(/H)= min
u (<;). и(1) (/Д g
g
где Дфк
— изменение отклонений корректируемых пара-
метров после проведения g корректирующих управлений,
и(1)(^)—единичный вектор корректирующей скорости, а и(^)—
ее модуль.
Таким образом, при оптимальных параметрах управления,
должны выполняться следующие условия, если g = g*, и<1)(/7) =
= uO)* (tj);
g
U7* (/H) = min V и 1,..., i, g*;
, Г J,
V Fji^uW*(tj)u(tj) = Дфк >«(/;) ;
7=1 7=1 (2.31)
4>t[u(1)W.-- u(1)*(/g)] = 0;
и (tj) 0.
84
* g "I
Условия (2.31) при заданном Д <j\ V u(/;-)l и фиксированных
Lj=i .1
пеменах коррекции, количестве корректирующих импульсов и на-
бавлениях корректирующих скоростей, соответствующих опти-
мальной стратегии, совпадают с условиями общей задачи линейно-
ного программирования: определение минимума линейной формы
переменных и(^) при линейных ограничениях и условии и(^)^0.
Известно, что множество решений такой задачи является выпук-
лым многогранником, а линейная форма W (/н) = V. «(/,) дости-
7 = 1
гает своего минимума в крайней точке многогранника. Этой точке
соответствуют г векторов вида FK(^)u<1>* (^), следовательно, лю-
бое изменение отклонений корректируемых параметров
' g
Д<Рк 2и(/у) ’
в том числе и соответствующее оптимальной стра-
тегии наведения, можно осуществить приложением г импульсных
управляющих воздействий, при этом величина W(ta) не увеличит-
ся по сравнению с (2.31). Итак, допущение, согласно которому оп-
тимальное число корректирующих импульсов может превышать
размерность пространства корректируемых параметров, приводит
к противоречию, значит, при оптимальной стратегии одноразовой
связанной коррекции, обепечивающей попадание вектора откло-
нений корректируемых параметров в заданную область при на-
личии линейных ограничений на допустимые направления коррек-
тирующих скоростей, достаточно проведения не более г импульсов.
Из теоремы 2.1 следует, что любую последовательность из g
импульсов при g>r можно привести к последовательности с чис-
лом корректирующих импульсов, не превышающих г, без увеличе-
ния энергозатрат на управление.
Теорема 2.2. При оптимальной стратегии вектор отклонения
корректируемых параметров после проведения последней коррек-
ции принадлежит границе заданного выпуклого множества:
А •;( (/^)с:(1;б - J.
(2.32)
Допустим, что это свойство несправедливо и найдена такая
°птимальная стратегия одноразовой ^-импульсной коррекции
ц И1),-, u*(^g), для которой выполняются ограничения на допу-
стимые направления корректирующих скоростей, а Дфк* (^) нахо-
дится внутри области ,/?9.
г g
Т° Вектор A :рк V ц(/;.)
2 u
7 = 1
Так как Д<рк+ (te)=k <рк (/„) + <рк
построенный из конца вектора Д<р1((^н),
ПеРесекает границу выпуклого множества ЛФ в некоторой точке
85
g
А, которая делит его на два вектора (первый из них Д фк
является внешним по отношению к Л*, а второй — Д <рк
L 7=1
принадлежит множеству ЛА, то
Д фк
= (1 — с)Дсрк
где 0<с<1 — коэффициент, определяющий отношение
коллинеарных векторов
Дф'к
модулей
Нетруд-
но видеть, что если в пространстве построить вектор отклоне-
ний, соответствующий точке А, и принять его в качестве Д<р1;+'(/,),
то
Дфк+'(/г) = Дфк (/Н) + Дфк
5} u
./•=1
Афк+'(/г)е (Bd ДД,
а суммарная характеристическая скорость такой ^-импульсной
коррекции W1 (tH) составляет:
(/„) = (! -c)Uy*(/H)<UZ*(/H),
так как 0<с< 1, а
и(/7) =(1 — С)Дфк
XFK
Следовательно, построенная таким образом стратегия коррек-
ции оказывается выгоднее оптимальной, что невозможно. Поэтому
принятое предположение неверно, и при оптимальной стратегии
Дфк+(^) (Bd ЛА-
Доказанное свойство имеет важное значение, так как позволя-
ет при расчете и оптимизации стратегии коррекции в общем слу^
чае ограничиться условиями типа равенства, выбирая Д фк
таким образом, чтобы Д<рк+(Д) (Bd ЛА-
Теорема 2.3. Оптимальные параметры управления g-импульсноИ
одноразовой коррекции, обеспечивающие минимум суммарной ха-
рактеристической скорости при ограничениях на допустимые на-
86
правления корректирующих скоростей и Л<рк+(^) удовлетво-
ряют следующему необходимому условию:
d'f.U
дих {tj)
«х ('о')
................................................................. (2.33)
Используя доказанные выше свойства, задачу поиска оптималь-
ной стратегии ^-импульсной одноразовой коррекции в общем слу-
чае можно записать:
[ g >1/2
min V[uT(0)u(M
uop, г, [j?! J
(2-34)
при условии
A<pk+(/g)€H(Bd (/;), ..., u(1)(/g)j=o,
причем при расчете параметров управления используются только
условия типа равенства. Как известно, поиск минимума функции
многих переменных можно свести к последовательному решению
задач оптимизации функции по каждой переменной, тогда при ус-
ловии выполнения заданных ограничений
g
= min min min V [uT (/.•) u (/,)]1/2. (2.35)
+ £ U (t.)
Д?к <‘g) S ? 2 = 1
Из (2.35) следует, что при любых фиксированных значениях
Л<рк+(^,), g (в том числе и оптимальных) справедливо
g
W'u{tK)= min V jut(/ )U(/ )]i/2>
u ('/>
при условии
Ф5[и(1)(Л),..., ud)(y=0;
Д«₽к (U+ V FK Oj)u (tj)=д<р+ (/р.
2 = 1
(2.36)
(2.37)
При u(^)#=0 минимизируемая функция и условия '(2.37) —диф-
ференцируемые функции параметров управления, следовательно,
Необходимые условия экстремума (2.36) имеют вид
87
дФхДи(<1)......u(/g)] _q.
дих (tj)
.............................................. ’-8)
д Фк-s [и (Л), • • • > u (Zg)] _Q
диг (tj)
где Фк5[и(Л), ...,u(/g)]= ^I^(O) + «y2(^-) + ^(G-)]1/2+
r g P
+ 2 i (^и)- ^?кНг'^g)+ ^Ki(^’)U (/;•)]+ h, r+; X
;=1 y=l V-l
x>Ь[и(1)(Л), • ••>u(1)(^)L
Дифференцируя ®KS[u(Л),..., u(/g)] по составляющим корректи-
рующих скоростей, получим следующую систему:
Ux(tj) । 41- d'^i I XV дф:[и(1)(/[), ...,u(1>(/g)]
----------к 7 ---—------к ------------------------- =0;
г/(/;.) dux(tj) ’ dux(tj)
............................................................ (2.39)
“z(zj) . 4?- d^i I xv d’h Iu(1)(zi)> •••.и(1)(гг)1 п
---77Д----Г 7, '-si —-—Г + У As,r+S -----------, .-------- — и>
“(^) Z-T1 Ouz(£7-) du2(tj)
или в матричном виде
и«°Р(Л, ...,h) + F^(/1( ...,/,)As = 0, (2.40)
где usHop(/i, ..., tg)—нормированный 3^-мерный вектор компонент
корректирующих скоростей; ks= (A.si,.... KSr,..., Asr+^)T — вектор
множителей Лагранжа, a FKS(/1,.... tg) — матрица частных произ-
водных от корректируемых параметров и ограничений по ко.мпс-
нентам корректирующих скоростей.
Условие оптимальности (2.39) связанной одноразовой коррек-
ции накладывает дополнительные ограничения только на направ-
ления оптимальных корректирующих скоростей. Эти ограничения
не зависят от величин исправляемых отклонений корректируемых
параметров.
2.5. Оптимизация параметров двухимпульсной связанной
коррекции
Для оптимизации характеристик связанной коррекции можно
воспользоваться необходимыми условиями (2.39) оптимальности
корректирующей скорости (см. разд. 2.4). Эти условия следует
добавить к условиям (2.37), накладываемым на допустимые отк-
лонения корректируемых параметров и возможные направления
88
корректирующих скоростей, и рассматривать их совместно. Одна-
ко поиск решения соответствующей нелинейной системы одним из
существующих численных методов сопряжен со значительными вы-
числительными трудностями, связанными с большой параметрич-
ностью системы, вид которой существенно зависит от режима уп-
равления и числа корректируемых параметров. Решение задачи
может упроститься, если ввести новые независимые переменные
и осуществлять оптимизацию относительно них. Примем в качест-
ве независимых переменных коэффициенты связи равные
отношению исправляемого /-й коррекцией отклонения i-ro пара-
метра ко всему заданному отклонению. Они характеризуют взаим-
ную зависимость между последовательно проводимыми связанны-
ми коррекциями. Диагональную матрицу CSK(^), составленную из
коэффициентов связи cS!(^), назовем матрицей связи j-и коррек-
ции. Использование в качестве переменных оптимизации коэффи-
циентов связи позволяет получить в явном виде условия оптималь-
ности, удобные и надежные алгоритмы расчета оптимальных ха-
рактеристик управляющих воздействий.
Рассмотрим двухимпульсную связанную коррекцию. Пусть в
моменты tj и tj+l проводятся корректирующие воздействия с це-
лью исправления с минимальной энергетикой заданных отклоне-
ний Дфк(^) корректируемых параметров:
W*(tj) = min [«(/,)-}-«(/;+I)|;
u(/;.).U(/;.+1) (241)
FK (tj) u (/;)+ FK (/;+1) u (/;+i)+ A <pK (tj) = O.
Оптимизация режима управления может быть проведена, ес-
ли количество корректируемых параметров меньше шести, причем
число свободных переменных равно пу = 6—г. Введем пу коэффи-
циентов связи для i-й коррекции, определяемых условием
С5Л(0) A<PK„(/;-) + FK„(/;) u (tj) = O, (2.42)
где С$„(^)—«у-мерная диагональная матрица, составленная из
С«1 ((;),..., csn(tj); A<pKn(/j)—пу-мерный вектор отклонений коррек-
тируемых параметров, составленный из пу компонент вектора
Афк(^), выбор которых в известной мере произволен; FKn(t>) —
матрица частных производных, образованная из му соответствую-
щих строк матрицы FK(^).
Тогда условия (2.41) можно заменить эквивалентными услови-
ями, обеспечивающими оптимальное управление заданной линей-
ной динамической системой:
W/*(tj)= min [u(tj)-|~zz(/;+1)J;
Csn<-‘P
I''k(0)u(0) + fk(/j+i)u(/;-+1) +A<pK(/;) = O; (2.43)
FK n (Oi) u (Oi) + c™ (O’) А Фк (0) = 0,
89
в которой минимизация суммарной характеристической скорости
по 6 компонентам /-й и (/'+1) -й корректирующих скоростей заме-
нена минимизацией по пу переменным, пу^3. Нетрудно видеть
что между множествами решений систем (2.41) и (2.43) существуй
ет изоморфизм, если соответствующий определитель системы
(2.43) невырожденный, а коэффициенты связи изменяются от
—оо до оо. Таким образом, основным условием при переходе к
эквивалентной задаче является такой выбор пу корректируемых
параметров из числа заданных, при котором определитель систе-
мы (2.43) будет невырожденным.
Продифференцировав выражение для суммарной характеристи-
ческой скорости коррекции по коэффициентам связи и предпола-
гая, что ы(^)=/=0 и u(tj+l) =#0, получим необходимое условие опти-
мальности в следующем виде:
1 <?и(/.-) 1 du(/,-+i)
-----------— и (6)Н------------------и (/,-+1) —0, (2.44)
И(/7) dCsn(jf) J dCsn(tj) 7+1 >
где dux (tj) duy (tj) duz (tj)
de si(tj) de si (tj) dcsi Uj)
С.УЛ if j} dux (tj) duy (tj) duz (tj)
dcSn (tj) dcsn (Jj) dcsn j)
dux(tj+i) duy(tj+i) duAtj+i')
desi i.tj') de si {tj) dcsi(tj)
d ^sn (J j) dux (tj+i) duy(Jj+i) duz(tj+i)
dcsn (if) dc$n (J j) dc$n (t j)
Для получения в явном виде выражений, входящих в (2.44), сос-
тавим систему
/ u (^/) \ _ ___ / Д фк (tj) \ (2 45)
0 \ + / \Qs« (^/) А Фк п j) /
или FKJ(/p /7+1)иД/;, /у+1)=-ДфкД/Д (2.46)
где ДфкД/у)=1Д?к1 (/;),...,Д<ркг(/у); (/У)Д?К1
...,с5П(/;)Д<ркп(/;)]г;
90
Из (2.46) при заданных значениях коэффициентов связи и не-
вырожденной матрице FKS(//, tj+i) можно определить компоненты
векторов корректирующих скоростей:
^/+1)— — (/у, tj+x) Д <pKS (tj)',
(2.47)
tj+1) — FK}(tj, tj+1) —
m61, m№
Дифференцируя (2.47) по коэффициентам связи, определим
du(tj) du(/-+1)
частные производные----------, ---------- и после подстановки
^sn (tj) д Csn (t j)
в (2.44) и некоторых преобразований получим следующее условие
оптимальности связанных коррекций:
М.Д/;, /7+1)и(/у)-|-----—-Мй(/7, tj+x) u(/;+1)=0, (2.48)
«Ср «(Zy + 1)
где Msi(tj, r/+i); Ms2(P, tj+i) — матрицы размерности (nyx3),
составленные из последних столбцов матрицы Ms(//, //-j-i) и затем
транспонированные:
tj + 1)--
О О
о Е„
О О
0Е„
Ms(tj, tj+1)
Ms(tj, ^y' + l)
о E3
О О
О О
О Е3
Ел — единичная матрица размерности (nyXny).
Оптимальные корректирующие скорости определяются из ре-
шения следующей системы:
FK (tj) Ек(/;-+1) / u (tj) \ /Д<рк(/;-)\ (2 49)
as^sl(^ji ^j + l) ^s‘l(h' Р'+Р \ u(6' + i / \ О J
где as = u(tj+i)/u(tj). Система (2.49) может быть решена одним из
итерационных методов однопараметрического поиска, причем на
каждом шаге при заданном значении as система превращается в
линейную.
Рассмотрим второй вид связанных управлений — проведение
маневра и коррекции в любой последовательности,— который ча-
сто используется при наведении современных АМС на участке
Подлета к планете назначения. Примем, что первой осуществляет-
ся коррекция, а вторым—маневр, тогда при проведении связан-
ного управления необходимо выполнить:
FK (tj) u (tj) + FK (tj+x) v (tj+x) -|— Д <pK (/,-)=0;
EK« (^j)u (t j) ~ (tj) Д <pK n (tj) =0
91
при условии
Г*(/у)= min {[ur(/y) U + (2.51)
^1 ('A— 'sn<‘P
дифференцируя которое по коэффициентам связи, получим необхо-
димое условие оптимальности связанных коррекции и маневра
1 du(tj) bVj + i dA7f+1 _q ,
«(/у) dCsn(tf) ' | ДУ/+1 | dCsn(tj) ’ ' 1
где д _______ имеет вид, аналогичный (2.48);
д Csn(tj)
д\У}+г Г dAVj+1 _ д Д7у+1 у
д Csn (0) I д (/у) д csn (//)]
При заданных коэффициентах связи система (2.50) определяет
параметры управления, которые равны
vs(/y,/y+1) = — F^’(/y, /у+1)Лфк//у) =
= —М5(/у, /у+1) ДфК5(/у), (2.53)
где vs(tj, /у+1) =[их(/у),..., Д/y+i,..., ДУу+1]т — вектор пара-
метров связанных управляющих воздействий.
Дифференцируя выражение (2.53) по csl (/у), ..., csn (/у), найдем
ди(Л-) д Д7,-+1
частные производные _______, ... , ______' . и после подстанов-
с)сп(/у) dcsn(ti)
ки их в (2.52) получим при условии u(/y)=H=O, AVy+i#=O:
1 W/'+? 1 M5l(/y, /у+1)и (t у)+М52(/у, /у+1) ДИу+1 = О, (2.54)
11 (ч)
где М.Ч1 (Л, Zy+i), Ms2(/y, /у+i)—матрицы размерности (пуХЗ), со-
ставленные из элементов матрицы МД/у, /у+Д по тем же прави-
лам, что и при связанной коррекции:
,п\1—п тП—п т37—п
М51
= (/у, /у+1) =
т17 .щ27 тЯ7
ООО т77-п
(2.55)
Мл (Д, /у+1)=
ООО т77
Оптимальные параметры управления при последовательном
проведении связанных маневра и коррекции определяются из реше-
ния нелинейной системы, вид которой аналогичен (2.49):
। F« (/у) FK(/y+1) / u(/y) / дФк(/у)\.
| а5М51(/у, /у+i) М52(/у, /у+1) ^v(/y+1) / \ 0 /’
(2.56)
92
При однородно-связанном управлении соотношения (2.49) ус-
танавливают взаимно однозначное соответствие между направле-
ниями корректирующих скоростей, соответствующих режиму огн
тимального двухимпульсного связанного управления. Так, при
г=3 для двух связанных коррекций, воспользовавшись свойствами
блочного обращения матриц, получим
(t.) г ,
777Г =Fk (tj) [Fk (/;-+1)]‘
U(Q+1)
“(0+i) ’
Аналогичным образом получаются необходимые условия опти-
мальности при проведении двух связанных маневров и любых дру-
гих комбинациях последовательно проводимых маневров и коррек-
ций.
Разработанный метод оптимизации параметров связанного уп-
равления можно распространить на большее число управляющих
воздействий, а также на различные виды энергетических критериев
оптимальности. В частности, если для проведения управления ис-
пользуются ДУ с различными характеристиками либо изменяется
масса КА, то в рассмотренный критерий качества целесообразно-
добавить коэффициенты, учитывающие изменение расхода топлива
при управлении, которые, как видно из (2.48) или (2.54), войдут
в качестве сомножителей в условия оптимальности. Если для про-
ведения управления используются различные разгонные блоки или
топливо из различных емкостей, то в качестве критерия оптималь-
ности можно принять условие минимума расхода топлива на по-
следующее управление. Примером может служить старт с орбиты
ИСП с помощью специального разгонного блока, отделяемого по-
сле выхода АМС на траекторию перелета, причем коррекция по-
следующей траектории перелета осуществляется ДУ, установлен-
ной на АМС. Параметры управления при старте с орбиты ИСП
целесообразно выбирать таким образом, чтобы характеристическая
скорость первой межпланетной коррекции была минимальной. Ес-
ли v(ij)—оптимизируемые параметры маневра, a u(O+j)— пара-
метры последующей коррекции, то
FK(/y) v(/y)-EFK(//+1)u(/;+1)-!- Д фк(/у) =0;
FKn ((у) * ((/) + С5П (/у) Д Тк„ (/у)=0,
при условии
Ц7*(//)= min [uT(/y+1)u(//+1)JV2.
csi (о)..с™( 0)
Критерий оптимальности имеет более простой вид, чем
поэтому, используя необходимые условия оптимальности
при u(tj+l) =£0, получим
1 du(Q+1)
“(O'+i) (О)
или
“(0+1)
Ms2((;> (у+1)ц((у+1) — 0.
ранее,.
(2.54)-
(2.58)’
93
Как видно из (2.58), при пу<3 существуют либо оптимальное
направление корректирующей скорости (пу = 2), ортогонаальное
плоскости, натянутой на векторы m2 (/j, А>-+1) и т2(Д tj+l), состав-
ленные из строк матрицы M.s2(/j, tj+i), либо плоскость оптималь-
ной коррекции (пу=1), ортогональная вектору mJ/.,-, Следу-
ет отметить, что оптимальные направление и плоскость такого
связанного управления не совпадают с оптимальными плоскостью
и направлением одноимпульсной коррекции, так как определяются
не градиентами в точке коррекции, а элементами матрицы
МДД fj+i). При пу = 3 и невырожденной матрице Ms2(/j, tj+i) соот-
ношение (2.58) выполняется, если u(/j+i)=0, т. е. отклонение кор-
ректируемых параметров должно полностью исправляться выбором
параметров управления маневра, что действительно возможно при
невырожденной матрице FK(/j), так как в этом случае fyj- = r, и
связанное управление вырождается в независимое (проводится
только маневр).
Таким образом, используя вместо исходной постановки задачи
оптимизации параметров управления связанных управлений лю-
бого вида эквивалентную ей задачу (2.43), получены условия оп-
тимальности, которые позволяют создать универсальный алгоритм
выбора оптимальных параметров управления. Их определение
-сводится к однопараметрическому поиску решения системы, кото-
рая на каждом шаге поиска является линейной, что позволяет ог-
раничиться классом линейных преобразований для любых управ-
ляющих воздействий. Размерность ее не зависит от числа корректи-
руемых параметров и равна количеству определяемых параметров
управления. В систему непосредственно могут включаться рассмот-
ренные ранее условия локальной оптимальности управляющего
воздействия.
При выводе условий оптимальности предполагалось, что
и(/;)=/=0 и u(//+i)#=0, т. е. что определитель системы (2.43) —не-
вырожденный и режим связанной коррекции эффективнее незави-
симой при г^З. На практике нередки такие случаи, когда прове-
дение связанной коррекции нецелесообразно с точки зрения энер-
гетических затрат.
Вырождение связанной коррекции в независимую может ока-
зать существенное влияние на алгоритм расчета и потребовать ис-
пользования дополнительных методов контроля. Однако до-
стоинством предложенного выше способа расчета является
то, что средства контроля содержатся в самом алгоритме.
Действительно, вырождение связанной коррекции приводит к то-
му, что либо u(/j)=0, либо u(tj+i)=O. Это означает, что коэффи-
циент щ = 0, или оо. Таким образом, ограничив возможный диа-
пазон изменения этого коэффициента, получим решение, которое
будет соответствовать допустимому соотношению между величина-
ми характеристической скорости двух связанных коррекций. Ко-
эффициент as [см. (2.56)] имеет простой физический смысл, и вы-
бор диапазона его изменения as тах не представляет
труда в каждом конкретном случае.
«4
2 6. Универсальный метод расчета многоразовой
детерминированной коррекции
Многообразие видов управляющих воздействий и условий, на-
кладываемых на корректируемые параметры, привело к созданию
различных, достаточно трудоемких, методов расчета характери-
стик параметров управления, предназначенных для конкретного
типа управления. Поэтому целесообразно использовать метод рас-
чета, охватывающий наиболее часто встречающуюся совокупность
видов и типов управляющих воздействий и наилучшим образом
приспособленный к программной реализации.
Доказанные выше свойства оптимальной стратегии позволяют
не рассматривать условия вида Дфк+(^) е а ограничиться ус-
ловиями вида равенства с последующим выбором допустимых отк-
лонений корректируемых параметров и минимальных энергозат-
рат. Универсальный метод базируется также на свойстве эквива-
лентности исходной задачи ^-импульсной одноразовой коррек-
ции последовательности задач, в каждой из которых определяются
характеристики управления для минимального числа управляю-
щих воздействий, обеспечивающих заданное изменение вектора
отклонений корректируемых параметров.
Действительно, пусть т. е. число независимых перемен-
ных управления не меньше числа корректируемых параметров,
FK(^)—матрица частных производных, ранг которой не меньше
г, тогда любое решение системы
g
+ J^FK(/y)u(/;)=A<p+ (tg), (2.59),
;=i
будет решением системы
FK (/у) ц (/у)-|-С5 (/у) Д фк (/„) = 0, ; = l,...,g, (2.60)
при условии
g
Cs(tj) = Er,
i=i
рДе C(tj)—диагональная матрица; Ег — единичная матрица раз-
мерности (гХг); ДфкЧМ = Дфк(^н) — Дфк+(^)> и наоборот, любое
Решение системы (2.60) будет решением исходной задачи.
Пусть u'(tj)—некоторое решение системы (2.59), тогда
Рк(/;)ц,(/7)=Дфк[и'(/;)]= — С' (tj) Дфк(/Н), 7=1,... , g,
где С/ (Л,)—диагональная матрица с элементами, равными от-
ношению компонент векторов ДфДиД^)] и Дфк'(Д) при заданных
значениях и'(^). При таком выборе элементов матрицы С/(tj) ре-
щение системы (2.59) будет решением системы (2.60), так как
95
FK (tj) u' (/;) + c; (tj) Д <p' (fH) = 0;
g
2 C' (tj) b (f к (/H) = Д <pK (/„) — Д <p+ (tg),
7 = 1
g
следовательно, Сд(/7-)= Ef.
С другой стороны, если u"(/7) — решение системы (2.60), то,
подставив его в (2.59), получим тождество. Система (2.60) имеет
решение, если ранг матрицы FK(f,) равен г. Область определения
элементов матрицы Cs(/7) —множество действительных чисел.
В случае r>f7j разделим последовательность из g коррекций
на группы g1,..., g1',.--, ga, состоящие из минимального числа кор-
г1
рекций, удовлетворяющих условию г /у7-. Тогда, рассматривая
/=1
параметры управления g'L коррекций как вектор 3§’-мерного про-
странства, можно получить условие вида (2.60) и аналогичным
образом показать эквивалентность задач.
Будем предполагать, что число коррекций и времена их прове-
дения заданы, необходимо найти только и(/7). Введем два шести-
мерных евклидовых пространства — кинематических и терминаль-
ных параметров. Для выделения из шестимерного пространства
подпространства размерности s<6 будем использовать матрицу
E(s):
E(s)= ;. Е5 =
где E(s)—матрица размерности (6x6); Es — единичная матрица
($Xs).
Используя матрицу E(s), пространство рассматриваемых тер-
минальных параметров можно разделить на два подпространства
.корректируемых и некорректируемых параметров
tpK(t)<=fKf5; Фк(О = Е(г)<р(/);
<Ph(/)g=.Fh6; <Гн(О = [Ео — Е(г)]<р(/),
где г — число корректируемых параметров.
Из пространства кинематических параметров подпространство
параметров управления, совпадающее при импульсной коррекции
с подпространством скоростей, можно выделить следующим обра-
зом:
u(/7-) =Е(3)[х+(/7-) — x(/7-)J, (2.61)
где х+(/7)—вектор кинематических параметров после проведения
коррекции.
«6
Если в момент tj проводится коррекция отклонения параметров
Лю (4), т0’ как слеДУет из рассмотренного выше свойства эквива-
лентности, для выделения исправляемой части отклонения при
r^fyj можно ввести диагональную матрицу связи C(tj) размерно-
сти (6X6), аналогичную по структуре Е(г), но с произвольными
элементами:
О О
С(/;)= о сд/;.) •
Соотношение для расчета u(/j) может быть получено из (2.60),
причем в линейной постановке Дф(/) и Дф[и(/у)] связаны с х(/у)
ии(У соотношениями
С (/у) Д <рк (/у) 4- Д<рк [ ц (/у)] =7 0;
Д<р(/у) = Д<р-(/у) + 8фп(4);
Д<р-(/у)=Ф(/¥)Х(/¥, /y_1)x+(/y_1) = F(/y_1)x+(/y_1); ^2’62^
Д<р[(и(/у)] = Ф(4) Х(4, /y)U(/y) = F(/y) U(/y),
где 6фп(4)—ошибки определения и прогнозирования терминаль-
ных параметров на /-м навигационном интервале (от /у_[ до 4).
Преобразуя соотношение (2.62), получим основное условие для
расчета u (tj) в следующем виде:
Е(г) F (/у) и (/у)4-С (/у) F (/y_i) х+ (/y_j)4-С (/у) 8ф" (/у) = 0, (2.63)
определяющее функциональную связь между вектором отклонений
терминальных параметров и вектором управления для двух после-
довательных моментов проведения коррекции траектории полета.
Для учета линейных ограничений на направление корректиру-
ющей скорости в момент tj и локальной оптимизации режима од-
но- и двухпараметрических коррекций необходимо (2.63) допол-
нить соответствующими условиями вида (2.8), (2.14). Целесооб-
разно эти условия ввести с помощью ортогонального преобразова-
ния базовой системы координат в точке проведения коррекции, ко-
торое бы осуществляло переход к независимым параметрам уп-
равления. В этом случае число независимых компонент корректи-
рующей скорости будет равно числу корректируемых параметров,
а соответствующие оси преобразованной системы совпадут с допу-
стимыми или оптимальными плоскостью или направлением кор-
рекции. Преобразование пространства траекторных параметров
осуществляется ортогональной матрицей вида
Физ (^;)
0
о
Q..3(4)
x(/y) = Qn(4-)xn(/y),
Где Опз(4)—матрица ортогонального преобразования (3x3).
Тогда
4—850 07
Е (Г) F (/;) Qn (/ j) u„ (tj) + c (/,-) Р^х+^-^Ч-
C(/7)8<p”(//) = O. (2.64)
Для входящих в (2.64) матриц E(r), С (tj), ранг которых г<6,
применимы только операции сложения и умножения, поэтому его
нельзя разрешить относительно и (Л,), если не определить особым
образом операцию обращения для такого типа матриц. Условимся
называть матрицу Н~1 (/j) обратной матрице H(/j), если для лю-
бой
с невырожденной квадратной подматрицей Hr(/j) размерности
(гХг) справедливо
Н-> (tj) Н (/7) = Н (tj) Н-1 (tj) = E(r).
Вычисление матрицы Н-1(/;) целесообразно осуществлять по
следующему алгоритму, использующему только общепринятые
операции с матрицами и удобному для программной реализации:
Н-1(/;)=[Н(/;) + Е6-Е(г)]-1-[Еб —Е(г)]. (2.65)
Справедливость соотношения (2.65) нетрудно доказать, вос-
пользовавшись правилом обращения невырожденной матрицы,
представленной в блочном виде [16].
Тогда, обозначив Нк(/3)-=Е(г)Е(/;)Оп(/;)Е(г), получим следу-
ющее выражение для расчета параметров управления при коррек-
ции:
Un (tj)= - Н71 (tj) С (tj) [F (tj_J X+ (/;-!) + 8<jp" (/;)];
u (/?-)=Qn (/?-) un (/,•); (2'66)
L i =6— r
В реальном случае вектор u+(/,) корректирующей скорости,
действительно сообщенной КА при проведении управляющего воз-
действия, отличается от расчетного на величину ошибок исполне-
ния:
U* (tj) = -НГ’ (tj)C(t,)[F (/y_1)X+(/;-i)4-8<p"(/y)] +
+ Su"(//); (2.67)
U+(/_,-) = Q„ (tj) U„ (/;) = U (/;) +8 U (tj),
98
отклонения терминальных параметров после проведения /-Й кор-
рекции равны:
Дф+ (/у)=F (/;-!) х+ (/7_х)4-F (/у)В и (/;)- F (/ДQ,, (/Д х
х НГ1 (/у)С(/y){F (;_j)x+(/;•-!)+ §ф" (/;)]; (2,68)
Д <Рк (/у) = IЕ (г) - С (/Д] F (/y_j) х+ (/7_Д - С (/Д 8 <рп (/р +
+ E(r)F(/p8u(/p.
Для двух коррекций, проводимых последовательно в моменты
tj и tj+i, справедливы следующие условия:
д фГ(/у+р = Д (/Д; д <pKOj+i)=A<pr(//+1)4-8 <р'к(/у+1);
х-(//+р = Х(/7+1, /Дх+(/Д; (2.69)
x+(/7+1) = x-(// + 1)4-u(/7+1)4-8u(//+1);
х+ (/Д = X (/7+1, tj) [E6-Qn (t}) НГ1 (tj) С (tj) F (/7_p] x+ (//_!) -
- Qn (tj) H?1 (tj) C (tj) 8 ф" (tj)4-8 u (tj).
Используя соотношения (2.66)...(2.69), можно провести расчет
всех последовательно проводимых g коррекций при заданных ко-
эффициентах связи. Для неоднородно-связанной коррекции r>fyj
и, как показано выше, необходимо одновременно рассчитывать g‘
коррекций. Поэтому пространство кинематических и терминальных
параметров необходимо увеличить до 6g‘. В таком расширенном
пространстве кинематических параметров в качестве первых 3g1
компонент примем отклонения координат в точках коррекции, а в
качестве последующих 3g- компонент—изменение скоростей; про-
странство кинематических параметров предварительно преобразу-
ется ортогональными матрицами Оп(/Д для учета ограничений и
локальной энергетической оптимизации. Тогда расчет неоднородно-
связанной коррекции можно проводить по методике, аналогичной
однородно-связанной, но в расширенных пространствах терминаль-
ных и кинематических параметров.
Для АМС на участке перелета, как правило, проводятся неза-
висимые коррекции, которые являются частным случаем связан-
ных. Поэтому соотношения для расчета характеристик независи-
мых коррекций можно получить из (2.66)... (2.69), если подстаг
нить в них условие независимости коррекций С(/Д=Е(г):
u„ (tj)= - НГ1 (tj) (F (//-J х+(/у_!)4- В ф" (/,-)];
и+ (//)= QH (tj) Нк (//)[Р(/7_1)х+(/^1)4-8ф,’(/7)]4-
4-Qh(/7) 8 ип (/,•); (2.70)
Д фк+ (tj) = Е (г) F (tj) 8 u (tj) - Е (г) 8 ф” (tj);
Л<₽+ (tj) = F (tj.j) х+ (tj_J - F (tj) Q„ (tj) ЯГ1 (tj) [F (tj_J x+ (tj^) 4-
4“ 8 ф" (tj)] 4~ F (tj) 8 u (tj).
4*
99
Из (2.70) видно, что для независимой коррекции Д<рк+(^), а
следовательно и u(/j+i), зависит только от ошибок проведения
предшествующего управляющего воздействия и точности прогно-
зирования параметров движения к моменту выполнения /+ 1-й
коррекции.
Высокие требования к точности реализации корректируемых
параметров современных АМС приводят к значительному росту
энергозатрат на одноразовую коррекцию, так как u(/J) и Д<рк+(^7)
связаны между собой обратной зависимостью, т. е. чем более эф-
фективна коррекция, тем больше влияние ошибок ее исполнения
на отклонения корректируемых параметров после ее проведения.
Для уменьшения расхода топлива на управление следует прово-
дить многоразовую коррекцию, определяя ее характеристики по-
следовательно по приведенным выше формулам. При многоразо-
вой коррекции исправление начальных ошибок выведения осуще-
ствляется на том участке полета, где приложение корректирующей
скорости наиболее эффективно влияет на изменение параметров
<рк. Последующие коррекции проводятся в менее эффективные
времена для удовлетворения требований к точности наведения и
исправляют оставшиеся отклонения.
2.7. Анализ и выбор состава корректируемых параметров
Правильный выбор корректируемых параметров значительно
влияет на энергозатраты при коррекции и является сложной зада-
чей, особенно для новых схем межпланетных полетов. Сложность
определения состава <рк связана с тем, что между различными тер-
минальными параметрами может существовать такая функцио-
нальная зависимость, что одновременное обеспечение заданных
значений терминальных параметров, принятых в качестве коррек-
тируемых, при ограниченных запасах топлива, предназначенного
для наведения, окажется невозможным. В то же время изменение
терминального параметра, не включенного в число корректиру-
емых, может оказаться таким, что его значение в результате вы-
полнения коррекции будет находиться в области допустимых зна-
чений, обеспечивающих решение целевой задачи полета.
Рассмотрим изменение отклонений некорректируемых парамет-
ров после коррекции. Для этого воспользуемся соотношением
(2.70), которое для одного некорректируемого параметра запишем
следующим образом:
Д фн+1 (/;) = [fH1 (/;_!)- f„i {tj)Н71 (/;) FKr X+ (Д--Д (2.71)
где fHi (/;•_[) —градиент некорректируемого параметра <pHi по ки-
нематическим параметрам в момент tj-i размерности (1X6);
fui (6)—градиент некорректируемого параметра по компонентам
вектора корректирующей скорости в момент tj размерности (1X^)1
FKr(/;,_[)—матрица производных от корректируемых параметров
по кинематическим в момент tj_x размерности (гХб).
100
рассматривая fni (tj) как вектор
„мерного пространства, в котором ба-
за задается вектор-строками fKi (tj),...
fKr(tj) матрицы Hr(Z/), представим
его в виде суммы г векторов, проеци-
руяЪ1(^/) на базовые направления:
i=i i=i
(2.72)
Рис. 2.5. Проецирование гра-
где ТК1н1(//)—проекция fH,(Z;) на на- Диента корректируемого пара-
правление градиента i-го корректируе- “ет,рД fsI На напРавле11ИЯ
мого параметра (рис. 2.5). "
Для всякой прямоугольной матри-
цы В(тХл), где т<п и ранг т, любая прямоугольная матрица
В'еп(«Х"1), удовлетворяющая условию ВВ-еп = Ет, где Ет — еди-
ничная матрица ранга т называется псевдообратной к В справа.
Пользуясь понятием псевдообратной матрицы, обратную матрицы
для произвольной невырожденной матрицы А, представленной в
блочном виде А = ||В1, В2||т, где Bi, В2— прямоугольные матрицы,
для которых определены псевдообратные справа матрицы, можно
выразить в блочном виде следующим образом:
А-М|Вы , ВДЕ|| , (2.73)
причем В2В1п-' = 0; В1В2п_‘ = 0.
Из определения обратной матрицы А-1 в блочном виде вытека-
ют следующие два свойства [24]:
а) если невырожденная матрица А удовлетворяет условию
А=|[ВЬ В2||т, то независимо от вида матриц В! и В2 справедливо
8^1= || Е, О I) ; B2A-i= || О, Е || ; (2.74)
б) если прямоугольная матрица Ъ(тХп) представлена в виде
суммы прямоугольных матриц В=В! + В2, а невырожденная мат-
рица А представлена в блочном виде А=||ВЬ В2||, причем В! и В2
Удовлетворяют условию (2.73), то
ВА-1=- || Е, Е || , (2.75)
где Е — единичная матрица.
Используя свойства прямоугольных матриц, можно показать,
fnl (0) Hr 1 (//)=[ (//)+••• X
-1
(2.76)
101
Аналогичным образом, матрицу FKr(^_i) размерностью (гХ6)
.представим в виде суммы двух подматриц, проецируя ее на под-
лространство, определяемое градиентом fni(^-i) и ортогональное
ему,тогда
(Z/-l) — Ркг 1) “(“Ркг у —1)»
(2.77)
где FKrH(fj_i) —матрица, составленная из проекций гра-
диентов корректируемых параметров на подпространство, опреде-
ляемое градиентом некорректируемого параметра; FKr°P(^_1) —.
из проекций на ортогональное ему подпространство.
Для проецирования градиентов некорректируемого и корректи-
руемых параметров введем ортогональную базу таким образом,
чтобы fnI (tj-1) был одним из базовых векторов. На выбор осталь-
ных базовых векторов особых ограничений не накладывается.
Подставляя (2.76) и (2.77) в (2.71), после некоторых преобразова-
ний получим
(tj) 1к1 (tj) I fH1 (tj—i) х+ (tj -J-J-
+ V [ /н1(/у) /н[ (/у)] КГ (tj-0...l°?rm (tj-OY Wm(tj-0 X+ (^-1)-
m = 1
(2.78)
Из (2.78) следует: для того чтобы после проведения коррек-
ции отклонение корректируемого параметра было нулевым, необ-
ходимо выполнение следующего условия, связывающего градиенты
корректируемых и некорректируемых параметров:
1 - 27"i(^)Z”i:(^)=°;
1=1 (2.79)
/1
причем случаи ортогональности fHi(//-i) и x+(/;-_i), а также равен-
ства последнего нулю являются тривиальными.
Если направление градиента некорректируемого параметра
fHl (tj) близко к направлению градиента одного из корректируемых
параметров fKf(^), то fHi(^) почти полностью проецируется на это
направление, а проекции на остальные направления градиентов
корректируемых параметров малы и не оказывают существенного
влияния на изменение некорректируемого параметра. Такие зави-
симости распространены на практике, поэтому представляет инте-
рес предельный случай, когда направление градиентов некорректи-
руемого и одного из корректируемых параметров полностью сов-
падают в момент проведения коррекции. Пусть
102
f н1 1 (^у) _Q ____2 2
I Гн1 (^) fKl (0) I — ’ I КН^ЖЛ^) I ~ ’ 1~ ’
Тогда
Д?Н1 (/;)=[! —^Н1 (t j) IkI {iy-1)] fHi (^/-1) X+ +
+ V ~l*Hi IT (/;-!) Г (/;-!) ХЧ6--1), (2.80)
m-1
a условие полного исправления отклонений некорректируемого
параметра в результате проведения коррекции при любых возмож-
ных х+(^-1) принимает вид
/*’(/,.) = —1—; 7нк;ау)/°Лт(/;-!) = О, т=\.......г. (2.81)
* К1 (*/—1)
Иными словами, отношение проекции градиента некорректируе-
мого параметра на направление градиента корректируемого пара-
метра в момент tj к модулю последнего должно быть равно отно-
шению модуля градиента некорректируемого параметра к величи-
не проекции на это направление градиента корректируемого пара-
метра в момент проведения предыдущей коррекции или маневра,,
а проекции последнего на направление градиента некорректиру-
емого параметра нулевые. Следовательно, fH1 (^-_i) и fKi (Zj-i) так-
же должны совпадать, и условие полного исправления отклонений
некорректируемого параметра после коррекции упрощается:
/н1(^;-1) /н1(С')
(2.82)
Исследования коррекции траектории АМС различных схем по-
лета и назначения показали, что во многих случаях с хорошей
степенью точности выполняется условие (2.82). Так, в работе [24]
показано, что при проведении коррекции гл или условного пери-
центра орбиты КА, осуществляющего облет Луны с возвращени-
ем и посадкой на Землю или межпланетный перелет с посадкой на
пери-
гл и
планету, происходит практически полное исправление отклонения
в скорости входа в атмосферу (или скорости в условном
Центре Ул). Это объясняется тем, что между параметрами
существует линейно-однозначная зависимость У- = а/—Т-
\ М а !
гДе а«const, так как величина корректирующей скорости мала по
сравнению со скоростью движения аппарата и практически ее не
изменяет. Условие (2.82) выполняется в любой точке траектории,
поэтому после проведения коррекции гп отклонения в скорости
®х°Да в атмосферу практически отсутствуют. Так, при существу-
гцих системах автономного управления и схемах выведения КА
а траекторию облета Луны с возвращением к Земле или траек-
Рию межпланетного перелета величина предельной характери-
в Ической скорости коррекции при оптимальной стратегии не пре-
щает 30 ... 40 м/с. В этом случне в результате проведения кор-
103
рекций траектории облета Луны, исправляющих отклонение высо-
ты условного перицентра, вынужденное изменение некорректиру.
емого параметра Vn таково, что после проведения коррекции его
отклонение от заданного значения не превышает 0,1...0,2 м/с. Та-
кое отклонение вполне допустимо и не требует специального исп-
равления. Если же включить параметр Vn в число корректируемых
то это приведет к значительному увеличению характеристической
скорости коррекции, так как для линейной динамической модели
независимое от гл исправление можно обеспечить только кор-
ректирующей скоростью, ортогональной градиенту параметра
влияние которой на неэффективно вследствие выполнения усло-
вия (2.82). Аналогичная зависимость существует между парамет-
рами i и Q траектории подлета к планете назначения, это объ-
ясняется тем, что семейство плоскостей подлетных гипербол мож-
но приближенно считать однопараметрическим и множество воз-
можных плоскостей орбит соответствует вращению плоскости во-
круг вектора, проходящего через центр масс планеты и параллель-
ного У,». Следует отметить, что эти свойства приближенно сохра-
няются и для более точных нелинейных моделей динамических
систем. Так, в той же области начальных отклонений корректиру-
емых параметров, о которой сказано выше, при решении нелиней-
ной задачи коррекции отклонения некорректируемого параметра
V„ после расчетной коррекции не превышают 0,5 м/с. Таким обра-
зом, анализ функциональной зависимости траекторных парамет-
ров необходим для рационального выбора корректируемых пара-
метров. Отсутствие такого анализа может привести к тому, что в
фк войдут терминальные параметры, которые практически взаимно
однозначно связаны между собой, что приведет к значительному
увеличению энергозатрат наведения без заметного уменьшения
ошибок наведения. Так, если в качестве корректируемых парамет-
ров приняты такие два практически взаимно однозначных пара-
метра траектории подлета к планете-цели, как гя и ЕВх, затраты
на коррекцию увеличиваются более чем в 10 раз по сравнению с
коррекцией только гл, в то время как ошибки наведения по пара-
метрам гя и Евх практически не отличаются друг от друга при
двух- и однопараметрическом вариантах коррекции.
2.8. Графоаналитические способы анализа свойств
одноимпульсной коррекции
При исследовании одноимпульсной коррекции в разд. 2.2 было
отмечено, что энергозатраты коррекции зависят от свойств гради-
ентов корректируемых параметров в точке коррекции. Векторы
градиентов корректируемых параметров в точке коррекции обра-
зуют репер. Двухпараметрической коррекции соответствует двух-
мерный репер, и угол между векторами градиентов корректирУ'
емых параметров характеризует их взаимную зависимость, опреде-
ляя локальные свойства коррекции. Действительно, если углы меж-
ду градиентами малы, то это означает, что изменение одного из
104
х приводит к одновременному вынужденному изменению друго-
Н и исправление их при независимой коррекции может потребо-
г°’ть значительного расхода топлива на управление движением.
Пои трехпараметрической коррекции репер трехмерный, и свой-
тва коррекции уже не полностью характеризуются углами между
векторами градиентов корректируемых параметров, так как важ-
ное значение имеет пространственная ориентация всех градиентов.
Если все три вектора градиентов корректируемых параметров не
совпадают, но лежат в одной плоскости, то в такой точке трехпа-
раметрическая коррекция невозможна и матрица FK(tj)—вырож-
денная.
Для исследования локальных свойств одноимпульсной коррек-
ции необходимо рассмотреть свойства преобразования, выполня-
емого при переходе из пространства корректируемых параметров
в пространство корректирующих скоростей. Если величина ошибок
исполнения коррекции мала по сравнению с величиной вектора
корректирующей скорости, то, пренебрегая ими и переходя для
большей геометрической наглядности от шестимерного простран-
ства кинематических и траекторных параметров к r-мерному про-
странству корректируемых параметров и корректирующих скоро-
стей, получим
цг(/у)=-НГ1(/у)Дфк(/;-). (2.83)
В этом случае для перехода к принятой основной системе коор-
динат необходимо воспользоваться соотношением (2.56), которое
осуществляет поворот вектора корректирующей скорости. Вос-
пользуемся свойствами полярного разложения, применив их к мат-
рице Hr(f,), тогда после некоторых преобразований будем иметь
Ur (/;)= - [Q (/;•) Ан 1 (/;) 1н (//)] Д Фк (^-), (2.84)
где Нг(/;) = 8й(/;)С1н(/;);
Sh (tj)= [нг (tj) Hr (^-)]1/2 = Ih (tj) Ah (tj) Ih (tj);
Q (tj)—Qh (tj) 1h (tj);
Ah (tj)= || Xhi (tj),..., кнг (tj) || ,
1н(Л)—ортогональная матрица приведения SH (tj) к канониче-
скому виду, а Ан (tj)—диагональная матрица, составленная из
собственных значений симметричной матрицы SH (tj).
Преобразования (2.84), выполняемые для перехода из про-
странства корректируемых параметров в пространство корректи-
рующих скоростей, имеют следующий геометрический смысл. За-
данный вектор отклонений корректируемых параметров Афк(б')
^Оборачивается на углы, соответствующие ортогональной матрице
(tj). Затем осуществляется чистое «растяжение» вдоль осей ко-
ординат^с коэффициентами Kni(tj), определяемыми диагональной
атРИцей Ан (tj). В результате выполнения этого преобразования
105
Рис. 2.6. Последовательность преобразований при расчете двухпараметрической
коррекции
изменяются длина вектора и его ориентация относительно прямо-
угольной системы координат, если коэффициенты hn(tj) не равны
между собой. Полученный вектор wKr(/,) назовем вектором преоб-
разованной корректирующей скорости.
Вектор wKr(tj) отличается от иг(Л,) тем, что для получения век-
тора корректирующей скорости необходимо вектор преобразован-
ной корректирующей скорости повернуть на углы, соответствую-
щие ортогональной матрице Q(/3) или Qn(6)Q(6), и заменить полу-
ченный вектор на противоположный.
Используя соотношения (2.84), можно осуществить графоана-
литический расчет энергозатрат коррекции. Рассмотрим его на
примере двухпараметрической коррекции (рис. 2.6). Пусть в двух-
мерном пространстве выбрана ортогональная система координат
О<Рк1<Рк2, где каждая из осей определяет отклонение в одном из
корректируемых параметров, и задан вектор отклонений
Дфк/(Д<Рк/, Дсрк2Л)т- Матрица ортогонального преобразования 1н((,)в
в двухмерном случае определяет поворот Дфь/ на угол pKi, и вектор
Дф/ переходит в Дф' в новой базовой системе Окрцрг. В этой систе-
ме необходимо выполнить растяжение вектора вдоль осей коорди-
нат пропорционально 1Дш G?) и 1/Хн2(6) для получения WK ,.(/;),
причем
Wr (tj) = Ur (tj) = U (/;) = [Wx(/7)+Wy(/;)]1/2;
Wx(/;) =
^•hi (0)
wi/(/7)
a?2
^H2 (fy)
а фь фг можно считать новыми корректируемыми параметрами.
Аналогичным образом выполняются преобразования для трехпа-
раметрической коррекции, но поворот вектора Дфк(/5) должен
106
поводиться на три угла, а растяжение — вдоль трех осей. Выпол-
нение графических преобразований в трехмерном пространстве-
Костаточно сложно и может быть заменено расчетом проекций
ектора Дфк(6) на независимые направления растяжения в соот-
ветствии с формулой (2.84). Графоаналитический способ реше-
ния уравнения (2.83) позволяет наглядно показать влияние каж-
дого из преобразований на величину корректирующей скорости, а
также выделить особые случаи.
Преобразование !ц й.п оказывает влияние на wr(tj) благодаря
повороту Дфк(С) относительно направлений, вдоль которых осу-
ществляется растяжение: чем меньше угол между Дфк(^) и осью
системы координат, для которой коэффициент н/ (tj) наибольший,,
тем меньшее значение имеет wr(^-) при заданной матрице Ан (Г;),
и наоборот. Нетрудно видеть, что при любых значениях aKi, рю
справедливо
< wr(6) <
где
(1 ПФ<(//)1
Г J
^hz(^), ^н? (/j) — наибольший и наименьший коэффициенты
Хн; 10).
Если 1н .(/3)=Е, то растяжение проводится вдоль координат-
ных осей и преобразование (2.84) упрощается. Из вида матрицы
SH (0) непосредственно следует, что этот случай имеет место, ког-
да корректируемые параметры в точке, где проводится коррекция,
независимы, т. е. fKi(0)^n (0) =0 при i=£n. Для линейно зависи-
мых корректируемых параметров 1н(^)=/=Е. Следовательно, эле-
менты матрицы 1Н(^) характеризуют взаимную зависимость кор-
ректируемых параметров между собой. Случаю линейно-однознач-
ной зависимости между корректируемыми параметрами соответст-
вуют условия fKi (/j)fKn (Л) = 1, a SH (Г;)—вырожденная. Таким
образом, выполнение преобразования с помощью матрицы 1н (£Д
осуществляет переход в пространство независимых корректиру-
емых параметров, в котором получение составляющих вектора
wKr(/j) не представляет особого труда. Используя матрицу 1н (ГД,
различные наборы корректируемых параметров в заданной точке
коррекции можно классифицировать по степени их взаимной
Функциональной зависимости.
Проведенные исследования полярного разложения матриц
"г(Л) при коррекции межпланетных траекторий АМС показали.
Что можно выделить группу корректируемых параметров трехпара-
метрической коррекции, имеющих одинаковую функциональную
зависимость-. Для любой группы из этих параметров энергозатраты
конвекции в момент tj заданного отклонения кинематических па-
107
раметров на момент tj_\ практически одинаковы. Таким свойством
обладают следующие группы корректируемых параметров: коор-
динаты £п, Лп в картинной плоскости и время пересечения картин-
ной плоскости или прохождения минимального расстояния; коор-
динаты гк, пк, Ьк в орбитальной системе, соответствующей пери-
центру номинальной гиперболы; радиус перицентра, наклонение
(долгота) узла подлетной гиперболы и время прохождения пери-
центра; точка посадки на поверхность планеты и радиус перицент-
ра подлетной гиперболы и т. д.
Влияние членов диагональной матрицы Лн (^) на u(Z,) ясно
из характера самого преобразования, которое состоит в растяже-
нии вектора вдоль осей координат: чем больше Лн« ((,), тем мень-
ше при прочих равных условиях величина корректирующей скоро-
сти, необходимая для исправления Д<рк(/,). Следовательно, коэф-
фициенты Хщ (tj) характеризуют эффективность проведения кор-
рекции выбранных параметров в момент tj. Они обладают следу-
ющим свойством: при любой взаимной зависимости между коррек-
тируемыми параметрами сумма квадратов коэффициентов лц/ (tj)
равна сумме квадратов модулей градиентов fKi(tj) корректируе-
мых параметров. Если коэффициенты Хн/ (tj) считать компонента-
ми некоторого вектора эффективности 1Эф(6), то
Чф (tj) = [Xhi (tj) + +ХНг — [/К1 (/;) + ... + /кг
Действительно, запишем SH(/3) в следующем виде:
s£ (/,.)=нг(/7)НД/7)=
(tj) fKl (tj) !•••> fKl (tj) fKr(t j)
tKr(tj)fK1(tj),...,fKr(tj)fKr(tj)
(2.85)
Составив характеристическое уравнение для (2.85) и используя
свойства корней алгебраических уравнений, получим следующее
условие:
^nidj^^Aidj).
i = l 1 = 1
Собственные векторы 1нг (^), образующие матрицу ортогональ-
ного преобразования 1н (tj), определяются из решения системы
линейных уравнений:
Sh (tj) 1н< (tj) = ^tii (tj) 1н/(tj), t = l ,..,r.
Таким образом, характеристическая скорость коррекции в мо-
мент tj при заданном Д<рк(6) однозначно определяется совокупно-
стью параметров, включающих вектор эффективности и углы по-
воротов 0Ki(6) (или вектора [tj)).
Рассмотрим еще один способ графического выполнения преоб-
разований, необходимых для оценки энергозатрат коррекции. Он
108
Рис. 2.7. Оценка энергозатрат двухпараметрической коррекции с использовани-
ем эллипса влияния
основан на построении фигуры влияния для единичного вектора
корректирующей скорости иО)^). Пусть приложение иО)^) при-
водит к следующему изменению отклонений корректируемых па-
раметров:
Д<рк [u<1>(/y)] = Hr(/y)u<1>(/y). (2.86)
Тогда множество векторов А<рк[и(1)(^)], соответствующих всем
возможным и^ЦД;), составляет множество векторов влияния
Я к(1)(/3-), а фигура, образуемая концами этих векторов, является
фигурой влияния. Геометрическим местом концов единичного век-
тора иО)(/.;•) при отсутствии ограничений на возможные направле-
ния корректирующих скоростей будет единичная сфера г-мерного
пространства. При линейном преобразовании (2.86) единичной
сфере в пространстве корректируемых параметров соответствует
эллипсоид:
(/.-)= 1;
1 } (2.87)
Д <ртк [u(D (/,)] [Нг (/7) Н? (/у)]-1 Д <рк [и(П (/.)] = 1.
Таким образом, фигура влияния — выпуклая оболочка множе-
ства векторов влияния одноимпульсной коррекции, и при трехпа-
раметрической коррекции она является эллипсоидом, а при двух-
параметрической— эллипсом (рис. 2.7). Для любого заданного
отклонения корректируемых параметров A<pK'((/) можно найти
соответствующий коллинеарный вектор влияния Д<рк'[и(1)((;)], при-
надлежащий фигуре влияния, и определить необходимый для его
исправления вектор корректирующей скорости
u(/y) = w(/;)u<1>(//),
где
w (/,)
U<Wy)
| А(Рк(^)| .
| A<pju(1)(^)] |
А«Гк1ц(1)(О)] Дфк(О)
| Д<рк [и(1)(<;)] Дд>К(/у)
109
Эллипсоид влияния, как и рассмотренные ранее характеристи-
ки, наглядно показывает эффективность коррекции различных
отклонений корректируемых параметров. Действительно, чем боль-
ше размеры фигуры влияния, тем больше эффективность коррек-
ции и меньше ее характеристическая скорость. Энергозатраты н?
коррекцию заданного вектора отклонений корректируемых пара-
метров тем меньше, чем ближе его направление к большей полу-
оси эллипсоида влияния. Поэтому полуоси эллипсоида влияния и
углы ориентации их относительно осей координат пространств?
корректируемых параметров эквивалентны введенной ранее сово-
купности параметров (вектор влияния и углы поворотов). Это объ-
ясняется тождественностью матриц преобразований ShV3) и
Нгт ((,-) Н,-((,), используемых для их получения. Таким образом, эл-
липсоид влияния можно рассматривать как один из удобных гео-
метрических образов, характеризующих преобразование (2.83;
свойства которого определяются матрицами 1н (tj), Ан ,(^).
При трехпараметрической коррекции преобразования (2.84)
(2.87) необходимо проводить в трехмерном пространстве, и и с
графическое выполнение затруднительно, особенно при использо-
вании фигуры влияния. В частном случае, когда коэффициенты
растяжения равны между собой (эллипсоид влияния становится
шаром), величина корректирующей скорости может быть получена
растяжением вектора Д<рк(Л) в 1ДГ(^) раз, где Xr(tj)—радиус
шара. Корректируемые параметры, обладающие таким свойством,
назовем однородными и обозначим if>K. С помощью линейного пре-
образования для любой выбранной точки коррекции можно осу-
ществить переход от <рк к if>K- Существенный недостаток такого пе-
рехода— зависимость матрицы преобразования от времени кор-
рекции, поэтому для каждой точки коррекции, вообще говоря, су-
ществуют свои параметры фк. Однако на траектории можно выде-
лить такие участки, где пересчет скорости коррекции при измене-
нии времени ее проведения не требуют сложных расчетов. В преде-
лах этих участков можно использовать единые параметры, ввел-
их только для опорных моментов коррекции. Примером однород-
ных корректируемых параметров могут служить координаты век-
тора прицельной дальности в картинной плоскости на участке
подлета к планете.
Рассмотрим преобразование вектора корректирующей скоро-
сти, соответствующее сдвигу времени проведения коррекции. Для
этого выразим вектор корректирующей скорости при коррекции в
момент tj' через вектор корректирующей скорости для момента l '
Мк(^)=— Нг(/;-)ur(/;)= — Hr(/;)ur(/'-) ; (2 88)
ur (/;) = НЭ‘ (/;) Hr(/y)Ur(/y).
Используя свойства полярного разложения матриц, получим
ur (t)) = Q (t'j) Ай1 (t'j) Ih (t'j) Ih(tj) ^H(tj)QT (tj) ur (tj). (2.89)
lift
pj3 (2.89) следует, что для определения ur(//) необходимо
u (t ) подвергнуть нескольким вращениям, соответствующим орто-
гональным матрицам 1н (//), 1н(^), Q(^'), Q(^), и двум растя-
жениям, соответствующим матрицам Ан (//), Лн (tj).
В некоторых частных случаях преобразования (2.89) имеют бо-
лее простой и наглядный вид.
1. Пусть при изменении момента проведения коррекции с t, на
/•' градиента корректируемых параметров изменяются таким обра-
зом, что
1н (ij) 1н(^) = Е,
т> е. взаимная зависимость между параметрами не изменяется,
тогда
ur(/;) = Q(/;)AH(4 /у)QT(/y)ur(/у); (2.90)
wKr(/') = AH(/), /y)wKr(/y),
где AhG/> tj) =Л н1 (^/)Лн (tj).
Из (2.90) следует, что величину корректирующей скорости для
момента tj' можно получить растяжением вектора wKr(tj) с помо-
щью диагональной матрицы Лн (tj', tj). Рассматриваемый случай
имеет место, в частности, когда при переходе от tj к углы меж-
ду градиентами не изменяются.
2. Пусть при сдвиге момента проведения коррекции градиенты
корректируемых параметров изменяются таким образом, что
1н (/;)1н(6-) = Е;
Лн1 (tj) Лн (tj)=a Е,
где а — некоторое положительное число.
Тогда преобразование вектора корректирующей скорости, вы-
званное изменением времени коррекции, будет иметь следующий
простой вид:
u,(/;)=aQ^)Q’(/})uf(/;.);
k L J
^Kr(ti)=awKr(tj),
причем для нахождения величины корректирующей скорости
u(tj') достаточно увеличить u(tj) в а раз. Этот случай имеет мес-
то, когда при изменении времени коррекции углы между градиен-
тами не изменяются, а их величины изменяются в 11а раз. Дейст-
вительно,
Sh (^^ЗнС/уПнС^рЛн1 (t}-, tj) IH (/;-)==~Sh(/;-),
тогда из вида матрицы Sh(^) следует
grad <Рк1 (tj) _ grad (tj) _ grad <ркз (tj)
grad<pK1(*'.) grad<pK3(<'.) grad <pK3 (/')
111
cos 6К1 (/;•) = COS 9K1(/;); cos 9k2 (/,-)=cos 9k2(^); COS0k3(/7) =
= COS 9к3(б) ,
где 0Ki, 0K2, 0кз — углы между градиентами корректируемых пара-
метров (г=3).
3. Пусть при изменении момента проведения коррекции
1й«)1н(^)=Е;
QT(/,)Q(/y) = E;
Ан1 (tj) Ан (/;) = аЕ,
тогда вектор корректирующей скорости в момент tj равен
ur(t'j)=aur(tj). (2.92)
Такое преобразование возможно, если при изменении момента
коррекции направления градиентов корректируемых параметров
сохраняются, а их величины изменяются пропорционально, т. е.
Нг ((/) =аНг((/).
На любой траектории можно выделить такие участки, где при-
ближенно выполняются условия, соответствующие одному из осо-
бых случаев. Так, при перелете Земля — Марс (см. разд. 2.3, при-
мер 5, рис. 2.4) на среднем участке, составляющем примерно тре-
тью часть от общего времени полета, с точностью не хуже 5%
выполняются условия (2.91), следовательно, энергозатраты коррек-
ции изменяются пропорционально интервалу времени, на который
сдвигается коррекция. На заключительном участке движения, как
следует из примера 3 (см. разд. 2.3), выполняется условие (2.92),
т. е. в этом случае при сдвиге коррекции сохраняется также неиз-
менным и направление вектора корректирующей скорости. Эти
свойства существенно упрощают анализ наведения АМС в различ-
ных нештатных случаях управления полетом, когда появляется не-
обходимость изменить место проведения коррекции. Таким обра-
зом, при исследовании коррекции траектории можно выбрать не-
которые базовые моменты, осуществив в них все необходимые для
анализа свойств и энергозатрат коррекции преобразования. Изме-
нение корректирующей скорости, вызванное изменением времени
коррекции по отношению к базовым временам, может быть оцене-
но с помощью полученных выше соотношений. При этом траекто-
рия полета разбивается на участки, где приближенно выполняют-
ся условия, соответствующие особым случаям преобразования.
Такой подход к задаче анализа коррекции позволяет все многооб-
разие корректируемых параметров для каждой траектории разбить
на группы с одинаковыми свойствами, а определение корректиру-
ющей скорости в любой точке свести к оценке ее только в выбран-
ных базовых точках для одного из составов корректируемых пара-
метров, входящих в каждую группу.
112
2 9. Анализ свойств связанной коррекции
Для анализа свойств связанной коррекции построим фигуру
влияния подобно тому, как это было выполнено при исследовании
одноимпульсной коррекции. В данном случае единичное управля-
ющее воздействие должно быть суммой элементарных воздей-
ствий, прикладываемых в заданные моменты tj проведения g свя-
занных коррекций. Выберем такие ие((Д, чтобы и^= V ие I,
7 = 1
тогда
где Дфк[и#(1)] — вектор, определяющий изменение корректируемых
параметров при проведении g последовательных коррекций с еди-
ничной суммарной характеристической скоростью, который будем
называть вектором влияния связанной коррекции.
Множество векторов влияния связанной коррекции, образую-
щих фигуру влияния, является выпуклой комбинацией соответст-
вующих векторов влияния одноимпульсных коррекций. Действи-
тельно, любые два вектора Д<рк[ц(1> (Д)] и Д<рк[и(1) (Z/+i)] принадлежат
множеству A<pK'[Ug(I)], так как для каждого из них выполняются ус-
ловия (2.93). Произвольная выпуклая комбинация их
aJHr(/3)u(1>(/i) +aj+1Hr(/j+l)u<1>(/j+i при а; + а,+1 = I также принад-
лежит множеству Д срк
g
2uw
,так как для нее выполняются
условия (2.93).
Фигура влияния позволяет оценить энергозатраты коррекции,
необходимые на исправление заданного отклонения корректиру-
емых параметров Дф/^н) при использовании принятого режима
управления. Если — коллинеарный вектор влияния свя-
занной коррекции, то
U(tj) = UgUe
ug
(2.94)
g 8
цД/Д; zzg = ^«(/;).
7 = 1 7=1
Из (2.94) следует, что минимизация ug равносильна нахожде-
Нию максимального вектора влияния в соответствующем направ-
лении. Иными словами, необходимо построить максимальную фи-
гуру влияния, соответствующую всем возможным комбинациям
и<!(^) корректирующих скоростей в заданные моменты времени с
Учетом ограничений, накладываемых на их возможные направле-
на
Рис. 2.8. Фигура влияния двухпараметрической коррекции при задании четырех
(а) и восьми (б) направлений u (tj)
ния, и при условии, что 0/4=1. Поэтому при нахождении выпук-
лой оболочки множества векторов влияния необходимо построить
максимальную фигуру, содержащую все возможные векторы вли-
яния одноимпульсных коррекций в заданные моменты времени.
Фигура влияния определяет также область отклонений корректи-
руемых параметров, которые могут быть исправлены при задан-
ных ограничениях на направления корректирующих скоростей.
При связанной коррекции могут быть исправлены только такие
векторы отклонений корректируемых параметров, которые либо
пересекают фигуру влияния, либо лежат внутри нее.
Рассмотрим фигуру влияния четырехимпульсной двухпарамет-
рической связанной коррекции при фиксированных направлениях
корректирующих скоростей. Она является многогранником в прост-
ранстве корректируемых параметров, построенном на векторах
влияния Дфк[и(0 (/,)], соответствующих заданным направлениям
корректирующих скоростей. Пусть (Л,)],..., A<pK'[u(I)(Л,)] имеют
вид, представленный на рис. 2.8, а. Тогда, соединяя концы этих
векторов отрезками прямых, получим многогранник 01234, кото-
рый и является фигурой влияния в рассматриваемом случае. По-
кажем на его примере некоторые свойства связанной коррекции.
Пусть Д<рк'(/П)—корректируемое отклонение параметров. Из рис.
2.8 видно, что Дфк'(/н) пересекает фигуру влияния в точке А, сле-
довательно, исправление такого отклонения возможно. Для этого
целесообразно провести коррекцию в моменты t2 и t3, так как точ-
ке А многогранника соответствуют два линейно независимых век-
тора Дфк[и(1)(/2)] и Дфк[и<1>(^3)]. Тогда в моменты и t4 коррекция
не проводится. Такой режим является оптимальным для исправле-
ния Дфк'(^н). Нетрудно видеть, что он зависит от корректируемого
отклонения. Так, коррекцию Дфк"(^н) целесообразно проводить в
114
юменты и h, а исправление Дфк"'(^н) при принятых ограниче-
’иях невозможно, так как этот вектор не пересекает многогранник
не лежит внутри него. В частном случае, когда направление век-
тора отклонений корректируемых параметров совпадает с направ-
ляем одного из векторов одноимпульсной коррекции, связанная
коррекция не оптимальна и целесообразно проведение одноимпуль-
сной коррекции в момент времени, соответствующий этому вектору
влияния. В более общем случае, когда допустимыми направления-
ми корректирующих скоростей являются не только рассмотренные
выше направления, но и противоположные им, фигура влияния
имеет вид многогранника (12345678), построенного по векторам
эффективности ±Дфк[и<1)(^1)],..., ±Дфк[и<1)(^)], как показано на
рис. 2.8, б. В этом случае возможна коррекция любого отклонения
корректируемых параметров, так как любой вектор Дфк(^н) пере-
секает одну из сторон многогранника (или лежит внутри него).
Следовательно, всегда найдутся такие два независимых вектора
влияния, которые определяют оптимальную стратегию двухпара-
метрической связанной коррекции. Во всех рассмотренных случа-
ях количество оптимальных коррекций не превышало двух, т. е.
числа корректируемых параметров.
В приведенных примерах при построении фигуры влияния мы
накладывали ограничения на возможные направления корректиру-
ющих скоростей (одно допустимое направление проведения коррек-
ции в каждый момент). Определим теперь фигуру влияния, соответ-
ствующую любым возможным направлениям корректирующих,
скоростей без всяких ограничений. Для простоты построения рас-
смотрим двухимпульсную двухпараметрическую коррекцию. При
связанной коррекции вместо единичной сферы в пространстве кор-
ректирующих скоростей, которая имеет место при одноимпульсной
коррекции, необходимо использовать фигуру, определяемую выра-
жением Mg(1)=], Если выбрать некоторые направления корректи-
рующих импульсов ±u(')(fj) и ±ц(1)(^-+1), тогда фигура с такой
метрикой в пространстве корректирующих скоростей будет ром-
бом (для двухимпульсной коррекции). Фигурой влияния в прост-
ранстве корректируемых параметров, соответствующей ромбу, яв-
ляется параллелограмм, построенный на векторах
± Д фк [иС1) (/;•)]= ±
1 1 (2.95J
± Дфк[и<1>(/;.+ 1)]=+ Hr(/y+1)u(1)(//+1).
Векторы ±Дфк[и<1)(^)] и ±Афк[и<1)(^-+1)] в силу условия (2.95)
принадлежат эллипсу влияния одноимпульсных коррекций для
моментов tj и ^i+! соответственно. Изменяя направления скоростей
ull)(^)> и выбирая только максимальные Дфк[ив(1)], полу-
чим множество векторов, определяющих соответствующую фигуру
влияния. Этому множеству должны принадлежать все векторы
влияния одноимпульсных коррекций для моментов tj и tj+i, а так-
любая их линейная комбинация (при условии aj + aj+i = l). Та-
ким образом, фигура влияния двухимпульсной двухпараметриче-
115
Рис. 2.9. Построение фигуры влияния двухпараметрической двухимпульсной свя-
занной коррекции (г) с помощью эллипсов влияния (б, в) одноимпульсной свя-
занной коррекции
ской коррекции является выпуклой оболочкой множества возмож-
ных изменений корректируемых параметров, соответствующих од-
ноимпульсным коррекциям в моменты tj и ^+1 с единичным кор-
ректирующим импульсом (рис. 2.9).
Полученная фигура влияния определяет свойства оптимальной
связанной коррекции при отсутствии ограничений на возможные
направления корректирующих скоростей. Если заданный вектор
отклонений корректируемых параметров пересекает фигуру влия-
ния на участках спрямляющих линий, то оптимальным по энергети-
ке является режим связанной коррекции. В остальных случаях це-
лесообразно проводить одноимпульсную коррекцию.
Эти результаты можно обобщить и на другие случаи связанной
коррекции, когда число корректируемых параметров и корректи-
рующих скоростей более двух. При трехпараметрической связан-
ной коррекции фигура влияния является выпуклой оболочкой эл-
липсоидов влияния одноразовых трехпараметрических коррекций,
соответствующих выбранным моментам их проведения. Если век-
тор исправляемых отклонений корректируемых параметров пере-
секает плоский участок фигуры влияния, то трехимпульсная кор-
рекция такого отклонения требует меньших энергозатрат, чем двух-
импульсная или одноимпульсная. В том случае, когда точка
пересечения фигуры влияния и корректируемого отклонения
лежит на ребре, то целесообразна двухимпульсная связан-
ная коррекция. При пересечении вектора Д<рк(^н) с участком одно-
го из эллипсоидов влияния одноимпульсной коррекции необходимо
проводить независимую коррекцию в момент времени, соответству-
ющий данному эллипсоиду. Аналогичные рассуждения можно про-
вести для четырехимпульсной (и более) коррекций.
Линейные участки на фигуре влияния связанной коррекции по-
являются в том случае, когда характеристики эллипсоидов влия-
ния одноимпульсной коррекции изменяются по времени немонотон-
ным образом. В противном случае всегда имеется такой эллипсо-
ид, внутри которого будут лежать все остальные эллипсоиды вли-
яния для других моментов проведения коррекции. Этот «охваты-
вающий» эллипсоид соответствует оптимальному моменту прове-
116
Рис. 2.10. Годограф вектора и максимальная фигура влияния двухимпульсной
солнечной коррекции
дения коррекции. Немонотонность изменения характеристик эллип-
соида влияния по времени обычно имеет место при исследовании
коррекции замкнутых многовитковых (типа ИСП) или межпланет-
ных орбит с числом полувитков более одного. Для однополувитко-
вых траекторий возможно вырождение матрицы производных кор-
ректируемых параметров в начале полета, если момент проведе-
ния коррекции близок к апсидальным точкам перелетной орбиты.
При удалении от перицентра матрица производных довольно быст-
ро перестает быть вырожденной, а сами производные монотонно
уменьшаются и эффективность коррекции падает. Как было пока-
зано в рассмотренных в разд. 2.3 примерах, производные от коррек-
тируемых параметров по корректирующей скорости для межпла-
нетных траекторий на значительном участке полета являются ли-
нейной функцией интервала времени движения от момента коррек-
ции до подлета к планете-цели или расстояния до планеты. Поэто-
му на перелетных орбитах одноразовые коррекции, как правило,
проводятся в одноимпульсном режиме. При коррекциях орбит ис-
кусственных спутников более распространены связанные коррек-
ции, причем при выборе оптимальных времен их проведения может
использоваться несколько витков ИСП.
Для простых случаев расчета связанной коррекции возможно
и целесообразно использование геометрического метода.
Пример 1. Пусть на траектории межпланетного перелета проводится двух-
импульсная «солнечная» коррекция. Корректируемые параметры — координаты
вектора прицельной дальности в картинной плоскости. Годограф вектора влия-
ния дЛЯ одноимпульсной солнечной коррекции имеет вид, показанный на
₽нс, 2.10, а, где tB и tK — время начала и конца полета. Каждая точка годогра-
117
фа характеризует изменение координат вектора придельной дальности в картин-
ной плоскости, соответствующее единичной корректирующей скорости, прикла-
дываемой в различные моменты времени в направлении на Солнце (или от
него). Симметричный вид кривой объясняется симметрией возможных направле-
ний корректирующих скоростей в каждой точке коррекции.
Годограф позволяет построить фигуру влияния для двухимпульсной «сол-
нечной» коррекции при любых заданных временах их проведения, а также по-
лучить максимальную фигуру влияния. Действительно, фигура влияния связан-
ной коррекции является параллелограммом, построенным на диагоналях
±Д<р„- [ц|Н(С)] и ±Дфк [и<’>(6-ы)]• При изменении времени проведения пер-
вой и второй коррекций вершины параллелограмма будут перемещаться -|0
кривой годографа. Максимальная фигура влияния имеет вид области, заштрихо-
ванной па рис. 2.10, а.
Из рассмотренных ранее свойств фигуры влияния следует, что для пзчг :ь.
ления отклонений корректируемых параметров, у которых соответствуют.!"'’
диус-вектор пересекает кривую годографа, энергетически оптимально проведение
одноимпульсной коррекции в момент времени, соответствующий Д<₽ к [и!Н(Г)],
с которым Д<рк(^н) совпадает по направлению. Если радиус-вектор пересекает
линейную часть фигуры влияния, то целесообразно проведение двух коррекций,
причем, как следует из рис. 2.10, а, оптимальными временами их прогд-ленчя
являются для первой и tj* для второй коррекций. Момент tj* определяется
из условия касания годографа прямой, проведенной из точки /я. Если годограф
имеет вид, изображенный на рис. 2.10, б, то оптимальными временами прове-
дения связанной двухимпульсной коррекции являются моменты tj* и /;+Г, если
соответствующий вектор Дфк(^н) пересекает линейную часть фигуры влияния.
Солнечная коррекция является однопараметрической (см. разд. 2.2), поэто-
му в общем случае при заданном времени проведения коррекции возможно не-
зависимое исправление только одного параметра. Однако при определенных
отклонениях корректируемых параметров можно выбрать такой момент ее вы-
полнения, когда не только возможно одновременное исправление двух парамет-
ров с помощью одноразовой коррекции, но и такой режим окажется оптималь-
нее по энергетике, чем режим двух связанных коррекций.
Пример 2. Пусть АМС находится на орбите искусственного спутника плане-
ты и необходимо исправить отклонение в параметрах гп и Тор с помощью свя-
занной коррекции. На возможные направления корректирующих скоростей огра-
ничений не накладывается, что обеспечивает возможность проведения одноим-
пульсной двухпараметрической коррекции почти в любой момент времени, за
исключением двух особых точек: перицентра и апоцентра. Однако эти две точки
являются оптимальными для однопараметрического исправления радиуса пери-
центра и периода орбиты (см. разд. 2.3). Действительно, наиболее эффективно
исправление периода орбиты проводить в перицентре, где, однако, невозможна
коррекция радиуса перицентра, так как градиент гл по корректирующей скоро-
сти в этой точке имеет нулевое значение. С другой стороны, апоцентр является
оптимальной точкой исправления радиуса перицентра, но здесь невозможно не-
зависимое исправление периода орбиты, так как градиенты коллинеарны, а со-
ответствующая матрица эффективности коррекции вырожденная. Оптимальным
направлением корректирующей скорости для гл и Тор в апоцентре является на-
правление, совпадающее с направлением скорости АМС. Проведение коррекции
в направлении, ортогональном вектору скорости (т. е. по радиусу-вектору), не
приводит в линейном приближении к изменению гл и Тор. Поэтому фигура влия-
ния одноимпульсной и связанной двухимпульсной коррекций при их проведении
в перицентре Г, и апоцентре t2 имеет вид, представленный на рис. 2.11. Для всех
остальных моментов коррекции фигуры влияния одноимпульсной коррекции яв-
ляются невырожденными и имеют вид эллипсов в пространстве корректируемых
параметров.
Из анализа фигуры влияния следует, -что оптимальное по энергетике ис-
правление. -радиуса перицентра и периода требует проведения двух связанных
коррекций.в апоцентре и перицентре орбиты. В апоцентре орбиты корректирует-
ся и часть отклонений. Т^р, функционально связанных с отклонением радиуса-
118
Рис, 2.11. Фигура влияния двухпара-
метрической двухразовой коррекции
гп и Гор
онцентра. В перицентре орбиты — ос-
вшаяся часть отклонений периода.
Корректирующие ИМПУЛЬСЫ проводятся
14 направлениях, соответствующих векто-
рам скоростей АМС в точках коррек-
ций.
При всей наглядности рас-
смотренного метода использовать
его для оптимизации режима
коррекции при числе корректи-
руемых параметров более двух
затруднительно из-за сложности
расчета, геометрического по-
строения фигуры влияния в мно-
гомерном пространстве и анализа
ее свойств. На практике, как пра-
вило, оказывается предпочтитель-
нее нахождение минимума энер-
гозатрат коррекции с помощью представленной в разд. 2.4 методи-
ки или одним из численных методов поиска экстремума для кон-
кретных значений отклонений корректируемых параметров с уче-
том всех ограничений, накладываемых на времена проведения кор-
рекций и возможные направления корректирующих скоростей.
2.10. Ошибки исполнения детерминированной коррекции
Проведение коррекции траектории полета АМС обеспечивается
бортовой системой автономного управления, последовательно осу-
ществляющей поиск навигационных ориентиров, ориентацию объ-
екта в космическом пространстве, стабилизацию его и управление
двигательной установкой с целью проведения необходимого кор-
ректирующего воздействия. В результате ошибок функционирова-
ния, которые всегда имеют место при работе любой технической
системы, реализованный вектор корректирующей скорости будет от-
личаться от расчетного. Для простоты исследования разделим
ошибки САУ на следующие четыре группы, которые имеют раз-
личную функциональную связь с параметрами управления: ошиб-
ки в корректирующей скорости, не зависящие от ее величины и
пропорциональные ее величине; угловые ошибки ориентации векто-
ра скорости и нормальная и боковая ошибки, ортогональные рас-
четному вектору и не зависящие от его величины.
Такое разделение является условным, и ошибки объединены по
группам, в которых отражены только основные особенности рабо-
ты бортовых систем в режимах ориентации, стабилизации и управ-
ления движением. В действительности ошибки ориентации и стаби-
лизации имеют более сложную зависимость от параметров управ-
ления. Так, ошибки ориентации вектора скорости являются след-
ствием работы САУ в режиме ориентации на пассивном и актив-
ном участках движения. Ориентация аппарата перед коррекцией
119
обеспечивается проведением с помощью датчиков солнечной и
звездной ориентации совмещения связанных с объектом осей с ося-
ми базовой системы координат, положение которой в пространстве
известно. Точность этого совмещения зависит от характеристик
приборов солнечно-звездной ориентации и составляет 3 ... 5' [39].
Ошибки ориентации могут также зависеть от конкретных условий
проведения сеанса ориентации (углов установки приборов, выбора
светил для ориентации и угла между направлениями на них с АМС
и др.). Затем САУ функционирует в режиме управления движени-
ем на активном участке, на котором базовая система определяется
с помощью ГСП. Передача управления на эту систему приводит к
появлению дополнительных ошибок ориентации. Если ошибки на-
чальной ориентации АМС не зависят от вектора корректирующей
скорости, то ошибки автономной системы при управлении движе-
нием на активном участке зависят как от его величины, так и от
направления. Действительно, после осуществления ориентации си-
стема автономного управления обеспечивает проведение таких
разворотов объекта, чтобы выставить ось двигательной установки
в нужном для проведения коррекции направлении. Ошибки выстав-
ки, вообще говоря, зависят от величины угловых разворотов, одна-
ко они малы по сравнению с ошибками начальной ориентации оси
ДУ. Таким образом, суммарные угловые ошибки ориентации, не-
смотря на их сложный характер, можно приближенно считать не-
зависимыми от направления в пространстве вектора корректирую-
щей скорости.
При работе двигательной установки САУ обеспечивает стаби-
лизацию движения центра масс КА, компенсируя с помощью уп-
равляющих воздействий возникающие из-за эксцентриситета тяги
или перекоса линии ее действия моменты. Если система управления
в режиме стабилизации обладает достаточной степенью устойчиво-
сти, то после затухания переходного процесса в системе наступает
некоторый квазистатический режим. Поэтому в том случае, когда
время работы двигателя при проведении коррекции достаточно ве-
лико, вариации нормальной и боковой скоростей в режиме угловой
стабилизации можно считать независимыми от величины коррек-
тирующей скорости. Среднеквадратичные составляющие нормаль-
ной и боковой ошибок корректирующей скорости могут составлять
0,05... 0,1 м/с [37]. Для выключения двигателя используется ин-
формация о продольной скорости объекта, получаемая от интегра-
тора линейных ускорений. Линейные ускорения, в свою очередь,
измеряются с помощью акселерометров, которые имеют погреш-
ности измерения, зависящие и независящие от величины ускорения.
В связи с этим ошибки интегратора имеют сложную зависимость от
величины характеристической скорости коррекции и времени рабо-
ты двигателя. Однако основной составляющей можно считать
ошибку, пропорциональную величине характеристической скоро-
сти коррекции, которая связана с нечувствительностью акселеро-
метров, составляющей для современных систем ~10-3и(^) м/с
[37]. Кроме этих ошибок на заданную корректирующую скорость
120
влияют разбросы импульса последействия двигателя и времени
срабатывания автоматики при выключении двигательной установ-
ки, которые также допустимо считать не зависящими от величи-
ны' корректирующей скорости.
Таким образом, при выбранном составе ошибок бортовых си-
стем КА их влияние на ошибки исполнения оказывается различ-
ным в зависимости от величины характеристической скорости кор-
рекции. При небольших скоростях коррекции основными составля-
ющими являются первая и четвертая группы ошибок.
С увеличением характеристической скорости наиболее значи-
тельными составляющими являются ошибки в скорости, пропор-
циональные ее величине, и угловые ошибки ориентации вектора
скорости.
Пусть в момент tj проводится коррекция траектории полета;
u(/j) =[«х(6), и2(/у)]т— расчетные значения вектора кор-
ректирующей скорости в фиксированной системе координат oxyz.
Введем систему координат ocxcyczc с центром в центре масс КА и
осью осгс, совпадающей по направлению с расчетным вектором
корректирующей скорости. Будем предполагать, что остальные оси
совпадают с соответствующими осями системы управления при
проведении коррекции. Тогда система ocxcyczc связана с исходной
линейным соотношением:
u(/y) = Ac(/y)uc(/y), (2.96)
где
Ас(/,)=
cos sin а}-
sin р sin7- a.j
— cos а,-
— sin cos cos ay-
cos fij sin cos a.j >
0 sin Uj
uc(/y)—вектор корректирующей скорости в системе ocxcyczc; ау,
Ру— сферические координаты u(ztJ), причем ошибки ориентации
приводят к соответствующим ошибкам в сферических координатах
а,, Ру, а ошибки стабилизации и интегратора — к ошибкам состав-
ляющих ихС(6)> Uyc(tj), Uzc(tj).
Тогда, дифференцируя (2.96) по параметрам, характеризующим
ошибки системы управления, и подставляя значение расчетной
корректирующей скорости в системе ocxcyczc, равное u2C(/y) =a(/j),
ихс(tj) =иус (tj) =0, получим с точностью до величин первого по-
рядка малости следующее выражение для ошибок исполнения кор-
рекции в инерциальной системе координат oxyz:
8u(/y) = Ac(/y)Suc (tj)
где В(/;) =
cos р,- sin a;-,
sin sin Иу,
— cosay-,
+ \ Uc(/y) = B(/y)8yc(/y), (2.97)
d(aj, Py)
— sin py, cos Py cos ay,
cos Py sin py cos ay,
0, sin ay,
— w(/y)sin py cos a;-, zz(/y)cospysinay
w(/у)cos py cos ay, u(tj) sin py sin ay 5
0, — и (tj) cos ay-
121
Вус(/у)=[ЗИхс(//),-,8Игс(^), Ь37, Say]T-
— вектор ошибок системы управления.
Так как ошибка системы управления бигс'(^) состоит из двух
составляющих — пропорциональной скорости и не зависящей от
нее, то, представив ее в виде duzc'(tj) = 60i;u(^) + бигС(^), получим
(6UXC (tj) = 6uxc (tj) , f)Uyc (tj)=t>llyC(tj) ).
8u(/y)=Bc(/y)8yc (/y),
(2.98)
где Bc(/y) =
icos ну sin a;-,
i . ,
isin sin aj,
| —cosay,
— sin 3y, cos 3y cos ay, w(/y)cos Sycosay,
cos 3y, sin 3y cos ay, и (/y) sin fly cos ay,
0, sin ay, и (/y) sin ay,
— «(/y) sin fly cos ay, и (tj) cos 3y sin a у |
и (tj) cos 3y cos ay, и (/y) sin 3y sin a;- •;
0, — и (tj) cos ay |
6yc (tj) — \buxc(tj), lu.yQ(tj), luzz(tj), 89u, 8f!y, Say]T— вектор ошибок
системы управления
Таким образом, используя соотношение (2.98), для каждого
конкретного набора ошибок системы можно получить соответст-
вующие ошибки исполнения коррекции в виде составляющих в
базовой системе координат.
Ошибки исполнения коррекции могут оказывать определенное
влияние на расчет коррекции, если в момент ее проведения tj не-
обходимо обеспечить заданную точность наведения. В этом случае
допустимый вектор корректирующей скорости, исправляющий из-
вестные отклонения корректируемых параметров при г<3, может
отличаться от энергетически оптимального для идеальной коррек-
ции, так как отдельные составляющие ошибок исполнения оказы-
вают различное влияние на соответствующие им ошибки в коррек-
тируемых параметрах, связанные с управлением движения КА.
Действительно, рассмотрим однопараметрическую коррекцию и
обозначим для упрощения анализа: бак,-—суммарная угловая
ошибка ориентации вектора скорости, 6ис°Р(£у) — суммарная
ошибка стабилизации, ортогональная вектору скорости и не зави-
сящая от его величины, а 6azc(^), 60ua(^) —независимая и про-
порциональная ошибки в величине скорости. Тогда после проведе-
ния коррекции отклонение в корректируемом параметре равно
AK+! (^)=Л-1 и(/у) = [6«гс (/у)4-89а« (/у)] fK1 (/yjud) (/у) +
+ (tj) + u(tj) oaKy]fK1 (tj) UU>(tj), (2.99)
где uop(0(^y)—единичный вектор, ортогональный вектору расчет-
ной корректирующей скорости.
122
Из (2.99) следует, что при энергетически оптимальной однопа-
паметрической коррекции на ошибки наведения влияют только
ошибки в величине скорости коррекции, так как
fK1 (/put’)(/;)=!; fKl(^)uVp>(/;-) = 0.
Если при этом значение AcpKi+(^) превышает допустимое от-
клонение в корректируемом параметре, а составляющие ошибок
6«zcGi) и 60,<«(О) значительно превышают составляющие ошибок
бИсор(^)> ba-HjU(tj) исполнения коррекции, то целесообразно изме-
нить направление вектора корректирующей скорости и не исполь-
зовать режимы оптимальной независимой коррекции. Пусть вы-
бранное направление корректирующей скорости составляет угол
0к1 с направлением градиента корректируемого параметра, тогда в
соответствии с (2.7)
/г (/,•) =
COS С1К1
“W . 1 Д?К1 (О') I
1 I »К1 (G-) I
а отклонение в корректируемом параметре равно
% о
= 18«2С (^)Н-----— «*(/;)! COS ак1/к1(/у)-
COS
— [8и°₽(/;)-|----(//), (2.100)
COS С1к1
где —величина корректирующей скорости при энергетиче-
ски оптимальном проведении однопараметрической коррекции. Из
(2.100) следует, что влияние составляющей ошибки, пропорци-
ональной величине корректирующей скорости, на отклонение
Дфк1+(^-) постоянно и не зависит от изменения угла акь Влияние
составляющей 5uzc на A<pKi+(G) уменьшается с увеличением aKi
пропорционально косинусу этого угла, а для составляющих
<5«cop(^j) и 6aKj соответствующее отклонение Дсрк1+(^,-) увеличива-
ется с ростом aKi пропорционально синусу и тангенсу этого угла.
Таким образом, из четырех составляющих ошибок наведения одна
уменьшается, а две увеличиваются с увеличением угла ак1. На
практике ошибки исполнения коррекции, направленные вдоль
и(0), как правило, значительно меньше ошибок, ортогональных
и(4/), причем с увеличением «(4,) это различие возрастает. Поэто-
му учет ошибок исполнения обычно не требует изменения направ-
ления вектора корректирующей скорости. Исключение составляют
такие случаи, когда ошибки исполнения коррекции приводят к не-
допустимо большому изменению какого-либо некорректируемого
параметра, отклонение в котором контролируется в процессе на-
ведения. Выбор корректирующей скорости должен осуществляться
на основе компромисса между отклонениями корректируемого и
некорректируемого параметров с учетом их допустимых значений.
Глава 3
ЛИНЕЙНАЯ СТОХАСТИЧЕСКАЯ
КОРРЕКЦИЯ
Стохастическая модель динамической системы является более
сложной по сравнению с детерминированной и применяется как при
проектно-баллистических исследованиях, так и при реальном по-
лете АМС для решения задач управления движением. Выведение
аппарата на траекторию перелета и дальнейший его полет сопро-
вождаются воздействием целого ряда возмущений, источниками ко-
торых являются работа САУ, а также ошибки функционирования
других систем, в том числе наземных систем навигационных изме-
рений. Влияние этих факторов сказывается при выведении на тра-
екторию межпланетных перелетов, прогнозировании движения и
проведении коррекций, вызывая появление ошибок оценки коррек-
тируемых параметров и реализации расчетных управляющих воз-
действий. Полет КА можно рассматривать как некоторый случай-
ный процесс, тогда значения кинематических параметров будут
случайными функциями аргумента t (времени полета), а корректи-
руемые параметры — случайными векторами r-мерного вероятност-
ного пространства. Таким образом, детерминированную траекторию
движения управляемого объекта можно рассматривать как частный
случай, некоторую случайную выборку из генеральной совокупности
возможных значений кинематических и терминальных параметров
(или их отклонений от номинальной траектории). Характеристики
распределения генеральной совокупности множества возможных
траекторий полета определяются законом и параметрами распреде-
ления ошибок функционирования каждой из перечисленных выше
систем и случайных возмущений, действующих на управляемую
динамическую систему. Априорные данные о возможном законе и
параметрах распределения основных случайных факторов, действу-
ющих на КА в полете, обычно определяются на основании проект-
ных исследований, моделирования работы систем с учетом резуль-
татов их отработки и предшествующих запусков каждого типа ап-
паратов.
Анализ разработанных к настоящему времени систем навига-
ционных измерений и автономного управления движением показы-
вает, что ошибки выходных сигналов систем при решении большин-
ства задач навигации и наведения различных КА допустимо счи-
тать распределенными по нормальному закону. Объясняется это
тем, что выходные ошибки являются результатом воздействия
124
Лолыпого количества сравнительно малых факторов, влияющих на
аботу отдельных блоков и устройств системы. Поэтому результи-
Рудащие ошибки могут быть приближенно представлены в виде
уммы большого числа случайных слагаемых, каждое из которых
мало по сравнению с оставшейся суммой. Если сформулированные
условия не нарушены, то к результирующей ошибке системы можно
применить центральную предельную теорему [23], согласно которой
закон распределения суммы случайных составляющих неограничен-
но приближается к нормальному закону с ростом числа слагаемых
вне зависимости от законов распределения этих составляющих,
факим образом, ошибки выведения АМС на траекторию перелета,
работы САУ, проведения навигационных измерений будем считать
распределенными по нормальному закону. Если при этом исключе-
ны систематические ошибки, то математические ожидания ошибок
функционирования таких систем равны нулю, а вероятностное мно-
жество возможных ошибок характеризуется соответствующей кор-
реляционной матрицей. Такое допущение существенно упрощает
исследование линейной стохастической коррекции, так как нор-
мальный закон относится к классу самовоспроизводящихся законов
распределения для линейных систем. Это означает, что любые ли-
нейные преобразования случайных величин не выводят их за рам-
ки исходного нормального закона распределения, а соответству-
ющая корреляционная матрица определяется соотношением
К[х ]=FyK[y ]F;, (3.1)
где К[у], К[х]—корреляционные матрицы случайных векторов
у и х; Fy — матрица линейного преобразования вектора у.
В тех случаях, когда ошибки отдельных систем КА описываются
более сложным, несамовоспроизводящимся законом распределения,
получение соответствующих законов и параметров распределения
характеристик стохастической коррекции может оказаться затруд-
нительным и привести к необходимости численного интегрирования
громоздких выражений, определяющих плотность распределения
отклонений траекторных и кинематических параметров. Чтобы из-
бежать вычислительных трудностей, целесообразно путем соответ-
ствующего выбора параметров распределения нормального закона
принять несколько завышенные, но достаточно надежные оценки
ошибок с необходимой гарантией того, что для действительного за-
кона распределения их предельная величина с необходимой вероят-
ностью не будет превышать аппроксимации с помощью нормаль-
ного закона.
Стохастический подход к задаче коррекции базируется на сле-
дующем основном предположении: вероятностные характеристики
ошибок параметров движения КА априорно известны с необходимой
Достоверностью. Это позволяет использовать при анализе стохасти-
ческой коррекции хорошо развитый аппарат математической ста-
тистики и теории вероятностей. В то же время возможна такая
постановка задачи управления, когда предполагается, что недо-
статочно точно известны либо функции распределения ошибок си-
125.
-стем, либо их параметры. Такой подход к задачам коррекции полу,
чил название гарантирующего, а коррекция, рассматриваемая в
рамках такой модели,— гарантированной коррекцией. В разд, j.g
приведены некоторые результаты сравнительного анализа этих двух
постановок задачи коррекции.
3.1. Определение характеристик стохастической коррекции
Для стохастической коррекции, из-за более сложной зависимо-
сти параметров управления от корректируемых и кинематических
параметров динамической системы, особо важное значение имеет
разработка эффективных, универсальных методов расчета ее основ-
ных; характеристик для различных видов корректирующего воздей-
ствия. В отличие от детерминированной коррекции, где необходимо
определить только конкретные значения вектора корректирующей
скорости, ошибок корректируемых и некорректируемых параметров,
энергозатраты на проведение коррекции, методика расчета стоха-
стической коррекции в общем случае должна включать в себя спо-
собы определения законов и параметров распределения всех ука-
занных характеристик. В случае стохастической коррекции в ли-
нейной постановке и при нормальном законе распределения ошибок
систем управления при ее выполнении, а также навигационных изме-
рениях, используемых для определения траектории полета, законы
распределения характеристик коррекции, связанных с этими ошиб-
ками линейной зависимостью, также являются нормальными. Од-
нако существует ряд важных характеристик линейной стохасти-
ческой коррекции, у которых даже при принятых допущениях
законы распределения отличаются от нормального и требуют со-
здания специальных методов их расчета. К их числу относятся
прежде всего энергозатраты и ошибки исполнения коррекции, кото-
рые даже при линейной модели динамической системы связаны с
ошибками выведения, прогнозирования движения и функционирова-
ния бортовых систем нелинейными зависимостями.
Задачу стохастической линейной коррекции сформулируем сле-
дующим образом. Пусть известна номинальная траектория полета,
на которую должна выводиться АМС с помощью проведения одного
из запланированных маневров (старта, торможения и др.). Выбра-
ны корректируемые параметры и задана область их допусти-
мых значений в пространстве корректируемых параметров ь-.
Необходимо на основании заданной априорной информации об
ошибках работы отдельных систем и принятой стратегии коррекции
найти вероятностные характеристики генеральной совокупности,
определяющей управляемое движение: отклонений кинематических
параметров, ошибок реализации корректируемых параметров, кор-
ректирующих скоростей, энергетических расходов и т. д.
При исследовании стохастических коррекций траектории пере-
лета АМС обычно предполагают, что вид коррекций, времена их
проведения и коэффициенты связи (при связанной коррекции) яв-
ляются едиными для всего множества возможных траекторий и не
126
ависят от конкретных реализаций ошибок. Использование именно»
3аКой стратегии коррекции объясняется присущими траекториям
межпланетного перелета свойствами эффективности коррекции, я
таКже принятыми принципами организации управления полетом,
согласно которым все необходимые работы по подготовке и прове-
дению управляющего воздействия (проведение сеансов измерений,
коррекций и др.) осуществляются по единому временному графику.
Свойства оптимальной стратегии (см. гл. 2) позволяют при рас-
исте статистических характеристик, как и в случае детерминиро-
ванной коррекции, ограничиться условиями вида (2.3) для мини-
мального числа управляющих воздействий, обеспечивающих ис-
правление корректируемых параметров, с последующим выбором
заданного вектора корректируемых параметров Дфк+(/г).
Таким образом будем полагать, что известны времена проведе-
ния коррекций tj и матрицы связи C(f,), единые для всего множе-
ства терминальных параметров, соответствующего возможным
ошибкам выведения, прогнозирования параметров движения и про-
ведения коррекций. Заданы корреляционные матрицы распределе-
ния этих ошибок для всех последовательно проводимых коррекций:
К[х(^н)], К[бфп(^/)], К[би(//)]. Методы расчета характеристик стоха-
стической коррекции могут быть получены на основе соотношения
(3.1), определяющего моментные характеристики функции случай-
ного векторного аргумента, а также соответствующих выражений,
используемых в гл. 2 для детерминированной коррекции. Учитывая
линейность выражений (2.66) ... (2.69), получим следующие соотно-
шения, определяющие корреляционные матрицы распределения ха-
рактеристик стохастической коррекции:
начальных отклонений терминальных параметров (корректиру-
емых и некорректируемых)
К [ Д Ф (/„)] = F (/н) К [х (/„)] F (/„); (3.2)
начальных отклонений корректируемых параметров
К[Д ф(/н)] = Е(г) F(/H) К [х (/H)(F(/H) Е(г); (3.3)
компонент расчетной корректирующей скорости /-й коррекции:
а) для независимой коррекции
К)ип (/;.) 1= [Н-1 (/;F) (/;-!)] К [х+ (/у) F (/;_1)1т +
+ Н71 (tj) К [8 ф" OIH-1 (3.4)-
к [u (/y)j=QH (tj) к [ип (/;-)] Q; (/,);
б) для однородно-связанной коррекции
К [U„ (/;)] = I Н-' (tj) С (/;)] {F (tj-i) К )х+ (/;•_! )] FT (/;-!) +
+ К[8<р„(/у)]} [ Нк] (tj) С (/;)]- (3.5)
компонент корректирующей скорости /-й коррекции после ее
Проведения
127
К Ju+ (/у)] = К [U (/;)]+ К [8 U (/;)]; (3.6)
отклонений терминальных параметров после /-й независимой кор.
К [ Д ф + (/у)] = [Eg - F (/;) Qn (/;) Н"1 (/;)] К [Дф (/;)] [Eg -
- F (tj) Q„ (tj) Н71 (tj)Y + [F (tj) Qn (tj) H71 (t7)] К IS Ф” (/;)] X
X [F^Qj/pH^tf^+F^pKlS u(/;)] Vs (tj), (3.7)
или однородно-связанной коррекции
КIД <р+ (/у)] = [Е6-F (tj) Qn (tj) Н-1 (tj) С (/;.)] КIД Ф (/у )ЦЕ6-
- F (tj) Qn (tj) Н71 (tj) C (/y)]T+JF (tj) Q„ (tj) H71 (tj) x
X C (tj)\К [8 <p" (tj)][F (tj) Qn (tj) H71 (tj) C (/;-)]r + F (tj) К [8 u (tj)\ x
xF'r(/;); (3.8)
отклонений корректируемых параметров после /-й независимой
коррекции
К [Д <р+ (/у)]=К [Д Ф7 (/у+j)] = Е (г) F (tj) К [8 и (/;)] FT (tj) Е (г) +
-|-Е(г)К [8 ф" (/;-)[ Е(г), (3.9)
или однородно-связанной коррекции
К [ Д ф+ (/,)] =[Е (г) — С (/;-)] К [ Д Ф (/у)] [Е (г) — С +
X- С (tj) К [8ф" (tj)] С (tj) + Е(г) F (tj) К18u (/y)I Fr (tj) Е (г); (3.10)
отклонений кинематических параметров после /-Й независимой
К [х+(/у)] = [ Q„ (tj) Н-1 (tj)] КIВ Ф" (tj)] [Q„(/y) Н71 +
—К18u (/у)] —}— [X (/у, t/—1) — Q„ (tj) (tj) F (tj—y) j x
xKIx+^-OlIX^, ^-Qj/pHjT^F(3.11)
или однородно-связанной коррекции
К [х+ (tj)] =[Qn (tj) H-1 (tj)C (tj) ]K [8 ф" (tj)] x
X [Qn (tj) H-1 (tj) C (/y)]r+ К [8 u (tj)] + [ X (tj, tj_.) -
- Q„ (tj) H^1 (tj) C (tj) F (/л)] К [X+ (/y-x)] [X (tj, tj^) -
-Q„ (tj) FM (tj) C (tj) F (/у_г)Г; (3.12)
прогнозируемых отклонений корректируемых параметров перед
проведением /+1-Й коррекции, определяемых на основании навига-
ционных измерений
128
К)ДФк (Z;+1)]=K [Д<Р7 (^+1)1 +к [Д Ф^' (/У+1)1=К 1Д ф+ (/;)]+
+ К[Д Ф’-(/;+1)1. (3.13)
Соотношения (3.2) ... (3.13) позволяют осуществить последова-
рльный расчет корреляционных матриц ошибок корректируемых
некорректируемых параметров, отклонений кинематических па-
раметров после каждой из g последовательно проводимых коррек-
ций, а также компонент соответствующих корректирующих скоро-
стей для независимой и связанной коррекций. Их функции распре-
деления—функции распределения многомерного нормального
закона.
Как известно, при нормальном распределении теоретически воз-
можна, хотя и с очень малой вероятностью, реализация очень
больших значений начальных отклонений корректируемых пара-
метров, корректирующих скоростей и ошибок наведения. Поэтому
условие (2.28) при стохастической коррекции является, строго гово-
ря, невыполнимым и должно быть заменено вероятностным услови-
ем вида
Р[ДФ+(9ей?]>Р’, (3.14)
где Рфд — допустимая вероятность выполнения условия (2.28), ко-
торая в задачах наведения межпланетных аппаратов принимается,
как правило, достаточно высокой, так как определяет надежность
выполнения программы полета.
Действительно, если отклонения параметров траектории в ка-
кой-либо момент t таковы, что вероятность события (2.28) велика,
то можно утверждать, что с большой вероятностью в дальнейшем
исправление корректируемых параметров не потребуется. В част-
ности, если соотношение (2.28) выполняется для начальных откло-
нений корректируемых параметров, соответствующих ошибкам
выведения АМС на траекторию перелета, то с большой вероят-
ностью коррекция движения его вообще не потребуется. Такой ап-
парат может быть выполнен конструктивно проще, и на нем могут
не устанавливаться системы навигации и наведения, а также дви-
гательная установка для проведения управляющих воздействий.
Аналогичным образом величина корректирующей скорости также
может оказаться как угодно большой, и поэтому при определении
необходимых запасов топлива на проведение управляющих воздей-
ствий также необходимо использовать вероятностные оценки. Сле-
довательно, для более сложной стохастической модели коррекции
Усложняется оценка точности и энергозатрат наведения по сравне-
нию с их оценкой для детерминированной модели.
Рассмотрим сначала характеристики точности наведения, опре-
деляемые соотношением (3.14). Вероятность выполнения требова-
ний к точности наведения может быть найдена интегрированием
следующего выражения:
(г)
Р[Д q>+ f ... (* р[Д ф+ (/g)Id [Д ф+ (/р], (3.15)
" я' “
5—850 129
где р[Д<рк+(^)]—плотность нормального закона распределения
Лфк+(^) с корреляционной матрицей (3.9) или (3.10), соответст-
вующей моменту tg проведения последней коррекции.
В общем случае вычисление r-мерного интеграла должно прово-
диться методами численного интегрирования, однако в некоторых
частных случаях при определенном задании области может
быть получено общее решение для (3.15). К числу таких фигур от-
носится, в частности эллипсоид, подобный эллипсоиду рассеивания.
Поэтому эллипсоид рассеивания удобно использовать в качестве
геометрической характеристики распределения любого случайного
вектора, имеющего нормальный закон распределения. Напомним,
что при нормальном законе распределения эллипсоид рассеивания
совпадает с эллипсоидом равной плотности, соответствующим за-
данной корреляционной матрице. Уравнение эллипсоида принима-
ет наиболее простой вид, называемый каноническим, если оси ко-
ординат совпадают с главными осями эллипсоида. С помощью
ортогонального преобразования системы координат уравнение эл-
липсоида всегда можно привести к каноническому виду. Если два
распределения таковы, что эллипсоид рассеивания одного из них
целиком лежит внутри эллипсоида рассеивания другого, то первое
распределение более сосредоточено, чем второе, и вероятность боль-
ших значений первой случайной величины меньше, чем для второй.
Эллипсоиды рассеивания могут быть построены для любой нор-
мально распределенной характеристики стохастической коррекции.
Наиболее часто используются для наглядного геометрического
представления области возможных значений отклонений корректи-
руемых параметров и корректирующих скоростей следующие эл-
липсоиды: начальных, ошибок корректируемых параметров, соот-
ветствующий К[Дфк(^н)], возможных корректирующих скоростей,
соответствующий К[и (//)], и ошибок наведения, соответствующий
К[Дф„ (/,)].
Пример 1. Пусть при двухпараметрической коррекции возможные отклоне-
ния корректируемых параметров (ошибки наведения) имеют следующую плот-
ность распределения:
Р (W> (^)J =
1
-------exp
2л%,%2
1 Г [А?к+1О2
(Д?к+2(^)]2 Ц
11
где оф], стф2— среднеквадратичные распределения отклонений корректируемых
параметров ДфК1+(М и ДфК2+ {tg)
Область вероятность попадания в которую необходимо определить, за-
дана в виде эллипса рассеивания:
„ (
| 2
I V
[Д?к+2(^)]2 ]
2 f ’
V J
130
__коэффициент, характеризующий отношение полуосей
среднеквадратичным отклонениям. Тогда
эллипса рассеива-
где к
ния к
Р [Д <р + (^) е= 91 т] = J J р [Д<РК1 (/g),
А'4(^)] d [Л (₽+(/г)]= 1-ехр
(3.16)
Из (3.16) следует, что вероятность попадания в эллипс рассеивания с полу-
осями, равными утроенным среднеквадратичным отклонением (&=3), составля-
ет ~ 0,989.
Пример 2. Пусть для трехпараметрической коррекции результирующие ошиб-
ки наведения распределены по нормальному закону со следующими пара-
метрами:
Р
ГД?+2(^)]2 [Д?,1з(^)]2 ]1
+ о2 (’
а<?3 . J
а область задана уравнением
Заменив переменные Дфк1+(^г), Дфкз+(М на новые с помощью сфери-
ческой системы координат, получим после некоторых преобразований следующее
выражение для вероятности попадания в трехмерный эллипсоид рассеивания:
Р [Д?к+ (^) е я f] = J J J р [Дф+ (^)] d [Дф+ (/g)] = ф/ [
/2
ехр
(3.17)
л
где Фг(-)— функция Лапласа.
Из (3.17) следует, что вероятность попадания в эллипсоид с полуосями, рав-
ными утроенным среднеквадратичным отклонениям (при k = 3), составляет
~ 0,97.
Из рассмотренных примеров следует, что вероятность попада-
ния в эллипсоид рассеивания с фиксированным значением k умень-
шается с увеличением параметричности вектора корректируемых
параметров. Напомним, что для нормально распределенной вели-
чины (г— 1) вероятность попадания в отрезок, соответствующий
Утроенному сренедвадратичному отклонению, составляет 0,997.
это свойство нормально распределенного случайного вектора не-
обходимо учитывать при замене условия (3.15) соответствующим
эллипсоидом ошибок наведения. При заданной вероятности вы-
полнения условия Л<рк+(^)е размеры области Л?ф, определя-
емые эллипсоидом рассеивания и выраженные в единицах средне-
5* 131
квадратичных отклонений, должны увеличиваться с увеличением
параметричности коррекций.
При стохастической коррекции энергозатраты наведения опре-
деляются из решения интегрального уравнения
Р
2[ит(//)иад/2<«р
7 = 1
(3.18)
где P(ug)—плотность распределения случайной величины ug, яв-
ляющейся нелинейной функцией случайных аргументов — векторов
корректирующих скоростей.
Выражение для плотности распределения ug имеет сложный ха-
рактер, а закон распределения при ограниченном количестве кор-
ректирующих воздействий отличается от нормального. Необходи-
мость численного интегрирования выражения (3.18) при проведе-
нии исследований стохастической коррекции приводит к большим
вычислительным сложностям и практически исключает возможность
эффективного поиска оптимальной стратегии, требующего много-
кратного вычисления критерия, связанного с энергозатратами на-
ведения. Поэтому в разд. 3.4 приведен приближенный метод рас-
чета, позволяющий по простым аналитическим зависимостям опре-
делить потребные энергетические запасы с точностью, достаточной
для этапа проектно-баллистических исследований.
Следует отметить, что при рассмотрении стохастической кор-
рекции был сделан ряд допущений, связанных с выбором страте-
гии наведения, законами распределения ошибок выведения, прог-
нозирования и исполнения коррекции. Основными из них являют-
ся следующие. Предполагается, что законы распределения всех
случайных ошибок (выведения, прогнозирования и исполнения кор-
рекции) известны и являются нормальными. Это позволяет ис-
пользовать при оценке характеристик стохастической коррекции
вероятностные методы, которые, как известно, имеют наиболее
простой вид для нормального закона распределения. Если допуще-
ния не выполняются, то расчет существенно усложняется и должен
быть осуществлен методом статистических испытаний. Генеральная
совокупность, из которой осуществляется случайная выборка, за-
дается принятыми законами и параметрами распределения указан-
ных ошибок. Расчет характеристик и параметров управления для
каждой случайной выборки осуществляется с использованием алго-
ритмов детерминированной модели динамической системы по из-
вестным в каждый момент t отклонениям терминальных и кинема-
тических параметров (см. разд. 2.6).
При рассмотрении детерминированной коррекции было показа-
но, что характеристики оптимальной стратегии зависят от величины
текущих отклонений корректируемых параметров. Поэтому и для
стохастической коррекции можно не выбирать t, и С(/3) едиными
для всей генеральной совокупности, а для каждой выборки задавать
свои значения tj, С(//), обеспечив адаптивность стратегии по отно-
132
пению к вектору состояния. В этом случае случайными функциями
окажутся не только параметры управления, но и такие характери-
стики стратегии, как количество коррекций, времена их проведения,
коэффициенты связи.
Таким образом, при исследовании стохастической линейной кор-
рекции возможны два класса используемых стратегий. В первом
случае стратегия определяется едиными значениями tj и С(^) для
всей генеральной совокупности. Этот класс стратегий может харак-
теризоваться преобразованием (3.4) корреляционной матрицы
отклонений корректируемых параметров. Во втором случае tj и
C(tj) являются случайными, зависящими от конкретной выборки
из генеральной совокупности, а класс стратегии задается линейным
преобразованием (2.66) текущих отклонений корректируемых па-
раметров. Так как для второго класса стратегий можно оптималь-
ным образом выбрать tj и С(^) для каждой выборки, то, следова-
тельно, и суммарные энергозатраты наведения могут оказаться
меньшими, чем для первого класса. Однако учитывая специфиче-
ские особенности наведения АМС, а также сложность оценки энер-
гозатрат и точности наведения для второго класса стратегии, в
дальнейшем будет проводиться анализ и синтез стратегии стохасти-
ческой коррекции только для первого класса. В пользу такого под-
хода говорит также тот факт, что при проектно-баллистических
исследованиях оценка энергетических затрат, требуемых для уп-
равления движением КА, должна осуществляться с некоторым за-
пасом по сравнению с минимально необходимыми.
3.2. Анализ свойств одноимпульсной стохастической коррекции
Усложнение модели управляемой динамической системы естест-
венно усложняет и анализ свойств коррекции траектории по срав-
нению с детерминированной, так как при стохастической коррекции
он должен характеризовать общие свойства отображения всего
пространства возможных траекторий в подпространство парамет-
ров корректирующей скорости. Поэтому методы анализа, основан-
ные на построении фигуры влияния корректирующей скорости, для
стохастической коррекции оказываются неприменимыми. Восполь-
зуемся свойствами полярного разложения матриц и приведения
корреляционной матрицы К[А<рк(^)] к каноническому виду. Для
большей наглядности преобразований и геометрической интерпре-
тации уменьшим размерность векторного пространства до размер-
ности, равной параметричности коррекции. Тогда получим
К [Ur (/;)I = Q (/;) А-1 (/;) Ц(/;)1 ф (/;) Лф (/; (/,) X
х Л-1 (0)QT (/;•), (3.19)
Где к[Д фк(/;)]= 1ф(/,-)Аф(/7.) Г (/;);
\ (/;) = || Х-^ (/,-), Х22, Х23 || — диагональная матрица.
133
Выберем новые корректируемые параметры “фк(^/) таким обра-
зом, чтобы в линейной постановке их отклонения были бы некор.
релированы, тогда корреляционная матрица их совместного распре-
деления будет иметь канонический вид, а Д'фк(Л') = 1£Афк(^).
В точке проведения коррекции введем ортогональную систему коор.
динат так, чтобы оси ее совпадали с направлениями растяжения.
Для ее получения необходимо исходную систему координат под-
вергнуть ортогональному преобразованию с помощью матрицы
1н (//). Как и ранее, пространство с новой базой будем называть
пространством преобразованных корректирующих скоростей. Орто-
гональные матрицы Iср (tj), ln(tj) характеризуют корреляцию
между ошибками корректируемых параметров и взаимную зави-
симость между корректируемыми параметрами в момент проведе-
ния коррекции. Для некоррелированных ошибок 1<р'(//)= Ег, для
независимых корректируемых параметров 1н (//) = ЕГ. Матрица
I н (tj) I <р (tj) характеризует ориентацию базовой системы простран-
ства преобразованных корректирующих скоростей относительно
пространства независимых корректируемых параметров. Преобра-
зования (3.19) имеют следующий геометрический смысл. Эллипсо-
ид рассеивания независимых корректируемых параметров с полу-
осями А,м>1 (tj), ..., kpr(tj) подвергается ортогональному преобразова-
нию, которое заключается во вращении его на углы, соответству-
ющие матрице I a(tj) I <р (tj). Полученный эллипсоид растягивается
вдоль координатных осей, не совпадающих в общем случае с глав-
ными осями эллипсоида; коэффициенты растяжения — элементы
диагональной матрицы Лн'(^): 1/Л.ш (tj), .... 1/Хнг (tj). В резуль-
тате выполнения этого преобразования изменяются полуоси и ори-
ентация эллипсоида. Полученный эллипсоид характеризует рас-
пределение преобразованных корректирующих скоростей. Для по-
лучения эллипсоида распределения корректирующих скоростей
необходимо осуществить еще одно ортогональное преобразование
с помощью матрицы Q(tj) или Qn(tj)Q(tj) (для основной системы
координат). Затраты топлива на проведение коррекции при стоха-
стической модели определяются полуосями эллипсоида распреде-
ления вектора корректирующей скорости. Поэтому для исследова-
ния энергозатрат коррекции достаточно рассмотреть параметры
распределения вектора wKr(tj).
На рис. 3.1 проиллюстрированы преобразования (3.19) для случая двух-
параметрической коррекции. Выражения для матриц (tj), 1н имеют вид
1ф(0) = |
cos a! (tj),
sin Ct! (tj).
— sin Cti (tj)
COS «! (tj)
(3.20)
!H
cos ?! (tj),
sin M0)>
— sin ₽! (tj) Г
COS ₽!(tj)I
Независимые корректируемые параметры Фк(0) и вектор преобразованной
корректирующей скорости wKr(^) определяются выражениями
134
Эллипс возможных преоб-
разованных корректирующих
скоростей u4(w4)
корректирующих скоростей
рис. 3.1. Преобразование эллипсоида ошибок корректируемых параметров при
двухпараметрической независимой коррекции
дФк (О) = д (0); w><f up = QT up^r up-
Для плоского случая преобразование (3.19) заключается в
са рассеивания независимых параметров на угол аД/,) — 0i(f?)
(3.21)
повороте эллип-
и последующем
растяжении его вдоль базовых направлений с коэффициентами 1/ХН1 (^‘) и
1/Ан2 (ij). Влияние каждого из преобразований на величину полуосей эллипса
возможных корректирующих скоростей непосредственно следует из самого ха-
рактера этих преобразований. При произвольных корреляции начальных откло-
нений и зависимости между корректируемыми параметрами полуоси эллипса
корректирующих скоростей заключены в области значений
/Л
XL2>);
Хф2
WyUP <KyUP
Х(1) (t Л = . х<2) _
wx(; W'P ’ wx“ WO) ’
,n Хф2(О) Хф1<0)
(Z^ = ' x W i ; ~~ x u-)
ЛН2<//)
Де ^ф1 (0) > Хф2 Up, XH1 Up > XH2 Up-
Аналогичные соотношения могут быть получены для трехпараметрической
коррекции.
В отличие от детерминированной коррекции для рассматрива-
емой модели графическое построение эллипсоида возможных кор-
ректирующих скоростей путем последовательного проведения ли-
нейных преобразований (вращения и растяжения) осуществить
практически невозможно. Это объясняется тем, что растяжение
эллипсоида вдоль направлений, не совпадающих с его главными
осями, приводит к сложному преобразованию размеров и ориента-
ции эллипсоида. Более простым и наглядным преобразование будет
в случае совпадения направлений растяжения с главными осями,
либо при равенстве коэффициентов растяжения или полуосей эл-
липсоида рассеивания корректируемых параметров (эллипсоиды
135
влияния или рассеивания вырождаются в шар). Хотя это частные
случаи преобразования, однако с помощью дополнительных линей-
ных преобразований можно переходить к корректируемым пара-
метрам, являющимся линейной комбинацией исходных, для кото-
рых соответствующий эллипсоид рассеивания или эллипсоид влия-
ния вырождаются в шар. Применение их к эллипсоиду влияния
или эллипсоиду рассеивания зависит от цели исследования.
Рассмотрим изменение корреляционной матрицы распределения
компонент корректирующей скорости, соответствующее измене-
нию— момента проведения коррекции с tj на tj', а также выделим
простые случаи такого преобразования.
Пусть K[ur(/j)] — корреляционная матрица распределения ком-
понент корректирующей скорости при проведении ее в момент tj,
НГ(Д)— матрица производных в момент tj'. Выразим корреляци-
онную матрицу K[ur (//)], соответствующую новому моменту прове-
дения коррекции, через K[ur(^)] и НГ(Л,), Нг(//), тогда
К [и, (/})] = [НГ1«) НД/р] К [и,(/у)1 [НГ1 (б) Нг(/Д1Т. (3.22)
Применяя к (3.22) свойства полярного разложения, получим
к [и,(/;•)]=РН(th д)К[ид/7)]Ртн(<-, 0); (3 23)
Рн«, /7)=О(/;)Л^(6) 1н(О) Ih(/;)Ah(/;)Qt(6).
Из (3.23) следует, что для получения эллипсоида возможных
корректирующих скоростей для момента tj' необходимо эллипсоид,
соответствующий моменту tj, подвергнуть нескольким вращениям,
определяемым ортогональными матрицами Q(Z/), 1н (tj), Q(tj'),
I a(tj') и нескольким растяжениям с коэффициентами, соответству-
ющими матрицам Лн(М, Лн1 (//) (см. разд. 2.8). Рассмотрим не-
которые частные случаи преобразования эллипсоида корректиру-
ющих скоростей. Таких основных случаев, как и для детерминиро-
ванной коррекции, три.
1. Пусть при изменении времени проведения коррекции сохра-
няется взаимная зависимость между корректируемыми параметра-
ми, т. е. I H(tj') I н (tj) = ЕГ. Тогда, обозначив Лн (tj', tj) =
= Лн1 (tj')A.n (tj), получим
К [ur(/;•)] = Q (/;) Ан (t'j, t}) QT(/,-) кIur(/;)] Q (tj) Лн (tj, tj) QT (tj) ;
(3.24)
к [wKr (/;•)] =Лн(/у, /;)K[wKr(/7)]AH(//, tj) .
В этом случае эллипсоид возможных скоростей для момента tj
коррекции поворачивается относительно начала координат на уг-
лы, соответствующие ортогональной матрице QT(^). В результате
получается эллипсоид преобразованных корректирующих скоростей
для момента tj. Затем он растягивается вдоль осей координат; ко-
эффициенты растяжения равны отношению элементов матриц
136
. (f3) и Ан (tj). Полученный в результате растяжения эллипсоид
вляется эллипсоидом преобразованных корректирующих скоростей
дЛЯ момента tj'. Выполняя затем преобразования, соответствующие
ортогональной матрице QG/), получим эллипсоид возможных кор-
пектирующих скоростей для момента tj'. Необходимые условия для
случая (3.24) приведены в разд. 2.8.
Более простой случай преобразования имеет место, когда в мо-
мент проведения коррекции дополнительно выполняется равенство
К [wKr (/;)] = QT (tj) К [ur (/;)] Q (t})= Awr (tj), ITH (tj) 1ф (tj) = Er;
(3.25)
где Awr (^) = ll^wi (tj), ..., k2vr (tj)\\ — диагональная матрица.
Тогда
(3.27)
K[wKr(/;-)] = AH(4 ^)Awr(/y)AH(6, /;). (3.26)
Следовательно, если оси эллипсоида возможных преобразован-
ных корректирующих скоростей в момент tj совпадают с направле-
ниями растяжения, то это свойство сохраняется и в момент tj',
причем величина полуосей увеличивается пропорционально отно-
шению коэффициентов растяжения для tj и tj'.
2. Пусть при изменении момента проведения коррекции гради-
енты корректируемых параметров меняются таким образом, что
1н {tj) Ih (tj) = Er;
Ан1 {tj) ^n(tj)=a Er,
где a — некоторое положительное число.
Подставляя условия (3.27) в (3.23), получим
K[ur(/;)]=a2Q«)Q4/;)K[ur(/y)]Q(/y)Q4<) ;
(3.2о)
к [wKr (//)] = а1 К [wKr (/;)].
Из (3.28) следует, что исходный эллипсоид возможных скоро-
стей подвергается растяжению с коэффициентом а по всем осям,
оставаясь подобным исходному, а затем доворачивается на углы,
соответствующие произведению ортогональных матриц Q (if/) X
XQt(G)- Эллипсоиды рассеивания для wKr(//) и wKr(fy) подобны.
Необходимые условия для рассматриваемого случая — неизменные
углы между градиентами и пропорциональное изменение величины
градиентов.
3. Пусть при изменении времени проведения коррекции градиен-
ты корректируемых параметров изменяются таким образом, что
1й(//)1н(/у)=ЕГ1 Q«)QT(//) = Er, Лн1(0)Лн(/у)=яЕг. (3.29)
Тогда
к [ur (/))] = а? К [ur (/,)];
К [wKr (/'•)] = а2 К [wK,(/,)],
(3.30)
137
и эллипсоид возможных корректирующих скоростей в момент //
получается из эллипсоида, соответствующего моменту tj, увеличе-
нием его осей в а раз без изменения ориентации. Такое преобразо-
вание имеет место, если при изменении момента коррекции направ-
ления градиентов в пространстве сохраняются, а величина их изме-
няется пропорционально Нг(//) =а-1Н,•(/;•).
3.3. Исследование характеристик распределения отклонений
корректируемых параметров
Геометрической характеристикой распределения отклонений
корректируемых параметров служат их эллипсоиды рассеивания,
наибольший интерес из которых представляет эллипсоид началь-
ных ошибок. Исследование его свойств помогает сформулировать
рациональные требования к проектируемой САУ разгонного блока,
осуществляющего выведение АМС на межпланетную траекторию.
Принимая во внимание большое число факторов, влияющих на
работу системы управления, априорный закон распределения откло-
нений кинематических параметров в конце активного участка выве-
дения обычно считают нормальным и характеризуют корреляцион-
ный матрицей K[x(ZH)]. В рамках линейного анализа соответству-
ющие ошибки корректируемых параметров также распределены по
нормальному закону с матрицей вторых моментов, равной
К [Д Фк (/„)] = FK (/„) К [х (/„)] FJ (Q. (3.31)
Применяя к матрице FK(^H) размерности (гХб) свойства по-
лярного разложения и переходя с помощью линейного преобразова-
ния к независимым отклонениям параметров, получим
к [д ФкО=Ррх(/н) К [£(/„)] Pfx(U;
Pfx (Q = If (Q Af (fH) Q (ZH) Jx (/H),
где Fk(/h)=Sf(/h)Qf(/k);
Sf (Q = [FK (/H) f: (/H)F= If (Q Af (/h) i; (/h);
Q(/h)=i;(/h)Qf(/h);
k[x(/h)I=ix(/h)k [x(/H)] i;(/K).
Геометрический смысл преобразования (3.32) заключается в
следующем. Эллипсоид рассеивания, соответствующий матрице
отклонений независимых параметров K[x(ZH)L проецируется с по-
мощью ортогональной матрицы Qnp(^H) = Q(^i) 1х(^н) размерности
(гХб) на некоторую систему координат в подпространстве коррек-
тируемых параметров. Оси этой системы — направления растяже-
ния полученного после проецирования на подпространство коррек-
тируемых параметров эллипсоида рассеивания; коэффициенты рас-
тяжения определяются элементами кы (/„) диагональной матрицы
Af (fH). Полученный после растяжения r-мерный эллипсоид затем
138
подвергается еще одному линейному преобразованию с помощью
ортогональной матрицы !,= (/н) размерности (гХг). Ортогональные
матрицы 1Х(£Н) и IF(M характеризуют корреляцию и взаимную
зависимость ошибок выведения и корректируемых параметров. Для
некоррелированных ошибок выведения и независимых корректиру-
емых параметров эти матрицы единичные.
Коэффициенты растяжения Лрц^н) согласно рассмотренным ра-
нее свойствам собственных значений симметричной матрицы удов-
летворяют условию У'4/^н) = УПк!^н)^к<(^н)] и харак-
i = i i ="1
теризуют чувствительность траектории к ошибкам выведения, при-
чем начальный эллипсоид рассеивания корректируемых парамет-
ров пропорционален изменению (tn) при неизменной ориента-
ции эллипсоида ошибок выведения относительно подпространства
корректируемых параметров. Для независимых корректируемых
параметров коэффициенты растяжения V> (tH) —модули градиен-
тов корректируемых параметров. Ориентация эллипсоида ошибок
выведения относительно подпространства корректируемых пара-
метров и соответствующий эллипсоид ошибок выведения, спроеци-
рованный на подпространство корректируемых параметров, опре-
деляются матрицей Qnp(/H) = Q(/H)lx (О), причем изменение эллип-
соида начальных ошибок корректируемых параметров, как следует
из (3.32), того же порядка, что и элементов матрицы преобразова-
ния Опр(^н). Аналогично размеры эллипсоида ошибок выведения,
спроецированного на подпространство корректируемых парамет-
ров, при прочих равных условиях пропорциональны изменению
полуосей эллипсоида рассеивания независимых параметров, соот-
ветствующего матрице К[х,(^н)]- Таким образом, изменение эллип-
соида начальных ошибок корректируемых параметров, а следова-
тельно, и энергозатрат коррекции, того же порядка, что и измене-
ние элементов матриц преобразования (3.32).
При расчете ошибок выведения обычно имеет место неопреде-
ленность в элементах матрицы К[х(^н)], вызванная использованием
разного рода предположений и допущений о характере и величине
ошибок функционирования отдельных систем и законов их распре-
деления. Так как изменение эллипсоида начальных ошибок кор-
ректируемых параметров того же порядка, что и изменение элемен-
тов матриц 1Х(/П), К[х (/„)], то для исследования надежности полу-
чаемых оценок достаточно рассмотреть устойчивость приведения
корреляционной матрицы К[х(^н)] к каноническому виду.
Пусть корреляционная матрица ошибок выведения К[х(^н)] по-
лучает некоторое приращение таким образом, что
К' [х (/„)] = К [х (/H)] + d К [х (/„)], (3.33)
гДе К/(х(/н)] — новая матрица ошибок, близкая к исходной.
Будем считать, что все собственные значения матрицы К[х (£н)]
Различны, тогда согласно свойству канонического преобразования
симметричной матрицы справедливо следующее соотношение [16]:’
139’
d i к ix; /н)] i; (/„)} = d К [x (/„)] i, (/„) + К [ x (/„)] d i, (/H) =
= dXx;- (/H) i; (fH) 4- Xxi (fH) d i( (/H), 4=1,...,6. (3.34)
Так как K[x(/H)] имеет действительные собственные значения, то
d {К [х(/„)] i, (/„)} i*(/H) = d лх/ (/н) i(. (/„) i*(Q4-
+ Xxl(/H)diz(/H)C(/H),
(3.35)
где if(/H), 1s*Uh) —собственные векторы прямой и транспонирован-
ной корреляционных матриц распределения х(/н).
Если в выражении (3.35) положить i—s, то изменение собст-
венных значений не превышает
4К[х(/н)]ч('нЧ*('н) I К [х (/„)] | | Е(/н) | |
м/- * ''С'- . J I --
if (W i( Gh) I Ч(^н) i; (zh) I
= a!IK, | 4/K[x(/„)] | = | d K[x(/H)] I , (3.36)
I i< (^н) I | i* (^h) j ,
где atIK, = —j----*----i-L=l—коэффициент перекоса матри-
I i« (tH) i,- (tn) |
цы для i-го собственного значения симметричной матрицы;
|dK[x(/H)]|; |ii(/H) |—норма матрицы и модули собственных век-
торов.
Из (3.36) следует, что изменение собственных значений того же
порядка, что и неточность задания корреляционной матрицы оши-
бок выведения. Изменение собственных векторов не превышает
(при t =/=s): .
d iz(/h)< | d К [x (/„)] | I i, (/H) | x
________anKS_______
I ^x4 (^н) ХхД/н) |
(3.37)
где S' означает суммирование для всех s=/=t.
Из (3.37) видно, что задача определения собственных векторов
может оказаться неустойчивой только при близких собственных зна-
чениях. Однако, как следует из рассмотренных ранее преобразова-
ний, проекция эллипсоида ошибок на подпространство корректиру-
емых параметров в этом случае практически не изменится, несмот-
ря на большое изменение соответствующих собственных векторов,
следовательно, не изменится и эллипсоид корректирующих скоро-
стей. Таким образом, оценки начального рассеивания корректиру-
емых параметров и величины потребной характеристической ско-
рости коррекции по заданной корреляционной матрице ошибок
выведения достаточно надежны, так как небольшие погрешности мат-
рицы ошибок приводят к изменению матрицы отклонений корректи-
руемых параметров, не превышающему этих погрешностей.
Это свойство, справедливое не только для ошибок выведения,
но и для ошибок прогнозирования и исполнения коррекции, явля-
140
етСя еще одной причиной, объясняющей столь широкое использова-
ние нормального закона при исследовании статистических
характеристик различных технических систем в тех случаях,
когда параметры распределения их ошибок известны недостаточно
точно.
Чувствительность траектории перелета к ошибкам выведения
влияет на выбор траектории, отвечающей заданным свойствам. Так,
если необходимо выбрать траекторию перелета, обеспечивающую
выполнение условий (3.15) без проведения коррекций, то на основе
анализа зависимости ошибок корректируемых параметров от оши-
бок выведения и траектории движения, можно найти необходимые
параметры орбиты. При проектировании и запуске автоматического
КА «Луна-2», предназначенного для жесткой посадки на Луну,
была выбрана траектория со временем перелета 1,5 сут, которая
.позволила осуществить посадку при существовавших тогда ошиб-
ках системы управления без проведения коррекций. Эта траектория
значительно отличалась от энергетически оптимальной траектории
перелета к Луне и для ее реализации потребовалось увеличить
расход топлива на участке выведения АМС. Энергетически опти-
мальные траектории обычно более чувствительны к ошибкам выве-
дения, и полет по ним требует проведения коррекций для выполне-
ния заданных условий к точности наведения.
Для АМС выбрать такую траекторию перелета к планете, ко-
торая обеспечила бы требуемую точность наведения без проведе-
ния коррекций при существующих системах автономного управле-
ния движением центра масс и ошибках в моделях движения, не-
возможно. Это объясняется прежде всего высокими требованиями
к точности наведения и необходимостью использования энергети-
чески оптимальных траекторий перелета. Поэтому схема полета
любой АМС предусматривает проведение определенного количест-
ва коррекций траектории движения.
3.4. Анализ свойств распределения скорости коррекции.
Расчет энергозатрат наведения
При стохастической модели характеристические скорости кор-
рекции «(//), ug являются случайными величинами. Они связаны
нелинейными функциональными зависимостями со случайными ар-
гументами— компонентами векторов корректирующих скоростей:
ux(tj), В качестве оценки энергозатрат в этом случае не-
обходимо использовать различные детерминированные функции от
их распределения: математическое ожидание М[и (//)]; M[ugJ; второй
момент M2[u(/j)]; М2[ие]; квантили up(//); ugF; вероятность Р„ со-
бытия, когда характеристическая скорость коррекции не превыша-
ет располагаемого запаса «зап-
Напомним, что квантилью называется такое значение случай-
ной величины, для которой функция распределения имеет заданное
141
значение, равное Рзад. Квантили up(^), ugF находятся из решения
интегральных уравнений
Р[«(/,•)< «р(/,•)] = Рэад;
Р{^<«р] = Рзад
и при больших значениях заданного уровня вероятности Рзад>0,9
определяют предельно возможную величину характеристической
скорости коррекции, превышение которой в полете маловероятно.
Из рассмотренных характеристик энергозатрат наведения предпо-
чтительными являются две последние, так как позволяют оценить
необходимые запасы, обеспечивающие проведение запланирован-
ных коррекций с высоким уровнем надежности, который требуется
при управлении КА. Математическое ожидание, которое опреде-
ляет средние значения случайной величины, используется обычно
для систем массового обслуживания и такой критерий не показате-
лен для космической техники. Второй момент распределения, хотя
и дает представление о расположении и рассеивании данной случай-
ной величины, но недостаточно характеризует вероятностные оцен-
ки затрат. Основными достоинствами этих характеристик являют-
ся аддитивность и простота расчета по сравнению с квантилями
ugF и вероятностью Р„. Именно по этой причине они доволь-
но часто используются в качестве критерия качества в различных
прикладных задачах оптимального управления. Однако при про-
ектировании и управлении полетом космических аппаратов не-
обходима оценка предельных затрат на проведение коррекции, ко-
торые определяют запасы топлива и требования к двигательным
установкам. Поэтому использование математического ожидания и
второго момента распределения характеристической скорости кор-
рекции в качестве критерия
Рис. 3.2. Сферические коорди-
наты вектора корректирующей
скорости
оценки энергетических затрат нецеле-
сообразно. Для вычисления характери-
стик энергетических затрат стохасти-
ческой коррекции проведем анализ за-
кона распределения и определим плот-
ность распределения иг.
Рассмотрим закон распределения
характеристической скорости в первую
очередь для одноимпульсной коррек-
ции. Будем считать, что
Uz(tj)—взаимно независимые компо-
ненты корректирующей скорости, а
соответствующая матрица их распре-
деления К[и(^)]—диагональная (пе-
реход к независимым составляющим
можно всегда осуществить с помощью
ортогонального преобразования компо-
нент вектора корректирующей скоро-
сти). Плотность совместного распре-
деления компонент корректирующей
142
сКорости имеет вид многомерного нормального закона:
P[u(/y)I =------G7------ ехР
(2л) AXyZ
L °2 [«л G,-)]
4 Gy)
°2 [«у Gy)]
2
tfgGy)
’2[«zGy)l
(3.38)
где Axyz—cr[ux (^/)]cr[wy (^/)]<j[Uz (ij) ]; o[ux(^j)], o[wy(G)]> Q[«zU/)]
среднеквадратические отклонения распределения их(Ь), uy(tj),
Uzftj) соответственно.
Выберем в качестве новых переменных сферические координа-
ты (рис. 3.2), тогда
ил(^-) = «(^)соз Ру cos а у;
ид — s'n cos
uz (t}) = и (tj) sin a.j.
(3.39)
Проведя замену переменных в распределении (3.38) и учитывая
однозначность преобразования (3.39), можно получить выражение
для плотности совместного распределения новых переменных.
Чтобы определить плотность распределения характеристической
скорости одноимпульсной коррекции, необходимо найти интеграл
it/2 2к
p[«Gy)] = j j'p)«Gy, aj, ^j)\da}d^j.
—it/2 0
Это оказывается возможным в общем виде только для одно- и
двухпараметрической коррекции, причем в последнем случае плот-
ность распределения выражается через специальную цилиндриче-
скую функцию Бесселя первого рода нулевого порядка Для
трехпараметрической коррекции плотность распределения u(tj)
имеет следующий вид:
р [«Gy)] = “ (^j) exp f —«2Gy) X
Axyz I
2а2 [их (tj)] а2 [Uy (tj)] +a2[uz(tj)] {^[ux((j)] + a2 [lly (/;)])
4<з2 [«x Gy)] ’2 \uy Gy)] a2 [4z Gy)]
( 1 4 Sin 2ау {2а2 [Млг(/ )] x
a, exp — — «2 Gy)------------------------------
} 4 2 * 1 4a2[Mx(/;.)]X
тг/2
—n/2
X a2 [Uy Gy)] — a2 [Ux Gy)] а2 [цг Gy)l — °2 [“y Gy)] °2 [“z (</)]}
X a2 [Uy Gy)] °2 [Uz Gy)]
, , . 2 °2 [UX G/)l - ’2 [Uy (^y)] \1 , .Q
X JQ «2G/)cos2aj--------------------------------- u/a.-. (3.40)
1 1 1 4°2 [ux (G-)] ’2 [uy Gy)] /j 1 ’
143
Следовательно, вычисление характеристик энергозатрат коррек-
ции приводит к необходимости интегрирования достаточно сложных
выражений, содержащих плотность распределения корректирующей
скорости (3.40), которое при трехпараметрической коррекции мож-
но выполнить только численными методами. Исключение составля-
ет частный случай равенства среднеквадратичных отклонений не-
зависимых компонент корректирующей скорости, для которого рас-
пределение и (tj) есть стандартное распределение типа уЛ/.2 с чис-
лом степеней свободы, равным параметричности коррекции. Для
определения характеристик энергозатрат можно воспользоваться
свойствами и таблицами квантилей распределения Yу2 , причем
характеристическая скорость коррекции имеет плотность вероят-
ности следующего простого вида (a[ux(/y)] = a[uy(/y)]=a[wz(^)])i:
при двухпараметрической коррекции
‘ °2(Hx(G-)] I 2 [а [Ид. (/y)]j J
при трехпараметрической коррекции
, /"Г “W [ 1 Г “(</) ]21
р [и (tj)[— 1 /-----------exp 1----------------- ?.
|/ л a3 [их (tу)] I 2 L ® \Цх (/у)] J J
Задача еще более усложняется для многоразовой коррекции,
где требуется определить плотность распределения суммарной ха-
рактеристической скорости
g
tis = u.(tx)-\-g) = и (/у), (3.41)
/=i
причем случайные величины и (tj) в общем случае являются кор-
релированными. Однако при независимой коррекции, наиболее рас-
пространенной при наведении АМС, случайные составляющие в
(3.41) можно считать практически независимыми, если ошибки ис-
полнения коррекции значительно меньше величины самой коррек-
тирующей скорости. При таком допущении распределение ug яв-
ляется функцией распределения суммы g независимых слагаемых,
и плотность распределения суммарной характеристической скоро-
сти коррекции равна композиции плотностей распределения харак-
теристических скоростей отдельных коррекций
Р1иг]=р[«(Л)]*р1«(^2)] * •-• * P[«(^)L (3.42)
где * — знак композиции.
Таким образом, для определения характеристик многоразовой
коррекции необходимо g-кратное интегрирование произведения g
выражений типа (3.40), что само по себе является сложной зада-
чей. Поэтому непосредственно вычислять характеристики энергоза-
трат коррекции, используя плотность распределения корректиру-
ющих скоростей, при проектно-баллистических исследованиях край-
не трудоемко и нежелательно.
144
рассмотрим некоторые свойства распределения характеристи-
ческой скорости коррекции, позволяющие упростить методику оцен-
ки энергетики наведения.
Теорема 3.1. Любой четный момент порядка 2k случайной ве-
личины u(tj) равен моменту порядка k случайной величины и2(//).
Справедливость этого свойства следует непосредственно из из-
вестной теоремы теории вероятности, согласно которой любой мо-
мент случайной величины х, являющейся функцией f(y) случайной
величины у с известным законом распределения р (у), может быть
вычислен по формуле
Мп(х) = j fn (у)р (у) dy, (3.43)
— 00
или применительно к распределению u(tj) при n=2k
jW2J“<0)1= f и2к(f j)p\u2(f j)\ du2(f,)= J (//)!*p (/;)]da2(tj) =
0 0
где p[u2 (/j)] — плотность распределения случайной величины
Теорема 3.2. Четный момент порядка 2k случайной величины
u(tj) может быть определен по формуле
[«(/;)] = /-* X
dk {(1 - 2Za2 [их (tj)] t Г1/2 (1 - 2Za2 [Uy ((.)] T)-l/2 X
X(1-2Za2[^(/7)]T)-l/2}
X dr*
при r = 0. (3.44)
Действительно, если составляющие uz(tj) незави-
симы, то характеристическая функция случайной величины u2(tj)
равна произведению характеристических функций ее слагаемых
ux2(tj), uy2(tj), и2^)-.
<Pu>(t) = <pа2(т)ф 2(Т)ф 2(Т), (3.45)
х иУ иг
где фиг(т)—характеристическая функция случайной величины
Для нормально распределенных компонент корректирующей ско-
рости
V (Т) = {1 — 2za2\llx (/;)] Т} -Ч2, ...,
?„2 (r)= {1 — 2/а2 [uz (t;)] г}-1/2. (3.46)
г
Моменты связаны с характеристическими функциями следу-
ющим соотношением:
145
(£/) = £—(т) при т=0, (3.47)
где <pyft(r)—k-я производная характеристической функции случай-
ной величины у в нуле; i2—— 1.
Так как четные моменты распределения u(tj) согласно теоре-
ме 3.1 выражаются через моменты распределения u2(/j), то после
подстановки в (3.47) выражений (3.45) и (3.46) непосредственно
получаем доказываемое соотношение (3.44).
Следствие. Момент второго порядка случайной величины u(tj)
равен сумме квадратов полуосей эллипсоида возможных корректи-
рующих скоростей или следу корреляционной матрицы распределе-
ния вектора корректирующей скорости:
M2\u(tf)\ = Sp К ju(/;)].
Действительно,
2 ('«)'? 2 (Т)? 2(Т)]
U ии
M2[U (/;)]= -------------------- = <32 [Ux (//)!+ °2 (^)1 +
О т
+«2М/)1
Для математического ожидания распределения u(tf) докажем
следующее свойство. Будем, как и ранее, предполагать, что рас-
пределение компонент корректирующей скорости приведено к неза-
висимым составляющим ux(tt), uy(tj), uz(tj) со среднеквадратич-
ными отклонениями о[иж(^)], tf[uz(^)], причем без нарушения
общности можно положить eftux(tj)]^o[uy (//)]; а[их(/;)]^а[иг(^)]-
Введем следующие нормированные характеристики:
° \Цу (О)] , °[«г(0)] .
— '' ' > & И------- »
1 > аа >0; 1 > > 0;
. , . ч M[«(Q)] ф
*^11 -------- /- — — }
“ “ “ /М2 [и (/,)]
о / г. , ° [«
рв(а„, Ьи) = —г=— ,
причем 0u2(au, Ьи) = 1—ku2(au, bu), так как для любой случайной
величины M2[y]=M2[y]+a2i[y].
Коэффициенты ku и 0и являются нормированными математиче-
ским ожиданием и дисперсией с ограниченными пределами измене-
ния, зависящими только от соотношения между среднеквадратич-
ными распределения компонент вектора u(tj) и не зависящими от
их величины. Нормирование характеристик распределения u(tj)
можно осуществить различным образом, однако особенностью kit
и ри является их малое изменение в области определения аргумен-
тов аи и Ьи, которое позволяет аналитически установить более точ-
ные границы изменения М[и (//)], о[и (^)].
146
Теорема 3.3. Нормированное математическое ожидание и сред-
еквадратичное распределения u(tj) являются ограниченными функ-
циями параметров распределения и(^), изменяющимися во всей
возможной области их определения в пределах
A’
где = y2/л; — 8/Зл;
Й1)=/ 1 —2/л; fj(z3) = /1 — 8/Зл
__коэффициенты распределения У у? с одной и тремя степенями
свободы.
Докажем это. Математическое ожидание u(tj) равно
М {«(/;)] = j u(tj)p[u (/,.)] du
и
или, учитывая известные свойства моментов случайной величины,
являющейся функцией от случайных аргументов, а также следствие
из свойства 3.2, получим
/, 2 । /)2\ —1/2 » « «
ku(aa, &„) = (2я)3/2J J J 1«х(/7) + ^(6-) + «г(/;)]1/2Х
— ОО — со —со
и/(/,)+-%^-+—А
2*2[«а'/)] [ 1
1
X ехр
dux(tj)dUy(tj)duz(tj).
(3.48)
Введем новые переменные =—»(/.); Zl= —uz(t j),
Uu Ьц
причем детерминант преобразования равен
D Uy(tj), uz(tj)]
------------------------= а„Ь„.
D [-4, Щ,
Тогда
ka Ьи)
А
00
00
(2л)3/2 a4 [Цд. (<y)J
W+Avi + ^Гх
— с© —. оо — оо
х ехр { - 2 * „п U1 + yi + j d Xi d У1 d Z1. (3.49)
Проведя замену переменных в (3.49), используя сферические
координаты, получим следующее выражение:
147
(1 + a2 +J2\-V2 «"4
ku(au, bu} = (2л)з/294 [и ~ j j J «3(/y)cos a; [1 +(6U- I) sin2ay-p
7 0 0 —K/2
4- (a« — I) sin2 py cos2 ay]1/2 exp
2o2[ux (//)]
d «(/;) d aj d Py.
(3.50)
Рассмотрим вычисление интеграла, входящего в выражение
(3.50):
оо 2т: тс/2
^U=JJ j «3(/y)cos a.j [1 +(^п— 1) sin2ay +
o о -я/2
Ш-0
sin2 py cos2 ay]1/2 exp
Ц2 (Q)
2a2(ux(/;)]
d «(Z;) d a;- d py =
2я «/2
= j j CCS «у [l+(iu— l) sin2 ay-r(<2u — I) sin2 py COS2 ay]1/2 X
0 —k/2
xda'df/f“1(C>exp[-1X-i-
af«(/y) = 2a4[«x(Zy)] x
2 2 0 '
J cos ay IJ [I +(z>u2— l) sin2a;--|-(au— l) sin2Py cos2 ay]1/2 dpy( day.
—ff/2 IO J
(3.51)
Далее вычислим интеграл, входящий в (3.51),
2к
/71„= У [1 + (^и — 1) sin2 ay 4-(flu — 1) sin2 Ру cos2 ay]1/2d Py =
о
= 4 [1 + (62- 1) sin2
где
a,Г
tc/2
*0 -
(1 — a2) cos2 ay sin2
1 — (1 — Л2) Sin2 dy
1/2
dP7,
.2 . (l-a2)cos2g|y
U 1 — (1 — Л2) sin2 aj ’
O<-AU<1, если au^-0, bu^0.
Выражение J [1 — Au sin2py]1/2d py при Aucl есть пол-
ный эллиптический интеграл второго рода, который может быть
представлен в виде разложения в ряд с помощью гипергеометри-
ческой функции Гаусса F(a, [3; у, z):
ъ/2
H.uUu)= \ [1-4 sin2Py]1/2dPy=^-F (-Y, 4-; 1. ^2)=
0
= *Ji—La;—!2±д!-...-Г <2»-i>4 . (3.52)
2 ( 22 22-4 22л! J 2л— 1 j v
148
Тогда получим
3 (au- 1)2cos4 a,
64 [1 — (i2 — I) sin2 a^]2 •••
(3.53)
Подставляя (3.53) в (3.51) с точностью до первых трех чле-
нов разложения полного эллиптического интеграла, после некото-
рых преобразований будем иметь
«/2
Ну cos а;-[1 — (1 — ft2) sin2 a;-]1/2day—
'о
"Z2 (1 — я2) cos2 а,
— 2ла4 [и (/,•)] I —Ц---------5--------— cos а< d а.- —
1 1 - (1 -i2) sin2 а. 1 1
т 7*2 (1—a2)2cos4 ay
- Ла4 [и (/.•)] cos а.- -=—Ц---------------L— d а, =
’ J ’ D "О "*«) sin2 Иу]2 }
где
1 — с2х2и dxu — f —
4 oJ Г
3 Г
64 J <гп^м3 “
0
2х2
ихи
d хи —
(3.54)
sin а7 = лц; cosa;-=|/ 1 — x2u\
c2=i-^; *2=i-*2-
Интегралы входящие в (3.54) —табличные, поэтому после
приведения подобных членов, получим следующее выражение для
безразмерного коэффициента ku(au, bu):
(1 + вц + *2)-1/2 ( (1-«и)
ku(au, bu)=----------------- 2б„-----2----— б„ +
“ “ “ - “ 2(1—iB)2
,2б„-
(2л)!/2 [
4(1 —42) + (1-я2) [1-2(1 -42)] . г--------
arcsin |/ 1 — ь2и —
4 (1-я2)2
32 *«(1-*2)2
____________3
(1-42)3/2 (I-42)s/2
з (1-^)2
16 ьа
2(1 -*2)3/2
, 15 С1 - a2 2
32 Mi-*2)
4
~т|- (1 — a2)2arcsin ]/1 —б2
10 w
(3.55)
И9
Соотношение (3.55) позволяет установить, что коэффициент
ku(au, bu) является монотонно возрастающей на интервале (0,1)
функций аргументов аи и Ьи, и кроме того, с точностью до трех чле-
нов разложения полного эллиптического интеграла второго рода
определяет его значения. Отметим, что в случае необходимости
точность расчета ku(au, bu) можно увеличить, использовав боль-
шее число членов разложения (3.52), причем получаемые новые
интегралы в выражении (3.54) также табличные, однако соотноше-
ние для ku(au, bu) окажется более громоздким. Установим преде-
лы изменения Ьи bu). Для этого в силу (3.55) рассмотрим пове-
дение функции ku(au, bu) в окрестности аи = 0, bu = 0 и аи=1
Ьи=1.
Для нахождения верхнего предела Ьи(аи, Ьи) представим
подынтегральное выражение в (3.48) в следующем виде:
j j S (^+^+^i)lgexp{- ‘ (^ + i>;+
— eo —oo —eo '
+*i) ldjc1d^1d^1= j J J + eiV?~
' — OO OO OO
— e2z2]1/2 exp { — 2--[aJ(Z }] (x^y^z^d xxd yxd zv
Положив e~ 61^82 и сделав замену переменных в (3.48), полу-
чим после некоторых преобразований с точностью до 82:
, . , . . (1 +2e2)V2
ka<dia, bu)<------------------
(2n)3^4 [uAi )]
x/2 /
C u3(/7-)cos а7-ехр| —
—it/2 (
«2 (tj)
2« [«х (C’)l
X d u(t}) d a}- d P;— e2 J J J u3(tj) cos a}- (cos2 a}- sin2 py-|-
0 0 —jt/2
+ sin2 ay) d u(tj) d a; d 8y== 1/ — fl--e2^!— s2)< 1 / — ,
V 3л \ 3 j у 3л
(3.56)
откуда следует, что ku (аи, bu) при аи^1, bus^l ограничена сверху
значением 8/Зл.
Аналогичным образом преобразовав выражение (3.50) в окрест-
ности a„ = 0, &и = 0, получим, что значения коэффициента ограни-
чены снизу
150
Таблица 2
Число степеней свободы Моменты Коэффициенты ар(/ х2)
м (V х2) м2(/ х2) k X ₽х Р=0,9 Р = 0,97 Р=0,997
1 У2/лаи Си2 0,797 0,609 1,41 2,27 3,565
2 Ул/2аи 2аи2 0,885 0,464 1,35 2,125 3,28
3 2у2/лаи Зч„2 0,921 0,387 1,34 2,1 3,21
Среднее значение — — 0,86 0,5 1,375 2,185 3,39
2^(1 +al+b^-lft
(я)я/2
£и(а„, bu)
л/2
j COS Cty [ 1-{-(в2 — 1) Sid2 Cty]1^2 X
— л/2
X I С [1------——— sin2 р/1 d Р Д d а, 1 f —
L 1 +e2tg2a; L4;| 1 У я •
Так как (3u(au, bu) связано c ku(au, bu) зависимостью
₽2(au, 6U)=1 —£2(au, bu),
то для ограниченной монотонно возрастающей функции £u(au, bu}
соответствующая ей функция pu(au, bu} также будет ограниченной,
убывающей с ростом аи и Ьи, изменяющейся в пределах
/л _ 2 X1/2 / Зя _ 8 Х1/2
—— > («и, bj > — --------- .
\ Л / \ оЛ j
Таким образом теорема полностью доказана.
В табл. 2 приведены значения первых двух моментов и норми-
рованных моментов ku, pu для предельных случаев изменения ар-
гументов аи, Ьи, соответствующих распределению типа Т^х2 с чис-
лом степеней свободы от 1 до 3. Из таблицы видно, что первый и
второй моменты увеличиваются в 2—3 раза при увеличении числа
степеней свободы. В то же время изменение нормированных харак-
теристик не превышает 20 ...30%, что позволяет, выбрав средние
значения ku(au, bu), ₽u(au, bu) с ошибкой не более 10... 15%, опре-
делять математическое ожидание и дисперсию распределения и(^)
по следующим простым соотношениям:
а\и (Zfy)] = 0,5 {а2\UX (/;•)]+ а2 [иу (/,)] %-а2\uz (/,)]}1/2.
151
Рис. 3.3. Зависимость нор-
мированных значений
М [a(G)J и o[u(fj)] от при-
веденного числа корректи-
руемых параметров гПр
Использование осреднении*
коэффициентов возможно только
для качественных оценок момен-
тов распределения «(/,-) и недо-
статочно для оценки энергетики
коррекции. Для повышения точ-
ности расчета целесообразно ис-
пользовать зависимость коэффи-
циентов ku(au, bu), pu(ou, bu) от
au, bu вида (3.55), либо их графи-
ческие зависимости от обобщен-
ного параметра-—приведенного
числа корректируемых парамет-
ров; Гпр= l+au2+&u2- На рис. 3.3
приведена такая зависимость, полученная путем интегрирования
(3.40) методом статистических испытаний в области определения
параметров аи, Ьи. Графическую зависимость можно приближенно
аппроксимировать квадратичной параболой
ka Ьи)--------0,03г2р + 0,18гпР+0,64.
Использование зависимости ku(au, bu) одного из указанных ви-
дов позволяет повысить точность расчета /И [м (/,•)], <з[и(/Д] до 5%.
Стандартное распределение V'/} имеет большое значение для
анализа свойств любых нечетных моментов распределения «(//).
Выполнив аналогичные преобразования, можно установить грани-
цы возможного изменения нормированных моментов третьего и бо-
лее порядков, получить приближенные зависимости их от парамет-
ров du И Ьи*
При известных математическом ожидании и дисперсии распре-
деления характеристической скорости определение квантилей удоб-
но проводить в виде
мр (/;) = М\и (/;)] 4- ар<з\u (tj)];
Mp = M[wg] + a£a[zzg,I (3’57^
где ap, agp — константы, зависящие от заданного уровня вероятно-
сти и параметров распределения характеристической скорости кор-
рекции. Значение констант может быть оценено с помощью нера-
венства Чебышева [25]
Р
и (tj) — Л4 [и (/;)]
а [и (<,)]
= (/.)>-!
ар
ар*
1
которое недостаточно сильное и для распределения характеристи-
ческой скорости даст недопустимо завышенные оценки энергоза-
трат, особенно при больших уровнях вероятности. С другой стороны,
на основании предельной теоремы [23], условия которой выпол-
няются для многоразовой коррекции, распределение суммарной ха-
152
ктеристической скорости асимптотически нормально при g—>-оо.
Поэтому при большом числе коррекций можно воспользоваться
цепкой agp для нормального закона. Особенность коррекции тра-
ектории движения АМС состоит в том, что число управляющих
воздействий обычно не превышает 2—4 на каждом участке полета,
оценка энергозатрат наведения с использованием нормального
закона окажется оценкой снизу, что недопустимо. Поэтому необ-
ходимо исследовать не асимптотическое поведение функции рас-
пределения характеристической скорости, а ограничиться числом
управляющих воздействий не более 5—6, так как при дальнейшем
увеличении числа коррекций распределение окажется достаточно
близким к нормальному.
Плотность и функцию распределения характеристической скоро-
сти можно представить в виде разложения по ортогональным поли-
номам нормированной случайной величины. Теоретически сходи-
мость такого разложения доказана для сравнительно небольшого
класса распределений. На практике для распределений с ограни-
ченными моментами небольшое число слагаемых дает удовлетвори-
тельное приближение к искомым плотности и функции распределе-
ния:
р р
сг сс
р I ~ Рн [«’I + р'3) [«^1+ р£,4) 1«^]+ • • ;
р р
Л r Q 1
(3.58)
их производные v-ro порядка, cvp — коэффи-
зависящие от моментов распределения
разложения, принимаемых для расчета, за-
где ри[-], GH[-], pH(v)[-], Gh(v)[-]— плотность, функция распределения
нормального закона и
циенты разложения,
„ Па — М Гц»-]
ц(/,.), = 5 .
О (««-]
Количество членов
висит от g и при числе управляющих воздействий не менее 3—4,
если параметры распределения ы(^) близки между собой, не пре-
вышает 5. Коэффициенты разложения необходимо определять на
основании полученных выше свойств распределения ы(^), что при-
водит к определенным вычислительным сложностям.
Проведенный с помощью разложения (3.58) и методом статис-
тических испытаний анализ распределения характеристической ско-
рости коррекции при ограниченном числе управляющих воздейст-
вий показал, что при уровне вероятности Рид>0,9 справедливы
Следующие свойства:
коэффициент ар(аи, Ьи) при любых аи, Ьи из допустимой облас-
ти не превышает значений коэффициента ар распределения^%2 с
°Дной и тремя степенями свободы соответственно
а^<аР(аи, Ьа) <а(Р^;
153
Рис. 3.4. Зависимость ар
одноимпульсной коррек-
ции от приведенного чис-
ла корректируемых пара-
метров ГПр
1,0 1,5 2,0 2,5 5,0 дПр
Рис. 3.5. Зависимость agp много-
разовой коррекции от приведенно-
го числа корректируемых пара-
метров и числа коррекций
(-------значения для нормаль-
ного закона распределения):
гпр = 1’ % гпр = 2* гпр = 3
коэффициент agp не превышает значений коэффициента нормаль-
ного распределения и распределения с одной степенью свободы,
причем G[u°g]^Gri[uag], G[u°gl]< G[u°gJ, если gi<gz, а все коррекции
имеют одинаковые характеристики распределения.
Для практического использования целесообразно применять
приближенные зависимости для ар и agp от приведенного числа
корректируемых параметров и приведенного числа коррекций, ко-
торые определяются выражениями
g [ц (G)] ф
a[zz(G)]
yi ° [ц (G)J
3 [« (6)]
/=1
где условно принято, что для первой коррекции дисперсия распре-
деления u(tj) наибольшая.
На рис. 3.4, 3.5 приведены зависимости для ар и agp, которые
с точностью не хуже 5% позволяют оценить энергозатраты коррек-
ции. Таким образом, приведенная методика позволяет вычислить
энергозатраты на проведение стохастической коррекции с достаточ-
ной для решения задач наведения точностью без численного инте-
грирования сложных выражений, связанных с функциями распре-
154
деления случайной характеристической скорости, по следующим
простым формулам:
/И [и (/у)] = ku(аи, bu)\Sp К [и (/Д]}1/2;
a [u(.tj)] = ^u(au, bu) [5/?К [и(/;)]}1/2;
«р(/у) = [£а(аа> 6а) + аР(аа, bu)^u(au, bu)\ {Sp К [и (/у)1}1/2;
S
15/7К1и(МР/2+
/=1
( g V/2
+ ?2(ав. ^)5/?K[u(/;)] ,
b=i J
где ku (•), рИ (•), а? (•), аД — коэффициенты, зависящие от средне-
квадратических отклонений независимо распределенных компонент
корректирующей скорости.
Использование такого алгоритма вероятностной оценки энерго-
затрат наведения позволяет сократить запасы топлива на борту
КА ча 20 ...40% по сравнению с тем, что дают существующие спо-
собы оценки предельной величины суммарной характеристической
скорости коррекции. Эффективность использования методики воз-
растает для перспективных АМС, запускаемых по сложным схемам
полета с большим числом управляющих воздействий.
3.5. Ошибки исполнения стохастической коррекции
При детерминированной линейной модели управляемого объек-
та зависимость между ошибками исполнения коррекции и ошибка-
ми САУ определяется следующим соотношением (см. разд. 2.10):
Ви(//) = Вс(/у)Вус(/Д (3.59)
где бус(^) —вектор ошибок бортовых систем, включающий ошиб-
ки ориентации вектора тяги, нормальной и боковой стабилизации
Движения центра масс и выключения ДУ.
При стохастической коррекции составляющие ошибок бортовых
систем и корректирующего импульса имеют случайный характер.
Поэтому ошибки исполнения стохастической коррекции являются
функциями двух групп случайных аргументов. Первая группа —
непосредственно ошибки системы управления: б«хс(^)> би2/с(^),
^ИгС(%), 60U, 6aj, 6|3j, а вторая группа — компоненты вектора рас-
четной корректирующей скорости, являющиеся случайными при
стохастической коррекции: «(/,-), а,, 0,. Даже при нормальном за-
коне распределения ошибок САУ результирующие ошибки испол-
нения имеют закон распределения, отличный от нормального, так
Как закон распределения второй группы случайных аргументов, су-
щественно негауссовский (см. разд. 3.4). Получение закона и пара-
метров распределения ошибок стохастической коррекции являет-
ся сложной задачей. Используемые в настоящее время способы оце-
155
нок этих характеристик не обладают достаточной точностью. Они
недостаточно корректно учитывают особенности распределения еду.
чайных аргументов, что приводит к существенному завышению тре-
бований к системе автономного управления и запасам топлива, не-
обходимыми для наведения АМС.
Рассмотрим влияние различных бортовых систем на ошибки ис-
полнения управляющих воздействий, законы и параметры их рас-
пределения. Для каждой конкретной реализации, принадлежащей
генеральной совокупности возможных значений вектора корректи-
рующей скорости, параметры uz(^), а/, р/ имеют фиксированные
значения, а ошибки исполнения коррекции зависят только от оши-
бок системы управления и связаны с ними линейным преобразо-
ванием (3.59). Если задана плотность распределения ошибок сис-
темы управления р[бус(О)]> то, произведя линейную замену пере-
менных в плотности распределения случайной величины бус(О), по-
лучим плотность распределения ошибок исполнения коррекции при
фиксированном векторе корректирующей скорости. Такой случай
характерен для находящегося в полете КА, когда известна траек-
тория движения и рассчитывается очередное корректирующее уп-
равление. Возможные ошибки исполнения такой коррекции, опре-
деляемые априорно перед ее реализацией, характеризуются плот-
ностью распределения р[6и (^)/и'(tj)], которую можно рассматри-
вать как условную плотность распределения ошибок исполнения
для статистической коррекции, определенную при условии, что вто-
рая группа случайных аргументов (компонентов расчетного вектора
корректирующей скорости) имеют заданные значения. Для систе-
мы случайных величин f>ux(tj), ..., д«г(0)> u(tj), р3, а/ совместная
плотность их распределения имеет следующий вид:
pfS^^y) u(tj)r^, ay] = p[8u(/7)/u(/;)Jp[zz(/;), aj,
(3.60)
а плотность совместного распределения ошибок исполнения кор-
рекции равна
оо 2тс тс/2
p{8u(/;-)] = J J j pJSu(/7)/u(/,-)]р[«(/,-), a;]d «(/,-) d3y da,.
0 0 — tc/2
(3.61)
Естественно предположить, что ошибки системы управления —
нормально распределенные величины с нулевыми математическими
ожиданиями и заданной корреляционной матрицей К[6ус(^)], при-
чем
Р I8 Ус (О')! — (2^5/2^ |K[Syc(/;)]T Х
х ехр [ —Г ,8 У' К-1 Is Ус (ZPl8 У' ] •
156
Линейные функции, определяемые преобразованием (3.59), нор-
мально распределенных величин бус(^), также нормальны, следо-
рательно,
Р [8 U (/ ,-)/и' (/,)] =-Тд-у 1 --- X
1 1 (2л)3/2/ |K[6u(/;)/u' (/;)]!
хехр{ — -у [&uT(/y)(K[&u(/;)/u'(^)])-1Su(/7)]j, (3.62}
где K[5u(Z/)u'(Z/)]=Bc'(^) К[бус(^)]Вс/т(^) —корреляционная мат-
рица условного распределения ошибок исполнения коррекции, г
Вс'(^)—матрица Вс(/.?) при подстановке в нее значений «(/;) =
^«'(М- Р?=₽/> (см. разд. 2.10).
Из (3.62) следует, что при фиксированном векторе корректирую-
щей скорости возможные ошибки его реализации, осуществляемой
с помощью бортовых систем, при принятых допущениях распреде-
лены по нормальному закону с корреляционной матрицей
Вс'(^) К[ёУс(^)]Вс'т(^).
Для получения плотности распределения би(/;) при стохастиче-
ской коррекции необходимо проинтегрировать совместную плот-
ность распределения системы случайных величин бижс(^), бр>
а3-, р3- по всей области возможных значений и(/3), тогда, ис-
пользуя (3.62), будем иметь
! Ч2 a2(7pcosa;
P [8u(/7)] (2я)3 j j |вс (O)K(8yc(/7)]Bcr(/,-)|1/2 X
X expl - [BuT(/y) (Bc (/y)K [8 yc (/;)] Bcr(/;))-l 8 U/(;)]} X
( , Г a2 (/.) cos2 a . cos2 p.
XeXpt-----2
a2[ax(Z;)]
a2 (j sin2 ai 1
°2 [uz (0)J - J
a2 (t.) cos2 asin2
°2 [«</ (MJ
d«(/;)da7dPy,
(3.63)
если оси фиксированной системы координат oxyz совпадают с ося-
ми эллипсоида возможных корректирующих скоростей. В общем
случае определить функцию распределения ошибок исполнения кор-
рекции, проинтегрировав (3.63), не представляется возможным. Это
объясняется главным образом тем, что случайные аргументы u(fj),
aj> Рз имеют сложный закон распределения, отличный от нормаль-
ного. Действительно, выражение для плотности распределения u(fj}
имеет вид (3.40), а плотности распределения а3, р, равны:
где
, . cos a.
; Р [“;] = —-------а7чЬ~'Е [(^аГ1)172] ,
лДХУ2
cos2 py sin2 Ру
157
cos2 a. sin2 a.
a«=----------—I--------— ;
a2[Mr(^)] a2[«z(0)J
cos2 a, sin2 a,
ft =-----------1-------— ,
£[•]— полный эллиптический интеграл второго рода.
Поэтому даже при нормальном законе распределения ошибок
системы управления соответствующий закон распределения ошибок
исполнения коррекции не является нормальным и не приводится ни
к одному из стандартных законов.
Для качественного анализа покажем на примере пропорци-
ональной ошибки величины скорости коррекции 69u и ошибки ори-
ентации бес,- скорости коррекции вид этих законов. Пусть при ра-
боте системы управления имеет место только пропорциональная
ошибка интегратора, тогда, положив 6aj = d|3j = O, 6uxc((j) =
= биус(tj) —0, f>uzc(tj) =dBuu(tj), где 69u— случайная ошибка, вы-
разим плотность распределения ошибок исполнения коррекции,
соответствующих пропорциональной ошибке интегратора, через ус-
ловную плотность в виде
00
р0 [8 и (/,)]= j р [8 и0(/у)/86„] р [89
(3.64)
тде в силу линейного преобразования du0 (tj) =69uu (^)
р [8 и0 (/y)/89J = (ff~2 ехр [ — -2-(86„)2 {8 uj (/,-) X
(2л) ' AXyZ L *
X K-1[u(/y)J8 u0(/;)}]. (3.65)
После подстановки (3.65) в (3.63) получим в результате инте-
грирования
n rs й 1 ( (О)]2 , 1М/)12
Рй о U (г ,-) =----775---------(------------------------
(2«)3/2о(9и)
A-xyz ( a2[wx(^)] [Иг ((,•)]
[8MW у/‘2сх ( /2 Г (^HQ)]2 [5MQ)]2
°2(“г(^)] J ’(9а) I. ’2[«л(^)] °2 (МО)]
[S^(Q)]2 ъ
’2[«г(0)) В’
(3.66)
где о(9и)—среднеквадратичное отклонение нормально распреде-
ленной случайной величины 69u.
Если при проведении коррекции имеет место только ошибка dfb
ориентации вектора тяги, то соответствующая плотность распреде-
ления ошибок исполнения коррекции имеет вид
158
рр [8 u (/,-)]
0-1 (5?/) [ [8ax(Q)]2
2лЛХу ( <?2[«x (/;)]
[8«y(0)]2 ^1/2
®2[Му(^)] J X
x exp
/2 r [tox(Q)F , [toy(Q)]2 1
о (SPy)[ о2[Ил.(/у)] <I2 [Uy (/;)] J
(3.67)
где a(6pj)—среднеквадратичное случайной величины 6|3у, имею-
щей нормальное распределение.
Выражения (3.66), (3.67) являются плотностями распределе-
ния частных ошибок исполнения коррекции и наглядно характеризу-
ют отличие закона распределения от нормального.
Корреляционная матрица ошибок исполнения, необходимая для
расчета стохастической коррекции, может быть получена на осно-
ве использования совместной плотности распределения ошибок кор-
рекции (3.63) только путем численного интегрирования соответст-
вующих выражений. Такой способ очень неудобен для расчета, так
как приводит к существенному усложнению оценки ошибок ис-
полнения.
Представим ошибку исполнения коррекции в виде суммы оши-
бок ориентации оси ДУ и стабилизации движения:
6 6
8и (/Д=28 (3.68)
t=i i=i
(cos py sin аД /— sin ру\
sin Ру sin dj j ; ?2 (^) = l cos $j j ’
— cos а, / \ 0 /
(cospycosay\ /u(tj) cos sin аД
sin Py cos a.j j! (.tj) — I и (tj) sinPy cos а у I >
sin ay / \ u(tj) sin ay /
( — u(tj) sin py cos ay\ / zz(/y)cos py sin a;\
и (tj) cos py cos ay I! 1б(^)=| u(tj) sin py sin a, I •
0 / \ — u.(tj) cos ay /
Считая ошибки САУ независимыми, корреляционную матрицу
ошибок исполнения коррекции можно получить как сумму корреля-
ционных матриц всех составляющих, если они известны:
6
К {8 и (/,-)] = 2K[Suz(/y)J. (3.69)
Х = 1
Так как вычислить К[бщ(^-)] без численного интегрирования:
Практически невозможно, воспользуемся оценкой корреляционной
Матрицы, получаемой формальной заменой случайных величин их
вторыми моментами:
15»
K[8U1(/y)I=-------a2<^----------K[₽;, aj;
ЛГ2 [u (/;)] M2 [zz (1!,)]
a2 (3zzyc)
К [8 u2 (/>•)] = -QtK [u (/;)] Qj;
лг2 [a (tj)]
KI8u3(/p] — a2(B“zc) K[u(/y)I;
K[8u4(/;)j=33(e„)KIu(/;)I;
K[8u5(/y)I=a2(8py)QlK[u(^)JQj;
(3.70)
a2 (Sa .•)
KI8u6(/;.)]=--------L^—Крз,., aj;
M2 [zz (,,-)]
K[^, aJ=
a2[zzx(/y)]a2[Mz(/;-)j О H
0 0 {»2[MW’%(W
где M2 fit (/;)] = a2 [Ux (/;)!+ a2 \Uy (/;)].
Возможность определения К[диг-((;)] на основании формальной
замены случайных величин их моментами не следует из свойств
распределения функций от случайных переменных. Поэтому необ-
ходимо оценить возникающие из-за такой замены ошибки приме-
нительно к распределению ошибок исполнения коррекции.
Для составляющих ошибок САУ 60u и б|83-, для которых ранее
были получены плотности распределения, корреляционные матри-
цы соответствующих ошибок корректирующей! скорости можно по-
лучить либо интегрированием выражений для вторых моментов, ли-
бо на основании свойств дисперсии произведения независимых цент-
рированных случайных величин, тогда корреляционные матрицы
.имеют вид
K[8u4(/y)] = a2(e„)KIu(/y)I;
К )8 u5(//)J = a2(8^.)Q1 К [и Q},
где 8и4(/j) = {ux(tj)-,
uz(tj)]TMu; 8и5(/;)=[— ux(t}), 0]T8^-,
который полностью совпадает с выражением (3.70), полученным
формальной заменой случайных величин их вторыми моментами.
Рассмотрим часто встречающийся в практике случай, когда дис-
3 60
версии распределения компонент корректирующей скорости рав-
ны между собой. Тогда случайные величины ы(^), a,, Р; взаимно
независимы и имеют сравнительно простые законы распределения:
u2(/j)cosa; ( и2 (t.-) )
pla(C-), а,- =---------------}-—ехр------------}--;
И1 7 1 1 (2л)3/2аЗ [Ux(t.)] Ч 2а2[аИ^)Н
п аз[Цх(/;)] еХР( 2а2[«ж(^)] J’
р1М= р[«/1=у cosa/> (3-71)
что позволяет определить вторые моменты распределения составля-
ющих ошибок исполнения, проинтегрировав соответствующие соот-
ношения:
оо 2п я/2
М2(^) =
aj р[а (/,), Рр a,-] dti(tj)d$jda.j,
(3.72)
а7]р [а (/у), Ру-, aj\d u{tj)d^j d a.j.
О О —я/2
Воспользовавшись свойствами моментов распределения функ-
ции случайных аргументов и подставив в (3.72) выражения для
случайных функций и плотности распределения (3.68) и (3.71),
проинтегрируем их и получим вторые моменты ошибок исполнения
коррекции:
(3.73)
7W2(^1) = Af2(^i)= 1/6; /и2($г1) = 2/3;
М2 ($Л2)=М2 (^2) = 1 /2.1 М2 ($г2)=0;
7W2(^3) = ^2M = ^2(U)= 1/3;
7W2(^4) = M2(^4)=?M2(^) = a2[ax(/y)];
^2 — (^5) = °2\их (^/)J;
(И2($г5)=0; ?И2(^6) = Л12(^6)=а2[аж(/;)]/2; 7И2(^6) = 2а2[цж(^)].
Смешанные моменты второго порядка для любых двух компо-
нент ошибок равны нулю, т. е. они некоррелированы. Корреляцион-
ные матрицы распределения частных ошибок исполнения коррек-
ции в рассматриваемом случае равны:
К[6и1(/у)] = 32(5Ижс)
— О О
6
О — О
6
9
0 0 —
3
; К[Su2(/у)] = a2(Sayc)
-00
2
О —О
2
ООО
6-850
161
К[8 u3 (f;)] = a2 (8мгс)
— 00
3
0 — О
3
КI8u4 (ty)I = a2 \ux (9„)
1 0 0
0 1 0
0 0 1
1 0 0
К18 u5(fy)]==O2[^(^)]a2(8py)
0 1 0
ООО
К)8 u6 (/,)] = a2\ux (tj)\ a2 (8ay)
— 0 0
2
0 — 0
2
0 0 2
Аналогичные результаты получаются и при подстановке в (3.70)
данных, соответствующих этому предельному случаю. Вторым пре-
дельным случаем является следующий: cr[ux (t j) ];> cr[uv (t;) ],
o’[«x(^)]^>cr[uz(/j)], t. e. когда при проведении коррекции одна из
осей эллипсоида возможных корректирующих скоростей намного
превышает другие. Тогда, преобразовав с учетом этого выражение
для плотности совместного распределения сферических координат
вектора корректирующей скорости, получим соответствующие соот-
ношения типа (3.72), которые проинтегрируем и найдем вторые мо-
менты распределения компонент векторов составляющих ошибок
проведения коррекции
А42 (^1)=°2 (8мхс); М2 Сх4)=М2 [и (tУ)1 а2 (6О);
Af2(^2) = a2(8ttgc); Л72(^5) = Л72[М(/;-)]а2(83у); (3.74)
^2(^3) = a2(5«zc); M2(lx6)=M2 [U (f;)]a2 (8аД
причем все остальные моменты равны нулю. Сравнивая получен-
ные выражения с (3.70) нетрудно убедиться в полном совпадении
результатов.
Следует отметить, что проведение маневра соответствует рас-
смотренному выше случаю, так как линеаризация динамической
системы осуществляется с учетом расчетных параметров управле-
ния. Поэтому можно считать, что ошибки проведения маневра, свя-
занные с ошибками работы системы автономного управления двй-
162
НЙЯ КА, и их корреляционная матрица определяются соотноше-
нием (3.74). Таким образом, для двух предельных случаев исполь-
зование выражений (3.70) при расчете корреляционных матриц
ошибок исполнения коррекций вполне допустимо. Для произволь-
ных соотношений полуосей эллипсоида методом статистических ис-
пытаний была осуществлена проверка справедливости приведен-
ной методики. Определялись элементы корреляционной матрицы
ошибок исполнения коррекции в широком диапазоне изменения
значений параметров, характеризующих распределение корректиру-
ющей скорости (аи, Ьи) и ошибок систем управления [ ° —,...,
> а также соответствующие им плотности и
функции распределения составляющих ошибок исполнения коррек-
ции. Проверка показала, что с достаточной для проектных иссле-
дований точностью (не хуже 5%) формальная замена случайных
величин их вторыми моментами возможна для получения частных
корреляционных матриц (3.70). Кроме того, предельные ошибки
исполнения коррекции для каждой из компонент, полученные ме-
тодом статистических испытаний, близки к предельным ошибкам
нормального закона при равных значениях среднеквадратичной
ошибки. Учитывая это обстоятельство и те трудности, которые воз-
никают в методике расчета стохастической коррекции, если закон
распределения ошибок отличается от нормального, будем считать,
что ошибки исполнения коррекции распределены приближенно по
нормальному закону с корреляционной матрицей (3.69) в системе
координат, связанной с независимыми компонентами корректиру-
ющей скорости. Для перехода к произвольной системе координат
необходимо корреляционную матрицу (3.69) подвергнуть соответ-
ствующим ортогональным преобразованиям.
3.6. Вероятностный и гарантирующий подходы
к задаче коррекции движения
В предыдущих разделах были рассмотрены с единых методичес-
ких позиций различные аспекты анализа линейной стохастической
коррекции, основанные на предположении, что ошибки выведения
АМС на траекторию перелета, прогнозирования движения и вы-
полнения управляющих воздействий распределены по нормальному
закону с известными моментными характеристиками. Однако дей-
ствительные законы распределения ошибок выведения, прогнози-
рования движения и исполнения коррекций неизвестны, и они, ес-
тественно, могут отличаться от принятых в расчете. Это, в свою оче-
РеДь, приводит к тому, что фактические характеристики возможных
°Шибок и энергозатрат наведения будут отличаться от данных, оп-
ределяемых с помощью приведенных в разд. 3.1, 3.4, 3.5 соотноше-
НИЙ. Такая ситуация при проектных исследованиях наиболее опас-
На в том случае, когда получаемые оценки значительно занижены
6* 163
по сравнению с действительными характеристиками. Поэтому в по-
следнее время при решении задач наведения наряду с вероятност-
ным рассматривается также гарантирующий подход [49]. Сущность
его заключается в следующем. Будем считать, что при исследова-
нии коррекции точные значения вероятностных характеристик оши-
бок выведения, прогнозирования движения и исполнения коррекции
неизвестны. Даны либо множество законов распределения, либо
диапазоны возможного изменения параметров известных законов
распределения, которым должны принадлежать действительные ве-
роятностные характеристики соответствующих ошибок:
р[х (/„)[££ .^[Х (/„)];
р[о<р"(/у)]е :й[8ф"(М; (3-75)
р [Ви (/,)[ е [8 и (/;•)[,
где ^[-]— заданное вероятностное множество.
Частным и наиболее простым случаем такого множества могут
быть замкнутые области в пространствах кинематических и терми-
нальных параметров, которым принадлежат все возможные реа-
лизации ошибок выведения, прогнозирования движения и испол-
нения коррекции:
х(/н)е J?Jx(/„)]; 8<p"(^)e [8<рп(г1;)]; 8 и (/,-) е J£[8 и (/,-)], (3.76)
где Я [•] — заданное множество евклидового пространства.
При гарантирующей коррекции необходимо найти такие оценки
точности и энергетических затрат наведения, которые на множест-
вах (3.75) обеспечивают выполнение следующих условий:
Р[Д <p+ (/g)e J?,,]=minP [Д <р+ (/g)e ^/^[х(/„)], 5Э[Ви(/;)]);
(3.77)
P[«g<«*] = minP [zzg <«£/.©] х (/„)], ...,^[8u(/,)[}.
Если ошибки заданы условием (3.76), то в выражении (3.77) ве-
роятностные оценки следует заменить на детерминированные. Для
каждой возможной реализации из генеральной совокупности, опре-
деляемой условиями (3.75) или (3.76), значения Дфк+(/Д, и(Г>),
связаны с х(/н), 6фп(Г,), 6u(ij) соотношениями (2.66) ... (2.69) при
связанной коррекции или (2.70) при независимой коррекции. Гаран-
тирующий подход является более общим решением задачи коррек-
ции и из него, как частный случай, могут быть получены условия
стохастической коррекции, если каждое множество ^{х(/и)>
^[6фп(/J], ^[6u(/j)] будет состоять только из одного элемента. Ус-
ложнение модели управляемой динамической системы приводит к
тому, что решение задачи наведения должно осуществляться только
численным способом, основанным на использовании статистического
моделирования, построении соответствующих законов распределе-
ния ошибок и суммарной характеристической скорости наведения
с последующим перебором всех допустимых распределений исход-
164
нЫХ ошибок р[х(/н)], р[6фп(^)], p[6u(G)l и определением таких их
комбинаций, которые обеспечивают выполнение условия (3.77).
Решение этой задачи при исследовании наведения АМС, преду-
сматривающего проведение независимых или связанных многора-
зовых коррекций, настолько трудоемко, что практически гаранти-
рующий подход реализуем только при дополнительных упрощаю-
щих предположениях. Они сводятся к следующему. Во-первых,
может упрощаться вид характеристик, используемых в качестве оце-
нок точности и энергетических затрат наведения. В ряде работ
[4, 12] применяются для этих целей математические ожидания рас-
пределений суммарной характеристической скорости и квадрата
ошибок наведения, вычисление которых значительно проще, чем
функций их распределения. Кроме того решение задачи коррекции
базируется на использовании свойства аддитивности математиче-
ского ожидания. Во-вторых, упрощается вид множества
53 [х О, 53 (/;)], .33 [5 и (/;)].
Допустимо предположить, что ошибки управляемой динами-
ческой системы имеют нормальные законы распределения с ну-
левыми математическими ожиданиями и неизвестными корреляци-
онными матрицами, элементы которых могут изменяться в задан-
ных пределах. В такой постановке решение задачи гарантирован-
ной коррекции сводится к многократному расчету характеристик
стохастической коррекции для каждой реализации из заданного
множества корреляционных матриц с использованием приведенных
в разд. 3.1 ...3.5 методов и последующего выбора таких ошибок вы-
ведения, прогнозирования движения и исполнения коррекции, ко-
торые удовлетворяют условию (3.77). Другим вариантом задания
допустимого множества ошибок управляемой динамической систе-
мы, в известном смысле противоположном рассмотренному выше,
является использование условий (3.76) в предположении, что зако-
ны распределения ошибок вообще неизвестны, однако определены
области, ограничивающие их возможные значения. Отсутствие ка-
ких-либо данных о вероятностных свойствах ошибок выведения,
прогнозирования движения и исполнения коррекции не позволяет
использовать в задаче коррекции методы статистического анализа.
Для получения гарантированных оценок достаточно определить
максимально возможные на заданном множестве значения ошибок
и энергетических затрат наведения, т. е. решать задачу наведения,
используя минимаксный подход в рамках детерминированной моде-
ли. Следует отметить, что применение того или другого допущения,
к сожалению, не всегда связано с физическими особенностями ис-
следуемого объекта и практическими требованиями, а подчас опре-
деляется соображениями простоты исследований или возможностью
получения аналитических решений.
В качестве примера гарантирующей коррекции рассмотрим наи-
более простой случай, когда допустимое множество ошибок x(iI1),
бФп(С), би (С) задается условиями вида (3.76). Пусть в заданные
Моменты времени t\, tj, ..., tg проводится многоразовая г-пара-
165
метрическая коррекция траектории движения КА. Тогда требова-
ния к точности наведения определяются следующим соотношением:
Дф+ (/р Е (3.78)
Сформулированные в разд. 2.4 свойства оптимальной детерми-
нированной линейной коррекции позволяют условия (3.78) заме-
нить условиями вида равенства и использовать для расчета пара-
метров управления рекуррентные соотношения (2.66) ... (2.69), если
в каждый момент tj заданы исправляемые отклонения корректируе-
мых параметров, ошибки прогнозирования движения, исполнения
коррекции, матрица C(f,) при проведении связанной коррекции и
вектор номинальных корректируемых параметров. Эти характерис-
тики стратегии наведения должны выбираться таким образом, что-
бы при всех возможных ошибках динамической системы, опреде-
ляемых выражением (3.76), с минимальными энергозатратами
обеспечить выполнение требований к точности наведения. Тогда для
получения гарантированной оценки энергетических затрат наведе-
ния необходимо найти
Г е
«g=rnin шах max max min ... max max УаЧЦ
дф°(<к) х</н) 6<₽n(G) !“((>) C(G) 5?ч(«г) «u(/g.)
(3.79)
при условии Дср^г(/р = шах шах ([д<р^(/g.)-(-Д<р£(/к)]} 6= Я?',
^(tg)
Дф^ (//) = [Е (Г) — С (/;)] Д<р + (/7-0 — С (/ j) Вфп (/;) + Е (Г) F (/;) 0U (/;).
(3.80)
Из (3.79) и (3.80) следует, что текущее состояние управляемой
динамической системы однозначно определяется совокупностью па-
раметров Дфк+ (tj-1), 6<ркп(Д)), 6и(/р, а критерий качества управ-
ления — аддитивный. Поэтому решение задачи сводится к проце-
дуре динамического программирования. Напомним, что принцип
оптимальности Р. Белмана справедлив для процессов, развитие ко-
торых при t>tj зависит только от состояния системы в момент tj
и не связано с характером их протекания до tj. Нетрудно видеть,
что рассматриваемая система обладает указанным свойством. Тог-
да в соответствии с общей схемой его применения рассмотрим про-
цесс управления движением КА в обратном порядке, т. е. начиная
с последней g-n коррекции. Предположим, что при расчете ее ха-
рактеристик известно состояние системы, тогда параметры управ-
ления и ошибки наведения равны
u+ (/р = —Qn (tg) НГ1 (ig) [ Д<р+(^_!) + 8<р" (/р[ + Bu (/р; (3.81)
Дфк (*Р = -Вфк (tg) + Е (г) F (/р Bu ttgy,
В<рп(/ре 53[Вфп(/р];
Ви(/р е S3 [Ви (/pl,
166
a
P
гарантированная оценка энергетических затрат на проведение кор-
екдии определяется выражением
urg — u7g + max max u+(tg) =
бф”(^) 6u(^>
= 4_1 + Sg_1[A<pK+(/g_1), 8<p"(/p, 8u(/p], (3.82)
где urg-i характеризует гарантированную оценку энергетических
затрат предшествующих g—I-й коррекций, от которых зависит сос-
тояние динамической системы перед выполнением последнего уп-
равляющего воздействия. Слагаемое Srg-i соответствует гаранти-
рованной оценке энергозатрат последней коррекции, причем в
(3.82) использовано свойство аддитивности рассматриваемого кри-
терия. Таким образом, если фактические отклонения корректируе-
мых параметров в результате проведенного в моменты ti,...,tg-\ уп-
равления движением равны Д<рк+Gg-i), то запасы топлива на бор-
ту КА, гарантирующие проведение последней коррекции с учетом
возможных ошибок прогнозирования и исполнения, оцениваются
условием
[Д<р+(/g-j), 8фк(^),
8u(/g)] = wr(/g) = max max и+(tg). (3.83)
s<pn(/g) 6u('P
Рассмотрим теперь второй шаг. Считая заданным состояние сис-
темы перед проведением коррекции в момент tg-X, запишем крите-
рий качества следующим образом:
Wg—Mg—2-|-5g—2 [Дфк Cg—2), 8<pK(/g_j), 8u (tg—1)] > (3.84)
где Sg-2 [Д ф^ (tg_2), 8u(/^_1)] =
= max max min [u+ (/^-jl-j-Sg-i} ,
причем в соответствии с (3.81) имеем
Дфк (tg_ 1)=Д ф?(/г_2)4-Е(г)Р(/г_1)и+(/г_1).
Аналогичным образом, продолжая далее этот процесс, получим
рекуррентное соотношение, определяющее функцию Srj-I при лю-
бом индексе /:
[д Фк (C'-i), 8фк(Л), 8 и (/,)] = max max min {м+(/7-)-|-
8<₽"
+ 5ДДф+U+(/у),..., 8 u(//+1)]} . (3.85)
Учитывая (3.85), задачу гарантированной оценки энергетиче-
ских затрат на проведение g коррекций представим в следующем
виде:
167
tig= min /max max max min [u+
д<₽0(М1Х('кМП(М8и('‘>С(<1)
max max min \u+(tj) +max max «+(/g)T, (3.86)
Sq>,I(/j.)6“(zy)c(f7)l 5<P"(^)5W JJ
при условии
max max (Л <рк(/к) +Д cp^(/^)J e J?<p;
s ф"(/7) e® f8¥k<0>]; X(/H)e®[x(/H)]; 3u(/pe ®[Su(/y)I.
Применение процедуры динамического программирования поз-
воляет свести решение задачи гарантированной коррекции к сово-
купности экстремальных (минимаксных) задач, оценивающих энер-
гетические затраты на каждой из последовательно проводимых
коррекций на множестве допустимых текущих состояний управля-
емой системы. Не углубляясь в вычислительные аспекты поиска ре-
шения (3.86), тем не менее отметим, что численная реализация
процедуры применительно к задаче гарантированной коррекции тра-
ектории движения АМС оказывается крайне сложной и трудоем-
кой. Поэтому при всей привлекательности общей постановки зада-
чи гарантированной коррекции практическое ее использование ог-
раничено из-за отсутствия эффективных методов решения. В ряде
работ рассматриваются модельные примеры, охватывающие наибо-
лее простые случаи — одноразовые или однопараметрические кор-
рекции [49]. Гарантированные оценки предполагают возможность
появления в полете наихудшей комбинации ошибок выведения,
прогнозирования движения и исполнения при каждой из последо-
вательно проводимых коррекций и по своей природе определяют
максимальные энергетические затраты и ошибки наведения. Эти
оценки не учитывают вероятности появления такой исключитель-
ной ситуации и поэтому, как правило, значительно превышают ана-
логичные характеристики стохастической коррекции. Покажем это
на примере однопараметрической независимой коррекции при ус-
ловии, что на допустимые векторы корректирующей скорости ог-
раничений не накладывается, а номинальные значения корректиру-
емых параметров заданы. Пусть в момент проведения последней
g-й коррекции известно, что
I (^-i) | < Л?к1 I 8<рк1 (/г) I < (^);
| 8игс(/?) | <8м2дс(/г); | 89„(/г) | <89д(^). (3.87)
Тогда для гарантированной оценки энергетических затрат по-
следней коррекции и точности наведения необходимо определить:
uT{tg)— max max max | m(/^)-]-8m(/^) | ;
Ч+И^-i) 8“(^)
168
Л??1г(^)= щах шах |д^(/g)| , (3.88)
5<№)8u(^
где [a?k+i(^-i) + 8?ki(^)] ;
8zz (/g) = 8zzzc (/*) + 89u (tg) u(tg);
A<?id (^) = /K1 (^) 8« (^) - 8?ki (^)-
Подставляя в (3.88) соответствующие выражения для ошибок
исполнения коррекции и отклонений корректируемых параметров
после ее проведения и учитывая (3.87), получим следующую
оценку:
Иг (^)=I (^) I [ 1 + 80« (^)] [ Д®К1 (^-1)+8®кТ (/р] + 8«zc (tg);
Д<йг(^)= I /к1(6') I [8zz*c(/g) + 89^(/p] + 8<p”f(tg). (3.89)
Сравним полученные результаты с оценками стохастической кор-
рекции. Для этого предположим, что предельные ошибки (3.87)
соответствуют утроенным среднеквадратичным отклонениям оши-
бок стохастической модели управляемого движения КА. В этом
случае с вероятностью Р = 0,997 характеристическая скорость g-й
коррекции и ошибки наведения не превышают (для стохастической
модели):
up(tg)= {/?i2(/p [1 + (89ид(/р)2] [Д<Рк1(^_г)2+
+ (8<р"?(/р)2] + [8«дс(/р]2)1/2;
ДТк1Р (tg) = {[/к1 (tg) (tg)}2 + [/к1 (tg) 89* (tg) а [и (/г)П2 +
+ М(/р]2}1/2. (3.90)
Сравнивая (3.89) и (3.90), нетрудно видеть, что гарантирован-
ные оценки характеристик g-й коррекции превышают вероятност-
ные, и различие между ними возрастает с увеличением ошибок
прогнозирования и исполнения коррекции, особенно при оценке точ-
ности наведения. При многоразовой коррекции разница между га-
рантированной и вероятностной оценками существенно растет с
Увеличением числа коррекций. Так как ugr является аддитивной
Функцией, то при g-разовой коррекции она равна сумме ur(tj)
каждой из последовательно проводимых коррекций, а при стохас-
тической коррекции ugp определяется выражением (3.57) и не из-
меняется пропорционально числу коррекций. Если для простоты
предположить, что оценки характеристической скорости каждой
коррекции равны между собой (в рамках соответствующих моде-
лей), то
иг=^ uT(tj) = gnT(tg);
7=1 _ (3.91)
«J=[0,27g+0X/g] up(tg).
169
и таким образом уже при g = 4 гарантированная оценка энергоза-
трат однопараметрической многоразовой коррекции практически
вдвое превышает вероятностную оценку. Аналогичным образом вли-
яет и увеличение параметричности коррекции, которое приводит к
значительному росту разницы в оценках. Поэтому применение га-
рантированного подхода должно основываться на физических свой-
ствах исследуемой динамической системы и подтверждаться опы-
том проектирования АМС и управления их полетом. В противном
случае использование таких оценок может оказаться слишком до-
рогой платой за гарантию и привести к неоправданному увеличе-
нию запасов топлива на наведение и требований к точностным ха-
рактеристикам систем навигации и автоматического управления
движением.
С этой точки зрения представляется целесообразным сравнить
оценки характеристик коррекции, полученные по априорным сведе-
ниям о возможных ошибках выведения, прогнозирования движе-
ния и исполнения коррекций с фактическими данными, получен-
ными при управлении полетом АМС. Следует отметить, что в кос-
мической технике возможность получения экспериментальных ре-
зультатов в сопоставимых условиях чрезвычайно ограничена. Уни-
кальность и высокая стоимость космических исследований, изме-
нение условий и целей полета, постоянное совершенствование са-
мих аппаратов и их бортовых систем практически не позволяют
воспользоваться методами статистического анализа для достовер-
ной проверки гипотезы о законе распределения ошибок исследуе-
мой динамической системы и сделать обоснованный выбор способа
оценки характеристик наведения. Проанализируем некоторые ре-
зультаты расчетов баллистики и навигации АМС. Так как харак-
теристики наведения существенно зависят не только от ошибок
функционирования бортовых систем, но и от траектории перелета,
то для удобства сопоставления экспериментальных данных преоб-
разуем их следующим образом. Для каждой траектории полета
АМС и схемы полета на основе приведенных выше методов оценим
характеристики стохастической коррекции: К[Д<рк(^н)], К{Л<рк+(^)]-
ир (/]), ир(/2), которые будем использовать для нормирования со-
ответствующих фактических характеристик двухразовой коррекции
траекторий движения этих АМС, полученных по результатам ана-
лиза навигационной и телеметрической информации. На рис. 3.6, «
приведен полученный таким образом эллипс возможных начальных
отклонений координат вектора прицельной дальности в картинной
плоскости, а также фактические ошибки реализации этих парамет-
ров для траектории перелета. Соответствующие эллипсы рассеива-
ния с полуосями, равными утроенным среднеквадратичным откло-
нениям, условно совмещены, следовательно, экспериментальные
данные показывают относительное положение и ориентацию фаН'
тических ошибок в эллипсах рассеивания. На рис. 3.6, б представ-
лены нормированные предельными значениями wp(^i), цр(/2) вели-
чины характеристических скоростей первой и второй коррекции-
Эти результаты имеют скорее качественный, чем количественный
170
Рис. 3.6. Характеристики ошибок выведения (а) и коррекций межпланетной тра-
ектории (б) АМС (Р = 0,997)
характер, однако показывают, что во всех рассмотренных случаях
экспериментальные данные не превышали оценок, полученных в
предположении нормального закона распределения ошибок выведе-
ния, прогнозирования движения и исполнения коррекций, значи-
тельно изменяясь в различных реализациях. Данные, конечно, не
являются доказательством правомерности использования только
вероятностного подхода при проектно-баллистических исследовани-
ях наведения АМС. Однако целесообразность перехода к гаранти-
рованным оценкам должна быть рассмотрена в каждой конкретной
задаче. Необходимо учитывать, что на практике из-за трудности
моделирования реальных условий работы наземных и бортовых сис-
тем навигации, наведения, автономного управления движением, не-
достаточно известном характере действующих на них возмущений,
приводимые разработчиками априорные оценки возможных оши-
бок функционирования систем, как правило, завышаются. Поэтому
стремление получить гарантированную оценку на каждом этапе
проектирования или решения задач навигации и наведения, ориен-
тируясь только на наихудшую комбинацию условий полета, может
привести к неоправданному ухудшению характеристик самого КА
и качества управления движением. Кроме того, при проведении ис-
следований существенное значение имеет простота методик рас-
чета, которая должна позволить провести анализ большого числа
в°зможных вариантов схем полета и управления движением, выб-
рав из них наиболее подходящий для каждого конкретного КА. Ус-
тойчивость характеристик, основанных на гауссовском распреде-
ении первичных случайных величин, к вариациям априорных дан-
1х> позволяет надеяться на то, что значительные ошибки оценки
энергетике и точности наведения при вероятностном подходе мо-
Ут быть исключены.
Глава 4
СИНТЕЗ ОПТИМАЛЬНОЙ СТРАТЕГИИ
КОРРЕКЦИИ
Рассмотренные в предыдущих разделах методы расчета и ана-
лиза коррекции траектории движения при детерминированной и
стохастической моделях управляемой динамической системы поз-
воляют перейти к рассмотрению главной задачи наведения — син-
теза оптимальной стратегии. Получение общего решения
задачи существующими методами математической теории оп-
тимальных систем практически невозможно, что объясняется
неаддитивной зависимостью критерия качества управления сис-
темой от параметров управления (корректирующих скоростей), а
также сложностью самой модели динамической системы, особенно
при исследовании стохастической коррекции. В последнем случае
текущее состояние системы должно быть описано достаточными
статистиками. Рассматриваемый класс динамических систем не от-
носится к системам с пассивным накоплением информации, у ко-
торых точность навигации не зависит от стратегии наведения. Для
современных АМС точность определения траектории полета сущест-
венно зависит от величины навигационного интервала. Поэтому даже
при заданной стратегии измерений точность прогнозирования дви-
жения зависит от стратегии наведения, количества коррекций и
места и времени их проведения. Следовательно, оценка точности
на каждом навигационном интервале должна проводиться совмест-
но с выбором оптимальной стратегии наведения, а характерис-
тики точности и энергетики наведения оказываются взаимно зави-
симыми.
Существуют два вида стратегии управления — рандомизирован-
ная и нерандомизированная [4]. Стратегия считается нерандомизи-
рованной, если управляющее воздействие определяется единствен-
ным образом при известном текущем состоянии системы. Иными
словами, она является некоторой последовательностью функций,
ставящей в соответствие всем прошлым и текущим измерениям, а
также прошлым управлениям определенные векторы корректирую-
щих скоростей. Если управляющие воздействия выражаются неко-
торым случайным преобразованием, то соответствующая стратегия
управления считается рандомизированной.
Нерандомизированная стратегия коррекции характеризуется
количеством корректирующих воздействий, временами их проведе-
ния, матрицами связи каждой коррекции или ее параметричностью
172
при независимой коррекции. Совокупность параметров UK, одно-
значно определяющих стратегию наведения, как правило, такова,
Что помимо выполнения основных требований, связанных с задан-
ными условиями подлета к планете назначения, можно удовлетво-
рить дополнительному условию экстремума критерия качества на-
ведения. Если для детерминированной модели динамической систе-
мы оптимальная стратегия является наилучшей из всех возможных
при конкретном состоянии системы (отклонений корректируемых
параметров, ошибок прогнозирования и исполнения коррекций), то
при стохастической модели она является наилучшей в среднем, для
всей генеральной совокупности возможных траекторий полета.
Существуют различные способы упрощения общей задачи син-
теза оптимальной стратегии, связанные с выбором критерия качест-
ва и навигационой модели, которые позволяют получить численное
или аналитическое решение. С этой целью, как правило, применя-
ются аддитивные критерии оптимальности, имеющие более удоб-
ную для исследований функциональную зависимость от парамет-
ров управления, и модель взаимно независимых ошибок систем,
В ряде случаев управляемая динамическая система сводится к сис-
теме с пассивным накоплением информации, что позволяет считать
ошибки прогнозирования не зависящими от стратегии коррекции
и в конечном счете проводить оптимизацию стратегии практически
без учета требований к точности навигации. Однако такие решения
не могут быть использованы при проектно-баллистических иссле-
дованиях и создании КА, так как не позволяют корректно оценить
энергетические затраты на управление и необходимые запасы топ-
лива на борту, а также требования к системам навигации и наве-
дения, допустимым ошибкам их функционирования.
4.1. Методы синтеза оптимальной стратегии коррекции
Сформулируем задачу синтеза стохастически оптимальной стра-
тегии коррекции, воспользовавшись общей постановкой задачи при-
менительно к одной из наиболее сложных из рассматриваемых мо-
делей динамической системы — стохастической модели.
Пусть на некотором участке полета Т: [/н, /к] задана наблюдае-
мая и управляемая линейная стохастическая динамическая систе-
ма, характеризуемая при проектно-баллистических исследованиях
совокупностью параметров, определяющих номинальные схему и
траекторию перелета и возможные ошибки выведения. Выбраны из-
меряемые параметры d и стратегия наблюдений UHa6 на множестве
Допустимых времен измерений ТнавеТ для каждого навигационного
интервала. Если известны корреляционные матрицы ошибок измере-
ний К[АН(О] и ошибок модели наблюдаемой системы К[?2(0L то ПРИ
заданных стратегиях навигации и наведения в рамках принятых ме-
тодов статистической обработки измерений и оценки точности нави-
гации могут быть определены в любой текущий момент t^T ошиб-
ки прогнозирования терминальных параметров К[6<рп(0], соответ-
ствующие всей совокупности проведенных к этому моменту измере-
173
ний. Стратегия наблюдений на навигационном интервале оптимизи-
руется в процессе ее синтеза с использованием существующих мето-
дов планирования навигационных измерений [28, 24, 9, 48, 49].
Управляющие воздействия заданы в классе импульсных функций
Йг с ограниченным изменением на множестве допустимых времен
управления ТупеТ. Множество Туп— кусочно-непрерывное, состоя-
щее из ограниченного числа упорядоченных и непрерывных интерва-
лов, на которых при принятых моделях функционирования бортовых
систем 3~i выполняются все ограничения, обеспечивающие возмож-
ность их нормальной работы. Проверка ограничений проводится для
всего множества возможных траекторий в рамках нелинейной моде-
ли динамической системы и принятой схемы полета. В этом случае
соответствующие интервалы будут иметь случайный характер, опре-
деляя вероятность выполнения ограничений, связанных с работой
систем. Однако для АМС в силу специфических условий их полета и
особенностей работы бортовых систем ориентации и управления
движением (см. разд. 1.6) проверка ограничений может проводить-
ся только для нелинейной детерминированной динамической систе-
мы с начальными условиями Х]°(/н), так как изменением интервалов
на заданном множестве траекторий с большой вероятностью можно
пренебречь. Исключение могут составлять отдельные участки дви-
жения АМС вблизи планет назначения, которые требуют вероятност-
ной или гарантированной оценки выполнения ограничений по работе
бортовых систем ориентации, вызванных влиянием планеты. Если
при проектно-баллистических исследованиях отсутствуют достовер-
ные модели бортовых систем, ограничивающие допустимые интер-
валы управления, то в качестве Туп может быть принято все мно-
жество Т. Частным случаем множества Туп является ограниченное
дискретное множество моментов проведения управляющих воздей-
ствий.
Возможны также линейные ограничения на допустимые направ-
ления корректирующих скоростей, связанные с функционированием
бортовых систем при проведении управляющих воздействий. Эти ог-
раничения должны учитываться при расчете корректирующей ско-
рости, что может быть выполнено с помощью соответствующего ор-
тогонального преобразования пространства корректирующих ско-
ростей (см. разд. 2.6).
Ошибки проведения управляющих воздействий принадлежат ве-
роятностному пространству ^i(0, а их характеристики зависят от
параметров стохастической модели работы САУ, установленной на
АМС, причем плотность распределения ошибок исполнения коррек-
ции не совпадает ни с одним из хорошо известных законов (см.
разд. 3.5). Однако при проектно-баллистических исследованиях для
оценки ошибок управляющих воздействий можно воспользоваться
достаточно точной и универсальной методикой определения ошибок
исполнения стохастической коррекции в рамках самовоспроизво-
дящего гауссовского закона распределения (см. разд. 3.5). В этом
случае вероятностное пространство ^i(Z) случайных возмущении
(/) модели динамической системы однозначно описывается кор-
174
реляционной матрицей ошибок K[6u(tj)], соответствующей задан-
ной корреляционной матрице ошибок систем ориентации и управле-
ния К[6ус (tj)].
Ограничения на конечные значения фазовых координат заменя-
ются ограничениями на терминальные (выходные) параметры ди-
намической системы, а вероятность выполнения ограничений по
фазовым координатам — вероятностью принадлежности параметров
<рк(0 соответствующей области J?q> допустимых значений. Эта заме-
на осуществляется в каждом конкретном случае с помощью моде-
лей бортовых систем АМС и позволяет при решении задач управле-
ния динамической системой осуществить переход к некоторому на-
бору универсальных параметров, из которых выбираются корректи-
руемые параметры <рк(0 (см. разд. 1.7, 2.3). Специфические особен-
ности конкретной АМС в этом случае определяют размеры и форму
области Как уже отмечалось, в число корректируемых пара-
метров необходимо включать минимально возможное количество
терминальных параметров <р, не допуская присутствия в их составе
функционально связанных между собой параметров, взаимно одно-
значная зависимость которых резко увеличивает затраты топлива на
управление. Для исключения таких параметров необходимо провес-
ти анализ состава корректируемых параметров с учетом требований
к точности наведения, характеризуемых размерами области J$<p.
Допустимые стратегии наведения определяют управляющее воз-
действие u(lj)eQ2 и ^-еТуп в зависимости от текущих отклонений
корректируемых параметров Д<рк(^) в виде следующего линейного
преобразования:
и(/;)= — НГЧ/рСС/ДДфк(/Д при y<ga, (4.1)
где gz — максимальное возможное число управляющих воздействий
на интервале Т.
Соотношение (4.1) для стохастической модели динамической сис-
темы порождает два различных класса стратегий управления в за-
висимости от того, применяется ли оно к каждому случайному от-
клонению Дфк(^) или ко всей совокупности возможных траекто-
рий. В первом случае параметры С (Л,), характеризующие страте-
гию управления, должны выбираться для каждого случайного зна-
чения Дфк(^) и поэтому сами являются детерминированными функ-
циями случайных аргументов — параметров состояния динамиче-
ской системы. При проектно-баллистических исследованиях обыч-
но используются стратегии второго класса, определяющие единый
способ исправления отклонений корректируемых параметров для
®сей совокупности возможных состояний системы в момент прове-
дения управляющего воздействия, вне зависимости от их конкрет-
ных-значений, которая, учитывая нормальный закон распределения
дЧ’к(^), имеет вид
К [U (/;)] = [НГ1 (/;) С (/,)] К 1Д Фк (/;)] [НГ1 (/;) С (/;)]-. (4.2)
175
Таким образом, стратегия наведения UK в этом классе допусти-
мых стратегий однозначно определяется набором параметров g, t„
которые используются для разработки программы управле-
ния полетом, единой для всех возможных траекторий полета АМС.
Хотя такая стратегия приводит к некоторому увеличению энерго-
затрат наведения, однако она существенно упрощает организацию
управления полетом и поэтому широко используется на практике.
Возможные состояния динамической системы, характеризуемые
корреляционой матрицей К[Дф(/3)], рассчитываются с помощью
соотношений (3.2) ... (3.13). Таким образом, задача синтеза стоха-
стически оптимальной коррекции формулируется следующим обра-
зом. Для генеральной совокупности возможных состояний линейной
динамической системы, определяемой корреляционными матрица-
ми ошибок выведения К[х(/Н)], ошибок системы управления К(бус],
навигационных измерений К[АН(ОЪ К(1г(О] и заданной области до-
пустимых отклонений корректируемых параметров J?», необходи-
мо определить стратегию наведения, обеспечивающую
Ф;(/и)=пНпФк{х?(/и), К[х(/н)], К[8ус], К[Ан(/)1, К[£2(/)В (4.3)
ик
при условии ФТ(/К)>Ф?,
где Фт(/г)=Р [д q>+ (tg) сн ,
х(/н)е532(К[х(/„)]); UCe ЗЗДКРУс], К [и (/,-)]);
Ан(/) е 535 (К [Ан(/)]); |2(/) е ®6(К [Е2(О]); (4.4)
d(/H, 9e^(UHj,
и ограничениях на допустимые управляющие воздействия
Й2; /,еТу„;
К [и (/,)] = [НГ1 (tj) С (/,)] К [А % (t})\ [НГ1 (tj) С(t})]\ (4.5)
причем входящая в состав Нк(^) матрица Qn(^) включает в себя
преобразования, учитывающие линейные ограничения на допусти-
мые направления и(/3) и локальную оптимизацию управляющего
воздействия. Функционалы Фк и Фт характеризуют энергетику и
точность управления.
Задача синтеза оптимальной стратегии коррекции сводится к
поиску такого энергетически оптимального управления, которое
удовлетворяет заданным требованиям к точности наведения и при-
надлежит допустимому классу управляющих воздействий и стра-
тегий. Энергетические критерии, используемые при проектно-бал-
листических исследованиях, определяют необходимые запасы топ-
лива, требования к двигательной установке, системе управления и
связаны с распределением суммарной характеристической скоро-
сти коррекции. В качестве энергетических критериев необходимо
использовать детерминированные функции распределения ug (ма-
176
тематическое ожидание M[ug] и квантиль ugp при заданном уровне
вероятности) (см. разд. 3.4)
Ф1к = /И[иг] = ^ М [и (/_,•)] = 2 J*и Р Iм (Z/)]du
7=1 7=10
(4.6)
Для расчета критериев качества управления можно использо-
вать приведенную в том же разделе методику, не требующую чис-
ленного интегрирования сложных выражений (4.6), содержащих
плотности распределений характеристических скоростей коррекции.
Из двух приведенных критериев предпочтительным является кри-
терий ugp при значениях уровня вероятности, близких к единице
(РиД~0,997). Из-за ограниченного числа дублирующих запусков
АМС по каждой космической программе (обычно не более двух),
высоких требований к надежности реализации управления крите-
рий AJ|[ug] является менее показательным и не определяет при про-
ектировании объектов запасов топлива и требований к системам.
Его основные достоинства — простота и аддитивность, поэтому он
часто используется при выборе оптимальной стратегии управле-
ния.
Требования к точности наведения считаются выполненными,
если вероятность события, при котором отклонения корректируе-
мых параметров после проведения последней коррекции находятся
в области J?<p, не ниже заданной. Это условие может быть замене-
но соответствующим ограничением на размеры эллипсоида рассеи-
вания или величину радиального отклонения вектора корректиру-
емых параметров (см. разд. 3.1).
Недостатком рассмотренных критериев качества управления яв-
ляется то, что эффективность стратегии оценивается только с точ-
ки зрения расхода топлива на наведение и не учитывает общей на-
дежности проведения управляющих воздействий, связанной с функ-
ционированием бортовых систем в сеансах, которая может сни-
жаться с увеличением числа коррекций. На стадии проектирования
Достаточно достоверной зависимости надежности управления от чис-
ла коррекций и энергозатрат, как правило, не существует. Поэто-
му решение задачи синтеза оптимальной стратегии целесообразно
проводить при различных ограничениях на количество коррекций.
Выбор рационального числа коррекций осуществляется на основе
сравнительного анализа характеристик оптимальной стратегии на-
ВеДения в зависимости от изменения g. При этом одновременно оце-
ниваются затраты топлива на проведение коррекции, возможности
°°ртовых систем и их надежность, сложность организации и воз-
можность проведения каждого управляющего воздействия совмест-
но С выполнением других работ по программе полета.
177
Следует отметить, что вид принятого критерия качества и ог-
раничений на управление оказывают существенное влияние не толь-
ко на оптимальную стратегию наведения, проектно-баллистические
характеристики АМС и требования к его системам, но прежде
всего на выбор методов поиска оптимальной стратегии и проведе-
ние синтеза в целом, которые осложняются следующими особенно-
стями, присущими задачам наведения космических аппаратов.
Первая состоит в том, что критерий качества динамической сис-
темы является многоэкстремальной функцией от параметров управ-
ления, а число коррекций может принимать только целочисленные
значения. Поверхность отображения критерия качества имеет слож-
ный характер, причем на ней возможны гребни, «овраги» и локаль-
ные экстремумы. Область определения функции качества также
имеет сложный вид из-за наличия ограничений на допустимые вре-
мена проведения коррекций и навигационных измерений. Поиск гло-
бального экстремума в таких задачах может оказаться практиче-
ски неосуществимым, так как универсальные методы решения, об-
ладающие достаточным быстродействием и эффективностью, от-
сутствуют. Для упрощения синтеза оптимальной стратегии можно
заменить исходную кусочно-непрерывную по времени задачу дис-
кретной, предполагая, что коррекция траектории должна проводить-
ся только на известном дискретном подмножестве фиксированных
моментов времени т3-еТуП, принадлежащих заданному множеству
Туп. Дискретным подмножеством могут быть заданы и коэффици-
енты связи С(т;) в области их определения. Тогда для выбора оп-
тимальной стратегии необходимо на заданном дискретном мно-
жестве Туп, C(tJ, g найти такие т/, C*(tj), g*, которые оптимизи-
руют критерий качества управления Фк. Если выбранные дискрет-
ные множества Туп, C*(xj) имеют достаточную частоту, т. е. соот-
ветствующие интервалы между временами проведения и возмож-
ными значениями характеристик управляющих воздействий доста-
точно малы, то решение дискретной задачи по величине оптимизи-
руемого критерия будет близко к решению кусочно-непрерывной
задачи. Для рационального выбора интервалов между возможны-
ми управляющими воздействиями целесообразно воспользоваться
приведенными в разд. 3.2 методами анализа характеристик стоха-
стической коррекции.
Дискретная задача принципиально разрешима, так как общее
число различных комбинаций параметров образует ограниченное
множество стратегий управлений, из которых необходимо найти
оптимальную. Следовательно, оно может быть упорядочено и про-
смотрено одним из численных методов поиска решения.
Другой особенностью задачи оптимизации стратегии коррекции
является наличие дополнительных условий, накладываемых
на управление динамической системой, наиболее важное из ко-
торых— требование к точности наведения. Сложность оп-
тимизации стратегии управления с дополнительными условиями
можно преодолеть заменой исходной задачи с ограничениями типа
178
неравенств эквивалентной задачей на безусловный экстремум с со-
ответствующим новым критерием качества управления. Критерий
эквивалентной задачи вводится с помощью множителей Лагранжа
либо функции штрафа {15]. Применяя эти методы, получим после-
довательность обычных задач безусловной оптимизации вида
Фк^н)=Фк(К[х(/н), К[8Ус(/;)], К[Дн(О]> К[Е2Ю]} +
+ (Ф.г(/К), Фд] , (4.7)
пределом решения которых при s->oo будет оптимальная стратегия
коррекции, обеспечивающая минимизацию энергозатрат наведения
при выполнении заданных требований к точности. Функция штра-
фа Лз{Фт(^к), Фтд}, зависящая от выполнения условия Фт (tg) ^Фтд,
строится одним из двух способов — внутренних (барьерных) или
внешних штрафных функций.
Современная теория оптимального управления позволяет ре-
шить сформулированную задачу синтеза оптимальной стратегии уп-
равления дискретной системой с помощью принципа Р. Веллмана
[10]. Этот принцип применим для марковских процессов в стохасти-
ческих динамических системах, т. е. процессах без предыстории при
аддитивных критериях.
Если на заданном дискретном подмножестве Туп в момент т/€Н
е{ть ...,тг, ...,Tjv} при N<g выбирается стратегия наведения, то она
должна обеспечить минимум соответствующей функции потерь R/,
которая определяет качество управления на оставшемся интервале
полета от момента Т/ до конца рассматриваемого участка tK. Одна-
ко критерий качества в рассматриваемой нами задаче наведения
не является аддитивным. Поэтому в момент т/ текущее состояние
динамической системы зависит от всех прошлых измерений и уп-
равляющих воздействий, а стратегия наведения на интервале [т/, У
оказывается зависящей от стратегии наведения на предшествую-
щем интервале [^н, тг], причем количество коррекций, проведенных
к моменту т/, равно j, где /^/. Зависимость R/ от предшествующих
наблюдений и коррекций можно заменить зависимостью от достаточ-
ных статистик s (тг), содержащих в себе всю необходимую инфор-
мацию, определяющую состояние динамической системы в момент
xi при известной стратегии управления движением на интервале
fra, т/]. Для линейной стохастической динамической системы, опре-
деленной в классе гауссовских самовоспроизводящихся распреде-
лений ошибок выведения, прогнозирования движения и исполнения
коррекций, в качестве достаточных статистик используются корре-
ляционные матрицы распределений этих параметров: К{х(т/)];
K[u(^)], ..., K[u(^_,)]. Тогда для поиска оптимальной
Ей коррекции необходимо найти для заданного состояния динами-
ческой системы в момент т/ минимум функции будущих потерь
js^g):
179
Rt = min Rz = min Фк, {K[x(rz)J, К [8 <рп (rz)], j — 1, UK(rz),
и«(\)
Фт(/Д Ф£, K[u(/1)],...,K[u(/y_1)L К )8ус (/,)],
(4.8)
Синтез оптимальной стратегии осуществляется рекуррентным
вычислением R*.v, начиная с последней коррекции для всех воз-
можных состояний в момент xn- Управляющие воздействия выби-
раются в виде линейных функций вектора состояния, а достаточ-
ные статистики позволяют упростить зависимость функции потерь
от стратегии предшествующих измерений и управляющих воздей-
ствий таким образом, что
И/ = фк {s(n). К[8ус(^, 4)], K[d(r„ Q], ик(г,)} +
+ £,{ФТ(/Д Ф*}, (4.9)
где К [бус (тг, ^к)]; К[й(т;, /к)] определяют стохастические харак-
теристики ошибок прогнозирования движения и исполнения кор-
рекций при заданной стратегии управления на оставшемся интер-
вале полета.
Достаточные статистики вычисляются .последовательно на осно-
вании известных значений s(t/) в предшествующей точке и при-
веденной в разд. 3.1 методики расчета стохастической коррекции:
s(rz+1) = s (s(tj), K[u(/;)], К[8фп(tz)]), tj = xl+x. (4.10)
Рассмотрим подробнее алгоритм расчета оптимальной страте-
гии коррекции методом динамического программирования. Пусть
тд’ — последний из возможных моментов проведения g-й коррек-
ции. Состояние динамической системы в этот момент при исполь-
зовании неаддитивного критерия Ф2к описывается однозначно сле-
дующими параметрами:
S(*jv)=(£> К [Д ф+ (Xjv-i)], К[8ф^(^)], a^-i],
rV1. (?— 1)пр, = __ (4.11)
Из приведенных выше параметров только К1Афк+(т.у-:) и
К [бфк11 (тлг)] используются для расчета характеристик корректи-
рующей скорости и отклонений корректируемых параметров после
коррекции, связанных с режимом недокоррекции, т. е. выбором
матрицы C(tg). Они определяют также оценку ошибок прогно-
зирования траектории полета после коррекции, если при решении
задачи определения параметров движения по навигационным изме-
рениям используется предварительная оценка возможных ошибок,
соответствующая всем предшествующим навигационным измере-
ниям. Все оставшиеся параметры необходимы для расчета крите,-
рия качества управления и функционально связаны со стратегией
180
управления на интервале [(н, tn]. Если при расчете Фгк пренебречь
зависимостью суммарной характеристической скорости от приве-
денных числа степеней свободы и количества коррекции (см.
разд. 3.5), то для расчета критерия качества достаточно только
двух параметров М [ug_i], ofug-j]. Таким образом, при определе-
нии состояния динамической системы после проведения коррекции
в момент тк необходимо выполнить следующие преобразования:
К [u (Q]=JНГ1 (/g) С (/,)] К [Д Фк (/,)][НГ1 (/g) С (/g)]\ tg= xN;
К ) Д <рк+ (/g)J=JE (г) - С (/,)] К [Д <рк (/g)] [Е (г) - С (/р] +
+ Е (г) F (/g) К [8 u (/g)] FT(tg) Е (г) + С (/g) К [Д <р" (т~„)]С (tgy,
^(U=«g=«g {^l[«g-il. 'V1- (й'_1)пр- 01«(Л)Ь
rnp(/g), M\u(tg)\, a[«(/g)l(; (4.12)
Фт(^)==Фт(К|Дфк+М|; K[8u(/g)] = K(K[8yc(/g)], K{u(/g)]},
где Фгк, Фт, К [6u ((g) | рассчитываются по приведенным в разд. 3.1,
ЗА, 3.5 методикам, не требующим проведения большого объема
вычислений для нахождения этих вероятностных характеристик,
имеющих сложную функциональную зависимость от управляющих
воздействий.
Выражение (4.12) позволяет определить допустимое множество
корректирующих скоростей, обеспечивающих выполнение требова-
ний к точности наведения, т. е. Фт^Фтд, а также найти оптималь-
ное управляющее воздействие из условия минимума энергетиче-
ских затрат на управление движением. Для этого необходимо вы-
числить
min [Ф (К[Д <р+(/g)]), Ф;)), (4.13)
C(/g) *
причем оптимизация функции потерь проводится по коэффициен-
там связи для всех возможных значений достаточных статистик
s(tw). Аналогичным образом проводится оптимизация управления
(в момент tn-i), которое зависит от состояния динамической си-
стемы s(t.v—i) и переводит ее в состояние s(tn), определяемое
Рекуррентным способом:
К [Д Фк (Гаг)]=К fД <р+ (Тдг-014- К [8 <р£ (Тд,)];
М [ug_2]+M[u (/g-01;
° 14g-1 ]=(°21«g-2] + a2 I« (g -1 )np =
(4.14)
(g — 2)„prgp 2 + a [a (^g—1)] g-1 [a Gi)] <np (*g-i)
(g — 2)пр + о [a (ig-1)] a-1 [a (^i)]
181
если в момент w-i проводится (g—1)-я коррекция. В том случае,
если коррекция в (N—1)-й точке не проводится, то можно пере-
ходить к предшествующей точке.
Продолжая аналогичные вычисления для всех заданных мо-
ментов проведения коррекции, получим множество оптимальных
управляющих воздействий, соответствующих множеству возмож-
ных значений достаточных статистик. Оптимальная стратегия ддя
статистических характеристик конкретной управляемой системы
определяется в порядке, отвечающем «прямому ходу» времени с
использованием полученного множества оптимальных управляю-
щих воздействий. Большая параметричность системы существенно
ограничивает практическое использование метода динамического
программирования, так как при выполнении процедуры вычисле-
ния s(rz) должны выбираться из всей области возможных состоя-
ний, точные границы которой определить достаточно трудно. Это
вынуждает принимать ее при проведении расчетов с большим
запасом. Число переборов различных вариантов управления на
каждом шаге I оценивается величиной порядка пт, где п — сред-
нее число дискретных значений каждого параметра из области
возможных его значений (для простоты принято одинаковым для
всех параметров); т — размерность системы. Параметричность
оптимизируемой динамической системы при неаддитивном крите-
рии качества и мультипликативных возмущениях велика даже с
учетом принятых упрощений (т>10 для трехпараметрической
коррекции).
Таким образом, эффективность метода динамического програм-
мирования зависит от параметричности системы, которая, как
следует из (4.8), при неаддитивных критериях качества и процес-
сах, имеющих негауссовское распределение отдельных характери-
стик, велика. Практическое применение метода из-за большого
объема вычислений ограничено сравнительно простыми случаями,
не имеющими принципиального значения для проектирования
АМС. В задачах синтеза оптимальной стратегии наведения КА,
рассматриваемых в существующей литературе, как правило,
используются упрощенные математические модели, позволяющие
уменьшить параметричность системы и оцепить достаточные коор-
динаты, определяющие ошибки прогнозирования независимо от
синтеза оптимальной стратегии наведения.
Другой способ синтеза оптимальной стратегии основан на
использовании численных методов поиска экстремума функции
качества управления:
Ф’/Л.)= min ФКДК[Х(/Н), К[8ус(/У)1, ...,фф Фт(/д}. (4.15
g,‘ р
Для решения (4.15) могут применяться различные детермини-
рованные и случайные методы поиска экстремума, а также их ком-
бинации. Результаты многочисленных исследований и синтез опти-
мальной стратегии наведения АМС различного назначения пока-
182
Зали, что для рассматриваемого класса задач предпочтительными
являются: методы детерминированного поиска — градиентный ме-
тод и его модификации, метод сечений, метод сканирования, а
также статистические методы — случайного градиента, случайного
направления и случайного перебора [15, 38]. Отличительной осо-
бенностью их, за исключением методов сканирования и случайного
перебора, является то, что они рассчитаны на унимодальные функ-
ции и позволяют определить только один из локальных оптимумов
многоэкстремальной системы. Поэтому целесообразно использо-
вать различные комбинации рассмотренных методов, осуществляю-
щие последовательный выбор начальных условий поиска, нахож-
дение локального экстремума и сравнение его с полученным ранее
значением критерия качества. Эффективность такого способа опти-
мизации многоэкстремальных систем зависит от общей организа-
ции поиска решения, который необходимо проводить в два этапа:
1) начальный поиск с целью исследования свойств критерия ка-
чества, его зависимости от стратегии наведения и выделение зон
возможных локальных экстремумов; 2) подробный поиск в выде-
ленных областях с целью определения оптимальных стратегий
наведения и последующее их сравнение на значения критерия ка-
чества управления.
Следует отметить, что эффективность каждого метода поиска
экстремума, а следовательно, и целесообразность применения его
при решении рассмотренной задачи, существенным образом зави-
сит от особенностей управляемой динамической системы, вида
критерия качества и характеристик стратегии наведения и поэтому
определяется опытным путем. Для каждой конкретной схемы
полета и задачи оптимизации стратегии наведения с учетом за-
данных ограничений и требований, свойств управляемой динами-
ческой системы подбирается наиболее подходящий для ее решения
метод из числа возможных (динамическое или линейное програм-
мирование, численный метод поиска экстремума).
4.2. Методы синтеза оптимальной стратегии
детерминированной коррекции
Детерминированная коррекция является частным случаем об-
щей задачи коррекции траектории движения, исходные данные
которого — заданная выборка из генеральной совокупности воз-
можных состояний динамической системы. Учитывая это, синтез
оптимальной стратегии детерминированной коррекции можно
Производить методами синтеза стратегии стохастической коррек-
ции (см. разд. 4.1). Однако при детерминированной модели кри-
терий качества управления, определяющий энергозатраты коррек-
ции, является аддитивным, а состояние динамической системы
однозначно характеризуется вектором отклонений корректируемых
Параметров, что значительно упрощает задачу синтеза, уменьшает
параметричность, повышает эффективность использования ме-
Да динамического программирования или численных методов
183
поиска экстремума. Кроме того, эти особенности позволили также
разработать ряд методов, приспособленных к решению задачи
синтеза оптимальной стратегии коррекции траектории движения
управляемой детерминированной системы [29, 49]. Рассмотрим их
применение на примере выбора стратегии связанной идеальной
коррекции. Задача имеет важное практическое значение, так как
на этом решении основываются различные итерационные способы
расчета управляющих воздействий в нелинейных задачах наведе-
ния. Сформулируем ее следующим образом.
Пусть заданы начальное состояние управляемой динамической
системы, определяемое вектором отклонений кинематических или
корректируемых параметров, и область допустимых отклонений
корректируемых параметров Необходимо определить страте-
гию одноразовой многоимпульсной коррекции, обеспечивающую
оптимизацию энергетического критерия качества управления
«*(/B)=min 2[uT(0)u(zPl1/2’ (4.16)
при выполнении следующих условий: Д<рк+(^) 6-еТуп;
u(tj) eS22, причем u(tj) зависит от заданного начального отклоне-
ния корректируемых параметров, предшествующего управления,
ограничений на допустимые направления корректирующей ско-
рости и определяется выражением (4.1).
На основании доказанных в разд. 2.4 свойств идеальной детер-
минированной коррекции количество корректирующих импульсов
при оптимальном исправлении заданного отклонения корректируе-
мых параметров не превышает г, а условия Д<рк+ (<tg) е эквива-
лентны условиям вида равенства, причем прицельная точка должна
принадлежать границе области допустимых отклонений и выби-
раться согласно требованиям минимума суммарной характеристи-
ческой скорости коррекции. Поиск оптимальной стратегии связан-
ной одноразовой детерминированной коррекции может быть све-
ден к решению обобщенной задачи линейного программирования,
которая должна рассматриваться как задача линейного програм-
мирования с линейным критерием качества управления и беско-
нечным числом векторов условий.
Введем новые переменные:
u(/;)=«(/y)u(’)(/y); FK(/y)u<’)(/;)£ Я «Щ/Д (4.17)
где и<1)(//)—единичный вектор корректирующей скорости;
— фигура влияния /-й коррекции.
Тогда (4.16) может быть записана следующим образом:
ug(t^ =min
g, /у, u(I)(/y) AV° LT^I
' g
, у = 1
I ,-,g,
(4.18)
184
три условии
Дфк^н) + 2Р’‘(^)и(^)и<1)(,!/)==ДЧ’° (2^);
/=1
Дфк (/г)еД;
Заменим множества Туп, J?(1)K(^) дискретными множествами
допустимых времен проведения коррекций Туп{т,..., т.\-} и мно-
жествами допустимых направлений исправления корректируемых
параметров = {М'Цт/),..., К/1’(т/),..., Ьп/(1)(т/)}, при-
ближенно аппроксимирующими фигуры влияния соответствующих
коррекций. Пусть прицельная точка задана, а ограничения на ко-
личество корректирующих импульсов отсутствуют. Рассмотрим
следующую вспомогательную задачу оптимизации стратегии кор-
рекции:
N nj
us(tH)= min УУ«/(т~-); (4.19)
N nj ~
2 2 Ul (т/)ьо’(тЗ)=дф° <^)-д
j=u=i
Xj e= Tyn, b$}> (t}) ce J?!/’ (ту) .
Задача (4.19) эквивалентна исходной задаче (4.18), так как
значения критериев качества управления u*g(tH) и их*(^н) на
оптимальном решении совпадают, а само оптимальное решение
не содержит двух векторов bt1)// (т/), принадлежащих одной фигу-
ре влияния коррекции в момент т/. Действительно, если предполо-
жить обратное, то любые два или более векторов «i(r/)b(%(T/),
соответствующих одному моменту коррекции, можно заменить
суммарным вектором:
д 4>к [и' (т;-)] = «1 (ту) Му’ (ту) +... +zzm (ту) Ь<4 (т~) =
= FK (*))«' (^-) bly’ (ту) ,
У которого «'(tj) <«1 (т/) + ... +«тп(т/), что противоречит условию
оптимальности стратегии коррекции. В нахождении минимума для
(4.19) состоит обобщенная задача линейного программирования,
отличающаяся от обычной задачи линейного программирования
тем, что для каждого т/ вектор Ь//<1>(т/) должен выбираться из
3аДанного множества Я (1)к(т/). Для поиска оптимальной страте-
гии можно использовать известные методы решения задач линей-
ного программирования. Однако если множества ^(1)к(т/) не яв-
ляются конечными, то эти методы должны быть соответствующим
°бразом модифицированы. Возможные модификации алгоритма
185
симплекс-метода для решения обобщенных задач линейного про-
граммирования, а также вопросы сходимости и эффективности
их рассмотрены в [49]. В отличие от задач линейного программи-
рования решение обобщенной задачи при bz/(1) (т/) е J?K(I,(x/) не
может быть получено за конечное число итераций, на каждой из
которых один из векторов Ьц(1)(т/) текущего базиса заменяется
внебазисным вектором. Однако на каждой итерации существует
оценка минимума критерия качества, что позволяет провести опти-
мизацию стратегии коррекции с заданной точностью. Следует от-
метить, что при решении задачи (4.19) симплекс-методом возмож-
но вырождение текущего или оптимального опорного решения,
которое является событием достаточно регулярным при оптимиза-
ции стратегии коррекции. Оно объясняется существованием реше-
ния на g* опорных векторах Ь//(1)(т7) при количестве коррекций
g*<r, что может привести к явлению зациклинивания итерацион-
ного процесса, при котором происходит периодическое возвраще-
ние к предыдущему базису. Это снижает эффективность метода и
затрудняет практическую его реализацию.
Рассмотрим еще один алгоритм выбора стратегии коррекции,
позволяющий осуществить переход от заданной последователь-
ности N>r связанных коррекций к последовательности из Af—1
связанных коррекций, для которой величина суммарной характе-
ристической скорости коррекции не превышает значения, соответ-
ствующего N коррекциям. Пусть известно некоторое решение за-
дачи (4.16):
2 FK (fy) и (/,)=2 к (fy) b)V (tj) = Д <р+ (^) - Д <рк (fH). (4.20)
/=1 /=1
Так как пространство корректируемых параметров r-мерное, а
Af>r, то векторные слагаемые в (4.20) линейно зависимы, следо-
вательно, существуют такие наборы чисел, как са1,..., caj,.... c,t.x,
что
2 a=\,...,N— г. (4.21)
7=1
Рассмотрим первое из таких условий, считая, не нарушая
общности, что С! = 2 так как в противном случае знаки
/=1
всех сц можно заменить на противоположные. Выберем такой
коэффициент, для которого ai/ = c1;7u(/;) =тах. Пусть величина
ai/ = max для s-ro коэффициента, т. е. als—при всех j^s-
Тогда, разделив (4.20) на — ais и складывая полученное уравне-
ние с (4.21), будем иметь
лг
У FK(f;)u(fy) —(als-av-), (4.22)
лшял L als J als
186
где суммирование распространяется уже на N—1 членов, так как
при i=s слагаемое в правой части выражения (4.22) равно нулю.
Таким образом, последовательность из N коррекций заменена
последовательностью из N—1 связанных коррекций, причем сум-
марная характеристическая скорость для новой последователь-
ности коррекций равна
aN-\ (U—
Ы а1ч als
Так как по условию с^О, ais>0, то uN_\ (tH) и сум-
марные энергозатраты новой стратегии коррекции не превышают
энергозатрат старой стратегии. Сами коррекции проводятся в те
же времена Л,..., In, что и для исходной последовательности,
кроме момента ts, когда она не проводится. Направления коррек-
тирующих скоростей сохраняются, а величины определяются усло-
вием Аналогичные рассуждения можно
als
последовательно применить к оставшимся N—1—г условиям (4.21)
и получить стратегию из г коррекций, которая по суммарной вели-
чине характеристической скорости не хуже исходной при любом на-
чальном значении N>r.
Отметим основные недостатки способов оптимизации стратегии
детерминированной коррекции, использующих методы линейного
программирования. Во-первых, сведение исходной задачи (4.16)
к обобщенной задаче линейного программирования (4.19) потре-
бовало замены фигур влияния J?K(I)G/) дискретными множества-
ми допустимых направлений Ь1/1>(^/), ..., b(1)nj-(/3-). Для
того чтобы J?k(1)(^-) хорошо аппроксимировало необхо-
димо выбирать /г, достаточно большим, что, в свою очередь, при-
водит к увеличению числа векторов в линейных ограничениях и
Усложнению решения. Во-вторых, в задаче (4.19), как это при-
нято в задачах линейного программирования, отсутствуют огра-
ничения на допустимое число ненулевых корректирующих импуль-
с°в, т. е. сняты ограничения вида g^gz. Для практических при-
ложений эти ограничения имеют важное значение, так как увели-
чение числа коррекций по сравнению с запланированным является
нежелательным. Достигаемое в этом случае уменьшение энерге-
тических затрат на коррекцию может не компенсироваться услож-
нением стратегии и возможным снижением общей надежности
Управления. Как правило, в реальных полетах количество коррек-
тирующих импульсов при связанной одноразовой коррекции не
Ревышает 2—3. Указанные недостатки существенно ограничивают
187
ооласть применения и эффек-
тивность поиска оптимальной
стратегии, основанного на ме-
тодах линейного программиро-
вания.
Наиболее распространен-
ным способом синтеза опти-
мальной стратегии детермини-
рованной коррекции является
сведение ее к численному поис-
ку экстремума многопарамет-
рической функции. В общем
случае необходимо последова-
тельно решить следующие част-
ные задачи:
1) определение оптималь-
ного режима проведения g кор-
рекций в фиксированные мо-
менты времени при заданном
Рис. 4.1. Графический выбор оптималь-
ных значений корректируемых парамет-
ров
значении Дф°к(М • u*Gi), •••> u*(^g)l
2) поиск оптимальных моментов проведения g коррекций при
заданном значении Д<рк°(^) : Л*, • ••, tg*',
3) оптимизация Д<рк+*(^) значений корректируемых парамет-
ров при условии Дфк+(Ме
Каждая из приведенных выше задач имеет свои специфиче-
ские особенности, которые необходимо учитывать при выборе ме-
тода решения. Так, для последней из рассмотренных задач целе-
сообразно отбраковать заведомо неперспективные (при заданном
Дфк(^н)) области значений Дфк+(^), используя теорему 2.1, а за-
тем методом упорядоченного перебора выбрать Дфк+*(/г) в одной
из граничных точек Оценочную функцию, определяющую эти
области, можно построить исходя из следующих соображений.
Как отмечалось ранее, фигура влияния многоимпульсной связан-
ной коррекции является выпуклой оболочкой соответствующих
фигур влияния одноимпульсных коррекций. Построив эту фигуру
с центром в конечной точке исправляемого вектора корректируе-
мых параметров Дф'к(/Н), подвергнем затем ее растяжению до
касания области ф в точке А, определяющей оптимальное зна-
чение прицельного параметра Дфк+*(/ё) (рис. 4.1). Нетрудно ви-
деть, что положение точки А зависит от исправляемого отклоне-
ния, а вектор Дфк°*(/г) составляет с вектором Дф'к(/Н) острый
угол.
Геометрические характеристики эффективности коррекции мо-
гут также применяться при организации поиска оптимальных вре-
мен ее проведения. Локальные экстремумы, гребни на поверх-
ности, соответствующей критерию качества связанной коррекции,
а также сама оптимальность режима связанной коррекции при
г=СЗ появляются в том случае, если параметры эллипсоидов влия-
ния одноимпульсной коррекции изменяются на траектории немо'
188
jiotohho. Поэтому на основе анализа изменения градиентов кор-
ректируемых параметров или вектора эффективности ХЭф(^)
можно выделить эти особенности и зоны возможных локальных
экстремумов для проведения внутри них поиска оптимального ре-
шения одним из методов поиска экстремума унимодальных много-
параметрических функций (см. разд. 4.3). В отдельных, наиболее
простых задачах синтез оптимальной стратегии коррекции может
быть осуществлен графоаналитически: путем построения макси-
мальной фигуры влияния на заданном множестве времен прове-
дения коррекций. Примером такого решения может служить слу-
чай двухимпульсной солнечной коррекции координат вектора при-
цельной дальности в картинной плоскости (см. разд. 2.9). В прак-
тике управления полетом современными АМС такие ситуации яв-
ляются чрезвычайно редкими, и задача синтеза, как правило,
решается численными методами.
Если предварительный анализ эффективности коррекции не
проводится, то для решения задачи поиска оптимальных момен-
тов коррекции должны применяться методы поиска глобального
экстремума, так как критерий качества управления может быть
многоэкстремальной функцией. Обычно для этих целей использу-
ется метод сканирования (перебора) совокупности возможных
комбинаций выполнения g коррекций в N допустимых дискретных
точках траектории.
Наиболее эффективным способом решения первой из рассма-
триваемой последовательности задач является использование не-
обходимых условий оптимальности связанной коррекции вида
(2.48). Предложенный в разд. 2.5 метод оптимизации двухимпульс-
ного связанного управления может быть обобщен на произвольное
количество связанных коррекций. Рассмотрим его применение для
случая трехимпульсной связанной коррекции. Пусть каким-либо
способом выбраны моменты проведения коррекции заданного
r-мерного отклонения корректируемых параметров. На каждый
вектор корректирующей скорости могут накладываться дополни-
тельные линейные условия, ограничивающие их возможные направ-
ления: py=py(^i) +Ру(^>) +Ру(М, гДе Ру(6)—количество ограни-
чений на /-ю коррекцию; ру — общее количество ограничений.
Целью решения задачи является определение оптимальных кор-
ректирующих воздействий, обеспечивающих исправление Д<рк(/Н)
с минимальными энергозатратами в фиксированные моменты вре-
мени t\, t2, t3. Для этого необходимо выполнить следующее:
1. Рассчитать матрицы FK(^i),..., FK(^) частных производных
От корректируемых параметров по компонентам корректирующих
скоростей и сформировать девятимер'ные векторы: обобщенных
Параметров управления us (^i, t2, ts), составленный из параметров
Управления и(^-), и обобщенных корректируемых параметров
АфкД^н), содержащий заданный /'-мерный вектор отклонений кор-
ректируемых параметров и дополненный g—г нулями.
2- Составить невырожденную квадратную матрицу FK(C, t?, t3),
включающую матрицы FK(C), •••, FK(^3), дополнения в виде ли-
189
нейных ограничений на возможные направления корректирующей
скорости и пу строк из матриц FK(/i), Рк(/г), где пу = 9—г—ру, а за-
тем найти обратную ей матрицу Ms (/ь t2, /3):
FK (/p t2; t3) FK(^) FKni (^i) 0 Qy(O 0 0 Fk(/2) 0 FK 0 Qy (/2) 0 FK (^3) 0 0 0 0 Qyv3) /nu . . zn19
МД/р t2, /3) = F71(/1, t2, /з); мд/р ^2> ^3) ~ zn91 . • w99
где Qy(/[),...> Qy(/3)—матрицы линейных ограничений на на-
правления корректирующих скоростей; FKni(/i), FKn2(M—матри-
цы, образованные из п, и п2 строк матриц FK(/i), FK(/2) соответ-
ственно; единственным условием их выбора является невырожден-
ность FK(/I, t2, t3). Для этого необходимо использовать такие
составляющие и такие моменты времени коррекции, для которых
соответствующие градиенты не будут коллинеарны.
3. Из матрицы Ms (/ь t2, t3) составить три подматрицы M$i (t},
t2, Ms2 (tb t2, t3), Ms3 (/b t2, t3) размерности (пХЗ), которые
образуются из п = пу столбцов матрицы M.s (/b t2, t3) от г+1 до
г+п и соответствующих строк от 1 до 9 (по 3 строки в каждой
матрице) и затем транспонируются:
М51 (/р /2, /3)—
mlr+l т1г+\
тЗг+1
т1г + п т2г + п т3г+п
•••> Mi3 (^1» ^2> ^з) —
m7r + l mSr+l т9г+1
mlr+n mSr±n т$г+п
4. Решить систему уравнений, определяющую оптимальные кор-
ректирующие скорости u* (/J, и*(/2), и*(/3):
FKs(^l> ^2> ^з)иД^1, ^2, ^з)=—(4.23)
где FK5(/H /2, /3) =
FK(^i) FK(/2) FK(/3)
as^sl^U ^2’ ^з) ^$М52(/р ^2> ^з) Mi3 (Л> ^2> ^3)
Qy(/i) о о
о Qy(/2) 0
0 0 Qy(/3)
а^ = «(/3)/«(/1); bs=u(t3)/u(t2).
190
Нелинейная система (4.23), как и аналогичная ей система
(2.49) при двухимпульсной связанной коррекции, имеет особый
вид, при котором для фиксированных значений as и bs она превра-
щается в линейную. Такая структура позволяет при построении
релаксационной последовательности, обеспечивающей численное
решение системы (4.23), ограничиться только классом линейных
преобразований.
Основным достоинством рассмотренного метода оптимизации
режима связанной коррекции является то, что он не требует орга-
низации перебора множества допустимых направлений, как это
имело место при решении обобщенной задачи линейного програм-
мирования. Параметры as и bs, по которым необходим численный
поиск решения, легко позволяют заранее определить рациональную
область поиска, так как характеризуют отношение между величи-
ной корректирующих скоростей. Поэтому всегда можно выбрать
такие диапазоны возможного изменения as и bs, вне которых целе-
сообразно сократить общее число корректирующих импульсов.
Близкие к нулю или очень большие значения параметров as и bs
приводят к вырождению задачи ^-импульсной связанной коррек-
ции. Однако в отличие от алгоритма обобщенного симплекс-мето-
да численный поиск оптимальных значений и* (^),..., и*(/3) с
использованием выражения (4.23) дает возможность на каждом
шаге итерационного процесса контролировать решение на вырож-
денность и при необходимости исключать те коррекции, которые
имеют по сравнению с другими малые значения характеристиче-
ской скорости. В этом случае следует составить новую систему
уравнений для расчета оптимальной стратегии с меньшим коли-
чеством управляющих воздействий и решать ее аналогичным об-
разом.
Таким образом, последовательное решение частных задач оп-
тимизации с использованием свойств и условий оптимальности
связанной коррекции, а также методом численного поиска экстре-
мума позволяют осуществить решение задачи синтеза оптимальной
стратегии детерминированной коррекции, определяя
ф g
Ug(tu)=min inin V «*(/;),
j = l,..., /..., g, (4.24)
гДе Д<рк+ (tg)^ (Вс?3?ф); g^g?; Z/eTyn; и* (tj)— оптимальные кор-
ректирующие воздействия, соответствующие фиксированным теку-
Щим значениям A<pK+(Zg), g, tj, полученные из решения уравнения
Рассмотрим некоторые примеры задачи синтеза оптимальной
стратегии коррекции траектории движения АМС, находящихся на
орбитах искусственных спутников Венеры и Марса. Основные тре-
ования к управлению их полетов, цели и назначение коррекции
Раектории движения, а также особенности выбора корректируе-
мых параметров рассмотрены в разд. 1.7.
191
Рис. 4.2. Коррекция под-
держания орбиты ИСВ:
/ — планета Венера; 2 — ор-
бита ИСВ; 3 — апоцентр ор-
биты; 4 — область ограниче-
ний на проведение коррек-
ций; /, П — унимодальные
области критерия качества
управления
Пример 1. Пусть АМС, осуществляющая полет
по орбитальной схеме и предназначенная для радио,
локационной съемки поверхности Венеры, переведена
на орбиту ИСВ. Целью коррекций является поддер.
жание параметров рабочей орбиты, обеспечивающих
регулярное ежесуточное выполнение сеансов карто.
графирования. Корректируемые параметры —гл, Гор,
т, а число коррекций не превышает двух. На воз-
можные времена проведения коррекций наложены
ограничения. Во-первых, коррекции невозможны в
районе перицентра орбиты, где осуществляется радио-
локационная съемка (час до и после перицентра).
Иными словами, коррекция может проводиться толь-
ко в интервале значений истинной аномалии от О„ =
= 114° до &к = 246° (рис. 4.2). Во-вторых, интервал
между двумя коррекциями должен составлять не ме-
нее 8 сут, это необходимо для проведения навигаци-
онных сеансов, определения орбиты, проведения рас-
четов и закладки уставок на последующие управляю-
щие воздействия. Состав корректируемых параметров
таков, что одновременное их исправление невозмож-
но: коррекция отклонений в т достигается соответ-
ствующим изменением Гор, что, естественно, может
противоречить требованиям коррекции отклонений в
периоде орбиты. Кроме того, эффективность коррек-
ции изменяется немонотонно: максимальное значение
grad достигается в апоцентре, a gradrop — в пе-
рицентре. Поэтому оптимальной является связанная
коррекция, причем при выборе времени их проведения на каждом витке необ-
ходимо выделять две области, внутри которых будет обеспечено выполнение ус-
ловий унимодальности критерия качества.
Рассмотрим сначала случай двухпараметрической коррекции, когда требует-
ся исправить следующие отклонения: ДГОР = 195 с, Дгя=325 км. При одно-
импульсном исправлении этих отклонений критерий качества имеет два локаль-
ных экстремума в моменты 6* и //*, симметричные относительно апоцентра (или
перицентра) орбиты, причем расположение их зависит от соотношения между
корректируемыми параметрами. В данном случае затраты на исправление Дгл
больше затрат на исправление ДТОр, и оптимальные точки проведения коррек-
ции расположены ближе к апоцентру (значения истинной аномалии составляют
160 и 200°). Корректирующая скорость равна и* (//) =«*(//*) =33 м/с, причем
она возрастает при сдвиге коррекции к перицентру или апоцентру. При связан-
ной двухимпульсной коррекции стратегия управления изменяется. Точка прило-
жения первого корректирующего импульса будет находится в апоцентре, где
наиболее эффективно исправление гя. Точка приложения второго корректирую-
щего импульса стремится к перицентру, но из-за ограничений не доходит до него.
Так как ограничения симметричны относительно перицентра, то возможны два
оптимальных решения: первое при ^i* = 180° и ©2* = 114°; второе при в'1* = 180
и д2‘ = 246°.
В обоих случаях суммарная величина корректирующей скорости составляет
21,8 м/с («*(/]*) =18 м/с, и*(/2*)=3,8 м/с), т. е. при двухимпульсной связанной
коррекции энергозатраты на управление сокращаются в 1,5 раза.
Рассмотрим теперь двухимпульсную трехпараметрическую коррекцию, ис*
правляющую следующие отклонения: ДГ0Р =—2000 с; Дгя=—180 км;
= —34 500 с.
Коррекции проводятся с интервалом 8 сут. В результате 011тиМы.
зации стратегии коррекции получено: первая коррекция и* (Л*) =36,6 м/с вы
полняется при fh*=230°; вторая коррекция и*(/2*) = 11,2 м/с—при #2*=‘4 ’
т. е. в граничной точке множества допустимых времен. п.
Если ограничения на времена коррекций отсутствуют, то характеристики
тимальной стратегии изменятся следующим образом: fh*=231°, 0'2* = '°
192
и*(?1*)=35,8 м/с, и*Ц2*)=7,5 м/с, т. е. точка приложения первого корректи-
рующего импульса практически сохраняется неизменной, а суммарная коррек-
тирующая скорость уменьшается на 4,5 м/с. Таким образом, в рассматриваемое
случае первая коррекция обеспечивает исправление т и гя, а вторая — Тор. По-
следовательность их исправления также зависит от конкретных значений откло-
нений корректируемых параметров. Так, если отклонения равны: ДТор = 2000 с;
Дгя =—100 км; Дт = 3300 с, то при первой оптимальной коррекции в основном
’исправляется т (ith* = 114°, u*(Z,*)=21 м/с), а при второй — гя и Трр (О'2* = 235°,
и* (Ц*) = 19,6 м/с).
Пример 2. Пусть для трехпусковой орбитально-десантной схемы полета
к Марсу с помощью одного ОА, выводимого на орбиту ИСМ с периодом Тор око-
ло 24 ч, необходимо обеспечить условия для съема научной информации с двух
СА, осуществляющих посадку на поверхность планеты с интервалом 2 сут.
ОА выводится на орбиту за месяц до посадки первого СА-1. Сеансы связи с
каждым СА проводятся на двух последовательных витках, причем расчетные
районы посадки, время посадки и начало передачи информации с СА заданы.
Длительности интервалов, в которых потенциал радиолинии СА —ОА превы-
шает пороговое значение, с учетом ошибок прогнозирования траектории полета,
ошибок исполнения коррекции, разбросов времени и координат посадки СА дол-
жны составлять не менее 25 мин для СА-1 и 20 мин для СА-2. Продолжитель-
ность связи зависит от всех шести параметров орбиты ИСМ. Однако, учитывая
ограниченные запасы топлива на проведение коррекций и эффективность влия-
ния отдельных параметров на условия связи, количество корректируемых пара-
метров не будет превышать 3, в качестве которых можно принять следующие
параметры орбиты ИСМ на витке, где проводится первый из запланированных
сеансов: т1, Тор' и г1. Графоаналитическое исследование зависимости интерва-
лов связи от корректируемых параметров позволяет определить область Жф,
в которой выполняются требования по их продолжительности. Центром ее яв-
ляется точка <Рк° со значениями корректируемых параметров (см. рис. 1.11):
Т’ = 12 ч 30 мин; 7’ор' = 24 ч 12 мин; гя’ = 5000 км. Продолжительность связи
во всех сеансах изменяется незначительно, если радиус перицентра находится
в диапазоне значений от 4800 до 5200 км. При этом первый интервал зависит
только от т1, а все остальные—от т1 и Гор1- Пусть исправляемые отклонения
корректируемых параметров составляют Ат1 =2 ч 07 мин; Д7’ор1 = 43 мин, ДгГ -
= 140 км. Будем считать, что первая из двух связанных коррекций может про-
водиться не ранее чем через 8 сут после выхода ОА на орбиту ИСМ, вторая —
не позднее чем на 3 сут до посадки СА-1, а интервал между ними — не менее
8 сут. Дополнительные ограничения на время коррекции, вызванные работой
бортовых систем ОА, отсутствуют. В рассматриваемом случае энергетический
критерий качества управления является функцией tl и Ц, имеющей локальные
экстремумы на каждом витке проведения коррекции. Учитывая это, поиск опти-
мальных времен двухимпульсной связанной коррекции осуществлялся комбина-
цией методов сканирования (для перебора унимодальных областей) и случай-
ного дискретного поиска экстремума суммарной характеристической скорости
коррекции на множестве возможных времен их проведения, которые назначались
Равномерно по истинной аномалии на каждом витке, принадлежащем допусти-
мому интервалу. Оптимизация режима коррекции при заданных временах про-
ведения на каждом шаге итерационного процесса проводилась на основе чис-
ленного решения необходимых условий оптимальности вида (2.48) одномерным
поиском по параметру as методом «золотого сечения» в диапазоне его возмож-
нЫх значений от 0,05 до 20, при котором один из корректирующих импульсов
Чожет отличаться от другого по величине не более чем в 20 раз. При большем
соотношении между ними целесообразен переход к одноимпульсной коррекции.
Расчеты показали, что первая коррекция должна выполняться в районе пери-
центра первого витка, вторая — через 1 ч после перицентра последнего витка
Допустимого интервала их проведения. Величины корректирующих скоростей со-
ставляют и*(6‘) =21 м/с, u*(f2*)=5,3 м/с.
При управлении полетом любого КА, как правило, рассчитывается несколь-
ко различных вариантов коррекции, упрощающих стратегию ее проведения или
7"850 193
учитывающих какие-либо особенности состояния систем. В частности, если вклю-
чение ДУ возможно только в районе перицентра орбиты, то в рассматриваемом
случае, учитывая, что радиус перицентра фактической орбиты ИСМ находится
в области значений, где их влияние на условия связи невелико, число корректи-
руемых параметров можно сократить до двух (т1 и Тор1). Отметим, что при та-
ком выборе мест проведения коррекции гя практически не изменяется, что и
позволяет перевести этот параметр в число некорректируемых. Другой упро-
щенный вариант стратегии — проведение одноимпульсной коррекции. Оценивая
ее возможности, целесообразно рассмотреть различные составы корректируемых
параметров и их влияние на выполнение условий связи. Проведенный численный
анализ показал, что для принятых отклонений корректируемых параметров
можно ограничиться однопараметрической независимой коррекцией, выполняемой
за 3 или 4 сут до первого сеанса связи с СА-1, исправляя только отклонения т1.
Значения некорректируемых параметров Тор' и гл‘, близкие к требуемым, реа-
лизуются путем выбора времени проведения коррекции благодаря их взаимной
функциональной связи с параметром т1. Так, отклонения параметров гп' и Тор'
после коррекции, проведенной в перицентре орбиты за 4 сут до первого сеанса
связи, составляют 140 км и 5 мин, что обеспечивает требуемую продолжитель-
ность интервалов связи. Характеристическая скорость такой коррекции состав-
ляет 5,1 м/с. Переход к режиму независимой коррекции упрощает организацию
управления полетом и уменьшает энергетические затраты. Однако условия связи
в этом случае менее оптимальные, что приводит к сокращению продолжитель-
ности интервалов (кроме первого для СА-1), которые уменьшаются не более чем
на 5 мин.
Из рассмотренных примеров следует, что стратегия ко<ррекцпи
орбиты ИСП существенным образом зависит от величины откло-
нений корректируемых параметров. Поэтому в отличие от управ-
ления движением АМС на участке перелета, на орбите спутника
планеты для каждой конкретной реализации следует выбирать
подходящую стратегию, определяя состав корректируемых пара-
метров и количество коррекций. В отличие от участков межпла-
нетного перелета управление движением АМС на орбите ИСП
осуществляется не по заранее запланированной программе, а в
соответствии с конкретной полетной ситуацией.
4.3. Оптимизация стратегии коррекции
межпланетной траектории перелета
Для проектно-баллистических исследований характерно ис-
пользование сложных критериев, большая неопределенность в сто-
хастических характеристиках систем навигации и наведения, обес-
печивающих выполнение навигационных измерений и коррекций
траектории, проведение анализа разнообразных ограничений, поз-
воляющих упростить работу создаваемой АМС и ее бортовых си-
стем. Поэтому методы синтеза оптимальной стратегии наведения
должны учитывать специфические особенности, свойственные
, управлению движением данного класса объектов, и позволять осу-
ществлять эффективный выбор стратегии при различных схемах
перелета и требованиях, присущих этапу проектирования. Анализ
свойств управляемого движения на участках межпланетных пере-
летов, а также применение методов исследования и расчета ха-.
194
рактеристик стохастической коррекции (см. гл. 3) позволяют
свести задачу синтеза оптимальной стратегии наведения данного
класса КА к численному поиску экстремума функции многих пе-
ременных в ограниченной последовательности областей, характе-
ризующих состояние динамической системы и обеспечивающих
унимодальность критерия качества. Решение задачи синтеза опти-
мальной стратегии коррекции траектории движения базируется на
использовании следующих свойств управления полетом АМС, по-
лученных в результате проведения исследований, выполненных
для различных схем полета, как для сравнительно простых схем
прямого перелета к планете, так и для сложных схем облета не-
скольких планет.
1. Высокие требования к точности наведения современных и
перспективных АМС приводят к необходимости выполнения мно-
горазовых коррекций траектории перелета на каждом межпланет-
ном участке. Вместе с тем высокая точность наведения АМС мо-
жет быть достигнута только при проведении навигационных измере-
ний на сравнительно продолжительных навигационных интервалах.
Указанные обстоятельства, а также ограничения, связанные с ра-
ботой бортовых систем, организацией и проведением сеансов на-
вигационных измерений и коррекций, оказывают существенное
влияние на стратегию наведения, ограничивая общее количество
управляющих воздействий, допускаемое при любой схеме пере-
лета. С другой стороны, семейство возможных траекторий подлета
к планете назначения, соответствующее заданным возмущающим
и управляющим воздействиям, приближенно является трехпара-
метрическим подмножеством пространства терминальных парамет-
ров. Количество корректируемых параметров не превышает трех,
и однократное их исправление возможно с помощью проведения
одного управляющего воздействия. Все это, а также монотонно
убывающий характер зависимости эффективности управления от
времени полета на каждом межпланетном участке (за исключе-
нием некоторых ограниченных областей), приводит к тому, что
межпланетные коррекции проводятся в режиме независимого
управления, т. е. г^З, а С(//) = Е. Таким способом проводились
коррекции современных советских межпланетных станций «Марс»
и «Венера», американских станций «Викинг», «Пионер — Венера»
и других, причем общее число корректирующих воздействий на
Участке межпланетного перелета не превышало трех.
2. Для сложных схем полета функция качества является мно-
гоэкстремальной. Однако во всех рассмотренных случаях много-
разовой независимой коррекции траектории перелета АМС появ-
ление локальных экстремумов на поверхности качества было свя-
зано только с вырождением матрицы FK(//). Поэтому предвари-
тельный анализ свойств и эффективности одноимпульсной коррек-
ции позволяет выделить зоны локальных экстремумов и выбрать
экие интервалы Тут- времен проведения коррекций, в которых
озможна унимодальность критерия качества. На рис. 4.3 показан
Д зависимости критерия качества от времени проведения кор-
7*
195
Рис. 4.3. Вид энергетического критерия
качества коррекции двухполувитковой
траектории перелета АМС
рекций двухполувитковой тра-
ектории перелета к Венере при
двухразовой схеме коррекций.
3. Точность наведения на
участке перелета определяется
временем проведения несколь-
ких последних коррекций, чис-
ло которых ак зависит от ис-
пользуемых навигационных си-
стем. Проведенный анализ
стратегии управления движе-
нием АМС показал, что во всех
рассмотренных вариантах сгк^С
sC2, т. е. результирующая точ-
ность наведения зависит от вре-
мени проведения не более двух
последних коррекций. Исследо-
вания проводились для АМС,
оснащенных наземными и ав-
тономными, радиотехническими и оптическими системами различ-
ного состава и точности. Следует при этом отметить, что при исполь-
зовании в навигационной системе автономных астроизмерений на
участке подлета к планете назначения результирующая точность
наведения оказывается зависящей только от времени проведения
последнего сеанса автономных измерений и последней коррекции,
если мультипликативные составляющие ошибок исполнения коррек-
ций малы по сравнению с аддитивными ошибками, не зависящими
от величины корректирующей скорости. Все предшествующие g—а*
корректирующие воздействия оказывают влияние только на сум-
марную характеристическую скорость, определяющую энергозатра-
ты наведения.
Тогда решение исходной задачи оптимизации стратегии управ-
ления АМС ыри наличии системы детерминированных и стохасти-
ческих ограничений можно заменить последовательностью задач,
осуществляющих анализ свойств импульсного управления, точ-
ности навигации на участке подлета к планете, а также миними-
зацию функций качества в области допустимых параметров управ-
ления:
ф*(и = тшФ<*(/„), (4.25)
g
'где Ф(Г(/н)= min Ф?-’*(/н)
при
ё^ё ёц’ tg ЕЕ Тtg—z+1 — Tyng—а+1, Фт1К{Дфк ОКФт’
Ф| а* (/„)= min Ф(’“(/„);
С—....'
при g = ^'<gs; tg = tg^Ty„g,...,tg..l+} = tg.
е=Туп1,..„
1 е т
уп^—а 4-
/1^
196
Минимизация критерия качества производится поэтапно. На
первом этапе оптимизируется выбор времен проведения g—ак пер-
вых коррекций на заданных интервалах допустимых времен их
проведения, фиксированных временах проведения ак последних
коррекций и общем числе корректирующих воздействий в рамках
принятого класса допустимых стратегий (без учета требований к
точности наведения).
На втором этапе осуществляется выбор оптимальных времен
проведения последних а?. коррекций при заданных допустимых
интервалах времен их проведения, обеспечивающих выполнение
требований к точности наведения, на множестве допустимых стра-
тегий, соответствующих Фке-,1*(А).
На третьем этапе производится выбор оптимального числа кор-
ректирующих воздействий, удовлетворяющих условию gsgLgz на
множестве стратегий, обеспечивающих Фкг*(^н)-
Такой подход оказался достаточно эффективным для решения
задачи синтеза оптимальной стратегии коррекции АМС. Выбор
численного метода поиска экстремума зависит от схемы полета и
назначения АМС. Отметим сравнительные преимущества и недо-
статки существующих методов численного поиска экстремума
функции применительно к задаче синтеза оптимальной стратегии
коррекции, полученные на основании опыта решения этой задачи
для различных схем перелета АМС. Градиентный метод следует
использовать при выборе оптимальной стратегии коррекции для
сравнительно простых схем управления при небольшом числе кор-
рекций (не более двух-трех) и при отсутствии ограничений па
время проведения коррекции и параметры управления. Это объяс-
няется снижением его эффективности с увеличением параметрич-
ности системы (расчет градиента требует проведения пробных
шагов, равных числу оптимизируемых параметров системы) и
сложностью учета ограничений (на каждом шаге необходимо про-
верять выполнение ограничений, а попав в их зону, делать шаг по
градиенту ограничений, либо вычислять конус допустимых направ-
лений). Метод применялся при оптимизации двухразовой схемы
коррекции перелета к Марсу без ограничений на время проведения
коррекции. Опыт использования для более сложных задач пока-
зал, что сходимость его, зависящая от начального приближения,
значительно ухудшалась при увеличении числа коррекций, и он
становился менее эффективным по сравнению с методом сечений.
Метод сечений в комбинации с методом «золотого сечения»
Для последовательной оптимизации по каждому из параметров
хорошо зарекомендовал себя при решении задач оптимизации
коррекции параметров траекторий перелета к различным планетам
Для сравнительно сложных схем, когда число коррекций доходило
До 8—ю.
Ограничения на оптимизируемые параметры системы не сни-
Жают его эффективности, так как могут быть учтены при выборе
ИНтервала поиска для каждого параметра. Недостатком метода
вляется зависимость его эффективности от вида линий уровней
197
критерия качества. Однако если вид зависимости критерия каче-
ства от параметров системы известен, то можно повысить его
эффективность, осуществляя поиск по направлениям, обеспечи-
вающим наибольшее изменение критерия качества.
Метод сканирования достаточно эффективен, если множество
допустимых состояний, дискретной динамической системы и пара-
метров управления невелико, причем наличие ограничений на их
возможные значения только уменьшает количество последователь-
но перебираемых состояний системы и повышает эффективность.
Отличительной особенностью метода сканирования является воз-
можность использования его без предварительного исследования
общей зависимости критерия качества многоэкстремальной систе-
мы, а также простота настройки для конкретной задачи, что поз-
воляет уменьшить общее число переборов за счет учета специфики
каждой задачи. Метод использовался при оптимизации схем кор-
рекции АМС, находящейся на орбите ИСП, с числом коррекций
не более 2—3 и ограничениями на допустимые интервалы прове-
дения коррекции, связанными с работой систем навигационных
измерений и автономного управления, где он оказался эффектив-
нее метода динамического программирования. В комбинации с ме-
тодом сечений сканирование использовалось также при выборе
оптимальной стратегии коррекции АМС различного назначения
для определения времени проведения ак последних коррекций,
обеспечивающих выполнение требований к точности наведения.
Кроме того, при сложных схемах полета метод сканирования мо-
жет использоваться для упорядоченного сбора информации о кри-
терии качества и выделения зон локальных экстремумов.
Статистическим методам поиска экстремума присущи основные
особенности, характерные для детерминированного аналога, одна-
ко при сложных многопараметрических системах возможно умень-
шение числа шагов поиска за счет случайного выбора направления
(в методах статистического градиента и случайных направлений)
или состояния системы (в методе случайного перебора). Однако
решение задач оптимизации стратегии коррекции АМС выявило,
что для данного класса аппаратов использование статистических
методов поиска практически не превышает эффективности поиска
решения.
Таким образом, экспериментальный анализ эффективности раз-
личных численных методов оптимизации показал, что при прове-
дении поэтапной оптимизации стратегии коррекции АМС целесооб-
разно использовать метод сечений для первого этапа и метод
сканирования для последующих этапов. При использовании такой
комбинации численных методов получены приведенные в
разд. 4.6, 4.7 результаты исследований по выбору оптимальной
стратегии коррекции траектории полета АМС различного назначе-
ния.
Структурная схема решения задачи синтеза оптимальной стра-
тегии коррекции межпланетной траектории АМС, реализующая
описанную выше методику, приведена на рис. 4.4.
198
Вход
Анализ приказа
и исходных
данных
Выбор схемы
и методов
решения
Расчет
характеристик
коррекции
Универсальные
модули и модели :
динамической
. системы;
методов поиска
экстремума;
расчета
терминальных
параметров
Настройка
моделей
и алгоритмов
решения
Расчесу
ошибок
коррекции
Расчет
корректирующих
и навигационных
параметров
Формирование
схемы
коррекции
Расчет
энергозатрат
коррекции
Линейная
стохастическая
модель
динамической
системы
Поиск
оптимальных
времен д-ап
' коррекции
Расчет
ошибок
навигации
Методы оценки
ошибок
навигации
межпланетных
станций
Поиск
оптимальных
времен а к
последних
коррекций
Анализ
точности
и оценка
Метод оценки
ошибок
проведения
стохастической
коррекции
Метод оценки
энергозатрат
стохасти ческой
коррекции
Выбор
оптимального
числа
коррекций
Численные методы
поиска экстремума
Универсальный
метод
расчета и(tj)
стохасти ческой
линейной коррекции
Анализ
результатов
Формирование
выходных
массивов
Выход
Динамическое
отображение
результатов
в подсистему
проектно-
баллистического
обеспечения
РИс- 4.4. Структурная схема решения задачи синтеза оптимальной стратегии кор-
рекции движения АМС на межпланетном участке
199
4.4. Особенности определения точности оценки параметров
движения АМС по навигационным измерениям
При оптимальной оценке состояния динамической системы не-
обходимо решить ряд задач, основными из которых являются:
выбор метода обработки навигационных измерений и их оптималь-
ного состава для каждой конкретной траектории полета, рацио-
нальных математических моделей движения и навигационных
измерений; определение точности оценки паграметров состояния
системы. В работа?: [2, 9, 32, 48] приводятся различные способы
оценки в зависимости от принятых допущений относительно воз-
можных законов распределения ошибок измерений, погрешностей
используемых моделей, а также оптимизации стратегии навига-
ционных измерений. В них показано, что в связи с особой важ-
ностью правильной оценки фактических параметров движения
системы, используемых при управлении полетом, обработку изме-
рений следует осуществлять таким образом, чтобы получить
наименьшие ошибки в самом неблагоприятном случае. Не оста-
навливаясь подробно на анализе полученных результатов иссле-
дований, приведем методику определения точности оценки пара-
метров движения АМС, которая может использоваться при реше-
нии задачи синтеза стратегии наведения.
Так как состояние рассматриваемой динамической системы в
момент t однозначно описывается зависимостью вида (1.5) при
заданном начальном состоянии в момент /н и известных парамет-
рах модели движения и управляющих воздействий, то такая мо-
дель в соответствии с [48] считается прогнозируемой. Следователь-
но, для определения движения АМС на любом интервале доста-
точно оценить вектор х(/у) и ряд параметров модели движения,
если априорная точность их знания недостаточна для решения
задач 'навигации и может быть улучшена путем согласования с
навигационными измерениями. Пусть у(//) = {х(/;), р'м}—вектор
оцениваемых параметров, где р'мерм — оцениваемые параметры
модели движения, к числу которых могут относиться гравитацион-
ные постоянные планет, их эфемериды, астрономическая единица,
положения станций слежения, возмущения траектории движения
и другие характеристики. При этом параметры р%ерм, не вклю-
чаемые в состав оцениваемых, следует рассматривать как мешаю-
щие, если их фактические значения известны с недостаточной точ-
ностью. Совокупность измерений d(/(), выполненных на навига-
ционном интервале [//, /;+1], образует вектор навигационных изме-
рений d (tj, причем Ан (tj, tj+i) —его ошибки. Пусть допол-
нительно известна некоторая априорная оценка вектора y°(tj) й
корреляционная матрица ошибок его оценки К[у°(//)]. Для ли-
нейной модели наблюдаемой системы справедливо
d(/;, /у+1) = Ан(/7., ^ОУ^ + АД/,, (4.26)
где Ан(//, tj+i) —матрица частных производных от навигационных
измерений d(h) по оцениваемым параметрам у(/;).
200
Новую оценку уп(^/) необходимо искать в виде линейной за-
висимости от результатов измерений, проводимых в моменты
ti...tn'-
y«(O) = y°(z/) + BK(Zr G'+i)y°(M’ (4.27)
где Вн(^, tj+i)—некоторая произвольная матрица, которая зави-
сит от принятого критерия оптимальности, определяющего выбор
метода статической обработки измерений.
Если критерий задан в виде квадратичной формы невязок оцен-
ки параметров, то обработка измерений осуществляется по методу
наименьших квадратов, причем
В„(/у, /у+1)=К[У°(/7)]Ан(/у, /;+1){К[Лн(/У:, //+1)Н
+ АН(/Л, /;+1)К [у°(/7)1 А„ (0, /у+г)}-1; (4.28)
К1У„(М==К [y°(/;)J-K 1У° (/;)! Ан (/у, /у+1) X
х (К[А„(/у, /у+1)1 + Ан(/у, /у+1)К[у° (/у)]АХ(/у, 0+1))-1Х
хАй(/у, /У+1)К [у0 (/,)],
где К[Ан(^-, tj+i)] — корреляционная матрица ошибок навигацион-
ных измерений.
Этот метод является в настоящее время основным для реше-
ния задачи оценки параметров движения различных КА. Он обес-
печивает оптимальное уточнение одновременно всех параметров
у(^) и состоятельность оценок, т. е. сходимость по вероятности
к истинным значениям параметров при п—>-оо, если выполняются
допущения, положенные в основу метода. Основное из них пред-
полагает, что известны математическое ожидание и корреляцион-
ная матрица (с точностью до некоторого произвольного множите-
ля) ошибок моделей движения и навигационных измерений. Об-
работка измерений по методу наименьших квадратов требует
привлечений всей информации, и задача выбора оптимального
состава не имеет смысла. При полетах АМС проводится, как пра-
вило, очень большое количество измерений на каждом навигацион-
ном интервале. Однако на практике возможность получения оце-
нок, неограниченно приближающихся к истинным значениям па-
раметров с увеличением количества измерений, не реализуется,
так как ни одна система допущений не удовлетворяется абсолютно
точно. Поэтому ошибка оценки имеет две составляющие: первая
соответствует системе допущений, а вторая связана с возможным
отклонением параметров моделей от принятых допущений и при
большом значении п является основной.
Если истинный закон распределения отличается от моделыю-
г°> то для любой корреляционной матрицы ошибок измерений,
принятой в качестве истинного распределения, можно найти соот-
етствующие ошибки модели движения, характеризуемые корре-
вционной матрицей дополнительных ошибок определения пара-
етР°в траектории:
201
K[y« (/pl — + [Амн (/;, ^/ + i)j ВН1 (/;, tj + ih
Вн1(/у, /;+1)={А^(//, /У+1)К[АН(/;, //+1)]АН(/Л //+1)]-*х (4.29)
X Ан (tj, tj + l) К [Ан (tj,
где К[АИП((/, (/+1)] — корреляционная матрица фактических оши-
бок измерений, которая отличается от используемой в (4.28) при
определении траекторных параметров.
Так как на практике действительные характеристики распре-
деления ошибок систем навигационных измерений неизвестны, то
существуют различные подходы к определению ошибок оценки па-
раметров движения, один из которых получил название гаранти-
рующего. Суть его заключается в том, что предполагается известным
некоторое множество возможных распределений ошибок моделей
движения и навигационных измерений и определяется наихудшая
по заданному критерию ошибка оценки. Возможны различные
способы описания упомянутого множества возможных распределе-
ний ошибок измерений: известен закон распределения и границы
изменения коэффициентов корреляции; заданы границы изменения
параметров спектрального разложения стационарной функции
случайных ошибок измерений; определена верхняя граница модуля,
возможных ошибок измерений (схема «бортика»). Последний
способ наиболее часто используется при проведении гарантирован-
ных оценок, так как он приводит к наиболее простым вычисли-
тельным алгоритмам. В частности, в работах [9, 28, 48] показано,
что для схемы «бортика» оценку параметров целесообразно про-
водить, используя количество измерений, равное размерности век-
тора y(tj), причем ошибка оценки в этом случае минимальна, не
зависит от принятой в расчетах матрицы К(АН(^, t;+i)] и равна
К[у"н(М = А71(/у, 6-+1)К[Амн(/у> /у+1)] [А71 (tj, tj+^. (4.30)
Гарантированные оценки базируются на наихудшем сочетании
всех возможных погрешностей, и поэтому получаемые результаты
оказываются сильно завышенными, так как в них не используется
вся возможная навигационная информация.
При оценке параметров движения АМС и определения ошибок
оценки можно использовать следующую модель ошибок измере-
ний, которая подтверждается имеющимся опытом проектирования,
отработки и применения систем навигационных измерений при
управлении полетом АМС. Ошибки разбиваются на две группы,
различные по своему характеру: 1) независимые, нормально рас'
пределенные для всех проводимых навигационных измерении
(случайные ошибки измерений); 2) практически постоянные ДДЯ
каждого измеряемого параметра на малых интервалах времени
(сеансе измерений). На больших интервалах времени, т. е. Д>пЯ
различных сеансов измерений взаимная корреляция между таки-
ми ошибками отсутствует (систематические ошибки сеанса изме'
рений). Тогда
202
Дн7(^) — £Ю (^/)>
где eHv — случайная, a 6)1V — систематическая ошибка измерений
у-го параметра.
Массовость измерений, проводимых на сеансе, уменьшает толь-
ко случайную составляющую ошибки измерений каждого парамет-
ра, не изменяя систематической составляющей. Каждый сеанс
измерений можно заменить одним измерением с эквивалентной
среднеквадратичной ошибкой, равной
(4.31)
где бн¥пг — предельная систематическая ошибка i-ro сеанса; ты —
число измерений на сеансе.
Для такой модели ошибок измерений можно проводить оценки
определяемых параметров по методу наименьших квадратов. Тогда
ошибка оценки имеет вид (4.28).
Если модель движения, в рамках которой проводится опреде-
ление траекторных параметров, отличается от действительной, то
ошибки модели приводят к соответствующим ошибкам оценки.
Так, если астрономические и астрофизические константы не вклю-
чены в у(/Д в качестве согласующих параметров, то неточность
их определения сказывается на результатах прогнозирования
траекторных параметров. Аналогичным образом влияют ошибки
геодезической привязки измерительных пунктов, ошибки привязки
времени проведения измерений, возмущения от работы системы
ориентации и травления газа из различных систем. Все эти пара-
метры можно включить в число ошибок модели движения. В ли-
нейной постановке
d (/,) = Ан (/Д у (/Д4-Ср(/Д Р; + Ан (/Д, (4.32)
где рм" — параметры, не включаемые в число определяемых, но
оказывающие влияние на движение КА; С (Д) — матрица их
влияния на измерения. Из (4.32) следует, что даже при отсутствии
аппаратурных ошибок могут иметь место отклонения измеренных
значений от расчетных, и как следствие этого отклонения опре-
деляемых параметров, равные
Уп (^Д = ВН2 (tj, /у+i) Рм» Вн2(/у, tj+1) = {Ан (tj, tj +1) К [Лн (tj, /;-+Д] х
X Ан(/у, ^;+Д) 1Ан(/;-, /;+1) К [Дн (tj, tj+1)] Ср (tj, /;+1)Ррм;
К1уГ(М=вн2(/у, tj+1) к [P:ibth2(/;, tj+1),
гДе К[р".Д — корреляционная матрица ошибок параметров модели
Движения.
Таким образом, возможны два способа оценки состояния дина-
вческой системы при наличии мешающих параметров. Первый
203
предполагает включение их в число оцениваемых. Такой подход
целесообразен в том случае, если имеются достаточно достоверные
данные о характере действия мешающих параметров и их возмож-
ной величине. В противном случае такой подход не целесообразен,
так как фактически движение АМС зависит от большого количе-
ства параметров и возмущающих воздействий и включение их без
должного основания в число оцениваемых может привести к ухуд-
шению точности оценки х(/;) и чрезмерному усложнению алгорит-
ма расчета. Выбор способа оценки состояния системы необходимо
проводить после детального анализа свойств конкретной системы.
Корректируемые параметры обычно не входят в число опреде-
ляемых, и их текущие значения должны быть найдены по соответ-
ствующим значениям определяемых параметров. В линейной по-
становке ошибки прогнозирования этих параметров, вызванные
ошибками оценки определяемых параметров, равны
К [8<Раы (//)! = Fy (/у) К [у„ (^y)JFy /)»
К 18ф-'н (0)]=Fy (/р К f УГ (/у)] Fy (/у); (4.33)
К [8ф£д (/у)J=Lp(/у) КIРмI Lp (/,);
Lp(tj) = FpM(tj) Fу(/у) {Ак(/у, /у+1)К[Лн(/у, ^y+i)]AH(/y» ^y+i)} 'X
хА(/у, /у+1) К [Ан (/у, ^y+i)]Cp(/y, /у+i),
где Fy (tj), F?yi(ti)—матрицы производных от прогнозируемых
параметров по определяемым параметрам и ошибкам модели дви-
жения. Суммируя, корреляционные матрицы в (4.33), получим сум-
марную корреляционную матрицу ошибок прогнозирования.
В качестве примера влияния мешающих параметров на оценку
состояния динамической системы рассмотрим источник ошибок,
связанный с возмущениями негравитационного характера, дейст-
вующими на участке межпланетного перелета. Причиной их воз-
никновения может являться использование немоментных схем
реактивных исполнительных органов САУ в режиме управления
движением относительно центра масс АМС или утечка рабочего
тела из-за негерметичности клапанов, травление газа из отсеков
АМС и другие. Отсутствие на борту станции специальных инер-
циальных систем, измеряющих эти возмущения, не позволяет
вводить их в модель движения в качестве известных детерминиро-
ванных составляющих. Однако, как показала практика полетов,
именно эти «мешающие» параметры оказывают наиболее сущест-
венное влияние на оценку движения АМС. Анализ условий работы
САУ позволяет получить некоторые представления о порядке ве-
личины ускорений, связанных с такими возмущениями, однако
достоверные данные о их статистических характеристиках, как
правило, отсутствуют (в частности, известно, что предельные зна-
чения ускорений могут изменяться от 10-6 м/с2 при стабилизации
в режиме постоянной трехосной ориентации до 10-5 м/с2 при успо-
204
Ксении после отделения АМС от разгонного блока). Включение
Мешающих параметров в состав оцениваемых по навигационным
измерениям даже при моделировании их влияния на траекторию
движения эквивалентным импульсным изменением вектора ско-
рости Av(^bZ) приведет, с учетом недостаточности априорных дан-
ных, к недопустимому увеличению параметричности системы.
Оценка параметров состояния такой расширенной системы ока-
жется практически невозможной. Поэтому оценим их влияние в
случае, когда они не вводятся в число уточняемых.
Из возможных направлений Av(^i) наибольшее влияние на
отклонения навигационных измерений дальности Д и радиальной
скорости Д имеет импульс, близки?! по направлению к радиусу-
вектору КА — Солнце. Для расчетов по определению влияния не-
гравитационных возмущений на оценку параметров движения при-
нята траектория Земля — Марс со временем перелета 290 сут.
Рассматривался навигационный интервал между первой и второй
коррекциями при различных вариантах проведения первой коррек-
ции и приложения импульсного возмущения, равного 10 мм/с.
Определялись ошибки оценки корректируемых параметров и т)п.
Модель ошибок измерений соответствовала (4.31), причем
о[ент(^)] и 6пнт приняты равными 100 м по Д и 0,1 м/с по Д.
Анализ полученных результатов показал, что за счет негравита-
ционных ускорений возможны значительные ошибки оценки и
т|п, которые практически на порядок превышают влияние аппара-
турных ошибок измерений. Их влияние на ошибки оценки имеет
сложный, колебательный характер, причем величина ошибок тем
меньше, чем точнее оценка начального состояния системы к мо-
менту возникновения возмущений. На рис. 4.5 представлено изме-
нение ошибок оценки корректируемых параметров при ?Bi = 30 сут,
Л = 20 сут, из которого следует, что максимальная ошибка текущей
оценки достигает 200 000 км по т)п и 10 000 км по и уменьша-
ется к концу навигационного интервала до 1000 и 300 км соответ-
ственно. Ошибки, полученные в результате статистической обра-
ботки навигационных измерений, значительно превышают факти-
ческое изменение корректируемых параметров, вызванное дейст-
вием возмущений, которое составляет 200 км по т)п и 15 км по £п-
Хотя возмущения изменяют параметры движения АМС в плос-
кости траектории перелета, наибольшее влияние они оказывают
на ошибки оценки т]п, т. е. в направлении, ортогональном этой
плоскости. Причина такого эффекта связана с тем, что для высо-
коточной оценки именно этих параметров при принятом составе
навигационных измерений требуются большие навигационные
интервалы, продолжительность которых достигает 3... 4 мес. Ины-
ми словами, большое влияние негравитационных возмущений на
•°Ненку параметров траектории движения объясняется недостаточ-
ной информативностью наземных измерений Д и Д на больших
Расстояниях АМС от Земли и малым относительным изменением
9тих измерений за время сеанса. Поэтому при полетах АМС целе-
205
Рис. 4.5. Ошибки прогнозирования коор-
динат в картинной плоскости при нали-
чии негравитационных возмущений
Рис. 4.6. Изменение фактиче-
ских ошибок прогнозирования
движения АМС на межпланет-
ном участке
сообразно использовать высокоточные навигационные системы,
проводящие измерение, кроме Д и Д углов, характеризующих на-
правление с НИПа на АМС, автономные астронавигационные и
другие типы измерений.
В заключение-отметим, что любая априорная оценка точности
требует проверки корректности принятых допущений путем
сравнения результатов с апостериорными данными об ошибках
оценки состояния системы. Для этих целей могут использоваться
векторы невязок и определение вероятностных характеристик по-
лученных ошибок измерений. Если они не превосходят ожидаемых
максимальных значений, учитывающих измерительные и методиче-
ские ошибки, то полученное решение непротиворечиво и может
быть использовано при управлении движением АМС. Такой способ
анализа результатов получил название оценки точности по внут-
ренней сходимости. Однако он дает только необходимое, но еще
не достаточное условие правильности решения задачи. Крайне
желательно проведение апостериорной оценки одной и той же ди-
намической системы по различным составам независимых навига-
ционных измерений, если это оказывается возможным. В част-
ности, таким эталоном при послеполетном анализе могут служить
результаты оценки параметров движения по автономным астро-
измерениям. На рис. 4.6 приведены характеристики изменения
ошибок оценки параметра сп для одной из АМС, на которой была
установлена система автономно?! навигации. Изменение ошибок
носит колебательный характер, что объясняется проявлением не-
гравитационных ускорений при работе САУ в режиме постоянной
трехосной ориентации. Фактические невязки измерений в несколько
раз превышали максимальные значения возможных аппаратурных
206
ошибок, что свидетельствовало о наличии методических ошибок,
вызванных отличием принятой пассивной модели движения от дей-
ствительной. Тем не менее метод наименьших квадратов широко
используется в практике управления движением АМС даже в тех
случаях, когда стохастические характеристики ошибок измерений
известны недостаточно точно, закон их распределения существенно
отличается от нормального, а модель движения нелинейная. При
этом в большинстве случаев оценки параметров движения полу-
чаются вполне удовлетворительными, согласованные с рассмотрен-
ным выше способом определения возможных ошибок, что объяс-
няется тем, что в основе метода лежит принцип минимизации
нормы вектора невязок измерений. Следовательно, если невязки
малы, аномальные измерения отбракованы, задача оценки состоя-
ния системы хорошо обусловлена, а норма вектора невязок соот-
ветствует ожидаемым значениям ошибок измерений, то можно
предположить, что и получаемые параметры траектории близки
к истинным значениям.
4.5. Оптимизация стратегии однопараметрической
многоразовой коррекции
Для качественного анализа основных свойств оптимальной
стратегии, рационального выбора количества коррекций и момен-
тов их проведения целесообразно рассмотреть упрощенные задачи
оптимизации, для которых оказывается возможным найти реше-
ние в конечном виде. Получаемые результаты могут использовать-
ся также для выбора начального приближения при численном
решении задач синтеза оптимальной стратегии в целях повыше-
ния эффективности и надежности сходимости метода последова-
тельных приближений.
Пусть необходимо выбрать оптимальную по энергетике страте-
гию однопараметрической независимой многоразовой коррекции
на участке полета [/н, А], обеспечивающую исправление с требуе-
мой точностью заданных ошибок выведения. Будем считать, что
ограничения на времена проведения коррекции отсутствуют;
ошибки прогнозирования корректируемого параметра cpKi на уча-
стке между любыми двумя управляющими воздействиями, опре-
деляющими навигационный интервал, описываются непрерывной,
Убывающей на данном отрезке функцией заданного вида. Произ-
водная ^к1 (tj) от корректируемого параметра по корректирующей
скорости, прикладываемой в оптимальном направлении (или в лю-
бом другом фиксированном направлении, если существуют огра-
ничения на проведении коррекции), является непрерывной, убы-
вающей функцией времени полета на участке [/„, известного
вида. Ошибки выведения и требуемая точность наведения харак-
теризуются величинами среднеквадратичных отклонений соответ-
ствующих распределений ошибок корректируемого параметра
207
о[Д<Рк1 (М] и од<р- Тогда оптимальная стратегия коррекции должна
обеспечивать:
Фк(^) = т1пФк {а[Д<рк1 (/„)], а (/у)], a[Su(/y)]J (4.34)
при условиях а{Д<р+к1 g<-gz-
В качестве критериев качества управления будем рассматривать
математическое ожидание, дисперсию и квантиль распределения
суммарной характеристической скорости коррекции. Основным из
критериев является ugp, однако, как будет показано ниже, условия
оптимальности для него функционально связаны с условиями опти-
мальности двух других критериев: A4[ug] и o2[ug], В соответствии
с методикой оптимизации многоразовой коррекции (см. разд. 4.3)
будем считать, что при заданном количестве коррекций g точность
наведения зависит от проведения только ак последних коррекций,
тогда выбор времени проведения g—ак первых коррекций не зави-
сит от требований к точности. Такое разделение общей задачи син-
теза на «точностную» и «энергетическую» подзадачи позволяет
определить стратегию g—ак коррекций из условия энергетической
оптимальности наведения при фиксированных временах проведения
ак последних коррекций. Условие оптимальности, если минимум до-
стигается внутри допустимой области изменения аргумента tj, имеет
вид
----L£L=0; — = 0; —S-=0;
dtj dtj dtj
У = 1,..., g aK; tg_a+1 = /g._a+i,..., tg = tg.
Рассмотрим зависимость характеристик однопараметрической
коррекции от ошибок прогнозирования движения и исполнения уп-
равляющего воздействия. Если в момент tj проводится кор-
рекция, то
[Дга . (Z;)] 'I 2
7 +°218 u (0)1. (4-36)
I /к1(tj) )
Где а2 [Д<рк1 (/;)!= °2 [Д<р"1 (0-1)] + ®2 [8?"1 Gj)]+
+ °2 [Верк! (^/-1)] ;
а2 [8 U (tj)J = а2[8«гс (/,-)] + а2 [6J а2 [и (/,-)] = а2 [8«ЛсМ +
, °2 [Д<Рк1 (Q)]
/кЛО) ’
а2 [Д<& (/;-!)] = /к! (/;_!) а2 [8 и (/;_!)].
Из (4.36) следует, что каждая коррекция функционально свя-
зана со всеми последующими коррекциями через ошибки прогнозш
зования и исполнения, поэтому выбор времени проведения /-«
208
коррекции влияет на параметры распределения характеристиче-
ских скоростей всех последующих коррекций.
Используя приведенные в разд. 3.5 методы расчета математиче-
ского ожидания, дисперсии и квантилей распределения суммарной
характеристической скорости коррекции, преобразуем выражения
(4.35) следующим образом:
ЭМ [tfg]
dtt
дМ [и (/;•)]
di)
g
ХЧ О" [U (/,)] _д
dtj
[и (/,-)] I___________________yi да2 [и (/,.)] =
аь ' [/, |1/2^ dt,
1 2 Щ °2 [и (Л')] 1
?№ о2[и(^)]—дисперсия распределения вектора корректирующей
скорости.
В условиях оптимальности (4.37) для tzgp принято, что agp =
=const. В действительности agp зависит от числа коррекций и рас-
пределения всех корректирующих скоростей, однако это изменение
не превышает 10% и при качественном анализе свойств оптималь-
ной стратегии им допустимо пренебречь. Из (4.37) видно, что усло-
вия оптимальности для критерия ugp являются линейной комбина-
цией соответствующих условий двух других критериев. Следователь-
но, если какая-либо стратегия является оптимальной по критериям
математического ожидания и дисперсии, то она одновременно
оптимальна и для критерия wgp. Времена проведения последних
коррекций должны выбираться таким образом, чтобы условие, на-
кладываемое на допустимые ошибки наведения, выполнялось при
наименьших значениях критерия качества управления.
Условия оптимальности стратегии коррекции достаточно сложны
и Для их упрощения сделаем дополнительные допущения. Покажем,
как в соответствии с ними изменяются условия оптимальности и
свойства оптимальной стратегии, и отметим, в каких случаях на
практике это допущения могут выполняться.
Задача 1. Пусть при проведении коррекций справедливы сле-
дующие положения.
1-^ Ошибки исполнения коррекции малы по сравнению с вели-
иной корректирующей скорости и не зависят от нее, т. е. отсутству-
т мультипликативные ошибки исполнения коррекции. Для совре-
енных систем автономного управления ошибки исполнения уп-
РавдЯЮ1цего воздействия обычно на порядок меньше его величины,
Ричем пропорциональные ошибки интегратора меньше случайной
209
(4.38)
составляющей ошибки, не зависящей от величины характеристиче-
ской скорости коррекции. Поэтому принятое предположение явля-
ется вполне допустимым и приводит к следующему упрощению:
а [ДФк1 (Л‘)]
° [и(</)]=—, - - - ;а Is и(//)]=’ [з«гс 0j)I;
7к1 \tj)
«[Дтк1 (<?)] =ZKi (*>)<» (<,)];
=.Q,
dtj
2. Ошибка прогнозирования корректируемого параметра в мо-
мент проведения коррекции мала по сравнению с исправляемым от-
клонением и ею можно пренебречь при расчете корректирующей
скорости. Это допущение также представляется оправданным, так
как коррекции должны проводиться тогда, когда исправляемые от-
клонения известны с высокой точностью. Коррекция траектории при
больших ошибках прогнозирования движения приводит к увеличе-
нию энергозатрат очередной и последующих коррекций, а такая
стратегия, как правило, оказывается не оптимальной. Тогда имеем:
<?а [д<рк1 (/;)]
a2[A?Ki(^)l=a2[A<p“H^-i)]+32 [8?к1(^-1)];
Ot j
Гл и и \1 [д<Рк1 (0)]
гл м |°LMk1(^)] --------------------+ (4-39)
° [Д<Рк1 (0+1)] I
I Г» 11 /7 \1 [S<fKl
+ « [8<рк1 (/;)] ------
0;
<?a [A<pKi (0+1)]
dt<
dtj
1
[Д'Рк! (0 + 2)]
1
dtj « [Д<рк1 (О+2)] dtj
3. Ошибки прогнозирования вероятного значения корректируе-
мого параметра малы по сравнению с самим прогнозируемым от-
клонением, вызванным ошибкой исполнения коррекции. В отличие
от первых двух для этого допущения необходимы более жесткие ус-
ловия. Оно справедливо в том случае, когда для определения тра-
ектории используется высокоточная система или навигационные
интервалы достаточны, чтобы провести измерения, необходимые
для определения параметров движения и ошибок реализации управ-
ляющих воздействий. Такое предположение сводит задачу синтеза
оптимальной стратегии коррекции к выбору оптимального управле-
ния динамической системой с пассивным накоплением информа-
ции, не зависящему от стратегии навигации:
0 [ А?к1 (^7')] = а [д?к1 (^7—1)1 = /к1 (^7—1) 0 (^/—1)]’
<мд?к1(о)] п до [д?к1 (0+1)] r „ и d/Ki(Q) . 40)
dtj ’ dtj 2С 7 1 dtj
да[Д<Рк1 (0+2)] _д
dtj
210
Принятые допущения позволяют упростить условия оптимально-
сти стратегии наведения, так как в этом случае время проведения
у-й коррекции в явном виде связано только со временем проведения
(/+ 1)-й коррекции, а ошибки наведения определяются только
ошибками исполнения последней коррекции, т. е. ак=1. Используя
(4.38)...(4.40), приведем условия оптимальности (4.37) к следующе-
му виду (соответственно для критериев качества управления
M[wg], cr2[ug], ugp):
А-м ttj)—
з[Д<Рк1(0)] , 1 rs .,
•> И G I 7 Г (.* J / “
/кип-) dtA Mj+i) dti
(4.41)
ар3„
МЛ(ОН—-—s——-Ba^t})=0, 7=1 1.
2 ^ °2[u(O)]|
U=1 J
Так как отклонение корректируемого параметра после коррек-
ции определяется моментом ее проведения, то для любой
заданной зависимости fK\ (t) можно определить такое tg*, при
котором выполняются требования к точности наведения
)=—
« [ВДгс]
(4.42)
о (4)] = Л1 (4)0 Ю] Л1
а [В«ас (/g)] = a [8«гс] = const.
Для монотонно убывающей функции fKi(0 условие (4.42) уста-
навливает оптимальное время проведения последней коррекции.
Таким образом, общая задача оптимизации стратегии коррекции
разделяется на две, каждая из которых может быть решена незави-
симо от другой: сначала находится оптимальное время проведения
последней коррекции из условия требуемой точности наведения
(4.42), затем определяются времена для оставшихся (g—1)-й кор-
рекций из условия минимума энергозатрат (4.41).
Следует подчеркнуть, что время проведения последней коррек-
ции в рассматриваемой задаче не зависит от принятого критерия
оптимальности и определяется только требованием к точности на-
ведения.
Для критерия M[ug] условие оптимальности можно привести
к следующей системе, считая, что —/ q.
° [S^zc]
« [Д<Рк1 (tH)]
/,<1 (/1) при
7 = 1;
Л1 (*;+1)
при / = 2
£-1-
(4.43)
211
Общее решение этой системы имеет вид
лЖ)
о[АУк1(/н)] 7 1 \//g,
®[8«zc] \ДО/
,х g~~i
или /К1 (/*) °' (Д,)”,
а с]
где
у=1 ,...,£-1,
А __ 3 4 [Д?К1 Он)]
“а w •
(4.44)
Используя общее решение системы, получим следующие свойст-
ва оптимальной для критерия M[ug] стратегии коррекции.
1. Отношение величин градиентов корректируемых параметров
(по составляющим корректирующей скорости) в моменты проведе-
ния любых двух последовательных коррекций постоянно и равно
=(тТ’ /=‘|.
Л1(/7)
2. В момент проведения коррекции отношение отклонения кор-
ректируемого параметра после коррекции к исправляемому данной
коррекцией отклонению постоянно для всех коррекций и равно
3 [Д?к1 (0)] I 1 V/g .' ,
-------------- — , J= 1
3 [ДсРк1 (О-i)] \д, /
3. Частные значения критерия качества (математические ожи-
дания распределения каждой корректирующей скорости) равны
между собой
М [и (/,)] = V [8zzzcI (Д,Ж у = 1
4. Оптимальное число коррекций определяется только ошибка-
ми выведения и требуемой точностью наведения, не зависит от оши-
бок исполнения коррекций и равно 1пДа.
Докажем последнее свойство. Действительно, на основании свой-
ства 3 величина M[ug] при числе коррекций g равна
М [ug]=gM[u(tj)]=gkua[buzc]^ey/g. (4.45)
Дифференцируя (4.45) по числу коррекций и приравнивая полу-
ченное выражение нулю, получим следующее условие для определе-
ния оптимального числа коррекций:
V [8wzc] (Д,)1/г - у kua [8игсJ (Д,)1^ 1пДа=0,
откуда g* = In До.
Таким образом, для критерия M[ug] оптимальная стратегий
многоразовой коррекции, обеспечивающая выполнение заданны*
требований к точности, полностью определена как по числу корреК'
212
F 3
дни, так и по временам их проведения при любой заданной зависи-
мости fni (t).
Рассмотрим оптимальную стратегию для критерия o2[ug]. Ус-
ловие оптимальности для o2[ug] после некоторых преобразований
приводится к системе уравнений вида (4.43), соответствующих ус-
ловиям оптимальности для критерия A4[ug], а следовательно, урав-
нения (4.44) являются общим решением для определения времен
проведения коррекций при оптимальной стратегии. Поэтому пер-
вые три свойства оптимальной стратегии коррекции для M[ug]
справедливы и для критерия а2 [и/], причем среднеквадратичные
распределения корректирующих скоростей в точках оптимальной
коррекции равны между собой и составляют
^[м(М = ^а2Мс](Ла)2/<
Что касается оптимального числа коррекций для критерия
o2[ug], то g* = 21nAa, т. е. в два раза превышает оптимальное число
коррекций для критерия M[ug] и также не зависит от ошибок кор-
рекции:
=^2[8«гс](До)- j-&2M;
g* =2 In
Критерий ugp, как было отмечено выше, является комбинацией
двух предыдущих. Из условий оптимальности (4.41) для этого
критерия видно, что если при некоторой стратегии коррекции вы-
полняются условия оптимальности для M[ug], o2[ug] одновремен-
но, то такая стратегия является оптимальной и для ugp. Следова-
тельно, при фиксированном числе коррекций оптимальная страте-
гия одинакова для всех критериев и определяется общим решением
(4.44). Можно показать, что такое решение является единственным
Для критерия tigp. Оптимальное число коррекций отличается от ра-
нее полученных для критериев M[ug] и o2[ug], так как
uPg = gk^ [8«2С] (Да)1/г + 18«2С] (ДО17*;
- p
OU 1
—= [^2С](Д3)^- — £иа[8«гс](До)^1пД.+
ag g
+ ^£_1/2apaaI8«»cl(Aa)1/g — £-3/2ари(Да)1пДа;
откуда (-L- llnAaW + (g*)-i/2aPpJ+ 4-^ = 0. (4.46)
Уравнение (4.46) приводится к уравнению 3-й степени, решив
оторое можно определить оптимальное число коррекций при за-
анных начальных ошибках и требуемой точности. Подставляя в
' -46) оптимальное число коррекций для критериев M[ug], о2[ие],
213
Рис. 4.7. Зависимость оптимального
количества однопараметрической кор-
рекции ОТ ошибок (<т[Дфк1 (Ml). точ-
ности наведения (афд) и вида крите-
рия качества управления
Рис. 4.8. Характеристики эффективности
стратегии однопараметрической много-
разовой коррекции
можно показать, что g* для находится между g* для М [г/?]
И (Т2 [«(?]
На рис. 4.7 приведено изменение оптимального количества кор-
рекций для каждого из рассматриваемых энергетических критериев
качества управления. Необходимо заметить, что g* может быть
сравнительно большим. Однако зависимость критерия качества от
числа коррекции при g>5 такова, что дальнейшее увеличение чис-
ла коррекций незначительно уменьшает энергозатраты коррекций.
Учитывая сложность проведения корректирующего управления в
космосе, затраты рабочего тела на ориентацию и стабилизацию при
коррекции, а также возможное снижение общей надежности, число
коррекций целесообразно ограничить. Так, при ошибках современ-
ных систем выведения и управления с учетом существующих требо-
ваний к точности для перелета Земля — планета, планета — плане-
та и планета — Земля достаточно ограничиться 2—4 коррекциями.
На рис. 4.8 показано относительное изменение эффективности стра-
тегии коррекций по сравнению с оптимальной в зависимости от
числа коррекций, 'ошибок и точности наведения.
Рассмотрим, как размещаются оптимальные моменты коррекции
на траектории перелета АМС. Исследования коррекций траектории
перелетов к планетам показали, что градиенты корректируемых
параметров резко уменьшаются в начале полета примерно по ги-
перболической зависимости; на заключительном же участке поле-
та зависимость их близка к линейной. Так, линейная зависимость
для отклонений в картинной плоскости имеет место на сравнитель-
но большом участке подлетной к планете траектории; зависимость
величины градиента в сфере действия одного притягиваю-
щего тела есть линейная функция от расстояния до притягиваю!116'
го тела. Таким образом, в качестве примера можно принять Д0е
модели зависимости градиента от времени (или любого параметр3»
214
однозначно с ним связанного): гиперболическую fKi (/) = an (tK—t)~l;
линейную /к! (/) =а/г(^к—t), tu<t^tK. Для каждой модели введем
новую переменную — безразмерное время полета следующим об-
разом;
~ ~ a
гиперболическая t =-----— ; ;
Т — z« t (4< — 4)
= t _t = =3 (4.47)
линейная t ——-------; fK2(t)=a/2t —
Подставляя (4.47) в общее условие оптимальности для всех
рассмотренных критериев, получим времена проведения коррек-
ций:
гиперболическая
__ Д/1° [вЦ2с1 д1/£.
/к-'н ’№1(4)1 ’ ’
—L—
z/+l
линейная
5* — ° [А?К1 (<н)1 д7/г
’ а/г(4 —[8“zd °
и, следовательно, отношение безразмерных времен проведения опти-
мальных коррекций постоянно, зависит только от <т[Д<рК1 (^н)],
и не зависит от коэффициентов ад, а/2 модели градиентов.
Для сравнения результатов решения приведем оптимальные вре-
мена четырехразовой коррекции при фиксированном времени по-
следней коррекции и двух моделей зависимости градиента от вре-
мени, причем для удобства все времена выражены через перемен-
ную 7:
гиперболическая 7i* = 0,961; 72* = 0,902; 73* = О,69; /4 = 0,0116;
линейная "7* = 0,37; 72* = 0,117; 6* = 0,0368; 74 = 0,0116.
Если при линейной модели все коррекции проводятся при />
-^0,5, т. е. во второй половине полета, то при гиперболической мо-
дели первые три коррекции проводятся при 7<0,5. Такое различие
объясняется сравнительно большой эффективностью коррекций
вначале полета и резким падением ее при приближении к концу
Полета для гиперболической модели.
Задача 2. Пусть при многоразовой однопараметрической кор-
Рвкции выполняются только первые два допущения. Однако прово-
дятся такие навигационные измерения, для которых решение задачи
215
навигации обладает следующим свойством: ошибки прогнозирова-
ния на каждом навигационном интервале определяются только вре-
менем окончания измерений и не зависят от величин интервала,
причем
Ч^’к^Д^/з/к!^)- (4-48)
Таким свойством обладают, например, ошибки прогнозирования
траектории по астронавигационным измерениям на участке подле-
та к планете назначения.
Отклонения корректируемого параметра после проведения каж-
дого управляющего воздействия определяются теперь не только
ошибками исполнения коррекции, но и ошибками прогнозирования
движения АМС к моменту проведения коррекций. Так как все
ошибки зависят только от времени последней коррекции, то по-
прежнему ак=1 и оказывается возможным проводить оптимизацию
энергозатрат первых (g—1) коррекций, а оптимальное время про-
ведения последней коррекции определять из условий точности на-
ведения вне зависимости от стратегии предшествующих коррекций:
о [Д<р+ (/*)]={°2 f2K{ (^)+a2zX 1/2 ад;
/к1(^)=-----------2-1/?
g {a2[^cJ +«/3}1/2
Для (принятой зависимости ошибок прогнозирования от навига-
ционного интервала справедливо
К'1 (',)] . <MWki(0+i)] п.
dtj dtf dtj
<МДМ (0+1)] Ai(0) , ^ki(O)
dtj а [ДМ (0+1)1 7
da [Д?к1 (Q+2)] _Q da [A?K1 (Q)] —Q
dtj ’ dtj
Условия оптимальности (4.37) упрощаются и имеют
случае следующий вид:
. ° [ДМ (О» ^Л1(0) । (°2 [5“zc]+а23}1/2
АМ Uj) —-------2 ,, ,-----73-----I------—------7-----
АНО) "О Ai(0+i)
<Э/к1 (0) А
X--------— =0;
dt.
(4.49)
(4.50)
в этом
г> . «2[ДМ(0>] ^/к1(0) , ( ,rs 1! 21 m
ДоД0)=------р—----------—------Ha2I8«zcl + «}3) X (4.01)
/1<1 (О') ^/к1(0) Q.
f \л (О+i) <*0
216
а'"Ви
kaAM (/;) + —-—? - 1/2- (G-)=о, у = 1,..., V -1.
2 »2[и(О)]
U = 1 J
При замене п2[6и] = о2[6цте] + а2/з, т. е. суммарной ошибки про-
гнозирования и исполнения коррекции эквивалентной ей ошибкой
исполнения коррекции, условия оптимальности (4.51) новой зада-
чи становятся тождественными условиям оптимальности (4.41)
рассмотренной ранее задачи. Следовательно, оптимальная страте-
гия коррекции в задаче 2 может быть получена из (4.44) при заме-
не, где это необходимо, о[5иХс] на о[6п]. Сохраняются также все
свойства оптимальной стратегии, полученные в задаче 1.
Задача 3. Пусть в отличие от предыдущей задачи ошибки про-
гнозирования зависят не только от момента окончания навигаци-
онного интервала, но и от его продолжительности, причем будем по-
лагать, что
° (6-)1 = а/з/к1(^)+/ Д// Д1 (^)- (4-52)
Ч — С'-1
Проведенные исследования ошибок прогнозирования на различ-
ных траекториях полета показали, что условие (4.52) приближенно
выполняется на некоторых участках траекторий полета к планетам,
если для определения траектории используются радиотехнические
измерения средств НКУ. Действительная картина изменения оши-
бок прогнозирования при межпланетных полетах значительно слож-
нее, однако модель (4.52) позволяет наглядно продемонстрировать
те сложности, которые возникают в рассматриваемой задаче опти-
мизации, если ошибки прогнозирования зависят от величин навига-
ционного интервала.
Во-первых, основное отличие этой задачи от двух предшествую-
щих состоит в том, что невозможно провести ее разделение на две
последовательно и самостоятельно решаемые задачи, позволяющие
определить время выполнения последней коррекции исходя из тре-
бований к точности наведения без оптимизации всей стратегии в це-
лом и затем выбрать времена оставшихся коррекций из условия
Минимума энергозатрат наведения. В данном случае ошибки про-
гнозирования и затраты топлива на проведение каждой коррекции
зависят от условий проведения двух соседних коррекций, следова-
тельно, ак>1. Во-вторых, условия оптимальности для каждой /-й
коррекции при заданных временах выполнения последующих кор-
рекций имеют более сложный вид, чем в двух предшествующих за-
дачах. Это не позволяет получить общее решение для системы
^•37), соответствующей принятой модели ошибок прогнозирова-
ния.
Для характеристики свойств оптимальной стратегии при моде-
ли (4.52) ошибок прогнозирования и некоторых частных значений
^Шибок выведения, прогнозирования и исполнения коррекции чис-
енным способом получены оптимальные стратегии коррекции для
Рйтерия M[ug], Поиск оптимальной стратегии осуществлялся ме-
217
тодом сечений, причем для простоты анализа время последней кор-
рекции было зафиксировано. Число коррекций g = 4, зависимость
^•1(0 —гиперболическая. Результаты оптимизации показали, что в
большом диапазоне значений коэффициентов а/з, ац, определяющих
величину ошибок прогнозирования, сохраняются основные свойст-
ва оптимальной стратегии коррекции, полученные в задачах 1 и 2.
Однако существует область значений а/з, ац, размеры которой за-
висят от их соотношения, где указанные свойства оптимальности
не выполняются. При ац~\ свойства 1 и 3 нарушаются только для
первой коррекции, но выполняются для последующих. При дальней-
шем увеличении а/4 свойства нарушаются для 1-й и 2-й коррек-
ций, но сохраняются для 3-й и 4-й. Точность наведения практически
зависит от времени проведения двух последних коррекций, т. е.
ак = 2, и поиск энергетически оптимальной стратегии можно прово-
дить при фиксированных tR, tg_\.
Из рассмотренных примеров следует, что характеристики и свой-
ства оптимальной стратегии коррекции существенно зависят от
принятого критерия качества и моделей ошибок систем, обеспечи-
вающих управление движением. Поэтому при решении задачи
синтеза стратегии наведения АМС необходимо учитывать возмож-
ности их бортовых систем и реальные условия полета.
В заключение отметим, что нами рассмотрены наиболее прос-
тые модельные задачи оптимизации однопараметрической много-
разовой коррекции в -стохастической постановке, позволяющие по-
лучить общее решение задачи синтеза. В них предполагалось, что
коррекции проводятся в независимом режиме, т. е. при условии
полного исправления известных отклонений корректируемых пара-
метров, а вероятностные характеристики энергетических затрат
определяются преобразованием (4.2), которое предполагает ис-
пользование единых значений t*, g* для всей генеральной совокуп-
ности возможных траекторий, заданной корреляционными матрица-
ми ошибок выведения, проведения коррекций и прогнозирования
движения. В то же -время возможна такая постановка задачи наве-
дения, когда выбор tj, g осуществляется в зависимости от конкрет-
ных значений отклонений корректируемых параметров, реализован-
ных в процессе полета. Для решения такой задачи необходимо
использовать более сложный и трудоемкий метод численного поиска
экстремума — динамическое программирование. В этом случае при
заданном дискретном множестве Туп необходимо найти алгоритм,
определяющий выбор tj* и С*(/;) в зависимости от Д<рк(/;). В рабо-
тах [12, 50] в такой постановке рассмотрены модельные задачи
синтеза оптимальной коррекции при некоторых дополнительных
предположениях относительно ошибок прогнозирования движения
и исполнения коррекций. В частности, показано, что оптимальное
исправление отклонений не соответствует режиму -независимой
коррекции. Однако если на интервале между коррекциями точность
оценки корректируемых параметров изменяется незначительно, т°
оптимальный способ коррекции близок к независимой коррекция-
218
Для каждой точки ^еТуп существует такая область значений
Дфк(2‘/) («область нечувствительности»), при попадании в которую
текущих отклонений корректируемых параметров их исправление в
точке t, проводить нецелесообразно. Размеры этой области тем
меньше, чем меньше изменяется точность прогнозирования на
участке между двумя возможными моментами проведения коррек-
ций. Физически это означает, что если заранее известно, что точ-
ность оценки Афк(//) на интервале [Д С+1] практически не улуч-
шится, то не имеет смысла откладывать исправление отклонений
корректируемых параметров на более позднее время, так как эф-
фективность u(fj) обычно выше, чем u(//+t). Общее количество кор-
рекций g в таких задачах не ограничивается и может существенно
возрастать по сравнению с режимом независимой коррекции.
Таким образом, использование преобразований (4.2) при синте-
зе оптимальной стратегии коррекции на этапе проектно-баллистиче-
ских исследований не только упрощает способы выбора стратегии,
но и позволяет оценить величину запасов топлива, необходимого
для управления движением АМС, с некоторой гарантией. Для ре-
альных условий полета АМС величина энергетического выигрыша
от использования более гибкой стратегии наведения на межпланет-
ном участке не превышает 10%.
4.6. Оптимизация стратегии коррекции
при полетах АМС к Марсу
В качестве примера использования рассмотренных методов рас-
чета и оптимизации характеристик стохастической коррекции, про-
водимых на этапе проектно-баллистического обоснования и выбора
схемы полета, приведем результаты решения задач наведения для
АМС, предназначенной для исследования Марса.
Полеты к Марсу с целью посадки на его естественные спутники
Фобос и Деймос или доставки образцов марсианского грунта на
Землю являются наиболее интересными и сложными задачами ос-
воения дальнего космоса в ближайшие десять—двенадцать лет. При
анализе стратегии коррекции, учитывая современное состояние ис-
следований и перспективы развития космической техники, наряду
с траекториями прямого перелета рассмотрим более сложные тра-
ектории движения с попутным облетом планеты Венера.
Синтез оптимальной стратегии коррекции должен проводиться
Аля каждой схемы полета, а его результаты зависят от конкретных
Характеристик бортовых систем, назначения АМС. Учитывая иллю-
стративное назначение данных материалов, предположим для опре-
деленности расчетов, что навигационные измерения проводятся с
Помощью комбинированной системы, включающей радиотехниче-
ские средства НДУ и автономные оптические средства БКУ. На
Сех участках полета проводятся наземные радиотехнические из-
д?Рения дальности (Д) и радиальной скорости (Д) движения
™С относительно ДИПа. Если наземные измерения не обеспечи-
219
вают необходимой точности определения параметров движения, т0
на отдельных участках полета на АМС автономно измеряются: два
угла между направлениями с АМС на планету и навигационные
звезды d2) и угловой диаметр планеты (d3), причем навига-
ционные звезды выбираются так, чтобы направления на них были
ортогональны, что обеспечивает повышение точности оценки [26].
Измерения могут иметь случайные и систематические ошибки,
среднеквадратичные и предельные значения которых равны: для
радиотехнических измерений 0,1 м/с по радиальной скорости и
0,1 км по дальности, для автономной системы 1'. На определение
и прогнозирование траектории движения АМС оказывают влияние
ошибки используемых астрономических и астрофизических конс-
тант, а также положения и геометрической фигуры планеты.
Ошибки постоянных согласно [42] приняты равными: гравитаци-
онных постоянных Земли, Марса и Венеры — 3 км3/см2; астроно-
мической единицы—10 км; положения планеты: вдоль орбиты —
1000 км для Марса и 500 км для Венеры, в ортогональном направ-
лении— 500 км для Марса и 150 км для Венеры.
Так как стратегия наведения АМС связана со стратегией нави-
гации, то для каждой схемы полета принимался соответствующий
ей рациональный состав навигационных измерений и времена про-
ведения сеансов. При этом учитывались результаты исследований
по оценке точности прогнозирования, требования к надежности ре-
шения навигационной задачи, существующие в настоящее время
принципы проведения навигационных измерений при полетах
АМС.
Будем считать, что на АМС установлены бортовые системы, ко-
торые позволяют проводить трехпараметрические коррекции без
ограничения их количества. Среднеквадратичные ошибки исполне-
ния корректирующего воздействия на всех участках полета равны:
продольная ошибка корректирующей скорости, нормальная и бо-
ковая ошибка стабилизации, не зависящие от величины характе-
ристической скорости — 0,05 м/с; продольная ошибка корректи-
рующей скорости, пропорциональная ее величине — 0,5-10-3 u(ti)<
ошибка ориентации вектора корректирующей скорости — 3'.
Ошибки выведения АМС на траекторию перелета зависят от
используемого для этих целей ракетно-космического комплекса,
схемы выведения и параметров самой траектории. Однако для од-
ной и той же системы выведения практически для всего диапазона
рассматриваемых на практике схем и траекторий перелета допус-
тимо использовать единую корреляционную матрицу ошибок выве-
дения, если в качестве оцениваемых параметров приняты коо?Ди;
наты и скорости АМС в конце активного участка в орбитальном
системе координат. Величина ошибок выведения в основном влия-
ет на проведение первой коррекции траектории. Поэтому буДеМ
предполагать, что перспективные средства обеспечат точность вь1'
ведения АМС примерно на порядок лучше, чем при первых полета
к Марсу и Венере в 60-х годах, когда для исправления этих ошибо!
требовалась корректирующая скорость 100 м/с [26].
220
4.6.1. Коррекция тра-
ектории прямого перелета
к Марсу. В зависимости
от назначения АМС, осу-
ществляющей перелет к
Марсу, в общем случае
можно рассматривать две
группы требований к точ-
ности наведения, при ко-
торых допустимые откло-
нения координат вектора
прицельной дальности со-
ставляют менее 100 или
менее 1000 км. В первом
случае может быть обес-
печена возможность про-
ведения аэродинамиче-
ского торможения для
выхода на орбиту ИСМ,
посадки СА в заданный
район поверхности Марса
с жесткими ограничения-
ми на углы входа или пе-
регрузки. Во втором слу-
чае возможны создание
спутника Марса с исполь-
зованием ракетодинами-
ческого торможения, по-
садка на поверхность и др.
Границы для каждой
группы введены условно
и определяются различ-
ным составом навигаци-
Рис. 4.9. Зависимость ошибок оценки кор-
ректируемых параметров от состава опре-
деляемых параметров и навигационных из-
мерений величины навигационного интерва-
ла на участке подлета к Марсу:
Р — радионавигационные измерения; А — авто-
номные измерения; хм — эфемерида Марса,
а. е. — астрономическая единица; цм — гравита-
ционная постоянная Марса
°нных средств.
Предварительные исследования влияния ошибок прогнозирова-
ния и исполнения коррекции на отклонения параметров подлета к
Марсу показали, что при использовании для определения траекто-
рии наземного комплекса можно обеспечить выполнение только
второй группы требований. Для выполнения первой группы требо-
ваний необходимо в сфере действия планет производить автоном-
НЫе измерения. На рис. 4.9 приведена характерная зависимость
°Шибок прогнозирования на участке подлета к Марсу, из которых
СЛеДует, что наземные радиотехнические измерения обеспечивают
'Точность прогнозирования 500 км, если последнее навигационное из-
*еРение проводится за 20 ч до подлета к Марсу, причем наиболь-
ее влияние оказывают ошибки астрономических постоянных и по-
тения планеты. В качестве корректируемых параметров для
Ченки энергозатрат приняты координаты гк, Ьк в орбитальной си-
еме на момент прохождения перицентра и время прохождения
221
Рис. 4.10. Зависимость изменения энергетиче-
ских затрат коррекции ошибок выведения
АМС на траекторию межпланетного перелета
Земля — Марс:
------ трехпараметрическая коррекция траектории
I класса;----- коррекция траектории II класса
перицентра т (или эк-
вивалентные отклонения
вдоль траектории). Со-
став корректируемых па-
раметров зависит от схе-
мы полета. Однако энерго-
затраты коррекции прак-
тически не изменятся, ес-
ли в качестве корректиру-
емых параметров принять
sn, Т|п> i(Q),T ИЛИ
Овх, Л.пос> фпос» з также лю-
бой другой набор из трех
параметров, однозначно
связанный с точкой и вре-
менем входа в сферу дей-
ствия планеты. Все кор-
рекции приняты трехпа-
раметричными.
Исследование свойств
управления полетом АМС
на различных траектори-
ях прямого перелета к Марсу показало, что рассматриваемое мно-
жество траекторий необходимо разделить на два класса: I — встре-
чи с Марсом на первом и II — втором полувитках. Двухполувит-
ковая траектория характеризуется наличием особой области, про-
тивоположной точке входа в сферу планеты назначения, где резко
возрастает величина скорости трехпараметрической коррекции.
Она разделяет зоны локальных минимумов энергозатрат. Хотя в
этой области характер изменения величин градиентов корректиру-
емых параметров плавный, без резких колебаний, между тремя
корректируемыми параметрами существует зависимость, в резуль-
тате чего матрица производных корректируемых параметров ста-
новится близкой к вырожденной. Иными словами, в этой области
трехпараметрическая коррекция практически невозможна, так как
независимыми являются только два параметра. На рис. 4.10 при-
ведены затраты на проведение двухпараметрических коррекции
(различных комбинаций), из которых следует, что энергозатраты
коррекции двух параметров в этой области не имеют тенденции к
резкому возрастанию. Вырождение трехпараметрической коррек-
ции в двухпараметрическую объясняется тем, что в области, про-
тивоположной точке входа в сферу действия Марса, приложение
корректирующей скорости в направлении, перпендикулярном плос-
кости движения, приводит к вращению орбиты вокруг линии узло0
(т. е. пересечению плоскостей орбит Марса и АМС). Поэтому 0
этой области проведение корректирующего воздействия в ортог0^
нальном плоскости движения направлении не приводит к измен®
нию точки входа в сферу действия, и семейство траекторий, соот
ветствующее корректирующему воздействию, двухпараметрическ°е’
222
Начальные ошибки корректируемых параметров также зависят
от времени перелета. Так, для принятой матрицы ошибок выведе-
ния соответствующие предельные отклонения корректируемых пара-
метров составляют (A<ppy = 3oiA(piKi (/„)]:
время перелета 210...240 сут: ДЬкРн= (20...30) • 103 км; ДгкРн =
₽ (40...60) • 104 км; ДтРн = 4О...5О ч;
время перелета 290... 300 сут (двухполувитковые траектории):
Д/>кРн= (И ... 12)-104 км; ДгкРн= (60 ... 65) • 104 км; Дтр« = 70...
...80 ч.
Исследования точности определения параметров траекторий по-
лета к Марсу показали, что если на межпланетном участке прово-
дится не более 3 коррекций, то ошибки прогнозирования, соответст-
вующие аппаратурным ошибкам измерений, практически не зависят
от траектории полета. Однако от траектории перелета зависит точка
входа АМС в сферу действия планеты и, как следствие этого, раз-
лично влияние ошибок положения Марса на прогнозирование кор-
ректируемых параметров. Траекториям с большим временем переле-
та соответствуют точки входа, для которых радиус-вектор, прове-
денный из центра массы Марса в точку входа, составляет малые
углы с вектором его скорости. Поэтому наибольшая из составляю-
щих ошибок положения Марса — вдоль орбиты—влияет только на
время подлета, а ортогональные составляющие ошибок положения
Марса оказывают влияние на Дгк, Д^к, что приводит к уменьшению
ошибок прогнозирования этих параметров на межпланетном участ-
ке и, как следствие, к некоторому уменьшению затрат на коррек-
цию. Однако указанное изменение не имеет определяющего харак-
тера при прочих равных условиях.
В качестве типичной траектории I класса рассмотрим траекто-
рию прямого перелета к Марсу в 1996 г. (см. разд. 1.1): время стар-
та 30.11.96, время перелета 7’пз-м = 232 сут. При реализации вто-
рой группы требований к точности подлета к Марсу представляется
Целесообразным рассмотреть схемы двух- и трехразовой коррекций.
Одноразовая коррекция требует очень больших энергетических за-
трат: при выполнении условий по точности затраты на одноимпульс-
нУю коррекцию превышают 450 м/с. Поэтому одноимпульсную схе-
му можно не рассматривать.
Будем считать, что в сфере действия Земли и Марса навигацион-
нЫе измерения средствами НКУ проводятся в каждой зо-
не радиовидимости. До первой и последней коррекции на меж-
планетном участке навигационные измерения выполняются еже-
суточно, а на остальных навигационных интервалах один раз в не-
делю.
Проведенные оценки точности и практика определения межпла-
тных траекторий [6, 7, 8] показали, что при этих условиях ре-
Ультаты оценок близки к оптимальным и процедуру оптимизации
п Ратегии измерений при синтезе стратегии коррекции можно не
Доводить.
т Пусть число коррекций равно двум. Для двухимпульсной схемы
реб°вания к точности выполняются, если последняя коррекция
223
Рис. 4.11. Характеристические ско-
рости двухразовой схемы коррек-
ции траектории прямого перелета
Земля — Марс:
<г = 220 сут;----/г=200 сут
Рис. 4.12. Зависимость оптималь-
ного времени проведения первой
коррекции от 6 (двухразовая схе-
ма)
приводится не ранее, чем за 10... 20 сут до подлета к Марсу. Как
показали расчеты, при заданной стратегии измерений ошибки прог-
нозирования, начиная с 200 сут полета, практически не уменьшают-
ся при добавлении измерений, причем величина их в 5...10 раз пре-
вышает влияние ошибок исполнения 2-й коррекции. Такой харак-
тер зависимости ошибок прогнозирования объясняется существен-
ным влиянием ошибок положения планет и астрофизических
постоянных. Аппаратурные ошибки радиотехнической системы из-
мерений не являются основными даже при малых навигационных
интервалах в начале полета и составляют 1 % от суммарных ошибок
при больших навигационных интервалах на среднем участке. По-
этому ограничим времена проведения последней коррекции диапа-
зоном 200...220 сут, так как сдвиг 2-й коррекции на более поздние
сроки не дает практического выигрыша в точности, а лишь вызыва-
ет увеличение затрат на коррекцию. Оптимизация времени первой
коррекции при фиксированном моменте проведения 2-й коррекции
проводилась методом сечений.
На рис. 4.11, 4.12 приведены зависимости энергозатрат для двух
предельных значений! времени второй коррекции /2, а также опти-
мальных значений //' от /2. Из полученных результатов следует-
при оптимальной стратегии двухразовой коррекции потребная сум-
марная характеристическая скорость коррекции не превышаеТ
20 м/с: оптимальное время проведения первой коррекции изменяет-
ся в диапазоне 6...8 сут полета при изменении времени второй к°Р'
рекции в диапазоне от 200...220 сут; величина суммарного корректй'
рующего импульса п2р вблизи оптимальных значений 6* меняете
224
Таблица 3
Двух-
разовая
Предельные отклонения корректируемых параметров,
вызванные ошибками
1 8,4 10,9
2 220 10.3
700 1700 700 950
550 900 -100 90
9900 3900
200 60
1200
560
.Трех- 1 6
разовая 2 167
3 220
1000 2000
560 950
700 1010
750 1000
450 900
460 60
10000 4000
2900 1000
150 50
медленно: при изменении в интервале 4,5...18 сут полета ш1’ увели-
чивается не более чем на 0,5 м/с. Это позволяет, если необходимо,
смещать первую коррекцию, практически не увеличивая суммарных
энергозатрат, проводя ее не в оптимальные моменты.
Отклонения корректирующих параметров после первой коррек-
ции в основном определяются ошибками исполнения коррекции, а
после второй коррекции — ошибками прогнозирования. В качестве
примера в табл. 3 приведены характеристики оптимальной страте-
гии двухразовой коррекции при ^ = 220 сут и трехразовой.
Для опенки влияния величины ошибок выведения и исполнения
коррекции на характеристики оптимальной стратегии были рас-
смотрены варианты, соответствующие увеличению начальных от-
клонений корректируемых параметров и ошибок исполнения кор-
рекции в 3 раза по сравнению с исходными значениями.
. Расчеты показали, что при одновременном увеличении ошибок
выведения и исполнения оптимальное время проведения первой
коррекции смещается в сторону более раннего проведения се:
^* = 6,5 сут. При увеличении только ошибок исполнения смеща-
ется в сторону более позднего проведения и составляет 17,5 сут,
что объясняется увеличением влияния ошибок исполнения на энер-
г°затраты второй коррекции.
Для определения рационального числа коррекций проведено
сравнение характеристик оптимальных стратегий двух- и трехразо-
вой коррекций. Выбор места проведения последней коррекции про-
8°ДИлся из тех же соображений, что и для двухразовой.
При сравнимых временах проведения последней коррекции трех-
разовая схема дает незначительный выигрыш в суммарной коррек-
тирующей скорости (не более 1...2 м/с). Кроме того, при увеличе-
нии числа коррекций из-за уменьшения навигационного интервала
8-850 225
перед последней коррекцией увеличиваются ошибки прогнозироэ-).
ния и, следовательно, конечные отклонения корректируемых пара,
метров, причем сдвиг 3-й коррекции на более поздние сроки при
существующем характере ошибок прогнозирования и исполнения
коррекции практически не уменьшает суммарных отклонений кор.
ректируемых параметров.
Сравнивая результаты оптимизации схемы коррекций при поде,
те к Марсу при использовании только радиотехнических наземных
измерений (см. табл. 3) с приближенным-решением задачи для ги-
перболической модели, приведенным в разд. 4.5, можно отметить
следующее: для двухразовой схемы время проведения первой кор-
рекции при фиксированном времени второй коррекции приближен-
но соответствует свойству 1; величины корректирующих скоростей
практически совпадают, что соответствует свойству 3; для трехразо-
вой схемы распределение времен проведения первой и второй кор-
рекций при фиксированном времени третьей не соответствует при-
ближенному оптимальному решению, в то же время для величин
корректирующей скорости второй и третьей коррекций! свойства
приближенного решения справедливы.
Такое различие оптимальных решений для схем двух- и трехра-
зовой коррекций объясняется влиянием ошибок прогнозирования,
величина которых существенно зависит от интервала между коррек-
циями. Для двухразовой схемы навигационные интервалы доста-
точны для такого уточнения параметров траектории, что ошибки
прогнозирования не оказывают определяющего влияния на энерге-
тические затраты. Для трехразовой схемы ошибки прогнозирования
к моменту проведения второй коррекции сравнимы с ошибками
исполнения, что и приводит к изменению оптимального навигацион-
ного интервала по сравнению с приближенным решением.
Аналогичным образом исследуем стратегию проведения коррек-
ции траектории перелета II класса к Марсу с датой старта 21.11.96 г.
и временем перелета 312 сут. Как было отмечено, особенностью
коррекции такой траектории является наличие особой области в
районе 24-х суток полета. Критерий качества имеет два ярко выра-
женных локальных экстремума, разделенных областью вырожде-
ния матрицы частных производных корректируемых параметров
трехпараметрической! коррекции. При этом только первую коррек-
цию можно проводить как до, так и после особой точки. Все ос-
тальные коррекции должны проводиться после нее.
Для рассматриваемой траектории перелета проведение первых
коррекций до особой точки и после нее дает примерно равноцен-
ные по точности схемы с несколько лучшей энергетикой для вари-
анта ранних первых коррекций. В табл. 4 приведены результаты
оптимизации двухразовой! схемы коррекций для случаев проведе-
ния первой коррекции до и после особой точки.
Для траектории II класса, так же, как и для I класса, увеличе-
ние числа коррекций на среднем участке траекторий не приводит
к уменьшению энергетических затрат на коррекцию. Это объясня-
ется ростом затрат, в первую очередь, на последнюю коррекии10’
226
Таблица 4
Проведение I-й коррекции Время проведения коррекций, сут Корректирующая скорость, м/с
Ья 2-я иР(Й*)
До особой точки 5 280 14 19
После особой точки 100 280 39 8
вызываемым увеличением ошибок прогнозирования из-за умень-
шения измерительного интервала. Обе схемы коррекции не слиш-
ком чувствительны к изменению Л, /2 — времени коррекции на сред-
нем участке. Так, сдвиг первой коррекции в интервале 2...20 сут
(при проведении до особой точки) и в интервале 94...105 сут (при
проведении после особой точки) приводит к изменению суммарно-
го корректирующего импульса в пределах 1 м/с. Примерно такое
же увеличение суммарного корректирующего импульса наблюдает-
ся при изменении времени второй коррекции на ± (3...5) сут. По-
этому при необходимости можно проводить сдвиг коррекций в
указанных пределах практически без увеличения суммарных энер-
гозатрат.
При синтезе оптимальной стратегии коррекции траектории по-
лета АМС, имеющей комбинированную систему навигационных
измерений, будем рассматривать стратегии коррекции, предусмат-
ривающие две коррекции на участке перелета до сферы действия
Марса и несколько коррекций на припланетном участке. Целесооб-
разность проведения только двух коррекций на участке межпланет-
ного перелета следует из приведенных выше результатов оптимиза-
ции стратегии коррекции при проведении наземных радиотехниче-
ских измерений. Действительно, так как точностные характеристики
трехразовой схемы коррекции на межпланетном участке хуже, чем
Двухразовой, а эффективность коррекций, проводимых в сфере дей
ствия Марса, значительно падает, то исправление ошибок коррек-
тируемых параметров коррекциями, проводимое в сфере действия
Марса, в случае трехразовой схемы требует больших энергетиче-
ских затрат, чем при двухразовой. Учитывая, что наземных измере-
ний недостаточно для наведения АМС с ошибками, не превышаю-
щими 100 км, будем считать, что на участке подлета к Марсу допол-
нительно проводятся автономные астроизмерения.
Оптимизацию стратегии коррекций будем проводить, как и ра-
нее, последовательно для фиксированного общего числа коррекций.
Рассмотрим случай трехразовой схемы коррекции.
Анализ ошибок прогнозирования параметров траектории по ав-
тономным измерениям показал, что точность прогнозирования су-
щественно зависит от времени последнего измерения (или расстоя-
ния до планеты), возрастая по мере приближения к планете, и
8* 227
практически не зависит от интервала, на котором проводятся измс.
рения, и числа измерении. Другая особенность определения и прог,
позирования траектории по автономным измерениям заключается п
том, что ошибки прогнозирования практически не зависят от началь-
ного разброса координат определяемого вектора состояния. Это
объясняется тем, что автономные астронавигационные системы яв-
ляются позиционными и при принятых ошибках измерений позво-
ляют с хорошей точностью определить положение АМС в момент
проведения измерений. В то же время начальные разбросы скоро-
стей, а также неточное значение геометрических п оптических \а.
рактеристик Марса существенно влияют на ошибки прогнозирова-
ния времени подлета к планете. Поэтому целесообразно для
повышения точности прогнозирования проводить совместную обра-
ботку автономных и наземных измерений. Использование радиотех-
нических измерений, как следует из рис. 4.9, позволяет уменьшить
ошибки прогнозирования в 1,5 раза.
Учитывая отмеченные выше свойства автономных систем астро-
навигационных измерений при заданных ошибках реализации кор-
ректируемых параметров, можно выбрать время проведения послед
ней коррекции, обеспечивающей их выполнение. Так, если за 12 ч
до перицентра проведен сеанс автономных измерений, то ошибки
прогнозирования (бсрк/' (Д) = 3<т[дсрпКг(^g)]) не превышают: без ис-
пользования наземных измерений 6/-кРп = 80...85 км, бтРп = 400—430 с;
с использованием наземных измерений бгкРп = 5О...6О км, бтр" =
= 120...150 с.
Оптимизацию стратегии коррекции будем проводить, как и ра-
нее, последовательно при фиксированном количестве коррекций,
оценивая изменение суммарных энергозатрат при различном чис-
ле коррекций. Рассмотрим случай трехразовой коррекции, если по-
следняя коррекция проводится в сфере действия планеты по авто-
номным измерениям за 7 ч до пролета перицентра. Эта схема
обеспечивает точность реализации не хуже 50 км. Оптимальная
стратегия коррекции соответствует следующим временам их про-
ведения: /j* = 8,2 сут; «Р(Л*) = 10,8 м/с; /2*==201,2 сут; »г (/2'Л) =
= 10,6 м/с; /З* = 231,6 сут; up(t3~) =76 м/с, причем суммарная ха-
рактеристическая скорость u3Pi = 84 м/с.
Особенностью трехразовой схемы являются большие затраты
на проведение последней коррекции, которые объясняются больши-
ми ошибками управления на среднем участке и малой эффектив-
ностью третьей коррекции, проводимой за 7 ч до подлета. Для
уменьшения энергозатрат целесообразно увеличить количество прп-
планетпых коррекций, проводимых также с использованием авто-
номных измерений, но в более эффективных точках (более ранних
по времени).
Схемы четырехразовой коррекции с двумя коррекциями на пр11'
планетном участке при сохранении неизменным времени послед-
ней коррекции имеет следующие характеристики оптимальной
стратегии: С* = 8 сут; ир(С) = 10,8 м/с; /2* = 214 сут; ир
228
12 м/с; = 230,2 сут (за
167 сут до перицентра),
и’р(^3*)=:14 м/с; Л/= 231,6 сут
(за 7 ч до перицентра),
ир(^*4) = 15 м/с. При этом
й4р* = 35 м/с, и увеличение чис-
ла коррекций до четырех дает
выигрыш в энергозатратах на-
ведения 50 м/с при одинаковой
точности реализации по срав-
нению с трехразовой схемой.
Дальнейшее увеличение числа
коррекций нерационально, так
как не приводит к существен-
ному уменьшению затрат на
проведение коррекций (рис.
4.13).
Ранее отмечалось, что на
Рис. 4.13. Зависимость суммарной ско-
рости оптимальной коррекции траектории
прямого перелета к Марсу от числа кор-
рекций
подлетном участке при использовании для определения орбиты ав-
тономных измерений практически выполняются условия для при-
менения результатов приближенной оптимизации. При существу-
ющих на среднем участке ошибках на припланетном участке оп-
тимальным (согласно результатам разд. 4.5) является проведение
3—4 коррекций. Однако выигрыш в суммарной характеристиче-
ской скорости коррекций по сравнению с двухразовой схемой не
превышает 3... 5 м/с, а увеличение числа коррекций на ма-
лом интервале времен существенно снижает надежность управ-
ления.
Оптимальная стратегия трехразовой коррекции для двухполу-
витковой схемы перелета характеризуется следующими временами
проведения коррекций (время последней коррекции принято одина-
ковым с траекторией I класса — за 7 ч до подлета): tj* = 5 сут;
uPUi‘) = 14 м/с; t2* = 298 сут; «р(^2*) = 15 м/с; f3*=311,7 сут;
цр(/3*)=70 м/с.
Суммарная характеристическая скорость трехразовой схемы со-
ставляет «3р* = 80 м/с. Точностные характеристики на припланетном
Участке практически не отличаются от соответствующих характери-
стик для траектории I класса. Небольшое уменьшение скорости
третьей коррекции и суммарной скорости коррекций по сравнению
с полувитковой траекторией объясняется несколько меньшими
ошибками прогнозирования параметров подлета к Марсу к момен-
ту проведения второй коррекции. Эффективным является проведе-
Ние на припланетном участке двух коррекций с использованием
автономных измерений (четырехразовая схема), что дает выигрыш
величине суммарной скорости коррекции 40 м/с по сравнению с
Рехразовой. Время проведения дополнительной коррекции на
Рипланетном участке — за 1,8 сут до подлета к Марсу.
Таким образом, проведенный анализ оптимальных стратегий
°Ррекций для двух классов траекторий показал, что основные
8*—85о 229
закономерности, связанные с наведением АМС при прямых пе-
релетах к Марсу, не зависят от выбора класса траекторий.
Оптимальная стратегия коррекции обладает следующими свойст-
вами.
1. Для наведения АМС с ошибками, не превышающими 1000 км,
достаточно проведения двух коррекций на межпланетном участке
полета и использования наземных радиотехнических измерений,
суммарная характеристическая скорость коррекций не превышает
20 м/с, причем энергетические затраты на проведение каждой из
двух коррекций одинаковы.
2. Для наведения АМС с ошибками, не превышающими 100 км,
целесообразно проведение четырехразовой схемы коррекции и ис-
пользования на припланетном участке в дополнение к навигацион-
ным измерениям НК.У автономных астроизмерений. Суммарная ха-
рактеристическая скорость наведения не превышают 35 м/с, причем
последние две коррекции проводятся в сфере действия Марса. Энер-
гетические затраты,и оптимальные времена проведения автономных
коррекций зависят от требуемой точности наведения и принятых
ошибок эфемериды Марса.
4.6.2. Коррекция траекторий полета к Марсу с пролетом у Ве-
неры. Для исследования оптимальных стратегий коррекции выбра-
на траектория экспедиции к Марсу в 1991 г. с пролетом Венеры на
участке полета к Марсу (см. разд. 1.1). Дата старта с орбиты ожи-
дания у Земли — 7 сентября 1991 г., время перелета Земля — Вене-
ра 162 сут, время перелета Венера — Марс 144 сут. При опенке
точности определения и прогнозирования траектории АМС предпо-
лагается, что проводятся радиоизмерения на всех участках полета
и астронавигационные автономные измерения в сферах действия Ве-
неры и Марса.
В качестве корректируемых параметров рассматривались коор-
динаты АМС в системе, связанной с картинной плоскостью планеты
(£п— соответствует пересечению картинной плоскости и плоскости
орбиты, £п—по вектору скорости на бесконечности, т]п — дополняет
систему до правой), причем результаты оценки энергетики не изме-
нятся для любых трех параметров, однозначно определяющих ус-
ловия пролета по наименьшему расстоянию, времени и положению
плоскости.
Могут рассматриваться следующие варианты выбора состава
корректируемых параметров: 1) при всех коррекциях исправляют-
ся только параметры, определяющие условия подлета к Марсу!
2) на каждом участке исправляются параметры пролета ближай-
шей планеты; 3) часть коррекций на участке Земля — Венера ис-
правляет параметры пролета Венеры, все остальные — параметра
подлета к Марсу.
Первый вариант выбора корректируемых параметров непосреД'
ственно направлен на выполнение конечной цели полета. ПослеДУ
ющие два варианта более просты и могут быть использованы Дл
предварительных исследований стратегий коррекции и упрошени
решения задач наведения.
230
U м/с
Рис. 4.15. Зависимость эффек-
тивности припланетной коррек-
ции от времени ее проведения
Рис. 4.14. Энергетические затраты на коррек-
цию ошибок выведения для траектории пере-
лета Земля — Венера — Марс:
~корректируются параметры подлета к Вене-
ре; ----- корректируются параметры подлета к
Марсу
Анализ характера изменения градиентов корректируемых пара-
метров позволил выявить следующие особенности коррекции рас-
сматриваемой схемы.
1. Участок перелета Земля — Венера является двухполувитко-
вым и поэтому имеется область, где матрица частных производных
близка к вырожденной (78...90-е сутки полета). Эта область распо-
ложена на 180° относительно входа в сферу действия Венеры. Ее
положение практически не зависит от выбора корректируемых па-
раметров (у Венеры'или у Марса). Однако при коррекции парамет-
ров подлета к Марсу имеется еще одна область вырождения, нахо-
дящаяся примерно на 180° от точки выхода из сферы действия
Венеры. Это обстоятельство характеризует различие в коррекции
заданных условий пролета Венеры и Марса. На среднем участке
траектории перелета от Земли к Венере рассматриваемые вариан-
ты коррекции практически эквивалентны.
На рис. 4.14 приведены затраты на одноразовую коррекцию на-
чальных отклонений для различных вариантов корректируемых па-
раметров на участке полета Земля — Венера. Существование облас-
тей вырождения приводит, как и ранее, к многоэкстремальности
критерия качества. С целью упрощения задачи проведем исследо-
вание стратегии коррекций на каждом участке в отдельности и
Полученные результаты используем для выбора начального приб-
лижения при решении общей задачи синтеза.
2. Другая особенность данной схемы — резкое падение эффек-
тности коррекций, проводимых после пролета Венеры в сравне-
нии с коррекцией до пролета перицентра.
Как видно из рис. 4.15, исправление одних и тех же ошибок
аведения через 4 ч после пролета перицентра требует на порядок
ЛьШих затрат, чем при коррекции за 4 ч до перицентра. Отметим,
что изменение эффективности коррекции на этом участке зависит
от минимального расстояния АМС относительно Венеры при ее об-
лете. Это обстоятельство накладывает особенно жесткие требования
на точность навигации на участке перелета к Венере (использова-
ние автономных измерений, повышение точности теории движения
Венеры).
3. После выхода из сферы действия Венеры эффективность кор-
рекции несколько увеличивается, и минимальные затраты одноразо-
вой коррекции на участке перелета Венера — Марс имеют место на
195-е сутки полета. Поэтому после выхода из сферы действия нави-
гационный интервал достаточен для определения трактории назем-
ными средствами и привлечение на отлетном участке от Венеры ав-
тономных измерений выигрыша в энергозатратах коррекции не
принесет.
Для сравнения второго и третьего вариантов корректируемых
параметров рассмотрены трехразовые схемы коррекций на участке
Земля — Венера с фиксированной третьей коррекцией, проводимой
по автономным измерениям за 6 ч до пролета перицентра. Как по-
казали расчеты, по энергозатратам, количеству и моментам прове-
дения коррекций оба варианта практически эквивалентны, исклю-
чая третью, последнюю перед Венерой коррекцию, где для третье-
го варианта затраты на коррекцию на 7...10 м/с меньше, чем для
второго. Затраты на последующие коррекции на участке Венера —
Марс при этом практически одинаковы. Уменьшение затрат на при-
планетную коррекцию объясняется более строгим учетом связи
между параметрами пролета у Венеры и Марса. В частности, время
пролета Венеры имеет слабую корреляцию с параметрами подлета
к Марсу, поэтому полное исправление его не целесообразно, за счет
этого и достигается выигрыш в величине мр(/3).
Предварительное исследование стратегии коррекции на участке
Венера — Марс позволило сделать вывод о целесообразности про-
ведения двух коррекций на среднем участке. Что касается коррек-
ций в сфере действия Марса, то здесь, как и для схем прямого пере-
лета, возможно проведение одной—двух коррекций по результатам
автономных измерений. Таким образом, для оптимизации стратегии
коррекции будем рассматривать схемы шести- восьмиразовых кор-
рекций с тремя—четырьмя коррекциями на каждом участке. В ре-
зультате оптимизации получены следующие характеристики стра’
тегии коррекции (для шестиразовой схемы): ^* = 3 сут; мр(Л’г)^
= 11 м/с; /2* = 157 сут: мр(/2*) = Н,5 м/с; /3* = 161,8 сут (за 5 ч*Д°
перицентра); мр(/3‘)=15 м/с; Ч*=180 сут; ыр(Ч*) = 15 м/с;
= 296 сут; мр(/5*) = 12,5 м/с; /6* = 305,77 сут (за 5,5 ч до подлета К
Марсу), мр(6з*) =95 м/с.
Суммарная характеристическая скорость коррекций данной схе
мы полета не превышает 120 м/с.
При коррекциях на участке полета Земля — Венера выполняю1"
ся условия приближенной оптимальности (см. разд. 4.5). Увеличу
ние числа коррекций на припланетном участке практически
уменьшает энергозатрат, но усложняет управление АМС. Наиоол
232
щими являются затраты на последнюю коррекцию. Поэтому целе-
сообразно увеличить число коррекций в сфере действия Марса, как
это было сделано для схем прямого перелета. Характеристики оп-
тимальной схемы семиразовой коррекции следующие: /4* = 200 сут;
цр(/4*) = 1б м/с; /5* = 275 сут; ир(/5*) = 12 м/с; /в* = 304,8 сут (за
1,2 сут до подлета к Марсу); up(/s*)=21 м/с; /7 = 305,77 сут,
ир(/7*)=22 м/с; стратегия предшествующих трех коррекций на
участке Земля — Венера осталась прежней; суммарная характери-
стическая скорость коррекций на участке Венера — Марс состав-
ляет 40 м/с, т. е. уменьшается на 60 м/с.
Отметим основные особенности, связанные с определением и
прогнозированием траектории полета по такой сложной схеме. На
среднем участке полета от Земли к Венере основное влияние на
точность прогнозирования могут оказывать погрешности определе-
ния положения Венеры. Точка входа в сферу действия планеты для
таких траекторий существенно отличается от точки входа при пря-
мых перелетах к Венере. В связи с этим влияние ошибок в положе-
нии планеты существенно другое, чем обычно при полетах к Вене-
ре: ошибка вдоль орбиты Венеры переходит в отклонение по коор-
динате £п, а не по времени подлета tpm, что приводит к значитель-
ному увеличению прогнозируемого пятна в картинной плоскости
при подлете к Венере. В сфере действия Венеры необходимо про-
ведение автономных измерений, так как ошибки прогнозирования
при использовании только наземной измерительной аппаратуры до-
вольно велики и составляют (при проведении последнего сеанса
радиоизмерений за 6 ч до пролета Венеры): 6£пРп (G) = 100 км;
6т]пРп(/з) =200 км; б?пРп(/з)=250 км. Проведение автономных из-
мерений и их совместная обработка с радиотехническими измере-
ниями позволяют уменьшить ошибки прогнозирования до
^пРп(^з)=20 км; 6т]пРп (/з) =80 км; 6£пРл (/з) = 150 км. Повышение
точности прогнозирования к моменту приведения третьей коррек-
ции особенно важно, так как ошибки пролета у Венеры переходят
в ошибки прилета к Марсу.
Проводимые в настоящее время работы по уточнению теории
Движения Венеры по данным обработки радиолокационных и опти-
ческих измерений позволят уменьшить ошибки определения эфе-
мерид Венеры до 10. ..15 км, что даст возможность отказаться от
использования автономной системы на этом участке полета [3, 19].
Наибольший интерес с точки зрения оценки ошибок прогноза
имеет участок перелета Венера — Марс. Точность прогнозирования
и°сле пролета Венеры в большей мере зависит от ошибок опреде-
ления положения планеты, а также аппаратурных ошибок измери-
тельной системы. На следующем навигационном интервале аппа-
ратурные ошибки не являются основными, но возрастает влияние
Погрешностей определения положения Марса. Ошибки прогнозиро-
вания к моменту проведения пятой коррекции практически не отли-
чаются от соответствующих ошибок подлета к планете при прямом
Перелете Земля — Марс. Поэтому сохраняются основные свойства
стратегии наведения, полученные в подразд. 4.6.1 для перелетного
233
и припланетного участков в сфере действия Марса. В частности
условия оптимальности по времени проведения коррекции на сред’
них участках не слишком строгие, и возможно изменение времен
их проведения в интервале 5.. .7 сут с увеличением суммарной ха-
рактеристической скорости не более 3 м/с.
Таким образом, исследование оптимальной стратегии коррекции
для рассматриваемой схемы полета к Марсу показало:
для реализации полета к Марсу необходимо провести шесть —
семь коррекций, причем три должны проводиться на участке пере-
лета Земля — Венера (одна припланетная с использованием авто-
номных измерений) и три — четыре на участке Венера — Марс в
том числе одна — две припланетные, с использованием автономных
измерений;
суммарная характеристическая скорость коррекций не превы-
шает 120 м/с при шестиразовой и 60 м/с при семиразовой коррек-
ции;
критерий качества ugp многоэкстремальный, причем количество
локальных минимумов определяется только количеством зон вы-
рождения матрицы FK(^-)-
В целях упрощения решения задач коррекции на межпланетном
участке перелета между Землей и Венерой в качестве корректируе-
мых параметров целесообразно использовать не условия подлета
к Марсу, а условия пролета АМС относительно Венеры.
4.6.3. Коррекция траекторий возвращения от Марса к Земле.
В зависимости от схемы полета к Марсу возврат может
происходить по следующим траекториям: Марс — Земля; Марс —
Венера — Земля.
Для обеспечения посадки ВА на поверхность Земли необходимо,
74 72 70 в 6 Ь
Рис. 4.16. Зависимость характеристиче-
ской скорости и ошибок наведения от
времени проведения последней коррек-
ции траектории прямого перелета
Марс — Земля:
1 — трехпараметрическая коррекция; 2—одно-
параметрическая коррекция; 3 — ошибки про-
ведения коррекции; 4 — ошибка прогнозиро-
вания радиуса условного перицентра
чтобы возможные ошибки вы-
соты условного перицентра не
превышали 10 км [32]. Выпол-
нив этих требований для пер-
вой схемы возможно при ис-
пользовании наземных измере-
ний. Проведение автономных
измерений на отлете от Марса
позволяет только уменьшить
суммарную характеристиче-
скую скорость коррекции (на
1...3 м/с) и поэтому не явля-
ется обязательным. Вторая схе-
ма является наиболее сложной
в отношении управления и ее
реализация при принятых
ошибках эфемерид Венеры не
целесообразна без использова-
ния автономных измерений в
сфере действия Венеры.
Время проведения послеД'
234
Йей коррекции для любой схемы зависит от допустимых ошибок
входа, и в качестве опорного момента принято время проведения
коррекции за 8 ч до входа в атмосферу; точность прогнозирования
условного перицентра составляет 5 км, а ошибки проведения кор-
рекции дают отклонения 7 км (рис. 4.16).
Синтез оптимальной стратегии коррекции траектории прямого
перелета с Марса на Землю осуществим для цикла полета в 1996 г.
Корректируемыми параметрами при оценке энергетики взяты
координаты £п, т)п в картинной плоскости и время прохождения пе-
рицентра 1рт. Результаты расчетов по оптимальной стратегии не
изменяются, если в качестве корректируемых рассматривать коор-
динаты гк, Ьк, пк в орбитальной системе на момент пролета пери-
центра, Гп, (, Т, hn, фпос, AnocJ 0ВХ> фпос, А-ПОС-
Учитывая, что ошибки выведения АМС на траекторию перелета
зависят от схемы старта с поверхности Марса, рассмотрим два
варианта корреляционных матриц К[х(Д)], которым соответствуют
следующие начальные отклонения корректируемых параметров:
Матрица А ЛАатрица В
Дт|пРн, КМ........................................ 240 000 110 000
Д£пРн, км......................................... 850 000 350 000
Д/ртР1!, сут...................................... 2,0 1,0
С целью выбора рационального числа коррекций оптимизация
стратегии коррекции проводилась при фиксированном числе кор-
рекций с последующим их изменением. Рассматривались схемы с
количеством коррекций не менее трех, так как двухразовая схема
при условии проведения последней коррекции за 8 ч до подлета к
Земле энергетически не выгодна.
Для трехразовой схемы оптимальная стратегия соответствует
следующим временам проведения коррекций (Матрица А): Л* =
= 30 сут; up(/i*)=32 м/с; Д* = 209 сут; ир(г‘2*) = 12 м/с; t3* за 8 ч
До подлета, цр(Д*)=34 м/с; суммарная характеристическая ско-
рость составляет и3р* = 55 м/с.
Для матрицы В оптимальные времена первых двух коррекций
изменяются, и характеристики оптимальной стратегии равны: Л* =
= 40 сут; ир(/Г) = 11 м/с; /2* = 212 сут; ир(Д*) = 12 м/с. Суммар-
ные затраты составляют 42 м/с, причем ир*(Д*) =33 м/с.
Четырехразовая схема с тремя коррекциями на межпланетном
Участке полета дает небольшой выигрыш в энергетике наведения,
Даже если начальные ошибки выведения соответствуют матрице А:
*i*=30 сут; ир(Л*)=32 м/с; Д*=81 сут; ир(Д*) = 1 м/с; t3* =
= 215 сут; цр(Д*)=9 м/с; Д* за 8 ч до подлета; и4р = 32 м/с; сум-
марная корректирующая скорость и4р = 50 м/с.
Вторая коррекция мала по величине, и поэтому такая схема не
Целесообразна. С точки зрения энергетики предпочтительнее четы-
рехразовая схема с двумя коррекциями в сфере действия Земли,
Которая уменьшает суммарную характеристическую скорость на
Ю м/с. Однако она требует проведения в течение одних суток двух
Коррекций по данным радиоизмерений, что может снизить надеж-
°сть управления. Поэтому для траекторий прямого перелета целе-
235
Рис. 4.17. Изменение градиентов корректи-
руемых параметров и энергетики трехразо-
вой коррекции ошибок выведения для пет-
левой траектории перелета Марс—Земля
сообразно принять схему
трехразовой коррекции, а
четырехразовая будет яв-
ляться резервной на слу.
чай увеличения ошибок
управления. Кроме того,
сокращение затрат мож-
но достигнуть за счет
уменьшения параметрич-
ности последней коррек-
ции (см. рис. 4.16). При
однопараметрической кор-
рекции (исправляется
только высота условного
перицентра) величина
скорости последней кор-
рекции уменьшается на 15 м/с, а дополнительные ошибки в некор-
ректируемых параметрах составляют Дт]п+Р (^) =200 км;
(М = 1 мин.
Анализ точностных характеристик рассмотренных схем коррек-
ций показал значительное влияние аппаратурных ошибок измери-
тельной системы на точность прогнозирования к моменту выполне-
ния первой коррекции и ее зависимость от величины навигацион-
ного интервала. Сравнительно высокая точность прогнозирования
достигается на участке от первой до второй коррекции благодаря
большому навигационному интервалу (180 сут).
Более сложна коррекция петлевой траектории перелета Марс —
Земля (рис. 4.17). Из рисунка следует, что критерий качества на-
ведения имеет пять зон вырождения: две в афелии и одна в пери-
гелии межпланетной орбиты, две в районе, отстоящем на 180° от
точки встречи АМС с Землей. Первую коррекцию можно проводить
в области А или В, где расположены локальные экстремумы с при-
мерно одинаковыми значениями энергетических затрат. Соответст-
вующие навигационные интервалы составляют 200 и 400 сут, что
вполне достаточно для надежной оценки траектории полета. Про-
ведение первой коррекции в более раннее время (до первой зоны
вырождения на 40-х сутках полета) не целесообразно из-за слиш-
ком короткого навигационного интервала и больших ошибок опре-
деления траектории движения. Таким образом, при оптимизации
стратегии коррекции особенно важно, учитывая сложный вид кри-
терия качества наведения, выделить все унимодальные области
возможного проведения каждой коррекции и выбрать решение, соот-
ветствующее глобальному экстремуму. Для таких траекторий могут
использоваться схемы трех-, пятиразовых коррекций с двумя — тре-
мя коррекциями на межпланетном участке и одной — двумя в сфе-
ре действия Земли. Они имеют практически те же основные свой-
ства и суммарные энергетические затраты, что и для траектории
прямого перелета Марс — Земля.
236
Траектория возвращения с Марса на Землю с пролетом вблизи
Венеры предъявляет наиболее жесткие требования к точности и
энергетике управления по сравнению со схемой прямого возвраще-
ния к Земле, вызванные необходимостью выполнения с высокой
точностью условий пролета у Венеры. При этом, как и для схемы
полета к Марсу с пролетом Венеры, имеют место те же основные
особенности: значительное увеличение ошибок при пролете Венеры;
резкое падение эффективности коррекции после пролета перицент-
ра в сфере действия Венеры (эффективность коррекции за
6 ч до пролета перицентра в 20 раз больше, чем через 6 ч после
пролета).
Рассмотрим траектории возвращения к Земле с датой старта с
орбиты ИСМ 10.07.1995 г., временем полета до Венеры 150 сут и
от Венеры до Земли 172 сут (полное время полета 322 сут). В сфе-
ре действия Венеры в районе перицентра орбиты АМС проводится
ракетодинамический маневр.
Исследовались шести-, восьмиразовые схемы коррекций (по две
коррекции на каждом среднем участке и по одной — две коррекции
в сфере действия Венеры и Земли), причем для первых трех кор-
рекций корректируемыми параметрами являются координаты в
картинной плоскости и время пролета Венеры, обеспечивающие
необходимые условия проведения маневра, а для последующих
коррекций-—координаты в картинной плоскости и время прилета к
Земле. Участок перелета Венера — Земля относится к классу двух-
полувитковых траекторий, для которых характерно существование
двух областей локальных экстремумов суммарных энергозатрат
трехпараметрических коррекций. Исследования показали целесооб-
разность проведения первой коррекции на этом участке до особой
точки (до 190 сут полета), так как в противном случае затраты на
наведение АМС возрастут на 100 м/с. Принято, что на участке
перелета Марс — Венера радиотехнические измерения проводятся
с интервалами 3 сут до первой коррекции, 5...10 сут от первой до
второй и 1 сут от второй до третьей; на участке Венера — Земля —
1 сут до первой и после второй коррекций и 5.. .10 сут от первой до
второй.
В результате оптимизации схем коррекций на участке Марс —
Венера получены следующие характеристики оптимальной страте-
гии:
трехразовая схема Л* = 45 сут; up(Zi*)=22 м/с; Z2*= 130,2 сут;
ир(/2*) = Ц м/с; /3*= 149,75 сут (за 6 ч до перицентра в сфере Ве-
неры), цр(/3*)=48 м/с; и3р* = 62 м/с.
четырехразовая схема Zi* = 45 сут; up(Zi*)=22 м/с; /2*=128 сут;
wp(Z2*)=8 м/с; /3* = 149,42 сут (за 14 ч до перицентра), up(t3*) =
=23 м/с; /4*= 149,75 сут полета (за 6 ч до перицентра), up(Z4*) =
==22 м/с; щр* = 50 м/с.
В каждом из вариантов время последней коррекции в сфере
Действия Венеры было принято одинаковым — за 6 ч до перицент-
ра. Это позволяет обеспечить приемлемую точность реализации
Условий пролета у Венеры: Aiqn+PGg) =30 км; Д£п+Р(^)=25 км;
237
Atpm+P((g) =45 с, а также контроль проведения последней коррек-
ции с помощью наземных и автономных измерений, расчет и выпол-
нение маневра. Получаемые ошибки реализации параметра проле-
та Венеры таковы, что их исправление на участке Венера —Земля
возможно с приемлемыми затратами (60 м/с).
Сравнение трех- и четырехразовой схем показывает, что пос-
ледняя дает небольшой выигрыш в суммарной характеристической
скорости (10 м/с), но усложняет управление объектом и поэтому
нецелесообразна.
При отлете от Марса возможно проведение автономных изме-
рений, которые обеспечивают более раннее проведение первой кор-
рекции, и как следствие этого уменьшение расходов: (t* = 6 сут;
up(t[*) = 15 м/с; (2* = 132 сут; up(t2*) =9 м/с; и3р* = 48 м/с.
Особенностью прогнозирования параметров движения АМС на
участке Марс — Венера является большое влияние аппаратурных
ошибок наземных измерений.
Возможные отклонения параметров подлета к Земле после про-
лета Венеры определяются ошибками управления на участке
Марс — Венера и исполнения маневра. Оптимальная стратегия
трехразовой схемы коррекций этих отклонений соответствует сле-
дующим временам их проведения: Л*= 154,5 сут (через 4,5 сут
после пролета Венеры); ир(Л*)=60 м/с; /2* = 270 сут; up(t2*) =
= 45 м/с; /З*=321,6 сут (за 8 ч до подлета к Земле); up(t3*) =
= 38 м/с; и3р* = 80 м/с. Затраты на первую коррекцию являются
определяющими на этом участке и, из-за раннего ее проведения,
ожидаемый выигрыш за счет увеличения числа коррекций не очень
велик. Так, четырехразовая схема с тремя коррекциями на среднем
участке позволяет уменьшить суммарные затраты на 15 м/с и ха-
рактеризуется следующими временами проведения коррекций (оп-
тимальная стратегия): Л* = 153,5 сут; up(/i*)=58 м/с; =
= 238 сут; «р(/2*)=24 м/с; /3* = 310 сут; ир(/3*) = 16 м/с; (**=
=321,6 сут; «р(/4*) = 10,5 см/с.
Для всех схем коррекции обеспечивается точность реализации
условий входа в атмосферу не хуже 10 км по высоте условного пе-
рицентра. Величина суммарной характеристической скорости на
участке перелета Венера — Земля снижается на 30 м/с, если в мо-
мент пролета перицентра в сфере действия Венеры производится
дополнительно исправление корректируемых параметров в картин-
ной плоскости Земли, совмещенное с импульсом маневра перехода
на траекторию возврата к Земле. В этом случае расчет маневра
должен производиться на основании измерений, выполненных пос-
ле автономной коррекции на подлете к Венере. Оптимальная стра'
тегия коррекции на участке Венера — Земля при заданном числе
коррекций меняется незначительно. Так, при четырехразовой кор'
рекции Л* = 155,5 сут; /2* = 237 сут; /3* = ЗО9,5 сут.
Таким образом, для рассмотренных классов траекторий возвра'
та от Марса к Земле достаточно проведения двух коррекций на
средних участках полета и одной коррекции в сфере действия
планет.
238
Точностные характеристики измерительных средств и ошибки
эфемерид планет оказывают влияние на оптимальную стратегию
коррекций. Действительно, уточнение положения планет приведет
к снижению затрат на припланетные коррекции и уменьшит эф-
фективность четырехразовой схемы (с двумя припланетными кор-
рекциями) по сравнению с трехразовой. Повышение точности ра-
дионавигационных систем существенно сказывается на энергетиче-
ских затратах, особенно в случае полета АМС по сложным схемам
с пролетом Венеры.
Эти же факторы сказываются на формировании облика АМС
и требованиях к его системам. В частности, уменьшение ошибок
расчета положения планет и использование высокоточных систем
навигационных измерений могут позволить отказаться от установки
на аппарат средств автономной навигации. Таким образом, сравни-
тельный анализ результатов синтеза оптимальной стратегии кор-
рекции траектории движения АМС, предназначенной для полетов
к Марсу и возвращения на Землю, позволяет сделать следующие
выводы.
1. На каждом межпланетном участке полета необходимо прове-
дение двух — трех коррекций параметров движения, осуществляе-
мых по данным наземных радиотехнических измерений.
2. Для обеспечения высокой точности наведения требуется
проведение дополнительных одной — двух коррекций в сфере дей-
ствия планет. При принятых ошибках определения астрономических
и астрофизических постоянных и эфемерид планет эти коррекции в
сфере действия Марса и Венеры должны проводиться по данным
автономных астронавигационных измерений, а в сфере действия
Земли — по наземным радиотехническим измерениям. При подлете
к Марсу проведение двух автономных коррекций дает значитель-
ный энергетический выигрыш по сравнению с одной коррекцией.
3. Для схем прямого перелета к Марсу и возвращения к Земле
необходимо проведение трех — четырех коррекций, причем одна —
Две коррекции в сфере действия Марса и Земли, а суммарная ха-
рактеристическая скорость не превышают 50 м/с.
4. Для сложных схем полета к Марсу и возвращения к Земле
с активным маневром в сфере действия Венеры необходимо прове-
дение шести — семи коррекций, из которых две — три проводятся
е сфере действия Венеры, Марса и Земли, а остальные — на меж-
планетном участке полета. Особенностью данных схем является
Резкое падение эффективности коррекции после пролета Венеры,
Что приводит к необходимости повышения точности навигации на
Участке подлета к ней (использование автономных измерений,
Уточнение эфемерид). Суммарные энергетические затраты на про-
ведение коррекций траектории при полетах по сложным схемам с
°блетом Венеры в 1,5. ..2 раза больше, чем при схемах прямого
Перелета.
5- Энергетический критерий качества многоразовой коррекции
Для двухполувитковых схем прямого перелета и сложных схем
перелета с облетом Венеры является многоэкстремальным, причем
239
количество локальных минимумов определяется только количест-
вом зон вырождения матрицы FK(/;), что необходимо учитывать
при синтезе оптимальной стратегии наведения.
В заключение отметим, что при проектировании АМС и синтезе
стратегии управления необходимо дополнительно проанализировать
влияние негравитационных возмущений на точность оценки пара-
метров движения. Величина возмущений и соответствующих оши-
бок навигации зависит от конструкции АМС, бортовых систем, схе-
мы полета и управления. Так, на станциях «Вега» на участке
перелета от Венеры к комете Галлея имели место негравитацион-
ные возмущения траектории движения, не превышающие по вели-
чине 10-11 км/с2. Причина их возникновения заключалась в том,
что после отделения СА изменилась центровка станции и действую-
щая на ПА сила солнечного давления создавала возмущающий
момент, который парировался исполнительными органами САУ.
Так как по одному из каналов САУ использовалась силовая схема
стабилизации, то возникала сила, влияющая на движение ПА.
В результате появились дополнительные ошибки оценки корректи-
руемых параметров по навигационным измерениям, которые из-за
больших навигационных интервалов на два порядка превышали
влияние аппаратурных ошибок.
4.7. Выбор стратегии коррекции траектории движения
АМС «Вега» и ее реализация
Траектории движения АМС «Вега» имеют два участка: Земля —
Венера и Венера — комета. На первом участке стратегия управле-
ния в основном аналогична управлению АМС типа «Вене-
ра-11...-14» (см. разд. 5.3). Сложность проектирования полета на
втором участке заключалась прежде всего в правильной . оценке
возможной точности определения параметров орбиты кометы Гал-
лея и прогнозировании условий встречи с ней АМС «Вега», по-
скольку это был первый полет к комете. Период обращения кометы
Галлея вокруг Солнца составляет около 76 лет, поэтому оптиче-
ских наблюдений за ее движением не проводилось с 1909—1911 гг.,
когда она последний раз приближалась к Земле. Следовательно,
при проектировании АМС «Вега» и выборе стратегии коррекции
их движения необходимо было учитывать, что новые наблюдения
кометы могут быть проведены только в 1985—1986 гг., уже после
запуска станций. Естественно было предположить, что из-за дейст-
вия на комету малых негравитационных ускорений, появляюши-хсЯ
при ее прохождении вблизи Солнца, новые наблюдения могут ока-
заться недостаточно согласованными с наблюдениями 1909"
1911 гг. Поэтому при синтезе стратегии наведения АМС «Вега»
рассматривались два варианта оценки точности определения пара*
метров движения кометы Галлея: только по наблюдениям 1985"
1986 гг.; с привлечением результатов наблюдений при предшесТ
вующих прохождениях кометы вблизи Земли. Предполагалось, чТ
новые измерения по условиям наблюдения кометы с Земли м°гУ
240
проводиться в периоды с января по апрель 1985 г. и с августа
1985 по январь 1986 г. Ошибка измерений прямого восхождения
йв и склонения бс кометы состоит из собственно ошибки наблюде-
ния небесного объекта и дополнительной составляющей, связанной
с неопределенностью положения ядра кометы в ее голове, угловые
размеры которой увеличиваются при приближении кометы к Земле,
а линейные размеры — при ее приближении к Солнцу. Предельное
значение этой составляющей в момент проведения измерений оце-
нивалось следующим соотношением
А —7 /2\ ЛЛКГ
(/) = гКг-----—--------— Рокг >
ГКГ У1) Г3-КГ V)
где Гкг(0 —текущее расстояние кометы от Солнца; гяКг — радиус
ее перигелия; г з-кг (0 —расстояние от кометы до Земли; рокг=
= 250 000 км — максимальный размер комы при прохождении ко-
метой перигелия; екг=0,1 — коэффициент, характеризующий не-
определенность положения ядра кометы.
Предельная величина собственной ошибки наблюдения прини-
малась равной 2". Результаты оценки точности прогнозирования
местоположения кометы на момент ее встречи с АМС «Вега» пред-
ставлены на рис. 4.18, где 8гкг, 8«кг, 8^кг —предельные ошиб-
ки прогнозирования в орбитальной системе координат (по радиу-
су-вектору, нормали и бинормали соответственно).
Неопределенность положения кометы существенным образом
зависит от состава наблюдений и составляет:
для первого варианта — на момент пролета станциями Венеры
(май 1985 г.) 600 тыс. км по радиусу-вектору, 10 тыс. км по би-
нормали и 1300 тыс. км по нормали, а на момент их встречи (март
1986 г.) соответственно 7 тыс. км,
для второго варианта соответ-
ственно 25 тыс. км, 1 тыс. км,
35 тыс. км и 3 тыс. км; 0,5 тыс. км,
6 тыс. км.
Таким образом, при априорной
оценке характеристик коррекции
на этапе проектирования АМС
необходимо ориентироваться на
первый вариант ошибок прогно-
зирования кометы, а затем непо-
средственно в полете осущест-
влять оперативный синтез опти-
мальной стратегии коррекции в
соответствии с конкретной ситуа-
цией.
При выборе стратегии коррек-
ции траектории движения АМС
«Вега» на участке полета Вене-
₽а комета предполагалось, что
1 тыс. км, 12 тыс. км;
Рис. 4.18. Ошибки прогнозирования
положения кометы на момент встречи
с АМС «Вега» по астрометрическим
измерениям
241
Рис. 4.19. Изменение градиентов кор-
ректируемых параметров траектории
АМС «Вега» на участке перелета Ве-
нера — комета Галлея
Рис. 4.20. Зависимость энергетических
затрат коррекции траектории переле-
та к комете Галлея от времени ее
проведения:
1 — исправление ошибок прогнозирования
движения кометы; 2 — исправление ошибок
наведения АМС «Вега» после пролета Ве-
неры
ошибки радиотехнических навигационных измерений и исполне-
ния коррекции аналогичны принятым в разд. 4.7, а начальные ошиб-
ки реализации межпланетной траектории перелета к комете опре-
деляются точностью наведения на участке подлета к Венере и не
превышают 500 км по координатам и 1 м/с по скоростям в момент
выхода АМС из сферы действия Венеры. В качестве корректиру-
емых параметров примем координаты вектора относительного по-
ложения АМС и кометы в орбитальной системе на расчетный мо-
мент их встречи. Анализ эффективности независимой трехпарамет-
рической коррекции показал: 1) в районе 75 ...90 сут полета имеет-
ся область вырождения матрицы FK(^-) и, как следствие, резкое
увеличение энергетических затрат на коррекцию начальных откло-
нений корректируемых параметров, связанных с ошибками прогно-
зирования кометы и наведения станций «Вега» при пролете их
вблизи Венеры (рис. 4.19); 2) существует два локальных экстре-
мума энергетического критерия качества наведения, в интервале
20 ...50 сут и ПО... 160 сут, для которых предельные характеристи-
ческие скорости коррекции начальных отклонений корректируемых
параметров практически одинаковы (рис. 4.20); 3) на участке под-
лета к комете (после 240 сут) эффективность коррекции существен-
но уменьшается (см. рис. 4.19).
Рассматривались различные варианты проведения трех- и четы-
рехразовых коррекций, причем во всех случаях время последнеи
коррекции принималось одинаковым, равным 260 сут, и выбира-
лось из удобства организации управления полетом АМС при про-
лете возле кометы Галлея.
При трехразовой коррекции первая коррекция может прово-
диться в области первого или второго локальных экстремумов. Вы-
бор рациональной схемы зависит от возможных ошибок прогнозИ'
рования орбиты кометы. При больших ошибках прогнозирован!!
242
Таблица 5
——— Количество коррекций I вариант ошибок оценки движения кометы II вариант ошибок оценки движения кометы
Время коррекций, сут Характе- ристиче- ская скорость, м/с Суммарная характери- стическая скорость, м/с Время коррек- ций, сут Характе- ристиче- ская скорость, м/с Суммарная характери- стическая скорость, м/с
«
29 20 35 148
3 146 135 190 187 15 160
260 94 260 15
100 145 146 138
3 190 18 180 187 6 159
260 18 260 25
29 19 35 148
4 135 135 160 120 9 159
185 15 187 5
260 35 260 15
(измерения 1985—1986 гг.) коррекция в области первого локаль-
ного экстремума исправляет только ошибки наведения АМС, свя-
занные с пролетом вблизи Венеры. Поэтому трехразовую коррек-
цию целесообразно проводить таким образом, чтобы первая коррек-
ция выполнялась в области второго локального экстремума.
Ощутимый энергетический выигрыш в этом случае дает четырех-
разовая схема коррекции, которая существенно уменьшает величи-
ну характеристической скорости последней коррекции, а также
результирующие ошибки наведения. Для второго, более оптимисти-
ческого варианта оценок точности прогнозирования кометы, четы-
рехразовая схема коррекции не обладает преимуществом перед
трехразовой и ее использование для наведения АМС не целесооб-
разно. Трехразовые схемы коррекции с временами проведения
первой коррекции в первой и второй областях локального экстре-
мума по энергетике наведения практически эквивалентны. Однако
последняя стратегия, как и в рассмотренном выше случае, имеет
недостаток, связанный с увеличением ошибок прогнозирования
Движения АМС из-за сокращения навигационных интервалов, осо-
бенно между первой и второй коррекциями. Поэтому этот вариант
Может рассматриваться как резервный для случая нештатного про-
ведения первой коррекции в более ранние сроки. Результаты опти-
мизации стратегии коррекции приведены в табл. 5. Таким образом,
Для наведения АМС «Вега» на комету после пролета Венеры целе-
сообразно использовать четырехразовую схему коррекции, если
оценка ошибок прогнозирования соответствует первому варианту,
й трехразовую схему, если ошибки соответствуют второму вариан-
ТУ- Суммарная характеристическая скорость составляет 160 м/с, а
Точность наведения в первом случае— 10 тыс. км (8 тыс. по радиу-
су-вектору и 5 тыс. по бинормали в точке встречи), а во втором —
^>5 тыс. км (3,1 тыс. км и 1,8 тыс. км соответственно). В суммарную
243
характеристическую скорость не включена характеристическая ско-
рость маневра, проводимого после пролета Венеры и предназначен-
ного для формирования номинальной траектории полета к комете
который может быть совмещен с первой коррекцией.
При реализации полета проведенные к моменту пролета Венеры
станциями «Вега» наземные оптические наблюдения за движением
кометы Галлея показали хорошую их согласованность с уже имею-
щимися измерениями, и на участке Венера — комета была выбрана
трехразовая схема наведения. Управляющие воздействия, совме-
щающие по своему функциональному назначению коррекцию и
маневр, были проведены 25 июня 1985 г. на АМС «Вега-1» и
29 июня на АМС «Вега-2». Величина характеристической скорости
управляющего воздействия на «Веге-1» составляла 158,5 м/с, в том
числе на исправление ошибок пролета Венеры необходимо было
затратить 14 м/с. На «Веге-2» из общей величины характеристиче-
ской скорости 297,6 м/с на исправление ошибок пролета Венеры
расходовалось 6 м/с.
Наблюдения за кометой Галлея были возобновлены в августе
1985 г., когда она находилась на расстоянии около 600 млн. км от
Земли. К новому прохождению кометы был проявлен большой на-
учный интерес во всем мире. Для исследования ее на близких рас-
стояниях были запущены 5 АМС: кроме двух советских две япон-
ские и по проекту «Джотто» (Европейского космического агент-
ства — ЕСА).
Задачи управления полетом АМС требовали повышения точно-
сти расчета эфемериды кометы на несколько порядков по сравне-
нию с результатами, полученными при ее появлении в 1909 г. Для
достижения этих целей была разработана и реализована специаль-
ная международная программа наблюдения кометы Галлея (IHW),
в которой участвовало большое число обсерваторий, расположен-
ных на различных континентах. Результаты измерений оперативно
передавались всем заинтересованным странам. Был составлен так-
же общий банк наблюдений кометы, который включал более 10 тыс.
оптических измерений, охватывающих интервал в 230 лет, т. е. при
предшествующих ее прохождениях. Все это давало возможность
осуществления оперативного уточнения эфемериды кометы Галлея
для наведения АМС «Вега». Анализ информации, полученный к
началу декабря 1985 г., показал, что ошибки в параметрах движе-
ния кометы, использованных ранее для расчета маневров на АМС
«Вега-1 и -2» в июне 1985 г., существенно меньше, чем ожидалось.
Достаточно сказать, что новая оценка этих параметров приводила
к соответствующему изменению координат в моменты встречи
АМС с кометой не более чем на 100 тыс. км и оказывала в'основ-
ном влияние на время встречи (отклонения по радиусу-вектору и
бинормали не превышали 1000 км). С другой стороны телеметри-
ческая информация, переданная с АМС в сеансах маневров, а так-
же последующие навигационные измерения траектории их движе
ния, позволили установить, что САУ выполнили расчетные маневр
с высокой точностью.
244
Таким образом, в середине декабря, когда согласно принятой
оптимальной стратегии предполагалось проведение очередных кор-
рекций траекторий движения станций, выяснилось, что отклонения
корректируемых параметров от заданных значений сравнительно
невелики: величины характеристических скоростей коррекций, необ-
ходимые для исправления этих отклонений, не превышали 3 м/с.
Было принято решение коррекции траектории в декабре 1985 г. не
проводить. При этом учитывалось, что запасы топлива на борту
станций позволяют скорректировать существующие ошибки наведе-
ния в феврале 1986 г. при проведении заключительных коррекций,
несмотря на возможное увеличение соответствующих энергетиче-
ских затрат почти на порядок. Принималось также во внимание то
обстоятельство, что отмена очередной коррекции будет одновремен-
но способствовать повышению точности решения задачи навигации
АМС.
Выполнение последних коррекций, определяющих точность на-
ведения станций «Вега» на комету Галлея, было намечено на сере-
дину февраля 1986 г., примерно за двадцать суток до встречи с
ней. При подготовке к их проведению, как и при управлении поле-
том любых других АМС, осуществлялся окончательный выбор усло-
вий пролета относительно кометы, который должен был учитывать
фактическую точность оценки параметров движения АМС, а так-
же дополнительную информацию о самой комете Галлея. Анализ
ограничений, связанных с работой бортовых систем, целесообразно
проводить с помощью построения изолиний, для соответствующих
характеристик в картинной плоскости, связанной с центром ядра
кометы (см. рис. 1.13). В этом случае в качестве корректируемых
параметров удобно использовать координаты £п, г]п, точки пересе-
чения траектории АМС с картинной плоскостью и время tpm проле-
та на наименьшем расстоянии от нее. Какие новые условия влияли
на выбор номинальных значений корректируемых параметров
фк0 для последних коррекций?
Во-первых, отмена коррекций траекторий в декабре 1985 г., как
отмечено выше, позволила повысить точность прогнозирования
Параметров движения АМС по данным радиотехнических измере-
ний, принятых для расчета коррекций. Во-вторых, оценка фактиче-
ской точности определения орбиты кометы Галлея, как показала
обработка оптических измерений, оказалась вдвое выше априор-
ной. Напомним, что согласно априорным оценкам предельные
°Шибки прогнозирования местоположения кометы на расчетный!
«омент ее встречи с АМС не должны превышать 3 тыс. км по коор-
динатам в картинной плоскости и 6 тыс. км по нормали к ней (соот-
ветствующее отклонение tpm = 80 с). В-третьих, несколько измени-
сь представление о пылевой модели комет на основе данных,
слученных американской станцией ICE. Эта станция, которая ра-
Зее Нах°Дилась на орбите вблизи точки либрации L=1 системы
Н Мля Луна, в 1984 г. была переведена с помощью серии ма-
целРОв на 0Рбиту перелета к комете Джакобини — Циннера. Перед
ставилась задача совершить пролет через голову и хвост коме-
245
ты на расстоянии около 10 тыс. км. В результате управления дви-
жением станция прошла на расстоянии 7860 км позади ядра коме-
ты (через кому и хвост) с относительной скоростью 21 км/с. Ца
основе полученной научной информации была уточнена пылевая
модель комет и минимально допустимое расстояние от ядра коме-
ты для АМС «Вега» было уменьшено с 10 до 6 тыс. км.
Таким образом, анализ реальных условий полета и основных
научных задач, решаемых при встрече с кометой, позволил осуще-
ствить окончательный выбор номинальных значений корректируе-
мых параметров и области их допустимых значений для АМС
«Вега-1». Расчетные значения координат точки встречи в картин-
ной плоскости, принятые для последней коррекции, составляли
£„ = 8000 км; т)п = 3000 км, а время встречи —6 марта 1986 г.
10 ч 19 мин 50 с московского времени, причем предельные ошибки
наведения (с учетом ошибок исполнения) не должны были превы-
шать 2 тыс. км в картинной плоскости и 50 с по времени. Что ка-
сается АМС «Вега-2», то оказалось, что фактическая траектория
ее полета с учетом полученных к середине февраля уточненных зна-
чений параметров орбиты кометы позволяла реализовать все усло-
вия, необходимые для работы комплекса научных приборов, без
проведения последней коррекции. Вероятность такого события ис-
ключительно мала, однако в реальном полете могут реализоваться
и такие «невероятные» события. Согласно полученной по навига-
ционным измерениям оценке условий встречи с кометой
Галлея, АМС «Вега-2» должна была пролететь на рассто-
янии 7,6 тыс. км от ядра (£„ = 7300 км, т]11 = 2000 км), причем
возможные ошибки такой оценки не превышали 1,5 тыс. км (см.
разд. 1.7).
10 февраля была проведена коррекция траектории движения
станции «Вега-1». Величина характеристической скорости коррек-
ции составляла 19,5 м/с. Следует отметить, что установленный на
АМС «Вега» комплекс научных приборов позволял определять
фактические значения углов, характеризующих направление с нее
на центр ядра кометы. С помощью специальных программно-аппа-
ратных средств на АМС осуществлялось высокоточное измерение в
базовой системе координат, реализуемой с помощью САУ, поло-
жений гиростабилизированной платформы и установленной на ней
телевизионной системы, обеспечивающих слежение за ядром коме-
ты в течение всего сеанса ее исследования на близких расстояниях-
Эти данные можно использовать в качестве автономных астронави-
гационных измерений для уточнения условий пролета АМС относи-
тельно кометы.
При соответствующей статистической обработке этой инфор-
мации при которой одновременно определяется не только траекто-
рия движения АМС относительно кометы, по и некоторые систе-
матические ошибки самого измерителя, эффективность авто-
номных измерений оказалась исключительно высокой. Они по
зволили с ошибкой, не превышающей 100 км, оценить точность
реализации заданных значений корректируемых параметров
246
ошибки прогнозирования эфемериды кометы Галлея, полученной
по данным наземных измерений. Анализ результатов автономных
измерений показал, что фактические условия пролета автоматиче-
ских межпланетных станций «Вега» относительно кометы характе-
ризуются следующими параметрами:
«Вега-1» «Вега-2»
Дата встречи............................ 6 марта 1986 г. 9 марта 1986 г.
Время встречи московское.................10 ч 20 мин 06 с 10 ч 20 мин 01 с
Наименьшее расстояние рт, км . , , 8850 8100
Координаты точки встречи
ёп, км......................................... 8380 7780
Т]п> км................................. 2910 2150
Таким образом, результирующие ошибки наведения составляют
около 400 км в картинной плоскости и 15 с во времени встречи.
Основным их источником являются ошибки параметров орбиты
кометы, принятых при расчете последней коррекции. Эти данные
вполне согласуются с приведенной выше оценкой возможной точ-
ности наведения и составляют около 25% от предельных значений
возможных ошибок наведения, соответствующих уровню вероятно-
сти Р = 0,997.
На движение кометы Галлея и прогнозирование условий встре-
чи с АМС существенное влияние оказывают негравитационные си-
лы реактивного характера, увеличивающиеся при приближении ко-
меты к Солнцу за счет улетучивающихся из ядра под действием
солнечных лучей молекул газов и частиц пыли (образования хво-
ста кометы). Значительная неопределенность в оценке величины
этих сил и является основным источником ошибок моделирования
движения кометы, а также приводит к необходимости их уточнения
совместно с параметрами орбиты кометы Галлея. Необходимо под-
черкнуть, что сложная модель движения кометы, большие эксцент-
риситет орбиты и объем измерительной информации, ограниченное
время решения задачи уточнения параметров движения кометы в
случае использования при наведении АМС, ставят ее в ряд наибо-
лее сложных задач практической астрономии.
Обработка астроизмерений, полученных после прохождения ко-
метой перигея орбиты 9 февраля 1986 г. (наблюдения кометы с
15 января были прерваны из-за неблагоприятных условий, связан-
ных с заходом ее за Солнце относительно Земли и возобновлены
20 февраля), показала, что математические ожидания ее координат
На расчетные моменты встречи с автоматическими межпланетны-
ми станциями «Вега» за короткий интервал времени изме-
нились более чем на 500 км. Это изменение тем более существенно,
Что в предшествующие два месяца оценка параметров орбиты была
Достаточно стабильной.
Прогнозируемые значения корректируемых параметров, реали-
зованных в результате наведения АМС, только по данным назем-
Ых астроизмерений, выполненных к моменту подлета к комете
станций , составляли:
247
«1:ега-1»
Дата встречи........................................ 6 марта
Время встречи московское . . . .10 ч 19 мин 53 с
Координаты точки встречи
ijn, км........................................ 8510
т]п, км........................................ 3070
«Вега-2»
9 марта
10 ч 20 мин 00 с
7760
2090
Сравнивая их с приведенными выше более точными данными
полученными по автономным астроизмерениям, нетрудно видеть’
что различие составляет до 1000 км-вдоль орбиты кометы и ;1(’
200 км в плоскости, ортогональной относительной скорости встречи
кометы п АМС.
АМС «Вега-1» прилетела к комете Галлея ранее, всех других
станций, а европейская станция «Джотто» позднее других и на бо-
лее близком расстоянии от ядра. Программа «Джотто» предусмат-
ривала встречу с кометой 14 марта на минимальном расстоянии
около 500 км от ядра со стороны, освещенной Солнцем. Обеспече-
ние такой высокой точности наведения только по данным наземных
наблюдений за движением кометы Галлея практически невозмож-
но. В связи с этим предполагалось, что проведение последней кор-
рекции траектории движения АМС «Джотто» будет осуществляться
с использованием результатов автономных астроизмеренип, выпол-
ненных советскими станциями «Вега-1 и -2». В этом заключалась
основная цель международного проекта «Лоцман», в котором АМС
•«Вега» отводилась роль первопроходцев. Проект предусматривал
проведение большого объема работ по согласованию методических
-принципов решения задач навигации и наведения для советских и
европейских станций, а также уточнения орбиты кометы Галлея по
данным совместной обработки наземных и автономных наблюдений,
разработке п тестированию специального программного обеспече-
ния, отработке взаимодействия, обмена информацией и согласова-
ния результатов. Особые трудности были связаны с крайне огра-
ниченным временем, которым располагали участники проекта для
предварительной обработки и анализа автономных измерений их
передачи в ЕСА, расчета уточненных эфемерид кометы и принятия
решений, так как последняя коррекция траектории движения
«Джотто» была намечена на И марта 1986 г., т. е. через двое су-
ток после пролета кометы АМС «Вега-2». Для эффективного ис-
пользования автономных измерений важное значение имела точ-
ность решения задачи навигации на заключительном участке поле-
та станций «Вега» (автономные измерения по своему характер)
являются относительными и связаны с положением наблюдателя и
пространстве, т. е. с траекториями движения АМС). Для повыше-
ния точности определения параметров движения станций «Вега»
на сравнительно небольших навигационных интервалах (от послед-
ней коррекции до встречи с кометой) предполагалось в рамка*
проекта «Лоцман» использовать дополнительно дифференциальны6
радиоинтерферометрические измерения. Они осуществлялись ам^
риканскими наземными станциями слежения за объектами -'ia,Ib0
пего космоса DSN, расположенными близ Мадрида, Канберры и
248
ролДстоУне- Большие расстояния между этими пунктами позволяли
с высокой точностью определять соответствующие угловые коорди-
наты АМС. Обработка угломерных и дальномерных навигационных
измерений, выполненных советскими наземными станциями слеже-
ния, позволила уменьшить ошибки навигации АМС «Вега» до 40 км
(среднеквадратичная ошибка оценки координат). Специально для
проекта «Лоцман» была разработана и реализована методика вы-
сокоточного определения траектории движения кометы Галлея по
данным совместной обработки наземных и автономных астроизме-
рений. Она предусматривала одновременное согласование движе-
ния кометы и двух АМС. В результате решения этой задачи была
получена новая эфемерида кометы Галлея, которая характеризова-
лась среднеквадратичными значениями возможных ошибок их рас-
чета не более 80 км. При проведении последней коррекции траекто-
рии движения «Джотто» прицеливание осуществлялось таким обра-
зом, чтобы номинальное значение минимального расстояния от
ядра составляло 560 км. Полученные с борта станции данные пока-
зали, что фактическое значение минимального расстояния от ядра
составляло около 610 км. Таким образом, реализация проекта
«Лоцман» обеспечила высокую точность наведения АМС «Джотто»
и позволила при близком пролете кометы Галлея провести иссле-
дования, которые дополняли результаты, полученные советскими
АМС «Вега». Другим важным научным результатом этих проектов
явилось такое уточнение орбиты кометы, которое было недостижи-
мо с помощью наземных оптических наблюдений.
9.
850
Глава 5
ОСОБЕННОСТИ РЕШЕНИЯ
НЕЛИНЕЙНЫХ ЗАДАЧ НАВЕДЕНИЯ АМС
Особенностями управления движением любого КА является слож-
ный, нелинейный характер уравнений, описывающих траекторию
полета, неизвестные или неполностью определенные параметры
действующих на него возмущений, ограниченные возможности бор-
товых систем и ошибки их функционирования. Важное значение при
этом имеет выбор такой стратегии управления, которая отвечала
бы требованиям к точности наведения при энергетических затратах
на ее реализацию, не превышающих имеющихся на КА запасов
топлива. Поэтому при баллистическом обеспечении управления дви-
жением АМС необходимо решение нелинейных задач синтеза опти-
мального наведения в условиях неопределенности. Теоретическую
их основу составляют методы теории оптимальных процессов, по-
лучившие в последнее время существенное развитие. Вместе с тем
многие встречающиеся на практике задачи оптимального управле-
ния являются настолько сложными, что не нашли приемлемого
решения в рамках общей теории. Для таких задач единственный
реальный путь — разработка упрощенных способов поиска ком-
промиссных решений, ориентированных на определенный класс
объектов и учитывающих присущие ему особенности и основные
требования.
Из многочисленных проблем, связанных с решением нелинейных
задач управления, рассмотрим только такие, которые име-
ют непосредственное отношение к оперативному баллистическо-
му обеспечению наведения АМС. Будем считать, что в результате
проектно-баллистических исследований выбраны схемы полета и
управления, номинальная траектория движения и характеристики
всех расчетных маневров. Известны также модели бортовых
систем, обеспечивающих управление движением АМС, а также науч-
ных систем, функционирование которых накладывает дополнитель-
ные требования к рабочей орбите. Необходимо выбрать такую стра-
тегию наведения, которая была бы наилучшим образом
приспособлена к конкретной полетной ситуации, и определить
параметры настройки систем автоматических межпланетных
систем, обеспечивающих проведение сеансов маневров и кор-
рекций. Все необходимые расчеты должны выполняться в рам-
ках соответствующего цикла управления в заданное ограничен-
ное время.
250
5.1. Основные принципы решения нелинейных задач
наведения АМС при управлении их полетом
Рассмотрим основные особенности решения задач баллистиче-
ского обеспечения наведения АМС при оперативном управлении их
полетом. Во-первых, на этом этапе решение задачи синтеза опти-
мальной стратегии наведения должно осуществляться в самой об-
щей постановке (см. разд. 1.4). Поэтому, в отличие от рассмотрен-
ных в гл. 4 задач синтеза стратегии наведения при проектно-балли-
стических исследованиях, объект управления необходимо описы-
вать нелинейной стохастической динамической системой в рамках
полетной модели. Текущее состояние ее характеризуется с помощью
достаточных статистик s(/), включающих математические ожида-
ния и корреляционные матрицы возможных ошибок оценки векто-
ров X] (/), Vi (/и, /), полученные на основе статистической обработки
проведенных к моменту t навигационных измерений. Априорные
характеристики ошибок систем навигации и автоматического управ-
ления, используемые при синтезе оптимальной стратегии управле-
ния U*(Z) на интервале полета [/, £к], могут уточняться по результа-
там анализа получаемой с АМС телеметрической информации, ха-
рактеризующей функционирование и реальные ошибки работы со-
ответствующих систем. Модель управляющих воздействий также
более сложного вида — неимпульсная, с протяженным активным
участком. Критерий оптимальности (энергетический или точност-
ной), как и ранее, определяет вероятностные характеристики стра-
тегии наведения, однако в некоторых случаях возможно использо-
вание негауссовских моделей ошибок работы бортовых систем.
Во-вторых, вероятностные или детерминированные ограничения,
определяющие допустимые области переменных состояния системы
и параметров управления, учитывают энергетические ресурсы и
технические возможности систем автоматического управления, а
также требования, предъявляемые к конечным параметрам орбиты
АМС, обеспечивающим выполнение запланированной программы
научных исследований. Поэтому при решении задач наведения не-
обходимо использовать различные модели функционирования бор-
товых систем АМС, характеристики которых могут изменяться в
процессе полета на основе анализа их состояния по данным полу-
чаемой с объекта телеметрической информации. И в-третьих, реше-
ние задач наведения должно осуществляться в строго определенное
и. как правило, крайне ограниченное время, с высокой надеж-
ностью, гарантирующей возможность получения результатов. От-
сутствие решения какой-либо задачи может привести к невыполне-
нию цели полета, а поэтому является недопустимым.
Решение задач оптимального управления для нелинейных сто-
хастических систем связано с большими вычислительными трудно-
стями, необходимостью использования сложных способов числен-
ного поиска экстремума и методов статистического моделирования
Аля нахождения вероятностных характеристик многопараметриче-
ских систем. Поэтому оперативный синтез оптимальной стратегии
9‘ 251
наведения при дополнительных условиях, накладываемых на точ-
ность, надежность и оперативность проведения расчетов, в общем
виде практически невозможен. В инженерной практике, в том чис-
ле и в практике управления полетами различных КА, нет нужды
при решении всех без исключения задач использовать самые слож-
ные математические методы и модели, идеальные критерии качест-
ва управления. Ценность представляют не только оптимальные, но
и так называемые рациональные решения, которые удовлетворяют
всем основным ограничениям и по-возможности приближаются к
оптимальным. Поэтому, если идти от конкретной проблемы, учиты-
вая ее специфические условия и требования, то методы могут ока-
заться более простыми и конструктивными. Важное значение при
этом имеет экспериментальная проверка их эффективности, под-
твержденная результатами полетов АМС. До тех пор пока каждая
стадия численного решения не проверена практикой, нельзя быть
уверенным, что имеющиеся ограничения по точности и устойчивости
метода, объему памяти, разрядности и быстродействию ЭВМ, ис-
пользуемых при баллистическом обеспечении наведения, не ока-
жутся существенным препятствием на пути полного завершения
вычислительного процесса.
Анализируя проблему выбора стратегии наведения в целом, не-
обходимо, придерживаясь системного подхода, рассматривать ее
как состоящую из взаимосвязанных частей, разделив общую зада-
чу на определенное число частных задач. Это позволяет осуществ-
лять сравнение альтернатив и поиск оптимальных решений только
в некоторой части, временно отстраняя другие аспекты. Такой спо-
соб решения называется субоптимизацией. Существует, как прави-
ло, несколько способов расчленения любой системы, и необходимо
в каждом конкретном случае выбрать подходящий способ деком-
позиции, взаимно увязывая все направления исследований друг с
другом. В силу этого для получения удовлетворительного решения
задачи оперативного синтеза стратегии наведения АМС будем при-
держиваться следующей методологии. Проведем декомпозицию об-
щей задачи на ряд последовательно решаемых частных задач. Для
каждой задачи, учитывая особенности полета, цели управления и
требования к наведению, разработаем семейство моделей движения
и функционирования систем АМС различного уровня точности и
выберем соответствующие методы решения частных задач. Конеч-
ным результатом решения последовательности этих задач являются
стратегия наведения, уставочные параметры и другая информация,
необходимая для проведения сеанса маневра или коррекции, а так-
же для подготовки к возможным нештатным или аварийным си-
туациям и оперативному выходу из них. Основными принципами,
которыми необходимо руководствоваться при проведении деком-
позиции, являются следующие.
1. На этапе оперативного баллистического обеспечения управле-
ния колетом наиболее высокие требования предъявляются к точ-
ности расчета параметров очередного управляющего воздействия,
осуществляющего перевод динамической системы из текущего в
252
требуемое конечное состояние. В то же время к оптимальности вы-
бираемой стратегии управления предъявляются менее жесткие тре-
бования, если она удовлетворяет ограничениям, связанным с рас-
полагаемыми запасами топлива. Поэтому синтез оптимальной
стратегии управления следует отделить от выбора параметров оче-
редного управляющего воздействия. Иными словами, исходная
задача синтеза оптимальной стратегии наведения заменяется зада-
чей синтеза управления для упрощенной, как правило линейной,
стохастической системы. Определение параметров управле-
ния, необходимых для проведения маневра или коррекции, осу-
ществляется в рамках нелинейной модели детерминированной ди-
намической системы при выбранной стратегии управления с исполь-
зованием условий оптимальности режима управления, соответст-
вующих линейной системе.
2. Состав и вид уставочных параметров, осуществляющих на-
стройку бортовых систем на проведение требуемой коррекции и
маневра, зависит от конкретного типа установленной на АМС ап-
паратуры, а следовательно, может изменяться для каждого нового
объекта или сеанса управления. Кроме того, зависимость управ-
ляющего воздействия от уставочных параметров может быть
сложного, неоднозначного, а в некоторых случая?; и неаналитиче-
ского вида.
Сами уставочные параметры, как правило, являются дискрет-
ными величинами, так как они закладываются на борт АМС в
специальные счетчики или ячейки БЦВМ ограниченной разряд-
ности. Поэтому задачу выбора параметров управления сле-
дует решать не в пространстве установочных параметров S', а в
пространстве универсальных параметров управления Л”. Такая за-
мена позволяет перейти при решении сложной задачи определения
параметров управления от неуниверсальных параметров !(//) к не-
прерывным и аналитическим параметрам vi(^), не'зависящим от
состава бортовой аппаратуры, комплектации систем АМС, исполь-
зуемых при проведении сеанса управления.
3. Ограничения на параметры движения АМС, связанные с ра-
ботой ее научных и обеспечивающих систем, могут быть разделены
На две группы. К первой относятся ограничения, определяющие
множество допустимы?; конечных состояний динамической системы.
Если заменить зависимость (ty\ ограничений этой группы за-
висимостью ^г{<р(0] от специальным образом выбранных терми-
нальных параметров, то задачи наведения сводятся к задачам
терминального управления, причем параметры <р(/) имеют универ-
сальный характер и практически не зависят от конструктивных
особенностей бортовых систем, целей и задач полета. Ограничения
второй группы определяют допустимые интервалы проведения уп-
равления.
Тогда синтез оптимальной стратегии наведения при оператив-
ном баллистическом обеспечении управления полетом автоматиче-
ской межпланетной станции сводится к решению последователь-
ности задач:
253
построение n-мерной области допустимых конечных состоя-
ний динамической системы в пространстве терминальных парамет-
ров
выбор r-мерного подпространства ST к корректируемых па-
раметров и соответствующей области Я^ их допустимых зна-
чений;
определение расчетных значений корректируемых параметров
Фк°, обеспечивающих заданную или максимальную вероятность вы-
полнения условия q:K+ на множестве возможных траек-
торий полета;
построение интервалов Туп, где допустимо проведение управ-
ляющих воздействий;
определение области допустимых управляющих воздействий в
пространстве параметров управления, если существуют ограниче-
ния на их проведение;
синтез субоптимальной стратегии управления, обеспечивающей
выполнение требований к точности наведения при минимальных
энергозатратах импульсного терминального управления линейной
стохастической динамической системой и заданных временах про-
ведения управляющих воздействий, принадлежащих множеству
допустимых управлений;
решение краевой задачи выбора субоптимальных параметров
очередного управляющего воздействия Vi(^) при детерминирован-
ной нелинейной модели динамической системы и неимпульсном
управлении, обеспечивающем выполнение граничных условий <рк°,
условий энергетической оптимальности параметров управления ли-
нейной системы и выбранной стратегии наведения;
определение уставочных параметров \(tj), используемых при
настройке систем АМС на проведение управления, соответствую-
щего расчетным значениям vi(tj) в рамках принятых моделей их
функционирования ?Tt.
При баллистическом обеспечении наведения могут также ре-
шаться задачи, связанные с контролем работы систем при выбран-
ных уставочных параметрах на физических и математических
моделях, расчетом дополнительной информации, необходимой для
проведения сеанса маневра или коррекции и оперативного анализа
его результатов, изменения уставочных параметров при возникно-
вении нештатных ситуаций и ряд других. Для выполнения расчетоз
разрабатывается специальное математическое обеспечение, объеди-
ненное в единую программную систему оперативного наведения
АМС. Такая многоуровневая проблемно-ориентированная програм-
мная система, использующая на каждом этапе вычислений матема-
тические модели и методы анализа и синтеза стратегии наведения
линейных и нелинейных, стохастических и детерминированных ди-
намических систем, позволяет добиться высокой оперативности |[
надежности при баллистическом обеспечении. Они достигаются,
прежде всего, путем подбора методов и моделей, соответствующих
требованиям к точности решения каждой конкретной задачи, по-
следовательным контролем получаемых данных опытными спецпа'
254
диетами, изменением принятого хода процесса в случае выявления
ошибок или нерасчетных ситуаций, всесторонней обработкой ме-
тодов и проверкой моделей.
Реализация принятых принципов позволяет разделить всю со-
вокупность задач оперативного обеспечения наведения на два
класса.
К первому относятся универсальные задачи, практически не
зависящие от реализации объекта и его бортовых систем,— синте-
за стратегии управления и выбора параметров очередного управ-
ляющего воздействия. Это наиболее трудоемкие задачи, при реше-
нии которых целесообразно использовать достаточно универсаль-
ные модели и методы, позволяющие осуществлять их настройку на
заданные схему полета, состав корректируемых параметров и пара-
метров управления.
Остальные задачи, связанные с выбором корректируемых пара-
метров, их расчетных и допустимых значений, расчетом уставоч-
ных параметров относятся к числу неуниверсальных.
Способы решения задач второго класса зависят от схемы поле-
та и управления, а модели систем — от требований к точности рас-
чета каждого управляющего воздействия и наведения в
целом. Отметим общий методический подход, основанный на ре-
зультатах анализа свойств наведения автоматических межпланет-
ных станций.
При терминальном управлении, к которому сводятся все зада-
чи оперативного баллистического обеспечения наведения, число
параметров, оказывающих влияние на выполнение заданной сово-
купности требований, не превышает 6. Анализ свойств движения
АМС при подлете к планете назначения или на орбите ИСП, энер-
гетических возможностей проведения управления и реализованных
в полете значений s(t) позволяет выбрать терминальных па-
раметров, из которых с помощью исследования их взаимной зави-
симости назначаются корректируемых параметров. Затем,
используя детерминированную модель движения и моделирование
конечного участка полета АМС, определяется область и внут-
ри нее выбираются такие значения фк°, которые с наибольшей! ве-
роятностью обеспечивают выполнение заданных требований. Учи-
тывая, что размерность вектора фк обычно не превышает 2—3, по-
строение области и выбор фк° могут осуществляться графоана-
литически. Однако при высоких требованиях к точности наведения
Для заключительных управляющих воздействий, формирующих па-
раметры рабочей орбиты, в ряде случаев необходимо использовать
Метод статистических испытаний при построении функций распре-
деления фк+(Д>).
Для каждой АМС, используя модели работы бортовых систем,
Детерминированные (или стохастические) модели движения,
йа каждом участке полета можно выделить интервалы, на кото-
рых при заданном s(Z) выполняются ограничения, связанные с их
Функционированием и реализацией программы полета.
255
5.2. Общая схема решения задач коррекции траектории движения
Реализация сформулированных в разд. 5.1 принципов баллисти-
ческого обеспечения наведения АМС применительно к коррекции
траектории ее движения позволяет воспользоваться при решении
соответствующей последовательности частных задач методами и
моделями, рассмотренными в предшествующих главах. Действи-
тельно, для синтеза субоптимальной стратегии коррекции могут
применяться приведенные в гл. 3 и 4 методы расчета и оптимизации
характеристик управления линейной стохастической динамической
системы, используемые при проектно-баллистических исследова-
ниях. Однако при оперативном обеспечении коррекции стохастиче-
ская линеаризация модели движения АМС должна осуществляться
для известного вектора достаточных координат s(/), определяюще-
го текущее состояние системы и ошибку ее оценки по навигацион-
ным измерениям. Задачи выбора корректируемых параметров, их
расчетных и допустимых значений, расчета ограничений на управ-
ляющие воздействия и времена их проведения, а также методы их
решения аналогичны рассмотренным в гл. 1 и 2. Таким образом,
новыми задачами при оперативном баллистическом обеспечении
являются выбор субоптимальных параметров очередного управляю-
щего воздействия и определение соответствующих уставочных па-
раметров. Рассмотрим первую из них, которая относится к числу
универсальных задач коррекции траектории движения.
Пусть выбраны корректируемые параметры, их номинальные
значения и характеристики оптимальной стратегии, определяющие
время и режим проведения коррекций траектории движения. Тогда
задача расчета параметров коррекции формулируется следующим
образом. Для заданной нелинейной детерминированной динамиче-
ской системы, описываемой дифференциальными уравнениями пер-
вого порядка вида (1.13) и известным текущим состоянием хД/),
необходимо найти такие значения параметров g последовательно
проводимых коррекций, которые обеспечивают при неимпульсной
модели управляющих воздействий одноразовое исправление откло-
нений корректируемых параметров:
<РК[Х1(О, Л),..., tg), фк=0, (5.1)
при выполнении условий
tj): u(/y)—»{tj, a.j, fly, ДИj); (5.2)
Г-у, ^[иод/д..., u<wp]=o.
Эти условия определяют ограничения на параметры управления,
связанные с работой бортовых систем АМС, и локальные условия
энергетической оптимальности линейной детерминированной кор-
рекции. Если число одновременно рассчитываемых ц(Д) соответст-
вует параметричности управления с учетом дополнительных огра-
ничений, то двухточечная краевая задача (5.1) может быть сведе-
на к нахождению минимума квадратичного функционала вида
256
ф^ч(л, л),..., 4)]=
= t min v1(/p t\),...,^(tg, tg), Ф°], (53)
V1(z” 'i).V1 (^Л)
где
ф>[х1(/), >1(Л, tg), срк]=Дф,Тг(/рл^Дфк+ (tg);
(^)=Фк[Х1(0, >1(^1, tl),:;
y-[(tg, tg), d?A] .q>x;
Av — диагональная матрица масштабных коэффициентов.
Поиск минимума (5.3) осуществляется численно модифициро-
ванным градиентным методом первого порядка. На каждом шаге
итерационного процесса параметры коррекций определяются соот-
ношением
ua(ti,...,tg)=ull-1(t1,..., /Д-Д^А^ДфДДД. (5.4)
Модификация градиентного метода заключается в том, что вы-
бор шага и направления спуска на каждом шаге итерационного
процесса производится на основе текущей оценки скорости сходи-
мости, определяемой изменением величины функционала. Для вы-
бора шага может использоваться метод «малого шага». Он опреде-
ляет способ уменьшения начального шага таким образом, чтобы
выполнялось следующее неравенство (аа=2~к):
ф> ф°, 11я-1 Др..., /г) + Д- А^ДфГ Дд! <
( Л = 0,1,2... J
ф°, и*-1 Др..., tg)\. (5.5)
Если при k — k* изменение функционала имеет наибольшее зна-
чение, но неравенство (5.5) при этом не выполняется, то величина
Шага на этой итерации принимается равной аа=1/2** и соответст-
вует методу наискорейшего спуска [15]. Таким образом, переход к
Шагу, обеспечивающему максимальное изменение функционала,
происходит только в тех случаях, когда при больших его значениях
(k<k*) не выполняется требование на скорость сходимости итера-
ционного процесса. Такая модификация повышает эффективность
градиентного метода при рациональном подборе коэффициента bi
Для соответствующего класса задач, так как нахождение оптималь-
ного шага для каждой итерации требует проведения большого объе-
ма вычислений. Для повышения быстродействия метода расчет
Матрицы Аа_;, характеризующей направление спуска, целесообраз-
но проводить не на каждой итерации, а только в том случае, если
Изменение функционала оказывается недостаточно эффективным.
° качестве условия для перерасчета матрицы Аа_; на а-м шаге
Можно использовать следующее условие
{хД/), ф°, и» Др..., /Д} <62ф> (хД/), ф°, Др..., tg)}, (5.6)
257
где b2— коэффициент, определяющий желаемую скорость сходимо-
сти процесса.
Поиск экстремума функционала (5.3) при наличии нелинейных
условий (5.2) требует на каждом шаге контроля соблюдения огра-
ничений задачи, который может осуществляться в общем случае
методами проекции градиента или возможных направлений, обес-
печивающих движение к экстремуму по последовательности допу-
стимых или почти допустимых точек с монотонно убывающими зна-
чениями Ф> {xi (/), фк°, и“(Л,..., tg)}- Учитывая особенности, свя-
занные с характером ограничений на параметры управления от си-
стемы автономного управления движением и видом условий локаль-
ной энергетической оптимальности линейной коррекции, во всех
практически важных задачах наведения АМС возможно включить
указанные ограничения в соответствующим образом формируемую
матрицу Ая_;-. Это избавит от необходимости применения достаточ-
но сложных и трудоемких методов проекции градиента или возмож-
ных направлений. Действительно, условия локальной оптимально-
сти независимой коррекции имеют линейный вид, поэтому их можно
объединить с матрицей частных производных FK(/(), характеризую-
щей направление спуска при расчете независимой коррекции, в
единый линейный оператор Аа_;, как это было сделано в разд. 2.2
при анализе линейной одноимпульсной коррекции. Для связанной
коррекции соответствующие условия энергетической оптимально-
сти не являются линейными функциями от компонент корректирую-
щих скоростей. Однако особый вид этих условий (см. разд. 2.4)
позволяет разработать итерационно-линейный алгоритм расчета
оптимальных параметров связанной коррекции, при котором на
каждой итерации для определения направления спуска формиру-
ется система типа (4.23) для трехимпульсной или (2.49) для двух-
импульсной связанной коррекции. Эти системы являются нелиней-
ными, и для нахождения направлени спуска требуется применение
методов численного поиска решения. Однако, как уже отмечалось,
на каждом шаге поиска при фиксированных значениях параметров
as и Ь, система превращается в линейную, что позволяет осу-
ществлять определение параметров коррекции в рамках еди-
ного алгоритма, основанного на использовании линейных преобра-
зований.
Рассмотрим некоторые вопросы практической реализации алго-
ритма решения задачи коррекции. При межпланетных коррекциях
в нелинейной детерминированной модели динамической системы
необходимо учитывать притяжение Солнца, Луны и планет, влия-
ние солнечного давления и сжатия Земли, а также динамические
операции, связанные с особенностями схемы полета АМС (расчет-
ные маневры разделения, увода, возмущения за счет работы систем
и др.) (см. разд. 1.5). Решение уравнений движения шестичленным
методом Адамса с автоматическим выбором шага обеспечивает
высокую оперативность численного интегрирования траекторй11
перелета, что позволяет осуществлять расчет матриц FK(0) мет0
дом конечных разностей. Для этих условий опытным путем бьС
258
Проведен выбор коэффициентов Ь\ и bi из условия быстродействия
численного решения задачи коррекции. Наиболее эффективными
являются их значения bi = b2=0,25, причем при расчете парамет-
ров управления среднее количество вычислений функции Фх, не
превышало 10, а изменений направления спуска — 3.
Для надежной сходимости итерационного процесса (5.4) необ-
ходимо, чтобы начальное приближение, с которого начинается ре-
шение нелинейной системы, обеспечивало бы достаточную близость
его к искомому решению. Мера близости зависит от вида функцио-
нальной зависимости корректируемых параметров от параметров
управления. Однако эта зависимость может оказаться многознач-
ной, существенно нелинейной, ограниченно определенной, а также
иметь точки разрыва и другие особенности. Действительно, в каче-
стве корректируемых могут использоваться такие параметры, как
I, й, со, фвх, Хвх, если замена их на другие, более простые, невоз-
можна, так как приводит к увеличению ошибок наведения. Так,
замена корректируемых параметров 9ВХ, i на ч]п при расчете
межпланетной коррекции, проводимой за неделю до подлета к пла-
нете назначения, может привести к соответствующему отклонению
угла входа до 30' (за счет изменения ¥«>), что соизмеримо с вели-
чиной допустимых ошибок входа СА в атмосферу. Обычный путь
расчета начального приближения заключается в упрощении исход-
ной системы или выборе таких переменных фк, которые являются
аналитическими функциями от параметров управления, близкими к
линейным, связанными с фк взаимно однозначным преобразова-
нием. Для межпланетных коррекций можно использовать одно из
следующих преобразований:
Фк(0=Фк(/? )Х(/1₽, /)Х(О;
Фк(О=Кп, W; (5.7)
фк = 0; Фк(О = Фк1х1(О, фк],
где x(t)—-отклонения кинематических параметров в момент t от
значений, соответствующих номинальной траектории полета, для
которой фк(0=фк°- Полученные значения и°(^) используются в
качестве начального приближения при решении задачи коррекции
по основным параметрам.
При использовании функции фк первого вида начальное при-
ближение определяется из решения линейных уравнений и отлича-
ется не более чем на 30% от окончательного решения. Для второго
вида функции фк необходимо численное решение нелинейных урав-
нений, однако, как показали исследования различных схем полета
АМС, включая сложные схемы с пролетом нескольких планет, на-
дежная сходимость итерационного процесса по этим параметрам
при использовании алгоритма (5.4) обеспечивается. Отличие и°(^-)
°т окончательного решения не превосходит 10%, а процесс сходил-
Ся за 3.. .5 итераций с одним расчетом матрицы Аа, причем резуль-
259
тирующая ошибка определения корректирующих скоростей не пре-
вышала 0,005 м/с.
Отличительной особенностью задач коррекции орбиты ИСП яв-
ляется более сложная модель действующих на объект сил, тре-
бующая учета влияния несферичности гравитационного поля пла-
неты и аэродинамического сопротивления, возмущений от Солнца
и планет, а также многовитковый характер движения АМС. Это
приводит к увеличению времени интегрирования уравнений движе-
ния по сравнению с участками межпланетного перелета. Поэтому
в задачах коррекции орбит ИСП для повышения эффективности
сходимости итерационного процесса особенно важное значение
имеет расчет начального приближения, оценка матриц производных
по приближенным аналитическим зависимостям и использование
параметров <рк- Упрощение исходной динамической системы при
замене переменных <рк на <рк позволяет существенно сократить об-
щее количество вычислений функции Ф> численным интегрирова-
нием, если ввести их следующим образом.
Представим зависимость <рк в виде суммы двух слагаемых
Фк[х1(0. vj/p 4),-, v^tg, 4)<^I=<PkIxi(O, t'i),...
’ vi(^> 4)1—Mxi<z)’ vi<zi’ vi<4’ 4)1.
где <pK — параметры некоторого невозмущенного движения; 6К —
некоторые дополнительные параметры, соответствующие возмущен-
ному движению. Пусть невозмущенное движение достаточно близко
к возмущенному, так что
V?(/p t'l);..., vl(tg, 4)1 = \IX1^)> VlUp 4),--, 4)1 —
—6K[xi(o, vh/p Л),..., vi(tg, 4)1-’°’
при Av?(//( 4) = vl(/p 4) —V1(4> 4)-’O,
t. e. выполняется условие
Фк!х(о, v?(/p vhtg, 4)1—ф°~
— фДх^П, vrj(/p 4)..-, v?(/g, 4)1 — фк—*0.
Тогда для расчета корректирующих скоростей можно исполь-
зовать следующий итерационный процесс
ipJXjtf), v?(/p 4),—, vi(^, 4)1 =
= фкР-1 + (фк— Фк[Х1(О, V!P-1(/p 4),-, 4)<^д11- (5'8)
На каждом £-м шаге для определения vif’(tj, tj') используются
либо соответствующие аналитические зависимости их от парамес-
ров фк невозмущенного движения, если такие существуют, либо
численное решение вида (5.4) для построения сходящейся Е
vi*(^-, tj') последовательности значений vf(tj, tj'). Достаточнее
условия для сходимости процесса (5.8) сформулированы в [241.
260
В качестве невозмущенного движения АМС на орбите ИСП це-
лесообразно использовать кеплеровское приближение, а также
другие нелинейные модели, учитывающие вековые возмущения от
второй зональной гармоники гравитационного потенциала планеты
(для орбит ИСМ) или возмущения среднего движения от сопротив-
ления атмосферы (для орбит ИСВ), гравитационного притяжения
Солнца.
Задача расчета уставок на проведение сеанса коррекции отно-
сится к числу неуниверсальных, так как зависит от моделей уста-
новленных на АМС бортовых систем, обеспечивающих его выполне-
ние. Однако можно выделить некоторые общие методические
принципы ее решения. Массив уставочных параметров целесооб-
разно разделить по функциональному признаку на следующие
группы: уставки на время начала сеанса коррекции 1вр(^); на
ориентацию 10р(^); на управление движением активного участка
1уп (6') •
Уставки первой группы при программно-временном управлении
полетом АМС определяют время начала сеанса в соответствии с
известной циклограммой работы бортовых систем и принятым в
расчете управляющих воздействий временем включения ДУ для
коррекции траектории. Уставки 1ор необходимы для установки при-
боров системы ориентации таким образом, чтобы они могли осуще-
ствить поиск, захват и приведение в поле зрения их датчиков нави-
гационных светил. Как следует из рассмотренного в разд. 1.6 при-
мера системы, обеспечивающей трехосную ориентацию АМС на
пассивном участке в сеансе коррекции, положение приборов в свя-
занной с центром масс станции системе координат определяется
углами ас, qB, рв- Выбор этих углов, навигационных светил, а также
комплектов приборов САУ, которые, как правило, резервированы
для повышения надежности работы системы, неоднозначен. Поэто-
му, используя дополнительные требования, вытекающие из приня-
тых условий проведения сеанса коррекции, можно однозначно оп-
ределить соответствующие углы перемещения приборов ориента-
ции. К уставкам 1уп относятся углы разворотов АМС, которые
производятся САУ после перехода в режим управления движением
на активном участке от ГСП для совмещения оси ДУ с направле-
нием расчетного управляющего воздействия, а также величина ка-
жущейся скорости для выключения ДУ. Оси приборной системы,
определяемой ГСП, могут отличаться от осей базовой системы,
определяемой приборами ориентации.
Если П2(^)—линейный оператор этого преобразования, а
ПД^) —матрица перехода из основной системы в базовую, то угло-
вые уставки определяются из следующего
=п(1)(а*, ^)=П1(^)П2(^) ГГ3(/у)пду,
где иду —единичное направление оси ДУ в приборной системе;
Пз(^)—матрица, характеризующая развороты АМС на ТСП по
Тангажу фупД/), рысканью фуП(6) и вращению <руп(^)-
261
Рис. 5.1, Структурная схема решения задачи расчета корректирующей скорости
262
Составив матрицу Из(//) и учитывая в ней принятый порядок
разворотов, уходы приборных осей и другие характеристики САУ,
для каждой конкретной системы при заданном р/*), можно
вычислить необходимые значения углов. Уставка на величину ка-
жущейся скорости рассчитывается с помощью нелинейного уравне-
ния, определяющего ее значение AV;rK в момент подачи команды на
выключение ДУ и учитывающего временные задержки прохожде-
ния сигналов в автоматике САУ, импульс последействия и другие
поправки. Все уставки затем представляются в требуемом для пе-
редачи на борт АМС виде. Так, если !(/;•)=[//, аз(^), рв(//)>
^уп(б'). фуп(М, AV/k]t — физические значения уставочных парамет-
ров li(tj), закладываемых в 18-разрядную память БЦВМ, то соот-
ветствующая уставочная информация равна
МО)
/уст [mi (/>•)]: от,(/;-)= -212 ; (5.9)
где nt — масштабный коэффициент; £-]ц — означает ближайшее це-
лое число.
В (5.9) предполагается, что 18-разрядное уставочное слово име-
ет 12 информационных и 6 служебных разрядов. Уставочные слова
формируются в массивы, снабжаются необходимыми функциональ-
ными командами и засылаются в САУ с помощью КИС. Структур-
ная схема решения задачи коррекции представлена на рис. 5.1.
5.3. Особенности баллистического обеспечения
припланетных маневров АМС
Стратегия и параметры маневров выбираются уже на стадии
проектирования. В общем случае перехода между орбитами опти-
мальная по энергетическим затратам стратегия определяется чис-
ленным решением необходимых условий оптимальности управления
Детерминированной нелинейной динамической системой. Для более
простых случаев (импульсные маневры в кеплеровском поле тяго-
тения) в ряде работ [21, 22] получены решения задачи оптимально-
го маневрирования. В частности показано, что при неограниченном
времени выхода на заданную орбиту и некоторых дополнительных
предположениях оптимальные маневры проводятся в апсидальных
точках, а их общее число не превышает четырех. Одноимпульсный
переход с орбиты на орбиту возможен только тогда, когда орбиты
имеют общие точки, а сам импульс должен проводиться в одной из
Них. Заметим также, что если в исходной постановке задач опти-
мального межорбитального перехода условия проведения маневра
Не ограничиваются, то при оптимальном решении может потребо-
ваться их выполнение на очень больших либо на очень малых рас-
стояниях от притягивающего центра. Это, в свою очередь, приво-
дит либо к неограниченному возрастанию времени перехода, либо
К практической невозможности приложения импульсов из-за пере-
263
сечения траекторией движения атмосферы или поверхности плане-
ты. В реальных случаях полетов АМС управление их движением
выполняется при ограничениях на время выхода на заданную ра-
бочую орбиту, количество импульсов и некоторые другие условия
их проведения, что не позволяет осуществлять маневры полностью
по оптимальной схеме. Основными типами маневров, которые при-
меняются на соаременных АМС, являются выход на орбиту ИСП,
разделение на два модуля и увод одного из них с целью перехода
на заданную траекторию движения относительно планеты. Число
импульсов, как правило, не превышает одного — двух, и проводят-
ся они в ограниченное время вблизи планеты назначения. Оптими-
зация схемы такого управления не вызывает особых сложностей,
выполняется одним из численных методов поиска экстремума мно-
гопараметрической функции в предположении, что маневры реали-
зуются при постоянных значениях величины и направления тяги
двигательной установки. При оперативном баллистическом обеспе-
чении необходимо уточнить характеристики этих маневров, изменив
их в допустимых пределах в соответствии с изменением фактиче-
ских параметров движения АМС на участке подлета к планете на-
значения.
Для современных АМС наиболее высокие требования предъяв-
ляются к выполнению условий, обеспечивающих функционирование
бортовых систем на припланетном участке. Поэтому при оператив-
ном изменении стратегии проведения маневров необходимо прежде
всего выполнить требования к точности наведения. Отличительной
особенностью маневров является приложение значительных, по
сравнению с коррекцией, управляющих воздействий, а следователь-
но, и большие изменения параметров движения АМС. Функции рас-
пределения этих параметров не всегда имеют вид нормального
закона, и для их построения требуется применение методов стати-
стического моделирования. Кроме того, на выполнение контроли-
руемых условий могут оказывать влияние не только ошибки наве-
дения, но и неточность в используемых параметрах бортовых
систем, динамика движения АМС или его модулей, условия рабо-
ты в атмосфере и на поверхности планеты, а также другие факто-
ры. Характеристики маневров существенно зависят от параметров
движения и поэтому должны выбираться оптимальным образом для
каждой возможной траектории полета АМС. Таким образом, при
баллистическом обеспечении припланетных маневров задачи выбо-
ра корректируемых параметров, их расчетных значений и субопти-
мальной стратегии управления следует решать совместно, исходя
из выполнения следующего основного условия:
Р {YJs(/), <р°, Л),..., V1(^, /к)]е У?}>Рзад, (5.Ю)
где У,-, Yr1—контролируемые условия и области их допустимых
значений.
Поиск значений <рк° осуществляется численным способом, при-
чем для очередной итерации методом статистических испытаний
осуществляется построение функции распределения параметров
264
У,- на множестве возможных траекторий, определяемом вектором
s(t), ошибками реализации управляющих воздействий и парамет-
ров систем АМС. Субоптимизация стратегии маневров проводится
для каждой конкретной выборки из указанного множества траек-
торий.
Учитывая большую трудоемкость решения такой задачи, особое
внимание следует уделять ограничению области поиска в простран-
стве .У*к- Для этого предварительно определяется область J?y
в пространстве корректируемых параметров, где без учета случай-
ных факторов выполняется условие
: У,-[Xj (/), <рк, vj/p /1),..., 4)]е У]. (5.11)
Затем уже из области осуществляется выбор расчетных
значений корректируемых параметров согласно условию (5.10).
Рассмотрим задачу выбора прицельных параметров при прове-
дении двух связанных припланетных маневров (увод и торможе-
ние ОА) для схемы полета, аналогичной АМС «Венера-9 и -10»
(см. рис. 1.2). В этом случае терминальными параметрами служат
параметры рабочей орбиты ИСВ. Пусть параметры движения ап-
парата после выполнения межпланетных коррекций таковы, что
маневры могут проводиться в плоскости подлетной гиперболы.
Учитывая это, выбор корректируемых параметров и стратегии уп-
равления следует проводить в четырехмерном пространстве пара-
метров орбиты ИСВ: гя, о, т, Тор. Для детерминированной динами-
ческой системы выберем область определяемую условиями
Д^с»^>^св; ^ТСП<С^тен>
Д1/2 = Al/iH- Д1/2< Д1/дЕ,
где Д/св— интервал времени, в течение которого выполняются усло-
вия связи СА и ОА; Псп —время перехода из режима стабилиза-
ции движения ОА по астроориентирам в режим стабилизации по
сигналам с гиростабилизированной платформы; /тен — время захо-
да ОА в тень Солнца.
Предварительный анализ энергетических затрат на проведение
Маневров с учетом располагаемых запасов топлива показал, что
Из всех орбит ИСВ, обеспечивающих циклическую работу средств
НКУ при управлении полетом, возможна орбита с минимальным
значением периода 48 ч, которую и выберем в качестве номиналь-
ной. Область J?Y> построенная из условий (5.12), ограничивает
возможное изменение остальных корректируемых параметров в
Пределах | Дгя| =400 км, | Ао| =5°, |Ат| =5 мин. Выбор значений
гп°, «У, т° в области должен осуществляться численным спосо-
бом с использованием статистического моделирования для оценки
вероятности выполнения условий (5.12). Следует отметить, что
Интервал времени связи Д£Св оценивается исходя из следующего
Условия
ПСв = ^ОА, ^Са/ГсА-ОА Пев, (5.13)
5.12
265
где Гса-ол — расстояние между СА и ОА; йОд, &сд— коэффициенты
усиления антенн, величины которых зависят от характеристик ан-
тенн, а также углов между осями их диаграмм направленности и
направлением на соответствующий объект. Эти направления кроме
геометрических условий относительного движения ОА и СА в сеан-
се связи зависят также от динамики движения СА на парашюте
при спуске в атмосфере Венеры и условий его посадки на поверх-
ность планеты. Указанные характеристики, как и ошибки наведе-
ния, являются случайными. Поэтому генеральная совокупность воз-
можных реализаций определяется значением s(t), ошибками про-
ведения маневров увода и торможения, а также следующими фак-
торами: углами раскачки СА при спуске в атмосфере; отклонением
оси СА от вертикали после посадки; возможными ошибками ис-
пользуемых в расчетах проектных оценок коэффициентов усиления
антенн.
Все случайные составляющие распределены по нормальному за-
кону, кроме углов раскачки СА при спуске, имеющих релеевское
распределение.
При заданных законах и параметрах распределения всех слу-
чайных составляющих для каждого значения вектора <рк° могут
быть рассчитаны функции распределения параметров орбиты ИСВ,
условий связи и ориентации. Следует отметить, что распределение
этих характеристик оказывается существенно несимметричным и
отличным от нормального даже при гауссовском распределении
исходных ошибок. Большое число ограничений на стратегию манев-
ров, а следовательно, и малая параметричность задачи, позволяют
осуществлять выбор оптимального режима методом численного
поиска экстремума. Действительно, эффективность увода пропор-
циональна расстоянию ОА от Венеры в момент его выполнения.
Однако ошибки наведения и сложность обеспечения самостоятель-
ного полета СА после его отделения от ОА ограничивают эти рас-
стояния. Поэтому время проведения увода обычно фиксировано и
не оптимизируется. Далее, при одноимпульсном переходе ОА с ги-
перболической траектории на орбиту ИСВ торможение должно про-
водиться в точке их пересечения, т. е. время торможения является
функцией от параметров орбиты ОА и также не подлежит оптими-
зации. Таким образом, при выборе стратегии достаточно провести
поиск экстремума суммарной характеристической скорости манев-
ров увода и торможения в функции только одного параметра, на-
пример радиуса перицентра подлетной гиперболы ОА. В результате
такого анализа выбираются параметры <рк°, обеспечивающие с
заданной вероятностью выполнение требований к наведению АМС
на участке подлета к планете.
При полете АМС «Вега» выбор параметров <рк° припланетного
маневра увода ПА должен был не только обеспечить сеанс связи
ПА и СА (во время спуска СА и при работе его на поверхности),
но и создать такие условия пролета ПА относительно Венеры, ко-
торые позволили бы ему пролететь вблизи кометы Галлея
266
(рис. 5.2). Эти требова-
ния были противоречи-
выми, особенно для
станции «Вега-2» и
привели к необходимо-
сти поиска компромис-
сных решений. Во-пер-
вых, после пролета Ве-
неры (через 20 сут),
был проведен маневр,
который предусматри-
вал дополнительное из-
менение параметров
межпланетной траекто-
рии для наведения ПА
на камету Галлея. Во-
вторых, маневр увода
ПА проводился с изме-
нением плоскости дви-
жения, которое выбира-
лось таким образом,
Рис. 5.2. Схема полета АМС «Вега» на участке
пролета Венеры:
/ — маневр увода ПА; 2 — маневр перевода ПА на
межпланетную траекторию перелета к комете Гал-
лея; 3 — передача информации с СА и ПАС на ОА;
4 — СА; 5 — ПАС
чтобы уменьшить суммарные энергетические затраты наведения.
В-третьих, в сеансе связи допускался поворот антенны ПА таким
образом, чтобы обеспечить наилучшие условия передачи информа-
ции с СА через ПА на Землю. Корректируемые параметры для про-
ведения маневра увода:
гп; I, т орбиты ПА после увода, а также угол фа поворота антенны
ПА вокруг оси аппарата, направленной на Землю после проведения
его ориентации. Тогда необходимо определить:
фк = (г“, 1°, т°, фа)т; P(A/CB[s(/), *1(Л, Л),
v*(/2, /2), МЛ, Л)]>д/сз}>Рзад;
Р (AVs [s (/), Фк,У1(Л, Л), v2(/2, /2), ^(Л, Л)]<д^г} >Рзад!
при условиях
ArJsV), v*(/p Л), vJ(/2, /2)]=/°г;
5.,г[S(/), Vi(/p t\), vl(/2, /2)] = йг; (5.14)
T.r[s (О, v*Vi, Л'), vj(/2, А)]=ф°г!
AVs= min {AV\[stf), фк, МЛ, A')] +
>1 (6. >i(^'2)
Is (Л, Фк’ V1(A’ A)]}’
Где £пГ, Цпг, Аг — координаты точки и время пересечения траекто-
рии движения ПА с картинной плоскостью, построенной в центре
^асс кометы Галлея; vi*(S, S')> М(А, А')—оптимальные уп-
равления.
267
Рис. 5.3. Зависимости AVE* и
М[Д/0В] (<?) от гя при проведении
двух связанных маневров для АМС
«Вега-1» (1) и «Вега-2» (2)
Рис. 5.4. Плотности распределения
ошибок наведения по углу входа 1 и
интервалу связи 2 для АМС «Вега»
Решение уравнения (5.14) осуществляется численным поиском
с использованием метода статистических испытаний для построения
функций распределения Д/св, AW, а также условий энергетической
оптимальности связанного управления линейной динамической си-
стемой вида (2.49).
На рис. 5.3 приведены зависимости математического ожидания
распределения A Vs* и Д/Св от гя при оптимальных значениях осталь-
ных корректируемых параметров, из которой следует, что при огра-
ничении суммарной характеристической скорости маневров до
500 м/с для станции «Вега-1» можно обеспечить более хорошие
условия связи, чем для «Веги-2». Поэтому пролет «Веги-1» был
осуществлен на расстоянии 35 000 км, а «Веги-2» на расстоянии
25000 км от поверхности Венеры, причем гарантированное время
связи при одинаковой вероятности для первой станции было на
20% больше, чем для второй. Следует подчеркнуть, что сложный
закон распределения имеют не только характеристики движения
ПА, но и условия входа СА в атмосферу (рис. 5.4). Поэтому при
высоких требованиях к точности наведения СА, как это имело ме-
сто при полетах АМС «Вега», необходимо при выборе корректи-
руемых параметров для последней коррекции траектории движения
также использовать метод статистических испытаний.
В соответствии с принятыми принципами баллистического обес-
печения при выборе корректируемых параметров и синтезе субоп-
тимальных стратегий маневров для повышения быстродействия
решения задач могут использоваться различные упрощенные моде-
ли нелинейной динамической системы. Поэтому в дальнейшем не-
обходимо уточнить параметры маневров и рассчитать уставки на
их проведение, используя более точные нелинейные детерминнР0'
ванные модели. Решение этих задач осуществляется теми же ме-
тодами, что и решение аналогичных задач при расчетах коррекин
268
траектории АМС. Однако в случае приложения больших импуль-
сов, учитывая быстропеременный характер движения АМС вблизи
планет, целесообразно в качестве параметров управления принять
время включения ДУ, величину характеристической скорости ма-
невра и углы ориентации тяги двигателя. Такой выбор параметров
обеспечивает более надежную сходимость итерационного процесса,
так как они оказывают примерно одинаковое влияние на измене-
ние <рк на каждом шаге и более независимы, чем компоненты векто-
ра корректирующей скорости. Локальная оптимизация параметров
управления проводится, как и ранее, с использованием необходи-
мых условий энергетической оптимальности управления линейной
динамической системой (см. разд. 2.5).
5.4. Задачи баллистического обеспечения наведения
при использовании автономных систем
При автономном наведении расчет необходимых для управления
движением АМС маневров и коррекций осуществляется системой
автономного наведения (САН), являющейся составной частью
САУ. Так как цели и требования при автономном наведении в ос-
новном те же, что и при программно-временном управлении по за-
кладываемым с Земли уставкам, то и общий состав задач наведе-
ния аналогичен рассмотренному в разд. 5.1. Однако возможности
БЦВМ существенно отличаются от возможностей вычислительных
средств, используемых при баллистическом обеспечении управления
полетом в ЦУПе. Из-за большого объема и сложности решения
полного состава задач БЦВМ современных САН, как правило, ре-
шают только часть задач из числа необходимых для управления
движением, а'остальные расчеты проводятся на Земле перед сеан-
сом автономного наведения, и результаты закладываются в САН
в виде соответствующих уставок. Поэтому конкретный состав задач
оперативного баллистического обеспечения автономного наведения
зависит от структуры и алгоритмов САН. Пусть, например, на
АМС, осуществляющей полет к Марсу, по орбитально-десантной
схеме установлена САН, которая на участке подлета к планете
назначения решает следующие задачи: проводит автономные астро-
измерения и уточняет по их данным предварительно заложенные
в систему параметры движения; определяет параметры управления
и настройки бортовых систем для проведения коррекции траекто-
рии движения, увода СА и торможения ОА, соответствующие за-
ложенным в систему значениям корректируемых параметров (ус-
тавкам САН). На рис. 5.3 приведена схема полета АМС на этом
Участке.
Выбор указанных значений корректируемых параметров и стра-
тегии проведения маневров и коррекции должен осуществляться
На Земле исходя из выполнения следующих требований: обеспече-
ния необходимых условий входа СА в атмосферу планеты; созда-
ния ИСМ с параметрами орбиты, позволяющими осуществить ре-
трансляцию информации с СА через ОА на Землю в сеансе связи
заданной продолжительности, проведение научных экспериментов.
269
При этом точность наведения
должна обеспечить выполнение
этих условий с заданной вероят-
ностью при затратах топлива на
управление не превышающих
располагаемых запасов.
Решение таких задач при бал-
листическом обеспечении авто-
номного наведения имеет ряд
особенностей. Во-первых, коррек-
тируемые параметры, являющие-
ся уставками САН, не имеют уни-
версального вида, зависят от ав-
тономных алгоритмов и выбира-
ются из условия простоты их реа-
лизации в БЦВМ. Так, в упомя-
нутой выше системе САН в каче-
стве корректируемых использу-
ются следующие параметры: Л0А,
соа — энергия и кинетический мо-
мент орбиты после коррекции;
базовой системе координат), через
Рис. 5.5. Схема операций на участке
подлета к Марсу:
1 — траектория движения АМС; 2 — сеанс
автономных навигационных измерений; 3 —
сеанс автономной коррекции; 4—маневр
увода СА на траекторию входа в атмосфе-
ру Марса; 5 — маневр торможения ОА,
выход на орбиту ИС?^
п(1>0А — единичный вектор (в
который должна проходить плоскость траектории после коррекции;
VT(1) — единичный вектор (в базовой системе координат), опреде-
ляющий направление скорости торможения; h3— энергия орбиты
ОА после торможения; ссх — кинетический момент траектории СА
после увода. Эти параметры отличаются от рассмотренных ранее
корректируемых параметров, имевших достаточно универсальный
вид и свойства. Bb-вторых, решение задач в автономных системах
обычно проводится по упрощенным моделям и алгоритмам, что свя-
зано с ограниченными ресурсами бортовых систем. В частности, в
рассматриваемом случае алгоритмы автономной навигации не учи-
тывают при обработке автономных измерений: несферичность фи-
гуры Марса, различие в яркости различных областей и атмосферу
планеты; при расчете коррекции и маневров: влияние притяжения
Солнца и планет, нецентральность гравитационного поля Марса,
протяженность активных участков. Поэтому простой пересчет вы-
бранных исходя из заданных требований параметров орбит СА и
ОА в уставки САН приводит к появлению методических ошибок.
В-третьих, комплекс бортовых алгоритмов образует программную
систему, выполняющую расчеты, необходимые для проведения авто-
номных коррекций и маневров. Конкретные особенности ее реали-
зации, циклограмму и логику работы, уровень обработки, а также
возможности БЦВМ необходимо учитывать при решении задач бал-
листического обеспечения автономного наведения и анализа резуль-
татов функционирования САН.
Поэтому при решении задач наведения, не включенных в состав
алгоритмов САН, необходимо применять модели автономной систе~
мы. Моделирование должно выполняться на уровне не только ма
270
тематического описания алгоритмов, но и описания программно-
вычислительной системы автономного наведения. Если включение
физических моделей САН в состав средств ИВК баллистического
обеспечения невозможно или не обеспечивает требуемой оператив-
ности проведения расчетов, то целесообразно использовать следую-
щие два типа математических моделей САН: ^(1)сдн — модель ал-
горитмов; ^(2>сан — модель программной системы автономного на-
ведения и БЦВМ, осуществляющую интерпретацию программы
САН на язык ЭВМ, входящей в состав ИВК (моделирование алго-
ритмов команд и разрядной сетки БЦВМ).
Таким образом, решение задач баллистического обеспечения
автономного наведения методически аналогично решению соответ-
ствующих задач припланетных маневров, рассмотренных в разд. 5.3,
и отличается главным образом использованием моделей САН со-
ответствующего уровня. При выборе номинальных значений кор-
ректируемых параметров, как и ранее, целесообразно использо-
вать не уставочные параметры автономной системы, а универсаль-
ные корректируемые параметры, имеющие ясный и наглядный
физический смысл, известные свойства. Для расчета функций;
распределения корректируемых параметров, вероятности выполне-
ния требований к точности наведения достаточно применять модель
^~(1>сан. При преобразовании <р°к в уставочные параметры автоном-
ной системы 1сан(Д) нужно учитывать алгоритмы САН и логику
работы бортовых систем в сеансе автономного управления. Значе-
ния уставочных параметров определяются из решения следующей
краевой задачи 1санЦЦ- UK, 1санЦ/_), ^"(1)сан]—<рк° = 0, при
выбранной стратегии наведения UK, заданных моделях управляе-
мой динамической системы. От рассмотренных ранее краевых задач
/определения параметров t'j) при обеспечении маневров и кор-
рекций они отличаются своей зависимостью от конкретной реализа-
ции автономной системы.
Важное значение для автономных систем наведения имеет конт-
роль функционирования САН и других обеспечивающих систем в
сеансе автономного управления, который осуществляется как апри-
орно, так и апостериорно. Априорный контроль заключается в ста-
тистическом анализе работы САН при рассчитанных уставках
Рсан(^). В процессе его проведения используются модель ^(2)сдн,
Модели динамической системы, включающие ошибки навигации и
отработки управляющих воздействий. Апостериорный контроль осу-
ществляется по данным телеметрической информации. Если при
проведении маневров и коррекций по уставкам, определяющим рас-
четное значение t'j), достаточно проконтролировать их отра-
ботку (по скачку радиальной скорости, данным о работе бортовых
систем), то при автономном наведении необходимо анализировать
Также и сам расчет управляющих воздействий, т. е. правильность
вычисления неизвестных до сеанса значений vi(tj, t'j). Исходными
Чанными являются уставки 1сан(Л), телеметрированные данные о
>езультатах расчетов, выполненных САН, отработке управляюще-
'о воздействия, причем, если САН использует многоканальный
271
принцип работы для повышения надежности, то анализ информа-
ции выполняется по каждому каналу. При этом определяется ко-
личество работающих каналов, выделяется состав достоверных
данных по каждому каналу, оценивается соответствие достоверных
величин допускам и их совпадение между собой в работающих ка-
налах.
Случай, когда информация полностью достоверна, работают
все каналы, а результаты расчетов по каждому из них совпадают
и соответствуют допускам, является штатным. При любом откло-
нении от штатного случая необходимо, используя модель £7“t2iCAH,
поканально проверить все этапы расчета характеристик наведения
при заданных уставках 1сан(^д) и исходной информации, получен-
ной в сеансе автономного наведения, оценить их соответствие теле-
метрическим данным и результатам исполнения управляющих воз-
действий, проанализировав возможные причины рассогласования
информации.
Таким образом, в рассмотренном примере системы автономной
навигации и наведения АМС для проведения баллистического обес-
печения необходимо выполнение следующих работ:
моделирование автономных астроизмерений по несферическому
Марсу с использованием характеристик яркости в спектральном
диапазоне, соответствующем бортовым измерителям;
моделирование алгоритмов автономной навигации и наведения,
осуществляющих обработку навигационных измерений, рас-
чет параметров траектории движения, коррекции и маневров,
а также реализованных в БЦВМ программ автономного управ-
ления;
статистический анализ точности автономной навигации и наве-
дения, учитывающий ошибки навигационных измерений, ориента-
ции и стабилизации, а также методические ошибки, связанные с не-
точностью моделей и исходных данных, принятых в автономных ал-
горитмах;
исследование и выбор корректируемых параметров и их расчет-
ных значений <рк°, удовлетворяющих совокупности заданных
требований к траектории движения АМС на участке подлета к
Марсу;
выбор стратегии автономного управления, расчет уставочных
параметров, соответствующих при принятых алгоритмах навигации
и наведения значениям <р°к;
статистический анализ работы алгоритмов и программ автоном-
ной системы при выбранных для сеанса уставочных параметрах
IcAnffJ;
контроль проведения сеанса автономного управления по резуль-
татам навигационных измерений и данным телеметрической ин-
формации о функционировании САН и других обеспечивают11*
проведение коррекции и маневров бортовых систем, расчет с ис-
пользованием моделей САН информации, необходимой для опера"
тивной подготовки программы работы с АМС на последуют6
участке полета.
272
5.5. Автоматизированные программные системы решения задач
наведения АМС
Для баллистического обеспечения наведения разрабатывается
специальное математическое обеспечение, которое по своей струк-
туре является многоуровневой иерархической системой, реализую-
щей рассмотренные выше методы решения задач межпланетных и
орбитальных маневров и коррекций, в том числе проводимых с по-
мощью систем автономного наведения. Особенностью обеспечения
наведения экспериментальных КА, к числу которых относятся все
.ДМС, является отсутствие стабильности программных средств и их
/зависимость от схемы полета, состава и типа бортовой аппаратуры.
{Необходимость оперативного и надежного приема и обработки ин-
формации, выработки эффективной стратегии наведения, наилуч-
ццим образом приспособленной к изменяющимся условиям полета,
требуют создания автоматизированных систем. Методической их
юсновой служат приведенные в гл. 5 методы решения задач наве-
дения, алгоритмы оптимального управления, математические моде-
ли движения АМС и функционирования ее бортовых обеспечиваю-
щих и научных систем. Существующие в настоящее время вычис-
лительные средства, операционные системы, входящие в состав их
збщего математического обеспечения, достигли такого уровня раз-
зития, что могут служить базой для создания таких автоматизи-
юванных систем. Конфигурация комплекса вычислительных средств
щлжна определяться на основе анализа общего состава задач, ре-
шаемых системой, и требований, предъявляемых к баллистическому
эбеспечению управления полетом в целом.
; Система баллистического обеспечения наведения относится к
классу проблемно-ориентированных систем обработки информации
я, как всякая такая система, должна выполнять функции органи-
зации эффективного сбора, хранения, поиска и обмена данными
формализованного состава, ввода и вывода информации, в том чис-
йе в режиме диалога, автоматизированного или автоматического (в
улучав необходимости) выполнения вычислительного процесса, свя-
занного с проведением анализа и расчета характеристик маневров
?! коррекций, моделированием работы систем АМС. Основными тре-
бованиями к ним являются: надежность и оперативность; уни-
1ерсальность, возможность расширения; простота и удобство ра-
>оты.
Надежность и оперативность, позволяющие проводить решение
'адач наведения с заданной точностью в строго определенное, огра-
ниченное время, зависящее от операционно-временного графика
[правления полетом, достигается прежде всего при разработке ме-
одов и алгоритмов. Разделение общей задачи баллистического
беспечения наведения на последовательность частных задач по-
воляет осуществить поэтапный контроль вычислительного процес-
а и использовать опыт специалистов для своевременного его из-
менения. Повышению надежности служит также выделение уни-
Мерсальных задач и создание для них программного обеспечения,
273
которое используется в течение длительного периода для различ
ных типов АМС.
С другой стороны, существенное повышение оперативности и
надежности может быть достигнуто путем автоматизации вычис-
лительных работ, программно-методического дублирования основ-
ных задач в рамках единой системы, особенно недостаточно про-
веренных на практике при решении задач неуниверсального харак-
тера. В системе автоматизируются и унифицируются: запуск и
прохождение расчетных задач, предоставление необходимых исход-
ных данных, прием и выдача информации абонентам по каналам свя-
зи. Обеспечивается также возможность оперативного изменения ис-
ходных данных и вычислительного процесса. Для этих целей создают-
ся соответс4вующие информационные архивы и специализированный
диалоговый язык, ориентированный на решение задач наведе-
ния. Особенность рассматриваемого класса задач состоит в том,
что они требуют сравнительно небольшого объема внешней инфор-
мации: о режиме работы бортовых систем, изменении программы
полета АМС, начальных условиях ее движения, и значительно боль-
шего объема информации, характеризующей параметры используе-
мых при баллистическом обеспечении моделей, которые являются
общими для различных задач наведения и практически неизменны-
ми в течение всего полета. Поэтому в системе особое внимание
должно уделяться упорядочению подготовки исходной информации,
автоматизации работы с данными и их документированию. Орга-
низацию хранения, поиска, ввода и предоставления информации
расчетным задачам целесообразно осуществлять с помощью цент-
рализованного банка данных, который позволяет исключить дуб-
лирование информации и упростить связи между программами.
Для решения задач наведения АМС может использоваться
структура базы данных, включающая в себя следующие типы мас-
сивов: астрономические и астрофизические постоянные, параметры
моделей бортовых систем и программы полета, начальные условия
движения и исходные данные для каждой частной задачи. Эта ин-
формация в совокупности определяет схему полета и управления
движением АМС, модели работы систем и их текущее состояние,
комплектацию приборов при проведении сеансов маневров и кор-
рекций и режимы их функционирования, условия движения управ-
ляемого объекта и требования к наведению. Аналогичным образом
классифицируются по назначению массивы информации, получае-
мой в результате решения задач наведения: командно-уставочная
информация, характеристики управляющих воздействий, парамет-
ры стратегии наведения, справочная информация для подготовки к
сеансу маневра или коррекции и др.
Особенность организации баллистического наведения АМС трб'
бует диалогового режима решения задач. Дело в том, что
разд. 5.1 формализованы только основные типы задач. Каждая и3
них может решаться различными методами, делиться, в свою оче^
редь, на отдельные подзадачи, а требования к точности и цели на
ведения могут зависеть от результатов их решения. Поэтому выбор
274
конкретной последовательности задач, методов и моделей, анализ
результатов расчета и возможность их использования для прове-
дения дальнейших работ целесообразно выполнять, основываясь на
опыте специалиста — оператора системы. Оператор осуществляет
ввод в систему необходимой информации, контроль используемых
для расчета данных и вычислительного процесса, а также исправ-
ление ошибок и изменение информации или программ, связанное с
появлением различных непредусмотренных ситуаций.
Структура языка диалога, объем предоставляемой системе ин-
формации существенным образом влияют на простоту и удобство
работы оператора, возможное количество ошибок. Каждый приказ
в системе должен определять тип операции (задачи), выполняемой
системой, и массивы параметров и исходных данных, используемых
в расчете. В штатном случае для настройки задачи на заданный
вариант решения может использоваться программа полета. Тогда
массив обязательных параметров будет содержать минимальную
информацию, характеризующую условные имена АМС, начальные
условия и исходные данные. При проведении расчетов в нештатных
ситуациях, требующих перестройки программных комплексов, ин-
формационные массивы должны включать в свой состав параметры,
обеспечивающие изменение методики или схемы вычислений, пара-
метров или моделей.
Таким образом, массив обязательных параметров содержит ли-
бо ссылки на архивные массивы информации, либо при отсутствии
в архиве каких-либо данных формируется на экране дисплея в виде
соответствующего табличного массива.
Специальное математическое обеспечение (СМО), предназна-
ченное для решения задач наведения, характеризуется высокой
степенью сложности. Объем СМО, разрабатываемого для балли-
стического обеспечения управления полетом современных АМС,
составляет 500 тысяч команд. Поэтому такие системы должны быть
достаточно универсальными, позволяющими с небольшими дора-
ботками переходить к решению задач наведения для новых типов
(или модификаций АМС, схем полета и управления движением. Для
ртого структура СМО должна основываться на принципах унифи-
кации и стандартизации, а сама система должна быть открытой
Для включения в ее состав новых программ. С этой целью необхо-
димо предусмотреть создание проблемно- и системно-ориентирован-
рых модулей, реализующих различные варианты выполнения типо-
вых операций (методы численного поиска экстремумов, решения
фаевых задач, численного интегрирования уравнений, построения
йолиний и др.), выделение в структуре каждой задачи независи-
мых от аппаратуры и схемы полета АМС частей, разработку стан-
артных моделей движения и функционирования бортовых систем.
1ри соблюдении этих принципов программные системы оказывают-
я более устойчивыми и меньше подвергаются различным измене-
нии, связанным с переходом к управлению полетом новых, более
Ложных типов АМС. Практика показала, что степень преемствен-
ости таких систем может превышать 60%.
275
Информационное обеспечение
Обеспечение ввода-вывода Управление 1/ планирование
Обработка приказов и заданий в режиме диалога II Планирование и управление заданиями
I Поиск, хранение, ।
I обеспечение информацией, j
I радота с каталогом :
Обеспечение ввода- вывода информации
на терминалы
OnpadneHue
задачами
I Обеспечение ввода - вывода на графические средства
L -J
Управление
данными
1 1 ! I i : Обеспечение обмена информации по каналам связи j
П 11
Защита ат |
несанкционированного :
_____дрступа________ I
Обрадатка, редактирова-
ние и запись в архивы
массивов
у
с;
£
>
Cj
Система
баллистического
обеспечения наведения
межпланетных
станций
[ Архивы
! информации:
а
с:
53
чз
,чз
Устройства
В бода- вь/вода
>1
5f
Подсистема лроектно-баппистичес- кхо обеспечения ? S?s Чз Ъ £ S й «ь Aj k г Подсистема поспепопетного анапиза резупьтатов
Архивы
I констант:
| динамических
• моделей; .
| моделей
: систем АМС;
I программе!
j полета
I Архивы
I результатов:
j решения задач;
I уставочной
: информации
| и форм
j обмена: „
I слрабочяаи
I информац и и
Общесистемные j
модули и !
модели :_____|
Модели систем I
АМС:
ориентации.САУ, I
САН ДУ, ;
рабиокомллекса !
л др.
исходных
данных
задан
ПрОдлСМНЯ -
ориентированные задачи
анализа и синтеза
стратегии наведения,
выбора корректируемых
параметров, расчета и
уточнения параметров
управления и уставок
Архив
начальных
условий
авигксния
Динамический
архив
[промежутон-
не результа-
те/)
Модели
динамической
системы
{численные,
аналитические,
линейные,
нелинейные,
стохастические
Методы
численного *
интегрирования
сравнений
ддингения
Методы
численного
поиска
экстремума
Методы
расчета
эфемерид
планет_______
Универсальные
методы
решения задач
наведения
Рис. 5.6. Структурная схема автоматизированной системы баллистического обес-
печения АМС
276
Оперативный Ввод и вывод Формирование приказов
анаоиз информации на и исходной
результатов терминалы информации
Анализ возможных Стохастическая приближенная то Се ль СЗижения
аварийных ситуаций Детерминированная модель движения
Оперативное изменение уставок по уточненному s/tj Поиск олтималонь/х t/tj)
Минимаксная оценка Зитолнения ограничений
обмен и выдача
уставок
Баллистический
анализ Функциониро-
вания систем 'при
U4)
Распет о
кодирование
уставок
Краевая задана
распета параметров
управления иf tj)
Оптимизац и я
стратегии
коррекции
Определение
интервалов Туп и
множества Л
Построение
множества Ду
и выбор ук
Расчет слровочной и технологической
информации
Моделирование работы систем
Условия оптимальности линейной
коррекций
Градиентный метод поиска
Детерминированная тайная модель
движения
Подсистема проектно -баллистического
обеспечения коррекции
—I Статистическая оценка точности
— Метод поиска оптимальных уЦ
— /во дело ошибок и дозы у /// ен и и
_ Стохастически я и детерминиообанна я
приближенные модели движения
Вь/Sop ограничений /р£
Графа аналитическое построение
изолинии
Рис. 5.7. Функциональная схема баллистического обеспечения коррекций траектории АМС
Основным элементом системы баллистического обеспечения на-
ведения АМС (рис. 5.6) является управляющая подсистема, кото-
рая обеспечивает: загрузку и запуск задач системы, включая без-
условные или условные (по времени или событию) режимы; обра-
ботку и анализ приказов системы в режиме диалога, реакцию на
возможные ошибки оператора; работу с информационными мас-
сивами, включая поиск и запись в архивы; защиту программ и
данных от несанкционированного доступа; обмен информацией
между абонентами по каналам связи.
Подсистема ввода-вывода обеспечивает прием и выдачу инфор.
мации на различные терминальные устройства информационно-вы-
числительного комплекса, включая алфавитно-цифровые и графи-
ческие дисплеи, применение которых повышает надежность и опе-
ративность баллистического обеспечения.
Расчетные возможности системы при баллистическом обеспече-
нии наведения определяются составом банка программных моду-
лей, реализующих различные алгоритмы решения отдельных за-
дач декомпозиции, а также методы численного интегрирования
уравнений движения, поиска экстремума, статистического модели-
рования и других проблемно-ориентированных вычислительных опе-
раций.
Следует отметить, что система баллистического обеспечения на-
ведения может входить в состав интегрированной системы, объеди-
няющей несколько проблемно-ориентированных систем, используе-
мых для управления полетом АМС. В этом случае в рамках инте-
грированной системы должны решаться общие вопросы организации
вычислительных работ, распределения ресурсов, изменения конфи-
гурации ИВК при отказах в аппаратных частях и др. На рис. 5.7
в качестве примера приведена функциональная схема выполнения
работ по баллистическому обеспечению коррекции траектории дви-
жения АМС, осуществляемых с помощью такой программной си-
стемы.
5.6. Анализ результатов баллистического обеспечения
наведения АМС «Венера-9 ... -14»
Рассмотрим основные результаты наведения советских автома-
тических станций, «Венера-9 ... -14», осуществлявших полеты к
планете Венера. Для анализа использовались данные, приведенные
в работах [6, 7, 8]. Основные задачи научных исследований, про-
водимых с помощью этих АМС, особенности их схем полета и
управления движением рассмотрены в разд. 1.1. Станции «Вене-
ра-9 ... -10» осуществляли полет по орбитально-десантной схеме
(см. рис. 1.2). Принятая схема создавала необходимые Усл0В11
для достижения высокой точности наведения СА в заданный ра”
он поверхности Венеры, предусматривала выведение ОА на ор-'й
первых искусственных спутников планеты, синхронную работ}
и СА на участке спуска СА в атмосфере и во время его работы
278
поверхности, длительное изучение планеты и ее ближайших окрест-
ностей одновременно двумя ИСП.
На стадии проектирования и подготовки к пуску были выбраны
•близкие к оптимальным траектории перелета к Венере по первому
Июлувитку с временем полета 137 и 134 сут. Они обеспечивали за-
данные окна дат старта и сдвиг времени прилета станций к плане-
ре назначения на трое суток, что было необходимо для организации
Падежной работы по управлению полетом двух АМС. Так как ап-
сидальное торможение ОА не обеспечивало требуемых интервалов
связи ОА и СА в сеансах съема научной информации, то преду-
сматривалось проведение маневров торможения ОА после прохож-
дения перицентра пролетной гиперболы с углами разворотов оси
гДУ под углами— (20 ... 30)° к местному горизонту. При таких ха-
рактеристиках сеансы связи осуществлялись в наиболее благопри-
ятных условиях на расстояниях 12 ... 38 тыс. км между С А и ОА
Йри углах места ОА относительно точки посадки СА более 60°.
В соответствии с выбранной схемой полета АМС были выведе-
ны на близкие к номинальным траектории перелета соответственно
8 июня 1975 г. в 7 ч 12 мин московского времени («Венера-9») и
14 июня в 7 ч 30 мин 6 с («Венера-10»). Схемой управления поле-
том были предусмотрены две коррекции движения АМС. Их цель —
Обеспечить оптимальные условия для осуществления всех припла-
нетных операций. Основные из них следующие: вход СА в атмосфе-
ру Венеры с углами 0ВХ —(20 ... 23)°, посадка СА на освещенную
.Сторону Венеры в район, ограниченный 285 и 295° долготы и 15 и
$5° широты (в венерографической системе координат), продолжи-
тельность связи не менее 115 мин. При этом энергозатраты на
Проведение маневров увода и торможения ОА не должны превы-
шать располагаемых запасов топлива, а параметры орбиты ИСВ
должны позволить выполнить программу научных исследований в
течение заданного времени активного осуществования ОА. В ка-
честве корректируемых параметров использовались tpm, £п, т]п. Вы-
1рр их номинальных значений <р°к и области допустимых ошибок
введения осуществлялся математическим моделированием
Ьижения АМС на участке подлета к планете Венера и прогно-
«рованием значений некоторой совокупности условий, критичных
точки зрения решения задач полета. Контролируемые условия
•тем отображались в картинную плоскость, в которой и осуществ-
ился необходимый выбор £°п, т]°п и (см. разд. 1.7). Для про-
Идения первых коррекций были приняты следующие номинальные
)в <рк°:
«Венера-9» «Венера-10»
22.10.75 25.10.75
6 ч 40 мин 00 с 6 ч 42 мин 00 с
17 900 19 300
12 500 8 250
дчения корректируемых пара
[та прилета
I км
L км
Первая коррекция движения АМС «Венера-9» была проведена
Июня в 14 ч 30 мин, а АМС «Венера-10» 23 июня в 13 ч. Исправ-
279
ляемые отклонения корректируемых параметров, определенные по
данным статистической обработки радиотехнических измерений
дальности и радиальной скорости АМС относительно наземных
станций слежения, составляли (Афк(^)):
по времени полета
по координате Ejn, км
по координате т]0, км
«Венера-9»
1 ч 24 мин 40 с
5400
5700
«Венера-10»
4 ч 49 мин 50 с
41 700
83 150
Телеметрические измерения, характеризующие работу бортовых
систем в сеансе коррекции, и результаты обработки навигационных
измерений показали, что ДУ обеих станций сообщили им необходи-
мые значения характеристических скоростей коррекции, равные
11,93 и 14,42 м/с соответственно. В результате проведения этих кор-
рекций станции были переведены на попадающие траектории, ко-
торым соответствовали приведенные ниже прогнозируемые значения
корректируемых параметров:
«Венсра-9»
Дата прилета ................................
tpm .........................................
^п, км . . .............................
Tin, КМ......................................
22.10.75
7 ч 42 мин 38 с
17310
12510
«Венсра-Ш»
25.10.75
6 ч 35 мин 16 с
20 090
9270
При расчете вторых коррекций были выбраны координаты мест
посадки СА на поверхность планеты и номинальные значения уг-
лов входа СА в атмосферу Венеры, которые использовались в ка-
честве корректируемых параметров. Вторые коррекции траектории
движения АМС были проведены 15 ноября в 5 ч 59 мин («Вене-
ра-9») и 18 ноября в 5 ч 20 мин («Венера-10»). Величины харак-
теристических скоростей этих коррекций составляли соответствен-
но 13,44 и 9,68 м/с. Номинальные параметры входа СА в атмосферу
Венеры и координаты точки посадки на поверхность планеты, при-
нятые при проведении второй коррекции ф°к, равны:
«Венера-9»
«Венера-10»
Дата входа в атмосферу..............
Время входа tpm.....................
Угол входа 0вх .....................
Время посадки tnoe..................
Широта точки посадки фПос...........
Долгота точки посадки ХПос..........
22.10.75 25.10.75
6 ч 53 мин 50 с 6 ч 55 мин 33 с
—20°30' —22° 10'
8 ч 08 мин 23 с 8 ч 12 мин 11 с
31°42' 16°02'
290°50' 291°00'
Два припланетных маневра для каждого ОА проводились в ре-
жиме связанного управления в плоскости подлетной гиперболы
СА, причем в качестве корректируемых параметров приняты {л
подлетной гиперболы ОА (после увода) и Тор, со, т орбиты ИС
(после торможения). Выбор их номинальных значений проводился
на основе статистического моделирования подлетного участка
учетом ошибок определения и прогнозирования траектории, а та
же ошибок наведения АМС на межпланетном участке полета, о
280
бок функционирования бортовых систем СА и ОА в сеансах увода,
'торможения и связи. Использовались математические модели ра-
боты систем автономного управления, радиокомплекса, програм-
мно-временного устройства, а также методика поиска необходимых
значений корректируемых параметров, приведенная в разд. 5.3.
Полученные в результате расчетов оптимальные параметры орбит
QA обеспечивали продолжительность передачи научной информа-
ции не менее 130 мин. Соответствующие значения характеристиче-
ских скоростей маневров увода и торможения составляли 247,3 и
22,7 м/с для АМС «Венера-9»; 242,2 и 976,5 м/с для АМС «Вене-
а-10».
Для удовлетворения высоких требований к точности наведения
Ж) А предусматривалась возможность выдачи команд и уставочной
информации непосредственно в процессе сеанса торможения. Так
Жак информативность навигационных измерений возрастает по ме-
е приближения к планете, для более точного расчета текущих ха-
шктеристик торможения целесообразно использовать возможно
Яолее поздние измерения. Однако чтобы не снижалась надежность
вправления, уточнение параметров управления и выдача команд
осуществлялись последовательно. Состав задач соответствовал
вписанному в разд. 1.2 циклу управления и предусматривал: при-
w и обработку навигационных измерений, определение и прогно-
бирование параметров траектории ОА, моделирование движения
кА при заданном маневре увода ОА и схеме полета, расчет усло-
вий проведения сеанса торможения и связи СА и ОА с учетом воз-
можных ошибок наведения и работы бортовых систем, выбор суб-
«тимальных параметров маневра торможения и формирование
ответствующей командно-уставочной информации, уточнение ус-
Ьвий входа СА в атмосферу и координат точки посадки. В резуль-
тате реализации выданных на борт уставок ОА вышли на орбиты
«СВ, оскулирующие элементы которых на момент прохождения
«сходящего узла первого витка равны (в венероэкваториальной
стеме координат):
I «Венера-9» «Венера-10»
ha........................................ 22.10.75 25.10.75
I......................................... 6 ч 01 мин 17 с 6 ч 02 мин 19 с
р............................................ 48 ч 18 мин 49 ч 23 мин
км .................................... 7595 7715
314°35' 278°40'
I....................................... 34°10' 29°30'
Отделившись от ОА за двое суток до подлета к планете, СА
еих станций продолжали пассивный полет до входа в атмосферу
шеры, затем после аэродинамического торможения были осу-
;ствлены их спуск и посадка на поверхность с последовательным
пользованием парашютов и аэродинамических тормозных щит-
p. На участке спуска каждого из СА в ходе сеанса связи с ОА,
родящимися на орбите ИСВ, были проведены измерения относи-
пьных скоростей их движения, переданы зафиксированные на
[ 10—850 281
Рис. 5.8. Эволюция элементов орбиты ОА
станций «Венера-9» и «Венера-10»
(-------)
борту СА значения пере-
грузок при аэродинамиче-
ском торможении и дру.
гая научная информация.
Измерения и передача ин-
формации продолжались
114 мин, из которых око-
ло 60 мин после посадки
СА. Совместная обработ-
ка этих данных, резуль-
татов навигационных из-
мерений движения ОА,
выполненных наземными
станциями, телеметриче-
ской информации, полу-
ченной в сеансах манев-
ров увода и торможения, позволила уточнить параметры входа СА
в атмосферу, его движение в атмосфере и координаты точки посад-
ки. После выхода ОА на орбиты ИСВ была осуществлена обшир-
ная программа научных исследований Венеры и околопланетного
пространства. Для ее реализации проводилось регулярное опреде-
ление параметров орбит, расчет и контроль условий проведения
экспериментов, формирование необходимой уставочной информа-
ции. Под влиянием возмущающих сил, основная из которых — гра-
витационное притяжение Солнца, орбиты спутников эволюциони-
ровали (рис. 5.8). Однако их изменение за время активного сущест-
вования ИСВ таково, что все условия, обеспечивающие проведение
экспериментов, выполнялись без дополнительных коррекций под-
держания параметров орбит.
Как отмечалось в разд. 1.1, полеты к Венере в циклах 1978 и
1981 гг. требовали существенно больших энергетических затрат,
поэтому схемы полетов АМС «Венера-11 ... -14» были приняты
пролетно-десантными, в которых отсутствовала операция перевода
ОА на орбиту ИСВ. В связи с этим на участке подлета к Венере
проводились только разделение АМС на два модуля: СА и ОА, а
также увод последнего на пролетную траекторию относительно
планеты. Параметры увода выбирались таким образом, чтобы наи-
более эффективно использовать возможности передачи информации
по радиолинии СА — ОА. Сохранилась также и преемственность в
конструктивных решениях станций. В остальном схемы полета и
управления, а также методы решения задач баллистического обес-
печения для АМС «Венера-11 ... -14» не отличались от ранее рас-
смотренных для АМС «Венера-9 ... -10».
АМС «Венера-11 и -12» выведены на межпланетные траектории
полета 9 октября в 7 ч 51 мин 38 с и 14 октября в 6 ч 59 мин 4
московского времени; время перелета составляло 107 и 98 СУ^
В результате обработки навигационных измерений, проведенных
первые сутки полета, оценены текущие значения корректируем
параметров, которые равнялись:
282
[Дата прилета
fpm
ttn, КМ «
|tln} КМ
13
«Венера-11»
25.12.78
ч 40 мин 11 с
4514
—111809
«Венера-12»
21.12.78
11 ч 13 мин 41 с
53655
—78892
г Коррекции движения должны были обеспечить СА оптимальные
[условия для осуществления припланетных операций, основные из
которых: вход в атмосферу под углами —(17 ... 20)° к местному
горизонту, посадка на освещенную сторону Венеры в район, огра-
ниченный 290 и 305° долготы и 0 и 20° южной широты венерографи-
[ческой системы координат. Этим условиям отвечали
(значения корректируемых параметров, принятые
первых коррекций:
следующие
проведения
ДЛЯ
1ата прилета
J
рт
°п, км , ,
°n, КМ . .
«Венера-! 1»
25.12.78
05 ч 25 мин 00 с
13596
—4812
05
«Венера-12»
21.12.78
ч 32 мин 00 с
13584
—4932
[ Первая коррекция движения АМС «Венера-11» была проведена
16 октября в 12 ч, а АМС «Венера-12» 21 октября в 12 ч. Теле-
метрическая информация и данные навигационных измерений по-
казали, что САУ обеих станций обеспечили проведение необходи-
мых корректирующих скоростей, равных 9,5 и 13,25 м/с соответст-
венно. Прогнозируемые значения корректируемых параметров по
ранным обработки навигационных измерений, выполненных после
коррекции, составляли:
Хата прилета
pm
►и» КМ <
|п, КМ . t
‘ «Венёра-11»
25.12.78
05 ч 29 мин
13315
—5751
: «Венёра-12»
21.12.78
05 ч 27 мин
13891
—4536
значения коор-
При расчете вторых коррекций были выбраны
инат мест посадки СА в пределах заданного района и времен вхо-
.а в
атмосферу, которым соответствовали:
,ата
прилета
фт
i п, КМ
°п, км
«Венера-11»
25.12.78
5 ч 25 мин
13645
—4794
«Венера-12»
21.12.78
5 ч 25 мин
13555
—4922
корректируемых параметров
I Следует отметить, что в качестве
[горой коррекции, как и при баллистическом обеспечении наведе-
|ия АМС «Венера-9 и -10», принимались 6Вх, ^>х, i- Значения коор-
|инат в картинной плоскости и tem использовались в качестве ка-
гального приближения для решения краевой задачи определения
Параметров коррекции. Они приводятся здесь для более нагляд-
ного анализа изменения <рк° в полете по мере увеличения требо-
1.0*
283
ваний к точности наведения и условиям посадки СА на поверхно-
сти планеты.
Вторые коррекции движения АМС «Венера-11 и -12» проводи-
лись 17 декабря в 6 ч 50 мин и 14 декабря в 6 ч 50 мин; станциям
сообщены корректирующие скорости 2,1 и 2,48 м/с. Параметры
увода ОА определялись из условия обеспечения максимального
времени передачи информации с СА при выполнении остальных
требований, связанных с работой бортовых систем. В результате
расчета получены следующие значения корректируемых парамет-
ров для маневра увода ОА:
«Венера-11» «Венера-12»
Дата прохождения перицентра , , , .
‘pm...............*................ •
Гп, КМ............................ .
q°n, км......................... , .
25.12.78
6 ч 23 мин
50788
— 17751
21.12.78
6 ч 25 мин
50883
— 17876
Соответствующие величины характеристических скоростей со-
ставляли 213,07 и 212,92 м/с. На припланетном участке по совмест-
ной обработке навигационных измерений движения ОА, телемет-
рической информации, полученной с СА. и-ОА,- а также измерениям
радиальной скорости движения СА относительно ОА в сеансе их
связи проведено уточнение параметров движения ОА, условий вхо-
да и посадки СА. Посадка СА была осуществлена в заданные рай-
оны поверхности Венеры с координатами: 14° ю. ш. и 299° долготы
(«Венера-11»), 7° ю. ш. и 294° долготы («Венера-12») при углах
входа соответственно —17,5 и —18,5°. Уточненные параметры ор-
бит ОА составляли:
Дата прохождения перицентра , . . .
tpm
6п, км.................................
Т]п, км...............................
«Венера-11» «Венера-!2»
25.12.78 21.12.78
06 ч 24 мин 01 с 06 ч 26 мин 41 с
51168 50991
—17628 —18071
Пролетев Венеру на расстояниях около 34,000 км от ее поверх-
ности, оба ОА продолжили полет по гелиоцентрическим траекто-
риям с периодами обращения 320,1 и 330,3 сут. На этих участках
полета проводились новые научные исследования по обнаружению
и локализации нестационарных источников галактического электро-
магнитного излучения (у-всплесков). Точность локализации этих
источников существенно зависит от параметров орбит ОА и может
приближенно характеризоваться .величиной Ьт(() = Г1(1) sin ап>
где ri(t) — расстояние от Земли до ближайшего из двух ОА; ап
угол между направлениями с Земли на них.
Реализованные в результате наведения орбиты ОА обеспечива-
ли изменение величины от 0,7 до 12,7 млн. км на интервале
проведения эксперимента [/нт, ^кт] (рис. 5.9). Баллистическое обес-
печение эксперимента заключалось в проведении двух связанных
маневров (по одному на каждом ОА) из условия
'кТ
U7*(/H) = rnin 1
> (А). > (^2) /нТ
284
Решение задачи осуществля-
ешь численным поиском экстре-
нна критерия качества (см.
азд. 5.3).
Оптимальные параметры ма-
евров соответствовали их прове-
ению 7 февраля наОА«Венера-
1» и 5 февраля наОА«Венера-
2», причем величины характери-
тических скоростей определялись
апасами топлива на борту ОА и
оставляли 350 и 335 м/с. В ре-
ультате проведения маневров
далось в два-три раза улучшить
словия для локализации у-
сплесков (см. рис. 5.9).
АМС «Венера-13 и -14» были
)ыведены на траектории меж-
манетного перелета 30 октября
Рис. 5.9. Изменение величины
после пролета Венеры:
1 — без проведения маневров на ОА;
2—при проведении двух оптимальных
маневров
.981 г. в 10 ч 27 мин и 4 ноября в 9 ч 54 мин. Время полета по этим
>рбитам составляло 122 и 121 сут соответственно. Наведение АМС
ia участке межпланетного перелета должно обеспечить углы входа
2А в атмосферу Венеры от —(18...20)° к местному горизонту и по-
садку их в район, ограниченный 290 и 310° долготы, 0 и 20° южной
тироты. Значения корректируемых параметров, принятые для про-
едения первых коррекций, составляли:
«Венера-13» «Венера-14»
,ата прилета . . 1.03.82 5.03.82
9т ..................................... 05 ч 59 мин 05 ч 59 мин
п, км...................................... 13331 14352
п, км...................... —5252 —5761
Оценка фактических параметров.по данным статистической об-
1ботки навигационных изменений, полученных за несколько пер-
>ix суток полета, которая легла в- основу расчета корректирующих
соростей и уставок для первых коррекций, была равна:
1та прилета..........................
1 ...................................
, км . . . . , ......................
, КМ . . ♦ • w ...................
«Венера-13»
1.03.82
9 ч 16 мин 00 с
10180
—42156
«Венера-14»
5.03.82
12 ч 37 мин 39 с
21702
—84082
Первые коррекции движения, проведенные 10 ноября в 12 ч на
ИС «Венера-13» и 14 ноября в 11 ч 30 мин на АМС «Венера-14»,
общили им расчетные приращения характеристических скоростей
5 и 7,34 м/с. Прогнозируемые значения корректируемых парамет-
в после выполнения коррекций, полученные по навигационным
мерениям, выполненным на трехмесячном навигационном интер-
ле, составляли:
285
Дата прилета.............................
^pm .....................................
5л, КМ ,.................................
Чп, КМ , .
«Венера-13»
1.03.82
05.53.15
13541
—4577
«Венера-14»
5.03.82
05.53.08
15502
—4973
В связи с появлением новых сведений о характере рельефа по-
верхности Венеры в районе посадки СА «Венера-13 и -14» при рас-
чете вторых коррекций были выбраны такие координаты точек по-
садки, которые позволяли осуществить исследования в морфоло-
гических районах поверхности, ранее не изучавшихся советскими
АМС. Следует подчеркнуть, что при проектировании схем полета
и управления станций «Венера» преследовалась цель проведения
комплексной программы исследования планеты, и для каждой но-
вой экспедиции районы посадки изменялись. Это расширяло пред-
ставления об атмосфере Венеры, протекающих в ней процессах,
геологических свойствах и рельефе ее поверхности (рис. 5.10).
Новым точкам посадки СА станций «Венера-13 и -14» соответ-
ствовали следующие значения корректируемых параметров
Дата прилета
i°
1 рт
5°п, КМ
Ч°п, км
«Венера-13»
1.03.82
6 ч 00 мин
12416
—7460
«Венера-14»
5.03.82
6 ч 00 мин
12880
—8880
В результате проведения вторых коррекций, величины харак-
теристических скоростей которых составляли 5,13 м/с («Венера-13»,
21 февраля, 7 ч 30 мин) и 5,37 м/с («Венера-14», 25 февраля, 7 ч
30 мин), были обеспечены требуемые условия входа и посадки СА
на планету, причем уточненные их значения оказались следую-
щими:
Угол входа 0вх, °
Широта посадки <рПос, 0..............
Долгота посадки ХПос, °..............
«Венера-13»
—18,7
—7,5
303,5
«Венера-14»
—18,9
—13,0
310,0
В соответствии со схемой управления за двое суток до подлета
к Венере было произведено отделение ОА и маневры увода с ха-
рактеристическими скоростями 224,35 и 171,4 м/с. Они обеспечили
перевод аппаратов на пролетные относительно планеты орбиты с
параметрами равными
Дата пролета.......< , »
*рт ..............
tn, КМ . . < . ........
Т|п, КМ .... «..... .
«Венера-13» «Венера-14»
1.03.82 5.03.82
6 ч 51 мин 51 с 6 ч 40 мин 41 с
49910 43122
—25593 —20342
Это фактические значения параметров, определенные по данным
навигационных измерений, которые отличались от принятых пр
расчете уставок на маневры значений корректируемых параметре6
286
о времени пролета на 5 и 36 с, по
оординате gn— на 177 и 118 км,
о координате т]п— на 15 и 35 км.
1осле пролета Венеры ОА про-
олжали движение по гелиоцент-
ическим орбитам с периодами
25,8 («Венера-13») и 324,8 сут
«Венера-14). На этом участке
существлялась отработка и экс-
ериментальная проверка методов
аведения, связанных с планиро-
авшимся в 1985 г. полетом АМС
Вега» к комете Галлея. С целью
тработки схемы полета к комете
методов решения задач баллис-
Рис. 5.10. Места посадки спускае-
мых аппаратов советских АМС
«Венера-4 ... -14»
ического обеспечения управле-
ия полетом таких станций 10 ию-
я 1982 г. в 7 ч была проведена
оррекция движения ОА «Вене-
а-13», имитирующая наведение в
»асчетную точку встречи с кометой. Была разработана соответ-
твующая математическая модель движения такой кометы и с ее
юмощью выбирались расчетные значения корректируемых пара-
гетров, которые удовлетворяли характерным для полета к комете
'аллея требованиям. Величина корректирующей скорости состав-
ляла 192 м/с, которая привела к изменению периода обращения до
)23,2 сут.
В заключение необходимо отметить, что результаты управления
юлетами АМС «Венера-9 ... -14» подтвердили эффективность из-
юженных методов расчетов и организации баллистического обес-
1ечения на всех этапах полета.
Глава 6
НАВЕДЕНИЕ АМС, ОСНАЩЕННЫХ
ДВИГАТЕЛЬНЫМИ УСТАНОВКАМИ
МАЛОЙ ТЯГИ
Исследуя вопросы наведения, мы до сих пор ограничивались
только такими АМС, у которых для выведения на траекторию меж-
планетного перелета и создания управляющих воздействий исполь-
зуются ЖРД большой тяги. Наряду с ними в настоящее время про-
ектируются АМС, оснащенные различными типами двигателей
малой тяги (ДМТ), которые имеют значительно больший удельный
импульс по сравнению с ЖРД. Использование ДМТ дает возмож-
ность не только увеличить массу полезной нагрузки, доставляемой
к планете назначения, но и, что не менее важно, уменьшить время
полета.
Однако методы решения задач наведения для таких аппа-
ратов существенно отличаются от рассмотренных ранее. При поле-
те АМС, оснащенной ЖРД, включение ДУ при управлении движе-
нием центра масс предусматривается только для проведения манев-
ров и коррекций, а время ее работы значительно меньше времени
перелета. Поэтому движение аппарата, в основном, определяется
действием гравитационных сил. В отличие от этого для АМС с
ДМТ время работы установки соизмеримо со временем перелета,
следовательно, при анализе движения необходимо учитывать по-
мимо гравитационных сил длительно действующую тягу двигателя,
которая из-за ошибок реализации имеет характер случайного про-
цесса.
Наличие таких ошибок, из-за большой протяженности актив-
ных участков, может привести к значительным отклонениям пара-
метров траектории от расчетных значений и, как следствие, к не-
обходимости их исправления путем проведения коррекций. Однако
для АМС с ДМТ исправление параметров движения может осу-
ществляться путем соответствующего изменения (коррекции) зако-
на управления вектором тяги. Таким образом, в дальнейшем под
коррекцией траектории движения будем понимать такое изменение
закона управления движением центра масс, которое предназначено
для исправления отклонений корректируемых параметров, связан-
ных с реализацией номинального закона управления. Тогда коли
чество коррекций определяет общее число этих изменений в про
цессе полета.
288
6.1. Постановка задачи наведения АМС с ДМТ
Задача наведения АМС, осуществляющей межпланетный пере-
тет с использованием ДМТ, может решаться в рамках общей по-
становки (см. разд. 1.4), согласно которой необходимо осуществить
синтез оптимальной стратегии терминального управления заданной
стохастической динамической системы при выполнении ряда огра-
ничений, накладываемых на допустимые управляющие воздействия
и стратегию наведения в целом. Однако эта постановка является
достаточно общей и ее необходимо конкретизировать применитель-
но к рассматриваемому здесь аппарату и этапу исследований. Если
ограничиться проектно-баллистической оценкой характеристик оп-
тимальной стратегии, то при решении задачи синтеза можно вос-
^ользоваться линеаризованной по критерию минимума квадрата
шибок реализации моделью динамической системы (см. разд. 1.5)
т считать, что корректируемые параметры <рк выбраны, область их
топустимых значений задана, а дополнительных требований на
зперативность и надежность проведения расчетов и форму их пред-
ставления, связанных с организацией управления полетом, нет.
Пусть межпланетная станция движется по траектории, которая
1меет продолжительные участки активного и пассивного полета,
/правление вектором тяги на активных участках проводится в со-
ггветствии с некоторым заданным законом, осуществляемым с по-
ющью САУ. Практическая реализация его приводит к тому, что
сактический закон управления может быть представлен как слу-
айная функция времени, состоящая из детерминированной состав-
(яющей, соответствующей номинальному закону изменения векто-
а ускорения ДМТ a°i('O и случайной ошибки его реализации ^(t).
(ля исправления возникающих в силу ошибок отклонений
раектории движения или корректируемых параметров Д<рк(О от
оминальных значений проводятся коррекции закона управления,
вторые приводят к появлению дополнительного управляющего
скорения v(t)=a(t), действующего в течение некоторого времен-
ого интервала [/ь /2] или до конца полета. Совокупность характе-
ристик, описывающих количество коррекций g, время их проведе-
ия tj и управляющее воздействие v(t), определяет стратегию UK
оррекции траектории движения АМС с ДМТ. Для таких объектов
орректирующее управление целесообразно выбирать исходя из
беспечения максимальной (или заданной) точности наведения при
граничении на энергетические затраты и количество коррекций,
аким образом, для управления движением таких аппаратов не-
бходимо, как и ранее, решить две взаимосвязанные задачи: оцен-
и и прогнозирования состояния системы (с определением возмож-
эй точности наведения), синтеза стратегии коррекции закона
правления.
Приведенная в ряде работ «теорема разделения» [4, 23] для ли-
ейных систем с квадратичным критерием качества при аддитив-
bix, не зависящих от управляющего воздействия возмущениях,
озволяет задачи определения достаточных координат s(t) и опти-
289
мальной стратегии наведения решать независимо. Это важное свой-
ство, существенно упрощающее синтез стратегии наведения, ис-
пользуется также в тех случаях, когда динамическая система не
полностью отвечает требованиям теоремы разделения. Покажем
что основание для такого подхода имеется в рассматриваемом
случае. Действительно, ошибки реализации должны принадлежать
некоторому вероятностному множеству характеризующему
возможные случайные изменения аг*-(7). Это множество зависит от
ошибок работы САУ, разбросов тяги ДМТ, закона управления.
Однако, учитывая, что коррекция закона управления не приводит
к значительному его изменению по сравнению с допустимо
считать, что вызваны случайными ошибками реализации
и не зависят от v(t) = a.(t). Таким образом, характеристики мно-
жества могут рассчитываться заранее и по своим свойствам
такие ошибки эквивалентны аддитивным ошибкам. Вектор бу-
дем аппроксимировать нормальным марковским процессом первого
порядка [12], который формируется с помощью некоторой линейной
системы, на вход которой подается белый шум. Такую систему опи-
шем с помощью стохастических дифференциальных уравнений пер-
вого порядка следующего вида:
= + (6.1)
где GjfZ), В =— диагональные матрицы с элементами br,
е(1)(Т) —вектор белого шума единичной интенсивности.
Если при выборе номинального закона управления кри-
терий качества является детерминированным функционалом, свя-
занным с характеристиками траектории движения (минимум топ-
лива или времени перелета, максимум полезного груза), то при
управлении стохастической системой он выражает только некото-
рую вероятностную меру возможного отклонения фактически реа-
лизуемого движения от заданного номинального. Для задач синте-
за оптимальной стратегии коррекции критерием качества может
служить функционал, определяющий вероятность принадлежности
реализованных значений корректируемых параметров в момент
окончания управления Дфк(4) заданной области Я ф пространства
Фк(/)=Р[ДФк(/к)е= А]- (6-2)
Таким образом, принятый критерий качества наведения АМС
с ДМТ оптимизирует точность реализации заданных значений кор-
ректируемых параметров в отличие от принятого в гл. 4 энергети-
ческого критерия. При выборе стратегии необходимо учитывать Д°
полнительные условия на допустимые управляющие воздействи^
или стратегию коррекции, к числу которых могут относиться огр
ничения на величину и ориентацию v(T_), количество коррекции
расход рабочего тела, необходимого для реализации управлен
Дополнительный расход на коррекцию равен
Д/т [V (/)].=Д [а1(О1—А (а? (Д), (6-3)
290
де /T[ai0(7)], /T[ai(^] — расход рабочего тела при реализации по-
ливального и скорректированного законов управления, причем для
юнных и плазменных двигателей постоянной мощности затраты
оплива характеризуются величиной
Ут!aj(/)] = у а[(/) at (/) лГ/. (6.4)'
'к
Таким образом, при синтезе оптимальной стратегии необходи-
мо определить
Ф*к(/) = штФх{Д<рк[/, х(/), v(/, /х), |т(/, /к), |2(Л ^)>
ик(О
Ан(/, /к), d(/H, /)]}, (6.5)
:сли движение системы и навигационные измерения описываются
[инеаризованными стохастическими уравнениями вида
х (/) = А; (/) X (t) + Ва(/) a (O-j-Dg (/)?!</); (6.6)
d(/) = Hd (/) х (/)+Лн (/),
допустимые управляющие воздействия удовлетворяют условиям
a(/)Ej?2(0; Д/т[а(/)]<7?;
Начальное состояние системы, определяемое x(t») считается
лучайным. Статистические характеристики начального состояния,
шибок измерений Ан(7) и возмущений описываемых выра-
кением (6.1), имеют следующий вид
М[х(/н)] = 0; М[|1(/)] = 0;
М [Ан (/)]=0; М [х (/н) хт (/„)] =К [х(/„)];
М[|1(/)|1(/)]=К[51(/)];
М[АН(/)АТН(/)] = К[АН(/)];
М (/) Ат (/)] = М [х (/н)II(/)] = М [Ан(/) хт(/„)] = 0.
Что касается расчета отклонений корректируемых параметров,
о для линейной системы они могут быть выражены с помощью
начений вектора состояния х(7ф) в некоторый фиксированный мо-
:ент времени, которые являются решением стохастического диффе-
енциального уравнения (6.6). Для определения вероятностных ха-
актеристик отклонений корректируемых параметров необходимо
гатистически моделировать случайный процесс, что потребует
олыпих затрат времени расчета на ЭВМ. Кроме того, численное
нтегрирование дифференциальных уравнений, правая часть кото-
ых содержит случайный процесс, представляет определенные
ложности.
291
Рассмотрим способ численного решения уравнений (6.6), кото-
рый можно использовать для расчета вероятностных характеристик
распределения х(7ф). Если известны состояние системы в момент t
управляющее воздействие v(t) на интервале [/, /ф], то решение урав-
нений (6.6) имеет следующий вид:
С
х(/<р) = Х(/т, /)х(/)+ [ X(/,,, т)Ва(т)а(т)Л-|-
I
1<?
J Х(/<р, т)(т)(т)dr. (6.7)
t
Так как ^t(t)—марковский случайный процесс вида (6.1), то
случайный процесс = [ О(/Ф, т)Ыт)Л, где Q(/„, т) =
7
= Х(т, ODg(r), также является марковским случайным процессом,
описывается формирующим фильтром первого порядка и имеет
следующие вероятностные характеристики:
__ Ч
М [<!(/)] = 0; К [?!(/)] = j Q(/<p, Т) к [?!(/)] QT(/?, T)rfr,
t
причем K[ii(7)] удовлетворяет уравнению
К [f (/)] = А, (/) К [?! (/)] + К [fl (О] Al(/) + D? (/) к [?! (/)] Dj (/)
с начальным условием K[^i(TH)]=O. Симметричная матрица может
быть представлена в виде произведения двух треугольных матриц
К[Ы0] = Пг(0П~(7/где П3~( 2) — нижняя треугольная матрица,
определив которую можно рассчитать случайный вектор [16] =
= IIf где wr(2) — вектор-столбец, составленный из незави-
симых случайных величин, распределенных по нормальному закону
с параметрами: Al[wr(2е)] = 0; К [wr (/)] =Д- Е 8 (/ — г).
Тогда, как показано в [43], можно получить случайный процесс
с теми же характеристиками, что и решение исходной системы
(6.6), если интегрировать выражения, не содержащие случайных
возмущений
х (/?)==Х (/¥, /) х (/)+J Q (/<р, т)а (т) t/T-j-Пг- (/) wr (/).
t
6.2. Оценка параметров траектории движения АМС с ДМТ
Решение задачи оптимальной оценки состояния динамической
системы на активных участках движения имеет ряд существенны^
особенностей, которые не позволяют использовать методы, прим
292
няемые для этих целей при пассивном движении аппарата. Модель
движения такой системы является стохастической, в которой от-
сутствует однозначная зависимость между оценками ее состояния
в различные моменты времени, поэтому нельзя ограничиться оцен-
кой только начального состояния системы по совокупности измере-
ний навигационного интервала, как это имело место при детерми-
нированных прогнозируемых моделях, а необходимо определять
текущее состояние системы, т. е. решать задачу динамической
фильтрации. Существуют два подхода к оценке состояния системы,
на движение которой оказывают влияние случайные возмущения.
Первый заключается в том, что модель динамической системы счи-
тается непрогнозируемой и она не используется при решении по-
ставленной задачи. Определение состояния системы в дискретные
моменты времени проводится независимо. Для этого создаются та-
кие навигационные системы, которые позволяют одновременно из-
мерять шесть параметров, функционально связанных с текущим со-
стоянием системы. Недостатком существующих систем является не-
высокая точность измерений, которая не позволяет их использовать
на значительных удалениях от Земли. Другой подход заключается
в измерении действующих на аппарат возмущений с помощью ак-
селерометров и использовании полученных результатов при инте-
грировании уравнений движения в рамках детерминированной мо-
дели вида (1.15). Как известно, акселерометры измеряют только
кажущееся ускорение, связанное с действием поверхностных сил
(аэродинамических, реактивных и др.), и не измеряют гравитаци-
Юнного ускорения. Поэтому при прогнозировании движения прихо-
дится использовать расчетные значения гравитационного ускорения,
-определяемые по соответствующим моделям. Ошибки измерений
[кажущегося ускорения приводят к появлению дополнительных оши-
бок оценки текущего состояния системы даже при точно известных
^начальном ее состоянии и модели гравитационных сил. Величина
этих ошибок возрастает с увеличением продолжительности актив-
ного участка, поэтому подобные системы инерциальной навигации
'применяются в том случае, когда активный участок непродолжите-
лен (выведение на орбиту ИСП, старт с орбиты или торможение
[При использовании ДУ большой тяги, аэродинамическое торможе-
। ние и спуск в атмосфере), и непригодны для АМС с ДМТ.
Таким образом, для рассматриваемой задачи определения тра-
ектории АМС на активном участке необходимо использовать инер-
|циальные и внешнетраекторные навигационные измерения и сов-
'местно их обрабатывать в рамках заданной стохастической модели
движения с целью уточнения текущего состояния системы. Стати-
стическая обработка измерений может быть выполнена с помощью
известного фильтра Калмана [23], если ошибки измерений в любые
два момента времени не коррелированы между собой и не связаны
со случайными возмущениями, а движение системы описывается
линеаризованной стохастической моделью:
х (/,)=хп (/<) + С (/,.) [d (/,) — D (/;) х„ (/,);
293
к [х(/,)] = {К-1 [х„ (/<•)] +□(/,.)к [Ан(Л)] DT(/Z)]-1; (6.8)
C(/.) = K[xn(/I.)]DT(/,.)K-1[d(/,.)];
К [хи (/,)] = Х(/г, /,•_!) К [х (Лч)] Хт(/,., КЦЛЛ)];
КН1(Л)1= J j Фа (Л, Т1)А [^(Л)|1(-г2)]Фа(Л, X2)dXxdX2y
где хи(Л)— прогнозируемое по инерциальным измерениям значе-
ние вектора х(Л); Фа(Л, х) — матрица частных производных векто-
ра состояния системы на момент ti по вектору ускорений в момент
те[Л-ь Л]. В общем случае последний интеграл в соотношении
(6.8) может быть получен только численным расчетом, причем для
упрощения вычислений можно предположить, что вектор ^(t) на
интервале между измерениями остается постоянным. Тогда двой-
ной интеграл сводится к одинарному, равному
К [|1(Л)1= j Фа(Л, х) dx К ПЛЛч)] j Ф(Л, Vdx.
Однако и в этом случае расчет К[^1(Л)] может представлять
определенные трудности, а само принятое допущение при больших
интервалах между измерениями может оказаться излишне грубым.
Учитывая, что возмущения, действующие на систему, представлены
в разд. 6.1 в виде формирующего фильтра первого порядка, рас-
смотрим алгоритм расчета матрицы К[^1(Л)] с использованием ре-
шения соответствующего стохастического дифференциального урав-
нения, которое для системы (6.1) имеет вид:
|1(Л)=ехр[ — Gg(z‘z_1)Д/;] {МЛ-1)+в£ j exp[G(T)r]e(T)a'r}, (6.9)
‘i—1
где \ti=ti — ti-i.; B^— диагональные матрицы; В= =
= \\bi, ..., £>3||, G^llgifO. £з(01|.
Следовательно, математическое ожидание и корреляционную
функцию случайного процесса определяют следующим образом:
М[|1(Л-)] = ехр G|(Л-j)&Л} 11 (Л-i);
‘i ‘i
К[?1(Л)] = Ь|Ь|ехр{-20^-!) ДЛ! j j exp { —G|(t)t) х
‘i— 1 ‘i—l
X M [£<1>(T)£(1)T(T1)] dxdxx = P|P| (1 — exp { — 2Gg Дф> (6-Ю)
где PS = (P£1, p£2, р£з), РЕх = *«^гГ1 1V2-
Используя (6.10), перепишем решение системы (6.9) следую
щим образом:
294
Ii — (^-i)?i (^-i)4“¥§ (Л)> (6-11)
где элементы диагональной матрицы Л£ (ti-i) и компоненты векто-
ра Yt (ti) равны Л#=ехр [—(^) = Pez V1—
РУ = bugrx (C-i) /2.
Введем вектор hT(t) = [xT(t), gt(t), g2(t), g3(t)], тогда его изме-
нение на интервале [ti—i, Z,] описывается дифференциальными урав-
нениями (f£[-] — однородные правые части уравнений для *(t),
^(0, G- .(0):
h (/) =1е [х (/,_!), ?! (/,-!)] + (/;),
где °> °> °]; (6-12)
‘l ‘i
У Vg(T)(/z —т)оГт; J V§(T)afr; ^e(/;) = Y^(^)-
‘i-\ ‘t-x
Интегрируя (6.12) и учитывая свойства б-корреляции случайных
составляющих, а также равенство нулю математического ожида-
ния вектора u£ (ti), получим следующее выражение для расчета
матрицы KUGJ]:
К1?(/г) К2?(/,) К3=(О 0
K2s(/;) К48 (/;) Kg: (/;) 0
К [?(/,)]= ё 5 °'
К31(/г) К6?(/(.) К5=(/() о
О О 0 0
где K15(/1-) = L(/J.)A/f/4; K2?(/;) = L(/;) Д//3; K31(/Z)=L(/,.) Д/;/2;
К5? (/,•)=L (/;); K4g (/,) = Ь(/;)Д^; К6? (/;) = L (/,.) Д/;;
L(ti)—диагональная матрица с элементами /г(А)=ру(1— ^2у),
•а б/* — символы Кронекера (/=1, 2, 3; k=l, 2, 3).
Если возмущения, действующие на АМС, описываются с по-
мощью формирующего фильтра, то вектор кажущегося ускорения
можно включить в число определяемых параметров, расширив со-
ответствующим образом вектор состояния системы. В том случае,
когда статистические характеристики случайных возмущений из-
вестны недостаточно точно, то в число определяемых параметров
могут включаться элементы матриц G£ (() и ВЕ , т. е. одновременно
с оценкой параметров движения АМС определить характеристики
случайного процесса.
Важное значение при оценке состояния системы имеет рацио-
нальный выбор состава измерений. При исследовании навигации
295
АМС с ДТМ на межпланетном участке перелета часто ограничи-
ваются рассмотрением только автономных астроизмерений, не учи-
тывая возможность использования наземных радиотехнических из-
мерений; широко применяемых при полетах современных АМС.
Как известно, автономные измерения наиболее эффективны при
движении АМС вблизи планет, а на среднем участке траектории
перелета наземные измерения предпочтительнее, т. е. наземные и
автономные измерения дополняют друг друга и целесообразно их
применять совместно. Однако на проведение радиотехнических из-
мерений влияет плазменное облако, образующееся вокруг аппара-
та при работе двигателя. Для оценки этого влияния по методике,
приведенной в [31], были проведены расчеты уровня электронной
концентрации, критичного для соответствующего диапазона частот,
которые показали, что радиосопровождение обеспечивается, если
длина волны, используемая РТС, более 2 см. Это условие выпол-
няется для современных систем радиотехнических измерений, по-
этому в дальнейшем будем считать, что для решения задачи нави-
гации принят следующий состав измерений: наземные радиоизме-
рения на всей траектории полета, инерциальные автономные изме-
рения на активных участках полета и автономные астроизмерения
на отлете от Земли и подлете к планете назначения.
6.3. Синтез оптимальной стратегии наведения
Рассмотрим сначала задачу оптимизации стратегии коррекции
траектории движения АМС с ДМТ без дополнительных ограниче-
ний на энергетические затраты и количество коррекций, т. е. коли-
чество возможных изменений программы управления возмущенным
движением центра масс. Для ее решения могут использоваться
принцип максимума или метод динамического программирова-
ния— наиболее распространенный способ в существующей литера-
туре [4, 12, 30], применяемый для описания процедуры синтеза оп-
тимальной стратегии управления. Практическая реализация метода
динамического программирования, как уже отмечалось, сопряжена
со значительными трудностями, связанными с определением пере-
ходной плотности вероятности при рекуррентном вычислении тер-
минальной функции потерь и ее оптимизации. С целью упрощения
задачи синтеза оптимальной стратегии ограничиваются критериями
качества, которые являются математическим ожиданием от четной
положительной функции, связанной с отклонениями корректируер
мых параметров или энергозатратами наведения. Примером такой
функции может служить квадратичная форма с положительно
определенной матрицей. Такие критерии обладают рядом свойств,
позволяющих провести исследование структуры оптимального
управления и использовать эти результаты при решении задачи син-
теза. Оптимизация осуществляется методами стохастического или
нелинейного программирования, для реализации которых необхо-
димо нахождение плотности распределения текущих отклонении
296
кинематических или корректируемых параметров, а также терми-
нальной функции потерь. Для их расчета применяются методики,
эснованные на вычислении n-мерного интеграла или статистическом
испытании (метод Монте-Карло). Оба способа требуют очень боль-
шого объема вычислительных операций. Поэтому важно предвари-
тельно оценить области возможных значений кинематических пара-
метров, для которых содержательна задача синтеза. Однако не-
смотря на различные упрощения решение задачи синтеза с исполь-
зованием динамического программирования достаточно трудоемко
и целесообразно рассмотреть возможность реализации других спо-
собов оптимизации. Одним из таких направлений является приме-
зение стохастического принципа максимума, который в соответст-
зии с теоремой разделения должен формулироваться в достаточ-
ных координатах.
Пусть в момент t задана линейная стохастическая динамическая
система, текущее состояние которой определяется математическим
эжиданием вектора х(7) и корреляционной матрицей К[х(7)] воз-
можных ошибок его определения на множестве проведенных нави-
Ьационных измерений. Тогда при известных априорных характери-
стиках случайных ошибок реализации управления ^t(t) статистиче-
ски оптимальное терминальное управление определяется из условия
максимума условного математического ожидания гамильтониана:
[£(/), ф (/), а(/), ЕД/), Фк] =
= шах [£(/), Ф(/), а(/), ЕД/), Фк]) , (6.13}
a (OeQi
'Де Ув [х(/)> ф(/), а(/), ЕД/), ФК] = ФО —фк +
at
4-ipT(/)f [£(/), а(/), ЕД/)] ;
DK — критерий, определяющий оптимальность управления; ф0,
ИО — сопряженные переменные; f[x(7), а(7), §4(/)] — правые ча-
:ти уравнений движения системы. Сопряженные переменные дол-
ины удовлетворять следующей системе дифференциальных урав-
зений:
а</>’ <614>
: граничными условиями
(♦“«Д-щдг"'®-14*01- (615)
Операция нахождения математического ожидания должна вы-
юлняться по всей совокупности реализаций случайных значений
запального состояния системы и случайного процесса, характери-
;ующего ошибки исполнения программы управления движением.
1ри фиксированном времени управления максимум статистическо-
о гамильтониана (6.13) должен быть постоянным, а при нефикси-
297
рованном — нулевым. В последнем случае при определении време-
ни окончания управления необходимо использовать условие
-^P[A<pK(/K)e^] = J Р[ИкО<1«н- /)1 оГД фк (/к) = 0, (6.16)
где p[A<pK(^/d(^ 0] — условная плотность распределения откло-
нений корректируемых параметров, оцениваемая на множестве вы-
полненных к моменту t навигационных измерений и ошибок реали
зации выбранной для интервала [7, ^к] программы управления дви
жением.
Таким образом, применение стохастического принципа максиму-
ма сводится к решению краевой задачи для системы линейных сто
хаотических дифференциальных уравнений (6.6) и (6.14) с гранич
ным условием (6.15). При нефиксированном времени управленш
добавляется условие, определяющее момент окончания интервала
управления. Сложность численной реализации этого метода связа
на с выбором начальных условий для сопряженных переменных i
оценкой осредненных стохастических характеристик управляемой
динамической системы.
В качестве примера решения задачи синтеза стохастически опти-
мального управления на основе принципа максимума рассмотрим
приведенный в ряде работ [12, 30] случай оптимизации управления
линейной динамической системой при квадратичном критерии ка-
чества без ограничений на энергозатраты и количество коррекций
Пусть движение системы описывается линейным стохастическим
дифференциальным уравнением
x(0=Af (Ох(О + Ва (О aW+D^OsW), (6.17)
где &W(t) вектор белого шума с единичной матрицей интенсивно-
сти.
Так как корректируемые параметры связаны с вектором х(^)
линейным соотношением вида (1.17), то для определения прогнози-
руемого в момент tj вектора отклонений корректируемых парамет-
ров за счет воздействия возмущений %i(0 и управления v(t) не-
обходимо решить следующее дифференциальное уравнение:
д %(</) = (О а (О + МО,
(6-18)
где ОК(/)=ФК(/9)Х(/<Р, /)Ва(О;
М0=Фк(0)Х(0,
Начальными условиями для него являются апостериорные зна
чения Дфк°(0 начальных отклонений корректируемых параметров
полученные после обработки навигационных измерений в предпо
ложении отсутствия коррекции управления и возмущений на по
следующем участке полета
298
Д фк (О=ФК (/<?) х° (/<₽);
х° (/<₽)= X (/<₽, /)х(/) + J Х(Ар, т)Ва(т)а°(т)^т.
t
Корректирующее управление в момент tj должно выбираться
аким образом, чтобы в любой заданный момент времени tj обес-
ечивалась минимизация критерия качества, характеризующего»
эзможные ошибки наведения
I
фк IД Фк О1/)] = 7И [Дфк(/,)Дфк (/,)] . (6.19>
Так как прогнозируемые значения отклонений корректируемых
1раметров в момент Л- равны
!) критерий качества (6.19) при аддитивных ошибках реализации
Правления можно записать следующим образом:
Фк [Дфк (/,•)!=ФкТ(/;)Фк(^-)+]> J ат(т)Ок(т)Ок(т1)а(т1)^т1+
-|-2Дф°(/,.) J QK(T)a(T)dT4-7H у у цДт) рк . (6.20)
Из анализа (6.20) следует, что критерий качества управления
одержит только два члена, зависящих от самого управляющего
эздействия, следовательно, оптимизация а(/) по критерию (6.19)
свивалентна минимизации функционала
Ч
Фк [Дфк (/,•)] = 2Д ф°(/,) у QK (т) а (т) dr +
t.
J
*1 ‘i
+ у ат(т)Ок(т)Ок(т1)а(т1)^т^т1. (6.21)
Ь ‘i
Для системы (6.17) и функционала (6.19) стохастический га-
ильтониан имеет вид
Ф(О, а(/), ?!(/), ФК] = 7И (Фо (О дФк[А*к(Zf)] +
dt
+ фф/)[QK (/) а (/)+ н(/)/d (/н, /у)]},
ричем, сопряженые переменные, учитывая (6.21), равны: фо = 0;
299
af(Z) =0; или i|>o = — 1; 4>(O = const=/=0. Независимо от значений co
пряженных переменных, максимальная величина гамильтониан;
соответствует такому корректирующему управлению, которое обес
лсчивает выполнение следующего условия:
‘i
Дф°(^-)+ J Qk(t)3(t)4Zt = 0, (6.22
‘J
т. е. статистически оптимальное корректирующее управление долж
но определяться таким образом, чтобы известные отклонения i
корректируемых параметрах были исправлены к следующему мо
менту коррекции программы управления. Полученное решение сов
падает с алгоритмом оптимального управления соответствующе:
детерминированной системой. Если на интервале [tj, проводите:
несколько сеансов навигационных измерений, результаты которы?
статистически обрабатываются для определения достаточных ко
ординат и прогнозирования отклонений корректируемых парамет
ров, то при заданной стратегии навигации ошибки наведения бу
дут минимальны в том случае, когда коррекция программы управ
ления осуществляется для каждой новой оценки корректируемы:
параметров. Действительно, из выражения (6.20) для критерия ка-
чества наведения следует, что его величина зависит от интервала
прогнозирования возможных ошибок реализации управления р.к(/)
Использование каждой текущей оценки достаточных координат для
коррекции программы управления позволяет уменьшить влияние
случайных ошибок на точность наведения. Таким образом, анализ
критерия качества и использование принципа максимума позволи-
ли определить структуру оптимального корректирующего управле-
ния. В частном случае, когда корректируется только один пара-
метр, а на управляющее воздействие накладывается ограничение
вида | a (() | =Сатах, оптимальное управление на интервале
определяется соотношением
а* (/) = цта-х sign qK (f) sign Дфк1 (/,)
(6.23)
, где 3'= | 7к(т)атах|о'т,
</к(£)—соответствующий элемент матрицы QK(0, характеризу-
ющий влияние корректирующего управления на исправляемые от-
клонения корректирующего параметра. Если | AcpKi°(tj) | т0
‘t+l
а* (/): Д<рк1 (.tj) qK (т) а (т) dx, а оптимальное корректирующее
Ч
управление неоднозначно на данном интервале.
Отметим следующие свойства оптимальной стратегии. В любой
момент времени возможные отклонения корректируемых парамет-
ров, определяющие текущую точность наведения, зависят от оши-
300
5ок прогнозирования и аддитивных ошибок реализации управле-
ния. Следовательно, если при последней коррекции программы уп-
равления выполняется условие (6.22), то результирующая точность
наведения не зависит от предшествующего управления. Величина
корректирующего ускорения связана с ошибками прогнозирования,
поэтому исправление Дфк(^) при больших ошибках неэффективно
: точки зрения величины энергетических затрат на управление. Учи-
тывая это, а также свойства случайного процесса, определяющего
ошибки |1(/), при наведении АМС с ДМТ целесообразно использо-
вать такие стратегии, при которых энергетические затраты и об-
щее количество коррекций программы управления ограничены.
Рассмотрим задачу коррекции траектории движения при огра-
ничении энергетических затрат и количества коррекций программы
управления. Синтез оптимальной стратегии наведения при допол-
нительных ограничениях может осуществляться методом множите-
лей Лагранжа с переходом к безусловной оптимизации обобщен-
ного критерия качества [15] либо путем расширения динамической
системы и включения в число достаточных координат параметров,
определяющих энергетику управления и количество коррекций.
В этом случае терминальная функция потерь или гамильтониан
оказываются зависящими от значений коэффициентов Лагранжа,
а условные плотности вероятности распределения достаточных ко-
ординат—от энергетики и количества коррекций, статистически
учитывая возможность прекращения процесса наведения из-за ог-
раниченных ресурсов. Указанные обстоятельства еще более услож-
няют решение и без того чрезвычайно трудоемкой задачи синтеза
Оптимальной стратегии кооррекции. Задачу можно упростить, если
использовать особенности полета АМС с ДМТ, для которых харак-
терны сравнительно малые суммарные расходы рабочего тела, свя-
занные с реализацией траектории межпланетного перелета. Огра-
ничение по энергетике коррекции не является слишком строгим, и
его можно использовать для предварительного выделения из до-
пустимого множества возможных корректирующих управлений та-
кого подмножества, которое обеспечивает его приближенное вы-
полнение. Ограничение по энергозатратам целесообразно опреде-
лять в виде функции от величины расходов, соответствующих
номинальной программе управления. Будем предполагать, что но-
минальная программа управления оптимальна по энергети-
ке, т. е. вариации первого порядка функционала 7т[а1°(/)], опреде-
ляющего энергозатраты, необходимые для осуществления межпла-
нетного перелета, равны нулю; дополнительные энергозатраты, не-
обходимые для проведения коррекции программы управления,
должны являться величиной второго порядка малости от расходов,
соответствующих номинальной программе управления.
Тогда корректирующее управление считается допустимым, если
Д/т [а(/)] < 82 [Ут [а?(/)]} . (6.24)
Рассмотрим некоторые виды программы корректирующего уп-
301
равления, выбор которых определен особенностями межпланетных!
траекторий и конструкции АМС. В общем случае программу уп-
равления вектором ускорения, развиваемого ДМТ, можно пред-
ставить как функцию величины a(t) и ориентации рду (/) вектора
тяги, а также параметров, характеризующих программу рабо-
ты ДУ
аД/): (аДЛ), Рду(/), пд, /на, /ка}, (6.25)
где пд — количество активных участников на траектории перелета;
/на, /Ка— времена их начала и окончания, причем Д/да = /ка—/На—
длительность работы ДУ на а-м участке.
Коррекцию номинальной программы управления можно прово-
дить путем изменения одного или нескольких параметров, входя-
щих в (6.25), тогда новая программа управления определит вектор
ускорений, который состоит из двух слагаемых
аД/)=а?(/)-а(/), (6.26)
где ai° (/), а (/) — номинальное и корректирующее ускорения.
Оценим энергозатраты, связанные с наведением АМС при раз-
личных изменениях параметров, характеризующих программу ра-
боты ДУ. Изменение энергозатрат при коррекции закона управле-
ния вида (6.26) для регулируемого двигателя малой тяги с точ-
ностью до величин второго порядка малости по сравнению с а1°(/)
равно
Д/т[а(/)] = Ут[а1(/)] —Ут [а?(/)] ^2 J а?(т)а(т)Л. (6.27)
С
Из (6.27) следует, что при коррекции траектории движения АМС
с ДМТ путем изменения величины тяги условия (6.24) не выпол-
няются. Более эффективной является коррекция закона управле-
ния изменением ориентации вектора тяги. В этом случае Д7т[а(/)]
не превосходит величины второго порядка малости от JT[ai°(/)]. Дей-
ствительно, если величина отклонения вектора тяги мала, то при
изменении ориентации имеем (а(/) =а1°(/)[рду (/)+Дрду (/)]):
С-
Д/Т[а (/)] j а?-(т) Д рду (т)Д рду (т) dr. (6.28)
'и
Если коррекция осуществляется изменением времени начала и
(или) конца активного участка, то будем считать, что номинальная
программа управления работой ДМТ сохраняется неизменной, а
величина дополнительного корректирующего управления того же
порядка, что и ai°(/). Тогда увеличение энергетических расходов
пропорционально увеличению продолжительности активных участ-
ков. Следовательно, для выполнения условия (6.24) достаточно,
чтобы
ДТак = 2 Д/да - 2 д^а = Так - Та°к < &Т°к, (6.29)
а=1 а=1
302
•де Гак0, Гак — суммарное время работы ДМТ при номинальном за-
<оне управления и в случае его коррекции изменением tHa, tKa-
Таким образом, если коррекцию траектории движения осущест-
злять путем изменения ориентации вектора тяги и времени начала
1 конца активного участка при условии (6.29), то энергетические
штраты такого управления не будут превышать допустимых зна-
зений, а задача синтеза может решаться без учета ограничений.
К числу несомненных достоинств такого выбора закона управления
следует также отнести тот факт, что коррекция движения может
осуществляться с помощью нерегулируемого двигателя. Пусть
С21д—множество допустимых корректирующих управлений, для ко-
торых выполняются ограничения на энергозатраты и количество
коррекций, тогда будем в дальнейшем рассматривать только та-
кие для которых справедливо
а(/)ей! (6.30)
Синтез оптимальной стратегии коррекции траектории АМС с
ДМТ будем осуществлять путем решения следующей последова-
тельности частных задач оптимизации:
выбора оптимальных времен коррекции закона управления, ис-
ходя из обеспечения максимальной точности наведения при задан-
ном количестве коррекций
t*j'- ФГ(/) = шахФк [х(/), а*(/)], 7=1,...,g; (6.31)
‘j
выбора оптимального закона управления для упрощенного кри-
терия качества управления при фиксированных временах коррек-
ции
а* (О : /И* [Д ср* (/к) Дфк (/к)] = min М х
'ж)
х[Дфк(/к)Дфк(/к)] . (6.32)
При таком подходе задача выбора времени коррекции отделя-
ется от синтеза закона управления, что позволяет использовать
при ее решении критерии качества управления более сложного ви-
да, а также численные методы поиска экстремума многопараметри-
ческих функций (см. гл. 4). В частности, если в качестве критерия
оптимальности принято условие (6.2), то для определения статис-
тических характеристик распределения Дфк(^к) на каждой итерации
требуется использование статистического моделирования случай-
ного процесса. Однако при оценке влияния на стратегию коррек-
ции случайных ошибок исполнения закона управления осреднение
по возможным выборкам заменялось осреднением по реализации
случайного процесса с использованием приведенного в разд. 6.1
способа численного интегрирования линейных стохастических урав-
нений движения.
При моделировании системы после каждой оценки по навига-
303
ционным измерениям достаточных координат в момент tj прогнози-
ровались параметры состояния на конец интервала управления tK,
определялись соответствующие отклонения корректируемых пара-
метров и корреляционная матрица их распределения. Затем при
t = tj рассчитывался оптимальный закон управления, обеспечиваю-
щий исправление отклонений корректируемых параметров к сле-
дующему фиксированному моменту ti+i проведения коррекции. Зна-
чения х(/), ф(/) определялись при совместном интегрировании пря-
мых и сопряженных дифференциальных уравнений системы и урав-
нения для вспомогательной переменной.
Для практических.целей важно не только выполнить требова-
ния к точности наведения, но и осуществить это с наименьшим ко-
личествохМ коррекций закона управления. Поэтому кроме двух рас-
смотренных выше задач необходимо дополнительно решить еще
одну, которая заключается в определении минимального количест-
ва коррекций, при котором для оптимальных Д*, а*(Д выполня-
ется:
Ф*(/) = шш[ФГ (О-ФГ]2. (5.33)
g
6.4. Синтез оптимальной стратегии коррекции
межпланетной траектории перелета Земля — Марс
Рассмотрим задачу коррекции межпланетной траектории дви-
жения АМС с ДМТ, осуществляющей перелет по маршруту Зем-
ля— Марс. Траектория полета на этом участке имеет два активных
участка: первый (АУ1), продолжительностью 57 сут и второй
(АУН)-—54 сут, разделенные 91 сут пассивного полета. Угол пе-
релета межпланетной траектории составляет 170°. Начальное ус-
корение, сообщаемое ДМТ 1 мм/с2.
Модель ошибок ускорений, действующих на АМС, имела два
слагаемых, определяющих случайную и систематическую ошибки,
последняя считалась постоянной для каждой реализации. Случай-
ная компонента рассчитывалась как выходная величина формиру-
ющего фильтра. Предполагалось, что ошибки, связанные с измене-
нием тяги ДМТ и углов ее ориентации, распределены по нормаль-
ному закону со среднеквадратичными отклонениями, равными 3%
и 20х соответственно. Начальные ошибки выведения на траекторию
перелета характеризовались величиной предельных отклонений
5000 км по координатам и 1 м/с по скоростям, а область —ве-
личинами допустимых отклонений координат и скоростей АМС на
момент Д входа в сферу действия Марса, равными 3000 км и 1 м/с
соответственно, которые приняты в качестве корректируемых па-
раметров. Ошибки выведения и реализации закона управления при-
водят к отклонениям траектории движения АМС на момент Д, дос-
тигающим 1,5... 2 млн. км. Следовательно, в процессе полета АМС
необходима коррекция закона управления по данным навигацион-
ных измерений. Считалось, что задача навигации решается по ин-
304
формации, состоящей из результатов наземных радиотехнических,
1ВТОНОМНЫХ оптических и инерциальных измерений. Основное вни-
мание уделялось анализу возможности использования для опреде-
ления движения АМС с ДМТ существующих и перспективных сис-
тем, обеспечивающих измерение дальности Д и радиальной скоро-
сти Д с ошибками 10 м и 1 см/с, кажущегося ускорения с ошиб-
кой 10-6 м/с2 и астроизмерения углов с ошибками от 10" до Г. Оцен-
:а точности проводилась численным моделированием сеансов на-
шгационных измерений и их статистической обработки на участке
щжпланетного перелета. Предполагалось, что радиотехнические и
штические навигационные измерения выполняются с дискретно-
тью 5 и 10 сут, а инерциальные измерения—-практически непре-
>ывно. В качестве ошибок оценки текущего состояния использо-
вались предельные отклонения прогнозируемых значений коорди-
1ат, АМС от их расчетных значений на момент tK в системе коор-
щнат, у которой одна ось направлена по вектору относительной
жорости входа АМС в сферу действия Марса, а две другие £п, т)п —
:й ортогональны. Результаты оценки точности прогнозирования
Дез учета ошибок реализации закона управления тягой ДМТ)
тредставлены в табл. 6. Из анализа результатов следует, что нави-
'ациониые средства позволяют обеспечить точность прогнозирова-
гия корректируемых параметров к концу второго активного участ-
ка, равную 1000 км при ошибках астроизмерений 1'. При отсут-
ствии радиотехнических измерений ошибки прогнозирования уве-
личиваются на два порядка. Однако основными во всех вариантах
являются инерциальные измерения, без которых решение задачи
равигации практически невозможно.
। Особый интерес представляет динамика изменения ошибок про-
гнозирования, так как именно от этого зависит стратегия коррек-
ции закона управления (рис. 6.1). В начале АУ1 по мере поступ-
ления навигационных измере-
ний происходит уменьшение
ошибок оценки, однако вскоре
Наступает «стабилизация», ха-
рактеризуемая постоянством
дисперсии апостериорного рас-
пределения прогнозируемых
отклонений корректируемых
параметров. Наступает как бы
равновесие между двумя про-
тивоположными факторами —
влиянием возмущений и ин-
формативностью навигацион-
ных измерений. Такой режим
наблюдается как на первом,
так и на втором активных
участка.'-:. На пассивном участ-
ке ошибки оценки благодаря
отсутствию возмущений от ра-
305
Рис. 6.1. Изменение ошибок прогнозиро-
вания корректируемых параметров в за-
висимости от навигационного интервала
боты ДМТ значительно уменьшаются. В начале АУП ошибки прог-
нозирования резко возрастают из-за действия случайных возму-
щений, а затем постепенно уменьшаются по мере повышения эффек-
тивности навигационной информации и сокращения интервала
прогнозирования. Таким образом, наличие работающего ДМТ
существенно увеличивает ошибки определения и прогнози-
рования параметров движения АМС. Поэтому перед прове-
дением наиболее ответственных операций, формирующих, напри-
мер, результирующую точность наведения, следует предусмотреть
небольшие интервалы пассивного полета для повышения точности
оценки параметров движения. Величина таких участков может быть
не очень большой. Так, десятисуточный пассивный полет перед под-
летом к сфере действия Марса позволяет в 5 раз уменьшить ошиб-.
Таблица 6
АУ1 Пас- АУП Навига-
Ошибки астроизмерений Ошибки астроизмерений
ОШИбкИг оценки, км г 30" 10"' учас- ток 1' 30" 10"' интервал, CVT
« ,РП М т - 30000 29000 25000 10000 900 500 350 10
км 20000 17000 16000 8000 400 300 200 5
10000 9500 9000 5000 800 550 450 10
км 8000 7500 7000 3000 650 400 350 5
мр,Г> 80000 60000 50000 25000 2000 1500 1300 10
км 55000 40000 35000 20000 1500 1200 1100 5
ки прогнозирования, если проводятся радиотехнические и оптиче-
ские навигационные измерения. Проектирование таких пассивных
участков должно осуществляться при выборе номинальной траекто-
рии межпланетного перелета.
При исследовании вопросов наведения (см. разд. 6.3) рассмат-
ривались две возможные стратегии коррекции. Первая — статисти-
чески оптимальная по точности коррекция с критерием
М[Дфкт(^к)Дфк(Д)] без ограничений на количество возможных из-
менений закона управления и энергозатраты наведения, а вторая —
с ограничениями на энергозатраты и количество коррекций, обес-
печивающая заданную вероятность выполнения требований к точ-
ности наведения.
Первая стратегия позволяет оценить предельную точность на-
ведения при заданной стратегии навигационных измерений, а так-
же необходимые для ее реализации энергозатраты наведения и тре-
бования к величине регулирования тяги ДМТ. Считалось, что кор-
306
рекция управления проводится в каждой точке, где оценивается со-
стояние динамической системы по навигационным измерениям, а
само корректирующее управление а (0 на каждом интервале]%, C+i]
не зависит от времени. Значение a* (t) определялось численным ре-
шением уравнения (6.22) при различных реализациях случайных
ошибок навигационных измерений и отработки а1°(0. Оценивались
предельные значения величины регулирования тяги и углов ориен-
тации оси ДУ, вероятность превышения которых не более 0,003. Ана-
лиз проведенных исследований показал, что на АУ1 изменение углов
ориентации оси ДУ, обеспечивающее исправление текущих откло-
нений корректируемых параметров, не превышает 15°, а на АУН —
5°. Величина корректирующего управления на АУ1 имеет два мак-
симума: в начале полета (20% от ai°(0) и на 40-е сутки полета
(15% от Первый из них связан с коррекцией начальных
ошибок выведения, когда a(t) выходит на ограничение по величи-
не регулирования тяги ДМТ, а второй обусловлен накоплением
ошибок реализации закона управления, а также снижением эффек-
тивности навигационных измерений. В конце АУ1 предельные зна-
чения a(t) уменьшаются до 7% от а10(7). На АУН величина кор-
ректирующего управления имеет один максимум (15% отО1°(0) на
168-е сутки полета, т. е. за 34 сут до входа в сферу действия Мар-
са. Он совпадает по времени с максимальными ошибками оценки
текущего состояния динамической системы. К моменту входа в сфе-
ру действия Марса величина корректирующего управления умень-
шается до 7% от ai°(0. Ошибки наведения зависят от дискретности
проведения радиотехнических и оптических измерений и составля-
ет около 3000 км по координатам в момент tK, если измерения про-
водятся с дискретностью 5 сут. Соответствующая вероятность по-
падания в область допустимых отклонений составляет 0,9985.
Энергетические затраты, необходимые для реализации такой стра-
тегии коррекции составляют 16% от затрат, необходимых для осу-
ществления перелета по номинальной траектории. Увеличение дис-
кретности измерений до 10 сут приводит к увеличению ошибок
наведения до 4500 км и снижению вероятности выполнения тре-
бований к точности наведения до 0,997. Если уменьшить диапазон
регулирования тяги ДМТ до величины 15%, то качественные и
количественные характеристики оптимальной стратегии практиче-
ски не изменятся. Однако переход на такой режим приведет к тому,
что предельные значения величины корректирующего управления
будут приближенно постоянными в течение каждого из активных
участков, составляя 15% от ai°(0, а возможные отклонения векто-
ра тяги увеличатся до 20°.
Сравним полученные результаты с характеристиками второй
стратегии при ограниченных энергетических затратах и количестве
коррекций, определив при этом минимально необходимое число
коррекций программы управления, обеспечивающее с вероятностью
0,997 выполнение требований к точности наведения. Пусть на каж-
дом активном участке проводятся по две коррекции. Найдем их оп-
тимальные времена из условия (6.31). Для каждой реализации
307
множества возможных траекторий с использованием принципа мак-1
симума определялось оптимальное корректирующее управление
а* (/), соответствующее заданным терминальным условиям. Допус-
тимое изменение ориентации вектора тяги принималось равным 10°,
а изменение суммарного времени активных участков — 2 дня.
В этом случае увеличение энергетических затрат не будет превы-
шать 2% от затрат, необходимых для реализации перелета по но-
минальной траектории. В результате численной оптимизации вре-
мен проведения коррекций стратегия выглядит следующим обра-
зом. Первая коррекция должна проводиться в начале полета после
оценки по навигационным измерениям ошибок выведения АМС на
траекторию межпланетного перелета. Она приводит к изменению
ориентации вектора ускорения на величину не более 8°, увеличению
общего времени перелета до 50 ч и изменению длитель-
ности АУ1 не более чем на 15 ч и АУН не более чем на 8 ч. Вторая
коррекция закона управления должна проводиться на 30-е сут по-
лета, причем дополнительное изменение ориентации вектора уско-
рения не превышает 2°, длительность работы ДУ на активных участ-
ках— 3 ч, время перелета—10 ч. В результате двух коррекций
возможные отклонения корректируемых параметров, связанные с
ошибками навигации и реализации управления движением на
оставшемся участке полета, уменьшаются до 200 тыс. км. Эти от-
клонения должны быть исправлены на АУН путем проведения двух
коррекций (в начале активного участка и за 10 сут до конца по-
лета). Эти коррекции имеют важное значение, так как формируют
результирующую точность наведения, которая составляет 4500 км,
причем вероятность выполнения требований — 0,997. Третья кор-
рекция, проводимая перед началом АУН, исправляет ошибки управ-
ления первого активного участка. Она приводит к изменению ори-
ентации вектора тяги до 5° и длительности работы ДУ до 5 ч. При
последней коррекции закона управления ориентация вектора тяги
варьируется в диапазоне 10°, а время окончания активного участ-
ка — 10 ч.
Четырехразовая стратегия позволяет практически полностью
исправлять накопившиеся к каждой коррекции отклонения коррек-
тируемых параметров. Поэтому точность наведения при
четырехразовой схеме коррекции закона управления близка к точ-
ности, обеспечиваемой рассмотренной выше оптимальной по кри-
терию (6.26) двадцатиразовой стратегией наведения при оди-
наковых временах последней коррекции. При этом энергетические
затраты первой стратегии на порядок превышают затраты, необхо-
димые при реализации более простой четырехразовой коррекции.
В заключение отметим, что рассмотренный пример наглядно пока-
зывает преимущества синтеза стратегии наведения с ограничением
энергетических затрат и количества коррекций.
СПИСОК ЛИТЕРАТУРЫ
1. Авдуевский В. С., Успенский Г. Р. Народнохозяйственные и научные кос-
ические комплексы. М., Машиностроение, 1985. 416 с.
2. Арис Р. Дискретное динамическое программирование. Введение в оптими-
ацию многошаговых процессов. М.: Мир, 1969. 315 с.
3. Аким Э. Л., Степаньянц В. А. Численная теория движения Венеры по ре-
ультатам радиолокационных наблюдений//ДАН. 1979. Т. 233. С. 314—318.
4. Аоки М. Оптимизация стохастических систем. М.: Наука, 1971. 424 с.
5. Алексеев К. Б., Бебенин Г. Г., Ярошевский В. А. Маневрирование косми-
еских аппаратов. М.: Машиностроение. 1970. 416 с.
6. Баллистика и навигация автоматических межпланетных станций «Вене-
а-9» и «Венера-10»/С. К. Абрамович, Т. Д. Агеева, Э. Л. Аким и др.//Космиче-
кие исследования. 1976. Т. 14. № 5. С. 667—676.
7. Баллистика и навигация автоматических межпланетных станций «Вене-
а-11» и «Венера-12»/С. К. Абрамович, Т. Д. Агеева, Э. Л. Аким и др.//Косми-
еские исследования. 1979. Т. 17. № 5. С. 670—680.
8. Баллистика и навигация автоматических межпланетных станций «Вене-
а-13» и «Венера-14»/Т. Д. Агеева, Э. Л. Аким, Н. М. Иванов и др.//Космиче-
кие исследования. 1973. Т. 21. № 2. С. 160—169.
9. Бажинов И. К., Почукаев В. Н. Оптимальное планирование навигацион-
ых измерений в космическом полете. М.: Машиностроение. 1969. 287 с.
10. Баллман Р. Динамическое программирование. М.: ИЛ, 1960. 400 с.
И. Березин И. С., Жидков Н. П. Методы вычислений. М.: Физматгиз, I960..
50 с.
12. Богуславский И. А. Методы навигации и управления по неполной стати-
тической информации. М.: Машиностроение. 1970. 255 с.
13. Бордовицина Т. В. Современные численные методы в задачах небесной?
(еханики. М.: Наука. 1984. 136 с.
14. Беттин Р. Наведение в космосе. М.: Машиностроение, 1966. 447 с.
15. Васильев Ф. П. Численные методы решения экстремальных задач. М.:
1аука, 1980. 518 с.
16. Гантмахер Ф. Р. Теория матриц. М.: Наука, 1966. 575 с.
17. Дубошин Г. Н. Небесная механика, основные задачи и методы. М.: Нау-
а. 1968. 800 с.
18. Демидович Б. П., Марон Н. А. Основы вычислительной математики. М.
’изматгиз, 1963. 664 с.
19. Единая релятивистская теория движения внутренних планет солнечной си-
гемы//ДАН. 1980. Т. 355. № 3. С. 314—320.
20. Иванов Н. М., Мартынов А. И. Движение космических летательных ап-
аратов в атмосферах планет. М.: Наука. 1985. 384 с.
21. Ильин В. А., Кузмак Г. Е. Оптимальные проблемы космических аппара-
та с двигателями большой тяги. М.: Наука. 1976. 744 с.
22. Ивашкин В. А. Оптимизация космических маневров при ограничениях на
асстояние до планет. М.: Наука. 1975. 392 с.
23. Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем-
I.: Мир, 1971. 400 с.
309
24. Космическая навигация/И. К. Бажинов, В. И. Алешин, В. Н. Почукаев!
Б. С. Поляков. М.: Машиностроение. 1975. 352 с. ]
25. Космические траекторные комплексы,/АП. А. Агаджанов, В. Е. Дулевич
А. А. Коростелев и др. М.: Советское радио. 1969. 248 с.
26. Кубасов В. Н., Дашков А. А. Межпланетные полеты. М.: Машинострое-
ние, 1979. 272 с.
27. Красовский Н. Н. Теория управления движением. М.: Наука. 1968. 475 с.
28. Лидов М. Л. К априорным оценкам точности по методу наименьших квад-
ратов//Космические исследования. 1964. Т. 2. № 5. С. 660—669.
29. Лидов М. Л., Ляхова В. А. Вычислительный алгоритм импульсной кор-
рекции при наличии ограничений//Космические исследования. 1960. Т. 6. № 4
С. 501—512.
30. Лебедев А. А., Красильщиков М. Н., Малышев В. В. Оптимальное управ-
ление движением космических летательных аппаратов. М.: Машиностроение. 1974
199 с.
31. Максимов Г. Ю. Теоретические основы разработки космических аппара-
тов. М.: Наука. 1980. 320 с.
32. Основы теории полета космических аппаратов/Под ред. Г. С. Нариманова
и М. К. Тихонровова. М.: Машиностроение. 1972. 608 с.
33. Охоцимский Д. Е., Рясин В. А., Ченцов Н. Н. Оптимальная стратегия при
корректировании//ДАН, 1967. Т. 175. № 1. С. 47—53.
34. Охоцимский Д. Е., Голубев А. Н., Сихарулидзе Ю. Г. Алгоритм управле-
ния космическими аппаратами при входе в атмосферу. М.: Наука. 1975. 399 с.
35. Платонов А. К. Исследование свойств корректирующих маневров в меж-
планетных полетах//Космические исследования. 1966. Т. 1. № 5. С. 670—683.
36. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В. Математическая
теория оптимальных процессов. М.: Физматгиз. 1960. 384 с.
37. Разыграев А. П., Основы управления полетом космических аппаратов. М.:
.Машиностроение. 1977. 469 с.
38. Растригин Л. А. Статистический метод поиска. М.: Наука. 1968. 376 с.
39. Раушенбах Б. В., Токарь Е. Н. Управление ориентацией космических ап-
паратов. М.: Наука. 1974. 598 с.
40. Соловьев Ц. В., Тарасов Е. В. Прогнозирование межпланетных полетов.
-М.: Машиностроение. 1973. 400 с.
41. Стратонович Р. Л. Применение теории процессов Маркова для оптималь-
ной фильтрации сигналов//Радиотехника и электроника. 1960. Т. 5. № 11.
С. 1751—1768.
42. Справочное руководство по небесной механике/Под ред. Г. Н. Дубошина.
JA.: Наука. 1971. 584 с.
43. Тихонов В. Н., Миронов М. Л. Марковские процессы. М.: Советское ра-
дио. 1977. 488 с.
44. Уайлд. Методы поиска экстремума. М.: Наука. 1967. 267 с.
45. Фельдбаум А. А. Основы теории оптимальных автоматических систем.
М.: Наука. 1966. 623 с.
46. Парный В. И. Об изохронных производных//ИСЗ. 1963. Т. 16, с. 226—
.238.
47. Эльясберг П. Е. Введение в теорию полета искусственных спутников Зем-
ли. М.: Наука. 1965. 540 с.
48. Эльясберг П. Е. Определение движения по результатам измерений. Мл
Наука. 1977. 416 с.
49. Эльясберг П. Е., Бахшиян Б. Ц., Назиров Р. Р. Определение и коррекция
движения. М.: Наука. 1980. 360 с.
50. Ярошевский В. А., Петухов С. В. Оптимальная однопараметрическая кор-
рекция космических аппаратов//Космические исследования. 1970. Т. 8, № 4.
•С. 515—523.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . .................................................. 5
'лава 1. Наведение автоматических межпланетных станций.................. 5
1.1. Схемы полета АМС............................................. 5
1.2. Управление полетом АМС. Навигация и наведение............... 14
1.3. Классификация управляющих воздействий. Корректируемые па-
раметры ........................................................ 22
1.4. Формулировка общей задачи наведения. Критерии оптимально-
сти ............................................................ 29
1.5. Модели динамической системы................................. 36
1.6. Ограничения на управление движением, связанные с работой
бортовых систем................................................. 47
1.7. Выбор корректируемых параметров и допустимой области их
реализации.............................................. 55
Глава 2. Линейная детерминированная коррекция............... 66
2.1. Формулировка задачи линейной коррекции.............. 66
2.2. Одноимпульсная коррекция............................ 68
2.3. Некоторые задачи коррекции траектории движения АМС . . 76
2.4. Связанная коррекция................................. 82'
2.5. Оптимизация параметров двухимпульсной связанной коррекции 88
2.6. Универсальный метод расчета многоразовой детерминированной
коррекции .................................................... 95
2.7. Анализ и выбор состава корректируемых параметров .... 106
2.8. Графоаналитические способы анализа свойств одноимпульсной
коррекции................................................ 104
2.9. Анализ свойств связанной коррекции.................. 113
2.10. Ошибки исполнения детерминированной коррекции...... 119
Глава 3. Линейная стохастическая коррекция............................ 124
3.1. Определение характеристик стохастической коррекции .... 126-
3.2. Анализ свойств одноимпульсной стохастической коррекции . . 133-
3.3. Исследование характеристик распределения отклонений кор-
ректируемых параметров.................................... 138
3.4. Анализ свойств распределения скорости коррекции. Расчет энер-
гозатрат наведения........................................ 141
3.5. Ошибки исполнения стохастической коррекции............. 155-
3.6. Вероятностный и гарантирующий подходы к задаче коррекции
движения.................................................. 163-
Глава 4. Синтез оптимальной стратегии коррекции..................... 172
4.1. Методы синтеза оптимальной стратегии коррекции............. 173
4.2. Методы синтеза оптимальной стратегии детерминированной
коррекции................................................. 183-
311
4.3. Оптимизация стратегии коррекции межпланетной траектории
перелета....................................................... 194
4.4. Особенности определения точности опенки параметров дви.Ке-
ния АМС по навигационным измерениям........................ 200
4.5. Оптимизация стратегии однопараметрической многоразовой кор-
рекции ........................................................ 207
4.6. Оптимизация стратегии коррекции при полетах АМС к Марсу 219
4.7. Выбор стратегии коррекции траектории движения АМС «Вега»
и ее реализация.................................................240
Глава 5. Особенности решения нелинейных задач наведения АМС . . 250
5.1. Основные принципы решения нелинейных задач наведения АМС
при управлении их полетом.......................................251
5.2. Общая схема решения задач коррекции траектории движения 256
5.3. Особенности баллистического обеспечения припланетных манев-
ров АМС.........................................................263
5.4. Задачи баллистического обеспечения наведения при использо-
вании автономных систем........................................ 269
5.5. Автоматизированные программные системы решения задач на-
ведения АМС.................................................... 273
5.6. Анализ результатов баллистического обеспечения наведения
АМС «Венера-9 ... -14» ..................................278
Глава 6. Наведение АМС, оснащенных двигательными установками ма-
лой тяги ..............................................................288
6 1. Постановка задачи наведения АМС с ДМТ......................289
6.2. Оценка параметров траектории движения АМС с ДМТ . . . 293
6.3. Синтез оптимальной стратегии наведения.....................296
6.4. Синтез оптимальной стратегии коррекции межпланетной траек-
тории перелета Земля — Марс.....................................304
Список литературы.....................................................309
НАУЧНОЕ ИЗДАНИЕ
Николай Михайлович Иванов, Владимир Сергеевич Поляков
НАВЕДЕНИЕ АВТОМАТИЧЕСКИХ МЕЖПЛАНЕТНЫХ СТАНЦИЙ
Редактор Е. И. Кравченко
Переплет художника А. Я- Михайлова
Художественный редактор В. В. Лебедев
Технический редактор Л. А. Макарова
Корректоры Л. Е. Сонюшкина, А. М. Усачева
ИВ № 5296
Сдано в набор 30.12.86. Подписано в печать 19.03.87. Т-04612. Формат 60Х90!/ю. Бумага типо-
графская № 1. Гарнитура литературная. Печать высокая. Усл. печ. л. 19,5. Усл. кр.-отт. 19,5.
Уч.-изд. л. 21,57. Тираж 1140 экз. Заказ № 850. Цена 3 р. 70 к.
'Ордена Трудового Красного Знамени издательство «Машиностроение»,
107076, Москва, Стромынский пер., 4
Московская типография № 8 Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли, 101898, Москва, Центр, Хохловский
шер., 7.