/


































































































































































































Автор: Кенио Т.
Теги: электротехника электрические машины и аппараты электронно-и аппаратостроение электроника электродвигатель
Год: 1987


Текст
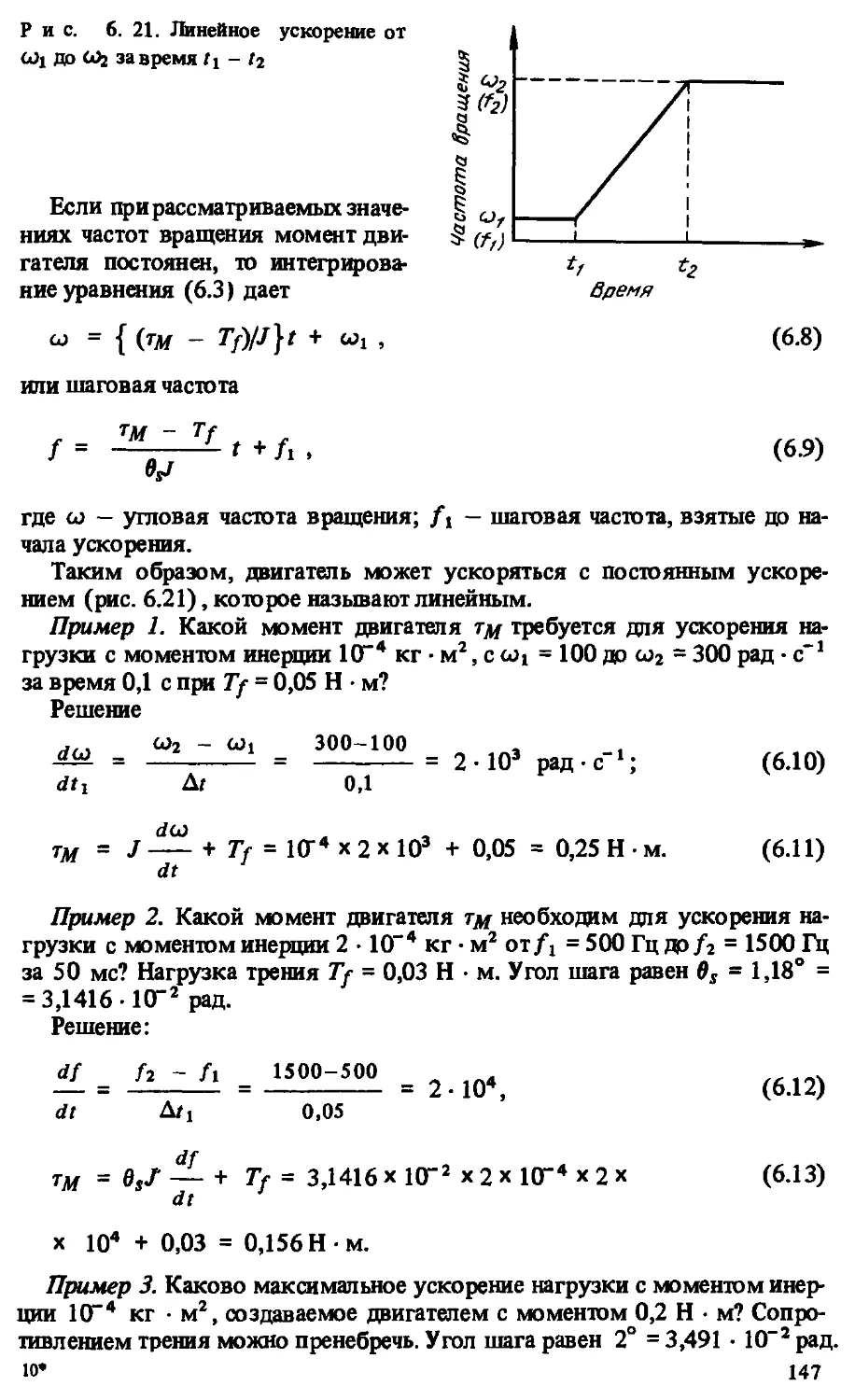
Т. Кенио
ШАГОВЫЕ
ДВИГАТЕЛИ
и их микро-
процессорные
системы
управления
МОСКВА ЭНЕРГОАТОМИЗДАТ 1987
ББК 31.26
К 35
УЖ 621313.13-133.32
Рецензенты Д.А. Бут, А.Н. Дедовский
Кенио Т.
К 35 Шаговые двигатели н их микропроцессорные системы
управления: Пер. с англ. - М.: Энергоатомиздат, 1987. -
200 с.: ил.
Рассмотрены вопросы анализа электромагнитных процессов в шаго-
вых двигателях различного типа, приведено большое количество кон-
структивных решений. Значительное внимание уделено микропроцес-
сорным системам управления, алгоритмам их работы и схемной реали-
зации систем управления. Приведены примеры применения шаговых
двигателей с микропроцессорным управлением.
Для инженерно-технических работников, занимающихся вопросами
исследования и применения шаговых двигателей.
2302030000-503
К 051(01)-87
ББК 31.26
Stepping motors
and their
microprocessor controls
Takashi Kenjo
Professor in the Department of Electrical Engineering,
Institute of Vocational Training,
Kanagawa, Japan
CLARENDON PRESS • OXFORD 1984
©Takashi Kenio, 1984
©Перевод на русский язык,
Энергоатомиздат, 1987
ПРЕДИСЛОВИЕ РЕДАКТОРА
За последние годы в нашей стране и за рубежом начал бурно развиваться
процесс создания гибких производственных систем и автоматизированных
рабочих мест. Большинство периферийных устройств для этих целей, а
также роботов и станков с ЧПУ основано на использовании шаговых дви-
гателей, управление которыми осуществляется от центральной ЭВМ или
микропроцессора.
Предлагаемая книга японского ученого Такаши Кенио посвящена ана-
лизу электромагнитных процессов в шаговых двигателях, микропроцес-
сорным системам управления и практической их реализации в машино-
строении. Рассматриваемые в книге вопросы для советских читателей
интересны еще и потому, что последняя монография по дискретным ша-
говым электроприводам под редакцией М.Г. Чиликина была выпущена
почти 20 лет назад, когда вопросы микропроцессорного управления
только возникали.
В книге подробно рассмотрены конструкции реактивных и гибрид-
ных шаговых двигателей, а также двигателей с постоянными магнитами.
Анализ электромагнитных процессов построен на основе эквивалентных
схем замещения магнитной цепи, причем достаточно просто объяснен
физический смысл возникновения электромагнитного момента. Большое
внимание уделено динамике работы шаговых двигателей. Математические
модели динамических процессов построены как на базе непосредствен-
ного решения дифференциальных уравнений динамики, так и на основе
анализа передаточных функций. Рассмотрены сложные и недостаточно ос-
вещенные в литературе вопросы устойчивости и колебаний шаговых дви-
гателей.
Несомненный интерес для широкого круга читателей представляют раз-
делы, посвященные системам управления шаговыми двигателями как
с обратной связью по положению ротора, так и без нее.
Книга привлекает большим количеством конкретных примеров приме-
нения шаговых двигателей в различных областях техники.
Несмотря на то, что книга предназначена для научных работников и
инженеров—разработчиков шаговых двигателей и оборудования с шаго-
выми электроприводами, она, несомненно, будет полезна и широкому
кругу читателей.
АЛ. Дедовский
ПРЕДИСЛОВИЕ
Осенью 1978 г., закончив рукопись книги ’’Фундаментальная теория и
применения шаговых двигателей” в соавторстве с Ниимурой, я посетил
профессора Лоуренсона и доктора Хагнеса из университета в Лидсе.
Дело в том, что одну главу книги я посвятил объяснению разработанной
ими теории статических и динамических характеристик шаговых двига-
телей. Промышленность, выпускающая электродвигатели, интенсивно
развивается в Японии с начала 70-х годов. Поэтому я считал, что книга
будет полезна многим инженерам и студентам. Профессор Лоуренсон
спросил, что я думаю о написании английского' варианта книги, и это
послужило первым толчком к его написанию.
После опубликования книги в Японии, ее разослали известным спе-
циалистам в области электродвигателей. Одна из них попала к доктору
Янгу из университета Heriot-Watt. Доктор Янг имел некоторые познания
в японском языке и смог оценить достоинства моей книги. Свой коммен-
тарий он отослал профессору Хаманду, издателю монографий по электро-
технике и электронике, который решил, что такая книга необходима на
английском языке. Профессор Хаманд предложил сделать просто перевод
этой книги. Однако я решил подготовить новый вариант, совершенно
пересмотрев содержание и включив новые данные с тем, чтобы предста-
вить книгу, которая вызовет интерес широкого круга читателей: от но-
вичков до специалистов по оборудованию с числовым программным
управлением.
Эта работа была выполнена благодаря поддержке и помощи многих
людей. Профессор Лоуренсон и доктор Хагнес предоставили мне свои
статьи и труды Международной конференции по шаговым двигателям и
приборам. Более того, профессор Лоуренсон внимательно прочел руко-
пись и посоветовал, как улучшить некоторые разделы. Сотрудник
фирмы Sanyo Denki Ниимура любезно согласился на репродукцию иллю-
страций из предыдущей книги и предоставил новые фотографии. Пред-
ставитель фирмы IBM Поулетко ответил на вопросы о достижениях в ис-
пользовании шаговых двигателей в вычислительной технике и предоста-
вил мне фотографии линейных шаговых двигателей. Доктор Годжин
из фирмы N.V. Philips Gloeilampenfabriken предоставил мне чертежи дви-
гателей из своей статьи и дал разъяснения по поводу типов этих
машин.
Я благодарен также за предоставленный иллюстративный материал:
Паттерсону из компании Hewlett Packard, Теннату из фирмы Moore Reed,
Егаве из фирмы MINEBEA, Каджиме из фирмы Fanuc, профессору уни-
4
верситета в Ньюкастле Харрису, Лэнсли из компании Inland Motor
Specialty Products Division, доктору Сингху из фирмы Exxon Office Sy-
stems, Итакуре из компании Nihon Micro Motor, Куо из университета
штата Иллинойс и компаниям Nippon Electric, Daini Seikocha, Cambridge
Instruments, Ricoh, IEE.
Выражаю глубокую благодарность сотрудникам издательства Claren-
don Press, которые терпеливо исправляли и совершенствовали мою
рукопись.
Т. Кенио
Канагава, Япония.
Май 1983 г.
Глава 1
ВВЕДЕНИЕ И ИСТОРИЧЕСКИЙ ОБЗОР
Книга посвящена электрическим машинам, называемым шаговыми дви-
гателями (ШД), и включает описание их конструкций, принципа работы,
теории, схем управления, а также особенностей применения.
В кратком историческом обзоре развития ШД рассмотрены первые
ТИП - с соленоидом-храповиком и зпектрогидравлические ШД. В этой гла-
ве описаны и другие типы ШД, однако конструктивные особенности со-
временных двигателей рассмотрены в гл. 2.
1.1. ЧТО ТАКОЕ ШАГОВЫЙ ДВИГАТЕЛЬ
И КАКОВЫ ЕГО ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
На рис. 1.1 представлено поперечное сечение типичного современного ШД;
это так называемый однопакетный реактивный двигатель. Для начала
разберем (или изучим), как он работает. Сердечник статора имеет шесть
выступающих зубцов, в то время как ротор всего четыре. Сердечники как
ротора, так и статора выполнены из магнитомягкой стали. Три набора
обмоток расположены, как показано на рисунке. Каждый набор состоит
из двух катушек, соединенных последовательно. Набор обмоток назы-
вается фазой, и, соответственно, машина — трехфазным двигателем.
Ток на обмотки подается от источника постоянного тока через пере-
ключатели I, Ц и III. В положении (7) обмотка фазы I подключена к ис-
точнику через переключатель 7 или согласно технической терминологии
возбуждена фаза 7. Магнитный поток, возникающий в результате воз-
буждения, показан на рисунке стрелками. В положении (7) два высту-
пающих зубца статора фазы I, будучи возбужденными, останавливаются
на одной прямой с двумя из четырех зубцов ротора. В терминах динамики
это положение является положением равновесия. Когда замыканием пере-
ключателя II в дополнение к фазе / возбуждается фаза II, в зубцах стато-
ра, соответствующих этой фазе, возникает магнитный поток, как показа-
но на рисунке для положения (2), и вследствие ’’натяжения” в наклон-
ных силовых линиях магнитного поля возникает вращающий момент.
Ротор, в конце концов, принимает положение (5).
Таким образом, за время выполнения одной операции переключения
ротор поворачивается на фиксированный ^гол, который называется углом
шага или шагом, в данном случае на 15°. Есин теперь разомкнуть пере-
ключатель I и отсоединить от источника питания фазу I, ротор повернется
на следующие 15° и займет положение (4). Таким образом, угловым
6
Рис. 1.1. Принципы работы реактивного ШД:
1 — сердечник статора; 2 - сердечник ротора
положением ротора в единицах угла шага можно управлять с помощью
процесса переключения. Если переключения производят последовательно,
го ротор будет вращаться шаговыми движениями, причем средней часто-
той вращения также можно управлять с помощью процесса переключения.
В настоящее время для управления ШД в качестве электронных пере-
ключателей применяют транзисторы, а сигналы на' переключение гене-
рируются цифровыми интегральными схемами или микропроцессором
(рис. 1.2).
Рис. 1.2. Современная система управления ШД:
1 — источник постоянного тока; 2 - интегральная микросхема или микропро-
цессор; 3 — транзисторный коммутатор (инвертор); 4 - двигатель
1
Шаговый двигатель — эго электрический двигатель, преобразующий
цифровой электрический входной сигнал в механическое движение. По
сравнению с другими приборами, которые могут выполнять эти же или
подобные функции, система управления, используемая в ШДХ обладает
следующими существенными преимуществами: во-первых, у нее нет об-
ратной связи, обычно необходимой для управления положением или
частотой вращения; во-вторых, не накапливается ошибка положения;
в-третьих, ШД совместим с современными цифровыми устройствами.
По этим причинам различные типы и классы ШД используют в перифе-
рийных устройствах ЭВМ и подобных системах.
1.2. ИСТОРИЯ ВОЗНИКНОВЕНИЯ ШАГОВЫХ ДВИГАТЕЛЕЙ
Выпуск ЛЕЕ [1], опубликованный в 1927 г., включал описание трех-
фазного реактивного ШД рассмотренного выше типа, который был ис-
пользован для дистанционного управления индикатором направления
торпедных аппаратов и орудий на военных кораблях Великобритании.
Как показано на рис. 1.3, вращаемый вручную коммутатор был исполь-
зован для переключения тока управления. Один полный оборот рукоятки
обеспечивал шесть шагов, выполняющих поворот ротора на 90°. Дви-
жение ротора шагами по 15° было замедленным для достижения тре-
буемой точности положения ротора.
В [1] подчеркивалось, что при конструировании этого простого ШД
необходимо было учесть много факторов и принять во внимание ряд
предосторожностей для того, чтобы добиться его удовлетворительного
функционирования. Этот механизм требует высокого отношения элект-
ромагнитного момента к моменту инерции движущихся частей, чтобы не
допустить пропуска шага, а электрическая постоянная времени — отно-
шение индуктивности цепи к ее сопротивлению — должна быть мала для
достижения высокой приемистости. С этими проблемами до сих пор стал-
киваются при создании современных двигателей.
Как следует из [2], ШД позже применяли на военных кораблях в США
для аналогичных целей. Впрочем, существуют примеры и более раннего
Рис. 1. 3. ШД, исполюованный в 1920-х годах на военных кораблях Велико-
британии:
а — двигатель; б — вращающийся коммутатор; в — внутренняя схема вращения
коммутатора
8
Рис. 1.4. Трехфазный ШД, изобретенный Уолкером:
1 — обмотка статора; 2 — ротор
фаза /
применения ШД [3]: "Шаговые двигатели реактивного типа, применяемые
в настоящее время как приборы управления позиционированием, были
известны как "электрические моторы середины XIX века”; мы сошлемся
на два заслуживающих внимания изобретения (1919 и 1920 гг., Велико-
британия) .
Зубчатая структура для минимизации шага. В 1919 г. инженером
Уолкером из Абердена (Шотландия) был получен патент Велнкобратании
[4] на изобретение конструкции ШД, вращающегося с малым шагом.
На рис. 1.4, а, б представлены соответственно продольное и поперечное
сечения такого трехфазного двигателя. Зубцы ротора (их 32) имеют тот
же шаг, что и зубцы на полюсах статора. Когда возбуждается фаза 1 и
магнитный поток проходит по пути, отмеченному пунктиром, группы
зубцов этой фазы устанавливаются напротив зубцов статора, как пока-
зано на рис. 1.4, б. В этом положении зубцы статора и ротора, относящиеся
к фазам 2 и 3, должны расходиться друг относительно друга на 1/3 шага
зубцов в противоположном направлении. Когда ток управления пере-
ключают с фазы 1 на фазу 2, ротор поворачивается по часовой стрелке
на угол, равный в этом случае (360/32)/3 = 3,75.
Однако, если ток управления подается на фазу 3, движение произойдет
против часовой стрелки на такой же угол. В описании к патенту Уолкер
представил чертежи ШД, известных сегодня как многопакетные реактив-
ного типа, а также как линейные двигатели. Тем не менее до 1950-х годов
двигателей, основанных на этих принципах, не выпускали.
Создание большого вращающего момента с помощью торцевой кон-
струкции типа "сандвич”. В 1920 г. Чикин и Тейн получили патент [5]
на изобретение ШД, создающего большой вращающий момент на единицу
объема ротора. Продольное сечение конструкции приведено на рис. 15,а.
Отличительная черта конструкции состоит в том, что ротор, выполненный
из магнитомягкой стали, располагается между двумя зубцами статора,
как показано на рис. 15, б. Такая структура способна создавать мак-
9
Рис. 1.5. Реактивный ШД изобретенный Чикином и Тейном:
а - продольное сечение; б — положение ротора; 1 - обмотка статора; 2 - ротор;
3 — обмотка; 4 — зубцы статора
симальный момент на единицу объема ротора. Однако впервые этот прин-
цип для создания мощных ШД с цифровым управлением применила
только в 70-е годы японская компания Fanuc Limited.
1.3. ЭРА ЦИФРОВОГО УПРАВЛЕНИЯ И ПРОГРЕСС 1960-Х ГОДОВ
В январе 1957 г. журнал Control Engineering [6] опубликовал отчет о
применении ШД. Он был посвящен системе трех ШД с цифровым управ-
лением, которые были использованы для перемещения фрезерного сто-
ла по трем осям. Для этого использовались многопакетные реактив-
ные ШД. Ротор такого двигателя представлен на pic. 1.6. Управление
осуществлялось с помощью лампового тиратрона.
Система привода показана на рис. 1.7. Управление движением трех
двигателей осуществлялось либо вручную, либо по записи на перфоленте,
которая считывалась фотоэлектрической головкой, посылавшей управ-
ляющие сигналы на тиратроны.
С момента выхода в свет этого отчета в промышленно-развитых стра-
нах начались интенсивные исследования, направленные на улучшение
характеристик ШД.
В силу того, что для привода с цифровым управлением требуются
большие значения момента и выходной мощности, в период с 1960 по
1974 г. в Японии стали широко использовать электрогидравлнческие ШД,
представляющие собой комбинацию обычного ШД и гидравлического ме-
ханизма (рис. 1.8). На рис. 19 представлен фрезерный станок с электро-
гидравлическим ШД, выпущенный в 1961 г. В качестве переключающих
элементов были использованы германиевые транзисторы.
Из [7—11 ] мы знаем о производстве ШД в США в начале 1960-х годов.
Продукция 29 фирм описана в [ 10], 21 фирмы — в [11]; более половины
из этих фирм выпускали механические ШД с соленоидом-храповиком.
Конструкции и механизм типичного двигателя с соленоидом-храпови-
ком описаны в [8].
10
Рис. 1. 6. Ротор многопакетного реак-
тивного ШД
Помимо реактивных ШД в го же самое время появились три типа ШД
с постоянными магнитами. Простейшим из них является называемый
теперь двигателем с постоянными магнитами. Статор такого двигателя
имеет выступающие полюсы, ротор представляет собой цилиндрический
постоянный магнит как в обычных синхронных двигателях.
Второй тип - эго гибридные двигатели (одноименнополюсные индук-
торные ШД с постоянными магнитами). У них имеются ротор, конструк-
ция которого представлена на рис. 1.10, и цилиндрический постоянный
магнит, намагниченный вдоль оси. На магнит установлены сердечники ро-
тора из магнитомягкого материала с зубцами. В двигателе использованы
принципы двигателя с постоянными магнитами и реактивного двига-
теля. Он изобретен сотрудниками компании General Electric и запатенто-
ван [12] в 1952 г. в США. Компании General Electric и Superior Electric
Рис. 1.7. Трехмерное числовое управление деталью с помощью реактивных
ШД, управляемых тиратронами:
1 - червячная передача; 2 - двигатель для передвижения ленты; 3 - устройство
считывания; 4 - лента; 5 - тиратрон; 6 - двигатель
Рис 18 Электрогидравлический ШД
I - двигатель, 2 - гидравлическое устройство
Рис 19 Фрезерный станок с числовым программным управлением
1 - шаговые двигатели
12
Рис. 1.10. Структура ротора гибрид-
ного ШД:
1 — магнитопровод из магнитомяг-
кой стали; 2 - постоянный магнит
стали первыми выпускать низкоскоростной синхронный двигатель с
частотой вращения не выше 100 рад/мин, использующий частоту напряже-
ния питания 60 Гц.
Впоследствии другие компании назвали двигатель такого типа Slo-syn
и постепенно улучшали его для использования в качестве ШД. Третий
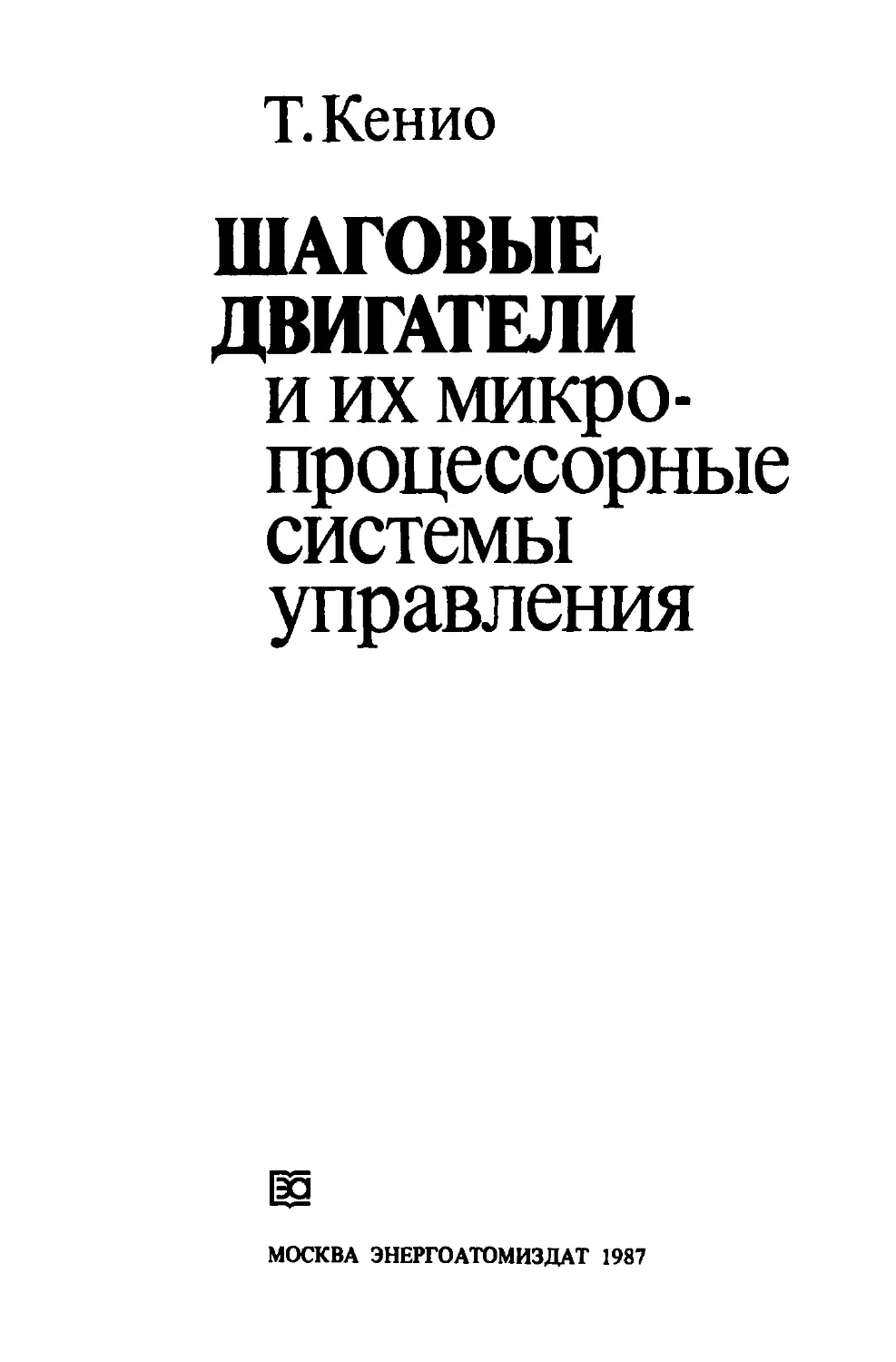
тип двигателя с использованием постоянных магнитов — это однофазный
двигатель Cyclonome, который выпускался фирмой Sigma Instruments
с 1952 г. Конструкция его с двумя постоянными магнитами на статоре
изображена на рис. 2.7.
Габариты шаговых двигателей приведены в соответствие с установлен-
ными размерами в сервоприводах (т.е. 08, 11, 15, 18, 20,23 и 34 типы,
где ОД и 11 относятся к двигателям с диаметром 31,4 и 43,2 м соответ-
ственно) .
В начале 1960-х годов появилась возможность использования ШД в
качестве приводов в терминальных устройствах ЭВМ. В середине 1960-х
годов Павлетко из компании IBM оснастил ШД многие виды своей про-
Рис. 1.11. Устройст-
во дисковой памяти
большой емкости, ис-
пользующее десять
(0 - 9) трехпакет-
ных ШД
13
Рис. 1. 12. Применение ШД в ХУ-гра-
фопостроителе, выпущенном в середине
1970-х годов:
1 - перо; 2 — направляющая; 3 -
стальная лента
дукции. Первая статья Павлетко
[13] появилась в 1972 г. в трудах
ежегодного симпозиума по систе-
мам и приборам дифференциаль-
ного управления.
В 1967 г. фирма Sanyo Denki начала серийный выпуск гибридных дви-
гателей Step-Syn (одноименнополюсных индукторных ШД с постоянными
магнитами) (рис. 1.11). Компания Superior Electric, еще раньше выпускав-
шая синхронные ШД с шагом 1,8°, в 1970-х годах начала выпуск полного
набора гибридных двигателей М-серий. Производство гибридных ШД
с шагом 1,8е начала фирма Sigma Instruments в 1969 г. (рис. 1.12).
1.4. БЫСТРЫЙ ПРОГРЕСС В 1970-Х ГОДАХ
Шаговые двигатели с высокими динамическими характеристиками были
необходимы еще до начала 1970-х годов, но именно в это время начался
быстрый рост числа ШД, используемых в вычислительной технике, что,
в свою очередь, привело к массовому их производству. В США производ-
ство печатающих устройств, использующих ШД и серводвигатели постоян-
ного тока, было рискованным предприятием; однако печатающие
устройства с управляемыми электро приводами, использующие интеграль-
ные схемы вместо сложных механизмов, употребляемых в прошлом,
привлекали молодых инженеров, так как представляли большую свобо-
ду для применения их знаний в области электроники. Аналогичная тенден-
ция прослеживалась в начале 1970-х годов и в других промышленно-
развитых странах.
Наиболее важные типы ШД, сконструированные для применения в пе-
риферийных устройствах вычислительных машин за десятилетие, вклю-
чают: четырехфазные двигатели с шагами 1,8; 2; 2,5; 5°; двигатели с
постоянными магнитами с шагами 7,5; 45; 90°; трех- и четырехфазные
реактивные двигатели с шагами 7,5; 15°; реактивные двигатели с 128
или 132 шагами за один оборот.
Последняя категория включает обычные двигатели для серийных пе-
чатающих устройств с большим числом символов в строке.
В начале 1970-х годов появились автоматические чертежные машины
[14], использующие ШД гибридного типа. Позднее линейные реактивные
ШД начали использовать для перемещения каретки в серийных печатаю-
щих устройствах (рис. 1.13) [15,46].
Шло развитие и шаговых двигателей, используемых в цифровых управ-
ляющих машинах. В 1973 г. фирма Fanuc под руководством Инабы доби-
лась успеха в создании мощных ШД. Это многопакетные реактивные ШД,
но в них использована структура типа ’’сандвич”, предложенная в [2]
14
Рис. 1.13. Принцип работы линейного ШД, используемого в серийном пе-
чатающем устройстве:
1 — датчик положения; 2 — направляющие (статор); 3 — ползунок (подвижное
устройство)
для достижения высокого вращающего момента. В двигателях был ис-
пользован цифровой управляющий механизм. Однако вскоре опять вер-
нулись к серводвигателям постоянного тока. Одной из причин этого
являются ограничения, накладываемые ШД, и желание получить плавное
окончание движения. Другая причина - это развитие цифрового управ-
ления для серводвигателей постоянного тока.
В области вычислительной техники серводвигатели постоянного тока
использовали там, где требовались высокая частота вращения и быстрое
ускорение и торможение, например при вращении дисков с символами
печатающего устройства или лентопротяжного механизма для магнит-
ной ленты. Двигатели постоянного тока подвержены механическому
износу щеток и коллектора. Эксперименты с ШД показали, что в них не
возникает проблем механического трения и обеспечивается высокая
надежность.
15. НОВЫЕ ОБЛАСТИ ПРИМЕНЕНИЯ ШАГОВЫХ ДВИГАТЕЛЕЙ
В другой области технологическое развитие, связанное с ШД, шло парал-
лельно с развитием транзисторов и других полупроводниковых прибо-
ров. В 1948 г. в телефонной лаборатории фирмы Bell был изобретен
точечно-контактный транзистор. В 1957 г. компания General Electric
объявила о создании первого тиристора SCR (кремниевый управляемый
выпрямитель).
В начале для управления ШД использовали механические контакты или
реле, затем газонаполненные или вакуумные лампы, которые постепенно
были заменены на полупроводниковые приборы: тир!сюры и транзисто-
15
ры. Хотя использование последних год от года расширялось, электро-
приводы с логическими схемами были все еще дорога. Именно поэтому
в 1960-х годах ШД не получили широкого применения. МОП-транзистары
появились лишь в 1964 г. В следующем году появились цифровые инте-
гральные схемы, затем микросхемы со средним уровнем интеграции,
а вслед за ними и большие интегральные микросхемы. В результате логи-
ческие схемы, входящие в систему управления ШД, стали миниатюрными,
возросла их надежность, снизилась стоимость и применение ШД стало
экономически оправданным.
Развитие полупроводниковой технологии, кажется, бесконечно.
В 1971 г. компания Intel объявила об изобретении четырехразрядного
микропроцессора. Затем Intel в 1972 г. и Motorola в 1974 г. выпустили
на рынок восьмиразрядный процессор, имеющий большую область при-
менения. Описанные здесь ШД широко применяют в электроприводе с
цифровой системой управления. Использование микропроцессоров для
управления ШД является только делом времени. Фактически с конца
1970-х годов микропроцессоры стали находить различные применения
в электроприводах с ШД.
1.6. ИССЛЕДОВАТЕЛЬСКАЯ АКТИВНОСТЬ
В конце 1950-х годов университеты н лаборатории промышленно разви-
тых стран начали интенсивное исследование ШД; результаты этих иссле-
дований опубликованы. В 1970-х годах состоялись две Международные
конференции, где специалисты науки и производства обменялись докла-
дами и обсудили возможности практического использования ШД. Еже-
годно с 1972 г. в Urbana-Champaign проходит симпозиум по приборам и
системам дифференциального управления под председательством про-
фессора Куо из университета штата Иллинойс (США). В 1974, 1976,
1979 гг. в Великобратании работала Международная конференция по
ШД и приборам под председательством профессора Лоуренсона из
университета в Лидсе. Шаговые двигатели были также предметом об-
суждения в 1976 г. на Международной конференции по малым электри-
ческим машинам, состоявшейся в институте инженеров-электриков
в Лондоне.
Глава 2
ОСНОВНЫЕ ПРИНЦИПЫ СОВРЕМЕННЫХ ШАГОВЫХ ДВИГАТЕЛЕЙ
2.1. СИСТЕМЫ УПРАВЛЕНИЯ С РАЗОМКНУТОЙ ЦЕПЬЮ
(БЕЗ ОБРАТНОЙ СВЯЗИ)
Как правило, работой ШД управляет электронная схема, а питание его
осуществляется от источника постоянного тока. Шаговые двигатели при-
меняют для управления частотой вращения без применения дорогого
контура обратной связи. Этот принцип используетя в приводе с разом-
кнутой цепью.
16
7
Рис. 2.1. Перфоратор бумажной ленты:
1 — система управления; 2 — перфоратор; 3 — звездочка; 4 — шаговый двигатель
Управление без обратной связи хотя и является экономически выгод-
ным, но имеет и ряд ограничений. Например, поворот ротора стано-
вится колебательным и нестабильным по значению конечных скоростей,
вследствие чего характеристики движения, частота вращения и ускоре-
ние ШД с управлением без обратной связи не могут быть такими же точ-
ными, как у двигателей постоянного тока с обратной связью. Следова-
тельно, уменьшение колебаний - это основная проблема, которую необ-
ходимо разрешить для расширения границ применения ШД.
2. 1.1. Конфигурация системы. Для понимания основной конфигурации
системы управления ШД рассмотрим управление перфоратором, который
использует ШД для подачи бумажной ленты (pic. 2.1). Этим устрой-
ством создаются управляющие инструкции в виде перфорации для ма-
шин с цифровым управлением. Система управления лентой может быть
представлена в виде схемы, изображенной на pic. 2.2.
Позднее мы объясним, почему для этой цели используют в основном
трех- и четырехфазные ШД. Рассмотрим работу трехфазного двигателя.
Наиболее важной особенностью ШД является то, что на каждый им-
пульс управления ротор поворачивается на фиксированный угол, значе-
ние которого в градусах называется шагом.
При получении команды логическая цепь определяет, какая фаза
должна быть задействована и посылает сигнал управления на инвертор,
определяющий значение тока ШД. Логическая схема обычно монтируется
из транзисторных элементов или интегральных схем. Если выходной
потенциал логической схемы высокий, возбуждается соответствующая
фаза обмотки, например фаза 1. Если выходной потенциал низкий, фаза
обмотки с этим номером отключается. Как показано на pic. 2.3, дви-
гатель вращается по часовой стрелке при управляющей последовательно-
сти 1 -> 2 -> 3 -* 1 . . . , направление против часовой стрелки реали-
17
Инпульсы
Рис. 2.2. Структурная схема системы управления двигателем:
1 — логический блок; 2 - инвертор; 3 - шаговый двигатель
эуется при обратной последовательности 1 -> 5 -> 2 -> 2 ... . При
этом заранее оговаривается, каким в данных условиях считать направ-
ление вращения по часовой стрелке.
Фазы обмотки обозначаются как 1, 2, 3 и т.д. либо как АиВ для не-
которых двухфазных двигателей. На pic. 2.3 показано однополупериод-
ное управление ШД, которое означает, что в каждый момент времени
возбуждена только одна фаза из трех (или четырех в случае четырех-
фазного двигателя). Однополупериодное управление часто используют
при объяснении основных принципов работы ШД, однако оно не всегда
является лучшим способом управления.
2. 1.2. Шаг и инкремент. В современных машинах с цифровым управ-
лением и периферийных устройствах ЭВМ данные записываются на во-
семь дорожек на ленте; это означает, что на одной линии может быть
восемь сигнальных отверстий. В дополнение к этому между третьей и
четвертой дорожками идут синхронизирующие перфорационные от-
верстия, в которые входят зубцы звездочки (зубчатого колеса устрой-
ства протяжки ленты). Линии символов располагаются с интервалом
в 2,54 мм. Когда на ленту заносятся данные с помощью ручного перфо-
ратора или из ЭВМ, она продвигается на 2,54 мм, останавливается для
перфорации линии символа, затем продвигается на следующие 2,54 мм,
останавливается опять и т.д.
ММПЦЛЬСЬ!
управления
Фаза
ИМПЦЛЬСЫ I I
у пра аления [ [
Двигатель
Двигатель
Рис. 2.3. Диаграммы последовательности входных импульсов управления и по-
следовательности возбуждения обмоток
18
Рис. 2.4. Зависимость угла поворо-
та ротора от времени для случая малой
частоты следования импульсов управ-
ления
Таким образом, самый простой
способ управления движением лен-
ты — это использование одиночных
импульсов для логической схемы,
когда двигатель за один шаг пово-
рачивает звездочку на угол, экви-
валентный этому шагу, т.е. продвигает ленту на 2,54 мм. Другой способ —
поворот ШД на несколько шагов для продвижения ленты на одну линию.
Например, можно использовать четырехфазный двигатель с шагом 1,8°,
передвигающий ленту к следующей линии за четыре шага. Диаметр
звездочки уменьшается в четыре раза, и в результате момент инерции
уменьшается в 4* =256 раз по сравнению с одно шаговым передвижением.
Одно движение на 2,54 мм, которое переводит ленту к следующей
линии, как в приведенном выше примере, называют инкрементом (при-
ращением). Один инкремент может выполняться за один шаг в первом
примере и за четыре шага в последнем. В системе, изображенной
на рис. 2.2, двигатель останавливается на определенное время после
выполнения одного инкремента движения для перфорации ленты,
затем цикл повтрряется. Такой тип движения называется инкрементным
движением, а управление, соответствующее ему, управлением инкре-
ментным движением. На рис. 2.4 и 25 показана связь между шаговым
и инкрементным действиями. На рис. 2.4 показана зависимость между
углом поворота ротора и частотой импульсов управления в случае,
когда эта частота относительно низкая, а инкрементное движение вы-
полняется за один шаг. На рис. 2.5 показаны случаи, когда один инкре-
мент выполняется за два либо четыре шага. Одношаговое выполнение
инкремента обычно сопровождается колебаниями, как показано
на рис. 2.4. Когда движение выполняется за несколько импульсов, по-
Р и с. 2.5. Инкрементные движения без колебаний при нескольких импульсах
управления
2» 19
Рис. 2.6. Устройство считывания с перфоленты
ступающих с соответствующими интервалами, колебаний может и не
быть. Они в случае одношаговой реализации гасятся соответствующей
электронной схемой управления.
Количество шагов на один инкремент часто больше четырех, напри-
мер, в устройстве ввода перфоленты (pic. 2.6). Когда данные с ленты
переносятся в контроллер или механизм с цифровым управлением,
действия выполняются блок за блоком. Один &юк данных состоит
из набора символов, например из 32, 48 или 64, и это количество может
быть различным в зависимости от системы. До того как устройство
начнет продвижение ленты, блок данных переносится в полупроводни-
ковую память контроллера и устройство будет двигаться так, как
определено в инструкциях, содержащихся в первом блоке данных.
После выполнения этих инструкций считывающая головка устройства
ввода перфоленты считывает следующий блок данных. Если система
считывает один символ за один шаг, а блок состоит из 32 символов, то
одно движение выполняется за 32 шага. Если одна линия символа
проходит за четыре шага, то одно инкрементное движение выполняется
за 128 шагов так, чтобы передать 32 байта данных. Когда одно движе-
ние включает много шагов, перед логической схемой необходимо вклю-
чить дополнительный каскад. Устройство, выполняющее эти функции,
называется входным контроллером. Входной контроллер после получения
входного сигнала посылает набор определенного числа импульсов с
заданными интервалами.
20
Рис. 2. 7. Лепестковый диск
2. 1.3. Особенности применения шагового двигателя. В этом парагра-
фе рассмотрены особенности управления ШД без обратной связи и опре-
делены некоторые технические понятия (термины).
1. Маленький угол шага. Двигатель проворачивается за каждый им-
пульс управления на определенный фиксированный угол. Чем меньше
шаг, тем большая частота вращения может быть достигнута. Одной из
особенностей ШД является то, что они могут обеспечивать маленький
шаг. Инженерам важно знать количество шагов за один оборот, т.е. шаго-
вое число. Соотношение между углом шага 9g и шаговым числом S
следующее:
S = 36О/05 . (2.1)
Двигатели, используемые в приводах символьных дисков (рте. 2.7)
печатающих устройств, выполняют 96, 128 или 132 шага за один оборот.
Обычно четырехфаэные двигатели имеют шаговое число 200. Некото-
рые прецизионные двигатели обеспечивают 500 или 1000 шагов за один
оборот. Однако шаг простых двигателей составляет 90,45 или 15°.
2. Высокая точность частоты вращения. Это важнейший параметр,
определяющий качество ШД. Двигатели конструируют так, чтобы в ответ
на входной импульс они поворачивались на определенный угол и останав-
ливались в определенном положении. В силу того, что точность пози-
ционирования без нагрузки зависит от параметров (физических и кон-
структивных) ротора и статора, из-за момента нагрузки имеются откло-
нения от конечного положения. С целью увеличения момента фиксации
воздушный зазор между зубцами ротора и статора выполняется мини-
мальным. Точность позиционирования зависит только от характеристик
двигателя и инвертора, в то время как другие параметры схемы управ-
ления на нее не влияют.
21
Рассмотрим ряд необходимых здесь понятий: максимальный стати-
ческий момент, положения, в которых ротор перестает двигаться, и точ-
ность позиционирования этих положений. Для определения каждого из
этих понятий существуют две концепции.
Максимальный статический момент [1]: а) удерживающий — опреде-
ляется как максимальный статический момент, который может быть
приложен к валу возбужденного двигателя без последующего враще-
ния; б) фиксирующий — определяется как максимальный статический
момент, который может быть приложен к валу невоэбужденного дви-
гателя без последующего вращения.
Как правило, чем выше удерживающий момент, тем меньше ошиб-
ки позиционирования, вызванные нагрузкой (см. 2.5.1). Фиксирующий
момент присутствует только в двигателях, имеющих постоянные маг-
ниты.
Положения, в которых останавливается ротор: а) конечное положе-
ние или положение равновесия определяются как ’’положения, в которых
останавливается ротор возбужденного, ненагруженного двигателя”;
б) положения фиксации определяются как положения, в которых
останавливается ротор ШД, имеющий постоянный магнит в невозбуж-
денном состоянии и при отсутствии нагрузки.
В некоторых двигателях для экономии энергии положения фиксации
используются для позиционирования при невозбужденных обмотках.
Точность позиционирования: а) ошибка углового положения - опре-
деляется как максимальная положительная или отрицательная ошибка
углового положения (по сравнению с нормированным углом шага),
которая наблюдается при движении ротора из одного положения равно-
весия в следующее; б) точность позиционирования — максимальная
ошибка углового положения для конечного положения, относящегося
ко всему набору нормированных углов шага, которые выполняются
за полный оборот ротора.
Примеры этих определений даны в табл. 2.1 и 2.2 [2] для реактив-
ного ШД с шагом 15° соответственно для точности позиционирования и
ошибки углового положения. Как видно из табл. 2.1, ошибки находятся
в пределах от +0,08 до —0,03°. Следовательно, точность позиционирования
определяется как 0,08° + 0,03° = 0,11°. Если ошибки отсчитывать отно-
сительно третьего положения, отмеченного в табл. 2.1 звездочкой, мак-
симальная ошибка будет равна 0,11°. Эта ошибка иногда выражается
как ±0,055°, так как можно найти положение, относительно которого
ошибки будут располагаться в пределах от 0,055 до —0,055°. Как видно
из табл. 2.2, ошибки лежат в пределах от +0,11 до —0,09°.
Следовательно, ошибка углового положения равна 0,11°.
Хотя по стечению обстоятельства обе ошибки имеют одинаковые зна-
чения, точность. позиционирования обычно выше, чем ошибка углового
положения.
3. Высокое отношение электромагнитного момента к моменту инер-
ции. Желательно, чтобы ШД в ответ на поступление входного импульса
или последовательности импульсов двигался с максимальным ускоре-
нием. От него требуется не только быстрое начало движения, но и быст-
рая остановка. Если во время движения последовательность импульсов
22
Таблица 2.1. Данные точности позиционирования, измеренные для
реактивного двигателя с углом шага 15°
Число шагов п Теоре- тиче- ский угол Экспе- римен- таль- ный угол ал Ошибка “п - n9s Число шагов п Теоре- тиче- ский угол nfly Экспе- ри мен- таль- ный угол ап Ошибка «и -”0s
0 0 0 0 13 195,00 195,05 + 0,05
1 15,00 15,06 + 0,06 14 210,00 209,97 -0,03
2* 30,00 29,97 -0,03 15 225,00 225,08 + 0,08
3 45,00 45,07 + 0,07 16 240,00 240,00 0
4 60,00 60,00 0 17 255,00 255,05 + 0,05
5 75,00 75,06 + 0,06 18 270,00 269,97 -0,03
6 90,00 89,97 -0,03 19 285,00 285,08 + 0,08
7 105,00 105,07 + 0,07 20 300,00 300,00 0
8 120,00 120,01 + 0,01 21 315,00 315,05 + 0,05
9 135,00 135,05 + 0,05 22 330,00 329,97 -0,03
10 150,00 149,97 -0,03 23 345,00 345,07 + 0,07
11 165,00 165,07 + 0,07 24 360,00 360,00 0
12 180,00 180,07 + 0,01
•Отсчет ошибки ведется относительно третьего положения.
Таблица 2.2. Значения ошибки углового положения, измеренные для
реактивного двигателя с углом шага 15°
Число шагов п Эксперимен- тальный угол шага (Зц Ошибка. Д,-154 Число шагов п Эксперимен- тальный угол шага (iff Ошибка, РП ~ «5°
0 0 0 13 15,04 + 0,04
1 15,06 + 0,06 14 14,92 -0,08
2 14,91 -0.09 15 15,11 + 0,11
3 15,10 + 0.!0 16 14,92 -0,08
4 14,93 -0,07 17 15,05 + 0,05
5 15,06 + 0,06 18 14,92 -0,08
6 14,91 -0,09 19 15,11 + 0,11
7 15,10 + 0,10 20 14,92 -0,08
8 14,94 -0,06 21 15,05 + 0,05
9 15,04 + 0,04 22 14,92 -0,08
10 14,92 -0,08 23 15,11 + 0,11
И 15,10 + 0,10 24 14,93 -0,07
12 14,94 -0,06
управления прервется, двигатель должен остановиться в положении,
определяемом последним импульсом. Ранее было показано, что для
этого отношение элек!ромагнитного момента к моменту инерции ротора
должно быть для ШД выше, чем для обычного электрического двига-
теля.
4. Шаговая частота вращения и частота импульсов. Частота вращения
задается числом шагов в секунду, и вместо показателя ’’частота враще-
ния” часто используется термин ’’шаговая частота вращения”. В силу
23
того, что для большинства ШД число шагов равно числу импульсов схемы
управления, частота вращения может быть выражена в терминах частоты
импульсов. В книге в качестве единицы шаговой частоты вращения
используется герц (I ц).
Следует, однако, отметить, что шаговая частота вращения не опреде-
ляет точно абсолютную частоту вращения. Частота вращения для обыч-
ных электрических машин выражается в оборотах в минуту; для реаль-
ной частоты вращения ШД рекомендуется тот же термин и единица изме-
рения. Соотношение между частотой вращения и шаговой частотой вра-
щения задается формулой
п = 60/75", (2.2)
где п — частота вращения, об/мин; f — шаговая частота вращения; S —
число шагов.
2.2. КЛАССИФИКАЦИЯ ШАГОВЫХ ДВИГАТЕЛЕЙ
В настоящее время используются разные типы электрических машин,
и ШД можно разделить на несколько типов в соответствии с их струк-
турой и принципами работы.
2.2.1. Реактивные двигатели являются основным типом ШД, приме-
няемым в настоящее время.
Конструкция реактивного ШД показана на рис. 2.8. Для облегчения
объяснения принципов его действия на рис. 2.9 приведено поперечное
сечение простого реактивного ШД. Это трехфаэный двигатель, статор
которого имеет шесть зубцов. Каждые два зубца статора, отстоящие
на 180° друг от друга, принадлежат одной фазе; катушки противополож-
ных зубцов соединены последовательно или параллельно (на рис. 2.9
они соединены последовательно). Ротор имеет четыре зубца. Статор и
ротор обычно изготавливают из шихтованного магнитомягкого мате-
риала, но часто используют и массивные роторы. Материал как статора,
так и ротора должен обладать высокой магнитной проницаемостью и
обеспечивать прохождение большого магнитного потока.
Определим, одинаковые или противоположные направления намагни-
чивания будут иметь зубцы одной фазы статора. Предположим, что в на-
Рис. 2.8. Разрез однопакетного реактивного ШД
24
Фаза /
Рис. 2.9. Поперечное сечение трехфазного ШД и схема соединения обмоток:
1 - обмотка; 2 - статор; 3 - ротор
шем примере они имеют противоположные направления намагничивания.
Таким образом, на рис. 2.9 зубцы /, II и /77 в возбужденном состоянии
представляют северный магнитный полюс, а /', II'п III'— южный.
Ток в каждой фазе управляется в режиме ДА (НЕТ) через соответ-
ствующие переключатели. Если ток подается в катушку фазы 1 или,
другими словами, фаза 1 возбуждена, магнитный поток будет проходить,
как показано на рис. 2.10. Ротор примет такое положение, что зубцы
статора / и Г и какие-либо два зубца ротора установятся по одной линии.
В этом случае магнитное сопротивление минимально, что обеспечивает
положение равновесия. Если ротор начнет двигаться от положения рав-
новесия под действием внешнего момента, приложенного к его валу,
то появится удерживающий момент, как показано на рис. 2.11. В этом
случае к ротору приложен внешний момент, направленный по часовой
стрелке, и ротор смещен в этом же направлении, что привело к искривле-
нию магнитных силовых линий на концах зубцов как статора, так и
самого ротора. Магнитные силовые линии имеют сильное натяжение,
известное как натяжение Максвелла. Другими словами, магнитные си-
Рис. 2.10. Положение равновесия при возбуждении фазы 1
Рис. 2.11. Силовые линии магнитного поля, создающие момент:
1 - силовые линии; 2 - внешний момент; 3 - возвращающий момент
25
Рис. 2. 12. Процесс выполнения шага при переключении возбуждения с фа-
зы 1 на фазу 2
ловые линии стремятся стать как можно более короткими и прямыми
(подобно эластичной струне). На рис. 2.11 этот эффект возникает на
концах зубцов, создавая момент против часовой стрелки для возвраще-
ния зубцов ротора на одну линию с зубцами статора.
Как видно из рис. 2.11, когда зубцы ротора и статора в возбужденной
фазе находятся не на одной прямой, магнитное сопротивление становится
минимальным. Посмотрим, что произойдет, если отключить фазу 1 и воз-
будить фазу 2. После переключения магнитное сопротивление резко воз-
растет. Поэтому ротор, как видно на рис. 2.12, повернется на угол 30°,
чтобы минимизировать магнитное сопротивление. Это движение на угол
шага при каждом переключении возбуждения называется шагом. После
выполнения ротором трех шагов он снова вернется в начальное положе-
ние. Это показано на рис. 2.13.
Укажем основные структурные особенности реактивных ШД.
А. Воздушный зазор должен быть минимальным для создания боль-
шого момента при небольшом объеме ротора и достижения высокой точ-
ности позиционирования. Влияние длины воздушного зазора приведено
на рис. 2.14. При одном и том же значении магнитодвижущей сипы неболь-
шой зазор будет обеспечивать больший магнитный поток, который со-
здает более высокий момент. Ясно также, что при воздействии на ротор
внешнего момента его уход от положения равновесия становится меньше
с уменьшением зазора. Значение зазора в современных ШД лежит в преде-
лах от 30 до 100 мкм.
Б. В шаговых двигателях возможно реализовать малый угол шага.
Угол шага в 30°, реализуемый структурой рис. 2.10, не является мини-
мально возможным. На рис. 2.15, а показан трехфазный реактивный ШД
с 12 зубцами на статоре и 8 на роторе; это в два раза больше, чем у кон-
струкции на рис. 2.10. На рис. 2.15, б показан четырехфазный ШД, имею-
Рис. 2.13. Принцип действия трехфазного реактивного ШД
26
Рис. 2. 14. Анализ магнитного поля при
малом (2) и большом (2) воздушных
зазорах
щий 8 зуодов на статоре и 6 на роторе. Угол шага обеих конструкций ра-
вен 15°. На рис/2.16 изображен четырехфазный ШД с углом шага 7,5°,
у которого 16 зубцов на статоре и 12 на роторе. Как видно из этого
рисунка, ШД изготовляют тонким для уменьшения момента инертин.
Соотношение между утлом шага 0g, числом фаз т и зубцами рото-
ра Nr, а также количеством шагов S задается формулой
S = 360/0$ = mNr.
Для того чтобы уменьшить угол шага 0g, число зубцов ротора Nr
должно быть увеличено. Из предыдущих объяснений следует, что число
зубцов статора должно быть увеличено точно так же, как и ротора, однако
оно не входит в уравнение. На рис. 2.17 показано поперечное сечение
реактивного ШД с малым утлом шага. Большие выступающие части,
вокруг которых располагается обмотка, называются полюсами. Полюс
статора имеет два или более зубца, все они одного полюса и в любой
момент времени намагничены в одном направлении. Так как для кон-
струкции рис. 2.17 Nr = 14, число фаз — 3, то S = 3 • 14 = 42 шага. Угол
шага в этой модели 6g ~ (360/42)° = 8,57°. На рис. 2.18 показана раз-
вертка магнитной системы ШД, объясняющая процесс движения на шаг.
Этот пример показывает, что число зубцов статора не является прямым
фактором для определения утла шага.
На рис. 2.19 приведен пример трехфазного ШД, у ко торт го число зуб-
цов ротора увеличено до 44. Число шагов на один оборот равно 132.
а) б)
Рис. 2.15. Поперечное сечение реактивных ШД с утлом шага 15 :
а — трехфазный (зубцов статора 12, ротора 8); б — четырехфазный (зубцов ста-
тора 8, ротора 6)
27
Рис. 2. 16. Статор и ротор четырехфазного реактора ШД с углом шага 7,5°
Пример четырехфазного ШД с 50 зубцами ротора приведен на рис. 2.20.
Угол шага равен 1,8°, и число шагов на один оборот у этой модели рав-
но 200. На рис. 2.21 представлена серия шестифазных реактивных ШД
с утлом шага 1,2°.
В. Многопакетные и однопакетные типы ШД. Все реактивные ШД,
описанные выше, принадлежат к однопакетному типу двигателей. Их
особенность состоит в том, что 3 или 4 фазы выполнены в виде одного
слоя, т.е. находятся в одной и той же плоскости. Другой тип реактив-
ных двигателей — многопакетный или каскадный. Разрез такого трех-
пакетного ШД представлен на рис. 2.22. В этой модели каждый пакет
соответствует одной фазе, а ротор и статор имеют одинаковое количество
зубцов. Теперь предположим, что возбуждена третья фаза обмотки,
расположенная на третьем пакете магнитной системы, и для этого слу-
чая зубцы статора и ротора установились на одной линии. В других фазах
в это время они расходятся на 1/3 шага зубца, как показано на рисунке.
Направления расхождения первого и второго пакетов противоположны
одно другому. Если возбуждение переключается с третьей фазы на
первую, то ротор повернется на один шаг по часовой стрелке, а если его
переключить на вторую, то на один шаг против часовой стрелки. На
рис. 2.23 показаны статор и ротор пятипакетно-
го ШД.
Рис. 2. 17. Поперечное сечение трехфазного реак-
тивного ШД с 2 зубцами она каждом полюсе (зубцов
ротора 14, угол шага 8,75 ) :
1 - полюс; 2 - зубец
28
Рис. 2. 19. Поперечное сечение трехфазного реактивного ШД (зубцов рото-
ра 44 и число шагов за одни оборот 132), магнитопроводы:
1 - статора; 2 - ротора
На рис. 2.24, а представлен продольный разрез уникального пятифаз-
ного реактивного ШД многопакетного типа, выпускаемого компанией
Fanuc и используемого в устройствах с числовым управлением. На
рис. 2.24, б показан принцип действия этого двигателя; зубец ротора
проходит между зубцами статора, ширина которых одинакова. Известно,
что эта структура создает большой электромагнитный момент на едини-
цу объема ротора.
Так как в многопакетном ШД,
показанном на рис. 2.24, использу-
ются кольцевые катушки типа соле-
ноида, распределение магнитного
поля для этой модели отличается
от других, представленных ранее в
книге. Сравнение дано на рис. 2.25.
В однопакетном двигателе маг-
Р и с. 2. 20. Поперечное сечение че-
тырехфазного реактивного ШД (зубцов
ротора 50, число шагов за один обо-
рот 200, угол шага 1,8 )
29
Рис. 2.21. Шестафазные реактивные ШД с углом шага 1,2°
Рис. 2. 22. Конструкция многопакет-
ного реактивного ШД:
1 — обмотки; 2 — зубец ротора; 3 -
третий пакет; 4 - второй пакет; 5 — пер
вый пакет
Рис. 2.23. Статор и ротор пятипакетного реактивного ШД
нитные полюсы расположены в плоскости, перпендикулярной валу двига-
теля. Этот вид распределения магнитного поля называется разноименнопо-
люсным. У многопакетного ШД (рис. 2.24) в плоскости, перпендикулярной
валу, расположен только один магнитный полюс (N или 5). Этот вид
30
Рис. 2. 24. Продольное сечение пятипакетного реактивного ШД типа ’’санд-
вич”:
I - обмотка; 2 - ротор
Рис. 2.25. Многополярное (а) и униполярное (б) магнитные поля:
1 - катушка
распределения называется одноименнополюсным. В некоторых типах
многопакетных реактивных ШД распределение магнитного поля может
быть также разноименнополюсным. Пример такой конструкции пред-
ставлен на рис. 2.26.
2.2.2. Шаговые двигатели с постоянными магнитами. Пример четырех-
фазного ШД с постоянными магнитами приведен на рте. 2.27. Цилиндри-
ческий постоянный магнит используется в качестве ротора, а статор имеет
4 зубца, вокруг каждого из которых имеется обмотка. Схема управления
приведена на рис. 2.28. Выход с каждой из фаз соединен с положитель-
ным зажимом источника питания. Если фазы возбуждаются в последова-
тельности 1 -+ 2 -* 3 . .. , ротор будет поворачиваться по часовой
31
Рис. 2. 27. Поперечное сечение четырех-
фазного ШД с постоянными магнитами
Рис. 2. 28. Принципиальная схема уп-
равления для четырехфазного ШД
стрелке, как показано на рис. 2.29. Очевидно, что для этого ШД угол шага
равен 90°. Если число зубцов статора и магнитных полюсов ротора
удвоить, то получится четырехфазный ШД с углом шага 45° (рис. 2.30).
Для дальнейшего уменьшения угла шага число магнитных полюсов ро-
тора и зубцов статора должно быть увеличено. Однако существует предел
как числа зубцов статора, так и числа полюсов ротора. В следующем па-
раграфе рассмотрена альтернативная гибридная конструкция ШД с по-
стоянными магнитами, имеющая малый угол шага.
Особенность ШД с постоянными магнитами состоит в том, что ротор
в конце движения приходит в фиксированное положение даже при сня-
тии питания с обмотки статора. Здесь срабатывает механизм фиксации,
и данное фиксированное положение называется положением фиксации.
Как правило, положения фиксации совпадают с конечными положениями
при возбужденных фазах (положениями равновесия), когда возбуждена
одна из фаз. При использовании постоянных магнитов возникают две
проблемы: во-первых, постоянные магниты дороги; во-вторых, макси-
мальная плотность магнитного Потока ограничена значением намагничен-
ности постоянного магнита. Хотя ферритовые постоянные магниты и
дешевы, из-за их относительно низкой намагниченности невозможно полу-
чить большой момент.
2.23. Гибридные шаговые двигатели. Другим типом ШД, использую-
щим для ротора постоянный магнит, является гибридный двигатель.
Термин ’’гибридный” происходит от того, что двигатель работает, исполь-
зуя принципы как реактивного двигателя, так и двигателя с постоянными
магнитами. Разрез и сечения (продольное и поперечное) ШД такого типа
показаны соответственно на рис. 2.31 и 2.32. Структура статора такая же,
как у реактивного ШД на рис. 2.20, или очень близка к ней, но обмотки
и их соединение отличаются от реактивного двигателя, в котором на од-
ном полюсе намотана только одна из двух катушек одной фазы. В че-
тырехфазном гибридном ШД катушки двух различных фаз намотаны
на одном полюсе, как показано на рис. 2.32. Таким образом, один полюс
принадлежит не только одной фазе. Две катушки на полюсе намотаны
по так называемой бифилярной схеме, которая будет рассмотрена в 2.26.
При возбуждении катушки создают магнитные потоки различной по-
лярности.
32
Рис. 2. 29. Шаги в четырехфазном двигателе с постоянными магнитами, воз-
буждающемся в последовательности 1 2 -> 3 -» 4
Рис. 2. 30. ШД с постоянными магнитами с углом шага 45°
Рис. 2.31. Поперечное сечение гибридного ШД
/
2
Рис. 2.32. Конструкция гибридного ШД:
I — магнитопровод статора; 2 - обмотки; 3 — магнитопровод ротора; 4 - обмот-
ка; 5 — постоянный магнит
Рис. 2. 33. Структура ротора гибридного ШД:
1 - шихтованная сталь; 2 - постоянный магнит
а!
6)
Рис. 2. 34. Прохождение силовых линий магнитного поля в гибридном ШД.
Поток, создаваемый ротором (а), образует униполярное магнитное поле, в то время
как поток, создаваемый статором (6), образует многополярное магнитное поле
34
Рис. 2.35. Сдвиг зубцов статора
Другой важной особенностью \ ам—
гибридного ШД является структура I 1| 1
ротора. Цилиндрический постоян- < /) )
ный магнит располагается в теле И I
ротора, как показано на рис. 2.33. *
Постоянный магнит намагничен
вдоль оси ШД для создания аксиального магнитного потока (рис. 2.34,я).
На каждый из полюсов постоянного магнита надет сердечник ротора из
магнитомягкого материала с зубцами. Зубцы пакетов сдвинуты друг от-
носительно друга на половину зубцового деления. В некоторых ШД зубцы
разных пакетов ротора совпадают друг с другом, но зубцы статора имеют
сдвиг по углу, как показано на рис. 2.35.
Магнитное поле, которое создается катушками статора, является раз-
ноименнополюсным (рис. 2.34, б).
Момент в гибридном ШД создается за счет взаимодействия магнитных
полей катушек и постоянного магнита в зубчатой структуре воздушного
зазора. Для объяснения этого рассмотрим развернутую модель ШД иа
рис. 2.36. На этой диаграмме зубцовые деления статора и ротора одина-
ковы. Однако в некоторых ШД зубцовое деление статора несколько боль-
ше, чем у ротора, что делается для создания фиксирующего момента и
Рис. 2. 36. Развертка четырехфазного гибридного ШД. Вверху поперечное се-
чение для южного магнитного полюса, внизу - для северного:
1 - усиление одного другим; 2 - нейтрализация одного другим; 3 - постоянный
магнит S; 4 — постоянный магнит N
>• 35
г1ДА>
Рис. 2.37. Трехпакетный габридный ШД с увеличенным моментом
увеличения точности позиционирования (см. рис. 3.16). Верхняя полови-
на этого рисунка представляет собой поперечное сечение северного полю-
са магнита, а нижняя — южного. Рассмотрим в этой модели магнитное по-
ле под зубцами I и III полюсов. Полюс I возбужден так, что является се-
верным полюсом, а полюс Ш — южным. Распределение создаваемого
ими магнитного поля показано на рисунке сплошными линиями. Пунк-
тирные линии представляют собой поток, создаваемый постоянным
магнитом.
Во-первых, следует отметить, что активный момент образуется только
за счет магнитного поля обмотки, как в реактивном ШД, из-за того, что
зубцы северного и южного полюсов ротора расходятся друг относительно
друга на половину зубцового деления. Постоянный магнит создает некото-
рый фиксирующий момент. Рассмотрим, что произойдет, когда магнитное
поле, создаваемое обмоткой, накладывается на поле, создаваемое по-
стоянным магнитом. Результат представлен на том же рисунке. Из-за того
что оба поля усиливают друг друга в пространстве, под зубцами полюса
появится движущая сила, ориентированная влево ( «- ), в то время как
под полюсом III обе компоненты нейтрализуют одна другую, ослабляя
силу, ориентированную вправо. Та же самая сила создается и в нижней
половине, так как поля статора и ротора имеют одинаковые направления
под полюсом III и противоположные под полюсом I. Таким образом,
результирующая сила будет направлена влево ( *- ). После того, как
ротор повернется на четверть шага между зубцами в этом направлении,
движущая сипа снизится до нуля и будет достигнуто положение рав-
новесия.
Если возбудить другие полюсы, то ротор сделает следующий шаг.
36
Рис. 2.38. Статор и ротор гибрид-
ного ШД с тороидальной обмоткой
Рис. 2.39. Продольное сечение
гибридного ШД с постоянными
магнитами на статоре:
1 — обмотка; 2 — кольцевой
постоянный магнит; 3 - зубцы
Как было показано выше, постоянный магнит играет важную роль в
создании момента. Но следует также отметить, что структура зубцов ста-
тора и ротора в гибридных ШД выбрана так, чтобы обеспечить реали-
зацию малого угла шага.
Этот двигатель [5] был сконструирован для исполэования в качестве
низкоскоростного синхронного и назван синхронным индукторным
двигателем. В действительности некоторые сегодняшние гибридные дви-
гатели могут быть использованы в качестве двух- или однофазных кон-
денсаторных синхронных двигателей. Двигатель с углом шага 1,8°
вращается с частотой 60 (или 72) об/мин при 50 (или 60) Гц. Обмотки
в этих двигателях не обязательно должны быть би филярными. Детали
обмоток рассмотрены в 2.2В.
Наиболее распространенным гибридным ШД является четырехфазный
200-шаговый двйгатель с углом шага 1,8°. Этот тип ШД выпускается
многими фирмами. Существуют, конечно, гибридные ШД с другими угла-
ми шага, например 2 или 5°. В ФРГ фирма Gerhard Berger выпускает
гибридные ШД, подробное описание которых можно найти в [6 и 7].
Для того чтобы повысить момент, применяют гибридные многопа-
кетные ШД (рис. 2.37).
2.2.4. Гибридные шаговые двигатели с постоянным магнитом в ста-
торе. Другой тип гибридного ШД [8] показан на рис. 2.38. Как видно
из рис. 2.39, где изображено продольное сечение этого двигателя, в стато-
ре расположен кольцевой постоянный магнит, а обмотки двух катушек
имеют тороидальную форму. В этом двигателе как магнит, так и ток в
обмотках создают одноименнополюсное магнитное поле. Зубцы статора
в двух пакетах смещены относительно друг друга на четверть зубцового
Деления, а зубцы четырех пакетов ротора расположены на одной линии.
37
Рис. 2.40. ШД с когтеобразным ротором
Принцип работы этого двигателя подобен принципу работы гибридного
линейного двигателя, который рассмотрен в 2.2.7.
2.2.5. Двигатель с постоянными магнитами когтеобразного типа. Еще
один тип ШД с постоянным магнитом — это двигатель с когтеобразными
полюсами. Поперечное сечение этого ШД показано на рис. 2.40. Статор
штампуют из круглой металлической полосы и вытягивают в форме
колокола. Когтеобразные полюсы статора выгибаются внутри в форме
полюсов-выступов. Пакет статора образуется соединением двух выгну-
тых таким образом оболочек, при этом когтеобразные полюсы пере-
межаются, а обмотка проходит с их внутренней стороны.
Отличительная черта ШД с когтеобраэными полюсами состоит в том,
что при прохождении тока через обмотки эти полюсы статора создают
разноименнополюсиое магнитное поле. Как показано на рис. 2.41, ротор
в виде цилиндрического керамического магнита (феррита) намагничен
так, что также создает разноименнополюсное магнитное поле. Как
правило, количество полюсов для ШД с углом шага 7,5° равно 24. Этот
тип ШД обычно двухпакетный. Зоны намагниченности двух пакетов ро-
тора находятся на одной линии, как на рис. 2.41, когтеобразные полю-
сы статора в пакетах смещены друг относительно друга на половину
полюсного деления.
Обмотки включают по двухфазной либо по четырехфазной схеме.
Обмотки фаз 1 и 3 выполнены бифилярными и помещены в пакет А,
а 2 и 4 - в пакет В. Фазы 1 я 3 соединены так, что полярность создавае-
мого ими магнитного поля противоположна полярности магнитного поля
фаз 2 и 4. На рис. .2.42 показана последовательность возбуждения фаз в
форме графика возбуждающего тока как для четырехфаэной, так и для
двухфазной схемы соединения обмоток. В двухфазной схеме управляю-
щий ток имеет прямоугольную форму с чередующимися направлениями.
Разберем работу двухфазной схемы управления, пользуясь рис. 2.43.
Рассмотрим пространственное расположение магнитных полюсов ротора
и зубцов статора в пакете А. Ротор сначала находится в положении,
показанном на схеме (7). Фаза А возбуждается положительным током;
38
a) g)
Рис. 2. 42. Форма кривой тока, используемая в ШД с когтеобразным рото-
ром:
а - четырехфазная схема; б - двухфазная схема
создаваемые при этом магнитные полюсы представлены на той же схеме.
Очевидно, что натяжением магнитных силовых линий ротор двигается
влево. На схеме (2) показано положение равновесия, когда фаза А воз-
буждена в положительном направлении. Затем, когда она отключается и
положительным током возбуждается фаза В, ротор продвинется дальше
в том же направлении, так как когтеобразные полюсы статора в пакете В
смещены влево относительно полюсов пакета А на половину полюсного
деления. На схеме (3) представлен результат возбуждения фазы В. После
продвижения ротора и перехода его в положение, показанное на схе-
ме (4), фаза В отключается, а фаза А возбуждается отрицательно направ-
ленным током. Отличительной чертой ШД с когтеобразными полюсами
является низкая стоимость, они находят широкое применение в качестве
двигателей для продвижения бумажной ленты и для перемещения головок
в миниатюрных дисковых системах для гибких дисков.
2.2.6. Шаговые двигатели с внешним ротором. Двигатели могут быть
разделены на два типа: с внешним и внутренним ротором. Все ШД,
описанные выше, принадлежат ко второму типу, в котором статор окру-
жает ротор. В двигателях с внешним ротором последний расположен вне
статора. Шаговые двигатели с внешним ротором выпускают редко [9]
Двигатель, представленный на рис. 2.44, — 81-шаговый реактивный двига-
тель с внешним ротором, сконструирован для системы прогона бумаги:
его ротор является роликом для прогона бумаги. Как следует из рис. 2.45,
статор этого двигателя трехпакетного типа. Три пакета статора закрепле-
ны на валу. Внешний ротор соединен с валом двумя подшипниками и
свободно вращается.
1 5' J,,"" 1 N 1 Е
УТЬ УШ?I I I I
S N S N
м ~ IЛ N 1 s ~|~?Г
S N S N
Рис. 2.43. Принцип действия ШД с постоянными магнитами и когтеобразным
ротором:
1 - ротор; 2 - зубцы статора
39
Рис. 2. 44. Реактивный ШД с внешним ротором
Рис. 2.45. Продольное сечение двигателя с внешним ротором, изображенного
на рис. 2.44:
1 - катушка; 2 - ротор; 3 — статор
2.2.7. Линейные шаговые двигатели. Все двигатели, описанные выше,
являются вращающимися машинами. Их конструкции позволяют ротору
вращаться относительно статора как по часовой, так и против часовой
стрелки.
Однако существуют двигатели, конструкция которых обеспечивает
линейное движение, они называются линейными. Видов линейных двига-
телей существует так же много, как и вращающихся. Они включают
двигатели постоянного тока, синхронные, асинхронные и вентильные.
Но линейные ШД представляют наибольший интерес среди всех малых
линейных двигателей, используемых для управления.
Реактивные линейные двигатели. На рис. 2.46 в качестве примера при-
веден трехфазный реактивный ШД, который был сконструирован фир-
мой IBM для движения каретки в серийном печатающем устройстве.
На рис. 2.47 изображена связь между зубцами статора, ползунка и об-
мотками. Сердечники как статора, так и ползунка набраны из пластин
электротехнической стали. Динамические характеристики и аспекты
управления этого типа двигателя рассмотрены в [ 10].
40
Рис. 2. 46. Трехфазный линейный реактивный ШД, используемый в печатаю-
щем устройстве
Линейные двигатели с постоянными магнитами. Принцип работы ли-
нейного ШД с постоянными магнитами [11] приведен на рис. 2.48. Дви-
гатель, который здесь называется ползунком, состоит из постоянного маг-
нита и электромагнитов А и В. Поток, созданный постоянным магнитом,
замыкается через сердечники электромагнитов, воздушные зазоры меж-
ду сердечником и статором. Если в катушке отсутствует ток, то магнит-
ный поток проходит через оба зубца сердечника, как показано для элект-
ромагнита В (рив. 2.48, айв). Если же обмотка возбуждена, то магнит-
ный поток концентрируется только в одном зубце сердечника. Это пока-
Р и с 2 47. Соотношение между зубцами статора, зубцами ползунка и полю-
сами обмоток:
1 — магнитопровод ползунка; 2 — обмотка; 3 — мапштопровод статора
41
Рис. 2.48. Принцип действия линейного ШД:
1 - постоянный магнит; 2 - электромагнит
зано на рис. 2.48, а дня электромагнита А. В этом случае плотность
магнитного потока через один зубец максимальна, а через другой —
незначительна.
На рис. 2.48, а зубец 1 электромагнита А расположен напротив зубца
статора. Когда катушка В подключается к источнику питания и ток про-
ходит в направлении, показанном на рис. 2.48, б, ползунок сдвинется
вправо на четверть шага зубцов и зубец 4 установится на одной прямой с
ближайшим зубцом статора. Далее электромагнит В отключается и обмот-
ка электромагнита А возбуждается с противоположной полярностью.
Это создает силу для продвижения ползунка вправо, а зубец 2 устанав-
ливается на одной прямой с ближайшим зубцом статора (рис. 2.48, в).
Для дальнейшего продвижения ползунка в этом направлении об-
мотка электромагнита А отключается и обмотка электромагнита В
(рис. 2.48, г) возбуждается в направлении, противоположном преды-
дущему.
На международной конференции по ШД и системам управления
в 1979 г. был представлен линейный ШД (рис. 2.49), который двигался
по статору в виде рейки [12]. Для минимизации массы ползунка приме-
няется постоянный магнит из SmCo5.
1 г
ЛПЛЛЛ1ЪПЛПЛЛГ1Л rLHJTJbnjrnjTJlJTriJTJTJbnjTJVri-r
Рис. 2.49. Продольное сечение ли-
нейного ШД с постоянными магни-
тами:
1 - магнит SmCOs; 2 - обмотка; 3 -
направляющая статора; 4 — ползунок;
5 — набор зубцов
42
2
3
Рис. 230. Структура линейного ШД с постоянными магнитами, используемого
в автоматическом чертежном устройстве:
1 — постоянный магнит SmCO$; 2 — прокладка; 3 - хомут; 4 - неподвижные
зубцы
На рис. 230 изображена структура линейного ШД, используемого для
движения чертежной головки автоматической чертежной системы. В дви-
гателе используются четыре плоских магнита из SmCos.
2.2.8. Обьрйые и бифилярные обмотки. Теперь рассмотрим типы об-
моток, используемых в ШД. Соленоидные катушки применяют в много-
пакетных реактивных ШД, двигателях с постоянными магнитами и когте-
образными полюсами. С другой стороны, для гибридных ШД и однопакет-
ных реактивных двигателей выбирают обычную или бифилярную обмот-
ку. В первом из них провод навивается несколько раз на простой полюс.
Во втором — два сложенных провода наматывают, как показано на
рис. 231, но отделяют один от другого, чтобы использовать независимо
друг от друга. Если один провод принадлежит фазе 1, то другой — фазе 3.
Аналогично, если один — фазе 2, то другдй — фазе 4.
Одна из целей бифилярной обмотки — это намагничивание полюса
статора в противоположных направлениях. Возбуждение фазы может
быть выполнено по одной из трех схем, приведенных на рис. 2.52. В обыч-
ном случае (рис .232, а) полярность полюса при возбуждении обмотки
может быть всегда либо северной, либо южной и исключает возможность
обратного переключения. Этот способ возбуждения называется одноимен-
нополюсиым возбуждением. В цепи (рис. 2.52, б) направление тока в
обмотке с помощью инвертора может переключаться на противополож-
ное. Однако для каждой фазы требуются четыре транзистора. Это воз-
можно при бифилярном возбуждении. Схема (рис. 2.52, в) включает
пару бифилярных обмоток, при возбуждении которых полюс статора
намагничивается в любом направлении. Если возбуждена одна из обмо-
ток, получается северный маг-
нитный полюс, если другая —
южный. Две катушки, намо-
танные по бифилярной схе-
ме, являются сцепленными
Рис. 2.51. Бифилярная обмотка
ОФОФОФО
•ОФОФОФ
ОФОФОФО
•ОФОФОФ
ОФОФОФО
офофофо
•офофоф
ОФОФОФО
•ОФОФОФ
офофофо
•офофоф
оаоФоео
офофофо
43
Р н с. 2.52. Три основные схемы возбуждения:
а - обычная обмотка, однополупериодное возбуждение; б — обычная обмотка,
двухполупериодное возбуждение; в - бифилярная обмотка, двухполупериодное
возбуждение
по магнитному потоку, если какая-либо из них возбуждена. Если вместо
бифилярных обмоток взять две независимые катушки, между ними воз-
никает перепад индуктивностей, а точность позиционирования умень-
шится.
В основном эффективность двигателей с постоянными магнитами, дей-
ствующих в режиме переменной полярности, выше, чем получаемая в
однополярном режиме.
Преимущества использования бифилярных обмоток в однопакетных
реактивных ШД рассмотрены в 2.3.5.
23. РЕЖИМЫ ВОЗБУЖДЕНИЯ
Принципы работы ШД будут объяснены применительно к однофазному
возбуждению. Этот метод возбуждения является одним из основных
и часто используется для анализа фундаментальных теоретических
проблем.
23.1. Однофазное возбуждение. Таблица 2.3. показывает последова-
тельность возбуждений в однофазном режиме для трех- и четырехфазных
двигателей. Звездочки обозначают возбужденные состояния, а пустые —
фазы без тока, т.е. невозбужденные состояния. Если ШД поворачивается
по часовой стрелке при возбуждающей последовательности фаза 1 -* 2 ->
-> 3 . . ., то он будет поворачиваться против часовой стрелки при
простой смене последовательности на противоположную (3 -> 2 -> 1).
Работа при однофазном возбуждении называется также однофазным управ-
лением.
23.2. Двухфазный режим возбуждения. Работа двигателя, при которой
всегда возбуждены две фазы, называется двухфазным возбуждением.
Прежде чем обсуждать преимущества режима, рассмотрим последова-
тельность'возбуждения и расположения зубцов ротора и статора в положе-
нии равновесия. Последовательность возбуждения для трех- и четырехфаз-
ных двигателей дана в табл. 2.4, откуда видно, что когда возбуждающий
ток переключается с одной фазы на другую (например, как показано
стрелками в табл. 2.4, а, фаза2отключается, а 1 возбуждается), то фаза 3
остается возбужденной.
Расположение зубцов, статора и ротора в положении равновесия при-
ведено на рис. 233. В этом случае они не лежат на одной линии, как при
44
Таблица 2.3. Последовательность возбуждения обмоток при однофазном
управлении
а) Трехфазный двигатель
Временное состояние Р 1 2 3 4 5 6 7 8
Фаза 1 Фаза 2 Фаза 3 * * * * * * * * *
б) Четырехфазный двигатель
Временное состояние Р 1 2 3 4 5 6 7 8
Фаза 1 * * *
Фаза 2 * *
Фаза 3 * *
Фаза 4 * *
Импульсы
Примечание. Р обозначает ’'начало”.
Рис. 2.53. Соотношение положений зуб-
цов статора и ротора при двухфазном
возбуждении
однофазном возбуждении (см. pic.
2.13). Распределение магнитного поля
и выполнение шага для трехфазного
двигателя изображено на поперечном
сечении, приведенном на рис. 2.54.
Большая разница между однофазным
и двухфазным способами наблюдается в движении ротора, как это пока-
зано на рис. 2.55. При двухфазном способе возбуждения колебания зату-
хают быстрее, чем при однофазном. Качественно это может быть объяс-
нено следующим образом (рис. 236 и 2.57). В первом случае всегда
возбуждены две фазы и цепь двух фаз при появлении колебаний в силу
электромагнитной индукции образует замкнутый контур. Это действует
на колебательную составляющую тока, но не влияет на стационарную,
вызывающую удерживающий момент. Таким образом, колебательное
движение ротора приводит к появлению колебательного тока, который
накладывается на стационарный ток каждой фазы. Следует отметить, что
в фазах / и 2 колебательные составляющие тока имеют противоположные
45
Таблица 2.4. Последовательность возбуждения обмоток при двухфазном
управлении
а) Трехфазный двигатель
Временное состояние Р 1 2 3 4 5 6 7 8
Фаза 1 * • -> * * * *
Фаза 2 • * * *
Фаза 3 * * • * * *
б) Четырехфазный двигатель
Временное состояние Р 1 2 3 4 5 6 7 8
Фаза 1 * • * * *
Фаза 2 * * • *
Фаза 3 * * * *
Фаза 4 * * * * *
Рис. 2.54. Изменение картины магнитного поля при выполнении шага при
двухфазном управлении обычным трехфазным реактивным ШД
Рис. 2. 55. Процесс установления ротора при однофазном (л) и двухфазном
(б) возбуждении
46
Рис. 2.56. Колебания ротора при двухфазном возбуждении:
1 — колеблющийся ротор
Рис. 2.57. Замкнутая цепь для колебательного тока:
1 - замкнутая цепь для колебательного тока
фазы. Так как момент, образуемый колебательной компонентой тока,
действует в противоположном направлении, колебания затухают, кинети-
ческая энергия, связанная с колебаниями ротора, преобразуется в теплоту.
Поскольку при однофазном возбуждении подобные замкнутые контуры
не образуются, то колебания затухают только под действием трения. Эта
проблема подробнее обсуждается в § 4.3.
233. Полушаговый режим. Схема управления (возбуждения), кото-
рая является комбинацией однофазной и двухфазной схем, называется по-
лушаговой схемой возбуждения. Последовательность возбуждения для
трехфазного вдигателя приведена в табл. 2.5. Здесь взяты два типа вре-
менных положений (А и В). В случае А позиционирования достигают
только за счет однофазного возбуждения, а две фазы возбуждаются при
переходе из одного положения равновесия в другое. Двухфазное возбуж-
дение используется в этом случае для подавления колебаний. В другом
методе для позиционирования используют как однофазное, так и двух-
фазное возбуждение. В этом методе временное положение должно быть
выбрано по схеме В, она уменьшает угол шага наполовину. Сравнение
однофазного, двухфазного и полушагового режимов для трехфазного ШД
приведено на рис. 2.58.
Таблица 2.5. Последовательность возбуждения обмоток при полушаговом
управлении (трехфазный двигатель)
Временное состояние А Р 1 2 э 4 5
Временное состояние В Р 1 2 3 4 5 6 7 8 9
Фаза 1 * * * * *
Фаза 2 * * * • * *
ФазаЗ * * * * *
47
2
4 -vy—V r-V r-v H W .
Рис. 2.58. Сравнение однофазного, двухфазного и полушагового управлений:
а — однофазное; б - двухфазное; в - полушаговое
В большинстве двигателей с более чем четырьмя фазами полушаговый
режим выполняется за счет комбинирования двух- и трехфазной схем
возбуждения или трех- и четырехфазной схем возбуждения.
2.3.4. Двухфазная схема возбуждения трехфазных реактивных двига-
телей с бифилярными обмотками. Одним из наиболее важных условий
при конструировании ШД является требование получения минимальных
габаритов.
В [3] утверждается, что трехфазный реактивный двигатель с бифиляр-
ными обмотками, работающий по двухфазной схеме возбуждения, удов-
летворяет этим требованиям. Схема соединения обмоток приведена
на рис. 2.59. Следует отметить, что катушки противоположных полюсов
соединяют так, что потоки обоих полюсов в каждый момент времени
направлены либо внутрь статора, либо наружу (см. рис. 2.13), где про-
тивоположные полюсы фазы создают
противоположные магнитные полюсы.
На рис. 2.60 показано распределе-
ние магнитного поля, получаемого в
результате возбуждения по схеме
табл. 2.6. В сердечнике существуют од-
новременно четыре замкнутые петли
магнитных силовых линий. В этом
N L J 3
Фаза 4 <|> Фаза 1
35/ /32 34/ /3/ S3 / 36
Рис. 2.59. Схема бифилярных обмоток
в трехфазном реактивном ШД
48
Р н с. 2. 60. Картина магнитного поля в трехфазном ШД с бифилярными об-
мотками. Р соответствует номеру возбужденной фазы на рис. 5.31
состоит отличие от схемы возбуждения с монофилярными обмотками
двигателей, в которых и при однофазной и двухфазной схеме возбуж-
дения существуют только две замкнутые петли магнитных силовых ли-
ний, как это показано на рис. 2.13 и 2.54. В действительности трехфазный
реактивный ШД с бифилярной обмоткой предпочтительнее, чем с моно-
филярными, по отношению момента к объему и демпфированию коле-
баний ротора.
2.3.5. Возбуждение с помощью двухполупериодного (мостового) ин-
вертора. При однополупериоднсм управлении гибридного ШД с бифиляр-
ными обмотками последние используются не полностью; например, при
двухфазном методе возбуждения в каждый момент ток проходит толь-
ко через половину обмоток. Полное их использование с помощью двух-
Таблица 2.6. Последовательность возбуждения обмоток при двухфазном
управлении для трехфазного реактивного двигателя с бифилярными обмотками
Временное состояние Р 1 2 3 4 5 6 7 8
Фаза 1 (S 1) * * *
Фаза 2 (S 2) * * * *
Фаза 3 (S 3) * * * *
Фаза 4 (S 4) * * *
Фаза 5 (S 5) * *
Фаза 6 (S 6) * *
49
Рис. 2.61. Устройство обмоток в гибридном ШД с обычными обмотками:
1 - фаза 1; 2 — фаза 2
Рис. 2.62. Мостовой коммутатор (инвертор) для двухфазного ШД
Рис. 2.63. Мостовой коммутатор (инвертор) с источником постоянного тока
со средней точкой
полупериодного (биполярного) управления соответственно увеличивает
выходную мощность двигателя. Гибридный ШД с монофилярной схемой
обмоток может быть представлен двухфазным двигателем, изображен-
ным на рис. 2.61. В этой модели полюсы 1, 3, 5, 7 принадлежат фазе А,
а 2, 4, 6 и 8 — фазе В. Если в фазе А полюсы У и 5 создают северные маг-
нитные полюсы, то 3 и 7 создают южные магнитные полюсы, и наоборот.
Это же утверждение справедливо и для фазы В.
Мостовая схема инвертора, показанная на pic. 2.62, используется для
управления ШД по двухполупериодной схеме с последовательностью
Таблица 2.7. Последовательность возбуждения обмоток при мостовом
управлении для трехфазного двигателя
Временное состояние Р 1 2 3 4 5 6 7 8
S 1 * * * * *
S2 * * * *
S 3 • * * * *
S 4 * * * *
S 5 * * * *
S6 * * * * *
S 7 * * * * *
S 8 * * * *
50
Фаза 3
Рис. 2. 64. Соединение обмоток в гибридном ШД с бифилярными обмотка-
ми при двухполупериодном управлении
Рис. 2.65. Прямоугольная форма напряжения питания для двухполупериод-
ного управления
возбуждений, приведенной в табл. 2.7. Отсюда видно, что через каждую
из обмоток всегда проходит ток то одной, то другой полярности. Извест-
но, что при применении двухполупериодного управления возможно уве-
личение на 25—30% момента на единицу входной мощности. Единственный
недостаток такой схемы состоит в том, что для нее требуется в два раза
больше транзисторов, чем для однополупериодного управления двига-
телем. Однако если возможно подсоединение в центре источника ЭДС,
как показано на рис. 2.63, количество переключающих элементов умень-
шается до четырех.
В случае двухполупериодной схемы управления двигателя с бифиляр-
ными обмотками они соединяются (рис. 2.64) так, что обмотки фаз 1 и 3
могут создавать магнитные полюсы одного знака в каждом полюсе ста-
тора. Как показано на рис. 2.65, напряжения в каждой из фаз при двух-
полупериодном управлении меют прямоугольную форму.
2.3.6. Управление малыми шагами. С помощью электронных устройств
можно разделить один шаг на множество малых шагов. Этот метод извес-
тен как минишаговое или микрошаговое управление и часто используется
в гибридных ШД. Идея минишагового управления взята у синусоидаль-
ного двухполупериодного управления гибридным ШД как синхронным
двигателем. Если гибридный ШД управляется не прямоугольным, а си-
нусоидальным двухфазным сигналом, то следует ожидать, что движение
ротора будет не дискретным, а плавным. Для некоторых двигателей в
особых условиях это справедливо [13]. Но во многих случаях гладкое
бесшаговое движение не реализуется нз-за фиксирующего эффекта, пере-
менного магнитного сопротивления цепи и появления в напряжении на-
веденных постоянным магнитом высших гармонических составляю-
щих.
Для деления шага управляющему току придают шагово-волновую фор-
му, как показано на рис. 2.66. Если один период разделить на 4п частей,
то один шаг разделится на и подшагов. В автоматической чертежной
системе, которая будет рассмотрена в 8.2.3, линейный гибридами ШД,
показанный на рис. 2.50, действует под управлением синусоиды, поде-
ленной на 96 шагов. Это делается для того, чтобы вычерчивающая голов-
ка могла выполнять 10 мкм движения при шаге между зубцами
0,96 мм.
51
4*
Рис. 2. 66. Зависимость тока от угла
при движении с малым шагом
У этой системы обеспечивается
высокое качество черчения. Если
подразделения не такие точные и
движение не такое плавное, какие
применяются в гибридном ШД для
графопостроителя, на ток наклады-
вается соответствующая третья гармоническая компонента, чтобы уничто-
жить неблагоприятные эффекты, возникающие из-за высших гармоник
в индуцируемом напряжении и других причин [14,15].
2.4. ОДНОФАЗНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
Все ШД, описанные выше, были многофазными. Однако существуют
конструкции, предназначенные для работы с однофазным возбуждением.
Они широко используются в часах, таймерах и счетчиках. В однофаз-
ных ШД всегда используются один или два постоянных магнита, так как
в миниатюрных ШД постоянные магниты необходимы для увеличения
отношения момента к потребляемой мощности. При рассмотрении одно-
фазного ШД мы должны учесть два аспекта: как зафиксировать ротор
в требуемом положении фиксации, когда обмотка не возбуждена, и по-
вернуть его в требуемом направлении переключением полярности един-
ственной обмотки. Рассмотрим эти проблемы по отношению к двум ти-
пам ШД.
2.4.1. Однофазный шаговый двигатель с асимметричным воздушным
зазором. Шаговый двигатель, изображенный на pic. 2.67, имеет в каче-
стве ротора магнит цилиндрической формы, а воздушные зазоры сужены
в одном направлении. Ротор при этом будет фиксироваться либо в поло-
жении, показанном на рис. 2.68, а либо б. Положение равновесия будет
такое, при котором магнитные полюсы ротора располагаются напротив
самых узких частей воздушного зазора. Для того чтобы повернуть
на 180° ротор, обмотка должна быть возбуждена так, чтобы созданный
ею поток был направлен, как показано на рис. 2.68, а, потому что маг-
нитные полюсы электромагнита и постоянного магнита в этом случае
Рис. 2. 68. Положения фиксации и полярность обмоток для поворота ротора
52
Рис. 2. 69. Однофазный ШД приме-
няемый в кварцевых часах:
1 - статор; 2 - обмотка; 3 - ротор
Длительность
Рис. 2. 70. Форма кривой напря-
жения, используемая в ШД
и
отталкивают друг друга.Из рис. 2.68
ясно, что естественное направление
вращения в силу данной формы
воздушного зазора направлено по
часовой стрелке. Если обмотка воз-
буждена в направлении, противопо-
ложном тому, какое показано на
рис. 2.68,я, ротор повернется про-
тив часовой стрелки на небольшой угол из-за момента между постоянным
магнитом и электромагнитом. Однако, когда обмотка будет отключена от
источника питания, ротор возвратится в исходное положение фиксации.
Для поворота из второй позиции в первую, возбуждение должно соот-
ветствовать направлению, указанному на рис. 2.68, б. Вращение в этом
случае происходит по часовой стрелке.
На рис. 2.69 изображен ШД, использующий такой принцип и применяе-
мый в кварцевых часах. Ротор этого двигателя представляет собой магнит
в форме диска диаметром около 1,5 мм, изготовленный из соединений
редкоземельных элементов и кобальта. Сердечник статора в этом при-
мере не является разрезным. Так как при возбуждении обмотки две
узкие перемычки статора насыщаются, то основной магнитный поток бу-
дет проходить через ротор. Форма управляющего напряжения в обмотке
показана на рис. 2.70, ширина импульса составляет около 8 мс. Пита-
ние происходит от батареи, вставляемой в часы. Для задания правильной
полярности возбуждения, чтобы не допустить пропуска шага при вклю-
чении часов после синхронизации их с источником точного времени, схема
управления запоминает положение ротора и подает возбуждающий сигнал
требуемой полярности.
2.4.2. Циклоном. Интересен ШД Cyclonome, выпускаемый фирмой
Sigma Instruments. Его конструкция приведена на рис. 2.71. В статор
встроены два магнита £-образной формы с высокой коэрцитивной си-
лой, изготовленные из сплава Алнико V. Ротор изготовлен из магнито-
мягкого материала и в данном примере имеет десять зубцов. Статор
имеет три полюса (X, Y и Z), изготовленные из пластин магнитомягкого
53
Рис. 2.71. Структура ШД Cydonome:
1 — фиксирующий полюс; 2 — постоянный
мапшт; 3 - ротор; 4 — управляющий полюс;
5 — обмотка
материала; движущие полюсы X и Yимеют
по три зубца с зубцовым делением 36°, а
Z — фиксирующий полюс. Рассмотрим ра-
боту этого однофазного ШД [16] в соответ-
ствии с рис. 2.72. Положение 1) является
положением фиксации при отсутствии тока. Зубцы 2, 4 и 6 фиксирующего
полюса Z расположены напротив трех зубцов ротора и направляют на
ротор магнитный поток. Так как зазор между зубдами ротора и полю-
сом Y в этом случае мал, то большая часть потока от ротора проходит
к полюсу Y.
Положение 2) показывает равновесие, когда через обмотку течет поло-
жительный ток. Поток через движущийся полюс Y нейтрализуется, но вы-
растает поток через полюс X. Он вызывает движение ротора по часовой
стрелке, которое приводит к тому, что зубцы полюса Xи соответствую-
щие зубцы ротора устанавливаются друг напротив друга.
Положение 5) представляет собой второе положение фиксации, опре-
деляемое тем, что фиксирующие зубцы 1, 3 и 5 находятся против соот-
ветствующих зубцов ротора. Ротор повернут на 18° относительно поло-
жения 1). Положение 4) показывает случай, когда через обмотку течет
отрицательный ток. Три соответствующих зубца ротора приводятся в
положение напротив трех зубцов полюса Y магнитным потоком в этом
полюсе. Положение 1) будет достигнуто, когда обмотка будет опять обес-
печена. Ротор повернется на угол 36° по часовой стрелке.
23. ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
2.5.1. Статические характеристики. Характеристики, относящиеся к за-
торможенному двигателю, называют статическими характеристиками.
54
Рис. 2.73. /’-б-характеристика:
1 - удерживающий момент
О 0,8 1,2 1,6
Ток, А
Рис. 2.74. Примеры/’-/-характеристик:
1 - четырехфазный реактивный ШД
с углом шага 1,8°; 2 - четырехфазный
гибридный ШД с углом шага 1,8 °
Т-6-характеристика. Шаговый двигатель фиксируют неподвижно в по-
ложении равновесия при возбуждающем токе, поданном по определен-
ной схеме возбуждения (одно- или двухфазной). Если теперь к ротору
приложить внешний момент, он вызовет угловое смещение. Отношение
внешнего момента Т к угловому смещению в приведено на рис. 2.73.
Эта кривая называется статической моментной характеристикой Т-6.
Максимальный статический момент называется удерживающим мо-
ментом, он соответствует 0 = ©м на рис. 2.73. Есин угловое смещение 6
больше, чем 0щ, то статический момент действует не в обратном направ-
лении, а в направлении следующего положения равновесия. Строго
удерживающий момент определяется как максимальный статический
момент, который может быть приложен к валу возбужденного двигателя
без последующего движения. Угол, при котором достигается удерживаю-
щий момент, не всегда отличается от положения равновесия на один угол
шага.
T-I-характеристика. Удерживающий момент возрастает с ростом тока,
и эта зависимость называется /’-/-характеристикой. На рнс. 2.74 [17]
изображены /’-/-характеристики типичного гибридного и реактивного ШД
с одним и тем же углом шага 1Д°. Максимальный статический момент,
существующий в гибридном двигателе с невозбужденной обмоткой,
является фиксирующим моментом, определенным в 2.1.8.
Детальный анализ измерений моментов и смещений приводится в [18].
2.5.2. Динамические характеристики. Динамическими характеристика-
ми называются характеристики двигателя во время движения либо в его
начале.
Характеристики пускового момента определяются диапазоном значе-
ний момента сопротивления нагрузки, в котором двигатель может запу-
скаться и останавливаться без потери шага для различных частот в наборе
импульсов (их около 100). Причина, по которой используется слово
’’диапазон”, а не ’’максимум”, заключается в том, что двигатель не спо-
собен запускаться или поддерживать нормальное вращение при малых
нагрузках сопротивления в определенных диапазонах частот, как показа-
55
Рис. 2. 75. Динамические характе-
ристики:
1 - удерживающий момент; 2 -
максимальный пусковой момент;
3 — выходной момент; 4 - макси-
мальная частота вращения; 5 — мак-
симальная пусковая частота; 6 - об-
ласть запуска; 7 - область нестабиль-
ности; 8 - область неподвижности
ротора
но на рис. 2.75. Во всех случаях, когда рассчитывается либо измеряется
пусковой момент, необходимо также четко определить схему управления,
метод измерения, способ стыковки и момент инерции, отнесенный к ва-
лу ШД. Как правило, диапазон пусковых значений момента понижается
с ростом момента инерции.
Характеристики выходного момента иначе называются характеристи-
ками в движении. После того, как выбранный двигатель запустился при
определенном управлении, обеспечивающем заданный способ воз-
буждения в пусковом диапазоне, частота импульсов постепенно воз-
растает. При некоторой частоте двигатель выпадает из синхронизма.
Взаимосвязь между моментом сопротивления нагрузки и максимальной
частотой импульсов, при которой сохраняется синхронизм, называется
выходной характеристикой (см. рис. 2.75). Кривая выходной характери-
стики зависит от схемы управления, способа стыковки, измерительных
приборов и других условий.
Максимальная частот приемистости определяется как максимальная
управляющая частота, при которой ненагруженный двигатель может
запускаться и останавливаться без пропуска шагов.
Максимальная выходная частот вращения определяется как макси-
мальная (шаговая) частота вращения, при которой ненагруженный дви-
гатель может двигаться без пропуска шагов.
Максимальный пусковой момент определяется как максимальный мо-
мент сопротивления нагрузки, с которой двигатель может запускаться
и сохранять синхронность при наборе импульсов с частотой до 10 Гц.
Глава 3
ТЕОРИЯ ЭЛЕКТРОМАГНЕТИЗМА И СТРУКТУРА ШАГОВЫХ ДВИГАТЕЛЕЙ
В гл. 2 для объяснения возникновения момента в ШД был применен ка-
чественный анализ. Объяснение велось с использованием понятия натяже-
ния силовых линий магнитного поля. В настоящей главе механизм созда-
ния момента анализируется с точки зрения электродинамики. Необходи-
мость такого подхода следует из анализа рабочего процесса в ШД.
Символы, используемые в гл. 3 и 4.
В - индукция магнитного поля; Bg - индукция магнитного поля в
воздушном зазоре; Bg - предел индукции магнитного поля при
насыщении (Тл);
56
С - константа, определяемая габаритными размерами двигателя и чис-
лом витков обмотки (В-с-рад-1; Нм-А”1 - рад-1);
D - коэффициент вязкого трения (Н • м • с • рад-1);
d - птубина паза между зубцами (м);
Ет - АГт/мЛЧ.см-(4-92);
е — электродвижущая сила (В);
f - сила (Н);
q — длина воздушного зазора (м);
Я - напряженность магнитного поля; Hg — напряженность магнитного
поля в воздушном зазоре (А • м-1);
1,1 - ток (А);
J — момент инерции (кг • м2). Безразмерное инерционное отношение,
см. (4.99);
Лр, kv - константы двигателя, см. уравнения (4.23) и (4.39) соответственно;
Кт - постоянная момента (Н-м • А-1-рад-1);
L — индуктивность (Гн)
т — число фаз;
М - взаимоиндукция (Гц);
и - число витков;
Nr — число зубцов ротора;
Ns — число зубцов статора;
р — число пар полюсов;
q - число зубцов статора иа одну фазу;
r,R - сопротивление (Ом);
s - оператор Лапласа d/dt (с-1);
5 - число шагов за одни оборот (рад-1);
Т - момент; Тр- выходной момент; Тщ - максимальный статический
момент (Н • м);
t — время (с);
v, V — напряжение (В);
w - ширина зубца (м);
Wm - магнитная энергия (Дж);
х — смещение по направлению х, область пересечения (м);
а — постоянная времени (с);
Р - постоянная времени (с);
6, Д - изменение (безразмерная);
f - отношение демпфирования (безразмерная);
в, 0 - угол поворота (рад);
X - шаг зубцов (рад);
д - магнитная проницаемость; До - магнитная проницаемость в воздуш-
ном зазоре (Гн/м);
5 - угол поворота в терминах электрического утла (рад);
р - угол момента (рад);
Т - момент (Н • м);
Ф - магнитный поток (Тл м2);
ф, Ф - потокосцепление (Тл м2);
ы, Si — угловая частота вращения (рад • с-1);
ып - собственная частота (с-1) d/dt (с-1).
Примечание. Строчными буквами обозначены функции времени; пропис-
ными — функции S; т к Т используют для момента.
57
3.1. МЕХАНИЗМ ОБРАЗОВАНИЯ СТАТИЧЕСКОГО МОМЕНТА
В РЕАКТИВНОМ ШАГОВОМ ДВИГАТЕЛЕ
Существует несколько способов определения момента, получаемого в ШД.
Качественное объяснение, данное в гл. 2, было приведено с использова-
нием теории максвеллового тензора напряжений. Но этот подход, осно-
ванный на теории поля, не всегда оправдан для описания ШД через его
конструктивные параметры. В настоящей главе используется метод ана-
лиза магнитной энергии и ко энергии в ШД. Начиная с идеального случая,
в котором сердечники ротора и статора имеют бесконечную магнитную
проницаемость, в книге сделан последовательный переход к рассмотрению
насыщающихся сердечников.
3.1.1. Анализ магнитных систем с бесконечной проницаемостью стали.
Для анализа втягивания якоря из ферромагнитного материала в магнит-
ное поле, созданное электромагнитом (рис. 3.1), использована модель
(рис. 3.2). Магнитный поток создается током /, проходящим по обмотке
из и витков. При этом на якорь в направлении х действует сила /. Якорь
может считаться зубцом ротора ШД, а электромагнит соответствует паре
зубцов статора реактивного ШД. Сначала определим индукцию магнитного
поля Во в воздушном зазоре (длина которого на рис. 3.2 обозначена че-
рез g/2). Закон Ампера вдоль контура, изображенного пунктирной ли-
нией, имеет вид
$Hdl = и/ (3.1)
Левую часть этого равенства можно переписать в виде
jH-dl = Hg(—+ Hg{— )+ Hig + Htl, (3.2)
\2/ \2 /
где Hg — напряженность магнитного поля в воздушном зазоре; Я,- —
напряженность магнитного поля в сердечнике; I — общая длина линии
вдоль сердечника.
Если магнитная проницаемость сердечника бесконечно велика, то
Н, так мала, что можно предположить Н, = 0. Если Я(- #= 0 и магнитная
проницаемость сердечника бесконечно велика, то мы приходим к фи-
Рис. 3.1. Пример втягивания якоря из магяитомягкого материала:
1 - сила; 2 - ток; 3 — электромагнит
58
Рис. 3. 3. Область пересечения
Рис. 3. 4. Зубец ротора втягивается магнитным полем и за время At со-
вершается перемещении Дх:
1 - зубец ротора; 2 - статор; 3 - поток Ф; 4 - поток Ф+ ДФ
зически абсурдному результату: В = цН( = 00 в сердечнике. Таким
образом, задается
Hg — nl/g. (3.3)
Индукция магнитного поля в зазоре
Bg = nonl/g, (3.4)
где До — магнитная проницаемость воздуха.
Обозначим глубину якоря через w, а расстояние, на которое якорь
входит между зубцами электромагнита, через х (рис. 3.3). Площадь
перекрытия равна xw. Bg в выражении (3.4), умноженная на площадь
перекрытия, дает магнитный поток:
Ф = xwnonl/g, (3.5)
откуда для потокосцепления Ф получим
Ф = лФ = xwn0n2I[g. (3.6)
Теперь предположим, что за время Д/ якорь сместился на расстоя-
ние Дх, как показано на рис. 3.4. Тогда изменение (приращение) пото-
косцепления АФ равно
g
ЭДС, индуцируемая в сердечнике изменением потокосцепления, равна
ДФ м/Дои2/ Ах
е = — -----= — --------- ----- .
Ar g At
Знак минус в этом выражении показывает, что направление ЭДС проти-
воположно направлению тока. Так как ток / от источника питания посту-
59
пает в обмотку в течение времени Дг и направлен навстречу ЭДС, то ра-
бота ДР,-, затрачиваемая источником, равна
wu0"2/
ДР,- = /|е|Дг = ——------Дх. (3.9)
g
Сопротивление обмотки для простоты считается равным нулю. Ис-
пользуя (3.4), ДР,- выражаем в терминах Bg:
Ве
АР, = —gw Ах. (3.10)
До
Работа, затрачиваемая источником, частично идет на выполнение меха-
нической работы, частично на увеличение энергии магнитного поля в
воздушном зазоре. Увеличение энергии магнитного поля в воздушном
зазоре задается формулой:
1 Bg
ДИ^ = — -------х (увеличение пространства воздушного зазора) =
2 До
1 ве
=--------gwAx. (3.11)
2 До
И: дат М0Ж1 меха силы з сравнения (3.10) и (3.11) можно видеть, что половина ДР,- перехо- в энергию магнитного поля в воздушном зазоре. Соответственно то заключить, что вторая половина ДР,- расходуется на выполнение нической работы. Так как механическая работа равна произведению \f на перемещение Ах, то мы имеем
fi- 1 вх Ьх = — gw Ах. (3.12) 2 До
Сс жращая обе части на Ах, получаем 1 ве
/ = 2- gw, (3.13) 2 До
кото рое, используя (3.4), можно записать в форме
/ 1 wflon2!2 = - . (3.14) 2 g
С другой стороны, энергия магнитного поля в зазоре
W, 1 Bg т = ~gxw . (3.15) 2 До
И: з (3.13) и (3.15) получаем
/ = —. (3.16) dx
60
Следует, однако, обратить внимание на то, что во время перемещения
ток / остается постоянным. Поэтому (3.16) должно быть переписано
в форме
у _ f 3
\ /j = const
(3.17)
Это уравнение остается справедливым и в общем случае, когда сопро-
тивление обмотки не равно нулю. С другой стороны, если используется
модель, в которой во время перемещения остается постоянным магнит-
ный поток, мы получим
у = (
\ Эл / ф = const
(3.18)
Для анализа ШД уравнение (3.17) используется чаще, чем (3.18).
3.1.2. Анализ магнитных систем с постоянной магнитной проницае-
мостью. В модели с бесконечной магнитной проницаемостью сердечника
магнитное поле присутствует только в воздушном зазоре и его математи-
ческое описание является простым. Однако если магнитная проницаемость
сердечника конечна, то энергия магнитного поля сосредоточена не только
в воздушном зазоре, но и в сердечнике, а также и в других областях.
В этом случае сложно определять сипу с использованием теории поля.
Вместо этого мы выведем выражение для силы, используя параметры
магнитной цепи в предположении, что магнитная проницаемость не яв-
ляется функцией магнитного поля.
Если индуктивность обмотки в модели рис. 3.3 равна L, то потоко-
сцепление Ф задается формулой:
Ф = LI, (3.19)
для магнитной энергии системы имеем выражение
Wm = -Lt1. (3.20)
2
Если якорь продвинулся за время Дт на расстояние Дх, то индуктив-
ность возрастет на Д£. ЭДС, индуцируемая в обмотке,
ДФ _ Д(1/)
Дг Дг
Если за это время значение тока I не меняется, то уравнение (3.21)
упрощается
(3-21)
е
е = -I-----.
Дг
(3.22)
Так как напряжение источника равно по значению, но противоположно
61
по знаку ЭДС, рассчитанной в (3.22), работа ДР/, производимая источни-
ком в цепи, равна
ДР, = 7|е|ДТ = ЛД£ . (3.23)
С другой стороны, увеличение магнитной энергии
ДИ^ = — ЛД£. (3.24)
2
Сравнивая уравнения (3.23) и (3.24), находим, что половина работы,
совершаемой в цепи источником питания, переходит в магнитную энер-
гию; отсюда можно предположить, что вторая ее половина идет на со-
вершение механической работы ДР0
ДР0 = /Дх = — F&L , (3.25)
2
тогда сила
/=—Л— . (3.26)
2 Дх
При выводе этих уравнений предполагали, что сопротивление обмотки
равно нулю. Но (3.26) применимо и в общем случае. Таким образом,
сила, действующая на якорь, направлена так, что увеличивается индук-
тивность или уменьшается магнитное сопротивление цепи.
3.1.3. Описи ши» магнитной системы ШД с насыщением. В большинст-
ве ШД сердечники подвержены насыщению. Если двигатель рассчитан на
работу в области линейной зависимости В/Н, то создаваемый им на еди-
ницу объема момент настолько мал, а сам двигатель настолько велик,
что не находит практического применения. Поэтому теория, не учитываю-
щая насыщения, практически не используется.
Проанализируем преобразование энергии, используя модель рис. 3.3.
Якорь или зубец втягивается силой /, обусловленной магнитным полем,
создаваемым обмоткой, и проходит от положения Хо до Хо + Дх за вре-
мя Дг. Потокосцепление ф является функцией положения х и тока г,
т.е. ф(х, i). При дальнейшем анализе переменные величины будут обозна-
чаться малыми буквами ф, L Если ток /завремя перемещения сохраняет
значение I, то работа, совершаемая источником за время Дт, равна
ДФ
ДР/ = Л>Дг = I------kt = /ДФ. (3.27)
Дг
С другой стороны, механическая работа, совершаемая якорем за интер-
вал Дг, равна
ДР0 = /Дх. (3.28)
Увеличение магнитной энергии в системе за перемещение Дх имеет вид
Ф + ДФ ф
ДИ'т = J Шф(хо + Дх, t) - J Нф(х0, 0. (3.29)
о о
62
Рис. 3.5. Энергия (7) и коэнергия
(2) магнитного поля в двух различных
положениях зубца:
а - при х = х0; б - при х = х0 + Дг
I I
а) б)
В этом уравнении ток i меняется от 0 до 7, а ф от 0 до Ф + ДФ или Ф
Каждый член правой части уравнения (3.29) имеет следующую физиче-
скую интерпретацию: первый представляет собой магнитную энергию
системы, в которой якорь находится в положении х = х0 + Дх. Интегри-
рование проводится по переменной Ф от 0 до Ф + ДФ при х0 + Дх
(рис. 3.5, ф; второй — магнитную энергию системы, когда якорь зафик-
сирован в положении х = х0. Интегрирование проводится по перемен-
ной ф от 0 до Ф при х = х0 (рис. 3.5, а). Каждый член интегрируется по
частям.
Первый член
J 1с1ф - [^]{,<Ф+ДФ> - JV(x0 + Дх, =
о о
= 7(Ф + ДФ) - J ф(х0 + Axti)di,
о
второй
ф I
J 1(1ф = /Ф - J Ф(ХО, fyli.
о о
(3.30)
(3-31)
Вторые члены в правых частях этих уравнений представляют собой маг-
нитную коэнергию Wjf (см. рис. 35). Подставляя (3.30) и (3.31) в урав-
нение (3.29), получаем
ДИ'т = /ДФ - J / ф(х0 + Дх.Осй - !ф(х0, i)di -.
I о о
(3.32)
Так как второй член представляет собой изменение магнитной ко-
энергии, связанной с перемещением Дх якоря, то (3.32) может быть
записано в виде
ДИ'и = /ДФ - ДрИх, i)di. (3.33)
о
Так как первый член правой части представляет собой работу ис-
точника тока, которая была определена в (3.27), мы можем перепи-
сать (3.33)
ДР/ = ДИ>т + Д(^(х, fyli.
о
(3-34)
63
с другой стороны,
ДР; = ДМт + ДР0.
(3.35)
Из сравнения уравнений (3.34) и (3.35) мы получаем для механи-
ческой работы ДР о выражение
ДР о = /Дх = Д(ф (х, i)di,
о
откуда электромагнитная сила
7
д!Ф(х, i)di
j. _ о________ _ / Э
Эх I Эх /7=const
Соответствующее выражение для момента
I
Э J ф (0, i)di , .
т = 0_________= ( )
эв 4ae/7=const’
(3.36)
(3.37)
(3.38)
где 0 — угловое положение ротора; — коэнергия.
Это фундаментальное уравнение, необходимое для расчета электро-
магнитных сил и момента, создаваемых ШД, когда магнитное насыщение
влияет на характеристики двигателя.
Если система имеет п обмоток, момент можно вычислить по формуле
Э п I
Т = — S {ф(0,
дв /= 1 о
(3.39)
3.1.4. Влияние насыщения на улучшение характеристик шаговых дви-
гателей. Обсудим эффект насыщения, используя модель рис. 3.6. Одной
из ее особенностей являются предельно малые размеры зазора, так что
для приближенного анализа можно положить g = 0. Другая состоит в том,
что якорь имеет прямоугольную характеристику В/Н; предел насыщения
обозначен Bg. Полагают, что среднее значение магнитной проницаемости
(= 2?$/И) намного больше, чем магнитная проницаемость в воздушном
зазоре До, но значительно меньше, чем в сердечнике статора:
До < — < Д.
Н
Рис. 3. 6. Модель ШД для малого зазора и зубца из
материала с характеристикой насыщения прямоугольной
формы
(3.40)
64
Рис. 3.7. Примеры запасенной материалом энергии магнитного поля (энергия
на единицу объема равна площади заштрихованной поверхности):
а - общий случай; б — линейный случай; в - насыщение
При этих условиях магнитная энергия, запасенная в системе, так мала,
что вся работа источника питания почти полностью преобразуется в меха-
ническую, как будет объяснено далее.
В той области, где магнитная проницаемость д постоянна, магнитная
энергая, приходящаяся на единицу объема, равна В2/2ц. Во-первых,
очевидно, что магнитная энергая в сердечнике статора мала, так как
предполагается, что магнитная проницаемость очень велика. Во-вторых,
объем воздушного зазора настолько мал, что магнитная энергая, сосре-
доточенная в этой области, также мала.
Следующая проблема — оценка магнитной энергии в якоре, втянутом
магнитным полем. Предполагают, что материал якоря имеет нелинейную
прямоугольную характеристику намагничивания В/Н. Магнитная энергая
В
в единице объема выражается в общем случае через интеграл JHdB,
о
и ее значение равно заштрихованной площади на графиках рис. 3.7.
Для линейного отношения В/Н, как показано на рис. 3.7, б, заштрихо-
ванная площадь равна (1/2)ЯВ или В2/2ц. Но для случая насыщения
(рис. 3.7, в) эта площадь пренебрежимо мала. Это означает, что магнит-
ная энергая, сосредоточенная в этой области, незначительна.
Теперь рассмотрим, как электрическая энергия преобразуется в меха-
ническую работу. Магнитный поток Ф, проходящий через площадь, по
которой перекрываются сердечник статора и якорь, задается формулой
Ф = B$xw, (3.41)
потокосцепление
ф = nB$xw. (3.42)
Таким образом, ЭДС, индуцируемая при движении ротора,
—е = nB$w------. (3.43)
dt
Работа, совершаемая источником тока в единицу времени, или электри-
ческая мощность, равна
dx
-el = InBgw — . (344)
5 — Зак. 650 rr
Как было показано, эта работа преобразуется в магнитную энергаю и
механическую работу.
Однако так как запасаемая магнитная энергия в настоящем случае
пренебрежимо мала, электрическая мощность в основном преобразуется
в выходную механическую. Механическая мощность на якоре равна
произведению силы / на скорость dx/dt, соответственно получаем
dx dx
/ —= InB$w — , (3.45)
dt dt
откуда
/ = InB$w . (3.46)
Следует отметить, если зависимость В/Н линейная и предельное значе-
ние магнитной индукции равно В$, сила выражается следующим образом:
/ = —JnBgw . (3.47)
2
Мы можем также вывести уравнение (3.46) из принципа магнитной
коэнергаи, отмечая, что коэнергая на единицу объема якоря равна
в
/BdH = В$Н и ее остаток незначителен.
° Сравнивая (3.46) и (3.47), можно заключить, что момент, создавае-
мый ШД, использующим для ротора насыщающийся магнитомягкий ма-
териал, может быть в два раза выше, чем у двигателя, для которого
взят материал с линейной зависимостью В/Н Однако, чтобы получить
этот момент, длина воздушного зазора должна быть как можно меньше,
чтобы энергия, содержащаяся в этой области, была минимальна. Если
длина зазора не равна нулю, множитель для момента меньше двух.
В [2] сделан подобный вывод при анализе силы, возникающей между
двумя частично перекрывающимися зубцами, а в [3] получено экспери-
ментальное подтверждение тому, что сила при сильно насыщенном якоре
в модели, аналогичной рис. 3.6, больше, чем вычисленная для случаев ли-
нейной зависимости В/Н
Более того, электрические потери в проводнике могут быть снижены,
как это будет показано, использованием для ротора насыщаемого маг-
нитомягкого материала. В предыдущих рассуждениях для простоты
полагали, что сопротивление обмотки равно нулю. Однако если мы
учитываем джоулевы потери, то нужно принимать во внимание и сопро-
тивление обмотки.
В некоторых приводах магнитная энергия расходуется на потери в про-
водниках при закрытом транзисторе, когда обмотка закорачивается.
В ряде схем управления магнитная энергия возвращается источнику
через диод обратного тока (рис. 4.27), но часть ее переходит в джоулеву
теплоту на сопротивлении обмотки и других частях электрической цепи.
Таким образом, если магнитная энергая не сосредотачивается в системе,
то бесполезные потери снижаются и эффективность двигателя возра-
стает.
66
Рис. 3.9. Г-б-характеристики; над зависимостями указаны соответствующие им
значения токов, выраженные в относительных единицах к нормированному зна-
чению
3.1.5. Характеристика зависимости момента от положения ротора при
двухсторонней зубчатости воздушного зазора. У большинства ШД воз-
душный зазор имеет двухстороннюю зубчатость. Типичная конструкция
зубцрв показана на рис. 3.8, она используется в многопакетных реактив-
ных ШД. Зависимость момента Т от углового положения ротора О
(Т-б-характеристика) показана на рис. 3.9 [4]. Кривая для значения то-
ка 0,16 абсолютно пологая, она почти полностью совпадает с теоретиче-
скими результатами, вытекающими из (3.14), и соответствует неограни-
ченной магнитной проницаемости зубцов. При росте тока форма кривых
меняется, все ближе подходя к синусоиде. Увеличение максимального
момента при росте тока от 0,5 до 1,33, без сомнения, пропорционально Т1,
что соответствует случаю линейной зависимости потока от тока
(рис. 3.10).
Характеристика Т-0 для нескольких углов при однофазном возбужде-
нии трехфазного ШД показана на рис. 3.11. Точки, в которых кривая
пересекает горизонтальную ось и имеет отрицательный наклон, являются
Рис. 3.10. Зависимость максимума статического момента от тока (1 А - нор-
мированный ток)
Угол поворота ротора, шаг
Рис. 3.11. Пример зависимости Т/б для трехфазного реактивного ШД
б* 67
Рис. 3.12. Модель реактивного ШД
при наличии взаимоиндукции
конечными или положениями равновесия. Этот тип кривых аппрокси-
мируется синусоидой или прямой линией.
3.1.6. Влияние взаимной индукции. Как было показано в гл. 2, для ШД
существует несколько схем управления: однофазная, двухфазная, трех-
фазная, полушаговая и т.д. Во всех управляющих схемах, кроме одно-
фазной, необходимо, чтобы взаимная индукция была минимальна, так как
ее наличие уменьшает точность позиционирования. Если взаимоиндукцию
нельзя считать незначительной, то в рамках линейной теории момент
можно рассчитать следующим образом.
Рассмотрим случай, приведенный на рис. 3.12: ЭДС, индуцирующиеся
в каждой из фаз, равны
ei =
ДМ
-7г — ;
Дг
(3.48)
(3.49)
Д£2 ДМ
е2 = -h —~h—,
bt Дг
где Li — индуктивность фазы Г, Li — индуктивность фазы 2; М -
взаимоиндукция между двумя фазами.
Работа ДР/, совершаемая двумя источниками за время Дт, равна
ДР/ = -(ei/i + е272)Дг = 7?Д£1 + 71Д£2 + 27172ДМ.
С другой стороны, приращение магнитной энергии в системе
Д^« = — (7?Д£1 + 71Д7,2) +Л72ДМ.
2
(350)
(3.51)
Из уравнений (350) и (3.51) следует, что половина работы, совер-
шаемой источником, преобразуется в приращение магнитной энергии.
Соответственно другая половина преобразуется в выходную механичес-
кую работу ДР0 = ТД0:
ТДв = — (7?Д£! + 71 ДА 2) + hh£M,
2
откуда для момента
2 эе 2 эе
Эм
эе
(352)
68
3ТЕОРИЯ МОМЕНТА ДЛЯ ГИБРИДНЫХ ШАГОВЫХ ДВИГАТЕЛЕЙ
3.2.1. Аналитическое приближение. Мы будем рассматривать двухфаз-
ный ШД, конфигурация полюсов которого показана на рис. 3.13 (зубцы
ротора не показаны). Обмотки статора соединены друг с другом, как по-
казано на рис. 3.13, и подключаются к источнику питания через двухпо-
лупериодный инвертор. Обмотки полюсов 1, 3, 5, 7 соединенены после-
довательно, образуют фазу А, аналогично 2, 4, 6, 8 — фазу В. Для про-
стоты анализа действие сопротивления обмоток, вихревых токов, фик-
сирующего момента, взаимной индукции и наличие гистерезиса не учи-
тываются. Так как магнитная цепь в двигателе считается линейной, маг-
нитный поток, создаваемый обмотками статора, не зависит от нама-
гниченности постоянного магнита и пропорционален приложенной ЭДС.
Начнем с фундаментального закона сохранения энергии.
(Электрическая мощность, отдаваемая источником) - (выходная
механическая мощность) + (величина изменения магнитной энергии).
(3.53)
Для обозначений введем следующее правило:
1) строчные буквы используются для обозначения переменных, зави-
сящих от времени;
2) прописные — для преобразований Лапласа и постоянных величин;
3) переменный во времени момент обозначается т, в отличие от пере-
менной времени г.
Теперь уравнение (353) можно записать в виде
Э0 d (1 , 1 , \
-(<4»А + <В»В) = Г — + ------ I —+ ~lBLBb (3-54)
or dt \ 2 2 /
где ед -ЭДС, индуцируемая в фазе Д ев — ЭДС, индуцируемая в фазе В;
ц — ток в фазе A; 1в — ток в фазе В; La — индуктивность фазы А; Lb —
индуктивность фазы В; т — развиваемый момент.
Так как мы предположили, что магнитная цепь линейна и взаимоин-
дукция между двумя фазами пренебрежимо мала, момент можно раз-
делить по фазам Л и В следующим об-
разом:
т = та + тв, (355)
откуда
d0 Id.
= ,л— ♦ _
(3.S6)
Рис. 3.13. Модель гибридного ШД с об-
мотками, соединенными по двухфазной
бифилярной схеме
69
~еВ^В = ТВ ----- + — ------‘в^В- (3-57)
dt 2 dt
3.2.2. Действие постоянного магнита на создание момента. Полная ЭДС
для каждой из фаз является суммой из ЭДС, создаваемой связью пото-
ка постоянного магнита с обмоткой фазы, и ЭДС, индуцируемой при
прохождении тока через обмотку фазы. Уравнение (3.56) для фазы А
можно переписать в виде
-(«#л + о,лХл = тл — + — ~at^LA ’ (358)
где е^А — ЭДС, индуцируемая током в фазе А, задаваемая уравнением
eLA ~ - — (»Л^л)- С3-59)
dt
Подставляя (359) в (358),получаем
d dO 1 d
~egAtA + 'Л — (»л^л) = т — + — — »л£Л> (36°)
dt dt 2 dt
откуда
d 1 d dLA diA
Ia — Ол^л) - — — »л£л = 'л — + laia —— ~
dt 2 dt dt dt
1 , diA 1 .2 dLA _ 1. ,2 dLA _ 1 .2 dLA
2 dt 2 dt 2 dt 2 de dt
(3.61, 3.62)
так как второй и третий член взаимно уничтожаются.
Подставляя это соотношение в (358), получаем момент для фазы А
, 1 „ dLA
ТА = -egA/6 + —i2A . (3.63)
2 UV
где
6 = dO/dt. (3.64)
Второй член в правой части уравнения (3.63) представляет собой мо-
мент, образованный изменением индуктивности фазы с углом поворота
ротора, характерный для реактивного ШД. В типичном гибридном ШД
изменение индуктивности фазы составляет несколько процентов и его
вклад в общий момент незначителен. Поэтому для момента получаем
т = ~(egAiA + egBiB)l6- (3.65)
Индуцируемая ЭДС для каждой фазы задается следующими фор-
мулами:
%А = »(-*! + Ф3 - + Ф?); (3.66)
70
egB = л (-Фа + Ф4 - Ф« + Фв)> (3.67)
где п — число витков на каждом полюсе; Ф* - поток постоянного магни-
та в каждом полюсе.
Из экспериментов известно, что форма eg близка к синусоиде, хотя и
включает несколько гармонических составляющих. Если пренебречь выс-
шими гармоническими, то egA и egB задаются:
egA = coCcos (<Щ - р); (3.68)
egB = wCsin(wr - р), (3.69)
где С - константа, определенная габаритами двигателя и числом витков
обмотки, В с • рад-1; р - фазовый угол, угол момента, рад.
Угловая частота ы в этих уравнениях связана с угловой частотой враще-
ния и числом зубцов ротора Nr соотношением
w = Nr0. (3.70)
3.2.3. Статический момент. Предположим, что ток в каждой фазе пред-
ставляет собой синусоиду той же частоты ы, что и индуцируемая ЭДС,
й = -Zjjfsinwr; (3.71)
iB ~ (3.72)
Подставляя уравнения (3.70) - (3.72) в (3.65), получаем
ыС1м , ,
т = - —g— |sin(wr - p)coswf - cos(wt - p) since;]-,
т = OV^MSinp . (3.73)
Так как момент, уравновешиваемый нагрузкой, пропорционален sinp,
то р называется углом момента или углом нагрузки.
Таким образом в идеальном гибридном ШД возникает момент без до-
полнительных. гармоник. Так как во многих ШД форма тока отлична
от синусоидальной, дополнительные гармонические составляющие в мо-
менте могут быть значительны. Даже при синусоидальной форме тока они
присутствуют в моменте из-за фиксирующего эффекта и гармоник в ЭДС,
создаваемой потоком постоянного магнита.
Для изучения гармонического состава момента и способов управления,
минимиизрующих влияние высших гармоник, следует ознакомиться
с [5-9].
3.3. Зубчатая структура, число зубцов,
число шагов за оборот и число полюсов
В гл. 2 были описаны отличия в использовании шагового и обычного дви-
гателей, а также показано, что в механизме создания момента наиболее
важной характеристикой ШД являются его зубцы. В большинстве других
вращающихся или линейных двигателей зубцы не являются абсолютно
71
Рис. 3. 14. Зубчатая структура активной зоны реактивного ШД с одинаковы-
ми зубцовыми делениями ротора и статора
Рис. 3. 15. Зубчатая стрктура активной зоны реактивного ШД с различными
зубцовыми делениями ротора и статора
необходимыми для создания момента, но они, как правило, используются
для минимизации зазора между ротором и статором, а образованные ими
пазы используются для укладки обмоток. Однако в ШД зубцы как рото-
ра, так и статора играют существенную роль в создании момента и фик-
сировании ротора в определенном угловом положении. В этом парагра-
фе будет рассмотрена структура зубцов, их количество и устройство.
3.3.1. Зубчатая структура. Зубчатые структуры различных ШД могут
быть разбиты на три основных типа. В ШД первого типа, изображенном
на рис. 3.14, статор и ротор имеют одинаковое количество зубцов. Этот
тип используется для многопакетных реактивных ШД (рис. 2.22 и 2.25).
В такой структуре все зубцы возбуждаются и отключаются в одно и то
же время. Второй тип показан на pic. 3.15. В нем число зубцов статора и
ротора различно. Эта структура используется в однопакетных реактив-
ных ШД с большим углом шага (рис. 2.15), и в такой машине не все
зубцы возбуждаются в одно и то же время. В ШД третьего типа (рис. 3.16)
зубцы статора объединены в группы на полюсах, а зубцы ротора распре-
делены равномерно по его краю. Эта структура используется в однопа-
кетных реактивных ШД с малым углом шага и гибридных ШД. В некото-
рых из них существует небольшая разница между зубцовыми шагами
ротора и статора, как показано на рис. 3.16, б\ например, 50 зубцов
на роторе и 48 на статоре.
При конструировании ШД одной из важнейших проблем является оп-
ределение отношения ширины зубца к ширине паза между зубцами, так
как оно сильно влияет на статический момент, а также на динамические
характеристики. Это один из наиболее важных факторов, определяющих
индуктивность фазы. (Связь между индуктивностью и динамическими
характеристиками двигателя будет рассмотрена в гл. 4).
Несмотря на существующие различия в конструкциях, все двигатели
создают момент благодаря раективному действию зубцов и, следова-
тельно, все рассмотренные конструкции могут быть отнесены к одной
из простых базисных конфигураций, подобных показанной на рис. 3.14.
Харрис в [4] дал описание создаваемого в такой зубчатой структуре
статического момента с учетом насыщения. Согласно исследованиям мак-
симальный средний момент получается при минимально возможном
воздушном зазоре и оптимальное отношение ширины зубца к зубцовому
делению tfk теоретически равно 0,42 и не зависит от разменов. В [4]
72
я
а> б)
Рис. 3. 16. Два типа зубчатой структуры активной эоны в гибридных ШД:
а - одинаковые зубцовые деления ротора и статора; б - зубцовое деление ста-
тора больше
отмечается, что в современных конструкциях отношение Г/Х колеблется
в пределах от 0,38 до 0,42 и это отношение является оптимальным.
Современные гибридные реактивные ШД со структурой, аналогичной
рис. 3.16, имеют следующие основные характеристики.
1. Отношение ширины зубца к зубцовому делению для статора око-
ло 0,5.
2. Глубина паза между зубцами d в статоре порядка половины зубцо-
вого деления X.
3. Отношение т/X для ротора в пределах от 0,38 до 0,45.
4. Форма паза между зубцами - полуокружность для ротора и либо
прямоугольная, либо полуокружность для статора.
5. Ширина воздушного зазора g берется как можно меньше с учетом
существующей технологии массового производства, она обычно состав-
ляет 0,05 мм, но в отдельных случаях равна 0,02 мм.
3.3.2. Связь между «мелом зубцов, количеством шагов за один оборот
и «шелом фаз. Число фаз т, зубцов ротора Nr и количество шагов за один
оборот S связаны основным уравнением [10]
S = mNr. (3.74)
Оно справедливо для однофазного или двухфазного управления, но
для полушагового мы должны использовать
S = 2mNr. (3.75)
Предположим, что возбуждающая последовательность импульсов
управления начинается с первой фазы в m-фазном двигателе. Когда пе-
риод возбуждающей последовательности импульсов закончится, снова
возбуждается первая фаза. Выполнив т шагов, ШД повернется на одно
зубцовое деление. Эта ситуация показана на рис. 2.13 для однопакет-
ного трехфазного ШД, ротор которого имеет четыре зубца. Так как для
поворота ротора на один шаг необходимо передать т возбуждающих
импульсов управления, то для выполнения полного оборота необходи-
мо mNr импульсов. Эти условия применимы и для многопакетного ШД.
Следует быть внимательным при рассмотрении однопакетного двига-
теля с бифилярной обмоткой. Как объяснялось в 2.3.4, трехфазный реак-
73
тивный ШД с бифилярными обмотками можно рассматривать как ше-
стифазный. Но становится ясно из рис. 2.60, что этот тип двигателя пово-
рачивается на один шаг зубцов за три шага. Таким образом, его необхо-
димо рассматривать как трехфазный при расчетах количества шагов за
один оборот.
При рассмотрении зубчатой структуры второго типа, в которой статор
и ротор имеют различные шаги зубцов, как показано на рис. 3.15, мы
имеем соотношение
q = \Nr - NS\,
где Nr — число зубцов ротора; N$ — статора;
Ns
q = —
т
- число зубцов статора на фазу.
Исключая тиз (3.74) и (3.77), мы получим
_ NrNS
О “ 1 1 ,
4
затем, принимая во внимание (3.76), имеем
s _ NrNS
Nr-NS
Из уравнений (3.76), '(3.77) и (3.79) получается зависимость между
q, S и т:
S = т(т + i)q для Nr > Ns; (ЗЛО)
S = т(т -1)4 для Nr < Ns. (3.81)
Можно показать, что максимальный угол шага для этого типа двигате-
лей равен 30°, как показано на рис. 2.12. Минимум q равен 2, так как
для разноименнополюсных конструкций необходимо, по крайней мере,
два магнитных полюса. Минимум т равен 3, для того чтобы направление
вращения определялось однозначно последовательностью импульсов
управления.
Поэтому из (3.81) имеем
S = 3x2x2 = 12 (3.82)
(3.76)
(3.77)
(3.78)
(3.79)
и
360
es = —
360 о
-----= 30°.
12
(3.83)
Глава 4
ФУНДАМЕНТАЛЬНАЯ ТЕОРИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ШАГОВЫХ ДВИГАТЕЛЕЙ
Динамические характеристики ШД так же важны, как и статические, и их
необходимо учитывать при выборе ШД дня системы управления. Суще-
ствует несколько теорий, описывающих динамику ШД, принадлежащих
различным авторам, в частности Лоуренсону и Хагенсу из университета
в Лидсе.
4.1. ФУНДАМЕНТАЛЬНЫЕ УРАВНЕНИЯ
Для анализа колебательных явлений и их затухания в ШД будем ис-
пользовать модели [1 ], приведенные на рис. 4.1. На рис. 4.1, а показан ШД
с постоянными магнитами, но эта модель применима и к гибридному ШД.
На рис. 4.1, б приведен однопакетный реактивный ШД. Две фазы в этих
моделях обозначены через А я В. Ротор на рис. 4.1, а имеет 2р магнитных
полюсов, а на рис. 4.1, б — 2р зубцов. Статор состоит из идентичных полю-
сов и обмоток, расположенных через равные интервалы X.
4.1.1. Двигатели с постоянным магнитом и гибридные двигатели. Если
максимальное значение потокосцепления, создаваемого постоянным маг-
нитом, равно лФм, то момент, создаваемый при прохождении тока i
в обмотке А, задается формулой
Тл = -рпФм1А sinpe. (4.1)
Аналогично момент, создаваемый током ip, равен
тв = — РяФмО?а1п(0 — X), (4.2)
где Р - число пар полюсов/которое для гибридного ШД, изображенного
на рис. 4.2, может быть выражено через Nr (число зубцов ротора).
Так как в этих .моделях угол 0 определяется относительно середины
полюса А, то потокосцепление нФ имеет практически синусоидальное
распределение в зависимости от утла 0:
лф = лф^соврб; (4.3)
ЭДС, индуцируемая в фазе А, равна
с/Ф </Ф dO
е.А = -п — = -п ------ — = (прФМ5юР0)е. (4.4)
g dt dO dt
Сравнивая уравнения (4.1) и (4.7), находим, что
ТА = ~egA^Al^
и имеет тот же самый вид, что и первый член в (3.63). Второй член, пред-
ставляющий собой момент, определяемый магнитным сопротивлением,
здесь опущен.
75
Уравнение движения ротора
Рис. 4.1. Модели ЩД, исполь-
зуемые для анализа электро-
магнитного демпфирования
d20
J----z- + D ----- +
dt* dt
+ pn&MiBsinP(e - X) =0.
(4-5)
Здесь D — коэффициент вязкого трения, который учитывает наличие воз-
духа и трения, а также может быть использован для описания электромаг-
нитных эффектов второго порядка, возникающих из-за гистерезиса и
вихревых токов. Уравнения для напряжения в обмотках статора
V - пл - L —- - М —- + —(пФмсоэрб) = 0; (4.6)
dt dt dt
V - rig - L — - M —— + — {п$м cosp(0 - X)} = 0, (4.7)
dt dt t
где V — напряжение источника питания; L — собственная индуктивность
каждой фазы; М — взаимная индуктивность; г — сопротивление цепи
обмотки статора.
При этом приняты допущения, что L и М не зависят от 0. Рассмотрим
разницу в динамических характеристиках ПЩ при однофазном и двухфаз-
ном способах возбуждения. Так как выведенные выше уравнения при-
менимы при возбуждении обеих фаз А и В, то ими можно описать двух-
фазное возбуждение. Одна из особенностей метода Лоуренсона и Хагенса
заключается в том, что описание однофазного возбуждения получается,
если предположить X = 0 в конечных выражениях либо на более ранних
стадиях анализа. Однофазное возбуждение соответствует случаю, когда
оба полюса возбуждаются одновременно.
Уравнения (4.5) - (4.7) являются нелинейными дифференциальными
уравнениями. Так как нелинейные дифференциальные уравнения крайне
сложно решить аналитически, мы начнем с их линеаризации. Если по
обмоткам обеих фаз проходит постоянный ток 10 в направлении, ука-
занном на рис. 4.3, то положение равновесия здесь достигается при
0 = Х/2. Отклонение от положения равновесия обозначим через S0. Оно
является функцией времени t и в последующем анализе мало. Когда
ротор поворачивается или колеблется, ток в обеих обмотках отклоняется
76
Рис. 4.2. Модель гибридного ШД;
P-Nr
Рис. 4.3. Управление положением
ротора
от установившегося значения на 14 и ie соответственно. Уравнения (4.5)
и (4.6) линеаризуются следующей процедурой.
Предположим, что
X 0 = — + 80; 2 (4.8)
tA = 4 + Ыа ; (4.9)
ie = 4 + 6/5. Тогда имеем: (4.Ю)
/рХ X рХ
sinp0 = sin^— + pS0j = sin-------cosp30 +
pX + cos sinp80. 2 (4-11)
Если pSO — малый угол, то cosp30 ~ 1; (4-12)
sinp30 « p80. (4-13)
Уравнение (4.11) упрощается: pX pX sinp0 = sin — + cos (60), 2 2 (4-14)
аналогично
/X \
sinp(0 — X) = sinpl— + SO — Xi =
pX / pX X = -sinp(X - 60) = -sin + pl cos 1 (30). 2 X 2 / (4.15)
77
Подставляя уравнения (4.8) - (4.10), (4.14) и (4.15) в (4.5), полу-
чаем
d2 (80) <1 (.80) . ч
J--------— + D ------- + Р«Фм(7о + 814) х
dt2 dt
Г ph рХ
х -< sin--- + p(cos------) (60) - -
L 2 2
- рпФмЦо + 8ig)}sin -у- - p(cos (60)} = 0. (4.16)
Если пренебречь произведением отклонений, т.е. членами 81460, полу-
чим линейное дифференциальное уравнение
d2 (60) 4/(60)
J -----— + D ----------
dt2 dt
/ рХ Л
2р* Фми/о ( cos-) (60)
X 2 /
( pX X
+ рФмп^sin I (6(4 - 8iB ) = 0.
(4-17)
Такой же процедурой линеаризуются (4.6) и (4.7)
</(614) d(8iB) - . [Р^У
r (8iA) + L --— + M -------------рФм«81п(— I---------= 0,
dt dt ' 2 / dt
(4-18)
d(8iB) d(8iA) / pX \ d(80)
r(8iB) + L ------+ M---------- + рФмивш!------).-----= 0.
dt dt X 2 / dt
(4.19)
Определим, какая функция выражает положение ротора 60(f) после
начала движения от положения равновесия при уте 0,. Интересно также
определить, как изменяются со временем значения (4 и iB • Для получения
ответов на эти вопросы мы должны решить уравнения \три начальных
условиях 60 = 0,- и d(8ff)/dt = 0 при t = 0. Для этого используем преоб-
разование Лапласа, обозначая d/dt =s и dt/dt2 =s2. Преобразования Лапла-
са от функций будут обозначаться большими буквами 60(f) -* 0(a),
(0 -* 1д («X 6«в (f) -* IB (s).
Решения имеют следующий вид:
/рХх
рФд/изт!----}(»©- Of)
1А = -1В = ------------------------- ; (4.20)
(г + Lps)
78
Наиболее важным является уравнение (4.21), описывающее изменение
утла поворота ротора во времени 0(f). Основной особенностью этого
уравнения является то, что его знаменатель имеет третий порядок по
переменной з. Уравнение (4.20) показывает, что токи, протекающие в
фазах А и В, равны по значению и противоположны по направлению.
В силу этих особенностей схема двухфазного возбуждения обеспечивает
(как это будет показано далее) хорошее демпфирование. Прежде чем
перейти к анализу полученных зависимостей, показем, что точно такие
же уравнения имеют место и для реактивного ШД.
4.1.2. Реактивный шаговый двигатель. Последующие рассуждения про-
ведены применительно к однопакетному реактивному ШД, но результаты
могут быть применены и для многопакетных типов, если предположить,
что взаимные индуктивности равны нулю. Индуктивности и взаимные
индуктивности обмоток двух фаз модели (рис. 4.1, б) имеют следующие
выражения:
La = Lo + LcoslpO; (4.25)
Lb = Lo + Zcos2p (6 - X); (4.26)
Mab = -^o + McosTp
(4.27)
Знак минус перед Mo в (4.27) показывает, что положительный ток
в одной из обмоток создает отрицательное потокосцепление в другой.
Момент, создаваемый у и !в из (352), равен
т =
2 А аб
1 dLB . . dMAB
+ — «Я ----- + *А гв ---—
2 В dt d0
(4-28)
79
= -! I* pZsin2pfl + PBpLsin2p(6 - X) +
+ 2iAiBpMsin2p\0 - ^429^
и уравнение движения, таким образом, имеет вид:
d20 d0
J + D — + 1гА pZsin2p0 + z^pZsin2p(0 - X) +
+ 2»л iBpMsin2p(0 - Х/2) = 0. (4.30)
Уравнения для напряжения в двух обмотках
V - riA - ^-{LAiA) - ~(MABiB)=Q- (4.31)
dt dt
d d
V - riB - — (LBiB) - — (MABiA) = 0. (4.32)
dt dt
В линеаризованной форме они примут вид:
d2(80) 4(80)
J ——- + D —+ 4р27о (М + ZcoapX) (60) +
dt2 dt
+ 2pI0Lsinp\(8iA - 6д) = 0; (4.33)
d d
r(6iA) + (Io + IcospX) — (6(4) + (M - Mo) —(8«b) -
dt dt
d
- 2pZ0ZsinpX — (60) = 0; (4.34)
dt
r(6iB) + (Io + ZcospX) — (6i'b) + (M - Mo) — (8(4) +
dt dt
d
+ 2pZ0ZsinpX — (60) = 0. (4.35)
dt
Уравнения (4.33) - (4.35) идентичны по форме для переменных 60,
8(4 и Ыв (4.17) - (4.19) для ШД с постоянными магнитами, и их ре-
шение при тех же начальных условиях будет следующим:
1а = -1в =
2pI0Ls,ia(p\)(,sQ - Of)
(г + Los)
(4.36)
80
Lv = Lo + LcospX - M + Mo;
(4.38)
2L2sin2pX
kv = ---------------— ;
LV(M + L cospA)
2 4p2/o(Af + LcospX)
wnp = -------------------—
J
(4-39)
(4.40)
4.2. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ШАГОВЫХ ДВИГАТЕЛЕЙ
По уравнениям (4.21) и (4.37) изменяется 86 в области s при на-
чальных значениях 86 = 0,-. До анализа характеристик затухания (демп-
фирования колебаний) определим передаточную функцию ШД.
На рис. 4.3 предполагается, что середина магнитного полюса ротора
при одинаковом возбуждении двух фаз расположена на в = Х/2; требуе-
мое значение угла в этом случае 6 = Х/2. Пусть преобразование Лапласа
требуемого значения угла равно 0/, а преобразование Лапласа действи-
тельного углового положения 86(г) равно ©о- Тогда передаточная функ-
ция задается соотношением
0о
G(s) = — • (4.41)
Рассмотрим данное уравнение для различных случаев.
4.2.1. Однофазное возбуждение. Как было отмечено, если X = 0, то обе
обмотки ведут себя как одна, поэтому решение для однофазного воз-
буждения может быть получено простой подстановкой X = 0 в уравнения
для двухфазного возбуждения. Последние члены в (4.17) — (4.19) и
(4.30) — (4.32) становятся равными нулю. Поэтому уравнения движе-
ния и баланса напряжения становятся независимыми. Передаточное
уравнение для ШД с постоянными магнитами получается только из (4.17)
и аналогично для реактивнрго ШД из (4.32). Для получения решения в
случае ШД с постоянными магнитами примем в (4.17) X = 0 и получим
d1 (60) </(60)
J ----— + D---------- + 2ргФмnlo86 = 0. (4.42)
dt2 dt
Так как 60 задает разность между реальным положением 0О и тре-
буемым положением 0,,
60 = 0О - 0/, (4.43)
6 — Зак. 650 ci
(4.42) можно переписать в вида
d20o(O 40о (О
J----1— + D----------+ 2р2Фмя/о0о(О = 2р2Фмп/о0;. (4.44)
dr dt
Преобразование Лапласа при начальных условиях 0О = 0, d0o/dt = O
при t = 0 равно
(s2J + sD + 2р2Фд/и/о)0о (s) = 2р2Фл/и/о01-, (4.45)
тогда для передаточной функции
G(s) = — = 2РгфМ"1о________________ = ___________
0,- s2J + sD + 2ргФМпГ0 s2 + (Os/J) + w2p
(4.46)
откуда ыпр является собственной угловой частотой и задается уравнением
ъ>пр = >/(2РгФм»/о/О (4.47)
ИЛИ
= у/(NrKTI0/J). (4.48)
Форма уравнения (4.48) хорошо известна дня гибридного ШД, Кр
в (4.48) - постоянная момента и задается выражением
Кр =2п!УгФм. (4.49)
Уравнение (4.49) решается следующим образом. Общий момент т яв-
ляется суммой т^ из (4.1) и тв из (4.2), но X = 0 дня однофазного воз-
буждения и р =Nr дня гибридного ШД. Следовательно,
т = -2УгиФл/7о8ш(Лг80); (4.50)
если упювое положение ротора 80 близко к нулю, то
sin (jVr50) = Nr86 и
т = -2ЛГ2иФм/о80. (4.51)
Когда момент, создаваемый ШД, представляется линейной функцией
от 60, его часто записывают как
т = —KTNrI08Q. (4.52)
Из сравнения (4.50) и (4.52) находим, что постоянная момента Кр
в (4.52) должна иметь вид, задаваемый (4.49). Подставляя р и Nr
в (4.47) и уничтожая и с помощью (4.49), мы получаем уравнение (4.48)
для Ыпр. Число витков здесь равно 2л, и если обозначить через число
витков в фазе обычного двигателя, то Кр примет вид
Кр = ПгМгФм. (4.53)
82
Рис. 4. 4. Зависимость момента от угло-
вого положения ротора и ее линейная ап-
проксимация:
1 — реальная зависимость момента от угло-
вого положения ротора; 2 - линейная аппрок-
симация
Теоретически постоянная момента выражается в этой форме, но обыч-
но ее получают, аппроксимируя зависимость Т/в прямой, как показано
на рис. 4.4.
Передаточная функция в форме (4.49) также может быть выведена
из (4.21). Так как в этом случае X = 0, то взаимная индуктивность М
равна индуктивности L и Lp в (4.22) становится равным нулю. После
умножения числителя и знаменателя (4.21) на Lp/r, примем Lp = 0 и
тогда получим
(s + 0/7)9;
® = “5---------------2
№ + (D/7)s +
Если заменить числитель константой, которая задает значение единицы
функции при s = 0, получим передаточную функцию. Очевидно, что она
будет такой же, как в (4.46). Передаточная функция для реактивного ШД
может быть определена точно так же.
4.2.2. Управление источником тока. Существует несколько вариантов
выбора формы напряжения питания или тока ШД. В уравнениях (4.6)
и (4.7) или (4.31) (4.32) фигурирует постоянное напряжение, исполь-
зуемое для управления источником напряжения. Однако когда в § 3.2
обсуждался вопрос создания момента в гибридном ШД, подразумева-
лось, что ток имеет синусоидальную форму. В этом разделе рассмотрим
передаточную функцию при питании ШД от источника тока. Момент,
задаваемый (3.73), запишется в виде
т = СЛГДл/ащр, (4.55)
где С - константа, определяемая габаритами ШД и числом витков, имею-
щая ту же размерность, что и постоянная момента [см. (4.12)]; 1м -
максимальное значение тока.
Угол момента р в этом случае
Р = ti - to, (4-56)
где ti — фаза тока в требуемом положении ротора; £0 — фаза тока в
реальном положении ротора.
Имеет смысл ввести в (3.71) и (3.72) величину ыг.
%i = ut. (4.57)
Это означает, что требуемое положение меняется при изменении зна-
чения ы или, другими словами, что все зависит от частоты вращения.
(4.58)
(4-59)
(4.60)
(4.61)
(4-62)
(4.63)
(4-64)
(4.65)
Если ii равна при t = ti, можно ожидать, что ротор установится в
положении, обеспечивающем р - 0 или $0 = & (трением пренебрегаем).
Значение ы в (4.57) равно угловой частоте индуцируемой ЭДС, задавае-
мой (3.68) и (3.69). Если частота вращения фиксирована, со пропорцио-
нальна числу зубцов Nr. Таким образом, фазы тока & и $0 связаны с ме-
ханическими углами 0,- и в о следующим образом:
8, = ti/Nr’,
»о = to/Nr-
Тогда момент в (4.55) запишется в виде
т = CNrlMsinNr (Qi - в0) = Кт1мМгяпМг(в{ — в0),
где
Кт = CNr.
Если Oi == в0, то
т = (Of - в0).
Уравнение движения имеет вид
d20o d6o
J — + D ---------- = KTIMNr(ei - во),
dt dt
Преобразование Лапласа с нулевыми начальными условиями
(Js2 + Ds + KtImN,.)® (s) = Кт1мМг®1,
из этого уравнения можно получить передаточную функцию
ео = шпр___________________________
Qi s2 + (Z)/J)s + ы2пр
Следует отметить, что передаточная функция ШД, управляемого источ-
ником тока при двухфазном возбуждении, точно такая же, как для управ-
ления источником напряжения при однофазном возбуждении, ее анало-
гично можно получить из (4.21). При управлении источником тока выби-
рают источник с бесконечно большим внутренним сопротивлением или
большим сопротивлением, включенным последовательно с обмоткой
фазы. Умножая числитель и знаменатель в (4.21) на r/L и полагая г = °°,
получаем
Заменяя числитель константой, задающей значение единицы функции
84
при s = 0, получаем передаточную функцию уравнения (4.65). То же мож-
но получить и для реактивного ШД.
4.23. Двухфазное возбуждение с управлением источником напряжения.
Передаточная функция выводится из (4.21):
(?(,) = -------------------------------------------------------
? + (г + т)? +{т~ V+ +
\Lp j / •* j \4р/
(4.67)
Подобная форма получается и дня реактивного ШД.
4.3. ОДНОШАГОВАЯ РЕАКЦИЯ
Теперь рассмотрим реакцию ШД. Сравним случай передаточной функции
второго и третьего порядка. Это означает сравнение однофазного и двух-
фазного возбуждения.
43.1. Передаточная функция второго порядка. Передаточная функция
для однофазного возбуждения и при управлении источником тока запи-
сывается в виде
<=>о _ шгп________
0/ № + 2$ыпз + со*
где f — коэффициент демпфирования:
Г = DIUun.
(4-69)
Вид уравнения (4.68) хорошо известен из теории управления с обрат-
ной связью. Реакция ва на шаговую функцию 0, имеет различные траекто-
рии в зависимости от значения f, как это показано на рис. 4.5. Как пра-
вило, для f < 1 (для обычного ШД £ < 0,5) реакция является колебатель-
ной. Время от начала шага до момента, когда ротор остается в заданном
угловом интервале, называется временем установки.
43.2. Передаточная функция третьего порядка. При двухфазном воз-
буждении (управлении) уравнения движения и баланса напряжений за-
висят друг от друга. Решение (4.20) или (4.36) показывает, что ЭДС
индукции, возникающая при движении, создает равные и противоххшож-
ные токи в возбужденных фазах, ко-
торые вызывают эффект циркули-
рующего тока достаточно большого
значения, близкого к 70 • Общий ток,
проходящий через источник, стано-
вится равен, по меньшей мере, 2Z0,
и это не влияет на мощность, отдавае-
мую источником. Если движение ро-
Рис. 4.5. Пример переходного процес-
са в системе второго порядка
85
тора колебательное, то циркулирующий ток также имеет колебательный
характер и вызывает потери в обмотках. Это явление показывает, что
кинетическая энергия ротора рассеивается, переходя в тепловые потери,
поэтому колебания его будут быстро затухать. Таково объяснение элект-
ромагнитного демпфирования при двухфазном возбуждении.
Знаменатель передаточной функции, приравненный нулю, называется
характеристическим уравнением. Если постоянная затухания D, возни-
кающая из-за сопротивления воздуха, равна нулю, характеристическое
уравнение для двухфазного управления принимает вид
s3 +(—) s2 + (1 + fc)w2s +^— ы2 = О,
(4.70)
где r/L - величина, обратная постоянной времени электрической це-
пи ШД; к - константа, задающая меру внутреннего демпфирующего по-
тенциала двигателя; ып — недемпфированная собственная частота малых
колебаний ротора около положения равновесия.
Это кубическое уравнение имеет один действительный и два комп-
лексно-сопряженных корня для 0 < к < 8; и так как почти для всех дви-
гателей к < 1, оно может быть записано в виде
(s + о) { (s + /З)2 + ы2} = 0. (4.71)
Из (4.71) следует, что зависимость реакции от времени всегда будет
задаваться формулой
0(1) = Ae~at + &?-P'cos(wT - у), (4.72)
где А, В и у — константы, определяемые из начальных условий.
Из анализа (4.72) можно заключить, что быстрая установка ротора в
положении равновесия возможна, если а и /3 велики; о, (3 и ы связаны
с параметрами системы r,L,k, ып таким образом
а + 2/3 = rL;
о(/32 + со2) = (гА)со2;
/З2 + со2 + 2ц(3 = (1 + к)ы2п .
(4.73)
Эти уравнения графически изображены на рис. 4.6. Видно, что значе-
ние /3/со„ достигает максимума при (r/L) ы„ для каждого к. Соотношения
для максимальных значений следующие:
Ы<йп = к/4, (4.74)
Л
(r/L)b>n = 1 + — , (4.75)
2
а/ып = 1- (4.76)
Для большинства современных ШД к < 1 и, следовательно, /3 < а/4;
первый член в (4.71) уменьшается, по меньшей мере, в четыре раза бы-
86
Рис. 4.6. Изменение параметров демпфирования а и (3 в зависимости от к
1Л r/L -
пунктиром показаны значения /З/со^; сплошными линиями -
стрее, чем второй. Таким образом, время установки определяется зна-
чением/3.
4.33. Влияние последовательных сопротивлений. Как было показано,
сопротивление цепи для минимизации времени установки ротора при
двухфазном возбуждении задается уравнением (4.7S). Оно справедливо
как для реактивных, так и дня ШД с постоянными магнитами. На рис. 4.7
показаны реакции ШД, измеренные для многопакетного трехфазного
реактивного ШД. Если к каждой из фаз, чьи сопротивления равны 0,5 Ом,
последовательно подсоединить внешние сопротивления, равные 32 Ом,
время установки становится минимальным. Результаты для однофазного
возбуждения показаны на рис. 4.8. Они значительно отличаются от случая
О 20 ' О о 100 200
время, нс Время , мс
Рис. 4. 7. Экспериментальные зависимости реакции трехфазного реактивного
ШД при двухфазной схеме возбуждения
Рис. 4. 8. Экспериментальные зависимости реакции ШД при однофазной схе-
ме управления
87
О 50 О 50
Время, мс q Время, не
Рис. 4. 9. Сравнение характеристик демпфирования для гибридного и реак-
тивного ШД при двуфазной схеме управления [3]. Сравниваемые двигатели: Step-
Syn 103-775-6 фирмы Sanyo для гибридного (в) и его модификация для реактивного
типа (б)
двухфазного возбуждения. Во-первых, затухание более медленное, во-
вторых, значение сопротивления цепи статора не оказывает заметного
влияния на затухание. Принцип достижения быстрого затухания колеба-
ний при помощи оптимального сопротивления обмоток или добавления
определенного сопротивления был запатентован в [2].
Для получения максимальной частоты приемистости и вращения при
двухфазном возбуждении необходимо использовать большие значения
внешних сопротивлений, чтобы минимизировать электрическую постоян-
ную времени L/r. Таким образом, необходим компромисс между хоро-
шим демпфированием колебаний и высокой частотой приемистости. Для
достижения хороших скоростно-моментных характеристик и демпиро-
вания колебаний следует провести ряд измерений в схеме управления.
43.4. Сравнение двигателей с постоянными магнитами и реактивных
двигателей. Распространено мнение, что реактивные ШД имеют худшие по-
казатели демпфирования по сравнению с ШД с постоянными магнитами
из-за того, что в них не используется магнит. Но, кажется, нет достаточ-
ного объяснения, почему параметр кр ШД с постоянными магнитами необ-
ходимо выбрать намного большим, чем kv для реактивного ШД. На
рис. 4.9 показаны реакции за один шаг, измеренные для гибридного дви-
гателя (который является специальным типом двигателя с постоянны-
ми магнитами) и реактивного ШД с углом шага 1,8° [3]. Оба двигателя
имеют одинаковые размеры и одинаковую схему управления (рис. S.21)
с С = 1 мкФ, Е = 24 В и Re, обеспечивающей фазовый ток в 1,5 А. Время
установки у реактивного ШД значительно больше, чем у ШД с постоянны-
ми магнитами.
44. ХАРАКТЕРИСТИКИ ЗАВИСИМОСТИ МОМЕНТА ОТ ЧАСТОТЫ вращения
Для того чтобы охарактеризовать зависимость момента от частоты враще-
ния, рассмотрим график, представленный на рис. 4.10. Ординаты пред-
ставляют собой момент, а абсциссы — шаговую частоту вращения, кото-
88
Рис. 4. 10. Зависимости момента от
частоты вращения:
1 — максимальный пусковой момент;
2 - кривая пускового момента; 3 — кри-
вая выходного момента; 4 — максималь-
ная пусковая частота; 5 - максимальная
частота вращения
Шаговая частота вращения , Гц
рая пропорциональна частоте вращения, но коэффициент пропорциональ-
ности или число шагов за один оборот зависят от структуры воздушного
зазора, количества фаз и способа их возбуждения. Обе зависимости
представляют входной и выходной моменты и называются кривыми
вращения.
4.4.1. Характеристики выходного момента. Кривая зависимости выход-
ного момента задает максимальный момент трения нагрузки, который ШД
может преодолеть без потерь синхронизма и с определенной шаговой
частотой вращения. Из (4.1) и (4.2), полагая рХ = тг/2, так как мы имеем
дело с двухфазным двигателем, получаем выражение для момента
т = -п1УгФм [ia sin (Nr 6) + /дсоа(ЛГ,.0)}. (4-77)
Пренебрегая взаимной индуктивностью М, уравнения баланса напря-
жений (4.6) и (4.7) представляют в виде
VA = Пд + L ----- +----(пФмcosNr0);
dt dt
VB =пв + L ------ + ----(пФмsinA^O).
dt dt
(4-78)
(4-79)
Параметр г объединяет сопротивления обмоток и внешнее дополни-
тельное сопротивление; индуктивность L считается не зависящей от
положения ротора, что справедливо для гибридных ШД.
Форма напряжения во многих случаях, например в мостовом инверторе
схемы управления на рис. S.29, представляет собой последовательность
прямоугольных разнополярных импульсов (рис. 4.11). Однако для
простоты анализа предполагают, что напряжение питания имеет синусои-
дальную форму
Уд = Vcosut; (4.80)
Vb = Kcos(wr - я/2). (4.81)
Эти уравнения можно решить и получить выражение для момента,
создаваемого ШД при постоянной частоте вращения ы:
Яг"Фм и . ч п2Л'гФ^СОг
Т = —— Ksin(p + v) - -----------г—Z-
х/(г2 + Ы2?2) г +W L
(4.82)
89
Рис. 4.11. Управление ШД
с помощыо мостового ком-
мутатора: на фазы подается
двухфазный прямоуголь-
ный сигнал по напряжению.
Основная компонента ука-
зана пунктиром
I I I Г I I I
О 1 2 J 4 5 6
Шаги
где
v = arctg(r/co£). (4.83)
В (4.82) р — угол момента ротора, и максимум выходного момента Тр
получается при р, удовлетворяющем соотношению р + v = я/2,
Тр = ♦ сЛ1 r2+w2Z2
Смысл членов правой части уравнения (4.84) можно понять, если вы-
ходной момент представить как часть максимального статического1, т.е.
при со = 0. Из (4.84) максимальный статический момент задается выра-
жением
= nNr<t>MVlr = пЫгФм1м, (485)
где 1м — максимальный ток в каждой фазе. Нормализованный мо-
мент равен
Тр ______1______________k
Тм х/1 + w2(Z/r)4 Р 1 + "2 (i/H2
где
пФм пФм
кр = -------— ~ .
L(V/r) L1M
4.42. Параметры, управляющие связью момента и частоты вращения.
Выражение для нормализованного момента (4.86) является простым и
достаточно полным. Во-первых, оно показывает, что если ПЩ имеет за-
данный статический момент, то его выходной момент при данной ча-
стоте вращения определяется только двумя параметрами: один из них -
это постоянная времени статора L/r и второй кр — отношение потокосцеп-
ления, созданного магнитом, к собственному потокосцеплению LI об-
(4.86)
(4.87)
1 Максимальный статический момент, определенный здесь, не совпадает в точ
ности с удерживающим моментом, определенным в 2.5.1.
90
CJ
Рис. 4.12. Составляющие нормализованного выходного момента:
1 - первая; 2 - вторая; 3 - результирующая
Рис. 4.13. Влияние кр на нормализованный выходной момент
мотки. Первый член уравнения является величиной, обратной импедансу,
и показан на рис. 4.12 кривой 1, которая быстро спадает при увеличении
шаговой частоты вращения. Второй (отрицательный) имеет форму, по-
казанную кривой 2. Результирующий момент 3 является разностью 1 и 2.
На рис. 4.13 показано влияние кр на момент при постоянной времени
обмотки L/r = 1 мс. Эти кривые показывают, что чем меньше значе-
ние кр, тем выше момент. В [4] показано, что для большинства гибрид-
ных ШД кр лежит в пределах от 0,2 до 0,6. В силу тормозящего эффекта,
выражаемого вторым (отрицательным) членом, момент уменьшается с
ростом кр, что соответствует увеличению демпфирования.
Изменения постоянной времени при изменении последовательно вклю-
ченного сопротивления (и напряжения для поддержания заданного зна-
чения тока и статического момента) для (типичного) габридного ШД
с кр = 0,25 показаны на рис. 4.14. Вместе с сопротивлением растет и вы-
ходной момент при всех частотах вращения. Однако, с другой стороны,
возрастают тепловые потери в сопротивлении и демпфирующий эффект
снижается.
4.43. Пусковые характеристики. Кривая зависимости пускового мо-
мента от шаговой частоты вращения представляет собой максимальный
момент трения нагрузки, при котором шаговый двигатель может за-
пускаться без сбоев, когда использу-
ется последовательность импульсов
заданной частоты. При анализе этой
возможности следует учитывать как
влияние момента инерции, так и
трение нагрузки. Фундаментальная
Рис. 4. 14. Влияние L/r на выходной
момент
91
теория этого явления была разработана в [5]. Для получения удовлетво-
рительных пусковых характеристик используются различные схемы
управления, рассмотренные в гл. 5.
45. РЕЗОНАНСЫ И НЕСТАБИЛЬНОСТИ
Теория пускового момента, рассмотренная в предыдущем параграфе,
разработана для упрощенной модели. В ней не учитываются явления
резонанса и нестабильности, возникающие при определенных шаговых
частотах вращения. Однако эти колебательные явления вносят возму-
щения в нормальную работу ШД. В некоторых случаях значение (ам-
плитуда) колебаний со временем возрастает и в конечном случае ШД вы-
падает из синхронизма. Во многих случаях реальные кривые выходных
моментов имеют провалы и всплески, как показано на рис. 4.15.
Резонанс и нестабильность, которые появляются в кривой пускового
момента, могут быть классифицированы по трем группам: низкочастот-
ный резонанс, среднечастотная нестабильность и высокочастотные коле-
бания. Кроме того, еще один вид нестабильности случается при пуске ШД:
двигатель не может быть нормально запущен при некоторых нагрузках
для определенных шаговых частот вращения. Все эти области выделяются
провалами и всплесками на кривой пускового момента.
4. 5.1. Низкочастотный резонанс. Когда ШД запускается с очень малой
частотой вращения, а частота импульсов возрастает медленно, наблюдается
резонанс первого типа в субгармониках собственной частоты 100 Гц. За-
тем появляется главный резонанс в районе собственной частоты. Эти коле-
бания лежат ниже 200 Гц и называются низкочастотным резонансом. На
рис. 4.16 приведены примеры нерегулярного движения из-за резонанса,
замеренные для трехфазного реактивного ШД с углом шага 7,5°. Собст-
венная частота колебаний в данном случае лежит в районе 100 Гц. При
Е
2 -
1 -
^1
Шаговая
Рис. 4. 15. Пример зависимости вы-
ходного момента:
1 - провалы в механической характе-
ристике; 2 - зоне нечувствительности
Рис. 4.16. Пример нерегулярного вслед-
ствие резонанса движения трехпакетного
реактивного ШД:
а — резонанс при частоте 25 Гц; б — на-
чало стабильного выполнения поворота при
двойной частоте вращения 26 Гц
tu 6 г~
<3
9 5 -
й л _
Е4
S> г
О 10
Время , мс
92
Рис. 4.17. Два варианта схемы коммутатора
возрастании частоты импульсов выше собственной частоты колебания
затухают и движение становится стабильным.
В большинстве практических ситуаций низкочастотные резонансы не
являются критическими ограничениями дня использования систем с ШД,
так как большинство систем двигатель-нагрузка могут быть сразу запу-
щены при шаговых частотах вращения выше собственной.
4. 5.2. Среднечастотная нестабильность. При возрастании шаговых ча-
стот до 500—1500 Гц ШД обнаруживают нестабильность поведения, не
являющуюся резонансом описанного типа. Это возникает из-за внут-
ренней нестабильности, присущей двигателю или схеме управления. Та-
кой тип колебаний называют среднечастотным резонансом или средне-
частотной нестабильностью. Их частота отлична от собственной и со-
ставляет от 1/4 до 1/5 шаговой частоты вращения. Одна из важнейших
проблем, которые приходится решать при подборе ШД для системы, как
избежать нестабильности этого вида или ее преодолеть. Характеристики
среднечастотной нестабильности не являются общепринятыми. Согласно
[7] нестабильность этого вида имеет следующие особенности.
1. Колебания могут иметь одну или несколько частотных компонент.
Они не связаны простым соотношением с шаговой частотой вращения и
имеют более низкую частоту в пределах от 5 до 200 Гц.
2. При постоянных условиях работы обычно наблюдают медленно вы-
растающие колебания, сбой наступает через несколько секунд или даже
минут, хотя может быть и внезапная потеря синхронизма.
3. Различные характеристики нестабильности зависят от схемы и спо-
соба управления, например полного и полушагового возбуждения
(управления).
4. Значение падения момента и увеличение частоты вращения чувстви-
тельны к уровню механического демпфирования. Часто при достаточном
демпфировании падения момента могут быть плавными или изменения
частоты вращения растянутыми по времени.
5. Момент инерции является важнейшим параметром; большая инер-
ционность обычно увеличивает нестабильность.
В [8, 9] изучены характеристики среднечастотной нестабильности
и методы ее подавления с помощью схем управления. Здесь приведены
некоторые результаты. Для изучения использовали гибридный ШД с
93
Y 1200
“ 1000
а
Я soo
600
4 чоо
| 200
I «
Рис. 4.18. Амплитуды колебаний ротора при коммутаторе по схеме I из [8]:
1 - низкочастотный резонанс; 2 - среднечастотная нестабильность
Рис. 4.19. Амплитуды колебаний ротора при коммутаторе по схеме 2 из [8]:
1 — низкочастотный резонанс; 2 — среднечастотная нестабильность
бифилярной обмоткой и углом шага 1,8°, работающий при фазовом
токе до 4 А. Удерживающий момент при двухфазном возбуждении и
максимальном токе составлял 2,1 Н • м, а момент инерции ротора был
равен 1,23 • 1(Г4 кг • м2. В [8] даны схемы управления, используемые
для измерений. Две из них показаны на рис. 4.17. На рис. 4.18 и 4.19 по-
казаны зависимости амплитуды колебаний от шаговой частоты вращения
при вращении двигателя без нагрузки.
Кривые низкочастотного резонанса представляют собой (шаговые
частоты вращения) колебания, соответствующие собственной частоте.
Собственные частоты, измеренные для схем управления 1 и 2, равны
соответственно 143 и 148 Гц. Ори выпадают из синхронизма в диапазоне
от 118 до 120 Гц. Амплитуда низкочастотного резонанса с ростом частоты
постоянно понижается и становится незначительной около 600 Гц. При
данных частотах вращения двигатель поддерживает стабильную синхрон-
ность и в пределах своих допусков развивает высокий момент.
Как следует из рис. 4.18 и 4.19, шаговые частоты вращения, при кото-
рых появляется среднечастотная нестабильность, для управления схем 1
и 2 различны. В схеме 1 нестабильность начинается при 760 Гц, но
синхронность сохраняется вплоть до 900 Гц. С другой стороны, в схе-
ме 2 пик нестабильности приходится на частоту 260 Гц, но эти колебания
существуют в очень узком частотном интервале и нц ведут к потере син-
хронизма. Однако большая амплитуда нестабильности внезапно появ-
ляется при 1275 Гц и ШД выпадает из синхронизма. Частота этих коле-
баний составляет от 1/5 до 1/4 шаговой частоты вращения. Формы кри-
вых для токов и частота вращения показаны на рис. 4.20.
4. 5.3. Влияние изменения параметров системы на нестабильность.
1) Момент нагрузки. В случае схемы управления 1 при подключении
нагрузки интервал частот для среднечастотной нестабильности частично
снижается, а в случае 2 — возрастает.
2) Момент инерции нагрузки. Его присутствие обнаруживает эффект,
противоположный моменту нагрузки. Так, при использовании схемы 1
94
Рис. 4. 20. Формы тока и частота
вращения при управлении по схеме 1
и частоте 850 Гц. Период колебаний
частоты вращения в четыре раза боль-
ше времени импульса
1 - ток; 2 - частота вращения
среднечастотная нестабильность возникает раньше при подключении на-
грузки, а для схемы 2 позднее.
3) Последовательно включенное сопротивление. Более высокое управ-
ляющее напряжение и последовательно включенное сопротивление улуч-
шают работу обеих схем управления на средних частотах.
4) Емкость. Для схемы 2, чем меньше емкость С, тем лучше воздей-
ствие схемы управления. Но малое значение С увеличивает перенапряже-
ния между коллектором и эмиттером Усе транзисторов инвертора схемы
управления.
5) Демпфирующие устройства. Если область среднечастотной неста-
бильности должна быть пройдена без потери синхронизма, то двигатель
должен иметь для этого соответствующее управление или следует исполь-
зовать инерционный демпфер. Хотя инерционное демпфирование увели-
чивает время реакции, оно может быть полезно при прохождении зоны
среднечастотной нестабильности, если высокая скорость реакции системы
не требуется. В тех случаях, когда демпфирование непременимо, необхо-
димо использовать соответствующие схемы управления и ускорения.
Для этих целей рекомендуется ознакомиться с [9].
4.5.4. Высокочастотные колебания. Если частота и далее возрастает,
то ШД успешно проходит эону среднечастотной нестабильности. Следую-
щая область нестабильности возникает при частотах от 2500 до 4000 Гц.
4.5.5. Теория нестабильности. Существует несколько теорий нестабиль-
ности. Одна из них, разработанная в 1979 г., приведена здесь и содержит
описание основ механизма нестабильности и влияние на нее демпфирова-
ния. Хотя внимание в основном сосредоточено на гибридных ШД с утлом
шага 1,8°, тем не менее можно получить аналогичные результаты для
реактивных ШД и двигателей с достоянными магнитами в силу подоб-
но ста уравнений динамики.
Отсутствие вязкого демпфирования. На рис. 4.22 приведена зависи-
мость момента от частоты при коэффициенте демфирования D = 0. Мак-
симальный момент идет по кривой выход-
ного момента в стабильной зоне вплоть до
срыва В, следуя далее новой (нижней)
границе стабильности в точку С. На рис.4.21
область нестабильности заштрихована. Со-
Р и с. 4. 21. Зависимость выходного момента
от частоты вращения в двигателях без демп-
фирования
ть/тм
Нормализованная частота
Рис. 4. 23. Изменение провалов в механической характеристике при измене-
нии коэффициента демпфирования
Нормализованная
частота
Рис. 4. 22. Зависимость выходного момента от частоты вращения в двигате-
ле с демпфированием
гласно предложенной теории при отсутствии вязкого трения падение мо-
мента отсутствует, а двигатель не способа! работать при частотах выше
ыс. Анализ показывает, что частота срыва задается простой формулой
= R/L , (4.88)
которая соответствует шаговой частоте вращения 2R/ irL. Типичный гиб-
ридный ШД с углом шага 1,8° имеет набор постоянных временных кон-
стант в диапазоне от 1 до 0,5 мс, которые задают точки срыва на частотах
от 640 до 1280 Гц.
Крутизна участка ВС зависит от других параметров и г . Для больших
моментов инерции (или больших значений г ) кривая ВС становится поч-
ти вертикальной. Снижение значения кр задается крутизной ВС. Момент
при частоте срыва Т/, определяется по формуле
Tb/TM = ' - , (4.89)
у2 2
где Тм — максимальный статический момент, задаваемый (4.85).
Вязкое демфирование и падение момента. Если D = 0, т.е. не прини-
мается во внимание вязкое демпфирование, на высоких частотах возни-
кает вторая область нестабильности. Это означает возможность падения
момента (рис. 4.22). Для того чтобы обеспечить стабильность в области
высоких частот, необходимо относительно небольшое демпфирование.
Для этого часто бывает достаточно торможения о воздух и трения. Если
обеспечено достаточное демпфирование, то теория показывает, что паде-
ния момента можно полностью избежать.
При наличии вязкого демпфирования существуют две частоты срыва
момента: c^bi и ы/,г; co/и имеет несколько большее значение, чем ыъ>
96
дня случая D = 0, в то время как ширина провала уменьшается при рос-
те D. Форма и размер провала сильно зависят от демфирования, как
показано на кривых рис. 4.23, которые построены для случая кр = 0,4
и r/conL = 2. Важное условие достаточности демпфирования для уничто-
жения провала момента задается соотношением
1 JUnkP
8 R/L
(4.90)
4.6. МЕХАНИЧЕСКИЕ ДЕМПФИРУЮЩИЕ УСТРОЙСТВА
Основной недостаток ШД заключается в явлениях резонанса и неста-
бильности. Один из способов снижения последних — это подключение ме-
ханического демпфера к валу ШД. Ниже приведен анализ типов механичес-
ких демпфирующих устройств.
4.6.1. Конструкции демпфирующих устройств. Существуют различные
виды демпфирующих устройств, но наиболее широко используемыми
являются пружинно-фрикционные (рис. 4.24), магнитно-фрикционные
(рис. 4.25) и вязкосгно-сцепленные или VCID (рис. 4.26). Пружинно-
фрикционное демпфирующее устройство состоит из инерционного коле-
са, которое свободно вращается на валу и монтируется между двумя
фрикционными прокладками, одна из которых зафиксирована на валу.
Давление между диском и прокладкой поддерживается с помощью пру-
жины, которая регулируется так, чтобы получить оптимальное демпфи-
рование. Магнитное демпфирующее устройство состоит из свободно вра-
щающегося дискового ферритового постоянного магнита и стального
Рис. 4. 24. Пружинно-фрикционный инерционный демпфер:
1 — контргайка; 2 — пружина; 3 - инерционный диск; 4 - неподвижная фрик-
ционная шайба; 5 - подвижная фрикционная шайба
Рис. 4.25. Магнитно-фрикционный инерционный демпфер:
1 — магнитопровод из магнитного материала; 2 — свободно вращающийся
магнитный диск; 3 — фрикционная шайба; 4 - неподвижный диск из магнито-
мягкого материала
Рис. 4.26. Инерционный демпфер на вязком трении:
1 — вязкая смазка; 2 — свободно вращающийся инерционный диск; 3 - коробка
7 —Зак. 650 97
диска, прикрепленного непосредственно к ротору. Между двумя дисками
монтируется фрикционная прокладка и на магните для прохождения маг-
нитного потока устанавливается магнитопровод. Давление обеспечивается
магнитной притягивающей силой между дисками и фрикционной проклад-
кой. Состоит VCID из инерционного диска внутри цилиндрической короб-
ки. Они могут свободно вращаться относительно друг друга, но простран-
ство между ними мало и заполнено жидкостью, содержащей кремний, так,
что относительное движение ведет к возникновению тормозящей силы на
каждом из них. При работе ШД внешняя коробка крепится непосредствен-
но к валу ротора.
4.6.2. Действие демпфирующих устройств. Предположим, что ротор
поворачивается и колеблется. Если инерционный диск обладает большим
моментом инерции, то он имеет тенденцию вращаться с постоянной часто-
той. В результате этого между ним и колеблющимся ротором появляется
разность частот, которая препятствует вязкому или фрикционному тре-
нию и устраняет колебания. По этой причине, чем выше момент инерции
свободного диска, тем лучше демпфирование. С другой стороны, большой
инерционный диск может снизить приемистость и эффективность системы.
Таким образом, важной проблемой становится оптимизация демпфирую-
щего устройства.
Простое аналитическое объяснение эффекта демпфирования может
быть дано с помощью передаточной функции (4.68) с учетом реакции, по-
казанной на рис. 4.5. Если момент инерции свободного диска велик, то
можно предположить, что в начальной части реакции он почти неподви-
жен, а это соответствует большому коэффициенту вязкости D системы.
Отсюда следует, что фактор демпфирования f велик и колебания умень-
шаются.
4.63. Теория демпфирующих устройств. Приведенные объяснения но-
сят качественный характер с учетом большого момента инерции сво-
бодного диска. В действительности, момент инерции должен быть соот-
ветствующим образом выбран. Проанализируем действие VCID количе-
ственно. Момент, создаваемый ШД и задаваемый уравнением (4.62),
записывается в форме
тт = Em(fii ~ ®о)> (4-91)
где
Ет = кт1м^г', (4.92)
б/ — требуемое угловое положение ротора; 60 — реальное угловое поло-
жение ротора.
Уравнение движения poppa имеет вид
(Ли + Лп)б'о ~ тт — rd > (4.93)
где Jm - момент инерции ротора; Jdi - момент инерции коробки демпфи-
рующего устройства.
Момент за счет вязкости, возникающий в коробке, равен
Td = D(fl0 - Odo), (4.94)
98
где 0</о - угловое положение инерционного диска. Уравнение движения
инерционного диска
= Td • (4-95)
Эти выражения образуют систему третьего порядка, которая решена
в [И]. При одношаговом возбуждении с нулевыми начальными условия-
ми вклад системы ротор—демфер в лапласовскую форму переходной
функции имеет вид
0О + «) G(s) = —. = — , 01 s3 + fc (1 + J)№ + Es + EK (4.96)
где E ~ Ет/ (Ля + Л//)» (4.97)
К = D/Jd0; (4.98)
7 — Jdo,l Ur "* Jdi) • (4.99)
Выражение для определения реакции системы можно получить из (4.96)
0o (0 = &i {1 - Ae~at - Be-^co^ut + Ф) } , (4.100)
где Л = J/4; (4.101)
в _ 1 //15J4 + 72/3 + 64/2 + 1287 + 256 'j 4 V \ -J2 + iJ + 16 / ’ (4.102)
1 / E(—J2 + 8J + 16) CO = / ; 4 V J + 1 (4.103)
ф = tg-l ; (J + 4)V (-J2 + 8J + 16) (4.104)
a + 20 = K(J + 1) и 0 удовлетворяет (4.87); (4.105)
803 - 8K(J + 1)02 + 2{№(J + I)2 + E}0 - EKJ « 0. Из этих уравнений может быть получено фундаментальное шение, необходимое для оптимизации, подробно описанное в (4.106) СОО ИЮ- НИ-
Быстрое подавление колебаний требует, в свою очередь, максималь-
но возможного значения 0, особенно когда этот эффект может быть
достигнут без одновременного получения высокого значения а (подра-
зумевая недопустимо медленную реакцию, в целом можно получить
хорошие результаты). Дифференцируя (4.106) по переменной К и no-
т. 99
лагая dP/dK = 0 для нахождения максимума /3, получаем
8/32 (7 + 1) + EL
40(7 + l)2
(4.107)
Подставляя (4.107) в (4.106), имеем
Ртах ~
(4.108)
В соответствии с этим из (4.10S)
ДЛЯ Ртах
(4.109)
и из (4.107)
J + 2 Г~Ё
К = ----------- /-------- для Ртах • (4.110)
2(7 + 1) V J + 1
Из (4.108) и (4.109) следует соотношение
0 J
— = — . (4.1И)
а 4
которое показывает, как и предполагали, что а не станет слишком боль-
шим.
Можно показать, что реакция становится колебательной, если отноше-
ние моментов инерции J удовлетворяет неравенству
/ 23456789
Т2 -87-16 >0 (4.112)
или
J > 4(1 + -/2) 9,66. (4.113)
Рис. 4. 27. Изменения Я, 0 и ш с мо-
ментом инерции J
Однако эти значения неприменимы на практике, так как такое большое
отношение моментов инерции ведет к уменьшению приемистости.
Практический оптимум получают при я = 0 и 7 =4. На рис. 4.27 изобра-
жены зависимости я, 0 и ы от J. При росте J 0 растет, а а убывает. Для
оптимизации системы полагают а = 0, что определяет область, где J отно-
сительно невелико. В [11] утверждается, что 7=4 является также обосно-
ванным оптимальным условием для характеристики распределения мо-
мента в нелинейной модели.
В линейной теории для 7=4
° = /гЦР^тЛ/о) = 0,54 V (Wdo) • (4.114)
2 (J + 1) у \j + 1/
100
Глава 5
СИСТЕМЫ И СХЕМЫ УПРАВЛЕНИЯ ШАГОВЫМИ
ДВИГАТЕЛЯМИ БЕЗ ОБРАТНОЙ СВЯЗИ
Одной из наиболее важных проблем при использовании ШД является раз-
работка систем управления без обратной и с обратной связью по положе-
нию ротора. В этой главе рассмотрены системы управления без обратной
связи.
5.1. СИСТЕМА УПРАВЛЕНИЯ
Простая система управления для ШД показана на схеме рте. 5.1. Для удоб-
ства объяснения она разделена на две части, ШД в примере четырехфазный
на рис. 5.1, а представлена часть системы управления от логического бло-
ка до двигателя.
Сигнал управления, приходящий на логический блок, обеспечивает
подачу сигнала управления на коммутатор, тем самым способствуя пере-
мещению ротора двигателя на один шаг. Направление вращения опреде-
ляется логическим состоянием входа, т.е. Н-уровень для вращения по ча-
совой стрелке и /.-уровень против часовой стрелки. В некоторых случаях
применяются логические блоки с не зависящим от направления выход-
ным сигналом. Если один инкремент движения осуществляется за один
шаг, то на схеме рте. 5.1, а представлена вся система управления. Но
если шагов два или больше, то перед логическим блоком необходимо
поставить еще одно устройство для создания соответствующей инкре-
менту цепочки входных импульсов. Это устройство называется входным
контроллером (рте. 5.1, 0). В сложных случаях функцию входного конт-
роллера выполняют такие электронные устройства, как микропроцессо-
ры, которые генерируют цепочки импульсов для ускорения или замедле-
ния движения оптимальным образом. В гл. 5 будут рассмотрены элемен-
ты логических блоков, а затем устройств коммутаторов и входных конт-
роллеров. В заключение приведен пример использования микропроцессо-
ра в схеме управления без обратной связи.
Рис. 5.1. Схема системы управления ШД:
1 - логический блок; 2 - коммутатор; 3 - двигатель; 4 - входной контроллер
101
5.2. ЛОГИЧЕСКИЕ БЛОКИ СИСТЕМЫ УПРАВЛЕНИЯ
Логический блок — это логическая схема, которая управляет последова-
тельностью возбуждения обмоток в соответствии с поступлением вход-
ных импульсов. Обычно логический блок состоит из регистра сдвига и
логических схем (функций) таких, как НЕ-И, HE-ИЛИ и т.д. В настоящее
время в качестве регистра сдвига применяют универсальные схемы. Одна-
ко для конкретных целей можно сконструировать необходимый логи-
ческий блок подбором соответствующей интегральной микросхемы,
реализующей триггер с логическим входом, срабатывающий по обратно-
му фронту сигнала управления (триггеры JK.-FF), и логических схем.
Базисные функции схем и триггеров приведены на рис. S.2. Триггер
А—I—ч
5-1—/
А-В=С
Вход Выход
А В С
1 1 0 0 1 0 1 0 1 0 0 0
НЕ-И
А
В
А
В _
А-В=С
с
С
Вход Выход
А С
1 1 0
1 0 1
0 1 1
0 0 1
ИЛИ
С
А
В
А+В=С
Вход Выход
А В С
1 1 1
1 0 1
0 1 1
0 0 0
НЕ-ИЛИ
А
В
А С
В L
А+В=С
С
Вход Выход
А В С
1 1 0
1 0 0
0 1 0
0 0 1
НЕ
А-Ц_у>-в
А = В
Вход Выход
А В
1 0 0 1
Триггер
JK-FF
t t+1~ J Q. —Q.t+1
1 1 H T
И a.
3—*
Вход Выход
J К Qt+1 Qt+i
1 1 0 0 1 0 1 0 Ъ 1 0 flt Qt 0 J & Устано- вить начало
С
А
А
В
Рис. 5.2. Логические блоки и их функции
102
Р 1 2 3 4 5 6 ... Р 1 2 3 4 5 6 ...
Фаза1,01 0 1 1 0 0 1 1 — Фаза 1,01 0 0 1 1 0 0 1 —
г, аг 0 0 1 1 0 0 1 ... 2.Q2 0 1 1 0 0 1 1 ...
3,01 1 0 0 1 1 0 0 — 3,01 1 1 0 0 1 1 0 ...
4,02 1 1 0 0 1 1 0 ... 4,02 1 0 0 1 1 0 0 ...
Фаза 13 4 2
V .
К коммутатору а)
К коммутатору
Рис. 5.3. Логический блок для двухфазного управления четырехфазным ШД
с равноправными направлениями вращения:
а - по часовой стрелке; б — против часовой стрелки
S)
JK-FF реализует функцию, задаваемую таблицей и выполняемую тогда,
когда на вход* поступает сигнал Н. Если на вход* поступает сигнал L,
то на выходе Q будет сигнал L, а на Q - Н. Поэтому вместо составления
логического блока из набора соответствующих интегральных микросхем
можно использовать универсальные логические блоки, разработанные
для 1ПД.
Рассмотрим несколько типов логических блоков, состоящих из инте-
гральных микросхем с транзисторно-транзисторной логической схемой
(TTL), изготовленных по КМОП-технологии.
5.2.1. Двухфазное управление четырехфазным двигателем. Для случая
без указаний направления вращения ротора простой логический блок
можно построить с помощью лишь двух триггеров JK-FF, как показано
на рис. 5.3. Таблица функций логического блока задана на том же рисун-
ке. Соответствие выходных сигналов логического блока сигналам управ-
ления на обмотках фаз задается следующей схемой:
Q1 — фаза 1;
Q1 - фаза 2;
Q2 - фаза 3;
Q2 - фаза 4.
Это означает, что если Ql= И. обмотка фазы 1 возбуждена. Если Q1 =
= L, фаза 7 не возбуждена. Как видно из сравнения двух таблиц на
рис. 5.3, схемы а и б задают противоположную последовательность воз-
буждения: направление, задаваемое на рис. 5.3, а, обеспечивает вращение
ротора по, а на рис. 5.3, б против часовой стрелки. Для изменения на-
правления вращения схемы включения следует поменять. Для этой цели
можно использовать схему переключения, показанную на рис. 5.4. Здесь
103
Рис. 5.4. Логический селектор для управления направлением вращения; в
цепи (а) С = А для команд уровня Н и С = В для команд уровня L; в цепи (б)
С- А для команд уровня Н и С = В для команд уровня L
Рис. 5.5. Двухфазный логический блок для четырехфазного двигателя с рав-
ноправными направлениями вращения
Рис. 5.6. Логический блок для двухфазного управления четырехфазным дви-
гателем
основная логическая функция обеспечивается за счет комбинации трех
схем НЕ-И или И и ИЛИ. Если задающий направление вращения сигнал
в схеме на рис .5.3, а имеет уровень Я, то на выходе С уровень сигнала
такой же, как и на входе А. Если же задающий направление вращения
сигнал имеет уровень Л, то на выходе С уровень сигнала совпадает с вхо-
дом В_ (рис. 5.3, б); для значения Н, задающего направление вращения,
С = А и С = В для уровня L. На рис. 5.5 представлен логический блок
для реверсивного двухфазного управления четырехфазным ШД. Он до-
104
Рис. 5.7. Логический блок для однофазного управления четырехфазным дви-
гателем с равноправными направлениями вращения
полнительно содержит схему изменения направления вращения. Другой
пример реализации реверсивного управления двигателем приведен
на рис. 5.6.
5.2.2. Логический блок для однофазного управления четырехфазным
двигателем. Однофазный логический блок получается добавлением четы-
рех логических схем И к выходам двухфазного блока, как это показано
на рис. 5.7 и 5.8. Значения логической функции, реализуемой этим бло-
ком, приведены в табл. 5.1 для направлений вращения по и против ча-
совой стрелки.
Изменение в выходной последовательности сигналов имеет место при
понижении уровня сигналов управления. Схема формирования входного
сигнала, обеспечивающая также снижение помех, показана на рис. 5.36.
Таблица 5.1. Примеры длительности импульсов и данные для их получения
т Длительность импульса мс Qm Целая аппроксимация Шестнадцате- ричное вы- ражение
1 1,984 252,2 252 FC
2 1,460 182,9 183 В7
3 1,212 149,8 150 96
4 1,059 129,4 129 81
5 0,952 115,1 115 73
6 0,873 104,6 105 69
5.2.3. Однофазный логический блок для трехфазных двигателей. Логи-
ческий блок для однофазного управления трехфазным двигателем с од-
нонаправленным вращением получается из комбинации регистра сдвига
и трех элементов И (рте. 5.9). Таблица значений функции логиче-
ского блока показана на том же рисунке. Логический блок для ре-
версивного вращения ротора ШД приведен на рис. 5.10, а. Для комму-
105
По часовой стрелке Против часовой стрелки
Р 1 2 3 ч 5 в — Р 1 2 3 ч 5 6 —-
Оч 0 1 0 1 0 1 0 — Оч 0 1 0 1 0 1 0 —
Оч 1 0 1 0 1 0 1 — Оч 1 0 1 0 1 0 1 —
Ог 0 0 1 1 0 0 1 — 0г 0 1 1 0 0 1 1 —
Ог 1 1 0 0 1 1 0 — Ог 1 0 0 1 1 0 0 —
Фаза 1 Оч-Ог 1 0 0 0 1 0 0 — Фаза 1 Оч-Ог 1 0 0 0 1 0 0 ---
2 ОгОг 0 1 0 0 0 1 0 2 Оч-Ог 0 0 0 1 0 0 0 —
3 Оч-Ог 0 0 1 0 0 0 1 3 Оч-Ог 0 0 1 0 0 0 0 —
Ч Оч-Ог 0 0 0 1 0 0 0 ч Оч-Ог 0 1 0 0 0 1 0 —
Рис. 5.8. Логический блок для однофазного управления четырехфазным дви-
гателем с равноправными направлениями вращения
тации триггеров JK-FF используют две схемы переключения направления
(рис.5.10,6, в).
5.2.4. Логический блок для двухфазного управления трехфазным дви-
гателем. Этот логический блок получается при использовании трех эле-
ментов НЕ-И вместо элементов И. См. также рис. 5.10.
5.2.5. Полушаговый логический блок для трехфазных двигателей.
На рис. 5.11 приведен пример такого блока, использующего три триггера.
5.2.6. Двухфазный логический блок для трехфазиого реактивного дви-
гателя с бифилярными обмотками. Логическая последовательность, необ-
ходимая для двухфазного управления таким двигателем, приведена
в табл. 2.4. Блок получается включением шести элементов И или НЕ-ИЛИ
на выходах схемы рис. 5.11, он приведен на рте. 5.12.
5.2.7. Два типа логических блоков для реверсивного вращения шагово-
го двигателя. Импульсный логический блок для реверсивного двигателя
имеет на входе управление шагами и направлением вращения. Схема
включения блока приведена на рис. 5.13, а. Существует и другой его тип,
имеющий вход для шагов по и против часовой стрелки (рте. 5.13, б).
5.2.8. Логический блок для управления четырехфазными гибридными
двигателями с помощью мостового инвертора (коммутатора). Схема
мостового инвертора для управления гибридным ШД показана на рис. 2.62
106
По часовой стрелке
Против часовой стрелки
Р 1 2 3 ч 5 — P 1 2 3 4 5 ...
Qi 0 1 0 0 1 0 Qi 0 0 1 0 0 1 —
Qi 1 0 1 1 0 1 — Qi 1 1 0 1 1 0 ...
йг 0 0 1 0 0 1 --- Qi 0 1 0 0 1 0 —
Hi 1 1 0 1 1 0 — Qi 1 0 1 1 0 1
Фаза 1 HrQi 1 0 0 1 0 0 Фаза 1 QrQi 1 0 0 1 0 0 ...
2 Qi-Qi 0 1 0 0 1 0 2 Qi-Hi 0 0 1 0 0 1 ...
3 Qi-Qi 0 0 1 0 0 1 3 Qi-Qi 0 1 0 0 1 0 ...
Рис. 5. 9. Логический блок для трехфазных двигателей с однонаправленным
вращением:
а - по часовой стрелке; б - против часовой стрелки
Рис. 5. 10. Логический блок (а) для трехфазного двигателя с равноправны-
ми направлениями вращения; однофазное (б) и двухфазное (в) управление
107
По часовой стрелке
Против часовой стрелки
Р 1 2 3 4 5 6 7
Фаза 1,01 1 1 0 0 0 1 1 1
Фаза 2,02 0 0 0 1 1 1 0 0
Фаза 3, 03 0 1 1 1 0 0 0 1
Р 1 2 3 4 5 6 7
Фаза1, 01 1 1 0 0 0 1 1 1
Фаза 2,02 0 1 1 1 0 0 0 1
Фаза 3, 03 0 0 0 1 1 1 0 0
Рис. 5. 11. Логический блок для полушагового управления трехфазным дви-
гателем
Фаза Р 1 2 3 ч 5 S 7 8 9
1 1 0 0 0 0 1 1 0 0 0
2 1 1 0 0 0 0 1 1 0 0
3 0 1 1 0 0 0 0 1 1 0
ч 0 0 1 1 0 0 0 0 1 1
5 0 0 0 1 1 0 0 0 0 1
6 0 0 0 0 1 1 0 0 0 0
НЕ-ИЛИ
Рис. 5. 12. Схема компоновки логического блока для трехфазного двигателя
с бифилярными обмотками, ее вход присоединяют к выходу схемы на рис. 5.11
Вход
Рис. 5. 13. Два вида логических блоков с равноправными направлениями
вращения
108
Рис. 5.14. Логический блок, выполненный на
КМОП-технологии фирмы Sanyo для универ-
сального использования
Рис. 5. 15. Примеры схем соединения ло-
гического блока и инвертора:
а, б - непосредственное; в, г - между бло-
ком и инвертором включен усилитель
и 2.63. В схеме рте. 2.62, использующей восемь силовых транзисторов,
ключи S1 и S4 должны работать одновременно. Точно так же пары S2
и S3, S3 и S8, S6 и S7 работают одновременно. Для управления их
ключами можно использовать логический блок рте. 5.5 со следующим
соединением: выход Q2 для пары S1 и S4; Q2 для S2 и S3; Q1 для S5 и
S8;Q1 для 56 и 57.
Для схемы инвертора (коммутатора) рис. 2.63 соединение может быть
следующим: выход Q2 для SI; Q2 для S2; Q1 для S3; Q1 для S4.
S.2.9. Универсальный логический блок на микросхеме со средней
степенью интеграции MSI. Вместо логического блока из отдельных инте-
гральных микросхем для управления инвертором (коммутатором)
можно использовать логический блок на MSI, разработанный для управ-
ления ШД по нескольким схемам. В качестве примера можно привести
блок РММ 8713 фирмы Sanyo, показанный на рис. 5.14. Он сконструиро-
ван для управления трех- или четырехфазным ШД при однофазном,
двухфазном или полушаговом возбуждении. Выходной сигнал логи-
ческого блока этого типа может непосредственно управлять базами сило-
вых транзисторов, собранных по схеме Дарлингтона, как показано
на рис. 5.15, б-г.
5.3. ИНВЕРТОР (КОММУТАТОР) ДВИГАТЕЛЯ
5.3.1. Соединение логического блока и инвертора. Выходной сигнал
подается на вход силового инвертора (коммутатора), который управ-
ляет включением обмоток двигателя. Инвертор можно будет назвать ком-
мутатором двигателя или просто коммутатором. Простейшим способом
соединения является непосредственное, как показано на рис. 5.15, а, б.
109
Но если выходные сигналы логического блока недостаточны для управ-
ления силовыми транзисторами, то необходимо между коммутато-
ром и логическим блоком включить усилитель, как это показано на
рис. 5.15,в, г.
5.32. Проблемы разработки коммутатора (инвертора). Обмотку ШД
представляют на схеме замещения последовательным соединением ин-
дуктивности и резистора. Кроме того, при вращении ротора в обмотках
возникает ЭДС. Следовательно, эквивалентная схема замещения ШД
выглядит, как показано на рис. 5.16. Прежде всего следует рассмотреть
наихудшие условия эксплуатации двигателя и силовых транзисторов для
различных значений напряжения питания. Так как ШД разрабатывают для
получения максимальной мощности в минимальном объеме, значение
температуры может достигать порядка 100 °C и, таким образом, сопро-
тивление обмотки повышается на 20-25%.
5.3.3. Защита транзисторов коммутатора. При запирании транзистора
(см. pic. 5.16) из-за наличия индуктивности L (di/dt) возникает ЭДС
самоиндукции, которая может привести к выходу из строя транзистора.
Существуют различные способы снижения перенапряжения и защиты
транзистора.
1. Диоды обратного тока. Если параллельно с обмоткой включен диод,
как это показано на рис. 5.17, то после выключения транзистора ток об-
мотки замыкается через него. В этой схеме не бывает больших изменений
тока при выключении и потенциал коллектора равен напряжению пита-
ния Е плюс падение напряжения на открытом диоде. Этот способ защиты
прост, однако ток в обмотке протекает в течение некоторого времени
после запирания транзистора, что приводит к появлению тормозного мо-
мента.
2. Диодно-резисторная защита. Для быстрого демпфирования тока
последовательно с диодом включается резистор, как показано на рис. 5.18.
Напряжение Vce на коллекторе при отключении равно
VCE - Е + IRS + Vfd ,
Рис. 5.17. Диодная
защита
110
Рис. 5.18. Диодно-
резисторная защита
Рис. 5.19. Защита с
помощью стабилитрона
Рис. 5.20. Сравнение действия различных схем защиты:
1 - диод; 2 - диод и резистор; 3 - диод и стабилитрон
Рис. 5.21. Пример четырехфазного инвертора со стабилитронной защитой
где Е — напряжение питания; / — ток в обмотке до выключения транзи-
стора; Rs — сопротивление резистора; Vp^ — падение напряжения на
диоде.
Чем больше Rs, тем быстрее затухает ток после выключения транзис-
тора и выше потенциал коллектора. Таким образом, быстрое уменьшение
тока в обмотке приводит к большим перенапряжениям на транзисторе.
3. Защита с помощью стабилитрона. Часто последовательно с обычным
диодом включают стабилитрон, как показано на рис. S.19. По сравнению
с двумя предыдущими схемами в этой уменьшение тока после выключе-
ния происходит быстрее (рис. 5.20). Достоинством данного способа
является то, что потенциал коллектора равен напряжению питания плюс
напряжение пробоя стабилитрона, которое не зависит от тока. Это
упрощает определение максимума потенциала коллектора. На рте. 5.21
приведена схема коммутатора с защитой транзисторов с помощью стаби-
литрона для четырехфазного двигателя. Резисторы R1 и R2 включены для
быстрого нарастания возбуждающего тока.
4. Емкостная защита. Ее часто используют для двигателей с бифиляр-
ными обмотками. Работа схемы объяснена на примере коммутатора для
четырехфазного двигателя (рте. 5.22). Конденсатор включают между
фазами 1 и 3 и 2 и 4. При отключении транзистора он поглощает энергию,
запасенную в обмотке, тем самым защищая транзистор. Рассмотрим си-
туацию, возникающую сразу после отключения транзистора VT1, при
однофазном управлении. Включен либо VT2, либо VT4, VT3 пока нахо-
Р и с. 5. 22. Четырехфаз-
ный инвертор с емкостной
защитой. Значения сопро-
тивления Re подобраны та-
ким образом, чтобы ток не
превышал номинального
значения
111
Рис. 5.23. Изменения механических характеристик при различных емкостях
конденсатора, включенного между фазами. Измерено по схеме рис. 5. 22
дится в отключенном состоянии. Так как обмотки фаз 1 и 3 выполнены
бифилярными, то ток будет циркулировать так, как показано на ри-
сунке пунктирной линией. Если VT3 включить, когда протекающий ток
становится равным нулю и заряд на конденсаторе максимален, то в этом
случае ток от источника питания протекает через обмотку фазы 1.
При двухфазном управлении такая же картина сохраняется. Емкост-
ная защита целесообразна в электроприводах, для которых шаговая ча-
стота вращения (частота приемистости) относительно невелика.
Другая особенность схемы состоит в том, что конденсатор является
электрическим демпфером. Как было показано, способ демпфирования
колебаний ротора заключается в переводе кинетической энергии в теп-
ловую. Если колеблется ротор, содержащий постоянный магнит, то в
обмотке возникает ЭДС индукции. Однако, когда цель разомкнута или
подключено большое сопротивление, эта ЭДС не приводит к появлению
значительного тока. Если конденсатор включен между фазами обмотки,
ток проходит по замкнутой цепи, показанной на рис. 5.22, и в обмотках
выделяется тепловая энергия, т.е. конденсатор работает как электри-
ческий демпфер. Кривые зависимостей выходного момента от емкости,
полученные для гибридного двигателя [2], приведены на рис. 5.23. Ис-
следуемый двигатель типа Step-Syn 103-807-6 (четырехфазный гибридный
с углом шага 1,8°); двухфазное возбуждение; момент инерции нагруз-
ки 2,44 • 104 кг • м2 и нормированный ток 3,05 А на каждую фазу.
Чем меньше емкость, тем больше при больших шаговых частотах враще-
ния выходной момент, который возникает из-за быстрого снижения тока
после выключения. Как показано на рис. 5.24 иногда вместо этого с
уменьшением емкости растет максимальный потенциал коллектора
транзистора после его отключения.
53.4. Уменьшение времени нарастания тока. При включении транзисто-
ра для возбуждения фазы из-за индуктивности обмотки ток в последней
нарастает по экспоненциальному закону. При увеличении частоты им-
пульсов управления отношение времени установления тока к периоду
импульсов управления становится больше и это приводит к снижению мо-
мента и медленному отклику двигателя на импульс управления. Суще-
112
Рис. 5.24. Изменение потенциала коллек-
тора транзистора с изменением емкости при
максимальном выходном моменте
ствуют различные способы уменьшения
времени нарастания тока и улучшения
моментных характеристик при высоких
шаговых частотах.
Включение последовательного резис-
тора. Наиболее дешевый способ -
это включение последовательно с
обмоткой резистора, как это показано
Емкость конденсатора,мкФ
на рис. 5.25. Подаваемое напряжение питания Е выбирается так, чтобы
получить в обмотках заданное значение тока при данных условиях. По-
стоянная времени уменьшится при этом от L/R w рр L (Re + Rw).
Недостаток метода состоит в том, что на последовательно включенном
резисторе выделяется значительная мощность. Если сопротивление об-
мотки четырехфазного двигателя равно 1,5 Ом, номинальный ток состав-
ляет 4 А и напряжение питания 24 В, то сопротивление, которое необхо-
димо добавить в каждой из фаз, равно 4,5 Ом. Потери мощности при
однофазном возбуждении управления составят приблизительно 4,5 • 42 =
= 42 Вт. При двухфазном возбуждении они удвоятся.
Использование двух источников питания. Для снижения рассеивания
мощности в транзисторах коммутатора и улучшения качества ШД исполь-
зуется коммутатор с двумя источниками питания. Схема такого коммута-
тора для одной фазы приведена на рис. 5.26. Если на логический блок
подается импульс управления, то на одном из выходов будет получен
выходной сигнал высокого уровня для возбуждения обмотки фазы.
Рис. 5. 25. Схема, обеспечивающая уменьшение времени нарастания тока при
включении внешнего сопротивления Re последовательно с обмоткой и росте
напряжения питания Е:
1 - Rw ~ сопротивление обмотки; L - индуктивность обмотки
Рис. 5.26. Уменьшение времени нарастания тока с помощью коммутатора с
двумя источниками питания:
1 - моностабильный мультивибратор; 2 — логический блок
8 —Зак. 650 113
Рис. 5.27. Формы напряжения (/) и тока (2) в коммутаторе с двумя источ-
никами питания; нормированный ток показан пунктиром (5)
Рис. 5.28. Коммутатор с двумя источниками питания для двухфазного управ-
ления четырехфазным двигателем
По этому сигналу включаются транзисторы VT1 и Т2 и высокое напря-
жение £// подается в обмотку. Диод VD1 имеет в это время обратное сме-
щение и отделяет источник питания с низким напряжением от источника
питания с высоким напряжением. Ток устанавливается достаточно быстро
из-за высокого значения Ец. Постоянная времени однотактного мульти-
вибратора подбирается так, чтобы транзистор VT1 отключался, когда ток
в обмотке незначительно отличается от максимального значения. После
того, как источник питания высокого напряжения отключен, включается
диод обратного тока и ток в обмотке создается за счет подключения к
ней источника питания низкого напряжения. Типичная форма кривой
тока показана на рис. S .27. Схема с двумя источниками питания для двух-
фазного управления четырехфазным двигателем приведена на рис. 5.28.
Для переключения источника питания высокого напряжения используют
два транзистора. Это исключает возможность возбуждения других фаз
двигателя.
В схеме с двумя источниками питания при возрастании шаговой часто-
ты высокое напряжение подключено большую часть времени.
5.3.5. Мостовые коммутаторы (инверторы) для четырех- или двухфаз-
ных двигателей. Эффективность небольшого двигателя выше, когда все
его обмотки постоянно возбуждены. По этой причине для управления че-
тырехфазным гибридным двигателем наилучшей является двухполупе-
риодная схема коммутатора, так как в этом случае четыре обмотки всегда
возбуждены. По сравнению с однополупериодным управлением, при ко-
тором ток проходит только в оддом направлении, возможно 20—35%-дое
увеличение момента.
Существуют два основных типа мостовых коммутаторов для управле-
ния двигателем. На рис. 5.29 показан один из них, использующий два
источника питания. Особенности этой схемы таковы.
Во-первых, соединение обмоток. Если двигатель имеет восемь отдель-
ных входов, то обмотки подключают так, как показано на рис. 5.29.
Через каждую из них в фазах 1 я 2 течет переменный ток, и они всегда
имеют одинаковую полярность. Таким образом, двигатель можно рас-
сматривать как двухфазный.
114
Рис. 5.29. Мостовая схема для двухполупериодного коммутатора
Во-вторых, устранение сквозных токов в коммутаторе.
Если VT1 включен, то VT2 выключен, и наоборот. Но существует воз-
можность того, что транзистор будет включен в то время, когда другой
все еще проводит ток. Поэтому для предотвращения включения в одно
и то же время двух транзисторов необходимо добавить задерживающую
цепочку. Для этих целей могут быть добавлены резисторы с переменным
сопротивлением, как это показано на рисунке.
В-третьих, диоды для снижения перенапряжений. Они, подключенные
параллельно силовым транзисторам, служат для снижения перенапряже-
ний при отключении последних. Эта функция диодов отличается от выпол-
няемой ими при однополупериодной схеме коммутатора. Если включен
VT1, то ток проходит по пути, показанному на рис. 5.29 сплошной линией.
Сразу после отключения VT1 и включения Р72 ток в обмотке не поме-
няет еще своего направления и будет замыкаться через VD2 и источник
питания Е2. При этом Е2 заряжается, а энергия магнитного поля в об-
мотке рекуперируется в источник. Так как при одно пол уперто дном уп-
равлении энергия магнитного поля рассеивается в обмотках, диодах,
внешних резисторах и стабилитронах, то двухполупериодное управление
в этом отношении является более совершенным.
В-четвертых, обратимость направления тока. При однополупертодном
управлении для демпфирования тока в обмотке, возникающего после
выключения соответствующего транзистора, используют различные схемы
защит. Напротив, при двухполупериодном управлении напряжение по-
дается на обмотки для изменения направления тока. После того, как ток,
проходящий по пути, указанному пунктирной линией, становится равным
нулю, устанавливается ток в обратном направлении через транзистор VT2.
Взаимосвязь между напряжением на обмотке и током через нее такая,
как показано на рис. 5.30. Форма кривой тока отличается от экспоненты
из-за наличия ЭДС.
Другая схема двухполупериодного управления приведена на рте. 5.31.
Здесь один источник, но четыре транзистора в каждой фазе. Для быстрой
установки возбуждающего тока параллельно обмоткам включают рези-
сторы. Схемы временной задержки или сопротивления необходимы для
предотвращения сквозных токов через транзисторы инвертора.
5.3.6. Коммутатор для трехфазного реактивного двигателя с бифиляр-
ными обмотками. Коммутатор [3] для трехфазного реактивного двигате-
». 115
Рис. 5.31. Разновидность мостового коммутатора
Рис. 5. 30. Формы напряжения (?) и тока (2) в двухполупериодном ком-
мутаторе
ля с бифилярными обмотками показан на рте. 5.32. Он обладает следую-
щими преимуществами.
1. Диоды VD1 и VD6 аналогичны по выполняемым функциям диодам
мостовых коммутаторов. В состоянии R (установка) в таблице на
рис. 5.32 обмотки фаз 1 и 2 возбуждены. Затем, когда приходит управ-
ляющий импульс, обмотка фазы 1 отключается и включается обмотка
фазы 3, но обмотка фазы 2 остается при этом возбужденной. Во время
переходного процесса магнитная энергия в фазе 1 должна либо превра-
титься в тепловую, либо рекуперироваться в источник питания. Так как
обмотки фаз 1 и 4 намотаны бифилярным способом для образования
значительной магнитной связи, ток будет течь через фазу 4 и диод VD4
и замыкаться через фазу 2 и транзистор VT2.
2. Конденсаторы, соединяющие обмотки, обеспечивают прохождение
переходных токов в начале переходного процесса. Например, сразу после
того, как VT1 выключен, a VT3 включен, переходный ток пройдет от
обмотки фазы 1 к 3 через конденсатор, их соединяющий.
3. Диоды VD8 и VD9 служат для отделения разных групп обмоток
одну от другой, допуская только эффекты совместных пар.
4. Диод VD7 служит для отделения источника низкого напряжения
Е, от Ецг когда VT7 открыт.
Рис. 5. 32. Коммутатор с двумя источниками питания для трехфазиого реак-
тивного ШД с бифилярными обмотками
116
Рис. 5.33. Схема ШИМ и формы кривых напряжения:
1 - нагрузка; 2 - токоизмерительиый резистор; 3 - диод обратного тока
5. Электрическое демпфирование эффективно благодаря наличию кон-
денсаторов и бифилярных обмоток. Это означает, что если движение рото-
ра колебательное, то ЭДС, индуцируемая в каждой фазе, имеет флукта-
ционную компоненту, которая действует совместно с взаимной индук-
цией бифилярных обмоток и создает колебательный ток через конденса-
торы. Это и есть гот механизм, при помощи которого кинетическая энер-
гия демпфируется и преобразуется в тепловую.
53.7. Управление с помощью широтно-импульсной модуляции. Комму-
татор с широтно-импульсной модуляцией (ШИМ) обеспечивает стабили-
зацию тока с незначительными потерями. Основная функция ШИМ комму-
татора представлена на pic. 5.33. Здесь индуктивная нагрузка, помещен-
ная в пунктирный прямоугольник, представляет собой обычный коммута-
тор (рис. 5.34). Напряжение на датчике тока нагрузки сравнивается
с эталонным с помощью операционного усилителя с высоким коэффи-
циентом усиления. Эталонное напряжение представляет собой сумму
высокочастотной компоненты треугольной или синусоидальной формы
и постоянной составляющей, с которой необходимо сравнить напряжение
Ри с. 5. 34. Схема коммутатора типа ШИМ:
1 - циркуляционный ток после запирания VT1; 2 - датчик тока; 3 - ток
после запирания VT4
117
Перми-,
робан-'
ный
ток
Ток
Рабочий период защиты
Рис. 5. 35. Прямоугольная форма напряжения и форма кривой тока
датчика. Если постоянная компонента эталонного сигнала и напряже-
ние датчика близки, то выходной сигнал усилителя будет иметь пря-
моугольную форму, как показано для v 0 на рис. 5.33.
Так как коэффициент усиления высок, то выходное напряжение на об-
мотках двигателя импульсно изменится практически от нуля до напряже-
ния источника питания. Сигнал усиливается транзистором VT2 и подается
на базу основного переключающего транзистора VT1 для импульсной
коммутации последнего. В состоянии включения ток проходит от источни-
ка питания к нагрузке, в противном случае протекает через диод обрат-
ного тока. Если частота переключений транзисторов выбрана в диапазоне
до 30 кГц, то колебательная компонента в токе нагрузки очень мала.
Так как при этом управлении напряжение, подаваемое на двигатель,
носит импульсный характер, то такое управление часто называют вибра-
ционным. Когда ток меньше заданного значения, у VT2 растет скважность
сигнала управления. В противном случае она уменьшается.
Значение напряжения, подводимого к коммутатору двигателя,
tQN + toFF
Преимущества ШИМ или вибрационного управления заключаются в
единственном источнике питания, малых потерях мощности и автомати-
ческом регулировании напряжения для управления при нормированном
токе.
Рассмотрим форму кривой тока в цепи рис. 5.34. Сразу после включе-
ния VT1 при однофазном управлении ток устанавливается на более низ-
ком значении, чем соответствующее эталонное, и VT4 находится в 0 так,
что источник питания высокого напряжения подключен к обмотке фазы 1,
и ток нарастает достаточно быстро. Когда ток достигает значения, близ-
кого к Vr/Rr, VT4 начинает работать в ключевом или вибрационном режи-
ме и ток через обмотку выглядит, как показано на рис. 5.35,и стабилизи-
руется на заданном значении. Когда транзистор VT1 выключается, ток
118
быстро уменьшается, благодаря дао дно-резисторной защите, включенной
параллельно обмотке.
В коммутаторе ШИМ этого типа частота коммутации транзисторов оп-
ределяется значением напряжения источника питания. Недостаток ШИМ
управления заключается в том, что коммутатор создает электромагнит-
ные помехи и акустический шум.
5.4. ВХОДНОЙ КОНТРОЛЛЕР
Последней частью системы управления является входной контроллер.
Он управляет количеством шаговых импульсов и их распределением во
времени, а в некоторых случаях и направлением вращения ротора.
5.4.1. Одношаговый контроллер. Простейшей является система, обеспе-
чивающая инкремент движения за один шаг. Зависимость количества ша-
гов от времени в этой системе будет такой, как показано на рис. 5.36.
Установление положения равновесия ротора имеет, как правило, колеба-
тельный характер, и демпфирование зависит от вида используемого дви-
гателя и схемы управления. Входной контроллер достаточно прост, так
как его функция заключается в создании входного сигнала, который
соответствует входному сигналу логического блока. Пример, приведен-
ный на рис. 5.37, имеет следующие особенности: требуется входной сигнал
соответствующего высокого уровня; выходная помеха фильтруется
конденсатором; форма входного сигнала формируется триггером Шмит-
та, который построен на логической схеме НЕ-И или HE-ИЛИ. Для устра-
нения входных сигналов обратной полярности используют диод, пока-
занный на рисунке пунктирной линией. Наиболее универсальные логи-
ческие блоки имеют встроенный триггер Шмитта.
5.4.2. Входной контроллер для электронного демпфера. Для выполне-
ния одношагового движения без колебаний используется способ, называе-
мый методом обратной фазы. Связь между положением ротора и време-
нем подачи импульсов управления приведена на рис. 5.38. Двигатель,
находящийся в положении равновесия при возбужденной обмотке фазы 1,
получает команду перейти в следующее положение равновесия. Если
ротор продолжает ускоряться за счет возбуждения обмотки фазы 2, то
он проходит следующее положение равновесия. Поэтому в то время, как
ротор движется к следующему положению равновесия, обмотка 2 от-
ключается и снова включается обмотка 1. Это создает момент, который
замедляет движение ротора и обеспечивает его возврат в требуемое поло-
жение равновесия. В момент возвра-
та ротора снова возбуждается об-
мотка 2. Импульс на включение 1 и
отключение 2 для создания тормоз-
ного момента должен быть точно
рассчитан по времени так, чтобы ро-
Р и с. 5. 36. Одношаговый отклик
119
Рис. 5. 37. Входной контроллер для однофазного управления, который может
быть широко использован для формирования импульса
тор имел нулевую частоту вращения в положении равновесия 2. Таким об-
разом, когда возбуждается обмотка 2, ротор находится в положении равно-
весия фазы 2 без проскоков и колебаний. Цепь входного контроллера
для управления методом обратной фазы приведена на рис. 5.39. Эта схе-
ма может быть применена при большем количестве шагов на инкремент
движения добавлением большего количества импульсов, предшествую-
щих импульсу обратной фазы. Для реализации способа устранения коле-
баний ротора методом обратной связи необходимо подобрать импульсы,
предшествующие моменту включения обратной фазы и дающие мини-
мальный отклик: импульс включения обратной фазы для замедления
движения ротора с нагрузкой так, чтобы достигалось точно требуемое
положение равновесия; последующий импульс так, чтобы удержать
ротор в его заданном положении с минимумом колебаний.
5.4.3. Демпфированное многошаговое движение. Одношаговое движе-
ние имеет в основном колебательный характер. Неколебательное много-
шаговое (инкрементное) движение может быть получено несколькими
шагами с соответственно распределенными во времени импульсами.
Приведем два примера.
1. Электронное демпфирование с задержкой последнего шага [1],
схемная реализация которого приведена на рис. 5.40. Предположим, что
желательно сделать три шага. Если подать последовательность их трех
импульсов со средней скоростью, то отклик будет такой, как показано
на рис. 5.40, а. Однако если период между первым и вторым импульса-
ми подобрать так, чтобы ротор прошел ровно один шаг, то его конечное
положение будет соответствовать фазе 3. Последний импульс применяется
тогда для удержания ротора в положении равновесия, как показано на
рис. 5.39, б. Если момент трения в системе таков, что ротор не проска-
Положение
равновесия
фазы Z
Положение
равновесия
фазы 1
Рис. 5.38. Угол поворота и ширина
импульса при демпфировании методом
обратной фазы:
1 - переключение с фазы 1 на фазу 2;
2 - переключение на фазу 1; 3 - пере-
ключение на фазу 2
120
Рис. 5.39. Входной контроллер при демпфировании методом обратной фазы од-
ношагового движения
кивает один шаг, то эту схему демпфирования использовать нельзя.
Она также неприменима, если количество шагов на один инкремент мень-
ше трех.
2. Электронное демпфирование с постоянной частотой подачи импуль-
сов управления. Если неколебательное инкрементное движение обеспе-
чивается несколькими импульсами управления с равными интервалами,
то входной контроллер может быть достаточно прост. Нимура [2, 4]
приводит примеры демпфированного инкрементного движения двигате-
ля реактивного типа с внешним ротором, у которого используется от
трех до шести импульсов управления с равными интервалами на один
инкремент движения как при однофазном, так и при двухфазном управ-
лении. Также представлены примеры полушагового управления с 6-12 ша-
гами на один инкремент. На рис. 5.41, а показан одношаговый отклик
при двухфазном управлении. На рис. 5.41, б, в представлены отклики при
трехшаговом (ширина импульса 8,6 мс) и шестишаговом (5,93 мс)
управлении соответственно.
управления управления
Рис. 5. 40. Обычное трехшаговое (а) движение и тоже при электронном
демпфировании с задержкой последнего шага (б)
121
Р и с. 5. 41. Одношаговое движе-
ние и движение без колебаний при
нескольких импульсах управления
с равными интервалами
На рис. 5.42 показана схема для генерации последовательностей им-
пульсов с одинаковыми интервалами. Формы импульсов для различных
узлов этой схемы приведены на рис. 5.43.
5.4.4. Ускорение и замедление ротора. Для работы ШД на частоте выше
его собственной частоты приемистости необходимо использовать схемы
ускорения и замедления для предотвращения пропуска шага. Для систем
управления без обратной связи это означает, что двигатель начинает рабо-
ту при шаговой частоте вращения, равной или ниже его максимальной
частоты приемистости, затем шаговая частота нарастает со временем до
требуемого значения. Кроме того, в большинстве случаев двигатель
должен замедляться до некоторой частоты вращения, до того как он оста-
новится без ошибок позиционирования. Рассмотрим следующие способы.
Вентильный осциллятор. Входной контроллер типа вентильного осцил-
лятора, использующий синхронизатор на интегральной микросхеме
IC 555, показан на рис. 5.44, а формы кривых потенциалов в точках
цепи — на рис. 5.45. Когда выходной сигнал достигает уровня L, моно-
стабильной схемой MSI выдается импульс шириной 7\. С другой сторо-
НЕ-И2
Рис. 5. 42. Входной контроллер для генерации нескольких импульсов управ-
ления с равными интервалами
122
Рис. 5. 43. Диаграммы на-
пряжений в схеме рис. 5.42
Точка А _Л_ГU 1—П_________________П_П_Г
Входной. _____________________________________
сигнал Ц
Точка С
Точка В п_п_п_п_п_л_гг
Выход
ны, после появления входного сигнала потенциал точки Л достигает уров-
ня L и микросхема IC 555 обеспечивает генерацию сигнала. Последова-
тельность импульсов, необходимая для поворота, подается в точках ми-
нимума кривой, они также имеют ширину Г,. Период колебаний в этом
случае составляет 0,7(R^ + Rb)C. Как ясно из рисунка, период колебаний
меньше, чем временной интервал между первым и вторым выходными
импульсами. Если число импульсов на одно движение равно N, счетчик
импульсов должен быть предварительно установлен на значение N — 1.
В данном примере используется счетчик типа 74192 или 74193. Схема
MS2 выдает сигнал после достижения потенциала в точке D значения L.
После этого в момент Га схема MS3 выдает импульс Г3. Время Га боль-
ше, чем период колебаний ротора при повороте, что обеспечивает его
надежную остановку. Однако для некоторых видов нагрузок двигателя
нет необходимости задавать последний шаговый интервал большим, чем
предыдущий.
Осциллятор
Вентиль
Йд =1 кОм
Йв 100 кОм
Возврат
1/2 -7400
о.
MS1
(Ъ)_
а
или 74192
и-яи 74193
74123
MS2
(V
а
BORROW 4700м ^~7900
^LOAB
Генератор импульсов
а
MS3
(г3)
а
1/2-74123
Возврат
И R I* !«
А В С Л
5В
0,001 мкфХ
5В
В
Выход
1/4-7432
65 В
Рис. 5.44. Вентильный осциллятор:
1 — импульсы вращения; 2 — прохождение первого импульса
123
Возврат и загрузка счетчика ~ Вход вентиля должен быть
Вход вентиля 1 уровня L вплоть до конца подсчета । 'Верхний предел
Потенциал вт. А Нижний, предел
Потенциал в т. В
Потенциал вт.С
й-потенциал MS1 U IT и и и и и
Потенциал вт.1) -1 1
d-потенциал в MS2
Q-потенциал в MS3 1 2 3 4 5 6
Выход _l и U и U И и Подсчет
Рис. 5.45. Диаграммы напряжений в вентильном осцилляторе
Резисторно-емкостное (RC) ускорение. Когда частота вращения на-
много больше частоты приемистости, для ускорения ШД требуется другой
способ. Если в системе двигатель—нагрузка с ростом частоты вращения
момент уменьшается, идеальной характеристикой ускорения является
такая, при которой рост ускорения уменьшается с увеличением частоты
вращения, т.е. последняя возрастает быстрее при низких значениях шаго-
вых частот вращения и медленнее при их высоких значениях. Схема
реализации способа приведена на рис. 5.46. Когда на вход поступает пус-
ковой сигнал, изменение потенциала на конденсаторе С носит экспонен-
1 — торможение; 2 — ускорение; 3 - начало торможения; 4 — счетчик импуль-
сов; 5 — конец; б - максимальная частота вращения; 7 - минимальная частота
вращения
124
Рис. 5.47. Профиль частоты импуль-
сов управления при Ж-ускорении
циальный характер и постоянная времени равна C(R1 +R2). Входной сиг-
нал поступает на преобразователь напряжение—частота V—F для создания
импульсов ускорения. В случае замедления ротора конденсатор С через R3
начинает разряжаться. Когда преобразователь V—F выдаст требуемое
число импульсов, счетчик импульсов посылает сигнал на базу транзисто-
ра VT2. При отпирании транзистора VT2 начинается разряд конденсатора.
Максимальная и минимальная частоты вращения регулируются пере-
менными сопротивлениями R2 и R3. На рис. 5.47 приведена зависимость
частоты следования импульсов управления от времени.
Одним из недостатков метода резисторно-емкостного ускорения яв-
ляется то, что скорость замедления в самом начале может быть слишком
велика. Способы устранения этого недостатка рассмотрены в [1].
5.5. УПРАВЛЕНИЕ УСКОРЕНИЕМ ДВИГАТЕЛЯ
С ПОМОЩЬЮ МИКРОПРОЦЕССОРА
Наиболее характерным качеством микропроцессоров является гибкость
программирования. Преимущество микропроцессора состоит также
в том, что он позволяет осуществлять генерацию временных импульсов,
управление логической последовательностью и выполнение функций
входного контроллера. Программа, рассмотренная ниже, служит для
простого управления ускорением и замедлением двигателя. Более слож-
ные способы регулирования частоты вращения могут быть реализованы
при помощи соответствующей программы для микропроцессора.
5.5.1. Основные концепции использования микропроцессоров серий
8080 и их структурная схема. Существует множество разработок соот-
ветствующего математического обеспечения для конкретных типов мик-
ропроцессоров. В примере предлагается простейший алгоритм с исполь-
зованием микропроцессора 8080А. Он может быть использован для лю-
бого микропроцессора серии 8080. Центральное процессорное устройство
CPU 8080А имеет шесть регистров, которые могут быть использованы для
управления двигателем.
Регистр В используется для хранения настоящего состояния возбужде-
ния обмоток.
Регистры С и Е. Регистр С используется для подсчета полного числа
шагов, а Е — для запоминания числа шагов, остающихся до окончания
движения. Если по инструкции движение состоит из ршагов,то число р
передается в регистр Е, а в С засылается нуль. После получения команды
на выполнение шага содержимое регистра С увеличивается на единицу,
а Е уменьшается на единицу. Пример соотношения между интервалами
импульсов и изменением содержимого регистров С и Е для различного
числа шагов приведен на рис. 5.48. Зависимости частоты следования им-
125
Рис. 5. 48. Соотношение между частотой следо-
вания импульсов управления и изменением дан-
ных в регистрах Е и С
E=Zi 1 I О
С=0| 1 I 2
I 4*1 | 4tf ।
Е=3| 2 I 1 I 0
C=0| 1 \ 2 I 3
I 4tf । 4tz । 4tj ।
E = 4| 3 I 2 | 1 I 0
C=0| 1 | 2 I 3 I 4
I 4ti 4ti ।
E=51 4 I 3 I 2 | 7 I 0
C=0| 1 | 2 I 3 I 4 I 5
[ t 4*z ^*з{Л*г t Ati ।
Рис. 5. 49. Зависимость частоты
следования импульсов управления от
времени
Е=6 । 5 । 4 । 3 | 2 | 7 । О
С=0| 1 | 2 | 3 | 4 | 5 | 6
। Ail । Atj AtZ
E = 75| /4 I 73 I 12 |77|70|9|8|7 6 5 I 4 I 3 I 2 I 7 I fl
C=0| 7 I 2 | 3 I 4 |5 |S|7|8 9 70| 77 17^ | 73 | 74 | 75
пульсов управления от времени приведены на рис. 5.49: двигатель должен
начать движение с частоты следования импульсов f0, линейно ускоряться
до fs и двигаться с постоянной частотой следования импульсов управле-
ния. Перед остановкой он замедляется, а затем должен остановиться
на частоте вращения, при которой он может это сделать без потерт
шага. В рассматриваемой программе двигатель ускоряется за шесть им-
пульсов и при замедлении используется их последовательность с теми же
самыми интервалами, но в обратном порядке. В примере, приведенном
на рис. 5.48, движение, состоящее менее чем из тринадцати шагов, вооб-
ще не может достигнуть требуемой частоты вращения, двигатель раз-
гоняется и затем сразу замедляется. Движение, состоящее из тринадцати
или более шагов, имеет область с требуемой частотой вращения, в кото-
рой управляющие импульсы подаются с постоянной частотой (через
равные интервалы).
Как было показано, содержимое регистров С и Е используется для
подсчета zадресов памяти, содержащей данные, из которых получается
временная последовательность импульсов.
Регистр D используется для хранения кода, управляющего направле-
нием движения, следующим образом: D = 0 или 00000000 для вращения
по и D = 1 или 00000001 для вращения против часовой стрелки.
Если D = 2, то процессор рассматривает это, как указание конца движе-
ния; таким образом, D = 2 или ООООООЮ для конца программы.
Команды о направлении вращения и количестве шагов для выполнения
движения заносятся в область памяти, начиная с адреса Y, как показано
на рис. 5.50. До первого движения данные из единицы памяти с адресом Y
переносятся в регистр D, а из Y + 1 — в Е. Для второго движения данные
изУ + 2иУ + 3 переносятся в регистры D и Е соответственно.
Двойной регистр HL. В математическом обеспечении микропроцессо-
126
Рис. 5. 50. Область памяти для конт-
роля направления вращения и числа
шагов на один оборот
Рис. 5. 51. Область памяти для дан-
ных частоты импульсов управления
ра- 8080 двойной регистр HL часто используется для определения адресов
памяти, из которых (или в которые) данные переносятся в регистр (или
из регистра). В нашей программе двойной регистр HL используется для
определения адресов памяти, содержащей значения интервалов импуль-
сов. До загрузки HL следует провести расчеты для определения правиль-
ного адреса. На рис. 551 показана область памяти для хранения интерва-
лов импульсов, которая соответствует шести адресам с X до X + 5.
(Адрес X определяется программой ассемблер как начальный адрес.)
Естественно, эту область можно расширить при использовании для уско-
рения и замедления двигателя большего числа шагов. Реальные интерва-
лы импульсов вычисляют с помощью данных Qm в каждом байте
памяти и числа состояний в выполнении некоторой части программы и
задают фомрулой
Д'ю = aQm + Ъ ,
где а и ft - константы, которые определяются математическим обеспе-
чением и временной частотой микропроцессора.
Адреса памяти определяют вниз от Х-ускорения и вверх обратно к
X- замедлению. Интервалы для требуемой частоты вращения получают
с использованием значения Qt, хранящегося по адресу X + 5.
Двойной регистр HL также используется для определения адресов дан-
ных о направлении вращения и количестве шагов вращения.
5.52. Структурная схема и программа микропроцессора. Рабочая схе-
ма программы приведена на рис. 552. Детали каждой из частей приведены
на других рисунках с привлечением кодов языка ассемблера. Объяснение
структурной схемы и программы проводится шаг за шагом следующим
образом.
1. От START до PUSH HL. Детали этой части приведены на рис. 5.53.
Объясним шаг за шагом.
127
Рис. 5.52. Общая структурная схема про-
граммы
LOOP1 _______
<STOP )
|hl~*~'hl+i I
t
| POPHL 1
11 PAUSE IP
( START )° RG82QQH |
| A—0011 00111
t
| SENIA |
♦
L_b*:a -I
,. t ...
| RESETS |
MVI A.33H
OUTDRIV
I HL*-Y |
MOV B,A
MOV Б,М
STOP ~) HLT
I aXjj I
YES
NO
| HL—-НЫ-1 | INX H .
I
| E—M | MOV E,M
1=2?
NO
Рис. 5.53. Подробная структур- -----—£-----.
ная схема от START до PUSH HL I CLEAR С | MVI С,О
128 I
STAPT
В *- 00110011
HL *- Y
D *- M
D = 2?
HL «- HL+ 1
E *- M
c *- 0
PUSH HL
Программа стартует в этом примере с адреса 8200Н. Огмвол Н
означает, что приведенное число записано в шестнадцатеричном
коде
Регистр В инициализируется и устанавливает возбуждающее со-
стояние. Эта стадия состоит из трех этапов:
А *“ 0011 0011. В аккумулятор А загружается число 0011 0011,
которое равно 33, для управления двигателем по двухфазной
схеме;
SEND А. Этот код посылается через выходной порт коммутато-
ру, как показано на рис. 5.54. Обмотки фаз 1 и 2 возбуждаются,
так как на цепи баз для 1 и 2 падается положительный потенциал
5 В;
В *- А. Данные из АС переносятся в регистр В для запоминания
в центральном процессорном устройстве CPU
В двойной регистр загружается число из Y, которое представляет
собой стартовый адрес области памяти, содержащей данные о на-
правлении вращения и числе шагов. Как показано на {же. 5.50, од
но движение описывается двумя байтами: первый для кода направ-
ления, а второй для числа шагов;
Данные из памяти с адресом Y пересылаются в регистр D
Если содержимое D = 2, то программа переходит к концу (END),
который описывается мнемоническим кодом HLT
Если D 2, содержимое HL увеличивается на единицу до следую-
щего состояния
Содержимое памяти по адресу Y + 1 пересылается в регистр Е
Содержимое регистра С очищается и становится равным нулю
Содержимое регистра HL не задается, так как HL использован
для других целей
2. Логический блок (процедура ROTATE). До анализа способов генера-
ции сигналов на включение обмоток в запрограммированное время рас-
смотрим, используя рис. 5.55, как на данном процессорном устройст-
ве CPU можно реализовать работу логического блока.
D=o?
SHIFT RIGHT
Содержимое регистра D пересылается в АС (аккумулятор) и
сравнивается с нулем (ООН). Если D = 0, то программа про-
должается по правой ветви, если D = 1, то продолжается по ле-
вой ветви
В правой ветви содержимое регистра В пересыпается в АС
и сдвигается вправо на один бит командой RRC; содержи-
мое АС меняется иа 1001 1001
SHIFT LEFT В левой ветви восьмибитовое число в АС сдвигается влево
командой RLC
INCREMENT MOTOR Данное из АС пересылается через выходной порт для совер-
шения двигателем одного шага по или против часовой стрелки.
В конце данное из АС загружается в регистр В
Изменение данных в регистре В показано на рис. 5.56, а, откуда видно,
что функция логического блока выполняется подачей четырех младших
битов восьмибитового сигнала на выходной порт. На рис. 556, б показано
однофазное возбуждение: для управления также берутся четыре млад-
ших бита, но начальное данное для регистра В равно 0001 0001. На
рис. 5.56 изображено полушаговое управление. Начальное значение для
регистра В равно 0000 01111 и четыре четных бита используются в каче-
стве управляющего сигнала.
3. Процедура COUNTER. Детали подсчета шагов и петли 1 (LOOP 1)
показаны на рис. 5.57. Функция счета выполняется следующим образом:
9 — Зак. 650
Шаговый двигатель
Рис. 5. 54. Связь между выходным портом и коммутатором (см. рис. 5.15)
|| rotate!
NO
В=0’
ROTATE : MOV A,I)
* - OOH
LEFT
a,b;cw
, YES .-—i——
I SHIFT left] [shift right!
[increment motor|
CPI
JZ
MOV
RRC
JMP
left: mov
RLC
JMP STEP
STEP:OUT IRIVER
MOV B,A
STEP
a,b;ccw
Рис. 5. 55. Структурная
схема процедуры ROTATE
76543210
0 0 0 1 0001
00100010
01000100
10001000
00010001
0 0 1 0 0 0 1 0
01000100
1 0 0 0 1 0 0 0
В)
76543210
00000111
OOOQ11 10
0 0 0 1 1 1 0 0
00111000
0 1 1 1 0 0 0 0
11100000
110 00001
10000011
в)
Рис. 5.56. Изменение данных в регистре В:
а - двухфазное; б - однофазное; в - полушаговое возбуждение
С «- С + 1
Е *- Е - 1
Е = О?
Так как регистр используется как счетчик, то его содержимое
наращивается на единицу после каждого шага. Содержимое ре-
гистра Е уменьшается на единицу
Если содержимое регистра Е становится равным нулю, это озна-
чает, что движение выполнено и программа переходит к LOOP 1.
В противном случае программа будет выполнять спедуюпщй шаг
4. Процедура PAUSE. В LOOP 1 процедура PAUSE выполняется первой;
она обеспечивает ожидание в течение определенного интертала времени,
пока система выполняет свои функции (печать символа на печатающем
устройстве), и реализуется следующим образом:
130
c*c+i] count: inr c
E*-E-1 ICR E
JZ PAUSE
YES
|hl-*-hl+i|
| POP HL I
HI PAUSE II
I A^FF I
рфс] L00P6
pause: mvi a.offh
PUSH в
loop 6: mvi
loops: dcr
JNZ
ICR
JNZ
POP
B.OFFH
в
LOOP 5
A
LOOP 6
В
I BVF I LOOPS
Рис. 5. 57. Процедура COUNTER
A *• FF
PUSHBC
В FF
В «- В- 1 1
В = О? J
А *- А- 11
А = О? J
POP ВС
В АС загружается FF. Шестнадцатеричное число FF равно двоич-
ному 1111 1111 или десятичному 256
Регистр В до сего времени использовался для хранения информа-
ции о состоянии возбуждения обмоток двигателя. Для того, что-
бы использовать его для других целей, содержимое сохраняется
и запоминается в памяти по адресу, определяемому указателем
стека. В процессоре 8080 PUSH ВС сохраняет содержимое пары
регистров В и С
Загружается FF в регистр В
Содержимое В повторно уменьшается на единицу, пока не станет
равным нулю
После уменьшения содержимого В до нуля содержимое АС после-
довательно уменьшается на единицу, пока не станет нулем. Этот
процесс занимает сравнительно много времени, так как имеет
место на каждом шаге работы двигателя загрузка FF в регистр В
и уменьшение его содержимого до нуля
Когда требуемый интервал времени прошел, содержимое реги-
стра В восстанавливается и его значение становится равным со-
стоянию возбуждения обмоток двигателя. Содержимое регистра С
также во сстанавлив ается
Процедура длится 995 868 тактов. Однако время на один такт равно
0,5 мкс, а общее время на всю процедуру составляет около 0,5 с. При
загрузке в регистр В меньшего числа общее время ожидания будет
меньше.
9. 131
||IIETERMINE ||
(19)
X-1 | LXI H,X-1(10)
MOV A,C (5)
SUB E (4) ; ч
JC CSUBN (10)
YES
(SLEW),
| HL—HL+C~| [HL
(48)' I
(22)
(ACCEL)
NO
NO (
YES
CSUBN.'MOV A,C(5)
CPI N (7)
JNC SLEW (10)
ESUBN: MOV A,E
CPI N
JNC SLEW
NO
YES
E»N?
(21)
HL + N |
(3)ECEL)|
| HL~*~HL+E |
(48) f
accel: push в (11)
MVI B,OOH (7)
БАБ В (10)
POP В (10)
JMP WAIT (10)
slew: push в (h) бесее: push
MVI ' '
MVI
БАБ
POP В (10)
NOP (4)
B,OOH
C.N
В
(10)
MVI Б,OOH
БАБ Б
POP Б
JMP WAIT
Рис. 5.58. Процедура DETERMINE
5. Определение адресов памяти для данных временных интервалов
импульсов. Если содержимое регистра Е не равно нулю, программа пере-
ходит к процедуре DETERMINE. В этой процедуре из данных регистров С
и Е вычисляется адрес памяти, содержащей данные для расчета соответ-
ствующего интервала до следующего переключающего сигнала. Этот ад-
рес загружается в двойной регистр HL. Детали этой процедуры приведены
на рис. 5.58. Сначала при инициализации в регистр HL загружается началь-
ное значение Х-1; здесь X - первый адрес области памяти, содержащей
данные для расчета интервалов импульсов (см. рис. 5.51). Адрес памяти
может быть определен сложением числа (от 1 до 6) с начальным значе-
нием X-1, помещенным в HL.
Число, которое следует прибавить, определяется следующим образом.
Сначала устанавливается,пройдено пй более половины движения. Если
Е > С, то движение в первой своей половине, если С > Е, то во второй.
В первой половине решается, является ли С > 6 или С < 6. Из рис. 5.48
видно, что если С < 6, движение происходит с ускорением и индекс т для
Дгт равен С. Соответственно число, которое следует добавить к Х-1,
есть С.
Во второй половине решается, является ли Е > 6 или Е < 6. Из рис. 5.48
видно, что если Е < 6, то движение происходит с замедлением и индекс т
132
II WAIT ||
I aJ-n--1 MOV A,M (7)
J---Г7—1 LOOM
| A—A-1 | ICR A (5)
(5)
Рис. 5.59. Процедура WAIT
A=0?
(Ю)
JNZ LOOPUdO),
NO
YES JMP ROTATE (10)
для Дгт равен Е. Соответственно число, ко-
торое следует добавить к X—1, есть Е.
Если С > 6 в первой половине или Е > 6
во второй половине, то движение происходит
с постоянной частотой вращения, поэтому
число, которое следует добавить к X—1, рав-
но 6.
В кодах языка ассемблера число 6 обозна-
чено как N. Можно положить N равным дру-
гому значению, когда для достижения пос-
тоянной частоты вращения требуется исполь-
зовать большее или меньшее число шагов.
Числа в круглых скобках на рис. 5.58 яв-
ляются номерами состояний процесса. Их
следует обязательно принимать во внимание для расчета данных, опреде-
ляющих временные интервалы.
6. Процедура WAIT. Следующей стадией является процедура создания
интервалов импульсов или интервалов между предыдущим и последую-
щим сигналами переключения. Как показано на рис. 5.51, область памяти
от X до X + 5 используется для хранения данных о временных интервалах
импульсов.
Структурная схема рис. 5.59 показывает детали этой процедуры, а ком-
ментарий приведен ниже.
д <- л Данные, хранящиеся по адресу, определяемому регистром HL, зано-
сятся в АС
А <- д _ j Содержимое АС уменьшается последовательно, пока не станет рав-
д _ о , ным нулю. На этот процесс отводится определенное время. Когда
АС становится равным нулю, выполнение этой процедуры закан-
чивается и программа возвращается к процедуре ROTATE, кото-
рая посылает следуюцщй сигнал на переключение обмоток для
поворота двигателя на следующий шаг.
5.5.3. Нахождение чисел для определения длительности Импульсов
управления. Проблема определения длительности импульса управления
, заключается в определении данных, которые следует поместить в память
с адреса X. Их получают, исходя из числа шагов в каждой процедуре и
времени длительности каждого шага. Числа в круглых скобках на
рис. 559 задают количество шагов для микропроцессора 8080. Общее
число шагов в процедуре WAIT равно 15Q + 2, где б — данное, пересылае-
мое из памяти в АС. Количество шагов в процедуре ROTATE равно 56,
а для стадии счета равно 20. Число шагов в процедуре DETERMINE рав-
но 90 (100); число в скобках задает количество шагов для равномерного
вращения. Таким образом, общее число шагов S, выполняемых между
двумя последовательными сигналами на переключение, равно
Sm = + 177(178).
Мы можем заменить 178 на 177 для простоты последующих вычисле-
ний. Если один шаг длится 0,5 мс, длительность импульса управления
ДГт = (15бт + 177) х 05 х 10“в (с).
133
Таблица 5.1. Примеры длительности импульсов и данные для их получения
т Длительность им- пульса мс Qm Целая аппроксимация Шестнадцато рич- ное выражение
1 1,984 252,2 252 FC
2 1,460 182,9 183 В7
3 1,212 149,8 150 96
4 1,059 129,4 129 81
5 0,952 115,1 115 73
6 0,873 104,6 105 69
В табл. 5.1 приведен пример интервалов импульсов и чисел Qm, через
которые интервалы импульсов создаются в настоящей программе.
55.4. Общая программа. Общая программа на ассемблере для устрой-
ства 8080 приведена в табл. 5.2. Грамматика языка ассемблер приведена
в [5]. Эта программа может быть транслирована на машинный язык,
язык пользователя или транслятора ЭВМ. Значение каждого шага описано
после символа (;).
В примере запрограммированы пятнадцать этапов с использованием
тридцати байтов памяти, начиная с Y.
Таблица 5.2. Общая программа на ассемблере для устройства 8080
Метка Код Операнд Комментарий
ORG 8200H Начало с адреса 8200
RESET: MVI A,33H Загрузка 00110011 в АС
OUT DRIVEP Данные из АС передаются на выход
MOV B,A Данные из АС пересылаются в регистр В
LXI H, Y Двойной регистр HL загружается из Y
LOOP 1: MOV D,M Пересылка из Y в D
MOV A, D Пересылка из D в АС
CPI 2 А -2
JZ STOP Если А = 2, перейти к STOP
INX H HL *- HL + 1
MOV E.M Y + 1 пересылается в Е
MVI c,o Очистка С, С *- 0
PUSH H Сохранение HL
ROTATE: MOV A, D Пересылка из Db АС
CPI О А-О
JZ LEFT Если А = 0, перейти к LEFT
RIGHT MOV A, В Пересылка В в А
RRC Сдвиг А вправо
JMP STEP Переход к STEP
LEFT MOV A, В Загрузка В в АС
RLC Сдвиг А влево
JMP STEP Переход к STEP
STEP: OUT DRIVER Вывод А
MOV B, A Загрузка А в регистр В
COUNT: INP C Наращивание регистра С
DCR E Уменьшение регистра Е
JZR PAUSE Если Е = 0, перейти к PAUSE
DETERM: LXI H‘X-1 Загрузка X—1 в двойной регистр HL
MOV A,C
134
Продолжение табл 5.2
Метка
Код Операнд
Комментарий
SUB JC E CSUBN С-Е Если Е >С, перейти к CSUBN
ESUBN: MOV A, E
CPI N E-N
JNC SLEW Если Е > N, перейти к SLEW
DECEL: PUSH D'
MVI D, О 1 HL *- HL + Е
DAD D
POP D J
IMP WAIT Перейти к WAIT
CSUBN: MOV A.C
CPI N С -N
JNC SLEW Если С > N, перейти к SLEW
ACCEL: PUSH В
MVI в, О
DAD в *- HL + С
POP в
JMP WAIT
SLEW: PUSH В
MVI В, О
MVI C,N Г *- HL + N
DAD В
POP В
NOP Пустой оператор для соблюдения
числа тактов
WAIT: MOV А, М Процедура WAIT
LOOP4: DCR А А *- А - 1
JNZ LOOP4 Если А ¥= 0, перейти к LOOP4
JMP ROTATE Перейти к процедуре ROTATE
PAUSE: MVI A.OFFH Процедура PAUSE, А •*- 11111111
PUSH В
LOOP6 MVI B.OFFH В «- 11111111
LOOP5: DCR В В «- В - I
JNZ LOOP5 Если В =# 0, перейти к LOOP5
DCR А А «- А- 1
JNZ LOOP6 Если А ¥= 0, перейти к LOOP6
POP В Конец процедуры PAUSE
POP н Восстановление адреса памяти для
программы движения
INX н HL «- HL + 1
JMP LOOP1 Перейти к LOOP1
STOP: HLT
DRIVER: EQU 2 Выходной порт 2 используется для
выхода на инвертор двигателя
N: EQU 6 N «- 6
X: DB 252 Данные для генерации Дг i
DB 183 Данные для генерации Дт j
DB 149 Данные для генерации Дт з
DB 129 Данные для генерации Д?4
ГЗ 115 Данные для генерации Дг $
DB 104 Данные для генерации Д?в
Y: DB 1 1 Направление и число шагов для
DB Ю J 1-ю движения (против часовой
стрелки 10 шагов)
DB 1 Т Направление и число шагов для
DB 5 J 2-го движения (против часовой
135
Продолжение табл 5.2
Метка Код Операнд Комментарий
стрелки 5 шагов)
DB ° У Направление и число шагов для
DB 23 J 3-го движения (по часовой стрел- ке 23 шага)
DB 0 1 Направление и число шагов для
DB 15 J 4-го движения (по часовой стрел- ке 15 шагов)
DB 1 1 Направление и число шагов для
DB з Г 5-го движения (против часовой стрелки 3 шага)
DB 0 } Направление и число шагов для
DB 33 J 6-го движения (по часовой стрел- ке 33 шага)
DB 1 1 Направление и число шагов для
DB 18 J 7-го движения (против часовой стрелки 18 шагов)
DB 0 ) Направление и число шагов для
DB 5 J 8-го движения (по часовой стрел- ке 5 шагов)
DB 1 1 Направление и число шагов для
DB И J 9-го движения (против часовой стрелки И шагов)
DB 0 1 Направление и число шагов для
DB 60 J 10-го движения (по часовой стрел- ке 60 шагов)
DB 1 1 Направление и число шагов для
DB 29 J 11-го движения (против часовой стрелки 29 шагов)
DB 1 1 Направление и число шагов для
DB 9 J 12-го движения (против часовой стрелки 9 шагов)
DB 0 1 Направление и число шагов для
DB 1 Г 13-го движения (по часовой стрел- ке 1 шаг)
DB 1 г Направление и число шагов для
DB 25 J 14-го движения (против часовой стрелки 25 шагов)
DB 0 1 Направление и число шагов для
DB 9 J 15-го движения (по часовой стрел- ке 9 шагов)
DB END 2 Конец печатаемых данных
Глава 6.
МОМЕНТНЫЕ ХАРАКТЕРИСТИКИ И ПЕРИОД СЛЕДОВАНИЯ
ИМПУЛЬСОВ УПРАВЛЕНИЯ - ИЗМЕРЕНИЕ И ИСПОЛЬЗОВАНИЕ
ПРИ КОНСТРУИРОВАНИИ СИСТЕМ УПРАВЛЕНИЯ
В этой главе описаны методы измерений моментных характеристик, а
также рассмотрены зависимости между формой момента, уравнением ди-
намики и ускорением ШД, даны некоторые вопросы теории определения
136
периода следования импульсов управления при ускорении и замедлении,
которые могут быть использованы при конструировании системы.
6.1. ИЗМЕРЕНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
6.1.1. Т-6-характеристика и удерживающий момент. Исследуемый двига-
тель находится в стационарных условиях и запитывается нормированным
током по определенной схеме возбуждения, например одно- или двухфаз-
ной. В случае однофазной схемы возбуждения для запитки должна быть
выбрана одна из трех или четырех фаз двигателя. Положение ротора при
отсутствии нагрузки есть равновесие или конечное положение. Измеряется
зависимость между моментом, приложенным к валу, и отклонением от
положения равновесия. Как показано на рис. 6.1 (гдег — радиусе м,М—
масса груза в кг, W = 9,8 М в Н), внешние моменты создаются при помо-
щи шкива, струны и гирьки. Если масса гирьки равна нулю, ротор нахо-
дится в положении равновесия. Если масса увеличивается, принимая
значения W2, W3, . . ., то ротор поворачивается по часовой стрелке,
занимая соответственно угловые положения 0it 02, 03 ... На рис. 6.2
приведен график зависимостей моментов 7} = rW, от углов О,. При уве-
личении смещения момент постепенно достигает максимума в точке Ом.
Характеристика Т- О для углов, больших, чем Ом, показанная на рис. 6.2
пунктиром, не может быть измерена прибором, изображенным на
рис. 6.1.
В идеальном случае кривые характеристик Т-0 для каждой фазы (при
однофазном управлении) или каждой комбинации фаз (при двухфазном)
идентичны. Но в большинстве реальных двигателей наблюдаются ва-
риации, как это показано на рис. 6.3. Удерживающий момент должен
быть определен как минимум максимума статического момента. Это
определение идентично данному в 2.5.1: максимальный статический мо-
мент,- который может быть приложен к валу возбужденного двигателя
без последующего движения. На рис. 6.3 положение ротора отсчитывается
от положения равновесия для первой фазы, и видно, что для других фаз
Рис. 6.1. Устройство для измерения 7'-0-характеристак
137
оно не находится в нормированных положениях 2Ss, 4BS и тд. Определе-
ние точностей позиционирования было дано в 2.1.3.
Для определения положения ротора другими методами может быть
также использован оптический преобразователь или точный бесконтакт-
ный потенциометр.
6.1.2. Г-/-характеристика. Как правило, максимальный статический
момент возрастает с увеличением тока. Графически такая зависимость
при определенной схеме возбуждения показана на рис. 6.4; она назы-
вается TV-характеристикой. На рисунке сравниваются характеристики
для реактивного 1 и гибридного 2 ШД, причем угол шага у каждого из
них равен 1,8°. Момент у реактивного двигателя в отсутствие возбужде-
ния равен нулю и при низких значениях тока возрастает в зависимости от
него по параболе. При высоких значениях тока скорость роста момента
невелика из-за магнитного насыщения сердечника. В гибридном или в
двигателе с постоянными магнитами статический момент существует
даже в отсутствие возбуждения и называется фиксирующим моментом.
Зависимость Т-I в гибридных двигателях и двигателях с постоянными
магнитами близка к линейной.
6.2. ИЗМЕРЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Динамические характеристики ШД включают пусковые и выходные ха-
рактеристики.
138
Рис. 6.5. Механические сцепления: 1 - резина
6.2.1. Роль устройства сцепления при измерении динамических харак-
теристик. Измерение динамических характеристик проводится при стро-
гом соблюдении необходимых условий эксплуатации электронной и
механической аппаратуры, потому что, как это было показано в гл. 4,
динамическое поведение ШД зависит от момента инерции нагрузки и демп-
фирующих механизмов, используемых в механических и электронных
устройствах системы управления. При анализе деталей динамических ха-
рактеристик двигателя прежде всего необходимо определить метод изме-
рения и схему управления.
Одним из наиболее важных факторов в измерительной аппаратуре яв-
ляется сцепление между валом двигателя и измерителем момента. Суще-
ствуют три типичных устройства сцепления: с помощью резиновой втул-
ки (рис. 6.5, а), сильфона (рис. 65, б) и жесткая связь между валом и
нагрузкой (рис. 65, в). На рис. 6.6, а показаны различия в кривых вы-
ходного момента при использовании устройств сцепления. Испытывался
четырехфазный гибридный двигатель с двухфазным управлением. Схема
управления изображена на рис. 6,6, б. В качестве измерителя момента
использовался гистерезисный динамометр, показанный на рис. 6.18.
Хорошие выходные характеристики в широком диапазоне шаговых ча-
стот вращения получают при использовании резинового- сцепления, так
как колебания ротора гасятся эластичной резиной, используемой для
сцепления. Если же применяется жесткое или сильфонное сцепление, то
0,5 1 1,5 2 2,5 3 а)
Шаговая частота вращения, кГц '
Рис. 6.6. Механические характеристики для различных
° - сцепление с помощью резиновой втулки; д -
сцепление с помощью сильфона
S)
сцеплений:
жесткое крепление;
139
Шаговая частота вращения, Гц
Рис. 6.7. Зависимость выходного
момента от частоты вращения для
жесткого сцепления и сцепления с люф-
том:
1 - с зазором; 2 - без зазора
из-за несовершенства механизма
демпфирования колебаний ротора.
после частоты следования импульсов
управления 1200 Гц наступает вне-
запное снижение момента, который
становится равным нулю при частоте
около 1700 Гц. Эти ухудшения ха-
рактеристик наступают, вероятно,
сцепления, который не обеспечивает
Другим важным фактором, влияющим на выходные характеристики,
является люфт в сцеплении. Воздействия люфта на одношаговый отклик
и выходные характеристики описаны в [2]. Очевидно, что при одно-
шаговом отклике благодаря использованию люфта достигается его улуч-
шение как в снижении резких отклонений момента, так и в увеличении
скорости затухания колебаний. Влияния жесткого сцепления и сцепления
с люфтом на выходные характеристики реактивных двигателей показаны
на рис. 6.7. Для жесткого сцепления из-за собственных колебаний при ша-
говой частоте 140 Гц начинаются глубокие провалы момента, которые
пропадают на частоте около 1300 Гц. При использовании сцепления с люф-
том провал момента возникает при низких шаговых частотах. В диапазо-
нах около 160 и 220 Гц испытываемый двигатель не в состоянии ста-
бильно вращаться, если он нагружен. Следует заметить, однако, что мак-
симальная выходная шаговая частота достигается благодаря наличию
люфта между двигателем и нагрузкой.
6.2.2. Пусковые характеристики. Пусковыми характеристиками яв-
ляются зависимости момента сопротивления нагрузки для различных
частот, при которых двигатель может стартовать и останавливаться без
потери синхронизма. Последовательность импульсов (их 100 или 200),
используемая при измерениях, показана на рис. 6.8. При измерении пуско-
вых характеристик важно определить момент инерции на валу двигателя,
тип сцепления и схему управления. Пусковые характеристики понижаются
при увеличении момента инерции нагрузки, как это показано на рис. 6.9.
Следует определять не только максимальный, но и минимальный момент
нагрузки. Например (рис. 6.10) при частоте следования импульсов около
значения /0 двигатель не в состоянии стартовать из-за колебаний до тех
пор, пока к нему не приложен значительный момент сопротивления.
Следует отметить, что пусковые характеристики зависят от того, как
прикладывается тормозной момент. В случае, приведенном на рис. 6.11,
Рис. 6. 8. Последовательность импульсов управления постоянной частотой
140
Шаговая частота Вращения fg Шаговая часть Вращения
Рис. 6. 9. Изменение пусковых частот вращения прн изменении момента инер-
ций нагрузки:
1 - выходной момент; 2 - пусковые моменты
Рис. 6.10. Диапазон частот, в котором двигатель не запускается:
1 - запуск невозможен
сипа тяжести, приложенная к гире, создает постоянный во времени мо-
мент сопротивления на валу двигателя. Предположим, что в начале воз-
буждена фаза 1 и к валу двигателя приложен внешний момент , вызы-
вающий смещение 0у от положения равновесия (рис. 6.12). Как только
первый импульс поступит на коммутатор (инвертор), фаза 7 отключится
и вместо нее возбудится фаза 2. Момент двигателя примет значение
Т'у > Ту. Разница Т{ — Ту используется для ускорения двигателя. Если она
достаточна для ускорения и обеспечивает синхронизацию двигателя после-
дующими импульсами, то Ту принадлежит пусковому диапазону. Так как
при росте значения Ту возрастет смещение 0у, то разница моментов при
этом становится меньше и максимальная частота следования импульсов,
при которой двигатель может запуститься, становится ниже. При 0 = 02
две кривые пересекаются. Момент, создаваемый в этой точке, является
максимальным пусковым моментом, так как разница равна нулю и
Рис. 6. 11. Постоянный момент сопротивления, обеспечива-
емый силой тяжести:
1 - шаговый двигатель; 2-трос; 3- нагрузка
Рис. 6. 12. Момент двигателя, обеспечивающий запуск для случая нагрузки,
обеспечиваемой силой тяжести:
1 - разность моментов для ускорения нагрузки; 2 - положение равновесия
141
Рис. 6. 13. Система, в которой момент нагрузки при запуске, является стати-
ческим моментом трения:
1 - нагрузка; 2 - шаговый двигатель; 3 - металлический тросик
двигатель может запуститься только при минимальной частоте следования
импульсов. Из анализа рис. 6.12 можно заключить, что существует опре-
деленная разница между максимальным пусковым и статическим мо-
ментами. При синусоидальной модели зависимости статического момента
от положения ротора отношение удерживающего момента к максималь-
ному пусковому значению равно V21
В случае, показанном на рис. 6.13, момент сопротивления нагрузки при
пуске является статическим моментом трения, т.е. начальное положение
ротора может быть любым в некотором диапазоне около положения рав-
новесия, в котором абсолютное значение статического момента двигателя
меньше момента трения нагрузки (рис. 6.14).
На рисунке начальное положение ротора ШД, расположенное дальше
всех слева от положения равновесия, соответствует наибольшей разно-
сти моментов, которая возникает при переключении обмоток, и самому
высокому пусковому моменту. С другой стороны, в крайней справа
от положения равновесия начальной точке имеет место наименьшая
разность моментов. Измерения пускового момента двигателя должны
проводиться в наихудших условиях, в которых создаются минимальные
разности моментов.
6.2.3. Зависимости выходного момента. Испытываемый двигатель на-
чинает движение в пусковом диапазоне частот вращения и разгоняется при
небольшой нагрузке вплоть до нормированной шаговой частоты, при ко-
торой измеряют выходной момент. Когда при этой частоте вращения
момент нагрузки постепенно возрастает, двигатель при некотором его
значении выпадает из синхронизма. Этот момент нагрузки и является вы-
ходным моментом при нормированной шаговой частоте вращения. За-
висимость выходного момента от шаговой частоты вращения приведена
на рис. 6.6 или 6.7. Как правило, выходной момент при низких шаговых
частотах вращения близок к пусковому (рис. 6.15).
Существуют, различные способы приложения момента нагрузки при
измерении выходного момента. Часто используют фрикционный тормоз,
142
Момент
Фаза 1 Фаза 2
Шаговая частота вращения
Р и с. 6. 14. Момент двигателя, обеспечивающий запуск, для случая нагрузки
статического трения:
1 - максимальная разность моментов; 2 - минимальная разность моментов;
3 - положение равновесия; 4 - диапазон трения нагрузки
Рис. 6. 15. Зависимости пускового (7) и выходного (2) моментов от частоты
следования импульсов управления
а)
Рис. 6. 16. Измерение мо-
ментов ШД с помощью
шкал динамометра:
а - с двумя шкалами;
б - с одной шкалой
Рн с. 6.17. Измерение моментов ШД с помощью тензодатчиков:
1 - мост 1; 2 - мост 2; 3 - дифференциальный усилитель; 4 - тензометры для
моста 1; 5 - двигатель; 6 - тензометры для моста 2
содержащий груз, шкив и динамометр. Момент нагрузки измеряется по
одной или двум шкалам динамометра, как это показано на рис. 6.16.
Момент нагрузки определяется:
в первом случае (рис. 6.16, а):
TL =/?(<?.- <?з), (6.1)
где R — радиус шкива, м; qx — показания шкалы 1, Н; q-i — показания
шкалы 2, Н;
во втором (рис. 6.16, б):
TL = Л(9,8М - q), У JLJ II (6.2) где М — масса груза, кг; q — показания шкалы, Н. Часто для измерения моментов применяют тензодатчики, как в приборе, показанном на рис. 6.17 [3]. 1 ^'][О _ I ^4.0 -кГ Х" ч. Рис. 6.18. Гистерезисный ди- намометр: 1 - испытываемый двига- тель
144
Винт с рифленой головкой устанавливает натяжение тросика, который
управляет моментом трения, а тензодатчики включаются по мостовой
схеме для определения разности натяжений Т\ - Тг. Прибор может быть
использован и для измерения пускового момента. Однако проблемы
создания начальной нагрузки такие же, как и в приборе, показанном
на рис. 6.13.
Для измерения выходных моментов ШД может быть использован ги-
стерезисный динамометр (рис. 6.18), предназначенный для измерения
динамического момента. Однако он не всегда подходит для ШД, имеющих
маленький угол шага из-за зубчатости механизма, создающего момент и
использующего гистерезисные явления [3].
6.3. УРАВНЕНИЕ ДВИЖЕНИЯ И УСКОРЕНИЯ
6.3.1. Уравнение динамики шагового двигателя. Когда ШД синхронизи-
руется с последовательностью импульсов управления, момент, создавае-
мый им, уравновешивает момент нагрузки, который представляет собой
сумму моментов, обеспечивающих ускорение нагрузки и трение. Это
утверждение может быть выражено в виде фундаментального динами-
ческого уравнения
do)
тм = J---- + Du + Tf, (6.3)
dt
где тм — момент, создаваемый ШД; J — момент инерции системы ротор-
нагрузка; и — угловая частота вращения ротора; D — коэффициент вяз-
кого трения; Tf — момент трения, не зависящий от частоты вращения.
Момент ШД тм зависит от частоты вращения, магнитодвижущей си-
лы, угла и других параметров двигателя, как и в случае статического
момента. Однако здесь он рассматривается как создаваемый определен-
ным двигателем с определенной системой управления, работающей по
определенной схеме. При использовании уравнения (6.3) сделаны сле-
дующие допущения: не используется механический демпфер; момент
двигателя не имеет колебательных составляющих при рассматриваемых
частотах вращения.
Первый член в правой части уравнения задает момент, необходимый
для ускорения системы ротор—нагрузка. Когда момент ротора передается
нагрузке с помощью шестеренок, ремней или иных передаточных меха-
низмов, момент инерции не является моментом самой нагрукзи, но дол-
жен быть приведен к валу двигателя. Формулы приведения момента к
валу двигателя даны в 6.5.1. Для вычислений используется система
единиц СИ.
В системе СИ единицей угловой частоты вращения ы является рад • с~1.
Однако на практике принято выражать частоту вращения в терминах
шаговых величин (Гц, шаг с-1) и уравнение движения в этом случае
имеет вид
df
тм = 0sJ — + 9sDf + Tf, (6.4)
dt
где es — угол шага, рад; f - шаговая частота вращения, шаг • с-1.
10 — Зак. 650 145
Р н с. 6. 19. Моменты сопротивления сухого и вязкого трения в зависимости
от частоты вращения:
1 - статический момент трения Ts при запуске; 2 — момент вязкого трения;
3 - статический момент трения Ту
Р н с. 6. 20. Изменение статического момента трения:
1 - упругая шкала; 2 - сцепление; 3 - ютлтепь
6.3.2. Моменты трения. Момент трения, возникающий во вращающемся
объекте, изменяется в зависимости от частоты вращения, как это
показано на рис. 6.19. Статический момент трения Ts существует при
пуске двигателя и после запуска он уменьшается, а затем возрастает
пропорционально частоте вращения. Компонента, пропорциональная
частоте вращения, соответствует второму члену правой части (6.3) и
возникает из-за вязкого трения. Слагаемое из (6.4), обозначенное на
рисунке как Ту, соответствует последнему члену в (6.3). Статический
момент трения Ts не имеет отношения к (6,3) или (6.4), Tai; как эти
уравнения описывают движение двигателя после запуска. Тем не ме-
нее Ts является важным фактором, влияющим на пусковые характери-
стики.
На рис. 6.20 показано, как измерить Ts и Ту. Прибор состоит из тро-
сика, намотанного на шкив, прикрепленный к нагрузке. Свободный ко-
нец тросика связан с динамометром, шкала которого проградуирована
в килограммах. Если сила, измеренная непосредственно перед вращением,
равна Fs, а после начала вращения Ту, тогда
Ts = rFs-, (6.5)
Г/ = rFf, (6.6)
где г - радиус шкива, м.
6.3.3. Ускорение. Здесь рассмотрена связь между моментом двигателя
и ускорением для некоторых простых случаев.
1) Линейное ускорение. Если членом, описывающим вязкое трение,
можно пренебречь, то (6.3) примет вид
rfco
тм - Tf = J ~ . (6,7)
146
Рис. 6. 21. Линейное ускорение от
О>1 До COj за время Zj - Z2
Если при рассматриваемых значе-
ниях частот вращения момент дви-
гателя постоянен, то интегрирова-
ние уравнения (6.3) дает
w = { {тм - Tf)/j}t + ,
или шаговая частота
Время
(6-8)
тм - Tf
OsJ
t + fi,
(6-9)
где co — угловая частота вращения; — шаговая частота, взятые до на-
чала ускорения.
Таким образом, двигатель может ускоряться с постоянным ускоре-
нием (рис. 6.21), которое называют линейным.
Пример 1. Какой момент двигателя тм требуется для ускорения на-
грузки с моментом инерции ICC4 кг • м2, с coi = 100 до со2 = 300 рад • с-1
за время 0,1 с при Tf = 0,05 Н • м?
Решение
д7
dtp
dtx
W1 300-100
— = -----------= 2 • 103 рад • с 1;
0,1
(6.10)
dtp
тм = J-------+ Tf = Iff4 х 2 х Ю3 + 0,05 = 0,25 Н • м.
dt
(6.11)
Пример 2. Какой момент двигателя тм необходим для ускорения на-
грузки с моментом инерции 2 • 10“4 кг • м2 отД = 500 Гц до /2 = 1500 Гц
за 50 мс? Нагрузка трения Tf = 0,03 Н • м. Угол шага равен 0S = 1,18° =
= 3,1416 - 1СГ2 рад.
Решение:
= 2-^ = И00-500 = 2 1()4) (612)
dt Д/1 0,05
df
тм = esT—+ Tf = 3,1416х Iff"2 х2х Iff-4 x2x (6.13)
dt
x Ю4 + 0,03 = 0,156 H • m.
Пример 3. Каково максимальное ускорение нагрузки с моментом инер-
ции Iff"4 кг • м2, создаваемое двигателем с моментом 0,2 Н • м? Сопро-
тивлением трения можно пренебречь. Угол шага равен 2° = 3,491 • 10-2 рад.
10* 147
Решение:
ускорение
dw 0.2
= ^м/J = г = К? рад с"2; (6.14)
dt------------------------------------------------------------2 X 10
df 1 dw 103 „
—- =----------= --------------- = 2,865 x 104 шаг • с-2. (6.15)
dt 0S dt 3,491 х Ю"2
2) Экспоненциальное ускорение. Когда вязким трением пренебречь
нельзя, уравнение движения записывается в виде
V — + Wf - (тм ~ Tf) = 0. (6.16)
dt
Если момент двигателя не является функцией частоты вращения или
шаговой частоты, то решение дифференциального уравнения имеет вид:
= тм - Tj_ _ / тм - Tf _ \ (D/J)t 6 17)
0S \ 0S )
где f 1 — начальная шаговая частота.
Таким образом, возможное ускорение уменьшается с ростом шаговой
частоты.
Если момент двигателя тм уменьшается с ростом шаговой частоты по
линейному закону
тм = Тмо - of, (6.18)
то максимальное ускорение также является экспоненциальным.
3) Торможение. Если последовательность импульсов управления вне-
запно оборвалась в момент, когда двигатель имел высокую частоту вра-
щения, он сразу не останавливается и продолжает движение. Для того что-
бы двигатель остановился без поворота, он должен быть сначала затормо-
жен до той частоты вращения, при которой он сможет остановиться.
Если шаговые импульсы управления появляются во времени с не-
большим запаздыванием по отношению к той частоте, которая требуется
для поддержания нормальной частоты вращения, то создаваемый ШД
момент тм будет отрицательным. Отсюда уравнение движения
df
V — + W + (7? - ТМ) = 0;
dt
(6.19)
тм < 0
Если член, описывающий вязкость трения, мал, то частота вращения
снижается линейно
Г= fs = Tf ~ ТМ t, (6.20)
0s J
где fs — шаговая частота до торможения при t = 0.
148
6.4. ОПРЕДЕЛЕНИЕ ДЛИТЕЛЬНОСТИ И ЧАСТОТЫ СЛЕДОВАНИЯ
ИМПУЛЬСОВ УПРАВЛЕНИЯ
Ниже рассмотрена теория, позволяющая определить длительность и час-
тоту следования импульсов управления.
6.4.1. Учет пусковых характеристик. Использовать для анализа пуско-
вых возможностей ШД (6.3) сложно, так как при вычислении момента
двигателя следует принять во внимание значение тока в обмотках и дви-
жение ротора. Поэтому рассмотрим пусковые возможности двигателя,
используя характеристики пускового момента. Как было показано в
6.2.2, пусковая частота вращения является функцией момента инерции
системы нагрузка — двигатель и изменяется в зависимости от способа
приложения нагрузки.
Поэтому необходимо учесть пусковые характеристики для той нагруз-
ки, при которой двигатель начинает движение. Предположим, что из
анализа зависимости пускового момента следует, что двигатель может
запускаться и останавливаться без сбоев при частоте следования импуль-
сов и периоде следования импульсов, равном 1/У1, как показано на
рис. 6.22, а. При вычислении длительности импульсов управления в этом
случае для ускорения имеет смысл считать период равным l//"i, как на
рис. 6.22, б, и определить изменение периода импульсов управления, при-
нимая во внимание пусковые характеристики двигателя.
6.4.2. Теория изменения периода импульсов управления при линей-
ном ускорении двигателя. Рассмотрим случай линейного ускорения
при следующих условиях: рассматриваемый ШД способен запускаться
при частоте следования импульсов Ут; двигатель можно разогнать при
ускорении0, шаг-с-2, до требуемой шаговой частоты fs.
Первое условие связано с пусковыми характеристиками, в второе —
с выходными.
Положим, что шаговая частота меняется непрерывно по закону
f=g+0t, (6.21)
что показано на рис. 6.23 сплошной линией. Это значение будет являть-
ся для двигателя командой по частоте вращения, но ее реальный про-
филь может быть такой, как показано на этом же рисунке пунктиром.
Моменты появления импульсов управления обозначим
f 1 = 0, .. .tm ...
Так как угол поворота для каждого импульса, начиная от да-го до
(т + 1)-го, равен углу шага, то площадь каждой трапеции А, В, С, Д ...
должна быть равна одному шагу.
А
ПП I I I I L П III.....................................IIIIL
время
а) б)
Рис. 6. 22. Управление с постоянной частотой вращения (о) и с ускоре-
нием (б)
149
Рис. 6.23. Длительность импульсов при
линейном ускорении
Теперь определим периоды импуль-
сов Atm:
ДОи = tm + t - tm (6.22)
и типичную частоту следования им-
пульсов fm для периода Д/т
/ш = 1/Дгш. (6.23)
Это идентично значению f в уравнении (6.21) при t = гт+Дг,и/2
или средней точке каждого периода импульса.
Теперь определим значение g в (6.21) таким образом, чтобы f в мо-
мент t = Atj/2 была равна Л. Так как Aft - первый период должен
быть равен 1/fi, уравнение (6.21) дает
ДЧ 1
/i = g + P-= g+P----- •
2 2ft
(6.24)
Соответственно g определяется как
£ = Л - — . (6.25)
2ft
Моменты появления импульсов tm могут быть определены из того,
что площадь трапеции abed равна т — 1 шагам; получаем уравнение
g + {(?+/3rm)} tm= 2(т- 1). (6.26)
Для tm получаем квадратное уравнение
Pt2m + 2gtm - 2(т - 1) = 0, (6.27)
откуда
tm = (V^ + 2(w- 1)0 -g)/0. (6.28)
Периоды импульсов задают уравнением
Ыт = tm + 1 - tm = { s/gi - 2mp - yJgi-2(m-\)& Jfl. (6.29)
Это математически эквивалентно уравнению
Дгт = ----------------------------- , (6.30)
у/ g2 + 2m 0 + y/g2 + 2(т- 1)0
которое позволяет выполнять математические расчеты с меньшей ошиб-
кой. Таким образом, типичной шаговой частотой для каждого интерва-
150
Рис. 6. 24. Анализ ускорения ШД. Так как fs превышает fs при определении
ее из (6.31), значения Дг$,ДГб - • полагают равными llfs
ла будет
fm = (y/g1 + 2т0 + 7g2 + 2 (w-1)0) /2. (6.31)
Значения Дг>п и fm для т = 1, 2, 3 ..., могут быть определены соот-
ветственно из (6.30) и (631). Но если /,п становится равной или пре-
вышает fs при т = М, то периоды импульсов и шаговая частота должны
быть положены соответственно равными l//s и fs, а последующие пе-
риоды становятся равны l//s. Этот момент поясняет на примере
рис. 6.24.
Пример. В таблице 6.1. заданы периоды испульсов для следующих
условий:У0 =500Гц; fs = 2000Гц; 0 = 10s шаг-с-2.
Для достижения необходимой шаговой частоты вращения требуется
двадцать шагов.
6.4.2. Расчеты достижения необходимой частоты вращения за М им-
пульсов. На рис. 6.25 показана зависимость частоты следования и момен-
та появления импульсов управления. В этом случае алгоритм управле-
ния, задаваемый (6.6), обеспечивает достижение необходимой частоты
вращения на импульсе М Atm = l/fs для т >М. Проанализируем алго-
Таблица 6.1. Моменты появления, периоды импульсов
и шаговые скорости при запуске и ускорении 10s шаг-с"2
с частотой от 500 до 2000 Гц
т tm< мс Дг»;, мс Ли. Гц т Гт, мс Дг»*, мс Ут, Гц
1 0 2,000 500 12 11,362 0,638 1568
2 2,000 1,483 674 13 12,000 0,613 1631
3 3,483 1,234 810 14 12,613 0,591 1691
4 4,718 1,080 926 15 13,205 0,572 1749
5 5,798 0,972 1028 16 13,776 0,554 1805
6 6,770 0,892 1122 17 14,330 0,538 1860
7 7,662 0,828 1208 18 14,868 0,523 1913
8 8,490 0,776 1288 19 15,391 0,509 1965
9 9,267 0,734 1363 20 15,900 0,500 2000
10 10,000 0,697 1435 (21) 16,400
11 10,697 0,665 1503
151
Рис. 6. 25. Изменение частоты вра-
щения при ускорении за время
ритм управления, при котором дви-
гатель начинает движение с началь-
ной шаговой частотой и достига-
ет fs на импульсе М. Полученное
ниже уравнение для алгоритма уп-
равления может быть использовано
для определения моментов появления и периодов импульсов управления
при линейном ускорении.
Из рис. 6.25 видно, что f в уравнении (6.21) становится равной необ-
ходимой шаговой частоте fs в момент t т, отсюда
= g + 0tM.
(6.32)
Из (6.28) имеем
fitM = y/g2 + 2(m- 1)0 -g, (6.33)
следовательно,
fs = y/g2+2(M-l)0, откуда находим необходимое ускорение 2(М- 1) (634) (635)
Исключая g из (6.24) и (6.35), получим квадратное уравнение
-^-+ (2M—3)0—(f2 -f2) = О,
из которого ускорение
V(2M- 3)i+ (fs/fil2- 1 + (2M — 3)
(6.36)
(6.37)
Моменты появления и периоды импульсов управления могут быть
найдены соответственно из (6.28) и (6.30) с 0, задаваемой (6.37), и
g — (6.25). Можно получить более простые уравнения, используя fs
вместо g.
Из (6.34) получаем
g2 =f2-2(M-l)0. (6.38)
152
Таблица 6.2. Моменты появления, периоды импульсов
и шаговые частоты вращения при запуске с Л от 500 до 2000 Гц на 20-м импульсе
управления; ускорение равно 101075 шаг-с-2
т tm > мс ДОи.мс fm, Гц т tm, мс мс fm, Гц
1 0 2,000 500 12 11,326 0,635 1576
2 2,000 1,480 676 13 11,960 0,610 1638
3 3,480 1,230 813 14 12,570 0,589 1699
4 4,710 1,076 929 15 13,159 0,569 1758
5 5,786 0,968 1033 16 13,728 0,551 1814
6 6,754 0,888 1126 17 14,279 0,535 1869
7 7,642 0,824 1213 18 14,814 0,520 1923
8 8,466 0,773 1294 19 15,334 0,506 1974
9 9,239 0,730 1370 Af=20 15,840 0,500 2000
10 9,969 0,694 1442 (21) 16,340
11 10,663 0,662 1510
(6.39)
Подстановка этого уравнения в (6.28), (6.30) и (6.31) дает следую-
щие результаты.
Моменты появления импульсов управления
. _ 2(m- 1)
—~ ~ — —-------ZZZZZZZZZZZZ"
V//- 2(М- т)0 + V//- 2(М- 1)0
Периоды импульсов управления
(6.40)
- 2(М- т-1)0+ >///- 2(М — т)Р
Шаговые частоты вращения
Ля = -±-= 1)0+ у//-2(/И- ж)0 |/2 (6.41)
при т = 1 ... (М- 1).
Моменты появления, периоды, частота импульсов управления для
т > Л/определяются следующим:
tm - tM+ (m-Af) lfs; (6.42)
Ыт = llfs- (6.43)
fm = fs- (6-44)
Пример. В табл. 6.2 даны периоды импульсов управления и шаговая
частота для случая f\ = 500 Гц, f2 - 2000 Гц, М = 20. Ускорение 0, най-
денное из (6.37), равно 101075 шаг с“2.
6.43. Линейное торможение. Простейший путь определения изменения
периодов импульсов управления для торможения — это использовать
ту же очередность, но в обратном порядке. Однако так как обычно тор-
можение должно выполняться быстрее, чем ускорение, и конечный пе-
153
Рис. 6. 26. Длительность импульсов
управления при линейном торможении
0 12 3 4 N=5
риод импульса может быть короче начального, необходимо вычислить
новые периоды импульсов управления для торможения. В этом случае
можно использовать результаты (6.35) со ссылкой на рис. 6.26. Уско-
рение торможения у, при котором затрачивается N импульсов и период
последнего импульса равен 1//1, задается соотношением
2(// -У2)
7 = -" - - - - ------------
V(2AT-1)2+ (Л//1)-1+ (2ЛГ-1)
где /1 - конечная шаговая частота; fs — шаговая частота нормального
вращения.
Используя значение у, периоды импульсов и частоты вращения вы-
числяют так:
Д^+И= 2/{у/7-2и7 + 1) 7 j;
(6.46)
(6.47)
fd+n ~ —----
Д^+n
р/2-2«7 + х/Л2-2(« - 1)7 }/2,
где d — номер конечного импульса управления до начала торможения.
Пример. В табл. 6.3 приведены периоды импульсов и шаговые часто-
ты, рассчитанные при следующих условиях: fs = 2000 Гц; = 600 Гц;
ЛГ=15.
Ускорение торможения, полученное из (6.45), 7 = 125142 шаг-с-2.
Таблица 6.3. Пример периодов импульсов при лилейном торможении
с шаговой частотой вращения от 2000 до 600 Гц за 15 импульсов
т &td+n> мс /d+л.Гц т Alrf+n. мс fd+n. гп
0 0,500 2000 8 0,687 1456
1 0,508 1968 9 0,731 1368
2 0,525 1904 10 0,786 1273
3 0,544 1837 И 0,855 1170
4 0,566 1767 12 0,946 1057
5 0,590 1695 13 1,074 931
6 0,618 1619 14 1,275 784
7 0,649 1540 15 1,667 600
154
Рис. 6. 27. Линейная аппроксимация выходного момента:
1 - аппроксимация; 2 - реальная зависимость
Рис. 6. 28. Длительности импульсов управления при экспоненциальном уско-
рении
6.4.4. Экспоненциальное ускорение. В большинстве случаев выход-
ной момент понижается с увеличением шаговой частоты. Если предполо-
жить, что он равен верхнему пределу момента, необходимого для вра-
щения и ускорения нагрузки, движение после запуска должно удовлет-
ворять соотношению
—- + D0sf + Тд <твых. (6.48)
dt
Пусть момент, создаваемый двигателем, аппроксимируется выраже-
нием
гм = ТМо - af (6.49)
в рабочем диапазоне частот вращения, как показано на рис. 6.27, и рас-
считанных для этого случая периодах импульса управления. Тогда урав-
нение движения примет вид
J0s d_L + D0s f + Тд = TMf) - af. (6.50)
dt
Перепишем (6.50)
J8S + (D0S - a)f - (TM0 - To) = 0, (6.51)
dt
его решением является
/=g+ (Z^_£L-gUl-exp(-^r)l. (652)
\ D0s+a /I ' J0s ')
Вид f как функции t показан на рис. 6.28. (На рисунке также показа-
ны значения периодов импульсов управления. Здесь g — это значение f
155
при t = 0 и ее следует определить так, чтобы первый период импульса
управления стал равен 1/Д, как в случае линейного ускорения. Значе-
ние fi — это шаговая частота, при которой двигатель может запустить-
ся без сбоя.
Интегрирование (652) дает угол поворота X, выраженный в шагах
х= ‘sfdt = +
о V к /
+ Г W exp (- -A-r) - 1 k (6-53)
\ К /\К ) I \ j6s / J
где
K=a+6SD. (6.54)
Так как X должен быть равен одному шагу при t = 1//\, то
тМо ~ г<> _ ( _j _ тМо ~ тоК \ /
К k fiK /\JOS //
(6.55)
ЛГ(Г) = t
\ К /
откуда получаем выражение для X в виде
( Тм° ~ Т° _
\ fiK
exp(-Kt/J0s) - 1
exp(-K/j6sfi)-l
(6.56)
Моменты появления импульсов управления могут быть получены из
решения уравнения
X(tm)-m = O, (657)
где m = 1,2, 3,4...
Периоды и частоты следования импульсов соответственно равны
АЪи ~ ^т+1 ~ (6.58)
fm = 1/ДГш. (659)
Их можно определить с помощью ЭВМ, используя небольшую про-
грамму. Начальное ускорение определяется соотношением
Рнач ) = {(.rMo-T0)/K-g}x
\dt I f=0 L 1
x (K/jes~) exp (-К/J6sfx).
(6.60)
156
Таблица 6.4. Пример периодов пмпульсов при экспоненциальном ускорении
ГН Гт,мс Д1т, мс fm, ГЦ т 1т, мс Д1т, мс fm, Гц
1 0 2,000 500 15 13,737 0,629 1590
2 2,000 1,495 669 16 14,366 0,612 1633
3 3,495 1,257 796 17 14,978 0,597 1675
4 4,752 1,109 902 18 15,575 0,583 1715
5 5,862 1,007 993 19 16,159 0,570 1753
6 6,869 0,930 1076 20 16,729 0,559 1790
7 7,798 0,870 1150 21 17,287 0,548 1826
8 8,668 0,821 1218 22 17,835 0,537 1861
9 9,489 0,781 1281 23 18,373 0,528 1894
10. 10,270 0,746 1341 24 18,901 0,519 1926
11 11,016 0,716 1396 25 19,420 0,511 1958
12 11,732 0,690 1448 26 19,930 0,503 1988
13 12,423 0,668 1498 27 20,433 0,496 2018
14 13,090 0,647 1545 28 20,929 —
В табл. 6.4 приведен пример вычислений при следующих условиях:
Максимальный момент, 7д/о, И-м................0,4
Статическое трение, Го, Н-м...................0,05
Наклон аппроксимирующего моментам,
Н-м-с-шаг^1 ..................................5 • 10“5
Момент инерции/, кг-м2........................10-4
Угол шага 0j, рад.............................0,031416
Коэффициент вязкого трения D, Н-м-с-рад-1.....10~э
Пусковая частота Л>Гц.........................500
Начальное ускорение для этого случая 0Нач, шаг-с-1 95 921,2
6.5. ПРИЛОЖЕНИЕ - ЭКВИВАЛЕНТНЫЙ МОМЕНТ ИНЕРЦИИ,
ПРИВЕДЕННЫЙ К ВАЛУ .ДВИГАТЕЛЯ
1. Передача с помощью ремня или шестерен. Если момент двигателя пе-
редается с помощью шестерен или ремня и шкивов, как показано на
рис. 6.29, общий момент инерции, отнесенный к валу двигателя, равен
( Zi V
J = I — I /j +/1 (6.61)
' Z2 /
или
/ Di V
J = 1 — J2 +J1,
\d2 !
(6.62)
где J — общий момент инерции на валу двигателя; — момент инер-
ции шестерни 1 или шкива 1; J2 — момент инерции на валу нагрузки;
нагрузки вала и шестерни 2 или шкива 2; Zx — число зубьев в шестер-
не 1; Z — число зубьев в шестерне 2; Dx — диаметр шкива 1; D2 — диа-
метр шкива 2.
2. Подъем груза (рис. 6.30). Если двигатель поднимает груз массой М
с помощью шкива с моментом инерции /1, то общий момент инерции,
157
2
Рис. 6. 29. Передача момента с помощью шестерен или шкива с ремнем:
I - нагрузка; 2 - шестерня 2; 3 - двигатель; 4 - шестерня 1; 5 - шкив 2;
6 - шкив 1
Рис. 6. 30. Подъем груза с помощью ремня:
1 - нагрузка; 2 - шкив; 3 - двигатель
Рис. 6. 31. Линейное движение груза с помощью ремня:
1 — шкив (момент инерции /]); 2 - двигатель
приведенный к валу двигателя, равен
J=Ji+—MD2. (6.63)
4
3. Перемещение груза с помощью ремня (рис. 6.31)
J = 2Ji + — MD1, (6.64)
4
где /1 — момент инерции каждого из шкивов, кг-м2; D — диаметр
шкива, м; М — масса груза и шкива, кг.
4. Линейное движение с помощью ведущего винта и шестерен. Если
рабочий предмет и стол двигаются с помощью шестерен и ведущего
винта, как показано на рис. 6.32, общий момент инерции, приведен-
ный к валу двигателя, равен
Z1 X ( р Z ! X2
— I (Л+/з) + М ~-----L
Z2 I \2я Zi
(6.65)
где Ji — момент инерции шестерни, соединенной с ротором, кг-м2;
Jj — момент инерции шестерни, соединенной с ведущим винтом,кг-м2;
/з — момент инерции винта, кг-м2; — число зубьев у шестерни, со-
единенной с ротором; Z2 — число зубьев у шестерни, соединенной с
158
Рис. 6. 32. Линейное движение стопа и детали с помощью ведущего винта
и шестерен:
1 — деталь; 2 - стол; 3 - шестерня 2; 4 — шаговый двигатель; 5 - шестерня 1
ведущим винтом; М — масса предмета и стола, кг; р — шаг ведущего
винта, м.
Глава 7
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
С ОБРАТНОЙ СВЯЗЬЮ
7.1. ОГРАНИЧЕНИЯ УПРАВЛЕНИЯ БЕЗ ОБРАТНОЙ СВЯЗИ
И НЕОБХОДИМОСТЬ УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ
В системах управления, рассмотренных в гл. 5, импульсы управления
поступают от внешнего источника, и принято допущение, что ШД в со-
стоянии среагировать на каждый из них. Этот способ относится к уп-
равлению без обратной связи. Он имеет свои преимущества и широко
используется в управлении частотой вращения либо позиционированием.
Однако в таком случае возможности ШД ограничены. Например, ШД
с управлением без обратной связи может пропустить импульс управ-
ления, если частота следования импульсов или инерции нагрузки слиш-
ком велика. Более того, движение двигателя с управлением без обрат-
ной связи имеет тенденцию становиться колебательным.
Возможности ШД могут быть в большой степени расширены, если
использовать обратную связь по положению и (или) по частоте враще-
ния для определения требуемой фазы (фаз) и времени их включения.
Тогда уже ШД станет работать как вентильный двигатель. В управле-
нии с обратной связью необходим датчик положения для определения
положения ротора. В настоящее время в качестве таких датчиков наи-
более часто применяют оптические, которые обычно устанавливают на
валу двигателя. Механизм и принцип работы оптического датчика объяс-
няется далее (см. рис. 7.10 и 7.11). В более современных системах вмес-
139
то аддитивного механического датчика положение ротора определяют
по форме кривых токов в обмотках двигателя (вентильные двигатели
без явновыраженного датчика положения ротора).
Управление с обратной связью предпочтительнее не только потому,
что исключает ошибки в совершении шага. Движение ротора более
ровное и можно достигнуть высокой шаговой частоты (частоты
приемистости).
7.2. УГОЛ КОММУТАЦИИ
До анализа деталей систем управления с обратной связью проанализи-
руем влияние угла коммутации фаз обмотки ШД.
7.2.1. Одношаговый угол коммутации и большие углы включения.
Предположим, что при системе управления с обратной связью, изобра-
женной на рис. 7.1, ШД начинает движение. Оптический датчик опреде-
ляет положение ротора и передает информацию логическому блоку,
который, используя информацию о положении ротора, определяют фа-
зу (или фазы), которую необходимо возбудить. Соотношение между
настоящим положением ротора и фазой (или фазами), которую сле-
дует возбудить, определяется в терминах угла коммутации. В примере
мы имеем дело с трехфазным двигателем, и при однофазном управлении
необходима последовательность возбуждения фаза 1 2 -+ 3 ... Сейчас
возбуждена фаза 1 и ротор находится в положении равновесия, соответ-
ствующем этой фазе. Затем возбуждается фаза 2, а 1 отключается
для того, чтобы двигатель начал движение. Угол коммутации в этом
случае равен одному шагу. Как только датчик положения определит,
что ротор занимает положение равновесия для фазы N, логический блок,
работающий с одношаговым углом коммутации, генерирует сигнал на
возбуждение фазы 7V+ 1 для продолжения движения. Таким образом,
ШД, управляемый системой с обратной связью, работает как вентиль-
ный двигатель постоянного тока, в котором обмотка (или обмотки),,
требуютциа возбуждения, выбираются по сигналам датчика положения
ротора.
Частота вращения ШД, управляемого системой с обратной связью,
меняется с нагрузкой, как показано на рис. 7.2. Чем больше нагрузка,
тем меньше частота вращения. Однако на практике одношаговый угол
коммутации не используется, так как в этом случае нет уверенности в
продолжении движения, поскольку существует момент трения. Причи-
ны здесь следующие. Предположим, что ротор двигается к положению
равновесия фазы, возбужденной в настоящий момент. Так как стати-
ческий момент при приближении ротора к положению равновесия пони-
жается, то двигатель может остановиться до положения равновесия в
той точке, где статический и момент трения равны и противоположно
направлены. Теперь, так как угол коммутации равен одному шагу, сле-
дующая фаза не возбудится, а это означает, что ротор не будет двигать-
ся дальше. Если переключение возбуждения делается до положения рав-
новесия, то двигатель может продолжить движение. В этом случае сле-
дует выбрать угол коммутации, больший, чем один шаг.
160
Рис. 7.1. Схемы управления ШД с обратной связью (вентильный двигатель):
1 — логический блок; 2 — источник постоянного тока; 3 — коммутатор (инвер-
тор) шагового двигателя; 4 — импульсы обратной связи (числовая информация о
положении); 5 - оптический датчик; 6 - шаговый двигатель
Р и с. 7. 2. Зависимость угла поворота ротора от времени при управлении с
обратной связью:
1 — малая нагрузка; 2 - большая нагрузка
7.2.2. Угол коммутации и статический момент. Зависимости момента
от положения для трехфазного двигателя могут быть аппроксимирова-
ны синусоидальными кривыми, показанными на рис. 7.3, а. Если двига-
тель работает при однофазном управлении с одношаговым углом ком-
мутации, то статический момент будет меняться со временем, как по-
казано на рис. 7.3, б толстыми линиями. Заметим, когда ротор дости-
гает положения равновесия фазы, возбужденной в настоящий момент,
она отключается и подключается следующая. На рис. 7.3, в показан слу-
, 1
чаи угла коммутации в 1— шага, который дает максимальное значение
4
момента при синусоидальном его изменении от угла. Если и дальше уве-
личивать угол коммутации, значение статического момента будет пони-
жаться (см. рис. 7.3, г, д). На рис. 7.4 приведен случай четырехфазного
двигателя, который показывает, что значение момента становится мак-
симальным при угле коммутации 1,5 шага.
7.23. Большие углы коммутации для высоких частот вращения. Из
рис. 7.3, д видно, что значение статического момента, развиваемого трех-
фазным двигателем, равно нулю, если угол коммутации равен 2 шагам.
Аналогично четырехфазный ШД с углом коммутации 2,5 шага создает
нулевой статический момент. Однако эти утверждения верны только
для случая, когда частота вращения мала. Если двигатель вращается,
то при этих углах коммутации создаются моменты, достаточные для
ускорения или поддержания заданной частоты вращения. Это происхо-
дит из-за постоянной времени обмоток. Кривые распределения момен-
та на рис. 7.3 и 7.4 построены в предположении, что ток достигает свое-
го максимального значения мгновенно, как только включается транзис-
тор. В действительности же существует временная задержка достиже-
ния током своего максимального значения из-за наличия индуктивнос-
ти обмотки.
И—Зак <>50 161
Фаза 2
Oiajaf ФазаЗ
/шаг
Рис. 7. 3. Соотношение между углом коммутации и статическим моментом в
трехфазном двигателе:
а - характеристики для каждой из фаз; б-д - различные углы коммутации от 1
до 2 шагов: 1 - фаза 2 отключена в положении равновесия фазы 1; 2 — фаза 3 от-
ключена в положении равновесия фазы 2
Рис. 7.4. Соотношение между углом коммутации и статическим моментом
в четырехфазном двигателе
На рис. 7.S соотношение между напряжением и током приведено для
трех различных шаговых частот вращения: низкой (а), средней (б) и
высокой (в). Ток, проходящий через обмотки за период, когда тран-
зистор включен, создает положительный момент для ускорения двига-
теля. С другой стороны, ток, циркулирующий в обмотке и диоде обрат-
ного тока после отключения транзистора, может быть причиной появ-
ления тормозного момента. Если частота вращения мала, то действие
тормозного момента незначительно. Однако при повышении частоты
вращения, как это ясно из рис. 7.S, б и в, время действия положитель-
ного момента становится сравнительно небольшим и средний момент
должен уменьшаться. Таким образом, максимальный момент недоста-
точно велик для того периода ускорения, который существует при зна-
чениях угла коммутации, близких к 1 шагу. Момент и максимальная
частота вращения возрастают при увеличении угла коммутации, так как
начальное время возрастания тока компенсируется более ранним вклю-
чением обмотки, как показано на рис. 7.6. В [1] проведен теоретичес-
162
Рис. 7. 6. Изменение момента при уве-
личении угла коммутации в диапазоне
больших частот вращения:
А — ускорение; Б — торможение: а —
1 шаг; б - 1,5 шага
6)
Рис. 7. 5. Связь между напряжением и током при одношаговом угле комму-
тации:
А — ускорение; Б — торможение
Угол коммутации , шаг
Рис. 7. 7. Зависимость максималь-
ной частоты вращения от угла комму-
тации, измеренная для гибридного ШД
с углом шага 1,8 при двухфазном
управлении
Угол коммутации ,
шаг
Рис. 7. 8. Зависимость максимальной частоты вращенияоот угла коммутации,
измеренная для гибридного двигателя с углом шага 1,8 при комбинации од-
но- и двухфазного управления
163
1Г
Фаза 2*3
Фаза h2 Фаза 3*/
Рис. 7.9. Определение угла коммутации при двухфазном управлении трех-
фазным ШД:
1 - положение равновесия с возбужденными фазами 1 и 2; 2- положение рав-
новесия с возбужденными фазами 2 и 3; 3 - положение равновесия с возбужден-
ными фазами 3 и 1; 4 - фаза 1 включена, а фаза 3 отключена пока, фаза 2 остается
возбужденной
кий анализ влияния угла коммутации на характеристику реактивного
двигателя.
На рис. 7.7 [2] приведен пример зависимости максимальной часто-
ты вращения от угла коммутации, измеренной для четырехфазного гиб-
ридного ШД при двухфазном управлении. В этом случае максимальная
частота вращения при угле коммутации, равном 1,0 шагу, составляет
около 1000 Гц и повышается до 14000 Гц при 3,2-шаговом угле комму-
тации. На рис. 7.8 приведен другой пример, в котором угол коммутации
машется не непрерывно, а дискретно приращениями по 0,5 шага в диа-
пазоне от 1,0 до 3,0 шага. При 1,5-шаговом и 2,5-шаговом углах комму-
тации использовалось однофазное управление, а при 1,0, 2,0 и 3,0-шаго-
вом — двухфазное. Максимальная частота вращения выше 25 кГц дости-
гается при 3,0-шаговом угле коммутации. Технические особенности
последнего случая рассмотрены в 7.2.5.
7.2.4. Определение угла коммутации при двухфазном управлении.
Влияние угла коммутации на характеристики двигателя до сих пор рас-
сматривалось для однофазных схем управления. Но угол коммутации
может быть также определен и для двухфазного управления. На рис.
7.9, а приведены зависимости статического момента от углового положе-
ния, аппроксимированные синусоидальными кривыми, когда возбуж-
дены две или три фазы. Положения равновесия указаны на том же ри-
сунке. Когда ротор достигает положения равновесия с возбужденными
фазами 1 и 2, фаза 1 отключается, а 2 остается включенной. Это управ-
ление с одношаговым углом коммутации. На рис. 7.9, б приведены за-
висимости момента для случая 1 ^-шагового угла коммутации.
7.2.5. Комбинация однофазного и двухфазного управления. Количест-
во выходных импульсов датчика положения ротора за один оборот на-
много больше, чем число шагов, поэтому трудно изменять угол комму-
тации непрерывно. Например, если для датчика положения число воз-
можных импульсов и шагов ШД за один оборот равно 200, то возмож-
ный набор углов коммутации будет равен 0, 1, 2 и 3 или 0,5, 1,5, 2,5
и 3,5 шага. Какой из них выбрать, зависит от взаимного положения дат-
чика и ротора, а также схемы управления. Однако при использовании
как однофазной, так и двухфазной схемы управления система может
использовать восемь различных углов коммутации.
Эта идея была выдвинута в [3] в 1967 г.
164
Рис. 7.10. Конфигурация оптического датчика обратной связи по положению:
1 - оптический датчик положения ротора; 2 - шаговый двигатель; 3 - логиче-
ский блок; 4 - обмотки; 5 - сигнал управления утлом коммутации
Р и с. 7.11. Принцип работы оптиче-
ского датчика положения ротора:
1 — вращающийся диск; 2 — непо-
движная маска; 3 - чувствительный
элемент; 4 — источник света
Датчик положения, представленный в этой работе, является комби-
нацией непрозрачного диска с S0 маленькими отверстиями, находящи-
мися на 7,2° друг от друга, и четырех пар фототранзистор—источник
света. В настоящее время для этих целей широко используют многока-
нальные оптические датчики. При выборе угла коммутации для комби-
нированного способа управления (одно- и двухфазного), будет исполь-
зоваться трехканальный оптический датчик с разрешающей способно-
стью 200 импульсов за один оборот. На рис. 7.10 показана модель ана-
логичного датчика, установленного непосредственно на валу двигателя.
Для простоты показан только один канал.
Принцип работы оптического датчика положения ротора показан
на рис. 7.11. На диске 1 чередуются прозрачные и непрозрачные секто-
ра. Так он вращается вместе с валом двигателя, маска 2 периодически
пропускает или блокирует свет. Выходной сигнал датчика формирует-
ся в требуемом виде как цифровой сигнал.
Одно из возможных соотношений между выходным сигналом дат-
чика и положениями равновесия при однофазном управлении приведе-
но на рис. 7.12. Датчик установлен на валу ротора так, что положения
равновесия оказываются в центрах интервалов Н-уровня при выход-
ном сигнале в канале А. Канал А используется для распознавания на-
правления вращения. Сигнал канала В, сдвинутый на 90° по отноше-
нию к А, используется для генерации временных импульсов, которые
используются как сигналы переключения. Здесь имеются два времен-
ных генератора: CG1 и CG2. Первый из них генерирует отрицательный
логический временной импульс каждый раз, когда сигнал канала В пони-
жается в интервале Н-уровня сигнала А. Второй генериует импульс при
возрастании сигнала канала В в интервале L-уровня сигнала А. Други-
ми словами, CG1 выдает импульсы при вращении по, a CG2 против ча-
совой стрелки. Положения ротора, при которых генерируются времен-
ные импульсы, здесь называются моментами (точками) коммутации-
Соотношение между возможными значениями угла коммутации, по-
ложениями равновесия при однофазном управлении и фазами, которые
165
Р: положения равновесно S: точки переключения
Рис. 7. 12. Соотношение между выходными сигналами датчика положения
ротора и положениями равновесия при однофазном управлении
должны быть возбуждены, приведены для направления по часовой стрел-
ке в табл. 7.1, против — в табл. 7.2. Для примера рассмотрим строку
для угла коммутации в 1,5 шага. Когда ротор пересекает точку комму-
тации S2, фаза 2 включается, а 3 возбуждается. Расстояние от S2 до сле-
дующего положения равновесия для возбужденной фазы 3 равно 1,5 ша-
га. Если в S2 возбуждается фаза 4, то угол коммутации составляет
2,5 шага, как это показано в шестой строке. Таким образом, однофаз-
ное управление включает углы коммутации 0,5; 1,0; 1,5; 2,5 и 3,5 ша-
Таблица 7.1. Связь углов коммутации, положений равновесия для
однофазного возбуждения и возбуждаемых фаз для четырезфазного двигателя
с направлением вращения по частовой стрелке. Переключения осуществляются
в положениях равновесия для двухфазного возбуждения
Угол ком- 81 S2 S3 S4 S5 S6
мутации -ч- Р1 1 •—.к Р2 ——1 РЗ 1 1 Р4 Р1 । >- Р2 -Примечание
0 4,1 1,2 2,3 3,4 4,1 #1
0,5 1 2 3 4 1 #2 Остановка
1,0 1,2 2,3 3,4 4,1 1,2 #3
1,5 2 3 4 1 2 #4 Поворот
2,0 2,3 3,4 4,1 1,2 2,3 #5 Ускорение
2,5 3 4 1 2 3 #6
3,0 3,4 4,1 1.2 2,3 3,4 #7
3,5 (-0,5) 4 1 2 3 4 #8 Торможение
П р и м е ч а н и е. Pl, Р2, РЗ, Р4 - положения равновесия для однофазного воз-
буждения. 1, 2 ... — точки переключения.
# 1 - эффективное торможение; нет гарантии реверса.
# 2 - слабое торможение; используется для конечного позиционирования.
# 3 - плохо для врщения.
# 4 - хороший запуск, медленное вращение.
# 5 - хороший запуск-ускорение.
# 6 - нет запуска двигателя, но обеспечивается высокая частота вращения.
# 7 - запуск двигателя b противоположном направлении, обеспечивает самую
высокую частоту вращения в прямом направлении.
# 8 - хорошее торможение.
166
Таблица 7.2. Связь углов коммутации, положений равновесия для
однофазного возбуждения и возбуждаемых фаз дли четырехфазного двигателя
с направлением вращения против часовой стрелки. Переключения совершаются
в положениях равновесия для двухфазного возбуждения
Угол ком- SI S2 а 1 S3 S4 S5 S6 Примечание
Р1 Р2 РЗ Р4 Р1 Р2
0 1,2 2,3 3,4 4,1 1,2 #1
0,5 1 2 3 4 1 #2 Остановка
1,0 4,1 1.2 2,3 3,4 4,1 #3
1,5 4 1 2. 3 4 #4 Поворот
2,0 3,4 4,1 1,2 2,3 3,4 #5 Ускорение
2,5 3 4 1 2 3 #6
3,0 2,3 3,4 4,1 1,2 2,3 #7
3,5 (-0,5) 2 3 4 1 2 #8 Торможение
Примечание. Смотри примечание к табл. 7.1.
га. Угол коммутации 3,5 шага можно рассматривать как —0,5 шага.
Если в S2 при вращении по часовой стрелке возбуждаются фазы 2 и 3,
как эго показано в третьей строке, то угол коммутации равен 1,0 шага,
так как следующей является точка S3, отстоящая от S2 на один шаг.
Двухфазное управление включает углы коммутации 0; 1,0; 2,0
и 3,0 шага.
В табл. 7.1 представлены точки коммутации для положений равнове-
сия при двухфазном управлении. Если датчик установлен так, что мо-
менты (точки) коммутации расположены в положениях равновесия
для однофазного управления, то соотношение между углами коммута-
ции и фазами, которые должны быть возбуждены, такие, как показа-
но в табл. 7.3 и 7.4.
7.2.6. Угол коммутации при пуске и вращении ротора. Когда систе-
ма сконструирована так, чтобы в положении равновесия ротор находил-
ся посреди промежутка между двумя точками коммутации, угол ком-
мутации при остановке или запуске меньше, чем при вращении, на
0,5 шага. Этот факт следует из табл. 7.1, если конечное позиционирова-
ние выполняется по однофазной схеме управления. Для того чтобы уста-
новить ротор в положение Р1 необходимо возбудить только фазу 1, а
для перевода ротора в положение равновесия Р2 следует возбудить фа-
зу 2, что соответствует второй строке в табл. 7.1 как для вращения по,
так и против часовой стрелки (табл. 7.2). Когда двигатель останавли-
вается при таком управлении, угол коммутации равен нулю. Но если
он вращается в каком-либо направлении, то угол будет равен 0,5 шага.
Разница в 0,5 шага имеет также место и при других схемах управления.
Предположим, что вначале двигатель находится в положении Р1 с воз-
бужденной обмоткой фазы 1, затем запускается в направлении по ча-
совой стрелке при управлении, задаваемом пятой строкой таблицы,
т.е. с углом коммутации, при вращении равным 2 шагам. Теперь возбуж-
даются фазы 3 и 4 и положение равновесия при этом располагается в точ-
167
Таблица 7.3. Связь углов коммутации, положений равновесия
и возбуждаемых фаз для четырехфазиого двигателя с направлением вращения
по часовой стрелке. Переключения совершаются в положениях равновесия для
однофазного возбуждения
Угол ком- S200 SI S2 S3 S4
мутации * Р4 7*7 7*12 7*2 — 7*23 РЗ 4 Р4
0 4 1 2 3
0,5 4,1 1,2 2,3 3,4
1.0 1 2 3 4
1.5 1,2 2,3 3,4 4,1
2,0 2 3 4 1
2,5 2,3 3,4 4,1 1,2
3,0 3 4 1 2
3,5 (-0,5) 3,4 4,1 1,2 2,3
П р и м е ч а н и е. 7*7, 7*2, 7*3 и 7*4 - положения равновесия для однофазного
возбуждения. 7*12, 7*2 3, 7*Э4 и Т*41 - положения равновесия для двухфазного воз-
буждения. 1, 2 ... - точки переключения, которые в этом случае отличаются от
точек 1, 2.... в табл. 7.1, 7.2.
ке S4, которая отстоит от Р1 на 1,5 шага. Таким образом, пусковой угол
коммутации меньше на 0,5 шага.
Разница в углах коммутации при запуске и вращении обусловлива-
ет то, что четырехфазный двигатель может быть запущен в требуемом
направлении по схеме с 2-шаговым углом коммутации. Если этот угол
при запуске также положить равным 2 шагам, то направление вращения
не будет определено.
7.2.7. Угол коммутации при ускорении и торможении. Если останов-
ленный двигатель требуется разогнать, то угол коммутации должен быть
больше 1 шага. На рис. 7.13 приведены зависимости частоты вращения
от углов коммутации 1,0; 1,5 и 2,0 шага (момент инерции нагрузки
5,28-10”5 кг-м2). Эти зависимости измерены для той же самой комби-
Таблица 7.4. Связь углов коммутация, положений равновесия
и возбуждаемых фаз для четырехфазиого двигателя с направлением вращения
против часовой стрелки. Переключении совершаются в положениях
равновесия для однофазного возбуждения
Угол ком- S200 S1 S2 S3 S4
мутации Р4 Р1 7*12 7*2 7*23 РЗ ?34 Р4
0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 (-0,5) Примеч а н и е. 1 2 3 4,1 1,2 2,3 4 1 2 3,4 4,1 1,2 3 4 1 2,3 3,4 4,1 2 3 4 1,2 2,3 3,4 Смотри примечание к табл. 7.3. 4 3,4 3 2,3 2 1,2 1 4,1
168
Рис. 7. 13. Зависимость
частоты вращения от чис-
ла шагов при углах комму-
тации 1,0 (/); 1,5 (2);
2,0 шага (3) (для случая
ускорения)
20 40 60 60 ГОО 120 ЦО 160 180 200
Смещение , шаг
Рис. 7. 14. Зависимость частоты
вращения от числа шагов при уг-
лах коммутации 0 (7); - 0,5 (2);
0,5 (3) шага (для случая тормо-
жения)
нации двигатель—система управления, которая была использована для
получения характеристик максимальной частоты вращения (см. рис. 7.8).
Очевидно, что схема управления с одношаговым углом коммутации
разгоняет двигатель менее эффективно, в то время как с двухшаговым
обеспечивает достаточное ускорение. Если угол коммутации увеличить
после того, как двигатель достиг определенной частоты вращения, то ус-
корение становится более эффективным. Для торможения ротора угол
коммутации нужно свести к нулю или некоторому небольшому значе-
нию. На рис. 7.14 показаны зависимости частоты вращения от числа ша-
гов при углах —0,5; 0; 0,5 шага и таком же моменте инерции нагрузки.
73. СИСТЕМА УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ,
ИСПОЛЬЗУЮЩАЯ МИКРОПРОЦЕССОР
В [3] предложено применить для управления ШД с обратной связью
большой либо малый микропроцессор. Так как в настоящее время мик-
ропроцессоры достаточно дешевы, использование их для управления
ШД стало очень интересной инженерной проблемой. Рассмотрим микро-
процессорную систему с обратной связью [4] для управления четырех-
фазным гибридным ШД с углом шага 1,8°. Для этих целей был исполь-
зован микропроцессор типа 8080А. Выбор угла и расположение точек
коммутации основано на данных табл. 7.1. В качестве датчика положе-
ния ротора использовали трехканальный оптический датчик. Каналы А
и В выполняли те же самые функции, какие описаны в 7.2.5. Третий
12-Зак. 650 169
Рис. 7.15. Зависимости частоты вращения от положения:
а - удовлетворительная; б - неудовлетворительная; 1 - конечное положение
канал R генерировал один импульс за оборот и использовался для оп-
ределения положения ссылки.
7.3.1. Задачи микропроцессора. На рис. 7.1S показаны две зависи-
мости частоты вращения от угла, построенные при управления ШД с
обратной связью. На рис. 7.15, а показан пример, в котором ШД запус-
кается с требуемым углом коммутации, ускоряется при другом его
значении и начинает торможение в момент, с которого частота враще-
ния быстро уменьшается и становится равной нулю как раз в требуемом
положении. Для запуска и ускорения использовали угол коммутации
более 1 шага, а для торможений нулевой или отрицательный. На рис.
7.15, б представлен неудачный пример управления. Торможение начина-
ется тогда, когда обнаружено конечное положение. Но двигатель не может
остановиться моментально и будет вращаться по инерции. Для приведения
ротора в нужное положение он должен вращаться в обратном направле-
нии с установлением соответствующего угла коммутации. Зависимость
частоты вращения от углового положения ротора может быть колеба-
тельной, как показано на рис. 7.15, б.
Микропроцессорная система используется здесь для определения
наилучшего времени изменения углов коммутации. На рис. 7.16 пока-
зана схема системы, в которой логический блок вынесен за микропро-
цессор. Сигнал позиционирования поступает
в блок формирования сигнала, который
управляет движением ротора и обменива-
ется информацией с микропроцессором.
Математическое обеспечение должно быть
Рис. 7.16. Система управления с логическим
биоком, вынесенным за микропроцессор:
1 - микропроцессор; 2 - команды управле-
ния; 3 - программа обучения и выполнения;
4 - монитор; 5 - коммутатор н логический
блок; б - оптический датчик положения ротора;
7 - шаговый двигатель; 8 - нагрузка
170
7
Рис. 7.17. Структурная схема системы управления:
1 - блок генерации временных сигналов и определения направления вращения;
2 - эталонный сигнал; 3 — направление вращения; 4 - временной импульс; 5 -
счетчик фазы; 6 - логический блок; 7 - источник постоянного тока; 8 - коммута-
тор двигателя; 9 - режим/направление; 10 - выходной порт 2; 11 - счетчик теку-
щего положения; 12- входной порт 1; 13 - счетчик ошибки; 14 - генератор сигна-
ла изменения угла коммутации; 15 — сигнал ошибки; 16 — расстояние (набор 1);
17 - угол коммутации; точка изменения (набор 2); 18 - входные порты 2 и 3;
19 - выходной порт 1; 20 - входные порты 3, 4 и 5; 21 - инструкции супервизо-
ру; 22 - нагрузка; 23 - двигатель; 24 - датчик положения ротора; 25 - процес-
сор/память (8080А)
организовано так, чтобы микропроцессор определял лучшее время для
изменения углов коммутации, основываясь на предыдущем опыте и
текущих данных о положении и частоте вращения. Микропроцессор в
конечном счете после нескольких итераций будет находить оптималь-
ное время изменения угла коммутации.
732. Элементы системы управления. На рис. 7.17 приведена структур-
ная схема системы управления ШД. Когда управляющая вычислительная
машина или другая система выдают задание, например, на печать симво-
ла либо позиционирование в определенной точке, микропроцессор вы-
числяет расстояние до требуемого положения и направление вращения.
Он также определяет времена для установки необходимых углов комму-
тации, исходя из следующих данных: текущего положения; шагового
расхождении между текущим и конечным положениями; сигнала про-
хождения ротором точки, отстоящей на полшага от конечного положе-
ния; сигнала о движении в противоположном направлении; частоты
вращения.
В примере, приведенном здесь, последнее данное не используется.
1. Блок генератора временных сигналов и определения направления
получает трехканальный сигнал от датчика положения ротора и выраба-
тывает временные импульсы для работы устройств вне микропроцессо-
ра. Соотношение между сигналами датчика и временными импульсами
было рассмотрено в 7.2.5 с использованием рис. 7.12. Сюда входит уст-
91 Р1 99 Р9 91 Pl 9U PU 99
Рис. 7.18. Триггерный блок для определения направления вращения
Рис. 7.19. Изменение направления движения (7) и импульсы времени
ройство определения направления вращения, представляющее собой
триггер, показанный на рис. 7.18. Временные сигналы от CG1, которые
являются короткими при движении по часовой стрелке, подаются на
выход S, временные сигналы от С62,_короткие при движении против
часовой стрелки, подаются на выход /?. Если от CG1 поступает корот-
кий временной импульс, то состояние Q1 станет равным Н. Дальней-
шие импульсы от CG1 не меняют состояний Q1 и Q2. В ситуации, при-
веденной на рис. 7.19, где двигатель вращается по часовой стрелке др
положения равновесия РЗ, а затем наоборот, выход Q1 триггера остает;
ся равным Н цо того момента, пока точка переключения S3 не будет
пройдена в направлении против часовой стрелки. Когда ротор пройдет
точку переключения S3, временной импульс, сгенерированный CG2,
изменит выходные состояния QI = L и Q2 - Н. Существует возмож-
ность колебаний ротбра около положения равновесия, как показа-
но на рис. 7.20. Но блок определения направления вращения не ме-
няет состояния до тех пор, пока не будет пересечена позиция пере-
ключения.
2. Блок вычисления фазы определяет, какую из четырех зон Pl, Р2,
РЗ или Р4 проходит ротор двигателя или в какой из них он остановился.
3. Логический блок находит фазу, которую необходимо возбудить,
получая сигналы об угле коммутации и направлении вращения от мик-
ропроцессора и основываясь на информации, получаемой от блока вы-
числения фазы. Схема работы приведена в табл. 7.1. Характеристики
каждого значения угла коммутации приведены в примечаниях к таб-
лице.
4. Блок остановки ПЩ. Для остановки ротора угол коммутации уста-
навливается равным 0,5 шага, если ротор двигателя находится в зоне
на расстоянии не более одного шага от конечного положения. Если час-
тота вращения двигателя достаточно мала при входе ротора в эту зо-
ну, он может быть замедлен и остановлен в требуемом конечном по-
ложении равновесия. Следовательно, в рассматриваемой системе уп-
равления конечное позиционирование выполняется однофазным уп-
равлением. Если ротор проходит конечную зону и не успевает остано-
вится, новый угол коммутации определяется микропроцессором по
его математическому обеспечению (программным способом). Как бу-
дет показано, угол коммутации устанавливают с помощью математичес-
кого обеспечения микропроцессора до попадания в конечную зону.
172
Рис. 7. 20. Малые колебания вблизи положения
равновесия не изменяют состояние блока опре-
деления направления вращения
Рис. 7.21. Структурная схема программы
5. Коммутатор (инвертор) двигателя. Си-
ловая часть системы управления двигате-
лем может быть различных типов, которые
были рассмотрены в § 4.3.
6. Блок вычисления текущего положения.
Это счетчик для регистрации текущего поло-
жения. Когда требуемое положение достига-
ется при вращении ротора по часовой стрел-
ке, счетчик сбрасывается до нуля и нара-
щивает значение на единицу с каждым временным импульсом, получен-
ным от CG1. Если требуемое положение достигается при вращении про-
тив часовой стрелки, счетчик устанавливается на 200 и значение на сле-
дующем импульсе равно 199. Таким образом, значение счетчика при дви-
жении против часовой стрелки уменьшается.
7. Счетчик ошибки. Этот блок вычисляет расстояние между текущим
и конечным положениями ротора и посылает эту информацию на вход-
ные порты 2 и 3 микропроцессора. Конечное положение определяется
микропроцессором.
8. Генератор сигналов изменения угла коммутации. На этот блок по-
сылается сигнал микропроцессора о положении, в котором необходимо
сменить значение угла коммутации. При достижении этого положения
сигнал сбрасывается и посылается микропроцессору как сигнал преры-
вания.
733. Математическое обеспечение микропроцессора. Здесь приведен
сравнительно простой пример программы для управления символьным
диском в печатающем устройстве. Структурная схема ее показана на
рис. 7.21.
1. Начальная установка. В начале двигатель работает по обычной схеме
без обратной связи, выполняя один оборот или меньше по часовой
173
Рис. 7. 22. Зависимость частоты вращения от расстояния для тринадцати ша-
гов в первом варианте движения:
• - положение равновесия; - точка изменения угла коммутации
стрелке. Это сделано для сброса счетчика текущего положения. При по-
ступлении сигнала, который поступает один раз за оборот, счетчик уста-
навливается в нуль.
2. Прогон предварительного обучения. Во время этого процесса каж-
дый вид движения, который может встретиться при управлении рабо-
той двигателя, выполняется по нескольку раз для обучения системы
микропроцессора, выявления времени изменения углов коммутации,
достижения оптимальных моделей частоты вращения при данной на-
грузке. Так как в рассматриваемом случае необходимо управлять
200-символьным диском, то для выявления оптимальных углов коммута-
ции требуется выполнение около сотни шагов в обоих направлениях.
В действительности это очень большое количество символов. Они распо-
лагаются по краю диска с малым моментом инерции. На практике, как
правило, используются машины с 128 или 132 символами, установленны-
ми на двойном лепестковом диске, как показано на рис. 8.3. Для просто-
ты математического обеспечения здесь полагается, что диск имеет один
ряд символов.
метод обучения объясняется рис. 7.22-7.24, на каждом из которых
приведено 13 шагов движения по часовой стрелке. Расстояние или чис-
ло шагов до нового конечного положения посылается из доходного пор-
та 01 в счетчик ошибки. Затем (ускорение по часовой стрелке) значения
угла коммутации и направление вращения передаются для запуска двига-
теля из выходного порта 02 в логический блок. Таким образом, двига-
тель ускоряется с углом коммутации 2,0 шага до тех пор, пока не достиг-
нет точки, ближайшей к конечному положению равновесия. Когда ротор
находится в конечной зоне, угол коммутации автоматически устанав-
ливается равным необходимому для остановки двигателя и начинается
174
Рис. 7. 23. Зависимость частоты вращения от расстояния (шагов) для тринад-
цати шагов во втором варианте движения:
• — положение равновесия; • — момент изменения угла коммутации
торможение. Если ротор выходит из конечной зоны и проходит следую-
щую точку коммутации, генератором сигналов изменения угла комму-
тации выдается выходное прерывание. Получая этот сигнал, микропро-
цессор выдает команду на изменение угла коммутации (торможение по
часовой стрелке) до 0,5 шага для эффективного торможения моментом,
направленным против часовой стрелки (возникающим при таком значе-
нии угла коммутации). Двигатель окончательно остановится и начнет
движение в противоположном направлении. Когда ротор проходит точ-
ку коммутации S3, имея противоположное направление вращения, гене-
ратор выдает противоположный сигнал прерывания. Получив его, мик-
ропроцессор определяет число шагов от конечного положения, которое
на рис. 7.22 равно девяти. Отметим, что значение угла коммутации авто-
матически становится равным (поворот против часовой стрелки) —1,5 ша-
га после реверса направления вращения, это отражено в табл. 7.1, 7.2.
Предположим, что ротор находится в зоне положения РЗ и двигатель
в режиме торможения при вращении по часовой стрелке. По табл. 7.1
найдем фазу, которая должна быть возбуждена. Эта фаза 2, в таблице
она подчеркнута. С другой стороны, в табл. 7.2 фаза 2 находится в столб-
це РЗ в строке, относящейся к повороту против часовой стрелки, для уг-
ла коммутации 1,5 шага. Таким образом, после поворота двигатель будет
ускоряться с углом коммутации 1,5 шага.
Когда он снова войдет в конечную зону, угол коммутации будет ус-
тановлен в нуль для попадания ротора в конечное положение. Но быст-
рая основка ротора в это время невозможна из-за инерции нагрузки. Ес-
ли ротор опять выйдет из конечной зоны, то опять генерируется выход-
ной сигнал прерывания для изменения угла коммутации, который при-
мет значения, соответствующие торможению при вращении против ча-
совой стрелки. После установки движения по часовой стрелке угол ком-
175
положения
Рис. 7. 24. Оптимальная зависимость частоты вращения от расстояния для
13 шагов
мутации автоматически принимает значение, соответствующее такому
повороту. Ускорение до конечной зоны не является таким же приемле-
мым, как ранее, из-за меньшего значения угла коммутации, равного
1,5 шага. В конечной эоне угол коммутации снова устанавливается в
нуль. Из рис. 7.23, б видно, что до остановки ротора в конечном положе-
нии произойдет еще одно или несколько колебаний.
Когда еще раз будет выдано то же самое задание, следует пройти 13 ша-
гов по часовой стрелке, торможение начнется в точке коммутации девя-
того шага перед конечной зоной. В этом случае частота вращения станет
равна нулю до достижения конечного положения, как показано на
рис. 7.23. Когда будет пройдена точка коммутации S190, выдается преры-
вание на реверс двигателя и счетчик ошибки подсчитывает количество
оставшихся до конечного положения шагов (на рис. 7.23 , 7.24). Оно
рассматривается как отрицательная ошибка в 4 шага. В памяти микро-
процессора ошибка корректируется на 8—4 = 4. Снова (см. рис. 7.23)
угол коммутации принимает значение, соответствующее торможению
против часовой стрелки, т.е. то же самое, что и для реверса направления
вращения по часовой стрелке, при сигнале прерывания на реверс движе-
ния по часовой стрелке. Дальнейшее выполнение движения такое же,
как и ранее. При повторении этого процесса несколько раз будет найде-
но оптимальное время изменения угла коммутации и достигнуто дви-
жение по кривой, приведенной на рис. 7.24.
3. Существуют ли данные для печати? После выполнения последова-
тельности из двухсот видов движений, система управления готова к
практической работе. Если микропроцессор получает какие-либо дан-
ные для печати, они помещаются в память.
4. Вычисление числа шагов и направления вращения. Рассчитывает-
ся расстояние между текущим и конечным положениями ротора и ре-
зультат засылается в счетчик ошибки. Момент, в который угол комму-
тации следует сменить с ускорения на торможение, также засылается
в генератор сигналов изменения угла коммутации.
5. Главная программа. Определяется значение угла коммутации, со-
ответствующее ускорению ротора, и посылается с порта 2 для запуска
двигателя. Предполагают, что каждое движение выполняется в крат-
чайшее время. Однако если случаются какие-либо вариации из-за изме-
176
Рис. 7. 25. Трехфазный реактивный ШД с оптическим датчиком положения
ротора
нения нагрузки, то могут произойти отрицательные или положительные
ошибки позиционирования и времена изменения угла коммутации бу-
дут скорректированы микропроцессором.
7.4. ДРУГИЕ ТИПЫ УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ
7.4.1. Обратная связь с управлением по току. Схема управления с обрат-
ной связью по значению тока в обмотках 132-шагового трехфазного
реактивного двигателя была предложена лабораторией Yokosuka
Electrical Conununication корпорации Nippon Telegraph and Telephone
Pablic и фирмой Sanyo Denki для применения в управлении фигурным
символьным диском серийного печатающего устройства. Некоторые эле-
менты этой системы могут быть найдены в [5], но основные ее черты
Рис. 7. 26. Структурная схема управления током в схеме управления с обрат-
ной связью по положению ротора:
1 - начальный сигнал; 2 - задание профиля частоты вращения; 3 - выбор фаз;
4 — задание угла коммутации; 5 — коммутатор двигателя; 6 — управление током;
7 - шаговый двигатель; 8 — оптический датчик положения ротора; 9 — импульсы
обратной связи по положению ротора
177
Рис. 7. 27. Формы кривых тока в обмотке сразу после начала возбуждения:
а - без нагрузки; б - с нагрузкой; 1 — без движения; 2 - с движением
приведены здесь. Двигатель, объединенный с инкрементным оптичес-
ким датчиком положения ротора, показан на рис. 7.25.
Структурная схема этой системы, приведенная на рис. 7.26, имеет
следующие особенности.
Во-первых, профили изменения частоты вращения во времени фикси-
руют заранее. Максимальное расстояние в каждом направлении равно
66 шагам. Профили частоты вращения заносят в постоянную память.
Основные из них имеют форму трапеций, но для короткого движения
используют треугольный профиль.
Во-вторых, положение и частота вращения ротора связаны обратной
связью и изменение последней сравнивают с заданным модельным про-
филем: расхождение между ними усиливается и используется для уп-
равления током двигателя.
В-третьих, в системе управления принимают углы коммутации 1,75;
1,25; 0,5 шага соответственно для ускорения, вращения с постоянной
частотой и торможения.
В-четвертых, используют коммутатор в виде прерывателя.
В-пятых, сигналы управления на выполнение шага во время ускоре-
ния и постоянного вращения берут от сигналов обратной связи датчи-
ка положения ротора, в то время как обычные используют только во
время торможения.
7.4.2. Управление с обратной связью без датчика. Управление с об-
ратной связью по положению ротора в основном нуждается в тех ти-
пах датчиков, которые преобразуют механические положения в электри-
ческие сигналы. Во многих случаях для этого используют датчики опти-
ческого типа. Однако у этих датчиков существуют некоторые недостат-
ки: они обычно дороже ШД; регулировка положения датчика относи-
тельно соответствующего положения ротора является нелегкой задачей;
возникают проблемы, связанные с нагреванием или электрическим шу-
мом.
Вместо оптического или другого типа механического датчика, соеди-
ненного с ротором, можно использовать для определения положения
последнего формы кривых тока или напряжения. В [6] дано описание
этого метода в системах управления реактивным ШД.
В 1979 г. на Международной конференции по ШД и системам была
представлена новая схема управления с обратной связью гибридным
двигателем, разработанная в [7]. Здесь приведены ее основные черты.
178
Рис. 7. 28. Система управления с об-
ратной связью по положению ротора че-
тырехфазным двигателем, использующая
датчик тока:
1 — микропроцессор; 2 — усилитель
сигнала управления; 3 — усилитель напря-
жения; 4 - обмотка; 5 - Я-С-генератор
Поперечное сечение двигателя представлено на рис. 2.49. Форма кри-
вой тока в обмотке сразу после коммутации показана на рис. 7.27, а.
Если двигатель не может достичь полной частоты вращения, например,
из-за необходимости работы против силы тяжести или подключения
инерционной нагрузки, получается нижняя кривая на рис. 7.27, б. Схе-
ма обратной связи для линейных двигателей использует разницу между
этими кривыми.
На рис. 7.28 приведена структурная схема. Управление двигателя
осуществляется по двухполупериодной двухфазной схеме, конец каж-
дой обмотки подсоединен к блоку сравнения напряжений. Другой вход
блока сравнения соединен с генератором экспоненциального сигнала,
который запускается микропроцессором. После команды на выполне-
ние шага микропроцессор задерживает сигнал так, что система управле-
ния оказывается в ситуации 1 на рис. 7 .Т1, а и б, т.е. не будет равенст-
ва напряжения в фазах и, в конечном счете, микропроцессор не получит
подтверждения выполнения шага.
Однако если блок сравнения получил кривую такой формы, как на
рис. 7.27, а к б для сигнала с движением, то будут две точки равенства
напряжения в фазах, на которых выход блока сравнения переключит-
ся в состояние выключено, а затем снова включено. Показано, что вре-
мя первого равенства напряжений является оптимальным для начала
следующего шага при ускорении двигателя или вращении с постоян-
ной частотой. Время второго равенства напряжений используется для ре-
жима торможения. Функционирование системы происходит следующим
образом.
1. Сигнал на выполнение первого шага в требуемом направлении выда-
ется включением тока в соответствующей обмотке.
2. После задержки микропроцессор запускает генератор сигнала экс-
поненциальной формы.
3. Когда блок сравнения выдает сигнал о первой точке равенства
напряжения, микропроцессор определяет, сколько шагов требуется для
выполнения движения. Если больше двух, что выбирается следующее
состояние управления и для ускорения двигателя возбуждается сле-
дующая обмбтка. В случае, когда осталось два шага или меньше, микро-
процессор устанавливает сигнал, который исключает ускорение до вто-
рой точки равенства напряжения в фазах. Задержка возбуждения обмот-
ки обеспечивает приведение в действие ’’электромагнитной упругости”
для эффективного торможения двигателя.
179
Глава 8
ПРИМЕНЕНИЕ ШАГОВЫХ ДВИГАТЕЛЕЙ
Ранее уже были приведены некоторые примеры применения ШД. Здесь
же рассмотрим это более подробно для различных областей техники.
8.1. ИСПОЛЬЗОВАНИЕ ШАГОВЫХ ДВИГАТЕЛЕЙ
В ПЕРИФЕРИЙНЫХ УСТРОЙСТВАХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
Эта область считается основной для применения ШД. Существует боль-
шое разнообразие периферийных устройств вычислительных машин, ос-
тановимся на основных, использующих ШД.
8.1.1. Серийное печатающее устройство. Серийное печатающее устройст-
во является автоматическим, печатающим в каждый такт времени по
одному символу. Внешний вид и его механизм приведены на рис. 8.1.
Конструкции печатающих устройств различных фирм мало отличаются
друг от друга. Схема печатания может быть рассмотрена по рис. 8.2.
Рис 81 Внешний вид и механизм серийного печатающего устройства
180
1
1 - бумага; 2 - символьный диск; 3 - молоточек; 4 - шаговый двигатель для
движения бумаги; 5 - редуктор; 6 — серводвигатель постоянного тока; 7 — шаго-
вый двигатель для подачи ленты; 8 - шаговый двигатель или серводвигатель по-
стоянного тока для передвижения каретки; 9 - направляющие; 10 — проволочный
тросик
Символьный диск крепится непосредственно к двигателю, помещенному
на каретке. Используются различные виды символьных дисков: лепест-
ковый (см. рис. 2.7); символьный типа "волан для бадминтона”
(рис. 8.3,а) и двойной лепестковый (рис. 8.3,б). Все они изготавливают-
ся из легких материалов. Количество символов может быть 64, 96, 128
или 132. Два последних числа используют в символьных дисках, рабо-
тающих с Латинским и японским алфавитами. В основном ЩД поименяют
для поворотов символьного диска в схеме управления без обратной свя-
зи при скорости печатания порядка 30 символов в секунду. Для высоких
скоростей берут серводвигатели постоянного тока с управлением по схе-
ме с обратной связью, однако вполне пригодны ШД, управляемые по
схеме с обратной связью. Шаговый или серводвигатель постоянного тока
используют для перемещения каретки. Шаговый двигатель с постоянным
магнитом с углом шага 45 или 90° применяют для продвижения ленты,
а также валика прогона бумаги.
8.1.2. Применение в печатающих устройствах линейных двигателей.
Принцип использования линейного реактивного ШД [1] для перемеще-
ния каретки в серийном печатающем устройстве был показан на рис. 1.13.
Реальная конструкция, основанная на этом принципе, показана на рис. 8.4.
Каретка, снабженная трехфазной обмоткой, работает как двигатель-пол-
зунок. Направляющая или стационарная основа изготовлена из слоистой
кремнийсодержащей стали и зубцы имеют тот же зубцовый шаг, что и
у каретки.
На рис. 8.5 [2] показан другой линейный реактивный двигатель для
перемещения каретки. Однако в этом устройстве ползунок не имеет
обмоток, в то время как на статоре расположено большое количество
катушек.
181
Рис. 8.3. Символьные диски:
а - типа "волан для бадминтона”; б - двойной лепестковый
8.1.3. Двухкоординатный ХУ-графопостроитель. В гл 1 были описаны
ШД, которые используют для передвижения пера в графопостроителе,
который служит для получения графического изображения результатов
вычислений. На рис. 8.6 изображен ^ГУ-графопостроитель, а на рис. 8.7 —
система управления пером в этом графопостроителе для одной оси [3].
В графопостроителе, показанном на рис. 1.12, для передачи движения
от вала двигателя перу используются шестерни. В графопостроителе,
изображенном на рис. 8.7, используется стальной тросик, покрытый
нейлоновой оболочкой. Он имеет преимущество в том, что отсутствуют
механические зазоры и уровень шума ниже. Для получения более высо-
кого качества и степени разрешения в графопостроителе на рис. 8.6 ис-
пользуется система управления с малым шагом, которая была рассмот-
рена в 2.3.6 [4].
Рис. 8.4. Реактивный линейный ШД, сконструированный для перемещения
каретки в серийном печатающем устройстве
182
1
Рис. 8.5. Линейный реак1ивный ШД, используемый в печатающем устройстве:
1 — задняя часть статора; 2 - ползунок; 3 — передняя часть статора
8.1.4. Системы управления гибкими флоппи-дисками. Гибкие диски
используются как вспомогательная память для всех классов ЭВМ. Они
также используются как устройство памяти для интеллектуальных терми-
налов. Флоппи-диск или дискета - это тонкий диск, у которого одна
или обе стороны покрыты магнитным материалом для занесения дан-
Р и с. 8 .6. Графопостроитель НР9872В фирмы Hewlett Packard
183
Рис. 8. 7. Механизм уп-
равления ЛТ-графопострои-
тсля, использующий два ШД:
1 — блок шкивов на ка-
ретке пера; 2 - огибаю-
щая Y; 3 — стальной гибкий
кабель в нейлоновой оплет-
ке; 4 - демпфер; 5 —
пластиковый шкиф на ша-
ровом подшипнике; 6 —
поворотный шкив; 7 — ша-
говый двигатель
Рис. 8.8. Структура гибкого диска и механизма дисковода:
1 — конверт; 2 - диск; 3 - окно для головки; 4 - зажимная втулка; 5 — втул-
ка шпинделя
Рис. 8.9. Механизм управления голов-
кой для гибкого диска:
1 — ведущий винт; 2 — головка; 3 -
каретка головки; 4 — шаговый даигатсль
ных. Как показано на рис. 8,8, он
вложен в пластиковый конверт и ус-
танавливается на устройство (диско-
вод) с частотой вращения 300 или
360 об/мин. При установке диска на
дисковод с вращающим механиз-
мом связан только диск, а конверт
остается неподвижным. В качестве
двигателей электропривода диска ис-
пользуют различные типы синхрон-
ных и вентильных двигателей, а ШД
применяют для передвижения маг-
нитной головки. Известно также, что
ШД можно использовать для враще-
ния диска.
184
Рис. 8. 10. Реактивный ШД для управления головкой дисковода для гибкого
диска
Диск имеет память от 250 до 1000 кбайт. Чтение и запись данных
йроизводятся одной или двумя магнитными головками. Расстояние
между дорожками (их 77 или больше в больших дисках и 35 или боль-
ше в малых) 0,5 мм. Диаметр большого диска составляет 20,3 см, а ма-
лого 13,3 см. На рис. 8.9 показан механизм вращения одностороннего
флоппи-диска. Головка перемещается между дорожками с помощью
ШД и ведущего винта. Наиболее часто в системе с большим диском ис-
пользуют четырехфазный реактивный двигатель с углом шага 15°
(рис. 8.10). Головка передвигается на одну дорожку при повороте дви-
гателя на 15°. Ранее для перемещения двух головок в дисководе с дву-
сторонним флоппи-диском, в котором головки передвигались лентой
из нержавеющей стали, использовали гибридный двигатель с углом ша-
га 1,8°. Шаговые двигатели с когтеобразными полюсами широко исполь-
зуют в системах с малыми флоппи-дисками.
8.2. ИСПОЛЬЗОВАНИЕ ШАГОВЫХ ДВИГАТЕЛЕЙ В СТАНКАХ
С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ
Другую большую область применения ШД нашли в управлении инстру-
ментами и деталями в станках с числовым программным управлением
и тд.
8.2.1. УУ-столы и вращающиеся столы. Устройство для управления
положением на плоскости, использующее два ШД для управления дви-
жением по направлениям X и У, называется УУ-столом. Конструктив-
ная схема этого устройства показана на рис. 8.11,а. Вращающимся сто-
лом с цифровым управлением также можно управлять с помощью ШД
(рис. 8.11, б). В этих устройствах механическая обработка выполняется
после позиционирования или вращения.
8.2.2. Фрезерные станки. Движением детали по трем осям в фрезер-
ных станках с числовым программным управлением можно управлять
13 —Зак. 660 185
Рис. 8.11. ХУ-стол (о) и вращающийся стол (б) с числовым программным управ-
лением
с помощью трех ШД. На рис. 8.12 изображены два двигателя для управ-
ления движением по осям X и У, а третий, управляющий движением по
оси Z и расположенный под столом, не показан. В фрезерных станках
с числовм программным управлением обработка режущим инструмен-
том выполняется во время работы двигателя. Как было показано в
гл. 4, момент, создаваемый ШД, имеет колебательную форму, поэтому
поверхность детали после окончания обработки имеет более низкую
чистоту поверхности, чем в станках с использованием серводвигателей
постоянного тока.
8.2.3. Чертежные автоматы, управляемые линейными двигателями.
Шаговые двигатели используют для управления чертежной головкой
чертежных автоматов. Принцип работы автоматов похож на принцип
работы АУ-графопостроителя, но размер плоскости больше, чем у по-
следних. Чертежными автоматами обычно управляют встроенные мини-
компьютеры. Здесь рассмотрен чертежный автомат, в котором перо уп-
равняется плоскостным (планерным) дви-
гателем, состоящим из двух линейных ШД.
Базисная конструкция и принципы ра-
боты ШД были рассмотрены в 2.2.7. Ис-
пользуя комбинацию двух линейных дви-
гателей, как показано на рис. 8.13 [15],
можно .построить двигатель, который пе-
редвигается на неподвижном основании в
любом направлении; один используется
Рис. 8. 12. Принцип работы фрезерного
станка с числовым программным управлением,
использующего три ШД:
1 — вращающий двигатель фрезы; 2 — де-
таль; 3 - фреза; 4 - шаговый двигатель
186
1 2
i.O.W
Рис. 8.13. Планерный двигатель, основанный на принципе СоЬиера:
7 - зубцы; 2 - борозды
Рис. 8.14. Чертежный автомат
Рис. 8.15. Чертежная головка
13*
187
Рис 8.16. Устройство считывания с перфоленты
для создания усилия в направлении X, другой — в направлении Y. Изоб-
ражения чертежного автомата и головки приведены соответственно на
рис. 8.14 и 8.15. Каждый линейный двигатель, вмонтированный в голов-
ку, имеет конструкцию, изображенную на рис. 2.50 с шагом зубцов
0,96 мм.
Неподвижное основание разбито бородками на эквидистантные квад-
раты в виде вафли. Бороздки заполнены немагнитным материалом для
создания зубчатой поверхности, так что двигатель может плавать над
или под поверхностью неподвижного основания на стабильной воздуш-
ной подушке.
Как показано на рис. 8.14, чертежная головка, масса которой 1,5 кг,
прижимается к неподвижному основанию магнитной силой, но свобод-
но перемещается из-за тонкой воз-
душной пленки толщиной 10 мкм.
Воздух к поверхности подводится
через четыре отверстия. Управление
двигателем осуществляется по схе-
ме с малым шагом; возбуждающий
ток представляет собой 96-шаговую
синусоидальную волну. Соответ-
ственно разрешение равно 96Q/96 =
= 10 мкм. Эта схема без обратной
связи, по положению ротора
Рис. 8. 17. Устройство контроля про-
филей копировальных станков
188
Рис 8 18 Соотношение между профилем детали токарного станка с числовым
программным управлением и линией движения резца
максимальные частота вращения и ускорение, которые можно достичь,
равны соответственно 1 и 9,8 мс-2.
Для исключения эффектов осцилляции при управлении без обрат-
ной связи по положению ротора в головку встраивают три акселеромет-
ра. Они служат для обнаружения колебаний и ввода обратной связи на
усилители инвертора (коммутатора) ШД для подавления нежелательных
перемещений. Два акселерометра используют для определения ускоре-
ний в направлениях осей X и У, а третий необходим для определения вра-
щательных колебаний.
8.2.4. Перфоратор и считыватель ленты. Использование ШД для управ-
ления звездочкой в перфораторе и считывателе ленты (рис. 8.16) упо-
миналось в гл. 2. В перфораторах со скоростью 100—200 линий в секун-
ду для управления звездочками применяют ШД. Для низкоскоростных
устройств используют храповый механизм. Скорость считывания с ленты
изменяется в пределах от 200 до 500 линий в секунду.
8.25. Устройство контроля профилей копировальных станков. Это
устройство используют для контроля данных на перфоленте копироваль-
ных станков с цифровым программным управлением. Шаговый двига-
тель служит для управления звездочкой, передвигающей перфоленту.
Внешний вид устройства приведен на рис. 8.17. Программируемый про-
филь рисуется на бумаге пером, прикрепленным к устройству (рис. 8.18).
8J. ДРУГИЕ ПРИМЕНЕНИЯ
Факсимиле. Устройства, предназначенные для передачи документов и чер-
тежей на расстояние с помощью телефонных линий, называются факси-
189
Рис. 8.19. Принцип работы устройства передачи документов:
1 — шаговый двигатель; 2 — направление движения; 3 — лампа; 4 — фотоэле-
мент; 5 - записывающая ища; 6 - телефонный канал
миле-машинами. Они все больше используются в настоящее время для
пересылки документов как в разные страны, так и на близкие расстоя-
ния. Основные принципы работы факсимиле-машины изображены на
рис. 8.19. Документ, навернутый на барабан, сканируется и поворачи-
вается (субсканирование), затем делится на графические элементы, ко-
торые переводятся в электрические сигналы фотоэлектрической считы-
вающей головкой. Сигналы затем посылаются по линиям передач к при-
нимающему устройству. Принимаемые сигналы демодулируют и воспро-
изводят записывающим пером. Горизонтальное сканирование и поворо-
ты барабана повторяются воспринимающим устройством.
Синхронные двигатели (гистерезисные или реактивные) или ШД ис-
пользуют при управлении барабаном для субсканирования как в переда-
ющем, так и в принимающем устройстве. Синхронные двигатели приме-
няют в тех факсимиле-машинах, где барабаны в обоих устройствах долж-
ны вращаться синхронно. В более новых факсимиле-машинах документы
тачала копируются, полученные данные временно запоминаются в бу-
ферной памяти, затем сжимаются для снижения их объема до необходи-
мых пределов и затем посылаются во временную память принимающего
устройства. Для этого класса машин незаменимы ШД.
Если объем памяти достаточен, то за один раз можно передать большое
число документов. Однако увеличение памяти ведет к удорожанию ма-
шины. Вместо этого повторяют запоминание, используя малый объем
оперативной памяти. Двигатель последовательно управляется инкремент-
ным способом. Количество данных, передаваемых за один инкремент,
зависит от типа документа, объема памяти, сжатия и условий линии пе-
редачи. Количество сканирований на миллиметр составляет от 4 до 8.
Чем больше это число, тем лучше качество воспроизведения документов
или чертежей.
Полуавтоматическое устройство для монтажа. На рис. 8.20 изображе-
ны полуавтоматическое устройство для монтажа плат и панель его уп-
равления. Коробка справа содержит проводники разной длины и цвета.
Управляющая панель справа совмещена с устройством считывания с пер-
фоленты. Весь монтаж программируется и запоминается на перфоленте.
Как только нажатием кнопки запускается программа монтажа, лампоч-
ка индикатора указывает первый из требуемых проводников. Одновре-
менно с этим запускаются два ШД, обеспечивающие перемещение по го-
190
Р и с. 8. 20. Полуавто магическое устройство для монтажа и панель управления:
1 — шаговые двигатели
ризонтальной и вертикальной осям и определяется отверстие, в которое
вставляется монтируемый проводник. Оба двигателя задействуются сра-
зу, как только очередной монтаж выполнен. Это осуществляется нажа-
тием ножной педали. Двигатели определят точку, к которой сигнал об
окончании действия, индикаторная лампа указывает второй проводник и
двигатели протягивают его к точке монтажа.
Применение ШД в космических летательных аппаратах. Шаговые двига-
тели используют в космических летательных аппаратах, запускаемых для
научного исследования планет [6, 7]. На сканирующей платформе распо-
лагают различные приборы, например, телевизионные камеры и ультра-
Рис. 8.21. Зубчатая передача в сканирующей платформе:
1 — муфта сцепления; 2 — выходной вал; 3—шаговый двигатель; 4—встроенный
потенциометр; 5 — простой потенциометр
191
Рис. 8.22. Устройство печати маркеров для маркировки стальных плит
фиолетовые спектрометры. Шаговые двигатели применяют для их наве-
дения на нужную цель. На аппарате Mariner использовали четырехфазные
двигатели с постоянными магнитами 11-го калибра (27 мм в диаметре)
с углом шага 90°. Зубчатая передача электропривода с передаточным
отношением 9081:1, изображенная на рис. 8.21, заключенная в металли-
ческий контейнер, обеспечивает на каждом шаге двигателя поворот вала
на 0,1792 м-рад (около 0,1°). Обратная связь по положению и телеметри-
ческие потенциометры, которые подключены к электроприводу выход-
ного вала с помощью высокоточного безлюфтового механизма, дают
точное измерение положения выходного вала электропривода.
Устройство печати маркеров применяется в тяжелой индустрии для
маркировки продукции (стальных плит и прочее) на металлургических
предприятиях (рис. 8.22). Шаговый двигатель может быть применен в
Рис. 8.23. Цифро-аналоговый преобразователь, использующий ШД
192
Рис. 8. 24. Принцип использования
однофазного ШД в часах:
1 - статор; 2 - минутная стрелка и
триб; 3 — триб с управляющим коле-
сом; 4 — третье колесо и триб; 5 — чет-
вертое колесо и триб; 6 — пятое колесо
и триб; 7 — шестое колесо и триб; 8 —
ротор; 9 - обмотка
электромеханических цифро-аналоговых преобразователях. Устройство,
изображенное на рис. 8.23, для аналоговой части использует потенциомет-
ры. Потенциометр соединен с валом ШД зубчатой передачей. Цифровой
сигнал система управления двигателя преобразует в аналоговый (напря-
жение на выходах потенциометра). В аналоговой части также можно ис-
пользовать синхронизаторы.
Изготовление интегральных схем с помощью электронного луча. В
устройстве для изготовления интегральных схем высокой степени ин-
теграции используют обычно два ШД. Они служат для управления точ-
ным положением AY-стола, несущего пластину в вакуумной камере во
время экспозиции электронным лучом.
Использование ШД в часах (рис. 8.24). Принцип работы двигателя
рассмотрен в 2.4.1. В часах высокостабильные колебания частоты 32 768
или 2IS Гц, создаваемые кварцевым генератором, понижаются до 1 Гц
с помощью делителя частоты, затем усиливаются для возбуждения катуш-
ки статора. Ротор ШД диаметром 1,5 мм вращается с частотой 1/2 оборо-
та в секунду и изготовлен из самарий-кобальтового магнита. Система уп-
равления, содержащая кварцевый генератор и электронный блок из де-
лителя частоты и инвертора, имеет малый объем.
СПИСОК ЛИТЕРАТУРЫ
Глава 1
[1] McClelland, W. (1927). The Application of Electricity in Warships. ЛЕЕ
65, 829-71. (Related part: pp. 850-2.)
[2] Kieburtz, R. B. (1964). The Step Motor—The Next Advance in Control
Systems. IEEE Transactions on Automatic Control. January, pp. 98-104.
[3] Byrne, J. V. and Lacy, J. C. (1976). Characteristics of Saturated Stepper and
Reluctance Motors. IEE Conf. Pub. 136 (Small Electrical Machines),
pp. 93-6.
[4] Walker, C. L. (1919). Improvements in and connected with Electro-magnetic
Step-by-step Signalling and Synchronous Rotation. UK Patent 137,150.
[5] Chicken, С. B. and Thain, J. H. (1920). Electrical Signaling Apparatus. US
Patent 1,353,025.
[6] Thomas, A. G. and Fleischauer, F. J. (1957). The Power Stepping Motor—A
New Digital Actuator. Control Engineering 4, (Jan.), 74-81.
[7] Bailey, S. J. (1960). Incremental Servps, Part I—Stepping vs. Stepless
Control. Control Engineering 7, (Nov.) 123-7.
[8] Bailey, S. J. (1960). Incremental Servos, Pan II—Operation and Analysis.
Ibid. 7, (Dec.) 97-102.
[9] Bailey, S. J. (1961). Incremental Servos, Part III—How They’ve Been Used.
Ibid. 8 (Jan.), 85-8.
[10] Bailey, S. J. (1961). Incremental Servos, Part IV—Today’s Hardware. Ibid.
8, (March), 133-5.
[11] Proctor, J. (1963). Stepping Motors Move In. Product Engineering 4, (Feb.
74-88.
[12] Feiertag, К. M. and Donahoo, J. T. (1952). Dynamoelectric Machine. US
Patent 2,589,999.
[13] Pawletko, J. P. (1972). Approaches to St, ’.ng Motor Controls. Proc. First
Annual Symposium on Incremental Motion Control Systems and Devices.
Department of Electrical Engineering, University of Illinois, pp. 431-63.
[14] Hinds, W. E. (1974). The Sawyer Linear Motor. Proc. Third Annual
Symposium on Incremental Motion Control Systems and Devices. University
of Illinous. pp. W1-W10.
[15] Chai, H. D. and Pawletko, J. P. Serial Printer with Linear Motor Drive. US
Patent 4,044,881.
[16] Singh, G., Gerner, M., and Itzkowitz, H. (1979). Motion Control Aspects in
the Qyx Intelligent Typewriter, Proc. International Conference on Stepping
Motors and Systems. University of I^eds. pp. 6-12.
Глава 2
[1] Biscoe, G. I. and Mills, A. S. (1977). The rationalisation and standardization
of stepping motors and their test methods. Proc. Sixth Annual Symposium on
Incremental motion control systems and devices. Department of Electrical
Engineering, University of Illinois, pp. 331-42.
194
[2] Kenjo, T. and Niimura, Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) pp. 243-4. Sogo Electronics Publishing Co., Ltd.,
Tokyo.
[3] Pawletko, J. P. and Chai, H. D. (1976). Three-phase variable-reluctance step
motor with bifilar winding. Proc. Fifth Annual Symposium on Incremental
motion control systems and devices. Department of Electrical Engineering,
University of Illinois, pp. F1-F8.
[4] Egawa, K. (1971). Stator design for a stepping motor. United States Patent
No. 3,601,640.
[5] Feiertag, К. M. and Donahoo, J.T. (1952). Dynamoelectric machine. United
States Patent No. 2,589,999.
[6] Heine, G. (1977). Control methodology of 5-phase PM stepping motors.
Proc. Sixth Annual Symposium on Increment motion control systems and
devices. Department of Electrical Engineering, University of Illinois, pp.
313-30.
[7] Kuo, В. C. (1979). Step motors and control systems. Chapter 14. SRL
Publishing Company, Champaign, Illinois.
[8] Goddijn, В. H. A. (1978). Effect of the number of pole pairs and permanent
magnet excitation on the performance of a hybrid stepping motor. Proc.
Seventh Annual Symposium on Incremental motion control systems and
devices. Incremental Motion Control Systems Society, Champaign, Illinois,
pp. 7-12.
[9] Niimura, Y. (1974). Outer-rotor-type stepping motor. Proc. Third Annual
Symposium on Incremental motor control systems and devices. Department of
Electrical Engineering, University of Illinois, pp. H1-H10.
[10] Pawletko, J. P. (1976). Dynamic responses and control aspects of linear
stepping motors. Proc. Fifth Annual Symposium on Incremental motor control
systems and devices. Department of Electrical Engineering, University of
Illinois, pp. P1-P17.
[11] Hinds, W. E. and Nocito, B. (1974). The Sawyer linear motor. Proc. Third
Annual Symposium on Incremental motor control systems and devices. De-
partment of Electrical Engineering, University of Illinois, pp. W1-W10.
[12] Langley, L. W. and Kidd, H. K. (1979). Closed-loop operation of a linear
stepping motor under microprocessor control. Proc. International conference
on stepping motors and systems. University of Leeds, England, pp. 32-6.
[13] Kenjo, T. and Takahashi, H. (1979). Speed ripple characteristics of hybrid
stepping motors driven in the ministep mode. Proc. International conference
on stepping motors and systems. University of Leeds. England pp. 87-93.
[14] Patterson, M. L. and Haselby, R. D. (1977). A microstepped XY controller
with adjustable phase current waveforms. Proc. Sixth Annual Symposium on
Incremental motor control systems and devices. Department of Electrical
Engineering, University of Illinois, pp. 163-8.
[15] Patterson, M. L. (1977). Analysis and correction of torque harmonics in
permanent-magnet step motors. Ibid. pp. 25-37.
[16] Bailey, S. J. (1960). Incremental servos, Part II: Operation and analysis.
Control Engineering Dec. pp. 97-102.
[17] Kenjo, T. and Niimura, Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) p. 231. Sogo Electronics Publishing Co., Ltd., Tokyo.
195
[18] Kuo, В. С. (1979). Step motors and control systems. Chapter 6. SRL Publish-
ing Company, Champaign, Illinois.
Глава 3
[1] Seely, S. (1962). Electromechanical energy conversion, p. 19. McGraw Hill
Book Company, Inc.
[2] Byrne, J. V. (1972). Tangential forces in overlapped pole geometries, incor-
porating ideally saturable material. Trans IEEE Mag. 8, (1), 2-9.
[3] Lawrenson, P. J., Hodson, D. P., and Harris, M. R. (1976). Electromagnetic
forces in saturated magnetic circuits. Proc. Conference on small electrical
machines. Institution of Electrical Engineers, London, pp. 89-92.
[4] Harris, M. R., Hughes, A., and Lawrenson, P. J. (1975). Static torque
production in saturated doubly-salient machines. Proc. IEE 122, (10),
1121-7.
[5] Patterson, M. L. (1977). Analysis and correction of torque harmonics in
permanent-magnet step motors. Proc. Sixth annual symposium on Incremen-
tal motion control systems and devices. Department of Electrical Engineering,
University of Illinois, pp. 25-37.
[6] Patterson, M. L. and Haselby, R. D. (1977). A microstepped XY controller
with adjustable phase current waveforms. Ibid., pp. 163-8.
[7] Pritchard, E. K. Mini-stepping observations on stepping motors. Ibid., pp.
169-78.
[8] Layer, H. P. (1977). Digital sine-cosine mini-stepping motor drive. Ibid.,
pp. 179-81.
[9] Kenjo, T. and Takahashi, H. (1979). Speed ripple characteristics of hybrid
stepping motors driven in the ministep mode. Proc. International conference
of stepping motors and systems. University of Leeds, pp. 87-93.
[10] Kuo, В. C. (1979). Incremental motion control. Step motors and control
systems. p. 15. SRL Publishing Company, Champaign, Illinois.
Глава 4
[1] Hughes, A. and Lawrenson, P. J. (1975). Electromagnetic damping in step-
ping motors. Proc. IEE 122, (8) 819-24.
[2] Hughes, A. and Lawrenson, P. J. (1978). U.K. Patent No. 1,523,348.
[З] Kenjo, T. and Niimura. Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) p. 111. Sogo Electronics Publishing Co., Ltd., Tokyo.
[4] Hughes, A., Lawrenson, P. J., and Davies, T. S. (1976). Factors determining
high-speed torque in hybrid motors. Proc. International conference on step-
ping motors and devices. University of Leeds, pp. 150-7.
[5] Lawrenson, P. J., Hughes, A., and Acarnley, P. P. <1976). Starting/stopping
rates of stepping motors: Improvement and prediction. Proc. International
conference on stepping motors and systems. University of Leeds, pp. 54-60.
[6] Lawrenson, P. J. and Kingham, I. E. (1977). Resonance effects in stepping
motors. Proc. IEE 124, (5), 445-8.
196
[7] Ward, P. A. and Lawrenson, P. J. (1977). Backlash, resonance and instabil-
ity in stepping motors. Proc. Sixth annual symposium on Incremental motion
control systems and devices. Department of Electrical Engineering, Univer-
sity of Illinois, pp. 73-83.
[8] Singh, G., Leenhouts, A. C., and Mosel, E. F. (1976) Electromagnetic reso-
nance in permanent-magnet step motor drive system. Proc. International
conference on stepping motors and systems. University of Leeds, pp. 115-24.
[9] Leenhouts, A. C. and Singh, G. (1977). An active stabilization technique for
open loop permanent-magnet step motor drive system. Proc. Sixth annual
symposium on Incremental motion control systems and devices. Department
of Electrical Engineering, University of Illinois, pp. 19-24.
[10] Hughes, A. and Lawrenson. P. J. (1979). Simple theoretical stability criteria
for 1.8° hybrid motors. Proc. International conference on stepping motors and
systems. University of Leeds, pp. 127-35.
[11] Lawrenson, P. J. and Kingham, I. E. (1975). Viscously coupled inertial
damping of stepping motors. Proc. IEE 122, (10), 1137-40.
Глава 5
[1] Maginot, J. and Oliver, W. (1974). Step motor drive circuitry and open loop
control. Proc. Third Annual Symposium on Incremental motion control system
and devices. Department of Electrical Engineering, University of Illinois, pp.
В1-39.
[2] Kenjo, T. and Niimura, Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) p. 157. Sogo Electronics Publishing Co., Ltd., Tokyo.
[3] Pawletko, J. P. and Chai, H. D. (1976). Three-phase variable-reluctance step
motor with bifilar winding. Proc. Fifth Annual Symposium on Incremental
motion control system and devils. Department of Electrical Engineering,
University of Illinois, pp. Fl-8.
[4] Niimura, Y. (1974). Outer-rotor-type stepping motor. Proc. Third Annual
Symposium on Incremental motion control system and devices. Department of
Electrical Engineering, University of Illinois, pp. Hl-10.
[5] Intel 8080 Assembly Language Programming Manual. Intel Corporation,
Santa Clara, California (1975).
Глава 6
[1] Kenjo, T. and Niimura, Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) pp. 225-7. Sogo Electronics Publishing Co., Ltd.,
Tokyo.
[2] Ward, P. A. and Lawrenson, P. J. (1977). Backlash, resonance and instability
in stepping motors. Proc. Sixth annual symposium on Incremental motion
control systems and devices. Department of Electrical Engineering, University
of Illinois, pp. 73-83.
[3] Kordic, K. S. (1976). Dynamic torque measurements for step motors. Proc.
Fifth Annual Symposium on Incremental motion control systems and devices.
Department of Electrical Engineering, University of Illinois, pp. El-21.
197
Глава 7
[1] Shimotani, К. and Kataoka, T. (1976). Improvement of a closed-loop step-
ping motor by excitation methods Trans. Institute of Electrical' Engineers of
Japan 96B, (6). 299-306.
[2] Kenjo, T. and Niimura, Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) p. 208. Sogo Electronics Publishing Co., Ltd., Tokyo.
[3] Fredriksen, T. R. (1968). Applications of the closed loop stepping motor.
IEEE Trans. Automatic Control AC13, (5), 464-74.
[4] Kenjo, T., Takahashi, H., and Takahara, T. (1980). Microprocessor controlled
self-optimization drive of a step motor. Proc. Ninth annual symposium on
Incremental motion control systems and devices. Incremental Motion Control
Systems Society, Champaign, Illinois, pp 115-24.
[5] Kenjo, T. and Niimura, Y. (1979). Fundamentals and applications of stepping
motors. (In Japanese.) p 218. Sogo Electronics Publishing Co., Ltd., Tokyo.
[6] Kuo, B.C. (1979). Incremental motion control—Step motors and control
systems, p. 256. SRL Publishing Company, Champaign, Illinois.
[7] Langley, L. W. and Kidd, H. K. (1979). Closed-loop operation of a linear
stepping motor under microprocessor control. Proc. International Conference
on Stepping Motors and Systems. University of Leeds, pp. 32-6.
Глава 8
[1] Chai, H. D. and Pawletko, J. P (1977). Serial printer with linear motor drive.
U.S Patent 4,044,881.
[2] Singh, G., Gerner, M , and Itzkwitz, H. (1979). Motion control aspects in the
Oyx intelligent typewriter. Proc. International Conference on Stepping Motors
and Systems University of Leeds, pp. 6-12.
[3] Patterson, M. L., Haselby, R D., and Kemplin, R M (1977). Speed, preci-
sion, and smoothness characterize four-color plotter pen drive system. Hewlett
Packard Journal 29, (1), 13-19.
[4] Patterson, M. L. and Haselby, R. D. (1977). A micro-stepped XY controller
with adjustable phase current waveforms. Proc. Sixth Annual Symposium on
Incremental motion control systems and devices. Department of Electrical
Engineering, University of Illinois pp 163-8
[5] Hinds, W. E. and Nocito, B. (1973). The Sawyer linear motor. Proc. Second
Annual Symposium on Incremental motion control systems and devices. De-
partment of Electrical Engineering, University of Illinois, pp. Wl-10.
[6] Hughes, R. О (1975) Dynamics of incremental motion devices associated
with planetary exploration spacecraft. Proc. Fourth Annual Symposium on
Incremental motion control systems and devices. Department of Electrical
Engineering, University of Illinois, pp. BB 1-8.
[7] Tohvar, A. F. and Hughes, R. O. (1976). Science platform pointing control
law for a planetary exploration spacecraft. Proc. Fifth Annual Symposium on
Incremental motion cr.ntroi systems and devices. Department of Electrical
Engineering, University of Illinois pp AA1-2.
198
ОГЛАВЛЕНИЕ
Предисловие редактора................................................. 3
Предисловие........................................................... 4
Глава 1. Введение и исторический обзор............................. 6
1.1. Что такое шаговый двигатель и каковы его основные характерис-
тики ............................................................. 6
1.2. История возникновения шаговых двигателей..................... 8
1.3. Эра цифрового управления и прогресс 1960-х годов............ 10
1.4. Быстрый прогресс в 1970-х годах............................. 14
1.5. Новые области применения шаговых двигателей................. 15
1.6. Исследовательская активность................................ 16
Глава 2. Основные принципы современных шаговых двигателей......... 16
2.1. Системы управления с разомкнутой цепью (без обратной связи) 16
2.2. Классификация шаговых двигателей............................ 24
2.3. Режимы возбуждения.......................................... 44
2.4. Однофазные шаговые двигатели ............................... 52
2.5. Характеристики шагового двигателя........................... 54
Глава 3. Теория электромагнетизма и структура шаговых двигателей 56
3.1. Механизм образования статического момента в реактивном шаго-
вом двигателе.................................................... 58
3.2. Теория момента для гибридных шаговых двигателей ............ 69
3.3. Зубчатая структура, число зубцов, число шагов за оборот и число
полюсов ......................................................... 71
Глава 4. Фундаментальная теория динамических характеристик шаговых
двигателей........................................................... 75
4.1. Фундаментальные уравнения................................... 75
4.2. Передаточные функции шаговых двигателей..................... 81
4.3. Одношаговая реакция......................................... 85
4.4. Характеристики зависимости момента от частоты вращения...... 88
4.5. Резонансы и нестабильности.................................. 92
4.6. Механические демпфирующие устройства........................ 97
Глава 5. Системы и схемы управления шаговыми двигателями без обрат-
ной связи........................................................... 101
5.1. Система управления..........................................101
5.2. Логические блоки системы управления.........................102
5.3. Инвертор (коммутатор) двигателя.............................109
5.4. Входной контроллер..........................................119
5.5. Управление ускорением двигателя с помощью микропроцессора . . . 125
Глава 6. Моментные характеристики и период следования импульсов
управления - измерение и использование при конструировании систем уп-
равления ........................................................... 136
6.1. Измерение статических характеристик.........................137
6.2. Измерение динамических характеристик....................... 138
6.3. Уравнение движения и ускорения............................. 145
6.4. Определение длительности и частоты следования импульсов управ-
ления .......................................................... 149
6.5. Приложение - эквивалентный момент инерции, приведенный к ва-
лу двигателя.................................................... 157
199
Глава 7. Управление шаговыми двигателями с обратной связно . . . ..159
7.1. Ограничения управления без обратной связи и необходимость убав-
ления с обратной связью............................................159
7.2. Угол коммутации........................................160
7.3. Система управления с обратной связью, использующая микропро-
цессор ........................................................169
7.4. Другие типы управления с обратной связью...............177
Глава 8. Применение шаговых двигателей............................ 180
8.1. Использование шаговых двигателей в периферийных устройствах вы-
числительных машин............................................ 180
8.2. Использование шаговых двигателей в станках с числовым програм-
мным убавлением................................................185
8.3. Другие бименения .........................................189
ПРОИЗВОДСТВЕННОЕ ИЗДАНИЕ
Кенио Т.
ШАГОВЫЕ ДВИГАТЕЛИ
И ИХ МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Рсдактб издательства А. А. Устинов
Художественные редактбы А.Т. Кирьянов, Г.И. Панфилова
Техническиередактбы Т.Н.Тюрина, Г.Н.Лядухина
Кбректор Р.К. Шилова
Оператб Л. А. Архангельская
ИБ № 2236.
Набор выполнен в Энергоатомиздате на Композере ИБМ-82. Подписано в печать
24.07.87. Формат 60 х 90 1/16. Бумага офсетная N* 2. Печать офсетная. Усл.
печ. л. 12,S. Усл. кр.-отт. 12,S. Уч.-изд. л. 13,43. Тираж SO00 экз. Заказ 650
Цена 1 р. 30 к.
Энергоатомиздат, 113114, Москва, М-114, Шлюзовая наб., 10
Московская типография № 6 Союзполиграфпрома при Государственном комитете
СССР по делам издательств, полиграфии и книжной торговли
109088, Москва, Ж-88, Южнопбтовая ул., 24.
Т Кенио .
х микро-
процессорные
истемы
I
F
У
i
* ,
'» . »*•
• ЭНЕРГОАТОМИЗДАТ’