/


























































































































Автор: Калабеков Б.А.
Теги: организация производственного процесса производственное планирование управление качеством программирование схемотехника радиоэлектроника
ISBN: 5-256-00674-6
Год: 1990




Текст
бДХалабехоз
о'ЛЛ. Малафеев
МЕТОДЫ
Автоматизирован! ioro
<Г / РАСЧЕТА
ЖжШЙкТРОННЫХ СХЕМ
I ТЕХНИКЕ СВЯЗИ
--4*'=%?--^Учебное пособий —
>- для высших
учебных :
< л- г '' заведении
-. , .- --- -- II " - Ч — I— < — ->*
Б. А.Калабеков
В.Ю.Лапидус
В. М. Малафеев
МЕТОДЫ
АВТОМАТИЗИРОВАННОГО
РАСЧЕТА
ЭЛЕКТРОННЫХ СХЕМ
В ТЕХНИКЕ СВЯЗИ
Допущено Государственным комитетом СССР
по народному образованию
в качестве учебного пособия
для студентов вузов,
обучающихся по специальностям
«Автоматическая электросвязь»,
«Многоканальная электросвязь»,
«Радиосвязь, радиовещание и телевидение»
Москва
И «Радио и
1990
связь»
ББК 32.973
К17
УДК 658.512.011.56 : 621.372(075)
Рецензенты: кафедра импульсной и вычислительной техники ЛЭИС
им. М. А. Бонч-Бруевича (зав. кафедрой доктор техн, наук, проф. Л. П. Глазу-
нов), доктор техн, наук, проф. И. П. Норенков
Редакция литературы по информатике и вычислительной технике
Калабеков Б. А. и др.
К17 Методы автоматизированного расчета электронных схем
в технике связи: Учеб, пособие для вузов/Б. А. Калабеков,
В. Ю. Лапидус, В. М. Малафеев.— М.: Радио и связь,
1990.— 272 с.: ил.
ISBN 5-256-00674-6.
Излагаются методы формирования математической модели электрон-
ных схем, расчета характеристик передачи, временных характеристик, от-
кликов, устойчивости линейных схем, процессов в нелинейных схемах, чув-
ствительности схем к отклонениям параметров их элементов. Приводятся
алгоритмы расчетов, основанные на методе переменных состояния, дается
их программная реализация на языке Бейсик.
Для студентов вузов связи, может быть полезна специалистам, заня-
тым схемотехническим проектированием радиоэлектронных устройств.
„ 2303020000-156
К 046(01 )-90 97’90
ББК 32.973
ISBN 5-256-00674-6 © Калабеков Б. А., Лапидус В. Ю., Малафеев В. М., 1990
ПРЕДИСЛОВИЕ
Широкая автоматизация исследований и разработок на базе
ЭВМ требует соответствующей подготовки инженерных кадров.
Среди специалистов и преподавателей вузов распространены
две точки зрения на подготовку в области применений ЭВМ. Од-
на точка зрения заключается в том, что инженер в процессе своей
профессиональной деятельности должен пользоваться исключи-
тельно универсальными программами и подготовка в вузе в об-
ласти применений ЭВМ сводится лишь к привитию навыков поль-
зования этими программами. Другая точка зрения предполагает,
что инженер в своей деятельности наряду с задачами, при реше-
нии которых можно использовать универсальные программы, по-
стоянно встречается с задачами, для которых он должен выби-
рать метод решения, разрабатывать алгоритм и программу, так
как эти задачи не реализуются универсальными программами.
В связи с этим в вузах необходимо обеспечить соответствующую
подготовку.
Авторы настоящего учебного пособия исходили из убеждения,
что подготовку инженеров специальностей радиотехники и связи
следует осуществлять на принципах, основанных на второй точке
зрения, и инженер указанных специальностей должен в процессе
вузовской подготовки изучать методы и алгоритмы, используемые
в программных средствах, которые предназначены для анализа
процессов в соответствующих устройствах или для проектирова-
ния последних.
Подготовка в области применений ЭВМ эффективна, если:
в определенных базовых дисциплинах обеспечиваются необхо-
димая математическая подготовка, связанная с изучением числен-
ных методов реализации типовых инженерных задач, алгоритми-
ческая подготовка, предусматривающая изучение приемов постро-
ения алгоритмов этих задач, и лингвистическая подготовка, обес-
печивающая описание алгоритмов на одном из универсальных
языков программирования (программирование с использованием
языков моделирования, управления и т. д. может быть предметом
изучения соответствующих профилирующих дисциплин учебных
планов специальностей);
последующая специальная подготовка будет реализована че-
рез большое число общетехнических и специальных дисциплин
3
учебных планов. При этом в каждой дисциплине должны изучать-
ся вопросы применений ЭВМ, органически связанные с основным
содержанием этих дисциплин. Совокупность таких вопросов, рас-
сматриваемых в различных дисциплинах, должна обеспечивать
необходимую полноту подготовки, а временная последователь-
ность их изучения должна быть подчинена требованиям их логи-
ческой взаимосвязи в единой системе подготовки в области при-
менений ЭВМ.
Трудности, с которыми сталкиваются при изучении вопросов
применений ЭВМ, в основном вызваны тем, что эти вопросы не-
достаточно отражены в учебной литературе. В надежде воспол-
нить этот пробел авторы при написании данной книги ставили
перед собой цель представить в ней в соответствующей методи-
ческой обработке материал, предназначенный для изучения воп-
росов применений ЭВМ в группе дисциплин специальностей ра-
дио- и электросвязи, имеющих схемотехническую направленность.
Материал гл. 1—6 ориентирован на использование в дисцип-
линах общеинженерной подготовки, связанных с изучением тео-
рии линейных и нелинейных электрических цепей, электронных
приборов. Здесь рассматриваются машинные модели некоторых
типов электронных приборов, формирование математической мо-
дели цепей и расчет их характеристик.
В последующих главах содержится материал, который пред-
назначен для использования при изучении специальных дисцип-
лин. Он охватывает следующие вопросы: прохождение сигналов
через высокодобротные цепи, включая расчет мгновенных значе-
ний отклика, огибающих амплитуды, фазы, частоты отклика; воп-
росы прохождения через цепи модулированных колебаний; расчет
искажений сигналов в цепях; устойчивости цепей против самовоз-
буждения, чувствительности их характеристик к отклонениям
параметров элементов, анализ влияния разброса параметров эле-
ментов.
Книга имеет следующие особенности.
1. Изложение основано на использовании метода переменных
состояния, выбор которого вызван следующими причинами. Метод
узловых потенциалов используется в программах САПР опреде-
ленного класса радиотехнических устройств. В задачах же иссле-
дований и разработок, при решении которых не используются
программы САПР, отдают предпочтение методу переменных со-
стояния. Такие задачи типичны для радиотехники и связи. Кроме
того, метод переменных состояния имеет широкое применение при
анализе различных систем и сетей связи. Таким образом, исполь-
зование данного метода обеспечивает единство подходов при ана-
лизе устройств, систем, сетей связи.
2. Приводятся примеры, а также задачи, предназначенные для
самостоятельной работы студентов.
3. В каждом виде расчетов рассматриваются методы и алго-
4
ритмы, основанные на этих методах, а также приводятся про-
граммы, реализующие алгоритмы. Таким образом, пособие содер-
жит материалы, которые могут быть использованы в качестве
программного обеспечения лабораторного практикума, практиче-
ских занятий, курсового и дипломного проектирования.
4. При написании программ был использован алгоритмический
язык Бейсик и предусмотрена ориентация на микроЭВМ (мини-
ЭВМ). Приведенпып а книге достаточно обширный набор про-
грамм позволяет читателю легко строить программы расчетов
с различными условиями. Для обеспечения большей ясности авто-
ры в ряде случаев избегали программистских ухищрений, направ-
ленных на повышение эффективности программ.
Б. А. Калабековым написаны введение, гл. 1, 2, §§ 3.1, 3.2, 3.4,
3.8, 3.9, гл. 4, §§ 6.1, 6.3, 6.5, гл. 7, 8, 9, 11 (кроме § 11.4), 12
(кроме § 12.5), 14 (кроме § 14.4); В. Ю. Лапидусом написаны
§§ 3.3, 3.5, 3.7, 3.10, 5.3, 6.2, 6.4, 11.4, 12.5, 14.4, приложение;
В. М. Малафеевым написаны § 3.6, гл. 5 (кроме § 5.3). 10, 13. 15.
ВВЕДЕНИЕ
В.1. ОСНОВНЫЕ НАПРАВЛЕНИЯ
ПРИМЕНЕНИЙ ВЫЧИСЛИТЕЛЬНОЙ
ТЕХНИКИ
Вычислительная техника проникает во все сферы человеческой
деятельности, включая научные исследования, разработку, произ-
водство и эксплуатацию разнообразных технических средств. Ис-
пользование вычислительной техники направлено на повышение
эффективности человеческого труда и, таким образом, способст-
вует развитию народного хозяйства. Широта применения средств
вычислительной техники в значительной мере определяет про-
мышленно-экономический потенциал государства. Этим объясня-
ется внимание, которое в нашей стране уделяется развитию
средств вычислительной техники и их применению.
Эффективное использование вычислительной техники возмож-
но при наличии специалистов с соответствующей подготовкой,
поэтому с точки зрения современных требований уровень подго-
товки специалистов в существенной мере должен определяться
их подготовленностью в направлениях, связанных с применением
ЭВМ и встраиваемых в аппаратуру специализированных микро-
процессорных устройств.
Многообразные применения вычислительной техники можно
разбить на следующие основные направления:
автоматизация проектирования,
автоматизация научных исследований,
автоматизация управления технологическими процессами,
автоматизация административно-организационного управления
предприятиями, отраслью.
Рассмотрим содержание каждого из приведенных направлений.
Автоматизация проектирования. Решаемые в процессе проек-
тирования задачи могут существенно различаться в зависимости
от класса объектов, подлежащих проектированию.
йри проектировании сетей связи решаются следующие основ-
ные задачи: выбор конфигурации сети, размещение узлов и уст-
ройств, выбор параметров сетей, развитие сетей во времени.
йри системотехническом проектировании разработка ведется
до уровня структурных (функциональных) схем, элементами ко-
6
торых служат блоки, узлы оборудования. В процессе проектиро-
вания разрабатываются варианты структурной схемы, т. е. набо-
ры взаимно связанных блоков, узлов, каждому из которых при-
своены некоторые выходные характеристики. Затем определяются
общие выходные характеристики системы и, если они не соответ-
ствуют требованиям технического задания (ТЗ), выдвигаются
новые варианты структурной схемы.
Схемотехническое проектирование устройств предусматривает
разработку блоков, узлов системы до уровня принципиальных
схем. При разработке аналоговых устройств задают варианты по-
строения, для которых находятся выходные характеристики, их
сопоставлением с требуемыми характеристиками определяется
работоспособность устройства. В проектировании цифровых уст-
ройств предусматриваются этапы алгоритмического проектирова-
ния, т. е. разработки алгоритма функционирования блоков, и ло-
гического проектирования с получением логической структуры
узлов.
Конструкторское проектирование устройств предусматривает
разработку конструкции устройства. Смысл технологического про-
ектирования состоит в разработке технологической подготовки
производства с изготовлением документации для изготовителя.
Наконец, объектом проектирования может служить не только
техническая система, устройство, но и экономическая система.
Различие объектов проектирования приводит к различию ре-
шаемых задач, математических методов, алгоритмов их решения.
Однако независимо от класса проектируемого объекта можно вы-
явить много общих черт процессов проектирования.
На рис. В.1 показана обобщенная схема, отражающая процесс
проектирования независимо от класса проектируемых объектов.
Проектировщик выдвигает вариант построения объекта. Далее
в результате анализа поведения варианта выявляются выходные
характеристики объекта, целенаправленным варьированием его
параметров достигается наилучшее функционирование (этот про-
цесс называют параметрической оптимизацией) для данного ва-
рианта построения объекта. Затем выявляется соответствие полу-
ченных выходных характеристик объекта требованиям ТЗ. Если
условия ТЗ оказываются невыполненными, то проектировщик со-
ставляет новый вариант, стремясь обеспечить требуемые показа-
тели, либо если такой вариант создать не удается, эти требова-
ния должны быть пересмотрены.
При проектировании без привлечения ЭВМ для анализа вари-
анта построения объекта создается макет, на котором проводятся
натурные испытания для определения выходных характеристик
рассматриваемого варианта объекта. Проектирование с примене-
нии ЭВМ позволяет предсказывать поведение выбранного вариан-
та построения объекта, не создавая макета и не приводя на нем
натурных измерений, что существенно (в десятки раз и более)
7
сокращает сроки проектирования. С помощью ЭВМ можно точнее
оценивать поведение объекта на основании характеристик, кото-
рые без ЭВМ получить невозможно (оценивать влияние на рабо-
тоспособность аппаратуры случайных отклонений параметров
элементов, возникающих на этапе ее изготовления, прогнозиро-
вать поведение аппаратуры в процессе ее эксплуатации, выявлять
влияние среды и случайных воздействий на поведение аппарату-
ры и т. д.). Это может обеспечить более высокое качество про-
екта.
Возможна разная глубина проникновения ЭВМ в процесс
проектирования, она зависит от степени разработанности соответ-
ствующих алгоритмов и наличия программного обеспечения. С по-
мощью ЭВМ может производиться лишь расчет выходных харак-
теристик, а формирование модели и весь остальной процесс могут
выполняться без ЭВМ. На ЭВМ часто возлагается и задача фор-
мирования модели (например, математической модели в виде
системы уравнений, описывающих анализируемый процесс), и,
следовательно, весь анализ в этом случае выполняется с помощью
8
ЭВМ. На ЭВМ может быть возложена и задача параметрической
оптимизации, включающая целенаправленное варьирование внут-
ренними параметрами объекта с последующим повторным анали-
зом и оцениванием характеристик проектируемого объекта.
Для проектирования с применением ЭВМ типичны следующие
черты:
процесс проектирования является автоматизированным (а не
автоматическим), т. е. в нем участвует человек. Человек решает
не только задачи, связанные с выдвижением вариантов построе-
ния объекта, но и задачи, связанные с управлением процессами
анализа и оптимизации, оценкой получаемых данных, выводом из
тупиковых ситуаций, не разрешимых с помощью ЭВМ; таким об-
разом, предпочтителен интерактивный режим, предусматриваю-
щий вмешательство человека в выполняемый ЭВМ вычислитель-
ный процесс,
известен набор видов характеристик, по которым оценивается
поведение объекта, известны алгоритмы получения характеристик
и часто имеется их программная реализация.
Изучить все элементы процесса автоматизированного проекти-
рования в одной учебной дисциплине невозможно. Основные воп-
росы, касающиеся методов, алгоритмов расчета характеристик,
формирования модели, оптимизации, должны быть предметом
изучения в дисциплинах, обеспечивающих базовую подготовку
в области автоматизации проектирования. В специальных дис-
циплинах должна осуществляться завершающая подготовка. Здесь
рассматриваются виды характеристик, определяющих поведение
проектируемого объекта, способы построения вариантов, разра-
ботка целевой функции для решения задачи оптимизации, выбор
из числа ранее изученных методов и алгоритмов таких, которые
обеспечивают эффективное решение задачи анализа и оптимиза-
ции. При выполнении курсовых проектов студенты приобретают
практические навыки в реализации процесса автоматизирован-
ного проектирования объектов определенного класса. В процессе
курсового проектирования студенты могут пользоваться готовыми
программами при условии изучения методов и алгоритмов, ис-
пользуемых при их построении, в предшествующих дисциплинах
базовой подготовки.
Следует иметь в виду, что чем выше уровень автоматизации
проектных работ, выполняемых студентами, тем ниже может ока-
заться эффективность учебного процесса, так как студенты будут
приобретать знания меньшего объема. Поэтому' следует отдавать
предпочтение системам автоматизированного проектирования,
предусматривающим интенсивное вмешательство студентов в вы-
полняемый с помощью ЭВМ вычислительный процесс. Из этих
соображений следует с осторожностью использовать в учебном
процессе программы, полностью автоматизирующие решение за-
дачи оптимизации, рекомендуется применять промышленные про-
9
Выбор бидоб
характеристик
Анализ
i Формирование
модели
; (математической
j имитационной )
кар актер исто .<
Обработка
'ннснх расч£
Рис. В.2
граммы систем автоматизирование»'
го проектирования (САПР) лишь
на этапе дипломного проектирова-
ния и пользоваться на более ранних
этапах обучения специально разра-
ботанными учебными программами.
Автоматизация научных иссле-
дований. Научные исследования сх-
ватывают испытания образцов но-
вой техники и исследования неизу-
ченных процессов (например, нели-
нейных процессов в оптических ли-
ниях связи, энергетических спектров
некоторых типов цифровых сигна-
лов) .
Исследование может заключать-
ся в получении экспериментальных
данных на реальном объекте и за-
тем в их обработке на ЭВМ для вы-
явления искомых закономерностей
или в моделировании процессов с
помощью ЭВМ. При постановке
сложных экспериментов на ЭВМ мо-
гут возлагаться различные функ-
ции— от управления аппаратурой
измерений и съема эксперименталь-
ных данных до формирования воз-
действий для управления состоянием
и динамикой объекта.
Таким образом, при проведении исследований ЭВМ может
использоваться для управления экспериментом, обработки экспе-
риментальных данных, моделирования исследуемых процессов,
формирования воздействий на модель, получения данных с модели
и их обработки.
На рис. В.2 приведена типичная схема научных исследований.
Исследователь формулирует задачу исследования, определяет
характеристики, отражающие существенные стороны исследуемо-
го процесса. Далее он проводит анализ для получения данных, по
которым могут быть построены искомые характеристики. Анализ
проводится либо с помощью постановки натурного эксперимента,
либо моделированием процессов на ЭВМ. Полученные данные
подвергаются обработке на ЭВМ с выявлением в них искомых
закономерностей (характеристик).
Особенности автоматизации научных исследований заключа-
ются в том, что из-за чрезвычайно широкого многообразия задач
исследований для их решения в распоряжении исследователя, как
правило, не бывает рекомендаций по выбору методов, а также
10
Рис. В.З
готовых (отлаженных) алгоритмов и программ. В этом состоит
принципиальное отличие от проектирования, при котором обычно
известны методика, используемые математические методы, алго-
ритмы и часто в распоряжении разработчика бывают и готовые
программы.
Очевидно, как и подготовка в области автоматизации проек-
тирования, подготовка в области автоматизации научных иссле-
дований требует базовой подготовки в ряде дисциплин, в которых
изучались бы методы алгоритмизации и составления программ,
методы обработки экспериментальных данных, общие приемы мо-
делирования процессов.
Предметом изучения при подготовке в области автоматиза-
ции научных исследований могут быть методы моделирования
некоторых типовых технологических процессов, традиционно изу-
чаемых в соответствующих дисциплинах, обработка данных экс-
перимента (натурного либо машинного) методами математической
статистики, разработка алгоритмов, реализующих эти методы,
разработка программ.
Автоматизация управления. С точки зрения логики функцио-
нирования системы управления решают три задачи (рис. В.З):
1) сбор и передачу информации о состоянии управляемого
объекта;
2) переработку полученной информации;
3) выдачу на управляемый объект воздействий, направляю-
щих протекающие в нем процессы в желаемое русло.
В таких системах вычислительные средства используются для
переработки полученной от объекта информации о состоянии
с выдачей данных для формирования управляющих воздействий.
В зависимости от характера объекта управления различают
системы управления технологическими процессами и системы ор-
ганизационно-административного управления. В первом случае
11
объектом управления являются всевозможные установки, прибо-
ры, станки, радиоприемные и радиопередающие устройства, рас-
пространяющиеся по линии связи сигналы, над которыми произ-
водится обработка, и т. д., во втором — люди, коллективы людей.
В системе управления технологическими процессами основной
формой передачи информации являются сигналы, в системе орга-
низационно-административного управления — документы.
В системах управления технологическими процессами для об-
работки информации широкое применение находят специализиро-
ванные микропроцессорные устройства, встраиваемые в аппарату-
ру самого объекта управления. Подготовка в области автомати-
зации управления технологическими процессами требует
подготовки в вопросах алгоритмизации задач управления и
проектирования микропроцессорных устройств. Очевидно, алго-
ритмы управления должны быть предметом изучения в специаль-
ных дисциплинах, методы проектирования микропроцессорных
устройств — в соответствующей базовой дисциплине.
В.2. ЭЛЕМЕНТЫ АЛГЕБРЫ МАТРИЦ
В данной книге рассматриваются методы, алгоритмы, програм-
мы анализа электронных схем, используемые при схемотехниче-
ском проектировании устройств или исследовании процессов в них.
При анализе сложных устройств (для чего и привлекаются ЭВМ)
математические выражения, описывающие процессы, оказываются
весьма громоздкими. Кроме того, при построении алгоритмов ана-
лиза возникает необходимость записи этих выражений в форме,
при которой они были бы пригодны для произвольно задаваемых
схем определенного класса. Для удобства представления таких
выражений, их компактности и лучшей обозримости в книге ши-
роко будет использоваться матричная форма записи математиче-
ских выражений.
Основные определения. Рассмотрим основные определения и
операции алгебры матриц, используемые в книге.
Матрицей называется набор m-п чисел (действительных или
комплексных), образующих прямоугольную таблицу из m строк
и п столбцов:
<7ц о1г ... alt
G 21 2 9 • • • 2 i
Д»11 •** &!П’1 —
О такой матрице говорят, что она имеет тип т\п. Если т =
= п, то матрица называется квадратной, если т=£п— прямо-
угольной.
12
Матрица типа mXl называется вектором-столбцом
Для выделения матриц общего типа будем над напечатанны-
ми полужирным шрифтом буквами, обозначающими матрицы, ста-
вить черту. Для обозначения векторов-столбцов будем также
пользоваться буквами с полужирным шрифтом, но без черты
сверху.
Матрица, в которой элементами главной диагонали являются
единицы, остальные элементы — нули, называется единичной и
обозначается 1:
О 0 ... (Г
1 о ... о
О 1 ... о
О О ... 1
Для квадратной матрицы существует величина, называемая
определителем (или детерминантом), для которого используются
следующие обозначения:
det А — А =
Цц ... <31,;
^'21 & 22 * * '
nt ^и-2 einn
Значение определителя находится из выражения
I
to
detA= 2 (- 1)4,/^ - апЬ-
(а,, а2. . . . ,чп )
Здесь сумма распространяется на всевозможные перестановки
(щ, аг, ...,ап) элементов 1, 2, ...,п, причем k = 0, если переста-
новка четная, и k—1, если перестановка нечетная. Таким обра-
зом, число суммируемых произведений равно п!.
Матрица, у которой определитель равен нулю (detA=O), на-
зывается особенной. Если detA^O, то матрица А называется не-
особенной.
Для квадратной матрицы следом называется сумма ее диаго-
нальных элементов:
tr А=а114-а22+ • • • + ^ПП‘
13
Для матрицы произвольного типа норма может быть вычисле-
на одним из следующих способов:
т-норма
II А (I = max I аи I
' /=1
(сумма модулей элементов строки, для которой эта сумма мак-
симальна) ;
/-норма
|| А || = max I an I
' <=1
(сумма модулей элементов столбца, для которого эта сумма мак-
симальна) ;
й-норма
<=1 /=1
(корень квадратный из суммы квадратов модулей всех элементов
матрицы).
Операции над матрицами. Рассмотрим те операции, которые
использованы в книге.
Сумма и разность матриц. Пусть
дп ± 6П
С = А ± В =- а^± Ьл
а12 ± />12 ... aln ± Ь1п
^22 — ^22 ••• 2П ± ^2П
~ @тг — Ь'пг •••
Таким образом, суммой (разностью) двух матриц А и В оди-
накового типа тхп называется матрица С того же типа с элемен-
тами сц, равными сумме (разности) соответствующих элементов
матриц А и В, т. е. = (cIJ = a;;—bij).
Умножение матрицы на скалярную величину. Умножение мат-
рицы А на скалярную величину а (в отличие от матричной вели-
14
чины, число элементов в которой больше одной, скалярная вели-
чина представляет собой одиночный элемент) приводит к матри-
це С, элементы которой а^—аац, т. е.
С = аА = Аа =
а<2п аа12 ...
ая21 ай22 ... а<2гл
Умножение матриц. Произведение матриц АВ имеет смысл
тогда и только тогда, когда число элементов в строке матрицы А
равно числу элементов в столбце матрицы В (т. е. число столбцов
в А равно числу строк в В).
Пусть матрица А имеет тип матрица В типа пур. Тогда
произведением АВ называется матрица С типа m'/.р с элементами
п
c,; = aixb\i+G12^2j+ • • -\-а,пЬп, = ^aikbzj, т. e. чтобы получить эле-
fe=i
мент с,- произведения двух матриц, необходимо элементы t-й стро-
ки первой матрицы умножить на соответствующие элементы /-го
столбца второй матрицы и полученные произведения сложить.
Пример В.1. Пусть
’3
А = 2
-О
4 —1 5’
1 0 4
1 2 0-
0 5
3 4
Тогда
С = АВ =
'3-1+4-2+(-1)-0+5-3
2-1 +1-2+0-0+4-3
0-1 + 1-2+2-0+0-3
3-3+4-(—2) + (—1)-5+5-4
2-3-+ 1-(—2/+0-5+4-4
0-3 + 1-(—2)+2-5+0-4
'26 16"
16 20
- 2 8-
Вообще говоря, АВ=/=ВА.
Определим объем операций, требуемых для умножения матри-
цы А типа туп на матрицу В типа пур. Нахождение каждого
элемента матрицы произведения С требует выполнения п опера-
ций умножения чисел и п сложений. В дальнейшем будем учиты-
вать лишь операции умножения (на выполнение операции умно-
жения ЭВМ затрачивает большее время, чем на выполнение
операции сложения). Так как число элементов в С равно тр, то
15
вычисление всех элементов этой матрицы потребует выполнения
N'=mpn умножений. При умножении двух квадратных матриц
порядка п объем вычислений составляет Л'=/г' умножений.
Транспонирование матрицы. Если в матрице А
^-11 ^12
Cl 2 J Cl 29 • • • Cl >
nil ^’112 ••• @4111^
заменить строки соответственно столбцами, получим так назы-
ваемую транспонированную матрицу Ат.
В частности для вектора-столбца транспонированной матрицей
является вектор-строка:
Действительны следующие свойства:
(А X В)т = Ат ± Вт, (A By = ВАТ, det Ат = det А.
Обращение матрицы. Обратной матрицей по отношению к дан-
ной А называется матрица А-1, которая, будучи умножена на дан-
ную матрицу (справа или слева), дает единичную матрицу, т. е.
АЛ = А А = 7.
Нахождение обратной матрицы А’1 называется обращением
матрицы А. _
Обратная матрица существует, если исходная матрица А квад-
ратная и неособенная (detA=^0)
Пример В.2. Пусть
"1
2
А -=
3
2 3'
4 5
5 6
Требуется показать, что обратной матрицей А-1 по отношению к исходной
матрице А является следующая:
1
А-1 = —3
о
— 3 2’
3 —1
-1 О
16
Действительно,
АЛ”1 = 2
L3 5 6
’ 1 —3
—3 3
- 2 —1
2 ГI О О
—1-010
О 0 0 1
Г 1
2
4
3
5
1.
Некоторые свойства обратной матрицы:
det А“’ = 1 /det А; (АВр1 = В~'А ', (А "7 - (Ар1.
Одним из широко используемых методов вычисления обратной
матрицы является метод Жордана. Этот метод состоит в следую-
щем.
Пусть исходная матрица А— квадратная неособенная матрица
n-го порядка. Строится система п линейных уравнений, где коэф-
фициентами при неизвестных являются элементы исходной матри-
цы А, а свободными членами — элементы первого столбца единич-
ной матрицы. Решение этой системы уравнений дает элементы
первого столбца искомой обратной .матрицы А . Если далее
в качестве свободных членов в системе уравнений выбрать эле-
менты второго столбца единичной матрицы, образуется система
линейных уравнений, решение которой дает элементы второго
столбца матрицы А-1, и т. д. Таким образом, /г-кратным решением
системы линейных уравнений, в которой в качестве свободных
членов последовательно выбираются столбцы единичной матрицы,
находятся все столбцы обратной матрицы.
Пример В.З. Покажем применение метода Жордана для обращения матрицы
'1
А= 2
*-3
Пусть искомая обратная матрица
’&и 6r2 ^13
А-1 = Ь21 62г
"t’si &32 ^33
Строим первую систему линейных уравнений
1 • Х\ Д 2 х2 3" 3 Хз = 1,
2 х 2 Д 5 • Хз — 0,
3 • лэ А 5 .v, д 6 л*з — 0.
Решение системы уравнений дает:
столбец А-1: 6ц=1, 621 =—3, Ьзг = 2.
Строим вторую систему уравнений
1 • х 1Д 2 • л* з Д 3 х з — 0,
2 x'i Д 4 Ал Д 5 • л'з = 1,
3 • Xi Д 5 • х2 Д 6 х3 0.
Х!=1, хз = —3, х3=2. Найден первый
2-6030
17
Решение системы уравнений дает: &12=—3, />22=3, Ь32=—1.
Наконец, строим третью систему уравнений
1 х3 4- 2 х2 4“ 3 • х3 == О,
2-Х1 + 4-х2 + 5-х3 = 0,
3-Х1 + 5-х24-6-Хз = 1.
Отсюда Ь1з=2, б23=—1, бзз=0.
Таким образом, получаем ранее приведенное значение обратной матрицы
А-1 =
1 —3 2'
-3 3 —1
2 —1 0-
Оценим объем вычислений, требуемый для обращения матрицы
п-го порядка описанным методом.
Решение системы линейных уравнений одним из наиболее эф-
фективных методов — методом Гаусса — требует выполнения
п(«4-1) («4-2)/3+«(«+1)/2 умножений и делений. При вычисле-
нии обратной матрицы производится «-кратное решение системы
линейных уравнений и число умножений и делений в п раз боль-
ше приведенной величины. При больших значениях п требуемое
число умножений и делений можно приближенно оценивать вели-
чиной п4/4.
Следует отметить, что в частном случае, когда матрица А яв-
ляется диагональной матрицей вида
задача нахождения обратной матрицы оказывается чрезвычайно
простой. Для такой матрицы
Матричное уравнение. Пусть дана система линейных уравнений
У1 ~ ^11-^1 4“ ^12^2 4~
У2 = ^21-^1 4" ^22-^2 4" ... 4" О27ХЛ,
уп = anlxt 4- Я,2х2 4- ... 4- аппхп.
18
Перейдем к очевидной матричной форме записи этой системы
уравнений:
Матрица в правой части равенства может быть представлена
произведением матриц
В справедливости такого представления нетрудно убедиться,
умножив матрицы в правой части равенства.
Последнее уравнение с использованием введенных обозначений
запишется в виде следующего матричного уравнения:
Y=AX.
Подобные матричные уравнения являются экономной формой
записи сложных систем уравнений.
В последнем уравнении обе части равенства умножим слева
на А-1
A" 'Y = А”1 АХ.
Л
Отсюда
X = A-Y.
Данное матричное уравнение соответствует исходной системе,
решенной относительно переменных
xi ~ ^иУ1. + Ь12у2 + ... + Ь1пуп-,
хг = Ьлуу + Ь22уг + ... + Ьг,гуп,
2’
19
Глава 1. ПОДГОТОВКА ДАННЫХ СХЕМЫ
ДЛЯ ВВОДА В ЭВМ
1.1. ПОСТРОЕНИЕ
ЭКВИВАЛЕНТНОЙ СХЕМЫ
Модели полупроводниковых приборов. Для анализа электронных
схем удобно активные элементы цепи (полупроводниковые при-
боры-диоды и транзисторы) представлять некоторыми электри-
ческими цепями. При этом такую цепь будем считать эквивалент-
ной полупроводниковому прибору, если оказываются совпадаю-
щими с требуемой точностью (в пределах используемых в приборе
режимов) токи в соответствующих выводах прибора и эквива-
лентной электрической цепи. Такие цепи называют электрически-
ми моделями приборов.
Предложены различные способы построения моделей полупро-
водниковых приборов. Ниже рассматриваются лишь модели, полу-
чившие широкое применение при машинном анализе электронных
схем.
Модель диода. На рис. 1.1,6 приведена широко используемая
модель полупроводникового диода (рис. 1.1,а) в режиме большого
сигнала. Рассмотрим элементы модели.
1. R—нелинейное сопротивление с вольт-амперной характе-
ристикой
i = / (и) = /0 fexp— --1Y (1.1)
Это выражение — вольт-амперная зависимость для р — «-перехо-
да. Здесь 10 — ток насыщения диода (обычно 10-12</о< Ю-6 мА
для кремниевых диодов и 1О-8<По< 10~2 мА для германиевых),
зависящий от температуры:
/0 = Ат ,оо(—) ехр | k I -?-^-V|, (Е-)
О 07=293 (293 у I Д (293 т ) ;
где 70т=29з — ток насыщения диода при температуре 7’=293 К;
/?д— параметр, значение которого может быть определено эмпи-
рически с помощью соответствующих измерений.
20
Входящее в показатель сте-
пени экспоненциальной функции
в (1.1) /?гд<рт — температурный по-
тенциал перехода, где <рт= ° 0 °
= 0,02577293, тл= \... 2,5 (опре-
деляемый эмпирически коэффи-
циент). а)
2. С—нелинейная емкость,
представляющая собой сумму не-
линейных .барьерной Сб И ДИффуЗИОННОЙ СдИф
С = Сб -г СдИф =--------ехр
(1 —1</«2)'г
Рис. 1.1
емкостей перехода:
(1.3)
Здесь срг — контактная разность потенциалов (0,2... 0,9 В), п —
коэффициент, лежащий в интервале 0...1; /гр— граничная часто-
та диода, которая в зависимости от технологических особенностей
производства диода может изменяться от нескольких мегагерц до
сотен гигагерц, Сб0 — барьерная емкость при и = 0.
3. 7?у — сопротивление утечки диода (обычно составляющее
мегомы).
4. /?д — объемное сопротивление полупроводника и контакта
(обычно 0<7?д<100 Ом).
Таким образом, данная модель диода требует задания пара-
метров Щд, &д, 7?д, /гр, /о, Соо, и.
В режиме малого сигнала все элементы модели на рис. 1.1,6
считаются линейными. Нелинейный резистивный элемент R заме-
няется линейным с проводимостью, равной дифференциальной
проводимости
g = —=——ехр -------- . (1.4)
аи т^Т 7Ид?т /
Модель биполярного транзистора в режиме большого сигнала.
Широкое распространение получила так называемая модель Эбер-
са —Молла, приведенная на рис. 1.2. Рассмотрим элементы этой
модели.
1. Нелинейные сопротивления R'K и R'3 отображают нелиней-
ные сопротивления соответственно коллекторного и эмиттерного
переходов. Токи i'K и 1'э в этих сопротивлениях определяются
выражениями
'к = /ко (ехр-^- — 1\ (1.5)
7' == /=о (ехР ~~--С , (1-6)
\ "1э«т /
21
Рис. 1.2
где /ко и /э0 — токи насыщения переходов; обычно /эо для германия
10ч...10~- мА, для кремния 10“14...10-6 мА; /ко on/oi. Тем-
пературная зависимость этих токов может быть представлена
выражениями, аналогичными (1.2):
/к0= /к°Г=29з(^) ехр(*к (L7)
so эо Г=293
(1-8)
mK, тэ, kK, k3 — эмпирически определяемые коэффициенты.
2. Управляемые источники токов iyl и iy2 управляются соот-
ветственно токами Гэ и Гк:
lyl— э, ty2 — Ctll к,
(1.9)
где
aN=^/(l+₽N), ai = ₽i/(l+₽i). (1.10)
Коэффициенты усиления по току в нормальном 0n и инверсном
01 включении транзистора являются функциями соответственно
токов Гэ и Гк. Эту функциональную зависимость 0(i) удобно за-
давать кусочно-линейной функцией вида
при i < /0
₽(0 =
0* + P*±izzb(Z-_Zj
r 1------ lk
при + k — (1.11)
при
Здесь ik, 0а — получаемые в результате измерений значения соот-
ветствующих величии в граничных точках линейных участков.
22
3. С3 и Ск — нелинейные емкости эмиттерного и коллекторного
переходов, складывающиеся из барьерной и диффузионной емко-
стей переходов:
С3 = -----£------+------!—— До ехр (j, (1.12)
(1 — иэ'/игэ)"э zn3<fT2nAv \m3ft )
ск=--------------+ —*—/„„exp^l, (1.13)
Рис. 1.3
здесь и Fi — произведение коэффициента усиления на полосу
пропускания соответственно для нормального и инверсного режи-
мов транзистора; Сэо и СКо — барьерные емкости при нулевых
значениях напряжения на соответствующих переходах; п3, пк—эм-
пирически определяемые коэффициенты (обычно 0,3<«э<0,5,
0,01 <пк<0,5); uZ3, и2к — контактная разность потенциалов соот-
ветственно эмиттерного и коллекторного перехода.
4. Ry*, Ry3 — сопротивления утечки соответственно коллектор-
ного и эмиттерного перехода (обычно превышающие 1 МОм).
5. R3, Re, RK — объемные и контактные сопротивления соответ-
ственно эмиттера (0...10 Ом), базы (0...100 Ом), коллектора
(0... 10 Ом).
Таким образом, данная модель транзистора требует задания
параметров /кот=£9з, /эот=29з, k3, тк, tn3, Pnq, •••,Рк,т, fho> • • •, Pin,
Сэо, Ско, ^э, пк, Fn, Fl, RyK, R
Модель биполярного
транзистора, не содержа-
щая нелинейных управляе-
мых источников. В пред-
ставленной на . рис. 1.2 мо-
дели транзистора присутст-
вуют нелинейные управляе-
мые источники тока iyi =
= aui'3 и ay2 = aij'K. Нели-
нейность этих источников
связана с тем, что коэф-
фициенты ctN и cti не являют-
ся постоянными величинами.
Они связаны с pN и Pi не-
линейными выражениями
(1.10); в свою очередь, pN
и Pi представляются нели-
нейными функциями вида
(1.11) от соответствующих
токов. Наличие подобных
нелинейных источников вы-
зывает определенные не-
23
удобства при формировании математической модели анализируе-
мого устройства.
Рассмотрим представленную на рис. 1.3 модифицированную
схему модели транзистора, не содержащую нелинейных источни-
ков. Схема построена в результате следующего преобразования
схемы на рис. 1.2.
Последовательно с R'-, введен нелинейный резистивный эле-
d (г'^
мент Ki с сопротивлением, численно равным а "Та-
ким образом, ток i'3 на Ri создает напряжение п: = а\Т'3, численно
равное управляющей величине источника z\-i. Следовательно,
теперь ток управляемого источника > может быть выбран про-
порциональным напряжению И\. При этом коэффициент пропор-
циональности равен 1 и источник тока /У1 оказывается линейным.
Для компенсации напряжения, возникающего на R\, в цепь по-
следовательно введен линейный управляемый источник напряже-
ния !/У1 = —Щ.
Нелинейное сопротивление Rz численно равно сн= Pi(i'K)/(1 +
+ Pi(Ck)), напряжение на /?2 «2=ai,,K. Напряжение управляемого
источника z/y2=—«г, и этот источник оказывается также линей-
ным.
Модель биполярного транзистора в режиме малого сигнала
(линейная модель). На рис. 1.4 приведена часто используемая
малосигнальная модель транзистора в схеме с общим эмиттером,
предназначенная для анализа процессов на переменном токе.
В модели представлены следующие элементы:
г б, — сопротивление базы, находящееся в пределах 5 ... 100 Ом;
гб,э — сопротивление эмиттерного перехода, определяемо? выраже-
нием
гб'э = Ч’т! 1 -т Р)/с Ф.Р/с; С1-14)
Сб,э—емкость эмиттерного перехода. Постоянная времени С6,эг6,э
обусловливает спад усиления по току на высоких частотах, и Сб,э
можно рассчитывать по формуле
Сб.э=Р/(2п/тгб,э), ' (1.15)
24
где fy — произведение коэффициента передачи на полосу пропус-
кания; гб,к — сопротивление обратной связи (обычно больше
1 Мом), определяемое выражением
г -- г., /h-„, (1.16)
б К б э' X /
где /?12 — обратный коэффициент передачи по напряжению;
Сб,к—емкость коллекторного перехода; гКУ— выходное сопро-
тивление. Оно обычно велико, и им часто пренебрегают.
Данная модель может использоваться в достаточно широком
диапазоне частот (до 1000 МГц).
Модель МДП-транзистора. На рис. 1.5 показана модель
МДП-транзистора. Вольт-амперная характеристика задается дву-
мя выражениями, соответствующими крутой и пологой ее облас-
тям. Эти области разделяются точкой насыщения, определяемой
следующими выражениями:
ГС(,.е= — \ -4.. Гд| (1.17)
1 -- Й L’ 1 -г 5 ! J
/с „ае = Г—( 1 Н- Zr- {u3- Uo f] 1 2 - I c ( 1 -r 0)}.
1 -j- 7) ( О з L/q)
(1.18)
Для крутой области (при UC<UQ нас, t/3<£7o)
/с =------—------[Д\-Д0)(7с-''с2(1 --4'2], (1.19)
1 +9 (U3- Ua) 1 0 1
для пологой области (при £7с>£7СНае, П3>Г'и)
, , I [Г-; Д 2.4(1 ^Д/с^еИГс-Генае)]1 2 - 1Д Y1
С С"аС\ Э(1Ч-В/СН„С) J ’
(1.20)
здесь Uc, U3 — напряжения соответственно па стоке и затворе от-
носительно истока; Uo — пороговое напряжение; 6, Uo, Мо, 0, А,
В — параметры транзистора.
Емкостные элементы в схеме модели используются для отра-
жения динамических свойств транзистора.
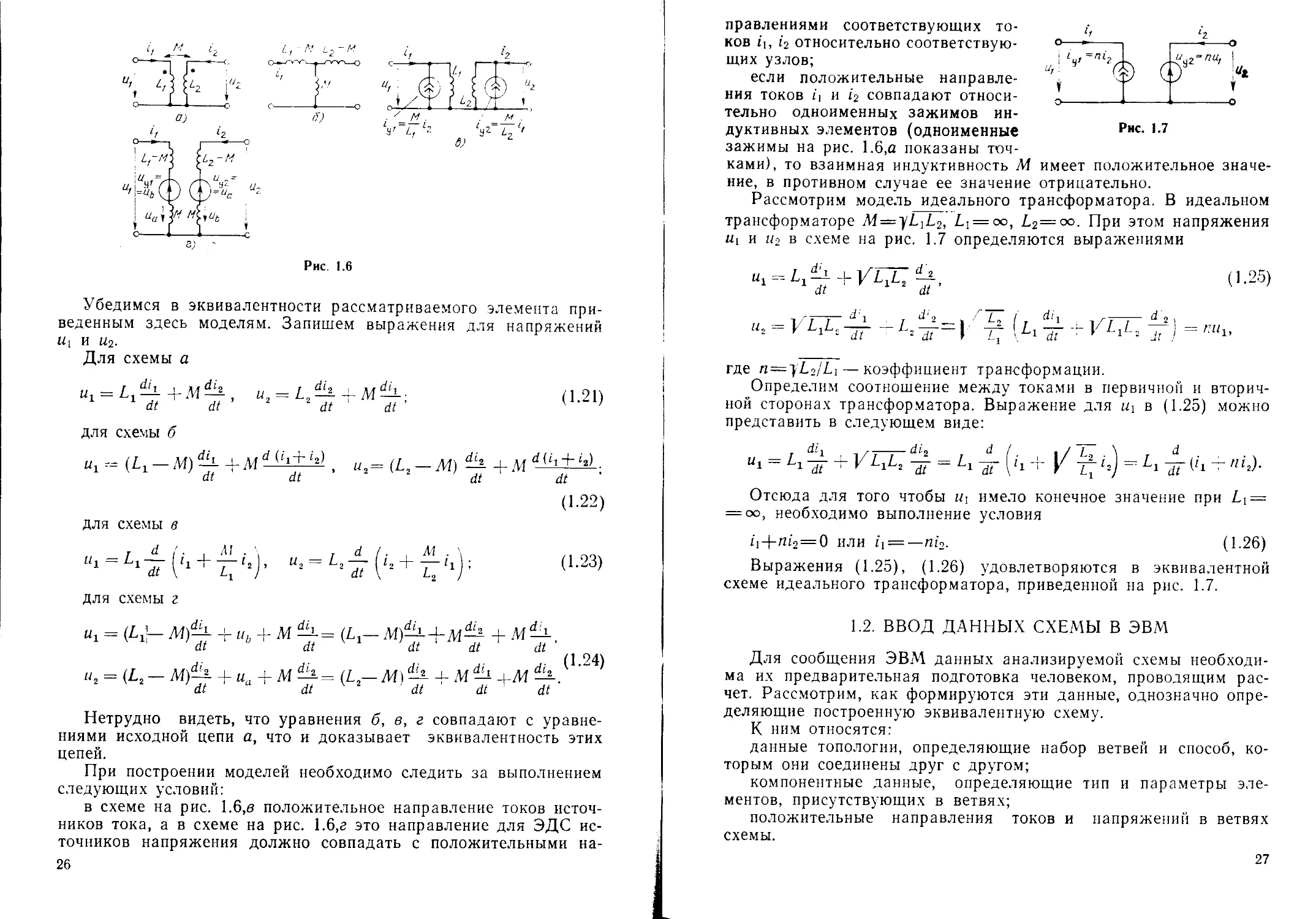
Модели индуктивно связанных цепей. Пусть в принципиальной
схеме анализируемого устройства содержится элемент с взаимной
индуктивностью, показанный на рис. 1.6,а. Алгоритм формирова-
ния математической модели устройства не предусматривает нали-
чия в его эквивалентной схеме таких элементов. Поэтому при
построении эквивалентной схемы устройства следует эти элемен-
ты заменить моделями, не содержащими взаимной индуктивности.
Три способа построения моделей показаны на рис. 1.6,6—г.
25
I, lz
L4’ L, Li гяг L, l!
6)
Рис 1.6
Убедимся в эквивалентности рассматриваемого элемента при-
веденным здесь моделям. Запишем выражения для напряжений
и «2.
Для схемы а
= + (1.21)
для схемы б
U1 = -M)d-^+M dJdi±hl , u2 = (^2 _ М) + M d-Sh±^L
dt dt dt dt
(1-22)
для схемы в
для схемы г
«1 = M)d-± +ub + M d-±= (L,-
dt dt dt dt dt
a- <r О-24)
u2 = (£2 — M)— -[-ua+M—= (L2— M} + м +M
'dt dt 2 ' dt dt ' dt
Нетрудно видеть, что уравнения б, в, г совпадают с уравне-
ниями исходной цепи а, что и доказывает эквивалентность этих
цепей.
При построении моделей необходимо следить за выполнением
следующих условий:
в схеме на рис. 1.6,в положительное направление токов источ-
ников тока, а в схеме на рис. 1.6,г это направление для ЭДС ис-
точников напряжения должно совпадать с положительными на-
26
о--------------------------о
Рис. 1.7
имеет положительное значе-
отрицательно.
правлениями соответствующих то-
ков 11, i2 относительно соответствую-
щих узлов;
если положительные направле-
ния токов it и i2 совпадают относи-
тельно одноименных зажимов ин-
дуктивных элементов (одноименные
зажимы на рис. 1.6,а показаны точ-
ками), то взаимная индуктивность М
ние, в противном случае ее значение
Рассмотрим модель идеального трансформатора. В идеальном
трансформаторе A1 = |L]L2, Li = °°, L2=<x>. При этом напряжения
«1 и и2 в схеме на рис. 1.7 определяются выражениями
(1.25)
at dt
__ < d -i d' 9 / f / d • i i---- d n >
«2 = V ^1^2 — — । ~T (/-I — ~ = rai>
где n=}A2/7-i — коэффициент трансформации.
Определим соотношение между токами в первичной и вторич-
ной сторонах трансформатора. Выражение для Wi в (1.25) можно
представить в следующем виде:
Отсюда для того чтобы ii\ имело конечное значение при Д =
= оо, необходимо выполнение условия
i1-|-ni2=0 или й = —ш‘2. (1-26)
Выражения (1.25), (1.26) удовлетворяются в эквивалентной
схеме идеального трансформатора, приведенной на рис. 1.7.
1.2. ВВОД ДАННЫХ СХЕМЫ В ЭВМ
Для сообщения ЭВМ данных анализируемой схемы необходи-
ма их предварительная подготовка человеком, проводящим рас-
чет. Рассмотрим, как формируются эти данные, однозначно опре-
деляющие построенную эквивалентную схему.
К ним относятся:
данные топологии, определяющие набор ветвей и способ, ко-
торым они соединены друг с другом;
компонентные данные, определяющие тип и параметры эле-
ментов, присутствующих в ветвях;
положительные направления токов и напряжений в ветвях
схемы.
27
При описании топологии схемы не учитывают компонентных
данных. Это позволяет каждую ветвь схемы представлять лини-
ей, соединяющей соответствующие узлы. При этом образуется так
называемый граф цепи. На рис. 1.8,а представлена схема, в кото-
рой пронумерованы узлы, элементы и для последних выбраны
положительные направления тока и напряжения. Нумерация уз-
лов выполняется произвольно (на рис. 1.8,о номера узлов заклю-
чены в кружки). Причем следует иметь в виду, что всякое соеди-
нение двух и более элементов рассматривается как узел (обозна-
чение узлом точки соединения двух элементов необходимо, чтобы
для каждого элемента можно было указать пару узлов, между
которыми включен в схеме элемент).
При нумерации ветвей будем придерживаться последователь-
ности, соответствующей такой иерархии типов элементов: управ-
ляемые источники напряжения, независимые источники напряже-
ния, емкостные, резистивные, индуктивные элементы, независимые
источники тока, управляемые источники тока. Нумерацию будем
начинать с ветвей, принадлежащих высшей ступени иерархии.
Исчерпав их, будем продолжать нумерацию, перейдя к ветвям
следующей ступени, пока не будут пронумерованы все ветви схе-
мы. В пределах каждого типа элементов (ветвей) нумерация по-
следовательная.
Выбор положительного направления тока и напряжения (по-
казанного в схеме стрелками) связан со следующим. В результа-
те расчетов вычисленные значения токов (напряжений) могут
оказаться положительными или отрицательными. Необходимо
указать, какому направлению в элементе соответствует положи-
тельное значение тока (напряжения). Положительные направле-
ния тока (напряжения) в элементах выбираются произвольно.
При этом будем считать, что выбранное положительное направ-
ление для тока одновременно является и положительным направ-
лением для напряжения.
28
На рис. 1.8,6 показан граф цепи. При его построении каждому
узлу цепи поставлен в соответствие узел графа, каждому элемен-
ту цепи — ветвь графа в виде линии, соединяющей соответствую-
щие узлы и имеющей те же обозначение и положительное направ-
ление, которые выбраны для элемента.
При подготовке компонентных данных может потребоваться
масштабирование параметров элементов, полезное в тех случаях,
когда в процессе выполнения вычислений может ожидаться воз-
никновение таких больших значений, которые выходят за пределы
представимых в ЭВМ значений и приводят к явлению перепол-
нения разрядной сетки (большие значения, например, могут воз-
никнуть при многократном умножении больших сопротивлений
106 106 -106...), либо очень малых значений, рассматриваемых в
ЭВМ как пуль (малые значения могут возникнуть, например, при
умножении малых емкостей 10_|2-10'12• 10~12. ..).
При масштабировании для напряжений, токов, сопротивлений,
емкостей, индуктивностей, частот, времени задаются соответству-
щие масштабные коэффициенты М:., М, М-, Мс, АД, ЛЕ, ЛЕ. Если
.г —параметр (например, напряжение в вольтах и т. д.) и Л1,—
выбранный для него масштабный коэффициент, то этот параметр
в ЭВМ представляется значением Х = х М,. Если промасштаби-
рованное значение этого параметра А' выводится из ЭВМ, то для
перевода в основную систему единиц необходимо его умножить
на масштабный коэффициент Мх:х — М,Х.
Масштабные коэффициенты должны удовлетворять очевидным
соотношениям:
Ми = МгМ1 (это соотношение вытекает из закона Ома),
Mt=MrMc (произведение гС имеет размерность времени),
Mt=MLlMr (частное Е/г имеет размерность времени"),
(частота имеет размерность, обратную размерности
времени).
Таким образом, из семи масштабных коэффициентов незави-
симо могут задаваться лишь три, остальные четыре коэффициента
должны вычисляться по приведенным выше выражениям. Нс мо-
жет быть полного произвола в том, какие масштабные коэффици-
енты принять независимо выбираемыми. Очевидно, нельзя неза-
висимо задавать значения всех масштабных коэффициентов, кото-
рые входят в любое из выражений, связывающих эти коэффици-
енты.
Так как ЛЕ,, Mi входят только в первое из выражений, то по
крайней мере один из этих коэффициентов должен быть в числе
независимо выбираемых. Двумя другими независимо выбираемы-
ми масштабными коэффициентами могут быть, например, М, и
Мс или какая-либо другая соответствующим образом подобранная
пара коэффициентов.
Масштабные коэффициенты, значения которых задаются не-
зависимо, целесообразно выбирать такими, чтобы в результате
29
Таблица 1.1
Тип эле- мента Номер ветви Началь- ный узел Конеч- ный узел Пара- метр Тип эле- мента Номер ветви Началь- ный узел Конеч- ный узел Пара- метр
и 1 1 6 1 R 6 3 6 0,2
и 2 5 6 1 R 7 3 4 3
с 3 1 3 1 L 8 2 4 2
с 4 1 2 5 I 9 6 4 1
R 5 2 5 0,1
масштабирования получались значения параметров, наиболее
близкие к единице, и, кроме того, сами масштабные коэффициен-
ты удобнее выражать числами, представляющими собой целую
степень десяти.
Покажем выбор масштабных коэффициентов на примере схе-
мы на рис. 1.8,а. Примем независимо выбираемыми масштабные
коэффициенты Л1„, Мг, Мс. Пусть Ми = 1. Для задания Мг найдем
среднее геометрическое наибольшего и наименьшего сопротивле-
ний резистивных элементов схемы и ближайшую степень десяти
примем в качестве Мг:У103-3-104 = 5,48-103« Ю4=МГ.
Аналогично можно определить масштабный коэффициент Мс:
/100-10~'2-5ЭЭ-10= 2,24-10“'° 10-’° = Мс.
Остальные масштабные коэффициенты вычисляются по приве-
денным выше выражениям, связывающим масштабные коэффици-
енты:
Mt=MrMc = 10410-1 ° = 10-6; Mf= 1 /Mt= 1 /10~6= 106;
ML=MtMr= 10-6104= 10-2; Mi=Mu/Mr= 1/104= 10"4.
На рис. 1.8,а в скобках приведены масштабированные значе-
ния параметров элементов.
Теперь можно рассмотреть порядок ввода в ЭВМ данных схе-
мы. Вводимые в ЭВМ данные должны содержать следующие све-
дения о каждой ветви схемы: указание о типе элемента ветви ((/,
С, R, L, I) и порядковый номер ветви; номера узлов, между кото-
рыми расположена ветвь; положительное направление ветви от-
ражается тем, что на первое место ставится узел, от которого
ветвь отходит (начальный узел), и на второе место — узел, к ко-
торому ветвь подходит (конечный узел); значение параметра эле-
мента с учетом соответствующего масштабного коэффициента. На-
пример, для четвертой ветви схемы на рис. 1.8,а это описание
имеет следующий вид: тип элемента — С; номер ветви — 4; уз-
лы — 1 и 2; параметр — 5. Нетрудно понять, что такой набор дан-
ных, приведенный для каждого элемента, обеспечивает однознач-
ное и полное описание схемы.
30
В табл. 1.1 приведен полный набор вводимых данных схемы,
показанной! на рис. 1.8,а.
Здесь параметры приведены в масштабированных значениях.
Значения параметров источников напряжения и тока в таблице
выбраны произвольно.
Приведенный способ описания данных схемы не является един-
ственным, существуют и другие способы их представления.
Глава 2.
ФОРМИРОВАНИЕ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ ЛИНЕЙНОЙ ЦЕПИ
2.1. КОМПОНЕНТНЫЕ
И ТОПОЛОГИЧЕСКИЕ УРАВНЕНИЯ
Каждую схему характеризует определенный, только ей присущий
ход процессов. Эта индивидуальность свойств конкретной схемы
связана с совокупностью признаков, характерных для нее. Оче-
видно, такими отличительными признаками являются:
тип и значение параметров элементов в ветвях схемы (компо-
нентные данные);
способ, которым соединены между собой ветви (топологиче-
ские данные).
Следовательно, математическую модель можно представить
компонентными уравнениями, отражающими свойства элементов
в ветвях, и топологическими уравнениями, отражающими свойст-
ва схемы, связанные с ее топологическими особенностями.
Компонентные уравнения. Выражают зависимость между током
и напряжением для элемента схемы. Приведем такие зависимости
для различных типов элементов:
линейный резистивный элемент
ir(t) =rur(t),
линейный индуктивный элемент
uL(t)=LdiL(t)/dt,
линейный емкостной элемент
ic(t) = Cduc(t) fdt,
нелинейный резистивный элемент
Ыг(0 =Т(К(0)> ir(f) =^Ur(t),
зг
управляемый источник
Уу (0 = / (*у (0) •
здесь уу(1) —управляемая величина (ток или напряжение управ-
ляемого идеального источника соответственно тока или напряже-
ния); .Гу(/) —управляющая величина (ток или напряжение управ-
ляющей ветви).
Приведенные выражения можно записать для каждой ветви
(каждого элемента) схемы.
Топологические уравнения. Характеризуют только способ сое-
динения ветвей и не отражают их содержимого, т. е. типа и зна-
чения параметров включенных в ветви элементов. Такими уравне-
ниями являются уравнения, которые строятся по законам Кирх-
гофа. Действительно, для участка схемы, представленного на
рис. 2.1,а, по закону Кирхгофа для токов (ЗКТ) алгебраическая
сумма токов, связанных с узлом, равна нулю: Е+с—<3 = 0. Это
уравнение не содержит сведений о том, каковы типы элементов,
включенных в ветви, и каковы параметры этих элементов. По за-
кону Кирхгофа для напряжений (ЗНК) для участка схемы на
рис. 2.1,6 алгебраическая сумма напряжений ветвей в замкнутом
контуре равна пулю: щ—и2-\-и2 = О. Это уравнение также не со-
держит компонентных данных.
Алгоритм построения полной системы уравнений по ЗКТ оче-
виден (если в схеме п узлов, то число независимых уравнений по
ЗКТ равно п— 1). Сложнее получается полная система уравнений
по ЗКН. Если в схеме т ветвей, то составляются т—(п—1) не-
зависимых уравнений по ЗКН. При этом для составления этих
уравнений в схеме должны быть предварительно найдены незави-
симые замкнутые контуры, т. е. такие, в каждом из которых име-
ется хотя бы одна ветвь, не входящая во все другие контуры.
Именно поиск таких независимых контуров и составляет относи-
тельную трудность построения полной системы уравнений по ЗКН
для цепи со сложной конфигурацией (топологией). Далее рас-
смотрим алгоритм, по которому могут быть построены уравнения
по законам Кирхгофа.
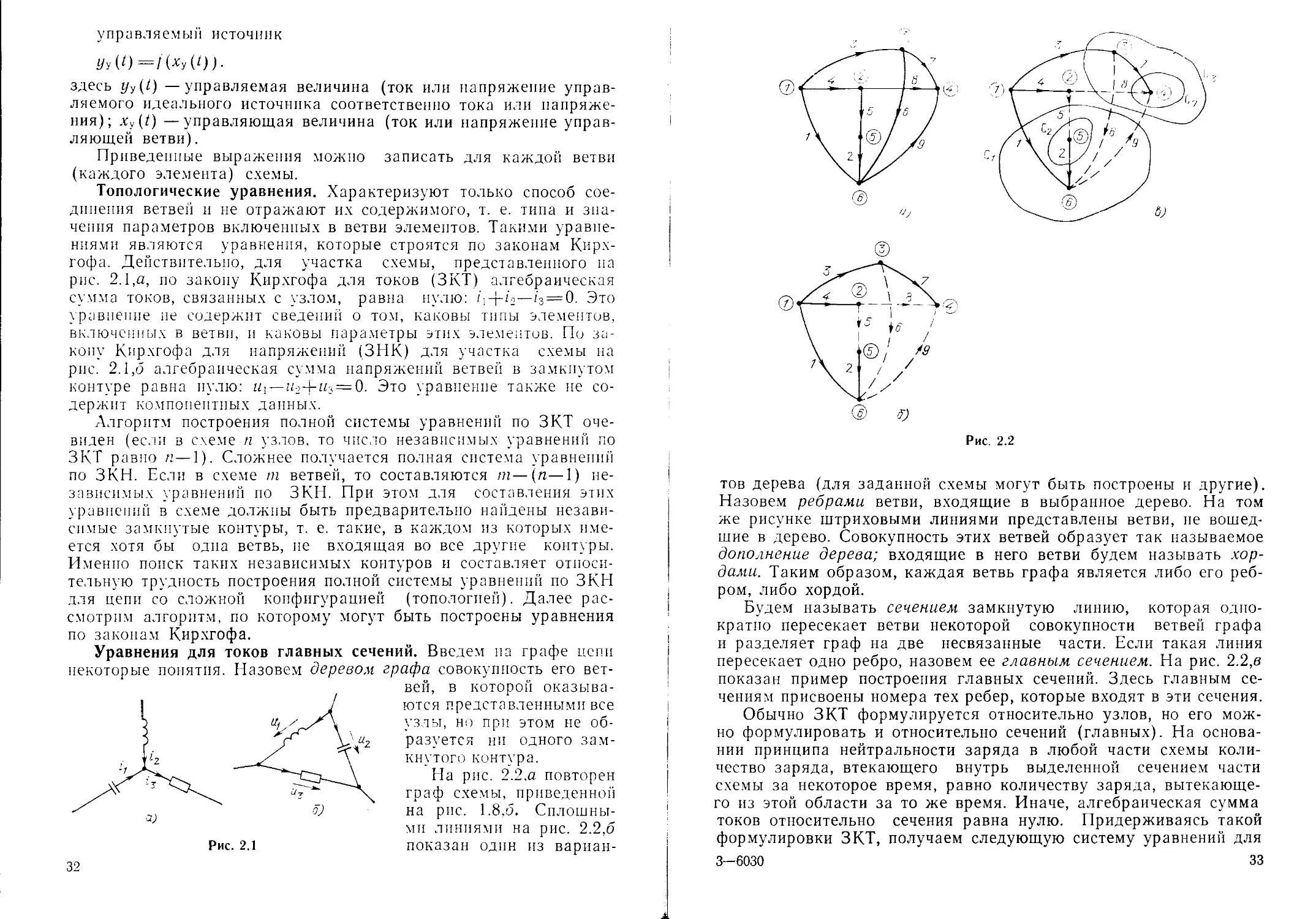
Уравнения для токов главных сечений. Введем па графе цепи
некоторые понятия. Назовем деревом графа совокупность его вет-
вей, в которой оказыва-
| / ются представленными все
S \ узлы, но при этом не об-
5 r* \d'“z разуется ни одного зам-
"V кнутого контура.
На рис. 2.2,а повторен
.ДД 5 граф схемы, приведенной
' о) на рис. 1.8.6. Сплошны-
ми линиями на рис. 2.2,6
Рис. 2.1 показан один из вариан-
32
Рис. 2.2
тов дерева (для заданной схемы могут быть построены и другие).
Назовем ребрами ветви, входящие в выбранное дерево. На том
же рисунке штриховыми линиями представлены ветви, не вошед-
шие в дерево. Совокупность этих ветвей образует так называемое
дополнение дерева; входящие в него ветви будем называть хор-
дами. Таким образом, каждая ветвь графа является либо его реб-
ром, либо хордой.
Будем называть сечением замкнутую линию, которая одно-
кратно пересекает ветви некоторой совокупности ветвей графа
и разделяет граф на две несвязанные части. Если такая линия
пересекает одно ребро, назовем ее главным сечением. На рис. 2.2,в
показан пример построения главных сечений. Здесь главным се-
чениям присвоены номера тех ребер, которые входят в эти сечения.
Обычно ЗКТ формулируется относительно узлов, но его мож-
но формулировать и относительно сечений (главных). На основа-
нии принципа нейтральности заряда в любой части схемы коли-
чество заряда, втекающего внутрь выделенной сечением части
схемы за некоторое время, равно количеству заряда, вытекающе-
го из этой области за то же время. Иначе, алгебраическая сумма
токов относительно сечения равна нулю. Придерживаясь такой
формулировки ЗКТ, получаем следующую систему уравнений для
3-6030 33
главных сечений, построенных па рис. 2.2,в (представив эти урав-
нения в форме, разрешенной относительно токов ребер):
<1 = —С—<«+*9 (для главного сечения С,),
<2 = С (для главного сечения С2),
h — ie—is—ig (для главного сечения С3),
й=^+*8 (для главного сечения С4),
i?=—i&—ig (для главного сечения С7).
Запишем эту систему уравнений в матричной форме:
Z1 1 1 0 — Г
с 1 0 0 0 1.
/3 — 0 —1 1 1 h
io
Z, -1 0 —1 0
/7_ 0 0 1 1_ Lc J ix
1р F
(2.1)
Или, введя обозначения для входящих в выражение матриц,
можно подобную систему уравнений представить в общем виде,
справедливом для произвольной схемы:
IP=-FIS.
Матрица F, которая в дальнейшем будет называться матрицей
главных сечений, определяет связь между векторами токов ребер
1р и токов хорд 1х.
Выпишем отдельно полученное для рассматриваемой схемы
значение матрицы главных сечений F:
и оз Хорды
1 2 Rx L 8 0 0 I 9 — Г 0
5 ’ 1 — 1 6 1 0
F _ \o — GJ Cu C (3 4 0 —1 —1 0 1 —1 1 0
Rp 7 0 0 1 1_
(2-2)
здесь строки матрицы принадлежат ребрам, столбцы — хордам
графа. Уравнения ЗКТ из этой матрицы получаются следующим
образом. Связь тока ребра с токами хорд выражается взятыми
с обратным знаком элементами строки матрицы F, принадлежа-
щей данному ребру, т. е. элементы строки матрицы F, взятые
с обратным знаком, служат коэффициентами, линейно связываю-
щими ток ребра, которому принадлежит строка, с токами хорд.
34
Из матрицы F вытекает не только система уравнений no ЗКТ,
но и система уравнений по ЗКН. Элементы столбцов матрицы F
являются коэффициентами, линейно связывающими напряжение
хорд, соответствующих столбцам, с напряжением ребер. Так,
столбцы матрицы F (2.2) определяют следующую систему урав-
нений по ЗКН:
zz5 = u1 — и2—т, U6 = Ui—и3,
11$ — tl3—U4—j—U7, ^9^“—^1'ф^зН-^7-
Отсюда система уравнений по ЗКН может быть записана
в следующей матричной форме, представляющей в общем виде
зависимость между напряжением хорд и напряжением ребер для
произвольной схемы:
UX = FTUP,
где Ux — вектор напряжения хорд; FT — транспонированная мат-
рица F; Up — вектор напряжения ребер.
Таким образом, матрица F определяет полную систему тополо-
гических уравнений.
Матрица главных сечений произвольной схемы. До сих пор мы
оперировали матрицей главных сечений, построенной для кон-
кретной схемы (рис. 1.8,а). Рассмотрим структуру этой матрицы
для произвольной схемы.
Строки и столбцы матрицы F можно сгруппировать по типам
элементов так, как это сделано в (2.2), где U — строки источников
напряжения; С — строки емкостных ребер; Rp— строки резистив-
ных ребер; Rx— столбцы резистивных хорд; L — столбцы индук-
тивных хорд; I — столбцы источников тока. При этом матрицу F
можно разбить па подматрицы и представить в виде
Хорды
R; L I
U ^UL ^UI
F = \5‘ С Fc/?^ Fc7 Fc/
tx -
RP F/? r F/? L Fy? i
— p v p p
(2.3)
здесь индексы у подматриц указывают типы ветвей, которым при-
надлежат строки и столбцы подматрицы.
Сформулированное выше правило построения уравнений токов
и напряжений с использованием матрицы F можно распростра-
3* 35
нить и на случай, когда эта матрица представлена в форме (2.3).
Подматрицы, расположенные вдоль строки и взятые с обратным
знаком, являются коэффициентами, связывающими вектор тока
группы ребер, которой принадлежит строка, с векторами тока
соответствующих групп хорд. Например,
I F I ________F I __FI
Подматрицы, расположенные вдоль столбца некоторой группы
однотипных хорд, после транспонирования являются коэффициен-
тами, линейно связывающими вектор напряжения этих хорд с век-
торами напряжения соответствующих групп ребер. Например,
Ur = FkU + F^Uc+F^Uv
Выражение (2.3) предполагает, что дерево графа выбирается
таким образом, чтобы все ветви с источниками напряжения и ем-
костными элементами принадлежали дереву (т. е. являлись бы
ребрами), а все ветви с источниками тока и индуктивными эле-
ментами принадлежали дополнению дерева (т. е. являлись бы
хордами); резисторы оказываются распределенными между дере-
вом и дополнением дерева. Такая структура матрицы F может
быть получена в цепях, не содержащих так называемых особенно-
стей. Под особенностями обычно понимают замкнутые контуры,
составленные только из источников напряжения (П-контуры),
только из емкостных элементов (С-контуры) или из источников
напряжения и емкостных элементов (ПС-контуры), либо сечения,
содержащие только источники тока (7-сечения) или только ин-
дуктивные элементы (L-сечения), или источники тока и индуктив-
ные элементы (/А-сечения). В дальнейшем, рассматривая цепи
с особенностями, будем иметь в виду лишь особенности в виде
С-контуров и L-сечений. Исключим из рассмотрения другие виды
особенностей, считая, что они перед анализом должны быть уст-
ранены за счет учета выходных сопротивлений источников, кото-
рые для источников напряжения включаются последовательно
с источниками, и для источников тока — параллельно источникам.
При наличии в анализируемой схеме особенностей не удается
все емкостные элементы иметь в дереве графа либо все индуктив-
ные элементы в дополнении дерева. Образуются хорды из емкост-
ных ветвей и ребра из индуктивных ветвей графа. Следует заме-
тить, что только емкостные ребра и индуктивные хорды являются
элементами, для которых могут независимо задаваться начальные
значения (начальные условия) напряжения (на емкостном эле-
менте) и тока (в индуктивном элементе). Число таких элементов
с независимыми начальными условиями определяет порядок цепи.
36
В каждой особенности в виде замкнутого контура напряжение на
одном из емкостных элементов контура по ЗКН может быть вы-
ражено через напряжения на других элементах этого контура и
с этой точки зрения не является независимым (этот емкостной
элемент оказывается хордой), а в особенности в виде сечения ток
одного из индуктивных элементов по ЗКТ может быть выражен
через токи остальных элементов сечения и, следовательно, не
является независимым (такой индуктивный элемент оказывается
индуктивным ребром).
Для цепей, содержащих рассматриваемые виды особенностей,
матрица главных сечений имеет следующую структуру:
Хорды
сх Rx Lx 1
и ' 0 F 1 UP .
Ср F ср£х р ПЛ
F? =- £ р л р
\о О Он Rp 0 F _FVX Fv
Ц 0 0 FVx 0 .
(2.4)
Наличие нулевых подматриц связано со следующим. Емкостная
хорда может быть только в контуре, в котором остальные элементы—
емкостные ребра. Поэтому напряжение емкостных хорд Ur может
сх
выражаться только через напряжения емкостных ребер LL (отсюда
_____ tp
=0, FR с =0 и Ft с -= О). Индуктивное ребро может быть в
сечении, в котором остальные ветви — хорды — составлены также из
индуктивных ветвей. Поэтому ток индуктивного ребра может выра-
жаться только через токи индуктивных хорд (отсюда FL с =0,
FVx-0 " %, = 5).
Алгоритм формирования матрицы главных сечений. Форми-
рование матрицы F производится в два этапа. На первом этапе
по введенным в ЭВМ данным цепи формируется структурная
матрица (другое встречающееся в литературе название этой
матрицы — матрица ипциденций). На следующем этапе в ре-
зультате преобразований, проводимых над структурной матри-
цей, получается матрица F.
Рассмотрим построение структурной матрицы. Составим
37
матрицу следующего вида. Припишем столбцы матрицы опреде-
ленным ветвям графа, строки — его узлам. Дадим элементам
atj этой матрицы следующие значения:
' 0, если /-я ветвь графа не подключена к ьму узлу;
—
+ 1, если /-я ветвь подключена к i-му узлу и
• направлена от этого узла;
[ — 1, если фя ветвь подключена к г-му узлу и на-
правлена в сторону этого узла.
Условимся при нумерации ветвей придерживаться следую-
щей их иерархии: управляемые источники напряжения, незави-
симые источники напряжения, емкостные, резистивные, индуктив-
ные элементы, независимые источники тока, управляемые источ-
ники тока. Нумерацию начнем с ветвей, принадлежащих высшей
ступени иерархии. Исчерпав их, будем продолжать нумерацию,
перейдя к ветвям следующей ступени иерархии и т. д., пока не
будут пронумерованы все ветви схемы. Именно такой порядок
был выбран при нумерации ветвей в графе на рис. 1.8,6. Для
этого графа построим следующую матрицу:
Ветви
1 2 3 4 5 6 7 8 9
1 “ 1 0 1 1 0 0 0 0 О'
о 0 0 0 — 1 1 0 0 1 0
— 3 А — с- ** со 3 0 0 —I 0 0 1 1 0 0
4 0 0 0 0 0 0 —1 — 1 —1
5 0 1 0 0 —1 0 0 0 0
6 1 —1 0 0 0 —1 0 0 1_
Каждая i-я строка такой матрицы показывает, какие ветви
подключены к t-му узлу и каково их направление относительно
узла; а каждый /-Й столбец указывает, с какими узлами соеди-
нена /-я ветвь.
Так как каждая ветвь подключена к двум узлам, то в любом
из столбцов матрицы А имеется два ненулевых элемента, один
из которых +1, другой —1. В связи с этим значения элементов
одной из строк матрицы всегда могут быть определены через
элементы других строк. Иначе говоря, одна из строк не является
независимой, не несет информации и может быть вычеркнута из
матрицы. Вычеркивая в А последнюю строку, получаем следую-
щую матрицу:
38
Ветви
1 2 3 4 5 0 7 8 9
1 ’ 1 0 1 1 0 0 0 0 0"
2 0 0 0 — 1 1 0 () 1 0
А — 3 ^СТр 3 0 0 —1 0 0 1 1 0 0 • (2.5)
СО 4 0 0 0 0 0 0 —1 —1 —1
5 о 1 0 0 - -1 0 0 0 0_
Эта матрица дает топологическое описание цепи. Назовем ее
структурной. _
Так как строки матрицы АСТр указывают ветви, подключен-
ные к соответствующим узлам, и их направление относительно
узлов, то умножая строки матрицы на вектор токов ветвей 1вет,
получаем алгебраическую сумму токов в узлах, равную нулю
по ЗКТ. Следовательно,
Aj вет — 0.
(2.6)
Действительно,
”10 1
0 0 0
0 0-1
0 0 0
0 1 0
подставим
1 0 0
-1 1 0
0 0 1
0 0 0
0—10
в (2.6) данные цепи на рис. 1.8,а
о о о-
0 1 о
1 о о
I -1 -1
ООО
Эта матричная запись соответствует следующей системе урав-
нений:
бДС'Ки — О,
-U~H'5“H'8 = 0,
—1з4-й4-17=0, (2.7)
—/>—Zs—=0,
<2 —!5=0.
Для получения матрицы F необходимо данную систему урав-
нений решить относительно токов ребер. Эту операцию можно
выполнить методом исключения переменных: из всех уравнений,
кроме первого, исключается ток 0, затем из всех уравнений, кро-
39
ме второго, исключается ток i2 и т. д. Проведение операции ис-
ключения переменных преобразует матрицу АСТр таким образом,
что в левой ее части образуется единичная матрица, а правая
часть представляет искомую матрицу главных сечении F. В ходе
преобразований используются перестановка строк и столбцов
матрицы, суммирование или вычитание строк. Допустимость та-
ких операций связана с тем, что перестановка строк в матрице
Астр вызывает лишь изменение порядка, в котором следуют урав-
нения в системе уравнений токов (2.7); перестановка столбцов
40
в матрице АсТр соответствует перестановке членов уравнении
(2.7); суммирование или вычитание строк матрицы Астр соответ-
ствует суммированию или вычитанию левых частей уравнений
токов. _
Алгоритм получения из матрицы АСТр матрицы F можно пред-
ставить следующей последовательностью шагов:
1) задается /=1;
2) исключая из рассмотрения первые (/—1) строк и (/—1)
столбцов, последовательно просматривают остальную часть мат-
рицы по столбцам и ищут первый ненулевой элемент. Пусть этот
элемент aik;
3) если k^j, то k-ii столбец ставится на /-е место, столбцы
от /-го до (k—1)-го сдвигаются вправо;
4) если i>j, то меняются местами i-я и j-я строки;
5) если ciii — — 1, то меняются на обратные знаки элементов /-Й
строки;
6) если в /'-м столбце кроме элемента имеются дополни-
тельные ненулевые элементы, то они устраняются прибавлени-
ем (или вычитанием) j-й строки к строкам этих элементов;
7) задается /=/-)-1. Если j^n—1 (где п— число узлов це-
пи), идти к шагу 2; в противном случае т—(п—1) (где т —
число ветвей) правых столбцов матрицы есть искомая матрица.
Сх ема алгоритма изображена на рис. 2.3. Используем дан-
ный алгоритм для получения матрицы F из структурной матри-
цы (2.5):
1 2 9 д 5 6 7 8 9
и 0 1 1 0 0 0 0 0"
0 0 0 — 1 1 0 0 1 0
0 0 —1 0 0 1 1 0 0
0 0 0 0 0 0 — 1 —1 —1
_0 1 0 0 —1 0 0 0 0_
1 о 3 4 5 6 7 8 9
‘1 0 1 1 0 0 0 0 О’
0 1 0 0 — 1 0 0 0 0
0 0 —1 0 0 1 1 0 0
0 0 0 0 0 0 —1 — 1 — 1
0 0 0 —1 1 0 0 1 0_
41
1 2
’1 О
О 1
=> о о
о о
о о
о
о
1
о
о
4
1
о
о
о
—1
5 G 7
О 1 1
— 1 о о
О —1 —1
О 0—1
1 о о
8 9
О О’
О О
О О
-1 —1
1 О
12 3 4
"1 000
0 10 0
=>0010
0 0 0 1
7 5 6
1 1 1
— 1 О о
О —1 —1
-10 0
О 0 —1
8
1
О
о
—1
9
О’
о
о
о
—1 —1
0 0 0 0
1 2 3 4 7 5 6
’1 0 0 0 1 1 1
0 1 0 0 0 — 1 0
=> 0 0 1 0 —1 0 —1
0 0 0 1 0 —1 0
о 0 0 0 —1 0 0
1
о
о
—1
8 9
о-
о
о
о
—1 —1
Ребра 5 Хорды
1 2 3 4 7! 6 8 9
”1 0 0 0 °: 1 1 0 — Г
0 1 0 0 0 1 — 1 0 0 0
=> 0 0 1 0 0 0 — 1 1 1 =>
0 0 0 1 0 i — 1 0 — 1 0
-0 о 0 0 1! 0 0 1 1_
Хорды
5 6 8 9
1 ’ 1 1 0 —г
.2 —1 0 0 0
=>F= 'g 3 0 —1 1 1
4 — 1 0 —1 0
7 0 0 1 1.
42
Первая матрица представляет собой исходную матрицу Астр.
Каждая следующая матрица есть результат преобразований,
выполняемых за одно повторение цикла алгоритма: вторая мат-
рица получена перестановкой второй и пятой строк в предыду-
щей матрице; третья матрица — изменением па обратный знака
элементов третьей строки и устранением дополнительного нену-
левого элемента в первой строке третьего столбца (вычитанием
из первой строки элементов третьей строки); четвертая матрица
получена в результате перестановки четвертой и пятой строк,
изменения на обратный знака элементов четвертой строки и уст-
ранения дополнительного ненулевого элемента в первой строке
4-го столбца (вычитанием из элементов первой строки элемен-
тов четвертой строки); пятая матрица получена перемещением
7-го столбца на место 5-го столбца и сдвига вправо 5-го и 6-го
столбцов; шестая матрица, получаемая в том же цикле алгорит-
ма преобразований, что и пятая матрица,— изменением на обрат-
ный знака элементов пятой строки и затем устранением допол-
нительных ненулевых элементов в первой строке (вычитанием из
элементов первой строки элементов пятой строки) и в третьей
строке (прибавлением к элементам третьей строки элементов
пятой строки).
2.2. МЕТОД ПЕРЕМЕННЫХ СОСТОЯНИЯ.
СТРУКТУРА МАТЕМАТИЧЕСКОЙ МОДЕЛИ
ЛИНЕЙНОЙ ЦЕПИ
Метод переменных состояния. Вынесем за пределы анализи-
руемой схемы (рис. 2.4,а) независимые источники (источники
входных воздействий — источники питания и входных сигналов)
и реактивные элементы. При этом будем считать, что анализи-
руемая схема не содержит управляемых источников, а реактив-
ные элементы схемы не образуют особенностей, т. е. контуров,
составленных из емкостных элементов или емкостных элементов
и источников напряжения, либо сечений, составленных из ин-
дуктивных элементов или индуктивных элементов и источников
тока. Оставшаяся часть схемы после вынесения из нее указан-
ных элементов (схема, заключенная в прямоугольник на
рис. 2.4,6) будет представлять собой линейную пассивную
/?-цепь. Очевидно, токи (напряжения) в элементах /?-цепи не
изменят своих значений, если индуктивные элементы заменить
источниками тока, а емкостные — источниками напряжения
(рис. 2.4,в). При этом источники, замещающие реактивные эле-
менты, должны быть такими, чтобы их токи и напряжения
в каждый момент времени имели те же значения, что и токи и
напряжения соответствующих элементов.
43
В такой преобразованной схеме линейная /?-цепь оказывает-
ся под воздействием источников двух типов: независимых источ-
v ГВ]
ников, представляемых вектором лни = , и источников за-
мещения реактивных элементов, которые представлены вектором
называемым вектором состояния. При известных на-
пряжении и токе независимых источников напряжения и токи
всех элементов схемы в любой момент времени определяются
вектором состояния для этого момента времени. Такой метод
анализа схемы с описанием анализируемых процессов с помощью
уравнений, в которых в качестве независимой переменной ис-
пользуется вектор переменных состояния, называется методом
переменных состояния.
Структура уравнений математической модели линейной цепи,
не содержащей особенностей. Математическая модель линейной
цепи без особенностей включает: уравнения токов резистивных
элементов, уравнения состояния, уравнения выхода. Рассмотрим
их общую структуру.
Уравнение шоков резистивных элементов. Пусть 1^, и 1„ —
р
векторы, в которых перечислены соответственно токи резистив-
ных ребер и токи резистивных хорд. Введем вектор токов резис-
тивных элементов 1рез, в котором перечисляются токи всех резис-
торов в последовательности, в которой вначале приводятся токи
резистивных ребер (токи, входящие в вектор 1„ ) и затем токи
р
резистивных хорд (токи, входящие в вектор ).
В соответствии с принципом суперпозиции значение каждого
тока, входящего в вектор 1рез, линейно зависит от значений токов
44
и напряжений всех действующих в схеме источников. Таким об-
разом, для тока каждого Л/ можно записать уравнение
(О = В1 j'X (/) +В2;ХНи(0 •
Такие уравнения, записанные для всех резистивных элемен-
тов, могут быть объединены в одно матричное уравнение
1рез (/) = В1Х(/) —|—В2ХНИ (/), (2.8)
где В] и В2 — матричные коэффициенты, значение которых опре-
деляется топологией и сопротивлениями резистивных элементов
/?-цепи на рис. 2.4,6. Назовем выражение (2.8) уравнением токов
резистивных элементов. Это уравнение — одно из уравнений,
входящих в состав математической модели цепи.
Уравнение состояния. Очевидно, одного уравнения токов ре-
зистивных элементов недостаточно для расчета 1рез, так как
в правую часть уравнения входит неизвестное X(Q. Необходимы
дополнительные уравнения, которые построим с помощью следу-
ющих рассуждений. Напряжение uL па каждом индуктивном
i
элементе L, связано с током в этом элементе соотношением
uL = LjdiLJdt, это же напряжение является одновременно на-
пряжением между соответствующими узлами /?-цепи, к которым
подключен индуктивный элемент, вследствие чего оно может быть
связано линейной зависимостью с X и Хнп:
«ио = Л-'4iL, ®
! at 1 f I
ИЛИ
—— ir (<)=: Ail.X(у) + Агг.^ни(О-
dt ' 1 1
(2-9)
Соответствую цие рассуждения можно провести относительно
каждого емкостного элемента. Ток ic емкостного элемента. С7- свя-
зан с напряжением и
С1
на этом элементе соотношением
= Cjduc J di. Этот т ок
одновременно принадлежит /?-цепи, вытекая
из узла и втекая в узел, между которыми включен емкостной эле-
мент. Следовательно, ток ic может быть связан линейной зави.
симостью с X и Хн„:
iC/ (о = с} ^с. (ог-= Ащ х (о + а;с.хнн (о
или
-^пс,(0 = ЛсХ(/)4-^сХ1Ш«).
(2.10)
45
Уравнения вида (2.9) и (2.10), составленные для всех индук-
тивных и емкостных элементов в последовательности, в которой
токи и напряжения этих элементов представлены в векторе со-
стояния X, можно объединить в одно матричное уравнение:
4х(0^--АЛ^+АЛЛО- (2.11)
at
Данное уравнение носит название уравнения состояния. Вхо-
дящие в правую часть уравнения А| и А2 представляют собой
матричные коэффициенты, значение которых определяется топо-
логией цепи и параметрами элементов.
Очевидно, порядок уравнения состояния [определяемый чис-
лом уравнений, объединенных в матричное выражение (2.11) J
цепи без особенностей равен числу элементов вектора X. Следо-
вательно, интегрируя эту систему уравнений (вектор Хни при
этом считается известным), можно определить все элементы
вектора состояния X. Подставляя найденное X в (2.8), затем мож-
но рассчитывать 1рез-
Уравнение выхода. Обычно в схеме бывает обозначен выход,
отклик на котором при анализе представляет интерес. Откликом
может быть напряжение цВых между некоторыми узлами (назы-
ваемыми выходными узлами) схемы либо ток /Вых в некоторой
ветви (называемой выходной ветвью) схемы. Чтобы не конкре-
тизировать вид отклика, в дальнейшем будем его обозначать
Хвых, под которым МОЖНО понимать либо «ВЫХ, либо (вых-
Так как отклик в случае ивых есть напряжение между неко-
торыми узлами Д-цепи на рис. 2.4,6 или в случае 1ВЫХ— ток
в некоторой ветви /?-цепи, его можно выразить линейной зави-
симостью от вектора состояния X и вектора независимых источ-
ников Хнп:
+ (2.12)
Здесь D[ и D2 — коэффициенты, определяемые данными схемы.
Следует заметить, что при построении уравнения выхода
(2.12) мы считали, что схема имеет единственный выход, поэтому
*вых(0 является скалярной (а не векторной) величиной.
Совокупность уравнений токов резистивных элементов, со-
стояния и выхода образует математическую модель цепи, на ко-
торой может быть основан любой анализ цепи.
2.3. АЛГОРИТМ ФОРМИРОВАНИЯ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЦЕПИ,
НЕ СОДЕРЖАЩЕЙ ОСОБЕННОСТЕЙ
Алгоритм вычисления коэффициентов уравнения токов резис-
тивных элементов. Пользуясь правилом построения топологиче-
ских уравнений с использованием матрицы главных сечений F
46
(2.3), записываем топологические уравнения для токов резис-
тивных ребер и напряжений резистивных хорд:
\ = - Fppz.L — FVI-FVxI^, (2.13)
Ьр = FkUc + FkU + Fb lb. (2.14)
X X X JJ x p
Топологические уравнения (2.13) и (2.14) дополним компо-
нентными уравнениями для резистивных элементов, определяю-
щими по закону Ома зависимость между напряжением и током
для этих элементов:
U? = RXI? . (2.15)
Р _ _ р X X
Здесь Rp, Rx— матрицы сопротивлений резистивных ребер и ре-
зистивных хорд. В этих матрицах элементы, расположенные
вдоль главной диагонали, — сопротивления соответствующих ре-
зистивных элементов, остальные элементы матриц имеют пуле-
вое значение.
Выразим в (2.14) напряжения па резистивных элементах че-
рез токи этих элементов, пользуясь компонентными уравнения-
ми (2.15), после чего в (2.13) и (2.14) все члены, содержащие
токи резистивных элементов, перенесем в левые части равенств:
1 Ч + FVxk _ ЧА Ч'1,
— Fj> R R Ip + RvIp = Fcr Ц. + Fur U.
p -X 1 P " X X G X
Объединим эти уравнения в одно матричное уравнение
(2.16)
С учетом введенных обозначений уравнение примет вид
Ац1рез — ВцХ + В12ХН„.
(2.17)
Сравнив (2.17) с (2.8), получим выражения для коэффициентов
Вх = Ай’Вц, В2=АП’В12. _ _ (2.18)
Значения же входящих в (2.18) матриц Ап, Вп и В12 опре-
делены в (2.16).
47
Пример 2.1. Построить уравнение токов резистивных элементов для схемы,
представленной на рис. 1.8.
Входящие в уравнение (2.8) векторы
Г и
I
рез —
ч
1/?х
Хни =
"1
«2 ;
г9
Матрицы сопротивления резистивных элементов с учетом масштабного ко-
эффициента Л1г=104
Вычисляем значение матриц, входящих в выражения коэффициентов урав-
нения токов резистивных элементов,
J _ FVx
- Ча rp r
“10 о
0 0,1 о
-о 0 0,2
—Г
о
0-
Для диагональной матрицы обратная матрица находится заменой в главной
диагонали элементов на их обратные значения
р оо’
Д-1 = о 10 о
• О 0 5-
Теперь можно определить значения коэффициентов уравнения токов рези-
стивных элементов:
'1 0 О’ ' 0 0 г ’ 0 0 — 1
II 1 - к II 1И 0 10 0 0 -1 0 = 0 —10 0
-0 0 5- — 1 0 0 -—5 0 0
“1 0 0‘ '0 0 -г " 0 0 —г
И ез lea” 7 = к II lea 0 10 0 1 - -1 0 — 10 —10 0
-о 0 5 -1 0 0 - 5 0 0-
48
Следовательно, уравнение токов резистивных элементов для рассматривае-
О
о
—5
О
— 10
о
- о
10
- 5
“з
4
to,
(2.19)
4
(в
Алгоритм
По матрице
бенностей (2.3) запишем топологические уравнения для U/, и 1с:
о
0-1
— 10
О
‘9
уравнения состояния.
вычисления коэффициентов
главных сечений для произвольной схемы без осо-
О
О
Пл = Ftfpz.Uy?p — FctUc F^cLI;
Ic = — Fc/?x Kx — FcdL — Fc/I.
(2.20)
(2.21)
Компонентные уравнения для индуктивных и емкостных эле-
ментов
U£ = L— I,, 1г=сАи (2.22)
L dt L с dt с
Заменим в (2.20) и (2.21) левые части равенств выражения-
ми (2.22), далее выразим Ц, через 1Р используя (2.15), и объ-
р р
единим полученные уравнения в одно матричное выражение
Ю + 10- > 1 1 1 1 II ? ~,J ‘ J [Щ Ь- , 1© 1 i® . ю it IU Ю 1I<C | СЧ oi I . r—। o. " a — i ? 1 -J f 4 '-'x''"' (J5 C IO I I 1 - ,=г < '°
в X °21 B22 Хни
С учетом введенных обозначений
А22^-Х = А211рез + В21Х 4- В22ХН„. (2.23)'
Отсюда, подставив вместо 1рез выражение (2.8) и решив урав-
d v
пение относительно — X, получим выражения, на которых
Л _
строится алгоритм вычисления коэффициентов Aj и А2 уравне-
ния состояния:
Ах = А221 (В21 + AjjBj); А2= А22 (В22 ( А21В,). (2.24)
Пример 2.2. Построить уравнения состояния для схемы, приведенной на
рис. 1.8.
4—6030
49
Определяем значения
уравнения состояния А| и
матриц, через
А2 в (2.24):
которые выражаются коэффициенты
С
А 22
о
22
О
1-0
О
L
о
0,2
О
в,
в.,
А21 =
Находим коэффициенты уравнения
мере 2.1 значения коэффициентов
ментов:
В!
состояния, используя вычисленные в при-
и В2
уравнения
токов резистивных эле-
А1 = А“1(В21 + А21в1)= О
*-о
О
-10
о
—1
О
О
А2 — а22
(В22 + А21 В2) —
‘ 1
О
О
О
О
О
1
О
Г
О
0-
' О
10
• 5
О
—10
О
О
О
Таким
образом, уравнение
d
dt
«з
«4
is
‘—5
О
-0,5
0
—2
—0,5
0
0,2
О
о
0,2
О
О *
О
0,5-
'—5
О
0,5
О'
о
0,5-
5
2
О
состояния
— 1
0,2
—1,5-
«з
«4
. О
0
'*-1
О
О
—1
— 1
1
О
О
—2
—0,5
—Г
0,2
—1,5-
ГО
О
О
О
О
О
—Г
О
о-
О
—2
О
О
—1,5-
рассматриваемой
схемы
’—5
—2
- О
О
—2
О
-1
О
1,5-
и
“2
О
. (2.25)
50
Алгоритм вычисления коэффициентов уравнения выхода. Как
отмечалось выше, отклик Л'вых на выходе схемы может быть на-
пряжением г/ных либо током /вых- Если отклик есть напряжение
»вых, то его можно представить алгебраической суммой напря-
жений ветвей при обходе некоторого контур;/ от одной (началь-
ной) выходной клеммы схемы ко второй (конечной) клемме. На-
пример, для схемы на рис. 1.8,а г/ВЫх можно представить, сумми-
руя напряжения вдоль контура с последовательностью узлов
4—3—1—6. Тогда
«вых = — И7—==—hr z—(2.26)
Ток i7 из уравнения (2.19) определяется выражением
i7= [00 -1 JX+[OO - 1JXHII.
Напряжение zz3 входит в вектор состояния, откуда
//3=[1 0 0]Х.
Напряжение z/i входит в вектор независимых источников, сле-
довательно,
z/1=[l OOJXHIt.
Подставив выражения z7, u3, z/i в (2.26), после приведения
подобных членов получим
| _J X 11 0 3]%,.... (2.27)
D[ Do
Из этого выражения следуют значения коэффициентов D[ и
Do уравнения выхода.
В рассмотренном случае контур, который был выбран для
определения выходного напряжения, не включал в себя ветви,
содержащие независимые источники тока и индуктивные элемен-
ты. Если это условие не выполняется и в выбранном контуре
присутствуют независимые источники тока или индуктивные эле-
менты, необходимо, пользуясь матрицей главных сечений F, вы-
разить их по закону Кирхгофа для напряжений через напряже-
ния ребер и затем произвести суммирование напряжений, входя-
щих в контур. Пусть, например, в схеме па рис. 1.8,а для опре-
деления выходного напряжения выбран контур между узлами
4—6 из одной ветви, содержащей источник тока ф и //ВЫх =—tig.
С помощью матрицы главных сечений F (2.2) выражаем напря-
жение этой ветви через напряжение ребер
Пвых = —Чд = — (— Ui и^-^- ti-^У =U\ — Z/3 — ZZ-
и, таким образом, приходим к тому же выражению, которое бы-
ло получено выше для zzBBIX. Очевидно, независимо от выбранно-
го контура получается одно и то же уравнение выхода.
Мы рассмотрели случай, когда откликом является напряже-
ние. Если отклик — ток, то он может быть определен алгебраи-
4* 51
ческим суммированием токов ветвей, подходящих к выходной
цепи. Для той же схемы на рис. 1.8,а
гВЫХ1 = 1б-
Подставив выражение i6 из уравнения токов резистивных
элементов (2.19), получим
/вых1 = [-£0_0]Х + 15^0]ХиП.
Di D2
Если ветвь, ток в которой рассматривается в качестве откли-
ка, содержит емкостной элемент или независимый источник на-
пряжения, то следует воспользоваться матрицей главных сече-
ний F и выразить отклик через токи хорд. Пусть откликом в схе-
ме па рис. 1.8,а является ток
£вых2== ^3-
Пользуясь матрицей F (2.2), выразим через токи хорд
£вых2== —1э
52
и затем каждый из токов в правой части равенства выразим через
X и Хни
'вь,х2 = 1-5 О 0]Х Цо 0 0] X,,,, - [0_0J] X - p_OJ] х„„ -
*6 Г8 Г9
= (_5 О -1|Х + (5 0-1] Х„„.
ПИ ~ST
Таким образом, для схемы на рис. 1.8 уравнения математи-
ческой модели имеют:
коэффициенты уравнения токов резистивных элементов
’ 0 0 —1 0 0 —1
в1 = 0 — 10 0 , В2 = 10 — 10 0 ; (2.28)
—5 0 0 5 0 0
коэффициенты уравнения состояния
—о 0 — Г 5 0 — 1
А1 = 0 2 0,2 , а2 = 2 —2 0 ; (2.29)
0,5 —0,5 — 1,5 0 0 —1,5
коэффициенты уравнения выхода (принимая в качестве от-
клика цепи напряжение ивых)
D] = [ —103J, D2=[103], (2.30)
На рис. 2.5 показана схема алгоритма вычисления коэффици-
ентов уравнения выхода (k — порядковый номер элемента в со-
ответствующем векторе 1рез или X; i — порядковый помер источ-
ника в векторе Хни).
2.4. ФОРМИРОВАНИЕ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ ЦЕПИ, СОДЕРЖАЩЕЙ
ОСОБЕННОСТИ
Как и ранее, будем рассматривать цепи с особенностями
в виде С-коптуров (контуров, составленных только из емкост-
ных элементов) и А-сечений (сечений, состоящих только из ин-
дуктивных элементов). Другие виды особенностей могут быть
устранены подключением к источникам из выходных сопротив-
лений.
При наличии в анализируемой схеме особенностей рассмат-
риваемых видов не удается иметь все емкостные элементы в реб-
рах либо все индуктивные элементы в хордах; образуются наря-
ду с емкостными ребрами Ср емкостные хорды Сх и наряду
с индуктивными хордами Lx индуктивные ребра Lp.
53
Рис. 2.6
Уравнения математической модели таких цепей с особенно-
стями имеют ту же структуру, что и эти уравнения цепей без
особенностей, т. е. структуру, представленную выражениями
(2.8), (2.11), (2.12). При вычислении коэффициентов уравнений
следует только в индексах подматриц матрицы F вместо С и L
подставить Ср и Lx и матрицу А22 вычислять, пользуясь выраже-
нием
Г(СП -у Fc с C4Fc с ) О
А„„ = Р С р х _ . (2.31)
О 1L, F.yLF,- J
Предлагаем в этом убедиться, проведя самостоятельно вывод
уравнений математической модели с использованием структуры
матрицы главных сечений F, приведенной в (2.4).
Пример 2.3. Для цепи, представленной на рис. 2.6, вычислить коэффициенты
уравнений математической модели.
В цепи имеются две особенности: С-контур, образованный элементами Сз,
С4, Сз, и L-сечение, образованное элементами Lg, Lio, Ьц.
Матрица главных сечений для данной цепи
С
Rp 7
Lp 9
5
' О
О
— 1
I
О
О
Хорды
Rx L<
6 8 10 11
110 1
— 10 0 0
0—1 10
— 1 0 —1 —1
0 0 10
0 0—1—1
I
12
54
Предлагаем самостоятельно получить эту матрицу для цепи.
Входящие в уравнения векторы
Определяем коэффициенты уравнения
ясь выражением (2.16):
токов резистивных элементов
ПОЛЬЗУ-
i7"| Г О
16 = о
'в 5
О
—10
о
Определяем коэффициенты уравнения состояния
55
Следовательно t
з — 2 ; о о ~
—2 7100
-----,—I_____
о о ] 6 2
О О I 2 7 J
^21 —
~О 0 1—1 О-
О О I 1 1
___.__I______
I —1 I 0 0
_0 —1 I О 0_
о
“О I о г
0 110
О ! о о
1 ! о о .
О -Fc,
р
° -
~0 0 I —г
О 0 ! о
о О [ о
.1 о I1 0.
”0,411765 0,117647 0 О
0,117647 0,176471 О О
О 0 0,184211 —0,0526316
О 0 —0,052632 0,157895 .
Позже мы рассмотрим способ нахождения обратной матрицы. Сейчас до-
статочно убедиться в правильности вычисления значения матрицы А^1, проверив
равенство А,2А^* = 1.
Таким образом,
—2,05883 —1,17647 —0,294118 0,117647“
Aj — А22 .(В21 + A2i Bj) — —0,588235 0,184211 — 1,76471 —0,131579 0,058824 —0,552633 0,176471 0 У
_—0,052632 —0,105263 0.157895 0
3,2353 —1,17647 —0, 411765 '
>1 >1 и1 to to + A2iB2) = 2,35294 —0,0526316 — 1,76471 0 —0,117647 —0,552633
0,157895 0 0,157895_
56
2.5. ФОРМИРОВАНИЕ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ ЦЕПИ, СОДЕРЖАЩЕЙ
УПРАВЛЯЕМЫЕ ИСТОЧНИКИ
До сих пор рассматривались цепи, которые содержат лишь
неуправляемые источники, характеризуемые тем, что для них
напряжение источников напряжения и ток источников тока яв-
ляются величинами (либо функциями времени), не зависящими
от токов и напряжений других ветвей схемы.
В управляемом источнике значение напряжения (тока) ис-
точника напряжения (тока) зависит от тока или напряжения
некоторой ветви схемы. Такие управляемые источники присутст-
вуют в эквивалентных схемах активных элементов (например,
транзисторов), их используют также при построении эквивалент-
ных схем индуктивно связанных цепей и т. д. Наиболее часто
встречающиеся типы управляемых источников показаны на
рис. 2.7. Здесь представлены источники тока и напряжения,
управляемые напряжением (рис. 2.7,а, в) и током (рис. 2.7,6, г)
некоторой ветви.
Управляемые источники образуют самостоятельный тип эле-
ментов (и соответственно ветвей) цепи. Будем считать, что нуме-
рация ветвей цепи производится в последовательности: управляе-
мые источники напряжения (l_Jy), независимые источники напря-
жения, емкостные, резистивные, индуктивные элементы,
независимые источники тока, управляемые источники тока (1У).
При этом управляемые источники напряжения окажутся ребра-
ми, управляемые источники тока — хордами графа цепи и мат-
рица главных сечений F будет иметь следующую структуру:
ч
и
F = ю" С
* си Р
Оч
Rp
ч
Хорды
Сх Rx Lx I Iv
OF F F F
1 UVRX 1 U.L 1 U Г *
OF F F F
F F F F F
CPCX SA SA S>' S>S
R 4 R 4 L FR I 4? /
P X p X p p y
0 0 F, L 0 0
Рис. 2.7
57
Из этой структуры матрицы F следует, что при выводе урав-
нения токов резистивных элементов выражение, аналогичное
(2.16), будет в данном случае иметь вид
(2.32)
или с учетом введенных обозначений
AnIrt.3 = В1хХ В12Х„„ В1эХуи. (2.33)
Для вектора Хуп (вектора, объединяющего токи и напряже-
ния управляемых источников) должна быть известна зависи-
мость от вектора токов 1рез и вектора состояния X:
Xv^NJpea+^X.
(2.34)
Матрицы Ni и N2 строятся по известной зависимости токов и
напряжений управляемых источников от управляющих токов и
напряжений ветвей цепи. Подставим выражение (2.34) в (2.33)
и после приведения подобных членов получим уравнение токов
резистивных элементов для цепи, содержащей управляемые ис-
точники:
1рсз = (Ан-ВД-ЩВЛ) X 4- (Ап-ВхЯГ’ВтЛ,,,.
В. в2
(2.35)
Перейдем к определению уравнения состояния. Нетрудно по-
казать, что для цепи, содержащей управляемые источники, выра-
жение (2.23) должно быть дополнено членом, включающим в се-
бя Ху„:
А22 4 х (0 = А211рез (/) + В21Х (0 + В22ХН„ (/) + B23XVH ((), (2.36)
at
где
L FyA О
(2-37)
58
Подставив (2.34) в (2.36) и приведя затем подобные члены,
получим
А22 — X (/) - (A..! -I- Nx) 1рсз(/) + (В21 -l-N2)X(0 -1- В22х„„(/). (2.38)
dt
После решения уравнения (2.38) относительно производной
Л- Х(Ч образуется уравнение состояния в форме выражения
(2.Н)
х (Ч = аД (В21 N2 (А;>1- Nd BJ X (/) —
at--------------------------------------
Ai
-г А^1 (В22 4- (А21 + NJ В,) Х„„ (t). (2.39)
А,
УПРЛ/КНЕНИЯ
1. Для приведенной на рис. 2.8 схемы без особенностей постройте структур-
ную матрицу и получите из нее матрицу главных сечений. Запишите систему
топологических уравнений по закону Кирхгофа для токов и напряжений.
2. Решите задачу 1 применительно к схеме, приведенной на рис. 2.9.
3. Решите задачу 1 применительно к схеме с особенностью, приведенной на
рис. 2.10.
4. Воспользуйтесь решением задачи 1 и получите для приведенной на рис.
2.8 схемы: а) уравнение токов резистивных элементов, б) уравнение состояния,
в) уравнение выхода.
5. Воспользуйтесь результатами решения задачи 2 и постройте для приве-
денной на рис. 2.9 схемы уравнения математической модели (уравнение токов
резистивных элементов, уравнение состояния, уравнение выхода).
н '*0 О' <0 0 —1 ь --2.НФ 57 Рис. 2.8 "бх ' С 1 ° 100 100 ИО 2z7g=r 000 Рис. 2.9 5JK 1к | О - () 1 1нш | \1к ивь|х(Д L i 1 Т J Рис. 2.10 59
Рис. 2.12
6. Воспользуйтесь результатами решения задачи 3 и постройте для приве-
денной на рис. 2.10 схемы уравнения математической модели (уравнение токов
резистивных элементов, уравнение состояния, уравнение выхода).
7. Постройте эквивалентную схему по переменному току для транзисторного
усилителя, принципиальная схема которого показана на рис. 2.11,а и получите
уравнения математической модели (уравнение токов резистивных элементов,
уравнение состояния, уравнение выхода). При построении эквивалентной схемы
усилителя воспользуйтесь схемой замещения транзистора, приведенной на
рис. 2.11.6.
8. Для активного фильтра нижних частот, принципиальная схема которого
приведена на рис. 2.12, постройте эквивалентную схему и получите уравнения
математической модели, приняв усилитель с коэффициентом усиления по напря-
жению К идеальным (с бесконечно большим входным сопротивлением).
9. Для активного фильтра верхних частот, принципиальная схема которого
приведена на рис. 2.13, постройте эквивалентную схему и получите уравнения
математической модели, приняв усилитель с коэффициентом усиления по на-
пряжению К идеальным (с бесконечно большим входным сопротивлением).
10. Покажите, что топологическое уравнение напряжений для произвольной
схемы UX = FTUP можно получить из топологического уравнения токов 1Р = —Flx.
используя равенство нулю алгебраической суммы мгновенных значений мощно-
стей в элементах схемы.
11. Покажите, что матрица главных сечений может быть представлена вы-
ражением F = AP-1AX, где Ар, Ах — матрицы, составленные из столбцов струк-
турной матрицы, принадлежащих соответственно ребрам и хордам.
60
Глава 3. РАСЧЕТ ХАРАКТЕРИСТИК
ЛИНЕЙНОЙ ЦЕПИ
3.1. ХАРАКТЕРИСТИКИ
ЛИНЕЙНОЙ ЦЕПИ
Характеристики линейной цепи определяются как ее отклики на
некоторые сигналы специальной формы. Эти сигналы выбирают-
ся таким образом, чтобы, зная отклик на них, можно было пред-
сказать (рассчитать) отклик цепи на произвольно заданное вход-
ное воздействие.
Для нахождения таких характеристик в схеме выделяются
точки, называемые входом и выходом. Ко входу подключается
независимый источник входного сигнала хвх специального вида
(кроме этого источника в схеме могут присутствовать лишь уп-
равляемые источники) и находится ОТКЛИК ,ГВЫх (рис. 3.1), явля-
ющийся характеристикой цепи.
Пусть Л'вх есть гармонический сигнал частоты о, отклик Л'Г1ЫХ
на этот сигнал будет также гармоническим сигналом той же час-
тоты ui. Представим л*вх и Хвых векторами в комплексной плос*
кости, обозначив их соответственно X(со) и ХВых- Тогда их отно-
шение /<((>>) ==А'вых/А'вХ есть комплексный коэффициент передачи
на частоте со. Очевидно, если принять Хвх=1, то К(ш) будет чис-
ленно (без учета размерностей величин) равен отклику А'вых.
Представим К(и) в показательной форме
К(со)=К((о)е^<“).
Тогда К(со) = |К(ц>) |—зависимость от частоты модуля ком-
плексного коэффициента передачи, называемая амплитудно-час-
тотной характеристикой (АЧХ), ср (со) =arg(X(<o))—зависимость
от частоты фазового угла комплексного коэффициента передачи,
называемая фазочастотной характеристикой (ФЧХ).
Если представить входной сигнал хвх и отклик на него хвых
их изображениями по Лапласу соответственно ABX(s) и ХВых($),
то их отношение является характеристикой цепи, называемой
передаточной функцией K(s) =ABbIX(s) /XBX(s). Очевидно, при
ABX(s) = l K(s) =ABbIX(s).
Переходная характеристика есть от- _________________
клик h(t) на единичный скачок (хвхЦ) = _ I ,
= !(/)). При этом начальное состояние
схемы считается нулевым (Х(0)=0),
т. е. при t=Q ток в индуктивных элемен-
тах и напряжение на емкостных элемен- Рис. 3.1
61
тах равны нулю и схема, таким образом, не содержит запасенной
в реактивных элементах энергии.
Импульсная характеристика представляет собой отклик цени
g(t) на единичный импульс (хвх(/) =д(/)). Как и в случае пе-
реходной характеристики, начальное состояние схемы принима-
ется пулевым (Х(0)=0) и при / = 0 схема не имеет запасенной
энергии.
Рассмотрим связь между характеристиками. Любая из при-
веденных выше характеристик полностью отражает свойства це-
пи. Следовательно, любая характеристика может быть получена
с помощью преобразований, производимых над другой характе-
ристикой той же цепи.
Зависимость между характеристиками определяется следую-
щим выражением:
Л'(<о)=К(х)|5=/ш, (3.1)
т. е. комплексный коэффициент передачи получается путем за-
мены в выражении передаточной функции д на кь.
Частотная и импульсная характеристики связаны между со-
бой парой преобразований Фурье:
оо оо
K(w. = gd'id~l“ltdt, gd)=-~-^- Ke'““da). (3.2)
— oo —oo
Вычисление этих выражений прямого и обратного преобразо-
вания Фурье рассматривается в гл. 14, посвященной цифровой
обработке сигналов.
Наконец, импульсная и переходная характеристики связаны
друг с другом соотношениями
t
g^} = ——d{t\ h<t) = i g (-) d~. (3.3)
dt J
o
3.2. РАСЧЕТ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
Выражение передаточной функции цепи имеет форму дроби,
числитель и знаменатель которой представляют собой полиномы
от д:
Степень п полинома N(д) равна порядку анализируемой
цепи, т. е. числу реактивных элементов в пей с независимыми
начальными условиями или, что то же самое, разности общего
числа реактивных элементов и числа особенностей, содержащих-
ся в цепи. В числителе ряд коэффициентов при старших степе-
62
пях а„, а, 1-1,... могут быть равны нулю и степень полинома
Л!(з) может быть меньше степени A'(s).
Расчет передаточной функции согласно выражению (3.4) сво-
дится к нахождению коэффициентов полиномов М (s) и N(s),
т. е. к расчету коэффициентов ап,..., а0, pn-i,..(3». В качестве
исходных выражений для расчета примем уравнения состояния
и выхода анализируемой схемы
——X (/)=.= АхХ (/)-ф A2.vbx (/), (3.5)
at
*ВЫх Й = D, X ((} - Da.YBJ/). (3.6)
Отличие данных выражений от ранее приводившихся (2.11) и
(2.12) состоит лишь в том, что вместо вектора Хнп здесь исполь-
3 v Т С Я С. lx с! <Л Я J) Н ЗЯ В И ЯI1JIЗ «V (/). Это связано с тем, что в цепи
предполагается один независимый источник, для которого вы-
брано обозначение .rBX(/).
Представим входящие в уравнения переменные и.х изображе-
ниями по Лапласу. Тогда в предположении нулевых начальных
условий получим
sX(s)=A1X(s)+A2Xbx(s), (3.7)
XBb,x(s) = D1X(s)+D2XBX(s). (3.8)
Решим выражение (3.7) относительно Х($). Группируя члены,
содержащие X(s), имеем
(s-1)— Aj-1 X (s) = A,.YB (X),
откуда
X (s) = (s •! — А/)-’ А;ХВЧ (s).
Подставим это выражение в (3.8)
А'вь,х Й) = [D, (s Л - А, )1 А, -- D;]XBX (х).
Отсюда
K(s) = D7(s-T — Ai)-1 А2(3.9)
Данное выражение может быть использовно для построения
алгоритма вычисления передаточной функции K(s). Основная
трудность вычисления этого выражения состоит в нахождении
обратной матрицы (s-1—At). Рассмотрим метод вычисления та-
кой матрицы, называемый методом Леверрье — Фаддеева. Этот
метод предусматривает следующую схему вычислений.
Пусть дана квадратная неособенная матрица А! (этим усло-
виям удовлетворяет матрица А! уравнения состояния реальной
63
схемы) п-го порядка. Все получаемые в ходе вычислений матри-
цы будут также квадратными матрицами п-го порядка. Приняв
Вп = 0 и ,р^= 1, проводят вычисления по следующей схеме:
ап—1 Вп 1, В„ j <х,г_ 1А1, р,г_1
«я—г 1 ~Т~ Ря—1‘ В,/ — 2 &л—г^1, —2
---рг Вп_1(
-у1гВ,г_г,
= + Во = <7оА1( ?о =----------------— tr Во,
(3.10)
0 — Во + f!0 • 1.
Последнее выражение — тождество, которое можно использо-
вать для проверки безошибочности проведенных вычислений.
Следует иметь в виду, что в ЭВМ вычисления производятся
с определенной точностью и для проверки правильности полу-
ченных значений пользуются выражением
ЦВо+₽о-1
где у — некоторая малая величина. Получение значения нормы
матрицы, превышающей у, свидетельствует о том, что исходная
матрица является особенной. Из-за конечной точности проводи-
мых в ЭВМ вычислений решение о том, что матрица особенная,
может приниматься и при выполнении условия р0<б, где б — до-
статочно малая величина.
В схеме вычислений в выражениях для [3; использована опе-
рация нахождения следа матрицы, обозначенная символом tr
(под следом матрицы понимают сумму ее элементов, располо-
женных на главной диагонали).
Через величины, значения которых рассчитываются в схеме
Леверрье — Фаддеева, можно выразить:
а) обратную матрицу A-1i, используя выражение
A-i1== —(1/ро)ао; (З-Н)
б) характеристический полином исходной матрицы Ai (ина-
че, характеристический полином анализируемой цепи)
det (s 1 —Ai) =sn+'^n_Isn-I+ ... +₽is+₽o;
в) обратную матрицу (s-1—А])-1, входящую в выражение
(3.6) передаточной функции:
, Г A V-1 — 1+an-2S'1 2 + • + «ls+ao
(3.12)
64
Пример 3.1. Рассчитать передаточную функцию иепи, приведенной на
рис. 1.8,а.
Возьмем матрицу
схемы,
Ai из уравнения состояния, построенного для данной
А1 =
'—5
о
-0,5
0
—2
—0,5
—1"
0,2
—1,5-
и выполним
действия
соответствии со схемой вычислений (3.10):
в
"О
в3= О
Lo
О'
0
0-
1;
0
0
0
а2 — + Рз‘ 1 —
’1
О
-о
0"
О
1-
В2 = а2А
'-5
0
-0,5
0
—2
—0,5
—1'
0,2 ,
— 1,5-
0
1
о
р2= - — trB, = 8,5;
"3,5
О
-0,5
О
6.5
-0,5
—Г
0,2 ,
7-
В, = а, А
"—1,8
0,1
L 1
0,5
—13,1
—2,5
—2"
1
— 11,1-
— — tr В, = 21,1;
2
'3,1
0,1
1
0,5
8
—2,5
—2'
1
10.
Во= а0А
'—16,5
О
О
0
—16,5
О
О'
О
—16,5-
— tr Во = 16,5.
О
Так как равенство О=Во + Ро-1 выполняется,
в ходе вычислений не допущено ошибки.
Пользуясь результатами вычислений, можно
А,-1 по (3.11)
это свидетельствует о
определить обратную
том, что
матрицу
А1>- рЧ0-
'0,1878787
0,0060606
-0,0606060
характеристический полином
0,0303030
0,4848484
—0,1515151
—0,1212121"
0,0606060 ,
0,6060606-
det{s-1—A,) =s3+8,5s2+21, ls+ 16,5,
5—6030
65
наконец, необходимую для вычисления передаточной функции обратную матрицу
(s.l_A1)-i =
'1 0 О' 0 1 0 -0 0 1- S2 4- '3,5 0 —Г 0 6,5 0,2 -0,5 -0,5 7- •а 4- 3,1 0,5 —2' 0,1 8 1 - 1 —2,5 10
s34-8,5s2 + 21,ls+ 16,5
Положим, что входным источником в схеме на рис. 1.8,а является источник
напряжения щ, остальные источники исключены из схемы. При этом исключение
из схемы указанных источников (zz2 = 0, 1'9 = 0) приводит к устранению соответ-
ствующих им столбцов в матрице А2 уравнения состояния (2.23). Таким обра-
зом, для рассматриваемой схемы с одним входом, на котором действует источ-
ник tii.
" 5 ’
2
- О -
Значения матриц D, и D2 уравнения выхода получим из выражения (2.27). При
этом в матрице D., оставляем лишь столбец, соответствующий и,. Таким обра-
зом. для рассматриваемого случая
£>,=[—! О 3], £)2=1.
Подставив найденные значения
в выражение (3.9), получим
Л' («)=[-!
О 3]х
'3,1 0,5 —2'
0,1 8 1
- 1 —2,5 10-
а3 4- 8,5s3 + 21, ls+ 16,5
[—1 0 3]а2 + [—2 —1,5 22] а 4-[—0,1 8 32]
а3 4-8,5з24-21,1а 4-16,5
— 5s2 — 13 s — 16.5 s34-3,5s24-8.1s'
=------------------------4- 1 =------------------------. (3-12')
s3 4- 8,5s2 4- 21,ls4-16,5 s3 4-8,5s2 4-21, Is 4-16,5
На рис. 3.2 приведена укрупненная схема алгоритма расчета
передаточной функции. Здесь блоки 3, 4, 5 выполняют действия,
связанные с расчетами в i-й строке вычислений по схеме Ле-
веррье — Фаддеева.
66
Заметим, что в каждой строке
вычислений схемы Леверрье—Фад-
деева при определении а использу-
ется значение матрицы В, найден-
ное в предыдущей строке, которое
затем не используется в последую-
щих вычислениях. Поэтому новое
вычисленное значение В может по-
мещаться в памяти ЭВМ на место
значений этой матрицы, найденных
в предыдущей строке схемы вычис-
лений. Значение а в блоке 6 исполь-
зуется для нахождения коэффициен-
та an-i полинома, стоящего в числи-
теле выражения передаточной функ-
ции (3.4); коэффициентами полино-
ма, стоящего в знаменателе переда-
точной функции, служат рп_,-.
Рис. 3.2
3.3. ПРОГРАММА РАСЧЕТА
ПЕРЕДАТОЧНОЙ ФУНКЦИИ
Изложенный выше алгоритм Леверрье—Фаддеева реализует
программа З.Е Исходными данными для программы служат мат-
рицы, входящие в уравнения переменных состояния и отклика
Ai, Аг, Di и скаляр D2. В результате расчета получаются поли-
номиальные коэффициенты числителя а0, а1г.. .,ап и знаменате-
ля ₽о, передаточной функции, представленной в ви-
де (3.4).
Принятые обозначения. В программе 3.1 приняты следующие
обозначения: №/о — порядок матрицы Аь А(0), А(1),..., А(№/о),
В(0), В(1),..., В(№/о)—массивы, хранящие полиномиальные
коэффициенты числителя и знаменателя K(s); Е — норма матри-
цы ||В04-р0-1 jj; ЕО — допустимая погрешность; Al, А2, D1—
имена массивов, входящих в уравнения переменных состояния и
отклика; D2 — скаляр в уравнении отклика; Q3, G3 — массивы,
в которых хранятся матрицы В, и аг, R3— массив для хранения
промежуточных значений.
5* 67
ПРОГРАММА 3.1
3300 REM РАСЧЕТ ПЕРЕДАТОЧНОЙ ФУНКЦИИ K(S)
3302 DIM Q3(10rl0)>G3(10>10)rA(10)>B(10)»R4(10>
3304 FOR IX = 1 TO NX X FOR JZ = 1 TO NX
3306 Q3(IX»JZ)=0 \ NEXT JX \ NEXT IX
3308 A(NX)=D2 X B(NX)=1 X E=0 \ E0=1.00000E-03
3310 FOR I0X-1 TO NX
3312 FOR IX = 1 TO NX \ FOR JX«1 TO NX \ G3 (IX. JXT=Q3 (IX'PffX)
3314 IF IZ=JZ THEN G3(IX»IX)=G3(IX,IX)+ B(NX-I0X+1)
3316 NEXT JX X NEXT IX
3318 FOR IX=1 TO NX \ FOR JX=1 TO NZ \ R4=0 X FOR KX-1 TO NZ
3320 R4=R4+G3(IZ,KZ)*A1(KX.JX) \ NEXT KX X Q3(IXrJZ)=R4
3322 NEXT JX X NEXT IX
3324 B=0 X FOR IX=1 TO NX X B=B+Q3(IX,IX) \ NEXT IX
3326 В(NX-I0Z>=-B/I0Z
3328 FOR IX=1 TO NZ X R4<IZ)=0 X FOR JZ=1 TO NX
3330 R4 (IX)=R4(IX)+D1(JX)*G3(JX»IX) X NEXT JX X NEXT IX
3332 A=0 X FOR IX=1 TO NX X A=A+R4(IX)»A2(IX) X NEXT IX
3334 A(NX-I0Z)=A+B(NX-I0X)*D2
3336 NEXT I0Z
3338 FOR IX=1 TO NZ \ FOR JX=1 TO NZ
3340 IF IX = JX THEN Q3(IX»IX)=Q3(IX г IX)+B(0)
3342 E=E+Q3(IX>JX)"2 X NEXT JX \ NEXT IX X E=SQR(E)
3344 IF E)E0 THEN PRINT ‘ПОЛУЧЕНА ОШИБКА ( E>.001 ) =‘>E
3346 PRINT X REM ВЫВОД РЕЗУЛЬТАТОВ РАСЧЕТА X PRINT
3348 FOR IX=0 TO NX
3350 PRINT ’A(’;ix;’) = 4 X PRINT USING "00000.0000000‘»A(IX)?
3352 PRINT »’B(’)IX;’>»4 X PRINT USING "00000.0000000",B(IX)
3354 NEXT IX
3356 RETURN
Для ввода элементов матриц Аь А2, Di и значения D2 можно
воспользоваться программой П.2, которая эту операцию осуще-
ствляет в режиме диалога.
Описание программы. Блокам схемы алгоритма, представлен-
ной на рис. 3.2, соответствуют группы операторов, размещенные
в следующих строках программы: блоку 1 соответствуют строки
3304—3306, блоку 2 — строки 3310 (начало цикла)—3336 (ко-
нец цикла), блоку 3 — строки 3312—3316, блоку 4 — строки
3318—3322, блоку 5 — строки 3324—3326, блоку 6 — строки
3328—3334. После выхода из цикла (строка 3336), в котором
получаются коэффициенты передаточной функции, производится
проверка точности выполнения операций. Для этого в строках
3338—3342 выполняется операция
В = В0 + ₽0-1
и рассчитывается норма
68
Рис. 3.3
Если норма не превышает заданной погрешности (ЕО), считает-
ся, что полученные результаты имеют приемлемую точность. До-
пустимая погрешность в подпрограмме принята Е0=0,001 (стро-
ка 3308). Если норма больше заданной погрешности, т. е. Е>Е0,
выдается сообщение Е1ОЛУЧЕНА ОШИБКА и значение рассчи-
танной нормы. Независимо от значения нормы на экран выводят-
69
ся значения полиномиальных коэффициентов а, и передаточ-
ной функции (строки 3346—3354).
Детализированные схемы алгоритмов операций, выполняемых
в отдельных блоках, представлены на рис. 3.3. В указанных схе-
мах алгоритмов переменные обозначены именами, принятыми
в программе. На рис. 3.3,а показан алгоритм обнуления матри-
цы в блоке 1. Реализация действий в блоке 3 показана алгорит-
мом на рис. 3.3,6. Алгоритм умножения матриц в блоке 4 проде-
монстрирован на рис. 3.3,в. След матрицы, вычисляемый в блоке
5, определяется по схеме алгоритма на рис. 3.3,г. Операции, от-
раженные в блоке 6, осуществлены в алгоритме, показанном на
рис. 3.3,д.
Рекомендации по использованию. Программа 3.1 выполняется
после ввода значений матриц Аь А2, D[ и скаляра D2. Эту про-
цедуру можно выполнить с помощью программы П.2. В этом
случае первые операторы программы записываются в виде
10 GOSUB 15000
20 GOSUB 390®
30 STOP
Далее под соответствующими номерами строк заносятся про-
граммы 3.1 и П.2 (или, если они предварительно были записа-
ны в виде отдельных файлов на магнитных носителях, заносятся
с помощью команды интерпретатора языка Бейсик APPEND).
Пример 3.2. Рассчитать передаточную функцию схемы, приведенной на
рис. 2.6. Исходными данными являются матрицы уравнений математической
модели цепи, полученные для этой схемы в § 2.4. Они имеют вид
A1 = ’—2,05883 - -0,588235 - 0,184211 -1,17647 -1,76471 -0,131579 —0,294118 0,05882 4 —0,552633 0,11 7647’ 0,176471 0
0,052632 -0,105263 0,1 57895 0
A2 = ‘ 3,2353 ’ 2,35294 —0,0526316 . b1 = [- -1 0 3 0] D2= 1,
0,157895 _
Для вывода результатов на печать в программу 3.1 были вставлены следующие
строки:
3301 uPEN "LP:" FOR OUTPUT OS FILEtl
3350 print *1» ’a < ’;iz; ’ > = ’; \ print using -tssss.stsstss'да <i:<> ?
3352 PRINT S1,,’B<’ ;ix;’> = ’; \ PRINT USING
3353 CLOSE Я
70
Ниже приведены полученные результаты:
р. ( е > 0.000000 7 В ( 0 - 0.0247681
А ( 1 ) 0.00^0082 В ( 1 > = 1.8173500
А < 2 ) - 0.633-1 Л 0 0 < ' ) - 5. 140900О
А ( 3 ) = 0.9829780 2 ( 3 ) 4.3761700
А ( 4 ) 1.0000W00 Ь ( 4 ) - 1.0000000
Передаточная функция анализируемой цепи
_ Ч-)- 0.982978-$3+0.63313-s< -Е0.0000082-з —0,0000007
з4 н- 4,37617-з3 + 5, 14009-s2-h 1,81735 s н-0,0247681
При расчете получена норма Е= 1,04045-10-3 (расчет произведен с одинарной
точностью, т. е. с представлением данных в четырехбайтовом формате в форме
с плавающей точкой).
3.4. РАСЧЕТ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
С ИСПОЛЬЗОВАНИЕМ
передаточной функции
Как указывалось в § 3.1, переход от передаточной функции
Л'(х) к комплексному коэффициенту передачи К (со) осуществля-
ется заменой в выражении K(s) переменной s на /со. Применяя
этот прием к (3.4), получаем
_ дД шН-Ц . .. Аад'и 4- а„ = Л(ц) + /А(м) (3
' “ (1“)'!-г Pn-i(/“)'2-1~r ... H-Pi/w + Po (ф(ы)—/<?2(ы)’
где Pi (со) и Qi(co)—сумма действительных членов полиномов
соответственно числителя и знаменателя; Р2(со) и Q2(co)—сум-
ма мнимых членов этих полиномов.
Очевидно,
Р1 (to) = CZq—ССчйРД-йЦСО4— . . . ,
Р2 (со) = «1 со—аз<о3+а5<о5—...,
Qi (со) = ро—Ргсо2ф-Р4С04— ...,
Q2(co)=p1—р3со3 + р5<о5—... (3.14)
Из (3.13) следует, что АЧХ определяется выражением
К (со) = | К (со) | = V\Р* (со) + /V (co)]/[Q2 (со) (со)j. С (3.15)
Для построения расчетного выражения для ФЧХ предвари-
тельно преобразуем (3.13) с получением в знаменателе дроби
действительной величины. Для этого числитель и знаменатель
дроби умножаем на величину, сопряженную со знаменателем,
71
т. е. на Q] (го) —jQ2(ro)
Д- = !Р,(м) /P2(<o)][(?i(to) — А(ь>)] _
[<?!(“) + /Q2(“)l [<?:(“) — /Q2(“)] —
_ + P2(t°)Q2(t°) + i — Р1(<д)Р2(<й)]
<??(«) +<?22(“)
Отсюда получаем выражение для расчета ФЧХ
, , , P„(a>)Q. (со) —P.(co)Q„(co)
ср (го) = arctg - u u - 2^ ’
ь + p2(«)Q2(co) ‘
(3.16)
Для построения характеристик /С (го) и ф(го) необходимо за-
даваться последовательностью значений частоты flt f2, • • • и при
каждом из них по формулам (3.14) — (3.16) рассчитывать орди-
наты АЧХ и ФЧХ. Обычно при построении графиков АЧХ и ФЧХ
используется либо равномерная шкала частот, при которой
fi+i = f!+^1 (^— постоянная величина, определяющая шаг изме-
нения частоты), либо логарифмическая шкала частот, при кото-
рой очередное значение частоты определяется из рекуррентного
выражения fi+i — k2fi. Объединяя два этих выражения, можно за-
писать = При этом, задавая /г2=1, получаем равно-
мерную, а при ki = 0 — логарифмическую шкалы частот.
На рис. 3.4 приведена схема алгоритма расчета частотных
характеристик с использованием данных предварительно рассчи-
танной передаточной функции,
ввод коэффициентов ki,
Здесь в блоке 1 производится
определяющих шкалу частот,
fmax — границы диапазона частот,
в котором производится расчет ха-
рактеристик. Блок 2 организует
цикл, в котором повторяется расчет
характеристик для частот от /min до
/max- Последовательность вычисле-
ний в блоках 3, 4 описана выше.
Пример 3.3. Воспользовавшись выраже-
нием передаточной функции (3.12'), рассчи-
тать частотные характеристики для цепи,
приведенной на рис. 1.8,а.
При расчете может быть неизвестен диа-
пазон частот /'mm ... (max, в котором распо-
лагается область частотной характеристики.
В этом случае рекомендуется, задав шкалу
частот выбором коэффициентов /г: = 0 и
k'2= Ю, обозреть широкий диапазон при от-
носительно небольшом числе рассчитывае-
мых ординат характеристик. Этот расчет
используется лишь для уточнения дпапа-
й2,
72
Т а б л ii ц а 3.1
f 1,00000-10“03 0,01 0,1
Pv — 1,38174-Ю-04 —0,0138174 — 1,38174
р-2 0,0508935 0,50869 4,84133
Qi 16,4997 16,4664 13,1443
q2 0,132575 1,3255 13,0095
К (<о) 3,08443-10~03 0,0308043 0,272235
? (“) 1,56548 1,51763 1,06857
f 1 10 100
— 138,174 — 13817,4 — 1 ,38174- 1О+08
Рг —197,156 —247541 —2,48045-10 08
Qi —319,067 —33540,2 —3,35565-Ю06
q2 —115,475 —246724 -2,48037-10 08
К(“) 0,709522 0,995714 0,999957
<? (“) 0,612259 0,0793526 7,95752-Ю”03
зона частот, в котором следует строить искомые частотные .характеристики.
В данном примере задаемся /rnin=0,001, fmax=100 (этим нормированным зна-
чениям частот при масштабном коэффициенте Л1/=106 соответствуют действи-
тельные значения, равные соответственно 0,001-105=1 кГц и 100-106=100 МГц).
Результаты расчетов даны в табл. 3.1.
Анализируя приведенные в таблице данные, нетрудно установить, что инте-
рес может представлять диапазон частот от /min=0,05 до fmax— 5 (при f<0,05
^(<o) близко к нулю, а при f>5 близко к единице). Повторяем расчеты,
выбрав диапазон частот 0,05 ... 5 и задав шкалу частот коэффициентами k2 = 2,
/ii = 0. Результаты расчета приведены в табл. 3.2.
Допустим, нас интересует с большими подробностями часть .характеристик,
расположенная в узком диапазоне частот 0,1 ... 1,0. В этом случае удобно
использовать равномерную шкалу частот, и если необходимо в этом диапазоне
73
Таблица 3.2
f 0,05 0,1 0,2 0,4 0.8 1 ,6 3,2
Pl (w) —0,345436 — 1 ,38174 —5,52698 —22,1079 —88,4316 —353,727 — 1414,91
Р2(со) 2,51368 4,84133 8,19436 4,48231 —86,2866 —934,583 —7965,25
Qi(w) 15,6611 13,1443 3,07734 —37,1906 — 198,263 —842,55 —3419,7
С2(со) 6.59775 13,0095 21,5306 37,1549 —20,9415 —803,893 —7703,87
A' (co) 0,149305 0,272235 0,399794 0,429097 0,619735 0,858099 0,959802
? (co) 1,30864 1,06857 0,718193 0,584882 0,667887 0,44705| 0,241963
Т а блица 3.3
f 0,1 0,2 0,3 0,4 0,5
Pifcu) -1,38174 —5,52698 — 12,4357 —22,1079 —34,5436
Р2(ш) 4,84133 8,19436 8,57079 4,48231 5,55937
<21 (co 13,1443 3,07734 —13,701 —37,1906 —67,3916
Q2(co) 13,0095 24,5306 33,0752 37,1549 35,2813
A (co) 0,272235 0,399794 0,421868 0,429097 0,459956
¥ (co) 1,06857 0,718193 0,574631 0,584882 0,641861
Окончание табл. 3.3
f 0,6 0,7 0,8 0,9 1,0
Л(со) —49,7428 —67,7055 —88,4316 —111,921 — 138,174
^г(со) —23,0426 —49,4556 —86,2866 —135,024 — 197,156
Qi(co) —104,304 —147,928 — 198,263 —255,309 —319,067
Q2(w) 25,9663 7,72143 —20,9415 —61,5109 —115,475
A (co) 0,510019 0,566023 0,619735 0,667821 0,709522
¥ (co) 0,677793 0,683022 0,667887 0,64226 0,612259
74
иметь 10 значений характеристик, то шаг по частоте определится значением
4 = 0,1 (4=1). Результаты расчетов при этих данных приведены в табл. 3.3.
Значения <р(«) в таблицах представлены в радианах. Кажущийся разрыв
в функции rf(w), обнаруживаемый по данным таблиц, связан с тем, что при
вычислении функции arctg направление отсчета угла выбиралось таким образом,
чтобы модуль угла не превышал л. Для устранения разрыва достаточно к отри-
цательным значениям ср (со) прибавлять 2л. На рис. 3.5 изображены графики
К (о) и ср(ю). построенные по табл. 3.2 и 3.3.
3.5. ПРОГРАММА РАСЧЕТА ЧАСТОТНЫХ
ХАРАКТЕРИСТИК С ИСПОЛЬЗОВАНИЕМ
ПЕРЕДАТОЧНОЙ ФУНКЦИИ
Схема алгоритма расчета амплитудно- и фазочастотных ха-
рактеристик через известную передаточную функцию показана
на рис. 3.4. Программа 3.2 реализует этот алгоритм. Исходными
данными для расчета служат полиномиальные коэффициенты
числителя и знаменателя передаточной функции К($), представ-
ленной в виде (3.4). Для расчета частотных характеристик зада-
ются нижняя и верхняя граничные частоты диапазона, представ-
ляющего интерес для пользователя, и коэффициенты, определя-
ющие способ изменения частоты в заданном диапазоне.
В результате расчета получается таблица значений модуля и фазы
комплексного коэффициента передачи на частотах, определяе-
мых выражением K+i = W<+^i-
Для нахождения передаточной функции предлагается про-
грамма 3.1, в которой полиномиальные коэффициенты переда-
точной функции запоминаются в массивах, обозначенных имена-
ми А и В.
Принятые обозначения. В программе 3.2 обозначения некото-
рых имен переменных совпадают с принятыми в программе 3.1.
Эти имена закреплены за общими для программ переменными,
что позволяет осуществить их последовательный вызов без до-
75
ПРОГРАММА 3.2
3500 REM РАСЧЕТ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕРЕЗ K(S)
3502 PRINT ’ ВВЕДИТЕ НАЧАЛЬНУЮ ЧАСТОТУ=М \ INPUT F
3504 PRINT ’ ВВЕДИТЕ КОНЕЧНУЮ ЧАСТОТУ=>; \ INPUT Fl
3506 PRINT ’ ВВЕДИТЕ МНОЖИТЕЛЬ ЧАСТОТЫ <К2)= ’I \ INPUT К2
3508 PRINT ’ ВВЕДИТЕ ПРИРАЩЕНИЕ ЧАСТОТЫ <К1)=’| \ INPUT Ki.
3510. PRINT ’ ЧАСТОТА КОЗ».ПЕРЕДАЧИ’ ФАЗА’
3512 W=2*PI*F
3514 Р1=0 \ Q1=0 \ Wl = l \ FOR IZ=0 ТО NX STEP 2
3516 Pl=Р1+А<IX)*W1 \ Q1=Q1+B(IX>*W1 \ U1=-W1»W*W X NEXT IZ
3518 P2 = 0 \ 02=0 \ W1=W \ FOR IX=1 TO NZ STEP 2
3520 P2=P2+A<IZ)*W1 \ Q2=Q2+B<IX)*W1 \ U1=-W1*U»W \ NEXT IZ
3522 К0 = О1л2+О2/‘'2 \ K3= <P1*Q1+P2»Q2)/К0 \ K4=<P2*Q1-P1»Q2)/К0
3524 K0=SQR<КЗл2+К4л2) \ GOSUB 3530 \ PRINT F,K0,Y0
3526 F=K2»F+K1 \ IF F<=F1 THEN 3512
3528 RETURN
3530 REM РАСЧЕТ ФАЗЫ
3532 IF K3O0 THEN 3540
3534 IF K4=0 THEN Y0=0 \ RETURN
3536 IF K4>0 THEN Y0=PI/2 \ RETURN
3538 Y0=-PI/2 \ RETURN
3540 Y0=ATN(K4/K3) \IF K3>0 THEN RETURN
75Д2 tf K4<0 THFN Y0=-PI+Y0 \ RETURN
3544 Y0=PI+Y0 \ RETURN
полнительных пересылок необходимых данных. Общими имена-
ми являются: N%—порядок матрицы Ai, А и В — массивы, хра-
нящие полиномиальные коэффициенты числителя и знаменателя
передаточной функции. Кроме этих имен переменных в програм-
ме 3.2 приняты следующие обозначения: Р1 и Р2 — действитель-
ная и мнимая части числителя; Q1 и Q2—действительная и мни-
мая части знаменателя комплексного коэффициента передачи
K(s) в выражении (3.13); F и F1 — начальная и конечная час-
тоты исследуемого диапазона; К1 и К2 — коэффициенты, опреде-
ляющие шаг изменения частоты; W — угловая частота, равная
(о==2л/'; КЗ и К4 — действительная и мнимая части K(s), соответ-
ствующие К' и К"; КО и Y0 — модуль и фаза комплексного ко-
эффициента передачи.
Описание программы. Укрупненная схема алгоритма пред-
ставлена на рис. 3.6, на котором показана детализация схемы
алгоритма на рис. 3.1. В детализированной схеме алгоритма бло-
ку 1 соответствуют строки 3500—3508, блоку 2 — строка 3512, бло-
ку 3 — строки 3514—3520, блоку 4 — строки 3522—3524. Расчет
фазы в блоке 5 осуществляется подпрограммой в строках 3530—
3544. Эта подпрограмма вызывается в строке 3524, там же произ-
водится вывод результатов (блок 6). Блокам 7 и 8 соответствует
строка 3526.
Детализация блоков схемы алгоритма на рис. 3.6 представ-
лена на рис. 3.7. Схема алгоритма расчета действительной и
76
мнимой частей числителя и знаменате-
ля К (и) в выражении (3.13) показана
на рис. 3.7,а. В этой схеме блокам 1 и
2 соответствует строка 3514, блокам 3,
4 и 5 — строка 3516, блокам 6 и 7 —
строка 3518 и блокам 8—10 — строка
3520. Изменение знака перед очеред-
ными членами ряда в выражениях
(3.14) осуществляется введением мно-
жителя W1, который в каждом цикле
меняет знак. Кроме того, этот множи-
тель одновременно увеличивается на
(О2.
Детализированная схема алгоритма
определения фазы ср (со) комплексного
коэффициента передачи показана на
рис. 3.7,5. В соответствии с этим алго-
ритмом в программе 3.2 в строках
3530—3544 определяется квадрант, в
котором находится угол ср. Алгоритм
предусматривает представление угла ср
значениями, модуль которых не пре-
вышает л (т. е. значениями, не выходя-
щими за пределы отрезка —л ... л).
При этом в процессе расчета ФЧХ
каждый переход угла ср границы меж-
ду квадрантами II и III приводит к
скачку получаемого при пользовании рис 36
данным алгоритмом значения ср в за-
висимости от направления перехода
на 2л или —2л. Такие скачки значений не следует рассматривать
как скачки фазы. Если необходимо устранить подобные скачки
в последовательности значений ср (что может потребоваться, на-
пример, при построении графика функции ср (со)), следует после
каждого перехода фазы ср из квадранта III в квадрант II из по-
следующих значений ср вычитать 2л (таким образом, после вто-
рого перехода этой границы вычитать 4л, после третьего перехо-
да— 6л и т. д.), а при переходе фазы ср из квадранта II в квад-
рант III — прибавлять 2л.
Например, пусть получена следующая последовательность
значений угла ср: ...—2,89; —3,1; 3,08; 2,94;... Здесь значение
3,08, следующее за значением —3,1, означает переход фазы из
квадранта III в квадрант II, и если этот переход является пер-
вым, то вычитанием 2л из значений после перехода указанной
границы между квадрантами эта последовательность может быть
представлена в следующем виде: ...—2,89; —3,1; —3,2;
—3,34;...
77
Рекомендации по использованию. Программа 3.2 выполняет-
ся, как правило, после выполнения программы 3.1, в которой
определяется передаточная функция. Значения матриц Аь А2, Dj
и скаляра уравнений переменных состояния и отклика вво-
дятся программой П.2. Таким образом, должна быть выстроена
следующая последовательность строк:
10 GOSUb 15000
20 GOSUb 3300
30 GOSUb 3500
40 STOF
78
после которой должны следовать программы П.2, 3.1, 3.2. Если
значения коэффициентов передаточной функции не представляют
интереса, то их можно не выводить на экран дисплея, исключив
строки 3346—3354 в программе 3.1.
Рассчитанные в диапазоне частот /ты— /max значения моду-
ля (КО) и фазы (Y0) комплексного коэффициента передачи пред-
ставляют собой амплитудно- и фазочастотные характеристики.
В том случае, когда необходимо построить график одной из этих
характеристик, можно воспользоваться программой П.4. Для по-
строения АЧХ следует в массивы X и Y занести значения частот
F и соответствующие нм значения КО. В программу 3.2 вводятся
следующие строки:
3511 N0 -- 0
3525 >HN0>=F \ У «.'•
Вызов программы П.4 можно осуществить, к примеру, в строке
35 следующим образом:
35 GOSUB 16000
В результате на экране построится график, число точек в кото-
ром будет равно NO.
Пример 3.4. Рассчитать АЧХ цепи, приведенной на рис. 2.6.
Воспользовавшись изложенным выше приемом, на экране дисплея получим
график, представленный на рис. 3.8.
F АМПЛИТУДНО - ЧАСТОТНАЯ ХАРАКТЕРИСТИКА
К (F) К <Е> _
1.00«е:-0з 9.499Е-04 »
2.000Е-03 3.043Е-03 »
4.000Е-03 7.943Е-03 *
8.000Е-03 1.746Е-02 •
1.600Е-02 3.536Е-02 *
3.200Е-02 6.710Е-02 1 •
6.400Е-02 1.107Е-01 1 *
1.280Е-01 1.708Е-01 1 *
2.560Е-01 3.907Е-01 1 *
5.120Е-01 7.055Е-01 ’
1.024Е+00 9.020Е-01 1 *
2.048Е+00 9.732Е-01 ‘ *
4.096Е+00 9.931Е-01 1 *
8.192Е+00 9.983Е-01 ’ «
1.638Е+01 9.996Е-01 ' «
3.277Е+01 9.999Е-01 ' *
6.554Е+01 1.000Е+00 1 F м
Рис. 3.8
79
1
3.6. АЛГОРИТМ РАСЧЕТА ЧАСТОТНЫХ
ХАРАКТЕРИСТИК С ИСПОЛЬЗОВАНИЕМ
НЕПОСРЕДСТВЕННО УРАВНЕНИЙ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЦЕПИ
Воспользуемся уравнениями состояния и выхода
-А X Д) = АД Д) Д А2хвх (0, хвых Д) = Ьд (I) + дгл-вх (/).
at
При гармоническом воздействии все переменные в схеме также
являются гармоническими. Представим входящие в уравнения
переменные в комплексной форме:
>Х = АД Д АДВЛ (3.17)
*вых - ОД 4- DX- (3.18)
Так как цель расчета состоит в нахождении комплексного ко-
эффициента передачи К—ХвыхДвх, можно воспользоваться сле-
дующим приемом: положим Хвх=1, тогда Х(со) и Хвых будут
численно равны и (3.17), (3.18) могут быть записаны в виде:
/(оХ = АДдА2, (3.19)
К (и) = ЬД Д D2. (3.20)
Входящие в уравнения переменные представим в форме Х=
= Х'+/Х"; К=K'+jK."- Тогда, приравнивая действительные и
мнимые части в (3.19) и (3.20), получаем следующую систему
уравнений:
—АД'—юХ"=А2, (3.21)
юХ'—AiX"=0, (3.22)
Х'—бД'+Дг, (3.23)
К"=ВД". (3.24)
Выражения (3.21) и (3.22) представляют собой матричную
форму записи системы линейных уравнений, решая которую мож-
но получить X' и X". По найденным X' и X", пользуясь (3.23) и
(3.24), можно определить К' и X" и затем ординаты АЧХ и ФЧХ:
Х(«>) = ] Д'2 ДА”2, (3.25)
ф(со) =arctg(X"/X'). (3.26)
Вычисление по формулам (3.21) — (3.26) повторяется в каж-
дой точке шкалы частот. На рис. 3.9 приведена схема алгоритма
расчета частотных характеристик рассмотренным методом.
80
Сравним рассмотренные выше
методы расчета частотных характе-
ристик с точки зрения их трудоем-
кости. В методе, основанном на
предварительном расчете передаточ-
ной функции, основной объем вы-
числений связан с расчетом переда-
точной функции (обращение матри-
цы (s-I—Ai) п-го порядка методом
Леверрье—Фаддеева требует вы-
полнения л4 операций умножения).
В методе, основанном на непосред-
ственном использовании уравнений
математической модели цепи, на-
хождение каждой ординаты частот-
ной характеристики требует реше-
ния системы линейных уравнений,
что в основном и определяет трудо-
емкость этого метода (решение си-
стемы линейных уравнений н-го по-
рядка имеющим наибольшее распро-
странение методом Гаусса исключе-
ния переменных требует Л’= (2п3+
+9л2+п)/6 операций умножения и
деления). И если требуется опреде-
лить т ординат частотных характе-
ристик, то число операций умноже-
ния и деления при втором методе Рис. 3.9
окажется равным mN.
Таким образом, при больших значениях т может оказаться
менее трудоемким метод расчета с использованием передаточной
функции, при малых т — метод с использованием уравнений ма-
тематической модели цепи.
3.7. ПРОГРАММА РАСЧЕТА ЧАСТОТНЫХ
ХАРАКТЕРИСТИК С ИСПОЛЬЗОВАНИЕМ
НЕПОСРЕДСТВЕННО УРАВНЕНИИ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЦЕПИ
Метод непосредственного получения частотных характеристик
с использованием уравнений переменных состояния (2.11) и от-
клика (2.12) в виде укрупненной схемы алгоритма показан на
рис. 3.9. Программа 3.3 реализует этот алгоритм. Исходными
данными для расчета являются Ab А2, D[ и Д2, входящие в вы-
ражения (2.11) и (2.12). В программу требуется ввести также
значения нижней fmm и верхней /таХ граничных частот исследуе-
6—6030 81
ПРОГРАММА 3.3
370® REM м РАСЧЕТ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ
3702 PRINT ’ ВВЕДИТЕ НАЧАЛЬНУЮ ЧАСТОТУ^’; \ INPUT F
3704 PRINT ’ ВВЕДИТЕ КОНЕЧНУЮ ЧАСТОТУ’’» \ INPUT Fl
3706 PRINT ’ ВВЕДИТЕ МНОЖИТЕЛЬ ЧАСТОТЫ’’J X INPUT К2
3708 PRINT ’ ВВЕДИТЕ ПРИРАЩЕНИЕ ЧАСТОТЫ’’» X INPUT К1
3710 PRINT ’ ЧАСТОТА ’»’КОЭФ.ПЕРЕДАЧИ’,’ ФАЗА'
3712 OOSUB 3714 X GOSUB 15500 X REM РЕШЕНИЕ СИСТЕМЫ \ GOTO 3730
3714 REM ФОРМИРОВАНИЕ СИСТЕМЫ УРАВНЕНИИ
3716 W=2*PI*F X FOR IX’l ТО NX
3718 С(IX»2»NX+1>=0 X С(NX+IX»2*NX+1)=-A2(IX) X NEXT IX
3720 FOR IX’l TO NZ X FOR JX’l TO NX X C(IZ,JX)=0
3722 C(NX+IX»NZ+JX)=0 X. C(NX + IX,JX)=A1(IX»JX)
3724 С<IX»NX+JX)’-Al<IX»JX) X NEXT JX X NEXT IX
3726 FOR IX’l TO 2»NX \ C(IX»IX)=W X NEXT IX X RETURN
3730 REM РАСЧЕТ МОДУЛЯ И ФАЗЫ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ
3732 К4’0 X КЗ-0
3734 FOR IX-1 ТО NX X K3’K3+D1 (IX)»Х1<IX) X K4=K4+D1<IX)«XI(IX+NX)
3736 NEXT IX
3738 K3-K3+D2 X K0«SQR(КЗ»КЗ+К4«К4) X GOSUB 3530 X REM РАСЧЕТ 6A3U
3740 PRINT F»K»»Y0 X F’K2*F+K1 X IF F<=F1 THEN 3712
3742 RETURN
мого диапазона, коэффициенты ki и k2, определяющие способ из-
менения частоты в заданном диапазоне. Результаты расчета
в виде таблицы значений модуля и фазы комплексного коэффи-
циента передачи выводятся на экран.
В программе 3.3 предполагается использовать следующие
программы: программу П.2 для ввода элементов матриц Ab А2,
D; и скаляра D2; программу П.З для решения системы уравне-
ний методом Гаусса; строки 3530—3544 из программы 3.2 для
нахождения значений фазы ср (со).
Принятые обозначения. В программе 3.3 большинство имен
совпадают с принятыми в программе 3.2 обозначениями пере-
менных: №/о—порядок матрицы Ар, Al, А2, DI, D2 — соответ-
ствуют А], А2, Dj и D2 уравнений математической модели цепи;
F и F1—начальная и конечная частоты исследуемого диапазо-
на; К1 и К2 — действительная и мнимая части комплексного
коэффициента передачи;- С — массив удвоенной размерности,
в котором хранятся коэффициенты системы уравнений в форме
(3.21), (3.22); XI — массив для хранения действительной и мни-
мой частей вектора переменных состояния [решение системы
уравнений (3.21), (3.22)].
Описание программы. Программа реализует алгоритм, схема
которого показана на рис. 3.9. В этой схеме блоку 1 соответст-
вует группа операторов в строках 3700—3710, блоку 2 — строки
3714 и 3740, блоку 3 — строки 3716—3726, блоку 4 соответствует
строка 3728, в которой вызывается программа П.З решения сис-
темы уравнений, блоку 5 соответствуют строки 3732—3736, бло-
ку 6 — строка 3738 и блоку 7 — строка 3740. В строке 3738 рас-
чет фазы Y0 осуществляется вызовом программы, в которой она
82
определяется (подпрограмма с номером первой строки 3530
в § 3.5).
В программе 3.3 формирование системы уравнений в форме
(3.21), (3.22) производится путем последовательного занесения
значений элементов вектора А2 (строки 3716—3718), массива
А1 (строки 3720—3724) в массив под именем С; затем в главную
диагональ С заносится текущее значение W (строка 3726).
В итоге в массиве С формируется матрица вида
со-Т, —X о
1®'С: —Аг
После этого из сформированной таким образом системы уравне-
ний методом Гаусса находится решение, которое располагается
в последнем столбце матрицы С (см. программу П.З). Получен-
ное решение пересылается в массив XI, и с его помощью нахо-
дятся модуль и фаза комплексного коэффициента передачи.
Здесь следует иметь в виду, что приводимый для решения
системы уравнений метод Гаусса не допускает значения частоты
0 = 0.
Рекомендации по использованию. Программа 3.3 выполняет-
ся непосредственно после ввода значений элементов матриц, вхо-
дящих в математическую модель схемы. Как и в ранее рассмот-
ренных программах, этот ввод можно осуществить программой
П.2. Следовательно, необходимо записать в первых строках про-
граммы
1® GOSL'B 15000
20 GOSU& 3700
30 STOP'
Затем следует ввести тексты программ П.2, П.З, 3.3 и из про-
граммы 3.2 — подпрограмму расчета фазы (строки 3530—3544).
Если все программы были предварительно записаны па каком-
либо носителе, то их можно переписать в память командой
APPEND (для расчета фазы достаточной будет загрузка всей
программы 3.2). В том случае, когда построение ФЧХ не требу-
ется, следует в строке 3738 убрать вызов подпрограммы (опера-
тором GOSLIB 3530) и не включать программу 3.2.
Вывод результатов расчета в виде графиков можно осущест-
вить с помощью программы П.4, присоединив ее к уже записан-
ным подпрограммам. Дополнительно следует ввести строки
3713 N0=0
3739 X<N0)=F \ Y<N0)=K0 \ N0 = N0 + 1
25 GOSUB 16000
6*
83
♦АЗО
Y (F)
ЧАСТОТНАЯ ХАРАКТЕРИСТИКА
Y(r>
1. ОДЕ-03
2.000E-03
4. ОДЕ-03
В.000Е-03
1.600Е-О2
3.200Е-02
6.400Е-02
1я280Е-01
2.560Е-01
5.120Е-01
1.024Е+00
2-048Е+00
4;096Е+00
8.192Е+00
1.438Е+01
3«277Е+01
6.554Е+01
2-714Е+00 ’
2.399Е+00 !
2.050Е+00 I
1.778Е+00 I
1.577Е+00 ’
1.390Е+00 ’
1.217Е+00 ‘
1.313Е+00 I
1.297Е+00 ’
8.881Е-01 ’
5.015Е-01 !
2.602Е-01 •
1.314Е-01 ! *
6.587Е-02 >»
3.295Е-02 »
1.648Е-02 *
8.240Е-03 *
F
Рис. 3.10
Видно, что способ запоминания результатов расчета для постро-
ения графика аналогичен рассмотренному в § 3.5.
Выше отмечалось, что расчет прекратится, если значение час-
тоты со будет равно 0. Однако в том случае, когда необходимо
найти значение К(0), можно, положив Х"(0)=0, решить систе-
му уравнений AiXz(0)=A2. Очевидно, что этот прием не единст-
венный, поскольку значение К(0) можно найти, воспользовав-
шись, к примеру, программой 3.2, т. е. через передаточную функ-
цию.
Приведем строки программы, в которых осуществляется вы-
зов необходимых подпрограмм для построения ФЧХ, и дополни-
тельные строки в программе 3.3 для построения графика. На
рис. 3.10 показан график ФЧХ цепи, изображенной на рис. 2.6.
10 GOSUB 15000
20 GOSUB 3700
25 GOSUB 16000
30 STOP'
3713 N0--0
373? \ Y<N0>sK0 \ N0-N0+1
3.8. АЛГОРИТМ РАСЧЕТА ПЕРЕХОДНОЙ
И ИМПУЛЬСНОЙ ХАРАКТЕРИСТИК
Рассмотрим расчет переходной и импульсной характеристик,
основанный на использовании непосредственно уравнений мате-
матической модели: уравнения состояния и уравнения выхода,
представленных в форме
-^X^XMAUO, (3.27)
dt
хВЬ1Х (/) = Dx X (/) Д O2xBX (i). (3.28)
Расчет переходной характеристики. Переходная характерис-
тика h{t) есть отклик цепи на единичную функцию при нулевых
начальных условиях цепи, поэтому при /<0 /г (7)--О, а при Z>0
в (3.27) и (3.28) следует положить хвх(/) = 1, хВых(0==^(0.
в результате чего образуется следующая система уравнений:
~ ХДП = AjX! (7) Д А.., (3.29)
dt
h(t) = DjXi (/) ДДг- (3.30)
Здесь и ниже для вектора состояния, соответствующего усло-
вию, когда в цепи действует входное воздействие Л'вх (t) = 1 ((),
принято обозначение ХДД (в отличие от ХД), принятого для
обозначения состояния цепи при иных входных воздействиях).
Для расчета переходной характеристики необходимо найти
Xjff) путем интегрирования системы дифференциальных уравне-
ний (3.29) и затем найденное значение вектора состояния Xi (/)
подставить в правую часть выражения (3.30). Для системы ли-
нейных дифференциальных уравнений (3.29) известно решение:
Хх (/) = eAl(Z ~/о) Хх (t0) -у (еА‘ — Т) Ах-' А„. (3,31)
Здесь Xi(Z) выражается через известное ХДД) (ХДД) есть
Xj(/) для момента t=t0). Входящая сюда экспоненциальная
функция от матричного аргумента определяется выражением
еА-г-^1 +'А17’ + — (А17’)2+-‘-(А1Г)3 щ...= V (3.32)
2! 3! 1 «Ji!
г=0
Для сокращения записи здесь T=t—t0. В дальнейшем Т будет
называться шагом интегрирования.
Нетрудно убедиться, что (3.31) действительно является реше-
нием уравнения (3.29). Для этого достаточно подставить (3.31)
в левую и правую части (3.29):
-АХ1-(0 = А1еА1ГХ1(/о) + еА-гА2;
dt
АЛ (t) Д А2 = Ах еА‘г Хх + Ах (еА‘г - 1) Ад1 А2 -4 А2 =
= А1еА‘7'Х1(/0)ДеА‘гА,
85
Как видим, при такой подстановке обе части уравнения (3.29)
оказываются тождественно равными и, следовательно, выраже-
ние (3.31) действительно является решением уравнения (3.29).
Таким образом, расчет Xi(Z) может быть основан на выра-
жении (3.31). Так как входящая в эту формулу экспоненциаль-
ная функция выражается бесконечным рядом членов, то при
практических расчетах пользуются приближенным ее значением,
удерживая конечное число первых членов ряда. Очевидно, такое
приближение будет тем точнее, чем меньше T—t—/0. В связи
с этим для обеспечения высокой точности расчета выбирают Т
достаточно малым и выражением (3.31) пользуются как рекур-
рентным: по заданному значению Xi(/0) находят да-
лее найденное X|(Z0+T) подставляют в правую часть выраже-
ния и находят Х1(/о+2Г) и т. д.
В соответствии с таким приемом расчета (3.31) можно пред-
ставить в виде разностного уравнения
X. (пТ-{-Т) =FiX1 (пТ) -(-Fj, (3.33)
где
К =1 + AJ+-±- (AJY + + (VA
2! k[ (3.34)
F5 = (Fx—1)АГ‘А2.
В зависимости от числа удерживаемых в разложении экспо-
ненциальной функции членов можно строить методы интегриро-
вания различных порядков:
метод первого порядка (6=1):
F^T+AjF, F2 = A,7’; (3.35)
метод второго порядка (& = 2):
Fx = 1 ф-АхГ-г(Ах7)2; F2 = (Т + -у Ах т] АгТ; (3.36)
метод четвертого порядка (& = 4):
Fx = Т + А/ + -1- (Ах7у + -L (А,?)3 + (АХГ)\
2 6 24
(3.37)
F = f 1 + — Ах7 + — (АХГ)2 + — (А/)3') А„Т.
\ 2 6 24 7
Формулы с таким способом определения коэффициентов Fi и
F2 уравнения (3.33) будем называть явными формулами интег-
рирования.
Погрешность вычисления (за счет приближенного представ-
ления экспоненциальной функции еА17>) на одном шаге
86
интегрирования пропорциональна Ткх.
Так, в методе первого порядка эта по-
грешность пропорциональна 7’2, в методе
четвертого порядка — Т5. С уменьшением
шага Т указанная погрешность уменьша-
ется и тем значительнее, чем больше k Рис 31)
(выше порядок метода). Например, в
методе четвертого порядка уменьшение шага Т в два раза при-
водит к уменьшению погрешности на одном шаге интегрирования
примерно в 32 раза.
Здесь следует иметь в виду, что в каждом шаге интегрирова-
ния используется приближенное значение Xi, полученное в пре-
дыдущем шаге, и к погрешности, содержащейся в Х!; добавляет-
ся погрешность данного шага интегрирования. Происходит на-
копление погрешности. Будем считать, что значение таким обра-
зом накапливаемой погрешности пропорционально числу шагов
интегрирования. При этом если шаг Т уменьшают в m раз, то
во столько же раз возрастает число шагов вычислении, необхо-
димых для достижения заданного значения t, и при уменьшении
погрешности одного шага в mk+i раз общая погрешность умень-
шается в тк раз.
Таким образом, выбором соответствующего малого значения
Т можно обеспечить требуемую точность вычислений. Задание
правильного значения Т обычно представляет трудную задачу.
Может быть рекомендована следующая процедура для выбора Т.
Переходную характеристику получают с шагом Т и повторно
с шагом 2Т. Если разность соответствующих значений этих ха-
рактеристик не больше допустимой погрешности, результат;, по-
лученный с шагом Т, принимается в качестве искомой характе-
Таблица 3.4
Время, мкс Результат точного ин- тегрирования Результаты интегрирования методом второго порядка при Т, мкс, равном Результаты интегрирования методом четвертого порядка при Т, мкс, равном
5 1 10 20 30 5 10 20 30
5 0,393 0,375 0,393
10 0,632 0,609 0,500 0,632 0,625
15 0,777 0,756 0,777
20 0,865 0,847 0,750 0 0,865 0,859 0,667
25 0,918 0,905 0,918
30 0,950 0,940 0,875 — 1,5 0,950 0,947 —0,375
35 0,970 0,963 0,970
40 0,982 0,977 0,938 0 0,982 0,980 0,889
45 0,989 0,985 0,989
50 0,993 0,991 0,969 0,993 0,993
55 0,996 0,994 0,996
60 0,998 0,996 0,984 0 —5,25 0,997 0,997 0,963 —0,891
87
1
1
ристики. В противном случае уменьшают шаг в два раза и по-
вторяют решение.
До сих пор предполагалось, что интегрирование ведется с до-
статочно малыми значениями шага, при которых не нарушается
так называемая устойчивость вычислительного процесса. Явление
неустойчивости проиллюстрируем на простейшем примере интег-
рирования дифференциального уравнения первого порядка. Урав-
нение состояния цепи первого порядка, приведенной на рис. 3.11
(при масштабных коэффициентах Мг = 103, Мс= 10~9, ЛД=10-6):
Пс (0 =’-(VM0 + 0,Кх (0.
at
Результаты интегрирования по формулам второго и четвер-
того порядков приведены в табл. 3.4.
Для данного примера характеристическое уравнение s+0,l =
= 0 имеет единственный корень Sj = —0,1 и аналитическое реше-
ние дифференциального уравнения
М^---1 —eSlZ= 1—е~0,1с. (3.38)
При малых значениях шага интегрирования Т решение, полу-
ченное из разностного уравнения (3.33), имеет малую погреш-
ность. С увеличением значения Т погрешность растет (см.
табл. 3.4 и рис. 3.12). Приближение Т к некоторому критическо-
му значению шага Ткр приводит к быстрому росту погрешности,
а затем наступает числовая неустойчивость вычислительного про-
цесса и получаемые нарастающие по модулю значения оказыва-
ются весьма далекими от точного решения.
Для обеспечения устойчивости решения по явным формулам
шаг интегрирования должен удовлетворять условию
11 + stT + -±- (V)2 + ... + A- (SiT)k | <1. (3.39)
Неравенство должно выполняться для всех корней sb s2,. ..,s„
характеристического уравнения.
Если корни характеристического уравнения представить
в форме 5,— сг(+/(0г (в случае действительного корня <о£=0), то
для метода первого порядка можно из (3.39) получить следую-
щее выражение для критического шага интегрирования:
TK х = min f----Y (3.40)
Когда все корни характеристического уравнения имеют дей-
ствительные значения, T'Kpi = 2/|о:]max, т. е. Тир: в этом случае
обратно пропорционален максимальному из модулей корней.
Критический шаг интегрирования для методов высоких по-
рядков не больше его значения T^pi для метода первого порядка.
Максимальное время fmax, в пределах которого может потре-
88
Рис. 3.12
Рис. 3.13
боваться расчет переходной характеристики, обратно пропорци-
онально минимальному из модулей корней характеристического
уравнения (в случае действительных корней). Примем
= 3/| cr,| min. Пусть из соображений обеспечения устойчивости
шаг интегрирования выбирается равным 7’=0,57'Kpi = 0,5Х
X 2/ | О'; | шах-
Тогда с учетом двукратного просчета с половинным и полным
шагом Т (для контроля точности) число шагов интегрирования,
требуемое для расчета переходной характеристики, составит
Л’инт = 3£тах/Т» 10|o;|max/Jo/mir. ПрИ бОЛЫНОМ рЭЗЛИЧИН ДеЙ-
ствительных составляющих корней характеристического уравне-
ния (при большом различии постоянных времени цепи) число
шагов А/цнт может оказаться столь значительным, что это вызо-
вет затруднения в реализации расчета на ЭВМ. В этих ситуа-
циях интегрирование с шагом Т <Ткр может обеспечивать из-
лишне высокую точность, однако увеличение Т оказывается не-
возможным из-за необходимости обеспечения устойчивости.
Это противоречие может быть разрешено использованием так
называемых неявных формул интегрирования, которые способны
обеспечивать устойчивость при больших значениях Т. Шаг Т
в этом случае выбирается только из соображений обеспечения
точности. На рис. 3.13 показана качественная картина зависимо-
сти погрешности от Т при использовании явных и неявных фор-
мул интегрирования. При использовании явных формул выбора
шага интегрирования ограничивается значением Ткр, превышение
которого приводит к резкому возрастанию погрешности, связан-
ному с явлением неустойчивости вычислительного процесса. По-
грешности же, возникающие при Т<Ткр, могут оказаться значи-
тельно ниже допустимых значений. Другими словами, явление
неустойчивости приводит к необходимости вести интегрирование
с малым шагом, обеспечивающим излишне высокую точность.
При использовании неявных формул явление неустойчивости мо-
жет не проявляться и, ориентируясь лишь на обеспечение точ-
89
пости, шаг интегрирования можно выбирать значительно боль-
шим. Это уменьшит число шагов интегрирования при расчете
переходной характеристики и уменьшит требуемое для расчета
машинное время.
Рассмотрим суть методов интегрирования с использованием
неявных формул. В уравнении состояния цепи первого порядка
при единичном воздействии х(/) =Д[Х(г)-}-Л2 обозначим
dt
правею часть и(х(/)), тогда х (t) = v (х (t)).
dt
Для перехода к разностному уравнению левую часть уравне-
ния представим приближенным выражением производной для
моментов времени в интервале «7сП<4 (л-}-1) Т:
х (/) = |х (пТ 4- Т) — х (пТ)]/Т.
Это значение производной может быть отнесено к любому мо-
менту времени в указанном интервале . Если
приведенное приближение производной относить к моменту вре-
мени t=nT, то
[х(пТ-\-Т)—x(nT)\/T=v (х(пТ)),
откуда
х (п Т-\-Т) =x(nT)-]-Tv(x(nT)).
Получается явная формула: значение переменной х в очеред-
ном шаге интегрирования выражается через значение этой пере-
менной, найденное в предыдущем шаге. Подставив выражение
и(х(пТ)) =А\х{пТ)-\-А2, придем к формуле метода первого по-
рядка (6=1):
х (пТ -t-T) = (1 i^)х (пТ)
Приближенное выражение производной может быть отнесено
и к моменту времени /=(«4-1)7
[х(пТ+Г)— x(nT)]/T=v(x(nT-j-T)) (3.41)
либо к моменту t= (пА-0,5)Т, для которого значение v(x) может
быть приближенно представлено так: v (х («7’4-0,57)) х
ж [u(x(«7))4-v(x(«74-7))]/2. В последнем случае
х(пТ^Т) -х(пТ) у(х(пТ)')-У-р(х(пТ -j-Т))
Т 2 ’ ( •
В двух этих случаях искомое значение х(«7-|-7) в очередном
шаге интегрирования выражается через неизвестное у(х(«7-|-
4-7)), в связи с чем эти формулы получили название неявных
формул интегрирования.
90
Решим (3.42) относительно х(пТ-}-Т):
л- (пТ + Т) = х (пТ) + Т ^222ЛД(:ДЛ+_Т2)
и заменим v выражением этой функции:
х (пТ + Т) = х (пТ) + Т AixJnT) +. Алх^пТ + +_2Л..
Отсюда
л (пТ + Т) = (1 — -j-A, Ту1 (1 + у х(пТ) +
+ (1--рл)-1АЛ.
Эта формула уже пригодна для численного интегрирования
уравнения.
Для цепей высоких порядков, когда состояние выражается
системой уравнений, входящие в последнюю формулу величины
необходимо представить матрицами:
Х1(пГ + Т)= П-АаЛ-1 (Т+ -уАЛ^ХД/гТД-г
Д [1 —2-АД j”'АД. (3.43)
Полученная формула обеспечивает точность, соответствую-
щую явной формуле второго порядка (k = 2).
Приведем без вывода другую формулу интегрирования:
X, (пТ л Т) = [Г- у АД + -±. (АЛ)2]" [т+ у АД -г
+ -2- (АЛ)2] X, (пТ) + [Т-2- АД Л (АЛ)2]"1 АЛ. (3.44)
Данная формула имеет точность, соответствующую явной
формуле метода четвертого порядка (k = 4).
Сравнивая полученные формулы с (3.31), нетрудно убедить-
ся, что в них использованы для экспоненциальной функции
еА‘г такие приближения:
еА*г^ [Т-2-ад]-1 (Т+2_ал),
ЧТ~ + [Т + т + дт (Х2)2] •
Эти выражения носят название приближений Паде. Имеется
ряд других приближений Паде, которые здесь приводиться не
будут. Особенность формул (3.43), (3.44) и других, построенных
91
на приближениях Паде, состоит
в том, что они обеспечивают устой-
чивость при любом значении Т (до-
статочно только, чтобы действитель-
ная часть корней характеристиче-
Рис. 3.14 ского уравнения была отрицатель-
ной). Таким образом, при использо-
вании неявных формул интегрирования шаг Т можно выбирать,
исходя лишь из условия обеспечения точности и не заботясь об
обеспечении устойчивости.
В тех случаях, когда требуемая точность невысока либо ког-
да матрица Ai уравнения состояния имеет большой разброс зна-
чений корней характеристического уравнения, неявные формулы
могут обеспечить существенное уменьшение числа шагов интег-
рирования. Однако следует иметь в виду, что эти достоинства
покупаются ценой затрат, необходимых для обращения матриц
в неявных формулах интегрирования.
Рассмотрим в качестве примера представленную на рис. 3.14
цепь второго порядка. Уравнение состояния этой цепи при еди-
ничном воздействии (с масштабными коэффициентами Ми=1.
Мг= KF, Л1с= IO”9, Mt = MrMc= 10-6):
Характеристическое уравнение цепи
| bs-A, | = Н+20 ~10 +20,ls+ 1=.-0
1 I —0,1 s + 0,1 I
имеет два корня: s,»— 20,05; s2~—0,05. Критический шаг ин-
тегрирования 7'Kpi = 2/|s1| «0,1 мкс.
В табл. 3.5 приведены результаты расчета напряжения иС1
при воздействии на входе единичной функции.
Таблица 3.5
Время, мкс Результат точного интегрирования Результаты интегрирования по явной формуле второго порядка Результат интег- рирования по неяв- ной формуле (3.43)
Т = 0.05 мкс Т = 0,1 мкс Т = 0,5 мкс
5 0,6084 0,6084 —0,0308 0,5997
10 0,6948 0,6948 —0,1264 0,6947
15 0,7622 0,7622 —0,2930 0,7622
20 0,8147 0,8147 —0,5410 0,8147
25 0,8556 0,8556 —0,8863 0,8556
30 0,8875 0,8875 —0,3505 0,8875
92
Как видно из таблицы, при интегрировании с использовани-
ем явной формулы второго порядка с шагом 7’=0,57'Kpi =
= 0,05 мкс достигается высокая точность результата, однако уже
при значении шага Т=0,1 мкс обнаруживается неустойчивость
вычислительного процесса. При интегрировании с использовани-
ем неявной формулы (3.43) обеспечивается достаточно высокая
точность при значении шага Т=0,5 мкс. Таким образом, исполь-
зование неявных формул интегрирования позволяет увеличить
шаг интегрирования и существенно сократить расходуемое ма-
шинное время.
Расчет импульсной характеристики. Рассмотрим особенности
расчета импульсной характеристики. Очевидно, в ЭВМ невоз-
можно точное воспроизведение дельта-функции, откликом на ко-
торую является импульсная характеристика. Можно воспользо-
ваться следующим приближением входного воздействия:
Для интегрирования используется выражение
X, (пТ 4- Т) = еА,г Хх (пТ) - (еА‘г — 1) Аг‘ Алвх (пТ),
где экспоненциальная функция еА1Г представляется рассмотренными
выше приближениями явных и неявных формул интегрирования.
3.9. АЛГОРИТМ РАСЧЕТА ОТКЛИКА ЦЕПИ
НА ПРОИЗВОЛЬНЫЕ ВОЗДЕЙСТВИЯ
Воспользуемся системой уравнений математической модели
цепи:
уравнение состояния
Л-Х(/) = + (3.45)
at
уравнение выхода
xBbIX(/)=D1X(0+D2xBX(/). (3.46)
Основная трудность решения поставленной задачи состоит
в интегрировании уравнения состояния с определением ХЦ),
после чего нахождение отклика сводится к расчету выражения
(3.46), что уже не представляет трудностей. Поэтому в дальней-
шем сосредоточим внимание на способах интегрирования урав-
нения (3.45).
93
В § 3.8 было показано, что вектор состояния ХД/) при дей-
ствии в цепи единичного сигнала 1(Д определяется выражением
(3.31). Положим в этом выражении tQ=0 и, так как ХД0)=0,
получим
Х1(0 = (е1*г-Т)А1-Аг. (3.47)
Зная вектор состояния ХД^) при воздействии единичной
функции, для определения вектора состояния при воздействии
произвольного сигнала %вх(0 можно воспользоваться интегра-
лом Дюамеля
t
Xx'(f) = J (3.48)
—oo
Входящая в это выражение производная от ХД/) может быть
определена дифференцированием (3.47). Заменив в производной
t на t—т, получим
X/ (t — т) = еА1(^’А2. (3.49)
Подставим (3.49) в (3.48) и затем интервал интегрирования
—оо ... t разобьем на два интервала —оо..Д0 и
/ ta _
X(f)= еА*и-т)АЛх(г)^= J еА1(/—А2авх (Д 4-
уеА‘('-т) АЛх(Д<Л. (3.50)
t О
Рассмотрим первый интеграл в этом выражении
J еА'<^> А2авх (Д = eA1(/-Zo) f еА*(^> А2авх (Д d-- =
— *0 I —
= еА.^-/о) у х/(/0-т)лвх(т)^ = еА1(/-мХ(/0). (3.51)
— оо
' х~/7) '
Подставим полученное выражение в (3.50)
X (0 = X До) + У еА1('-т) АЛх (т) d^. ’ 3.52 ;
to
94
В выражении (3.52) слагаемые правой части имеют четкий
физический смысл. В первом слагаемом Х(/о) определяет состо-
яние цепи, возникающее к моменту t0 под действием входного
сигнала .гвх(/). Множитель е^*-^1 определяет его изменения
в интервале времени t0... t при условии хвх=0 в этом интервале.
Второе слагаемое определяет составляющую состояния Х(/),
связанную с действием хвх(0 в интервале времени t0... t при
нулевом состоянии цепи в начале этого временного интервала
(т. е. в момент to).
Перейдем от выражения (3.52) к разностному уравнению,
для этого положим tQ—tiT, t=nT-\-T:
- - nTiT -
Х(пТ + Т) = еА'т Х(пТ) + e^lnT+T) А2 J е~Л,\твХ(ф^. (3.53)
пТ
Чтобы это выражение было пригодно для построения алго-
ритма вычислений, необходимо входящий в выражение интеграл
представить некоторым приближением.
Пусть на малом интервале пТ... (пТ-\-Т) шага интегрирова-
ния хвх(0 может быть принято постоянной величиной, равной
л'вх(«Т). Тогда
пТ+Т __ пТ±Т _
f Лвх (т) ф- двх (пТ) i е~Л‘т d~ =
пТ пТ
_ пТ+Т _ _
--АГ'^ЛпТ)^ | = АГ^вЛпТ)(^("т^Т)-е~^т}.
пТ
Подставляя полученное выражение в (3.53), получаем после
очевидных преобразований
X (пТ + Т) = еА‘г X (пТ) ж (еА*г — Т) Аг’ А2хвх (пТ). (3.54)
На основе (3.54) может быть построено следующее расчетное
выражение:
X (пТ + Т) = FjX (пТ) + F2 лвх (пТ), (3.55)
где F, н F2 представляют собой приближения для функций еА“т и
(еА‘г- 1)А;*А2, определяемые выражениями (3.34).
Сравнивая (3.55) с выражением (3.33), построенным для рас-
чета переходной характеристики, видим, что различие состоит
лишь в том, что второе слагаемое (3.54) содержит множитель
ХвХ(«Т), который в выражении переходной характеристики от-
95
сутствует (в случае расчета переходной характеристики
Х*вх (^^) —- 1) -
Как и при расчете переходной характеристики, задавая
в (3.34) при определении функций Fi и F2 различные значения k,
можно строить явные формулы интегрирования различных по-
рядков.
Рассмотрим построение алгоритма расчета с использованием
неявной формулы интегрирования. Представим левую часть вы-
ражения (3.45) в интервале времени пТ... (пТ-[-Т) приближе-
нием
d х Х(лГЧ-Г) — Х(пТ)
dt Т
Правую часть уравнения (3.45) в этом же временном интер-
вале представим приближением в форме среднего арифметиче-
ского значения этой части выражения для крайних моментов
временного интервала:
А X (/) * А X (t) (чГ)]4-[А1Х(гг7'-^<Г)~А2~,'вх(.';Г-|-Т)]^
При использовании приведенных выше приближений уравне-
ние (3.45) примет следующий вид:
Х(пТ) -Х(пТ) = [АрЦпТ) + АгхВч(пГ)] + [AxX(nr + Т) -р Агхв (пТНТ)]
Т 2
Решив это уравнение относительно Х(пТ-\-Т), получим
+ (T-yA/J-1 (7+-1-X/|X(/z7’) +
+ (I— ± AJJ“1 А2 л'в (пГ) +М”7’ + ?) . (3.56)
Это выражение отличается от выражения (3.43) для расчета
переходной характеристики лишь наличием во втором слагае-
мом сомножителя (хвх(пТ) -\-хвх(пТ-\-Т'))/2, равного среднему
арифметическому значений входного воздействия в граничных
точках шага интегрирования.
На рис. 3.15 приведена схема алгоритма расчета отклика це-
пи на произвольно заданное воздействие. В блоке 1 предусмат-
ривается ввод исходных данных: значения шага интегрирования
Т, граничного значения временного интервала /max, в котором
предусматривается расчет отклика, порядка используемой явной
формулы интегрирования и начальных условий цепи X (значе-
96
ний напряжений на емкостных элемен-
тах и токов в индуктивных элементах
в момент/=0). В блоке 2 производит-
ся обращение к подпрограмме расчета
коэффициентов Fi, F2 рекуррентного
выражения (3.55). Далее происходит
вхождение в цикл, в каждом повторе-
нии тела которого в блоке 4 произво-
дится обращение к подпрограмме рас-
чета мгновенного значения входного
воздействия, в блоках 5 и 6 — расчет
для очередного момента времени век-
тора состояния X и значения отклика
хВых, блок 7 обеспечивает вывод рас-
считанных значений отклика.
При расчете переходной характери-
стики блок 4 исключается, а в блоках
5 и 6 принимается ,гБХ=1; при расчете
импульсной характеристики хвх при-;
нимается равным 1 на первом шаге ин-
тегрирования и 0 на последующих ша- i
гах интегрирования.
:<: = г. х - Fz г s
Рис. 3.15
3.10. ПРОГРАММА РАСЧЕТА ПЕРЕХОДНОЙ,
ИМПУЛЬСНОЙ ХАРАКТЕРИСТИК
И ОТКЛИКА ЦЕПИ НА ПРОИЗВОЛЬНОЕ
ВОЗДЕЙСТВИЕ
Изображенная на рис. 3.15 укрупненная схема алгоритма
расчета временных характеристик детализирована на рис. 3.16.
На детализированной схеме демонстрируется алгоритм, позво-
ляющий оценить погрешность вычислений. Оценка производится
путем расчета при двух значениях шага интегрирования Т и Т/2
откликов цепи /ДДО и hT/22 и определения с их помощью отно-
сительной погрешности е. В соответствии с этим алгоритмом со-
ставлена программа 3.4. _
Исходными данными для вычислений являются матрицы Аь
А2, Di и скаляр D2, входящие в уравнения переменных состояния
и отклика. Для расчета временной характеристики требуется
также ввод значений параметров, определяющих характер про-
7—6030 97
цесса интегрирования. Результатом работы программы является
таблица, в которой для каждого текущего значения времени вы-
водятся значения временной характеристики hi(t) и h2(t), рас-
считанные с шагом Т и 772, и относительная погрешность е.
Программа 3.4 составлена таким образом, что позволяет про-
извести расчет как переходной, так и импульсной характеристи-
ки или получить отклик цепи на произвольное воздействие. Тип
временной характеристики обусловлен процедурой, в которой
98
ПРОГРАММА 3.4
3900 REM II РАСЧЕТ ВРЕМЕННЫХ ХАРАКТЕРИСТИК И
3902 PRINT "ВВЕДИТЕ ПАРАМЕТРЫ ПРОЦЕССА ИНТЕГРИРОВАНИЯ"
3904 PRINT ’ НАГ ИНТЕГРИРОВАНИЯ'’J \ INPUT Т
3906 PRINT ’ ПЕЧАТАТЬ РЕЗУЛЬТАТЫ КАЖДОГО К-ГО ШАГА'Ч \ INPUT KZ
3908 PRINT ’ ПОРЯДОК 0ОРМУЛЫ ИНТЕГРИРОВАНИЯ'Ч X INPUT N1X
3910 PRINT ’ КОНЕЦ ИНТЕРВАЛА ИНТЕГРИРОВАНИЯ'’I X INPUT Т1
3912 Т-Т/2 X GOSUB 3920 X REM РАСЧЕТ F1,F2: ШАГ Т/2
3914 FOR IX'l ТО NX \ F4(IX)'F2(IX)
3916 FOR JX'l ТО NX X F3(IX,JX)=F1(IX,JX) \ NEXT JX \ NEXT IZ
3918 T«T»2 \ GOSUB 3920 X REM F1»F2: ШАГ T X GO TO 3950
3920 REM РАСЧЕТ Fl & F2 »•» X<(N+l)T>=F1*X<NT>+F2
3922 FOR IX'l TO NX \ FOR JX'l TO NX X E4(IX,JX)=0
3924 IF IX'JX THEN E4(IX»JX)=1
3926 Fl(IX»JX)=E4(IX>JX) \ NEXT JX X NEXT IX
3928 FOR I3X=N1X TO 1 STEP -1
3930 FOR IX'l TO NX X FOR JX'l TO NX X R3(IX»JX>=0 X FOR MX=1 TO NX
3932 R3(IX»JX)=R3(IXrJX)+F1(IX>MX)»A1(MX»JX) \ NEXT MX
3934 R3<IX»JX)»(T/I3X)«R3<IX»JX)+E4(I XrJX) X NEXT JX X NEXT IX
3936 FOR IX'l TO NX X FOR JX=1 TO NX
3938 Fl(IX.JX)=R3(IX,JX) X NEXT JX X NEXT IX
3940 IF I3XO2X THEN GO TO 3948
3942 FOR IX=1 TO NX X F2(IX)-0 X FOR JX'l TO NX
3944 F2<IX)=F2(IX)+F1(IX»JX)*A2(JX) X NEXT JX
3946 F2(IX)=T*F2(IX) X NEXT IX
3948 NEXT I3X X RETURN
3950 REM РАСЧЕТ ПЕРЕХ. ХАР. С T & Т/2
3952 PRINT ’ РЕЗУЛЬТАТЫ ВЫЧИСЛЕНИЙ! ’
3954 PRINT Ч ВРЕМЯ ' С ШАГОМ Т ! С ШАГОМ Т/2 I ОТН.,ПОГРЕШИ’
3956 T0-0 X LX«0X X FOR 1*1 ТО NX
3958 B3(IX)=0 X B4(IX)=0 X X1(IX)=0 X X2(IX)=0 X NEXT IX
3960 T0=T0+T X IF T0IT1 THEN RETURN
3962 GOSUB 3990 X REM РАСЧЕТ ВХОДНОГО СИГНАЛА Ы Ы(1)Ы(2)
3964 FOR IX'l ТО NX X B3(IX)=0 X FOR МХ = 1 ТО NX
3966 ВЗ(IX)=ВЗ(IX)+F1(IX»MX)*Х1(MX) X NEXT MX
3968 ВЗ(IX)=ВЗ(IX)+F2(IX)»W X NEXT IX
3970 FOR IX'l TO NX X XI(IX)“ВЗ(IX) X NEXT IX
3972 FOR IX=1 TO 2X X FOR J»1 TO NX X B4(J>=0 X FOR MX'l TO NX
3974 B4(J)'B4(J)+F3(J»MX)»X2(MX) X NEXT MX X B4(J)=B4(J)+F4(J)*W(IX)
3976 NEXT J X FOR MX=1 TO NX X X2(MX)=B4(MX) X NEXT MX X NEXT IX
3978 H1=D2»H X H2 = H1 X FOR IX'l TO NX
3980 Hl'Hl+Dl(IX)*B3(IX) X H2=H2+D1(IX)«В4(IX) X NEXT IX
3982 LX-LX+1 X IF LX(>KX THEN 3960
3984 LX'0X X IF H2<>0 THEN E'ABS((H1-H2)/Н2)
3986 PRINT T0»HlrH2.E X GO TO 3960
3990 W'l X W(l)'l X W(2)=l X RETURN
рассчитываются значения входного сигнала xBx(t) в моменты
времени, определяемые шагом интегрирования Т.
Принятые обозначения. В программе 3.4 задействованы следу-
ющие имена переменных: №/о— порядок матрицы А]; Т — шаг
интегрирования; N1 %—порядок формулы интегрирования (соот-
ветствует k в формуле (3.34)); Т1 — конец интервала интегри-
рования (в тексте обозначен £тах); К°/о—шаг печати, показы-
вающий, через сколько шагов интегрирования Т следует выводить
результаты расчета; Е — относительная погрешность вычис-
7* 99
лений (е); ТО — текущее время (/); F1 и F3 — двумерные мас-
сивы, соответствующие Fj в (3.34); F2 и F4 — одномерные мас-
сивы, соответствующие F2 в (3.34); Н1 и Н2 — отклики цепи
(/ii(/) и h2(t)); XI и Х2— одномерные массивы (*i(0 и x2(t));
Е4 — единичная матрица (1); W — значение входного сигнала,
рассчитываемого с шагом Т (xBX(/)); W(l) и W(2)—два значе-
ния входного сигнала, рассчитываемых с шагом Т/2 (xBX(^— 7/2)
и Хвх(О); R4, ВЗ, В4 — массивы для хранения результатов про-
межуточных вычислений; Al, А2, DI, D2 — имена, соответствую-
щие обозначениям матриц математической модели цепи (Аь А2,
Di, £>2).
Описание програмы. Блокам детализированной схемы алго-
ритма, представленной на рис. 3.16, соответствуют группы опе-
раторов в строках программы 3.4. Раскроем содержание блоков
алгоритма. В блоке 1 (строки 3900—3910) в режиме диалога
запрашиваются параметры процесса интегрирования: шаг интег-
рирования, интервал интегрирования, порядок формулы интегри-
рования, шаг вывода результатов. После этого в блоках 2 (стро-
ки 3912—3916) и 3 (строки 3918) производится расчет матриц
F, и F2 с шагом Т и 7/2, соответственно обозначенных именами
Fl, F2, F3, F4. В блоке 4 (строки 3956—3958) устанавливается
начальное состояние цепи в момент времени /=0, т. е. x(0)=0.
Увеличение текущего времени на шаг интегрирования и про-
верка условия окончания процесса интегрирования в блоках 5 и
6 осуществляются в строке 3960. Если текущее время превысит
значение /таХ, расчет закончится. В блоке 7 (строка 3962) про-
изводится расчет входного сигнала (подпрограмма в строке
3990). Приводимая в строке 3990 запись определяет входной
сигнал в виде единичного скачка, т. е. xBX(t) = l(t), поэтому ре-
зультатом вычислений в программе будет переходная характе-
ристика. В блоке 8 (строки 3964—3970) производится расчет
с шагом Т значения Xi(nT-[-T) по рекуррентной формуле (3.55).
Для нахождения с уменьшенным вдвое шагом интегрирования
значения х2(пТ-\-Т) в блоках 9 и 10 (строки 3972—3976) осуще-
ствляется двукратный просчет по формуле (3.55). В качестве
входных сигналов в моменты времени, соответствующие полови-
не шага и целому шагу, берутся значения W(l) и W(2), рассчи-
тываемые в строке 3990. В блоке 11 (строки 3978—3980) опреде-
ляются отклики цепи h\(t) и h2(t). В блоке 12 (строка 3982)
увеличивается счетчик (L) числа пройденных шагов. Если число
пройденных шагов равно шагу вывода результатов расчета К
(блок 13), производится в блоках 15—17 (строки 3984—3988)
расчет относительной погрешности и вывод на экран дисплея
значений текущего времени I, значений hi(t) и h2(t) (соответст-
венно имена ТО, Hl, Н2, Е). Для исключения возможности пере-
полнения разрядной сетки в случае деления на нуль при расчете
100
Рис. 3.17
е (что возможно, когда характеристика й2(0 пересекает ось абс-
цисс) в строке 3984 предусмотрен обход формулы, и значение
погрешности на данном шаге не изменяется. Интегрирование
с шагом Т продолжается до тех пор, пока текущее время не пре-
высит заданного значения Zmax.
В блоках 2, 3, 4, 8, 10, 11 осуществляются операции сложения
и умножения матриц, детализированные схемы алгоритмов ко-
торых рассматривались ранее (см. § 3.3). Поэтому на способах
реализации этих операций в указанных блоках останавливаться
не будем.
В программе 3.4 процедура определения входного сигнала
изображена в виде схемы на рис. 3.17. На рис. 3.17,а входной
сигнал принят постоянным и равным 1(/). Для получения им-
пульсной характеристики цепи необходимо, чтобы на входе дей-
СТВОВЗЛ СИГНАЛ Л'вх (0=б(/). В ЭВМ. такой сигнал моделируется
следующим образом:
вх } (О при T<t.
101
Схема алгоритма на рис. 3.17,6 отражает этот случай. При рас-
чете с шагом интегрирования 7/2 входной сигнал на отрезке
t<T/2 принят равным 2/7. Ниже приведена подпрограмма,
введение которой позволит получить импульсную характерис-
тику.
S990 IF T0<=T THEN U=l/T \ Ы(1)=2/Т \ G0 ТО 39?Л
' 3992 W(5)=0 \ 14-7 0
3994 U(2>--0 \ RETURN
В программе 3.4 процедура определения значения входного
сигнала па каждом шаге интегрирования записана в строках,
начиная с 3990. Наличие такой процедуры обеспечивает возмож-
ность записи в качестве входного сигнала произвольного воздей-
ствия. В этом случае программа 3.4 осуществит расчет отклика
цепи на воздействие, характер изменения которого должен быть
соответствующим образом описан в строках, начинающихся
с номера 3990. Проиллюстрируем это на примере. Возьмем в ка-
честве входного воздействия трапецеидальный импульс. Такой
импульс в ЭВМ моделируется следующим образом:
'0 при t<t3-
— при +
•*вх(0 ' A (f3 ta tc— t)itz
при (t3 -г /ф + У нс (г/ + 4~ 4 4- Q;
при г‘3 + ^ф<^<г'з + ^ф + /11>
где А — амплитуда импульса, t3— задержка импульса, /ф — дли-
тельность фронта импульса, ta — длительность вершины импуль-
са, tc— длительность среза импульса.
Схема алгоритма нахождения значений входного воздействия
показана на рис. 3.17,в. Программная реализация этого алгорит-
ма будет приведена ниже.
Когда на входе действует произвольный сигнал, который мо-
жет быть описан аналитически, соответствующая формула долж-
на быть записана в строке 3990.
Рекомендации по использованию. Программа 3.4 выполняется
после ввода значений Ai, А2, Db D2. Эту процедуру, как и в ранее
рассмотренных программах, можно осуществить с помощью про-
граммы П.2. В этом случае первые строки программы могут
иметь вид
10 GOSUB 15000
20 GOSUB 3300
30 STQV
После этих строк вводится текст соответствующих подпрограмм.
Для построения графика временной характеристики следует вве-
102
ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
Н (Т)
i.000r-:-»i
2.000Е 01
3.000Е-01
4.000Е-01
5.000Е-01
6.000Е-01
7.000Е-01
8,000Е-01
9.Э00Е-01
1 .-ЭЭ0Е+00
1. 100Е+00
1.2Э0Е+00
1.300Е+00
1.400Е+00
1.500Е+00
1.500Е+00
1.700Е+00
1.600Е+00
1.900Е+00
7.07LE-01
4.937Е-01
3.379Е-0Х
2.25£Е~ 01
1.46ОЕ-01
9.012Е-02
5.184Е-02
2.639Е-02
1.022Е-02
6 . &7(fi. — 04
-.419Е-02
-«585Е-02
-.352Е-02 *
-.869Е-03 *
2.195Е-03 *
5.390Е-03 »
8.526Е-03 !<•
1.148Е-02 I* Т
Рис. 3.18
сти следующие строки:
3959 N0 = 0 „ ,
3935 X(N0)-T0 X Y(N0):Hl \ N0=N0+i
25 GOSUB 16000
Рассмотрим случай, когда необходимо рассчитать отклик на
входной сигнал, представляющий собой трапецеидальный им-
пульс. Составим две программы: первая запрашивает значения
параметров трапецеидального импульса, вторая рассчитывает
значение хвх в заданные моменты времени.
Программа для ввода параметров трапецеидального импуль-
са имеет вид
3998 print "залайте параметры трапецеидального импульса"
3999 PRINT ’ВВЕДИТЕ АМПЛИТУДУ A=’l \ INPUT А
4000 PRINT ’ВВЕДИТЕ ЗАДЕРЖКУ =’i \ INPUT U0
4001 PRINT ’ВВЕДИТЕ ДЛИТЕЛЬНОСТЬ ПЕРЕДНЕГО ФРОНТА =’; \ INPUT 74
4002 PRINT ’ВВЕДИТЕ ДЛИТЕЛЬНОСТЬ ВЕРШИНЫ ИМПУЛЬСА \ INPUT Т2
4003 PRINT ’ВВЕДИ"." ДЛИТЕЛЬНОСТЬ ЗАДНЕГО «РОНТА =’! \ INPUT ТЗ
4004 RETURN
Программа, рассчитывающая значения хвх в заданные момен-
ты времени:
3990 GOSUB 3992 \ Ы(2>=Ы
3991 Н=Т0-Т/2 \ GOSUB 3992 \ U < 11 =1) \ Ц=Ы (2) \ RETURN
3992 IF H<W0 THEN 3997
3993 IF H<W0+T4 THEN Ы=<A«(Н-Ы0))/Т4 \ RETURN
3994 IF H=W0+T4 THEN W=A \ RETURN
3995 IF H<=W3+T4+T2 THEN H=A \ RETT?.-;
3996 IF H<=W0 + T4 + T2-'"' THEN Ы= <Л» Щч-ЯА+ТЗ+ТЗ-Ю > /ТЗ \ RETURN
3997 W=0 \ RETURN
103
После ввода приведенных подпрограмм следует в программу
3.4 добавить
3911 GOSUB 3998 \ REM «ВВОД ПАРАМЕТРОВ ИМПУЛЬСА»
Легко показать, что с помощью этих подпрограмм путем за-
дания соответствующих значений параметров трапецеидального
импульса можно получить как переходную, так и импульсную
характеристики.
Пример 3.5. Рассчитать переходную характеристику схемы на рис. 2.6 при
следующих условиях: шаг интегрирования Т=0,1, порядок формулы интегриро-
вания А=4, шаг печати результатов А=1, интервал интегрирования /Шах=1.9.
Результаты расчета приведены на рис. 3.18.
УПРАЖНЕНИЯ
1. Для схемы, приведенной на рис. 3.19, при масштабных коэффициентах
Afu = l, А1г=103, .Мс = 10-9 справедливы следующие уравнения математической
модели:
d
di
«C1W1 Г-1 О
иС2^)_] . О —2
«С! (О । 1
иС2^) . 2
ивх (О,
Хвых(0 — [1
и
Ь«вх(0-
_ иС2^).
Рассчитайте вручную передаточную функцию цепи, используя для обраще-
ния матрицы метод Леверрье — Фаддеева.
2, Для схемы, приведенной на рис. 3.20, при масштабных коэффициентах
Ми = 1, Мг=103, Л4с = Ю~9 справедливы следующие уравнения математической
модели:
Рис. 3.20
Рис. 3.19
104
100 нФ
Рис. 3.21
Рассчитайте вручную передаточную функцию цепи, используя для обраще-
ния матрицы метод Леверрье—-Фаддеева.
3. Для схемы активного полосового фильтра, приведенной на рис. 3.21, при
масштабных коэффициентах Mu = l, Afr=103, Мс = 10-7 справедливы следующие
уравнения математической модели:
%(0
“с2(0
- иС^_
”—0,047637
—20,956
0
20,96
0,047637 0
—0,052402 0
0 —0,47637
—20,96 —20,956
0
0
—0,047637
—0,052402
21,008
0
Ывых (0 — [0
0 0,99773
—0,99773]
«с,(О
«С,(О
“C3<Z>
uct
+ 0-uB< (1).
Рассчитайте с помощью ЭВМ передаточную функцию фильтра, используя
программу 3.1.
4. Докажите справедливость выражения (3.11).
5. Докажите справедливость выражения (3.12).
6. Докажите справедливость выражения (3.40)
7. Докажите справедливость выражения (3.44).
8. Для схемы на рис 3.20 рассчитайте частотную характеристику с помощью
ЭВМ, используя полученную при решении задачи 2 передаточную функцию и
программу 3.2.
9. Рассчитайте вручную АЧХ и ФЧХ приведенной на рис. 3.19 схемы, ис-
пользуя рассчитанную при решении задачи 1 передаточную функцию.
10. Рассчитайте с помощью ЭВМ частотную характеристику схемы на
рис. 3.21, используя программу 3.3 и приведенные в задаче 3 уравнения мате-
матической модели.
105
11. Для схемы на рис. 3.21, используя программу 3.4 и приведенные в за-
даче 3 уравнения математической модели, рассчитайте переходную и импульс-
ную характеристики с применением явных формул интегрирования.
12. Для условий задачи И определите критический шаг интегрирования при
использовании явных формул первого, второго и четвертого порядков.
13. Повторите расчет переходной характеристики для условий задачи И,
применяя неявные формулы интегрирования. Убедитесь, что использование не-
явных формул допускает интегрирование с увеличенным шагом интегрирования.
14. Определите в условиях задачи 11 с помощью программы 3.4 отклик
цепи на воздействие
(О
ХВ (0 = | 1
10
где ti= 10 ; с.
при
при
при
/ < 0,
tr<t,
Глава 4.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
НЕЛИНЕЙНОЙ ЦЕПИ
4.1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЦЕПИ
С НЕЛИНЕЙНЫМИ РЕАКТИВНЫМИ
ЭЛЕМЕНТАМИ
При рассмотрении цепей, содержащих нелинейные реактивные
элементы, практически важное значение представляет случай,
когда емкость нелинейного емкостного элемента является функ-
цией напряжения на этом элементе (Су •— ®у (ис )), а индуктив-
ность нелинейного индуктивного элемента — функцией тока
в этом элементе (Су = фу (Л 4).
При этом знание вектора состояния Х(£), элементы которого
представляют собой напряжения на емкостных элементах и то-
ки в индуктивных элементах, позволяет на каждом шаге интег-
рирования уравнений состояния цепи определять соответствую-
щие значения нелинейных реактивных элементов.
Таким образом, структура уравнения состояния цепи с нели-
нейными реактивными элементами может быть принята той же,
что и структура уравнения состояния цепи, не содержащей нели-
нейных элементов, т. е.
-£-Х(/) = АхХ(0 + А2Х№.
at
106
Элементы матричных коэффициентов А] и А2 уравнения со-
стояния определяются параметрами элементов цепи. Поэтому
для цепи, не содержащей нелинейных элементов, все элементы
этих матриц являются константами. Иначе для цепи с нелиней-
ными реактивными элементами. На каждом шаге интегрирова-
ния вектор состояния ХЦ) принимает новое значение, изменяют-
ся напряжения, токи в реактивных элементах. Это вызывает из-
менение параметров нелинейных реактивных элементов и,
следовательно, приводит к изменению элементов матричных ко-
эффициентов Ai и А2. Однако требуемый па каждом шаге интег-
рирования пересчет коэффициентов Aj и А2 не представляет
трудностей.
Если нелинейные реактивные элементы не входят в особенно-
сти цепи (С-, СП-контуры и L-, LZ-сечения), такой пересчет ко-
эффициентов Ai и А2 связан с изменением элементов лишь тех
строк этих матриц, номера которых соответствуют положениям
напряжений, токов нелинейных реактивных элементов в векторе
состояния Х(/). Пусть C'j, L'j— соответственно значения емко-
сти и индуктивности нелинейных реактивных элементов в нача-
ле текущего шага интегрирования и пусть после выполнения
шага интегрирования новому значению вектора состояния Х(/)
соответствуют новые значения С"3-, L"j параметров этих реактив-
ных элементов. Тогда для получения новых значений Ai и А2
достаточно соответствующие строки этих матриц умножить на
или L'j/L"i. Этот вывод следует из выражений (2.24).
Не представляет больших сложностей пересчет матричных ко-
эффициентов А] и А2 и в случаях, когда нелинейные реактивные
элементы входят в особенности цепи. Предлагаем требуемую при
этом на каждом шаге интегрирования коррекцию "Aj и А2 рас-
смотреть самостоятельно.
В уравнении токов резистивных элементов (2.8) и уравнении
выхода (2.12) матричные коэффициенты Вц В2 и Dj, D2 не зави-
сят от значений параметров реактивных элементов. Поэтому эти
коэффициенты имеют в пределах шага интегрирования не изме-
няющиеся от времени t значения и наличие в цепи нелинейных
реактивных элементов не вносит, таким образом, особенностей
в процесс интегрирования уравнения состояния.
4.2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЦЕПИ
С НЕЛИНЕЙНЫМИ РЕЗИСТИВНЫМИ
ЭЛЕМЕНТАМИ
Структура уравнений математической модели. Для выявле-
ния общей структуры уравнений математической модели цепи
с нелинейными резистивными элементами воспользуемся тем же
107
' “и ЙГД \
Хн
Источники . замещпгО'о.ие
нели^ейнше лл з UG .'ПОЛЬ/
Рис. 4.1
приемом, который был ранее использован для получения струк-
туры уравнений линейной цепи. Вынесем из анализируемой схе-
мы независимые источники, реактивные элементы и нелинейные
резистивные элементы (рис. 4.1,а). При этом оставшаяся часть
схемы (заключенная на рис. 4.1,а в прямоугольник) представля-
ет собой линейную резистивную схему. Далее произведем экви-
валентную замену нелинейных резисторов источниками напряже-
ния или тока (рис. 4.1,6).
Если j-ii нелинейный резистивный элемент замещен источни-
ком напряжения ин/, то ток этого источника inj должен выра-
жаться через его напряжение зависимостью, соответствующей
вольт-амперной характеристике j-го нелинейного резистивного
элемента: Zhj=(«и/). При замещении k-ro нелинейного резис-
тивного элемента источником тока напряжение на этом источ-
нике должно выражаться через ток источника зависимостью,
представляющей собой вольт-амперную характеристику /г-го не-
линейного резистивного элемента: unk — qik (iHft).
Представим вектором UH напряжения источников напряже-
ния, замещающих группу нелинейных резистивных элементов,
а вектором 1н —токи источников тока, замещающих эти элемен-
ГЦ,]
ты. Эти векторы, в свою очередь, объединим в вектор = I , '
I *н J
Тогда на рис. 4.1,6 линейная резистивная схема окажется под
воздействием трех групп источников, напряжения и токи которых
представляются векторами X, Хни, Хн.
Из сравнения рис. 4.1,6 и 2.4,в видно, что различие их состо-
ит лишь в том, что действующие в линейной цепи источники
объединяются в два вектора X и Хни, в цепи с нелинейными ре-
108
зистивными элементами возникают дополнительные источники,
представленные вектором Хн. На основании принципа линейной
связи токов в линейной резистивной схеме с напряжениями и то-
ками источников, действующих в схеме, можно структуру урав-
нений математической модели цепи с нелинейными резистивными
элементами представить в следующем виде:
уравнение токов линейных резистивных элементов
1рез — Bi X + В2 Хни + В3 Хн, (4.1)
уравнение состояния
4-Х= АхХ+АЛн + АА, (4.2)
уравнение отклика
А^^х + адш-ьЬзХн. (4.3)
Как видим, особенность уравнений математической модели
цепи с нелинейными резистивными элементами, отличающая их
от уравнений линейной цепи, заключается в наличии в правой
части каждого из уравнений третьего члена, содержащего вектор
Хн. Обратим внимание на следующее обстоятельство. В (2.11)
число уравнений равно числу неизвестных, входящих в X (числу
реактивных элементов с независимыми начальными условиями).
Система (2.11) является полной в том смысле, что позволяет на-
ходить все неизвестные. В (4.2), записанном для нелинейной це-
пи, число уравнений также равно числу элементов, входящих
в вектор состояния X. Число же неизвестных больше (за счет
члена "АзХн) на количество нелинейных резистивных элементов
в схеме. Таким образом, это матричное уравнение не является
полным. Для получения полной системы необходимо кроме (4.2)
иметь дополнительную систему уравнений. Определим эту систе-
му уравнений.
Вектор токов 1ц , который объединяет токи источников напряже-
ния, замещающих нелинейные резистивные элементы, можно предста-
вить матричным выражением ly ='?i(UH). Аналогично можно пред-
ставить вектор напряжений U/h, объединяющий напряжения источников
тока, которые замещают нелинейные резистивные элементы, выраже-
нием U/h = у, (1Н).
Объединим эти два выражения в одно матричное выражение
109
Кая дни из токов, входящих в вектор К/ , и каждое из напряже-
ний, входящих в вектор II/ являются одновременно токами и напря-
жениями линейной резистивной цепи на рис. 4.1,6. Поэтому эти
токи и напряжения линейно зависят от напряжений и токов дей-
ствующих в схеме рис. 4.1,6 источников, т. е.
?(ХН) =-- МхХ + М2ХНН + Мзхн. (4.4)
Система уравнений (4.2), (4.4) уже является полной и позво-
ляет находить X и Хн. Имея значения этих величин, затем можно
производить вычисления по выражениям (4.1) и (4.3).
Алгоритм расчета коэффициентов уравнений математической
модели. Рассмотрим алгоритм расчета матричных коэффициен-
тов, входящих в уравнения (4.1), (4.2), (4.4). Как и для линей-
ной схемы, эти коэффициенты должны выражаться через под-
матрицы матрицы главных сечений F. Особенность этой матри-
цы цепи с нелинейными резисторами в том, что под Rp и Rx
понимают линейные резистивные ребра и хорды, а нелинейные
резисторы образуют строки UH и столбцы 1н:
Хорды
и Fupx L Flt I Fh FU/H
с Q F^ Fcl FC/ (4.5)
F ю — — —
FVx Fv Fz? z p FVh
_ F Vx Fi/hl FV Fizhzh _
Для вывода выражений, определяющих матричные коэффи-
циенты уравнения токов линейных резистивных элементов и
уравнения состояния цепи с нелинейными резистивными элемен-
тами, требуются выкладки, аналогичные тем, которые проводи-
лись в § 2.3 при выводе выражений коэффициентов уравнений
линейной цепи. Не повторяя этих выкладок, запишем разверну-
тые уравнения токов линейных резистивных элементов и уравне-
ния состояния в окончательном виде:
1Рез — Ан’ Вп X 4- Ап1 В12 Хни + Ап1 ВиХн, (4.6)
В: В а Вз
—— X = А22 (В21 + А21 Вх) X 4- А221 (В22 + А21В2) Хни +
at "------------------—' ----;——----------
Ах Аг
+ А22! (В23 + А21 Вз) Хн. (4.7)
А,
НО
Таким образом, коэффициенты В1; Вг, Аь А, имеют тот же
смысл и определяются теми же выражениями, что и аналогич-
ные коэффициенты уравнений линейной цепи.
Приведем лишь величины, входящие в выражение коэффици-
ентов В3 и А3:
° . Г 0 -’Н
-т _ ’ -023 __т -
Уравнение (4.4) характерно лишь для цепи с нелинейными
резистивными элементами. Приведем последовательный вывод
выражений коэффициентов этого уравнения. Из (4.5) вектор 1ин
токов источников напряжения, замещающих нелинейные резис-
тивные элементы, по закону Кирхгофа для токов
Вы
(4.8)
Ч = Ру,л —FyHz.Ir. — FyH/I — FyH/H IH. (4.9)
По закону Кирхгофа для напряжения вектор U/h напряжений
на источниках тока, замещающих нелинейные резисторы:
и,я _ F?,„и + fJ,h ц. + f;a I RPI»P + й,,. u„.
(4.10)
Объединим выражения
жение
(4.9) и (4.10) в одно матричное выра-
— Fy г
в в
о
-FyB/
О
н,
Хви
(4.11)
ч
ЛЧ
щхн)
о
С учетом введенных обозначений (4.11) имеет следующий
вид:
Ф (Х„) = Нх X + Н2Хнп + Н3 Х„ + Н41рез. (4.12)
Заменив в данном выражении 1рез формулой (4.1), после со-
ответствующей группировки членов получим
Ф (Хн) = (HL_bHiB1)X + (Нг + Н4вг) х„и -н (Н3 + НА) Хн. (4.13)
м, м, м,
Выражения (4.11) и (4.13) определяют способ вычисления
значений матричных коэффициентов уравнений (4.4).
111
Рис. 4.2
В заключение поясним способ совместного решения уравне-
ний (4.2) и (4.4) для нахождения X и Хн. Будем считать, что из-
вестны начальные условия, т. е. значение вектора состояния для
момента to=O, иначе Х(0). Подставляют Х(0) в (4.4) и решают
систему нелинейных уравнений (4.4). При этом находится зна-
чение Хн(0). Далее подставляют найденное Хн(0) в (4.2), про-
водят шаг интегрирования системы дифференциальных уравне-
ний и находят Х(Т’). Подставляют затем Х(Т’) в (4.4) и решают
повторно систему нелинейных уравнений, определяя Хн(7') и т. д.
Пример 4.1. Определить уравнения математической модели цепи, приведен-
ной на рис. 4.2,п, приняв в качестве вольт-амперной характеристики диода вы-
ражение
/д= io-6 (е-“д/0’037 - 1).
На рис. 4.2,6 показана эквивалентная схема, в которой параметры элемен-
тов представлены с использованием масштабных коэффициентов Ми=1, Mi =
= 10—3, Л4г=103, Л4с = 10~6, ML= 1, диод представлен нелинейным резистивным
элементом, замещенным источником напряжения ии.
Расчеты приводят к следующим результатам,
Матрица главных сечений
— 1
—1
0
«и
Яр - о
L
О'
0
1
- 1
—1.
Матричные коэффициенты уравнения гоков линейных резистивных элемен-
тов:
1
-- Fp Яр
р х
FVx Г1
Ях J L0 0,1]
’001]
—1 о о]
112
Матричные коэффициенты уравнения состояния:
Г—40 0 —41
A22* (B21 + A21B1) —
0 0 4 ,
1 —1 —1-
А3 — А22 (В2з ~b AjjBg) —
—40"
0
О -
8—6030
113
Коэффициенты нелинейного алгебраического уравнения:
Н, = Н2 = Н3 = 0, ] = [О 1].
М] = Н1+Н4В1 = [—10 О 0],
М2= Н2+ Н4В2 = 10,
м3 = н3+н4в3 = -10.
Нелинейное алгебраическое уравнение.
10~3 (е “н/0’037_1) = [_]0 0 0]
“С,
иС.
-J- Юи —- 10uH.
Уравнение отклика:
-j- 0 • и -J- 0 • Уц •
Глава 5.
ОТКЛИК НЕЛИНЕЙНОЙ ЦЕПИ
НА ПРОИЗВОЛЬНОЕ ВОЗДЕЙСТВИЕ
5.1. МЕТОДЫ РЕШЕНИЯ НЕЛИНЕЙНЫХ
АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
Метод итераций. Для использования этого метода исходное не-
линейное уравнение записывается в виде
x=f(x).
(5.1)
114
Пусть известно начальное приближение корня х=си. Под-
ставляя это значение в правую часть уравнения (5.1), получаем
новое приближение
С1=/(Со).
Далее, подставляя каждый раз новое значение корня в (5.1),
находим последовательность значений
cn+i = f(cn), п=1, 2,... (5.2)
Итерационный процесс прекращается, если результаты двух
последних итераций близки:
| Cn+i сп ( <Zе. (5.3)
Достаточным условием сходимости метода итерации являет-
ся условие |/Дсп) | < 1. На рис. 5.1 представлена схема алгорит-
ма решения нелинейного уравнения (5.1) методом итераций.
Здесь с—начальное приближение корня, а в дальнейшем — ре-
зультат предыдущей итерации, х — значение корня после каж-
дой итерации.
Метод простых итераций. Используемый при этом методе спо-
соб перехода от уравнения f(x)=O к уравнению вида х=ф(х),
необходимому для решения методом итераций, очевиден из вы-
ражения
х=х—kf (х) =<р (х).
Итерации проводятся по формуле
х1+1=х,—kf(Xi), (5.4)
где k — некоторая константа, выбираемая из условия
— ?(х) =1 — (Л— Й/(Л))| = I 1 — kj'(x) I <7И<1,
Рис. 5.1
выполнение которого необходимо
для обеспечения сходимости ите-
рационного процесса. Метод про-
стых итераций пригоден для
определения не только действи-
тельных, но и комплексных кор-
Рис. 5.2
8:
115
ней; в последнем случае выбирается комплексное начальное при-
ближение Со.
Метод Ньютона. Геометрический смысл метода поясняется
рис. 5.2. Заданное приближение х<°> определяет точку а, через
которую проводится касательная к кривой f(x). Точка пересече-
ния касательной с осью абсцисс определяет значение следующе-
го приближения и т. д. Из прямоугольного треугольника
х(0>—х(1) ——Дх(1>=f (х<°>) /tg а=/(х<°>) /Л(х(0)).
Отсюда для (i'4-l)-fl итерации
x^=x^—f(^)/f'(x^) =ср(х«’))_ (5.5)
К этой формуле можно прийти и другим путем. Представим
функцию f(x) рядом Тейлора, удерживая в нем правые два
члена:
f (х) ^f(x^) (х^) = о.
Отсюда
Дх<‘+1) = х(<+1)_х^ = — f(x&) [f'(x^),
что соответствует (5.5).
Формула (5.5) определяет вычислительный процесс в методе
Ньютона. Данный метод, как правило, обеспечивает более высо-
кую быстроту сходимости, чем метод итераций, но в каждой ите-
рации требует большего объема вычислений. Последнее связано
с тем, что необходимо вычисление /(x(i)) и
Трудность в применении метода Ньютона состоит в выборе
начального приближения, которое должно находиться в опреде-
ленной окрестности точного решения. Поэтому иногда целесооб-
разно использовать смешанный алгоритм. Он состоит в том, что
сначала применяется всегда сходящийся метод (например, метод
деления отрезка пополам [8]), а после некоторого числа итера-
ций — быстро сходящийся метод Ньютона.
Метод Ньютона — Рафсона. Этот метод является развитием
метода Ньютона для решения систем нелинейных уравнений.
Пусть дана система уравнений
Л(хь х2, . ..,хп)=0,
^(xj, х2, • • •> Хп) — 0,
(хь х2, •.., хД —О (5.6)
или в матричной форме записи
f(x)=O.
Для получения итерационной формулы представим функции
fb /2...fn рядом Тейлора, удерживая в нем члены, содержащие
116
производные не выше первой:
А° + -^-Дл<г+') + ... + + = 0;
дх1 1 <>>'п
af(‘)
/Р+ —— Дл<‘^ + ... + -А-Дл(' + » = 0; (5.7)
дл'х дгп п
Дд(1+1) +... + Ь_ д%(.+1) = о.
дхг 1 дхп
Здесь f(<)/=f3-(x(i)1, .. .,x(i)n). Матричная запись этой систе-
мы уравнений
или с учетом введенных обозначений
W<‘>Ax<I’+1> = — f(0 (5.8)
Матрица W носит название матрицы Якоби.
Решив систему линейных уравнений (5.7), можно определить
Дх(‘+1) и затем
Х(‘+1) = х(1)_]_Дх(<’+1).
На рис. 5.3 дана схема приведенного алгоритма.
Основным условием применения метода Ньютона — Рафсона
для решения системы уравнений является возможность определе-
ния обратной матрицы Якоби на каждом шаге. Однако можно
показать [15J, что приближенное значение W4 можно рассчи-
тать следующим образом. Предположим, что W-1 представляет
собой обратную матрицу Якоби после i-й итерации. После (i‘+
+ 1)-й итерации матрица Якоби
WF1 — W?1 AW/Wf1. (5.9)
Этот подход не всегда точен и зависит от ряда допущений. Од-
нако для многих случаев формула (5.9) может существенно об-
легчить нахождение матрицы Якоби.
117
Метод Бройдена. Метод Ньюто-
на — Рафсона имеет хорошую схо-
димость, но при этом необходим рас-
чет обратной матрицы Якоби на
каждой итерации, что приводит
к большим затратам машинного
времени. Метод Бройдена [15], яв-
ляясь развитием метода Ньютона —
Рафсона, лишен этого недостатка.
Он имеет два существенных отли-
чия:
1) на каждой итерации не рас-
считывают ни прямую, ни обратную
матрицу Якоби, не вычисляют до-
полнительные функции для получе-
ния численных оценок отклонений
переменных, а используют только
те функции, которые находят при
наличии постоянной матрицы схемы;
2) на каждой итерации рассчи-
тывают коэффициент затухания,
указывающий на сходимость реше-
ния, что является достоинством ме-
тода по сравнению с методом Нью-
тона—Рафсона, так как последний
не гарантирует сходимость. Кроме
того, этот коэффициент позволяет
оценивать ошибку вычисления, да-
же когда решение
чено.
Суть
чается
лучить
Рафсона
ние x(‘+1), к его г-му приближению нужно
определенный вектор поправки
дх(;+1)= (—x(‘+1) = x(i)+Ax(‘+1).
В методе Бройдена используется не вся
лишь часть ее:
Рис. 5.3
еще не полу-
метода Бройдена заклю-
в следующем:
по формуле
следующее
прибавить вполне
чтобы по-
Ньютона —
приближе-
(5.10)
поправка, а берется
x<‘+1)=x(i)-]-X(i)Ax(‘+I), (5.11)
где скалярный коэффициент А(,) выбирается таким образом, что-
бы минимизировать (или просто уменьшить) норму вектора
либо элемент вектора, имеющий максимальное значение. Если
сходимость в методе Ньютона — Рафсона обеспечена, то в методе
Бройдена за счет выбора Х(‘>>1 достигается большая скорость
118
сходимости. Если же сходимость метода Ньютона — Рафсона не
обеспечена, то в методе Бройдена она обеспечивается выбором
/?'->< 1.
Метод Бройдена устраняет трудности, характерные для мето-
да Ньютона — Рафсона, связанные с вычислением матрицы Яко-
би и ее обращением. Это достигается тем, что вместо обратной
матрицы Якоби используется приближение к ней, вычисляемое
в каждом шаге итерации по формуле
и(* +1) и(I)________[X. Дх ~4~ В (*______________f )J(Дх ) Н
(Дх(1))1 Н(0 (р'+б _ f(Z>)
(5.12)
Из-за сложности выкладки, связанные с выводом этого вы-
ражения, опущены. Последовательный вывод выражения (5.12)
имеется в [15].
Алгоритм отыскания решения по методу Бройдена можно
представить следующим образом [15].
I. Задание начальных значений х<°> вектора х, являющегося
решением уравнения f(x)=0.
2. Получение начального значения Н<°> матрицы итераций пу-
тем обращения матрицы Якоби W<°>.
3. Расчет Ь‘>=f (x(i>), t=0, 1, 2,...
4. Нахождение ДхЮ= H^fW.
5. Выбор такого Х(,), для которого норма ||f(,’+I)ll<llf<”li.
6. Расчет х1‘+,>=хб)-|-х(!')Дх<‘>.
7. Проверка нормы матрицы на сходимость.
8. Расчет
9. Определение Н<,+1> по формуле (5.12).
10. Повторение вычислений, начиная с этапа 4.
5.2. РАСЧЕТ СТАТИЧЕСКОГО РЕЖИМА
ЭЛЕКТРОННОЙ СХЕМЫ
Расчет статического режима схемы имеет важное значение
при ее анализе. Он позволяет составлять карты режимов рабо-
ты схемы по постоянному току, находить значения токов, напря-
жений, рассеиваемых мощностей в элементах схемы.
Существует два подхода к расчету статического режима. Один
из них заключается в том, что из схемы исключаются все реак-
тивные элементы и формируется математическая модель полу-
ченной цепи, которая в общем случае представляет собой нели-
нейную резистивную схему. В этом случае математическая мо-
дель представляет собой систему нелинейных алгебраических
уравнений, решая которую с помощью того или иного численного
метода, можно найти значения токов и напряжений на резистив-
ных элементах.
119
Другой подход состоит в том, что в случае отсутствия сигна-
лов на входах ц епи, а также в стационарном режиме токи и
напряжения в эл^Ментах цепи не зависят от времени. Следова-
тельно, производи-ая ВеКТора переменных состояния в левой час-
ти уравнения сос-^,ояния может быть приравнена нулю. В этом
учае также поручается система нелинейных алгебраических
уравнении, решая которую, можно найти токи и напряжения не
только на резистивных, но и на реактивных элементах в стати-
ческом режиме.
Рассмотрим Уравнения статического режима. Все действую-
щие в анализиру^мой
схеме воздействия Хня можно разделить
а два типа: воз^ействия истоЧников входных сигналов ХСИгн и
воздействия исто\щИКОВ ПИТания Хпит. Таким образом,
[V
24 СИ ГН
X
лпит .
Под статичеы^им режимом схемы понимают режим, при ко-
тором отсутствую^ сигналы ХсИГн = 0 и существуют лишь воздей-
ствия от источники
питания Хппт. Следовательно, для статиче-
ского режима
I О
L z пит _
и расчет статиче^,кого режима сводится к расчету токов (напря-
жении), возникающих в схеме под воздействием источников пи-
тания. Обычно и сточники питания — источники постоянного на-
пряжения (либо ^гока). при этом в статическом режиме токи (на-
пряжения) во все^х элеменТах схемы постоянны.
Для статическ^ого режИма уравнение состояния (4.2) запишем
в следующей фор ме.
Аа2 ’л" Х = (Ьм + Аг1Вг) X (Вгг + А21В,) [ ° ] +
N — __L~ ---—---' £ Л ПИТ J
Gx G2
+(+ а21 в3) Хн
G?----
или с учетом ввеДденных обозначений
А2г^ = ё1Х. + ё Г о -|+ЬзХн.
ЕУ'пит J
(5.13)
(5.14)
Так как в стати 1Ческом режиме токи и напряжения в схеме по-
стоянны, в индуктивных элементах текут постоянные токи, на
емкостных элеме:.нтах образуются постоянные напряжения. Отсю-
120
?(X„) = (M2-M1Gr*G2)
L "’'пит
да----= 0 и уравнение (5.14) приобретает вид
dt
0 = G1X + oJ ° ] + G3XH. (5.15)
1 ^пит J
Решим это уравнение относительно X
Х = —Gr’Gj 0 l-Gr‘G3XH. (5.16)
X I А О п. ' /
L -^пит J
Подставим это решение в уравнение (4.4)
+ (М3-МД-!бз)ХН) (5.17)
в которое не входят параметры реактивных элементов схемы.
Выражение (5.17) является уравнением статического режима.
Оно позволяет находить Хн — токи (напряжения) в нелинейных
элементах схемы. Затем, пользуясь выражением (5.16), можно
определить вектор состояния X и, если необходимо, рассчитать
токи в линейных резистивных элементах схемы.
5.3. ПРОГРАММА РАСЧЕТА ОТКЛИКА
НЕЛИНЕЙНОЙ ЦЕПИ
Итерационный метод Бройдена, алгоритм которого изложен
в § 5.1, реализован в программе 5.1. Исходными данными для
программы служат система нелинейных уравнений и начальное
приближение решения этой системы. По заданным начальным
приближениям в программе производится многократное уточне-
ние этого приближения, пока не будет достигнута требуемая точ-
ность решения.
Принятые обозначения. В программе 5.1 задействованы сле-
дующие имена переменных: N — число уравнений и переменных;
X(1),...,X(N)—начальное приближение переменных и получае-
мое решение; Ml—максимально допустимое число итераций; Е—
допустимая погрешность решения; F(l),...,F(N)—система не-
линейных уравнений в форме F(I) =0; Н — двумерный массив
для хранения матрицы итераций Н; S1—норма полученного ре-
шения на каждой итерации; Т — переменная, показывающая ха-
рактер протекания итерационного процесса решения уравнений;
Yl, Р, V—одномерные массивы для хранения промежуточных
результатов.
Описание программы. В соответствии с алгоритмом метода
Бройдена (см. § 5.1) в программе 5.1 в строках 5204—5208 вво-
дятся значения начальных приближений Х(1),..., X(N). Уравне-
ния F( 1),..., F(N) записаны в программе в виде отдельной под-
программы, начинающейся с номера строки 5270. По начальным
приближениям Х(1) в строке 5210 вычисляются значения
121
ПРОГРАММА 5.1
5200 REM РАСЧЕТ СТАТИЧЕСКОГО РЕЖИМА » МЕТОД ПРОЙДЕНА
5202 DIM Х(20)»F(20)rYl(20>гР(20)»U(20)>Н(20г20)
5204 Т = 0 \ PRINT 'ЧИСЛО НЕИЗВЕСТНЫХ N =" I X INPUT N
5206 PRINT "ВВЕДИТЕ НАЧАЛЬНЫЕ ПРИБЛИЖЕНИЯ Х(1)"
5208 FOR IZ = 1 ТО N \ PRINT " X("IIZ?")="? \ INPUT XCIZ> \ NEXT IZ
5210 008UB 5270 \ IF T=5 THEN 5236
5212 M=1
5214 FOR 1=1 TO N \ P(I)»0 X FOR J=1 TO N \ H(IrJ)=0 \ NEXT J \ NEXT I
5216 FOR IZ=1 TO N \ H(IX»IX)=1 X NEXT IZ
5218 FOR KZ=1 TO N \ P(KX>=1.00000E-03 X GOSUB 5242 X IF T>0 THEN 5236
5220 P<KZ)=0 \ NEXT KZ
5222 FOR IZ=1 TO N \ S1=0 X FOR JZ=1 TO N
5224 S1=S1-H(IZ»JZ)»F<JZ) X P<IZ)=S1 X NEXT JZ \ NEXT IX
5226 GOSUB 5242 X IF T>0 THEN T=T+2 X GO TO 5236
5228 S1=0 \ FOR IX=1 TO N \ Sl-Sl+F(IZ)*F(IZ) \ NEXT IX
5230 S1=SQR(S1> X IF 81<1.00000E-06 THEN 5238
5232 IF МЯ000 THEN PRINT "ЧИСЛО ИТЕРАЦИИ M>1000" \ T=T + 1 X GO TO 5236
5234 GO TO 5222
5236 PRINT "T="JT X GO TO 5240
5238 FOR IZ=1 TO N \ PRINT "X("IIZJ")="!X(IZ) X NEXT IZ
5240 PRINT "РАБОТА ЗАКОНЧЕНА" X GO TO 5262
5242 FOR 1=1 TO N X X(I)«X(I)+P(I) \ V(I)=F(I) X NEXT I X GOSUB 5270
5244 IF T=1 THEN RETURN
5246 M=M+1 \ FOR IZ=1 TO N X Y1(IZ)=F(IZ)-U(IZ) X NEXT IX
5248 S1=0 X FOR IZ=1 TO N \ S2=0
5250 FOR JZ=1 TO N X S2-S2+H(IZ»JZ)»Y1(JZ) X NEXT JZ
5252 U (IZ)=S2-P (IZ) X S1=81+S2»P(IX) X NEXT IX
5254 IF 31=0 THEN T=2 X RETURN
5256 FOR JZ=1 TO N X S2=0 X FOR IZ=1 TO N
5258 S2=S2+P(IX)*H(IX»JZ) X NEXT IX X S2-S2/S1
5260 FOR 1-1 TO N X H(I»JZ)=H(I»JX)-82«M(I) X NEXT I X NEXT JX X RETURN
5262 RETURN
F(I). В строках 5214—5216 формируется матрица итераций Н
в виде единичной матрицы. Затем в строках 5218—5220 и 5242—
5244 осуществляются приращения решений и находятся новые
значения F(I). Уточнение матрицы Н производится в строках
5246—5260. В строках 5228—5230 рассчитывается норма S1 и,
если точность получаемого решения становится приемлемой, вы-
дается на экран результат решения (строки 5238—5240).
Характер протекания итерационного процесса отображает пе-
ременная Т, которой присваиваются определенные значения в за-
висимости от результатов проводимых вычислений. Например,
Т—0 при нормальном протекании итерационного процесса, Т=1,
если число итераций превышает заданное значение Ml, Т = 2 —
первоначальное задание матрицы итерации Н приводит к деле-
нию на нуль, Т—4 — деление на нуль при повторном вычислении
матрицы итераций Н.
Рекомендации по использованию. Нелинейные уравнения
должны быть записаны в подпрограмме, начинающейся со стро-
ки 5270.
122
Предполагается, что решаемые уравнения представлены
в форме /, = 0, i=i, 2,...,Nr, и вычисленные значения левых час-
тей уравнений (/,) в программе присваиваются переменным
F(l), F(2),..F(N). В том случае, когда требуется контролиро-
вать итерационный процесс, получаемые на каждой итерации
значения F(I) можно выводить на экран с помощью операторов
PRINT. Одновременно с этим можно выводить на экран получае-
мые решения Х(1),..., X(N). Такой способ контроля наглядно
демонстрирует характер вычислительного процесса, необходимое
число итераций для получения решения с заданной точностью.
Пример 5.1. Решить систему двух нелинейных алгебраических уравнений:
fi (Xi, х2) = 10—3е40Х1—1 — х2,
f2(*i, *2) = 10—3е40х*~г -ф-2Х2.
Начиная со строки 5270, запишем заданные нелинейные уравнения в форме:
52'.’0 F (1) = 1.00000Е-03» <ЕХР < 4б»х (1: -1) > -X (2)
5272 F <2)“1. 0000 0Е-03» <EXF(40»Х(2)-1>)+2»Х(1)
5274 PRINT F(1)fF(2) >Х(1) г X<2) \ RETURN
При начальном
дующий вид:
Р(1>
3.67879Е-04
3.67894Е-04
3.66894Е-04
1.73459Е-08
приближении Xi = 0, Л'2=О итерационный процесс имеет сле-
F <2) х < 1 >
3.67879Е-04 0
3.69879Е-04 1.00000Е-06
3.69894Е-04 1.00000Е-06
3.26836Е-08 -1.86630Е-04
X (2>
0
0
1.00000Е-06
3.65126Е-04
Х< 1 )=-1.86630Е-04
Х( 2 >= 3.65126Е-04
При начальном приближении Xi = 0,i, x2 = 0,l итерационный процесс
F С1 >
-.0799145
-.0799137
-.0799147
.029384
.0311341
5.90209Е-03
-1.69364Е-04
-9.10921Е-07
F (2)
.220086
.220088
.220088
.0824214
-.0107086
-7.05590Е-03
1.60798Е-04
2.79717Е-07
X (1)
. 1
.100001
.100001
.0411494
-5.40786Е-03
-3.67507Е-03
-1.07525Е-04
-1.86513Е-04
X (2)
. 1
. 1
.100001
-.0274761
-.0308378
-5.58450Е-03
5.35665Е-04
3.66056Е-04
Х< 1 1=-1.8651 ЗЕ-04
Х( 2 )= 3.66056Е-04
123
Глава 6. АНАЛИЗ ПРОЦЕССОВ
В ВЫСОКОДОБРОТНЫХ УСТРОЙСТВАХ
6.1. РАСЧЕТ ОТКЛИКА ЦЕПИ
С ИСПОЛЬЗОВАНИЕМ ПЕРЕДАТОЧНОЙ
ФУНКЦИИ
Как было показано в § 3.1, по известной передаточной функции
K(s) можно рассчитать импульсную характеристику g(t) и пере-
ходную характеристику h(t) цепи, выполнив обратное преобра-
зование Лапласа над соответствующими изображениями:
— (6.1)
На обратном преобразовании Лапласа можно построить и
расчет отклика линейной цепи Х'вых(0 па входное воздействие
хвх(0 ПРИ известном изображении входного воздействия XBX(s)
и передаточной функции K(s):
АВЫх (О ЕУ (s)K(s). (6.2)
Если при расчете импульсной или переходной характеристики
по (6.1) подлежащие обратному преобразованию Лапласа опера-
торные выражения K(s) и — K(s) представляют собой дробно-
рациональные функции аргумента s, то при расчете отклика по
(6.2) операторные выражения могут быть функциями произволь-
ного вида. Ниже рассматривается метод нахождения обратного
преобразования Лапласа для операторных выражений произволь-
ного вида. Очевидно, он может быть использован и для нахож-
дения импульсной и переходной характеристик по выражениям
(6.1).
Пусть задано изображение F(s) и требуется найти оригинал
f(t). Связь между F(s) и /(/) выражается интегралом Лапласа
F(s) = (6.3)
6
В интеграле (6.3) используем подстановку
e-a' = cosx, (6.4)
откуда
t =----— In cos х (6.5)
а
124
i
я
I!
/(/) = /[— —Ineos = Ф(л). (6.6)
\ о /
Из (6.5) следует выражение в дифференциалах
dt = — -^-dx. (6.7)
а СОЗ X
Подставим (6.5), (6.7) в интеграл (6.3) и изменим пределы
интегрирования в соответствии с условиями: при /=0 х=0 и при
/=оо х=л/2. При этом придем к выражению
п'2
F(s) = — С cos‘s/'~1 х sin л (D(x)dx. (6.8)
5 J
о
Более удобную форму выражение (6.8) примет, если s пред-
ставить в виде s= (2m-}-l)o:
ТС; 2
qF ((2т ф- 1)о) = j cos2'"x'sin лФ(х)4х, (6.9)
о
Можно показать, что
cos27!x sinx = 2"21! 2 [(^ j — L—J 1 s’nI- — 0 + Ip'L (6.10)
Здесь
/2m\ r-.k (2m')! „ o ,
= = —5------------число сочетании из 2m по к, причем
\ k j k\(2m— fe)!
( 1 принимается равным нулю.
Подставим (6.10) в (6.9), после чего поменяем порядок вы-
полнения операций суммирования и интегрирования:
((2И + 1) о) = 2- f 2 2" - ( , bin 1(2 (m -
6 l/=oL4 j 4 /J
\ m tc/2 г Л
. v Г I /2m\ f 2m \ 1
— z)+1)хПФ(х)</х = 4 2) ( .)— L X
j i=ob L ' 4 J
X sin [(2 (m — i) 4- 1) x j Ф (x) dx
= 4”'" )]ГФ(^)8ш[(2(т-/) + l)x]dx. (6.11)
i=0 L 4 * ' 1 1' -I о
Интеграл в правой части полученного выражения можно рас-
сматривать как выражение, определяющее Ск — коэффициент
125
для (2/e-j-l)-f[ гармоники разложения функции Ф(х) в ряд Фурье
по синусоидальным составляющим, т. е.
ч/2
ck = А у Ф (х) sin|(2& 4- 1) лс]cix. (6.12)
о
Следовательно, искомую функцию Ф(х) можно приближенно
представить рядом Фурье в виде суммы т составляющих нечет-
ных гармоник:
Ф(х) = sin[(2& 4 1)xj. (6.13)
При x=0 по выражению (6.13) Ф(0)=0 [следовательно,
f(O)=OJ. Пока будем считать, что условию f (0) = О удовлетво-
ряет искомый оригинал f(t). Затем это ограничение будет снято.
Таким образом, задача определения Ф(х) [а, следовательно,
и нахождения искомой f(0] в соответствии с выражением (6.13)
свелась к поиску коэффициентов Со, Ct,...,Cm. Рассмотрим, как
могут быть найдены значения этих коэффициентов.
Подставим (6.12) в (6.11) вместо интеграла:
oF((2n 4 1)о) = 4-|т+11 я ^17 — (. jRm-r (6.14)
1=0 L ' 1 ' J
Отсюда
т т + 1
X [(Т) - ±^°F ((2m+1)о)- (6J5)
i=0
Или, раскрывая стоящую слева сумму, выражение (6.15)
можно представить в форме
= —oF((2m + 1)о). (6.16)
Отсюда для вычисления коэффициентов Со,..., Ст можно со-
ставить следующую систему линейных уравнений.
Если в (6.16) положить т = 0, получим
Со^-—oF(3); (6.17)
при т=1 из (6.16) следует
Со-фС?! = — oF(3a); (6.18)
Л
126
при m = 2
2С0 + 3Cj 4-С2 = — aF(5a) и т. д. (6.19)
Таким образом, коэффициент Со вычисляется непосредственно
по выражению (6.17). Подставив найденное Со в (6.18), можно
определить коэффициент Cit а подставив вычисленные значения
Cq и Ci в (6.19), можно определить С2 и т. д. Как видим, для
определения коэффициента Ск должны быть известны значения
исходного изображения F(s) в точках о, Зо, 5о,..., (2&-]-1)<т.
Найденные значения коэффициентов Ск позволяют, восполь-
зовавшись выражением (6.13), определить значение Ф(х) и за-
тем по выражению (6.6) найти искомый оригинал f(f) для любых
значений t.
Теперь отметим некоторые особенности, связанные с рассмот-
ренным расчетом. Как было указано выше, использование выра-
жения (6.13) предполагает, что )(0)=0. Когда это условие ока-
зывается нарушенным, необходимо из исходного изображения
F (s) вычесть значения f(O)/s, т. е. в качестве изображения ис-
пользовать выражение F (s)—Затем после вычисления
оригинала к его значению следует прибавить /(0). Значение f (0)
можно определить из условия
/(0) = Нт sf(s).
s->oo
Значение <т определяется временным интервалом (max, в пре-
делах которого вычисляются значения оригинала f(t). Приняв,
что ст должно быть обратно пропорционально /max, его значения
МОЖНО выбрать, пользуясь соотношением О= ( 1 . . . 2)//max-
Еще одна особенность вычислений связана со следующим.
Стоящие в (6.16) перед величинами С, коэффициенты определя-
| / 1т \ / Im \ I „ ,
ются выражением вида — . Стремление обес-
L\m — i / \т — I — 1 / J
печить высокую точность конечных результатов вычислений вы-
зывает желание выбирать большим значение т [определяющее
число составляющих в аппроксимации (6.13)]. Однако с ростом
х /1т\
т быстро растет значение С2,п = —максимальное среди
\т /
вычисляемых чисел сочетаний. Уже при /?г>8 для точного пред-
ставления в ЭВМ значения требуется для представления чи-
сел длина разрядной сетки, превышающая 4 байта. Следует
иметь в виду, что, начиная с некоторых значений, дальнейший
рост т приводит к быстрому снижению точности представления
указанных выше чисел, при этом быстро растет погрешность ко-
нечного результата вычислений. Чтобы можно было выбирать
значения т>8 без внесения указанных погрешностей, необходи-
127
мо строить вычисления, используя представление чисел с двойной
точностью (с длиной разрядной сетки 8 байт). Однако и в этом
случае возможности точного представления результатов вычисле-
ний исчерпываются при /п>16. Таким образом, при одинарной
точности представления чисел в ЭВМ. рекомендуется выбирать
т<:8, при двойной — т^16.
На рис. 6.1 представлена схема алгоритма расчета отклика
цепи при известной передаточной функции. Блоки 2—10 осуще-
ствляют расчет коэффициентов С/, входящих в выражение
(6.13), блоки И—17 производят расчет и вывод значений откли-
ка для моментов времени, изменяющихся с шагом АТ Обозначе-
ния и выражения, присутствующие в схеме алгоритма, в основ-
ном совпадают с использованными при изложении метода расче-
та. Некоторые трудности могут возникнуть при рассмотрении
той части алгоритма, которая связана с формированием коэффи-
циентов Ct. Рекомендуется самостоятельно выполнить выкладки
128
в схеме алгоритма, приводящие к первым трем значениям коэф-
фициента, и убедиться, что они совпадают с их значениями в вы-
ражениях (6.17) —(6.19).
6.2. ПРОГРАММА АНАЛИЗА ПРОЦЕССОВ
ПО ИЗВЕСТНОЙ ПЕРЕДАТОЧНОЙ
ФУНКЦИИ
Алгоритм, изображенный на рис. 6.1, реализуется в програм-
ме 6.1. Исходными данными для расчета являются операторное
выражение F(s) произвольного вида и значения параметров, ха-
рактеризующих процесс вычислений. Результат расчета — ориги-
нал хвых(0, который, в частности, может быть переходной или
импульсной характеристикой.
Принятые обозначения. В программе 6.1 FNS(S)—функция,
описывающая в операторной форме изображение F(s) произ-
вольного вида; S — значение о в формуле (6.4); Т1—значение
временного интервала, в пределах которого определяется ориги-
нал ХвыхЦ); М — число составляющих в аппроксимации (6.13);
ТО — значение времени t, в которое определяется оригинал; Т —
значение временного шага, с которым определяется ТО; С1(1);
С1 (2),..., Cl (М) —массив коэффициентов в аппроксимации
(6.13); Y — оригинал Л'выхЦ); F0 — начальное значение /(0).
Описание программы. Блокам схемы алгоритма, изображен-
ной па рис. 6.1, соответствуют следующие строки программы 6.1:
блоку 1 — строки 6200—6204, блокам 2 и 3— строка 6206, бло-
ку 4 — строки 6208 и 6214, блокам 5 и 6 — строка 6210, блокам
7—10 — строки 6212 и 6214, блокам 11—13 — строки 6126—6220,
блокам 14 и 15 — строка 6222, блоку 16— строка 6224, блоку
17 — строка 6230.
ПРОГРАММА 4.1
6200 РЕМ ОБРАТНОЕ ПРЕОБРАЗОВАНИЕ ЛАПЛАС^
6202 DEF FNS(S)= ATN(2/6) X DIM Cl (20)
6204 INPUT TlrMrT»F0
6206 S=1.5/T1 \ B=4»S/PI X Cl(0)=B*(FNS(S>-F0/S)
6208 FOR 1=1 TO M
6210 Z=1 X A=2*I X B=4*B X Cl(I)=B*(FNS((2*1+1)»S)-F0/<(2»I+1)*S))
6212 FOR J=1 TO I \ U=Z*A/J X Cl(I)=C1(I>-(U-Z)*C1(I-J) \ A=A~1 \ Z=U
6214-NEXT J X NEXT I
6216 FOR T0»0 TO T1 STEP T \ IF T0=0 THEN X=0 X GO TO 6220
6218 X=EXP(-S»T0) \ X=PI/2-ATN(X/SQR<1-X*X))
6220 Y=0
6222 FOR 1=0 TO M \ Y=Y+C1(I)*SIN((2*1+1)*X) X NEXT I
6224 Y=Y+F0
6226 IF T0=0 THEN Yl=2 \ GO TO 6230
6228 Y1=SIN(2*T0)/Т0
6230 PRINT T0>Y»Y1 X NEXT T0
6232 STOP
9—6030
129
Таблица 6.1
t Расчет по формуле f (О = sin 2/,'t Расчет / (О методом обратного преобразования Лапласа
Л1 = 8 (одинарная точность) Al = J6 (двойная точность)
0 2 2 2
0,4 1,79339 1,81524 1,78772
0,8 1,24947 1,23334 1,25574
1,2 0,562886 0,605086 0,565042
1 ,6 —0,0364838 —0,0798821 —0,0385625
2 —0,378401 —0,415345 —0,384043
2,4 —0,415068 —0,359727 —0,398261
2.8 —0,225452 —0,147725 —0,240543
3,2 0,0364216 0,0316392 0,0262538
3,6 0,220463 0,117476 0,243918
Для иллюстрации работы программы выбрана функция
F(s) = arctg(2/s),
для которой известен оригинал
Программа 6.1 представлена в форме, предусматривающей
двукратное вычисление оригинала функции F (s) = arctg(2/s): по
приведенному выше аналитическому выражению f(t) =sin 2.t[t
(строки 6226—6228) и методом обратного преобразования Ла-
пласа. Результаты расчета при значениях параметров Т1 = 4, Т—
= 0,4, F0 = 2 приведены в табл. 6.1.
При использовании программы для выполнения обратного
преобразования над другими функциями необходимо внести в нее
следующие изменения: в строке 6202 следует записать аналити-
ческое выражение функции F(s), строки 6226—6228 исключить,
а в строке 6230 в операторе PRINT убрать переменную Y1.
Рекомендации по использованию. Для нахождения оригинала
от произвольного операторного выражения K(s) его следует
описать в первых строках программы с помощью оператора
DEF FNS(S) = ... Затем необходимо найти значение F0 и ввес-
ти его в программу. В соответствии с рекомендациями, изложен-
: - Р Рис. 6.2 ными в описании алгоритма, следует уве- личивать значение М для получения бо- лее точного результата (при этом по- мнить, что максимальное значение М мо- жет быть равно 8 или 16 в зависимости от того, с какой точностью выполняется расчет: одинарной или двойной).
130
Пример 6 1. Рассчитать переходную характеристику иепи, изображенной на
рис. 6.2.
Передаточная функция этой цепи
1 /(АС)
К (5) = 52 + s(?/A + 1 (LC) ’
Переходная характеристика определяется с помощью обратного преобразования
Лапласа
h (/) «- К (s)/s.
Примем значения параметров элементов: £. = 100 Гн, С = 0,01 Ф, 7? = 0,1 Ом.
В этом случае последовательный контур, изображенный на рис. 6.2, является
высокодобротпым.
Значение /(0) определяем из выражения
f (0) = lim sK (s) = 0,
S-»oo
т. e. в програм.му следует записать Г0 = 0.
Для расчета переходной характеристики удобно польссззться программой
6.2. В ней используется тот иге метод и алгоритм обратного преобразования
Лапласа, что и в программе 6.1. Отличие состоит в том, что предусматривается
задание числителя (FNA) и знаменателя (TNB) передаточной функции. Исполь-
зуемая в программе переменная Т2 использована для задания значения
В приведенном тексте программы F\A и F.XB соответствуют передаточной
функции рассматриваемой цепи.
По приведенной программе с помощью обратного преобразования Лапласа
рассчитаем значения переходной характеристики и сравним их с результатами
расчета по программе 3.4 (интегрирование уравнений состояния). Для выпол-
нения расчета по программе 6.2 приняты значения М=16, Т = 0,2. При интег-
рировании уравнения состояния шаг интегрирования принят Т = 0,2, порядок
формулы интегрирования k = 4 (точность, соответствующая методу Рунге — Кут-
та четвертого порядка), интервал интегрирования 11 с.
ПРОГРАММА 6.2
6200 REM ОБРАТНОЕ ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
6201 DEF FNB <S> =S' 2+.001»S+1 X DIM СК16)
6202 DEF FNA(S>=1 X DEF FNS<S>=FNA<S>/FNB<S»ZS
6204 INPUT T1»M»T>T2
6206 F0=0 X S=1.5/T2 X B=4*S/PI X Cl(0>=B»(FNS(S)-F0ZS)
6208 FOR 1=1 TO M
6210 Z=1 X A=2»I X B=4*B X Cl(I>=B»(FNS((2»I+1>»S>-F0/((2»I+1>»S>>
6212 FOR J=1 TO I X U=Z»A/J X Cl(I)=C1<I>-(U-Z>»C1<I-J> X A=A-1 X Z=U
6214 NEXT J X NEXT I
6216 FOR T0=0 TO T1 STEP T X IF T0=0 THEN X=0 X GO TO 6220
6218 X=EXP(-S*T0> X X=PIZ2-ATN(XZSOR(1-X»X)>
6220 Y=0
6222 FOR 1=0 TO M X Y=Y+C1(I>*SIN((2*1+1>*X) X NEXT I
6224 Y=Y+F0
6230 PRINT T'-Y X NEXT T0 X RETURN
9
131
Таблица 6.2
t Расчет по програм- ме 6-2 (методом обратного преобразования Лапласа) Расчет по програм- ме 3-4 (методом инт егрирования уравнения СОСТОЯНИЯ) Расчет по програм- ме 6.2 (методом обратного преобразования Лапласа) Расчет по програм- ме 3-4 (методом интегрирования уравнения ] СОСТОЯНИЯ)
0 0 0 6 —0,518502 0,042844
1 0,449886 0,45954 7 0,392712 0,24839
2 1,40204 1,4152 i 8 1,30345 1,1444
3 1.96874 1,9884 j 9 1,76389 1,9068
4 1,74547 1,6527 10 1,52696 1,8351
5 0,63291 0,71752 11 0,965189 0.9961
Результаты расчета приведены в табл. 6.2. Там же приведены результаты
расчета тех же величин, проведенного методом интегрирования уравнений со-
стояния. Из таблицы видно, что характеристики, полученные двумя методами,
имеют близкие значения. При этом следует иметь в виду, что трудоемкость по-
лучения характеристик путем интегрирования уравнения состояний выше, чем
при использовании обратного преобразования Лапласа.
6.3. АЛГОРИТМ АНАЛИЗА ПРОЦЕССОВ
ПО ИЗВЕСТНОЙ ЧАСТОТНОЙ
ХАРАКТЕРИСТИКЕ
Анализ при периодическом воздействии. Рассмотрим случай,
когда на входе узкополосной цепи действует периодическое коле-
бание Хвх(0 с периодом Тп. Известно, что периодическое колеба-
ние имеет дискретный спектр, составляющие которого являются
коэффициентами ряда Фурье и вычисляются по формуле
/гвх
е adt
(6.20)
где Сь вх — комплексная амплитуда k-ii гармонической составля-
ющей входного сигнала хВх(0, частота которой fk=k/Tn. Заме-
тим, что такая запись комплексного сигнала предполагает его
представление в виде неподвижного вектора на комплексной
плоскости, в свою очередь вращающейся с угловой скоростью
(Ой — 2 л & — 2 л .
1 п
Таким образом, использованная запись выражения составля-
ющих приводит к тому, что каждая из них оказывается представ-
ленной в отдельной плоскости, вращающейся с частотой, соответ-
ствующей данной составляющей. Это вызывает трудности при
их суммировании. Поэтому используем для них иную запись, при
которой все они представлялись бы в одной комплексной плоско-
132
сти, вращающейся с некоторой определенной частотой. В качест-
ве такой комплексной плоскости в рассматриваемом случае удоб-
но выбрать плоскость, вращающуюся с частотой составляющей
входного сигнала f0, ближайшей к средней частоте полосы про-
пускания цепи. Пусть эта частота является частотой m-й компо-
ненты, т. е. fQ=m/Tn.
Будем вести отсчет составляющих от составляющей с номе-
ром т. Таким образом, k-ii составляющей присваивается индекс
i=k—т. При этом составляющая с частотой f0, ближайшей
к средней частоте полосы пропускания цепи, будет иметь индекс
i=0, составляющие с частотами ниже f0 будут иметь индексы
(СО, большими f0 — индекс г>0.
Комплексная амплитуда i-й составляющей входного сигнала
в такой общей для всех составляющих плоскости представится
выражением
CiBX = e/2^/rn^_ f (6.21)
' п Л
Множитель г'
комплексной
частоту.
Интеграл
7-п/2
С I
-Тп/2
Гп/2
-7-п/2
сообщает вектору CiBi вращение в общей
плоскости, обеспечивая вектору свойственную ему
в выражении (6.21) можно представить в форме
Гп/2
= ( xBX(0cos2x^^-
п п
-С/2
sin 2z - ' tdt = V;' + /с
7П ‘ '
= v, е'
(6.22)
Для вычисления каждого интеграла можно использовать обыч-
ные приемы численного интегрирования. С учетом (6.22) выра-
жение (6.21) примет вид
= (6.23)
Каждая i-я составляющая входного сигнала передается на
выход цепи с коэффициентом передачи
Kt = к - к (-<-) 'T”) = (6.24)
где К} = К (ZM —ордината АЧХ цепи на частоте f = (i т)/Тп‘
'. и /
<рг = с;? (’ m 'j — ордината ФЧХ на той же частоте.
133
Таким образом, i-я составляющая входного сигнала на выхо-
де цепи будет определяться выражением
CiB.„x = ClBx Ki = vtKt e'W*«'4 (6<25)
Результирующий вектор выходного сигнала
а а
£ Сгв,„х(0= 2 ^^(^+^ + 2^) +
/=—а ! = —а
+ j V OjATsin f'i; + ог 4- 2т:—Ц = -l /S.pl. (6.26)
\ тп )
i = —a
Вычисленные временные функции Si(t) и S2(t) позволяют
определить многие характеристики отклика на выходе цепи.
Мгновенное значение отклика. Для вычисления мгновенного
значения отклика необходимо вектор С’зых(1) умножить на вра-
щающий множитель е7"’'01 — еу*""‘;п (где f0 = m/Ts;— частота
вращения общей плоскости, на которой суммируются составляю-
щие выходного сигнала) и затем найти проекцию вектора па
мнимую ось:
(/) = Im(С’вых (/) е;2г''!//7и =
— I 3,--у S2-(0sin farctg-^- - '2т. ।. (6.27)
\ *^1(O '-a i
Огибающая амплитуд и фаз отклика. Из выражения (6.27)
очевидно, что огибающая амплитуд должна определяться выра-
жением
(6.28)
Огибающая фаз (определенная как временная зависимость
отклонений мгновенной фазы от значения 2лт!/Тп) представля-
ется выражением
50Г (0 = arctg . (6.29)
Огибающая частот. Известно, что частота колебаний опреде-
ляется как производная по времени от мгновенной фазы колеба-
ний. Будем определять огибающую частот, отсчитывая частоту
относительно Щ = т;Тп. Тогда
d d
. s1(o — s2d)-s2(t)-— s^t)
5сгчасг(О = — 5огфазы(0= — 5,2(0 4-3,2(0 ' (6'30')
134
Входящие в (6.30) производные определяются следующими
выражениями:
а
S3(t) = -±-S2(t)=~ V + =
dt dt Ы \ i n /
z=—a
a
_ _?E- V iv к cos (д ж <? r 2r —/Y
'p / j it I I I I T I 1 'p I ’
1 п ш \ 1 П /
i——>a
(6.31)
a
'iKtsin Г
(6.32)
Приведенные выше выкладки позволяют построить схему ал-
горитма вычисления мгновенных значений и огибающих отклика
узкополосной цепи на периодические воздействия. Схема этого
алгоритма изображена на рис. 6.3.
Анализ при непериодическом воздействии. Непериодический
сигнал имеет сплошной спектр. Такой спектр характеризуется
спектральной функцией S(co), определяемой интегралом Фурье.
Пусть Л'ВХ(П—входной сигнал во временной области. Спектраль-
ная функция Звх(м) сигнала хвх(0 представляется прямым пре-
образованием Фурье
ОО
5BX(/)= J xS3(f)e~iatdt.
— ос
(6.33)
Если /< (со) =/С(со) е/ч=(<>)— частотная характеристика цепи,
представляющая собой частотную зависимость комплексного ко-
эффициента передачи, то спектральная функция выходного сиг-
нала
5Вых (®) = 5ВХ (<«) К (со) — SBX (со) К (и) е/1₽(ц>) =
= 5вх(со)К(со)е/“?(ш,+ф(ш)). (6.34)
Здесь Звх(и) =SBX(tt>)где Sbx(<b) и ф(со) — соответственно
модуль и фаза спектральной функции на частоте со.
Обратным преобразованием Фурье, выполненным над
£вых(<о), можно определить выходной сигнал во временной обла-
135
Рис. 6.3
сти в мгновенных значениях
оо
*вь,х (0 = ~ f сГсо =
— оо
00
= _2_ [ SB. (со)ХНе7(“' + ¥(ш)++(ш,)^.
2п J
— 00
136
(6.35)
Так как SBX(co), К(ш) — четные, а ф(о>), ф(о>) — нечетные
функции частоты, то интегрирование в (3.35) можно вести в пре-
делах 0 ... оо:
ОО
хВЬ1Х V) = Re 4- f W K (6.36)
b
Рассмотрим прохождение сигнала через цепь, имеющую уз-
кую полосу пропускания частот. Обозначим среднюю частоту
в полосе пропускания f0 и примем, что за пределами полосы
частот (fo—Fn) ... (fo+Fn) модуль коэффициента передачи име-
ет малые значения, вследствие чего (6.36) можно представить
приближением
2тс(/0 + /='1! >
хвых (/) = Re — f Звх(«))л МеЛ“/ + ?(“’+'ф(ш!)б/со. (6.37)
2Г-(.Д—Гп)
Для вычисления интеграла в (6.37) разобьем полосу частот
О ... Fn на п равных частей и пусть Fn/«=/o/wz- Тогда интеграл
можно заменить суммой
^(O = Re-L £ (6.38)
/=—п
где <£>1 = -~/0 —2—.
т
Выражение (6.38) определяет мгновенные значения выходно-
го сигнала. Из него следует, что выходной сигнал можно описать
суммой дискретных спектральных составляющих с частотами
2л/о ———, где t = —п ... п. Представим эти составляющие век-
т
торами в комплексной плоскости, вращающейся с частотой /о-
При этом результирующий вектор в этой плоскости определится
выражением
п
^вых (^) ~ ^вх
(6.39)
Определив St(t) и S2(t), далее по выражениям (6.27) — (6.32)
можно рассчитать мгновенные значения, огибающие амплитуд,
фаз и частот.
Расчет передаточной характеристики узкополосной цепи. При
воздействии на узкополосную цепь сигнала, имеющего форму
137
единичной функции, на выходе цепи образуется отклик в виде
гармонических колебаний с относительно медленно изменяющи-
мися огибающими амплитуд и частот. Расчет такого отклика мо-
жет быть основан на выражении (6.39). Определим входящую
в выражение спектральную функцию SBx(w) сигнала на входе
цепи. Так как в рассматриваемом случае входной сигнал
10 при £<0,
хвх(0 || прИ / О,
то
00 оо
(со) = f Л-ВХ (0 е-/ш/ dt = [ е/ш/ dt = -L.
J J
—оо О
Следовательно,
Подставив эти выражения в (6.39), получим
У . (6.40)
ТС Ш I 1
i=—n
Отсюда
п
S1(t\ —— V —5— К (со;) cos [2r.foitlm + »(®г) — т/2]=
i = —n
п
— — у -^1--К(а;)5т|2т/0г7/т + <? (6.41)
i=—n
п
S2(0 = — У —Jp- К (cojsinj 2r.foit/m -}-?((ог) — т/2] =
тс /к т —i
i = —n
п
L б _L_
л / J »г -4- г
— п
К (ыг) COS [2т/0г7/т Д- ? (сог)|.
(6.42)
Далее по выражениям (6.27) — (6.32) можно рассчитать ха-
рактеристики отклика (мгновенные значения, огиоающие ампли-
туд, фаз и частот).
138
6.4. ПРОГРАММА АНАЛИЗА ПРОЦЕССОВ
по известной частотной
ХАРАКТЕРИСТИКЕ
Анализ процессов по известной частотной характеристике осу-
ществляется по алгоритму, схема которого изображена па
рис. 6.3. Этот алгоритм реализует программа 6.3, в которой осу-
ществляется расчет мгновенного значения отклика цепи л'ВЫх(0
по формуле (6.27), огибающих амплитуд и фаз — по (6.28) и
(6.29), а также огибающей частот — по (6.30). Исходными дан-
ными для расчета являются матрицы уравнения математической
модели цепи AI; А2, Di и значение скаляра D2. В программе ис-
пользуются в качестве подпрограмм программа П.1 для ввода
исходных данных в виде уравнений схемы и программа 3.2 или
3.3 для расчета частотных характеристик.
Принятые обозначения. В программе 6.3 переменным при-
своены имена: Х% — порядок матрицы Ад Al, А2, D1, — масси-
вы для хранения матриц Aj, А;, Dj, входящих в уравнения цепи;
D2 — скаляр £)2 из уравнения отклика; 2Х — число отсчетов в по-
лосе частот; М — коэффициент, определяющий шаг изменения
частоты [соответствует т в (6.24) ]; ТО соответствует произве-
дению fot; КО и Y0 — значения огибающих амплитуд и фаз; КО и
Y0—массивы размерностью 2Х для хранения значений модуля и
фазы комплексных коэффициентов передач на 2N отсчетах час-
ПРОГРАНМА 6.3
6400 REM ««АНАЛИЗ ПРОЦЕССОВ ПО ИЗВЕСТНОМ ЧАСТОТНОЙ ХАР-КЕ «К
6401 PRINT 'ЗАДАЙТЕ ЧИСЛО ОТСЧЕТОВ №"» X INPUT N
6402 PRINT "ВВЕДИТЕ ШАГ ОТСЧЕТОВ <F/M> М = "> X INPUT М
6404 PRINT "ВВЕДИТЕ ПЕРИОД T="l X INPUT Т
6406 PRINT "ПРИРАШЕНИЕ ПЕРИОДОВ "I X INPUT 00
6407 PRINT "ВВЕДИТЕ ДЛИТЕЛЬНОСТЬ ПРОЦЕССА Т1 = ') \ INPUT Т1
6408 FX-0 X 0=0 X Т0-.25 X GOSUB 3300 X IF Ы4Х = 1 THEN Т0=«
6410 FOR I=-N ТО N X F=<l+I/M)/T X F1=T X Kl = l X K2 = l \ GOSUB 3512
6412 FX-FX+1 \ Y0(FX)=Y0 X K0(FX)=K0 X NEXT I
6414 PRINT "ВЫВЕРИТЕ ХАРАКТЕРИСТИКУ" X DIM Y0<300),К0<300)
6416 PRINT "МГНОВЕННОЕ ЗНАЧЕНИЕ ОТКЛИКА -> 1"
6418 PRINT "ОГИБАВШАЯ АМПЛИТУДЫ -) 2"
6420 PRINT "ОГИБАВШАЯ ФАЗЫ -> 3"
6422 PRINT "ОГИБАВШАЯ ЧАСТОТЫ -> 4"» X INPUT Ы4Х
6424 FX=0 X S1»0 \ S2-0 X S3=0 X 84=0
6426 FOR I=-N ТО N X FX-FX+1 X W1-2«PI»T0«I/M+Y0<FX)
6428 C-K0<FX)«COS<U1)/<M+I) X S=K0 <FX) «S IN <W1) / <M + I)
6430 S2-S2+C X 81=81+8 X S3-S3+S»! X S4=S4+C*I X NEXT I
6432 S1-S1/PI X S2--S2/PI X K0-SQR<S2»32+S1«S1) X Y0-ATN<S2/S1)
6434 PRINT O*T> X ON Ы4Х GO TO 6436>6438»6440.6442
6436 X-K0«SIN<Y0+2»PI«T0) X PRINT X X GO TO 6444
6438 PRINT K0 X GO TO 6444
6440 PRINT Y0 X GO TO 6444
6442 S3»2«S3/T/M X S4=2«S4/T/M X S0=<S1»S3-S2«S4>/<K0«K0> X PRINT 80
6444 0-0+00 X T0-T0+O0 X IF T0<=T1 THEN 6424
6446 RETURN
139
тоты; S1 и S2 соответствуют Si и S2 в выражении (6.26), S3 —
производной Sr в выражении (6.31), S4 — производной S„
dt dt
в выражении (6.32); X — мгновенное значение отклика хВы.ч(0;
SO — значение огибающей частот; W4% — переменная, определя-
ющая вид расчета; ОО — величина, показывающая количество
пропускаемых периодов колебаний при нахождении амплитуды
огибающей.
Описание программы. Программа 6.3 соответствует схеме
алгоритма, изображенной на рис. 6.3. Блоку 1 соответствует
группа операторов в строках 6400—6407. После ввода в этих
строках необходимых для расчета значений параметров N, М, Т,
характеризующих fm-m и fmzx частотной характеристики, в строке
6408 рассчитывается передаточная функция (по программе 3.1).
Затем в цикле определяются значения модуля и фазы комплекс-
ных коэффициентов передачи. Блокам 3—6, отражающим этот
цикл, соответствуют строки 6410 и 6412. При этом вхождение
в программу 3.2 (программу расчета частотной характеристики
через передаточную функцию) осуществляется через строку 3512,
чтобы обойти запрос данных в этой программе.
В строке 6410 данные для программы 3.2 формируются та-
ким образом, чтобы осуществился расчет модуля КО и фазы Y0
комплексного коэффициента передачи на одной частоте (F=F1).
Получаемые значения КО и Y0 заносятся в массивы КО и Y0.
Значения KI = K(f) и ф£ = ф(/:) в массивах КО и Y0, лежащие
В ДИЭПаЗОНб ОТ fmin ДО fmax, служат базой для дальнейших рас-
четов. Выбор вида расчета осуществляется в строках 6414—6422.
Затем блоки 7 и 8 реализуются в строках 6424—6430.
В зависимости от выбранного вида расчета в программе идет
разветвление: в строке 6436 производится расчет мгновенного
значения отклика хвых(0 (блок 13), в строке 6438 — огибающей
амплитуд (блок 14), в строке 6440 — огибающей фаз (блок 15),
в строке 6442 — огибающей частот (блок 16). В этих же строках
выводятся па экран полученные результаты расчета.
В строке 6444 увеличивается время ТО и, если значение ТО
(в программе начальное значение принято равным четверти пе-
риода) оказывается меньше заданной длительности Т1, расчет
продолжается при новом ТО, увеличенном на заданное прираще-
ние периодов ОО.
Рекомендации по использованию. В программе 6.3 для полу-
чения значений модуля КО и фазы Y0 комплексных значений ко-
эффициента передачи использованы программы 3.1 и 3.2. Тот же
результат можно получить с помощью программы 3.3. Для этого
следует в строке 6408 убрать обращение к программе 3.1 (опе-
140
Рис. 6.4
ратор COSUB 3300), а в строке 6410
обратиться к строке 3712 (вместо
3512).
Выбор значений числа отсчетов
N и шага отсчета (с помощью па-
раметра М) обусловлен характе-
ром изменения кривой частотной
характеристики. При резком ее из-
менении следует увеличивать число
составляющих N и уменьшать шаг отсчетов, т. е. увеличивать зна-
чение М.
Пример 6.2. Рассчитать переходную характеристику узкополосного фильтра,
изображенного на рис. 6.4.
Его АЧХ, полученная с помощью программы 3.3, представлена на рис. 6.5.
Анализ АЧХ показывает сложность расчета во временной области, поскольку
цепь имеет чрезвычайно высокую добротность.
Когда рассчитывают мгновенные значения отклика цепи с помощью про-
граммы 3.4, получается характеристика, представленная на рис. 6.6 (расчет про-
изведен с шагом Т=0,314 с до значения rmax = 37,68 с, порядок формулы интег-
рирования 6, шаг вывода результатов на экран 2). Период колебаний получает-
ся равным 6,28. Если при шаге интегрирования Т = 0,314 вывод осуществлять
через 200 значений, то можно получить огибающую амплитуды. Результаты та-
кого расчета до момента /гпа.х = 3768 с представлены на рис. 6.7. Для построения
этой характеристики в программе 3.4 выполнено 12 000 шагов интегрирования.
Построим зависимость амплитуды огибающей от времени с помощью про-
граммы 6.3. Для выполнения расчета примем Х = 50 и М = 5000, т. е. будет
>>>>>> ЧАСТОТНАЯ ХАРАКТЕРИСТИКА
32270Е+0
30S71E+0
.28373Е+0
•27174Е+0
•25476Е+0
.23778Е+0
-22679Е+0
•203S1E+0
.13682Е+0
.16984Е+0
.15285Е+0
. 13587Е+0
. 11S39E+0
. 10190Е + 0
.84921Е-1
-67937Е-1
50952Е-1
•33968Е-1
.16964Е-1
.14901Е-7
1 МММММММММММММММММММ
мммммммммМмммммммммм*
..... .15500Е+0 ---------------------------------------------.1<542»Е+е
Рис. 6.5
141
>>>>>>
ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
< < < < <
.18447Е->
.16678Е-4
.14909Е-4
.13139Е-4
.11370Е-4
.96011Е-5
.78318Е-5
.60А25Е-5
.42932Е-5
.25239Е-5
.75465Е-6
.10146Е-5
.27839Е-5
.45532Е-5
.63225Е-5
.90918Е-5
.98611Е-5
.11630Е-4
.13399Е-4
.15169Е-4
.16938Е-4
И
К
М
* м
м
к *
-31400Е±0 ------------------------------------------------ .37679Е+2
Рис. 6.6,
>Ш>> ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА <<<{<
.2^47Г-3
•27880Е-3
•26413Е-3
.24945Е-3
•23478Е-3
,22010Е-3
.20543Е-3
«19076Е-3
«1760ВЕ-3
U4141E-3
«14673Е-3
«13206Е-3
•11739Е-3
.10271Е-3
•88043Е-4 I
«73369Е-4 !
>58695Е-4 I
.44021Е-4 I*
«29347Е-4 !
•14673Е-4 !
♦.00000000 !---------------------------------------------------------->
—---- .31400Е+0 -------------------------------------------- .37677Е+4
Рис. 6.7
рассчитано 100 значений модуля и фазы комплексного коэффициента передачи
с шагом отсчета по частоте fo/5OOO. Значение ОО выберем таким образом, чтобы
получить значения огибающей амплитуды в те же моменты времени, что и
в расчетах, выполненных по программе 3.4. Результаты расчета сведены в табл.
5.3. Из таблицы следует, что даже для такой узкополосной цепи, какой является
142
Таблица 6.3
Время, Расчет огибаощей амплитуды ' Время, с Расчет огибающей амплитуда/
по программе 6.3 по программе 3.4 по программе 6-3 по программе 3.4
314 1,32348 £—04 1,3296 £-04 1884 2,70683 £—04 2,6766 £—04
628 2,22639 £—04 2,2171 £—04 2198 2,39669 £—04 2,3541 £—04
942 2,73542 £—04 2,7257 £—04 2512 2,01690£—04 1,9700 £—04
1256 2,93957 £—04 2,9254 £—04 2826 1,62134 £—04 1,5652 £—04
1570 2,91131 £—04 2,8869 £—04 3140 1,22614 £—04 1,1706 £-03
схема, представленная на рис. 6.4, выбранные параметры расчета дают прием-
лемую точность.
Здесь следует иметь в виду, что значения огибающей могут быть получены
в произвольные моменты времени t и расчет не требует знания значений оги-
бающей в предыдущие моменты времени. Если предположить, что затраты вре-
мени на один шаг интегрирования в программе 3.4 составляют 2 с, то для про-
ведения п шагов потребуется 2л [с] (если п = 2000, то время счета будет 4000 с).
При расчете по программе 6.3 требуемое значение можно получить примерно за
2 с и, таким образом, время счета сокращается в п раз.
6.5. АЛГОРИТМ АНАЛИЗА ПРОЦЕССОВ
С ИСПОЛЬЗОВАНИЕМ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ ЦЕПИ
Методы анализа, применяемые при автоматизированном про-
ектировании различных узлов радиоэлектронной аппаратуры, эф-
фективны в тех случаях, когда переходные процессы носят апе-
риодический или быстрозатухающий характер. Однако сущест-
вует ряд устройств, для оценки характеристик которых требуется
моделирование на ЭВМ протекающих в них процессов на про-
тяжении большого числа периодов входных или генерируемых
в устройстве колебаний. К классу многопериодных относятся де-
текторы, модуляторы, избирательные усилители, автогенераторы
гармонических колебаний, выпрямители, стабилизаторы напря-
жения с непрерывным и импульсным регулированием и т. и.
Попытки применять для анализа таких устройств методы чис-
ленного интегрирования обыкновенных дифференциальных урав-
нений, рассмотренные в гл. 3, зачастую приводят к необходимо-
сти выполнения чрезмерно большого объема вычислений.
Может быть достигнута большая экономия машинного време-
ни, если учесть, что в многопериодных (высокодобротпых) систе-
мах огибающая переходного процесса является медленно изме-
няющейся функцией времени по сравнению с периодом возника-
ющих колебаний.
Численное интегрирование уравнения состояния в этом случае
можно представить в виде двух процессов: процесса интегриро-
143
Рис. 6.8
вания на протяжении срав-
нительно малого числа ко-
лебаний с шагом Т, который
рыбирается с помощью изло-
женной в § 3.8 методики.
Этот процесс подготавлива-
ет данные для выполнения
шагов «по огибающей»
Н^Т. Шаг Н может состав-
лять несколько десятков
(сотен) периодов колеба-
тельного переходного про-
цесса, что и обусловливает
соответствующее ускорение
вычислений [12].
Пусть для резонансного линейного устройства с высокой доб-
ротностью получены уравнения состояния и отклика. Восполь-
зуемся для простоты формулой явного интегрирования (3.43):
X(«7’+7')=F1X(«7')+F2.
Примем нулевые начальные условия: Х=0. Интегрируя урав-
нение состояния с шагом Т, составляющим доли периода коле-
баний в цепи, найдем два ближайших максимума отклика на
выходе Хвых(0- Пусть им соответствуют моменты времени 6 и t2
и значения вектора состояния Х(С) и Х(/2) (рис. 6.8). Учитывая
«медленность» изменения амплитуды колебаний хВых(0, можно
считать, что далее в течение многих m периодов (где m может
составлять десятки и сотни) изменение Х(0 в моменты, когда
Хвых(/) принимает амплитудное значение, происходит с не-
изменной скоростью. При этом
X(/2+m(/2-/I))=X(/2)+m[X(/2)-X(/1)J.
H=m\t2—1[) назовем шагом «по огибающей». Для проверки точ-
ности расчетов целесообразно производить два расчета «по оги-
бающей»: с шагом Н и шагом Н/2. Сравнение результатов рас-
четов служит для определения шага Н, при котором результаты
удовлетворяют предъявленным к точности расчетов требованиям.
В данном алгоритме, где шаги интегрирования периодическо-
го процесса чередуются с шагами интегрирования по огибающей,
важную роль играет определение начальных условий в каждом
цикле интегрирования. В [12] изложен алгоритм нахождения
вектора начальных условий и показано, что данный метод эффек-
тивен при анализе линейных схем высокой добротности.
144
УПРАЖНЕНИЯ
1. Приведенная на рис. 6.9 схема полосового фильтра имеет передаточную
функцию, описываемую выражением
tf(s) = 4,03 • 10Js/(s2 +1,884 102s + 3,55 • 106).
При использовании масштабных коэффициентов Л4/=10~3 и Л4/=103 выра-
жение К (s') принимает вид
K(s) = 4,03s/ (s2 + 0,1884s + 3,55).
Используя последнее выражение и программу 6.2 обратного преобразования
Лапласа, приведенную в § 6.2, рассчитайте с помощью ЭВМ:
а) переходную характеристику h (/) «- — К (s) | , б) импульсную характери-
L s J
стику [г(.')+К (s)J.
2. Уравнения математической модели приведенного на рис. 6.9 фильтра опи-
сываются следующими выражениями (при использовании масштабных коэффи-
циентов Af-=10"3, Л1/=103):
d 14-1(0] Г—3,7682 203,17'
dl [uC2(/)]-L—7,5365 405,41.
“ci(0] [0,94339
uc2(oJ ' L 1,8867
«в; (О,
«вых(0 = [0 73,257] -ф0-ивх(/).
иС2
На входе фильтра действует одиночный импульс напряжения П-образной
формы с амплитудой 1 В и длительностью 1 мс.
Используя эти условия и программу 3.4, рассчитайте с помощью ЭВМ:
а) мгновенное значение отклика, б) огибающую амплитуд отклика, в) огибаю-
щую частоты отклика.
3. Повторите решение задачи 2, используя программу 6.3 (программу ана-
лиза с использованием частотной характеристики). Сравните результаты с по-
лученными при решении задачи 2 данными.
4. Рассчитайте переходную характеристику фильтра, приведенного на рис. 6.9.
используя программу 6.3.
Рис. 6.9
10—6030
145
Глава 7. ПРОХОЖДЕНИЕ МОДУЛИРОВАННЫХ
КОЛЕБАНИИ ЧЕРЕЗ ЛИНЕЙНЫЕ ЦЕПИ
7.1. АНАЛИЗ АМПЛИТУДНО-
МОДУЛИРОВАННЫХ СИГНАЛОВ
В ЛИНЕЙНЫХ ЦЕПЯХ
Пусть амплитуда несущего колебания Хто, его частота f0. Дейст-
вующее на входе линейной цепи модулированное колебание при
этом будет иметь форму
Л-Вх (/) =XmQ [ 1 +л-н (/) ] sin 2xf0t, (7.1)
где Xa(t)—модулирующая функция, значения которой лежат
в интервале, определяемом неравенством —l^-vM(/)^l.
Рассмотрим случай, когда модулирующая функция уДГ)
представляет собой гармоническое колебание частоты F:
А'м(0 — mzos2nFt, (7.2)
где ш — коэффициент, характеризующий глубину амплитудной
модуляции.
Подставим (7.2) в (7.1):
ХВх(Ц =Xmo(l+"I cos 2-тН) sin2n/oi =
= Xm0sin2n/ol+Xmo^sin (2л/о0 cos (2лИ). (7.3)
Используем известное из тригонометрии соотношение
2sinacos p=sin(a+P)-(-sin(a—p).
Тогда выражение (7.3) примет вид
-Ах (0 = Am0 sin 2Д0/ 4- -j- Х„лпг sin 2z (/0 + F)t +
4- А',„сщ sin 2т: (/0F)t. (7.4)
Выражение (7.4) определяет спектр рассматриваемого мо-
дулированного колебания. Представим спектральные составля-
ющие колебания в комплексной плоскости, вращающейся с час-
тотой несущего колебания Д>- Тогда результирующий вектор вход-
ного колебания определится следующим выражением:
С... (О - У» (1 + ~~ т J*" + X е-«-« ) - £ (7.5>
<=-1
здесь v0 = Am0, ц_х = щ = ±-тХпЛ.
146
Пусть комплексные коэффициенты передачи цепи для состав-
ляющих модулированного колебания равны
Л', = К (/0 + iF) = Aj/o+ iF)e,'f('° + !F> = /^е'Ч, (7.6)
где /(, = /((/о-|~iF)—ордината АЧХ цепи на частоте fo-\-iF; <рг=
= ф(/о+?А)—ордината ФЧХ цепи на той же частоте.
При этом результирующий вектор выходного сигнала
СВых(Ч= 2 цгКге'2‘’= 2 иЛ«соз(2"'^ п-?i)-г
/=—1 /=-!
1
+ / 2 viKisin (2иТ/ л- Tf t = 51 (?) - /5, ( ?) =
£ = -l
^J 'VI?) X? (?) ez arcts i/Sl(Z(7.7)
где
1
511?)-= 2 Vi^i C0S l-r/A? -- Cjl,
—1
1
S,(?) = 2 sin (2t./F? — cpj.
/•=-1
Мгновенное значение выходного сигнала. Мгновенное значе-
ние сигнала на выходе цепи определится умножением СВых(?) на
„ 2г f t
вращающий множитель е ° и нахождением затем проекции на
мнимую ось комплексной плоскости
хВых (?) = 1т(Свых (ОФ2кГ°1) =
= Im (j Sf (?) + S22 (?) e/(arctg «•«l/MiW)) =
= VS^d) + S22 (?) sin (2x/0? + arctg Sj/Sj). (7.8)
Огибающая амплитуд и фазы. Из выражения (7.8) следует,
что выходной сигнал представляет собой колебание частоты f0,
у которого амплитуда изменяется во времени по закону
50г амил (0 = ] ХЛО + ЗЛО, (7.9)
фаза колебания изменяется во времени по закону
50Гфаз(?) = arctg-|^-. (7.10)
г>1 а)
Выражения (7.9) и (7.10) определяют огибающие выходного
сигнала соответственно по амплитуде и фазе.
10* 147
Огибающая частот. Так как мгновенная частота колебания
определяется производной по времени от мгновенной фазы коле-
бания, то мгновенная частота сигнала хВЫх(0
/ (О = ~ (2^ + arctg S2 (О/S, (/)) =
at
= io-\— ---—arctg (7.11)
° 2п dt S Sj(O v
Огибающая частот определится как временная зависимость от-
клонений мгновенной частоты от частоты несущего колебания f0
2т:
5<1Г 4acr (0 = f (0 — /о = ~ arctg =
2л dt ^i(t)
S,(t) — S,(t) — S.,(t) — 5
1 1 dt 21 л ’ dt 1 _ ^(QS3(Z)-rS2(/)S4(/)
~ 2- S*(t)d-S^(t}
Л\2 4-
здесь
S3(0 = — —S,(0- — —
2т: dt ' 2- dt
2 iFviKi cos (2r.iFt -•
v^K; sin (2r.iFt 4- ?,) =
(7.13)
2л at
2-
— V Videos c2r.iFt -r <?i) =
dt
Z=-l
= S iFvi Kisin (2r.iFt -г ?i).
(7.14)
Искажения. С помощью амплитудного детектора из получен-
ного на выходе линейной цепи сигнала хВЫх(0 формируется сиг-
нал Хд(/), воспроизводящий форму огибающей хВых(0- При от-
сутствии искажений сигнал на выходе детектора в точности вос-
производит (в определенном масштабе) модулирующий сигнал
хм(/) независимо от частоты модуляции F.
Различают линейные и нелинейные искажения. Линейные ис-
кажения связаны с неравномерностью частотной характеристи-
ки передачи модулирующего сигнала на выходе детектора. Эти
искажения можно оценивать отношением амплитуд первой гар-
моники в огибающей модулированного колебания на выходе ли-
нейной цепи на некоторых двух модулирующих частотах Fx и F2
при неизменных остальных параметрах модулированного сигна-
ла на входе линейной цепи.
148
Нелинейные искажения связаны с появлением в спектре
хд(/) составляющих, отсутствующих в модулирующем сигнале
x„(t). Эти искажения можно оценивать коэффициентами гармо-
ник (отношением амплитуд второй, третьей гармонических со-
ставляющих к амплитуде первой гармоники).
Искажения можно рассчитать с помощью следующих опера-
ций. Пусть Ch(Fi 1)—комплексная амплитуда /с-й гармонической
составляющей огибающей сигнала хВых(0 на выходе цепи при
частоте модулирующего сигнала Fn. Эта величина вычисляется
с помощью выражения
Ck(Fn) = 2Fn J I ' ", (7.15)
где 5)(0 и S2(/) определяются приведенными выше выраже-
ниями.
Допустим, Ск (Fn) рассчитывается при k=l, 2, 3 и п=1, 2.
Тогда коэффициент гармоник
т|л = Cj (F2)(FJ.
Коэффициент гармоник по 2-й и 3-й гармоникам на частотах
Fi и F2
т]2пл (F\)=C2(Fi) /Ci(Fi) ,
Лзнл (Fi) = C3 (Fi) /Cj (Fj),
1]2нл (F2)=C-2 (F2)/Ci (F2),
^(F2)=C3(F2)/CI(F2).
7.2. АНАЛИЗ ЧАСТОТНО-МОДУЛИРОВАННЫХ
СИГНАЛОВ В ЛИНЕЙНЫХ ЦЕПЯХ
Рассмотрим прохождение ЧМ-сигнала через линейную цепь,
ограничившись лишь модуляцией гармоническим сигналом одной
частоты.
Пусть мгновенное значение частоты подчинено следующему
закону:
со (/) = coo+Aw cos Fit, (7.16)
где wo — частота несущего колебания; Aw — максимальное откло-
нение частоты от значения соо; П— частота модулирующего ко-
лебания.
Представим действующее на входе цепи ЧМ-колебание
в форме
xKK(t)=Xmo sinip((). (7.17)
149
Мгновенная круговая частота <»(/) является производной от
мгновенной фазы ф(/), т. е. w(/) — отсюда
dt
t
-}({) = J СО (/)<#+ %.
О
В дальнейшем без ущерба общности выкладок примем на-
чальную фазу модулирующего колебания фо равной нулю и
ф(0 = р(?М- (7.18)
о
Подставим (7.16) в (7.18) и выполним интегрирование
t
'М/)= р«’о -ф Д'» cosQMdf = ©0'sin Q/= 3sinQ/. (7.19)
о
Величина p = Aco/Q называется индексом частотной модуляции.
Используя (7.19), записываем выражение (7.17) в следующем
виде:
Д’вых(^)sin^ooZ-ppsinQ/). (/.20)
Применим к (7.20) известное преобразование sin(a+p) =
= sin a-cos p+cos a-sin |3:
A'Bx(0=X«o[sin w0(-cos(p sin Qt) +
+cos cooZ-sin(p sin Qt) ]. (7.21)
Из теории бесселевых функций известно, что
ОО
cos(3sin= ]0С?) -г 2
i = l
оо
sin(psinQZ) = 2 2л; + 1(р) sin[(2Z + 1)QZ],
1 = 0
(7.22)
здесь Z„(p) —функция Бесселя n-го порядка от аргумента р. Рас-
чет функций Бесселя будет представлен позже.
Вернемся к выражению (7.21) и подставим в него (7.22)
xBJZ) = A’m0 Jo (t3) sin <%/4- 2
2 Л, (3) cos 20 • sin (0(/
Z=1
оо
+ 2 * ЗА; :-1 (?) sin (2/ -4 llQ^COSo)^
<=о
(7.23)
150
Из тригонометрических преобразований известно, что
2sin a- cos р.=sin (а—Р) 4-sin (а4~Р).
Следовательно,
2 cos 2iQ.t• sin (oo^=sin (од/—2iQ/) +sin («>о^4~2(ЙО ;
2sin (2i4-l) Pt-cos t£>o^=sin ((2t'4-l) Pt—(£>ot) +
+sin ((2i'+1) Q/H-coqZ) =—sin (<b0Z— (2i-41) 9 t) -4
4~sin (o)q/~(2r‘+1)9^).
Подставим эти выражения в (7.23)
{ОО
70(;3) sin соо/ — 2Лг (fnfsin (со,/ — +
/=1
00
-ь sin(y/ — 2/Qz-J — 2Л^1('Р)[— sin»со0г — (2/ — 1‘9/) —
4- sin (<о0/ 4- (27 4- 1)П<)]|. (7.24)
Так как
оо 00
2 Л, (и) sin— 2797) 4- siniWfl/ —(2/-4 1)9-0] =
f=I /=0
oo
= 2 (~~ b^.tp) sinico/ —/90;
z=i
^zAz + i (p) sin (°V "h (2z + 1) QO 4~ 2^2i (P) s'n (“o^ 4- 2zQi) =
<=o i=l
= ЛС3) sin («/ 4- iQt),
i = \
выражение (7.24) приводится к виду
{ 00
Л-ВХ(О = Х,и0 < Jo (р) sin O)0f -г 2 Ji (р) [sin (aot -4 iPJ) -4
I Z = 1 4
4- (— 1)' sin (co/ — O)]k (7.25)
151
Таким образом, в спектре ЧМ-колебания наряду с составля-
ющей несущей частоты содержатся компоненты с частотами
«)о±/Т2. Дискретный характер спектра связан с тем, что модули-
рующий сигнал является периодическим, следовательно, перио-
дическим является и модулированное колебание но
в отличие от AM-колебания при частотной модуляции гармони-
ческим сигналом одной частоты в спектре образуется бесконеч-
ное число составляющих.
Будем считать, что составляющими при i>a из-за их малости
можно пренебречь, т. е. допустимо приближение
АД0 sinco/+
а
^4 Д (3) [sin (о,/ /'2' i
=i
(— 1)' sin на0/
(7.26)
Как в § 7.1, представим компоненты модулированного сигна-
ла векторами в комплексной плоскости, вращающейся с частотой
несущего колебания со0. Тогда результирующий вектор ЧМ-коле-
бания на входе цепи запишется в виде следующего выражения:
Свх (/") — X,„о
1=1
(7.27)
Здесь использовано соотношение (—= Убедиться в спра-
ведливости этого тождества предлагается самостоятельно, прове-
ряя его для различных значений I.
Если К(f) — комплексный коэффициент передачи цепи на час-
тоте f, то вектор сигнала на выходе цепи
Свых(Ч = ^т0|к (/о)/»(?) +
Д • „ — i‘ 2-F/+I),
+ ^/г(ХИ(/о + ^)е 4-КХо — lF)e I
/=1
/ а
I 1 (fж 1 /( тсiFt 4-ф(fо + iF
+
I /=1
152
Представим Свьгх(/) в алгебраической форме комплексного
выражения
свых (0 = Л’шо (к Uо) Jo Ф) cos ср (f0)+ (fj) (к (/о + iF) cos (2ir iFt +
I Z=1 4
+ ? (to + 'Л) + Л (to —iF) cos [ 2ra (Ft + -y ) + (? (fo “ iFF ) +
+ j [(ШЗД) sin <p(/o^ -
— 2Л 'Л ! К (f0 + iF) sin (2raFt 4- <p ()„ 4- iF}) —
i=i 4
— К (fo —iF) sin [2r.i [Ft 4- —') — 3(/0 —zFi'jW = SJ/) 4- /S„(O.
47.29)
Рассчитав Si(/) и S2(£), можно воспользоваться выражения-
ми (7.8) — (7.14) для расчета мгновенного значения огибающих
амплитуд, фаз и частот для сигнала на выходе цепи.
Теперь рассмотрим вычисление присутствующих в (7.29)
функций Бесселя.
Функция Бесселя /,,(р) выражается суммой ряда следующе-
го вида:
/ (3) _ (Р/2)" ~2 I (Р/2)' л _ _
“ ‘ 0!Щ 11(п+ 1)! 2': (л-4 2)!
= у L3fl)
Zj А! (л 4-й)! j
k=o
Запишем выражения двух последовательных членов ряда
(- 1)^ЧР/2)^2'-2
(й-1)!(«4-*-1)! '
_(-1р(₽ 2)"^ - (- i)*-i(P/2r 2t-Чр/24
й!(/г4-й)! (й—1)! й(л4-й—1)! (п4-й)
Отсюда видно, что если член ак-х уже рассчитан, то очеред-
ной член ак можно вычислить по выражению
= — а^1
(Р/2)2
k(n 4-й)
Использование этой зависимости между последовательными
членами ряда существенно упрощает вычисления.
153
Рис. 7.1
Вычисление /.Лр) можно выполнить,
суммируя конечное число начальных чле-
нов ряда (7.30). При этом абсолютная
погрешность в вычисленном /П(Р) по
абсолютному значению не будет превы-
шать модуля последнего суммируемого
члена ряда. На рис. 7.1 показана схема
алгоритма, основанного на расчете 7П(Р)
суммированием ряда (7.30). Здесь г|—
допустимая относительная погрешность
в вычисленном значении 7П(Р).
Если в (7.29) суммируется большое
число членов и возникает необходимость
много раз обращаться к подпрограмме
расчета бесселевой функции, объем вы-
числений может оказаться значительным.
Он может быть существенно сокращен,
если использовать справедливое для
функции Бесселя соотношение
(7.31)
Р
В этом случае достаточно вычислить зна-
чения /о(Р) и 7i(Р) и далее, пользуясь
выражением (7.31) как рекуррентным,
находить при каждом обращении к не-
му значение функции Бесселя на едини-
цу большего порядка.
УПРАЖНЕНИЯ
На входе фильтра нижних частот действует AM-напряжение u=C7m(l +
+ tn cos Qt) sin (oQt со следующими значениями параметров: Um = l В, т=0,8,
£2 = 0,5л • 106, Ыо=2л-1О6 рад/с.
Передаточная функция цепи (при ЛТ,= 10 Л Лф=106)
K(s) = -10/(s2+./^+l).
Используя программу 6.3, рассчитайте с помощью ЭВМ: а) мгновенные
значения отклика, б) огибающую амплитуд отклика, в) огибающую фазы от-
клика, г) огибающую частоты отклика.
154
Глава 8. ОСОБЕННОСТИ РАСЧЕТА ПЛОХО
ОБУСЛОВЛЕННЫХ СХЕМ
Цифровое моделирование процессов в линейных схемах часто
осложняется одновременным присутствием в схеме элементов,
задающих малые и большие постоянные времени (или, что то же
самое, малые и большие собственные значения матрицы AJ. Та-
кие ситуации часто встречаются при анализе схем аппаратуры
связи. Малые собственные значения обусловлены реактивными
элементами с большими значениями параметров, а большие соб-
ственные значения — элементами с малыми значениями пара-
метров. Такое различие значении параметров приводит к тому,
что числа, из которых состоит матрица А1( отличаются друг от
друга на много порядков. Это приводит к тому, что математиче-
ские операции над матрицей А, сопровождаются настолько боль-
шими ошибками, что они могут привести к совершенно неверным
результатам.
Эти трудности можно преодолеть, если учесть известную за-
висимость степени влияния реактивных элементов в различных
частотных областях от значения параметров этих элементов. Про-
цессы в области нижних частот (больших времен) определяются
в основном реактивными элементами с большими значениями ем-
костей и индуктивностей; па ход этих процессов слабо влияют
реактивные элементы с достаточно малыми значениями емкостей
и индуктивностей и их влиянием на процессы можно пренебречь.
В области же верхних частот (малых времен) основное влияние
на ход процессов оказывают реактивные элементы с малыми ем-
костями и индуктивностями, и влиянием элементов с достаточно
большими емкостями и индуктивностями можно пренебречь.
Упорядочим реактивные элементы и соответствующие им пе-
ременные так, чтобы они оказались разделенными на три груп-
пы. Введем следующие обозначения: Хы, Хс, Хб — векторы пере-
менных состояния, соответствующие малым, средним и большим
значениям параметров элементов. Тогда уравнение состояния схе-
мы можно представить в следующем виде:
(8.1)
В области верхних
элементах со средними
частот малы напряжения на емкостных
и большими значениями емкостей (мало
155
сопротивление этих элементов) и малы токи в индуктивных эле-
ментах со средними и большими значениями индуктивностей (ве-
лико сопротивление этих элементов). В связи с этим можно при-
нять Хс»0, Х,б~0. Исключив из (8.1) эти переменные (устра-
нением второго и третьего столбцов в матрице А] и второго и
третьего уравнений), получим
АШ1ХМ + ВМХНИ.
at
(8.2)
Этому уравнению соответствует исходная схема, в которой за-
корочены емкостные элементы и отключены индуктивные элемен-
ты со средними и большими значениями параметров (емкости и
индуктивности этих элементов приняты равными бесконечности).
В области средних частот не сказывается влияние элементов
с малыми и большими значениями параметров. Можно принять
X.-, лх О и исключить в (8.1) эту переменную в правой части и со-
ответствующее ей третье уравнение; кроме того, Хм =& 0 (мало
dt
напряжение на индуктивных элементах с малым значением ин-
дуктивности и, следовательно, мала скорость изменения напря-
жения на них; мал ток в емкостных элементах с малым значе-
нием емкости и, следовательно, мала скорость изменения напря-
жения на них).
При этом образуется следующая система уравнений:
О = АМ,[ХМ + АМСХС + ВМХНИ,
—~~ Хс = АСМХМ + АССХС + ВСХНИ.
(8.3)
Системе уравнений (8.3) соответствует схема, полученная из
исходной закорачиванием емкостных элементов и отключением
индуктивных с большими значениями параметров, а также от-
ключением емкостных элементов и закорачиванием индуктивных
с малыми значениями параметров.
Из (8.3) можно исключить переменную Хм. Для этого решим
первое уравнение относительно Хм:
Хм = А-’(- А,,е Хс — В,( Хн1|)
и подставим полученное выражение во второе уравнение:
-А- хс = (Асе - АсМАЙм Амс) хс + (Вс - ACMAjBM) Хни. (8.4)
dt
Рис. 8.1
В области низких частот можно принять —— Х„ = 0; = 0.
dt dt
При этом система уравнений (8.1) приведется к следующему виду:
О = А,,,,ХМ - АЧСХС Н- АмбХб 4- ВМХН1!)
О — ACJIXM АССХС 4- АсбХб 4- ВСХНП,
~ X = Абл1Хм + АССХС + АббХб -р ВбХр:
at
(8.5)
Этой системе уравнений соответствует схема, получаемая путем
отключения емкостных элементов и закорачивания индуктивных
с малыми и средними значениями параметров. Используя два
первых уравнения, можно устранить в третьем уравнении (8.5)
переменные Хм и Хс. При этом в образующемся уравнении будет
лишь переменная Хб, связанная с большими емкостями и индук-
тивностями цепи.
В качестве примера рассмотрим цепь, приведенную на
рис. 8.1,а. Здесь емкости С2, С3, С4 имеют соответственно малое,
среднее и большое значения. Уравнение состояния цепи:
и,
d
dt 113
-
х
[ —2-102 — 102 — ю2 Г'4"| Г102 1
— 0,1 — 0,1 — 0,1 и3 + 0,1
10~4 — 10‘ — 2-Ю-4. и,\ 1.2 • 10~’J
А1 ~х. Аз
В матрицах А[ и А2 малым реактивным элементам соответствуют
строки с большими по абсолютному значению элементами и на-
157
оборот. Так, малая емкость С2 вызвала появление в первой стро-
ке матриц А] и А2 относительно большие по абсолютному значе-
нию элементы. Большой емкости С4 соответствует третья строка
с малыми абсолютными значениями элементов.
В соответствии с (8.2) получаем уравнение для области верх-
них частот:
~и, = --2-102-п2 + 102.
Пользуясь (8.3), для области средних частот записываем сис-
тему уравнений:
0 = —2-10+2 — ЮЧ+ Ю+1,
~ ~~-Ц+., —0,143-4-0,+!,
откуда после исключения переменной п2 получаем
+L,/i = _ 0,05.4,-0,05^.
dt ’ J ’ 1
Записываем систему уравнений (8.5) для области нижних
частот:
0 = — 2 • Ю+2 — 102м3 — 10+4 + 104,
0 = — 0,Ь2 —0,Ь3 —0,4 + 0,+!,
~ и, = 10-+2 - 10-+, - 2 • 10 -+ _ + 2 • ICT+j.
dt
После исключения переменных п2 и и3 имеем
— —ю-’«, +10-4.
dt
Цепи, соответствующие полученным уравнениям, показаны
на рис. 8.1. На рис. 8.1,а приведена полная эквивалентная схема,
на рис. 8.4— г даны схемы, отражающие процессы в областях
соответственно верхних, средних и нижних частот; эти схемы со-
ответствуют полученным выше уравнениям для отдельных час-
тотных областей.
158
Глава 9. РАСЧЕТ НЕЛИНЕЙНЫХ ИСКАЖЕНИИ
В ЭЛЕКТРОННЫХ УСИЛИТЕЛЯХ
9.1. ИСКАЖЕНИЯ В ЦЕПИ, СОДЕРЖАЩЕЙ
НЕЛИНЕЙНЫЕ РЕЗИСТИВНЫЕ ЭЛЕМЕНТЫ
С ХАРАКТЕРИСТИКОЙ ВИДА ih=T(Mh)
Схема замещения нелинейного резистивного элемента. Будем
считать, что вольт-амперная характеристика гн=Чг(«н) резисто-
ра имеет слабо выраженную нелинейность. Основываясь на этом
предположении (связанном с тем, что будут рассматриваться
усилители с коэффициентом гармоник, не превышающим, напри-
мер, единиц процентов), представим функцию Чг рядом Макло-
репа, удерживая в нем члены с производными не выше третьего
порядка:
zH = (и.) = ВД+ Ф' (О’ пн Д--j- Т" (0) н„2 Ж -1- Ф"' (0) (9.1)
В дальнейшем при расчете нелинейных искажений будем учи-
тывать нелинейные продукты лишь второго и третьего порядков
малости. Представим входящее в (9.1) напряжение на резистив-
ном элементе в форме
Ин==1бЖгСЖиз== С»н cos(о.'^ЖД:)Ж
-Е t/W2C0S (2©/-|-ф2) Ж Cm3 cos (ЗЫЖфз), (9.2)
где и2 и и3— напряжения соответственно второй и третьей гар-
моник основной частоты со. Составляющими более высоких по-
рядков малости мы пренебрегали. Из утверждения слабо выра-
женных нелинейных свойств резистивного элемента следует
Um2/ЦИ1<С1, Это позволяет в третьем и четвертом
членах ряда (9.1) заменить ип на щ, и, если положить Чг(0)=0
(считая, что цн=0 при гн = 0), выражение (9.1) представится
в виде
1 9
С = ^(«н) = ^'(0) WH Ж-у Ф" (0)641 COS2((o( + cpj) ж
-|__Еф-"фО){/^ cos3 (со/ + ).
О-
(9.3)
Так как
Uj2 = Um\ cos- (со/ Ж <Pi) = Emi Н—cos (2®^ Ж 2<pj)
«13 = Emi cos3 (at Ж ?i) •--=
159
— mi ~ COS (3<i)^ -j- З'-pj) -j COS (to/ 'Pl) j ,
то, отбрасывая в выражении u12 не представляющую интереса посто-
янную составляющую а в выражении — составляющую
-^-t/micos (со/ + cd-l) основной частоты со Гиз-за малости W"' (0) — х
4 L 3! ' 4
X Uli cos (со/ + cpi) по сравнению с соответствующей [составляющей
’F' (0) Uml cos (со/ + aj первого члена в правой части выражения (9.3)j,
выражение (9.3) запишем в виде
iH = ¥ (uH) = Ф' (0) иа + -L ЧГ (0) Uh cos (2сох/ + 2?1)
4
р- ~~ Т"' *0) Uli cos (Зсо* 4- 3?х) = -j- /, — /3. (9.4)
Согласно данному выражению нелинейный резистивный эле-
мент (рис. 9.1,а) можно заместить схемой, представляющей со-
бой параллельное включение трех элементов (рис. 9.1,6): линей-
ного резистивного элемента с проводимостью, имеющей значение
'КДО) и пропускающей ток ti = 4//(0)«H [равный первой состав-
ляющей выражения (9.4)], источника тока /2=-^-Ф" (OyXiCOS (Scoj/—|—
4-.2<fi) [равного второй составляющей выражения (9.4)] и
источника тока/3 = Ф"'(0) L/ml cos (Зсс^/4-3?х) [равного треть-
ей составляющей выражения (9.4)].
Данной схемой замещения будем пользоваться при расчете
нелинейных искажений.
Расчет нелинейных искажений методом присоединенной схемы.
Пусть анализируемая RLC-цепъ не содержит управляемых источ-
ников и имеет один нелинейный элемент, представляющий собой
нелинейный резистивный элемент со слабо выраженными нели-
нейными свойствами и вольт-амперной характеристикой в форме
1н=Чг(ин). Будем считать, что цепь находится под воздействием
независимых источников гармонического напряжения и тока од-
ной частоты со.
Представим нелинейный резистивный элемент схемой замеще-
ния, показанной на рис. 9.1,6, и вынесем за пределы схемы все
независимые источники и источники токов /2 и i3, входящие в схе-
му замещения нелинейного резистивного элемента. Полученная
таким образом схема дана на рис. 9.2. Пусть выходной величиной
в схеме является ток /вых. При таком представлении заключенная
в прямоугольник часть схемы является пассивной линейной
160
Рис. 9.1
/?ЛС-цепью. Так как эта цепь оказалась под воздействием гар-
монических источников трех частот (независимых источников
частоты а, источника тока м частоты 2а и источника тока ;3
частоты За), то в выходном токе должны быть составляющие
этих же трех частот. Следовательно, ток гВЫх может быть пред-
ставлен выражением
1вых-- ^ЕЫХ1-Ь^ЫХ2_|_^ЫХ2,
где члены правой части выражения являются гармоническими
компонентами выходного тока с частотами соответственно
а, 2а, За. Очевидно, составляющая Ьыхь имеющая частоту а,
обусловлена действием только независимых источников внешне-
го воздействия с частотой а; составляющая гВЫх2 обусловлена
действием источника тока 12 и, наконец, составляющая г’выхз —
действием источника тока z3.
Если теперь убрать из схемы источники тока i2 и г3, как пока-
зано па рис. 9.3,а, то в выходном токе гВых исчезнут составляю-
щие 1вых2 и 1'выхз и ток 1вых будет содержать лишь компоненту
частоты а. В дальнейшем схему на рис. 9.3,а будем называть ос-
новной.
Если из схемы на рис. 9.2 убрать все независимые источники
(сохранив в цепи лишь выходные сопротивления источников: ну-
левое выходное сопротивление источников напряжения и беско-
нечное выходное сопротивление источников тока) и источник то-
ка i3 в схеме замещения нелинейного резистивного элемента, то
образуется схема, приведенная на рис. 9.3,6. Выходной ток в та-
кой схеме
&вых2 — Im вых2 COS (2a^“E(pBbix2) •
И, наконец, если из схемы на рис. 9.2 исключить независимые
источники и источник тока 1'2, сохранив в схеме лишь источник
11—6030 161
Рис. 9.3
тока i3, то образуется схема, приведенная на рис. 9.3,в, и выход-
ной ток будет равен
1'выхз — Лп выхЗ COS (Зсо/ф-фвыхз)
Определив приведенные выше составляющие выходного тока
в схемах на рис. 9.3,а — в, можно вычислить коэффициенты гар-
моник:
по второй гармонике
Т|2==Лп вых2/Лп вых1,
по третьей гармонике
Г] 2 = /т выхз/^m вых!,
общий
"Ч — TJ2 “Ь "ЧЗ ~ Лггвых2 “Ь-^твыхз/Лпвых!- (9.6)
Рассмотрим способ расчета амплитудных значений компонен-
тов ВЫХОДНОГО ТОКа Лпвыхь 1т вых2, ^твыхз-
Расчет /щвых1 производится обычным приведенным в § 3.6
методом расчета отклика линейной цепи на гармонические воз-
действия в схеме на рис. 9.3,а; /твых2 и /тВыхз представляют со-
бой амплитудные значения откликов на воздействие источников
тока t2 и i3 и могут быть определены из выражения
1т вых2 == im%K (2со) , 1т выхз== 1т3К(3()3) , (9.7)
где im вых2, /щ выхз — комплексные амплитудные значения состав-
ляющих г'выхг, «выхз выходного тока iBbIX; Im2, 1тз— комплексные
амплитудные значения токов i2, i3 источников в схемах на
рис. 9.3,6 и в; Х(2со), Л(Зсо) — комплексные значения коэффициен-
тов передачи по току на частотах соответственно 2со, Зо от источ-
ников тока i2, 1’3 к выходу в схемах на рис. 9.3,6 и в.
Используем следующий прием вычисления К(2<в) и К(Зсо).
Известно, что пассивная линейная схема обладает свойством об-
ратимости: коэффициент передачи по току в некотором направ-
лении равен коэффициенту передачи по напряжению в обратном
162
направлении. Применим это правило к схе-
мам на рис. 9.3,6 и в. Коэффициенты пере-
дачи по напряжению в обратном направле-
нии можно найти так. К выходу схемы на
рис. 9.4 (эту схему будем называть присо-
единенной) подключим источник Оо— 1 еди-
ничной амплитуды и частоты 2а [для на-
хождения К(2со)] и Зю [для нахожде-
ния К(Зсо)]. Тогда напряжения йт
на клеммах линейного сопротивления схемы замещения не-
и
линейного резистивного элемента окажутся численно рав-
ными искомым коэффициентам передачи К в (9.7). Таким образом,
если Кп(2со)—отклик на единичное воздействие Ко частоты 2со
и б7п(3со)—отклик на единичное воздействие [70 частоты Зю
в присоединенной схеме, то
1т вых2 — Лп2 б пт (2(0 ) , 1т аыхз — 1т3С,Т,т (Зю) . (9-8)
Кажущееся несовпадение размерности левой и правой частей
выражений связано с тем, что в правой части приведенных выше
равенств вместо Кпт(2ю) и Кпт(3со) должен быть коэффициент
передачи L'nm(2<a)/Ко и Кпт(3со)/Ко, но величина Ко=1 В, име-
ющая размерность напряжения, опущена. В дальнейшем не бу-
дем обращать внимания на расхождение размерностей в выра-
жениях, возникающее из-за указанной причины.
Входящие в выражения (9.8) 1т2 и 1т3 могут быть определе-
ны следующим образом. В основной схеме (см. рис. 9.3,а) можно
определить напряжение Umi на линейном сопротивлении схемы
замещения нелинейного резистивного элемента, возникающее под
действием независимых источников. Затем из выражения (9.4)
следует
/„^-^"(О)^,, /тз = 4-Ф"'(0)^. (9.9)
4 24
Подставив эти выражения в (9.8), получим
41ВЫх= = ~ ЧТ"(0)U2mlйпт (2(0), i,m = j- ч-"' (0)и3т1 ипт (з®).
4 24
(9.10)
Итак, для вычисления продуктов нелинейных искажений по
второй и третьей гармоникам частоты ю, обусловленных нелиней-
ным резистивным элементом с характеристикой вида iH=4r(MH),
необходимо:
а) построить основную схему, заменив в исходной нелиней-
ный резистивный элемент линейным с проводимостью ^'(О), рав-
ной линейной составляющей нелинейной проводимости; затем
определить напряжение Omi на линейном резистивном элементе,
11* 163
возникающее под действием независимых источников гармониче-
ского напряжения и тока основной частоты со;
б) построить присоединенную схему, исключив из основной
независимые источники и введя в выходную цепь схемы источник
О0 гармонического напряжения единичной амплитуды; выбрав
частоту источника и0 равной 2со и Зы, определить на этих час-
тотах напряжения Cnm(2<a), Спт(3а>) на линейном сопротивлении
(замещающем нелинейный резистивный элемент) под действием
источника Uo;
в) по выражениям (9.10) вычислить составляющие второй и
третьей гармоник /МВых2 и /твыхз в составе выходного тока и по
формулам (9.6) вычислить коэффициенты гармоник.
Рассмотренный прием с использованием присоединенной схе-
мы назовем методом присоединенной схемы.
Расчет нелинейных искажений в цепи с несколькими нелиней-
ными резистивными элементами. При наличии в схеме несколь-
ких нелинейных резистивных элементов с характеристиками ти-
па iH = 'P(«ii) каждый из них может быть замещен схемой, пред-
ставленной на рис. 9.1,6. Далее строится основная схема и в ре-
зультате ее анализа вычисляется напряжение основной частоты
св, возникающее на линейной части схемы замещения каждого
нелинейного резистивного элемента под действием независимых
источников. Затем строится присоединенная схема и определяет-
ся напряжение на тех же элементах, создаваемое включенным
в выходную цепь схемы источников гармонического напряжения
единичной амплитуды и частоты 2ы и Зш. По полученным данным
вычисляются составляющие частот 2® и Зы в составе выходного
тока суммированием комплексных значений составляющих, созда-
ваемых отдельными нелинейными резистивными элементами
ь
inm^ = £ -у- (0) Umu йпт{ (2®),
l=k . . (9.11)
I твыхз = У] ® < (0) ^m\i О mi (За»),
1 = 1
здесь k — число нелинейных резистивных элементов; входящие
в выражения величины с индексом I относятся к i-му нелинейно-
му резистивному элементу.
9.2. ИСКАЖЕНИЯ В ЦЕПИ, СОДЕРЖАЩЕЙ
НЕЛИНЕЙНЫЕ РЕЗИСТИВНЫЕ ЭЛЕМЕНТЫ
С ХАРАКТЕРИСТИКОЙ ВИДА ын=ф(1н)
Схема замещения нелинейного резистивного элемента. Не по-
вторяя всех выкладок, проведенных выше применительно к ха-
рактеристике iH=4f(«H), запишем для рассматриваемого случая
164
выражение, аналогичное (9.4):
ц. = ф (4,1 = ф' (0) iti 4- — ф"(0)/т1 COS ДсО/' + 2<ft} +
4
-j—— i'" (0) /Д1 cos (3crf + 3'ii) =• «! ~ u„ + w3. (9.12)
24
Данному выражению соответствует схема замещения нелиней-
ного резистивного элемента (рис. 9.5,а), представленная на
рис. 9.5,6. Как видим, отличие данной схемы замещения от при-
веденной на рис. 9.1,6 схемы замещения нелинейного резистив-
ного элемента с характеристикой вида tH= 1Г' (»н) состоит в том,
что в ней присутствуют источники напряжения и> и иА с частота-
ми 2со и Зсо и они включены последовательно с элементом ф'(0),
отображающим линейную составляющую сопротивления нели-
нейного резистивного элемента.
Расчет нелинейных искажений. Расчет продуктов искажений
в этом случае имеет следующие особенности. Основная и присо-
единенная схемы имеют вид, представленный на рис. 9.6. В ос-
новной схеме (рис. 9.6,а) рассчитываются следующие токи, воз-
никающие под действием независимых источников: составляю-
щая основной частоты со /твых1 в составе выходного тока (ВЫх и
ток частоты со в цепи элемента, отображающего линейную со-
ставляющую ipz(0) сопротивления нелинейного резистивного эле-
мента. В присоединенной схеме (рис. 9.6,6) рассчитываются токи
/пт(2со) и 7пт(3со) частоты 2(в и Зсо, возникающие в элементе
ф'(0) под действием включенного в выходную цепь источника на-
пряжения Uo единичной амплитуды и частоты 2со, Зсо.
Рис. 9.6
165
По вычисленным значениям определяются составляющие час-
тот 2(о и Зсо в составе выходного тока
LBb,x2 = 4-^'(0n™i^(2(o),
, (9.13)
Лнвыхз — 2^ ” (Q) ml (ЗсО).
При наличии в схеме нескольких нелинейных резистивных
элементов с характеристиками вида иа = ^(1н) продукты искаже-
ний в выходной цепи рассчитываются по выражениям
k
im^_ = ~ ^)lmU 1т: (2(о),
(9.14)
= Ц'" (0) i3mu /", (3(0).
24
1=1
9.3. ИСКАЖЕНИЯ В ЦЕПИ, СОДЕРЖАЩЕЙ
НЕЛИНЕЙНЫЕ ЕМКОСТНЫЕ ЭЛЕМЕНТЫ
Схема замещения нелинейного емкостного элемента. Пусть
емкость элемента выражается функцией С(ис), где ис — мгно-
венное значение напряжения на элементе. Ток через такой эле-
мент определится выражением
dur „ . _
'с = С (tic) —• (9.10)
Представим емкость С(«с) рядом Маклорена, удержав в нем
члены с производными не выше второго порядка:
С(ис) = С (0) +С' (0) ис+С" (0) u2c. (9.16)
Подставляя выражение в (9.15) и учитывая, что
dur 1 du^+i
Uk —С — —1-------____
с dt k + 1 dt ’
получаем
du,- dur 1 „ dur
><= = c <o> ~r + c' <°) “с T + -2-C" Ю) =
dur , i , du?. , t „ du?.
= C(0)-^ + Ас'(0)_Д 4- -l_C"(0)-£-. (9.17)
dt 2 dt 6 dt
Здесь первый член выражения можно рассматривать как ток
через линейный элемент с емкостью С(0). Остальные члены
166
выражения содержат продукты нелинейных искажении. Входя-
щее в выражение (9.17) напряжение ис представим суммой со-
ставляющих uc=Ui-\-u2-[-u3, где щ = U-mi cos (а44~Ф1)—составля-
ющая основной частоты, и2 и и3 — гармонические составляющие
с частотой, соответственно равной 2<о и Зсо, и амплитудой, суще-
ственно меньшей Um\. Из последнего условия во втором и третьем
членах выражения (9.17) допустимо принять ис~и\ и предста-
вить выражение в виде
‘с=с (°> -^г+4с> 44+4-с" (°) 44 • <9-18>
n du,2 du,3
Производные —и —можно ппедставить следующими выоа-
dt dt
жен иям и:
г1 cos ~ ?1)]2 =
dt dt 1 ,VJ
= [Umi j ~ + 4- C°s (-0)' + 2?1)B = — S’O (2(0* 4- 2cj I,
at ( L 2 2 J J
44=4-^ cos(^+?1i]3 =
at at
= -%- [u3mi I — cos (3(o* + 3-fj) 4- — cos (co* -4 } —
dt | L 4 4 JI
— — — (0*7^1 sin (3<o* 4- 3<px)-— соЬ'ш! sin((of 4~ ?i'-
Подставим эти выражения в (9.18)
ic = С(0)-^- --L С' (0) (о*Л sin (2(о* 4- 2?1) -
— —С" (0) (o7mi sin (3(о* 4- 3tpj)-—С" (0)(oL*mi sin ((of 4- ®i)
8 8
du^ 1 n
C (0) - -g-C (0) (0*7*! sin (2(0f 4- 2?1) -
— — C" (0) (oL'm! sin(3(of -4 3px).
8
Последнее выражение получено в результате пренебрежения
1 3
составляющей основной частоты------------С” (0) (o!7mi sin(®f 4- <?i) ,
8
которая существенно меньше соответствующей составляющей, со-
.. „ dU/—
держащейся в первом члене с (0)
(9.19)
167
Рис. 9.7
Рис. 9.8
Из (9.19) следует, что нелинейный емкостной элемент можно
представить схемой замещения, приведенной на рис. 9.7,6. Здесь
токи i2, !3 источников тока отражают соответственно второй и
третий члены выражения (9.19):
| 9
/2 — — — С (О) (or. mI sin (2(of + 2ух),
1 з (9’20)
is =-------С" (О) й/Xl sin (3(0* + 3^).
8
Выражения (9.20) в комплексной форме имеют следующий
вид:
^-/-^'(О)®^, /т3^ j±C”(0)aO3ml. (9.21)
2 о
Расчет нелинейных искажений. Воспользуемся, как и ранее,
методом присоединенной схемы. Основная и присоединенные схе-
мы для рассмотренного случая приведены на рис. 9.8. Пусть
6'mi — комплексное напряжение, возникающее за счет действия
независимых источников на линейной составляющей С(0) емко-
сти нелинейного элемента в основной схеме; Ц"1 (2<о) и U?nl (Зо>)—
комплексные напряжения на том же элементе, воз-
никающие за счет действия источника единичного напряжения
Uo= 1 в присоединенной схеме. Тогда составляющие токов вто-
рой и третьей гармоник в выходном токе определятся выраже-
ниями
4вых2 = (2(0) = А С' (0) ай2т1й" (2(0),
(9.22)
7твыхз = (3®) = 4- С” (0) Untl (3(0).
Когда в схеме имеется несколько нелинейных емкостных эле-
ментов, результирующие продукты искажений определяются сум-
168
мированием продуктов, возникающих от отдельных нелинейных
элементов.
Мы рассмотрели расчет нелинейных искажений, связанных
с наличием в схеме нелинейных емкостных элементов. Нетрудно
построить соответствующие формулы для расчета нелинейных
искажений в схеме, содержащей нелинейные индуктивные эле-
менты, однако мы их не приводим, так как подобные схемы
встречаются редко.
9.4. НЕКОТОРЫЕ ОСОБЕННОСТИ
ИСПОЛЬЗОВАНИЯ МЕТОДА
ПРИСОЕДИНЕННОЙ СХЕМЫ
Рассмотрим применение метода присоединенной схемы для
некоторых случаев, отличных от рассмотренных выше.
Искажения в цепи, в которой выходной величиной является
напряжение uEL^. В ранее рассмотренных случаях в качестве вы-
ходной величины рассматривался ток ;вых и для нахождения
коэффициента передачи в обратном направлении в выходную
Упрабтяемисй
источник
в основной сиене
Управляема :й.
источник в/ при-
соединенной скеме
Рис. 9.9
169
цепь присоединенной схемы включался источник гармонического
напряжения 1/0=1. Если выходной величиной является напря-
жение ивых, указанный коэффициент передачи находится для
присоединенной схемы с включенным в выходную цепь источни-
ком гармонического тока 10 единичной амплитуды с частотами
2(й и Зсо. Далее продукты нелинейных искажений 0т вых2 ОтвЫхз
в выходном напряжении определяются теми же выражениями,
какими выше определялись составляющие 1т выхз и 7твыхз в со-
ставе выходного тока 1ВЫХ.
Искажения в цепи, содержащей управляемые источники. Во
всех ранее рассмотренных случаях предполагалось, что анали-
зируемая схема не должна содержать управляемых источников,
так как цепь должна обладать свойством обратимости. В этом
случае коэффициент передачи в некотором направлении можно
выражать через коэффициент передачи между теми же точками,
но в обратном направлении. Наличие в цепи управляемых ис-
точников лишает цепь указанного свойства. Однако некоторое
перестроение схем управляемых источников, показанное на
рис. 9.9, позволяет все выведенные выше расчетные выражения
распространить и на схемы, содержащие управляемые источники.
Глава 10. РАСЧЕТ ПЕРИОДИЧЕСКИХ
ПРОЦЕССОВ В НЕЛИНЕЙНЫХ
УСТРОЙСТВАХ
При анализе ряда радиотехнических схем, на входе которых дей-
ствует внешнее воздействие с периодом Тп, интерес представляет
определение амплитуды и фазы в установившемся режиме. Эта
задача может быть решена с использованием математической
модели схемы, т. е. с использованием обычных численных мето-
дов решения системы алгебраических и дифференциальных урав-
нений. Однако при внешнем воздействии на слабодемпфирован-
ные схемы требуется длительное время для затухания возникаю-
щих при этом переходных процессов. При решении задачи на
ЭВМ расчет переходного процесса в таких схемах потребует не-
допустимо больших затрат машинного времени.
Эффективным способом решения этой задачи, т. е. нахожде-
ния амплитуды и фазы колебаний в установившемся режиме, яв-
ляется оптимальный выбор начальных условий.
В принципе, можно так выбрать начальные условия, что рас-
чет колебаний во временной области будет сразу соответствовать
170
расчету режима со стационарными амплитудой и фазой колеба-
ний. Для такого расчета требуется сравнительно небольшое чис-
ло точек для нескольких периодов колебаний, тогда как при не-
удачном задании начальных условий придется рассчитать, осо-
бенно в высокодобротных схемах с медленно изменяющейся оги-
бающей, огромное количество точек до момента установления
стационарной амплитуды. Рассмотрим алгоритм, позволяющий
существенно сократить время расчета установившихся колебаний
в высокодобротных схемах путем правильного задания началь-
ных условий.
Проиллюстриуем процесс определения оптимальных началь-
ных условий на примере произвольной схемы первого порядка,
воспользовавшись методикой, изложенной в [1J.
Уравнение состояния такой схемы, находящейся под внеш-
ним воздействием с периодом Тп, можно записать в нормальной
форме:
= / i x it), t \. (10.1)
Интегрируя обе части (10.1) от нуля до некоторого момента/,
получаем это уравнение в эквивалентной интегральной форме:
t
x(t) = х0+ t)dt, (10.2)
б
где л'о — начальное условие.
Запишем уравнение (10.2) для момента 74
х (Тп) = х0 4- J jix{t), t)dt. (10.3)
о
Если правильно выбрать начальные условия, то переходной
компоненты не будет и колебательный процесс, начиная с перво-
го периода, будет стационарным, т. е.
х(Тп) =х0.
Для решения задачи численными методами введем обозначе-
ние
тп
х0 +t)dt = F(x0\). (10.4)
о
Тогда условие стационарности с учетом (10.4) можно запи-
сать в виде
xo-F(xo)=O. (10.5)
Для решения уравнения (10.5) относительно х0 воспользуем-
ся методом Ньютона (см. § 5.1).
171
Введем обозначение
x0—F(x0)=g(x0). (Ю.6)
Тогда
il0.7)
\ ОХа /
Расчетная формула примет следующий вид:
= 1-----) (^)-F(x^)). (10.8)
\ dx\R' 1
Изложенный выше метод может быть обобщен для линейных
и нелинейных схем порядка выше первого и с высокой добротно-
стью. В этом случае уравнения (10.6) — (10.8) должны быть за-
писаны в векторной форме и итерационная формула приобретает
следующий вид:
Х^+1) = Х^’ —[Г —W — F(X^’)J, (10.9)
где
~ аЛ(Хр) оЛ(Х0)~
— О-’01 ^Л’оп
W(X0)= .................... .
dFn(X0) dFn(X0)
- дхп <F'on
Хо — вектор начальных условий; F(X0) = [Л (Хо) ... Fn (Хо) ]т.
Алгоритм, реализующий формулу (10.9), сводится к выпол-
нению следующих последовательностей операций.
1. Задаемся произвольным значением Х<0)0 и с помощью чис-
ленного интегрирования вычисляем F(X<o>o).
2. Вычисляем W(X<0)0) (например, прямым методом прира-
щений) .
3. Вычисляем Х(1>0 по формуле (10.9), проверяем условие схо-
димости итерационного процесса, и если оно не выполняется, пе-
реходим к п. 1 с новым начальным условием и т. д. Последняя
итерация алгоритма (10.9) позволяет найти значение вектора
начальных условий.
Рассмотрим расчет периода стационарных колебаний в авто-
колебательной системе. Представленный выше алгоритм можно
использовать при расчете периода колебаний в автоколебатель-
ной схеме, в которой начальные условия влияют на время .уста-
новления стационарных колебаний. При этом период колебаний
зависит только от параметров элементов схемы. Поэтому в век-
торе начальных условий компонент можно исключить из рас-
смотрения, а вместо него ввести новую неизвестную величину —
172
период колебаний Тп. Тогда вектор неизвестных начальных усло-
вий приобретает вид
(Xgj ... A'oj—1, Тп, ... Хоп) т.
Функция F(X0) запишется в виде
Гп
F(X0, rn) = X0+ f f(X, t)dt. (10.10)
b
Уравнение (10.5) будет иметь вид
Ф(2) =Х0—F(X0, Тп)=0.
Алгоритм его решения относительно вектора Z
Z(fc+D = Tnfc'))-1 (X(ofe) — F(Xi)fc), T‘fc))). (10.11)
Матрица отличается от единичной тем, что на z-й позиции
имеет нуль, так как дх;/дТп = 0, а матрица Якоби W(X0, Тп) от-
личается от матрицы W формулы (10.9) i-м столбцом
ЙТ1 (Хо. 7~п) dF2 (Хр, Г„)
чДп дТа
dFn ( '-0, 7~п) , т
(10.12)
Все остальные столбцы этой матрицы вычисляются так же, как
в алгоритме (10.9), причем в качестве Т„ в F(X0, Тп) нужно
брать k-e приближение Г<*)п. Вычисление элементов i-го столбца
основано на следующем: пусть переменными х, являются пере-
менные состояния Нс{, IL.
^.(0 /СО) W) _ uL(t)
dt C ’ dt ~ L ’ ‘
Заменяя ( на и вводя ис и получаем
ди(Тп> иСо) _ иСо) diL{Tn, iLo) _ uL(Tn, iLo)
дТи ~ С ’ дТп L '
Из (10.12) следует, что
dF‘a:’-~-o) = h(Tm Хо). (10.15)
Из (10.13) и (10.14) видно, что для получения столбца (10.12),
когда или Fi = uCe следует выписать правые части (10.15)
в момент t=Tn, причем на k-ii итерации нужно брать t=T^k'>n-
173
Глава 11. РАСЧЕТ ЧУВСТВИТЕЛЬНОСТИ
СХЕМЫ К ОТКЛОНЕНИЯМ
ПАРАМЕТРОВ ЭЛЕМЕНТОВ
11.1. МЕТОД ПРИСОЕДИНЕННОЙ СХЕМЫ
В процессе проектирования схемы устройства определяются па-
раметры элементов, входящих в состав схемы, т. е. значения со-
противлений резисторов, емкостей конденсаторов и т. д. В даль-
нейшем рассчитанные при проектировании параметры элементов
будем называть номинальными.
В изготовленном образце устройства элементы будут иметь
параметры, отличные от номинальных. Такие отклонения пара-
метров возникают па этапе производства аппаратуры, а также
в процессе ее эксплуатации. Подробнее об этом говорится
в гл. 12. Очевидно, отклонения параметров элементов будут вы-
зывать изменения характеристик устройства. Пусть у — некото-
рая характеристика устройства, в качестве которой можно рас-
сматривать ток, напряжение на выходе, коэффициент передачи,
частотную, переходную характеристики и т. д. Характеристика у
является функцией параметров элементов схемы
y = f(.Pi, Р2,-.;Рп), (11.1)
где pt — параметр i-ro элемента. Степень влияния отклонения
параметра р, i-ro элемента на характеристику у устройства оце-
нивают так называемой чувствительностью Syp.
_ А'иги ду । (11е?)
1 УнпЧ dpi |Pl-=/’jHOM
где р/ном, уаоы — номинальные значения р,-, у.
Таким образом, чувствительность равна относительному от-
клонению характеристики у, приходящемуся на единицу относи-
тельного отклонения параметра р,-.
Очевидно, основная трудность расчета чувствительности со-
стоит в нахождении частной производной дуjdpL, называемой
коэффициентом влияния параметра р,- на характеристику у.
В связи с этим дальнейшее изложение связано с приемами рас-
чета коэффициента влияния.
Очевидный прием для расчета ду/др, может состоять в вы-
числении Ay/Api при достаточно малой величине приращения
Др,. Такой прием требует проведения следующего объема вы-
числений. Анализируется схема при номинальных значениях па-
раметров все;х элементов р,=р1Ном, i=l, 2,...,«, с определением
174
номинального значения у=у11Ом- Далее проводится и-кратный
анализ той же схемы в следующих условиях: при i-м анализе
задают малое отклонение Др, параметра pi и, сохраняя номи-
нальные значения параметров всех прочих элементов, проводят
анализ схемы с определением у и Ду, соответствующих Др,-. Не-
достаток этого способа расчета коэффициентов влияния состоит
в том, что требуется многократный [(«+1)-кратный] анализ
схемы и, таким образом, затраты машинного времени оказыва-
ются большими. Кроме того, обычно бывают неизвестны сообра-
жения по выбору оптимального значения отклонения Др,-: боль-
шое значение Др,- может нарушить справедливость приближения
, чрезмерно малое Др, может вызвать большую по-
грешность в определении Ду.
Для расчета коэффициентов влияния достаточно широкого
класса схем могут быть предложены специальные приемы, более
эффективные (требующие меньшего объема вычислений) по
сравнению с рассмотренным прямым методом вычисления част-
ных производных. Один из эффективных методов расчета коэф-
фициентов влияния, называемый методом присоединенной схемы,
рассматривается ниже.
Линейная RLC-схема. без управляемых источников при гармо-
нических воздействиях одной частоты. Пусть схема находится
под воздействием независимых источников гармонического на-
пряжения и тока некоторой частоты ® и выходной величиной
анализируемой схемы является напряжение б'вых. Для поминаль-
ных значений напряжений, токов, сопротивлений будем пользо-
ваться обозначениями Окои, /ном, ZH0M. Рассмотрим влияние на
напряжение ЙВЫх изменений сопротивления Z, i-ro элемента.
Пусть все элементы, за исключением i-ro, имеют номиналь-
ные значения сопротивлений, а сопротивлению i-ro элемента Z,-
сообщим бесконечно малое приращение Zi—Zi mK-\-dZi. При
этом ток в элементе /,- получит некоторое приращение dir. It =
= /,ном+^7, и напряжение на элементе можно представить вы-
ражением
йi = itzt = it (zfH0M + dze) — itZtaoM + iidZj —
” 7H- (7гном dij) dZ; I tZ7,H0McfZj.
В последнем выражении отброшена бесконечно малая dldZt
второго порядка малости.
В полученном выражении слагаемые представляют собой на-
пряжения соответственно па номинальном значении сопротивле-
ния и его приращении. Введем для второго слагаемого обозначе-
ние dUi — h HondZi (рис. 11.1,а) и затем элемент dZt заменим
эквивалентным источником напряжения dOi (рис. 11.1,6).
175
i£ziHOI,
а)
d-d iiMOndZ£ Ц ^hoh
s)
Рис. 11.1
На рис. 11.2,а показана анализируемая схема, в которой i-й
элемент представлен схемой замещения. Заключенная в прямо-
угольник часть схемы представляет собой пассивную RLC-схему
с номинальными значениями параметров элементов. Очевидно,
отклик этой схемы на входные воздействия (независимые источ-
ники) представляет собой номинальное значение выходпогр на-
п ряжен и я бу ы х но м, отклонение d L.во, х — б в hi х б вых но м, связан-
ное с dZiy может быть найдено в схеме на рис. 11.2,6 как отклик
той же схемы па воздействие источника напряжения dCl =
= 'h H0„dZ,:. Вследствие линейной зависимости между воздейст-
вием и откликом, если разделить напряжение dUt на dZt, то от-
dUf . ~ ,0
клик на напряжение • 1 Ом = /;ком окажется равным
(7Z- £
дОъых/dZ:, т. е. искомому коэффициенту влияния отклонения Z,
на б^вых.
Рис. 11.2
176
Обозначим Ku—OifUi — коэффициент передачи в схеме на
рис. 11.2,в от источника напряжения Лиом-1 Ом к выходу. Тогда
_^Гвь,х j к Л] .3)
^2 гном К 1
Вследствие того, что пассивная линейная схема обладает
свойством обратимости, коэффициент передачи по напряжению
Ки в прямом направлении равен коэффициенту передачи по току
в обратном направлении, т. е. численно равен току /п«, возникаю-
щему в схеме рис. 11.2,г под действием включенного к выходу
источника гармонического тока единичной амплитуды: К.и=
= /",• (1/1А).
Подставив это выражение в (11.3), получим
%^ = /гномЛ(1/1А).
(11.4)
Интересуясь лишь численным значением коэффициента влия-
ния, опустим в (11.4) коэффициент, учитывающий размерность
величин:
Здесь /! Ном — ток в i-м элементе основной схемы с номиналь-
ными значениями параметров элементов; /Д —ток в том же эле-
менте так называемой присоединенной схемы (рис. 11.2,г), полу-
ченной из основной путем исключения из нее независимых источ-
ников и подключения к выходу источника тока единичной
амплитуды и той же частоты, какова частота источников входных
воздействий.
Особенность расчета коэффициентов влияния в схеме, выход-
ной ВеЛИЧИНОЙ В КОТОРОЙ ЯВЛЯеТСЯ ТОК /Вых, состоит в том, что
в присоединенной схеме в выходную цепь вводится источник на-
пряжения единичной амплитуды и частоты, совпадающей с час-
тотой источников входных воздействий.
Итак, обозначив выходную величину АВЫх [в качестве АВЫх
можно рассматривать напряжение ЙВых ЛИОО ТОК /вых] , МОЖНО
записать выражение для коэффициента влияния в форме
= /. /п (116)
* НОМ 1 I • \ 1 1 • /
Таким образом, для расчета коэффициентов влияния по па-
раметрам всех элементов схемы достаточно произвести двукрат-
ный расчет токов: в анализируемой схеме под действием источ-
ников входных воздействий (рис. 11.3,а) и в отсутствие входных
воздействий под действием подключенного к выходу единичного
12—6030 177
Рис. 11.3
источника тока (или напряжения) в присоединенной схеме
(рис. 11.3,6).
Неудобство выражения (11.6) состоит в том, что оно опреде-
ляет частную производную по сопротивлению Z- элемента, между
тем на практике больший интерес представляет частная произ-
водная по параметру элемента (г, L, С). Очевидно, для резистив-
ного элемента
п-... ; п . , —
— ir .ном /г(. ’ (11.7)
Для индуктивного элемента
<1
— Li
Для емкостного элемента
д-Хвчх _ ;,Л 5-YB.,x . дХвьгх — с(-
PQ -}а d^wCi) дус 1 dZc_ dYc.
—Li I I
= —jtt)Zc ~д/ВЫХ = —JM^C. ic ,HOM^C. = —/и6'Сном iic, • (11-9)
Таким образом, коэффициент влияния дХВЪ1Х/дС1 выражается
через произведение напряжений на емкостном элементе С, в ос-
новной и присоединенной схемах.
При расчете на ЭВМ удобно не формировать уравнения ма-
тематической модели раздельно для основной и присоединенной
схем, а формировать эти уравнения для комбинированной схемы,
содержащей источники входных воздействий Хни и единичный
источник xq, включенный в выходную цепь. При этом, полагая
в уравнениях Хо—0, получаем основную схему, а при Хни=0 и
х0= 1 — присоединенную схему. Система уравнений для такой
178
М ЧЛ'
комбинированной схемы с представлением величин в комплекс-
ной форме имеет следующий вид:
1рс3 = BjX В2Х11Н ВОЛ'О, (11.10)
(/®-1 — Aj) X = А2Х|1И + Аохо. (11.11)
Положив в (11.10) и (Н.П) хо = О, имеем уравнения для ос-
новной схемы
/резном = Ми- + ВЛ.,и. (11.12)
(/<о-7 — AJ Х1ЮМ = А, Х1Ш. (11.13)
Представляя комплексные величины в форме
1рез ном = 1рез ном “Г j 1рез ном, XH01I = Хном -f- )ХНОМ, Хнп =_ХНИ -р ]ХНИ
и приравнивая в (11.12) и (11.13) действительные и мнимые
части по обе стороны равенств, получаем следующую систему
уравнений с действительными величинами:
1рез ном = BjXuoj, 4- В2ХНИ, 1рсз ном = В1ХК-М -у В2ХНИ', (11.14)
А1ХНО:Л (оХном = А2ХНИ, СоХвом AjXhom — А2Хни* (11.13)
Решение системы линейных уравнений (11.15) позволяет опреде-
лить Хном и Хн'ом, т. е. действительные и мнимые части напряжений
на емкостных элементах и токов в индуктивных элементах и,
таким образом, найти комплексные значения входящих в (11.14)
и (11.15) напряжений и токов, соответствующих основной схеме.
Из (11.10) и (11.11), положив в них ХНц=0 и х0= 1, получим
уравнения для присоединенной схемы:
1рез = М" + Во, (/®-7-А1)Хп = Ао. (11.16)
Как это было сделано выше, представим входящие в (11.16)
величины в форме 1рез — ^рез +/I рез И Хп = Х/п+)Х"п. Пр и этом,
приравнивая действительные и мнимые части по обе стороны
равенств, имеем следующую систему линейных уравнений с дей-
ствительными величинами:
1?,з = В3Х'ПВо, Ve^BX'"; (11.17)
- “гх п-соХ"п = Ао, ®Х'П — Ах"п = 0. (11.18)
Решением системы линейных уравнений (11.48) можно найти
Х'п и Х"п и, следовательно, определить для присоединенной схемы
комплексные значения напряжений на емкостных элементах и
12* 179
токов в индуктивных элементах. Подстановка найденных значе-
ний Х'п и Х"п в (11.17) позволяет определить 1Ре3 и 1ре", т. е.
комплексные значения токов резистивных элементов в (11.16).
Таким образом могут вычисляться дХвых/дп, дХвых/dLi,
дХвыъ/дС, по выражениям (11.7) — (11.9).
Часто интересуются влиянием отклонений параметра элемен-
та не на комплексное значение отклика, а на модуль и фазу от-
клика. Представив Хвых = А'в, ... e,!A'JV, рассмотрим расчет коэффи-
циента влияния отклонений параметра элемента р, на модуль
дХвых/dpi и фазу дфвых/дрг- отклика.
Можно показать, что
In Хвых = Re (In Хвых)
(здесь Re — символ действительной части комплексной величи-
ны). Действительно,
Re(ln.YB,.;x) = Re {In (АЛВЬ.Х е'*в«:} =Re(ln.YBKX -г pBb J = ln.YBb;x.
Следовательно,
Re(lnX ) ШХ ... v
е е - X
с v ZkBWX*
Таким образом,
дХ.в-»- = eRe(ln*B«x’ = eRe In*Bsrx) _^-[Re(lnA'Bbtx)J =
dpt dpi d;\
= Хвых [Re (In Хвых)] = MsbIX Re [ (In ATBbIX) 1 =
dpt L dpi J
= A'BbIXRe(^-!— (11.19)
\ dPi J
Для получения выражения дфвых/дрг используем тождество
фвых=1т(1пХвых) (здесь 1т — символ мнимой части комплекс-
ной величины с отбрасыванием /). В справедливости этого тож-
дества нетрудно убедиться:
Im (In А"вых) = Im [In (.YBb,x e'^ = Im (In A'BblX + /эвых ) = ?BbIx.
Следовательно,
dpi ~ dp{
= Im f—J—
\ 7CBbIX
180
Im(ln%BbIX) = Imf-^—lnA'BbIX') =
opi /
d V \
, Л вых •
dpi )
(11.20)
гв
Рис. 11.4
Входящая в (11.19) и (11.20)
производная дХвых1др{ представ-
ляет собой коэффициент влия-
ния, определяемый выражения-
ми (11.7) — (П.9), в зависимости
от того, к какому типу элементов
относится параметр р{.
Пример 11.1. Для схемы на рис. 11.4
рассчитать чувствительность модуля
и фазы выходного напряжения по параметрам всех элементов. Номинальные
значения параметров элементов: t7BX= (1— 1) В, С2 = 1 нФ, С3 = 1 нФ, С4 = 2,5 нФ,
г5=0,5 кОм, г6 = 2,2 кОм, г7 = 2,2 кОм, г8 — 5,1 кОм, га=7,5 кОм.
Уравнения схемы
d
dt
Cl /-
G2
исг
ис„
’—0,59418
— 0,44556
—0,09379
—0,44556
—0,481 16
—0,11580
—0,23447’
—0,28952
—0,26155.
'0,48414'
0,36305
0,22457-
ив .+
—0,75792
—0,81847
0,11228
"—0,48414
—0,11003
0,34451
—0,14861
_—0,10105
—0,36305
0,08251
0,37203
—0,03559
—0,10912
—0,56142"
—0,32694
0,32694
0,05504
0,03742.
“с2
С з
“с4 _
- 0,76486'
0,28071
—0,28071
0,12109
"—0,61756"
0,14035
—0,14035
0,06054
0,04117.
Уравнения получены с использованием следующих значений масштабных
коэффициентов: Л4Ц = 1, Л11=10**3, Afr=I03, Л4с = 10~9, Л4/=106. Результаты
расчетов по (11.7) и (11.9) на частоте со = 10ь рад/с приведены в табл. 11.1
и 11.2.
Цепь с управляемыми источниками. Рассмотрим влияние от-
клонения сопротивления г,- на выходное напряжение t/вых в схе-
ме с управляемым источником. Пусть управляемым источником
является источник тока, управляемый напряжением. Так же, как
это делалось выше, включим последовательно с г,- н0-и источник
(7 = Л создающий на выходе отклик численно равный коэф-
181
Таблица 11.1
Номер элемента ^ПОМ» МА 1 /п. А
5 0,77962-/0,28047 —0,34339- /0,24073
6 0,31321-/0,28354 0,08269 - —0,41050 • / 0,14438
7 -0,27766-/0,08635 /0,23953
8 0,11904—j 0,07713 0,10372- -/0,04904
9 0,07065-/0,00614 0,11534- /0,09655
Окончание табл. 11.1
Номер элемента dU р ВЫХ _ / / п _Ё_ дг ~ г,-ном? г , ui i fi кОм C>ri кОм дер 1 ari ’ кОм
5 —0,33523-/0,09137 —0,32606 —0,22571
6 0,06684^/0,02177 0,06470 0,05166
7 0,13466-/0,03106 0,13684 —0,03626
8 0,00857-/0,01384 0,00973 —0,02453
9 0,00756-/0,00753 0 00818 —0,01287
Таблица 11.2
Номер элемента ^С^ном’ В %10’ •, в
2 0,00308-/0,46640 —0,3851Н /0,37044
3 0,07722-/0,34746 —0,33608/- /0,47115
4 -0,07888-/0,23597 -0,03806- -/0,19727
Окончание табл. 11.2
Номер ^ВЫХ ;.,г> ггП В в д ср 1
элем ента пГ 1ШиС;НОМи Г . 1 1 нФ dCf ' нФ нФ
2 -0,17159-/0,18076 —0,15529 —0,36650
3 -0,13771-/0,15312 —0,12394 —0,30924
4 —0,04355-/0,02455 0,04551 —0,03886
фициенту влияния дивых/дг{; управляемый источник вынесем из
схемы (рис. 11.5). В соответствии с (11.3) dOBb,Jdrt = J г.номКи.
Коэффициент передачи К= йъ/й\ здесь не может быть выра-
жен коэффициентом передачи тока в обратном направлении li/Io,
так как рассматриваемая схема не является обратимой (из-за
наличия в ней управляемого источника). Условие К=/П<7Л> мо-
182
Рис. 11.5
Рис. 11.6
жет быть обеспечено в присоединенной схеме, показанной на
рис. 11.6, на которой в схему управляемого источника внесены
определенные изменения. Действительно, представим коэффици-
ент передачи К в основной схеме в следующей форме: K. = U2lih =
= (72//) (//£/) (1//Ui). Здесь й2/1 и — коэффициенты
передачи для обратимых частей схемы. В присоединенной
схеме они равны: C2/I — Un2/ io', С'/C\ = lnt/1а. Члену i;Q'=a
Рис. 11.7
183
Рис. 1 1.8
в присоединенной схеме соответствует равный ему коэффициент
передачи /п/ ип2 = а.
Следовательно, 7\ можно определить из присоединенной схе-
мы, положив /0=1 А; Х= (Сп2//о) (/П/Сп2) (/п,//п) =/п;//0 =
= /"/ (1/А).
Таким образом, если в присоединенной схеме изменить соот-
ветствующим образом построение управляемого источника, то
коэффициенты влияния могут быть определены так же, как для
схем, не содержащих управляемых источников, т. е. бЛ'Вых/<5р,=
=it
На рис. 11.7 показаны варианты схем управляемых источни-
ков (а) и их представление в присоединенной схеме (б), приве-
дены формулы для расчета коэффициента влияния по параметру
управляемого источника.
Пример 11.2. Рассчитать чувствительность выходного напряжения линейной
транзисторной схемы (рис. 11.8,а) по параметрам всех ее элементов. Номиналь-
ные значения параметров элементов схемы: r<_ — 1 кОм, г2 = 0,5 кОм, г3 =
= 2,5 кОм, г< = 0,5 кОм, <5 = 0,15 кОм, г6=10 кОм, <7 = 0,9 кОм, г8 = 0,4 кОм.
Номинальные значения коэффициента передачи по току для транзисторов VT1
и VTв схеме включения с общим эмиттером £4=02 = 50. Номинальное значение
входного напряжения t7Bx= 1 В.
На рис. 11.8,6 и в представлены эквивалентная (основная) схема анализи-
руемой цепи и соответствующая ей присоединенная схема со следующими дан-
ными управляемых источников:
/9 = Щ/2, Ло = «2Л, О"= -о2(7"п.
Уравнения токов резисторов, полученные при использовании масштабных
коэффициентов Ми= 1, ЛН = 10“3, Mr= 103:
184
Таблица 11.3
Номер Г П А ЙУВЫХ г/нпм ^в’-гх
элемента /НоМ Ч • А дг1 ^ВЬ’Х НОМ dri
1 0,99486 —2,68798 —2,67416 —0,99486
2 0,01026 — 5,51053 —0,05654 —0,01052
3 —0,37909 —0,04355 0,01651 0,01535
4 —0,13439 0,04355 —0,00585 —0,00109
5 —5,87025 2,59730 —15,24680 —0,85083
6 000051 0,26880 0,00014 0,00051
7 —0,98408 —2,55376 2,51310 0,84145
8 6,71994 1,00000 6,71994 1,00000
а) для основной схемы
б) для присоединенной схемы
’ 0,99486“ _—2,68798
2НоМ 0,01026 —5,51053
ЗНО'Л —0,37909 сп —0,04355
4HQM —0,13439 V 0,04355
□ном —5,87025 в<’ 2,59730
сном 0,00051 7 п 16 0,26880
7Но'Т —0,98408 7 п 7 7 —2,55376
8Но. I 6,71994. 7 п _78 — 1,00000.
Результаты расчета чувствительности приведены в табл. 11.3.
Коэффициенты влияния и чувствительность по параметрам управляемых
источников:
<5РВь.х Л?! = — ЛЛ,П= 0,00112,
S>'< = rra^' .dU^- = 0,02078,
1 ^ВЫХ НОМ
dUBuxlda2 = —Ци"а = 0,00140,
_ а2НОМ дЦвы,
°2 ~~ и Яп
и ВЫХ НоМ
= 0,02601.
11.2. АЛГОРИТМ РАСЧЕТА ВЛИЯНИЯ
ОТКЛОНЕНИЙ ПАРАМЕТРОВ ЭЛЕМЕНТОВ
НА ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЦЕПИ
Пусть откликом цепи является напряжение СВых. Не уточняя,
является ли входное воздействие напряжением (7ВХ или током 7вх,
представим его величиной Хвх. Тогда комплексный коэффициент
передачи на частоте со будет К (со) = Свых/А'вх. Если положить
185
Авх=1, то при этом коэффициент передачи численно окажется
равным отклику цепи Овых и, следовательно, без учета размер-
ности величин можно записать <9К(ш)/(9р; —г1б'вых/^Р<.
Таким образом, расчет коэффициента влияния отклонения
параметра р, на комплексный коэффициент передачи свелся
к расчету коэффициента влияния отклонения параметра рг на
выходное напряжение, метод вычисления которого рассматри-
вался в § Ц.1. Расчет дК((й) /dpt вносит лишь особенность, за-
ключающуюся в том, что входное воздействие Хвк в основной
схеме принимается единичным (например, единичной ампли-
туды) .
К аналогичным выводам можно прийти в случае, если откли-
ком цепи является ток /Bax и рассматривается влияние отклоне-
ния параметра элемента на коэффициент передачи вида К(ы) =
= /вых;А'вх. Положив здесь ЛвХ=1, получим, что коэффициент
передачи окажется в этом случае численно равным отклику /ВЫх
и, следовательно, dK(co) /dpi~dIBm/dpi. Таким образом, расчет
коэффициента и в этом случае можно производить методом, из-
ложенным в § 11.1, приняв в основной схеме Хвх=1.
Итак, при расчете dK(®)/dpi следует положить в основной
схеме Хвх=1 и далее рассчитывать частную производную
дАТых. dpi, численно равную /др,.
Для определения коэффициента влияния отклонения парамет-
ра i-го элемента р, на АЧХ и ФЧХ можно воспользоваться выра-
жениями (11.19), (11.20), записав их в виде
= XHRefU— (Ц.21)
d/Д- \К (<о) др, J
=1т f-Д- АЩ (11.22)
д/д \К (<о) др, /
11.3. АЛГОРИТМ РАСЧЕТА ВЛИЯНИЯ
ОТКЛОНЕНИЯ ПАРАМЕТРОВ ЭЛЕМЕНТОВ
НА ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЦЕПИ
В § 11.1 и 11.2 чувствительность рассматривалась в частотной
области. Предполагалось, что анализируемая схема находится
под воздействием независимых источников гармонического тока
и напряжения одной частоты, неизменной амплитуды; считалось,
что неустановившиеся процессы отсутствуют и схема находится
в установившемся режиме (практически этот режим обеспечива-
ется выбором достаточно большого времени между моментом
включения источников и моментом анализа процессов в схеме).
Соблюдение этих условий позволяло представлять величины
в комплексной форме.
186
Рис. 11.9
Перейдем к рассмотрению чувствительности во временной об-
ласти. При этом снимем указанные выше ограничения: независи-
мые источники могут быть источниками произвольной формы на-
пряжения и тока (и, следовательно, с произвольным спектром
частот), процессы в анализируемой схеме могут иметь неустано-
вившийся характер. При этих условиях будем определять част-
ные производные по параметрам элементов от величин (токов,
напряжений и т. д.), представленных в форме функций времени.
Пусть отклик на выходе цепи является напряжением «вЫх(0-
Будем определять частные производные вида duBblx(t) /дг{,
дмвых(0 /dLi, диВЫХ (t)ldCi.
Расчет коэффициента влияния диВЫх (t) l<3rk. Пусть схема не
содержит управляемых источников и все элементы схемы, кроме
элемента rk, имеют номинальные значения параметров. Вынесем
за пределы схемы все независимые источники. Параметру эле-
мента rk дадим приращение dr а, которое также вынесем из схе-
мы (рис. И.9,а). Заключенная в прямоугольник часть схемы
представляет собой пассивную линейную RLC-схему, не содержа-
щую управляемых источников. Напряжение на резистивном эле-
менте с сопротивлением rk=rk B0K-Ydrk
Urk(t) = rkirk[t) = rkamxirk{t) 4- ir/i(t)drk.
Здесь первое слагаемое есть напряжение щ чоч на г&ном, второе—-нап-
ряжение durk на приращении drk. Таким образом, durk(f) = irk (t) drk.
Так как приращение drk вызывает изменение тока в цепи резистив-
187
ного элемента rk, то представим ток ir в виде
= %н<.м(0 + dirk
и подставим в выражение dur (t)
durk^ P/^homG) 4“ dhk\drk К^ном (0 drk-
Здесь отброшен член второго порядка малости.
Как и в § 11.1, заменим элемент drk источником напряжения
durk(t) (рис. 11.9,6). При этом выходное напряжение можно
представить двумя составляющими: составляющей иВыхнои(/),
связанной с действием независимых источников Хп11(^), и со-
ставляющей duBblx(t), вызванной действием источника dur (t'<.
Устранив из схемы независимые источники (положив Хни(/)=0),
получим схемы на рис. 11.9,в. Далее разделим на drk напряже-
ние источника dur и) и напряжение на выходе схемы duBblx(t);
при этом напряжение источника станет численно равно току
‘rk".o".i‘dа напряжение на выходе станет равно производной
6//вых(0/дгк (рис. 11.9,г).
Таким образом, дивых (t)/drk численно равно отклику на вы-
ходе схемы, образующемуся под действием включенного после-
довательно с гк источника напряжения, численно равного h-^-пч Kt-
Воспользовавшись интегралом Дюамеля, можно записать
о
Выражение записано в предположении, что включение независи-
мых источников происходит в момент времени t=Q (при
Х„и=0) при нулевых начальных условиях (Х(0)=0). В (11.23)
grk (t—т) есть импульсная характеристика — отклик, получае-
мый на выходе схемы на рис. 11.10,а под действием в цепи гк
а)
S)
Рис. 11.10
188
напряжения и, имеющего форму единичного импульса u = b(t—
—т). Так как рассматриваемая схема обладает свойством обра-
тимости, при поиске частных производных по параметрам многих
элементов удобнее передачу импульсного напряжения в прямом
направлении gr (/—т) определять передачей импульсного тока
в обратном направлении. Это можно выполнить, подключив к вы-
ходным клеммам схемы источник тока io=b(t—т) и определив
ток i^it—т) от этого источника в цепи г* в присоединенной
схеме (рис. 11.10,6). Подставив в выражение (11.23) вместо
п
gr (t—равное ему получим
= (П.24>
о
Пример 11.3. Проверить справедливость выражения (11.24) на простейшем
примере цепи первого порядка, представленной на рис. 11.11,а.
Пусть входе цепи с момента 1 = 0 действует постоянное напряжение 6.
Тогда ток через г при номинальных значениях параметров элементов
U - —
'гном (0 = — б гС .
г
Ток через тот же резистивный элемент в присоединенной схеме (рис.
11.11.6)
t—1
1гп(/-т)= е"~.
ГС
Отсюда
^=СSLe-Fcf._Le~~Fc\ dz= _JLte~Tc .
dr J r \ rC I r2C
o
Правильность этого реультата, полученного методом присоединенной схе-
мы, можно подтвердить прямым дифференцированием отклика
U^S!1=± e“Fc )j= __LZe-Fc.
dr dr r2C
Как видим, результат совпадает с выражением, полученным методом присоеди-
ненной схемы.
Рис. 11.11
189
Рис. 11.12
Для расчета коэффициентов влияния в схемах, откликом
в которых является ток гвых(0> можно пользоваться тем же ин-
тегралом (11.23), если в нем grk (t—т) рассматривать как от-
клик на включение к выходу напряжения формы единичного
импульса.
Таким образом, независимо от того, является ли отклик
Хвых(0 напряжением или током, коэффициент влияния
о
Расчет коэффициента влияния дхВых(0/dLk- Повторим приве-
денные выше выкладки применительно к индуктивному элементу
Lk. Дадим индуктивности приращение dLk: Lk—Lh H0M-\-dLk и
затем dLh, а также независимые источники вынесем за пределы
схемы (рис. 11.12,а). Напряжение на dLk равно
(О
б/щ (I) = dLk-——
к at
dLk
d’'Lk ном d)
dt
Заменим элемент dLk источником напряжения diiLk\t), после чего,
разделив на dLk это напряжение и отклик на него с?«ВЫх(0 и по-
ложив Хнц=0, получим схему, представленную на рис. 11.12,6.
Отличие этой схемы от схемы на рис. 11.9,г лишь в значении
напряжения источника, которое в данной схеме равно
— г^н°м(0-
190
Отсюда при соответствующей замене величин в (11.23) мо-
жет быть записано выражение
” - f 4 <’) <11 25>
b
Знак минус перед интегралом связан с тем, что dx=—dt.
Пример 11.4. Применить выражение (11.25) для расчета коэффициента вли-
яния dtisaidt)/дЬ к цепи, представленной на рис. 11.13,а. Положим, что на входе
цепи с момента / = 0 действует напряжение U. Тогда ток Л.но.и(/) в индуктив-
ном элементе при номинальных значениях параметров элементов
zLhom (0 = -е Llr).
В приведенной на рис. 11.13,6 присоединенной схеме ток в том же элемен-
те L равен
lf(/-T) = 4(l-e-Z7rJ = -7-е“^.
at L г
Подставив эти выражения в (11.25), получим
дИвчх(О
dL
1 — е
о
• “TV <dr -гт-
—— e L‘r dz = — te ri
L/r L2
Справедливость показанного приема расчета коэффициента влияния можно
подтвердить прямым дифференцированием выражения отклика цепи:
Цвчх(/)=бе .
aL Li
Этот результат совпадает с выражением, полученным выше методом присо-
единенной схемы.
Расчет коэффициента влияния dxBblx(t) /дСк. Как и в преды-
дущем случае, дадим приращение dCk параметру емкостного
Рис. 11.13
191
Рис. 11.14
элемента Ck и построим схему на рис. И.14,а. Ток в элементе
dCk
d.ic (О
= dCk-----
к лг
dt
Произведем эквивалентное заме пение элемента dC,. источником
тока diC/i. Если затем поло.-кить в схеме Хни = 0, то на выходе це-
пи образуется отклик dxBblx(t), вызванный действием источника
тока di ck', а если, кроме того, поделить ток источника dick на
dCK, то отклик на выходе цепи будет равен производной
^вых (/) ]dCk (рис. 11.14,6). В соответствии с данной схемой
*в х(0 С ^ном^)
dCk J dz >
0
Здесь знак минус перед интегралом обусловлен теми же причина-
ми, что и в (11.25). Заменив о- U — т) откликом u" (t—
ck ck ’
вующего на выходе цепи в присоединенной схеме (рис.
источника х0 (t — т) = 8 (t — т), получим
от дейст-
11.14, в)
(/) _ f
dCk J dt
6
Uck (t — ^dz.
(11.26)
Пример 11.5. Рассчитать коэффициент влияния дивых(()/дС в схеме на рис.
ll.ll.a, полагая, что на входе цепи с момента 1=0 действует напряжение U.
Напряжение на элементе С в основной схеме
“CHOM(z)=L/G-e ГС)-
Напряжение на элементе С в присоединенной схеме (рис. 11.11,6)
192
Подставляем эти выражения в (11.26)
dC J d~ С
О
О
Проверку результата проведем прямым дифференцированием отклика цепи:
диГых(0 d Г ( _____ — Н______ __Ut ~
X ~dC L U 'J- rC2
что подтверждает правильность результата, полученного методом присоединен-
ной схемы.
11.4. ПРОГРАММА РАСЧЕТА
ЧУВСТВИТЕЛЬНОСТИ
Определение чувствительности схемы к отклонению парамет-
ров элементов связано с расчетом коэффициентов влияния.
Укрупненная схема алгоритма расчета коэффициентов влияния
изображена па рис. 11.15. Программа 11.1 реализует этот алго-
ритм. Для расчета коэффициентов влияния должны быть пред-
ПРОГРАММА 11.1
11400 REM РАСЧЕТ КОЭФФИЦИЕНТОВ ВЛИЯНИЯ
11402 PRINT "ВВЕДИТЕ ЧАСТОТУ ="F X INPUT F
11404 FOR 1=1 ТО NX X FOR J=1 TO NX X Al(I,J)=АЗ<I,J> X NEXT J
11406 A2<I)=A4(I) X NEXT I X GOSUB 3714 X GOSUB 15500
11408 FOR 1=1 TO 2*NX X X2<I)=X1(I> X NEXT I
11410 FOR 1=1 TO N3 X D<I)=0 X FOR K=1 TO NX
11412 D(I>=D(I>+B1<I»K)*X2<K> X NEXT К X NEXT I
11414 FOR 1=1 TO N3 X I1(I)=D(I)+B2<I) X NEXT I
11416 FOR 1=1 TO N3 X I2<I)=0
11418 FOR K=1 TO NX X 12<I>=12<I>+B1<I.К)*X2<K+NX> X NEXT К X NEXT I
11420 FOR 1=1 TO NX X FOR J=1 TO NX X Al<IrJ)=A<I,J) X NEXT J
11422 A2(I)=A0(I> X NEXT I X GOSUB 3714 X GOSUB 15500
11424 FOR 1=1 TO N3 X S<I>=0 X FOR K=1 TO NX X S(I>=S<I)+B<I>K>*X1<KX
11426 NEXT К X NEXT I
11428 FOR 1=1 TO N3 X 13(I>=S<I)+B0<I) X NEXT I
11430 FOR 1=1 TO N3 X I4<I>=0
11432 FOR K=1 TO NX X 14(I)=14(I>+B<I>K)*X1(K+NX) X NEXT К X NEXT I
11434 PRINT "КОЭФФИЦИЕНТЫ ВЛИЯНИЯ РЕЗИСТОРОВ СХЕМЫ"
11436 FOR 1=1 ТО N3
11438 Y1 < I > = 11 < I > * 13 < I) — 12 < I > * 14 < I > X Y2(I)=I1<I)*14<1>+12<I>*13<I?
11440 PRINT Y1(I)I' + j ’FY2(I> X NEXT I
11442 K=1
Ц444 PRINT "КОЭФФИЦИЕНТЫ ВЛИЯНИЯ ИНДУКТИВНОСТЕЙ И ЕМКОСТЕН СХЕМЫ"
11446 FOR 1=1 ТО NX X IF I>N1 THEN K=-l
11448 Y4<I)=2*K*PI*F*<X2<I)«XI<I>-X2<I+NX>«XI<I+NX>>
11450 Y3<I)=2*K»PI*F*<X2<I>*X1(I+NX)+X2<I+ NX)*X1(I>)
11452 PRINT Y3<I>»’ + J ’FY4(I> X NEXT I
11454 STOP
13—6030 193
варительно определены матрицы А],
А2, Bi, В2 основной и присоединенной
схем. Ввод этих матриц осуществляет-
ся в режиме диалога. Результатами
расчета являются комплексные значе-
ния коэффициентов влияния резистив-
ных, индуктивных и емкостных эле-
ментов цепи, число которых также
вводится в программу. Для нахожде-
ния комплексных значений вектора
переменных состояния основной и при-
соединенной схем используются про-
цедуры из программы 3.3: формирова-
ние системы уравнений и решение
сформированной системы уравнений.
Расчет комплексных коэффициентов
влияния в форме (11.7)— (11.9) про-
изводится на заданной частоте, кото-
рая вводится в начале программы.
Принятые обозначения. В програм-
ме используются следующие массивы:
Al, А2, Bl, В2 — для хранения матриц
А], А2, Bi и В2 математической модели
основной схемы (уравнения токов ре-
зистивных элементов и переменных
состояния); А, АО, В и ВО — аналогич-
ные матрицы присоединенной схемы;
N1—число емкостных элементов; N2—
число индуктивных элементов; N3—
число резистивных элементов; F — значение частоты, на которой
определяются коэффициенты влияния; №/о — размерность матри-
цы Ai; II и 12, 13 и 14 — действительные и мнимые части ком-
плексных значений токов резистивных элементов основной и при-
соединенной схем; Y1 и Y2 — действительные и мнимые части
комплексных коэффициентов влияния резистивных элементов;
XI и Х2— действительные и мнимые части комплексных значе-
ний векторов переменных состояния присоединенной и основной
схем; Y3 и Y4 — действительные и мнимые части комплексных
коэффициентов влияния индуктивных и емкостных элементов.
Описание программы. Следующим блокам схемы алгоритма,
представленной на рис. 11.15, соответствуют строки: блоку 1 —
строки программы 11400—11402, блоку 2 — строки 11404—11406,
блоку 3 — строки 11410—11418, блоку 4 — строки 11420—11422,
блоку 5 — строки 11424—11432, блоку 6 — строки 11434—11438,
блоку 7 — строки 11442—11450, блоку 8 — строки 11440—11452.
Для выбора требуемой формулы расчета коэффициентов влияния
194
емкостных и индуктивных элементов необходимо в начале про-
граммы ввести их количество. Затем в строке 11442 вводится
ключ — переменная К, которому присваивается значение К=— 1
в том случае, когда рассчитываются коэффициенты влияния ем-
костных элементов, и К= 1 для индуктивных элементов. Ком-
плексные коэффициенты влияния выводятся сначала для резис-
торов, затем для емкостных и индуктивных элементов. При этом
следует иметь в виду, что порядок следования выводимых коэф-
фициентов влияния определяется порядком элементов в соответ-
ствующих векторах схемы, т. е. в векторах X и 1рез. Продемон-
стрируем сказанное на примере.
Пример 11.6. Рассчитать коэффициенты влияния на АЧХ для цепи, изобра-
женной на рис. 11.16. Для этой цепи уравнения токов резистивных элементов и
переменных состояния имеют вид
—1.672
0,064935
—2,4959
0,032467 1,9967 "1 Г «с„ ’
—0,38961 —3,961 uCi
2,4756 —0,24756-* *- 18 -
’1,6396
0,32467
0,020292
0,32467"
£\+ —3,8961 /0,
—0,2435 J
~ —0,8198 —0,081168 0,0081169“
0,016233 —0,097402 0,0097402
—0,83603 0,016233 —0,0016233
0,016233 —0,097402 —0,99025
0,90097 '
0,081168
0,8198
0,081168,
“—0,81168'
£1 + 0,025974 0,16233
0,97402
Сз
г8
Расчет по программе произведем на
результаты:
коэффициенты влияния резистив-
ных элементов схемы
частоте Г=0,1 мГц. Получены следующие
—.131408 + 1 —.315319
.021607 + i —8.72859E—03
—.148903 + i .150668
.057957 + j —.189741
0,15 нФ 0,1 к
Рис. 11.16
13!
195
коэффициенты влияния емкостей и индуктивностей схемы
.253142+ j .132815
—3.09941+ i — 1.69387
—.012775+ j .0219472
Порядок следования полученных значений коэффициентов влияния для ре-
зистивных элементов: г4, ге, г5, г7, что обусловлено их порядком в уравнении
токов резистивных элементов. Коэффициенты влияния для реактивных элемен-
тов следуют в порядке С2, Сз, Ls, что обусловлено их порядком следования
в векторе переменных состояния.
Для расчета чувствительности необходимо по программе 3.3 найти коэф-
фициент передачи на заданной частоте и по формуле (11.2) получить требуе-
мые результаты.
УПРАЖНЕНИЯ
1. Рассчитайте методом присоединенной схемы коэффициенты влияния па-
раметров элементов на выходное напряжение Хаых=Увых и чувствительность
выходного напряжения к отклонениям параметров элементов для схем,
приведенных на рис. 11,17 (ш=103 рад/с).
2. Решите задачу 1. считая откликом цепи Хвых=/вых-
3. Решите задачу 1, считая откликом цепи Л'=Саых/б'вх, где Л'вх — пара-
метр входного независимого источника.
4. Решите задачу 1, считая откликом K = где Хвх— параметр вход-
ного независимого источника.
5. Рассчитайте методом присоединенной схемы коэффициенты влияния па-
раметров элементов на выходные характеристики в схемах, приведенных на
рис. 11.18. Найдите значения этих же величин непосредственным дифференци-
рованием выражения выходной характеристики, представленной функцией па-
раметров элементов. Сравните результаты расчетов, проведенных двумя мето-
дами.
6. Воспользуйтесь выведенными в § 2.4 уравнениями математической моде-
ли схемы, представленной на рис. 2.6. Внесите в уравнения изменения, преду-
Рис. 11.17
196
Рис. 11.18
сматривающие использование источника Lh в качестве входного независимого
источника в основной схеме, источника U2 •— в качестве источника единичного
напряжения в присоединенной схеме, исключение из схемы источника тока /12.
Постройте вручную уравнение выхода комбинированной схемы (включающей
в себя элементы основной и присоединенной схем), приняв Л'Вых=/2.
С помощью ЭВМ, используя программу 11.1, рассчитайте коэффициенты вли-
яния параметров элементов на выходную характеристику на частоте f=l МГц.
7. Решите задачу 6 при следующих условиях: Л'Бых=С'12, —входной не-
зависимый источник, /12 — источник единичного тока в присоединенной схеме,
источник О2 исключите из схемы.
8. Для приведенных на рис. 11.19 схем методом присоединенной схемы
определите коэффициенты влияния параметров элементов на переходную харак-
теристику.
9. Покажите справедливость построения присоединенных схем управляемых
источников, приведенных на рис. 11.7.
10. Докажите, что коэффициенты влияния параметров управляемых источ-
ников на выходные характеристики Xвых определяются выражениями, приведен’
ными на рис. 11.7.
11. Покажите, что метод присоединенной схемы (при его использовании для
расчета коэффициентов влияния параметров элементов на выходные характе-
ристики) может быть распространен на нелинейные схемы.
Рис. 11.19
197
12. Изменение температуры окружающей среды вызывает изменение пара-
метров элементов. Покажите применение метода присоединенной схемы для рас-
чета коэффициентов влияния температуры окружающей среды на выходные ха-
рактеристики схемы при известной зависимости параметров элементов от тем-
пературы.
Глава 12. АНАЛИЗ ВЛИЯНИЯ РАЗБРОСА
ПАРАМЕТРОВ ЭЛЕМЕНТОВ
НА РАБОТОСПОСОБНОСТЬ
УСТРОЙСТВА
12.1. ПОСТАНОВКА ЗАДАЧИ
Под разбросом параметров элементов будем иметь в виду откло-
нения этих параметров (сопротивления резисторов, емкости кон-
денсаторов и т. д.) от номинальных значений, полученных
в результате расчета схемы. Такие отклонения вызываются сле-
дующими причинами:
1) на этапе изготовления устройств они обусловлены тем, что
элементы, на которых строится устройство, имеют вероятностное
распределение параметров. При монтаже устройств на дискрет-
ных элементах используются резисторы, конденсаторы, транзис-
торы, параметры которых имеют случайные значения, лежащие
вблизи указанных для них заводом-изготовителвхМ номиналов.
Такой разброс параметров элементов интегральных микросхем
связан со случайными отклонениями в технологическом процес-
се их изготовления;
2) на этапе эксплуатации устройств возникает медленный
уход значений параметров элементов, связанный с процессом
старения, изменением температуры и т. д.
В дальнейшем будем рассматривать лишь отклонения перво-
го вида. Случайные отклонения параметров элементов приводят
к изменению выходных характеристик устройства (выходных на-
пряжений, токов, коэффициента усиления, частотной характерис-
тики и т. д.), и если эти отклонения таковы, что выходные ха-
рактеристики оказываются за пределами допустимой области их
изменений, устройство считается неработоспособным.
Одна из основных задач анализа разброса параметров эле-
ментов состоит в том, чтобы определить, какова вероятность воз-
никновения таких ситуаций, при которых из-за разброса пара-
метров элементов нарушается работоспособность устройства.
198
Устройство может характеризоваться несколькими выходны-
ми характеристиками yi, которые являются функциями парамет-
ров pi, р2,-..,рп элементов и могут быть представлены в форме
yi = fAPi, р2,---,Рп), 1 = 1, 2,...,т. (12.1)
Очевидно, выходные характеристики (/, могут быть функцией
еще одной переменной, являющейся частотой (например, для
частотной характеристики) либо временем (например, для пере-
ходной характеристики).
Отклонение параметров р, от их номинальных значений р, „ом
приводит к изменению у/. Пусть допустимые пределы изменения
Уз, при котором сохраняется работоспособность схемы, у 1Н ... у,*.
Тогда вероятность того, что изготовленное устройство окажется
работоспособным (годным к эксплуатации), равна
Рт== Вер (г/1н^У1 Утв^Р-Ут^Р-Утв) ( 12.2)
Определение этой вероятности и составляет содержание ана-
лиза влияния отклонений параметров элементов.
Для упрощения изложения в дальнейшем проведем анализ
лишь одной выходной характеристики схемы:
y = f)pi, Р2,---,Рп). (12.3)
Ниже рассматриваются два метода анализа: метод малых от-
клонений и метод случайных испытаний (метод Монте-Карло).
Метод малых отклонений основан на предположении линей-
ной зависимости между выходными характеристиками и пара-
метрами отдельных элементов. Такое допущение оказывается
справедливым при малых отклонениях параметров элементов,
а при больших отклонениях может привести к большим погреш-
ностям в оценке работоспособности устройства. Достоинство ме-
тода заключается в его простоте. Он требует относительно не-
большого объема вычислений, и поэтому анализ с его использо-
ванием может проводиться многократно. Если результат анали-
за влияния разброса параметров элементов, проведенный мето-
дом малых отклонений, свидетельствует о низкой вероятности
работоспособности (т. е. предсказывает высокий процент брака
в процессе выпуска радиотехнического изделия, выполняемого по
анализируемой схеме), то, не подвергая сомнению правильность
полученных данных, следует предусмотреть способы уменьшения
разброса параметров элементов либо внести в схему изменения,
при которых она окажется менее чувствительной к отклонениям
параметров. После внесения в схему изменений повторяется ана-
лиз влияния разброса параметров путем повторного расчета ве-
роятности работоспособности. Однако если анализ, проведенный
методом малых отклонений, дал положительный результат (ве-
роятность работоспособности выше допустимого значения), то,
чтобы убедиться в том, что полученный результат не содержит
199
значительных погрешностей, можно повторить анализ методом
статистических испытаний, дающим более точные результаты.
При таком использовании методов не потребуется часто прибе-
гать к расчету громоздким, требующим большого объема вычис-
лений, методу статистических испытаний.
12.2. МЕТОД МАЛЫХ ОТКЛОНЕНИЙ
Представим выходную характеристику у рядом Тейлора:
п
1/ = /(Р1Ном, Л™.,,--, ++••• (12.4)
*=0 \Pi~~Ном
Положив отклонения параметров Др,- малыми, удержим в раз-
ложении лишь члены, содержащие производные не выше перво-
го порядка. При этом получим следующее выражение для откло-
нения выходной характеристики:
(12.5)
- — 1 К» ВО‘.1
Входящие в данное выражение частные производные вида
dyldpi представляют собой коэффициенты влияния параметров
элементов па выходную характеристику у. Обычно интерес пред-
ставляют не абсолютные отклонения значений выходной харак-
теристики Дг/, а относительные значения этих отклонений ду =
= Лу/укак, и отклонения параметров элементов задаются также
в относительных величинах dpt — kpil Pi ном. При этом выражение
(12.5) записывается в форме
Ьу = — У1 I — у syp., (12.6)
Унсм Р1нхл Z/hqm dpi |р/ — /’/ном " 1
i=l z = l
где SJri _ Pl1 —чувствительность выходной характе-
Дно? 1 dPi I Гi ном
ристикп к изменению параметра элемента pi. Методы расчета
чувствительности рассмотрены в гл. 11.
При использовании выражения (12.6) и методов, построенных
на нем, следует иметь в виду, что:
выражение (12.6) является приближенным, справедливым для
достаточно малых отклонений дрр,
для большинства случаев анализа схем не существует удоб-
ных (требующих относительно небольшого объема вычислений)
оценок значений бр,, при которых равенство (12.6) позволит по-
лучить результаты с приемлемой точностью. Поэтому дальней-
шее уточнение этого выражения с включением в него следующих
200
1Шмм<
Рис. 12.1
членов ряда Тейлора лишено смысла, так как это вызовет суще-
ственное увеличение объема вычислений, но не обеспечит гаран-
тий получения необходимой точности.
В большинстве практических случаев анализа линейных схем
точность, обеспечиваемая выражением (12.6), оказывается до-
статочной при —0,25^6p(sg>|-0,25. Когда возникают сомнения
относительно точности результатов, эти результаты следует счи-
тать предварительными, а окончательные оценки получать, про-
водя расчет методом Монте-Карло.
На выражении (12.6) базируются следующие методы анали-
за: метод анализа по наихудшему сочетанию параметров элемен-
тов и метод моментов.
Метод анализа по наихудшему сочетанию параметров элемен-
тов. Если для tipi известен интервал изменений —б^бр^б/, то
максимально возможное изменение
п
(12.7)
z=i
При этом бг/тах соответствует такой ситуации, когда параметры
всех элементов имеют максимальные по величине и такие по
знаку отклонения, при которых возникает наибольшее по абсо-
лютному значению отклонения выходной характеристики бу.
Этот метод может быть использован в тех случаях, когда рас-
пределение параметров элементов имеет вид, представленный на
рис. 12.1,а. При этом можно полагать, что с вероятностью 0,5 па-
раметр принимает одно из двух значений. Если распределение
параметров элементов имеет форму, показанную на рис. 12.1,6,
расчет методом по наихудшему сочетанию параметров может
дать весьма пессимистические оценки. Это связано с тем, что
метод предусматривает оценивание годности схемы сравнением
допустимого значения относительного отклонения выходной ха-
рактеристики бУдоп с максимально возможным относительным
отклонением этой характеристики буп1ах, т. е. схема считается
пригодной к использованию для серийного выпуска изделий, ес-
ли для нее бутах^буДОп. Это условие является очень жестким,
201
его выполнение приводит к тому, что любые реально возникаю-
щие при выпуске изделий бу оказываются заведомо мсльшс
буЛпп и брак из-за разброса параметров элементов будет полно-
стью отсутствовать. Достижение такого результата может потре-
бовать существенного усложнения схемы и удорожания изделий,
выпускаемых по такой схеме. Экономически может оказаться бо-
лее выгодным допускать некоторый процент брака, если при
этом схема может быть упрощена и себестоимость изделия сни-
зится настолько, что экономический эффект от ее снижения пе-
рекроет потери, связанные с уходом в брак некоторой части
выпущенных изделий.
Когда распределение параметров элементов имеет вид, пред-
ставленный на рис. 12.1,6, желательно пользоваться методом
моментов. К этому же методу следует прибегать в тех случаях,
когда между отклонениями параметров отдельных элементов су-
ществуют сильные корреляционные связи (что, например, имеет
место в интегральных микросхемах).
Метод моментов. Метод предполагает, что приращения бр>
заданы статистическими распределениями и для них известны
числовые характеристики: математическое ожидание Л1{бр,} и
дисперсия D{p}, и при необходимости учета корреляционных свя-
зей между параметрами отдельных элементов известна корреля-
ционная матрица этих связей
R -
г и ... г1п
Ггз ...
(12.8)
„Пг1 Гцг Гпз •••
При этом, пользуясь выражением (12.6), можно рассчитать
следующие величины:
а) математическое ожидание отклонений выходной характе-
ристики
(12.9)
б) дисперсию характеристики у в случае некоррелированных
параметров элементов (г>д=0 при i#=j)
D {у} = D {Pl} (Stf + D {р2} (S^)2 +...+ D {pn} (S^ =
= 2D{pJ(Sp.)2=
(12.10)
202
где Dt = D{pjSp.}, и в случае коррелированных, параметров элементов
D{y} = ... IX] R
(12.11)
Если все учитываемые параметры элементов схемы имеют
нормальное распределение, то ду имеет также нормальное рас-
пределение:
ы(оу) =
1
|/z2n ау
(Sy—M {Sy}}2
Ъу2
При этом вероятность годности схемы Р, определяется выра-
жением
Ч
Р, = Р < ty < = \ су) d (Zy)
Ч
24 J
(12.12)
Выражение (12.12) можно записать через функции Лапласа:
(12.13)
где F (х) = -pL J e~t2/2dt-
— оо
Выбор для расчета выражения (12.12) либо (12.13) связан
с наличием в библиотеке стандартных программ программы вы-
числения определенных интегралов и программы вычисления
функции Лапласа, а также с объемом вычислений по каждой из
стандартных программ.
12.3. МЕТОД СЛУЧАЙНЫХ ИСПЫТАНИЙ
(МЕТОД МОНТЕ-КАРЛО)
Сущность метода Монте-Карло. Появление ЭВМ вызвало раз-
витие и широкое использование нового направления вычисли-
тельной математики — направления, использующего метод слу-
чайных испытаний, называемый также методом Монте-Карло.
Сущность метода Монте-Карло удобно рассмотреть на простей-
203
Рис. 12.2
Рис. 12.3
шем примере вычисления определенного интеграла следующего
вида:
1
7 = jf(x)ctx, (12.14)
о
полагая 0=С/(х)^1 при 0<Щ'^1. На рис. 12.2 показана подынтег-
ральная функция )(х). Очевидно, при принятых условиях график
этой функции оказывается внутри единичного квадрата, значение
же искомого интеграла I есть часть площади этого квадрата,
находящаяся под кривой функции /(х) (заштрихованная область
па рис. 12.2).
Представим следующий процесс. Пусть точка случайным об-
разом многократно «бросается» в единичный квадрат так, что
она обязательно попадает в этот квадрат и никакие участки пло-
щади квадрата не имеют преимуществ (с точки зрения попада-
ния в них точки) перед другими. Моделирование такого случай-
ного попадания точки в единичный квадрат с равномерным рас-
пределением точек попадания по площади квадрата можно осу-
ществить следующим образом.
Каждая точка квадрата характеризуется координатами х=а
и у=$ (рис. 12.2). Если значения а и [3 в каждом испытании
будут выбираться из последовательности случайных чисел с рав-
номерным распределением на отрезке [0, 1J, то будут выполнены
сформулированные выше условия случайного попадания точки
в единичный квадрат.
Итак, пусть в Ем испытании выбрана пара случайных чисел
а,- и р,-, которым в квадрате соответствует точка (а,, р(). Произ-
ведем проверку условия
Р/<Даг). (12.15)
Выполнение условия соответствует случаю попадания точки
в площадь под кривой f(x). Пусть из N таких случайных
испытаний в п случаях неравенство выполняется. Тогда отноше-
ние n/N при большом У близко к вероятности р попадания точ-
204
ки в площадь под кривой [ (х). Очевидно, вероятность р численно
равна площади под кривой f(x) и, следовательно, значению ис-
комого интеграла. Итак,
I=p^n]N=p. (12.16)
О такой величине p = n/N говорят, что она является эмпири-
ческой оценкой вероятности р.
Вновь повторив серию из N испытаний, мы, наверное, получим
новое значение р. При этом возможны такие значения р, которые
находятся в достаточно близкой окрестности точного значения р,
однако могут быть получены значения р и далекие от р.
Таким образом, р является случайной величиной, характеризуе-
мой некоторым распределением (рис. 12.3). Если задать некото-
рую область допустимых погрешностей [—Дд, Дд] —доверитель-
ный интервал, то вероятность Ра получения решения, не выходя-
щего из этой области, может быть сделана как угодно близкой
к единице путем выбора достаточно большого Лг. На рис. 12.3
показано, что увеличение N приводит к увеличению вероятности
Рд получения решения р с допустимой погрешностью:
Р+Ад ~ ~
Рд= w(p)dp. (12.17)
Л-Лд
Таким образом, при решении задачи методом Монте-Карло важ-
но правильно определить необходимое число испытаний Лг.
Перейдем к способам определения Л'. В рассмотренном выше
примере р подчиняется биномиальному распределению и число-
вые характеристики определяются следующими выражениями:
математическое ожидание равно р, дисперсия
al=p(l-p)/.V. (12.18)
р
Из теории вероятностей известно, что вероятность отклонения
р от его среднего значения р подчиняются неравенству
Р( I р~р | >Дд)<орДд2. (12.19)
Это соотношение называется неравенством Чебышева. Оно дает
оценку вероятности получения неудовлетворительного решения,
т. е. решения с погрешностью, превышающей допустимое значе-
ние (иначе, решения, значение которого лежит за пределами до-
верительного интервала). Так как Р(|р—р|^Лд) = 1—Ря и =
= р(1—р)1^, то из неравенства Чебышева следует, что для обес-
печения решений, находящихся в заданном доверительном интер-
вале с доверительной вероятностью РД, число испытаний N долж-
но удовлетворять соотношению
N^p(l~ р)/[\\ (1- РД) J.
(12.20)
205
Очевидно, что выражение не может быть непосредственно ис-
пользовано для нахождения N, так как р является неизвестной
величиной (само нахождение р составляет сущность нашей зада-
чи). Однако если учесть, что и, следовательно, р(1—p)sC
^0,25, то для расчета N можно записать неравенство
№?0,25/[Л2д(1- Рд)]. (12.21)
Из полученного выражения следует, что метод Монте-Карло не
годится для получения решений с высокой точностью (малым
Дд). Действительно, пусть Дд = 0,001, Рд=0,995. Тогда
^0,25/[(0,001)2(1—0,995)J = 50-106. Такое число испытаний да-
же при решении относительно несложных задач (с небольшим
числом операций в каждом испытании) практически невозможно
реализовать на современных ЭВМ средней производительности.
Вместе с тем при точностях, обычно требуемых при большинстве
расчетов электронных схем, реализация решения методом Монте-
Карло не вызывает серьезных трудностей.
Следует заметить, что выражение (12.21), как правило, дает
весьма завышенные значения N. Распределение р является
асимптотически нормальным и при достаточно больших N может
быть принято практически нормальным. В этом случае
Лд
Р.=—Д— f expf- — \dx = 2F — 1, (12.22)
P
x
где F (x) = J exp dt — функция Лапласа.
—oo
Отсюда
t = Д = К*1 ( 1+?д Y (12.23)
Р А' р I 2 I х
Здесь F~l (х) — функция, обратная F(x). Из (12.18) и (12.23)
имеем
ol = p(l-p)/N = ^/i2p. (12.24)
Так как р(1—/з)<0,25, то из (12.24) можно получить расчет-
.И ; -мани
ное соотношение
Л^гО,25/2Р/А2д. (12.25)
Избыточность в значении N из (12.25) связана с тем, что при
получении этого выражения вместо р(1—р) было взято его мак-
симально возможное значение 0,25. Для устранения этой избы-
точности требуемое N можно находить непосредственно в ходе
проведения испытаний. Пусть проводятся испытания сериями по
206
.V| и после каждой очередной серии проверяется условие
р(1-р)/Л’^Д2д//2р. (12.26)
Выражение (12.26) получено из (12.24) путем замены р на близ-
кое к нему значение его эмпирической оценки р.
Если условие (12.26) не выполняется, то проводится очеред-
ная серия из iVi испытаний. В противном случае число испыта-
ний считается достаточным и испытания прекращаются.
Некоторые формулы для практических расчетов. В практиче-
ских задачах обычно выполняется условие р<^1 (малая вероят-
ность брака, малая вероятность ошибок при передаче данных и
т. д.). Если представляющая интерес вероятность р близка к еди-
нице, следует рассчитать величину, дополняющую до единицы,
т. е. величину р'=1—р. При этом будет выполняться условие
р'< 1 (например, если интересуются вероятностью выхода год-
ных схем Рг, которая близка к единице, следует вести расчет ве-
роятности брака Ро=1—Ру.
При выполнении условия р<^1 выражение (12.20) приводит-
ся к виду
Лг>---------- (12.27)
Лд2( 1 Рд)
а из (12.24) следует
t2
Дд2 Р
Во всех приведенных выше выражениях доверительный интер-
вал Ад представляет собой допустимое значение абсолютной
погрешности в оценке искомой вероятности р. Чаще удобно вы-
ражать эту погрешность в относительной величине: т]д=Дд/р.
Выразив в (12.27) и (12.28) доверительный интервал Ад через
величину т]д, имеем
------------!-------
-Рд)
N ^_J—t2
РЧд
Отсюда видно, что при одной и той же допустимой относи-
тельной погрешности цд с уменьшением р растет требуемое чис-
ло испытаний.
Если в (12.29) и (12.30) положить pwp=n/N, то получим
удобные для расчетов выражения
п Зэ----------,
»7дг(1“Рд)
/г — t2
Пд2 Р
(12.28)
(12.29)
(12.30)
(12.31)
(12.32)
207
1
При пользовании выражениями (12.31) и (12.32) не предус- 4
матривается вычисление числа испытаний N, испытания продол-
жаются, пока п (например, число тех испытаний, при которых
обнаруживается брак) не достигнет значения, определяемого
этими выражениями. Одновременно с подсчетом п должен про-
водиться счет общего числа испытаний Ы. Затем искомая веро-
ятность p=n/N.
Например, пусть Рд=0,9, т)д=0,25. Из (12.31) получаем |
п Д'---------—----- = 160.
(0,25)2 (1 —0,9)
Так как tp = F~' / 1 + j = 1,65, то в соответствии с (12.32)
----!--- 1 652 = 44.
(0,25)2
Отсюда видно, что формула, построенная в предположении
нормального распределения р, в данном случае приводит к со-
кращению числа испытаний примерно в 4 раза.
Если задача анализа сформулирована таким образом, что не
требуется определение вероятности р, но достаточно установить
факт, что эта вероятность для исследуемой схемы не выше неко-
торого допустимого значения рдоп, то требуемое число испыта-
ний ;V может быть определено из выражений
PjonVU — -Рд)
(12.33)
--------L2. (12.34)
Ддоп’Ь2 Р
Например, пусть Рд=0,9, т]д=0,25, рдоп=10-2. Тогда из вы-
ражения (12.33) Л'АМб ООО, из выражения (12.34) Л'Аз4400. Если
при проведении такого числа испытаний не накопится значение
п, получаемое из выражений (12.31), (12.32), то можно утверж-
дать, что при заданных Рл и т]д обеспечивается вероятность
<Рдоп. Такой подход позволяет прекратить испытания до того,
как будет достигнуто получаемое из выражений (12.31), (12.32)
значение п и, таким образом, уменьшается число проводимых
испытаний Л’.
Алгоритм анализа влияния разброса параметров элементов
методом Монте-Карло. В соответствии с изложенным при при-
менении метода Монте-Карло для анализа влияния разброса
параметров элементов проводится N испытаний схемы. Для каж-
дого элемента с варьируемым параметром ЭВМ формирует по-
следовательность случайных чисел. Каждая последовательность
случайных чисел должна иметь распределение и корреляционные
связи, характерные для соответствующего параметра. В каждом
208
Рис. 12.4
Рис. 12.5
испытании параметрам элементов присваиваются значения из со-
ответствующих последовательностей случайных чисел. Таким об-
разом, параметры элементов схемы приобретают случайный на-
бор значений. Для каждого такого случайного набора значений,
которое присваивается параметрам элементов при испытании,
проводится анализ схемы с определением интересующих разра-
ботчика выходных характеристик. После проведения испытания
далее аналогичным образом параметрам элементов присваивает-
ся новый случайный набор значений и проводится следующее
испытание с определением значений выходных характеристик
схемы.
При одних наборах случайных значений параметров элемен-
тов выходные характеристики будут соответствовать требовани-
ям, при других наборах они могут оказаться неудовлетворитель-
ными.
Разработчика могут интересовать:
14—6030 209
а) относительное число случаев, в которых выходные харак- |
теристики не удовлетворяют (или удовлетворяют) требованиям, i
и, следовательно, процент брака (процент выхода годных изде- f
лий) при серийном выпуске изделий по данной схеме;
б) относительное число случаев выхода значения характерис-
тики за пределы допусков (при анализе причин брака это важно
для каждой выходной характеристики);
в) эмпирическое распределение некоторых выходных характе-
ристик в форме гистограмм.
Приведенная на рис. 12.4 схема алгоритма предусматривает
определение процента выхода годных схем. Для получения оцен-
ки вероятности брака из-за недопустимых отклонений значений
отдельных выходных характеристик и построения гистограмм
этих характеристик необходимо предусмотреть (вместо блоков 5
и 6 на рис. 12.4) вычисления, представленные схемой алгоритма
на рис. 12.5.
12.4. ФОРМИРОВАНИЕ
ПОСЛЕДОВАТЕЛЬНОСТЕЙ СЛУЧАЙНЫХ
ЧИСЕЛ
Формирование случайных чисел с равномерным распределе-
нием на отрезке [0, 1]. Метод получения таких чисел, как прави-
ло, базируется на использовании рекуррентных соотношений, по-
зволяющих по заданному случайному числу находить следующее
случайное число последовательности. Рассмотрим наиболее рас-
пространенные алгоритмы:
1) данное двоичное «-разрядное случайное число возводится
в квадрат с получением 2«-разрядного результата, средние п раз-
рядов этого результата принимаются в качестве дробной части
следующего случайного числа;
2) перемножаются два случайных двоичных «-разрядных чис-
ла £(-_1 и g,-. Из получающегося 2«-разрядного произведения вы-
деляются его « средних разрядов, которые присваиваются дроб-
ной части следующего случайного числа;
3) целое число т); умножается на целую константу k, из про-
изведения выделяются « младших разрядов, которые приписы-
ваются тр+ь Полученное число рассматривается как дробная
часть очередного случайного числа g,+i. Константа k определя-
ется выражением 8^ + 3, где р— любое целое число. В качестве
начального числа используется любое нечетное число.
Для проверки близости распределения формируемых случай-
ных чисел к равномерному распределению пользуются различны-
ми приемами. Один из таких приемов основан на проверке часто-
сти появления чисел в определенных интервалах отрезка [0, 1].
Например, может определяться частость появления чисел, нахо-
210
дящихся в интервалах [О, O,5J, [0,25, 0,75J; количество т чисел
в этих интервалах должно составлять примерно половину от об-
щего количества N сформированных чисел (m/N»0,5).
Другой прием проверки близости к равномерному распределе-
нию состоит в определении математического ожидания и диспер-
сии сформированных чисел и сравнении их с соответствующими
числовыми характеристиками случайной величины, имеющей рав-
номерное распределение на отрезке [0, 1]. Для случайной вели-
чины с равномерным распределением [w(g) = l] математиче-
ское ожидание
1 1 ]
—1' = 0,5; (12.35)
2 Jo
математическое ожидание квадрата случайной величины
М (?) = [ w (£) 4di = f М? =
i i
Л1(<2) = Г^=гЧ‘ — —.
J J L з Jo з
о о
(12.36)
дисперсия
D (£) = М Г;2) — Л12 (В) = --(0,5)2 = 0,083333. (12.37)
3
Эмпирические оценки этих числовых характеристик для сфор-
мированной последовательности случайных чисел g':
математическое ожидание
N
(12.38)
1=1
математическое ожидание квадрата случайной величины
N
W2) = vS^'2’ (12-39)
1=1
дисперсия
О(Г)=М(Г)-М2(Г)- (12.40)
Близость №(£'), Л1(|'2), D(^') к значениям соответственно
М(£), Л1(£2), D (g) может служить признаком близости распре-
деления сформированных чисел к равномерному распределению.
Пример 12.1. Пользуясь третьим из приведенных выше алгоритмом форми-
рования случайных чисел, получить 20 чисел и убедиться в близости распреде-
ления чисел к равномерному.
14* 211
Зададимся р=5, определим значение константы £ = 8-5-1-3 = 43 и зададимся
начальным числом с0 = 0,485373. Образуется последовательность случайных чисел:
0,485373 0,871039 0,454677 0,551111 0,697773
0,004238 0,182277 0,837911 0,030173 0,297439
0,789877 0,964711 0,482573 0,750639 0,277477
0,931511 0,054973 0,363839 0,645077 0,738311
Математическое ожидание
N' '
Л1 (£')=-^JJgZ'= 0,52055^=0,5.
1=1
Математическое ожидание квадрата случайной величины
Л'
М (g'2) = V У! 0,36043 =
•» 4^ о
/ = 1
Дисперсия
.V / .V з 2
г2— = °-°8946^0’083333-
<=1 <=1
Количество т чисел в интервале [0, 0,5] и [0,25, 0,75] равно 10 и m/N=
= 0,5. Близость полученных значений числовых характеристик к соответствую-
щим числовым характеристикам случайной величины с равномерным распреде-
лением на отрезке [0, 1] свидетельствует о том, что сформированная последо-
вательность чисел имеет практически равномерное распределение.
Несмотря на то, что при известном алгоритме формирования
чисел и заданном начальном числе все числа последовательности
оказываются определенными однозначно, такие последовательно-
сти обладают свойствами последовательности случайных чисел.
В вычислительной математике эти числа называют псевдослучай-
ными. Особенность псевдослучайных чисел состоит в том, что
возникновение числа, ранее появлявшегося в последовательности
случайных чисел, приводит к тому, что следующие за ними участ-
ки последовательности оказываются совпадающими с предыду-
щими. Таким образом, в последовательности чисел образуются
периодически повторяющиеся участки. Так как количество ис-
пользуемых чисел последовательности не должно превышать
длины, равной периоду, то период составляет одну из важных
характеристик алгоритма, по которому производится формирова-
ние случайных чисел. При использовании третьего из приведен-
ных выше алгоритмов период Т=2п~2. Так, при п = 31 7’=231-2 =
= 229» 100-3' 29 = IO8-7.
Случайные числа с равномерным распределением на отрезке
[0, 1] имеют самостоятельное значение; кроме того, они исполь-
212
зуются для формирования чисел с другими характеристиками.
Формирование случайных чисел с нормальным распределени-
ем. Согласно центральной предельной теореме теории вероятно-
стей распределение суммы п независимых равномерно распреде-
ленных чисел стремится к нормальному при п-^оо.
Достаточное для практических целей приближение к нор-
мальному распределению обычно достигается уже при относи-
тельно небольшом количестве суммируемых чисел (п=4...8).
Таким образом, случайные числа, имеющие практически нор-
мальное распределение, могут быть получены по весьма просто-
му алгоритму:
п
У = (12.41)
(=1
где X: — случайное число, взятое из последовательности чисел
с равномерным распределением в интервале [0, 1]. При этом
математическое ожидание Л1(у) =пМ(х) = 0,5.ч и дисперсия
D (у) =nD (х) = п/\2. Для получения случайных чисел с нормаль-
ным распределением, с нулевым математическим ожиданием и
единичной дисперсией следует пользоваться выражением
у° = — 0,5/zj] 12/«. (12.42)
Случайные числа у° могут быть исходными для получения
чисел у с нормальным распределением и любыми заданными ма-
тематическим ожиданием М{у)=а и дисперсией D{y):
у = а + УЩ^У°- (12.43)
Моделирование случайных значений параметров элементов
при анализе влияния разброса параметров элементов методом
Монте-Карло можно провести следующим образом. Пусть моде-
~ лируется сопротивление резистора с номинальным значением гн»м.
| Если распределение значений сопротивления принимается равно-
S мерным в пределах гНом±Агтах, то для получения случайного
значения г в очередном испытании схемы выбирается из после-
довательности случайных чисел с равномерным распределением
на отрезке [0, 1] очередное число а,- и затем вычисляется значе-
ние г с помощью выражения
т = тном-|-(2а;—1)Агтах. (12.44)
Если сопротивление г характеризуется нормальным распреде-
лением с дисперсией D(r), то из последовательности чисел с нор-
мальным распределением, нулевым математическим ожиданием
213
Рис. 12.6
Рис. 12.7
и единичным значением дисперсии выбирается случайное число
у°1 и затем в соответствии с выражением (12.43)
D(r)y°. (12.45)
Формирование случайных чисел с произвольно заданным за-
коном распределения методом Неймана. Метод Неймана являет-
ся универсальным, пригодным для формирования чисел с любым
требуемым распределением при условии, что возможные значе-
ния этих чисел не выходят за пределы некоторого ограниченного
интервала [а, &]. Для выполнения этого условия следует в опре-
деленных случаях вместо заданного распределения w(y) исполь-
зовать аппроксимацию в виде усеченного распределения ы'(у'),
как показано на рис. 12.6. Пусть требуется сформировать слу-
чайные числа с заданным распределением w(y) (рис. 12.7,а)
в интервале [а, &]. Произведем преобразование координат:
У* = (У—a)l(b—a); wi(y*) = w(a+(b—a)y*)/wmax, (12.46)
где датах — максимальное значение w(y). В новой системе коор-
динат функция распределения оказывается вписанной в единич-
ный квадрат (рис. 12.7,6).
Будем выбирать пары чисел из последовательности независи-
мых случайных чисел с равномерным распределением в интер-
вале [0, 1]. Пусть очередная выбранная пара таких чисел и
т]£ определяет точку в единичном квадрате (см. рис. 12.7,6). Если
выполняется неравенство
т]<< wi (|,) =w(a+(6—a)^)/wmax, (12.47)
214
то формируется число
«Л=а+ (b-a)^i,
(12.48)
принадлежащее последовательности чисел с требуемым распре-
делением w(y). Если неравенство не выполняется, данная пара
чисел отбрасывается и выбирается для формирования числа сле-
дующая пара чисел gt-+1 и тр+ь На рис. 12.8 приведена схема ал-
горитма описанного метода.
Суть метода можно пояснить следующим образом. Обратимся
к рис. 12.9. Кривой 1 здесь изображена функция плотности ве-
роятности щ(д) = 1 при равномерном распределении. Если вы-
бран участок ---~- Д j, то вероятно-
стью щ(е)Д=Д можно оценивать частость, с которой на этом
участке появляются числа в последовательности случайных чисел
с равномерным распределением. Для неравномерного распреде-
ления (кривая 2) эта частость на том же участке будет пропор-
циональна Д'ДсО/Д- Следовательно, чтобы получить последова-
тельность чисел с неравномерным распределением, можно взять
последовательность чисел с равномерным распределением и сни-
зить в ней частость появления чисел, сделав ее пропорциональной
(д). Это можно выполнить, сохранив на каждом участке лишь
часть чисел, равную ayjg). Остальные числа должны быть от-
брошены. Таким образом, щДд) определяет вероятность, с кото-
рой число, взятое из последователь-
ности чисел с равномерным рас-
пределением, должно быть исполь-
зовано для формирования числа
с заданным распределением. Для
решения вопроса, должно ли слу-
чайное число быть использовано
или оно должно быть отброшено,
выбирается из последовательности
чисел с равномерным распределени-
ем другое число тр и проверяется
215
I
неравенство (12.47), которое будет выполняться с вероятностью
^iU).
Формирование случайных чисел с заданными коэффициента-
ми корреляции. Пусть требуется сформировать п последователь-
ностей случайных чисел: 1-я последовательность z(1)i, z(1)2,...;
2-я последовательность z(2)i, z(2)2, z(2>3, • • •; п-я последовательность
z(n)b z(n)2, 2(п)з,... Потребуем, чтобы в каждой последовательно-
сти случайные числа были независимы, имели нормальное рас-
пределение с нулевым математическим ожиданием и заданной
дисперсией о2,- (i=l, 2,..., и), между числами последовательно-
стей должны быть обеспечены корреляционные связи с заданной
корреляционной матрицей
- Г 1 г13 ... г1п '
^21 1 Пз • •• П/г
- ^п1 I пг ^пз -
Такие последовательности чисел могут потребоваться при
статистическом анализе схемы методом Монте-Карло в условиях,
когда между параметрами элементов существуют корреляцион- :
ные связи. В этом случае в i-м испытании схемы выбирается на-
бор п чисел z(1\-, г<2>,,..., (по одному из каждой последова-
тельности) и варьируемым параметрам элементов сообщаются
Значения Р1 = Р1ном_|"^1^> Р2==р2яом~]~^2\', • • • 1 Рп = Рп коя-\-~'П>i, ;
где PiHOM, р2ном,..., Рп ном — номинальные значения параметров со-
ответствующих элементов.
Одним из описанных выше методов сформируем последова- j
тельность независимых случайных чисел ух, У2,--- с нормальным
распределением, нулевым математическим ожиданием и единич-
ной дисперсией. Тогда требуемые последовательности случайных
чисел могут быть получены следующим преобразованием чисел
у(0) в г-’: i
г<2) = а21У(0)1-]-й22Р<0)2;
2(3) = д31у(0)1_|_а32(/(0)24-а33г/(0)з;
= ап\У1'<у'1}.-\-с1П2у<'й'>2-\-апъу<'й\-\-... -\-С1ппУ^п- (12.49)
Значения коэффициентов ац, входящих в уравнения, вычисли- ,
ются следующим образом. Возведя в квадрат левую и правую ।
части первого уравнения и затем усреднив их, получим D(z(1)) = I
= flfi£>(p'°>) = ап, так как по условию D (у”'1) = 1. Отсюда йц = ;
= уО(2(')) =оь Перемножим левые и правые части первого и j
второго уравнений и затем усредним их:
-U) _(2) _ _ п 7(0)2 , (0) (0)
Z Z ------- ^11 ^21 У1 I ^11^221/1 9
216
где z{ * z(2) = z/,0)2 = 1; t/Q0) y20t =0 (так как числа y*0) неза-
висимы и имеют нулевое математическое ожидание). Следова-
тельно, Г12СТ1О2=«па21- Отсюда «21= (ri20riO2)/«n = r12O2. Далее
находим коэффициент а22.
°2 ~ г<2)2 ~ «21 ~Ь «22,
откуда == а2^/]—Г22.
Аналогично определяются остальные коэффициенты: а31 = г13а3;
аз2 = аз(ггз—Г1з)/]Л1 —rf2; «зз = <Г1 ——(г2з —r13)2/(l —rf2) И
т. д.
12.5. ПРОГРАММА ФОРМИРОВАНИЯ
СЛУЧАЙНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ
Изображенный на рис. 12.8 алгоритм получения случайных
последовательностей по заданному распределению реализован
в программе 12.1. Функция распределения в ней задается в стро-
ке 12402 оператором DEF FNF(X) = ... Записанная здесь функ-
ция 0,5е 0 5-- является всего лишь примером представления функ-
ции распределения. Пользователю необходимо в этом операторе
заменить запись .5^сЕХР(—. 5>}<Х) на запись, соответствующую
требуемой функции распределения. Исходными данными для ра-
боты программы являются: длина формируемого массива случай-
ных чисел, диапазон изменения случайных чисел, аналитическая
запись закона распределения, максимальное из значений функ-
ции распределения w(y). Выходными данными являются запи-
санные в массив случайные числа с заданным распределением.
Принятые обозначения. Используются следующие имена пе-
ременных: Y0 — массив случайных чисел с заданным законом
распределения; №/о—длина последовательности случайных чи-
сел (количество формируемых случайных чисел); А1 и В1—диа-
пазон изменения случайных чисел; W0—максимальное значение
функции распределения щтах; А и В—пара последовательных
ПРОГРАММА 12.1
12460 REM ФОРМИРОВАНИЕ СЛУЧАЙНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ
12402 DEF FNF(X)’Х*ЕХР<-.5»Х"Х) \ HIM Y0C5000)
12404 W0«SQR<.5>*ЕХР<-.5>
12406 PRINT "ВВЕДИТЕ ДИАПАЗОН ИЗМЕНЕНИЯ СЛУЧАЙНЫХ ЧИСЕЛ”
124Ф8 PRINT "НИЖНЯЯ ГРАНИЦА А’"5 X INPUT Al
12410 PRINT "ВЕРХНЯЯ ГРАНИЦА B="l X INPUT Bl
12412 PRINT "ДЛИНА ПОСЛЕДОВАТЕЛЬНОСТИ N="» X INPUT NX’
12414 FOR IX’l TO NX
12415 A»RND<X) X B=RND(X>
12416 X"(A1+(Bl-Al)*A> X IF B>FNF(X)/W0 THEN 12415
12420 Y0(IX)’X X NEXT IX X RETURN
217
случайных чисел с равномерным законом распределения; X —
пересчитанное значение случайного числа по формуле (12.48).
Описание программы. Заданный закон распределения записы-
вается в аналитическом виде в начале программы с помощью
оператора DEF FNF(X)=... (строка 12402). Для реализации
алгоритма необходимо предварительно найти максимальное зна-
чение функции распределения. Найденное значение wmax можно
ввести с помощью оператора INPUT W0 в строке 12404. Значение
W0 можно найти также по аналитическому выражению, предва-
рительно полученному и записанному, к примеру, в строке 12404.
В строках 12408—12412 вводятся интервал изменения случайных
чисел и требуемое их количество. В строке 12414 осуществляет-
ся последовательная выборка случайных чисел А и В с равно-
мерным законом распределения. Затем в строке 12416 формиру-
ется число X по формуле (12.48) и проверяется условие (12.47).
В соответствии с этим условием формируемое число заносится
в массив (строка 12420) либо производится новая выборка двух
случайных чисел.
Рекомендации по использованию. Заданный закон распреде-
ления и (у) должен быть описан в строке 12402. Кроме того,
должно быть найдено значение а’П!ах, которое записывается
в строке 12404. Больше никаких дополнительных изменений вно-
сить в программу не требуется.
Следует иметь в виду, что рассматриваемая программа мо-
жет быть оформлена в виде процедуры, генерирующей случай-
ные числа с заданным законом распределения. В этом случае не-
обходимо все исходные данные хранить в вызывающей програм-
ме и получаемые значения случайных чисел не заносить в мас-
сив Y0. При этом после возвращения в вызывающую программу
очередное случайное число находится в переменной X.
Пример 12.2. Получить последовательность из 2048 случайных чисел по за-
кону распределения, описываемого функцией вида ш = 0,5е-0>51, и построить ги-
стограмму полученной последовательности.
Для построения гистограммы дополним программу следующими строками:
80 REM ПОСТРОЕНИЕ ГИСТОГРАММЫ ЗАКОНА РАСПРЕДЕЛЕНИЯ .5»ЕХР I- .J*X>
90 GOSUB 12400
100 FOR 1=1 ТО 20 \ Y<I>=0 \ NEXT I
110 D = < В1 - A1 > /20
120 FOR IX = 1 TO NX
130 1=0
140 IF Y0<IX)-Al<D*I THEN Y(I)=Y<I)+1 \ GO TO 100
150 1=1+1 \ GO TO 140
180 NEXT IX
190 FOR 1=0 TO 20 \ PRINT Y(I> \ NEXT I
220 N0=20 \ ROFUB 16000
250 STOP
218
X
0.000Е+00
0.500Е+00
1.000Е+00
1.500Е+00
2.000Е+00
2.500Е+00
3.000Е+00
3.500Е+00
4.000Е+00
4.500Е+00
ГИСТОГРАММА РАСПРЕДЕЛЕНИЯ W—.5»EXP <-.5«Х)
0.000Е+00 *
7.070Е+02 !
6.160Е+02 •
4.250Е+02 1
3.460Е+02 !
2.740Е+02 1
2.150Е+02 !
1.540Е+02 !
1.090Е+02 1
8.600Е+01 !
Рис. 12.10
5.000Е+00 6.800Е+01 ! »
N
В результате работы программы строится график, приведенный на рис. 12.10.
УПРАЖНЕНИЯ
1. Рассчитайте вероятность выхода годных схем с учетом разброса пара-
метров элементов при следующих условиях: учесть влияние на выходную ха-
рактеристику отклонений параметров четырех элементов; чувствительность вы-
ходной характеристики к отклонениям параметра каждого элемента равна 0,5;
отклонения параметров элементов имеют нормальное распределение с дисперси-
ей 0,01; допустимое значение отклонения выходной характеристики равно 20%.
2. Пользуясь методом анализа по наихудшему сочетанию параметров эле-
ментов, определите допустимые отклонения параметров элементов при следую-
щих условиях: учесть влияние на выходную характеристику отклонений пара-
метров четырех элементов; чувствительность выходной характеристики к откло-
нениям параметра каждого элемента равна 0,5; отклонения параметров элемен-
тов имеют равномерное распределение; допустимое значение отклонения выход-
ной характеристики равно 20%.
3. Определите условия окончания испытаний схемы при анализе вероятно-
сти выхода годных схем методом Монте-Карло, если допустимое относительное
значение погрешности результата 10% при доверительной вероятности 0,9. Ре-
шение проведите двумя способами:
а) пользуясь выражением, полученным из неравенства Чебышева для веро-
ятности выхода годных схем;
б) пользуясь выражением, полученным в предположении нормального рас-
пределения эмпирической оценки вероятности выхода годных схем.
4. Составьте программы формирования случайных чисел с равномерным рас-
пределением на отрезке [0, 1], используя приведенные в § 12.4 алгоритмы
Предусмотрите в программах расчеты, связанные с проверкой близости распре-
деления формируемых случайных чисел к равномерному распределению. Сфор-
мируйте с помощью ЭВМ. последовательность чисел и проверьте близость их
распределения к равномерному.
5. Составьте программу формирования случайных чисел с нормальным рас-
пределением, нулевым математическим ожиданием и единичным значением дис-
персии, используя метод суммирования чисел с равномерным распределение^м.
Предусмотрите построение гистограммы распределения. Используйте программу
219
для формирования с помощью ЭВМ последовательности чисел с нормальным
распределением.
6. Сформируйте с помощью программы 12.1 методом Неймана последова-
тельность чисел с нормальным распределением, нулевым математическим ожи-
данием и единичным значением дисперсии. Построив гистограмму распределе-
ния, проверьте на близость к нормальному распределению.
7. Рассчитайте коэффициенты в выражении (12.49) для формирования
четырех последовательностей с нормальным распределением, дисперсией 0,04 и
корреляционной матрицей
0,2 0,3 0,4'
R =
0,2 1 0,5 0,3
0,3 0,5 1 0,2
.0,4 0,3 0,2 1
8. Составьте выражения для моделирования случайных значений парамет-
ров резистора и конденсатора с номинальными значениями параметров г„ом=
= 10 кОм, Сном=1000 пФ, если:
а) параметры имеют равномерное распределение с максимальным значени-
ем относительного отклонения 20%;
б) параметры имеют нормальное распределение со среднеквадратическим
значением относительного отклонения 0,2.
Глава 13. АНАЛИЗ УСТОЙЧИВОСТИ
РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ
13.1. АНАЛИЗ УСТОЙЧИВОСТИ ПРОТИВ
САМОВОЗБУЖДЕНИЯ
Методы анализа устойчивости. При расчете электронных схем
одним из основных требований, предъявляемых к качеству их
функционирования, является требование устойчивости. Линейная
схема с обратными связями считается устойчивой, если она, бу-
дучи выведена из состояния равновесия некоторой причиной
(внешним воздействием, изменением начального состояния), воз-
вращается в исходное состояние после прекращения действия
этой причины.
Правила, позволяющие вынести суждения об устойчивости
электронной схемы на основании анализа расположения корней
характеристического уравнения, минуя вычисление самих корней,
формулируются с помощью критериев устойчивости. При анализе
220
схемы на ЭВМ наиболее удобны алгебраиче- у,,,»
ские критерии (критерии Рауса и Гурвица), ~ ' s2
позволяющие судить об устойчивости схемы * ' х
по коэффициентам характеристического урав- ;
нения схемы । ь/у о “
sn-|-fen_jSn—>4- ... — 0- (13.1) s7 ; s5
Решение характеристического уравнения Рис 13л
n-й степени содержит п корней. Корни ха-
рактеристического уравнения могут быть
вещественными, комплексными попарно сопряженными, мнимы-
ми попарно сопряженными, нулевыми. В общем случае si—
= a;+/coi. На рис. 13.1 показаны возможные положения корней
на комплексной плоскости при Si = ai, s2 = a2-\-j®2, s3 = a2—/а>2,
54 = 0, 55=—05, Sg =—Ctg-j-y'lBe, s7 = l—Cig—/(Og-
Корни с отрицательными вещественными частями принято
называть левыми, поскольку в комплексной плоскости корней
они расположены слева от мнимой оси, а корни с положитель-
ными вещественными частями — правыми корнями. Условие ус-
тойчивости линейной цепи таково: чтобы линейная цепь была
устойчива, необходимо и достаточно, чтобы все корни ее харак-
теристического уравнения были левыми.
Вычисление корней характеристического уравнения в общем слу-
чае является весьма сложной задачей, поэтому важное зна-
чение имеют правила (критерии), которые позволяют определить
устойчивость без вычисления корней. Прежде чем формулировать
критерий устойчивости, отметим, что необходимым условием ус-
тойчивости цепи любого порядка является положительность всех
коэффициентов характеристического уравнения:
bn>0; bn-i>0; Ьп-2>0.. Д0>0.
Для цепей первого и второго порядков необходимое условие
устойчивости является и достаточным, поскольку в этом случае
все корни характеристического уравнения левые. Однако для
цепей третьего и высших порядков положительность коэффициен-
тов характеристического уравнения является необходимым усло-
вием устойчивости, но недостаточным. В этом случае все вещест-
венные корни характеристического уравнения левые, комплекс-
ные же корни могут быть и правыми.
Критерий устойчивости Рауса позволяет по коэффициентам
характеристического уравнения без вычисления его корней сде-
лать вывод об устойчивости цепи. Алгоритм Рауса основывается
на анализе специальной таблицы — матрицы Рауса. Она состав-
ляется из коэффициентов характеристического уравнения цепи
с помощью следующего правила: в первой строке записываются
коэффициенты характеристического уравнения bn, bn-2,
во второй строке Ьп-\, bn-з, Ьп-5, • Элементы в остальных стро-
221
ках вычисляются с помощью рекуррентных соотношений
бЛ,4 = с?г-_2>£+1—г tdi-^k+i,
= dik = bzik—l')', d2k = b2k-lt
i=3, 4,...,n, k=\, 2,...,n. (13.2)
Число строк в матрице Рауса равно п+1. Устойчивость цепи
проверяется в процессе заполнения матрицы Рауса. Для устой-
чивости цепи необходимо и достаточно, чтобы коэффициенты пер-
вого столбца матрицы Рауса имели один и тот же знак, т. е. при
К=1 были положительными:
d\\=bп>0, +i = +~i>0, d3i>0,.... di+i,i.^>0.
Если не все коэффициенты первого столбца положительны, то
цепь неустойчива, а число правых корней характеристического
уравнение равно числу перемен знака в первом столбце матрицы
222
Рауса. На рис. 13.2 приведена схема алгоритма анализа устой-
чивости линейной цепи.
В качестве иллюстрации применения алгоритма Рауса рас-
смотрим характеристическое уравнение некоторой схемы:
s4+ 16s3+32s2+ 10s4-5=0.
Таблица Рауса имеет следующий вид:
1 32 5 О
16 10 О О
31,4 5 0 0
7,4 000
5 000
Так как элементы первого столбца таблицы положительные,
можно сделать вывод об устойчивости схемы.
Оценка запаса устойчивости. Применение критериев устойчи-
вости позволяет ответить на вопрос, устойчива или неустойчива
схема при данных параметрах ее элементов, по эти критерии не
позволяют непосредственно оценить запас устойчивости схемы.
Будем называть запасом устойчивости $ наименьшее из аб-
солютных значений вещественных частей всех корней характе-
ристического уравнения при условии, что все корни имеют отри-
цательные вещественные части:
B = (13.3)
(си— вещественные части корней характеристического уравне-
ния) .
Геометрически запас устойчивости представляет собой рас-
стояние от мнимой оси /со плоскости s до ближайшего к ней ве-
щественного корня или до ближайшей пары комплексно-сопря-
женных корней (рис. 13.3). Чем больше запас устойчивости, тем
более удалены эти корни от оси /со в левой полуплоскости $ и
тем устойчивее схема.
Запас устойчивости определяет скорость затухания свободных
колебаний, соответствующих ближайшим к оси /со корням: чем
больше запас устойчивости, тем скорее затухают свободные ко-
лебания. Для определения запаса устойчивости используется так
называемое смещенное уравнение [14]. Пусть характеристиче-
ский полином имеет вид
7-(s) —bnSn-\-bn—]Sn
На плоскости $ = а+/со сдвинем ось на величину А (рис. 13.3).
Тогда получится новая плоскость s1 = ai+/co, где ai = a4~A.
223
Перейдем в многочлене L(s) от переменной s к переменной sj:
S = S!—Д, /,($!—Д) =bn(s1—Д)п+
+ bn-^Sr—Д) ”-1 +... +MS1-Д)4-6о. (13.4)
Представим (13.4) рядом Тейлора по степеням Si
L (s, - Д) = L (- 4) s, s. +...+,
(13.5)
где /.(*)(- Д) = Л I .
dSj* |s, = o
Все производные порядка выше n равны 0, поэтому ряд со-
держит конечное число членов. После замены переменных харак-
теристическое уравнение примет вид
L(si—Д) =0.
Заменив правую часть (13.14) рядом (13.5), можно получить
новое характеристическое уравнение
sn_|_c,sn-i+ _.. +с.п_15+Си==0> (13,6)
где
k
у,—1,2,..., п. (13.7)
* 4J (п — kV. (k— 0! п 1’ ’ ’ '
/=о
Уравнение (13.6) представляет собой смещенное характерис-
тическое уравнение, соответствующее смещенной плоскости sb
Коэффициенты смещенного уравнения выражаются через коэф-
фициенты исходного характеристического уравнения и зависят от
смещения Д. Корни смещенного уравнения совпадают с корнями
исходного характеристического уравнения схемы. Если смещение
оси меньше запаса устойчивости то все корни уравнения
(13.7) лежат в левой полуплоскости Sj. Если смещение Д сде-
лать больше £, то некоторые корни окажутся в правой полуплос-
кости Si. Чтобы определить, лежат ли все корни смещенного
уравнения в левой полуплоскости Si, используются те же крите-
рии устойчивости, которые применяются в несмещенном уравне-
нии. Эти критерии дадут положительный результат (схема устой-
чива) только при Д<£. Таким образом, запас устойчивости g
можно определять как значение сдвига Д, при котором смещен-
ное характеристическое уравнение схемы перестает удовлетво-
рять критерию устойчивости. Схема алгоритма оценки запаса ус-
тойчивости показана на рис. 13.4.
Влияние изменения параметров элементов схемы на ее устой-
чивость. Формулы (13.2) и (13.7) позволят решить, устойчива
224
Рис. 13.3
Рис. 13.4
Рис. 13.5
схема или нет, и оценить запас устойчивости при данных значе-
ниях параметров элементов схемы. Особый интерес представляет
исследование влияния на устойчивость схемы изменения пара-
метра какого-либо ее элемента.
В общем случае для схемы с сосредоточенными параметрами
передаточная функция имеет вид
K(s) =
amsm+am-ism~1+ ••• +Д1* + «о
bn s" + bn—i s'’”"1 +•••+&! s+ ba
(13.8)
225
15-6030
Известно [16], что зависимость передаточной функции схемы
от любого ее элемента является билинейной, т. е. можно запи-
сать
K(s) = (13.9)
C(.S) + PlD(s) v 7
где Л(з), jB(s), C(s), D(s)—полиномы с вещественными коэф-
фициентами, которые не являются функциями элемента схемы
pi. Такое представление Л($) справедливо независимо от того,
что понимается под рг. сопротивление, емкость, индуктивность,
коэффициент усиления какого-либо усилителя или управляемого
источника (если этот параметр является частотно-независимым).
Из-за наличия билинейной зависимости существует связь между
коэффициентами характеристического полинома и элементом рг.
bj=bj mypM^a-^-bpi), (13.10)
где Ь/ — коэффициенты характеристического полинома ; bj норм
коэффициенты характеристического полинома с нормированными
коэффициентами, т. е. полинома, где bn= 1.
Билинейная зависимость [т. е. зависимость вида (13.9)] по-
зволяет ответить на важный вопрос анализа схемы: насколько
можно изменить t-й параметр схемы р,, чтобы схема не потеряла
устойчивости? Ответ на этот вопрос может быть найден следую-
щим образом: пусть известен характеристический полипом схемы
при номинальном значении параметра p;=pi. Определим харак-
теристические полиномы схемы при значениях этого параметра,
равных р2 и рз, т. е. получим три характеристических полинома
Li(s), L2(s), L3(s).
На основании билинейной зависимости можно записать сис-
тему уравнений
(a+bpl)Li(s)=C(s)+p1D(s),
(а-рр2) L2 (s) = С (s) +p2D (s) ,
(a+bp3) L3 (s) = C (s) -|-p3£> ($) • (13.11)
В системе уравнений (13.11) три неизвестные величины: Ь,
C(s) и D(s), поскольку а принимает значение 0 или 1. Из сов-
местного решения уравнений системы (13.11) можно получить
следующие выражения:
q (^) (Д bPi)Lj(s)р2- (а~\~ bp^L^s)(12 |2)
Pi Pl
р (^) __ я(^-1(5) L2(s)) 4- b(p1L1(s) p2L2(s)) (12 |2)
Pl—Pi
b : zz[p1(La(a)-Z.a(s))+pa(L3(s)-£1(5)) + p3(L1^)-L2(s))l
(Z.i(s) — £3(s)) PsPi + ^iis) — Li(s))plpi + (L3(s) — L^s)) Р1р,'. '
(13.14)
226
Причем если знаменатель (13.14) равен 0, то а=0, Ь=1.
Если знаменатель отличен от 0, то а=1, Ь=0. Определив C(s),
ГДз) и Ь, можно записать характеристический полином в виде
функции от параметра Его элемента схемы
L(s) = C(s)+piD(s). (13.15)
Далее исследование устойчивости можно проводить по извест-
ным алгоритмам, например Рауса, изменяя параметр р, и опре-
деляя предельное его изменение, при котором происходит потеря
устойчивости. Схема алгоритма такой программы приведена на
рис. 13.5.
13.2. ПРОГРАММА РАСЧЕТА ЗАПАСА
УСТОЙЧИВОСТИ ПРОТИВ
САМОВОЗБУЖДЕНИЯ
Изложенный выше алгоритм расчета устойчивости и запаса
устойчивости против самовозбуждения реализует программа
13.1. Исходными данными для работы программы служат коэф-
фициенты характеристических полиномов ЛДх), Е2(5) и Z.3(s),
полученные для трех значений параметров plt р2 и р3 элемента
pt. Программа 13.1 анализирует устойчивость схемы при задан-
ном значении варьируемого параметра и, если схема устойчива,
определяет границу устойчивости.
Принятые обозначения. В программе 13.1 приняты следую-
щие обозначения: №/о — порядок полинома п; Pl, Р2, РЗ—три
задаваемых значения параметра р,-; LI, L2, L3 — одномерные
массивы для хранения полиномиальных коэффициентов полино-
мов Li(s), L2(s), L3(s)', L, С, D — одномерные массивы, храня-
щие коэффициенты полиномов L(s), C(s) и D(s); ^ — двумер-
ный массив для хранения таблицы Рауса; R2, R3— минимальное
и максимальное значения параметра pi. Остальные имена пере-
менных используются для промежуточных вычислений.
Описание программы. Блокам схемы алгоритма, представлен-
ного на рис. 13.5, соответствуют группы операторов, размещен-
ные в следующих строках программы: блоку 1 соответствуют
строки 13200—13212; блоку 2 — строки 13214—13224; блоку 3 —
строка 13226; блоку 4 — строка 13244; блоку 5 — строки 13246—
13260; блоку 6 — строка 13228; блоку 7 — строки 13230—13240;
блоку 8 — строка 13242.
После формирования коэффициентов полиномов C(s) и D(s)
по формулам (13.12) и (13.13) (блок 2) и ввода варьируемого
параметра схемы pi (блок 3) производится расчет устойчивости
по формулам Рауса. Если схема неустойчива, происходит воз-
врат к запросу нового значения параметра р, в блоке 3. В про-
тивном случае, когда схема устойчива, запрашиваются мини-
мальное и максимальное значения диапазона изменения парамет-
15* 227
ПРОГРАММА 13.1
13200 PRINT ’Введите порядок многочлена N "\ INPUT NX
13202 PRINT \ PRINT "41. Значение параметра Р1“ "Р X INPUT Pl
13204 FOR 1=0 ТО NX \ PRINT "L1<"PIP"> = "? \ INPUT LI CI) X NEXT I
13206 PRINT \ PRINT "42. Значение параметра P2= "P \ INPUT P2
13208 FOR 1=0 TO NX \ PRINT "L2("PIP")= "P X INPUT L2CI) \ NEXT I
13210 PRINT \ PRINT "43. Значение параметра P3= "P \ INPUT P3
13212 FOR 1=0 TO NX \ PRINT "L3("FIP">= "P \ INPUT L3CI) \ NEXT I
13214 A=0 \ B=1 \ P0=P2-P1 \ FOR 1=0 TO NX
13216 B(I) = <1.3 (I) -LI <I) ) *P1»P3+ <L2 (D-L3CI) ) »F2*F3< < L1 <I>-L2 <I>)*P1»P2
13218 IF ABS(В<I>)>1.00000E-04 THEN A=1 X B=0
13220 NEXT I
13222 FOR 1=0 TO NX X С<I)=<<A+B»P1)»P2»L1<I)-<A+B*P2)»L2<I)»P1)/Р0
13224 D<I)=<A*<L2<I)-LI<I)>+R*<L2<I>*P2-L1<I)*P1>)/Р0 X NEXT I
13226 PRINT " 4 Pi= "P X INPUT P X R=P X GOSUB 13244
13228 IF AX=1X THEN PRINT "Неустойчива" X GO TO 13226
13230 PRINT "MIN"? X INPUT R2 X PRINT "MAX"? X INPUT R3
13232 E=.01 X F' = R2 X GOSUB 13244
13234 IF AX=1X THEN R0=R2 \ R1=R \ GO TO 13240
13236 P=R3 X GOSUB 13244 X IF ax-07 THEN PRINT "Хстоичиаа' X GO TO 13226
13238 R1=R X R0=R3 '
13240 IF ABS((R0-R1)/R1)>E THEN 13262
13242 PRINT "Запас устойчивости при Pi="?RP" ** Ii- "tR0 X GO TO 13226
13244 FOR 1=0 TO NX X L<I)=C<I)+P*D<I) X B<I)=L<I) X NEXT I
13246 AX=0X X N1=INT<NZ/2)+1
13248 FOR 11 = 1 TO N1 X R<11,1)=B<2*11-2) X R<11,2)=P<2*11-1> X NEXT II
13250 FOR 11=3 TO NZ+1 X IF R<1,I1-1><=0 THEN AX=1X X RETURN
13252 R5 = R(1,11-2)/R<1,11-1)
13254 FOR Jl=l TO N1 X R<JIrI1)=R<JI+1,I1-2)-R5»R(JI+1,I1-J>
13256 NEXT Л X NEXT II
13258 FOR 11=1 ГО NZ + 1 X IF R<lrll)<=0 THEN AX=1Z
13260 NEXT II X RETURN
13262 P=<R0+Rl)/2 X GOSUB 13244
13264 IF AZ=0X THEN Rl=p X GO TO 13240
13266 R0=P \ GO TO 13240
pa и рассчитывается граничное значение параметра, при котором
теряется устойчивость. Анализ устойчивости в заданном диапазо-
не осуществляется также по формулам Рауса, при этом поиск
граничного значения производится методом деления пополам.
Если в задаваемом диапазоне значений схема устойчива, выда-
ется сообщение «устойчива» (строка 13236). При нахождении
границы, где схема становится неустойчивой, выводятся заданное
значение параметра и значение параметра, при котором схема
теряет устойчивость. Граничное значение в программе находится
с относительной погрешностью 0,01.
Рекомендации по использованию. Программа 13.1 требует
ввода значений полиномиальных коэффициентов для трех значе-
ний параметров элемента схемы р,. Полиномиальные коэффици-
енты можно получить с помощью программ П.1 и 3.3. Далее для
произвольного значения параметра р,- программа определяет ус-
тойчивость схемы для формируемого в строке 132444 полинома
(13.15). Если возникнет необходимость вывести на экран дисплея
228
значения коэффициентов полинома L(s) при произвольном зна-
чении pt, то в строке 13244 в тело цикла следует вставить опера-
тор PRINT L(l).
УПРАЖНЕНИЯ
1. Характеристическое уравнение схемы имеет вид
12s‘4-2s2+4s+30=0.
Определите, устойчива ли схема.
2. С помощью критерия Рауса исследуйте устойчивость схемы, характери-
стическое уравнение которой
2s3 + 6s2+10s+15 = 0.
3. Каков запас устойчивости схемы из задачи 2?
4. Для последовательного колебательного контура при трех значениях R=
= 1, 2, 3 получены характеристические полиномы
Lt (s) =s2+s+1,
/.2(s)=s2+2s+1,
(s) = s2+3s 4-1,
значения L и С равны 1.
Пользуясь программой анализа запаса устойчивости, определите область
изменения параметра R.
Глава 14. СПЕКТРАЛЬНЫЙ АНАЛИЗ СИГНАЛОВ
14.1 . АНАЛОГОВЫЕ И ЦИФРОВЫЕ СИГНАЛЫ
Обычно выдаваемый источником сигнал (речевой сигнал в теле-
фонии и радиовещании, телевизионный сигнал и др.) имеет ана-
логовую форму, описываемую непрерывной во времени функцией
с мгновенными значениями, находящимися в некотором интерва-
ле. Передача и обработка таких сигналов могут осуществляться
также в аналоговой форме. Однако в последнее время все более
широкое распространение получают системы передачи и обработ-
ки, в которых поступающие на вход аналоговые сигналы преобра-
зуются в цифровую форму, полученные цифровые сигналы пере-
даются и обрабатываются, на выходе системы производится
обратное преобразование сигналов из цифровой формы в анало-
говую.
Использование цифровой формы представления сигналов мо-
жет обеспечить более высокую помехоустойчивость при передаче
сигналов, стабильность параметров обработки (независимость от
229
времени и влияния изменений в ок-
ружающей среде — температуры,
влажности и т. д.), возможность по-
строения аппаратуры с применением
последних достижений микроэлек-
троники.
Преобразование сигналов из ана-
логовой формы в цифровую вклю-
чает в себя следующие операции:
дискретизацию, квантование и ко-
дирование (рис. 14.1). В процессе
дискретизации из непрерывного
сигнала х(/) берутся отсчеты (мгновенные значения), кото-
рые следуют через определенный временной интервал Т, на-
зываемый тактовым интервалом. Согласно теореме Котельнико-
ва, если сигнал имеет ограниченный спектр, т. е. все его спект)-
ральпые составляющие имеют частоты, не превышающие некото-
рой частоты Fmax, то для восстановления аналогового сигнала из
последовательности его дискретных значений тактовый интервал
должен удовлетворять условию 7^1 / (2Гтах). Сущность опера-
ции квантования состоит в следующем. Создается сетка уровней
квантования, смещенных друг относительно друга на величину,
называемую шагом квантования, каждому уровню квантования
приписывается порядковый номер (0, 1, 2, 3,...). Полученные
в результате дискретизации отсчеты заменяются ближайшими
к ним уровнями квантования. Так, на рис. 14.1 отсчет в момент /п
заменяется ближайшим к нему уровнем квантования с номером 3,
а взятый в тактовый момент 7 отсчет — ближайшим к нему уров-
нем квантования с номером бит. д. Очевидно, процесс кванто-
вания вносит погрешность в представление значений сигнала.
Однако выбором достаточно малого шага квантования эту по-
грешность можно снизить до допустимых значений. Таким обра-
зом, последовательность отсчетов сигнала в процессе квантова-
ния преобразуется в последовательность соответствующих чисел
(номеров уровней квантования). Для представленного на
рис. 14.1 сигнала эта последовательность чисел: 3, 6, 7, 4, 1, 2 и
т. д. Наконец, в процессе кодирования числа этой последователь-
ности представляются в определенной системе счисления, напри-
мер двоичной.
Пусть x(t) —аналоговый сигнал, а соответствующий ему циф-
ровой сигнал [полученный в результате аналого-цифрового пре-
образования сигнала х(0] есть х(пТ), где Т — тактовый период,
п — номер отсчета аналогового сигнала при его преобразовании
в цифровую форму, пТ — тактовые моменты (моменты отсчета
аналогового сигнала). При этом будем полагать, что аналоговый
сигнал имеет ограниченный спектр и тактовый период удовлетво-
ряет условию 7^1 (2/?тах) .
230
В дальнейшем будем полагать, что при /<0 х(/)=0 и, сле-
довательно, отличные от нуля значения х(пТ) могут иметь место
лишь при nTS^O и п представляет собой последовательность О,
1, 2,... чисел натурального ряда.
Известно, что операция получения спектральной функции
Х(ш) по известной временной функции x(t) аналогового сигнала
и аналогового сигнала x(t) по известной его спектральной функ-
ции Л7<о) производится с помощью пары преобразований Фурье
zV(<o) = J x(t)e~iat dt, (14.1)
о
= X^e^dco. (14.2)
—оо
Для цифрового сигнала спектральная функция последова-
тельности х(пТ) обозначается Л'(е-'иГ), а преобразования Фурье
определяются следующими выражениями:
Х(е/шГ) = 2 х(пТ)е~!'пшТ, (14.3)
п=0
г/Т
х (пТ) = ~ j X (eiwt) е1пшТ da. (14.4)
-n/Г
Преобразование Фурье независимо от того, проводится оно
над аналоговыми или дискретными сигналами и является оно
прямым или обратным, характеризуется следующим свойством:
преобразование Фурье, выполняемое над периодической функцией,
приводит к дискретной функции и, наоборот, преобразование
Фурье дискретной функции является периодической функцией.
Из этого следует, что если аналоговая функция x(t) является
дискретной, то ее спектральная функция является периодической.
Если спектр JV((o) аналогового сигнала x(t) представляется
функцией, изображенной на рис. 14.2,а, то после преобразования
в цифровую форму сигнал будет описываться дискретной функ-
цией х(пТ) и его спектральная функция будет периодической,
как показано на рис. 14.2,6. Как видно из рис. 14.2, в пределах
интервала —л/Т^ш^л/Т модули спектральной функции анало-
гового и цифрового сигналов подобны. При ограниченном спект-
ре аналогового сигнала спектр цифрового сигнала оказывается
неограниченным и имеет периодическую структуру с периодом
2л/Т. Отсюда следует прием, используемый для получения ана-
логового сигнала x(t) из цифрового сигнала х(пТ): достаточно
цифровую последовательность преобразовать в последователь-
231
Рис. 14.2
ность импульсов, имеющих малую длительность и амплитуды,
равные х(пТ), а затем из спектра такого дискретного сигнала
с помощью фильтра нижних частот выделить ту ее часть в интер-
вале О^ы^п/Т, которая совпадает со спектром аналогового сиг-
нала. При этом на выходе фильтра образуется аналоговый сиг-
нал x(t), соответствующий цифровому сигналу х(пГ).
14.2 . ДИСКРЕТНОЕ ПРЕОБРАЗОВАНИЕ
ФУРЬЕ
Вычисление выражения (14.3) не может быть реализовано,
так как в нем предусматривается суммирование бесконечного
числа членов. При решении практических задач используется
конечное число N отсчетов аналогового сигнала и, следовательно,
в выражении (14.3) может производиться суммирование конеч-
ного числа членов. В этом случае пара преобразования Фурье
принимает вид так называемого дискретного преобразования
Фурье (ДПФ):
i S x(flT)W'tk’ (14-5)
n=0 n=0'i
k = 0, 1,..., A — 1;
У-l A'-l
- 2 zY(&)e/2wft/v 2 X(k)W~nk}, (14.6)
A= 0 k=0
/z == 0, 1,..., N— 1.
Здесь Wnk = z~i2mkiN. Выражение (14.5) определяет прямое диск-
ретное преобразование Фурье (ДПФ), выражение (14.6)—об-
ратное дискретное преобразование Фурье (ОДПФ).
Рассмотрим различие в результатах, получаемых при исполь-
зовании (14.3), (14.4) и (14.5), (14.6).
232
В случае ДПФ предполагается,
что исходная функция х(пТ) явля-
ется периодической с периодом NT,
поэтому для суммирования в (14.5)
из последовательности х(пТ) выби-
раются значения в пределах одного
периода (рис. 14.3,а). Тогда в силу
сформулированных в § 14.1 свойств
преобразования Фурье дискретность
функции х(пТ) приводит к перио-
дичности спектральной функции
X(k), а так как функция х(пТ) при-
нимается периодической, то спек-
тральная функция X (k) оказывает-
ся дискретной. Следовательно, в
дпф результат преобразования
всегда будет периодической и дис-
кретной функцией, и, таким обра-
Рис. 14.4
зом, первые 7V/2—1 точек X(k) определяют спектральные состав-
ляющие на положительных частотах, следующие N/2—1 точек
соответствуют спектральным составляющим при отрицательных
частотах (рис. 14.3,6).
Перейдем к рассмотрению алгоритма ДПФ и ОДПФ. Оба пре-
образования можно вычислить с помощью одного и того же ал-
горитма. Для этого используется выражение
,v—1
A(k)= % a(n)Wnk, 6 = 0, 1,..., AZ—1. (14.7)
n=0
233
Для прямого ДПФ а(п)=х(пТ], а искомое X(k) = -L A (k);
при вычислении обратного ДПФ a{n)=X{N—п), п = 0, 1,...
- • -, N— 1; п(0) =Х(0), а искомое x(kT) равно A (k).
Таким образом, для вычисления ДПФ и ОДПФ можно поль-
зоваться единым алгоритмом, предусматривающим расчет по
выражению (14.7). Схема такого алгоритма приведена на
рис. 14.4.
14.3 . БЫСТРОЕ ПРЕОБРАЗОВАНИЕ ФУРЬЕ
Представленный на рис. 14.4 алгоритм дискретного преобра-
зования Фурье предусматривает большой объем вычислений.
Для вычисления одного значения A(k) требуется А-кратное по-
вторение внутреннего цикла и, таким образом, выполнение N
умножений (в общем случае пар комплексных чисел). А для
нахождения А’ значений А (/г) потребуется А-кратное повторение
внешнего цикла и число умножений будет равно А2. Этот алго-
ритм содержит большое количество избыточных операций, в том
числе и таких, когда одни и те же операции многократно выпол-
няются над одними и теми же значениями величин. Это связано
со следующим. Весовая функция Ц7^* = е-/2лп*/у является перио-
дической функцией аргумента nk. Так как п и k принимают зна-
чения из последовательности О, 1,...,А—1, то произведение nk,
принимающее значения 0, 1,..., (А—I)2, будет содержать боль-
шое число периодов N и соответствующие им значения весовой
функции Wnk будут повторяться через период N. В табл. 14.1
периодичность показана для N = 8.
В пределах одного периода первые N/2 значений Wnk отли-
Таблица 14.1
nk 0 1 2 3 4 5
W"''' U7« 1 VV' W'2 Ц73 Ц74 —Г» — U'l
Окончание таб.г. 14.1
nk 6 7 8 9 10
W’nk Гб = _Ц72 W' = - W* = W1 F10 = F2
234
чаются от вторых N/2 значений лишь знаком. Действительно,
= е-/2л 4/8 — — — 1 — — Ц/О,
Ц75 = е-/2л5/8 = е-7Ле-/2л1/8==_Ц71 и т д (14.8)
Устранение избыточных операций умножения приводит к так
называемому алгоритму быстрого преобразования Фурье (БПФ).
Рассмотрим один из способов построения алгоритма БПФ,
называемый способом прореживания по времени.
Считая, что N делится на 2, представим выражение (14.7)
двумя суммами, соответствующими четным и нечетным значени-
ям п: i
N—1 А'/2—1
S. — j2itkn/N — j2^2nklN
a(/z)e -- Л, а(2/г)е +
м=0 н=0
Л72—1 .V/2—1
S. л —/2< (2n +1) k' .V «и —/2^2'?^/^
a(2n 4- l)e — Л a(2/z)e 4~
/1 = 0 /1 = 0
/V/2—1 .V/2-1
, -/2*6//V -/2*2nfc/.V /o . ,w2nfe
4-e 2j «(2«+l)e - 2i a(2/z)U7 +
/1=0 n=0
Л/2-1
+ wk 2 a(2n + V\wink = B(k) + WkC{k}, (14.9)
n=0
где B(k) и C(k)—суммы соответственно первого и второго сла-
гаемых.
Таким образом, У-точечное преобразование A (k), k = 0, 1,...
...,N—1, можно произвести, вычислив два V/2-точечных преоб-
разования: B(k), & = 0, 2,...,У—2, C(k), k=l, 3,...,V—1, с по-
следующим их объединением по формуле (14.9). На рис. 14.5,а
показан этот прием для У=8. Такая же схема, но использующая
соотношения (14.8) для сокращения числа умножений при объ-
единении двух 4-точечных преобразований, показана на
рис. 14.5,6.
Прямое вычисление V-точечного преобразования требует №
комплексных умножений, при рассмотренном приеме прямое вы-
числение двух V/2-точечных преобразований потребует
2(N/2)2 = №/2 комплексных умножений, а их объединение — еще
Л//2 умножений. Таким образом, количество умножений станет
равным (УН-V2)/2, что при больших N примерно вдвое сокраща-
ет требуемое количество умножений.
Если .V/2 в свою очередь делится на 2, то вычисление каждо-
го из преобразований B(k) и C(k) можно также свести к двум
У/4-точечным преобразованиям, что вызовет дополнительное
уменьшение требуемого количества операций умножения и т. д.
23.
На рис. 14.6 показано сведение 8-точечпого преобразования к че-
тырем 2-точечиым, на рис. 14.7 дана полная схема вычислений,
в которой дополнительно приведены вычисления, требуемые для
2-точечпых преобразований.
Если N представляется целой степенью двух (2V = 2"'), то
вычисления разбиваются па m = log2 jV этапов, в каждом из ко-
торых требуется 1V/2 умножений. Таким образом, общее количе-
,у
ство умножений— log2jV. Например, при 1V=21O= 1024-точеч-
ном преобразовании число умножений окажется равным 0,5X
236
Рис, 14.7
X Ю24Х 10« 104/2, в то время как при //-точечном ДПФ потре-
бовалось бы Л,2«10'’ операций умножения. Как видим, БПФ
обеспечивает существенное сокращение объема вычислений
(в данном примере в 200 раз).
Следует обратить внимание на то, что исходные отсчеты по-
даются на входы преобразователя не в естественном порядке
[на рис. 14.7 эта последовательность: а(0), а(4), a(2),...j. Для
получения номеров отсчетов в требуемой последовательности не-
237
обходимо номера отсчетов, следующие в естественном порядке,
представить в двоичной системе счисления, а затем в каждом из
этих двоичных представлений переставить разряды, записав их
в обратном (так называемом двоично-инверсном) порядке:
естественный порядок ООО 001 010 011 100 101 ПО 111
двоично-инверсный порядок 000 100 010 ПО 001 101 011 111
десятичные номера (0) (4) (2) (6) (1) (5) (3) (7)
Убеждаемся, что полученная последовательность входных от-
счетов соответствует приведенной на рис. 14.7.
Рассмотрим выполнение перестановок элементов массива в со-
ответствии с двоично-инверсным порядком следования. На
рис. 14.8 представлен алгоритм перестановок. Предлагаем само-
стоятельно, задавшись числом элементов в массиве, проследить
выполняемые в алгоритме операции и убедиться в том, что они
действительно приводят к образованию двоично-инверсной после-
довательности элементов.
238
______1__I---____A(P) --
f/ерсстаноЬка данных
S япоично - инверсном \
порядке .z-s, / V-x ,
-----г~~1----— A(q)
I i: ~~y 1___________________
I 3~-;z ~~l
ZZZZEEEE------------------------~n
Номера пары Ранных fi moccuBp
p:^(r-i) + : q>p i-r1 1
Выборка парь/ данных
в'.---А(р); С'ы-А (г/)„
вычисление вспомогательной величины:
Вычисление пары новых п.начечии:
а(р)'-~в+Т! ;
б)
Рис. 14.9
Обратимся к рис. 14.7 и рассмотрим, какая емкость памяти
требуется для хранения исходных данных, промежуточных и ко-
нечных результатов БПФ. Как мы видели выше, двоично-инверс-
ная последовательность получается путем перестановок пар эле-
ментов, производимых в исходной последовательности. Таким
образом, получение двоично-инверсной последовательности не
требует использования дополнительного массива ячеек памяти,
она формируется в том же массиве ячеек, в которых хранилась
исходная последовательность.
В процессе выполнения БПФ (см. рис. 14.7) на любом его
этапе результат вычисления соответствующих пар значений А'(р)
и A'(q) получается путем использования только значений А(р)
и A(q), которые берутся из результата предыдущего этапа пре-
образований (рис. 14.9,а). Поэтому для хранения вычисленных
239
значений А'(р) и A'(q) не обязательно использовать новые
ячейки памяти, эти значения можно помещать в ячейки, хранив-
шие результаты предыдущего этапа А(р) и A(q). Соответствен-
но результаты, получаемые в ходе первого этапа преобразования,
можно помещать на место элементов двоично-инверсной последо-
вательности. Этот принцип использования памяти на рис. 14.7
отражен тем, что результаты каждого этапа преобразований име-
ют обозначения, совпадающие с обозначениями предыдущего
этапа. Таким образом, требуемая для БПФ емкость памяти для
хранения исходных данных, промежуточных и конечных резуль-
татов преобразования равна N слов (числу элементов в исход-
ном массиве данных).
На рис. 14.9,6 показана схема алгоритма БПФ, где ш =
= log2jV — число этапов, проводимых в процессе преобразования.
Предлагается, пользуясь алгоритмом, получить в общем виде
результат преобразования и убедиться в том, что он соответству-
ет приведенным выше выкладкам.
14.4. ПРОГРАММА БЫСТРОГО
ПРЕОБРАЗОВАНИЯ ФУРЬЕ
Изложенный в § 14.3 алгоритм БПФ, отображенный на
рис. 14.8 и 14.9, реализован в программе 14.1. Исходными дан-
ными для расчета служат размер выборки п и выборка А (п).
Размер выборки, который участвует в расчете, должен представ-
ляться целой степенью двух (п=2'4). Программа реализует пря-
мое и обратное преобразования Фурье. При прямом преобразо-
вании для сигнала х(пТ) получается спектральная функция
X{k). При обратном преобразовании из спектральной функции
в соответствии с (14.7) получается исходный сигнал. В программе
14.1 использована подпрограмма расчета фазы, алгоритм кото-
рой описан в § 3.5.
Принятые обозначения. В программе 14.1 переменным при-
своены следующие имена: №/о—размер выборки (№/o=2fe);
А — двумерный массив А (1, №/о) для хранения выборки и ре-
зультатов расчета; Ll%—L4°/o, Al, А2, Bl, B2 — переменные
для храпения промежуточных результатов.
Описание программы. В программе можно выделить три час-
ти. В первой части, в строках 14406—14420, производится двоич-
ная инверсия входной последовательности. Во второй, в строках
14422—14436, осуществляются преобразования, связанные с сум-
мированием слагаемых по формуле (14.7). В строках 14438—
14446 результаты вычислений выводятся на экран. Третья часть
осуществляет подготовку данных для реализации обратного пре-
образования Фурье. В строках 14450—14458 составляющие спек-
тральной функции делятся на №/о и переставляются в соответст-
вии с правилом а(0)=Х(0), а(п) =X[N—п), n=l, 2,...,N— 1
240
ПРОГРАММА 14.1
14400 REM БЫСТРОЕ ПРЕОБРАЗОВАНИЕ ФУРЬЕ \ DIM А(1»32)
14402 REM NZ- РАЗМЕР ВЫБОРКИ г NX = 2'K
14403 REM ВЫБОРКА ЗАНОСИТСЯ В A(0rNX)>А(1»NX)
14404 LlX=NX-jf< X L2X=NX/2X X JX = 0X \ RX=LOG (NX) /LOG (2)
14405 PRINT "ПРЯМОЕ БПФ —>1 » ОБРАТНОЕ БПФ —> -1'5 X INPUT FZ
14406 IF FZ=-1 THEN GOSUB 14450
14408 FOR IZ=0Z TO LIZ X IF JX<=IZ THEN 14414
14410 A1=A(0X»JX) \ A2=A(1Z»JX) X A(0Z»JX)=A<0Zг IX)
14412 A(1Z»JZ)=A(1Z»IZ> X A(0Z»IX)=A1 \ A(1X.IX)=A2
14414 LX=L2Z
14416 IF LZ1JZ THEN 14420
14418 JX»JZ-LZ X LX=LX/2Z \ GO TO 14416
14420 JZ-JZ+LZ X NEXT IZ \ REM КОНЕЦ ДВОИЧНОЙ ИНВЕРСИИ.
14422 FOR IZ=1Z TO RZ X L1X = 2X'4(IZ-1Z) \ L2X=2X~(RX-IX)
14424 FOR LX=1Z TO L2Z \ FOR MZ=1Z TO LIZ
14426 L3Z=(MZ-1Z)+(LZ-1Z)»2Z»L1Z X L4Z=L3Z+L1X
14428 B1«A(0Z,L3Z) X B2=A<IZ»L3Z)-X C1=A(0Z»L4Z) X C2=A<lZrL4Z)
14430 A0=2«PI»((MZ-1)»L2Z)/NZ
14432 A1=C1»COS(A0)+C3»SIN(A0) X A2=-C1*SIN<A0)+C2»COS(A0)
14434 A(0Z,L3Z)=B1+A1 X A(IZ»L3X)=B2+A2 X A<0Z,L4Z)=B1-A1
14436 A(1Z.L4Z)=B2-A2 X NEXT MZ X NEXT LX X NEXT IZ
"14438 FOR IZ=0X TO NZ-1Z
14440 PRINT A(0X»IZ)rA(lX»IZ>r X REM РЕЗУЛЬТАТЫ РАСЧЕТА.
14442 K3-A(0Z»IZ) X K4=A(lZrIZ> X GOSUB 3532 X REM РАСЧЕТ ФАЗЫ.
14444 A1 = Y0*180/PI X A2=SQR (A < 1X» IZ) л2+А (0Zr IX)'''2)
14446 PRINT A2.A1 X NEXT IX
14448 STOP
14450 REM ПОДГОТОВКА ДАННЫХ ДЛЯ ОБПФ X FOR IX=1 TO L1Z/2X
14452 A1=A(0.NX-IX) X A2=A<1.NZ-IX) X A(0»NZ-IX)=A<0»IZ)
14454 A<1rNZ-IZ)=A(1»IZ) X A<0»IZ)=A1 X A(1»IZ)=A2 X NEXT IZ
14456 FOR IX=0 TO NX-1 X A<0,IZ)=A<0fIX)/NX X A(1»IZ)=A<1»IX)/NX
14458 NEXT IX X RETURN
[cm. (14.7)]. Управление режимом преобразования осуществля-
ется в строках 14405, 14406.
Рекомендации по использованию. Прежде чем обратиться
к программе 14.1, переменной №/о должно быть присвоено значе-
ние размера выборки, которая представляется целой степенью
двух. Таким образом, №/о выбирается из ряда 2, 4 8, 16, 02 и
т. д. В программе задан размер выборки №/о=32, определенный
оператором DIM в строке 14400; если размер выборки превыша-
ет 32, пользователю необходимо внести соответствующие изме-
нения в оператор DIM. В массив А заносится выборка, причем
в первую строку А(0, №/о) заносятся действительные и во вто-
рую строку А(1, №/о)—мнимые составляющие выборки.
Пример 14.1. Определить периодическую спектральную функцию X(k) сиг-
нала х{пТ), полученного дискретизацией меандра,
х (пТ) =
0 при
1 при
—1 при
при условии, что размер
п = 0, 4,
п = 1. 2, 3.
п = 5. 5. 7
выборки п=8.
На ЭВМ получены результаты, которые сведены в табл. 14.2.
16—6030
241
Таблица 14.2
Отсчеты спектральной функции Комплексная форма спектральной функции Показательная форма спектральной функции
Действительные составляющие А (0, N%) Мнимые составляющие А (1, N %) Модуль А1 Фаза А2
0 0 0 0 0
1 1.19209 Е—07 —4,82843 4,82843 —90°
2 0 0 0 0
3 0 —0,828427 0,828427 —90°
4 0 0 0 0
5 — 1.19209 Е—07 0,828427 0,828427 90°
6 0 0 0 0
7 0 4,82843 4,82843 903
УПРАЖНЕНИЯ
1. Составьте программу вычисления ДПФ, пользуясь схемой алгоритма,
приведенной на рис. 14.4.
2. Пользуясь программой БПФ, рассчитайте спектр импульсов прямоуголь-
ной формы. Проверьте правильность полученных результатов, сверив их с дан-
ными спектра, взятыми из справочной литературы или вычисленными анали-
тически.
3. Составьте программу построения гистограммы преобразования Фурье слу-
чайной последовательности 1024 чисел с равномерным распределением на от-
резке [0, 1] (используйте программу БПФ в качестве подпрограммы). Проведите
расчет на ЭВМ.
4. Покажите, что энергетический спектр последовательности определяется
выражением P(k)=X(k)X*(k) = |Х(£) |2.
5. Постройте программу вычисления энергетического спектра последователь-
ности х(п), используя программу БПФ в качестве подпрограммы.
6. Покажите, что спектр последовательности х(п) действительных чисел
обладает свойством комплексно-сопряженной симметрии:
X(k)=X*(X—k),
где X* (N—k) — величина, комплексно-сопряженная X (N—k).
7. Покажите, что сигнал у(пТ) =х(пТ)е1'2ярп/м имеет спектр, сдвинутый от-
носительно спектра сигнала х(пТ) на р дискретных значений частоты.
8. Докажите соотношение
N—l N-1
|х(п)12 = J] \X(k) | \
п=0 fe=0
носящее название теоремы Парсеваля.
242
Глава 15. СИСТЕМЫ АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ
15.1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ
АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ
Система автоматизированного проектирования (САПР)—«орга-
низационно-техническая система, представляющая собой ком-
плекс средств автоматизированного проектирования, взаимосвя-
занный с подразделениями проектной организации и выполняю-
щий автоматизированное проектирование»1.
Как отмечалось во введении, процесс автоматизированного
проектирования радиоэлектронной аппаратуры (РЭА) включает
следующие этапы: системотехническое проектирование, схемотех-
ническое, конструкторское, технологическое.
Разработка САПР РЭА — это сложная научно-техническая
проблема, требующая больших интеллектуальных и материаль-
ных затрат. Для успешного функционирования САПР необходи-
мы средства обеспечения, среди которых принято выделять:
техническое обеспечение: ЭВМ, используемые в САПР, уст-
ройства ввода, вывода, передачи, хранения, отображения инфор-
мации;
математическое и программное обеспечение: методы и алго-
ритмы, необходимые для решения задач проектирования, созда-
ния адекватных математических моделей физических компонен-
тов. Эти методы и алгоритмы реализуются с помощью пакетов
прикладных программ;
информационное обеспечение современных САПР РЭА: по су-
ти, это база данных, имеющая подчас настолько широкое разви-
тие, что она перерастает в базу знаний о проектируемых объек-
тах. В информационное обеспечение входят описания стандарт-
ных процедур, типовых проектных решений. Разработчик должен
располагать также всеми документами и описаниями, которые
объединяются в методическое обеспечение САПР.
Подавляющее большинство созданных и создаваемых САПР
РЭА представляют собой развивающиеся системы: введенный
в эксплуатацию основной (базовый) вариант в дальнейшем рас-
ширяется за счет базы данных, информационных связей, а также
модернизируется в процессе создания дополнительного и более
совершенного программного обеспечения. Базой данных (БД) на-
зывают совокупность связанных между собой данных о проекти-
1 ГОСТ 22487—77. Проектирование автоматизированное. Термины и опре-
деления.
16* 243
руемом объекте. База данных может иметь несколько назначе-
ний, соответствующих различным представлениям о хранящихся
данных. Сами данные и отношения между ними в БД отделены
от основного массива операторов программы проектирования.
Для введения БД отдельно от прикладных программ требу-
ются соответствующие средства доступа к данным, образующие
систему управления базами данных (СУБД).
При создании БД можно выделить основные требования,
предъявляемые к этим системам:
информация, представленная в БД, должна быть возможно
более полной, достоверной и корректной. Поскольку данные
в процессе проектирования часто претерпевают изменения, то
корректность, в частности, означает возможность внесения изме-
нений о данных в информационный фонд;
в процессе создания и функционирования САПР необходимо
предусмотреть возможность изменения информационного и про-
граммного обеспечения; при этом организация хранения инфор-
мации должна быть такой, при которой исключается дублирова-
ние, т. е. хранение одних и тех же сведений в различных масси-
вах информационного фонда. Хранящаяся информация должна
быть также защищена в первую очередь от непроизвольного уни-
чтожения— это особенно важно при многопользовательском ре-
жиме работы.
Объем БД и минимизация затрат памяти находятся в проти-
воречии. Однако при организации БД необходимо учитывать
тенденцию к увеличению объема занимаемой памяти и применять
с-редства уплотнения хранящейся информации.
Развитие и совершенствование как самих БД, так и СУБД
привели в настоящее время к созданию адаптивных САПР [13].
Адаптация САПР может быть определена как способность сис-
темы проектирования приспосабливаться к специфическим свой-
ствам решаемой задачи путем автоматической настройки струк-
туры и состава программного обеспечения на задачу. Процесс
адаптации в САПР может осуществляться на различных уров-
нях. При проблемной адаптации происходит приспособление сис-
темы проектирования к специфическим свойствам решаемой за-
дачи на уровне ТЗ.
. В процессе схемотехнического проектирования реализуется
адаптация системы на уровне методов и алгоритмов. Так, воз-
можность адаптации численного анализа электронных схем была
подготовлена предшествующими работами по комбинированным
методам анализа [И]. Адаптация основана на совместном при-
менении явных и неявных формул интегрирования путем предва-
рительной настройки на определенную формулу или на пошаго-
вую очередность применяемых формул. Адаптация численного
анализа обеспечивает выбор и настройку соответствующего алго-
ритма в автоматическом режиме.
244
Другим аспектом адаптации при численном анализе является
адаптация на уровне алгоритмов. При этом широко используются
приемы, состоящие в таком разделении исходной модели на час-
ти, при котором каждая из них была рассчитана по наиболее
подходящему алгоритму (например, разделение вектора перемен-
ных на быструю и медленную составляющие, анализ схемы в раз-
личных частотных диапазонах с использованием различных
эквивалентных представлений схемы) [16]. В литературе такой
подход называется алгоритмической декомпозицией.
При схемотехническом проектировании наряду с адаптацией
на уровне алгоритмов анализа успешно применяется адаптация
на уровне математических моделей. Это относится как к модели-
рованию активных компонентов (транзисторов, диодов, операци-
онных усилителей и т. д.), так и к формированию математической
модели всего проектируемого объекта. Адаптация на уровне мо-
делирования компонентов означает, что в процессе проектирова-
ния выбирается наиболее подходящая модель, которая подверга-
ется целенаправленным изменениям в зависимости от особенно-
стей решаемой задачи на различных частотных и временных ин-
тервалах.
При решении задач схемотехнического проектирования «боль-
шой размерности» в адаптивных САПР происходит адаптация
математической модели всего объекта на основе макромоделиро-
вания и структурной декомпозиции (расщепление сложного объ-
екта на части) [2J. Под макромоделированием понимается такой
процесс, когда типовые фрагменты (подсхемы, функциональные
микросхемы) представляются математическими моделями, кото-
рые можно встраивать в схему, располагая лишь знанием значе-
ний сигналов (токов, напряжений) на их внешних связях. При
этом укрупняется само понятие «компонент», поскольку компо-
нентом может быть сложная схема, а его описание существенно
упрощается. В этом случае адаптация в процессе проектирова-
ния обеспечивается выбором наиболее подходящей математиче-
ской модели для каждого фрагмента схемы с учетом взаимных
влияний и связей этих фрагментов. Процесс адаптации на уровне
макромоделей заключается в том, что некоторый фрагмент схе-
мы на разных уровнях проектирования (или при решении разных
задач) представляется в виде целого набора макромоделей раз-
личной степени сложности. В процессе проектирования макромо-
дели меняются по соответствующим признакам на основе крите-
рия адаптации.
При любом типе декомпозиции объект и его модель расщеп-
ляются на отдельные фрагменты, объединенные посредством
внешних связей.
Очевидно, что наибольший эффект при проектировании можно
получить при согласовании процессов адаптации формирования
и анализа математической модели. Такой подход, названный мно-
245
гоуровневы.м адаптивным моделированием, используется при про-
ектировании схем с высокой степенью интеграции, в основном
БИС и СБИС [13]. Многоуровневое адаптивное моделирование
можно представить как активное взаимодействие между моделя-
ми и алгоритмами, в процессе которого формируются новые мо-
дели и видоизменяются алгоритмы. (Некоторые из достижений
многоуровневого адаптивного моделирования реализованы в сис-
теме программ ЭЛАИС-87 [13].)
Развитие методов адаптации в САПР РЭА непосредственно
связано с процессом интеллектуализации САПР. Потребность
в интеллектуализации САПР (особенно при проектировании
СБИС) стимулирует исследования по созданию ЭВМ пятого по-
коления, которые сами являются частью программ по созданию
искусственного интеллекта. Реальные перспективы для автомати-
зации проектирования связаны с экспертными системами [18],
положившими начало новой области развития техники — инже-
нерии знаний. Такие системы способны накапливать знания
в данной области науки и техники и выступать в роли сопроек-
тировщика при формулировке и решении сложных задач.
15.2. ОСНОВНЫЕ ТРЕБОВАНИЯ
К ТЕХНИЧЕСКИМ СРЕДСТВАМ САПР
Развитие технических средств САПР определяется общим
развитием вычислительной техники. Являясь сложными развива-
ющимися системами, решающими важные народнохозяйственные
задачи, САПР базируются на самой совершенной вычислитель-
ной технике. В процессе развития технические средства САПР
прошли путь от универсальных ЭВМ, снабженных минимальным
набором сервисных устройств, до сложных многоуровневых ком-
плексов технических средств, объединяющих в единую проекти-
рующую систему различные по назначению и производительно-
сти ЭВМ.
В принципе, технические средства САПР можно разделить на
группы по их назначению. Для подготовки и ввода данных ис-
пользуются различные дисплеи (символьные, графические), теле-
тайпы, кодировщики графической информации. Программная об-
работка данных осуществляется с помощью универсальных (или
специализированных) ЭВМ. Сюда же входят устройства накоп-
ления и хранения информации, каналы связи. Для отображения
и документирования используются различные печатающие уст-
ройства, графопостроители, координатографы, фотонаборные ус-
тановки для изготовления фотошаблонов.
В комплексе технических средств САПР следует особо выде-
лить автоматизированные рабочие места (АРМ) проектировщи-
ков. Технические средства в АРМ группируются вокруг высоко-
производительной мини-ЭВМ. АРМ обладает набором каналов
246
достаточной пропускной способности и контроллеров как для под-
ключения периферийных устройств, так и для связи с ЭВМ
других уровней или других комплексов. Совместная работа тех-
нических средств АРМ осуществляется посредством «общей ши-
ны», к которой подключаются все внешние устройства. При этом
само «рабочее место», как правило, базируется на микроЭВМ.
Современные многоуровневые комплексы технических средств
САПР по сути являются вычислительной сетью, в которой вокруг
одной или нескольких взаимосвязанных сверхмощных ЭВМ (ти-
па БЭСМ-6, ЕС-ЭВМ последних моделей, Эльбрус I, II) группи-
руются АРМ, в состав которых входят микроЭВМ. Процесс орга-
низации проектирования с помощью такой сложной дорогостоя-
щей взаимосвязанной техники требует разработки специальных
методов и алгоритмов распределения задач, данных, сбора и удоб-
ного представления информации и т. д. Однако лишь с помощью
таких САПР возможно сегодня проектирование СБИС.
15.3. ВЗАИМОДЕЙСТВИЕ ЧЕЛОВЕКА
И ТЕХНИЧЕСКИХ СРЕДСТВ В САПР
Проектирование РЭА с помощью САПР требует от инженера-
проектировщика определенной подготовки. Специфика автома-
тизации схемотехнического проектирования заключается в том,
что в определенной степени воспроизводится процесс человече-
ской деятельности и формализовать в достаточной мере даже
отдельные ее стороны не всегда возможно.
Практически все современные САПР являются диалоговыми
системами, в которых главную роль в процессе проектирования
играет человек, определяя ход процесса, осуществляя управление
им на основе получаемых результатов. Сам процесс проектиро-
вания, как правило, носит итеративный характер, требуя неодно-
кратного обращения пользователя в ходе проектирования к сис-
теме.
Под диалогом понимается обмен информацией между челове-
ком и ЭВМ, в процессе которого человек ставит задачу, а ЭВМ
решает ее. Диалог в САПР нужен для ввода данных, извлечения
данных из БД, просмотра на экране дисплея результатов, конт-
роля за ходом выполнения процесса вычислений и т. д. В процес-
се создания САПР хорошая программная организация диалога —
это одна из важнейших составляющих успешного функционирова-
ния всей системы. Как правило, пользователь САПР не является
ее создателем, поэтому особую важность приобретают сервисные
возможности при организации диалога между ЭВМ и инженером-
проектировщиком.
При организации диалога можно выделить следующие его
формы, чаще других используемые на практике: альтернативную,
сценарную, директивную. Альтернативная форма является про-
247
стейшей. Управление диалогом происходит со стороны ЭВМ.
Каждый запрос ЭВМ сопровождается набором стандартных от-
ветов, и по указанию проектировщика реализуется решение той
или иной задачи.
Пример альтернативного диалога в процессе расчета схемных
функций цепи:
...Выберите требуемую схемную функцию...
коэффициент передачи по напряжению — 1
коэффициент передачи по току — 2
входное сопротивление — 3
выходное сопротивление — 4
групповое время прохождения сигнала — 5
Ответ:
Ответ подразумевает номер варианта ответа. Такой диалог
позволяет даже слабоподготовленному пользователю осуществ-
лять проектирование под управлением ЭВМ.
Сценарная форма диалога ориентирована на более высокую
квалификацию пользователя. При этом система запрашивает
у пользователя требуемые данные. Пользователь должен знать
коды данных, формат их представления. В случае ошибок ЭВМ
выводит на экран сообщения об ошибках пользователя и пред-
лагает воспользоваться инструкцией.
Примером такого взаимодействия может быть такой диалог:
— имя модели —
Т
— имя компонента —
КТ315А
— Укажите номер экземпляра компонента. Если параметры
стандартные, дайте команду «Возврат каретки».
Такая форма диалога предусматривает определенную само-
стоятельность пользователя.
При организации директивной формы диалога ориентация на
опытного, подготовленного пользователя, хорошо знающего воз-
можности системы. Общение с ЭВМ здесь происходит по иници-
ативе пользователя на основе принятого формата команд.
Пример директивной формы диалога:
... Библиотека активных компонентов...
Т КТ 819А/М1 ВК
Здесь пользователем введена команда, запрашивающая вывод
значений параметров модели биполярного транзистора КТ 819А
из раздела библиотеки Ml.
Нужно отметить, что ни одна из этих форм диалога не отвеча-
ет в полной мере требованиям поиска проектных решений. Поэто-
му на практике используют комбинации этих форм диалога.
Важнейшими критериями эффективности САПР являются ма-
шинное время и качество полученного решения. Процесс диалога
248
может занимать больше времени, чем процесс решения задачи.
Поэтому в развитых САПР предусматривают адаптацию диалога
к уровню подготовки пользователя. Так, если пользователь не
справляется с директивной формой диалога, предусматривается
переход на сценарную и альтернативную. Критериями перехода
на другую форму диалога могут быть число ошибок или время
реакции пользователя. Причем пользователь всегда имеет воз-
можность вернуться к директивной форме диалога. Таким обра-
зом, задача адаптации диалоговых средств к уровню квалифи-
кации пользователя решается на основе выбора соответствующих
режимов и форм ведения диалога. При этом для различных ка-
тегорий пользователей формируются выходные сообщения раз-
личного объема и информативности.
15.4. МАТЕМАТИЧЕСКИЕ МЕТОДЫ
АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ РЭА
Понятие математической модели схемы (ММС) трактуется
очень широко, поэтому существует большое разнообразие спосо-
бов представления ММС.
Метод узловых потенциалов [15J. Достоинство этого метода
представления ММС заключается в сравнительной простоте про-
цесса формирования системы уравнений схемы.
В методе узловых потенциалов ММС имеет вид
YX=J,
(15.1)
где Y — матрица узловых проводимостей; X — вектор узловых по-
тенциалов; J — вектор правых частей (задающий вектор).
В программах автоматизации схемотехнического проектиро-
вания решение системы уравнений (15.1) является часто повто-
ряющейся задачей. Проблемы решения этой системы с помощью
ЭВМ заключаются в следующем. При расчете электронных схем
матрица Y обычно оказывается сильно разреженной, т. е. содер-
жит большое число нулевых элементов. Так, при размерности
матрицы Y, равной 102—103, число ненулевых элементов в ней
составляет единицы и доли процента от общего числа элементов.
В процессе решения (15.1) матрица Y трансформируется. При
этом на месте нулевых элементов появляются ненулевые, что ве-
дет к дополнительным затратам на время решения и на объемы
памяти. Поэтому первой проблемой является сохранение высокой
степени разреженности матрицы Y в процессе решения.
Другой проблемой является проблема сохранения точности
результатов на уровне ошибок округления исходных данных.
249
Основные методы решения (15.1) следующие.
1. Разложение матрицы Y на сомножители (метод LU-разло-
жения). Решение сводится к решению аналогичной задачи с мат-
рицами более простого вида.
Матрица Y представляется в виде произведения матриц [6]:
Y = LIJ. (15.2)
После этого система (15.1) представляется в виде двух под-
систем:
Ly.l, Ux=y.
Другим способом является нахождение для матрицы Y мат- (
риц-сомножителей С, S, G, для которых справедливо соотноше-
ние
CYS = G. (15.3)
Тогда х= SU, где U — решение системы:
GU = D, D=CJ. (15.4)
Основные затраты времени и памяти при решении (15.1)
с помощью этих методов определяются на этапе нахождения мат-
риц L и U или С, S, 7» (прямой ход решения). Затраты на само
решение (обратный ход решения) оказываются на порядок
меньше.
2. Обращение матрицы Y, т. е. x=Y_|J. Обращение можно
произвести с предварительным разложением ее на множите-
ли [6J:
Y ^L U -1 или Y-^SG-'C?
В программах САПР РЭА этот способ почти не используется,
так как для вычисления Y-1 требуется больше арифметических
операций, чем для решения (15.1) первым методом.
3. Методы решения (15.1), когда матрица Y имеет специаль-
ный вид (ленточный, блочный, блочно-диагональный) и т. д. Кон-
центрация ненулевых элементов матрицы Y в заранее известных f
местах позволяет разработать эффективные методы решения ~
(15.1) [10J.
Как уже отмечалось, специфика решения системы (15.1) на
ЭВМ состоит в необходимости высокой точности решения и вмес-
те с тем сохранения разреженности матрицы Y. Разработан ряд
способов реализации этих требований. Один из них — упаковка
ненулевых элементов матрицы Y [10]. Этот способ подразумева-
250
ет хранение матрицы Y в виде списков — одномерных массивов,
содержащих информацию о значении ненулевых элементов и их
номерах строк и столбцов. Все универсальные методы упаковки
основаны на замене двумерного массива — матрицы Y — несколь-
кими одномерными массивами — списками. Во всех этих методах
имеется список значения ненулевых элементов и список позици-
онных указателей. Однако замена матрицы списками требует до-
полнительных вычислений для определения номера строки и
столбца ненулевого элемента. Это замедляет поиск элементов по
сравнению с их поиском в исходной матрице. При выборе спосо-
бов упаковки скорость поиска ненулевого элемента в списке иг-
рает первостепенную роль.
Увеличению эффективности решения на ЭВМ способствуют
также специальные алгоритмы [1, 10], предусматривающие та-
кие способы обработки уравнений, при которых число новых не-
нулевых элементов будет минимальным. Сравнение эффективно-
сти этих алгоритмов позволяет сделать следующие заключения:
даже самые простые алгоритмы позволяют существенно умень-
шить число новых ненулевых элементов, процедуры упорядочения
целесообразно применять при порядке системы п^20; при увели-
чении порядка системы п (zz>100) различие в эффективности
алгоритмов пропадает.
Модифицированный метод узловых потенциалов [10] позво-
ляет получить ММС сравнительно невысокого порядка при прак-
тически любых ветвях, содержащих зависимые источники. Этот
метод состоит в том, что базис узлового метода дополняется пе-
ременными типа управляющих ветвей и управляемыми источни-
ками типа разности потенциалов. Уравнения узлового метода до-
полняются компонентными уравнениями управляющих ветвей и
источников типа разности потенциалов.
Метод переменных состояния. Этот метод использован в ка-
честве основного при изложении материала данного учебного
пособия. Как уже отмечалось, отличительной особенностью и не-
сомненным достоинством этого метода является возможность по-
лучения математической модели проектируемого устройства
в нормальной форме Коши, т. е. разрешенной относительно про-
изводных. Таким образом, можно использовать программы интег-
рирования, обычно имеющиеся в математическом обеспечении
ЭВМ. Этот метод является эффективным при проектировании
радиотехнических устройств, для которых информация заключе-
чена в огибающей несущего сигнала (высокодобротные AM- и
ЧМ-фильтры, усилители, корректоры, специальные усилительные
устройства многоканальной электросвязи, охваченные глубокими
обратными связями, и т. д.). Метод переменных состояния явля-
ется основным методом САПР систем автоматического управле-
ния и сетей связи.
251
Основным недостатком метода переменных состояния являет-
ся сложность формирования математической модели схемы и ори-
ентация па явные методы решения систем дифференциальных
уравнений, практически не пригодные для расчета схем с боль-
шим разбросом постоянных времени из-за ограничений на шаг
расчета. Реализация неявных методов затруднительна из-за
сложности вычисления матрицы Якоби.
В силу этих причин в настоящее время в подавляющем боль-
шинстве современных промышленных программ САПР РЭА в ка-
честве базовых переменных рассматриваются узловые потен-
циалы.
Для повышения эффективности автоматизированного проекти-
рования используются методы диакоптики. Идея применения
этих методов в автоматизированном проектировании РЭА состо-
ит в разделении математической модели схемы на некоторое
число независимых фрагментов и проведении па ЭВМ анализа
параллельно для этих фрагментов с периодическим согласовани-
ем результатов. Эффективность этих методов повышается с рос-
том сложности проектируемого устройства. Разбиение схемы на
подсхемы по функциональному признаку обычно выполняет про-
ектировщик, работающий с САПР РЭА. Имеются программы,
позволяющие автоматически разбивать граф схемы на класте-
ры— слабосвязанпые между собой подграфы. Основная цель
применения методов диакоптики — сокращение затрат машинно-
го времени в результате замены решения одной задачи большой
размерности решением нескольких задач меньшей размерности.
Комбинированные алгоритмы анализа. Одним из способов по-
вышения эффективности автоматизированного проектирования
является применение комбинированных алгоритмов, в которых на
разных этапах используются различные методы решения задачи.
Комбинированные алгоритмы позволяют уменьшить затраты ма-
шинного времени и повысить точность анализа. Различают вре-
менное и пространственное комбинирование. При временном ком-
бинировании разные алгоритмы применяются на различных эта-
пах вычислительного процесса. При пространственном общая
система уравнений разбивается на подсистемы и они интегриру-
ются с помощью различных алгоритмов. Алгоритмы в свою оче-
редь делятся на циклические и адаптивные. В циклических алго-
ритмах смена методов происходит через определенное число шагов
(итераций). Адаптивные алгоритмы построены таким обра-
зом, что для их реализации выбирается тот метод, который по-
зволяет получить при решении данной задачи наибольший выиг- |
рыш (добиться наибольшей эффективности). •
252
ПРИЛОЖЕНИЕ
П.1. ПРИНЦИПЫ ПОСТРОЕНИЯ ПРИВОДИМЫХ
В КНИГЕ ПРОГРАММ И ПРИЕМЫ ИХ ИСПОЛЬЗОВАНИЯ
Для большинства методов расчета, изложенных в книге, приве-
дены готовые к использованию программы, составленные из под-
программ. Для написания программ использовалась версия язы-
ка Бейсик, широко распространенная в массовых отечественных
диалоговых вычислительных комплексах ДВК-2, ДВК-3, микро-
ЭВМ «Электроника 60» и других совместных с ними ЭВМ. В про-
граммах задействовались в основном общие для всех версий язы-
ка операторы, благодаря чему читатели могут без труда перево-
дить программы на другие версии языка, используемые
в микроЭВМ.
Для использования программ следует знать принципы, кото-
рые были заложены при их написании.
1. Обращение к подпрограммам из вызывающей программы
осуществляется с помощью оператора COSUB (где
>|<— номер первой строки подпрограммы).
2. Номера строк подпрограммы сформированы таким обра-
зом, что два младших разряда определяют номер строки в под-
программе, при этом первая строка имеет номер 00. Остальные
разряды определяют номер подпрограммы, причем этот номер
совпадает с номером раздела, к которому относится эта подпро-
грамма. Младший из этих разрядов определяет номер парагра-
фа, где подпрограмма описывается, остальные — номер раздела.
Например, если номера первой строки в вызываемых подпро-
граммах 5200 и 14 400, это означает, что они приведены в § 5.2
и 14.4 соответственно. Такой принцип нарушен только в § 3.10,
где первый номер строки взят 3900, иначе номер 3100 указывал
бы на § 3.1.
3. Подпрограммы, которые реализуют некоторый метод расче-
та, приведены непосредственно в разделах, посвященных описа-
нию этого метода. Используемые неоднократно подпрограммы
сведены в приложения. Строки приводимых в приложении под-
программ пронумерованы числами из диапазона 15 000—30 000.
4. Имена переменных в подпрограммах подобраны таким об-
разом, чтобы пользователю была предоставлена возможность
при написании дополнительных подпрограмм выбирать имена
253
переменных без боязни, что они уже задействованы. Для обозначе-
ния переменных во всех подпрограммах были использованы только
имена, состоящие из одной буквы или буквы и одной из цифр
ряда 0, 1, 2, 3, 4 (например, КО, М3, А2% и т. д). В тех случаях,
когда у пользователя возникает необходимость введения новых
имен переменных, он может их конструировать из буквы и одной
из цифр 5, 6, 7, 8, 9 (например, К7, М.8, А5%, Р9 и т. д.).
5. Подпрограммы предусматривают вывод результатов на эк-
ран дисплея. В тех случаях, когда требуется вывод результатов
на печать, следует в начале вызывающей программы открыть
канал для вывода оператором ОРЕХ..., в конце — закрыть ка-
нал для вывода оператором CLOSE..., а в оператор PRINT
(в самой подпрограмме) включить номер канала вывода или
продублировать указанным оператором имеющийся оператор
PRINT.
Пусть в программе в строке с номером 670 вызывается под-
программа оператором GOSLB 5000, а в самой подпрограмме
в строке 5065 оператором PRINT выводятся результаты расчета.
Тогда в программу следует ввести следующие операторы:
669 OPEN 'LP:~ FOR OUTPUT AS FILE I
670 GOSU3 500.)
671 CLOSE £2
а в подпрограмму внести оператор, к примеру, в строке
5066 PRINT Ф2» Аг. - ..
Очевидно, возможны и другие варианты написания таких проце-
дур вывода.
6. В ряде программ авторы опустили описание размерно-
стей участвующих в расчетах массивов. Язык Бейсик не требует
наличия в программе операторов описания массивов, если их
размерность не превышает 10. В тех случаях, когда в программе
требуется массив большей размерности, его описание дается
с увеличением, необходимым относительно максимально возмож-
ной размерности при отсутствии описания, т. е. 10. Например,
если формируется система уравнений и приводится описание DIM
(20, 20), это означает, что при расчете с максимальной размер*-
ностью 14 необходимо данное описание изменить на DIM (28, 28).
7. Для облегчения поиска программ в конце книги приведен
список программ.
П.2. ПРОГРАММА ФОРМИРОВАНИЯ МАТРИЦ
УРАВНЕНИИ математической модели цепи
Программа П.1 формирует для линейной RLC-цепи уравне-
ния состояния (2.11) и выхода (2.12). Алгоритм формирования
такой системы уравнений изложен в § 2.3. В программе не пред-
254
ПРОГРАММА П.1
S REM ПРОГРАММА ФОРМИРОВАНИЯ УРАВНЕНИИ RLC-ЦЕПИ мм*
10 REM 1. ФОРМИРОВАНИЕ ТОПОЛОГИЧЕСКИХ УРАВНЕНИИ.
15 DIM MX(25) ,Р(25> ,НЗ*(25> , АХ (25,25),BZ(25) ,Ml*(25> ,U1Z(25> ,U2Z(25),М8*(25>
29 FOR 1-1 ТО 25 X М*(1>-"0~ \ М1ж(1>=-0" X М3м(1)="0" X UlZ(I)-0
25 U2Z(I)-0 X *М8* (I)-STRx(I) X FOR J=1 ТО 25 X AZ(I,J)-0 X NEXT J X NEXT X
30 J1Z-0 X YZ-0 X DlM-'E" X D2*="C" X D3*-"R" X D4*="L" X DSx-'X"
35 HZ-0
40 PRINT "ВВЕДИТЕ НОМЕР ВЕТВИ"» X INPUT JZ
AS IF JZ>0 THEN GOSUB 305 X GO TO 40
50 YX-0 X FOR IZ-1 TO 25 X IF U1Z<IZ)>0 THEN J1Z-IZ
55 IF YX<U1Z(IZ) THEN YZ=U1Z<IZ>
69 IF YX<U2Z(IZ) THEN YZ=U2Z(IZ)
45 NEXT IX X GOSUB 240 \ IF HZ-1 THEN GO TO 35
79 REM ПОЛУЧЕНА МАТРИЦА ИНДИДЕНЦИИ AZ(1...YZ,1...J1X)
75 FOR JZ-1 TO YZ-1 X PZ-JZ X GOSUB 405 X IP' LZ-JZ GO TO 85
80 GOSUB 140
85 IF KZ-JZ GO TO 95
90 GOSUB 185
95 IF AZ(JZ,JZ)-1Z GO TO 105
100 GOSUB 200
105 GOSUB 210 X NEXT JZ X GOSUB 425
110 FOR QZ-1 TO J1Z X М3*<QZ)-M*(QZ) X NEXT OZ X ZZ-1 X TZ-J1X
115 GOSUB 380 X EZ-D1X X CZ-D2Z X LZ-U4Z X I0Z-D5Z
120 FOR QZ-1 TO J1Z X М3*(QZ)-Ml*(QZ) X NEXT QZ X ZZ-1 X TZ-YZ-1
125 GOSUB 380 X RZ-D3Z X ZZ-YZ X TZ-J1Z
130 GOSUB 380 X R0Z-D3Z X GO TO 465
135 REM ПЕРЕСТАНОВКА СТОЛБЦОВ В A
140 FOR IZ-1 TO YZ-1 X BZ(IZ)-AZ(IZ)JZ) X AZ (IZ, JZ)-AZ (IZ , LZ)
145 FOR QZ-LZ TO JZ+2 STEP -1 X AX(IZ,QZ)-AZ(IZ,QZ-1) X NEXT QZ
150 AZ(IZ»JZ+1)-BZ(IZ) X NEXT IZ
155 D*=M1*(JZ) X D8*=M8*(JZ) X Ml* (JZ)-Mix (LZ) X M8*(JZ)-M8*(LZ)
160 T-P(JZ) X P(JX)=P(LZ>
165 FOR QZ-LZ TO JZ+2 STEP -1 X Ml*(QZ)-Mix(QZ-1> X M8*(QZ)-MS*(QZ-1)
170 P(QZ)-P(QZ-1> X NEXT QZ
175 M1*(JZ+1)-D* X M8*(JZ+1>=D8x X P(JZ+1)=T X RETURN
180 REM ПЕРЕСТАНОВКА СТРОК В A
IBS FOR QZ-1 TO J1Z X BX(QZ)-AZ(JZ»QZ) X AX<JZ,QZ)-AZ(KZ.QZ)
190 AZ(KZ,QX)-BZ(QX> X NEXT QZ X RETURN
195 REM УМНОЖЕНИЕ СТРОКИ НА -1
200 FOR QZ-1 TO J1Z X AZ(JX.QZ)— AZ(JZ.QZ) X NEXT QZ X RETURN
205 REM ДОПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ AZ
210 ZZ-1 X FOR QZ-1 TO YZ-1 X IF QZ-JZ GO TO 230
215 IF AZ(QZ,JZ)=0Z GO TO 230
220 IF AZ(QZ,JZ>=1 THEN ZZ—1
225 FOR WZ-1 TO J1Z X AX(QZ,UZ)-AZ(QZ»WZ)+ZZ«AZ<JZ,UZ) X NEXT UZ X ZZ-1
230 NEXT QZ X RETURN
235 REM КОРРЕКТИРОВКА A
240 FOR QZ-1 TO J1Z X IF M*(QZ)="0" THEN WZ-QZ X GO TO 265 X NEXT QZ
245 FOR QZ-1 TO YZ X SZ-0 X FOR WZ-1 TO J1Z X SX-SZ+ABS(AZ(QZ,WZ)>
250 NEXT UZ X IF SZ<2 THEN GZ-OZ X GO TO 285
255 NEXT QZ X PRINT "ВЫ ВВЕЛИ ") J1Z "ВЕТВЕЙ. ЖЕ ЛАЕТЕ ПРОДОЛЖИТЬ ВВОД?"
260 PRINT ЛА - 1" X PRINT ,,'НЕТ - 0" X INPUT HZ X GO ТО 300
265 PRINT "ВЫ ЗАБЫЛИ ВВЕСТИ ")UZ»"-0 ВЕТВЬ»ВВЕДИТЕ ЕЕ" X JX-UX
270 GOSUB 305 X IF YX(U1Z(JZ) THEN YZ-UIZ(JZ)
275 IF YZ<U2X(JZ) THEN YZ-U2X(JZ)
280 GO TO 240
285 PRINT "B")GZ"-OM УЗЛЕ РАЗОМКНУТА ЦЕПЬ!"
290 PRINT "ЕСЛИ ВЫ,ПРОАНАЛИЗИРОВАВ СИТУАЦИЮ,ХОТИТЕ ВНЕСТИ ИСПРАВЛЕНИЯ*
295 PRINT "( ПОВТОРНО ВВЕДЯ НЕКОТОРЫЕ ВЕТВИ), НАЖМИТЕ 1" X INPUT HZ
300 RETURN
305 REM ВВОД RLC X PRINT "ТИП ВЕТВИ", X INPUT Dk
255
310 IF DX-D1X GO TO 340
315 IF D*=D2* GO TO 340
320 IF D*=D3x GO TO 340
325 IF D«=D4M GO TO 340
330 IF Dx=D5« GO TC 340
335 PRINT "ВВЕДИТЕ ВЕРНО ТИП ВЕТВИ”, \ GO ТС 305
340 PRINT "НАЧАЛЬНЫЙ УЗЕЛ"» \ INPL . KZ
345 IF КХ>25Х THEN PRINT "ВВЕДИТЕ ВЕРНО НАЧАЛЬНЫЙ УЗЕЛ " \ 30 ТО 340
350 PRINT "КОНЕЧНЫЙ УЗЕЛ "» X INPUT LZ
355 IF LZ>25Z THEN PRINT "ВВЕДИТЕ ВЕРНО КОНЕЧНЫЙ УЗЕЛ “ \ GO ТО 351
360 PRINT "ПАРАМЕТР"» \ INPUT С а
365 IF U1X(JX)>0 THEN K!Z = U1Z<JZ', \ L1Z-U2X(JZ) \ AZ(K1X»JZ)«0
370 AX(LlXfJX)=0 X U1Z(JZ)-KX \ U2X(JX)=LZ X M*(JZ)=D*+STR*(JZ)
375 M1*<JX)«M«(JZ) \ P(JZ)»C X AZ(KZ»JZ>—1 X AZ(LZ»JZ)-1 X RETURN
380 D1X-0 X D2Z-0 \ D3Z-0 X D4X-0 \ DSZ-0 x FOR QX-ZZ TO Tz
385 D*-M3‘«(QZi X DlZ=D1Z+POS(D«»DI«»1) X D2Z-D2Z+P0S(D«»D2 -»1)
'390 D3X-D3Z+P0S(D*»D3«»1) X D4Z-D4X+P0S(D*»D4*»1) X D5Z-D5Z+PCS (D« »i)5« r 1 > '
395 NEXT QZ X RETURN
400 REM ПОИСК НЕНУЛЕВОГО ЭЛЕМЕНТА AZ
405 FOR J2X-PX TO J1X X FOR I1Z-PZ TO YX-1 X IF AZ(I1Z»J2Z)-0 GO TO 415
410 KZ-I1Z X LZ=j2Z X GO TO 420
415 NEXT HZ X NEXT J2Z
420 RETURN
425 REM ВЫВОД МАТРИЦЫ ГЛАВНЫХ СЕЧЕНИЯ F
430 PRINT TAB(10)"НАТРИДА ГЛАВНЫХ СЕЧЕНИИ" X IZ=0
435 FOR QX-YX TO Jlz X IX-IZ+1 X PRINT TAB (3» IZ) M8-* (QZ ) » X NEXT QZ
440 PRINT X PRINT "--------”»
445 FOR QX-YX TO J1Z X PRINT "----"? X NEXT QZ X PRINT
450 IX-0 X FOR QZ-1X TO YX-1Z X PRINT M8«(QZ)» X PRINT ":"5
455 I1X-0 \ FOR WZ=YZ TO J1Z X PRINT AZ(QZ»WZ>; X F0<IZт11Z)=AZ(QZ,ЫХ>
460 I1Z-I1X+1 X NEXT WZ X PRINT X IZ-IZ+1 X NEXT QZ X RETURN
465 JX=1 X FOR IZ-1 TO EZ X E(IZ-1)=P(JZ) X JZ-JZ+1 \ NEXT IZ
470 FOR IZ=1 TO CZ X C<IZ-1)=P<JZ) X JZ-JZ+1 X NEXT IX
475 FOR IZ=1 TO RZ X R(IX-1)=P(JX) X JZ-JZ+1 X NEXT IZ
460 FOR IZ-1 TO R0Z X R0(IX-1)=P(JX) X JZ-JZ+1 X NEXT IX
485 FOR IZ-1 TO LX X•L(IZ-1)=P(JX) X JZ-JZ+1 X NEXT IX
490 FOR IZ-1 TO I0Z X 10 (IZ-1) -P < JZ) X JZ-JZ+1 .X NEXT IX
495 REM 2.ФОРМИРОВАНИЕ УРАВНЕНИИ СОСТОЯНИЯ И ТОКОВ РЕЗИСТОРОВ.
. 500 QX-RZ+R0Z-1 X XZ-CZ+LZ-1 X UZ-EZ+I0Z-1 X C1Z-CX-1
505 Q1X-R0X+LX-1 X Q2X-R0Z-1 X Q3Z-RZ-1 X Q4-EZ+CZ X Q5-Q4-1
510 FOR IZ-0 ТО QX X FOR JZ-0 TO XX X B1(IZ»JZ)=0 X NEXT JZ X NEXT IZ
515 IF RZ«LZ-0 THEN 535 >
520 М-0 X K»CZ X A1-Q4 X A2-Q5+RZ X B1-R0Z X B2-Q1Z X GOSUB 870 *
525 FOR TO Q3X X FOR J»CZ TO XX X Bl <I»J)=F<I»J) X NEXT J X NEXT 1
530 IF CZ»R0Z*0 THEN 545
535 M-RZ X К-0 X Al-EX X A2-Q5 X Bl-0 X B2-Q2Z X GOSUB 880
540 FOR I-RX TO QX X FOR J-0 TO C1Z X Bl(I»J)=F(Ij J) X NEXT J X NEXT I
545 FOR 1-0 TO QZ X FOR J=0 TO UX X B2(I»J)=0 X NEXT J X NEXT I
550 IF RX*I0X«0 THEN 570
555 М-0 X K=EX X A1-Q4 X A2-Q5+RZ X B1-Q1X+1 X B2-Q1Z+I0Z X GOSUB 870
560 FOR 1-0 TO Q3Z X FOR J-EZ TO UZ X B2(I»J)=F<I»J) X NEXT J X NEXT I
565 IF EX»R0Z-0 THEN 580
570 M-RX X К-0 X Al-0 X A2-EZ-1 X Bl-0 X B2-Q2Z X GOSUB 890
575 FOR I-RX TO QX X FOR J-0 TO EX-1 X B2 (I»J) =F <I»J) X NEXT J X NEXT I
>,580 FOR 1-0 TO QX X FOR J=0 TO QX X A(IfJ)=0 X NEXT J X NEXT I
к 585 IF RZ-0 THEN 620
590 FOR 1-0 TO Q3X X А(Ы)-1 X NEXT I X IF R0X-0 THEN 675
)595 M-0 X K-RX X A1-Q4 X A2-Q5+RZ X Bl-0 X B2-Q2X X GOSUB 870
£00 FOR 1-0 TO Q3X X FOR J-RX TO QZ X A(I»J) —F(I»J) X NEXT J X NEXT I
£05 M-RX X К-0 X A1-Q4 X A2-Q5+RX X Bl-0 X B2-Q2X X GOSUB 880
£10 FOR I-RX TO OX X FOR J-0 TO Q3Z X A(I»J)—F(I»J)*R(J) X NEXT J \ NEXT X
615 FOR I-RX TO QX \ A(I»I)-R0(I-RX) X NEXT I X GO TO 625
'620 FOR I-RX TO QX X A<IrI)-1/R0(I-RX) X NEXT I X GO TO 675
£25 REM ОБРАЩЕНИЕ МАТРИЦЫ All
256
630 FOft 1-0‘ТО QZ X FOR J=® TO OX \ B0(I»J)=0 \ NEXT J X NEXT I
635 B4-1 \ FOR K«1 TO QZ+1 X FOR Iе® TO QZ X FOR J-0 TO QZ
640 A0(I»J)-ВФ<Ip J) X IF J-I THEN A0<IrJ)=A0<I»J)+B4
645 NEXT J \ NEXT I
650 FOR IZ-0 TO QZ \ FOR JZ=0 TO QZ \ Rl-0 X FOR KZ=0 TO QZ
655 R1-R1+A0(IZpKZ)»A<KZpJX) \ NEXT KZ X B0<IZpJZ)=R1 \ NEXT JZ X NEXT IZ
660 Rl-0 \ FOR 1*0 TO QZ \ R1-R1+B0<IpI) X NEXT I X B4--R1/K X NEXT К
665 FOR IZ-0 TO QZ X FOR JZ = 0 TO QZ \ A(IZ»JZ)--A0(IZ»JZ>/В4 X NEXT JZ
670 NEXT IX \ REM ОБРАЩЕНИЕ ЗАВЕРШЕНО A(0..QZ,0..QZ)
675 FOR Y-0 TO XZ \ FOR 1=0 TO QZ X Rl-0 X FOR J=0 TO QZ
680 Rl-Rl+A(IfJ)»B1(J»Y) X NEXT J X R1CD-R1 X NEXT I
685 FOR 1-0 TO QX \ Bl(I»Y)=R1 (I) X NEXT I X NEXT Y
690 FOR Y=0 TO UZ X FOR 1=0 TO QX X R1=0 X FOR J=0 TO 0/
695 R1-R1+A<I»J)*B2(J»Y) X NEXT J X R1(I)-R1 X NEXT I
700 FOR I»0 TO QX X B2(I»Y)=Rl<I) \ NEXT I X NEXT Y
705 REM ПОЛУЧЕНЫ МАТРИЦЫ Bl(0...QXг0...XX) » B2(0...QZ»0...UZ)
710 FOR 1-0 TO XX X FOR J-0 TO XZ X A1(IpJ>=0 X NEXT J X NEXT I
715 M-0 X K=CZ X Al-EZ X A2-Q5 X B1-R0Z X B2-Q1Z X GOSUB 870
720 FOR 1-0 TO C1Z X FOR J-CX TO XZ X Al(I,J)=F(I,J) X NEXT J X NEXT I
725 M-CX X К-0 X Al-EZ \ A2=Q5 X B1-R0Z X B2«Q1X X GOSUB 880
730 FOR I-CZ TO XX X FOR J-0 TO C1Z X Al(IpJ)-F(I»J) X NEXT J X NEXT I
735 FOR 1-0 TO XX X FOR J=0 TO UX X A2(I»J)-0 X NEXT J X NEXT I
740 IF CZ»I0Z-0 THEN 760
745 M-0 \ K-EZ X Al-EX X A2-Q5 X B1-R0Z+LZ X B2-Q1Z+I0Z X GOSUB 870
750 FOR 1-0 TO C1Z X FOR J-EZ TO UZ X A2 (I p J)-F (I p J) X NEXT J X NEXT I
755 IF EZ«LZ«0 THEN 770
760 M-CZ X К-0 X Al-0 X A2-EX-1 X B1-R0Z X B2-Q1X X GOSUB 880
765 FOR I-CZ TO XZ X FOR J=0 TO EZ-1 X A2<IrJ)-F<IpJ) X NEXT J X NEXT I
770 FOR 1-0 TO XZ X FOR J=0 TO QZ X A8(IpJ)«0 X NEXT J X NEXT I
775 IF CZ»R0Z-0 THEN 795
780 M-0 X K-RZ X Al-EZ X A2-Q5 X B1=0 X B2-Q2Z X OOSUB 870
785 FOR 1-0 TO C1Z X FOR J=RZ TO QZ X A8 (I»J)»F(IpJ) X NEXT J X NEXT I
790 IF RZ»LX-0 THEN 805
795 M-CZ X К-0 X A1-Q4 X A2-Q5+RX X B1-R0Z X B2-Q1Z X GOSUB 880
800 FOR I-CZ TO XZ X FOR J-0 TO Q3Z X A8 (I» J)-F (I » J) »R ( J) \ NEXT J X NEXT I
805 FOR Y-0 TO XZ X FOR 1=0 TO XZ X Rl-0 X FOR J-0 TO QZ
810 R1-R1+A8(IpJ)«В1(JpY) X NEXT J X R1(I)=R1 X NEXT I
815 FOR 1=0 TO XZ X Al(I»Y)—R1(I)+A1(IpY> X NEXT I X NEXT Y
820 FOR Y-0 TO UZ X FOR 1-0 TO XZ X Rl-0 X FOR J-0 TO QZ
825 Rl-Rl +A8 (I, J) »B2 (J r Y) X NEXT J X RKD-Rl X NEXT I
830 FOR 1=0 TO XZ X A2(I»Y)=R1(I)+A2(IpY) X NEXT I X NEXT Y
835 IF CZ-0 THEN 855
840 FOR J-0 TO C1Z X FOR Y-0 TO XZ X Al(J»Y)«А1(J»Y)/С(J)
845 NEXT Y X FOR Y-0 TO UZ X A2<JpY)-A2(JpY)/С(J) X NEXT Y X NEXT J
850 IF LZ-0 THEN 890
855 FOR J-CZ TO XZ X FOR Y=0 TO XX X Al(J»Y)-Al<JpY)/L<J-CZ)
860 NEXT Y X FOR Y=0 TO UZ \ A2<J»Y)=A2(JpY)ZL(J-CZ) X NEXT Y X NEXT J
865 GO TO 890
870 X=M X FOR I=A1 TO A2 X Y-K X FOR J«B1 TO B2 X F(XpY)=-F0(Ip J)
875 Y-Y+l X NEXT J X X-X+l X NEXT I X RETURN
860 X-M X FOR J=B1 TO B2 X Y-K X FOR I=A1 TO A2 X F (X pY)=F0 (Ip J)
885 Y=Y+1 X NEXT I X X-X+l X NEXT J X RETURN
890 REH ПОЛУЧЕНЫ МАТРИЦЫ Al(0...XZp0...XZ)pA2(0...XZp0...UZ)
895 REM 3. ФОРМИРОВАНИЕ УРАВНЕНИЯ ОТКЛИКА (D1pD2)
900 PRINT 'ВХОДНОЙ ИСТОЧНИК "» X INPUT Ml* X T1»=SEG»(Ml»»1»1)
905 PRINT "ТИП ВЫХОДНОГО СИГНАЛА(UpI)"p X INPUT М2» X T2«-SEGm(M2mp1p1)
910 PRINT "ВЫХОД"» X INPUT М3» X T3»=SE0»(М3»»2»2) X T4»«SEG»(М3»»1»1)
915 Tm=SEG»<M3»p2»3) X GOSUB 970 X IF T3»-D3» THEN GOSUB 950 X GO TO 102®
920 IF T3«=D4» THEN KZ-SZ-EZ-RZ-R0Z-1Z X GO TO 940
925 KX-SZ-EZ-1Z X IF T2»="U" THEN 935
930 GOSUB 980 X GOSUB 955 X GO TO 1020
935 GOSUB 990 X GOSUB 955 X GO TO 1025
94® IF T2»-'U" THEN 930
945 80 TO 935
17—6030
257
958 KZ-SX-EZ-CZ-IZX GOSUB 995
955 ТИ—HIM \ GOSUB 97»
96» IF Tlx-DlM THEN NZ-SZ-1Z \ RETURN
945 NZ-SZ-CZ-RZ-R8Z-LZ-1Z \ RETURN
978 FOR IX-1 TO 25 \ IF Hlx(IX>»Tx THEN GX-IX \ RETURN
975 NEXT IX \ RETURN
98* FOR IX-8 TO XX \ DI<IX>-Al<KX»IX>«P(SX> \ NEXT IX
985 FOR IX-8 to UX \ D2<IZ>-A2<KZ.IX>»P<8Z> \ NEXT IX \ RETURN
998 FOR IX-• TO XX \ Dl(IZ>-8 \ HEXT IX \ D1<KX>-1X X D2-8X \ RETURN
995 FOR IX-8 TO XX X DI<IZ)-Bl(KZ»IZ) X NEXT IX
1888 FOR IX-8 TO UX X D2(IX)-B2<KZrIX) X NEXT IX
18*5 IF T2X-D5M THEN RETURN
1818 FOR IX-8 TO XX X DI(IX) -DI <IX> »P (SX> X NEXT IX
1815 FOR IX-8 TO UX X D2(IZ)-D2<IX)«P<SX) X NEXT IX X RETURN
1828 D2-D2CNX)
1825 FOR IX-8 TO XX X A4(IX)-A2(IX.NX) X NEXT IX X IF T4x-'+" THEN 1835
1838 FOR IX-8 TO XX X DI(IX)--D1(IX) X NEXT IX X D2—D2
1835 NZ-XZ+1 X PRINT NX X PRINT '-------- Al ----------*
1848 FOR IX-8 TO XX X FOR JX-8 TO XX X PRINT A1<IZ.JX>I X NEXT JX
1845 PRINT X NEXT IX X PRINT '-------- A2 -----------
1858 FOR IX-8 TO XX X PRINT A4(IX> X NEXT IX X NX-XX+I
1855 PRINT '------ 01 ----------- X FOR IX-8 TO XX X PRINT DKIX)»
186» NEXT.IX X PRINT X PRINT '-------- D2 ----------• X PRINT D2
ставлены модули, позволяющие формировать уравнения цепи
при наличии в ней особенностей и управляемых источников. Эти
модели легко реализовать и подключить к основной программе,
воспользовавшись алгоритмами, изложенными в § 2.4 и 2.5.
Исходными данными для программы является описание схе-
мы на языке ввода данных (см. § 1.2). Ввод исходных данных
организован в режиме диалога, при этом последовательно запра-
шиваются: номер ветви, тип элемента в ветви, начальный и ко-
нечный узлы подключения и параметр элемента в ветви. Кроме
того, запрашивается информация о независимом источнике, вы-
бранном в качестве входного, о типе выходного сигнала, который
может быть током или напряжением, и о ветви, с которой сни-
мается выходной сигнал. _
Выходными данными программы являются матрицы Ai, А2,
D] и скаляр D2, входящие в уравнения состояния (2.11) и выхо-
да (2.12). В процессе выполнения программы выводится матрица
главных сечений в виде (2.3), определяющая полную систему
топологических уравнений.
Принятые обозначения. В программе приняты следующие
обозначения имен переменных: Al, А2, Bl, В2, D1 и D2 соответ-
ствуют Ai, А2, Bi, В2, Di и D2 в выражениях (2.8), (2.11), (2.12);
А4 соответствует А2; А %—двумерный массив для хранения мат-
рицы инциденций; F0 — массив матрицы главных сечений F;
Р-—массив значений параметров элементов цепи; МФ — массив
данных о типах и номерах элементов цепи; U1 %, U2% — масси-
вы, в которые записаны начальные и конечные узлы подключения
ветвей; Ml Ф— массив, аналогичный МФ, в котором отражена
информация о том, какие ветви попали в ребра и хорды; Е°/о —
число источников типа Е; С% и L% — число емкостных и индук-
258
тивных элементов; R% и R0% —
число резисторов, вошедших в реб-
ра и хорды соответственно; 10% —
число источников тока типа I; Е, С,
R, RO, L, 10 — массивы, в которых
записаны параметры соответствую-
щих элементов; F — двумерный мас-
сив, в котором формируются под-
матрицы матрицы F. Остальные пе-
ременные имеют вспомогательное
значение (например, I, К, 1%, К%
и т. д. обозначают индексы масси-
вов; X, М, Al, А2 и т. д. используют-
ся для временного хранения значе-
ний переменных). В конце програм-
мы переменной №/о присваивается
значение, указывающее суммарное
количество реактивных элементов
цепи, т. е. фактически размерность
матрицы Ai.
Описание программы. Програм-
ма П.1 реализует алгоритм, укруп-
ненная схема которого представлена
на рис. П.1. В программе можно вы-
делить три основные части. В пер-
вой части (блоки 1—-4 схемы алго-
Рис. П.1
ритма, строки 5—490 программы)
осуществляется формирование матрицы главных сечений F в форме
(2.3). Во второй части (блоки 5, 6, строки 495—890) формиру-
ются матрицы Вь В2, Ai и А2, входящие в уравнения токов резис-
торов (2.8) и переменных состояния (2.11). В третьей части (бло-
ки 7, 8, строки 895—1060) формируются матрица D1 и значение
D2, входящие в уравнение выхода (2.12).
Для формирования матрицы главных сечений последователь-
но осуществляется: ввод описания анализируемой цепи (блок /,
строки 5—45, 305—375), формирование матрицы ннциденций
(блок 2, строки 235—300), преобразование матрицы ннциденций
в матрицу главных сечений (блок 3, строки 50—105). В блоке 4
(строки 425—460) полученная матрица главных сечений выво-
дится на экран.
При формировании уравнений (2.8) и (2.11) (блоки 5, 6) по-
следовательно формируются матрицы Вп, В12, Ан в строках
500—620, затем в строках 625—670 обращается матрица Ап
(использован метод Леверрье — Фаддеева) и полученная матрица
17* 259
ПРОГРАММА ТТ.2
15000 REM ВВОД МАТРИЧНЫХ КОЭФФИЦИЕНТОВ A1,A2»D1»D2
15062 DIM Al(10»10>»А2(10)»D1(10)
15005 Rx=’BBOAMTE ЗНАЧЕНИЯ КОЭФФИЦИЕНТОВ МАТРИЦЫ'
15010 PRINT 'РАЗМЕРНОСТЬ МАТРИЦ (НЕ БОЛЕЕ 10) №’> \ INPUT NZ
15015 PRINT R«J" Al "f \ PRINT \ FOR IZ = 1Z TO NZ
15020 FOR JZ=1Z TO NZ X PRINT 'Al(’IIZ»’»’!JZi’)=’;
15025 INPUT A1(IZ»JZ> X NEXT JZ X NEXT IZ
15030 PRINT R«l" A2 ~f X PRINT X FOR IZ=1 TO NZ
15035 PRINT ’A2(’»IZ!’)=’I X INPUT A2(IZ) X NEXT IZ
15040 PRINT R*l" DI "I X PRINT X FOR IZ=1Z TO NZ
15045 PRINT 'DI<’IIZI’)=’1 \ INPUT Dl(IZ) \ NEXT IZ
15050 PRINT Rxl" D2"1 X PRINT X PRINT ’D2*’l \ INPUT D2
15055 RETURN
Aii1 умножается в строках 675—700 последовательно на матрицы
Ви и В12. В результате имеем матрицы В! и В2.
В строках 710—890 аналогично получаем матрицы А22, А21,
,В21 и В22 и из них в соответствии с (2.24) матрицы At и А2.
В блоке 8 формируются матрицы Db А2 и значение D2. Алго-
ритм формирования Di и D2, входящих в уравнение выхода
(2.12), показан на рис. 2.5.
В строках 1035—1060 выводятся N% — размерность матрицы
Аь матрицы А], Аг, D! и значение D2. Выводимые данные явля-
ются исходными для других программ, поэтому их следует со-
хранить.
Рекомендации по использованию. Получаемая в программе
П.1 система уравнений является исходной для решения различ-
ных задач, в частности, изложенных в гл. 3, 6. Поэтому к этой
программе можно подключать другие программы, если имеется
свободная область памяти. Совместное использование программ
можно осуществить и путем записи полученных значений Ai, А2,
Dt, D2 в файл на внешнем носителе (для этого можно, например,
в строке 1033 открыть канал для записи и указать его в опера-
торах PRINT). Считывание данных можно провести с помощью
программы П.2, записанной уже в предварительно очищенную
память ЭВМ.
Емкость свободной области памяти можно увеличить, умень-
шив размерность массивов, описываемых в строке 15 программы
П.1 (в приводимом листинге программы максимальное число вво-
димых ветвей 25).
В программе предусмотрен контроль правильности ввода опи-
сания анализируемой цепи. При необходимости можно визуаль-
но проконтролировать ввод и получаемую матрицу инциденций.
.260
Для этого после строки 70 следует вставить строки программы,
отображающей матрицу инциденций на экран:
71
72
73
74
FOR QZ = 1 ТО JiZ \ PRINT TAB(4>QZ;
FOR QZ = 1 TO J1Z \ PRINT TAB(1>'
FOR OZ=1 TO YZ.\ PRINT QZ» \ PRINT
PRINT AX(QZ»WZ)i \ next WX \ PRINT
\ NEXT QZ \ PRINT \ PRINT'“
"» \ NEXT QZ \ PRINT
"I"» \ FOR WZ = 1 TO J1X
\ NEXT QZ \ RETURN
"I
На экран дисплея можно вывести также все получаемые мат-
рицы. Например, в строке 705 вывести матрицы В] и В2 уравне-
ния токов резисторов, в строке 890 — матрицы А! и А2 уравнения
состояния.
Пример П.1. Получать значения элементов матриц, входящих в уравнения
состояния и выхода для цепи на рис. 1.8,а. Входным источником принять эле-
мент ui, выходным сигналом — напряжение на элементе R7.
Перед вводом данных схемы в ЭВМ проводится масштабирование парамет-
ров элементов. Далее необходимо пронумеровать узлы и ветви (нумеруются
вначале источники напряжения £, затем емкостные элементы С, затем резисто-
ры R, индуктивности L и источники тока 1), выбрать положительное направле-
ние в ветвях. Данные для ввода анализируемой цепи показаны в табл. П.1.
Введенный в последней строке символ 0 служит признаком конца ввода
описания цепи.
Перед формированием уравнения выхода необходимо указать следующие
сведения: выбранный в качестве входного источник напряжения или тока, тип
выходного сигнала хВЫх (ток 1 или напряжение U), а также выходная ветвь
с обязательным указанием знака « + » или «—», означающим совпадение или
несовпадение положительного направления ветви с положительным направлением,
принятым для выходного сигнала. Диалог с ЭВМ имеет вид (сообщения, вы-
даваемые программой, подчеркнуты):
Таблица П.1
Номер ветви Тип ветви Начальный узел Конечны’! у зел Параметр
1 Е 1 6 1 1
2 Е 5 6 1
3 С 1 3 1
4 С 1 2 5
5 R о 5 0,1
6 R 3 6 0,2
7 $ 3 4 3
8 L 2 4 2
9 I 6 4 1
0
з
------А1 -------
-5 0 -1
« -2 0.2
0.5 -0.5 -1.5
------А2--------
5
2
0
------D1--------
0 0-3
------D2-------
0
Рис. П.2
261
ВХОДНОЙ ИСТОЧНИК EI
ТИП ВЫХОДНОГО СИГНАЛА U
ВЫХОД +R7
В процессе выполнения программы последовательно выводятся: матрица
главных сечений в виде
5 6 8 9
1 110—1
2—1000
30—1 1 1
4—1 0—1 0
7 0 0 11
а также значения N% (размерность матрицы AJ, Al, А2, D1 и D2 (рис. П.2).
П.З. ПРОГРАММА ВВОДА МАТРИЦ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЦЕПИ
Для ввода элементов матриц А:, Д2, D, и скаляра D2, входя-
щих в уравнения переменных состояния и отклика, используется
программа П.2. Запрос элементов матриц производится в режиме
диалога.
Принятые обозначения. №/о—размерность матрицы А1 —
двумерный массив для хранения матрицы Ац А2, D1—одномер-
ные массивы для хранения матриц А2, D2 соответствует эле-
менту D2.
Описание программы. В программе П.2 в строке 15010 произ-
водится запрос размерности матриц, входящих в уравнения пере-
менных состояния и отклика. Затем последовательно в циклах
(строки 15015—15025, 15030—15035, 15040—15045) запрашива-
ются элементы матриц Ai, А2, Di и в строке 15050 — значение D2.
Рекомендации по использованию. В программе ввод элементов
матриц осуществляется в ответ на выдаваемую машиной под-
сказку. Когда размерность матриц невелика, описанный способ
ввода не вызывает затруднений. Однако при большой размерно-
сти матриц или необходимости многократного повторения ввода
матриц такой способ может вызвать определенные неудобства,
связанные с вводом большого количества цифр, вероятностью
появления ошибок. В этом случае предпочтительней осуществить
ввод матриц путем чтения заранее сформированного файла дан-
ных или путем выборки коэффициентов, занесенных в программу
оператором DATA.
В первом случае в программу следует внести операторы от-
крытия и закрытия канала для ввода из файла данных, а в опе-
раторах INPUT указать канал ввода. Например, если в файле
DATA.BAS записаны последовательно значения переменных
262
№/o, Al, А2, DI, D2, то в программу П.2 надо включить строки
15501 OPEN -DATA.BPS- FOK INPUT AS FILE Ф4
15053 CLOSE «4
Все операторы INPUT следует дополнить указанием на номер
канала, по которому будет производиться чтение. Например, сле-
дует заменить строку
'.5010......\ INPUT NX
на строку
15010 .......\ INPUT 44, NX
В том случае, когда данные записываются с помощью оператора
DATA, в программе П.2 все операторы INPUT заменяются опе-
ратором READ.
П.4. ПРОГРАММА РЕШЕНИЯ СИСТЕМЫ
ЛИНЕЙНЫХ УРАВНЕНИЙ
Программа П.З реализует известный метод Гаусса или метод
последовательного исключения неизвестных для решения систе-
мы линейных уравнений в форме
СХ А.
Исходными данными для программы являются матрицы С и А,
записанные в один двумерный массив. Найденные неизвестные
располагаются в последнем столбце этого массива.
Принятые обозначения. №/о—размерность матрицы Аь вхо-
дящей в уравнение состояния; U%—размерность решаемой сис-
темы уравнений; С — двумерный массив размерностью (U°/o,
U% + 1); XI—одномерный массив, в который пересылаются най-
денные неизвестные.
Рекомендации по использованию. Для использования програм-
мы предварительно в №/о засылается размерность матрицы Аь
Это вызвано тем обстоятельством, что данная программа исполь-
зуется при получении частотных характеристик (вызов осуществ-
ляет программа 3.3). Поэтому в строке 15505 этот размер увели-
чивается вдвое. В том случае, когда требуется решить систему
уравнений независимо от программы 3.3 размерность системы
должна быть присвоена U%. Результаты вычислений,
производимых программой, хранятся в последнем столбце мас-
263
ПРОГРАММА П.З
15500
15505
15510
15515
15520
15535
15540
15545
15550
15555
15560
15565
15570
15575
15580
15585
15590
REM РЕШЕНИЕ СИСТЕМЫ УРАВНЕНИИ \ ЩМ
UX=2»NZ X LX=0
С (20,21),Х1(20)
IZ«LX+1
FOR KX«LX ТО ОХ-1
IF C(KZ,LZ)=0 THEN PRINT 'НЕТ РЕШЕНИЯ >\ STOP
IF KX=LX THEN 15550
FOR MX=LZ TO UZ+1
T1=C(LZ,MX> X C (LX,MX) = C (KX, MX) C fKX ,MX'< =T1 \ NEXT MX
FOR JX=UX+1 TO LX STEP -1 X C(LX,JX)=C(LX,JX)/С(LZ,LX)
NEXT JX
FOR IZ = KZ + 1 TO UX X FOR JX=LZ + 1 TO UX + 1
С(IX,JZ)=C(IX,JX)-С(IXtLX)»C(LX•JZ) \ NEXT JX \ NEXT IX
IF LX<)UX-1 THEN 15510
NEXT KZ
FOR IX=UX
FOR KX-IX
NEXT KX X
TO 1 STEP
TO 1 STEP
NEXT IZ X
-i \ xi(iz)=c<iz,ux+i>zc(iz,ix>
-1 X С(KX,UX+1)=C(KZ,UZ+1)-C(KX,IX)»Х1(IX)
RETURN
сива C; C(l, -M),..C (U°/o, а также в векторе XI:
XI (1),..., XI (U%).
Пример П.2. Решить систему уравнений (матрицы С и А записаны в одну
матрицу)
1 0,17 —0,25 0,54 0,3'
0,47 1 0,67 —0,32 0,5
—0,11 0,35 1 —0,74 0,7
0,55 0,43 0,36 1 0,9_
Дополним программу П.З строками
I
15505 1_Z = 0 \ INPUT UZ > i
15579 PRINT "РЕЗУЛЬТАТ РЕШЕНИЯ ' V
15583 print х(";iz;") = -;xi<iz) :
)
В результате находим
Х(1) = 0.440889,
X (2) = —0.363031,
Х(3) = 1.1668. I
X(4) = 0,393567. ;
П.5. ПРОГРАММА ПОСТРОЕНИЯ ГРАФИКА j
Программа П.4 предназначена для одновременного вывода 4»
таблицы из п значений аргумента х и функции у, а также гра- j
фика y=f(x). Исходными данными для программы являются п
значений х и у.
264
ПРОГРАММА П.4
16000 REH »* ПОСТРОЕНИЕ ГРАФИКА ФУНКЦИИ Y«F(X)«»
16002 REM ЧИСЛО ТОЧЕК ЗАДАНО В N0
16005 REM ВВЕДЕНЫ X(0)»Х(1>,..X(N0-1)IY<»>,Y(1),..Y(N0-1)
16010 DIM Х(100>»Y(100) \ L4=54 \ L3=TTYSET(255Z»80)
16015 S4«=F—.------------------------------------------------------>’
16020 S3x=F ’
16025 PRINT ' ’ 5S4x
16030 M4=Y(0> \ N4=Y(0>
16035 FOR IZ = 1 TO N0-1 \ IF Y(IZ)>H4 THEN H4=Y(IZ>
16040 IF Y(IZ)(N4 THEN N4=Y(IZ)
16045 NEXT IZ
16050 IF M4<0 THEN H4=0
16055 IF N4>=0 THEN N4=0
16060 IF M4-N4=0 THEN M4=l
16065 S2Z = -(L4*N4)/(H4-N4)+1
16070 S3«=SEG«(S3»»1fS2Z-1>&’!’iSEG«(S3*,S2Z + 1>LEN(S3*))
16075 FOR IZ=0 TO N0-1 \ S4»=S3x X S1Z=(L4«(Y(IZ)-N4))/(M4-H4)+1
16080 S4«=SEG«(S3»,»S1Z-1)6F*F6SEG»(S3X.S1Z+1fLEN(S3x)>
16085 PRINT USING S. itsлллл ’»X (IZ) 8 Y (IX) I
16090 PRINT S4X \ NEXT IX X RETURN
Принятые обозначения. NO — число точек для построения гра-
фика; Х(0),..., X(N0) — массив значений аргумента; Y(0),...
. ..,Y(N0)—массив значений функции; М4— максимальное из
значений функции у, N4 — минимальное из значений функции у;
L4 — максимальное число шагов по оси ординат у, S3<>, S4<>—
строковые переменные, в которых формируется строка для выво-
да данных.
Описание программы. Для построения графика находят мини-
мальное и максимальное значения функции, которые необходимы
для определения расположения оси абсцисс и для расчета значе-
ния шага по оси ординат. Минимальное и максимальное значе-
ния функции определяются в строках 16030—16060. В программе
принято, что когда максимальное значение функции М4 меньше
нуля, то М4 присваивается значение нуля (строка 16050), когда
минимальное значение функции N4 больше нуля, то N4 присваи-
вается также значение нуля (строка 16055). Это сделано для то-
го, чтобы ось абсцисс была обозначена на графике. Затем в стро-
ках 16065—16080 в переменных 83Ф и 54Ф определяются и ус-
танавливаются позиции символов, соответствующих оси абсцисс
(символ!) и положению ординаты функции Y (символ ^).
В строках 16085—16090 осуществляется форматный вывод
значений аргумента и функции и строки графика. Количество
выводимых значений определяется переменной N0.
Рекомендации по использованию. Программа П.4 вызывается
из основной программы, в которой предварительно должны быть
определены переменные N0 и массивы X и Y. График строится
на экране дисплея, при этом оси ординат повернуты на 90°. Ко-
265
0.000Е+00 0.000Е+00 м
3.142Е-01 3.090Е-01 ! м
6.283Е-01 5.87ВЕ-01 I м
9.42SE-01 8.090Е-01 ’ *
1.257Е+00 9.311Е-01 ! If
1.571Е+00 1.000Е+00 ! *
1.В85Е+00 9.511Е-01 ! It
2 Л97Е+00 8.090Е-01 ! 0
2.513Е+00 5.878Е-01 1 It
2.В27Е+00 3.090Е-01 ! К
3.142Е+00 3.183Е-06 if
3.456Е+00 -.309Е+00 К t
3.770Е+00 -'.5В8Е+00 X i
4.0В4Е+00 -.809Е+00 X i
4.398Е+00 -.951Е+00 X i
4.712Е+00 -.100Е+01 X i
5«027Е+00 -.951Е+00 X i
5.341Е+00 -.В09Е+00 X i
5.655Е+00 -.58ВЕ+00 X i
5.969Е+00 -.309Е+00 К i
6.283Е+00 -.674Е-05 «1
Рис. П.З
личество точек в графике ограничено значением 100, указанным
в строке 16010. В том случае, когда требуется график вывести
на печать или запомнить в файле, следует ввести строку
16001 OPEN ТЕ:- FOR OUTPUT AS FILE 42
или
• >
16001 OPEN "GRAFIK.DAT" FOE OUTPUT AS FILE 42
Затем в строках 16085 и 16090 после оператора PRINT указать
номер канала #2 и перед выходом из программы (оператор
RETURN) вставить оператор CLOSE.
Пример П.З. Вывести на печать график функции z/=sin х, рассчитываемой
при значениях аргумента, изменяющихся с шагом 0,314159 в диапазоне от 0 до
2л.
Вызывающая программа имеет вид
к 1”0
10 FOR Y = 0 ТС 6-3 STEP .314159
20 X<I>=Y
30 Y<I>=SIN(Y)
35 1=1+1
40 NEXT Y
45 N0=I
50 GOSUB 16000
60 STOP
Полученный график представлен на рис. П.З.
266
СПИСОК ЛИТЕРАТУРЫ
.. 1. Автоматизация схемотехнического проектирования: Учеб, пособие для вузов/
В. Н. Ильин, В. Т. Фролкин, А. И. Бутко и др.; Под ред. В. Н. Ильина. —
М.: Радио и связь, 1987. — 368 с.
2. Алексеенко А. Г. Макромоделирование аналоговых ИС на основе метода
базовых моделей// Микроэлектроника.— 1980. — Вып. 5. — С. 413—422.
3. Влах И., Сингхал К. Машинные методы анализа и проектирования элек-
тронных схем: Пер. с англ. — М.: Радио и связь, 1988. — 560 с.
4. Демирчян К. С., Бутырин П. А. Моделирование и машинный расчет элек-
трических цепей: Учеб, пособие для вузов. — М.: Высшая школа, 1988.—
335 с.
5. Диалоговые системы схемотехнического проектирования/ В. И. Анисимов,
Г. Д. Дмитриевич, К. Б. Скобельцын и др.; Под ред. В. И. Анисимова. —
М.: Радио и связь. 1988. — 288 с.
6. Жумик В. В., Стахов П. Г. Оценка устойчивости диакоптических методов
расчета динамических режимов электронных цепей// Теоретическая электро-
техника. — 1987. — Вып. 43. — С. 123—126.
7. Ильин В. Н., Коган В. Л. Разработка и применение программ автоматизации
схемотехнического проектирования. — М.: Радио и связь. 1984. — 368 с.
8. Калабеков Б. А Применение ЭВМ в инженерных расчетах в технике свя-
зи.— М.: Радио и связь, 1981. — 224 с.
9. Моделирование и оптимизация на ЭВМ радиоэлектронных устройств/
3. М. Бененсон, М. Р. Елистратов, Л. К. Ильин и др.; Под ред. 3. М. Бе-
ненсона. — М.: Радио и связь, 1981. — 271 с.
10. Норенков И. П. Введение в автоматизированное проектирование технических
устройств и систем. — М.: Высшая школа, 1986. — 304 с.
11. Норенков И. П. Комбинированные методы моделирования и анализа в си-
стемах автоматизированного проектирования// Приборостроение. — 1983.—
№ 9. — С. 77—82.
12. Норенков И. П., Евстифеев Ю. А., Маничев В. Б. Метод ускоренного ана-
лиза многопериодных электронных схем// Радиотехника.— 1987. — № 2.—
С. 71—74.
13. Сигорский В. П, Проблемная адаптация в системах автоматизированного
проектирования// Изв. вузсв СССР. Радиоэлектроника. — 1988. — Т. 31,
№ 6. — С. 5—22.
14. Теория автоматического управления. Ч. I. Теория линейных систем автома-
тического управления: Учеб, для вузов. — 2-е изд., перераб. и доп./ Н. А. Ба-
баков. А. А. Воронов, А. А. Воронова и др.; Под ред. А. А. Воронова. —
М.: Высшая школа, 1986. — 367 с.
15. Фидлер Дж. К., Найтингейл К. Машинное проектирование электронных схем.
Пер. с англ./ Под ред. Г. Г. Казеннова. — М.: Высшая школа, 1985. — 216 с.
16. Хьюлсман Л. П., Аллен Ф. Е. Введение в теорию и расчет активных фильт-
ров: Пер. с англ. — М.: Радио и связь, 1984. — 381 с.
17. Чуа Л. О., Пен-Мин Лин. Машинный анализ электронных схем: Пер. с англ./
Под ред. В. Н. Ильина, —М.: Энергия, 1980. — 640 с.
18. Экспертные системы. Принципы работы и примеры: Пер. с англ./. А. Бру-
кинг, П. Джонс, Ф. Кокс и др.; Под ред. Р. Форсайта. — М.: Радио и связь,
1987, —224 с.
267
список ПРОГРАММ
Название программы Параграф Стр.
Программа 3.1. Расчет передаточной функции з.з 68
Программа 3.2. Расчет частотных характеристик с использо- 3.5 76
ванием передаточной функции Расчет фазы
Программа 3.3. Расчет частотной характеристики с использо- 3.7 82
ванием уравнений математической модели цепи Программа 3.4. Расчет переходной, импульсной характеристик з.ю 99
и отклика цепи на произвольное воздействие Программа 5.1. Решение нелинейных уравнений методом Брой- 5.3 122
дена (расчет статического режима) Программы 6.1, 6.2. Анализ процессов по известной переда- 6.2 129
точной функции (обратное преобразование Лапласа) Программа 6.3. Анализ процессов по известной частотной ха- 6.4 139
рактеристике (расчет мгновенного значения отклика, оги- бающих амплитуд, фазы, частот)
Программа 11.1. Расчет коэффициентов влияния 11.4 193
Программа 12.1. Формирование случайных последовательно- 12-5 217
стей Программа 13.1. Расчет устойчивости схемы. 13.2 228
Расчет запаса устойчивости Программа 14.1. Быстрое преобразование Фурье 14.4 241
Программа П.1. Формирование матриц уравнений математи- П.2 255
ческой модели цепи Программа П.2. Ввод матричных коэффициентов математиче- П.2 260
ской модели цепи Программа П.З. Решение системы линейных уравнений П.4 264
Программа П.4. Построение графика функции П.5 265
ОГЛАВЛЕНИЕ
Предисловие .......................................................
Введение.............................................................. 6
В.1. Основные направления применения вычислительной техники ... 6
В.2. Элементы алгебры матриц........................................ 1“
Глава 1. подготовка данных схемы для ввода в эвм ... 20
1.1. Построение эквивалентной схемы...................................20
1.2. Ввод данных схемы в ЭВМ..........................................27
Глядя 9 ФОРМИРОВАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЛИНЕЙНОЙ
глава z. ЦЕПЦ ....................................................... 31
2.1. Компонентные и топологические уравнения.........................31
2.2. Метод переменных состояния. Структура математической модели ли-
нейной цепи...........................................................43
2.3. Алгоритм формирования математической модели цепи, не содержа-
щей особенностей .................................................... 46
2.4. Формирование математической модели цепи, содержащей особенности 53
2.5. Формирование математической модели цепи, содержащей управляе-
мые источники ........................................................57
Упражнения ...........................................................59
Глава 3. РАСЧЕТ ХАРАКТЕРИСТИК линейной цепи...................61
3.1. Характеристики линейной цепи.................................61
3.2. Расчет передаточной функции..................................62
3.3. Программа расчета передаточной функции.......................67
3.4. Расчет частотных характеристик с использованием передаточной
функции...........................................................71
3.5. Программа расчета частотных характеристик с использованием пере-
даточной функции .....................................................75
3.6. Алгоритм расчета частотных характеристик с использованием непо-
средственно уравнений математической модели цепи..................80
3.7. Программа расчета частотных характеристик с использованием непо-
средственно уравнений математической модели цепи..................81
3.8. Алгоритм расчета переходной и импульсной характеристик ... 84
3.9. Алгоритм расчета отклика цепи на произвольные воздействия . . 93
3.10. Программа расчета переходной, импульсной характеристик и откли-
ка цепи на произвольное воздействие ................................. 97
Упражнения ........................................................104
Глава 4. математическая модель нелинейной цепи .... Ю6
4.1. Математическая модель цепи с нелинейными реактивными элементами 106
4.2. Математическая модель цепи с нелинейными резистивными элементами 107
Глава 5. отклик нелинейной цепи на произвольное
ВОЗДЕЙСТВИЕ ........................................................114
5.1. Методы решения нелинейных алгебраических уравнений .... 114
5.2. Расчет статического режима электронной схемы....................119
5.3. Программа расчета отклика нелинейной цепи......................121
269
Глава 6. АНАЛИЗ ПРОЦЕССОВ в высокодобротных устройствах 124
6.1. Расчет отклика цепи с использованием передаточной функции . . 124
6.2. Программа анализа процессов по известной передаточной функции . 129
6.3. Алгоритм анализа процессов по известной частотной характеристике 132
6.4. Программа анализа процессов по известной частотной характеристике 139
6.5. Алгоритм анализа процессов с использованием математической мо-
дели цепи .........................................................143
Упражнения ............................................................145
Глава 7 ПРОХОЖДЕНИЕ МОДУЛИРОВАННЫХ КОЛЕБАНИЙ ЧЕРЕЗ
' ЛИНЕЙНЫЕ ЦЕПИ.......................................146
7.1. Анализ амплитудно-модулированных сигналов в линейных цепях . . 146
7.2. Анализ частотно-модулированных сигналов в линейных цепях . . . 149
Глава 8. особенности расчета плохо обусловленных схем . 155
Глава 9. РАСЧЕТ НЕЛИНЕЙНЫХ искажений в электронных
усилителях ...................................159
9.1. Искажения в цепи, содержащей нелинейные резистивные элементы
с характеристикой вида i„=4r(u„)................................159
9.2. Искажения в цепи, содержащей нелинейные резистивные элементы
с характеристикой вида ив=^(ы).....................................164
6.3. Искажения в цепи, содержащей нелинейные емкостные элементы . . 166
‘9.4. Некоторые особенности использования метода присоединенной схемы 169
Глава 10 расчет периодических процессов в нелинейных
'устройствах ......................................................170
Глава 11 расчет чувствительности схемы к отклонениям
'параметров элементов..............................................174
11.1. Метод присоединенной схемы............................... . 174
11.2. А.лгоритм расчета влияния отклонений параметров элементов на
частотные характеристики цепи......................................185
11.3. Алгоритм расчета влияния отклонения параметров элементов на вре-
менные характеристики цепи.....................................186
11.4. Программа расчета чувствительности.........................193
Упражнения ............................................................196
Глава 12 анализ влияния разброса параметров элементов
на работоспособность устройства..........................198
12.1. Постановка задачи..........................................198
12.2. Метод малых отклонений.....................................200
12.3. Метод случайных испытаний (метод Монте-Карло)..............203
12.4. Формирование последовательностей случайных чисел . . . . 210
12.5. Программа формирования случайных последовательностей . . . 217
Упражнения ............................................................219
Глава 13.анализ устойчивости радиоэлектронных устройств . 220
13.1. Анализ устойчивости против самовозбуждения.................220
13.2. Программа расчета запаса устойчивости против самовозбуждения . 227
Упражнения ............................................................229
Глава 14. спектральный анализ сигналов...........................229
14.1. Аналоговые и цифровые сигналы...............................229
14.2. Дискретное преобразование Фурье.............................232
14.3. Быстрое преобразование Фурье................................234
14.4. Программа быстрого преобразования Фурье...............240
Упражнения ............................................................242
Глава 15. системы автоматизированного проектирования . . 243
15.1. Общие сведения о системах автоматизированного проектирования . 243
370
15.2. Основные требования к техническим средствам САПР .... 246
15.3. Взаимодействие человека и технических средств в САПР . . 247
15.4. Математические методы автоматизированного проектирования РЭЛ 249
Приложение.........................................................253
П.1. Принципы построения приводимых в книге программ и приемы их
использования................................................ 253
П.2. Программа формирования матриц уравнений математической моде-
ли цепи...................................................... 254
П.З. Программа ввода матриц математической модели цепи .... 262
П.4. Программа решения системы линейных уравнений..................263
П.5. Программа построения графика................................ 264-
Список литературы..................................................267
Список программ....................................................268
Учебное издание
Калабеков Бениамин Аршакович
Лапидус Владимир Юрьевич
Малафеев Владимир Михайлович
МЕТОДЫ АВТОМАТИЗИРОВАННОГО РАСЧЕТА ЭЛЕКТРОННЫХ
СХЕМ В ТЕХНИКЕ СВЯЗИ
Учебное пособие
Заведующая редакцией Г. И. Козырева. Редактор Т. М. Бердичевская. Переплет художника
В, Я. Виганта. Художественный редактор Н. С. Шеин. Технический редактор Л. А. Горшкова.
Корректор Н. В. Козлова
ИБ № 1981
Сдано в набор 16.03.90 Подписано в печать 29.05.90 Формат 60x88’/ie
Бумага офсетная .V 2 Гарнитура литературная Печать высокая
Усл. печ. л. 16.66 Усл. кр.-отт. 16,66 Уч. изд. л. 16,35 Тираж 23000 экз.
Изд. № 22654 Зак. № 6030 Цена 85 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Ордена Октябрьской Революции и ордена Трудового Красного Знамени МПО «Первая
Образцовая типография» Государственного комитета СССР по печати. 113054, Москва,
Валовая, 28.