/






































































































































































































































Текст
Philippe Robert
Réseaux et files d'attente:
méthodes probabilistes
Springer
Philippe Robert
INRIA
Domaine de Voluceau
Rocquencourt BP 105
78153 Le Chesnay, France
Mathematics Subject Classification 2000:
60055, 60K20, 60K25, 60K30, 90B15, 90B18, 90B22
ISBN 3-540-67872-7 Springer-Verlag Berlin Heidelberg New York
Tous droits de traduction, de reproduction et d'adaptation réservés pour tous pays.
La loi du II mars 1957 interdit les copies ou les reproductions destinées à une utilisation collective.
Toute représentation, reproduction intégrale ou partielle faite par quelque procédé que ce soit, sans le consentement
de l'auteur ou de ses ayants cause, est illicite et constitue une contrefaçon sanctionnée par les articles 425 et suivants
du Code pénal.
Springer- Verlag Berlin Heidelberg New York
est membre du groupe BertelsmannSpringer Science+Business Media GmbH.
<9 Springer-Verlag Berlin Heidelberg 2000
Imprimé en Allemagne
SPIN: 10733493
41/3142 - 543 2 1 0 - Imprimé sur papier non acide
CO'He, Hame U l1pu'He
Avant-propos
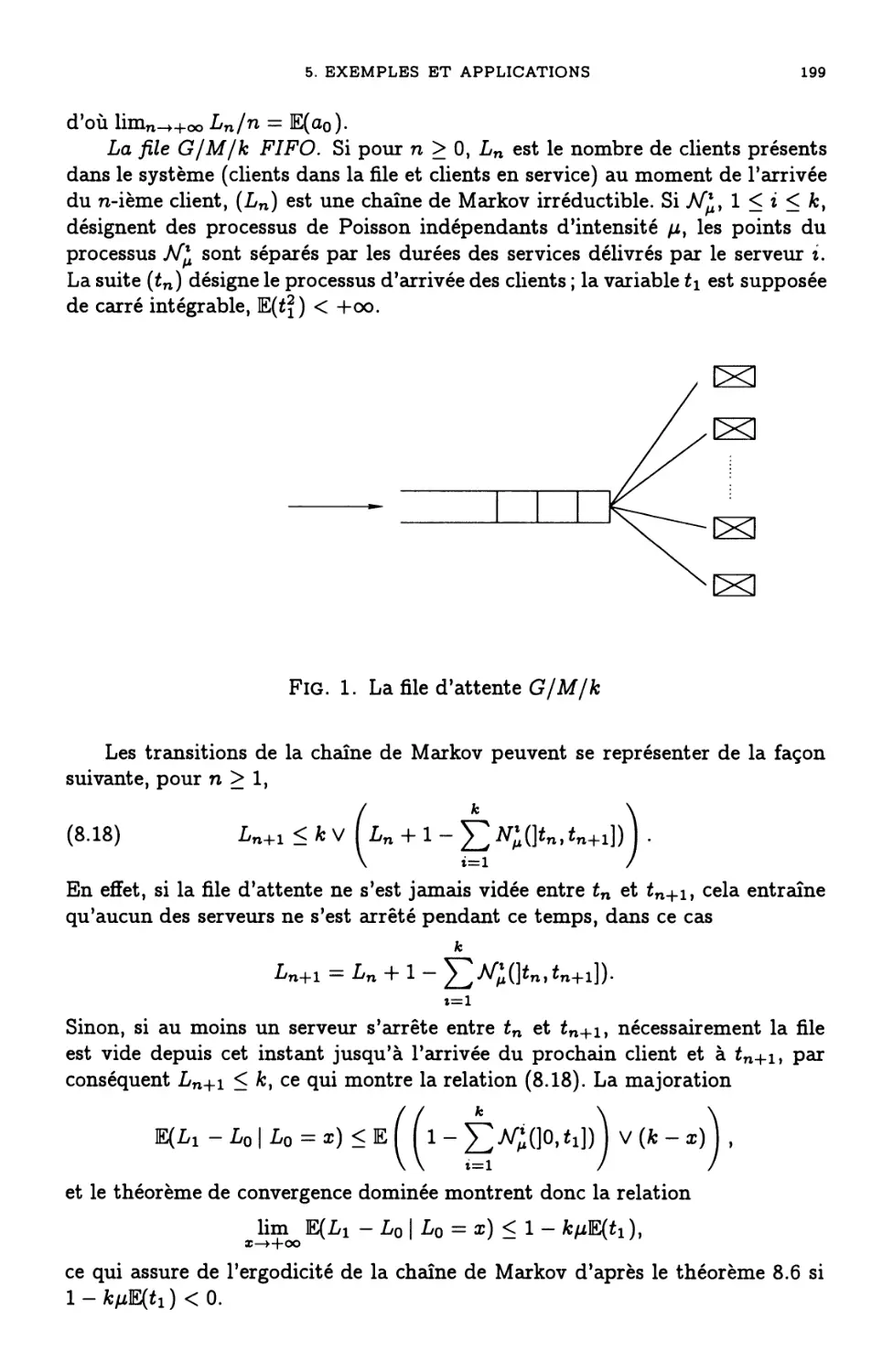
Ce livre présente une catégorie de modèles probabilistes regroupés sous le
nom de réseaux ou systèmes de files d'attente; en première approximation ces
systèmes peuvent être décrits comme des ensembles d'unités de traitement sou-
mis à des flux de requêtes. Ces modèles interviennent dans de nombreuses appli-
cations, comme par exemple les réseaux de télécommunication (depuis Erlang,
1917!) ou encore les réseaux informatiques. Sur le plan théorique, ils sont à la
source d'une large classe de problèmes: marches aléatoires et diffusions réfléchies,
asymptotiques de processus de Markov, processus ponctuels, etc... Le propos de
ce livre est de présenter les techniques probabilistes qui permettent d'étudier
le comportement qualitatif de ces modèles : existence de régimes stationnaires,
caractérisation du comportement à l'équilibre, étude asymptotique du compor-
tement transitoire (événements rares, théorèmes limites) et des régimes critiques
(saturation), etc... Les réseaux de files d'attente sont vus ici comme un champ
d'expérimentation riche des méthodes probabilistes classiques: techniques de
martingales, de processus de Markov, ou encore de théorie ergodique.
Le livre est organisé de la façon suivante. Le chapitre 1 introduit la notion
de processus ponctuel qui permet de décrire les processus d'arrivée de clients.
Les très importants processus de Poisson sont présentés en détail et les résultats
classiques concernant les processus de renouvellement sont rappelés (le théorème
de renouvellement entre autres).
Les chapitres 2 et 3 étudient la file d'attente GI IGI /1, le processus d'arrivée
des clients est un processus de renouvellement. Le cadre naturel de l'étude est
celui des marches aléatoires. La factorisation de Wiener-Hopf est démontrée
et utilisée pour déterminer la loi du maximum d'une marche aléatoire. Cela
permet d'obtenir la loi à l'équilibre des variables de cette file d'attente: temps
d'attente, nombre de clients,... Le chapitre 3 s'intéresse aux résultats limites de
la file GI /GI /1 : asymptotique de la queue de distribution des temps d'attente
et étude de la file au voisinage de la saturation. La technique de changement de
probabilité est l'ingrédient principal pour la démonstration de ces résultats.
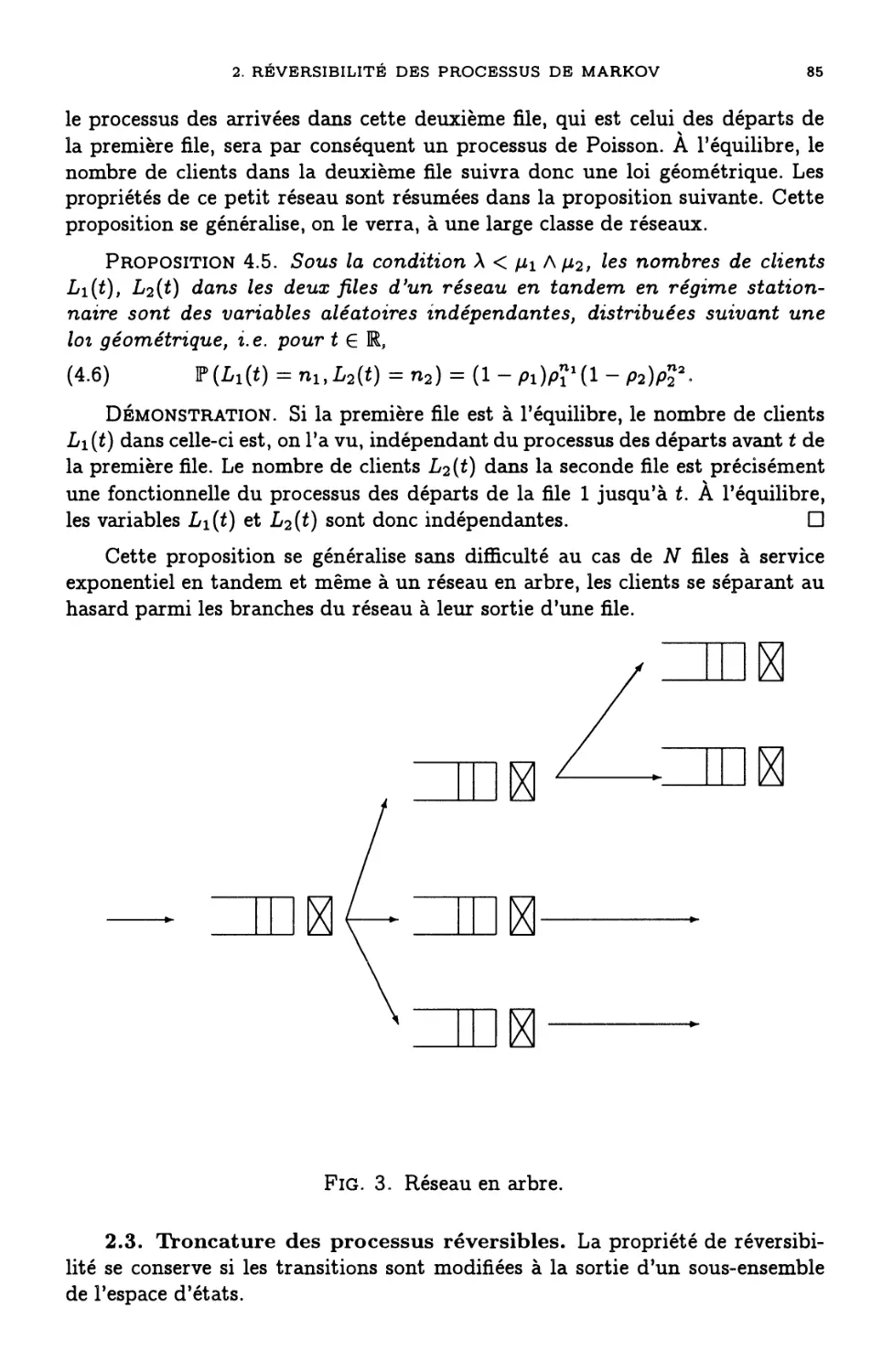
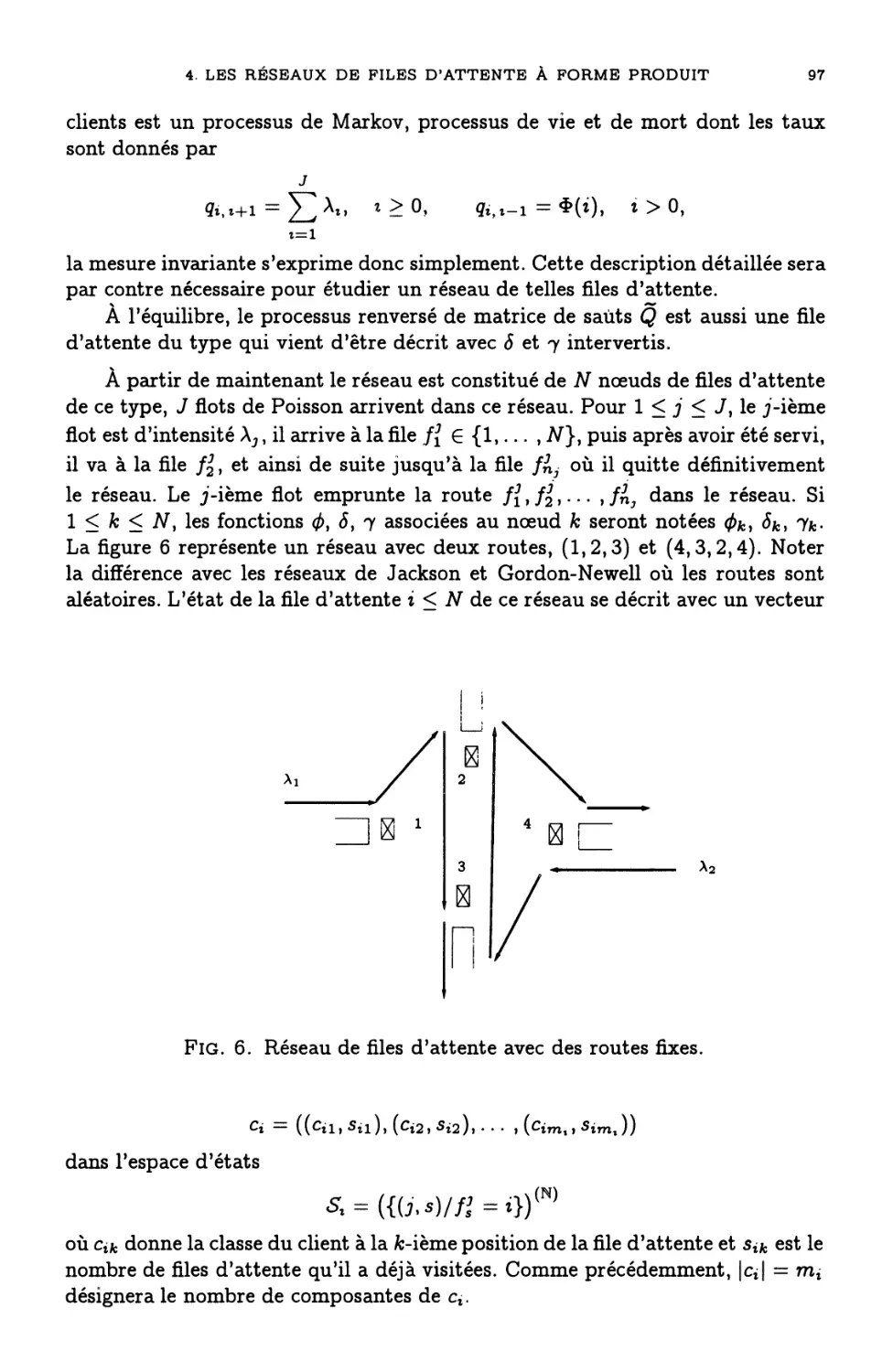
Le chapitre 4 s'intéresse aux réseaux classiques de files d'attente: réseaux
de Jackson, réseaux avec perte, réseaux de Gordon-Newel ou encore réseaux de
Kelly. Les propriétés de réversibilité des processus de Markov de sauts associés
permettent d'exprimer le régime stationnaire de ces réseaux. Ils ont la remar-
quable particularité d'avoir une probabilité produit à l'équilibre.
Les chapitres 5 et 6 présentent l'étude détaillée de deux files d'attente im-
portantes : les files M 1 M /1 et M / M /00. La première est l'élément de base
viii
des réseaux de Jackson et la seconde celui des réseaux avec perte. À ces deux
files d'attente correspondent deux processus stochastiques classiques: la arche
aléatoire simple réfléchie en 0 pour la première et le processus d'Ornstein-Uhlen-
beck à valeurs discrètes pour la deuxième. Une étude fine de ces deux modèles est
conduite. Les questions de conditionnement, de temps d'atteinte, d'événements
rares, de grandes déviations (pour la file M / M /1) sont traitées. Les problèmes
de renormalisation abordés dans un cadre général au chapitre 9 sont introduits
avec ces exemples simples.
Le chapitre 7 étudie les files d'attente ayant un flot d'arrivée de Poisson. Ces
files ont de nombreuses propriétés remarquables (à l'équilibre les clients voient
le régime stationnaire, insensibilité,...).
Le chapitre 8 présente les principaux critères d'ergodicité et de transience
utilisés pour déterminer si un système de files d'attente converge ou non vers un
équilibre. Les fonctions de Liapunov sont le principal outil dans ce domaine.
Le chapitre 9 introduit une technique de renormalisation qui permet d'étu-
dier des processus markoviens de sauts plus complexes, notamment ceux qui
décrivent les réseaux de files d'attente. En faisant un changement de temps et
une renormalisation en espace avec un facteur N, le comportement du proces-
sus peut se simplifier notablement quand N devient grand, jusqu'à devenir la
solution d'une équation différentielle déterministe dans certains cas. Ce procédé
permet d'obtenir des résultats qualitatifs sur des modèles de réseaux autres que
ceux vus au chapitre 4, comme par exemple les réseaux avec des classes de prio-
rité. Les processus limites interviennent naturellement pour traiter les questions
d'ergodicité de ces processus.
Les chapitres Il et 12 considèrent les files d'attente dans le cadre de la
théorie ergodique. Le chapitre 10 présente les résultats de base de ce domaine.
Les processus ponctuels stationnaires sur IR sont introduits et construits à partir
des interarrivées et leurs principales propriétés sont démontrées. La file d'attente
à un serveur avec la discipline FIFO dont le processus d'arrivée est un processus
ponctuel stationnaire est ensuite analysée.
L'annexe A sur les approximations poissonniennes n'est pas directement
lié à un système de files d'attente particulier. Les problèmes de convergence
vers un processus de Poisson interviennent dans plusieurs chapitres. Comme
ce sujet ne figure pas forcément dans les cours d'introduction aux processus
stochastiques, cette présentation succincte est aussi une invitation à la littérature
de ce domaine.
Les résultats utilisés concernant les processus de Markov, les martingales et
les questions de convergence en distribution sont rappelés dans les annexes B,
C et D.
Plusieurs des domaines présentés sont classiques: la factorisation de Wiener-
Hopf des marches aléatoires réfléchies, les réseaux à forme produit ou encore
les processus ponctuels stationnaires. D'autres questions sont en revanche plus
modernes i.e. encore en évolution : la renormalisation des processus stochas-
tiques associés aux réseaux, l'estimation des queues de distribution des tailles
des files d'attente, ou encore les événements rares et les grandes déviations pour
ïx
les systèmes de files d'attente. La plupart des preuves sont probabilistes, utilisant
soit des techniques markoviennes, de martingales ou encore de théorie ergodique.
Les résultats présentés dans ce livre ne sont pas forcément démontrés sous les
hypothèses les plus générales. Cela permet en général de mieux comprendre les
phénomènes décrits; de plus, des complications techniques, dont le gain est quel-
quefois marginal sont ainsi évitées. Par exemple, les questions d'ergodicité, de
transience des chaînes de Markov ne sont envisagées que pour les espaces d'états
dénombrables. Les mêmes résultats sont essentiellement vrais pour les espaces
d'états continus et pour les mêmes raisons, mais avec le cadre technique plus
compliqué des chaînes de Harris. Pour compléter le sujet traité, en bas de page
figure quelquefois la référence à un article de recherche jugé intéressant.
Ce livre doit beaucoup à Jacques Neveu, par son enseignement et ses tra-
vaux sur le sujet. Ljauteur lui est largement redevable. Ce livre est issu d'une
série de cours de troisième cycle au laboratoire de probabilités de l'Université de
Paris VI, je remercie Jean Jacod pour son accueil dans le laboratoire. De nom-
breux auditeurs et lecteurs ont, par leurs remarques, influencé ces cours. Lors de
ceux-ci, Philippe Bougerol a plus d'une fois posé des questions embarrassantes.
Franck Delcoigne, Vincent Dumas et Fabrice Guillemin ont lu et commenté plu-
sieurs parties. Christine Fricker et Danielle Tibi ont annoté de façon détaillée la
plupart des chapitres et si certaines parties sont lisibles, le lecteur devrait leur
en être gré; je les en remercie vivement. Je remercie aussi Thierry Jeulin qui
m'a encouragé à écrire ce livre ainsi qu'un rapporteur anonyme pour ses nom-
breuses remarques. Ce travail a été effectué dans le cadre stimulant et convivial
de l'équipe de recherche ALGORITHMES de l'INRIA-Rocquencourt, je remercie
en particulier Philippe Flajolet largement responsable de ce climat.
Notations et définitions générales
Une file d'attente est la donnée d'une (ou plusieurs) unité de service où
arrivent des clients qui demandent une certaine durée d'utilisation de cette unité
(le service demandé par les clients). Quand les clients ne peuvent accéder à
cette unité de service, ils patientent dans une file d'attente en attendant d'être
servis. La file d'attente peut éventuellement n'accepter qu'un nombre fini de
clients, dans ce cas les clients trouvant la file pleine à leur arrivée sont rejetés
par le système. Un client peut être servi pendant une certaine période puis
abandonné par le serveur. Le service résiduel d'un client est la durée du service
qui reste à effectuer, quand celui-ci est nulle client quitte la file d'attente. La
charge de la file d'attente est la somme de tous les services résiduels de tous
les clients présents. Un réseau de files d'attente est la donnée de plusieurs files
d'attente entre lesquelles circulent des flots de clients. Mathématiquement, une
file d'attente est définie par
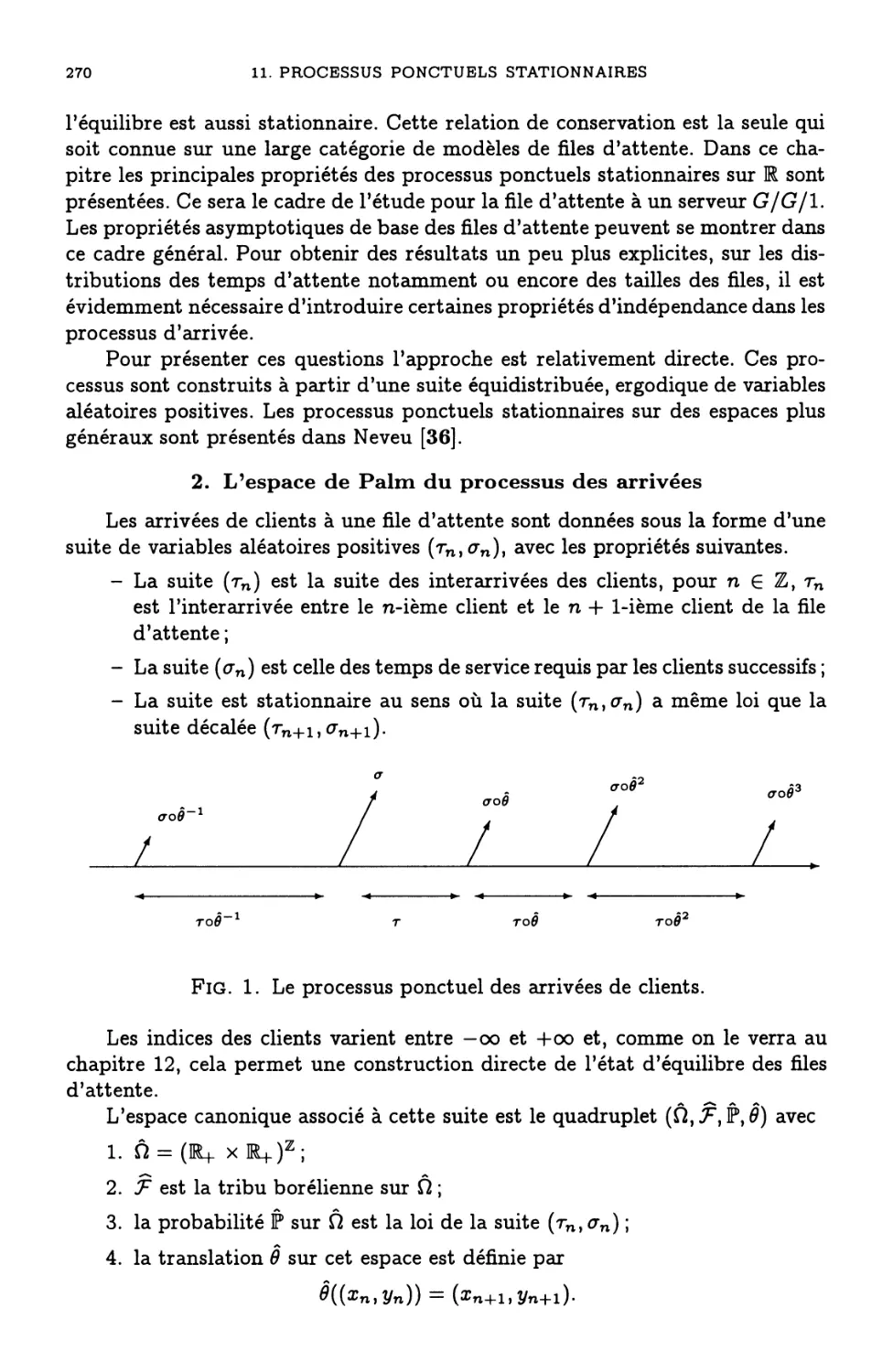
- Un processus d'arrivée de clients, Le. une suite croissante (t n ), avec t n
l'instant d'arrivée du n-ième client.
- Une suite de réels positifs (un) avec Un qui est la durée de service requise
par le n-ième client.
- Une discipline de service.
Exemples :
1. FIFO (First ln First Out), les clients sont servis dans l'ordre des
arrivées.
2. LIFO (Last ln First Out), le serveur sert le client arrivé le plus
récemment.
3. Processor Sharing (partage égalitaire). Quand n clients sont pré-
sents le service de chacun d'eux diminue au taux lin.
4. File avec priorité: Si deux classes de clients arrivent à la file d'at-
tente (les clients verts et rouges par exemple), le serveur sert en
priorité les clients rouges. Un client vert n'est servi que s'il n'y a
aucun client rouge.
5. File avec priorité non préemptive : Même discipline que précédem-
ment avec la restriction qu'un client en service ne peut être inter-
rompu même par un client plus prioritaire.
xii
La nomenclature de Kendall On représente couramment les modèles sto-
chastiques de files d'attente sous la forme d'un quadruplet
A/SINs/N e .
- A est relatif à la loi des arrivées de clients, ses principales valeurs sont
1. G (Général) : interarrivées stationnaires complètement générales.
2. GI (Général Indépendant) : la suite des interarrivées (t n + 1 -t n ) est
i.i.d. (suite de variables indépendantes identiquement distribuées).
3. M (Markov) : Les (t n + 1 - t n ) sont indépendantes distribuées sui-
vant une loi exponentielle de même paramètre. Le processus d'ar-
rivée est alors un processus de Poisson.
4. D (Déterministe) : t n + 1 - t n = C pour tout n E N, les arrivées
périodiques.
- S concerne la distribution de la durée de service requis par un client.
Les principales valeurs sont les mêmes que précédemment, il suffit de
remplacer les interarrivées t n + 1 - t n par Un-
- N s est le nombre de serveurs à l'unité de service et Ne la taille de la file
d'attente.
Exemples
- la file M/M/1/°o (ou M/Ml1) est la file d'attente avec un processus
d'arrivée poissonnien, des services exponentiels, un serveur et une file
d'attente de capacité illimitée.
- La file G/G/1/0 ne dispose d'aucune place d'attente, un seul client peut
être éventuellement présent, celui en service (file avec rejet ).
Les processus stochastiques sont généralement notés sous la forme (X(t))
ou (X n ) pour désigner respectivement (X(t); t > 0) et (X n ; n EN).
Table des matières
Chapitre 1. Processus ponctuels
1. Définitions générales sur les processus ponctuels
2. Processus de Poisson
3. Processus de Poisson sur la droite réelle
4. Processus ponctuels de renouvellement
7
7
10
20
25
Chapitre 2. La file GI /GI /1 FIFO et le maximum d'une marche aléatoire 33
1. Résultats généraux sur la file GI IGI Il FIFO 33
2. Factorisation de Wiener-Hopf 37
3. Application à la file GI IGI Il 41
4. Les files d'attente GIIMl1 et M/GIl1 46
5. La file d'attente H1/G/1 53
6. Une preuve probabiliste de la factorisation 55
Chapitre 3. Théorèmes limites 59
1. Introduction 59
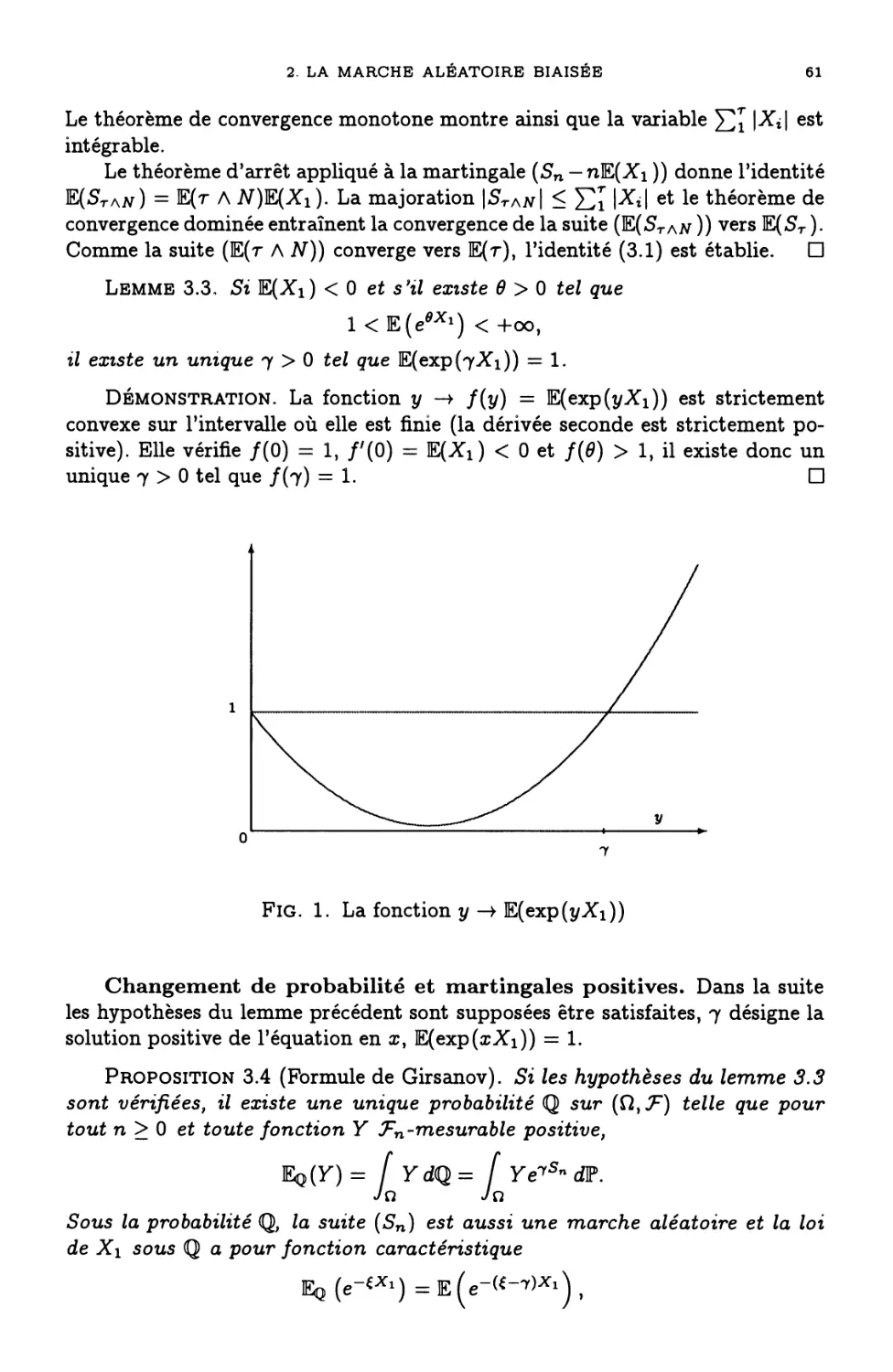
2. La marche aléatoire biaisée 60
3. Asymptotique de la queue de distribution de W 64
4. Le maximum d'une période d'occupation 68
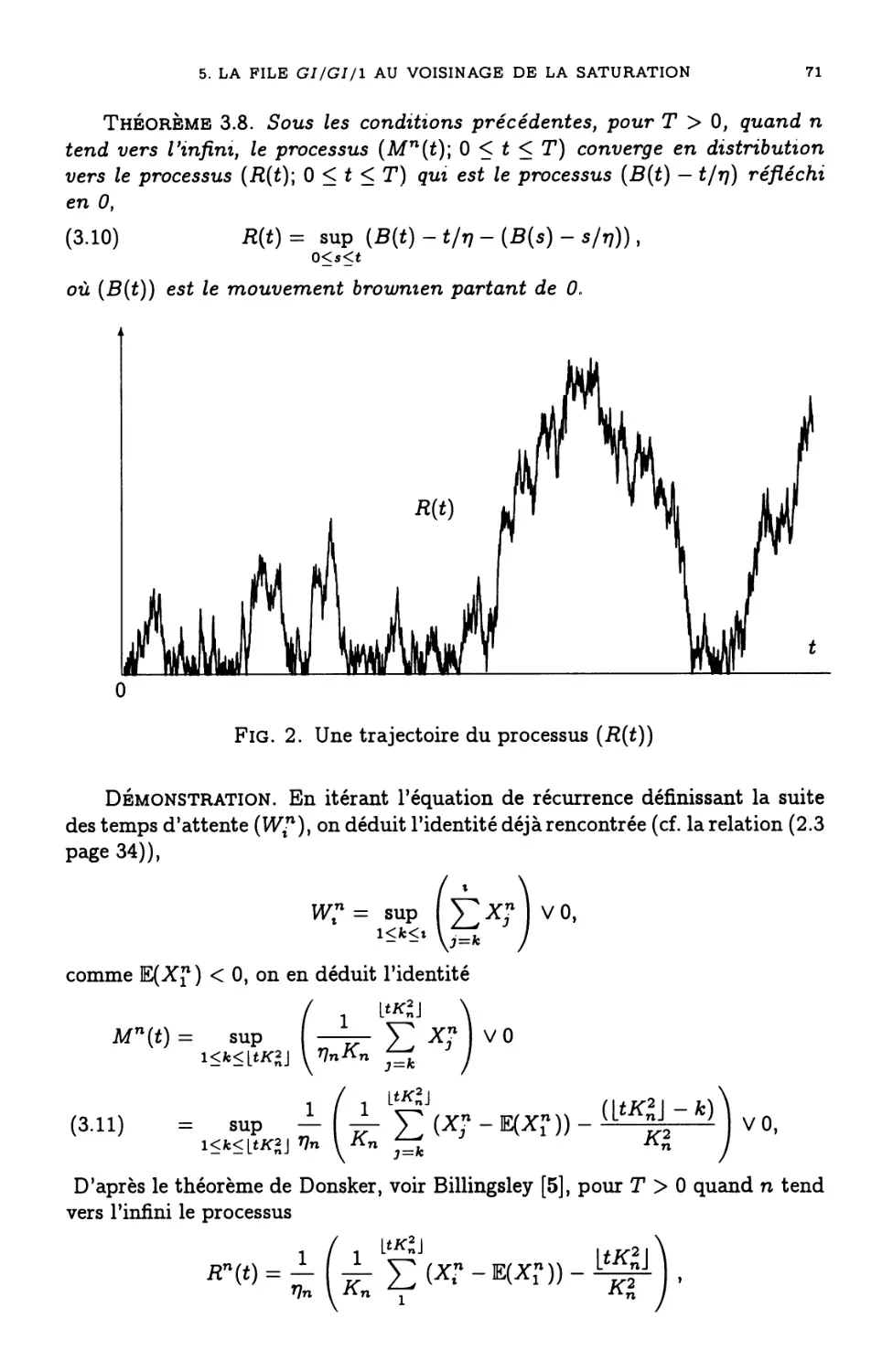
5. La file GI IGI Il au voisinage de la saturation 70
6. La marche aléatoire conditionnée à dépasser a 75
Chapitre 4. Réversibilité et équations d'équilibre des réseaux 79
1. Introduction 79
2. Réversibilité des processus de Markov 80
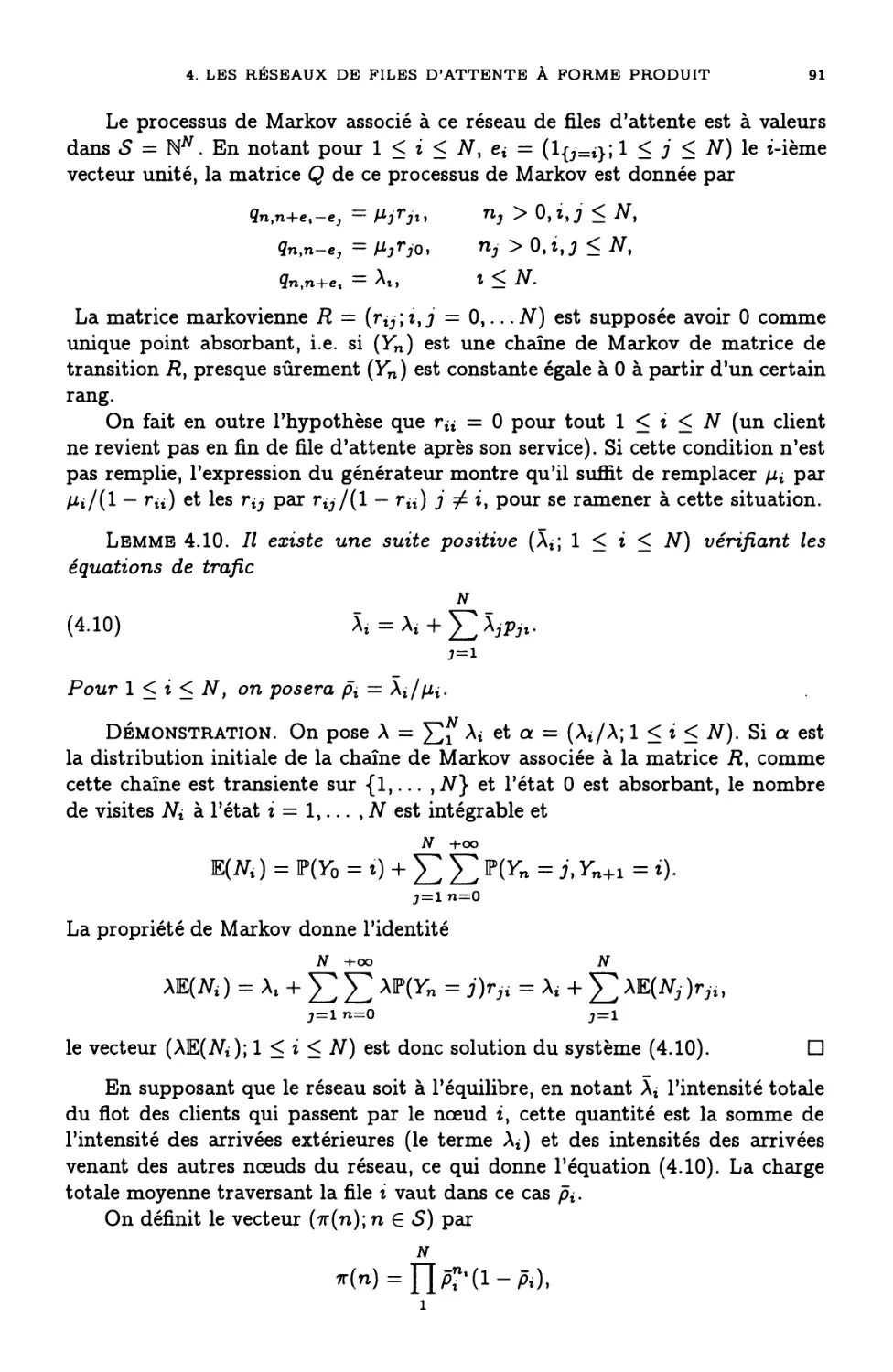
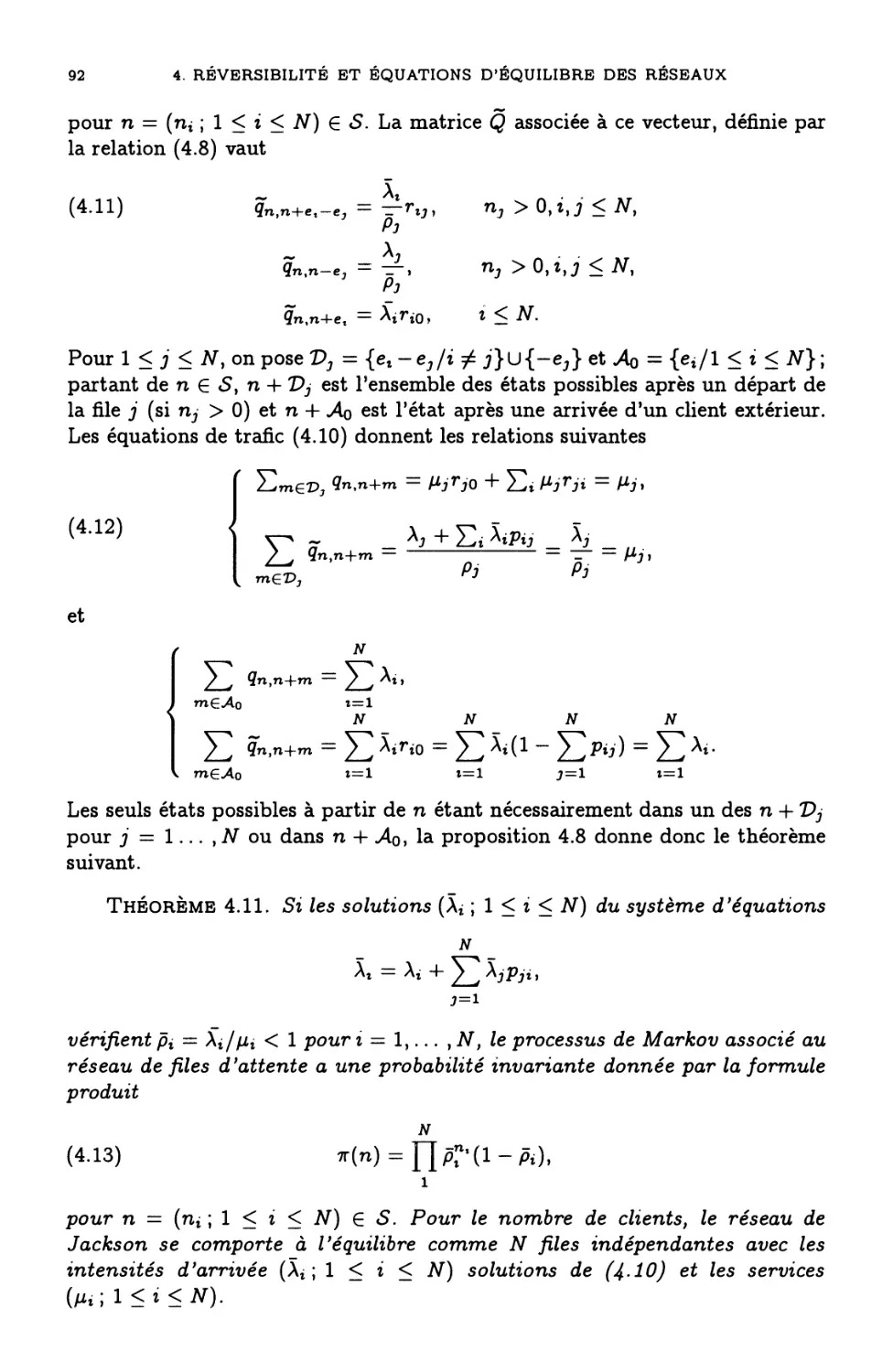
3. Les équations de balance locale 88
4. Les réseaux de files d'attente à forme produit 90
Chapitre 5. La file MIM/1 et la marche aléatoire simple réfléchie 101
1. Introduction 102
2. Les martingales exponentielles de la file M 1 Mill 04
3. Les lois des temps d'atteinte: vers le bas 106
4. Vitesse de convergence à l'équilibre 111
5. Les lois des temps d'atteinte : vers le haut 114
6. Événements rares Il 7
7. Renormalisation de la file M/Ml1 121
8. Grandes déviations 126
2
TABLE DES MATIÈRES
9. Appendice
134
Chapitre 6. La file d'attente MIMloo
1. Introduction
2. Une famille de martingales remarquables
3. Les lois des temps d'atteinte: vers le bas
4. Les lois des temps d'atteinte: vers le haut
5. Le processus renormalisé
6. Un théorème de la limite centrale
7. La file d'attente à capacité limitée MIM/NIN
8. Appendice
137
137
141
146
148
152
155
158
168
Chapitre 7. Les files d'attente avec une entrée poissonnienne
1. Un client et un observateur voient le même état
2. La file d'attente MIGI/1 FIFO
3. La file d'attente à une infinité de serveurs
4. La file MIG/1 LIFO préemptif
171
171
174
178
179
Chapitre 8. Critères de stabilité
1. Récurrence des chaînes de Markov
2. Ergodicité
3. Transience
4. Un critère d'ergodicité pour les processus de Markov
5. Exemples et applications
6. Le théorème de Liapunov classique
183
184
186
189
194
197
201
Chapitre 9. Méthodes de renormalisation
1. Renormalisation des processus
2. Les limites fluides d'une classe de processus de Markov
3. Limites fluides et problème de réflexion de Skorokhod
4. Relation entre renormalisation et ergodicité
5. Limites fluides et équilibre local
6. Appendice: le problème de réflexion de Skorokhod
203
204
211
219
227
232
237
Chapitre 10. Théorie ergodique
1. Systèmes dynamiques discrets
2. Ergodicité et théorèmes ergodiques
3. Systèmes dynamiques continus
4. Endomorphismes markoviens
247
247
252
259
263
Chapitre Il. Processus ponctuels stationnaires
1. Introduction
2. L'espace de Palm du processus des arrivées
3. Construction d'un processus ponctuel stationnaire
4. Les relations entre (0, JP>, (et)) et (Ô, P, ê)
5. Loi jointe des arrivées des clients autour de t = 0
6. Propriétés des processus ponctuels stationnaires
269
269
270
272
277
281
284
TABLE DES MATIÈRES
3
7. Annexe
290
Chapitre 12. La file d'attente GIG/1 FIFO 295
1. Le temps d'attente 296
2. Le nombre de clients 300
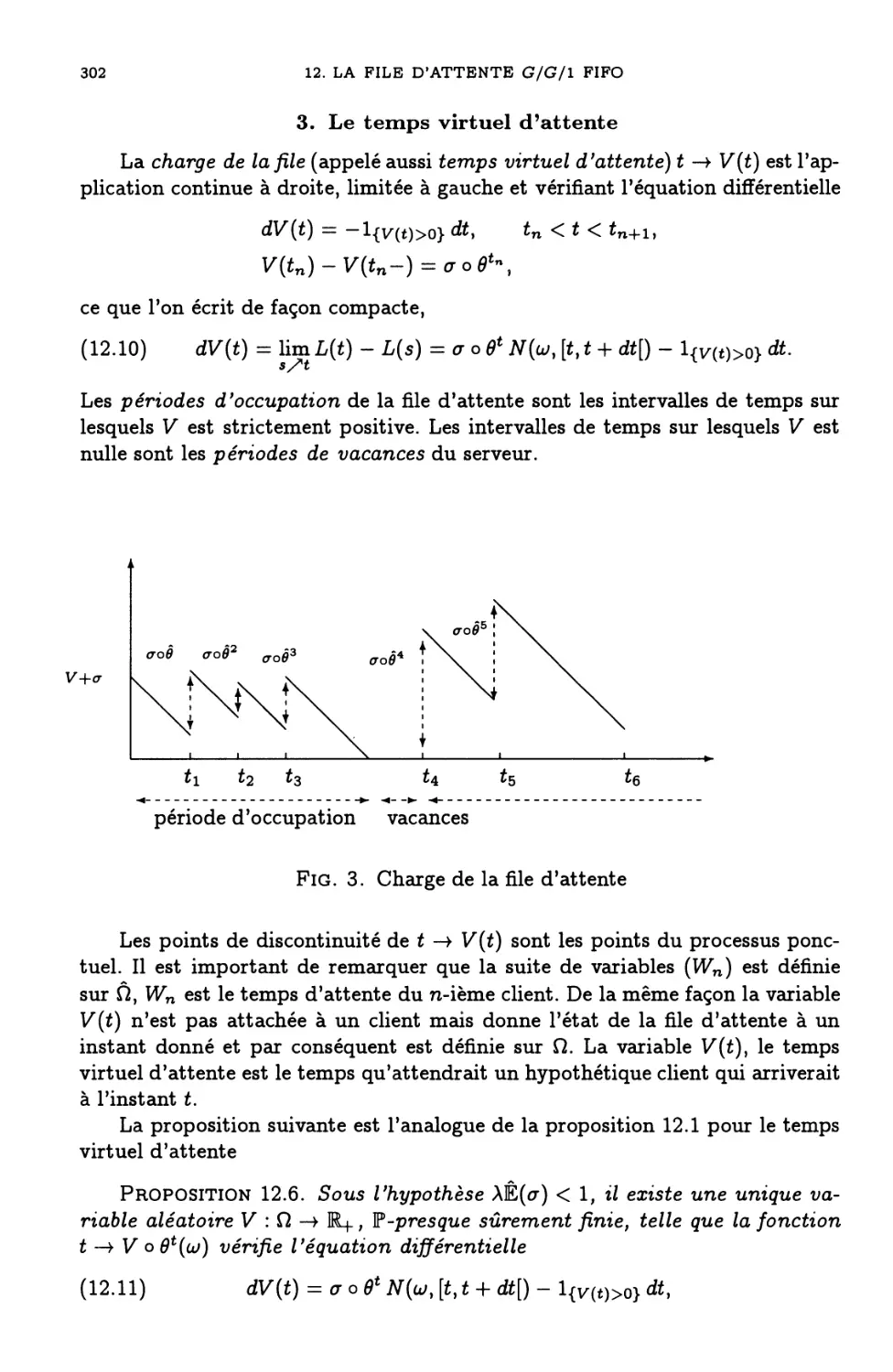
3. Le temps virtuel d'attente 302
4. Les processus ponctuels stationnaires associés 305
5. Instabilité de la file G /G /1 309
6. La file d'attente à deux serveurs G/G/2 310
Annexe A. Loi de Poisson et événements rares 315
1. L'équation de Stein 316
2. Le cas de dépendance faible entre les variables 322
3. Méthodes de couplage 327
4. Appendice 330
Annexe B. Rappels sur les martingales 333
1. Martingales à temps discret 333
2. Martingales à temps continu 335
3. L'intégrale stochastique par rapport à un processus de Poisson 336
4. Équations différentielles stochastiques avec sauts 338
Annexe C. Les processus markoviens de sauts 341
1. Le générateur infinitésimal 342
2. L'équation de mesure invariante 346
3. La chaîne incluse 347
4. Les martingales associées 347
Annexe D. Convergence en distribution 349
1. La norme en variation totale sur les probabilités 349
2. Convergence de processus 351
Bibliographie 357
Table des figures 361
Index 363
co
11""-4
Q)
:;j
u
o
0..
co
:;j co
co Q)
co 1-4
0iij
o
5-t
Q.., 0
. ....
+0')
ro
co
rn
Q)
....
. .....
cU
..Q
u
rn
Q)
..-t
(0
Q)
....
Q)
Q)
u
cU
""d
Q)
'Q)
""d
Q)
""d
co
......04
Q)
:;j
u
o
co
:;j
co
co
Q)
U
o
1-4
a...
rn
o
. .....
cU
..-t
CHAPITRE 1
Processus ponctuels
Sommaire
1.. Définitions générales sur les processus ponctuels 7
Transformée de Laplace d'un processus ponctuel 9
2.. Processus de Poisson 10
Un résultat élémentaire 10
2.1. Définition et propriétés 11
2.2. Construction d'un processus de Poisson 14
2.3. Propriétés générales des processus de Poisson 16
2.4. Conditionnement au voisinage de 0 18
3. Processus de Poisson sur la droite réelle 20
3.1. Convergence vers un processus de Poisson 20
3.2. Processus de Poisson marqué sur IR 22
4. Processus ponctuels de renouvellement 25
4.1. Exemples 28
4.2. Couplage 29
4.3. Propriétés de mélange 30
Ce chapitre, essentiellement introductif, présente les définitions relatives aux
processus ponctuels et donne les principaux résultats sur une importante sous-
classe: les processus de Poisson. Le processus de Poisson est, avec le mouvement
brownien, un processus universel. Il intervient dans nombre de théorèmes limites
et sa structure simple permet le calcul explicite de la distribution de la plu-
part de ses fonctionnelles. La dernière partie rappelle les principales propriétés
concernant les processus ponctuels de renouvellement.
1. Définitions générales sur les processus ponctuels
L'espace d'états H est un espace métrique localement compact et a-compact
(i.e. H est la réunion d'en ensemble dénombrable de compacts). La plupart des
résultats sont aussi valables dans le cadre d'un espace métrique complet. L'espace
H est muni de la tribu borélienne. L'espace des mesures de Radon sur H est
noté M(H) et Mp(H) est l'ensemble des mesures ponctuelles sur H, i.e. le
sous-ensemble des éléments m de M (H) de la forme
(1.1) m = L 6 un ,
n
8
1. PROCESSUS PONCTUELS
où 8a est la masse de Dirac au point a et Un, nEZ une suite d'éléments de
H. Si la mesure ponctuelle m ne compte pas de points multiples (Le. Un # u p
si n :f p) elle peut être représentée sous la forme ensembliste m = {un}. Une
mesure de la forme (1.1) est de Radon si et seulement si tout compact contient
un nombre fini de points de la mesure ou encore si la suite (un) est sans point
d'accumulation dans H.
Si f est une fonction sur H, intégrable par rapport à une mesure ponctuelle
m = {un}, l'intégrale de f par rapport à m est notée
mU) = 1 J(x) m(dx) = L J(u n ),
H n
et si A est un borélien de H, m(A) est le nombre de points de m dans A,
m(A) = m(lA) == L l{U n EA}.
n
L'espace Mp(H) est muni de la topologie de la convergence faible des mesures
et de la tribu borélienne associée. Ainsi, une suite (m n ) de mesures ponctuelles
converge vers m E Mp(H) si et seulement si
lim mn(f) = m(f),
n-++ex>
pour toute fonction continue f : H -4 à support compact. Pour tout borélien
A de H la fonction m ---+ m(A) est mesurable.
DÉFINITION 1. Un processus ponctuel est une variable aléatoire à valeurs
dans Mp(H).
Sauf mention explicite l'espace de probabilité est (0, F, P). La loi d'un pro-
cessus ponctuel
N : (0, F, P) -t Mp(H)
w -t N(w, dx)
est entièrement déterminée par la loi des N (w, f) où f est continue à support
compact sur H. Une autre classe de fonctions f détermine aussi la loi de N,
il s'agit des fonctions étagées de la forme f (x) = E = 1 ai lA, (x), x EH, avec
n E N et, pour 1 < i < n, ai E IR et Ai est un borélien de H. En utilisant
que N est à valeurs entières sur les boréliens, il s'en suit que la loi de N est
entièrement déterminée par les JP>(N(w, Al) = k 1 ,. .. ,N(w, An) = k n ), où n > 1,
(A ) parcourt les n-uplets de boréliens de H et (k i ) les n-uplets d'entiers.
Si N est un processus ponctuel sur H et f une fonction mesurable positive
sur H, l'intégrale de f par rapport à N sera notée
J J(x) N(w, dx) ou encore pour abréger J J(x) N(dx),
de la même façon, si A est un borélien de H, on notera N(A) la variable N(w, A).
DÉFINITION 2. Un processus ponctuel N est simple si JP>-presque sûrement
N (w, {a}) = 0 ou 1 pour tout a EH. L' ntensité d'un processus ponctuel est la
mesure positive sur H définie par tl(A) == E(N(A)), pour tout borélien A de H.
L DÉFINITIONS GÉNÉRALES SUR LES PROCESSUS PONCTUELS 9
Noter que la mesure J1. n'est pas forcément de Radon. Si T est une variable
entière non intégrable, la variable N = 6 1 +61/2 +61/3 +. . . +61/T est un processus
ponctuel sur et vérifie la relation E(N([O, a])) = +00 pour tout a > o.
Transformée de Laplace d'un processus ponctuel.
DÉFINITION 3. Si N : n Mp(H) est un processus ponctuel et f une
fonction borélienne positive sur H, la transformée de Laplace de N en f est
définie par
tPN(J) = lE ( exp ( - ! f(x) N(w, dX)) ) .
Si N 1 et N 2 sont deux processus ponctuels indépendants, la transformée de
Laplace de la superposition N 1 + N 2 de ces deux processus ponctuels en f vaut
tP N 1+ N 2(J) = lE ( exp ( - ! f(x) N 1 (w, dx) - ! f(x) N 2 (w, dX)) )
=1E(ex p (-! f(X)N 1 (w,dX))IE(ex p (-! f(X)N 2 (w,dX)))
= 1/JN 1 (f)1/JN 2 (f).
PROPOSITION 1.1. L'application N -t 1/JH est injective, i.e. 1/JN caractéri-
se complètement la loi de N.
DÉMONSTRATION. Si Al, . .. ,Ak sont des boréliens de H et
q,(a) = lE ( exp ( - L aiN{A i ))) = tPN(J),
avec f(x) = E a i 1 A,(x), alors 4J (et donc 1/JN) détermine complètement la loi
du vecteur (N(A 1 ),... ,N(Ak)), ce qui suffit à déterminer la loi de N. D
Comme dans le cas des variables aléatoires usuelles, la transformée de Laplace est
un outil commode pour montrer la convergence en loi d'une suite de processus
ponctuels. La proposition suivante donne un critère de convergence en loi des
processus ponctuels, voir Neveu [36] pour sa démonstration.
PROPOSITION 1.2. Si (N n ) est une suite de processus ponctuels telle que
la suite des transformées de Laplace 1PN n (f) converge vers 1/J(f) quand n
tend vers l'infini et 1/J(af) converge vers 1 quand a '\, 0 pour toute fonction
f, positive, continue à support compact sur H, alors (N n ) converge en loi
vers un processus ponctuel dont la transformée de Laplace est donnée par
1/J.
Un petit résultat technique conclut cette section. Il concerne les mesures de
Radon diffuses, i.e. les mesures de Radon ne chargeant pas les points, la boule
de centre x et de rayon r est notée B(x, r)
LEMME 1.3. Si J.L est une mesure de Radon diffuse sur un espace métri-
que localement compact H et K un compact de H, alors pour tout ê > 0,
il existe n > 1, Xl,... ,X n E H et Tl, . .. ,Tn < ê tels que pour i = 1,... ,n,
J.L(Ë(x , ri)) < ê et K C Uï B(Xi, ri).
10
1. PROCESSUS PONCTUELS
DÉMONSTRATION. En effet pour x E K, la compacité locale montre qu'il
existe r x > 0 tel que B(x, r) soit compact pour tout r < r x , en particulier
J.L (B (x, r) ) < + 00. Le théorème de la convergence dominée appliqué à la fonction
indicatrice de la boule B (x, r) donne l'identité
lim J.L (B ( x, r )) = J-L ( { x }) = 0,
r-+O
puisque la mesure est diffuse. En prenant r x < ê tel que J.L(B(x, r x )) < ê, comme
UxEK B(x, r x ) est un recouvrement de K, la propriété de compacité permet d'en
extraire un recouvrement fini. Le lemme est démontré. 0
2. Processus de Poisson
Un résultat élémentaire. Les variables aléatoires de Poisson apparaissent
très naturellement dans nombre de résultats asymptotiques. Le résultat classique
en la matière est la proposition suivante.
PROPOSITION 1.4. Si les 1;" 1 i > 1 sont des variables aléatoires indépen-
dantes à valeurs dans {O, l} telles que
a) lim n -++ oo SUPi IE(Ii) = 0 ;
b) limn-t+oo E, E(Ii) = lim n -++ oo E, JP>(I = 1) = À < +00,
la variable Sn = Ei Ii converge en loi vers une variable aléatoire de Poisson
de paramètre À.
DÉMONSTRATION. Si lui < 1 et pi = E(Ii), la fonction génératrice de Sn
en u E [0, 1[ vaut
lE (u Sn ) = If (1 - pi + pi u ) = exp ( 2;)Og(l - pi(l - u))) ·
L'inégalité élémentaire -x - x 2 < 10g(l - x) < -x pour 0 < x < 1/2 et la
condition a) donnent pour n assez grand,
L 10g(l - pi(l - u)) + LPi(l - u) < L(pi)2 < supIE(I ) L IE(I );
, .
, t , ,
quand n tend vers l'infini le terme de droite de l'inégalité précédente est équi-
valent à À sup, 1E(I ), d'où
lim 10g(1 - pi(l - u)) = lim - pi(l - u) = -À(l - u),
n +oo n-++oo
,
À k
lim 1E(u Sn ) = exp(-À(l- u)) = -e-)'u k .
n-++oo k!
k>O
Par conséquent, la suite (Sn) converge en loi vers une variable aléatoire de Pois-
son de paramètre À. D
L'annexe A montre que l'indépendance peut être remplacée par une hypothèse
plus faible de mélange ou encore par une propriété de symétrie pour avoir encore
. .
une convergence pOlssonnlenne.
2. PROCESSUS DE POISSON
11
2.1. Définition et propriétés.
DÉFINITION 4. Si J..L est une mesure de Radon positive sur H, un processus
de Poisson N d'intensité J-L sur H est un processus ponctuel sur H vérifiant les
propriétés suivantes :
a) si A est un borélien de H la variable aléatoire N(w, A) est distribuée
suivant une loi de Poisson de paramètre J-L(A), Le. pour k > 0,
IP'(N(w, A) = k) = Jl( )k e-I'(A);
b) si Al, . .. t An sont des boréliens deux à deux disjoints de H, les variables
aléatoires N ( Al), . . . ,N ( An) sont indépendantes.
Pour tout compact K de H, N(K) est une variable aléatoire de Poisson de
paramètre J..L(K) < +00, en particulier P(N(K) E N) = 1 ; un processus de Poisson
est donc nécessairement un processus ponctuel. L'intensité d'un tel processus
ponctuel est bien donnée par la mesure J-L puisque 1E(N(A)) = J..L(A) , la valeur
moyenne d'une loi de Poisson de paramètre J..L(A) vaut J-L(A). La proposition
suivante montre que a) et b) caractérisent complètement la loi d'un processus
de Poisson.
PROPOSITION 1.5. Si N est un processus de Poisson d'intensité J-L sur
H, sa transformée de Laplace est donnée par
(1.2)
.,pNU) = exp ( - J (1 - e- /(0:») Jl(dX)) ,
pour toute fonction f borélienne positive. De plus, N est un processus ponc-
tuel simple si et seulement si J..L est diffuse.
DÉMONSTRATION. Il suffit de considérer les fonctions étagées de la forme
n
f = L Ài1Ai'
1
où les Ài sont des réels positifs et les Ai des boréliens deux à deux disjoints,
JE( exp (-NU))) = JE ( exp ( - ÀiN(Ai)) ) ,
en utilisant la condition d'indépendance b), il vient
n
E( exp (-N(f))) = rr E( exp (-ÀiN(Ai))) ,
1
comme les lois des N(Ai) sont de Poisson d'après a),
n
JE( exp (-N(f))) = rr exp (-Jl(Ai) (1 - e- À ,)) ,
1
12
1. PROCESSUS PONCTUELS
finalement
E(exp(-N(f))) = exp (- tJ.L(A,) (1- e- À '))
= exp ( - ! (1 - e-/(zJ) J.L(dX)) .
Si la mesure J.L charge un point x EH, la masse de N sur x, N ( {x} ), est une
variable de Poisson de paramètre J-L( {x}) > 0, en particulier P(N( {x}) = 2) > 0,
et donc N n'est pas simple.
Réciproquement si J.L est diffuse et K est un compact de H, le lemme 1.3
montre l'existence d'une partition finie de boréliens (An) recouvrant K telle que
J-L(An) < ê. Si X est une variable aléatoire de Poisson de paramètre À,
À k -À 2 À k -À 2
(1.3) IP'(X > 2) = kfe = À (k 2)! e < À 1
k>2 k>O +
- -
on en déduit la majoration
P(N n'est pas simple sur K) < L P(N(An) > 2)
n>l
< L J.L(An)2 < ê L J-L(An) < êJ-L(K),
n>l n>l
- -
en faisant tendre ê vers 0 on obtient
P(N n'est pas simple sur K) = o.
Le processus ponctuel N est donc IP-presque sûrement simple sur K. Si (Kn) est
une suite de compacts qui croît vers H, Le. UnKn = H, comme
P(N n'est pas simple sur Kn) = 0,
pour tout n > 1, en utilisant le théorème de convergence dominée on en déduit
que N est P-presque sûrement simple. 0
La proposition suivante montre que la propriété b) de la définition 4 est,
modulo une hypothèse, caractéristique des processus ponctuels de Poisson.
PROPOSITION 1.6. Un processus ponctuel NP-presque sûrement simple
sur H ayant la propriété d'indépendance suivante :
- pour toute famille Al,. . . ,An de boréliens deux à deux disjoints de
H, les variables aléatoires N (Al), . .. ,N (An) sont indépendantes,
est un processus de Poisson d'intensité J.L si l'intensité J.L de N est une
mesure de Radon diffuse sur H.
DÉMONSTRATION. Si K est un compact de H, la mesure J.L étant diffuse,
pour n > 1, le lemme 1.3 permet de construire une partition finie (Ai) de K de
sous-ensembles dont l'adhérence est compacte, telle que pour tout i,
n B - ( n n ) ( n ) 1 n 1
A C X i ri' J.L Ai < - et ri < -.
n n
2. PROCESSUS DE POISSON
13
En procédant de façon récursive, il est loisible de supposer que tout n, k > 1,
il existe un sous-ensemble Ir de N tel que (A +l; i E Ir) forme une partition de
Ai:. La variable N(K) se décompose de la façon suivante,
(1.4) N(K) = L N(Ai) = L l{N{A?)=l} + L N(Ai)1{N{A ) 2}.
1.
1.
1.
La majoration
N(A )1{N{A ) 2} = 1{N(A ) 2} L N(A;+l)
JEI
> L N{Aj+1}1{N(A;+1)?:2}
J EI;a
montre que la suite
( N{Af}1{N(Af)?:2})
est décroissante. Sa limite est presque sûrement nulle à l'infini, sinon avec pro-
babilité positive il existerait une suite (i n ) telle que A +l C A? et N(A? ) > 2
.n+l.n .n -
pour tout n. Les Ain étant dans des boules de rayon tendant vers 0, la limite
des Ain est donc au plus réduite à un point. Ce point limite éventuel serait de
masse au moins 2 pour le processus ponctuel, ce qui contredit la simplicité de
N. D'où la convergence presque sûre vers O. Comme cette suite est majorée par
la variable intégrable N(K), elle converge aussi dans L 1 vers 0, d'où l'identité
lim 1E ( l{N(An)=l} ) = J1.(K).
n-t+oo L-, ,
t
Comme E(l{N(A )=l}) < E(N(Ai)) = J-L(Ai) < lIn, les variables l{N(A?)=l}
satisfont donc aux hypothèses de la proposition 1.4, on en déduit que
L l{N{A?)=l}
1.
converge vers une loi de Poisson de paramètre J1.(K). L'équation (1.4) montre
que N(K) est une variable de Poisson de paramètre J-L(K).
Si A est un borélien de mesure finie, il existe une suite de compacts KnCA
tel que J.L(A) = lim n -++ oo J-L(Kn). La variable N(Kn) suit une loi de Poisson de
paramètre J.L(Kn), en utilisant sa fonction génératrice il est facile d'en déduire
qu'elle converge en loi vers une loi de Poisson de paramètre J1.(A). Comme la
quantité 1E(IN(A) - N(Kn)1) = J-L(A - Kn) tend vers 0 quand n tend vers l'in-
fini, la variable N(A) - N(Kn) tend vers 0 dans L 1 . La variable N(A) a même
distribution que la limite de la suite (N(K n )), une loi de Poisson de paramètre
J-L(A). 0
Si J.L n'est pas diffuse, la proposition n'est pas vraie, il suffit de considérer le
processus ponctuel trivial N = 00 sur IR qui satisfait évidemment la condition
d'indépendance sans être de Poisson.
14
1. PROCESSUS PONCTUELS
De même si J1. est diffuse mais N n'est pas simple, la proposition n'est pas
vraie non plus : si 1P = En OU n est le processus de Poisson d'intensité J-L/2
(pour l'existence voir la section suivante), alors N = En 20 Un est d'intensité J..L,
satisfait la propriété d'indépendance (parce que 1P la satisfait) mais ce n'est pas
un processus de Poisson (tous les boréliens ont un nombre pair de points).
2.2. Construction d'un processus de Poisson.
LEMME 1.7 (Superposition de processus de Poisson). Si la suite (J..Ln) de
mesures de Radon positives sur H est telle que la somme J..L = En J-Ln soit
aussi de Radon, si (N n ) une suite de processus de Poisson ndépendants
d'intensités respect ves (J-Ln), alors N = En N n est un processus de Poisson
d'intensité J1..
DÉMONSTRATION. Pour n > 1, la transformée de Laplace du processus
ponctuel N 1 + . . . + N n prise en f vaut
exp (- i (1 - e - f( Z)) (J.Ll + . . . + J.Ln)( dx ) )
et par conséquent ce processus ponctuel est de Poisson d'intensité J-L1 + . . . + J..Ln.
Il suffit d'utiliser la proposition 1.2 pour conclure. 0
La proposition suivante montre que l'on peut toujours construire des processus
de Poisson.
PROPOSITION 1.8. Si J..L est une mesure de Radon positive sur H, il existe
un processus ponctuel de Poisson d'intensité J-L.
DÉMONSTRATION. Si J-L une mesure de Radon et A un borélien de H tel
que 0 < J..L( A) < +00, J..LA (dx) est la mesure de probabilité lA (x )J1.( dx) 1 J..L(A) et
(Xi) une suite de variables aléatoires indépendantes de loi J1.A. En prenant v une
variable aléatoire de Poisson de paramètre J-L(A) indépendante des (Xi), NA est
le processus ponctuel sur A défini par
v
NA = LOx,.
=o
Le processus ponctuel NA est un processus de Poisson d'intensité 1A(X)J1.(dx).
En effet, si f est borélienne positive,
JE( e-NA(f)) = L J.L( )n e-Jl(A)JE( e- E: f(X.))
n>O
= L J.L( )n e-Jl(A) ( 1 e-f(z) J.LA(dX» ) n
n>O A
= exp ( - i (1- e-f(Z)) J.L(dX») .
La transformée de Laplace de NA est celle d'un processus de Poisson d'intensité
1 A ( X ) J..L ( dx ) .
2. PROCESSUS DE POISSON
15
L'hypothèse de eT-compacité pour H donne l'existence d'une partition (An)
de boréliens de H telle que 0 < J1.(An) < +00 pour tout n > 1. Il est donc
possible de construire une suite de processus de Poisson indépendants (N A, )
dont les intensités respectives valent lA, (X )J.L( dx). Le lemme précédent montre
que la suite des processus E NA, converge en loi vers un processus de Poisson
d'intensité Ei oo lA, (x)J.L(dx) = J1.(dx). D
La construction précédent donne la propriété classique de conditionnement
des processus de Poisson.
COROLLAIRE 1.9 (Conditionnement sur un ensemble). Si N est un proces-
sus de Poisson d'intensité J1. et A un borélien de H tel que 0 < J1.(A) < +00,
a) le processus ponctuel N restreint à A est un processus de Poisson
d'intensité J-LA = 1A(X)J-L(dx);
b) conditionnellement à {N(A) = n}, n > l, les points du proces-
sus ponctuel N dans A ont la même distribution que n variables
aléatoires indépendantes de loi 1A(x)J.t(dx)/ J.t(A).
DÉMONSTRATION. Les assertions a)et b) découlent de la preuve précédente
en effet la variable N peut être représentée comme la somme de deux processus
de Poisson indépendants à supports disjoints NA + N H -A, NA est le processus
ponctuel N restreint à A. Le processus NA est un processus de Poisson d'in-
tensité 1A(x)J.L(dx), d'où la propriété a). La variable NA se représente de plus
comme E ox" où les (Xi) sont i.i.d. de loi de probabilité 1A(x)J1.(dx)/J.L(A) et
indépendants de v, variable de Poisson de paramètre J1.(A). La loi de N restreint
à A conditionnée à l'événement {N(A) = n} est donc la loi de E OXi' d'où la
propriété b). 0
Un processus de Poisson d'intensité Àdx sur IRP, P > 1 peut se construire
simplement de la façon suivante : des points Xl,... ,X lÀnP J sont lancés uni-
formément sur le pavé [-n/2, n/2)P (avec LaJ, partie entière de a). Le processus
ponctuel N n ainsi obtenu est asymptotiquement de Poisson d'intensité À dx sur
W. En effet, si f est une fonction positive à support compact sur IRP, la trans-
formée de Laplace en f de ce processus ponctuel vaut
"pNn(f) = 1E ( ex p ( _ LI:J !(Xi) ) ) = ( Ip r e-/(z) dX ) LÀnPJ 1
i=l n J[-n/2,n/2]p
en supposant que le support de f soit contenu dans le pavé [-n/2, n/2]P
"pNn(f) = ( 1- r ( 1- e-f(X» ) dX ) LÀnPJ ,
n P J[-n/2,n/2]p
quand n tend vers l'infini ce terme converge vers
exp (-À kp (1- e-/(Z») dX) 1
la transformée de Laplace du processus de Poisson d'intensité À dx prise en f. Le
processus ponctuel N n converge en loi vers un processus de Poisson de paramètre
16
1. PROCESSUS PONCTUELS
À. Ce processus de Poisson peut être vu comme un lancer de points au hasard
sur l'espace IRP .
2.3. Propriétés générales des processus de Poisson. Cette section
donne les propriétés classiques des processus de Poisson généraux.
PROPOSITION 1.10. Si N est un processus de Poisson d'intensité J..L sur
H et A un borélien de H tel que J1.(A) = +00, JP>-presque sûrement, le nombre
de points de N dans A est infini, N(A) = +00.
DÉMONSTRATION. Il existe une suite croissante de compacts Kn C A tels
que J1.(Kn) -t +00 quand n tend vers l'infini. Pour n E N, la variable N(Kn)
suit une loi de Poisson de paramètre J-L(Kn), si pEN,
IP'(N(Kn) = p) = J.L(Kn)P e-j.L(K n ).
p!
et donc limn +oo 1P'(N(Kn) < p) = 0 pour tout P > o. Pour n E N, Kn est un
sous-ensemble de A, la relation 1P'(N(A) < p) < 1P'(N(Kn) < p) donne l'égalité
r(N(A) < p) = 0 pour tout pEN. La variable N(A) est r-p.s. infinie. 0
EXEMPLES.
1. Pour H = IR et J1.( dx) = À dx, les points de N peuvent être représentés par une
suite doublement infinie (t n ) telle que limn _oo t n = -00 et limn +oo t n =
+00.
2. Si J1.(dx) = dx/x2 sur H =]0, +00[, le processus de Poisson associé a presque
sûrement un nombre fini de points sur l'intervalle ]a, +00] pour a > 0 et une
infinité de points s'accumulent en o.
PROPOSITION 1.11 (Marquage). Si N = L: 6u n est un processus de Pois-
son d'intensité J..t sur H et (X n ) une suite de variables aléatoires à valeurs
dans un espace localement compact u-compact G, i.i.d. indépendantes de
N de loi v, alors
Nx = L 6(u n ,X n )
est un processus de Poisson sur H x G d'intensité J1. v.
DÉMONSTRATION. Si f : H x G -t ll4 est continue à support compact, la
transformée de Laplace du processus ponctuel N x en f est donnée par
lE ( exp ( - L f(u n . X n ))) = lE (lE ( exp ( - L f(u n . X n )) 1 N) ) .
en notant "lN" le conditionnement par rapport à la tribu engendrée par le
processus ponctuel. La propriété d'indépendance des suites (un) et (X n ) entraîne
l'identité
(1.5) lE (ex p ( - L f(u n . X n )))
= lE ( lE ( Q exp ( - J f(u n . y)) v(dy) 1 N ) ) .
2. PROCESSUS DE POISSON
17
Si pour x E H, h(x) est définie par
e-h(z) = / e-f(z,y) v(dy),
comme {un} est un processus de Poisson d'intensité J-L, l'égalité (1.5) peut se
réécrire de la façon suivante
JE( exp (- Lh(un»)) = exp (- /(1- e-h(Z»JL(dX»)
= exp ( - / (1 - e-f(z,y» J.L(dx) V(d Y ») ,
d'où la proposition.
o
PROPOSITION 1.12 (Image d'un processus de Poisson). Si N est un pro-
cessus de Poisson sur H d'intensité J-L, 4J une application mesurable de
H dans un espace métrique localement compact G, et s la mesure jjq, sur
G, image de J..L par 4J, est de Radon sur G, le processus ponctuel Nq, sur G
image de N par 4J est un processus de Poisson d'intensité J..tq,.
DÉMONSTRATION. En prenant une fonction f continue à support compact
sur G, si N = EnEZ oU n ' alors N 0 4J = EnEZ Oq,( Un)' par conséquent,
JE ( exp (-Nq;(f») = JE ( exp (-N(f 04>») =
exp (- / (1 - e- fOq;(Z») J.L(dX») = exp ( - / (1 - e- I(Z») J.Lq;( dX») ,
la proposition est démontrée. 0
PROPOSITION 1.13. Si N = En OU n est un processus de Poisson d'inten-
sité J1. sur H et (X n ) une suite de variables aléatoires i. i. d. à valeurs dans
un espace métrique localement compact u-compact G, indépendantes de N
et de loi v, les propriétés suivantes sont satisfaites,
a) effacement: si A est un borélien de G,
NA = L l{X n EA}Ou n
n
est un processus de Poisson sur H d'intensité v(A)J..L;
b) translation (Dobrushin) : Si H = G = IRP , P > 1 et
T X (N) = L OUn+X n ,
n
et la convolution J1. * v est de Radon sur IRP, le processus ponctuel
T X (N) est un processus de Poisson dont l'intensité vaut J..L * v.
En particulier si N a pour intensité la mesure de Lebesgue À dx,
le processus T X (N) est encore un processus de Poisson d'intensité
Àdx.
18
1. PROCESSUS PONCTUELS
DÉMONSTRATION. La proposition 1.11 montre que le processus ponctuel
M = {un, Xn} est de Poisson d'intensité J.I. Il. En utilisant la définition de
la propriété de Poisson, il est facile de montrer que le processus N A possède la
propriété d'indépendance pour le nombre de points dans des ensembles boréliens
deux à deux disjoints. Le nombre de points de NA dans un borélien B de H est
le nombre de points de M dans B x A, cette variable suit donc une loi de Poisson
de paramètre J1.(B)II(A), d'où a).
La proposition 1.12 et la mesurabilité de l'application (u, x) -t u+x donnent
aisément la première partie de b). Pour terminer il suffit de remarquer que la me-
sure de Lebesgue est invariante par convolution avec une mesure de probabilité,
en effet pour f continue à support compact, on a l'égalité
r J(x + y) dx v(dy) = r J(x) dx v(dy)
JRPxRP JRPXRP
= r J(x) dx v(JRP) = r J(x) dx,
JRP JRP
donc À dx * Il = À dx, ce qui achève la démonstration de la proposition. 0
COROLLAIRE 1.14. La loi du processus de Poisson sur IRP d'intensité
À dx est invariante par la translation, i.e. pour t E W, En Oun+t est aussi
un processus de Poisson d'intensité À dx.
2.4. Conditionnement au voisinage de o. Dans cette partie M = {un}
est un processus de Poisson d'intensité À dx sur IRP et (X n ) une suite de va-
riables i.i.d. de loi Il sur G localement compact u-compact, indépendante de M.
La proposition 1.11 montre que N = {(un, X n )} est un processus de Poisson
d'intensité À dx Il. En notant B(O, ë) la boule de centre 0 et de rayon ë,
B (0, ë) = {x = (Xi) E IRP /1 Xi 1 < ë, = 1, . .. ,p},
si A est un borélien de IRP et f une fonction intégrable sur W, N(A) désigne
par abus de notation N (A x G) et
r J(x) N(dx) = r J(x) N(dx, dy).
JA JAXG
La proposition suivante concerne le comportement de N conditionné à avoir
un point au voisinage de l'origine. Elle montre en particulier que le condition-
nement d'un processus de Poisson à avoir un point en 0 ne change pas la loi du
processus ponctuel en dehors de O.
PROPOSITION 1.15. Si N est un processus ponctuel de Poisson sur W x G
d'intensité Àdx lI(dy), la loi de N sachant {N(B(O, ë)) -:1 O} converge vers la
loi de Fi + oo,x quand ë tend vers 0 ; Fi est un processus de Poisson de même
loi que N et X est une variable aléatoire de loi 1I( dx) qui est indépendante
-
de N.
DÉMONSTRATION. Pour montrer ce résultat le critère de la proposition 1.2
en terme de transformée de Laplace est utilisé. Si f est une fonction positive
2. PROCESSUS DE POISSON
19
continue à support compact sur IR x G,
JE( exp (- J J(X)N(dX)) N(B(O,e)) -::J 0) =
lE ( exp ( - r J(x) N(dx) - r J(x) N(dX) ) N(B(O, ë)) :1 0 ) ,
JRP-B(O,e) } B(O,£)
comme le processus de Poisson N restreint IRP - B (0, ë) est indépendant de la
restriction de N à B(O, ë), ce terme vaut
(1.6) JE ( exp ( - J J(x) N(dX)) N(B(O, e)) -::J 0) =
JE (ex p ( - Lp-B(O,e) J(x) N(dX)) )
x lE ( exp ( - r . J(x) N(dX) ) N(B(O, ë)) :1 0 ) .
} B(O,e)
Si t 1 = inf{x > OjN(B(O, x)) :1 O} et X est la variable telle que (t 1 , X)
soit un point de N, alors X est une variable de loi v et indépendante de t l .
L'inégalité (1.3) utilisée une nouvelle fois donne la relation
1E ( ex p ( - r J(x) N(dX) ) 1{N(B(0,e»#0}
} B(O,e)
- exp (- J(t1' X)) 1{N(B(o,e»=1}) < JP(N(B(O, e)) > 2) < À 2 e 2p .
Comme P(N(B(O, ë)) f:. 0) = 1-exp( -Àë P ) '" Àë P , l'inégalité précédente montre
qu'il suffit d'étudier le comportement asymptotique de
JE ( exp (- J(t 1 . X)) 1{N(B(o,e»=1}) _ JE ( exp (- J(t 1 . X)) l{tl <e} )
IP(N(B(O, ë)) :1 0) IP(t 1 < ë)
Pour t > 0, P(t 1 > t) = P(N(B(O, t) = 0) = exp( -Àt P ), ÀpuP-1e-ÀUP est la
densité de t I , cette dernière quantité vaut
le Àpup-1e-ÀUPJE ( exp (- J(u, X))) du / (1 - exp (-Àe P ))
e P
= 1 Àe-ÀUJE ( exp ( - J(u 1 / P , X))) du / (1- exp (-Àe P ))
= Àë P 1 l eP e-ÀUJE ( exp ( -J(U1/P,X) )) du.
1-exp(-Àë P )ë P °
En utilisant la continuité de J, quand ë tends vers 0, ce dernier terme converge
vers exp (- 1(0, X)). Du théorème de convergence dominée on déduit donc la
20
1. PROCESSUS PONCTUELS
convergence
limE ( ex p ( - r f(X)N(dX) ) N(B(O,ë));fi 0 ) = E ( eXP(-f(O,X))).
e O J B(O,e)
En reprenant la relation (1.6), il vient
! E ( exp (- ! f(x) N(dX)) N(B(O, e)) 1= 0)
= E ( exp ( - ! f(x) N(dX)) ) E ( exp (- f(O, X))) ,
et ce dernier terme vaut
E ( exp (- ! f(x) (N(dx) + 6(o,x)) ) ) ,
d'où la proposition.
D
3. Processus de Poisson sur la droite réelle
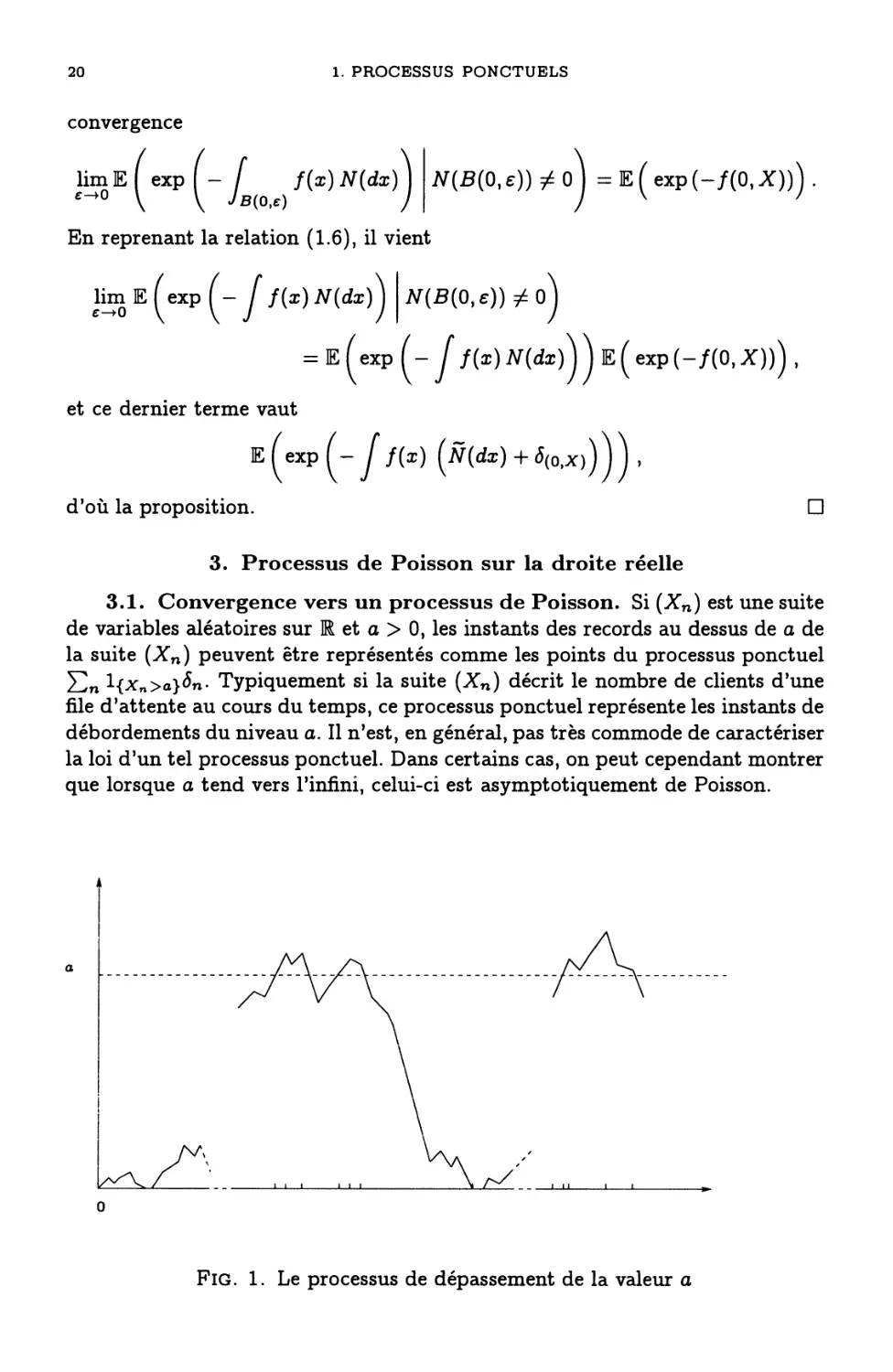
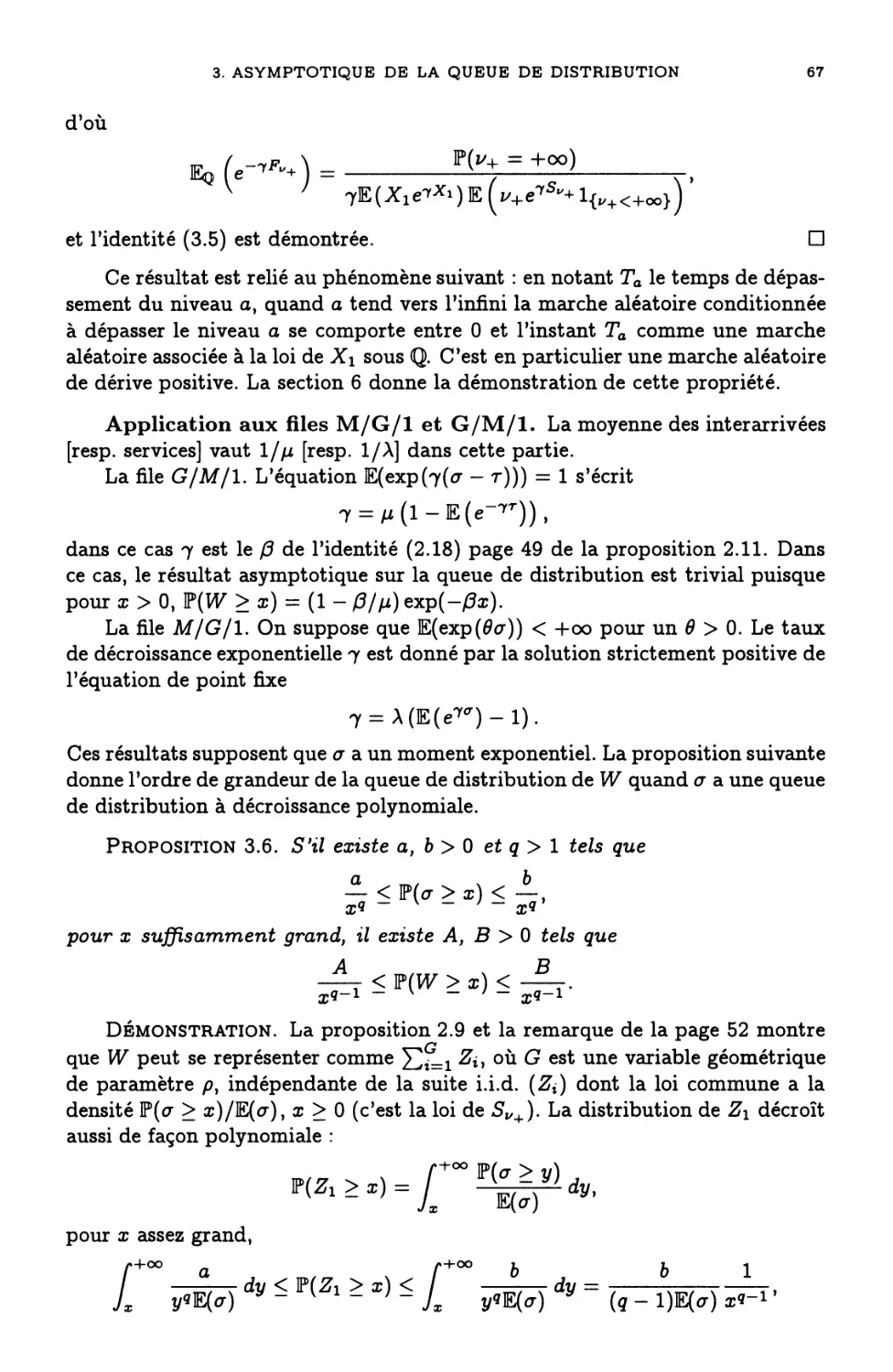
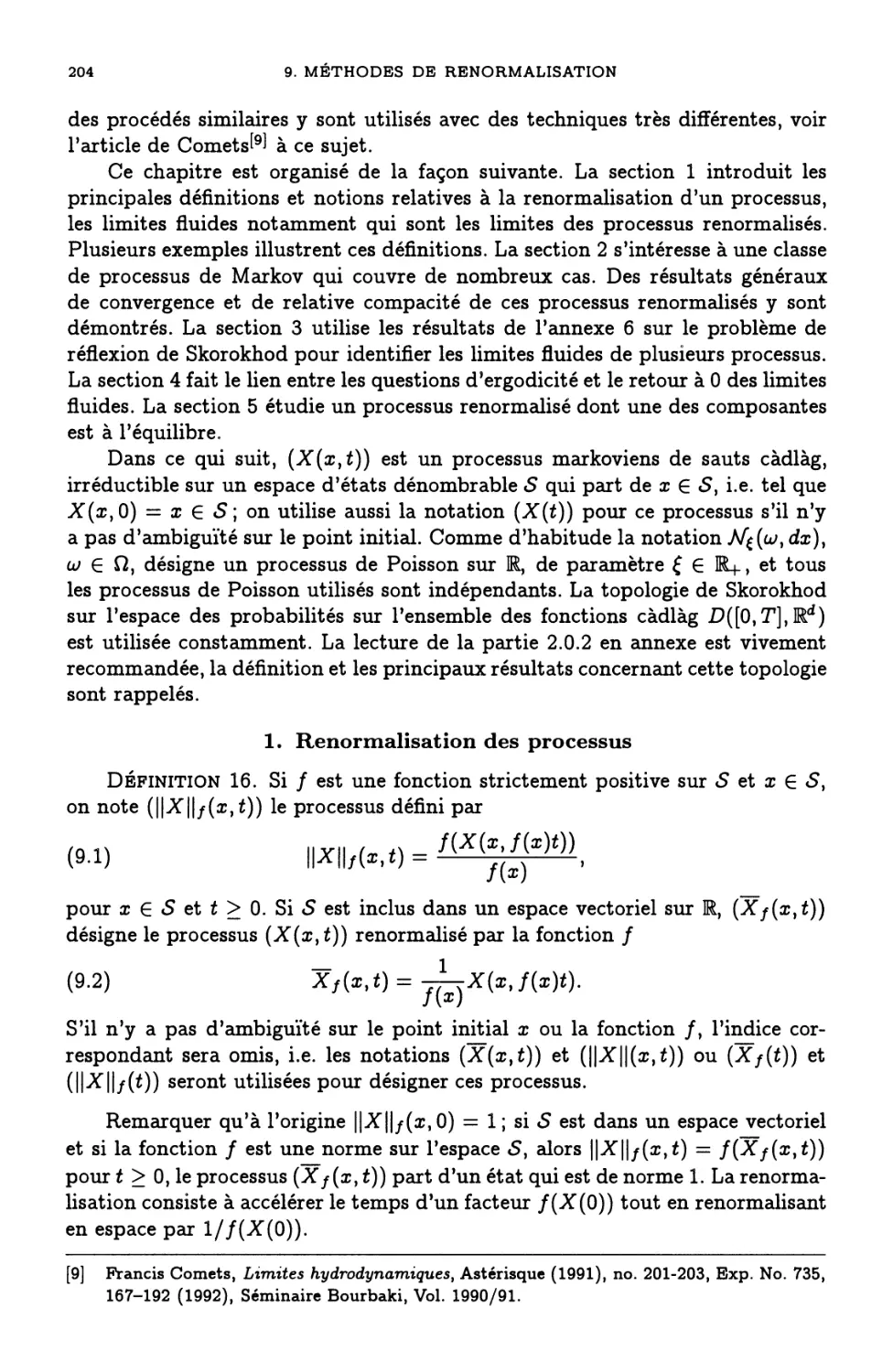
3.1. Convergence vers un processus de Poisson. Si (X n ) est une suite
de variables aléatoires sur IR et a > 0, les instants des records au dessus de a de
la suite (X n ) peuvent être représentés comme les points du processus ponctuel
Ln l{X n >a}On. Typiquement si la suite (X n ) décrit le nombre de clients d'une
file d'attente au cours du temps, ce processus ponctuel représente les instants de
débordements du niveau a. Il n'est, en général, pas très commode de caractériser
la loi d'un tel processus ponctuel. Dans certains cas, on peut cependant montrer
que lorsque a tend vers l'infini, celui-ci est asymptotiquement de Poisson.
i
a
--------------------- ----------
i
i
k /'\ __
1 1
\
rJ ':: '"
.
1 1 1
o
FIG. 1. Le processus de dépassement de la valeur a
3. PROCESSUS DE POISSON SUR LA DROITE RÉELLE
21
Le cas simple où les variables (X n ) sont i.i.d. donne une idée du type de
résultat qui peut être obtenu. La proposition suivante est dans une certaine
mesure l'analogue de la proposition 1.4 pour les processus ponctuels.
PROPOSITION 1.16. S'il existe a et À > 0 tels que
lim exp(aa)r(X o > a) = À,
a---++oo
quand a tend vers l'infini le processus ponctuel
Na = L 1{Xn>a}6nexp(-aa)
n
converge en loi vers un processus ponctuel de Poisson de paramètre À.
DÉMONSTRATION. Si f est une fonction continue à support compact sur IR,
la transformée de Laplace en f du processus ponctuel vaut
E ( exp (- !(ne-<>4)l{X" 4}) )
= Il (1 -IP'(X o > a)(l - exp (- !(ne-<>4»)) ) ,
n
par indépendance et équidistribution des (X n ). En utilisant encore l'identité
élémentaire
Ilog(l- x) +xl < x 2 , 0 < x < 1/2,
si a est assez grand, on en déduit l'inégalité
L log (1 -IP'(X o > a) (1 - exp (- !(ne-<>4») ))
n
+ L IP'(X o > a) (1 - exp (- !(ne-<>4» )
n
< IP'(X o > a)2 L ( 1 - exp (_ !(ne-<>4» ) 2 ;
n
comme r(X o > a) t'V À exp( -aa), ce dernier terme est équivalent à une somme
de Riemann, et par conséquent à
À 2 e-<>4/ (1 _ e-!(X») 2 dx,
et donc converge vers 0 quand a tend vers l'infini, de même
4 OO L IP'(X o > a) (1 - exp (- !(ne-<>4» ) = À / (1 - e-!(X») dx.
n
La transformée de Laplace en f du processus ponctuel N n converge vers
exp ( -À /(1- e-!eX»dX) 1
22
1. PROCESSUS PONCTUELS
d'où la convergence de la suite (N n ) vers un processus de Poisson d'intensité
À. 0
Dans la proposition précédente la convergence poissonnienne est obtenue
essentiellement grâce à l'hypothèse réductrice d'indépendance des variables que
l'on somme. En pratique cette hypothèse niest bien sûr pas vraie, néanmoins la
convergence reste plausible; voir le livre d'Aldous [1] consacré à ce sujet. Sous
certaines hypothèses techniques de mélange (indépendance asymptotique), il est
possible de montrer cette convergence (voir Leadbetter [31]).
Une convergence poissonnienne de ce type est montrée pour les processus
décrivant le nombre de clients des files M/M/1 et MIM/oo dans les chapitres 5
et 6 respectivement.
3.2. Processus de Poisson marqué sur 1R.
DÉFINITION 5. On appelle processus de Poisson marqué sur 1R, un processus
de Poisson dont l'intensité est de la forme À dx lI(dy) sur IR x H où Il est une
mesure de probabilité sur un espace localement compact a-compact H.
D'après la proposition 1.11, un processus de Poisson marqué sur IR peut
être représenté comme {(t nJ X n )} où {t n } est un processus de Poisson sur IR
d'intensité À dx et (X n ) une suite i.i.d. de loi Il, indépendante des t n , nEZ.
Les variables X n marquent les t n . Dans toute la suite N = {(t nJ X n )} est un
processus de Poisson marqué, avec la convention de numérotation
. . . < t- 1 < ta < 0 < t 1 < . .. .
Par abus de notation, si A est borélien de IR, N(A) désignera N(A x H).
La première coordonnée (t n ) de ce processus peut être înterprétée comme une
composante temporelle. Il est naturel de définir la filtration associée (Ft) : pour
t E IR Ft est la tribu engendrée par les variables aléatoires N(A x U), où A est
un borélien de ] - 00, t] et U est un borélien de HJ ou encore
Ft = a (N(]a,b] x U)la,b < t, U E B(H)).
PROPOSITION 1.17. Si N est un processus ponctuel de Poisson marqué
sur 1R et T un temps d'arrêt presque sûrement fini, le processus ponctuel
translaté de T (N(]T, T + t])) est indépendant de FT et a même loi que
(N(]O, t])).
Le processus (N(]O, t])) est la mesure de comptage associée à N, les sauts
de hauteur 1 de ce processus croissant à valeurs entières ont lieu aux points
du processus N. Il est équivalent de se donner la mesure de comptage ou le
processus ponctuel.
DÉMONSTRATION. Si F(1R.t-, IR) désigne l'espace des fonctions mesurables
de 1R.t- dans 1R muni de la topologie de la convergence simple et de la tribu
borélienne associée. En notant N(]T, T +. ]) = (N(]T, T +t])) il suffit de montrer
que l'identité
E(f(N(]T, T +. ])) 1 :FT) = E (f(N(]O, 0 + . ]))) ,
3. PROCESSUS DE POISSON SUR LA DROITE RÉELLE
23
est p.s. vraie pour toute fonctionnelle f mesurable bornée sur F(II4, IR) ne
dépendant que d'un nombre fini de coordonnées à valeurs entières. En effet, ceci
entraîne d'abord l'indépendance de (N(]T, T + .])) et de FT, l'espérance condi-
tionnelle étant constante, et ensuite que les lois de (N(]T, T + .])) et (N(]O, .]))
sont identiques.
En remarquant que puisque N(]a, a + x]) --+ N(]b, b + x]) quand a '\, b, si f
est une fonction ne dépendant que d'un nombre fini de variables entières, pour
ai: = k/2", k > 0, n > 1,
lim f(N(]ai:, ai: + . ]))l { a n <T<an } = f(N]T, T + . ]),
n-++oo L....-, Ie-l - le
kEZ
et donc
( 1.7)
lim 1E ( f(N(]ai:,ai: +. ]))l { a n <T<an } 1 FT )
n-++oo L....-, Ie-l - le
kEZ
= 1E ( f ( N (] T, T + . ])) 1 FT),
d'après le théorème de convergence dominée.
La propriété de temps d'arrêt de T montre que l'ensemble {T E]a k _ 1 , a k ]}
est Fan-mesurable pour k, n E N, d'où l'égalité
le
lE ( f(N(]ai:, ai: + . ]})l{TE]a;:_l.am 1 FT)
= lE (1E(f(N(]ai: ,ai: + . ]}) 1 Fa;: }l{TE]a;:_l.am 1 FT ) .
La propriété de Poisson d'indépendance entre les événements avant ai: et ceux
après ai: donne l'égalité
lE (f(N(]ai:, ai: + . ]}) 1 Fa;:) = lE (f(N(]ai:, ai: + · ]})) ,
ce dernier terme vaut IE(f(N(]O,O + . ]))) d'après l'invariance par translation
du corollaire 1.14. En remarquant que l'événement {T E]a k _ 1 , ai:]} est FT-
mesurable, on obtient l'identité
lE ( f(N(]ai:, ai: + . ]))l{TE]a;:_l.am 1 FT) = lE (f(N(]O, 0 + . ]))) l{TE]a;:_l.a;:n,
en sommant cette dernière identité et en utilisant la relation (1.7), il vient
lE (f(N(]T. T + . ])) 1 FT) = lE (f(N(]O. 0 + . ]))) l{T<+oo} .
Le théorème est démontré.
D
PROPOSITION 1.18. Pour tout n > 1, t n est un temps d'arrêt, les va-
riables -to, t 1 , t n + 1 - t n , n i= 0 sont indépendantes et équidistribuées de loi
exponentielle de paramètre À.
DÉMONSTRATION. Comme IP(t 1 > t) = IP(N(]O, t]) = 0) = exp( -Àt), la
variable t 1 suit donc une loi exponentielle de paramètre À.
L'égalité {t n < t} = {N(]O, t]) > n} E Ft montre la propriété de temps
d'arrêt de la variable t n . Le processus (N(]t n , t n + t])) est indépendant de la
tribu Ft n et de même loi que (N(]O, t])) d'après la proposition 1.17; en particulier
24
1. PROCESSUS PONCTUELS
t n + 1 - t n , la coordonnée du premier point positif de (N(]t n , t n + t])), suit une
loi exponentielle de paramètre À et est indépendante des tk - tk-l, 2 < k < n.
Les variables t n + 1 - t n , n > 0 et t 1 sont donc i.i.d. exponentielles de paramètre
À, et indépendantes des variables (t n + 1 - t n ; n < 0) et -ta.
Il est facile, via la transformée de Laplace, de montrer que le processus ponc-
tuel {-t n } est aussi un processus de Poisson d'intensité À dx. Par conséquent
les variables (t n + 1 - t n ; n < 0) et -ta sont donc aussi i.i.d. de distribution
exponentielle de paramètre À. 0
Pour n E N, l'identité {N([O, t]) = n} = {t n < t < t n + 1 } et l'indépendance
de t n et t n + 1 - t n donnent la relation
(Àt)n e-),t = 1 +00 lP' ( t < t < t + X ) Àe-),:Z: dx
1 n_ n ,
n. a
d'où, en utilisant le théorème de Fubini,
(Àt)n ( )'t ) i t),:z:
, = JE e n l{t n <t} = e hn(x) dx,
n. a
où h n est la densité sur Il4 de la variable t n . En dérivant la relation précédente
par rapport à t, il vient
(Àx )n-1
hn(x) = À (n _ 1)! e->':z:.
COROLLAIRE 1.19. Si T est un temps d'arrêt et t 1 (T) est la distance
entre T et le premier point de N après T, t 1 (T) = inf{t n - T/t n > T}, alors
t 1 (T) est indépendant de FT et suit une loi exponentielle de paramètre À.
La proposition suivante résume les principales propriétés de N en tant que
processus stochastique.
PROPOSITION 1.20. Si F est un borélien de H, le processus
(M(t)) = (N(]O, t] x F) - Àv(F)t)
est un processus à accroissements indépendants, en particulier c'est une
(Ft)-martingale et un processus ayant la propriété de Markov jorte. Le
processus croissant de cette martingale vaut (ÀZI( F)t).
DÉMONSTRATION. Si s < t,
N(]O, t] x F) = N(]O, s] x F) + N(]s, s + t] x F),
la propriété de Poisson assure l'indépendance de N(]s, s + t] x F) et Fs, ainsi
JE(N(]O,t] x F) - Àv(F)tl Fs) = N(]O,s] x F) - Àv(F)s,
d'où la propriété de martingale. Pour le processus croissant, la démonstration est
similaire. En utilisant la propriété d'indépendance il est facile d'établir l'égalité
JE (M(t + s)21 Fs) = M(S)2 + Àv(F)t,
pour s, t positifs; Le processus (M(t)2 - ÀZI(F)t) est donc une martingale et
par conséquent (Àv(F)t) est le processus croissant de (M(t)). La propriété de
Markov forte est une conséquence directe de la proposition 1.17. 0
4. PROCESSUS PONCTUELS DE RENOUVELLEMENT
25
PROPOSITION 1.21. Si N est un processus de Poisson marqué sur 114 x H
d'intensité À dt v( dy) et f une fonction mesurable de H dans 114 telle que
la quantité IH f(y)211(dy) soit finie, alors le processus
( r f(y) (N(ds,dy) ->'V(d Y )) )
J]O,t] x H
est une martingale de carré intégrable dont le processus croissant est donné
par
(>,t ln f(y)2 V (d Y ))
DÉMONSTRATION. La propriété de martingale se montre de la même façon
que précédemment, c'est une conséquence de la propriété d'indépendance des
processus de Poisson. Il ne reste qu'à calculer la variance.
Si f est la fonction indicatrice d'un ensemble mesurable, le résultat est celui
qui vient d'être démontré dans la proposition précédente. Si f = a lA +(3lB où A
et B sont deux ensembles mesurables disjoints de H, la propriété d'indépendance
des processus de Poisson montre que les variables aléatoires
ex r lA (y) ( N(ds, dy) - >'V(dY)) et {3 r lB(Y) ( N(ds, dy) - >'V(dY))
J]O,t] x H J]O,t] x H
sont indépendantes et de moyenne nulle, par conséquent
1E ( r f(y) (N(ds,dY) _ >'V(dY)) ) 2
J]O,t] x H
=a 2 1E ( r lA(Y) (N(dS,d Y )_>,V(d y )) ) 2
J]O,t] x H
+{321E ( r lB(Y) (N(ds,dY) _ >'V(d Y )) ) 2
J]O,t] x H
= >, t (ex 2 v(A) + {32v(B)) = >,t ln f(y)2 v(dy).
En généralisant, on en déduit que l'identité précédente est vraie pour toutes les
fonctions mesurables étagées. Pour conclure il suffit d'approximer une fonction
mesurable positive f par de telles fonctions. D
4. Processus ponctuels de renouvellement
Un processus de Poisson sur II4 d'intensité À est une suite croissante de
points dont les espacements forment une suite i.i.d. de variables aléatoires ex-
ponentielles de paramètre À. Dans cette partie ce schéma de construction d'un
processus ponctuel sur 114 est étendu au cas où les espacements forment une suite
i.i.d. (Ti; i E Z) quelconque, TO est une variable positive telle que IE( TO) < +00.
26
1. PROCESSUS PONCTUELS
Dans toute cette partie la suite (Ti) est fixée. Le résultat suivant relie la conver-
gence en distribution des processus ponctuels et la convergence en loi des ac-
croissements.
PROPOSITION 1.22. Si (N n ) = ({t;:; k > O}) est une suite de processus
ponctuels sur ll4 telle que
- t'ô = 0 pour tout n EN;
- pour n E N, la suite de variables aléatoires posit1.ves (t k + 1 - ti:) est
1,. i. d. ;
- la variable ti - ta = ti converge en lo1. vers t 1 quand n tend vers
l'infini;
si (tk+ 1 - tk) est une suite i. i. d. de même loi que t 1 , le processus ponctuel
N n converge en distribution vers N = {tk} quand n tend vers l'infini.
DÉMONSTRATION. Le critère de convergence donné par la proposition 1.2
est utilisé. Si f est une fonction continue positive à support dans [0, K] il faut
prouver l'égalité
lim E(exp(-Nn(f))) = Hm E ( exp ( -" f(ti:) ))
n + n +
= IE ( exp ( - L f{tn»)) = IE( exp (-NU))).
Pour ê > 0, comme la suite (tk) converge en probabilité vers l'infini, il existe
ka > 0 tel que IP (tko < K) < ê et il existe A tel que si n > A,
IIP(ti: o < K) - IP(tko < K)I < ê.
En prenant n > A,
lIE ( exp ( - L f(ti:») ) - IE ( exp ( - L f(tk») ) 1
< lIE (exp ( - L f{ti:») l{t o>K}) - IE ( exp ( - L f(t k ») l{t k o >K}) 1
+ IP(tko < K) + IP(ti: o < K),
le premier terme du membre de droite converge vers 0 quand n tend vers l'infini
puisque les distributions finies (ti:; k < ka) convergent en distribution et, la
fonction f étant nulle en dehors de l'intervalle [0, K], les variables sous le signe
espérance ne dépendent que de ces marginales finies. Les deux autres termes du
membre droit sont majorés par 3ê. La proposition est démontrée. 0
DÉFINITION 6. Si x > 0, le processus ponctuel NX = {t } est défini par
- ti = x ;
- t + 1 = t + T n, pour n > o.
Le processus N X est le processus de renouvellement associé à la suite ('Tn)
dont le premier point est en x. Pour t > 0, Tt N X désigne le processus ponctuel
NX translaté de t, i.e. Tt NX = {t - t} et NX(B n. ) la restriction du processus
ponctuel NX à un borélien B.
4. PROCESSUS PONCTUELS DE RENOUVELLEMENT
27
PROPOSITION 1.23. Si F est une variable aléatoire indépendante de la
suite (Ti) dont la distribution a pour densité IP( TO > x) /IE( TO) sur ll4 i. e.
(1.8 )
IP'(F E A) = i IP'( T )X) dx,
pour tout borélien A de 114, le processus ponctuel N = NF sur ll4 associé
à cette variable F est invariant par les translations positives, i. e. pour tout
t > 0, les processus ponctuels Tt N = {t - t} et {t } = N ont même
distribution sur ll4 .
DÉMONSTRATION. Pour simplifier les notations, l'exposant F dans {t } est
omis dans cette preuve. On pose lit = N([O, t]) + 1, si f et 9 sont des fonctions
boréliennes positives sur ]R et ]RN respectivement, par définition de la variable
lit, on al' égalité
JE (f(t". - t)g«t".+k+1 - t".+k))) = L JE (1{t n _ ' 9<t n }f(t n - t)9«Tn+k))) .
n>l
Pour n E N, la variable t n ne dépendant que des Ti, i < n, on en déduit que la
quantité précédenten vaut
JE (g«Tn+k))) L JE ( 1{t n - 1 9<t n }f(tn - t)) = JE (g«Tk))) JE (f(t", - t)) .
n>l
La suite (t llt +k+1 -tllt+k) = (Tllt+k) est i.i.d. de même loi que (Tk) et indépendante
de tilt - t. Le processus ponctuel N translaté de t restreint à ll4 vaut {tilt +k -
t; k > O}. Pour montrer que ce processus ponctuel a même loi que N, il suffit
donc de prouver que la distribution du premier point tilt -t est celle de la variable
F ou encore que
( ) - def 1 - r( ç)
(1.9) JE exp(-ç(t", -t)) = F(ç) = JE (exp (-çF)) = ÇJE(TO) 1
pour tout ç > 0, avec r(ç) = 1E(exp(-çTo)). Le membre de gauche étant une
fonction de t bornée par 1, si on montre que
(1.10) 1+ 00 JE ( exp (-ç(t", - t))) exp (-zt) dt
= r+ oo JE( exp (-çF)) exp (-zt) dt = !JE( exp (-çF)) 1
Jo Z
pour tout z > 0, par unicité de la transformée de Laplace d'une fonction réelle
on en déduira la relation voulue.
28
1. PROCESSUS PONCTUELS
En découpant la droite réelle suivant les points de N, avec la convention
ta = 0, on obtient les égalités
r+ CXJ
Jo lE ( exp (-Ht ll . - t))) exp (-zt) dt
( l tn+l )
= JE L exp (- (tn+1 - t)) exp (-zt) dt
n>a t n
= JE ( L e- ztn exp (-Ht n +l - tn) = xp (-Z(t n + 1 - t n )) )
n>a
en séparant le premier terme de la somme et en utilisant les hypothèses d'indé-
pendance, il vient
r+ CXJ
Jo lE ( exp (-Ht ll . - t)) ) exp (-zt) dt
=: F(€) - F(z) L F - ( ) - ( ) n-l T(€) - T(Z)
è + ZTZ è'
Z- Z-
n>l
et comme F(€) = (1- T(€))/(€1E(Ta)),
r+ CXJ
Jo lE ( exp (-ç(t ll . - t))) exp (-zt) dt
1 ( l-T(€) 1-T(Z) ) T( )-T(Z) 1-T( )
= Z - € €E( Ta) - zE( Ta ) + (z - €)zIE( Ta) = z€E( Ta) ,
d'où la relation (1.10) et par conséquent l'invariance de N par les translations
positives. D
4.1. Exemples.
Processus de Poisson. Si Ta est une variable aléatoire exponentielle de
paramètre À, la variable F définie par (1.8) est aussi une variable exponentielle
de paramètre À. Le processus N a donc même distribution que Na, c'est un
processus de Poisson d'intensité À sur Il4. La proposition 1.13 montre aussi
l'invariance de ce processus par les translations positives.
Processus déterministe. Si Ta est constante égale à D, la distribution de la
variable F correspondante est
1
P(F E dx) = D l{a :z: D} dx,
i.e. F est uniformément distribuée sur [0, D]. Le processus ponctuel N associé
est {F + nD}.
L'espérance de la variable F est donnée par
r+ CXJ P( Ta > x) 1 ( rTQ ) E( T6 )
IE( F) = Jo x IE( TO ) dx = IE( TO ) lE Jo x dx = 2 JE( TO) ,
4. PROCESSUS PONCTUELS DE RENOUVELLEMENT
29
en utilisant le théorème de Fubini pour la première égalité. La variable F a un
premier moment si et seulement si Ta est de carré intégrable. Le premier point de
N est donc situé très loin si T5 n'est pas intégrable (voir le chapitre Il, page 283
pour une discussion de ce phénomène).
DÉFINITION 7. Une probabilité J1. sur IR n'est pas latticielle s'il n'existe pas
de fJ > 0 tel que J-L(fJZ) = 1.
Une probabilité J-L sur IR est étalée s'il existe na E N tel que la mesure J-L*no a
une composante non triviale par rapport à la mesure de Lebesgue, Le. s'il existe
une fonction borélienne positive non triviale h telle que
no
J1.*no (f) = 1 f(X1 + . . . + Xno) TI J1.( dXi) > 1 f(x )h(x) dx,
1
pour toute fonction borélienne positive f.
PROPOSITION 1.24. Si la variable Ta a une distribution non latticielle,
en notant, pour x > 0, Si le premier point de N X après t,
S = inf{u > t/NX([t, u]) i= O} = inf{t /t > t},
la variable positive Si - t converge en distribution vers la distribution de
densité x -t IP( Ta > x) 11E( Ta) sur , quand t tend vers l'infini.
DÉMONSTRATION. La preuve classique de ce résultat repose sur le théorème
de renouvellement. Voir Durrett [16] par exemple. 0
Les résultats qui suivent concernent principalement la convergence en loi des
processus de renouvellement translatés de t quand t tend vers l'infini. Dans
ce qui suit N désigne le processus ponctuel NF invariant par les translations
positives (Proposition 1.23).
4.2. Couplage. Sous les hypothèses de la proposition précédente, la coor-
donnée du premier point de Tt N X converge en distribution vers celle du premier
point de N. Le théorème ci-dessous donne un résultat plus fort: il est possible de
construire un espace de probabilité où les processus ponctuels Tt NX ( n . ) et
TtN( n . ) sont identiques pour t suffisamment grand (le processus ponctuel
TtN( n . ) a même loi que N d'après la proposition 1.23).
THÉORÈME 1.25 (Couplage d'un processus de renouvellement). Si la loi de
la variable Ta est étalée, pour x > 0, il existe un espace de probabilité sur
lequel les processus TtNX( n . ) et TtN( n. ) couplent: il existe une
variable H IP-presque sûrement finie telle que si t > H,
TtNX( n.) = TtN( n.).
DÉMONSTRATION. Voir Asmussen [2], Théorème 2.3, page 146.
D
3a
1. PROCESSUS PONCTUELS
Le cas des variables latticielles. Si la variable Ta est à valeurs dans N* et
x E N, le processus de renouvellement associé NX ne charge que l'ensemble
N. Le processus N correspondant est défini par N = NF, avec JP>( F = n) =
JI» ( Ta > n) lIE( Ta ), pour n > 1. Il est facile de vérifier que N est aussi invariant par
les translations entières. La proposition ci-dessous est donc la version latticielle
du théorème précédent.
PROPOSITION 1.26. Si Ta est une variable aléatoire non nulle à valeurs
entières telle que JI» ( Ta E kN) < 1 pour tout kEN, et si pour x E N les proces-
sus ponctuels NX et N sont des processus de renouvellement indépendants
associés à la variable Ta, la variable H = inf{k/NX({k}) =.N"({k}) = 1} est
JI» -presque sûrement finie.
DÉMONSTRATION. Voir Lindvall [32].
D
4.3. Propriétés de mélange. Les théorèmes précédents permettent de
montrer, modulo une hypothèse sur le support de Tl, que le processus ponctuel
NX vu depuis le point t converge en distribution vers le processus ponctuel N.
PROPOSITION 1.27. Si la distribution de la variable Ta n'est pas latti-
ciel le, pour x > 0 le processus ponctuel Tt NX (I14 n . ) converge en distribu-
tion vers le processus de renouvellement N quand t tend vers l'infini.
De plus, si la distribution de Ta est étalée, pour n E N, quand t tend
vers l'infini, le vecteur
( Ta, . . . ,T n, Tt N X (I14 n . ))
converge vers (T , . . . ,T , N) au sens de la convergence en distribution; les
variables (TI, i = 0, . . . n) sont i. i. d. de même loi que Ta et indépendantes de
N.
DÉMONSTRATION. Avec les notations de la preuve de la proposition 1.23
et de la proposition 1.24, si lit = NX([O, t]) + lIe terme t t vaut S: et la suite
(t t+k+l - t t+k) a même loi que la suite i.i.d. (Ti) et est indépendante de t t.
Par conséquent le théorème 1.24 montre que la suite (t t+n+1 - t t+n) des espa-
cements du processus ponctuel NX converge en distribution vers (t +l - t ), la
suite des espacements du processus de renouvellement stationnaire. La proposi-
tion 1.22 montre donc la convergence des processus ponctuels correspondants,
d'où la première partie de la proposition.
La deuxième partie se montre en utilisant la même méthode que précédem-
ment, il suffit d'établir la convergence en distribution de (Ta,... ,Tn, S: - t)
vers (T ,... ,T , F) où F est une variable aléatoire indépendante des variables
T , . .. ,T dont la loi est donnée par la relation (1.8). Il est facile de vérifier que
Z(t) = (S: - t) est un processus de Markov de probabilité invariante F et ayant
la propriété de couplage d'après le théorème 1.25. Ce processus de Markov est
ergodique (d'après la proposition 3.13 de [2]) et mélangeant (Théorème 16.1.5
de [33]), i.e. si K > 0, g est une fonction mesurable bornée sur lR.t- et f est une
fonctionnelle mesurable bornée sur les fonctions de Il4 dans IR ne dépendant
4. PROCESSUS PONCTUELS DE RENOUVELLEMENT
31
que des coordonnées plus petites que K,
lim E(f( Z)g( Z(t)) ) = 1E(f( Z) )E(g(F)).
t---++oo
Ceci suffit à établir notre assertion. En effet, si f est une fonction mesurable
bornée sur }Rn , on déduit de la convergence précédente la relation
tE oo E(f(ro,... ,rn)l{tn K}g(Z(t))) = E(f(ro,... ,rn)l{tn K})1E(g(F)).
Pour E > 0 il existe K tel que IP(t n > K) < E et no tel que si n > no,
lE (f( ro,. .. ,rn)l{tn K}g(Z(t))) -E(f( ro,. . . ,rn)l{tn K})1E(g(F)) 1 < E,
on en déduit l'inégalité
IE(f(ro,... ,rn)g(Z(t))) -1E(f(ro,... ,rn))E(g(F))1 < (1 + 21lflloollglloo) E,
ce qui achève la démonstration de la proposition. D
CHAPITRE 2
La file GI/GI/l FIFO et le maximum d'une
marche aléatoire
Sommaire
1. Résultats généraux sur la file GI/GI/1 FIFO
2. Factorisation de Wiener-Hopf
3. Application à la file GI/GI/l
3.1. Les cycles d'occupation
3.2. Le nombre de clients
3.3. La charge de la file d'attente
3.4. Représentations de la loi de W
4. Les files d'attente GI/M/1 et M/GI/1
4.1. La file GI/M/1
4.2. La file M/GI/1
5. La file d'attente Hl/GJ1
6. Une preuve probabiliste de la factorisation
33
37
41
43
44
45
45
46
49
51
53
55
Cette file d'attente a un processus d'arrivée qui est de renouvellement, les
services des clients sont des variables i.i.d. et le service se fait dans l'ordre des
arrivées. On s'intéresse dans ce chapitre aux propriétés asymptotiques de cette
file d'attente: lois à l'équilibre du temps d'attente, du nombre de clients ou
encore de la charge de la file. Le cadre naturelle de cette étude est celui des
marches aléatoires.
1. Résultats généraux sur la file GI/GI/1 FIFO
Les clients arrivent aux instants t n , n E N et le client d'indice n requiert le
service Un. Les suites des interarrivées (Tn) = (t n + 1 - t n ) des clients à la file
d'attente et de leurs services (un) sont supposées être i.i.d. et indépendantes;
Tn est la durée entre les arrivées des clients d'indice n et n - 1. Les arrivées
multiples sont exclues et donc IP( Ta > 0) = 1. Sous cette hypothèse, le processus
ponctuel d'arrivée est donc un processus de renouvellement. La charge de la file
sera notée
E(u)
p = = ÀE(u).
JE( T)
Pour n > 0 W n est le temps d'attente du n-ième client quand le client d'indice
o attend la quantité w. À l'instant t n + W n + Un le n-ième client quitte la file
34
2. LA FILE GI /GI /1 FIFO
d'attente, l'instant de début de service du n + 1-ième client, t n +1 + W n + 1 est
donc égal à max(t n +1' t n + W n + un). La suite (W n ) vérifie donc la relation
suivante,
(2.1)
W o = W, W n = (W n - 1 + Un - Tn)+,
quand n > 1, avec a+ = max(O, a) pour a E nt
En posant X n = Un - Tn, (Sn) désigne la suite des sommes partielles as-
sociées, pour n > 1,
n
Sn = L:Xk
k=l
et So = o. La tribu engendrée par les variables aléatoires U1, . .. ,Un et Tl, . . . ,Tn
est notée 1= n .
Le calcul explicite de la loi de la suite (W n ) et celle de son éventuelle li-
mite est le principal sujet d'étude de ce chapitre. Le premier résultat concerne
l'existence de cette limite. Un résultat similaire est montré dans un cadre plus
général (voir la proposition 12.3 dans le chapitre consacré à la file G 1 G Il).
PROPOSITION 2.1.
1. Si p < 1, (W n ) est une chaîne de Markov ergodique. Cette suite
converge en loi vers une unique variable W telle que
(2.2) W lOI (W + Xo)+,
avec W et Xo = 0'0 - To indépendants. De plus IF(W = 0) > 0 et W a
même loi que le maximum de la marche aléatoire associée à (X n ),
loi
W = supSn.
n>O
2. Si p > 1, la chaîne de Markov est transiente et IF-presque sûrement,
lim Wnln = JE(u) - JE(T).
n-t+CX>
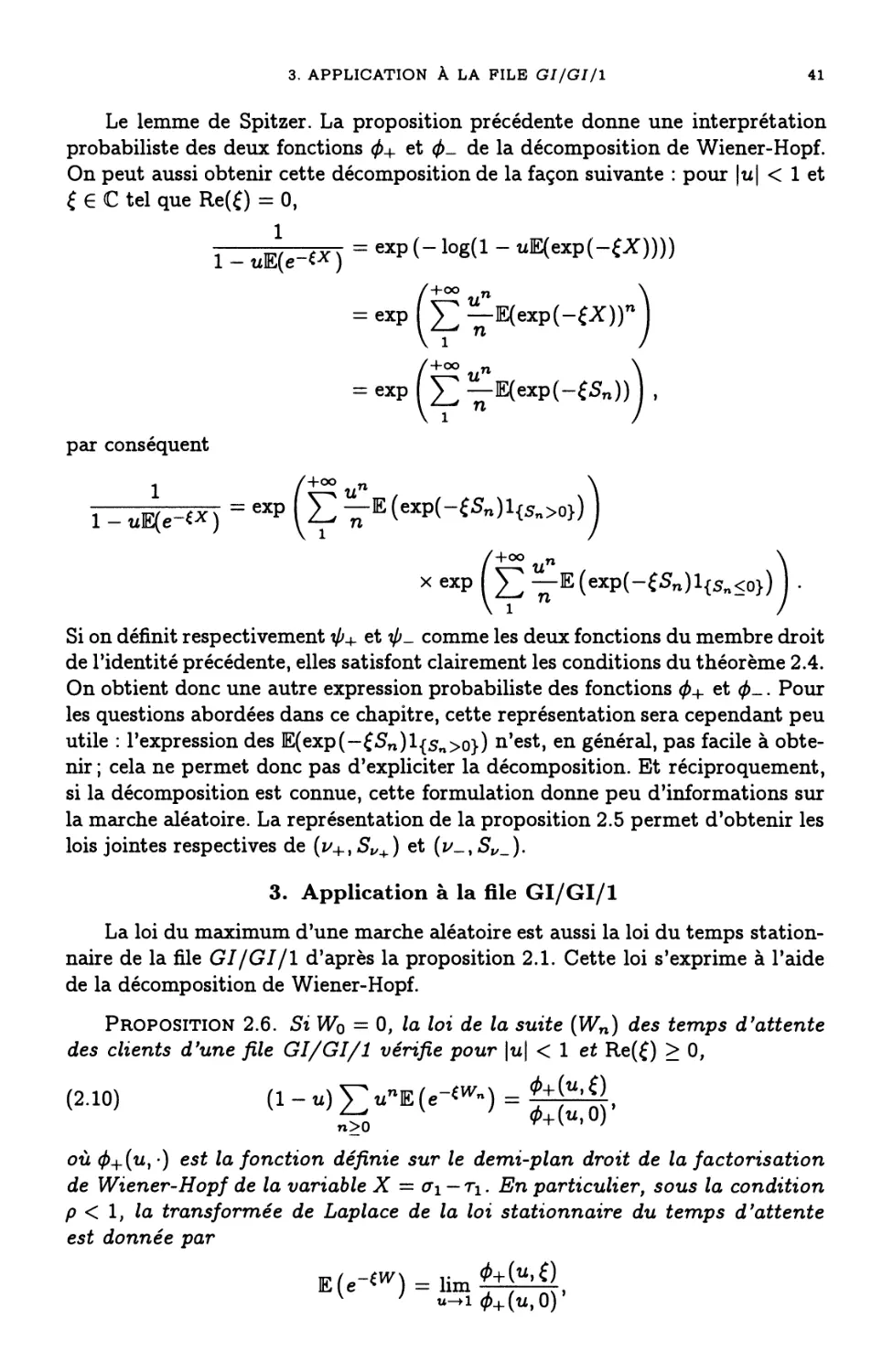
DÉMONSTRATION. Par récurrence sur la relation (2.1),
W n = (W n - 1 + Xn)+,
il est clair que (X n , W n - 1 ) sont des variables indépendantes et donc que (W n ) a
la propriété de Markov. En itérant (2.1), l'identité suivante s'obtient facilement
par récurrence,
W n = sup ( t Xi ) V ( w + tXi ) .
2 k n+1 7,=k i=l
Si JE(u - T) < 0, la loi des grands nombres montre que L =l Xiln converge p.s.
vers la moyenne de Xl, E(u - T) < o. En particulier, IF-presque sûrement, la
quantité
(2.3)
n
W + Sn = W + L: Xi
7,=1
1. RÉSULTATS GÉNÉRAUX SUR LA FILE GI IGI Il FIFO
35
tend vers -00 et donc ne contribue plus à la borne supérieure (2.3) à partir d'un
certain rang; IF-presque sûrement la variable W n ne dépend plus de w pour n
suffisamment grand.
Les hypothèses d'indépendance et d'équidistribution des suites de variables
(O"i) et (Ti) donnent l'identité
( loi ( )
Xl, X 2 , . .. t X n ) = X n , Xn-1' . . . ,Xl ,
la relation (2.3) permet d'obtenir l'égalité
(2.4)
loi ( )
W n = SUp Sk V w + Sn .
0<k<n-1
La suite (W n ) converge donc en loi vers sup{Snln > O} qui est fini IF-p.s. puisque
la marche aléatoire converge p.s. vers -00. La chaîne de Markov (W n ) a donc une
probabilité invariante et toutes ces trajectoires se rejoignent indépendamment
du point initial. La proposition 3.13 de [2] assure que (W n ) est une chaîne de
Markov ergodique. L'équation (2.2) est l'équation de mesure invariante de cette
chaîne de Markov. Si IF(W = 0) = 0, l'équation (2.2) peut s'écrire
W loi W + X o ,
en prenant la transformée de Fourier, on obtient lE( exp(€X)) = 1 pour Re(€) = 0,
soit X = 0, IF-p.s. d'après l'unicité de la transformée de Fourier, donc lE(X) = 0
ou encore p = 1, contradiction. La partie a) est montrée.
Si p > 1, l'identité (2.3) montre que W n > w + L Xi, en utilisant encore
la loi des grands nombres, IF-p.s.
liminf W n > lE(cr) -lE(r) > O.
n---++oo n
En particulier, IF-p.s. W n > 0 à partir d'un certain rang (aléatoire) no, en som-
mant la relation (2.1) entre no et n, il vient pour n > no
n
W n = W no + LX"
no+1
d'où la dernière assertion de la proposition.
o
Si p < 1 et G(x) = IF(W < x), l'équation ci-dessous est la version analytique
de (2.2)
( ) { G(X) = 0, x < 0,
2.5 G(x) = J oo G(x - y)X(dy), x > 0,
où X(dy) est la distribution de Xo = 0"0 - Ta. Une technique d'analyse com-
plexe peut être utilisée pour résoudre les équations (2.5), voir par exemple
Gakhov [23]. Ce type d'approche présente toutefois l'inconvénient de perdre
l'interprétation probabiliste de (2.5). Une technique de marches aléatoires sera
introduite pour traiter cette équation.
Le cas critique p = 1 n'est pas pris en considération dans la proposi-
tion précédente. Dans le cas où les services et les interarrivées sont i.i.d. et
indépendants, la proposition ci-dessous montre que cette file d'attente est en fait
36
2. LA FILE GI /GI /1 FIFO
instable, pourvu que les variables (1 ou T ne soient pas constantes. La différence
avec le cas p > 1 réside dans le taux d'explosion de la file: quand p > 1, le
temps d'attente du n-ième client croît linéairement en n; dans le cas critique,
la croissance est seulement de l'ordre de vn,.
PROPOSITION 2.2 (File GI IGI /1 : le cas critique). Si p = 1 et si les va-
riables 0'0 et Ta sont de carré intégrable et s l'une des deux variables est
non dégénérée, la suite (W n / vn,) converge en loi vers la valeur absolue
d'une variable gaussienne centrée de même variance que (10 - Ta.
DÉMONSTRATION. On suppose W o = 0, la démonstration dans le cas général
est similaire. La relation (2.4) montre que W n + 1 a même loi que
V n = sup Sk.
O<k<n
Si TJ = y lE(((1o - TO)2), pour n > 0 on définit la fonction continue Yn(t) sur [0,1]
valant Skl(TJvn,) au point k/n pour k = 0,. . . , n et linéaire entre ces points,
1
Yn(t) = (SLntJ + (nt - LntJ)Xl nt J+1),
TJv n
t E [0, 1],
où ltJ désigne la partie entière de t. Les maxima de la fonction t-tYn(t) sont
nécessairement atteints aux points kln, k = 0, . .. ,n, on en déduit l'égalité
V n )
c = sup Y n (s .
TJv n 0 5 1
Le théorème de Donsker , voir Billingsley [5] par exemple, établit la convergence
en distribution de la suite des processus ((Yn(t))) vers un mouvement brownien
(B(t)). Si C[O, 1] est l'espace des fonctions continues sur [0,1] muni de la norme
uniforme, la fonctionnelle
g --7 sup g(s),
0<5<1
est continue sur C[O, 1]. Par conséquent, pour toute fonction 1 continue bornée
sur IR, la fonctionnelle
g 4 1 ( SUp g(s) ) ,
0<5<1
est continue bornée sur C[O, 1], ainsi
lim JE ( 1 ( sup Yn(s) ) ) = 1E ( 1 ( sup B(S) ) ) .
n-t+oo 0<5<1 0<5<1
- - - -
La variable sUPO<5<1 Yn(s) converge en loi vers sUPO<5<1 B(s), qui a même
loi que IB(l)l, vOir-Rogers et Williams [44] par exemple. La proposition est
démontrée. D
2. FACTORISATION DE WIENER-HOPF
37
2. Factorisation de Wiener-Hopf
Cette section est consacrée à un résultat classique de marche aléatoire qui
permet d'exprimer la loi stationnaire du temps d'attente. L'approche probabi-
liste exposée ici est due à Feller, nous suivons principalement la présentation due
à Neveu[30]. Comme précédemment, pour n > 0 Sn désigne la somme partielle
Xl + . . . + X n des variables i.i.d. (Xi)'
Le petit lemme élémentaire suivant traduit la propriété de Markov forte
d'une marche aléatoire.
LEMME 2.3. Si v:O -t Nu {+oo} est un temps d'arrêt relativement à la
filtration (Fn) tel que IP(v < +00) > 0, sachant l'événement {v < +oo}, la
su te (Sv+n - Sv) est indépendante du couple (Sv, v) et a même loi que la
marche aléatoire initiale (Sn)'
DÉMONSTRATION. En effet si pEN et f et g sont deux fonctions boréliennes
positives définies respectivement sur les ensembles IR N et IR,
IE (f( (Sv+n - Sv) )g(Sv) l{v=p}) = 1E (f( (Sp+n - Sp) )g(Sp) l{v=p}) .
La variable g(Sp)l{v=p} est Fp-mesurable et f((Sp+n - Sp)) ne dépend que des
variable X k d'indice k > p + 1 ; l'indépendance des (X n ) donne l'égalité
1E (f((Sv+n - Sv))g(Sv)l{v=p}) = IE(f((Sn))) IE(g(Sv )l{v=p}),
et donc le lemme.
o
THÉORÈME 2.4 (Factorisation de Wiener-Hopf). Pour u E C tel que 11.£1 <
1, il existe un unique couple de fonctions (ifJ+ (1.£, .), ifJ- (u, .)) vérifiant les
conditions suivantes
a) pour € E C tel que Re(€) = 0,
1
(2.6) 1 _ ulE( e- X) = 4>+ (u, ç)4>- (u, ç);
b) les fonctions ifJ+ (1.£, .) et ifJ- (1.£, .) sont respectivement holomorphes
dans le demi-plan droit {Re(€) > O} et dans le demi-plan gauche
{Re( ) < O} et continues bornées ainsi que leur inverse dans la fer-
meture de ce domaine; de plus,
lim ifJ+(u,€) = 1.
Re( )-++oo
DÉMONSTRATION. La variable v_ désigne le temps d'atteinte du demi-axe
négatif, v _ = inf {k > OIS k < O}, avec la convention inf 0 = + 00. Il est clair que
v_ est un temps d'arrêt relativement à la filtration (Fn).
[30] Jacques Neveu, Files d'attente, 1983-1984, Cours de troisième cyle, Laboratoire de Pro-
babilités de PU niversité de Paris VI.
38
2. LA FILE GI /GI /1 FIFO
Pour E C tel que Re( ) = 0, l'indépendance et l'équidistribution des (X n )
donnent l'identité
1E ( Une- S" ) = "un (E(e- X))n = 1 1
1- u1E(e- X)
n>O n>O
- -
en séparant les 11_ premiers termes de la somme précédente, il vient
1E ( 2: une- S" ) = lE ( 2: une- S" )
n O O n<v_
+ lE ( uv-e- Sv- 2: une- (S"+v_-SV_» ) .
n>O
Si 11_ = +00, la variable u v - e- sv- est bien entendu nulle (lui < 1). Le
lemme 2.3 montre que, conditionnellement à l'événement {II_ < +oo}, les va-
riables (11_ t Sv_) et la suite (Sn+v_ - Sv_) sont indépendantes et (Sn+v_ - Sv_)
a même loi que (Sn), Le dernier terme de l'égalité précédente vaut donc
lE ( u"-e- S,,- ) lE ( 2: une- S" ) ,
n>O
on obtient ainsi
(2.7)
1
1 - u1E( e- xo )
lE (L:o n<lI_ une- Sn )
1 - lE ( 1.£11- e - S,,_ )
En posant
1
<1>- (u, ) = ( ) ,
1 - lE u v - e- sv-
pour Re( ) < 0, comme Sv_ < 0 et 11_ > 1, il est clair que
o < 1 - 11.£1 < Il - lE ( 1.£"- e - S,,_ ) 1 < 1 + 11.£1;
la fonction rP- (u, .) et son inverse sont par conséquent continues bornées sur le
demi-plan {Re( ) < O} et holomorphes sur {Re( ) < O}.
L'équation (2.7) suggère de poser
rP+(u, ) = 1E ( 2: une-{S" ) ,
O n<v_
par définition de 11_ cette fonction s'exprime comme
Â\ ( u t ) - 1E ( une- s" 1 )
'1'+ , - {SI >0,... ,S"-1 >o,Sn>O} .
n>O
2. FACTORISATION DE WIENER-HOPF
39
Il reste à montrer que 4>+ possède les bonnes propriétés sur {Re( ) > O}. Le
vecteur (Xl, X 2 ,... ,X n ) ayant même loi que (X n , Xn-1'.' . ,Xl), on a l'égalité
( 8 1 ) loi ( 8 1 ) .
n, {Sl>O,... ,Sn-l>O,Sn>O} - n, {Sn>Sl,Sn>Sn-b... ,Sn>O} ,
la fonction 4>+ ( U, .) peut donc s'écrire comme
A. ( u t ) = 1E ( une- Sn 1 )
'f'+ , {Sn>Sn-l,... ,Sn>SbSn>O} .
n>O
Si 11+ désigne le premier temps de record de la marche aléatoire (Sn),
11+ = inf{k > OISk > Sk-1,... ,Sk > Sl, Sk > Sa = O},
la condition initiale Sa = 0 entraîne que 11+ est aussi le temps d'atteinte du
demi-plan strictement positif 11+= inf{k > 01 Sk > O}. La fonction 4>+ peut donc
se découper de la façon suivante,
(2.8) 4>+ (u, €) =
1 + 1E ( ulI+e- Sv+ un-lI+e- (Sn-sv+)l )
{Sn>Sn-l,... ,Sn>Sl,Sn>O} .
n lI+
La somme dans l'équation (2.8) porte sur tous les instants où la marche aléatoire
atteint un record. Pour n > 11+, l'inégalité Sn > 811+ entraîne Sn > Sk pour tout
k < 11+ ; les instants de records de la marche aléatoire (Sn) après l'instant n = 11+
sont donc aussi les instants de records associés à la marche aléatoire translatée
(Sn+lI+ - SII+)' d'où
4>+(u,€) = 1 + lE ( ulI+e- Sv+ L: un-lI+e- (Sn-sv+)
n lI+
l{Sn -s,,+ >Sn-l-S,,+ ,... ,Sn -S,,+ >S"++1 -S,,+ ,Sn -S,,+ >O} ) .
En utilisant à nouveau le lemme 2.3, il vient
A. ( u t ) - 1 + 1E ( ull+e- SV+ ) 1E ( une- Sn 1 )
'f'+ , - {Sn>Sn-b... ,Sn>Sl ,Sn>O}
n>O
= 1 + E ( u"+e-£S"+ ) 4>+(u, ).
La représentation de 4>+ (u, .) est donc analogue à celle de 4>- (u, '),
1
4>+ ( u, €) = ( ) ,
1 - lE u ll + e - sv+
en particulier cette fonction et son inverse sont holomorphes sur {Re( ) > O} et
continues bornées sur {Re( ) > O}. Comme SII+ > 0 si 11+ < +00, on en déduit
lim 4>+ ( u, ) = 1.
Re( )--++oo
40
2. LA FILE GI IGI /1 FIFO
La preuve de l'existence de deux fonctions vérifiant les conditions a) et b) est
donc achevée.
Unicité. Si (1/J+, 1/J-) est un couple de fonctions vérifiant a) et b), la rela-
tion (2.6) donne pour 11.£1 < 1 et Re( ) = 0,
1/J+ (1.£, ) <P- (1.£, )
<p+(u,ç) -1/J-(u,ç).
La fonction H définie par
H(Ü = t/J+(u,ç) , si Re(Ü > 0 et H(ç) = 4>-(u,ç) 1
<p+ (1.£, €) 1/J- (u, €)
si Re( ) < 0, est holomorphe sur C - {Re( ) = O} et continue sur C, donc holo-
morphe sur C tout entier (en utilisant le théorème de Morera par exemple, voir
Rudin [45] par exemple). Cette fonction étant bornée, le théorème de Liouville
montre que H est une fonction constante, or
lim H(€)= lim t/J+(u,ç) =1,
Re( ) +oo Re( ) +oo <p+ (u, )
ainsi H - 1, soit 1/J+ = <p+ et 1/J- = <p-. La démonstration du théorème est
terminée. D
Dans la preuve du théorème précédent la proposition suivante a été montrée au
passage.
PROPOSITION 2.5. Pour lui < 1, les fonctions <p+ (u, .) et <p- (u, .) de la
décomposition du théorème précédent s expriment sous la forme
4>+(u,ç)= 1 -€S =IE ( L une- sn ) ,
1 - IE ( u lI + e v+ )
O n<lI_
pour Re( ) > 0, et
1
4>- (u, Ç) = 1 _ IE( U V - e-€S,,- ) 1
pour Re( ) < 0, avec
11+ = inf{k > 01 Sk > O} et 11_ = inf{k > 01 Sk < O}.
Par conséquent, pour lui < 1 et Re( ) = 0,
111
(2.9) 1 - ulE(e-€X1 ) = 1 -lE(uv+ e-€S,,+) x 1 -1E(uv- e-€S,,-) .
La décomposition qui a été obtenue en <p+ et <p- ou encore en 11+ et 11_
n'est pas complètement symétrique. Les instants où la marche atteint 0 ont été
associés arbitrairement au "-" de la décomposition, ce qui entraîne que SII_ < 0
si 11_ est fini et SII+ > 0 si 11+ est fini, d'où la condition
lim <p+( u, ) = 1.
Re( ) +oo
Cette différence n'intervient pas si la loi de X ne charge pas les points; dans ce
cas la décomposition est symétrique.
3. APPLICATION À LA FILE GI /GI /1
41
Le lemme de Spitzer. La proposition précédente donne une interprétation
probabiliste des deux fonctions + et 4J- de la décomposition de Wiener-Hopf.
On peut aussi obtenir cette décomposition de la façon suivante: pour lui < 1 et
E C tel que Re( ) = 0,
1
1 _ uE(e-£X) = exp (-log(1 - uE(exp( - X))))
( +00 n )
= exp : E(exp( - X)t
( +00 n )
= exp : E(exp( - Sn)) 1
par conséquent
1 ( +00 un )
1- uE(e-£X) = exp -;;:-E(exp(- Sn)1{Sn>O})
( +00 n )
X exp : E(exp(- Sn)1{Sn O}) .
Si on définit respectivement 1/J+ et 1/J- comme les deux fonctions du membre droit
de l'identité précédente, elles satisfont clairement les conditions du théorème 2.4.
On obtient donc une autre expression probabiliste des fonctions + et _. Pour
les questions abordées dans ce chapitre, cette représentation sera cependant peu
utile: l'expression des lE{exp( - 8n)1{Sn>O}) n'est, en général, pas facile à obte-
nir; cela ne permet donc pas d'expliciter la décomposition. Et réciproquement,
si la décomposition est connue, cette formulation donne peu d'informations sur
la marche aléatoire. La représentation de la proposition 2.5 permet d'obtenir les
lois jointes respectives de (v+, 8 11 +) et (v_, 8 11 _).
3. Application à la file GI/GI/l
La loi du maximum d'une marche aléatoire est aussi la loi du temps station-
naire de la file G I / G III d'après la proposition 2.1. Cette loi s'exprime à l'aide
de la décomposition de Wiener-Hopf.
PROPOSITION 2.6. 8i W o = 0, la loi de la suite (W n ) des temps d'attente
des clients d'une file GI/GI/l vérifie pour lui < 1 et Re( ) > 0,
(2.10) (1- u):L unE (e-£W n ) = <p+(u. ) 1
n>O +(u,O)
où + (u, .) est la fonction définie sur le demi-plan droit de la factorisation
de Wiener-Hopf de la variable X = 0'1 - Tl, En particulier, sous la condition
p < l, la transformée de Laplace de la loi stationnaire du temps d'attente
est donnée par
E(e-£W) = lim <P+(U, ) 1
u-+1 + (u, 0)
42
2. LA FILE GI /GI /1 FIFO
pour Re(€) > o.
DÉMONSTRATION. La suite (W n ) définie par (2.1) est une fonctionnelle de
la marche aléatoire (Sn), On décompose de la même façon que dans la preuve
précédente,
(2.11)
2: une- Wn = 2: une- Wn + u ll -2: une- wv_+n.
n>O O n<lI_ n O
Pour n < v_, par définition de v_, Sk > 0 pour tout k < n, et d'après la
relation (2.1)
W o = 0 = So, W 1 = (X 1 )+ = Sl, W 2 = (Sl + X 2 )+ = S2,. . . ,
W n = (Sn-1 + Xn)+ = Sn,
pour n < v_ ; de plus
W II _ = (SII_-1 + X II _)+ = (SII_)+ = 0,
le client d'indice v_ est le premier client après 0 à ne pas attendre. Le premier
terme du membre de droite de l'égalité (2.11) peut s'écrire
2: une- Sn.
O n<lI_
La suite (W II _+ n ) vérifie W II _ = 0 et pour n > 0,
W II _+ n + 1 = (W II _+ n + X II _+ n + 1 )+,
qui n'est autre que la relation (2.1) pour la suite translatée (X II _+ n ). La suite
(W II _+ n ) est donc la suite (W n ) associée à (X II _+ n ). Le lemme 2.3 montre que
(W II _+ n ) a même loi que (W n ) et est indépendant de v. En prenant l'espérance
de l'identité (2.11), il vient
lE ( 2: une- wn ) = lE ( 2: une- sn ) + lE(u ll -)1E ( 2: une- wn ) ,
n O o n<lI_ n O
par conséquent
JE ( 2: une- wn )
n>O
lE ( L:o n<v_ une-£Sn )
1 - IE( u 11_ )
La représentation de l/J+ de la proposition 2.5 donne
1 -lE(u ll -)
l/J+ (u, 0) = 1 '
-u
et donc l'égalité (2.10).
Sous l'hypothèse p < 1, d'après la proposition 2.1, la suite (W n ) converge en loi
vers W, soit
lim lE(e- Wn) = lE(e- w),
n +oo
3. APPLICATION À LA FILE GI /GI /1
43
pour tout tel que Re( ) > 0; il est facile d'en déduire la relation suivante,
lim(l - u) u n 1E(e-€W n ) = 1E(e-€w),
u--+1
n>O
la proposition est établie.
D
a
t
Sv_
FIG. 1. Les suites (W n ) et (Sn) interpolées
La proposition 2.6 permet donc, moyennant la connaissance de la factorisation
de Wiener-Hopf associée à U - T, de déterminer la loi du temps d'attente sta-
tionnaire. D'autres caractéristiques de la file d'attente s'expriment aussi par ce
biais.
3.1. Les cycles d'occupation. Au cours de la preuve de la proposition 2.5
il a été montré que si v_ est fini, v_ est l'indice du premier client après 0
qui n'attend pas. La variable t v _ est par conséquent la durée du premier cycle
d'occupation de la file d'attente et à t = t v _ un nouveau cycle d'occupation
commence. La charge totale traitée pendant cette première période vaut E - O'i
et la quantité -Sv_ = t v _ - E - O'i n'est autre que le temps de liberté du serveur
pendant le premier cycle d'occupation.
Sous l'hypothèse p < 1, les périodes d'occupation sont JP>-presque sûrement
finies. Le deuxième cycle d'occupation est une fonction de la suite (u n + v +, T n + v +)
qui est indépendante de la suite finie (unI\V_' TnI\V_) d'après le lemme 2.3. Les
cycles d'occupation sont donc indépendants et équidistribués. De la proposi-
tion 2.5 on déduit le résultat suivant.
PROPOSITION 2.7. Sous la condition p < 1 la transformée de Laplace de
la durée 1 d'une période de vacances est donnée par
1E ( -€I ) - 1 . 1
e - u 1 - 4>- (u, _€) 1
44
2. LA FILE CI JCI /1 FIFO
pour Re(ç) > 0, et la fonction génératrice du nombre de clients sèrvis pen-
dant une période d'occupation par
( 11_ ) 1
Eu =1- 4> ( )"
_ u,O
3.2. Le nombre de clientse Si p < 1 et le temps d'attente W o du client
o suit la loi du temps d'attente stationnaire W, la relation
W loi (W + Xo)+
montre que pour tout n E N, le temps d'attente W n du n-ième client a même loi
que W. La variable Qn désigne le nombre de clients à l'arrivée du n-ième client.
Si le n-ième client trouve au moins k clients dans la file d'attente à son arrivée,
comme la discipline de service est FIFO, le client arrivé à tn-k n'est donc pas
encore parti, ainsi
JP>(Qn > k) = JP>(tn-k + W n - k + O'n-k+1 > t n )
= JP> ( Wn-k + U n -k+l - 1"n-k+l > t 1"0 ) ;
=n-k+2
les variables W n - k , O'n-k+1, (Ti), n-k + l < i < n étant indépendantes, on en
déduit l'égalité
IP( Qn > k) = IP ( W o + ua - 1"0 > 1"i) .
Si k > 2, la variable tk-1 = 2: :- 1 1 T'I, est JP>-p.s. strictement positive, par consé-
quent
JP>(Qn > k) = JP> ((W o + Xo)+ > tk-1) = JP>(W > tk-1),
d'après la relation (2.2). L'égalité précédente montre que la variable Qn converge
en loi quand n tend vers l'infini, d'où l'identité
JP>(Q > k) = JP>(W > tk-1)
où Q est la loi asymptotique des (Qn); cette relation est aussi vraie pour k = 1
puisque {Q > 1} = {W > O}.
PROPOSITION 2.8. Sous la condition p < l, si Q est le nombre de clients
à l'arrivée d'un client dans la file d'attente à l'équilibre, pour k > l,
(2.12)
JP>( Q > k) = JP>(W > tk-1),
où t k - 1 est la somme de k-1 variables indépendantes de même loi que TO
et West une variable aléatoire indépendante de tk-1 ayant la loi du temps
d'attente stationnaire.
La distribution de la loi du temps d'attente à l'équilibre donne la distribution
du nombre de clients que trouve un client à son arrivée.
3. APPLICATION À LA FILE GI IGI Il
45
3.3. La charge de la file d'attente. La charge V(t) de la file d'attente
à l'instant t est la somme des services restant à effectuer par le serveur à cet
instant. C'est aussi le temps qu»il faudrait attendre pour que la file se vide s»il
n'y avait plus d'arrivées après t (voir la section consacrée à cette variable dans
le chapitre 12). La charge juste avant l'arrivée d»un client est par conséquent le
temps d'attente de ce client, pour n E N, V(t;;) = W n ; W n est la charge vue par
un client qui arrive et V(t) est la charge vue par un observateur extérieur. La
proposition 12.7 page 304 du chapitre sur la file GIG/1 donne la relation liant
les lois du temps d'attente stationnaire d»un client W, de son service (j et de la
charge à l'équilibre V, pour Re(€) > 0,
( 1 -€u )
JE (e- V) = 1 - ÀJE(cr) + ÀJE e- w -; .
L'indépendance du temps d'attente et de la valeur du service d'un client pour
la discipline FIFO permet de réécrire la formule de Takàcs de la façon suivante,
JE (e- V) = 1 - ÀJE(cr) + ÀJE (e- W) 1 - JE e- O') 1
pour Re(€) > O. La loi du temps d'attente à l'équilibre donne la loi de la charge
stationnaire.
(2.13)
3.4. Représentations de la loi de W. La condition p < 1 est supposée
être satisfaite dans cette partie.
1. La représentation de l/J+ de la proposition 2.5, pour lui < 1 et Re(€) > 0,
l/J+(u,€) = 1E ( L une-€sn ) ,
o n<lI_
et le théorème 2.6 donnent,
1E (e-€W) = lim 1E ( L une-€Wn ) 1 - U
u/1 1 - JE( u ll - ) ,
0$ n<lI_
comme W n = Sn pour 0 < n < v_, il vient
( -€W ) _ JE ( Lo n<v_ e- Wn )
JE e - JE(v_)
La variable v_ est le temps de retour à 0 de la chaîne de Markov (W n ),
l'équation ci-dessus n'est que la représentation habituelle de la mesure
invariante d'une chaîne de Markov.
2. Une autre expression de la fonction l/J+ est donnée par la proposition 2.5,
1
+ ( !L, f) = 1 JE( v - s ) 1
- U + e &1+
46
2. LA FILE GI /GI /1 FIFO
la proposition 2.6 montre que si pour Re(ç) > 0,
JE (e- W) = lim 1 - JE(u v +) _ 1 -IP + < +00) 1
u--+ 1 1 - IE{ u 11+ e - Sv + ) 1 - IE( e - 1.'+ 1 {II + < + 00 } )
en particulier, comme 811+ > 0 si v+ < +00, en faisant tendre Re(€) vers
l'infini il vient
(2.14)
r(w = 0) = r(v+ = +00).
(2.15)
Si a = r(v+ < +00), on obtient
JE(e- W) = 1- a
1 - aJE (e- S"+ 1 v+ < +00)
+00 n
= L a n (1- a)JE (e- S"+ 1 V+ < +00) 1
n=O
autrement dit, la proposition suivante est vérifiée.
PROPOSITION 2.9. 8i (Zi) une suite i. i. d. de variables aléatoires indépen-
dantes, distribuées comme 811+ sachant l'événement {v+ < +oo}, le temps
d'attente stationnaire W a même loi que
G
LZi'
=1
où G est une variable géométrique de paramètre r(v+ < +00) indépendante
de la suite (Zi).
L'identité précédente est facile à obtenir directement. La proposition 2.1 montre
que la loi de West celle du maximum de la marche aléatoire (8n) associée à
U - T partant de o.
Si la marche aléatoire passe au-dessus de 0, i.e. sur l'événement {v+ < oo},
partant de t = v+ à la position 8 11 +, la marche repart comme de t = 0 en 0,
indépendamment du passé (lemme 2.3). Partant de cette position, si la marche
passe encore au-dessus de 0, le maximum sera au moins égal à la somme de
deux variables indépendantes distribuées comme SII+ sachant l'événement {v+ <
+oo}, et ainsi de suite (voir la figure 2 ci-dessous). Le maximum s'écrit donc
comme une somme géométrique de variables indépendantes de même loi que 811+
sachant {v+ < oo}. Le paramètre de la variable géométrique étant r(v+ < +00),
d'où la représentation précédente de la loi de W.
4. Les files d'attente GI/M/I et M/GI/l
Ici X = U - T avec une des deux variables T ou U distribuée exponentiel-
lement. La factorisation de Wiener-Hopf s'applique aux cas, d'école, de ces files
d'attente.
4_ LES FILES D'ATTENTE GI/M/1 ET M/GI/1
47
1
w
----------------------- 1
S +
----------------------
S2
....+
------------------.
S +
t
FIG. 2. Décomposition du maximum de la marche aléatoire
Si (4)+, l/J-) est le couple de fonctions de la factorisation de Wiener- Hopf
pour la variable X, en posant pour lui < 1,
,,/. ( ë ) = 4>-(u, -€) et ,,/. ( ë ) Â\ ( ë ) Â\ ( )
Y'+ u, Â\ ( _ ) , Y'- u, = '1'+ u, - '1'- U, -00 ,
t.p_ u, 00
(2.16)
avec
4> - ( U, - 00) = lim 4>- ( u, ) = 1 lE( \ ) 1
Re«()--+-oo - U V - {s...._ =O}
le couple de fonctions (1/J+, 1/J-) est clairement celui associé à la factorisation de
la variable -X. La factorisation pour la file M IGI Il se déduit donc de celle de la
file GI / Mil. La loi du service u est supposée être une distribution exponentielle
de paramètre J..L.
PROPOSITION 2.10. Si X = u - r où u est exponentielle de paramètre J..L,
la factorisation de Wiener-Hopf de X est donnée par
J..L + € b( u) + €
4>+(u, ) = b(u) + (' et 4>-(u, ) = Jl + - uJllE(e£T) 1
pour lui < 1, b(u) est l'unique racine réelle positive de l'équation
x - J..L(l - uE( e- XT )) = o.
A u voisinage de u = 1, la racine b( u) se comporte de la façon suivante :
a) Si p < 1, alors lim u ./1 b(u) = 13 où {3 est l'unique racine réelle> 0 de
l'équation
x - J..L (1 - E( e - XT )) = O.
b) Si p > 1, alors lim u /1 b(u) = 0 et
lim b( u ) _ 1 .
u/1 (1 - u) 1E(u) -E(r)
48
2. LA FILE CI ICI /1 FIFO
DÉMONSTRATION. Dans ce cas, la fonction caractéristique E( exp ( -€X))
vaut J-LE(exp(€r))/(J-L+€) et donc, pour U tel que lui < 1,
1 J-L+
1 - uE( e-(X 1 ) - J-L + - uJ-LE( e r) .
Si fu( ) = J-L + ç - uJ-LIE(exp(çr)), sur le cercle Cp, = {€/I + J-LI = J1.} contenu
dans le demi-plan gauche, on a
IUJ-LIE( e r) 1 < IUJ-LI < IJ-LI = I€ + J-LI.
Le théorème de Rouché (voir Rudin [45] p. 242 par exemple) montre que lu a
une seule racine, de multiplicité 1, à l'intérieur de Cp,. De plus, toute racine € de
lu dans le demi-plan gauche vérifie lx + J-LI = IUJ1.E(exp(€r))1 < J-L; cette racine
est nécessairement à l'intérieur de C p,. La fonction lu a une unique racine -b( u)
dans le demi-plan gauche. Celle-ci est réelle, b( u) est la solution de l'équation
9u ( x) = J-L (1 - uIE( e - xr ) )
sur Il4 (voir la figure 3 et la démonstration pour gl ci-dessous ).
L'identité
1 J-L + ç b( u) + €
= x
1 - ulE( e- Xl ) b( u) + € J-L + € - UJ-LIE( e r)
donne la factorisation de Wiener-Hopf dans ce cas; en effet en posant
J-L + € b( u) + €
cP+( u, Ç) = b( u) + et cP- (u, ) = J.L + - UJ.LIE( e r)'
pour lui < 1 et Re(€) = 0, les fonctions 4J+ et 4J- ainsi définies vérifient les
conditions a) et b) du théorème 2.4.
Si p < 1, comme gl (0) = 0 et g (0) = J-LE( r) = E( r) lIE( 0') > 1 et que gl
converge vers J1. à l'infini, il existe un autre point fixe /3 strictement positif. La
fonction gl étant concave, il ne peut y en avoir d'autre. Pour tout U E [0,1[,
la décroissance des fonction x -t gu ( x) et U -t gu ( X ), 0 < U < 1, montre la
décroissance de U -t b( u) et la relation b( u) > (3. La limite limu /1 b( u) est aussi
un point fixe non nul de gl supérieur à {3, elle vaut donc nécessairement (3.
La première partie de la proposition est démontrée.
Si p > 1, la dérivée de gl à l'origine est strictement plus petite que 1,
la concavité de gl montre que 0 est le seul point fixe sur Il4 de gl et donc
lim u /1 b(u) = o. Pour u tel que lui < 1,
J.L - b( u) = UJ.LJE ( e-b(u)r) ,
et en faisant le développement limité
JE ( e-b(u)r) = 1 - IE(r)b(u) + o(b(u)),
il vient
. J-L(l-u)
hm b() = 1 - J.LIE( r),
u/1 u
ce qui achève la démonstration de la proposition.
D
4. LES FILES DtATTENTE GI/M/1 ET M/GI/1
49
/J.
9u(X)
91(X)
/J.(l-u)
o
x
13 b( u )
FIG. 3. Les fonctions gu et gl, le cas p < 1.
4.1. La file GI/M/I. Dans cette section la loi des services est une expo-
nentielle de paramètre J1.. La proposition suivante exprime que, conditionnelle-
ment à ce qu'il soit non nul, le temps d'attente stationnaire d'une file d'attente
GI/M/1 suit une loi exponentielle.
PROPOSITION 2.11. a) Sous la condition p < 1, la loi W(dx) du
temps d'attente stationnaire de la file d'attente GIIMl1 est donnée
par
(2.1 7)
W(dx) = oo + (1 - ) {je-/3x dx,
où {3 est l'unique solution dans l'intervalle ]0, J1.[ de l'équation
(2.18)
J1. (l-lE(e- 13 7")) = {3.
b) Si p > 1, la durée d'une période d'occupation est infinie avec proba-
bilité 1 - 11 p,
DÉMONSTRATION. La transformée de Laplace de W s'obtient à l'aide des
propositions 2.6 et 2.10,
E(e-£W) = lim iP+(u,€) = lim J.L + € x b(u) = J.L + € x {j
u/,l 4>+ (u, 0) u/'l b( u) + J1. {3 + € J1.
= {3 + ( 1 _ (3 ) {j ,
J1. J.L + {3
50
2. LA FILE GI IGI Il FIFO
d'où l'assertion a). En utilisant les propositions 2.7 et 2.10 ,
E ( ull- ) = 1- J1.(1- u)
b( u ) ,
d'où r(v_ < +00) = lim u /'l1E(u ll -) = l/p, et donc le b) de la proposition. D
Un résultat similaire est aussi vrai pour la charge :
COROLLAIRE 2.12. Si P < 1, la lo de la charge stationnaire de la file
d'attente GIIM/1 est donnée par
(2.19) V(dx) = (1 - p)t5 o + p{3e-/3x dx,
avec {3 solution de (2.18).
DÉMONSTRATION. D'après la formule de Takàcs (2.13),
( 1 - O' )
JE (e-£V) = 1 - p + -XJE (e-£W) JE - ; 1
il ne reste plus qu'à utiliser la proposition précédente. D
PROPOSITION 2.13. Si P < 1, la loi stationnaire du nombre Q de clients
que trouve un client à son arrivée dans la file est une loi géométrique de
paramètre 1 - {3/ J1. où {3 est l'unique solution dans l'intervalle ]0, J1.[ de
Jl (1 - lE (e-I3 T )) = {3.
DÉMONSTRATION. D'après la proposition 2.8, pour n > 2,
r(Q > n) = r(W > t n - 1 ),
W sachant {W > O} suivant une loi exponentielle de paramètre {3, donc
J1D(Q > n) = J1D(W > O)JE(e- J3tn - 1 ) = (1 - ) JE (e-J3T) n-l ,
d'après la relation (2.18) cette dernière quantité vaut (1 - {31 Jl)n. La démons-
tration de la proposition est terminée. D
Remarque sur la loi conditionnelle de W. Le caractère exponentiel de la
loi conditionnelle du temps d'attente stationnaire peut se voir de manière proba-
biliste assez simplement avec la proposition 2.9. Il faut tout d'abord déterminer
la loi de la variable SII+ sachant que v+ est fini, position de la marche lors du pre-
mier passage au-dessus de O. Les contributions positives de la marche aléatoire
sont uniquement dues à la variable (j qui suit une loi exponentielle. Si la marche
passe au-dessus de 0, la propriété d'oubli de la loi exponentielle entraîne que le
saut au-dessus de 0, qui vaut SII+' suit une loi exponentielle de paramètre J1..
Formellement on peut l'établir de la façon suivante,
+00
r(SII+ > a,v+ < +00) = L:r(S < O,i < n,Sn> a)
n=l
+00
= L: r(Sn > a ISi < 0, i < n, Sn > O)r(Si < 0, i < n, Sn > 0),
n=l
4. LES FILES D'ATTENTE GI/M/1 ET M/GI/1
51
pour n > 1 et a > 0, on a l'égalité
r(Sn > a ISi < 0, i < n, Sn > 0) =
r(U n > a - Sn-1 + Tn ISn-1 < 0, Un > -Sn-1 + Tn) = e-lJ.a,
d'où
r(SII+ > a, V+ < +00) = e-lJ.ar(v+ < +00) = e-lJ.a.
La loi de West donc identique à celle d'une somme de G variables i.i.d. de même
loi que SII+ sachant {v+ < +oo}, Le. exponentielles indépendantes de paramètre
J.L. La variable G est une variable géométrique de paramètre a = JP>(v+ < +00)
indépendante de ces variables i.i.d. En utilisant l'égalité {W > O} = {v+ <
+oo}, on obtient la relation suivante: pour de partie réelle positive
]E(e- W 1 W > 0) = ]E(e- W 1 v+ < +00)
_ n-1 ( l ) ( J.L ) n (1 - a)J.L
- a -a J.L+€ - (1-a)J.L+€'
par conséquent la variable W conditionnée à être non nulle suit une loi expo-
nentielle de paramètre (1 - a)J.L. Il ne reste plus qu'à calculer a = JP>(W > 0). La
relation (2.2) donne
r(W = 0) = r(W + U < T) = (1 - a)r(u < T) + ar(W + u < TI W > 0),
donc
1 - a = (1 - a)JP>(u < T) + ar(W + u < TI W > 0),
en utilisant que la loi de W sachant {W > O} est une exponentielle de paramètre
(1 - a)J-L,
1- a = 1- E (e- C1 - ar )Il T ) .
Ainsi (1 - a)J.L est solution de (2.18) et vaut par conséquent 0 ou (3. Comme
1 - a = r(W = 0) > 0, on en déduit a = 1 - (3 1 J.L.
4.2. La file M/GI/I. La loi de la variable T est une loi exponentielle de
paramètre À.
PROPOSITION 2.14.
a) Si p < 1, la transformée de Laplace du temps d'attente stationnaire
d'une file d'attente MIGI Il est donnée par la formule de Pollaczek-
Khintchine : pour Re( ) > 0,
(2.20)
1E ( e- W ) _ 1 - p
- 1-À -l(l-]E(e-(CT))'
b) Si p > 1, la durée d'une période d'occupation est infinie avec proba-
bilité {31 J-L, où {3 est la solution de (2.18).
52
2. LA FILE GI /GI /1 FIFO
DÉMONSTRATION. La factorisation de u - T en 1/J+, 1/J- s'obtient en utilisant
la relation (2.16) et la proposition 2.10, en remplaçant J1. par À et T par u,
1/J+(u, ) 4J-(u, - ) b(u) - À(l - u)
1/J+(u,O) 4>-(u,O) À - - uÀJE(e- CT) x b(u) ,
pour lui < 1 et Re( ) > O. Si p < 1,
JE ( - W ) r 1/J+(u, ) (l-p)
e = u 1/J+ ( u, 0) = - À( 1 - lE{ e- CT )) ,
d'après le comportement de b(u) au voisinage de 1 dans ce cas (Proposition 2.10,
en se rappelant que u et T sont inversés), d'où l'assertion a) de la proposition.
De la même façon que pour la file GI lM/l, la décomposition de Wiener-Hopf
donne la fonction génératrice de la variable v _ ,
E( u 11- ) = 1 _ b( u) 1
J1.
si p > 1, alors b(u) -t /3 quand u -t 1, soit r(v_ < +00) = 1-{31J-L. D
Le résultat suivant est une propriété remarquable de la file M IGI Il : la loi de
la charge stationnaire à un instant arbitraire est la même que la loi de la charge
stationnaire juste avant une arrivée de client (autrement dit, le temps d'attente
stationnaire). La section 1 du chapitre 7 donne une explication générale de ce
phénomène.
COROLLAIRE 2.15. Si P < 1 la loi de la charge stationnaire V est la
même que la loi du temps d'attente.
DÉMONSTRATION. En effet, la relation (2.20) peut s'écrire
( 1 - CT )
E (e-€W) = 1 - P + ,XE (e-€W) E - ; 1
et le membre de droite vaut lE{exp(-€V)) d'après la formule de Takàcs (2.13).
D
Remarque sur la loi de W. La relation (2.20) n'a pas d'interprétation pro-
babiliste immédiate comme dans le cas de la file G 1 1 Mil. Cette loi à l'équilibre
peut cependant se décomposer comme suit, pour Re( ) > 0,
+00
(2.21) E (e-€W) = L pn(l - p) (E (e-€R") r
n=O
+00
= L pn(l_ p)E (e-€l:; Rk) 1
n=O
où R CT est une variable aléatoire telle que
JE ( _ RO' ) = 1 - JE(e- CT))
e lE(u) '
la variable R CT a même loi que le premier point d'un processus de renouvellement
stationnaire associé à u, voir le chapitre 1 page 29. En particulier sa densité
5. LA FILE D'ATTENTE Hl/G/1
53
sur Il4 vaut IP(u > x)/E(u). D'après l'identité (2.14), r(W = 0) = r(v+
+(0) = 1 - p, la proposition 2.9 et la relation (2.21) suggèrent donc que la loi
conditionnelle de SII+ sachant {v+ < +oo} est la loi de RU.
PROPOSITION 2.16. Si p < 1, la loi stationnaire du nombre Q de clients
que trouve un client à son arrivée est donnée par
(2.22)
IP'(Q = n) = r (Àx)n-l e->''''W(dx),
J]O,+oo] (n - 1)!
r(Q = 0) = 1 - p,
n > 1,
où W(dx) est la loi du temps d'attente stationnaire.
DÉMONSTRATION. D'après la proposition 2.8, en utilisant que le processus
d'arrivée N>. est un processus de Poisson de paramètre À, pour n > 1
IP(Q = n) = IP(tn-l < W < t n )
( ('xw)n-l _ )
= IP'(N).(]O, W[) = n - 1) = lE (n _ 1)! e w l{w>o} .
Le passage à la limite quand Re(€) vers l'infini dans l'identité (2.20) montre
l'égalité r(W = 0) = 1 - P et comme r(Q = 0) = r(W = 0), la preuve de la
proposition est terminée. D
5. La file d'attente HI/G/l
Cette section est consacrée à un exemple assez représentatif de l'utilisa-
tion en pratique de la décomposition de Wiener-Hopf. La notation Hl (hyper-
exponentielle d'ordre 1) désigne les lois dont la transformée de Laplace est
donnée par
N
(2.23) E( e- T) = Il a ,
ai + €
=1
pour Re( ) > 0, N E N et 0 < al < a2 < ... < aN. Une telle variable T est la
somme de variables aléatoires exponentielles indépendantes dont les paramètres
respectifs valent al, . .. ,aN.
Dans cette section la loi des interarrivées est donnée par (2.23). Pour calculer
la loi du temps d'attente stationnaire associé à cette file d'attente, la fonction à
décomposer vaut
1 n l(ai - )
1-u1E(e- Xo) - n l(ai-€)-uE(e- U)n f lai'
avec lui < 1 et Re(€) = o.
Si K > aN et DK = { I Re(€) > 0, I€ - aNI < K}; quand E C appartient au
bord de DK, nécessairement I€ - ail > ai pour tout i < N, d'où l'inégalité
N N N
uE(e- U) Il ai < lui Il ai < Il(ai - €) ,
=1 =1 i=l
(2.24 )
54
2. LA FILE GI IGI /1 FIFO
o
aN+K
FIG. 4. Le contour de DK
le théorème de Rouché montre que le dénominateur de (2.24) a exactement N
racines ai(u), i = 1,... ,N dans DK. En faisant tendre K -t +00, on en déduit
que le demi-plan droit ne compte que N racines et elles sont toutes dans DaN'
L'équation (2.24) se réécrit
1 fi ai - n l(ai(u) - )
1- u1E(e-€Xo) - ,=1 ai(u) - n l(ai - €) - uE(e- cr) n l a,'
pour lui < 1 et Re( ) = o. En posant
A. ( t ) _ n l(ai(u) - ) t A. ( t ) Il N ai - ç
'f' + u, - N N e 'f' - u, = a.. ( U ) _ t'
ni=l (ai - ç) - uE( e- cr) n'=l a, ,=1. ç
ces deux fonctions vérifient clairement les assertions a) et b) du théorème 2.4.
La transformée de Laplace de W s'exprime donc comme
(2.25) E(e- W)=lim(l-u)fI ai N n l(ai(u)- ) N .
u/,l i=l ai (u) ni=l (ai - ç) - uE( e-€cr) ni=l ai
Pour u tel que lui < 1, les ai(u), i = 1,. .. ,N sont les solutions dans le demi-plan
droit du dénominateur de (2.24) et vérifient l'équation
N
(2.26) fu( ) = 1 - uE ( e-H<T-r») = 1 - uE (e- <T) Il ai = o.
i= 1 ai - €
La fonction lu est concave sur l'intervalle ]0, a1[, lu(O) = 1 - u et
lim fu(ç) = -00,
€ -+0,1
elle a donc une unique racine al (u) dans cet intervalle. La fonction u -t f u (ç)
étant décroissante pour ç E]O, a1[, il en va de même pour u -t a1(u). Comme
Il (0) = 0 et I (0) = E( u) - E( T) < 0, la concavité de Il montre que 0 est
6. UNE PREUVE PROBABILISTE
55
la seule racine de /1 sur l'intervalle [0,a1[. La limite lim u /1 a1(u) étant aussi
une racine de f1 dans cet intervalle; elle ne peut que valoir 0, par conséquent
lim u /l al (u) = O. Un développement limité au voisinage de 0 de l'équation (2.26)
donne facilement que limu 1 (1 - u) 1 al ( u) = IE( r) - E( u).
PROPOSITION 2.17. Si la loi commune des interarrivées est la loi de
la somme de N variables aléatoires indépendantes exponentielles dont les
paramètres valent respectivement 0 < al < a2 < . . . < aN, sous la condition
E(u) < IE(r) la transformée de Laplace du temps d'attente stationnaire est
donnée par
(2.27) E(e- w) = al(E(r) - E(u)) n 2 ai(l - ta.d 1
E( e- O') ni=l ai - ni=l (ai - €)
où les ai, i = 2, . . . ,N sont les solutions non nulles dans le demi-plan droit
de l'équation
N N
IE(e- O') Il ai - Il (ai - ) = O.
=1 i=l
DÉMONSTRATION. Pour i > 2, les (ai(u);O < u < 1) étant bornés, on note
ai une des valeurs d'adhérence quand u tend vers 1. En utilisant l'identité (2.25)
et le comportement de a1(u) au voisinage de 1, on obtient la relation (2.27).
Comme E(exp( -€W)) est défini pour tout tel que Re(€) > 0, on en déduit que
les ai, i > 2, sont non nuls et sont les racines du dénominateur de (2.27) dans
le demi-plan droit. La proposition est établie. 0
La condition de stabilité ne concerne que le comportement de la racine al (u)
au voisinage de u = 1.
6. Une preuve probabiliste de la factorisation
Le propos de cette section est de montrer que les calculs menés dans la sec-
tion 2 ont une version probabiliste. Essentiellement, la démonstration faite aupa-
ravant pour obtenir la décomposition de Wiener-Hopf s'appuie sur le découpage,
aux temps d'arrêt v+ et v_, de la série
1
q,(u, ) = 1 _ uE(e- X) = LunE (e- Sn) 1
n>O
pour lui < 1, Re(€) = O. La méthode présentée dans cette section est due, dans
un cadre plus vaste, à Greenwood et Pitman(15). En posant
1-u
t/J(u, ) = l-uE(e- X) '
pour u E]O, 1[, la fonction 1jJ peut s'écrire comme
1jJ(u,€) == Lun(l-u)E(e- Sn) =E(e- sG),
n>O
[15] P. Greenwood and J. Pitman, Fluctuation identities for Lévy processes and splitting at
the maximum, Advances in Applied Probability 12 (1980), 893-902.
56
2. LA FILE GI 101 /1 FIFO
où G est une variable géométrique de paramètre u, indépendante de la marche
aléatoire (Sn). La fonction 1/J peut se décomposer de la façon suivante.
THÉORÈME 2.18. Si G est une variable géométrique de paramètre u E
]0, 1[, ndépendante de la marche aléato re (Sn), alors
(2.28) E (e-€Sa) = 1 - u = E (e-€Ma) E (e-€ma) ,
1 - u1E( e- x )
s Re(€) = 0, avec pour n E N,
Mn = sup Sk,
O<k<n
m n = inf Sk.
O<k<n
DÉMONSTRATION. La variable T désigne le premier instant d'atteinte du
maximum de (Sn) avant l'instant G,
T = inf{k > OISk = MG},
en reprenant la variable G géométrique précédente, on va établir dans un premier
temps l'égalité
(2.29)
E (e-€Sa) = E (e-€Ma) E ( e-€(Sa-Ma») ,
ou encore, de façon équivalente
E (e-€Sa) = E (e-€ST) E ( e-€(Sa-ST») .
Si T était un temps d'arrêt, le lemme 2.3 donnerait l'indépendance entre ST
ST
o
ST-SG
T
G
FIG. 5. Décomposition de la marche aléatoire arrêtée à G
et So - ST, et la décomposition (2.29) serait démontrée. La variable T n'est
cependant pas un temps d'arrêt, il faut aller plus loin que T pour savoir que
T est bien un temps d'atteinte du maximum. La propriété d'indépendance est
cependant vraie, elle est due à la propriété d'oubli de la loi géométrique de G.
6. UNE PREUVE PROBABILISTE
57
ASSERTION. les variables Sr et Sc - ST sont indépendantes. En notant
comme précédemment,
11+ = inf{k; Sk > O},
la suite finie £ = (Sk; 0 < k < 11+) est appelée une excursion; c'est la trajectoire
de la marche aléatoire arrêtée au moment où elle devient strictement positive. Le
lemme 2.3 montre que la marche aléatoire (Sn) est le recollement d'excursions
(E.) = ( ( X ; 0 < k < v ) )
indépendantes et distribuées comme £. Il n'est bien sûr pas exclu que la marche
aléatoire ne soit le recollement que d'un nombre fini d'excursions, la dernière
correspondant à une période d'occupation infinie. Ce sera le cas avec probabilité
1 si r (11+ = + 00) > o.
Si (ai) est une suite i.i.d. de variables aléatoires géométriques de paramètre
u, on procède de la façon suivante: pour chaque i E N, si G i < IIi, l'ex-
cursion £" est peinte en rouge. Autrement, si Gi > II , l'excursion est laissée
inchangée. La variable T désigne l'indice de la première excursion marquée en
rouge. L'indépendance de (ai) et (Sn) montre que, conditionnellement à T, les
excursions £", 0 < i < T - 1 sont indépendantes des excursions £i, i > T. Une
excursion n'est positive qu'au dernier point de sa trajectoire à l'instant 11+, les
maxima successifs de la marche aléatoire ont donc nécessairement lieu aux der-
niers instants des excursions. En posant
r-1
G = Il'' + G-
+ 'T'
"=0
comme G; < 11+, le maximum de la marche avant a est donc atteint avant
-
E II , par conséquent
S -
'T-l Il'
u,=o +
=M
E 'T-l
Il'
,=0 +
= Ma'
En particulier Ma est une fonctionnelle des excursions £i, 0 < i < T - 1 et
a'T
Sa-Ma= LX;,
k=l
ne dépend que de l'excursion £;. Par conséquent les variables Sa - Ma et MG
sont indépendantes. Pour établir l'assertion il suffit maintenant de prouver que
la variable G a même loi que G et est indépendante de la marche (Sn).
La propriété d'oubli de la loi géométrique,
r(G -11; > nlG > II ) = un,
montre que, conditionnellement à l'événement {G > II }, la variable G s'exprime
comme IIi + G 1 , où G 1 est une variable géométrique indépendante de IIi et par
58
2. LA FILE CI JCI /1 FIFO
conséquent de la marche aléatoire. En recommençant, conditionnellement à l'évé-
nement {G 1 > v }, on a l'identité G 1 = vî +G 2 , avec G 2 indépendante de (Sn),
et ainsi de suite. De cette façon on obtient une suite de variables géométriques
(G n ) indépendantes de (Sn), telles que G = E -l v + G-r, où T est le premier
indice i pour lequel Gi < v . La variable G a donc même loi que G. La variable
-
G est donc géométrique de paramètre u et indépendante de la marche aléatoire.
La relation (2.29) est établie.
Il reste à prouver l'identité (2.28), ou encore que Sc - Mc a même loi que
mc. La relation
c
Sc - Mc = inf Xi,
O<k<C L..J
- - k+1
et l'indépendance de G et de la marche aléatoire donnent l'identité en loi
(Xc, XC-l,. .. ,Xl) loi (Xl, X 2 ,. .. ,Xc),
d'où
k
Sc - Mc loi inf Xi = mC
O<k<C L..J '
- - 1
ce qui achève la démonstration du théorème. D
En notant 1P+(u, €) = lE(exp( -€Mc)) et 1P-(u, €) = E(exp( - mc)), comme
Mc > 0 et mc < 0 les deux fonctions 1P+ et 1P- ont les propriétés d'holomorphie,
de continuité et de bornitude des fonctions <P+ et <P- de la décomposition de
Wiener-Hopf. Le résultat d'unicité du théorème 2.4 montre que pour Re(€) > 0,
E (e- MG)
cI>+( u, 0 = P(MG = 0) ,
et pour Re( ) < 0,
cI>-(u, 0 = JE (e-€mG) l-lE(u"+) .
1-u
L'identité {Mc = O} = {G < v+} donne l'égalité IP(Mc = 0) = 1 - E(u ll +) et
de la relation (2.9) on déduit
1 - IE(u ll +) 1
1 - u - 1 - IE( u 11- ) .
La proposition suivante est donc démontrée.
PROPOSITION 2.19. Si G est une variable géométrique de paramètre u E
]0,1[, indépendante de la marche aléatoire, les fonctions cP+, cP- de la décom-
position de Wiener-Hopf s'expriment de la façon suivante,
E( e- MG ) E( e- mG)
cI>+(u,O = 1 _ JE(u"+ ) ' cI>-(u, {) = 1 _ JE(u"- ) '
avec, pour n E N,
Mn = sup Sk
O<k<n
et m n = inf Sk,
O<k<n
CHAPITRE 3
Théorèmes limites
Sommaire
1. Introduction 59
2. La marche aléatoire biaisée 60
Changement de probabilité et martingales positives 61
U ne famille de marches aléatoires biaisées 63
3. Asymptotique de la queue de distribution de W 64
Application aux files M/G/1 et G/M/l 67
4. Le maximum d'une période d'occupation 68
5. La file GI/GI/1 au voisinage de la saturation 70
6. La marche aléatoire conditionnée à dépasser a 75
1. Introduction
La factorisation de Wiener-Hopf permet, en théorie, de calculer la trans-
formée de Laplace du temps d'attente de la file d'attente GI IGI Il FIFO à
l'équilibre. En pratique cette méthode revient à chercher les pôles et les zéros
de fonctions définies dans le plan complexe. Il n'est pas toujours commode d'en
calculer le nombre, ni a fortiori de les localiser. La transformée de Laplace s'ex-
primant avec ces quantités, il peut être assez difficile d'obtenir une description
qualitative simple de cette file d'attente.
Dans ce type de situation, il est naturel d'étudier la variable temps d'attente
au voisinage des valeurs critiques de certains paramètres. Le comportement du
temps d'attente pour des valeurs extrêmes de certains paramètres est étudié
dans ce chapitre. Tout d'abord on s'intéressera aux très grandes valeurs du
temps d'attente. Sous certaines hypothèses, on le verra, la distribution du temps
d'attente a une queue de distribution exponentielle; pour x assez grand
P(W > x) l'V Ce-'Y'X,
où C et 1 sont des constantes. La deuxième partie concerne la file d'attente juste
en dessous du régime de saturation, il est montré que, convenablement renor-
malisé, le temps d'attente converge en distribution vers une loi exponentielle.
60
3. THÉORÈMES LIMITES
2. La marche aléatoire biaisée
Comme dans la précédente section, la suite (X n ) de variables i.i.d. est définie
sur l'espace de probabilité canonique (0, F, P) associé à cette suite et on suppose
que Xl est intégrable. On désigne par (Fn) = (O'(X 1 ,. .. ,X n )) la filtration de la
suite (X n ) et la tribu F n'est autre que vnFn. La marche aléatoire associée sera
notée (Sn) = (E - l Xi). Les deux résultats élémentaires suivants seront utiles
par la suite.
PROPOSITION 3.1. Si IE(X 1 ) > 0, alors pour a > 0, le temps de dépasse-
ment de a,
Ta = inf{nlSn > a},
est IP-presque sûrement fini et intégrable.
DÉMONSTRATION. L'hypothèse E(X 1 ) > 0 permet de fixer une constante
K > 0 telle que 1E(X 1 /\K) > O. Comme la marche aléatoire (E Xi /\ K) minore
la marche initiale, le temps de dépassement de a pour celle-ci est supérieur à
Ta. Il suffit donc de montrer la proposition pour une marche aléatoire dont les
sauts sont bornés supérieurement. On suppose que les sauts positifs de la marche
sont majorés par K. La suite (Sn - nE( Xl)) est une martingale et pour N > 0
la variable Ta /\ N est un temps d'arrêt borné, le théorème d'arrêt pour cette
martingale donne la relation
IE(STaAN - (Ta 1\ N)IE(X 1 )) = 0,
et par conséquent
IE( Ta /\ n) E( Xl) = IE( ST a AN)
= E( ST a AN - S (Ta -1) + AN ) + IE( S (Ta -1) + AN) < a + K.
Le théorème de convergence monotone permet de déduire l'inégalité
E(Ta) < (a + K)/JE(X 1 ).
D
La proposition suivante concerne la marche aléatoire arrêtée à un temps d'arrêt,
elle généralise l'identité JE(Sn) = nJE(X 1 ).
PROPOSITION 3.2 (Formule de Wald). Si la variable aléatoire T est un
temps d'arrêt integrable et E(IX 1 1) < +00, alors ST = E T- 1 Xi est intégrable
et
(3.1 )
E ( X.) = E(XdE(r).
DÉMONSTRATION. Comme dans la preuve précédente, pour N E N le théo-
rème d'arrêt appliqué à la martingale (E IXil- nE(IX 1 1)) et au temps d'arrêt
T /\ N donne la relation
( TAN )
E IXil = E(r A N)E(IX 1 1) < E(r)E(IXd) < +00.
2. LA MARCHE ALÉATOIRE BIAISÉE
61
Le théorème de convergence monotone montre ainsi que la variable E IXil est
intégrable.
Le théorème d'arrêt appliqué à la martingale (Sn - nE(X l )) donne l'identité
IE(SrI\N) = E(r A N)IE(X l ). La majoration ISrANI < E; IXil et le théorème de
convergence dominée entraînent la convergence de la suite (E(SrAN)) vers IE(Sr)'
Comme la suite (E(r A N)) converge vers 1E(r), l'identité (3.1) est établie. D
LEMME 3.3. Si IE(X l ) < 0 et s 'il ex ste (J > 0 tel que
1 < E (e 8X1 ) < +00,
il ex ste un unique 'Y > 0 tel que IE( exp ( 'Y Xl)) = 1.
DÉMONSTRATION. La fonction y --t f(y) = E(exp(yX l )) est strictement
convexe sur l'intervalle où elle est finie (la dérivée seconde est strictement po-
sitive). Elle vérifie f(O) = 1, f'(O) = E(X l ) < 0 et f(9) > 1, il existe donc un
unique 'Y > 0 tel que f('Y) = 1. D
1
o
"Y
FIG. 1. La fonction y -t E( exp(yX l ))
Changement de probabilité et martingales positives. Dans la suite
les hypothèses du lemme précédent sont supposées être satisfaites, '1 désigne la
solution positive de l'équation en x, 1E(exp(xX 1 )) = 1.
PROPOSITION 3.4 (Formule de Girsanov). Si les hypothèses du lemme 3.3
sont vérifiées, il existe une unique probabilité <Q sur (O,.r) telle que pour
tout n > 0 et toute fonction Y .r n -mesurable positive,
IEQ(Y) = L y dQ = L Ye-ySn dJP'.
Sous la probabilité <Q, la suite (Sn) est aussi une marche aléatoire et la loi
de Xl sous <Q a pour fonction caractéristique
EQ (e- EXt ) = lE ( e-(E--y)Xt ) 1
62
3. THÉORÈMES LIMITES
si Re(€) = O. La variable Xl est intégrable pour Q sous la condition
1E(IX 1 1 exp(')'X 1 )) < +00,
dans ce cas 1EQ(X 1 ) > O.
Si T est un temps d'arrêt et Y une variable positive Fr-mesurable,
l'identité suivante est satisfaite,
(3.2) l Yl{T<+oo} dlP = l Ye--rsTl{T<+oo} dQ.
DÉMONSTRATION. Il est facile de vérifier que la suite (Zn) = (exp(')'Sn)) est
une martingale. En effet, pour n > 1,
lE ( e-ySn+1 l.r n ) = e-ySn lE (e-YX n +1) = e-ySn.
Pour tout élément A E Fn, on pose
Q,. (A) = L e -y Sn n,
Qn est une probabilité puisque Qn(O) = 1E(exp(')'Sn)) = (E(exp(')'X 1 )))n = 1.
Les (Qn) ainsi définis sont compatibles : si p < n, alors Qn (A) = Qp (A) pour
tout A E Fp C Fn. En effet,
Q,. (A) = lE (lAe-ySn) = lE ( lAIE ( e-ySn l.r p ) )
puisque A est Fp-mesurable; la propriété de martingale de (Zn) donne l'égalité
Qn(A) = E(lAe1' S p) = ij,,(A).
La suite de probabilités (Qn) est donc compatible. En prenant pour 0 l'espace
canonique associé à la suite Li.d. (X n ), le théorème de Daniell-Kolmogorov (voir
Rogers et Williams [44] par exemple) montre l'existence d'une unique probabilité
Q sur F telle que Q = Qn sur :F n .
La dernière assertion à prouver concerne la loi de (Sn) sous Q. Si { E C tel
que Re({) > 0, pour n > lIa définition de Q donne la relation
IF.Q (e- ESn ) = lE ( e-(E--Y)Sn) = (lE ( e-(E--y)X 1 ) ) n 1
par conséquent la variable Sn est la somme de n variables i.i.d. et la transformée
de Laplace de leur loi commune est donnée par E( exp( -({ - 'Y)X 1 )). Sous la
probabilité Q la suite (Sn) est une marche aléatoire.
Si T est un temps d'arrêt et Y une variable aléatoire Fr-mesurable positive,
+00
1 Yl{T<+oo} dlP = L 1 Yl{T=i} n,
o =o 0
pour i E N,
l Yl{T=i} n = l Ye--ys'l{T=i}e-Ys; n.
2. LA MARCHE ALÉATOIRE BIAISÉE
63
La variable Y étant .rr-mesurable, Ye-'Y s , l{r=i} est .ri-mesurable. Par défini-
tion de Q,
l Yl{-r=i} dlP = l Ye --yST l{-r=i} dQ,
en sommant cette dernière identité on obtient la relation (3.2).
La stricte convexité de la fonction f : y -t lE(exp(yX 1 )) vue dans la démons-
tration du lemme 3.3 montre que la dérivée à gauche de cette fonction en y = 'Y
est strictement positive. Si lE( 1 X 11 exp( 'Y Xl)) < +00, alors
fi ( 'Y) = IE( Xl exp ( ')' Xl)) = 1EQ ( X 1) > O.
La démonstration de la proposition est achevée.
S'il existe 9 > 'Y tel que 1E(exp(9X 1 )) < +00, la condition
E (IX 1 I e 'Y X l) < +00
est nécessairement satisfaite d'après la majoration x exp( 'Yx) < A+exp( 9x) pour
tout x > 0 si A est suffisamment grand.
Sous la probabilité IP la marche aléatoire (Sn) a une dérive E(X 1 ) négative
mais sous la probabilité Q, cette dérive est positive (d'où la dénomination marche
biaisée). Ce phénomène peut s'expliquer de la façon suivante: la probabilité Q
est absolument continue par rapport à IP, dQ = exp(')'St) dIP sur la tribu .rt, en
raison du coefficient exp( 'YSt) la probabilité <Q privilégie les chemins de la marche
aléatoire pour lesquels St est très grand, ces chemins sont donc largement au
dessus de O. Cette propriété de dérive positive sera importante par la suite.
Ce procédé de changement de probabilité se généralise à toute une famille
de martingales.
o
Une famille de marches aléatoires biaisées. De la même façon que dans
la preuve de la proposition 3.4, si pour 0 < 9 < ge = sup{9 lE (e 8X1 ) < +oo}, la
fonction </>(9) est définie par
</>(9) = E (e 8X1 ) ,
la suite (exp( 9S n ) 1 </>( 9)n) est une martingale. Il est donc possible de définir une
probabilité Qo sur (2 de telle sorte que pour tout n > 0
e 8Sn
dQs = l/>(8)n dJP' sur la tribu :Fno
Sous la probabilité Qo, la suite (Sn) est aussi une marche aléatoire. La trans-
formée de Laplace de la loi des sauts de celle-ci est donnée par
- ( e- Xl ) = E ( e-( -8)Xl )
8 4>( 9) ,
en particulier, la valeur moyenne d'un saut vaut
E (X 1 e 8X1 )
8 (Xd = E( e 9X1 ) 0
64
3. THÉORÈMES LIMITES
Et comme précédemment, si T est un temps d'arrêt et Y une variable aléatoire
positïve :Fr mesurable alors,
(3.3) l Yl{7"<+oo} dlP' = l Y ;;: l{7"<+oo} dQs.
Lorsque (J varie, la marche aléatoire sous privilégie des chemins différents de
la marche aléatoire initiale.
Les probabilités Qg sont utilisées pour obtenir des résultats de grandes dévia-
tions, par exemple pour estimer la probabilité de l'événement {Sn l'Van} avec
a # E( Xl). Pour cela on utilise, s'il existe, (J tel que la marche aléatoire sous
Qg croisse à la vitesse a, i,e, lF.Q8 (Xl) = a. Le théorème 5.20 page 132 sur les
grandes déviations de la file M / M /1 est montré de cette façon. Remarquer que
si Xl est RD-presque sûrement majoré par une constante C, la valeur maximale
lF.Q8 (Xl) ne peut excéder C. Dans la suite de ce chapitre seul le paramètre 'Y est
utilisé.
Dans le cadre un peu plus délicat des diffusions les relations de changement
de probabilité sont connues sous le nom de formule de Cameron-Martin ou de
Girsanov. Par exemple si (B(t)) est le mouvement brownien standard, pour
cr E IR la martingale exponentielle
( e crB (t)-cr 2 tf2 )
permet de la même façon un changement de probabilités. Pour cette probabilité
il est facile de vérifier que le processus (B(t)) a même loi qu'un mouvement
brownien avec dérive (B(t) - at). Ce procédé a de nombreuses applications, il
permet dans certains cas de déduire la loi d'une fonctionnelle du mouvement
brownien avec dérive à partir de la loi de cette fonctionnelle pour le mouvement
brownien standard (voir Rogers et Williams [43] ou Revuz et Yor [42]).
3. Asymptotique de la queue de distribution de W
Le contexte est celui de la file d'attente GI IGI Il. La variable X n vaut
Un - Tn où (Tn) est la suite des interarrivées et (un)) celle des services, ces
suites sont LLd., indépendantes entre elles et vérifient lE( (1) < lE( Tl ). Dans le
chapitre 2 il a été montré que sous ces conditions, la suite des temps d'attente
des clients de la file GI IGI /1 était une chaîne de Markov ergodique. De plus,
le temps d'attente stationnaire W a même distribution que le maximum M de
la marche aléatoire (Sn). Le théorème suivant décrit la queue de distribution de
W, les premiers résultats de ce type sont dûs à Kingman[22].
THÉORÈME 3.5. Si les deux conditions suivantes sont vérifiées:
a) IE(X 1 ) < 0 avec Xl = U1 - Tl;
b) il existe (J > 0 tel que
1 < E (e 8 0') < +00;
[22] J. F. C. Kingman, Inequalities in the theory of queues, Journal of the Royal Statistical
Society B 32 (1970), 102-110.
3. ASYMPTOTIQUE DE LA QUEUE DE DISTRIBUTION
65
l'inégalité suivante est alors satisfaite
(3.4) JP(W > a) = JP (r:; Sn > a) < e--.,.a,
pour a > 0, où, est l'unique solution strictement positive de l'équation
IE( exp ( 'Y Xl )) = 1.
Si de plus la variable a est non latticielle (voir la définition page 29) et
1E (IX1Ie1'X1) < +00,
la loi de la variable W a alors une queue de distribution à décro ssance
exponentielle et
(3.5) lim e-.,.aJP(W > a) = C l = JP(II{ = +00) ) ,
0.-4+00 - ,IE(X 1 e1'X 1 )1E v+e1' S &.l+ l{v+<+oo}
où C l > 0 et 11+ est le temps d'atteinte de l'axe positif par la marche
aléatoire,
11+ = inf{n/Sn > O}.
Comme on le verra dans la preuve, la constante C 1 de (3.5) est bien définie.
Son calcul explicite peut, éventuellement, se faire à l'aide de la loi jointe de
(v+, Sv+). De toutes façons le paramètre important pour l'étude qualitative de
cette file d'attente est, qui lui se calcule aisément en pratique.
DÉMONSTRATION. Pour a > 0, Ta désigne le temps d'atteinte de [a, +oo[
par la marche aléatoire,
Ta = inf{njSn > a}.
Si M = sup{Snln > O}, l'identité (3.2) donne
JP(W > a) = JP(M > a) = JP(T a < +00) = ! e--",ST a l{Ta<+oo} dQ
(3.6) JP(W > a) = e--.,.aJEQ (e--"'(STa-a)l{Ta<+oo})'
comme STo. > a, on obtient
IP(W > a) < e-1'a,
et donc l'inégalité (3.4).
Si IE(IX 1 1 exp('YX1)) < +00. La formule (3.2) de la proposition 3.4 donne
l'inégalité EQ(X l ) > 0 et, d'après la loi des grands nombres Q-presque sûrement,
lim Sn = JEQ(Xd > o.
n-4+oo n
Par conséquent, Q-presque sûrement la suite (Sn) converge vers l'infini, en par-
ticulier si a > 0, le temps d'arrêt Ta est Q-presque sûrement fini. L'identité (3.6)
se réécrit
(3.7)
JP(W > a) = e--.,.aJEQ (e--",(STa -a»)
66
3. THÉORÈMES LIMITES
Pour n > 0, la suite (ZI+) est définie par récurrence par ZI = 0 et
ZI +l = inf{ n > ZI / 8n - 8 v + > O},
en supposant comme d'habitude que inf 0 = +00, en particulier
ZI = inf{nlSn > O} = ZI+.
Comme la marche aléatoire sous Q converge presque sûrement vers l'infini, les
variables ZI+ sont Q-p.s. finies.
La suite (Sv n ) est par définition croissante, le lemme 2.3 page 37 montre
+
que sous la probabilité Q les accroissements
(Sv n + 1 - 8 v n )
+ +
sont i.i.d. de même loi que Sv+. La suite (Sv;) est donc un processus de renou-
vellement de loi 8 v +. On va montrer que les hypothèses du résultat de renouvel-
lement (Proposition 1.27 page 30) sont satisfaites dans ce cas.
- Intégrabilité. Comme lF.Q (Xl) > 0, le lemme 3.1 donne l'intégrabilité de
la variable ZI+ pour la probabilité Q, la formule de Wald (3.1) montre par
conséquent l'intégrabilité de la variable Sv+ pour la probabilité Q.
- Sauts non latticiels. Les sauts positifs de la marche aléatoire sont dûs à la
variable (j. L'hypothèse sur u entraîne donc que la variable Sv+ est non
latticielle.
La suite (Sv n ) est la suite des records successifs de la marche aléatoire. La
+
première fois où la suite (Sn) franchit le niveau a est nécessairement à un de ces
instants de records, autrement dit Ta est un ZI pour p > 1.
Sur l'ensemble {Ta. < +oo}, la quantité ST a est le premier point du proces-
sus de renouvellement (Sv n ) après a. D'après le théorème de renouvellement,
+
quand a tend vers l'infini, la variable ST a - a converge en distribution, pour la
probabilité Q, vers la variable F v + distribuée suivant la loi du premier point du
renouvellement stationnaire associé à la distribution de Sv+, pour X > 0,
1 r+ oo
Q(FI/+ > x) = lF.Q(SI/+) I" Q(SI/+ > y) dy.
On déduit de l'équation (3.7) la convergence
lim e1' a IP(W > a) = lF.Q ( e-1'F + ) .
a-t +00
Il reste à calculer le membre de droite, d'après l'expression de la loi de Fv+, on
a
1 -lF.Q ( e -'YS + )
1EQ (e-'YFv+ ) = .
'YlF..Q (Sv+)
L'identité de Wald, 1EQ(Sv+) = (ZI+)1EQ(Xl) et la relation (3.2) donnent
1 - 1E ( e -'Ys + e 'Ys + 1 { })
( pt, ) v+<+oo
EQ e-'Y + -
- ')'JE(X 1 e'Y X 1) JE (v+e'Y Sv + l{I/+<+OO}) 1
3. ASYMPTOTIQUE DE LA QUEUE DE DISTRIBUTION
67
d'où
IEQ (-'YF', ) IP'(II+ = +00)
e "+ = -y JE (X 1 e'Y X l ) JE (lI+e'Y S ,,+ l{v+<+oo})'
et l'identité (3.5) est démontrée.
D
Ce résultat est relié au phénomène suivant: en notant Ta le temps de dépas-
sement du niveau a, quand a tend vers l'infini la marche aléatoire conditionnée
à dépasser le niveau a se comporte entre 0 et l'instant Ta comme une marche
aléatoire associée à la loi de Xl sous (Q. C'est en particulier une marche aléatoire
de dérive positive. La section 6 donne la démonstration de cette propriété.
Application aux files M/G/l et G/M/l. La moyenne des interarrivées
[resp. services] vaut 11 J1. [resp. 1/ À] dans cette partie.
La file GIM/I. L'équation E(exp('1(O' - r))) = 1 s'écrit
'Y = J-L (l-E(e-1'T)) ,
dans ce cas 'Y est le /3 de l'identité (2.18) page 49 de la proposition 2.11. Dans
ce cas, le résultat asymptotique sur la queue de distribution est trivial puisque
pour x > 0, IP(W > x) = (1 - /3/ J1.) exp( -(3x).
La file MIG/I. On suppose que E(exp(90')) < +00 pour un 9 > o. Le taux
de décroissance exponentielle 'Y est donné par la solution strictement positive de
l'équation de point fixe
'1 = À (E(e1'O') -1).
Ces résultats supposent que 0' a un moment exponentiel. La proposition suivante
donne l'ordre de grandeur de la queue de distribution de W quand 0' a une queue
de distribution à décroissance polynomiale.
PROPOSITION 3.6. S'il existe a, b > 0 et q > 1 tels que
a b
- < IP ( O' > X ) < - ,
x q - - - x q
pour x suffisamment grand, il existe A, B > 0 tels que
A B
x q - 1 < IP(W > x) < x q - 1 .
DÉMONSTRATION. La proposition 2.9 et la remarque de la page 52 montre
que W peut se représenter comme E - l Zi, où G est une variable géométrique
de paramètre p, indépendante de la suite i.i.d. (Zi) dont la loi commune a la
densité IP(O' > x)/1E(O') , x > 0 (c'est la loi de Sv+). La distribution de Zl décroît
aussi de façon polynomiale :
(+oo IP(O' > y)
IP'(ZI > x) = I" lE(u) dy,
pour x assez grand,
1 +00 a 1 +00 b b 1
lE( ) dy < IP'(ZI > x) < lE( ) dy = ( )IE() I
X yq 0' x yq 0' q - 1 0' x q -
68
3. THÉORÈMES LIMITES
d'où l'existence de al, b l > 0 tels que pour x assez grand,
al b 1
x q - 1 < P(Zl > x) < x q - 1 .
D'après la représentation de la loi de W, pour x > 0,
+00 ( n )
IP(W > :z:) = ; pn(1- p)1P Zi > :z: ,
en particulier
pal
IP(W > x) > P(G > 1, Zl > x) = pIP(Zl > x) > x q - 1 .
Pour n > 1, l'inégalité élémentaire
IP ( Z, > :z:) < t IP (Z, > : ) = nlP (Zl > : ) < : 1
donne l'existence d'une constante finie B > 0 telle que P(W > x) < B Ix q - l . La
proposition est démontrée. 0
4. Le maximum d'une période d'occupation
Le propos de cette section est d'estimer le maximum de la charge de la file
d'attente sur une période d'occupation, ou encore la hauteur maximum des très
longues périodes d'occupation du serveur.
DÉFINITION 8. La condition (C) est satisfaite si
1. lE( Xl) < 0 avec Xl = U - T et la distribution de u est étalée (voir la
définition page 29) ;
2. il existe (J > 0 tel que 1 < E( exp ((JO')) < +00,
3. 1E(IX 1 1 exp('1X1)) < +00; où '1 est l'unique solution strictement positive
de l'équation
E(e1'Xl) = 1.
Si IE(X l ) < 0, le temps d'arrêt 11_ = inf{n > OISn < O} est fini P-presque
sûrement. La marche aléatoire (Sn) fait une excursion positive sur l'intervalle
{O, . . . ,11_ - 1}. D'après le chapitre 2, si un client initie un cycle d'occupation
à t = 0 alors 11_ est l'indice du premier client qui n'attend pas après t = o. Le
résultat principal de cette section est le suivant.
THÉORÈME 3.7. Sous la condition (C) le maximum de la marche aléa-
toire (Sn) sur une excursion positive vérifie la relation
lim e1' a p ( max Sk > a )
a-++oo O k<lI_
(3.8)
dei lP(v+ = +00) (1 - lE ( e'Y S ,,- ) )
= C 2 =
'rIE ( Xl e'Y X l ) lE (v+e 'Y S ,,+ 1{1I+ < +oo} ) 1
4. LE MAXIMUM D'UNE PÉRIODE D'OCCUPATION
69
avec C 2 > 0 et
v+ = inf{n > /Sn > O} et v_ = inf{n > OISn < O}.
DÉMONSTRATION. Si n > 0, on note Mn = max Sk. Pour a > 0,
- a<k<n
P(Mv_ < a < Moo) = P(M v _ < a, Ta < +00),
où Ta est, comme précédemment, le temps de dépassement de a par la marche
aléatoire. En remarquant que l'événement
{v_ < +00, Mv_ < a, Ta < +oo} = {Mv_ < a < Moo}
= {Mv_ < a, v_ < Ta < +oo}
est :FTa -mesurable, l'identité (3.2) donne
IP'(M II _ < a < Moo) = JEQ (e--YSTa l{II_<+oo. M,,_ <a. Ta <+oo} ) .
Comme JEQ(X 1 ) > 0, la variable Ta est donc finie Q-presque sûrement (Proposi-
tion 3.1), ainsi
IP'(M II _ < a < Moo) = e--yaJEQ (e--Y(ST a -a) l{II_<+oo. M,,_ <a} ) .
Du théorème de Lebesgue on déduit qu'il existe aa > 0, ka > 0 tels que, si
a > ao et k > ka, alors
(11{v_<+oo, Mv_<a} -l{v_<+oo}1) < E et (l{k v_<+oo}) < E,
par conséquent, pour a > aa et k > ka l'inégalité suivante est satisfaite,
IJEQ (e--Y(STa -a) l{II_<+oo. M,,_ <a}) - (e--Y(STa -a) l{II_<k} ) 1 < 2£.
L'événement {v _ < k}, ne dépendant que des variables Xl, . .. ,X k, la proposi-
tion 1.27 page 30 montre que la variable ST a - a converge en loi et est asymp-
totiquement indépendante des premiers point du processus de renouvellement,
et donc des variables Xl,' . . ,X k ,
a.!} oo (e--Y(ST a -a) l{II_<k}) = (e --yF,,+ ) (l{II_<k});
F v + est la loi du premier point du processus de renouvellement stationnaire
associé à Sv+ sous la probabilité Q. Noter qu'il faut aussi vérifier que la variable
8 v + est étalée si (J l'est, en utilisant que la variable v+ est non bornée c'est un
exercice élémentaire. Finalement on obtient
lim e'Yap(M v _ < a < Moo) = ( e-'YFv+ ) (l{v_<+oo}),
a-+ +00
et d'après la démonstration du théorème 3.5,
lim e'Yap(M oo > a) = EQ ( e-'YFv+ ) ,
a-++oo
70
3. THÉORÈMES LIMITES
d'où
lim e1' a IP(M II _ > a) = IE.o ( e-'YF + ) (l-lF.Q(l{II_<+oo}))
a-++oo
IP'(II+ = +00) (1 - E ( e'Y s ,,- ) )
-yE ( X 1 e'Y X l ) E (lI+e'Y S "+ l{v+<+oo} ) ,
ce qui achève la démonstration du théorème.
D
La section 6 décrit plus précisément le comportement de la marche aléatoire
conditionnée à atteindre un très haut niveau.
5. La file GI/GI/l au voisinage de la saturation
Ici la file d'attente GI /GI Il est étudiée quand la quantité E(X 1 ) = JE(O'l -
Tl) tend vers 0 par valeurs inférieures. La proposition 2.2 montre que dans le
cas où JE( 0'1) = JE( Tl), le temps d'attente du n-ième client croît essentiellement
en vn,. Si WX 1 désigne le temps d'attente stationnaire associée, intuitivement la
variable WX 1 tend en distribution vers l'infini quand E(X 1 ) tend vers o. Le prin-
cipal résultat de cette section est la convergence en loi de WXl convenablement
renormalisé. Les premiers résultats de ce type ont été montrés par Kingman[23].
Dans toute la suite de cette partie, (Xî) est une suite de variables aléatoires
de carré intégrable non dégénérées telles que
1. pour tout n > 0, E(Xî) = -l/Kn < 0;
2. lim n -++ oo IE(Xi) = 0;
3. en posant TJn = v var(Xf), lim n -++ oo TJn = TJ > O.
Pour n > 0, la suite (Xi) est i.i.d. de même loi que x n et (Win) est la suite des
temps d'attente associés définie par
W; = 0, Win = (W l + Xi)+,
pour i > 1. En posant Mi = - Win IE( Xi ) 1 TJn, comme E( Xi) < 0, la récurrence
précédente peut se réécrire sous la forme
M'!"- = ( M'!"- - 1E( X i) X'!"- ) +
1-1 1.'
TJn
pour i > 1. Après la renormalisation en espace, on renormalise en temps pour
définir, si t > 0,
(3.9)
M = 0,
Mn(t) = M K J.
[23] J.F.C. Kingman, The heavy traffic approx'I,mation in the theory of queues, Proc. Symp.
on Congestion theory (Chapel Hill), Univ. of North Carolina Press, 1965, pp. 137-169.
5. LA FILE GI IGI /1 AU VOISINAGE DE LA SATURATION
71
THÉORÈME 3.8. Sous les conditions précédentes, pour T > 0, quand n
tend vers l'infini, le processus (Mn(t); 0 t < T) converge en distribution
vers le processus (R(t); 0 < t < T) qui est le processus (B(t) - tlTJ) réfléchi
en 0,
(3.10)
R(t) = sup (B(t) - tlTJ - (B(s) - SITJ)) ,
O<s<t
où (B(t)) est le mouvement brown en partant de o.
R(t)
t
o
FIG. 2. Une trajectoire du processus (R(t))
DÉMONSTRATION. En itérant l'équation de récurrence définissant la suite
des temps d'attente (Win), on déduit l'identité déjà rencontrée (cf. la relation (2.3
page 34)),
WIn = sup ( t Xl ) V 0,
l k t j=k
comme IE(xr) < 0, on en déduit l'identité
( 1 LtK J )
Mn(t) = sup K L Xl va
l k LtK J TJn n ]=k
( L t K J ( L 2 J ) )
= sup L(Xl-IE(X ))- tK n2 -k vo,
l k LtK J TJn Kn ]=k Kn
D'après le théorème de Donsker, voir Billingsley [5], pour T > 0 quand n tend
vers l'infini le processus
(3.11 )
( LtK J 2 J )
Rn(t) = TJ 1 ; L (Xi - IE(X )) _ Lt:; ,
n n 1 n
72
3. THÉORÈMES LIMITES
sur l'intervalle [0, T] converge en distribution vers le mouvement brownien avec
dérive (B(t) - tlTJ; 0 < t < T), où (B(t)) est le mouvement brownien issu de O.
L'identité (3.11) montre que (Mn(t)) peut s'exprimer en fonction de (Rn(t)) de
la façon suivante :
Mn(t) = sup (Rn(t) - Rn(s)).
O<s<t
L'application définie sur l'espace des fonctions càdlàg sur [0, T] muni de la to-
pologie de la convergence uniforme,
f ---t 1/J(f), 1/J(f)(t) = sup (f(t) - f(s)),
O<s<t
est continue pour la topologie associée à cet espace (voir l'appendice ou Billing-
sley [5]). On en déduit la convergence en loi du processus (Mn(t); 0 < t < T)
vers (R(t); 0 < t < T) défini par (3.10) quand n tend vers l'infini. D
Pour t fixé
R(t) = sup (B(t) - B(s) - (t - s)ITJ) = sup (B(t) - B(t - s) - SITJ) ,
O<s<t O<s<t
- - - -
et puisque (B(t) - B(t - s); 0 < s < t) a même loi qu'un mouvement brownien
sur [0, t]. La variable R(t) a donc même loi que sup{B(s) - slTJ; 0 < s < t}, elle
converge par conséquent en loi vers la distribution de la variable aléatoire
R = sup (B(t) - t/TJ) .
t>o
Un résultat classique sur la renormalisation du mouvement brownien montre que
(tB(llt)) est aussi un mouvement brownien issu de o. En particulier IP-presque
sûrement limt o tB(l/t) = 0, et donc limt +oo B(t)lt = 0, d'où IP-p.s.
lim B(t) - t = -00.
t-t+oo
La variables R est donc presque sûrement finie.
La loi de R est donc la mesure invariante du processus (R(t)). Il est natu-
rel de supposer que les lois stationnaires des temps d'attente convenablement
renormalisés (WnlE(Xi)ITJn) vont converger en loi vers cette mesure invariante.
Autrement dit le diagramme ci-dessous commute (les flèches indiquent que t ou
n tendent vers l'infini),
(Mn(t))
l
(R(t))
Le petit lemme suivant donne la loi de R.
) W n IE(Xi)/TJn
l
R
LEMME 3.9. Si (B(t)) est un mouvement brownien partant de D, la va-
riable aléatoire R = sup{B(t) - tlt > O} suit une loi exponentielle de pa-
ramètre 2.
5. LA FILE GI IGI /1 AU VOISINAGE DE LA SATURATION
73
DÉMONSTRATION. Il est facile de vérifier que (exp(2(B(t) - t))) est une
martingale. Pour a > 0, la variable Ha = inf{t > 0IB(t) - t > a} est un
temps d'arrêt relativement à la filtration naturelle de (B(t)). Le théorème de
Doob sur les martingales arrêtées donne, pour t > 0,
lE ( exp(2(B(Ho. 1\ t) - Ho. 1\ t))) = 1,
comme limt-++oo B(t) - t = -00, il vient P-p.s.
lim exp(2(B(H a 1\ t) - Ha 1\ t)) = e 2a l{H a <+oo}.
t-++oo
La variable positive exp(2(B(H a 1\ t)) - Ha 1\ t)) étant majorée par la constante
exp(2a), le théorème de convergence dominée permet de déduire l'égalité
1E (e 2a l{H a <+oo}) = 1,
soit P(Ha < +00) = P(R > a) = exp( -2a), d'où le lemme.
D
PROPOSITION 3.10. Si W n a la loi du temps d'attente stationnaire as-
sociée à la variable Xf, sous les hypothèses l, 2 et 3 page 70, la variable
-JE{Xf) W n
1]
converge en distribution vers la loi de
sup (B(t) - t) ,
t>o
où (B(t) est le mouvement brownien,. cette variable a une distribution ex-
ponentielle de paramètre 2.
Ce résultat indique que si p est très proche de 1, alors le temps d'attente sta-
tionnaire de la file GI IGI /1 est approximativement ÀTJ 2 VI(l - p) où V est une
variable exponentielle de paramètre 2.
DÉMONSTRATION. D'après la relation (3.11), la variable
-1E(Xf) W n
y' var(Xf)
a même loi que
( LtK J ) ( LtK J 2 J )
sup L -X;'JE{Xf) = sup L (Xj - JE{Xf)) _ LtK; .
t O TJn ]=1 t o TJn Kn J=l Kn
D'après le théorème 3.8, pour T fixé,
sup -.!:.. ( L J (Xj _ JE{Xf)) _ LtK;J ) sup ( B(t) _ ! ) ,
O t T TJn Kn ]=1 Kn o t T TJ
74
3. THÉORÈMES LIMITES
quand n -t +00. Le résultat principal de la proposition est que cette convergence
est vraie pour T = +00. Les termes résiduels
sup 2.. ( t -X;'IE(Xf) ) et sup ( B(t) - ! ) ,
k LTK J 'TJn J=l t?T 'TJ
ne contribuent pas de manière importante dans le supremum sur toute la droite
réelle. Ceci est clairement vrai pour le deuxième terme si T est assez grand.
Pour le premier terme, ceci sera vérifié si celui-ci est uniformément négatif en n
quand T est grand.
Pour ce faire, on utilise une inégalité de martingale. La martingale utilisée
permet aussi montrer la loi des grands nombres (voir Durrett [16] pour cette
démonstration de la loi des grands nombres et Asmussen [2] pour son utilisation
dans ce cadre). Pour n fixé et k > 0, on note Yjn = -Xj1E(Xî) + E(Xî)2,
k
Sk = L n,
1=1
et Qk la tribu engendrée par les variables Sk, y k n+ 1 , Yk 2'. .. La filtration (Qk)
est décroissante et Sk est Qk-mesurable.
ASSERTION. La suite (Sk / k) est une martingale renversée pour (Qk), i.e.
pour k > 1,
JE ( Sk-d(k-l) 1 9k) = Sk/k.
Comme Sk-1 = Sk - y k n , il suffit de calculer lE(y k n /Qk). Par symétrie, on déduit
l'identité E(Yjn 1 Qk) = lE(y k n 1 Qk) pour tout j < k. La somme des Yjn pour
j < k valant Sk, elle est Qk-mesurable, d'où IE(ykn 1 Qk) = Sklk et la relation
E ( S I( k _ 1 )1 g ) = Sk - Sklk = Sk
k-1 k k _ 1 k '
d'où l'assertion.
La suite ((Snln)2) est donc une sous-martingale renversée et l'inégalité de
Doob pour celle-ci donne l'inégalité
(3.12)
JP> ( su p ISII > a ) < 2.. IE(S ) .
>k J - a 2 k 2
,_
En revenant aux W n ,
r ( sup t -XjIE(Xf) > 0 ) = JP> ( sup t Yjn > IE(Xf)2 ) ,
k?lT K J 1=1 k?lT K J 1=1
6. LA MARCHE ALÉATOIRE CONDITIONNÉE À DÉPASSER a
75
l'équation (3.12) montre
r ( sup t -X;E(X ) > 0 )
k LTK J j=l
1 E ( xn ) 2 var ( Xn ) K2
< 1 1 n var ( Xn )
- E(Xf)4 LT K J LT K J 1 .
La suite (var(Xf)) converge vers TJ2 et (K /LTK J) vers liT; pour E > 0 il
existe donc To tel que pour T > To,
r ( sup t -XjE(X ) > 0 ) < E, pour tout n E N, et
k LTK J 1=1
r ( su p (B(t) - t ITJ ) ) < E.
s>T
On en déduit, pour a > 0,
r ( - E(Xî) w n > a ) - r ( SUP(B(t) - t) > a )
v var(Xf) O t
< 2E + r ( sup l J -XjE(X ) > a ) - r ( sup (B(t) - t) > a ) ,
O t T j=l O t T
et ce dernier terme tend vers 0 quand n tend vers l'infini. La converge en loi est
donc démontrée.
Il reste à prouver que la variable
X = 1/TJ sup (B(t) - tlTJ)
t>o
suit une loi exponentielle de paramètre 2. La propriété de renormalisation du
brownien montre que (TJB(tITJ2)) est aussi un mouvement brownien issu de o.
En utilisant celui-ci, on obtient que X a même loi que
sup (B(t/TJ2) - t1TJ 2 ) = sup(B(t) - t).
t>o t>o
- -
Le lemme 3.9 permet de conclure. 0
La convergence de la suite (W n) convenablement renormalisée a été montrée
grâce à une technique de martingale. Si ce point technique est important, la
partie cruciale de la preuve est la représentation explicite de W n en fonction de
la marche aléatoire associée à Xf.
6. La marche aléatoire conditionnée à dépasser a
Les notations et hypothèses de la section 3 sont encore utilisées. La marche
aléatoire conditionnée à dépasser un certain niveau est l'objet de cette section.
Le comportement de cette marche conditionnée est à la base des résultats de
conditionnement obtenus dans les sections 3 et 4.
76
3. THÉORÈMES LIMITES
THÉORÈME 3.11. Si Ta = inf{njSn > a} et la condition (C) page 68 est
vérifiée,
1. conditionnellement à l'événement {Ta < +oo}, les lois marginales de
la suite (Sn/\T a ) convergent en distribution quand a tend vers l'infin
vers celles de la marche aléatoire (S.",), loi de (Sn) partant de 0 sous
la probabilité Q.
2. La loi conditionnelle de (Sn+Ta) sachant l'événement {Ta < +oo} est
la loi sous la probabilité r de la marche aléatoire (Sn) partant de
STa'
Ce résultat montre que le chemin conditionnel d'une marche aléatoire de
dérive négative avec un grand maximum se décompose en deux parties : la
première suit le chemin d'une marche dont la dérive, 1EQ(X 1 ), est positive, la
seconde suit le chemin de la marche initiale de dérive négative E(X 1 ), et retourne
à o.
y=a+IE(X 1 )(t-a/IEo)(Xl»
y= (Xl)t
a 1
(st)
(St)
t
o
Ta
FIG. 3. La marche aléatoire conditionnée à dépasser a
DÉMONSTRATION. L'assertion 2 du théorème n'est autre que la propriété de
Markov forte de notre marche aléatoire (lemme 2.3).
Pour montrer le a) du théorème il suffit de prouver que si KEN et f :
}RN -t Il4 est une fonction borélienne bornée ne dépendant que des K premières
coordonnées, alors la relation suivante est satisfaite
lim E(f((Sn/\T a )) 1 Ta < +00) = 1EQ(f(Sn)).
a--4+oo
L'identité (3.2) donne, Ta étant Q-p.s. fini,
E (f((Sn/\T a ))l{T a <+oo}) = lF.Q (f((Sn/\Ta))e--rSTa) ,
6. LA MARCHE ALÉATOIRE CONDITIONNÉE À DÉPASSER a
77
La proposition 1.27) montre que (ST a - a, Xi, 0 < i < K) converge quand
a -t +00 en distribution pour la probabilité Q vers la loi du vecteur (F v +, X" 0 <
i < K), où F v + et X1.' 0 < < K sont indépendants et F v + suit la loi du premier
point d'un renouvellement stationnaire associé à la variable Sv+' En utilisant
l'identité précédente, on obtient
EQ (i(SnI\T..)e--r(STa -11) )
IE{f((Sn/\T a )) 1 Ta < +00) = ( ) '
EQ e-"(ST a -a)
et en faisant tendre a vers l'infini, il vient
. EQ(J«Sn)))EQ (e-1'F,,+ )
hm E(j((Sn/\T a )) 1 Ta < +00) = ( ) = 1EQj((Sn)),
a-++oo 1EQ e -"( F v +
ce qui achève la démonstration du théorème. D
Conditionner la marche aléatoire à dépasser un niveau très haut la force à se com-
porter comme une marche avec une dérive positive. Le résultat suivant montre
que la forcer à ne plus revenir à 0 la transforme en une chaîne de Markov.
PROPOSITION 3.12. Si Xl est tel que IE(X 1 »0, la marche aléatoire (Sn)
conditionnée à ne pas retourner en dessous de 0 est une chaîne de Markov,
la probabilité de transition r(x, dy) de cette chaîne est donnée par
IP y(lI_ = +00)
r(x, dy) = 1P'",(v_ = +00) lP'(x + Xl E dy),
avec IPx(.) = IP(.I Sa = x) et 11_ = inf{k > O/Sk < O}.
Il Y a une légère différence de définition de 11_ par rapport à celle du cha-
pitre 2, le terme k > 0 est remplacé ici par k > O. L'identité précédente définit
bien une probabilité puisque par définition de 11_, pour X > 0,
IP' '" (v_ = +00) = lE ( IP' "'+X 1 (v_ = +00)) ,
donc
lE (1P''''+Xl(V- = +00))
r(x, IR) = IP' ( )
x 11_ = +00
Bien évidemment r(x,] - 00,0]) = 0 pour x > O.
DÉMONSTRATION. La propriété de Markov est une conséquence de la propo-
sition C.3 page 344 (cette proposition est démontrée dans le cas d'un processus
à temps continu mais elle se transpose aisément au cas discret). Si f est une
fonction borélienne bornée sur Jl4. et x > 0,
lE (J(x + Xd 1 {T o =+oo}) = r f(y)lP'y(To = +00) lP'(x + Xl E dy),
J]O,+oo[
78
3. THÉORÈMES LIMITES
par conséquent
1 f(y) r(x, dy) = E(f(x + xd 1 Ta = +00)
1 IPy(To = +00)
= f(y) JP' (11 _ ) JP'(x + Xl E dy),
]O,+oo[ x 0 - +00
d'où l'expression de la probabilité de transition. 0
CHAPITRE 4
Réversibilité et équations d'équilibre des réseaux
Sommaire
1. Introduction 79
2. Réversibilité des processus de Markov 80
2.1. La propriété de réversibilité 80
2.2. Application au processus des départs de la file MI Mil 83
2.3. Troncature des processus réversibles 85
2.4. Un autre critère de réversibilité 87
3. Les équations de balance locale 88
4. Les réseaux de files d'attente à forme produit 90
4.1. Les réseaux de Jackson 90
4.2. Les réseaux de Gordon-Newel 93
4.3. Réseaux de files d'attente multi-classe 95
1. Introduction
Dans ce chapitre l'état d'équilibre de certains réseaux de files d'attente est
étudié. L'état de ces réseaux est décrit à l'aide de processus de Markov de sauts
(X(t)) = (Xi(t); 1 < i < N) à valeurs dans NN , Xi(t) étant le nombre de clients
dans le i-ième nœud du réseau. Les résultats utilisés sur les processus de sauts
sont rappelés dans le chapitre 1 sur les processus de Poisson et dans l'annexe C.
Le fonctionnement de ces réseaux peut être assez simplement décrit : les
clients arrivent à une des files d'attente du réseau, attendent éventuellement, se
font servir, puis vont dans une autre file d'attente ou quittent définitivement le
réseau, et ainsi de suite. Avec ce type de dynamique pour t > 0 fixé, les variables
Xi(t) sont, à priori, corrélées. Pourtant, si les processus d'arrivée sont de Pois-
son et les services exponentiels, ces réseaux possèdent la propriété remarquable
d'avoir une mesure invariante produit, ce qui traduit à l'équilibre une propriété
d'indépendance des variables Xi(t) à t fixé.
Le phénomène de mesure invariante produit est lié à certaines propriétés de
réversibilité des processus de Markov. Les résultats principaux dans ce domaine
sont rappelés. Au passage, le théorème de Burke sur la propriété de Poisson du
processus des départs d'une file M / M /1 à l'équilibre est démontré. Ce chapitre
suit assez largement l'exposé de Kelly [28] sur le sujet.
80 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
2. Réversibilité des processus de Markov
Dans la suite on considérera un processus de Markov (X t ) continu à droite
avec une limite à gauche en tout point (càdlàg) à valeurs dans un espace d'états
dénombrable S; on notera X(t-) la limite à gauche de X en t. On suppose
dans la suite que ce processus est irréductible et homogène dans le temps et
sa matrice de sauts est notée Q = (qij). Si elle existe, la probabilité invariante
(11" ( i); E S) du processus de Markov vérifie les équations d'équilibre
(4.1)
1I"(i) ( 2: qij ) = 2: 7r(j)Qji.
1"#" 1#'"
pour tout i E S.
2.1. La propriété de réversibilité.
PROPOSITION 4.1. Si (X(t)) est un processus de Markov de sauts sta-
tionnaire, (i.e. X(O) a pour loi (1I"(i); i ES), la probabilité invariante de ce
processus), pour T > 0, le processus renversé
(X*(t)) = (X ((T - t)-))
est un processus de Markov sur l'intervalle de temps [0, T] dont la matrice
de sauts Q* = (qij; i, j E S) est donnée par
(4.2 )
* 11" (j )
qij = qji 7r( i) ,
pour ,j E S.
En régularisant à gauche avec -, le processus (X*(t); 0 < t < T) ainsi défini
est bien continu à droite. Ce procédé ne change pas la loi du processus puisque
pour t > 0, P(X(t) = X(t-)) = 1 (voir l'annexe C page 341 sur les processus de
sauts) ; les variables X(t) et X(t-) ont même loi. Plus généralement si 0 < t 1 <
t2 < ... < t n , le vecteur (X(t1),'" ,X(t n ) a même loi que (X(t 1 -),... ,X(t n -.)
DÉMONSTRATION. Il suffit donc de montrer que (X(T-t); 0 < t < T) est un
processus de Markov, la même propriété sera vraie pour la régularisée à gauche
de ce processus puisqu'ils ont même loi. Si 0 < t 1 < t2 < ... < t n < T et
il, . . . ,i n ES, on a
(4.3) P(X(T - t n ) = i n 1 X(T - t n - 1 ) = in-1'... ,X(T - t 1 ) = il)
IP(X(T - t n ) = i n , . . . ,X(T - t 1 ) = il)
IP(X(T - t n - 1 ) = in-1'... ,X(T - t 1 ) = il).
Le numérateur du terme de droite de l'égalité précédente peut s'écrire comme
(4.4) P(X(T - t 1 ) = ill X(T - t n ) = i n ,... ,X(T - t 2 ) = i 2 )
x IP(X(T - t n ) = i n , . .. ,X(T - t 2 ) = i 2 ),
et par la propriété de Markov de (X(t)), cette quantité vaut
P(X(T - t l ) = i 1 1 X(T - t 2 ) = i 2 )P(X(T - t n ) = i n ,. . . ,X(T - t2) = i 2 ).
2. RÉVERSIBILITÉ DES PROCESSUS DE MARKOV
81
Le terme de droite de l'égalité (4.3) s'écrit donc comme
IP(X(T - t n ) = i n , . . . ,X(T - t 2 ) = i 2 )
IP(X(T - t n - 1 ) = in-1'. .. ,X(T - t 2 ) = 2)
IP(X(T - t n ) = n 1 X(T - t n - 1 ) = in-1'... ,X(T - t 2 ) = i 2 ).
De proche en proche, on obtient finalement,
IP (X(T - t n ) = n 1 X(T - t n - 1 ) = n-1,... ,X(T - t 1 ) = il)
= r(X(T - t n ) = i n 1 X(T - t n -1) = n-1),
et donc la propriété de Markov du processus (X(T - t); 0 < t < T).
La continuité à gauche de (X(t)) donne la relation
lim IP(X(T - sn) = i n , . .. ) X(T - Sl) = il)
Sn \,.t n ,... ,S1 '\.,t1
= IP(X*(t n ) = i n ,... ,X*(t 1 ) = il),
on en déduit la propriété de Markov de (X*(t); 0 < t < T) de celle du processus
(X(T - t);O < t < T).
Les transitions de ce processus de Markov se calculent aisément. En effet, pour
o < t < T, 0 < h < T - t et i,j E S,
IP ( X* ( t h ) = . , X* ( t ) = . ) = IP(X((T - t - h)-) = i, X((T - t)-) = j)
+ J r(X((T - t)-) = j) ,
lims/T-t IP(X(s - h) = i, X(s) = j)
lims/T-t IP(X(s) = j)
le processus (X(t)) étant stationnaire (voir la section 4 du chapitre 10 page 263),
IP(X(s - h) = i, X(s) = j) = IP(X(O) = i, X(h) = j),
on en déduit l'égalité
TID (X * ( h) = . 1 X * ( ) = . ) = IP(X(O) = i, X(h) = j)
If t + t t J IP'(X (0) = j) ,
= IP'(X(h) = j 1 X(O) = i) ;g '
en divisant par h et faisant tendre h vers 0, on obtient que le processus renversé
est homogène dans le temps et que sa matrice de transition est bien donnée par
la matrice Q*. D
DÉFINITION 9. Le processus de Markov (X(t)) est réversible, si pour tout
entier n et toute suite 0 < t 1 < t 2 < . . . < t n < T, on a l'égalité en loi
(X (t 1 ), X (t 2 ), . .. ,X (t n )) loi (X* (t 1 ), X* (t2), . . . ,X* (t n )).
La réversibilité est l'identité en loi du processus (X (t); 0 < t < T) et du processus
renversé (X*(t); 0 < t < T) pour tout T > O.
PROPOSITION 4.2. Un processus de Markov (X(t)) réversible est station-
na re.
82 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
DÉMONSTRATION. Comme précédemment, par commodité de notation, on
retire momentanément le - de X(t-). Si 0 < t 1 < t 2 < ... < t n et t E IR et
T > t n , d'après la propriété de réversibilité
(X(T - t1), X(T - t 2 ),. .. ,X(T - t n )) loi (X(t 1 ), X(t 2 ),. .. ,X(t n )),
par conséquent pour t E IR,
( X (T + t - (t + t 1 ) ), X (T + t - (t + t 2 )), . . . ,X (T + t - (t + t n )))
loi (X (t + t 1), X (t + t 2 ), . .. ,X (t + t n )).
On en déduit l'identité
( X ( t 1), X ( t 2 ), . . . ,X ( t n )) loi (X (t + t 1), X (t + t 2 ), . . . ,X (t + t n )),
le processus (X (t)) est donc stationnaire.
D
Si la mesure invariante du processus de Markov est connue, la réversibilité s'ex-
prime très simplement en utilisant la matrice de transition.
THÉORÈME 4.3. Un processus de Markov est réversible si et seulement
si il existe une suite positive (7r( i); i E S) telle que
(4.5) 7r( i)qij = 7r(j)qji,
pour i,j E S et LiEs 7r(i) = 1.
DÉMONSTRATION. Si (X(t)) est réversible, ce processus est nécessairement
stationnaire d'après la proposition précédente, on note (7r( i); i E S) sa probabi-
lité invariante. Pour i, j E S, i =F j,
r(X(O) = i, X(t) = j) = JIb(X(O) = j, X(t) = i)
par la propriété de réversibilité, ce que l'on peut encore écrire
7r( i)r(X (t) = j 1 X (0) = i) = 7r(j)r(X(t) = i 1 X (0) = j).
En divisant par t et en faisant tendre t -t 0, on en déduit l'équation (4.5).
Réciproquement, si (X(t)) est un processus de Markov vérifiant (4.5), en
sommant la relation (4.5) sur tous les j de S, on obtient que (7r(i)) est la pro-
babilité invariante du processus de sauts. Si la loi de X (0) est (7r( i); i ES),
d'après (4.2) et (4.5), le processus (X(t)) et le processus renversé sont des pro-
cessus de Markov càdlàg qui ont même matrice de transition et même loi à
t = 0 (la loi stationnaire), on en déduit, Proposition C.2 page 343, que ces deux
processus sont identiques en loi et donc que (X (t)) est réversible. D
Les processus de vie et de mort sur N. Un processus de vie et de mort sur
N est un processus Markov pour lequel qij est nul sauf si Ii - j/ < 1 (sauts aux
voisins immédiats). La matrice de transition Q admet une mesure invariante si
les équations
(qi,,+l + q",-l) 7r(i) = qi+1,i 7r(i + 1) + qi-1,i 7r(i - 1),
i E N, ont une solution de somme finie. Celles-ci peuvent se réécrire
Qi,i-1 7r(i) - Qi-1,i 7r(i - 1) = Qi+1,i 7r(i + 1) - Qi,i+1 7r(i),
2. RÉVERSIBILITÉ DES PROCESSUS DE MARKOV
83
Le terme de gauche étant nul pour = 0, on obtient
q'+l" 7r( i + 1) = Q",+l 7r( i),
qui est le critère de réversibilité vu précédemment. Si un processus de vie et de
mort a une probabilité invariante, il est donc nécessairement réversible (voir à
ce sujet la remarque page 346).
La file MI M / K. Cette file d'attente compte K serveurs, les clients y ar-
rivent suivant un processus de Poisson, K d'entre eux peuvent être servis simul-
tanément et les services ont une distribution exponentielle. Si le taux d'arrivée
vaut À et le taux de service J.L, la récurrence précédente donne les relations
(i + l)J.L7r(i + 1) = À7r(i),
KJ-L7r(i + 1) = À7r(i),
o < i < K,
i > K.
On en déduit donc que
1 ( À ) n
7r(n) = C- - ,
n! J.L
1 ( À ) K ( À ) n-K
11"(n) = C K! J1. KJ1. 1
n < K,
n > K,
est la probabilité invariante si ÀI K J-L < 1 et C la constante de normalisation
associée. Sous cette condition, le nombre de clients de la file M / MI K à l'équilibre
est donc un processus réversible.
En particulier, la probabilité invariante de la file MI Mil est une loi géomé-
trique de paramètre p = À/ J-L si p < 1 et celle de la file M / MI 00 est une loi de
Poisson de paramètre p. .
Les files en tandem MI MI 1 ./Ml1. Le vecteur du nombre de clients
dans chacune des files (L 1 (t), L 2 (t)) est un processus de Markov, donc la matrice
de sauts est définie par
Q(i,j),(i+1,j) = À,
q(i,j),('-1,j+1) = J.L1,
Q("j),(i,i-l) = J..L2,
q( i,j),( k,l) = 0,
i, j E N,
i > 1, j E N,
i E N, j > 1,
sinon, si (k, l) 1: (i,j).
Ce processus ne peut être réversible puisque l'intensité de la transition de (1,0)
vers (0,1) vaut J..L1 et l'intensité de la transition inverse est nulle. La relation
7r((l,O))q(l,O)(O,l) = 7r((0, l))q(O,l)(l,O)
ne peut donc être vérifiée.
2.2. Application au processus des départs de la file M/M/I. Le
nombre de clients d'une file MIM/1 à l'équilibre est, on vient de le voir, un
processus de Markov réversible. Le résultat suivant est une simple conséquence
de cette propriété.
84
4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
o
ta
FIG. 1. Processus du nombre de clients d'une file d'attente M/M/l
PROPOSITION 4.4 (Burke). Le processus des départs d'une file M/M/1 à
l'équilibre est un processus de Poisson et le nombre de clients dans la file
d'attente à t = ta est indépendant du processus des départs avant t = ta.
DÉMONSTRATION. Notons (L(t)) le processus du nombre de clients de cette
file d'attente stationnaire. Comme celui-ci est réversible, pour ta > 0 (L(t); 0 <
t < ta) a même loi que (L( (ta - t) - ); 0 < t < ta). En particulier, les instants
de sauts positifs des processus (L(t); 0 < t < ta) et (L((t a - t)-); 0 < t <
ta) ont même loi. Les instants de sauts positifs de (L((ta - t)-); 0 < t < ta)
sont précisément les instants de départs de la file d'attente. Par conséquent, le
processus ponctuel des arrivées entre 0 et ta a même loi que celui des départs
entre 0 et ta. Si la file MI M /1 est stationnaire, le processus des départs est donc
un processus de Poisson.
La propriété de Poisson pour les arrivées montre que le nombre de clients à
t = 0, qui ne dépend que des arrivées avant t = 0, est indépendant des arrivées
entre 0 et ta. Cela se traduit pour le processus renversé par le fait que le nombre
de clients à ta est indépendant du processus des départs avant ta. La proposition
est démontrée. D
À
DJ
J-L1
TIIJ
J-L2
.
.
.
FIG. 2. Files en tandem.
Les files d'attente MIM/1 en tandem. En reprenant les notations précé-
dentes pour cet exemple et en notant Pi = ÀI J1.i, pour i = 1,2. À l'équilibre
2. RÉVERSIBILITÉ DES PROCESSUS DE MARKOV
85
le processus des arrivées dans cette deuxième file, qui est celui des départs de
la première file, sera par conséquent un processus de Poisson. À l'équilibre, le
nombre de clients dans la deuxième file suivra donc une loi géométrique. Les
propriétés de ce petit réseau sont résumées dans la proposition suivante. Cette
proposition se généralise, on le verra, à une large classe de réseaux.
PROPOSITION 4.5. Sous la condition À < J..L1Â J-L2, les nombres de clients
L 1 (t), L 2 (t) dans les deux files d'un réseau en tandem en régime station-
naire sont des variables aléatoires indépendantes, distribuées suivant une
lo géométrique, i. e. pour t E IR,
(4.6) JP> (L1(t) = ni, L 2 (t) = n2) = (1 - P1)p 1 (1 - P2)p 2 0
DÉMONSTRATION. Si la première file est à l'équilibre, le nombre de clients
L 1 (t) dans celle-ci est, on l'a vu, indépendant du processus des départs avant t de
la première file. Le nombre de clients L 2 (t) dans la seconde file est précisément
une fonctionnelle du processus des départs de la file 1 jusqu'à t. À l'équilibre,
les variables L 1 (t) et L 2 (t) sont donc indépendantes. D
Cette proposition se généralise sans difficulté au cas de N files à service
exponentiel en tandem et même à un réseau en arbre, les clients se séparant au
hasard parmi les branches du réseau à leur sortie d'une file.
=co [gJ
=co [gJ
=co [gJ
.
=co [gJ
=co [gJ
.
=co [gJ
.
FIG. 3. Réseau en arbre.
2.3. Troncature des processus réversibles. La propriété de réversibi-
lité se conserve si les transitions sont modifiées à la sortie d'un sous-ensemble
de l'espace d'états.
86 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
PROPOSITION 4.6. Si le processus de Markov associé à la matrice Q =
(qij) est réversible et si A est un sous-ensemble de S, a > 0 et Q = ((jij) la
matrice définie par
{ J
qiJ
= aq'J'
== q'J'
E A, j E S - A,
sinon pour i- j,
le processus de sauts associé à Q admet la probabilité invariante 1f = (;ri; i E
S) définie par
{ ,
7r,
== C7r( i),
= Ca7r(i),
i E A,
i E S - A,
avec la constante de normalisation
1
C= .
7r(A) + a7r(S - A)
Ce processus est aussi réversible à l'équilibre.
DÉMONSTRATION. La vérification est immédiate.
o
Les files d'attente à capacité limitée. Si a vaut 0 dans la proposition
précédente, cela revient à interdire des transitions de A en dehors de A. Dans
le cadre des files d'attente en prenant A = {O, 1, . . . ,C}, cela suppose que les
clients sont rejetés dès que la file contient C clients. Si une file d'attente de
capacité illimitée est réversible (i.e. le processus du nombre de clients l'est),
alors la même file d'attente mais avec une capacité finie est aussi réversible.
Application aux réseaux de files d'attente avec perte. Ces réseaux sont
souvent utilisés pour étudier les réseaux de télécommunication (voir l'article de
Kelly[19] par exemple). Nous utiliserons le langage de ce domaine pour les décrire.
On suppose que le réseau compte N nœuds, sommets d'un graphe Q. Une route
r reliant un nœud x à un nœud y est une suite finie de nœuds, r = (Xl,. .. ,Xk),
tels que Xl = X, Xk = Y et, pour i = 1,... ,k - 1, Xi et Xi+1 sont voisins dans
le graphe (ce que l'on notera (Xi, Xi+1) Er). La figure 4 décrit un réseau à 6
nœuds et deux routes, l'une reliant Xl à X4 et l'autre X2 à X3. L'ensemble des
routes du réseau est noté 'R.
Les appels utilisant la route r E 'R arrivent suivant un processus de Poisson
de paramètre Àr et la distribution de la durée de ces appels est une loi expo-
nentielle de paramètre J..Lr. En notant Xr(t) le nombre de communications sur
la route r à l'instant t, le vecteur X(t) = (Xr(t); r E 'R) est un processus de
Markov décrivant notre réseau. Si le nombre de serveurs, i.e. de communications
simultanées possibles, est infini, pour r E 'R, le processus (Xr(t)) est le nombre
de clients d'une file MIM/oo, de taux d'arrivée Àr et de taux de service J-Lr.
La mesure invariante de ce processus de vie et de mort, on l'a vu, la loi de
Poisson de paramètre Àrl J..Lr et à l'équilibre (Xr(t)) est réversible. Les proces-
sus (X r (t) ), r E 'R sont clairement indépendants; le processus (X (t)) est par
[19] F .P. Kelly, Loss networks. Annals of Applied Probability 1 (1991), no. 3. 319-378.
2. RÉVERSIBILITÉ DES PROCESSUS DE MARKOV
87
X2
o
o
X4
o X3
FIG. 4. Routes dans un réseau avec perte.
conséquent réversible, et sa mesure invariante * est donnée par
i( n) = fI (Àr / J.Lr t r e-).r/ /-<r ,
n r !
r E 'R..
pour n = (n r ) E NJ'R..I (IRI est le cardinal de R).
Naturellement la capacité de ces réseaux est en pratique finie, pour i, j < k,
on note Cij le nombre maximum d'appels simultanés utilisant le lien reliant les
nœuds x, et Xj. L'espace d'états est dans ce cas
S = { n = (n r ) E Ni'R.1 / L n r < Cij,
rE'R..,(Xi ,Xj )Er
Vi, j < k } .
D'après la proposition précédente, la mesure invariante *8 du processus de sauts
associés n'est autre que la mesure * restreinte à l'ensemble S,
,.., ( ) C fI (Àr / J-Lr ) n r
7rs n = S ,
"0 n r .
rE '"
où Cs = I: fI (Àr/J.L;t r
n r .
nES rE'R..
est la constante de normalisation.
2.4. Un autre critère de réversibilité. Nous terminons cette section
par un critère de réversibilité, dû à Kolmogorov, qui ne fait pas intervenir ex-
plicitement les mesures invariantes des processus considérés.
PROPOSITION 4.7. Un processus de Markov ayant une probabilité inva-
riante est réversible si et seulement si
(4.7)
qi 1 '2qi 2 '3 ... qin-linqinil = qilinqinin-l ... q i a i 2q i 2 i l'
pour tout n E N et toute suite il,... ,i n de S.
88 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
DÉMONSTRATION. Si le processus de Markov est réversible, en appliquant
de façon répétée la relation (4.5), on obtient pour il, . . . ,i n E S et k < n,
7r(i 1 )qi 1 i 2qi 2 '3 ... q'k-l'k = 7r(i k )q'k'k_l q'k-l i k-2 ... qi 3 '2q'2'1'
puis en posant in+1 = il et en utilisant que 7r( il) > 0, on en déduit la rela-
tion (4.5)<
Réciproquement, en fixant o E S, pour i E S, le processus de Markov étant
irréductible, il existe une suite 1,. . . , n telle que qii n qi n i n - 1 . . . qi 1 io > 0, on
pose
( ' ) q'O'l q'tl't2 . . . qin't
7r = .
qÜ n q'n '1'1-1 0 . . q'l '0
Si j1,... ,jp est une autre suite pour laquelle qijpqjpJp-l ... qjl'O > 0, l'équa-
tion (4.7) montre que
qioil qi 1 i2 . . . qi n i qijn qjnJn-l . . . qjl '0
= 1,
qiOjl qjlj2 . . . qjn,qü n qin'n-l . . . qi1,0
ou encore
qiO'l qi 1 't2 . . . q't n i _ qiOjl qjlj2 . . . qjn 't
qii n qi n i n - 1 . . . qi 1 io qijn qjnjn-l . . . qjl io
La définition de 7r( i) ne dépend pas donc pas la suite (i k ) choisie. Si i, j E S
sont tels que qji > 0, alors
( ' ) q'tOil qi 1 '2 . . . qi n iqij
7r qij = qji = qji 7r (j).
qji qii n qi n in-l . . . q'l io
Donc, si qji > 0 ou qij > 0 l'équation (4.5) est vérifiée pour la suite (7r(i)) ainsi
construite. On en déduit que le processus de Markov est réversible. D
3. Les équations de balance locale
La réversibilité est une propriété forte de symétrie d'un processus de Markov.
Pour montrer qu'un processus est réversible, il suffit d'exhiber un candidat pour
la mesure invariante et de vérifier les équations de flux (4.5) entre deux points
de l'espace d'états.
Les processus de Markov ne sont pas, en général (voir le cas de la file en
tandem par exemple), des processus réversibles. Une propriété intermédiaire
(appelée quasi-réversibilité) est cependant satisfaite dans un grand nombre de
cas. De la même façon que pour la réversibilité, la vérification de cette propriété
donnera au passage la mesure invariante du processus de Markov ainsi que la
caractérisation de certains processus de sortie des réseaux.
PROPOSITION 4.8. S'il existe des suites positives (7r(i); i E S) et (qij; i,j E
S) telles que, pour tout élément io de S, il existe une partition (AjO; j E 1)
de S - {io} et
(4.8)
(4.9)
7r( i)qij = 7r(j)qji,
i, j E S,
L (j'tok = L qiok,
kEA '0 kEA '0
J 1
j E l,
3. LES ÉQUATIONS DE BALANCE LOCALE
89
alors (7r( i); i E S) est la mesure invariante du processus de M arkov associé
à la matrice de transition Q et, si la mesure invariante (7r( i)) est de somme
finie, la matrice Q = (qij; i, j E S) est la matrice du processus stationnaire
renversé.
DÉMONSTRATION. L'équation (4.8) donne
L 7r(j)qj o = 7r(io) L (fiOJ'
JES-{ o} JES-{i o }
et de l'identité (4.9), on déduit la relation
L (fioJ = L L OJ = L L qioJ = L qioJ.
JES-{,o} lEI JEA;o lEI JEA;o jES-{i o }
En combinant ces deux équations, on obtient l'équation de balance globale (4.1)
pour (7r(i); i ES). L'assertion sur le processus renversé est une conséquence
directe de la proposition 4.1. La proposition est démontrée. D
REMARQUES.
1. Si Aj = {j} pour j f. i, le processus de Markov vérifiant la proposition
précédente avec cette famille de partitions est réversible.
2. Sous les hypothèses de la proposition précédente, pour j E l, en sommant
sur A j l'équation (4.8), on obtient que la mesure invariante (7r ( i)) vérifie les
équations de balance locale
7r(i) L qik = L 7r(k)qk J
kEA' kEA'
1 1
i E 5,j E l,
qui sont des équations plus détaillées que les équations (4.1). À l'équilibre,
le flux de probabilité de i vers A; est égal au flux inverse.
3. D'après la relation (4.8), si qiok = 0 et qkio = 0, la même relation est vraie
pour q. En particulier si
No = {k/qiok = 0 et qk,o = O},
la relation (4.9)
L OJ = L qioJ
JENo JENo
est donc satisfaite. Par conséquent, il suffit en fait de trouver une partition
de S - No U {io} pour montrer que 7r est la mesure invariante du processus
de sauts.
COROLLAIRE 4.9. La suite (7r(i); i E 5) est une mesure invariante du
processus de M arkov associé à la matrice Q si et seulement si la suite
( j; i, j E S) définie par (4.8) vérifie
L k = L qik, i E 5.
k k
90 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
DÉMONSTRATION. En prenant la suite (Aj;j E 1) ne comportant que l'élé-
ment S -{i}, les équations (4.8) et (4.9) sont équivalentes à la relation de balance
globale (4.1) qui est toujours vérifiée par la mesure invariante. D
4. Les réseaux de files d'attente à forme produit
4.1. Les réseaux de Jackson. Un réseau de Jackson est un ensemble de
N files d'attente FIFO avec le fonctionnement suivant: pour 1 < i < N, la
i-ième file d'attente (appelée aussi le -ième nœud du réseau) délivre un service
exponentiel de paramètre J1.i et les clients arrivent dans le réseau à la file i suivant
un processus de Poisson de paramètre À i . Une fois servi par la file i, le client
passe à la file j avec probabilité Pij (avec Pii = 0) ou quitte définitivement le
réseau avec la probabilité résiduelle. La matrice R = (Tij; i, J = 0,... ,N) est
définie par, si i =f. 0 et j 1= 0,
T,j = Pij ;
TiO = 1 - E:=1 Pij ;
Tao = 1
de telle sorte que R est une matrice markovienne. On suppose que toutes les
variables aléatoires utilisées sont indépendantes.
- []D
! ÀJ
I
TjO
Ti)
TiO
Ài
J-Li
- ==UG
ik
w
r Àk
FIG. 5. Un réseau de Jackson
4. LES RÉSEAUX DE FILES D'ATTENTE À FORME PRODUIT
91
Le processus de Markov associé à ce réseau de files d'attente est à valeurs
dans S = NN. En notant pour 1 < i < N, ei = (l{j=i}; 1 < j < N) le i-ième
vecteur unité, la matrice Q de ce processus de Markov est donnée par
qn,n+e, -e" = J..Ljr j.",
qn,n-e J = J..LJrjO,
qn,n+e, = .Àt,
nJ > 0, i, j < N,
nj > 0, i, J < N,
< N.
La matrice markovienne R = (rij; i, j = 0,. . . N) est supposée avoir 0 comme
unique point absorbant, Le. si (Y n ) est une chaîne de Markov de matrice de
transition R, presque sûrement (Y n ) est constante égale à 0 à partir d'un certain
rang.
On fait en outre l'hypothèse que rii = 0 pour tout 1 < i < N (un client
ne revient pas en fin de file d'attente après son service). Si cette condition n'est
pas remplie, l'expression du générateur montre qu'il suffit de remplacer J..Li par
J..Lil(l - rii) et les rij par rij 1(1 - rii) j :F i, pour se ramener à cette situation.
LEMME 4.10. Il existe une suite positive (Xi; 1 < i < N) vérifiant les
équations de trafic
( 4.10)
N
Xi = Ài + L Xjpj.".
J=l
Pour 1 < i < N, on posera Pi = Àil J..Li.
DÉMONSTRATION. On pose À = Ef Ài et a = (Ài/À; 1 < i < N). Si a est
la distribution initiale de la chaîne de Markov associée à la matrice R, comme
cette chaîne est transiente sur {l, . . . ,N} et l'état 0 est absorbant, le nombre
de visites Ni à l'état i = 1, . . . , N est intégrable et
N +00
E(N i ) = r(Y o = i) + L L r(Y n = j, Y n + 1 = i).
J=ln=O
La propriété de Markov donne l'identité
N +00 N
ÀE(Ni) = À." + L L Àr(Y n = j)rji = Ài + L ÀE(Nj )rji,
J=ln=O J=l
le vecteur (ÀE(N i ); 1 < i < N) est donc solution du système (4.10).
o
En supposant que le réseau soit à l'équilibre, en notant À i l'intensité totale
du flot des clients qui passent par le nœud i, cette quantité est la somme de
l'intensité des arrivées extérieures (le terme Ài) et des intensités des arrivées
venant des autres nœuds du réseau, ce qui donne l'équation (4.10). La charge
totale moyenne traversant la file i vaut dans ce cas Pi.
On définit le vecteur (1r(n);n E S) par
N
1r( n) = TI P ' (1 - Pi),
1
92 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
pour n = (ni; 1 < i < N) E S. La matrice Q associée à ce vecteur, définie par
la relation (4.8) vaut
(4.11 )
_ Àt
q =-r
n,n+e -e, - tJ'
PJ
- ÀJ
qn,n-e, = ,
PJ
qntn+e = ÀiriO,
nJ > 0, i, j < N,
nJ > 0, i, j < N,
i < N.
Pour 1 < j < N, on pose 'DJ = {et - eJli =1 j}U{ -e J } et Ac = {ei/1 < i < N};
partant de n E S, n + 'Dj est l'ensemble des états possibles après un départ de
la file j (si nj > 0) et n + Ac est l'état après une arrivée d'un client extérieur.
Les équations de trafic (4.10) donnent les relations suivantes
LmEV, qn,n+m = J-LjrjO + Li J..Ljrji = J..Lj,
( 4.12)
L - ÀJ + Li )..iPij )..j
qn,n+m = = = J..Lj,
mE
et
N
L qn,n+m = L Ài,
mEAo t=l
N N N N
L qn,n+m = L )..iriO = L )..i(l - LPij) = L Ài.
mEAo t=l t=1 J=l t=l
Les seuls états possibles à partir de n étant nécessairement dans un des n + 'Dj
pour j = 1... ,N ou dans n + Ao, la proposition 4.8 donne donc le théorème
suivant.
THÉORÈME 4.11. Si les solutions ()..i ; 1 < i < N) du système d'équations
N
)..t = À i + L )..jpji,
J=1
vérifient Pi = À i 1 J..Li < 1 pour i = 1) . . . ,N, le processus de M arkov associé au
réseau de files d'attente a une probabilité invariante donnée par la formule
produit
( 4.13)
N
1r(n) = Il p '(l - Pi),
1
pour n = (ni; 1 < i < N) E S. Pour le nombre de clients, le réseau de
Jackson se comporte à l'équilibre comme N files indépendantes avec les
intensités d'arrivée (À i ; 1 < i < N) solutions de (4..10) et les services
(J..Li; 1 < i < N).
4. LES RÉSEAUX DE FILES D'ATTENTE À FORME PRODUIT
93
\
Al' équilibre, l'état du réseau à l'instant t est indépendant du processus
des départs avant t. Les processus des départs du réseau à partir de cha-
cune des files sont des processus de Poisson indépendants, de paramètres
respectifs (ÀiriO; 1 < < N).
Il est important de noter que la propriété de Poisson ne concerne pas tous
les départs d'une file donnée, seulement les instants de départ des clients qui
quittent ensuite le réseau. En général le processus de tous les départs d'une file
n'est pas Poisson (voir Walrand [52]).
DÉMONSTRATION. Il suffit de montrer la dernière partie du théorème. En
-
utilisant que la matrice Q est la matrice du processus de Markov renversé.
D'après les équations (4.11), cette matrice de transition Q correspond aussi
à un réseau de Jackson de N files d'attente dont les paramètres (À i ), (Ji,i) , (pij)
sont donnés par
ÀI = ÀiriO,
J.1.1 = J.L l ,
- .ÀJ
PiJ = -=-r JI'
ÀI
_ Ài
PiO = -=-,
ÀI
pour ,J = 1,..., N. La i-ième file de ce réseau a des arrivées extérieures
d'intensité ÀiriO et délivre des services de loi exponentielle de paramètre J.Li
(équation (4.12)). Le processus renversé étant aussi un réseau de Jackson, à partir
d'un instant donné, les arrivées extérieures à chacune des files de ce réseau sont
donc des processus de Poisson indépendants de l'état du réseau à cet instant. Il ne
reste plus qu'à remarquer que les arrivées du processus renversé correspondent
aux départs définitifs du processus initial, ce qui achève la démonstration du
théorème. 0
Le processus de Markov décrivant l'état du réseau admet une mesure inva-
riante qui est solution des équations de balance globale. Il suffit que cette me-
sure soit sommable pour qu'il y ait une probabilité invariante. En général on
montre l'existence de cette probabilité invariante avec d'autres méthodes, avec
les résultats du chapitre 8 par exemple, et ensuite on essaie de caractériser celle-
ci. La proposition 9.5 page 224 (voir la remarque après le corollaire 9.8) donne
une démonstration "plus naturelle" pour un réseau de Jackson sous la condition
PI < 1 pour tout .
4.2. Les réseaux de Gordon-Newel. Le réseau de Gordon-Newel est
l'analogue fermé du réseau de Jackson. C'est un réseau de N files d'attente dans
lequel circulent M clients. Pour i = 1, . .. ,N, la i-ième file d'attente délivre un
service exponentiel de paramètre J.Li. À la sortie de cette file, un client passe à la
file j avec probabilité Pi]. La matrice de transition Q du processus de Markov
associé à ce réseau est donnée par
qn,n+e,-e, = J.l.jPjl,
nj > 0, i, j < N.
La matrice P = (Pij; i, j = 1,. . . ,N) est la matrice de transition d'une chaîne
de Markov irréductible et, par conséquent, ergodique puisque l'espace d'états
94 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
est fini. Si (IIi ; = 1, . . . ,N) est la mesure invariante de cette chaîne,
N
IIi = L lIjp]",
1
(4.14)
i=l,... ,N,
ces équations sont les analogues des équations du trafic (4.10), de la même
manière les charges Pi sont définies par
Il,,
( 4 .15 ) Pi = -, = 1, . .. ,N.
J-L,
Le processus de Markov décrivant ce réseau est à valeurs dans
s = { n = (ni; 1 < i < N) / ni = M } .
L'irréductibilité de la matrice de transition P sur {l, . . . ,N} entraîne celle de
ce processus de Markov sur S. De la même façon que précédemment, on définit
N
1r(n) = TI p?\
1
n = (ni ; 1 < i < N) ES,
et la matrice Q définie par (4.8) vaut
_ Il,,
qn,n+e,-e, = -Pi],
PJ
de la même façon que dans la preuve précédente, les équations (4.14) donnent
pour n = (ni; 1 < i < N) E S et j = 1,. . . , N tel que n] > 0,
(4.16)
nj > 0,
i,j < N
L qn,n+m = L J-Ljpji = J.LJ'
mE'D, "
_ _ L:i lIiPij _ IIj _ .
qn,n+m - - - - J-LJ.
mE'D,
Partant de l'état n E S, l'état suivant du processus est nécessairement dans un
des n + Vj, j = 1,... ,N. La proposition 4.8 et les équations (4.17) donnent le
théorème suivant pour les réseaux fermés.
( 4.17)
THÉORÈME 4.12. Le réseau fermé de files d'attente de matrice de rou-
tage (pij) décrit précédemment a pour mesure invariante la probabilité
N
1r(n) = TIp?"
1
n = (ni; 1 < i < N) E S,
où, pour i = 1, . . . ,N, Pi = IIi / J-Li et (IIi) vérifie le système d'équations
N
IIi = L IIjPj",
1
et K est la constante de normalisation.
4. LES RÉSEAUX DE FILES D'ATTENTE À FORME PRODUIT
95
La constante de normalisation K n'est en général pas très simple à exprimer
en raison de la taille de l'espace d'états. Des procédures récursives permettent
cependant d'exprimer numériquement K assez simplement, voir Walrand [52].
4.3. Réseaux de files d'attente multi-classe. Pour commencer, le ré-
seau est constitué d'une seule file d'attente dans laquelle arrivent J flots de
Poisson de paramètres respectifs Àl"'. ,ÀJ. Pour j = 1,... ,J, un client du
j-ième flot sera dit de classe j. À son arrivée, si n clients sont déjà présents,
ce client sera placé en position l = l,... ,n + 1 avec probabilité 1'(1, n), où
E :ll 1'(1, n) = 1. Si n clients sont présents dans la file, le client en position l
reçoit un service exponentiel de paramètre 4>(n)6(l, n) pour l = 1,... ,n, avec
E l 6(l, n) = 1. Globalement le serveur travaillera donc à la vitesse 4J(n). La
fonction n --t 4>( n) est supposée strictement positive quand n > o.
Le fonctionnement de cette file d'attente peut être décrit par un processus
de Markov à valeurs dans
s = ({ 1, . .. ,J}) (N) = { C = (Ci; 1 < i < n) / n E N, Ci E {l, . . . ,J} } 1
le vecteur 0 correspond à la file vide. Si si c = (Ci; 1 < i < n) ES, on note
Ici = n la longueur de c et, pour i = 1, . .. ,n, Ci indique la classe du i-ième client
dans la file. Il reste à définir les transitions du processus de Markov associé sur
l'ensemble S. Les opérateurs d'ajout (A;) et de suppression (Si) sont définis par,
Ai(c) = (C1,C2,'" ,ci-l,j,C ,Ci+1,'" ,cn), i = 1,... ,n+ 1, j = 1,... ,J,
Si(C) = (C1,C2,..' ,Ci-l,Ci+l,... ,cn), i = 1,... ,n,
pour C = (Ci; 1 < i < n) ES. La matrice de transition Q de ce processus de
Markov est déterminée de la façon suivante
(4.18 )
(4.19)
qc,A (c) = Àj--y(i, IcI),
qc,S,(c) = ct>(lc!)6(i, Ic!),
= 1, . . . ,1 ci + 1, j = 1, . . . ,J,
i = 1, . . . , Ici.
Il est important de noter que la classe d'un client n'influe ni sur la place où
celui-ci est installé dans la file à son arrivée, ni sur le taux de service que lui
déli vre le serveur.
La file M / M 1 K FI FO. Il Y a une seule classe de clients pour cette file; un
client qui arrive est placé à la fin de la file et seuls les K premiers clients sont
servis, pour n E N,
4J(n) = n 1\ K,
6(1, n) = { 0 1/ , (n 1\ K), 1 < l < n 1\ K,
l > n 1\ K,
(1 ) { 0, l = 1, . .. ,n,
--y ,n = 1, l = n + 1.
96 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
La file M 1 MI K LI FO. Les fonctions f/J et 'Y ne changent pas et seuls les K
derniers clients de la file sont servis,
8(1, n) = { :(n /\ K),
(n - K)+ < l < n, n :F 0,
l « n-K)+.
La file MI M /1 processor sharing. Le service étant égalitaire, la variable 8
est changée en
1
8(l,n) == -
n
l = 1, . . . ,n.
Sous les conditions d'ergodicité, la mesure invariante de ce processus de
Markov est donnée, à une constante de proportionnalité près, par
Ici À
11"( c) = rr cPth '
l==l
cES.
En effet, toujours en utilisant la définition (4.8), la matrice Q associée à 7r ainsi
défini est donnée par
qc,A:(c) = Àj8(i, Ici + 1), i = 1,... ,Ici + 1,
qc,Si(C) = <I>(lcl),(i, Icl- 1), i = 1,... ,Ici, j = 1,... ,J.
Pour j = 1, . . . ,J fixé, les équations suivantes se vérifient aisément,
Icl+l Icl+l
L qc,A:(c) = Àj = L qc,A:(c)' et
i==l ==1
!cl Ici
L qc,S,(c) = <I>(lcl) = L qc,S,(c).
==1 ==1
Partant de cES, les seuls états possibles pour Q et Q sont Ai (c), j = 1,. . . ,J,
i = 1,... , Ici + 1 et Si(C), i = 1,... ,Ici. Les deux identités précédentes et la
proposition 4.8 montrent donc que 7r est la mesure invariante du processus de
Markov.
(4.20)
PROPOSITION 4.13. La file d'attente à plusieurs classes de clients admet
la mesure invariante définie par
ici À
11"( c) = rr cPth '
l==l
cES,
pourvu que K = ECES 7r(c) soit fini. Pour j E {l,... ,J}, le processus des
départs des clients de classes j est un processus de Poisson de paramètre
ÀJ'
DÉMONSTRATION. Le processus renversé de matrice de transition Q est aussi
une file d'attente avec plusieurs classes de clients. Les arrivées des clients de
classe j forment un processus de Poisson de paramètre Àj, ce qui entraîne la
propriété de Poisson pour les départs de la file d'attente initiale. 0
La description détaillée de la file d'attente n'est pas nécessaire si l'on s'in-
téresse uniquement au nombre de clients dans cette file. En effet, le nombre de
4. LES RÉSEAUX DE FILES D'ATTENTE À FORME PRODUIT
97
clients est un processus de Markov, processus de vie et de mort dont les taux
sont donnés par
J
qi, t+l = L .Àt, 1, > 0,
t=l
qi,t-l = q,(i), i > 0,
la mesure invariante s'exprime donc simplement. Cette description détaillée sera
par contre nécessaire pour étudier un réseau de telles files d'attente.
À l'équilibre, le processus renversé de matrice de sauts Q est aussi une file
d'attente du type qui vient d'être décrit avec 6 et 'Y intervertis.
À partir de maintenant le réseau est constitué de N nœuds de files d'attente
de ce type, J flots de Poisson arrivent dans ce réseau. Pour 1 < j < J, le j-ième
flot est d'intensité .ÀJ' il arrive à la file ff E {l, . . . J N}, puis après avoir été servi,
il va à la file f , et ainsi de suite jusqu'à la file f i où il quitte définitivement
. .
le réseau. Le j-ième flot emprunte la route ff, f , . .. ,f/"', dans le réseau. Si
1 < k < N, les fonctions (j), 6, 'Y associées au nœud k seront notées <Pk, 6 k , 'Yk.
La figure 6 représente un réseau avec deux routes, (1,2,3) et (4,3,2,4). Noter
la différence avec les réseaux de Jackson et Gordon-Newell où les routes sont
aléatoires. L'état de la file d'attente i < N de ce réseau se décrit avec un vecteur
1 !
U
Àl 2
1 4 r-
I
L-
3 ).2
/
n
FIG. 6. Réseau de files d'attente avec des routes fixes.
Ci == ((Cil, Sil), (Ci2, Si2),... ,(Cim" Sim,))
dans l'espace d'états
St = ({ (j, S) / f = i}) (N)
où Cik donne la classe du client à la k-ième position de la file d'attente et Sik est le
nombre de files d'attente qu'il a déjà visitées. Comme précédemment, ICil = mi
désignera le nombre de composantes de Ci.
98 4. RÉVERSIBILITÉ ET ÉQUATIONS D'ÉQUILIBRE DES RÉSEAUX
Pour la description markovienne de ce réseau, les quantités (Sik ; 1 < k <
mi) ne sont nécessaires que si une file d'attente figure plusieurs fois dans le
chemin d'un des flots d'arrivée.
Il est facile de voir que C (t) = (Ci (t); 1 < i < N) est un processus de
Markov irréductible dans l'espace d'états S = n 1 Si. Si l'état du réseau vaut
C = (Ci), les transitions à partir de cet état peuvent être décrites comme suit.
- Un client du J-ième flot arrive avec intensité Àj dans le réseau à la file
f = ff, le couple (j, 1) est inséré en l-ième position dans cette file avec
probabilité '1 f (l, 1 cf 1).
- Un client du j-ième flot à l'étape s < nJ de sa route, à la place l de la file
f = f;, quitte celle-ci pour la place m de la file g = f +l avec intensité
<pf(lcfI)6f(l, ICfl)'1g(m, Icgl),
le couple (j, S + 1) est alors à la place m de Cg.
- Un client du j-ième flot à l'étape nj de sa route, à la place l de la file
f = f " quitte le réseau avec intensité
lj)f(lcfI)8f(l,lcfl).
Pour i E {l, . . . ,N}, la mesure 'Tr est définie par
1c,1 À
1ri( Ci) = lJ. t/>i( ) ' et pour C = (cd E s,
(4.21 )
N
'Tr( C) = rr 'Tri (Ci),
1=1
La mesure 'Tr est un candidat naturel pour la mesure invariante du processus de
Markov.
La matrice Q associée à cette mesure 'Tr donne clairement la matrice de sauts
correspondant à un réseau de files d'attente comportant J classes de clients
arrivant suivant des processus de Poisson de paramètre (Àj). Le j-ième flot
suit la route inverse fh" f ,-l' . . . ,ff du j-ième flot dans le réseau initial. Les
transitions de la matrice Q peuvent être décrites de la façon suivante :
- Un client du j-ième flot arrive avec intensité Àj dans le réseau à la file
f = f " le couple (j, 1) est inséré en l-ième position dans cette file avec
probabilité 6 1 (l, ICI 1 + 1).
- Un client du j-ième flot à l'étape S < nj de sa route, à la place l de la
file f = f -5' quitte celle-ci pour la place m de la file g = f _ 5 -1 avec
, ,
intensité
lj)f(ICfl)'1l(l, ICfl - 1)6 g (m, Icgl + 1),
le couple (j, S + 1) est alors à la place m de Cg.
- Un client du j-ième flot à l'étape nj de sa route, à la place l de la file
f = ff , quitte le réseau avec intensité
<t> f ( 1 cI 1)'11 (l, 1 cIl - 1).
4. LES RÉSEAUX DE FILES D)ATTENTE À FORME PRODUIT
99
THÉORÈME 4.14. Le réseau de files d'attente multi-classe à routes fixes
admet, sous la réserve qu'elle soit sommable, la mesure produit (4.21)
comme mesure invariante. Le processus de sortie du réseau de chaque classe
de clients est un processus de Poisson.
DÉMONSTRATION. Si l'état initial est CEe, l'intensité d'une arrivée exté-
rieure de classe j dans le réseau vaut >"j pour Q et pour Q. Un départ de la file f
a lieu avec intensité 4>(lcfl) pour Q et Q. On vient donc d'obtenir une partition
des états atteignables à partir de C vérifiant les hypothèses de la proposition 4.8.
La proposition est démontrée. D
CHAPITRE 5
La file M/M/l et la marche aléatoire simple
réfléchie
Sommaire
1. Introduction 102
2. Les martingales exponentielles de la file M/M/1 104
3. Les lois des temps d'atteinte: vers le bas 106
Le comportement du cas transient 109
4. Vitesse de convergence à l'équilibre 111
5. Les lois des temps d'atteinte: vers le haut 114
6. Événements rares 117
6.1. Les grandes périodes d'occupation 117
6.2. Le processus des excursions au voisinage de a 119
7. Renormalisation de la file M/M/1 121
8. Grandes déviations 126
8.1. Le cas linéaire 126
8.2. Le cas linéaire par morceaux 130
8.3. Généralisation 132
9. Appendice 134
La densité de la durée d'une période d'occupation 134
Ce chapitre étudie les distributions explicites et les comportements asymp-
totiques de la file d'attente M / M /1. Jusqu'à présent, seul le comportement à
l'équilibre de cette file d'attente a été considéré. Ici les lois transitoires, les temps
d'atteinte entre autres, la vitesse de convergence et les événements rares de cette
file d'attente sont analysés. Les processus renormalisés associés sont aussi intro-
duits et pour ceux-ci une loi des grands nombres et un théorème de la limite
centrale fonctionnels sont démontrés. Cette étude est aussi une introduction au
chapitre sur la renormalisation où le cadre plus général, et plus délicat, des
réseaux de files d'attente sera envisagé. Enfin, un résultat de grandes déviations
du processus renormalisé conclut le chapitre. Il s'agit d'estimer la probabilité
que la trajectoire du processus du nombre de clients suive un chemin très peu
probable.
Comme il est facile de le voir, la file MIMl1 n'est que la version à temps
continu de la marche aléatoire réfléchie en 0 qui saute de 1 ou -1. À ce titre
102
5. LA FILE D'ATTENTE M/M/1
cette file d'attente est un processus stochastique classique de la théorie des pro-
babilités. Dans cette étude les martingales exponentielles sont utilisées, elles
permettent d'éviter les habituels calculs fastidieux de lois transitoires.
1. Introduction
Dans tout ce qui suit N (dx) désigne un processus de Poisson sur IR de
paramètre E . Tous les processus de Poisson utilisés sont définis sur le
même espace de probabilité et sont indépendants. Avec la même notation qu'au
chapitre 1, si l est un intervalle de 114, la quantité N (I) désigne le nombre de
points du processus N dans cet intervalle.
L'intensité des arrivées à cette file d'attente vaut À et celle des services J..L et
F = (Ft) est la filtration associée aux processus (N À (]O, t])) et (N (]O, t])), i.e.
Ft = a(NÀ(]O, s]),N (]O, s]), s < t),
pour t > o. Si L(t) est le nombre de clients de cette file à l'instant t, (L(t)) est
un processus de sauts sur N dont la matrice de sauts Q = (qij) est définie par
q"''''+l = À,
qi .,,-1 = J.1.,
qiJ = 0,
E N;
i > 0;
Ii - jl > 1.
Les propriétés à l'équilibre de cette file vues dans les chapitres sur la file G l 1 G l Il
(Chapitre 2) et sur les réseaux de files d'attente (Chapitre 4) sont rappelées dans
la proposition suivante.
PROPOSITION 5.1. Si À < J.1., alors le processus de Markov (L(t)) est er-
godique, le nombre de clients L à l'équilibre suit une loi géométrique de pa-
ramètre p = ÀI J.1. et la loi stationnaire du temps d'attente West déterminée
par
IP(W > x) = pe-(p,-À):£ ,
x > o.
À l'équilibre, le processus (L(t)) est réversible et le processus des départs de
la file d'attente est un processus de Poisson de paramètre À.
Le processus (L(t)) peut aussi être décrit comme la solution de l'équation
différentielle stochastique. Voir la proposition B.11 page 338 en annexe pour
l'existence et l'unicité des solutions de ces équations différentielles.
PROPOSITION 5.2. Le processus de Markov de générateur Q partant de
x ENa même loi que l'unique solution de l'équation différentielle stochas-
tique
(5.1)
L(dt) = NÀ(dt) - l{L(t-»o}N ( dt),
avec L(O) = x, ou encore pour t > 0,
L(t) = x +NÀ(]O,t]) - r l{L(s-»o}N (ds),
J]O,t]
1. INTRODUCTION
103
le processus
(5.2)
(M(t)) = (L(t) - x - Àt + J.L l t l{L(s»O} ds )
est une martingale.
DÉMONSTRATION. L'équation (5.1) est tout à fait naturelle. Le processus
(L(t)) saute de +1 suivant un processus de Poisson N). de paramètre À. Si
L(t-) > 0, le service résiduel a du client à la tête de la file d'attente suit une loi
exponentielle de paramètre J-L, ce a est tel que t + a est le premier point après t
du processus ponctuel NIJ'
Formellement, pour établir la correspondance entre la solution de l'équation
différentielle (5.1) et le processus de Markov de générateur Q et de point initial
x, la proposition C. 7 page 348 est utilisée. Il suffit de montrer que si (L( t)) est
la solution de l'équation différentielle stochastique (5.1), pour toute fonction f
le processus
(f(L(t)) - f(x) -l t Q(f(L(s))) dS)
est une martingale locale.
L'expression différentielle de (L(t)) donne, pour t > 0,
(5.3) df(L(t)) = (f(L(t-) + 1) - f(L(t-))) N).(dt)
+ l{L(t-»O} (f(L(t-) - 1) - f(L(t-))) NIJ(dt).
En rappelant que pour x E N,
Q(f)(x) = l: q:Z;i(f(i) - f(x)),
t#:z;
et donc pour t > 0,
l t Q(f(L(s))) ds = l t À (/(L(s) + 1) - f(L(s))) ds
+ l t l{L(s»O}J.L (f(L(s) - 1) - f(L(s))) ds,
par conséquent en intégrant l'équation différentielle (5.3), il vient
f(L(t)) - f(x) -l t Q(f(L(s))) ds
= l t (/(L(s-) + 1) - f(L(s-))) (N).(ds) - Àds)
+ l t l{L(s-»O} (/(L(s-) - 1) - f(L(s-))) (NIJ(ds) - J.Lds).
La proposition B.9 page 337 montre que le terme de droite de l'expression précé-
dente est une martingale locale. La loi de (L( t)) est donc celle du processus de
104
5. LA FILE D'ATTENTE M/M/1
Markov de générateur Q. La dernière assertion de la proposition s'obtient en
prenant f(y) = y pour yEN. D
DÉFINITION 10. On appelle processus libre le processus (Z(t)) défini par
(5.4) Z(t) = N À (JO, t]) - N (]O, t]).
Si L(t-) > 0, au voisinage de t le processus (L(t)) se comporte localement
comme le processus libre, i.e. dL(t) = dZ(t). L'équation (5.1) s'écrit aussi comme
dL(t) = NÀ(dt) - N (dt) + l{L(t-)=O} N (dt)
== dZ(t) + l{L(t- )=O} N (dt),
le terme l{L(t- )=O} N ( dt) compense la partie négative du processus libre (Z(t))
(voir la section 6 sur cette question de processus réfléchi).
Plusieurs processus de Markov intervenant dans ce chapitre, les notations
!Ex, JP> x sont relatives uniquement au processus de Markov (L( t)) partant de
l'état initial x E N.
2. Les martingales exponentielles de la file M/M/I
La proposition suivante est l'analogue de la proposition 3.4 page 61 pour le
processus à temps continu (Z(t)).
PROPOSITION 5.3. Si u E IR, le processus
(5.5) (H(t)) = (uZ(t)eÀt(l-U)+ t(l-l/U») ,
est une martingale. Il existe une unique probabilité JP>u telle que si Y est
une fonction Ft-mesurable positive,
JEU (Y) = 1 y dlP'U = 1 y H(t) dlP',
et réciproquement
JE(Y) = 1 y H(t)-l dlP'U = 1 y exp( -Àt(l - :1( jlt(l - l/u)) dlP'U.
Sous la probabilité JP>u, N À et N sont deux processus de Poisson indépen-
dants de paramètres respectifs Àu et J-L/u.
DÉMONSTRATION. Les processus N). et Np. étant à accroissements indépen-
dants, il en va de même pour (Z(t)). La propriété de martingale en découle: si
s < t,
lE (H( t) 1 Fs) = H( 5 )e(t-S)(À(l-U)+J.«l-l/U))1E ( uZ(t)-Z(s) 1 Fs )
= H( 5 )e(t-s )(À(l-u)+J.«l-l/u))1E ( uZ(t)-Z(S») = H( 5).
Pour montrer l'existence et l'unicité de JP>u, le théorème de Daniell-Kolmogorov
(Rogers et Williams [44]) est une nouvelle fois utilisé. D'après celui-ci il suffit
de montrer la propriété de compatibilité: si s < t et A E Fs,
i H(t) dlP' = i H(s) dlP'.
2. LES MARTINGALES EXPONENTIELLES DE LA FILE M/M/1 105
Cette relation est la conséquence directe de la propriété de martingale, en effet
i H(t) dJP' = i IE(H(t) 1 :Fs) dJP',
car A E Fs, d'où
i H(t) dIP' = i H(s) dIP'.
Il reste à identifier la loi de (N)., NJ1.) pour la probabilité pu. La transformée de
Laplace des processus ponctuels (voir la section 1 du chapitre 1) est commode
dans cette situation: si f, g sont deux fonctions mesurables positives sur lR.t-, à
support dans [0, t], t > 0, les fonctionnelles
J I(s) }/),(ds), et J g(s) }/1J(ds),
sont Ft-mesurables. Par définition de la probabilité pu,
lE" (ex p (- J I(S)}/),(dS») exp ( - J g(S)}/IJ(dS»))
= lE ( uN (]O,t])e)'t(l-u) exp ( - J I(s)}/), (dS»)
x (l/u)N,,(]O,t]) elJt(l-l/u) exp (- J g(s) }/IJ( ds) ) )
par indépendance de N). et Np. pour la probabilité P, ce dernier terme vaut
lE ( uN (]O,t])e)'t(l-u) exp ( - J I(S)}/),(dS») )
x lE ( (l/u )N,,(]O,t]) elJt(l-l/u) exp ( - J g( s)}/IJ (dS») ) .
En particulier, en faisant g = 0, on obtient l'égalité
lE" (ex p ( - J I(S)}/),(dS») )
= lE ( uN (]O,t])e)'t(l-u) exp ( - J I(s) }/),(dS») ) ,
pour toute fonction f continue à support compact sur lR.t-. On en déduit la
relation suivante valable pour toutes les fonctions f, g mesurables positives à
support compact,
lE" (ex p (- J I(S)}/),(dS») exp (- J g(S)}/IJ(dS»))
= lE" (ex p (- J I(S)}/),(dS»)) lE" (ex p (- J g(S)}/IJ(dS»)).
106
5. LA FILE D'ATTENTE M/M/1
Les processus ponctuels N). et NIJ sont indépendants sous pu. Le calcul précédent
montre que si f est mesurable positive à support dans [0, t],
JEU (ex p ( - J f ( s) N), ( dS)) )
= JE ( UN>. (]o.t])e),t(l-u) exp ( - J f(s)N),(dS)) ) 1
cette dernière quantité vaut
e),t(l-u)JE ( exp ( -l t (1(s) -logu)N),(dS)) ) .
L'expression de la transformée de Laplace d'un processus de Poisson (Proposi-
tion 1.5 page Il) donne les égalités
JEU (ex p ( - J f(s) N), (dS)) )
= e),t(l-u) exp (-À l t (1- exp(-(1(s) -logu))) dS)
= exp ( -Àu J (1 - exp( - f(s))) dS) .
Sous ru le processus N). est donc un processus ponctuel de Poisson de paramètre
Àu. En remplaçant u par l/u, le résultat correspondant pour NIJ est établi. 0
REMARQUES.
1. En utilisant le corollaire C.6 page 348, la propriété de martingale de (H(t))
peut se montrer analytiquement. Il suffit de remarquer que la fonction
(t, y) -t u Y e().(l-u)+IJ(l-l/u»t
est harmonique en espace-temps pour le générateur du processus libre.
2. Si u = YJ..LIÀ , sous la probabilité ru, (Z(t)) est un processus symétrique,
différence de deux processus de Poisson indépendants de paramètre . La
martingale exponentielle correspondante est
C;p1 Z (t) exp ( ( JX - v'ilf t) ) .
3. Si u = J-LI À, sous la probabilité pu, N). et NIJ sont des processus de Pois-
son indépendants de paramètres respectifs J..L et À. Les paramètres des deux
processus de Poisson sont échangés. La martingale de ce cas vaut (11 pZ(t»).
3. Les lois des temps d'atteinte : vers le bas
DÉFINITION Il. Si bEN, dans toute la suite Tb désigne le temps d'atteinte
de b partant de L(O), Le.
(5.6)
Tb = inf{s > OIL(s) = b}.
3. LES LOIS DES TEMPS D'ATTEINTE: VERS LE BAS
1a7
Si L(O) = 1, Ta est le temps qu'il faut pour se vider à la file M/M/1 avec un
client initial; Ta est la durée d'une période d'occupation de cette file d'attente.
PROPOSITION 5.4. Si a ? b, la transformée de Laplace du temps d'at-
teinte de b partant de a est donnée par
(5.7) IEa (e- xTb ) = (IE 1 (e- XTO ))a-b,
pour x > 0, avec
(5.8) lEt (e -:Z:To) = À + Ji. + x - V( À+ Ji. + x)2 - 4ÀJi. .
Si À < J1., la variable Ta admet un moment exponentiel d'ordre (v'X - )2
et
(5.9) IEl (e( v'À-V)i)2 T o ) < /¥. .
Si À > J1. et L( 0) = l, la variable Ta est finie avec probabilité J1. 1 '\.
DÉMONSTRATION. Si a > b et L(O) = a, le temps d'atteinte de b se dé-
compose comme la somme de deux termes: le temps d'atteinte de a - 1 et le
temps d'atteinte de b partant de a - 1. La propriété de Markov forte montre que
ces deux temps d'atteinte sont indépendants. De proche en proche on en déduit
que Tb se décompose comme la somme de b - a temps d'atteinte indépendants
(Ti; a < i < b + 1), la variable Ti étant le temps d'atteinte de i - 1 partant de i.
Comme le processus (L(t)) est identique au processus libre (Z(t)) tant qu'il ne
touche pas 0, ces transitions sont homogènes en espace jusqu'à cet instant. En
particulier, pour a < i < b + 1 la distribution de la variable Ti ne dépend pas de
i, par conséquent
IEa (e- xTb ) = 1E 1 (e-XTo)a-b .
Si £(0) = 1, comme la condition en 0 de (5.1) ne joue aucun rôle jusqu'au temps
d'atteinte de 0, L(t) vaut 1 + Z(t) jusqu'à cet instant. Par conséquent Ta est le
temps d'atteinte de -1 du processus libre (Z(t)). La variable Ta étant un temps
d'arrêt, la propriété de martingale de (H(t)) donne
(5.10) lE ( uZ(tI\To) e(À(l-U)+I-'(l-l/U)(tI\To)) = 1.
Si x E IR, l'équation
(5.11 )
'\(1 - u) + J1.(1 - l/u) = -x
a pour solutions
À + J-L + x ::1: V(À + Jl + x)2 - 4ÀJ1.
2À
si (À + J-L + x)2 - 4ÀJl > 0, ce qui est vérifié si x > -( v'X - )2. Il est facile de
montrer que pour x > 0 la quantité
(5.12)
À + J-L + x - V (À + Jl + x)2 - 4À
U x = ,
2À
108
5. LA FILE D'ATTENTE M/M/1
est positive et majorée par 1. En prenant u = u x dans la relation (5.10), le
théorème de convergence dominée montre que
1 = tE oo JE ( U;(tATo) e-'" tATO) = JE ( u;(To)e-"'To) = JE (u;le-"'To) ,
d'où la relation (5.8).
Si À < J.L, la quantité x = - ( .jX - )2 vérifie les relations (À + J..L + x)2 -
4ÀJ.L = 0 et u x = V J..LIÀ > 1; en prenant u = u x dans l'équation (5.10), il vient
lEt (u;le(v'X-v1')2tATO) < lEt (u;(tATo)e(v'X-v1')2tATo) = 1,
et en faisant tendre t vers +00, le théorème de convergence monotone donne
l'inégalité voulue pour le moment exponentiel d'ordre (.jX _ )2.
Si À > J.L, pour x > 0,
IE ( -xTo ) IE ( -xTo 1 )
1 e = 1 e {To<+oo} '
on en déduit l'égalité
IP 1 (To < +00) = lim IE 1 (e- xTo ) = ,
X-40,x>0 .1\
d'après l'identité (5.8). La proposition est démontrée.
D
La dernière assertion de cette proposition a déjà été démontrée dans le cadre de
la file GI / M Il (voir le b) de la proposition 2.11 page 49).
La relation (5.9) peut aussi être obtenue de façon analytique. Le membre de
droit de l'identité (5.8) est une fonction continue dans le demi-plan {Re(x) >
-(.jX - )2} (et analytique à l'intérieur). Le théorème de convergence mono-
tone montre que
{ii = lim 1FQ (e -",To) = 1FQ ( e<.;).- y'ï:ï) 2T O ) .
V x -(.;).- y'ï:ï)2
L'inégalité (5.9) est en fait une égalité.
Si À < J.L, en prenant les dérivées d'ordre 1 et 2 de (5.8) en x = 0, on obtient
l'espérance et la variance de To,
1
1E 1 (To) = À '
J1.-
et
J..L+À
varl (To) = (1-£ _ À)3 .
Dans la preuve précédente, il a été montré que si L(O) = n, To s'écrit comme la
somme de n variables aléatoires indépendantes de même loi que To partant de 1.
Par conséquent le théorème de la limite centrale donne le résultat asymptotique
suivant.
PROPOSITION 5.5. Si À < J1., le temps d'atteinte To de 0 de la solution
(L(t)) de l'équation (5.1) telle L(O) = n, alors
1 . To _ 1
lm - , ,
n-4+oo n J.L - .1\
3. LES LOIS DES TEMPS D)ATTEINTE : VERS LE BAS
109
L(t)
--....._................................................................... t
BI
B3
<
<
B4=+00
FIG. 1. Une trajectoire du processus (L(t)) dans le cas À > J..L
au sens de la convergence en loi; de plus la variable
To - nl(J1. - À)
v/ n(J-L+ À)/(J..L- À)3
converge en loi vers une loi gaussienne centrée réduite quand n tend vers
l'infini. Le temps de retour de la file MI M /1 partant de n est asymptoti-
quement linéaire en n.
Le comportement du cas transient. Cette section décrit la trajectoire
de la file d'attente MI M Il lorsque celle-ci est instable. Si p = ÀI J..L > 1, d'après la
proposition 5.4, une période d'occupation est infinie avec probabilité 1-11 p < 1.
Dans ce cas, la trajectoire de (L(t)) se décrit simplement: c'est le recollement de
G périodes d'occupation finies, où G est une variable aléatoire de loi géométrique
de paramètre J..LI À = P(To < +00), et de la dernière période d'occupation qui
est infinie. Dans le cas de la figure 1, les Bi représentent les durées des périodes
d'occupation, la quatrième est infinie.
La loi d'une période d'occupation de longueur finie se décrit simplement.
PROPOSITION 5.6. Si À > J.L, la loi conditionnelle du processus (L(tI\T o ))
sachant {To < +oo} a même lo que le processus (L( t 1\ To)) pour lequel À et
J..L sont inversés, . e. avec le taux d'arrivée J..L et le taux de service À.
DÉMONSTRATION. Si f est une fonctionnelle mesurable bornée sur l'en-
semble F(Il4, N) des fonctions à valeurs entières sur Jl4. muni de la topologie
de la convergence simple, pour a > 0 et x E N l'identité
lE.: (p-Z(TOI\a) f(L(To /\ . »l{To<a}) = -1 (i(L(T o /\ . »l{To<a} ) ,
11a
5. LA FILE D'ATTENTE M/M/1
s'obtient avec la formule de changement de probabilités en prenant u = l/p (en
notant L(T a A . ) le processus (L(T a At)) ). Comme L(t) = Z(t) + x si t < Ta
pour la probabilité JP> x, on en déduit l'égalité
1Ex(px-L(T o l\a) f(L(T a 1\. ))l{To<a}) = 1E -1 (f(L(Ta 1\. ))l{To<a}).
-1 -1
Pour la probabilité JP> ,À et J1. sont inversés et par conséquent Ta est IP -
presque sûrement fini. De plus, p étant supérieur à 1, en faisant tendre a vers
l'infini et en utilisant le théorème de convergence dominée, l'identité précédente
devient
lE.: (pz J(L(To fi . ))l{To<+oo}) = IF4- 1 (J(L(T o fi . ))) 1
en prenant f - 1, ceci donne l'égalité JP> x(Ta < +00) = p-x. Par conséquent
lE.: (f(L(To fi . )) 1 To < +00) = IF4- 1 (t(L(T o fi . )))),
ce qui achève la preuve de la proposition.
D
La proposition suivante donne la loi de (L(t)) sur la dernière période d'oc-
cupation qui est infinie. De cette façon la trajectoire du cas transient sera
complètement décrite.
PROPOSITION 5.7. Sous la condition p = À/ J..L > l, le processus (L(t))
sachant l'événement {Ta = +oo} est un processus de Markov, de vie et de
mort dont les intensités de sauts R = (Tij) sont données par
p.,,+l - 1
Tii+1 = J1. . ,
p'" -1
i-1 1
p -
et TÜ-1 = À . ,
p'" - 1
pour i > 1.
DÉMONSTRATION. La proposition C.3 page 344 de l'annexe sur les processus
de sauts montre la propriété de Markov du processus conditionné, sa matrice de
sauts R = (Tij) s'exprime en fonction de la matrice Q = (qij) de (L(t)) de la
façon suivante,
Irj (Ta = +00)
Tij = IP i (Ta = +00) qij,
pour i -:F j. D'après la proposition 5.8, IP 1 (Ta < +00) = J..L/ À, la propriété de .
Markov forte et l'homogénéité spatiale donnent
(5.13)
n
IP'n (To < +00) = rr lP'i (Ti-l < +00) = ( r .
.,,=1
Noter que cette égalité peut être aussi obtenue en utilisant le fait que (11 pZ(t»)
est une martingale bornée. La proposition est démontrée. D
4. VITESSE DE CONVERGENCE À L'ÉQUILIBRE
111
4. Vitesse de convergence à l'équilibre
Le moment exponentiel de la distribution d'une période d'occupation obtenu
dans la proposition 5.4 permet d'estimer la vitesse à laquelle cette file d'attente
atteint l'équilibre. La notation Il . IIvt désigne la norme de la variation totale sur
les mesures (voir l'annexe D).
PROPOSITION 5.8. Si G p est la distribution géométrique de paramètre
p = À/ J-L < 1, alors, pour x E N et t > 0, la distance à l'équilibre de la
distribution de L( t) satisfa t la relation
IIIP' ",( L( t) E . ) - G pllvt < ( /¥. '" + 2) e-( v'X-y'ii)2t,
où IP:z:(L(t) E . ) désigne la loi de la probabilité de la variable aléatoire
L( t) pour IP x. La constante (VX - VP-)2 est le taux exact de décroissance
exponentielle vers l'équilibre au sens où
(5.14)
lim ! log IllP'o(L(t) E . ) - G pllvt = -( VX - ..ffi)2.
t---++oo t
DÉMONSTRATION. Un couplage est utilisé pour montrer la première in-
égalité. En notant (L(t)), le processus à l'équilibre, i.e. c'est un processus de
Markov de matrice de sauts Q et tel que pour y E N, IP(£(O) = y) = pY(l - p).
Le processus (L(t)) qui part de x E N évolue indépendamment du processus
(L(t)) tant qu'il ne l'a pas rencontré. Après leur rencontre (éventuelle) les deux
processus suivent la même trajectoire. Si on oublie le processus à l'équilibre,
le processus (L(t)) ainsi construit a bien même loi que le processus de Markov
associé à une file M / M /1 avec x clients à l'origine. Si H désigne le temps de
rencontre des deux processus, alors
IIIP:z:(L(t) E . ) - Gpll vt = sup IIP:z:(L(t) E A) - IP(£(t) E A)I
ACN
= sup IEx {l{L(t)EA} - l{l(t)EA})1
ACN
< lE., (ll{L(t)EA} - l{L(t)EA} 1) < IP'",(H > t),
car
1 1 {L(t)EA} - l{L(t)EA} 1 < l{L(t),lL(t)} = l{H>t}.
Si L(O) = x > L(O), les sauts de chaque processus valant 1 ou -1, quand
(L(t)) touche 0, (L(t)) a nécessairement croisé la trajectoire du processus sta-
tionnaire. Le temps de couplage de ces deux processus est donc inférieur au
temps de retour à 0 de (L(t)) dans ce cas. Inversement si L(O) < £(0), le temps
de retour à 0 du processus stationnaire est supérieur au temps de couplage.
112
5. LA FILE D'ATTENTE M/M/1
En utilisant la relation (5.9), il vient
lEx (e(v'X-,;ïï)2H) < lEx (e(v'X-,;ïï) 2T O) IP(L(O) < x)
+ 1E ( IBC ( ( v"X-V;;)2To ) 1 )
L(O) e {L(O»:z:} ,
par conséquent,
:z: +00 fi?
lEx(e(v'X-,;ïï)2H) < V IP(L(o) < x)+ L V IP(L(O)=y)
y=:z:+1
:z: +00 fi?
= V ( 1 - p"'+!) + L V pY ( 1 - p)
y=x+1
x f£ X+1
< +2 >.
-VI. J-L i
et en utilisant l'inégalité de Tchebichev,
IIIP ",(L( t) E . ) - G pllvt < lEx (e( v'X-,;ïï)2 H) e-( v'X-,;ïï)\
d'où
111P,.{L(t) E . ) - Gpll vt < ( j¥ '" + 2 ) e-(v'X-,;ïï)2t.
La première inégalité de la proposition est démontrée. On déduit de celle-ci la
relation
limsup loglllPo(L(t) E') - Gpll vt < -(JÀ - .fïi)2,
t---++oo t
et comme
IIIPo(L(t) E . ) - Gpll vt > IIPo(L(t) = 0) - (1 - p)l,
pour établir la dernière assertion, il suffit de montrer que
liminf log IlPo(L(t) = 0) - (1 - p)1 > -(JÀ - .fïi)2,
t---++oo t
Ici un autre couplage est utilisé, (L(t)) est, comme ci-dessus, le processus station-
naire et (L(t)) le processus qui part de o. À la différence du couplage précédent
les deux processus utilisent toujours les mêmes processus de Poisson N et NIL. .
Par conséquent la condition initiale L(O) = 0 montre que le processus station-
naire est au-dessus de l'autre processus, Le. L(t) < L(t) pour tout t. De plus,
sur les intervalles où L(t) > 0, la différence L(t) - L(t) reste constante.
L'instant To, le temps d'att nte de 0 par (L(t)), est le temps de rencontre
des deux processus. En effet à To les deux processus sont tous les deux en o.
De plus la différence L(t) - L(t) ne peut décroître que lorsque L(t) = 0, ce qui
4. VITESSE DE CONVERGENCE À L'ÉQUILIBRE
113
entraîne que celle-ci ne peut être nulle pour la première fois que lorsque L(t) = 0
et donc à Ta. L'inégalité suivante est par conséquent vraie,
l{L(t)==a} - 1 {L(t)==a} > 1 {T o >t,L(t)==1}.
En effet, le terme de gauche est positif. Et si le membre de droite vaut 1, Ta > t
ce qui revient à dire que les deux processus ne se sont pas encore rencontrés
avant l'instant t donc L(t) < L(t) et, comme L(t) = 1, nécessairement L(t) est
nul. Le membre de gauche vaut donc aussi 1 dans ce cas, ce qui établit l'inégalité.
On en déduit la relation
IIPa(L(t) = 0) - (1 - p)1 = IPa(L(t) = 0) - IPa(L(t) = 0)
> IP(l(t) = 1, Ta > t).
Le processus (L (t)) étant réversible (Proposition 5.1), cette dernière quantité
vaut
IP(L(O) = 1, Ta > t) = p(l - p)IP 1 (T a > t),
l'inégalité précédente devient
IIPa(L(t) = 0) - (1 - p)1 > p(l - p)IP 1 (T a > t).
Il suffit donc d'étudier la queue de distribution de Ta. Le lemme suivant termine
la démonstration de la proposition. 0
LEMME 5.9. Sous la condit on p < 1,
(5.15)
lim lOgjpl(To > t) = -(vIX - ..ffi)2.
t +oo t
DÉMONSTRATION. Comme précédemment, Ta sera vu comme le temps d'at-
teinte de -1 par (Z(t)). Si v > 1/VP, alors Àv - J-Llv > 0, sous la probabilité
IPv, (Z(t)) a donc une dérive strictement positive, d'après la proposition 5.4,
IPV(T a = +00) > o. En utilisant la formule de changement de probabilités,
jp(To > t) = e-().(l-v)+/L(l-l/v»t ]EV (v-Z(t) l{To>t} ) 1
> e-(À(1-V)+#L(1-1/v»t JEV ( v-Z(t) 1 )
_ {To==+oo} ,
(5.16)
puis l'inégalité de Jensen pour la probabilité IPV sachant {Ta = +oo}, il vient
(5.1 7)
]EV (v- Z (t)l{T o =+oo}) = ]EV (v-Z(t) 1 To = +00) jpV(T o = +00)
> v-JE'l(Z(t) 1 To==+oo)IPV(T a = +00).
Le terme en exposant s'écrit
1
]EV (Z(t) 1 To = +00) = jpv(T o = +00) ]EV (Z(t)l{T o =+oo}).
114
5. LA FILE D'ATTENTE M/M/1
Quand t tend vers l'infini la variable Z(t)jt converge vers Àv - J-L/v dans L 2 (IPV)
(Corollaire 10.10 page 255). On en déduit la relation
l o v ( Z ( t ) 1 ) J-L
lm 1E - Ta = +00 = Àv - -.
t-++oo t v
Comme
lim loglP'V(T o = +00) = 0,
t--4+oo t
en utilisant l'égalité (5.17) on obtient la borne inférieure
lim inf log JEV ( v-Z(t) l{To=+oo} ) > - ( Àv - J-L ) log v,
t--4+OO t v
l'identité (5.16) donne la relation
liminf loglP'(T o > t) > - ( À(l - v) + J-L ( 1 - ) ) - ( Àv - J-L ) logv.
t--4+OO t v v
En faisant tendre v vers 1/ on obtient finalement
lim inf log IP'(To > t) > -( - ..ffi)2.
t--4+OO t
L'identité suivante est une conséquence de la majoration (5.9) et de l'inégalité
de Tchebichev,
limsup loglP'(To > t) < -( - ..ffi)2,
t--4+OO t
la relation (5.15) est donc établie.
D
La quantité ( - ..ffi)2 est le taux de convergence à l'équilibre, c'est aussi le
taux de décroissance exponentielle de la distribution de Ta. Ce résultat est tout
à fait naturel si on considère Ta comme le temps de retour dans un ensemble
significatif pour la mesure invariante: le voisinage de o.
La variable Ta n'a donc pas de moment exponentiel d'ordre strictement
plus grand que ( - ..ffi)2. Cela peut aussi se montrer de façon analytique en
utilisant l'égalité (5.8). D'après cette identité, la fonction z -t IE( exp( -zTa))
est holomorphe sur le demi-plan Re(z) > -( - ..ffi)2 et -( - ..ffi)2 est un
point singulier.
5. Les lois des temps d'atteinte: vers le haut
Pour a < b, la loi du temps d'atteinte Tb de b partant de a est étudiée..
Ces temps d'atteinte s'interprètent comme les temps de débordement de files
d'attente à capacité limitée. Si C E N*, le nombre de clients Lc(t) de la file
MIMI1/C vérifie la même équation différentielle que celle de la file MI Mil ,
avec une condition de bord supplémentaire,
dLc(t) = l{Lc(t-) c}NÀ(dt) - l{Lc(t-»a}N (dt).
5. LES LOIS DES TEMPS D'ATTEINTE: VERS LE HAUT
115
Si les deux files d'attente partent toutes les deux avec a clients, a < C, juste
avant l'instant TC+l' les quantités L(t) et Lc(t) coïncident. Le temps TC+l est
le premier instant de débordement de la file M / Mille.
Ici, à la différence du temps d'atteinte d'une valeur inférieure, la condition
de réflexion en 0 joue un rôle et donc le processus libre (Z (t)) ne peut être direc-
tement utilisé comme auparavant. Pour construire une martingale intéressante
pour calculer la loi de Tb, une combinaison linéaire de deux martingales associées
au processus libre est utilisée. Les coefficients de cette combinaison sont choisis
de telle sorte que la propriété de martingale reste vraie après un passage en o.
La proposition 5.3 suggère naturellement deux telles martingales. En prenant,
pour x > 0,
(5.18) 4>1(x) = >. + fJ. + x - J( >.+ fJ. + x)2 - 4>'fJ. .
(5.19) 4>2 (x ) = À + fJ. + x + J( >.+ fJ. + X)2 - 4ÀfJ. 1
alors pour i 1,2, (4)i(x)Z(t)exp{-xt)) est une martingale. La construction
suivante est due, dans un cadre plus général, à Kennedy[20].
PROPOSITION 5.10. Pour x > 0, si 4>l(X) et 4>2(X) sont les deux solutions
en u de l'équation
À(l - u) + fJ. ( 1 - ) = -x,
le processus
(M(t)) = (((1 - 4>1 (x ))4>2 (x )L(t)+1 + (4)2 (x ) - 1)4>1 (x )L(t)+1) e- xt ) ,
est une martingale.
DÉMONSTRATION. En posant
(5.20) h(t, y) = ((1- 4>1(X))4>2{X)Y+l + (4)2{X) - 1)4>1(X)Y+1) e- xt ,
pour t > 0 M{t) == h{t, L(t)), d'après le corollaire C.6 page 348 il suffit de
montrer que h est harmonique en espace-temps pour le générateur Q, soit pour
tout t > 0 et y E N,
ah
8t (t, y) + Q ( h ) ( t, y) = o.
La propriété est clairement vraie pour y > 0 puisque pour i = 1,2,
(t, y) -t <Pi (x) Y e -xt
est harmonique en espace-temps pour le générateur du processus libre (voir la
remarque 1 page 106), qui coïncide avec Q pour y > o. Il reste donc à vérifier
[20] D.P. Kennedy, Some martingales related to cumulative sum tests and single-server
queues, Stochastic Processes and their Applications 4 (1976), 261-269.
..
116
5. LA FILE D'ATTENTE M/M/1
l'identité précédente pour y = 0, dans ce cas
ah
e xt 8t (t. 0) = - x ( tP2 ( x) - tP1 ( X )) ,
e xt Q ( h) (t, 0) = À (1 - 4>1 (x)) (4)2 (x) - 1) (4)2 (x) - 4>1 (x)) ,
le résultat découle de l'identité À (1 - 4J1 (x)) (<P2 (x) - 1) = x pour x > 0, qui se
vérifie en remarquant que 4J1(X)+4>2(X) = (À+J-L+x)/À et 4J1(X)4J2(X) = J-L/À. 0
Le principal résultat de cette section est contenu dans la proposition suivante.
PROPOSITION 5.11. Si a < b, pour x > 0,
(5.21) lE.. (e -XTb) = (PtP1 (x ))b-o 1 - tP1 (x) + (1 - PtP1 (x ))p°tP1 (x )20+1 ,
1 - <Pl (x) + (1 - P4>l (x) )p b 4>l (x )2b+l
avec
tP1(X) = À + Jl + x - J(À + Jl + X)2 - 4ÀJl ,
2À
De plus si À < J1., la variable (ÀI J-L)n Tn tend en loi vers une distribution
exponentielle de paramètre (J-L - À)2 / J1. quand n tend vers +00.
DÉMONSTRATION. L'irréductibilité de (L( t)) montre que Tb est fini Ira-
presque sûrement. La martingale (M(t)) de la proposition 5.10 arrêtée au temps
d'arrêt Tb est bornée donc converge dans L 1 quand t tend vers l'infini, d'où
l'égalité 1E(M(Tb)) = E(M(O)), et donc
-XTb _ (1 - 4>l(X))4>2(X)a+1 + (4)2(X) - 1)4>l(X)a+1
lE.. (e ) - (1 - tP1(X))tP2(X)b+ 1 + (tP2(X) - 1)tP1(X)b+1 ·
d'où l'identité (5.21) puisque 4>1(X)4>2(X) = J.L/À.
Pour montrer la seconde partie de la proposition, on suppose a nul, le cas
général est similaire. La transformée de Laplace de Tn est donnée par,
(5.22) !F.o (e- XTn ) = (PtP1 (x))n 1 - tP1 (x) + (1 - PtP1 (x ))tP1 (x) 1
1 - 4>1 (X) + (1 - P4>l(X))pn4>l (x)2n+1
pour X > o. La dérivée de 4>1 en 0 valant -1/(J-L - À), la condition À < J.L donne
pour n au voisinage de l'infini,
X
4>1 (xp n ) = 1 - À pn + o(pn),
J.L-
soit 4>1 (xpn)n rv 1. En injectant cette relation dans l'équation (5.22) il vient
IEo ( e-XpnTn ) = pn 1 - p + o(pn)
xpn I(J-L - À) + (1 - p)pn + o(pn)
1 - P + 0(1)
xl(J-L - À) + 1 - P ,
par conséquent
lim IEo ( e-XpnTn ) = (Jl - À)2 / Jl 1
n-++oo (J-L - À)2 1 J-L + x
ce qui achève la preuve de la proposition.
o
6. ÉVÉNEMENTS RARES
117
Si À < J-L, le processus (L(t)) redescend très vite de n, en un temps linéaire
en n (Proposition 5.5). Par contre, le temps pour atteindre n partant de 0 est
exponentiel en n, de l'ordre de (J-LI À)n.
Dans les deux sections sur les temps d'atteinte, les transformées de Laplace
des temps d'arrêt considérés ont été obtenues. L'inversion de ces transformées
n'est pas une opération simple et, quand c'est possible, les expressions obtenues
ne sont pas commodes à utiliser (voir Pappendice de ce chapitre). En revanche,
les résultats obtenus au passage ont permis de donner une description qualitative
du comportement de cette file d'attente. Par exemple, le moment exponentiel
de Ta a permis d'estimer la vitesse de convergence à l'équilibre. La convergence
en loi de la proposition 5.11 permet de décrire certains événements rares.
6. Événements rares
À-#J.
#J.-À
a
FIG. 2. Simulation d'une période d'occupation haute
6.1. Les grandes périodes d'occupation. Si p = ÀI J-L < 1, la trajectoire
de la file M / M /1 atteint de grandes valeurs sur une échelle de temps exponen-
tielle, de l'ordre de (J1./ À)a pour dépasser la valeur a. Dans toute cette section
p < 1, le processus (L( t)) est étudié quand il atteint des grandes valeurs. Formel-
lement, il s'agit de donner la loi limite d'une période d'occupation qui atteint la
valeur a. La section 6 du chapitre 3 comporte une étude similaire pour le cas des
marches aléatoires. Le cadre plus restreint permet de donner ici une description
explicite de l'occurrence de ces événements rares.
PROPOSITION 5.12. Si À < J-t, la loi de (L(t 1\ Ta)) sachant {Ta < Ta}
converge, quand a tend vers l'infini, vers la loi d'un processus de vie et de
mort dont les intensités sont données par
1 - pX+1 1 _ pX-1
(5.23) rxx+1 = J-L ,r xx -1 = À .
1 - pX 1 _ pX
118
5. LA FILE D'ATTENTE M/M/1
DÉMONSTRATION. On suppose que L(O) = 1, le cas général étant identique.
Pour a E Il4 la variable T désigne le temps d'arrêt Ta 1\ Ta. Sur l'intervalle de
temps [0, T], le processus (L(t)) est identique au processus (1 + Z(t)). Prenons
j : D(Il4, N) 4 II4
y -t j(y),
une fonctionnelle mesurable bornée continue sur l'ensemble des fonctions sur
Il4 à valeurs dans N càdlàg muni de la topologie de Skorokhod (voir l'appendice
à ce sujet ou Billingsley [5]). Comme (11 pZ(t») est la martingale exponentielle
correspondant à u = 1/ p, on en déduit
JE l (f( L( r 1\ t 1\ . ))) = JE l (pZ(TAt) f( L( r 1\ t 1\ . )) pZ( l\t) )
= -l (pZ(Tl\t) f(L(r 1\ t 1\ . )))
= -l (pL(Tl\t)-l f( L( r 1\ t 1\ . ))) 1
-1
avec les notations de la section 2. La variable T étant ri -p.s. finie et comme
p < 1, le théorème de convergence dominée montre l'égalité
JE l (f(L( r 1\ . ))) = -l (pL(T)-l f(L( r 1\ . ))) .
En notant Ta(Y) le temps d'atteinte de a par la fonction y), l'identité précédente
appliquée à la fonctionnelle
D(ll4 ,N) Il4
y -t j(y)l{T Q (y)<To(Y)}'
donne la relation
JE l (I(L( r 1\ . ))l{To<To}) = -l (pL(T)-l f(L( r 1\ · ))l{To<To} )
= -l (pL(To)-l f(L(Ta 1\ . ))l{T o <To}) 1
soit,
(5.24)
-1
lE 1 (j(L{Ta 1\ . ))l{T Q <T o }) = (pa-1 j(L(T a 1\ . ))l{T Q <T o }) .
D'après la remarque 3 page 106, les intensités des deux processus N). et NI}. sont
inversées pour la probabilité r o avec Ua = p-1. Le processus (L( t)) est transient
-1
pour la probabilité r o si p < 1, par conséquent ri (Ta = +00) > o. En faisant
tendre a vers l'infini dans (5.24), on déduit par le théorème de convergence
dominée
-1
lim p1- a lE 1 (j(L(T a 1\. ))lrl <To}) = lEi (j(L(.))l{To=+oo}) ,
a +oo Q
par conséquent
(5.25)
a oo JB4 (t(L(T a 1\ . )) 1 Ta < Ta) = -l (f(L(.)) 1 Ta = +00)
6. ÉVÉNEMENTS RARES
119
Le terme de droite fait intervenir la loi conditionnelle de (L{ t)} sachant que le
temps d'atteinte de 0 est infini. La proposition 5.7 permet de conclure. 0
En utilisant le théorème d'arrêt pour la martingale (J-L/ À)1+Z(t) au temps d'arrêt
Ta 1\ Ta, on obtient
IP ( T ) == 11 p - 1 = a-1 1 - P
1 a < 0 1/ pa _ 1 P 1 _ pa '
qui peut aussi être vu dans le cadre discret comme la formule de la probabilité
de ruine des joueurs; en particulier lima +oo p- aP 1(T a < Ta) = (1 - p)/ p.
L'identité (5.25) montre que la trajectoire d'une période d'occupation dé-
passant le niveau a est celle d'une file M / M /1 dont le processus d'arrivées est
d'intensité J-L et les services de loi exponentielle de paramètre À. Cette dernière file
d'attente est bien évidemment instable et atteint donc le niveau a rapidement, en
un temps linéaire en a (en appliquant la proposition 5.4 pour le temps d'atteinte
de 0 du processus (a - L{t}}).
La partie descendante de la période d'occupation après Ta est, d'après la
propriété de Markov forte, identique au processus libre qui part de a. En par-
ticulier la pente vaut À - J..L. D'après les équations {5.23}, le taux de croissance
de la partie montante vaut pour x grand, J.L - À. Il n'y a toutefois pas symétrie
pour les distributions puisque la partie montante est une chaîne de Markov non
homogène en espace.
(5.26)
a
t
..
Ra
Hl
Rl
H2
FIG. 3. La suite des excursions de (L(t)} au voisinage de a
6.2. Le processus des excursions au voisinage de a. Pour décrire le
processus de débordement du niveau a par la file d'attente, les suites de temps
120
5. LA FILE D'ATTENTE M/M/l
d'arrêt (Rn) et (Hn) sont définies récursivement de la façon suivante,
Hn = inf{t > Rn-11 L(t) = a},
Rn = inf{t > Hnl L{t) = O}
= inf {t > Rn-11 L(t) = 0, L(s) > a pour un s E [Rn-l, t]},
avec Ra = o. Le processus ponctuel Na associé à la suite croissante (Hn) est
celui des premiers temps d'atteÏnte de a après un passage en O. La propriété de
Markov forte de (L(t)) montre que les suites (Hn - R n - 1 ) et (Rn - Hn), sont
Li.d. et indépendantes.
Pour n E N, la variable Hn - Rn-l a même loi que le temps d'atteinte de a
partant de 0; d'après la proposition 5.11, pa(H n -R n - 1 ) converge en distribution
vers une loi exponentielle de paramètre (J-L - À)2 / J-L quand a tend vers l'infini.
D'après la proposition 5.5, la descente vers 0 est très rapide: IP-presque sûrement,
lim pa(R n - Hn) = 0,
a---++oo
puisque d'après la proposition 5.5, {Rn - Hn)/a converge vers IP-p.s. vers une
constante. Les accroissements du processus ponctuel
No, = L Opa.H n ,
n>l
convergent par conséquent vers des variables exponentielles i.i.d. La proposition
suivante vient donc naturellement.
PROPOSITION 5.13. Si P < 1, le processus ponctuel
No, = L Opa.H n
n
converge en loi vers un processus de Poisson de paramètre {J-L - À)2 1 J-L.
DÉMONSTRATION. Comme la suite (pO, Hn - pa H n - 1 ) converge en distribu-
tion vers une une suite i.i.d. dont la loi commune est exponentielle de paramètre
, la proposition 1.22 page 26 montre que le processus ponctuel En>lopa.Hn
converge en loi vers un processus de Poisson de paramètre ç. - D
Le processus No, ne décrit cependant pas complètement le processus des
temps d'atteinte par (L(t)) de a, i.e. celui des instants s tels que L(s) = a et
L(s-) f:. a. Il n'est cependant pas plausible que ce processus soit un processus
de Poisson: en effet, si L(t o ) vaut a, avec probabilité positive, (L{t)) visitera a
plusieurs fois après cet instant avant de partir vers 0 ; voir la figure 3 au voisinage
de H .
Une description informelle. Pour a grand et n E N, au voisinage de Hn le
processus (L{t)) se comporte comme le processus (a + Zn(t - Hn)), où (Zn(t))
est un processus de même loi que le processus libre (Z(t)). Juste après Hn,
les visites de (L(t)) à a, correspondent donc aux visites de (Zn(t)) à o. Comme
(Zn(t)) converge IP-p.s. vers -00 quand t tend vers l'infini, il n'y a qu'un nombre
fini de telles visites après Hn. Après celles-ci, le processus (L(t)) revient en 0
(à t = Rn) et ne revient en a que très longtemps après, à l'instant t = Hn+1.
7. RENORMALISATION DE LA FILE M/M/1
121
Les visites de (L(t)) à a peuvent donc être décrites comme un processus de
Poisson de paramètre pa(J1. - À)2 1 J1. (les Hn), et à chaque point de ce processus
sont attachées les visites à 0 de (Zn (t)), où (Zn) est une suite i.i.d. de processus
libres.
Une propriété de la loi du temps que passe le processus libre en 0 termine
cette section.
PROPOSITION 5.14. Si P < 1, la variable
So = 10+ 00 l{z(sJ=O} ds
suit une loi exponentielle de paramètre J-L - À.
DÉMONSTRATION. Le processus libre reste en 0 un temps EÀ+ de distri-
bution exponentielle de paramètre À + fJ. avant de sauter en 1 [resp. -1] avec
probabilité À/(À + J1.) [resp. J-L/(À + J1.)]. Si le saut est 1, alors (L(t)) visitera
o à nouveau, dans ce cas Sa = EÀ+JJ. + Sb, où Sb est indépendante de EÀ+JJ.
et de même loi que Sa. Si le saut est de -1, alors avec probabilité ÀI J1., le
processus revient en 0 (Proposition 5.4). On en conclut que Sa est la somme
de G variables i.i.d. exponentielles de paramètre À + j.j, et G est une variable
géométrique indépendante de paramètre 2À/(À + j.j). On en déduit, en prenant
la transformée de Laplace par exemple, que Sa suit une loi exponentielle de
paramètre J1. - À. D
7. Renormalisation de la file M/M/l
La renormalisation considérée ici consiste, pour un processus stochastique,
à accélérer l'échelle de temps du processus et à augmenter parallèlement la taille
de son état initial. Ce procédé présente l'avantage de supprimer les fluctuations
aléatoires pour ne conserver que la tendance principale du processus. Dans le
cas de la file M / M /1 ce procédé est particulièrement simple, cet exemple sert
d'introduction à cette problématique.
Initialement la file d'attente compte x N clients et la suite (x N) satisfait
1 . x N lUI .
lm N =xEJ.l .
N-++oo
On pose
L - ( ) _ L(Nt)
N t - ,
N
où L est le processus du nombre de clients de cette file d'attente, solution de
l'équation différentielle (5.1) avec la condition initiale x N. Noter que LN vit
sur une échelle de temps très rapide t -t Nt et les arrivées et les services des
clients sont accélérés du facteur N. La renormalisation en espace, le facteur liN,
compense, on le verra, cette accélération du temps.
PROPOSITION 5.15. Le processus renormalisé (LN(t)) converge vers une
fonction déterministe, l néa re par morceaux, plus précisément pour t E ,
IP-p.s.
lim LN ( t) = L ( t) = (x + (À - J1.) t) + .
N---++oo
122
5. LA FILE D'ATTENTE M/M/1
De plus, si la suite ( (xN/N - X») tend vers 0 et (B(t» est le mouvement
brownien standard, on a la convergence des processus
(5.27)
.JN ( LNjl : (t» ) (B(t»,
sur l'intervalle de temps [0, xl (J.L - À)+ [ quand N tend vers l'infini.
DÉMONSTRATION. Si À < J.L, TN = Toi N est le premier temps d'atteinte de
o par (LN(t)). La proposition 5.5 montre que
1 . x
lm TN = , '
N +oo J.L - A
Ir-presque sûrement. D'après l'identité (5.1), jusqu'au temps d'atteinte de 0, le
processus (L(t) - XN) est la différence de deux processus de Poisson, autrement
dit,
(5.28)
L - (t ) XN N). (]O, N(t  TN )]) - Np. (]O, N(t  TN )])
N Â TN = N + N .
Pour t < xl(J.L - À), IP-presque sûrement t < TN à partir d'un certain rang, et
par conséquent la loi des grands nombres pour les processus de Poisson donne,
presque sûrement,
lim LN(t) = x + (À - J.L)t.
N +oo
Il reste à montrer que pour t > x / (J.L - À), If-p.s.
(5.29)
lim LN(t) = o.
N +oo
Si (L (t)) est le processus renormalisé pour la condition initiale L(O) = LyNJ
avec les mêmes processus de Poisson, d'après ce qui précède, si y + (À - J.L)t > 0,
alors IP-presque sûrement
lim L (t) = y + (À - J.L )t.
N---t+oo
L'application y -t L (t) est clairement croissante.
Si ê > 0 est fixé, en posant y = ê + (J.L - À)t, alors y > x. Il existe donc No
tel que, si N > No, alors XN < LyN J. La monotonie donne, pour N > No,
(5.30)
LN(t) < L (t),
d'où l'inégalité
limsupLN(t) < limsupL (t) = y + (À - J.L)t = ê
N---t+oo N---t+oo
If-p.s. Cette majoration montre que pour ê > 0 If-p.s. lim sUPN +oo LN(t) < ê
et donc limN +oo LN(t) = o.
7. RENORMALISATION DE LA FILE M/M/1
123
Le cas À > J-L. Dans ce cas, la loi des grands nombres montre que la quantité
inf ( N À (]O, s]) - N (]O, s]) ) ,
s>o
est finie IP-presque sûrement puisque le terme générique tend vers +00. Comme
XN tend vers l'infini, le membre de droite de l'égalité (5.28) est donc Ir-p.s. stric-
tement positif pour N suffisamment grand. Autrement dit, Ir-p.s. TN = +00,
pour N assez grand, (LN(t)) s'exprime donc comme la différence de deux pro-
cessus de Poisson et la démonstration se termine comme dans le cas précédent.
Pour € E Hlt, le théorème de Donsker pour les processus de Poisson montre
la convergence
( N((]O, - çNt ) (B(t)),
quand N tend vers l'infini. Par indépendance de N À et N , on en déduit la
convergence suivante
( NÀ(]O, Nt]) - N (]O, Nt] - (À - J-L)Nt ) (B(t)).
vI (À + p,)N
La convergence (5.27) s'obtient avec la représentation (5.28) de (LN(t)) pour
t < TN et la convergence presque sûre de TN vers xl (J-L - À). D
x
.
o
x
-À
FIG. 4. Le processus renormalisé (L(t)) et les fluctuations de (LN(t))
La renormalisation ne conserve que la dérive déterministe (À - J1. )t. La par-
tie fluctuation aléatoire, représentée asymptotiquement par un brownien, est
gommée par ce procédé.
Si À < p" une fois que le processus renormalisé touche 0, il Y reste. Cette pro-
priété est caractéristique des systèmes stables (cf. la proposition 9.9 page 229).
124
5. LA FILE D'ATTENTE M/M/1
Elle a été montrée avec un argument de monotonie, intuitivement elle peut s'ex-
pliquer de la façon suivante : une fois que le processus (L( t)) a touché 0, avec
l'argument de couplage de la preuve de la proposition 5.8, il est quasiment à
l'équilibre et donc évolue essentiellement dans un voisinage borné. L'accélération
du temps, linéairement en N, ne fait pas visiter des valeurs très grandes au pro-
cessus puisqu'il faut, d'après la proposition 5.11, une échelle de temps exponen-
tielle, de l'ordre de (Jjl À)Ny, pour dépasser la valeur Ny. La renormalisation
en espace en 1 lN écrase donc les fluctuations, ce qui explique que le proces-
sus renormalisé reste collé en O. Cet argument sera utilisé dans la preuve de la
proposition 5.17.
Cette section se termine par une estimation qui sera utile pour traiter les
problèmes de grandes déviations. Le lemme suivant donne une estimation uni-
forme de la loi des grands nombres pour les processus de Poisson.
(5.31 )
LEMME 5.16. Pour , t E Il4, E, fJ > 0, il existe No tel que si N > No,
P ( sup N"d]O, sN]) _ çSI < 0 ) > 1 - E.
O<s<t N
DÉMONSTRATION. La proposition 1.20 page ?? montre que le processus
( N"d] Nt]) _ çt)
est une martingale relativement à sa filtration naturelle. Comme celle-ci est de
carré intégrable, l'inégalité de Doob donne la relation
P ( sup Nd]O,Ns]) _ çs > 0 ) < JE(Nd]O, tP/N - çt)2
O<s<t N
t
N fJ2 '
et donc le lemme.
D
(5.32)
PROPOSITION 5.17. Pour E, fJ > 0, il existe No E N tel que si N > No,
inf Pz ( sup ILN(S) - (x + (À - J1.) s)+1 < fJ ) > 1 - E.
Iz/N-xl<6/2 O<s<t
DÉMONSTRATION. Pour ZEN, fJ > 0, en notant
LlN(S) = LN(S) - (x + (À - J1.)s)+,
comme dans la preuve précédente, TN désigne le premier temps d'atteinte de 0
par le processus renormalisé (LN (t) ),
(5.33) Pz ( sup ILlN(s)1 > fJ )
O<s<t
< Pz ( sup ILlN(S)1 > fJ ) + Pz ( sup ILlN(s)1 > fJ ) .
O'5: S '5: tÂT N TNÂt<S5: t
7. RENORMALISATION DE LA FILE M/M/1
125
D'après la représentation (5.28) de LN(. 1\ rN), si IzlN - xl < fJ/2,
IPz ( sup I N(S)I > fJ ) ==
OS:S5: tAT N
Tm ( lN NÀ(]O,Ns]) , ( N (]O,NS] )
Ir z sup Z - x + - /\S - - J-LS
O SS:tATN N N
> 6) ,
et ce dernier terme est majoré par
IP ( sup N (]O, NsJ) - Às > ) + IP ( sup NJ!(] NsJ) - J.LS > - 4 fJ ) .
O<s<t N 4 O<s<t
- - - -
Le lemme 5.16 assure donc de l'existence de N 1 tel que si N > N 1 , alors
sup IPz ( sup ILlN(s)1 > fJ ) < =-.
IzjN-xl<6/2 05:S tATN 2
( 5.34 )
Il reste à majorer le dernier terme de l'inégalité (5.33). La convergence presque
sûre de rN vers xl(J1. - À) donne l'existence de N 2 , tel que si N > N 2 ,
IP ( r < x - 6/2 ) < E .
N_ J..L-À -4
En décomposant suivant que rN est plus grand que (x - fJ/2)/(p, - À) ou non,
on obtient les inégalités suivantes
IPz ( sup ILlN(S)1 > fJ ) < IPz ( sup ILlN(s)1 > fJ )
TNAt<sS:t TN<S5: t + T N
( X - fJ / 2 ) ( X - fJ / 2 )
< /P'z sup ILN(S)I > 6/2, TN > _ À + /P'z TN < _ À ;
TN<S5:t+TN J..L J1.
la propriété de Markov forte de (L( t)) donne l'inégalité
IPz ( sup ILlN(s)1 > fJ ) < Ifo ( sup ILN(S)I > fJ / 2 ) + 4 E
TNAt<s5: t O sS:t
E
< IPo(TLN6/2J < Nt) + 4 .
La proposition 5.11 montre que (pLN6 J TLN6J) converge en distribution vers une
loi exponentielle quand N tend vers l'infini. En particulier IPo(TLN6/2J < Nt)
tend vers 0 quand N tend vers l'infini, il existe donc N 3 tel que si N > N 3 ,
!Pz ( sup /LlN(s)1 > fJ ) < 2 '
TNAt< s'5:t
et en prenant No = NI V N 3 , si N > No, l'inégalité (5.32) est vérifiée. D
126
5. LA FILE D'ATTENTE M/M/1
8. Grandes déviations
Les notations de la section précédente sont conservées. Si LN(O) = zEN,
pour fJ > 0 et ZEN, la proposition 5.17 montre que l'événement
(5.35) n ,6(</» = { sup ILN(S) - </>(s)1 < fJ } ,
O<s<t
est asymptotiquement de probabilité 1 quand la fonction 4> vaut
4>( s) = (x + (À - J1.) s ) +
et avec la condition IzlN - xl < fJj2. Sinon, pour </>(5) = x + as, avec x > 0 et
a t À - J1., cet événement est asymptotiquement négligeable.
Cette section étudie à quel taux cet événement devient négligeable quand </>
est une fonction arbitraire. Cela revient à évaluer la probabilité que la trajectoire
de (L(t)) reste dans un tube de diamètre fJ autour du chemin aberrant s -t 4>(s).
Le résultat principal est le théorème 5.20, page 132.
Dans cette étude, les cas suivants seront successivement envisagés: 4> est tout
d'abord une fonction linéaire, puis linéaire par morceaux et enfin une fonction
de classe el. Le traitement du cas transient ne différant pas notablement du
cas ergodique, pour simplifier la présentation, la file sera supposée stable dans
toute cette section, i.e. p < 1. Dans la suite, la notation N 1 est utilisée pour des
entiers a priori différents; c'est un abus de notation pour désigner un entier plus
grand que le N 1 précédent et qui en plus vérifie une autre propriété.
8.1. Le cas linéaire. La fonction l/J vaut
(jJ( s) = (x + as rt- ,
avec x > 0 et a E IR. La réflexion de (L(t)) en 0 amène à étudier trois cas de
figures :
1. la fonction c/J est> 0 sur l'intervalle [0, t] ;
2. pour s < t, 4>(s) = as avec a > 0, en particulier 4>(0) = 0;
3. pour tout s < t, 4>(s) = O.
8.1.1. Les trajectoires dans 114 - {O}. Dans ce cas, x > 0 et x + at > o.
La formule de changement de probabilité donne, pour u E ,
(5.36) !Pz ( sup ILN(S) - (x + as)1 < fJ )
O<s<t
= 1E u ( u-Z(Nt) e-(ÀN(l-u)+ N(l-l/u»t 1 )
z 'R} (4)) .
N,6
En notant
( ) _ a + J a 2 + 4ÀJ-L
u a - 2À '
la solution positive de l'équation Àu - J-L/u = a, quand N tend vers +00
l'événement n 6(</» est asymptotiquement de probabilité 1 pour la probabi-
,
lité IP (Q) si z est tel que Iz / N - xl < fJ /2 (Proposition 5.17).
8. GRANDES DÉVIATIONS
127
Comme x > 0, si 6 est assez petit, le processus (L( N s )) est strictement posi-
tif sur l'intervalle [0, t] sur l'événement 'R ,6(</»' et donc identique au processus
libre translaté de z, (Z(Ns) + z), en particulier
(5.37) Z(Nt) E [aNt + xN - Z - 6N, aNt + xN - z + 6N].
L'identité (5.36) pour u = u(a) devient
IP ( 'R t ( Â\ )) - (a) ( e-Z(Nt) logu(a)-Nt(À(l-u(a»+I-L(l-l/u(a») 1 )
z N,6 'Y - z 'R. .6(<I» 0
En définissant
H(x,a) = alogu(a) + À(l- u( a)) + Ji. (1- u( ) ) ,
a + v a 2 + 4ÀJ.L
(5.38) H(x, a) = a log 2À + À + Ji. - v a 2 + 4ÀJi.,
(noter que H ne dépend pas de x), la relation (5.37) montre que la probabilité
de l'événement 'R ,6( (jJ) vérifie les inégalités
IPz('R ,6(</») eH(x,a)Nt > Ir (a)('R ,6(</») e-(6N+lxN-zDllogu(a)l,
Ir z ('R}y,6(</») eH(x,a)Nt < r (a)('R ,6(</») e(6N+lxN-zD 1 logu(a)/,
par conséquent
(5.39)
1 t
N log IP z('R N ,6( (jJ)) + H(x, a)t
> log (1P' ("')(n ..s(4>))) - (8 + lx - z/NI) Ilogu(a)1
et
(5.40) log IP' z(n ..s(4») + H(x, a)t < (8 + lx - 1) 1 log u( a)l.
Si ê > 0, pour 6 0 assez petit de telle sorte que
ê
2601Iogu(a)1 < 2
et 6 < 6 0 il existe, d'après la minoration (5.32), N 1 E N tel que pour N > N 1 ,
inf log IP' (",} (nk..s( 4») > _:..
Iz/N-xl 6/2 N 2
Finalement pour N > NI et 6 < 6 0 , les relations (5.39) et (5.40) donnent les
inégalités
{ SUPlz/N-xl<6 1 10gIrz ('R ,6(</») + H(x,a)t < ê,
inflz/N-xl<6/2 1 IogIPz ('R ,6((jJ)) + H(x,a)t > -ê,
ce qui achève l'estimation de la probabilité de 'R 6(</» dans ce cas. Les autres
,
cas sont plus délicats en raison de la réflexion en o.
(5.41 )
128
5. LA FILE D'ATTENTE M/M/1
8.1.2. Le problème de la frontière x = o. Ici </J(s) = as, pour s < t et
a > o. Dans ce cas, en raison de la réflexion en 0, le processus libre n'est pas
directement utilisable. La fonction H est prolongée en x = 0 en définissant aussi
H(O, a) par la relation (5.38), en particulier H(x, a) = H(O, a) pour tout x E Il4
si a > o.
Si T/o = 261 a (avec 6 assez petit pour que T/o < t), alors
'Rk,6(<P) = { 'RjJ,6(<P), sup ILN(s) - asl < 6 } ,
170 s t
et la propriété de Markov de (L( t)) montre, en posant <Pl (s) = a( 1]0 + s)
(5.42)
IP z ('R .o (4))) = lEz (ln;J,6(<fI)1P L(NT/o) ('R ;o (4)d)) 1
d'où l'inégalité
IP z ('R .o( 4») < lEz (l{ILN(T/o)-aT/ol<o}1P L(NT/o) ('R ;o (4)d)) .
D'après les inégalités (5.41), pour 6 assez petit, il existe N 1 tel que si N > N 1 ,
log IPLN(T/o) ('R ;o (4)d) + H(O, a)(t - 170) < I
sur l'événement {ILN(T/o) - aT/ol < 6}; par conséquent la relation (5.42) montre
que pour 6 suffisamment petit, inférieur à aej(4H(O, a)), il existe N 1 tel que si
N > N 1 ,
1
sup N loglP z ('R .o(4>)) + H(O, a)t < E,
z/N-5:. fJ
ce qui donne la borne supérieure.
Pour minorer ces probabilités, comme
(5.43 )
Ifz('R ,6(<P)) > Ifz ('R ,6(<P), {Z(s) > 0, Vs > O}) ,
avec la formule de changement de probabilités, ce dernier terme vaut
(a) ( e-Z(Nt) log u(a)-Nt(. (l-u(a»+J.L(l-l/u(a») 1 )
z {'R .6(cP),Z(s) 0,'Vs 0} .
Comme Z et L sont identiques tant que Z est positif,
(5.44) e(6N+z)l1 o g u (a)I+NH(0,a)tIf z ('R ,6(ct») >
1P (a) ('R .o(4», Z(s) > 0, Vs > 0) .
En utilisant l'inégalité (5.32), il est facile de montrer que l'expression
inf If (a) ('R fJ(<p), Z(s) > 0, Vs > 0)
z/N 6/2 '
converge vers
lPu(a) (Z(s) > 0, Vs > 0) = lPu(a)(T o = +00) = 1 - ÀU (a)
a
>.u(a) > °
8. GRANDES DÉVIATIONS
129
quand N tend vers l'infini. Avec l'inégalité (5.43), on en déduit que pour fJ assez
petit, il existe N 1 tel que si N > NI,
{ suPzIN 6 1 10gIrz ('R. ,6(4») + H(O, a)t < ê,
inf z / NS 6/2 1 log Ir z ('R. ,6(4») + H(O, a)t > -ê.
(5.45)
8.1.3. La trajectoire plate x == 0 et a = o. Ici <p est identiquement nulle
sur [0, t], l'événement 'R. ,6(4)) est donc asymptotiquement probable. En posant,
(5.46)
H(O, 0) = 0,
les inégalités (5.45) sont aussi vérifiées d'après la proposition 5.17.
Les résultats précédents se montrent de la même façon en remplaçant l'évé-
nement 'R. ,6((jJ) par l'événement
{ILN(t) - (jJ(t) 1 < fJ} = {ILN(t) - (x + at)+1 < fJ}.
Les inégalités (5.41), (5.45) et (5.46) établissent donc la proposition suivante.
PROPOSITION 5.18. Si P < 1, a E IR, x, t E II4 et (jJ(s) = (x + as)+, pour
ê > 0 et fJ suffisamment petit, il existe No tel que si N > No, alors
inf N I logIrz ( sup ILN(S) - 4>(s)1 < fJ ) + H(x,a)t > -ê,
Iz/N- x l<6/2 O<s<t
sup loglP'z ( . sup ILN(S) - 4>(s)1 < 0 ) + H(x,a)t < ê
Iz/N-xl<6 O s t
et
inf N I log Ir z ( 1 LN (t) - 4>( t) 1 < fJ ) + H (x, a)t > -ê,
Iz/N-xl<6/2
sup N I log IP'z (ILN(t) - 4>(t)1 < 0) + H(x, a)t < E,
Iz/N-xl<6
où H(x, a) est défini par
a + V a2 + 4ÀJ.L
H(x, a) = a log 2À +À+J.L- V a 2 +4ÀJ.L,
si (x, a) i- (0,0) et H(O, 0) = o.
L'expression H(x, a)t donne le taux de décroissance exponentielle en N de
la probabilité de 'R. ,6 ((jJ). Il est remarquable que ce taux de décroissance soit
le même si l'on force toute la trajectoire à être autour de <p ou seulement le
dernier point du processus. L'explication est bien sûre contenue dans la formule
de changement de probabilité. Si le processus est forcé à l'origine et en t à être
autour deux points spécifiés, la trajectoire du processus est celle d'une marche
aléatoire; elle sera donc autour d'une ligne droite entre ces deux points, et par
conséquent dans un tube autour de (jJ.
130
5. LA FILE D'ATTENTE M/M/1
À-J..' 0
FIG. 5. La fonction a -t H(x, a), pour x > 0
8.2. Le cas linéaire par morceaux. Le résultat précédent est étendu
en étudiant la probabilité que la trajectoire renormalisée soit dans un tube de
diamètre fJ autour d'une fonction cP, linéaire par morceaux avec
cP( s) = { cPl (s) = x + al S,
cP2 (s - v),
pour s < v,
pour v < s < t,
où (jJ2 (s) = y + a2 s avec y = cPl (v) = x + al v. Les constantes des fonctions
(jJi, i = 1, 2 sont telles que (jJ est positive sur l'intervalle [0, t].
La propriété de Markov de (L(t)) donne, en utilisant la définition (5.35),
!P z CR k,6 ( 4> )) = !P z ( sup 1 LN ( s) - (jJ1 ( S ) 1 < fJ, sup 1 LN ( s) - 4>2 (s - v) 1 < fJ )
O<s<v v<s<t
- - - -
= Ez (1'R. '6(tf>dIPL(Nv) ('R. 6(iP2») .
La proposition 5.18 montre que pour ê > 0 et fJ assez petit, il existe N 1 E N tel
que si N > N 1 J
!P L( N v) ('R 6 ( cP2 )) < exp N ( ê 1 2 - H (y, a 2) (t - v)),
sur l'événement {IL(Nv)/N - yi < fJ}, et
sup !Pz ('R ,o(cP1)) < exp N(ê/2 - H(x, a1)v).
Iz/N -xl::;6
Comme 'R N ,6((jJ1) est un sous-ensemble de {IL(Nv)IN - yi < fJ}, pour N > N 1 ,
la relation suivante est établie,
1
sup N loglP'z('R. .o(iP» + H(x, adv + H(y, a2)(t - v» < ê.
Iz/N-xl 6
8 GRANDES DÉVIATIONS
131
Par définition de H,
H(x, adv + H(y, (2)(t - v) = l t H(</I(s), </l'(s)) ds,
donc l'inégalité précédente peut se réécrire comme
1 l t
sup N log Ir AR}..5( </1)) + H( </1 ( s), </l' (s)) ds < E.
Iz/N-xl ô 0
L'inégalité ci-dessous avec la borne inférieure,
1 l t
inf N loglPz('R ,ô(4») + H(4)(s), 4>'(s)) ds > -e,
Iz/N-xl ô/4 0
s'obtient de la même façon en utilisant la relation
Ir z (R}..5 (</1)) > lEz (lR;:,.6/2(tPd Ir L(Nv) (R 6 (</12)) )
et la proposition 5.18.
Comme précédemment, les résultats obtenus sont inchangés en remplaçant
n ,6(4)) par l'événement
{ 1 LN ( v) - </1 ( v) 1 < 0, 1 LN ( t) - </1 ( t) 1 < 0 } .
La proposition suivante s'obtient par récurrence sur le nombre de segments de
la fonction linéaire par morceaux.
PROPOSITION 5.19. Sous la condition p < 1, pour x et t E lR.t, si 4>
est une fonction positive, continue et linéaire sur les intervalles [Vi, Vi+1 [,
i = 0, . . . ,n - 1 où 0 = Va < VI < . . . < V n = t avec 4>(0) = x 1 alors pour E > 0
et 8 > 0 suffisamment petits, il existe N 1 E N et 8 1 > 0 tels que si N > NOl
sup log Ir z ( sup 1 LN ( s) - 4>( s) 1 < 8 ) + l t H ( </1 ( s), </l' (s)) ds < E,
Iz/N-xl<Ô1 O s t 0
et
(5.47)
sup loglP z ( sup ILN(Vi) - 4>(vi)1 < 8 ) +
Iz/N -xl<ô1 N O< <n
l t H(</I(s), </l' (s)) ds < E,
et la fonction H ( " .) est définie par
a + a2 + 4ÀJ-L
H(y,a) = a log 2À +À+J.L- a2+4ÀJ.L1
si (y, a) =1 (0,0) et H(O, 0) = o.
132
5. LA FILE D'ATTENTE M/M/1
8.3. Généralisation. La fonction 4J est de classe el à valeurs positives.
Le résultat de grandes déviations du processus du nombre de clients se formule
de la façon suivante.
THÉORÈME 5.20. Si P < 1 et x, t E , 4J ; Il4 -4 114 est une fonction
de classe el, vérifiant 4J( 0) == x, alors pour tout E > 0 et pour 8 > 0
suffisamment petit, il existe No E N et 8 1 tels que si N > No,
sup log 1P'.z ( sup ILN (s) - 4J(s)1 < 8 ) + l t H(q,(s), cll(s» ds < e,
Iz/N-xl<ch O s t 0
où H est définie par
a + a2 + 4ÀJ1.
(5.48) H(x,o:) = cdog 2>. + >. + l' - 0: 2 + 4>'1',
si (x, a) =1 (0,0) et H(O, 0) = O.
DÉMONSTRATION. D'après ce qui précède, le théorème est vrai pour les
fonctions linéaires par morceaux. Il reste à approximer la fonction 4J par des
fonctions linéaires par morceaux (4Jn). La fonction définie par (5.48) présente
toutefois une difficulté, elle est continue en tout point de Il4 x IR, sauf au point
(0,0) ,
lim H(O, a) 1= H(O, 0).
0---+0,0 >0
L'approximation de
l t H(q,(s), q,'(s») ds par l t H(q,n(s), q, (s» ds ,
n'est donc pas à priori valide. La fonction H est en revanche continue par valeurs
inférieures, au sens où,
lim H(x, a) = H(xo, ao),
x ---4 x 0 , x x 0 ,
0---4 0 0 ,o oo
de plus
(5.49)
lim inf H(x, a) = H(xo, ao).
x ---4 x 0 ,0 ---4 0 0
Ces propriétés suffisent, on va le voir, pour montrer le résultat de grandes
déviations annoncé dans le théorème.
Borne inférieure. La fonction 4J étant de classe el, pour tout TI > 0, il est
possible de trouver une fonction 4J.", linéaire par morceaux sur [0, t], telle que
4J 17 (s) < 4J( s), cjJ (s) < cP' (s), 0 < s < t,
et
sup 14J 17 (s) - 4J(s)1 < TI,
O<s<t
sup 14J (s) - 4J'(s)1 < TI.
O<s<t
La propriété de continuité de H par valeurs inférieures donne
lim H(cjJ17 (s), cjJ (s)) = H(4J(s), 4J'(s)), s E [0, t],
'7---40
8. GRANDES DÉVIATIONS
133
et le théorème de convergence dominée
lim (t H(4)1/(s), </> (s)) ds = t H(,p(s), 4/(s)) ds.
oJo Jo
Pour ê > 0, il existe Tlo tel que si TI < Tlo,
i t i t ê
H ( 4J ( s), 4J ( s)) ds - H ( 4J( s ), 4J' ( s )) ds < -.
00 2
Pour 8 > 0,
!Pz ( sup ILN(S) - </>(s)1 < 0 + 71' ) > !Pz ( sup ILN(s) - 4J'7(s) 1 < 8 ) ,
O<s<t O<s<t
- - - -
Si TI < Tlo est fixé et 8 > 0 assez petit, il existe (Proposition 5.19) No E N et 8 1
tels que pour N > No,
inf N I log!Pz ( sup ILN(S) - 4J (s)1 < 8 )
Iz/N-xl<ch O<s<t
ê {t
> - 2 - Jo H ( ,p., ( s ), ,p ( s)) ds,
d'où
inf N 1 log IP'z ( sup ILN{S) - tj)(s) 1 < 8 + TI )
Iz/N-xl<ch O<s<t
> -E -i t H(,p(s), ,p'(S)) ds.
Borne supérieure. Pour n > 1, on note l/Jn est la fonction continue linéaire
par morceaux
(5.50)
,pn ( s) = ,p ( ) + (ns - k) (,p ( k : 1 ) - ,p ( ) ) ,
si lsnJ = k. La fonction tj)n coïncide avec 4J aux points k/n, k < ltnJ. La
continuité uniforme de 4J et tj)' montre qu'elle converge uniformément vers (jJ de
même que sa dérivée à droite vers 4J'.
La fonction H étant positive, le lemme de Fatou et la propriété (5.49)
donnent
(t liminf H(,pn(s), ,p (s)) ds < liminf t H(,pn(s), ,p (s)) ds,
Jo n +oo n +oo Jo
i t H( </>( s), ,p' (s)) ds < lim inf i t H(,pn (s), ,p (s)) ds.
o n +oo 0
Il existe donc no tel que pour n > no,
i t ê i t
H(4J(s), l/J'(s)) ds - - < H(4Jn(s), 4J (s)) ds.
o 2 0
134
5. LA FILE D'ATTENTE M/M/1
La majoration
!Pz ( SUp ILN(S) - 4>(s)1 < 6 ) < Ir z ( SUp ILN(klno) - 4>(k/no)1 < 6 )
O s t O k LnotJ
= !Pz ( sup ILN(k/no) - 4> n o(klno)1 < 6 ) ,
O k LnotJ
et l'identité (5.47) de la proposition 5.19 appliquée à la fonction lPno montrent
que pour E > 0 et 6 assez petit, il existe No E N et 6 1 > 0 tels que si N > No,
sup loglP'z ( sup ILN(k/no) - 4>(k/no)1 < 6 )
Iz/N-xl<ch O k Lno(1
< - 1 t H ( 4>no ( s ), 4> o ( s )) ds.
Par conséquent l'inégalité suivante est vérifiée
(5.51) sup loglP'z ( sup ILN(k/no) - 4>(klno)1 < 6 )
Iz/N-xl<ch O k lnotJ
t
< e - 1 H ( 4>( s), 4>' ( s)) ds;
finalement
sup log IP' z ( sup ILN (s) - 4>( s)1 < 6 ) < e - (t H(4)( s), 4>' (s)) ds.
Iz/N-xl<ch O s t Jo
Cette dernière inégalité et la relation (5.50) achèvent la preuve du théorème. D
Si la preuve du théorème précédent comporte nombre de points techniques,
les idées utilisées sont assez simples. Le changement de probabilité est, bien
entendu, l'ingrédient principal. Regarder les trajectoires du processus (L( t)) qui
suivent t -t X + at revient à considérer le changement de probabilité qui donne
la pente a à (L(t)). Le second point important concerne la discontinuité en 0, la
fonction (x, a) -t H(x, a) qui en résulte n'est plus continue mais conserve une
propriété cruciale: la semi-continuité inférieure (5.49). Cette propriété permet
l'approximation par des fonctions linéaires par morceaux.
Le théorème précédent peut être étendu au cas où la fonction 4> est abso-
lument continue par rapport à la mesure de Lebesgue. Dans ce cas, la dérivée
existe presque partout. Modulo cette généralisation, le théorème précédent est
un résultat de grandes déviations faible pour le processus (L( t)).
9. Appendice
La densité de la durée d'une période d'occupation. La densité de la
durée de la période d'occupation est explicitée en inversant la transformée de
Laplace (5.8). Ces inversions présentent assez souvent un caractère de curiosité
dans le domaine des files d'attente. Les expressions des densités de probabilité,
9. APPENDICE
135
quand elles sont connues, s'expriment avec des fonctions spéciales (les fonctions
de Bessel ici) plus ou moins faciles à manipuler. En général, les résultats asymp-
totiques peuvent être obtenus plus simplement de manière probabiliste.
PROPOSITION 5.21. Si À < J1. et L(O) = 1, la densité de Ta vaut
(ii Il(2 t) .-(À+JL)t
VÀ te,
t > 0,
OÙ Il est la fonction de Bessel modifiée d'ordre 1,
+00 (t/2)2k+l
Il(t) = L k!(k + 1)! 1
k=O
t E IR.
DÉMONSTRATION. En utilisant la décomposition en série entière des puiss-
sances de (1 + x), pour Ixl < 1,
+00
V I + x == L C /2xk,
k=O
avec
c k _ 1/2{1/2 - 1)(112 - 2)... (1/2 - k + 1)
1/2 - k! '
en posant Cr/2 = 1, d'où
1 - V I - x 2 = 2k! (/ ) 2k+l
X k!(k + 1)! x 2 ,
k>O
par conséquent
(5.52)
IE l (e- ZTo ) = (ii 1 - JI - 4ÀIl/(>' + Il + x)2
VÀ 2 /(À+J1.+x)
2k! ( À ) k ( J1. ) k+l ( À + J1. ) 2k+1
= L k!(k + 1)! >. + Il À + Il À + Il + x .
k>O
Si kEN et x E IR,
( À + J-L ) 2k+1
À+J-L+x
est la transformée de Laplace en x de la somme de 2k + 1 variables aléatoires
indépendantes de loi exponentielle de paramètre À + J1., c'est donc la transformée
de Laplace en x de la loi de densité
t 2k
(À + J-L)2k+l e-(À+JL)t
(2k)! '
136
5. LA FILE D'ATTENTE M/M/l
sur Il4. On en déduit que Ta a pour densité sur Il4,
1 j.L(Àj.L)keke-(>'+IJ.)t = (ii 1 ( )2k+lt2ke-(>'+IJ.)t
k!(k + 1)! V À k!(k + 1)!
k a k O
_ (ii Il(2 t) -(À+JL)t
-V te,
ce qui achève la démonstration de la proposition. D
La relation (5.52) a une interprétation très simple. Si p E [0,1] et q = 1 - p,
le terme
2k! k k+l
k!(k + l)!P q
est la probabilité qu'une marche aléatoire simple dont les sauts valent 1 [resp
-1] avec probabilité p [resp q], arrive en 0 pour la première fois à t = 2k + 1
en partant de 1 à t = 0 (voir Feller [19] par exemple). Les sauts du processus
de Markov (L(t)) entre 0 et Ta sont espacés suivant un processus de Poisson de
paramètre À + J1.. Un saut de ce processus vaut +1 avec probabilité Àj(À + J1.) et
-1 sinon. Le terme général de la série (5.52) est donc la transformée de Laplace
d'une période d'occupation de la file M/M/1 où k clients sont servis.
CHAPITRE 6
La file d'attente M/M/oo
Sommaire
1. Introduction 137
2. Une famille de martingales remarquables 141
3. Les lois des temps d'atteinte: vers le bas 146
4. Les lois des temps d'atteinte: vers le haut 148
Événements rares 150
5. Le processus renormalisé 152
6. Un théorème de la limite centrale 155
7. La file d'attente à capacité limitée M/M/N/N 158
7.1. Le cas sur-critique p > 1 160
7.2. Le cas critique p = 1 164
7.3. Le cas sous-critique p < 1 167
8. Appendice 168
8.1. Le processus d'Ornstein-Uhlenbeck 168
8.2. Le lemme de Gronwall 169
1. Introduction
La file d'attente à une infinité de serveurs est, avec la file d'attente M j M /1,
un modèle de base. Elle joue un rôle crucial dans la plupart des études pro-
babilistes de réseaux de télécommunication. Comme la file M j M /1, son intérêt
dépasse largement le cadre des files d'attente puisque ce modèle se rencontre dans
d'autres domaines, comme par exemple la physique statistique ou l'informatique
théorique.
Les propriétés à l'équilibre de ce modèle sont étudiées dans les chapitres 4
et 7. Les résultats abordés ici concernent les propriétés transitoires de la file
M/M/oo. Si la trame de l'étude est similaire à celle utilisée pour la file M/M/1,
les propriétés de cette file présentent de notables différences avec celles d'une
file M / M /1.
1. La capacité de service étant potentiellement infinie, la file MjMjoo est
toujours stable. La queue de distribution, 1r([n, +oo[), du nombre de
clients à l'équilibre est, si P = Àj J1. est la charge,
P k P n 1 1
"" -p < -n- - n(log p+1)
- k ,e _, f'V '2= n 2e ,
. n. v L,1r
k>n
138
6. LA FILE D'ATTENTE M/M/oo
alors que la décroissance de la queue de distribution de la file M 1 Mil à
l'équilibre est seulement géométrique. Cette file d'attente est très stable.
Les lois asymptotiques des temps d'atteinte reflètent aussi cette propriété,
voir les propositions 6.8 et 6.10.
2. Le processus du nombre de clients n'est plus, en dehors de 0, une marche
aléatoire. Par conséquent, et cela complique sensiblement l'étude, les mar-
tingales positives associées (Proposition 6.4) ne sont pas des martingales
exponentielles simples comme celles utilisées pour la file MI Mil.
3. Le procédé de renormalisation étudié pour ce modèle consiste à accélérer
les arrivées des clients tout en renormalisant en espace par le même fac-
teur. Le processus limite est aussi un processus déterministe. Celui-ci
n'est cependant pas un chemin linéaire par morceaux, mais une courbe
qui converge exponentiellement vite vers l'asymptote p (Théorème 6.13).
En particulier, p remplace 0 pour la valeur de la trajectoire absorbante
du processus renormalisé.
4. La perturbation autour de la trajectoire déterministe est une diffusion
qui n'est pas un mouvement brownien mais une diffusion ergodique liée
au processus d'Ornstein-Ühlenbeck (Théorème 6.14).
Comme dans le chapitre 5 sur la file d'attente M/M/1, le processus N (dx)
désigne un processus de Poisson sur IR, de paramètre ( E Il4. Avec la même
notation qu'au chapitre 1, si l est un intervalle de Il4, la quantité N (I) désigne
le nombre de points du processus N dans cet intervalle. Un indice en haut
Nf ,i E N est ajouté s'il y a besoin d'une suite i.i.d. de processus de Poisson de
paramètre (.
Le processus des arrivées est un processus de Poisson d'intensité À, les ser-
vices sont distribués exponentiellement, de paramètre J1. et p = À/ J1. est la charge
de la file d'attente. La filtration :F = (:Ft) est définie par
:Ft = U (NÀ(]O, s]),N (]O, s]), i E N, s < t) ,
pour t > O. Le processus du nombre des clients (L(t)) est un processus de Markov
de sauts dont la matrice de sauts Q = (qij) est donnée par
qi i+1 = À, i E N,
qi i-1 = J-L, i E N,
qij = 0,
Ii - jl > 1.
Les intensités de saut de ce processus ne sont, à la différence de la file M/M/1,
pas bornées. En revanche l'intensité des sauts vers le haut est bornée, il n'y a
donc pas de problème d'explosion en temps fini pour ce processus de Markov
(voir l'appendice C). De façon plus synthétique, si f est une fonction réelle sur
N, le générateur s'exprime comme,
(6.1) Q(f)(n) = À(f(n + 1) - f(n)) + nJ-L(f(n - 1) - f(n)),
pour n E N. La proposition 7.3 et le résultat de réversibilité des processus de
vie et de mort vu au chapitre 4 sont résumés dans la proposition suivante.
1. INTRODUCTION
139
PROPOSITION 6.1. La loi stationnaire du nombre de clients est une loi de
Poisson de paramètre p = À/J1.. À l'équilibre le processus (L(t)) du nombre
de clients dans la file d'attente est réversible et le processus de départ est
un processus de Poisson de paramètre À. De plus, pour t E lR.t, la distance à
l'équilibre à l'instant t pour la distance en variation totale vérifie l'inégalité
IIIPo(L(t) E . ) - QPllvt < 1 - e- pexp ( -JJt) ,
en notant QP la loi de Poisson de paramètre p.
Le processus (L(t)) peut aussi être vu comme la solution d'une équation dif-
férentielle stochastique. Cette formulation sera utile pour étudier les propriétés
du processus renormalisé.
PROPOSITION 6.2. Le processus de Markov de générateur Q partant de
x ENa même loi que l'unique solution (L(t)) de l'équation différentielle
stochastique
L(t- )
(6.2) L(dt) = N>.(dt) - L: N;(dt),
1=1
avec L(O) = x, ou encore
(6.3)
+00
L(t) = x + N>.(]O,t]) - L: 1 l{L(s-) i}N;:(ds).
i=l ]O,t]
Le processus
(6.4)
(M(t)) = (L(t) - L(O) - Àt + J1.1 s L(s) dS)
est une martingale de carré intégrable dont le processus croissant vaut
(M) (t) = Àt + J1.1 t L(s) ds.
Le processus N>. est celui des arrivées de clients. Pour i > 1 le processus
N; s'interprète de la façon suivante : s'il y a au moins i clients dans la file à
l'instant t, la distance au premier point de N; après t est le service résiduel du
i- ième client.
DÉMONSTRATION. La proposition B.11 page 338 en annexe montre l'exis-
tence et l'unicité de la solution (L(t)) de l'équation différentielle (6.2). Pour
établir la correspondance entre la solution de l'équation différentielle et le pro-
cessus de Markov (L( t)), la proposition C. 7 page 348 montre qu'il suffit d'établir
que, si f est une fonction réelle sur N, le processus
(/(L(t)) - /(L(O)) -l t Q(f)(L(s)) dS)
140
6. LA FILE D'ATTENTE M/M/oo
est une martingale locale. Comme le processus (L(t)) ne fait que des sauts de
hauteur 1, il est facile de vérifier la relation suivante
dj(L(t)) = lim j(L(t)) - j(L(s))
s)"t
= (/(L(t-) + 1) - I(L(t-))) NÀ(dt)
L(t- )
+ ((J(L(t-) - 1) - I(L(t-))) L N;(dt).
1=1
L'expression différentielle obtenue précédemment montre que j(L(t)) peut se
représenter sous la forme
I(L(t)) = I(L(O)) + R(t) + À l t (/(L(s-) + 1) - I(L(s-))) ds
+J.l.l t (t(L(s-)-l)-I(L(s-)))L(s-)dS
= I(L(O)) + R(t) + l t Q(J)(L(s-)) ds,
I(L(t)) = I(L(O)) + R(t) + l t Q(J)(L(s)) ds,
où le processus (R( t)) est la martingale locale définie par,
(6.5) R(t) = r (/(L(s-) + l)-I(L(s-)}) (NÀ(ds)-Àds)
J]O,t]
+00
+ L 1 l{L(s-) i} ((J(L(s-) -1) - I(L(s-)}) (N;(ds) - J.l.ds).
i=l ]O,t]
La représentation précédente montre que le processus (L(t)) est solution du
problème de martingale associé au générateur Q, i.e. le processus
(/(L(t)) - I(L(O)) -l t Q(J)(L(s)) dS) ,
est une martingale locale pour toute fonction réelle f sur N. Par conséquent
(L(t)) a même distribution que le processus de Markov associé à Q de point
initial x.
En prenant f(x) = x, on en déduit que
(/(L(t)) - I(L(O)) -l t Q(J)(L(s)) dS)
= (L(t) - L(O) - Àt - J.l.l t L(s) dS) = (M(t)),
est une martingale locale. Pour s < t E IR, la variable L( s) est majorée par
NÀ(]O, t]) + L(O), par conséquent la variable sup{M(s); s < t} est intégrable. Le
2. UNE FAMILLE DE MARTINGALES REMARQUABLES
141
processus (M(t)) est donc une martingale d'après la proposition B.7. L'expres-
sion (6.5) de cette martingale montre que celle-ci s'écrit comme une intégrale
stochastique par rapport aux martingales des processus de Poisson,
+00
M(t) = N),(]O, t]) - Àt - L 1 l{L(s-) i} (N;(ds) - J1. ds).
i=l ]O,t]
La variable M(t)2 est la somme de
+00 ( ) 2
(N),(]O,t]) - Àt)2 + L 1 l{L(s-) i} (N;(ds) - J1.ds) 1
i=l ]O,t]
(6.6)
et des produits
2 r l{L(s-) i} (N;(ds) - J1. ds) r l{L(s-) j} (Nt(ds) - J1. ds),
J]O,t] J]O,t]
pour i # j E N, et
- 2 (N), (JO, t]) - Àt) r l{L(s- ) i} ( (ds) - J1. ds), i E No
J]O,t]
En majorant les diverses fonctions indicatrices par 1 il est facile de montrer
l'intégrabilité de toutes ces variables aléatoires. Les processus associés à ces pro-
duits sont, d'après la proposition B.10 page 338, des martingales. Le processus
croissant de (M(t)) est donc le terme qui compense l'expression (6.6) de telle
sorte que celle-ci soit une martingale.
Pour E Illt et h est une fonction sur N, le processus croissant de la mar-
tingale
( r h(L(s-)) (Nd w , ds) - dS) )
J]O,t]
vaut, d'après la proposition B.9 page 337,
( l t h 2 (L(s-)) dS) 1
et par conséquent le processus
( M(t)2 - Àt - J1.1 t L(s) dS) ,
est une martingale. La démonstration de la proposition est achevée. D
2. Une famille de martingales remarquables
La famille de martingales ci-dessous est l'analogue, pour la file MI MI 00, des
martingales exponentielles de la file d'attente MI Mil. Ces martingales jouent
un rôle central. Elles permettent de construire les martingales utilisées pour
calculer les lois des temps d'atteinte.
142
6. LA FILE D'ATTENTE M/M/oo
LEMME 6.3. Pour c E IR, la fonction
(6.7) hc : (t, x) -t (1 + ce#-£t)Xe-Pcexp(#-£t) ,
est harmonique en espace-temps pour le générateur Q de (L(t)), autrement
dit,
8hc
8t (t, x) + Q(hc)(t, x) = 0,
pour t E Illt et x E N, avec la convention Q(hc)(t, x) = Q(hc(t, .))(x).
DÉMONSTRATION. En effet, pour t E Illt et x E N,
a c (t, x) = e-pcexp(/-&t) (J.Lxce/-&t (1 + ce/-&tt- l - ),ce"'t (1 + e"'tt)
= J.Lx ( (1 + ce/-&tr: - (1 + ce/-&tt- l ) e-pcexp(/-&t)
-),c ( (1 + e"'t)"'+1 - (1 + e/-&t)"') e-pcexp(/-&t)
= - Q(hc)(t, x),
la fonction hc est donc harmonique en espace-temps pour le générateur Q. 0
Le corollaire C.6 page 348 donne la traduction probabiliste du lemme précédent.
PROPOSITION 6.4. Si c E IR et L(O) = x E N, le processus
(6.8) (Ec(t» de! ( (1 + ce"'t) L(t) e-pcexp(/-&t»)
est une martingale.
C'est une martingale exponentielle de Doléans-Dade introduite dans Fri-
cker et al. [13]. Le cadre général des martingales positives associées à un processus
est présenté dans Rogers et Williams [43] (dans la section sur les martingales
exponentielles) .
DÉMONSTRATION. La fonction t -t 8h c l8t étant continue, le corollaire C.6
montre que le processus (hc(t, L(t)) = (£c(t)) est une martingale locale. Comme
L(s) < x+N,\(]O, t]) pour s < t E Illt, la variable sup{£c(s), s < t} est intégrable.
On en déduit que (£c(t)) est une martingale (Proposition B.7 page 336). 0
La propriété de martingale donne l'égalité IE:z: ( £c (t)) = IE:z: (£c (0) ), pour t, c E
Illt et x E N, soit
E..: ((1 + ce/-&t)L(t) e-pcexp(/-&t») = (1 + c)"'e- PC ,
d'où, en faisant un changement de variable, pour u E [0,1],
(6.9) E..: (uL(t») = eP(l-exp( -/-&t»(u-l) (1 + (u - 1 )e-/-&t) '" .
La variable L(t) a même loi que la somme de deux variables aléatoires indé-
pendantes, respectivement de loi de Poisson de paramètre p(l - exp( -J-Lt)) et
[13] C. Fricker, Ph. Robert, and D. Tibi, On the rates of convergence of Erlang's model.,
Journal of Applied Probability 36 (1999), no. 4, 1167-1184.
2. UNE FAMILLE DE MARTINGALES REMARQUABLES
143
de loi binomiale de paramètres x et exp( -J-Lt). L'interprétation est assez simple,
la loi de Poisson est la loi du nombre des clients arrivés après t = 0 et encore
dans la file. La binomiale correspond au nombre restant des x clients initiaux
qui n'ont pas encore fini leur service. Ce résultat est montré différemment dans
la section 3 du chapitre 7.
La variable c étant libre, les dérivées successives de £ (t) par rapport à c
donnent toute une famille de martingales. Un résultat classique (voir Chihara [9]
par exemple) montre que, pour w > 0 et x E N,
+00 n
C(w,x) = (l+wY'e- pw = LP (x) wl l
n.
n=O
où p (x) est un polynôme de degré n en x. Les p sont les polynômes de Poisson-
Char lier. Il s'agit d'une famille classique de polynômes orthogonaux. Le proces-
sus (C(cexp(J-Lt), L(t))) étant une martingale,
1E(C(ce t, L(t)) 1 Fs) = C(ce S, L(s)), s < t,
en identifiant les coefficients de la décomposition analytique en c de cette iden-
tité, on en déduit le corollaire suivant.
COROLLAIRE 6.5. Pour n > 0, si p (x) est le polynôme de Poisson-
Charlier de degré n, le processus
(en tp (L(t))) ,
est une martingale. En particulier, en prenant n = 1 et n = 2, les processus
( 6.10)
(e t(L(t) - p)) et
(e2 t ((L(t) - p)2 - L(t)))
sont des martingales.
Le mouvement brownien standard (B(t)) présente une situation similaire.
Pour c E IR, le processus (exp(cB(t) - c 2 t/2)) est une martingale, la martingale
exponentielle du mouvement brownien. La décomposition
+00 n
H(c,x) = ecz-c2/2 = =--hn(x),
n!
n=O
où les hn(x) sont les polynômes orthogonaux d'Hermite, montre de la même
façon que pour n > 0, le processus
(t n / 2 h n (B(t)/../i))
est une martingale. Les cas n = 1 et n = 2 correspondent aux martingales
classiques (B(t)) et (B(t)2 - t).
À la différence de la file MI M 1 lIa martingale exponentielle (£c (t)) ne donne
pas directement des résultats sur les lois de temps d'atteinte. Le terme temps
cexp(J1.t) n'est pas séparé du terme spatial L(t) dans cette martingale. Pour
remédier à ce problème, il est naturel d'intégrer la martingale par rapport à
son paramètre libre c suivant une mesure j(c) dc. Un changement de variable
fait sortir exp(J-Lt), les variables t et L(t) sont alors séparées. C'est la méthode
utilisée pour obtenir les martingales de la proposition suivante.
144
6. LA FILE D'ATTENTE M/M/oo
PROPOSITION 6.6. Pour a > 0, t E Il4 et L(O) = x E N, s
(6.11) [",(t) = e-"'J.'t 1+ 00 (1 + y)L(t)y"'-l e - PY dy,
(6.12) J",(t) = e-"'J.'t 1 1 (1 - y)L(t)y"'-l e PY dy,
et Ta = inf{t > 01 L(t) = O}, les processus (Icr(t)) et (Jcr(t /\ Ta)) sont des
martingales.
La variable temps t est séparée de la variable espace (L(t)) pour ces deux
martingales, de plus la martingale associée à (Jcr(t)) est bornée comme fonction
de L(t). Ces propriétés permettront, on le verra, d'exprimer les lois des temps
d'atteinte de cette file d'attente.
DÉMONSTRATION. Pour s < t, l'expression (6.9) de la loi de la variable L(s)
montre que celle-ci est majorée par x + Y, y est une variable ayant une loi
de Poisson de paramètre p(l - exp( -J1.s)). Il est donc facile de vérifier que la
variable
1+ 00 (1 + y)L(s)y"'-l e - PY dy
a une espérance finie sous la condition a > 0 ; elle est par conséquent Ir-p.s. finie
pour tout s < t. Le processus défini par (6.11) est donc Ir-presque sûrement fini
et intégrable. Le processus (J cr (t)) est lui clairement bien défini puisque
J",(t) < e-"'J.'t 1 1 y"'-l e py dy < +00.
Pour 0 < s < t et Y une variable aléatoire fs-mesurable positive, d'après la
propriété de martingale de (Ge ( t ) ) ,
E (Y£c(t)) = E (YE(£c (t),rs)) = E(Y£c(s)) .
En intégrant cette identité sur Il4 par rapport à la mesure ecr-1 de sur lR.t, on
obtient l'identité
1+ 00 E (Y(l + eét)L(t) e-pceXP(J.'t)) e",-l de
= 1+ 00 E ( Y(l + eeJ.'s)L(s) e-pcexp(J.'s)) e",-l de.
La formule de Fubini et un changement de variable donnent l'égalité
E ( Ye-"'J.'t 1+ 00 (1 + y)L(t) e- PY y",-l dy )
= E ( Ye-"'J.'S 1+ 00 (1 + y)L(s)e- PY y"'-l d Y )
pour toute fonction Y fs-mesurable. On en déduit l'égalité presque sûre
1E ( 1 cr ( t) 1 f s ) = 1 cr ( s ) ,
2. UNE FAMILLE DE MARTINGALES REMARQUABLES
145
le processus (10: (t)) est donc une martingale. La première partie de la proposition
est démontrée.
Pour c E [0,1] et a > 0, en utilisant la définition (6.7) de h c , le processus
(h-c( t, L(t))) = ((1 - ee/-&t)L(t) e Pc exp(/-&t»)
est une martingale. Comme dans le cas précédent, ce processus est intégré par
rapport à cO:- 1 de, non sur Illt, mais sur l'intervalle [0, exp( -J-Lt)]. En posant
(ex p ( -p,t)
(6.13) g(t, x) def Jo h-c(t, x)e"-l de
(ex p ( -p,t)
= Jo (1 - ee/-&t)'" ePcexp(/-&t) e,,-l de,
on obtient de cette façon un processus (g(t, L(t))). Bien entendu, comme la borne
d'intégration dépend du temps, la démonstration précédente de la propriété
de martingale ne peut pas être utilisée. Il est cependant remarquable que ce
processus reste une martingale s'il est arrêté au temps Ta.
Le processus
(g (t, L(t)) -i t ( + Q(g)) (s, L(s)) dS)
étant une martingale (Proposition C.5 page 348), le théorème d'arrêt de Doob
montre que
( {tATo ( 8 9 ) )
(6.14) 9 (t 1\ To, L(t 1\ To)) - Jo ât + Q(g) (s, L(s)) ds
est aussi une martingale.
Si s < Ta, la dérivée partielle de g par rapport à t s'écrit
8g ( L( )) - -p,s h ( L( )) -(o:-l)p,s
8t S, s - -J-Le - exp( -p,s) S, s e
(ex p ( -p,s) 8h-c
+ Jo ât (s, L(s))e"-l de
(ex p ( -p,s) 8h-c
= Jo ât (s, L(s))e"-l de,
puisque s < Ta entraîne L(s) > 0 et donc h_ exp(-p,s) (s, L(s)) = o. D'autre part,
il est facile de vérifier l'identité
(ex p ( - p,s)
Q(g)(s, L(s)) = Jo Q(h-c)(s, L(s))e"-l de.
Finalement, pour s < Ta,
( 8 9 ) (exp( -p,s) ( 8h-c )
8t + Q(g) (s, L(s)) = Jo ât + Q(h- c ) (s, L(s))e"-l de = D,
car la fonction h-c est harmonique en espace-temps pour Q d'après le lemme 6.3.
Le processus défini par (6.14) étant une martingale, il en va de même pour
146
6. LA FILE D'ATTENTE M/M/oo
(g (t A Ta, L(t A Ta))) qui vaut (Ja(t A Ta)) par changement de variable est aussi
une martingale. La proposition est démontrée. D
3. Les lois des temps d'atteinte: vers le bas
La notation pour les temps d'atteinte est la même que celle utilisée pour la
file d'attente MIMl1.
DÉFINITION 12. Pour a E N, la variable Ta désigne le temps d'atteinte de a
par le processus de Markov (L(t)), Le.
Ta = inf{t > OjL(t) = a}.
Le processus (L(t)) étant ergodique, la variable Ta est IP-presque sûrement
finie pour tout a E N. Comme dans le cas de la file MI Mil, l'étude se fait en
deux parties, suivant que le point à atteindre est au-dessus ou en dessous du
point initial.
PROPOSITION 6.7. Pour a > 0 et a > b > 0,
( 6.15)
( -aTb ) = Ba(a)
JL:Ja e Bb(a) ,
avec, pour y > 0,
By(a) = 11 (1 - e)Y e Ot /I-'- l e Pc de.
Le résultat est dû à Takàcs[33] pour l'expression de la transformée de Laplace
d'une période d'occupation (temps d'atteinte de 0 partant de 1). Le résultat ci-
dessus a été obtenu par Guillemin et Simonian[16].
DÉMONSTRATION. La martingale (J a (tATa)) de la proposition 6.6 est bornée
donc uniformément intégrable. Par conséquent,
1Ea (J a (0)) = 1Ea (J a (Tb A Ta)) = 1Ea (J a (Tb))
et l'identité (6.15) s'en déduit.
D
Pour y E N, la fonction a -t By(a) est divergente en o. Le terme de gauche
de (6.15) est clairement continu en a = 0 et sa limite vaut 1. Il est facile de
vérifier analytiquement la continuité en a = 0 du terme de droite de (6.15).
PROPOSITION 6.8. Si L(O) = n E N, le temps d'atteinte de 0 est de l'ordre
de log n. Plus précisément la variable aléatoire Ta jlog n converge en proba-
bilité vers la constante 11 J-L quand n tend vers l'infini.
[33] L. Takàcs, On a probability problem arising in the theory of cou.nters, Proceedings of the
Cambridge Philosophical Society 52 (1956), 488-498.
[16] Fabrice Guillemin and Alain Simonian, 7ransient characteristics of an M / M /00 system,
Advances in Applied Probability 27 (1995), no. 3, 862-888.
3. LES LOIS DES TEMPS D'ATTEINTE: VERS LE BAS
147
DÉMONSTRATION. La proposition précédente montre que pour a > 0,
4>n(a) = JE,. (e-"/-&To) = 11 (1 - ef e"-l e Pc de / 11 e"-l e Pc de.
En posant an = al log n, la transformée de Laplace de J1.To/logn en a est
donnée par
(6.16) 4>n(a n ) = an 11 (1 - et e"n- 1 e Pc de / an 11 e"n-1 e Pc de.
En utilisant la série de la fonction exponentielle, le terme du dénominateur de
l'identité précédente se développe comme
1 +00 k
1 Qn-1PC d _ 1+ " P
an cee - an (k )k ' '
o k=l + an .
par conséquent
lim an r 1 e"n- 1 e Pc de = 1.
n +oo Jo
Il reste donc à étudier la convergence de
an 11 (1 - et e"n- 1 e Pc de
1 +00 k 1
= an r (1 - et e"n- 1 de + an L ! r (1 - et e"n+1c-1 de.
Jo k=l Jo
La série étant majorée par exp(p) -1, le dernier terme du membre droit de cette
égalité converge clairement vers 0 quand n tend vers l'infini. On déduit de ce
qui précède que la quantité <Pn(a n ) est équivalente à
an 11 (1 - et e"n- 1 de.
L'intégrale précédente vaut B(n + 1, an) où B désigne la fonction Beta, cette
fonction s'exprimant à l'aide de la fonction Gamma via la relation
B( ) de! 1 1 X-1 (l _ ) Y-1 d = r(x )r(y)
x, y cee r( ) ,
o x+y
x, y > 0,
avec
r(x) = 1+ 00 c'''-le- c de .
La fonction r vérifie
lim x r ( x) = 1 et r ( x) f'.J X x -1 vi 211" x e - x ,
x o
quand x tend vers +00 d'après la formule de Stirling. Voir Whittaker et Wat-
son [53] pour un exposé des principales propriétés de ces fonctions.
148
6. LA FILE D'ATTENTE M/M/oo
La représentation avec la fonction r donne un équivalent de <Pn(a n ) quand
n tend vers l'infini
r( a n -1 )r( n)
rPn-l (an-d "" an-l r( ) .
a n -1 + n
On en déduit les équivalences
nn- 1 e- n v21rn
<Pn-1 (a n -1) ""
(a n -1 + n)Qn-l+ n - 1 exp( -(a n -1 + n)) y' 27r(n + a n -1)
( a n - 1 ) -Q
"" 1- n-l(an_l+n) n-l
a n -1 + n
"" exp ( -(n - 1) an-l - 1 (a ) log(an-l + n» ) .
a n -1 + n og n - 1
Ce dernier terme converge vers exp( -a) quand n tend vers +00, d'où
lim En ( ex p ( -aJ-LTo/log n) ) = e- Q ,
n +oo
ce qui achève la démonstration de la proposition. D
Le temps de retour à 0 partant de n est très petit, de l'ordre de (log n) 1 J-L quand
n est très grand (comparer avec l'ordre de grandeur linéaire en n dans le cas de
la file MI Mil). Il est facile d'expliquer l'ordre de grandeur en logn : quand le
processus est en n, au bout d'un temps exponentiel de moyenne l/(nJ-L + À), il
monte en n + 1 avec probabilité À/(nJ-L + À), sinon il descend en n - 1. Si n est
assez grand, le prochain saut est en n - 1 avec une très forte probabilité. Avec
cette approximation, le temps moyen de retour à 0 est de l'ordre de
n
"'" 1 "" log n
iJ-L + À J1..
=1
4. Les lois des temps d'atteinte : vers le haut
PROPOSITION 6.9. Pour a > 0 et 0 < a < b,
(6.17) JE.. (e-aTb) = r a( a) ,
rb(a)
avec, pour y > 0,
ry(a) = l+oo (1 + eJp)Y ea/p.-1e- c de.
La fonction a -t ro(aJ1.) est la fonction Gamma usuelle. La transformée de
Laplace (6.17) de Tb partant de a est la représentation intégrale d'un résultat de
Takàcs [51] dans le cas MIG/oo.
DÉMONSTRATION. La martingale
(Ia(t» = (e-ap.t l+oo (1 + x)L(t)xa-1e-P:Z: dx )
4. LES LOIS DES TEMPS D'ATTEINTE: VERS LE HAUT
149
de la proposition 6.6 arrêtée au temps d'arrêt Tb est bornée, donc uniformément
intégrable, d'où
IEa ( la (Tb)) = la ( a ) .
Comme L(Tb) = b, il vient
lEa(e-QI£Tb) 1+ 00 (1 + c)bcQ-1e- PC dc = 1+ 00 (1 + c)"cQ-1e- PC dc,
la formule (6.17) est établie. 0
PROPOSITION 6.10. Si L(O) = x, la variable aléatoire
pnTn
(n - 1)!
converge en loi vers une loi exponentielle de paramètre J-L exp( - p) quand n
tend vers l'infini.
DÉMONSTRATION. L'identité (6.17) montre qu'il suffit d'établir la conver-
gence pour x = o. D'après l'identité (6.17) de la proposition 6.9, pour a > 0, la
transformée de Laplace de Tn au point aJ1. vaut
{+oo / (+oo
(e-QI£Tn) = Jo cQ-1e- c dc Jo (1 + cf pt cQ-1e- c dc.
En développant (1 + ci p)n, le dénominateur de cette expression est égal à
n ( n ) 1
L k kr(a+k),
k=O p
et en posant 4Jn(a) = 1/IEo (e-a Tn) on obtient
A. ( ) = ( n ) r( a + k)
'j/n a k k r ( a ) .
k=O P
La fonction Gamma vérifie la relation classique r(x + 1) = xr(x) pour x > 0
(celle-ci s'obtient facilement en intégrant par parties), d'où
4>n(a) = 1+a ( ) :k g (a+i).
Si an = apn /(n - 1)! l'égalité précédente donne la relation
n n k n k-1 ( . )
_ n p - i=l an +
4>n(a n ) - 1 + a L..., k (n - k)! (k - 1)! '
k=l
n-1 k n-k-1
(6.19) 4>n(a n ) = 1 + a (k + 1) ! (k + 1 n _ k) J1 (1 + an fi).
(6.18 )
150
6. LA FILE D'ATTENTE M/M/oo
Pour tout 0 < k < n - 1 l'inégalité
n-k-1
1 < IT (1 + anli) < (1 + an)n,
=1
est clairement satisfaite et le membre de droite de celle-ci converge vers 1 quand
n tend vers l'infini. Par conséquent le k-ième terme de la série (6.19) converge
vers pk Ik! quand n tend vers l'infini. De plus, pour 0 < k < n - 1, la quantité
nl(k + l)(n - k) étant majorée par 1, il vient
n-k-1
(k + 1 n _ k) IT (1 + an) < (1 + an)n;
=1
cette dernière expression étant bornée en n, le théorème de la convergence do-
minée appliqué à la série de l'identité (6.19) (vue comme une intégrale sur N par
rapport à la mesure finie de densité ((k + 1)pk Ik!) montre que
lim cl>n(a n ) = 1 + ae P .
n-.t+oo
La transformée de Laplace de Tn vérifie donc
n oo Eo (exp ( - aJ.LpnTn/(n - 1)!)) = 1/(1 + ae P ) = e- P /(e- P + a),
d'où la convergence en loi annoncée.
D
Partant de n grand le processus (L(t)) redescend très vite vers 0 en un temps de
l'ordre de log n (Proposition 6.8) et partant de 0 ce processus atteint le niveau
n très lentement, au bout d'un temps de l'ordre de (n - l)!l p n.
Le résultat précédent est l'analogue pour la file MI M 100 de la proposi-
tion 5.11 pour la file MI MI 1. Dans les deux cas la loi du temps d'atteinte TA
d'un événement rare A renormalisé avec le facteur IP(A) est très proche d'une
loi exponentielle. Ce résultat de convergence est montré pour tous les processus
réversibles par Keilson [27] (les processus du nombre de clients pour les files
MI MI 1 et MIMloo rentrent dans ce cadre). Le livre d'Aldous [1] montre ce-
pendant que ces approximations exponentielles sont valables dans un cadre bien
plus large: la réversibilité n'est pas une condition cruciale pour obtenir ce type
de propriété.
Événements rares. Le temps d'atteinte de n grand est donc de l'ordre de
(n - l)!l p n et celui de n + 1 est plus grand d'un facteur nlp. Cette remarque
suggère le phénomène suivant : le processus atteint n puis redescend aussitôt
vers 0 et donc ne passe pas avant en n + 1 avec une très forte probabilité. Noter
ici la différence avec la file MI Mil, quand le nombre de clients atteint la valeur
n pour cette file, celui-ci reste un moment dans le voisinage de n. En particulier
la valeur n + 1 peut être atteinte avant de redescendre en o.
Ce phénomène peut se voir aussi de la façon suivante, si an = pn I(n - 1)!
et ç > 0, la propriété de Markov forte de (L(t)) donne
(6.20) IEo (exp(-Ça n +1 T n+1))
= IEo (exp( -çpanTnln)) En (exp( -ça n +1 T n+1)).
4. LES LOIS DES TEMPS D'ATTEINTE: VERS LE HAUT
151
Il est facile de montrer que IEo ( exp ( - ç pan T ni n )) tend vers 1 quand n tend vers
l'infini: pour no E N et n > no
1Eo (exp( - panTnln)) > 1Eo (exp( - panTnlno)),
en faisant tendre n vers l'infini on en déduit
lim infIEo (exp( -çpanTn/n)) > lim inf IEo (exp( - panTnlno))
n + n +
= j.Le- P /(J1.e- P + çp/no),
il suffit de faire tendre no vers +00 pour obtenir le résultat. Autrement dit la
relation (6.20) montre que la variable a n +1 Tn+1 partant de L(O) = n converge
aussi en loi vers une loi exponentielle de paramètre J1. exp( -p). Ce que l'on peut
résumer de la façon suivante: dans le trajet de 0 vers n + 1, c'est la dernière
étape de n à n + 1 qui est la plus significative.
Le temps de retour à 0 étant très petit, les temps d'atteinte successifs de
n sont donc essentiellement séparés par des variables aléatoires de distribution
exponentielle de paramètre J1. exp( _p)pn I(n - 1)!; autrement dit le processus
des temps d'atteinte de n est asymptotiquement un processus de Poisson. Un
résultat analogue est vrai pour la file MI MI 1 (Proposition 5.13 page 120), mais
en ne prenant qu'un sous-ensemble des temps d'atteinte de n par le processus
du nombre de clients.
PROPOSITION 6.11. Si (Ti,n) est la suite ordonnée des instants d'atteinte
de la valeur n > 0 par (L(t)),
{ Ti, n, i E N} = {t E II4 1 L( t) = n, L ( t -) i= n},
le processus ponctuel
+ +
L Ot"n = L Op n 'Ti,n/(n-1)h
= 1 = 1
converge vers un processus de Poisson de paramètre J1. exp( - p) quand n tend
vers l'infini.
DÉMONSTRATION. Les arguments mentionnés ci-dessus donnent quasiment
la preuve. La propriété de Markov forte de (L(t)) montre que la suite des ac-
croissements (ti+1,n -ti,n) est i.i.d. Si an = pnl(n -1)! et L(O) = n, en posant
Un = inf{t > OjL(t) = n,L(t-) i= n},
la variable anU n a même loi que les ti+1,n - ti,n. La proposition 1.22 page 26
montre qu'il suffit de montrer que la variable an Un partant de L(O) = n converge
en loi vers une loi exponentielle de paramètre J1. exp( - p).
Sur l'événement {To < Un, L(O) = n} la variable an Un se décompose comme
la somme de deux variables indépendantes, respectivement de même loi que
anTo avec L(O) = n et anTn avec L(O) = o. La première variable converge en
loi vers 0 (Proposition 6.8) et la loi de la deuxième variable converge vers une
loi exponentielle de paramètre J-L exp( -p) (Proposition 6.10). Il suffit donc de
152
6. LA FILE D'ATTENTE M/M/oo
montrer que la probabilité de l'ensemble {Ta < Un} tend vers 1 quand n tend
vers l'infini.
Partant de n pour que l'instant Un intervienne avant le temps de retour à 0,
soit le processus atteint n + 1 avant 0, soit il atteint n après être passé en n - 1,
d'où
(6.21)
IPn(Ta > Un) < IPn(Tn+1 < Ta) + IPn-1(Tn < Ta).
Pour ë > 0, la suite (IPn(Tn+1 < Ta)) vérifie les inégalités suivantes
IPn(Tn+1 < Ta) = IPn(an+1Tn+1 < anTa)
< IPn(an+1Ta > ê) + IPn(an+1Tn+1 < ê)
= IP'n (T o /logn > E/(an+tlogn)) + IP'n{an+lTn+l < ê).
La variable aléatoire Ta Ilog n convergeant en loi vers une constante et la suite
(ë/a n +1logn) tendant vers l'infini, le premier terme du membre de droite de
l'inégalité précédente converge vers 0 quand n tend l'infini. La convergence en
loi de a n +1 Tn+1 partant de L(O) = n vers une distribution exponentielle de
paramètre J1. exp( - p) donne
limsupIP n (T n + 1 < Ta) < (1- e-£lJ.ex P (-p»)IJ1.e- p .
n--++oo
En faisant tendre ê vers 0, on en déduit que la suite (IPn(Tn+1 < Ta)) tend vers
a quand n tend vers l'infini. L'inégalité (6.21) permet de conclure. 0
5. Le processus renormalisé
La renormalisation de (L( t)) considérée ici consiste à accélérer le processus
d'arrivée d'un facteur N E N et de renormaliser (L(t)) par N. Ce changement
d'échelle a été introduit par Kelly[18] pour étudier la convergence des mesures
invariantes des réseaux avec perte (voir aussi l'article[19] pour un tour d'horizon
de ce sujet).
Le processus de Poisson des arrivées (N À (]O, t])) est remplacé par le processus
de Poisson (NÀ(]O, tN])) de paramètre ÀN. Le processus du nombre de clients
associé est noté (LN (t)) et
LN(t) = LN(t)
N
est le processus renormalisé. La valeur à l'origine LN(O) est un entier vérifiant
1 . LN(O) 11).
lm N = x E Jl. .
N-t+OO
L'équation intégrale (6.3) devient
( 6.22)
+00 t
LN(t) = LN(O) + NÀ(]O, Nt]) - L 11{LN(S-) i} N (ds).
=1 a
[18] F .P. Kelly, Blocking probabilities in large circuit-switched networks, Advances in Applied
Probability 18 (1986), 473-505.
[19] F.P. Kelly, Loss networks, Annals of Applied Probability 1 (1991), no. 3, 319-378.
5. LE PROCESSUS RENORMALISÉ
153
LEMME 6.12. Pour N E N, le processus
(MN(t)) = ( LN(t) - LN(O) - Àt + J.L l t LN(s) ds )
est une martingale telle que
JE(M (t)) < (J.LLN(O) + À (1 + t)) t ,
pour t E Il4 et N E N.
DÉMONSTRATION. La proposition 6.2 montre que
( LN(t) - LN(O) - ÀNt + J.L l t LN(S) dS)
est une martingale de processus croissant
(ÀNt + J.L l t LN(S) dS) ,
par conséquent
JE(M (t)) = (Àt + J.L l t JE(L N (s)) dS) < (J.LLN(O)t + À ( 1 + t) t) 1
puisque pour tout s E 114, LN(S) < LN(O) + N (]O, N s]). D
Le lemme précédent montre que (LN(t)) vérifie
LN(t) = LN(O) + MN(t) + Àt - J.L l t LN(s) ds,
avec le terme martingale MN(t) qui devient négligeable, en l/ffi, quand N
tend vers l'infini. Si la suite de processus (LN(t)) a une valeur d'adhérence (y(t))
pour la topologie de la convergence uniforme sur les compacts (en particulier
y(O) = x), en supposant que MN(t) disparaît effectivement, la fonction (y(t))
vérifie donc l'équation
y(t) = x + Àt - J.L l t y(s) ds ,
ou encore y'(t) = À - J1.y(t), avec y(O) = x, soit y(t) = P + (x - p) exp( -J1.t). La
valeur d'adhérence est donc unique. Le théorème suivant établit la convergence
vers cette fonction de façon rigoureuse. Noter au passage que le phénomène
observé pour la file MI M /1 est ici encore valable: la renormalisation écrase le
perturbation stochastique autour d'une trajectoire déterministe.
THÉORÈME 6.13 (Loi des grands nombres). Si pour t E Il4,
(6.23) x(t) = p + (x - p)e-p,t,
la variable aléatoire
sup
O<s<t
LN(S) _ x(s)
N
154
6. LA FILE D'ATTENTE M/M/oo
converge vers 0 dans L 1 quand N tend vers +00. En particulier, pour tout
ê > 0 et pour tout t > 0,
( 6.24 )
lim 1F ( sup L S) - x(s) > E ) = o.
N +oo O<s<t
DÉMONSTRATION. La fonction t -t x(t) vérifie l'équation
x(t) = x + Àt - J.L l t x(s) ds;
en posant ZN(t) = LN(t) - x(t), il vient
t
ZN(t) = (LN(O) - x) + MN(t) - J.L 1 ZN(S) ds,
en particulier
(6.25) sup IZN(s)1 < ILN(O) - xl + sup IMN(s)1 + J-L l t sup IZN(U)J ds.
o s t o s t 0 o u s
Les inégalités de Cauchy-Schwartz et de Doob et le lemme précédent appliqués
successivement donnent les inégalités
( lE ( sup I MN(S)I ) ) 2 < JE ( sup I MN(S)1 2 )
O<s<t O<s<t
- - - -
< 4JE(M (t)) < (J.LLN(O) + À (1 + t)) t < ,
où C est une constante indépendante de N. Par conséquent si la fonction lN est
définie par
IN(t) = JE ( sup I ZN(S)I ) ,
O<s<t
l'inégalité (6.25) montre que lN vérifie pour u < t,
fN(U) < ILN(O) - xl + J C lN + J.L lU fN(S) ds.
En appliquant l'inégalité de Gronwall (Lemme 6.24, page 169), on déduit la
relation
fN(t) < (ILN(O) - xl + J CIN) el't;
IN(t) tend par conséquent vers 0 quand N -t +00. La convergence L 1 annoncée
dans le théorème est établie. D
6. UN THÉORÈME DE LA LIMITE CENTRALE
155
6. Un théorème de la limite centrale
Les notations de la section précédente sont conservées. Cette partie étudie
les fluctuations de (LN (t)) autour de la limite déterministe (x (t))
(6.26) ( ..JN(LN(t) - x(t))) = ( LN(t).iNNx(t) ) ,
en supposant que la valeur à l'origine vérifie de plus
1 . LN(O) - Nx
lm fîT = V,
N-++ex> V N
où v est un réel. Le processus défini par (6.26) possède la propriété de Mar-
kov sur Il4. Le théorème suivant est dû, dans un cadre un peu plus général, à
Borovkov[4]. Il décrit la nature des fluctuations autour de la trajectoire limite
du processus renormalisé.
THÉORÈME 6.14. Le processus
( LN (t).iNNX(t) )
converge en distribution, quand N tend vers +00, vers le processus à ac-
croissements indépendants (non homogènes) (X(t)) défini par
(6.27) X (t) = ve-I-'t + l t e-I-'(t-s) Jh[S) dB(s), t E Il4 1
(B(t)) est le mouvement brownien et la fonction h est définie par
h(t) = 2À + J-L(x - p)e-Jl.t.
Si x = p, alo.:s x(s) = p pour tout s E IR et la limite (X(t)) est un processus
d' Ornstein- Uhlenbeck
X(t) = ve-I-'t + J2X l t e-I-'(t-s) dB(s),
de façon équivalente, (X (t)) satisfait l'équation différentielle stochastique
X(O) = v,
dX(t) = -J1.X(t) dt + J2X dB(t).
La partie 8.1, page 168 rappelle la définition du processus d'Ornstein-Ühlen-
beck.
DÉMONSTRATION. En posant
G ( ) = LN(t) - Nx(t)
Nt VN '
le lemme 6.12 montre que le processus
(6.28) (YN(t)) def ( GN(t) - GN(O) + 1-' l t GN(S) dS)
[4] A. A. Borovkov, Limit laws for queueing processes n multichannel systems, Sibirsk. Mat.
Z. 8 (1967), 983-1004.
156
6. LA FILE D'ATTENTE M/M/oo
est une martingale de carré intégrable dont le processus croissant vaut
<YN>(t) = Àt + J1.1 t LN(S) ds.
D'après le théorème 6.13 le processus croissant «YN>(t)) converge en probabi-
lité vers ,(t) défini par
-y(t) = Àt + J1.1 t x(s) ds = 2Àt + (x - p)(! - e- lLt ).
On en déduit, Théorème D.10 page 355, que le processus (YN(t)) converge en
loi vers (B(,(t)), où (B(t)) est le mouvement brownien standard.
Avec ce résultat nous sommes en mesure de prouver que (GN(t)) est une
suite te due de processus. Il restera ensuite à identifier la limite. Le module de
continuité W N de (G N (t)) défini par
wN(6) = sup IGN(u) - GN(v)1
u, v t) lu-v 1 c5
vérifie l'inégalité
(6.29)
(6.30)
wN(6) < sup ( IYN(U) - YN(v)1 + J1. r IGN(s)1 dS )
u,v t)lu-vl c5 J u
< J1.6 sup IGN(u)1 + sup IYN(u) - YN(v)l.
u t Ut v tt lu-vi 6
Pour s, t E 114 tels que s < t, la définition de (YN(t)) donne
IGN(s)1 < IYN(s)1 + IGN(O)I + J1.1 s IGN(u)1 du,
sup IGN(u)1 < sup IYN(u)1 + IGN(O)I + J1. r sup IGN(v)1 du.
o u s O U S Jo O v u
En utilisant le lemme de Gronwall, on obtient donc l'inégalité
(6.31) sup IGN(u)1 < ( sup IYN(u)1 + IGN(O)I ) elJ.s,
O<U<S o<u<s
- - - -
pour s < t. La suite de processus (YN(t)) étant convergente, avec l'argument
de continuité vu dans la preuve de la proposition 2.2 page 2.2, les variables
aléatoires
( sup IYN(U)I )
O<u<t
convergent aussi en distribution. Comme de plus GN(O) converge vers v quand
N tend vers +00, pour Tl > 0, il existe K > 0 et No tels que si N > No,
r (( sup IYN(u)1 + IGN(O)I ) elJ.t > K ) < Tl ,
O<u<t 2
6. UN THÉORÈME DE LA LIMITE CENTRALE
157
la relation (6.31) donne donc la majoration
(6.32)
IP ( sup IGN(U)I > K ) < Tl 2 .
O<u<t
La suite (YN(t)) de processus est tendue; pour TI, e > 0, il existe donc 6 0 et N 1
tels que le module de continuité de (Y N (t)) vérifie l'inégalité
(6.33) r ( sup IYN(u) - YN(v)1 > e ) < TI ,
u, v t,lu-vl 6o 2 2
si N > N 1 . En choisissant 6 < 6 0 1\ e/(2J-LK) et N > No V N 1 , la relation (6.30)
montre l'inégalité
r(wN(6) > ê) < r ( sup IYN(u) - YN(v)1 > e )
u, v t, lu-vi 6 2
+ 1F ( 6J-L sup IGN(U)I > ) ,
O<u<t 2
et d'après (6.33) et (6.32) chacun des deux termes du membre de droit de
l'inégalité précédente est majoré par TI 12. Pour e, TI > 0, il existe 6 et N 2 tels
que l'inégalité r(wN(6) > e) < TI soit satisfaite si N > N 2 .
Le théorème D.9 page 354 montre que la suite (GN(t)) est tendue dans
l'espace des fonctions càdlàg sur [0, t] et que toute valeur d'adhérence a pour
support l'ensemble des fonctions continues. Si (X(s)) est une valeur d'adhérence
de cette suite, de l'identité (6.28), on déduit que r-p.s. pour tout s < t,
B("}'(s» = X(s) - v + J.L 1 5 X(u) du.
( 6.34 )
Le processus (B ( "Y ( t))) est identique en loi au processus
(l t -l''}''(s) dB 1 (S)) 1
où (B 1 (t)) est un mouvement brownien standard (c'est une martingale continue
avec le même processus croissant). L'équation (6.34) peut donc se réécrire sous
la forme différentielle
(6.35)
dX ( s) = -1 "Y' ( s) dB 1 ( s) - J-LX ( s) ds
et il est bien connu que cette équation différentielle stochastique a une seule
solution (voir Rogers et Williams [43] par exemple). La suite (GN(t)) n'a donc
qu'une seule valeur d'adhérence, elle converge donc en loi.
La limite est simple à expliciter, comme
X(t) = v + l t -l''}''(s) dB(s) - J.L l t X(s) ds,
158
6. LA FILE D'ATTENTE M/M/oo
il est facile de vérifier que
X(t) = ve-I-'t + l t e-l-'(t-s \;"y'(S) dB(s)
est la solution de cette équation.
Dans le cas où x = p, ,(t) = 2Àt, la relation (6.35) montre que (X(t)) est
bien la solution de l'équation différentielle dX(t) = v'2ÀdB(t) - J-LX(t) dt, ce qui
achève la démonstration du théorème. D
Un modèle connexe. Le parking de super-marché: les hypothèses probabi-
listes sont les mêmes. La file d'attente a des places numérotées et un client à son
arrivée prend la place avec le plus petit numéro. Le nombre total de clients est
toujours celui d'une file d'attente MIMloo. Ce modèle a toutefois une compo-
sante spatiale: l'ensemble des places occupées. Plusieurs caractéristiques sont
intéressantes dans ce contexte : le numéro de la place du client le plus éloigné,
ou encore le nombre de places vides jusqu'au dernier client, etc. Ce modèle est
étudié par Aldous[l].
7. La file d'attente à capacité limitée M/M/N/N
Cette file d'attente est la version tronquée de la file M / M /00, si À est le taux
d'arrivée, J1. le taux de service et p = À/ J-L, le processus du nombre de clients est
à l'équilibre un processus réversible, sa mesure invariante 7rN est donnée par
k
7rN(k) = C-l ! ,
( 6.36)
o < k < N,
où C est la constante de normalisation,
N
C = L , .
.
i=O
C'est le modèle de base d'un lien téléphonique entre deux nœuds: N commu-
nications peuvent être acheminées simultanément et quand la file est pleine les
nouvelles requêtes sont rejetées. Quand plusieurs files d'attente de ce type sont
reliées entre elles en réseau le modèle obtenu est celui de la section 2.3 page 86.
Dans ce contexte il est intéressant d'estimer la probabilité qu'un client soit rejeté,
le temps qu'il faut pour que la file déborde, le temps entre deux débordements,
etc . . .
Cette file d'attente simple est étudiée quand le taux d'arrivée ÀN est pro-
portionnel à la capacité. Le processus du nombre de clients noté (L;' (t)) vérifie
l'équation différentielle
( 6.37)
L (t- )
dL;'(t) = l{L (t-)<N}NÀN(dt) - L N;(dt).
i=l
[1] David Aldous, Some interesting processes arising as heavy traffic limits in an M / M /00
storage process, Stochastic Processes and their Applications 22 (1986), 291-313.
7. LA FILE D'ATTENTE À CAPACITÉ LIMITÉE M/M/N/N
159
p>l
1
L (t)
x
FIG. 1. Les trois régimes de la file M / M / N / N
De la même façon le temps d'atteinte de a E {O, . . . ,N} est noté T:,
T: = inf{t > 0/ Liv(t) = a}.
Le processus renormalisé (LN(t)) naturellement défini par
L -. ( ) - LN(t)
Nt - , tEI14,
N
est à valeurs dans [0, 1] ; à t = 0, la condition suivante est vérifiée,
(6.38)
lim Liv(O) = x E [0,1].
N +cx>
Tant que (LN(t)) n'a pas atteint la valeur N, le processus se comporte comme
le processus libre (LN(t)). D'après le théorème 6.13, quand t est assez grand
LN(t)IN vaut approximativement p. Cette file d'attente a, suivant les valeurs
de p, trois types de fonctionnement possibles. Une description informelle de
ceux-ci est présentée ci-dessous; elle est guidée par la loi des grands nombres et
le théorème de la limite centrale démontrés précédemment.
1. Si p > 1, ce cas sera appelé par la suite sur-critique (forte charge). La loi
des grands nombres montre que LN(t) devrait atteindre N en temps fini.
La file d'attente va donc être remplie rapidement.
2. Le cas p < 1, sous-critique (faible charge), comme (LN(t) - pN)IVN
est une diffusion, en première approximation le processus (LN (t)) va
vivre dans une région du type [pN - AVN, pN + AVN] C [0, N]. Les
phénomènes de débordement sont donc rares.
3. Si p = 1, cas critique, la limite du processus renormalisé x(t) tend vers
1 quand t -t +00, donc la file d'attente se remplit asymptotiquement.
Cette description est bien sûr peu informative sur le processus réel de
débordement.
160
6. LA FILE D'ATTENTE M/M/oo
Dans la suite, chacun de ces cas est étudié séparément. À chaque fois, le
comportement asymptotique du temps de premier débordement TH est étudié
et une loi des grands nombres est démontrée.
7.1. Le cas sur-critique p > 1. Quand p > 1, la file d'attente est très
rapidement saturée. On peut le voir de façon heuristique: si LN(O) est de l'ordre
de Nx avec x < 1, tant que le nombre de clients reste de l'ordre de Nx, le
processus (L:N(t)) est un processus de vie et de mort transient, sautant de +1
avec une intensité ÀN strictement plus grande que l'intensité des sauts de -1
qui est de l'ordre de J-LxN < J1.N < ÀN. Par conséquent, le processus va être
poussé vers la frontière N. Le processus limite (p + (x - p) exp( - J1.t)) est en 1 à
l'instant
.!. log ( P - x ) .
J1. p-1
La proposition suivante établit la convergence en probabilité du temps de débor-
dement vers cette quantité.
Au passage, nous avons vu que, si LN(t) _ Nx, le processus se comporte
localement comme celui du nombre de clients d'une file MIM/1 instable avec
une intensité d'arrivée ÀN et de service J1.xN.
PROPOSITION 6.15. Si P > 1, le temps de débordement T'N de la file
d'attente converge en probabilité vers
.!. log ( P - x ) t
J1. p-1
si la condition initiale vérifie limN-++oo L:N(O)/N = x.
DÉMONSTRATION. Le processus (exp(J1.(t A TN ))(pN - LN(t A TN ))) est une
martingale d'après le corollaire 6.5 et le théorème d'arrêt des martingales. Avant
l'instant TH' les processus (LN(t)) et (Liv(t)) coïncident, et par conséquent
TN = TH' La propriété de martingale montre donc l'égalité
JE ( exp{lt(t 1\ TN )(pN - LN(t 1\ T N ))) = pN - LN(O),
et comme LN(t A T ) < N, on en déduit l'inégalité
(pN - N)1E( exp(J1.t A TH)) < pN - LN(O).
En faisant tendre t vers l'infini, le théorème de convergence monotone montre
que
JE ( exp (J1.T )) < (p - LN (0) ) 1 (p - 1).
La variable exp(J1.T H ) est intégrable et comme elle est positive
o < exp(J1.t A TH )(pN - LN(t A TH)) < pN exp(J1.T H ).
La martingale exp(J1.(t A TH ))(pN - Liv(t A TH)) est donc uniformément inté-
grable, on obtient ainsi l'identité
L* (0)
( 6.39) 1E ( exp (J-L T* ) ) = p - N .
N p-1
7. LA FILE D'ATTENTE À CAPACITÉ LIMITÉE M/M/N/N
161
La fonction x -t (x - N p)2 - x étant comprise entre N 2 (p - 1)2 - N et (N p)2
pour x variant entre 0 et N, le même type d'argument appliqué à la deuxième
martingale de la relation (6.10) arrêtée en TN
(exp(2Jl(t 1\ T )) ((LN(t 1\ T ) - N p)2 - LN(t 1\ T ) ) ) ,
donne l'égalité
-* 2 -*
lE ( ( 2 T* )) = (p - LN(O)) - LN(O)/N
exp J1. N (p _ 1) 2 _ liN .
L'équation (6.39) et l'identité précédente montrent donc
var ( eXP(JlT )) = 0 (liN),
en utilisant l'inégalité de Tchebichev, pour ê > 0,
IP' (1 exp(JlT ) - JE ( exp(JlT )) 1 > g) < var ( eXP(JlT )) 1 g2 1
on en déduit que (TH) converge en probabilité vers
1 p - x
lim log (lE ( exp(J1.TN ))) = - log ,
N--++oo J-L P - 1
d'après la relation (6.39). La proposition est démontrée.
o
Le petit lemme suivant sera utilisé pour montrer que le processus renormalisé
reste en 1 quand il atteint 1.
LEMME 6.16. Le processus (Ljy(t)) est minoré par un processus de vie et
de mort (ZN(t)) partant de Ljy(O) dont la matrice de saut (Rïj) est donnée
par Ri.i+1 = ÀN, pour i < N et Ri,i-1 = J1.N pour i > O.
DÉMONSTRATION. La preuve se fait en construisant le processus (ZN(t))
à partir du processus (Ljy(t)). Il suffit bien entendu de définir les instants de
sauts de (ZN(t)). Les sauts de +1 sont les mêmes pour (ZN(t)) et (Ljy(t)). Si à
l'instant ta, (Ljy(t)) saute de -1, alors (ZN(t)) aussi; de plus, indépendamment,
à l'instant t, ZN(t) saute de -1 si ZN(t) > 0 avec intensité J1.(N - LN(t)).
Globalement les sauts vers le bas de (ZN(t)) se font avec intensité J1.N. Comme
des sauts vers le bas sont rajoutés, il est clair que LN(t) > ZN(t). Le lemme est
démontré. 0
PROPOSITION 6.17 (Loi des grands nombres). Si p > 1, pour tout ê > 0 et
tEI14,
lim JP> ( sup L S) - y(s) > g ) = 0,
N --++00 a<s<t
avec
y(t) = (p + (x - p)e- lLt ) Â 1.
162
6. LA FILE D'ATTENTE M/M/oo
DÉMONSTRATION. En notant N(S) = ILN(s)IN - y(s)1 pour s E Il4,
(6.40) r ( sup N(S) > ë )
O<s<t
< r ( sup N(S) > ë ) + r ( sup N(S) > ë ) .
O s T l\t T s t
Le deuxième terme du membre de droite de (6.40) se réécrit comme
r ( sup L S) - y(s) > ê )
TN s t
< r ( sup L S) - 1 > ê ) + r ( sup Iy(s) - 11 > :. )
T* <s<t 2 T* <s<t 2
N- - N- -
et avec la propriété de Markov forte cette expression est majorée par
(6.41) rN ( sup ( 1 - L S) ) > :. ) + r ( sup Iy(s) - 11 > :. ) .
O<s<t 2 T* <s<t 2
- - N- -
La fonction s -4 y(s) est continue en
So = ..!:. log ( P - x ) ,
J-L p-1
avec y(s) = 1 pour s > sa ; il existe 6 > 0 tel que
sup Iy(s) - 11 < ë/2,
s so-c5
ce qui entraîne l'inégalité
r ( sup Iy(s) - 11 > ë 2 ) < r (T N < sa - 6);
TN s t
la proposition 6.15 montre que ce dernier terme tend vers 0 quand N tend vers
l'infini. L'autre terme de (6.41) se majore de la façon suivante,
( ( LN(S) ) ë ) ( * )
IP'N o t 1 - N > 2" < IP'N TN-LEN/2J < t .
Le lemme 6.16 montre que (LN(t)) est minoré par un processus de vie et de mort
(ZN(t)) réfléchi en N de matrice (Rïj) telle que Ri,i+1 = ÀN et Rii-1 = J1.N. Si
rN est le temps d'atteinte de N - LëN/2J par (ZN(t)), la minoration de (LN(t))
donne l'inégalité
rN ( sup ( 1 - L S) ) > :. ) < rN (rN < t);
O<s<t 2
le processus (N - ZN(tIN)) est donc celui du nombre de clients d'une file d'at-
tente MI Mil stable dont le taux d'arrivée [resp. de service] vaut J1., [resp. À] et
NrN est le temps d'atteinte de LëN/2J partant de o. La proposition 5.11 montre
7. LA FILE D'ATTENTE À CAPACITÉ LIMITÉE M/M/N/N
163
que la variable (J1.IÀ)leN/2JNTN converge en distribution vers une loi exponen-
tielle. En particulier IPN (TN < t) tend vers 0 quand N tend vers +00. Le membre
de gauche de l'inégalité (6.41) tend donc vers 0 et donc le deuxième terme du
membre de droite de l'inégalité (6.24) aussi.
En utilisant une méthode similaire, comme LN et LN coïncident jusqu'à
TH' le premier terme du membre de droite de l'inégalité (6.24) tend aussi vers
0, par conséquent le terme gauche de cette inégalité tend vers 0 quand N tend
vers l'infini. La proposition est démontrée. D
Le processus renormalisé partant de 1 reste collé en 1. La question naturelle qui
suit ce résultat concerne la nature des fluctuations du processus non renormalisé
(LN(t)) en dessous de N. La proposition suivante étudie, sans la renormalisation
spatiale, le comportement de (LN(t)) au voisinage de N ou plus précisément
celui de (N - LN(tIN)), qui n'est autre que le processus du nombre de serveurs
libres. Le résultat principal est que le nombre de clients reste très proche de N,
un nombre fini de places de la file d'attente sont inoccupées.
PROPOSITION 6.18. Sous la condition p > l, les lois marginales finies
du processus de Markov (YN(t)) = (N - LN(tIN)) avec la condition initiale
YN(O) = a E N convergent en distribution vers celles d'un processus de vie et
de mort (Y(t)) dont la matrice de sauts Q = (qij) est donnée par qi,i+1 = J1.
et qi+1,i = À pour i E N.
DÉMONSTRATION. La chaîne incluse (DN(n)) de (YN(t)) (voir la définition
Section 3 page 347) a comme matrice de transition PN = (PN(i,j)) définie par
PN(i, i + 1) = J-L(N - i)1 (ÀN + J1.(N - i)) si i < N,
PN(i,i -1) = ÀNI (ÀN + J1.(N - i)) si 0 < i < N,
et les autres termes de la matrice sont nuls. Quand N tend vers +00, la matrice
PN converge, coordonnée par coordonnée, vers la matrice P de la chaîne incluse
(D(n)) d'un processus de vie et de mort de matrice de transition p,
( .. 1) J1. ( " ) À .
p , + = À ,p , - 1 = À , > O.
+J-L +J1.
La chaîne de Markov (DN(n)) converge donc en loi vers (D(n)). Avec la condi-
tion initiale YN(O) = a, le prochain instant de saut suit une loi exponentielle de
paramètre (À + J1.( N - a)) lN et converge donc vers une distribution exponentielle
de paramètre À + J1.. La convergence annoncée s'obtient en utilisant la construc-
tion des processus de sauts à partir de leurs chaînes incluses (Chapitre C). 0
La mesure invariante du processus (N - LN(t)) est aussi celle de (N - LN (tl N)).
Ce dernier convergeant en distribution vers (Y(t)), il est plausible que la mesure
invariante de (N - LN(t)) converge vers celle de (Y(t)).
PROPOSITION 6.19. Si P > 1, la mesure invariante du nombre de ser-
veurs inoccupés (N -LN(t)) converge vers une loi géométrique de paramètre
1 / p, en particulier la probabilité de blocage vérifie
lim 1rN(N) = 1 - 11 p.
N-t+oo
164
6. LA FILE D'ATTENTE M/M/oo
DÉMONSTRATION. La mesure invariante 'Tr N étant une loi de Poisson tron-
quée de paramètre N p, pour k < N,
(pN)N -k 1 ( 1 ) k 1
1fN(N - k) = (N - k)! L: 0 (pN)N-. j(N - i)! = P KN
avec
k 1 Nk(N _ k)! N 1 Nk(N - k)!
KN = L pi Ni(N _ i)! + L pi Ni(N - i)! ;
=o =k+1
l'expression Nk(N - k)!/Ni(N - i)! converge vers 1 pour i < N et est majorée
par 1 pour i > k. Le théorème de convergence dominée appliquée à la deuxième
somme de l'expression précédente montre donc la relation
lim KN = 1 \j 1
N--t+oo - P
d'où la convergence en loi annoncée
lim 'TrN(N - k) = ( ! ) k ( 1- ! ) .
N--t+oo P P
D
7.2. Le cas critique p = 1. En reprenant le raisonnement approximatif
du début de la partie précédente, si L'N(O) est dans le voisinage de N, l'intensité
des sauts de -1 est la même que celle des sauts de 1, de l'ordre de ÀN. Le temps
d'atteinte de N sera donc beaucoup moins rapide que dans le cas précédent.
L'équation 1 + (x - 1) exp( -J1.t) = 1 du temps d'atteinte de la saturation par
le processus renormalisé donne bien entendu t = +00 ; il faut cependant se rap-
peler (Théorème 6.14) que le processus est une perturbation gaussienne (X(t))
autour de la trajectoire limite et donc que N peut-être atteint en temps fini.
L'approximation gaussienne donne
LN(t) rv N(l + (x - l)e- JLt ) + ViiX(t),
en admettant que le processus (X(t)) reste avec une forte probabilité dans un
voisinage borné (il est en fait ergodique), le processus (LN(t)) sera en N pour
un t de l'ordre de (log Vii) 1 J1.. La proposition suivante montre en effet que les
valeurs du temps d'atteinte de N sont essentiellement concentrées autour de
(log N)/(2J1.) (voir aussi la figure 2).
PROPOSITION 6.20. Si P = 1 et L'N(O) = 0, la variable aléatoire
J1.TN - (log N)
2
converge en distribution vers une variable dont la densité en x E IR vaut
J! e- x e-exp(-2x)!2.
7. LA FILE DtATTENTE À CAPACITÉ LIMITÉE M/M/N/N
165
/ '"",
/ \
, \
0/4 \
1 \
1 \
1- 3 \
, \
1 \
1 \
1 0 .2 \"
1 .
1
/
/ 0.1
1
1
,/
-1
"-
'-,
'
......,""'-,------_.-
-2
o
1
2
3
4
FIG. 2. La distribution de J1.TN - (log N)/2 quand p = 1.
DÉMONSTRATION. La proposition 6.9 montre que, pour a > 0,
1FQ(e-",,.T ) = r(a)
q. N(a)
avec
(+oo
<1>N(a) = Jo (1 + e/N)N e"'-1 e -c de ;
en faisant le changement de variables c = V 2Nx, cette égalité devient
(+oo N
<1>N(a) = N"'/2 2"'/2-1 Jo (1 + .j 2x/N) X",/2-1 e - V'2Nz dx.
L'intégrale précédente se représente sous la forme
A _ 1 +00 Nlog(1+ J2X/N )- V2Nx 0/2-1 d
N - e x x.
o
Il est facile de montrer que la fonction y -t y2 log( 1 + 11 y) - y est décroissante
sur lltr, par conséquent pour x > 0 la suite
(Nlog (1 + .j 2X/N) - V2Nx )
est décroissante et converge vers -x. En appliquant le théorème de convergence
monotone, il vient
1 +00
lim AN = e- x x o / 2 - 1 dx = r(a/2).
N-++oo 0
166
6. LA FILE D'ATTENTE M/M/oo
d'où
lim N a / 2 2a/2-1 (exp (-aJ,LT*)) = r(a) ;
N--++oo N r(a/2)
la formule de duplication de Legendre pour les fonctions Gamma (voir Whittaker
et Watson [53], page 240)
2 2 :z:- 1 r(x)r(x + 1/2) = .;7rr(2x),
pour x > 0, donne
lim (exp (-a(J,LT N - (log N)/2))) = 2 a ; r ( a ; 1 ) .
N--++oo v
Il reste à inverser la transformée de Laplace
2; r ( a; 1 ) = 1+ 00 exp (alog(2Y)/2 -logy/2 - y) dy,
le changement de variables x = -log(2y)/2 donne
2; r ( a ; 1 ) = I! 1: 00 e-ao: exp (-x - e- 2 o: /2) dx,
ce qui achève la démonstration de la proposition. D
La loi des grands nombres dans ce cas est similaire à celle montrée pour le
processus libre (LN (t)).
PROPOSITION 6.21. Si P = l, pour t E 114 et ê > 0,
lim r ( sup L S) - (1 + (x - 1)e-!'S) > ê ) = o.
N --++00 O<s<t
DÉMONSTRATION. La preuve est simple : avec très forte probabilité TH est
plus grand que t et, entre 0 et TH' le processus (Liv(t)) est identique à (LN(t)).
Formellement, l'inégalité
r ( sup L S) - (1 + (x - 1)e-!'S) > ê )
O s t
< r(T N < t) + r ( sup LN(S) - (1 + (x - 1)e-!'S) > ê ) ,
O<s<t N
le théorème 6.13 et la proposition précédente permettent de conclure. D
Les fluctuations de (L:N(t)) autour de (1 + (x -1) exp( -J-Lt)) sont aussi de l'ordre
de Vii. Si LN(O) = N, il est possible de montrer un théorème de la limite cen-
trale pour (Ljy(t)), la limite de ((N - Ljy(t))IVii) est un processus d'Ornstein-
Ühlenbeck réfléchi ; c'est un processus positif, sur 114 - {o} il vérifie l'équation
différentielle (6.43) avec a = 1 et u = 1.
Cette partie se termine avec le comportement asymptotique de la probabilité
invariante.
7. LA FILE D'ATTENTE À CAPACITÉ LIMITÉE M/M/N/N
167
PROPOSITION 6.22. La probabilité invariante du processus de Markov
( N -;;(t) )
converge vers la loi de la valeur absolue d'une loi normale centrée réduite
quand N tend vers l'infini.
De plus la probabilité 1rN(N) de blocage vérifie
lim VN1rN(N) = V2/1r .
N-++oo
DÉMONSTRATION. La formule (6.36) pour 1rN donne l'égalité
(k) = IP'(N 1 ([0, N)) = k)
1rN r(N 1 ([0, N]) < N) ,
pour kEN où, comme d'habitude, N 1 est un processus de Poisson de paramètre
1. Le théorème de la limite centrale pour les processus de Poisson montre que
la quantité
IP'(N1([0, N)) < N) = IP' ( Nl([O - N < 0)
converge vers 1/2 quand N tend vers l'infini et pour x E
. ( N-k ) . ( N-N1([0,N]) )
hm 7rN k: 0 < Vii < x = 2 hm IP' 0 < Vii < X
N-++oo N N-++oo N
(2 1 Z 2
= v ;: 0 e- U /2 du.
La première partie de la proposition est donc démontrée. La dernière assertion
utilise la formule de Stirling
NN -N
IP'(N1([0,N)) = N) = ;, '" 1/ v 27rN.
o
À l'équilibre l'intensité du processus des clients rejetés, ou encore le processus
de s clie nts qui trouvent la file pleine, vaut N1rN(N), elle est donc de l'ordre
V 2N 11r. Dans le cas sur-critique cette intensité est linéaire en N de l'ordre de
N(l - 11 p) d'après la proposition 6.19.
7.3. Le cas sous-critique p < 1. Ce cas est particulièrement simple, le
processus (L:N(t)) vit autour de pN (avec une amplitude de Vii) et donc
coïncide essentiellement avec (LN(t)). La proposition suivante montre que les
théorèmes 6.13 et 6.14 s'obtiennent sans difficulté, c'est le même principe de
démonstration que pour la proposition 6.21 pour le processus (Ljy(t)). La pro-
position suivante donne l'ordre de grandeur du premier instant de débordement
dans ce cadre.
PROPOSITION 6.23. Si P < 1 et avec la condition initiale Ljy(O) = 0,
la variable aléatoire (N pN J1. T 'N) converge en distribution vers une variable
exponentielle de paramètre 1 - p.
168
6. LA FILE D'ATTENTE M/M/oo
DÉMONSTRATION. En utilisant les notations de la preuve de la proposi-
tion 6.10, le remplacement de p par pN dans l'identité (6.18) donne pour a > 0,
. -1 N ( N ) 1 k-1 .
<PN(a) = ( (e-a/'T N )) = 1 + a k Nkpk n (a + t).
Si aN = aNpN, 4JN(aN)-l est la transformée de Laplace de NpnJ-LTN en a et
cette quantité s'exprime de la façon suivante
N N k k rr -1 i aN
4JN(aN)=1+a kP - (1- N )(1+ i )
k=l =1
1 k N N- rr k-1 i aN
= 1 + a (k + 1)p (k + 1)(N _ k) . (1 - N )(1 + i)'
k=O =1
(6.42)
Le passage à la limite se fait comme dans la preuve de la proposition 6.10.
L'expression NI(k + l)(N - k) est bornée par 1 pour 0 < k < N - 1, ainsi
N N-k-1 ( . )
aN N OlN 2 p N
(k + 1)(N - k) rI 1 - N ( 1 + i ) < (1 + aN) < e 1
=1
comme p < 1, ce dernier terme est majoré par une constante indépendante de
N; le théorème de convergence dominée appliqué à la somme du membre droit
de l'équation (6.42) donne par conséquent
+00
lim 4JN(aN) = 1 + a L pk = 1 + a/(1 - p),
N--t+oo
k=O
d'où
lim 1Eo (exp( -aNJ1.T N )) = (1 - p)/(l - p + a).
N--t+oo
La proposition est démontrée.
D
8. Appendice
8.1. Le processus d'Ornstein-Ühlenbeck. Ce processus est la solution
de l'équation différentielle stochastique
(6.43 )
dX(t) = -aX(t) dt + 0- dB(t),
où a, 0- > 0 et (B(t)) est le mouvement brownien standard. Il est facile de
résoudre cette équation, (X (t)) se représente sous la forme
t
X(t) = X(O)e- at + q 1 e-a(t-s) dB(s), t E 114.
C'est un processus de Markov ergodique (la dérive ramène fortement le processus
au voisinage de l'origine), et sa distribution invariante est une loi gaussienne
centrée de variance 0- 2 1 (2a). Si la loi de X (0) est la distribution invariante,
8. APPENDICE
169
(X(t)) est un processus stationnaire gaussien de même loi que le mouvement
brownien changé de temps
(a/V20.exp( -at)B (exP(-2at))) .
8.2. Le lemme de Gronwall..
LEMME 6.24. Si h et f sont des fonctions boréliennes positives sur lR.t-
et ê > 0 tels que
( 6.44 )
I(s) < ê + 1 5 I(u)h(u) du,
pour s < t 1 alors
I(s) < ê exp (1 5 heu) dU) .
pour s < t.
DÉMONSTRATION. La preuve se fait en itérant la relation (6.44) : si s < t et
n > 1,
I(s) < ê + I: ê t h(ud dUl r U1 h(U2) dU2 ... r,-l h(Ui) dUi
i=l Jo Jo Jo
+ 1 5 h(ud dUl l u1 h(U2) dU2 .. .l un - 1 h(u n ) dU n
n-1 (l S ) i l i h(uk)duk
= ê + ê L heu) du 1{o ul "' ui 5} Il J/ ( )
i=l 0 ]Rie k=l 0 h u du
+ (1 5 heu) dU) n Lk 1{O ul "' Un 5} TI ;j: :
= ê +ê I: ( 1 5 h(U)dU ) i IP'(Xl < X 2 < ... < Xi < s)
t=l 0
+ (1 5 h(u) dU) n IP'(X l < X 2 < ... < X n < s),
où ( Xi) est une suite de variables i.i.d. de densité h( u) 1 J; h( v) dv sur l'intervalle
[0, s]. Par symétrie, il vient r(X 1 < X 2 < . . . < Xi < s) = Iii! ainsi
n-l ( (S ) i 1 ( (S ) n 1
I(s) < ê + ê Jo heu) du i! + Jo heu) du n! '
il suffit de faire tendre n vers l'infini pour obtenir le résultat. D
CHAPITRE 7
Les files d'attente avec une entrée poissonnienne
Sommaire
1. Un client et un observateur voient le même état 171
L'état de la file d)attente 172
Exemples 173
2. La file d'attente M/GI/1 FIFO 174
2.1. La loi de la durée de la période d'occupation 174
2.2. La méthode des chaînes incluses 176
3. La file d'attente à une infinité de serveurs 178
4. La file M/G/1 LIFO préemptif 179
Dans ce chapitre, le processus d'arrivée est un processus de Poisson marqué
N = L 6(t n ,CT n )
nEZ
d'intensité À dt x 0'( dx) sur IR x II4. Comme d'habitude, si A est un borélien de
Il4 x Il4 , N ( A) désigne le nombre de (t n , Un) dans A ; si 1 est un intervalle de II4 ,
par abus de notation N (1) désigne N (1 x II4 ). La suite (t n ; nEZ) est croissante
et ta < 0 < t 1 . La proposition 1.11 page 16 du chapitre 1 sur les processus de
Poisson marqués montre que {t n } est un processus de Poisson d'intensité À dx
sur IR indépendant de la suite ( un), qui est i.i.d. de loi commune 0'( dx ), la loi
des services de cette file. La filtration naturelle associée à ce processus est notée
(Ft), pour t E IR où Ft est la tribu engendrée par tous les événements avant t,
Ft = 0' (N(] - 00, s] x A)I s < t, A E B(II4))
Avec ces hypothèses, trois modèles de file d'attente sont étudiés: la file avec
un serveur avec les disciplines de service FIFO et LIFO, et la file à une infinité
de serveurs. On commence tout d'abord par une propriété générique des files
d'attente ayant un tel processus d'arrivée.
1. Un client et un observateur voient le même état
Ces files d'attente possèdent la propriété remarquable suivante: à l'équilibre,
l'état de la file à un instant arbitraire a même distribution que l'état de la file
vu par un client qui arrive.
172 7. LES FILES D'ATTENTE AVEC UNE ENTRÉE POISSONNIENNE
L'état de la file d'attente. En rappelant que Mp(IR x Illt-) est l'espace
des processus ponctuels sur IR x IR+ (voir le chapitre 1), pour s < t E IR, si la file
d'attente est vide à l'instant s, l'état de celle-ci juste avant l'instant t est donné
par la variable </J(s, t, N), où </J : {(s, t) E IR x IR, s < t} x Mp(IR x Il4) -t IR est
une fonction mesurable positive vérifiant les propriétés suivantes: pour s < t,
(7.1)
(7.2)
4J( s, t, N) = t/J(O, t - s, T S N),
t/J(s, t, N) = </J(t 1 (s), t, N([s, t[ n. )),
où T S N désigne la translation de s du processus ponctuel N (voir la définition 30
page 272), t 1 (s) est le premier point t n de N plus grand que s et enfin N([s, t[n. )
désigne le processus ponctuel ayant les mêmes points que N sur l'ensemble
[s, t[ x II4 et identiquement nul en dehors de cet ensemble.
La relation (7.1) indique que la dynamique de la file d'attente est homogène
dans le temps et la relation (7.2) impose que la fonctionnelle t/J( s, t, N) ne
dépende que de la restriction de N à l'intervalle [s, t[. Pour simplifier les no-
tations on a supposé un état initial vide. En rajoutant une variable à la fonc-
tionnelle t/J, il est cependant facile de généraliser ce type de représentation quand
l'état initial est arbitraire.
DÉFINITION 13. Une file d'attente a la propriété de couplage en arrière pour
l'état </J s'il existe une variable Ta < 0, IP-presque sûrement finie, telle que pour
s < Ta,
(7.3)
t/J(s, 0, N) = t/J(Ta, 0, N).
PROPOSITION 7 .1. Sous les conditions (7.1) et (7. 2), et si la fonction-
nelle </J satisfait la condition de couplage en arrière, si S(t) = </J(O, t, N), on
a l'égalité
lim S(t) loi lim S(t n ),
t-++oo n-++oo
où les limites sont prises pour la convergence en loi.
Si S (t) est défini comme l'état de la file d'attente juste avant l'instant t, la
proposition ci-dessus montre que sous certaines conditions l'état vu à un instant
arbitraire t grand a même loi que l'état vu par le n-ième client avec n grand.
DÉMONSTRATION. Si n > 1, des propriétés (7.1) et (7.2) on déduit les
égalités
t/J(O,tn,N) = t/J(t 1 ,t n ,N)
= </J(t 1 - t n , 0, Ttn N)
= </J(t 1 - t n , 0, Ttn N([t 1 - t n , O[ n .)).
Les points de la composante temporelle d'un processus de Poisson étant espacés
par des variables i.i.d. (exponentielles), il vient
(t 1 - t n , Ttn N([t 1 - t n , O[ n .)) loi (t_ n + 1 - ta, Tto N([t_ n + 1 - ta, O[ n .));
1. UN CLIENT ET UN OBSERVATEUR VOIENT LE MÊME ÉTAT 173
la distance au premier point à gauche de 0 de N ayant une distribution expo-
nentielle, on a aussi l'égalité en loi
(t_ n + 1 - ta, T t ON([t_ n +1 - to,O[n.)) loi (t_ n +2,N([t- n +2,0[n.)).
Noter ici l'importance du fait que l'intervalle [t_ n + 1 , O[ est ouvert en o. Dans
le membre de gauche de l'identité précédente il y a un point en 0 pour Tto N,
dans le membre de droite il n'y a pas de point en 0 pour N. En récapitulant, on
obtient l'égalité
tjJ(O, t n , N) loi tjJ(t- n +2' 0, N([t_ n + 2 , O[ n .)) = t/J(t_ n + 2 , 0, N).
La propriété de couplage en arrière montre donc que la variable tjJ(O, t n , N)
converge en distribution vers t/J(To, 0, N) quand t tend vers l'infini.
De la même façon si t > 0, la relation (7.1) donne l'égalité
(jJ(O, t, N) = t/J( -t, 0, N),
donc la variable tjJ(O, t, N) converge aussi en distribution vers t/J(T o , 0, N) quand
n tend vers l'infini, ce qui achève la démonstration de notre proposition. D
Exemples.
La file d'attente MIG/1 FIFO. Si V(t) est la charge de la file d'attente
juste avant l'instant t, il est clair que les relations (7.1) et (7.2) sont vérifiées.
D'après la remarque du chapitre 12 page 300, si la file est vide à l'instant s <
0, la charge V(O) de la file d'attente juste avant l'instant 0 peut être représentée
sous la forme
sup ( r x N(dv, dx) + U ) = sup ( t (Ti + t n ) .
s u o J]u,O[XR+ n,s tn <0 i=n
Si ÀE(u) < 1, la loi des grands nombres montre que Ir-presque sûrement,
1 a 1
lim - LUi + t n = E(u) - , < O.
n -oo n . /\
l.=n
Il existe donc No tel que si n < No, alors
a
L Ui + t n < 0,
l.=n
par conséquent, si s < tNo' on a l'égalité
sup ( r x N(du, dx) + U ) = sup ( r x N(du, dx) + U ) ,
s u O J]u,O[XR+ tNo U O J]u,O[XR+
le sup étant positif ou nul. On en déduit la propriété de couplage en arrière dans
ce cas. Le proposition 7.1 montre donc que la charge à l'équilibre a même loi que
le temps d'attente stationnaire (la charge juste avant l'arrivée d'un client). C'est
le corollaire 2.15 page 52 obtenu en calculant explicitement les lois en question.
Le même résultat est bien entendu vrai pour d'autres caractéristiques de la
file d'attente comme le nombre de clients.
174 7. LES FILES D'ATTENTE AVEC UNE ENTRÉE POISSONNIENNE
La propriété de couplage en arrière est aussi satisfaite pour une file d'at-
tente MI G Il avec un serveur et une discipline de service conservative (voir
la définition page 307) puisque la charge de celle-ci est la même que celle de
la file d'attente MIG/1 FIFO. Par conséquent la proposition 7.1 s'appliquera à
toutes les caractéristiques d'une telle file d'attente satisfaisant les propriétés (7.1)
et (7.2). Les résultats sur la charge et le nombre de clients vus précédemment
sont donc aussi vrais pour les disciplines LIFO, processor sharing,...
La file d' attente MI G 100. Si la file est vide à l'instant s, le nombre de
clients juste avant l'instant t est donné par la fonctionnelle
L(t) = r l{u+:z:>t} N(du, dx)
J[s.t[XJR+
qui vérifie clairement les relations (7.1) et (7.2). La variable L(O) vaut
r l{u+:z:>o} N(du, dx) = L l{tn s.tn+/Tn>O},
J[s,O[XJR+ n<O
la loi des grands nombres montre que la suite (t n + O'n)/Inl tend P-presque
sûrement vers -11 À quand n tend vers - 00. De la même façon que dans l'exemple
précédent, il existe No E N, tel que si s < tNo'
1 l{u+:z:>o} N(du, dx) = 1 l{u+:z:>O} N(du, dx),
[s .O[ [tHo .o[
d'où la propriété de couplage en arrière de cette file d'attente. La proposition 7.1
s'applique donc aussi au nombre de clients de cette file d'attente. Pour C E N, la
file M / G / cie peut être vue comme la file M / G /00 à laquelle on a retiré certains
clients, le même type de résultat sera donc vrai pour cette file d'attente.
2. La file d'attente M/GI/l FIFO
Cette file d'attente est étudiée au chapitre 2. Une jolie propriété de bran-
chement de cette file d'attente est tout d'abord démontrée. Elle permet de
déterminer la distribution d'une période d'occupation de cette file d'attente. La
méthode de la chaîne incluse est ensuite introduite pour cet exemple élémentaire.
C'est une façon simple de trouver une chaîne de Markov dans un processus qui
n'est pas forcément markovien.
2.1. La loi de la durée de la période d'occupation. Sous l'hypothèse
p = À1E( 0') < 1, B désigne la durée de la période d'occupation quand la file
d'attente commence avec un client dont le service vaut 0'0. La variable B est un
temps d'arrêt relativement à la filtration (Ft), B est le premier instant où tous
les clients, le client initial compris, ont été servis. Autrement dit, à l'instant B,
tous les services des clients arrivés avant B ont été effectués, ou encore
B = inf { t > 0 / a o + r x N(ds, dx) - t < A } .
J]o.t] xJR+
2. LA FILE D'ATTENTE M/GI/1 FIFO
175
Si deux clients sont présents au début avec leurs services respectifs 0'0, O'b, la
période d'occupation engendrée par ceux-ci peut se décomposer en deux mor-
ceaux. En ignorant tout d'abord le deuxième client, B est la période engendrée
par 0'0. À t = B, il ne reste donc plus que la charge O'b. La période d'occupation
engendrée par O'b est la période d'occupation associée au processus ponctuel
TB N qui est le processus ponctuel N translaté de B. En utilisant que B est
un temps d'arrêt et la propriété de Markov forte pour les processus de Poisson
(Proposition 1.17 page 22), on en déduit que TB N est un processus de Poisson
de même loi que N et indépendant de B. La période d'occupation engendrée
par deux clients est donc la somme de deux variables indépendantes de même
loi que B.
En reprenant la période d'occupation avec un seul client initial, à t = 0'0,
après le départ du client 0, N([O,O'o]) clients sont présents dans la file et de-
mandent respectivement les services 0'1, . . . ,00N([O,O"oD. En généralisant ce qui a
été vu pour deux clients, on peut donc écrire la période d'occupation comme
N([o,O"oD
(7.4) B = 0'0 + L Bi,
1=1
où les (Bi), qui sont les périodes d'occupation engendrées par les N([O, 0'0])
clients présents à t = 0'0, sont des variables indépendantes de même loi que B
et indépendantes de 0'0. Le client 0 engendre N([O, 0'0]) clients. Si X(ç) désigne
la transformée de Laplace d'une variable aléatoire X prise en E C, en utilisant
l'équation précédente, il vient
B( ) = IE(exp( - B))
= E (J exp ( -€ (x + N ]) Bi) ) u( dx) )
= E (J e-{x B(€)N([O.x]) U(dX))
= E (J exp (-€x - Àx(l - B(€))) U(dX)) = ü(ç + À(l - B(ç))).
Il est facile de vérifier que, pour x > 0, l'application f : y ü(x + À(l - y))
est convexe, vaut E(exp( -(x + À)O')) pour y = 0 et IE(exp( -xO')) pour y = 1 et
donc possède un unique point fixe sur l'intervalle [0,1].
La condition de stabilité ÀE( 0') < 1 apparaît pour x = o. En effet, si ÀE( 0') <
1, par convexité l'équation y = ü(À(l - y)) n'admet que la solution y = 1 dans
l'intervalle [0,1]. Sinon, il existe un autre point fixe Yc < 1. Il est alors facile de
montrer l'inégalité
IP(B < +00) = lim Ë(x) = Yc < 1.
:z: o
La proposition suivante résume ce qui vient d'être vu.
PROPOSITION 7.2. Pour x > 0, la transformée de Laplace en x > 0 de la
durée de la période d'occupation de la file MIG/1 est l'unique solution sur
176 7. LES FILES DtATTENTE AVEC UNE ENTRÉE POISSONNIENNE
[0,1] de l'équation
y = lE( exp( -(x + À(l - y))uo)).
Il n'est pas en général commode d'utiliser la transformée de Laplace de B
pour estimer r(B > a) avec a grand par exemple. Ici la situation est un peu
plus compliquée puisque la transformée de Laplace elle-même ne s'exprime que
comme solution d'une équation de point fixe. Il reste que l'on peut toujours
dériver successivement en 0 cette équation de point fixe pour exprimer les mo-
ments de la période d'occupation. Plus directement l'équation (7.4) donne en
intégrant l'égalité
E(B) = E( u) 1(1 - À lE( u)),
par récurrence tous les moments de B peuvent ainsi être obtenus. La section 4
du chapitre 3 étudie l'asymptotique de la queue de distribution de la variable B
dans le cas de la file GI IGI Il.
2.2. La méthode des chaînes incluses. Ce paragraphe introduit une
technique qui permet d'étudier des processus qui ne sont par forcément mar-
koviens. L'exemple du nombre de clients dans la file M IGI Il illustre cette
méthode. Il est clair, pour cette file d'attente, que le processus du nombre de
clients (L(t)) n'a pas de propriété de Markov en général. La variable R(t), la
valeur du service résiduel du client en service à l'instant t, doit être ajoutée
à (L(t)) pour obtenir une description markovienne du nombre de clients dans
la file. La méthode de la chaîne incluse consiste à essayer de trouver une suite
d'instants (Tn) pour lesquels la suite (L{Tn)) est une chaîne de Markov. Dans
le cas de la file MI G 1 Il, si les (T n) sont les instants de départ des clients de la
file d'attente (ou encore les instants où le service résiduel vient juste s'annuler),
L{Tn) = L{Tn-1) + N{[Tn-1' TnD - 1,
L{Tn) = N{]t n , t n + un]),
n > 1 si L(Tn-1) > 0,
n > 1 si L(Tn-1) = o.
La suite des départs est définie par
- Tn = Tn-1 + Un, si L(Tn-1) > 0; un service sépare deux départs si la file
est non vide,
- Tn = t n + Un, si L{Tn-1) = 0; le n - 1-ième client laisse la file vide en
partant, le n-ième trouve donc la file vide à son arrivée et par conséquent
est servi immédiatement.
La variable Un est indépendante de L(Tn-1) qui ne dépend du processus marqué
des arrivées que jusqu'à l'instant T n - 1 . La propriété de Poisson montre que le
processus ponctuel N restreint à l'intervalle [Tn-l' Tn[ est indépendant de la
variable L(Tn-1)' par conséquent (L(T n )) est une chaîne de Markov dont les
transitions sont données par
p(n, n + k) = IP' (N([O, u]) = k + 1) = JE ((ÀU)kHe-À/T /(k + 1)!) 1
2. LA FILE D'ATTENTE M/GI/l FIFO
177
pour n > 1, k > -1 et
p(O, k) = JI» (N([O, cr)) = k) = E ((Àcr)ke-À/T jk!) .
Sous la condition p < 1, cette chaîne de Markova une unique mesure invariante
7r, l'équation de mesure invariante associée à cette chaîne est, pour n E N,
7r(n) = L 7r(k)p(k, n),
kEN
ce qui donne dans ce cas l'égalité
1T(n) = 1T(k)E ( (ÀO')n+1-k e- ÀO' ) + 7r(O)E ( (ÀO')n e- ÀO' )
(n+l-k)! n!
= ..ç... 1T(k + l)E ( (Àu)n-k e- ÀO' ) + 7r(O)E ( (Àu)n e- ÀO' ) .
(n- k)! n!
Le premier terme du membre de droite de l'équation précédente est le n-ième
terme de la convolution de (7r(k)) avec la suite (1E((Àu)k exp(-ÀO'))lk!). Aussi,
il est naturel d'introduire g( u) = L 7r( n )u n la fonction génératrice de (7r( n))
en u E [0,1]. L'équation précédente devient
g(u) = ( 2: 7r(k + 1)U k ) E ( e-À/T(l-U») + 1T(O)E(e- À /T(l-U»,
k>O
d'où
g(u) = ( g(u) : g(O» ) E ( e-À/T(l-U») + g(O)E ( e-À/T(l-U») ,
soit
E ( e- Àd (1-U») (1 - u)
g( u) = g(O) u _ E (e-À/T(l-U») .
La relation de normalisation g(1) = LnEN 7r(n) = 1 donne l'identité g(O) = 1- p.
La mesure invariante de la chaîne (L(T n )) a donc pour fonction génératrice
(1 - p) E( e - À 0' ( 1-u) ) (1 - u)
u - E( e- ÀO' (l-u»)
La loi à l'équilibre du nombre de clients dans la file à un instant de départ
d'un client est donc connue. D'après la proposition 12.4 page 301, c'est la loi du
nombre de clients que voit un client qui arrive et la section 1 montre que c'est
aussi la distribution à l'équilibre de (L(t)). La méthode de la chaîne incluse a
donc permis d'exprimer la distribution à l'équilibre d'un processus qui n'est pas
forcément markovien. Un exemple plus élaboré de cette méthode est présenté
dans la section 4.
(7.5)
178 7. LES FILES D'ATTENTE AVEC UNE ENTRÉE POISSONNIENNE
Il est aisé de vérifier que l'expression de la fonction génératrice du nombre de
clients à l'équilibre aurait aussi pu être obtenue en combinant les équations (2.20)
et (2.22) page 53.
3. La file d'attente à une infinité de serveurs
À son arrivée dans la file, chaque client est servi immédiatement et par
conséquent ne reste dans la file que pendant la durée de son service. Si L(t) est
le nombre de clients à l'instant t, en supposant Lo = 0,
L(t) = L l{tn t,tn+Un>t} = N(At),
nEN
avec At = {( s, x) E II4 x II4 1 s < t, s + x > t}. Comme N est un processus de
Poisson d'intensité À dt 0'( dx) sur ll4 x II4, le nombre de clients à l'instant t suit
donc une loi de Poisson de paramètre
Lt À ds u(dx) = À 1 (t - (t - x)+) u(dx) = À 1 x /\ t u(dx).
Asymptotiquement, le nombre de clients converge en distribution vers une loi
de Poisson de paramètre p.
Le processus de sortie. Ce processus n'est autre que D = EnEZ 6t n +u n et
d'après le résultat de Dobrushin, Proposition 1.13 page 17 du chapitre 1, D est
donc un processus de Poisson de paramètre À. Remarquer que lorsque les services
sont exponentiels, cette propriété peut être montrée comme dans le cas de la file
MIMl1 puisque le processus (L(t)) du nombre de clients est un processus de
Markov réversible.
PROPOSITION 7.3. Pour la file d'attente à une infinité de serveurs, la loi
stationnaire du nombre de clients est QP, une loi de Poisson de paramètre
p et le processus de départ est un processus de Poisson de paramètre À. De
plus pour t > 0,
IIIPo(L(t) E .) - QPllvt < 1 - exp (-À1E((O' - t)+)) ,
où Il . IIvt désigne la norme en variation totale (voir l'annexe D J.
DÉMONSTRATION. Il ne reste que l'inégalité sur la vitesse de convergence à
prouver. Il suffit de montrer l'inégalité suivante. Si pour 6, 17 E lR.t, 17 < 6, alors
IIQ17 - Qô Ilvt < 1 - e-(Ô-17) .
Si N 1 est un processus de Poisson de paramètre 1 sur IR,
IIQ'1 - Qôll vt = L IIP'(N1([O, 77]) = k) -1P'(N1([O, 6]) = k)1 '
k>O
comme
11{N! ([Ot17])=k} - 1 {Nt ([Otô])=k} 1 < liN! ([1]tô]),tO} (l{Nt ([O,ô])=k} + 1 {Nt ([O,17])=k}) ,
4. LA FILE M/G/1 LIFO PRÉEMPTIF
179
on en déduit
IIQlI - QÔ IIvt < L IP' (N l ([0,71)) = k, N l ([71, 6)) =F 0 )
k>O
+ L IP' (N l ([0,71)) = k, N l ([71,6)) =F 0 ) .
k>O
Cette dernière quantité vaut
r(N 1 ([17,6]) # 0) = 1 - e-(Ô-17) ,
ce qui achève la démonstration de la proposition.
D
4. La file M/G/I LIFO préernptif
Pour cette discipline, un client ne peut être servi s'il y a des clients qui
sont arrivés après lui dans la file. Le temps de séjour d'un client demandant le
service 0'0 est le temps que met la file d'attente pour épuiser le service de ce
client ainsi que tous les services des clients qui trouvent ce client présent dans
la file. Autrement dit, le temps de séjour de ce client correspond à la période
d'occupation engendrée par celui-ci (la durée de celle-ci ne dépend pas de la
discipline de service pourvu que le serveur travaille tant qu'il y a des clients
dans la file d'attente). La variable B définie précédemment et le temps de séjour
d'un client dans la file MIG/1 LIFO ont donc même loi.
Le processus des services résiduels. Notons
S = {(Xi) E }R . /Xi = 0 à partir d'un certain rang} = }R(N).
La file d'attente peut se représenter par un processus de Markov ( Zt ) à valeurs
dans l'espace d'états S,
Z (t) = (Zl (t), Z2(t), . .. ,Zk(t),...)
où Zl (t) est le service résiduel du dernier client arrivé dans la file, Z2(t) le service
résiduel du client non encore servi arrivé avant celui-ci, etc... Le nombre de clients
dans la file est le nombre de coordonnées non nulles de Z (t) et la charge de la file
est la somme des coordonnées. Si la file est vide, on note Q = (0,0, . . . ,0,. . . ) son
état. Ce processus de Markova une chaîne incluse naturelle ( X n) en regardant
ce processus juste avant les instants d'arrivées des clients
X n = lim Z ( t) = (z 1 ( t n - ), Z2 ( t n - ), . . . ,- Z k (t n - ), . . . ).
t/t n
La discipline LIFO étant conservative, la proposition 7.1 montre qu'à l'équilibre
la chaîne (X n ) a même probabilité invariante que le processus de Markov (Z(t)).
Les transitions de cette chaîne sont données de la façon suivante : si X a = (Xi)
est l'état de la file juste avant l'arrivée du client 0, juste après cet instant, l'état
de la file vaut
ro = (Yi) = (0'0, Xl, X2,...) = (0'0, X O ).
180 7. LES FILES D'ATTENTE AVEC UNE ENTRÉE POISSONNIENNE
Juste avant t 1 , date d'arrivée du client suivant, l'état de la file vaudra
( n+1 )
X l = LIQ= Y,91<L +lYi} LYi- t l,Yn+2,Yn+3,... +l{tl L ooYi}Q.
n>O 1
La somme des coordonnées de X n vaut W n le temps d'attente du n-ième client
de la file FIFO. Sous la condition p < 1, la proposition 2.1 page 34 montre que
(W n ) est une chaîne de Markov ergodique. Il en va donc de même pour ( X n )
d'après la proposition 3.13 de Asmussen [2]. Dans la suite, la mesure invariante
de cette chaîne de Markov est explicitée.
Pour cr = (ai) E IR . , notons X l = (Xi) et
<Pl ( a ) = E(e-< . X l» = E (ex p ( - aiXi) ) ,
la transformée de Laplace de X 1. La définition de X 1 donne l'expression suivante
pour la fonction (jJ1 ( a ),
E ( e- À L oo y,)
( n r Yn + 1 +oo )
+ E Le-À Ul Yi X Jn Àe-ÀUe-al(Yn+l-U) du e - U a,Yn+i 1
n>O 0
par conséquent
<Pl ( a ) = E ( e- À L OO y,)
( n À +oo. . )
+ 1E '""'" e -À L..,1 y, X (e- Q1 Yn+l - e- ÀYn + 1 )e - L..,2 Q,Yn+, .
À - al
n>O
En remplaçant les (Yi) par leurs valeurs et en intégrant suivant u, on obtient
( 7.6) (jJ1 ( a ) = Ü ( À ) 4>0 ( À ) +
À al x ( ü(a l ) - Ü(À))<po( a )+ L Ü(À) (<po( À (n). a ) - <po( À (n+1). a )) ) ,
n>O
où a. b désigne la concaténation des vecteurs a = (al, . .. ,an) et b = (b 1 , . .. ,b p ),
a . b = (al, . . . ,an, b 1 , . .. ,b p ) et
ü(ç) = lE (e- CT) ,
À (n) = (À,... ,À),
n fois
l/>O( a ) = lE ( e-< Q .Ko» ,
À = À (+oo) et a = (ai+1).
Il reste à trouver une distribution 1r sur S telle que si :Ka a pour loi 1r il en va de
même pour X l. De façon équivalente, cela se traduit en terme de transformée de
4. LA FILE M/G/1 LIFO PRÉEMPTIF
181
Laplace de la façon suivante, si (jJo est la transformée de Laplace d'une distribu-
tion 1r sur S et si Ka a pour loi 1r, alors (jJ1 = o. Cette distribution 1r est alors
nécessairement la mesure invariante de la chaîne de Markov ( X n ). En posant
n
(jJo( a ) = L pn(l - p) Il h(ai),
n>O 1
avec
h ( ê ) = 1 - ü(ç) = r+ oo IP'( U x) -€x d
ç E( lT ) Jo E( lT) ex,
alors
_ u(À)
u(À)tPo( À ) = 1 _ ph(À) x (1 - p) = 1 - P,
et
(jJO ( À ( n) . a ) - o ( À ( n+ 1 ) . a )
,-n
= L p'h(À)n(h(a1) - h(À)) Il h(aj)(l - p)
i n+1 2
,
= pn+1(l - p)h(À)n(h(a1) - h(À)) L pi Il h(aj+1)
i>O 1
= pn+1h(À)n(h(a1) - h(À))(jJo( a ).
L'équation (7.6) devient
tPl( a ) = 1 - P + À': al tPo( a ) (ü(ad - Ü(À) + p(h(ad - h(À))) 1
en utilisant u( ) = 1 - E( (j )h( ), on obtient
À
(jJ1 ( a ) = 1 - p + À (ph ( al) - al E( lT ) h ( al) )
- al
= 1 - P + ph ( al) (jJo ( a ) = (jJo ( a ) .
La fonction (jJo est donc la transformée de Laplace de la mesure invariante de la
chaîne ( X n)'
PROPOSITION 7.4. Sous la condition p < 1, le processus de Markov (Z(t))
des services résiduels de la file d'attente servie par la discipline LIFO pré-
emptive a pour mesure invariante la distribution
n ( ) +00
) "'" n Il JP> (j > Zi Il )
1r(dzlJ... 1 dz nl ...) = (1 - P oQ. + L.., p (1 - p) lE(u) dZ i oo(dz i .
n>l 1 n+1
En particulier le nombre de clients de cette file à l'état stationnaire suit
une loi géométrique de paramètre p.
182 7. LES FILES D'ATTENTE AVEC UNE ENTRÉE POISSONNIENNE
DÉMONSTRATION. Il suffit de remarquer que la transformée de Laplace de
la distribution 7r vaut (jJo. En utilisant l'expression de 7r, il est facile de vérifier
que pour n > 0, la probabilité d'avoir n clients pour 7r vaut
fs l{zl>o.... .Zn>O.z,,=o. k>n} 1r(dz) = pn(1- p).
D
Il est remarquable que la loi du nombre de clients à l'état stationnaire ne dépende
de la distribution de (1 que par son premier moment. Pour la discipline FIFO, le
relation (7.5) montre que la distribution de (1 intervient de façon plus détaillée
dans l'expression de la loi du nombre de clients. Pour la file à une infinité de
serveurs, la distribution de (1 n'intervient que par le premier moment dans la
distribution stationnaire du nombre de clients. Cette propriété est habituelle-
ment appelée insensibilité de la file d'attente, une file d'attente est dite insen-
sible si la distribution stationnaire du nombre de clients ne change pas quand
la distribution du service est remplacée par une autre distribution de même
espérance. Ainsi les files d'attente LIFO, à une infinité de serveurs possèdent
la propriété d'insensibilité mais pas la file FIFO. L'insensibilité a été montrée
de façon brutale, en vérifiant l'équation de mesure invariante. Cette propriété
peut être montrée dans un cadre plus général (dans le cas de réseaux de files
d'attente par exemple) en vérifiant un ensemble de relations algébriques que
vérifie la mesure invariante quand toutes les variables sont exponentielles (voir
Burman[6] par exemple).
[6] D.Y. Burman, Insensitivity in queue ng systems, Advances in Applied Probability 13
(1981), 846-859.
CHAPITRE 8
Critères de stabilité
Sommaire
1. Récurrence des chaînes de Markov 184
2. Ergodicité 186
3. Transience 189
Divergence à l'infini d'une chaîne transiente 192
4. Un critère d'ergodicité pour les processus de Markov 194
5. Exemples et applications 197
6. Le théorème de Liapunov classique 201
Ce chapitre concerne l'étude de la convergence en distribution des chaînes
de Markov à valeurs dans un ensemble dénombrable. Lors de l'étude de la file
GI IGI Il au chapitre 2, le résultat de convergence en distribution de la chaîne
de Markov (W n ) est obtenu en s'appuyant sur la représentation explicite de la
variable aléatoire W n en fonction de la marche aléatoire associée aux arrivées et
aux services. Les chaînes de Markov décrivant les systèmes de file d'attente n'ont
pas en général une représentation aussi simple. Dans ce chapitre des critères de
stabilité sont établis pour celles-ci, ils permettent de traiter un grand nombre
de cas. Les deux résultats principaux sont les théorèmes 8.6 pour l'ergodicité
et 8.9 pour la transience. Ces critères de stabilité résultent de l'adaptation au
cadre stochastique d'un résultat classique de stabilité d'équations différentielles
dû à Liapunov[25] en 1892. Les premiers résultats probabilistes de ce type sont
dus, semble-t-il, à Khasminskii dans le cadre des diffusions (voir son livre [24]).
La formulation du critère de Liapunov est rappelée en fin de chapitre dans l'ap-
pendice (voir Hirsch et Smale [25] pour un exposé détaillé de ces questions). Au
chapitre 9, une méthode de renormalisation est introduite, elle présente l'intérêt
d'établir plus précisément l'analogie entre la stabilité d'équations différentielles
déterministes et l'ergodicité des chaînes de Markov.
L'étude est restreinte au cas d'espaces d'états dénombrables pour éviter
les complications, essentiellement techniques, inhérentes aux chaînes de Harris
(voir le livre de N ummelin [39] à ce sujet). Le lecteur pourra aussi consulter les
livres de Fayolle et al. [18] et Meyn et Tweedie [33] entièrement consacrés à ces
questions.
[25] Alexandre M. Liapunov, Problème général de la stabilité du mouvement, Annales de la
Faculté des Sciences de l'Université de Toulouse 9 (1907), 203-475.
184
8. CRITÈRES DE STABILITÉ
Dans tout ce chapitre, (Mn) est une chaîne de Markov homogène irréductible
sur un espace de probabilité (0, F, IP), à valeurs dans un espace d'états dénom-
brable S. La probabilité de transition est notée p(., .) et F = (Fn) désigne la
filtration engendrée par (Mn), Le. Fn = O'(Mo,... ,Mn) pour n > O. Comme
d'habitude, la notation IEx (.) indiquera l'espérance pour la chaîne partant de x.
Pour pEN la variable aléatoire 9 P de 0 dans 0 est la translation dans le temps
associée à la chaîne de Markov, en particulier pour n E N, M n (9P) = Mp+no En
choisissant convenablement l'espace de probabilité 0, une telle variable 9 existe
toujours (voir la section 4 du chapitre 10 page 263).
DÉFINITION 14. Si r est un temps d'arrêt relativement à la filtration F, la
suite induite associée à 'T est la suite croissante (t n ) définie par
t o = 0,
t n = t n - 1 + r o9 tn - 1
pour n > 1. La chaîne induite est la suite (M tn ) et la filtration induite F T est
la filtration associée, F T = (F ) = (Ft n ).
Dans le cas où la chaîne de Markov est ergodique et stationnaire (i.e. Mo
a pour loi la probabilité invariante), la translation 8 1 est un endomorphisme
de l'espace de probabilité (Proposition 10.17 page 264). Si 'T est un temps d'at-
teinte de la chaîne de Markov, l'application 9 T est l'endomorphisme induit défini
page 249.
PROPOSITION 8.1. Les variables (t n ; n > 0) sont des temps d'arrêt et la
chaîne induite (M tn ) est une chaîne de Markov homogène.
DÉMONSTRATION. Pour n > 1 la variable t n est un temps d'arrêt: en
procédant par récurrence, si t n - 1 est un temps d'arrêt, pour k > 1 on a l'égalité
k
{t n = k} = U{t n - 1 = i} n {r 0 9 i = k - i},
,=0
comme {r 0 9' = k - i} E Fk, t n est un temps d'arrêt.
La propriété de Markov forte de (Mn) donne directement la même propriété
pour la chaîne induite, pour x E S
IP(M tn + 1 = xIF ) = IP(M tn + 1 = xlFt n ) = IPM tn (MT = x).
D
1. Récurrence des chaînes de Markov
La proposition suivante est un résultat élémentaire sur la récurrence des
chaînes de Markov.
PROPOSITION 8.2. S'il existe une fonction f : S -t ll4 et K > 0 tels que
a) {xlf(x) < L} est fini pour tout L > 0,
b) IEx (f{M 1 )) < f(x) si f(x) > K,
la chaîne de Markov (Mn) est récurrente.
1. RÉCURRENCE DES CHAÎNES DE MARKOV
185
DÉMONSTRATION. L'argument classique de Doob est utilisé. En posant
T K = inf{k > 01 f(M k ) < K},
comme f(M n ) > K sur l'événement Fn-mesurable {n < T K }, la condition b) et
la propriété de Markov entraînent
E(f(M n + 1 ) 1 Fn) = lEM n (f{M 1 )) < f(M n ) sur {n < T K }.
Autrement dit, la suite (f(MTKl\n)) est une surmartingale positive, d'après le
théorème B.3 page 334 celle-ci converge Ir-presque sûrement vers une limite finie.
Sur l'ensemble {TK = +oo}, la suite (f(M n )) est donc Ir-p.s. convergente.
L'irréductibilité de la chaîne et la condition a) montrent que, pour tout L>O,
presque sûrement la suite (f(M n )) visite le complémentaire de l'ensemble fini
{x 1 f (x) < L}, par conséquent presque sûrement
limsupf(M n ) = +00.
n-t+oo
On en déduit que la variable T K est donc Ir-presque sûrement finie, la chaîne est
donc récurrente. D
DÉFINITION 15. Une fonction f : S -t IR est dite sur-harmonique pour la
chaîne de Markov (Mn) si IB:.z:(f(M 1 )) < f(x) pour tout x E S. La fonction est
harmonique s'il y a égalité dans la relation précédente.
PROPOSITION 8.3. Une fonction f sur S est sur-harmonique si et seule-
ment si pour tout x E S la suite (f(M n ) est une surmartingale si (Mn) est
la chaîne de M arkov partant de x.
DÉMONSTRATION. Si f est sur-harmonique, pour n > 1 la propriété de
Markov de (Mn) donne l'égalité E(f(Mn+1)IFn) = EM n (f(M 1 )) et ce dernier
terme est majoré par f(M n ) puisque f est sur-harmonique. La suite (f(M n ))
est une surmartingale.
Réciproquement si pour x E S et (Mn) est la chaîne de Markov partant de
x, la suite (f(M n )) est une surmartingale, donc E(f(M 1 )IFo) < f(M o ) et par
conséquent IEx(f(M 1 )) < f(x). La fonction f est sur-harmonique. D
Le b) de la proposition 8.2 peut se traduire par une propriété de sur-harmonicité
de la fonction f sur une partie de S. La proposition suivante montre toutefois
que cette propriété ne peut être vraie sur tout l'espace si la chaîne est récurrente.
PROPOSITION 8.4. Une chaîne de Markov (Mn) admet une fonction sur-
harmonique positive non constante si et seulement si elle est transiente.
DÉMONSTRATION. En reprenant la preuve de la proposition précédente, la
propriété de sur-harmonicité se traduit par le fait que la suite (f(M n )) est une
surmartingale positive et donc converge presque sûrement. En prenant deux
points x, y de S tels que f ( x) =1= f (y), si la chaîne est récurrente, elle repasse
une infinité de fois par x et par y, ce qui contredit la convergence presque sûre
de (f(M n )), la chaîne n'est donc pas récurrente.
186
8. CRITÈRES DE STABILITÉ
Réciproquement, si la chaîne est transiente, pour Z E S si Tz est le temps
de retour à z, la fonction fz(y) = IPy(Tz < +00) est sur-harmonique. En effet, si
x i= z,
Ex (fz(M 1 )) = Ex (IPM 1 (T z < +00)) = E.z: (l{T z <+oo}) = fz(x).
Comme fz(z) = 1 et fz étant majorée par 1, la fonction fz est sur-harmonique,
positive et bornée. Elle est non constante puisque pour y i= z, fz(y) < 1 par
transience de la chaîne de Markov. La proposition est démontrée. D
2. Ergodicité
Le résultat élémentaire de base concernant l'ergodicité des chaînes de Mar-
kov est contenu dans la proposition suivante.
PROPOSITION 8.5. Si F est un sous-ensemble fini de S et
TF = inf{k > OIMk E F},
si g(x) = Ex (TF) est fini pour tout x E S et IB:.z: (g(M 1 )) < +00 pour tout
x E F, la chaîne de Markov est ergodique.
DÉMONSTRATION. Comme la variable TF est finie presque sûrement, la
chaîne de Markov passe une infinité de fois dans F. Pour p > 1, X p désigne
l'élément de F visité par (Mn) lors de la p-ième visite à F. La propriété de
Markov et l'irréductibilité de (Mn) montrent que (X n ) est aussi une chaîne de
Markov irréductible sur l'ensemble fini F. La chaîne (X n ) a donc une probabilité
invariante 7rF. Le temps de retour strict Tt à F est défini comme
Tt = inf{k > 0IMk E F},
et la mesure 7r sur S par
( T+ -1 )
1f(J) = E.- F f(Md ,
pour toute fonction f bornée sur S. On va montrer que la mesure 7r ainsi définie
est invariante pour la chaîne de Markov (Mn). Les propositions 10.2 et 10.3 au
chapitre 10 généralisent ce type de représentation.
Si x est un élément de S, la définition précédente donne
( T+-1 )
1f(x)=E.- F ?_ l{M.=z} ,
d'où
1f(X)E..: (J(Md) = E.- F ( l{M.=z, OSi<T;}E..: (J(Md)) ;
2. ERGODICITÉ
187
pour i E N, l'événement {O < i < Tt, Mi = x} est Fi-mesurable et en utilisant
la propriété de Markov de (Mn), il vient
1r(x)JF...,(f(Md) = F ( l{M.=:z:. OSi<T;} F (f(Mi+d 1 Fi))
= F ( F (l{M.=:Z:, OSi<T;}f(Mi+d 1 Fi) )
= F ( T l l{Mi=:z:}f(Mi+d) .
La mesure 7r vérifie donc
( T+-1 )
(f(Md) = 1r(x)JF...,(f(Md) = F f(Mi+d
= F (T l f(Mi)) + F (i (MT;))'
Par définition de la chaîne (X n ), M T + = Xl, et comme 7rF est la probabilité
F
invariante de la chaîne (X n ), on déduit
F (f (MT; )) = F (f(Xd) = F (f(X o )) = F (f(Mo)).
Par conséquent En-(f(M 1 )) = 7r(f), 7r est donc une mesure invariante pour la
chaîne (Mn). Par définition de Tt, en décomposant suivant la première transi-
tion de la chaîne de Markov il vient
7r(l) = F (Tt)
(8.1) = 1 + F (lEMl (Tt) l{Ml F}) = 1 + F (lEMl (TF) l{Ml F})
d'où l'inégalité
7r(1) < 1 + F (g(M 1 )) < 1 + sup Ex (g(M1)) < +00.
zEF
La chaîne de Markov irréductible (Mn) a une mesure invariante finie, elle est
donc ergodique. D
Le résultat principal concernant l'ergodicité peut être maintenant établi. La
formulation est due à Filonov[12].
THÉORÈME 8.6. S'il existe une fonction f : S -t 114, K" > 0 et un
temps d'arrêt 'T > 1 intégrable tels que
a) Ex (f(M-r) - f(x)) < -,Ex (r) si f(x) > K,
[12] Y. Filonov, A criterion for the ergodicity of discrete homogeneous Markov chains, Aka-
demiya Nauk Ukrainskoi SSR. Institut Matematiki. Ukrainskii Matematicheskii Zhurnal
41 (1989), no. 10, 1421-1422.
188
8. CRITÈRES DE STABILITÉ
en notant F l'ensemble {x/f(x) < K}, le temps d'atteinte TF de F
TF = inf{k > 01 f(M k ) < K}
est intégrable et
(8.2)
Ex (TF) < f(x)/" x E S.
Si de plus l'ensemble F est fini et
b) Ex (f(M 1 )) < +00 quand f(x) < K,
la chaîne de Markov (Mn) est ergodique.
Une fonction satisfaisant les conditions ci-dessus peut être interprétée comme
une fonction énergie de la chaîne de Markov, cette fonction décroît en moyenne
au cours du temps quand l'état initial est très grand pour la fonction. Ce type de
résultat ( fonction de Liapunov ) existe sous de nombreuses formes. Le corollaire
classique suivant, connu sous le nom de critère de Foster, est obtenu en prenant
le temps d'arrêt 'T - 1.
COROLLAIRE 8.7. S'il existe une fonction f : S -t ll4, K" > 0 tels que
a) Ex (f(M 1 ) - f(x)) < -, si f(x) > K ;
b) Ex (f(M 1 )) < +00 si f(x) < K ;
c) l'ensemble {x E SI f(x) < K} est fini,
la chaîne de Markov (Mn) est ergodique.
La condition a) du théorème précédent est la propriété centrale pour l'ergo-
dicité de la chaîne de Markov. La condition d'intégrabilité b) n'est toutefois pas
superflue comme le montre le petit exemple suivant, qui n'est autre que la chaîne
de Markov associée à un processus de renouvellement discret (voir la section sur
les processus de renouvellement page 30 à ce sujet). La chaîne de Markov (Mn)
est définie par
Mn+1 = Mn - 1 si Mn > 0,
Mn+1 = Zn si Mn = 0,
où (Zn) est une suite de variables i.i.d. La fonction f (x) = x vérifie la relation
1B:.z:(f(M 1 )) - f(x) = -1 si x > O. La condition a) est donc satisfaite. Mais si
Mo = 0, la variable Zo est le temps de retour à 0 de la chaîne de Markov. Celle-
ci n'est ergodique que si Zo est intégrable, ce qui est précisément la condition
supplémentaire b).
PREUVE DU THÉORÈME 8.6. En notant (t n ) la suite induite associée à 'T
(voir la définition 14), si
Il = inf{k > Oltk > TF},
l'ensemble {II > k} = {tk < TF} est F'k(= Ftk)-mesurable puisque TF est un
temps d'arrêt relativement à la filtration (Fn). Par conséquent Il est un temps
d'arrêt relativement à la filtration Fr = (F'k).
3. TRANSIENCE
189
Posons X n = f(M tn ) + 'Ytn. La suite de variables aléatoires positives (X n )
est adaptée à la filtration (F ) et
JF..., (X n +11 :F;.) = JF..., (f( M tn +r(9'n») + -y(t n + r( 8 tn )) 1 F ) 1
la propriété de Markov forte donne l'identité
E.c (X n + 1 1 F ) = 'Ytn + EM tn (f(M-r) + 'Y r ) ;
l'inégalité f(M tn ) > K est vraie sur l'ensemble {v > n} = {t n < TF}, par
conséquent
E.c (X n + 1 1 F ) - X n = lEM tn (f(M-r) - f(M tn ) + 'Yr) < 0
sur l'ensemble {v > n} d'après la condition a). Autrement dit (XI/An) est une
surmartingale positive relativement à la filtration Q. En particulier 1Ex (XI/An) <
X o , soit
1Ex (f(M tvAn ) + 'Ytl/An) < f(x).
La fonction f étant positive, le théorème de convergence monotone montre
l'inégalité Ex (tl/) < f(x )l'Y. Comme tl/ > TF, on en déduit la majoration du
temps de retour à F, E.c(TF) < f(x)/'Y pour tout x E S, et, pour x E F la
condition b) donne l'inégalité
JF..., (IEMl (TF)) < JF..., ( f( d ) < +00.
La proposition 8.5 permet de conclure que la chaîne de Markov est ergodique. 0
La relation (8.2) n'est pas informative pour x E F, puisque dans ce cas
TF = o. En prenant
Tt = inf{k > OIMk E F},
si F = {O}, cette variable est le classique temps de retour à o. Les deux variables
Tt et TF coïncident pour Mo = x ri. F et E.c(Tt) < f(x)/'Y dans ce cas. Pour
x E F, l'inégalité suivante s'obtient de la même façon que la relation (8.1)
IB:.c (Tt) < 1 + IB:.c (lEM 1 (TF)) ,
et la relation (8.2) donne finalement la majoration
(8.3) E.c (Tt) < 1 + IB:.c (f(M 1 )) l'Y.
3. Transience
Cette section donne un critère de transience pour une chaîne de Markov.
Le premier résultat est un critère de non ergodicité; il est dû, semble-t-il, à
Tweedie.
PROPOSITION 8.8. S'il existe une fonction non constante f : S -t 114 et
K > 0 tels que K < sup{f(x),x E S} et
a) E.c (f(M 1 )) > f(x) si f(x) > K ;
b) sup E.c ( If(M 1 ) - f(x)1 ) = C < +00,
x:f(x) K
la chaîne de Markov (Mn) ne peut être ergodique.
190
8. CRITÈRES DE STABILITÉ
DÉMONSTRATION. La fonction f étant non constante, quitte à augmenter K,
il est loisible de supposer que inf{f(x)lx ES} < K. Si l/ = inf{k > 0lf(Mk) <
K}, la condition a) exprime que la suite (f(M nAJI )) est une sous-martingale
positive, en particulier pour tout x ES,
(8.4)
Ex (f(M IIAn )) > f(x).
Si la chaîne est ergodique, la variable l/ est intégrable et
f(M IIAn ) !4 f(MJI)
quand n tend vers l'infini. En effet, l'inégalité
Ex (lf(M JlAn ) - f(MJI)1) < E.c ( If(Mk+d - f(Mk)l )
JlAn
= E..: ( E..:(lf(Mk+d - f(Mk)l) l,rk)l{,,>k}) ,
et la propriété de Markov donnent la majoration
(8.5) E..: (lf(M"l\n) - f(M,,)I) < E..: ( IEMk (If (Ml) - f(MO)l)l{,,>k}) .
En remarquant que l'inégalité f(M k ) > K est vérifiée sur l'événement {l/ > k},
la condition b) montre que ce dernier terme est majoré par
C E..: ( l{">k}) = CE..: ((v - n)+),
et donc tend vers 0 quand n tend vers l'infini. La convergence en norme L 1 est
donc vraie sous l'hypothèse d'ergodicité de la chaîne. En faisant tendre n vers
l'infini dans l'équation (8.4), on obtient l'inégalité E.c (f(MJI)) > K pour tout
x ES. Si f ( x) > K, ceci contredit la définition de l/ puisque f (M JI) < K. La
proposition est démontrée. 0
La condition b) sur les sauts n'est pas superflue, en effet si (Mn) est la chaîne
de Markov sur N telle que
- p(O, 1) = 1 ;
- p(n, n + 1) = 1 - p(n, n - 1) = p < 1/2,
En prenant la fonction f ( x) = x, pour x > 1,
n > 1.
E.c (f(M 1 ) - f(x)) = 2p - 1 < O.
La fonction f satisfaisant les conditions du théorème 8.6, ce pavé peut donc
écraser la mouche suivante : cette chaîne est ergodique. Si f (x) = a X avec a =
(1 - p)lp, pour x > 1 on a l'égalité Ex(f(M 1 )) = f(x), la condition a) est
satisfaite pour cette fonction et la chaîne est ergodique.
Les conditions a) et b) ne sont pas suffisantes pour déduire la transience de
la chaîne de Markov, si f(x) = x la marche aléatoire symétrique avec réflexion
en 0 satisfait a) et b) mais est récurrente.
3. TRANSIENCE
191
Le théorème suivant donne un critère simple. C'est une variante d'un résultat
plus général dû à Lamperti[24] (quï lui-même attribue à Doob ces idées).
THÉORÈME 8.9. S'il existe une fonction f : S -t II4 et K, '"Y > 0 tels que
sup{f(x), x E S} > K et
a) Ex (f ( Ml) - f ( x )) > '"Y si f ( x) > K,
b) sUP:z:ES Ex (lf(M 1 ) - f(x)12) < +00,
la chaîne de Markov (Mn) est transiente.
DÉMONSTRATION. Comme sup{f(x), x E S} > K, d'après la condition a)
il existe Xo E S tel que f(xo) > K + '"Y. La probabilité de transition q(.,.) est
définie de la façon suivante :
q(x,y) = IP:z:(M 1 = y), f(x) > K,
q(x,y) = IP:z:(M II = y) = o:z:o(y), f(x) < K,
où v est le temps d'atteinte de Xo par la chaîne de Markov. La variable v peut
être supposée finie presque sûrement sinon la chaîne (Mn) n'est pas récurrente
et la démonstration est terminée. Une chaîne de Markov (N n ) associée à q vérifie
clairement
(8.6)
(8.7)
1E:z:(f(N 1 ) - f(x)) > 'Y,
pour tous les x ES, de plus
(8.8) A = supEx (lf(N 1 ) - f(x)12)
:z:ES
< supEx (lf(M 1 ) - f(x)12) + (f(xo) + K)2 < +00.
:z:ES
Pour B > 0 et n E N on pose
1
Zn = B + J(N n ) 1
et (Qn) désigne la filtration engendrée par la suite (Zn). La propriété de Markov
de (N n ) donne la relation
(8.9) IE{ Z n+d9n) - Zn = !E Nn ( B + (Nd - B + (No) ) = 6.(N n ),
en notant pour x E S, (x) = Ex (l/(B + f(N 1 )) - IJ(B + f(x))). Il est facile
de vérifier l'identité
(B + J(x))6.(x) + JE., (J(Nd - J(x)) = JE., ( (f(N1) - f(x))2 )
B + f(x) (B + f(N 1 ))(B + f(x)) ,
les inégalités (8.7) et (8.8) donnent donc la majoration
6.(x) < (B + (X))2 ( -'Y + ) ,
[24] J. Lamperti, Criteria for the recurrence or transience of stochastic process. l, Journal of
Mathematical Analysis and Applications 1 (1960), 314-330.
192
8. CRITÈRES DE STABILITÉ
par conséquent, si B est choisi suffisamment grand la quantité (x) est négative
pour tout x E S. De la relation (8.9) on déduit que la suite (Zn) est une surmar-
tingale positive. La fonction g(x) = 1/(B + f(x)) est donc sur-harmonique pour
la chaîne (N n ) (Proposition 8.3) et comme elle est non constante sur son es-
pace d'états, la chaîne de Markov (N n ) est donc transiente (Proposition 8.4). Si
No = Xo l'ensemble 0 0 = {N n # xo, \:ln > 1} est donc de probabilité positive. La
définition (8.6) de la probabilité de transition q(., .), montre que, sur l'ensemble
0 0 la suite (N n ) ne passe pas dans l'ensemble {x; f(x) < K}. Les probabilités
de transition p(., .) et q(.,.) étant identiques en dehors de cet ensemble, on en
déduit que IP:z:o(Mn # Xo, \:ln > 1) > o. La chaîne de Markov (Mn) est donc
transiente. 0
La condition a) est bien sûr la principale raison de la transience de la chaîne
de Markov. Une condition sur les sauts, la condition b) dans la formulation, est
toutefoÏs nécessaire comme le montre l'exemple suivant:
- Pour a > 0, on définÏt la probabilité de transition p(., .) sur N - {O, 1}
par
- p(n, n + 1) = 1 - 1/(n Q logn) pour n > 2,
- p(n,2) = 1j(n Q logn) pour n > 2.
Si f(x) = x, la chaîne de Markov (Mn) associée à p(.,.) vérifie la relation
1 x - 2
Ex (f ( M1) - f(x )) = 1 -
x Q log X x Q log x
pour x > 2. On a deux cas :
- a < 1, comme
lim Ex (f(M 1 ) - f(x)) = -00,
:z: +oo
en utilisant le théorème 8.6, on en déduit l'ergodicité de cette
chaîne de Markov.
- a > 1 et pour x assez grand Ex (f(M 1 ) - f(x)) > 1/2. Si T est le
temps de retour à 2 partant de 2, sa loi est donnée par
n+2 ( 1 ) ( n+2 ( 1 ) )
!P(T > n) = If 1 - ka log k = exp - log 1 - ka log k 1
pour n E N.
Si a > 1, il est facile de vérifier que IP(T = +00) > 0, la chaîne est
donc transiente. Si a = 1, la condition a) du théorème précédent
est satisfaite mais IP(T = +00) = 0, la chaîne n'est pas transiente
mais récurrente nulle.
Divergence à l'infini d'une chaîne transiente. La condition a) du théo-
rème 8.10 suggère une croissance de f(M n ) supérieure à n'Y. Ce résultat n'est
pas vrai en général, par exemple si l'ensemble {xj f(x) < K} est infini, avec
probabilité positive la chaîne peut rester dans cet ensemble. Le théorème suivant
donne un critère dans ce sens.
3. TRANSIENCE
193
THÉORÈME 8.10. S'il existe une fonction f : S -t ll4 et K, 6 0 , 'Y > 0 tels
que sup{f{x), x E S} > K et
a) Ex (f(M 1 ) - f(x)) > 'Y si f(x) > K,
b) sUPxES lE.: (ex p (Oolf(Md - f(x)I)) < +00,
c) l'ensemble {xl f(x) < K + 'Y} est fini,
la chaîne de Markov (Mn) est transiente et pour x E S, !Px-presque sûrement
(8.10) lim inf f(M n ) > 'Y.
n +<x> n
DÉMONSTRATION. La démonstration utilise la même méthode que la preuve
du théorème 8.9 : se ramener au cas où la condition a) est valable partout et
ensuite construire une surmartingale adéquate.
La chaîne de Markov étant irréductible, le temps de sortie de l'ensemble fini
{xl f(x) < K + 'Y},
v = inf{k > 01 f(Mk) > K + 'Y},
est fini presque sûrement. La probabilité de transition q(.,.) est définie de la
façon suivante :
(8.11)
q(x,y) = !P:z:(M 1 = y),
q(x, y) = !Px(M II = y),
f(x) > K,
f(x) < K.
Par construction, en notant de façon générique (N n ) une chaîne de Markov
associée à la matrice q, pour tout x E S,
(8.12) E:z:(f(N 1 ) - f(x)) > 'Y,
pour tout x E S. Si Mo = No le saut If(N 1 ) - f(No)1 vaut If(M 1 ) - f(Mo)1 si
f(M o ) > K, sinon celui-ci est majoré par
max If(M 1 ) - f(x)l,
:z:,f(x) K
qui a un moment exponentiel d'ordre 6 0 puisque l'ensemble {xl f(x) < K} est
fini d'après l'hypothèse c), par conséquent
(8.13) A = supEx ( ex p (oolf(Nd - f(No)I) ) < +00.
xES
Pour n > 0, 6 > 0 et si 'Y1 tel que 0 < 'Y1 < 'Y est fixé, la variable Zn définie par
Zn = exp (o(n'Yl - f(N n }})
vérifie l'inégalité
(8.14) Ex (Zn+1 1 Qn) - Zn
= ZnIE.: (exp ( O(-Yl - f(Nn+d + f(N n }}) - 11 Qn) 1
194
8. CRITÈRES DE STABILITÉ
si (Qn) est la filtration engendrée par la suite (Zn). La relation précédente devient
avec la propriété de Markov de (N n )
(8.15) !Ex (Zn+1 1 Qn) - Zn = ZnlENn (exp (6X) - 1),
en notant X = 'Y1 - f(N 1 ) + f(N o ). Pour t E IR, il est facile de vérifier les
inégalités élémentaires
e 6t _ 1 + ot < 02 12 e 61tl < 0 2 (C + e6oltl)
pour une constante C indépendante de 6 < 6 0 /2 et t E IR. Pour x E S, en utilisant
l'inégalité précédente et les inégalités (8.12) et (8.13) on déduit la majoration
!Ex (exp (6X) - 1) < 6 ('Y1 - 'Y + 6(C + A)).
En prenant 6 suffisamment petit, le terme de gauche de cette inégalité est donc
négatif pour tout x ES.
La relation (8.15) montre que la suite (Zn) est une surmartingale positive et
par conséquent converge presque sûrement vers une limite finie. En particulier
la suite (n'Y1 - f(N n )) est presque sûrement bornée et donc
1 . ° nf f(Nn) >
lm 1 _ 'Y1,
n--++oo n
en faisant tendre 'Y1 vers 'Y on peut remplacer 'Y1 par 'Y dans cette inégalité.
On revient à la chaîne de Markov (Mn), la sous-suite (Y n ) de (Mn) est définie
par récurrence de la façon suivante :
- Y o = Mo ;
- pour n > 1, Y n = Mp pour un pEN,
- Y n + 1 = Mp+1 si f(Y n ) > K ;
- Y n + 1 = M llp où v p = inf{k > plf(Y n ) > K + 'Y} sinon.
D'après la définition (8.11) la suite (Y n ) est une chaîne de Markov de probabilité
de transition q, presque sûrement elle vérifie l'inégalité
l . . nf f(Yn) >
lm 1 'Y .
n--++oo n -
En particulier presque sûrement f(Y n ) > K à partir d'un certain rang, comme
p( x, .) et q( x, .) coïncident si f (x) > K il existe donc deux entiers (aléatoires)
Po et no tels que Y n = Mpo+n pour tout n > no. La suite (Mn) vérifie donc la
relation (8.10) D
4. Un critère d'ergodicité pour les processus de Markov
Cette partie considère un processus markovien de sauts (X(t)) càdlàg, irré-
ductible sur un espace d'états dénombrable S avec une matrice de sauts Q =
(qij ), (Ft) désigne la filtration naturelle associée à ce processus. Si f est une
fonction sur S, on note pour x E S
Q(f)(x) = L qzi(f(i) - f(x)),
ES
4. UN CRITÈRE D'ERGODICITÉ POUR LES PROCESSUS DE MARKOV 195
pourvu que cette quantité soit définie. Voir l'annexe C pour les définitions géné-
rales des processus de sauts markoviens. Dans le cas du temps discret, les critères
reposent sur l'étude de la quantité IEx(f(M 1 )) - f(x) pour une fonction f bien
choisie. Dans le cas continu il est donc naturel de considérer, pour x E S,
1F.z (J(X(t)))
t=o
qui vaut Q(f)(x) d'après la relation (C.1). Par analogie avec le cas discret,
si Q(f)(x) est négatif pour x en dehors d'un ensemble fini, le processus de
Markov sera attiré dans cet ensemble et donc sera récurrent. La proposition 8.13
est la traduction rigoureuse de cette analogie. La proposition suivante est le
correspondant continu de la proposition 8.5.
PROPOSITION 8.11. Si F est un sous ensemble fini de S et TF le temps
d'atteinte de F i. e.
TF = inf{s > OIX(s) E F},
si la quantité g(x) = Ex (TF) est finie sur S et Ex (g(X(l))) < +00 pour tout
x E F, le processus de Markov (X(t)) est ergodique.
DÉMONSTRATION. La suite croissante (t n ) de temps d'arrêt est définie par
t o = 0 et
t n = inf{s > t n - 1 + 1/X(s) E F}
pour n > 1. Noter le décalage de 1 dans la définition de ces temps d'arrêt,
en particulier t n + 1 - t n > 1 pour tout n E N. La propriété de Markov de
(X(t)) montre que la suite (X(t n )) est une chaîne de Markov sur S. Il est facile
de montrer que cette chaîne est aussi irréductible, on note 'lrF la probabilité
invariante de (X(Tn)). Si f est une fonction positive sur S, 'Ir est la mesure sur
S définie par
E.r (f) = l f(x) 1r( dx)
= E.r F (l h J(X(s)) dS) = 1rF(X)1F.z (l tt J(X(s)) dS) ,
il suffit de montrer que cette mesure est finie et que 'Ir est invariante pour le
processus de Markov (X(t)), i.e. En- (f(X(t))) = En- (f) pour tout t > o.
La propriété de Markov de (X(t)) donne la relation
1r(S) = En- F (t 1 ) = 1 + JE,..F (lE X (l) (TF))
= 1 + En- F (g(X(l))) < 1 + supEx (g(X(l))) < +00,
zEF
la mesure 7r est donc finie.
196
8. CRITÈRES DE STABILITÉ
Si f est une fonction positive sur S et t > 0,
(f(X(t))) = L 1r(x)E:c(f(X(t)))
:cES
= L F ( l tt l{X(s)=:I:} dS ) E:c(f(X(t)))
zES 0
1 +00
= F (l{X(s)=:c,tl>S}) E:c(f{X(t))) ds,
:cES 0
l'événement {X(s) = X, t 1 > s} étant Fs-mesurable, en utilisant une nouvelle
fois la propriété de Markov, il vient
(f(X(t))) = L F ( (+oo l{X(s)=:I:.tl>s}f{X{t + s)) dS )
:cES Jo
= En- F (l t' f{X{t + s)) dS) = En- F ([t+tt f{X{s)) dS) ,
d'où l'identité
(8.16) En-(J{X{t))) = En- F ([tt f{X{s)) dS) + En- F (lt+t 1 f{X{s)) dS) .
La propriété de Markov forte du processus (X(t)) (Proposition C.1) donne la
relation
En- F (lt+tl f{X{s)) dS) = En- F (EX(t d (l t f{X{s)) dS) ) ,
comme 1rF est la probabilité invariante de la chaîne de Markov (X(t n )), si la
variable X(O) a pour loi 'lrF, la variable X(t 1 ) a aussi pour loi 'lrF, d'où
En- F ([:+tl f{X{s)) dS) = En- F (l t f{X{s)) dS) .
L'égalité (8.16) donne finalement
En- (J{X{t))) = En- F (l tt f{X{s)) dS) = En- (J),
et par conséquent l'invariance de la mesure 'Ir pour le processus de Markov (X(t)).
La proposition est démontrée. 0
THÉORÈME 8.12. S'il existe une fonction f : S -t 14, des constantes K,
'Y > 0 et un temps d'arrêt r intégrable tels que si f( x) > K,
lE., (f{X{r))) - f{x) < --yIE.,{r),
en notant F = {x 1 f( x) < K}, le temps d'atteinte TF de F est intégrable et
(8.17) Ex (TF) < f(x ) l'Y
pour x F. Si de plus F est fini et Ex(f{X(l))) < +00 pour tout x E S, le
processus de Markov (X(t)) est ergodique.
5. EXEMPLES ET APPLICATIONS
197
DÉMONSTRATION. La preuve est identique à celle du théorème 8.6 (en uti-
lisant le critère d'ergodicité de la proposition 8.11). D
La constante 1 figurant dans la condition d'intégrabilité de la proposi-
tion 8.11 (Ex (g(X(l))) < +00) ou le théorème 8.12 (Ex (f(X(l))) < +00) peut
bien sûr être remplacée par n'importe quelle autre constante.
La proposition suivante donne un critère utilisant explicitement le générateur
du processus de Markov.
PROPOSITION 8.13. S'il existe une fonction f : S -t lR-t- et des constantes
K, 'Y > 0 telles que
a) pour x tel que f(x) > K
Q(f)(x) < -'Y,
b) les variables aléatoires sup{f(X(s))1 s < 1} et Jo 1 IQ(f)(X(s))1 ds sont
intégrables,
c) l'ensemble F = {xlf(x) < K} est fini,
le processus de Markov (X(t)) est ergodique.
DÉMONSTRATION. Si TF désigne le temps d'atteinte de F par le processus
(X(t)), r = TF 1\ 1 est clairement un temps d'arrêt et le processus
(1 (X(r 1\ t)) - I(X(O)) - l'rAt Q(f)(X(s)) dS)
est une martingale locale d'après la proposition C.5 page 348. Les hypothèses
d'intégrabilité b) de la proposition et la proposition B.7 montrent que c'est en
fait une martingale. Si x fi. F, on en déduit l'égalité pour t > 0,
IF..., (1 (X(r 1\ t))) - I(x) = IF..., (l'rAt Q(f)(X(s)) dS) .
En faisant tendre t vers l'infini, d'après la condition b) on peut utiliser le
théorème de convergence dominée pour obtenir l'identité
IF..., (1 (X( r))) - I(x) = IF..., (1'r Q(f)(X(s)) ds )
< -'YEx(r),
d'après la condition a). Il suffit d'appliquer le théorème précédent pour conclure.
D
5. Exemples et applications
La file MIGJ1. Au chapitre 7 page 176, nous avons vu que si Ln désigne
le nombre de clients dans la file à l'instant Tn du départ du n-ième client, (Ln)
est une chaîne de Markov irréductible vérifiant l'inégalité
Ln = Ln-1 + NÀ([T n , Tn + UnD - 1,
198
8. CRITÈRES DE STABILITÉ
si Ln-1 > 0, où Un est le service du n-ième client et N À le processus de Poisson
d'intensité À des arrivées. Sur l'ensemble {La> O}, on a donc
1E(L 1 - La 1 Lo) = 1E(N À ([O, u[)) - 1 = ÀE(u) - 1,
autrement dit, si À1E(u) < 1, la fonction identité est une fonction de Liapunov et
sous cette condition, la chaîne (Ln) est ergodique. Réciproquement si ÀE( u) > 1,
il existe K tel que ÀE( u 1\ K) > 1, si on remplace les services ( un) par les services
bornés ( Un 1\ K), il est clair que la chaîne de Markov (Ln) ainsi obtenue minorera
la chaîne (Ln). De cette façon les sauts de (Ln) ont un moment d'ordre 2 borné.
Avec la même fonction de Liapunov f{x) = x on en déduit que celle-ci est
transiente d'après le théorème 8.10. Par conséquent, (Ln) est aussi transiente
dans ce cas.
Instabilité d'un protocole de communication ouvert :ALOHA. Ce mo-
dèle est un exemple classique de protocole de communication dans un environne-
ment distribué. Des émetteurs se partagent un unique canal de communication.
Chaque unité de temps, il y a possibilité de transmettre un message sur ce ca-
nal. Si au moins deux émetteurs essaient de transmettre chacun leur message
dans la même unité de temps, les messages se superposent sur le canal; chaque
émetteur sait alors que son message n'a pas été transmis à cause de la collision;
il devra effectuer une autre tentative ultérieurement. Les émetteurs ne peuvent
se concerter pour l'accès au canal (en imaginant par exemple que les émetteurs
soient dispersés sur les îles polynésiennes), ils ne peuvent constituer une file
d'attente pour résoudre ce conflit d'accès. Pour éviter des collisions à répétition,
un algorithme simple peut résoudre ce problème (protocole de communication
ALOHA ) : au début de chaque unité de temps, chaque requête tire une pièce
de monnaie de biais p. Si le résultat est pile (avec probabilité 1 - p), la requête
essaie d'accéder au canal, sinon elle attend la prochaine unité de temps. On note
an le nombre de nouvelles requêtes arrivées pendant la n-ième unité de temps,
on suppose que la suite (an) est i.i.d avec E( ao) > o. Si Ln est le nombre de
requêtes en attente à t = n, (Ln) est une chaîne de Markov dont les transitions
sont données par
L 1 = La + ao - l{L: o B:=l}
où les (BI) sont des variables de Bernoulli indépendantes de paramètre p < 1
(le cas p = 1 est trivialement transient). En choisissant no tel que pour n > no,
np(l - p)n-1 < E(ao )/2,
IE(L 1 - La 1 La > no) = IE{ao) - np(l - p)n-1 > 1E(ao)/2.
Comme dans l'exemple précédent, quitte à minorer les ai par ai 1\ K, la chaîne
de Markov (Ln) est donc transiente. Ce protocole de communication est instable
quelle que soit la valeur de p. Le théorème 8.10 montre en plus
liminf Lnln > E(ao).
n--++oo
Comme Ln < L: ai, la loi des grands nombres montre que IP-presque sûrement,
limsupLnln < E{ao),
n--++oo
5. EXEMPLES ET APPLICATIONS
199
d'où lim n -++ oo Lnln = E(ao).
La file GIMlk FIFO. Si pour n > 0, Ln est le nombre de clients présents
dans le système (clients dans la file et clients en service) au moment de l'arrivée
du n-ième client, (Ln) est une chaîne de Markov irréductible. Si N , 1 < i < k,
désignent des processus de Poisson indépendants d'intensité J1., les points du
processus N sont séparés par les durées des services délivrés par le serveur i.
La suite (t n ) désigne le processus d'arrivée des clients; la variable t 1 est supposée
de carré intégrable, E(t ) < +00.
..
C8J
C8J
C8J
C8J
FIG. 1. La file d'attente GIMlk
Les transitions de la chaîne de Markov peuvent se représenter de la façon
suivante, pour n > 1,
(8.18) Ln+! < kv (Ln+l- N (]tn'tn+!])).
En effet, si la file d'attente ne s'est jamais vidée entre t n et t n + 1 , cela entraîne
qu'aucun des serveurs ne s'est arrêté pendant ce temps, dans ce cas
k
Ln+1 = Ln + 1- L:N;(]t n ,t n +1]).
1=1
Sinon, si au moins un serveur s'arrête entre t n et t n + 1, nécessairement la file
est vide depuis cet instant jusqu'à l'arrivée du prochain client et à t n + 1 , par
conséquent Ln+1 < k, ce qui montre la relation (8.18). La majoration
JE(L 1 - Lo 1 Lo = x) < lE ( (1- N;(]O,tl])) V (k - X)) 1
et le théorème de convergence dominée montrent donc la relation
lim JE(L 1 - La 1 La = x) < 1- kJ1.JE(t 1 ),
:1:-++00
ce qui assure de l'ergodicité de la chaîne de Markov d'après le théorème 8.6 si
1 - kJ-LJE(t 1 ) < o.
200
8. CRITÈRES DE STABILITÉ
De la même façon que précédemment, il est facile de voir que pour n E N
k
Ln+1 > Ln + 1 - LN;(]t n , t n + 1 ]),
1
d'où la relation
k
Ln+1 - Ln > 1 - LN;(]t n , t n +1])'
i=l
Si 11 J-LIE(t 1 ) < k la chaîne de Markov (Ln) est donc ergodique et si 1/ J-LIE(t 1 ) > k,
elle est transiente.
Une file d'attente à fonctionnement variable. Les arguments de stabi-
lité vus dans les exemples précédents utilisent le fait que, pour une fonction f
convenablement choisie, la dérive instantanée f(M n + 1 ) - f(M n ) est de moyenne
strictement négative quand f(M n ) est très grand. Le modèle suivant donne un
exemple simple de file stable où cette propriété n'est pas toujours vérifiée.
La file d'attente est à temps discret. Les clients arrivent de façon i.i.d. par
paquets aux débuts des unités de temps et demandent un service d'une unité
de temps. La file d'attente oscille entre deux états, un état de fonctionnement
normal où le nombre de clients arrivant dans une unité de temps a même loi
que la variable aléatoire ao. Elle quitte cet état avec probabilité 1 - ao pour
se retrouver en état perturbé où le nombre de clients suit la loi de la variable
aléatoire al. La file quitte l'état perturbé avec probabilité 1 - al.
La description markovienne de ce modèle est donnée par Mn = (ln, Ln) où
ln est l'état de la file à t = n (0, normal et 1, perturbé) et Ln est le nombre
de clients dans cette file à t = n. Il est clair que Mn = (ln, Ln) est une chaîne
de Markov. Les transitions de la deuxième coordonnée sont données par L 1 =
l + ai -l{l>o}, si (lo,Lo) = (i,l) et pour i = 0,1, la variable ai désigne une
variable de même loi que le nombre d'arrivées par unité de temps quand la file
est en mode i.
Si (1 0 , Lo) = (i, l), on note r le temps de retour de (ln) à i après être passé
par 1 - i et f( i, l) = l. La variable r est clairement un temps d'arrêt et s'écrit
1 + Go + 1 + G 1 où Go et G 1 sont deux variables géométriques indépendantes
de paramètres respectifs ao et al. Une majoration simple donne la relation
l+G o l+Gl
j(M r ) < L aO,k + L a1,k + (Lo - r)+
k=l k=l
l+G o l+Gl
= j(M o ) + L (aO,k -1) + L (a1,k -1) + (r - Lo)+,
k=l k=l
où, pour i = 0,1 et k > 1, ai,k désigne le nombre d'arrivées dans la k-ième unité
de temps si la file d'attente est dans le mode i. Pour ë > 0, si K est choisi tel
que E((r - l)+) < ë pour tout l > K, en prenant l'espérance dans l'inégalité
6. LE THÉORÈME DE LIAPUNOV CLASSIQUE
201
précédente il vient,
lE(i,l) (f(M T ) - f(M o )) < ao) - 1 + JE ad - 1 + E,
- ao - al
pour l > K. Par conséquent si
IE( ao) - 1 lE{ al) - 1 0
+ < ,
1 - ao 1 - al
la chaîne de Markov est ergodique.
Pour cette file d'attente, la dérive moyenne sur un pas de temps vaut
(8.19)
lE{ L 1 - Lo 1 10 = i, Lo > 0) = IE( ai) - 1,
pour i = 0, 1. La condition de stabilité obtenue est plus faible que la condi-
tion E( ao) < 1 et IE( al) < 1 que l'on pourrait retenir comme critère d'ergo-
dicité au vu des relations (8.19). La dérive moyenne sur une unité de temps
n'est pas forcément négative même si l'état de départ est grand. Par contre, la
dérive moyenne sur un intervalle de temps suffisamment long est nécessairement
négative, quel que soit l'état initial grand.
6. Le théorème de Liapunov classique
Si West un ouvert de }Rn contenant 0 et H : W -t }Rn est une application
continue telle que
H(O) = 0,
la solution maximale (i.e. définie sur l'intervalle de longueur maximale) de
l'équation différentielle
X'(t) = H(X(t)),
telle que X(O) = x E West notée (X(x, t)). L'hypothèse sur H assure que le
point 0 est un point d'équilibre de cette équation différentielle, Le. X(O, t) = 0
pour tout t > o. Le théorème suivant donne un critère de stabilité des solutions:
si le point initial n'est pas trop loin du point d'équilibre 0, alors la solution
(X(x, t)) converge vers 0 quand t tend vers l'infini.
THÉORÈME 8.14. S'il existe un voisinage U de 0 et une jonction j : U -t
IR continue, différentiable sur U - {O} telle que
j(O) = 0 et j(x) > 0, si x E U - {O}.
(8.20) S(H(x))j'(x) < 0 pour x E U - {O},
avec S(y) est la somme des coordonnées de y E }Rn, alors le point 0 est
stable, i. e. il existe un voisinage U 1 de 0 tel que pour tout x E U 1 ,
lim X(x, t) = o.
t---++oo
La condition (8.20) montre que, si le point initial n'est pas le point d'équili-
bre, alors dans un voisinage de 0 la fonction t -t j(X(t)) a une dérivée négative,
ce qui force X(t) à converger vers o. Par analogie, en interprétant j(M 1 ) - j(x)
comme la dérivée de n -t j(M n ) en n = 0, la condition b) du corollaire 8.7
202
8. CRITÈRES DE STABILITÉ
revient à dire que cette dérivée doit être strictement inférieure à -'Yen moyenne
en dehors d'un ensemble fini.
CHAPITRE 9
Méthodes de renorrnalisation
Sommaire
1. Renormalisation des processus 204
1.1. Limites fluides 205
1.2. Exemples 205
2. Les limites fluides d'une classe de processus de Markov211
3. Limites fluides et problème de réflexion de Skorokhod219
3.1. La file M/M/1 219
3.2. Les réseaux de Jackson 221
4. Relation entre renormalisation et ergodicité 227
L'absorption en 0 229
5. Limites fluides et équilibre local 232
Un processus de vie et de mort gouverné par un processus ergodique233
6. Appendice: le problème de réflexion de Skorokhod 237
6.1. La dimension 1 238
6.2. Le problème de réflexion à plusieurs dimensions 240
Si (X(t)) est un processus de Markov sur Zd, il est en général difficile d'avoir
des caractéristiques explicites de sa loi stationnaire (si celui-ci est ergodique),
et à fortiori de son comportement transitoire. L'exemple des réseaux de files
d'attente, Chapitre 4, pour lesquels la loi stationnaire est connue est plutôt une
exception, les résultats de forme produit n'étant pas vrais en général. Dans le
même esprit que le chapitre 3, une façon d'obtenir des résultats qualitatifs pour
ces processus consiste à étudier certaines asymptotiques du processus. Il s'agit ici
de modifier le processus en accélérant le temps et en renormalisant en espace par
un paramètre et d'étudier le comportement du processus modifié quand ce pa-
ramètre tend vers l'infini. Comme on le verra, ce procédé présente l'avantage de
gommer certaines fluctuations qui n'influent pas sur le comportement principal
du processus. Le processus limite ainsi obtenu est une caricature du proces-
sus initial, cela peut être par exemple la solution d'une équation différentielle
déterministe. Dans le cas d'une marche aléatoire, ce procédé donne une fonc-
tion linéaire ayant pour pente la moyenne de ses accroissements. Les idées de
renormalisation des processus ont émergé récemment dans le domaine des files
d'attente, pour étudier les questions d'ergodicité et de transience notamment.
Dans un autre contexte, la physique statistique, ces idées sont plus anciennes,
204
9. MÉTHODES DE RENORMALISATION
des procédés similaires y sont utilisés avec des techniques très différentes, voir
l'article de Comets[9] à ce sujet.
Ce chapitre est organisé de la façon suivante. La section 1 introduit les
principales définitions et notions relatives à la renormalisation d'un processus,
les limites fluides notamment qui sont les limites des processus renormalisés.
Plusieurs exemples illustrent ces définitions. La section 2 s'intéresse à une classe
de processus de Markov qui couvre de nombreux cas. Des résultats généraux
de convergence et de relative compacité de ces processus renormalisés y sont
démontrés. La section 3 utilise les résultats de l'annexe 6 sur le problème de
réflexion de Skorokhod pour identifier les limites fluides de plusieurs processus.
La section 4 fait le lien entre les questions d'ergodicité et le retour à 0 des limites
fluides. La section 5 étudie un processus renormalisé dont une des composantes
est à l'équilibre.
Dans ce qui suit, (X(x, t)) est un processus markoviens de sauts càdlàg,
irréductible sur un espace d'états dénombrable S qui part de x E S, Le. tel que
X(x,O) = x ES; on utilise aussi la notation (X(t)) pour ce processus s'il n'y
a pas d'ambiguïté sur le point initial. Comme d'habitude la notation N (w, dx),
w E n, désigne un processus de Poisson sur IR, de paramètre ç E Il4, et tous
les processus de Poisson utilisés sont indépendants. La topologie de Skorokhod
sur l'espace des probabilités sur l'ensemble des fonctions càdlàg D([O, T], IR d )
est utilisée constamment. La lecture de la partie 2.0.2 en annexe est vivement
recommandée, la définition et les principaux résultats concernant cette topologie
sont rappelés.
1. Renormalisation des processus
DÉFINITION 16. Si f est une fonction strictement positive sur S et x E S,
on note (II X Il f ( x, t)) le processus défini par
II X II ( t ) = f(X(x, f(x)t))
f x, j(x) ,
(9.1)
pour x E S et t > o. Si S est inclus dans un espace vectoriel sur IR, ( X f(x, t))
désigne le processus (X (x, t)) renormalisé par la fonction f
- 1
(9.2) Xf(x,t) = f(x) X(x,f(x)t).
S'il n'y a pas d'ambiguïté sur le point initial x ou la fonction f, l'indice cor-
respondant sera omis, i.e. les notations ( X (x, t)) et (1IXII(x, t)) ou ( X f(t)) et
(1IXllf(t)) seront utilisées pour désigner ces processus.
Remarquer qu'à l'origine IIXllf(x,O) = 1; si S est dans un espace vectoriel
et si la fonction j est une norme sur l'espace S, alors IIXllf(x, t) = f( X f(x, t))
pour t > 0, le processus ( X f (x, t)) part d'un état qui est de norme 1. La renorma-
lisation consiste à accélérer le temps d'un facteur j(X(O)) tout en renormalisant
en espace par 11 f(X(O)).
[9] Francis Comets, Limites hydrodynamiques, Astérisque (1991), no. 201-203, Exp. No. 735,
167-192 (1992), Séminaire Bourbaki, Vol. 1990/91.
1. RENORMALISATION DES PROCESSUS
205
Dans ce chapitre on considère le cadre des processus de Markov à temps
continu. Le cadre du temps discret est similaire: si (X n ) est une chaîne de
Markov, le processus renormalisé est défini comme
II X II ( t ) = f{X Lf(x)tJ)
f x, f( x) ,
si Xo = x E S et t E Il4 (comme d'habitude, LyJ désigne la partie entière de
y E IR). Les résultats de ce chapitre sont aussi vrais dans ce cadre.
1.1. Limites fluides.
DÉFINITION 17. Une limite fluide associée au processus de Markov (X(t))
et à une fonction positive f est un point d'accumulation des lois de probabilité
des processus
{ ( !(X(;(:t)t)) ) ; x ES} = HIIXllf(x, t)) ; x E S}
sur l'espace des fonctions càdlàg muni de la topologie de Skorokhod.
Si l'espace d'états S est inclus dans un espace vectoriel de dimension finie,
un point d'accumulation des lois de probabilité de l'ensemble de processus
{( !tX) X(x,!(x)t)) ; x ES} = {( X f(X,t)) ; x E S}
est aussi appelé par abus de langage une limite fluide. Une limite fluide est
donc une loi de probabilité Q d'un processus càdlàg. Quitte à agrandir l'espace
de probabilité initial, il est possible de représenter une limite fluide comme un
processus (W(t)) de loi <Q défini sur l'espace de probabilité de base.
Les limites fluides donnent une expression asymptotique des trajectoires du
processus de Markov, et donc le comportement qualitatif de celui-ci pour des
grandes valeurs initiales.
1.2. Exemples.
1.2.1. Une marche aléatoire sur Z. Pour À > 0, la variable N). est un
processus de Poisson d'intensité À sur IR (comme d'habitude N).(A) désigne le
nombre de points de N). dans un borélien A de IR); (Yi) est une suite i.i.d.
de variables aléatoires à valeurs entières de carré intégrable. Pour x E Z, le
processus (X ( x, t)) défini par
N). (]O,t])
X(x, t) = x + L Yi
1=1
est un processus de Markov. En posant j(z) = Izl pour z E Z, le processus
renormalisé associé ( X f(x, t)) vaut
_ 1 ( N). (]O,lxlt]) )
Xf(X,t) = j;î x + Yi 1
206
9. MÉTHODES DE RENORMALISATION
si t > 0 et x E Z. Avec les propriétés d'indépendance du processus de Poisson
et de la suite (Yi), il est facile de vérifier que le processus
( X j(x, t) - 1:1 - ÀIE(Yo)t)
( 1 NÀ(]O,lxlt]) IE(Y; ) )
= j;1 (Yi - IE(Y o » + IXI (N),(]O,lxlt]) - Àlxlt)
est une martingale dont le processus croissant est donné par
( ':1 2 Àt (var(Y o ) + E(Y o )2) ) .
L'inégalité de Doob (Théorème B.4 page 334) permet d'obtenir la convergence
uniforme sur les compacts du processus renormalisé, Le. pour tout E > 0,
lim r ( sup l X f(x, s) - sgnx - ÀIE(Y o ) S I > E ) = 0,
Ixl-++oo O<s<t
où sgnz = 1 si z > 0 et -1 sinon.
Sur l'espace D(lllt, IR) la convergence au sens de la topologie de la conver-
gence uniforme sur les compacts entraîne la convergence en distribution pour
la topologie de Skorokhod (voir l'appendice B, page 353). On en déduit que le
processus
( X f (x, s) - sgn x - ÀIE(Y o ) s)
converge en loi vers le processus identiquement nul pour la topologie de Sko-
rokhod sur les probabilités. Il y a donc deux limites fluides, (-1 + ÀIE(Y o ) t) et
(1 + ÀIE(Y o ) t), ce sont des processus déterministes linéaires.
L'accélération du temps et la renormalisation spatiale a pour effet de ne
conserver que la tendance principale du processus de Markov (croissance linéaire
en À1E(Y o )) et de gommer les fluctuations (browniennes) autour de cette trajec-
toire déterministe. Si IE(Y o ) = 0, la renormalisation n'est pas très informative
sur l'évolution du processus puisque la limite est constante.
D'autres types de renormalisation sont possibles. Ainsi, dans l'exemple pré-
cédent, si IE(Y o ) = 0, il est naturel de considérer le processus
( (X(X, f(x)t) - X» )
f(x)
(9.3)
qui converge en distribution vers ( v À var(Yo)B(t)) d'après le théorème de Dons-
ker; (B(t)) est le mouvement brownien standard.
Les renormalisations considérées dans ce chapitre sont du type loi des grands
nombres, la renormalisation (9.3) est du type théorème central limite.
1.2.2. La file d'attente MI Mil. On note À le taux d'arrivée, J1. le taux de
service et L(t) le nombre de clients de la file à l'instant t > o. Toujours avec
f (z) = z si ZEN, le processus renormalisé est défini par
- 1
L(N, t) = N L(Nt),
1. RENORMALISATION DES PROCESSUS
207
si L(O) = N E N. La proposition 5.17 page 124 du chapitre sur la file MIMI1
montre la convergence en distribution
( L (N, t)) (1 + p. - J.L) t)+) ,
sur l'espace D(lR.t, IR) muni de la convergence uniforme sur les compacts. Avec
le même argument que dans l'exemple précédent, la convergence a donc lieu
aussi pour la topologie de Skorokhod (Proposition D.5 page 353). La fonction
(1 + (.À - J1.) t) + est donc l'unique limite fluide de ce processus de Markov.
lN.2(t)/N
#JI
À I
r À1
#J2
#J2
l "
"
"
"
"
"""" L (XN,t)
"
"
"
"
"
"
"
"
"
"
#JI -#J2
l-y
..----
À I -#JI """
"
"
""" #JI
"
"
Àl
lN.I(t)/N
o
y
1
FIG. 1. Files en tandem: une trajectoire limite
1.2.3. Deux files d'attente en tandem. Le processus d'arrivée de clients
est de Poisson de paramètre .Àl' les clients se font servir dans la première file
d'attente au taux J1.1 puis passent dans la deuxième file qui délivre le taux J1.2.
Pour i = 1, 2 la quantité li (t) désigne le nombre de clients dans la file i à l'instant
t > o. Le processus de Markov (L(t)) = (ll(t), l2(t)) est à valeurs dans . On
suppose que .À 1 < J1.2 < J1.1 ce qui assure en particulier l'ergodicité du processus
(L(t)) (Proposition 4.5 page 85).
Le raisonnement qui suit n'est pas complètement rigoureux. Cet exemple
illustre une façon dont on peut identifier en pratique les limites fluides. En
formulant le problème correctement (comme un problème de réflexion de Sko-
rokhod), le résultat est établi dans la section 3. La section 5 reprend aussi cet
exemple.
On se donne une suite d'états initiaux (XN) telle que, pour N E N,
- XN = (lN.l(O),lN.2(0));
- lN,l (0) + lN,2 (0) = N;
- la suite (lN,l(O)IN) converge vers y E [0,1].
208
9. MÉTHODES DE RENORMALISATION
Si f(y) lIyll = IY11 + IY21, pour y = (Y1,Y2) E JR2, le processus renormalisé
associé à f et partant de x N est à valeurs dans JRt, il est défini par
L ( ) = ( lN,l (Nt) lN,2(Nt) )
xN,t N ' N .
La première composante de L (XN, t) correspond au processus renormalisé d'une
file MI Mil, par conséquent on a la convergence
( lN.1 Nt) ) ---t ((y + (>'1 - J.Ld t )+) ,
quand N tend vers l'infini (pour la topologie de Skorokhod). De plus, si TN est le
premier instant où la file 1 se vide, presque sûrement la variable TN lN tend vers
t 1 = yl(J1.1 - À 1 ) quand N tend vers l'infini. Tant que la file 1 est non vide, la
deuxième file d'attente reçoit un flot poissonnien de paramètre J-L1, on en déduit
la convergence
( lN2(Nt) )
, N -t (1 - Y + (J1.1 - J1.2)t) ,
pour t < t1.
Après l'instant TN, partant de 0, la file 1 atteint l'équilibre rapidement (Pro-
position 5.8), son processus de sortie est donc asymptotiquement de Poisson.
L'échelle de temps rapide du processus renormalisé permet donc de considérer
la file 2 comme une file MIM/l recevant un flux poissonnien de requêtes de
paramètre À 1 et partant avec l N,2 (TN) clients initiaux, avec presque sûrement
def . l N,2 ( TN ) J1.1 - J1.2
Y1 = hm N = 1 - Y + À y = 1 + (..\1 - J1.2)t 1 .
N +oo J1.1- 1
Par conséquent, pour t > t 1 ,
( lN2(Nt) ) +
, N -t (Y1 + (À 1 - J1.2)(t - t 1 ))
= (1 + (À 1 - J1.2)t)+
Pour résumer,
(9.4)
{ (y + (À 1 - J-L1)t, 1 - Y + (J1.1 - J-L2)t)
( L (XN, t)) -t
(0, (1 + (À 1 - J1.2)t)+)
pour t < t 1 ,
pour t > t 1 ,
avec t 1 = yl(J1.1 - À 1 ).
Il est facile de vérifier que les seules limites possibles de l'ensemble des pro-
cessus renormalisés { L ( x, t) ; x E } sont les fonctions déterministes linéaires
par morceaux définies par (9.4) avec y parcourant l'intervalle [0,1]. Noter que
pour la file MIMl1 il n'y a qu'une seule fonction déterministe possible.
1. RENORMALISATION DES PROCESSUS
209
1.2.4. Non-unicité de la limite. Dans les exemples précédents, si la suite
des états initiaux renormalisés (XN 1 f(XN)) a une limite x, la limite fluide ob-
tenue ne dépend que de x, pas de la suite (XN) proprement dite. L'exemple
ci-dessous montre que ce n'est pas toujours le cas.
On considère un processus de sauts sur S = Z x N dont la matrice de sauts
Q = (qxy) est définie par
pour i E Z, q(i,j)(i,j-1) = a SI j > 1, q(i,j)(i,j+l) = (3 SI j > 0,
pour j E N, q(i,j)(i+l,j) = À SI i > 0, q(i,j)(i-l,j) = J1. SI i > 0,
q(i,j)(i-l,j) = À SI i < 0, q(i,j)(i+l,j) = J1. SI i < 0,
q(O,j)(l,j) = À/2, q(O,j)( -l,j) = À/2.
>-'/2 >-'/2
---- --
(3
À+
cr
À-p,
X N(t)
>-.-p,
{3
+À
cr
1
o
FIG. 2. Trajectoires limites d'un processus de sauts sur Z x N
On suppose que a > {3 et À > J1.. Si (X(t)) = (Xl (t), X 2 (t)) est le processus
de Markov associé, (X 2 (t)) est le processus associé à une file MIM/l stable dont
le taux d'arrivée vaut (3 et le taux de service a. On prend la même fonction f
que dans l'exemple précédent. Pour t > 0, on note ( X N(t)) = (XN,l(t), X N ,2(t))
le processus renormalisé associé. La deuxième composante de celui-ci converge
donc vers ((1 + (a - (3)t)+).
Le processus de Markov (IXl(t)1) est celui d'une file d'attente MIMl1 dont
le taux d'arrivée vaut À et le taux de service J1., il est donc transient d'après
l'hypothèse À > J1.. Pour cette file, il n'y a qu'un nombre fini de passages par
0, par conséquent ( Xl (t)) est presque sûrement de signe constant à partir d'un
certain temps.
Si X(O) = (Vii, N), XN,l(t) est positif pour tout t > 0 avec une probabilité
qui tend vers 1 quand N tend vers l'infini. En effet, une file MIMII transiente
qui part de Vii ne revient pas à 0 avec une probabilité qui tend vers 1. Par
conséquent, la première composante ne peut changer de signe, et donc
lim X N ( 0) = (0, 1) et ( X N ( t )) -t (( À - J1.)t, (1 + (a - (3)t) + )
N +oo
De la même façon si X(O) = (-Vii, N),
lim X N (0) = (0, 1) et ( X N ( t )) -t (- (À - Il) t, (1 + (a - (3)t) +) .
N +oo
210
9. MÉTHODES DE RENORMALISATION
Les deux suites de points initiaux ont la même limite mais elles donnent lieu à
deux limites fluides différentes.
1.2.5. Une limite fluide non déterministe. La renormalisation, on l'a vu,
gomme certaines fluctuations aléatoires. La limite du processus renormalisé peut
cependant conserver une partie aléatoire.
On reprend l'exemple précédent et la suite des états initiaux (XN) = (0, N).
Par symétrie, la première coordonnée converge vers +00 ou -00 avec probabilité
1/2. La première composante du processus renormalisé a donc deux trajectoires
équiprobables ((À - J1.)t) et (-(À - J1.)t). La limite du processus renormalisé
( X N(t)) n'est pas déterministe dans ce cas. Le changement d'échelle de temps
n'affecte en rien le caractère aléatoire du signe final de (x 1 (t) ).
1.2.6. Un processus sans limite fluide: la file MIMloo. On note À le
taux d'arrivée, J1. celui des services et (L(t)) le processus du nombre de clients
de la file. La fonction de renormalisation est la même que pour la file MI MI 1.
Si l'état initial est N, on note
- 1
LN(t) = N L(Nt)
le processus renormalisé. Si Ta est le premier instant d'atteinte de a E N du
processus (L(t)), les propositions 6.8 et 6.10 page 149 donnent pour e, K > 0,
lim r N ( T. N o > e ) = 0, et lim ro ( N EN < K ) = o.
N +oo N +oo
Pour 0 < s < t,
r N ( sup L N(U) > e ) < rN ( T. N o > S ) + r N ( T. N o < s, sup L N(U) > e ) ,
s<u<t s<u<t
- - - -
la propriété de Markov forte montre que le deuxième terme du membre droit de
cette inégalité est majoré par
r ( TE N < t )
o N - .
On en déduit la convergence
lim r N ( sup L N(U) > e ) = 0,
N-++oo s<u<t
pour tout e > 0 et 0 < s < t.
Le processus renormalisé ( L N (t)) converge vers le processus nul en dehors de
t = o. En reprenant les notations de la partie 2.0.2 sur la topologie de Skorokhod,
on a l'inégalité
d T (!, g) > I!(O) - g(O)1
pour toutes les fonctions!, g de D([O, T], IR) où d T (!, g) est la distance définissant
la topologie sur cet espace. L'application (z(t)) -t z(O) est donc continue sur
D( ,IR) muni de la topologie de Skorokhod. Une limite fluide de cette file d'at-
tente vaut donc nécessairement 1 pour t = O. On en conclut que la file MIMloo
n'a pas de limite fluide pour cette fonction de renormalisation, en effet le pro-
cessus renormalisé ne peut converger pour la topologie de Skorokhod puisque la
2. LES LIMITES FLUIDES D'UNE CLASSE DE PROCESSUS DE MARKOV 211
seule limite possible n'est pas continue à droite en O. La renormalisation étudiée
pour cette file d'attente au chapitre 6 n'est pas du même type que celle présentée
ICI.
2. Les limites fluides d'une classe de processus de Markov
Dans cette section, on s'intéresse aux propriétés génériques des limites fluides
d'une classe assez générale de processus de sauts à valeurs dans Nd. Si d'autres
types de processus rencontrés en pratique ne rentrent pas dans ce formalisme,
les techniques utilisées ici s'appliquent très souvent.
À partir de maintenant dEN est fixé, la norme L 1 sur Zd est notée Il . Il,
i.e. Iimli = I m 11 + ... + Imdl si m = (mk) E Zd.
DÉFINITION 18. Un processus markovien de sauts (X(t)) appartient à la
classe (C) si sa loi est celle de la solution d'une équation différentielle stochastique
du type
(9.5) dX(t) = L l{X(t-)EC.} 1 m Vi (dt, dm),
'El Zd
1 est un ensemble au plus dénombrable et, pour i El,
- Ci est un sous-ensemble de }Rd ;
- Vi est un processus de Poisson sur lR..t- x Zd d'intensité Ài dt vi(dm) avec
Ài positif. Les processus ponctuels Vi, i E 1 sont indépendants;
- L:iEI À i JZd IIml1 2 vi(dm) < +00.
L'intégrale sur Zd dans l'équation (9.5) porte bien entendu sur la variable
m. Remarquer que, pour t fixé, le processus ponctuel marqué Vi(dt, dm) est soit
la mesure nulle soit une masse de Dirac (voir la Proposition 1.11).
L'équation différentielle (9.5) est vectorielle, si j = 1, . . . ,d, pour la j-ième
coordonnée, elle équivaut à
(9.6) dXj(t) = L l{x(t-)Ec.} r mj Vi (dt, dm).
iEI JZd
La proposition B.11 page 338 en annexe établit l'existence et l'unicité des solu-
tions de ces équations différentielles. La matrice de sauts Q = (qxy; x, y E S)
d'un tel processus est donnée par
qx.x+m = L l{XECi}Ài v i({m}),
iEI
pour x E Nd, m E Zd et qxy = 0 pour les autres y i= x.
EXEMPLES.
La file M / M /1. Le nombre de clients (L(t)) satisfait l'équation différentielle
dL(t) = N>.(dt) - l{L(t-):; O} NI-L(dt),
si les taux d'arrivée et de service sont donnés respectivement par À et J1.. En
posant V 1 (dt,dm) = N>.(dt) 6 1 et V 2 (dt, dm) = NI-L(dt) 6-1, avec CI = N
et C 2 = N - {O} (6x est comme d'habitude la masse de Dirac en x). Il est clair
212
9. MÉTHODES DE RENORMALISATION
que la loi du processus (L(t)) vérifie une équation du type (9.5). En fait plus
généralement, le vecteur des nombres de clients dans les nœuds d'un réseau de
Jackson a aussi cette propriété.
Le réseau de Jackson à d nœuds. On reprend les notations de la section 4.1
page 90, P = (pij) est la matrice de routage, (À i ) et (J-Li) sont les taux d'arrivée
et de service aux nœuds du réseau. On adjoint une colonne et une ligne à P en
posant PiO = 1 - Pil - . . . - Pid pour 1 < i < d, POi = 0 et Poo = 1, on note Q
la matrice ainsi obtenue. Les ei, i = 1,... ,d désignent les vecteurs de la base
canonique de }Rd et eo = 0 le vecteur nul.
Pour i, j < d avec i > 0, Cij = {n = (nk)/ni > O} et Vij est un processus
de Poisson d'intensité J-LiPij dt 6 ej - ei ; COj = Nd et VOj est un processus de
Poisson d'intensité Àj dt 6ej. Le processus Vij est le processus des arrivées à
la file j venant de la file i, VOi celui des arrivées au nœud i depuis l'extérieur et
Vjo le processus des départs définitifs au nœud j. En utilisant la même méthode
que pour montrer les équations (5.1) page 102 et (6.2) page 139, il est facile de
vérifier que la solution (X (t)) de l'équation différentielle stochastique
dX(t) = I: l{X(t-)EC,,} 1 m Vij(dt, dm)
0< i,j <d, Zd
( i,])#(O,O)
a même loi que le processus de Markov associé au réseau de Jackson avec les
paramètres définis plus haut.
Une file d'attente prioritaire. Les clients arrivant à une file d'attente sont
répartis en deux classes 1 et 2. Pour i = 1, 2, les clients de classe i arrivent
suivant un processus de Poisson de paramètre Ài et sont servis au taux J-Li. Les
clients de classe 1 ont priorité sur ceux de classe 2, i.e. un client de classe 2 ne
peut être servi que s'il n'y a aucun client de classe 1.
En prenant CI = {n = (nI, n2)/n1 > O}, C:; = {n = (0, n2)/n2 > O} et
pour i = 1,2, ct = , Vi+ un processus de Poisson d'intensité Ài dt 6ei et Vi-
un processus de Poisson d'intensité J1.i dt 6- eiJ le processus de Markov associé
est bien celui de la file prioritaire. Un réseau de files d'attente avec des files
prioritaires peut donc être représenté par un système d'équations différentielles
du type (9.5).
La fonction f pour renormaliser cette classe de processus est bien entendu
la norme Il.11 sur Nd. Si x E Nd, on note ( X (x, t)) le processus renormalisé avec
la fonction f, pour t > 0
- 1
X(x, t) = n;nX(x,lIxllt).
On commence par une propriété élémentaire qui est utile pour établir l'ergodicité
de ces processus de Markov (voir la condition d) du corollaire 9.8 page 228).
PROPOSITION 9.1. Si (X(t)) est un processus de Markov de classe (C),
pour T > 0 les variables aléatoires
{ IIX(Xli IIT)11 ; x E } = {IIXllf(X, T); x E }
2. LES LIMITES FLUIDES D'UNE CLASSE DE PROCESSUS DE MARKOV 213
sont uniformément intégrables.
L'uniforme intégrabilité est définie en appendice page 333.
DÉMONSTRATION. Il suffit de montrer que les moments d'ordre 2 de ces
variables aléatoires sont bornées,
sup E ( (IIXII,(x, T»2) < +00.
:z:ENd
Pour E l, la proposition 1.21 page 25 montre que le processus
( r IImll (Vi(dS, dm) -),idSVi(dm)) )
J]O,t] x z d
(9.7)
est une martingale et que son processus croissant vaut
(),i l)lm ll2 Vi(dm)t) .
Par indépendance des processus de Poisson (Vi; i El), les martingales définies
par (9.7) sont indépendantes, de moyenne nulle, et par conséquent orthogonales.
Si t > 0, la relation (9.5) donne la majoration
IIX(x, t)1I < IIxli + 2: r IImli Vi( ds, dm).
iEI J]O,t]XZ d
En utilisant l'inégalité élémentaire (Xl + X2 + X3)2 < 3(x + x + x ), il vient
(9.8)
E ((IIX(x, t)11)2) < IIxll 2 + ( 2:),i r IImll Vi (dm) t ) 2
3 1 JZd
tE
+ lE ( 2: r IImli (Vi (ds, dm) - ),i ds Vi (dm) ) ) 2 ,
iEI J]O,t]XZ d
d'après la propriété d'orthogonalité des martingales (9.7), le membre de droite
de cette inégalité vaut
IIxI12 + ( 2:),i r d IImli Vi (dm) t ) 2 + 2:),i r )lm1l2 Vi (dm) t.
iEI Jz iEI Jz
Par conséquent pour T > 0,
lE ( ( IIX(x, II XIIT)II ) 2 )
IIxil
< 3 (1 + II II f;),i ld IIml1 2 Vi (dm) T + ( ),i ld Iimii Vi (dm) T ) 2) ,
les moments d'ordre 2 des processus renormalisés à l'instant T sont donc bornés
supérieurement quand IIxll tend vers l'infini. On en déduit l'uniforme intégrabi-
lité de ces variables. D
214
9. MÉTHODES DE RENORMALISATION
On fixe 1 < j < d. L'équation différentielle stochastique (9.6) montre que le
processus
(Mj(t)) = ( Xj(t) - Xj(O} - 2:: Ài r mj vi(dm} l t l{X(s)EC.} dS )
iEI JZd 0
(9.9) = ( 2:: r l{X(s-)EC;}mj (Vi(dS,dm)-ÀidSVi(dm}) )
iEI J]o.t]XZ d
est une martingale. De la même façon que dans la preuve précédente, la pro-
position B.9 page 337 montre que le processus croissant de celle-ci est donné
par
((Mj) (t)) = ( 2:: r l{X(S)EC'}Àidsm Vi(dm} ) .
iEI J]O,t] x Zd
Le processus ( Mj (x, t)) est la martingale (9.9) renormalisée,
- 1
Mj(x, t} = Ilxll Mj(x, Ilxllt}.
Le processus croissant de cette martingale est donné par
(9.10)
( M j ) (x, t) = _ 11 1 11 2 2:: r l{x(z,s)EC;}À i ds m vi(dm)
x iEI J]o.lIzllt] x Zd
= _ 11 1 11 2:: r l{x(z,lIzlls)EC;}Ài ds m Vi (dm).
x iEI J]O,t] x Zd
On en déduit avec l'inégalité de Doob, pour e > 0 et t > 0,
JI» ( sup I Mj (x,t)1 > e ) < E( Mj (x,t}2) = 1 2 E(( Mj (x,t}))
O<s<t e e
< Ilx IE:2 À i id m Vi (dm).
La martingale ( M j (x, t)) converge donc en probabilité vers 0 uniformément sur
les compacts quand Ilxll tend vers l'infini. En utilisant la représentation (9.9) de
(M(t)), il vient
(9.11) X j (x, t) = 1 I Xj l 1 + M j (x, t) + 2:: Ài r mj Vi( dm} r t l{x(z.lIzlls)EC.} ds.
x iEI JZd Jo
Pour T, 6, TI > 0, si Wh est le module de continuité d'une fonction h sur [0, T],
l.e.
wh(6) = sup(lh(t) - h(s)1 ; s, t < T, It - si < 6),
2. LES LIMITES FLUIDES D'UNE CLASSE DE PROCESSUS DE MARKOV 215
l'équation (9.11) donne la majoration suivante
(9.12) IP (W X, (Z,)(O) > 17) < IP (w M; (Z,)(O) > 17/ 2 )
+ Ir ( sup L Ài r Imjlvi(dm) l t l{x(z,lIzllu)EC.} du > 17/ 2 ) .
s,t T,lt-sl 6 iEI JZd s
Le deuxième terme du membre de droite de l'inégalité précédente est nul dès
que
20 L llmjIVi(dm) < 17.
EI Zd
L'inégalité
IP (W M, (Z,)(O) > 17/ 2 ) < IP C tI Mj (X,t)1 > 17/ 2 )
et la convergence de ( M j (x, t)) vers 0 montrent que le premier terme du membre
de droite de l'inégalité (9.12) tend vers 0 quand Ilxll tend vers l'infini. Il existe
donc K > 0 tel que si IIxll > K, alors
IP (w M , (z,)(c5) > 17/2) < s,
Les hypothèses du théorème D.9 page 354 sur la relative compacité d'un en-
semble de fonctions càdlàg sont vérifiées, l'ensemble des processus ( X j (x, t)),
x E IR d est donc relativement compact et tous les processus limites sont conti-
nus. Pour ê > 0, il existe donc un compact Kj de D(I14, IR) tel que
inf Ir ( Xj (x,.) E Kj) > 1- ê/d,
:cEJRd
d'où
inf Ir ( ( X j ( x, .) ; j = 1, . . . ,d) E rr d K j ) > 1 - ê.
:cER.d
1
Comme le produit de compacts est aussi compact, on en déduit que l'ensemble
des vecteurs ( X j (x, t) ; j = 1,. . . ,d), x E IR d est relativement compact pour la
topologie de Skorokhod et tous les processus limites sont continus. La proposition
suivante vient d'être établie.
PROPOSITION 9.2. Si (X(x, t)) est un processus de Markov de classe (C),
l'ensemble des processus renormalisés
{( X (x, t)); x E } = { II II (X(x, Ilxllt)); x E }
216
9. MÉTHODES DE RENORMALISATION
est relativement compact et toutes ses valeurs d 'adhérence, . e. les limites
fluides associées, sont des processus continus. Le processus
(9.13) ( M (x, t))
= ( X (x, t) - Il:11 - Ài hd m Vi (dm) l t 1{x(:z:.II:z:lIs)EC.} dS)
est une martingale qui converge en probabilité vers 0 uniformément sur les
compacts quand Ilxll tend vers l'infini, i.e. pour tout T > 0 et e > 0,
lim JP> ( su p Il M ( x, s) Il > e) = o.
Il:z:1I +cx> O<s<T
Il reste à caractériser les limites fluides de ces processus. Les processus renor-
malisés étant solutions d'une équation différentielle stochastique, il est naturel
d'essayer de caractériser les limites fluides comme les solutions d'une équation
différentielle.
Si les ensembles (Ci) sont des cônes de Rd, Le. pour i El, si x E Ci alors
ax E Ci pour tout a > 0, l'égalité (9.11) peut se réécrire de la façon suivante
X (x, t) = Il : 11 + M (x, t) + L Ài ( m Vi (dm) {t 1{ X (:z:.s)EC.} ds.
iEI JZd Jo
(9.14)
En supposant que le passage à la limite soit valide et que x/llxll -t a quand Ilxll
tend vers l'infini, une limite fluide ( z (t)) devrait satisfaire l'équation
z (t) = a + L À i ( m Vi (dm) {t 1{Z(s)EC.} ds,
EI JZd Jo
ou encore, sous forme différentielle,
dZ(t) = L À i ( m Vi( dm) 1{z(t)EC.} dt.
iEI J Zd
La proposition ci-dessous montre que cette équation est satisfaite si la limite
fluide est en dehors des points de discontinuité de l'équation différentielle, i.e.
tant que z (t) n'est pas sur le bord d'un des Ci, i E 1.
PROPOSITION 9.3. Si ( z (t)) est une limite fluide d'un processus de la
classe (C), si les ensembles (Ci; i E 1) sont des cônes de Rd et s'il existe
un intervalle [0, to] tel qu'avec probabilité l, pour tout t E [0, to], le proces-
sus ( z (t)) n'est sur la frontière d'aucun des ensembles (Ci), alors presque
sûrement
(9.15) z (t) = z (O) + L Ài ( m Vi (dm) l t 1{z(U)ECi} du,
iEI JZd 0
pour tout t E [0, ta].
2. LES LIMITES FLUIDES D'UNE CLASSE DE PROCESSUS DE MARKOV 217
DÉMONSTRATION. Il existe une suite (xn) de Nd telle que la suite (lIxnlD
tende vers l'infini et la suite des processus ( X (x n , t)) converge en distribution
vers ( z (t)) pour la topologie de Skorokhod. Comme d'habitude, si h est une
fonction réelle et t > 0, on note Ilhllcx>,to = sup{lh(u)l; u < to}.
En prenant un espace de probabilité adéquat, le théorème de représentation
de Skorokhod (Théorème D.8 page 354) permet de supposer que la suite des
processus ( X (x n , t)) converge presque sûrement vers ( z (t)) pour la topologie de
Skorokhod. Presque sûrement, il existe donc des applications continues, stricte-
ment croissantes (an) de [0, to] dans [0, to] vérifiant an(O) = 0, an(t O ) = to et
les inégalités
(9.16)
(9.17)
l an(s) - an(t) 0
lim sup og = ,
n-++cx> s, tE[O,to] ; si=t S - t
lim sup II X (x n , an(s)) - z (s)11 = 0,
n-++cx> sE[O,to]
d'où
lim lIa - 111cx>,to = 0,
n-++cx>
d'après la proposition D.2 page 351) pour une version a de la dérivée de Radon-
Nikodym de la fonction croissante an.
Pour i E l, on note fi la fonction indicatrice de l'ensemble Ci. Si 0 < t < t o
et n E N, avec un changement de variables on obtient
(an(t) (t
Jo h( X (xn. u)) du = Jo h( X (x n , an(u))a (u) du.
on en déduit les inégalités
i an (t) i t
def --
An(t) = a h(X(xn. u)) du - a h( z (u)) du
< l t (h( X (xn. an(u))) - h( z (u))a (u) du + l t h( z (u))(a (u) - 1) du
(t o
< Ila lIoo,to Jo Ih( X (x nl an(u))) - h( z (u)) 1 du + lIa - 111oo,to
La quantité Ifi( X (X n , an(u)))- fi( Z (u))1 étant majorée par 2, le lemme de Fatou
donne l'inégalité
i to
lim sup Ifi( X (X n , an(u))) - fi( Z (U)) 1 du
n-++cx> 0
i to
< limsup Ifi( X (X n , an(u))) - fi( Z (u))1 du,
o n-+ +CX>
218
9. MÉTHODES DE RENORMALISATION
l'hypothèse sur z et l'inégalité (9.17) entraînent que le terme sous cette intégrale
est nul. On a ainsi obtenu la convergence presque sûre
lim sup An(t) = 0,
n-++ex> t to
et donc la convergence
(l t h( X (x n , u)) du; i El) ---+ (l t h( z (u)) du; i El)
pour la topologie de Skorokhod sur D([O, ta], }Rd). On en déduit la convergence
en distribution des processus correspondants sur l'espace de probabilité initial.
En revenant à l'espace de probabilité initial, l'identité (9.14) donne pour
t < ta,
X (Xn,t) = IIXnll + M (xn,t) + LÀ> r mVi(dm) r t h( X (xn,u)) du.
X n >EI JZd Jo
Par hypothèse, le membre de gauche de cette identité converge en distribution
vers ( z (t)). Comme la martingale ( M (x n , t)) tend en probabilité vers 0 uni-
formément sur l'intervalle [0, ta] (Proposition 9.13), la proposition D.5 page 353
montre que, sur cet intervalle, le processus associé au membre de droite converge
en distribution vers
( Z (O) + L À i r d m Vi (dm) r t l{Z(u)EC.} dU ) ,
iEI Jz Jo
noter que l'on utilise au passage que si ( X (x n , t)) converge vers (z(t)) en dis-
tribution pour la topologie de Skorokhod, alors la suite de variables aléatoires
( X (xn,O)) converge en loi vers z(O), (voir la discussion de l'exemple de la file
MIMloo page 211). La proposition est démontrée. 0
La proposition précédente montre que l'étude des limites fluides se concentre
sur les points de discontinuité de la dynamique, i.e. quand le processus (X(t))
est sur le bord d'un des ensembles (Ci). En dehors de ces points, le processus
renormalisé converge vers la solution d'une équation différentielle déterministe
ordinaire.
C'est un des mérites des méthodes de renormalisation de concentrer l'étude
sur le trait difficile de ces processus, la discontinuité de la dynamique. Ces points
de discontinuité peuvent conserver une part de la complexité du processus ori-
ginel, comme par exemple une composante aléatoire, voir le cas de la limite
fluide non déterministe. Il n'y a pas, actuellement, de méthode générique pour
traiter ces points de discontinuité. Le problème se résout quelquefois en reve-
nant au niveau macroscopique, i.e. en étudiant une fonctionnelle du processus
non renormalisée, voir l'exemple ayant deux limites fluides pour la même condi-
tion initiale. La section suivante présente un outil important pour aborder les
problèmes de discontinuité dans certains cas.
3. LIMITES FLUIDES ET PROBLÈME DE RÉFLEXION DE SKOROKHOD 219
3. Limites fluides et problème de réflexion de Skorokhod
Si (Y(t)) est une fonction càdlàg à valeurs dans }Rd telle que Y(O) > 0 et
P = (pij) une matrice d x d, une solution au problème de Skorokhod associé à
(Y(t)) et P est un couple de vecteurs (X(t)) = (Xi(t); 1 < i < d) et (R(t)) =
(Ri(t); 1 < i < d) de D(II4, }Rd) tel que, pour tout t > 0,
a) X(t) = Y(t) + (1 - tp)R(t) ;
b) pour 1 < i < d, Xi (t) > 0, l'application t -t Ri (t) est croissante avec
Ri(O) = 0;
c) avec la condition de réflexion
1 +00
o Xi(S) dRi(S) = O.
La section 6 est consacrée aux questions d'existence et d'unicité du problème de
Skorokhod. La proposition 9.14 de cette section donne une condition suffisante
pour qu'il existe une unique solution. Pour t > 0, la fonction (R(t)) est l'unique
solution de l'équation de point fixe
(9.18)
Ri(t) = 0 V sup ( tPiiRi(S) - ries) ) ,
O s t 1=1
pour i = 1,. .. ,d et (X(t)) est bien sûr donné par X(t) = Y(t) + (1 - tp)R(t).
La proposition 9.14 montre une propriété de continuité de ce couple de solutions
par rapport au processus (Y(t)).
De façon schématique la proposition 9.14 s'utilise de la façon suivante: si
le processus ( X (x, t)) est le processus renormalisé d'un processus de Markov, on
cherche d'abord à l'exprimer sous la forme
X (x, t) = Y (x, t) + (1 - tp) R (x, t),
de telle sorte que ( X (x, t), R (x, t)) soit la solution au problème de Skorokhod
associé à ( Y (x, t)). Si le processus ( Y (x, t)) converge convenablement vers le
processus (Z(t)) quand Ilxll tend vers l'infini, on en déduira que le couple
( X (x, t), R (x, t)) converge en distribution vers la solution au problème de Skoro-
khod associé à (Z(t)). On aura ainsi obtenu la convergence du processus renor-
malisé. Le processus ( Y (x, t)) contient généralement des termes martingales qui
deviennent négligeables à l'infini. L'exemple des réseaux de Jackson ci-dessous
et celui de la section 5 sont traités de cette façon. Pour illustrer cette méthode
simplement, on commence par l'exemple de la file MIM/1.
3.1. La file M/M/l. Si (L(t)) est le processus du nombre de clients d'une
file MIM/1 avec un taux d'arrivée À et un taux de service J-L, l'équation (5.1)
220
9. MÉTHODES DE RENORMALISATION
associée à ce processus se réécrit de la façon suivante, si t > 0,
t
L(t) = L(O) +NÀ(]O,t]) -11{L(S-»O}NJ'(dS)
= L(O) +NÀ(]O,t]) -NJ'(]O,t]) + l t l{L(s-)=O} NJ'(ds) ,
L(t) = Y(t) + J1.1 t l{L(s)=O} ds
(9.19)
avec
Y(t) = L(O) + (À - J-L)t + M(t)
et (M ( t )) est la martingale définie par
M(t) = (NÀ(]O,t]) - >.t) - (NJ'(]O,t]) - J1.t) + l t l{L(s-)=O} (NJ'(ds) - J1.ds).
La relation (9.19) montre que le couple
(X y (t), Ry(t)) = ((L(t)), (J1.1 t l{L(s>=O} dS) )
est la solution au problème de Skorokhod pour la fonction (Y(t)).
Pour L(O) = N, si X est un des processus L, Y, M, on note X N(t)
X (N t) lN le processus renormalisé associé au processus X. Avec le même argu-
ment que dans la preuve de la proposition 9.2, il est facile d'obtenir la relation
lim JP>( sup l M N(s)1 > e) = 0,
N +oo O<s<T
pour e > O. Par conséquent, si y(t) = 1 + (À - J1.)t, on en déduit
lim JP>( sup I Y N(S) - y(s)1 > e) = O.
N +oo O<s<T
La proposition 9.14 page 244 montre que si (X y , Ry) est le couple solution au
problème de Skorokhod associé à y, il existe KT > 0 tel que
II L N - X ylloo,T < KTII Y N - ylloo,T,
par conséquent
limsupIP ( sup I L N(S) - Xy(s)1 > e )
N-t+oo O s T
< limsupJP> ( sup I Y N(S) - y(s)1 > el KT ) = O.
N +oo O s T
D'après l'exemple traité page 240, si (X y , Ry) est la solution au problème de
Skorokhod associé à la fonction y, Xy(t) = (1 + (À - J-L)t)+. On en déduit que
la limite fluide de (L(t)) est la fonction ((1 + (À - J-L)t)+). Ce raisonnement est
généralisé dans la suite au cas des réseaux de Jackson.
3. LIMITES FLUIDES ET PROBLÈME DE RÉFLEXION DE SKOROKHOD 221
3.2. Les réseaux de Jackson. L'utilisation du théorème 9.13 pour l'étude
des limites fluides des réseaux de Jackson est due à Chen et Mandelbaum[7]. On
reprend les notations précédentes utilisées pour le réseau de Jackson : des d-
uplets de 114 (Ài) et (J1.i) et une matrice markovienne (Pij; i, j = 0, . . . ,d) telle
que la valeur 0 soit la seule valeur absorbante pour la chaîne de Markov associée.
Ces paramètres sont respectivement les taux d'arrivée, de service et la matrice
de routage d'un réseau de Jackson à d nœuds. Le vecteur du nombre des clients
à l'instant t est noté X(t) = (Xi(t) ; i = 1, . . . ,d). En reprenant l'équation (9.5)
dans ce cas particulier, le processus (X (t)) est la solution de l'équation intégrale,
pour i = 1, . .. ,d,
(9.20) Xi(t) = Xi(O) + N À , (]O, t])
d d
+ L 1 l{x,(s-)#O} NJ'jpj; (ds) - L r l{X;(s-)#o}NJ';p.,(ds).
j=1 ]O,t] )=0 J]O,t]
En notant (Mi (t)) la martingale
d
(9.21) Mi(t) = N>.. (JO, t]) - .Àit + L r l{xj(s- )#o} (NJ'jp,; (ds) - J.Ljpji ds)
j=1 J]O,t]
d
- L r l{x;(s-)#O} (NJ';p;j(ds) - J.LiPij ds),
)=0 J]O,t]
l'équation (9.20) se réécrit
Xi(t) = Xi(O) + Mi(t) + ( .Ài - J.Li + t J.Ljpji ) t
)=1
d t d t
+ L 1 1 {X;(S)=0}J.LiPi j ds - L 1 1 {X,(S)=0}J.LjP j i ds.
j=O 0 j=l 0
Si 1 < i < d, en posant
R;(t) = J.Li l t l{x;(s)=O} ds,
Yi(t) = Xi(O) + Mi(t) + ( .Ài - J.Li + t J.Ljpji ) t,
)=1
(9.22)
(9.23)
on déduit l'identité
d
Xi(t) = Yi(t) + Ri(t) - L Rj , (t)Pji
)=1
[7] H. Chen and A. Mandelbaum, Discrete ftow networks: bottleneck analysis and ftuid ap-
proximations, Mathematics of Operation Research 16 (1991), no. 2, 408-446.
222
9. MÉTHODES DE RENORMALISATION
qui peut être écrite de façon plus compacte comme
( 9.24 )
X(t) = Y(t) + (1 - tp)R(t),
en notant 1 la matrice identité de }Rd. La matrice P = (pij ; 1 < i, j < N) est
sous-markovienne et sans état récurrent. Pour i = 1,... ,d, Yi(O) > 0 et les
fonctions (Xi(t)) et (Ri(t)) sont càdlàg et positives, la fonction t -t Ri(t) est
continue, croissante, nulle à l'origine et ne croît qu'aux instants où Xi est nul. Le
couple (X, R) est donc la solution au problème de Skorokhod associé à (Y(t)).
Cette constatation est formelle puisque Y dépend de X, elle est cependant cru-
ciale pour l'étude des limites fluides de ces réseaux.
On prend (XN) une suite de Nd telle que IlxN11 = N et
lim X N N = a = (ai) E }R ,
N-++oo
en particulier Ilaii = 1. Si pour x E Nd, (Z(x, t)) est un processus sur Nd,
on note ( Z N(t)) = (Z(XN, Nt)jN et (X(a,t)) désigne le processus de Markov
satisfaisant l'équation (9.20) avec la condition initiale X(a, 0) = a. Par définition,
le processus ( X N (t)) est la renormalisation du processus du nombre de clients
dans les files du réseau avec la fonction f(x) = Ilxll = I X 11 + ... + lx dl, pour
x = (Xi) E }Rd.
Pour N > 1, (YN(t)), (RN(t)) et (MN(t)) sont les processus définis par les
équations (9.21), (9.22) et (9.23) pour la condition initiale X(O) = XN, les pro-
cessus renormalisés associés respectifs sont donc ( Y N(t)), ( R N(t)) et ( M N(t)).
De cette façon, ( X N, R N) est la solution au problème de Skorokhod associé à la
fonction ( Y N),
X N(t) = Y N(t) + (1 - tp) R N(t).
Il est facile de vérifier que la martingale ( M N (t)) est la martingale ( M (x N, t))
de la proposition 9.2, elle converge en probabilité vers 0 uniformément sur les
compacts. Le processus ( Y N(t)) converge donc au même sens vers la fonction
déterministe ( Y oo(t)) = (Yi(t)) définie, pour 1 < i < d et t > 0, par
Yi(t) = ai + ( Ài - J1.i + t J1.jp j i ) t,
)=1
i. e ., si e > 0,
lim JI» ( sup II Y N(S) - Y oo(s)11 > e ) = o.
N-++oo O<s<T
On note ( X 00 , R oo) la solution du problème de réflexion associé à la matrice P
et à la fonction Y 00. La proposition 9.14 montre qu'il existe KT > 0 tel que
II X N - X oolloo,T < KTII Y N - Y oolloo,T'
Il R N - R oolloo,T < KTII Y N - Y oolloo,T.
3. LIMITES FLUIDES ET PROBLÈME DE RÉFLEXION DE SKOROKHOD 223
On en déduit les majorations
Ir (II X N - X oolloo,T > e) < Ir (II Y N - Y oolloo,T > el KT) ,
JI» (II R N - Roo lloo,T > e) < JI» (II Y N - Y oolloo,T > el KT) ,
la suite ( X N(t), R N(t)) converge donc en probabilité uniformément sur les com-
pacts vers la fonction ( X 00 (t), R oo (t)), qui est déterministe puisque ( Y 00 (t) )
l'est. En utilisant la proposition D.5 page 353, on vient donc de montrer que,
si la suite des états initiaux renormalisés converge, le réseau de Jackson a une
seule limite fluide et celle-ci est déterministe. La proposition suivante vient donc
d'être établie.
PROPOSITION 9.4. Si (X(x, t)) = ((Xi(X, t) ; i = 1, . . . ,d)) est le processus
de Markov associé à un réseau de Jackson de matrice de routage P et d'état
initial x E Nd, et (x N) est une suite de Nd telle que
lim IIXNII = +00 et lim IIXNII = a = (ai),
N +oo N +oo XN
le couple
( X(XN' tllxNID (t )
IIx Nil ' J.Li Jo l{xi(xN,lIxNllu)=O} du
converge en distribution uniformément sur les compacts vers la fonction
déterministe (X Ya ' Rya) solution au problème de Skorokhod pour la matrice
P et la fonction (Ya(t)) définie par
Ya(t) = a + (À - (I - tP)J.L) t,
À = (À i ) et J1. = (J1.i) étant respectivement les vecteurs des intensités d' ar-
rivée et de service aux nœuds du réseau.
L'ensemble des fonctions {(Xya(t)); a E IR ,lIall = 1} est l'ensemble
des limites fluides du processus (X (x, t)) .
L'exemple de deux files d'attente en tandem. On reprend le réseau de
l'exemple 1.2.3 page 207. Ce réseau a les paramètres suivants À = (À 1 , 0), J1. =
(J.L1, J1.2) et la matrice de routage P = ((0,1), (0,0)). Si a = (al, 1- al) E [0,1]2,
la fonction (Ya(t)) = (Ya,l(t), Ya,2(t)) est définie par
Ya,l(t) = al + (À 1 - J-L1)t,
Ya,2(t) = 1 - al + (J1.1 - J1.2)t.
L'équation de point fixe (9.18) donne les identités
X ya ,l(t) = (al + (À 1 - J-L1)t)+,
R ya ,l(t) = (al + (À 1 - J1.1)t)-,
R ya ,2(t) = 0 V sup (RYa,l(S) - Ya,2(S))
O<s<t
= 0 V sup ((al + (À 1 - J1.1)S)- - (1 - al) - (J1.1 - J1.2)S) ,
O<s<t
224
9. MÉTHODES DE RENORMALISATION
et la fonction (X Ya ,2 (t)) vaut
X y a t 2 ( t) = Yex,2 ( t) + RYa, 2 ( t) - RYa, 1 ( t ) .
La limite fluide est alors complètement déterminée. Dans le cas où À 1 < J-L2 < J-L1,
en posant t 1 = a1/(J1.1 - À 1 ) et t 2 = 1/(J1.2 - À 1 ), les équations précédentes
donnent
pour t < t 1 ,
RYa (t) = (0, 0), XYa (t) = (al + (À 1 - J1.1)t, 1 - al + (J1.1 - J1.2)t)
pour t 1 < t < t 2 ,
RYa (t) = (-al - (À 1 - J-L1)t, 0), XYa (t) = (0, 1 + (À1 - J-L2)t)
et pour t > t 2 ,
RYa (t) = (-al - (À 1 - J1.1)t, -1 - (À 1 - J1.2)t), XYa (t) = (0,0)
ce qui établit en particulier la convergence (9.4) page 208.
Les limites fluides qui ont été obtenues dans la proposition 9.4 sont une
caricature du processus de Markov décrivant un réseau de Jackson. Une fois les
limites fluides obtenues, il est naturel de se demander comment les propriétés
du processus initial se traduisent en terme de limites fluides et vice versa. La
proposition suivante s'intéresse à la propriété d'ergodicité des réseaux de Jack-
son. On y montre que si les paramètres du réseaux sont tels que le processus de
Markov admet une probabilité invariante (Théorème 4.11 page 92), alors toutes
les limites fluides sont nulles à partir d'un certain rang. Cette propriété et sa
réciproque sont étudiées dans un cadre plus général dans la section 4. L'utilisa-
tion des limites fluides dans la preuve de cette proposition est due, semble-t-il,
à Meyn et Down.
PROPOSITION 9.5. Si (Xi; i = 1,.. . ,d) est l'unique solution du système
d'équations
(9.25)
N
Xi = À i + L Xjpji, i = 1, . . . ,d,
)=1
et si Xi < J-Li pour tout i = 1,... ,d" il existe une constante T telle que
toutes les limites fluides sont nulles après l'instant T, i. e. XYa (t) = 0 pour
tout t > T et tout a E IR tel que lIall = 1.
DÉMONSTRATION. D'après le lemme 4.10 page 91, pour tout vecteur À =
(À i ) de IR , il existe un unique vecteur X = ( i) à coordonnées positives tel que
(9.26) (1 - tp)X = À ou encore X = AÀ,
en posant A = (1 - tp)-l, c'est la forme vectorielle des équations (9.25). La
matrice A est en particulier un opérateur positif, Le. les coordonnées de Ax
sont positives si celles de x le sont. Les inégalités Xi < J.Li, pour tout i =
3. LIMITES FLUIDES ET PROBLÈME DE RÉFLEXION DE SKOROKHOD 225
1, . . . ,d, donnent la condition d'existence d'une probabilité invariante vue dans
le théorème 4.11 page 92.
On fixe a E IR tel que Ilaii = 1. Les coordonnées de la fonction (Ya(t)) =
(Ya, (t) ; i = 1, . . . ,d) sont clairement lipschitziennes, la proposition 9.14 montre
qu'il en va de même pour les coordonnées des fonctions
( X y a ( t )) = (X y a , i ( t) ; i = 1, . . . ,d), ( RYa ( t )) = (Ry a ,i ( t) ; i = 1, . . . ,d).
En particulier si h est une de ces fonctions, h est absolument continue par rapport
à la mesure de Lebesgue (voir la preuve de la proposition D.2 page 351),
h(t) = h(O) + l t k(s) ds;
presque partout h est dérivable et sa dérivée vaut h (voir la démonstration de
la proposition D.2 page 351 par exemple). On pose
Li(t) = sup RYa.iC t ) - RYa,i(S)
O s<t t - s
et L(t) = (Li(t)), en particulier pour i = 1,... J d, Rya,i(t) < Li(t) Lebesgue-
presque partout.
On établit tout d'abord, pour i = 1, . . . ,d, l'inégalité
(9.27)
a,i(t) + Xi - J-Li < 0,
Lebesgue presque partout sur IR.
D'après la proposition 9.13, la fonction RYa vérifie l'équation (9.43)
Rya,i(t) = 0 V sup ( tPiiRya'i(U) - YQ,i(U) ) .
O u t j=l
En discutant suivant les cas, on obtient l'inégalité
Rya,i(t) - RYa,i(s)
< sup ( tPii(Rya'i(U) - Rya,i(s)) - (YQ,i(U) - YQ,i(S)) )
s u t j=l
d
< LPji(Rya,j(t) - RYa,j(s)) + sup (-(Ya,i(U) - Ya,i(S))) ,
)=1 s u t
pour 0 < S < t. La définition de Ya et la relation (9.26) donnent pour u, S > 0,
Ya(u) - Ya(s) = (u - s)(I - tp)(X - J1.).
L'inégalité précédente se réécrit donc sous la forme (avec la convention que les
inégalités sont vérifiées coordonnée par coordonnée),
RYa(t) - RYa(s) < (t - s) tpL(t) + sup (-(u - s)(I - tp)(X - J-L))
s<u<t
< (t - s) (tPL(t) - (I - tp)(X - J.L)) 1
226
9. MÉTHODES DE RENORMALISATION
en utilisant le fait que < J-L. On obtient ainsi l'inégalité
L < tpL(t) - (1 - tp)( - J1.),
d'où
(1 - tp)(L(t) + - J1.) < o.
Comme la matrice A, l'inverse de (1 - tP), est un opérateur positif, on en déduit
l'inégalité L(t) + - J-L < 0 et donc l'inégalité (9.27) puisque RYa (t) < L(t).
La fonction (X Ya (t)) vérifie l'équation de réflexion
Xya(t) = YQ(t) + (1 - tp)Rya(t)
pour tout t > 0, d'où, en utilisant A l'inverse de 1 - tp, il vient
(9.28)
AXya(t) = Aa + AÀt - A(I - tP)J1.t + A(I - tp)Rya(t),
AX Ya (t) = Aa + ( - J-L) t + Rva (t),
d'après la relation (9.26). Pour x E 1R , on pose
f(x) = L(Ax)i'
,
où (AX)i est la i-ième coordonnée du vecteur Ax. La fonction g: t -t f(XYa(t))
est positive (A est un opérateur positif), absolument continue, car combinaison
linéaire de fonctions qui ont cette propriété. L'égalité (9.28) donne la relation
d
g(t) = L( i - J1.i + RYaJi(t))
1=1
Lebesgue-presque partout. L'inégalité (9.27) montre que cette dernière quan-
tité est négative ou nulle pour tout t > o. La fonction g est donc positive et
décroissante. Si ta est un point où g est non nul et où g et RYa sont dérivables,
il existe une coordonnée ia E {l, . . . ,d} telle que Xya,i o (ta) -# 0, par conséquent
e la condition de réflexion c) du problème de Skorokhod on déduit l'égalité
RYa,io (ta) = O. En utilisant encore l'inégalité (9.27), on obtient la majoration
9 ( ta) < io - J-Lio'
L'inégalité
def -
g(t) < -TJ = SUp (À i - J-Li) < 0
l<,<d
est par conséquent vraie presque partout sur l'ensemble où g est non nul. En
posant Ta = inf{t > Ojg(t) = O}, pour t < Ta,
g(t) = g(O) + l t 9(S) ds < g(O) - 17 t ,
on en déduit que Ta est inférieur à g(O)ITJ. Comme g est positive et décroissante,
elle est nulle à partir de Ta. Les coordonnées de a étant bornées par 1, g(O) est
4. RELATION ENTRE RENORMALISATION ET ERGODICITÉ 227
donc aussi borné quand a parcourt la boule unité de Ri. La constante Ta peut
donc être choisie indépendamment de a. La proposition est démontrée. 0
4. Relation entre renormalisation et ergodicité
On revient dans cette section au cas d'un processus de Markov (X(t)) général
à valeurs dans un espace d'états dénombrable. Le résultat suivant est dû à Rybko
et Stolyar[31] (quand le temps d'arrêt T est déterministe).
THÉORÈME 9.6. S'il existe une fonction f positive sur S, des constantes
A, ê strictement positives et un temps d'arrêt T tels que
. Ex (T)
(9.29) hmsup J( ) < A,
f(:c) +oo x
(9.30) limsup Ex ( f(X(T)) ) < 1- ê,
f(:c) +oo f(x)
si la variable f(X(1)) est intégrable et si l'ensemble
FK = {x E Slf(x) < K}
est fini pour tout K > 0, le processus de Markov (X(t)) est ergodique.
Pour K suffisamment grand, le temps d'atteinte TFK de FK par (X(t))
satisfait l'inégalité
Ex(TFK) < 4A
f(x) - ê '
pour tout x E S tel que f(x) > K.
DÉMONSTRATION. Il existe K > 0 tel que pour tout x E S vérifiant f(x) >
K les inégalités suivantes soient vérifiées,
(9.31 )
Ex (f (X ( T ) )) < (1 - ê / 2) f ( x ) et Ex (T) < 2A f ( x ) .
Par conséquent si f(x) > K, on en déduit l'inégalité
lE.: (J(X(r))) - J(x) < - J(x) < - 4 lE.: (r).
Comme l'ensemble {x E SI f(x) < K} est fini, le théorème 8.12 page 196 montre
que le processus (X(t)) est ergodique. La majoration de la moyenne de T FK est
une conséquence de l'inégalité (8.17) de ce théorème. 0
La fonction t -t f(X(x, t))j f(x) part de 1 et la condition (9.30) impose qu'au
bout d'un certain temps T, elle soit en moyenne strictement plus petite que 1 si
l'état initial est assez grand.
La proposition ci-dessous fait le lien entre les questions d'ergodicité et le
comportement du processus renormalisé.
PROPOSITION 9.7. Si une fonction positive f sur S est telle que
[31] A. N. Rybko and A. L. Stolyar, On the ergodicity of random processes that describe the
function ng of open queueing networks, Problems on Information Transmission 28 (1992),
no. 3, 3-26.
228
9. MÉTHODES DE RENORMALISATION
a) pour tout K > 0, l'ensemble {x E S/f(x) < K} est fini,
b) la variable f(X(l)) est intégrable,
et s'il existe T > 0 et ê > 0 tels que
limsup JE., (IIXllf(x, T)) = limsup JE., (J( ft)T))) < 1 - E,
I(:z:)-++oo I(:z:)-++oo x
le processus de Markov (X(t)) est ergodique.
DÉMONSTRATION. En notant T = f(X(O))T, la variable T est clairement
un temps d'arrêt et vérifie E:z: ( T) / f (x) = T» il suffit d'appliquer le théorème
précédent pour conclure. 0
Le corollaire suivant montre si toutes les limites fluides tendent vers 0 convena-
blement alors le processus de Markov est ergodique.
COROLLAIRE 9.8. Si les conditions a) et b) de la proposition précédente
sont satisfaites et s'il existe T tel que
c) la variable IIXII/(x, T) converge en loi vers 0 quand f(x) tend vers
l'infini,
d) la suite (1IXI1/(x, T) ; x E S) est uniformément intégrable
le processus de Markov est ergodique. La condition c) peut être remplacée
par
c') le processus (IIXI1/(x, t)) converge pour la topologie de Skorokhod vers
(x(t)) quand f(x) tend vers l'infini et x(t) = 0 pour tout t > T/2.
DÉMONSTRATION. Pour x E S, T E 114- et K > 0, on a l'inégalité
JE., (iIXllf(X, T)) < JE., (1IXllf(X, T)l{IIXllf(Z.T) K}) + JE., (K /\ IIXllf(X, T)) ·
D'après la condition d), le premier terme du membre de droite est arbitrairement
petit, uniformément en x si K est suffisamment grand. Pour K fixé, l'autre terme
tend vers 0 en raison de la convergence en loi et du fait que la fonction y -t K /\ Y
est continue bornée. On en déduit la convergence en moyenne des limites fluides
vers 0,
lim E.z: (1IXII/(x, T)) = 0,
I(:z:)-++oo
la proposition précédente peut donc s'appliquer.
Pour montrer la dernière partie, il suffit de remarquer que la fonction x est
continue en T. Comme le processus (1IXII/(x, t)) converge vers (x(t)) pour la
topologie de Skorokhod et que x est continue en T, le théorème 7.8 page 131 du
livre d'Ethier et Kurtz [17] montre que IIXII/(x, T) converge en loi vers x(T) = 0
quand f(x) tend vers l'infini. D
Si l'on compare ces résultats avec les critères en termes de fonction de Liapunov
du chapitre 8, il faut encore ici trouver une fonction de Liapunov f avec une
bonne propriété. De ce point de vue, le corollaire précédent n'améliore appa-
remment pas la situation. En pratique ce n'est cependant pas le cas, si l'espace
4. RELATION ENTRE RENORMALISATION ET ERGODICITÉ 229
S est dans un espace muni d'une norme Il . Il, il suffira en général de prendre
j(x) = Ilxll. On ramène ainsi l'étude de l'ergodicité à celle du comportement
limite du processus ( X j(t)) quand j(X(O)) tend vers l'infini. Cette étude est
en général plus facile que la recherche d'une fonction j satisfaisant l'inégalité de
dérive (Théorème 8.6, condition a)).
Exemple: les réseaux de Jackson. La proposition 9.5 montre que si X =
(Xi) est la solution des équations de trafic et si Xi < J1.i pour tout i = 1,. .. ,d,
toutes les limites fluides sont déterministes et nulles à partir d'un instant com-
mun. En utilisant le résultat d'uniforme intégrabilité de la proposition 9.1, le
corollaire 9.8 donne l'ergodicité du processus de Markov décrivant le réseau,
sous la réserve que ce processus soit irréductible. Il est facile de vérifier que
cette condition est satisfaite si chaque nœud du réseau est alimenté par un autre
nœud du réseau ou par un flot d'arrivées extérieures.
Le corollaire 9.8 est aussi utilisé pour établir ci-dessous la proposition 9.11.
L'absorption en o. Les exemples de processus de Markov ergodiques vus
jusqu'à maintenant exhibent tous le même phénomène, les limites fluides at-
teignent 0 en temps fini et restent ensuite collées en 0 (voir aussi la discussion
à la fin de la preuve de la proposition 5.15 pour la file MIM/1). L'explication
heuristique de ce phénomène est simple: le processus (f(X(x, t))) atteint un
ensemble fini fixé en un temps asymptotiquement linéaire en j ( x), ensuite au
bout d'un temps fini, négligeable pour la renormalisation en temps, le processus
est à l'équilibre et donc reste principalement dans le voisinage d'un ensemble
fini et par conséquent IIXllf(t) = j(X(x, f(x) t))/ f(x) tend vers 0 quand j(x)
tend vers l'infini.
Le résultat suivant montre que, sous les hypothèses de la proposition 9.7 et
d'une condition de relative compacité, cette propriété est vraie.
PROPOSITION 9.9. Si une fonction positive j sur S est telle que
a) pour tout K > 0, l'ensemble {x E Slf(x) < K} est fini,
b) la variable j(X(l)) est intégrable,
c) il existe T > 0 et ê > 0 tels que
r Ex (J(X(J(x)T))) < 1 - E
lm sup j( ) _ ,
j(:z:)-++oo X
d) l'ensemble des processus
{ ( f(X( ( x) t)) ) ; X, Y E S, f(y) < f(x) }
est relativement compact pour la topologie de Skorokhod sur les pro-
cessus càdlàg,
alors pour toute limite fluide (W (t)), il existe une variable aléatoire T, JP>-
presque sûrement finie, telle que
(9.32) JP> ( su p W(t) = 0 ) = 1.
t>'T
230
9. MÉTHODES DE RENORMALISATION
Les conditions a), b) et c) sont les conditions d'ergodicité de la proposi-
tion 9.7. La condition d) est apparemment la plus contraignante. En pratique
l'existence des limites fluides s'obtient en montrant que l'ensemble
{(IIXllf(x, t)) ; x E S} = { ( f(X(;( t) t)) ) ; x ES}
est relativement compact. En général cette propriété entraîne la condition d) de
la proposition.
DÉMONSTRATION. La proposition 9.7 montre que le processus (X(t)) est
ergodique. On fixe K > 0 tel que l'ensemble F = {x E S/f(x) < K} soit non
vide. Si TF est le temps d'atteinte de F par le processus (X(t)), la variable
TF est presque sûrement finie et l'inégalité (9.31) de la proposition 9.7 donne
l'existence d'une constante C telle que
Ex (TF) < Cf(x)
si f(x) > K. Par conséquent, si TF est le temps d'atteinte de F pour le processus
changé de temps, i.e.
TF(X) = inf{t > 01 f(X(x, f(x) t)) < K},
ou encore, TF (x) = TF / f (x). On obtient donc la majoration
sup Ex (TF(X)) < C,
x; J(x»K
l'ensemble des variables aléatoires TF(X), x E S est relativement compact. Par
définition d'une limite fluide, il existe une suite (XN) de S telle que la suite de
processus (IIXIIJ(XN, t)) converge en loi vers (W(t)) quand N tend vers l'infini.
Cette suite de processus est en particulier relativement compacte, la suite des
couples
{((IIXIIJ(XN, t)), TF(XN)) ; N > 1}
est donc aussi relativement compacte dans l'espace des probabilités sur l'espace
D(IR.t, IR) x IR+ (le produit de deux compacts est un compact). Quitte à prendre
une sous-suite de (XN), on peut supposer que la suite précédente converge en
distribution vers ((W (t)), T). En particulier, pour ê > 0 et 0 < a < b,
(9.33) liminf JP> ( sup IIXIIJ(XN, t) > ê, TF(XN) < a )
N +oo a<t<b
> JI» ( sup W(t) > ê, T < a ) ,
a<t<b
en effet, si 0 est un. ouvert de D (IR.t ,IR) x IR.t, alors
i IP (WIXllf(XN, t)), rp(xN)) E 0) > IP (((W(t)), r) E 0 )
d'après le théorème 1.4 de Billingsley [5]. La propriété de Markov forte de (X(t))
pour le temps d'arrêt
TF = TF(X(O))f(X(O))
4. RELATION ENTRE RENORMALISATION ET ERGODICITÉ 231
donne la relation
r ( sup IIXllf(XN, t) > ê, TF(XN) < a ) =
a<t<b
( ( f(X((t - TF(XN ))f(XN ))) ) )
IEx N l{TF(zN)<a}IP'X(TF(zN)/(zN)) a b f(XN) > ê
< L ry ( SUp f(X(f(XN) t)) > ê ) .
yEF O<t b f(XN)
Si chacun des termes de la somme précédente tend vers 0 quand N tend vers
l'infini, comme l'ensemble F est fini, la relation (9.33) donne l'identité, pour
o < a < b,
r ( sup W(t) > ê, T < a ) = 0, d'où r ( su p W(t) > ê, T < a ) = 0,
a t b t a
en faisant tendre b vers l'infini. La continuité à droite presque sûre de (W(t)) en
tout point donne l'égalité
r ( su p W(t) > ê ) = r ( u { su p W(t) > ê, T < a })
t>r aEQ t a
< L r ( su p W(t) > ê, T < a ) ,
aEQ t a
la relation (9.32) sera alors démontrée. Il reste donc à montrer que pour y E S
la quantité
IPy ( sup f(X(f(XN) t)) > ê ) = IP ( sup f(X(y, f(XN) t)) > ê )
O<t b f(XN) O<t b f(XN)
tend vers 0 quand N tend vers l'infini.
Comme le processus de Markov (X(t)) est ergo, dique la variable (X(y, t))
converge en distribution quand t tend vers l'infini. Il en va de même pour
(f(X(y, t))), ainsi pour ê > 0, il existe K et to > 0 tels que si t > to, alors
r(f(X(y, t)) > K) < ê. Comme la variable sUPo<s<to f(X(y, s)) est finie presque
partout (car X est càdlàg, donc bornée r-p.s.), -K- peut être choisi de telle sorte
que l'inégalité suivante soit vraie
r ( sup f(X(y, s)) > K ) < ê, d'où supr(f(X(y, t)) > K) < ê.
o s to t>o
Si p > 1, 0 < t 1 < . . . < t p et 6 > 0, l'inégalité
r ( sup f(X(y, f(XN) ti)) > 0 ) < pê
l<i<p f(XN)
232
9. MÉTHODES DE RENORMALISATION
est donc vraie dès que f(XN) > K16. On en déduit que les lois marginales
du processus (f(X(y, f(XN) t))1 f(XN)) tendent en distribution vers celles du
processus identiquement nul. La condition d) assure la relative compacité de la
suite de processus
( f(X(y, f(XN) t)) )
f(XN) .
La proposition D.7 page 354 montre donc que tout point d'accumulation de
cette suite est nécessairement le processus nul, cette suite converge donc en
distribution vers le processus nul. Pour T > 0, la définition de la topologie
de Skorokhod sur D([O, T], IR) entraîne la continuité de l'application (z(t)) ---*
sUPO<t T z (t) sur cet espace, on en déduit l'identité
lim JP> ( sup J(X(y, J(XN) t)) > E ) = 0,
N-++oo O<t b f(XN)
pour tout b > o. La proposition est démontrée. D
Sous certaines conditions, la proposition 9.9 montre que pour chaque limite
fluide d'un processus ergodique il existe un temps aléatoire après lequel celle-ci
est égale à O. Dans le cas d'un réseau de Jackson ergodique, une propriété plus
forte (Proposition 9.4) est vraie: toutes les limites fluides sont nulles après un
instant déterministe.
5. Limites fluides et équilibre local
Les limites fluides sont les valeurs d'adhérence d'un processus de Markov
changé de temps avec un état initial grand. Quand l'espace d'états est multi-
dimensionnel, certaines coordonnées de l'état initial peuvent être petites et les
coordonnées correspondantes du processus peuvent atteindre un état d'équilibre
en temps fini qui sera appelé un équilibre local. Les autres coordonnées du
processus de Markov seront alors influencées par ce processus à l'équilibre. Dans
le cadre des systèmes de files d'attente, tant que ces autres coordonnées restent
grandes, la dynamique ne change pas en général. Le changement intervient quand
l'une des grandes coordonnées s'annule, l'ensemble des petites coordonnées est
modifié (certaines d'entre elles peuvent se mettre à croître par exemple), un
nouvel équilibre local peut alors éventuellement s'installer, et ainsi de suite. De
cette façon, on peut espérer identifier les limites fluides d'un tel processus de
Markov. Par exemple, dans le cas de deux files en tandem qui partent de l'état
initial (0, N), le processus renormalisé du nombre de clients dans la deuxième
file se comporte comme celui d'une file MI M Il avec une arrivée poissonnienne,
le processus des départs de la première file à l'équilibre.
À titre d'illustration de ce phénomène, le cas d'un processus de vie et de mort
gouverné par un processus de Markov ergodique est étudié dans cette section.
C'est un cas particulier d'un modèle étudié dans le chapitre 3 de [18] (avec des
fonctions de Liapunov). On montre que les limites fluides du processus de vie
et de mort sont effectivement gouvernées par l'état d'équilibre du processus de
Markov ergodique. Une fois encore, les techniques utilisées peuvent traiter des
cas plus généraux.
5. LIMITES FLUIDES ET ÉQUILIBRE LOCAL
233
Un processus de vie et de mort gouverné par un processus er-
godique. Dans cette partie, (Z(t)) est un processus de Markov ergodique à
valeurs dans un espace d'états S dénombrable, sa matrice est notée Q = (qxy)
et 'Tr désigne la probabilité invariante. On suppose en outre que les processus
de Poisson (N Àz ' Np,z ; x E S) sont définis sur le même espace de probabilité et
sont indépendants de (Z (t)) et entre eux.
On considère le processus de Markov à valeurs dans S x N avec la matrice
de sauts R = (T(x,i),(y,j) ; x, y E S, i, j E N) définie comme suit. Pour x, y E S
et i E N,
T(x,i),(y,i) = qxy,
T(x,i),(x,I+1) = Àx et T(x,i),(x,i-1) = J1.x si i:F 0
et T(x,I),(y,j) est nul pour les autres valeurs en dehors de la diagonale. Les suites
(Àx) et (J1.x) sont supposées être strictement positives. La première composante
de ce processus de Markov est un processus de Markov de matrice de sauts Q,
noté aussi (Z(t)). Conditionnellement à {Z(t) = x}, la deuxième coordonnée
(X(t)) se comporte comme un processus de vie et de mort.
Il est clair que (X(t)) a même loi que la solution de l'équation différentielle
stochastique dX(t) = NÀz(t_> (dt)-l{x(t- );tO} Np,z(t-> (dt). Le couple (Z(t), X(t))
est un processus de Markov dont la matrice de sauts vaut R.
PROPOSITION 9.10. Si (XN(t)) est la solution de l'équation différentielle
(9.34) dX(t) = NÀZ(t_> (dt) -l{x(t-);to}Np,z(t_)(dt),
avec les conditions initiales (Z(O), X(O)) = (x, N) E S x N, en notant
v". deI L (.>.'" - JL", )11"( X), ·
xES
sous la condition sUPxES(À x + J-Lx) < +00, le processus (XN(Nt)IN) converge
en distribution vers ((1 + v 1r t)+) quand N tend vers l'infini.
La quantité V 1r est la dérive moyenne du processus de vie et de mort quand
le processus (Z(t)) est à l'équilibre. La proposition montre qu'elle dirige le com-
portement de la limite fluide de (X (t)). La condition initiale de (Z (t)) est fixée
à x et donc petite relativement à celle de (X (t)).
DÉMONSTRATION. D'après l'équation (9.34), XN vérifie la relation
(9.35) XN(Nt) = N + MN(Nt) + l Nt >'Z(s) ds - l Nt l{xN(s);éO}JLZ(s) ds,
pour t > 0, avec
(9.36)
MN(t) = r (N Àz (._> (ds) - >'Z(s) ds)
J]O,t]
- r l{x N (s- );éO} (N llz (.-> (ds) - JLZ(s) ds).
J]O,t]
234
9. MÉTHODES DE RENORMALISATION
Si pour t > 0, :Ft désigne la tribu engendrée par les variables (Z(s); s < t) et
les processus de Poisson (N Àz ' Np,z ; x E S) restreints à l'intervalle [0, t], alors
(MN(t)) est une martingale locale relativement à la filtration (Ft) et
MN(t) = L r l{z(s-)=x} (N Àz (ds) - Àx ds)
xES J]O,t]
+ r l{xN(s-)#O,Z(s-)=x} (N,..Jds) - J.Lx ds).
J]O,t]
Les propositions B.9 et B.7 page 336 montrent que chaque terme de la somme
précédente est une martingale. En utilisant la même méthode que dans la preuve
de la proposition 6.2 (via la proposition B.10 page 338), le processus croissant
«MN>(t)) de (MN(t)) en t vaut
(l t ÀZ(s) ds + l t l{x N (s)#O}J.LZ(s) dS) .
En particulier, lE((MN (t))2) < sUPXES(À x + J1.:r;) t < +00, (MN(t)) est une mar-
tingale de carré intégrable. De l'inégalité de Doob, on déduit la relation
JP> ( sup IMN(Ns)1 > E ) < 1 lE(MN(Nt)2)
O<s<t N N 2 ë 2
< N 2 E ( l Nt (ÀZ(s) + J.LZ(s») dS) < N 2 (Àx + J.Lx) t
et par conséquent
lim JP> ( sup IMN(Ns)1 > E ) = o.
N-++oo O<s<t N
L'équation (9.35) peut se réécrire sous la forme
XN(Nt) 1 (Nt
N = YN(t) + N Jo l{XN(s)=O}J.LZ(s) ds,
avec
MN (Nt) 1 (Nt
YN(t) = 1 + N + N Jo (ÀZ(s) - J.LZ(s») ds.
Le couple
( XN(Nt) 1 (Nt )
(9.37) N ' N Jo l{xN(s)=O}J.LZ(s) ds
est clairement la solution du problème de Skorokhod associé à la fonction (YN (t)).
En utilisant le critère de tension du théorème D.9 page 354 et le fait que les
suites (Àx) et (J-L:r;) sont bornées, il est facile de montrer que la suite des lois des
processus continus
(UN(t)) = ( l Nt (ÀZ(s) - J.LZ(s») dS)
5. LIMITES FLUIDES ET ÉQUILIBRE LOCAL
235
est tendue dans l'espace des probabilités sur les fonctions continues.
Si p < 1 et 0 < t 1 < t 2 < . . . < t p , le théorème ergodique pour le processus
de Markov (Z(t)) montre que IP-presque sûrement
1 l Nt1
lim N (ÀZ(s) - J1.Z(s)) ds = v 7r t i,
N --++00 °
pour i = 1,. . . ,p. On en déduit que les lois marginales de toute valeur d'adhé-
rence de la suite sont celles du processus (v 7r t). La suite de processus (UN(t))
converge donc en distribution vers (v 7r t) (l'espace C(I14, IR) étant muni la to-
pologie de la convergence uniforme sur les compacts), la suite (YN(t)) converge
donc de la même façon vers (1 + v 7r t).
Les inégalités (9.48) et (9.49) de la proposition 9.14 permettent de conclure
que le couple (9.37) converge en distribution vers la solution du problème de
Skorokhod associé à la fonction (1 + v 7r t). En particulier (XN(Nt)IN) converge
en loi vers (( 1 + V 7r t) +), ce qui achève la démonstration de la proposition. D
EXEMPLES
Deux files d'attente en tandem. On reprend l'exemple de la partie 1.2.3
page 207 avec la suite des états initiaux XN = (0, N). La composante (11 (t)), le
nombre de clients d'une file MIMl1 avec les paramètres À 1 < J1.1, est ergodique
et sa probabilité invariante 'Ir est une loi géométrique de paramètre À 1 1 J1.1. La
coordonnée (12(t)) est un processus de vie et de mort, l'intensité des sauts -1
vaut J-L2 et l'intensité des sauts + 1 vaut J1.1 si 1 1 (t) > 0 et 0 sinon. La proposition
précédente montre donc que (l2(Nt)IN) converge vers ((1 + v 7r t)+) avec
À 1
V 7r = (1 - 'Ir(O))J1.1 - J-L2 = -J1.1 - J1.2 = À 1 - J-L2,
J1.1
ce qui établit rigoureusement la convergence (9.4) page 208 dans le cas où y = O.
Limite fluide d'un processus de sauts dans . On considère le processus
de Markov (X(t), Y(t)) sur dont la matrice de sauts Q = (qmn; m, n E )
est donnée par (voir aussi la figure 3) :
si i > 0 et j > 0,
Q(i,j)(i+1,j) = À1' q(i,j)(i,j+1) = À2' q(O,j)(O,j+1) = Àv, q(j,O)(j+1,O) = À h ;
si i > 0 et j > 0,
q(i,j),(i-l,j) = J-L1, q(i,j),(i,j-1) = J1.2, q(O,j)(O,j-1) = J1.v, q(j,O)(j-1,O) = J1.h,
q(O,O),(O,l) = Ào, q(O,O),(l,O) = Ào et les autres composantes en dehors de la diago-
nale sont nulles. Il est facile de vérifier que le processus (X(t), Y(t)) fait partie
de la classe (C) des processus de sauts étudiés dans la section 2.
Pour N > 1, on note (XN(t)) = (X N ,l(t),XN,2(t)) le processus de Markov
de matrice Q dont l'état initial est donné par XN = (laNJ, l(1 - a)NJ) pour
a E [0,1]. La suite des états initiaux (XN) vérifie
lim IlxN11 = 1
N +oo N
et
lim X N N = (a, 1 - a).
N--++oo
236
9. MÉTHODES DE RENORMALISATION
À2
Àv Ptt Àl
Àl
JJ.v
JJ.2
ÀI-JJ.l
À2 - JJ.2
Ào À2
V1r
<----
a Ào JJ.h Àh
FIG. 3. Limite fluide d'un processus de sauts dans
À l'intérieur de l'ensemble N2 les coordonnées sont indépendantes et se
comportent comme deux files MI Mil. Le résultat de renormalisation de la file
M / M /1 permet de conclure que le processus (X N (N t ) lN; t < ta) converge en
distribution vers la fonction (a + (À 1 - J-L1) t, 1 - a + (À 2 - J-L2) t; t < ta) avec
a l-a
ta = 1\ .
(J1.1 - À 1 )+ (J1.2 - À 2 )+
Si ta = +00, de façon équivalente si À 1 > J1.1 et À 2 > J1.2, l'étude du processus
renormalisé est terminée.
Si ta < +00, on peut supposer par exemple que ta = (1 - a)/(J1.2 - À 2 ) ; en
particulier À 2 < J1.2. L'instant où la deuxième coordonnée du processus renorma-
lisé est nulle converge p.s. vers ta et, avec la propriété de Markov forte, l'étude
se ramène au cas où les états initiaux (XN) = (XN t 1' 0) vérifient
l . x N 1
lm _ N ' = 1 > O.
N-++oo
La mesure d'équilibre 7r de la deuxième composante est une loi géométrique
de paramètre À21 J1.2. La dérive de la première composante vaut À 1 - J1.1 ou
Àh - J1.h suivant que la deuxième coordonnée est strictement positive ou nulle.
La proposition 9.10 montre que (X N ,2(Nt)IN) converge en distribution vers la
fonction (0, (1 + v 1r t)+) avec
V1l" = (>'1 - J-Ld >'2 + (>'h - J-Lh) ( 1 _ À 2 ) .
J-L2 J1.2
En particulier, si V 1r < 0 (comme c'est le cas sur la figure 3), le processus renor-
malisé est nul à partir d'un certain temps.
Le résultat suivant a été montré par Malyshev [18] en recollant des fonctions
de Liapunov linéaires. L'approche fluide a le mérite de donner directement les
conditions d'ergodicité.
6. APPENDICE : LE PROBLÈME DE RÉFLEXION DE SKOROKHOD 237
PROPOSITION 9.11. Si une des conditions suivantes est satisfaite, le pro-
cessus de M arkov de matrice de sauts Q est ergodique :
a) À 1 < J-L1, À 2 > J-L2 et
(9.38 )
À 1 ( À1 )
(À 2 -J1.2)-+(À v -J1.v) 1-- <0;
J-L1 J1.1
b) À 2 < J-L2, À 1 > J1.1 et
(9.39)
À 2 ( À2 )
(À 1 - J-L1) - + (À h - J1.h) 1 - - < 0;
J-L2 J-L2
c) À 1 < J1.1, À 2 < J1.2 et les relations (9.38) et (9.39).
DÉMONSTRATION. Les conditions a), b), c) assurent que les limites fluides
reviennent en O. Sous la condition c), suivant le point de départ, la limite fluide
peut toucher l'axe des ordonnées et celui des abscisses, ce qui explique les deux
contraintes (9.38) et (9.39).
Si le point initial est (a, 1 - a) avec a E [0, 1], sous chacune des trois condi-
tions, il est facile de vérifier que les limites fluides sont nulles à partir d'un
temps T indépendant de a. La proposition 9.1 assurant de la propriété d'uni-
forme intégrabilité, la proposition est une conséquence du corollaire 9.8. D
La limite fluide du processus a été construite, via la propriété de Markov forte,
en recollant des morceaux de trajectoires (au nombre de deux dans ce cas). Cette
procédure est naturelle, elle permet d'obtenir directement l'expression explicite
de la limite fluide. Cet aspect intuitif de la limite fluide n'est pas aussi apparent
quand celle-ci est exprimée comme solution d'un problème de Skorokhod. En
pratique, dans des cas plus compliqués, la combinaison de ces deux points de vue
est fructueuse. On identifie tout d'abord la limite fluide possible en découpant
la trajectoire, ensuite on peut montrer que c'est réellement une limite fluide en
vérifiant qu'elle est la solution du problème de Skorokhod associé.
6. Appendice: le problème de réflexion de Skorokhod
La résolution d'un problème de réflexion de Skorokhod associé à une fonction
càdlàg (Y (t)) de Il4 dans }Rd est la construction d'une fonction (X (t)) à valeurs
dans }Rd de telle sorte que (X(t)) reste dans un domaine C }Rd donné. Cette
fonction (X(t)) se comporte comme (Y(t)) dans l'intérieur du domaine et subit
une réflexion lorsqu'il atteint la frontière de celui-ci. À (X (t)) est associée une
autre fonction càdlàg (R(t)) intervenant naturellement pour ce problème, c'est
la quantité qui force (X(t)) à rester dans . Dans le cadre des files d'attente, le
domaine en question est un orthant IR (le nombre de clients dans les files ne peut
être négatif). Les résultats d'existence et d'unicité de telles fonctions permettent
de montrer que, si la suite (x N 1 Il x Nil) des états initiaux renormalisés a une
limite, alors les processus renormalisés convergent vers une limite déterministe.
Ce n'est, en général, pas vrai pour tous les processus de Markov; voir page 209
l'exemple du processus dans Z x N. La résolution de ce type de problème de
238
9. MÉTHODES DE RENORMALISATION
réflexion permet aussi de construire certaines diffusions réfléchies dans des sous-
ensembles de d, voir l'article de Costantini[10].
Comme d'habitude D(I14, ]Rd) désigne l'ensemble des fonctions càdlàg sur
Il4 à valeurs dans d où d > 1. Cet espace est muni de la topologie de Skorokhod.
6.1. La dimension 1. Le cas de la dimension 1 est traité séparément en
raison de son importance et du fait que les solutions au problème de Skorokhod
y ont une représentation explicite.
THÉORÈME 9.12. Si Y est une fonction càdlàg sur Il4 à valeurs réelles
telle que Y(O) > 0, il Y a un unique couple (X, R) de D(I14, ) solution au
problème de Skorokhod associé à (Y(t)), i.e. tel que pour tout t > 0,
- X(t) = Y(t) + R(t);
- X(t) > 0, l'application t -t R(t) est croissante et R(O) = 0 ;
- (X, R) vérifie la condition de réflexion
(R)
(+oo
Jo X(s) dR(s) = o.
le couple solution (X y, Ry) est défini par,
(9.40)
(9.41)
Xy(t) = Y(t) V sup (Y(t) - Y(s)),
O<s<t
Ry(t) = 0 V sup (-Y(s)),
O<s<t
pour t > o.
Comme une telle fonction X est positive, la condition (R) impose que la
fonction croissante t -t R(t) n'augmente que sur l'ensemble {t; X(t) = O}.
DÉMONSTRATION. Si (X, R) et (X', R') sont deux couples de solutions du
problème de réflexion, nécessairement X - X' = R - R'. Pour t > 0, la mesure
signée J1. étant définie par J1.(dx) = d(R- R')(x), ou encore J1.([0, t]) = R(t) - R'(t)
pour tout t > o. Le théorème de Fubini donne la formule classique de changement
de variables
r (R - R')(s) d(R - R')(s) = r r J.L(du) J.L(ds) = r J.L(du) J.L(ds)
J[O,t[ J[O,t[ J[O,s] Jo u s<t
= ( r J.L(du)J.L(ds) + r J.L(dU)J.L(dS) )
2 } o U,s<t } o u=s<t
[10] C. Costantini, The Skorohod oblique refiection problem in domains with corners and
application to stochastic differential equations, Probability Theory and Related Fields 91
(1992), no. 1, 43-70.
6. APPENDICE : LE PROBLÈME DE RÉFLEXION DE SKOROKHOD 239
d'où la relation
(9.42) r (R - R')(s) d(R - R')(s)
J [O,t[
= ( J1.([O, t[)2 + L J1.( {s} )2 ) .
O s<t,JL( {s} )#0
La condition de réflexion donne l'identité
r (R - R')(s) d(R - R')(s) = r (X - X')(S) d(R - R')(s)
J[O,t[ J[O,t[
= - r X(S) dR'(s) - r X'(S) dR(s) < 0,
J[O,t[ J[O,t[
puisque X et X' sont positives, et par conséquent
r (R - R')(s) d(R - R')(s) = O.
J[O,t[
De l'égalité (9.42), on déduit que J1.([O, t[) = 0 pour tout t > 0, par conséquent
R(t) = R'(t) pour tout t > 0 et donc X = X'.
Il reste à vérifier que les deux fonctions définies par les équations (9.40)
et (9.41) sont solutions au problème de Skorokhod. Notons (X(t)) et (R(t))
celles-ci. Seule la condition de réflexion (R) n'est pas complètement immédiate.
Pour obtenir cette condition de réflexion, la fonction X étant positive, il
suffit de montrer que l'ensemble F = {t 1 X (t) > O} est négligeable pour la
mesure dR. Les fonctions (X(t)) et (R(t)) sont clairement càdlàg. Pour t > 0,
alors X(t) > 0 si et seulement si -Y(t) < 0 ou -Y(t) < sup{ -Y(s) ; s < t}. De
cette équivalence on déduit les deux assertions suivantes.
a) La continuité à droite de (Y(t)) donne, pour ê > 0, l'existence de fJ > 0 tel
que Y(s) > Y(t) -ê, pour tout s dans l'intervalle [t, t+fJ]. Par conséquent
si X(t) > 0 il existe fJ > 0 tel que X(s) > 0 et R(s) = R(t) si s E [t, t + fJ].
b) Si X(t) > 0, R(t) peut donc s'écrire comme
R(t) = 0 V sup (-Y(s)) = 0 V sup (-Y(s))
O s t O s<t
= lim 0 V sup (-Y(s)) = lim R(t').
t ' t, O<s<t ' t ' t,
t ' <t - - t ' <t
Si (X(t)) > 0, la fonction R est continue à gauche en t et par conséquent
continue tout court.
D'après a) l'ensemble F = {tl X(t) > O} est donc une réunion dénombrable
d'intervalles non vides de Il4. Si t E F, il existe x > t tel que [t, x[C F, on note
t o = sup{s E [t,x[IR(u) = R(t), Vu < s}. Si t o < x, la continuité à gauche de R
en t o donne donc R(t o ) = R(t o -) = R(t) et a) donne un intervalle [t, ta + fJ] sur
lequel R est constante égale à R(t). Contradiction, donc t o = x. On en déduit
240
9. MÉTHODES DE RENORMALISATION
que la fonction R est constante sur chacun des intervalles constituant F. Si 1
est un de ceux-ci et a < (3 sont les deux points à ses extrémités, alors
dR(]a,{3[) = R({3-) - R(a) = R({3-) - R(a+) = 0
puisque R est constante sur ]a,{3[C F. D'autre part si a E l, alors a E F et
donc
dR( {a}) = R(a) - R(a-) = 0,
d'après b), de la même façon dR( {{3}) = 0 si (3 E F. On a donc montré que
dR(I) = 0 et donc, en sommant sur tous les intervalles de F, dR(F) = o. La
condition de réflexion (R) est démontrée. D
Le cas d'une fonction affine. Si x > 0, À, J1. > 0 et (y(t)) = (x + (À - J-L)t) ,
la solution (x, r) du problème de réflexion associé à (y(t)) est donnée dans ce
cas par
(x(t)) = ((x + (À - J1.)t)+),
(r(t)) = ((x + (À - J1.)t)-),
en vertu de l'égalité
(x + (À - J1.)t)+ = (x + (À - J1.)t) + (x + (À - J1.)t)-.
Le mouvement brownien. Si (B(t)) est le mouvement brownien standard
sur IR, la formule de Tanaka (voir Rogers et Williams [43]) donne la relation
IB(t)1 = r t sgnB(s) dB(s) + Lo(t),
Jo 2
où (Lo(t)) est le temps local du brownien en 0, fonction croissante qui ne croît
que sur les zéros de (B(t)). Le couple (IB(t)l, Lo(t)/2) est donc la solution du
problème de réflexion associé à la fonction
(l t sgn(B(s)) dB(S))
qui a même loi que (B(t)) (c'est une martingale continue dont le processus
croissant vaut (t)). On déduit que le couple (X, R) solution du problème de
réflexion associé au mouvement brownien a même loi que (IB(t)l, Lo(t)/2).
6.2. Le problème de réflexion à plusieurs dimensions. Dans ce cadre,
le problème de réflexion n'a pas, à la différence de la dimension 1, une solution
explicite connue. Si P est une matrice carrée de dimension d > 1, la matrice
transposée est notée tp.
DÉFINITION 19. Une matrice carrée P = (pij) sur }Rd à coefficients positifs
est sous-markovienne et sans état récurrent si, pour 1 < i, j < d,
- 2::::=1 Pik < 1
- limn-++ooPij = 0, si pn = (pij) est la n-ième puissance de la matrice P.
6. APPENDICE : LE PROBLÈME DE RÉFLEXION DE SKOROKHOD 241
La matrice de routage des réseaux de Jackson considérés précédemment est
sous-markovienne et sans état récurrent. Le théorème suivant, dû à Harrison et
Reiman[17], est l'analogue multi-dimensionnel du théorème 9.12.
THÉORÈME 9.13. Si (Y(t)) est une fonction càdlàg à valeurs dans }Rd
telle que Y(O) > 0 et P = (pij) une matrice d x d sous-markovienne sans état
récurrent, il existe un unique couple de fonctions (Xy(t)) = (XY)i(t); 1 <
i < d) et (Ry(t)) = (Ry,i(t); 1 < i < d) de D(II4, }Rd) tel que pour tout t > 0
et tout 1 < i < d,
a) Xy(t) = Y(t) + (1 - tp)Ry(t);
b) XY)i(t) > 0, l'application t -t RY)i(t) est croissante avec RY)i(O) = 0;
c) avec la condition de réflexion
r+ oo
(R) Jo XY,i(S) dRY.i(S) = o.
La fonction (Ry (t)) est l'unique solution (Ri (t); i = 1, . . . ,d) des équations
(9.43) Ri(t) = 0 V sup ( tpjiRj(S) - ¥i(S) ) ,
O s t )=1
pour i = 1, . . . ,d et t > o.
Dans le cas de la dimension 1, en prenant P11 = 0, l'équation de point
fixe (9.43) se réduit à la représentation explicite (9.41).
DÉMONSTRATION. Un couple (X, R) est solution au problème de réflexion
si et seulement si la variable R( t) = (Ri (t) ; i = 1,... ,d) vérifie l'équation de
point fixe (9.43).
En effet, si (X, R) vérifie les conditions du théorème, on a l'égalité
R(t) - X(t) = tpR(t) - Y(t),
et comme X est positif, pour i = 1, . . . ,d et s < t,
d
Ri(t) > Ri(s) > LPjiRj(s) - }'i(s).
j=l
Par conséquent
Ri(t) > Zi(t) de! 0 V SUp ( tpjiRj(S) - ¥i(S» ) .
O s t j=l
La condition de réflexion donne que dRi-presque partout sur II4
d
Ri(t) = LPjiRj(t) - Yi(t) < Zi(t).
j=l
[17] J .M. Harrison and M.I. Reiman, Refiected brown an motion on an orthant, Annals of
Probability 9 (1981), no. 2, 302-308.
242
9. MÉTHODES DE RENORMALISATION
L'égalité Ri(t) Zi{t) est donc valable dRi-presque partout. La formule de
changement de variables vue dans la preuve du théorème 9.12 donne l'inégalité
(Ri{[O, t[) - Zi{[O, t[))2 < r (Ri{S) - Zi{S)) d{Ri{s) - Zi{S))
J[O,t[
= - r (Ri{s) - Zi{S)) dZi{S) < 0,
J[O,t[
on en déduit que Ri([O, t[) = Zi([O, t[) pour tout t > o. Le vecteur (Ri) est
solution du système d'équations (9.43).
Réciproquement, si R vérifie l'identité (9.43), pour i = 1, . . . ,d, la fonction
t -t Ri{t) est clairement croissante et la fonction (X(t)) = (Xi(t) ; i = 1, . . . ,d)
définie par
d
Xi(t) = Yi(t) + Ri{t) - LPjiRj(t),
j=l
pour i = 1, . .. ,d, vérifie d'après l'équation de point fixe (9.43)
Xi(t) = 0 V sup ( tpjiRj{S) - Yi{S) ) - ( tpjiRj{t) - Yi{t) ) ,
O s t j=l j=l
donc les coordonnées de (X (t)) sont toutes positives. Si Xi (t) est strictement po-
sitive pour t > 0, les propriétés de continuité à droite des composantes de (Y(t))
montrent l'existence d'un voisinage à droite de t sur lequel Ri est constante,
La condition de réflexion (R) se vérifie alors de la même façon que pour la di-
mension 1. La preuve du théorème se ramène donc à celle de l'existence et de
l'unicité de la solution à l'équation de point fixe (9.43).
Dans la suite, si Z = (Zi) est une fonction càdlàg sur IR d , la quantité IIZlIoo,T
désigne la norme du sup sur [0, T],
IIZlloo,T = sup m¥iX IZi(S)I.
O<s<T l d
Pour i, j = 1, . . . ,d, l'hypothèse sur la matrice P montre que la quantité pij
tend vers 0 quand n tend vers l'infini. Il existe donc un entier ko tel que pour
tout = 1, . . . ,d,
( 9.44 )
d
L ka 1
p.. < -.
J, - 2
j=l
(9.45)
On pose R (t) = 0 pour i = 1, . .. ,d et t > 0 et
R +l{t) = 0 V sup ( tpjiRj{S) - ¥i{S) ) ,
o s t j=l
6. APPENDICE : LE PROBLÈME DE RÉFLEXION DE SKOROKHOD 243
pour n > o. L'inégalité élémentaire
(9.46) sup (z(s) - y(s)) - sup (z'(s) - y'(s))
O s t O s t
< sup Iy(s) - y'(s)1 + sup Iz(s) - z'(s)l,
O<s<t O<s<t
- - - -
donne, pour n > 1, la majoration
d
sup IR +l(s) - Ri(s)1 < LPji sup IRj(s) - Rj-1(s)l.
O s T j=l O s T
En itérant, il vient pour n > ko
d
sup IR +l(s) - Ri(s)1 < p i sup IR -ko+1(s) - R -kO(s)l.
O<s<T ] O<s<T ] ]
- - ]=1 - -
De l'inégalité (9.44), on déduit la relation
(9.47)
II Rn+1 - Rn ll < II Rn-ko+1 _ Rn-ko ll
OOt T - 2 OOt T ,
d'où
II R n + 1 _ Rn ll < 1 II R n - k oLn/k o J +1 _ Rn-koLn/koJ Il
oo,T - 2Ln/koJ oo,T
< ln koJ sup IIRp+l - RPlloo.T.
2 O p<ko
La norme Il.lIoo,T étant plus forte que la distance de la topologie de Skorokhod, la
suite (Rn) est donc de Cauchy dans l'espace D([O, T], }Rd) muni de la topologie de
Skorokhod. Cet espace étant complet, la suite (Rn) a une limite R E D([O, T], }Rd)
et l'inégalité précédente montre que (Rn) converge vers R pour la norme Il.lloo,T.
L'inégalité (9.46) montre que l'application
(z(t)) -t ( 0 V sup ( tPjiZj(S) - Yi(S) ) )
O s t ]=1
étant continue de D([O, T],}Rd) muni de la topologie associée à Il . Iloo,T dans
lui-même, la fonction R vérifie donc l'équation (9.43).
Si R' est une autre solution à l'équation de point fixe (9.43), en utilisant la
même méthode que pour montrer l'inégalité (9.47), pour n > 1,
IIR n - R'lloo.T < IIRn-ko - R'lIoo.T.
En faisant tendre n vers l'infini, on en déduit la relation
Il R - R' Il 00. T < Il R - R' Il 00. T,
et par conséquent R = R', d'où l'existence et l'unicité de la solution à l'équation
de point fixe (9.43), ce qui achève la démonstration du théorème. D
244
9. MÉTHODES DE RENORMALISATION
DÉFINITION 20. Une fonction f d'un intervalle J dans IR est de Lipschitz
d'ordre a > 0 s'il existe une constante G telle que pour tout x, y E J
If(x) - f(y)1 < Glx - ylQ.
La proposition D.2 page 351 montre qu'une fonction de Lipschitz d'ordre 1 a
une densité par rapport à la mesure de Lebesgue.
La proposition ci-dessous donne les importantes propriétés de régularité des
solutions au problème de réflexion : continuité des variables Ry et X y en Y et
propriété de Lipschitz de Ry et X y si Y est Lipschitz.
PROPOSITION 9.14. Sous les hypothèses du théorème 9.13, pour T > 0,
il existe une constante KT telle que, si Y et y' sont des fonctions càdlàg
telles que Y(O) > 0 et Y'(O) > 0, alors
(9.48 )
IIXy - Xy,lloo,T < KTIIY - Y'lloo,T,
et
(9.49)
IIRy - Ry' /loo,T < KTIIY - Y'lloo,T,
en notant IIZlloo,T = sUPO<s<T max1 i d IZi(S)1 si Z(t) = (Zi(t)).
Si les coordonnées d'une fonction càdlàg Y sont de Lipschitz d'ordre a
sur l'intervalle [0, TL il en va de même pour Ry et X y.
DÉMONSTRATION. On reprend les définitions et notations de la preuve pré-
cédente. On note (Rn) la suite définie par la récurrence (9.45), si Y est une
fonction càdlàg, (Sn) est la suite définie par la même récurrence mais en rem-
plaçant Y par Y'. Les suites (Rn) et (sn) convergent respectivement vers Ry
et Ry'. En utilisant encore l'inégalité (9.46), pour i = 1,... ,d, on obtient la
relation
d
sup IRi(s) - Si(s)1 < IIY - Y'/loo,T + LPji sup IRj-1(s) - Sj-1(s)l.
O s T j=l O s T
En itérant il vient, pour n > ko,
sup IRi(s) - Si(s)1
O<s<T
d
< dkollY - Y'lloo,T + LP;i sup IRj-kO(s) - Sj-kO(s)l.
)=1 O s T
Si ko est choisi de façon à satisfaire l'inégalité (9.44), on obtient la relation
II R n - Sn ll < dk II Y - Y' II + II Rn-ko - sn-ko ll
oo,T _ 0 oo,T 2 oo,T,
et en faisant tendre n vers l'infini, on en déduit l'inégalité
IIRy - Ry,lloo,T < 2dk o llY - Y/lloo,T.
L'identité X y = y + (1 - tP)Ry entraîne alors directement la relation (9.48).
6. APPENDICE : LE PROBLÈME DE RÉFLEXION DE SKOROKHOD 245
Si les coordonnées de f sont de Lipschitz d'ordre a, on note
L (f) Ifi(t) - fi(S)1
cr = max sup
l dO s<t T It - slcr
si f = (fi) (si f est à valeurs réelles, le max est bien sûr superflu). La fonction
y étant lipschitzienne d'ordre a, la définition (9.45) de la suite (Rn) montre la
propriété de Lipschitz d'ordre a pour la fonction Rn. De plus, pour 0 < s < t < T
et i = 1, . . . ,d, en discutant suivant les cas on obtient l'inégalité
R +l(t) - R +l(S) = 0 V sup ( tPiiRj(U) - ¥i(U) )
o u t j=l
- 0 V sup ( tPiiRj(U) - ¥i(U) )
o u s J=l
< sup ( tPii(Rj(U) - Rj(s)) - (¥i(u) - ries)) ) ,
s u t J=l
il vient
d d
Lcr(R +l) < LPjiLcr(Rj) + Lcr(Yi) < LPjiLcr(Rj) + Lcr(Y).
J=l j=l
En itérant cette inégalité, il vient pour n > k o , i = 1, . . . ,d,
d
Lcr(Ri) < dkoLcr(Y) + LP;i Lcr(Rj-k O )
j=l
d'où
L,ARn) < dkoL",(Y) + L",(Rn-ko)
< G = 2dkoLcr(Y) + sup Lcr(RP).
O p ko
La suite (Lcr(Rn)) est donc bornée. Pour s, t E [0, T] et n > 1,
max IRi(t) - Ri(s)1 < Glt - slcr,
l<i<d -
la convergence de la suite (Rn) vers Ry donne la relation
l ftd IRY,i(t) - Ry,i(s)1 < Glt - slcr,
donc (Ry) est de Lipschitz d'ordre a sur [0, T]. La même propriété est donc
vraie pour X y . D
CHAPITRE 10
Théorie ergodique
Sommaire
1. Systèmes dynamiques discrets
Le théorème de récurrence de Poincaré
Endomorphismes induits
2. Ergodicité et théorèmes ergodiques
La tribu des ensembles invariants
Les endomorphismes ergodiques
2.1. Exemples
Le théorème ergodique
La décomposition ergodique
3. Systèmes dynamiques continus
Les tours
4. Endomorphismes markoviens
247
248
249
252
252
252
253
254
256
259
262
263
Dans cette partie les résultats et définitions de base de la théorie ergodique
dans un cadre probabiliste sont rappelés. Ce sujet n'est pas aussi souvent abordé
que les questions de processus de Markov ou la théorie des martingales, pour
cette raison la plupart des résultats ont été démontrés. Pour une vue plus large
du domaine le lecteur intéressé peut consulter le livre de référence de Cornfeld et
al. [11]. Le triplet (O,:F, P) désigne un espace de probabilité dans ce qui suit.
1. Systèmes dynamiques discrets
DÉFINITION 21. Un endomorphisme T de (O,:F, P) est une application de
o dans 0 telle que
1. T est une application mesurable;
2. T préserve la probabilité JP> : pour toute fonction f mesurable positive sur
l'ensemble 0,
(10.1)
fo f(T(w» dlP(w) = fo f(w) dlP(w).
Un automorphisme T est un endomorphisme bijectif tel que T- 1 soit mesurable.
248
la. THÉORIE ERGODIQUE
Les résultats qui sont exposés dans cette partie concernent principalement
l'étude des itérés d'un endomorphisme. Il s'agit, dans ce cadre assez général, de
donner les propriétés des trajectoires (Tn (w)), w E 0, où Tn est le n-ième itéré de
l'endomorphisme T. Dans toute la suite, T est supposé être un endomorphisme.
Si A E F et n E N, la notation T-n(A), qui est utilisée dans ce chapitre, ne
suppose pas que T est bijectif; c'est la notation ensembliste de {w E nlTn(w) E
A}. Quand T est bijectif, T-n(A) est aussi l'image de A par le n-ième itéré T-n
de l'endomorphisme T- 1 .
EXEMPLES.
1. Si n = {O, 1}, F est l'ensemble des parties de n, P = !(6 0 + 6 1 ), T(O) = 1 et
T(l) = 0 alors T est un automorphisme.
2. Pour a E [0,1], la translation TOi : x -t x + a mod 1, sur le tore n = [0,1[
muni la tribu borélienne et de la mesure de Lebesgue, est un automorphisme.
3. En prenant le même espace de probabilité que précédemment, l'opérateur
T : x -t 2x mod 1 est aussi un endomorphisme sur cet espace.
4. La transformation (x, y) -t (x, y + 4>(x)), avec 4> fonction mesurable de [0, 1[
dans [0,1[, est un endomorphisme du tore en dimension deux [0, l[x[O, 1[
muni de la mesure de Lebesgue.
Un exemple important, celui des endomorphismes markoviens, est traité en détail
à la fin dans la section 4 page 263.
Le théorème de récurrence de Poincaré.
DÉFINITION 22. Si A E F, la variable
VA(W) = inf {n > OITn(w) E A},
est le temps d'atteinte de l'ensemble A. L'ensemble Vn(A) est celui des trajec-
toires qui partent du complémentaire de A et y restent au moins n unités de
temps,
Vn(A) = AC n T- 1 (A C ) n T- 2 (A C ) n... n T-n(A c ),
ou encore Vn(A) = AC n {VA(W) > n}, pour n > 0, en notant AC = n - A, le
complémentaire de A. On pose Vn(A) = n pour n < o.
Le théorème ci-dessous est le premier résultat de base pour l'étude de la
trajectoire des itérés de T.
THÉORÈME 10.1 (Théorème de Poincaré). Si T est un endomorphisme de
n et A E F est un événement non négligeable, la variable aléatoire
VA(W) = inf {n > OITn(w) E A}, .
est IP-presque sûrement finie sur A.
DÉMONSTRATION. Si n > 1, par définition de VA, on a l'égalité
(10.2) A n {VA> n} = {w E A, T(w) A, T2(w) A,... ,Tn(w) A}
= An T- 1 (A C ) n T- 2 (A C ) n... n T-n(A c ),
1. SYSTÈMES DYNAMIQUES DISCRETS
249
d'où
A n {VA> n} = T- 1 (A C ) n T- 2 (A C ) n ... n T-n(A c )
- AC n T- 1 (A C ) n T- 2 (A C ) n ... n T-n(A c ),
ou encore, en utilisant la suite des Vn(A) définie ci-dessus,
(10.3)
A n {VA> n} = T- 1 (V n _ 1 (A)) - Vn(A).
L'invariance de IP par T donne la relation
IP(T- 1 (V n _ 1 (A))) = JE (lV n _l(A) 0 T) = JE (lV n _l(A») = IP(V n - 1 (A)),
et en utilisant l'identité (10.3), il vient
IP(A n {VA> n}) = IP(V n - 1 (A)) - IP(Vn(A)).
Les ensembles Vn(A), n E N étant décroissants, la suite (IP(Vn(A))) est dé-
croissante, donc convergente. En faisant tendre n vers l'infini dans l'identité
précédente on obtient l'égalité
IP(An{VA==+OO})= Hm IP(An{vA>n})=O,
n--..t+oo
ce qui achève la démonstration du théorème.
D
Endomorphismes induits. Si A E F est tel que IP(A) > 0, l'opérateur TA
de A dans A est appelé opérateur induit,
TA : w -t TIIA(W) (w).
Le théorème précédent montre que TA est IP-presque sûrement défini sur A, par
convention on posera TA(W) = w sur l'ensemble de probabilité nulle où VA est
infini. La tribu FA est la tribu F restreinte à A et IP A la probabilité sachant
l'événement A, IP A = IP(. nA)/IP(A). L'espérance par rapport à la probabilité IP A
est notée lEA (.).
PROPOSITION 10.2. Si T est un endomorphisme de (0, F, IP), l'opérateur
TA est un endomorphisme de l'espace de probabilité (A,FA,IPA)'
DÉMONSTRATION. L'application VA est mesurable, ainsi pour BEF,
+00
{TA E B} = U{T k E B}n{VA = k},
k==l
la variable TA est donc aussi mesurable.
Pour n E N, l'indicatrice de l'événement {TA == n} s'écrit sous la forme
l{TA=n} = 1AnT-l(AC)n...nT-n+l(AC)nT-n(A)
= (l-lAc) ( ri IT-'(Ac») (l-lT-n(Ac»),
250
10. THÉORIE ERGODIQUE
en développant, cette dernière expression s'exprime à l'aide de la suite (Vn(A))
de la façon suivante,
l{TA=n} = 1 Vn _ 2 (A) 0 T - 1V n _ 1 (A) - 1 Vn _ 1 (A) 0 T + 1 Vn (A)'
Si f est une application mesurable positive bornée sur A,
+00
r(A)IEA (f 0 TA) = L lE (f 0 T n 1{TA=n}) ,
n=l
en utilisant la décomposition de l'événement {TA = n}, il vient
+00
JP>(A)IEA (f 0 TA) = L lE ( (l vn _ 2 (A) - 1 Vn _ 1 (A») 0 T x f 0 T n )
n=l
+ lE ((l Vn (A) - 1v n -tCA») f 0 Tn) 1
et par invariance de JP> par l'endomorphisme T,
+00
(10.4) JP>(A)IEA (f 0 TA) = L lE ((l Vn _ 2 (A) - 1 Vn _ 1 (A») f 0 Tn-l)
n=l
+ lE ((l Vn (A) - 1v n -tC A ») f 0 Tn) .
La majoration
l(lv n -l(A) - IVn(A») f 0 Tnl < IIfIl00 1 {IIA=n},
montre que les séries
+00 +00
LIE ((l Vn _ 2 (A) - 1V n _ 1 (A») f 0 Tn-l) et LIE ((lVn(A) - 1V n _1(A») f 0 Tn)
n=O n=O
sont absolument convergentes. L'égalité (10.4) peut donc se réécrire
JP>(A)lE A (f 0 TA)
+00 +00
= LIE ((l Vn _ 1 (A) - 1 Vn (A») f 0 Tn) + LIE ((l Vn (A) - 1 Vn _ 1 (A») f 0 Tn)
n=O n=l
= lE ( (l v _ 1 (A) - 1 Vo (A»)f) = IE( lA!) = JP>(A)IE A (f) .
Finalement on obtient l'égalité lEA (f 0 TA) = lEA (f), pour toute fonction mesu-
rable bornée, l'opérateur TA préserve JP> A. D
PROPOSITION 10.3. Si T est un endomorphisme et si f est mesurable
positive bornée sur f2,
(10.5)
lE (f1{vA<+OO}) = JP>(A)IE A C l f 0 T n ) 1
en particulier,
lE ( ) _ JP>(VA < +00)
A VA - JP>(A) .
1. SYSTÈMES DYNAMIQUES DISCRETS
251
L'identité (10.5) donne la probabilité JP> sur l'ensemble {VA < +oo} en fonc-
tion de la probabilité JP> A. La dernière égalité est la formule de Kac.
DÉMONSTRATION. D'après le théorème de Fubini
IP'(A)IE A C l f 0 Tn) = lE (l An {IIA>n}f 0 T n ) ,
et comme précédemment, pour n E N, on a l'égalité
A n {VA> n} = T- 1 (V n _ 1 (A)) - Vn(A).
L'ensemble Voo(A) = {VA = +oo} vérifie clairement Voo(A) C T- 1 (V oo (A)).
Par invariance de JP> par T, les ensembles Voo(A) et T- 1 (V oo (A)) ne diffèrent
donc que d'un ensemble de probabilité nulle. Le théorème de Poincaré montre
que l'ensemble Voo(A) est, modulo un ensemble de probabilité nulle, dans le
complémentaire de A. À un ensemble négligeable près, l'identité ensembliste
A n {VA> n} = T- 1 (V n _ 1 (A) - Voo(A)) - (Vn(A) - Voo(A)),
est donc satisfaite, d'où
(10.6) IP'(A)IE A C l f 0 Tn) = lE ( (l V _ 1 (A)-Voo(A) 0 T - 1 Vo (A)-Voo(A)) f)
+ lE ( (l Vn _ 1 (A)-Voo(A) 0 T - 1 Vn (A)-Voo(A)) f 0 Tn) .
Pour N > 1, l'invariance de JP> par T donne l'égalité
N
IE ( (l Vn _ 1 (A)-V oo (A) 0 T - 1 Vn (A)- Voo(A)) f 0 Tn)
N
= L lE ( 1 Vn _ 1 (A)-V oo (A) f 0 Tn-l) - lE ( 1 Vn (A)-V oo (A) f 0 Tn)
n==l
= E( 1 Va (A) - V 00 (A) f) - JE( 1 V N (A) - V 00 (A) f 0 T N ),
Comme VN(A) - Voo(A) = {N + 1 < VA < oo}, il vient
lE (l VN (A)-voo(A)f 0 T N ) < IlflloolP'(N + 1 < VA < 00),
en faisant tendre N vers l'infini, on obtient l'égalité
lE ( (lVn_l(A)-Voo(A) 0 T - 1Vn(A)-Voo(A)) f 0 Tn) = lE(lvo(A)-Voo(A) f).
L'identité (10.6) devient
IP'(A)IEA C l f 0 Tn) = lE ( 1 V _ 1 (A)-V oo (A) 0 T x f) = lE ( 1n-{IIA=+oo} x f) ,
ce qui achève la démonstration de la première identité. La formule de Kac s'ob-
tient en prenant f = 1 dans la relation (10.5). D
252
10. THÉORIE ERGODIQUE
2. Ergodicité et théorèmes ergodiques
La tribu des ensembles invariants.
DÉFINITION 23. Une fonction mesurable f est invariante par l'endomor-
phisme T si r-presque sûrement, f 0 T = f. Un événement A est invariant si sa
fonction indicatrice est invariante, ou encore si A et T- 1 (A) sont identiques à
un ensemble de probabilité nulle près.
Noter que la notion d'ensemble invariant est liée, via les ensembles négli-
geables, à la probabilité considérée.
PROPOSITION 10.4. L'ensemble I des ensembles invariants pour un en-
domorphisme T est une tribu.
DÉMONSTRATION. Comme T- 1 (O) = 0, l'ensemble 0 appartient à I. Si A
est invariant, T- 1 (A) et A sont identiques à un ensemble de mesure nulle près,
il en va de même pour T- 1 (AC) = AC et AC E I. Finalement si (Ai) est une
suite de I, pour i E N on note Ni l'ensemble de probabilité nulle T- 1 (A i ) - Ai U
Ai - T- 1 (Ai)' La réunion de ces ensembles satisfait l'égalité T-1(UiAi) = UiAi
à l'ensemble négligeable UiNi près, l'ensemble UiA est donc invariant. D
L'espérance conditionnelle d'une variable intégrable par rapport à la tribu des
invariants est une fonction invariante.
Un élément A de :F tel que A C T- 1 (A) est invariant car
r(A) < r(T- 1 (A)) = r(A),
par conséquent A et T- 1 A ne diffèrent que d'un ensemble de mesure nulle. La
trajectoire d'un élément w E 0, appelée aussi orbite de w,
O(w) = {Tn(w)ln > O},
vérifie O(w) C T- 1 (O(w)), c'est donc un ensemble invariant.
Les endomorphismes ergodiques.
DÉFINITION 24. Un endomorphisme est ergodique si tout ensemble inva-
riant par T est de probabilité 0 ou 1.
PROPOSITION 10.5. Un endomorphisme Test ergodique si et seulement
si toute fonction mesurable invariante est r-presque sûrement constante.
DÉMONSTRATION. Si Test ergodique et f est une fonction mesurable in-
variante, pour x E IR, l'ensemble Fx, = {wlx < f(w)} est invariant et donc de
probabilité 0 ou 1. Comme limx, _oo r(Fx,) = 1 et limx, +oo r(Fx,) = 0, la quan-
tité Xo = sup{xlr(Fx,) = 1} est finie. Pour z < Xo, r-p.s. f(w) > z et si y > Xo,
r-p.s. f(w) < y. En prenant deux suites (Yn), (zn) telles que Zn < Xo < Yn
et limn +oo Zn = limn +oo Yn = Xo, r-presque sûrement pour tout n E N
l'inégalité Zn < f(w) < Yn, est satisfaite et donc f(w) = Xo.
Réciproquement si A est un ensemble invariant, la fonction lA est inva-
riante donc presque sûrement constante, par conséquent r(A) = 0 ou 1, Test
ergodique. D
2. ERGODICITÉ ET THÉORÈMES ERGODIQUES
253
PROPOSITION 10.6. Si T est un endomorphisme ergodique, pour tout en-
semble mesurable A non négligeable, le temps d'atteinte
VA(W) = inf {n > OITn(w) E A},
est IP-p.s. fini sur O. En particulier la probabilité IP s'exprime à partir de la
restriction de IP sur A,
(10.7)
IE{f) = lE (lA 1I 1 f 0 Tn) ,
pour toute fonction mesurable bornée.
La propriété d'ergodicité complète le théorème de Poincaré en assurant la
finitude presque sûre de v A sur le complémentaire de A. Presque sûrement les
trajectoires O( w) sont denses pour la probabilité IP, i.e. parcourent tous les
ensembles non négligeables.
DÉMONSTRATION. En effet l'ensemble B = {VA(W) = +oo} est invariant
car B C T- 1 (B), par conséquent IP(B) = 0 ou 1. Comme A C B C d'après
le théorème de Poincaré, nécessairement IP(B) = 0, la variable v A est IP-p.s.
finie. L'identité (10.7) est une application directe de la relation (10.5) de la
proposition 10.3. D
2.1. Exemples.
La translation sur le tore.
PROPOSITION 10.7. La translation sur le tore TOI. : x -t x + a mod 1 est
ergodique si et seulement si a est irrationnel.
DÉMONSTRATION. Si a est irrationnel, il suffit de montrer qu'une fonction f
de L 2 ([0, ID invariante par Ta est constante. Il est bien connu, voir par exemple
Rudin [45], que les fonctions x -t exp(2i7rnx), nEZ forment une base hilber-
tienne de L 2 ([0, ID. En particulier, il existe une suite réelle (fn) telle que
f(x) = Lfne2i1rnx,
nEZ
Lebesgue-presque partout. Par invariance par Ta,
f(Ta(x)) = f(x + a) = L e2i1rna fn e2i 1f'nx = f(x) = L fn e2i 1f'nx,
nEZ nEZ
presque partout. L'unicité de la décomposition sur la base hilbertienne montre
l'égalitéexp(2i7rna)fn = fn pour tout nE Z,pourn i= 0, exp(2i7rna) i= 1 (a est
irrationnel), ceci entraîne fn = 0 et par conséquent f = fa p.s. L'endomorphisme
Ta est ergodique.
Réciproquement si a = plq E [0,1] où p et q sont des entiers premiers entre
eux, la fonction x -t exp(2i7rqx) est invariante par Ta. L'endomorphisme n'est
pas ergodique dans ce cas. D
254
la. THÉORIE ERGODIQUE
Dans le cas où a = plq E [0,1] avec q # 0 et p et q premiers entre eux, les
ensembles invariants sont faciles à décrire. Si E = {ilq; 0 < i < q}, x + E est le
plus petit ensemble F contenant x tel que T- 1 (F) = F. Les ensembles invariants
par Ta sont, à un ensemble de mesure nulle près, de la forme A + E où A est un
borélien de [0, 11 q[.
La transformation x -t 2x sur le tore. La proposition suivante se montre
avec la même méthode.
PROPOSITION 10.8. La transformation x -t 2x sur le tore [0, 1[ muni de
la mesure de Lebesgue est ergodique.
Le théorème ergodique.
THÉORÈME 10.9 (Théorème ergodique de BirkhofI). Si T : n -t n est un
endomorphisme et f une fonction intégrable, Ir-p.s.
(10.8)
n
lim ..!:. f (Ti(w» = JE (J 1 I) (w),
n +oo n L-,
i=l
où l est la tribu des ensembles invariants de T.
DÉMONSTRATION. La preuve ci-dessous est une variante, due à N eveu[29],
de la démonstration de Garsia[14] (voir aussi Cornfeld [11]). Elle reprend les
arguments de la preuve de la proposition 12.1 page 296.
Pour E > 0, en posant g = f -E(f 1 I) - E, la suite (W n ) est définie par
(10.9) W o = 0, W n + 1 = (W n + g)+ 0 T, n > o.
Comme W 1 > Wo = 0, alors W 2 = (W 1 + g)+ 0 T > (Wo + g)+ 0 T = W 1 , par
récurrence W n + 1 > W n pour tout n E N, la suite est croissante, notons W sa
limite. Toujours par récurrence, pour n E N,
n
W n > L g 0 Tj,
j=l
et les W n sont intégrables. En passant à la limite dans les identités (10.9), on
obtient la relation W = (W + g)+ oT, en particulier l'événement A = {W = +oo}
est invariant par T.
La définition (10.9) de la suite (W n ) montre que pour n E N,
(10.11) W n + 1 - W n 0 T = (g V -W n ) 0 T,
en notant comme d'habitude a V b = max(a, b), comme A est invariant par T,
(10.10)
JE ((W nH - W n 0 T)lA) = JE ( W n + 1 1A) - JE ( (WnlA) 0 T) ,
cette dernière quantité vaut
E(W n + 1 1A) -E(W n 1A) = E((W n + 1 - W n )IA) > O.
[29] Jacques Neveu, Construction de files d'attente stationnaires, Lecture notes in Control
and Information Sciences, 60, Springer Verlag, 1983, pp. 31-41.
[14] Adriano M. Garsia, A simple proof of E. Hopf's maximal ergodic theorem, Journal of
Mathematics and Mechanics 14 (1965), 381-382.
2. ERGODICITÉ ET THÉORÈMES ERGODIQUES
255
L'intégration de l'égalité (10.11) sur l'ensemble A donne donc l'inégalité
lE ((9 V -W n ) 0 T lA) > O.
Le théorème de convergence dominée et l'invariance de A établissent la relation
IE( 1 Ag) > 0, par conséquent,
o < E(lAg) = E(lA1E(g 1 l )).
La définition même de g donne E(g 1 I) = -ê, d'où 0 < -êIP(A), nécessairement
IP(A) = 0, soit W < +00, IP-p.s.
L'inégalité (10.10) et la croissance de la suite (W n ) montrent que pour n E N,
la somme partielle 2:7=1 9 0 Tj est majorée par W. En utilisant l'expression de
g et l'invariance de IE(f 1 I) par T, il vient
n
n
L(f 0 Tj - IE(f 1 I) - ê) < W,
j=l
par conséquent, IP-p.s.
d'où LfoTj < W+n(IE(fII)+ê),
j=l
1 n .
lim sup - L f 0 TJ < E(f 1 I) + ê.
n +oo n J=l
En faisant tendre ê vers 0, on en déduit que toute fonction intégrable f vérifie
IP-presque sûrement
1 n .
limsup - L f 0 TJ < 1E(f 1 I),
n +oo n . 1
J=
et en remplaçant f par - f,
n
liminf "" j 0 Tj > lEU 1 I).
n +oo n
j=l
La démonstration du théorème ergodique est achevée.
D
Dans le cas d'une transformation ergodique la tribu l des ensembles invariants
est la tribu grossière, le théorème ergodique donne donc le corollaire suivant.
COROLLAIRE 10.10. Si T est un endomorphisme ergodique et f une fonc-
tion intégrable, IP-p.s.
( 10.12)
1 n .
lim - f (Tt(w)) = E(f).
n +oo n
t=l
Si, pour p > 1 f E Lp(O), la convergence a aussi lieu dans Lp(O).
Ce corollaire peut s'exprimer de la façon suivante: si l'endomorphisme est
ergodique alors IP-p.s. la moyenne temporelle de la trajectoire de (f(Tn(w))),
( j(Ti(W))) 1
256
la. THÉORIE ERGODIQUE
converge vers la moyenne spatiale de f(w), E(f). La trajectoire de (Tn(w))
parcourt l'ensemble 0 suivant le poids de la probabilité r, ce qui complète le
résultat de la proposition 10.6 sur la densité des trajectoires de T.
PREUVE DU COROLLAIRE 10.10. Comme l est la tribu formée de 0,0 et
tous les ensembles de mesure nulle ainsi que leurs complémentaires, si Test
ergodique l'espérance conditionnelle par rapport à I est l'espérance tout court.
Si 1 E Lp est positive, pour ê > 0, d'après le théorème de convergence
dominée, il existe K > 0 tel que Iif 1\ K - Illp < ê, en notant Il.llp la norme dans
Lp(O). Le théorème de convergence dominée et le théorème ergodique montrent
l'existence de no tel que si n > no,
1 n
n LU /\ K) 0 T' - lEU /\ K)
i=O
< ê,
p
et l'invariance de r par T donne l'inégalité
1 n 1 n
- L (1 1\ K) 0 T - - L loTi
n n
i=O =o
p
n
< L IIU /\ K - 1) 0 T'll p = Il! /\ K - !llp,
i=O
par conséquent si n > no, on obtient finalement
n
L ! 0 Ti - lEU)
i=O
< 3ê.
p
La convergence avec la norme de Lp et pour les fonctions positives est établie.
Si f est une fonction arbitraire, il suffit de la décomposer en la différence de
deux fonctions positives et d'appliquer ce qui précède. D
La convergence pour la norme L 2 des sommes partielles est un cas particulier
du théorème ergodique de von Neumann(voir Neveu [34]).
La décomposition ergodique. On s'intéresse ici à l'ensemble des pro-
babilités qui sont préservées par une application mesurable T : f2 f2 fixée.
Deux mesures positives J1., v sur 0 sont dites étrangères s'il existe S E F tel que
J1.(S) = J1.(O) et v(S) = o.
LEMME 10.11. Si r et Q sont deux probabilités sur 0 pour lesquelles T
est un endomorphisme, alors
(10.13)
dQ = ah dr + (1 - a)J1.,
avec a E [0, 1], h E L 1 (r) positive telle que J h dr = 1 et J-L est une probabilité
sur 0 étrangère à la probabilité r. Les probabilités h dr et J1. sont invariantes
par T et leurs supports sont des ensembles invariants pour la probabilité Q.
2. ERGODICITÉ ET THÉORÈMES ERGODIQUES
257
DÉMONSTRATION. Le théorème de Radon-Nikodym permet de décomposer
Q de la façon suivante
dQ = ah dIr + (1 - a)J-L,
où a E [0,1], h E L 1 (O,!P) est positive et J1. est une probabilité sur (2 étrangère
à la probabilité dr : il existe S E :F tel que J1.((2) = J1.(S),et r(S) = 0, par
invariance de r par T,
r(T- 1 (S)) = r(S) = o.
Si f est une fonction positive mesurable bornée nulle en dehors de S,
J I 0 T h dIf' < 11/1100 r Ihl dIf' = 0,
JT-l (8)
et par invariance de Q par T,
J loT d(.L = J loT dQ = J 1 dQ = J 1 d(.L,
pour toute fonction nulle en dehors du support de J1.. Par conséquent J-L est
invariante par T, il en va donc de même pour la probabilité h dr.
Le support S de J-L vérifie
Q(S n T- 1 (Sn = r h dIf' + (.L(S n T- 1 (S)C)
} SnT-l(S)c
= J1.(T- 1 (S)C) = J1.(SC) = 0,
de la même façon Q(SC n T- 1 (S)) = o. Les deux ensembles S et T-1(S) sont
donc identiques à un ensemble Q-négligeable près. L'ensemble S est invariant
pour la probabilité Q. D
PROPOSITION 10.12 (Propriété d'extrémalité). Si T est une fonction me-
surable de n dans n, l'ensemble P des probabilités invariantes par T est un
ensemble convexe. Si cet ensemble est non vide, les points extrémaux de P
sont les probabilités pour lesquelles T est un endomorphisme ergodique.
Si r et Q sont deux probabilités distinctes pour lesquelles T est un
endomorphisme ergodique, leurs supports sont disjoints: il existe S E :F tel
que r(S) = 1 et Q(SC) = 1.
DÉMONSTRATION. Il est clair que l'ensemble P est convexe. Si r est une
probabilité pour laquelle T est un endomorphisme ergodique, et s'il existe deux
probabilités r 1 , r 2 invariantes par T et a E [0,1] tels que
(10.14) Ir = ar 1 + (1 - a)r2'
il faut montrer que nécessairement a = 0 ou a = 1.
D'après le lemme précédent, quitte à décomposer r2 par rapport à !Pl, les
probabilités !Pl et r 2 peuvent être supposées étrangères et le support S de r 1
invariant pour la probabilité !P. Par ergodicité de Ir, soit r( S) = 1 et alors a = 1,
ou !P(S) = 0 et a = o. La décomposition (10.14) est nécessairement triviale. La
probabilité r est un point extrémal de l'ensemble convexe P.
258
10. THÉORIE ERGODIQUE
Réciproquement si IP est un point extrémal de P et s'il existe un ensemble A
invariant non trivial, 0 < IP( A) < 1, la probabilité IP se décompose sous la forme
IP = IP(A) + IP(AC) c,
en notant Qa(.) = IP(. n B)/IP(B), la probabilité IP sachant B. Comme A est
invariant, les probabilités et c sont invariantes par T, ce qui contredit
l'extrémalité de r. Il n'existe donc pas d'événement invariant non trivial, l'en-
domorphisme Test ergodique pour IP.
Pour terminer, on suppose que T est un endomorphisme ergodique, pour
deux probabilités r et Q distinctes, le lemme précédent donne la décomposition
( 10.15) Q = ah dIP + (1 - a) J1.,
avec a E [0,1], h E L 1 (0, IP) et J1. étrangère à IP : il existe S E :F tel que J1.(S) = 1
et r(S) == o. Toujours d'après le lemme précédent, les probabilités J-L et h dr
sont invariantes par T et le support S de J1. est un ensemble invariant pour Q.
L'ergodicité de T pour Q entraîne l'alternative Q(S) = 0 ou Q(S) = 1.
Si <Q(S) est nul, la décomposition (10.15) montre que a = 1, la probabilité
Q est absolument continue par rapport à IP, Q = h dr. Par invariance de Q par
T,
! fOThdlP'=! fhdlP',
pour toute fonction f mesurable bornée, en itérant et en sommant, on en déduit
n
! L f 0 Ti hdlP' = ! fhdlP'.
=1
pour tout n E N. Le corollaire 10.10, l'ergodicité de IP et le théorème de Lebesgue
montrent par passage à la limite l'égalité
JEU) ! h dlP' = ! fh dIP',
pour toute fonction mesurable bornée f, h est par conséquent IP-presque sûr-
ement constante, égale à IE(h) = 1. On en déduit que les probabilités IP et Q
sont identiques, ce qui contredit notre hypothèse initiale. Par conséquent Q(S)
vaut 1 et donc Q = J-L, les probabilités IP et Q sont étrangères. La proposition
est démontrée. D
L'ensemble des probabilités pour lesquelles T est un endomorphisme est claire-
ment un ensemble fermé. Par analogie à la dimension finie où tout point d'un
ensemble convexe fermé peut s'écrire comme barycentre de points extrémaux, il
est naturel de conjecturer que toute probabilité IP invariante par T se représente
de la façon suivante,
(10.16)
! f dlP' = 1 mp(dQ) l f dQ,
pour toute fonction f mesurable positive, en notant £ l'ensemble des probabilités
pour lesquelles Test ergodique et mp une mesure sur £. La représentation (10.16)
3. SYSTÈMES DYNAMIQUES CONTINUS
259
est vérifiée sous certaines conditions topologiques, voir le livre de Phelps [41].
La décomposition en composantes ergodiques permet de se ramener au cas où
la transformation est ergodique.
Exemple : la translation sur le tore. La translation sur le tore
T : x -t x + plq,
avec q 1: 0 et p, q E N premiers entre eux, donne un exemple élémentaire de
cette décomposition. Pour x E [0, 1/q[, la translation T est un automorphisme
ergodique sur l'ensemble x + E = {x + ilq; 0 < i < q}, muni de la probabilité
uniforme
q-1
1
J1.x = - L:: Ox,+i/q.
q
=o
Les probabilités J1.x" x E [0, 1/q[ sont les seules pour lesquelles Test ergodique: en
effet si J-L est ergodique et s'il existe deux ensembles disjoints mesurables Al, A 2
de [0, 1/q[ non négligeables pour J1., pour i = 1, 2, l'ensemble Bi = UxEAi (x + E)
est invariant et de probabilité positive. Par conséquent la probabilité J-L restreinte
à [0, 1/q[ ne peut être qu'une mesure de Dirac, les J1.x, x E [0, 1/q[ sont donc les
seules probabilités ergodiques. La mesure de Lebesgue sur [0, 1[ se décompose
de la façon suivante par rapport à ces mesures ergodiques, si 1 est mesurable
bornée sur [0, 1],
r 1 r 1 / q
Jo f(x) dx = Jo J1.t(f) dt,
avec J1.t (/) = fol I( u )J1.t (du).
3. Systèmes dynamiques continus
Cette section étudie les flots qui sont le pendant continu des itérées d'un
endomorphisme.
DÉFINITION 25. Un flot (Tt) est une famille d'endomorphismes de n in-
dexée par IR, telle que
1. Tt 0 T S = T t + s , pour tout s, t E IR;
2. l'application (w, t) -t Tt (w) est mesurable.
Une fonction mesurable 1 est invariante par (Tt) si If-presque sûrement l'égalité
f 0 Tt = 1 est vraie pour tout t E IR. Un ensemble est invariant si sa fonction
caractéristique l'est.
Le flot (Tt) est ergodique si les seuls ensembles invariants sont de probabilité
o ou 1.
EXEMPLES.
1. Si Tt(x) = x + t mod 1, pour x E [0, 1[ et t E IR, (Tt) est un flot sur le tore
[0, 1[ muni de la mesure de Lebesgue.
260
10. THÉORIE ERGODIQUE
2. Si IP est la loi sur Mp(JR), l'espace des mesures ponctuelles sur JR d'un pro-
cessus ponctuel stationnaire, les translations sur les mesures forment un flot
continu sur Mp(JR) (voir le chapitre Il).
THÉORÈME 10.13 (Théorème ergodique pour les flots). Si (Tt) est un flot
ergodique et (Z(t)) un processus tel que
1. la variable 8 1 = sup{Z(s), s E [0,1]} est intégrable,
2. la fonction t -t Z(t) est additive pour le flot: pour s, t E JR,
( 10.1 7) Z (t + s) = Z ( t) + Z ( s) 0 Tt ,
JP>-presque sûrement,
lim Z(t) = IE(Z(l)).
t +oo t
Pour p > 1 la convergence a lieu dans Lp si la variable 8 1 appartient à cet
espace.
L'intervalle [0,1] dans la condition d'intégrabilité ne joue pas de rôle particulier.
En effet si n E N, la propriété d'additivité de t -t Z(t) montre que
sup {Z(s)} = sup {Z(s) 0 Tk} + Z(n),
n s n+1 O<s<l
et Z(n) = L: -0 1 Z(l) 0 Ti, par conséquent la variable sUPo<s<n{Z(s)} est aussi
intégrable pour tout n E N. - -
DÉMONSTRATION. Les égalités Z(O) = 0 et
n-1
Z(n) = L Z(l) 0 T
i=O
sont une conséquence directe de la relation (10.17). Le théorème ergodique ap-
pliqué à l'endomorphisme Tl montre que IP-p.s.
(10.18) lim Z(n) = IE(Z(l)/Id,
n +oo n
où Il est la tribu des invariants associée à Tl.
Si t E JR, la propriété d'additivité (10.17) donne
Z(t) = Z(ltj) + Z(t - ltj) 0 TLt J ,
( l. J désigne la partie entière) et par conséquent l'inégalité
Z(t) - Z( lt J) 8 1 0 TLtJ
ltJ < ltJ
On suppose pour le moment que IP-presque sûrement
S oTn
( 10.19) lim 1 = O.
n +oo n
La quantité
Z(t) - Z(ltJ)
ltj
3. SYSTÈMES DYNAMIQUES CONTINUS
261
converge donc IP-p.s. vers 0 quand t tend vers l'infini et
lim Z(t) = JE(Z(1)jI 1 )
t---t+oo t
IP-presque sûrement d'après (10.18). On définit
H = lim Z(t) ,
t-..t+oo t
quand la limite existe et H = 0 sinon, d'après ce qui précède, IP-p.s.
H = E(Z(1)II 1 ).
En faisant tendre t vers +00 dans l'identité
Z(t) 0 T S = Z(t + s) _ Z(s)
t t t '
on obtient que, pour tout s E , Ho T S = H, JP>-p.s. L'ergodicité du flot montre
que H est p.s. constante, et donc l'égalité presque sûre H = IE(H) = E(Z(l)).
Il reste à montrer la convergence (10.19). La variable 8 1 étant intégrable,
il en va de même pour Sl 0 Tl - Sl. En appliquant le théorème ergodique à
l'endomorphisme Tl et la variable SI 0 Tl - Sl, il vient
n-1
lim Sl o T n = lim .!. (SloT1_SI)o(T1)i=JE(S10T1_S1jId,
n-..t+oo n n-..t+oo n
i=O
IP-presque sûrement. Il faut maintenant calculer E(SI 0 Tl - Sl/I 1 ). Si A est
un événement de Il, les ensembles A et T-1(A) sont identiques à un ensemble
de probabilité nulle près. L'opérateur Tl étant aussi un endomorphisme, les
ensembles A et T 1 (A) sont aussi identiques à un ensemble de probabilité nulle
près. Par définition de l'espérance conditionnelle,
JE (JE(Sl 0 Tl jII)lA) = JE (Sl 0 Tl lA ) = JE(SdTl(A»),
comme 1Tl(A) = lA IP-p.s.
JE (JE(Sl 0 Tl jII)lA) = JE(SdA) = JE (JE(SdII)lA) ,
pour tout élément A de Il, on en déduit l'égalité presque sûre
IE(Sl 0 Tl - Sl/I 1 ) = 0,
et donc
(10.20)
1 . S 1 0 T n
lm = 0,
n-..t+oo n
IP-presque sûrement. La convergence dans Lp se traite de la même façon. D
COROLLAIRE 10.14. Si f E L 1 et (Tt) est un flot ergodique, JP>-p.s.
lim l t f 0 T S ds = JEU).
Itl-..t+oo t 0
262 la. THÉORIE ERGODIQUE
DÉMONSTRATION. Si Z(t) = J; f 0 T S ds,
sup IZ(s)1 < t If 0 TSI ds,
O s l Jo
et l'espérance de ce dernier terme vaut E(lfD < +00. D'autre part, comme
I t + s
Z(t + s) = Z(t) + t f 0 TU du,
et
I t+S (S
t f 0 TU du = Jo f 0 TuH du = Z (s) 0 Tt ,
on conclut avec le théorème ergodique pour les flots.
D
Les tours.
DÉFINITION 26. Si S est un automorphisme et r une application mesurable
positive non identiquement nulle sur l'espace de probabilité (0 0 , Fa, Ira), la tour
de hauteur r et de base 0 0 est la donnée de l'espace de probabilité (0, F, Ir) et
du flot (Tt) définis par
1. 0 = 0 0 x [0, r[= {(w, x)/w E 0 0 ,0 < x < r(w)},
2. F est la tribu restriction à 0 de la tribu produit Fa B(II4),
3. la probabilité Ir est la restriction à 0 du produit de Ira et de la mesure
de Lebesgue sur ,
JE(f) = k f(w, x) dIP' der lF..o 7") ka dlP'o l T (W) f(w, x) dx,
pour une fonction f mesurable de 0 0 dans II4-,
4. le flot (Tt) s'exprime à l'aide des itérées de S,
Tt(w, x) = (Sk(W), x + t - tk(W)) ,
si tk(w) - x < t < tk+1(W) - X où tk = E - roSi si k > 0, ta = 0 et
tk = E ;l k roSi si k < O.
Le fait que (Tt) constitue bien un flot sur l'espace de probabilité (0, F, Ir)
est démontré dans la section 3 du chapitre Il. Par abus de langage, quand il n'y
aura pas d'ambiguïté, on parlera de la tour (Tt).
PROPOSITION 10.15. Si S est un automorphisme sur 0 0 et r une appli-
cation mesurable positive non identiquement nulle, la tour (Tt) de hauteur
r et de base 0 0 est ergodique si et seulement si S l'est.
DÉMONSTRATION. Si S est ergodique et A un ensemble invariant pour (Tt),
il existe un sous-ensemble mesurable Al de A tel que P(A 1 ) = P(A) et T t (A 1 ) =
Al pour tout t E . Si B = {w E Oo/(w,O) E Al} est la projection de Al sur 0 0 ,
pour s E [0, r(w)[ et w EBla définition du flot montre que (w, s) = TS(w, 0) est
4. ENDOMORPHISMES MARKOVIENS
263
un élément de Al. Par conséquent, Al est l'ensemble B x [0, r[ et la définition
de JP> donne
1 J l T(W)
IP'(A) = IP'( Ad = lF.o (T) dlP'o( w) 0 1{(w,:Z:)EBX [O,T(W)[} dx
(10.21) = IF.o T) l TdlP'o.
L'ensemble B est invariant pour S : si (w,O) appartient à Al, par invariance de
Al, TT(W)(W, 0) = (S(w), 0) est aussi un élément de Al. Par conséquent S-l(B) C
B, B est invariant pour S, l'ergodicité de JP>o donne l'alternative JP>o(B) = 0 ou
1, ce qui entraîne JP>(A) = 0 ou 1 d'après la relation (10.21). Le flot (Tt) est
ergodique.
Réciproquement si (Tt) est ergodique et B un ensemble invariant pour S,
en posant A = {(w, x)/w E B,O < x < r(w)}, il est facile de vérifier que A est
invariant pour le flot (Tt) et donc JP>(A) = 0 ou 1. Comme précédemment, en
utilisant l'expression de IP, on en déduit que JP>o(B) = 0 ou 1 donc que S est
ergodique. D
Le théorème d'Ambrose-Kakutani[2], voir Neveu [36], montre que, sous certaines
hypothèses, un flot peut se représenter à l'aide d'une tour. Ce résultat ramène es-
sentiellement l'étude des flots à celle des systèmes dynamiques discrets. L'article
de Totoki[34] expose les propriétés de changement de temps des flots.
4. Endomorphismes markoviens
Le propos de cette section est de situer les processus de Markov dans le
contexte des endomorphismes. L'espace d'états S est un espace localement com-
pact muni de la tribu borélienne B sur lequel est défini p, la fonction de transition
d'une chaîne de Markov homogène en temps, Le. une application positive définie
sur S x B telle que
1. Pour tout A E B, l'application x -t p(x, A) est mesurable,
2. Pour tout x E S, p(x, dy) est une mesure de probabilité sur S.
Cette chaîne a une probabilité invariante 7r, autrement dit,
r f(x)7r(dx) = r f(y) 7r(dx)p(x, dy),
J s J S 2
pour toute fonction borélienne bornée f sur S.
Le lemme ci-dessous est élémentaire: si le point initial Xl de la chaîne de
Markov (X n ) associée à p a pour loi 7r, pour p > lIe vecteur (Xl, . .. ,X p - 1 ) a
même loi que (X 2 , . . . ,X p ), autrement dit la suite (X n ) est stationnaire.
(10.22)
[2] W. Ambrose and S. Kakutani, Structure and continuity of measurable fiows, Duke Ma-
thematical Journal 9 (1942), 25-42.
[34] H. Totoki, Time changes of fiows, Memoirs of the Faculty of Sciences 20 (1966), no. 1,
27-55.
264
10. THÉORIE ERGODIQUE
LEMME 10.16. Si P > 2, pour toute fonction mesurable positive f sur
l'espace produit Sp-l,
p-l
( 10.23 ) 1 f ( X 2, . . . ,x p) 11" ( dx 1) fI p( x) , dx) + 1 )
SP . 1
)==
p-l
= r f(X2"" ,X p ) 11"( dX 2) fI p(Xj,dxi+d.
J Sp-l .
)==2
DÉMONSTRATION. Si f(X2" .. ,x p ) = g(x2)h(X3,. .. , x p ), avec g et h me-
surables bornées sur leurs espaces de définition respectifs,
p-1
1 f(X2" 00' X p ) 11"(dxd fI p(Xj, dXj+d
sp j==l
p-1
= 1 g ( X 2) 11" ( dx 1 ) p( Xl, dX2) 1 fI p( x j , dx j + 1) h ( X3, . . . ,x p )
S2 Sp-2
)==2
p-1
= 1 g(X2) 11"( dX 2) 1 fI p(Xj, dXi+dh(X3,'" ,X p )
S Sp-2 )==2
p-1
= r f( X 2,X3, oo. ,X p ) 11"( dX 2) fIp(Xj,dXi+d,
JSP-l .
)==2
d'après la relation (10.22) appliquée à la fonction
p-2
X2 -t g(X2) hp-l fI p(xj, dXi+dh(X3"" ,X p ).
)==2
L'identité (10.23) est donc vérifiée pour les fonctions f produit, et par conséquent
pour toutes les fonctions mesurables bornées sur SP. D
DÉFINITION 27. L'espace 11 = SZ est muni de la tribu borélienne.r associée
à la topologie produit. La translation T sur 11 est définie par
T(w) = (Xi+1),
si w = (Xi) E 11 et (Xi+l) désigne l'élément dont la i-ième coordonnée vaut Xi+l.
Il ne reste plus qu'à définir une probabilité sur cet espace. C'est l'objet de la
proposition suivante.
PROPOSITION 10.17. Il existe une unique probabilité JP> sur f2 telle que
q-1
(10.24) r f dlP = r f(xp, 00 . ,x q ) 11"( dx p ) fI p(Xj, dXj+d
Jn JSP-q+l
)==p
si f est une fonction positive mesurable sur f2 ne dépendant que des coor-
données d'indices compris entre p et q E Z, f(w) = f(x p ,. . . ,x q ) pour un
élément w = (Xi).
4. ENDOMORPHISMES MARKOVIENS
265
Sur cet espace de probabilité l'opérateur de translation T est un endo-
morphisme.
DÉMONSTRATION. Si Ir p,q est la probabilité sur Sq-p+l définie par le membre
de droite de (10.24) et si f est une fonction mesurable positive ne dépendant
que des coordonnées d'indice compris entre p + 1 et q - 1, alors
! f dlPp,q = ! f dlP'p+l,q = ! f dlP'p+1,q_l,
d'après le lemme précédent. Les probabilités JP> p,q, p, q E Z sont donc compa-
tibles : si f ne dépend que des coordonnées d'indice compris entre p' et q',
p < p' < q' < q,
! f dlP'p,q = ! f dlP' p',q"
Le théorème de Daniell-Kolmogorov, voir Rogers-Williams [44], montre l'exis-
tence et l'unicité de la probabilité JP> sur O.
Si f(w) = f(x p , . .. ,x q ) pour w = (Xi), f 0 T(w) = f(Xp+l' . . . ,X q +1), par
conséquent
! f dlP' = ! f 0 T dlP',
T est un endomorphisme de l'espace (0, F, P).
D
Le triplet (0, F, P) est l'espace de probabilité canonique associé à la chaîne de
Markov à l'équilibre.
DÉFINITION 28. Pour nEZ, l'application X n désigne la projection sur la
n-ième coordonnée, X n : w -t X n , si w = (Xi).
La suite (X n ; n > 0) est la chaîne de Markov de matrice de transition p et
de loi initiale 7r, elle est stationnaire au sens où
(X n + 1 (w)) = (Xn(T(w))) loi (Xn(w)),
et par récurrence, pour n E N, Xn(w) = Xo 0 Tn(w).
EXEMPLES.
1. Si S = {O, 1} et p(O, 1) = p(l, 0) = 1, l'espace associé est celui d'une suite de
période 2. Dans ce cas, la probabilité est portée par deux points: (n mod 2)
et(n+1 mod2).
2. Si p(x, dy) = J1.(dy) où J1. est une probabilité sur S, (0, F, Ir) est l'espace de
probabilité canonique associé à une suite i.i.d. de variables aléatoires de loi
J1.. Dans ce cas 7r = J1..
3. Si S = [O,l]d est le tore de dimension d > 1 et p(x, X + dy) = J-L(dy) pour
a E S et J1. une probabilité sur S. L'espace associé est celui de la marche
aléatoire de loi J1. sur le tore.
266
la. THÉORIE ERGODIQUE
PROPOSITION 10.18. Si p(x, dy) = J1.(dy), T est un automorphisme ergo-
dique et satisfait la propriété de mélange
lim E(f 0 Tng) = E(f)E(g),
n-++oo
pour f, g E L 2 (0, IP).
La propriété de mélange revient à dire que pour n assez grand, les variables f oT n
et g sont indépendantes. Si T n est interprété comme la translation dans le temps
à l'instant n, cela revient à dire que lorsque n est grand, l'endomorphisme oublie
ce qui s'est passé initialement.
DÉMONSTRATION. L'ergodicité est une conséquence de la propriété de mé-
lange. En effet, si A E :F est un événement invariant par T et j = lA, pour une
fonction g E £2,
E(f 0 T n g) = E(f g),
pour tout n E N. Si la propriété de mélange est vraie, le terme de gauche de
l'égalité précédente tend vers E(f)E(g) quand n tend vers l'infini, par conséquent
E(f g) = E(f)E(g) pour toute fonction g E L 2 . La fonction f est donc IP-p.s.
constante, d'où JP>(A) = 0 ou 1. L'endomorphisme Test ergodique.
Si f1 et gl E £2 ne dépendent que d'un nombre fini de coordonnées, pour n
assez grand f1 oTn et gl n'ont plus de coordonnées en commun. Les applications
coordonnées sont, on l'a vu, indépendantes dans ce cas et donc E(f1 0 T n g 1 ) =
IE(f1 )E(gl) pour n assez grand. Pour f, g E L 2 et E > 0, par définition de la tribu
produit il existe Il, gl E L 2 ne dépendant que d'un nombre fini de coordonnées
telles que IIf - fl112 < E et Iig - gl112 < E. Pour No assez grand et n > No,
fI 0 T n , gl ne dépendent par des mêmes coordonnées, on en déduit l'égalité
E(f1 0 T n gl) = IE(f1 )E(gl )
et la relation
IIE(1 o Tng) - IE(f)IE(g)1 < IIE((j - f1) o Tng)1 +
IE(j1 0 Tn(g - gl))1 + l1E(fl )E(gl) -1E(f)E(g)l,
par l'inégalité de Cauchy-Schwartz et l'invariance de JP> par T,
IE(f 0 T n g)-E(j)E(g)1
< 2(IIgll2 + IIgl112)lIf - fl112 + 2(lIf1l2 + IIfll12)llg - gl112
< 2E(lIglb + IIfl12 + 2E).
La propriété de mélange est établie. D
La loi des grands nombres est une application du résultat précédent et du
théorème ergodique.
COROLLAIRE 10.19 (Loi des grands nombres). Si (Zn) est une suite i.i.d.
de variables à valeurs dans S et f une fonction mesurable de S dans telle
que la variable f(Zo) soit intégrable, JP>-p.s.
1 n
lim - f (Zi) = E(f(Zl )).
n +oo n
t=l
4. ENDOMORPHISMES MARKOVIENS
267
La convergence a lieu dans Lp si f(Zo) E Lp, p > 1.
DÉMONSTRATION. Si J1. est la distribution de Zo, en prenant l'espace de pro-
babilité de la proposition 10.17 pour lequel p( x, dy) = J1.( dy), la définition (10.24)
de JP> montre la suite (X n ) = (X o oT n ) est i.i.d. de loi commune J1., donc de même
loi que la suite (Zn). L'endomorphisme Tétant ergodique dans ce cas (Proposi-
tion 10.18), le théorème ergodique à la fonction f 0 Xo permet de conclure. D
Le corollaire suivant est fort utile pour les théorèmes limites des processus ponc-
tuels. Un processus de renouvellement stationnaire est un processus de renou-
vellement invariant par les translations positives (voir la construction page 27
et la proposition 1.23).
COROLLAIRE 10.20. Si JP> est la loi sur Mp(IR) d'un processus de renou-
vellement stationnaire de loi J1., le flot Tt des translations sur les mesures
ponctuelles est ergodique pour JP>.
DÉMONSTRATION. En prenant 0 0 , l'espace associé à la matrice de transition
p(x, dy) = J1.(dy), d'après la proposition Il.4, le flot (Tt) est isomorphe à la tour
de base 0 0 et de hauteur la coordonnée d'indice O. La proposition 10.18 montre
que la translation T sur 0 0 est ergodique, d'après la proposition 10.15 il en va
de même pour (Tt). D
Si l'ensemble S est fini et la chaîne de Markov n'est pas irréductible, il existe
A C S non vide, ainsi que son complémentaire, tel que p(x, A) = 1 pour tout x E
A. L'ensemble A Z est invariant par T, T-1(AZ) = A Z . Si 7r est une probabilité
invariante pour cette chaîne de Markov telle que 7r(A) E]O, 1[, la probabilité JP>
associée sur (2 vérifie, en utilisant la définition,
JP> (AZ) = 7r(A) E]O, 1[.
L'endomorphisme T n'est donc pas ergodique dans ce cas. Il est facile dans
ce cadre de montrer que la décomposition ergodique est directement liée aux
probabilités invariantes sur les composantes irréductibles de la chaîne de Markov.
Le résultat suivant établit l'ergodicité de T si la chaîne est irréductible.
PROPOSITION 10.21. Si S est dénombrable et p est une matrice de tran-
sition irréductible ayant une probabilité invariante, alors l'automorphisme
Test ergodique.
DÉMONSTRATION. On va montrer que si f,g E L 2 (O),
1 n .
lim - lE (f 0 Tlg) = 1E(f)lE(g).
n +oo n
i=l
Cette condition, dite de mélange faible entraîne clairement que Test ergodique
(voir le début de la preuve de la proposition 10.18). On va vérifier la propriété
de mélange faible dans le cas où f et g sont bornées et sont de la forme suivante
f(w) = f(x P1 '." ,x q1 ) et g(w) = g(XP2".' ,x q2 -1)1{x Q2 =x} pour w = (Xi),
X E S, Pl < q1 et P2 < q2. Pour le cas de fonctions f et g générales, la suite de
268
10. THÉORIE ERGODIQUE
la preuve est analogue à celle de la proposition 10.18. Si No est suffisamment
grand pour que No + Pl > q2 + 1, pour i > No,
lEU 0 Ti g) = lE (i(X P1 +i, . .. ,X q1 +i)g(X p2 , ... ,Xq2-dl{Xq2=:Z:}) ,
avec la propriété de Markov, ce dernier terme vaut,
E (g(X p2 ,... ,Xq2-1)1{xq2=x}) lEx (f(XP1+ -q2'." ,Xql-q2+ ))'
Un résultat classique, voir Feller [19], montre que, pour les chaînes de Markov
irréductibles ayant une probabilité invariante, les moyennes de Cesàro convergent
vers la probabilité invariante,
1 n
lim - lEx (f(XPl +i-q2' . .. ,Xql-q2+i))
n-++oo n L-,
=1
= JE,.. (f(X 1 ,... ,Xql-Pl+1)) = E(f).
On en déduit la propriété de mélange faible et donc l'ergodicité. D
Le corollaire ci-dessous est l'équivalent de la loi des grands nombres pour les
chaînes de Markov.
COROLLAIRE 10.22. Si (X n ) est une chaîne de Markov sur S dénom-
brable, irréductible avec une pro.babilité invariante 'Tr telle que Xo = x E S,
pour toute fonction f mesurable sur S, intégrable pour 'Tr, JP>-p.s.
1 n
lim - E(f(Xi)) = JE,.. (f(Xo)).
n +oo n L-,
=1
DÉMONSTRATION. Supposons que Xo a pour loi 'Tr, le théorème ergodique
appliqué à la chaîne de Markov montre que IP-p.s.
1 n
(f(Xo)) = lim - 1E(f(Xi))
n-++oo n L-,
=1
1 n
= lim - E(f(Xi)),
n-++oo n L-,
=Tz
en notant Tx le temps d'atteinte de x E S qui est JP>-p.s. fini. Par la propriété
de Markov forte, la suite (X n + Tz ) a même distribution que la chaîne de Markov
(X n ) qui part de x. On en déduit notre résultat. D
Le corollaire peut aussi se montrer facilement avec la loi des grands nombres en
utilisant la propriété d'indépendance de la chaîne de Markov entre deux temps
de retour à un point donné.
CHAPITRE Il
Processus ponctuels stationnaires
Sommaire
1. Introduction 269
2. L'espace de Palm du processus des arrivées 270
3. Construction d'un processus ponctuel stationnaire 272
L'espace de probabilité du processus ponctuel stationnaire 275
4. Les relations entre (n, IP, (et)) et (Ô, lP, 9) 277
Conditionnement au voisinage de 0 280
5. Loi jointe des arrivées des clients autour de t == 0 281
Exemples de processus ponctuels stationnaires 282
6. Propriétés des processus ponctuels stationnaires 284
6.1. Théorèmes limites 284
6.2. Transformations des processus ponctuels stationnaires 286
6.3. Relations entre processus ponctuels stationnaires 289
7. Annexe 290
1. Introduction
Une file d'attente est un opérateur sur les processus d'arrivée. Les clients
arrivent aux instants (t n ), demandent des services (un) et attendent (W n ) pour
être servis, le n-ième client arrive à t n et quitte la file à t n + W n + Un. La
file transforme le processus ponctuel d'arrivée {t n } en un processus ponctuel
{t n + W n + un}, associé aux départs des clients. Il est naturel de s'intéresser aux
propriétés des processus ponctuels qui sont préservées par cette transformation.
Peu de propriétés d'indépendance sont en fait conservées. Si, par exemple, le
processus d'arrivée est un processus de renouvellement, le processus de départ
ne sera pas, en général, un processus de renouvellement. Une exception notable,
et c'est pratiquement le seul contre-exemple (avec la file M IG /(0), concerne une
arrivée poissonnienne avec des services exponentiels; dans ce cas, le processus
de départ est aussi un processus de Poisson (voir le chapitre 4).
Une propriété plus faible des processus ponctuels est cependant préservée
par les files d'attente. Un processus ponctuel est stationnaire si les arrivées vue
de l'instant 0 ont même distribution que les arrivées vues d'un instant arbitraire,
(voir la définition rigoureuse dans la section suivante). Si le processus ponctuel
d'arrivée est stationnaire, alors le processus ponctuel des départs de la file à
270
11. PROCESSUS PONCTUELS STATIONNAIRES
l'équilibre est aussi stationnaire. Cette relation de conservation est la seule qui
soit connue sur une large catégorie de modèles de files d'attente. Dans ce cha-
pitre les principales propriétés des processus ponctuels stationnaires sur 1R sont
présentées. Ce sera le cadre de l'étude pour la file d'attente à un serveur GIG/1.
Les propriétés asymptotiques de base des files d'attente peuvent se montrer dans
ce cadre général. Pour obtenir des résultats un peu plus explicites, sur les dis-
tributions des temps d'attente notamment ou encore des tailles des files, il est
évidemment nécessaire d'introduire certaines propriétés d'indépendance dans les
processus d'arrivée.
Pour présenter ces questions l'approche est relativement directe. Ces pro-
cessus sont construits à partir d'une suite équidistribuée, ergodique de variables
aléatoires positives. Les processus ponctuels stationnaires sur des espaces plus
généraux sont présentés dans Neveu [36].
2. L'espace de Palm du processus des arrivées
Les arrivées de clients à une file d'attente sont données sous la forme d'une
suite de variables aléatoires positives (T n , un), avec les propriétés suivantes.
- La suite (Tn) est la suite des interarrivées des clients, pour nEZ, Tn
est l'interarrivée entre le n-ième client et le n + 1-ième client de la file
d'attente;
- La suite ( Un) est celle des temps de service requis par les clients successifs;
- La suite est stationnaire au sens où la suite (T n , un) a même loi que la
suite décalée (Tn+l' U n +l).
U u08 2
L u08 u08 3
u08- 1 / / /
/
. ... ... .
T08- 1 T ToB T08 2
FIG. 1. Le processus ponctuel des arrivées de clients.
Les indices des clients varient entre -00 et +00 et, comme on le verra au
chapitre 12, cela permet une construction directe de l'état d'équilibre des files
d'attente.
L'espace canonique associé à cette suite est le quadruplet (Ô, j, JP>, 8) avec
1. Ô = (II4 x II4)Z ;
2. j est la tribu borélienne sur Ô ;
3. la probabilité JP> sur Ô est la loi de la suite (T n , un) ;
4. la translation 8 sur cet espace est définie par
8((x n , Yn)) = (Xn+l' Yn+l).
2. L'ESPACE DE PALM DU PROCESSUS DES ARRIVÉES
271
PROPOSITION Il.1. La translation 8 : Ô -t Ô est une bijection mesurable
et préserve la probabilité r, i. e. pour toute fonction mesurable positive f
définie sur Ô,
(11.1)
tU) = J f dP = J f 0 ê dP.
DÉMONSTRATION. Si w = (Xi, Yi) E Ô, les fonctions de la forme
f(w) = 1 { } ,
(xII 'Yll )EA 1 ,... ,(X ln 'YIn )EA n
avec k E Z, 1 < k < n et Al, . . . ,An des boréliens de ll4 x 114, engendrent la
tribu produit F. Il suffit de montrer (11.1) pour les fonctions de ce type. Dans
ce cas
J f 0 ê dP = P ((X'l +1, Yil +d E Al, . .. ,(Xin+l' Yin+d E An )
= P ((Ti1+l' u'l+d E Al,'" ,(Tin+l, uin+d E An)
= P ((Till UiJ E Al, . . . ,( Tin' UiJ E An ) ,
d'après la propriété de stationnarité de (T n , Un), et cette dernière quantité vaut
J fdP.
L'identité (11.1) est établie.
Les fonctions
o
T, a : Ô ---t lR-t
w t----+ T( w) = xo } . ( )
W ( ) SI W = X n , Yn
.---r a W = Yo
sont mesurables, et pour nEZ, ((T, u), (T 0 ê, U 0 ê),. . . ,(T 0 ê n , U 0 ê n )) a
même loi que la suite initiale ((Ta, ao), (Tl, al)'... ,(T n , Un)). En particulier la
loi de T (resp. a) est la loi commune des interarrivées Tn (resp. des services an).
L'espace Ô ainsi construit est l'espace des inter arrivées et des services des
clients. L'application a est le service du client d'indice 0 et Test l'interarrivée
avec le prochain client qui arrive après celui-ci. L'application 8 fait passer d'un
client au client qui le suit dans l'ordre des arrivées: a = ao (resp. T = Ta) et
a08 = al (resp. T08 = Tl). L'espace (Ô,F,r,8) est habituellement appelé
l'espace de Palm du processus d'arrivée de clients.
Hypothèse. Dans toute la suite, on suppose que 8 est une transformation
ergodique, les variables a et T sont r-intégrables et r( T > 0) = 1.
La condition r( T > 0) = 1 n'est pas cruciale, elle interdit presque sûrement
les arrivées simultanées, Un {Tn = O}. Cela ne change pas la généralité des
résultats, mais simplifie la formulation et la démonstration de ceux-ci.
Il reste à définir une origine temporelle pour ce processus d'arrivée de clients,
l'instant d'arrivée du premier client avant t = 0 par exemple. Celle-ci doit être
272
11. PROCESSUS PONCTUELS STATIONNAIRES
choisie de telle sorte que la loi du processus d'arrivée soit la même quel que soit
l'instant d'où l'on observe les arrivées. Formellement, le changement d'origine
se définit avec les translations sur les mesures ponctuellesn
DÉFINITION 29. Pour une mesure ponctuelle m E Mp(IR x lR.t) sur IR x lR.t
et t E IR, on note Ttm, la mesure m translatée de t définie par
Ttm(J) = J f(x - t) m(dx),
pour une fonction f mesurable bornée, si x = (s, y) E IR x lR.t la quantité x - t
désigne l'élément (s - t, y). Si m = {(un, Yn)}, la translatée de t de m est le
processus ponctuel Ttm = {(un - t, Yn)}.
Noter que la translation ne s'effectue que sur la composante temporelle. La
notion d'invariance par translation dans le temps peut alors s'exprimer de la
façon sui vante.
DÉFINITION 30. Un processus ponctuel N = {tn,Yn} sur Mp(IR x 114) est
dit stationnaire si sa loi est invariante par les opérateurs (Tt), ou encore
E (f( {t n , Yn})) = E (f( {t n - t, Yn})) ,
pour tout t E IR, et toute fonctionnelle f mesurable positive sur Mp(IR x lR.t).
Le corollaire 1.14 page 18 montre qu'un processus de Poisson d'intensité À
sur IR est un processus ponctuel stationnaire.
Comme dans le chapitre sur les processus de Poisson, la suite des points d'un
processus ponctuel w sur IR est représentée sous la forme d'une suite croissante
(t n (w)), telle que t o (w) < 0 < t 1 (w). Les t n , nEZ sont des fonctionnelles sur les
processus ponctuels. La construction d'un processus ponctuel stationnaire avec
des interarrivées et des services fixés est étudiée dans la section suivante.
3. Construction d'un processus ponctuel stationnaire
La suite croissante (tn( )), E Ô, des sommes partielles des 'T 0 8k( ), k E Il
et les services associés est définie par
n-1
" "k
tn( ) = 'T 0 () ( ),
k=O
to( ) = 0;
n > 1.
- ,
-1
" "k
t n ( ) = - 'T 0 () ( ),
k=n
n <-1
- ,
en particulier t 1 = 'T. L'hypothèse d'ergodicité de 8 et le théorème ergodique
ponctuel (Théorème 10.9) montrent que r-presque sûrement
tn( ) "
lim = E( 'T) et
n--++oo n
lim tn(ç) = t( r),
n--+-oo n
3. CONSTRUCTION D'UN PROCESSUS PONCTUEL STATIONNAIRE 273
d'où
lim tn( ) = +00 et lim tn( ) = -00.
n +oo n -oo
La suite (t n ) n'a IP-presque sûrement pas de point d'accumulation fini, le proces-
sus {t n } est donc un processus ponctuel, il comporte de plus un point à l'origine
en t = O.
Le problème consiste à fixer une origine au processus ponctuel marqué sur
l'espace IR x lR.t,
{ln(€)} def { (t n (€), a 0 ê n (€)) }
de façon à obtenir l'invariance par translation dans le temps. L'existence d'une
variable aléatoire U telle que pour tout t E IR
{tn( ) - U + t} loi {tn( ) - U}
résoudrait cette difficulté. Rigoureusement cela se formule de la façon suivante:
pour KEN, si UK est une variable aléatoire uniforme sur [t-K( ), tK( )], la
proposition suivante montre que le processus ponctuel {ln ( ) - U K} converge en
loi vers un processus ponctuel ayant la propriété d'invariance par translation.
PROPOSITION Il.2. Le processus ponctuel marqué
{ln (€) - U K} = { (t n (0 - U K, a 0 ê n (€) ) }
converge en loi quand K tend vers l'infini vers un processus ponctuel sta-
tionnaire dont la loi Q est donnée par
(11.2)
1 Ir l tl( )
Q(f) = A dr( ) f ( {tn( ) - x} ) dx,
E(t 1 ) Ô 0
si f est une fonctionnelle mesurable bornée définie sur les processus ponc-
tuels.
DÉMONSTRATION. La quantité mK(f) désigne l'espérance de f({t n - UK})
conditionnellement au processus ponctuel {tn}. Le point U K ayant une loi uni-
forme sur [t-K, tK], il vient
1 l tK -
mK(f) = t . f ({t n - x}) dx
K - t-K t-K
1 K -1 l tlc+1
= L f({tn-x})dx
tK - t-K tL
k=-K ft:
1 K-1 l tlc+l-tlc
= L f({tn-tk-x})dx.
tK - t-K 0
k=-K
D'après la définition des tn( ), pour k, n > 0,
( n-1 ) ( n-k-1 )
ln - t k = T 0 ê i , a 0 ê n = T 0 ê i + k , a 0 ê n ,
(11.3 )
274
11. PROCESSUS PONCTUELS STATIONNAIRES
et comme oi+k = Di 0 Ok ,
(11.4 )
- - "'k
t n - tk = tn-k 0 () .
Cette relation se montre de la même façon pour n négatif. En utilisant (11.3),
il vient
1 1 i tl cele - "'k
mK(/) = /({tn-k - x} 0 () ) dx.
tK - t-K k=-K 0
En posant g = J l /( {ln - x}) dx et en remarquant maintenant que le processus
ponctuel {ln-k -x} est identique au processus ponctuel {ln -x} (la numérotation
n'a aucune importance), la quantité mK(/) peut se réécrire comme
mK(J) = k 7K go ê k / k t 1 0 êk.
La fonction g étant intégrable, l'ergodicité de 8 et le théorème ergodique ponctuel
montrent que la quantité
K-1 / K-1
k "J;K 9 0 ê k k K t 1 0 ê k
converge JÎD-presque sûrement vers IÊ(g) lIÊ( t 1 ) quand K tend vers l'infini. La
variable mK(/) étant JÎD-presque sûrement majorée par 11/1100, l'application du
théorème de convergence dominée donne
'" 1 '" ( i tl - )
lim E(mK(/)) = '" E /({t n - x}) dx .
K +oo E(t1) 0
Il reste à prouver que la loi de Q est invariante par les translations (Tt). Pour
t E IR, la translation Tt : Mp(IR x Il4) -t Mp(IR x Il4) est continue, la loi du
processus ponctuel
{ln - UK - t} = Tt ({ln - UK})
converge donc vers Tt Q le translaté de Q quand K -t +00.
Les variables U K, U K + t sont uniformément distribuées sur un intervalle
contenant IK = [t-K( ) + t, tK( )]. Ainsi, conditionnellement à ce que ces va-
riables soient dans 1 K, elles sont distribuées comme V K, une variable uniforme
sur 1 K. On en déduit les relations
IÊ (/{{ln - UK - t}))
= IÊ (1 ({ln - (UK + t)}l{UK+tEIK})) + 0 (P{UK + t ri h))
= P{U K + t E IK)IÊ (/{ {ln - VK})) + 0 (P{U K + t ri I K )) .
De la même façon
IÊ (J{{ln - UK})) = P{UK E h)IÊ (J{{ln - V K })) + 0 (P{UK ri h)) 1
3. CONSTRUCTION D'UN PROCESSUS PONCTUEL STATIONNAIRE 275
en utilisant que
lim r(UK +t E I K ) = lim r(UK E I K ) = 1,
K4+00 K4+00
on en déduit que
f)= lim IÊ(f({tn-UK})== lim IÊ(f({tn-UK-t}) = TtQ(f),
K4+00 K4+00
ce qui achève la démonstration de la proposition.
o
COROLLAIRE Il.3. Le triplet (Mp(IR x Il4),Q, (Tt)) est un système dy-
. ,
naml,que, au sens ou
- pour t E IR, Tt : Mp(IR x II4) Mp(IR x II4) est une bijection,
- l'application (t,m) -t Tt(m) est mesurable de IR x Mp(IR x II4) vers
l'ensemble des mesures ponctuelles Mp(IR x Il4), les deux ensembles
étant munis de leurs tribus boréliennes,
- si s t E IR Tt 0 T S = T t + s
" ,
- la probabilité Q est invariante par (Tt), TtQ = Q pour tout t E IR.
L'espace de référence associé à la loi Q sur les processus ponctuels est maintenant
défini.
L'espace de probabilité du processus ponctuel stationnaire. La pro-
position précédente suggère d'ajouter une variable aléatoire X à l'espace Ô telle
que
o < X < t 1 (€),
de façon à ce que le processus ponctuel {t n (€) - X} ait pour loi Q. Cela peut se
faire en considérant l'extension suivante de f2 :
a) l'espace de probabilité 0 est défini comme suit,
( Il.5) 0 = Ô x [0, t 1 [= {( € , x ) 1 € E Ô et 0 < x < t 1 ( €) },
b) l'ensemble 0 est muni de la tribu :F, restriction à 0 de la tribu produit
j: B(II4),
c) en utilisant (11.2), il est naturel de définir la probabilité IP sur 0 par
I d f 1 1 l tl ( )
E( f) = f ( € , x ) dIP ( €, x ) e ,. dr ( €) f ( €, x) dx,
o E(t 1 ) Ô 0
pour une fonction f mesurable de 0 -t II4.
Au couple w = (€, x) on associe le processus ponctuel
(11.6)
- def-
N(w, du) = {tn(w)} = {t n (€) - x},
de façon équivalente, pour nEZ et w = (€, x) E 0,
tn(w) = (tn(ç) - x, a 0 ên(ç)) .
Pour ce processus ponctuel, le premier point à gauche de 0 est en to(w) = -x, et
(r(ê n (€))) donne la suite des interarrivées à partir de ce point. De cette façon,
276
11. PROCESSUS PONCTUELS STATIONNAIRES
le processus ponctuel N a pour loi Q avec la probabilité IP sur 0 : si j est une
fonctionnelle mesurable positive sur Mp(IR x ll4) , alors
E(N(w,j)) = E(j({ln( ) - x}))
= 1 r dJÎD(ç) rh( ) f ({tn(ç) - x}) dx = Q{f).
E(t 1 ) Jô Jo
Ceci entraîne donc que le processus ponctuel N est stationnaire.
La translation Tt de ce processus ponctuel donne lieu à une transformation
(}t de w = ( , x) dans 0, de telle sorte que le processus ponctuel associé à (}t (w)
soit le translaté de t du processus ponctuel N,
( Il.7)
N((}t(w), du) = Tt(N(w, du)) = {ln( ) - x - t} = {ln(w) - t}.
En effet si k E Z est l'unique entier tel que tk(W) < t < tk+1(W). Le processus
ponctuel Tt ( N (w, du)) a son origine en t ; le premier point sur sa gauche est en
tk(W) - t, et le point suivant est à distance
"'k
tk+1(W) - t - (tk(w) - t) = tk+1( ) - tk( ) = ,,-((} ( )).
Les points de ce processus ponctuel s'obtiennent avec les interarrivées
(T 0 ên+k(Ç)) = (T 0 ên(êk(ç))) 1
le n-ième point du processus translaté se trouve donc en tn+k(W) - t. En posant
d)
(11.8 )
et(w) = (êk(ç), x + t - tk(O) 1 si tk(ç) - x < t < tk+1(Ç) - x,
alors (}t (w) E 0 et le processus ponctuel est bien Tt N (w, du), l'identité (11.7)
est donc vérifiée. Au passage, c'est l'unique point de 0 vérifiant cette propriété
(les interarrivées et le premier point à gauche de 0 déterminent le point de 0).
Il est clair que (w, t) -t (}t(w) est une application mesurable de 0 x IR dans O.
Pour s, t E IR, d'après (11.7),
N((}t+S(w), dx) = Tt+S(N(w, dx)) = Tt(TS(N(w, dx))),
d'après le corollaire Il.3, d'où
N ((}t+s (w ), dx) = Tt (N ((}S (w ), dx)) = N ((}t ((}S (w )), dx),
la relation (11.7) montre que ((}t) satisfait la relation de groupe,
(11.9) (}t+S(w) = (}t 0 (}S(w).
Le processus {t n (w)} est IP-presque sûrement ponctuel puisque r-presque
sûrement Itn( )1 converge vers +00 quand n tend vers l'infini. Sur l'ensemble de
probabilité nulle (pour la probabilité IP) où ceci n'est pas vrai, le processus N
est la mesure nulle, de cette façon N sera bien un processus ponctuel.
La proposition suivante résume les propriétés de l'espace ainsi construit.
4. LES RELATIONS ENTRE (0, Pt(e t )) ET (Ô, Pt 8)
277
PROPOSITION Il.4. Si (0, P, (et)) est défini par (11.5), (11.6) et (11.8),
le processus ponctuel stationnaire
N : (0, P, (et)) -t (M p (IR x 114), Q, (Tt))
W = (ç,x) N(w,du) = {tn(w} = {tn(ç) - x}
est un isomorphisme de systèmes dynamiques au sens où
a) N est bijective,
b) l'image de r par N vaut Q,
c) le processus ponctuel N commute avec (et),
(11.10) N(et(w), dx) = Tt N(w, dx), w E 0,
ou encore, pour tout nEZ,
(11.11)
tn(et(w)) = tn+k(W) - t,
où k est l'unique entier tel que tk(W) < t < tk+1(W).
L'espace de probabilité obtenu avec les définitions (11.5), (11.6) et (11.8)
est une construction classique de théorie ergodique, voir le chapitre 10. C'est
le système dynamique à temps continu associé au système dynamique discret
(Ô, r, 8) et à la fonction 'T; on l'appelle tour de hauteur t 1 . La construction
d'un processus ponctuel stationnaire avec un espace de Palm fixé revient donc à
construire le flot associé à la fonction 'T (voir la définition et certaines propriétés
des tours page 262).
4. Les relations entre ((1, r, (et)) et (Ô, r, ê)
Plongement de Ô dans O. L'espace {2 se plonge de façon naturelle par la
fonction 4> dans l'espace ((1,:F, P),
4>:Ô-tO
ç -t (ç,O).
Par la suite on identifiera Ô, 8, r, et les fonctions u, t 1 , à leur image par <p : si f
est mesurable positive sur 0, on pose
k J dIP> = k J(€. 0) dIP>(€),
et 8 ( ç , 0) = (8 ( ç), 0).
Le processus ponctuel associé à l'élément w = (ç,O), n'est autre que le
processus ponctuel {tn(ç)} avec un point en o. L'ensemble Ô est donc le sous-
espace de (1 sur lequel le processus ponctuel stationnaire N charge le point o.
En utilisant les définitions de et et de t n , il est clair que pour nEZ,
(11.12)
e tn (w) = (ên(ç), 0) E Ô.
L'application e tn : 0 -t 0 est donc à valeurs dans Ô. Si 0 < x < t 1 (ç), la
relation (11.8) nous donne, pour w = (ç,O) E Ô,
eX(w) = (ç,x).
278
11. PROCESSUS PONCTUELS STATIONNAIRES
En considérant l'espace {2 comme un sous-ensemble de (1, la relation (11.6)
reliant IP et r peut donc se réécrire de la façon suivante.
PROPOSITION Il.5. Si f est une fonction mesurable positive sur (1 alors
(11.13)
J I i l tl(W)
fdIP= A f(8 S (w))dsdr.
E(t1) ô 0
La formule ci-dessous, due à Mecke[27], donne la relation inverse, i.e. la
probabilité r en fonction de la probabilité IP.
PROPOSITION Il.6 (Formule de Mecke). Le processus ponctuel marqué N
est stationnaire et vérifie
(11.14) E ( kXIR+ f(et(w), t, y) N(w, dt, d Y )) =), J L f(w, t, CT(W)) dt dfP>,
où À = 1 lIÊ( t 1 ) et f est une application mesurable positive sur (1 x IR x Il4 .
On déduit de cette proposition le corollaire suivant.
COROLLAIRE Il.7. Si f est une fonction mesurable (1 -t II4, t E IR, alors
E(l t f(eU(w)) N(w, dU)) = ),IÊ(f)t,
(11.15)
et si 9 : IR -t II4 est borélienne,
(11.16) E (J g(t) N(w, dt)) =), J g(t) dt;
en particulier pour a < b E IR, alors IE(N[a, b]) = À(b - a), avec
N[a, b] = r N(w, dt)
J[a.b]
désignant le nombre de points de N dans l'intervalle [a, b].
Suivant la définition 2 du chapitre 1, le processus ponctuel N est d'inten-
sité À dx. La mesure de Lebesgue étant implicite pour les processus ponctuels
stationnaires, on dira que N est d'intensité À.
PREUVE DE LA PROPOSITION Il.6. Si w = ( ,x) E (1,
r f ( et (w ), t, y) N ( w, dt, dy) = L f (e tn ( w ), t n ( w ), CT 0 en (0) ,
JRXR+ n
l'identité (11.12) donne
r f(et(w), t, y) N(w, dt, dy) = L f (en(ç), 0), -x + tn(ç), CT 0 en(Ç)) .
JRXR+ n
[27] J. Mecke, Stationiire zufiillige Masse auf lokalkompakten Abelschen Gruppen, Zeitschrift
für Wahrscheinlichkeitstheorie und verw. Geb. 9 (1967), 36-58.
4. LES RELATIONS ENTRE (0, P, (et» ET (Ô, n>, 8)
279
D'après la relation (11.6), l'espérance pour r de la quantité précédente vaut
(11.1 7)
1E ( r f(ot (w), t, y) N(w, dt, d Y ) )
JIR xlR+
( rtl( ) ! )
=,XIÊ Jo dx f(ot(w), t, y) N(w, dt, dy)
( l tn( ) )
= ÀJÊ L j( (ê n (€), 0), x, U 0 ê n (€)) dx .
n tn( )-tl( )
(11.18)
Comme t n (€) - t 1 (€) = t n - 1 0 8(€), pour nEZ on a
JÊ ( rn f((ên(Ç), 0), x, u 0 ên( )) dX )
Jtn( )-tl( )
= k IÊ ( 1{tn_l09(OS"'stn}f((ên( ), 0), X, U 0 ên( ))) dx,
et ce dernier terme est, par invariance de ê pour r,
k IÊ ( 1{tn_l09-(n-l)WS"'9n09-(n)(mf(( , 0), X, u( ))) dx.
La relation (11.18) devient donc
1E ( r f(ot(w), t, y) N(w, dt, d Y ) )
JIR xlR+
( l tno8-n( ) )
= ÀJÊ L A j(€, x, a(€)) dx .
nEZ tn_l0e-(n-l)( )
En sommant les intégrales entre les parenthèses, on obtient l'identité (11.14). D
L'identité (11.14), la formule de Mecke est la plupart du temps utilisée pour
définir la mesure de Palm du processus ponctuel stationnaire N. La procédure
est inverse de celle qui a été utilisée ici. Un processus ponctuel stationnaire est
donné, on montre via (11.14), l'existence de la probabilité de Palm et les princi-
pales propriétés de l'espace de Palm sont ensuite démontrées. Pour introduire le
processus stationnaire d'arrivée de clients, il peut être plus naturel de partir des
suites d'inter arrivées et des services et d'utiliser une construction classique de
théorie ergodique. De cette façon l'espace de Palm a une interprétation intuitive
immédiate.
Il arrive cependant que le processus ponctuel stationnaire soit défini d'em-
blée, pour la superposition de processus ponctuels stationnaires par exemple,
l'espace de Palm n'étant pas toujours commode à expliciter. L'appendice traite
cette situation. Pour notre cadre, la définition suivante permet de résoudre cette
petite difficulté.
280
11. PROCESSUS PONCTUELS STATIONNAIRES
DÉFINITION 31. Si N est un processus ponctuel sur un espace de probabilité
(11, P, (8 t )) tel que la relation (11.14) est vérifiée pour une probabilité r sur 11,
alors cette probabilité est appelée probabilité de Palm du processus ponctuel.
Il est clair d'après la relation (11.14) que la probabilité de Palm est unique.
Conditionnement au voisinage de o. Pour le moment, un processus
ponctuel stationnaire a été construit à partir d'une suite stationnaire ergodique.
Il n'est cependant pas exclu que d'autres constructions soient possibles. L'intui-
tion voudrait toutefois que si on conditionne le processus ponctuel stationnaire
à avoir un point dans un voisinage de 0, on retrouve le processus ponctuel initial
(tn(ç)). Nous allons montrer cette propriété pour le processus N. Les questions
d'unicité sont traitées dans l'appendice.
D'après la proposition Il.2 la distribution de N est la limite en loi (sous r)
quand K tend vers l'infini des processus ponctuels {tn(ç) - UK}. La variable
U K est uniforme sur l'intervalle [t-K(Ç), tK(Ç)] et joue le rôle de l'origine de ces
processus ponctuels. Pour N fixé, en conditionnant l'origine U K à être dans un
petit voisinage d'un des tn(ç), la loi du processus ponctuel {tn(ç) - UK} va être
proche de r, la loi du processus ponctuel {tn(ç)} avec un point à l'origine. En
supposant que cette approximation passe à la limite quand K tend vers l'infini,
la loi IP (la loi du processus ponctuel N) conditionnée à avoir un point dans
un voisinage de l'origine vaut asymptotiquement r, la loi de {tn(ç)}, quand
la taille du voisinage tend vers o. La proposition suivante établit ce résultat
rigoureusement.
PROPOSITION Il.8. Si j est une fonction mesurable bornée définie sur
11 telle que t -t j(8 t (w)) soit r-presque sûrement continue à droite en t = 0,
alors
lim JE ( f 1 N[ -x, 0] t= 0 ) = IÊ(j).
x-tO+
DÉMONSTRATION. Si x > 0, la relation (11.13) nous donne
JE{jl{N[-z,O],tO}) = ),IÊ (lh j l{N[-z,o],to}(B S (w)) ds )
= ),IÊ (lh j(BS(w))l{N[s-z,s],tO} dS) ,
d'après l'identité (11.10). Sur Ô, pour 0 < s < t1, on a N[s - x, s] f:. 0 si et
seulement si 0 est dans l'intervalle [s - x, s],
lEU 1 N[-x,O] -1- 0) = IÊ (lzt\t 1 j(BS(w)) dS) / IÊ(x t\ tI),
lEU 1 N[-x,O] -1- 0) = IÊ ( lZl\h j(BS(w)) dS) / IÊ(l t\ tl/x).
D'après la continuité de j, limx-to 1/x fox j(8 S (w)) ds = j(w). Le théorème de
convergence dominée de Lebesgue permet de conclure. D
5. LOI JOINTE DES ARRIVÉES DES CLIENTS AUTOUR DE t = a 281
La proposition 1.15 sur les processus de Poisson peut donc se reformuler de la
façon suivante : un processus de Poisson N a pour mesure de Palm la loi de
N + 8 0 .
COROLLAIRE Il.9.
a) Si A est un borélien de 0, alors
lim IP( 8 tl E A 1 N[ -t, 0] 0) = 1P>(A).
t a+
b) Quand t -t 0+, la loi conditionnelle de t1 sachant N[ -t, 0] 0 sous
IP converge vers la loi de t1 sous 1P>.
DÉMONSTRATION. En se rappelant que t 1 > 0, IP-presque sûrement, pour
t > 0, assez petit, t 1 (8 t (w)) = t 1 (w) - t. Par conséquent, si g est une fonction
continue bornée sur IR, la fonction f(w) = g(t1(W)) satisfait les hypothèses de la
proposition précédente. On en déduit que
lim E(f 1 N[ -t, 0] 0) = IÊ(f) = IÊ(g(t 1 )),
t a
ce qui montre la convergence en distribution et donc b). En développant soi-
gneusement, et en utilisant les propriétés de (8 t ) et l'expression précédente de
t 1 (8 t (w)), pour t assez petit on obtient l'égalité
8tl(8t(w)) = 8tl(l t(w»(8t(w)) = 8tl(l t(W»+t(w) = 8tl(w)(w).
La fonction t -t 1{8tlEA}(8t(w)) est donc IP-presque sûrement continue à droite.
La proposition précédente peut s'appliquer, ce qui achève la démonstration du
corollaire. D
5. Loi jointe des arrivées des clients autour de t = 0
Si f désigne une fonctionnelle mesurable bornée sur Rt- x IR z , la rela-
tion (11.13) donne
lE (J( -ta, (ln - ta))) = >.IÊ (Io h f ( - ta (BU), (ln - to)(B U )) dU) ,
d'après l'identité (11.8), t n (8 U ) = t n - u, pour nEZ et 0 < u < t 1 , et comme
ta = 0 sur Ô,
lE (J( -ta, (ln - to))) = >.IÊ (lo t1 f( -u, (ln)) du ) .
On obtient donc la proposition suivante.
PROPOSITION Il.10. Si f est une fonctionnelle mesurable bornée sur
l'espace Iltt x IR z ,
(11.19)
lE (J( -ta, (ln - ta))) = >.IÊ (lo t1 f( -u, (ln)) du ) .
282
11. PROCESSUS PONCTUELS STATIONNAIRES
En particulier, la loi jointe des dates d'arrivées des points juste avant et
juste après l'instant t = 0 est donnée par
IE{g(t o , td) = >.IÊ (lr g( -u, r - u) du ) ,
(11.20)
si g est une fonction borélienne positive sur IlL x Iltt .
La relation (11.19) n'est autre que la relation (11.2) reformulée dans le cadre
de l'espace O.
Si g est une fonction borélienne positive sur II4,
(11.21)
IE{g{ -to)) = IE{g{tt)) = >.! r(dx) fox g(u) du = >.! g(u)JP>(r > u) du,
Les variables t 1 , -ta ont donc pour densité r(T > t)/IÊ(r) par rapport à la
mesure de Lebesgue.
Exemples de processus ponctuels stationnaires.
Les processus de renouvellement stationnaires. Si la suite (r n ) = (roB n )
est i.i.d., la relation (11.19) donne la loi du processus ponctuel stationnaire
associé. Si f et gn, nEZ sont des fonctions boréliennes positives sur IR, et alors
JE ( f( -ta) Il 9n((t n + l - tn)) ) = ÀIÊ ( l h f( -u) Il gn({tn+1 - t n )) dU ) .
nEZ a nEZ
Sous r, la suite (t n + 1 -t n ) = (ToB n ) est i.i.d. de même loi que T et les t n + 1 -t n ,
n -:F 0 sont indépendants de t l = T. On en déduit
1E ( f( -to) fi gn((t n +1 - tn)) ) = ÀIÊ ( l T f( -u)go(r - u) dU ) Il IÊ (gi(T)).
a a n#a
Pour construire le processus ponctuel stationnaire, il suffit donc de prendre deux
variables aléatoires (ta, t 1 ), indépendantes de la suite (T n), et dont la loi est
donnée par (11.20). Notre processus ponctuel n'est autre que la superposition de
deux processus de renouvellement, l'un sur le demi-axe positif, (t 1 + L Ti; n > 0)
et l'autre sur l'axe négatif (ta - L l Ti; n < 0).
1. Processus de Poisson. Si r est une variable aléatoire exponentielle de
paramètre À, la loi jointe de (-ta, t l ) est donnée par
r+ oo l x
IE{g{ -t o , td) = >. Jo >.e->'X dx 0 g(u, x - u) du
= r >'e->'u>'e->'vg(u,v)dudv.
JR+XR+
Les variables -ta, t l sont donc indépendantes, de distribution exponen-
tielle de paramètre À. La loi de t l (resp. -ta) est donc dans ce cas la
même que celle des interarrivées.
5. LOI JOINTE DES ARRIVÉES DES CLIENTS AUTOUR DE t = 0 283
2. Processus déterministe. Si TO - D, alors t 1 est une variable U D uniforme
sur [0, D] et t o = D - t 1 . Les points du processus ponctuel stationnaire
sont les UD + nD, nEZ.
3. Processus pour lequel la variable t 1 n'est pas intégrable. Si TO a pour
densité 2/x31{x 1} sous r, alors la loi de TO a un premier moment fini.
La densité de la variable t 1 sur II4 vaut 1/2 inf(l/x2, 1), en particulier
la variable t 1 n'a pas de premier moment.
Les exemples a) et c) mettent en évidence un paradoxe; l'interarrivée des
clients autour de 0 de la version stationnaire a, dans le cas a), une moyenne
double de la moyenne initiale des interarrivées, et dans le cas c), celle-ci n'est
même pas intégrable. Si T a un moment d'ordre 2, t1 est intégrable puisque
1 1 +00 A IÊ( T2)
E( t 1 ) = uIP( T > u) du = A .
IE( T) 0 - 2IE( T)
En reprenant l'optique de la section 3, il est facile d'expliquer intuitivement ce
paradoxe apparent. Quand on jette au hasard l'origine UN sur [t-N( )J tN( )],
ce point a une forte probabilité de tomber dans un grand intervalle séparant
deux points du processus ponctuel. Si la variance est très grande (infinie dans le
cas c)), le point tombera pratiquement toujours dans ces grands intervalles (qui
alternent avec des tout petits), ce qui explique que l'intervalle autour de 0 soit
en général plus grand. L'origine du processus ponctuel stationnaire déforme le
processus ponctuel initial.
Un processus de renouvellement alterné. On considère deux suites i.i.d.
et indépendantes (ai), (b i ) . Les lois respectives des variables aléatoires ao J b o
sont F et G. Les ai, i E Z représentent les durées des périodes de fonction-
nement d'une machine, celles-ci alternent avec des périodes de panne dont les
durées sont les bi, i E Z. Pour avoir une description des instants de panne et de
réparation il est bien sûr possible de se ramener au cas précédent en considérant
le processus ponctuel des débuts de fonctionnement. Celui-ci est un processus
de renouvellement associé à la suite i.i.d. (ai + bi). Ce processus ponctuel ne
donnera cependant pas les instants de début de panne. Il est commode ici de ra-
jouter une marque u qui vaut 0 ou 1 pour indiquer si c'est une période de panne
qui commence ou non. On définit la loi de la suite (T n , un) sur (IR x {O, l})Z par
1P>(uo = m) = 1/2, pour m = 0,1,
et conditionnellement à {uo = 1},
- pour i E Z, U2i = 1 et U2i+l = 0,
- les suites (T2i), (T2i+1) sont i.i.d. et indépendantes, de lois respectives F,
G,
de la même façon, conditionnellement à {uo = O},
- pour i E Z, U2i = 0 et U2i+l = 1,
- les suites (T2i), (T2i+1) sont i.i.d. et indépendantes, de lois respectives G,
F.
284
11. PROCESSUS PONCTUELS STATIONNAIRES
Il est facile de vérifier que la suite (Tn, un) est stationnaire. Le processus ponctuel
marqué stationnaire N = {t n , m n } associé à cette suite est d'intensité
1 1
À = - .
E( TO) E( ao) 12 + E(b o ) 12
L'identité (11.19) nous donne aussi la loi jointe suivante: si f est borélienne
positive sur IR 3 ,
JE (f( -to, tl, t 2 - td 1 { CT o=o}) = JE (l bo f( -u, b o - u, ad du )
= À J! G(dx)F(dy) r f( -u, x - u, y) du.
2 RxR Jo
En particulier la probabilité d'être dans une période de panne à l'instant t = 0
vaut
À ( lE( b o )
IP( CT o = 0) = 2 11R xG( dx) = IE(ao) + IE(b o ) .
6. Propriétés des processus ponctuels stationnaires
Le système dynamique continu qui a été construit hérite de la propriété
d'ergodicité du système dynamique discret initial.
PROPOSITION Il.11. Le flot (8 t ) est ergodique sur (0, F, IP).
DÉMONSTRATION. Il suffit d'utiliser la remarque après la proposition Il.4
et la proposition 10.15 page 262. D
À partir de maintenant tous les processus ponctuels stationnaires N = {t n }
seront définis sur l'espace de probabilité (O,:F, Ir, (8 t )) et vérifieront
( Il.22) N ( 8 t ( W ), dx) = Tt N ( w, dx ) ,
pour tout t E IR et w E O.
6.1. Théorèmes limites.
PROPOSITION Il.12 (Théorème ergodique). Si f : 0 -t II4 est une fonc-
tion mesurable, alors
l i t ...
lim - f(85) N(w, ds) = ÀE(f),
t +oo t 0
DÉMONSTRATION. Si Zt(w) = f f(8U(w)) N(w, du), alors
Zt(9 S (w)) = l t f(9 u + S (w)) N(9 S (w), du),
en utilisant la relation (11.10), on obtient
(t+5
Zt(9 S (w)) = ls f(9U(w)) N(w, du).
IP - p.s.
6. PROPRIÉTÉS DES PROCESSUS PONCTUELS STATIONNAIRES 285
ainsi Zt+s = Z s + Zt ((}S). La proposition précédente montre que le flot ((}t)
est ergodique, le théorème ergodique 10.13 pour les flots continus donne par
conséquent, Ir-presque sûrement
lim t f(9U(w)) N(w, du) = lE ( rI f(9U(w)) N(w, dU) ) ,
t +oo t Jo Jo
et la relation (11.15) termine la démonstration,
lE (1 1 f(9U(w)) N(w, dU)) = .\JÊ(f).
D
Les propriétés asymptotiques et infinitésimales des processus ponctuels station-
naires sont résumées dans la proposition suivante :
PROPOSITION Il.13. Ir-presque sûrement,
a) limt +oo N[O, t]lt = À,
b) limn +oo tnln = 1/À,
et
c) limt o Ir(N[O, t] = l)/t = À,
d) limt o IP(N[O, t] > 2)lt = o.
DÉMONSTRATION. Le a) est une conséquence immédiate de la proposition
précédente. Pour b) en remarquant que pour x > 0,
{N]O, t] < xt} = {tLxtJ > t} = {tLxtJ I(xt) > 1/x} ,
si l z J est la partie entière de z. De la partie a), on déduit que Ir-presque sûrement,
liminftnln > 1/ À .
n +oo
L'inégalité inverse avec la limite supérieure se montre de la même façon.
D'après la relation (11.20),
Ir(N[O, t] > 1) = Ir(t 1 < t) = ÀIÊ( T /\ t),
le théorème de convergence dominée de Lebesgue montre donc la convergence
( Il.23)
l Ir(N[O,t] > l)lt = À.
De la même façon, en utilisant la relation (11.13), on obtient
P(N[O, t] > 2) = P(t 2 < t) = .\JÊ (1 tl 1{t2(9$)9} dS) .
En remarquant que t 2 ((}S) = t 2 - S pour 0 < s < t 1 ,
P(N[O, t] > 2) = .\JÊ (k+ 1{h- t 5 s 5 t l} dS) =.\JÊ ((t l - (t 2 - t)+) V 0) ,
P(N[O, t] > 2)/ = .\JÊ ((1 - (t 2 - h)/t)+ 1\ tIlt) .
286
11. PROCESSUS PONCTUELS STATIONNAIRES
D'après l'hypothèse initiale sur la fonction T, t 2 - t1 = T 0 8 > 0, 1P>-presque
sûrement et donc (1 - (t 2 - t 1 )lt)+ A t 1 1t converge 1P>-presque sûrement vers 0
quand t tend vers O. On obtient d) par le théorème de Lebesgue et c) en utilisant
d) et (11.23). D
La probabilité qu'un processus ponctuel stationnaire d'intensité .À ait un
point dans intervalle de longueur h est de l'ordre de Àh, pour h assez petit.
Notons aussi, mais c'est une conséquence directe de la définition de Ir, que la
probabilité que le processus N ait un point en t E IR vaut o.
6.2. Transformations des processus ponctuels stationnaires.
PROPOSITION Il.14 (Effacement). Si A est un borélien de IR et X : Ô -t
IR est une variable aléatoire mesurable telle que r(X E A) > 0 alors le
processus ponctuel
NA = L 1{Xo8 tn EA}(W) 8t n
nEZ
est stationnaire d'intensité Àr(X E A) et sa mesure de Palm est donnée
par
1 l
f dUP.
Ir(X E A) XEA
DÉMONSTRATION. Si g est une fonction mesurable bornée sur IR x Il4, et
pour t E IR,
r g(u, y) Tt NA(w, du, dy) = r g(u - t, y) NA(w, du, dy)
JRXR+ JRXR+
= r g(u - t, y)1{xo9u(w)EA} N(w, du, dy),
JRXR+
la relation de groupe (11.9) donne
r g(u, y) Tt NA(w, du,dy)
JRXR+
= r g(u - t, y)1{xo9u-t(9t(w»EA} N(w, du, dy)
JRXR+
= r g(u, y)1{xo9u(9t(w»EA} Tt N(w, du, dy),
JRXR+
ce qui vaut, d'après la relation (11.22),
r g( u, y)1{xo9u(9t(w»EA} N(Bt(w), du, dy)
JRXR+
= r g(u, y) NAW(w), du, dy),
JRXR+
on en conclut que Tt NA (w, dx) = NA (et (w), dx). Le processus ponctuel est bien
invariant par translation, et donc stationnaire.
6. PROPRIÉTÉS DES PROCESSUS PONCTUELS STATIONNAIRES 287
Pour exprimer sa probabilité de Palm, en prenant une fonction f mesurable
positive sur l'espace (2 x IR x Il4,
1E ( r j(ot(w), t, y) NA(w, dt, d Y ) )
JR. xR.+
= lE (l j(ot(w), t, u(w))1{Xo8 t (w)EA} N(w, dt)) ,
la relation (11.14) pour N donne,
lE (kXR+ j(ot(w), t, y) NA(w, dt, d Y )) = À! k j(w, t, u(w))l{X(w)EA} dt dP,
d'où l'expression de la probabilité de Palm de NA et de son intensité. D
PROPOSITION Il.15 (Translation). Si S : Ô -t IR est une variable aléatoire
mesurable, le processus ponctuel Ns défini par
N s = {( t n + S 0 e tn J 0" 0 e tn )},
ou encore
Ns(f) = L j(t + S(ot(w)), y) N(w, dt, dy),
pour une fonction f mesurable positive sur IRx IR+, est un processus ponctuel
stationnaire de même intensité que N et sa mesure de Palm IPs est donnée
par
! 9 ai's = ! g(OS) ai',
si g : (2 -t Il4 est mesurable.
DÉMONSTRATION. Tout d'abord ce processus est bien défini sur (2 : S est
défini sur Ô et l'application w -t e tn ( w) est à valeurs dans Ô.
Pour t E IR, et g mesurable positive sur IR x Il4,
r g(t, y) Tt Ns(w, dt, dy) = L 9 (tn(w) + s 0 etn(w) - t, u 0 e tn (w)) ,
JR.XR.+ nEZ
la relation (11.9) donne S 0 e tn (w) = S 0 e tn -t (et (w )), on a donc
Tt Ns(w, dt, dx) = r 9 (s - t + S 0 os-tW(w)), y) N(w, ds, dy)
JR. xR.+
= r 9 (s + S 0 OS(ot(w)), y) Tt N(w, ds, dy),
JR. xR.+
ce qui vaut d'après (11.22),
r 9 (s + S 0 OS(ot(w)), y) N(et(w), ds, dy) = ! g(s, y) Ns(et(w), ds, dy).
JR. xR.+
Ainsi Tt N s (w, dt, dy) = N s (et (w ), ds, dy), le processus ponctuel est donc sta-
tionnaire.
288
11. PROCESSUS PONCTUELS STATIONNAIRES
Si f est mesurable positive sur n x IR x Il4,
1E ( r fW(w), t, y) Ns(w, dt, d Y ) )
JJR xJR+
=E(lf(et+soe'(w),t+soet(w),uoet(w)) N(w,dt)) 1
la relation (11.14) pour N appliquée à la fonction
h : (w, t, y) -t f ((}s (w ), t + S (w), y),
donne
1E ( r f(et(w), t, y) Ns(w, dt, d Y ) )
JJR xJR+
= E (1 h(et(w), t, y) N(w, dt, d Y )) = >. ! L h(w, t, u(w)) dtdIP>
= >.! L J(es(w), t + S(w), u(w) dsdIP> = >. ! L f(es(w), t, u(w) dsdlP',
on en déduit l'expression de la mesure de Palm de Ns. D
Si S est tel que S 0 (}t est le temps de séjour (temps d'attente et temps de
service) dans la file d'attente du client arrivé à l'instant t, alors le processus Ns
n'est autre que le processus de sortie de la file d'attente. Avec l'hypothèse sur les
temps de séjour, le résultat mentionné dans l'introduction est donc démontré:
si le processus d'entrée est stationnaire, le processus de sortie l'est aussi.
PROPOSITION Il.16 (Superposition). Si pour i = 1,2, Ni est un proces-
sus ponctuel stationnaire d'intensité Ài et de mesure de Palm ri, alors la
superposition N, définie par
N(f) = N 1 (f) + N 2 (f),
pour f mesurable positive, est aussi un processus ponctuel stationnaire d'in-
tensité À = Àl + À 2 et de mesure de Palm r = (À 1 r 1 + À 2 r 2 )/À.
DÉMONSTRATION. La stationnarité se montre facilement, pour t E IR
T t (N 1 + N 2 )(w, ds, dy) = Tt N 1 (w, ds, dy) + Tt N 2 (w, ds, dy)
= N 1 ( (}t ( W ), ds, dy) + N 2 ( (}t ( W ), ds, dy)
= (NI + N 2 )((}t(w), ds, dy).
La probabilité de Palm et l'intensité se calculent sans difficulté.
L'espace de Palm 11 s'exprime facilement dans ce cas
D
ô = {wIN 1 (w, {O}) = 1}u{wIN 2 (w,{0}) = 1}.
6. PROPRIÉTÉS DES PROCESSUS PONCTUELS STATIONNAIRES 289
6.3. Relations entre processus ponctuels stationnaires. En conser-
vant les notations de la proposition précédente, la relation suivante, due à
Neveu[28] dans le cas général, donne une relation entre les deux mesures de Palm
de processus ponctuels stationnaires définis sur le même espace de probabilité.
PROPOSITION Il.17. Si N 1 = 2:nEZ65n' N 2 = 2:nEZ6tn et j: 0 -t lR.t- est
mesurable alors
( Il.24 )
À1IÊl (j) = À2 ( L j(8 Sn ) ) .
0 5n <tI
DÉMONSTRATION. En notant
h(w) = L j(8 Sn (w)) = 1 h j(8 S (w))N 1 (w,ds),
0 5n<tl
pour nEZ,
(tloe tn
h(8 tn (w)) = Jo j(8 S + tn (w)) N 1 (8 tn (w) (w), ds)
i tn +tl o8 tn
= j(8 5 (w)) N 1 (w, ds),
t n
comme t 1 (8 tn ) = t n + 1 - t n (le prochain point après t n est t n + 1 !),
i tn + l
h(8 tn )(w) = j(8 5 (w)) N 1 (w,ds).
t n
Le principe de la preuve de la proposition est très simple. Il suffit d'écrire une
intégrale suivant N 1 comme une intégrale par rapport à N 2 , ce que l'on fait de
la façon suivante,
(11.25)
1 1 j(8 S ) N 1 (w, ds) = L j(8 Sk )
o O 5k<1
O h j(8 Sk ) + O t=<l (n tn+l j(8 Sk )) 1 sk tl(91) j(8 Sk ).
En utilisant (11.25), l'égalité précédente peut s'écrire comme
fol 1(8 5 ) N1(w,ds) = 2:0 tn<1 h(8 tn ) + h(w) - h(8 1 (w))
= f; h(8 5 ) N 2 (w, ds) + h(w) - h(8 1 (w)).
Si h est intégrable alors E( h - ho ( 1 ) = 0 par invariance de IP par 8 1 . En prenant
l'espérance de l'égalité (11.15) donne
À 1 1Ê" (J) = lE (1 1 j(8 S ) N 1 (w, dS)) = lE (1 1 h(8 S ) N 2 (w, dS)) = À 2 1Ê4 (h),
[28] Jacques Neveu, Sur les mesures de Palm de deux processus ponctuels stationnaires, Zeit-
schrift für Wahrscheinlichkeitstheorie und verw. Geb. 34 (1976), 199-203.
290
11. PROCESSUS PONCTUELS STATIONNAIRES
la relation (11.24) est donc vérifiée dans ce cas.
En posant g = f /\ KI (1 + N 1 [0, t 1 ])2 , alors le h correspondant à g est intégrable
pUIsque
l t1 1 l t1 1
o (1 + N l [0, tl])2(Bs(w)) N l (w, ds) = 0 (1 + N l [s, tl])2 (w) N l (w, ds)
N[0,t1]+1
- L 1/k 2 < +00.
2
La relation (11.24) est donc vraie pour g, en faisant tendre K vers +00 et en
utilisant le théorème de convergence monotone, on obtient l'égalité (11.24). D
7. Annexe
Cette section considère le point de vue inverse à celui que nous venons de
voir pour étudier les processus ponctuels stationnaires. Il est montré qu'à un
processus ponctuel stationnaire donné, on peut associer un espace de Palm.
De plus il n'existe qu'un processus ponctuel stationnaire pour une distribution
donnée sur les interarrivées.
Si Q est une probabilité sur n = Mp(IRx IR+), invariante par les translations
(Tt) et d'intensité finie, i.e.
L w([O, 1]) dQ(w) < +00,
l'invariance par translation et la condition de finitude entraînent que w[ -n, n]
est intégrable pour tout entier n E N, par conséquent w( K) est intégrable pour
tout compact K de IR. Autrement dit, l'application
N : n --t Mp(IR x Il4)
w--tw
est un processus ponctuel stationnaire. On va montrer que l'on peut associer à
Q une mesure de Palm Q au sens où nous l'avons défini précédemment.
PROPOSITION Il.18. Il existe une unique probabilité Q sur n invariante
par T t 1 1 telle que Q( {ta = O} = 1 et
(11.26) JE ( r h(Tt(w), t) N(w, dt, d Y ) ) = >. r r h(w, t) dt dQ,
JR. xR.+ Jo JR.
pour h mesurable positive sur n x IR.
La fonction h ne dépend pas de la marque pour simplifier la présentation.
DÉMONSTRATION. Si f est une application mesurable bornée sur n, et si g
est continue à support dans le compact K de IR, alors
r dQ r I(Tt(w))g(t) N(w, dt, dy) < 1l/II00IIgil00 r w(K) dQ(w).
Jo JR.XR.+ Jo
7. ANNEXE
291
On en déduit que pour tout intervalle borné 1 de IR, l'application
9 r dQ r j(Tt(w))g(t) N(w, dt, dy)
Jo J R. xR.+
est linéaire, continue sur l'espace des fonctions continues sur 1 muni de la norme
uniforme. Le théorème de Riesz, voir Rudin [45], montre alors l'existence d'une
unique mesure de Radon J-L f sur IR telle que
r dQ r j(Tt(w))g(t) N(w, dt, dy) = r g(t) J1.f(dt),
Jo JR.XR.+ JR
pour toute fonction borélienne positive g sur IR. Si x E IR,
(11.27)
r dQ r j(Tt(w))g(t - x) N(w, dt, dy)
Jo JR.XR.+
= r dQ r j(Tt+Z(w))g(t) T Z N(w, dt, dy)
Jo JR. xR.+
= r dQ r j(Tt(TZ(w)))g(t) T Z N(w(dt, dy),
Jo JRXR.+
comme Q est invariant par TX, ce dernier terme vaut
r dQ r j(Tt(w))g(t) N(w, dt, dy).
Jo JRXR.+
On en déduit l'identité
L g(t - x) J1.f( dt) = L g(t) J1.f( dt),
pour toute fonction borélienne positive g. La mesure J1.f est invariante par trans-
lation sur IR, par conséquent J-L f est proportionnelle à la mesure de Lebesgue;
il existe donc l(f) E IR tel que J-Lf(dt) = l(f) dt. En posant g = l{[O,l]} dans
l'égalité (11.27), il est facile de montrer que, sur l'ensemble des boréliens de n,
l'application
A --t l(lA),
définit une mesure positive bornée sur n. En posant À = l(1o) et
l j dQ = lU)/>',
la relation (11.26) est donc satisfaite pour toutes les fonctions h = fg, et donc
pour toutes les fonctions puisque les fonctions à forme produit engendrent la
tribu borélienne sur n x IR.
L'invariance de Q par Ttl. L'invariance par translation de la mesure de
Lebesgue et le théorème de Fubini donnent, si h est mesurable positive sur
l'ensemble n x IR,
>.l L h (Th (w), t) dt dQ = >.l L h (Th (w), t + t 1 (w)) dt dQ,
292
11. PROCESSUS PONCTUELS STATIONNAIRES
en appliquant l'identité (11.26) à l'application (w, t) -t h(Th (w), t + t 1 (w)), on
obtient
À l k h(Ttl(W),t)dtdQ
=E ( r h(Ttl(Tt(w)),t+tl(Tt(w))) N(W,dt,d Y ) )
JR. xR.+
= E ( rh (Tt+tt(Tt(W»(w), t + t 1 (T t (w))) N(w, dt, d Y ) ) ,
JR. xR.+
il est facile de voir que si t est un point de la mesure ponctuelle w, alors t +
t1 (Tt(w)) est aussi un point (d'indice décalé) de w. La dernière somme peut donc
s'écrire
E ( r h(Tt(w), t) N(w, dt, d Y ) ) = À r r h(w, t) dt dQ,
JR. xR.+ Jo JR.
d'où
l k h(Ttl (w), t) dt dQ = l L h(w, t) dt dQ.
On en déduit l'invariance de Q par Ttl.
En posant h(w, t) = 1{to(w)=Ot O ::;t::;1}, l'identité (11.26) s'écrit
E ( r 1{to(Tt(w»=o.o99} N(w, dt, d Y ) ) = ÀQ(t o = 0),
JR. xR.+
si t est un point de w, nécessairement to(Tt(w)) = 0, par conséquent,
À = E(N([O, 1])) = ÀQ(t o = 0),
et donc Q(t o = 0) = 1, ce qui achève la démonstration de la proposition. D
Le résultat d'unicité suivant conclut cette section (voir aussi la proposi-
tion 11.8 page 280).
PROPOSITION 11.19. Si Q est une probabilité sur n invariante par Ttl
telle que (t 1 ) < +00, il existe alors une unique probabilité Q, loi d'un pro-
cessus ponctuel stationnaire d'intensité finie, ayant la propriété de condi-
tionnement : pour toute fonction mesurable bornée f définie sur n telle que
t -t f(8 t (w)) est Q-presque sûrement continue à droite en t = 0, alors
(11.28) o: +EQ (i 1 w([-x, 0]) #0) = (f),
où EQ désigne l'espérance pour la probabilité Q.
DÉMONSTRATION. Étant donné la probabilité Q construite dans la section 3
un processus ponctuel stationnaire d'intensité 1/ (t1)' ayant la propriété de
conditionnement (11.28). Il reste donc à montrer l'unicité.
7. ANNEXE
293
Si Q1 a la loi d'un autre processus ponctuel stationnaire d'intensité finie
vérifiant le résultat limite (11.28). Alors Q1 a une mesure de Palm Q1 vérifiant
l'identité (11.26),
EQl ( r h(Tt(w), t) N(w, dt, d Y ) ) = ÀQl r r h(w, t) dt d'Ô!.
lR.XR.+ lolR.
Si h est une fonction mesurable positive sur 0 x IR, comme par définition il n'y
a pas de point entre to et t1,
r h(TS(w), -s)l{to(w)::S;s<tt(w)}N(w, ds, dy) = h(TtO(w), -to(w)),
lR. xR.+
la relation (11.26) donne, en se rappelant que to _ 0, Q. -presque sûrement,
EQl (h(TtO (w), -to(w))) = À Q1 l k. h(w, -s ) l{o::S;s<tl(w)} ds dQ..
Si f est mesurable positive sur 0, en posant h(W,5) = f(TS(w)) dans l'identité
ci-dessus, on obtient
EQl (f(w)) = À Q1 l h j(T-S(w)) l{o::S;s<tl (T-'(w»} ds dQ..
Il est facile de vérifier que les conditions {t o < 5} et {5 < t 1 (T- S )}
équivalentes à {-t 1 < -5 < -to}, d'où
r rh (w)
EQl (f(w)) = ÀQl Jo Jo j(TS(w)) ds d'Ô!,
sont
(11.29)
une relation analogue à (11.13) est donc valide pour QI et Q.. La démons-
tration de la proposition Il.8 de conditionnement pour 1P et r n'utilisant que
l'identité (11.13), on en déduit que pour toute fonction mesurable bornée f
définie sur 0 telle que t -t f((}t(w)) soit Q-presque sûrement continue à droite
en t = 0, alors
lim EQl ( f 1 w([-x, 0]) :1 0 ) = (f),
x-+o+ 1
et donc l (f) = (f) pour toutes ces fonctions f. Si f est une fonction
mesurable sur 0, la fonction w -t f(Ttl (w)) a clairement cette propriété de
continuité, donc
l(f) = l(foTtl) = (foTtl) = (f),
on en conclut que Q = Q. et À = 1/ (t1) = 1/ 1 (t 1 ) = ÀQl. Les re-
lations (11.29) et (11.13) donnent par conséquent Q = Q1, ce qui achève la
démonstration de notre proposition. 0
CHAPITRE 12
La file d'attente G/G/1 FIFO
Sommaire
1. Le temps d'attente 296
2. Le nombre de clients 300
3. Le temps virtuel d'attente 302
4. Les processus ponctuels stationnaires associés 305
Les files d'attente avec discipline conservative 307
5. Instabilité de la file GIGll 309
6. La file d'attente à deux serveurs G/G/2 310
Dans ce chapitre, la file d'attente à un serveur avec service dans l'ordre
d'arrivée des clients est étudiée. Le processus d'arrivée de clients est un pro-
cessus ponctuel stationnaire marqué N = {(t n , u 0 ()t n )} défini sur l'espace de
probabilité (0, F, 1P). Cet espace est muni d'un flot ergodique ((}t) vérifiant
N((}t(w), dt, du) = Tt N(w, dt, du),
pour t E IR et w E 0, où Tt est la translation sur les processus ponctuels. Comme
dans le chapitre précédent on suppose qu'il n'y a pas d'arrivées simultanées
(IP(t 1 > 0) = 1), ce qui n'est pas une hypothèse réellement restrictive.
Ce chapitre est consacré à l'étude du comportement asymptotique de cette
file d'attente. La convergence en loi des temps d'attente des clients et le com-
portement asymptotique de la file d'attente à un instant arbitraire (i.e. pas
forcément à une arrivée de clients) sont analysés. Un exemple de file d'attente à
deux serveurs clôt ce chapitre pour montrer que la très satisfaisante description
du comportement asymptotique de la file G / G Il est en fait un cas très particu-
lier. Le modèle de la file G 1 G /1 est important mais les résultats obtenus pour
cette file ne s'étendent pas, en général, aux autres systèmes de files d'attente.
Le principal résultat présenté dans ce chapitre (Proposition 12.1) est dû à
Loynes (voir la référence plus loin). Les processus ponctuels stationnaires ont
été introduits par Franken et al. [21] dans le cadre des files d'attente. Enfin,
l'utilisation du cadre de la théorie ergodique pour formuler les résultats est due
à Neveu[29], c'est la présentation qui est adoptée dans ce chapitre (voir aussi le
livre de Baccelli et Brémaud [3]).
[29] Jacques Neveu, Construction de files d'attente stationnaires, Lecture notes in Control
and Information Sciences, 60, Springer Verlag, 1983, pp. 31-41.
296
12. LA FILE D'ATTENTE G/G/1 FIFO
N(w, dt)
1 CD
..
FIG. 1. La file d'attente FIFO
1. Le temps d'attente
À l'instant ta- (juste avant l'arrivée du client 0) la somme totale des services
à effectuer vaut w. La discipline de service FIFO impose donc que le client
arrivant à ta attend w avant de commencer à être servi. La variable aléatoire W n
définie sur Ô désignera le temps d'attente du n-ième client arrivé après t = O.
Celui-ci commence son service à t = t n + W n et quitte la file une fois celui-ci
achevé, Le. à t = t n + W n + (J 0 On. Comme les clients sont servis dans l'ordre
d'arrivée, si la file est non vide à cet instant, le client qui le suit dans la file (le
n+1-ième) accède au serveur, on obtient l'identité
t n + 1 + W n + 1 = (t n + W n + (J a On) V t n +1,
et donc l'équation de Lindley
_ An An +
(12.1) Wa=w, W n + 1 -(W n +uaB -raB) .
Le temps de séjour Sn du n-ième client est défini par W n +uaO n , en particulier
la suite (t n + Sn) est celle des instants de départ de cette file d'attente.
La proposition suivante, due à Loynes [26], est le résultat clé pour étudier ce
problème.
PROPOSITION 12.1. Sous la condition ÀIÊ(u) < 1, il existe une unique
variable aléatoire W : Ô -t II4, IP>-presque sûrement finie, vérifiant IP>-p.s.
(12.2) W a ê = (W + u - r)+,
de plus IP>(W = 0) > O.
La relation (12.2) est l'équivalent dans ce cadre de l'équation (2.2) pour la
file GI IGI Il.
DÉMONSTRATION. Si (V n ) est la suite définie par
Va = 0, V n + 1 a ê = (V n + u - r)+,
par récurrence il est facile de vérifier que la suite (V n ) est croissante et que sa
limite W = limn-++<x> V n vérifie
(12.3)
W a ê = (W + u - r)+.
Le sous-ensemble de Ô, A = {W = +oo} est donc invariant par ê. En utilisant
l'hypothèse d'ergodicité du flot ê pour IP>, on a donc l'alternative IP>(A) = 0 ou
[26] R.M. Loynes, The stability of queues with non independent inter-arrival and service times,
Proc. Cambridge Ph. Soc. 58 (1962), 497-520.
1. LE TEMPS D'ATTENTE
297
JÎD( A) = 1. Si cette dernière égalité est vraie, JÎD-presque sûrement limn-t+oo V n =
+00. Par définition de (V n ),
V n + 1 08 - V n = -V n A (r - 0'),
les variables V n étant intégrables (démonstration par récurrence), l'invariance
de JÎD par ê et la croissance de la suite montrent que
IÊ(V n A (r - 0')) = IÊ(V n - V n + 1 08) = IÊ(V n - V n + 1 ) < 0,
pour n > 0, et donc en faisant tendre n vers +00,
IÊ(r) - IÊ(O') = l/À - IÊ(O') < 0,
par le théorème de convergence monotone, ce qui contredit l'hypothèse. La va-
riable West donc finie r-presque sûrement.
Il faut montrer que toute solution U de (12.2) vérifie r(U = 0) > O. En faisant
l'hypothèse que r(U = 0) = 0, l'équation (12.2) peut encore s'écrire
U 0 8 = U + 0' - r,
JÎD-presque sûrement. En remarquant que U 0 9 - U est intégrable, le lemme 12.2
ci-dessous donne l'égalité IÊ(U 09- U) = 0 et donc ÀIÊ(O') = 1, ce qui est
contradictoire avec l'hypothèse, d'où l'identité r(U = 0) > o.
Il reste à montrer l'unicité. Si U est une solution de (12.2), la relation U > 0 = Va
et la définition de la suite (V n ) donnent
V 1 0 ê = (Va + 0' - r)+ < (U + 0' - r)+ = U 0 ê,
et donc U > V 1 r-presque sûrement. Par récurrence, on obtient que V n < U
r-p.s. pour tout n E N et finalement W < U.
L'ensemble {W = U} est invariant par ê d'après (12.2) et contient donc le
sous-ensemble non négligeable {U = O} (même démonstration que pour l'en-
semble {W = O}). L'ergodicité de 9 permet de conclure à l'égalité JP>-presque
sûre U = W. D
LEMME 12.2. Si X est une variable aléatoire positive sur Ô telle que la
variable X 09-X soit intégrable alors IÊ(X 09- X) = o.
DÉMONSTRATION. En effet si X est intégrable,
IÊ(X 09- X) = IÊ(X 0 9) - IÊ(X) = 0,
par invariance de r par ê. En particulier pour K > 0,
IÊ(X A K 0 9 - X A K) = 0,
en utilisant l'inégalité élémentaire
IX09AK-X AKI < IX09-XI,
pour K > 0, le théorème de convergence dominée permet de conclure. 0
298
12. LA FILE D'ATTENTE G/G/1 FIFO
En utilisant la définition de la suite (V n ), il est facile de vérifier par récurrence
l'égalité
(12.4)
-1
V n = SUp 2:(0' - r) 0 êi,
-n::;k::;O k
avec la convention E l . = o. La proposition précédente peut donc aussi être
démontrée en utilisant le théorème ergodique : les sommes partielles tendent
presque sûrement vers -00, donc la borne supérieure est p.s. constante à partir
d'un certain rang. La variable W = lim n -++ oo V n peut donc se représenter comme
(12.5)
-1
W = sup 2:(0' - r) 0 êi.
k::;O k
Le résultat de stabilité pour la file G 1 G Il peut maintenant être établi.
PROPOSITION 12.3. Sous l'hypothèse ÀIÊ(O') < 1, la suite (W n ) converge
en variation totale vers la loi de la variable W définie par l'équation (12.2),
lim 11IP>(W n E .) - IP>(W E .)lIvt = 0,
n-++oo
où r(X E .) désigne la loi de la variable aléatoire X. De plus la suite (W n )
possède la propriété de couplage fort, i. e. la variable
(12.6)
T = inf{n > 0IW k = W 0 êk,Vk > n},
est IP>-presque sûrement finie. Presque sûrement, la suite (W n ) coïncide avec
la suite stationnaire (W 0 ê n ) à partir d'un certain rang.
La norme en variation totale IIr - Qllvt entre deux probabilités r et Q sur
IR est définie par
sup Ir(A) - Q(A)I,
AEB(R)
voir l'annexe D pour les propriétés de cette norme.
DÉMONSTRATION. La propriété de couplage. D'après la définition de la suite
(W n ) des temps d'attente,
W o = w,
.....n .....n +
W n + 1 = (W n + 0' 0 8 - r 0 8 ) ,
si w = W alors W 1 = (W + 0' - r)+ = W 0 ê, et par récurrence la suite (W n )
est donc la suite stationnaire (W 0 en). La suite avec la condition initiale w = 0
sera notée (W ).
Si on montre que pour tout w, la suite (W n ) couple presque sûrement avec
la suite (W ), au sens où W n = W pour n suffisamment grand, ceci entraînera
en particulier que (W ) couple avec la suite stationnaire (W 0 ê n ) et donc les
autres suites coupleront avec la suite stationnaire.
1. LE TEMPS D'ATTENTE
299
Par récurrence il est clair que W n > W pour tout n > o. Si W n > W pour
tout n > 0, alors W n > 0 pour tout n > 0, d'où
n
Wn+1=Wn+aOen-roen, Wn=w+L:(a-r)oe n
1
et d'après le théorème ergodique, r-presque sûrement la quantité
n
L: (a - r) 0 en nIÊ( a - r)
1
tend vers -00 quand n tend vers l'infini. L'événement {W n > W pour tout n >
O} est donc de probabilité nulle. Presque sûrement il existe un n pour lequel
W n = W ; à partir de cet instant les deux suites sont donc identiques, d'où
la propriété de couplage. On note T l'instant où les deux suites se rencontrent
pour la première fois.
Si A est un borélien de IR
Ir(W n E A) - r(W E A)I = Ir(W n E A) - r(W 0 en E A)I
< r(W n -1 W 0 en) = r(T > n) '\, 0,
la convergence en variation totale est établie.
o
Wl
W2
WO+O'=W+O' .
W3.
wg+O'=O'
. . 0 .
Wf
W6=W3 "
Ô
ta = 0 t 1 t2
t3
t 4
t 5
t 6
FIG. 2. Couplage du temps d'attente de la file GIG/1
En utilisant les définitions respectives des suites (V n ) page 296 et (W )
page 298, il est facile de montrer la relation V n = W 0 e- n . Ceci donne une
interprétation intuitive de la variable V n . La variable W est le temps d'attente
du n-ième client après 0 quand la file d'attente commence avec l'arrivée d'un
client à t = o. Avec l'interprétation de e comme l'opérateur de passage d'un
client au suivant, e- n fait remonter de n clients en arrière, ainsi la variable V n
n'est autre que le temps d'attente du client arrivé à t = 0 quand le n-ième client
arrivé avant t = 0 commence a être servi dès son arrivée. La variable W, limite
des V n , n > 0, est donc le temps d'attente du client 0 quand la file d'attente a
commencé à t = -00, et par conséquent a atteint un état stationnaire à t = o.
300
12. LA FILE D'ATTENTE G/G/1 FIFO
La représentation (12.4) de V n donne l'identité
(12.7)
n-1
W = sup L(O" - r) 0 êi.
O k n k
2. Le nombre de clients
La variable W construite dans la proposition 12.1 permet de construire une
version stationnaire de toutes les autres variables caractérisant la file d'attente.
D'après la relation (12.2), si West le temps d'attente du client d'indice 0, le
temps d'attente de celui qui suit vaut W 09. De la même façon si on s'intéresse
au nombre Q de clients que trouve le client d'indice 0 à son arrivée dans la file,
cette variable définie sur Ô peut se représenter comme
Q = L 1{tn+(w+u)o8n o} = r 1{s+(u+W)o9'>O} N(w, ds),
t n <0 J] -oo,O[
c'est le nombre de clients arrivés avant t = 0 et qui n'ont pas encore quitté la
file d'attente. La translatée de Q par ê vaut
Q 0 ê = L 1{t n oê+(W+0')oê n + 1 >0} = L l{t n +(W+O')oê n >tl}'
t n 08<0 t n <tl
qui est le nombre de clients dans la file que trouve le client qui suit le client o.
Le nombre de clients en attente dans la file d'attente à l'instant t est la
variable aléatoire L(t) définie sur (2 par
(12.8) L(t) = L 1{t n +(w+0')08 tn >t}.
tn t
Le nombre de clients dans la file à l'instant t s'exprime comme
L(t) = L 1{t n +(w+U)o9' n >t} = J 1{s t,s+(u+W)o9.>t} N(w, ds)
tn t
= J 1{s-t O,s-t+(u+W)o9'>O} N(w,ds)
= J 1{ s O,s+( u+ W)o9' >O} Tt N (w, ds).
La relation (11.10), N((}t(w), ds) = Tt N(w, ds) montre donc que
L(t)(w) = J l{s o,s+u+w>O} N(Ot(w), ds) = L(O)(Ot(w)).
On retrouve le même principe que précédemment, une variable de la file d'attente
à l'instant t définie par (12.8) n'est autre que celle prise à l'instant 0 mais
translatée, par le flot continu cette fois, de (}t.
Sur Ô, la variable L(O-) = limt)"o L(t) n'est autre que la variable Q. De la
même façon L(W + 0") définie sur Ô est le nombre de clients dans la file lors
du départ du client o. La proposition suivante montre que la loi de ces deux
variables sont identiques et s'exprime en fonction de la loi de W.
2. LE NOMBRE DE CLIENTS
301
PROPOSITION 12.4. Si ÀIÊ(O') < 1, à l'équilibre le nombre de clients au
moment de l'arrivée d'un client a même loi que le nombre de clients qu'il
laisse à son départ. De plus, pour n > 2,
IP>(Q > n) = IP>(L((W + 0')) > n) = IP>(W > t n - 1 ).
DÉMONSTRATION. Si le client 0 trouve au moins n > 1 clients dans la filet
la discipline étant FIFO, le n-ième client arrivé avant t = 0 est encore dans la
file, par conséquent
r(L(O-) > n) = IP>(t- n + (W + 0') 0 ê- n > 0),
l'invariance de IP> par êndonne l'égalité,
IP>(L(O-) > n) = IP>(t n < W + 0').
Ce dernier terme vaut précisément IP>(L(W + 0') > n). L'idenité précédente peut
être réécrite de la façon suivante
IP>(L(O-) > n) = IP>(t n - t1 < W + 0'- t1) = IP>(t n - t 1 < (W + 0'- t 1 )+),
la dernière égalité est conséquence de l'inégalité stricte IP-presque sûre, t n > t 1 ,
pour n > 2, puisque par hypothèse il n'y a pas d'arrivées simultanées. Des
relations W 0 ê = (W + 0' - t l )+ et t n -1 0 ê = t n - t l on déduit
IP>(L(O-) > n) = IP>(W 09 > t n - 1 0 9) = IP>(W > t n - 1 ),
par invariance de IP> par ê, d'où le résultat.
D
Le résultat suivant est une relation liant, à l'état stationnaire, le temps moyen
d'attente d'un client et le nombre moyen de clients dans la file d'attente à un
instant arbitraire.
PROPOSITION 12.5 ( Formule de Little).
(12.9)
IE(L(O)) = À(IÊ(W) + IÊ(O')).
DÉMONSTRATION. La relation (12.8) pour t = 0 peut se réécrire
L(O) = J 1{s o,s+(w+0')o6'>O} N(w, ds),
et la formule de Mecke (11.14) donne l'égalité
IE(L(O)) = >,JÊ (J l{s o.s+w+O'>O} dS) 1
d'où la formule annoncée.
D
Le chapitre 4 montre que la loi stationnaire du nombre de clients d'une file
d'attente dans un réseau de files d'attente peut être explicitée sous certaines
conditions. En revanche, il est en général difficile d'obtenir des résultats sur
la loi des temps d'attente dans les réseaux. Cette formule est donc un moyen
d'obtenir la valeur moyenne du temps d'attente dans une file d'attente d'un
réseau.
302
12. LA FILE D'ATTENTE G/G/1 FIFO
3. Le temps virtuel d'attente
La charge de la file (appelé aussi temps virtuel d'attente) t -t V (t) est l' ap-
plication continue à droite, limitée à gauche et vérifiant l'équation différentielle
dV(t) = -l{v(t»O} dt, t n < t < t n + 1 ,
V ( t n ) - V (t n -) = u 0 e tn ,
ce que l'on écrit de façon compacte,
dV(t) = lim L(t) - L(s) = u 0 et N(w, [t, t + dt[) - l{v(t»O} dt.
s/,t
Les périodes d'occupation de la file d'attente sont les intervalles de temps sur
lesquels V est strictement positive. Les intervalles de temps sur lesquels V est
nulle sont les périodes de vacances du serveur.
(12.10)
V+O'
O'oê
O'oê 2
O'oê 3
O'oê 4
.
N OêS :
+ :
l ,
, ,
l ,
,
,
t 1
t2 t 3
t 4
t5
t6
---------------------- -- ---------------------------
période d'occupation vacances
FIG. 3. Charge de la file d'attente
Les points de discontinuité de t -t V(t) sont les points du processus ponc-
tuel. Il est important de remarquer que la suite de variables (W n ) est définie
sur (2, W n est le temps d'attente du n-ième client. De la même façon la variable
V (t) n'est pas attachée à un client mais donne l'état de la file d'attente à un
instant donné et par conséquent est définie sur (2. La variable V(t), le temps
virtuel d'attente est le temps qu'attendrait un hypothétique client qui arriverait
à l'instant t.
La proposition suivante est l'analogue de la proposition 12.1 pour le temps
virtuel d'attente
PROPOSITION 12.6. Sous l'hypothèse ÀIÊ(u) < l, il existe une unique va-
riable aléatoire V : (2 -t , IP-presque sûrement finie, telle que la fonction
t -t V 0 et (w) vérifie l'équation différentielle
(12.11)
dV(t) = u 0 et N(w, [t, t + dt[) - l{v(t»O} dt,
3. LE TEMPS VIRTUEL D'ATTENTE
303
ou encore
V(8 t (w)) = V(w) + r U 0 8 s N(w, ds) - l t l{v(s»O} ds;
J]O,t] 0
de plus r(V = 0) = 1 - ÀIÊ( a).
La proposition précédente peut se formuler en disant qu'il existe une unique
solution stationnaire t -t V(8 t ) à l'équation différentielle (12.11). De la même
façon la proposition 12.1 exprime que l'équation différentielle (discrète!) (12.1)
a une unique solution stationnaire n -t W 0 en.
DÉMONSTRATION. Si West le temps d'attente du client d'indice 0, Le. arrivé
à t = to, à cet instant la charge de la file vaut W + a. Par conséquent, il est
naturel de définir la charge V de la file à l'instant 0 par
(12.12) V(w) = {(W + a) 0 8 tO (w) + to(w))+ .
L'application 8 to est, on l'a vu dans le chapitre précédent, à valeurs dans Ô
et donc (W + a) 0 8 to est bien définie sur O. Pour montrer que la variable
V ainsi définie vérifie l'équation différentielle (12.11), il suffit de vérifier cette
équation pour t = o. En effet, en remplaçant w par 8 t (w) et en remarquant
que N(w, [t, t + dt[) = N(9 t (w), [0, dt[)), l'équation différentielle en (9 t (w), 0) est
identique à celle en (w, t).
a) Si to(w) < 0, alors pour h suffisamment petit to(9 h (w)) = to(w) - h,
(W + a) 0 8 tO (8 h (w)) = (W + a) 09 tO ((Jh(w»(9 h (w))
= (W + a) 0 8(t O ((Jh(w»+h)(w) = (W + a) o8 tO (w),
d'où la relation
V(8 h (w)) = {(W + a) 0 8 tO (w) + to(w) - h)+ ,
et par conséquent
V(8 h (w)) - V(w) = -l{v(w»o}dh.
(12.13)
(12.14)
b) Si to(w) = 0, west dans Ô, pour h < 0 suffisamment petit, on a
to(8 h (w)) = t- 1 (w) - h,
V(8 h (w)) = {(W + a) 0 8 t - 1 (w) + t- 1 (w) - h) + ,
V(w) = (W + a)(w).
Comme west dans Ô
t 1 (8 t - 1 (w)) = -t- 1 (w), d'où e((8 t - 1 (w)) = 8 t1 (8 t - 1 (w)) = w,
la relation (12.2) prise en 8 t - 1 (w) donne l'égalité
W(w) = ((W + a) 0 8 t - 1 (w) + t-1(W))+.
et les égalités (12.13) et (12.14) montrent
(V(O) - V(O- ))(w) = a(w),
304
12. LA FILE D'ATTENTE G/G/1 FIFO
ce qui achève la démonstration de l'équation différentielle (12.11) pour la
fonction V.
Unicité. Si Z est une solution stationnaire de l'équation différentielle (12.11),
en définissant H = Z 0 e to - (w ), l'équation (12.11) intégrée sur l'intervalle [t o , t 1 [
montre l'égalité
,. +
Hoe=(H+0'-t 1 ) ,
donc nécessairement H = W, IP>-presque sûrement d'après le résultat d'unicité
de la proposition 12.1. La fonction t -t Z 0 ()t(w) vaut W en to(w), donc Z = V
par unicité des solutions d'une équation différentielle ordinaire.
En intégrant (12.11), on obtient
V(Bt(w)) - V(w) = l t u(BS(w)) N(w, ds) -l t l{v(9'(w»O} ds,
le membre de droite est dans L 1 (IP), donc d'après le lemme 12.2, l'espérance du
terme de gauche est nulle, d'où
o = lE (l t u(BS(w)) N(w, ds) -l t l{v(9'(w»O} dS)
= ÀIÊ(u)t -l t 1P(V(BS(w) > 0) ds = (ÀIÊ(u) -IP(V > 0)) t,
d'après le corollaire Il.7 et l'invariance de JP> par (et). D
La définition (12.12) de V et la représentation (12.5) de W donne la relation
-1
V = 0 V sup L (0' - T) 0 e ti ( e to (w )) + 0' 0 e to (w) + to,
n<O
- t=n
en utilisant e ti ( e to (w)) = e ti (w), il vient
l t - 1
V = 0 V sup 0' 0 es N (w, ds) + ta - t n + 0' 0 e to (w) + t o ,
n O t n
v=ovsup r ta uoBSN((w),ds)+tn=OVsup rD uoBSN(w,ds)+t n .
n O J tn n O J tn
Cette expression peut se réécrire sous la forme
(12.15) V = sup rD u 0 B S N(w, ds) - t.
t O J-t
La proposition suivante donne une relation entre V et W, la formule de
Takàcs. Celle-ci n'est en fait qu'une simple conséquence de la relation entre les
probabilités r et IP>.
PROPOSITION 12.7 (Formule de Takàcs). Si ÀIÊ(O') < 1, les transformées
de Laplace du temps d'attente stationnaire W et de la charge stationnaire
V vérifient la relation
,. ,. ( 1 - e- O' )
(12.16) lE (e-{V) = 1 - ÀIE(u) + ÀIE e- W '
> O.
4. LES PROCESSUS PONCTUELS STATIONNAIRES ASSOCIÉS 305
DÉMONSTRATION. En utilisant la relation (11.13) qui donne r en fonction
de r, il vient
lE (e-(V 1{v>o}) = >.JÊ (l h e-(V08'1{vo8'>O} dS) .
Sur Ô et 0 < s < t 1 , d'après l'équation différentielle vérifiée par V, V 0 9 5
(V - s)+. Sur Ô, un client arrive à t = 0 donc V = V(9 0 -) +0' et d'après ce qui
précède V(9 0 -) = W IP>-p.s. sur cet événement, donc
V095=(W+0'-s)+ IF>-p.s.surÔ,
lE (e-(V 1{V>o}) = >.JÊ (e-((W+<T) l hA (W+<T) e(s ds )
= >'Z (JÊ (e-((W+<T-t d +) - JÊ (e-((W+<T») ) .
La relation (12.3) et l'invariance de IF> par 9 montrent l'égalité
( (1 - e- U) )
lE (e-(V 1{v>o}) = >.JÊ e-(W '
d'où la formule.
D
Les variables W et V n'ont, en général, pas la même distribution. On s'en
convainc aisément avec la file déterministe Ô = {O}, ,(0) = 1 et 0'(0) = a < 1, la
solution de l'équation (12.2) est la variable nulle W = 0 (les clients n'attendent
jamais). Ainsi r(W = 0) = 1 mais r(V = 0) = 1 - a. Lorsque le processus d'ar-
rivée de clients est un processus de Poisson, les variables V et W ont la même
distribution (voir le chapitre 7 page 1 71).
Si W et 0' sont indépendants, ce qui est vrai pour la file GIIGIll (Cha-
pitre 2), la transformée de Laplace de la loi conditionnelle de V est donnée par
E( e- vl V > 0) = JÊ (e- W) JÊ ( 1 =- e-(<T )
E(O') '
pour Re( ) > O. Conditionnellement à {V > O}, la variable V a même loi que W
plus une variable résiduelle associée au service 0' dont la transformée de Laplace
vaut, pour Re( ) > 0,
JÊ (1 - e - U) 1 JÊ ( 0' ) ,
cette variable a pour densité h( x) = IF> ( 0' > x) lJÊ( 0') sur .
4. Les processus ponctuels stationnaires associés
Le processus des départs. D'après la proposition Il.15, si S est une variable
aléatoire définie sur (2, le translaté du processus ponctuel N par S est encore un
processus ponctuel stationnaire. En prenant le temps de séjour S = W + 0' on
obtient que le processus des départs de la file d'attente,
D = L 6tn+Wo8tn+uo8tn
nEZ
306
12. LA FILE D'ATTENTE G/G/1 FIFO
est un processus ponctuel stationnaire de même intensité que le processus des ar-
rivées. Cette propriété peut se voir comme une relation de conservation: un pro-
cessus ponctuel stationnaire est transformé par une file d'attente en un processus
ponctuel stationnaire. Cela motive l'utilisation des processus ponctuels station-
naires comme cadre naturel pour décrire les processus d'arrivée des clients. La
proposition 4.4 page 84 montre que le processus de sortie stationnaire d'une file
MI M Il stable est un processus de Poisson. En dehors du cas particulier de cette
file d'attente, il y a peu de résultats connus sur la loi du processus de sortie de
la file G 1 G Il autres que la propriété de stationnarité (voir le tour d'horizon de
Daley[ll] sur ce sujet).
Les périodes d'occupation stationnaires. En appliquant le résultat sur le
procédé d'effacement des points d'un processus ponctuel stationnaire (Propo-
sition Il.14), on obtient que le processus ponctuel
L l{wo(Jt n =O} 6t n = L 6Tn
nEZ nEZ
est stationnaire d'intensité ÀP(W = 0) et de mesure de Palm
l{w =O} dJλ / Jλ(W = 0).
En particulier, P-presque sûrement, la file d'attente GIG/1 stationnaire se vide
une infinité de fois. Les (Tn) sont croissants et numérotés de telle sorte que
To < 0 < Tl. Le processus ponctuel défini ci-dessus est le processus ponctuel
des arrivées de clients qui n'attendent pas.
PROPOSITION 12.8. Si Il = inf{k > 0IW 0 ê- k = O} est le numéro du
premier client avant 0 à ne pas attendre, alors To = t_ 1I et
-1 -1
Ak Ak
W= (O'-r)08 = 0'08 +t_ lI .
-II
-II
DÉMONSTRATION. En remarquant tout d'abord que Il est le temps d'atteinte
de l'ensemble de probabilité non nulle {W = O} par le flot ergodique 8- 1 , on
en déduit que Il est fini P-presque sûrement. Par définition de Il, les variables
W 0 ê- k , k = -II + 1, . . . ,0 sont toutes strictement positives et donc d'après la
relation (12.2),
W 0 ê-l, = (W 0 ê- i - 1 + (0' - r) 0 ê- i - 1 )+ = W 0 ê- i - 1 + (0' - r) 0 ê- i - 1 ,
pour i = -II + 1,. . . ,0, d'où la représentation de W. D
Le client arrivé à t = t_ 1I initie la période d'occupation dans laquelle le client
o est servi. On peut montrer de la même façon que la durée de cette période
vaut To,Td 0' 0 8 S N(w, ds) et la durée de la période de vacances qui suit
Tl - To - r a 0 Os N(w,ds).
J[To,Tl [
[11] D.J. Daley, Queue ng output processes, Advances in Applied Probability 8 (1976), 395-
415.
4. LES PROCESSUS PONCTUELS STATIONNAIRES ASSOCIÉS 307
'"
To
t_ II + 1
t o
t 1
Tl
FIG. 4. Période d'occupation de la file à un serveur
Les files d'attente avec discipline conservative. On entend par dis-
cipline conservative toute discipline qui interdit au serveur de se reposer tant
qu'il y a des clients dans la file, il peut cependant servir ceux-ci dans un ordre
arbitraire. Cette définition entraîne que la charge totale de la file d'attente ne
change pas par rapport à la discipline FIFO : elle décroît à vitesse 1 tant qu'elle
est strictement positive et augmente de la valeur des services au moment de l'ar-
rivée des clients. Les résultats précédents montrent que si ÀIÊ( u) < 1, il existe
une unique variable aléatoire stationnaire vérifiant l'équation de la charge de
la file d'attente. En particulier une file servie par une discipline conservative
aura les mêmes périodes d'occupation que celle servie par la discipline FIFO. La
méthode pour construire un état stationnaire sera de reconstruire la file d'at-
tente avec la discipline considérée sur chacune des périodes d'occupation de la
file FIFO.
EXEMPLES.
1. La discipline LIFO. Un client n'est servi dans cette file d'attente que lorsqu'il
n'y a plus aucun client arrivé après lui dans la file. Ainsi à son arrivée un client
est immédiatement servi, puis éventuellement abandonné si un autre arrive
etc... La charge de la file à un instant d'arrivée ne s'interprète plus comme
le temps nécessaire pour accéder au service. Le client d'indice 0 quitte la
file d'attente à l'instant t si le serveur a traité tous les services des clients
arrivés entre 0 et t. Sur (2, le temps de séjour du client 0 se définit donc
naturellement par
S = inf { t > 0 / r u 0 8 s N (w, ds) < t } ,
J[O,t[
S est le premier instant où toute la charge arrivée entre 0 et t (le service du
client 0 inclus) a été traitée par le serveur.
2. Une discipline prioritaire avec préemption. Si N 1 = {(sn, U1 0 9 Sn )} et N 2 =
{( t n , U2 0 9 tn )} sont deux processus ponctuels stationnaires d'intensités res-
pectives À 1 et À 2 et de mesures de Palm rI et r 2 . Alors
N = {(sn, U1 0 9 Sft , 1)} + {(t n , U2 0 9 tn , 2)} = {(un, U 0 9 Un , m 0 9 Un )}
308
12. LA FILE D'ATTENTE G/G/I FIFO
est un processus ponctuel stationnaire d'intensité À = Àl + À 2 et de mesure
de Palm r définie par
A Àl A À 2 A
, = À À 'l + À À '2.
1+ 2 1+ 2
Comme Ô = {uo = O} = {so = O}U{to = O} et m: Ô -t {1,2} est définie
par m = 1 sur {so = O} et m - 2 sur {t o = O}. L'application m marque le
type du client. Le service u est défini par U1 si m vaut 1 et U2 sinon.
La condition ÀIÊ(u) < 1 s'écrit donc
( À1 A À 2 A )
(>'1 + >'2) >'1 + >'2 ffi4 (uI) + >'1 + >'2 (U2) < 1,
soit
(12.17)
À 1 IÊ 1 (U1) + À2 (U2) < 1.
(12.18)
Si les clients 1 sont prioritaires dans la file d'attente, i.e. un client de
type 2 n'est servi que s'il n'y a aucun client de type 1 présent. Notons w
[resp. w ], la charge totale due aux clients de type 1 [resp. 2] que trouve
le n-ième client à son arrivée. À l'arrivée du client suivant, la discipline de
service entraîne que ces deux quantités valent respectivement
W +l = (w + U n 1{m n =1} - (U n +1 - u n ))+ ,
W +l = (w + u n 1{m n =2} - (U n +1 - Un - w - U n 1{m n =1})+)+ .
En particulier la somme (la charge totale donc) vaut
(W +l + W +l) = ((w + w ) + Un - (U n +1 - u n ))+ .
Sous la condition (12.17) et le résultat de stabilité de la file FIFO, il
existe une unique variable W sur Ô vérifiant
W 0 ê = (W + u - Ul)+,
Si t_ 1I est le temps d'arrivée du client qui initie la période d'occupation du
client d'indice 0 de la file FIFO associée à W, i.e. Il = inf{k > 0IWoê- k = O}.
En posant W II = W=-II = 0 à t = t_ 1I et en utilisant la récurrence 12.18, on
note W 1 = w6 et W 2 = wB les valeurs obtenues à l'arrivée du client o. En
utilisant la relation que vérifie W, il est facile de vérifier que W l et W 2 ainsi
définies satisfont
A +
W 1 09= (W l + U1{m=1} - Ul) ,
A + +
W 2 09= (W 2 + u1{m=2} - (Ul - W 1 + U1{m=1}) ) .
qui est l'équivalent pour la file prioritaire de la relation (12.1).
5. INSTABILITÉ DE LA FILE GIG/1
309
5. Instabilité de la file G/G/1
La proposition suivante donne le comportement transient de la file d'attente
GIGl1, i.e. quand le processus d'arrivée des clients sature la capacité de service
de la file d'attente.
PROPOSITION 12.9. Si ÀIÊ(O') > 1, alors JP>-presque sûrement,
. W n " 1
hm - = IE(O') - -,
n-t+oo n À
et IP-presque sûrement
lim L ( t) = À _ ,,1 .
t-t+oo t IE( 0')
DÉMONSTRATION. En utilisant (12.1), il vient facilement que pour n > 0,
n-1
W n > w+ L(O'-r)oe k ,
1
d'après le théorème ergodique 10.9, on en déduit que JP>-p.s.
1 . . f Wn lE " ( ) 1
lm ln - > 0' --.
n-t+oo n À
En particulier les W n sont tous strictement positifs à partir d'un certain rang
no, ainsi pour n > no,
W n + 1 = W n + 0' 0 en - 'T 0 en,
et donc
n-1
"k
W n = W no + (0' - r) 0 9 ,
no
le théorème ergodique donne la première convergence de la proposition. Le temps
d'attente des clients est IP>-p.s. strictement positif à partir d'un certain rang.
Autrement dit, les clients trouvent toujours la file occupée au bout d'un certain
temps. En utilisant la relation (11.6) donnant IP en fonction de IP>, on en déduit
que IP-p.s. L(t) > 0 pour t suffisamment grand. Sans restreindre la généralité on
peut supposer que L(t) > 0 pour tout t > 0, le serveur travaille toujours, ainsi
{ N([O,t])-n }
{L(t) > n} = (FOot; > t ,
en effet il y a au moins n clients à t si la somme des services des N([O, t]) - n
premiers excède t. On conclut en prenant n = L (À - 1 lIÊ( 0') :!: ê)t J et en utilisant
le théorème ergodique pour N([O, t]) et pour E 0' 0 9 t ,. D
Dans le cas d'égalité ,:xIÊ( 0') = 1, la file peut être stable : il suffit de prendre
le cas déterministe r _ 0' _ 1, l'équation (12.2) a une infinité de solutions, la
variable W constante égale à x convient pour tout x > o. Ce type de stabilité
est toutefois pathologique, cette file d'attente n'étant jamais vide. Avec une
310
12. LA FILE D'ATTENTE G/G/1 FIFO
hypothèse supplémentaire d'indépendance, cette file critique est instable (voir
la proposition 2.2 page 36).
6. La file d'attente à deux serveurs G/G/2
Dans cette section, l'unité de service est constituée par deux serveurs et
à chacun d'eux est associée une file d'attente. Le processus des arrivées est
donné comme précédemment par un processus ponctuel stationnaire marqué
N (w, dt, du). La répartition des clients entre les deux files d'attente se fait de la
façon suivante: à son arrivée le client, qui connaît la charge de chacune des deux
files, se rend dans la file avec la plus petite charge. En cas d'égalité, la file est
choisie au hasard. Si la file est vide au moment de l'arrivée du client 0, W [resp.
W ] désigne la plus petite [resp. plus grande] des charges des files d'attente à
l'arrivée du n-ième client. Le mécanisme de répartition des clients entre les deux
files entraîne que ces deux variables vérifient les équations de récurrence
w l = ( W 2 - T 0 ê n ) + /\ ( W 1 + u 0 ê n - T 0 ê n ) +
n+ 1 n n ,
w 2 = ( W 2 - T 0 ê n ) + V ( W 1 + u 0 ê n - T 0 ê n ) +
n+ 1 n n ,
avec WJ = W = o. Comme dans le cas de la file GIG/1 FIFO, on s'intéresse
dans ce qui suit à l'existence et l'unicité d'une solution stationnaire W =
(W l , W 2 ) à l'équation précédente,
(12.19)
(12.20)
W l 0 ê = (W 2 - T)+ /\ (W 1 + u - T)+,
W 2 0 ê = (W 2 - T)+ V (W 1 + u - T)+.
Le résultat suivant, dû à Kiefer et Wolfowitz [21], est le correspondant (faible)
de la proposition 12.1 pour la file GIG/2.
PROPOSITION 12.10. Sous la condition ÀIÊ(u) < 2 il existe un couple de
variables (W l , W 2 ) P-p.s. finies vérifiant les relations (12.19) et (12.20).
De plus P(W I = 0) > 0 et (W 1 , W 2 ) est minimale au sens où toute autre
solution (Xl, X2) de (12.19) et (12.20) vérifie W l < Xl et W 2 < X2 IP-p.s.
DÉMONSTRATION. La suite (W , W ) est définie par récurrence par
(12.21)
(12.22)
w 1 0 8 = ( W 2 - T ) + /\ ( W l + u - T ) +
n+1 n n ,
W +l 0 ê = (W - T)+ V (W + u - T)+,
et W = W = o. En utilisant la monotonie (coordonnée par coordonnée) de la
fonction
f : (x, y) -t ((x + u - r)+ /\ (y - r)+, (x + u - r)+ V (y - r)+),
[21] J. Kiefer and J. Wolfowitz, On the theory of queues with many servers, Transactions of
the AMS 78 (1955), 1-18.
6. LA FILE D'ATTENTE À DEUX SERVEURS G/G/2
311
il est facile de montrer que la suite (W , W ) est croissante, soit W = (W 1 , W 2 )
sa limite. La variable W vérifie les équations (12.19) et (12.20),
W 1 0 8 = (W 2 - r)+ A (W 1 + a - r)+,
W 2 0 8 = (W 2 - r)+ V (W 1 + a - r)+.
L'inégalité W 1 < W 2 montre que l'ensemble A = {W 1 = +oo} est invariant
par 8, donc de probabilité 0 ou 1 par ergodicité de 8. Si 1P(A) = 1, 1P-p.s. pour
i == 1,2 la suite (W ) tend vers l'infini quand n tend vers l'infini. En faisant la
somme des équations (12.21) et (12.22), il vient,
(W +l + W +l) 08 - (W + W ) = (-r) V (-W ) + (a - r) V (-W ).
En prenant l'espérance et en utilisant la propriété de croissance, on obtient
l'identité
IÊ (( - r) V ( - W )) + IÊ (( a - r) V ( - W ) )
"' ( 1 2 ) "' ( 1 2 )
= E (W n + 1 + W n + 1 ) -E (W n + W n ) > O.
En faisant tendre n vers l'infini, le théorème de convergence monotone donne
l'inégalité
A A A 2
o < IE(a) - 2IE(r) = E(a) - À '
ce qui est contradictoire avec l'hypothèse de la proposition. La variable W 1 est
donc r-p.s. finie. L'ensemble {W 2 == +oo} est par conséquent invariant par 8, s'il
est de probabilité 1, la deuxième équation du système (12.21) et (12.22) donne
la relation
'" 2 2 "' ( 2 1 2 )
o < E(W n + 1 - W n ) = E (-r) V (-W n ) V (W n - W n + a - r) .
Le terme sous l'espérance dans le membre de droite est compris entre -r et
a. Le théorème de convergence dominée montre l'inégalité IÊ( -r) > 0 qui est
absurde. Le vecteur W est donc une solution r-p.s. finie de (12.19).
Si IP(W 1 = 0) = 0, les + peuvent être supprimés des équations (12.19), en
faisant la somme de celles-ci, on obtient
(W 1 + W 2 ) 08- (W 1 + W 2 ) = a - 2r,
et d'après le lemme 12.2 donne l'identité IÊ(a-2r) = 0, contradiction. La variable
W 1 s'annule donc sur un ensemble de probabilité positive.
Si dans les équations (12.21) et (12.22), la condition initiale est changée en
WJ = x, W = y, avec x > 0 = WJ et y > 0 = W5. Par récurrence, on constate
facilement que la suite engendrée majore notre suite (W , W ). En particulier,
si X = (Xl, x2) est une solution de (12.19), celle -ci vérifie nécessairement les
inégalités Xl > W 2 et X 2 > W 2 . La solution W est donc minimale. D
La proposition précédente ne peut être améliorée en ce qui concerne l'unicité
des solutions aux équations (12.19) comme le montre le petit exemple suivant
dû à Neveu: Si f2 = {0,1}, 8 est l'automorphisme de f2 qui intervertit 0 et 1
et IP la probabilité uniforme sur f2. Les interarrivées sont déterministes égales à
312
12. LA FILE D'ATTENTE G/G/1 FIFO
1 (r = 1) et les services sont définis par 0'(0) = 2, 0'(1) = 3/2. Il est facile de
vérifier que pour tout 0 < a < 1/2 le vecteur V défini par
V (O) = ( 2 ) V (l) = ( + a )
est solution de (12.19).
Ce contre-exemple montre que, même sous l'hypothèse IÊ(O') < 2, ce système
de files d'attente ne se vide pas forcément comme c'est le cas pour la file GIG/1.
Il est facile de voir que si une solution de (12.19) a ses deux coordonnées
nulles avec probabilité positive alors c'est nécessairement la solution minimale
construite précédemment. Un résultat complémentaire dû à Brandt [5] sur cette
file d'attente termine cette section. Ce résultat montre l'existence d'une solution
maximale au système (12.19).
PROPOSITION 12.11. Sous les hypothèses de la proposition précédente,
il existe une variable aléatoire V = (V1, V2) telle que pour toute solution
X = (X 1 ,X 2 ) de {12.19}, on ait IP-p.s. Xl < V 1 et X 2 < V 2 .
DÉMONSTRATION. Pour dEN, de la même façon que dans la preuve précé-
dente, la suite (W , W ) est définie par
W +l 08= (W - r)+ A (W + 0' - r)+,
W +l 08= (W - r)+ V (W + 0' - r)+,
avec la condition initiale WJ = W 1 +d, W = W2 +d et (W 1 , W 2 ) est la solution
minimale construite précédemment.
wl 0 8 = (W 2 + d - r)+ A (W l + d + 0' - r)+
< (W 2 - r)+ A (W l + 0' - r)+ + d = W l 08 + d = WJ 08,
donc wl < WJ et de la même façon W{ < W . La monotonie de la fonction
f définie ci-dessus montre que la suite (W , W ) est décroissante, sa limite est
notée (W 1 (d), W 2 (d)).
Toujours avec le même argument de monotonie il est clair que la suite
(W 1 (d), W 2 (d))
est croissante (c'est vrai sur les conditions initiales et cela se propage par ré-
currence jusqu'aux limites). Si V = (V 1 , V 2 ) est la limite de cette suite, il faut
montrer que V ases coordonnées 1P-p.s. finies. La méthode est essentiellement la
même que pour montrer la finitude de (W1, W2) dans la proposition ci-dessus.
Montrons par exemple que V l est IP-p.s. fini. L'ensemble {Vl = +oo} est inva-
riant par 8, s'il est de probabilité 1, alors
lim V 1 (d) = lim V 2 (d) = +00,
d-++oo d-++oo
[5] A. Brandt, On stationary waiting times and limiting behaviour of queues with many
servers II: The G/G/m/oo case, Elektron. Inf. verarb. Kybern. 21 (1985), no. 3, 151-
162.
6. LA FILE D'ATTENTE À DEUX SERVEURS G/G/2
313
1P-p.s. En faisant la somme des équations de (12.19) pour (y1(d), y2(d))), il vient
(y1(d) + y2(d)) 0 8 - (y1(d) + y2(d))
= (-r) V (_y2(d)) + (a - r) V (_y1(d)).
Le membre de droite est compris entre a - 2r et a, donc intégrable. Le terme
de gauche est donc d'espérance nulle, d'où l'égalité
IÊ (( - r) V ( - y2 ( d)) + (a - r) V ( - y 1 ( d) )) = o.
Il reste à appliquer le théorème de convergence dominée pour obtenir
IÊ(a - 2r) = 0,
ce qui est absurde. La variable y1 est donc P-p.s. finie. La preuve de la finitude
presque sûre de y2 est analogue.
Si X = (Xl, X2) est une solution de (12.19), il existe un entier naturel d tel
que
P(X 1 < d, X 2 < d) = a > 0,
d'où
a < IP>(X 1 < d+ W 1 ,X 2 < d+ W 2 )
< 1P ( X 1 0 8 < W 1 0 8 x 2 0 8 < w 2 0 8 ) = IP ( X 1 < w 1 x 2 < W 2 )
- - l' - 1 - l' - l'
de proche en proche, on en déduit l'inégalité
a < IP(x 1 < W , X 2 < W ),
et en passant à la limite, il vient
a < IP(X 1 < WJ, X 2 < Wl) < IP(X 1 < y1, X 2 < y2).
Maintenant il suffit de remarquer que l'ensemble {Xl < y1, X 2 < y2} est
invariant par 8. Comme on vient de montrer qu'il était de probabilité strictement
positive, il est de probabilité 1, V est la solution maximale des équations (12.19).
o
ANNEXE A
Loi de Poisson et événements rares
Sommaire
1. L'équation de Stein 316
2. Le cas de dépendance faible entre les variables 322
2.1. Les variables indépendantes 322
2.2. Les variables mélangeantes 323
3. Méthodes de couplage 327
Couplage monotone 329
4. Appendice 330
Majoration de la loi de Poisson 330
Dans ce chapitre, les Ii, i = 1,... ,n, sont des variables aléatoires de Ber-
noulli de paramètres respectifs Pi = JP>(Ii = 1) ; leur somme est notée W = L Ii
et À = E(W) = L Pi est la valeur moyenne de W. Si les Ii sont des fonctions
indicatrices d'événements rares, on s'intéresse ici aux conditions pour lesquelles
la loi de la variable W peut être approximée par une loi de Poisson de paramètre
À. Ce type de situation a déj à été rencontré à plusieurs reprises dans les chapitres
précédents.
1. La proposition 1.4 montre que, dans le cas où les variables de Bernoulli
sont indépendantes et les Pi très petits, la variable W suit approximati-
vement une loi de Poisson de paramètre À.
2. Si Hi,a est le i-ième instant où le nombre de clients de la file MI Mil
revient en a pour la première fois depuis le dernier passage en 0 et Ii est
la fonction indicatrice de l'événement
{ Hi,a < ;a t } ,
la proposition 5.13 montre que si p < 1, W converge en loi vers une loi
de Poisson de paramètre (J-L - À)2tl j1. quand a tend vers l'infini.
3. Si 'ri a est le i-ième instant d'atteinte de la valeur a par le nombre de
1
clients de la file M 1 M 100 et Ii est la fonction indicatrice de l'événement
{ Ti,a < (a;a 1)! t } ,
la proposition 6.11 montre que W converge en loi vers une loi de Poisson
de paramètre j1. exp( -p)t quand a tend vers l'infini.
316
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
Le premier cas a été démontré de façon élémentaire. Pour les deux derniers
exemples, les démonstrations ont utilisé l'expression explicite des lois de temps
d'atteinte de ces événements rares.
La méthode de Chen-Stein qui est présentée ici systématise l'obtention de
résultats de convergence vers une loi de Poisson. Elle permet de traiter de nom-
breux cas où les variables (Ii) sont corrélées. Cette approche donne en plus
une inégalité sur la distance en variation totale entre la loi de W et une loi
de Poisson de paramètre lE(W). Dans le cas classique où les variables (Ii) sont
indépendantes, cette inégalité est non triviale. La première section donne les
bases techniques de la méthode de Chen-Stein, la suite est consacrée à plusieurs
types d'applications. Bien entendu, ce chapitre n'est qu'une introduction. De
nombreux exemples ainsi que des raffinements techniques sont présentés dans le
livre de Barbour et al. [4] sur lequel s'appuie cet exposé.
1. L'équation de Stein
La distribution de Poisson de paramètre À sur N est notée QÀ = (Q ),
À Àn_ À
Qn = le ,
n.
pour n E N et si f est une fonction bornée, QÀ(f) désigne l'espérance de f pour
la probabilité QÀ,
+00 Àn
QÀ(f) = Lf(n),e- À .
n.
o
LEMME A.1. Si f : N -t N est une fonction bornée, alors
L(Àf(n + 1) - nf(n))Q = o.
n>O
Réciproquement, si Q = (Qn) est une probabilité sur N telle que
L(Àg(n + 1) - ng(n))Qn = 0
n>O
pour toute fonction g bornée, nécessairement Q = QÀ .
DÉMONSTRATION. La première assertion se vérifie sans difficulté. Si f est
une fonction bornée sur N, la fonction f définie par f(n) = f(n) - f(n - 1)
pour n E N est aussi bornée et par conséquent
L(À f(n + 1) - n f(n))Qn = 0,
n>O
L(Àf(n + 1) + nf(n - 1)) - (À + n)f(n)Qn = 0,
n>O
en notant 0 le générateur du nombre de clients d'une file MI M 100 dont le
taux d'arrivée est À et le taux de service 1 (voir la relation 6.1 du chapitre 6),
1. L'ÉQUATION DE STEIN
317
l'équation précédente se réécrit sur la forme
J O(f)dQ = 0,
pour toute fonction bornée f, autrement dit Q est la mesure invariante du pro-
cessus de Markov associé à 0 (voir le chapitre sur l'annexe sur les processus de
Markov page 346). Par unicité de cette mesure, on en déduit Q = QÀ. D
Le lemme précédent montre que West une variable aléatoire qui suit une loi
de Poisson de paramètre À si et seulement si E( Àg(W + 1) - W g(W)) = 0 pour
toute fonction bornée g. L'idée à la base de la méthode de Chen-Stein est de
perturber ce résultat : si la quantité E( Àg(W + 1) - W g(W)) est petite pour un
nombre suffisamment large de fonctions g bornées, alors la loi de West proche
d'une loi de Poisson de paramètre À. Ce type de méthode a été introduit par
Stein[32] pour étudier de façon précise la convergence vers la loi normale dans le
théorème de la limite centrale. Chen[8] a développé cette idée pour l'appliquer à
la convergence de variables aléatoires vers une loi de Poisson.
La suite de cette section est consacrée à l'étude de l'opérateur qui, à une
fonction g, associe la fonction n -t Àg( n + 1) - ng( n).
DÉFINITION 32. Si f est une fonction bornée sur N, une fonction g est so-
lution de l'équation de Stein associée à f si
(A.1) Àg(n + 1) - ng(n) = f(n) - QÀ(f),
pour tout n E N.
Si gl et g2 sont deux solutions de l'équation (A.l), il est facile de vérifier
que pour tout n E N,
(n - 1)'
gl (n) - g2 (n) = À n . (gl (0) - g2 (0)),
l'équation (A.l) a donc une unique solution si g(O) = O. La proposition suivante
donne deux représentations d'une telle solution.
PROPOSITION A.2. Si f est une fonction positive bornée, il existe une
unique fonction bornée g solution de l'équation de Stein associée à f telle
que g(O) = o. La fonction g est donnée par
g(n) = (n 1)! I:(f(i) - QÀ(f)) ; ,
2.=0
(A.2)
n > 1.
Cette fonction g peut aussi s'exprimer sous la forme
(A.3)
r+ oo
g(n) = - Jo (JE..f(L(s)) -JE..-lf(L(s))) ds,
n > 1,
[32] C. Stein, A bound for the error n the normal approximation to the distribution of a
sum of dependent random vanables, Sixth Berkeley Symposium Math. Stat. Probab.
(Univ. California Press, ed.), 1971, pp. 583-602.
[8] L.Y. Chen, Poisson approx mat on for dependent trials, Annals of Probability 3 (1975),
no. 3, 534-545.
318
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
où (L(t)) est le processus du nombre de clients d'une file MIMloo de taux
d'arrivée À et de taux de service 1,. 1En(.) désigne l'espérance pour ce pro-
cessus qui part de n.
On note que le processus de Markov (L(t)) qui intervient dans cette propo-
sition a précisément pour mesure invariante une loi de Poisson de paramètre À.
Ce processus intervient aussi pour la raison suivante : si g est une solution de
l'équation de Stein associée à f, la fonction h définie par h(n) = g(l) +. . . + g(n)
vérifie g(n) = h(n) - h(n -1) et par conséquent en utilisant l'équation de Stein,
on obtient l'identité
Àh(n + 1) + nh(n - 1) - (À + n)h(n) = f(n) - QÀ(f),
pour n E N, ce qui peut être réécrit sous la forme
(A.4)
(2(h) = f - QÀ(f),
où (2 est le générateur du processus de Markov (L(t)).
DÉMONSTRATION. Il est facile de voir que la fonction g définie par l'iden-
tité (A.2) vérifie l'équation de Stein. La relation QÀ(f - QÀ(f)) = 0 montre que
pour n E N,
g(n) = - (n ;n 1)! f(j(i) - QÀ(j)) ; 1
,=n
par conséquent,
( 1)' +00 À i
Ig(n)1 < n;n · L If(i) - QÀ(j)lif
n
+00 À i
< 211fll00 L l < 2e À llfll00,
.
o
la fonction g est donc bornée.
Il reste à établir l'identité (A.3). Comme précédemment, la fonction h est
définie par h(O) = 0 et g(k) = h(k) - h(k - 1) pour k > 1. Si L(O) = n E N, (2
étant le générateur du processus (L( t)) le processus
(M(t)) = (h(L(t)) - h(L(O)) - l t O(h)(L(s)) dS) ,
est une martingale locale (voir la proposition 6.2 page 139). Le processus des
arrivées N>. à la file d'attente est un processus de Poisson de paramètre À,
l'inégalité L(t) < L(O) + N>. (JO, t]) est clairement satisfaite. Comme
L(O)V L(t)-l
Ih(L(t)) - h(L(O))1 < L Ih(i + 1) - h(i)1 < IIglloo(L(t) + L(O))
i=L(O)I\L(t)
< Ilglloo(N).(]O, t]) + 2n)
1. L'ÉQUATION DE STEIN
319
et d'après la relation (A.4)
l t O(h)(L(s)) ds = l t (f(L(s)) - QÀ(f)) ds < 2tlljlloo.
on en déduit que pour tout T > 0 la variable sup{M(t)lt < T} est intégrable.
Par conséquent, la proposition B.7 page 336 montre (M(t)) est une martingale,
d'où
IEn ( h(L(t)) - h(L(O)) - l t O(h)(L(s)) dS) = IE(M(O)) = o.
En utilisant la relation (A.4), il vient
IEn(h(L(t)) - h(n) = IEn (l t (f(L(s)) - QÀ(f)) dS) ,
(A.5) IEn(h(L(t)) - h(n) = l t (IEnj(L(s)) - QÀ(f)) ds.
Si Il . Il vt désigne la norme en variation totale (définie dans l'annexe D), par
définition, pour s > 0,
lIEn f ( L ( s )) - Q À (f) 1 < Il f Il 00 Il IP n ( L ( s) E . ) - Q À Il vt ,
où IP n (L( s) E . ) désigne la loi de la probabilité de la variable aléatoire L( s)
pour IPn. La proposition 6.1 page 139 montre la convergence exponentiellement
rapide vers 0 quand s tend vers l'infini de la quantité IIIPn(L(s) E . ) - QÀllvt. Le
membre de droit de l'identité (A.5) a donc une limite quand t tend vers l'infini.
Par conséquent la limite Hn = limt +oo IEnh(L(t)) existe.
Un couplage permet de montrer que cette limite ne dépend pas du point
initial n : on considère deux processus associés au générateur 0, l'un partant avec
n clients et l'autre avec n + 1 clients. Ils ont tous deux les mêmes arrivées, les n
clients initiaux les mêmes services et (j désigne le service du client supplémentaire
pour la file qui part avec n + 1 clients. Les deux processus sont donc égaux à
l'instant t = (j de départ du client initial supplémentaire, d'où
IEn+1h(L(t)) -Enh(L(t)) = En ((h(L(t) + 1) - h(L(t)))l{cr>t}) ,
par définition de h, il vient
IIEn+1 h (L(t)) -IEnh(L(t))1 = IEn (g(L(t) + l)l{cr>t}) 1
< IIgllooe- t ,
par conséquent Hn = Hn+1 pour tout n E N. En faisant tendre t vers l'infini
dans l'équation (A.5), on en déduit l'égalité
1 +00
h(n) = Hl - 0 (IEnj(L(s)) - QÀ(f)) ds,
320
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
ce qui donne l'identité attendue
r+ oo
9(n) = - Jo (!Enf(L(s» - !En-l f(L(s))) ds.
Il est raisonnable de supposer que la quantité Hn = limt +oo En h(L(t))
vaut QÀ(h) puisque (L(t)) converge en loi vers QÀ. La fonction h n'étant pas à
priori bornée, cette convergence ne peut pas être utilisée directement. 0
La proposition suivante est le principal résultat de cette section.
PROPOSITION A.3. Si A est un sous-ensemble de N, la solution gA de
l'équation de Stein associée à la fonction f = lA telle que g(O) = 0 vérifie
les inégalités suivantes
(A.6)
119Alloo < 11\ J :e '
1 -À
-e
lI gA 1100 < À
1
<1/\-
- À'
(A.7)
où (gA) est la fonction définie par (gA)(n) = gA(n + 1) - gA(n) pour
n E N.
DÉMONSTRATION. La preuve de l'inégalité (A.7) est dans l'appendice de ce
chapitre page 331. Le couplage de la preuve précédente est utilisé pour considérer
le processus du nombre de clients d'une file MI M 100 avec les points initiaux n
et n+ 1. On note X(t) le nombre de clients parmi les n clients initiaux qui n'ont
pas fini leur service à l'instant t, u le service du n + 1-ième client initial et Lo(t)
le nombre de clients dans la file qui sont arrivés après l'instant o. Le processus
(Lo(t)) est celui du nombre de clients quand la file est vide initialement. Pour
t > 0, la variable Lo(t) suit une loi de Poisson de paramètre Àt = À(l- exp( -t))
(voir la section 3 page 178 par exemple). Les arrivées et les services sont les
mêmes pour les deux processus. Si f = lA, la représentation (A.3) de gA donne
(A.8)
r+ oo
9A(n + 1) = - Jo (!En+! f(L(s» - !Enf(L(s))) ds
r+ oo
= - Jo (Ef(Lo(s) + X(s) + l{cr>s}) - Ef(Lo(s) + X(s») ds
1 +00
= - 0 (Ef(Lo(s) + X(s) + 1) - Ef(Lo(s) + X(s))) e- S ds,
la fonction sous l'intégrale précédente est comprise entre -1 et 1, par conséquent
IlgA 1100 < 1.
Pour x E N et s > 0, comme la loi de la variable Lo(s) est QÀ$,
E(f{Lo(s) + x + 1) - f(Lo(s) + x)) = L Q 5(f(n + x + 1) - f(n + x)),
n>O
1. L'ÉQUATION DE STEIN
321
cette relation se réarrange pour donner l'égalité
1E(f(Lo(s) + x + 1) - f(Lo(s) + x)) = L f(n + X)(Q 1 - Q $),
n>O
avec Q $1 = O. La fonction f ne valant que 0 ou 1, on obtient l'encadrement
L 1{Q 1 Q '} (Q l - Q ')
n>O
< 1E(f(Lo(s) + x + 1) - f(Lo(s) + x)) <
L 1{Q 1 Q '} (Q l - Q ') .
n>O
Par conséquent
IJE(J(L o (s) + x + 1) - f(Lo(s) + x))1 < ;t Q ' 1
le lemme A.8 en annexe permet d'en déduire l'inégalité
1
l1E(f (Lo ( s) + x + 1) - f ( Lo ( s) + x)) 1 < ..; 1
2eÀ s
pour tout x E N. L'identité (A.8) donne la majoration attendue de IIgA 1100,
119All00 < 1+ 00 V2e>. e-S) ds = J :e '
o
Le principe général de la méthode de Stein. L'équation de Stein pour la
fonction indicatrice d'un sous-ensemble A de N est
(A.9)
l{WEA} - QÀ(lA) = ÀgA(W + 1) - W gA(W),.
En prenant l'espérance puis le sup sur tous les sous-ensembles A, par définition
de la norme en variation totale, il vient
IIIP(W E .) - QÀllvt < sup IÀ1E(gA(W + 1)) -1E(WgA(W))I.
ACN
L'estimation du membre de droite de l'inégalité ci-dessus donnera un majorant
de la distance entre la loi de W et celle d'un processus de Poisson de paramètre
À. Dans cette estimation, la proposition A.3 est l'élément-clé pour obtenir une
borne indépendante de l'ensemble A considéré. La méthode utilisée varie suivant
les contextes. Les cas envisagés ici peuvent être décrits sommairement comme
suit.
(A.1D)
- Le cas faiblement dépendant. Les indices ont une signification temporelle,
le processus considéré est mélangeant: Ii est presque indépendant de Ij
si i et j sont assez éloignés. C'est bien entendu le cadre naturel des files
d'attente.
322
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
- La loi des variables Ii possède certaines propriétés de symétrie (invariance
de la loi par une permutation des indices par exemple). Il n'y a donc pas
de notion de voisinage de faible dépendance dans ce cas. Une technique
de couplage liée à la symétrie peut cependant être utilisée pour estimer
le membre droit de (A.10). De nombreux modèles combinatoires rentrent
dans ce schéma.
2. Le cas de dépendance faible entre les variables
2.1. Les variables indépendantes. Dans cette partie, les variables Ii,
1 < i < n, sont indépendantes. Si g est une solution de l'équation de Stein
associée à la fonction bornée f, d'après la définition (A.1)
E(f(W)) - QÀ(f) = ÀEg(W + 1) -E(Wg(W)),
l'hypothèse d'indépendance des I montre l'égalité
JE(J(W» - QÀ(J) =),JE (g(W + 1) - Pi9(Wi + 1)) ,
n
où Wi = Lj:;éi Ij ; or par définition À = L Pi, donc on obtient l'identité
=1
n
JE(J(W» - QÀ(J) = LPi (JE(g(W + 1) - g(Wi + 1») .
1
En remarquant que la différence g(W + 1) - g(Wi + 1) est nulle si Ii 0,
l'équation précédente peut se réécrire sous la forme suivante,
n
E(f(W)) - QÀ(f) = LP;(E(g(Wi + 2) - g(W i + 1)),
1
par conséquent
n n
IIE(f(W)) - QÀ(f)1 < sup Ig(n + 1) - g(n)1 LP; = II glloo LP;'
n 1 1
En prenant le sup de cette inégalité sur toutes les fonctions indicatrices f, la
majoration (A.7) de II glloo par 1 donne la proposition suivante due à Le Cam,
elle renforce considérablement la proposition 1.4 page 10.
PROPOSITION A.4. Si les Ii sont n variables de Bernoulli indépendantes,
en posant Pi = P( Ii = 1) et À = Li Pi, la loi de la somme W de ces variables
aléatoires vérifie l'inégalité
n
(A.11)
IIIP'(W E . ) - QÀllvt < LP < lIJ}fnPi,
1 - -
où Q).. est une loi de Poisson de paramètre À.
2. LE CAS DE DÉPENDANCE FAIBLE ENTRE LES VARIABLES 323
2.2. Les variables mélangeantes. On revient au cas de variables de Ber-
noulli générales. À chaque indice i est associé Vi un sous-ensemble de {l, . .. ,n}
ne contenant pas i, et V{ le complémentaire de Vi U {i}. Les sommes Zi et Yi
sont définies de la façon suivante Zi = LjEV, Ij et Yi = LjEV,C Ij. En parti-
culier pour tout i < n, W = + Zi + Ii ; dans ce qui suit l'ensemble c est
l'ensemble des indices j pour lesquels Ij est presque indépendante[3] de Ii, i.e.
E( Ii Ij) PiPj pour j E Vi c . La notion de mélange pour les processus de Markov
est introduite dans la section 4.
Si g est la solution de l'équation de Stein associée à la fonction f bornée,
l'équation (A.9) s'écrit, en utilisant les définitions de À et W, comme
n
E(f(W)) - QÀ(f) = ÀE(g(W + 1)) - L E(Iig(W)),
i=1
cette égalité peut être décomposée de la façon suivante,
n
1E(f(W)) - QÀ(f) = LPiE(9(W + 1) - g(Wi + 1))
1
n
+ LPi1E(9(Wi + 1)) -E(Iig(W)),
1
ce qui donne l'inégalité
n
(A.12) l1E(f(W)) - QÀ(f)1 < LP " g"oo
1
n
+ LPiE(g(Yi + Zi + 1) - Iig(Yi + Zi + 1)) .
1
Pour i E {l, . . . ,n}, l'identité
Zi
g(Yi + Zi + 1) = g(Yi + 1) + L (g(Yi + j + 1) - g(Yi + j)) ,
j=1
la majoration
Z,
L (g(Yi + j + 1) - g(Yi + j)) < II gllooZi,
j=1
[3] R. Arratia, L. Goldstein, and L. Gordon, Two moments suffice for poisson approxima-
tions: the Chen-Stein method, Annals of Probability 17 (1989), no. 1, 9-25.
324
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
et l'inégalité (A.12) montrent la relation
(A.13) IlE{f(W) - Q>'(f)1 < lI glloo ( tp + PilE{Zd + IE{Ii Zi))
n
+ LPilE{9(Yi + 1)) -1E(Iig(Yi + 1)) .
1
Le dernier terme du membre de droite se majore de la façon suivante,
n n
L(PilE{9(Yi + 1)) -1E(I i g(Yi + 1))) = L IE{g(Yi + l)(Pi - Ii))
i=l i=l
n
< L JE (lg(Yi + l)IIJE(Pi - Ii 1 Ij, j E lf.C)I) .
'&=1
En notant TJi = IIE(Ii 1 Ij,j E V/) - pil, le paramètre mesurant la faible dépen-
dance de Ii et des Ij pour j E c, l'inégalité (A.13) devient
IlE{f(W)) - Q>'(f)1 < II glloo ( tp + PilE{Zd + JE(IiZi)) + IIglloo t 1]i,
et finalement en prenant la borne supérieure sur toutes les fonctions f indi-
catrices, les inégalités (A.6) et (A.7) donnent la généralisation suivante de la
proposition A.4.
PROPOSITION A.5. Si les Ii sont n variables de Bernoulli, Pi = IP(Ii = 1)
et À = Pl + . . . + Pn, la loi de la somme W de ces variables aléatoires vérifie
l'inégalité
(A.14) IIJP>(W E . ) - QÀ Ilvt
< (1/\ ) (tp + PilE{Zi) + JE(IiZd) + Jx t 1]i.
où QÀ est une loi de Poisson de paramètre À et pour i < n,
- Vi est un sous-ensemble de {l,... ,n} - {i} et V/ le complémentaire
de ViU{i};
- Zi = EjE Ij ;
- TJi = IIE(I i 1 Ij,j E V{) - pil.
Dans le cas indépendant Zi = 0 et T/i = 0 pour tout i < n, l'inégalité (A.11)
est une conséquence de (A.14).
La plus longue section montante d'une marche aléatoire simple. Une
marche aléatoire de biais P présente une succession de montées et de descentes,
Rn désigne la longueur de la plus longue montée entre les instants 0 et n. On
s'intéresse au comportement asymptotique de Rn quand n tend vers l'infini.
Ce problème se rencontre naturellement dans l'étude des modèles probabilistes
d'une séquence génomique : la similarité de deux séquences (Ai) et (Bi) i.i.d.
2. LE CAS DE DÉPENDANCE FAIBLE ENTRE LES VARIABLES 325
de taille finie à valeurs dans un alphabet fini est définie à partir de la notion
de score; c'est le nombre maximal de coordonnées consécutives pour lesquelles
les suites A et B coïncident. Ce modèle est bien entendu simplifié, l'hypothèse
d'indépendance n'étant pas vérifiée en général.
Si les X." sont n variables de Bernoulli indépendantes de paramètre p, Rn
est le nombre maximum de 1 consécutifs pour cette suite finie. Pour t < n et
i < n, on pose
Ii = l{X,=o,X'+l=l,... ,X,+t=l}
si 1 < i < n - t,
Il = l{Xl=l,... ,Xt=l},
et Ii = 0 si i > n - t. La variable W associée est le nombre de segments de 1
consécutifs de longueur supérieure ou égale à t, en particulier
{Rn < t} = {W = O}.
Comme
Pl = P(I I = 1) = pt et Pi = P(Ii = 1) = (1 - p)pt SI 1 < i < n - t,
la moyenne À vaut donc
À = E(W) = (n - t - l)pt(l - p) + pt < npt.
Les variables Ii et Ii+1 ne sont pas indépendantes mais Ii et Ii+t+1 le sont en
vertu de l'indépendance des (Xi). Le voisinage de dépendance est naturellement
défini par
Vi = {j 10 < Ii - jl < t}.
En reprenant les notations de la proposition précédente, il est facile d ' obtenir
les relations suivantes
t
E(Zi) = L(E(Ii+j )l{i+j n} + l{l j iAt}E(Ii-j)) < 2t p t,
j=l
E(Ii Ij) = 0 pour j E Vi donc E(I i Zi) = 0 et 1]i = o.
L'inégalité (A.14) montre la relation
Ir(R n < t) - e-ÀI = Ir(W = 0) - e-ÀI
1
< IIIP'(W E . ) - QÀllvt < À (1 + 2t) np 2t.
Si, pour a > 0,
t = l a(lOgn + log(l - P)) J
log(l/p) ,
pour ce t, on a l'équivalence
À (n(l _ p))l-O,
326
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
pour n grand. L'inégalité précédente donne
lim 1JP>(R n < t) - e- À 1 = 0,
n-+-+oo
par conséquent la limite
lim IF ( Rn log(l/p) < a )
n-+-+oo log n + log( 1 - p)
vaut 1 ou 0 suivant que a > 1 ou a < 1. La variable
Rn log(l/p)
logn + log(l - p)
converge en loi vers 1. La variable Rn est de l'ordre de logn/log(l/p) quand n
tend vers l'infini.
Graphe aléatoire. Le graphe considéré est l'hypercube {O, l}N de dimen-
sion N. Deux sommets de ce graphe sont reliés s'ils ont exactement une coor-
donnée qui diffère. Chacune des (N - 1)2 N - 1 arêtes est orientée au hasard, si
i et j sont les sommets d'une arête, la variable Xij vaut 1 si l'arête (i, j) est
orientée vers i et 0 sinon. Les variables (Xi,j) sont par hypothèse indépendantes.
On s'intéresse au nombre de sommets qui ont k flèches rentrantes. Pour
étudier cette quantité, il est naturel de prendre les variables de Bernoulli sui-
vantes : Ii vaut 1 si le sommet i a k flèches rentrantes et 0 sinon. Si i et j sont
deux sommets du graphe qui diffèrent de plus d'une composante, les variables Ii
et Ij sont clairement indépendantes. Pour la famille de voisinages (Vi) définie par
Vi = {j /Ii - jl = 1} (Ixl désigne la somme des valeurs absolues des coordonnées
de x), il est facile de vérifier les égalités suivantes
C k
P _ N
i - 2 N '
C k
E(Zd = N 2: 1
À = lE(W) = C7v,
TJi = 0,
et, si i et j sont des sommets voisins E(I i Ij) = 0 si k=O ou N et
C k C k-l
N-l N-l
IE( Ii 1 j) = 2 N -1 X 2 N -1
pour 1 < k < N - 1 et
lE(Ii Zi) =
c k C k - 1
N N-l N-l
2 N - 1 2 N - 1
1<k<N-1
- -
o
k = 0, N.
L'inégalité (A.14) montre la relation
Il ( ) ck ll (C7v)2+N(C )2+4NC _lCt-=-\ « l+5N)C
JP>WE' - Q n t<
v - 2 N Ck - 2 N .
N
3. MÉTHODES DE COUPLAGE
327
Si N l est un processus de Poisson de paramètre 1, le théorème de la limite
centrale pour les processus de Poisson donne
lim P ( Nl ( [ 0 , x]) - x E' ) = G ( 0, 1) ( . ) ,
:1:4-+00 fi
où G(O,l) est une loi normale centrée réduite. Si (k N ) est une suite d'entiers
vérifiant
l . C kN 1 . N c';t
lm N = +00 et lm = 0,
N +oo N +oo 2 N
en remarquant que QC est la loi de Nl([O, C ]), l'inégalité précédente donne le
résultat suivant
lim P ( w - C';t
N -++00 J C';t
) 1 . TID ( Nl ([0, C';t]) - C';t )
E. = lm lf E .
N -++00 J C N
= P(G(O, 1) E . ).
La méthode de Stein permet dans ce cas de montrer que la variable W satisfait
un théorème de la limite centrale. La suite (k N ) = (N /3) vérifie les conditions
requises pour un tel résultat.
3. Méthodes de couplage
Les variables Ii considérées dans cette section ont des propriétés de symétrie
qui excluent une quelconque propriété de mélange et donc une utilisation efficace
de la proposition A.5. Le résultat suivant donne une autre facette de la méthode
de Chen-Stein.
PROPOSITION A.6. Si, pour chaque indice i, il existe deux variables Ui
et Vi définies sur le même espace de probabilité telles que Ui a même loi
que W et Vi + 1 a même loi que la variable W sachant l'événement {Ii = 1},
l'inégalité suivante est satisfaite
(A.15)
II£(W) -IP'>.lIvt < (1/\ ) tPiE(!Ui - Vil).
1
DÉMONSTRATION. Si g est une fonction bornée et i < n, clairement
IE(Iig(W)) = E (g(W)l{Ii=l}) = PiE(g(W) 1 Ii = 1),
et donc, si g est la solution de l'équation de Stein (A.1) associée à une fonction
indicatrice f,
E(f(W)) - PÀ(f) = ÀE(g(W + 1)) - E(Wg(W))
n
= LPi (E(g(W + 1)) - E(g(W) 1 Ii = 1)) ;
1
328
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
l 'hypothèse sur les lois des variables Ui et Vi donne la relation
n
IE(f(W)) - IP\(f) = LPi (1E(g(U, + 1)) -1E(g(Vi + 1)))
1
n ( IU'- I )
= t; Pi JE g(Ui 1\ Vi + k + 1)) - g(Ui 1\ Vi + k) 1
d'où l'inégalité
n
IIE(f(W)) - IP\(f)1 < II glloo LPiIE(IUi - Vi!).
1
Comme précédemment le résultat s'obtient en prenant le sup sur toutes les
fonctions indicatrices f et en utilisant l'inégalité (A.7). 0
Exemple. le nombre de points fixes d'une permutation aléatoire
La variable 1r est une permutation aléatoire de l'ensemble {l,... ,n} choisie
uniformément parmi toutes les permutations. On s'intéresse au nombre de points
fixes de 1r. Si Ii = If7r( i)=i}, la variable W associée est le nombre de points fixes
de cette permutation, Pi = lin et À = 1.
Le couplage suivant est utilisé: ;ri est la permutation définie sur l'ensemble
{ 1, . . . ,n} - {i} défini par
{ ;ri(l) = k,
;ri (j) = 1r (j ) ,
si 1r(i) = k et 1r(l) = i,
si j -:Il.
On pose Ui = W et Vi = Ej#i l{;,(j)=j} est le nombre de points fixes de la
permutation ;ri. La variable Vi a même loi que le nombre de points fixes d'une
permutation aléatoire d'un ensemble de n - 1 éléments. Conditionnellement à
l'événement {Ii = 1}, la variable W - 1 est le nombre de points fixes d'une per-
mutation aléatoire de n -1 éléments. La loi de Vi + 1 est donc la loi conditionnelle
de W sachant {Ii = 1}. Comme
1E(I U i - Vil) = JP'(7r(i) = i) + L JP'(7r(k) = i, 7r(i) = k) = ,
n
k#i
l'inégalité (A.15) donne la majoration
n 2
IIIF(W E . ) - Qll1 < lI glloo LPi 1E (I U i - Vil) < -.
n
1
La loi du nombre de points fixes d'une permutation aléatoire converge vers une
loi de Poisson de paramètre 1 quand n tend vers l'infini.
3. MÉTHODES DE COUPLAGE
329
Couplage monotone. Si les variables (Ui) et (Vi) vérifient les hypothèses
de la proposition précédente et si l'inégalité Vi < Ui soit vraie pour tout indice
i, l'inégalité (A.15) se réécrit
(A.16) Il.c(W) - JP>>.lIvt < (1/\ ) tPilE(Ui - Vi).
Des relations E( Ui) = IE(W) et E(Vi) + 1 = E(W 1 Ii = 1) valables pour tout
indice i, on déduit les identités suivantes
n
n
LPiIE(Ui) = E(W) LPi = (E(W))2 j
1 1
n
n
LPiIE(Vi) = L P(Ii = l)IE( I i (W - 1) 1 Ii = 1)
1 1
n
= LE(Ii(W - 1)) = E(W 2 ) -E(W).
1
En utilisant ces identités dans l'inégalité (A.16), il vient
IIJP>(W E . ) - Q>'II < (1/\ ) (E(W) - var(W)) ,
comme À = IE(W), on en déduit la proposition suivante
PROPOSITION A.7. Si pour chaque indice i, il existe deux variables Ui
et Vi définies sur le même espace de probabilité telles que Vi < Ui, Ui a
même loi que W et Vi + 1 a pour loi celle de la variable W sachant {Ii = 1},
l'inégalité suivante est satisfaite
(A.17)
À var(W)
Il IP (W E . ) - Q Il vt < 1 - À .
Si un couplage monotone existe, alors la convergence de W vers une variable
de Poisson revient simplement à montrer que le rapport variance sur moyenne
est proche de 1 (ce rapport est bien entendu égal à 1 pour une loi de Poisson).
Exemple. Lancer de boules dans des urnes
Si Ii est la fonction indicatrice de l'événement {Zp i= i, \:/p E {l,... ,m}}, la
variable W correspondante est le nombre d'urnes vides. Pour chaque indice i
on considère le couplage suivant : les boules tombées dans la i-ième urne sont
remises au hasard dans les autres urnes. L'opération revient donc à mettre les
boules uniformément dans les n - 1 autres urnes ou ce qui revient au même, à
conditionner par l'événement {Ii = 1} qu'aucune boule ne tombe dans la i-ième
urne. Pour j i= i, on pose Ij = 1 si l'urne j est vide après cette opération et 0
sinon; en particulier Ij < Ij. En posant Ui = W et Vi = Ej:;éi Ij, la variable
Vi + 1 a même loi que W sachant {Ii = 1}. La différence Ui - Vi s'exprime de la
façon suivante,
Ui - Vi = Ii + L I j(l- IJ),
):;éi
330
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
elle est par conséquent positive; ce couplage est donc monotone.
La variable À = IE(W) vaut n(l - I/n)m et
var(W) = À + n(n - 1) (1 - 2/n)m - n 2 (1 - 1/n)2m ,
l'inégalité (A.17) donne la relation
II p(W E . ) _ Qn(l-l/n)m ll < -n(n - 1)(1 - 2/n)m + n 2 (l - 1/ n )2m .
vt n(l - I/n)m
Si m = Lnlogn + nxJ, alors quand n tend vers l'infini, À = n(l - l/n)m est
équivalent à exp( -x) et le terme de droite de l'inégalité précédente tend vers O.
Le nombre d'urnes vides converge vers une loi de Poisson de paramètre exp( -x).
Si Tn désigne le nombre minimal de boules qu'il faut lancer pour que les n
urnes soient occupées, on a l'identité {Tn < m} = {W = O}. Comme
IIP'(W = 0) - e-n(l-l/n)'" 1 < IIIP'(W E . ) - Qn(l-l/n)m Iltit
le terme de gauche tend donc aussi vers 0 quand n tend vers l'infini et on en
déduit que, pour x E II4 ,
lim P(Tn < Ln log n + nx J) = e- exp( -:c) .
n-++oo
La variable Tn/n - log n converge donc en distribution vers une loi double ex-
ponentielle sur IR. Il faut de l'ordre de n log n boules pour remplir au moins une
fois chaque urne. Ce problème est aussi connu sous le nom de collectionneur de
coupon : à chaque étape, un collectionneur tire un coupon au hasard parmi n,
il s'agit d'évaluer le temps nécessaire pour que la collection des coupons soit
complète.
4. Appendice
Majoration de la loi de Poisson.
LEMME A.8. Pour tout x positif, la suite (x n exp( -x)/n!) est croissante
avant no = Lx J et décroissante ensuite, de plus
( x n ) 1
sup __e-:C < .
nEN n! - v2ex
DÉMONSTRATION. La première partie du lemme se vérifie aisément. Pour
obtenir l'inégalité, l'argument de Barbour et al. [4] est repris. Si n > 1, h(n) est
défini par
xn+l/2 (n + ! )n+l/2
h(n) = sup .jXQ = sup e-:C = 2 e-(n+l/2).
x>o :c>o n! n!
Ainsi
log h(:(:) 1) = (n + 1/2)log(n + 1/2) - (n - 1/2) log (n -1/2) -1-1ogn
= n ((1 + 1/2n) log (1 + 1/2n) - (1 - 1/2n) log (1 - 1/2n) - 2/2n) ;
4. APPENDICE
331
cette dernière quantité est négative puisque la fonction
X -t (1 + x) log( 1 + x) - (1 - x) log( 1 - x) - 2x
est décroissante sur l'intervalle [0,1[. La suite (h(n)) est donc décroissante et par
conséquent h(n) < h(O) = 1/V2e pour tout n E N. Le lemme est démontré. D
La figure 1 montre que la borne du maximum dans le lemme est précise numéri-
quement. Noter que, si x est entier, cette borne supérieure vaut
XX 1 1
-:1:
-e "-J < ,
x! V21rx v2ex
quand x est grand, d'après la formule de Stirling.
0.01
0.015
0.014
0.013
0.012
0.011
0.009
0.008
0.007
FIG. 1. La fonction x -t 1/ v2ex -suPn{x n exp(-x)/n!}
Preuve de l'inégalité (A. 7).
DÉMONSTRATION. La représentation (A.2) de gA est utilisée,
(n - 1)! ( n-1 . À i ( +ex> . Ài _;\ ) n-1 Ài )
gA(n) = >.n f( )if - f( )ife h if
= (n;n 1)! e- ( ( Y:: f(i) : ) f : - ( f f(i) : ) Y:: : )
. . . .
i=O i=O i=O i=O
(n - 1)! -À ( ( n-1 . À' ) +ex> À i ( +ex> . À i ) n-1 À i )
= >.n e L f( )l L l - L f( )l L l .
. . . .
i=O i=n i=n i=O
Si A = {m} pour mEN, la fonction g{m} notée gm s'exprime donc comme
(n - 1)! -À ( Àm ( +ex> À' ) Àm ( n-1 Ài ) )
gm(n) = >.n e 1 L l 1{m n-l} - 1{m n}1 L l .
m. . m. .
,=n i=O
332
A. LOI DE POISSON ET ÉVÉNEMENTS RARES
Pour n < m,
Àm -À nI.
9m(n) = - m! e L Ài (n - 1)(n - 2) ... (n - + 1),
7.=1
donc la suite n -t gm ( n) est décroissante entre 0 en m; de la même façon pour
n> m,
( ) Àm -À L oo À7.
gm n = - , e ( . ) ( . ) '
m. . t + n t + n - 1 ... n
7.=0
et la suite n -t gm ( n) est clairement décroissante à partir de n = m + 1. Par
conséquent on en déduit que pour tout n 1= m
gm(n + 1) - gm(n) < 0
de plus la quantité
( 1 +00 À7. 1 m-1 À i )
gm(m + 1) - gm(m) = , L le- À + - L le- À
/\ t. m t.
7.=m+ 1 i=O
e- À ( +00 À i 1 m Ài )
= T . L if + m L (i - 1)!
7.=m+ 1 7.= 1
est positive et majorée par (1- exp(-À))/À, d'où la majoration
1 -À
-e
sup(gm(n + 1) - gm(n)) < À .
nEN
En revenant à un sous-ensemble A quelconque de N, il est clair que gA
EmEA gm, et pour tout n E N,
gA(n + 1) - gA(n) = L gm(n + 1) - gm(n) < gm(m + 1) - gm(m),
mEA
d'après les propriétés de monotonie des fonctions n -t gm(n) vues précédem-
ment, d'où l'inégalité
1 -À
-e
gA(n + 1) - gA(n) < sup(gm(m + 1) - gm(m)) < À .
mE A
comme gA = -gAc, cette relation est aussi vraie pour IgA(n + 1) - gA(n)l, d'où
le résultat. D
ANNEXE B
Rappels sur les martingales
Sommaire
1. Martingales à temps discret 333
2. Martingales à temps continu 335
3. L'intégrale stochastique par rapport à un processus de
Poisson 336
4. Équations différentielles stochastiques avec sauts 338
Ce chapitre donne un bref aperçu des définitions et résultats concernant les
martingales. Pour plus de détails on peut consulter les ouvrages de Williams [55]
pour un exposé introductif, de Neveu [35] et Rogers et Williams [43, 44].
1. Martingales à temps discret
Dans tout ce qui suit, le triplet (0, F, Ir) est l'espace de probabilité de base.
Une filtration (Fn) est une suite croissante de sous-tribus de F.
DÉFINITION 33. Une famille (Za; a E l) de variables aléatoires réelles est
uniformément intégrable si, pour tout ê > 0, il existe B > 0 tel que
IE(IZQll{IZal B}) < ê,
pour tout a E l.
Cette propriété est clairement vraie s'il existe p > 1 tel que
supIE(IZaIP) < +00.
aEI
Un temps d'arrêt T est une variable aléatoire sur 0 à valeurs dans N U { +oo}
telle que pour tout n E N, l'événement {T < n} appartient à la tribu Fn.
L'indice n a une interprétation temporelle, la tribu Fn est celle des événements
connus à l'instant n, Le. ceux qui se sont déroulés avant l'instant n.
DÉFINITION 34. Si (Mn) est une suite de variables intégrables sur 0 à va-
leurs dans IR telle que pour tout n E N, Mn est Fn-mesurable,
- la suite est une (Fn)-surmartingale si, pour tout n E N, Ir-p.s.,
IE(M n + 1 1 Fn) < Mn;
- la suite est une (Fn)-sous-martingale si, pour tout n E N, Ir-p.s.,
E(M n + 1 1 Fn) > Mn;
334
B. RAPPELS SUR LES MARTINGALES
- la suite est une (:Fn)-martingale si Ir-p.s.,
1E(Mn+l 1 :F n ) = Mn,
pour tout n E N.
PROPOSITION B.1. Si (Mn) est une martingale et </J une fonction convexe
sur les réels, si </J(M n ) est intégrable pour tout n E N, (</J(M n )) est une sous-
martingale.
DÉMONSTRATION. Il suffit d'appliquer l'inégalité de Jensen pour l'espérance
conditionnelle, P-presque sûrement,
</J(M n ) = </J(E(Mn+l 1 :F n )) < E(</J(Mn+1) 1 :F n ).
o
Une martingale (Mn) vérifie bien entendu 1E(M n ) = 1E(Mo) pour tout n E N,
la proposition suivante montre que cette propriété se généralise à la martingale
arrêtée à un temps d'arrêt.
PROPOSITION B.2 (Martingales arrêtées). Si (Mn) est une martingale et
T un temps d'arrêt alors (MTAn) est une martingale, en particulier
1E(MTAn) = 1E( M o)
pour tout n E N.
THÉORÈME B.3. Une surmartingale positive (Mn) converge Ir-presque
sûrement vers une limite finie.
THÉORÈME B.4 (Inégalité de Doob). Si (Mn) est une sous-martingale po-
sitive, pour a > 0,
JP> ( sup Mp > a ) < 1E(M n ) 1
O p n a
pour tout n E N.
COROLLAIRE B.5. Si (Mn) est une martingale, pour a > 0,
P ( sup IMpl > a ) < 1E(IM n l) 1
O p n a
et si Mn E L 2 (Ir) pour tout N E N,
Ir ( sup IMpl > a ) < 1E( ) .
O p n a
DÉMONSTRATION. Les fonctions x -t Ixl et x -t x 2 sont convexes sur IR. Il
suffit d'utiliser la proposition B.1 et l'inégalité de Doob. 0
La proposition suivante donne un moyen de construire des martingales à partir
d'une martingale donnée. C'est une version discrète de l'intégrale stochastique.
2. MARTINGALES À TEMPS CONTINU
335
PROPOSITION B.6. Si (Mn) est une (:Fn)-martingale et (N n ) une suite
de variables aléatoires bornées telle que N n soit :F n -mesurable pour tout
n E N, la suite
(B.1 )
(ln) = (tNi-1(Mi - Mi-d)
est une (:Fn)-martingale.
DÉMONSTRATION. Pour n E N la variable ln est intégrable puisque la suite
(N n ) est bornée et les variables (Mi, 0 < i < n) sont intégrables. Les propriétés
de mesurabilité de (Mn) et (N n ) donnent les égalités
n+l
E(In+1/:F n ) = LE(N i - 1 (M i - M i - 1 )I:F n )
7.== 1
n
= L N i - 1 (M i - M i - 1 ) + N n E((M n + 1 - Mn)l:F n ) = ln,
i==l
d'après la propriété de martingale de (Mn). La suite (ln) est une martingale. D
2. Martingales à temps continu
Toutes les définitions et les résultats de la première section se transposent
au cas où la variable temporelle n E N est remplacée par t E Rr-. Les processus
considérés sont Ir-presque sûrement tous continus à droite avec une limite à
gauche en tout point.
DÉFINITION 35. Un processus (X(t)) est adapté si
- l'application (w, t) -t X(t) est mesurable pour la tribu produit;
- pour t > 0, l'application w -t X(w, t) est :Ft-mesurable.
Une variable aléatoire T à valeurs réelles est un temps d'arrêt si, pour tout t > 0,
l'événement {T < t} est :Ft-mesurable.
Une des notions supplémentaires par rapport au temps discret est celle de
martingale locale.
DÉFINITION 36. Un processus (M(t)) est une martingale locale si
- M(O) est :Fo-mesurable;
- il existe une suite croissante (Tn) de temps d'arrêt tendant vers l'infini
telle que, pour tout n E N, le processus
(M(Tn 1\ t) - M(O))
est une martingale.
La proposition suivante donne un critère pour qu'une martingale locale soit
une vraie martingale.
336
B. RAPPELS SUR LES MARTINGALES
PROPOSITION B.7. Si (M(t)) est une martingale locale à valeurs dans IR
et si pour tout t E 114,
(B.2)
JE ( sup I M(S)I ) < +00,
O<s<t
le processus (M(t)) est une martingale.
DÉMONSTRATION. Il existe une suite de temps d'arrêt (Tn) tendant vers
l'infini telle que pour n > 1, (M(Tnl\t)-M(O)) est une martingale, en particulier
lE(M(Tn 1\ t) - M(O) 1 :Fs) = M(Tn 1\ s) - M(O),
pour s < t E 114 et n E N. La variable M(O) est intégrable d'après la rela-
tion (B.2), d'où
E(M(T n 1\ t) 1 :Fs) = M(Tn 1\ s)
comme
M(Tn 1\ t) < sup M(u)
O<u<t
pour tout n E N, la condition (B.2) et le théorème de convergence dominée
montrent donc l'égalité Ir-presque sûre
JE(M(t) 1 :Fs) = M(s),
d'où la propriété de martingale de (M(t)). D
DÉFINITION 37. Un processus adapté (X(t)) est prévisible s'il est adapté
par rapport à la filtration engendrée par les processus adaptés continus à gauche.
Un processus adapté continu à gauche est par conséquent prévisible. Si (X(t))
est càdlàg et adapté à la filtration (Ft) le processus (X(t-) est prévisible.
PROPOSITION B.8. Si (M(t)) est une martingale locale pour laquelle il
existe une suite croissante de temps d'arrêt convergeant presque sûrement
vers l'infini telle que (M(Tn 1\ t)) soit une martingale de carré intégrable, il
existe un unique processus croissant prévisible tel que
(M(t)2 - A(t))
soit une martingale locale, le processus (A(t)) est le processus croissant de
la martingale locale (M (t) ) .
3. L'intégrale stochastique par rapport à un processus de Poisson
On rappelle les définitions et propriétés de l'intégrale par rapport au proces-
sus de Poisson. Les livres de Brémaud [7] et Davis [13] présentent ces questions
dans un cadre général. Pour À > 0,
N).. = L 6t n
nEN
3. L'INTÉGRALE STOCHASTIQUE PAR RAPPORT À UN PROCESSUS DE POISSON 337
est un processus de Poisson d'intensité À sur Illr. Si t > 0, la tribu Ft est celle
engendrée par les variables aléatoires N (]O, s]) pour s < t..
La proposition 1.20 page 24 montre que le processus
(N À (]O, t]) - Àt)
est une martingale. Si X est un processus adapté càdlàg, l'intégrale stochastique
de X par rapport à cette martingale se définit simplement
Z(t) = (t X(s) (N).(w, ds) - À ds) = ( X(s) (N).(w, ds) - À ds)
o ]O,
L X(t n ) - À l t X(s) ds.
nEN;O<tn t 0
On utilisera aussi la notation différentielle
dZ(t) = X(t) (NÀ(dt) - À dt)
pour représenter (Z ( t ) ) .
PROPOSITION B.9. Si (X(t)) est un processus adapté càdlàg borné, le
processus
( ( X(S-HN>.(W,dS)-ÀdS) )
]O,t]
est une martingale dont le processus croissant est donné par
(À 1 t X 2 (S)dS) .
Pour la preuve voir Rogers et Williams [43], Théorème 8.1 page 15 par
exemple.
L'intégration de X(s-) plutôt que de X(s) par rapport à la différentielle de
la martingale N À (]O, t]) - Àt préserve la propriété de martingale. C'est l'analogue
continu de la proposition B.6 page 335, le terme Ni-1 est le X(s-) du processus
(N n ) dans l'égalité (B.1).
De plus ce terme avec la limite à gauche intervient naturellement dans les ex-
pressions différentielles des processus de sauts. Si (X (t)) est une fonction càdlàg,
constante par sur un nombre fini d'intervalles, alors pour t > 0,
X(t) = X(O) + L X(s) = X(O) + l t dX(s),
O s t 0
où la somme a lieu sur les discontinuités de X et X (s) = X (s) - X (s- ). La
relation précédente revient à dire que la quantité X(t) - X(O) est la somme des
sauts de X entre 0 et t. De la même façon, si (Y(t)) est aussi càdlàg, constante
par intervalle, le produit (X(t)Y(t)) a un saut en s si
- s est un instant de saut de X et Y est continu en s, et dans ce cas le saut
vaut Y(s) X(s) = Y(s- ) X(s) (et le cas symétrique en inversant les
fonctions X et Y).
338
B. RAPPELS SUR LES MARTINGALES
- s est un instant de saut de X et Y le saut de XY en s vaut
X(s) Y(s) + Y(s) X(s) + X(s) Y(s).
On en déduit la formule d'intégration par partie
X(t)Y(t) = X(O)Y(O) + L Y(s- ) X(s) + L X(s- ) Y(s)
O<s<t O<s<t
- - - -
+ L X(s) Y(s),
O<s<t
ou encore
(B.3) X(t)Y(t) = X(O)Y(O) + 1 t Y(s-) dX(s) + 1 t X(s-) dY(s)
+ L X(s) Y(s).
O<s<t
PROPOSITION B.lO. Si f et 9 sont des fonctions bornées sur N, et N)..,
Np, sont deux processus de Poisson sur IR de paramètres respectifs À, j1. > 0,
le processus
(1 t f(L(s-))(N>.(ds) - .\ds) 1 t g(L(s-))(NI' (ds) - dS)) 1
est une martingale.
DÉMONSTRATION. Le processus est noté (Z(t)) = (A 1 (t)A 2 (t)), où A 1 (t) et
A 2 (t) sont les deux intégrales ci-dessus de 0 à t. Les deux processus de Poisson
N).. et Np, étant indépendants, la probabilité qu'ils aient un point en commun
entre 0 et test nulle. les processus (A 1 (t)) et (A 2 (t)) n'ont donc presque sûrement
pas de discontinuité en commun entre 0 et t. Par conséquent, avec probabilité
1, la relation (B.3) donne l'identité
Z(t) = Z(O) + 1 t A 2 (s- )f(L(s-)) (N).(ds) - .\ds)
+ 1 t A 1 (s- )g(L(s- ))(NI' (ds) - J..L ds).
En utilisant la proposition B.9, il est facile d'en déduire que le processus (Z(t))
est une martingale. 0
4. Équations différentielles stochastiques avec sauts
Les équations différentielles stochastiques avec sauts interviennent dans plu-
sieurs chapitres (les files d' attente MI Mil, M 1 MI 00 et les méthodes de renor-
malisation). La proposition ci-dessous est élémentaire, elle montre que l'existence
et l'unicité des solutions pour la plupart des équations considérées.
PROPOSITION B.11. Si J est un ensemble au plus dénombrable et, pour
i E J,
- Ci est un sous-ensemble de IR d ,.
4. ÉQUATIONS DIFFÉRENTIELLES STOCHASTIQUES AVEC SAUTS 339
- Vi est un processus de Poisson marqué sur Il4 x Zd d'intensité Ài dtfi!J
Vi (dm) avec À i positif et Vi une probabilité sur Zd. Les processus
ponctuels Vi, i E 1 sont indépendants;
- À = EiEI À i < +00.
L'équation différentielle stochastique
(B.4) dX(t) = L 1 1 {X(t-)Ec.}m \ti(dt, dm),
lEI Zd
à une unique solution vérifiant X(O) = x E Zd.
L'intégrale dans l'équation (B.4) se fait sur la variable m. Pour "t" fixé
la mesure Vi (dt, dm) est soit la mesure nulle soit une masse de Dirac (voir la
Proposition 1.11).
DÉMONSTRATION. On note N le processus ponctuel sur défini par
N(dt) = LVi(dt,Zd) = L6 tn ,
iEI n l
la suite (t n ) est choisie croissante. La superposition de processus de Poisson
indépendants est un processus de Poisson (Lemme 1.7 page 14), d'intensité finie
puisque À est fini. Par récurrence on montre que l'équation (B.4) a une unique
solution sur [0, t n ] pour tout N > 1. On suppose qu'il y a une unique solution
sur l'intervalle [0, t n ], nécessairement pour t E [t n , t n +l [, X(t) = X(t n ). Au point
t n on a
X(tn+d = X(t n ) + L l{x(t n )ECi} r m \ti(tn, dm),
iEI JZd
(se rappeler que la mesure Vi(t n , dm) est portée par au plus un seul point, cf.
la proposition 1.11 page 16). On en déduit que l'équation différentielle (B.4) a
une unique solution sur [0, t n +l]. La proposition est démontrée. D
Exemples.
La file MI Mil. Si L( 0) = x E N et N).. et Np, sont des processus de Poisson
indépendants sur Il4 de paramètres respectifs À et j1., le nombre de clients (L( t)
se représente comme l'unique solution de l'équation
dL(t) = N)..(dt) - l{L(t-»O} Np, ( dt).
La file MI M 100. Si (N ) est une suite i.i.d. de processus de Poisson sur Il4
de paramètre J-L, le nombre de clients de cette file d'attente se représente comme
la solution de l'équation différentielle
+CX>
dL(t) = N)..(dt) - L l{i L(t-)}N (dt).
1=1
Noter qu'ici la troisième condition sur la somme des intensités de la propo-
sition B.11 n'est pas satisfaite. Cette (petite) difficulté se résout aisément en
remarquant que L(t) < N)..([O, t]), il n'y a donc presque sûrement qu'un nombre
fini de discontinuités sur l'intervalle [0, t] (au plus 2N)..([0, t])). La démonstration
précédente s'applique donc aussi dans ce cas.
ANNEXE C
Les processus rnarkoviens de sauts
Sommaire
1. Le générateur infinitésimal
U ne propriété de conditionnement
2. L'équation de mesure invariante
3. La chaîne incluse
4. Les martingales associées
342
344
346
347
347
Ce chapitre est un exposé très élémentaire des questions relatives aux pro-
cessus de sauts. Le lecteur intéressé peut consulter le livre de Norris [38] pour
un exposé introductif et ceux de Rogers et Williams [43, 44] (les chapitres III
et IV) qui traitent de façon détaillée les délicates questions relatives à ces pro-
cessus. Dans toute la suite (Ft) est une filtration sur un espace de probabilité
fixé.
DÉFINITION 38. Un processus adapté (X(t)) sur S est de Markov si pour
tout s, t > 0 et x E S, JP>x-presque sûrement
Ex (f(Xt+s)1 Ft) = IEX(t) (f(Xs )),
pour toute fonction mesurable bornée f sur S, ou encore
JP> x(X t + s E . 1Ft) = JP>X(t)(X s E . ).
Voir la définition d'un processus adapté page 336.
Un processus de sauts est un processus de Markov à valeurs dans un espace
d'états dénombrable S, continu à droite avec une limite à gauche en tout point.
De façon équivalente un processus de sauts est une mesure de probabilité sur
l'espace Ds([O, +oo[) des fonctions continues à droite avec une limite à gauche
en tout point (càdlàg), à valeurs dans S. L'espace Ds([O, +oo[) est muni de la
topologie de Skorokhod (voir l'annexe D pour la définition de cette topologie).
Les processus considérés sont supposés être irréductibles et homogènes dans
le temps. On fait aussi l'hypothèse que les processus sont "normaux", au sens
où, presque sûrement, les instants de sauts ne s'accumulent pas sur un intervalle
de temps fini.
Exemple d'un processus avec une infinité de sauts en temps fini. Partant de
i E N le processus saute en i + 1 au bout d'un temps exponentiel Ei de paramètre
i 2 . S'il part de 1, il arrive en n à l'instant Tn = El + . . . En-1 où les (Ei) sont
342
C. LES PROCESSUS MARKOVIENS DE SAUTS
des variables indépendantes. Il est facile de voir que T 00 = lim n Tn est Ir-presque
sûrement finie, en effet si > 0,
JE (e-(Tn) = ri i/: = exp ( loge! - U(i2 + )))
par conséquent le produit infini
n-1 '2
lE ( e- Too ) = fI .
. 2 +
,=1
a un sens, et en faisant tendre vers 0 dans l'équation précédente, on en déduit
que IF(T 00 < +00) = 1. Il Y a une infinité de sauts sur l'intervalle [0, T oo[ et à
t = T 00 le processus est à l'infini.
Les processus de sauts rencontrés dans les réseaux de files d'attente sont
normaux de ce point de vue.
Les réseaux de Jackson et les réseaux avec perte. Pour qu'il y ait un
nombre infini de sauts pendant un temps de temps fini dans le cadre de ces
réseaux, il faut nécessairement qu'il y ait un nombre infini d'arrivées de clients
dans les réseaux pendant cet intervalle de temps. Cet événement est donc de
probabilité nulle.
La proposition suivante se montre de la même façon que la propriété de
Markov forte d'un processus de Poisson sur 1R, voir le livre de Norris [38].
PROPOSITION C.l. Un processus markovien de sauts a la propriété de
Markov forte.
1. Le générateur infinitésimal
Le générateur infinitésimal d'un processus de Markov (X(t)) est la matrice
Q = (qij; i, j E S) définie par
qij = lim !1P'(X(s) = j 1 X(O) = i),
5-+0 S
pour i =F j et
qii = - L qij.
j=F i
La matrice Q est aussi appelée matrice de sauts. Pour i, j ES, la quantité qij
est la dérivée en 0 de l'application t -t Ir(X(t) = j 1 X(O) = i). La matrice Q est
bien sûr un opérateur sur les fonctions f définies sur S et on note
Q(f)(i) = L qijf(j) = L qij(f(j) - f(i)),
JES j=l=i
quand cette somme a un sens. Si f est la fonction constante égale à 1, clairement
Q(f) est identiquement nulle.
1. LE GÉNÉRATEUR INFINITÉSIMAL
343
Si f est une fonction bornée sur S, la propriété de Markov donne la relation
(J(X(t + s))) - (f(X(t))) = (IEX(t) (J(X(s))) -J(X(O)))
2: (f(j) - f( i))IP(X (s) = j 1 X(O) = i)IP x(X (t) = i),
i,jES,i j
en divisant par s et en supposant que le passage à la limite quand s tend vers 0
est valide, on obtient l'identité
(J(X(t))) = 2: %(f(j) - J(i))lP'", (X(t) = i),
i,jES,i j
(C.l) (J(X(t))) = (Q(f)(X(t))) 1
ou encore, sous forme intégrale,
(C.2) (J(X(t))) - (f(X(O))) = 1 t (Q(f)(X(s))) ds.
Le résultat d'unicité suivant a lieu pour les processus de sauts qui n'explosent
pas en temps fini. Il est utilisé dans le chapitre sur la réversibilité.
PROPOSITION C.2. Pour x E S, il existe un unique processus de Markov
continu à droite, de générateur Q, tel que IP(X(O) = x) = 1.
L'unicité se réfère bien sûr à celle de la loi de probabilité IP x sur l'espace
Ds([O, +oo[).
EXEMPLES
Le processus de Poisson. Pour À > 0, si N)., est un processus de Poisson de
paramètre À, le processus (X(t) = (X(O) +N).,(]O, t]) est markovien et sa matrice
de sauts est donnée par qi,i+1 = À, qii = -À et qij = 0 pour les autres couples
(i, j). L'égalité Qi,i+1 = À vient de la relation
IP(X(s) = i + 11 X(O) = i) = IP(N).,(]O, s]) = 1) = Àse-).,s.
La file M/Ml1. Si L(t) est le nombre de clients à l'instant t, (L(t)) est un
processus de Markov dont la matrice de transition Q est donnée par
qi,i+1 = À,
q " "- 0
1, ,j - ,
i > 0,
Ii - jl > 1.
qi,i-1 = J-L,
À titre d'exemple, on montre l'égalité qi,i-1 = J-L pour i > o. La notation N x
désigne un processus de Poisson de paramètre x. Si X(O) = i, pour s petit,
l'événement {X(s) = i - 1} a lieu si, pour un kEN, il yak + 1 services
effectués (en particulier N (] 0, s]) > k + 1) et k arri vées dans l'intervalle ] 0, s].
344
C. LES PROCESSUS MARKOVIENS DE SAUTS
Il est facile de voir que, si k > 0, cet événement est en o( s), par conséquent
r(x(s) = i - 11 X(O) = i) = r(NÀ(]O, s]) = o,N (]O, s]) = 1) + o(s)
= r(NÀ(]O, s]) = O)r(N (]O, s]) = 1) + o(s)
= e- Às J-Lse- s + o(s),
d'où la relation qi J i-1 = Jj.
La file M/M/oo. La matrice de transition du nombre de clients est définie
par
Qi,i+1 = À,
Qi,i-1 = J-L,
qiJJ = 0,
i E N,
Ii - jl > 1.
Quand la file compte i clients, chacun d'eux est servi. Le temps de sortie
du premier d'entre eux sera donc le minimum de i variables exponentielles
indépendantes de paramètre Jj, Le. une variable exponentielle de paramètre ij1.,
d'où la relation qi,i-1 = iJ-L.
Les files d'attente en tandem MIMl1 -t .IMl1. Le nombre de clients dans
chacune des files (L 1 (t), L 2 (t)) est un processus de Markov, pour (i,j) =1= (k, l),
q( i,j) J( k,l) =
À, k = i + 1,
J-L1, k = i - 1, i > 1,
J-L2 , k = i,
0, SInon.
l = j,
l = j + 1,
l = j - 1, j > 1,
Une propriété de conditionnement.
PROPOSITION C.3. Si (X(t)) est un processus markovien de sauts tran-
sient sur S, de matrice de sauts Q = (qij) tel que
qi = Lqij < +00,
Ji=
pour tout j E S, et si H est un sous-ensemble de l'espace d'états, TH le
temps d'atteinte de H par (X(t)), le processus (X(t)) conditionné à ne ja-
mais atteindre H est un processus de M arkov dont la matrice de sauts
Q = (qij) est donnée par
_ Pj(TH = +00)
qiJ = qiJ Pi(TH = +00)'
pour i =1= j ES.
DÉMONSTRATION. L'événement {TH = +oo} est non négligeable en raison
de la transience du processus, le conditionnement est donc bien défini. Si fii>
désigne la probabilité r( . 1 TH = +00) et E(.) l'espérance pour cette probabilité,
il faut montrer que si h : S -t Il4 est une fonction bornée, s, t E Il4, x > 1
(h(X(s + t)) IFs) = ÎËX(s) (h(X(t»)
1. LE GÉNÉRATEUR INFINITÉSIMAL
345
ou encore pour toute variable Y Fs-mesurable,
(C.3) ÎËx (Yh(X(s + t))) = ÎËx (YËX(S) (h(X(t)))) .
En décomposant l'événement {TH = +oo}, on obtient l'égalité
Ex (h(X(s + t))Y1{TH=+oo})
= JE:.., (h(X(s + t))l{X(u) H. Vu s} Yl{X(u) H. Vu s} ) ,
la fonction Y1{X(u)(lH, V'u s} étant Fs-mesurable, d'après la propriété de Markov
de (X ( t ) ) ,
Ex (h(X(s + t))Yl{TH=+oo})
= JE:.., (!EL. (h(X(t))l{X(U) H. vu O}) Yl{X(u) H. 'v'u:ss} )
= JE:.., (!EL. (h(X(t)) 1 TH = +00) Yl{X(u) H. Vu:Ss}IP'L. (TH = +00)) .
La variable lEL" (h(X(t)) 1 TH = +00) Yl{X(u)(lH, V'u s} étant Fs-mesurable, la
propriété de Markov de (X(t)) donne la relation
Ex (h(X(s + t))Yl{T H =+oo})
= JE:.., (!EL. (h(X(t)) 1 TH = +00) Yl{X(u) H. vu s}l{X(u) H. VU S})
= JE:.., (!EL. (h(X(t)) 1 TH = +00) Yl{TH=+oo}) ·
Finalement,
JE:.., ( h(X(s + t))Y1 TH = +00 )
= JE:.., (!EL. (h(X(t)) 1 TH = +00) yi TH = +00) 1
pour la probabilité IP x sachant {TH = +oo} l'espérance conditionnelle de h( L t + s )
sachant Fs vaut
lE L " (h(X(t)) 1 TH = +00).
On en déduit que (X(t)) sachant {TH = +oo} est un processus de Markov.
Il reste à calculer le générateur. Si i, j E S-H, la propriété de Markov donne
l'égalité suivante pour t > 0,
(C.4) IPi(X(t) = j, TH = +00) = IPi(X(t) = j, TH > t)JP>j(TH = +00),
clairement
(C.5) IPi(X(t) = j) - IPi(X(t) = j, TH > t)) < JP>i(X a deux sauts sur [0, t]).
346
C. LES PROCESSUS MARKOVIENS DE SAUTS
Ce dernier terme est en o( t) puisque
lP'i(X a deux sauts sur [0, t]) = l t qie-q.(t-s) LPij(l - e-q;S) ds
a J;/='&
= e-q;t l t qieq;S LPij(l - e- q . S ) ds,
a J;/=i
où (pij) est la matrice de transition de la chaîne incluse. La fonction sous
l'intégrale est continue en s, en divisant chacun des termes de l'égalité par t
et en faisant tendre t vers 0, on en déduit l'estimation en o(t).
L'égalité (C.4), la majoration (C.5) et la définition de qij montrent donc la
relation
N l . 111]) (X( ) " 1 ) rj(TH = +00)
qij= Im-j[i t =J TH =+00 =% IP'(T ) "
t O t i H = +00
La proposition est démontrée. 0
2. L'équation de mesure invariante
Si 'Ir est une probabilité invariante du processus de Markov (X(t)) sur S,
par définition IEn- (f (X (t))) = 'Ir(f) pour tout t > 0 et toute fonction f bornée
sur S, par conséquent
1E.r (f(X(t))) = O.
En intégrant l'équation (C.1) par rapport à la probabilité 'Ir, on obtient que si f
est une "bonne" fonction,
'Ir(Q(f)) = 0,
ou encore
L 7r(i)qij(f(j) - f(i)) = o.
i,jES,i#j
Si f est la fonction indicatrice du singleton {i} cette égalité devient
(C.6) 7r(i) ( L qi j ) = L 'Ir(j)qji.
jES,j;/=i jES,j;/=i
Ce système constitue les équations d'équilibre du processus de Markov : 7rQ = O.
EXEMPLE : LES PROCESSUS DE VIE ET DE MORT Au chapitre 4, page ?? il a
été vu que la mesure invariante (7r ( i)) d'un processus de vie et de mort sur N
satisfait nécessairement la relation 'Ir ( i + 1 )J-Li+1 = 'Ir ( i)Ài' avec À i = qii+l et
J-Li = qii-1 pour i > O. En particulier
'&-1
11'( i) = 11'(0) Il Àk 1
a J.Lk+1
4. LES MARTINGALES ASSOCIÉES
347
si la somme
f fi Àk
i=l a J-Lk+1
est finie, la mesure invariante est finie. Cette condition de finitude ne suffit pas
à assurer l'ergodicité du processus de Markov. Si Àn = nn et J.Ln = 2(n - 1)n-1,
la suite géométrique (1/2n+1) satisfait l'équation de mesure invariante. Il est
cependant facile de montrer que ce processus de Markov n'est pas ergodique
puisque lim n Ànl J1.n = +00 (en utilisant le théorème 8.10 page 193 appliqué à
la chaîne de Markov incluse et la fonction f(x) = x). Ce processus est donc
transient et a une mesure invariante finie. Ce paradoxe apparent s'explique par
le fait que le processus explose en temps fini (écrire l'équation de récurrence que
satisfait la moyenne du premier temps d'atteinte de n). L'équation de mesure
invariante n'a donc pas de sens dans ce cadre.
3. La chaîne incluse
Si (X n ) désigne la suite des états successifs visités par (X(t)), alors (X n )
est une chaîne de Markov dont les transitions (pij) sont données par
P . . _ _ qi,j _ qi,j
j - -
qii Ek#i qik '
pour i 1= j. Le processus reste dans l'état i une durée de distribution exponen-
tielle de paramètre -qii = Ej#i qij et saute en j avec probabilité Pij. La chaîne
incluse décrit la composante spatiale du processus de sauts et la suite (-qii) la
composante temporelle. La définition de la chaîne incluse donne facilement la
proposition suivante.
PROPOSITION C.4. Si le processus (X(t)) a une mesure invariante (1r(i)),
la suite (1r(i))) = (-qii1ri) est une mesure invariante pour la chaîne incluse
(X n ) .
Si (X n ) est une chaîne de Markov sur S sans boucle, i.e. telle que r x (X 1 =
x) = 0 pour tout x ES, il est facile de construire un processus de sauts dont
la chaîne incluse est (X n ). Si N 1 est un processus de Poisson de paramètre
1 indépendant de (X n ), le processus (X(t)) = (XNl(]O,t]») est un processus de
Markov càdlàg dont la chaîne incluse est (X n ). La matrice de sauts Q = (qij) est
définie par qij = r(X 1 = j 1 Xo = i) pour j 1= i. Bien que les deux processus (X n )
et (X(t)) soient équivalents dans ce cas, il est souvent plus commode de travailler
avec la version continue de la chaîne de Markov (technique de poissonnisation
d'une chaîne de Markov).
4. Les martingales associées
La proposition suivante donne un moyen de construire des martingales lo-
cales à partir d'un processus markovien de sauts. Pour les preuves des résultats
de cette section, voir par exemple la section IV-20 de Rogers et Williams [44]
pages 30-37.
348
C. LES PROCESSUS MARKOVIENS DE SAUTS
PROPOSITION C.S. Si g est une fonction sur ll4 xS telle que l'application
8g(t, x)
t-t 8t
est continue pour tout x ES, le processus
(g(t l X(t)) - g(O, X(O)) -l t ( + Q(g(S,.))) (s, X(s)) dS)
est une martingale locale.
En particulier si f est une fonction sur S, en posant g( t, x) = f (x), la
proposition précédente montre que le processus
(f(X(t)) - f(X(O)) -l t Q(f)(X(s)) ds )
est une martingale locale. Si en plus ce processus est une martingale (voir la
proposition B.7 page 336), on en déduit l'identité (C.2)
Ex (f(X(t))) - Ex (f(X(O))) = l t Ex (Q(f)(X(s))) ds
pour tout t > O.
DÉFINITION 39. Une fonction g sur ll4 x S telle que
ag ; x) + Q(g(t, .))(t , x) = 0
pour tout x E S et t > 0 est une fonction harmonique en espace-temps pour le
générateur Q.
COROLLAIRE C.6. Si g est une fonction harmonique en espace-temps
pour le générateur Q telle que l'application
8g(t, x)
t-t 8t
soit continue pour tout x E S, le processus (g(t, X(t))) est une martingale
locale.
La proposition suivante montre que ces propriétés de martingales caracté-
risent la loi du processus de Markov.
PROPOSITION C.7 (Problème de martingale). Si le processus markovien
de sauts (X(t)) est continu à droite avec des limites à gauche en tout point
tel que le processus
(f(X(t)) - f(X(O)) -l t Q(f)(X(s)) dS)
soit une martingale locale pour toute fonction f sur S, alors la loi de (X(t))
est celle de l'unique processus de M arkov càdlàg de générateur Q et de point
initial x.
ANNEXE D
Convergence en distribution
Sommaire
1. La norme en variation totale sur les probabilités 349
2. Convergence de processus 351
Les topologies sur les espaces de fonctions 351
Les probabilités sur C([O, T], ]Rd) et D([O, T], ]Rd) 353
Relative compacité et convergence des suites de processus 353
Dans ce chapitre on rappelle les définitions et les résultats relatifs à la conver-
gence en distribution qui sont utilisés dans ce livre. Pour les questions de conver-
gence de processus on pourra consulter le livre de Billingsley [5] (1968!); voir
aussi pour les critères en terme de martingales Ethier et Kurtz [17] et Jacod et
Shiryaev [26].
1. La norme en variation totale sur les probabilités
On suppose ici que S est un espace dénombrable.
DÉFINITION 40. La norme en variation totale d'une suite (J-L(x); x E S) est
donnée par
(D.1 )
l l
IIJLllvt = 211JLII1 = 2 L IJL(x)I,
xES
La norme en variation totale peut s'exprimer de façon plus probabiliste.
PROPOSITION D.I. Si r et Q sont des probabilités sur S alors
IIIP' - Qllvt = sup IIP'(A) - Q(A)I = sup J / dr - J / dQ
ACS f,lIfllooS1
où 11/1100 est la norme infinie sup{I/(x)l/x ES}.
DÉMONSTRATION. En effet, si r = (p(x)) et Q = (q(x)), en notant
S+ = {x E Slp(x) > q(x)},
pour A C S,
r(A) - Q(A) = (r - Q)(A n S+) + (r - Q)(A n S )
< r(s+) - Q(S+) = -(r(S ) - Q(S )).
350
D. CONVERGENCE EN DISTRIBUTION
On en déduit la relation
sup Ir(A) - Q(A)I = r(s+) - Q(S+),
ACS
d'où
sup Ir(A) - Q(A)I = L p(X) - q(X) = - L p(X) - q(X)
ACS :.cES+ :.c{ls+
1
= 2 L Ip(x) - q(x)1 = IIIP - Qllvt,
:.cES
la dernière égalité de la proposition étant une conséquence immédiate de la
définition de la norme en variation totale. 0
La norme en variation totale présente l'avantage de majorer Ir(A) - Q(A)I pour
tous les événements A et c'est la norme qui sera principalement considérée ici. Si
r et Q sont deux probabilités étrangères, Le. il existe un sous ensemble A de S
tel que r(A) = 1 = Q(AC), il est facile de vérifier que la distance IIr - Qllvt vaut
1, la valeur maximale de la distance entre deux probabilités pour cette norme.
Si X et Y sont deux variables aléatoires à valeurs dans S, la quantité
IIJP>(X E . ) - r(Y E . )llvt
désigne la distance en variation totale des lois de X et Y.
Si l'espace d'états n'est plus discret, la proposition précédente montre que
la définition de la norme en variation totale peut s'étendre sans difficulté, avec
la réserve toutefois que les événements A pris pour obtenir la borne supérieure
soient mesurables.
Pour mesurer l'écart avec une probabilité 1f sur S telle que 1f(x) > 0 pour
tout x E S, d'autres distances peuvent être retenues.
La "distance" en séparation
p(x)
d s (r,7r) = max - ( ) -1 ,
:.cES 1f X
noter l'absence de symétrie entre r et 1f. Cette" distance" est plus contraignante
que la norme en variation totale,
2111P - 1I"IIvt = L Ip(x) - 1I"(x)1 = L : : - 1 1I"(x) < ds(IP, 11").
:.cES :.cES
Si S = {l,... ,N} et U k la probabilité uniforme sur {l,. .. ,k} pour k < N,
alors IIUN-1 - UNllvt = 1/2N et d s (UN-1, UN) = 1. Les probabilités UN-l, UN
sont proches pour la norme en variation totale mais pas pour la distance en
séparation.
La distance dans L 2 ( 7r ) ,
d 2 (JP>, 1f) =
p(x) 2
L 1I"(X) - 1 1I"(X) ,
:.cES
2. CONVERGENCE DE PROCESSUS
351
celle-ci présente l'avantage de se situer dans un cadre hilbertien, donc plus
agréable mathématiquement. Ces distances se comparent de la façon suivante
Il IP - 1(" Il L < 211 IP - 1(" Il vt < d 2 (IP, 1(") < d s (IP, 1("),
les deux dernières inégalités viennent de l'inégalité de Cauchy-Schwartz.
2. Convergence de processus
Dans cette section, S est un espace métrique complet séparable. Les résultats
concernent essentiellement S = IR d , S = C ([0, T], IR d ) ou S = D ([ 0, T], }Rd) avec
o < T < +00. Si x = (Xi) E IR d , on pose Ilxll = I X 11 + ... + IXdl.
Les topologies sur les espaces de fonctions.
2.0.1. L'espace des fonctions continues. L'espace S = C([O, T], IR d ) est
celui des fonctions réelles continues sur [0, T]. Si T < +00, il est muni de la
norme infinie
Ilflloo,T = sup Ilf(s)ll,
sE[O.T]
si f est continue sur l'intervalle [0, T]. Si T = +00, la topologie de la convergence
uniforme sur les compacts est définie par la distance d oo définie de la façon
suivante: si f, g E C([O, +00[, IR d )
doo(J, g) = r+ oo Il! - glloo,T e- T dT.
Jo 1 + Iif - glloo,T
De cette façon C([O, T], IR d ) est un espace métrique complet séparable.
2.0.2. L'espace des fonctions càdlàg. On note ([O, T]) l'ensemble des
fonctions continues strictement croissantes de [0, T] dans [0, T] valant 0 en 0 et
T en T. Si a est un élément de cet ensemble on pose
H(a) = sup log a(s) - a(t) .
[ ] s-t
s,tE O,T ;s;é:t
PROPOSITION D.2. Si a E ([O, T]) est telle que H(a) soit fini, elle est
absolument continue par rapport à la mesure de Lebesgue, i.e. il existe une
fonction mesurable a' telle que pour t E [0, T],
a(t) = lt a'(u) du,
de plus
lia' - 11100 < H(a) exp(H(a))
où a' est une version de la dérivée de Radon-Nikodym de a par rapport à
la mesure de Lebesgue.
DÉMONSTRATION. Le lecteur se reportera à Rudin [45] pour les résultats
généraux de théorie de la mesure utilisés dans cette preuve. Si H(a) est fini,
e-H(Q)(t - s) < a(t) - a(s) < eH(Q)(t - s)
352
D. CONVERGENCE EN DISTRIBUTION
pour tout 0 < s < t < T et si f est une fonction mesurable sur [0, T], constante
par intervalle, il est clair que
e-H(a) 1 T IJ(u)1 du < 1 T IJ(u)lda(u) < eH(a) 1 T JJ(u)1 du.
En approximant on en déduit que la relation précédente est vraie pour toutes les
fonctions mesurables positives bornées. La mesure da est donc absolument conti-
nue par rapport à la mesure de Lebesgue d'après le théorème de Radon-Nikodym.
La première partie de la proposition est démontrée. L'inégalité précédente donne
l'encadrement
(e-H(a) -1) 1 T J(u) du < 1 T J(u)(a'(u) -1)du < (eH(a) -1) 1 T J(u) du,
pour toute fonction mesurable positive bornée J, on en déduit l'inégalité
la'(u) - 11 < (eH(a) -1) V (1- e-H(a») < eH(a)H(a)
Lebesgue-presque partout pour u E [0, T]. La proposition est démontrée. D
Le lemme suivant donne une propriété élémentaire des fonctions càdlàg.
LEMME D.3. Si f est une fonction càdlàg sur [0, T], pour tout E > 0, il
existe une suite croissante (ti; i = 0, . . . ,n) vérifiant ta = 0, t n = T et
sup IJ(t) - J(s)1 < E,
t: s t<t +l
DÉMONSTRATION (BILLINGSLEY [5]). On note Ta le supremum des t < T
tel que le lemme soit vrai sur l'intervalle [0, t]. La continuité à droite en 0 montre
clairement que Ta > o. De plus comme f a une limite à gauche en Ta, le lemme est
aussi vrai sur l'intervalle [0, Ta] et la continuité à droite en Ta interdit l'inégalité
Ta < T. Le lemme est démontré. D
L'espace D([O, T], IR d ) est l'ensemble des fonctions continues à droite avec des
limites à gauche. Si T < +00, il est muni de la topologie due à Skorokhod induite
par la distance d T définie de la façon suivante: si f, g E D([O, T], IR d )
dT(f,g) = inf ( H(a) + sup IIf(t) - g(a(t))II ) .
aE.6([a,T]) tE[a,T]
Remarquer qu'en prenant la fonction a(x) = x dans la borne inférieure, on
obtient la norme uniforme IIf - glloo,T' par conséquent
dT(J, g) < IIJ - glloo,T.
Si T = +00, l'espace est muni de la distance d oo telle que si J, g E D([O, 00[, }Rd)
(f ) 1 +00 dT(f, g) -T dT
doo ,9 = d (J ) e .
a 1+ T ,g
Avec cette distance, l'espace D([O, +00[, IR d ) est complet et séparable.
Pour T > 0 et f, g E D([O, T], IR d ), clairement IIf(O) - g(O)1I < dT(f, g),
l'application f -t f(O) est donc continue sur l'ensemble D([O, T], IR d ) muni de la
topologie de Skorokhod.
2. CONVERGENCE DE PROCESSUS
353
Les probabilités sur C([O, T],}Rd) et D([O, T],}Rd). Les espaces fonction-
nels C([O, T],}Rd) et D([O, T],}Rd) sont munis des topologies qui viennent d'être
définies. Les probabilités sur ces espaces sont relatives aux tribus boréliennes
associées. Comme au chapitre D, la loi de la probabilité de la variable aléatoire
y est désignée par la notation IP(Y E . ).
PROPOSITION D.4. Si S = C([O, T], }Rd) OU S = D([O, T], }Rd), une probabi-
lité sur S est entièrement déterminée par la loi des marginales de dimension
finie, i. e. si IP et Q sont deux probabilités sur S telles que pour tout pEN
et t l , . .. ,t p E [0, T],
IP ( ( X ( t 1), . .. ,X ( t p )) E . ) = Q( ( X ( t 1 ), . .. J X ( t p )) E . ),
alors IP = Q.
Relative compacité et convergence des suites de processus. Sur un
espace métrique S général, la convergence des probabilités sur S est défini de la
façon suivante.
DÉFINITION 41. Si S est un espace métrique une suite de probabilités (IPn)
sur S converge étroitement vers une probabilité IP si
lim 1 (jJdIPn = 1 (jJdIP,
n-t+cx>
pour toute fonction continue bornée (jJ sur S.
Par abus de langage et pour fixer le contexte, on dira d'une suite conver-
gente (IPn) de probabilités sur D([O, T], }Rd) qu'elle converge pour la topologie
de Skorokhod.
PROPOSITION D.5. Si (X n ) est une suite de processus càdlàg sur [0, T]
telle que, pour tout TI > 0,
lim IP ( sup IXn(s) - x(s)1 > TI ) = 0,
n-t+CX> O<s<T
où (x(t)) est une fonction càdlàg déterministe sur [0, T], alors (X n ) converge
étroitement vers (x(t)) pour la topologie de Skorokhod ou encore la suite des
lois de (X n ) converge étroitement vers la mesure de Dirac en (x(t)).
DÉMONSTRATION. Si (jJ est une application continue bornée sur D([O, T], }Rd)
et ê > 0, la fonction étant continue au point x = (x(t)), il existe TI > 0 tel que
si dT(X, y) < TI alors 1(jJ(x) - (jJ(y) 1 < ê. Comme dcx>,T(x, y) < IIx - yllcx>,T, on a
la relation 1(jJ(x) - (jJ(y) 1 < ê si Ilx - yllcx>,T < TI. La majoration
1(jJ(x) -1E((jJ(X n ))1 < 211(jJIIcx>IP ( sup IXn(s) - x(s)1 > TI )
O<s<T
+ lE (liP( x) - iP(X n ) 11{8uPo ' T IXn(s}-:z:(s}l l1} )
< 211(jJIIcx>IP ( sup IXn(s) - x(s)1 > TI ) + ê.
O<s<T
354
D. CONVERGENCE EN DISTRIBUTION
entraîne la convergence de la suite (IE( 4>( X n ))) vers 4>( x). La proposition est
établie. D
DÉFINITION 42. Une suite (IP n) de probabilités sur S est dite tendue si pour
tout e > 0, il existe un compact K de S tel que pour tout n E N,
IPn(K) > 1 - e.
Une probabilité sur S est un élément du dual des fonctions continues bornées
sur S; autrement dit une suite (IPn) converge étroitement vers une probabilité IP
si elle converge au sens de la topologie faible. Il est bien connu que la topologie
induite sur les probabilités sur un espace S métrique séparable est métrisable
(Théorème de Banach-Alaoglu, voir Rudin [46]).
THÉORÈME D.6 (Théorème de Prohorov). Une suite de probabilités (IPn)
sur S est relativement compacte si et seulement elle est tendue.
Le théorème suivant permet de décomposer la démonstration de la conver-
gence des lois d'une suite de processus en deux étapes.
PROPOSITION D.7. Si S = C([O, T], IR) ou S = D([O, T], IR), une suite de
probabilités (IP n) sur S converge vers la probabilité IP dès que
- la suite (IP n) est tendue;
- les lois marginales de dimension finie de IP n convergent en distribu-
tion vers celles de IP, i. e. pour tout pEN et t1, . .. ,t p E [0, T]
lim IP n ( X ( t 1) E . , . .. ,X ( t p ) E . ) = IP ( X ( t 1) E . , . .. ,X ( t p ) E . )
n-++oo
La convergence étroite d'une suite de probabilités n'est pas toujours facile
à utiliser en pratique. Il est toujours plus commode d'avoir une convergence
presque sûre d'une suite de variables aléatoires. Le théorème suivant permet de
ramener la convergence en loi à une convergence presque sûre sur un espace de
probabilité adéquat.
THÉORÈME D.8 (Théorème de représentation de Skorokhod). Si une suite
de probabilités (IPn) sur D([O, T], IR d ) converge vers la probabilité IP, il existe
un espace de probabilité (O,:F, Q) sur lequel sont définis des processus càdlàg
(Yn(t)), n > 1 et (Y(t)) tels que, pour n > 1, la loi de (Yn(t)) soit IPn, IP la
loi de (Y(t)) et Q-presque sûrement (Yn(t)) converge, pour la topologie de
Skorokhod, vers (Y(t)) quand n tend vers l'infini.
Le théorème suivant donne un critère pour que chaque valeur d'adhérence
d'une suite de probabilités sur D([O, T], IR) soit une probabilité sur C([O, T], IR),
i.e. que le processus limite associé soit continu. Ce type de critère s'utilise natu-
rellement pour montrer la convergence d'une suite de processus de sauts vers le
mouvement brownien.
THÉORÈME D.9. Si S = C([O, T], IR) ou S = D([O, T], IR), une suite (IPn)
de probabilités sur S telle que pour tout e > 0,
- il existe a vérifiant IPn(IX(O)1 > a) < e pour tout n EN;
2. CONVERGENCE DE PROCESSUS
355
- pour tout 17 > 0, il existe fJ > 0 tel que
IPn(wx(fJ) > 17) < ê,
pourn assez grand, oùwx(fJ) = sup(IX(t)-X(s)l;s,t < T, It-sl < fJ);
est tendue et toute valeur d'adhérence IP est une probabilité sur les fonctions
continues sur [0, TL i.e. IP(C([O, T], IR)) = 1.
On termine ce chapitre sur un théorème (Théorème 1.4, page 339 de Ethier
et Kurtz [17]) qui donne un critère de convergence d'une suite de martingales
vers le mouvement brownien changé de temps.
THÉORÈME D .10. Si les suites de processus (Y N (t)) et (AN (t)) et la fonc-
tion cro?'ssante t -t 1(t) sont telles que, pour N E N,
1. YN(O) = 0 et 1(0) = 0,
2. (YN(t)) est une martingale locale relativement à sa filtration natu-
relle.
3. l'application t -t AN (t) est croissante,
4. le processus (YN(t)2 - AN(t)) est une martingale locale relativement
à la filtration naturelle de (YN(t)),
pour T > 0
5. lim lE ( su p IAN(t) - AN(t- )1 ) = 0,
N-++oo t<T
6. lim lE ( su P IYN(t) - YN(t- )1 2 ) = 0,
N-++oo t<T
7. pour tout t > 0, AN(t) converge en probabilité vers 1(t),
alors (YN(t)) converge en distribution vers le processus (B(1(t)) où (B(t))
est le mouvement brownien standard.
Bibliographie
1. David Aldous, Probability approximations via the Poisson clumping heuristic, Springer-
Verlag, New York, 1989.
2. Sf6ren Asmussen, Applied probability and queues, John Wiley & Sons Ltd., Chichester,
1987.
3. François Baccelli and Pierre Brémaud, Elements of queueing theory, Springer- Verlag, Ber-
lin, 1994, Palm-martingale calculus and stochastic recurrences.
4. A. D. Barbour, Lars Holst, and Svante Janson, Poisson approximation, The Clarendon
Press Oxford University Press, New York, 1992, Oxford Science Publications.
5. Patrick Billingsley, Convergence of probability measures, Wiley series in probability and
mathematical statistics, John Wiley & Sons Ltd, New York, 1968.
6. , Ergodic theory and information, Robert E. Krieger Publishing Co., Huntington,
N.Y., 1978, Reprint of the 1965 original.
7. Pierre Brémaud, Point processes and queues, Springer- Verlag, New York, 1981, Martingale
dynamics, Springer Series in Statistics.
8. J. A. Bucklew, Large deviation techniques in decision, simulation and estimation, Wiley
series in probability and mathematical statistics, John Wiley & Sons Ltd, 1990.
9. T. S. Chihara, An introduction to orthogonal polynomials, Gordon and Breach Science
Publishers, New York, 1978, Mathematics and its Applications, Vol. 13.
10. J. W. Cohen, The single server queue, 2nd ed., North-Holland, Amsterdam, 1982.
11. 1. P. Cornfeld, S. V. Fomin, and Ya. G. SinaI, Ergodic theory, Springer- Verlag, New York,
1982, Translated from the Russian by A. B. Sosinskil.
12. David Roxbee Cox and Valerie Isham, Point processes, Chapman & Hall, London, 1980,
Monographs on Applied Probability and Statistics.
13. M. H. A. Davis, Markov models and optimization, Chapman & Hall, London, 1993.
14. Amir Dembo and Ofer Zeitouni, Large deviations techniques and applications, Jones and
Bartlett, 1993.
15. Paul Dupuis and Richard S. Ellis, A weak convergence approach to the theory of large
deviations, Wiley Series in Probability and Statistics : Probability and Statistics, John
Wiley & Sons Inc., New York, 1997, A Wiley-Interscience Publication.
16. Richard Durrett, Probability : theory and examples, second ed., Duxbury Press, Belmont,
CA, 1996.
17. Stewart N. Ethier and Thomas G. Kurtz, Markov processes, John Wiley & Sons Inc., New
York, 1986, Characterization and convergence.
18. G. Fayolle, V. A. Malyshev, and M. V. Men'shikov, Topics in the constructive theory of
countable Markov cha ns, Cambridge University Press, Cambridge, 1995.
19. W. Feller, An introduction to probability theory and its applications, 3rd ed., vol. l, John
Wiley & Sons Ltd, New York, 1968.
20. , An introduction to probability theory and its applicat ons, 2nd ed., vol. II, John
Wiley & Sons Ltd, New York, 1971.
358 BIBLIOGRAPHIE
21. P. Franken, D. Konig, U. Arndt, and V. Schmidt, Queues and point processes, John Wiley
& Sons Ltd, Chichester, 1981.
22. M. 1. Freidlin and A. D. Wentzell, Random perturbations of dynamical systems, second
ed., Springer-Verlag, New York, 1998, Translated from the 1979 Russian original by Joseph
Szücs.
23. F. D. Gakhov, Boundary value problems, Dover Publications Inc., New York, 1990, Trans-
lated from the Russian, Reprint of the 1966 translation.
24. R. Z. Has'minskir, Stochastic stability of difJerential equations, Sijthoff & Noordhoff, Al-
phen aan den Rijn, 1980, Translated from the Russian by D. Louvish.
25. Morris W. Hirsch and Stephen Smale, Differentiai equations, dynam1.cal systems, and
linear algebra, Academic Press [A subsidiary of Harcourt Brace Jovanovich, Publishers],
New York-London, 1974, Pure and Applied Mathematics, Vol. 60.
26. Jean Jacod and Albert N. Shiryaev, Limit theorems for stochastic processes, Grundlehren
der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences],
vol. 288, Springer- Verlag, Berlin, 1987.
27. J. Keilson, M arkov chains models-rarity and exponentiality, Applied Mathematical
sciences, vol. 28, Springer Verlag, New York, 1979.
28. Frank P. Kelly, Reversibility and stochastic networks, John Wiley & Sons Ltd., Chichester,
1979, Wiley Series in Probability and Mathematical Statistics.
29. J. F. C. Kingman, Poisson processes, Oxford studies in probability, 1993.
30. L. Kleinrock, Queueing systems, John Wiley & Sons Ltd, New York, 1976.
31. M. R. Leadbetter, Georg Lindgren, and Holger Rootzén, Extremes and related properties
of random sequences and processes, Springer- Verlag, New York, 1983.
32. Torgny Lindvall, Lectures on the coupling method, Wiley Series in Probability and Ma-
thematical Statistics : Probabilityand Mathematical Statistics, John Wiley & Sons Inc.,
New York, 1992, A Wiley-Interscience Publication.
33. S. Meyn and R. Tweedie, Markov cha1.ns and stochastic stability, Communications and
control engineering series, Springer, 1993.
34. Jacques Neveu, Bases mathématiques du calcul des probabilités, Masson et Cie, Éditeurs,
Paris, 1970, Préface de R. Fortet. Deuxième édition, revue et corrigée.
35. , Martingales à temps discret, Masson et Cie, éditeurs, Paris, 1972.
36. , Processus ponctuels, École d'Été de Probabilités de Saint-Flour (P.-L. Hennequin,
ed.), Lecture Notes in Math., vol. 598, Springer- Verlag, Berlin, 1977, pp. 249-445.
37. G. F. Newell, The M/M/oo serv1.ce system with ranked servers 1.n heavy traffic, Lecture
Notes in Economics and Mathematical Systems, vol. 231, Springer- Verlag, Berlin, 1984,
With a preface by Franz Ferschl.
38. J. R. Norris, Markov cha1.ns, Cambridge University Press, Cambridge, 1998, Reprint of
1997 original.
39. Esa Nummelin, General irreducible M arkov chains and nonnegative operators, Cambridge
University Press, Cambridge, 1984.
40. William Parry, Topics in ergodic theory, Cambridge Tracts in Mathematics, vol. 75, Cam-
bridge University Press, Cambridge, 1981.
41. Robert R. Phelps, Lectures on Choquet's theorem, D. Van Nostrand Co., Inc., Princeton,
N.J .-Toronto, Ont.-London, 1966.
42. Daniel Revuz and Marc Yor, Continuous martingales and Brownian motion, second ed.,
Springer- Verlag, Berlin, 1994.
43. L. C. G. Rogers and David Williams, Diffusions, Markov processes, and mart1.ngales. Vol.
2 : Itô calculus, John Wiley & Sons Inc., New York, 1987.
BIBLIOGRAPHIE
359
44. , Diffusions, Markov processes, and martingales. Vol. 1 : Foundations, second ed.,
John Wiley & Sons Ltd., Chichester, 1994.
45. Walter Rudin, Real and complex analysis, third ed., McGraw-Hill Book Co., New York,
1987.
46. , Punctional analysis, second ed., International Series in Pure and Applied Mathe-
matics, McGraw-Hill Inc., New York, 1991.
47. Richard F. Serfozo, Point processes, Stochastic models, North-Holland, Amsterdam, 1990,
pp. 1-93.
48. A. Shwartz and A. Weiss, Large deviations for performance analysis, Stochastic Modeling
Series, Chapman & Hall, London, 1995.
49. Ya. G. SinaI, Introduction to ergodic theory, Princeton University Press, Princeton, N.J.,
1976, Translated by V. Scheffer, Mathematical Notes, 18.
50. Charles Stein, Approximate computation of expectations, Institute of Mathematical Sta-
tistics, Hayward, Calif., 1986.
51. L. Takàcs, Introduction to the theory of queues, Oxford University Press, New York, 1962.
52. Jean Walrand, Queueing networks, Prentice-Hall, 1988.
53. E. T. Whittaker and G. N. Watson, A course of modern analys s, Cambridge Mathema-
tical Library, Cambridge University Press, Cambridge, 1996, Reprint of the fourth (1927)
edition.
54. Peter Whittle, Systems n stochast c equilibrium, John Wiley & Sons Ltd., Chichester,
1986.
55. David Williams, Probability with martingales, Cambridge University Press, Cambridge,
1991.
Table des figures
1 Le processus de dépassement de la valeur a 20
1 Les suites (W n) et (Sn) interpolées 43
2 Décomposition du maximum de la marche aléatoire 47
3 Les fonctions 91), et 91, le cas p < 1. 49
4 Le contour de D K 54
5 Décomposition de la marche aléatoire arrêtée à G 56
1 La fonction y -t E(exp(yX 1 )) 61
2 Une trajectoire du processus (R(t)) 71
3 La marche aléatoire conditionnée à dépasser a 76
1 Processus du nombre de clients d'une file d'attente MI MI 1 84
2 Files en tandem. 84
3 Réseau en arbre. 85
4 Routes dans un réseau avec perte. 87
5 Un réseau de Jackson 90
6 Réseau de files d'attente avec des routes fixes. 97
1 Une trajectoire du processus (L(t)) dans le cas À > J-L 109
2 Simulation d'une période d'occupation haute 117
3 La suite des excursions de (L(t)) au voisinage de a 119
4 Le processus renormalisé (L(t)) et les fluctuations de (LN(t)) 123
5 La fonction a -t H(x, a), pour x > 0 130
1 Les trois régimes de la file MI MIN lN 159
2 La distribution de J1.TN - (logN)/2 quand p = 1. 165
1 La file d'attente GIMlk 199
1 Files en tandem : une trajectoire limite 207
2 Trajectoires limites d'un processus de sauts sur Z x N 209
362 TABLE DES FIGURES
3 Limite fluide d'un processus de sauts dans 236
1 Le processus ponctuel des arrivées de clients. 270
1 La file d'attente FIFO 296
2 Couplage du temps d'attente de la file GIGl1 299
3 Charge de la file d'attente 302
4 Période d'occupation de la file à un serveur 307
1 La fonction x -t 1/ V2ex - sUPn{x n exp( -x)/n!} 331
Index
Balance locale (Équations), 88
Bessel (Fonction), 135
Biaisée, Marche aléatoire - , 60, 63
Boules (Lancer de - dans des urnes), 329
Brandt, Andreas, 312
Burke (Théorème), 83
Burman, David Y., 182
Collectionneur de coupons, 330
Conditionnement
d'un processus de Markov, 344
d'une chaîne de Markov, 77
d'une marche aléatoire, 75
de la file M/M/1, 109, 117
Conditionnement en 0
d'un processus de Poisson, 18
d'un processus ponctuel stationnaire, 280,
292
Conservative (Discipline), 173, 307
Convergence
Critère de - d'une suite de processus,
355
d'une suite de probabilités, 353
en loi de processus ponctuels, 9
vers une loi de Poisson, 10, 120
Couplage, 327
d'un processus de renouvellement, 29
de la file M/M/1, 111
fort de la file G/G/1, 298
monotone, 329
Critique (File d'attente), p = 1, 36
Croissant Processus - d'une martingale lo-
cale, 336
Cycle d'occupation de la file GI /GI /1, 43
Absorption d'une limite fluide, 229
Adapté (Processus), 335
Aldous, David J., 22, 150, 158
ALOHA (Protocole), 198
Alterné (Processus de renouvellement -),
283
Ambrose-Kakutani (Théorème), 263
Arrêt (Temps), 333, 335
Arrêt (Théorème) d'- pour les martingales,
334
Arrivées (Loi des) avant et après 0 d'un
processus ponctuel stationnaire, 281
Atteinte (Temps)
Densité pour la file M/M/1, 135
File M/M/1, 107, 116
File M/M/oo, 146, 148
Moments, 187
Attente (Temps), 296
Automorphisme, 248
càdlàg, Processus -, 341
Cameron-Martin (Formule), 64
Capacité (File d'attente à - limitée), 158
Central limite pour un graphe aléatoire,
326
Chaîne de Markov
Ergodicité, 187
induite, 184
Non-récurrence, 189
Transience, 191, 192
Changement de probabilité, 61
Charge d'une file d'attente, xi, 302
Chen, Louis Y., 317
Chihara, 143
Classe (Réseau multi-classe), 95
Daley, Daryl J., 306
Débordement (Temps), 160
Décomposition
du maximum d'une marche aléatoire, 45
du temps d'attente
de G/M/1, 50
de GI /GI /1,45
de M/G/1, 53
Départs (Processus)
d'un réseau
de Jackson, 92
multi-classe, 99
de la file
G/G/1, 305
M/M/1, 83
Déterministe (Processus), 28, 283
364
Diffuses (Mesures de Radon), 9
Dirac (Mesure de -), 8
Discipline de service
Prioritaire, xi, 307
Processor S haring, xi
Conservative, 173, 307
FIFO, xi
LIFO, xi, 307
Distance à l'équilibre
de la file M/M/1, 111
Dobrushin, Roland L'vovitch
(llo6pyutuH, PO.ltaHO JIb808Uttt), 17
Donsker (Théorème), 36, 71
Doob (Inégalité), 334
Doob, Joseph L., 185
Dynamique (Système), 247, 259, 275
Échange (Formule), 289
Effacement
d'un processus de Poisson, 17
d'un processus ponctuel stationnaire, 286
Égalitaire (Discipline), xi
Endomorphisme, 247
induit, 249
Équation de Stein, 317
Équation différentielle de la file M / M /00,
139
Équations de balance locale, 88
Équilibre
Équations d '-, 80, 346
Point d'- d'une équation différentielle,
201
Distance à l'-
de la file M/M/1, 111
Ergodicité
Critère d'-
pour un processus de Markov, 196
pour une chaîne de Markov, 187
Critère d'- et limite fluide, 228
d'un processus de renouvellement sta-
tionnaire, 267
et irréductibilité d'une chaîne de Mar-
kov, 267
Ergodique
Décomposition, 256
Endomorphisme, 252
Propriété d'extrémalité, 257
Représentation intégrale, 258
Théorème -
dans Lp, 255
ponctuel, 254
pour les flots, 260
Translation sur le tore, 253
Excursion
d'une marche aléatoire, 57
INDEX
de la file M/M/1, 120
Explosion d'un processus de Markov, 342
Exponentielle (Loi)
Convergence vers -, 116, 149
Exponentielle (Martingale)
File M/M/1, 104
File M/M/oo, 142
Marche aléatoire, 61
Mouvement brownien, 64
Exponentielle (Queue de distribution)
Maximum d'une période d'occupation,
68
Temps d'attente
de GI /GI /1,64
de M/G/1 et G/M/1, 67
Facteurs de la représentation de Wiener-
Hopf, 40, 58
Factorisation de Wiener-Hopf, 37
Feller, William, 37
FIFO (File d'attente), xi
Flot, 259
sous une fonction, 262
Fluide
Absorption d'une limite -, 229
Ergodicité et limite -, 228
Fluide (Limite), 205
Foster (Critère), 188
Frontière (Problème de la - pour les grandes
déviations), 128
Gamma (Fonction), 149, 166
Garsia, Adriano M., 254
Générateur infinitésimal, 342
G/G/1, 295
Convergence en variation totale, 298
Instabilité, 309
N ombre de clients, 300
Propriété de cou plage fort, 298
Relation entre temps d'attente et nombre
de clients, 301
Temps d'attente, 296
Temps d'attente stationnaire, 298
G/G/2, 310
Instabilité, 311
Solution
maximale, 312
minimale, 310
GI/GI/1
Cas p = 1, 36
Formule de Takàcs, 45
Loi du nombre de clients, 44
Loi stationnaire du temps d'attente, 41
Saturation, 70
Girsanov (Formule), 61
G/M/1
Loi stationnaire
de la charge, 50
du nombre de clients, 50
du temps d'attente, 49
Queue de distribution, 67
Représentation du temps d'attente, 50
G/M/1 (File d'attente), 46
G/M/k (Ergodicité), 199
Gordon-Newel (Réseau), 93
Équations de trafic, 94
Mesure invariante, 95
Grands nombres (Loi), 266
pour une chaîne de Markov, 268
Graphe aléatoire, 326
Greenwood, Priscilla E., 55
Gronwall (Lemme), 154, 169
Harmonique (Fonction), 185
en espace-temps, 106, 142, 145, 348
Harris ergodicité du temps d'attente, 34
Hermite (Polynômes), 143
H/G/1 (File d'attente), 53
Incluse (Chaîne), 346
Incluse (Méthode de la chaîne -), 176
Induit (Endomorphisme), 249
Induite (Chaîne de Markov), 184
Générateur infinitésimal, 342
Insensibilité (Propriété), 182
Intégrabilité uniforme, 333
Intensité
d'un processus de Poisson, 11
d'un processus ponctuel, 8
Invariant (Ensemble, Fonction), 252
Jackson (Réseau), 90, 212
Équations de trafic, 91
Limites fluides, 212
Mesure invariante, 92
Renormalisation, 221
Kac (Formule), 251
Keilson, Julian, 150
Kelly, Frank P., 79, 86, 152
Kendall (Notation de -), xii
Kennedy, Douglas P., 115
Kiefer, James E., 310
Kingman, John Frank Charles, 64, 70
Kolmogorov (Critère), 87
Kolmogorov Andreï Nikolaevitch
(KO.ltM,020p08 AHopeb , HU7\,O.ltae8u"t), 87
Lamperti, John, 191
Lancer de points sur IRP, 16
Laplace (Transformée)
INDEX
365
d'un processus de Poisson, 11
d'un processus ponctuel, 9
Latticielle (Distribution non -), 29
Le Cam (Inégalité), 322
Legendre (Formule de duplication), 166
Liapunov
Critère de stabilité, 201
Fonction, 188
Stabilité de -, 201
Liapunov, Alexandre Mikhaïlovitch
( JIRnYHo8, A.lte7\,CaHOp MUXaU.lt08u"t), 183
LIFO (File d'attente), xi
Limite fluide, 205
Équation différentielle, 216
M/M/oo, 210
Files en tandem, 207
Non unicité, 209
Lindley (Formule), 296
Lipschitz
Propriété de - d'une fonction, 244
Little (Formule), 301
Locale (Équations de balance), 88
Locale (Martingale), 335
Loi conditionnelle
d'un processus de Markov, 344
d'une marche aléatoire, 75, 77
de la file M/M/1, 109, 117
Loynes, R.M., 296
Mélange (Propriété de - pour un endomor-
phisme markovien), 265
Marche aléatoire
Markov forte, 37
Maximum, 34
Section montante, 324
Markov forte (Propriété)
d'un processus de Poisson, 22
d'un processus de sauts, 342
d'une marche aléatoire, 37
Markovien (Endomorphisme), 264
Martingale, 334
à temps continu, 335
arrêtée, 334
d'un processus de Poisson, 24
de la file M/M/oo, 142
exponentielle
d'un processus réfléchi, 115
d'une marche aléatoire, 61
de la file M / M /1, 104
du mouvement brownien, 64
locale, 335
Problème de - (solution), 348
Maximale, Solution - de la file G/G/2, 312
Maximum
d'une marche aléatoire, 34
366
du mouvement brownien avec dérive, 72
Loi du - d'une marche aléatoire, 41
Mecke (Formule), 278
Mélangeantes (Variables), 323
M/G/1
Ergodicité, 197
LIFO préemptif, 179
Chaîne incluse, 179
Loi stationnaire, 181
Loi stationnaire
de la charge, 52
de la durée de la période d'occupa-
tion, 175
du nombre de clients, 53
du temps d'attente, 51
Propriété de branchement, 174
Queue de distribution, 67
Représentation du temps d'attente, 53
M/G/1 (File d'attente), 46,174
M/G/oo, 178
Vitesse de convergence, 178
Minimale, Solution - de la file G/G/2, 310
M/M/1
Événements rares, 120
Comportement transient, 109
Grandes déviations, 132
Loi des temps d'atteinte, 107, 116
Martingale, 115
Processor sharing, 96
Processus des départs, 83
Théorème de la limite centrale, 121
Vitesse de convergence, 111
M/M/oo
Équation de Stein, 318
Événements rares, 150
Convergence des temps d'atteinte, 149
Limite fluide, 210
Loi des grands nombres, 153
Loi des temps d'atteinte, 146, 148
Martingale, 142
Théorème de la limite centrale, 155
M/M/K
FIFO, 95
LIFO, 96
M/M/N/N
Blocage (Asymptotique de la probabi-
lité de -), 163, 167
Temps d'atteinte, 164, 167
Monotone (Couplage), 329
Montante (Section - d'une suite marche
aléatoire), 324
Multi-classe (Réseau)
Mesure invariante, 96
von Neumann, John von, 256
INDEX
Neveu, Jacques, 37, 254, 270, 289
Nummelin, Esa, 183
Occupation
Cycle d'-, 43
Densité pour la file M/M/1, 135
Grandes périodes d '- de la file M / M /1,
117
Loi de la durée - pour la file M/G/1,
175
Loi du nombre de clients dans un cycle,
44
Période, 302
stationnaire, 306
Opérations sur les processus réversibles, 85
Ornstein-Ühlenbeck (Processus), 155, 166,
168
Orthogonaux (Polynômes) de Poisson-Charlier,
143
Palm
Espace, 271
Mesure, 279
Parking (Problème), 158
Permutation aléatoire, 328
Pitman, Jim, 55
Poincaré (Théorème de récurrence), 248
Points fixes d'une permutation aléatoire,
328
Poisson (Loi)
Distance à la loi de -, 322, 327
Majoration, 330
Poisson (Processus), 282
Poisson (Processus)
Conditionnement d'un - , 15
Construction d'un - , 14
Convergence vers -, 21, 120, 151
Image d'un - , 17
Loi des grands nombres, 124
Marquage d'un - , 16
Superposition de - , 14
Transformée de Laplace d'un -, 11
Poisson-Charlier (Polynômes), 143
Pollaczek-Khintchine (formule), 51
Ponctuelle (Mesure), 7
Préemptive (Discipline), xi
Prioritaire (File d'attente), xi, 212
Probabilité (Changement de -) , 61
Problème de martingale (solution), 348
Processor Sharing (File d'attente), xi
Processus de Markov
Ergodicité, 196
Processus de vie et de mort, 82, 346
Processus ponctuel de renouvellement, 25
Processus ponctuel stationnaire, 272
Produit (Formule)
Réseau de Gordon-Newel, 95
Réseau de Jackson, 92
Réseau de Kelly, 99
Réseau multi-classe, 99
Produit (Mesure invariante), 79
Quasi-Réversibilité, Propriété de, 88
Queue de distribution exponentielle
Maximum d'une période d'occupation,
68
Temps d'atteinte de M/M/1, 113
Temps d'attente
de GI /GI /1, 64
de M/G/1 et G/M/1, 67
Rares (Événements)
de la file M/M/1, 120
de la file M/M/oo, 150
Record d'une marche aléatoire, 39
Récurrence (Critère de non-), 189
Récurrente (Chaîne de Markov), 185
Réfléchi (Martingale d'un processus -),115
Réflexion Problème de - de Skorokhod, 238
Rejet (File d'attente avec -), xii
Relation entre
JP et n\ 277
deux processus ponctuels stationnaires,
289
les lois d'un observateur extérieur et d'un
client, 171
mesure invariante et processus renversé,
89
Problème de martingale et Processus de
Markov, 348
temps d'attente et nombre de clients, 44
Renormalisation
de la file
GI /GI /1, 70
M/M/1, 121
M/M/oo, 152
M/M/N/N, 158
des réseaux de Jackson, 221
Renouvellement
Couplage, 29
Processus ponctuel, 25, 282
Théorème, 29
Renversé (Processus), 80
d'un réseau de Jackson, 92
d'un réseau multi-classe, 98
Représentation
de la factorisation de Wiener-Hopf, 40
du temps d'attente
de G/M/1, 50
de GI /GI /1,45
INDEX
367
de M/G/1, 53
Représentation de Skorokhod, 354
Réseau
avec perte, 86
de Gordon-Newel, 93
de Jackson, 90, 212
multi-classe, 95
Résid uel (Service), xi
Réversibilité, 80
Critère, 82, 87
Quasi, 88
Réversible
Processus -, 81
Routage (Matrice), 91
Saturation de la file GI /GI /1, 73
Sauts (Matrice), 342
Séjour (Temps), 296
Semi-continuité (Propriété de), 134
Séparation (Distance), 350
Skorokhod
Problème de réflexion, 238
Continuité, 244
Représentation, 354
Théorème, 354
Topologie de -, 351
Skorokhod, Anatolii Vladimirovitch
( C'K:OPOXOO, A HamO./l,UÜ B./l,aOUM,Up08Uttt) ,
352
Sortie (Processus)
d'un réseau de Jackson, 92
de la file G /G /1, 305
de la file M/M/1, 83
Sous-martingale, 333
Spitzer (Lemme), 40
Stabilité de Liapunov, 201
Stationnaire
Suite -, 270
Un processus réversible est -, 82
Stationnaire (Processus ponctuel), 272
Arrivées (Loi des) avant et après 0, 281
Construction d'une tour, 277
Convergence vers, 273
de renouvellement, 25, 282
alterné, 283
Effacement, 286
Processus de renouvellement
alterné, 287
Relation entre les mesures de Palm, 289
Superposition, 288
Stein (Équation)
Inégalités, 320
Solution, 317
Stein, Charles, 317
Sur-harmonique (Fonction), 185
368
INDEX
Surmartingale, 333
Takàcs (Formule), 45, 50, 304
Takàcs, Lajos, 146, 148
Tandem (Files d'attente en -),83,84,207,
223
Temps d'attente stationnaire de la file G / G /1,
298
Temps virtuel d'attente, 302
Équation différentielle, 302
Tendue (Suite - de probabilités), 354
Totoki, Haruo, 263
Tour, 262
Trafic (Équations)
Réseau de Gordon-Newel, 94
Réseau de Jackson, 91
Transience
Critère, 191
de divergence, 192
du temps d'attente, 34
Transient (Comportement) de la file M/M/1,
109
Translation
d'un processus de Poisson, 17
d'une mesure ponctuelle, 272
sur le tore, 253
Intégrabilité uniforme, 333
Urne (Lancer de boules), 329
Vacances
Loi de la durée des - de la file GI /GI /1,
43
Période, 302
Variation totale (Norme), 349
Processus de vie et de mort, 82, 346
Vitesse de convergence de la file
M/G/oo, 178
M/M/1, 111
Wald (Formule), 60
Wiener-Hopf
Facteurs de la représentation de -, 40
Factorisation de -, 37
Preuve probabiliste de la factorisation,
56
Wolfowitz, Jacob, 310