
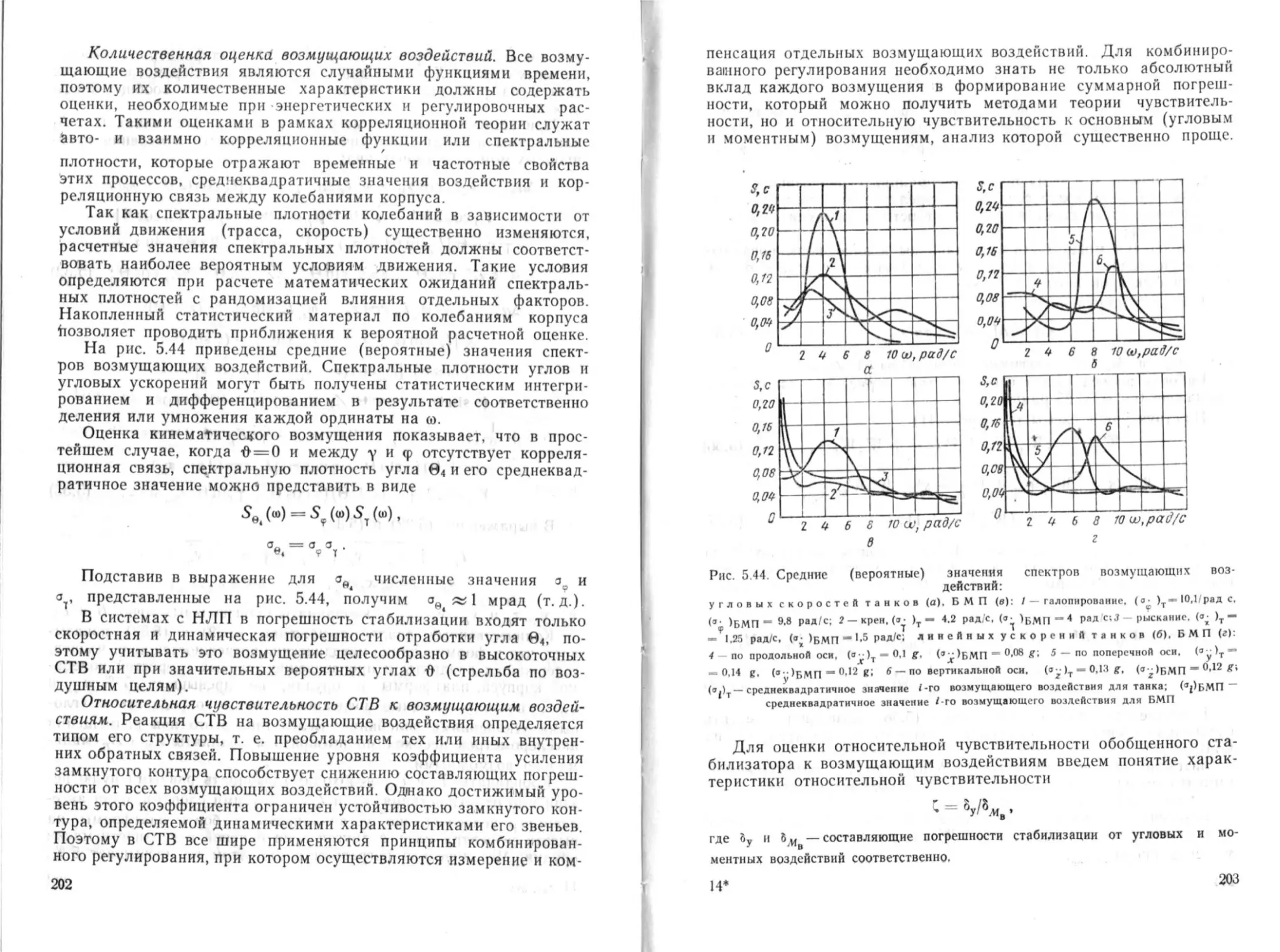

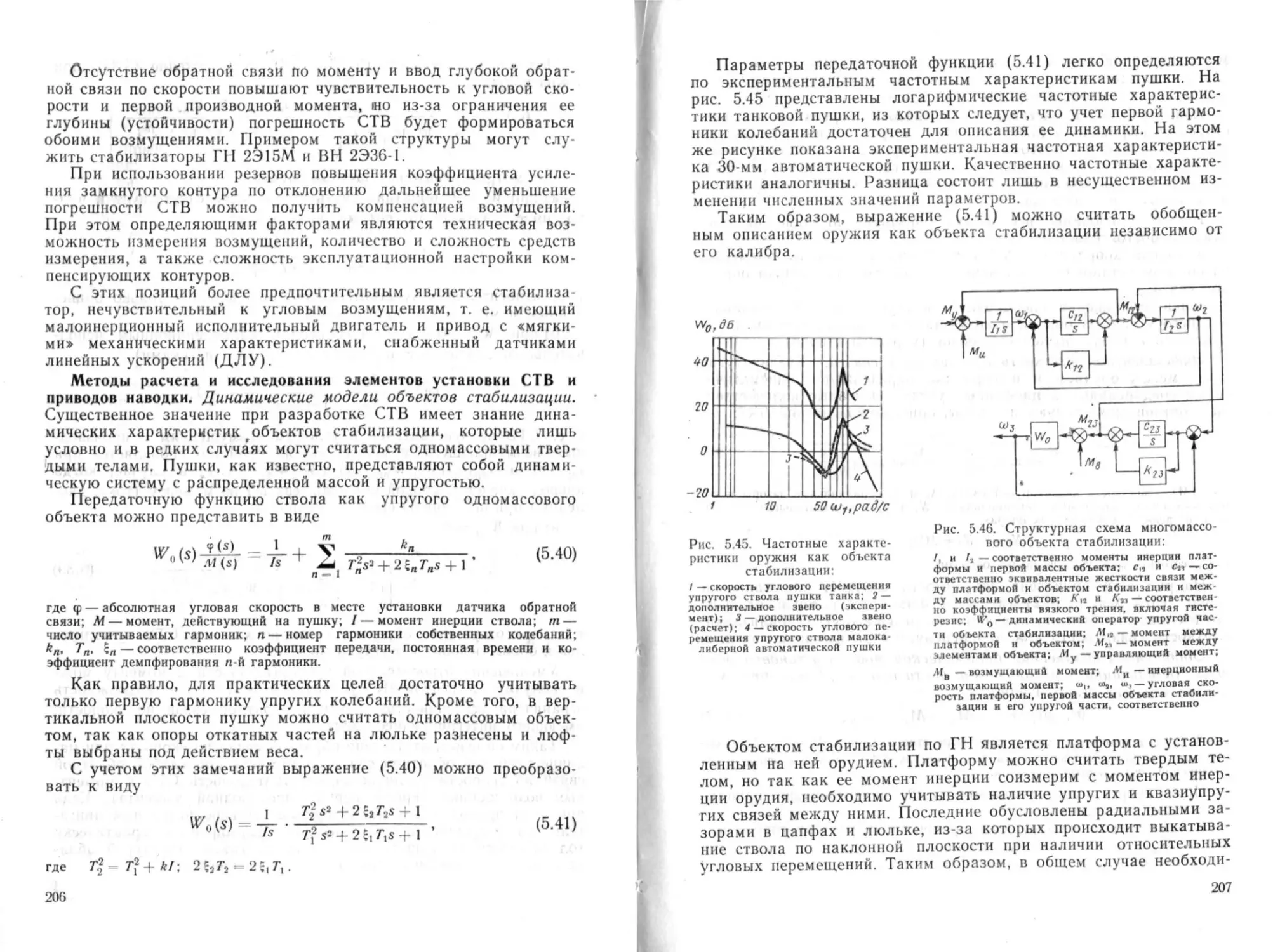
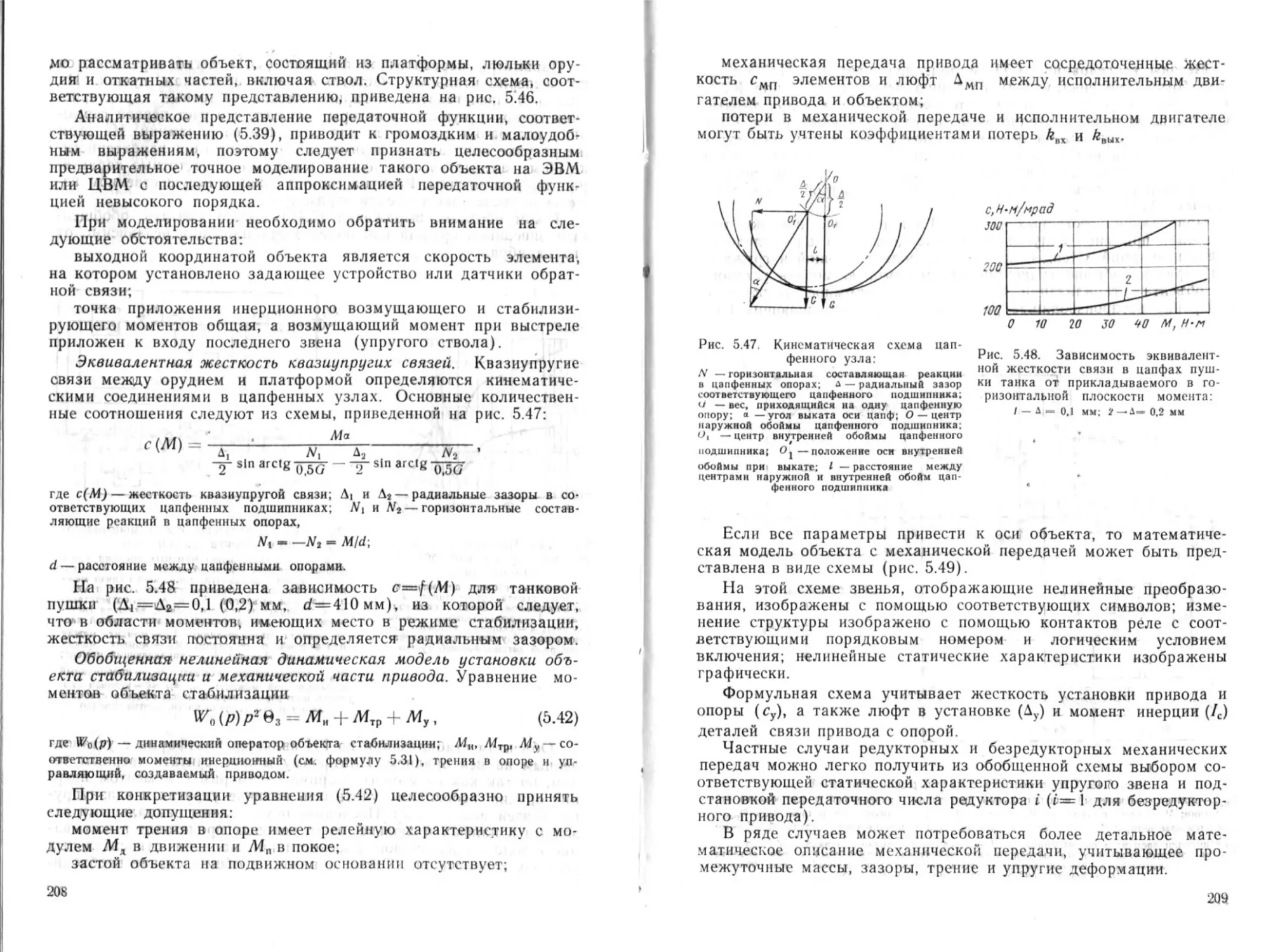
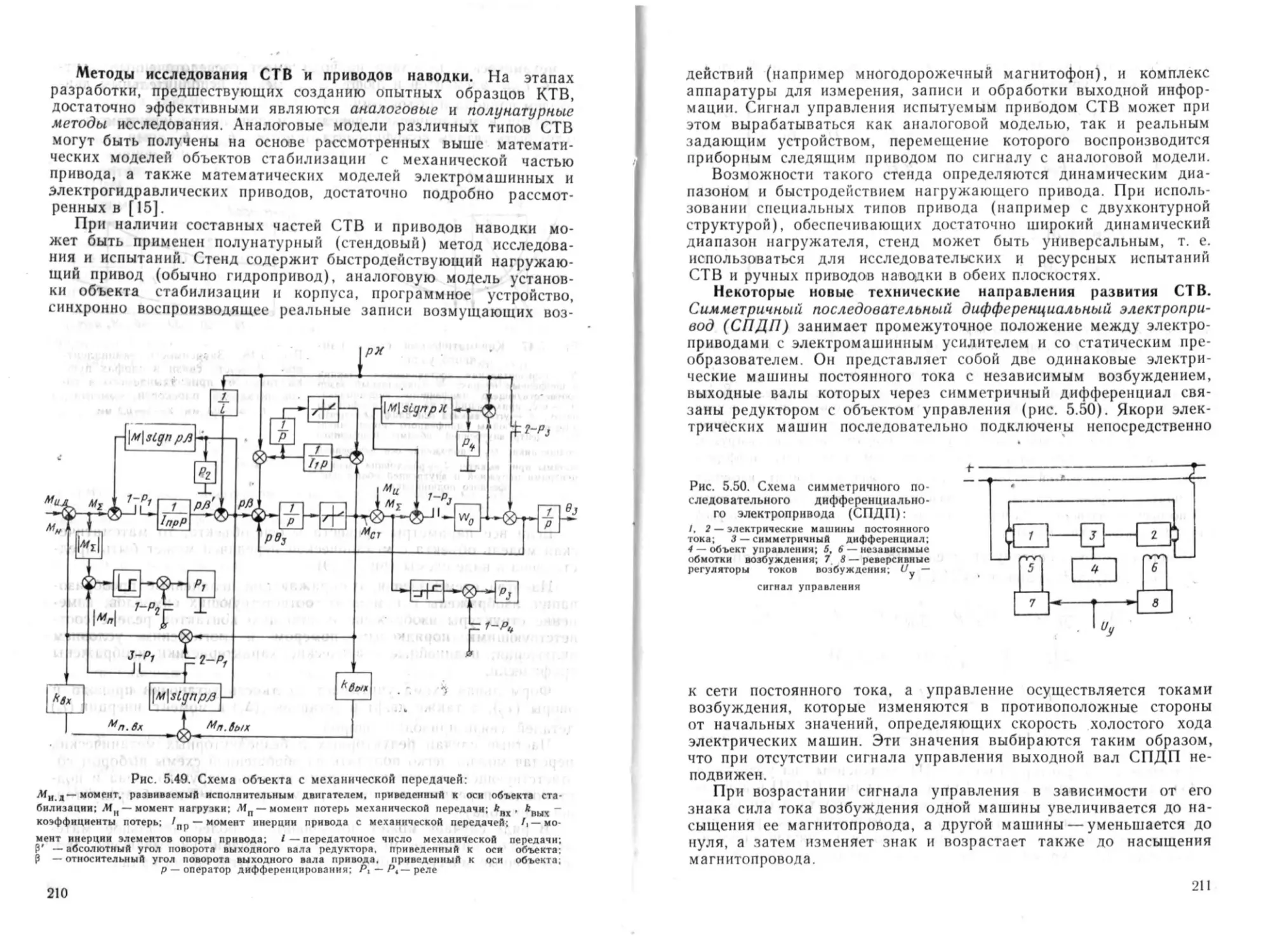

Автор: Исаков П.П.
Теги: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды инженерия военная техника военное дело инженерное дело издательство машиностроение серия теория и конструкция танка
Год: 1982




4. Л& 15412 т. л
\
СПЗЦЭТДЁЛ
ИНЗ. Ns
Теория л
и конструкция
I ГАН КА----
в дЕсятиротх’
1 Под ф&аакцией •
д-ра техн. * наук проф."' П : П/ ИСА КОВА
Том 2
ОСНОВЫ ПРОЕКТИРОВАНИЯ ВООРУЖЕНИЯ ТАНКА
Редактор тома канд. техн, наук Э. К. Потемкин
Москва «МАШИНОСТРОЕНИЕ» 1982
УДК 623.438.3.01 011
Теория и конструкция танка.— Т. 2 Основы проектирования
вооружения танка — М.: Машиностроение, 1982. 252 с.
В книге изложены основные принципы проектирования и уста-
новки оружия, а также системы управления огнем в танке. Сформу-
лированы основные требования, приведены методы расчета и
указаны пути развития составных частей комплекса танкового во-
оружения.
Книга предназначена для руководителей научно-исследователь-
ских и испытательных организаций оборонной промышленности
и Министерства обороны, конструкторов, научных работников, пре-
подавателей и учащихся военных академий, высших учебных заве
дений и военных училищ соответствующего профиля.
Ил. 116, табл, 16, список лит. 21.
В книге пронумеровано 252 страницы.
ПРЕДИСЛОВИЕ
Настоящая книга посвящена основным вопросам проектиро-
вания танкового оружия и системы управления огнем (СУО).
В ней изложены принципы формирования требований к комплек-
су танкового вооружения (КТВ) и его составным частям с учетом
их назначения и условий использования. Показаны возможные
технические решения, направленные на удовлетворение требова-
ний, выдвигаемых развитием танкового вооружения. Рассмотрены
вопросы устройства и установки в танке основных составных
частей КТВ (пушки, боеприпасов, автомата Лряжапия и СУО),
и дан анализ характера действия снарядов по танковым целям,
позволяющий выявить основные направления совершенствования
боеприпасов. • 5
Авторами 2-го тома являются Э. К. Потемкин, Ю. Д. Кара-
гин, Ю. К. Беззубиков, Е. М. Белецкий, В. П. Близгарев,
Л. Н. Борзикова, Б. И. Гинзбург, Г. Г. Голуб, В. В. Гришин,
О. А. Добисов, Н. И. Заморянский, Е. И. Затравив, Г. В. Иванов,
Н. А. Колонистов, Г. А. Кохан, В. В. Кошелев, Б. П. Лаврищев,
И. Е. Лайхтман, Н. А. Лукьянов, А. 3. Никольская, Р. И. Сверд-
лов, Л. В. Скарлато, В. Я. Соколов, А. А. Сушков, В. Е. Тютина.
Глава 1. ОСОБЕННОСТИ УСТРОЙСТВА
И УСТАНОВКИ СОСТАВНЫХ ЧАСТЕЙ
КОМПЛЕКСА ТАНКОВОГО ВООРУЖЕНИЯ
1.1. НАЗНАЧЕНИЕ И СОСТАВ КОМПЛЕКСА
ТАНКОВОГО ВООРУЖЕНИЯ
Огневая мощь является важнейшим боевым свойством танка,
тем>пы развития которого значительно опережают темпы развития
остальных свойств. Современный танк должен поражать против-
ника днем и ночью,, с ходу и с места на дальности не менее
2000—3000 м. При этом необходимо опередить противника в об-
наружении цели и открытии огня и иметь достаточно мощные
средства поражения различных целей.
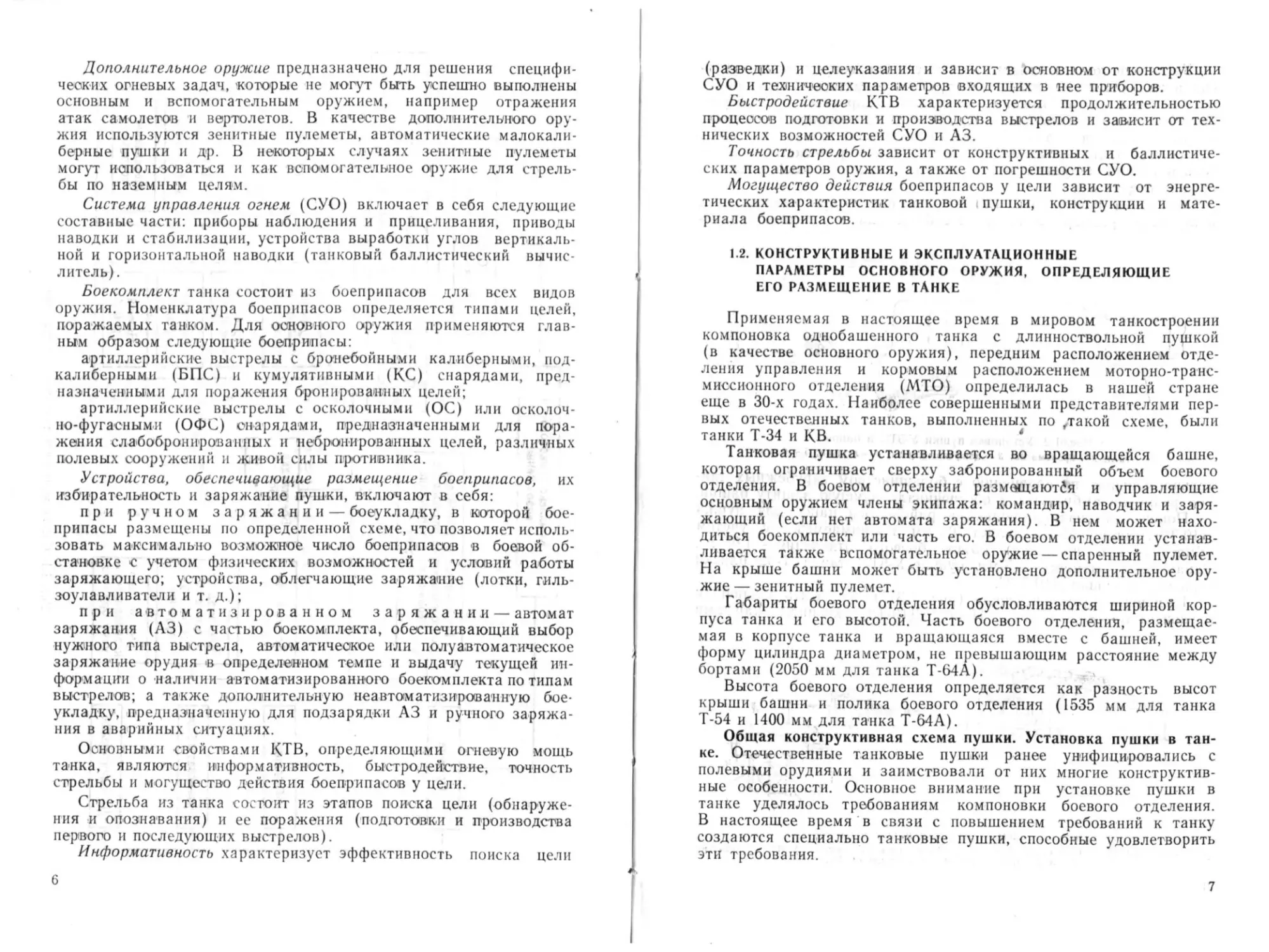
Комплекс танкового вооружения (рис. 1.1) включает в себя
оружие, систему управления огнем, боекомплект и устройства,
обеспечивающие размещение боеприпасов в танке и заряжание
оружия.
Многообразие требований, предъявляемых к танку, и широкая
номенклатура целей (как по степени опасности для танка, так и
по уровню их защищенности) привели к необходимости оснаще-
ния танка различными видами оружия.
В качестве основного оружия танка используется пушка, пред-
назначенная для поражения танков, самоходных артиллерийских
установок, боевых машин пехоты, артиллерии и пусковых уста-
новок ПТУРС, стартовых площадок для ракетного оружия, раз-
личных полевых сооружений (в том числе ДЗОТов, ДОТов
и бронеколпаков), скоплений живой силы и т. д. Основной вид
стрельбы из танковой пушки — стрельба прямой наводкой на все
дальности непосредственного видения целей. Применяется также
стрельба с закрытых позиций.
Вспомогательным оружием является, как правило, спаренный
пулемет (иногда спаренная автоматическая малокалиберная
пушка), предназначенный для уничтожения и подавления проти-
вотанковых средств ближнего боя (пехотные установки ПТУРС,
гранатометы, безоткатные орудия и др.), легкобронированных и
специальных машин, а также живой силы противника.
4
Рис. 1.1. Состав комплекса танкового вооружения
Дополнительное оружие предназначено для решения специфи-
ческих огневых задач, которые не .могут быть успешно выполнены
основным и вспомогательным оружием, например отражения
атак самолетов и вертолетов. В качестве дополнительного ору-
жия используются зенитные пулеметы, автоматические малокали-
берные пушки и др. В некоторых случаях зенитные пулеметы
могут использоваться и как вспомогательное оружие для стрель-
бы по наземным целям.
Система управления огнем (СУО) включает в себя следующие
составные части, приборы наблюдения и прицеливания, приводы
наводки и стабилизации, устройства выработки углов вертикаль-
ной и горизонтальной наводки (танковый баллистический вычис-
литель).
Боекомплект танка состоит из боеприпасов для всех видов
оружия. Номенклатура боеприпасов определяется типами целей,
поражаемых танком. Для основного оружия применяются глав-
ным образом следующие боеприпасы:
артиллерийские выстрелы с бронебойными калиберными, под-
калиберными (БПС) и кумулятивными (КС) снарядами, пред-
назначенными для поражения бронированных целей;
артиллерийские выстрелы с осколочными (ОС) или осколоч-
но-фугасными (ОФС) снарядами, предназначенными для пора-
жения слабобронированных и небронированных целей, различных
полевых сооружений и живой силы противника.
Устройства, обеспечивающие размещение боеприпасов, их
избирательность и заряжание пушки, включают в себя:
при ручном заряжании — боеукладку, в которой бое-
припасы размещены по определенной схеме, что позволяет исполь-
зовать максимально возможное число боеприпасов в боевой об-
становке с учетом физических возможностей и условий работы
заряжающего; устройства, облегчающие заряжание (лотки, гиль-
зоулавливатели и т. д.);
при автоматизированном з а р я ж а н и и — автомат
заряжания (АЗ) с частью боекомплекта, обеспечивающий выбор
нужного типа выстрела, автоматическое или полуавтоматическое
заряжание орудия в определенном темпе и выдачу текущей ин-
формации о наличии автоматизированного боекомплекта по типам
выстрелов; а также дополнительную неавтоматизированную бое-
укладку, предназначенную для подзарядки АЗ и ручного заряжа-
ния в аварийных ситуациях.
Основными свойствами КТВ, определяющими огневую мощь
танка, являются информативность, быстродействие, точность
стрельбы и могущество действия боеприпасов у цели.
Стрельба из танка состоит из этапов поиска цели (обнаруже-
ния и опознавания) и ее поражения (подготовки и производства
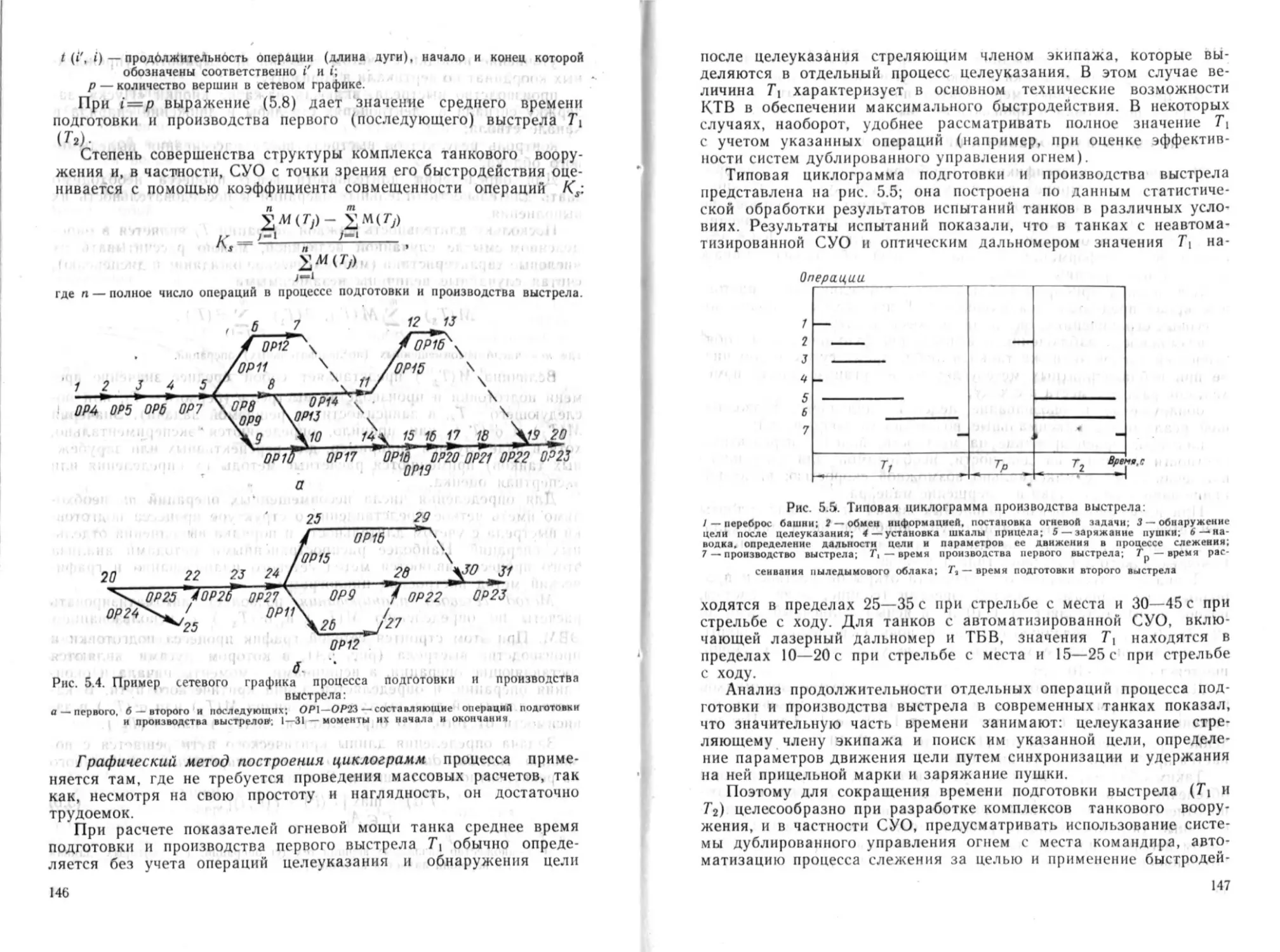
первого и последующих выстрелов).
Информативность характеризует эффективность поиска цели
6
(разведки) и целеуказания и зависит в основном от конструкции
СУО и технических параметров входящих в нее приборов.
Быстродействие КТВ характеризуется продолжительностью
процессов подготовки и производства выстрелов и за«ввсит от тех-
нических возможностей СУО и АЗ.
Точность стрельбы зависит от конструктивных и баллистиче-
ских параметров оружия, а также от погрешности СУО.
Могущество действия боеприпасов у цели зависит от энерге-
тических характеристик танковой пушки, конструкции и мате-
риала боеприпасов.
1.2. КОНСТРУКТИВНЫЕ И ЭКСПЛУАТАЦИОННЫЕ
ПАРАМЕТРЫ ОСНОВНОГО ОРУЖИЯ. ОПРЕДЕЛЯЮЩИЕ
ЕГО РАЗМЕЩЕНИЕ В ТАНКЕ
Применяемая в настоящее время в мировом танкостроении
компоновка однобашенного танка с длинноствольной пущкой
(в качестве основного оружия), передним расположением отде-
ления управления и кормовым расположением моторно-транс-
миссионного отделения (МТО) определилась в нашей стране
еще в 30-х годах. Наиболее совершенными представителями пер-
вых отечественных танков, выполненных по /такой схеме, были
танки Т-34 и КВ.
Танковая пушка устанавливается во вращающейся башне,
которая ограничивает сверху забронированный объем боевого
отделения. В боевом отделении размещаются и управляющие
основным оружием члены экипажа: командир, наводчик и заря-
жающий (если нет автомата заряжания). В нем может нахо-
диться боекомплект или часть его. В боевом отделении устанав-
ливается также вспомогательное оружие — спаренный пулемет.
На крыше башни может быть установлено дополнительное ору-
жие — зенитный пулемет.
Габариты боевого отделения обусловливаются шириной кор-
пуса танка и его высотой. Часть боевого отделения, размещае-
мая в корпусе танка и вращающаяся вместе с башней, имеет
форму цилиндра диаметром, не превышающим расстояние между
бортами (2050 мм для танка Т-64А).
Высота боевого отделения определяется как разность высот
крыши башни и поляка боевого отделения (1535 мм для танка
Т-54 и 1400 мм для танка Т-64А).
Общая конструктивная схема пушки. Установка пушки в тан-
ке. Отечественные танковые пушки ранее унифицировались с
полевыми орудиями и заимствовали от них многие конструктив-
ные особенности. Основное внимание при установке пушки в
танке уделялось требованиям компоновки боевого отделения.
В настоящее время в связи с повышением требований к танку
создаются специально танковые пушки, способные удовлетворить
эти требования.
7
Главными конструктивными элементами современной танко-
вой пушки являются: ствол или труба с эжектором, казенником
и затвором с полуавтоматическим приводом; противооткатные уст-
ройства (тормоза и накатники); люлька с направляющими ствола
и приспособлениями для установки (крепления) пушки в танке.
Люлька цилиндрической формы с концентрическими относи-
тельно ствола направляющими занимает минимальный объем в
боевом отделении.
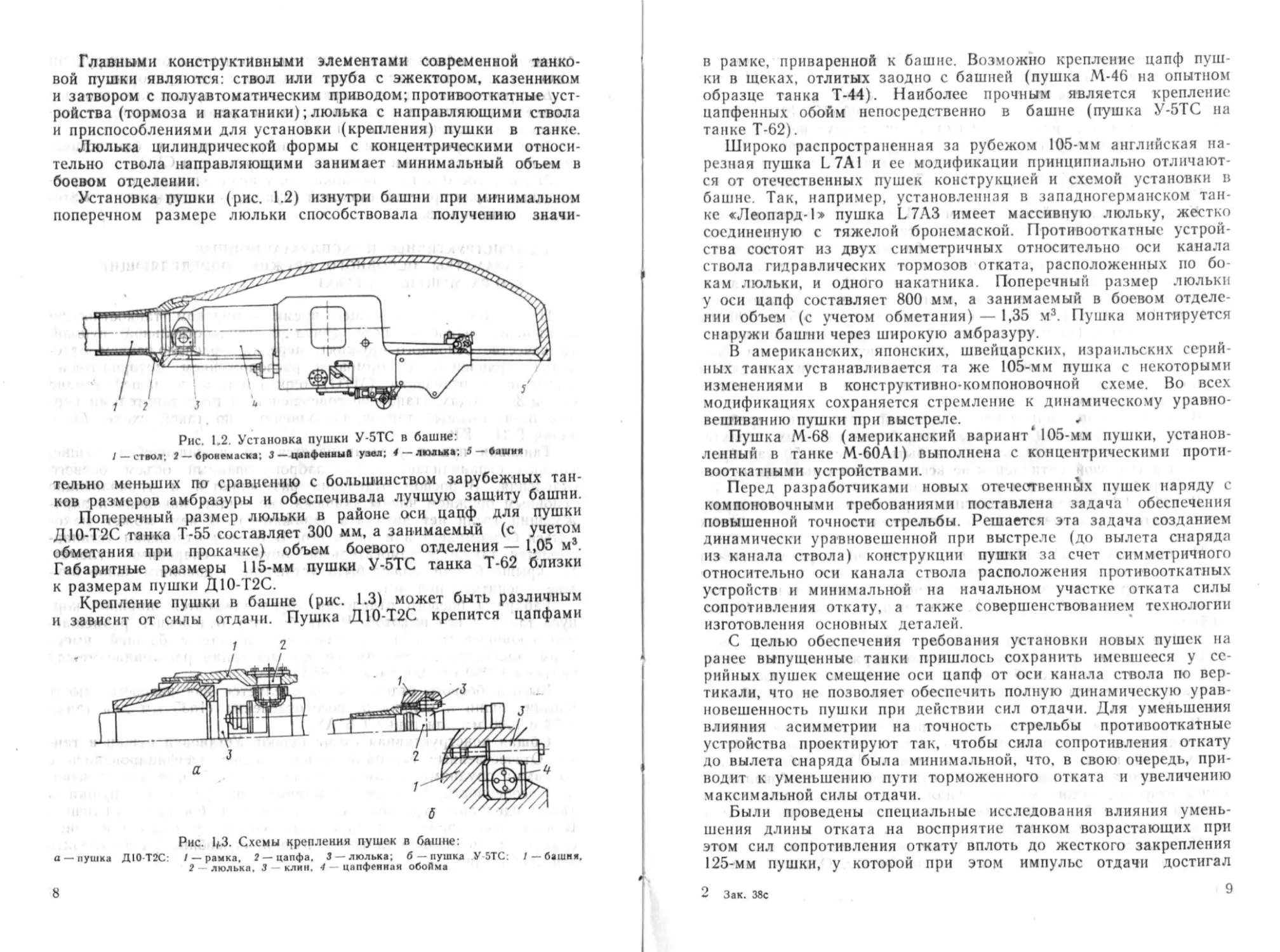
Установка пушки (рис. 1.2) изнутри башни при минимальном
поперечном размере люльки способствовала получению значи-
Рис. 1.2. Установка пушки У-5ТС в башне:
/-ствол, г — броиемаска; 3 — цапфенный узел; 4—лкмма; 5 —башня
тельно меньших по сравнению с большинством зарубежных тан-
ков размеров амбразуры и обеспечивала лучшую защиту башни.
Поперечный размер люльки в районе оси цапф для пушки
Д10-Т2С танка Т-55 составляет 300 мм, а занимаемый (с учетом
обметания при прокачке) объем боевого отделения—1,05 м3.
Габаритные размеры 115-мм пушки У-5ТС танка Т-62 близки
к размерам пушки Д10-Т2С.
Крепление пушки в башне (рис. 1.3) может быть различным
и зависит от силы отдачи. Пушка Д10-Т2С крепится цапфами
Рис. U3. Схемы крепления пушек в башне:
а — пушка Д10-Т2С: / — рамка. 2 —цапфа. 3— люлька; б — пушка У-5ТС: / — башня,
2 люлька. 3 клин. 4 цапфенная обойма
8
в рамке, приваренной к башне. Возможно крепление цапф пуш-
ки в щеках, отлитых заодно с башней (пушка М-46 на опытном
образце танка Т-44). Наиболее прочным является крепление,
цапфенных обойм непосредственно в башне (пушка У-5ТС на
танке Т-62).
Широко распространенная за рубежом 105-мм английская на-
резная пушка L7AI и ее модификации принципиально отличают-
ся от отечественных пушек конструкцией и схемой установки в
башне. Так, например, установленная в западногерманском тан-
ке «Леопард-1» пушка L7A3 имеет массивную люльку, жестко
соединенную с тяжелой бронемаской. Противооткатные устрой-
ства состоят из двух симметричных относительно оси канала
ствола гидравлических тормозов отката, расположенных по бо-
кам люльки, и одного накатника. Поперечный размер люльки
у оси цапф составляет 800 мм. а занимаемый в боевом отделе-
нии объем (с учетом обметания) — 1,35 м3. Пушка монтируется
снаружи башни через широкую амбразуру.
В американских, японских, швейцарских, израильских серий-
ных танках устанавливается та же 105-мм пушка с некоторыми
изменениями в конструктивно-компоновочной схеме. Во всех
модификациях сохраняется стремление к динамическому уравно-
вешиванию пушки при выстреле. t *
Пушка М-68 (американский вариант* 105-мм пушки, установ-
ленный в танке М-60А1) выполнена с концентрическими проти-
вооткатными устройствами.
Перед разработчиками новых отечественных пушек наряду с
компоновочными требованиями поставлена задача обеспечения
повышенной точности стрельбы. Решается эта задача созданием
динамически уравновешенной при выстреле (до вылета снаряда
из канала ствола) конструкции пушки за счет симметричного
относительно оси канала ствола расположения противооткатных
устройств и минимальной на начальном участке отката силы
сопротивления откату, а также совершенствованием технологии
изготовления основных деталей.
С целью обеспечения требования установки новых пушек на
ранее выпущенные танки пришлось сохранить имевшееся у се-
рийных пушек смещение оси цапф от оси канала ствола по вер-
тикали, что не позволяет обеспечить полную динамическую урав
новешенность пушки при действии сил отдачи. Для уменьшения
влияния асимметрии на точность стрельбы противооткатные
устройства проектируют так, чтобы сила сопротивления откату
до вылета снаряда была минимальной, что, в свою очередь, при-
водит к уменьшению пути торможенного отката и увеличению
максимальной силы отдачи.
Были проведены специальные исследования влияния умень-
шения длины отката на восприятие танком возрастающих при
этом сил сопротивления откату вплоть до жесткого закрепления
125-мм пушки, у которой при этом импульс отдачи достигал
Зак. 38с
9
28 кН с, а сила отдачи — 4 МН, и 152-мм пушки, у которой
импульс отдачи достигал 40 кН-с, а сила отдачи — 6 МН. Эти
исследования показали, что и при воздействии указанных им-
пульсов сил отдачи устойчивость танка массой 35—40 т обеспе-
чивается, однако с увеличением сил отдачи растут перегрузки на
экипаж и аппаратуру танка. Нагрузки на членов экипажа (води-
теля) достигают предельно допустимых значений согласно меди-
ко-техническим требованиям (МТТ—75) при силе отдачи около
2 МН.
Калибр артиллерийской системы. В целях повышения могу-
щества действия боеприпасов разработчики танковых пушек по-
следовательно увеличивали их калибр. Предельным калибром,
который рассматривался для использования в отечественных и
зарубежных танковых пушках, был калибр 152 мм, однако в ка-
честве основных были приняты пушки меньшего калибра — от
100 до 125 мм для отечественных танков и от 105 до 120 мм
для зарубежных. По мере увеличения калибра наряду с улучше-
нием энергетических параметров, увеличением могущества бое-
припасов, возрастают габаритно-массовые параметры пушки и
боеприпасов, увеличиваются сила отдачи и ее импульс, воздей-
ствующий на танк.
В соответствии с принятыми в полевой артиллерии требова-
ниями для достижения максимальных баллистических характе-
ристик длина ствола пушки должна быть не менее 50 калибров.
Однако в танковой артиллерии нс всегда удается выполнить ука-
занные требования, и в том числе по длине ствола.
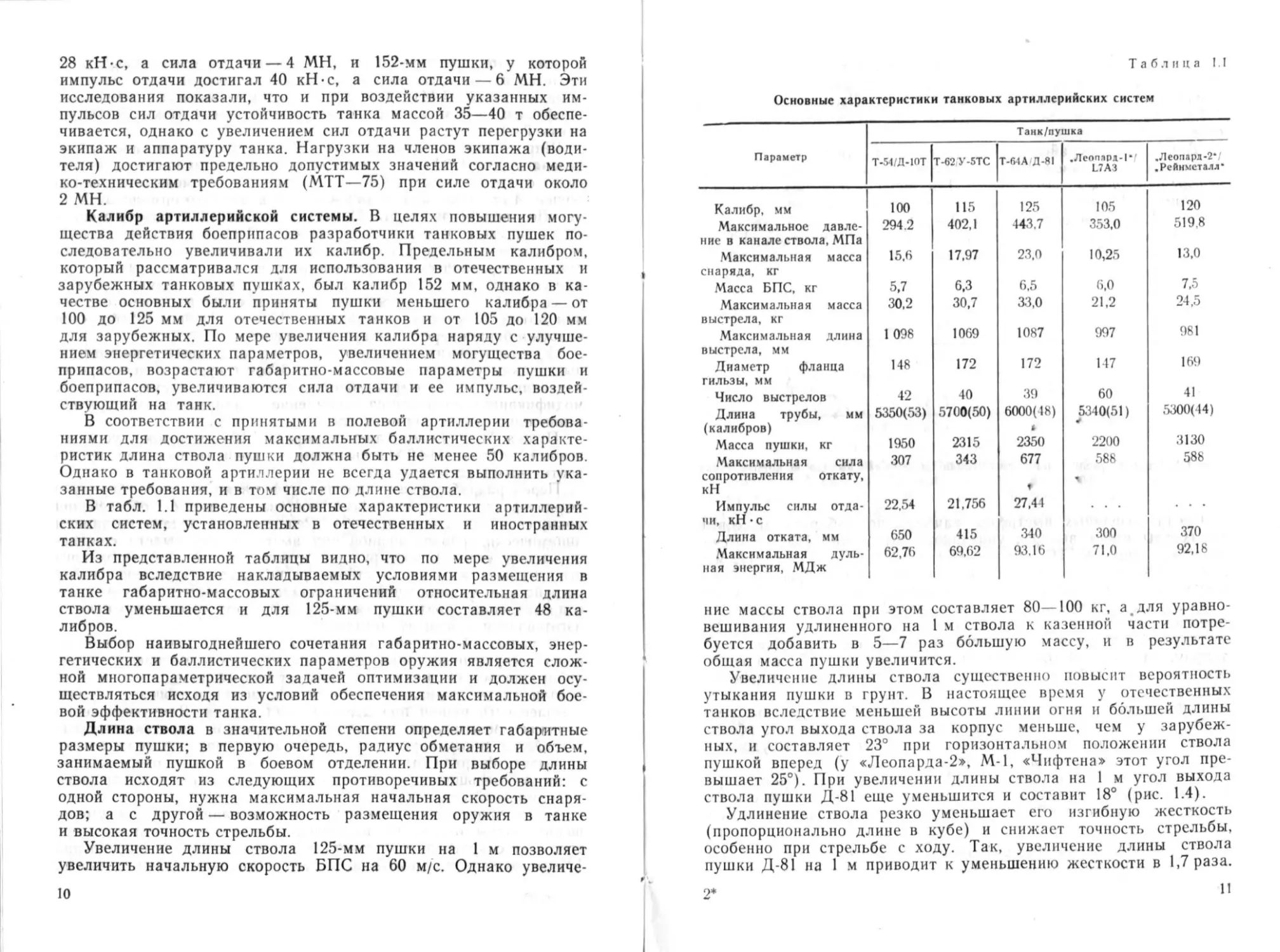
В табл. 1.1 приведены основные характеристики артиллерий-
ских систем, установленных в отечественных и иностранных
танках.
Из представленной таблицы видно, что по мере увеличения
калибра вследствие накладываемых условиями размещения в
танке габаритно-массовых ограничений относительная длина
ствола уменьшается и для 125-мм пушки составляет 48 ка-
либров.
Выбор наивыгоднейшего сочетания габаритно-массовых, энер-
гетических и баллистических параметров оружия является слож-
ной многопараметрической задачей оптимизации и должен осу-
ществляться исходя из условий обеспечения максимальной бое-
вой эффективности танка.
Длина ствола в значительной степени определяет габаритные
размеры пушки; в первую очередь, радиус обметания и объем,
занимаемый пушкой в боевом отделении. При выборе длины
ствола исходят из следующих противоречивых требований: с
одной стороны, нужна максимальная начальная скорость снаря-
дов; а с другой — возможность размещения оружия в танке
и высокая точность стрельбы.
Увеличение длины ствола 125-мм пушки на 1 м позволяет
увеличить начальную скорость БПС на 60 м/с. Однако увеличе-
10
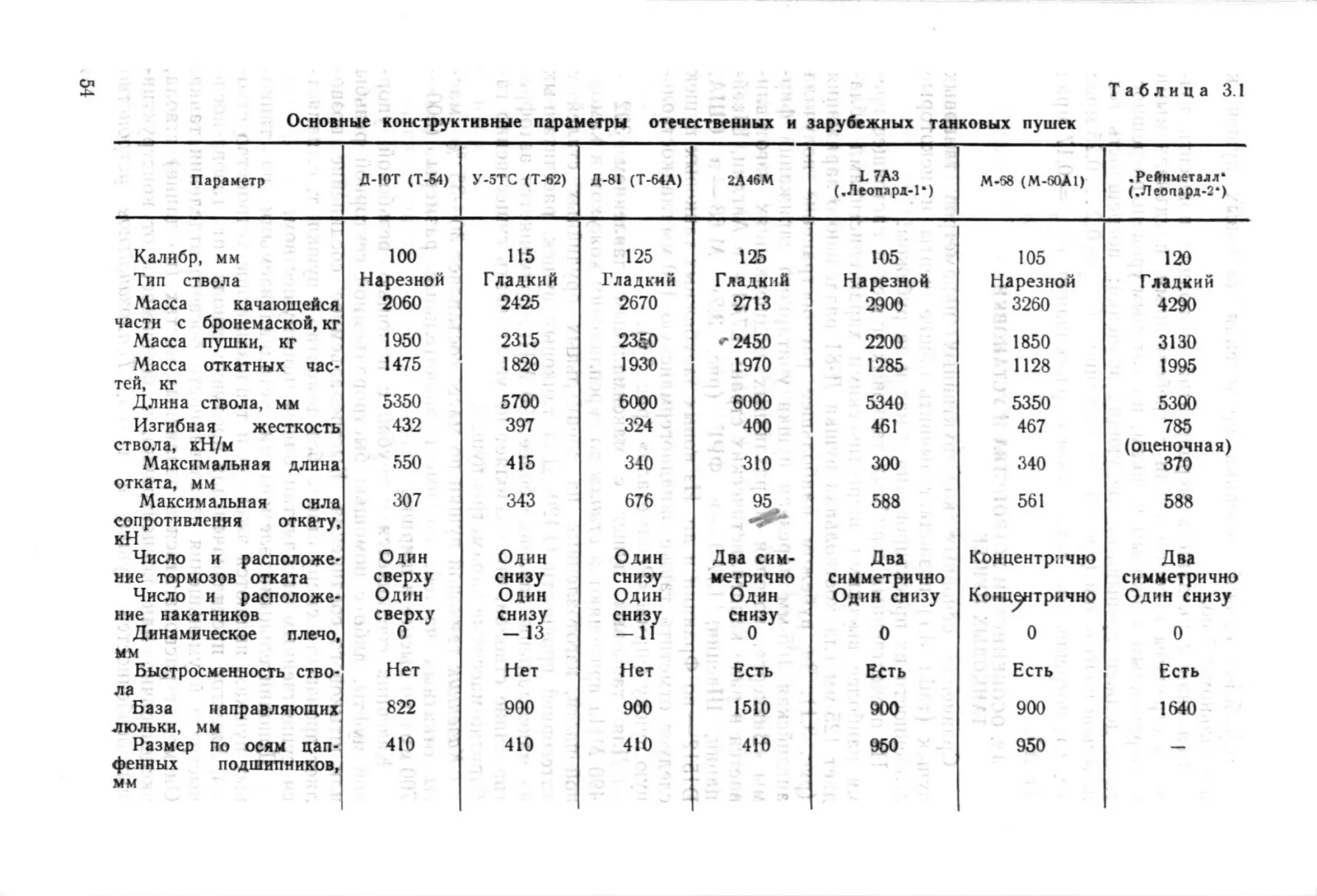
Таблица II
Основные характеристики танковых артиллерийских систем
Параметр Танк/пушка
Т-54/Д-ЮТ Т-62У-5ТС T-6IA Д-Я1 .Леопард-)'' L7A3 .Леопард -2' .Рсйнмсталл'
Калибр, мм 100 115 125 105 120
Максимальное давле- ние в канале ствола. МПа 294 2 402,1 443.7 353,0 519,8
Максимальная масса 15.6 17,97 23,0 10,25 13,0
снаряда, кг
Масса БПС, кг 5.7 6,3 6.5 6,0 7.5
Максимальная масса 30.2 30,7 33,0 21,2 24,5
выстрела, кг Максимальная длина выстрела, мм 1098 1069 1087 997 981
Диаметр фланца 148 172 172 147 169
гильзы, мм
Число выстрелов 42 10 39 60 41
Длина трубы, мм 5350(53) 5700(50) 6000(48) 5340(51) .5300(44)
(калибров)
Масса пушки, кг 1950 2315 2350 2200 3130
Максимальная сила 307 343 677 588 588
сопротивления откату, кН *
Импульс силы отда- чи, кН-с 22,54 21,7.56 27,44
Длина отката, мм 660 415 340 300 370
Максимальная дуль- ная энергия, МДж 62,76 69.62 93,16 71,0 92,18
нис массы ствола при этом составляет 80—100 кг, а .для уравно-
вешивания удлиненного на 1 м ствола к казенной части потре-
буется добавить в 5—7 раз большую массу, и в результате
обшая масса пушки увеличится.
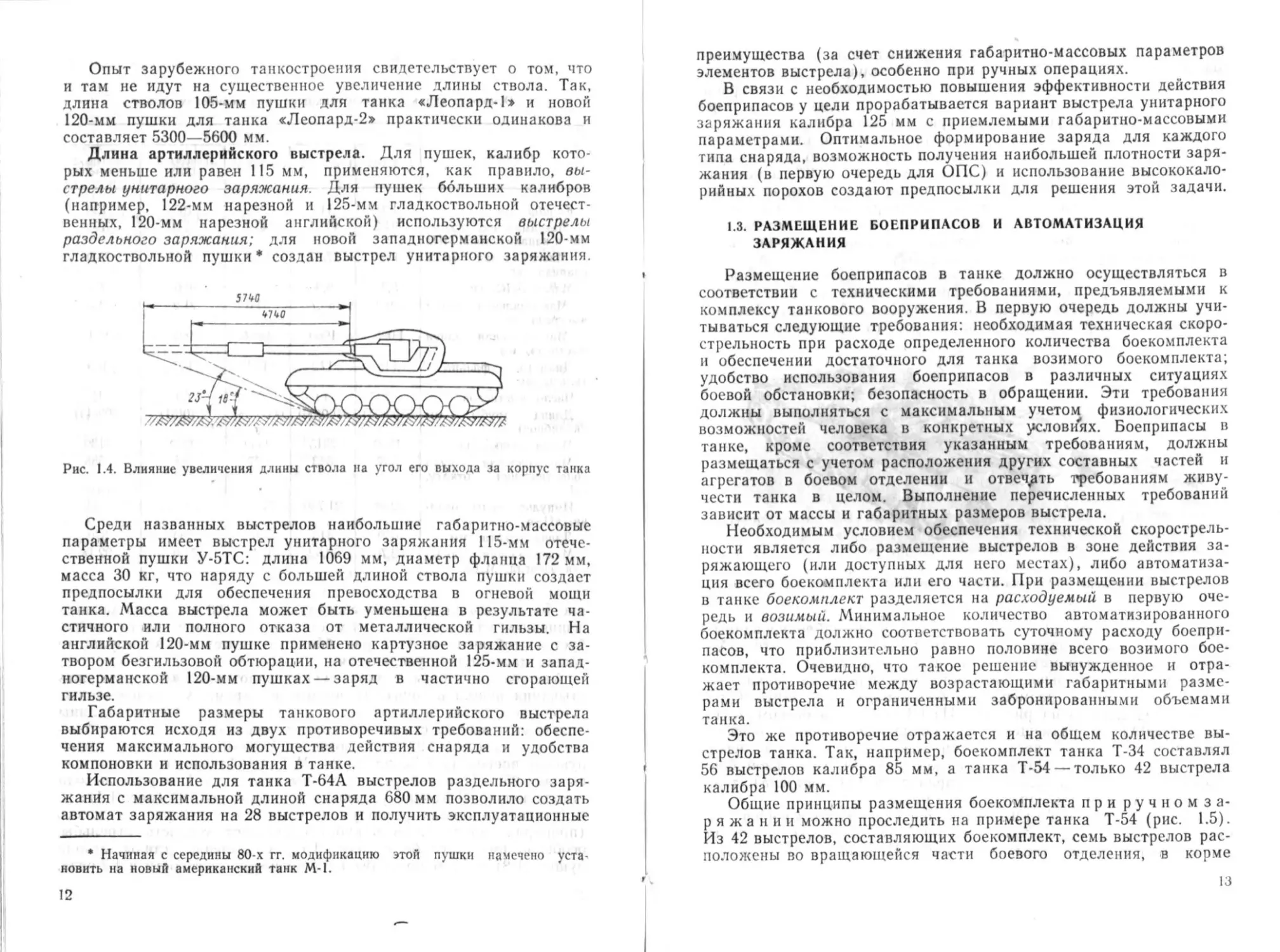
Увеличение длины ствола существенно повысит вероятность
утыкания пушки в грунт. В настоящее время у отечественных
танков вследствие меньшей высоты линии огня и большей длины
ствола угол выхода ствола за корпус меньше, чем у зарубеж-
ных, и составляет 23° при горизонтальном положении ствола
пушкой вперед (у «Леопарда-2», М-1, «Чифтена» этот угол пре-
вышает 25°). При увеличении длины ствола на 1 м угол выхода
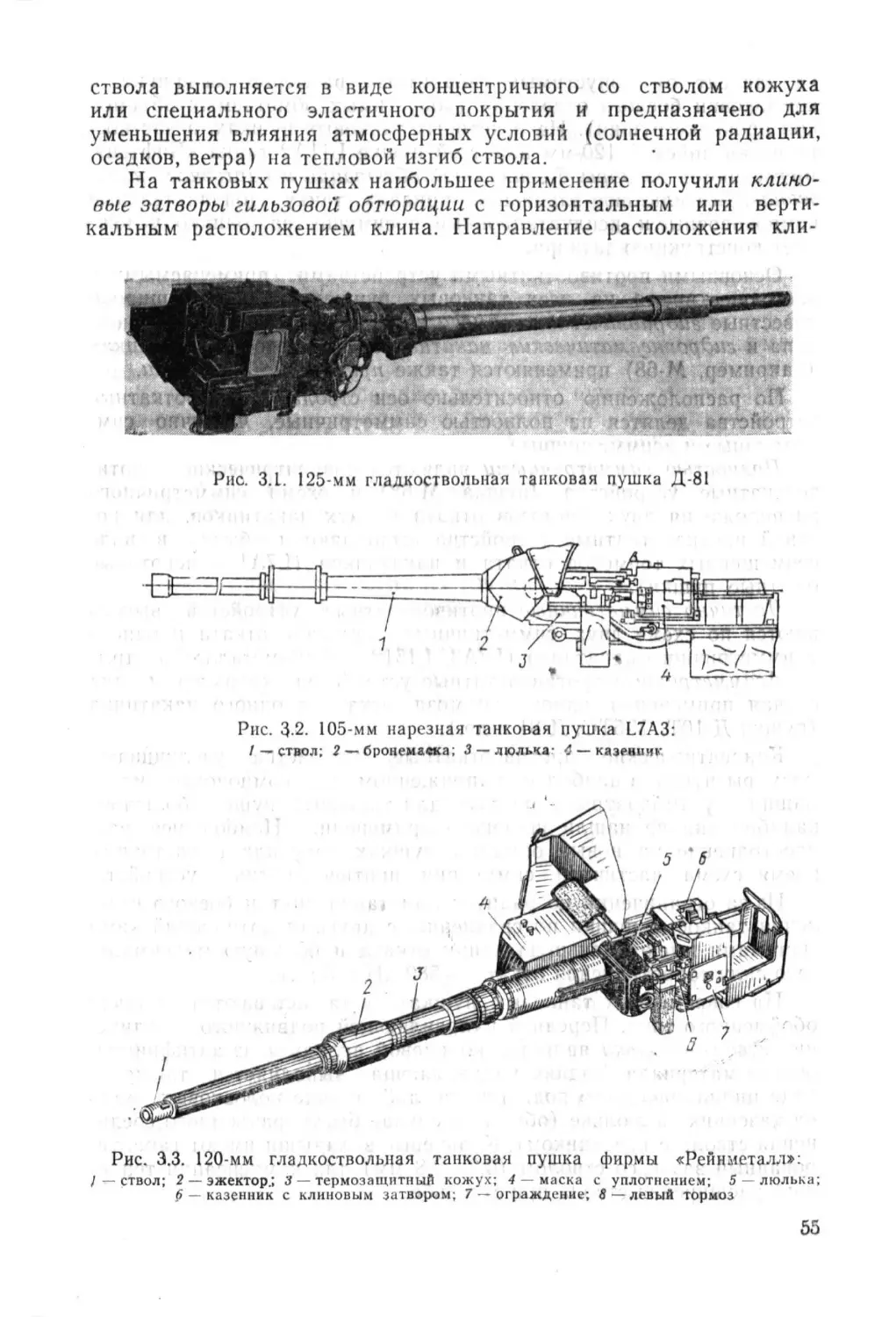
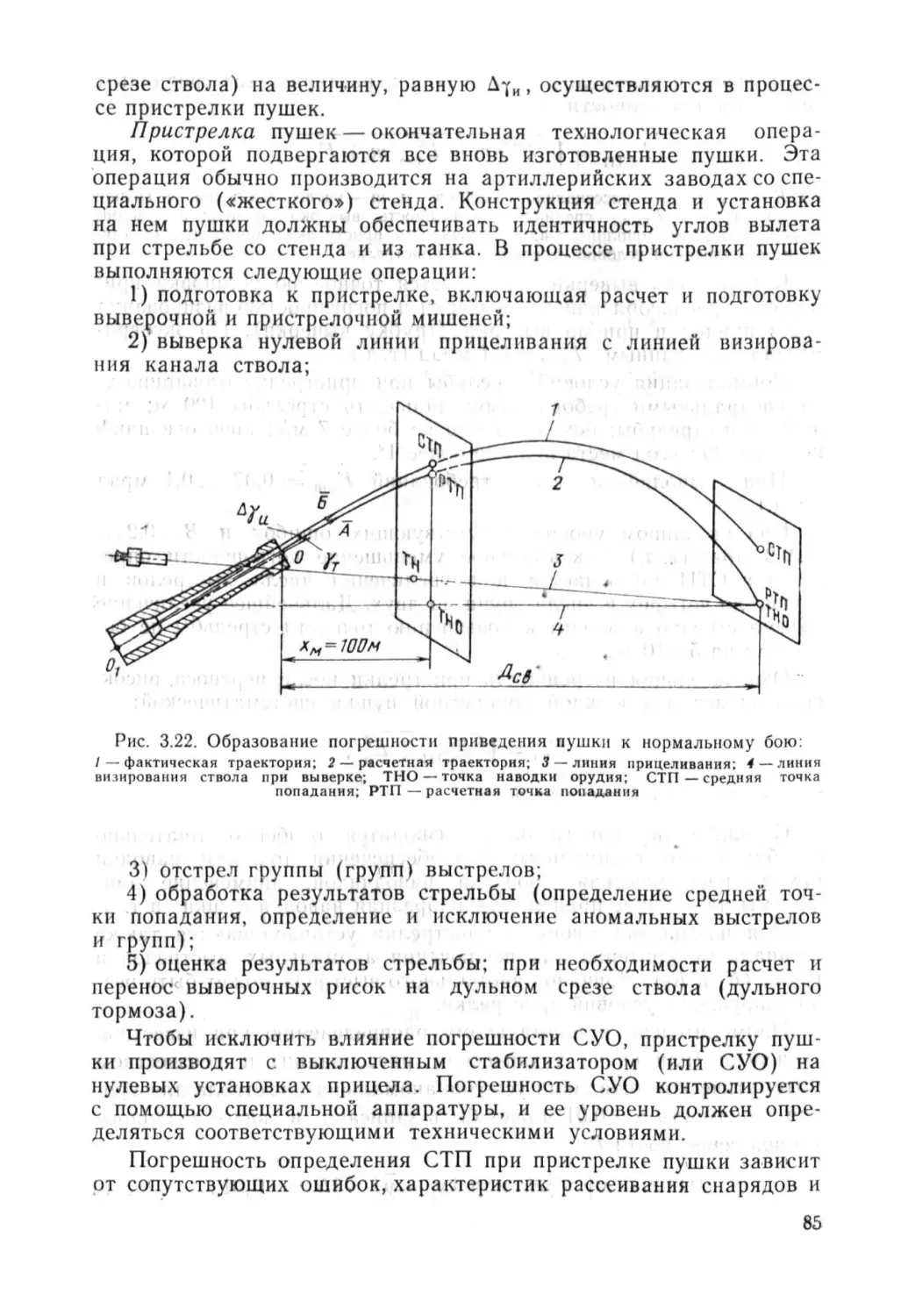
ствола пушки Д-81 еще уменьшится и составит 18° (рис. 1.4).
Удлинение ствола резко уменьшает его изгибную жесткость
(пропорционально длине в кубе) и снижает точность стрельбы,
особенно при стрельбе с ходу. Так, увеличение длины ствола
пушки Д-81 на 1 м приводит к уменьшению жесткости в 1,7 раза.
2* 11
Опыт зарубежного танкостроения свидетельствует о том, что
и там не идут на существенное увеличение длины ствола. Так,
длина стволов 105-мм пушки для танка «Леопард-1> и новой
120-мм пушки для танка «Лсопард-2» практически одинакова и
составляет 5300—5600 мм.
Длина артиллерийского выстрела. Для пушек, калибр кото-
рых меньше или равен 115 мм, применяются, как правило, вы-
стрелы унитарного заряжания. Для пушек больших калибров
(например, 122-мм нарезной и 125-мм гладкоствольной отечест-
венных, 120-мм нарезной английской) используются выстрелы
раздельного заряжания: для новой западногерманской 120-мм
гладкоствольной пушки* создан выстрел унитарного заряжания.
Рис. 1.4. Влияние увеличения длины ствола на угол его выхода за корпус танка
Среди названных выстрелов наибольшие габаритно-массовые
параметры имеет выстрел унитарного заряжания 115-мм отече-
ственной пушки У-5ТС: длина 1069 мм, диаметр фланца 172 мм,
масса 30 кг, что наряду с большей длиной ствола пушки создает
предпосылки для обеспечения превосходства в огневой мощи
танка. Масса выстрела может быть уменьшена в результате ча-
стичного или полного отказа от металлической гильзы. На
английской 120-мм пушке применено картузное заряжание с за-
твором безгильзовой обтюрации, на отечественной 125-мм и запад-
ногерманской 120-мм пушках —заряд в частично сгорающей
гильзе.
Габаритные размеры танкового артиллерийского выстрела
выбираются исходя из двух противоречивых требований: обеспе-
чения максимального могущества действия снаряда и удобства
компоновки и использования в танке.
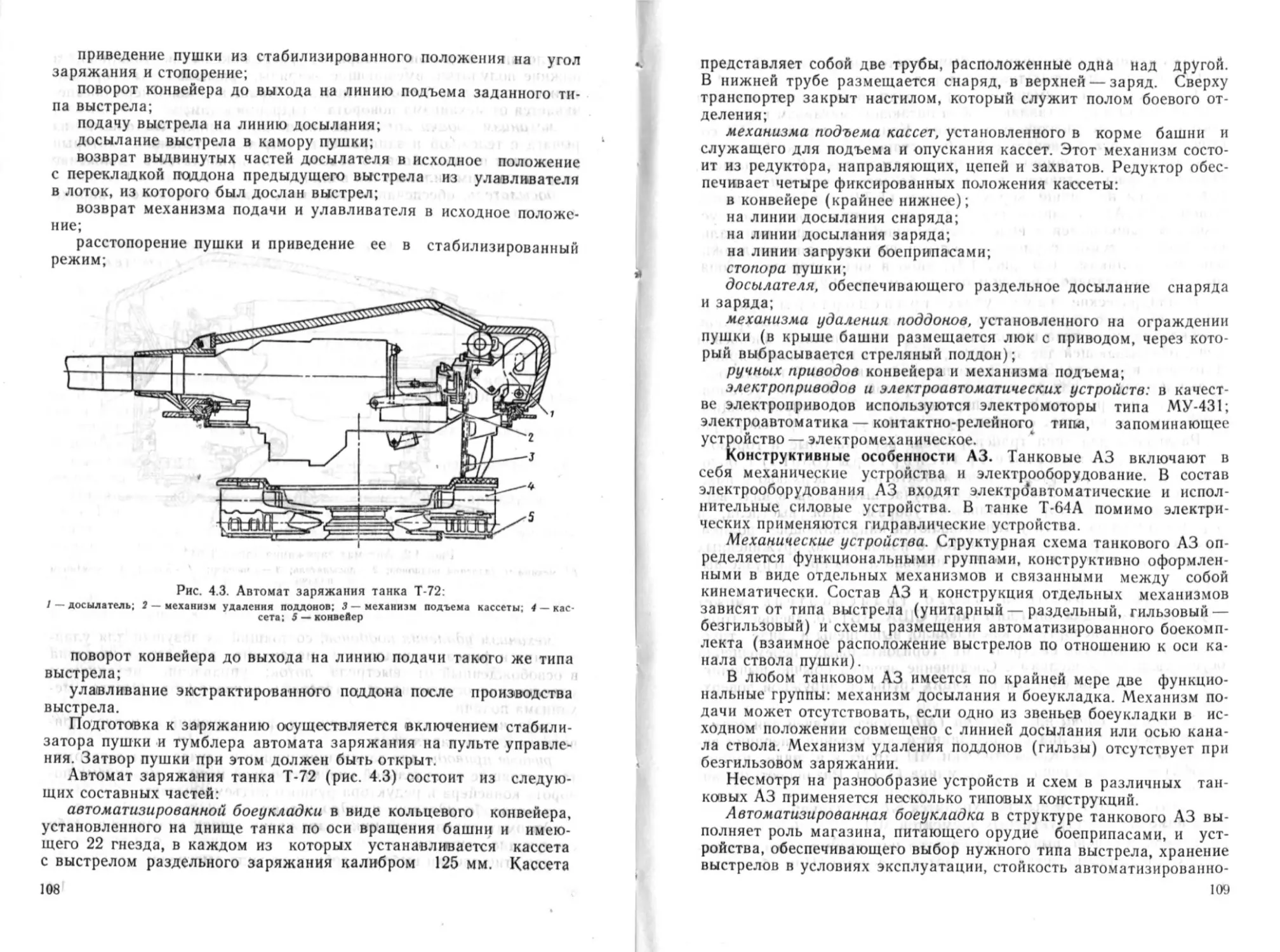
Использование для танка Т-64А выстрелов раздельного заря-
жания с максимальной длиной снаряда 680 мм позволило создать
автомат заряжания на 28 выстрелов и получить эксплуатационные
* Начиная с середины 80-х гг. модификацию этой пушки намечено уста-
новить на новый американский танк М-1.
12
преимущества (за счет снижения габаритно-массовых параметров
элементов выстрела), особенно при ручных операциях.
В связи с необходимостью повышения эффективности действия
боеприпасов у цели прорабатывается вариант выстрела унитарного
заряжания калибра 125 мм с приемлемыми габаритно-массовыми
параметрами. Оптимальное формирование заряда для каждого
типа снаряда, возможность получения наибольшей плотности заря-
жания (в первую очередь для ОПС) и использование высококало-
рийных порохов создают предпосылки для решения этой задачи.
1.3. РАЗМЕЩЕНИЕ БОЕПРИПАСОВ И АВТОМАТИЗАЦИЯ
ЗАРЯЖАНИЯ
Размещение боеприпасов в танке должно осуществляться в
соответствии с техническими требованиями, предъявляемыми к
комплексу танкового вооружения. В первую очередь должны учи-
тываться следующие требования: необходимая техническая скоро-
стрельность при расходе определенного количества боекомплекта
и обеспечении достаточного для танка возимого боекомплекта;
удобство использования боеприпасов в различных ситуациях
боевой обстановки; безопасность в обращении. Эти требования
должны выполняться с максимальным учетом физиологических
возможностей человека в конкретных условиях. Боеприпасы в
танке, кроме соответствия указанным требованиям, должны
размещаться с учетом расположения других составных частей и
агрегатов в боевом отделении и отвечать требованиям живу-
чести танка в целом. Выполнение перечисленных требований
зависит от массы и габаритных размеров выстрела.
Необходимым условием обеспечения технической скорострель-
ности является либо размещение выстрелов в зоне действия за-
ряжающего (или доступных для него местах), либо автоматиза-
ция всего боекомплекта или его части. При размещении выстрелов
в танке боекомплект разделяется на расходуемый в первую оче-
редь и возимый. Минимальное количество автоматизированного
боекомплекта должно соответствовать суточному расходу боепри-
пасов, что приблизительно равно половине всего возимого бое-
комплекта. Очевидно, что такое решение вынужденное и отра-
жает противоречие между возрастающими габаритными разме-
рами выстрела и ограниченными забронированными объемами
танка.
Это же противоречие отражается и на общем количестве вы-
стрелов танка. Так, например, боекомплект танка Т-34 составлял
56 выстрелов калибра 85 мм, а танка Т-54 — только 42 выстрела
калибра 100 мм.
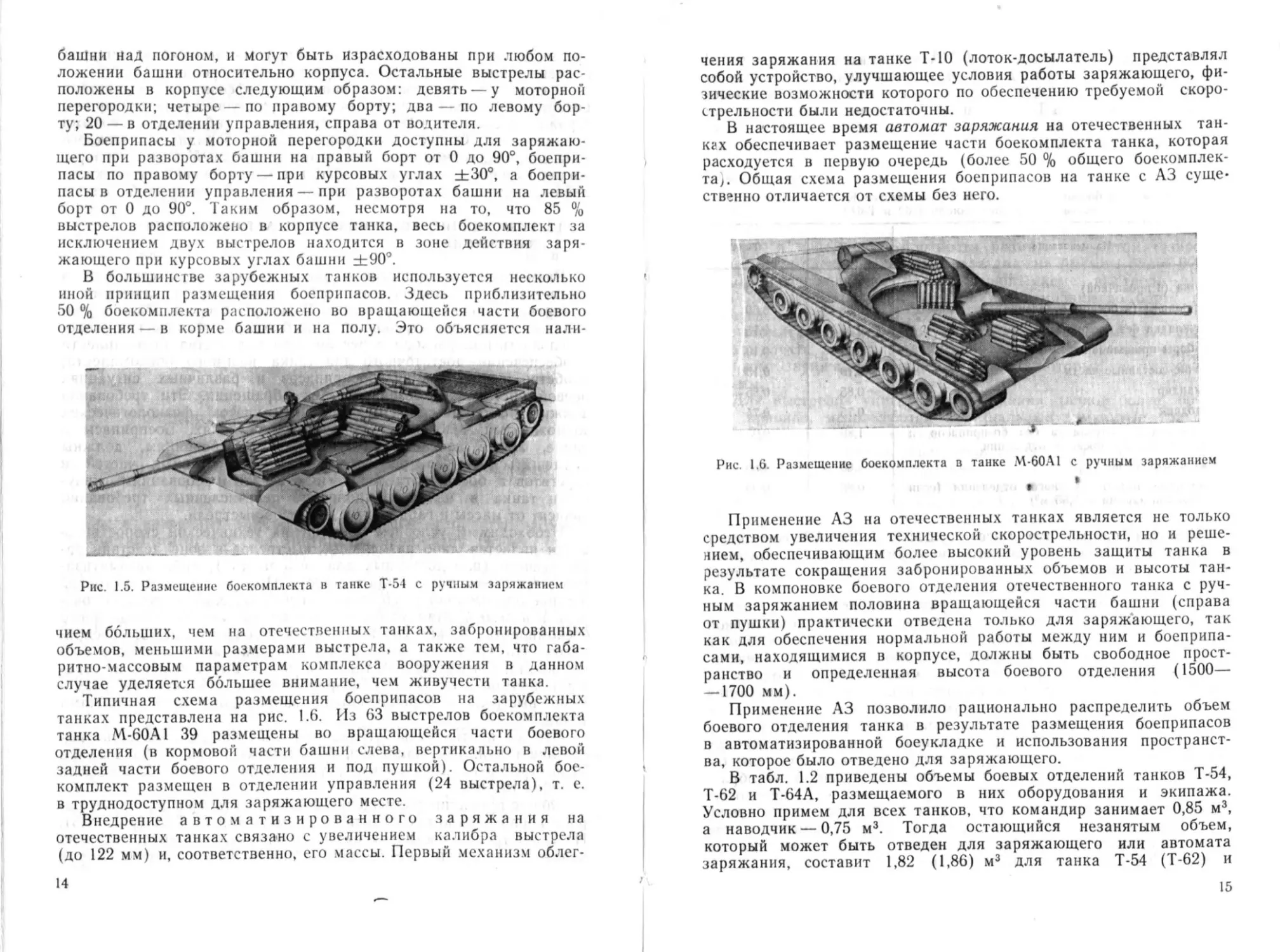
Общие принципы размещения боекомплекта при руч но м за-
ряжании можно проследить на примере танка Т-54 (рис. 1.5).
Из 42 выстрелов, составляющих боекомплект, семь выстрелов рас-
положены во вращающейся части боевого отделения, в корме
13
башни над погоном, и могут быть израсходованы при любом по-
ложении башни относительно корпуса. Остальные выстрелы рас-
положены в корпусе следующим образом: девять — у моторной
перегородки; четыре — по правому борту; два — по левому бор-
ту; 20 — в отделении управления, справа от водителя.
Боеприпасы у моторной перегородки доступны для заряжаю-
щего при разворотах башни на правый борт от 0 до 90°, боепри-
пасы по правому борту — при курсовых углах ±30°, а боепри-
пасы в отделении управления — при разворотах башни на левый
борт от 0 до 90°. Таким образом, несмотря на то, что 85 %
выстрелов расположено в корпусе танка, весь боекомплект за
исключением двух выстрелов находится в зоне действия заря-
жающего при курсовых углах башни ±90°.
В большинстве зарубежных танков используется несколько
иной принцип размещения боеприпасов. Здесь приблизительно
50 % боекомплекта расположено во вращающейся части боевого
отделения — в корме башни и на полу. Это объясняется нали-
Рис. 1.5. Размещение боекомплекта в танке Т-54 с ручным заряжанием
чием больших, чем на отечественных танках, забронированных
объемов, меньшими размерами выстрела, а также тем, что габа-
ритно-массовым параметрам комплекса вооружения в данном
случае уделяется большее внимание, чем живучести танка.
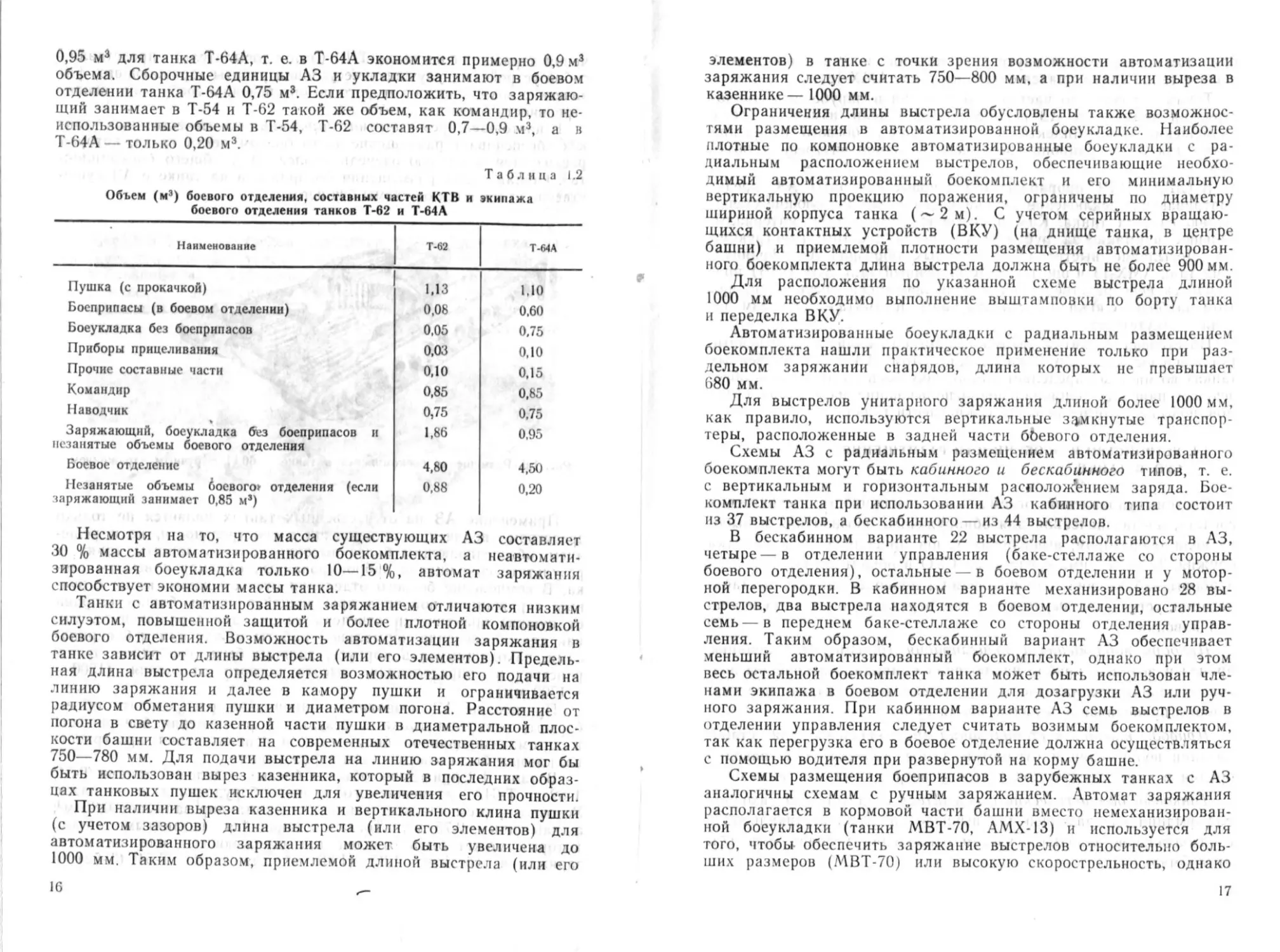
Типичная схема размещения боеприпасов на зарубежных
танках представлена на рис. 1.6. Из 63 выстрелов боекомплекта
танка М-60А1 39 размещены во вращающейся части боевого
отделения (в кормовой части башни слева, вертикально в левой
задней части боевого отделения и под пушкой). Остальной бое-
комплект размещен в отделении управления (24 выстрела), т. е.
в труднодоступном для заряжающего месте.
Внедрение автоматизированного заряжания на
отечественных танках связано с увеличением калибра выстрела
(до 122 мм) и, соответственно, его массы. Первый механизм облег-
14
чения заряжания на танке Т-10 (лоток-досылатель) представлял
собой устройство, улучшающее условия работы заряжающего, фи-
зические возможности которого по обеспечению требуемой скоро-
стрельности были недостаточны.
В настоящее время автомат заряжания на отечественных тан-
ках обеспечивает размещение части боекомплекта танка, которая
расходуется в первую очередь (более 50 % общего боекомплек-
таЛ Общая схема размещения боеприпасов на танке с АЗ суще-
ственно отличается от схемы без него.
Рис. 1.6. Размещение боекомплекта в танке М-60А1 с ручным заряжанием
Применение АЗ на отечественных танках является нс только
средством увеличения технической скорострельности, но и реше-
нием, обеспечивающим более высокий уровень защиты танка в
результате сокращения забронированных объемов и высоты тан-
ка. В компоновке боевого отделения отечественного танка с руч-
ным заряжанием половина вращающейся части башни (справа
от пушки) практически отведена только для заряжающего, так
как для обеспечения нормальной работы между ним и боеприпа-
сами, находящимися в корпусе, должны быть свободное прост-
ранство и определенная высота боевого отделения (1500—
— 1700 мм).
Применение АЗ позволило рационально распределить объем
боевого отделения танка в результате размещения боеприпасов
в автоматизированной боеукладке и использования пространст-
ва, которое было отведено для заряжающего.
В табл. 1.2 приведены объемы боевых отделений танков Т-54,
Т-62 и Т-64А, размещаемого в них оборудования и экипажа.
Условно примем для всех танков, что командир занимает 0,85 м3,
а наводчик — 0,75 м3. Тогда остающийся незанятым объем,
который может быть отведен для заряжающего или автомата
заряжания, составит 1,82 (1,86) м3 для танка Т-54 (Т-62) и
15
0,95 м3 для танка Т-64А, т. е. в Т-64А экономится примерно 0,9 м3
объема. Сборочные единицы АЗ и укладки занимают в боевом
отделении танка Т-64А 0,75 мэ. Если предположить, что заряжаю-
щий занимает в Т-54 и Т-62 такой же объем, как командир, то не-
использованные объемы в Т-54, Т-62 составят 0,7—0,9 м3, а в
Т-64 А — только 0,20 м3.
Таблица 1.2
Объем (и3) боевого отделения, составных частей КТВ и экипажа
боевого отделения танков Т-62 и Т-64А
Наименование Т-82 Т-64А
Пушка (с прокачкой) 1,13 МО
Боеприпасы (в боевом отделении) 0,08 0.60
Боеукладка без боеприпасов 0.05 0,75
Приборы прицеливания 0,03 0.10
Прочие составные части 0,10 0,15
Командир 0,85 0,85
Наводчик 0,75 0.75
Заряжающий, боеукладка без боеприпасов и незанятые объемы боевого отделения 1,86 0.95
Боевое отделение 4,80 4,50
Незанятые объемы боевого» отделения (если заряжающий занимает 0,85 м’) 0,88 0,20
Несмотря на то, что масса существующих АЗ составляет
30 % массы автоматизированного боекомплекта, а неавтомати-
зированная боеукладка только 10—15 %, автомат заряжания
способствует экономии массы танка.
Танки с автоматизированным заряжанием отличаются низким
силуэтом, повышенной защитой и более плотной компоновкой
боевого отделения. Возможность автоматизации заряжания в
танке зависит от длины выстрела (или его элементов). Предель-
ная длина выстрела определяется возможностью его подачи на
линию заряжания и далее в камору пушки и ограничивается
радиусом обметания пушки и диаметром погона. Расстояние от
погона в свету до казенной части пушки в диаметральной плос-
кости башни составляет на современных отечественных танках
750—780 мм. Для подачи выстрела на линию заряжания мог бы
быть использован вырез казенника, который в последних образ-
цах танковых пушек исключен для увеличения его прочности.
При наличии выреза казенника и вертикального клина пушки
(с учетом зазоров) длина выстрела (или его элементов) для
автоматизированного заряжания может быть увеличена до
1000 мм. Таким образом, приемлемой длиной выстрела (или его
16
элементов) в танке с точки зрения возможности автоматизации
заряжания следует считать 750—800 мм, а при наличии выреза в
казеннике — 1000 мм.
Ограничения длины выстрела обусловлены также возможнос-
тями размещения в автоматизированной боеукладке. Наиболее
плотные по компоновке автоматизированные боеукладкн с ра-
диальным расположением выстрелов, обеспечивающие необхо-
димый автоматизированный боекомплект и его минимальную
вертикальную проекцию поражения, ограничены по диаметру
шириной корпуса танка (*2м). С учетом серийных вращаю-
щихся контактных устройств (ВКУ) (на днище танка, в центре
башни) и приемлемой плотности размещения автоматизирован-
ного боекомплекта длина выстрела должна быть не более 900 мм.
Для расположения по указанной схеме выстрела длиной
1000 мм необходимо выполнение выштамповки по борту танка
и переделка ВКУ.
Автоматизированные боеукладкн с радиальным размещением
боекомплекта нашли практическое применение только при раз-
дельном заряжании снарядов, длина которых нс превышает
580 мм.
Для выстрелов унитарного заряжания длиной более 1000 мм,
как правило, используются вертикальные з.^мкнутые транспор-
теры, расположенные в задней части ббевого отделения.
Схемы АЗ с радиальным размещением автоматизированного
боекомплекта могут быть кабинного и бескабинного типов, т. е.
с вертикальным и горизонтальным расположением заряда. Бое-
комплект танка при использовании АЗ кабинного типа состоит
из 37 выстрелов, а бескабинного — из 44 выстрелов.
В бсскабинном варианте 22 выстрела располагаются в АЗ,
четыре—в отделении управления (баке-стеллаже со стороны
боевого отделения), остальные —в боевом отделении и у мотор-
ной перегородки. В кабинном варианте механизировано 28 вы-
стрелов, два выстрела находятся в боевом отделении, остальные
семь—в переднем баке-стеллаже со стороны отделения управ-
ления. Таким образом, бескабинный вариант АЗ обеспечивает
меньший автоматизированный боекомплект, однако при этом
весь остальной боекомплект танка может быть использован чле-
нами экипажа в боевом отделении для дозагрузки АЗ или руч-
ного заряжания. При кабинном варианте АЗ семь выстрелов в
отделении управления следует считать возимым боекомплектом,
так как перегрузка его в боевое отделение должна осуществляться
с помощью водителя при развернутой на корму башне.
Схемы размещения боеприпасов в зарубежных танках с АЗ
аналогичны схемам с ручным заряжанием. Автомат заряжания
располагается в кормовой части башни вместо немеханизирован-
ной боеукладкн (танки МВТ-70, АМХ-13) и используется для
того, чтобы обеспечить заряжание выстрелов относительно боль-
ших размеров (МВТ-70) или высокую скорострельность, однако
17
при этом используются внутренние объемы и наносится ущерб
защите танка (качающаяся башня на танке АМХ-13).
Таким образом, до настоящего времени в зарубежном танко-
строении применение АЗ не преследовало цели изменить схему
размещения боекомплекта или компоновку боевого отделения
танка для более рационального использования внутренних объе-
мов.
В США и ФРГ прорабатываются новые варианты АЗ, преду-
сматривающие исключение заряжающего и способствующие умень-
шению силуэта танка. Как показывают имеющиеся материалы,
большое внимание за рубежом уделяется простоте конструкции
АЗ. Досылание выстрелов в известных образцах АЗ (француз-
ский танк АМХ-13 и шведский безбашенный танк Strv-ЮЗВ) про-
изводится непосредственно из механизированной боеукладки, при
этом наиболее сложная составная часть автомата — механизм по-
дачи — отсутствует.
По степени развития автоматизации заряжания отечественные
танки превосходят зарубежные, при этом АЗ в отечественных
танках во многом определяет компоновку боевого отделения, обес-
печивая наиболее рациональное использование внутренних объе-
мов, повышение огневой мощи и живучести танка.
1.4. УСТРОЙСТВО И ОСОБЕННОСТИ РАЗМЕЩЕНИЯ
СУО В ТАНКЕ
Система управления огнем—это совокупность технических
средств, предназначенная для обнаружения, опознавания и выбо-
ра цели оператором, вычисления углов прицеливания и наводки
оружия. Техническими средствами СУО в общем случае являются
приборы наблюдения и прицеливания, приводы наводки и стаби-
лизации, устройства выработки углов вертикальной и горизонталь-
ной наводки.
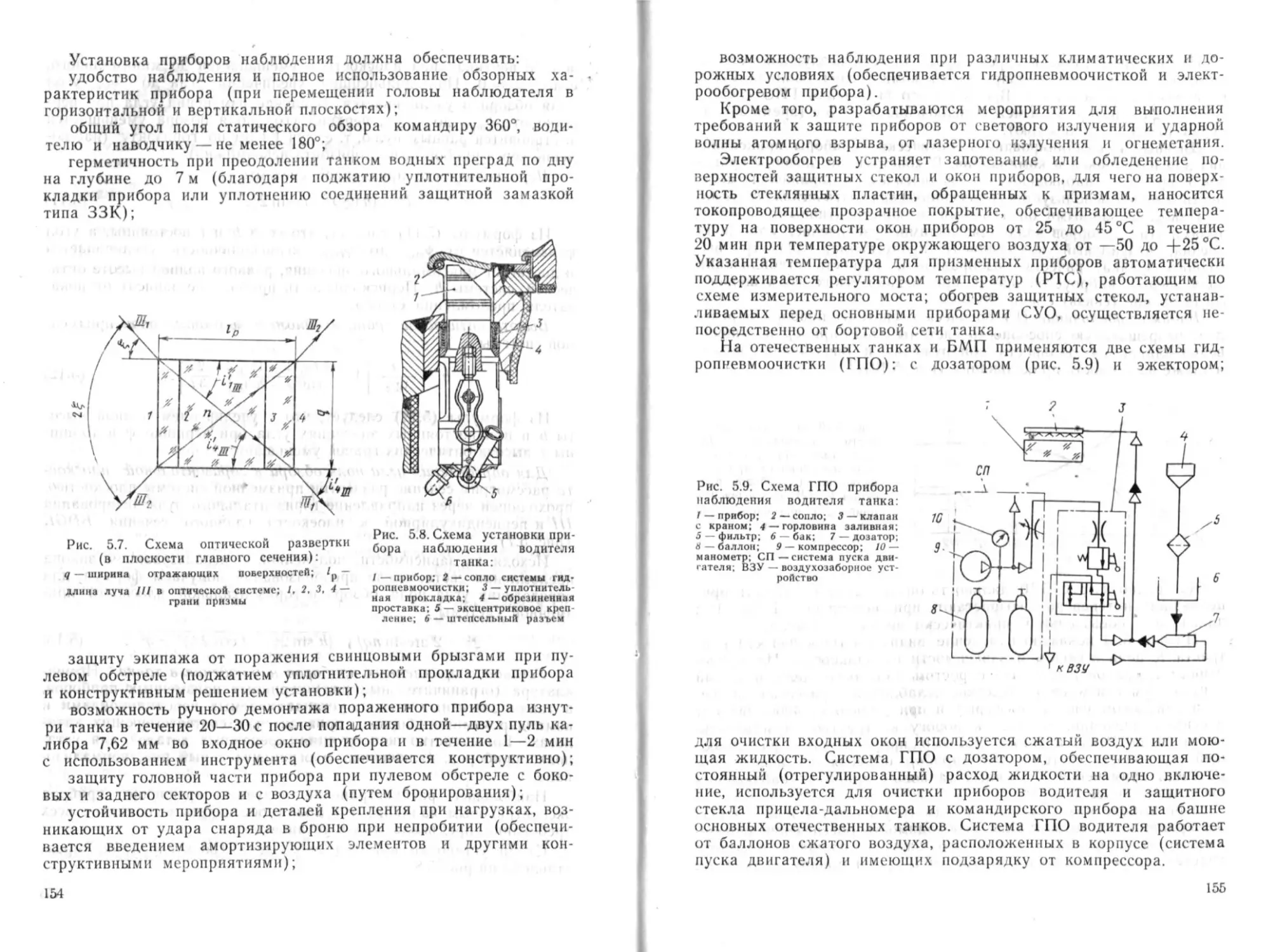
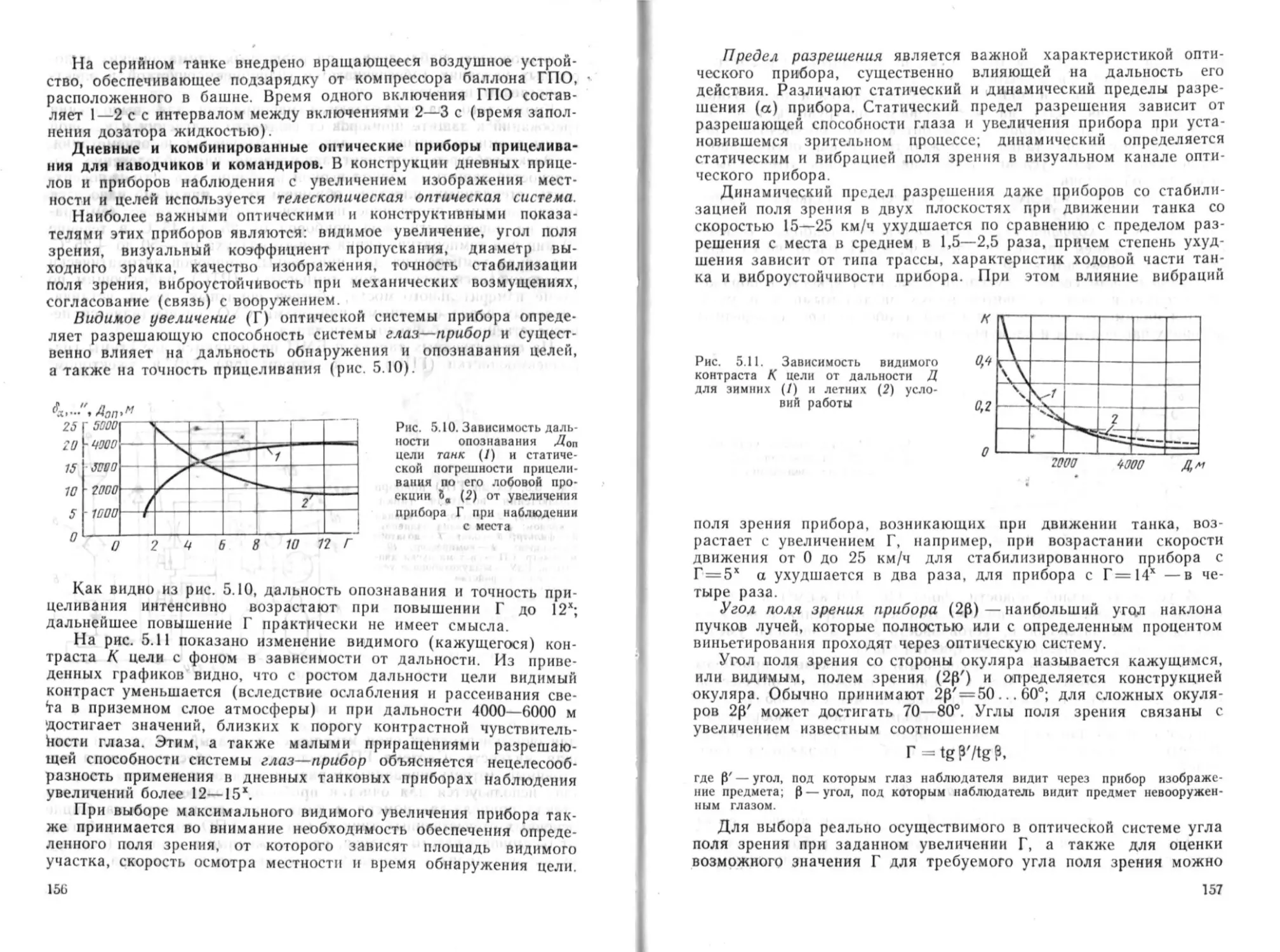
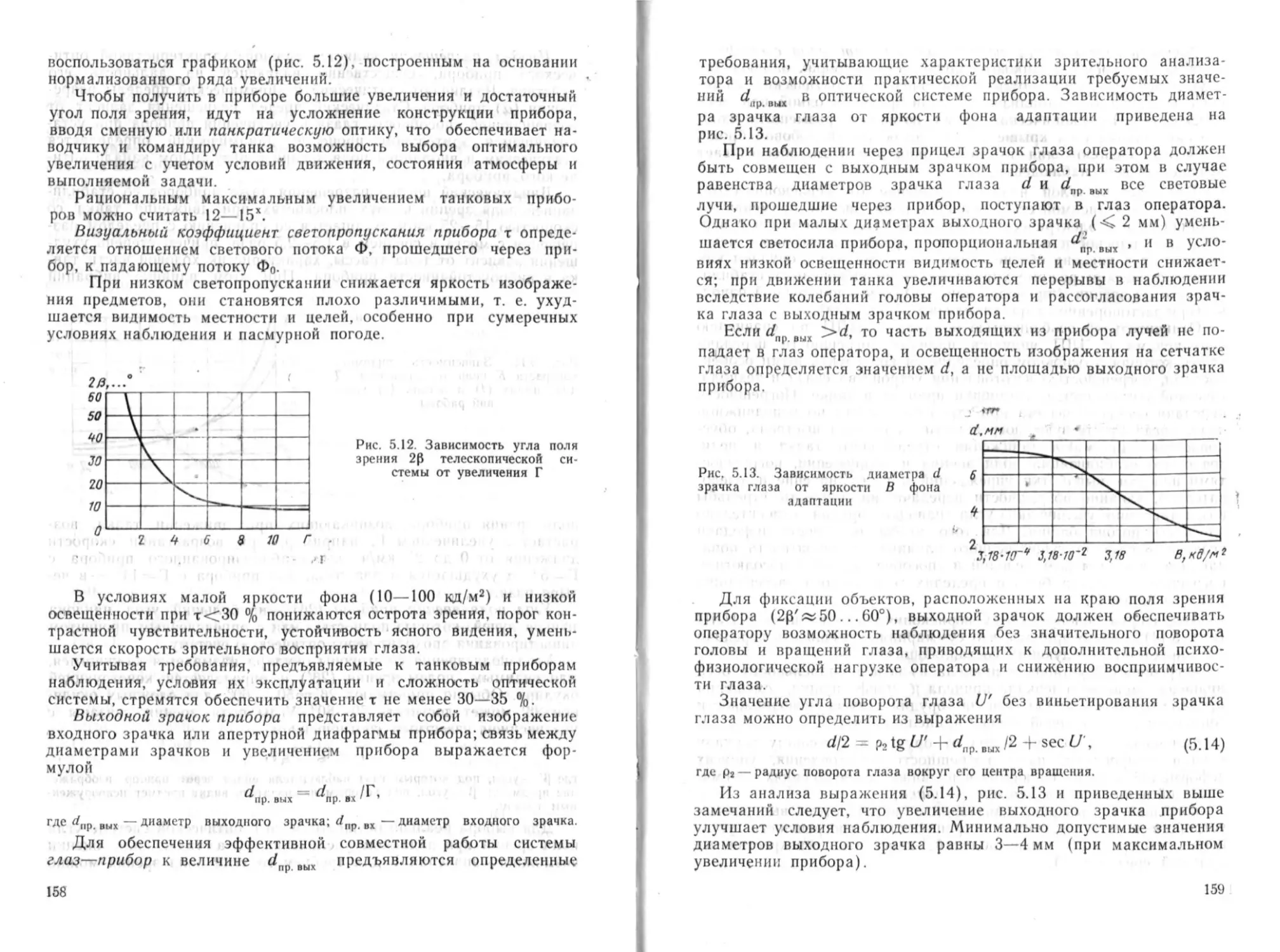
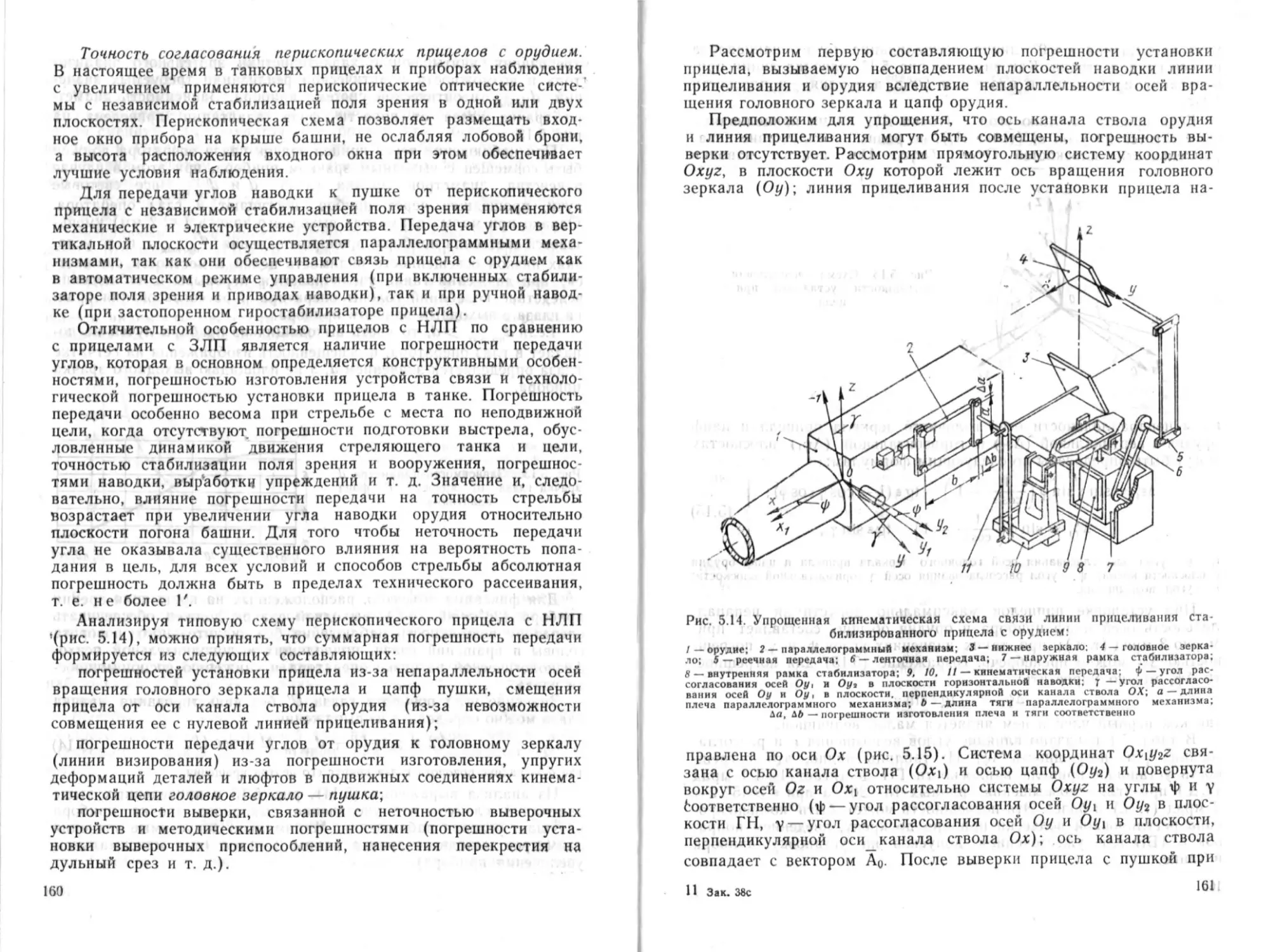
Приборы, наблюдения и прицеливания (призменные приборы,
прицел наводчика, прибор наблюдения командира и приборы ноч-
ного видения) предназначены для поиска целей, выдачи целеука-
заний и прицеливания в любое время суток.
Приводы наводки и стабилизации предназначены для стаби-
лизации вооружения и отработки углов наводки, т. е. наводки
орудия в упрежденную точку (точку встречи снаряда с целью).
Танковый баллистический вычислитель с датчиками входной
информации предназначен для вычисления углов вертикальной и
горизонтальной наводки с учетом отклонений условий стрельбы
от нормальных.
18
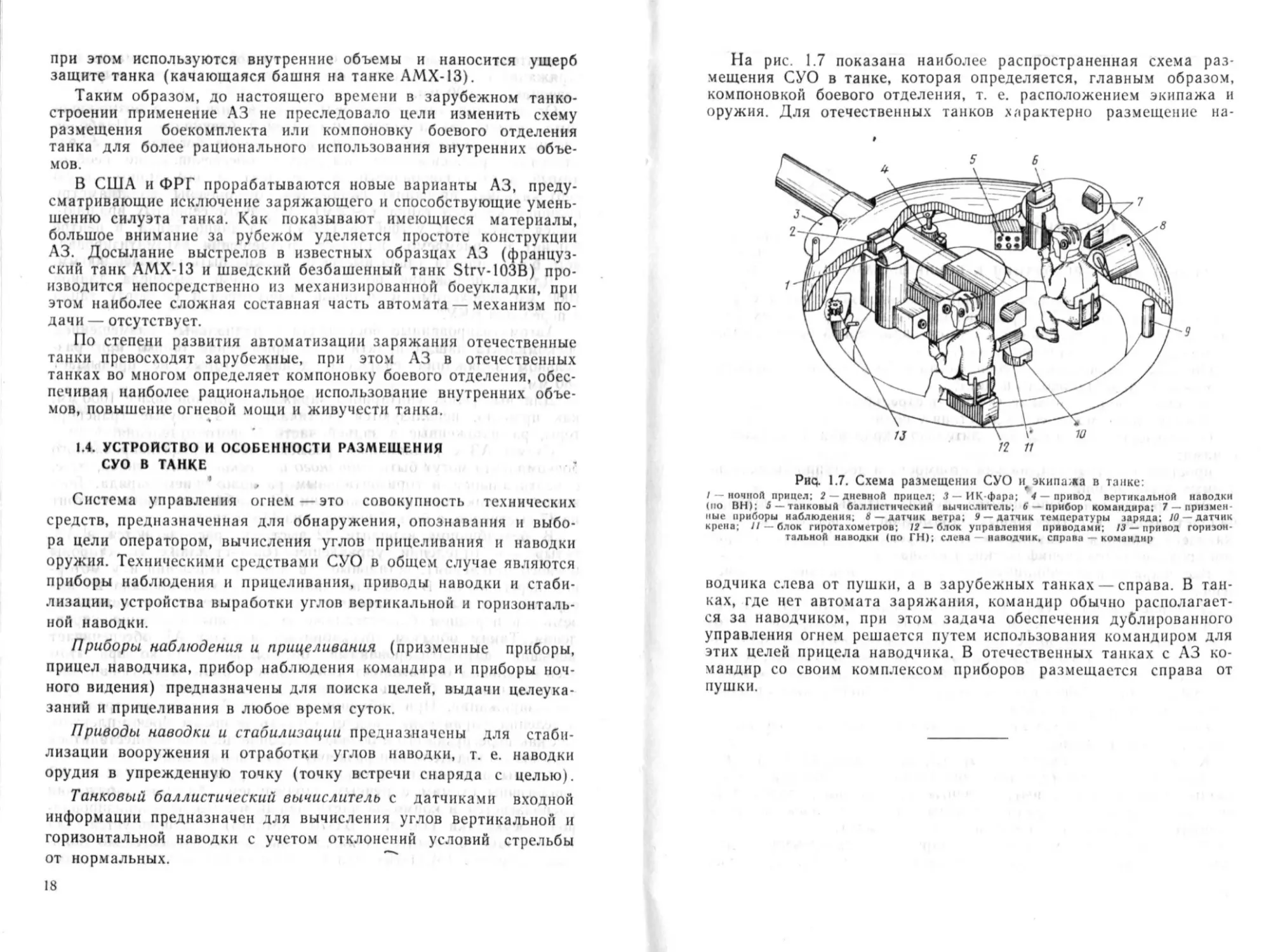
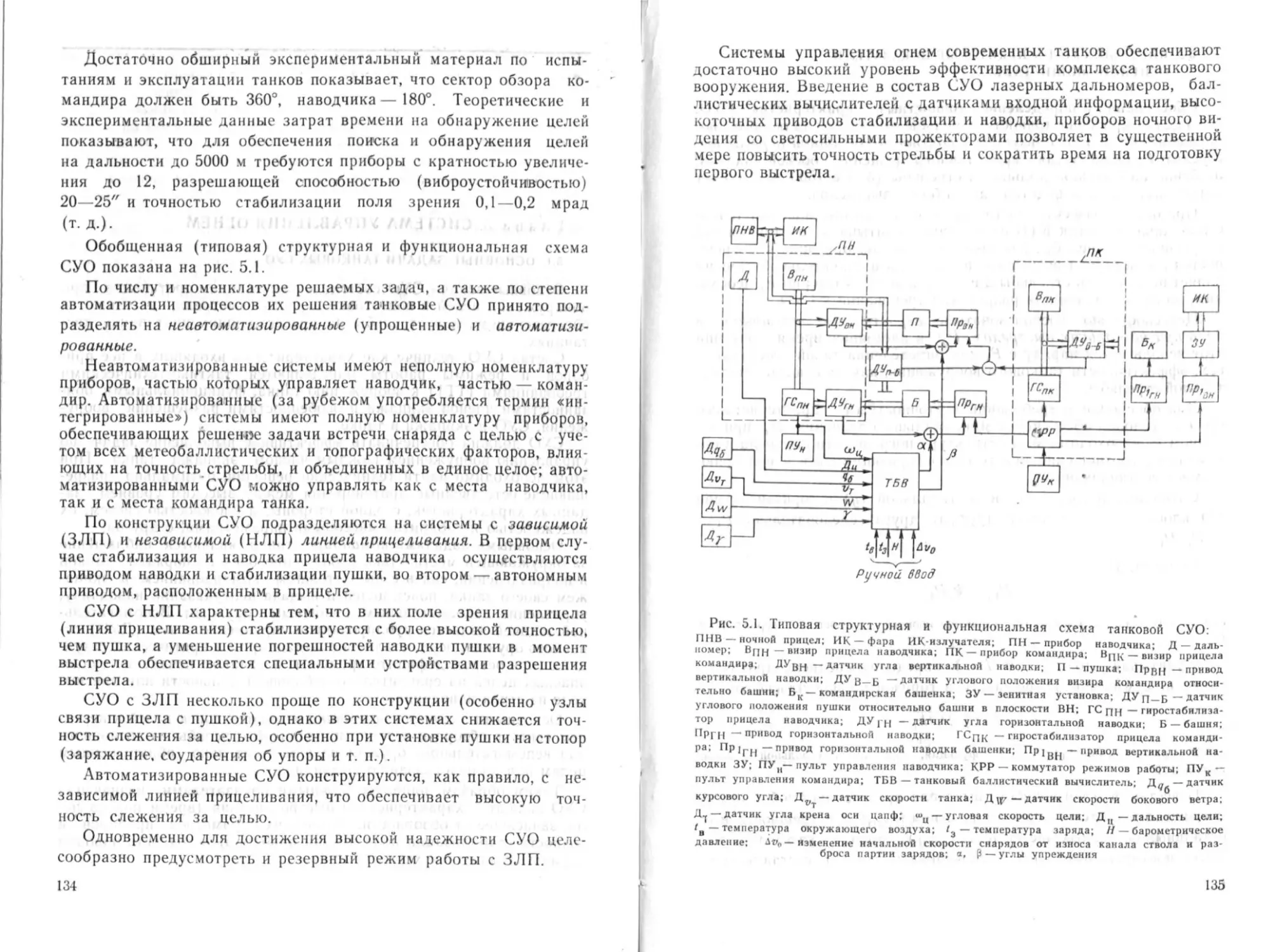
На рис. 1.7 показана наиболее распространенная схема раз-
мещения СУО в танке, которая определяется, главным образом,
компоновкой боевого отделения, т. е. расположением экипажа и
оружия. Для отечественных танков характерно размещение на-
Pwq. 1.7. Схема размещения СУО и экипажа в танке:
/ ночной прицел; 2 дневной прицел; 3 — ИК фара; 4 привод вертикальной наводки
(по BH); 5 — танковый баллистический вычислитель; 6 — прибор командира; 7 — приэмен
ные приборы наблюдения, в —датчик ветра; 9 — датчик температуры заряда; 10 — датчик
крена; II блок гнротахометров; 12 — блок управления приводами; 13 — привод горизон-
тальной иаводки (по ГН); слева наводчик, справа — командир
водчика слева от пушки, а в зарубежных танках — справа. В тан-
ках, где нет автомата заряжания, командир обычно располагает-
ся за наводчиком, при этом задача обеспечения дублированного
управления огнем решается путем использования командиром для
этих целей прицела наводчика. В отечественных танках с АЗ ко-
мандир со своим комплексом приборов размещается справа от
пушки.
Глава 2 БОЕПРИПАСЫ
2.1. ОСНОВНЫЕ ТРЕБОВАНИЯ К БОЕПРИПАСАМ
Требования к танковым боеприпасам вырабатываются с уче-
том многочисленных факторов, исходя из задач, решаемых тан-
ком; оптимизация требовании является характерной особенностью
современного развития боеприпасов.
Общими техническими требованиями к боеприпасам являются:
максимальная дальность полета;
минимальное рассеивание (кучность стрельбы);
максимальное могущество действия у цели;
безопасность при стрельбе, длительном хранении и обращении
с ними;
простота конструкции, низкая стоимость и доступность исполь-
зуемых материалов.’
Эти требования выполняются путем оптимального подбора
баллистических, конструктивных параметров и показателей пора-
жающего действия боеприпасов. К конкретным образцам снаря-
дов предъявляются специфические требования.
Все снаряды классифицируются по виду их действия и назна-
чению.
Действие бывает ударное (бронебойные снаряды), оско-
лочное, фугасное, кумулятивное и др. Снаряды, кото-
рые оказывают два и более видов действия, называются снаряда-
ми комбинированного действия, или многоцелевыми. К ним
относятся осколочно-фугасные, бронебойно-фугасные, кумулятивно-
осколочные, бронебойно-трассирующие, бронебойно-зажнгательно-
трассирующие и другие снаряды.
По назначению снаряды подразделяются на основные, специаль-
ные и вспомогательные.
К основным относятся снаряды, предназначенные для по-
ражения живой силы и уничтожения техники противника (оско-
лочные, осколочно-фугасные, фугасные, бронебойные, кумулятив-
ные, зажигательные снаряды; снаряды с готовыми поражающими
элементами, а также комбинированного действия).
К специальным относятся снаряды, предназначенные для
решения особых боевых задач, а также для снижения потерь своих
20
войск от огня противника (осветительные, дымовые, зажигатель-
ные, целеуказательные, агитационные и другие снаряды).
К вспомогательным относятся снаряды, предназначен-
ные для обучения личного состава, проведения учебных стрельб,
испытаний различных видов и составных частей вооружения (лафе-
топробные, практические, баллистические и другие снаряды).
Определяющую роль в боекомплекте танка играют основные
снаряды, причем их номенклатура в танках разных стран до не-
давнего времени была неодинаковой. Так, основными снарядами
в английских танках были бронебойные подкалиберные и броне-
бойно-фугасные, во французских — кумулятивные, в западногер-
манских и американских — бронебойные подкалиберные, кумуля-
тивные и бронебойно-фугасные снаряды.
В последние годы в большинстве стран наблюдается тенденция
к сокращению номенклатуры снарядов и оснащению танков, во-
оруженных как гладкоствольными, так и нарезными пушками,
оперенными бронебойными подкалиберными снарядами, которые
обладают наибольшим могуществом действия на дальности дейст-
вительной стрельбы. Например, в боекомплект нового западногер-
манского танка «Леопард-2» входят только два типа снарядов:
оперенные бронебойные подкалиберные и многоцелевые кумуля-
тивно-осколочные. t
Могущество действия у цели бронебойных снарядов зави-
сит от бронепробиваемости и эффективности их действия после
пробития брони. Эффективность заброневого .действия характери-
зуется числом и массой осколков, углом и скоростью их разлета,
их зажигательной способностью и другими параметрами.
Требования к бронепробиваемости снарядов назначаются ис-
ходя из обеспечения надежного пробития защиты танков вероят-
ного противника при их маневрировании на дальности действи-
тельной стрельбы (дальность, на которой с вероятностью 0,9
обеспечивается хотя бы одно попадание из трех выстрелов в ми
шень № 12 или попадание первым выстрелом с вероятностью
0,55).
Дальность действительной стрельбы зависит от свойств пуш-
ки, снаряда и СУО; для современных танков, например, при
стрельбе с места подкалиберным снарядом она составляет
2000 м. Намечается тенденция дальнейшего увеличения даль-
ности действительной стрельбы.
Для оценки необходимого уровня бронепробиваемости броне-
бойных снарядов в табл. 2.1 приведена характеристика броневой
защиты модернизированных зарубежных танков (ФРГ и США)
2-го поколения. Дальнейшее улучшение броневой защиты этих
танков осуществляется путем увеличения углов наклона брони
до 75° и более и применения экранированных, разнесенных и
сложных преград. Защищенность танков 3-го поколения «Лео-
пард-2» (ФРГ) и М-1 (США) в 1,3—1,5 раза выше по сравнению
с танками 2-го поколения. Из представленных в таблице данных
21
следует, что для пробития брони бронебойные снаряды должны
быть эффективными в широком диапазоне углов встречи с бро-
невыми преградами различного типа.
Таблица 2.1
Характеристика броневой защиты модернизированных зарубежных
танков 2-го поколения
Танк Толщина лобовой брони, мм Тип лобовой броии/угол наклона
корпуса башни корпуса башни
«Леопард-1А4» (ФРГ) ПО 250 Стальная повы- шенной стойкос- ти/60в Стальная разне- сенная сварная/350
М-60АЗ (США) 120 180 Стальная лнтая/64® Стальная литая/30°
Могущество ОФС определяется массой взрывчатого вещест-
ва, числом и размерами поражающих элементов. Одной из основ-
ных характеристик ^могущества по осколочному действию являет-
ся приведенная зона поражения живой силы (в положении ле-
жа, стоя) и техники. Для танковых 100—125-мм снарядов при-
веденная зона поражения живой силы в положении лежа состав-
ляет 300—400 м2. Эта зона может быть увеличена до 1000 м2
и более при применении готовых осколков. Кроме того, эти сна-
ряды характеризуются фугасным действием и избыточным дав-
лением во фронте ударной волны. Фугасное действие оценивает-
ся размерами воронки, образующейся в грунте после взрыва
Диаметр воронки, образующейся после взрыва снарядов калиб-
ром 100—125 мм, составляет 2—3 м, а глубина ее — 0,5—1 м.
Избыточное давление от точки разрыва в радиусе 3 м для тех же
снарядов равно 100—500 кПа.
Кучность стрельбы является одним из параметров ее точности
и зависит в основном от степени отработки и совершенства сна-
рядов. В качестве основной характеристики кучности стрельбы
принимается техническое рассеивание снарядов, оцениваемое
срединным (вероятным) отклонением точек попадания снарядов
в группе выстрелов от центра рассеивания (средней точки попа
дания). Техническое рассеивание снарядов, применяемых для
стрельбы по вертикальным целям, характеризуется срединными
отклонениями по высоте и в боковом направлении (В„, Вб).
а снарядов, применяемых для стрельбь^ по местности, отноше-
нием срединного отклонения по дальности к дальности стрельбы
(ВК!Д), которые для современных танковых снарядов имеют
следующие значения: В„ — В6 =0,2 ... 0.4 мрад (т. д.); В.;Д
= 1/100... 1/500.
22
Требование максимальной дальности стрельбы предъявляется
только к ОФС. Дальность стрельбы зависит от угла возвыше-
ния пушки, начальной скорости снаряда и ее уменьшения на
траектории, определяемого баллистическим коэффициентом.
Требование максимальной дальности стрельбы имеет большое
значение для сухопутной артиллерии; для танков это связано
со стрельбой с закрытых позиций, которая ведется в ограничен-
ных случаях. Основным видом стрельбы из танка является
стрельба прямой наводкой, поэтому более существенным является
требование дальности прямого выстрела, зависящей от начальной
скорости снаряда и его баллистического коэффициента. Для ОФС
и КС современных танковых пушек дальность прямого выстрела
составляет 1000—1200 м, для бронебойных подкалиберных снаря-
дов — 1800—2000 м и более.
Конструкторы стремятся увеличить дальность прямого выст-
рела, так как это приводит к повышению точности стрельбы из
танка. Однако степень влиянии дальности прямого выстрела на
точность стрельбы зависит от баллистических параметров снаряда
и совершенства СУО. Для низкоскоростных снарядов (кумуля-
тивного и осколочно-фугасного) и неавтоматизированных СУО
с оптическим дальномером дальность прямого выстрела суще-
ственно влияет на точность стрельбы. Для БПС, обладающих вы-
сокой скоростью и низким баллистическим коэффициентом, уве-
личение дальности прямого выстрела свыше 2000 м незначитель-
но сказывается на точности стрельбы. С введением автоматизи-
рованных СУО с лазерным дальномером, позволяющих учитывать
отклонения условий стрельбы от нормальных и значительно
уменьшать погрешность измерения дальности, зависимость точности
стрельбы от дальности прямого выстрела уменьшается. Поэтому,
устанавливая требования дальности прямого выстрела, необхо-
димо учитывать характеристики не только боеприпасов, но и
СУО.
Безопасность боеприпасов при стрельбе, длительном хранении
и обращении с ними имеет важное значение, так как в противном
случае возможно возникновение аварийных ситуаций. Предпоч-
тительными для танка с точки зрения безопасности стрельбы и
стойкости при длительном хранении являются выстрелы унитар-
ного заряжания с металлической гильзой.
Требования к простоте конструкции и доступности исходных
материалов повышаются с ростом потребности армии в боепри-
пасах. Наиболее простыми по конструкции являются цельнокорпу-
сные снаряды. Корпуса, состоящие из нескольких деталей, приме-
няют, если нельзя иначе добиться необходимых боевых свойств
(например, в бронебойных подкалиберных снарядах используются
сердечники из твердых сплавов, отделяющиеся поддоны и др.) или
способ снаряжения взрывчатых веществ вынуждает применять
оболочку, состоящую из двух и более деталей (осколочно-фугас-
ные снаряды).
23
Корпуса осколочно-фугасных снарядов изготавливаются из
обычных углеродистых сталей, а бронебойных — из легированных.
В последнем случае стремятся применять недефицнтные легирую-
щие добавки. Тем не менее необходимость увеличения могущества
действия боеприпасов приводит к усложнению их конструкции,
применению дефицитных сплавов на основе вольфрама, кобальта
и других материалов. Поэтому в настоящее время снаряды одного
типа разрабатываются как простой, так и сложной конструкции, а
выбор того или иного снаряда для конкретного танка определяется
экономическими и стратегическими соображениями.
2.2. НАЗНАЧЕНИЕ. УСТРОЙСТВО И ДЕЙСТВИЕ
БРОНЕБОЙНЫХ СНАРЯДОВ
Бронебойные снаряды предназначены для стрельбы прямой
наводкой по танкам, самоходным установкам и другим подвиж
ным бронированным целям. Кроме этого бронебойные снаряды
могут быть использованы для стрельбы по амбразурам долго-
временных оборонительных сооружений и железобетонным за-
щитным сооружениям.
Бронебойные снаряды должны обеспечивать надежное пора-
жение указанных целей. Это достигается либо за счет их кине-
тической энергии, либо за счет энергии взрывчатого вещества
В соответствии с этим бронебойные снаряды подразделяются на
снаряды ударного действия (бронебойные калиберные и подка-
либерные) и взрывного действия (кумулятивные и бронебойно-
фугасные).
Так как снаряды взрывного действия содержат достаточно
большое количество взрывчатого вещества, то они используются
также для поражения живой силы.
До начала второй мировой войны основными снарядами для
борьбы с бронированными целями являлись бронебойные кали-
берные. Во второй мировой войне кроме них применялись бро-
небойные подкалиберные и кумулятивные снаряды. Все эти
снаряды разрабатывались для нарезных пушек.
В послевоенный период были разработаны бронебойные опе-
ренные подкалиберные снаряды так называемой «стреловидной»
формы, что привело к развитию отечественных гладкоствольных
пушек. В 70-х гг. в ФРГ также были разработаны оперенные
снаряды для гладкоствольной пушки калибра 120 мм. Затем
такие снаряды были разработаны за рубежом и для нарезных
пушек. Бронебойно-фугасные снаряды разработаны в начале
60-х гг. и применяются в зарубежных танках.
Бронебойные калиберные снаряды (рис. 2.1) разработаны
для нарезных пушек и подразделяются на снаряды с острой го-
ловной частью (остроголовые), с бронебойным наконечником
и с притупленной головной частью (тупоголовые).
24
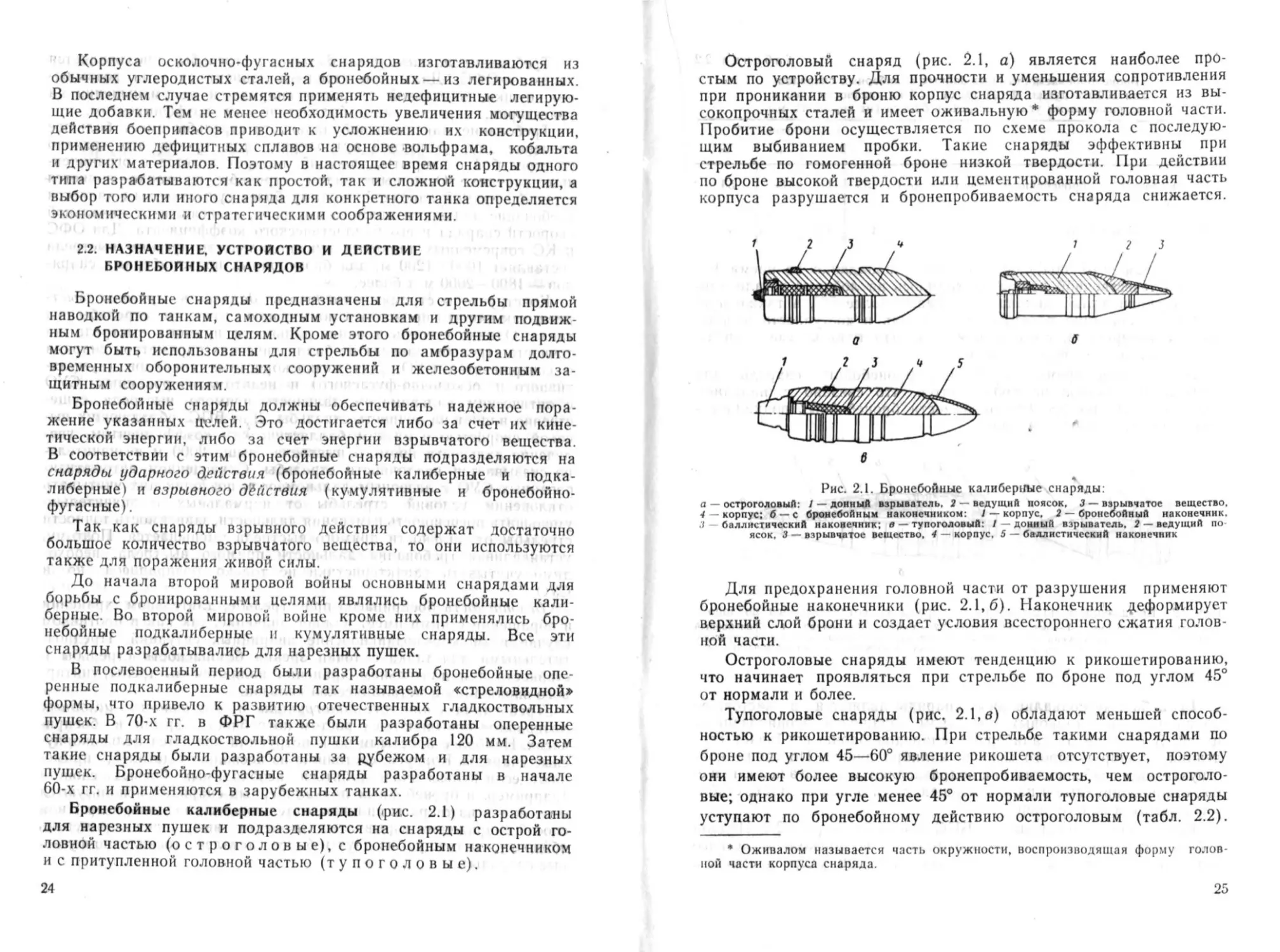
Остроголовый снаряд (рис. 2.1, а) является наиболее про-
стым по устройству. Для прочности и уменьшения сопротивления
при проникании в броню корпус снаряда изготавливается из вы-
сокопрочных сталей и имеет оживальную* форму головной части.
Пробитие брони осуществляется по схеме прокола с последую-
щим выбиванием пробки. Такие снаряды эффективны при
стрельбе по гомогенной броне низкой твердости. При действии
по броне высокой твердости или цементированной головная часть
корпуса разрушается и бронепробиваемость снаряда снижается.
Рис. 2.1. Бронебойные калиберные снаряды.
а - остроголовый: 1 — дойный взрыватель. 2 — ведущий поясок. 3 — взрывчатое вещество.
— корпус; б —с бронебойным наконечником; / — корпус, 2 - бронебойный наконечник,
баллистический наконечник; в - тупоголовый: / — донный взрыватель. 2 — ведущий по
ясок, 3 — взрывчатое вещество. 4 — корпус. 5 - баллистический наконечник
Для предохранения головной части от разрушения применяют
бронебойные наконечники (рис. 2.1,6). Наконечник деформирует
верхний слой брони и создает условия всестороннего сжатия голов-
ной части.
Остроголовые снаряды имеют тенденцию к рикошетированию,
что начинает проявляться при стрельбе по броне под углом 45°
от нормали и более.
Тупоголовые снаряды (рис. 2.1, в) обладают меньшей способ-
ностью к рикошетированию. При стрельбе такими снарядами по
броне под углом 45—60° явление рикошета отсутствует, поэтому
они имеют более высокую бронепробиваемость, чем остроголо-
вые; однако при угле менее 45° от нормали тупоголовые снаряды
уступают по бронебойному действию остроголовым (табл. 2.2).
* Оживалом называется часть окружности, воспроизводящая форму голов-
ной части корпуса снаряда.
25
Таблица 2.2
Бронепробиваемость бронебойных калиберных снарядов
для 100-мм пушки Д-10Т танка Т-55 на дальности 2000 м
под различными углами встречи с броней (от нормали), мм
Учитывая, что подавляющее число попаданий во время Ве-
ликой Отечественной войны приходилось на лобовые детали тан-
ков, имевшие углы наклона от нормали более 50°, а также при-
нимая во внимание простоту конструкции и доступность исполь-
зуемых материалов, следует признать, что тупоголовые снаряды
тогда были более эффективными.
В настоящее время калибериые бронебойные снаряды для
современных танков не производятся, что связано с наличием
более мощных по бронепробиваемости бронебойных подкалибер-
ных и кумулятивных снарядов.
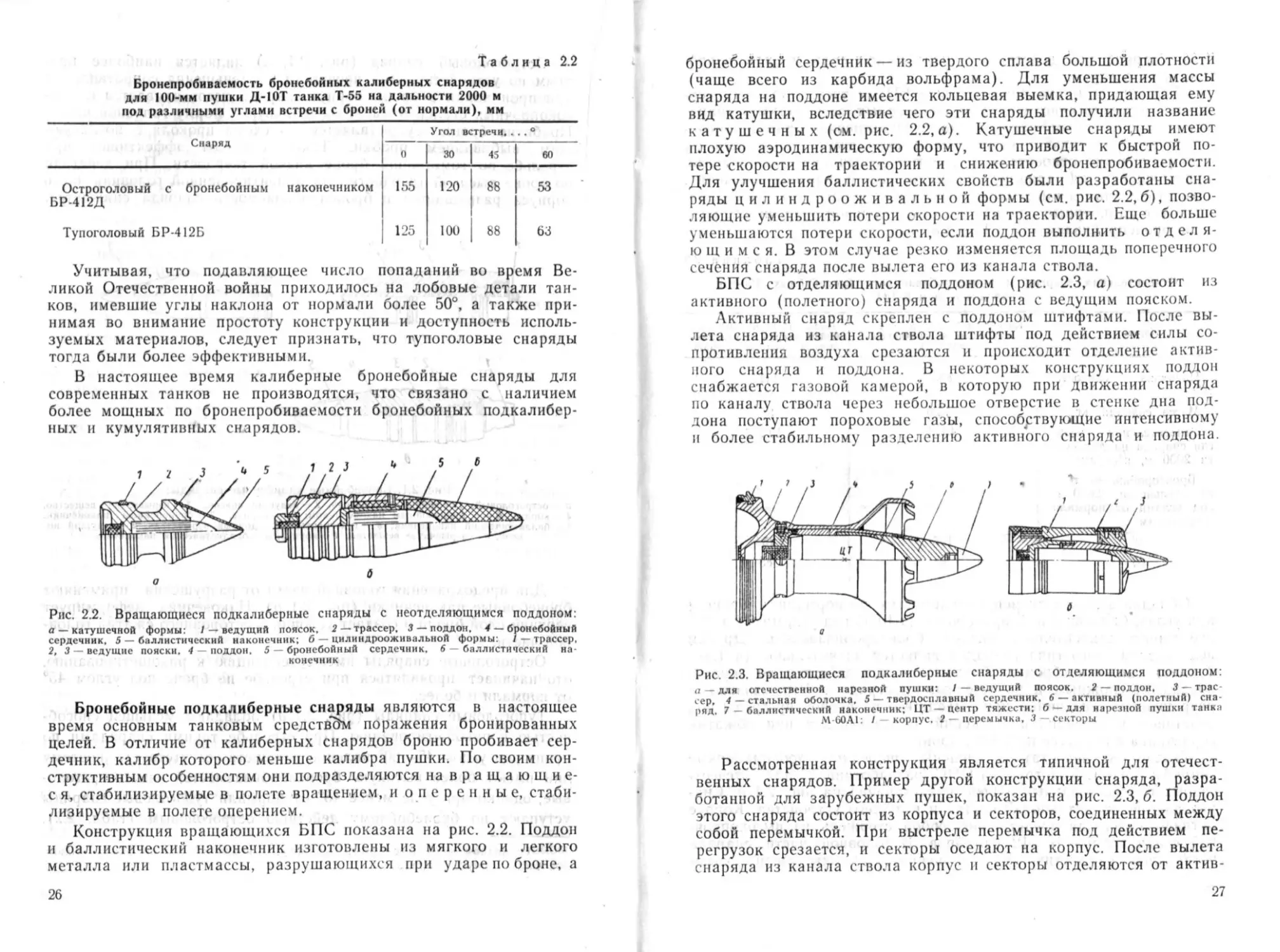
Рве. 2.2. Вращающиеся подкалиберные снаряды с неотделяющимся поддоном:
а — катушечной формы: 1 - ведущий поясок. 2 — трассер. 3 — поддон. 4 — бронебойный
сердечник. 5 — баллистический наконечник; б цилиндрооживальной формы: / — трассер.
2. 3 — ведущие пояски. 4 поддон. 5 — бронебойный сердечник. 6 баллистический на
конечник
Бронебойные подкалиберные снаряды являются в настоящее
время основным танковым средствТУм поражения бронированных
целей. В отличие от калиберных снарядов броню пробивает сер-
дечник, калибр которого меньше калибра пушки. По своим кон-
структивным особенностям они подразделяются навращающие-
с я, стабилизируемые в полете вращением, н оперенные, стаби-
лизируемые в полете оперением.
Конструкция вращающихся БПС показана на рис. 2.2. Поддон
и баллистический наконечник изготовлены из мягкого и легкого
металла или пластмассы, разрушающихся при ударе по броне, а
26
бронебойный сердечник — из твердого сплава большой плотности
(чаще всего из карбида вольфрама). Для уменьшения массы
снаряда на поддоне имеется кольцевая выемка, придающая ему
вид катушки, вследствие чего эти снаряды получили название
к а т у ш е ч н ы х (ом. рис. 2.2, а). Катушечные снаряды имеют
плохую аэродинамическую форму, что приводит к быстрой по-
тере скорости на траектории и снижению бронепробиваемости.
Для улучшения баллистических свойств были разработаны сна-
ряды цилиндрооживальной формы (см. рис. 2.2,б), позво-
ляющие уменьшить потери скорости на траектории. Еще больше
уменьшаются потери скорости, если поддон выполнить отделя-
ющимся. В этом случае резко изменяется площадь поперечного
сечения снаряда после вылета его из канала ствола.
БПС с отделяющимся поддоном (рис. 2.3, а) состоит из
активного (полетного) снаряда и поддона с ведущим пояском.
Активный снаряд скреплен с поддоном штифтами. После вы-
лета снаряда из канала ствола штифты под действием силы со-
противления воздуха срезаются и происходит отделение актив-
ного снаряда и поддона. В некоторых конструкциях поддон
снабжается газовой камерой, в которую при движении снаряда
по каналу ствола через небольшое отверстие в стенке дна под-
дона поступают пороховые газы, способствующие интенсивному
и более стабильному разделению активного снаряда и поддона.
Рис. 2.3. Вращающиеся подкалиберные снаряды с отделяющимся поддоном:
а - для отечественное нарезной пушки: / — ведущий поясок. 3 — поддон. 3- трас
сер. /-стальная оболочка. 5 - твердосплавный сердечник, б — активный (полетный) сна
ряд, 7 баллистический наконечник; ЦТ — центр тяжести; б — для нарезной пушки танка
M GOAI; I корпус. 3 — перемычки, 3 - секторы
Рассмотренная конструкция является типичной для отечест-
венных снарядов. Пример другой конструкции снаряда, разра-
ботанной для зарубежных пушек, показан на рис. 2.3,6. Поддон
этого снаряда состоит из корпуса и секторов, соединенных между
собой перемычкой. При выстреле перемычка под действием пе-
регрузок срезается, и секторы оседают на корпус. После вылета
снаряда из канала ствола корпус и секторы отделяются от актив-
27
ного снаряда под действием центробежной силы и силы сопро-
тивления воздуха.
Действие по броне вращающихся БПС с твердосплавным сер-
дечником аналогично действию калнберных остроголовых снаря-
дов с бронебойным наконечником. Повышение бронепробивае-
мости по сравнению с калибернымн снарядами достигается за
счет увеличения относительной энергии сердечника, т. е. энергии,
приходящейся на единицу площади его поперечного сечения.
Представленные в табл. 2.3 данные показывают, что БПС пре-
восходят калиберные снаряды по относительной энергии в 2,2 раза
и по бронепробиваемости в 1,6—1,8 раза.
Таблица 2.3
Относительная энергия и бронепробнваемость бронебойных 100-ми
снарядов пушки Д-10Т
Параметр Калиберный снаряд с бро- небойным наконечником БР412Д Подкалнберный вращаю щийся снаряд с отделяю шимся поддоном ЗБМв
Начальная скорость, м/с 895 1415
Масс* снаряда, кг 15,9 5,7
Относительная энер- гия снаряда на дальнос- ти 2000 м, кДж/дм2 Бронепробнваемость на дальности 2000 м под углами от нормали к броне, мм: 4998 10 878
0° 155 280
60° 53 85
Обладая высокой бронепробиваемостью по нормали к броне и
при углах, близких к ней, вращающиеся БПС под углами 6(г и бо-
лее имеют относительно низкую бронепробнваемость. Другим
недостатком этого типа снарядов является значительное (в 1,5—
2 раза) снижение бронепробиваемости при действии по экрани-
рованным, сложным и разнесенным преградам. Это связано с
разрушением сердечника при выходе его из первой преграды под
действием внутренних напряжений, образующихся при обжатии
сердечника в процессе пробития брони.
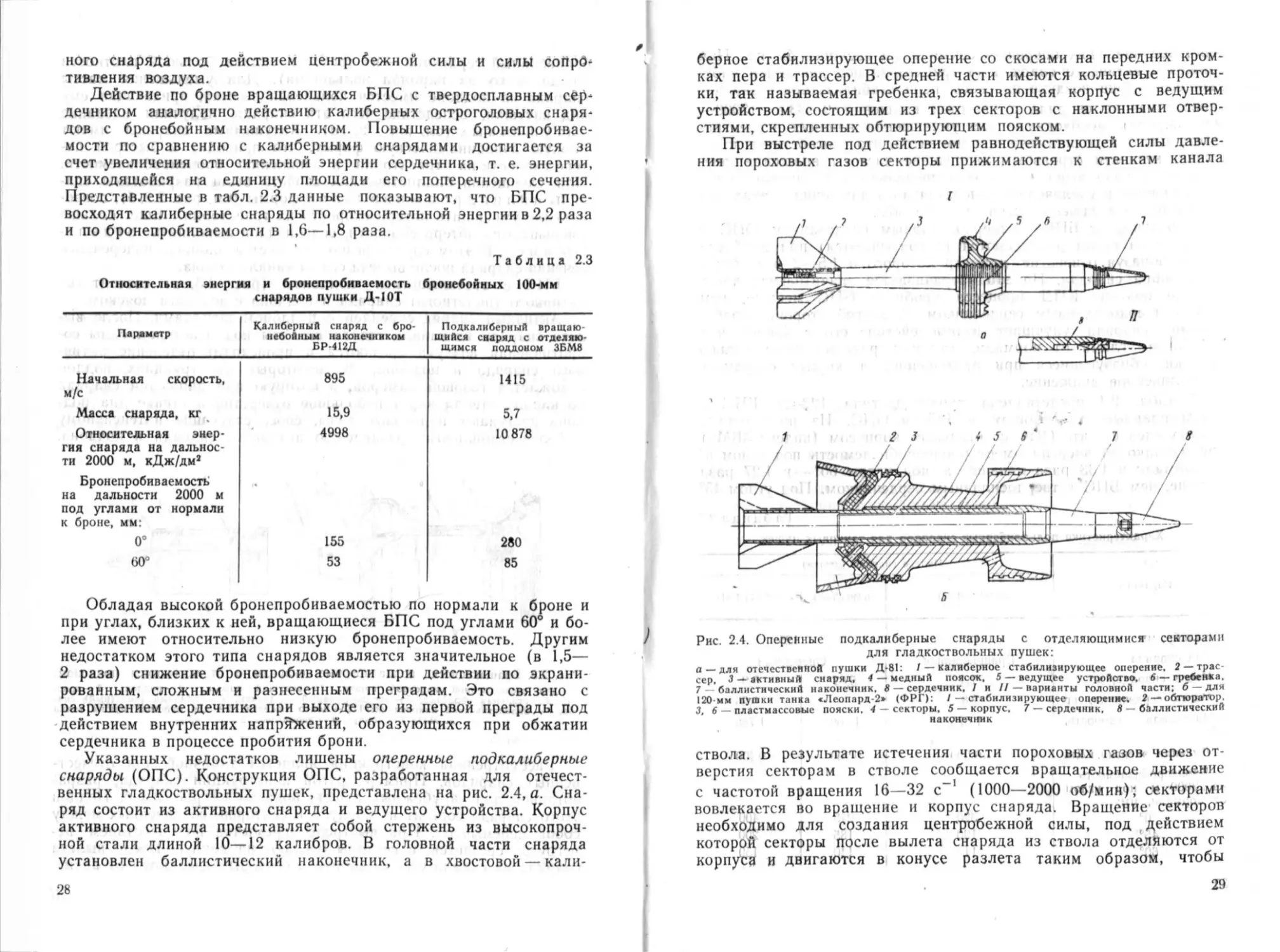
Указанных недостатков лишены оперенные под калиберные
снаряды (ОПС). Конструкция ОПС, разработанная для отечест-
венных гладкоствольных пушек, представлена на рис. 2.4, а. Сна-
ряд состоит из активного снаряда и ведущего устройства. Корпус
активного снаряда представляет собой стержень из высокопроч-
ной стали длиной 10—12 калибров. В головной части снаряда
установлен баллистический наконечник, а в хвостовой — кали-
28
верное стабилизирующее оперение со скосами на передних кром-
ках пера и трассер. В средней части имеются кольцевые проточ-
ки, так называемая гребенка, связывающая корпус с ведущим
устройством, состоящим из трех секторов с наклонными отвер-
стиями, скрепленных обтюрирующим пояском.
При выстреле под действием равнодействующей силы давле-
ния пороховых газов секторы прижимаются к стенкам канала
Рис. 2.4. Оперенные подкалиберныс снаряды с отделяющимися секторами
для гладкоствольных пушек:
а —для отечественной пушки Д»81: / — калиберное стабилизирующее оперение. 2 —трас
сер. 3 — активный снаряд. 4 — медный поясок. 5 — ведущее устройство. 6 — гребенка.
7 баллистический наконечник, 8 сердечник. / и // — варианты головной части; б -для
120 мм пушки танка «Леопард-2» (ФРГ): / — стабилизирующее оперение. 2 — обтюратор.
3. 6 ~ пластмассовые пояски. 4 - секторы. 5 - корпус. 7 — сердечник, в баллистический
наконечник
ствола. В результате истечения части пороховых газов через от-
верстия секторам в стволе сообщается вращательное движение
с частотой вращения 16—32 с“’ (1000—2000 об/мин); секторами
вовлекается во вращение и корпус снаряда. Вращение секторов
необходимо для создания центробежной силы, под действием
которой секторы после вылета снаряда из ствола отделяются от
корпуса и двигаются в конусе разлета таким образом, чтобы
29
хвостовое оперение, опережая секторы, не касалось бы их. При
движении активного снаряда на> траектории под действием набе-
гающего потока воздуха на скосы пера стабилизатора возникает
проворачивание снаряда с частотой вращения 50—83с-1(30р0—
5000 об/мин), необходимое для уменьшения влияния эксцентри-
ситета масс и аэродинамических моментов, что способствует повы
шению кучности стрельбы. Увеличение частоты вращения опе-
ренного снаряда выше некоторого предельно допустимого значе-
ния приводит к увеличению колебательного движения снаряда на
траектории и ухудшению кучности стрельбы.
В отличие от БПС с твердосплавным сердечником ОПС с
корпусом из стали разрушаются (срабатываются) при пробитии
брони, образуя отверстие, диаметр которого в 1,5—2 раза боль-
ше калибра снаряда. На это затрачивается значительная часть
энергии, поэтому КПД процесса пробития ОПС меньше, чем
БПС с твердосплавным сердечником. С другой стороны, сраба-
тывание снаряда улучшает взаимодействие его с броней под
большими углами от нормали, так как рикошетируют только
осколки, образующиеся при разрушении, а корпус сохраняет
прямолинейное движение.
В табл. 2.4 представлена характеристика 122-мм БПС с
твердосплавным сердечником и 125-мм ОПС. Из приведенных
данных следует, что ОПС со стальным корпусом (индекс ЗБМ9)
при одинаковой энергии имеет бронепробиваемость под углом 0°
от нормали в 1,33 раза меньше, а под углом 60° — в 1,27 раза
больше, чем БПС с твердосплавным сердечником. Под углом 45°
Таблица 2.4
Характеристика подкалиберных снарядов для танковых пушек
Параметр Индекс снаряда (пушка)
ЗБМ11 (M-SJ) ЗБМ9 (Д-81) ЗБМ15 (Д-81)
Калибр, мм Вид снаряда 122 Вращающийся 125 Оперенный
Масса снаряда, к»* Ч 5,67 5,9
Масса сердечника, кг 2.К — 0,26
Начальная скорость, м/с 1 575 1 800 1 785
Дульная энергия, кДж 9 200 9200 9 100
Бронепробиваемость на 2000 м под углом от нормали, мм: 0’ 320 245 400
45е 190 185 200
60е ПО 140 150
3<1
действие их одинаково. Для повышения бронепробиваемости
ОПС под углом 0° от нормали и при углах, близких к ней, в го-
ловной части корпуса размещают твердосплавный сердечник
(ОПС индекса ЗБМ15, см. рис. 2.4,а).
Другим направлением повышения бронепробиваемости яв-
ляется применение сердечников из тяжелого сплава на основе
вольфрама, отличающегося от карбида вольфрама более высо-
кой плотностью и низкими прочностными характеристиками.
Тяжелый сплав, как и сталь, срабатывается при пробитии брони.
На рис. 2.4, б представлена конструкция 120-мм ОПС танка
«Леопард-2» с сердечником из тяжелого сплава. Для прочности
снаряда при выстреле сердечник скреплен резьбой со стальной
оболочкой из прочной стали, которая также имеет резьбу для сое-
динения с ведущим устройством, выполненным в виде трех сек-
торов из алюминиевого сплава с двумя центрующими базами,
соединенных обтюрирующими пластмассовыми поясками. Опере-
ние подкалиберное относительно калибра ствола. Масса сердеч-
ника — 3,3 кг.
При одинаковой энергии этот снаряд под углом 60° обеспечи-
вает повышение бронепробиваемости приблизительно на 20 % по
сравнению с цсльнокорпусным ОПС, выполненным из стали.
Дальнейшее увеличение могущества действия связано с изгото-
влением корпуса целиком из тяжелого сплава. За рубежом в ка-
честве материала для корпуса наряду с вольфрамовым сплавом
рассматривается сплав на основе обедненного урана, обладающий
более высокими прочностными характеристиками. Реализация
этого направления способствует увеличению бронепробиваемости
на 10-20%.
Расчет бронепробиваемости бронебойных снарядов. Для рас-
чета толщины пробиваемой брони калибсрных снарядов наи
большее распространение благодаря своей простоте получила
эмпирическая формула Жакоба де Марра
vc^Kd°JS ^0,7/(^0,5cos а),
где vc—скорость пробития снарядом брони, м/с; /С — коэффициент, характе-
ризующий сопротивляемость брони (для снарядов с оживальной формой голов-
ной части и с бронебойным наконечником К = 1900. .. 2100; для снарядов
с притупленной формой головной части К = 2100 .2300); d калибр сна-
ряда, дм; Ь — толщина брони, дм; <7—масса снаряда, кг; а —угол встречи
от нормали к броне,... °
Формула оценки бронепробиваемости, предложенная
К. А. Берзиным, позволяет учесть влияние прочности брони:
.^69^(1 ^6.16^-)^.
где — коэффициент эффективности, учитывающий особенности устройства
снаряда; as—предел текучести брони. МПа; Св — толщина брони, в калибрах;
Ся — относительная масса снаряда ( Cq ~ q/d1).
31
Значения коэффициента К„ полученные путем обработки
результатов стрельб, следующие:
для остроголовых снарядов с радиусом головной части 1,5—2 ка-
для притупленных снарядов с диаметром притупления 0,6—
0,7 калибра и радиусом головной части 4—6 калибров . . . 1.20—1,30
для снарядов с бронебойным наконечником............0,90—0,95
Указанные формулы справедливы при углах а=0...60° для
остроголовых снарядов, а также с бронебойным наконечником и
а=0...30° для тупоголовых снарядов. С введением показателя
степени 0,7 для cos а они могут быть использованы для прибли-
женной оценки бронепробиваемости тупоголовых снарядов при
а =45... 60°.
Расчет бронепробиваемости вращающихся БПС может выпол
няться по формулам, установленным для калиберных бронебой-
ных снарядов, с учетом коэффициентов согласования, получен-
ных экспериментально. В частности, скорость пробития брони
БПС с неотделяющимся поддоном рассчитывается по видоизме-
ненной формуле Жакоба де Марра
+ p^cos aj,
где dc — диаметр сердечника, дм; qc— масса сердечника, кг; Ц — коэффициент,
учитывающий участие поддона в пробитии брони (определяется по табл. 2.5);
<7п — масса поддона, кг.
Таблица 2.5
Значения коэффициента |д
Калибр сларяда. мм Угол встречи от нормали. . .. •
0 30
37 1.0 0,45
45 0,50 036
57 0,49 0,39
76 0,31 0,36
85 0,23 0,20
Скорость пробития брони подкалиберными снарядами с твер-
досплавным сердечником и отделяющимся поддоном может быть
определена по формуле
vi = 2^b=s/(4,+0.\4M),
где — масса оболочки сердечника.
Теория бронебойного действия снарядов «^срабатывающегося»
типа была разработана д-ром техн, наук В. М. Пучковым и раз-
вита в работе д-ра техн, наук В. В. Яворского.
Формулы бронепробиваемости имеют следующий вид:
при а- '45°
6 =(2,76 — 0,117a —0,762 aa) о,);
за
при 45°^л^70°
b=O,85lof(vc, D|)cos [а4- 70(1 — vc /0,277)].
где /(?* vt) - 1 ;
Vc - VC/CO; V, = /2(а*-а’) ; == ;
«’ = «J (po^o): l0 = 7o/(/po); f = «</2/4;
Co —скорость звука в броне; </а—диаметр активного снаряда; д0 — масса
активного снаряда; ро—плотность брони; вк—предел прочности материала
корпуса снаряда; а,—предел текучести брони
Приведенные формулы справедливы для оценки бронепробивае-
мости снарядов, по размерам близких к эталонному активному
снаряду (калибр 38—45 мм, длина корпуса 10—12 калибров).
Кумулятивные снаряды. КС по сравнению с БПС имеют бо-
лее высокую бронепробиваемость, которая практически не зависит
от дальности стрельбы; однако они обладают меньшей начальной
скоростью, определяемой допустимыми значениями действующих
при выстреле перегрузок, и худшими баллистическими характе-
ристиками.
Как и БПС, по конструктивным особенностям КС делятся на
вращающиеся и оперенные.
Рис. 2.5. Вращающиеся кумулятивные снаряды:
а —с иепроаорачиваюшнмся кумулятивным уэлом: / —капсюль детонатор. 2 - ведущий
поясок. 3 — корпус. 4 — взрывчатое вещество. 5- металлическая воронка-облицовка. 6
ввннтная головная часть оживальной формы, 7-головной взрыватель. 8 — трассер, о —•
с проворачивающимся кумулятивным узлом: / — задний подшипник, i — корпус кумуля
тивного узла. .1 — взрывчатое вещество. 4 — кумулятивная облицовка. 5—корпус сна-
ряда. 6 — передний подшипник
Вращающиеся КС (рис. 2.5) разрабатываются для нарезных
пушек и относятся к первым образцам снарядов такого типа.
Металлическая воронка-облицовка снаряда изготовлена, как пра-
вило, из меди марок М2, М3 или малоуглеродистой стали (СтЗ,
сталь 10). Распространенными формами облицовок являются сфе-
рическая, рупорообразная и коническая.
Основным недостатком вращающегося кумулятивного снаряда
является его низкая бронепробиваемость, достигающая двух ка-
либров при действии по нормали. Причина снижения бронепро-
3 Зак. 38с 33
биваемости—вращение снаряда, приводящее к рассеиванию
кумулятивной струи в процессе ее формирования в резуль-
тате действия центробежной силы при частоте вращения, превы-
шающей некоторое допустимое значение. Зависимость бронепро-
биваемости от частоты вращения кумулятивного снаряда пред-
ставлена на рис. 2.6. Из графика видно, что допустимое значение
частоты вращения, при котором не наблюдается существенного
снижения бронепробиваемости КС, составляет 25—33 с~ (1500—
2000 об/мин), что значительно ниже значений, получаемых при
выстреле из нарезных пушек.
Рис. 2.6. Зависимость бронерробнваемости от частоты вращения кумулятив-
ного снаряда
Указанный эффект снижения бронепробиваемости вращаю-
щихся КС устраняется в снарядах с проворачивающимся относи-
тельно вращающегося корпуса кумулятивным узлом (см. рис. 2.5,6),
который устанавливается в корпусе снаряда на подшипниках и
может свободно проворачиваться относительно вращающегося
корпуса. Возможное вовлечение кумулятивного узла во вращение
из-за трения в опорах компенсируется различными способами
(смазка в опорах, разгрузка пороховыми газами, аэродинамиче-
ские вертушки и т. п.), при этом частота вращения кумулятив-
ного узла не превышает указанных выше допустимых значений.
Бронепробнваемость снарядов с проворачивающимся кумуля-
тивным узлом достигает 3,5—4 калибров при действии по норма-
ли, однако находится ниже возможного для данного калибра
уровня вследствие уменьшения диаметра заряда взрывчатого
вещества, обусловленного наличием корпусов снаряда и кумуля-
тивного узла. Недостатками этого снаряда являются также слож-
ность конструкции и высокая стоимость.
Отмеченных недостатков лишены оперенные КС, разрабаты-
ваемые как для нарезных, так и для гладкоствольных танковых
пушек. Оперенные КС (рис. 2.7) для нарезных пушек по устрой-
34
ству корпуса и заряда аналогичны вращающимся. Их отличие
состоит в наличии стабилизирующего устройства, представляю-
щего собой раскрывающееся после вылета из ствола надкалибер-
ное оперение (см. рис. 2.7, а). Это оперение состоит из несколь-
ких лопастей, имеющих скосы, обеспечивающие проворачивание
снаряда в полете с небольшой частотой вращения, необходимой
для уменьшения влияния эксцентриситета масс и аэродинамиче-
ских моментов. Кроме этого, такие снаряды снабжаются прово-
рачивающимся (плавающим) кольцом с обтюрирующим пояском.
Разновидностью оперенных КС являются снаряды с жестким
(нераскрывающимся) калиберным оперением (см. рис. 2.7, в).
Для создания необходимого запаса аэродинамической устойчи-
вости оперение таких снарядов располагается на удлиненном
хвостовике, а головная часть ступенчатая, что позволяет полу-
чить лучшее компоновочное решение в заданных габаритных
размерах благодаря дополнительному стабилизирующему дейст-
вию ступенчатой головки снаряда.
Рис. 2.7. Оперенные кумулятивные снаряды
а—с раскрывающимся оперением для нарезной пушки: / — раскрывающееся надкали-
верное оперение, 2 — плавающее кольцо с обтюрирующим пояском. 3 — головодонный
взрыватель; б —с раскрывающимся оперением для гладкоствольной пушки: / — рас-
крывающееся оперение. 2 — поясок, запрессованный в корпус, 3 — головной взрыватель;
в—с нераскрывающимся оперением: / — жесткое калиберное оперение. 2—поясок, за-
прессованный в корпус, 3 — контактная шина, 4 — головодонный взрыватель
3*
35
КС для гладкоствольных пушек (см. рис. 2.7, б) кроме про-
стоты конструкции имеют хорошие показатели бронепробивае-
мости. Для них нет необходимости в проворачивающемся кольце
с обтюрирующим пояском, и он заменяется простым по устройст-
ву запрессованным в корпус пояском. Оперение, как правило,
раскрывающееся, но может быть и жестким калиберным. Броне-
пробиваемость таких снарядов достигает 4—4,5 калибров при
действии по нормали.
Действие кумулятивных снарядов по броне. При ударе сна-
ряда по преграде срабатывает детонационная цепь и происходит
взрыв кумулятивного заряда. Детонация заряда, как правило,
осуществляется со стороны донной части. При этом фронт дето-
национной волны, имеющий в зависимости от типа взрывчатого
вещества скорость D=7500... 8900 м/с, достигает вершины ку-
мулятивной облицовки, а затем распространяется к ее основа-
нию, т. е. к головной части снаряда. Продукты взрыва заряда
последовательно, начиная с вершины, обжимают кумулятивную
облицовку, образуя из металла ее внутренней поверхности куму-
лятивную струю, скорость головной части которой может превос-
ходить скорость детонации и составляет 8000—10 000 м/с.
Рис. 2.8. Схема образования куму-
лятивной струи в процессе переме-
щения фронта детонации по обли-
цовке:
/ — пест; 3 — струя
Ввиду того, что скорость мбжатия облицовки уменьшается
при перемещении от вершины ее к основанию, скорость кумуля-
тивной струи также уменьшается по мере ее формирования.
Вследствие разных скоростей по длине кумулятивная струя при
движении вперед сначала растягивается, а затем разрушается
на отдельные частицы; эффективность действия струи при этом
уменьшается. В кумулятивной струе содержится 10—15 % метал-
ла облицовки. Большая часть металла облицовки обжимается
в форме песта и движется вслед за кумулятивной струей со ско-
ростью 500—1000 м/с, практически не оказывая влияния на бро-
непробиваемость. Схема образования кумулятивной струи и песта
в процессе перемещения фронта детонации по облицовке пока-
зана на рис. 2.8.
36
Наибольший эффект производит кумулятивная струя при под-
рыве заряда ВВ на определенном, так называемом фокусном
расстоянии, составляющем в зависимости от конструкции сна-
ряда 2—3 диаметра заряда ВВ.
Основу теории бронебойного действия кумулятивной струи,
разработанной академиком М. А. Лаврентьевым, составляет
предпосылка о том, что процесс бронепробития рассматривается
как проникание идеальной несжимаемой жидкости в жидкость
соответствующей плотности по законам установившегося дви-
жения, при этом инерционные силы превалируют над упругими
и вязкими.
С помощью уравнения Бернулли получим соотношения для оп-
ределения давления струи на броню
и давления брони на струю
I а
Pt — 2
где Рстр — плотность струи; рер — плотность брони; и — скорость струи; и —
скорость проникания. 4 «
Так как в месте контакта струи с преградой pi=p2, то
4’Рстр(«-«)2 =
откуда
Общая глубина проникания кумулятивной струи
- иГар - Ul/(V - U) -I /Рстр/Рвр,
где ТПр — время проникания струи длиной I.
Таким образом, глубина проникания кумулятивной струи за-
висит от длины струи и плотности брони, но не зависит от ско-
рости струи, что объясняется основной предпосылкой теории бро-
непробития, не учитывающей влияния прочностных свойств пре-
грады на глубину проникания.
Гидродинамическая теория хорошо согласуется с эксперимен-
тальными данными для материалов облицовок и преград, имею-
щих малую сжимаемость. Уточнение гидродинамической теории
состоит в учете прочностных характеристик практически сжимае-
мых материалов преграды и струи, причем большую роль играют
характеристики материала преграды.
37
Глубина проникания кумулятивной струи с учетом прочност-
ных свойств преграды определяется по формуле
L - I /Рстр/Рбр [ I - «1 y/(PcTPf’) 1 + г,
где <Х| — безразмерный коэффициент; у — динамическая прочность преграды;
г — величина, характеризующая глубину проникания с учетом прочности пре-
грады, численно равная радиусу пробоины.
Бронебойно-фугасные (сплющивающиеся) снаряды (БФС).
Они входят в боекомплект некоторых зарубежных танков и пред-
назначены для стрельбы по бронированным целям и целям, рас-
положенным за различными защитными преградами, а также для
поражения живой силы. Бронебойное действие этих снарядов
заключается в образовании откола, возникающего на тыльной
стороне брони в результате взрыва снаряда на ней. Действие по
живой силе обусловливается наличием заряда мощного ВВ в
корпусе из высокопластичной легированной стали.
Типичная конструкция БФС приведена на рис. 2.9, где изо-
бражен 120-мм английский бронебойно-фугасный снаряд для
пушки танка «Чифтен». Снаряд имеет сравнительно тонко-
стенный корпус, заполненный взрывчатым веществом и из-
Рис. 2.9. Бронебойно-фугасный сна-
ряд:
/ — донный взрыватель; 2 — тонкостенный
корпус; 3 — взрывчатое вещество
готовленный из высокопластичных легированных сталей с отно-
сительно высокими механическими свойствами. Толщина стенок
корпуса увеличивается к донной части за счет уменьшения внут-
реннего диаметра. В оживальной части корпуса размещается
амортизатор из инертного материала. Для снаряжения приме-
няются мощные пластичные ВВ со скоростью детонации 7800—
8200 м/с. Для подрыва заряда ВВ применяются донные механи-
ческие взрыватели предохранительного типа с дальним взведе-
нием.
Принцип действия БФС по бронированным целям заключает-
ся в следующем. При ударе снаряда в броню тонкостенный кор-
пус и ВВ сплющиваются, в результате чего контактная поверх-
ность увеличивается до 1,5—2,0 калибров, и в этот момент про-
исходит детонация ВВ, обеспечиваемая взрывателем.
Детонация ВВ непосредственно на броне приводит к импульс-
ной нагрузке и образованию ударной волны сжатия, которая
распространяется в броне со скоростью около 5000 м/с. При
встрече ударной волны сжатия со свободной тыльной поверх-
ностью возникает отраженная волна растяжения, которая дви-
38
жется в противоположном направлении. При сложении части
волны растяжения с частью волны сжатия, которая еще не до-
шла до свободной поверхности, растягивающее напряжение воз-
растает и, когда оно равно сопротивлению отрыва, происходит
откол с тыльной поверхности брони.
Расположенный в головной части снаряда амортизатор пред-
назначен для предупреждения преждевременного подрыва и со-
здания необходимых условий для сплющивания заряда ВВ перед
подрывом на преграде.
Начальная скорость БФС определяется прочностными характе-
ристиками стенок корпуса и для известных танковых зарубежных
снарядов не превышает 700—750 м/с.
Бронепоражающее действие БФС мало зависит от угла встре-
чи с броней. В частности, толщина поражаемой брони, оценивае-
мая по наличию полного откола, при углах встречи до 60° со-
ставляет для монолитной брони 1,1—1,3 калибра, а при угле
встречи 70° уменьшается до 0,8—0,9 калибра. Экранированная и
разнесенная броня существенно (в 2—3 раза) снижает бронепо-
ражающее действие БФС. Это объясняется подрывом снаряда
на экране или первой преграде, при этом действие по второй пре-
граде осуществляется осколками брони экрана или первой пре-
грады. 4
Осколочно-фугасное действие БФС характеризуется образо-
ванием при взрыве ударной волны и большого числа мелких
высокоскоростных осколков. Практически фугасное действие
БФС равноценно действию обычных ОФС равного калибра.
Осколочное действие БФС по открыто расположенной живой
силе меньше по сравнению с ОФС вследствие заглубления сна-
ряда в грунт при стрельбе по открытой местности (из-за донного
расположения взрывателя).
Несмотря на то, что БФС являются многоцелевыми, перспек-
тива их использования в танках проблематична из-за низких зна-
чений начальной скорости и ее больших потерь на траектории, от-
рицательно сказывающихся на точности стрельбы, а также сниже-
ния бронепробиваемости при действии по экранированным, разне-
сенным и сложным преградам.
2.3. НАЗНАЧЕНИЕ, УСТРОЙСТВО И ДЕЙСТВИЕ
ОСКОЛОЧНО-ФУГАСНЫХ СНАРЯДОВ
Конструкция ОФС современных танков определяется спосо-
бом их стабилизации в полете.
Осколочно-фугасный снаряд, стабилизируемый вращением
(рис. 2.10, а), используется, как правило, в унитарном выстреле.
Осколочно-фугасные снаряды, стабилизируемые в полете
оперением (см. рис. 2.10,6), используются в механизмах раз-
дельно-гильзового заряжания; для исключения осевого перемеще-
39
ния снаряда в лотке механизма заряжания пушки на лопасти
стабилизатора надевается пластмассовое кольцо.
При движении снаряда по каналу ствола в результате действия
сил инерции линейного ускорения лопасти стабилизатора срезают
стопор. После вылета снаряда за дульный срез орудия лопасти
открываются, поворачиваясь на угол 90°. и удерживаются в по-
лете силой набегающего потока воздуха, обеспечивая устойчи-
вость снаряда на траектории.
Рис. 2.10. Осколочно-фугасные сна-
ряды:
а — стабилизируемые вращением: / — ас
дущий поясок, ? —разрывной заряд. J —
корпус. 4 —дополнительный детонатор.
5 — привинтная головка. 6 — взрыватель
б — стабилизируемые оперением: 1 — пласт
массовое кольцо. 1 — оси. 3 — лопасти.
4 стопор лопасти. 5 - корпус ставил и.ia
тора, 6. 7 — обтюрирующие пояски, в —
разрывной заряд (BB). 9—корпус. 10 —
взрыватель
Танковые ОФС комплектуются взрывателем В-429Е ударного
действия, ввинченного в верхнюю часть снаряда. При встрече с
преградой взрыватель срабатывает и вызывает детонацию разрыв-
ного заряда.
На боковой поверхности корпуса взрывателя имеются риски
с отметками «О» (кран открыт) и «3» (кран закрыт). Взрыва-
тель В-429Е можно устанавливать на осколочное действие (кран
установлен на «О>, колпачок снят), на осколочно-фугасное (кран
установлен на «О», колпачок надет) и фугасное действие (кран
установлен на <3», колпачок надет).
40
В качестве наиболее оптимальной рекомендуется установка
взрывателя на осколочно-фугасное действие, так как в этом слу-
чае обеспечивается безопасность обращения с ОФС в боевом от
делении танка, не требуется выполнения каких-либо операций
по установке взрывателя в танке перед выстрелом и обеспечи-
вается безотказное действие взрывателя у цели; выстрелы по-
даются с установленным краном взрывателя на «О» и надетым
колпачком.
В исключительных случаях (для обеспечения безотказного
действия взрывателя при стрельбе по торфяному и болотистому
грунтам на дистанции до 3000 м) целесообразна установка взры-
вателя на «О> без колпачка. В этом случае, если позволяет об-
становка, свинчивание колпачка со взрывателя производится
перед выстрелом.
В общем случае действие снаряда у цели происходит следую-
щим образом. После срабатывания взрывателя и детонации ВВ
корпус снаряда разрушается; образуются осколки произвольной
формы и ударная волна.
Характеристики поражающего действия снарядов опреде-
ляются как экспериментально, так и теоретически.
Экспериментальное определение характеристик осколочного
и фугасного действия предусматривает:
испытания снарядов подрывом в бронекамере (по ГОСТ
В18243—72), в щитовой мишенной обстановке (по ГОСТ
В18245—72) и в грунте (по ГОСТ В18247—72)-
определение максимального избыточного давления и удель-
ного импульса ударной волны при взрыве (по ГОСТ В18246—72).
Испытания снарядов подрывом в бронекамере проводятся
для исследования распределения осколков по массе. Целью испы-
таний снарядов подрывом в щитовой мишенной обстановке являет-
ся определение количества и скорости разлета осколков в зависи-
мости от угла разлета. При испытаниях снарядов подрывом в грун-
те определяются максимальный диаметр и объем воронки, образу-
ющейся при подрыве.
Поражающее действие, наносимое цели осколками корпуса
снаряда, называется осколочным.
Эффективность поражения снарядом цели обусловлена влия-
нием многочисленных факторов, которые иногда носят случайный
характер, поэтому результат поражения цели необходимо также
рассматривать как случайное событие.
Наиболее полно характеризует поражающее действие снаряда
по цели координатный закон поражения цели, устанавливающий
зависимость между удалением точки разрыва снаряда от цели
(координатами точки разрыва) и соответствующей ей вероят-
ностью поражения цели. Одной из характеристик является приве-
денная зона поражения Snp , графическое изображение которой
показано на рис, 2.11, а размеры для ОФС приведены в табл. 2.6.
4 Зак. 38с
41
Характеристика ОФС
Т а б л ц а 2.6
NM •<19ИПМ Способ ставили- >ации Масса снаряда, кг Дайна снаряаа в калибрах Масса ВО. Тип В В Макси- мальная дальность, м Приведен- ная зона поражения, м*
100 Вращением 15,6 4.8 1.69 А-1Х-2 13 400 300
115 Оперением 18,0 5,65 2.8 A-IX-2 9000 350
125 1 Оперением 23,3 5.5 3.4 A-IX-2 10000 400
Как правило, цели, поражаемые ОФС, представляют собой со-
вокупность разных по уязвимости элементов. Обычно принимает-
ся, что для поражения уязвимого элемента достаточно попадания
в него хотя бы одного поражающего осколка. Физически картина
взаимодействия осколков с уязвимым элементом цели может
быть описана следующим образом: от точки разрыва снаряда
во все стороны разлетаются осколки ( /VeeK ), часть которых в
определенном направлении и на определенном удалении от точки
разрыва перехватывается рассматриваемым уязвимым элементом.
C(x,z)
Рис. 2.11. Графическое изображение
приведенной зоны поражения
Если допустить, что точки попадания осколков в элемент рас-
пределяются равномерно по его проекции на картинную плос-
кость (а это допущение правомерно, так как размеры уязвимых
элементов сравнительно невелики), то можно утверждать, что
распределение вероятности попадания подчиняется закону Пуас-
сона.
Согласно закону Пуассона вероятность попадания хотя бы
одного убойного осколка в v-й уязвимый элемент цели можно
рассчитать по формуле
я», (*,?.*)= 1-е’",
где . — математическое ожидание числа осколков, попадающих в уязви-
мый элемент: х, у, г— координаты точки подрыва снаряда относительно иентра
цели; i—порядковый номер радиуса; / — порядковый номер угла разлета ос-
колков.
42
При расчете вероятности поражения уязвимого элемента не-
обходимо учитывать влияние экранирования этого элемента либо
соседними элементами, либо местными предметами.
Целесообразно рассмотреть способ расчета среднего числа
осколков , попадающих в v-й уязвимый элемент. Проекцию
поражаемой площади v-ro уязвимого элемента на картинную
плоскость можно представить как часть шаровой поверхности,
вырезанной из сферы полым конусом, имеющим вершину в точке
разрыва снаряда. При этом центр поверхности шара также совме-
щается с точкой разрыва снаряда, за радиус шара принимается
расстояние /?,/у от точки разрыва снаряда до центра тяжести
уязвимого элемента, а образующие полого конуса должны прохо-
дить через две крайние точки проекции уязвимого элемента.
Тогда
д
2'(cos
где N0CK — число осколков, образующихся при разрыве снаряда; Д С,, — от-
носительное число осколков, разлетающихся внутри полого конуса, образующие
которого составляют с осью снаряда углы ?С»П1|П и — относи-
тельное число осколков массой q и более; S, (ф/#) — площадь проекции пора-
жаемой поверхности v-ro уязвимого элемента на картинную плоскость.
Число осколков, образующихся при разрыве снаряда в броне-
камере, определяется по вышеуказанной методике. Площадь про-
екции поражаемой поверхности v-ro уязвимого элемента на кар-
тинную плоскость определяется известными графоаналитически-
ми методами. Определение углов ?г,ю1п н основано
на допущении, что уязвимые элементы являются прямоугольными
параллелепипедами. В этом случае достаточно определить углы
?сч . образуемые осью разорвавшегося снаряда и направле-
ниями от точки разрыва на каждую из восьми вершин параллеле-
пипеда, а из полученных восьми углов выбрать только два: мини-
мальный и максимальный ©
Tc’mln с’тм
При таком подходе вся проекция уязвимого элемента обяза-
тельно будет лежать внутри полого конуса, не выходя за его пре-
делы.
Расчет углов производится по следующей формуле:
(у у, )sinOe — х, )со$нс
©е, = arccos —. *t * =-,
H’-s) (' V
где 0С — угол падения снаряда; х,^. у,*, х,*— прямоугольные координаты й-й
вершины v-ro уязвимого элемента.
4*
43
Как ранее указывалось, распределение осколков по конусам
определяют при подрывах снарядов в щитовой мишенной обста-
новке в статике (без стрельбы). В динамике (при выстреле) под
воздействием полетной скорости снаряда vc происходит смеще-
ние потока осколков в направлении головной части снаряда.
Доказано, что осколки соседних конусов в подавляющем боль-
шинстве случаев не перемешиваются, происходит лишь сдвиг
образующих конусов вперед по направлению движения снаряда,
причем число осколков внутри каждого конуса остается практи-
чески таким же, как и в статике. На основании этого можно счи-
тать, что задача по определению числа осколков, разлетающихся
в конусе, образующие которого составляют с осью снаряда углы
<?с, тш и 'Рощах ’ СВ°ДИТСЯ к пересчету этих углов применитель
но к статическим условиям, т. е. к определению новых углов
© и которые могут быть найдены из формулы
*m!n *max
cos ф = cos © 1/"1 — z£sln © /и2 —
Tvmln(m»x) Tc*mln(max) V с *c*mln(max) Р
— t»csln2?cv , , lvp,
c*mln (max) 1
где ve —скорость снаряда в момент подрыва; ир — начальная скорость раз-
лета осколков в статических условиях.
Рассчитанные значения © и © позволяют по экспе-
1 *mtn *mix
риментальной интегральной зависимости (SAVy(<p)] определить
относительное число осколков, разлетающихся в направлении
уязвимого элемента цели (ACfJ.
Для определения относительного чис^та убойных осколков CQ„
необходимо знать минимальную массу убойного осколка , счи-
тая при этом, что все осколки большей массы на заданном удале-
нии /? для v-ro уязвимого элемента тем более будут убой-
ными. Минимальная масса убойного осколка определяется в про-
цессе решения двух уравнений. Первое уравнение определяет за-
висимость скорости элемента на удалении от его начальной
скорости и баллистического коэффициента. Второе уравнение
определяет связь необходимой убойной скорости осколка с его
потребной кинетической энергией у цели и характеристики уязви-
мости элемента цели.
В работе И. В. Долинина предложена система двух урав-
нений:
0,0374 -и q^g sin Qv
0,0374Uy6^ -Wi'^slnQ,
/?, = 13,37^'3 In
*4 = 95,6 Ve^ ,
где ууб — убойная скорость осколка; Еул — удельная кинетическая энергия,
необходимая для поражения данного элемента.
44
В работе [9] показано, что оценка поражающих свойств
осколков по удельной кинетической энергии не всегда оправдана,
и дается рекомендация по использованию в качестве характерис-
тик поражающего действия осколков их массы и скорости. Тогда
второе уравнение может быть представлено в виде
- 0,92 )Ло, 1 я (/>„ + 0.667S.) (1 + Т) р/ ,
где =0.1SM6BpTnp9”1»
л - kS^ocKq~ 1,
vc — предельная скорость осколка при сквозном пробитии преграды, м/с; п —
число граней осколка в поперечном направлении; Лпр — толщина преграды, м;
SM — площадь миделя осколка, м2; я, — предел текучести материала прегра-
ды, Па; <? — масса осколка, кг; Тоск — плотность осколка, кг/м’; 7пр — плот-
ность материала преграды, кг/м’; k = 2,4, если < 784 МПа; к — 0,83, если
а, > 784 МПа.
Определив на основании экспериментальных данных мини-
мальную массу осколка, находим относительное число осколков
(Cq ) массой q и более.
Поскольку на цель воздействуют нс только осколки, но и удар-
ная волна, то вероятность поражения определяется как сложное
событие по формуле
А (х, у) = 1 - [1 - Р,ЖК (х.у)] J1 - , (х,у)],
где Аоск — вероятность поражения уязвимого элемента осколками; в _
вероятность поражения того же уязвимого элемента ударной волной.
Выбор направлений совершенствования осколочно-фугасных
снарядов. Для увеличения эффективности ОФС необходимо умень-
шить ошибки стрельбы из танка, обеспечить оптимальное сочета-
ние параметров координатного закона поражения цели с распреде-
лением точек разрыва снарядов и увеличить могущество действия
снарядов.
Известно, что осколочное действие ОФС зависит от ряда кон-
структивных параметров, определяющих число осколков, их рас-
пределение по массе, форму, скорость и углы разлета. Наряду
с этим существенное влияние на эффективность осколочного дей-
ствия оказывают также условия стрельбы: скорость и угол встре-
чи снаряда с преградой, характер цели, ее уязвимость и размеры,
а также время замедления взрывателя и наличие экранирующих
свойств местности.
Перечисленные факторы по характеру их влияния на могу-
щество действия осколочно-фугасных снарядов можно свести в две
группы:
1) факторы, влияющие на увеличение общего числа поражаю-
щих элементов, воздействующих на цель;
45
2) факторы, влияющие на повышение поражающих свойств
элементов.
Анализ использования серийных осколочно-фугасных снаря-
дов показывает, что могущество их действия не полностью реали-
зуется в существующих комплексах танкового вооружения, что
объясняется отсутствием на практике возможности установки
взрывателей на требуемое по условиям стрельбы время срабаты-
вания, значительным влиянием экранирующих свойств местности
при стрельбе ОФС с контактными взрывателями и большим рас-
сеиванием снарядов по дальности вследствие малых углов падения,
определяемых баллистическими характеристиками существующих
танковых пушек.
Целесообразно рассмотреть влияние заглубления снаряда в
грунт или преграду за время действия ударного взрывателя на
эффективность осколочного действия по открытой живой силе.
Под временем действия ударного взрывателя подразумевается
промежуток времени от момента встречи снаряда с преградой
до момента его разрыва. Путь снаряда в преграде за время дей-
ствия ударного взрывателя при условии его равнозамедленного
движения может быть вычислен с использованием формулы Бере-
занского:
где/ —путь снаряда в преграде; vB — скорость встречи снаряда с преградой;
Г—время действия взрывателя, d — калибр снаряда; *Пр — коэффициент со-
противления преграды; q — маеса снаряда.
Зависимость приведенной зоны поражения от глубины внедре-
ния снаряда в грунт, от высоты подрыва и экранирующих свойств
местности приведена на рис. 2.12.
Уменьшение площади приведенной зоны осколочного пораже-
ния в зависимости от заглубления снаряда может быть объяснено
тем, что в поражении цели не участвуют осколки от той части
корпуса снаряда, которая находится в грунте. В то же время при
стрельбе танковыми ОФС для обеспечения наибольшего фугасно-
го действия необходимо иметь оптимальное заглубление снаря-
дов в преграду. Указанные обстоятельства обусловливают уста-
новку взрывателей на мгновенное или замедленное действие в за-
висимости от решаемой танком боевой задачи. Наличие в совре-
менных отечественных танках автоматов заряжания позволяет
создать автоматические устройства для установки ударных (кон-
тактных) взрывателей на требуемое время действия, однако бо-
лее эффективен способ ликвидации влияния заглубления снаряда
на поражающее действие, заключающийся в обеспечении воздуш-
ного подрыва снарядов.
Воздушный подрыв снарядов дает следующие преимущества
по действию:
увеличивается число осколков, способных поразить цель;
резко ослабляется влияние рельефа местности;
46
обеспечивается с большей эффективностью поражение цели
при промахах в результате уменьшения рассеивания снарядов по
дальности при использовании высокоточных электронных взрыва-
телей и автоматических систем их установки.
Как видно из рис. 2.12,6, эффективность поражения открыто
расположенной живой силы при неконтактном подрыве на опти-
мальной высоте увеличивается на 20 % по сравнению с наземным
разрывом, а эффективность поражения живой силы, расположен-
ной в открытых окопах, —в 1,3—4 раза в зависимости от угла па-
дения снаряда 0С [3].
Рис. 2.12. Зависимость приведенной
зоны Лораження осколочно-фугасного
снаряда:
а—от глубины внедрения снаряда вг грунт;
б—от высоты подрыва: /—нс —45, 2 —
ее= 55°,------живая сила, расположенная
в окопах.-------открыто расположенная жи-
вая сила; в —от влияния экранирующих
свойств местности; Snp — площадь приведенной
зоны поражения без учета экранирования.
вКр—с учетом экранирования; 1—глуби
на внедрения; Н — высота подрыва
Однако полученные данные нельзя признать соответствующими
реальным условиям, так как они не отражают отрицательного
влияния таких факторов, как экранирование целей и заглубление
снарядов в грунт при наземном подрыве, а наличие экранирования
целей (см. рис. 2.12, в) резко снижает поражающее действие ОФС.
Таким образом, воздушный подрыв танковых снарядов —ре-
альный путь повышения эффективности осколочно-фугасных сна-
рядов.
Дистанционное срабатывание снарядов при стрельбе из танка
обеспечивается электронными дистанционными взрывателями.
Применение электронных взрывателей в танковых снарядах
увеличивает точность времени их срабатывания, а также позволя-
47
ет выполнить аппаратуру и устройства для их установки с габари-
тами, приемлемыми для размещения в танках. Желаемое время
подрыва устанавливается при соприкосновении установочного при-
бора с головкой взрывателя (рис. 2.13), однако наличие ручной
установки электронных взрывателей не обеспечивает эффективной
стрельбы по движущимся целям. Для ликвидации этого недостат-
ка фирма «Дженерал электрик> разрабатывает для армии США
взрыватель, увеличивающий точность подрыва и скорострельность.
Время на взрывателе устанавливается автоматически после
вылета снаряда из пушки; оно высчитывается танковым балли-
стическим вычислителем по данным лазерного дальномера с уче-
том отклонений условий стрельбы от нормальных и передается по
радиоканалу на снаряд, находящийся от танка на небольшом уда-
лении (примерно 4 м).
Рис. 2,!3. Ручная установка электронного дистанционного взрывателя
Одним из направлений увеличения общего числа поражаю-
щих элементов является организованное дробление ОФС с после-
дующим использованием готовых поражающих элементов. Улуч-
шить характеристики действия поражающих элементов можно в
результате увеличения скорости и плотности материала поражаю-
щих элементов, а также уменьшения их коэффициента формы.
При воздушном подрыве погрешности стрельбы образуют так
называемый эллипсоид рассеивания точек подрыва снарядов,
а координатный закон поражения цели характеризует совокуп-
ность точек разрывов снарядов в пространстве, приводящих к по-
ражению цели с определенной вероятностью.
Форма и размеры зоны поражения зависят от конструкции
снаряда и цели, и в сочетании с погрешностями стрельбы опреде-
ляют эффективность стрельбы из танка. Например, если форма и
размеры зоны поражения полностью соответствуют как по величи-
не, так и по направлению размерам эллипсоида рассеивания точек
48
разрывов снарядов в пространстве, то вероятность поражения
цели будет равна единице. Однако в настоящее время уровень
погрешности стрельбы из танка не позволяет спроектировать сна-
ряд, у которого зона поражения соответствовала бы эллипсоиду
рассеивания, поэтому зона поражения существующих ОФС сущест-
венно отличается от наиболее оптимальной формы.
Целесообразно разрабатывать такие снаряды, у которых зона
возможных поражений была бы подобна эллипсоиду рассеивания
и максимальным образом приближалась к нему по размерам. Как
следует из анализа погрешностей стрельбы из танка, рассеивание
точек разрыва по дальности значительно превосходит рассеива-
ние по высоте и направлению, поэтому поиск целесообразно вести
в направлении создания снарядов, имеющих зону поражения, рас-
пространяющуюся вдоль траектории.
Примером таких конструкций могут служить различные моди-
фикации шрапнельных снарядов, в которых шрапнель выполняет-
ся в виде шариков и стержней.
В 60-х гг. в США были разработаны снаряды со стреловид-
ными оперенными убойными элементами, предназначенные для
отражения массированных атак пехоты на ближних дистанциях
(стрельба на картечь) и для поражения открыто расположенной
живой силы при дистанционном подрыве смаря^.
Корпус снаряда гранаты ХМ-66 изготавливается из алюми-
ниевых сплавов и имеет стальное основание. Оживальная часть
корпуса включает в себя переходную въулку йля механического
дистанционного взрывателя, имеющего ударное действие. В пере-
ходной втулке помещается сборочная единица из четырех детона-
торов ХМ-86, замедлителя М-7 и детонатора ХМ-87, вставленного
в огнепередаточную трубку, которая соединяет переходную втулку
с основанием гранаты. В основании гранаты помещается вышиб-
ной заряд, а в корпусе находятся 5000 стреловидных элементов
массой 0,8 г каждый (или 8000 элементов массой по 0,52 г) и не-
большая шашка пиротехнического состава. Стреловидные элемен-
ты уложены по встречной (оппозитной) схеме укладки и сгруппи-
рованы в самостоятельные блоки.
Функционирование взрывателя начинается сразу же после
вылета снаряда из канала ствола, и поэтому действие снаряда
может происходить как в непосредственной близости от орудия,
так и на заданной дальности. После срабатывания дистанцион-
ного взрывателя происходит детонация элементов разрывного
заряда, расположенных в переходной втулке, и вскрытие голов-
ной части корпуса снаряда. Одновременно воспламеняется вы-
шибной заряд и стреловидные элементы выталкиваются порохо-
выми газами. Целеуказательный заряд попадает в центр пло-
щади рассеивания поражающих элементов и горит около 15 с,
позволяя корректировать стрельбу. Начальный момент раскры-
тия корпуса и полет стреловидных элементов показаны на
49
рис. 2.14. Схема зоны разлета стреловидных поражающих эле-
ментов 105-мм снаряда ЗМ546 при стрельбе на заданную даль-
ность приведена на рис. 2.15. При установке дистанционной
трубки на картечь срабатывание происходит в 3 м от дульного
среза. Ширина дуги основания конуса разлета стреловидных
элементов на расстоянии 300 м достигает 119 м.
Рис. 2.14. Начальный момент раскрытия корпуса гранаты ХМ-66 и полет
стреловидных элементов
По данным зарубежной печати, действие этой гранаты по от-
крыто расположенной живой силе примерно в восемь раз выше по
сравнению с действием обычной осколочной гранаты этого же
калибра.
Рис. 2.15. Схема зоны разлета стреловидных поражающих элементов 105-мм
снаряда 3M54G:
1 — расстояние от точки срабатывания взрывателя, /? —расстояние от дульного среза
до центра цели
50
В США проводятся дальнейшие исследования по повышению
эффективности действия снарядов со стреловидными элементами,
исследуются пути повышения начальной скорости стреловидных
элементов, повышения и выбора оптимальной скорости встречи
этих элементов с целью, а также причины, вызывающие уменьше-
ние скорости стреловидных элементов в полете. Проводятся ра-
боты по определению оптимальной массы элемента для пораже-
ния соответствующих целей. Уделяется внимание соблюдению
симметричности элементов в процессе изготовления (в результате
технологических мероприятий), а также за счет устранения при-
чин, вызывающих повреждение элементов при выстреле.
Таким образом, развитие танковых ОФС целесообразно осу-
ществлять в направлении создания снарядов с дистанционным
подрывом при обеспечении максимального могущества действия
у цели и оптимального распределения зоны поражения.
Глава 3. ТАНКОВЫЕ ПУШКИ
3.1. ОСНОВНЫЕ НАПРАВЛЕНИЯ РАЗВИТИЯ ПУШЕК
Основными показателями назначения танковой пушки явля-
ются энергетические, с помощью которых обеспечивается заданная
вероятность поражения цели.
Танковая 125-мм гладкоствольная пушка Д-81 (2А26) в раз-
личных ее модификациях является основным вооружением совре-
менных отечественных основных танков (Т-64А, Т-72 и Т-80).
Для реализации высоких энергетических показателей при суще-
ствующих габаритно-массовых ограничениях для этой пушки были
разработаны и освоены высокопрочные орудийные материалы,
что позволило создать высокопрочные стволы при относительно
малой толщине стенок, а следовательно, и малой изгибной жест-
кости. -
Первые серийные образцы пушки Д-81 (2А26) в точности
стрельбы уступали зарубежным танковым пушкам. Это проявля-
лось в нестабильности стрельбы, т. е. в повышенном рассеивании
средних точек попадания (СТП) групп снарядов при стрельбе в
реальных условиях. Срединное значение разброса СТП, характе-
ризующее ошибку технической подготовки пушек, для БПС со-
ставляло 0,35 мрад (т. д.) и для ОФС примерно 0,53 мрад (т. д.).
Разброс СТП более чем вдвое превышал техническое рассеивание
снарядов и при использовании новых прицельных комплексов ста-
новился одной из главных погрешностей стрельбы. Поэтому основ-
ным направлением совершенствования танковых пушек стало по-
вышение точности стрельбы, для чего необходимо было уменьшить
разброс СТП в 2—3 раза. В решении этого вопроса участвовали
практически все научно-исследовательские и опытно-конструктор-
ские организации отрасли. Был разработан и внедрен следующий
комплекс мероприятий, охватывающий все этапы создания танко-
вых пушек:
совершенствование конструкции серийных орудий и разработ-
ка новых систем;
создание новой технологии изготовления основных деталей
(в первую очередь стволов) с уменьшенными допусками на кри-
визну и разностенность;
52
выработка единой методики приведения танковых пушек к
нормальному бою.
Реализация указанных мероприятий позволила повысить точ-
ность стрельбы в соответствии с требованиями, предъявляемыми
к современным танковым пушкам, по которым уровень погрешнос-
ти не должен превышать следующих значений: погрешность тех-
нической подготовки (срединное значение) £т п =0,2 ... 0,25 мрад
(т. д.); погрешность технического рассеивания ^^'=0,17 мрад
(т. д.).
3.2. ОСОБЕННОСТИ УСТРОЙСТВА И УСТАНОВКИ
ТАНКОВЫХ ПУШЕК
Сравнение основных конструктивных параметров танковых
пушек (табл. 3.1) позволяет выявить общие черты и некоторые
особенности их проектирования у нас и за рубежом.
Из отечественных серийных танковых пушек в настоящее вре-
мя наиболее высокими энергетическими характеристиками обла-
дает 125-мм гладкоствольная пушка Д-81 раздельного заряжания
(рис. 3.1). За рубежом наибольшее распространение получила
английская 105-мм нарезная пушка унитарного заряжания фир-
мы «Виккерс», которая в различных модификациях изготавли-
вается в ряде капиталистических стран: L7A1 т— в Англии, Швей-
царии, Швеции, L7A3 — в ФРГ (рис/ 3.2), М-68 — в США,
D1512 — во Франции и др. Из новых зарубежных танковых пушек
следует отметить также западногерманскую 1^0-мм гладкостволь-
ную пушку фирмы «Рейнметалл» (рис. 3.8).
Для танковых пушек с максимальным давлением 392 —
490 МПа применяются стволы со скрепляющим кожухом в камор-
ной части, изготовленные из специальных орудийных сталей с
категорией прочности О 120. Для танковых пушек, рассчитанных
на максимальное давление более 490 МПа, применяется автофре-
тирование стволов, что позволяет не увеличивать существенно га-
баритно-массовые параметры пушек.
Казенник танковой пушки по массе составляет 30—35 % мас-
сы откатных частей, но имеет значительные размеры (500—
700 мм) по высоте и ширине.
Казенник соединяется с трубой с помощью резьбовой упор-
ной муфты, либо с помощью быстроразъемной секторной резьбы
или штыкового соединения. Быстроразъемное соединение позво-
ляет произвести смену ствола без демонтажа пушки, т. е. являет-
ся существенным эксплуатационным преимуществом.
Дополнительными элементами, устанавливаемыми на танко-
вых пушках, являются эжектор и теплозащитное устройство ство-
ла. Эжектор предназначен для продувки ствола от газов после
выстрела и уменьшения загазованности боевого отделения танка.
Он может располагаться в различных местах (по длине) ствола,
эксцентрично или концентрично, в зависимости от конструктив-
ных особенностей пушки и танка. Теплозащитное устройство
53
2
Основные конструктивные параметры отечественных и зарубежных танковых пушек
Таблица 3.1
Параметр Д-ЮТ (Т-64) У-5ТС (Т-62) Д-81 (Т-64А) 2А46М L7A3 (.Леопард-1*) М-68 (M-6QA1) .РеВяметалл* (.Леопард-2*)
Калибр, мм Тип ствола Масса качающейся части с бронемаской, кг Масса пушки, кг Масса откатных час- тей, кг Длина ствола, мм Изгибная жесткость ствола, кН/м Максимальная длина отката, мм Максимальная сила сопротивления откату. 100 Нарезной 2060 1950 1475 5350 432 550 307 115 Гладкий 2425 2315 1820 5700 397 415 343 125 Гладкий 2670 2350 1930 6000 324 340 676 125 Гладкий 2713 -2450 1970 6000 400 310 95, 105 Нарезной 2900 2200 1285 5340 461 300 588 105 Нарезной 3260 1850 1128 5350 467 340 561 120 Гладкий 4290 3130 1995 5300 785 (оценочная) 370 588
Число и расположе- ние тормозов отката Число и расположе- ние накатников Динамическое плечо, мм Быстросменность ство- ла База направляющих люльки, мм Размер по осям цап- фенных подшипников, мм Один сверху Один сверху 0 Нет 822 410 Один снизу Один снизу - 13 Нет 900 410 Один снизу Один снизу -11 Нет 900 410 Два сим- метрично Один снизу 0 Есть 1510 410 Два симметрично Один снизу 0 Есть 900 950 Концентрично Конц^нтрично 0 Есть 900 950 Два симметрично Один снизу 0 Есть 1640
ствола выполняется в виде концентричного со стволом кожуха
или специального эластичного покрытия и предназначено для
уменьшения влияния атмосферных условий (солнечной радиации,
осадков, ветра) на тепловой изгиб ствола.
На танковых пушках наибольшее применение получили клино-
вые затворы гильзовой обтюрации с горизонтальным или верти-
кальным расположением клина. Направление расположения кли-
F
Рис. 3.1. 125-мм гладкоствольная танковая пушка Д-81
Рис. 3-2. 105-мм нарезная танковая пушка L7A3:
/ — ствол; 2 — бронемаоса; 3 — люлька- С — казенник
Рис. 3.3. 120-мм гладкоствольная танковая пушка фирмы «Реннметалл>:
/ — ствол; 2 — эжектор.; 3 — термозащитный кожух; 4 — маска с уплотнением; 5 —люлька;
6 — казенник с клиновым затвором; 7 — ограждение; 8 — левый тормоз
55
на зависит от допустимых габаритных размеров казенника и
компоновки боевого отделения (допустимых обметаемых объемов
при прокачке пушки). На некоторых танковых пушках, в частнос-
ти на английской 120-мм нарезной пушке L11A2 танка «Чифтен»,
применяются затворы безгильзовой обтюрации и картузное заря-
жание. Безгильзовое заряжание придает танку дополнительные
компоновочные и эксплуатационные преимущества, однако услож-
няет конструкцию затвора.
Основными противооткатными устройствам^, применяемыми в
настоящее время на всех танковых пушках, являются широко
известные гидравлические тормоза веретенного или канавочного
типа и гидропневматические накатники. На некоторых пушках
(например, М-68) применяются также пружинные накатники.
По расположению относительно оси ствола противооткатные
устройства делятся на полностью симметричные, частично сим-
метричные и асимметричные.
Полностью симметричными являются концентрические проти-
вооткатные устройства (пушка М-68) и схема симметричного
расположения двух тормозов отката и двух накатников, для ко-
торой противооткатные устройства выполняются обычно в виде
совмещенных тормозов отката и накатников (L7A1 и некоторые
опытные пушки).
Частично симметричные противооткатные устройства выпол-
няются по схеме двух симметричных тормозов отката и одного
асимметричного накатника (L7A3, L1512, «Рейнметалл» и др.).
Асимметричные противооткатные устройства характерны для
случая применения одного тормоза отката и одного накатника
(пушки Д-10Т, У-5ТС, Д-81 и др.).
Концентрические противооткатные устройства увеличивают
размеры пушек в наиболее напряженном по компоновке месте
башни — у амбразуры, и поэтому для танковых пушек большого
калибра они не нашли широкого применения. Наибольшее рас-
пространение на новых опытных пушках получила в настоящее
время схема частичной симметрии противооткатных устройств.
Из-за ограничений по радиусу обметания внутри боевого отде-
ления танковые пушки по сравнению с другими артиллерийскими
системами имеют меньшую длину отката и большую максималь-
ную силу сопротивления откату — 580 кН и более.
На современных танковых пушках устанавливаются люльки
обойменного типа. Передней направляющей подвижного соедине-
ния ствол — люлька является кольцевой вкладыш из антифрикци-
онного материала. Задняя направляющая выполняется также в
виде цилиндрического подшипника, либо в виде полозковых опор
на казеннике и люльке (обычно в случае быстроразъемного соеди-
нения ствола с казенником). Кольцевые вкладыши имеют гаранти-
рованный зазор со стволом (0,3—0,8 мм) для компенсации тепло-
вого расширения ствола при стрельбе.
56
Обычно для установки танковых пушек используются цапфен-
ные конструкции, представляющие собой игольчатый подшипник
в специальной обойме, размещенный в передней части люльки;
при установке пушки он закрепляется в специальных расточках
в лобовой части башни. Монтаж и демонтаж всей пушки осуще-
ствляются изнутри боевого отделения при поднятой башне. В пе-
редней части люльки на ее горловине снаружи башни устанавли-
вается бронемаска, являющаяся дополнительной частью защиты
и уплотнения амбразуры башни. При такой установке отечест-
венных пушек обеспечиваются сравнительно небольшие (в срав-
нении с зарубежными) размеры амбразуры башни и лучшая бро-
невая защита боевого отделения при меньших габаритно-массо-
вых параметрах пушки.
Конструктивно зарубежные танковые пушки отличаются от
отечественных более массивной бронемаской, на которой разме-
щены цапфы. Амбразура башни, имеющая большие размеры, по-
зволяет осуществлять установку пушки снаружи без демонтажа
башни. Масса бронемаски пушки «Рейнметалл» составляет 36 %
массы пушки, в то время как у пушки Д-81 она не превышает
4-5%.
3.1 ФАКТОРЫ, ВЛИЯЮЩИЕ НА ТОЧНОСТЬ
СТРЕЛЬБЫ ТАНКОВЫХ ПУШЕК
Точность стрельбы танковых артиллерийских систем зависит
от конструктивных, энергетических (баллистических) и техноло-
гических параметров пушки и снаряда и методов подготовки пуш-
ки к стрельбе.
В процессе выстрела пушка и снаряд подвергаются ряду воз-
мущающих воздействий. Изменение характера и значений этих
воздействий в зависимости от типа пушки, снарядов и условий
стрельбы приводит к тому, что ошибки артиллерийской системы
от пушки к пушке, от выстрела к выстрелу могут носить система-
тический (повторяющийся) и неповторяющийся (случайный) ха-
рактер.
Всю совокупность факторов, вызывающих отклонение траек-
тории снарядов и определяющих меткость и кучность стрельбы,
можно разделить на основные пять групп.
1. Конструктивные схемы пушки и снарядов, их габаритно-
массовые и энергетические (баллистические) характеристики, оп-
ределяющие средние углы вылета снарядов, от которых зависят
систематические отклонения траектории снарядов для всего се-
мейства пушек одного типа. В боекомплект танковых пушек вхо-
дят различные типы снарядов — бронебойные подкалиберные и
калиберные, кумулятивные, осколочно-фугасные и др.; каждый
тип снаряда характеризуется своим средним углом вылета. Раз-
ницу в углах вылета разных типов снарядов принято называть
разнобоем снарядов.
57
2. Индивидуальные особенности изготовления пушек, разброс
их габаритно-массовых параметров, определяющих силовое и мо-
ментное нагружение артиллерийской системы при выстреле. Раз-
брос этих параметров является причиной появления индивидуаль-
ных углов вылета снарядов, отличных от средних. Индивидуаль-
ные углы вылета снарядов являются случайно# величиной для
всего семейства пушек одного типа, но вызывают систематические
отклонения траектории снарядов у каждой конкретной пушки.
3. Некоторые характеристики пушки и снарядов (настрел
ствола, его тепловой изгиб, температура заряда и т. д.), измене-
ние которых влияет на углы вылета снарядов. Изменение углов
вылета носит случайный характер, но вызывает повторяющие-
ся отклонения траектории снарядов для конкретных условий
стрельбы.
4. Неидентичность условий от выстрела к выстрелу при
стрельбе с места; разброс параметров, определяющих траекто-
рию каждого выстрела, связанный с конструктивными, производ-
ственными и эксплуатационными особенностями снаряда, заряда
и пушки, характером их взаимодействия при выстреле и поведе-
нием снаряда на траектории, что приводит к неидентичности усло-
вий каждого выстрела при стрельбе с места и вызывает рассеи-
вание снарядов, которое принято называть техническим. К непо-
средственным причинам технического рассеивания снарядов
относятся разброс начальных возмущений при вылете снаряда,
определяемый разнообразием условий движения снаряда по ка-
налу и выхода из него; разброс начальных скоростей снарядов
вследствие различия температуры и химических свойств пороха
заряда, плотности заряжания, массы снарядов и т. д.; разнообра-
зие условий полета снарядов на траектории из-за отклонений
в их форме, влияния периода последействия и атмосферных
условий.
5. Изгибные колебания ствола от действия транспортных пере-
грузок и характер взаимодействия снарядов со стенками трубы
при движении по изогнутому каналу ствола при стрельбе с ходу,
вызывающие вибрационное рассеивание снарядов. На уровень виб-
рационного рассеивания снарядов влияют изгибная жесткость и
масса консольной части ствола, а также характеристика подвески
танка, профиль дороги и степень кривизны ствола.
Из рассмотренных пяти групп факторов, влияющих на точ-
ность стрельбы артиллерийской системы, первые три определяют
ее меткость, а последние две — кучность.
Динамика перемещений составных частей пушки и танка при
выстреле. Теоретическое и экспериментальное исследование ди-
намики механической системы танк — пушка — снаряд При выстре-
ле позволяет выявить общие закономерности происходящих при
выстреле явлений и обосновать требования к конструктивной схе-
58
ме пушки, ее отдельным составным частям и способам их сопря-
жения.
Общие методы и приемы теоретического исследования дина-
мики артиллерийских систем изложены в специальной техниче-
ской литературе.
Для построения математической модели исследуемой систе-
мы целесообразно воспользоваться методом векторных уравне-
ний, который при достаточной строгости позволяет сравнительно
просто и наглядно описать динамику артиллерийской системы не-
зависимо от числа обобщенных координат. Уравнения движения
каждой составной части составляются в относительной (подвиж-
ной) системе координат, связанной с этими частями, при этом
моменты инерции их остаются постоянными. Переносное движе-
ние учитывается соответствующими переносными ускорениями и
реакциями связей.
Уравнения движения системы составляются на основании за-
конов сохранения количества и момента количества движения:
-£-mv= Е^+ЕЛГ.;
at • •
им,,..
Расчетная схема пушки типа Д-81 представлена на рис. 3.4.
На расчетной схеме приняты следующие условные обозначения:
аи — угол наводки в вертикальной плоскости;
Рс — сила давления пороховых газов на'дно снаряда;
£ки~сила давления пороховых газов на дно канала ствола;
Rt, Ян — составляющие силы сопротивления тормоза отката и накатника,
действующие на откатные части;
Яг Ян — те же силы, действующие на люльку;
Fc (y Xj — реакция снаряда на трубу;
еу, е, —плечи динамической пары в вертикальной и горизонтальной
плоскостях;
<V, N' — реакции ствола и люльки в центре вращения откатных частей;
Дц—радиальный зазор в цапфах;
Ду—тепловой зазор между стволом и передним направляющим
вкладышем люльки;
св (fnp) ~ угловая жесткость привода вертикальной наводки;
0у, — вертикальные и горизонтальные составляющие угла нутации
снаряда в канале ствола.
В соответствии с принятой расчетной схемой составные части
механической системы пушка — снаряд могут совершать следую-
щие виды движения при выстреле:
снаряд — поступательное движение по каналу ствола на рассто-
яние хс, вращение в канале ствола и нутационное колебательное
движение на углы 0у, в пределах переменного зазора б(х)
между стволом и центрующим утолщением снаряда;
откатные части — поступательное движение в направляющих
люльки на расстояние угловое экваториальное движение от-
59
носительно центра заднего вкладыша люльки в вертикальной и
горизонтальной плоскостях («ОТКу, «о™,)- Упругий ствол совер-
шает динамический изгиб в вертикальной и Горизонтальной пло-
скостях, характеризующийся углами поворота дульного среза
анэгу и аИЛГ/, скоростями перемещения дульного среза уизг и zKK\
люлька — угловое экваториальное движение относительно оси
цапф в вертикальной плоскости (<хЛу) и угловое экваториальное
движение в горизонтальной плоскости (аД/) в пределах радиаль-
ного зазора Дц.
Рис. 3.4. Расчетная схема танковой пушки типа Д-81
Углы вылета в вертикальной и горизонтальной плоскостях
(у и со) относительно заданного стволу положения характери-
зуют направление вектора начальной скорости снаряда в мо-
мент вылета и определяются следующими зависимостями:
I в ®ИЗГу + «ОТКу 4* »Лу 4" + Уизг +
4" вотку -*отк) 4* ЛЛу 4" -*отк)) 5
1 А
ш = ®иаг* + “отк, + — I &tb + 4"
4" аотк* 4" — -*отк) 4* 4" b I хотк)).
60
Величины у и и могут быть найдены только после определе-
ния с помощью математической модели системы каждой из со-
ставляющих, входящих в зависимости (3.1).
Ниже без вывода уравнений математической модели приво-
дится окончательный вид основных из них.
Уравнения получены при условии, что 81паи = 0, созая = 1.
Уравнение поступательного движения снаряда в канале ствола
/иелс = Рс,
где тс — масса снаряда,
является решением задачи внутренней баллистики и не зависит
от остальных уравнений модели.
Уравнение отката
^отк-^отк = ₽т
также не зависит от остальных уравнений модели. Здесь /потк —
масса откатных частей; начальные условия: лотк = 0, хогк = 0.
Уравнения центрования снаряда в канале ствола
Период центрования (до момента выхода переднего центрую-
щего утолщения снаряда из ствола) определяемся по формуле
/ А — Z m 9/ di № Г I / d* № r ? I 26 v
X [/ncru Фу sin ф — mcru Ф,cos «I» + D?2 b sin (<p 4- ф0 — Ф) —
— D<?b cos (? 4- ?0 — Ф)]. (3.2)
где /»./« — экваториальный и аксиальный моменты инерции снаряда; ф —-
угол прецессии снаряда в стволе, характеризующий угловое положение точки
контакта переднего центрующего утолщения снаряда; <р —угол собственного
вращения снаряда в стволе, создаваемый или нарезами, или газодинамическими
устройствами; £У—дисбаланс неуравновешенной массы снаряда; ф0— началь-
ное угловое положение дисбаланса; Фу, Фж— функции переносных ускорений,
вид которых будет приведен далее.
Начальное положение точки контакта переднего центрующего
утолщения со стволом случайно и с равной вероятностью может
находиться в пределах
О-Сфо<2гс, ф0 -= 0.
Период выхода описывается уравнениями
/Д = Л ? ©у + 4- D?2 sin (<р 4- <?0) -
- «Zu фж 4- 4? — Л («отк, 4- «Жж);
/Д = - /дф в, 4- «<ЛЛД 4- 0фг cos (ф 4- Фи) -
(3.3)
— /ПсГцФу - /.ф Н, - Z. (®отку 4" аду) .
61
Начальными условиями для интегрирования этих уравнений
являются следующие: '
©z< = 8(x)sin^/2d;
= ф 8 (х) cos ф/2 £;
0ув = 8 (х) cos Щ2Ь ;
0у# — — ф 8 (х) s!n ф/2Л,
вычисленные для момента времени, соответствующего выходу пе-
реднего центрующего утолщения из ствола.
Уравнения углового движения откатных частей
Движение в пределах теплового зазора люльки может быть
описано уравнениями
^отмуаот«у = 4- /?т (Лт 4- d) 4- /?в (Л„ 4- d) 4-
4- (лс - х^ 4- /) - 4«лу;
Лпи^отк, “ Р4“ /??т 4" X
Х^с-^+О-
(3.4)
Здесь /<и<у. /Откж - момент инерции откатных частей; FCy> FCa — проекции реак-
ции сааряда.
Начальные условия: 4^ = 0, «OTKy=0, a0„z# = ?0, 0,
где Ро — начальное возможное рассогласование ствола с люлькой в горнзон
тальной плоскости в пределах теплового зазора.
Рассогласование может появиться, например, при крене
стреляющего танка, а также после каждого выстрела из-за нали-
чия сухого трения между стволом и направляющим вкладышем
люльки.
Уравнения движения люльки
4% = - сл «лу 4- V/ - - /?'ЛВ;
4«л, “ — ₽тЛт + ,
(3.5)
N' = - N,
где — момент инерции люльки.
Второе уравнение системы (3.5) имеет ограничение: движение
возможно только в пределах гарантированного зазора в цапфах
Дп и ограничивается величиной
«лж<Лц/2Н.
Входящая в первое уравнение системы (3.5) неизвестная реак-
ция W определяется из условия кинематики перемещений точки
контакта ствола с люлькой, общей для обоих элементов. Функ-
ция реакции N определяется зависимостью
Л/ — топ [£ 4- вд^^Хотц 4~ 2хотквотв
®Ду^ 4“ ®отк -^отк)] •
62
Начальные условия для интегрирования системы уравнений
(3.5):
«лу = 0, аЛу = 0. «л,—То. «о«=0.
где То—возможное рассогласование люльки с лафетом перед выстрелом в пре-
делах гарантированного зазора Ац.
Следует иметь в виду, что в зависимости от значения тепло-
вого зазора Дт между стволом и люлькой возможны случаи вы-
бора этого зазора при выстреле, поэтому при интегрировании
(3.4) необходимо вести контроль величины
* = V(«отку - «лу)’ + («отк, “ «-,)’ •
При достижении \= механическую систему люлька —от-
катные части следует рассматривать как единый агрегат, в кото-
ром составляющие силы R являются внутренними, приложенными
к центру масс качающейся части. В этом случае угловое движение
качающейся части описывается известным из теории артиллерии
уравнением
4«« = 4- Rtd' 4- Fc (хс - xj.
где /к—момент инерции качающейся части; —расстояние от центра масс
качающейся части до оси цапф; Rz — суммарная сила сопротивления откату.
Входящие в уравнения (3.2) и (3.3) переносные ускорения
Фу и Фд, а также проекции реакции снаряда на ствол ГСу и
определяются зависимостями:
Фу = g + (вв«у 4- в-у) (хе - х* 4- 0 4-
+ 2хс [<4т«у 4- «Лу 4- Уизг/' (*)] 4-
4-?>»/(*) 4-Ру (*)*«;
Ф, - - («отк, + «л,) ~ 4- /) 4- 2хс (х) -
«отк, «л,| 4“ гизг/(-*) 4- Р, i (3 6)
= 4- 4 ? - 4? ф] 4-
4- Dy* cos (<р 4- <?о Ф)тс (фу cos Ф 4- Ф, sin ф);
FCy — — Ре COS ф ;
FCa в sin ф,
где р”(х) и р”(х) —вторые производные по х от функций кривизны (непря-
молннейности) ствола в вертикальной и горизонтальной плоскостях: f(x) —
нормальная функция, выражающая формулу свободных нзгнбных колебаний
упругого ствола; /'(х) — производная нормальной функции по х.
63
Расчет динамики упругого ствола представляет собой само-
стоятельную задачу, поэтому остановимся на ней несколько под-
робнее.
Одним из способов определения параметров динамического
изгиба ствола при выстреле является метод приведения.
В соответствии с этим методом уравнения вынужденного изги-
ба ствола по 1-й форме свободных изгибных колебаний могут
быть записаны в виде
^пр^Упр “ У пр 4" ^npt^ »
^npz ^пр = ~~ ^пр^пр 4” ^пр, •
где Afn₽/— приведенная (к выбранной точке приведения) масса упругого
ствола по 1Л форме свободных изгибных колебаний; спр; — приведенная жест-
кость ствола по 6ft форме; /'ПР/ , ^пр, —приведенные силы по Лй форме.
Приведенные масса и жесткость ствола определяются по фор-
мулам
M„fi^^m,^(x)dx-
где mx~- функция распределенной по длине / массы ствола; !х — функция
распределенного по длине, I момента инерции поперечного сечения ствола;
Е — модуль упругости; ft (х) — вторая производная i-й нормальной функции
по х.
Частота свободных изгибных колебаний ствола по i-й форме
определяется зависимостью
Pl = j/^np/M^np, •
Приведенные силы можно разбить на две группы: от сосредо-
точенных усилий и от распределенной нагрузки. Применительно
к стволу сосредоточенной силой является реакция снаряда, а рас-
пределенной — силы инерции от распределенной массы ствола
при переносном угловом ускорении откатных частей а0„, или
всей качающейся части ак. Приведенная сила от сосредоточен-
ной нагрузки определяется формулой
64
а от распределенной — интегралом
.. i
F= 3 f Mg*fi (х) dx •
Этот интеграл — постоянная величина (обозначим ее Л), вы-
ражающая интенсивность распределенной нагрузки на ствол при
переносном угловом ускорении а.
Таким образом, для рассматриваемой расчетной схемы дина-
мический изгиб ствола определяется следующими уравнениями:
Л^ир.Упр, = ^Лр.Упр. 4“ Ftyfl(X) “оТВуЛ , 1
.. (3.7)
Л^ир^пр| = £npz*npj 4" f~tafl (-*”) 4“ аогк,»А . I
Здесь FC( > определяются функциями (3.6).
В случае углового движения всей качающейся части н послед-
ние члены уравнений (3.7) вместо а0ТЖу z подставляется аку г.
Основной сложностью в задаче о динамическом изгибе артил-
лерийского ствола является определение достоверных фактиче-
ских форм свободных изгибных колебаний ствола, а следователь-
но, его приведенных параметров.
Задача определения форм и частот изгибных колебаний упру-
гого стержня обычно сводится к решению тем или иным способом
исходного дифференциального уравнения
(3.8)
Строгое аналитическое решение уравнения в квадратурах воз-
можно только для призматических стержней (постоянного сече-
ния) при ограниченных условиях их закрепления.
В связи с развитием вычислительной техники появилась воз-
можность решения уравнения (3.8) достаточно точными с матема-
тической точки зрения методами, в частности, методом конечных
разностей — для определенных условий защемления ствола как
упругого стержня. Возможны следующие допущения:
ствол закреплен консольно с заделкой по переднему срезу
люльки;
ствол представляет собой свободную балку, совершающую ко-
лебания в тепловом зазоре люльки;
ствол представляет собой упругую балку с одной опорой в рай-
оне заднего направляющего вкладыша люльки.
Ни одно из этих допущений не позволяет точно определить
формы и частоты свободных изгибных колебаний ствола.
В частности, замеренная инструментами и полученная по ре-
зультатам спектрального анализа фактических изгибных колеба-
ний ствола танковой пушки Д-81 частота его свободных изгибных
колебаний Ьго тона равна 20,5 Гц.
5 Зак. 38с
65
Расчетные значения этой частоты, определенные методом ко-
нечных разностей, составляют для консольного ствола 10—12 Гц;
для свободного ствола 14—15 Гц; для ствола с одной опорой
16—18 Гц, что на 17—50 % отличается от фактического значения.
Хорошую точность расчета частот и, соответственно, форм сво-
бодных изгибных колебаний ствола как упругого стержня перемен-
ного сечения дает простой и очень нетрудоемкий (даже при руч-
ном счете) метод, изложенный в [2].
Этот метод основан на предположении, что первая форма из-
гибных колебаний упругого стержня близко совпадает с формой
упругой линии при прогибе от собственного веса для реальных ус-
ловий его закрепления —ствол оперт в казенной части на две опо-
ры (направляющие вкладыши люльки) и имеет сосредоточенные
массы казенника, эжектора и дульного утолщения (рис. 3.5).
При использовании этого метода уже второе приближение даст
результат, совпадающий с фактической частотой с точностью не
ниже 0,5—1,0 %.
Расчетные схемы, положенные в основу математической моде-
ли колебания башни и корпуса танка при выстреле, основные обо-
значения и линейные размеры приведены на рис. 3.6 и 3.7.
Характер кинематической связи, накладываемой конструкцией
погона на движение башни относительно корпуса машины в плос-
кости стрельбы, позволил свести задачу о движении башни к зада-
че о движении эквивалентного четырехзвенника в| а2 Ь2 Ьь имею-
щего одно неподвижное звено он 6|, связанное с корпусом танка,
и три подвижных звена (а2Ь2 — связанное с башней; О| а9 и 6|&2 —
66
Phq. 3.6. Расчетная схема башни танка
Рис. 3.7. Расчетная схема подрессоренного корпуса танка
5*
67
связанные с шарами). Из расчетной схемы можно сделать вывод,
что
axbx = di = const;
a2b2 — d2 = const;
axa2 = bxb2 = lm = 2 (гл — гш) = const,
где гд — радиус поверхности дорожки погона; гш — радиус шара.
Движение башни рассматривается относительно корпуса танка,
а движение корпуса —в абсолютной земной системе координат.
В единую механическую систему уравнения движения башни и
корпуса объединяются реакциями в погоне
Уравнения движения башни и корпуса танка составлены на ос-
новании законов сохранения количества движения и момента ко-
личества движения.
Уравнение движения башни в вертикальной плоскости
m6y6 = sin ая 4- МАу - МВу - m6yK — сбу6,
где те—масса башни; Св — линейная жесткость шарового погона, приведен-
ная к точке контакта с шаром в плоскости стрельбы (может быть определена
только экспериментально).
Уравнение движения башни в плоскости выстрела
т6х6 = — cos а, 4- NA* — NB* — — с6х6.
Уравнение углового движения башни на шаровом погоне в пло-
скости стрельбы
/б» RzAt sin ая + NbA2 - NaA. 4- (NAjr - NBj) X
XA2-c6(A, + A2)n-/6t,
где /в—момент инерции башни в плоскости стрельбы; О и е — соответственно
угловые ускорения поворота башни и корпуса.
Уравнения движения звеньев, связанных с шарами:
4 «л = - MAJW | sin (ал 4- ) | 4- Л^/ш | cos (вл 4- %e) |;
^шав~ I cos (лв 4" aBt) I + |sin (ад 4" Лвл) I »
где /ш — условный момент инерции шара; его значение отличается от момента
инерции башни на 3—4 порядка и при этом из-за незначительности практически
не влияет на движение башни.
68
Кинематические уравнения связи, объединяющие движение че-
тырехзвенника в единую систему:
ал/ш | COS (ад + ал>) | = - ув + Л Л ;
I sin (<хд + «л.) I = + Л, (»2 + М);
«X | COS (ав 4- ав) I = Уб + ла&;
«А | Sin (as + «в.) I = - А2 (О2 4- • &) •
Уравнение вращения башни на шаровом погоне
4, U ~ те 4- тьхйАь -г Rth,
где /б| — момент инерции башни в поперечной плоскости; — угловая жест-
кость привода: Лб — расстояние от центра масс башни до оси вращения; Л —
расстояние между равнодействующей силы сопротивления откату и центром
масс башни.
Уравнение движения корпуса танка в вертикальной плоскости
Мжук = - ЛГЛу - - 2yK(rt 4- с2 4- с3 4- Ci 4- сь 4- с6).
Уравнение движения корпуса танка в плоскости выстрела
Мкхк----------------Na* + NBx - f19Dx - mt1lD2 -
+ (3.9)
где /тр( — приведенное удельное сопротивление качению’ гусеничного движи-
теля; mTf — приведенная к центру ведущего колеса масса трансмиссии; /Тр —
коэффициент сцепления гусениц с грунтом.
Уравнение экваториального углового движения корпуса в пло-
скости выстрела
/«• - - 2 В (с,/? + с21‘ + с312 - ctl2 - c.J2 - c,fy -
- rn,„H,D3 + N,A, -N„A, + (Л^ - 7V.J H,. (3.10)
В уравнениях (3.9) и (3.10) обозначено:
=» MKg 4- 2ук(й 4- сг 4- с3 4- ск 4- 4- сл);
D2 = лг« — (5, 4- В2* 4- В3ук) е — (Км 4- 5, е 4- Я4ув) ук;
В, = L, sin а, + Н3 cos а, + г« + Н, - /« sin ? + ;
«ср
в., - L3 COS а, - Н3 Sin а, 4- 4 + — - М) Sin Р - М^псч + ЯзСОВаО.
« «ср
В3-161а;
Кы sin at 4" -"-j0S a‘- 4- Sin P ;
«ср
Bl = \fa.
69
Приведенная система уравнений описывает динамику танка
при стрельбе вдоль корпуса. При стрельбе на борт уравнения ос-
таются аналогичными, но в них
/тр, = 0 •
/птр = 0.
/, = /, = /3 = = /. --- 612,
где В — ширина колея.
Входящий в уравнение (3.10) момент инерции корпуса должен
быть определен относительно продольной оси.
Таким образом, получена система дифференциальных и кине-
матических уравнений движения механической системы танк —
пушка — снаряд, решение которой позволяет определить линейные
и угловые ускорения, скорости и перемещения любого элемента
системы и его долю в процессе формирования углов вылета.
На рис. 3.8 и 3.9 приведены результаты расчета и эксперимен-
тальные данные по угловым перемещениям основных составных
Рис. 3.8. Экспериментальные (сплошная линия) и расчетные (пунктир) угло-
вые перемещения элементов пушки Д-81 и танка Т-64А при выстреле:
а БПС; б - ОФС: / — откатные части, 2 — люлька, 3 — башня, 4 — момент вылета
снарядов
/ - БПС; 2 КС; 3 ОФС
70
Частей пушки и танка и динамическому изгибу ствола для пушки
Д-81, установленной в танке Т-64А. Анализ этих данных показыва-
ет хорошую сходимость расчета и эксперимента и позволяет сде-
лать следующие предварительные выводы:
угол вылета формируется в основном за счет колебаний откат-
ных частей и динамического изгиба ствола;
перемещение башни к моменту вылета снарядов составляет не
более 0,06 мрад (т. д.), а перемещение корпуса начинается уже
после вылета снарядов;
характер колебаний пушки и изгиба ствола существенно зави-
сит от типа выстрела.
Малые перемещения башни и корпуса танка до момента вы-
лета снарядов позволяют исключить колебания танка от собст-
венного выстрела из числа факторов, влияющих на точность
стрельбы танковых пушек.
3.4. ВЛИЯНИЕ ОСНОВНЫХ ПАРАМЕТРОВ ПУШКИ
НА УГЛЫ ВЫЛЕТА СНАРЯДОВ
На пушку в момент выстрела действуют следующие основные
моменты:
момент Pwe равнодействующей силы давления пороховых
газов, не совпадающей с центром откатных масс (момент дина-
мической пары);
моменты Ph составляющих сил сопротивления откату;
моменты сил взаимодействия снаряда со стволом.
Целесообразно рассмотреть влияние первых двух групп мо-
ментов. Параметры колебаний частей пушки зависят от харак-
тера действующих до вылета снарядов моментов и габаритно-
массовых параметров пушки. При уменьшении моментов
и Ph ко времени вылета снарядов наблюдается уменьшение угло-
вых перемещений откатных частей (рис. 3.10 и 3.11).
Наиболее чувствительны к изменению моментных нагрузок
«тяжелые» снаряды (ОФС и КС) с меньшей начальной ско-
ростью. При уменьшении моментной нагрузки уменьшается и раз-
ница в перемещениях ствола при стрельбе разнотипными снаря-
дами (БПС и ОФС), что приводит к уменьшению разнобоя этих
снарядов.
Это подтверждается и результатами стрельбы из пушки Д-81,
приведенными в табл. 3.2, где показано влияние изменения мо-
ментов Ркне и Ph на углы вылета снарядов при искусственном
изменении плеча динамической пары (е) и недоливе жидкости в
тормоз отката (А).
Из таблицы видно, что уменьшения разнобоя снарядов раз-
личных типов можно добиться только при одновременном умень-
шении возмущающих моментов от противооткатных устройств и
динамического плеча.
Уменьшение динамических возмущений пушки при снижении
нагрузки от моментов положительно сказывается также на умень-
71
Рис. 3.10. Угловые перемещения откатных частей пушки Д-81 при различных
силах торможения отката (при недоливе жидкости в тормоз <»ткатя
при стрельбе):
а- БПС: / — ори заполненном тормозе, 2 — при недоливе 0,6 л. 3 момент вылета сна
ряда; б —ОФС: / при заполненном тормозе. 2 при недоливе 0.2 л. 3 при недоливе
0.4 л, 1 — при недоливе 0.6 л. 5 — момент вылета снаряда
Рис. 3.11. Угловые перемещения откатных частей пушки Д-8! (оГносительно
люльки) при различных значениях плеча динамической пары при стрельбе:
в— БПС; б —ОФС: / — при е— 12.5 мм, 2 — при в •* 0. 3 — момент вылета снаряда
72
Таблица 3.2
Влияние моментов Pwe и Rh на углы вылета снарядов пушки Д-81
Условия Углы вылета сна- рядов т. мрал (т. *.) Рассеивание ту углов вылета, ырад (т. *.) Разнобой ТОФС~ ТБПС' «рад (т. в.)
БПС ОФС БПС ОФС
Серийная пушка: е — — 12,6 мм; А — 0,4 л -0,20 0,80 0,20 0.21 -0,60
Варианты: е - 12,6 мм; А - 0,6 л -0,11 -0,70 0,20 0,21 -0.59
е = 0; А — 0,4 л -0,22 0.64 0,19 0,19 -0,42
е - 0; А - 0,6 л -0,34 -0,22 0,18 0,18 4-0.12
шении рассеивания углов вылета из-за разброса баллистических
параметров и массы снарядов, что в конечном итоге улучшает
кучность стрельбы. Динамические моменты устраняются в резуль
тате рациональной компоновки откатных частей, при которой
центр их масс максимально совмещается с осью канала ствола
линией действия силы Ра,
Нагрузка от момента силы сопротивления откату может быть
уменьшена благодаря симметричному расположению противоот-
катных устройств и обеспечению неторможенного отката до мо-
мента вылета снарядов из ствола.
Симметричное расположение противооткатных устройств пред-
почтительнее, так как способствует рациональному размещению
масс откатных частей и устранению плеча динамической пары.
Но и при использовании нескольких симметрично расположен-
ных элементов противооткатных устройств (тормозов и накатни-
ков) из-за наличия отклонений от номинала размеров основных
деталей и их взаимного расположения (в пределах допусков) не-
возможна полная ликвидация моментной нагрузки.
С этой точки зрения наиболее рациональными являются кон-
центрические противооткатные устройства. Однако возможность
их применения реальна для пушек калибром до 100 мм, посколь-
ку концентрический тормоз отката н накатник увеличивают по-
перечные размеры люльки и отрицательно влияют на компоновку
пушки в ограниченных по размерам боевых отделениях современ-
ных танков.
Наиболее реальной и практически осуществимой схемой обес-
печения высокой динамической уравновешенности пушки при вы-
стреле является симметричное расположение противооткатных
устройств (двух тормозов отката и двух накатников) при гаран-
тированном малоторможенном откате до момента вылета снаря-
дов из ствола. Малоторможенный откат на начальном участке
может обеспечить хорошую динамическую уравновешенность
6 Зак. 38с
73
пушки даже при несимметричном расположении тормозов отката
при условии отсутствия плеч динамической пары.
Поскольку составляющая сил сопротивления откату от накат-
ников не может быть уменьшена, то для ликвидации моментной
нагрузки рационально иметь два симметрично расположенных
накатника. Однако в силу относительно малого влияния момент-
ной нагрузки от накатника для упрощения конструкции пушки и
улучшения ее компоновки в танке допускается применение одного
накатника.
Осуществление малоторможенного начального отката принци-
пиально возможно двумя способами:
обеспечением достаточно больших площадей истечения у тор-
мозов отката на начальном участке;
применением плавающих рубашек у поршня тормоза отката.
Рис. 3.12. Тормоз отката канавочного типа:
а —вариант I; б —вариант II; 1 — цилиндр с канавкой; 2 — шток с поршнем; 3 — пла-
вающая рубашка
Первый способ конструктивно прост; он используется при от-
сутствии существенных ограничений размеров цилиндров тормо-
зов. Второй способ позволяет создавать тормоза отката с малы-
ми размерами диаметров цилиндров, но несколько усложняет
конструкцию поршневой группы.
Возможные конструктивные решения тормозов отката кана-
вочного и веретенного типов с плавающей рубашкой показаны на
рис. 3.12 и 3.13. Тормоз отката канавочного типа (вариант 1,
см. рис. 3.12, а) имеет недостаток, заключающийся в нестабиль
ном свободном ходе рубашки поршня в зависимости от вязкости
жидкости (условий стрельбы), сил трения между рубашкой и
штоком поршня и др. Нестабильности свободного хода способ-
ствует также тот факт, что плавающая рубашка при откате под-
вергается нагрузке со стороны сжимающейся при откате пружи-
ны, расположенной между рубашкой и упором на штоке.
74
Более рациональны тормоза отката веретенного и канавочно-
го типов (вариант II, см. рис. 3.12,6 и 3.13), лишенные этого
недостатка.
В этих тормозах упомянутая выше пружина не способствует
движению плавающей рубашки в направлении движения штока
(отката) и даже удерживает ее до момента подхвата упором на
штоке поршня, разжимаясь при откате. Этим самым обеспечи-
вается гарантированный (необходимый) малоторможенный откат
при любых условиях стрельбы, что, безусловно, способствует по-
вышению стабильности и точности стрельбы.
Рис. 3.13. Тормоз отката веретенного типа:
/ — цилиндр; 2—шток с поршнем; 3 — плавающая рубашка; / — веретено
Противооткатные устройства с малоторможенным начальным
откатом применяются в некоторых зарубежных и отечественных
танковых пушках. Это направление конструирования является
перспективным также и потому, что помимо значительного умень-
шения нагрузки на пушку при выстреле до момента вылета сна-
рядов одновременно разгружается и лафет. Последний фактор
может иметь существенное значение для боевых военных гусе-
ничных машин легкой категории.
Из параметров пушки, определяющих ее стойкость к возму-
щающим воздействиям, наиболее важное значение имеют упру-
гие характеристики ствола. Это объясняется тем, что ствол яв-
ляется самым чувствительным элементом современных танковых
пушек.
При уменьшении статической изгибной жесткости ствола уве-
личивается амплитуда изгибных колебаний ствола при выстре-
ле, возрастает роль колебаний высших тонов, их зависимость от
типа снаряда. И наоборот, при увеличении изгибной жесткости
ствола наблюдается сближение углов вылета разнотипных снаря-
б*
75
дов, уменьшение скорости перемещения дульного среза, влияю-
щей на начальный нутационный толчок и рассеивание снарядов.
Максимально упругие характеристики ствола проявляются при
стрельбе с ходу в виде вибрационного рассеивания углов вылета
снарядов.
Чувствительность ствола к вибрационной нагрузке может быть
определена его частотной характеристикой
i
f mxfl (*) dx
W 7' (3J,)
fnpz —РкМп^1 + ’HnpjAt
где — частота гармонического возмущения, передаваемого стволу от кор-
пуса танка; цПр. —приведенный коэффициент сопротивления ствола по i-A
форме ((Апр/ " Л<пР/ 6 — логарифмический декремент изгнбных колебаний
ствола.
Если известны частотная характеристика, а также спектраль-
ная плотность колебаний корпуса Sy(pK), то среднеквадратичное
отклонение угловых перемещений дульной части ствола от изгиб-
ных колебаний
/’«.и
где рк н и р* в — нижнее н верхнее значения спектра колебаний корпуса танка.
По экспериментальным данным, при движении танка по пере-
сеченной местности стволы пушек, у которых длина консольной
части ствола 4840 мм и изгибная жесткость 323 кН/м, совершают
изгибные колебания с угловой амплитудой дульной части 1,0—
1,2 мрад и преимущественно с частотой, равной частоте свобод-
ных изгнбных колебаний первого тона. Соответствующее этим ко-
лебаниям вибрационное рассеивание может достигать и даже
превышать техническое рассеивание снарядов.
Как видно из выражения (3.11), чувствительность ствола к
вибрационной нагрузке определяется тремя основными парамет-
рами ствола: массой, жесткостью и декрементом колебаний.
Возможности увеличения нзгибной жесткости ствола тради-
ционными способами при фиксированной длине ствола и задан-
ной массе пушки ограничены. Однако имеются некоторые резер-
вы (увеличение жесткости на 20—25 %) за счет рационального
распределения масс элементов пушки, уменьшения консольной
части ствола (увеличения базы направляющих люльки) и опти-
мизации геометрического профиля трубы.
Как известно из теории колебаний упругих стержней, частоту
колебаний и, соответственно, изгибную жесткость можно повы-
сить предварительным продольным растяжением стержня. При
76
этом частота колебаний увеличивается в соответствии с зависи-
мостью
Д-/’оК1 + 77Гч> ,
где Ро — частота изгнбных колебаний без учета силы продольного растяжения;
Т — сила продольного растяжения; — критическая Эйлерова сила.
Частота колебаний и изгибная жесткость связаны зависи-
мостью рг=с)т. При Т=7\р можно получить приращение жест-
кости Дс=2Др, т. е. на 82 %.
Растяжение артиллерийского ствола можно обеспечить с по-
мощью двухслойной продольно-напряженной конструкции, в кото-
рой внутренний слой сжат, а наружный растянут. В этом случае
при условии обеспечения также и прочности ствола при выстреле
можно получить увеличение его жесткости в 1,4—1,5 раза.
На рис. 3.14 и 3.15 показана баллистическая установка ка-
либра 12,7 мм с продольно-напряженным стволом и результаты
стрельб из нее с вибростенда. Результаты стрельб наглядно пока-
Рис. 3.14. Баллистическая установка калибра 12,7 мм с продольно-напря-
женным стволом:
/ — ствол; 2 —гайка для натяжения ствола, имеющая различный шаг резьбы в соедине-
ниях со стволом и кожухом 3
зывают, что существует возможность уменьшения рассеивания
снарядов при увеличении изгибной жесткости ствола благодаря
применению продольно-напряженных конструкций.
Другим направлением уменьшения чувствительности ствола
к вибрационной нагрузке, как видно из выражения (3.11), может
быть применение специальных виброзащитных покрытий ствола,
увеличивающих его декремент колебаний. Для стволов-монобло-
ков 6»0,12... 0,15; для многослойных и многокомпонентных кон-
струкций стволов, состоящих из чередующихся слоев вязко-упру-
гого и упругого материалов, 6«1,0... 1,5.
Вибропоглощающее покрытие артиллерийского ствола долж-
но иметь достаточную механическую прочность и термостойкость.
В качестве таких покрытий могут быть использованы стеклопла-
стики с механической прочностью 784 МПа (80 кге/мм2) и выше.
На типовых осциллограммах записи изгнбных колебаний ствола
77
(рис. 3.16) по результатам испытаний моделей стволов пушек со
стеклопластиковым вибропоглощающим покрытием (толщина по-
крытия \ = O,ldCTB, длина покрытия /„ = 0,3/ст, в дульной и сред-
ней частях) показана возможность изменения характера изгибных
колебаний ствола от действия ударных нагрузок.
На точность стрельбы танковых пушек влияют также гаранти-
рованные зазоры в сопряжении ствола с люлькой, особенно теп-
ловой зазор в передней (цилиндрической) направляющей.
баллистической установки с про
дольно-напряженным стволом с виб-
ростенда:
/—ствол не напряжен, вибраций нет; ? —
ствол не напряжен, вибрации есть; 3 —
ствол напряжен, вибраций нет; 4 ствол
напряжен, вибрации есть
Рис. 3.16 Типовые осциллограммы за-
писи изгибных колебаний ствола:
о — без внбропоглощающего покрытия; б —
с покрытием
Как видно из расчетной схемы пушки (см. рис. 3.4), при на-
личии теплового зазора Ду между передним кольцевым направ-
ляющим вкладышем и стволом на крене танка будет иметь место
угловое рассогласование ствола с люлькой в поперечной плоскос-
ти, а следовательно, и с линией прицеливания.
Это рассогласование определяется выражением аотк = Ду sin ккр/25
и при значениях Ау = 0,8 мм, 5 = 900 мм, лкр = 15о составляет
0,12 мрад (т. д.).
При стрельбе на крене это рассогласование является дополни-
тельной погрешностью стрельбы.
78
При стрельбе с ходу под действием переносных поперечных
ускорений ствол будет совершать угловые колебания в пределах
зазора Ду с частотой переносных ускорений.
Амплитуда этих колебаний
= 4/гsln (агс,е 777—) •
\ a I /пер
где гпер. уПСр — амплитудные значения переносных ускорений.
Проведенные расчеты и фактические замеры позволили устано-
вить, что при движении танка по среднестатистической трассе со
скоростью примерно 7 м/с имеют место угловые колебания ствола
относительно люльки с амплитудой 0,14—0,15 мрад, что сравнимо
с погрешностью стабилизации. При существующих кольцевых нап-
равляющих вкладышах можно уменьшить это рассогласование
ствола с люлькой (уменьшением зазора и увеличением базы нап-
равляющих), но устранить полностью нельзя. Для полного исклю-
Рнс. 3.17. Вариант конструктивной
схемы передней направляющей
люльки призменного типа с люфто-
выбирающим устройством:
J—ствол; 3 — люлька: 3 — люфтовыбира
ющее устройство; 4 — направляющие при
змеиного типа
чения этого рассогласования целесообразно изменить конструкцию
направляющих вкладышей и выполнить их по призменному типу, а
для исключения возможных отрывов ствола при движении танка
от призменной направляющей — ввести верхнюю упругую опору.
Вариант такой конструктивной схемы показан на рис. 3.17.
Боковыми направляющими служат самоустанавливающиеся
вкладыши, образующие призму, а роль верхней опоры люфтовы-
бирающего устройства выполняет установленный на упругом валу
ролик. Упругими элементами могут быть различные конструкции,
79
например тарельчатые пружины. Эти элементы можно устанавли-
вать в любом удобном месте люльки, но целесообразнее — вблизи
центра масс ствола.
Испытания опытных конструкций таких направляющих на
пушке Д-81 показали, что благодаря четкой фиксации начального
углового положения ствола относительно люльки техническое рас-
сеивание снарядов уменьшается в 1,2—1,3 раза.
Моменты от сил взаимодействия снаряда со стволом (третья
из отмеченных выше групп моментов, возмущающих пушку при
выстреле) зависят как от баллистических и конструктивных пара-
метров снаряда (массы, скорости, динамической неуравновешен
ности, габаритных размеров, формы и расположения ведущего и
центрующих поясков и т. д.), так и в значительной степени от
кривизны ствола.
Ликвидация моментов от сил реакции снаряда на ствол прак-
тически невозможна, поэтому целесообразно ставить вопрос толь-
ко об уменьшении влияния этих моментов на углы вылета снаря-
дов и их рассеивание.
Для количественной оценки кривизны ствола наиболее широко
используются два параметра — непрямолинейность оси канала
ствола и дульный угол. Непрямолинейность ствола измеряется с
помощью специальных приборов и представляется в табличной,
графической или аналитической формах в проекциях на верти-
кальную и горизонтальную плоскости. Дульный угол измеряется
с помощью дульных приборов.
Кривизна ствола пушек, установленных в танках, формируется
из прогиба консольной части ствола под действием собственной
массы и технологической (или производственной) непрямолиней-
ностн. Технологическая непрямолинейность является следствием
погрешности изготовления стволов (увод инструмента при расточ-
ке, коробление при термической обработке и т. д.) и носит случай
ный характер как от ствола к стволу, так и по его длине, что опре-
деляет случайность суммарной кривизны стволов пушек.
Влияние кривизны ствола на динамические углы вылета снаря-
дов проявляется посредством смещения положения центра масс
откатных частей (изменения плеча динамической пары) и измене-
ния характера сил взаимодействия снаряда со стволом, обуслов-
ленных появлением дополнительной центробежной силы при дви-
жении снаряда но искривленному стволу. На рис. 3.18 приведены
расчетные данные влияния единичной кривизны ствола на углы вы-
лета БПС и ОФС (для пушки Д-81). Линейные функции для раз-
ных типов снарядов имеют различный характер, что предопределя-
ет появление индивидуального разнобоя ОФС для каждой пушки.
Наибольшее влияние на угол вылета и разнобой оказывает кривиз-
на дульной части ствола, при этом особенно нежелательной явля-
ется кривизна с изменением знака. Перегиб дульной части ствола
приводит к увеличению разнобоя и начальных возмущений снаря-
да при вылете (углов и скоростей нутации).
80
Для уменьшения суммарной кривизны стволы при сборке пу-
шек ориентируют таким образом, чтобы технологическая непрямо-
линейность компенсировалась прогибом ствола от собственного
веса. Как правило, 80 % стволов имеют технологическую непрямо-
линейность сложного пространственного характера, а 20 % — кри-
визну, располагающуюся вблизи одной плоскости. На рис. 3.19
показана технологическая непрямолинейность стволов различного
Рис. 3.18. Влияние единичной
кривизны ствола пушки Д-81
на углы вылета снарядов при
стрельбе:
/—ОФС; 2—БПС: а — дульный
срез; х — расстояние от казенного
среза; /ств - длина ствола
линия 1 — 2 при ориентации ствола
а пушке совмещается с вертикаль-
ной плоскостью (тонка / -вверх:
точка 2 — вниз); 3 — дульный срез,
точки но оси ствола указаны через
каждые 0,4 м по длине ствола; А
и /> — njMK-трапственное и плоскост-
ное расположение кривизны
ческой оси ствола. Для стволов с пространственным расположени-
ем технологической непрямо линейности определенная ориентация
ствола в вертикальной плоскости не позволяет уменьшить суммар-
ную кривизну по всей длине ствола. Учитывая наиболее сущест-
венное влияние на углы вылета кривизны в дульной части ствола,
за основной критерий ее оценки следует принять дульный угол и
стволы при установке в пушку ориентировать дульным углом вверх.
По результатам стрельб была определена линейная корреля-
ционная зависимость углов вылета снарядов от фактического
дульного угла ствола пушки в боевом положении.
81
Для пушки Д-81 (рис. 3.20) степень зависимости углов вылета
снарядов (в вертикальной плоскости) от фактического дульного
угла ствола характеризуется следующими коэффициентами корре-
ляции гу: для БПС — 0,85; для КС — 0,92; для ОФС — 0,90. Раз-
личный характер влияния кривизны на динамические составляю-
щие углов вылета разнотипных снарядов в данном случае прояв-
ляется в различных углах наклона прямых регрессий углов вылета
БПС, КС и ОФС от дульного угла.
Рис. 3.20. Статистическая зависимость углов вылета снарядов у от фактиче-
ского дульного угла ву ствола пушки Д-81 при стрельбе:
‘ а в- БПС; б - КС; в - ОФС
Для уменьшения влияния индивидуальных погрешностей изго-
товления каждой пушки, и прежде всего кривизны ствола, на точ-
ность стрельбы проводится операция технической подготовки пу-
шек, заключающаяся в согласовании средней траектории снарядов
с линией прицеливания.
Суммарная ошибка, вносимая непосредственно артиллерийской
системой пушка — снаряд в общую погрешность стрельбы, опреде-
ляется тремя основными составляющими:
погрешностью технической подготовки;
погрешностью технического рассеивания снарядов;
погрешностью вибрационного рассеивания снарядов (при
стрельбе с ходу).
Уровень этих ошибок зависит от степени оптимизации конст-
руктивных и баллистических параметров артиллерийской системы,
технологических допусков и их влияния на углы вылета снарядов,
а также от способов и методик технической подготовки пушек
к стрельбе.
82
3.5. ТЕХНИЧЕСКАЯ ПОДГОТОВКА ТАНКОВЫХ
ПУШЕК
Техническая подготовка заключается в приведении пушки к
нормальному бою и выверке прицела с пушкой. Формирование по-
грешности технической подготовки показано на рис. 3.21.
Приведение отечественных танковых пушек к нормальному бою
по действующим в настоящее время методикам включает в себя:
определение средних (табличных) углов вылета или их откло-
нений относительно основного, обычно бронебойного подкалибер-
ного снаряда и введение их вертикальных составляющих в шкалу
дальности прицела;
определение для каждой пушки отклонений средних индивиду-
альных углов вылета основного снаряда от заложенных в прицел
и их учет посредством переноса линии визирования канала ствола.
Под нормальными для пушки условиями стрельбы подразуме-
ваются следующие:
температура ствола соответствует температуре окружающего
воздуха;
наружная поверхность ствола не подвергается воздействию
внешних условий (солнечная радиация, дождь, ветер);
температура жидкости в тормозах отката нормальная (±15°C);
прицел выверен с пушкой;
настрел ствола незначительный.
В реальных условиях стрельбы появляются дополнительные
ошибки, обусловленные нестабильностью стрельбы пушки и рас-
согласованием выверки прицела с пушкой.
Схематично образование погрешности приведения пушки к нор-
мальному бою в вертикальной плоскости показано на рис. 3.22. Ли-
ния визирования канала ствола ОО| является базой для согласовав
иия с пушкой нулевых линий прицеливания при выверке. Вектор Л
определяет начало расчетной траектории снарядов с учетом таб-
личного угла вылета -jT. Табличный угол вылета вводится в углы
прицеливания пушки как постоянная составляющая для всей
шкалы дальности прицела. Начало фактической средней траек-
тории снарядов на каждой конкретной пушке, показанное векто-
ром Б, обычно отличается от расчетного из-за отклонений индиви-
дуальных углов вылета от табличных.
Для горизонтальной плоскости схема приведения пушки к нор-
мальному бою является аналогичной за исключением того, что
учесть средние углы вылета в этой плоскости для обычных (неавто-
матизированных) прицельных устройств невозможно, поэтому
в качестве табличных углов вылета для всех типов снарядов в го-
ризонтальной плоскости записываются нулевые углы.
Экспериментальное определение отклонений индивидуальных
углов вылета БПС от табличных и их учет посредством пере-
носа линии визирования ствола (выверочных рисок на дульном
83
84
Рис. 3.21. Формирование погрешности технической подготовки пушек
срезе ствола) на величину, равную Д?и, осуществляются в процес-
се пристрелки пушек.
Пристрелка пушек — окончательная технологическая опера-
ция, которой подвергаются все вновь изготовленные пушки. Эта
операция обычно производится на артиллерийских заводах со спе-
циального («жесткого») стенда. Конструкция стенда и установка
на нем пушки должны обеспечивать идентичность углов вылета
при стрельбе со стенда и из танка. В процессе пристрелки пушек
выполняются следующие операции:
1) подготовка к пристрелке, включающая расчет и подготовку
выверочной и пристрелочной мишеней;
2) выверка нулевой линии прицеливания с линией визирова-
ния канала ствола;
Рис. 3.22. Образование погрешности приведения пушки к нормальному бою:
/—фактическая траектория; 2 — расчетная траектория; 3 —линия прицеливания; 4 —линия
визирования ствола при выверке; ТНО —точка наводки орудия; СТП—средняя точка
попадания; РТП — расчетная точка попадания
3) отстрел группы (групп) выстрелов;
4) обработка результатов стрельбы (определение средней точ-
ки попадания, определение и исключение аномальных выстрелов
и групп);
5) оценка результатов стрельбы; при необходимости расчет и
перенос выверочных рисок на дульном срезе ствола (дульного
тормоза).
Чтобы исключить влияние погрешности СУО, пристрелку пуш-
ки производят с выключенным стабилизатором (или СУО) на
нулевых установках прицела. Погрешность СУО контролируется
с помощью специальной аппаратуры, и ее уровень должен опре-
деляться соответствующими техническими условиями.
Погрешность определения СТП при пристрелке пушки зависит
от сопутствующих ошибок, характеристик рассеивания снарядов и
85
числа групп и выстрелов в группах и характеризуется срединным
значением погрешности
£стп = пт 4-
где В — техническое рассеивание снарядов; п. т — число выстрелов в группе
н число групп; £выв — срединная погрешность выверки прицела с пушкой;
Е 10п — срединная дополнительная погрешность пристрелки, зависящая от сте-
пени нормализации условий стрельбы при пристрелке.
Погрешность выверки определяется точностью установки при-
боров и приспособлений для выверки и погрешностью визирования
через прицел и прибор выверки (трубку выверки). По экспери-
ментальным данным евыв —0,1 мрад (т. д.).
Нормализация условий стрельбы при пристрелке оговаривает-
ся специальными требованиями: дальность стрельбы 100 м; ма-
лый темп стрельбы; боковой ветер не более 7 м/с; крен оси цапф
не более 30'; угол места цели не более 1°.
При выполнении всех требований Еюа = 0,07 ... 0,1 мрад
(т. д.).
При указанном уровне сопутствующих ошибок и В=0,2...
...0,3 мрад (т. д.) максимальное уменьшение погрешности опре-
деления СТП наблюдается при увеличении числа выстрелов в
группе до четырех и числа групп до двух. Дальнейшее увеличение
объема стрельб приводит к повышению точности стрельбы не бо-
лее чем на 5—10 %.
Окончательная погрешность пристрелки после переноса рисок,
являющаяся для каждой конкретной пушки систематической:
^«р ~ V^стп + ’
где £р—погрешность нанесения рисок.
Стрельба при пристрелке производится особенно тщательно
с соблюдением специальных мер обеспечения точности наводки
орудия: периодическая проверка наводчиков, применение диа-
фрагмы на окуляре прицела, однообразная наводка пушки и т. д.
Для повышения точности пристрелки устанавливаются также
специальные критерии для исключения аномальных выстрелов и
групп (К\ и /G). Причиной аномального выстрела может быть рез-
кое нарушение условий пристрелки.
Применительно к нормальному распределению при известной
дисперсии (или иначе техническом рассеивании) и неизвестном
математическом ожидании условие аномального выстрела для уро-
вня значимости а=0,01 может быть записано в виде заданного
уровня вероятности Р:
или |yz —у| >?ЯВ) =0,01 .
86
Оценка аномальности группы по кучности может быть произ-
ведена по размаху между крайними пробоинами, тогда условие
аномальности имеет вид заданного уровня вероятности Р:
Р ( I -^п>вх — -^mln | > ^6 ИЛИ | Утах УпИп | > ~ 0,01 .
Значения коэффициентов 0 и t в зависимости от числа вы-
стрелов в группе соответственно следующие: при трех выстре-
лах—3,81 и 5,5; при четырех — 4,14 и 5,9; при пяти —4,36 и 6,2;
при шести —4,53 и 6,5; при семи 4,65 и 6,7; при восьми —
4,75 и 6,8.
Риски на дульном срезе ствола по результатам пристрелки
смещаются пропорционально координатам СТП.
Минимальное отклонение СТП, при котором возможен и целе-
сообразен перенос рисок, называется критерием переноса и обо-
значается Кз. Распределение СТП в пределах ±К3 можно считать
равномерным с плотностью вероятности <pi (х) = 1/2К^’.
Безусловное распределение координат центров рассеивания
пушек (а), не имевших переноса рисок после пристрелки (уло-
жившихся в ±/(з),
к, j - *
J ?«(х)тж(а)Лг ——^=-9 2’2«
-X, ’J Г Л
г*е <’2 = ’пр + -Г*3-
Здесь (для пушек, не имевших переноса рисок) появляется
дополнительная погрешность, которая в переводе на срединное
значение будет равна
Р - )<2"Кз/У~3 = 0.39К,.
Следовательно, критерий К3 должен быть как можно меньше,
чтобы соблюдалось оптимальное соотношение повторяющихся и
неповторяющихся ошибок при стрельбе, т. е. BJM-
С другой стороны, минимально возможное смещение рисок
ограничивается точностью инструмента для их нанесения и толщи-
ной рисок (0,5—1 мм). Значение Кз для танковых пушек в на-
стоящее время устанавливается в пределах от 20 до 30 мм.
Правильность выбора критерия Кз проверяется сравнением
статистических распределений СТП пушек с переносом рисок
после пристрелки и без него; расхождение при этом не должно
Превышать 10—15 %.
После установки пушек в танки и периодически в процессе
эксплуатации танков производится проверка пристрелки пушек
(определение меткости стрельбы). Точность определения СТП
при проверке должна быть не ниже, чем при пристрелке. Меткость
стрельбы оценивается по специальному критерию — габариту К<.
87
С доверительной вероятностью Рлм =0,98 меткость считается
недостаточной, если одна из координат СТП пушки выходит за
критерий К4:
= 3 4- ^тп
В этом случае целесообразно уточнить перенос рисок по ре-
зультатам проверки пристрелки.
Приведение пушки к нормальному бою для основного снаряда
(БПС) сопровождается погрешностью пристрелки. Для других ти-
пов снарядов (КС и ОФС) отличие индивидуальных углов вылета
от табличных проявляется при стрельбе в полной мере как пог-
решность разнобоя, поэтому погрешность приведения к нормально-
му бою будет характеризоваться суммой ошибок:
о. . -= + ил« Е, . “
где % ь (Еп 6) — среднеквадратичная (срединная) погрешность приведения
пушки к нормальному бою, ’пр(^пр)—то же для пристрелки; зржзм (£ раЗИ) —
то же для разнобоя.
Основной причиной разнобоя КС и ОФС является различное
влияние кривизны ствола на углы вылета разных типов снарядов.
Как уже отмечалось, наблюдается линейная корреляционная
зависимость углов вылета снарядов от фактического дульного
угла ствола пушки с коэффициентом корреляции, близким к еди-
нице.
На рис. 3.23 представлены полученная по экспериментальным
данным зависимость углов вылета БПС и ОФС от дульного угла
в вертикальной плоскости и статистическая плотность распреде-
ления дульных углов для пушки Д-81.
88
Пушке со средней кривизной соответствуют средние (таблич-
ные) углы вылета ОФС относительно БПС. Учет табличного угла
вылета ОФС в прицеле можно представить в виде переноса линии
70ФС вверх на величину fT. Тогда погрешность разнобоя При
стрельбе ОФС будет определяться полем вертикальных ординат
между линиями ?БПС и (70ФС + 7т)« Зависимость погрешности
разнобоя от дульного угла для ОФС можно представить в сле-
дующем виде:
Мофс =»», + ». (3.12)
где А и В — постоянные.
Числовые характеристики распределения погрешности разно-
боя (математическое ожидание М и дисперсия D) как линейной
функции случайной величины (дульного угла) при известных па-
раметрах распределения дульных углов могут быть найдены по
формулам
^(дТофс1 = ЛНу
0ФС Ус₽ (3.13)
/^Д10Фс1 = Л’Я[8,]. J
Указанный подход позволяет при ограниченном объеме
стрельб достаточно просто оценить в первом приближении уро-
вень погрешности разнобоя танковых пушек.
Несоответствие характеристик плотности распределения тех-
нологических дульных углов и дульных углов на собранных пуш-
ках (см. рис. 3.23) объясняется несовершенством приборов и ме-
тодов, применяемых при определении и ориентации технологиче-
ской кривизны.
Для уменьшения разброса фактического дульного угла на со-
бранных пушках и приведения его в соответствие с допуском на
технологический дульный угол при определении технологического
дульного угла и его ориентации при сборке пушки необходимо
соблюдать следующий условия:
закрепление ствола при измерении должно быть идентичным
его закреплению в люльке;
точность приборов для измерения дульного угла должна быть
не ниже 0,05—0,10 мрад (т. д.);
оптимальное распрложение ствола в пушке должно соответст-
вовать показаниям прибора Н, = 0, 8у = Нш1п.
В качестве одного из основных мероприятий для уменьшения
разнобоя может быть рекомендовано уменьшение технологиче-
ской кривизны стволов пушек. Так, например, для пушки Д-81
(Как видно из рис. 3.23) уменьшение технологического допуска
на дульный угол с 1,5 до 1,0 мрад (т. д.) позволяет уменьшить
максимальную погрешность разнобоя ОФС с 2,0 до 0,8 мрад
(т. д.), а среднеквадратичное отклонение ора31) при оценке по
зависимостям (3.12) и (3.13) уменьшается с 0,30 до 0,20 мрад
(т. Д ).
89
3.6. СТАБИЛЬНОСТЬ СТРЕЛЬБЫ ПУШКИ
В процессе эксплуатации танков меткость и Кучность стрельбы
из пушки могут изменяться. Всю совокупность факторов, которые
приводят к смещению СТП пушки, можно разделить на две ос-
новные группы.
1. Изменение конструктивных параметров артиллерийского
орудия по мере настрела в пределах его живучести, являющееся
причиной необратимых систематических изменений углов вылета
снарядов. К этой группе относятся износ внутренней поверхнос-
ти канала ствола и необратимые изменения его начальной кри-
визны.
2. Изменение условий стрельбы, вызывающее временные слу-
чайные смещения СТП. К этой группе относится изменение углов
вылета от теплового изгиба ствола, нестабильности характерис-
тик противооткатных устройств, температуры заряда, а также
возможное рассогласование выверки прицела с пушкой.
Износ канала ствола вызывается эрозионным действием по-
роховых газов и взаимодействием снаряда со стенками канала
ствола. Износ канала ствола понижает баллистические параметры
орудия по мере настрела и способствует увеличению рассеивания
снарядов.
В табл. 3.3 приведены характеристики кучности стрельбы из
пушки Д-81 в начале и конце срока службы стволов. Рассеивание
снарядов калиберного типа (ОФС и КС) в меньшей степени за-
Таблица 3.3
Увеличение технического рассеивания снарядов по мере износа ствола пушки Д-81, мрад
Новый ствол Изношенный ствол
Тип снаряда
въ во вб
БПС 0,18 0,20 0,40 0,35
КС 0,15 0,15 0,20 0,17
ОФС 0,15 0,15 0,21 0,18
висит от износа ствола по сравнению с подкалиберными снаря
дами. Рассеивание подкалиберных снарядов в конце срока служ-
бы ствола увеличивается в 1,5—2 раза. Это объясняется большим
влиянием износа ствола на движение снаряда с разрезным под-
доном.
Неизбежный процесс износа канала можно замедлить и про-
длить срок службы стволов. Для этого рекомендуется применение
флегматизаторов и специальных присадок к заряду (типа двуоки-
си титана), нанесение на внутреннюю поверхность ствола туго-
90
плавких облицовок, выбор рациональных конструкций снаряда и
материалов для ведущих поясков и др. На меткость стрельбы
танковых пушек (погрешность технической подготовки) наиболь-
шее влияние оказывает другой фактор, сопутствующий настрелу,—
изменение исходной кривизны канала стволов.
Характер и степень изменения кривизны канала ствола по мере
настрела во многом зависят от уровня остаточных напряжений в
материале ствола. В процессе стрельбы в результате силового и
термического воздействия, а также снятия внутренних слоев ма-
териала происходит перераспределение остаточных напряжений,
которое приводит к изменению кривизны канала ствола.
Влияние изменения кривизны канала ствола на углы вылета
снарядов аналогично влиянию технологической кривизны (см.
рис. 3.19).
Для повышения меткости стрельбы танковых пушек необходи-
мо добиваться минимального уровня остаточных напряжений в
стволах в процессе их изготовления путем оптимизации техноло-
гии термической и механической обработки, а также исключе-
нием операций правки.
Изменение углов вылета снарядов в пределах срока службы
артиллерийских орудий независимо от причины происхождения
может быть учтено при периодической пристрелке пушек.
Тепловой изгиб стволов от внешних факторов. Из числа факто-
ров, относящихся непосредственно к nyuitfe и оказывающих су-
щественное влияние на стабильность стрельбы, необходимо отме-
тить в первую очередь тепловой изгиб ствола. Увеличение влияния
этого фактора объясняется тенденцией к повышению баллистичес-
ких характеристик танковых пушек, увеличению длины стволов,
следствием чего является уменьшение их изгибной жесткости.
Тепловой изгиб появляется при наличии градиента температу-
ры по поперечным сечениям ствола. Все вызывающие его фа кто-
р ы можно разделить на внешние и внутренние. К внеш-
ним относятся односторонний нагрев ствола солнцем, неравномер-
ное охлаждение наружной поверхности ветром, атмосферными
осадками, естественная конвекция воздуха. К внутренним факто-
рам относится неравномерный разогрев ствола при стрельбе, обус-
ловленный его разностенностью.
Исследование влияния теплового изгиба ствола на точность
стрельбы танковых пушек построено на теоретическом и экспери-
ментальном анализе чувствительности ствола к различным фак-
торам и вероятностной оценке значений этих факторов в реаль-
ных условиях боевой эксплуатации танков.
У1
Изменение углов вылета снарядов при тепловом изгибе под
действием солнца (рис. 3.24) может быть выражено приближен-
ной зависимостью
ATe = - 4csinpc, (3.14)
где Ас — коэффициент, зависящий от чувствительности ствола к тепловому
изгибу и интенсивности солнечного излучения; лс— угол высоты солнца над
горизонтом, который зависит от географической широты, времени года и суток,
направления стрельбы.
Полагая, что стрельба возможна в любое дневное время су-
ток, можно принять, что случайная величина рс подчиняется за-
кону равномерной плотности на участке от 0 до л:
/(Рс) <=
О при рс <0;
1/тс при о < Ре < It;
0 при Ре > тс.
(3.15)
Рис. 3.24. Изменение углов вылета
снарядов пушки Д-81 при односто-
роннем нагреве ствола солнцем:
/ — БПС; 2 -ОФС
Рис. 3.25. Плотность распределения
числа выстрелов по результатам
полигонных и войсковых испытаний
1 — экспериментальная; 2 — расчетная
Числовые характеристики распределения погрешностей от теп-
лового изгиба под воздействием солнца могут быть определены
как функции случайной величины по известным зависимостям
М|?(Х)1 = f ?(x)/(x)dx;
- со
Л I? (•*)! = У [ф (*) - ту f(x) dx
92
или в данном случае
Л1{Д7с] = j-4csln?c-J-<;
D (Д Тс1 = f(- A sin 9С)2 4- < - (М [Д 7 J)2.
(3.16)
В условиях неравномерного охлаждения ствола изменение
углов вылета под действием осадков (Лу0) и конвекции воздуха
(Д7и) зависит от степени разогрева ствола или числа произведен-
ных выстрелов п. Плотность распределения п с учетом опытных
данных полигонных и войсковых стрельб (рис. 3.25) может быть
получена по выравниванию эмпирической кривой распределения
числа выстрелов, как для модуля случайной величины, распреде-
ленной ho нормальному закону:
О прил=0;
_L[T(^)+f(«±-)] прив>0.
f(n, т, а) =
(3.17)
Так же могут быть определены числовые характеристики по-
грешности от неравномерного охлаждения ствола с учетом эмпи-
рической зависимости чувствительности ствола к внешним усло-
виям (рис. 3.26).
Суммарное влияние теплового изгиба .ствола от внешних усло-
вий можно представить в виде полной группы несовместных собы-
тий, сумма вероятностей которых
Рс + 7>о + />в=1.
где с —солнце; о —осадки; п — пасмурно.
Плотность распределения погрешности от внешних условий
/(Д 7яя) = Ре/(Д 7с) + Р0/(Д 7о) + РП/(Д К),
а значения погрешности определяются по соответствующим значе-
ниям отдельных составляющих:
/И[Д7вн| = РсМ(Дь] + РоМ[Д7о]4-РпМ[Дь]; |
В условиях Европейского театра военных действий погрешности
стрельбы пушки Д-81 от теплового изгиба ствола под влиянием
внешних условий и с учетом зависимостей, приведенных на
рис. 3.26, 3.27 и в выражениях (3.14) — (3.18), составляют:
для БПС М [Д7вя]=0,7 мрад (т. д.); а[Аум]=0,31 мрад
(т. Д.);
для ОФС М [Д7ян ] =0,16 мрад(т.д.); о [Лувн ] =0,45 мрад
(т.д.).
93
Для уменьшения влияния внешних факторов на тепловой из-
гиб используются различные теплозащитные устройства. Наибо-
лее широко применяются металлические теплозащитные кожухи,
устанавливаемые концентрично со стволом; воздушный зазор
между стволом и кожухом составляет 8—10 мм. На некоторых
пушках используются теплозащитные покрытия на основе мате-
риалов с низкой теплопроводностью (асбест, сотофенопласт и др.).
Все перечисленные типы конструкций теплозащитных ус-
тройств обеспечивают уменьшение теплового изгиба ствола на
70—80 %. Применение металлического кожуха на пушке Д-81 по
вероятностной оценке уменьшает погрешность стрельбы от влия-
ния внешних условий а[Дувн] до 0,1—0,12 мрад (т. д.).
Тепловой изгиб от разностенности ствола. Изменение угла вы-
лета при тепловом изгибе от неравномерного разогрева ствола
под влиянием разностенности зависит от нескольких случайных
факторов — ориентации и значения разностенности (&р), темпа
стрельбы т и числа произведенных выстрелов п (рис. 3.27).
Эмпирическая зависимость изменения углов вылета от разно-
стенности при ее определенной ориентации
Д7вр= (3.19)
где 4, Ь, с — эмпирические показатели.
Рис. 3.26. Влияние условий ох-
лаждения ствола на изменение
углов вылета снарядов пушки
Д-81
------ при действии осадков;------
при свободной конвекции воздуха; / —
БПС: 2-ОФС
Рис. 3.27. Влияние разностен-
ности ствола на изменение углов
вылета снарядов пушки Д-81:
а — после 10 выстрелов со скорострель
костью: /—5 выстр., мин (БПС), 2 —
I выстр.. мин (ОФС), 3 — 1 выстр.мин
(БПС). 4 — 0.5 выстр./мин (БПС); б-
для разного числа выстрелов при посто-
янной разностенности 1,5 мм и
скорости стрельбы 1 выстр. / мин: /—
ОФС, 2 —БПС
94
Для вероятностной оценки погрешности стрельбы пушек, вы-
зываемой разностенностыо ствола, необходимо знать коэффи-
циенты в формуле (3.19) и законы (или плотности) распределе-
ния случайных величин 8р, п, т. Тогда числовые характеристики
распределения погрешностей, вызываемых разностснностью ство-
ла, определяются как функции трех случайных величин:
М [ЛЬр] = у] [4^(8,. п, -)/(8р, п, <)d\dnd-.-,
’>1’х
X /(&р, п, т) d\dn dz — М2 [ Д 7вр].
Если принять ориентацию разностенности равновероятной в
любом направлении, то погрешность стрельбы от разностенности
будет круговой с характеристиками
М = 0; D'fAT.pl = D[Al4p14-M4AT.p].
Подход к определению необходимых зависимостей и законов
распределения заключается в статистическом анализе результа-
тов испытаний пушек и танков.
В частности, на рис. 3.28 показана статистическая кривая
плотности распределения разностенности на пушках Д-81 при до-
Рис. 3.28. Статистическая плот-
ность распределения стволов
пушки Д-81 по разностенности:
I — экспериментальная; 3 — расчетная
пуске 2,5 мм. Эта кривая распределения удовлетворительно ап-
проксимируется логарифмически нормальным распределением с
числовыми характеристиками М [8р] = 1,08 мм; <з,р =0,49 мм.
Для пушки Д-81 при допуске 2,5 мм погрешность стрельбы
БПС от разностенности ствола ] =0,28 мрад (т. д.); для
ОФС з[Д у4р] =0,39 мрад (т. д.).
95
Основным направлением снижения влияния разностенности
на тепловой изгиб ствола, как следует из анализа, является ее
уменьшение. Уменьшение допуска на разностенность до 0,8 мм
позволит снизить <з[Дт, ] для пушки Д-81 до 0,10—0,12 мрад (т. д.).
Влияние на стабильность стрельбы противооткатных устройств
и температуры заряда. К факторам, оказывающим влияние на
изменение углов вылета снарядов в различных условиях стрель-
бы, следует отнести также возможное изменение характеристик
противооткатных устройств и температуру заряда.
При стрельбе происходит разогрев жидкости в тормозе отката
пушки, изменение ее вязкости и усилий отката (рис. 3.29), в том
числе на начальном участке, который является определяющим
для формирования углов вылета.
Рис. 3.29. Изменение характеристик жидкости в тормозе отката (а) и диа-
грамма усилия отката при стрельбе (б):
/ — в начале стрельбы; 2 — после 40 выстрелов; 3 — момент вылета снарядов; Д/ж — при
ращение температуры жидкости; |i — коэффициент кинематической вязкости; R — сила со-
противления тормоза отката: Т — время выстрела
Для пушки типа Д-81 изменение силы сопротивления откату
через 40 выстрелов (при полном заполнении тормоза жидкостью)
приводит по расчетной оценке к изменению углов вылета ОФС на
0,4—0,5 мрад (т. д.); БПС менее чувствителен к изменению силы
сопротивления откату, и соответствующие изменения углов выле-
та не превышают 0,10—0,15 мрад (т. д.).
Особенно существенное влияние на стабильность стрельбы ока-
зывает изменение характеристик противооткатных устройств в
пушках, в которые жидкость заливается не полностью для ком-
пенсации расширения при разогреве. При недоливе жидкости в
тормозе отката в процессе стрельбы происходит ее перемешива-
ние с воздухом и образование пенистой эмульсии, что наряду
с разогревом и расширением жидкости способствует нестабиль-
ной работе тормоза на начальном участке, тем более, что допус-
кается определенный разброс недолива жидкости.
96
Влияние температуры заряда на углы вылета снарядов прояв-
ляется в виде изменения моментной нагрузки на откатные части
до вылета снарядов от давления пороховых газов. Для пушки
Д-81 при изменении температуры заряда от —40 до Н-40°С изме-
нение углов вылета ОФС по расчету должно составить 0,45 мрад
(т. д.); результаты стрельб показали близкие значения порядка
0,50—0,60 мрад (т. д.).
Нестабильность углов вылета, по-видимому, целиком опреде-
ляется изменением моментов сил R и Ркп.
Необходимо уменьшить эти моменты путем применения рацио-
нальной конструкции пушек, в том числе концентричного или сим-
метричного расположения противооткатных устройств, обеспечения
«свободного» отката на начальном участке, исключения плеча
динамической пары.
Рассогласование прицела с пушкой. На стабильность стрель-
бы помимо указанных выше факторов, относящихся непосредст-
венно к самой артиллерийской системе, существенное влияние
оказывает точность согласования пушки с прицелом.
Причинами нарушения согласования прицела с пушкой при
эксплуатации танка могут быть геометрический параллакс вы-
верки, влияние крена танка, сбиваемость прицельной марки при
стрельбе и движении.
Погрешность выверки от геометрического параллакса зависит
от координат выходного окна прицела относительно оси канала
ствола, дистанции сведения нулевой линии прицеливания и оси
канала ствола и дальности стрельбы. Для современных танков
эта погрешность в диапазоне дальности 500—2500 м не превышает
0,3 мрад (т. д.) и является систематической для каждой даль-
ности.
Рассогласование прицела с пушкой при крене танка возникает
в результате смещения прицела, ствола и люльки под действием
собственной массы в местах их крепления. Суммарное рассогла-
сование при крене до 15° для серийных танков составляет 0,2—
0,4 мрад (т. д.). Для его уменьшения необходимо уменьшить за-
зоры в местах крепления прицела, в цапфенных устройствах,
а также применять призменные направляющие и люфтовыбираю-
щие устройства в соединении ствол—люлька.
Одной из наиболее существенных и трудноустраняемых при-
чин рассогласования прицела с пушкой при стрельбе является
сбиваемость прицельной марки. Применение прицелов с незави-
симой линией прицеливания и сложными кинематическими свя-
зями между пушкой и маркой привело к тому, что сбиваемость
прицельной марки стала одной из существенных проблем.
Причиной сбиваемости марки является разнообразие выбора
люфтов от действующих при выстреле моментов, различная подат-
ливость элементов связи прицела с пушкой и внутренних кинема-
тических связей в прицеле.
7* 97
Допустимое значение сбиваемое™ прицельной марки оговари-
вается в технических условиях на прицел или танк; для современ-
ных отечественных танков оно обычно составляет 0,5 мрад (т. д.).
Для обеспечения высокой точности стрельбы согласование прице
ла с пушкой так же важно, как и точность составных частей
комплекса танкового вооружения. Общие тенденции развития
КТВ, повышение характеристик точности СУО и артиллерийской
системы требуют уменьшения допустимого значения сбиваемое™
прицельной марки до 0,2 мрад (т. д.).
Из-за ограниченности традиционных мер борьбы со сбивае-
мостью прицела (уменьшение люфтов, повышение жесткости свя-
зей) в конструкции некоторых танков предусматриваются спе-
циальные системы непрерывного контроля и корректировки вывер-
ни прицела с пушкой. Такая система разработана и установлена
на одной из модификаций английского танка <Чифтен». Рядом
с прицелом устанавливается проектор, проецирующий изображе-
ние треугольной прицельной марки на стальное зеркало, установ-
ленное на дульном срезе ствола. Отраженное изображение марки
направляется в поле зрения прицела. Совмещение отраженной
марки с основной маркой прицела означает согласованное поло-
жение нулевой линии прицеливания с пушкой. В противном слу-
чае совмещения м,арок добиваются регулировкой положения сет-
ки прицела по вертикали и горизонтали. По данным зарубежной
информации, подобные системы разрабатываются также для аме-
риканского танка Д1-1 и западногерманского танка <Леопард-2».
Применение таких систем на танке позволит оперативно следить
за точностью согласования прицела с пушкой и периодически его
корректировать. Кроме того, при использовании дульного среза
как базы для согласования прицела с помощью таких систем
можно также в какой-то мере учитывать тепловой изгиб ствола.
3.7. ПУТИ ПОВЫШЕНИЯ ТОЧНОСТИ СТРЕЛЬБЫ
ТАНКОВЫХ ПУШЕК
Требования к погрешности артиллерийской системы опреде-
ляются как общими требованиями точности стрельбы тайков, так
и составом КТВ и уровнем развития СУО. По мере совершенст-
вования приборов наблюдения и прицеливания, внедрения лазер-
ных дальномеров, танковых баллистических вычислителей, позво-
ляющих решать задачу встречи снаряда с целью, высокоточных
стабилизаторов вооружения удельный вес ошибок артиллерий-
ской системы в общей погрешности стрельбы возрастает.
Основными направлениями повышения точности стрельбы тан-
ковых пушек являются следующие: совершенствование конструк-
тивных, баллистических и технологических параметров пушек и
снарядов; повышение точности методик и инструментов, приме-
няемых при технической подготовке пушек, особенно для танков
с автоматизированными СУО; разработка методов и способов уче-
98
та индивидуальных погрешностей пушек в виде поправок при
стрельбе.
Как следует из анализа динамики танковой пушки, «ля полу-
чения высоких характеристик меткости и кучности стрельбы кон-
струкция пушки должна обеспечивать максимальную динамиче-
скую уравновешенность пушки при выстреле, в особенности до
момента вылета снаряда из канала ствола. Это требование пред-
полагает рациональную компоновку откатных частей, при кото-
рой центр масс совмещен с осью канала ствола — линией дейст-
вия на пушку равнодействующей силы давления пороховых газов.
Из рассмотренных возможных конструктивных решений наи-
более рациональным для танковых пушек является применение
симметричной схемы расположения тормозов отката и накатни-
ков с одновременным обеспечением малоторможенного отката до
момента вылета снаряда. Динамическая уравновешенность пуш-
ки при выстреле обеспечивает также уменьшение нестабильности
стрельбы, обусловленной изменениями характеристик противоот
катных устройств и колебаниями температуры заряда в процессе
стрельбы.
Повышению точности наводки пушки при стрельбе, особенно
с ходу, способствует уменьшение влияния люфтов в соединениях,
в том числе благодаря применению призменнцх направляющих
люльки с люфтовыбирающими устройства хТи, рациональной конст-
рукции цапф и т. д.
Вопросы повышения изгибной жесткости ствола при заданных
баллистических и габаритно-массовых' параметрах ствола
являются одними из наиболее сложных. Некоторые резервы, как
было показано выше, существуют в оптимизации баллистического
решения и габаритов ствола, уменьшении его консольности и ра-
циональном распределении масс сборочных единиц пушки.
Уменьшению вибрационного рассеивания снарядов может спо-
собствовать применение стволов новых конструкций, в том числе
продольно-напряженных, и стволов с вибропоглощэющими по-
крытиями. Предварительная оценка подтверждает эффективность
применения стволов новых конструкций. Работы в этом направле-
нии в настоящее время ведутся: подбираются оптимальные мате
риалы и конструкции ствола.
Одним из основных направлений уменьшения погрешности
разнобоя является уменьшение технологической кривизны ство-
лов. Так, например, для пушки Д-81 уменьшение технологическо-
го допуска на дульный угол с 1,75 до 0,80 мрад (т. д.) позволяет
уменьшить погрешность разнобоя КС и ОФС эразн с 0,3 до
0,2 мрад (т. д.), т. е. в 1,5 раза.
Оценка технологической кривизны стволов по дульному углу
не является достаточно полной. В процессе формирования углов
вылета снарядов участвуют последовательно все участки ствола,
при этом влияние кривизны ствола увеличивается по мере движе-
99
ния снаряда от казенной части к дульной. Соответственно и тре-
бования к кривизне отдельных участков ствола должны быть
различными, а допуски на кривизну — дифференцированными.
Разработка дифференцированных по длине ствола допусков
должна производиться с учетом конкретных характеристик артил-
лерийских систем и требований к их точности, а также с учетом
технологического и станочного оборудования для изготовления
стволов, возможностей и точности контрольно-измерительной ап-
паратуры.
Одновременно необходимо уменьшать и разностенность ство-
лов. Для пушки Д-81 уменьшение допуска на разностенность
стволов с 2,5 до 0,8 мм способствует уменьшению ва с 0,28 —
0,40 до 0,10 — 0,12 мрад (т. д.). В данном случае также целесо-
образно внедрение дифференцированных допусков по длине
ствола.
Конструктивные и технологические мероприятия позволяют
повышать точность стрельбы пушек для всех типов танков, но в
силу ряда причин имеют ограниченные возможности.
Для танков с автоматизированными СУО дальнейшее повыше
ние точности приведения пушек к нормальному бою снарядами
всех типов благодаря учету индивидуальных погрешностей разно-
боя возможно беЗ существенного усложнения СУО.
Основной проблемой при решении вопроса учета разнобоя
является определение погрешности разнобоя.
Пристрелка как способ определения индивидуальных углов
вылета (особенно при выпуске серийной продукции на заводах
промышленности) при всей своей наглядности и простоте имеет
следующие существенные недостатки:
большая стоимость и продолжительность операции;
необходимость в специально оборудованных полигонах;
увеличение настрела ствола;
ограниченная точность, так как операция связана с рядом
трудноконтролируемых ошибок, сопутствующих стрельбе.
В этой связи наиболее перспективным является применение
бесстрельбовых методов определения углов вылета по замерен-
ным индивидуальным технологическим параметрам пушек.
В качестве одного из таких методов может быть использован
расчет углов вылета по дульному углу. Предпосылкой возмож-
ности использования этого метода является линейная корреля-
ционная связь между этими величинами с коэффициентами кор-
реляции, близкими к единице.
Статистический анализ результатов стрельб из пушек У-5ТС
и Д-81 (табл. 3.4) показывает возможность перехода на бес-
стрельбовый метод.
100
Таблица 3.4
Результаты пристрелки пушек У-5ТС и Д-81 различными методами
Пушка Рассеивание СТП после при- стрелки бесстрельбовым ме- тодой, мрад (т. д.) Рассеивание СТП после стрельб, мрад (т. д.)
Ех £ £g
У-5ТС 0,21 0,18 0,18 0,18
Д-81 0,24 0,20 0,23 0,17
Дальнейшим развитием бесстрельбовых методов приведения
к нормальному бою можно считать метод расчета углов вылета
посредством учета влияния кривизны отдельных участков ствола
(см. рис. 3.17) с помощью зависимостей
п I
7=2 Kfli или 7 = j К(х) а (х) dx,
где Ki или/((х) — кривизна Ьго участка ствола или ее функция по длине
ствола; или а (х) — коэффициент влияния единичной кривизны участка
ствола на угол вылета; I — длина ствола.
Для внедрения этих методов необходимо применение высоко-
точных автоматизированных систем измер*ення кривизны ствола
п уточнение зависимости а(х).
Учет индивидуальных погрешностей пушки в виде поправок при
стрельбе позволяет уменьшать повторяющиеся ошибки артилле-
рийской системы до уровня методических и инструментальных по-
грешностей.
В последнее время разрабатываются снаряды с коррекцией
траектории на последнем участке, что позволит повысить не только
меткость, но и кучность стрельбы и приблизить вероятность попа-
дания первым выстрелом к уровню управляемого снаряда.
Глава 4. АВТОМАТ ЗАРЯЖАНИЯ
4.1. НАЗНАЧЕНИЕ АВТОМАТА ЗАРЯЖАНИЯ,
ОБЩИЕ ТРЕБОВАНИЯ
Танковый автомат заряжания — это автоматизированное уст-
ройство, предназначенное для подачи в зарядную камору орудия
выстрела требуемого типа. Впервые в мировом танкостроении тан-
ки с АЗ серийно начали выпускаться в СССР (танк Т-64). Автома-
тизированная боеукладка этого танка содержит 30 выстрелов раз-
дельного заряжания калибра 115 мм трех типов (бронебойный
подкалиберный, кумулятивный, осколочно-фугасный), которые мо-
гут загружаться в любом соотношении и заряжаться в орудие по
команде наводчика. Автоматизированная боеукладка танка Т-64А
с пушкой Д-81 калибра 125 мм вмещает 28 выстрелов.
Автомат заряжания выполняет следующие операции:
загрузку боекомплекта в боеукладку;
ввод в блок памяти информации о типах загружаемых выст-
релов;
заряжание орудия требуемым типом выстрела;
выброс или перекладку поддона (гильзы);
выдачу информации об имеющемся количестве выстрелов по
типам;
разгрузку боеукладки.
Существуют следующие режимы заряжания орудия, отличаю-
щиеся продолжительностью цикла заряжания и степенью загру-
женности экипажа:
автоматический «серия»;
автоматический «одиночный»;
полуавтоматический (пооперационный);
ручной (с помощью ручных приводов).
Танкам Т-64 и Т-64А предшествовали танки Т-62 и Т-10М.
Танк Т-62 оснащен 115-мм пушкой с выстрелом унитарного заря-
жания. В боевом отделении находится два выстрела, каждый из
которых вручную можно зарядить за 7—9 с. Автомат заряжания
танка Т-64 вмещает 30 выстрелов (трех типов), продолжитель-
ность цикла заряжания одного выстрела не более 8 с.
Танк Т-10М имеет пушку калибра 122 мм с выстрелами раз-
дельного заряжания. Автомат заряжания на танке Т-64А позволил
102
примерно в два раза сократить цикл заряжания практически та-
кого же орудия, увеличить примерно в три раза число выстрелов
в боевом отделении и максимально увеличить скорострельность
пушки. Благодаря АЗ удалось отказаться от одного члена экипа-
жа, уплотнить компоновку боевого отделения, уменьшить высоту
и объем танка.
В конечном итоге внедрение АЗ способствовало повышению ог-
невой мощи и защиты танка.
Однако оснащение танков АЗ обусловило появление специфи-
ческих проблем, одной из которых являлась проблема обеспечения
высокой надежности АЗ, и прежде всего — безотказности. Отсутст-
вие опыта отработки и эксплуатации АЗ, многообразие условий
эксплуатации, существенно влияющих на работоспособность АЗ
(запыленность, механические воздействия, влага и т. д.), рассредо-
точение сборочных единиц АЗ по всему боевому отделению и боль-
шая их номенклатура (механические, электрические, гидравличес-
кие, электронные) потребовали проведения большого объема работ
на стадиях проектирования, производства и эксплуатации для до-
стижения приемлемого уровня безотказности.
Другим проблемным вопросом при разработке первых образ-
цов АЗ явилось функционирование АЗ при воздействии на танк
противотанковых средств (ПТС), в том числе мин, а также избы-
точного давления ядерного взрыва.
К автоматам заряжания предъявляются следующие общие
технические требования: »
продолжительность цикла заряжания йе должна лимитировать
продолжительность цикла подготовки и производства прицельного
выстрела;
надежность АЗ должна быть не ниже, чем у других составных
частей КТВ;
боекомплект должен обеспечивать необходимый расход боепри-
пасов при выполнении боевой операции;
техническое обслуживание АЗ перед стрельбой должно отсутст-
вовать;
ремонтопригодность должна быть такова, чтобы время замены
основных сборочных единиц АЗ удовлетворяло временным ограни-
чениям на ремонтные работы в период боевой эксплуатации танка.
4.2. СХЕМЫ АВТОМАТА ЗАРЯЖАНИЯ
В классической компоновке танка можно выделить три основ-
ные схемы расположения автоматизированного боекомплекта
(рис. 4.1):
I — в нише качающейся башни либо неподвижно (при непод-
вижной относительно корпуса установке пушки) на едином осно-
вании с пушкой;
II —в нише обычной башни;
III — в нижней части боевого отделения в корпусе.
ЮЗ
Типовые циклограммы процесса заряжания первого и последу-
ющих выстрелов для рассматриваемых схем построены при следу-
ющих условиях (см. рис. 4.1):
заряжание первого выстрела осуществляется при повороте
конвейера на три шага;
для заряжания второго выстрела необходим поворот конвейера
на один шаг.
Цикл заряжания обозначен Т, с верхними индексами /, // и III,
соответствующими схемам АЗ, и нижними индексами I, 2, X, соот-
ветствующими первому выстрелу, второму и их сумме.
Рис. 4 1с Схемы ангоматов заряжания и циклограммы их работы
В процессе заряжания выстрела при современном конструктив-
ном исполнении пушки и боеприпасов минимально необходимыми
являются две операции, связанные с перемещением выстрела:
совмещение осей выстрела и каморы;
досылание выстрела.
Минимальный путь перемещения выстрела в первой операции
равен максимальному диаметру выстрела.
В схеме I с замкнутым транспортером при наличии в боекомп-
лекте нескольких типов выстрелов путь перемещения в первой опе-
рации зависит от вместимости конвейера, характеризуемой коли-
чеством выстрелов N, и числа типов выстрелов п.
При одинаковом числе выстрелов каждого типа, вращении
конвейера только в одном направлении и раскладке выстрелов
104
группами по типам в наихудшем случае необходим поворот кон-
вейера на У(н— 1)/л -|- 1 шагов.
Зазоры между выстрелами в конвейере и размеры емкостей
для выстрелов (лотки, кассеты) в направлении движения выстрела
на линию досылания можно определить для каждого конкретного
калибра с помощью коэффициента К3. Максимальный диаметр
выстрела можно выразить через калибр d с помощью коэффициен-
та Кг. Тогда максимальное время выдачи выстрела на линию до-
сылания
Г. = [ЛЛ(л - l)/n + 1 ] (К, - Kr) d!v*,
где vK —средняя скорость конвейера.
Путь перемещения выстрела в процессе досылания складыва-
ется из длины выстрела, длины запирающего устройства пушки и
длины отката пушки, которые можно выразить через длину выст-
рела Обозначив длину запирающего устройства £3TB/B и от-
ката Лотм/„ получим следующую зависимость для времени до-
сылания выстрела и реверса цепи досылателя в схеме тандемного
досылания:
Г, -(1 + + *„>/.(1/0, + 14).
где иж и t»p — средняя скорость прямого и обратного хо^ов цепи досылателя.
При раздельном досылании 7\ увеличивается в результате
введения дополнительно «длинного прямого и обратного ходов
цепи досылателя. Увеличивается также время выдачи выстрела
на линию досылания за счет деления этой операции на два такта.
Обозначив через Ту п время, связанное с удалением поддона из
зоны досылания и не совмещаемое с рассмотренными операция-
ми, получим наибольшее суммарное время цикла заряжания для
схемы I:
Г, - [ЛГ(Л - \)/п + 1 ] (ЛГЭ 4- Кт) d/vK 4-
+ (1-ЬЛзтв4-Л0ТЖ)/в(1/^4-1,^)+Гуп. (4.1)
Из (4.1) видно, что увеличение числа типов выстрелов и ве-
личины автоматизированного боекомплекта при л>1, габаритных
размеров боеприпасов и соответствующих параметров орудия
приводит к увеличению продолжительности цикла заряжания.
При размещении боеукладкн по схеме II досыланию выстрела
предшествует операция совмещения оси канала ствола с линией
досылания, т. е. приведение орудия на угол заряжания. Эта опе-
рация частично или полностью может совмещаться с поворотом
конвейера. После досылания выстрела и реверса цепи досылателя
на длину запирающего устройства пушки &зт,/в орудие приво-
дится в стабилизированном режиме на угол стрельбы. Вследствие
8 Зак. 38с 105
этого продолжительность цикла заряжания по схеме II в сравне-
нии со схемой I больше.
В схеме III добавляется операция подъема выстрела на линию
досылания с реверсом — возвратом лотка и механизма подъема
в исходное положение. Эти операции не совмещаются во времени
с другими; кроме того, исключается возможность частичного со-
вмещения реверса цепи досылателя с приведением орудия на угол
стрельбы (имеющая место в схеме II), хотя путь досылания
уменьшается. При этом продолжительность циклов заряжания по
сравнению со схемой II возрастает.
4.3. КОНСТРУКТИВНАЯ РЕАЛИЗАЦИЯ СХЕМ
АВТОМАТА ЗАРЯЖАНИЯ
Автоматы заряжания, реализующие схему I, не нашли широ-
кого применения из-за следующих недостатков:
больших неиспользуемых объемов, обметаемых качающейся
частью укладки на пушке или качающейся частью башни;
ограничения угла вертикальной наводки;
нарушения уравновешенности пушки (башни) по мере расхо-
дования боекомплекта и ухудшения вследствие этого условий
стабилизации;
недостаточного числа выстрелов, размещаемых в боеукладке
за пушкой;
высокой вероятности попадания ПТС в зону размещения бое-
комплекта.
Примером реализации устройства облегчения заряжания по
схеме I может служить легкий танк АМХ-13 (Франция) с качаю-
щейся башней, в нише которой находятся два барабана вмести-
мостью по шесть выстрелов.
Примером исполнения по схеме II может быть АЗ опытного
танка МВТ-70 (США). Горизонтальный транспортер, располо-
женный в нише башни, вмещает 26 выстрелов калибра 152 мм
со сгорающими гильзами. Каждый выстрел размещается в лотке,
выполненном в виде трубы, снабженной фиксаторами. Досыла-
тель цепной, двухручьевый.
Основными недостатками АЗ, выполненного по схеме II, яв-
ляются ограниченность объема, выделенного для его размещения,
и высокая верояпность попадания ПТС в зону размещения бое-
комплекта.
Реализация АЗ по схеме III осуществлена на танках Т-64А
и Т-72.
Автомат заряжания танка Т-64А (рис. 4.2) включает в себя
следующие составные части:
автоматизированную боеукладку в виде кольцевого конвейера,
вращающегося на шариковой опоре, смонтированной на внутрен-
нем кольце погона башни. Выстрелы уложены на конвейере в лот-
ках, состоящих из двух шарнирно сочлененных частей; верхние
106
полулотки, вмещающие заряды, расположены вертикально, а
нижние полулотки, вмещающие снаряды, расположены горизон-
тально под полом боевого отделения. Вращение конвейера обеспе-
чивается от механизма поворота с гидроприводом;
механизм подачи лотков на линию досылания, состоящий из
рычага с тележкой и запирающего устройства тележки, который
установлен на полу боевого отделения и приводится в движение
гидравлическим силовым цилиндром;
досылатель, обеспечивающий тандемное досылание снаряда
и заряда;
Рис. 4.2} Автомат заряжания танка Т-64А:
/ — механизм удаления поддонов. 2 — досылатель; 3 — конвейер; 4 — лоток; 5 — механизм
подачи
механизм удаления поддонов, состоящий из ловушки для улав-
ливания и фиксации поддона и механизма перекладки поддона
в освобожденный от выстрела лоток; управление механизмом
улавливания осуществляется тросовым приводом от рычага ме-
ханизма подачи;
гидромеханический стопор пушки, фиксирующий ее после при-
ведения к углу заряжания;
ручные приводы для заряжания пушки в случае отказа автома-
та, состоящие из отдельной кинематической цепи в механизме по-
ворота конвейера и редуктора ручного подъема рычага;
электрооборудование и гидросистему.
Автоматизированный цикл заряжания пушки включает в себя
следующие операции:
нажатие кнопки выбора требуемого типа выстрела;
8*
107
приведение пушки из стабилизированного положения на угол
заряжания и стопорение;
поворот конвейера до выхода на линию подъема заданного ти-
па выстрела;
подачу выстрела на линию досылания;
досылание выстрела в камору пушки;
возврат выдвинутых частей досылателя в исходное положение
с перекладкой поддона предыдущего выстрела из улавливателя
в лоток, из которого был дослан выстрел;
возврат механизма подачи и улавливателя в исходное положе-
ние;
расстопорение пушки и приведение ее в стабилизированный
режим;
Рис. 4.3. Автомат заряжания танка Т-72:
/ — досылатель; 2 — механизм удаления поддонов; 3 — механизм подъема кассеты; 4 - кас
сета; 5 — конвейер
поворот конвейера до выхода на линию подачи такого же типа
выстрела;
улавливание экстрактированного поддона после производства
выстрела.
Подготовка к заряжанию осуществляется включением стабили-
затора пушки и тумблера автомата заряжания на пульте управле-
ния. Затвор пушки при этом должен быть открыт.
Автомат заряжания танка Т-72 (рис. 4.3) состоит из следую-
щих составных частей:
автоматизированной боеукладки в виде кольцевого конвейера,
установленного на днище танка по оси вращения башни и имею-
щего 22 гнезда, в каждом из которых устанавливается кассета
с выстрелом раздельного заряжания калибром 125 мм. Кассета
108
представляет собой две трубы, расположенные одна над другой.
В нижней трубе размещается снаряд, в верхней — заряд. Сверху
транспортер закрыт настилом, который служит полом боевого от-
деления;
механизма подъема кассет, установленного в корме башни и
служащего для подъема и опускания кассет. Этот механизм состо-
ит из редуктора, направляющих, цепей и захватов. Редуктор обес-
печивает четыре фиксированных положения кассеты:
в конвейере (крайнее нижнее);
на линии досылания снаряда;
на линии досылания заряда;
на линии загрузки боеприпасами;
стопора пушки;
досылателя, обеспечивающего раздельное досылание снаряда
и заряда;
механизма удаления поддонов, установленного на ограждении
пушки (в крыше башни размещается люк с приводом, через кото-
рый выбрасывается стреляный поддон);
ручных приводов конвейера и механизма подъема;
электроприводов и электроавтоматических устройств: в качест-
ве электроприводов используются электромоторы типа МУ-431;
электроавтоматика — контактно-релейного типа, запоминающее
устройство — электромеханическое.
Конструктивные особенности АЗ. Танковые АЗ включают в
себя механические устройства и электрооборудование. В состав
электрооборудования АЗ входят электрЗавтоматические и испол-
нительные силовые устройства. В танке Т-64А помимо электри-
ческих применяются гидравлические устройства.
Механические устройства. Структурная схема танкового АЗ оп-
ределяется функциональными группами, конструктивно оформлен-
ными в виде отдельных механизмов и связанными между собой
кинематически. Состав АЗ и конструкция отдельных механизмов
зависят от типа выстрела (унитарный — раздельный, гильзовый —
безгильзовый) и схемы размещения автоматизированного боекомп-
лекта (взаимное расположение выстрелов по отношению к оси ка-
нала ствола пушки).
В любом танковом АЗ имеется по крайней мере две функцио-
нальные группы: механизм досылания и боеукладка. Механизм по-
дачи может отсутствовать, если одно из звеньев боеукладки в ис-
ходном положении совмещено с линией досылания или осью кана-
ла ствола. Механизм удаления поддонов (гильзы) отсутствует при
безгильзовом заряжании.
Несмотря на разнообразие устройств и схем в различных тан-
ковых АЗ применяется несколько типовых конструкций.
Автоматизированная боеукладка в структуре танкового АЗ вы-
полняет роль магазина, питающего орудие боеприпасами, и уст-
ройства, обеспечивающего выбор нужного типа выстрела, хранение
выстрелов в условиях эксплуатации, стойкость автоматизнрованно-
109
го боекомплекта к возгоранию. Выполняется она в танках в виде
конвейеров и замкнутых транспортеров.
Конвейеры применяются при радиальном расположении
боекомплекта и представляют собой питающий механизм карусель-
ного типа в виде дискового магазина. Конвейер серийных АЗ со-
стоит из каркаса, в гнездах которого установлены лотки (кассеты)
с выстрелами, и опорно-поворотного устройства. Как правило,
конвейеры располагаются под полом боевого отделения и уста-
навливаются на днище корпуса танка (Т-72), либо на погоне
башни (Т-64А). В зависимости от этого опорно-поворотное ус-
тройство выполняется в виде установленной на днище централь-
ной опорной тумбы с расположенными по периферии поддержи-
вающими роликами (см. рис. 4.3), либо в виде второго погона,
выполненного заодно с погоном башни (см. рис. 4.2).
Цилиндрические замкнутые транспортеры применя-
ются в схемах с параллельным расположением осей выстрелов.
Боеукладки этого типа выполнены в виде бесконечной звеньевой
цепи, охватывающей две звездочки, одна из которых имеет прину-
дительное вращение. Звенья цепи представляют собой гнезда бое-
укладки и служат для размещения выстрелов. С помощью установ-
ленных на них роликов гнезда перемещаются по направляющим,
конфигурация которых соответствует конфигурации транспортера.
Различают два типа транспортеров: вертикальные и горизон-
тальные. Вертикальные транспортеры (БМП-1) с боко-
вой загрузкой и разгрузкой боекомплекта имеют верхнюю и ниж-
нюю направляющие. Звенья в этом случае выполнены в виде вер-
тикального лотка с горизонтальными упорами для выстрела, в
верхней и нижней части устанавливаются направляющие ролики.
Крепление выстрела осуществляется с помощью подпружиненных
захватов, которые стопорятся относительно лотка при загрузке вы-
стрела.
Примером горизонтального транспортера может
служить боеукладка опытного танка США МВТ-70. Звенья гори-
зонтального транспортера, как правило, выполнены в виде труб,
в которых фиксация выстрела от горизонтальных перемещений
осуществляется защелками. Соединение звеньев обычно выполня-
ется в виде шарниров, охватывающих трубы по наружной поверх-
ности.
Механизм подачи или подъема (МП) предназначен для совме-
щения выстрелов с линией досылания и обеспечения операции за-
грузки боеприпасов. Кинематически МП строится в виде рычага
(Т-64А) или в виде цепного подъемника (Т-72). Различают два ви-
да подачи:
в лотке, в котором выстрел хранится в боеукладке;
с помощью конструктивных элементов МП.
В первом случае рычаг, или каретка подъемника, имеет захва-
ты с сопряженными деталями на лотке (кассете). При безлотко-
110
вой (БМП-1) подаче на МП закреплен захват, который представ-
ляет собой ложементный лоток с установленными на нем лапками.
Лапки подпружинены и стопорятся во время подачи выстрела.
Лоток (кассета) при раздельном заряжании состоит из двух
полулотков, которые при наличии взаимных угловых перемещений
во время подачи соединяются между собой шарнирно (Т-64А) ли-
бо жестко (Т-72).
Полулотки выполняются в виде труб, и тогда фиксация эле-
ментов выстрела осуществляется защелками (см. рис. 4.3), или
в виде несущих лотков с двумя захватами на каждом, которые
для обеспечения необходимого усилия фиксации снаряда в осевом
направлении зажимаются между собой защелкой с помощью
специального приспособления (см. рис. 4.2).
Механизм досылания (досылатель) предназначен для переме-
щения выстрела в камору орудия. В танковых АЗ применяются
досылатели, имеющие в качестве толкающего элемента цепь с од-
носторонним складыванием. В боевом отделении танка досылатель
устанавливается в корме башни над погоном, в результате чего
нижнее расположение цепи невозможно. В серийных досылателях
используются либо две цепи, объединенные общим клоцем и скла-
дывающиеся в горизонтальной плоскости (Т-64А), либо цепь,
складывающаяся в вертикальной плоскости (Т-72). Соответственно
кожух цепи располагается горизонтально» (см. ‘рис. 4.2) или име-
ет верхнее расположение (см. рис. 4.3).
Для уменьшения габаритных размеров и »массы досылателя
в качестве толкающего элемента может использоваться гибкая
лента, наматывающаяся на барабан. Однако возможности ее при-
менения ограничены массой досылаемого выстрела.
Обе разновидности конструкции танковых цепных досылате-
лей равноценны по таким параметрам, как серповидность, про-
пеллерность и увод толкающего элемента, которые, как показы-
вает практика, зависят прежде всего от качества и точности изго-
товления шарниров звеньев цепи.
Механизм удаления поддонов (МУП) предназначен для удале-
ния поддонов (гильз) из боевого отделения. Различают два типа
МУП: с предварительным улавливанием и без него. МУП с пред-
варительным улавливанием принципиально отличается
способом удаления поддонов (гильз) в пустой лоток (Т-64А) или
наружу из боевого отделения (Т-72). Улавливатели шарнирно ус-
танавливаются на ограждении пушки и состоят из конической или
цилиндрической трубы с установленными в ней лапками (собачка-
ми) для удержания поддона и упора, выполненного в виде дна
улавливателя или отдельно.
Для удаления поддона из улавливателя используется энергия
упругих элементов (пружины, торсиона), которые взводятся при
подъеме или опускании корпуса улавливателя. При удалении на-
ружу поддон выбрасывается в осевом направлении двумя захва-
тами; при перекладке в пустой лоток — перемещается вниз по
111
двум направляющим с помощью толкателя, выполненного в виде
рычага. Привод улавливателя (для подъема на время досыла-
ния) может быть автономным (Т-72) или связанным с приводом
механизма подачи (Т-64А).
МУП без предварительного улавливания (гиль-
зоотвод) представляет собой направляющее устройство, служа-
щее для совмещения траектории экстрактируемого поддона (гиль-
зы) с окном выброса наружу.
В некоторых опытных образцах комплекса танкового вооруже-
ния применяются составные части АЗ, принципиально отличные
от описанных выше конструкций (механизированная боеукладка
в виде барабана или конического транспортера). Однако эти
устройства не получили распространения вследствие свойствен-
ных им недостатков (ограниченный боекомплект, ослабление за-
щиты и живучести танка и т. д.) или ограничений, накладывав
мых компоновкой боевого отделения.
Электрооборудование АЗ. Электроавтоматическне устройства
обеспечивают последовательность выполнения операций цикла за-
ряжания, а также срабатывание блокировок, предохраняющих АЗ
от поломок. В составе электроавтоматических устройств и приводов
АЗ могут быть выделены следующие основные функциональные
группы:
исполнительные устройства;
датчики положения кинематических узлов АЗ;
выходные управляющие устройства;
логические управляющие устройства;
запоминающее устройство;
устройства сигнализации и индикации количества выстрелов
в конвейере.
В АЗ серийных танков в качестве исполнительных устройств
применяются электродвигатели постоянного тока последователь-
ного возбуждения, электромагниты, а также гидромоторы и гид-
роцилиндры. Так, в АЗ танка Т-72 применяются реверсивные
электродвигатели МУ-431 и электромагниты ЭМТ-81, ЭМТ-11,
ЭВУ-74. В АЗ танка Т-64А применяются электродвигатель ПД-1
в приводе гидронасоса, электромагниты ЭМ-74 в золотниковой ко-
робке и электромагниты ЭВУ-74 в визуальном указателе, гидро-
мотор в приводе механизма поворота конвейера, силовые гидро-
цилиндры в приводах досылателя, механизма подъема и сто-
порах.
В качестве датчиков положения кинематических узлов АЗ
серийных танков в основном применяются микропереключатели
Д-703, Д-701 и МП1-1 в специальном исполнении.
Выходные управляющие устройства серийных АЗ выполнены
fra электромагнитных реле средней мощности ТКЕ, 8Э, РЭН и
контакторах типа ТКД.
Логические управляющие устройства серийных АЗ выполнены
на электромагнитных реле средней мощности РЭС и 8Э с исполь-
112
зованием дискретных полупроводниковых элементов (транзисто-
ров, диодов), резисторов и конденсаторов.
В серийных танках применяются электромеханические запо-
минающие устройства (ЗУ). Индикация числа выстрелов по ти-
пам на танках Т-64А осуществляется непосредственно на ЗУ—ви-
зуальном указателе (ВУ), а на танке Т-72 — с помощью стрелоч-
ного показывающего прибора.
Совершенствование АЗ в направлении увеличения логических
возможностей и повышения скорострельности (например, автома-
тический ввод информации о типе загружаемого выстрела, введе-
ние двустороннего вращения конвейера) ведет к увеличению чис-
ла реле, коммутационных каналов, что, в свою очередь, приводит
к снижению надежности, увеличению массы и объема блоков.
Одним из основных направлений повышения надежности схем
управления АЗ в условиях габаритно-массовых ограничений яв-
ляется построение логической части схемы на малогабаритных
элементах с высокой надежностью, в частности на интегральных
микросхемах.
Исследования показали, что для блока управления АЗ танка
Т-64А замена логической релейной схемы на интегральные микро-
схемы позволит уменьшить объем более чем в 1,5 раза и массу
более чем в три раза.
Развитие электроавтоматических устройств’, используемых в
АЗ, выдвигает новые повышенные требования к датчикам поло-
жения кинематических узлов АЗ в части стабильности переход-
ного сопротивления и вибраций («дребезга») контактов при пере-
ключении. Целесообразно строить датчики положении на базе
герметичных магнитоуправляемых контактов, сохраняющих высо-
кую стабильность переходного сопротивления в процессе эксплуа-
тации и хранения.
Применение средств технической диагностики позволяет су-
щественно сократить время поиска неисправного узла в АЗ и
время проверки АЗ на функционирование. Поиск неисправного
узла может производиться либо вручную с помощьк) простей-
ших устройств диагностического контроля (контрольно-провероч-
ный комплект КПК-74 на танке Т-64А), либо в автоматичес-
ком режимес применением более сложных средств диагности-
ки, осуществляющих автоматический поиск и индикацию неисправ-
ности по специальной программе.
При выполнении логической части схемы АЗ на интегральных
микросхемах целесообразно предусмотреть встроенный конт-
роль, позволяющий обнаруживать неисправность с точностью
до сборочной единицы.
4.4. ОСНОВНЫЕ ПАРАМЕТРЫ АВТОМАТА
ЗАРЯЖАНИЯ
Основные параметры АЗ назначаются исходя из требований
к эффективности комплекса танкового вооружения и танка в це-
нз
лом, возможностей компоновки и уровня его конструктивного со*
вершенства, связи между собой и с параметрами других состав-
ных частей КТВ. Так, временные характеристики АЗ назначаются
исходя из требований к системе управления огнем, определяются
схемой и конструкцией АЗ и связаны с размещением автомати-
зированного боекомплекта, габаритными размерами и конструк-
цией выстрелов.
Продолжительностъ цикла заряжания является основным фун-
кциональным параметром АЗ. Она определяется циклограммой,
которая строится в прямоугольных координатах и является гра-
фическим изображением кинематики цикла. Циклограмма отобра-
жает структурную схему, кинематические связи между отдельными
механизмами и принцип синхронизации перемещений исполни-
тельных органов, использованный в системе управления. Такое
многообразие взаимосвязанных факторов, отраженных в цикло-
грамме, предопределяет ее значение и как основного исходного
материала, анализ которого позволяет определить принципиальные
пути и возможности сокращения времени заряжания.
В танковом АЗ осуществлено управление по пути. Включение
исполнительного механизма, выполняющего последующую опера-
цию, происходит лишь после того, как закончена предыдущая, не-
зависимо от времени ее, продолжения. Для построения циклограм-
мы, кроме заданной последовательности в работе исполнительных
механизмов, необходимо знать временные интервалы их рабочих
и холостых перемещений. По способу определения времени от-
дельных операций различаются расчетные и эксперимен-
тальные циклограммы.
Интервалы времени рассчитываются с учетом мощности н ха-
рактеристики приводного двигателя, а также статических и дина-
мических сопротивлений перемещениям.
Экспериментально интервалы времени определяются осцил-
лографированием процесса заряжания. Очевидно, что продолжи-
тельность отдельных операций не может быть стабильной в усло-
виях эксплуатации. Так, на продолжительность отдельных опера-
ций могут влиять повышенная запыленность, температура и
влажность (увеличение сопротивлений), колебания напряжения в
сети (уменьшение мощности, развиваемой двигателем), число вы-
стрелов, находящихся в данный момент в боеукладке, положение
подаваемого выстрела в боеукладке по отношению к окну выда-
чи в момент включения АЗ, перегрузки при движении танка и т. д.
Однако при определении продолжительности операций для по-
строения циклограммы (как опытной, так и расчетной) эти фак-
торы не учитываются, а их влияние оценивается в процессе спе-
циальных испытаний.
Определение продолжительности цикла заряжания произво-
дится при следующих условиях:
напряжение в сети 27 В;
114
температура воздуха 13 °C;
запыленность воздуха отсутствует;
поворот механизированной боеукладкн производится на три
шага;
испытания производятся на неподвижном танке с креном 20°
при различных курсовых углах разворота башни через каж-
дые 90°.
Указанные ограничения снижают вероятность расхождения
между расчетными и опытными значениями времени отдельных
операции цикла АЗ, полученными на различных образцах.
При расчете продолжительности отдельных операций необходи-
мо определить законы движения исполнительных органов состав-
ных частей АЗ. Конечным результатом является определение за-
висимостей
а = о(Г); г» = -ц(Г); S = S(T)
или
? = ?(П; ? = т = ?(П.
где а, и, S н <р — ускорение, скорость, путь и угол поворота соответственно.
Учитывая, что траектория подачи выстрела в общем случае
описывается тремя координатами (угол поворота относительно
башни, вертикальное и горизонтальное перемещения), что соот-
ветствует работе основных механизмов АЗ (конвейера, механиз-
ма подачи и досылателя), можно записать
’ (4.2)
(от. + отмп) у = Рмп cos а — £ Ф; (4.3)
тлх = РЛ(К - m,g [sin (? 4-1) 4- /cos (₽ 4- 7)], (4.4)
где /пр* — приведенный момент инерции конвейера; ф. у, х — ускорения; Мк.
Рмп • ^дос — движущий момент и силы, действующие со стороны со-
ответствующих приводов АЗ; ЕМФ, 2Ф - статические сопротивления; /лмп,
>пл — массы механизма подачи и выстрела соответственно; а — угол между
векторами движущей силы и скорости механизма подачи; 0 — угол заряжа
ння; у —угол наклона корпуса танка (в плоскости заряжания); f — коэффи
циент трения; g — ускорение свободного падения.
Первые члены правой части уравнений представляют собой
движущие силы, которые определяются энергетической характе-
ристикой приводного двигателя.
Если момент статических сопротивлений постоянен, а движу-
щая сила является только функцией скорости (боеукладка, цеп-
ной досылатель), задача сводится к графическому определению
по характеристике приводного двигателя скорости установивше-
гося движения. Чтобы избежать избыточной мощности двигателя,
рекомендуется выбирать его по сопротивлениям механизма в ус-
тановившемся режиме. Тогда при номинальной частоте вращения
115
вала наиболее полно используется мощность двигателя, а дина-
мические составляющие сопротивлений, т, е. левые части уравне-
ний (4.2) — (4.4), компенсируются пусковым моментом и разгон-
ным участком характеристики.
Зная ф или v установившегося режима и путь перемещений,
нетрудно определить время; при этом время разгона Гр или тор-
можения можно определить графически. Для этого по характери-
стике двигателя Л4д = Л4д(?) и приведенному моменту сопротивле-
ния Мпр е —= /Ипр с (<р) для ряда точек вычисляются значения
1/(Мд — Мпр с) и строится график ф(ф) = 1 /(Л4Л — Мпр с).
По площади графика ф(ф) определяются значения ДГ измене-
ния скорости на Дф, исходя из того, что ДТ= /Д<р/(Л4д— Afnp с).
Время разгона можно также вычислить по формуле
Г, = [4р/(Л»Д-М.р.,)|р'?. (4.5)
Ускорение при разгоне
® = (Л1, Л4,рс)//пр. (4.6)
Угол поворота звана приведения за время разгона равен
?= ^(М.-Л«ПР.Л24Р. (4.7)
Выражения (4.5) — (4.7) справедливы при допущении, что раз-
гон происходит при постоянном движущем моменте. Если момент
сопротивления пропорционален угловой скорости, т. е. Л4с=Л1с(<р)
или = Afc(?)'-’, а /пр = const, то переменные в уравнениях дви-
жения разделяются, и они могут быть интегрированы в квадра-
турах.
Время разгона и торможения является определяющим в опе-
рации вращения боеукладки, так как при наличии большой мас-
сы и небольшого пути перемещения работа привода в данном
случае имеет двухпериодную характеристику — разгон и тормо-
жение. При этом время торможения практически равно времени
разгона, так как используется электродинамическое торможение.
Для механизма подачи, особенно рычажного типа, силы сопро-
тивлений не постоянны на различных участках перемещения. В
этом случае движущие силы являются функциями перемещений.
’Если силы зависят от перемещений, то уравнение движения в
форме кинетической энергии
является первым интегралом дифференциального уравнения дви-
жения
М„,. - <4-8)
116
которое получено из уравнения Лагранжа второго рода, так как
Л1пр является обобщенным силовым параметром, ф— обобщенной
координатой. Поэтому в рассматриваемом случае удобно исполь-
зовать уравнение
Ар М 4 - Ар (?.) 4 “ М - мс (?)1 d? . (4.9)
откуда ________________________________
। / /«₽ (*) + 2 f [мж (?) - Мс (?)] d?
?2= г ’
Для определения ф2 должно быть известно ф(; если рассмат-
ривается движение механизма с момента пуска, то ф1 = 0. Исполь-
зуя уравнение (4.9), можно получить зависимость ф=ф(ф),
так как ф(ф)'=£/ф/</Г, то
d7= f <*?/<?(<?); Га — Г, = j </?'?(?)•
Уравнение (4.9) позволяет определить зависимость Т=Г(ф).
Если движущие силы по кинематике (МЦ) — функции перемеще-
ний и скоростей, то непосредственное интегрирование уравнения
(4.8) невозможно, так как подынтегральная функция в правой
части уравнения зависит от двух взаимосвязанных переменных
Ф и ф, а зависимость между ними неизвестна. Задача может быть
решена приближенно. В предположении, что задано ф=фо при
ф=фо. из уравнения (4.8) можно определить
где МПр0 — (А*пр л Л/Пр Jo •
Полагая, что ф0=сопз(, для малого перемещения Дф из фор-
мулы равнопеременного движения получим
<?t = / + 2ф0 a <р,
где ф| — угловая скорость при ф| - фо + Дф;
А<вр| 4--5-'Pi(rf/np/rf?)i
Для значения угла ф2=фо4-2Дф будем иметь
= + 2?» Д Ь •
117
В результате получается зависимость <р=<р(<р), по которой
можно получить и остальные кинематические зависимости, как
это было показано выше, в том числе и Г—7((р).
Моменты (силы) статических сопротивлений, приведенных к
звездочке или шестерне привода соответствующего механизма,
зависят прежде всего от конструкции и кинематики этого меха
низма. Выражение силы сопротивления в виде второго члена пра-
вой части уравнения (4.2) справедливо для всех видов цепных
досылателей.
Уравнения приведенных моментов статического сопротивления
для боеукладок будут иметь общие зависимости с учетом состав-
ляющих трения опорно-поворотного устройства и массы автома-
тизированного боекомплекта (в предположении, что израсходо-
вана половина выстрелов, а корпус танка имеет крен). Аналогич-
на структура выражения статических сопротивлений и для меха-
низма подачи. Тогда для случая /пр =const и /имп = const в об-
щем виде можно записать:
для боеукладок
М„ = Nm^g sin Д, (1 -Ь X
x(r,A» + r.-^-/c°si)].
где —число выстрелов в боеукладке; у—угол наклона боеукладки в гори-
зонтальной плоскости; Д| — угол в плане между осью /-го снаряда и диамет-
ральной плоскостью наклона боеукладки; тк — масса пустой боеукладки;
«в — масса выстрела;/?, r(, rt — радиусы центров масс выстрелов, шаровой
опоры и поддерживающих роликов соответственно; М, f — коэффициенты тре
ния в шаровой опоре и поддерживающих роликах;
для механизма подачи
рмп С. = « (“. + "мп) [cos (I + а> + / sln (т + + Т+7 Х
X(^£.+ U + E^j,
где тмп — масса каретки механизма подачи; О — угол наклона направляющих
от вертикали; й — расстояние между точками контакта роликов с направляю
щими; ft + с — расстояние между точками контакта реборд роликов с направ
ляющими; £|, Сз —смещение массы выстрела относительно оси симметрии на-
правляющих в продольной и поперечной плоскостях; А, в—габаритные раз-
меры каретки подъемника в плане; ^ — смещение приводной цепи относи
тельно оси симметрии направляющих по глубине и ширине; f, — коэффициент
трения в подшипниках роликов и их реборд о направляющие;
/('” -г 2/лмп)
/п„ sin У
cos 2,
где / —коэффициент сопротивления в подшипниках роликов;
118
/=ЛГ(2н+/оЛ)/£>,
где AC—безразмерный коэффициент (К = 1,2... 1,8); Ц| — коэффициент тре-
ния роликов о направляющие; /оП — коэффициент трения в опорах роликов
(0,1 —для трения скольжения; 0,015 —для трения качения); da — диаметр
цапфы ролика; D—наружный диаметр ролика.
Для механизма подачи рычажного типа выражение статиче-
ских сопротивлений описывается как сумма моментов полезных и
вредных (от сил трения) сопротивлений относительно звена при-
ведения, т. е. оси вращения рычага в зависимости от угла его
поворота.
Кроме рабочих и холостых операций основных функциональ-
ных механизмов циклограмма АЗ включает в себя временные ин-
тервалы нажатия оператором кнопки начала цикла АЗ, расстопо-
рения и стопорения пушки и боеукладки, закрывания и открыва-
ния затвора пушки, а также приведения пушки к углу заряжания
и углу стрельбы, включая время ожидания выстрела.
На рис. 4.4 и 4.5 приведены циклограммы АЗ танков Т-72 и
Т-64А, из которых видно, что рабочие и холостые перемещения за-
нимают внутри цикла определенное положение.
В работе функциональных механизмов должны быть останов-
ки, продолжительность которых
Т0-Т ар | Гх),
где Г — общее время работы механизма; Гр, Гх — продолжительность рабо-
чего и холостого перемещений.
Продолжительность остановки автоматизированных боеукладок
Го = 7- Гр.
Время, отсчитанное от начала работы АЗ, по истечении кото-
рого функциональный механизм приходит в исходное положение,
называется фазовым временем. Сокращение фазового времени
(в основном благодаря совмещению операций во времени) яв-
ляется одним из основных путей сокращения продолжительности
цикла заряжания.
Практически при подготовке первого выстрела автоматическое
заряжание производится одновременно с наводкой и в некоторых
случаях с измерением дальности (в зависимости от конструктив-
ных особенностей СУО).
Продолжительность цикла заряжания не должна лимитиро-
вать время подготовки и производства прицельного выстрела. По-
этому АЗ современных КТВ должны обеспечивать готовность
к стрельбе основного оружия в соответствии с техническими воз
можностями СУО.
Следовательно, такие вопросы, как значимость АЗ в обеспече-
нии боевой эффективности КТВ, оценка временных характеристик
существующих образцов АЗ и обоснование требований к вновь
разрабатываемым, должны согласовываться с техническими ха-
рактеристиками используемых СУО.
119
Операции Время, с
1 2 3 4 5 6 7 8 9 10
Выбор типа выстрела
Расстопореннс вращающегося транспортера
Приведение пушки к углу заря- жания 1
Стопорение пушки
Поворот вращающегося транспор- тера на три шага
Стопорение вращающегося транс- портера
Подъем рамки
Подъем кассеты
Досылание выстрела
Возврат цепи
Открывание люка
Удаление поддона
Подопускание кассеты
Досылание заряда
Закрывание люка
Возврат цепи
Закрывание клина
Опускание кассеты в транспортер г.
Опускание рамки на улавливание поддона н
Расстопорение пушки L
Приведение пушки к углу стрель- бы
Ожидание выстрела Л
Выстрел
Откат—накат 1 Г
Открытие клина Г
Экстракция поддона у
^з-7.0с
Гх = 8,3с
Рис. 4 4. Циклограмма автомата заряжания танка Т-72
120
7\ = 8,3 с
Рис. 4.5. Циклограмма автомата заряжания танка Т-64А
121
Циклограмма подготовки выстрела одного и того же комплек-
са танкового вооружения может изменяться в зависимости от раз-
личных ситуаций его использования. Так, например, при обнару-
жении цели командиром за начало отсчета времени подготовки
первого выстрела принимается целеуказание командира, а при об-
наружении цели наводчиком•— принятие решения об открытии
огня. При этом изменится общее время подготовки исходных ус-
тановок для стрельбы и начала работы АЗ (в первом случае
момент начала работы АЗ определяется реакцией наводчика на
целеуказание командира, во втором — совпадает с началом отсчета
времени подготовки выстрела). Следует отметить, что при нали-
чии дублирования управления огнем практически можно рассмат-
ривать только вторую ситуацию. Временные интервалы операций,
b выполнении которых участвуют приборы КТВ и наводчик (на-
ведение поля зрения и марки на цель, уточнение наводки), будут
изменяться при стрельбе с ходу и с места. И, наконец, возможны
случаи стрельбы с неполной подготовкой исходных данных, на-
пример, без измерения дальности. Такая ситуация будет возни-
кать при стрельбе по цели на известной дальности или на малых
дистанциях.
На продолжительность работы СУО наибольшее влияние ока-
зывает способ определения дальности. На отечественных танках
с АЗ используются оптический и лазерный дальномеры.
Для реализации технических возможностей СУО цикл заря-
жания по времени долж'ен быть совмещен с операциями наведе-
ния поля зрения и марки на цель (для оптического дальномера)
или с этими же операциями и операцией измерения дальности
(для лазерного дальномера).
В первом случае операции заряжания и измерения дальности
по времени совместить нельзя, так как базовая труба оптического
дальномера жестко связана с пушкой, поэтому измерение даль-
ности может производиться только после окончания цикла заря-
жания. При уточнении исходных установок для второго и после-
дующих выстрелов затраты времени не зависят от способа изме-
рения дальности и ситуации при обнаружении цели, а опреде-
ляются временными интервалами оценки результатов предыдуще-
го выстрела и уточнения наводки. Практически время подготовки
второго и последующих выстрелов определяется продолжитель-
ностью цикла заряжания.
Развитие СУО требует сокращения времени заряжания. По-
тенциальные возможности сокращения продолжительности цикла
заряжания танкового АЗ зависят от возможностей сокращения
временных интервалов отдельных операций, совмещения опера-
ций во времени внутри цикла и осуществления фазового сдвига
циклов и исключения внецикловых операций.
122
Продолжительность цикла заряжания существующих танковых
АЗ определяется следующими общими для всех конструкций осо-
бенностями:
фиксированным углом заряжания;
нижним (по отношению к линии заряжания) расположением
автоматизированного боекомплекта;
наличием лотка (кассеты), являющегося одновременно кине-
матическим звеном боеукладкн, механизмов подачи и досылания
выстрелов;
синхронизацией перемещений исполнительных органов или уп-
равлением кинематическим циклом, осуществляемым по пути (вы-
полнение последующей операции начинается после окончания
предыдущей);
незначительной по отношению к массе автоматизированных
выстрелов массой исполнительных механизмов.
Все эти конструктивные особенности определяют структурную
схему танковых АЗ и наличие одноименных функциональных
групп.
Продолжительность заряжания определяется не только вре-
менем работы АЗ, но и двумя внецикловыми операциями — при
ведением пушки к углу заряжания и к углу стрельбы.
Возможность сокращения времени каждой, отдельной опера-
ции зависит от условий и динамики приЛ)дного механизма.
Динамика боеукладкн характеризуется большой массой и
малыми перемещениями. Тахогра.мма работы цривода босуклад-
ки двухпериодная — разгон и торможенйе. Поэтому при форси-
ровании скорости за счет мощности привода средняя скорость и
время операции изменяются незначительно.
Условия работы МП определяются большими значениями ста-
тической составляющей момента сопротивления.
Расчеты показывают, что при увеличении мощности приводов
этих механизмов на 40 % средняя скорость увеличивается на
20 %, а общее время цикла заряжания сокращается на 0,7 с.
Характер работы досылателей как механизмов односторонне-
го действия специфичен тем, что масса досылаемого выстрела не
участвует в режиме торможения, а соотношение активного и
инерционного участков досылания при требуемом усилии закусы-
вания ведущего пояска выстрела в каморе и конечной скорости
зависит от скорости досылания (приобретенной досылаемым вы-
стрелом кинетической энергии).
Известные конструктивные решения, построенные на принци-
пе сокращения пути досылания при увеличении максимальной
скорости (бросковое досылание с использованием аккумулиро-
ванной энергии) позволяют сократить время досылания выстрела.
И, наконец, снижение общего временного интервала процесса за-
ряжания в результате исключения внецикловых операций (приве-
дения пушки к углу заряжания и углу стрельбы) решается заря-
жанием пушки в стабилизированном режиме.
123
Автоматизированный боекомплект определяет число выстре-
лов, которые может произвести танк с максимальной скоро-
стрельностью при минимальной загрузке экипажа. Значение
этого показателя наряду с другими (скорострельностью, точ-
ностью стрельбы, действием снаряда у цели) определяет количе-
ство целей, поражаемых танком в минимальное время. В зару-
бежных танках без АЗ (с заряжающим) эквивалентным поня-
тием является понятие боекомплект к бою готов (боекомплект,
расположенный во вращающейся части и удобный по доступу и
расположению для непосредственного использования).
Автоматизированный боекомплект определяется:
габаритными размерами и формой пространства, выделенного
в танке для размещения боеукладки;
габаритными размерами и формой выстрелов (в случае уни-
тарного заряжания) и снарядов и зарядов (в случае раздельного
заряжания);
совместимостью габаритных размеров и формы боеукладки и
выстрелов (снарядов и зарядов).
Размеры и форма пространства, выделяемого для размеще-
ния боеукладки, определяются компоновкой танка и боевого от-
деления. В серийных танках с АЗ (Т-64А, Т-72) этот объем, раз-
мещаемый в нижней части боевого отделения, представляет собой
тело вращения с вертикальной осью. Наибольший диаметр огра-
ничен внутренней шириной корпуса в диаметральном сечении бое-
укладки. *
Для увеличения диаметра и, соответственно, объема боеуклад-
ки борта танка Т-64А выполнены фигурными, тогда как на тан-
ке Т-72 борта плоские. Автоматизированные боеукладки в этих
танках представляют собой кольцо; различие между ними опре-
деляется схемой раскладки зарядов и габаритами.
Габаритные размеры и конфигурация выстрелов определяют-
ся требованиями к их действию у цели, баллистическими характе-
ристиками, требованиями размещения и эксплуатации в танке.
Длина выстрела определяет возможную схему раскладки, а диа-
метральные размеры выстрела — величину боекомплекта (в усло-
виях заданных ограничений). Для осуществления горизонтальной
раскладки боекомплекта в ограниченном шириной боевого отде-
ления объеме длина выстрела должна быть меньше половины
ширины корпуса. На танках с АЗ для возможности раскладки
боекомплекта в выбранной компоновке боевого отделения исполь-
зованы выстрелы раздельного заряжания с максимальной дли-
ной снаряда 680 мм и длиной заряда 408 мм.
Наиболее полное использование объема, имеющего форму
кольца с приведенными выше соотношениями размеров и формы
боеукладки и выстрелов, достигается при радиальной раскладке
снарядов и вертикальной параллельно оси вращения боеукладки
раскладке зарядов. Такая схема раскладки реализована в АЗ
124
танка Т-64А. В боеукладке АЗ танка Т-72 заряды располагаются
радиально над снарядами.
При радиальной раскладке объем боеукладки, приходящийся
на один выстрел, представляет собой призму, имеющую в основа-
нии сектор с углом при вершине 360/Уя, где — количество вы-
стрелов в автоматизированном боекомплекте. В реальных кон-
струкциях АЗ из-за размещения в центральной части боеукладки
ВКУ, привода вращения и опоры механизма подъема часть приз-
мы, прилегающая к углу 360/АГ., исключается из объема, выде-
ленного для размещения выстрела.
Полнота использования объема боеукладки определяется со-
вместимостью конфигурации и габаритных размеров выстрелов и
объема боеукладки, приходящегося на один выстрел; количествен-
но полнота использования объема боеукладки определяется отно-
шением объема выстрела (Ив) к объему боеукладки, приходяще-
муся на один выстрел (Уб). Снаряды и заряды представляют со-
бой тела вращения конической и цилиндрической форм с выступа-
ющими кольцевыми элементами (ведущие пояски, фланец гильзы).
Снаряды разных типов (бронебойный подкалиберный, осколочно-
фугасный, кумулятивный) имеют различную конфигурацию и га-
баритные размеры; отличаются они и собственным объемом.
Для перемещения выстрелов (загрузкр, подъем, досылание)
в боеукладке должны быть учтены их максимальные (прежде все-
го диаметральные) размеры. При этом оценочный объем выстрела
как тела вращения, состоящего из простейших форм (цилиндр и
конус), по максимальным размерам (ведущий поясок, фланец
гильзы) увеличивается по сравнению с собственным объемом. При-
менительно к боеприпасам пушки Д-81 это увеличение составляет
примерно 1,5 л.
В боеукладке выстрелы размещаются в лотке, кассете, выпол-
няющих следующие функции:
гнезда для размещения выстрела;
элемента системы досылания (из него досылается выстрел);
элемента системы подъема выстрела на линию досылания.
Объем, занимаемый выстрелом вместе с лотком (кассетой),
превышает собственный объем выстрела на 5—6 л. Объем, занима-
емый и обметаемый боеукладкой, приходящийся на один выстрел,
является удельным объемом боеукладки (У6).
Для танков с АЗ и пушкой Д-81 полнота использования объе-
ма К\~ VJVi составляет примерно 0,4.
Общий объем, занимаемый в танке АЗ, включает в себя поми
мо объемов, занимаемых и обметаемых всеми составными частями
АЗ, объемы между ними и корпусными деталями и, прежде всего,
зазор между боеукладкой и корпусом (днищем и бортами). Этот
зазор является важнейшим параметром, определяющим живучесть
АЗ. Количественно полнота использования объема АЗ определяет-
125
ся отношением собственного объема выстрела к объему АЗ, прихо-
дящемуся на один выстрел (удельному объему):
Xi= ^V„A3.
Для рассматриваемых АЗ с боеприпасами пушки Д-81 Аг~0,25.
Увеличение автоматизированного боекомплекта в условиях за-
данных ограничений является сложной технической задачей. Уве-
личение полноты использования объема АЗ примерно до 0,4 позво-
лило бы автоматизировать весь боекомплект современных танков
(40 выстрелов).
4.5. НАДЕЖНОСТЬ И ЖИВУЧЕСТЬ АВТОМАТА
ЗАРЯЖАНИЯ
Термины и определения. Специфика АЗ позволяет сформулиро-
вать основные термины надежности (ГОСТ 13377—75) следую-
щим образом.
Автомат заряжания является работоспособным, если продол-
жительность циклов заряжания пушки, загрузки и разгрузки бое-
комплекта соответствует требованиям технической документации
для каждого режима работы.
Цикл — совокупность неповторяющихся операций при выполне-
нии функций, осуществляемых в определенной последовательности.
Функции могут выполняться в различных режимах, отличаю-
щихся продолжительностью циклов, так что переход (по причине
отказа элемента АЗ) с отного режима на нижеследующий (дубли-
рующий) приводит к увеличению длительности цикла. Функция за-
ряжания пушки, например, может выполняться в автоматическом
и полуавтоматическом режимах.
Под полным отказом АЗ понимается событие, исключающее
выполнение функций АЗ во всех режимах (например, заклинивание
конвейера).
Под частичным отказом АЗ понимается отказ элемента АЗ,
приводящий к переходу на дублирующий режим функционирова
ния, отличающийся увеличением длительности цикла и загрузки
оператора (например, отказ досылателя — возможно досылание
вручную).
Под неисправностью АЗ понимается состояние, при котором АЗ
нс соответствует хотя бы одному из требований технической доку-
ментации, при этом переход на другой режим не требуется.
Неисправности АЗ классифицируются на не приводящие к от-
казам и вызывающие отказы. Например, для АЗ танка Т-64А пре
вышение тормозных оборотов механизма поворота конвейера мож-
но квалифицировать как неисправность. Однако при значительной
степени разрегулировки тормозных оборотов эта неисправность
может вызвать частичный отказ — нестопорение конвейера.
Характер нарушения работоспособности и виды отказов при
технической эксплуатации и в условиях воздействия ПТС во мно-
126
гом сходны. Представляется целесообразным приемы обеспечения
безотказности и методики ее определения распространить и на ус-
ловия боя.
Одними из наиболее опасных боевых повреждений АЗ являются
повреждения, сопровождающиеся воспламенением пороховых за-
рядов боекомплекта, приводящие к полному выходу танка из
строя. Свойство АЗ, заключающееся в защищенности автоматизи-
рованного боекомплекта от воспламенения при пробитии, называ-
ется стойкостью к воспламенению.
Выбор показателя безотказности. Безотказность АЗ является
важнейшей характеристикой его надежности. Опыт испытаний и
эксплуатации серийных танков с АЗ показал, что безотказность
АЗ зависит от протяженности и условий пробега (динамические
нагрузки, пыль, температура) и от наработки циклами заряжания.
Поэтому при задании и определении безотказности АЗ целесооб-
разно ввести оба вышеуказанных фактора — пробег танка и нара-
ботку циклами заряжания (стрельбой), объединенные понятием
«условная задача».
Под безотказностью АЗ при выполнении условной задачи по-
нимается свойство АЗ сохранять работоспособность без вынужден-
ных по вине АЗ перерывов при загрузке W выстрелов, пробеге L км
и израсходовании загруженных N выстрелов- •
Формула определения показателя безотказности АЗ на стадии
проектирования. Показатель безотказности АЗ определяется как
произведение двух составляющих. ,
P — P(L)P(N),
где Р — показатель безотказности АЗ; P(L), P(N) — вероятность безотказной
работы АЗ соответственно при пробеге L км и наработке N выстрелов.
Учитывая многофункциональность АЗ, распределение числа
циклов по функциям в общем случае может быть задано следую-
щим образом: число циклов загрузки — $3, число циклов раз-
грузки— Qp и число циклов заряжания пушки — N3 п, где$э>Рр.
С учетом вышеуказанного вероятность безотказной работы АЗ
P = P(L)P(S„ Qp, N,„).
где P(S3. Qp, Ухп)—вероятность безотказной работы АЗ при выполнении
циклов загрузки, разгрузки и заряжания пушки.
Таким образом, для определения Р следует оценить P(L), ис-
пользуя информацию о работоспособности АЗ после пробега, и
P(S3, Qp, N3 п), используя информацию о работоспособности АЗ
при функционировании.
Методика оценки безотказности. Для расчета показателей без-
отказности АЗ целесообразно использовать метод структурных
схем. Основой метода является использование условных видов по-
127
следовательных и параллельных соединений звеньев, выполняющих
отдельные функции при работе системы.
Ограничения применимости метода — отказы элементов струк-
турной схемы — должны быть независимыми, что обеспечивается
выполнением следующих условий:
один и тот же элемент должен представляться в структурной
схеме только в виде одного звена, т. е. должна соблюдаться оди-
нарность звеньев;
элемент схемы рассматривается только в двух состояниях: ис-
правен или неисправен.
Для дифференцированного анализа надежности АЗ как слож-
ной миогорежимной системы и четкого определения влияния без-
отказности отдельных составных частей на уровень безотказности
в целом необходимо АЗ представить в виде структурной схемы —
разделить на простые конструктивные группы. Разделение осу-
ществляется с учетом принципа построения АЗ, рабочих функций
его составных частей, взаимосвязи между ними. Необходимо руко-
водствоваться следующими основными принципами разделения:
каждая конструктивная группа должна выполнять определен-
ную функцию, не дублируемую другими группами; в этом случае
вероятность выполнения условной задачи определяется как произ-
ведение вероятностей выполнения функций соответствующими кон-
структивными группами;
должна быть обеспечена возможность оценки безотказности
каждой из конструктивных групп в отдельности;
должна быть составлена формула для вычисления вероятности
выполнения условной задачи;
для сравнения уровня безотказности конструктивных групп раз-
личных АЗ необходимо, чтобы сравниваемые группы выполняли
идентичные функции.
Целесообразно соблюдение удельной равнозначности отдель-
ных групп, т. е. конструктивные группы следует формировать од-
ного порядка по сложности, влиянию на безотказность АЗ в целом
и по объему работ, затрачиваемых на их изготовление, подготовку
к эксплуатации и эксплуатацию.
В качестве примера на рис. 4.6 приведена структурная схема
АЗ танка Т-64А, включающая электрооборудование, механические
и гидравлические узлы; разбивка на функциональные группы про-
изведена внутри выделенных структур.
Так, например, в группе досылания выстрела на безотказность
выполнения операции «досылание выстрела и возвращение цепи
досылателя» влияют: замок лотка, пружина для раскрытия захва-
тов и т. д. — всего восемь элементов.
Функции, выполняемые элементами групп:
открывание замка лотка и энергичное раскрытие захватов;
досылание выстрела цепным досылателем и реверс цепи;
поворот рычага сброса защелки, достаточный для сброса за-
щелки створки механизма улавливания.
128
Зак. 33с
Рис. 4.6. Структурная схема автомата заряжания танка Т-64А
Гидравлические сборочные единицы
3
Невыполнение любой из перечисленных функций означает от-
каз группы и частичный отказ АЗ. Вероятность безотказной рабо1
ты досылания выстрела Рл определяется по формуле
Р. = П Р'л,
/ — I
где Рд — вероятность безотказной работы / го элемента группы.
Вероятность выполнения АЗ условной задачи в соответствую-
щем режиме работы АЗ определяется как произведение вероят-
ностей безотказной работы групп, участвующих в работе АЗ.
Безотказность АЗ должна оцениваться на этапах проектирова-
ния, стендовых и натурных испытаний, в процессе серийного про-
изводства и при эксплуатации. Для определения количественных
значений вероятности безотказной работы необходимо знание
закона распределения отказов и параметров этого закона.
Нарушения работоспособности АЗ сводятся к двум видам
отказов: постепенному и внезапному. Статистическая обработка
опытных данных показывает, что для описания распределения
постепенных отказов АЗ может быть рекомендован нормальный
закон, для описания распределения внезапных отказов — экспо-
ненциальный. Оценка параметров законов производится по резуль-
татам исследовательских испытаний.
Экспериментальное подтверждение значения показателя безот-
казности целесообразно осуществлять при проведении контроль-
ных испытаний.
Живучесть АЗ. Безотказность АЗ при воздействии противотан-
ковых средств с непробитием определяет возможность АЗ выпол-
нять свои функции при обстреле, воздействии избыточного давле-
ния ядерного взрыва, подрыве танка на мине.
Все отказы АЗ при непробитии брони с точки зрения непос-
редственной причины их появления и возможных мероприятий,
направленных на их устранение, можно разделить на следующие
группы:
1. Отказы, вызванные локальным динамическим воздействием,
характеризующимся нагрузками примерно 104 g на опорные эле-
менты (кронштейны, балки) АЗ, остаточными и высокоскоростны-
ми упругими деформациями брони в месте установки АЗ. Прояв-
ление отказа: разрушение бонок, узлов крепления и, соответст-
венно, пультов; деформация борта, препятствующая вращению
конвейера — заклинивание конвейера.
2. Отказы, вызванные распределенной динамической нагрузкой,
передаваемой через промежуточные элементы на составные части
АЗ. Проявление отказа: перемещение элементов в зазорах (на-
пример, выскакивание лотков из крюков конвейера, разрегули-
ровка).
130
3. Отказы, вызванные динамическим или статическим воздей-
ствием на АЗ других систем. Проявление отказа: изгиб рычага по-
дачи лотков торсионом (при минном подрыве).
Живучесть при воздействии противотанковых средств количест-
венно определяется числом попаданий в танк, при котором АЗ со-
храняет свою работоспособность.
Существенное место в экспериментальной оценке живучести
и проверке эффективности конструктивных мероприятий, направ-
ленных на устранение выявленных отказов, принадлежит методике
испытаний АЗ.
Анализ показывает, что в боевой ситуации в цикле подготовки
и производства выстрела АЗ значительную часть времени находит-
ся в функционирующем состоянии. Таким образом, испытания АЗ,
моделирующие боевую ситуацию, когда на стреляющий танк воз-
действуют ПТС, должны оценивать живучесть как функционирую-
щего, так и нефункционирующего АЗ. Влияние удара, вызываемо-
го воздействием ПТС на функционирующий и нефункционирую-
щий АЗ, различно. Так, элементы электроавтоматики функциони-
рующего АЗ находятся в рабочем состоянии, поэтому при воздей-
ствии ПТС появляется возможность ложных срабатываний кон-
тактных пар. В неработающем АЗ основные механизмы зафикси-
рованы на стопорах или перемещения их при механическом возму-
щении ограничиваются упорами; отсутствует рабочее зацепление
взаимодействующих элементов и контактных поверхностей (напри-
мер, лоток — рычаг подачи). Наложение, на функционирующий
АЗ импульсного воздействия, вызванного, например, попаданием
снаряда, существенно увеличивает вероятность отказа.
Таким образом, номенклатура и вероятность отказов функцио-
нирующего АЗ выше, чем нефункционирующего.
В современных АЗ операции выполняются в основном после-
довательно. Это означает, что при проведении испытаний танка
обстрелом во время выполнения операции некоторой функциональ-
ной группой АЗ одновременно производится ударное воздействие
на остальные группы, находящиеся в это время в нефункционирую-
щем состоянии.
Основными направлениями обеспечения живучести при воздей-
ствии ПТС являются следующие:
учет воздействия и обеспечение прочности элементов составных
частей АЗ при динамическом нагружении;
использование высокоэффективных амортизирующих крепле-
ний деталей АЗ к корпусу и башне;
размещение составных частей АЗ на одном основании для ис-
ключения их взаимного перемещения при воздействии ПТС;
ограничение перемещений механизмов АЗ, исключающее изме-
нение их положения после воздействия ПТС.
Стойкость к воспламенению может быть определена произве-
дением следующих вероятностей: попадания поражающего элемен-
9* 131
та в зону размещения выстрелов, попадания поражающего элемен-
та непосредственно на пороховой заряд через защитные оболочки
и воспламенения порохового заряда.
Требование снижения вероятности попадания поражающих эле-
ментов на боеприпасы предполагает поиск зон боевого отделения,
вероятность попадания в которые минимальна. Известно, что наи-
большая вероятность попадания — в башню и верхнюю часть кор-
пуса; нижняя часть корпуса является наименее поражаемой, хотя
ее броневая защита существенно слабее, чем башни. Этим положе-
нием диктуется стремление располагать боекомплект ниже погона.
Для защиты обитаемых отделений от воздействия воспламенив-
шегося заряда необходимо размещать боеукладки в отсеках, из ко-
торых возможен сброс избыточного давления наружу.
На ряде зарубежных танков каждый выстрел, находящийся
в нише башни, помещается в металлический пенал.
Глава 5. СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ
5.1. ОСНОВНЫЕ ЗАДАЧИ ТАНКОВЫХ СУО
Основные задачи СУО состоят в опережении противника при
обнаружении целей и подготовке первого выстрела, а также в
обеспечении меткой стрельбы на превосходящих противника дис-
танциях.
Состав СУО, технические характеристики входящих в нее при-
боров и режимы работы определяются тактико-техническими
требованиями (ТТТ) к вооружению танка, функциональными обя-
занностями членов экипажа и особенностями размещения воору-
жения, СУО и экипажа в танке. .
СУО должна обеспечивать эффективное выполнение задач по
управлению вооружением каждым членом экипажа танка. При
этом необходимо найти технические решения, оитимально разре-
шающие естественные противоречия между высоким уровнем за-
данных характеристик, с одной стороны, и сложностью систем, их
надежностью и габаритно-массовыми параметрами, с другой.
Основными задачами командира танка являются наблюдение
за окружающей местностью, соблюдение боевого порядка танков
в подразделении, связь с вышестоящим командованием и экипа-
жем своего танка, поиск целей и выдача целеуказаний наводчику,
управление дополнительным (зенитным) оружием. Вспомогатель-
ной задачей является дублированное управление огнем (ДУО) ос-
новного оружия, осуществляемое командиром в критических ситуа-
циях (при остром дефиците времени): внезапном появлении танко-
опасных целей на сравнительно небольшой дальности или при вы-
ходе из строя наводчика.
Основными задачами наводчика являются поиск целей в перед-
нем секторе обзора и ведение прицельной стрельбы из основного
или вспомогательного оружия по самостоятельно обнаруженным
целям или по целеуказанию командира.
Таким образом, наиболее важными показателями назначения
СУО являются характеристики быстродействия (время поиска це-
ли, зависящее от обзорности, оптических параметров приборов и
точности стабилизации поля зрения приборов) и точность наводки
оружия (точностные характеристики СУО).
133
Достаточно обширный экспериментальный материал по испы-
таниям и эксплуатации танков показывает, что сектор обзора ко-
мандира должен быть 360°, наводчика — 180°. Теоретические и
экспериментальные данные затрат времени на обнаружение целей
показывают, что для обеспечения поиска и обнаружения целей
на дальности до 5000 м требуются приборы с кратностью увеличе-
ния до 12, разрешающей способностью (виброустойчииостью)
20—25" и точностью стабилизации поля зрения 0,1—0,2 мрад
(т. д.).
Обобщенная (типовая) структурная и функциональная схема
СУО показана на рис. 5.1.
По числу и номенклатуре решаемых задач, а также по степени
автоматизации процессов их решения танковые СУО принято под-
разделять на неавтоматизированные (упрощенные) и автоматизи-
рованные.
Неавтоматизированные системы имеют неполную номенклатуру
приборов, частью ко!орых управляет наводчик, частью — коман-
дир. Автоматизированные (за рубежом употребляется термин «ин-
тегрированныеэ) системы имеют полную номенклатуру приборов,
обеспечивающих решение задачи встречи снаряда с целью с уче-
том всех метеобаллистических и топографических факторов, влия-
ющих на точность стрельбы, и объединенных в единое целое; авто-
матизированными СУО можно управлять как с места наводчика,
так и с места командира танка.
По конструкции СУО подразделяются на системы с зависимой
(ЗЛП) и независимой (НЛП) линией прицеливания. В первом слу-
чае стабилизация и наводка прицела наводчика осуществляются
приводом наводки и стабилизации пушки, во втором — автономным
приводом, расположенным в прицеле.
СУО с НЛП характерны тем, что в них поле зрения прицела
(линия прицеливания) стабилизируется с более высокой точностью,
чем пушка, а уменьшение погрешностей наводки пушки в момент
выстрела обеспечивается специальными устройствами разрешения
выстрела.
СУО с ЗЛП несколько проще по конструкции (особенно узлы
связи прицела с пушкой), однако в этих системах снижается точ-
ность слежения за целью, особенно при установке пушки на стопор
(заряжание, соударения об упоры и т. п.).
Автоматизированные СУО конструируются, как правило, с не-
зависимой линией прицеливания, что обеспечивает высокую точ-
ность слежения за целью.
Одновременно для достижения высокой надежности СУО целе-
сообразно предусмотреть и резервный режим работы с ЗЛП.
134
Системы управления огнем современных танков обеспечивают
достаточно высокий уровень эффективности комплекса танкового
вооружения. Введение в состав СУО лазерных дальномеров, бал-
листических вычислителей сдатчиками входной информации, высо-
коточных приводов стабилизации и наводки, приборов ночного ви-
дения со светосильными прожекторами позволяет в существенной
мере повысить точность стрельбы и сократить время на подготовку
первого выстрела.
Ручной, ввод
Рис. 5.1. Типовая структурная и функциональная схема танковой СУО
ПИВ — ночной прицел; ИК - фара ИК-излучателя; ПН — прибор наводчика' Д - даль-
номер; Н|]Н визир прицела наводчика; ПК - прибор командира; Впк - визир прицела
командира; ДУ вн—датчик угла вертикальной наводки; II - пушка; ПрВ|{ — привод
вертикальной наводки; ДУВ_В —датчик углового положения внзнра командира относи-
тельно башни; Вк— командирская башенка; ЗУ — зенитная установка; ДУП_Б— датчик
углового положения пушки относительно башни в плоскости ВН; ГС пн - гиростабилиза-
тор прицела наводчика; ДУ гн — датчик угла горизонтальной наводки; D — башня;
ПРГН ~ привод горизонтальной наводки; ГСПК — гиростабилизатор прицела команди-
ра; Пр )гн — привод горизонтальной наводки башенки; Пр j вн — привод вертикальной на-
водки ЗУ; ПУЖ— пульт управления наводчика; КРР — коммутатор режимов работы; ПУК —
пульт управления командира; ТБВ — танковый баллистический вычислитель; Д — датчик
курсового угла; Д — датчик скорости танка; Д^р—датчик скорости бокового ветра;
Д-j — датчик угла крена оси цапф; ®ц —угловая скорость цели; Д дальность цели;
—температура окружающего воздуха; /3 — температура заряда; //—барометрическое
давление; Ао,— изменение начальной скорости снарядов от износа канала ствола и раз-
броса партии зарядов; в, р — углы упреждения
135
6.2. ВЛИЯНИЕ СУО НА НЕКОТОРЫЕ ПОКАЗАТЕЛИ
ОГНЕВОЙ МОЩИ ТАНКА
Обоснование и определение точностных характеристик СУО.
В качестве критерия точности стрельбы комплекса танкового во-
оружения обычно используется вероятность попадания первым вы-
стрелом Р\ Однако для эффективного решения боевой задачи,
особенно на большой дальности стрельбы (более 1500 м), может
потребоваться производство двух и более выстрелов.
При оценке эффективности стрельбы и при обосновании точно-
стных характеристик КТВ необходимо учитывать повторяемость
погрешностей стрельбы. Увеличение доли повторяющихся погреш-
ностей в суммарной погрешности выстрела в значительной степени
влияет на точность стрельбы в целом, поэтому критерий Pi необхо-
дим, но недостаточен для разработки требований к СУО.
Целесообразно воспользоваться вероятностью попадания в
цель при нескольких выстрелах Рп: в настоящее время критерий
этот используется наряду с Pi для определения такой составляю-
щей эффективности танкового вооружения, как дальность действи-
тельной стрельбы.
Для обоснования требований к точностным характеристикам
СУО из условия обеспечения максимального значения Рп при за-
данном Р] необходимо знать структуру погрешности выстрела и оп-
тимальное соотношение между ее повторяющимися и неповторяю-
щимися составляющими,
Случайные погрешности в вертикальной (у) и горизонтальной
(х) плоскостях не зависят друг от друга, следовательно, Pf=
= Р, Р, .
’х ’у
Полагая, что
где kp— весовой коэффициент, характеризующий соотношение вероятностей
Р*х и %
и учитывая, что Р, Ф(//ох), определим среднеквадратичное
значение суммарной погрешности в горизонтальной плоскости
= IKfVPtt).
где 2/ —размер цели; f (YРх 'kP ) — функция, обратная интегральной функции
Лапласа Ф
Известно, что погрешность выстрела представляет собой сумму
погрешности системы управления огнем (®Су0) и погрешности всех
остальных составных частей КТВ (°КТц). причем каждая из них
имеет повторяющиеся (п) и неповторяющиеся (н) составляющие.
136
Приняв, что
(эктв)“ = (®суо )" l ;
(Зктв)и ~ СаСУо)"
где *п»*и—весовые коэффициенты,
после ряда несложных преобразований получим формулы для оп-
ределения повторяющейся и неповторяющейся составляющих сум-
марной погрешности СУО в горизонтальной плоскости:
(’суо). = + 1>/(/K*W; (5<)
(асто (, = //!-|«Л*.+ (5-2)
где ц “3^/(°п 4 — коэффициент корреляции.
Заменив в полученных формулах I на Л (половину размера це-
ли в вертикальной плоскости), получим аналогичные формулы для
расчета составляющих погрешности СУО в вертикальной плоско-
сти.
В свою очередь оСУО состоит из характеризующих погреш-
ности отдельных составных частей и приборов СУО:
где т, q — число соответственно повторяющихся t и негговторяюшнхея состав-
ляющих погрешностей.
Как следует из полученных формул, задача синтеза точност-
ных характеристик приборов СУО сводится к решению одного
уравнения со многими неизвестными.
Введем функции
С„-3/,(□,);
/-1
с.-£/(’<).
/—I
которые в самом общем виде характеризуют технико-экономичес-
кие затраты, необходимые для обеспечения СУО требуемой точно-
сти стрельбы.
Задача определения неизвестных а, может быть сформулирова-
на как задача определения экстремума функции С„ (Си) при огра-
Г т(<)
ничении вида а= 1/ У3?- Решение данной задачи (определение
условного экстремума) достаточно хорошо известно. Значения т
и q выбираются в соответствии с классификацией погрешностей
исследуемой СУО по повторяемости, а вид функций /<(’<) может
Ю Зак. 38с
137
быть известен или выбран, исходя из экспертных оценок. Для ил-
люстрации изложенного метода рассмотрим следующий пример.
Пусть требуется определить точностные характеристики элементов СУО,
обеспечиваюшие наибольшее значение вероятности / п при стрельбе с ходу
кумулятивными снарядами на дальности 2200 м в неподвижную цель с разме
рами 2Л X 21 — 2,68 X 3,44 м с вероятностью Р| — 0,55. Примем следующие
исходные значения: kp — 1,1; kn kn 1,0; ц = 0,4. Значение ц выбрано из
условия обеспечения наибольшего значения вероятности Рп • Исходя из клас-
сификации ошибок СУО по повторяемости будем считать, что
( °СУО в 3ТБВ + ( 9ДВИ + °пер ’
( °СУО ) = + ( ®ДВИ + ®пр •
гАе 3тбв — среднеквадратичное значение (СКЗ) погрешности танкового бал-
листического вычислителя; (’дви^п- С^3 повтоРя>ощейся составляющей по-
грешности датчиков входной информации (ДВИ) — учета отклонений условий
стрельбы от нормальных; аПер— СКЗ погрешности передачи (связи прицела
с пушкой), «сл — СКЗ погрешности слежения; (’дви)ц — СКЗ неповторяю-
щейся составляющей погрешности датчиков входной информации; аПр — СКЗ
погрешности привода в момент производства выстрела.
Для расчета примем следующие значения функций Сп и Сн :
для вертикальной плоскости
СТБВ "= V°TBB » (Сдвн ЭД’ДВИ )п ; Сп«Р = °'5/апер ;
Сел — 1Асл • (СдВИ)н 0,1/(<>дВИ )я ; Спр = 1/впр;
для горизонтальной плоскости
СТБВ = V«TBB : (Сдви )п " 2/(вДВИ )п: Спер “ <Wonep I
Сел = 0,8/аез; (СдВИ )н = 0,5/(здВц )н • Спр = 1 Д'впр .
По формулам (5.1) и (5.2) определим СКЗ составляющих погрешностей
СУО:
в вертикальной плоскости
(’СУО )„ - * / - 0.5в = 0.26 мрад (Г.Д.);
J \ Т ' ly *р I n I
'•-° ’’ ’Wp’ 0,58/^= 0,32 “₽ал (тд'’
и в горизонтальной плоскости
(9СУО )п “ -- 0.29 мрад (т.д.);
I /" 1 — и /'0^
(аСУО )и ~ Т[РХх) У *ГП = 0,65^ “2“ - 0Л5 мрад (т.д ).
Для определения погрешности приборов СУО в вертикальной плоскости
составим функцию Лагранжа:
'Ч’ТБВ. ’ДВИ - ®пер)« —Ь- + -2-.+ 35- + X (4бв + 32ви -Ь - О’уо) ,
ТЬВ Дои ПСР
138
а также систему уравнений для определения параметра А. (множитель Лагран-
жа) и координат возможных точек экстремума:
<?/г/даТБВ = — М3тБВ + 2 лзТБВ = 0 ;
^7^’ДВИ = — 1 /’дви + 2 *’дви ~ 0;
<^4 d’nep — ~~ V’nep + 2^’пер = 0;
3ТБВ + 9ДВИ ’пер- ®*®67 = °-
Решив полученную систему уравнений, имеем
°ТБВ =0-15 мРал <Т’Л ); (°ДВИ )я = °’18 “Рад <т-д ); ’мр = °-И мРад 1т-д )-
Аналогично найдем нсповторяюшиеся составляющие погрешностей состав-
ных частей СУО:
за, =-- 0,21» мрад (т.д.); (здви)н ~ 0,1 мРад <тд’пр = °*20 мРад <тд)-
Таким же образом определим погрешность составных частей СУО в гори-
зонтальной плоскости:
3ТБВ 0,16 мрад (Т.д.) ; (’дви)п^ °’2 “Рад <т д):
’пер = 0.12 мрад (т.д); в„ - 0.2 мрад (т.д.);
(’дви)и °-16 мРад <т д ): ’пр = 0»25 “Рад <т д >
Время поиска цели и подготовки выстрела. В условиях совре-
менного боя фактор времени приобретает ^жизненно важное зна-
чение для экипажа танка. Только своевременное обнаружение про-
тивника и упреждение его в открытии огня создает реальные пред-
посылки для победы в огневом противоборстве. ’
Поиск цели при наблюдении из танка — это процесс, который
заключается в осмотре местности и выделении (обнаружении) на
ней предметов, которые по конфигурации, угловым размерам и
другим характерным признакам идентифицируются как объекты
военной техники определенного типа (опознавание).
Процесс опознавания цели отличается от процесса обнаружения
главным образом значительно меньшими размерами обследуемой
области пространства и необходимостью различать более мелкие
элементы цели. Однако оба эти процесса имеют общую физическую
природу и описываются математическими зависимостями одного
вида.
Процесс подготовки выстрела включает ряд операций (целеука-
зание, наводка, слежение), обеспечивающих попадание в цель.
Время поиска цели и подготовки выстрела, характеризующее
два важнейших свойства комплекса танкового вооружения (инфор-
мативность и быстродействие), в значительной мере определяется
техническими характеристиками СУО.
Оценка поисковых возможностей приборов СУО может произ-
водиться различными способами:
расчетным путем (методами моделирования);
квалиметрическим методом (с учетом схем обзорности) ;
экспериментально (по результатам испытаний).
10*
139
Согласно общей теории поиска объектов поиск цели из танка
является случайным процессом марковского типа с непрерывным
временем и дискретными состояниями. Этот процесс характеризу-
ется пуассоновским потоком событий, состоящих в обнаружении
и опознавании цели наблюдателем. Продолжительность Т процесса
поиска является случайной величиной, интегральный закон рас-
пределения которой имеет вид:
т
- сып*г
Р(Г)==1 —е 6 , (5.3)
где Р(Т) — вероятность обнаружения и опознавания цели за время Т. Х«(Т) -
интенсивность потока обнаружений и опознаваний, характеризующая число со-
бытий в единицу времени.
Величина Хо(Г) зависит от технических характеристик СУО,
психофизиологических параметров членов экипажа и их количества,
характеристик целей и внешней среды. В общем случае Хо(Т) яв-
ляется неубывающей функцией времени.
При моделировании процесса поиска широко используется
принцип квазистационарности, когда в пределах достаточно малого
отрезка времени ДГ все факторы, влияющие на интенсивность по-
иска, считаются неизменными. При этом Xo=const, и вероятность
обнаружения и опознавания цели Р, математическое ожидание М
и дисперсия о2 определяются по упрощенным формулам
P(r) = l-e"vs (5.4)
Л)(Т) = 1/Ч; (5.5)
а’(П = >/^. (5.6)
Формулы (5.3) — (5.6) составляют основу любой математичес-
кой модели поиска цели из танка и являются инвариантными от-
носительно физической природы и принципов действия поисковых
средств (оптические, тепловизионные, радиолокационные и т. п.),
характеризуя взаимосвязь между основными показателями танко-
вых приборов наблюдения при поиске целей. В качестве таких по-
казателей обычно используются:
Ра— вероятность обнаружения (опознавания) цели за опреде-
ленное время;
То — среднее время обнаружения (опознавания) цели: То=
До — предельная дальность обнаружения (опознавания) цели
через прибор наблюдения.
Для расчета указанных показателей необходимо прежде всего
определить Хо. Наиболее полно вопрос определения Х^ примени-
тельно к дневным оптическим танковым приборам разработан
в трудах Р. И. Павловского, В. С. Федорова, Ю. П. Павлова и
В. М. Разумова.
140
При поиске цели одним наблюдателем через одиночный прибор
/. yln[e Х’*'='+е“~-е 4“+Г^)],
где ы — угловая скорость линии визирования; ip —угол сектора поиска; ф—
угол поля зрения прибора в горизонтальной плоскости; — интенсивность
процесса при условии, что цель находится в поле зрения прибора.
• . _ *log(l log(l+rZ)
rjog(l + -*-/„) log (I + Гтак)
' агл '
где k — коэффициент, учитывающий перерывы в наблюдении; р~ заметность
цели на данном фоне; г0 — различаемое™ цели в идеальных условиях; F—
коэффициент уменьшения различаемое™ цели в конкретных условиях; 7Л — ла-
тентный период сенсомоторной реакции зрения; “гл— угол четкого видения
глаза; fv — коэффициент учета скорости цели; гтах — различаемое™ абсолют-
но черного круга больших размеров на абсолютно белом фоне.
При поиске цели одновременно несколькими членами экипажа
интенсивность процесса Ко выражается формулой
^о = 2\и» (5.7)
где /чи — интенсивность поиска цели i-м члена# экнИажа; М — количество
членов экипажа, ведущих поиск цели.
При наличии нескольких приборов наблюдения на одном рабо-
чем месте в формулу (5.7) подставляются средйевзвешенные зна-
чения , определяемые по формуле
*/ 2 */
^=2^/^
где *4 — число приборов наблюдения на рабочем месте i-ro члена экипажа;
— интенсивность поиска цели i-м членом экипажа через /й прибор.
Наряду с методом математического моделирования.для прибли-
женной оценки показателей эффективности танковых приборов на-
блюдения применяется квалиметрический метод, в соответствии
с которым среднее время обнаружения (опознавания) цели опре-
деляется по формуле
Ту = ,
где —среднее время обнаружения (опознавания) цели из эталонного
танка (аналога) в определенных условиях; К/у —коэффициент, учитывающий
отличие технических характеристик прибора и условий наблюдения от эталонных.
— показатели обзорности, видимого увеличения, ста-
билизации поля зрения и светопропускания прибора наблюдения оцениваемого
141
танка соответственно (рис. 5.2);/Сн#^, Л' гэ/у • . К, •—то же для эта-
лонного танка; А*, Лг, Ас. А. — коэффициенты весомости обзорности, види-
мого увеличения, стабилизации поля зрения и светопропускания (у А, 1^,
определяемые методом экспертного опроса, на основании математического мо-
делирования или анализа экспериментальных данных.
Анализ схем обзорности является наиболее распространенным
способом качественной оценки поисковых возможностей приборов.
По схемам обзорности определяют пространство, видимое эки-
пажем (суммарные углы по вертикали и горизонту, углы полей
зрения отдельных приборов, непросматриваемые зоны).
Рис. 5.2. Зависимость составляющих коэффициента К// от технических ха
рактеристнк приборов наблюдения
а —показателя обзорности от угла статического обзора; б — показателя кратности увелнче
имя от ее значения: /—прибор типа ТПД. 2 — прибор типа ТК.Н; а — показателя стаби-
лизации поля зрения от срединной погрешности стабилизации: /—по BH. 2 — по ГН; г
показателя светопропускания от коэффициента светопропускания
Используя накопленный практический опыт, можно путем со-
поставления обзорности оцениваемого танка и известного аналога
качественно представить его возможности по поиску и обнаруже-
нию целей. Соответствующие показатели эталонного танка опреде-
ляются экспериментально.
Экспериментальный метод обеспечивает количественную оцен-
ку и объективное сравнение исследуемых СУО.
Достоверность результатов в значительной степени зависит от
методов испытаний. В основу применяемой в настоящее время ме-
142
годики исследования процессов поиска положены следующие
принципы:
при испытаниях имитируются боевые действия танкового под-
разделения при прорыве обороны мотопехотного батальона меха-
низированной дивизии предполагаемого противника;
в качестве объектов поиска применяются натурные цели и ма-
кеты, часть из которых имитирует ведение огня;
для набора статистических данных опыты многократно повто-
ряются; тактическая обстановка систематически меняется;
ширина полосы поиска составляет ±500 м по курсу движения
наступающего танка;
в процессе испытаний фиксируются скорость движения танка,
внешние условия, число и тип обнаруженных целей, время обна-
ружения и опознавания целей, их дальность.
В частных методиках могут быть приняты определенные допу-
щения и ограничения, связанные с характером местности, увели-
чением или уменьшением числа целей, обеспечением экипажу
определенных условий для выполнения боевой задачи.
Анализ и обобщение результатов испытаний показывают, что
средние и крупноразмерные цели (танк, танк в окопе, установка
тяжелого ПТУРСа) обнаруживаются экипажем при работе с мес-
та и с ходу через приборы с однократным увеличением на даль-
ности 600—1200 м, через приборы с 3,5—5-кратным увеличением
без стабилизации поля зрения на дальности 1500—3000 м и через
прицелы с 8—10-кратным увеличением и независимой стабилиза-
цией поля зрения на дальности 3000—4000 м.
Средняя дальность обнаружения малоразмерных целей
(ПТУРСа пехотного, РПГ, РПТР) в 1,5—2,5 раза меньше, чем
крупноразмерных.
Вероятность (частость) обнаружения целей уменьшается с
увеличением их дальности. Так, например, в экспериментах по
поиску целей типа танк в окопе через нестабилизированный
прибор с 5-кратным увеличением при скорости движения танка
15—25 км/ч и наблюдении в секторе 15—20° в течение ограничен-
ного времени вероятность обнаружения целей на дальности
1200—1300 м была близка к единице, в то же время на дальности
1700—1800 м снизилась до 0,4 (рис. 5.3).
Среднее время обнаружения (опознавания) цели при прочих
равных условиях также зависит от технических характеристик
приборов наблюдения, и в первую очередь от стабилизации поля
зрения и кратности увеличения.
Так, в эксперименте по поиску цели типа танк (лобовая проек-
ция) на фоне летней растительности (контраст—не менее 0,5)
при метеорологической дальности видения (МДВ) 10 км среднее
время обнаружения цели одним наблюдателем составило в секто-
ре поиска 30°:
при наблюдении через 5-кратный нестабилизированный прибор
с места 20—40 с, с ходу 100—120 с;
143
при наблюдении через 7—8-кратный прибор с зависимой ста-
билизацией поля зрения — с места 20—30 с, с ходу 60—80 с;
при наблюдении через 8— !2-кратный прибор с независимой
стабилизацией поля зрения — с места 15—20 с, с ходу 25—30 с.
Проведение специальных игр и учений с применением натур-
ных целей и макетов, а также проведение полевых испытаний
является весьма трудоемкой задачей, требующей сложной орга-
низации и больших материальных затрат. Применяется, как пра-
вило, только для сравнения приборов испытываемых объектов
1иежду собой.
Для получения некоторых закономерностей процессов поиска
и опознавания цели из танка в последнее время начинают все бо-
лее широко применяться методы натурно-математического моде-
различных стендов и микрополиго-
нов. Эти методы позволяют устра-
нить основные трудности, сопутст-
вующие натурным испытаниям (не-
повторяемость внешних условий,
сложность организации и высокая
стоимость эксперимента) и дают
возможность моделирования в ши-
роком диапазоне различных внеш-
них условий (фон, освещенность,
тип цели, дальность, рельеф и т. п.).
Для полной оценки приборов
СУО и поисковых возможностей
танков на различных этапах их
жизненного цикла целесообразно
применение и сочетание различных
методов, взаимно дополняющих
лирования с использованием
500 1000 1500 Д*
Рис. 5.3. Влияние дальности
цели и скорости движения
танка ня вероятность обнару-
жения цели командиром:
I — v — 15 км/ч: 2 - v — 25 км ч
ДРУГ Друга.
После обнаружения цели экипаж танка выполняет определен-
ные операции по подготовке стрельбы и производит по цели один
или несколько выстрелов. Количество операций, последователь-
ность их выполнения и конкретное содержание определяются со-
ставом и структурой комплекса танкового вооружения и обста-
новкой на поле боя.
Укрупненно можно рассматривать следующие основные опе-
рации:
целеуказание стреляющему члену экипажа, включая переброс
башни и обмен информацией;
обнаружение цели стреляющим членом экипажа после целе-
указания;
заряжание пушки боеприпасом требуемого типа, включая
предварительные операции по установке необходимой шкалы при-
цела, стопорению пушки и выбору соответствующего боеприпаса
нз боеукладки;
наводка, измерение и ввод дальности в прицел;
144
уточнение наводки с учетом времени на выработку упрежден-
ных координат по вертикали и горизонту;
производство выстрела, включая нажатие кнопки «Пуск», за-
держку сигнала в электроцепях стрельбы и движение снаряда в
канале ствола;
контроль результатов выстрела после рассеивания пыледымо-
вого облака.
Для определения длительности всего процесса необходимо
знать длительность отдельных операций и последовательность их
выполнения.
Поскольку длительность каждой операции Tf является в опре-
деленном смысле случайной величиной, мож»но рассчитывать их
числовые характеристики (математическое ожидание и дисперсию),
считая случайные величины независимыми:
М(Г,) = i Л)(ГУ), э«(Г,) - V оЧГу).
/-1 /-1
где т — число несовмещенных (последовательных) операций.
Величина M(TZ ) представляет собой Среднее значение вре-
мени подготовки и производства выстрела (первого — Т\, или по-
следующего— Т2, в зависимости от решаемой задачи). Значения
M(Tj) и о2 (Гу), как правило, определяются •* экспериментально,
хотя в ряде случаев (например, для перспективных или зарубеж-
ных танков) применяются расчетные методы их определения или
экспертная оценка.
Для определения числа несовмещенных операций m необхо-
димо иметь четкое представление о структуре процесса подготов-
ки выстрела с учетом длительности и порядка выполнения отдель-
ных операций. Наиболее распространенными методами анализа
*>того процесса являются метод сетевого планирования и графи-
ческий метод построения циклограмм.
Метод сетевого планирования позволяет автоматизировать
расчеты по определению M(TZ ) и a2(Tt ) с использованием
ЭВМ. При этом строится сетевой график процесса подготовки и
производства выстрела (рис. 5.4), в котором дугами являются
составляющие операции, а вершинами — моменты начала и окон-
чания операций, и определяется длина критического пути. В ка-
честве длины /-й дуги выступает величина М(Г7) или о2 (Г») в за-
висимости от того, что определяется: М(1\ ) или <та(7'л ).
Задача определения длины критического пути решается с по-
мощью метода динамического программирования, основанного
на реккурёнтном соотношении Веллмана:
Г(/) - max [Г(Г)+ /(/',/)], (5.8)
z'e А
где i - 1.2, . . . ,р;
.4/ — множество начальных вершин тех дуг операций, для которых данная
i-я вершима является конечной;
145
t (i', 0 — продолжительность операции (длина дуги), начало и конец которой
обозначены соответственно Г и I;
р — количество вершин в сетевом графике.
При i=p выражение (5.8) дает значение среднего времени
подготовки и производства первого (последующего) выстрела Т\
U2)
Степень совершенства структуры комплекса танкового воору-
жения и, в частности, СУО с точки зрения его быстродействия оце-
нивается с помощью коэффициента совмещенности операций Ks:
.
где п — полное число операций в процессе подготовки и производства выстрела.
Рис. 5.4. Пример сетевого графика процесса подготовки и производства
выстрела:
а—первого, в — второго и последующих; ОР\ — ОР23— составляющие операций подготовим
и производства выстрелом; 1—31 — моменты их начала н окончания
Графический метод построения циклограмм процесса приме-
няется там, где не требуется проведения массовых расчетов, так
как, несмотря на свою простоту и наглядность, он достаточно
трудоемок.
При расчете показателей огневой мощи танка среднее время
подготовки и производства первого выстрела Г| обычно опреде-
ляется без учета операций целеуказания и обнаружения цели
146
после целеуказания стреляющим членом экипажа, которые вы-
деляются в отдельный процесс целеуказания. В этом случае ве-
личина Г| характеризует в основном технические возможности
КТВ в обеспечении максимального быстродействия. В некоторых
случаях, наоборот, удобнее рассматривать полное значение Т\
с учетом указанных операций (например, при оценке эффектив-
ности систем дублированного управления огнем).
Типовая циклограмма подготовки и производства выстрела
представлена на рис. 5.5; она построена по данным статистиче-
ской обработки результатов испытаний танков в различных усло-
виях. Результаты испытаний показали, что в танках с неавтома-
тизированной СУО и оптическим дальномером значения Т\ на-
J
5
—
Т, ТР . тг *
Рис. 5.5. Типовая циклограмма производства выстрела:
/ — переброс башни; 2 — обмен информацией, постановка огневой задачи. 3 — обнаружение
цели после целеуказания; 4 — установка шкалы прицела; S — заряжание пушки; 4— на-
водка, определение дальности цели и параметров ее движения в процессе слежения;
7 — производство выстрела; Г, — время производства первого выстрела; Тр — время рас-
сеивания пыледымового облака; Г> — время подготовки второго выстрела
ходятся в пределах 25—35 с при стрельбе с места и 30—45 с при
стрельбе с ходу. Для танков с автоматизированной СУО, вклю-
чающей лазерный дальномер и ТБВ, значения находятся в
пределах 10—20 с при стрельбе с места и 15—25 с при стрельбе
С ходу.
Анализ продолжительности отдельных операций процесса под-
готовки и производства выстрела в современных танках показал,
что значительную часть времени занимают: целеуказание стре-
ляющему члену экипажа и поиск им указанной цели, определе-
ние параметров движения цели путем синхронизации и удержания
на ней прицельной марки и заряжание пушки.
Поэтому для сокращения времени подготовки выстрела (Л и
Г2) целесообразно при разработке комплексов танкового воору-
жения, и в частности СУО, предусматривать использование систе-
мы дублированного управления огнем с места командира, авто-
матизацию процесса слежения за целью и применение быстродей-
147
ствующих автоматов заряжания с унитарными выстрелами и воз-
можность заряжания пушки на любом угле возвышения.
Внедрение указанных мероприятий позволит сократить сред-
нее время подготовки и производства выстрела до 6—10 с.
5.3. ПРИБОРЫ НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ
Назначение и классификация приборов. Танковыми прибора-
ми наблюдения и прицеливания называют совокупность техниче-
ских средств, обеспечивающих вождение танка и использование
его вооружения в различных условиях эксплуатации. О значении
этих приборов в оснащении танка свидетельствует тот факт, что
свыше 80 % информации об окружающей обстановке экипаж
получает через органы зрения.
К танковым приборам наблюдения и прицеливания в настоя-
щее время предъявляются высокие ТТТ при жестких габаритно-
массовых ограничениях; они должны обеспечивать:
возможность наблюдения и выполнения функциональных обя-
занностей членов экипажа танка в любое время суток, в том чис-
ле при неблагоприятных метеоусловиях и организованных поме-
хах, при работе с места и с ходу;
обнаружение и опознавание целей на дальности, позволяю-
щей реализовать максимальные возможности вооружения;
надежное ориентирование на местности, видение перспективы
местности и дороги на дальности, необходимой для уверенного
вождения танка с максимально возможной скоростью; выдержи-
вание направления атаки и совершение маневра.
При всем многообразии решаемых задач и условий работы
требуется также, чтобы номенклатура приборов была минималь-
ной, однако невозможно выполнить поставленные требования с
помощью какого-либо одного типа приборов.
Диапазон естественной освещенности открытой местности при-
родными источниками лучистой энергии (солнце, луна, звезды,
ночное небо) составляет от ЬКЯлк в ясный солнечный день до
(2—3)-10 4 лк в облачную безлунную ночь. Освещенность закры-
той местности (лесные массивы, горные ущелья) ночью умень-
шается до (5—6) • 10-5 лк.
Для оптических приборов, в которых в качестве приемников
внешней информации используются органы зрения человека, ос-
вещенность должна быть в пределах от 1105 до 1—3 лк. Наблю-
дение при освещенности от (1—3) до (5—6) • 10“s лк обеспечи-
вается приборами ночного видения.
Таким образом, по времени суток, в течение которого приборы
обеспечивают решение функциональных задач экипажа, их мож-
но отнести к трем группам: дневные, ночного видения и кругло-
суточные (круглосуточность работы может обеспечиваться прин-
ципом действия прибора или конструктивными мероприятиями —
комбинированием дневного и ночного каналов в едином приборе).
148
По месту установки в танке различаются четыре группы при-
боров: командира, наводчика, водителя и заряжающего.
По функциональному назначению приборы подразделяются на
приборы наблюдения, прицелы, дальномеры, зенитные прицелы
и прицелы-дальномеры (приборы слежения, наводки).
По типу связи с вооружением различаются приборы с зависи-
мой и независимой линией прицеливания.
По типу оптической схемы приборы разделяются на периско-
пические и с оптическим шарниром.
По конструктивным признакам и физическим принципам рабо-
ты приборы обычно подразделяются на дневные оптические (од-
нократные и многократные), ночного видения электронно-оптиче-
ские (на электронно-оптических преобразователях) и оптико-элек-
тронные (тепловизионные, телевизионные и т. д.).
По режиму работы приборы ночного видения можно разде-
лить на пассивные, активные и пассивно-активные. Приведенная
классификация не исчерпывает возможные отличительные при-
знаки приборов и дополняется ниже при рассмотрении их отдель-
ных типов.
Приборы наблюдения однократного увеличения и их установ-
ка в танке. Обзорность из танка в основном обеспечивается при-
зменными приборами наблюдения однократного увеличения.
Параметрами обзорности с рабочего места Каждого члена эки-
пажа являются углы поля статического и динамического обзора
в горизонтальной и вертикальной плоскостях, перекрытие углов
поля обзора соседних приборов и непросматрйваемое расстояние
от танка. Значения этих параметров зависят от оптических ха-
рактеристик приборов, их количества и установки в танке.
Методика определения параметров обзорности предусматри-
вает измерение:
углов поля статического обзора приборов в горизонтальной и
вертикальной плоскостях;
углов поля бинокулярного обзора в горизонтальной плоскости;
углов поля динамического обзора в горизонтальной и верти-
кальной плоскостях;
непросматриваемого расстояния от прибора и от танка.
Измерения производит специально подготовленный испыта-
тель поочередно через все размещенные в танке приборы.
Танк устанавливается на ровной площадке, имеющей разметку
в виде концентрических окружностей с делениями через 5—10°,
таким образом, чтобы голова члена экипажа, с места которого
проводятся измерения, размещалась над центром площадки.
Определение углов статического обзора производят последова-
тельным визированием через прибор при максимально возможном
перемещении головы наблюдателя относительно выходного окна
в горизонтальной и вертикальной плоскостях. Одновременно из-
меряется непросматрйваемое расстояние через каждые 10° визи-
рованием через прибор вниз.
149
По результатам измерений строятся схемы обзорности, кото-
рые представляют собой графическое изображение просматри-
ваемых и непросматриваемых зон в горизонтальной и вертикаль-
ной плоскостях через все оптико-механические и электронно-опти-
ческие приборы, установленные у членов экипажа. Кроме того,
строятся общие схемы статической и динамической обзорности
при одновременном наблюдении всем экипажем с помощью при-
боров дневного и ночного видения.
Перечень основных параметров обзорности, их условные бук-
венные обозначения и определения, а также правила выполнения
схем обзорности установлены отраслевым стандартом. Схемы об-
зорности включают: схемы расположения приборов и защитных
наблюдательных стекол, таблицы с основными оптическими пара-
метрами приборов, а также таблицы с их оптическими и кон-
структивными параметрами при установке в танке.
Призменные приборы наблюдения предпочтительнее осталь-
ных приборов, так как обеспечивают бинокулярное зрение, ви-
зуальный коэффициент пропускания 45—60 %, большие углы
поля обзора и поля зрения, а также наблюдение при сильной
тряске, вибрации и колебаниях без фиксации глаз наблюдателя.
В основных отечественных танках у водителя обычно устанав-
ливаются два—четыре призменных прибора, обеспечивающих угол
поля обзора в горизонтальной плоскости 140—170° при непросмат-
риваемом расстоянии от танка 4—5 м.
У командира во вращающейся башенке устанавливаются
три—пять приборов, обеспечивающих угол поля статического об-
зора 250—360°, у наводчика устанавливаются один—три прибора
с углом поля обзора вперед и на левый борт 90—150°.
Иностранные танки, как правило, имеют восемь—девять приз-
менных приборов на рабочем месте командира, размещаемых в
крыше башни вокруг командирского люка, или в командирской
башенке с большим, чем на отечественных танках, диаметром
погона.
Основные требования, предъявляемые к приборам наблюдения
однократного увеличения:
сохранение герметичности при наружном избыточном гидро-
статическом давлении на головную часть прибора не менее
6,86 Па, на остальную часть —3,92 Па;
механическая прочность при нагрузках, возникающих от уда-
ра снаряда в броню при непробитии;
тыльная прочность выходного окна при пулевом попадании
во входное окно;
обеспечение ручного демонтажа пораженного прибора;
электрообогрев окон и устойчивость их к воздействию грязи
и моющей жидкости системы гидропневмоочистки;
устойчивость к гамма-излучению;
наличие нейтрального светофильтра для защиты глаз наблю-
дателя от солнечного излучения.
150
Взаимосвязь оптических и конструктивных параметров приз-
менных приборов. Основными оптическими параметрами приборов
наблюдения являются: о — угол поля обзора в вертикальной плос-
кости; ап — верхний и нижний углы поля обзора в вертикаль-
ной плоскости; 2^ — угол поля обзора в горизонтальной плоскости;
Р — перископичность; е — угол поля зрения в вертикальной плос-
кости; 2<о — угол поля зрения в горизонтальной плоскости.
К конструктивным параметрам относятся: h — полная высота
оптической системы; / — толщина призм; ф—угол при вершине
призм; q ширина отражающих поверхностей.
Рис. 5.6. Призменная оптическая система, развернутая в плоскопараллельную
пластинку
Специальное исследование показало, что общий угол поля обзо-
ра оператора в горизонтальной плоскости зависит от угла поля об-
зора прибора и числа устанавливаемых приборов; непросматри-
ваемое расстояние от танка — от угла ои и наклона брони; возмож-
ность наблюдения выше горизонта — от угла а, и наклона прибора
в установке; расстояние от середины выходного окна до внутренней
поверхности брони —от перископичности Р и угла в(1 и пр.
Для вывода математических зависимостей рассмотрим прибор
двукратного отражения (рис. 5.6), оптическая система которого
состоит из целой призмы или из нескольких соприкасающихся
частей; система развернута в плоскопараллельную пластинку, и
проведены дополнительные построения Фигура BDGE изобра-
151
жает главное сечение системы (перпендикулярное отражающим
поверхностям 2 и 3) с углом при вершине ф=#45°.
Из схемы следует, что угол поля обзора в вертикальной плоско-
сти о определяется как сумма а, и После преобразования зави-
симостей, полученных с использованием закона преломления све-
та. получим формулу для определения угла обзора в вертикаль-
ной плоскости призменной системы:
о . _arcs|n л 1(* *<-'>
/Л»-г л /(Л tg^-^O’ + ^tg^
где л-показатель преломления стекла
Для часто встречающегося случая, когда угол ф=45°,
для верхнего угла поля обзора
(5.9)
имеем:
для нижнего угла поля обзора
з„ — — arcsin nt/ К(А — 2/)J t2.
Тогда
з — arcsln
nt
4- arcsin Г .. -=^.
К(Л -2/)’4-/’
Из анализа формул (5.9) и (5.10) следует, что с увеличением
полной высоты системы Л при постоянных значениях угла при
вершине, толщины призмы t и показателя преломления стекла п
углы поля обзора в вертикальной плоскости уменьшаются. Когда
угол при вершине призм равен 45°, абсолютное значение нижнего
угла поля обзора в вертикальной плоскости всегда больше значе-
ния верхнего угла поля обзора. Это положение иногда необходи-
мо изменить при проектировании установки прибора за счет
уменьшения угла при вершине.
Анализ формулы (5.9) показывает, что каждая призменная си-
стема при изменении угла при вершине от минимального до мак-
симального значений при постоянных Л, f, п имеет свои значения
угла при вершине, при которых верхний или нижний угол поля
обзора равен нулю.
Предельные значения угла при вершине (максимальное
и минимальное ^mln ) определяются из условия, что верхний или
нижний угол поля обзора достигает максимального значения
(90°), т. е. когда угол падения равен предельному углу 1т, при ко-
тором наступает полное внутреннее отражение. Например, система,
параметры которой й=185 мм, / = 35 мм и п— 1,5163, имеет пре-
дельные значения
Кш = 29°43' и 58°44' .
При постоянных параметрах Л, /, п и изменении угла при вер-
шине от минимального до максимального значений угол поля об-
152
(5.10)
зора в вертикальной плоскости о уменьшается до минимального,
если <jj =0. При дальнейшем увеличении угла до угол
поля обзора а увеличивается. В случае изменения угла при вер-
шине от ^1Л1П до фюах, верхний угол поля обзора уменьшается
и становится равным нулю, т. е. луч I идет по горизонту (наблю-
дение через прибор выше горизонта невозможно).
Перископичность призменной системы
Р (Л tg ф — /) sin 2ф. (5.11)
Из формулы (5.11) следует, что если h и t постоянны, а угол
ф изменяется от фт(п до фтах, перископичность увеличивается
и достигает максимального значения, равного полной высоте опти-
ческой системы h. Перископичность прибора не зависит от пока-
зателя преломления стекла.
Высота оптической грани входного и выходного окон призмен-
ной системы
_ / К Mtg4-l)tg* + 2q 512.
Из формулы (5.12) следует, что с увеличением полной высо-
ты h и при постоянных значениях угла при вёршине ф и толщи-
ны I высота оптических граней уменьшается.
Для определения угла поля обзора в горизонтальной плоскос-
ти рассмотрим сечение развертки призмейной системы плоскостью,
проходящей через направление горизонтального луча визирования
III и перпендикулярной к плоскости главного сечения BDGE
(рис. 5.7).
Исходя из зависимости, полученной с использованием закона
преломления света, после преобразований получаем формулу для
определения угла поля обзора в горизонтальной плоскости при-
зменной системы
2? 2 arcsin nqlV (h. sin 2ф — /cos2^)* + q- . (5.13)
Установка призменных приборов наблюдения в танке. Номен-
клатура (ограничительный ряд) серийных призменных приборов,
а также защитных стекол, устанавливаемых перед прицелами и
командирскими приборами, приводится в соответствующих ката-
логах. Большинство конструкций крепежных деталей для уста-
новки приборов, включенных в ограничительный ряд, нормализо-
вано.
Наибольшее распространение получило крепление прибора
эксцентриковым валиком, что может обеспечить выполнение всех
требований, предъявляемых к установке.
Схема установки прибора наблюдения водителя танка пред-
ставлена на рис. 5.8.
153
Установка приборов наблюдения должна обеспечивать:
удобство наблюдения и полное использование обзорных ха-
рактеристик прибора (при перемещении головы наблюдателя в
горизонтальной и вертикальной плоскостях);
общий угол поля статического обзора командиру 360°, води-
телю и наводчику — не менее 180°;
герметичность при преодолении танком водных преград по дну
на глубине до 7 м (благодаря поджатию уплотнительной про-
кладки прибора или уплотнению соединений защитной замазкой
типа ЗЗК);
Рис. 5.7. Схема оптической развертки
(в плоскости главного сечения):
q — ширина отражающих поверхностей; -
длина луча 111 в оптической системе; 1. 2, 3, 4 —
грани призмы
Рис. 5.8. Схема установки при
бора наблюдения водителя
танка:
/ — прибор; 2 — сопло системы гид-
роппевмоочистки, 3 — уплотнитель
ная прокладка; 4 — обрезиненная
проставка; 5 эксцентриковое креп
ление; 6 — штепсельный разъем
защиту экипажа от поражения свинцовыми брызгами при пу-
левом обстреле (поджатием уплотнительной прокладки прибора
и конструктивным решением установки);
возможность ручного демонтажа пораженного прибора изнут-
ри танка в течение 20—30с после попадания одной—двух пуль ка-
либра 7,62 мм во входное окно прибора и в течение 1—2 мин
с использованием инструмента (обеспечивается конструктивно);
защиту головной части прибора при пулевом обстреле с боко-
вых и заднего секторов и с воздуха (путем бронирования);
устойчивость прибора и деталей крепления при нагрузках, воз-
никающих от удара снаряда в броню при непробитии (обеспечи-
вается введением амортизирующих элементов и другими кон-
структивными мероприятиями);
154
возможность наблюдения при различных климатических и до-
рожных условиях (обеспечивается гидропневмоочисткой и элект-
рообогревом прибора).
Кроме того, разрабатываются мероприятия для выполнения
требований к защите приборов от светового излучения и ударной
волны атомного взрыва, от лазерного излучения и огнемстания.
Электрообогрев устраняет запотевание или обледенение по-
верхностей защитных стекол и окон приборов, для чего на поверх-
ность стеклянных пластин, обращенных к призмам, наносится
токопроводящее прозрачное покрытие, обеспечивающее темпера-
туру на поверхности окон приборов от 25 до 45 °C в течение
20 мин при температуре окружающего воздуха от —50 до -f-25°C.
Указанная температура для призменных приборов автоматически
поддерживается регулятором температур (РТС), работающим по
схеме измерительного моста; обогрев защитных стекол, устанав-
ливаемых перед основными приборами СУО, осуществляется не-
посредственно от бортовой сети танка.
На отечественных танках и БМП применяются две схемы гнд-
ропневмоочисткн (ГПО): с дозатором (рис. 5.9) и эжектором;
Рис. 5.9. Схема ГПО прибора
наблюдения водителя танка
I — прибор; 2 — сопло; 3 — клапан
с краном; 4 — горловина заливная;
5 фильтр; 6 — бак; 7 — дозатор.
Л — баллон; 9 — компрессор; 10 —
манометр; СП—система пуска дви
гателя; ВЗУ — воздухозаборное уст-
ройство
для очистки входных окон используется сжатый воздух или мою-
щая жидкость. Система ГПО с дозатором, обеспечивающая по-
стоянный (отрегулированный) расход жидкости на одно включе-
ние, используется для очистки приборов водителя и защитного
стекла прицела-дальномера и командирского прибора на башне
основных отечественных танков. Система ГПО водителя работает
от баллонов сжатого воздуха, расположенных в корпусе (система
пуска двигателя) и имеющих подзарядку от компрессора.
155
На серийном танке внедрено вращающееся воздушное устрой-
ство, обеспечивающее подзарядку от компрессора баллона ГПО,
расположенного в башне. Время одного включения ГПО состав-
ляет 1—2 с с интервалом между включениями 2—3 с (время запол-
нения дозатора жидкостью).
Дневные и комбинированные оптические приборы прицелива-
ния для наводчиков и командиров. В конструкции дневных прице-
лов и приборов наблюдения с увеличением изображения мест-
ности и целей используется телескопическая оптическая система.
Наиболее важными оптическими и конструктивными показа-
телями этих приборов являются: видимое увеличение, угол поля
зрения, визуальный коэффициент пропускания, диаметр вы-
ходного зрачка, качество изображения, точность стабилизации
поля зрения, виброустойчивость при механических возмущениях,
согласование (связь) с вооружением.
Видимое увеличение (Г) оптической системы прибора опреде-
ляет разрешающую способность системы глаз—прибор и сущест-
венно влияет на дальность обнаружения и опознавания целей,
а также на точность прицеливания (рис. 5.10).
Рис. 5.10. Зависимость даль-
ности опознавания Доп
цели танк (/) и статиче-
ской погрешности прицели-
вания по его лобовой про-
екции В, (2) от увеличения
прибора Г при наблюдении
с места
Как видно из рис. 5.10, дальность опознавания и точность при-
целивания интенсивно возрастают при повышении Г до 12х;
дальнейшее повышение Г практически не имеет смысла.
На рис. 5.11 показано изменение видимого (кажущегося) кон-
траста К цели с фоном в зависимости от дальности. Из приве-
денных графиков видно, что с ростом дальности цели видимый
контраст уменьшается (вследствие ослабления и рассеивания све-
Ya в приземном слое атмосферы) и при дальности 4000—6000 м
достигает значений, близких к порогу контрастной чувствитель-
ности глаза. Этим, а также малыми приращениями разрешаю-
щей способности системы глаз-прибор объясняется нецелесооб-
разность применения в дневных танковых приборах наблюдения
увеличений более 12—15х.
При выборе максимального видимого увеличения прибора так-
же принимается во внимание необходимость обеспечения опреде-
ленного поля зрения, от которого зависят площадь видимого
участка, скорость осмотра местности и время обнаружения цели.
156
Предел разрешения является важной характеристикой опти-
ческого прибора, существенно влияющей на дальность его
действия. Различают статический и динамический пределы разре-
шения (а) прибора. Статический предел разрешения зависит от
разрешающей способности глаза и увеличения прибора при уста-
новившемся зрительном процессе; динамический определяется
статическим и вибрацией поля зрения в визуальном канале опти-
ческого прибора.
Динамический предел разрешения даже приборов со стабили-
зацией поля зрения в двух плоскостях при движении танка со
скоростью 15—25 км/ч ухудшается по сравнению с пределом раз-
решения с места в среднем в 1,5—2,5 раза, причем степень ухуд-
шения зависит от типа трассы, характеристик ходовой части тан-
ка и виброустойчивости прибора. При этом влияние вибраций
Рис. 5.11. Зависимость видимого
контраста К цели от дальности Д
для зимних (/) и летних (2) усло-
вий работы
поля зрения прибора, возникающих при движении танка, воз-
растает с увеличением Г, например, при возрастании скорости
движения от 0 до 25 км/ч для стабилизированного прибора с
Г=5Х а ухудшается в два раза, для прибора с Г=14х —в че-
тыре раза.
Угод поля зрения прибора (20) — наибольший угол наклона
пучков лучей, которые полностью или с определенным процентом
виньетирования проходят через оптическую систему.
Угол поля зрения со стороны окуляра называется кажущимся,
или видимым, полем зрения (20') и определяется конструкцией
окуляра. Обычно принимают 20'= 50... 60°; для сложных окуля-
ров 20' может достигать 70—80°. Углы поля зрения связаны с
увеличением известным соотношением
Г = tg₽'/tg р,
где 0' — угол, под которым глаз наблюдателя видит через прибор изображе-
ние предмета; 0 — угол, под которым наблюдатель видит предмет невооружен-
ным глазом.
Для выбора реально осуществимого в оптической системе угла
поля зрения при заданном увеличении Г, а также для оценки
возможного значения Г для требуемого угла поля зрения можно
157
воспользоваться графиком (рис. 5.12), построенным на основании
нормализованного ряда увеличений.
Чтобы получить в приборе большие увеличения и достаточный
угол поля зрения, идут на усложнение конструкции прибора,
вводя сменную или панкратическую оптику, что обеспечивает на-
водчику и командиру танка возможность выбора оптимального
увеличения с учетом условий движения, состояния атмосферы и
выполняемой задачи.
Рациональным максимальным увеличением танковых прибо-
ров можно считать 12—15х.
Визуальный коэффициент светопропускания прибора т опреде-
ляется отношением светового потока Ф. прошедшего через при-
бор, к падающему потоку Фо.
При низком светопропусканни снижается яркость изображе-
ния предметов, они становятся плохо различимыми, т. е. ухуд-
шается видимость местности и целей, особенно при сумеречных
условиях наблюдения и пасмурной погоде.
Рис. 5.12. Зависимость угла поля
зрения 20 телескопической си-
стемы от увеличения Г
В условиях малой яркости фона (10—100 кд/м2) и низкой
освещенности при т<30 % понижаются острота зрения, порог кон-
трастной чувствительности, устойчивость ясного видения, умень-
шается скорость зрительного восприятия глаза.
Учитывая требования, предъявляемые к танковым приборам
наблюдения, условия их эксплуатации и сложность оптической
системы, стремятся обеспечить значение т не менее 30—35 %.
Выходной зрачок прибора представляет собой изображение
входного зрачка или апертурной диафрагмы прибора; связь между
диаметрами зрачков и увеличением прибора выражается фор-
мулой
^.р. вых <р вх /Г.
где rfrip. вых “ диаметр выходного зрачка; г/пр вх — диаметр входного зрачка.
Для обеспечения эффективной совместной работы системы
глаз—прибор к величине dnp вых предъявляются определенные
158
требования, учитывающие характеристики зрительного анализа-
тора и возможности практической реализации требуемых значе-
ний d вих в оптической системе прибора. Зависимость диамет-
ра зрачка глаза от яркости фона адаптации приведена на
рис. 5.13.
При наблюдении через прицел зрачок глаза оператора должен
быть совмещен с выходным зрачком прибора, при этом в случае
равенства диаметров зрачка глаза d и dnv вых все световые
лучи, прошедшие через прибор, поступают в глаз оператора.
Однако при малых диаметрах выходного зрачка (-С 2 мм) умень-
шается светосила прибора, пропорциональная ^.ых » и в усло-
виях низкой освещенности видимость целей и местности снижает-
ся; при движении танка увеличиваются перерывы в наблюдении
вследствие колебаний головы оператора и рассогласования зрач-
ка глаза с выходным зрачком прибора.
Если </пр вых >d, то часть выходящих из прибора лучей не по-
падает в глаз оператора, и освещенность изображения на сетчатке
глаза определяется значением d, а не площадью выходного зрачка
прибора.
Рис. 5.13. Зависимость диаметра d
зрачка глаза от яркости В фона
адаптации
Для фиксации объектов, расположенных на краю поля зрения
прибора (20'«5О... 60°), выходной зрачок должен обеспечивать
оператору возможность наблюдения без значительного поворота
головы и вращений глаза, приводящих к дополнительной психо-
физиологической нагрузке оператора и снижению восприимчивос-
ти глаза.
Значение угла поворота глаза U' без виньетирования зрачка
глаза можно определить из выражения
d/2 = р2 tg W + rfnp вых /2 4- sec U , (5.14)
где pa — радиус поворота глаза вокруг его центра вращения.
Из анализа выражения (5.14), рис. 5.13 и приведенных выше
замечаний следует, что увеличение выходного зрачка прибора
улучшает условия наблюдения. Минимально допустимые значения
диаметров выходного зрачка равны 3—4 мм (при максимальном
увеличении прибора).
159
Точность согласования перископических прицелов с орудием.
В настоящее время в танковых прицелах и приборах наблюдения
с увеличением применяются перископические оптические систе-
мы с независимой стабилизацией поля зрения в одной или двух
плоскостях. Перископическая схема позволяет размещать вход-
ное окно прибора на крыше башни, не ослабляя лобовой брони,
а высота расположения входного окна при этом обеспечивает
лучшие условия наблюдения.
Для передачи углов наводки к пушке от перископического
прицела с независимой стабилизацией поля зрения применяются
механические и электрические устройства. Передача углов в вер-
тикальной плоскости осуществляется параллелограммными меха-
низмами, так как они обеспечивают связь прицела с орудием как
в автоматическом режиме управления (при включенных стабили-
заторе поля зрения и приводах наводки), так и при ручной навод-
ке (при застопоренном гиростабилизаторе прицела).
Отличительной особенностью прицелов с НЛП по сравнению
с прицелами с ЗЛП является наличие погрешности передачи
углов, которая в основном определяется конструктивными особен-
ностями, погрешностью изготовления устройства связи и техноло-
гической погрешностью установки прицела в танке. Погрешность
передачи особенно весома при стрельбе с места по неподвижной
цели, когда отсутствуют погрешности подготовки выстрела, обус
ловленные динамикой движения стреляющего танка и цели,
точностью стабилизации поля зрения и вооружения, погрешнос
тями наводки, выработки упреждений и т. д. Значение и, следо-
вательно, влияние погрешности передачи на точность стрельбы
возрастает при увеличении угла наводки орудия относительно
плоскости погона башни. Для того чтобы неточность передачи
угла не оказывала существенного влияния на вероятность попа-
дания в цель, для всех условий и способов стрельбы абсолютная
погрешность должна быть в пределах технического рассеивания,
т. е. не более Г.
Анализируя типовую схему перископического прицела с НЛП
’(рис. 5.14), можно принять, что суммарная погрешность передачи
формируется из следующих составляющих:
погрешностей установки прицела из-за непа рал дельности осей
вращения головного зеркала прицела и цапф пушки, смещения
прицела от оси канала ствола орудия (из-за невозможности
совмещения ее с нулевой линией прицеливания);
погрешности передачи углов от орудия к головному зеркалу
(линии визирования) из-за погрешности изготовления, упругих
деформаций деталей и люфтов в подвижных соединениях кинема-
тической цепи головное зеркало — пушка-,
погрешности выверки, связанной с неточностью выверочных
устройств и методическими погрешностями (погрешности уста-
новки выверочных приспособлений, нанесения перекрестия на
дульный срез и т. д.).
160
Рассмотрим первую составляющую погрешности установки
прицела, вызываемую несовпадением плоскостей наводки линии
прицеливания и орудия вследствие непараллельное™ осей вра-
щения головного зеркала и цапф орудия.
Предположим для упрощения, что ось канала ствола орудия
и линия прицеливания могут быть совмещены, погрешность вы-
верки отсутствует. Рассмотрим прямоугольную систему координат
Oxyz, в плоскости Оху которой лежит ось вращения головного
зеркала (Оу)\ линия прицеливания после установки прицела на-
2
Рис. 5.14. Упрощенная кинематическая схема связи линии прицеливания ста-
билизированного прицела с орудием-
/—орудие; 3 — параллелограммный механизм; 3 —нижнее зеркало; 4 — головное зерка-
ло; » —реечная передача; 6 — ленточная передача; 7 — наружная рамка стабилизатора;
в —внутренняя рамка стабилизатора; 9. 10. // — кинематическая передача; ф —угол рас
согласования осей Оу, и Оу, в плоскости горизонтальной наводки; Т — угол рассогласо-
вания осей Оу и Оу. в плоскости, перпендикулярной оси канала ствола ОХ; в—длина
плеча параллелограммного механизма; Ь — длина тяги параллелограммного механизма;
Да, ДО — погрешности изготовления плеча и тяги соответственно
правлена по оси Ох (рис. 5.15). Система координат Ox\y2z свя-
зана с осью канала ствола (Oxi) и осью цапф (Оу2) и повернута
вокруг осей Oz и Ох{ относительно системы Oxyz на углы ф и у
Соответственно (ф — угол рассогласования осей Оух и Оу2 в плос-
кости ГН, у —угол рассогласования осей Оу и Оух в плоскости,
перпендикулярной оси_канала ствола Ох); ось канала ствола
совпадает с вектором Ао. После выверки прицела с пушкой при
11 Зак. 38с 161
угле возвышения е«0° линия прицеливания будет направлена
по оси канала ствола. Как видно из рис. 5.15, наводка линии при-
целивания происходит в плоскости OxiZ, а орудия — в плоскости
Oxi«i.
Если придать орудию угол е (точка Д), линия прицеливания
переместится на угол ei (точка 40, не равный е вследствие непа-
раллельное™ плоскостей Oxi? и OxjZr Погрешности наводки
Рис. 5.15. Схема определения
погрешности установки при-
цела
из-за непараллелыюсти осей головного зеркала прицела и цапф
орудия в вертакальной (AeJ и горизонтальной (Дф|) плоскостях
могут быть определены по следующим формулам:
Acj = sin т sin<p ----1 ) —tge(l — cos 7 cos ф); I
/14 <5l5>
- 1J — tgeslni ,
где у — угол рассогласования осей головного зеркала прицела и цапф орудия
в плоскости крена; ф —угол рассогласования осей в горизонтальной плоскости;
в —угол возвышения.
При установке прицелов максимально допустимая непарал-
лельное™ осей цапф прибора и орудия обычно составляет при-
мерно 3 мрад (т. д.); при таких значениях углов ф и у, погреш-
ностью Aet можно пренебречь. Выражение (5.15) для погрешнос-
ти Дф| можно упростить:
Дф, = — tg е sin 7,
так как первый член в нем является малой величиной.
В табл. 5.1 показано влияние углов возвышения е и рассогла-
сования у на погрешность Лфь Из таблицы видно, что погреш-
ность установки прицела в плоскости ГН достигает 1—1,4 мрад
(т.д.) при углах возвышения, равных 15—20°, а при «>45° 2—
4 мрад (т. д.) и более. Эта погрешность может быть компенсиро-
вана регулировкой подвески прибора по крену, введением попра-
вок в ТБВ или ужесточением допусков на установку прибора
в танке.
162
Таблица 5.!
Погрешность наводки Дф( в горизонтальной плоскости
из-за непараллельное™ осей головного зеркала прицела и цапф орудия,
мрад (т. д.)
12
16
45
75
0
О
0
О
анализа
0,042
0,089
0,136
0,198
0.084
0,179
0,274
0,4
0,127
0,27
0,412
0,603
3
6
9
11
Для
прицела—погрешности
рис. 5.16.
Точка А входного зрачка
прибора расположена на рас-
стояниях AD = a и BD = b от
оси цапф по высоте и от оси
канала ствола в боковом нап-
равлении соответственно. Точ-
ка В лежит на пересечении
осей канала ствола и цапф. Вы-
верка прицела производится по
точке С, удаленной от точки А
на дальность выверки Д9.
0,171
0,362
0,555
0,81
0,214
0,455
0,695
1,02
0,292
0,62
0.765
1,38
0.462
0,982
1.5
2,2
0,8
2,6
3,8
2,98
6,35
9,71
14,2
второй составляющей погрешности
параллакса
углового
установки
рассмотрим
В связи с тем, что размеры
а и b <Дв,для упрощения
предположим, что точки В, А и
Д лежат в одной плоскости
(ВАД), а плоскость ВСД сов-
падает с горизонтальной. Если
цель расположена на расстоя-
нии Дцу=Дв , возникает погрешность углового
торую, пренебрегая величинами второго порядка
определить из следующих выражений:
Рис. 5.16. Схема формирования уг-
лового параллакса прицела и ору-
дия:
Ь — расстояние между осью капала ствола
и линией прицеливания
параллакса, ко-
малости, можно
Ае3^а(1/Ди-1/Д,);
Дф3«д(1/Рц-1/£>в),
где Лет — погрешность углового параллакса в плоскости ВН; а — смещение
линии прицеливания по высоте; Дп—дальность цели; Д, —дальность вы-
верки; Лфт—погрешность углового параллакса в плоское™ ГН; b — смещение
линии прицеливания в боковом направлении.
Обычно для танков смещение линии прицеливания относитель-
но оси канала в боковом направлении больше смещения по вы-
соте (6>а).
11*
163
На рис. 5.17 приведена зависимость погрешности углового па-
раллакса Лф2 в плоскости горизонтальной наводки от дальности
цели и смешения линии прицеливания в боковом направлении.
При Ь «0,5 м на максимальной дальности стрельбы Дф2 =
™ 0,15... 0,2 мрад (т. д.).
Если размеры а и b по компоновочным соображениям невоз-
можно уменьшить, то погрешность углового параллакса компен-
сируется с помощью ТБВ
Рассмотрим третью составляющую — погрешность выверки
Рис. 5.17. Зависимость погрешности
углового параллакса по ГН от
дальности цели:
I - Ь - 0,5 и; 2 - » - 1.0 м; 3 - А - «Л м
Под выверкой ^прицела с орудием понимается сведение нуле-
вой линии прицеливания и геометрической оси канала ствола в
одной точке на дальности выверки 1600—2000 м.
Суммарная погрешность выверки включает в себя следующие
составляющие: погрешности совмещения марки прицела с точкой
наводки, дискретности механизма выверки, установки прибора
для выверки в стволе орудия, нанесения рисок и перекрестия на
дульном срезе ствола орудия, совмещения перекрестия с точкой
наводки.
Если принять в качестве критерия оценки выверки техническое
рассеивание пушки Ет р, то для того, чтобы погрешность вывер-
ки Ел не оказывала существенного влияния на точность стрельбы,
ее значение должно быть в 2—3 раза меньше технического
рассеивания, т. е. например, при Ег =0,15 мрад (т. д.),
£. < 0,05 мрад (т. д.).
Суммарная срединная погрешность выверки прицела с пуш-
кой определяется выражением
е.=+ .
где Ее пр — срединная погрешность совмещения марки прицела с точкой на-
водки; £м — приведенная срединная погрешность дискретности, равная 0,39/
(/ — перемещение прицельной марки при повороте механизма выверки на одни
шаг; для механизмов выверки с плавным перемещением прицельной марки
Ел = 0); Ес п — погрешность совмещения перекрестия с точкой наводки,
Еу — погрешность установки прибора для выверки; Е* — погрешность нанесе-
ния рисок и перекрестия на дульном срезе.
164 II
В процессе эксплуатации из-за перепадов температуры, вибра-
ционных и ударных возмущений точность согласования прицела
с орудием может нарушаться.
В настоящее время в СУО вводят систему встроенного контро-
ля выверки, позволяющую оперативно проверить согласование
прицела и орудия без выхода экипажа из танка и при необходи-
мости произвести корректировку выверки перед стрельбой за
10—15с.
Как показывают экспериментальные исследования, погреш-
ность передачи углов от линии прицеливания к орудию связана
с углом возвышения орудия зависимостью, близкой к линейной,
а погрешность передачи угла возвышения е может быть записана
в виде
+ <5.16)
где а —длина рычага параллелограммного механизма; Ла (Aft) — отклонение
длины рычага (тягн) от номинального размера (см. рис. 5.14).
Погрешность передачи в плоскости вертикальной наводки
можно компенсировать механически — введением в параллело-
граммный механизм компенсатора, выполненного, например, в
виде эксцентриковой полуоси, являющейся осьр одного из шар-
нирных соединений параллелограмма. •
Принцип действия механического компенсатора основан на
использовании зависимости (5.16) и заключается в том, что при
изменении соотношения длин рычагов (например, длины рыча-
га а на некоторую величину Да) принудительно вводят в кинема-
тические соединения вертикальной передачи линейную погреш-
ность Деп, противоположную по знаку и равную по величине по-
грешности Дек ц всей кинематической цепи между головным зерка-
лом и орудием.
Значение нескомпенсированной погрешности передачи угла
Де' ц*= Деж ц Де„ определяется отклонением от линейной за-
висимости погрешности Двж ц.
Виброустойчивость танковых стабилизированных приборов.
Как указывалось ранее, применение стабилизированных приборов
многократного увеличения повышает дальность обнаружения с
ходу и уменьшает время поиска целей по сравнению с нестабили-
зированными приборами.
В современных танках преимущественно применяется незави-
симая стабилизация поля зрения приборов силовым гироскопиче-
ским стабилизатором, установленным непосредственно в корпусе
прибора и обеспечивающим погрешность стабилизации не более
0,15 мрад (т. д.). Кроме этого может использоваться стабилиза-
ция с помощью индикаторных систем, следящих за рассогласова-
нием между линией прицеливания и стабилизатором, а также за-
висимая стабилизация от основного оружия танка.
165
Упрощенная схема силового двухплоскостного гиростабилиза-
тора прицела с независимой стабилизацией поля зрения показана
на рис. 5.14. Наружная рамка гироскопического стабилизатора
ленточно-реечной передачей с передаточным отношением »=2 : 1
связана с головным зеркалом, а внутренняя рамка пространствен-
но-кинематической передачей с <=1 с нижним зеркалом прицела.
При угловых колебаниях корпуса танка гиростабилизатор сохра-
няет неизменное положение в пространстве, а вместе с ним стаби-
лизируется и поле зрения прицела. Угловые колебания корпуса
танка имеют случайный характер, оказывают отрицательное воз-
действие на стабилизированный прибор, так как вызывают вибра-
ции поля зрения в широком спектре частот (от 30 до 200 Гц),
приводящие к ухудшению разрешающей способности системы
глаз—прибор.
Спектр частот вибраций поля зрения обусловлен внешними
возмущениями и динамическими свойствами гиростабилизатора,
а также конструкцией кинематической связи его с зеркалами.
На рис. 5.18 приведена зависимость спектральной плотности
ускорений корпуса прибора по углам тангажа (<₽), крена (у) и
рыскания (х) от частоты вибраций. Приближенно можно считать
угловые колебания корпуса прибора случайным процессом с нор-
динамическими системами. Тогда угловые колебания поля зрения
по горизонтали (агн) и вертикали (авн) имеют вид
«гн =
»вн=
где IT (Р), (Р), (Р) — передаточные функции горизонтального и верти-
кального каналов стабилизации по углам крена, рыскания н тангажа соответ-
ственно.
Спектральная плотность угловых колебаний поля зрения за-
пишется в виде
где ш — частота вибраций.
166
Зависимость нормированной спектральной плотности угловых
колебаний поля зрения от частоты вибраций прицела с независи-
мой стабилизацией в двух плоскостях показана на рис. 5.19. На
графиках максимумы кривых соответствуют частотам нутацион-
ных колебаний гиростабилизатора (26—30 Гц) и кинематических
элементов прибора (120 Гц).
Среднеквадратичное отклонение амплитуды колебаний поля
зрения ап 3 служит характеристикой виброустойчивости поля
зрения прибора. Для измерения колебаний поля зрения танковых
приборов применяется специальная аппаратура, в которой ис-
пользуются принципы кинографирования или фотоэлектрической
регистрации вибраций поля зрения. У современных танковых при-
боров зп 3 не превосходит 30—40".
Несмотря на то, что амплитуды колебаний поля зрения весь-
ма незначительны, они оказывают отрицательное воздействие на
точность наводки. Повысить виброустойчивость оптических при-
боров в условиях возмущений, возникающих при движении танка,
Рис. 5.19. Зависимость нормирован-
ной спектральной плотности вибра-
ций поля зрения от их частоты;
/ — в плоскости горизонтальной наводки;
1 — в плоскости вертикальной наводки
можно применением поплавковых гиростабнлизаторов, имеющих
Значительно менее выраженный резонанс на частоте нутационных
колебаний; высокочастотные пики кривых спектральной плотнос-
ти колебаний поля зрения можно срезать, увеличив эквивалент-
ную жесткость элементов кинематической связи гиростабилизато-
ра со стабилизируемыми зеркалами.
Другим эффективным способом повышения виброустойчивости
является снижение уровня возмущений на корпусе прибора и по-
давление спектра частот, близких к собственным частотам гиро-
стабилизатора и кинематических связей прибора, путем оптими-
зации параметров подвески прибора.
Выбор параметров подвески основан на результатах динами-
ческого анализа дифференциальных уравнений системы амортиза-
ции, а исходными данными для расчета подвески являются:
ориентировочная кинематическая схема;
наименьшая главная собственная частота гиростабилизатора
/гс»
167
масса прибора m;
моменты инерции прибора относительно главных центральных
осей /х, /у, /ж;
допустимые линейные перемещения корпуса прибора в подвес-
ке при воздействии перегрузок ag\
допустимые угловые перемещения (х„) по углу рыскания
под воздействием приложенного заданного момента PL,
линейные (х, у, г) и угловые (<р, 7, х) ускорения, действующие
на прибор.
Из теории колебаний известно, что для придания колебатель-
ному звену (каким является подвеска прибора) свойств низкоча-
стопного фильтра требуется, чтобы параметры упругих элементов
подвески и их расположение обеспечивали подавление спектра
частот, близких к главным собственным частотам гиростабилиза-
тора и его кинематических соединений, т. е. выполнялись следую-
щие условия:
с,.,.:«2.Лп/гс;
сч. т. 2 *Угс Л. •
где Q с — линейная жесткость системы амортизации по осям £, т), £;
с?_ Т( ж — угловая жесткость системы амортизации по углам тангажа, крена
и рыскания.
Таким образом, расчет подвески прибора сводится к оптимиза-
ции жесткости системы амортизации и ее элементов. Поскольку
система амортизации в конечном итоге должна обеспечивать наи-
меньшие колебания поля зрения, после расчета подвески обычно
делается уточнение параметров ; и 7,х с учетом до-
пустимого среднеквадратичного отклонения амплитуды коле-
баний
К .1-
Рассмотрим в качестве примера расчет системы амортизации прибора, кине-
матическая схема которой представлена на рис. 5.20. Шарнир А представляет
собой вращательно-поступательную пару 4 го класса, а шарниры Б и В —
вращательные пары 5-го класса. Оси всех шарниров параллельны оси цапф
пушки Таким образом, корпус прибора имеет возможность перемещаться по-
ступательно вдоль осн ц и вокруг шарниров А. Б и В на углы и <₽з
соответственно. Кроме того, за счет деформаций осей кронштейнов корпус при
бора имеет еще две степени свободы по углам крена и рыскания.
Для расчета подвески принимаются следующие исходные данные:
/гс = 28 Гц; m - 90 кг 1Хл - 1.04 кгм»;
/ -2,55 кгм’; I, 2,18 кг-м’; ag3 мм; РЛ —13511м; 4'.
х, у, г — 10 м с’; (, х ”20 с-2,
168
а также следующие геометрические размеры элемеатов подвески
I - 0,088 м; Л = 0,030 м; /, = 0,213 м; !3 - 0,160 м; /* 0,075 м;
л,= 0,040 м; о, =; 0,18 к; а, 0.046 м; а4 = 0,167 м.
Потенциальная энергия системы амортизации может быть записана в виде
£р = ~2~ “ ~2~ (<t XJ + г> + fj А* 4- с4 Х^ + 4- сж А?). (5.17)
где li — деформация / го упругого элемента.
Рис. 5.20. Кинематическая схема системы амортизации
При малых отклонениях корпуса прибора от положения статического рав-
новесия упругие элементы получают следующие деформации:
Ха = - | + /3 Т ;
А< = Ч + (G + Л) *
Перемещения корпуса прибора в обобщенных координатах:
е - (И ft 4- (Oj + <h) fj 4- ДзЪ;
1- ч;
С — (I + G) fi + 6 Тз + /а Тз:
f f 1 4- f > + Тз .
откуда
f । — — hvl1 + CM;
f з = 6/Оз — «тТ/вз;
7з= —«з-15 — CM + GhAh + tyA+Uf •
(5.1Я)
(5.19)
12 Зак. ЗМ
169
Подставляя выражения (5.18) в выражения (5.19), получаем деформации
упругих элементов в обобщенных координатах:
К, - а, 6/аз - ai°i f/дз;
(5.20)
С учетом выражений (5.20) выражение (5.17) можно записать в виде
-«,(/+/1Р iihl
где q = с2а,/ а,;
(/ + /!>’ Il
Р
(5.21)
(5.22)
Для совмещения центра жесткости системы амортизации с центром масс
прибора коэффициенты взаимного влияния cv, должны быть све-
дены к нулю.
Очевидно, что — 0, если
сс*е1(/+Л)’/»/(/’/а).
Коэффициенты c5f и сгм сводятся к нулю введением дополнительных
жесткостей с5 (вдоль осн £) и св (вдоль оси т] в задней подвеске). Поэтому
выражения (5.21) можно записать в следующем виде:
сс - cja?/aj + с6;
«С = с, (/ + /,)’///» + с3 ;
(/+/i)’/j
S — с 1 р
(5.23)
ctf----.
Коэффициенты = 0 и cEf — 0, если
св • (6 + U/6; сь “ сз^ ail (°за*) •
(5.24)
170
Подставив приведенные ранее исходные данные в выражения (5.22) —(5.24),
произведя численные расчеты с учетом дополнительных требований к жесткос-
ти, определяемых действующими на прибор перегрузками fnqjag < с с н
РД/хет < см, где q-* (х, у, gj, получаем искомые жесткости элементов под-
вески:
71 кН/м < г, < 330 кН/м; 190 кН/м < г3 < 900 кН/м;
с, = 2.4 с,; 167 кН/м < г* < 510 кН/м; с5 = 0.82 г,;
ск - 1.81 г4; 100 кН -м/рад < сж < 175 кН м/рад;
ст < 175 кН-м/рад.
Таким образом, в рассматриваемом примере диапазон допустимых жест-
костей упругих элементов весьма широк. Для улучшения виброизолнрующих
свойств системы амортизации можно рекомендовать нижнюю границу этого
диапазона.
Приборы командира. Приборы командира должны обеспечи-
вать:
круговой статический обзор с рабочего места командира для
управления огнем и движением собственного танка (подразделе-
ния), а также обнаружения близко расположенных (до 1000 м)
целей;
динамический круговой обзор независимо от положения баш-
ни для расширения возможности обнаружения из танка близких
и удаленных (более 1000 м) целей; • *
целеуказание наводчику с погрешностью не более 1—2 мрад
(т. д.) и полное дублирование стрельбы из оснрвного оружия для
повышения возможностей маневра огнем, быстродействия и на-
дежности комплекса танкового вооружения;
стрельбу по наземным и воздушным целям из вспомогатель-
ного оружия;
оперативную смену режимов работы (переход от дневных ус-
ловий работы к ночным, от стрельбы из дополнительного оружия
к стрельбе из основного оружия).
Состав и характеристики приборов командира зависят от
компоновочных особенностей боевого отделения танка, объема и
габаритов рабочего места командира, расположения других чле-
нов зкипажа в боевом отделении и распределения функций между
ними.
Повышение требований к защите танков привело к увеличению
толщины брони, уменьшению силуэтов танков и их внутренних
объемов, сокращению численности экипажа и количества оптиче-
ских приборов; одновременно значительно возросли требования
к поисковым возможностям экипажа танка, и особенно коман-
дира.
Это связано со скоротечностью боя, увеличением средних и
максимальных скоростей движения танков, уменьшением резерва
времени на выполнение операций при работе с вооружением и
приборами танка, внедрением новых комплексов вооружения,
улучшением маскировки целей, увеличением потока информации,
12*
171
который должен быть обработан экипажем танка. Увеличился
сектор обзора местности, который экипаж танка должен держать
под визуальным контролем при ведении боевых действий. Напри-
мер, командиру в зависимости от вида боевой деятельности необ-
ходимо вести наблюдение за местностью, площадь которой нахо-
дится в пределах от 0,4 до 2 км2 (без учета наблюдения за воз-
душной обстановкой), меняя направление наблюдения.
При натурном моделировании боевой операции по прорыву
танками обороны предполагаемого противника были получены
следующие данные: 95 % времени командир вел наблюдение в
переднем секторе, равном 200°, из них около 70 %—в переднем
секторе, составляющем около 100е. Обзор в переднем секторе
±110® обеспечивался поворотом головы, а в заднем секторе
±70° — изменением позы.
При действиях танка в глубине обороны противника коман-
диру необходимо непрерывно держать под зрительным контролем
все окружающее пространство, поэтому распределение направле-
ний наблюдения будет, по-видимому, близко к равновероятност-
ному закону в диапазоне 360° по ГН.
Как показывают эксперименты, наиболее часто (75—80 %
времени) в процессе наблюдения и поиска целей используются
призменные приборы, при этом, например, центральным при-
зменным прибором, расположенным по оси командирской башен-
ки, командир пользуется около 30 % времени. Призменные при-
боры наблюдения на рабочем посту командира танка являются
в настоящее время основным средством обеспечения кругово-
го статического обзора.
Исходя из тактических и эргономических требований призмен-
ные приборы устанавливаются таким образом, чтобы большая
часть угла (200°) в переднем секторе наблюдалась командиром
без изменения положения туловища, т. е. только при повороте го-
ловы и глаз. По условиям компоновки допускается на второстепен-
ных направлениях наблюдения использование вспомогательных
приборов, которые требуют изменения позы командира.
Выходные зрачки окуляров центрального прибора командира
и выходные окна призменных приборов следует разместить на од-
ном уровне для обеспечения максимально возможных углов обзора
и удобства работы с приборами. Для просмотра местности на ми-
нимальных расстояниях (8—20 м) с ходу углы обзора с рабочего
места командира по ВН с учетом колебаний танка должны состав-
лять не менее 25°.
Призменные приборы обеспечивают обнаружение и опознава-
ние целей на дальности до 1000 м. Малоразмерные танкоопасные
цели, например установки ПТУРСов, могут располагаться на значи-
тельно больших расстояниях.
Для обнаружения и опознавания удаленных целей, ведения
стрельбы из оружия танка и выполнения ряда других функцио-
нальных задач предназначен прибор с многократным увеличением,
172
который более эффективно используется при двухплоскостной
стабилизации поля зрения, обеспечивает полное дублирование
прицела наводчика при управлении основным оружием и имеет
рациональную схему управления дополнительным оружием.
Повышение точности целеуказания при обнаружении цели ко-
мандиром является одним из резервов уменьшения времени подго-
товки первого выстрела. Точное согласование марки прицела на-
водчика с целью (погрешность не более 2 мрад) после целеуказа-
ния уменьшает время обнаружения цели наводчиком и наводки
на 15—20 %.
Выбор схемы дублированного управления огнем из основного
оружия, осуществляемого командиром, зависит от компоновочных
особенностей танка, конструкции основного прибора командира и
требований к системе ДУО.
Режим ДУО реализуется различными способами. При установ-
ке на рабочем месте командира отдельного прибора, связанного
с орудием, обеспечивается высокая точность передачи углов и
принципиальная возможность ввода углов прицеливания и упреж-
дения от ТБВ, однако при этом требуются дополнительные объемы
в боевом отделении. Для перехода с центрального прибора, распо-
ложенного в командирской башенке, на прибор ДУО затрачивается
дополнительное время, в том числе дл% повторного отыскания
цели в поле зрения прибора ДУО. Для исключения этого недостат-
ка применяется оптическая приставка к основному прибору коман-
дира, которая соединяется параллелограммом с’орудием. Прицели-
вание производится через окуляр основного прибора командира.
На зарубежных танках используются коллимационный способ
ввода положения орудия в основной прибор (танк «Чифтен») и
электрическая связь прибора с орудием (танки типа «Леопард»).
При расположении наводчика и командира в боевом отделении
друг за другом применяется предназначенная для командира оп-
тическая приставка к основному прицелу наводчика (танк М-1).
Для круглосуточного наблюдения центральный командирский
прибор, как правило, выполняется комбинированным и включает
в себя дневной и ночной каналы.
Дальность действия прибора ночью ограничивается габарита-
ми оптической схемы, размещаемой в приборе, характеристиками
приемно-преобразовательного устройства (ЭОП, фотоприемники
и т. д.) и осветителя для активных режимов работы приборов.
Опыт разработки командирских приборов и компоновочных
проработок их установки в танках показывает, что рациональные
(максимально возможные) диаметры их объективов, удовлетвори-
тельно размещаемых внутри боевого отделения, находятся в преде-
лах от 80 до 100 мм.
Для решения перечисленных функциональных задач и удов-
летворения ТТТ приборы командира размещаются во вращающей-
ся командирской башенке или применяется панорамный прибор
173
с неограниченным углом поворота головки в плоскости горизон-
тальной наводки, устанавливаемый в башне неподвижно.
Классификация командирских приборов с увеличением приве-
дена на рис. 5.21. Установка приборов командира в башенке
(рис. 5.22) обеспечивает: непрерывное наблюдение благодаря раз-
вороту башенки в секторе вышедшего из строя призменного прнбо-
РиС| 5.21. Классификация командирских приборов с увеличением
ра через сохранившийся прибор; свободный доступ к оборудова-
нию, расположенному в передней части боевого отделения на рабо-
чем месте командира, при отведении центрального прибора в сто-
рону; стрельбу из зенитного пулемета, расположенного на башен-
ке, при закрытом люке (с использованием зенитного прицела с
окуляром внутри боевого отделения) или при открытом люке
(с выходом командира и прицеливанием через коллиматорный при-
цел, установленный на пулемете).
При компоновке командирских башенок необходимо предусмат-
ривать свободное пространство в зоне поворота центрального ко-
мандирского прибора при вращении башенки, что вызывает сни-
жение коэффициента полезного использования объема боевого от-
деления. Размещение приборов на определенном расстоянии от
оси вращения башенки приводит к ее неуравновешенности, что зат-
рудняет наблюдение с ходу при отсутствии привода горизонталь-
ной наводки башенки.
174
г
Поле зрения серийных командирских приборов, устанавливае-
мых в башенках, при колебаниях башни танка удерживается в нап-
равлении наблюдения по ГН вручную прокачкой корпуса прибора
вокруг горизонтальной оси, что также затрудняет наблюдение и
обнаружение целей с ходу, требует больших энергозатрат коман-
дира.
Рис. 5.22. Установка приборов в ко-
мандирской башенке:
1 — центральный прибор; 2 — осветитель-
ный прибор; 3 вспомогательный при-
зменный прибор; 4 — основной призмен
ный прибор
Рис. 5.23. Установка командирских при-
боров при комбинированной панораме:
/ — панорамный прибор; 2 — призменные при-
боры ; 3 — осветитель
Приборы командира и его рабочее место во вращающихся ко-
мандирских башенках совершенствуются в следующих направле-
ниях:
вводятся система стабилизации поля зрения и однократная
призменная ветвь в центральный прибор;
вводятся режимы ДУО и пассивно-активный в ночных условиях;
предусматривается отдельный зенитный прицел для стрельбы
из зенитного пулемета при закрытом люке.
175
Эти мероприятия обеспечивают непрерывный статический об-
зор через призменные приборы и однократный призменный канал
центрального прибора в переднем секторе, увеличение дальности
действия в дневных и ночных условиях, в том числе при наблюде-
нии с ходу. Прибор командира устанавливается без прокачки, и
вводится привод горизонтальной наводки башенки. Пассивные ре-
жимы основного прибора в ночных условиях и ДУО позволяют ис-
ключить осветитель для активного режима, так как большую часть
темного времени суток командир может вести наблюдение в пас-
сивном режиме; при необходимости для подсветки цели может
применяться высокоинтенсивный осветитель наводчика при перек-
лючении управления основным оружием на командира.
Применение комбинированного (дневно-ночного) панорамного
прибора (рис. 5.23) позволяет улучшить возможности и условия
наблюдения при сохранении одинаковых с башенкой объемов ра-
бочего места командира. Это связано с возможностью некоторого
увеличения габаритных размеров прибора и диаметра входного
объектива ночного канала, введения панкратического увеличения
в дневном канале н двухплоскостной стабилизации поля зрения.
Прибор устанавливается неподвижно, поэтому не нужно свобод-
ное пространство для его поворота, уменьшается диапазон рабочих
движений командира, а следовательно, и уровень его энергозатрат
в процессе боевой деятельности.
Панорамный прибор позволяет дублировать прицел наводчика
при управлении пушкой, обеспечивать стрельбу из зенитной уста-
новки (ЗУ) с ходу и наблюдение в дневных и ночных условиях,
автоматическое введение углов прицеливания и упреждения от
ТБВ при стрельбе из основного и дополнительного оружия, изме-
рение дальности с помощью панкратического базового дальноме-
ра без изменения точки прицеливания, высокоточное целеуказание
(погрешность I—2 мрад) и круговой динамический обзор.
Головка панорамного прибора должна находиться на большей
высоте по сравнению с приборами, установленными в башенке,
т. е. так, чтобы призменные приборы, неподвижно установленные
в башие, не мешали наблюдению. В связи с этим панорамный при-
бор должен иметь ббльшую, чем призменные приборы, периско-
пичность. У его головки образуется зона, непросматриваемая через
однократные призменные приборы, поэтому желательно иметь
в панорамном приборе однократный призменный канал.
Наблюдение в секторе вышедшего из строя призменного прибо-
ра может осуществляться командиром только при замене этого
прибора или в результате разворота всей башни.
Поскольку панорамный прибор, в отличие от приборов в ко-
мандирских башенках, устанавливается неподвижно, его стре-
мятся сконструировать таким образом, чтобы доступ к механизмам,
расположенным в передней части боевого отделения, был свобод-
ным. При наблюдении в панорамный прибор требуется специаль-
ная система ориентации оператора в положении головки (линии
176
визирования) относительно направлений движения и стрельбы
(положения башни). Дальнейшее усовершенствование рабочего
места командира на основе вращающихся командирских башенок
и панорамных приборов ведется в направлении комллексирования
оптических дневных и комбинированных приборов с приборами,
основанными на других физических принципах, включая тепло-
пеленгаторы и тепловизоры, телевизионные круглосуточные кана-
лы, лазерную подсветку. Например, разделение функций между
дневной оптической панорамой со стабилизированным полем зре-
ния и круглосуточным телевизионным (ТВ) каналом позволяет,
сохранив основные функции наблюдения, целеуказания и дублиро-
вания в дневных условиях за панорамным прибором, обеспечивать
стрельбу по воздушным целям и наблюдение ночью с помощью
замкнутого телевизионного канала.
Комплексирование дневного панорамного прибора и круглосу-
точного ТВ-канала обеспечивает:
упрощение конструкции и уменьшение (в два — три раза) габа-
ритных размеров панорамного прибора и его входного окна, так
как исключается ночной канал, головная призма может прокачи-
ваться на меньшие углы;
точное согласование ЗУ и передающей камеры ТВ-канала;
удобное наблюдение двумя глазами изображения на экране
ночью и при стрельбе по зенитным целям»
Этот вариант конструкции обеспечивает более гибкие компоно-
вочные решения по сравнению с командирской башенкой и комби-
нированной панорамой. •
При уменьшении размеров прибора, и особенно его головной
части, улучшается доступ к механизмам боевого отделения, а так-
же уменьшается непросматриваемая зона в переднем секторе.
В случае размещения передающей камеры ТВ-канала на ЗУ
наводчик тоже может стрелять из нее (при установке на его рабо-
чем месте видеомонитора). Недостатками конструкции являются
меньшие надежность и живучесть вследствие наружного располо-
жения ЗУ, усложнение электронных схем, необходимость наводки
ЗУ при наблюдении ночью.
Танковые приборы ночного видения (ПНВ). Классификация
ПНВ приведена на рис. 5.24. ПНВ различаются по способу преоб-
разования изображения (ПНВ прямого действия, в которых преоб-
разование изображения осуществляется одновременно по всему
нолю зрения, и последовательного действия, в которых преобразо-
вание изображения осуществляется поэлементно за счет сканиро-
вания), по конструктивному исполнению, как правило, по типу при-
емников и преобразователей лучистой энергии (электронно-опти
чес кий преобразователь — ЭОП, телевизионные передающие труб-
ки, фоторезисторы, фотодиоды и т. д.).
Активные ПНВ с непрерывной подсветкой наиболее широко ис-
пользуются в современных отечественных и зарубежных танках.
Конструктивно они состоят из двух основных блоков: прибора
177
с ЭОП и прожектора или фары с инфракрасным светофильтром,
объединяемых общим понятием ИК-осветитель. В комплект ряда
ПНВ дополнительно входят автономные блоки питания.
Рис. 5.24. Классификация ПНВ
Один из наиболее важных параметров — дальность Д опозна-
вания (обнаружения) целей активными ПНВ — является функци-
ей многочисленных факторов и их сочетаний, значительная часть
которых имеет случайный характер:
Д — f(c, m, k, s, A, n),
где c — характеристики мишенной обстановки (размеры, форма, ориентация,
скорость перемещения цели, ее контраст относительно фона, яркость фона);
m — метеорологические условия наблюдения (уровень и направленность естест-
венной нбчной освещенности — ЕНО, степень ослабления используемого излу-
чения приземным слоем атмосферы); k — конструктивные параметры ПНВ (па-
раметры оптической схемы и ЭОП, из которых наиболее важными являются
диаметр объектива, чувствительность и коэффициент преобразования ЭОП,
частотноконтрастные характеристики оптических элементов и ЭОП); а —харак-
теристики ИК-осветителя (энергия, спектральное и пространственное распреде-
ление излучения, база — расстояние между оптической осью осветителя и ли-
нией визирования ПНВ); Л — характеристика наблюдателя (тренированность,
утомленность, предварительный инструктаж, контрастная чувствительность,
острота зрения и цветоощущение зрительного анализатора); п — эргономиче-
ские показатели танка (освещенность в кабине наблюдателя, шумы и вибрации
танка, вибрации изображения или наблюдателя).
178
Аналитические методы расчета дальности опознавания (обна-
ружения) ПНВ требуют большого количества исходных данных,
значительная часть которых может быть получена только экспери-
ментальным путем. Поэтому основной метод определения даль-
ности опознавания (обнаружения) ПНВ — испытания в натурных
условиях. Дальность опознавания современными активными ПНВ
колеблется от 400 до 1500 м в зависимости от размера объектива
и параметров ИК-осветителей; ПНВ водителя позволяют наблю-
дать полотно дороги на дальности 50—80 м.
Основным недостатком активных ПНВ является необходимость
использования ИК-ооветителей, которые демаскируют танк перед
противником, оснащенным простейшими ПНВ. Большие размеры
осветителей, устанавливаемых, как правило, вне бронированного
объема, обусловливают их высокую уязвимость стрелковым оружи-
ем, осколками снарядов, ударной волной ядерного взрыва. Наблю-
дение возможно в пределах относительно небольшого участка, ос-
вещаемого прожектором или фарой, что затрудняет ориентирова-
ние и усложняет поиск целей.
Рис. 5.25. Зависимость
спектральных характерис-
тик чувствительности фо-
токатодов от длины волны:
I — мультжщелочвой фотокатод
(пассивные ПНВ); 2 —мульти-
щелочкой фотокатод с продлен-
ной ИК-чувстжительиостыо (пас-
сивно-активные ПНВ); 9 — фото-
катод на OaAs (пассивно-ак-
тивные ПНВ); 4 —фотокатод на
Оя1пАмР (пассивно-активные
ПНВ); 9 — кислородно-цезиевый
фотокатод (активные ПНВ)
Пассивные ПНВ отличаются от активных большей степенью
маскировки, надежности и меньшим энергопотреблением (в ре-
зультате исключения ИК-осветителей). Возможность создания пас-
сивных ПНВ появилась после разработки высокочувствительных
мультищелочных фотокатодов (кривая / на рис. 5.25) и каскадных,
а позднее и канальных ЭОП. Конструктивная схема этих приборов
подобна активным ПНВ, но они не нуждаются в подсветке мест-
ности и целей ИК-осветителями.
В зависимости от размеров входного объектива дальность опоз-
навания современными пассивными ПНВ командира и наводчика
изменяется от 400 до 1200 м, приборы водителя обеспечивают ви-
димость полотна дороги на дальности до 120 м. Однако при дос-
тигнутой в настоящее время чувствительности входных фотокато-
дов ЭОП пассивные ПНВ обеспечивают возможность наблюдения
17»
лишь до уровней ЕНО 1—5-10 ~3 лк, что составляет 30—60 % го-
дового фовда темного времени суток. При меньших уровнях ЕНО
дальность опознавания (обнаружения) ПНВ резко уменьшается.
Пассивно-активные ПНВ появились вследствие невозможности
создания на основе ЭОП пассивных ПНВ, обеспечивающих уве-
ренное наблюдение при уровнях ЕНО, меньших 1 • !0*3 лк. Эти
ПНВ выполняются либо на двух ЭОП с различными фотокатода-
ми, каждый из которых обеспечивает один из режимов работы, ли-
бо на одном ЭОП с мультищелочным фотокатодом повышенной
чувствительности (кривая 2 на рис. 5.25).
2000 U000 6000 8000*8".»
Рис. 5.26. Зависимость дальнос-
ти опознавания Д приборов ноч
ного видения от метеорологиче-
ской дальности видимости SM:
/—для импульсного ПНВ; Г —для пас-
сивного ПНВ (ЕНО - I 10~3ль)
Рис. 5.27. Характеристики видимого
и ближнего НК-диапазона спектра:
I — спектральная плотность яркости свече-
ния ночного неба; f — спектральный коэф-
фициент пропускания атмосферы х <Х>; a —
спектральный коэффициент яркости штат-
ной краски XB 616 р (X)i 4 ~ спектральный
коэффициент яркости луговой залйии г (Л)
Этим приборам, а также активным и пассивным ПНВ на ЭОП
присущ ряд общих недостатков, существенно ограничивающих
действия танков в ночных условиях. Низкая помехозащищенность
ПНВ от локальных световых помех (вспышек выстрелов, излучения
прожекторов, фар, трассеров снарядов, двигателей УРС и т. п.)
обусловливает потерю видимости в ПНВ после прекращения воз-
действия помехи в течение 3—5 с, что затрудняет вождение и на-
блюдение результатов стрельбы.
ПНВ очень чувствительны к ухудшению метеоусловий
(рис. 5.26). При этом уменьшение дальности опознавания (обнару-
жения) ПНВ в неблагоприятных метеоусловиях не может быть
существенно компенсировано ни применением более светосильных
оптических элементов, ни ЭОП с большим коэффициентом преоб-
разования, ни увеличением энергии излучения ИК-осветителей.
Эти ПНВ малоэффективны при наблюдении замаскированных це-
лей вследствие малого контраста последних.
180
Увеличение дальности опознавания (обнаружения) и расшире-
ние рабочего диапазона ЕНО в сторону нижней границы может
быть достигнуто при использовании высокоэффективных полупро-
водниковых фотокатодов на основе арсенида галлия (uaAs) и фос-
фида арсенада галлия индия (GalnAsP), имеющих существенно
более высокую по сравнению с мультищелочными фотокатодами
чувствительность, простирающуюся в ближний инфракрасный ди-
апазон спектра, благоприятный, как это видно из графиков
(рис. 5.27 и 5.25, кривые 3 и 4), по интенсивности излучения ночно-
го неба, пропусканию атмосферы и контрасту целей, а также фо-
новых образований. Фотокатоды на GaAs в 10 раз, а на GalnAsP
в 20 раз эффективнее известных мультищелочных фотокатодов.
Внедрение этих фотокатодов позволит увеличить дальность опо-
знавания ПНВ в 13—1,8 раза без увеличения габаритов приборов.
Наряду с применением новых фотокатодов увеличение дальности
опознавания ПНВ при работе в активном режиме может быть до-
стигнуто и в результате повышения интенсивности излучения тан-
ковых ИК-осветителей. Практически все известные танковые ИК-
прожекторы разработаны на основе ксеноновых газоразрядных
ламп, отличающихся интенсивным излучением как в видимой, так
и в ближней ИК-области спектра.
Значение осевой силы света прожектора с отражательной свето-
оптической системой может быть определено из уравнения
/ — TjAfB£,
где /—осевая сила света, кд; т, — коэффициент полезного действия (п —
= 0.4...0,6); Дс,— площадь светового отверстия, м*; В — габаритная яркость
тела накала излучателя, кд/м*.
Высокая яркость разрядной плазмы (до 109 кд/м1) ксеноно-
вых газоразрядных ламп сверхвысокого давления позволяет созда-
вать танковые прожекторы с осевой силой света в десятки мил-
лионов кандел, в то время как осевая сила света осветителей на
лампах накаливания не превышает нескольких миллионов кан-
дел. К тому же ксеионовые лампы сохраняют постоянство свето-
вого потока в течение длительного времени и имеют в несколько
раз ббльший, чем у ламп накаливания, срок эксплуатации.
В конструктивном исполнении прожекторы на ксеноновых лам-
пах — трудоемкая и дорогостоящая аппаратура со сложными схе-
мами питания ксеноновых газоразрядных ламп, дистанционными
автоматическими устройствами для изменения спектра, интенсив-
ности и угла светорассеяния, а также системами охлаждения для
отвода тепла от них.
Телевизионные ПНВ, создаваемые, как правило, на основе ва-
куумных телевизионных передающих трубок, сочлененных с ЭОП,
близки по дальности опознавания (обнаружения) к ПНВ на ЭОП
(при одинаковых параметрах входных оптических элементов) и
обладают теми же недостатками. Однако развязка входной и вы-
ходной частей прибора при минимальных габаритах канала связи
181
между ними, имеющая место в телевизионных ПНВ, обеспечивает
широкие возможности компоновки оборудования и расположения
экипажа. Одновременное воспроизведение изображения на экра-
нах нескольких видеоконтрольных устройств позволяет продубли-
ровать функции членов экипажа и уменьшить их утомляемость
благодаря исключению строгой фиксации головы в процессе наб-
людения и обеспечению биокулярного зрения. Телевизионные
ПНВ хорошо комплексируются с танковыми автоматизированными
СУО при электронном формировании прицельных марок, управля-
емых ТБВ. Телевизионный принцип разложения изображения объ-
екта позволяет создавать на основе телевизионных ПНВ системы
автоматического сопровождения целей.
К недостаткам существующих телевизионных ПНВ следует от-
нести большие габаритно-массовые размеры. Однако успехи, дос-
тигнутые в развитии твердотельных телевизионных преобразовате-
лей свет — сигнал на основе приборов с зарядовой связью (ПЗС)
позволяют надеяться на широкое распространение в будущем но-
вого вида телевизионных ПНВ, отличающихся от предшественни-
ков значительно ббльшей компактностью, меньшими стоимостью и
энергопотреблением. Приборы с зарядовой связью представляют
собой малогабаритные фотопреобразовательные устройства мат-
ричного типа с кремниевой мишенью, чувствительной в области
спектра 0,4—1,! мкм, в котором осуществляется самосканирование
и предварительное усиление, в результате чего двухмерное изобра-
жение преобразуется в последовательность электрических им-
пульсов.
Импульсные ПНВ основаны на использовании метода прост-
ранственной селекции, позволяющей выделить из большого числа
информации, поступающей в визуальный канал ПНВ, только ин-
формацию о цели и небольшом участке окружающего ее простран-
ства. Подсветка цели и местности в импульсных ПНВ осуществля-
ется короткими зондирующими импульсами длительностью
100—200 нс, формируемыми источником светового излучения
(рис. 5.28) и следующими с большой частотой повторения (до
10 кГц), задаваемой генератором. В качестве источника излуче-
ния, как правило, применяют лазеры, выгодно отличающиеся от
газоразрядных ламп меньшими габаритными размерами и энерго-
потреблением при более высокой частоте следования импульсов,
большей энергетической яркости и строгой монохроматичности
излучения. Отраженные от цели и местности световые импульсы
поступают на приемник ПНВ (ЭОП или передающую телевизион-
ную трубку), снабженный электронным затвором, управляемым ге-
нератором через регулируемую линию задержки. Время задержки
(27’1, 2Гг) отраженного импульса относительно зондирующего оп-
ределяет дальность цели, а длительность импульса и время откры
того состояния затвора (время выдержки) — глубину наблюдаемо-
го в каждый конкретный момент времени пространства. Измерс-
182
ние дальности цели осуществляется в приборе автоматически по
формуле
Дц = сГэ/2,
где Дц — дальность цели, м; с —скорость света, м/с; Г3 — время задержки, с.
Варьируя время задержки и выдержки, оператор может наблю-
дать местность, избегая засветки ПНВ рассеянным излучением, и
выделить цель на слабоконтрастиом фоне, наблюдая теневое изоб-
ражение.
Импульсные ПНВ значительно слабее реагируют на ухудшение
метеоусловий и имеют в 1,5—2 раза большую дальность опознава-
ния по сравнению с ПНВ на ЭОП непрерывного действия (см.
рис. 5.26).
Высокая монохроматичность излучения лазерных осветителей
позволяет оснастить оптическую систему визуального канала уз-
кополосным интерференционным светофильтром, согласованным
с длиной волны лазерного излучателя, и ослабить сигнал световой
помехи до 105 раз. Этого вполне достаточно для исключения зас-
ветки поля зрения импульсных ПНВ маршевыми двигателями
ПТУРСов, при этом ПТУРСы могут наводиться по пятну лазер-
ного излучателя ПНВ.
Однако поиск целей импульсными ПНВ затруднен из-за малых
углов поля зрения (от долей до 4°), обусловленных ограничен-
ной мощностью компактных лазеров, и глубины наблюдаемого
в конкретный момент времени пространства. По конструктивному
исполнению импульсные ПНВ — это сложные и дорогостоящие
приборы.
183
Тепловые ПНВ основаны на восприятии и преобразовании соб-
ственного теплового излучения объектов наблюдения — визуализа-
ции теплового контраста между целью и окружающей средой. Для
тепловых ПНВ используются два окна прозрачности атмосферы
от 3 до 5 и от 8 до 13 мкм: в этих спектральных диапазонах атмос-
фера обладает наименьшим поглощением лучистой энергии.
Для наземных целей, температура которых отличается от тем-
пературы окружающей среды всего на несколько градусов (реже
на десятки градусов), ббльшая часть теплового излучения прихо-
дится на второе окно прозрачности атмосферы (рис. 5.29).
Рис. 5-29. Характеристики среднего ИК-днапазона спектра и приемников
излучения:
/ — спектральная обнаружительная способность пироэлектрического приемника излучения
при температуре ЧП *С (о*) ; 1— спектральная обнаружительная способность приемника
излучения на HyCdTe при температуре -196 °C (о*) ; J - спектральная обнаружительная
способность приемника излучения на PbSe при температуре —78 "С / — спектраль
пая обнаружительная способность приемника излучения на !nSb при температуре —196 *С
(°х) • 5 “ спектральный коэффициент пропускания атмосферы т (X) ; 6 — относительная
спектральная плотность собственного теплового излучения абсолютно черного тела при
температуре ЧП “С b (1)
Преимуществами тепловых ПНВ по сравнению с другими пас-
сивными прицелами являются:
работоспособность в любое время суток в неблагоприятных по-
годных условиях (дымка, слабый туман);
возможность обнаружения и опознавания целей, скрытых ред-
кой растительностью, маскировочными сетями, дымами;
помехозащищенность от воздействия локальной засветки.
Это связано с эффективной передачей контраста, работой в оп-
тимальных окнах прозрачности атмосферы и в спектральном диа-
пазоне, далеком от максимума излучения источников световых по-
184
мех, меньшей степенью аэрозольного ослабления теплового излуче-
ния по сравнению с видимым.
Достаточно подробные сведения по физическим основам и кон-
структивному исполнению тепловых средств наблюдения содер-
жатся в монографиях Хадсона и Ллойда.
По функциональному назначению тепловые ПНВ подразделя-
ются на тепловые обнаружители (ТПО) и те п ловизо-
р ы. Тепловые обнаружители более просты и компактны, но позво-
ляют лишь выявлять наличие цели в поле зрения прибора. Они
комплексируются, как правило, с приборами наблюдения на иных
физических принципах — прицелами дневного видения, ПЧВ на
Рис. 5.30. Принципиальная схема* тепловизора
/ — объект наблюдения; 7-объектив; 3 — устройство сканирования; 4 — приемник нзлуче
имя; 5 — холодильник; 6 — блок электронной обработки сигналов; 7 - видеоконтрольное уст-
ройство
ЭОП, телевизионными ПНВ и позволяют увеличивать обнаружи-
тельные способности последних при выявлении замаскированных
целей и при действиях в неблагоприятных метеоусловиях. Даль-
ность- действия известных современных ТПО достигает 1500—
2000 м. Тепловизоры обеспечивают визуализацию контура и темпе-
ратурных полей по объекту наблюдения, что достаточно для его
опознавания.
Одна из возможных принципиальных схем тепловизора пред-
ставлена на рис. 5.30. ИК-излучение от наблюдаемого объекта по-
падает в устройство сканирования, откуда направляется на много-
элементный охлаждаемый приемник ИК-излучения, содержащий
до 50 и более детекторов. Сигналы с приемника поступают в элект-
ронный блок, где усиливаются, преобразуются и подаются па ви-
деоконтрольное устройство.
Изображения на экранах тепловизоров весьма специфичны и
требуют специальной тренировки операторов. Тепловое изображе-
ние практически не имеет теней, поэтому пространственное воспри-
185
ятйе в них хуже. К тому же хорошо излучающие цели, как пра-
вило, обладают низким коэффициентом отражения видимого
излучения, так что яркие участки теплового изображения могут
оказаться темными в видимом спектре и наоборот.
Приемники ИК-излучения тепловых ПНВ, особенно для пред-
почтительного спектрального диапазона 8—13 мкм (см. рис. 5.29),
нуждаются в сильном охлаждении (до— 196 °C). Неохлаждаемые
пироэлектрические приемники, применяемые в некоторых ТПО,
значительно уступают охлаждаемым по чувствительности и непри-
годны для создания тепловизоров с требуемой дальностью дейст-
вия 2000—2500 м.
Приемники излучения спектрального диапазона 3—5 мкм ме-
нее критичны к охлаждению, а некоторые из них могут функциони-
ровать при температуре от — 128 до — 83 °C, создаваемой компакт-
ными термоэлектрическими охлаждающими устройствами. Однако
тепловизоры на э?их приемниках при одинаковых размерах вход-
ных оптических элементов уступают тепловизорам на приемниках
спектрального диапазона 8—13 мкм по дальности опознавания (в
1,3—1,5 раза) и по степени проработки фоновой обстановки.
Из анализа особенностей различных видов ПНВ можно сде-
лать вывод, что ни один из них не является универсальным, отве-
чающим в полной мере всей совокупности требований, предъявля-
емых к ПНВ. В наибольшей степени этим требованиям отвечают
пассивные тепловизионные системы, имеющие максимальные по
отношению к другим ПНВ дальности опознавания (до 2000 м) и
обнаружения (до 3000 м), обеспечивающие возможность наблюде-
ния целей в неблагоприятных метеоусловиях, разведку целей,
скрытых редкой растительностью, маскировочными сетями, дыма-
ми, отличающиеся помехозащищенностью от локальной засветки,
достаточной для использования тепловизоров в качестве прицелов
не только для артиллерийского оружия, но и ПТУРСов.
Недостаточная эффективность тепловизоров при выравнивании
температуры наблюдаемых объектов и фона вследствие высокой
увлажненности или загрязненности объектов может быть компен-
сирована комплексированием тепловизоров с ПНВ, основанными
на других физических принципах.
Оптимальным можно считать комплексирование тепловизоров
с телевизионными ПНВ, позволяющее использовать общие блоки
электронной обработки сигналов и видеоконтрольные устройства
на рабочих местах членов экипажа. Подобные весьма сложные и
дорогостоящие приборы наиболее целесообразны в качестве об-
щих прицельных устройств командира и наводчика.
Комбинированный ПНВ панорамного обзора командира, к ко-
торому предъявляются жесткие ограничения по габаритно-массо-
вым параметрам, вероятно, и в дальнейшем будет изготовляться
пассивно-активным на основе ЭОП, как наиболее простой и ком-
пактный. Ограниченная дальность опознавания прибора (1000 м)
при приемлемых габаритных размерах может компенсироваться
186
наличием на рабочем месте командира видеоконтроЛьного устрой-
ства прицела наводчика. Для повышения разведывательных спо-
собностей командира целесообразно оснастить его пассивно-актив-
ный ПНВ компактным ТПО с дальностью обнаружения до 2000 м.
Для оснащения рабочих мест водителя в 80—90 гг. будут ис-
пользоваться пассивно-активные ПНВ на ЭОП. К основным на-
правлениям совершенствования этих ПНВ относятся увеличение
угла поля зрения до 70° и обеспечение безокулярного (экранного)
наблюдения.
5.4. ПРИВОДЫ НАВОДКИ И СТАБИЛИЗАТОРЫ
ТАНКОВОГО ВООРУЖЕНИЯ
Основные показатели качества. Приводы наводки предназначе-
ны для придания оружию необходимого положения в пространстве.
Наиболее распространенный способ наводки оружия — поворот
платформы, на которой оно установлено (башни, башенки, турель-
ной установки), в горизонтальной плоскости и самого оружия от-
носительно платформы — в вертикальной. В соответствии с этим
различают приводы вертикальной (по ВН) и горизонтальной
(по ГН) наводки.
Чтобы повысить точность стрельбы с ходу, в состав приводов
наводки включают устройство, обеспечивающее стабилизацию
оружия и измерение его отклонений от заданного направления, а
также регулятор, формирующий закон управления приводом
в замкнутом контуре автоматического регулирования. Привод на-
водки с функцией стабилизации оружия называют стабилизатором
танкового вооружения (СТВ).
Основным показателем качества приводов наводки является
скорость наводки (минимальная, максимальная, перебросочная).
В СТВ к этому показателю добавляется точность стабилизации —
качественная оценка стабилизации оружия, отражающая степень
приближения углового положения оружия к заданному относи-
тельно цели положению. Точность стабилизации оценивается зна-
чением погрешности стабилизации, характеризующей угловое от-
клонение стабилизированного оружия танка от заданного относи-
тельно цели положения при нейтральном положении органов уп-
равления. Важными показателями качества СТВ являются также
эффективная частота колебаний стабилизированной пушки и мак-
симальная скорость отработки привода. Эффективная частота слу-
жит приближенной характеристикой спектрального состава пог-
решности стабилизации. Максимальная скорость отработки отра-
жает кинематические возможности стабилизации оружия при ко-
лебаниях корпуса танка. При недостаточном значении этой ско-
рости оружие будет отклоняться от стабилизированного направ-
ления.
Требования к основным показателям качества СТВ и приводов
наводки должны быть обусловлены допустимым значением погреш-
187
ноети наводки орудия в момент вылета снаряда из канала ствола
(момент выстрела) и временем подготовки выстрела.
Влияние характеристик СТВ на точность наводки пушки в мо-
мент выстрела. Точность наводки на цель стабилизированного ар-
тиллерийского орудия зависит от структуры СУО: с зависимой
(ЗЛП), независимой (НЛП) или с полузависимой (зависимой
в одной плоскости и независимой в другой) линией прицеливания.
Контуры наводки СУО с ЗЛП и НЛП имеют идентичные по
структурным связям системы слежения за целью. В систему слеже-
ния входят человек-оператор (наводчик), машинная часть, включа-
ющая в себя орган управления, и стабилизатор. Контур наводки
для СУО с ЗЛП совпадает с системой слежения за целью, а для
СУО с НЛП к этой системе слежения добавляется также система
слежения привода орудия за линией прицеливания, имеющая спе-
циальное устройство, ограничивающее погрешность в момент раз-
решения выстрела. Таким образом, в режиме наводки для обоих
типов контуров существует общность формирования погрешностей,
обусловленных системами слежения.
Существенными особенностями этих систем являются:
наличие в них наводчика как звена замкнутого контура, осу-
ществляющего слежение за подвижной и неподвижной целью;
действие на вс£ основные элементы контура, включая операто-
ра, интенсивных возмущений, вызывающих появление случайных
помех, искажающих входные и управляющие воздействия.
В общем случае на систему действуют регулярный входной
сигнал (средняя относительная скорость цели) и случайные вход-
ные сигналы (погрешность СТВ как помеха на входе, флюктуации
относительной скорости цели), а также случайная помеха, обус-
ловленная колебаниями пульта управления из-за действия на на-
водчика механических возмущений (рис. 5.31).
Физические основы формирования погрешности наводки. При
фронтальном движении и малом уровне помехи от наводчика
(квазистационарные условия движения) регулярная составляю-
щая сигнала на входе контура равна нулю, и процесс прицелива-
ния определяется только погрешностью стабилизации и флюктуа-
цией скорости цели. При повышенной скорости движения танка
(более 20 км/ч) сказывается влияние помехи от наводчика через
канал пульта управления (ПУ). 0граниченные динамические воз-
можности человека обусловливают сравнительно малый диапазон
частот входных колебаний порядка 1 рад/с, надежно отрабатыва-
емых системой слежения. При большей частоте колебаний (навод-
чик практически не реагирует на изменение положения марки от-
носительно цели, и процесс слежения в этом случае сводится к
удержанию марки в некотором среднем положении, определяемом
наводчиком по размахам колебаний.
Таким образом, регулярные и низкочастотные входные сигналы,
включая и уводы гиродатчика, могут отрабатываться наводчиком
в замкнутом контуре практически без погрешности.
188
Внешняя нелинейная характеристика системы определяет за-
висимость скорости наводки от угла поворота ПУ. Ее зону нечув-
ствительности определяет достигнутый уровень минимальной ско-
рости наводки. При навадке со скоростью, меньшей достигнутого
минимального уровня, оператор совмещает марку с целью рывка-
ми, выходя за зону нечувствительности скоростной характерис-
тики и возвращаясь в нее, увеличивая тем самым погрешность
наводки. С увеличением регулярной составляющей скорости цели
слежение производится с большим коэффициентом усиления замк-
нутой системы за счет смещения рабочей точки вверх по парабо-
лической внешней скоростной характеристике. Это приводит к уве-
личению колебательности данной системы при наводке и к воз-
растанию погрешности отработки случайных входных сигналов.
Рис. 5^31. Структурная схема системы слежения:
— относительная скорость цели; #CT — погрешность стабилизации; «а — помеха от па-
подчнха' а — угол поворота пульта управления; — скорость увода гиродатчика;
»сд — погрешность слежения; ®н — скорость наводки; 1Fa — динамический оператор навод-
чика; — динамический оператор стабилизатора; IFf-jy — динамический оператор пульта
управления; Т„ Т„ Т, — постоянные времени; — параметры затухания; ч —чистое за-
паздывание наводчика; S — оператор Лапласа
Основные закономерности влияния СТВ и параметров контура
наводки на погрешность выявляются достоверно только статисти-
чески из-за большого количества одновременно действующих слу-
чайных управляющих и возмущающих воздействий. Для оценки
этого влияния определяются регрессионные связи между состав-
ляющими погрешности наводки и каждым действующим фактором
с учетом рандомизации влияния остальных. При надежной стати-
стической информации эти зависимости (с учетом стандартной
погрешности отклонения оценки исследуемых параметров от их
математических ожиданий) являются достаточными для определе-
ния влияния на точность наводки характеристик СТВ и парамет-
ров контура наводки, а также разработки ТТТ к ним.
Погрешность наводки в системах с ЗЛП. Основные регрессион-
ные зависимости между параметрами контура наводки для ЗЛП
189
(системы слежения для НЛП) приведены на рис. 5.32—5.34, на ко-
торых под эффективной частотой погрешности СТВ понимается
отношение среднеквадратичных значений скорости изменения пог
решности к самой погрешности, зависящее от качества настройки.
Из приведенных зависимостей следует, что при скорости движе-
ния танка по случайным трассам более 25 км/ч появляются помехи
от наводчика через ПУ, что вызывает существенное снижение точ-
ности наводки. Наиболее заметно это проявляется для больших
значений регулярной скорости цели и при большой крутизне нели-
нейной скоростной характеристики на участке точного слежения.
Рис. 5.32. Зависимость эффективной часто
ты погрешности стабилизации <*>, от коэф
фнциента усиления Кус разомкнутого СТВ.
/ — в плоскости вертикальной наводки; 3 — в ало
скости горизонтальной наводки; Лус — Г//«, где
С — жесткость стабилизатора; /» — момент инер
ции объекта стабилизации
раО/с
11
10
8
6
Ч
2
0,15 0,2 0,25 Кус-10*. с *
Рнс. 5.33. Влияние спектрально
го состава погрешности СТВ
на соотношение между погреш
ностями наводки (вш) стабили-
зации (ает) в системе с ЗЛП
Погрешность наводки в системах с ЗЛП определяется по сле-
дующей методике. При фронтальном движении по из-
вестным из результатов эксперимента значениям (срединное
значение погрешности стабилизации) и используя зависимость,
приведенную на рис. 5.33, находят значение погрешности наводки.
Затем определяют приращение погрешности с учетом истинного
значения минимальной скорости наводки (см. рис. 5.34).
При косом движении находят погрешность на-
водки аналогичным образом, затем по заданной угловой скорости
движения цели <% и внешней скоростной характеристике опреде-
ляют приращение погрешности (рис. 5.35).
Погрешность наводки в системах с НЛП. Для СУО с НЛП пог-
решность наводки определяется погрешностями контура слежения
марки за целью и слежения привода в момент выстрела. Основ-
ная доля в формировании погрешности наводки приходится на
I90
вторую составляющую, так как погрешности контура слежения
марки за целью малы благодаря высокой точности и низкой эф-
фективной частоте погрешности стабилизации поля зрения
(’лл^’2 мрад, «>,<0,2 рад/с).
Погрешность слежения привода в момент выстрела зависит от
ряда факторов: погрешности стабилизации оружия, ширины зоны
разрешения выстрела, запаздывания выстрела и др. При НЛП
в двух плоскостях проявляется также фактор взаимовлияния кон-
туров наводки.
Рис. 5.р5. Зависимость прира-
щения погрешности наводки
от характеристики ПУ и ско-
рости цели:
------* — без помех от наводчика
через ПУ;--------j — при наличии
помех; ; ,_.и _
I 2
“ «у ; «у — угол поворота пуль-
та управления; — скорость на-
водки
Рис. 5.34. Зависимость прира-
щения погрешности наводки
Дзи от порога минимальной
скорости наводки
/ — при наличии помех от наводчи
ка через ПУ; 3 — без помех
Стремление повысить точность наводки за счет существенного
ограничения погрешности слежения привода зоной разрешения
выстрела приводит к увеличению времени ожидания выстрела. Од-
ним из важнейших факторов, влияющих на время ожидания выст-
рела при движении танка, является также характер случайных ко-
лебаний стабилизированного танкового орудия в обеих плоскостях
наводки.
В системе с НЛП представляют интерес следующие параметры,
центрированные (неповторяющиеся) случайные и системати-
ческие (повторяющиеся) составляющие погрешности слежения
привода в момент выстрела в обеих плоскостях (zc, ус и zc, уе);
время ожидания выстрела Тож при разных значениях шири-
ны зоны разрешения выстрела, математических ожиданий погреш-
ности слежения привода (zCJ и усд), времени запаздывания выст-
рела (Т9).
191
Основные регрессионные зависимости между параметрами кон-
тура наводки с НЛП приведены на рис. 5.36—5.41. Они даны для
четырех корреляционных функций погрешности, соответствующих
различной настройке СТВ и аппроксимированных в виде:
R (Г) = De" *|Г| (cos рг 4- sin р | Г |,
где а и ₽ — постоянные коэффициенты.
Рис. 5.36. Зависимость времени ожидания выстрела Тож от относительной
зоны разрешения выстрела 4/Oc«t
‘ ~ Л.’са, - ОА 6 ~ “ вэсл2 ~ » - ^°CJ, - 1,4»
/. 2. 3. 4 — точки настройки (/ — а — 4.9 рад/с. ₽ — 5,7 рад/с, — 7 рад/е; 2 — а — 3,6 рад,с.
Р — 7.0 рад/с. •», - 9 раде; 3 - « — 2,7 рад, с, 0—10 раде. «е — 11 рад/е; 4 - a — 2 раде, 0 —
— 14 рад/с, о»9 = 14 ры/с); А, В — половины эоны разрешения выстрела в плоскостях горизои
талькой н вертикальной наводки соответственно; . ЭСЛ ) — погрешности слежения при
вода по ГН и ВН соответственно
Следует отметить, что при постоянных значениях Гож и фикси-
рованных (стабильных) спектральных характеристиках погрешно-
стей СТВ по ВН и ГН существует достаточно жесткое соотношение
между допустимыми по времени ожидания выстрела относитель-
на
ными зонами разрешения выстрела в обеих плоскостях. Это соот-
ношение ухудшается при математическом ожидании погрешности
слежения zu (см. рис. 5.40).
Методика расчета погрешности наводки в системах с НЛП за-
ключается в следующем. По известной погрешности стабилизации
поля зрения прицела (ап s) определяют погрешность прицеливания
(слежения марки относительно цели) апр по формуле
учитывая низкочастотный,
стабилизации поля зрения.
как правило, спектр погрешности
Рис. 5.38- Зависимость времени ожи-
дания Гож от относительной зоны
разрешения выстрела Л/аСЛ|:
-------
zcai математическое ожидание пог-
решности слежения привода по ГН при
непрерывном слежении; /. 1. 3 — точки
настройки (см. рис 5.36)
Рис. 5.37. Зависимость относитель-
ной погрешности слежения привода
в момент выстрела Oq/’caj от от-
носительной зоны разрешения выст-
рела по ГН при фиксированном зна
чении В] аСл2=0,9:
/, J, 3 —точки настройки (см. рис. 5.36);
»С1 — погрешность слежении привода по
ГН в момент выстрела
Экспериментально определяют параметры погрешности СТВ
□ст и <»э в горизонтальной и вертикальной плоскостях наводки;
измеряют ширину зоны разрешения выстрела в этих же плоскос-
тях. Погрешность зст практически равна погрешности слеже-
ния привода <зсл при настройке СТВ в пределах, заданных ТУ. По
графику (см. рис. 5.37) определяют значение погрешности слеже-
ния привода в момент выстрела ас.
Для значений Л/асл, В /• и и>„ характеризующих настройку
СТВ, определяют Гож (см. рис. 5.36).
13 Зак. 36с
193
Учитывая независимость погрешностей прицеливания (аир), сле-
жения привода в момент выстрела (ае) и передачи от пушки
к прицелу (ап<р), погрешность наводки рассчитывают по формуле
°- V °пР + + %.₽ •
Обратная задача—определение параметров контура наводки
для обеспечения требуемой точности стрельбы.
Рис. 5.40. Границы допустимых зна-
чений относительной зоны разреше-
ния с трепа в обеих плоскостях
при Тож - 0,2 с для = 11 рад/с,
w»bh “ 5,5 рад/с:
1 2 “0,5
,мрад
Рис. 5.39. Зависимость математиче-
ского ожидания погрешности сле-
жения привода по_ГН в_момент вы
стрела хс от гСд1:
/ - »СЛ1 - од мрад; 2 - -0,5 мрад; J -
’СЛ| “°’7 “Р’л
Требования к погрешности слежения привода в момент выстре-
ла в обеих плоскостях (о. и зс>) предъявляются, исходя из тре-
бований к погрешности наводки он. Учитывая погрешности прице-
ливания и передачи от пушки к прицелу для конкретной конструк-
ции, рассчитывают
ас - 1Л а2 - (а2 + o’ I.
с " и 'пр 1 пер7
Затем по значениям погрешностей СТВ в одной из плоскостей,
например, по ГН, определяют отношение С учетом этого
отношения и настройки ш, (см. рис. 5.37) определяют А/аел,
а следовательно, и ширину зоны разрешения выстрела (2 А).
По найденному отношению 4/асл (см. рис. 5.40) определяют
возможную минимальную относительную зону разрешения выстре-
ла в другой плоскости наводки (например, вертикальной) S/afJ4
с условием обеспечения Гож<0,2 с.
194
По полученному значению В/а^ определяют для веР’
тикальной плоскости наводки, откуда находят по требуемой зс по-
грешность <зсд в этой плоскости.
При наличии математического ожидания погрешности слеже-
ния привода ^„(Усл) методика определения параметров конту-
ра аналогична изложенной выше, но при этом выбор зоны разре-
шения выстрела должен производиться с учетом отношения хся А
(Усд/В) (см Рис 5.40), что приводит к расширению относитель-
ной зоны при условии обеспечения требуемого времени Тож.
Из-за влияния большого количества факторов на погрешность
наводки определение требований к параметрам и характеристи-
кам СТВ и приводов наводки является вариационной задачей.
Обеспечение требуемой точности наводки современных СУО с НЛП
в двух плоскостях при допустимом времени ожидания выстрела
достигается благодаря высокой точности стабилизации оружия
в обеих плоскостях и рациональному использованию зоны разре-
шения выстрела. В частности, при высокой точности стабилизации
в одной плоскости без ограничения ее зоной разрешения выстрела
можно допустить относительно низкую точность в другой плоскос-
ти, существенно ограничив ее зоной разрешения выстрела.
В качестве примера в табл. 5.2 приведены два варианта таких
требований, обеспечивающих погрешность наводки ан =0,22 мрад,
£и — 0,15 т. д.) по ВН и зя =0,37 мрад (£„ =0,25 т. д.) по ГН
при зс=0,15 и 0,25 мрад и зпер =0,2 и 0,1 мрад соответственно.
Таблица 5.2
Требования к параметрам СТВ и приводов наводки
Параметры 1 вариант II вариант
Среднестати- стическое значение Требования Среднестати- стическое значение Требования
Точность СТВ: уровень срединной по- 0,10/0,4’ 0,15/0,5 0,2/0.25 0,25/0,35
грешности Е„, мрад (т. д ) эффективная частота -/11 ~/9 9/11 8/9
«>,, рад/с Математическое ожи- 0.5/0,5 0,5/0,5 0,5/0,5 0,5, ОД
дание погрешности сле- жения привода ггл (Уед).--.' Зона разрешения вы- стрела (2В/2А)....' 3/3 3±0Д/3*0Д 1.5/3 1,5 h 0.5/3 ±0.5
*В числителе — плоскость наводки вертикальная, в знаменателе — гори-
зонтальная.
J3’ 195
В первом варианте за счет высокой точности стабилизации по
ВН требования к ширине зоны разрешения выстрела в этой пло*
скости невысокие (зона практически не ограничивает погрешность
в момент выстрела, но запрещает его при больших рассогласова-
ниях марки прицела и орудия, вызванных соударениями с упорами
башни). При допускаемой значительной погрешности стабилизации
по ГН требования к зоне более высокие, обеспечивающие ограни-
чение погрешности (ос/асл «0,4). При этом какие-либо требо-
вания к спектральному составу погрешности по ВН не предъявля-
ются, а по ГН они должны быть достаточно высокими.
Во втором варианте требования к погрешности стабилизации по
ВН понижены, а по ГН повышены. При этом для обеспечения до-
пустимого времени ожидания выстрела зона разрешения выстрела
по ВН должна быть в два раза уже, а по ГН такая же, как в пер-
Рис. 5.41. Обобщенная структура СТВ:
'Г',И — динамический оператор обратной связи по моменту исполнительного двигателя (тому
якоря, давлению); Vnp — динамический оператор усилительных элементов привода. Не-
динамический оператор обратной связи по скорости исполнительного двигателя (обратной
ЭДС, расходу); 1Г0 с —динамический оператор главных обратных связей; /пр — приведенный
к оси объекта стабилизации момент инерции исполнительного двигателя с редуктором:
«70 — динамический оператор объекта стабилизации (в простейшем случае, при одномассо-
вом неупругом объекте (Fo —/ф. где/о - момент инерции объекта); сМП - приведенная
к осн объекта стабилизации жесткость механической передачи (редуктора); -Инд — приве
денный к оси объекта момент, развиваемый исполнительным двигателем; .Иу — управляю-
щий момент, приложенный от привода к объекту; Л4тр — суммарный момент трения в опоре
объекта и в исполнительном двигателе; *тр - оператор трения в опоре и в исполнительном
двигателе; “>н. д — приведенная к оси объекта скорость исполнительного двигателя; в, — угол
наводки орудия, задаваемый наводчиком; Я, — угол отработки угла в системе координат
задающего устройства; в» — угоу! отработки в системе координат, связанной с осями инер-
ции объекта; н —угол поворота относительно корпуса танка в системе координат, связан
ной с осями инерции объекта; н, — дополнительный угол поворота в системе координат за-
дающего устройства при несовпадении с этой системой осей инерции объекта (кинематичес
кое возмущение); х — угол поворота корпуса танка в плоскости, нормальной к оси вращения
объекта (угловые возмущения); .Мм — инерционный возмущающий момент (моментные доз-
мущення); « — оператор Лапласа
196
вом варианте. Допустимые значения гсл(усл) не должны превы-
шать 0,5' во всех случаях.
Обобщенная структура СТВ. Основные показатели качества
стабилизаторов и приводов наводки определяются их динамичес-
кой структурой и реальными условиями в танке (возмущающими
воздействиями).
На рис. 5.41 приведена обобщенная структурная схема стаби-
лизатора с возможными контурами внутренних обратных связей и
каналами приложения возмущающих воздействий.
Уравнение линейного приближения обобщенного стабилиза-
тора, полученное из структурной схемы, имеет вид
U7X (s) 83 = UZH (s) (0, + 04) + (s) х 4- WM (s) М., (5.25)
где ITx(s)—характеристический оператор; U/H(s)—оператор наводки; UTy(s)
оператор угловых возмущений; IFM (s)— оператор моментных возмущений; Мо
суммарный возмущающий момент, включающий в себя в режиме стабилизации
инерционный возмущающий момент Мм и момент трения AfTp; в,, в4, х —
см. рис. 5.41.
Погрешность стабилизации как основной показатель качества
СТВ при В, = 0 определяется по формуле
Таким образом, мгновенная погрешность стабилизации Лв, из-
меренная в системе координат задающего устройства, зависит от
возмущающих воздействий как
функций времени и динамической
структуры СТВ, включающей в се-
бя помимо динамического операто-
ра регулятора также динамиче-
ские операторы редуктора и объ-
екта стабилизации.
Рассмотрим более детально фор-
мирование возмущающих воздейст-
вий и их количественную оценку.
Кинематическое возмущающее
воздействие. При анализе кинема-
тического возмущения представ-
ляют интерес только угловые пере-
мещения, поэтому начало всех си-
стем координат условно сведено в
общую точку О, лежащую в плос-
кости погона платформы (башни)
и на ее оси вращения (рис. 5.42).
Система координат OX KZ — земная,
ось ОУ совпадает с осью задающе-
У, у"
х”'х" х'х
Рнс. 5.42. Преобразование ко-
ординат при анализе кинема-
тического возмущения:
Т — угол крена; — угол между
осью орудия и платформой; Ф —
угол поворота орудия относительно
осн цапф при возврате в стабили-
зированное положение
го устройства. Система координат Охуг связана с платформой,
причем ось Ог направлена по оси вращения платформы, а ось Ох
параллельна оси цапф орудия.
197
Ось орудия совпадает с осью задающего устройства, система
Охуг повернута относительно системы OXYZ на угол крена у вок-
руг оси Оу, а затем вокруг оси Ох (оси цапф) на угол е = &+?,
где О — суммарный угол возвышения; <р—угол галопирования, измеренный
в плоскости колебаний орудия; г — угол между осью орудия и плоскостью пого-
на платформы.
Рассматривая далее переход оси Оу от идеально стабилизиро-
ванного к новому положению в результате поворота на углы ф от-
носительно оси Ох и относительно оси Ог, получаем систему
уравнений:
/•» х(sin Н4 sin « sin 7 4- cos Н4 cos 7) 4-
4- у (cos ф cos Н4 sin • sin 7 + sin ф cos t sin 7 — cos sin H4 cos 7) 4-
4- z (cos ф cos H4 sin 7 4- sin Ф sin H4 cos 7 — sin | cos H, sin e sin 7);
Y *= x sin H4 cos 7 4- У (cos ф cos H4 cos t — sin ф sin t) —
— z (sin Ф cos H4 cos « 4- cos ф sin e);
Z — x (sin H4 sin t cos 7 — cos 04 sin 7) 4- y(cos|cos H, sin « cos 7 4-
4- sin Ф cos « cos 7 4- COS Ф sin 04 sin 7) 4- z (cos ф cosH4 cos 7 —
— sin Ф cos H4 sin e cos 7 — sin ф sin H4 sin 7).
Из совместного решения уравнений для орта Оу при условиях
x=z=0; у=1; X^Q, У=соз е; Z=sin е получим
tgH4 sin 7Sin»/(cos2» 4- sin2 е cos 7). (5.26)
В режиме стабилизации переменная составляющая угла крена
обычно мала (у <; 10°), на основании этого можно записать:
sin 7»7; cos7^1 Htg04^04.
Тогда из уравнения (5.26)
Н4л?7sine = 7 sin(b 4- т)« (5.27)
Таким образом, для идеальной стабилизации орудия, ось кото-
рого не совпадает с плоскостью погона, платформа должна пово-
рачиваться на углы, соответствующие выражению (5.27). Другими
словами, при переходе от угла поворота платформы, измеряемого
относительно ее оси инерции, к углу в системе координат задающе-
го устройства необходимо введение поправки, определяемой угла-
ми крена, возвышения и галопирования.
Влияние этой поправки на погрешность стабилизации зависит
от места установки задающего устройства. Если оно установлено
на орудии или кинематически связано с ним, угловая поправка
вырабатывается в соответствии со схемой, представленной на
рис. 5.42, и погрешность СТВ содержит скоростную и динамиче-
скую погрешности отработки угла поправки. Если же задающее
устройство установлено на платформе, то угол Н4 целиком войдет
198
в погрешность стабилизации орудия. Последнее замечание рас-
пространяется на погрешность стабилизации линии прицеливания
в системах с ЗЛП при рассогласовании ее с осью орудия (ввод
углов прицеливания и упреждения), а также на погрешность ста-
билизации орудия при рассогласовании его оси с осями задаю-
щего устройства.
Инерционный возмущающий момент. Для определения этого
момента необходимо рассмотреть динамику объекта управления
на подвижном основании.
Рис. 5.43. Система координат объекта стабилизации:
Ог — ось вращения платформы; о,г, —ось вращения орудия (ось цапф); С — центр масс
платформы; С,-центр масс орудия; координаты произвольной точки Ь на плат
форме; Г. и Fo> — расстояния от центров масс соответственно платформы и орудия до их
осей вращения
Пусть система координат OXYZ жестко связана с платформой
(башней) и имеет начало в ее центре масс (рис. 5.43). Ось OY
проходит через ось вращения платформы, a OZ параллельна
этой оси. Если OX, OY, OZ — главные центральные осн инерции,
то для вращательного движения относительно центра инерции
(масс) будут справедливы уравнения Эйлера:
/xwx + (,z -/r)u,rtt>z = A,x;
/ru»f + (/x-/z)«»x«»z
/z «z 4- (/K — Ix) <*»x«>r = Mz,
(5.28)
где lx. lY, /z—главные центральные моменты инерции; <*>*. проек-
ции вектора абсолютной угловой скорости платформы на соответствующие оси
системы координат OXYt,Mx, MY. Mz— проекции вектора главного момента
относительно центра инерции на соответствующие оси системы координат OXYZ.
199
Если перейти к осевому моменту инерции по теореме Штейне-
ра и рассматривать в выражениях (5.28) только уравнение по
единственной степени свободы платформы относительно корпу-
са, то
/Пш, = /Их 4* т„Уошх — (/у — /х)шхшу,
Мг = + Мтрх + тп Го (аог — g sin ft),
где /п и /лп — соответственно осевой момент инерции и масса платформы;
Муи и AfTpj — соответственно проекции управляющего момента, приложен-
ного от выходной шестерни редуктора, н момента трения, Оц,—проекция
абсолютного линейного ускорения центра инерции; g — ускорение свободного
падения; О —угол между осью X и горизонтальной плоскостью.
Из анализа векторов относительного, переносного и кориоли-
сового ускорений в центре инерции следует, что в системе коорди-
нат Охуг (см. рис. 5.43), жестко связанной с корпусом,
/п = Myt 4- Мтрх + т„ Yo (аОх - g sin ») -
— -у- (тп Y2Q + 4) |(<?2 - 72) sin 2 9 4- ? к cos 2 6]. (5.29)
Помимо управляющего момента и момента трения в правую
часть выражения (5.29) входят инерционные члены, зависящие от
конструктивных параметров платформы, а также от проекции
линейного ускорения аОх в точке О на ее оси вращения, наклона
плоскости погона и угловых скоростей колебаний корпуса. Оче-
видно, что величина аОх является следствием колебаний корпуса
по всем шести степеням свободы.
Полученное по аналогичной методике уравнение для орудия
имеет вид
4 = MyXi - MTpz + т„ YOi (а0 - g sin +
+ -у (тп У* + /у - /х) ([(ж 4- в)2 - г’ sin2 6 - 72 cos2 0 +
4- 7 sin20J sin214“(* 4~6)(7cos0 — <? sin8)cos2t|. (5.30)
Оценка четвертых членов уравнений (5.29) и (5.30) при встре-
чающихся на практике конструктивных параметрах башен и пу-
шек, а также реальных параметрах колебаний корпуса показы-
вает, что их значение не превышает 10 % моментов трения. В свя-
зи с этим при практических расчетах они могут быть опущены,
и полный инерционный возмущающий момент представляется
единым для всех объектов простым выражением
Л1Н = Мн (аОх - g sin b)/g, (5.31)
где Ми — полный момент неуравновешенности объекта.
Нетрудно заметить, что этот момент пропорционален «кажу-
щемуся» ускорению и может быть непосредственно измерен лн-
200
нейным акселерометром в точках О и О( с направлением измери-
тельных осей по X и Х|. Однако установка акселерометров в этих
точках на реальных объектах затруднена либо вообще невоз-
можна.
При установке акселерометров в произвольных точках Б и Б\
платформы и орудия методические погрешности измерения инер-
ционных моментов имеют вид:
® A cos *б - 1б s,n лб + ? 7 A c°s (2 в + « J -
— Yo cos 2 0] 4- sin 0 [/л cos (0 4- аь.) — Yo cos 0) —
— ;-’cos 8 [/b.sin(0 4- аЛ) — Kosln0J — 2 x0ZB sin лБ 4-
4- xZB cos 0—i xZB sin 0 — ?ZB sin 0 — ^ZB cos 0 ; (5.32)
Дав,ж. = ~ Acos «в, - Zs,sln + (« + в)’ X
X RSi sin (e 4- a5i) - YOi sin t] - (? sin 0 -
— 7 cos 0)2 |/B cos (e 4- a5) — Yo cos в] sin e 4-
4- (<p sln0 — 7 cos 0)ZB sin #4- (x 4- 0)Ze cos* 4-
4- (7a — <?2) Zfi sin 2 H cos e 4-7 <|ZB cds 2 0 cos в —
— (x 4- 0) (© sin 0 — 7 cos-H) (ZB cos (2* 4- *Б) —
— Yo cos2e] 4- (* 4- 8)(<? cos 0 4- 7 sin 8) ZB sine . (5.33)
В выражениях (5.32) и (5.33)
= /4 + : zs. “ Vx\ + :
«s= arctgxg/ys; afi - erctg*s/yft;
лв, yB, zB и лв, yB, zB — координаты произвольных точек Б и Б\.
Количественный анализ выражений (6.32) и (5.33) показы-
вает, что в формировании методических погрешностей доля членов,
содержащих квадраты и произведение угловых скоростей колеба-
ний корпуса, платформы и орудия, не превышает б % аОх и
аОх, поэтому основные погрешности будут определяться угло-
выми ускорениями колебаний. Вследствие этого при размещении
акселерометров необходимо выбирать координаты Zr> и Z/( мини-
мально возможными.
Координаты YB и YB необходимо выбирать равными нулю не-
зависимо от возрастания 1В и 1В. Другими словами, один аксе-
лерометр целесообразно устанавливать на борту платформы на
высоте ее центра масс, а другой — на боковой поверхности маски
орудия. Методическая погрешность при этом не превышает 5 %.
14 Зек. Звс 201
Количественная оценка возмущающих воздействий. Все возму-
щающие воздействия являются случайными функциями времени,
поэтому их количественные характеристики должны содержать
оценки, необходимые при энергетических и регулировочных рас-
четах. Такими оценками в рамках корреляционной теории служат
авто- и взаимно корреляционные функции или спектральные
плотности, которые отражают временные и частотные свойства
этих процессов, среднеквадратичные значения воздействия и кор-
реляционную связь между колебаниями корпуса.
Так как спектральные плотности колебаний в зависимости от
условий движения (трасса, скорость) существенно изменяются,
расчетные значения спектральных плотностей должны соответст-
вовать наиболее вероятным условиям движения. Такие условия
определяются при расчете математических ожиданий спектраль-
ных плотностей с рандомизацией влияния отдельных факторов.
Накопленный статистический материал по колебаниям корпуса
Позволяет проводить приближения к вероятной расчетной оценке.
На рис. 5.44 приведены средние (вероятные) значения спект-
ров возмущающих воздействий. Спектральные плотности углов и
угловых ускорений могут быть получены статистическим интегри-
рованием и дифференцированием в результате соответственно
деления или умножения каждой ординаты на ш.
Оценка кинематического возмущения показывает, что в прос-
тейшем случае, когда 0=0 и между у и <р отсутствует корреля-
ционная связь, спектральную плотность угла и его среднеквад-
ратичное значение можно представить в виде
% = °? V
Подставив в выражение для зя численные значения зо и
в, представленные на рис. 5.44, получим ай| «1 мрад (т. д.).
В системах с НЛП в погрешность стабилизации входят только
скоростная и динамическая погрешности отработки угла в4, по-
этому учитывать это возмущение целесообразно в высокоточных
СТВ или при значительных вероятных углах О (стрельба по воз-
душным целям).
Относительная чувствительность СТВ к возмущающим воздей-
ствиям. Реакция СТВ на возмущающие воздействия определяется
типом его структуры, т. е. преобладанием тех или иных внутрен-
них обратных связей. Повышение уровня коэффициента усиления
замкнутого контура способствует снижению составляющих погреш-
ности от всех возмущающих воздействий. Однако достижимый уро-
вень этого коэффициента ограничен устойчивостью замкнутого кон-
тура, определяемой динамическими характеристиками его звеньев.
Поэтому в СТВ все шире применяются принципы комбинирован-
ного регулирования, при котором осуществляются измерение и ком-
202
пенсация отдельных возмущающих воздействий. Для комбиниро-
ванного регулирования необходимо знать не только абсолютный
вклад каждого возмущения в формирование суммарной погреш-
ности, который можно получить методами теории чувствитель-
ности, но и относительную чувствительность к основным (угловым
и моментным) возмущениям, анализ которой существенно проще.
Рис. 5.44. Средние (вероятные) значения спектров возмущающих воз-
действий:
угловых скоростей танков (а), Б М П (в): / — галопирование, (а^ )т — 10,1, рад с.
)БМП“ 9.8 Р«Д/с: 2 —крен. )т — 4.2 рад,с, )бМП“4 рад си рыскание. (’ж )т-
— 1.25 рад/с, (а- )бмП рад?с, линейных ускорений танков (б). Б М П <е>:
4 по продольной осн. —0,1 g, (’^>БМП — 0,08 g; 5 — по поперечной оси.
-0,14 g, (®-)БМП —012 g; в — по вертикальной оси. —0,1.3 g, (» рБМП “ °'*2
(»рт—среднеквадратичное значение 1-го возмущающего воздействия для танка; (’рБМП
среднеквадратичное значение / го возмущающего воздействия для БМП
Для оценки относительной чувствительности обобщенного ста-
билизатора к возмущающим воздействиям введем понятие харак-
теристики относительной чувствительности
с=мч*
где Ъу и 6м — составляющие погрешности стабилизации от угловых и мо-
ментных воздействий соответственно.
14* 203
С учетом выражения (5.25)
с= (д) х/[ (5) , (5.34)
т. е. зная соответствующие операторы возмущений, можно оце-
нить долю основных возмущений в формировании погрешности.
Для упрощения анализа целесообразно принять следующие
допущения:
СТВ линеен, и к нему применим принцип суперпозиции;
возмущающие воздействия некоррелированы между собой;
нормированные спектральные плотности возмущений идентич-
ны по форме;
возмущения могут быть представлены в виде нормированных
по среднеквадратичным значениям линейчатых спектров с одина-
ковыми фиксированными частотами.
При этих допущениях
*о (®/)/Af„o (*|) = ° «/«jq , (5.35)
где Хо(»о/) и — амплитуды возмущений на i-й частоте.
Рабочая полоса частот в соответствии с рис. 5.44 находится в
диапазоне 0<»/-<25 рад/с.
Из структурной схемы (см. рис. 5.41)
^,(sj = + D4pS’ + (5.36)
W'jM(s) = (W'MU741+l)3Ls’+W'.UZ.p-i- +
MU MH
+ (^^np+l). (5.37)
Для выявления каналов воздействия основных возмущений на
обобщенный стабилизатор достаточно рассмотреть только соот-
ветствующие операторы возмущений. С учетом выражений (5.36)
и (5.37)
V, W» + «W М- = (V„ HZ,, 4-1) (/„pS’M + s‘M. + М.) +
+ MZ. UZ0I> + -JL. sM,). (5.38)
Качественный анализ выражения (5.38) позволяет отметить
следующие общие закономерности воздействия возмущений на
СТВ:
интенсивность воздействия первой производной возмущающего
момента определяется механической жесткостью редуктора и со-
отношением внутренних обратных связей;
интенсивность воздействия угловой скорости зависит только
от соотношения операторов и U/w, а углового ускорения — от
момента инерции /пр.
204
Подставив выражения (5.35) — (5.37) в выражение (5.34), при
s—/(о получим
. } (r*rBp4U)/,pAi+r№rnp
\ гмп / смп
Рассмотрим некоторые частные случаи:
а) при lV'w=0 обратная связь по скорости отсутствует и при-
вод имеет «мягкие» моментные характеристики
ZnpM<
1 — 4р ш//<мп
т. е. относительная чувствительность определяется только приве-
денным моментом инерции привода;
б) при V/)e 0 и /ор -> 0 (привод с малоинерционным испол-
нительным двигателем и «мягкими» характеристиками)
9л<и
* — 4р “^мп
г. е. СТВ не чувствителен к угловым вс^мущениям и производ-
ным возмущающего момента; это же свойство проявляется при
Лр ' и * /11р (<’)/) (W,и W'np 1) т. с, в случае, когда
привод охвачен глубокой обратной связыб по моменту (току, дав-
лению) при неглубокой связи по скорости;
в) при =0
Ji________/npAi-h^^np
I смп / смп
(5.39)
т. е. при отсутствии обратной> связи по моменту СТВ чувствите-
лен к обоим основным возмущениям.
Уменьшение относительной чувствительности к моменту мож-
но получить в результате увеличения \Рш, но эта возможность
Ьграничена устойчивостью контура обратной связи по скорости,
имеющего интегрирующее звено.
Таким образом, отсутствие обратной связи по скорости или на-
личие глубокой обратной связи по моменту при слабой обратной
связи по скорости увеличивает чувствительность СТВ к момент-
ным возмущениям (кроме первой производной момента). Если
при этом привод имеет малоинерционный исполнительный двига-
тель, то погрешность стабилизации формируется практически
только самим возмущающим моментом. Такой структурой обла-
дают все отечественные электрогндравлические СТВ.
205
Отсутствие обратной связи по моменту и ввод глубокой обрат-
ной связи по скорости повышают чувствительность к угловой ско-
рости и первой производной момента, но из-за ограничения ее
глубины (устойчивости) погрешность СТВ будет формироваться
обоими возмущениями. Примером такой структуры могут слу-
жить стабилизаторы ГН 2Э15М и ВН 2Э36-1.
При использовании резервов повышения коэффициента усиле-
ния замкнутого контура по отклонению дальнейшее уменьшение
погрешности СТВ можно получить компенсацией возмущений.
При этом определяющими факторами являются техническая воз-
можность измерения возмущений, количество и сложность средств
измерения, а также сложность эксплуатационной настройки ком-
пенсирующих контуров.
С этих позиций более предпочтительным является стабилиза-
тор, нечувствительный к угловым возмущениям, т. е. имеющий
малоинерционный исполнительный двигатель и привод с <мягкн-
ми» механическими характеристиками, снабженный датчиками
линейных ускорений (ДЛУ).
Методы расчета и исследования элементов установки СТВ и
приводов наводки. Динамические модели объектов стабилизации.
Существенное значение при разработке СТВ имеет знание дина-
мических характеристик гобъектов стабилизации, которые лишь
условно и в редких случаях могут считаться одномассовыми твер-
дыми телами. Пушки, как известно, представляют собой динами-
ческую систему с распределенной массой и упругостью.
Передаточную функцию ствола как упругого одномассового
объекта можно представить в виде
= 7F + i^+'2tr.s + l- <5Л°>
где ф — абсолютная угловая скорость в месте установки датчика обратной
связи; М — момент, действующий на пушку; / — момент инерции ствола; m —
число учитываемых гармоник; п — номер гармоники собственных колебаний;
Тп, 5Я— соответственно коэффициент передачи, постоянная времени и ко-
эффициент демпфирования л-й гармоники.
Как правило, для практических целей достаточно учитывать
только первую гармонику упругих колебаний. Кроме того, в вер-
тикальной плоскости пушку можно считать одномассовым объек-
том, так как опоры откатных частей на люльке разнесены и люф-
ты выбраны под действием веса.
С учетом этих замечаний выражение (5.40) можно преобразо-
вать к виду
где 7’=7*+*/; 2 5,7,-25,7,.
206
Параметры передаточной функции (5.41) легко определяются
по экспериментальным частотным характеристикам пушки. На
рис. 5.45 представлены логарифмические частотные характерис-
тики танковой пушки, из которых следует, что учет первой гармо-
ники колебаний достаточен для описания ее динамики. На этом
же рисунке показана экспериментальная частотная характеристи-
ка 30-мм автоматической пушки. Качественно частотные характе-
ристики аналогичны. Разница состоит лишь в несущественном из-
менении численных значений параметров.
Таким образом, выражение (5.41) можно считать обобщен-
ным описанием оружия как объекта стабилизации независимо от
его калибра.
Рис. 5.45. Частотные характе
ристикн оружия как объекта
стабилизации:
I — скорость углового перемещения
упругого ствола пушки тайка; 2 —
дополнительное звено (экспери-
мент); 3 — дополнительное звено
(расчет); 4 — скорость углового пе-
ремещения упругого ствола малока-
либерной автоматической пушки
Рис. 5.4С>. Структурная схема многомассо-
вого объекта стабилизации:
Л и — соответственно моменты инерции плат-
формы и первой массы объекта; с,» и — со-
ответственно эквивалентные жесткости связи меж-
ду платформой и объектом стабилизации и меж
ду массами объектов; K,t и — соответствен-
но коэффициенты вязкого трения, включая гисте-
резис; Ц'о — динамический оператор упругой час-
ти объекта стабилизации; .И„ — момент между
платформой и объектом; .И,,— момент между
элементами объекта; — управляющий момент;
Л(в — возмущающий момент; Л1И — инерционный
возмущающий момент; <*,. «•». »»> —угловая ско-
рость платформы, первой массы объекта стабили-
зации и его упругой части, соответственно
Объектом стабилизации по ГН является платформа с установ-
ленным на ней орудием. Платформу можно считать твердым те-
лом, но так как ее момент инерции соизмерим с моментом инер-
ции орудия, необходимо учитывать наличие упругих и квазиупру-
гих связей между ними. Последние обусловлены радиальными за-
зорами в цапфах и люльке, из-за которых происходит выкатыва-
ние ствола по наклонной плоскости при наличии относительных
угловых перемещений. Таким образом, в общем случае необходи-
207
мо рассматривать объект, состоящий из платформы, люльки ору-
дие и откатных частей, включая ствол. Структурная схема, соот-
ветствующая такому представлению, приведена на рис. 5.46.
Аналитическое представление передаточной функции, соответ-
ствующей выражению (5.39), приводит к громоздким и малоудоб-
ным выражениям, поэтому следует признать целесообразным
предварительное точное моделирование такого объекта на ЭВМ
или ЦВМ с последующей аппроксимацией передаточной функ-
цией невысокого порядка.
При моделировании необходимо обратить внимание на сле-
дующие обстоятельства:
выходной координатой объекта является скорость элемента,
на котором установлено задающее устройство или датчики обрат-
ной связи;
точка приложения инерционного возмущающего и стабилизи-
рующего моментов общая, а возмущающий момент при выстреле
приложен к входу последнего звена (упругого ствола).
Эквивалентная жесткость квазиупругих связей. Квазиупругие
связи между орудием и платформой определяются кинематиче-
скими соединениями в цапфенных узлах. Основные количествен-
ные соотношения следуют из схемы, приведенной на рис. 5.47:
. ... Ма
с- “к; ~~м~ д? ~л7~•
2-8,пагс,8о^сГ ~5,пагс'еЮТ
где с(М) — жесткость квазиупругой связи; Л| и — радиальные зазоры в со-
ответствующих цапфенных подшипниках; У» и горизонтальные состав-
ляющие реакций в цапфенных опорах,
У, . . M/d ;
d — расстояние между цапфенными опорами.
На рис. 5.48 приведена зависимость c=/(Af) для танковой
пушки (&4=Aa=0,l (0,2) мм, d—410 мм), из которой следует,
что в области моментов, имеющих место в режиме стабилизации,
жесткость связи постоянна и определяется радиальным зазором.
Обобщенная нелинейная динамическая модель установки объ-
екта стабилизации и механической части привода. Уравнение мо-
ментов объекта стабилизации
W'. (р) Р1 е, = М. + М,р + М,. (5.42)
где W'o(p) — динамический оператор объекта стабилизации; Л/и. Л/Т{и Л/у — со-
ответственно моменты инерционный (см. формулу 5.31), трения в опоре н уп-
равляющий, создаваемый приводом.
При конкретизации уравнения (5.42) целесообразно принять
следующие допущения:
момент трения в опоре имеет релейную характеристику с мо-
дулем Мд в движении и Мп в покое;
застой объекта на подвижном основании отсутствует;
208
механическая передача привода имеет сосредоточенные жест-
кость смп элементов и люфт Амп между исполнительным дви-
гателем привода и объектом;
потери в механической передаче и исполнительном двигателе
могут быть учтены коэффициентами потерь Лнх и ЛвЫХ.
Рис. 5.47 Кинематическая схема цап-
фенного узла:
Л’ — горизонтальная составляющая реакция
а цапфенных опорах, а — радиальный зазор
соответствующего цапфенного подшипника;
Ч — вес, приходящийся на одну цапфенную
опору; ® — угол выката оси цапф; О — центр
наружной обоймы цапфенного подшипника;
О, — центр внутренней обоймы цапфенного
подшипника; Og — положение оси внутренней
обоймы при выкате; I — расстояние между
центрами наружной и внутренней обойм цап-
фенного подшипника
Рис. 5.48. Зависимость эквивалент-
ной жесткости связи в цапфах пуш-
ки танка от прикладываемого в го-
ризонтальной плоскости момента:
/ — А — 0.1 мм; г — X— 0.2 мм
Если все параметры привести к оси объекта, то математиче-
ская модель объекта с механической передачей может быть пред-
ставлена в виде схемы (рис. 5.49).
На этой схеме звенья, отображающие нелинейные преобразо-
вания, изображены с помощью соответствующих символов; изме-
нение структуры изображено с помощью контактов реле с соот-
ветствующими порядковым номером и логическим условием
включения; нелинейные статические характеристики изображены
графически.
Формульная схема учитывает жесткость установки привода и
опоры (су), а также люфт в установке (Ду) и момент инерции (/с)
деталей связи привода с опорой.
Частные случаи редукторных и безредукторных механических
передач можно легко получить из обобщенной схемы выбором со-
ответствующей статической характеристики упругого звена и под-
становкой передаточного числа редуктора i (г—1 для безредуктор-
ного привода).
В ряде случаев может потребоваться более детальное мате-
матическое описание механической передачи, учитывающее про-
межуточные массы, зазоры, трение и упругие деформации.
209
Методы исследования СТВ и приводов наводки. На этапах
разработки, предшествующих созданию опытных образцов КТВ,
достаточно эффективными являются аналоговые и полу натурные
методы исследования. Аналоговые модели различных типов СТВ
могут быть получены на основе рассмотренных выше математи-
ческих моделей объектов стабилизации с механической частью
привода, а также математических моделей электромашинных и
электрогидравлических приводов, достаточно подробно рассмот-
ренных в [15].
При наличии составных частей СТВ и приводов наводки мо-
жет быть применен полунатурнын (стендовый) метод исследова-
ния и испытаний. Стенд содержит быстродействующий нагружаю-
щий привод (обычно гидропривод), аналоговую модель установ-
ки объекта стабилизации и корпуса, программное устройство,
синхронно воспроизводящее реальные записи возмущающих воз-
Рис. 5.49. Схема объекта с механической передачей:
ж— момент, развиваемый исполнительным двигателем, приведенный к осн объекта ста-
билизацни; Л<н —момент нагрузки; Мп — момент потерь механической передачи; *вк . *ВЬ1Х -
коэффициенты потерь; /пр — момент инерции привода с механической передачей; мо
мент инерции элементов опоры привода; /—передаточное число механической передачи;
₽’ — абсолютный угол поворота выходного вала редуктора, приведенный к оси объекта:
₽ — относительный угол поворота выходного вала привода, приведенный к оси объекта;
р— оператор дифференцирования; Р> — Р,— реле
210
действий (например многодорожечный магнитофон), и комплекс
аппаратуры для измерения, записи и обработки выходной инфор-
мации. Сигнал управления испытуемым приводом СТВ может при
этом вырабатываться как аналоговой моделью, так и реальным
задающим устройством, перемещение которого воспроизводится
приборным следящим приводом по сигналу с аналоговой модели.
Возможности такого стенда определяются динамическим диа-
пазоном и быстродействием нагружающего привода. При исполь-
зовании специальных типов привода (например с двухконтурной
структурой), обеспечивающих достаточно широкий динамический
диапазон нагружателя, стенд может быть универсальным, т. е.
использоваться для исследовательских и ресурсных испытаний
СТВ и ручных приводов навадки в обеих плоскостях.
Некоторые новые технические направления развития СТВ.
Симметричный последовательный дифференциальный электропри-
вод (СПДП) занимает промежуточное положение между электро-
приводами с электромашинным усилителем и со статическим пре-
образователем. Он представляет собой две одинаковые электри-
ческие машины постоянного тока с независимым возбуждением,
выходные валы которых через симметричный дифференциал свя-
заны редуктором с объектом управления (рис. 5.50). Якори элек-
трических машин последовательно подключены непосредственно
Рис. 5.50. Схема симметричного по-
следовательного дифференциально-
го электропривода (СПДП):
1.3— электрические машины постоянного
тока, 3 — симметричный дифференциал;
1 — объект управления; 6, 6 — независимые
обмотки возбуждения; 7 в — реверсивные
регуляторы токов возбуждения; (/у —
сигнал управления
к сети постоянного тока, а управление осуществляется токами
возбуждения, которые изменяются в противоположные стороны
от начальных значений, определяющих скорость холостого хода
электрических машин. Эти значения выбираются таким образом,
что при отсутствии сигнала управления выходной вал СПДП не-
подвижен.
При возрастании сигнала управления в зависимости от его
знака сила тока возбуждения одной машины увеличивается до на-
сыщения ее магнитопровода, а другой машины — уменьшается до
нуля, а затем изменяет знак и возрастает также до насыщения
магнитопровола.
211
Разомкнутый СПДП описывается следующей системой диф-
ференциальных уравнений:
U = Я,®, + Н2®2 4- 21R;
Му — сНх1 — &tw( — Л10 sign — Л2//» sign —Jpw\;
М\ — cHJ. — £iw2 — Мц sign ®2 — ktHt sign Н2 ;
о» -- Ш] — <й_,;
(5.43)
М' t М';
М'^-М'~М',
где U— напряжение питания; Hi » -^-срФг, Н».«• сгФ2; <•»„ <»,— угловые
скорости вращения соответственно первой и второй электрических машин; I —
сила тока в якоре; R — сопротивление якоря; Л1р М.2— моменты, приведенные
я я 0.975* l
к оси соответственно первой и второй электрических машин; с — —зо~i *» —
коэффициент скоростного трения; Л2 — коэффициент трения, обусловленного
вихревыми токами в якоре; М9 — момент потерь холостого хода; р — символ
дифференцирования; J — момент инерции электрической машины; <», — приве-
денная к валу электрической -машины угловая скорость вращения нагрузки;
Мл — приведенный к оси электрической машины момент на выходе дифферен-
циала; Мн — приведенный к оси электрической машины момент нагрузки;
Jo — момент инерции нагрузки, приведенный к валу электрической машины;
се— постоянная машины; Фь Ф2 — магнитные потоки соответственно первой
и второй электрических машин.
Решая совместно систему уравнений (5.43) при./' e0, sign<oi —
= sign о»в, получаем уравнение СПДП:
+[2Л-+w+4}<-
=-2 к+4++
+ + "4 + + "’>] <" - *=> +
+ ^(*>+4)<1«.|-|"И.>1. (5.44)
Статические характеристики СПДП, полученные из уравнения
(5.44), приведены на рис. 5.51. Для использования СПДП в качест-
ве привода наводки его необходимо охватить обратной связью по
скорости. Если сигнал обратной связи формировать как разность
сигналов тахогенераторов, измеряющих скорость каждой электри-
ческой машины, и, кроме того, использовать известный способ уве-
212
личения скорости благодаря ослаблению магнитных потоков, то
можно реализовать диапазон регулирования скорости порядка
(5—7) • 103, существенно превосходящий получаемый с помощью
других типов электроприводов. При повышении максимальной ско-
рости в СПДП достигается снижение установленной мощности
электрических машин (в результате увеличения передаточного
числа редуктора )и уменьшение габаритно-массовых параметров
в 1,5—2 раза по сравнению с другими типами приводов. Управле-
ние СПДП осуществляется относительно маломощными статичес-
кими усилителями, так как сила токов возбуждения машин, приме-
няемых в приводах наводки, не превышает обычно 10 А.
При использовании СПДП в качестве привода СТВ необходи-
мо повышать быстродействие по каналу управления, для чего
Рис. 5.51. Статические характеристики СПДП:
а — механические (при р— 0); б — регулировочная (при р—О « rtfH — О); «и— скорость выход
ного вала СПДП; Л<н — момент нагрузки; / — при t/yl: 2 — при (/уз; 3 — при //уз ; Uy —
сигнал управления; |Г/у|| < l^yjl < —» ~~ —при положительном и отрица
тельном U соответственно
требуются специальные электрические машины с низковольтными
обмотками возбуждения и схема управления, содержащая нели-
нейные обратные связи по якорному току. СТВ на основе СПДП
могут обеспечить точность стабилизации не уровне —
=0,3 ... 1,0 мрад (т. д.).
Двухконтурная структура СТВ. Для обеспечения высокой точ-
ности стабилизации, трудно достижимой в обычных одноконтур-
ных СТВ (например, на уровне 0,1 мрад) в плоскости вертикаль-
ной наводки при использовании электропривода, целесообразно
применять двухконтурную структуру стабилизатора (рис. 5.52).
Контур, включающий в себя основной электропривод (например
СПДП) и редуктор, называют скоростным, а образованный задаю-
щим устройством (инерциальным датчиком), объектом и безредук-
213
торным приводом ограниченного перемещения — моментным. Оче-
видно, что максимальное перемещение исполнительного двигателя
моментиого контура (ИДМ) определяется погрешностью скорост-
ного контура, следящего за нулевым положением ИДМ. В качест-
ве ИДМ могут быть использованы линейный электродинамический
двигатель или линейный электромагнитный двигатель моментно-
го типа, который работает только в режиме стабилизации, когда
требуемый момент невелик (в других режимах его необходимо
блокировать стопором). Уровень погрешности в режиме стабилиза-
ции в этом случае определяется характеристиками моментного кон-
тура с учетом компенсации углового возмущения скоростным кон-
туром.
Рис. 5.52. Функциональная схема двухкон-
турного СТВ:
/ — привод скоростного контура: 3 — объект ста-
билизации; Л — привод моментного контура; 4 —
главные обратные связи; », — угол наводки;
н, —абсолютные угловые перемещения объекта.
I — приведенное к оси объекта перемещение ис-
полнительного двигателя скоростного контура.
? — угол колебаний корпуса: ф — приведенное
к оси объекта перемещение исполнительного двн
гателя моментного контура
Уравнение моментного контура стабилизатора можно записать
в виде
W'o (р) е, = *, 0, + ^. + М. +
+ М1Г , sign (Д0, - Pt) + Мтр иам sign , (5.45)
где 4 — координата относительного перемещения моментного контура; Мтр ц
и Л1тр идм — соответственно моменты трения в цапфах и в ИДМ.
Из уравнения (5.45) следует, что суммарный возмущающий мо-
мент пушки уменьшается из-за вязкой составляющей (рф<£р<р)
и сухого трения, так как (рН3 — Рф) и рф не синфазны. Кроме то-
го, из этого уравнения видно, что при малом значении модуля
оператора U^Jp) на точность стабилизатора не будут влиять па-
раметры скоростного контура, а следовательно, редуктора.
5.5. ТАНКОВЫЕ БАЛЛИСТИЧЕСКИЕ ВЫЧИСЛИТЕЛИ
Алгоритмы современных ТБВ. Задача встречи, предполагающая
определение координат точки ожидаемой встречи снаряда с движу-
щейся целью (упрежденной точки пространства), состоит в реше-
нии векторного уравнения
Ду=До+^. (5-46)
где Ду —вектор упрежденной дальности; До— вектор текущей дальности цеди;
L — вектор линейного упреждения.
214
Рис. 5.53. Системы координат для
вывода уравнений задачи встречи
снаряда с движущейся целью
Для непосредственного определения из уравнения (5.46)
необходимы устройства автоматизированного решения простран-
ственных векторных задач. При их отсутствии используется метод
проектирования уравнений на оси некоторой системы координат,
позволяющий свести рассматриваемую задачу к системе скаляр-
ных уравнений, из которых в дальнейшем определяются баллисти-
ческие параметры (угол прицеливания и время полета) и углы на-
водки орудия.
Для вывода кинематических уравнений задачи встречи исполь-
зуются следующие системы координат (рис. 5.53):
— подвижная прям
занная с танком, оси которой
стему;
ОтХгдаг — прямоугольная
система координат, связанная
с башней танка и повернутая
относительно OTxi^jZi на угол
<7ft (курсовой угол) вокруг осн
О^-,
От6Т]£— прямоугольная си-
стема координат, связанная с
линией прицеливания и повер-
нутая относительно системы
Orx2y2z2 на углы Pi вокруг осн
и е, (угол места цели)
вокруг оси
Огхзу3гз — прямоугольная
система координат, связанная
с линией цели и повернутая
относительно системы
на угол тл (угол крена)
вокруг оси От£;
O-fXtyiZt — прямоугольная
система координат, связанная
с линией цели в момент упреж-
дения и повернутая относи-
тельно системы ОуХзузгз на
углы кинематического упреждения вокруг оси Отг3 и ац
вокруг оси От#4;
OTx5</5z5 —прямоугольная система координат, связанная с ору-
дием и повернутая относительно системы От£т]£ на углы навод-
ки вокруг оси и ан вокруг оси Отуь;
Отхцуцгц — прямоугольная система координат, связанная с
целью.
Определим упрежденную дальность и кинематические упреж-
дения для движущейся цели, приняв следующие допущения:
параметры движения цели постоянны в течение полета снаряда
до точки встречи;
>льная система координат, свя-
азуют левую координатную си-
215
стреляющий танк неподвижен.
Так как в танковых СУО ввод углов производится относитель-
но линии прицеливания, то искомые углы упреждения ац и рц мо-
гут быть найдены из равенства соответствующих членов матриц
перехода -А| и А2 от системы координат O£q£ к системе Ох^у^г^,
где
cos я cos 3
— sin 3
sin a cos р
cos я sin р sin 7л — sin я cos 7л
cos р. sin 7л
sin a sin Р sin 7л + cose cos 7л
COS а Sin р COS 7л 4- Sin а Sin 7л
cos Р cos 7л
sin а sin Р cos 7л — cos а sin 7Л
cos яц cos Эц COS Яц Sin Зц — Sin Яц
А,= — Sin Зц COS Зц 0
Sin Яц cos Зц Sin «ц Sin Зц COS яи
Приравнивая вторые и третьи члены первых строк матриц Ai
и А3, а также принимая во внимание небольшое значение углов а
и 0, получаем
“и = a cos Тл ~ ₽ sin 7л ; | (5 47)
ри cos уд-basing . I
Для определения углов а, 0 и упрежденной дальности Ду вос-
пользуемся векторным уравнением (5.46), которое при принятых
допущениях запишется так:
Д, = Д, + 7.Г, (548)
где ; 3- Дйз; Т— премя полета; + «’яйз -
вектор скорости движения цели; Д—дальность цели в момент выстрела;
*4 • хз • Уз > гз ~ единичные векторы соответствующих осей.
Спроектировав уравнение (5.48) на оси системы координат
ОТЬ|С и решив полученную систему совместно с уравнениями
(5.47), получим искомые уравнения
vut 7 . в __ «%чг _ . |
До4-*цЕ7 ’ Р“ ^o + vu‘,r ' I
д, = Л + ^г,
(5.49)
где . vurj. ец:—проекции скорости движения цели на оси системы коорди
нат ОгбпС
Уравнения (5.49) справедливы для неподвижного танка. При
стрельбе с. ходу необходимо вводить кинематические поправки на
скорость собственного движения, влияющую на начальную ско-
рость снаряда, что приводит к изменению траектории его полета.
Для определения этих поправок рассмотрим векторное уравне-
ние скорости вылета снаряда из танкового орудия
«t -1>0 + «т. (5.50)
где “ с'о вектор скорости вылета снаряда из неподвижного танкового
орудия; vT = vTx? — вектор скорости танка.
Проектируя уравнение (5.50) на оси системы ОуХ.лу^ и учи-
тывая, что матрица перехода А3 от системы координат OT*i yt
к системе ^тхьу;>г3 может быть представлена в виде
А3 = А?Лв ,
где
Icos у 0 sin ?
0 10;
— sin f 0 cos?
I cos qb — sin q6 0
Aa = sin qt cos qb 0 •
6 I 0 0 1
Ф — угол между башней н орудием в плоскости наводки орудия по высоте,
после преобразований получаем:
VT Sin Ф COS Oft
ir = — arctgf —г1—1:
s ve Н- vT cos ? cos go
Q . vT sin 96
PT — arc g c “5 * ,
где “и — кинематические поправки на скорость собственного движения.
Кроме того, из-за отличия составляющей скорости снаряда
(ус)Хь от табличного значения v0 поправку в начальную скорость
снаряда, вызванную отклонениями внутрибаллистических условий
стрельбы от нормальных, необходимо дополнить составляющей
-[(^)ж5- ®оЬ
При выводе кинематических уравнений рассмотрим также вли-
яние боковой составляющей скорости ветра Wb на траекторию по-
лета снаряда.
Используя [3], можно записать
₽r=-
где — поправка на боковое отклонение снаряда из-за действия ветра;
*ir= 1/Ду- l/KVcJx/l-
Полагая, как и ранее, что ввод угла производится относи-
тельно линии прицеливания, учет влияния W6 на траекторию сна-
ряда может быть осуществлен с помощью уравнений
?r- - UZe^Tcos-b;
er-: U70A’u.,7'sln 7Л.
217
Таким образом, вследствие независимости величин ац, % аг
и ?ц. ?т. а также их небольшого значения кинематические
уравнения задачи встречи можно записать в виде
v^T vTsinf cos
До + vu: Т + v0 + VT COS f COS 96 6 * s n
ft _ -- V^T_________________________WJt Fcost- (5-51)
’ * До + Г VO 4- t*T COS f cos 96 6 w’
— До 4"
Реализовать в конструкции ТБВ уравнения системы (5.51)
в приведенной форме нельзя из-за специфики измерения в танке
некоторых параметров, входящих в эти уравнения. Учитывая, что
в танке возможно измерение только относительных угловых ско-
ростей движения линии цели и скорости ветра, которые определя-
ются выражениями
, v . vT sin «д cos 9б
27 +-------ТС,-----:
v„ v,sln«6
. <“i>" “ X 2T“
• (^б)от= UZeCOSfe — Т'тЗШКб.
искомые кинематические уравнения после ряда упрощений, допус-
тимых ввиду малости углов, могут быть представлены в виде
Г/., х cos96(<? — «)] До т । vTcos96f
«к - [(•<)«---------\--------j-j; ? + -^"vTcos96
+ К ^'б)<п 4- V. sin <7б]
л (5.52)
Ду m До 4- ?иЕ т.
Перейдем к выводу баллистических уравнений задачи встречи.
Известно, что определение баллистических величин при стрельбе
из артиллерийского орудия производится в соответствии с уравне-
ниями
Т = /Д),
где/,, /р — функции, задаваемые таблицами стрельб для нормальных
условий.
При отклонении условий стрельбы от нормальных необходимо
вводить соответствующие поправки.
218
Возможны два способа учета поправок. При первом в качестве
расчетной выбирается точка, соответствующая дальности, опреде-
ляемой векторным соотношением
д = ду + п,
где П — суммарный вектор поправок, представляющий собой функцию вектора
Д и отклоняющих факторов ЛФ, т. е.
* - 2 П| (Д.
При этом вычисление баллистических координат производится
в соответствии с уравнениями
< = Л(Д):
Г = /г(Д).
Решение задачи встречи с учетом поправок вторым способом
предполагает изменение функциональных зависимостей между
баллистическими и упрежденными координатами, справедливых
для нормальных условий, и сводится к решению уравнений вида
+ Са. ЛФ,);
+ (л W-
(5.53)
Более точное решение задачи встречи с учетом поправок обес-
печивается при вычислении а и Г по формулам (5.53).
Необходимо отметить, что применение указанных формул свя-
зано с определенными трудностями, обусловленными необходи-
мостью использования при расчете Ду и Д метода итераций
(метода последовательных приближений), который требует при-
менения сложной аппаратуры.
С целью упрощения определение искомых баллистических ве-
личин можно осуществить по формулам
Ё/«/ («о)ДФ|
------------
1 -2Л/ («о)
2/п(Го)ДФ1
7'=7'о4-~--------------
i-2/п (Го)дф,
(5.54)
где /в< f Ti—функции, задаваемые таблицами стрельб; /1Р /г/—произ-
водные функций и fTi ;
219
Го = Л/[1~^Д(Л)];
Л=А(Л),
fT — производная функции /г.
Учитывая уравнения (5.52) и (5.54), а также имея в виду, что
угол прицеливания а в танковых СУО вводится относительно ли-
нии прицеливания, упрощенные полные уравнения задачи встречи
можно представить в виде
Г vTcos96(f —в)1 До
« COS 7. + [(.,)„---------------] д?
+ |(^б)от + *'т81п<7б]Лжтб7';
= « sin Те + (<^)0Т-^Г - (W6)ot*w Т.
Ху
VT cos 9б<?
»о 4- vT cos qt
(5.55)
Целесообразно отметить, что упрощения, принятые при выводе
уравнений (5.55), не приводят к существенным ошибкам при
стрельбе из танка как по наземным, так и по воздушным целям.
В известных ТБВ используются более простые алгоритмы ре-
шения задачи встречи, что обусловлено требованиями упрощения
аппаратуры при заданном уровне погрешностей.
Наиболее широко применяется в танковых СУО алгоритм вида
«х = a*coSTe + (U^6)oAr*sln f6; |
?1 = а*81п1л-+-(«11)отГ*-(и/б)оАГ*, |
®о+(®о) Аф«-
(5.56)
гМ+Ьп(Фф.'.
%-/.(Д*); 7j=/r(4*);
г,
Д* = ДГ7+ f vTcosq6dT,
ТД
км — коэффициент, определяемый из таблиц стрельб для нормальных усло-
вий; Гд —момент времени измерения дальности; Тв — момент производства
выстрела; та— угол крена башни.
В последнее время в связи с возросшими требованиями к эф-
фективности танкового вооружения, а также с расширением круга
решаемых задач (стрельба по воздушным целям) в ТБВ реализу-
ются более сложные алгоритмы, в которых в отличие от алгоритма
(5.56) производится более точное решение кинематических урав-
220
нений задачи встречи благодаря учету скорости движения цели по
высоте и в направлении линии прицеливания:
лт = a* cos тб -J- (w.)0T Т* + (
= «♦ Sin ь +
где Ду = Д0 + еи£7Л
(5.57)
Сравнение (5.56) и (5.57) с (5.55) показывает, что данные ал-
горитмы имеют ряд методических ошибок, анализ которых будет
рассмотрен далее.
Анализ методов получения входной информации в танке. Как
следует из уравнений задачи встречи, для вычисления углов на
водки орудия at и необходимо определить дальность цели,
знать законы движения цели и танка, метеобаллистические и топо-
графические данные.
Все многочисленные методы определения перечисленных пара-
метров можно разделить на две группы. Первую группу составля-
ют методы, основанные на использовании измерительных устройств,
а вторую — методы, предусматривающие получение необходимой
информации в соответствии с правилами и наставлениями по
стрельбе. , •
Методы второй группы, обладая невысокой точностью и низ-
ким быстродействием, требуя большой тренированности операто-
ра, малопригодны, а в ряде случаев неприемлемы для современ-
ных танковых СУО.
В первой группе различают методы непосредственного измере-
ния, в которых информацию получают от реального объекта, и кос-
венного измерения, в которых информацию получают от модели
объекта (физической или математической).
В современных танковых СУО методы непосредственного из-
мерения применяются для определения таких параметров, как
дальность цели, скорость движения танка, курсовой угол, скорость
и направление ветра, угол крена оси цапф, угол места цели, тем-
пература и давление воздуха, износ канала ствола. Методы и
средства измерения большинства этих параметров ничем не отли-
чаются от общепринятых и достаточно полно рассмотрены в спе-
циальной литературе. Однако измерение некоторых из этих пара-
метров (скорость и направление ветра) на танке имеет ряд особен-
ностей, обусловленных необходимостью размещения чувствитель-
ных элементов датчиков на башне танка, а также специфическими
условиями эксплуатации.
Методы косвенных измерений используются для определения
прежде всего параметров движения цели и температуры зарядов.
При этом наибольшее распространение нашли методы измерения
с помощью физических моделей. Чтобы помимо погрешностей, соп-
ровождающих любой процесс измерения, не вносить дополнитель-
ны
ную погрешность, при использовании этих методов необходимо
обеспечить идентичность протекания процессов во времени на объ-
екте и модели.
Методы определения параметров движения цели. Для управле-
ния стрельбой по движущейся цели необходимо знать параметры
движения, под которыми понимается вектор скорости движения
цели для мгновенного ее положения в пространстве и закон его
изменения во времени.
Задачу определения вектора скорости обычно сводят к нахож-
дению скалярных величин, определяющих eeKtop скорости цели
относительно осей принятой системы координат. В танковых СУО
искомыми составляющими вектора скорости движения цели явля-
ются его проекции (г>ц1, ®U1J, vuZ) на оси системы координат
О;т£, связанные с линией прицеливания. Непосредственное опре-
деление значений г»и5, vei(, vu. для нахождения точки встречи,
как было показано выше, не обязательно. Нужно знать скорости
изменения координат текущего положения цели, которые при ее
сопровождении вырабатываются системой слежения.
В самом общем случае система слежения состоит из оптическо-
го визира (прицела), по показаниям которого оператор судит о
погрешностях слежения, органа управления, воздействуя на кото-
рый, он стремится уменьшить наблюдаемые погрешности, и приво-
да, определяющего связь' между перемещением органа управления
и получающимся при этом видимым смещением марки.
Как правило, используется привод с управлением по скорости,
предусматривающий соответствие между углом отклонения пульта
управления и скоростью изменения координаты цели, т. е.
где — угловая координата цели; ф— угол поворота пульта.
Осуществление этой связи в рассматриваемых СУО обеспечи-
вается с помощью гиростабилизатора (либо гироскопи-
ческого датчика угла — ГДУ). Определить скорость измене-
ния текущих координат цели в данной системе слежения можно
синхронизацией движений прицельной марки с целью и измерением
при этом угловой скорости движения линии прицеливания п .
В танковых системах используются обычно методы косвенного
измерения о»л п, предусматривающие измерение сигнала наводки,
поступающего на привод прицела. Эти методы основаны на том,
что сигнал наводки, поступающий на гироскопический датчик уг-
ла, представляет собой некоторую функцию скорости <ия п. Дейст-
вительно, угловая скорость прецессии ГДУ с достаточной степенью
точности может быть описана уравнением
шл. (5.58)
где — МН- коэффициент пропорциональности; Я—кинетический момент;
М — возмущающий момент.
222
Тогда, учитывая, что момент наводки, развиваемый моментным
датчиком ГДУ
М
где —коэффициент пропорциональности, Л, lt~ сила токов управляющих
обмоток моментного датчика,
уравнение (5.58) можно выразить либо через силу тока:
либо через напряжение:
(4) *»(#<>
где kf, kp — коэффициенты пропорциональности; R — сопротивление обмотки
моментного датчика.
Для получения линейной связи между угловой скоростью <ол п
и сигналом наводки (/j или Ui) необходимо выполнение условия
kf «const, которое не всегда можно обеспечить. Тогда для получе-
ния информации об угловой скорости движения линии прицелива-
ния необходимо в цепь измерения сигнала Наводки включить
функциональный п р е о б р а з о в а те л ь A, =f (/2). Таким
образом, измеряя напряжение сигнала наводки ..(Л либо силу тока
Л , например, включением в цепь управляклцей обмотки момент-
ного датчика измерительного сопротивления, мож-
но измерить угловую скорость линии прицеливания.
Определение параметров движения цели одним из рассмотрен-
ных выше способов происходит в замкнутой через человека-опера-
тора системе слежения, поэтому процесс измерения всегда сопро-
вождается динамическими ошибками (особенно при стрельбе с
ходу), вызванными непроизвольными реакциями человека на на
блюдаемое им рассогласование прицельной марки с целью
Наиболее радикальным средством, уменьшающим случайные
динамические ошибки, является сглаживание, т. е. усреднение па-
раметров движения цели за некоторый промежуток времени, пред-
шествующий текущему моменту (время наблюдения Т„л6).
Следует отметить, что закон изменения и>л п определяет и функ-
цию, которой необходимо усреднять мгновенные значения скорости
за время наблюдения. Однако закон движения цели может быть
произволен, поэтому можно лишь предполагать (экстраполиро-
вать) закон движения цели за время полета снаряда, т. е. прибе-
гать к некоторым гипотезам о движении цели за указанное время
Один из наиболее распространенных способов экстраполяции
движения цели предполагает, что цель за время упреждения дви-
жется так же, как и до момента выстрела. В этом случае экстра-
223
полиция в условиях помех сводится к задаче оптимального сгла-
живания и связана с решением интегрального уравнения
гнаб
.((Г- ,) + R. (Т- »)| к(V) Л = k, + jR„ (Г- »)«МЛ. (5.59)
где Rm (Т—v) — корреляционаая функция случайной составляющей полезного
сигнала m(T); Rn (/—v) — корреляционная функция случайной составляющей
помехи п(Т); k(v) — импульсная переходная функция устройства ©пределе
ния скорости “л „ ; Хо — постоянный коэффициент; x(v) — импульсная пере-
ходная функция идеального устройства определения скорости <*>л n ; v — момент
времени.
Решение уравнения (5.59) дает следующую оптимальную (по
критерию минимума среднеквадратичной погрешности воспроизве-
дения полезного сигнала) структуру сглаживающего устройства:
UZ(s)- 1/(Г'« 4- 1),
где Я7(з) — передаточная функция сглаживающего устройства; «—оператор
Лапласа; Г'— постоянная времени.
Экспериментальные исследования показывают, что введение
сглаживающего устройства (фильтра) позволяет уменьшить
случайные динамические изменения п в несколько раз. Однако
применение фильтра приводит к выработке ложной скорости дви-
жения цели «>л, обусловленной погрешностями динамического
запаздывания в отработке регулярной составляющей сигнала на-
водки.
Так, например, при стрельбе по целям, имеющим относитель-
ную угловую скорость движения, равную нулю, <*>л составляет при-
мерно 0,5 мрад/с (среднеквадратичное значение), что приводит
к существенным погрешностям стрельбы.
Одним из возможных методов устранения указанного недостат-
ка может быть удержание прицельной марки на цели в течение
определенного времени, необходимого для завершения переходных
процессов в фильтре. Однако при этом увеличивается время на
производство выстрела, усложняется обучение операторов и веде-
ние стрельбы из танка.
Наиболее приемлемым и исключающим выработку ложного
сигнала скорости движения цели является метод, предусматриваю-
щий определенный алгоритм преобразования сигнала наводки при
измерении ®, п. Этот алгоритм предполагает подключение фильт
ра к сигналу наводки по истечении некоторого времени с начала
процесса слежения и производство фильтрации с постоянной вре-
мени, изменяющейся в зависимости от времени слежения по пара-
болическому закону от Тнлч до Гоит, т. е.
Гн.ч при Т < Г,;
ТП' + а(Т -Ttf при 7\<Г<Гг;
То„ при Т > Тг,
Г' =
224
Такая последовательность операций при измерении <*»д п и
нестационарная фильтрация сигнала наводки позволяют, как по-
казывают результаты экспериментальных исследований, практи-
чески исключить выработку «ложной скорости», не увеличивая
времени на производство выстрела.
Методы линейной фильтрации случайных динамических пог-
решностей, обусловленных механическими возмущениями, дейст-
вующими на оператора при движении танка, обеспечивают сниже-
ние уровня погрешностей, но не позволяют эффективно сглаживать
помехи, идущие от наводчика, так как их спектр достаточно бли-
зок к спектру полезного сигнала.
Одним из способов повышения помехозащищенности процесса
определения параметров движения цели является применение
в танковых СУО полуавтоматических систем слежения (ПСС),
обеспечивающих по ряду дискретных совмещений прицельной мар-
ки с целью восстановление закона ее движения.
Рис. 5.54. Структурная схема ППС с экстраполятором:
а — 1 типа; 6 — 11 типа
Рассмотрим задачу синтеза структуры простейшей ПСС с л и-
нейным экстраполятором, обеспечивающим восстановле-
ние равномерно прямолинейного закона движения цели.
Примем за основу синтезируемой системы структуру, приведен-
ную на рис. 5.54, а. Сформулируем задачу синтеза данной системы
слежения: необходимо таким образом определить коэффициент пе-
редачи Л,, чтобы к моменту окончания л-го совмещения на выхо-
де экстраполятора присутствовало бы напряжение, пропорциональ-
ное скорости движения цели. Следует отмстить, что необхо-
димое число совмещений для обеспечения автоматического слеже-
ния однозначно определяется принятой гипотезой о движении це-
ли и в рассматриваемом случае равняется двум.
15 Зак. 38с
225
Представим закон движения линии цели /ц (Г) в виде интерпо-
ляционного полинома Лагранжа, содержащего в явном виде функ-
цию /ц (Т) в фиксированные моменты времени:
/,(Г) = А (Г,) 4- А(Л), (5.60)
где /ц(7<) соответствует положению линии цели к моменту окончания Z-го со-
вмещения (/ — 1,2).
Для определения параметров движения цели продифференци-
руем уравнение (5.60) по Т. Тогда получим
Д(?) = /ц(Т,)/(Л - та)+А(Га)/(Л - Г,).
С другой стороны, параметры движения цели, вырабатываемые
системой слежения к моменту окончания второго совмещения, мо-
гут быть определены согласно рис. 5.54, а из следующего уравне-
ния
Л,. .(Л = и,+] и, ат.
где /Пр. м—первая производная функции /пр< м (Т), описывающей закон дви-
жения прицельной марки; U\ — напряжение на выходе экстраполятора в мо-
мент окончания первого совмещения; C/j—управляющее напряжение в период
второго совмещения; Т\ — момент начала второго совмещения
Учитывая, что
А(Г() = Др.,(Т,),
и то, что при Т=Т2 должны быть выполнены условия
Л (Г.)=4, (Г,).
исходное уравнение для определения коэффициента k, можно за-
писать в виде
f \u2dTdT + f U2k,dT = (T2 - Г,) [ U2dT. (5.61)
г» г, т,
Решение уравнения (5.61) дает
k, = Т2 - Г,,
т. е. коэффициент передачи экстраполятора Л, прямо пропорцио-
нален времени между совмещениями.
Известна и другая структура ПСС (см. рис. 5.54,6), в которой
восстановление закона движения цели обеспечивается при выполне-
нии условия
Л,= 1/(Га-Л).
Методы определения температуры заряда. Для определения
температуры зарядов в танке с помощью моделей необходим
226
мо обеспечить идентичность температурных полей зарядов и моде-
ли. В соответствии с теорией подобия это можно осуществить при
соблюдении тождественности краевых условий и математического
описания процессов, протекающих на объекте и модели.
Последнее условие может быть удовлетворено при соблюдении
равенства значений критериев подобия, которыми для рассматри-
ваемого процесса (изменение температуры заряда) являются кри-
терии Фурье (Fo) и Био (Bi). Определение температуры зарядов
(G), находящихся в танке, с помощью моделей сопровождается
погрешностями, вызванными несоблюдением равенства критериев
Fo и Bi для модели и заряда и несоблюдением равенства краевых
(начальных и граничных) условий.
Результаты теоретических и экспериментальных исследований
показывают, что в качестве эквивалентного заряду тела
может быть принят неограниченный цилиндр (цилиндр), высота
которого равна бесконечности). Это позволяет определить темпера-
турное поле заряда решением дифференциального уравнения тепло-
проводности вида
dt(R. 7) Г№(*. 7) , I dt(R. 7)1
57 ~а [~5Я» R dR ] ’
где / —температура; R — пространственная координата^ 7 — время; а — коэф-
фициент температуропроводности заряда. •
Следует указать, что при определении t3 для решения задачи
встречи требуется знание не всего температурного поля (темпера-
туры как функции пространственных координат и времени), а
только среднеобъемной температуры, координаты кото-
рой находятся на радиусе, равном 0,7 радиуса цилиндра.
Определить температурное поле воздуха в боеукладке с нерав-
номерно распределенными источниками энергии при случайном ха-
рактере изменения тепловых потоков от внутренних источников
(например, при включении или выключении ряда из них), а также
при изменяющемся во времени внешнем тепловом потоке в (настоя-
щее время довольно сложно. Поэтому воспользуемся результатами
экспериментальных исследований температурного поля современ-
ного танка, из которых следует, что изменение избыточной темпе-
ратуры в каждом месте боеукладки описывается простой экспонен-
той с показателем k = 0,5, а температурное поле боеукладки нерав-
номерное, причем показатель экспоненты k — величина постоянная
в любом месте боеукладки, т. е. не зависит от координат мест рас-
положения зарядов в боеукладке.
Рассмотрим метод учета Zs с помощью теплового аналога заря-
да (имитатора). Учитывая, что соответствующим выбором характе-
ристик модели конструктивная ошибка может быть сведена до
требуемого минимума, основное внимание уделяем анализу пог-
решностей, вызванных несоблюдением равенства начальных (8Н)
и граничных (8Г) условий.
15* 227
Для определения характера изменения погрешности 8М рас-
смотрим следующую задачу. Пусть заряды, имеющие среднесуточ-
ную температуру окружающей среды /ср, загружаются в боеуклад-
ку танка, где температура воздуха изменяется по закону
I.
где /уст — установившееся значение температуры воздуха в боеукладке; /в —
начальное значение температуры воздуха в боеукладке; Т — текущее время от
момента загрузки боекомплекта; Тв — время с момента включения теплоис-
точников в танке до момента загрузки боекомплекта.
Решая дифференциальное уравнение теплопроводности для
рассматриваемого случая, получаем
<.(Г) - *.Р+ -2 В.е %F“
2fc/t(/Pd~)e *Г_______
/мл (/рТ) - 4-pd Л (/м)
(5.62)
МЛ = <о + (*усг-*о) 1 “
2J,(/Pd)e*(r+r,)
/МЛ (/М) - Pd Л (/Pd)
-2^e-^'r+r^/(l-^Pd)l
i - о J
(5.63)
где BH — постоянные коэффициенты; рл — корни характеристического урав-
нения, зависящие от критерия Bi; Jo, Л — функции Бесселя соответственно ну-
левого и первого порядка; Pd — — критерий Предводителева;
b = e
Тогда погрешность
*м(Л = *о + (*усг-/о)
Ь) - Pd
226
__ V n
i-i4/pd
где
Л, - (4 - <.,) [ I - S B"e ’”P° ] • (5 64)
ц2д
____— T
/?2 *
4, “ e " .
Выражение (5.64) при 7^=0 (к моменту загрузки боекомплек-
та теплоисточники выключены) и b*=d=l можно записать в виде
МЛ = й-е (5-65)
При некотором Т„ ">Т\ b=dzs0, а поэтому выражение для
погрешности &н имеет вид
МЛ (<,„-/.„)£ а, е (5.66)
/—1
Из выражений (5.65) и (5.66) видно, что по истечении некото-
рого промежутка времени, начиная с момента • загрузки, погреш-
ность из-за несовпадения в начальных температурах имитатора
и зарядов уменьшается по закону экспоненты. f
Перейдем к анализу погрешностей, 'вызванных неравенством
граничных условий для имитатора и зарядов. Это неравенство
обусловлено тем, что температурное поле в местах размещения за-
рядов, как было сказано выше, неодинаково, а поэтому имитатор
в танке будет взаимодействовать со средой, температура которой
характерна только для одного заряда или группы зарядов.
Пусть температура воздуха в месте размещения имитатора оп-
ределяется уравнением
^1в = Луст (^)уст ^о) е ’
а в месте размещения /-го заряда уравнением
Gb ~ GyCT (^2уст 'о)е
Учитывая, что в этом случае решение дифференциального урав-
нения теплопроводности для среднеобъемных температур имитато-
ра и заряда аналогично уравнению (5.63) при Г, =0, а также то,
что
«т(Г) = /и(Г)-/3(Г),
где &г — погрешность из-за несоблюдения равенства граничных условий,
229
выражение для погрешности примет вид
2J,(KPd)e~*r
KPdJo(KPd) - Pd J, (/Pd)
&г (Луст — ^густ) 1
УМ
-^/Pd
I—I
Анализ полученного выражения показывает, что погрешность
Зг зависит от степени неравномерности температурного поля бое-
укладки и с течением времени увеличивается.
Результаты количественного анализа составляющих погрешно-
сти определения ta с помощью имитатора, обусловленных несоблю-
дением равенства краевых условий, при различных условиях заг-
рузки боекомплекта приведены на рис. 5.55. Расчеты проведены по
Рис. 5.55. Зависимость по-
грешности измерения тем-
пературы зарядов с по-
мощью имитатора от вре-
мени:
а — при несоблюдении началь-
ных условий; б — при несоблю-
дении граничных условий; О, I,
2, 3, 4—время от момента вклю-
чения теплоисточников в танке
до момента загрузки боекомп-
лекта, в часах
экспериментальным данным, полученным
ратурного поля боеукладкн танка Т-64А
именно:
при исследовании темпе-
в зимних условиях, а
т 1^уст — /о] — 20 С;
т R/уст — ^<yctl = Ю ’С»
где т [/уст — /о] — математическое ожидание избыточной температуры;/и[/ууст—
— //уст! — математическое ожидание неравномерности температурного поля
боеукладкн.
Анализ данных, представленных на этом рисунке, показывает,
что невозможность соблюдения равенства краевых условий приво-
дит к существенным погрешностям определения температуры за-
ряда с помощью имитатора, при этом наибольшие погрешности
имеют место при несоблюдении равенства в начальных условиях.
В реальных условиях эксплуатации танка погрешность &г (Г) бу-
230
дет меньшей вследствие уменьшения неравномерности температур-
ного поля боеукладкн при вращении башни и конвейера.
Таким образом, основным недостатком определения /3 с по-
мощью тепловых аналогов является высокий уровень погрешности
6Н. Снизить этот уровень можно при размещении в танке несколь-
ких аналогов, каждый из которых является аналогом той части
боекомплекта, с которой он достаточное время находился в одних
температурных условиях.
Наиболее просто данная задача решается при применении
электрических моделей в качестве теплового аналога заряда. Целе-
сообразно остановиться на этом вопросе более подробно.
Рассмотрим переходную функцию заряда Л3. Учитывая, что
тепловой моделью танкового заряда является бесконечный ци-
линдр, эту функцию можно представить в виде
*,-1-2 Я„е (5.67)
/—I
В качестве электрического аналога примем инерционное звено,
переходная функция которого имеет вид
Л»=1 —е"г/г, (5.68)
где Т*— постоянная времени инерционного звена. « *
Сравнив выражения (5.67) и (5.68), после ряда преобразова-
ний имеем
" -
Г« Г/1п 2. Впе , (5.69)
/-1
т. е. электрической моделью среднеобъемной температуры заряда
является инерционное звено, постоянная времени которого зави-
сит не только от собственных характеристик заряда, но и от вре-
мени.
Однако техническая реализация нестационарного звена со-
гласно выражению (5.69) представляет определенные трудности,
поэтому на практике с достаточной степенью точности постоян-
ную времени можно определить из выражения
Г' = Я2/(р2а).
Функциональная схема электрической модели среднеобъемной
температуры заряда представлена на рис. 5.56.
Отметим некоторые особенности метода определения /3 с по-
мощью электрического аналога заряда. При полной смене бое-
комплекта погрешность в задании начальных условий может быть
полностью исключена (предполагается, что начальная темпера-
тура зарядов, загружаемых в танк, известна). Однако при час-
тичной смене боекомплекта в случае применения одного аналога
231
будет возникать погрешность >и. Естественно, Что можно каж-
дому заряду придать свой аналог и тем самым погрешность
исключить полностью, но это приведет к усложнению конструк-
тивных решений и увеличению объема прибора. Поэтому целесо-
образно определить минимальное число аналогов, при котором
обеспечивается требуемая точность измерения.
Для простоты дальнейших выкладок рассмотрим решение
этой задачи при некоторых частных законах изменения темпера-
туры воздуха в боеукладке
Рис. 5.56. Функциональная
сеема электрической модели среднеобъемной тем-
пературы заряда
1. Пусть температура воздуха в боеукладке /в к моменту пер-
вой загрузки боекомплекта, имеющего начальную температуру /0.
равна температуре воздуха окружающей среды /ср, т. е. tu t<9=
=const, причем /ср >/0.
Полагая, что темп загрузки боекомплекта v (время между
двумя загрузками) постоянен и температура вновь загружаемых
зарядов равна tQ, температуру зарядов / й загрузки и ей пред-
шествующей можно определить следующими выражениями:
<,]/(/„-/«) = 1-2 вяе ; <5.70)
i-1
(С., (П(5-71)
i-l
Вычитая (5.71) из (5.70), получаем
S(7')=i^e п* ~2Ае . (5.72)
<- i
где &(Г)—относительная разница температур зарядов двух последовательных
загрузок.
232
Будем считать, что на борту танка находятся р тепловых ана-
логов. Так как для зарядов, загружаемых р + 1 раз, используется
первый аналог и аналогом первых зарядов становится второй
и т. д., то, принимая во внимание, что pv>2, уравнение (5.72)
можно записать так:
В (Г) = В^~ с1Т + ^ [ег ’ - 1 ], (5.73)
где с = р^а/Я» .
2. Пусть температура воздуха в боеукладке с момента первой
загрузки зарядов с начальной температурой t0 изменяется по за-
кону экспоненты
Тогда с учетом допущений предыдущего случая погрешность
6(7') определится выражением
m.- ।
(5.74)
Результаты вычислений по формулам (5.73J и (5.74) для раз-
личных значений v н р при Т=0 приведены на рис. 5.57. Как
Рис. 5.57. Зависимость изменения погрешности измерения температуры заряда б
от числа электрических аналогов:
а ~ ze " Гср " С0Пв,1 6 ~ ZB “ густ ~ ^уст ~ * *Г
следует из представленных данных, погрешность определения
температуры зарядов при частичной смене боекомплекта можно
значительно уменьшить путем использования на борту танка не-
скольких электрических аналогов заряда.
Выбор необходимого количества аналогов определяется тре-
буемой точностью измерения /3.
16 Зак. 38с
233
Методы определения скорости и направления ветра. При изме-
рении скорости и направления ветра на танке необходимо учиты-
вать воздействие на чувствительный элемент датчика как меха-
нических возмущений, так и внешней среды (пыль, грязь, атмо-
сферные осадки), а также ограничения габаритных размеров
датчика.
Имеющие наибольшее распространение в метеорологической
практике методы определения направления ветра с помощью
флюгарок малоприемлемы в танке, так как при этом датчик
имеет слишком большие габаритные размеры и высокую чувстви-
тельность к механическим возмущениям. Поэтому в танковых
СУО используются методы, основанные на выделении ортогональ-
ных составляющих вектора скорости ветра. В настоящее время
известно несколько таких методов, в частности метод выделе-
ния боковой составляющей скорости ветра с по-
мощью спрямляющей решетки и термоэлектри-
ческий метод.
Конструктивная схема датчика для первого из указанных ме-
тодов приведена на рис. 5.58. В данной схеме датчик представ-
Рис. 5.58. Конструктивная схема
электромеханического датчика ветра:
/ — корпус; 2 — генератор; Л — внят; 4 —
спрямляющая решетка; а—опора с обте-
кателем
ляет собой цилиндрический корпус, с обоих концов которого
встроены опоры. На одной из опор закреплен электромеханиче-
ский анемометр винтового типа, преобразующий аэродинамиче-
ское давление воздушного потока в электрический сигнал. Вто-
рая опора по своей форме зеркально повторяет первую. В резуль-
тате достигается равенство аэродинамических условий для воз-
действия воздушного потока внутри корпуса справа и слева.
Каждая опора на торце имеет спрямляющую решетку, которая
совместно с обтекателем обеспечивает равномерный воздушный
поток:
UZ6= VFcos?^,
где 1Гб — составляющая скорости в направлении продольной оси анемометра;
IF—вектор скорости; —угол между направлением ветра и продольной
осью анемометра.
234
Результаты экспериментальных исследований датчиков ветра,
построенных по данной схеме, свидетельствуют о том, что требуе-
мая точность измерения обеспечивается при достаточно боль-
ших размерах датчика, что является существенным недостатком
данного метода.
Более предпочтительным с этой точки зрения является термо-
электрический метод, в котором используется зависимость
степени охлаждения нагретого тела (обычно применяется термо-
сопротивление) от скорости воздушного потока. Непосредственное
применение термосопротивлений в качестве чувствительных элемен-
тов (термоэлементов) в датчике ветра на танке не позволяет
достаточно точно определить направление ветра, так как, во-пер-
вых, решение получается неоднозначным (теплоотдача термосо-
противлення при продольном обтекании пропорциональна W,
а при поперечном — пропорциональна / UZ), во-вторых, при
углах, близких к 90° (поперечное обтекание), чувствительность
слишком мала, а при углах, близких к нулю (продольное обтека-
ние), сильно сказывается возмущающее действие элементов, под-
держивающих термосопротивление. Кроме того, чувствительные
элементы на основе термосопротивления сильно подвержены воз-
действию внешней среды.
Поэтому для танковых датчиков ветра более приемлем прин-
цип построения термоэлемента в виде нагреваемой прямоуголь-
ной металлической пластинки, размещаемой в замкнутом объеме,
сообщающемся с атмосферой только через отверстия в устройст-
ве диафрагмирования (рис. 5.59).
Среднеобъемная температура t такого элемента связана с тем-
пературой среды tcp и тепловой мощностью А/, выделяемой в эле-
менте, следующим соотношением:
t = tcp + HF,
где F — некоторый коэффициент, зависящий от геометрии элемента, теплопро-
водности материала, из которого элемент изготовлен, и условий эксплуатации.
Количественно эти условия можно характеризовать коэффи-
циентом теплоотдачи а, который, в свою очередь, является функ-
цией потока, омывающего чувствительный элемент.
Таким образом, между температурой t и скоростью потока
можно записать следующую цепочку зависимостей:
UZ -> а - F - 1.
Следовательно, зная зависимость Г(а), ^которая определяется
экспериментально, можно по температуре t судить о скорости W.
Указанная конструкция термоэлемента согласно проведенным
исследованиям обладает резко выраженной зависимостью степе-
ни охлаждения от направления потока, а наличие замкнутых ка-
мер, сообщающихся с атмосферой через отверстия в устройствах
диафрагмирования, обеспечивает выделение составляющей ско-
16*
235
рости ветра в широком диапазоне углов и повышение точности
благодаря отсутствию распространения тепловых потоков вне на-
правления расположения термоэлементов.
Характеристики датчика практически не зависят от количест-
ва отверстий в устройстве диафрагмирования, поэтому при эксп-
луатации на танке засорение даже большинства из них не сни-
погрешность
Рис. 5.59. Конструктивная схема термоэлектрического дат-
чика ветра:
/ — устройство диафрагмирования; 2 — корпус; 3 — теплоизоляционная
пластина; 4 — термоэлемент
жает точности: среднеквадратичное значение пог-
решности датчика составляет 1 м/с.
Небольшие размеры датчика (d=20 мм, Л =
= 15 мм), реализуемые при использовании данно-
го метода измерения U/e, позволяют обеспечить до-
статочно эффективную систему защиты (например,
пневмоочистку) от пыли, грязи, а также и от воз-
действия атмосферных осадков.
Анализ точности ТБВ. В самом общем случае
решения задачи встречи на выходе ТБВ может быть
представлена в виде суммы следующих слагаемых:
где 8т п — трансформированная погрешность, представляющая собой ошибку
вычисления угла обусловленную неточностью входной информации;
п — методическая погрешность, представляющая собой ошибку вычисления
угла обусловленную неточность требуемой математической зависимос-
ти; п—инструментальная погрешность, представляющая собой ошибку
вычисления угла обусловленную неточностью изготовления баллисти-
ческого вычислителя.
Не останавливаясь на вопросах анализа инструментальных
погрешностей вычислителя, которые полностью определяются
принятыми схемотехническими решениями и достаточно подроб-
но изложены в литературе, перейдем к рассмотрению первых
двух составляющих погрешности.
Анализ трансформированных погрешностей. Пусть ТБВ реали-
зует уравнение, которое можно представить в виде
У = y(Xi, х2......xh ... , хп).
Наличие входных погрешностей в значениях аргументов
вызывает появление трансформированной погрешности
\ я - у (х, + 8Х|, х2 4- &х2, • • - •> xi + 8х,...........х„ + 1хя) —
- У (хь х............ х(, . . . , хя). (5.75)
236
Разложив правую часть уравнения (5.75) в ряд Тэйлора и
ограничившись первым членом, будем иметь
Ем
Если входные погрешности являются случайными величинами,
то случайной величиной будет и трансформированная погреш-
ность, числовые характеристики которой при заданных Л, опреде-
ляются по формулам
;
4Т дх1 Ja *1
п п (576)
- 2 (<*У Dxi 4 Д 2 (Эу дх^К, ,.
где (ду/Аг^д,—частная производная вря значении аргумента, равном его мате-
матическому ожиданию; Klt t — корреляционные моменты для погрешностей
и Ixj.
В качестве примера определим трансформированные погреш-
ности ТБВ, реализующего уравнение (5.56).
Взяв частные производные по каждому аргументу, входящему
в уравнение (5.56), получим •
" 1Г1д cos Те + (sin 4- [СA7*cos 76 -
— «*sln 4- ^„7^sin76i(Wz6)OT 4-COS76 4-
4- (^б)»А sin7e V fTl (Гв) И», 4 И1Гт cos 7. 4-
+ (^6)оА Sin 7^] 4- [^«ftcos 7б 4- (W'ahA sin 7б^б |%б »
s,n Тб + (юч)<>т + a* COS 7e57o -
- Лн7-8 (UZ6)0T 4- sin 7*2/., («.)И», 4- [(<%kn -
- (V fn (Го) ЙФ,- 4- ГЧ + [Flt,T sin 76 4-
-Ь (*%)•’ F2PT — ( ^б)от *н I 4- I/*,<в Sin 7б 4-
4- (\)ot .
где fu — частная производная функции а * по i-му ее аргументу; Г2/
частная производная функции 7 * по i-му ее аргументу; 5$, — погрешность
измерения i ro параметра.
237
Анализ методических погрешностей. Как известно, источни-
ками методических погрешностей ТБВ являются различные допу-
щения и упрощения, принимаемые при решении задачи встречи.
Если при построении ТБВ вместо точных уравнений, в качест-
ве которых примем уравнения в виде (5.55), используются урав-
нения (5.56) или (5.57), то вычисление углов и будет сопро-
вождаться определенным уровнем методических погрешностей.
Сравнивая (5.56) с (5.55), получим
х, т . "т cos ?б у
М. П ( с)и Ду + v0+vTcos?ft +
4- v1 sin q6kv.T+ (U/6)0T Тб +
2/.л«о)Аф/ 2Л/<«о)дф1
“Ь ~~--------m ‘ -------------Н & »д I
1- 2 л’/(«о>д^
I -1
(5.77)
- г*] - <uz«>" *»г’1
где (ДУ)-/«(Д*)
Анализ первого уравнения системы (5.77) показывает, что ме-
тодическая погрешность п обусловливается:
отсутствием учета скорости движения цели в вертикальной
плоскости и в направлении линии прицеливания;
отсутствием учета влияния скорости движения танка на ско-
рость вылета снаряда из орудия;
неточным учетом поправки на составляющую скорости ветра
в боковом направлении;
неточным определением угла прицеливания с учетом поправок
на отклонение условий стрельбы от нормальных.
Согласно второму уравнению системы (5.77) методическая
погрешность б₽м „ обусловлена:
неточным определением времени полета снаряда с учетом по-
правок на отклонение условий стрельбы от нормальных;
неточным вычислением угловой скорости движения линии це-
ли в момент упреждения;
неточным учетом поправки на составляющую скорости ветра
в боковом направлении.
Аналогично можно получить методические погрешности ТБВ,
реализующего уравнения (5.57).
238
При сравнении этих уравнений с идеальными получим
где
5 %, п = (ш:)от IТ “ I + cos qb <? X
* [ 1___________Ll -L vr cos я т
А L «о + vT cos f в Ду 1 ' ТГу '
+ (1^б)отТбкГ-Лн7'#] +
V /в/(«о) Л ф/ У /«/ («о)
+ —-----------------------------------*"8ад’’
i - 2S 4 <«о)д ф/
I - 1
»L. - -jj-1 т - г«| - (wj„ [ k, т - k. т' ],
вад = 4 (Л 4 «at П - /. (Д. + Г*).
(5.78
Из выражений (5.78) следует, что в данном случае методические
погрешности 6aM „ и 60м„ обусловлены:
неточным определением угла прицеливания и времени полета
снаряда с учетом поправок на отклонение условий от нормальных;
неточным учетом скорости движения танка; .
неточным определением поправки на Составляющую скорости
ветра в боковом направлении.
В общем случае аргументы, входящие в /равнения (5.77) и
(5.78), представляют собой случайные величины, поэтому методи-
ческие погрешности также являются случайными и их характери-
стиками будут
m8-.n = IJ • • • f8M.n/(xi‘ х2......xn)dxxdx2 ... dxn\
ж. Ж. хп
°8».. = И • • .( (8м.- т8«. „>’/<•*.. л,...х.)dxxdx2 . . . dx„
Ж, Ж, хп
где /<Х1, х9,... , х„) —закон распределения системы случайных величин
kb *з....Л„1.
Аналитическое определение числовых значений методических
погрешностей весьма затруднительно, ввиду сложности описания
подынтегральных выражений, поэтому более приемлемы числен-
ные методы.
Не останавливаясь на детальном количественном анализе всех
источников методических погрешностей, приведем здесь лишь
некоторые результаты расчета этих погрешностей для алгоритма
(5.57), обусловленных неточным решением баллистических урав-
нений задачи встречи для случая стрельбы кумулятивными сна-
рядами из 125-мм танковой пушки при A/S=A(,=35°C и Доо=
= 1,5% (табл. 5.3), а также неточным решением кинематических
239
Таблица 5.3
Методические погрешности решения баллистических уравнений
задачи встречи
Д. М Методическая погрешность вычисления угле прицеливания — «—а*, мрад (т. л.) Методическая погрешность вычисления времени полета бГ-Т-Г». с
] 5(1) 0,16 0,5 10“’
2 000 0.33 1.0 10"’
2 500 0.5 1.6-10”’
уравнений для того же типа снарядов при з =30°, з? в =4,2°
и нормальном законе их распределения (табл. 5.4).
Еще одним источником возникновения методических погреш-
ностей при решении задачи встречи является отсутствие знания
законов изменения параметров движения цели и ветра в период
движения снаряда до цели. Это приводит при вычислении углов
упреждения к методическим погрешностям экстраполяции за вре-
мя полета снаряда.
Таблица 5.4
Методические погрешности решения кинематических уравнений
задачи встречи
Д. М Методическая погрешность вычисления увла упрежаення по ВН &ак. мрад (т. Д.) Методическая погрешность вычисления угла упреждения по ГН *3Ж. ырдд (т. д.)
гт - 5 м/с vr -10 м/с т»т — 5 и/с от - 10 их
m а m в m а m •
1 500 -0,07 0,10 -0,13 0,19 0 0,06 0 0,15
2000 -0,10 0.13 -0.20 0,27 0 0,08 0 0.20
2 500 -0.14 0,18 -0,28 0.36 0 0,10 0 0,23
Найдем выражения для вычисления этих погрешностей.
В соответствии с данным выше определением методическая
погрешность упреждения на движение цели за время Т
V гт •
8?= J |% + т(Г)М7 -Г I (и,.+ '>(Г)]Л_(ГП[,,, Г)</Т,
ëРЬ
где «о —систематическая составляющая полезного сигнала; т(Г) — случайная
составляющая полезного сигнала с известной корреляционной функцией Rm( 7);
£„(Г) — импульсная переходная функция канала определения скорости дви-
жения цели; ф(Т) — случайная составляющая сигнала измерения скорости двн
женин цели, представляющая собой сумму полезного сигнала т{Т) и помехи
Т'пр. ~ момент производства выстрела; Т'упр— момент встречи снаряда
с целью.
240
Полагая экстраполятор линейной системой, представим погреш-
ность в виде двух составляющих:
неслучайной (систематической)
(«?).«,- Г *adT-T J »А( T„r ., T)dT (5.79)
гпр. в 0
и случайной (статистической)
(»₽)«- ]Рт(П</Г-7 Г)<7Г. (5.80)
Определим дисперсию случайной погрешности (8р)сл.
Возводя в квадрат выражение (5.80) и применяя операцию
математического ожидания к обеим частям полученного выраже-
ния, имеем
гупр гупр гупр гпр. в
Г,)^Г,-27-J ( «п+(7-„ 7)Х
Г. 4 О
^Лр. В Т'пр. в в
х к. „ T)d7\dT+ Tl | j 4.(7^,, Г,) X
Х<(7.„, T,)Rt(T„ Г,). ' (5.81)
где R* (Г) — корреляционная функция сигнала ф(Г); (Г) — взаимно
корреляционная функция.
Считая, что функции, стоящие под знаком интеграла, стацио-
нарны, а воздействия т(Т) и п(Г) некоррелированы, вместо (5.81)
с учетом результатов работы [8] можно записать
гупр гупр гп|>. в
j | «т(Г,-7-)Х
гпр. В Л|р. в °
X k (Г, - Г) dl\dT 4- 2 Т2 М (Гпр в - z, z) (z) dz, (5.82)
0
гпр. в ~ *
где ,-z, г) =| *(7*)*(Г4-г)«/г;
7, т — переменные значения времени.
Как видно, полученная формула позволяет вычислить диспер-
сию случайной составляющей погрешности, если известна им-
пульсная переходная функция канала определения ш.
241
Таким образом, по формулам (5.79) и (5.82) можно рассчиты-
вать числовые характеристики искомой методической погреш-
ности.
Перейдем к рассмотрению методической погрешности в вычис-
лении поправки на изменение траектории снаряда из-за действия
ветра Ь?
Определим погрешность ЗРГ как разность между углом,
проходимым снарядом в боковом направлении из-за действия вет-
ра за время Т, и углом, выработанным ТБВ, т. е.
Ту гпр. в
«?г = f k,(T, »)|И7, + тк(»))Л- [ kv(T, »)Х
' л₽- в °
Х1^. + 1ВГ«|Л.
где *с(7) — импульсная переходная функция, описывающая движение снаряда
в боковом направлении; kv,(T) — импульсная переходная функция канала
определения V.
Тогда аналогично предыдущему можно записать
Ту Тц^. В
f МЛ V) «'.Л- ( МЛ »)
U. в О
-ъ)Х
,)t =2j Л1,(Г —z, z)R„(z)dz-2,\ I R,
*irp. в " *ep. в О
X^c(r-v)Aw(r-v2)rfv1rfv2 + 2xy Mw(T-z, z) X
X Rm(z)dz.
Особенности решения задачи встречи при стрельбе по воздуш-
ным целям. Решение задачи встречи при стрельбе из танка по
воздушным целям имеет ряд особенностей, связанных как с ха-
рактером движения этих целей, так и с принятыми способами ве-
дения стрельбы.
Как уже отмечалось, между угловыми и линейными координа-
тами существуют соотношения (5.49). Продифференцировав по Т
данные уравнения, после ряда упрощений, допустимых ввиду не-
большого значения членов vzT и v^T в сравнении с (Д + и{ Г),
получим
шс(Г) = ^Д1/(Д14-^Д)’;
<Вг(Г) = ^Д1/(Д.4-^Г)2,
(5.83)
Анализ этих выражений показывает, что для высокоскорост-
ных целей (и5 >20 м/с) допущение о постоянстве угловых ско-
242
ростей ю, и в период процесса слежения является неправо-
мочным, а поэтому их следует рассматривать изменяющимися во
времени.
Это обстоятельство приводит к тому, что при фильтрации пе-
ременных параметров движения на выходе сглаживающего
устройства возникают динамические погрешности воспроизведе-
ния полезного сигнала, уровень которых существенно снижает
точность стрельбы. Для обеспечения требуемой точности исполь-
зуются методы компенсации динамических погрешностей.
Как известно, динамическая погрешность воспроизведения по-
лезного сигнала при условии отсутствия случайных погрешностей
может быть представлена в виде
8(7) = С0«(Т) + С,ш(7) + ^-«>(Г) +
+ ... ... (5.84)
где С(— коэффициенты погрешностей, значения которых определяются по
следующей реккурентной формуле:
с'' 24гs*];
IFj = 1 — 1Г(д).
Полагая, что на вход сглаживающего устройства, передаточ-
ная функция которого имеет вид
UZ(s)=1/(rs+l),
поступает сигнал в форме (5.83), а также и то, что с достаточной
степенью точности можно ограничиться тремя первыми членами
в уравнении (5.84), динамическая погрешность
8(7) = - .(7) [ Д[ Ч г Г + -дД tjr (ГТ[ (5.85)
Таким образом, задача сглаживания параметров движения
воздушной цели может быть решена с требуемой точностью при
условии компенсации динамических погрешностей согласно вы-
ражению (5.85).
Изменение угловых скоростей движения воздушной цели в
процессе слежения вызывает не только усложнение структуры
устройств определения ш. и » но и в значительной степени
усложняет сам процесс слежения. В связи с этим рассмотрим
возможность использования полуавтоматических систем слеже-
ния, позволяющих существенно упростить сопровождение воздуш-
ных целей в результате применения в данных системах принципа
дискретного совмещения прицельной марки с целью. Определим
структуру экстра пол ятор а ПСС, обеспечивающего по двум диск-
243
ретным совмещениям восстановление закона движения воздуш-
ной цели, например по ВН. Установим соотношение между угло-
вой скоростью на выходе экстраполятора (®,). и скоростью
Так как к моменту окончания второго совмещения
(•»); = «1_2/7'i-v
где «|_2 —угол, проходимый прицельной маркой за время между совмещения
ми 7^,,
то с учетом первого уравнения системы (5.49) можно записать
Wc-®С(/(Д‘ + ЧГ1-2)- (5-86>
Сравнивая (5.83) с (5.86), получим
ос (Г) = (ш,)с Д, (Д, + Vi-a)/•
Полагая в последней формуле
^-(Дз-ДО/Г,.,,
где т — текущее время после окончания второго совмещения; — дальность
цели в момент окончания второго совмещения,
окончательно получаем
+^ТГ!^У]- <5Л7)
Аналогично запишем выражение для (Т):
(Г) = («,)„ Д,[дг (1 + . (5.88)
Таким образом, измеряя в момент окончания каждого совме-
щения дальность цели и преобразуя сигнал на выходе экстрапо-
лятора после второго совмещения в соответствии с выражениями
(5.87), (5.88), путем двух дискретных совмещений можно обеспе-
чить определение параметров движения воздушной цели.
Перейдем к рассмотрению второй особенности решения задачи
встречи, обусловленной использованием при стрельбе по воздуш-
ной цели снарядов с дистанционным взрывателем.
При стрельбе такими снарядами всегда существует время за-
паздывания Т3 между моментом установки взрывателя и момен-
том вылета снаряда из канала ствола, которое в самом общем
случае определяется временем на установку взрывателя 7'у , за-
244
ряжание ( Гж, _ ) и производство выстрела Гпр в. Поэтому
при решении баллистических уравнений задачи встречи необхо-
димо вводить поправку во время полета Т на изменение этой
величины за время Тэ, значение которой может быть найдено из
выражения
где m [7э] — математическое ожидание времени запаздывания.
Точность вычисления поправки в соответствии с приведенным
выражением определяется разбросом времени Гэ относительно
математического ожидания и во многом зависит от момента уста-
новки взрывателя на интервал времени, в течение которого проис-
ходит процесс заряжание — производство выстрела.
Если предположить, что установка взрывателя производится в
начальный период досылания снаряда, то в этом случае средне-
квадратичное значение погрешности определения поправки о1г
при допущении о независимости составляющих времени 7\ опре-
деляется выражением
’.г - / ’Г,+ 4,+ • <5-89>
где 7'у—время установки взрывателя; Тл— время досылания; 7\_Пр в ~
период времени между окончанием досылания и началом производства вы-
стрела; Гпрл—время производства выстрела. •
Как следует из выражения (5.89), значение з4Г будет доста-
точно велико, так как момент начала производства выстрела мо-
жет колебаться в довольно больших пределах. Если же установка
взрывателя совмещена с моментом производства выстрела, то
погрешность з4Г, определяемая в данном случае выражением
з,г= |з2г а2 , будет существенно меньше.
’ 'у 'пр. •
5.6. ТЕНДЕНЦИИ РАЗВИТИЯ ТАНКОВЫХ СУО
Главная задача дальнейшего развития и совершенствования
танковых СУО — дальнейшее повышение их технического уровня.
Для успешного решения этой задачи необходимо разработать
приборы наблюдения и обнаружения целей в условиях естествен-
ных и искусственных помех (туман, дым, пыль, маскировка и
т. Д.), автоматизировать процессы поиска, слежения за целью и
наводки оружия.
В современных танках в решении перечисленных задач управ-
ления стрельбой принимает участие человек-оператор. Наименее
автоматизирован процесс поиска и обнаружения цели с помощью
оптических приборов.
245
В реальных условиях боевой обстановки видимость цели за-
труднена из-за задымленности и запыленности поля боя, а также
вследствие применения противником маскирующих средств, ис-
пользования экранирующих свойств местности, естественных и
искусственных укрытий.
Результаты экспериментальных исследований показывают, что
дальность обнаружения цели в реальных условиях эксплуатации
танков соизмерима с дальностью действительной стрельбы, что
предъявляет повышенные требования к быстродействию совре-
менных СУО. Человек-оператор испытывает при этом острый де-
фицит времени, что может приводить к ошибкам в управлении
оружием и снизить эффективность стрельбы.
Использование тепловизионных и радиолокационных приборов
в танковых СУО позволяет повысить эффективность поиска цели
в условиях помех, особенно в случае автоматизации этого про-
цесса.
Одним из возможных направлений решения этой задачи мо-
жет быть создание системы автоматизированной разведки целей
(АРЦ) по демаскирующим факторам, источниками которых яв-
ляются различного рода излучения (лазерное, инфракрасное, ра-
диолокационное и т. п.), а также огневое противодействие про-
тивника. АРЦ позволит в значительной мере облегчить поиск,
сократить цикл определения координат цели и автоматизировать
процесс целеуказания. *
Дальнейшее повышение эффективности обнаружения цели
может быть обеспечено в составе подразделения танков специаль-
ными средствами разведки, основанными на комплексном анализе
различных признаков целей, с передачей автоматического целе-
указания отдельным танкам.
Значительная роль в современных СУО отводится человеку
в решении задачи слежения за целью.
Ручным системам слежения (РСС) присущ ряд недостатков:
низкая помехозащищенность ввиду существенного влияния ме-
ханических возмущений, действующих на оператора при движе-
нии танка, а следовательно, на точность слежения за целью и
определение параметров ее движения;
сложность алгоритма действий человека при сопровождении
движущейся цели, что связано с необходимостью синхронизации
движений прицельной марки и цели;
ограниченные возможности сопровождения маневрирующих и
высокоскоростных целей, обусловленные низкими динамически-
ми характеристиками системы наводчик — контур управления.
Отмеченные недостатки значительно влияют на суммарную
погрешность СУО и снижают эффективность современных комп-
лексов танкового вооружения.
Одним из направлений совершенствования точностных и вре-
менных характеристик танковых СУО является применение полу-
автоматических систем слежения (ПСС) с дискретным управле-
246
нием. ПСС позволяет по ряду последовательных совмещений
прицельной марки с целью восстановить закон движения цели и
автоматизировать процесс сопровождения цели, сохранив за че-
ловеком только контролирующие функции. Более высокая поме-
хозащищвнность, меньшая критичность к параметрам контура уп-
равления, независимость закона изменения управляющего сигна-
ла от характера действий оператора в период совмещения обеспе-
чивают этим системам существенные преимущества по сравнению
с РСС. Но точность воспроизведения закона движения цели в
ПСС во многом определяется точностью совмещения прицельной
марки с целью, т. е. зависит от многих субъективных факторов,
присущих человеку.
Полное устранение влияния этих факторов возможно только
при использовании автоматических систем слежения (АСС). Из-
вестно несколько направлений создания АСС, основанных на ис-
пользовании принципов радиолокации, лазерной локации, тепло-
видения и пространственной фильтрации изображения (гологра-
фическая фильтрация).
Ни один из перечисленных принципов построения АСС не мо-
жет обеспечить достаточно высокую надежность процесса слеже-
ния в условиях боевой эксплуатации танка. Поэтому необходимо
применение комплексных методов, использующих различные при-
знаки целей, взаимно дополняющие информацию о ней (сочета-
ние тепловых и радиолокационных средств с оптическими, теле-
визионными и электронно-оптическими), что обеспечивает про-
цесс слежения в максимально широком* диапазоне тактических
и погодных ситуаций.
В современных танковых СУО достигнут достаточно высокий
уровень автоматизации наводки орудия в упрежденную точку.
Однако некоторые факторы (например, температура зарядов,
износ канала ствола орудия, изменение начальной скорости сна-
рядов из-за разброса партий зарядов, тип боеприпаса), обуслов-
ленные неравномерностью температурного поля боеукладки, воз-
можностью частичной смены боекомплекта, широкой номенкла-
турой однотипных боеприпасов с заметными отличиями в балли-
стических характеристиках, требуют создания специальной систе-
мы автоматического ввода этой информации в СУО в процессе
заряжания, что наряду с другими датчиками входных данных,
используемых для решения задачи встречи, должно явиться осно-
вой информационно-измерительного комплекса СУО танка.
Анализ точности стрельбы современных комплексов танкового
вооружения показывает, что надежное выполнение боевой задачи
(попадание в цель с вероятностью не менее 0,9) может быть осу-
ществлено только при производстве нескольких выстрелов. Для
сокращения времени решения боевой задачи необходима авто-
матическая система контроля и корректирования результатов
стрельбы.
247
Как известно, метод автоматического корректирования предпо-
лагает определение положения х'-го снаряда относительно точки
прицеливания (прицельной марки) в момент ожидаемой встречи
с целью и введение соответствующих поправок на производство
i 4- 1-го выстрела. Поскольку после выстрела положение при-
цельной марки может быть произвольно относительно цели, то
для определения погрешности выстрела необходимо либо фикси-
ровать положение прицельной марки в момент производства вы-
стрела, чтобы затем измерить координаты снаряда относительно
зафиксированного положения, либо организовать непрерывное
слежение за целью.
Очень важно точио определить момент упреждения. Использо-
вать для этой цели информацию ТБВ нельзя, так как в ТБВ не-
достаточно точно вычисляется время полета снаряда. Одновре-
менное слежение за целью и снарядом позволяет достаточно
точно определить момент упреждения (по моменту равенства даль-
ностей цели и снаряда), а следовательно, измерить суммарную
погрешность выстрела и вычислить требуемые поправки.
Таким образом, необходим новый подход к построению танко-
вых СУО, учитывающий широкую номенклатуру задач, скорость
их решения, потребность в различных каналах получения инфор-
мации о цели, объем информации и рациональное ее использова-
ние в зависимости от тактических и метеорологических условий,
многорежимность СУО.’т. е. целесообразно рассматривать СУО
как информационцо-управлякнцую систему, использующую борто-
вую ЦВМ. При этом высокая надежность приборов и стабиль-
ность СУО в процессе длительной эксплуатации танков (в том
числе в боевых условиях) обеспечиваются применением систем
резервирования, самонастройки, автоматизированного встроенно-
го контроля и средств диагностики.
Важными направлениями разработки новых СУО являются
снижение их стоимости, уменьшение габаритных размеров и по-
вышение надежности благодаря широкому использованию дости-
жений электронной техники и применению принципов блочно-
модульного исполнения приборов.
СПИСОК ЛИТЕРАТУРЫ
1 Абчук В. А., Суздаль В. Г. Поиск объектов. М Советское радио, 1977.
336 с.
2. Бидерман В. Л. Прикладная теория механических колебаний. М.: Высшая
школа, 1972. 416 с.
3. Ганичев А. Н. Воздушный подрыв боевых частей реактивных снарядов
залпового огня. — Боеприпасы, 1972, № 6, с. 3—6.
4. Дмитриевский А. А. Внешняя баллистика М.: Машиностроение, 1979.
478 с.
5. Изнар А. Н, Электронно-оптические приборы. М.: Машиностроение, 1977.
264 с.
6. Козе л к ин В. В., Усольцев М. Ф. Основы инфракрасной техники. М.: Ма-
шиностроение, 1974 . 335 с. *
7. Корольков Ю. В., Леонтьев С. А. Определение передаточной функции
танковой пушки как объекта регулирования с распределенными параметрами. —
Вопросы оборонной техники. Сер. IX, 1972, вып. 26, с. 11—14.
8 Ллойд Дж. Системы тепловидения: Пер. с англ. М.: Мир, 414 с
9. Одинцов В. А. О критериях пробивной способности осколка. — Оборонная
техника, 1967, № 9, с. 73—76.
10. Орлов Б. В., Лармон Э. К., Маликов В. Г. Устройство и проектирование
стволов артиллерийских орудий. М.: Машиностроение, 1976. 432 с.
II. Основы теории и проектирования вычислительных приборов и машин уп-
равления / Л. Н. Преснухин, Л. А. Соломонов, В. Н. Четвертаков и др.
М.: Высшая школа, 1970. 636 с.
12. Павловский Р. И., Чубаренко А. И., Сафонов Б. С. Основы теории бое-
вой эффективности танков. М.: ЦНИИ информации, 1981 264 с.
13 Проектирование и расчет вычислительных машин непрерывного дейст-
вия / Под ред. А. Н. Лебедева, В. Б. Смолова. М : Машиностроение, 1966. 336 с.
14. Роуз А. Зрение человека и электронное зрение: Пер. с англ. М.: Мир,
1977. 216 с.
15. Садовский Б. Д. н др. Математическая модель регулируемого гидропри-
вода. — Вопросы оборонной техники, сер. IX, 1967, вып. 3, с. 13—45.
16 Самусенко М. Ф. Основы проектирования артиллерийского вооружения
танков и самоходных артиллерийских установок. М.: Воениздат, 1958. 682 с.
17. Сидоров В. А., Кренев С. А. Определение баллистических характеристик
и пробивного действия осколков. — Боеприпасы, 1976, № 1, с. 35—37.
249
18. Трель Г. В. Унификация формул КПД и структурная схема КПД меха
ннческих передач. — Вопросы оборонной техники, сер. IX, 1967, вып. 2, с. 73—90.
19. Хадсон Р. Инфракрасные системы Пер. с англ. М.: Мир, 1972. 534 с.
20. Худков Н. Н. Исследование поперечных колебаний артиллерийских ство-
лов при выстреле. — Оборонная техника, 1975, № 12, с. 27—29.
21 Шиманский Ю. А. Динамический расчет судовых конструкций.— Суд-
промгиз, 1963. 444 с.
ОГЛАВЛЕНИЕ
Предисловие ......................................................
Глава 1. Особенности устройства и установки составных частей комп-
лекса танкового вооружения.........................................
1.1 Назначение и состав комплекса танкового вооружения
1.2. Конструктивные н эксплуатационные параметры основного оружия,
определяющие его размещение в танке...............................
1.3. Размещение боеприпасов и автоматизация заряжания.............
1.4. Устройство и особенности размещения СУО в танке..............
Глава 2. Боеприпасы..........................., . . ............
2.1. Основные требования к боеприпасам...........................
2.2. Назначение, устройство и действие бронебойных снарядов . . .
2.3. Назначение, устройство и действие осколочно-фугасных снарядов
Глава 3. Танковые пушки...........................................
3.1. Основные направления развития пушек ........................
3.2. Особенности устройства и установки танковых пушек ...
3.3. Факторы, влияющие на точность стрельбы танковых пушек .
3 4. Влияние основных параметров пушки на углы вылета снарядов . .
3.5. Техническая подготовка танковых пушек.......................
3.6. Стабильность стрельбы пушки.................................
3.7. Пути повышения точности стрельбы танковых пушек.............
Глава 4. Автомат заряжания .......................................
4.1. Назначение автомата заряжания, общие требования..............
4.2. Схемы автомата заряжания....................................
4.3. Конструктивная реализация схем автомата заряжания ...
4.4. Основные параметры автомата заряжания .......................
4.5. Надежность и живучесть автомата заряжания ..................
Глава 5. Система управления огнем.................................
5.1. Основные задачи танковых СУО................................
5.2. Влияние СУО на некоторые показатели огневой мощи танка
5.3. Приборы наблюдения и прицеливания...........................
5.4. Приводы наводки и стабилизаторы танкового вооружения . . .
5.5. Танковые баллистические вычислители.........................
5.6. Тенденции развития танковых СУО ............................
Стр
3
7
13
18
30
20
23
39
S3
52
53
57
71
83
90
98
102
102
103
106
113
126
133
133
136
148
187
214
245
Список литературы ................................................. 249
<»
Редактор Е. Е. Алленых
Технический редактор Т. С. Старых Корректор Т. Е. Макарова
Сдано в набор 31.03.82. Подписано в печать 14.12.82.
Формат 60x90*/ie- Бумага писчая № 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 15.75. Уч.-изд. л. 16,14.
Заказ 38с
Ордена Трудового Красного Знамени издательство «Машиностроение»,
107076, Москва, Стромынский пер., д. 4.
Типография ведомственная