/



























































































































































































































Текст
А. Б. ГОРДИН
Занимательная кибернетика
НАУЧНО-ПОПУЛЯРНАЯ БИБЛИОТЕКА ШКОЛЬНИКА
НАУЧНО-ПОПУЛЯРНАЯ БИБЛИОТЕКА ШКОЛЬНИКА
БИБЛИОТЕЧНАЯ СЕРИЯ
А. Б. ГОРДИН
Занимательная кибернетика
ИЗДАНИЕ ВТОРОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
МОСКВА „РАДИО И СВЯЗЬ" 1987
ББК 32.816 Г 68
УДК 007.001.81
Гордин А. Б.
Г 68 Занимательная кибернетика-2-е изд., перераб.
и доп.-М.: Радио и связь, 1987.-224 с.: ил-(Межизд. серия «Научно-популярная библиотека школьника»).
В занимательной форме рассказывается о кибернетике, роботах, о теории игр, устройстве электронно-вычислительных машин, биоэлектрических системах управления. Приведены описания, по которым читатель может самостоятельно построить много интересных самодельных приборов. По сравнению с первым изданием (1974 г.) материал значительно обновлен и дополнен.
Для широкого круга читателей.
1502000000-089
046(01)-87 ББК 32.816
Рецензенты: доктор физ.-мат.наук Г. О. Крылов, В. Ф. Шулешов
ИБ № 910
Научно-популярное издание
Аркадий Борисович Гордин
Библиотечная серия
ЗАНИМАТЕЛЬНАЯ КИБЕРНЕТИКА
Издание второе, переработанное и дополненное
Редактор И. Н. Суслова Художественный редактор Н. С. Шеин Художники В.Н. Забайров, А Г Бессонов Технический редактор Г. И. Колосова Корректор Т.В. Дземидович
Сдано в набор 3.10.85. Подписано в печать 30.09.86.
Т-17548. Формат 84 х 1О8'/32. Бумага офсетная № 1 Гарнитура Таймс Печать офсетная. Усл.печ.л. 11,76. Усл.кр.-отт. 47Д65. Уч.-изд.л. 12,54. Тираж 150000 экз. (I завод. 1 -120000 экз.). Изд. № 20716. Зак. № 1054. Цена 80 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Можайский полиграфкомбииат Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли, г. Можайск, ул. Мира, 93.
© Издательство «Радио и связь», 1987
На базе новейших кибернетических устройств и систем быстрыми темпами развивается автоматизация различных видов умственной деятельности человека. Автоматизация эта захватывает все новые и новые области, возможности ее безграничны.
Академик В. М. Глушков
ДРУГУ-ЧИТАТЕЛЮ
(ВМЕСТО ПРЕДИСЛОВИЯ)
Вы открыли книгу, которая посвящена кибернетике-одной из самых молодых и перспективных наук XX века.
За последние три десятилетия кибернетика проникла во все отрасли промышленности, в медицину, военное дело, искусство и быт.
Первые шаги молодой науки вызвали большой интерес, об этом можно судить по огромному количеству посвященной ей научно-популярной литературы. Однако книга, которую вы держите в руках, несколько отличается от других. В ней не только рассказывается об основных идеях кибернетики, но также приведены различные описания и схемы самодельных кибернетических моделей и приборов, которые вы сможете построить своими руками. Многие из них могут пригодиться в учебе, на производстве, в быту, в часы досуга.
Книга будет полезной учителям, руководителям технических кружков школ и внешкольных учреждений, поможет им в выборе тематики работы.
Все описанные в книге приборы, устройства и модели были сконструированы в последние годы и построены юными кибернетиками в лаборатории кибернетики и радиоэлектроники Дома пионеров г. Свердловска под руководством и при непосредственном участии автора.
Многие из этих кибернетических устройств неоднократно демонстрировались на республиканских, всесоюзных и международных выставках, где были отмечены Почетными дипломами и медалями. В книге
з
приведены описания приборов разной степени сложности, рассчитанные как на начинающих, так и на более опытных радиолюбителей.
Конечно, о такой сложной и увлекательной науке, как кибернетика, невозможно подробно рассказать в небольшой по объему книге, но автор надеется, что она станет началом вашего дальнейшего знакомства с удивительным миром кибернетических машин.
Впереди у вас новые встречи с другими книгами, интересные открытия, замечательные находки.
Мы понимаем, что описать все интересующие любителей техники схемы в одной, тем более такой маленькой, книге очень трудно. Но если она даст вам новые полезные знания, если вы своими руками построите хотя бы один кибернетический прибор-значит, задача, поставленная автором, выполнена.
Итак, наше небольшое и, будем надеяться, увлекательное путешествие начинается.
1
В главе читатель совершит путешествие в глубь веков, побывает в разных странах, встретится с человекоподобными андроидами, а затем отправится в будущее
В конечном счете рано или поздно может появиться такой робот, интеллект которого будет сравним с интеллектом среднего человека.
Академик В. М. Глушков
Давайте немного помечтаем: представим, что мы находимся в кабинете машины времени, которая может доставить нас в далекое прошлое, в удивительное настоящее и прекрасное будущее. Цель нашего путешествия-проследить долгий и трудный путь человека к осуществлению мечты о механическом помощнике, который мог бы облегчить тяжелый изнурительный труд на производстве, помочь в домашнем хозяйстве.
При раскопках гробниц фараонов археологи обнаруживали среди них усыпальницы детей. Вместе с детьми в пирамидах были найдены куклы с подвижными руками и ногами. Это первое дошедшее до наших дней свидетельство о стремлении людей еще в давние времена сотворить искусственного человека.
Древние греки и римляне строго почитали трогательный и немного грустный обычай-прощание с детством. Вступая в пору зрелости, дети приносили своих кукол перед заходом солнца в храм богини Афродиты или Венеры. В Мексике и Перу, в пустынях Африки, джунглях Австралии археологи при раскопках также часто находили кукол.
История создания человекоподобных движущихся механизмов восходит к далекому прошлому, к тем временам, когда сказка смешивалась с былью и каждая легенда отражала мечту народа.
Фантастическая машина времени переносит нас на древний остров Крит. Ярко светит солнце. Круто подни
5
маются горы в заоблачную высь. Оливковые деревья раскинули свои ветви ... Плодовые сады, пальмовые рощи-маленький рай посреди лазурного моря.
Много чудесных легенд можно услышать на этой земле. Одна из них рассказывает о необыкновенном доме, вызывающем удивление и восхищение всех островитян. Внешне здание напоминало поросший цветами холм, а внутри комнаты были расположены в виде лабиринта, по которому мог пройти только хозяин дома, мудрый Дедалос. Никому из посторонних не удавалось разгадать тайну великого мастера и выйти самому из необычного жилища.
Создатель этого лабиринта Дедалос прославился также изготовлением деревянных человечков, которые могли шагать и двигать руками, и особенно своим самым прекрасным творением-деревянной движущейся фигурой богини Афродиты.
Папирусы древности донесли до нас описания многих механизмов, подражающих движениям человека и животных. Легенды гласят, что тарентский философ и математик Архит в IV веке до н. э. смастерил деревянного голубя, который махал крыльями и мог даже взлетать; египетский фараон Птоломей Филадельфийский в III веке до н. э. заставил своего раба изготовить куклу, подражающую движениям человека.
Наше путешествие в глубь веков продолжается... II век до н.э. Древняя Греция. На одной из узких улочек Афин живет математик и механик Герои Александрийский. Слава о нем гремит по всей стране. Его принимают жрецы храмов и императоры. Герои-непревзойденный мастер, создающий искусственных животных. Толпы народа стекаются к его дому, где каждый вечер перед заходом солнца он показывает чудесную машину. Маленькие певчие птички сидят напротив огромной совы. Как только сова отворачивается от птичек, певуньи начинают весело свистеть. Но стоит грозной сове повернуть голову к птичкам-и те сразу замолкают.
Автомат Герона Александрийского (рис. 1) действовал с помощью очень остроумной конструкции. Были использованы два закрытых сосуда-большой и маленький. На крышке одного из них помещались птички, другого-сова. В большой сосуд стекала вода, постепенно вытесняя воздух, который, проходя по тонкой трубочке, издавал свистящий звук, напоминающий пение птицы.
6
Рис. 1. Схема автомата «Сова и поющие соловьи»
Заполнив этот сосуд, вода по отсосной трубе начинала переливаться в другой, масса которого соответственно увеличивалась. С помощью веревки, перекинутой через блок, прикрепленный к валу, поворачивалась ось с сидящей на ней совой. Уровень воды в сосуде в это время был небольшим, воздух по трубке не выходил, и птички «молчали». После того как большой сосуд освобождался, ось, а вместе с ней и сова возвращались в исходное положение. Затем процесс повторялся. Уровень воды в сосуде опять повышался, сова отворачивалась, певчие птички начинали свистеть.
Автомат Герона чрезвычайно прост. Его можно изготовить самим из совсем простых деталей (старый водопроводный кран, аквариум, латунные или алюминиевые трубки).
Машина времени не спешит покидать дом Герона Александрийского, вся жизнь которого была отдана изобретательству. Через несколько лет после создания «поющих птиц» он придумывает еще более интересный ме-
7
ханизм- театр автоматов. О его устройстве мы знаем из книги «Автоматы», написанной самим Тероном Александрийским (так впервые в мире появилось греческое слово «автоматос», что означает «самодвижущий»). Каждый вечер у ворот своего дома Герои Александрийский демонстрировал согражданам свой театр. Вот как сам изобретатель описывает это необычайное представление, сюжет которого был заимствован из «Малой Илиады»:
- Картина первая. Данайцы чинят суда, пилят, рубят, сверлят, вбивают гвозди, готовятся к спуску на воду. Слышны звуки вколачиваемых гвоздей.
- Картина вторая. Люди тянут суда в воду.
- Картина третья. Зритель видит небо, спокойное море, по нему плывут под парусами в кильватерной колонне суда, возле которых резвятся дельфины. Начинается шторм, строй кораблей нарушается.
- Картина четвертая. Месть Навплия и Афины грекам, побившим их сына Паломеда камнями. На сцене стоят герои пьесы Навплий и Афина. В руке Навплия зажигается факел. Мореплаватели, приняв огонь факела за свет маяка, направляют корабли на скалы.
- Картина пятая. Кораблекрушение. В волнах появляется плывущий Аякс, слышится удар грома. В руке Афины сверкает молния, поражающая Аякса. Аякс исчезает, исчезает также и Афина. Представление заканчивается.
Театр Герона поражал присутствующих: механические фигуры разыгрывали сложные действия, занавес открывался автоматически, так же происходила смена декораций.
На первый взгляд механические игрушки могут показаться всего лишь забавой, однако они стоят в самом начале пути, по которому шло развитие автоматов.
МЕХАНИЧЕСКИЕ ЧУДЕСА
Тридцать долгих лет-с 1216 по 1246 год день за днем трудился талантливый немецкий философ и алхимик Альберт Великий, чтобы построить своего железного человека. Трудно описать механическое чудо того времени. Механический человек, одетый в ливрею, «служил» в доме Альберта Великого привратником. Железный слуга открывал дверь и приветствовал входящего поднятием руки. Мастер так хорошо сделал своего «привратника», что его трудно было отличить от настоящего человека. И вот однажды любимый ученик Альберта Великого-8
епископ Фома Аквинский, которому до этого не приходилось видеть «привратника», пришел в гости к своему учителю. Дверь ему открыл железный слуга. Вид «привратника», его лицо и фигура смутили епископа. «Нечистая сила!»-воскликнул Фома Аквинский и стал громить механизм тяжелым посохом. Когда на шум прибежал Альберт Великий, все было кончено. От «привратника» остались одни шестеренки, каркас и винты. Чертежи, расчеты и описания чудной машины не сохранились.
Человек всегда мечтал создать механическое «существо», не только внешне напоминающее его самого, но умеющего говорить, слушать, думать. Уже в XIII веке епископ Роберт Гросетест пытался сделать «говорящую» голову, которая могла бы произносить отдельные слова. Предложенная им схема состояла из сложной системы трубок различной формы и длины, через которые продувался воздух, в результате чего возникали звуки, отдаленно напоминающие человеческий голос.
Даже в наш, двадцатый, век, с его развитой техникой пока еще не удалось создать говорящую машину.
Эпоха Возрождения оставила миру не только шедевры искусства, но и образцы интересных машин и механизмов.
Талантливый ученый Леонардо да Винчи сконструировал и построил сложную механическую модель льва.
Дворец короля Людовика XII в Милане. Тронный зал. На троне восседает сам король. Открывается дверь, и в зал входит огромный лев, замирают пораженные придворные. Страшный зверь подходит к трону, останавливается у ног Людовика XII, поднимает лапу, открывает отверстие в груди, и оттуда падают белые лилии-эмблема французских королей.
Продолжая наше путешествие на машине времени, перенесемся в средневековье, когда человек создает часовой механизм-одно из самых совершенных устройств в мире. Именно часы-первый автомат, созданный человеком, первое программное устройство. Завод пружины приводит в действие сложнейшие шестеренки и зубчатые колеса, рычаги и кулачковые механизмы. Часы как бы получают задание произвести ряд определенных движений: стрелки движутся по кругу, звенит колокольчик и т.д.
С помощью часового механизма можно открывать и закрывать дверцы, заставлять двигаться фигурки жи
9
вотных, как это сделано сейчас на фасаде Центрального театра кукол в Москве.
Часовой механизм стал основой для подавляющего числа автоматов-живых существ, созданных в средние века и чаще всего служащих движущимися деталями, приводимыми в действие механизмом часов.
Первые башенные часы были установлены в 1352 году на Страсбургском соборе. В первоначальном виде они не сохранились, до нас дошло только их описание. Механизм указателя времени в них занимал три этажа, на каждом из которых во время боя часов появлялись фигуры, изображающие людей или животных. Утро начиналось кукареканьем петуха. Статуя, возникающая на нижнем этаже, указывала дату. На втором этаже по кругу проходили фигуры, выполненные в виде знаков Зодиака, фаза их обращения точно соответствовала действительному периоду движения зодиакальных созвездий, т. е. составляла 23 часа 56 минут. На самом верху через каждый час появлялись три библейских царя и степенно кланялись.
Слава об этих часах гремела по всему миру, они считались главной достопримечательностью страны. Отовсюду приезжали люди полюбоваться необыкновенным чудом. Но шли годы, механизм старел и ветшал. В 1547 году часы пришлось остановить для ремонта. И лишь через тридцать лет, в 1574 году, вторично рожденные, они были пущены в ход.
Венгерский путешественник Мортон Чомбор, посетив в 1620 году Германию, с восторгом отозвался об этих часах.
Через два столетия страсбургские часы вновь подверглись реконструкции. Часовой механизм стал приводить в движение ряд символических фигур. Каждый час разыгрывался маленький спектакль, изображающий течение жизни человека: в первые 15 минут появлялась фигурка младенца, через четверть часа выходил юноша, еще. через 15 минут-зрелый муж, а по истечении часа проходил, ковыляя, старик в сопровождении смерти с косой за плечами. Ровно в полдень на террасе, где смонтированы часы, появлялись аллегорические фигуры и раздавался крик петуха.
Диковинные часы, прошедшие через века как памятник, обессмертивший человеческий труд, до сих пор являются одной из главных достопримечательностей го
10
рода Страсбурга. Сейчас эти часы работают уже после третьей реконструкции.
Машина времени переносит нас в XIII век. Не следует забывать, что развитие науки и техники тогда еще только начиналось.
Плеяда гениальных ученых того времени занималась созданием и конструированием автоматов. Кабинет средневекового философа Альбертуса Магнуса. Сидя за большим столом, хозяин принимал гостей. Входные двери с почтительным поклоном открывал ... механический человек.
Знаменитый средневековый астроном Иоганн Региомонтан (1436-1476), живший в Германии, много лет трудился над созданием механического орла. Дошедшие до наших дней описания свидетельствуют, что, когда император священной Римской империи Максимилиан II Габсбургский въезжал в Нюрнберг, механический орел приветствовал его наклоном головы и хлопаньем крыльев.
И снова встреча через века. Дворец французского короля Карла V. Минуя парадные залы и пышные гостиные, спустимся по винтовой лестнице в полуподвальное помещение, где придворный часовщик Джуанелло Турриано изготовляет заводные игрушки в виде животных и шагающих человечков. Особенно удалась ему шагающая лошадь, которая брыкалась и прыгала, когда на нее садился «наездник».
Достижения отдельных талантливых самоучек быстро распространяются по миру. Начинается повальное увлечение механикой-конструируются часы с пастухом и пастушками, танцующими дамами, львы и собаки разыгрывают сцены, и все это управляется часовыми механизмами.
Даже в наши дни, проходя по залам Эрмитажа, мы не устаем восхищаться произведениями талантливых мастеров-механиков, которые вручную, пользуясь совсем простым инструментом, изготовляли часы с движущимися фигурками, исправно работающие и поныне.
Наша машина времени направляется в XVIII век, который был назван современниками «веком часов». Петербург. Российская Академия наук. В те годы механическими мастерскими заведовал Иван Петрович Кулибин (1735-1818)-талантливый изобретатель, создавший много любопытных механизмов, в том числе и знаменитые часы, хранящиеся в Эрмитаже. Часы эти по внеш-
11
нему виду и величине напоминали гусиное яйцо. В золотом корпусе художественной работы кроме часового механизма находился миниатюрный театр автоматов, где крохотные фигурки разыгрывали сцену, сопровождаемую перезвоном. Сигналом к началу представления был поворот специальной стрелки. Ровно в полдень часы играли гимн, а в течение второй половины суток вызванивали мелодию, сочиненную самим изобретателем. Каждые час, полчаса и четверть часа отмечались особым перезвоном.
В XVII-XVIII веках в России было немало и других мастеров-умельцев, проявлявших чудеса изобретательности и таланта.
Лучшие русские мастера начинают успешно конструировать всевозможные механические устройства, приводимые в движение часовыми пружинами. Газеты пестрят объявлениями о демонстрациях таких устройств. Вот, например, что писали «Санкт-Петербургские ведомости» в номере 59 за 1777 год: «С дозволения главной полиции показываема здесь будет между Казанской церковью и Съезжей в Марковом доме прекрасная, невиданная здесь никогда механическо-музыкальная машина, представляющая изрядно одетую женщину, сидящую на возвышенном пьедестале, играющую на поставленном перед нею искусно сделанном флигеле (клавесине) десять отборнейших, по новому вкусу сочиненных пьес, т.е. три менуэта, четыре арии, два полонеза и один марш. Она с превеликой скоростью выводит наитруднейшие рулады и при начатии каждой пиесы кланяется всем гостям головою. Искусившиеся в механике и вообще любители художества немало будут иметь увеселения, смотря на непринужденные движения рук, натуральный взор ее глаз и искусные повороты ее головы, все сие зрителей по справедливости в удивление привести может».
Имена талантливых русских изобретателей Кулибина, Ползунова, братьев Черепановых, о которых много написано в литературе, пользуются мировой известностью. Однако в отечественной истории техники много незаслуженно забытых имен. К ним можно отнести имя талантливого русского изобретателя XIX века Антона Марковича Гамулецкого, который всю жизнь занимался конструированием автоматических устройств. Автор этих строк много лет вел поиск материалов о жизни и деятельности изобретателя. И вот однажды в газете «Известия» № 130 (18585) он нашел следующие строки: «В 1794 12
году в сорокалетием возрасте Гамулецкий возвращается в Россию и поступает на службу. В 1808 году в чине коллежского регистратора уходит в отставку и целиком отдается любимому делу: он создает различные неведомые дотоле механические и физические приборы и автоматы».
Проходят годы неутомимого труда изобретателя. В изобретения вкладываются все небольшие сбережения. Царское правительство не помогало талантливому изобретателю. Но воля и настойчивость победили. Через двадцать лет работы Антон Маркович открыл «механический кабинет» для всеобщего обозрения. Успех был огромный. Любознательные посетители часами ждали очереди, чтобы посмотреть, как тогда называли, «чудеса механики». И чудеса действительно начинались у входа. На верхней площадке лестницы посетителей встречала парящая в воздухе фигура, выполненная в рост человека. Экскурсанты сами могли убедиться, что механический человек не был подвешен сверху и не имел подпорок снизу или с боков. Как только посетитель вступал на последнюю ступеньку, «летающий человек» поднимал руку, в которой держал валторну, и приветствовал вошедших звуками торжественной музыки.
«Десять лет,-пояснял Гамулецкий,-я трудился, чтобы найти точку опоры и вес магнита и железа, дабы удержать фигуру в воздухе...»
Далее «Известия» так сообщают о чудесах, которые творились в механическом кабинете: «Едва посетитель усаживался на диван, установленный в кабинете, как начинала звучать приятная музыка-внутри дивана автоматически включался особый музыкальный ящик. Затем гость брал в руки «волшебную палочку» и, взмахивая ею, сам совершал «чудеса»; по его желанию на полу начинала разъезжать маленькая колесница, из ваз, расставленных по углам, выскакивали называемые посетителями карты... Гамулецкий всегда сам демонстрировал свои изобретения. С особой гордостью изобретатель показывал купидона, оттачивающего стрелу, амура, играющего на арфе, железного петуха, вдохновенно кричащего «кукареку», лающую механическую собачку, черную кошку, которая мяукала, лениво выгибая спину, змею, с шипением проползающую через салон. Наибольшее удивление вызывала говорящая голова «чародея», отделанная под бронзу».
13
Рис. 2. Разрез механической утки Ж. Вокансона
Судьба этих автоматов, к сожалению, неизвестна. До нас не дошли ни схемы, ни конструктивные решения интересных механизмов Гамулецкого.
Особую страницу в истории создания механических автоматов открыл французский механик Жак Вакансон (1709-1782). Созданная им утка и поныне слывет среди специалистов самым удивительным аппаратом такого рода.
Прежде чем мы узнаем о том, как работает утка Ва-кансона, давайте познакомимся с самим изобретателем.
Жак де Вакансон жил в Гренобле и работал инспектором шелковой мануфактуры. Он изобрел первый в мире автоматический ткацкий станок, много сделал для родного города, соорудил в нем водопровод. Но не только этим запомнился Вакансон соотечественникам. В историю механики он вошел как отец латунной утки и железного флейтиста.
Вакансон построил механическую утку в натуральную величину. Эта утка, повторяющая до мельчайших подробностей живой образец, щелкала клювом, плавала, брызгалась в воде, двигала крыльями, чистила и расправляла перья, крякала, вытягивала голову вверх, выклевывала из протянутой ладони зерна и глотала их, повторяя глотательные движения живой утки, и даже «переваривала» корм (рис. 2).
14
Сложным был жизненный путь этой утки. Она украшала ряд выставок, французская Академия после смерти Вакансона оспаривала у представителей шелковой мануфактуры право на обладание чудесной птицей. Несколькими годами позже она совершила путешествие по странам Европы как главный экспонат выставок, и, наконец, ее за большие деньги приобрел для своего «кабинета искусств и чудес» Готтфрид Кристоф Бейрейс, профессор естествознания, химии, физики и медицины при университете в Хельмштадте. Все свое состояние этот человек тратил на приобретение технических диковинок.
В 1805 году, совершив продолжительное и трудное путешествие, к профессору Бейрейсу постучался иностранец, который из всех его сокровищ заинтересовался только уткой. К тому времени птица уже была почти «развалиной», ее искусственное перьевое одеяние было порядком подпорчено молью. Но несмотря на это, посетитель в том же году написал большую статью, посвященную чудо-птице, ради которой он предпринял путешествие из Веймара. Статья принадлежала государственному министру Иоганну Вольфгангу Гёте.
После Хельмштадта утка еще раз появляется в Париже, а затем ее следы теряются в неизвестности. Никто не знал, за какую цену она меняла хозяев, но это должны были быть колоссальные суммы.
Спору нет, утка Вакансона остается техническим чудом, но мастер создал целый ряд других, не менее интересных работ, таких, например, как механический флейтист, законченный в 1738 году. Музыкант имел рост 178 см и играл на флейте, вдувая воздух с помощью мехов и перебирая клавиши пальцами в определенной последовательности. Он исполнял одиннадцать различных мелодий. Конструктор долго изучал игру на флейте, чтобы заставить своего флейтиста безошибочно двигать пальцами с помощью обычных пружин. Везде, где демонстрировался флейтист, собирались восторженные толпы. Наконец, Жак де Вакансон решил показать свое создание членам французской Академии наук. На заседании разгорелись бурные страсти. Игра флейтиста была настолько хороша, что члены Академии заподозрили автора в обмане. Чтобы реабилитировать себя, Вакансон написал брошюру, в которой подробно объяснил устройство своего изобретения.
Благодаря нашей фантастической машине времени, перенесемся в Австрию XVIII века.
15
Рис. 3. Автомат для игры в шахматы Кемпелена
Большое оживление царило во дворце королевы Марии-Терезы. Придворные обменивались сенсационной новостью: Фаркаш Вольфганг Кемпелен собирался демонстрировать свой шахматный автомат-машину, по словам изобретателя, оставившую позади себя все, что было создано человеком. Однако у этого события есть своя история-несколько лет назад венгерский инженер-механик Кемпелен из города Пижани заверил королеву, что сможет создать автомат, который ... будет думать. В теплый майский вечер 1769 года он демонстрировал это изобретение.
Открываются большие двери, и на четырех колесиках в зал вкатывают чудо-машину размером 120 х 80 см. Снимают покрывало. Перед собравшимися предстает странная большая кукла-турок, сидящая на комоде (рис. 3.) На коленях у турка шахматная доска. Кемпелен открывает дверцы комода, и взорам присутствующих открываются валы, шестеренки, трансмиссии, пружины. Дверцы закрываются. Начинается игра. Королева делает свой первый ход. Затем угловатым, дрожащим движением делает ответный ход турок. Шахматная баталия разгорается, в конце ее происходит что-то невероятное. Губы турка изДают звук, похожий на слово «шах». Еще несколько ходов-и королева проигрывает партию. Гул изумления и восторга прокатывается по залам дворца. Королева считалась хорошим игроком... После этой победы начинается триумфальное шествие чудесного автомата по всему миру. Сенсационному турку проигрывает великий князь Павел, Фридрих II, Наполеон и Екатерина
16
II. Постепенно следы этой машины теряются. Стало известно, что Кемпелен расстается со своим автоматом, однако время от времени турок появляется в разных городах: в 1818 году-в Милане и Париже, в 1821 году-в Лондоне.
В 1847 году почти забытого турка вновь «открывает» знаменитый писатель Эдгар По, который посвящает ему большую статью. С тех пор о турке ничего не известно.
Каким же образом все-таки приводилась в движение эта удивительная чудо-машина? Проникнуть в ее тайну помог сам изобретатель. Перед смертью Вольфганг фон Кемпелен делает сенсационное разоблачение. Он заявляет шокированной публике, что его машина приводилась в действие не только механизмом, но и ...человеком, спрятанным внутри комода, на котором сидел турок. Человек с помощью системы рычажного устройства мог приводить в движение руку куклы. Положение искусственной руки спрятанный шахматист легко мог наблюдать, так как шахматная доска была очень тонкой. Уже значительно позднее стало известно, что многие знаменитые шахматисты того времени за огромные вознаграждения играли с высокопоставленными особами, исполняя роль турка. Возникает справедливый вопрос, почему никто не мог увидеть спрятанного игрока, когда Кемпелен перед началом каждого сеанса открывал дверцы комода для обозрения. Но вскоре и это стало известным. Никогда все дверцы не открывались одновременно, это делалось в определенной последовательности, чтобы шахматист, находящийся в комоде, успел сменить свое местоположение и при этом остаться невидимым. И только когда все дверцы закрывались, игрок выпрямлялся и начинал манипулировать различными механизмами и рычагами. Вот и все, что осталось от «думающей машины», перед которой даже короли снимали шляпу. Но автор не зря так подробно рассказывал о ней своим читателям. Несмотря на кажущуюся простоту этой машины, в ней применялись узлы и механизмы, которые используются и по сей день. «А шахматы?»-спросит читатель. А шахматы здесь ни при чем.
Настоящий шахматный автомат построил в 1890 году испанский инженер Торрес Кеведо. Изобретенное им механическое устройство было довольно простым, оно разыгрывало ладейный эндшпиль-король и ладья против короля. Человек играл королем, и машина всегда выигрывала партию.
17
И еще одна, не совсем обычная история.
Рассказывают один забавный случай, произошедший с механическим человеком, который «умел» играть на трубе. Его построил немецкий изобретатель Иоганн Кауфман. В 1806 году Наполеон отдыхал во дворце после битвы при Иене. Вдруг среди ночи сон его был прерван звуком трубы. Это был сигнал прусской кавалерии. Поднялась тревога. Однако вскоре выяснилось, что кто-то, проходя по темным залам дворца, нечаянно нажал пусковую кнопку искусственного трубача.
Наше путешествие в мир механических автоматов
подходит к концу. Сейчас мы перенесемся в Швейцарию. В маленькой деревушке Шо де Фон, стоящей возле самой французской границы, живут отец и сын. Оба часовщики. Отец-Пьер-Жак Дро много сил и труда вкладывает в обучение своего сына любимой профессии Часовых Дел Мастера. Далеко за полночь сидят отец и сын, разбирая устройства сломанных часовых механизмов. Надо отдать должное сыну Анри-он чрезвычайно способный ученик, старается во всем быть похожим на отца, работой которого очень гордится. Слава о талантливых мастерах далеко разнеслась по всей Швейцарии и Франции.
Успех, выпавший на долю отца и сына Дро, был завоеван ими упорной, кропотливейшей работой. Пьер-Жак Дро создал множество интересных механизмов. Достаточно вспомнить прекрасные маятниковые часы, сконструированные им для короля Испании Фердинанда IV. В часы был встроен механизм, который управлял фигурами пастушка и собаки. «Когда часовая стрелка подходила к какому-нибудь часу,-пишет известный популяризатор науки О. Дрожжин, - пастушок подносил ко рту флейту и свистел столько раз, сколько должно быть пробито часов. У ног пастушка лежала собачка, охраняя корзину с яблоками. Если кто-либо пытался взять яблоко, механическая собачка начинала лаять. Когда яблоко клали обратно, собака на часах замолкала».
Однако самую большую известность принесли отцу и сыну Дро механические люди. Целые толпы путешественников спешили в маленькую деревушку, чтобы посмотреть сделанного Пьером-Жаком Дро механического человека, который умеет писать (рис. 4).
Во второй половине XVIII века этому действительно трудно было поверить. Но молва оказалась права. В 1770 году Пьер-Жак Дро заканчивает своего механического писца. За работой отца внимательно следил его шестна-18
Рис. 4. Андроид отца и сына Дро
дцатилетний сын Анри. Через четыре года после ее окончания он создает собственную конструкцию -
механического художника. Затем оба умельца начали постройку механической музыкантши.
Шел 1774 год. В Париже открылась выставка, на которую отец и сын Дро представили свои изобретения. Выставка имела огромный успех. Многочисленные зрители бурно приветствовали механических собратьев.
Что же представляли собой механические люди отца и сына Дро? Вот как их описывает О. Дрожжин
в книге «Разумные машины» (Детиздат, 1936 г.):
«Писец был ростом с пятилетнего ребенка; он сидел на скамейке перед столиком. В правой руке маленького механического человека было гусиное перо (в то время стальных перьев еще не знали). Писец макал перо в стоящую перед ним чернильницу и писал разные слова и даже фразы без всякого участия человека. Буквы были крупные, красивые, с нажимом и располагались в ровные строчки. Между словами он оставлял промежутки. При писании механический человек двигал головой и, казалось, следил за тем, что пишет. Окончив работу, писец посыпал лист бумаги песком для высушивания чернил, а потом стряхивал его. Другой механический человек, таких же размеров, как и первый, держал в руке карандаш и рисовал разные фигурки. Рисовал не сразу, а с остановками, как бы размышляя. Иногда дул на лист, чтобы удалить соринки. Рисунки получались удачные.
Музыкантша-тех же размеров, что и два ее «брата»,-играла на фисгармонии, ударяя пальцами по клавишам. Четко и легко удавались ей трели и быстрые пассажи. Она поворачивала также голову и глаза, как бы следя за положением рук. Ее грудь поднималась и опускалась, будто дышала. Окончив игру, механическая женщина наклоняла голову, благодаря слушателей за одобрение».
19
Движения всех трех механических людей были так естественны, что многие зрители готовы были считать их живыми. И только когда Дро, открывая дверцы со стороны спины, показывал находящийся внутри сложный механизм, зрители начинали верить, что перед ними действительно произведения техники, а не живые существа.
«Железные люди» Пьера и Анри Дро получили название «андроиды», что означает «человекоподобные, человекообразные».
В некоторых книгах, посвященных роботам, авторы пишут, что слово «андроид» образовалось от имен и фамилии отца и сына Дро (Ан-дро-ид), другие склонны считать, что это производное от искаженного греческого слова «антропос»- «человек».
ПРИКЛЮЧЕНИЯ МЕХАНИЧЕСКИХ ЛЮДЕЙ
Успех на Парижской выставке натолкнул Пьера Дро на мысль показать своих механических людей испанскому королю Фердинанду IV. Писец, рисовальщик и музыкантша были погружены на парусник, и путешествие началось, но возле берегов Испании корабль потерпел крушение. Анри Дро и его механические люди хотя и вымокли, но были спасены. Морская вода-страшный враг металла, он начинает быстро ржаветь, механические люди были повреждены. Анри разобрал все механизмы, почистил их и снова собрал. Андроиды обрели вторую жизнь. В Мадриде открылась выставка, устроенная Анри Дро. Но на этом не кончились злоключения изобретателя и его творений. Святейшая инквизиция усмотрела в работах Анри колдовство и арестовала его, изъяв механических людей. В те далекие и страшные времена обвинения в колдовстве были равносильны смертному приговору. Инквизиция пытала изобретателя и на несколько долгих лет отправила его в тюрьму...
Преодолевая неимоверные трудности, Анри вырывается из заключения и бежит на родину. Здесь в 1790 году он узнает о смерти отца и через год умирает сам. Однако для андроидов продолжается «жизнь», полная приключений ...
Принцип работы андроидов основан на использовании механической силы пружин. Создание знакомых и простых для нас механизмов для механиков прошлого было нелегкой проблемой. Вспомним, сколько шестеренок было в моделях Вакансона, Дро и других мастеров 20
средневековья. Сейчас эти шестеренки делаются почти мгновенно с помощью всего лишь одной операции -штамповки. Мастера средневековья вытачивали их вручную, затрачивая на это многие часы, дни, недели, пользуясь примитивными шаблонами и напильником.
Еще более трудной была задача проектирования кинематических механизмов. Сейчас они рассчитываются по формулам, известным из теории машин и механизмов, используются также типовые проектные решения. Всем этим, конечно же, не могли воспользоваться Вакансон и Дро, им приходилось все делать впервые, полагаясь на мастерство и интуицию.
Идут годы, и человечество овладевает новыми видами энергии. В жизнь входят паровая турбина Джеймса Уатта, лампы накаливания Эдисона и Ладыгина. Люди вписывают новую страницу в увлекательную книгу истории. Поэтому автор приглашает своих читателей в новое путешествие, в страну, где живут уже не механические, а электрические люди, именуемые роботами.
ЭЛЕКТРИЧЕСКИЕ РОБОТЫ
Сначала чуть-чуть истории. 1920 год. Прага. Выдающийся чешский писатель Карел Чапек пишет пьесу под заглавием «RUR» («Россумовские универсальные роботы). Так были названы человекоподобные машины-изобретение инженера Россума, способные выполнять за человека все виды работ. Герой пьесы -главный инженер россумовских фабрик Гарри Домин-так рассказывает историю создания роботов: «Изготовление роботов основано на открытии, сделанном великим физиологом Россумом. Однажды Россум, тогда еще молодой ученый, отправился на какой-то далекий остров изучать морских животных. При этом он делал попытки воспроизвести протоплазму, пока не открыл вещество, обладающее всеми свойствами живой материи, из которого можно было образовать любое живое существо, начиная от инфузорий и кончая человеком». Племянник изобретателя-инженер Россум-младший-решил использовать гениальное открытие, чтобы изготовлять «живые и разумные рабочие машины». «Один робот,-сказал он себе,-с прокормом обходится в три четверти цента в год и вполне заменяет двух с половиной человек. Роботам можно читать библию или логарифмы, кормить их ананасами или соломой-чем угодно, им это все равно, у них нет никаких
21
потребностей и ощущений. Они не имеют воли, страстей, души. Роботы не дорожат жизнью, она им не нужна. Когда они изнашиваются, их выбрасывают».
Далее пьеса Чапека рассказывает о том, как некая акционерная компания наладила массовый выпуск дешевых роботов, чтобы заменить ими живых людей-рабочих и служащих на фабриках и заводах, как впоследствии роботы вышли из повиновения и восстали против своих создателей.
Талантливое произведе-
Рис. 5. Паровой человек, окон- ние Чапека—острая сатира струированный Дж. Муром на тех, кто боится техники, считая, что машина может поработить человека. Нет нужды говорить, насколько необоснованны эти страхи. Человек всегда будет повелителем машины, он ее творец. Но это отдельная тема, о ней мы поговорим в другой главе. А вот слово «роботы» навсегда осталось в лексиконе человечества. К этому времени прочно входят в жизнь электричество, радио, автоматика. Конструирование человекоподобных автоматов продолжается, но уже на новой основе. В движение их приводит электричество, они снабжаются имитаторами голоса (динамические громкоговорители), органов зрения (фотоэлементы), слуха (микрофоны и усилители низкой частоты).
Мы опять приглашаем читателя в путешествие, где его ожидают знакомства с железными людьми. Первым, кто встретится на нашем пути, будет паровой человек, сконструированный в 1893 году Дж. Муром. Приводимый в действие паровой машиной мощностью 0,5 лошадиных сил, он ходил по кругу со скоростью 14 км/ч (рис. 5). Его одежда напоминала латы рыцаря. Шлем закрывал глаза и лоб. Во рту он держал дымящуюся сигару (таким образом из механизма выходил пар). Рост парового человека достигал двух метров. Это был, пожалуй, первый и последний паровой робот, поражающий воображение современников. А вот электрических 22
роботов было построено великое множество, и первым из них был «Мистер Телевокс», изобретенный американским инженером Велели. Управлялся «Телевокс» с помощью свистка. Внутри робота был установлен микрофон, который улавливал свистки-команды, а также усилитель для преобразования слабых сигналов микрофона. Сигналы поступали на вход трех избирательных фильтров, каждый из которых был настроен на определенную частоту. Затем выделенная частота включала исполнительное реле, приводящее в движение мотор.
В схему «Телевокса» был введен распределитель, который, переключаясь, коммутировал один из пяти электродвигателей.
Что мог «Телевокс?» Вот что рассказано об этом роботе в книге О. Дрожжина «Разумные машины».
«Сидя за столиком, Венсли взял в руки телефонную трубку с аппарата, стоящего перед ним. В этот самый момент что-то щелкнуло в другом телефонном аппарате перед «Телевоксом», и затем раздалось жужжание: «з-з-з-з». По-видимому, «Телевокс» отвечал, что слушает. Тогда Венсли поднес к губам свисток и издал протяжный звук: «ту-утут». «Телевокс» снова ответил, но на этот раз прерывистым жужжанием: «дз.. дз... дз». Венсли снова свистит. Теперь «Телевокс» отвечает уже действием: он поднимает флаг, открывая для обозрения портрет Вашингтона, первого американского президента.
Присутствовавшие в лаборатории Венсли журналисты и сотрудники газет разразились аплодисментами, приветствуя первое проявление способностей «Телевокса». По-сле этого, давая различное число повторных свистков, Венсли заставил «Телевокса» пустить в ход вентилятор, зажечь лампы в комнате, открыть окно, закрыть двери, пустить в ход пылесос. Присутствующих особенно поражало то обстоятельство, что «Телевокс» выполнил еще несколько приказаний, не сходя с места, не двигая ни одним членом своего деревянного нескладного тела ...».
«Смешная человекообразная внешность «Телевокса» в его действиях никакой роли не играет. Мой робот, если отбросить его оболочку, представляет собой центральную автоматическую телефонную станцию, к которой в качестве абонентов присоединено несколько электромоторов. Эти электромоторы и производят те действия, которые вы только что видели»,-говорит Венсли.
Впоследствии «Телевокс» работал дежурным при водопроводной системе одного нью-йоркского небоскреба.
23
Он следил за уровнем воды, пускал в ход насос и т.п.
«Телевокс» имел огромный успех. Начинается изобретательская лихорадка. Создаются электрические роботы, которые «умеют делать все». В 1928 году английским инженером Ричардсом сконструирован робот «Эрик» (рис. 6). 15 сентября 1928 года этот робот выступал на ежегодной выставке общества модельных инженеров. Удивляя всех присутствующих, он произносит длинную речь. «Эрик» обладал представительной внешностью. Он был закован в серебристые латы, внутри его узких глаз светились электрические лампочки, на
Рис. 6. Робот «Эрик» груди красовалась надпись
«RUR». Когда «Эрика» включали, во рту его начинали светиться зеленые лампочки, сигнализирующие, что вся электрическая схема в исправности. Робот вставал, поднимал руки, разговаривал. И это особенно поражало всех присутствующих. В то время еще не было магнитофонов и звук записывался только на патефонные пластинки.
Еще один брат «Телевокса»-робот «Альфа»-детище английского профессора Гарри Мея. Масса «Альфы»-две тонны. Голова его имеет вид цилиндра, вместо глаз-очки-пластины со множеством отверстий. Вместо ушей-большие микрофоны. Робот «Альфа» более совершенен, чем его братья «Телевокс» и «Эрик». Он встает, садится, поднимает и опускает руки. По просьбе зрителей двигает пальцами. Если в протянутую руку робота вставить пистолет, он очень метко стреляет вверх и вперед. На расстоянии двадцати метров все пули попадают в «яблочко» мишени. «Альфа» может говорить, свистеть, петь, во время пения он открывает рот. Управляется он человеческим голосом.
Успех электрических людей, как их называла пресса
24
тех лет, привлек внимание электротехнических фирм, которые начинают изготовлять роботов для рекламных целей. Так, робот «Вилли», построенный в 1934 году компанией «Вестингауз», мог вставать, садиться, двигаться вперед-назад и, кроме того, был заядлым курильщиком.
В этом же году был построен робот, изображающий женщину, сидящую на диване. На коленях у нее лежала цитра. Если кто-нибудь из присутствующих произносил название популярной песни, робот тотчас начинал наигрывать на цитре ее мелодию. Конечно, такая жестко запрограммированная система не могла иметь большой объем памяти, поэтому число исполняемых песен было очень ограниченным.
На Лондонской радиовыставке 1932 года тоже не обошлось без механического человека, который сообщал точное время и читал вслух газету (статьи из утренних газет оперативно записывались на грампластинки).
Продолжим наше путешествие и пройдемся по Всемирной выставке 1933 года, открывшейся 1 июня в Чикаго с целью показать достижения науки и техники за прошедшие сто лет. Здесь экспонировался робот, который умел продевать нитку в иголку. Он «питался» электрической энергией и сжатым воздухом и получал команды по радио.
В отделе «Медицина» демонстрировался оригинальный робот. Это был тщательно одетый четырехметровый мужчина, который читал посетителям лекцию о процессе пищеварения. Во время чтения он элегантным жестом растегивал жилет, и зрители видели часть грудной клетки и живота, закрытые прозрачным целлулоидом. Очень хорошо просматривались пищевод, желудок, кишечник, печень. Робот водил пальцем по своим внутренностям и подробно объяснял, как работает пищеварительный тракт. Лекция продолжалась двадцать минут.
В отделе животноводства экспонировалась необычная корова. Она дышала, жевала жвачку, двигала головой вправо и влево, махала хвостом, закрывала и открывала глаза, мигала... и даже давала настоящее молоко, которое было налито в доильную установку. Этот робот-точная копия настоящей коровы. Его программный механизм был выполнен в виде вала, на котором располагались кулачки. Вал приводился в движение электромотором. Кулачки были связаны с рычагами, а те, в свою очередь,-с различными частями тела: головой, глазами,
25
хвостом. Впоследствии механическая корова использовалась как пособие для изучения зоологии.
На Всемирной выставке 1937 года в Париже был показан сложнейший робот «профессор Аркадиус». Его словарный запас достигал 180 слов. За плату он составлял «психологические характеристики» и вручал их посетителям.
Описанные роботы были созданы почти полвека тому назад. Читая о них сейчас, мы можем только снисходительно улыбаться. Достижения современной кибернетики и электроники позволяют строить механизмы значительно более сложные, чем роботы двадцатых-тридцатых годов. Однако нельзя забывать, что они являются прародителями современных роботов.
В книге «Я-робот», написанной знаменитым американским фантастом, профессором биохимии Бостонского университета А. Азимовым, рассказывается о том, как робот-нянька Робби спасает девочку, которая чуть не попала под колеса трактора. Несколько лет тому назад этот рассказ действительно воспринимался как фантазия. Но вот построен робот «Тинкер». Автор этого «электрического человека»-англичанин Деннис Уэстон, живущий в городе Лиде. Воспринимающей системой (глазами) робота служит телевизионная установка, вместо ушей-радиоприемник с антенной. Передатчик для управления располагается на расстоянии одного-двух километров. «Тинкер» может выполнить 180 команд. Как было написано в журнале «Техника-молодежи», робот с особым удовольствием прогуливает по улице ребенка в коляске и за два года он ни разу не ошибся в маршрутах.
В наше время сотни энтузиастов-любителей строят роботы. Какие они? Зачем нужны, да и вообще нужны ли?
Для того чтобы ответить на эти совсем не простые вопросы, автор приглашает читателя посетить Политехнический музей в Москве-один из крупнейших музеев мира, где собраны наиболее интересные образцы техники прошлого и настоящего. Отдел автоматики, телемеханики и кибернетики. У входа нас встречает робот с необычным и немного странным названием «Сепулька» (рис. 7). Так он назван в честь одного из лемовских героев. Вот что сам робот рассказывает посетителям музея о себе:
«...Я родился 1 января 1962 года. Мои отцы-инженеры Марк Александров и Марк Горохов-в течение ряда недель думали над тем, каковы смысл и цель моей
26
Рис. 7. Робот «Сепулъка»
Рис. 8. Робот «АРС»
жизни. И вот, в соответствии с их решением, я-робот-должен выступать как экскурсовод Политехнического музея. В залах автоматики, телемеханики и кибернетики я сопровождаю посетителей от экспоната к экспонату и отвечаю на вопросы любознательных.
Являюсь ли я каким-то чудом техники? Вовсе нет. Я функционирую на общеизвестных основах телемеханики и разговариваю с помощью магнитофонной установки. После того как я ознакомлю посетителей со многими отраслями промышленности, в которых применяются системы телемеханики, я еще рассказываю и о своей собственной конструкции. Таким образом, я выполняю одновременно две роли: музейного экскурсовода и экспоната».
Октябрь 1966 года. Автор этих строк по заданию редакции научно-технического журнала едет в Калугу к Б.Н. Гришину, преподавателю техникума железнодорожного транспорта, создателю робота «АРС». Накануне я позвонил из Москвы, чтобы предупредить о своем приезде. В ответ раздался голос: «Отвечает номер 33-44.
27
В настоящее время хозяина нет дома. Если вам нужно что-нибудь передать, говорите. Автомат в течение двух минут запишет вашу речь. Говорите, пожалуйста». Голос автомата меня так озадачил, что я, передав дату приезда, забыл сказать, в котором часу прибывает мой поезд. Очевидно, поэтому в квартире меня встретил не хозяин, а его механический секретарь (рис. 8). «Здравствуйте, проходите, пожалуйста. Я вам очень рад. Меня зовут «АРС», что означает «автоматический радиоэлектронный секретарь». Разрешите предложить вам послушать музыку». Я в растерянности пробормотал: «Пожалуйста». Несколько минут молчания, а затем из соседней комнаты раздалась приятная мелодия-включился магнитофон. Борис Николаевич рассказал мне, что «АРС» может записать радиопрограмму, включить телевизор, поворачивать голову. Каково же устройство «АРС»? Внутри робота установлены два лентопротяжных механизма для записи и воспроизведения речи на магнитной пленке. Поворот головы, движения, вращение руки осуществляются девятью электромоторами с редукторами. Автоответчик действует по следующей программе: телефонный звонок с помощью звукового реле включает механизм руки, связанный с телефонной трубкой. В это же время включается магнитофон с пленкой, склеенной в кольцо, на которой записан текст ответа абоненту. Абонент слышит сообщение. Затем его голос в течение двух минут записывается на другой магнитофон. В механизме робота имеется простое программное устройство, управляющее последовательностью его действий.
Наше путешествие продолжается. Из Калуги-родины великого Циолковского мы перенесемся на «фабрику чудес» американского кинематографа-в Голливуд, где познакомимся еще с одним человекоподобным роботом специального назначения. Его создатель-американский инженер А. М. Ат-тон-избрал для него «про-
Рис. 9. Робот А.м. Аттона фессию» киноактера. Эта ку-
28
Рис. 9. Робот А.М. Аттона
В настоящее время хозяина нет дома. Если вам нужно что-нибудь передать, говорите. Автомат в течение двух минут запишет вашу речь. Говорите, пожалуйста». Голос автомата меня так озадачил, что я, передав дату приезда, забыл сказать, в котором часу прибывает мой поезд. Очевидно, поэтому в квартире меня встретил не хозяин, а его механический секретарь (рис. 8). «Здравствуйте, проходите, пожалуйста. Я вам очень рад. Меня зовут «АРС», что означает «автоматический радиоэлектронный секретарь». Разрешите предложить вам послушать музыку». Я в растерянности пробормотал: «Пожалуйста». Несколько минут молчания, а затем из соседней комнаты раздалась приятная мелодия-включился магнитофон. Борис Николаевич рассказал мне, что «АРС» может записать радиопрограмму, включить телевизор, поворачивать голову. Каково же устройство «АРС»? Внутри робота установлены два лентопротяжных механизма для записи и воспроизведения речи на магнитной пленке. Поворот головы, движения, вращение руки осуществляются девятью электромоторами с редукторами. Автоответчик действует по следующей программе: телефонный звонок с помощью звукового реле включает механизм руки, связанный с телефонной трубкой. В это же время включается магнитофон с пленкой, склеенной в кольцо, на которой записан текст ответа абоненту. Абонент слышит сообщение. Затем его голос в течение двух минут записывается на другой магнитофон. В механизме робота имеется простое программное устройство, управляющее последовательностью его действий.
Наше путешествие продолжается. Из Калуги-родины великого Циолковского мы перенесемся на «фабрику чудес» американского кинематографа-в Голливуд, где познакомимся еще с одним человекоподобным роботом специального назначения. Его создатель-американский инженер А. М. Ат-тон-избрал для него «профессию» киноактера. Эта ку
28
кла-робот (рис. 9) была изготовлена для исполнения главной роли в одном из кинофильмов для детей. Она могла передвигаться в любом направлении, двигать руками, встряхивать и кивать головой, глаза ее, как живые, двигались вправо и влево. Управление всеми движениями куклы во время киносъемок производилось по радио: внутри нее и в специальной тележке, связанной с ней, размещались радиоаппаратура и аккумуляторы. Рэйнбоу (так назвали куклу, по-английски «rainbow»-«радуга») прекрасно справилась с порученной ей ролью, структурная схема этого робота приведена на рис. 10.
Приведенные примеры иллюстрируют возможности практического использования человекоподобных роботов. Почти все искусственные живые существа, созданные человеком,-андроиды, роботы-это не только забавные игрушки. Они представляют собой своеобразный сплав инженерной мысли и искусства народных умельцев.
Во время нашего путешествия мы удивлялись «умению» роботов подражать действиям человека, хотя прекрасно понимали, что они всего-навсего человекоподобные автоматы, в которые людьми заложена жесткая программа действий. Ничто не может изменить ее, разве только «гибель» робота. Но нельзя забывать, что автоматы освободили человека от утомительного занятия-
Дешифратор номонд
Отключение
Двигатель, управляющий ввижением правой руки
Двигатель, управляющий ВВижением левой руки
Двигатель, управляющий „Встряхивай иг «“головы
J ДВигагпель, управляющий Т| ВРижгмием повороте голобы
шифратор команд
i Z3456 7В 9
J Двигатель, управляющий
П__________ВВижением глад
J Двигатель, управляющий
"П____ поворотом корпуса
Двигатель тележки
Двигатель ног
Рис. 10. Функциональная схема робота «Радуга»
29
следить за работой машин и добросовестно выполняют свою жестко определенную программу. Однако в отличие от человека роботы, с которыми читатель познакомился в этой главе, имея «зрение», «слух» и «голос», не могут приспособиться к изменению обстановки. Поэтому человекоподобные роботы должны «умереть», как вымерли многие животные, не приспособленные к изменению жизни, они останутся лишь украшением музеев, героями научно-фантастических книг и фильмов.
В наш век быстрого развития технического прогресса на смену отцам-роботам идут роботы следующего поколения с новыми свойствами и возможностями. А нам опять предстоит интересное путешествие в страну искусственных живых существ.
В пятидесятые годы перед наукой встала очень сложная, не решенная до сих пор проблема общности живых и неживых систем. К тому времени учеными был накоплен большой запас сведений о строении живых организмов, о том, как работают органы чувств. Но чтобы познать процесс, его нужно смоделировать, пусть даже модель будет во много раз проще своего прототипа: фоторезистор может стать прототипом глаза, микрофон-уха и т.д. Ученые начинают создавать простейшие механические устройства, наделяя их свойствами живых организмов и, самое главное, снабжая обратной связью.
УЧЕНЫЕ СТРОЯТ ИГРУШКИ? ВОВСЕ НЕТ!
Обратная связь-что это такое? В кибернетической энциклопедии читаем: «Обратная связь - воздействие результатов функционирования какой-либо системы (объекта) на характер этого функционирования». Обратившись к жизненному опыту, можно вспомнить массу примеров обратной связи, применяемой в технических устройствах.
В 1765 году Иван Иванович Ползунов (1728-1766) устроил систему для регулирования уровня воды в котле паровой машины, соединив поплавок с краном водоподающей трубы так, что если поплавок опускался ниже заданного уровня, кран открывался, а если поднимался выше - закрывался.
Примеров обратной связи можно привести множество. Подробно ее свойства были изучены Христианом Гюйгенсом (1629-1695) в 1657 году. Гюйгенс исследовал обычные пружинные часы с маятником, выяснив, как зависит ход часов от длины, положения и массы маятника.
зо
Работа машин и механизмов, имевших обратную связь (или иначе машин со следящими системами), поддается точному описанию и расчету. Занимается ею особая отрасль науки -автоматическое регулирование.
В живых организмах также имеются системы регулирования с обратной связью, разумеется, во много раз сложнее. Поэтому автор не сравнивает мир живой и неживой природы, хотя между ними есть и несомненные черты сходства. Для нормального существования живого организма необходимо строгое поддержание постоянства некоторых физико-химических величин, регулирование которых производится автоматически и протекает помимо ощущений, воли и сознания. Автоматические реакции по поддержанию постоянства внутренней среды организма (гомеостазис) присущи большинству живых организмов.
Механизмы с обратной связью не только регулируют вегетативные функции внутренних органов, в ряде случаев они обеспечивают управление скелетной мускулатурой, устойчивость тела в поле тяжести, наилучшие условия работы рецепторов, а также многие другие безусловные рефлексы.
Английский физиолог Грей Уолтер, занимающийся исследованием поведения живых организмов и изучением высшей нервной деятельности, не случайно обратился к техническим аналогам, которые можно было быстро построить и экспериментировать с ними в широких пределах. Сконструированный им робот-черепаха-мог имитировать ряд поведенческих актов живого организма. Но еще раньше черепах Грея Уолтера появились роботы-животные, созданные отцом кибернетики-Норбертом Винером. Одну из своих моделей он назвал моль, другую-клоп. Действующая модель Винера представляла собой тележку с установленным на ней электродвигателем. Управление осуществлялось с помощью двух фоторезисторов, включенных на входы электронных усилителей. Если на фоторезисторы падало одинаковое количество света, то на выходе усилителей напряжение тоже было одинаковым и модель оставалась неподвижной. При изменении освещенности одного из фотоэлементов равновесие нарушалось, срабатывало реле, включался электродвигатель и тележка начинала движение, которое продолжалось до тех пор, пока не уравнивались освещенности обоих фоторезисторов. Моль была отрегулирована так, что «стремилась» двигаться к свету, а клоп, наоборот,
31
прятался от света и обшаривал комнату в поисках темного угла.
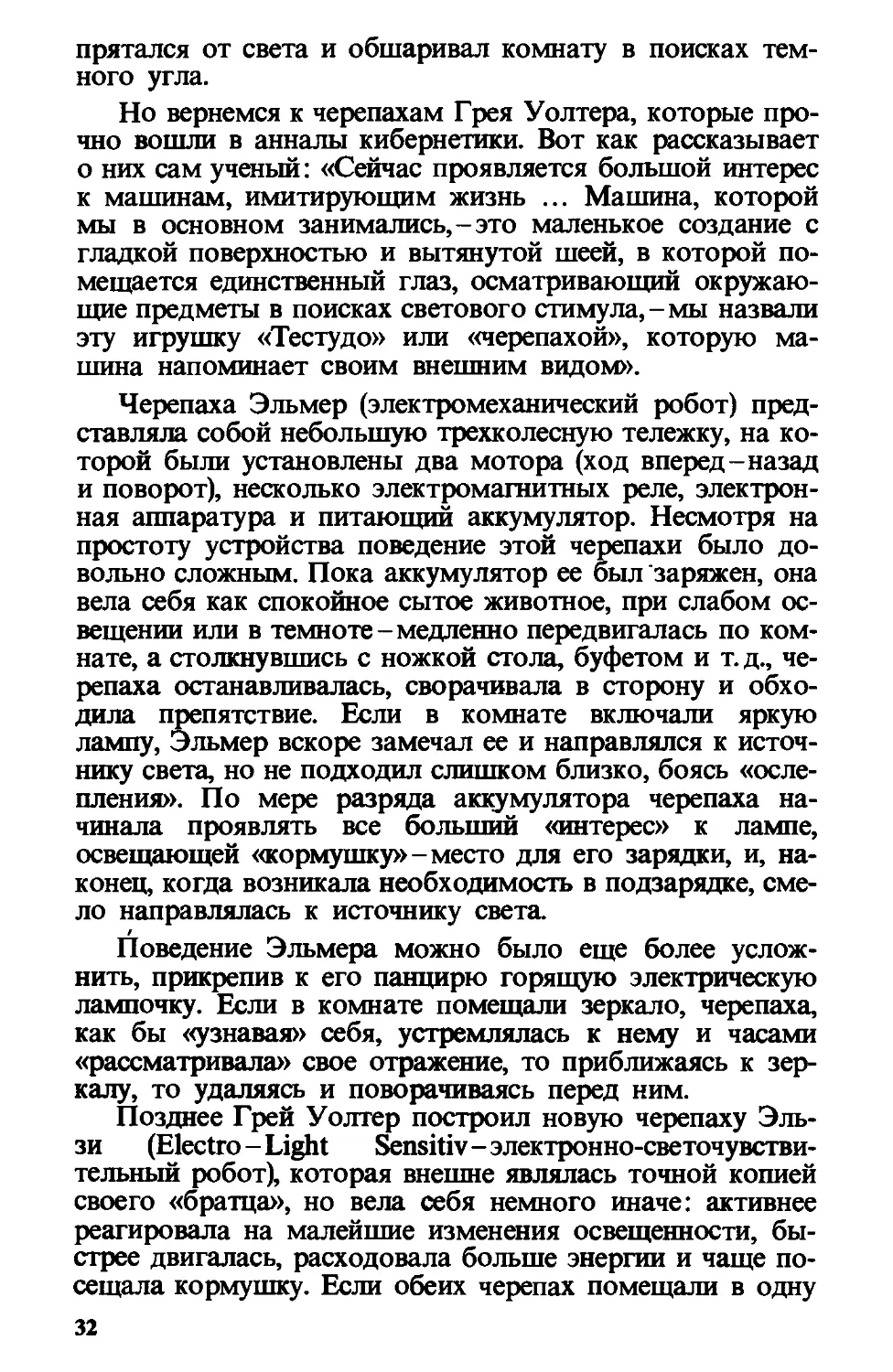
Но вернемся к черепахам Грея Уолтера, которые прочно вошли в анналы кибернетики. Вот как рассказывает о них сам ученый: «Сейчас проявляется большой интерес к машинам, имитирующим жизнь ... Машина, которой мы в основном занимались,-это маленькое создание с гладкой поверхностью и вытянутой шеей, в которой помещается единственный глаз, осматривающий окружающие предметы в поисках светового стимула,-мы назвали эту игрушку «Тестудо» или «черепахой», которую машина напоминает своим внешним видом».
Черепаха Эльмер (электромеханический робот) представляла собой небольшую трехколесную тележку, на которой были установлены два мотора (ход вперед-назад и поворот), несколько электромагнитных реле, электронная аппаратура и питающий аккумулятор. Несмотря на простоту устройства поведение этой черепахи было довольно сложным. Пока аккумулятор ее был ’заряжен, она вела себя как спокойное сытое животное, при слабом освещении или в темноте-медленно передвигалась по комнате, а столкнувшись с ножкой стола, буфетом и т.д., черепаха останавливалась, сворачивала в сторону и обходила препятствие. Если в комнате включали яркую лампу, Эльмер вскоре замечал ее и направлялся к источнику света, но не подходил слишком близко, боясь «ослепления». По мере разряда аккумулятора черепаха начинала проявлять все больший «интерес» к лампе, освещающей «кормушку»-место для его зарядки, и, наконец, когда возникала необходимость в подзарядке, смело направлялась к источнику света.
Поведение Эльмера можно было еще более усложнить, прикрепив к его панцирю горящую электрическую лампочку. Если в комнате помещали зеркало, черепаха, как бы «узнавая» себя, устремлялась к нему и часами «рассматривала» свое отражение, то приближаясь к зеркалу, то удаляясь и поворачиваясь перед ним.
Позднее Грей Уолтер построил новую черепаху Эль-зи (Electro-Light Sensitiv-электронно-светочувствительный робот), которая внешне являлась точной копией своего «братца», но вела себя немного иначе: активнее реагировала на малейшие изменения освещенности, быстрее двигалась, расходовала больше энергии и чаще посещала кормушку. Если обеих черепах помещали в одну
32
комнату, они быстро находили друг друга, сближались и начинали кружиться в своеобразном танце.
Более интересной была третья черепаха Г рея Уолтера по имени Кора (Conditional Reflex Automat-автомат условного рефлекса). Этот кибернетический зверек обладал не только «зрением» и «осязанием», подобно своим предшественникам, но еще и «слухом»: к его органам чувств конструктор добавил микрофон. Кроме того, черепаху можно было обучать, вырабатывая у нее что-то вроде условного рефлекса (благодаря наличию элемента памяти в виде конденсатора, способного в течение некоторого времени сохранять накопленный электрический заряд).
Грей Уолтер выработал у Коры условный рефлекс, обучив ее останавливаться перед препятствием и сворачивать в сторону по звуковому сигналу-свистку. Свисток раздавался всякий раз, когда Кора, двигаясь по комнате, натыкалась на какую-либо преграду. По сигналу свистка она останавливалась, отступала назад и сворачивала в сторону, даже если перед ней никакого препятствия не было.
Своеобразные черты поведения описанных кибернетических игрушек придавали им сходство с настоящими живыми существами, отличительной особенностью которых является умение действовать целесообразно, с учетом окружающей обстановки. В дальнейшем роботы, моделирующие поведение живых организмов, стали предметом пристального внимания ученых-кибернетиков, и не только ученых. В течение нескольких лет был создан «зверинец» кибернетических животных: черепах, лисиц, белок, собак и т.д. Объединенные общим принципом действия, эти зверюшки отличались главным образом внешним оформлением. Их изготавливали радиолюбители, научные лаборатории и кружки юных техников во многих странах. Широкую известность получили: мышь, отыскивающая дорогу в лабиринте,-детище американского ученого Клода Шеннона; «белка», собирающая орехи и относящая их в гнездо, созданная американцем Эдмундом Беркли; лисицы Барбара и Джоб, построенные французом Альбером Докроком и др. В Ленинградском электротехническом институте был сконструирован щенок, реагировавший на пищу и свет. Вместо свистка в качестве условного раздражителя использовалось ... нажатие на его хвост.
Известно очень большое количество искусственных животных, но наибольшую популярность в нашей стране
зз
снискала черепаха инженеров Васильева и Петровского. Она демонстрировалась на многих симпозиумах по автоматическому регулированию и кибернетике и различных выставках, вызывая всеобщий интерес посетителей.
Итак, создание кибернетического «зверинца»... что это? Забава способных инженеров и известных ученых? Нет. Создание таких моделей-не пустое времяпрепровождение. Науку все больше и больше интересует вопрос об устройстве памяти и системах управления поведением животных и человека, а искусственные черепахи и белки-первые попытки смоделировать изучаемые явления в лабораторных условиях.
Искусственные животные помогают исследовать процессы обучения и забывания, выработки условных рефлексов. Электрические роботы-животные, имеющие простое и понятное средство связи между собой, т. е. своеобразный язык, могут осуществлять и более сложные формы «сотрудничества» и приспособления к изменяющейся внешней обстановке. Несомненно, что изучение психологии поведения и мышления с помощью роботов имеет большое будущее.
РОБОТ-СЫН РОБОТА
Эволюция роботов продолжается. Те из них, с которыми мы познакомились, «умеют» выполнять много полезных действий. Они «видят», «слышат», «обучаются», реагируют на электромагнитное излучение. Ученые начинают думать о том, чтобы внедрять их в производство.
Умные, проворные автоматы нужны в металлургии, машиностроении, авиации и сельском хозяйстве. Действительно, почему бы роботам-манипуляторам не отправлять заготовки в печь, загружать и разгружать самолеты? И такие роботы были созданы. Рождение их происходило не сразу.
Давно уже разработан манипулятор-механические руки, работающий на атомных электростанциях. «Мозг» такого робота-электронно-вычислительная машина. «Мышцы»-электрические, пневматические, гидравлические двигатели. «Глаза»-фотоэлектронные, телевизионные или лазерные установки. Нужно состыковать, собрать в единый механизм отдельные детали робота. При этом совсем не обязательно, чтобы он был похож на человека, главная его задача-точно выполнять свою работу.
34
Давно прошли времена, когда роботов конструировали одаренные любители-одиночки. Современные умные машины создаются из готовых, серийно выпускаемых устройств. Во всем мире крупные научные коллективы серьезно и последовательно решают эту проблему.
В Академии наук СССР создан научный совет по проблеме «Роботы и робототехнические системы». Для подготовки высококвалифицированных кадров во многих вузах страны открыта специальность «Робототехнические системы». Плодотворно работает лаборатория роботов Ленинградского института авиационного приборостроения.
В центре помещения лаборатории возвышается огромный голенастый дюралевый паук. Его шестиугольное туловище опутано проводами, трубками, кабелями, соединенными с квадратным ящиком, стоящим поодаль. Это ЭВМ-«мозг» робота. За пауком, в углу, виднеется огромная металлическая клешня, приводимая в движение гидравликой.
Профессор М. Б. Игнатьев рассказывает: «Это наши действующие роботы. Представьте, что мы находимся в одном из цехов завода турбинных лопаток. Вот здесь нагревательная печь, в которую загружены турбинные лопатки. Детали уже нагрелись до нужной температуры (тысяча и более градусов). Рабочий вынимает их из печи и опускает в ванну с маслом. Жара, дым. Работа утомительная, однообразная и неинтересная. Автоматизировать это производство традиционными методами невозможно. Здесь нужен думающий автомат-манипулятор, управляемый ЭВМ, т.е. робот. Именно такое устройство и создано коллективом нашей кафедры.
Представьте теперь, что вместо рабочего у печи стоит наш робот. В управляющей вычислительной машине заложена программа его действий. Нужно только отдать команду и приступить к работе. Робот зашевелился, протянул клешню-схват в печное отверстие, нащупал раскаленную деталь, взял ее точно посередине, осторожно вынул, перенес, минуя окружающие предметы, к ванне и опустил в масло. Вернулся за второй деталью, потом за третьей, четвертой ... И так без устали, без передышки. Его не смутит наличие в печи деталей другой конфигурации, другой массы (что для механического автомата является неразрешимой проблемой)-сведения о возможных изменениях условий труда заложены в памяти робота. Он гибко меняет свое поведение, переходит от
35
одного вида деятельности к другому. Для этого у робота есть все возможности. В его клешне расположены четыре фотоглаза, которыми он видит деталь и на расстоянии, и в непосредственной близости. Рабочие поверхности клешни-схвата имеют органы осязания-тактильные датчики. Суставы «чувствуют» углы поворота различных элементов руки и усилия, которые приходится прилагать гидравлическим мускулам во время работы».
А существуют ли роботы на заводах? Давайте мысленно представим себе, как работает сборочный конвейер. На каком заводе? Существенного значения не имеет. На всех конвейерах обязательно единое правило-разделение сложной технологической операции на несколько простых.
Движение изделия совмещено со сборкой, расчлененной на простые операции. Конвейер радиозавода не является исключением из правил. Сначала собирают отдельные платы из резисторов, конденсаторов, транзисторов, микросхем, а уже затем из этих плат монтируют радиоприемники. По всей длине конвейера сидят рабочие и быстро выполняют одну-единственную простейшую операцию. Труд этот не столько тяжел, сколько однообразен, его монотонность порождает утомление. «Долбление в одну клетку,-как говорил великий физиолог И. Павлов,-усыпляет человека; непрерывное торможение вызывает сонливость; начиная бороться со сном, человек делает ошибки».
Ежегодно в нашей стране увеличивается выпуск телевизоров, радиоприемников, автомашин. Возрастает потребность в автоматических устройствах, заменяющих труд человека. Как уже говорилось, множество производственных операций складывается из простых, циклически повторяющихся движений. А если вспомнить роботов, с которыми мы уже познакомились на страницах этой книги, то они способны повторять одни и те же движения бесконечное число раз. Значит, можно создать производственный автомат-робот для обслуживания станков, машин, технологических процессов, который получил название «промышленный робот».
Для какой бы работы ни создавался промышленный робот, он имеет два одинаковых узла: рабочий орган (механическую руку или манипулятор) и программное устройство, задающее цель и последовательность действий. Этим промышленный робот отличается от других автоматов.
36
РУКА-ВЕНЕЦ ТВОРЕНЬЯ
Человеку всегда была необходима усиленная и удлиненная рука. Однако техника тех далеких лет не была готова к выполнению этого «заказа».
В сороковых-пятидесятых годах XX века начинает развиваться атомная промышленность, появляются первые копирующие манипуляторы-механические руки, которые управлялись человеком и не имели запоминающего устройства. Через некоторое время были созданы роботы-манипуляторы, оснащенные программным устройством с записью. Представьте себе, что человеческая рука произвела определенную операцию с помощью манипулятора. Записывающее устройство записало эту информацию на магнитную пленку в течение однократной демонстрации рабочего цикла. Достаточно перемотать пленку на начало или склеить ее в кольцо-и робот-манипулятор будет «самостоятельно» производить заданную ему работу. Выполнить задание робот сможет только в том случае, если дать ему подробную инструкцию (неважно, записана она на магнитной пленке или на перфокарте). И здесь перед конструкторами встает очень трудная задача. Человек не задумывается, какое нужно сделать движение, чтобы, например, взять паяльник и впаять радиодеталь в печатную плату, он делает это автоматически. Роботу же нужны команды. Каждое выполняемое им простейшее движение необходимо сопроводить подробной программой на понятном роботу языке.
Если рабочему, стоящему у конвейера, каждый раз не нуЭкно объяснять, как и откуда взять деталь, а достаточно сказать, куда ее припаять, то роботу нужны точные и ясные инструкции: взять радиодеталь; из какой секции, каков номинал детали, куда ее положить, с какой скоростью перемещать руку и т.д. Составление программы-очень трудоемкая и ответственная работа. Она выполняется с помощью манипулятора, соединенного с вычислительной машиной.
РОБОТЫ УЧАТСЯ ДУМАТЬ
Читатель, наверное, помнит, как его учили паять. На столе лежали приготовленные паяльник, олово, канифоль, радиодетали и провода. Новичок внимательно слу-
37
шал руководителя кружка или своего товарища, но все же красивой и правильной пайки не получалось. Необходим был навык. Задумывались ли вы, что такое навык? Человек получает навык, повторяя одни и те же движения, он обучается. В период обучения мозг выдает рукам многочисленные команды. Взгляд контролирует работу. Постепенно руки, обучившись, начинают производить ту или иную операцию автоматически. Навык выработался. Человек производит операцию быстро, точно и наиболее рациональными движениями достигает нужного результата. А теперь попробуем заменить человека роботом. Его «мозг»-вычислительная машина, которая уступает возможностям человеческого мозга в миллионы раз, поэтому обучение робота-проблема довольно сложная.
Норберт Винер в своей книге «Творец и робот» писал: «Главное преимущество мозга перед машиной-способность оперировать с нечетко очерченными понятиями. Мозг свободно воспринимает стихи, романы, картины, содержание которых любая ЭВМ должна была бы отбросить как нечто аморфное».
Человеком управляет его мозг-разум, роботом-программа. В словаре С. И. Ожегова слова «разум» объясняется как высшая ступень познавательной деятельности человека, способность логически и творчески мыслить. Для того чтобы робот заменил человека, его нужно обучить-создать ему программу действий. Но и этого мало, необходимо перестроить рабочее место таким образом, чтобы робот мог использовать свои «человеческие» возможности. И такие роботы были созданы. Сейчас их называют роботами первого поколения. Они работают по жестко запрограммированной инструкции типа «взять — положить». Роботы первого поколения имели очень мало «человеческих» чувств. Они не видели, не осязали, у них не было никаких органов, которые сообщали бы, что делается в рабочей зоне. Такого робота обучали по программе, и он начинал работать. В процессе выполнения заданий он ничему не обучался. Опыт не шел ему впрок. Робот первого поколения-автомат с заданной программой, но от других таких автоматов его отличает наличие манипулятора. Механическая рука робота первого поколения имела довольно много степеней свободы, это зависело от его конструкции и целевого назначения. На рис. И приведена схема производственного участка, обслуживаемого роботом первого поколения. Сейчас роботы первого поколения успешно работают во всем ми-38
Рис. 11. Робот первого поколения
ре. В нашей стране в числе первых построен робот, предназначенный для автоматизации многих технологических операций. Его «отцы»-Институт электросварки им. Е.О. Патона Академии наук УССР и Горьковский автозавод-«научили» его профессии сварщика. На автомобильном заводе в г. Тольятти трудится робот «Верса-трон». Он имеет трубчатую горизонтальную руку, проходящую сквозь вертикальную колонку, укрепленную на основании, сделанном в виде квадратной тумбы. Рука может поворачиваться в пределах горизонтального угла в 240° и перемещать груз массой до 10 кг. Если она и допустит ошибку, то не более чем на 3,2 мм. Подвижность руки такова, что она может дотянуться до любой точки внутри цилиндра высотой и радиусом в один метр. Скорость работы «Версатрона» от 250 до 1200 операций в час! Большим достоинством робота является его «память». Если однажды взять его за руку и провести, «показав» последовательно ряд рабочих операций, «Верса-трон» самостоятельно запомнит эту последовательность и будет строго ее придерживаться. По специальности «Версатрон»-штамповщик широкого профиля. Он штампует колпаки для колес автомобиля «Жигули» и один заменяет шестерых работниц.
39
Роботы первого поколения типа «Версатрон» завоевывают все большую популярность. К началу 1977 года в мире работало 3 500 роботов этого типа. В настоящее время, по данным японской печати, в мире насчитывается более 3 млн. роботов-манипуляторов.
РОБОТ-ВНУК РОБОТА
Роботы второго поколения-это автоматы, оснащенные манипулятором, органами чувств, умеющие воспринимать информацию из внешнего мира. Основной рабочий инструмент робота второго поколения-манипулятор-конструируется таким образом, чтобы производить любые работы. Поэтому он должен иметь больше степеней свободы, чем у человеческой руки, подвижность которой обеспечивают три сустава: плечевой, локтевой и кистевой. Конструкторы задумались, почему бы не сделать роботу пять суставов? Хватательные органы (клешни) у роботов второго поколения делаются универсальными. Они не только захватывают деталь, но могут ее еще и «примагнитить». И самое главное, рука робота может поворачиваться практически на любой угол.
Чтобы манипулятор мог приблизительно делать то, что делает человеческая рука, его необходимо оснастить системой датчиков, сообщающих о силе схвата, робот должен уметь оценить массу детали, силу, с которой он ее сжимает. Сравните, как по-разному человеческая рука берет хрустальный бокал или молоток.
Робот второго поколения оснащается также и «зрением». Но это не то бинокулярное зрение, к которому привык человек. В качестве зрительного анализатора в механизме робота применяются замкнутая телевизионная система или лазерный луч. С помощью такого зрения робот может измерять расстояние с точностью до миллиметра.
Однако роботы второго поколения пока не обладают главным преимуществом человека - распознаванием образов. Задача эта очень сложная. О ней мы расскажем в третьей главе.
И, конечно, роботы второго поколения имеют «мозг», в качестве которого применяется электронно-вычислительная машина. Всеми действиями робота управляет компьютер. А вот «слух» ему не нужен, хотя многим кажется, что управление роботом упростится, если команды будут подаваться человеческим голосом. Однако
40
это не совсем так. В Институте кибернетики УССР под руководством академика В. М. Глушкова был создан робот, который «понимает» голосовые команды. Но чтобы научить его «понимать» несколько сотен слов, произносимых одним и тем же инженером (мы сознательно подчеркнули, что машина «понимает» голос только одного человека), необходима большая электронно-вычислительная машина. Понятно, что пока из-за технической сложности и высокой стоимости оснащать робота системой слуха еще преждевременно.
Сейчас в печати все чаще появляется термин «интеллектуальные роботы». Из приведенных выше примеров читателю становится ясным, что роботов, оснащенных памятью, зрением и слухом, можно назвать интеллектуальными. В их схему устанавливают несколько специализированных микропроцессоров.
Интеллектуальные роботы, или роботы третьего поколения, оснащаются системой датчиков, которые обеспечивают ему функционирование на высоком техническом уровне. Такой робот способен распознавать неизвестную или меняющуюся обстановку, автоматически вырабатывать решения о своих дальнейших действиях, самообучаться.
Крупнейший советский специалист в области робототехники доктор технических наук, профессор А.Е. Кобринский говорит: «... пройдет совсем немного времени, и роботы прочно войдут в нашу жизнь. Будут решены три большие задачи, которые пока сдерживают развитие робототехники: а) разработка системы искусственного интеллекта, очувствленного робота, б) проблема, связанная с развитием теории и принципов построения опорнодвигательных аппаратов шагающего типа, в) проблема организации вычислительных процессов при функционировании роботов».
«РОСА», ГРЕЮЩАЯСЯ У КАМИНА, ИЛИ ПРОСТЕЙШАЯ АДАПТИВНАЯ СИСТЕМА
Как уже говорилось, одним из важнейших свойств живого организма, необходимым для выживания, является адаптация. Изучение поведения организма в период его приспособления к окружающей среде-одна из основных задач кибернетики.
41
Ьслшреи литания
ЭлектроОТигатель
РеАуктор
Рис. 12. Внешний вид адаптирующейся системы «Роса»
Адаптивной называется система, которая может приспособиться к изменению внешних и внутренних условий. В качестве примера может служить организм человека или животного. Вспомните, как он реагирует на изменение температуры окружающей среды, мобилизуя все внутренние защитные силы, чтобы температура тела не опускалась ниже критической точки. Организм приспосабливается к среде, в которой обитает. В период адаптации (а это время может длиться в одном случае секунды, в другом-месяцы) работает весь сложнейший управляющий комплекс организма, миллионы нервных клеток, тысячи мышц. Создать такую систему искусственным путем пока еще не представляется возможным, поэтому ученые «отрабатывают» ее части, адаптирующиеся к свету, звуку, теплу и т.д.
Простейшую из таких систем построили во Владимирском педагогическом институте А. Е. Пальтов, С. А. Муханов, В. И. Швецов. Свое устройство они назвали «Роса»-робот, способный к адаптации. Такой же робот с несколько усовершенствованной схемой был сконструирован юными техниками г. Свердловска. Его поведение напоминает поведение кошки, греющейся у камина (рис. 12). Как известно, кошка-теплолюбивое животное, как и наш робот, который, однако, «не хочет» обжигаться и «выбирает» наиболее оптимальное для себя расстояние от источника тепла, отодвигаясь от него, если жарко, и приближаясь, когда холодно.
Мы предлагаем читателю самому изготовить устройство «Роса». Робот состоит из двух простых усилителей, образующих каналы А и Б, на входах которых включены датчики, чувствительные к температуре (рис. 13). Датчиком температуры служит термистор, включенный в мостовую схему. Напряжение, полученное на ее выходе, усиливается двухкаскадным усилителем, на выходе которого включено электромагнитное реле К1. Контакты реле управляют работой электродвигателя Ml, приводящего робот в движение.
42
Рис. 13. Принципиальная схема адаптирующего устройства
Двухканальная система настраивается таким образом, что реле канала А срабатывает при более низкой температуре, чем реле канала Б. Датчики крепятся на поверхности, находящейся на одной плоскости.
В качестве источника тепла могут быть использованы, например, камин или рефлектор, применяющиеся для обогревания комнаты. Рефлектор устанавливается перед роботом на расстоянии, равном примерно 0,5 м. Пока термисторы еще не нагрелись, реле не сработали, «Роса» начинает двигаться к источнику тепла.
По мере его приближения срабатывает реле первого канала, которое своими контактами отключает электродвигатель от источника тепла. Робот останавливается-он нашел для себя оптимальные температурные условия. Попробуем увеличить тепловое излучение, приблизив рефлектор к роботу и создав ему таким образом неблагоприятную обстановку. Нагревается термистор, срабатывает реле второго канала, и робот отъезжает от рефлектора. Происходит реверс (изменение вращения) электродвигателя; движение будет продолжаться до тех пор, пока термистор второго канала не охладится и усилитель канала Б не выключит электродвигатель. Робот опять находит для себя комфортные условия.
Перемещая рефлектор (изменяя температуру окружающей среды), можно наблюдать, как «Роса», подобно живой кошке, приспосабливается к изменяющейся ситуации.
43
Принципиальная схема приведена на рис. 13. На вход усилителя постоянного тока, состоящего из транзисторов VT1 и VT2, включена мостовая схема, содержащая резисторы R2, R3 и R4 и термистор R1. Резисторы R3 и R4-переменные; изменяя их величину, устанавливают температурный порог. На выходе усилителя включено реле РЭС-22, которое управляет электродвигателем. Кнопка SB3 включает устройство в работу. Данные деталей приведены на рис. 13. Используются реле РЭС-22 (паспорт РФ4.500.129); электродвигатель типа ДПМ-20, понижающий редуктор от электродвигателя ДСД-2. Источником питания служат круглые батареи типа 373 («Марс» или «Сатурн»), соединенные последовательно по восемь штук, или аккумуляторы СУС-3. Примерное расположение деталей на тележке показано на рис. 12. Термисторы-типа ТК-2-50.
Общий вид робота и его конструкция приведены на рис. 13.
Внешне робот можно выполнить по-разному, изготовив его корпус из фанеры, пластика или из ворсистой ткани, применяемой в производстве мягких игрушек. Каждый конструктор сможет сам выбрать наиболее понравившийся ему вариант.
В ТАЙНЫ КОСМОСА
Отец космонавтики Константин Эдуардович Циолковский писал: «Земля есть колыбель разума, но нельзя вечно жить в колыбели». Великий ученый понимал, что завоевание космоса-это необходимость, которая рано или поздно встанет перед человечеством: запасы природных ископаемых с каждым десятилетием истощаются, население Земли увеличивается. А сколько полезного и нужного для самой Земли можно совершить, осваивая космос!
Поэтому человек с неослабевающей энергией продолжает штурмовать Вселенную. Все новые космические корабли отправляются к Венере и Марсу. Автоматическая аппаратура производит фотосъемку поверхности далеких миров, изучает их рельеф, атмосферные условия. Человек уже побывал на Луне, и недалек тот день, когда он высадится на таинственную поверхность какой-то другой планеты.
44
Много неожиданностей и опасностей подстерегает там первооткрывателей: непривычная атмосфера, изнуряющая жара и леденящий холод, высокий уровень радиации, незнакомые растения и животные-всего не предугадаешь! Для обеспечения безопасности космонавтов первыми в путешествие по загадочной планете отправятся роботы-автоматические разведчики, способные своевременно обнаружить опасность и предупредить о ней отважных исследователей.
Такой КИН-Кибернетический Исследователь Неведомого-может выполнять ряд действий, присущих живому организму и необходимых разведчику во время путешествия по неведомой планете. В темноте он «дремлет», оставаясь неподвижным. Когда же встает солнце или включается освещение, он «пробуждается» и начинает двигаться. Продвигается КИН осторожно, внимательно осматривая дорогу. Он может двигаться вперед и назад, свернуть вправо или влево, когда соответственно справа или слева от него появляется яркий источник света. Если на его пути встретится препятствие, робот отступает и пытается обойти преграду. Так же поступает КИН и в тех случаях, когда обнаруживает впереди какую-либо опасность: чрезмерно крутой спуск (пропасть), воду, огонь или сильный источник тепла.
Исследователю незнакомой среды необходимо знать, нет ли в ней губительных для организма излучений, поскольку ни одно живое существо не может долго находиться в зоне действия сильного источника радиоактивности. И здесь КИН может быть полезен человеку. Как только робот «почувствует» радиактивное излучение, он поднимает правую руку, окрашенную в красный цвет, сигнализируя об опасности. На шлеме у него загорается красная лампочка, и одновременно подается звуковой сигнал тревоги.
Радиоволны являются единственным видом связи космонавта с родной планетой. Поэтому для космических путешественников очень важно своевременно обнаружить радиосигналы, поступающие с Земли или других космических кораблей. Однако физиологами установлено, что очень сильное электромагнитное поле оказывает вредное воздействие на организм человека, который не имеет органа чувств, воспринимающего радиоизлучение. Поэтому наш робот снабжен блоком, четко реагирующим на появление в окружающем пространстве электромагнитных волн. При их обнаружении в пределах частот-
45
ного диапазона 5 МГц-200 кГц робот поднимает левую руку, окрашенную в синий цвет. На груди у него загорается табло с надписью: «Внимание! В эфире электромагнитное излучение», а из динамика, установленного внутри робота, раздается голос, произносящий эту же фразу.
Интересная особенность нашего кибернетического исследователя-его способность к накоплению «жизненного опыта», т.е. к образованию «условного рефлекса». Если подавать звуковой сигнал, например свист, всякий раз, когда КИН встречается с какой-нибудь опасностью (попадает в воду, приближается к огню, останавливается перед пропастью), то вскоре он «поймет» смысл этого звукового сигнала и в дальнейшем будет достаточно одного свистка, чтобы робот остановился, отступил назад и выбрал другой путь.
ЗНАКОМЬТЕСЬ - КИН
Предлагаем читателям заняться постройкой действующей модели КИНа-робота-разведчика, предназначенного для исследования незнакомой среды. В процессе изготовления этого железного человека энтузиасты-конструкторы смогут познакомиться с основными узлами и схемами кибернетических машин, приобретут много полезных знаний и навыков.
Функциональная схема робота изображена на рис. 14.
«КИН-2» состоит из десяти отдельных блоков, установленных в общем корпусе. Кроме того, в составе робота имеются: ведущий реверсионный двигатель, три табло, сигнализирующие о повышении температуры, наличии радио- и радиационного излучения, а также сирены и магнитофон, оповещающие о наличии радиационного и радиоизлучения.
В процессе движения КИН управляется с помощью реле, концевых выключателей и датчика, сигнализирующего о наличии водной преграды. Питание осуществляется от двух аккумуляторных батарей.
В состав робота входят следующие блоки:
«Движение»-для управления перемещением вперед — назад; вправо-влево;
«Восприятие тепла и звука», состоящий из двух отдельных независимых узлов, один из которых предназначен для сигнализации о повышении окружающей температуры с помощью табло, а второй-для восприятия 46
звукового сигнала и управления блоками выработки условных рефлексов;
«Условный рефлекс тепло-звук», имитирующий выработку условного рефлекса при наличии одновременно звукового сигнала и повышенной температуры;
«Условный рефлекс поворота», управляющего поворотом робота направо или налево при наличии звукового сигнала;
«Радиоизлучение», сигнализирующий о наличии высокочастотного поля при помощи светового табло и магнитофона;
«Водная преграда» для перемены направления движения робота при встрече с водной преградой;
«Радиационная разведка», предупреждающий о наличии радиоактивного излучения с помощью сирены и светового табло;
«Световой фон», осуществляющий включение робота при наличии общего освещения;
стабилизатор напряжения, обеспечивающий постоянное напряжение (5 В) для питания всех микросхем, имеющихся в составе робота;
сигнализации о включении и разряде аккумулятора, действующий с помощью светодиода, гаснущего при разряде аккумулятора ниже определенного предела.
Движение робота производится с помощью реверсивного электродвигателя Ml. Поворот направо и налево осуществляют электромагнитами LI, L2. Система концевых выключателей SB1-SB5, реле К1-К5 и других элементов обеспечивает управление движением робота. Работа всех отдельных блоков и их взаимодействие описаны ниже.
Принципиальная схема приведена на рис. 15. В состав робота входит основной ведущий реверсивный двигатель с редуктором, электромагниты LI, L2, служащие для осуществления поворота вправо и влево, стабилизированный источник питания напряжением 5 В, устройство сигнализации включения, группа реле, управляющая движением, разъемы для подключения блоков, концевые выключатели SB1-SB5, необходимые для управления движением, табло, сигнализирующее о повышении температуры, блоки «Световой фон», «Водная преграда», разъемы для подключения остальных блоков, о которых рассказано ниже. Питание робота осуществляется от двух последовательно соединенных аккумуляторных батарей, одна из которых дает напряжение 9 В, а другая
47
15 В (в сумме дающие 24 В). Для контроля работы батарей имеется устройство, сигнализирующее о нормальном заряде с помощью светодиода. Движение робота управляется источниками света.
Первоначальное включение робота осуществляется переключателем SB6. «Оживает» КИН при появлении общего освещения (например, если в комнате вспыхнул свет). В этом случае меняется сопротивление фоторезистора R3 в блоке «Световой фон», что приводит к увеличению токов транзистора VT1, VT2 и срабатыванию реле К4, которое своими контактами включает питание на всю остальную схему робота. Порог освещенности, при котором включается КИН, устанавливается резистором R4. Направление движения определяется локальным источником света, в зависимости от положения которого робот может двигаться прямо или поворачиваться направо или налево. Выбор направления движения осуществляется с помощью блока движения, соединенного с основной схемой разъемом Х2. Двигатель Ml является реверсивным.
48
SB1
SBZ
SB3
I БВ1
I CB2
Блок „ВоЛиая преграва
Блок „Сигнализация Включения и разряда аккумулятора"
Блок „Радиационная развеВка*
Блок Световой фон"
Блок „СтаЛили-затор , напряжения
EL3
SB5
Рис. 14. Функциональная схема робота «КИН-2»
Блок „РаВш>-излучеиие
584
HA4
При движении на источник света напряжение + 24 В подается с контакта 8 разъема Х2 на левую (рис. 15) обмотку возбуждения двигателя. При повороте налево напряжение с контакта 11 разъема Х2 подается на электромагнит L1, при повороте направо напряжение с контакта 5 подается на электромагнит L2. На разъемах XI-Х6 (рис. 15-21) приведены следующие обозначения: УР— блок условного рефлекса; П-поворот робота вправо; Л-поворот робота влево.
Если робот сталкивается с пряпятствием, срабатывает один из концевых выключателей SB1, SB2, SB3, установленных впереди и по бокам робота (в зависимости от направления движения). При этом включается реле К1, которое своими контактами К 1,2 самоблокируется и одновременно отключает напряжение + 24 В от контакта 7 разъема Х2 и включает основной ведущий двигатель в режим реверсирования, для чего напряжение пода-
49
ется через правую обмотку возбуждения. Мотор меняет направление вращения, и робот начинает двигаться в противоположную сторону.
Как только КИН отходит от препятствия, все концевые выключатели оказываются в исходном положении. При этом напряжение + 24 В через их нормально замкнутые контакты, нормально замкнутые контакты К5.1 блока «Водная преграда» и контакты К 1.1 ранее сработавшего реле К1 подается на обмотку реле К2. При срабатывании реле К2 напряжение + 24 В отключается с помощью контактов К2.1 от контакта 10 разъема Х2 и подключается к контакту 4 разъема Х2, при этом изменяется направление движения, например, если до отхода робот двигался направо, его колеса поворачиваются влево.
Осуществление указанных операций выполняется блоком движения, работа которого подробно описана ниже.
Одновременно с изменением направления движения во время отхода контактами К2.2 включается реле вре-
50
<5 Антенна ♦24В +5B
Табло
4
SB3
К2
кзл
SB4
Выход
SB5
SB1
5В2
El
R14 гон
R13 Юк
VD2 №133
К4.2 |
FU2 FU1
R3 ФСД-1
VT1 0307
24В
R5 100
R4 Юк
R7 300
FT2
0307
VT6
R16
62
FT7 П307
R11 Г 820 [
R15 75
RB 1к
) VT4 КТ315Г
- , ИИ Ч L i КС139Д
vt5\2v \xttj
КГ315ГГ-----“ Я12
R9 Г] RIO 1К
240 LJ 200 VDJ ‘ >
KC139A
FT3 КГВ01Б
Вкл.
Маги.
_5 6_
7
___X6 ♦ 24B
♦24 В
VT8 МЛ42Б
Т 6В2 ' 9В
VD4 FD5
АЛ102В Д814А Z J
2
3
Рис. 15. Принципиальная схема робота «КИН-2»
мени, собранное на реле КЗ, резисторах Rl, R2 и конденсаторах Cl, С2. Через несколько секунд после начала отхода срабатывает реле КЗ, которое контактами К3.1 обесточивает обмотки реле К1 и К2. В результате контакты возвращаются в исходное положение. Робот продолжает движение в ту сторону, где находится источник света. Если при отходе назад робот встретился с препятствием ранее, чем срабатывает реле КЗ, то один из концевых выключателей SB4 или SB5 обесточит реле К1 и К2 и робот будет двигаться, как описано выше, при срабатывании реле КЗ. КИН может обнаружить водную преграду (наличие воды) и отойти от нее, продолжив движение в другом направлении.
Описанные выше операции выполняются блоком «Водная преграда», выполненным на транзисторе VT7. Чувствительным элементом являются контакты Е1, укре
51
пленные на передней части тележки, на которой установлен ведущий двигатель. Тележка закрыта декоративным корпусом, имитирующим «ботинки» робота. Электроды (датчики) изготовлены из фосфористой бронзы и покрыты защитным слоем хрома или никеля. Толщина их составляет 1 мм, длина 35 мм. Они крепятся на расстоянии 1-2 мм друг от друга. Высота крепления от пола составляет 5-6 мм. Электроды включены на вход усилителя, собранного на транзисторе VT7 типа ПЗО7.
В случае отсутствия у конструктора транзистора ПЗО7 его можно заменить другими-ПЗО8, П309, КТ312, КТ605.
При встрече с водной преградой понижается сопротивление между контактами Е1, что приводит к возрастанию базового, а следовательно, и коллекторного токов транзистора VT7. При этом срабатывает реле К5, которое своими контактами К5.1 включает реле К1. Дальнейшее движение робота осуществляется, как описано выше, при срабатывании концевых выключателей SB1-SB3.
К разъемам XI-Х6 подключаются соответственно следующие блоки: звука и тепла, условного рефлекса «тепло-звук», радиоизлучения и радиационной разведки, условных рефлексов поворота. Работа этих блоков описана ниже.
Устройство сигнализации разряда аккумулятора собрано на транзисторе VT8. Оно работает следующим образом. При включении робота выключателем SB6 напряжение с одной из аккумуляторных батарей подается на данное устройство и приводит к зажиганию светодиода VD4. При разряде аккумулятора ниже напряжения стабилизации стабилитрона VD5 светодиод VD4 гаснет, что является сигналом разряда аккумулятора. Для питания микросхем необходимо стабилизированное напряжение 5 В. Стабилизатор напряжения собран на транзисторах VT3-VT6. Регулировка напряжения осуществляется резистором R12.
Блок «Условный рефлекс «тепло-звук» предназначен для выработки условного рефлекса, в котором условным раздражителем является звуковой сигнал, а безусловным-тепловое излучение. Принципиальная схема блока приведена на рис. 16. В блоке применены три микросхемы. Микросхемы DD10 К155ЛАЗ является логическим устройством, a DD11 К155ИЕ5 предназначена для счета импульсов и одновременно является устройством памяти.
52
DDW К155ЛАЗ DD11 К155ИЕ5
Рис. 16. Блок «Условный рефлекс тепло-звук»
Блок работает следующим образом: если на его входы поступают напряжения высокого уровня (логическая единица) одновременно с датчиков тепла и звука, то на выходе 6 микросхемы DD10 появится сигнал высокого уровня. При прекращении хотя бы одного из входных сигналов (или обоих вместе) на выходе 6 микросхемы DD10 возникает отрицательный перепад напряжения, который приводит к срабатыванию счетчика импульсов DD11. При повторении входных сигналов счет импульсов будет продолжаться до тех пор, пока не появится напряжение высокого уровня на том выходе микросхемы DD11, где установлена перемычка «а». При этом на входах 9, 10, 12 микросхемы DD10 тоже появляется напряжение высокого уровня, в результате чего на входе 5 микросхемы DD10 возникает напряжение низкого уровня (логический нуль) и дальнейший счет прекращается. Таким образом, условный рефлекс, т.е. сигнал наличия теплового излучения, будет вырабатываться только при подаче звукового сигнала. Он формируется на выходе И микросхемы DD10 (логический нуль). В случае, если несколько раз будет подаваться только звуковой сигнал, это приведет к срабатыванию микросхемы DD12 и счету количества импульсов звукового сигнала. Когда он достигнет такого значения, что на выходе микросхемы DD12, к которому подключена перемычка «б», появляется напряжение высокого уровня, то сигнал на входах 2, 3 устанавливает напряжение на всех выходах микросхемы DD11 в нуль.
53
Рис. 17. Блок «Условный рефлекс поворота»
В результате условный рефлекс забывается. Дальнейшая подача звуковых сигналов не будет включать табло «Тепловое излучение». Если же звуковой сигнал начнет подкрепляться сигналом «Тепло» раньше, чем напряжение микросхемы DD11 установится в нуль, то произойдет подкрепление условного рефлекса, в нуль установится микросхема DD12, и сигнал «Тепло» будет продолжать появляться при подаче звукового сигнала.
Блок условного рефлекса соединяется с основной схемой базового блока разъемом ХЗ.
Блок, вырабатывающий условный рефлекс, управляющий поворотом, схема которого приведена на рис. 17, вырабатывает условные рефлексы, позволяющие осуществить поворот робота направо или налево при подаче звукового сигнала, который является условным раздражителем. Безусловным раздражителем служит источник света, перемещающийся вправо или влево.
Входящие в состав блока микросхемы DD6 и DD7 предназначены для выработки условного рефлекса поворота налево, микросхемы DD8 и DD9-направо. На микросхемах DD6 и DD8 К155ЛАЗ собраны логические устройства, DD7 и DD9 К155ИЕ5 являются счетчиками импульсов.
Рассмотрим для примера, как работает блок выработки условного рефлекса поворота налево. В исходном состоянии напряжения на микросхемах DD7 и DD9 установлены в нуль. При отклонении источника света влево
54
и одновременной подаче звукового сигнала на входы 1 и 2 микросхемы DD6 через контакты 6,7 разъема Х4 будут поданы напряжения высокого уровня. При этом на выходе 3 микросхемы DD6 появится напряжение низкого уровня, а на выходе 6-соответственно, высокого уровня. Если входные сигналы или хотя бы один из них на контактах 6 и 7 разъема Х4 повторяются несколько раз (при условии, что на втором контакте имеется логическая единица), микросхемой DD7 будет производиться счет импульсов.
Когда число входных импульсов достигает значения, при котором на выходе микросхемы DD7 с установленной на ней перемычкой «а» возникает напряжение высокого уровня, счет импульсов прекратится и на входах 9, 10,12 микросхемы DD6 тоже появится напряжение высокого уровня. Это приведет к тому, что на выходе 6 микросхемы DD6 напряжение высокого уровня будет устойчиво сохраняться, что обусловливает прекращение счета импульсов. На выходе 11 микросхемы DD6 при подаче звукового сигнала возникнет напряжение низкого уровня, которое и является сигналом поворота налево, подающимся через контакт 5 разъема Х4 и контакт 13 разъема XI в блок движения.
Условный рефлекс поворота направо вырабатывается аналогичным образом с помощью микросхем DD8 и DD9. Если ранее был выработан условный рефлекс поворота налево, то при первом же сигнале, создающем условный рефлекс поворота направо, напряжение высокого уровня с контакта 6 микросхемы DD8 поступает на входы 2 и 3 микросхемы DD7, что приводит к ее установке в нулевое положение и, следовательно, к забыванию условного рефлекса поворота налево. Количество входных сигналов, необходимых для выработки условного рефлекса поворота направо, определяется положением перемычки «б».
Забывание условного рефлекса поворота направо осуществляется при первом сигнале, формирующем условный рефлекс поворота налево, за счет подачи напряжения высокого уровня с выхода 6 микросхемы DD6 на входы 2 и 3 микросхемы DD9, что приводит к установке напряжения данной микросхемы в нуль.
Блок «Движение», схема которого приведена на рис. 18, действует с помощью светового сигнала, положение которого определяет направление движения: оно происходит по прямой линии, если источник света нахо-
55
дится прямо перед роботом; при перемещении этого источника вправо или влево осуществляется соответствующий поворот. Движения производятся по сигналам, поступающим с установленных в передней части робота световых датчиков, в качестве которых использованы фоторезисторы типа ФСК-1.
Если источник света находится непосредственно перед роботом, освещены оба фоторезистора, при перемещении его вправо освещается только фоторезистор R19. Когда робот движется влево, освещается фоторезистор R22. Токи фоторезисторов R19 и R22 управляют транзисторами VT9 и VT10, в результате чего изменяются напряжения в резисторах R20 и R23. Эти напряжения управляют триггерами Шмитта, в качестве которых использована микросхема DD1 К155ТЛ1. При отсутствии светового сигнала на выходах 6 и 8 этой микросхемы устанавливается напряжение высокого уровня. При появлении светового сигнала на одном из выходов или на обоих одновременно в зависимости от положения источников света появляется напряжение низкого уровня. На микросхемах DD2 К155ЛАЗ и DD3 К155ЛА4 собрано логическое устройство, работающее следующим образом. В том случае, если напряжение низкого уровня появляется одновременно на обоих выходах 6 и 8 микросхемы DD1, на выходе 6 микросхемы DD3 появляется напряжение высокого уровня, т.е. напряжение не менее 2,4 В, которое че-
5б
УТ9,УП0 - МЛ-396 УТ11,УГ12,УГ13- П307
xz
1 Вход УР
2 Выход УР
3 +5 В
4 + Z4B
5 Лоб. П
6 1
7 Мотор
в Мотор
9 + 24В
10 + Z4B
11 ЛоВ. Л
12 Выход УР
и Вход УР
14
15
Рис. 18. Блок «Движение»
рез резистор R25 подается на базу транзистора VT12. Коллекторным током транзистора VT12 включается реле Кб, а затем- электродвигатель, и робот приходит в движение. Если источник света отклонится вправо, напряжение низкого уровня появляется только на выходе 6 микросхемы DD1, а напряжение высокого уровня-на выходах 6 и 12 микросхемы DD3, в результате чего с помощью контактов реле К5 одновременно с включением электродвигателя осуществляется поворот вправо. Включение поворота производится контактами реле К5.1, управляемого коллекторным током транзистора VT11. Аналогично происходит поворот влево при соответствующем перемещении источника света.
В логическом устройстве блока движения предусмотрена возможность ввода и вывода сигналов для формирования условных рефлексов (напряжений высокого уровня), которые выводятся с выходов 8 и 12 микросхемы DD3. Сигналы с блока условных рефлексов на осуществление поворота вправо и влево в зависимости от выработанного условного рефлекса подаются на входы 1 и 13 микросхемы DD2. Логическое устройство работает таким образом, что при наличии одновременно двух раздражителей-условного (звук) и безусловного (свет), сиг-
57
i авизирующих о разном направлении поворота, преимущество отдается безусловному раздражителю. При этом в блоке условного рефлекса происходит «забывание» выработанного ранее условного рефлекса. Если источник света находится непосредственно перед КИН, а с блока условного рефлекса поступает сигнал поворота, робот подчиняется этому сигналу. В устройстве предусмотрен отход от препятствия, находящегося на пути робота. Направление отхода определяется предыдущей линией движения, для чего предусмотрена дополнительная группа контактов реле К5 (К5.2).
Блок движения соединяется с базовым блоком с помощью разъема Х2 Питание электронной схемы блока осуществляется от источника + 5 В, который подключается к выводам 14 микросхем DD1-DD3. Выводы 7 всех микросхем соединяются с корпусом. Реле питается от источника + 24 В.
Блок «Восприятие звука и тепла», схема которого приведена на рис. 19, содержит два конструктивно объединенных независимых устройства, одно из которых предназначено для восприятия звукового сигнала, другое-сигнала повышения окружающей температуры.
Устройство формирования звукового сигнала состоит из микрофона, микрофонного усилителя, собранного на 58
DD5 К155ГЛ1 XI
Рис. 19. Блок «Восприятие
звука и тепла»
микросхеме DD4 219УН1; фильтра C6L3, оконечного каскада усилителя, транзистора VT14, двуполупериодно-го выпрямителя на диодах VD6 и VD7, триггера Шмитта, в качестве которого использована половина микросхемы DD5 типа К155ТЛ1.
При подаче звукового сигнала (например, свистка) звук попадает в микрофон, слабый электрический сигнал усиливается микрофонным усилителем, собранным на микросхеме DD4. С входа 1 микросхемы DD4 через конденсатор С7 усиленный сигнал поступает на базу транзистора VT14. Параллельно выходу микросхемы DD4 включен фильтр L6L3, который выделяет из звукового сигнала основную частоту. Транзистор VT14 дополнительно усиливает сигнал. С коллектора транзистора VT14 через конденсатор С8 сигнал поступает на диодный выпрямитель. При отсутствии сигнала на делителе, состоящем из резисторов R32 и R33, появляется напряжение высокого уровня (около 3 В), которое через резистор R34 поступает на входы триггера Шмитта. При этом на выходе 6 микросхемы DD5 возникает напряжение низкого уровня. При подаче звукового сигнала на резисторе R34 появляется отрицательное напряжение, которое снижает потенциал на входе триггера Шмитта. При этом на
59
выходе 6 микросхемы DD5 появляется напряжение высокого уровня, которое через контакт 1 разъема XI подается на оба блока выработки условного рефлекса.
Устройство для восприятия окружающей температуры состоит из терморезистора R35, усилителя, собранного на транзисторах VT15 и VT16, триггера Шмитта, в качестве которого используется вторая половина микросхемы DD5 и исполнительного устройства, собранного на транзисторе VT17. Кроме того, в схеме имеются фазоинвертор, собранный на транзисторе VT18 и предназначенный для восприятия сигнала с блока условного рефлекса.
Устройство работает следующим образом. В исходном состоянии (при комнатной температуре) сопротивление резистора R35 велико. При этом токи, протекающие в коллекторных цепях транзистора VT15 и VT16, малы.
На входе триггера Шмитта имеется напряжение высокого уровня, а на выходе 8 микросхемы DD5-низкого. При этом транзистор VT17 закрыт, а контакты реле К8.1 разомкнуты. При повышении окружающей температуры увеличивается ток через транзисторы VT15 и VT16. При достижении определенной температуры, зависящей от параметров схемы и порога срабатывания триггера Шмитта, на выходе 8 микросхемы DD5 появляется напряжение высокого уровня, которое через контакт 2 разъема XI поступает в блок выработки условного рефлекса. Одновременно открывается транзистор VT17, срабатывает реле К8 и своими контактами включает табло, сигнализирующее о повышении температуры. Табло также загорается от сигнала высокого уровня, поступающего с блока условного рефлекса «Тепло-звук» через контакт 5 разъема XI, при этом транзистор VT18 закрывается, а транзистор VT17 открывается.
Блок «Радиоизлучение» (рис. 20). Радиоволны, наведенные в антенне в широком диапазоне частот, поступают на вход микросхемы DD13 (К237ХА2). Они усиливаются примерно в 2000-2500 раз и детектируются.
Низкочастотный сигнал, снимаемый с выхода микросхемы, поступает на дифференциальный усилитель, собранный на транзисторах VT19, VT20. Нагрузкой усилителя является реле типа РЭС-6 (паспорт РФО.452.143).
Порог срабатывания реле устанавливается потенциометром R50.
Блок «Радиационная разведка» (рис. 21). Его назначение-обнаружить радиационную опасность и оповестить 60
Рис. 20. Блок «Радиоизлучение»
о ней. Чувствительным элементом блока является газоразрядный счетчик типа СТС-5 (или СТС-1).
Для питания счетчика высоким напряжением применен блокинг-генератор, собранный на транзисторе VT21 (КТ801Б). Трансформатор блокинг-генератора намотан на магнитопроводы из трансформаторной стали Ш12, толщина набора 12 мм; первичная обмотка содержит 146 витков провода ПЭЛ 0,22 с отводом от 26-го витка; вторичная обмотка-3000 витков провода ПЭЛ 0,08. Импульсы, вырабатываемые блокинг-генератором, выпрямляются диодом VD1 (КД412А) и заряжают конденсатор С21 до напряжения 300-500 В.
При появлении радиационного излучения в счетчике возникает разряд. Импульсы напряжения с резистора R53 через конденсатор С22 поступают на двухкаскадный усилитель, собранный на транзисторах VT22 и VT23. Первый каскад собран по схеме с общим коллектором, что обеспечивает достаточно высокое входное сопротивление усилителя. Второй каскад собран по схеме с общим эмиттером. С коллекторной нагрузки второго каскада положительные импульсы напряжения поступают через конденсатор С24 на выпрямитель, собранный по схеме удвоения напряжения на диодах VD12 и VD13. Этот выпрямитель заряжает конденсатор С26. Разряд конденсатора происходит через резистор R61. Напряжение, выделяющееся на нем, складывается с опорным напряжением на конденсаторе С25, которое устанавливается потенциометром R62 при регулировке блока. Суммар-
61
ное напряжение приложено к базе транзистора VT24, входящего в состав пусковой схемы, собранной на транзисторах VT24 и VT25. Действует спусковая схема следующим образом.
При отсутствии радиации потенциал базы транзисто; pa VT24 определяется только положением движка потенциометра R62. Он устанавливается таким образом, чтобы транзистор VT24 был открыт и через него протекал ток 9-10 мА. При этом транзистор VT25 закрыт и ток через реле К10 не течет. При радиации на конденсаторе С26 появляется напряжение, значение которого зависит от интенсивности радиационного излучения. Напряжение на конденсаторе С26 складывается с опорным напряжением, и потенциал базы транзистора VT24 изменяется, что ведет к уменьшению тока через транзистор. При некотором значении интенсивности радиации изменение тока транзистора VT24 приводит к тому, что транзистор VT25 открывается, а транзистор VT24 закрывается. При этом срабатывает реле К10, включая исполнительный узел.
Конструкция КИН разработана с таким расчетом, чтобы можно было в случае надобности видоизменить и совершенствовать его электронную схему, вводить новые узлы и устройства, обеспечивая более обширную программу работы модели.
Конструкция узла привода «рук» робота приведена на рис. 22, «ног» робота-на рис. 23.
Заканчивая главу, автор с грустью расстается с умными машинами, которые помогают человеку познавать 62
Рис. 21. Принципиальная схема блока «Радиационная разведка»
Х6
1 + Z4B
г ВыхоЗ
3 Выхов
ч -Z4B
Рис. 22. Узел привода «рук» робота.
1-врухаь. 2-пружина. 3-фибровая шайба.
4 -большая шестерня. 5-электрический двигатель, 6-малая шестерня
Рис. 23. Кинематическая схема привода «ног» робота.
1-обрезиненное колесо. 2-червячная шестерня, 3-кривошип. 4-шатун, 5-муфта. 6-редуктор, 7 - электродвигатель. 8-имитатор ходьбы левой ноги. 9-имитатор левой ноги.
мир, облегчая его труд. И кто знает, может быть через пятьдесят-сто лет мы сможем разговаривать с роботом, поручая ему не только физическую работу, но и интеллектуальные задачи, строго соблюдая при этом первый закон робототехники, который сформулировал А. Азимов: «Робот не может причинять ущерб человеческому существу или допустить своим бездействием, чтобы такой ущерб был нанесен».
63
2
В главе читатель совершит путешествие в мир понятий кибернетики и познакомится с Алгоритмом, Информацией, Черным ящиком и другими не менее интересными и загадочными терминами
Действенно жить-это значит жить, располагая правильной информацией.
Н. ВИНЕР
Путешествуя в огромном мире Кибернетики, можно заблудиться, если не знаешь ее языка. За сравнительно недолгие годы существования этой науки ее терминология обогатилась многими понятиями. Естественно, в небольшой книге мы не сможем рассказать обо всех, но главные термины вы должны знать.
Американский математик Норберт Винер (1894-1964), названный «отцом кибернетики», опубликовал в 1948 году книгу «Кибернетика или Управление и связь в животном и машине» и таким образом положил начало рождению новой науки. Он впервые показал пути создания теории управления и связи для различных систем, обобщив достижения многих научных дисциплин.
Первая статья о кибернетике (хотя это слово тогда еще не было произнесено) была опубликована в журнале «Философия науки» в 1943 году Розенблютом, Винером и Бигелоу и называлась «Поведение, цель и телеология». И только через четыре года появилось слово «кибернетика». Вот как об этом рассказывает сам Норберт Винер: «По примеру других ученых мы были вынуждены придумать неогреческое слово, чтобы дать название нашей науке». Сам Н. Винер был человеком весьма одаренным. Он знал тринадцать языков, в том числе датский, итальянский, португальский, китайский, шведский. В четырнадцать лет он окончил колледж, в восемнадцать-стал доктором философии в Гарвардском университете, затем последовало два года работы в Англии, в Кембридже 64
(1913-1915). В 1914 году Н. Винер прошел годичную стажировку в крупнейшем университете Германии-Геттингене. В 1915-1916 годах Н. Винер слушал курс лекций в Колумбийском университете. В 1917-1918 годах-работал в Американской энциклопедии, глубоко познакомился с трудами по математике, философии, логике. В 1918-1919 годах призывается в армию, служит на Абердинском полигоне, затем сотрудничает в газете «Бостон геральд». В конце 1919 года Н. Винер получил должность ассистента на кафедре математики Массачусетсского технологического института, где преподавал в течение десяти лет. В 1929 году ему было присвоено звание доцента, а в 1932 году-профессора Массачусетсского технологического института. В период начала второй мировой войны Винер участвовал в разработке и применении электронно-вычислительных машин для баллистических расчетов.
В это же время ученый работал над проблемой общности принципа отрицательной обратной связи для систем автоматического регулирования и для живых организмов. Его идеи были горячо поддержаны доктором Розенблютом и легли в основу молодой науки-кибернетики. В 1960 году Норберт Винер участвовал в работе Первого международного конгресса по автоматическому управлению в Москве, где выступил с докладом.
На первых порах у нас и за рубежом многие ученые отнеслись к новой науке с большим недоверием, но кибернетика, несмотря на скептические прогнозы, продолжала свое победное шествие. Она доказывала свое право на существование не только теоретическими результатами, но и огромным вкладом в решение ряда сложнейших практических задач. Появились мощные вычислительные машины, создаются самонастраивающиеся системы управления. В наше время кибернетика стала одной из ведущих наук. Она глубоко проникает в другие отрасли знаний, в практику медицины, металлургии, военного дела, сельского хозяйства и т. д. В последнее время ни одна крупная научно-техническая задача не решается без применения кибернетики. Уже возникли новые науки, обслуживающие ее практические нужды: техническая кибернетика, экономическая кибернетика, биологическая кибернетика, медицинская кибернетика и т. д.
Что же изучает кибернетика? Предметом ее исследования являются технические, биологические, экономические управляемые системы, т. е. такие, в которых может
65
3 Библиотечная серия
быть осуществлено целенаправленное управление. Управляемая система характеризуется способностью изменять свое движение, переходить в различные состояния под влиянием управляющих воздействий. Так самолет может занимать разные положения в пространстве, двигаясь с определенной скоростью под воздействием управляющих команд летчика. Температура в мартеновской печи может изменяться в результате подачи приказа с пульта управления или по программе, заложенной в электронно-вычислительную машину (ЭВМ). Таких примеров можно привести много, но смысл сказанного заключается в том, что при движении или изменении состояния объекта возникает положение, когда из множества движений или состояний необходимо выбрать одно. Где нет выбора, там нет и не может быть управления.
Как мы сейчас выяснили, кибернетическая система -это управляемая система, а значит, в ней должен присутствовать механизм или устройство, осуществляющие управление. Например, летящий самолет, управляемый автопилотом или летчиком,-управляемая система. Но на движение самолета помимо управляющего воздействия летчика (или автопилота) оказывают существенное влияние и другие факторы: сила и направление ветра, плотность атмосферы, положение рулей, тяговые усилия двигателей. Эти условия, воздействующие на управляемую систему (в нашем конкретном случае-самолет), называются в кибернетике входными воздействиями. Под их влиянием происходят изменение системы, воздействие ее на окружающую среду, т.е. функционирование.
Одно из важнейших понятий в кибернетике -модель. Человек еще на заре своего развития обращался к моделированию. Прежде чем построить дворец, архитектор создавал его модель, уменьшенную во много раз. В наше время ни одно крупное сооружение, будь то атомная электростанция, океанский атомоход или самолет, не обходятся без моделирования, которое способствует тщательному изучению объекта. Достаточно вспомнить, что при создании советского самолета «Ил-62» его модель (точнее, уменьшенное подобие) была помещена в аэродинамическую трубу, где ее подвергали «продуванию». При изучении объекта были получены более 25 тыс. числовых характеристик, и только тогда конструкторы снова вернулись от модели к самому самолету. А ведь совсем недавно к моделированию относились с большим недоверием. Вот интересный пример недооценки его зна-66
чения. В 1870 году в Англии был спущен на воду броненосец «Кэптен», который перевернулся и затонул на первых ходовых испытаниях. Погибли 523 моряка. Это было национальной трагедией для английского народа, которую, тем не менее, можно было предотвратить. Задолго до этого печального дня ученый-кораблестроитель В. Рид провел исследования на модели броненосца и бесспорно доказал, что корабль опрокинется даже при небольшом волнении моря. Однако лорды английского Адмиралтейства не поверили ему, что и привело к трагедии.
В кибернетике применяют математическую модель системы, используя которую можно рассчитать параметры почти любой структуры. Математические модели достаточно универсальны. С их помощью можно очень точно исследовать не только различные проектируемые системы, но и действующие объекты. Наш маленький рассказ о моделях хочется закончить словами знаменитого русского кораблестроителя и математика академика Алексея Николаевича Крылова (1863-1945): «Казалось бы, что может быть общего между расчетом движения небесных светил ... и качкой корабля. Между тем, если написать только формулу и уравнение без слов, то нельзя отличить, какой из этих вопросов решается: уравнения одни и те же». Чтобы промоделировать процессы, происходящие в кибернетических системах, решить ряд задач по теории управления, применяют понятие «черный ящик».
«Черный ящик»-метод, используемый не только в кибернетике. Он применяется также в радио- и электротехнике, телефонистами и специалистами по вычислительным машинам. Метод «черного ящика» удобен и прост для изучения многих технологических процессов, его можно использовать везде, где необходимо знать, что подается на вход какого-либо устройства и что получается на его выходе. Исследователей не интересуют процессы, происходящие внутри самого устройства («черного ящика»).
Таким образом, «черный ящик»-это система, в которой внешнему наблюдателю доступны лишь входные и выходные величины, а внутреннее устройство неизвестно. Метод «черного ящика» часто используется в кибернетике, так как предметом ее изучения является поведение сложных систем, а не их устройство. Поэтому метод «черного ящика» представляет очень удобный инстру
67
3»
мент познания для исследования кибернетических систем. Впервые понятие «черный ящик» предложил английский ученый У. Р. Эшби, утверждавший, что его теория «черного ящика»-изучение отношений между экспериментом и окружающей средой, когда особое внимание уделяется потоку информации.
Итак, поток информации ... Путешествуя по огромному и таинственному миру кибернетики, мы подошли к самому загадочному и интересному понятию -информация. Что же это такое? Не вещество и не энергия. А что же? Прежде чем автор ответит на этот далеко не простой вопрос,-немного истории. С самых древних времен человек погружен в море информации. С самого рождения до последнего вздоха, независимо от своего желания, он получает информацию в том или ином виде.
Слово «информация» от латинского «informatio», что значит «разъяснение», «изложение». Когда-то это слово обозначало сведения, передаваемые устно, письмом или каким-либо другим способом (например, с помощью разноцветных флагов между кораблями на море, условных электрических сигналов-азбука Морзе и т.д.). В последние годы это понятие стало еще шире-сейчас его понимают как «мера определенности в сообщении или, иначе, определенные сведения, совокупность некоторых данных или знаний».
В наше время термин «информация» встречается повсеместно. Очень часто его любят видоизменять-говорят об информативности, информированности и т.д. Так что же все-таки такое информация? Выражение: «Получать информацию», означает: «Узнавать что-либо». Однако известно, что знания бывают полезными и бесполезными. Иногда, прочитав статью или книгу, мы ничего нового не узнаем. Все это нам уже известно. В таком случае говорят о нулевой информации. Значит, человеку — приемнику информации-важна только такая, которая приносит ему новые знания. Однажды полученная неискаженная информация, продублированная дважды, трижды, новых знаний уже не несет.
Информацию можно измерить. Впервые стройную теорию о количественной характеристике передаваемых сообщений развил в 1947 году американский ученый Клод Элвуд Шеннон, решивший задачу о предельном количестве информации, которое может быть передано без ошибок по каналу с шумами. Иначе говоря, Шеннон определил, чему равна пропускная способность канала, 68
путепровода, по которому идет информация. С незапамятных времен человек испытывал потребность в передаче сообщений. В Древней Греции на горах зажигали цепочку костров и таким образом передавали необходимую информацию. Древнеримские гонцы быстро и четко сообщали о победах и поражениях. В наше время информацию передают телефон, телеграф, радио, телевидение. Миллионные тиражи газет и книг, километры телевизионных видеопленок хранятся в библиотеках и архивах. Передача сообщения всегда связана с материальным носителем, любая информация не может существовать без своего «передатчика». Даже человеческое мышление невозможно без материальных носителей: вещества мозга и нервов. Самый современный носитель информации -электрический ток, характеристиками которого являются амплитуда, частота, фаза. Передаваемый информационный материал как бы накладывается на электрический носитель. В кибернетике применяются и неэлектрические носители информации, например масло в гидравлической системе.
Ученым, занимающимся кибернетикой, важно не только получить и сохранить информацию, но и передать ее потребителю без искажений. Как вы помните, передача информации происходит по каналу связи, которым может быть и телефонная линия, и живой нерв, и радиоканал, и воздух, и тракт магнитной записи. Количество информации, проходящей по каналу связи, не может превышать его пропускной способности, определяемой по тому, какое количество информации проходит по нему за единицу времени. Для управления кибернетической системой очень важно передавать и получать неискаженную информацию.
Клод Шеннон вывел основную формулу для подсчета количества информации в сообщении: I = log и, где /-количество информации, бит; и-число равновероятных исходов в событии.
В кибернетике процесс передачи информации почти всегда связан с проблемой кодирования в месте передачи информации и декодирования в месте ее приема. Вспомним, как передают телеграммы с помощью телетайпа. В месте передачи телеграфист, нажимая клавиши, на которых обозначены буквы русского и латинского алфавитов, преобразует нужные буквы в электрические посылки системы. Каждой букве соответствует определенное соче
«9
тание электрических сигналов, которые передаются по проводам в место приема и попадают в такой же телетайп, как и в месте передачи. Специальное декодирующее устройство, установленное в телетайпе, превращает электрические сигналы в буквы русского или латинского алфавита.
Наше маленькое путешествие в мир кибернетических терминов подходит к концу, но мы ничего не сказали об очень важном ее понятии-об алгоритме. Во многих специальных и популярных книгах оно толкуется по-разному. Для этого есть веские причины.
Академик В.М. Глушков писал: «Алгоритмом называется конечная система правил, по которым совершается преобразование дискретной информации».
Академик А. А. Марков пишет: «В математике принято под алгоритмом понимать точное предписание, определяющее вычислительный процесс».
А такое солидное издание, как «Энциклопедический словарь», в 1981 году дает следующее определение алгоритма: «Конечный набор правил, позволяющих чисто механически решать любую конкретную задачу из некоторого класса однотипных задач».
Если читатель обратится к собственному опыту и вспомнит школьный курс математики, он самостоятельно сможет сформулировать определение алгоритма. Для того чтобы облегчить ему задачу, вспомним, как учат в начальной школе сложению по единицам, которое выполняется школьниками чисто автоматически. Вот эти правила: «Отложим на счетах столько косточек, сколько единиц в первой цифре, и прибавим к ним число косточек, равное числу единиц второй цифры. После этого сосчитаем сумму». Пользуясь этим правилом, первоклассник складывает одноразрядные числа на школьных счетах. Но в математике вместо слова «правило» говорят «алгоритм». Если решаемую задачу можно сравнить с замком, то алгоритм ее решения-это ключ, открывающий замок.
Слово «алгоритм», то есть «правило», приобрело теперь чрезвычайно широкий смысл. Это точное указание о порядке решения целого класса сложных задач посредством ряда простых операций. Иными словами, алгоритм-это руководство для решения задач. Его можно даже облечь в форму кратких приказов, которые надо выполнять точно и беспрекословно. Тогда алгоритм послужит вам добросовестным «проводником»-покажет путь к решению любой задачи.
70
3
В главе читатель узнает, что машина может думать, управлять, считать и разговаривать с человеком
В конце концов мы придем к тому, что ЭВМ можно будет выдавать задание, как любому сотруднику, и она будет четко его выполнять, в случае необходимости что-то уточняя, в чем-то советуясь ...
Академик В М. ГЛУШКОВ
РОЖДЕНИЕ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ
Электронно - вычислительные машины прочно и навсегда вошли в нашу жизнь. Без них не может обойтись ни одно промышленное предприятие или научно-исследовательский институт. Как когда-то механические и электрические машины облегчали физический труд человека, так сейчас ЭВМ расширяет его интеллектуальные возможности. Мы уже привыкли к большим залам, заполненным шкафами, стойками, начиненными транзисторами, диодами, резисторами, конденсаторами и микросхемами. Электронно-вычислительные машины стали символами технического прогресса, ведь именно успехами в использовании быстродействующих цифровых электронных машин обусловлены в значительной мере достижения перспективной науки-кибернетики.
Несмотря на сравнительно молодой возраст вычислительной техники-ей недавно исполнилось сорок лет,-она прошла большой и славный путь, завоевав себе прочные позиции в нашей жизни. За сорок лет сменилось три поколения электронно-вычислительных машин, и уже сейчас ведутся проектные работы по созданию машин четвертого и пятого поколений.
Электронно-вычислительные машины первого поколения собирались на электронных лампах, потребляющих сотни киловатт электроэнергии, ЭВМ второго поколения изготовлялись на транзисторах, и, наконец, ЭВМ третьего поколения, выпускаемые в наши дни, делаются на интегральных микросхемах.
71
Электронно-вычислительные машины четвертого поколения будут базироваться на применении больших интегральных микросхем. Эти машины имеют принципиально новое решение: в их структурную схему введены мультипроцессоры, осуществляется оперативная связь с периферийными устройствами, ЭВМ сохраняют свою работоспособность при отказе отдельных узлов и т.д.
Рождение вычислительной техники имеет свою интересную и увлекательную историю.
Первую машину для выполнения основных арифметических операций еще в 1637 году пытался построить Ши-кард. В 1641 году Блэз Паскаль сконструировал примитивное устройство, производящее сложение и вычитание. Над счетной машиной для выполнения четырех арифметических действий трудился Лейбниц в 1670 году. Подобные модели разрабатывали Грилет и Полениус. Однако, прежде чем счетные машины достигли своей зрелости, прошло еще 200 лет. Здесь необходимо отметить арифмометр петербургского инженера В.Т. Однера, в котором выполнение основных арифметических операций осуществлялось с помощью системы рычагов, рукояток и зубчатых колес, впоследствии получивших название однеровских.
Гораздо ближе к программному управлению, чем конторская машина, был аппарат, появившийся в Европе приблизительно в XI столетии (в Китае-значительно раньше). Предание гласит, что какому-то звонарю, в обязанности которого входило отмечать ударами в колокол время суток, отсчитываемое каждый час по песочным часам, пришла счастливая мысль заставить совершать эту работу механизм, приводимый в движение грузом. Регулярность включения механизма боя, возможно, навела того же звонаря на мысль сконструировать другой механизм-зубчатый, который после заданного числа оборотов зубчатых колес включал перезвон колоколов, исполнявших определенную мелодию. Стрелки и циферблат завершили изобретение часов с зубчатым колесным механизмом.
Где же в часах программное управление? Здесь реализуется чрезвычайно простая программа с одной-един-ственной без конца повторяющейся инструкцией, которая гласит: «Продвинься на один зуб вперед». Этот приказ неукоснительно выполняется механизмом часов.
Первую вычислительную машину с автоматическим управлением начал строить в 1822 году Чарльз Бэббедж.
72
Он сумел спроектировать механическую аналитическую машину-сверхарифмометр, в которой имелись запоминающие и арифметические устройства, а также почти все блоки, которые есть в современных ЭВМ.
Лишь в тридцатых годах XX столетия появились первые технические средства-электромагнитное реле, шаговые распределители, которые позволили осуществить идею Бэббеджа.
На базе электромеханических элементов и была построена универсальная цифровая вычислительная машина «МАРК-1», созданная в США коллективом ученых и инженеров под руководством Говарда Айкена в 1939-1944 годах. Это был громоздкий многотонный счетный комбайн высотой в 2,5 м и длиной более 15 м, содержавший многие тысячи электромагнитных реле, шаговых распределителей и переключателей. Машина «МАРК-1» могла выполнять три сложения в секунду; умножение на машине занимало около шести секунд, вычисление логарифма-около одной минуты.
В 1947 году в США была построена более совершенная специализированная электромеханическая машина «МАРК-II». Аналогичные устройства появились и в других странах: СССР, Англии, Швеции, Голландии. Вскоре на смену им пришли электронные машины, в которых место колес Бэббеджа и электромагнитных реле Айкена заняли электронные лампы. Первая такая машина-«ЭНИАК» была построена в США в 1945 году. Она содержала около 18000 электронных ламп, 1500 реле, потребляла мощность 100 кВт и занимала площадь более 180 м2. Ее память состояла из 20 накопителей по 10 десятиразрядных чисел; для ввода и вывода использовались перфокарты. «ЭНИАК» выполняла около 1000 вычислительных операций в секунду.
Авторами «ЭНИАК» (электронного цифрового интегратора и вычислителя) (Electronic Numerical Integrator and Computer) были Джон Моучли и Д. Преспер Эккерт.
Однако через тридцать лет после постройки «ЭНИАК» окружной суд в Минниаполисе, заседая 4,5 месяца, установил, что Эккерт и Моучли не изобрели первыми автоматическую электронную цифровую вычислительную машину, а извлекли сущность концепции из проекта Джона Винсента Атанасова.
В 1947-1950 годах коллективы ученых и инженеров многих стран приступили к разработке электронных цифровых вычислительных машин.
73
В Советском Союзе первая ЭВМ была создана в 1950 году в Институте математики АН УССР под руководством академиков С. А. Лебедева и М.А. Лаврентьева. Вот что рассказывает академик С. А. Лебедев: «В первые послевоенные годы я работал в Киеве. Меня только-только выбрали академиком Академии наук УССР и под городом (Киевом-прим, автора) в Феофании создавалась лаборатория, где суждено было родиться первой советской электронно-вычислительной машине...»
Первое советское электронно-вычислительное устройство получило название МЭСМ-малая электронная счетная машина. В 1953 году в строй вступила БЭСМ-болыпая электронная счетная машина, построенная также под руководством С. А. Лебедева для Академии наук и признанная тогда самой быстродействующей из европейских устройств подобного типа (средняя скорость счета-до 10 тыс. операций в секунду). Затем был освоен серийный выпуск разработанной по проекту Героя Социалистического Труда Ю.Я. Базилевского большой машины «Стрела», которая впоследствии сыграла немалую роль в решении ряда научных задач. В коллективе, которым руководил член-корреспондент АН СССР И. С. Брук, были построены универсальные машины «М-2» и «М-3».
С 1954 года начат также серийный выпуск универсальной машины «Урал-1», а затем «Урал-4» конструкции Б. И. Рамеева. Машины всех этих типов быстро нашли применение в различных отраслях народного хозяйства.
Все эти ЭВМ принадлежали к первому поколению. Их отличительными признаками были: использование электронных ламп, скорость счета 10-20 тыс. арифметических операций в секунду. Одной из самых острых проблем эксплуатации этих машин была низкая надежность. Вспомните: в вычислительной машине «ЭНИАК» было 18 тыс. электронных ламп, из которых 2 тыс. ежемесячно выходили из строя и требовали замены. Джон фон Нейман-крупнейший математик и создатель теории игр-вспоминал: «Машина так велика, что ее включение каждый раз «уносит» две лампы. Поиск неисправностей занимал от нескольких часов до нескольких суток».
Процесс программирования на машинах первого поколения требовал большого искусства и изворотливости-нужно было хорошо представлять структурную схему машины и знать, как она реагирует на различные ситуации.
74
В вычислительную технику внедрился и быстро завоевал доминирующее положение транзистор. Транзистор способен выполнять те же функции, что и трехэлектродная лампа, занимая примерно в 100 раз меньший объем и потребляя в 100 раз меньше мощности. Надежность транзисторов гораздо выше, чем у электронных ламп, а срок их службы равен не менее 10 тыс. часов.
Итак, второе поколение ЭВМ было собрано на транзисторах. Это привело к резкому снижению потребляемой мощности (вспомните, что первые ЭВМ, собранные на лампах, потребляли сотни киловатт электроэнергии). Но шли годы ... Развитие науки потребовало решения таких сложных задач, с которыми ЭВМ второго поколения или вообще не могли справиться, или решали их с большими ограничениями (не хватало быстродействия, емкости памяти и т.д.). Были созданы принципиально новые ЭВМ, получившие название ЭВМ третьего поколения. По своим математическим «способностям» они стоят значительно выше, чем машины первого и второго поколений. К выпуску таких устройств страны социалистического содружества приступили в 1972 году. Единая система вычислительных машин (ЕС ЭВМ)-это комплекс стационарных типовых машин с широким диапазоном производительности, имеющих общую структурную базу и общую систему команд (совместимость программирования, общую номенклатуру внешних устройств и одинаковую логическую связь между устройствами). Эти вычислительные машины имеют еще одну очень важную особенность-они позволяют иметь большое количество абонентов, являясь, таким образом, машинами коллективного пользования. Применение ЭВМ модели ЕС позволяет обеспечить эффективное управление целыми отраслями народного хозяйства, крупными объединениями. Удобно использовать эти машины, когда производственный процесс рассредоточен на больших площадях, например при добыче каменного угля, нефти или газа.
Машины четвертого поколения становятся уже многопроцессорными вычислительными системами с быстродействием в десятки и сотни миллионов операций в секунду. Машины работают в непрерывном режиме, одновременно решая задачи, приходящие от разных абонентов (многие из них часто находятся друг от друга на сотни и тысячи километров). К машинам четвертого поколения относят советскую ЭВМ «Эльбрус», «ПС 2000», американские «В-7700», «Иллиак-IV».
75
В дальнейшем будут создаваться машины пятого поколения. Они еще проектируются, о них пишут и спорят. Но уже сейчас можно с уверенностью сказать, что это будут ЭВМ, созданные на базе лазерной технологии, обладающие огромным быстродействием, близким к скорости света, сверхмалыми размерами (ЭВМ в кубике размером 50 х 50 х 50 мм), конечно, на сверхбольших интегральных схемах. Наука не стоит на месте. Человечество в своем стремлении к знаниям встает на новую ступень развития. И вот уже в 1982 году японские ученые объявили о начале работ над ЭВМ пятого поколения, которые будут иметь систему ввода и вывода информации с помощью голоса, графиков, образов и различных документов. Эти машины смогут сами узнать закодированный образ с помощью ассоциативных связей, уточнить неясно поставленные вопросы и дать на них удовлетворительные ответы. Однако самое главное их отличие от машин предыдущих поколений-наличие базы знаний. Используя эту базу и воспринимая ту же информацию, что и человек, они будут выдавать советы по целесообразным действиям в тех или иных конкретных ситуациях. Такие машины получили название экспертных ЭВМ. Область их применения практически безгранична.
Теперь, когда мы окинули беглым взглядом перспективы развития вычислительной техники до конца XX века, вернемся к машинам третьего поколения: на примере ЕС ЭВМ проследим, как считают современные ЭВМ.
КАК НАУЧИЛИ СЧИТАТЬ ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ
Мы не перестаем восхищаться точностью и быстродействием ЭВМ. Казалось бы, привычные слова «считает, как вычислительная машина» вызывает протест-издавна мы привыкли, что мыслить может только живое существо. А как же научили считать ящик, начиненный конденсаторами, резисторами, микросхемами?
Чтобы ответить на этот вопрос, необходимо снова совершить небольшое путешествие в далекое прошлое... IX век. Багдад. В этом древнем городе жил ученый-звездочет Аль-Хорезми. По приказу багдадского халифа он написал книгу, в которой учил, как правильно делить наследство между наследниками. А чтобы купцам и адвокатам было понятнее содержание, привел в книге
76
ряд примеров, основанных на личном опыте. За разрешением наиболее сложных и запутанных дел о делении наследства в те далекие времена обращались к халифу, а халиф советовался со своими учеными и министрами. Вот тогда-то впервые Аль-Хорезми ввел в употребление цифровое исчисление, которым мы пользуемся до сих пор. В основе арабского исчисления лежит привычная нам десятичная система, которая значительно проще римской. В этой системе все числа записываются с помощью десяти цифр: 1, 2, 3, 4, 5, 6, 7, 8, 9, 0. При этом каждый высший разряд числа больше низшего разряда, находящегося справа от него, в 10 раз. Например, число 1985 можно представить так: 1985 = 1 • 103 + 9-102+ + 8-101 + 5-10°.
Еще более наглядно можно показать позиционную систему, если отложить любое число, например 135, на линейном отрезке (рис. 24).
Хорошо видно, что число 135 состоит из одной сотни, трех десятков и пяти единиц. Степень числа 10 определяет количественное значение каждой единицы, занимающей определенное место (позицию) в изображении числа. Многоразрядные числа составляются как сочетания различных степеней числа 10. Итак, в основании десятичной системы счисления положено число 10. Но существуют и другие системы, в них основанием является не 10, а какое-нибудь другое число, например 2 (двоичная система), 4 (четверичная система), 5 (пятеричная), 8 (восьмеричная), 16 (шестнадцатеричная система) (табл. 1).
Электронно-вычислительная машина обрабатывает информацию, которая может быть представлена в двух видах-непрерывной и дискретной (прерывистой). Непрерывная форма информации всегда представляется в виде плавно меняющихся величин. Это могут быть углы поворота, валиков и шестеренок, переменный ток, изменяющийся по определенному закону, например речь,
преобразованная микрофоном.
Дискретная информация-это информация, которая изменяется скачкообразно.
Для электромеханических, релейных и электронных элементов, которые применяются в элек-
ЕОииицы ,---ч (О Единицы
k4-1 J____। । । > । । । । > I—<
Десятки Десятки
Сотки
Рис. 24. Десятичное число, отложенное на линейном отрезке
77
Таблица 1
Число десятин- Число двоим- Число четверичной системы Число пятеричной системы Число восьмеричной системы Число шестнадцатеричной системы
ной системы ной системы
10 2 4 5 8 16
0 0 0 0 0 0
1 1 1 1 1 1
2 10 2 2 2 2
3 и 3 3 3 3
4 100 10 4 4 4
5 101 11 10 5 5
6 но 12 11 6 6
7 111 13 12 7 7
8 1000 20 13 10 8
9 1001 21 14 И 9
10 1010 22 20 12 А
И 1011 23 21 13 В
12 1100 30 22 14 С
13 1101 31 23 15 D
14 1110 32 24 16 Е
15 1111 33 30 17 F
16 10000 100 31 20 10
тронных быстродействующих машинах, характерно наличие двух различных устойчивых состояний. Например, реле может быть замкнуто или разомкнуто, электронная лампа-проводить или не проводить ток, конденсатор -заряжен или не заряжен, магнитный сердечник-намагничен или размагничен. Если пользоваться для изображения чисел в машине такими элементами, то придется обратиться к системе счисления, в которой имеются только две цифры, т. е. к двоичной.
В двоичной системе счисления каждый высший разряд любого числа больше соседнего с ним низшего разряда не в 10 (как в десятичной системе), а только в 2 раза, поэтому для записи чисел можно использовать всего две цифры: 1 и 0. Таким образом, здесь многоразрядные числа составляются как суммы различных степеней двойки. Например, число 1010 в двоичной системе: 1-23 + 0-22 + + 1 • 21 + 0 • 2° = 10 (в десятичной системе).
Число 1985 в двоичной системе счисления выглядит так: 1111100001.
На первый взгляд двоичная система счисления может показаться настолько неудобной, что ее вряд ли можно где-либо применить. Но это только потому, что для многих она непревычна. На самом же деле, хотя числа в этой
78
системе и выглядят очень громоздкими и однообразными, арифметические действия над ними очень упрощаются. Это заметил еще Готтфрид Вильгельм Лейбниц, впервые исследовавший двоичную систему счисления подробно (некоторые математики интересовались этой системой и до Лейбница, изобретение же ее историки приписывают китайскому императору Фо Ги, жившему 3400 лет до нашей эры). Лейбниц писал в 1703 году: «При сведении чисел к простейшим началам, каковы 0 и 1, всюду выявляется удивительный порядок...» Особенно восхищали Лейбница своей простотой правила двоичного сложения и умножения.
Таблица сложения, например, состоит здесь всего из четырех строчек:
0+0=0 1+0=1
0+1 = 1 1 + 1 = 10
(результат последнего действия означает перенос единицы в высший разряд). Вот пример сложения «столбиком» чисел 9 (1001) и 10 (1010) на основании этой таблицы сложения: 1001
+
1010
10011
Не сложнее выглядит и умножение в двоичной системе.
Таблица двоичного умножения состоит также из четырех строчек:
0x0 = 0 1 х 0 = 0
0x1=0 1x1=1
Умножение двух чисел сводится к выполнению повторного сложения:
1001
х
1001
0000 1001 0000
1001
юною
79
Для того чтобы перевести число из десятичной системы в двоичную, удобно пользоваться следующим приемом: нужно записать число в десятичной системе и последовательно делить его на 2 с округлением до целого числа в сторону уменьшения, записывая в столбик все результаты деления; затем возле каждого нечетного результата деления поставить 1, а возле четного 0. Полученное число (в двоичной системе), состоящее из единиц и нулей, следует записать в строчку слева направо, начиная с нижней цифры правого столбца.
Например, переведем в двоичную систему из десятичной число 46:
46 0
23 1
И 1
5 1
2 0
1 1
В результате получаем число 101110.
Для обратного преобразования числа 101110 в десятичную систему счисления нужно нуль или единицу каждого разряда этого числа умножить на соответствующую степень числа 2 и полученные результаты сложить: 1 -25 + 0-24 + 1-23 + 1 -22 + 1-21 + 0-2° = 46.
АНАТОМИЯ ЭЛЕКТРОННОГО МОЗГА
Мы выяснили, что ЭВМ оперирует с различной цифровой информацией. Значит, в ней должно быть устройство для ввода и вывода этой информации. Арифметическое устройство принимает команды от других блоков машины, преобразует информацию и выполняет арифметические и логические операции. Как мы уже говорили выше, в ЭВМ происходят процессы сложения и вычитания, поэтому необходимо арифметическое устройство.
Связь человека с ЭВМ осуществляется через устройства ввода и вывода (иногда еще называемых периферийными устройствами). Назначение периферийных устройств-принять, накопить и преобразовать информацию таким образом, чтобы ее можно было ввести в машину или вывести из нее. Для этого информация кодируется и наносится на специальные носители (перфокарты, магнитную ленту, магнитный барабан). Перифе-
80
Рис. 25. Структурная схема ЭВМ (синими стрелками показаны потоки сигналов управления. белыми-информационные потоки) рийные устройства производят также работу по преобразованию двоичного кода в десятичный. Информация преобразуется в форму, удобную для чтения человеком (в вычислительной технике его называют пользователем). Периферийные устройства могут отстоять на десятки и сотни километров от вычислительной машины, для связи с которой используются различные каналы (радиостанции, линии телефонно-телеграфной связи).
В ЭВМ третьего поколения появились устройства ввода-вывода, позволяющие ввести непосредственно в машину графическую информацию, оптические читающие устройства с документов и рукописей, появились дисплеи (экранные пульты), состоящие из электронно-лучевой трубки, устройства графического ввода (световое перо) и буквенно-цифровой клавиатуры. В устройство вывода включают графопостроитель, который выдает информацию в графической форме (графики, чертежи, схемы и даже рисунки).
Всякая ЭВМ управляется по программе, поэтому в ней имеется блок, контролирующий процессы автоматического управления и называемый устройством управления. Он является электронным диспетчером ЭВМ— координирует во времени совместную работу всех устройств машины, обеспечивая строгое выполнение программ. Программа решения-совокупность команд, показывающих действия над числами и последовательность их выполнения. Такую программу для машины соста-
81
вляет программист; она в закодированном виде наносится на магнитную ленту, перфокарту или перфорированную ленту и вводится в память машины. Составление программ (программирование)-важнейшая и наиболее трудоемкая работа при эксплуатации ЭВМ.
К составлению программы привлекаются высококвалифицированные математики-программисты, так как от качества этой работы зависит эффективность действий машины.
Теперь, когда мы кратко ознакомились с устройством ЭВМ, можно нарисовать ее структурную схему (рис. 25).
ЯЗЫК ЭЛЕКТРОННЫХ МАШИН
Для «общения» с ЭВМ человеку необходим язык, который был бы понятен машине. В процессе развития вычислительной техники для различных конструкций были созданы разные языки. Как правило, машинный язык-это последовательность различных команд, закодированных в двоичном коде. Мы уже говорили, что программу для ЭВМ составляет программист, т.е. человек, знающий язык данной машины. Вначале каждая фирма или завод-изготовитель снабжали «свою» машину «своим» языком. Поскольку решаемая на ЭВМ задача должна быть представлена в виде алгоритмов, то все языки, необходимые машинам, являются алгоритмическими или представляют способ выражения алгоритмов. Так появились специальные алгоритмические языки: «Алгол», «Фортран», «Альфа», «Кобол», «Джовил», «Липе» и др. Таких языков, разработанных для задач разного класса, более пяти тысяч!
Хотя названные языки и облегчали общение человека с машиной, их нужно было учить, кроме того, каждый из них имел свои недостатки и не решал всех проблем общения. Поэтому конструкторы задумались, нельзя ли обучить ЭВМ естественному языку человека и вводить в машину непосредственно текст, напечатанный на пишущей машинке. Эта проблема была решена. В принципе такие устройства уже имеются, но они еще очень дороги и в настоящее время их црименение экономически нецелесообразно. Где же выход? В развитии и упрощении машинных языков! В 1974 году в институте кибернетики Академии наук УССР под руководством академика В.М. Глушкова был создан компьютер «Мир-3». Язык, 82
на котором дается задание этой машине, максимально приближен к обычному математическому языку, на котором студенты и учащиеся решают свои задачи. Машина «Мир-3» обладает «интеллектом», т. е. при рождении в ее устройство заложена определенная информация. Ей не нужно объяснять простые вещи, она довольно легко может найти синус или косинус, найти логарифм числа и т.д. В ее памяти хранится более 200 формул из алгебры, геометрии, тригонометрии и математического анализа. Возникшая проблема общения «человек-машина» значительно сложнее, чем кажется на первый взгляд. Здесь проектировщики ЭВМ сталкиваются с двумя вопросами: нельзя ли непосредственно ввести человеческую речь в ЭВМ и получить ответ машины?; можно ли научить машину понимать язык человека?
На первый вопрос можно уже сейчас ответить утвердительно. Ученые научились разговаривать с машиной, предъявляя ей текст, напечатанный на обычной пишущей машинке, или «вводя» его в память с помощью телеграфного аппарата или дисплея. Расскажем о дисплее несколько подробнее. Почти все машины третьего поколения снабжены пультом-экраном, напоминающим телевизионный приемник. На экране такого телевизора (его называют дисплеем) ЭВМ выдает графическую информацию, формулы, геометрические фигуры, различные знаки. На экране дисплея может одновременно появиться около 2000 знаков. С появлением электронно-лучевых устройств отображения информации, предназначенных специально для ЭВМ, общение человека с машиной значительно упростилось. На пульте дисплея имеется клавиатура, причем каждой клавише соответствует понятный машине символ (или знак). Экран дисплея становится как бы листом бумаги, заложенным в пишущую машинку. Набрав нужный текст или формулу на клавиатуре и проверив на экране, не вкралась ли ошибка, оператор нажимает кнопку и пересылает текст в оперативную память ЭВМ. Электронное или световое перо с вмонтированным фотоэлементом подводится к точке экрана, координаты которой должны быть введены в машину, и с помощью электронного луча создается передаваемый в машину импульс, определяющий выбранную точку. Эти координаты вводятся в память ЭВМ. Соответствующая точка на экране может быть высвечена или стерта. Двигая перо по экрану, можно вводить графики, схемы, диаграммы, рисунки. Экран современного дисплея рассчитывается на
83
1000-2000 алфавитно-цифровых знаков, время заполнения всего экрана-доли секунды. Нетрудно представить себе такую картину. У вас дома установлен дисплей, подключенный к телефонной линии. С помощью клавиатуры запрашиваете у ЭВМ интересующие вас сведения. Проходит две-три секунды и нужная страница справочника появилась на экране вашего дисплея. Электронно-вычислительная машина предлагает конструктору варианты, из которых он выбирает оптимальные. Академик В.М. Глушков очень удачно сказал: «Взаимоотношения человека с машиной напоминают работу руководителя и коллектива. Руководитель дает идеи, коллектив, как талантливый исполнитель, воплощает их в жизнь».
На второй вопрос, сможет ли машина понимать человеческий голос, можно ответить следующее. В любом языке существует полисемия (многозначность отдельных слов и фраз, возможность разного написания одних и тех же слов, особенно собственных имен и иностранных фамилий). Поэтому для общения с машиной необходимо вносить изменения в синтаксис языка, иначе говоря, исключить многозначность. Такой язык называют формальным, а запись информации на нем-формализацией. В результате формализации и появились языки программирования, о которых мы рассказали выше («Фортран», «Кобол», «Алгол» и т. д.). Чем выше формализован язык, чем он имеет больше ограничений, тем легче «научить» ЭВМ его понимать, но тем сложнее человеку им пользоваться. Однако нас интересует, сможет ли машина понимать язык человека. Тут возникают сложности. В данном случае программу для ЭВМ нужно построить таким образом, чтобы при обнаружении слова, имеющего разные значения, или фразы, которая может трактоваться по-разному, нужный вариант выбирался на основании уже имеющейся в машине дополнительной информации. Все это требует очень сложных программ, но мы уверены, что пройдет немного времени и наш читатель сможет вести диалог с ЭВМ на своем родном языке. Можно представить себе такую картину. По автомагистрали мчится автомобиль, на борту которого установлена малогабаритная ЭВМ. По команде шофера, отданной голосом, ЭВМ начинает выдавать необходимые характеристики движения (скорость, профиль дороги и т.д.).
Мы уже сейчас в состоянии предсказать все возможности, которые откроются перед человеком, когда машина научится принимать наши команды с голоса по радио 84
и телефону. Ясно, что, научив ЭВМ подчиняться голосовым приказам, мы облегчим управление самолетом, станком, автомашиной, руки человека освободятся для непосредственной работы по управлению.
В одном из вычислительных центров страны создано устройство, которое «понимает» голосовые команды человека. Правда, набор команд еще невелик, но с их помощью можно заставить электронно-вычислительную машину производить вычисления.
Не менее интересный микрокалькулятор изобретен для слепых. При нажатии клавиш голосовое устройство повторяет вводимые цифры и команды, а затем голосом выдает результаты вычисления.
В наши дни выпускаются ЭВМ третьего поколения, которые снабжаются устройствами для выдачи обработанной информации в удобном для приема виде. Такое устройство называется графопостроителем. Например, если машина рассчитывает узел какой-нибудь машины, то с помощью графопостроителя конструктор может получить уже готовый чертеж. Графопостроитель чертит лучше самого квалифицированного чертежника, руки его не дрогнут, если даже в соседней комнате прозвучит выстрел. Его точность поражает самых искушенных специалистов-она исчисляется тысячными долями миллиметра.
ПАМЯТЬ МАШИНЫ
Электронно-вычислительную машину невозможно создать без надежных запоминающих устройств. Для хранения введенной в машину информации ей необходима память, обычно состоящая из простых, многократно повторяющихся элементов. Нельзя сравнивать- память машины с гораздо более совершенной памятью человека.
Вся информация, вводимая в ЭВМ, как уже говорилось выше, представляется в цифровом виде - двоичными числами, состоящими из нулей и единиц. Это связано с особенностями составных частей ЭВМ: триггеров, магнитных сердечников и других элементов релейного действия, которые могут находиться в двух состояниях: быть открытыми либо закрытыми, т.е. пропускать или не пропускать ток, иначе говоря, быть намагниченными или размагниченными. Информацию, вводимую в память ЭВМ, можно разбить на две группы. В первую группу входит информация, необходимая машине
85
в данный момент, во вторую-нужная при дальнейшей работе.
Арифметическое и управляющее устройства представляют собой сложную систему, предназначенную для производства арифметических операций и операций управления. Эти два устройства работают в таком тесном контакте, что в последних моделях ЭВМ их называют одним коротким словом-«процессор». Процессор-электронное «сердце» и «мозг» ЭВМ.
В арифметическом устройстве помимо операций сложения, вычитания, умножения, а иногда и деления происходят также операции сдвига, сравнения, преобразования чисел.
Как же работает арифметическое устройство? По командам, приходящим из управляющего устройства, оно принимает из запоминающего устройства необходимые данные. Принятая информация (а читатель помнит, что вся она в устройствах ввода ЭВМ переведена в двоичный код) обрабатывается. Арифметическое устройство в своем составе имеет несколько сот одноразрядных сумматоров, которые соединяются в многоразрядные.
Их функция-выполнять операцию автоматического сложения многоразрядных двоичных чисел. Другие арифметические операции-вычитание, умножение и деление,— как известно, также могут быть сведены к сложению. Поэтому арифметическое устройство ЭВМ может выполнять все четыре основных действия арифметики. Арифметические устройства современных ЭВМ собраны на микросхемах. Это обеспечивает огромную скорость работы. Достаточно сказать, что ЭВМ, производящая около миллиона операций в секунду, затрачивает на сложение двух шестидесятичетырех разрядных двоичных чисел 0,000024 с. За секунду такая машина способна выполнить более 40000 сложений или вычитаний. Умножение и деление занимают несколько больше времени, поэтому машина успевает выполнить за одну секунду лишь 20 тыс. таких действий.
Кроме арифметического устройства (АУ) в ЭВМ имеется ряд других важных узлов: запоминающее устройство (ЗУ), или память, устройство управления (УУ), устройства ввода исходных данных и программ (Ввод) и вывода полученных результатов (Вывод). Соединение этих устройств-структурная схема ЭВМ (рис. 25).
Чтобы машина могла решить задачу, в нее вводится программа решения-совокупность команд, показываю-86
щих, какие действия и в какой последовательности нужно производить над числами. Такую программу должен составить для машины человек. Программа эта наносится в закодированном виде на перфорированную ленту, перфокарту или магнитную ленту и вводится с помощью устройства ввода в память машины (т.е. в запоминающее устройство). Составление программы вычислений — программирование-важнейшая и наиболее трудоемкая работа при эксплуатации электронных счетных машин. От того, насколько рационально составлена программа, зависит эффективность работы машины. Поэтому, как уже отмечалось выше, к составлению программ привлекаются высококвалифицированные специалисты-математики-программисты.
Для «общения» математиков с машиной необходим язык, который был бы понятен не только человеку, но и машине. Таких специальных машинных языков было создано за последние четверть века более пяти тысяч — разных для различных машин. Это обилие машинных языков только мешало развитию техники программирования; поэтому ученые ряда стран на конференции в Цюрихе в 1958 году пришли к выводу о необходимости создания единого, универсального алгоритмического языка.
Запоминающее устройство машины предназначено для хранения исходных данных задачи, программы ее решения, промежуточных и окончательных результатов, многочисленных физических, математических и других постоянных (констант), которые могут понадобиться при решении задачи.
Запоминающие устройства выполняются на электронно-лучевых трубках, ферритовых сердечниках, магнитных лентах, барабанах, магнитных дисках. Чтобы уяснить себе принцип работы ЗУ, нет нужды подробно рассматривать все перечисленные устройства. Наиболее характерным с нашей точки зрения является ЗУ на магнитном диске, которое представляет собой плоскую дюралюминиевую пластинку с очень тонким (десятки микрон) ферромагнитным покрытием, вращающемся с частотой до нескольких тысяч оборотов в минуту (2400). Запись и считывание информации производятся с помощью специальных магнитных головок, очень похожих на те, которые применяются в магнитофонах.
Самый простой способ записи-это нанесение на диск информации в двоичном коде. Если пропускать импульсы тока по обмотке магнитной головки, то участки
87
диска будут намагничены в тех местах, которые проходили под головкой. Это будет соответствовать записи 1 (не-намагниченным участкам соответствует 0). Считывание чисел, записанных на диске, производится в тот момент, когда намагниченный участок проходит под магнитной головкой. При этом в обмотке головки возбуждаются импульсы напряжения, которые, усиливаясь, поступают в арифметическое или управляющее устройства, а в необходимых случаях-на устройство вывода результатов.
Прием, хранение и выдачу информации ЗУ осуществляет по командам, поступающим от устройства управления, которое руководит действиями всех узлов электронной вычислительной машины, обеспечивая автоматическое проведение вычислительного процесса, начиная с момента ввода программы до получения окончательного результата.
Итак, обратившись снова к рис. 25, проследим за взаимодействием основных узлов ЭВМ во время ее работы. После введения в машину программы через устройство ввода в нее подаются исходные данные задачи, которые воспринимаются запоминающим устройством. Затем арифметическое устройство приступает к вычислениям согласно командам, поступающим из управляющего устройства. Промежуточные результаты накапливаются в памяти машины-запоминающем устройстве и используются арифметическим устройством по мере надобности для продолжения вычислений. Окончательный результат передается на устройство вывода, где ему придается форма, удобная для прочтения или изучения. Обычно ответ получается в виде графиков или числовых таблиц. Устройство вывода может быть электромеханическим (например, электрическая пишущая машинка), электронным (дисплей, о котором мы уже говорили выше) или графопостроителем.
ЗАГЛЯНЕМ В БУДУЩЕЕ ЭВМ
Попытаемся представить себе развитие вычислительной техники в недалеком будущем.
Уже в наши дни созданы комплексы мощных ЭВМ, работающих по принципу мультипрограммирования. Речь идет о таком использовании электронных вычислительных машин, при котором каждая из них работает с большим количеством потребителей одновременно.
88
Электронно-вычислительная машина, подобно автоматической телефонной станции, соединена линиями связи с несколькими сотнями обслуживаемых абонентов. Это позволяет быстро и своевременно получать от них необходимую для переработки информацию и выдавать результаты вычислений. Одна ЭВМ, установленная, например, в Москве, сможет обслуживать сразу многие научно-исследовательские институты (выдавать информацию по ряду вопросов и исследований, находить оптимальные варианты использования приборов, производить сложные конструкторские расчеты, начислять зарплату и т.п.).
Со временем в Советском Союзе будет создана единая вычислительная система (ЕВС), которая сможет решать математические и логические задачи большой степени сложности. Машины найдут широкое применение в автоматизированном производстве, в системе обучения, в автоматических библиотеках и справочных бюро, в быту и коммунальном хозяйстве. Наступит время, когда в квартирах рабочих и служащих будут установлены дисплеи и пульты дистанционного управления вычислительными машинами, предназначенными специально для обслуживания бытовых нужд населения. Такой дисплей станет незаменимым предметом нашего быта. С его помощью человек сможет не выходя из дома получить совет, консультацию или иную информацию по любому интересующему вопросу.
Электронные вычислительные машины работают по программам, заданным человеком. При выполнении такой программы ЭВМ отводится роль усердного исполнителя, который строго придерживается данных ей предписаний. Что же касается осмысливания задачи, то главную роль здесь пока играет человек. Отлично справляясь с изобретением и организацией идей, он непревзойден в отыскании ассоциаций в среде понятий, не обладающих очевидной общностью, он способен творить, ему дороги человеческие ценности. Вычислительная машина представляет собой полную противоположность человеку: она способна обращать концентрированное внимание на бесчисленные подробности, она точна и надежна, может легко и безошибочно выполнять наиболее трудные и длинные расчеты, затрачивая на это в среднем миллионную долю того времени, которое потребовалось бы человеку; она лишена эмоций и не страдает от однообразия и усталости; узнав что-либо однажды, она будет по
89
мнить это совершенно точно до тех пор, пока не получит приказ забыть, и тогда забывает мгновенно и окончательно.
Если связать человека и машину эффективными каналами связи так, чтобы они работали совместно, недостатки одного из партнеров будут компенсироваться преимуществами другого. Такой симбиоз позволит человеку и машине полностью проявить свои индивидуальные достоинства при выполнении общей работы.
До сих пор мы рассказывали о машинах, которые действуют по принципу алгоритмического программирования. Это значит, что, решая задачу, машина перебирает разные варианты и, если их окажется слишком много, на поиски нужного варианта уходит достаточно времени. Зачастую при этом машину не может «спасти» даже ее быстродействие, задача оказывается ей не под силу. С другой стороны, известно, что человек в подобных случаях способен интуитивно отбирать лишь некоторые из вариантов, лежащих вблизи решения задачи, не перебирая всех способов, а уж затем анализирует отобранные варианты и находит среди них нужный. Пример тому-игра в шахматы.
Нельзя ли научить машину работе по такому принципу?
Оказывается, можно. Такое программирование задач для машины, в отличие от алгоритмического, назвали эвристическим (от греческого слова «Эврика!»-«Нашел!»). Американские инженеры, разрабатывающие систему эвристического программирования, дали ей название «искусственный интеллект». Эвристическое программирование сводится к тому, чтобы перевести на язык машины отдельные акты человеческого мышления, последовательность его логических действий. Задача эвристического программирования-научиться решать с помощью ЭВМ сложные логические задачи, не поддающиеся решению с помощью алгоритмического программирования. Внедрение эвристики обещает человечеству точную диагностику заболеваний, автоматическую расшифровку энцефалограмм и кардиограмм, успешное решение сложных игровых задач, доказательство теорем и многое другое.
Эвристическое программирование дает ключ к такому важному направлению деятельности человека, как перевод с одного языка на несколько других.
Внедрение микроэлектроники уже сегодня позволило
90
создавать микрокалькуляторы, умещающиеся в кармане. А завтра на больших и сверхбольших интегральных схемах будут созданы ЭВМ, которыми смогут рассчитать кратчайший маршрут городского транспорта из одной точки города в другую, выбрать рациональный маршрут воскресной загородной прогулки, учитывая интересы всех ее участников, получить первичную медицинскую консультацию и многое другое.
Со временем машины станут еще более быстродействующими, самообучающимися, самосовершенствующимися. Грозит ли это чем-либо человеку? Станут ли когда-либо машины умнее, чем их создатели?
Думается, что не следует слишком переоценивать возможности машин. Человек всегда сможет сохранить над ними контроль. Даже в отдаленном будущем машины останутся послушным инструментом в его руках. С каждым годом эти чудесные помощники будут занимать в жизни человека все большее место и верно служить ему в созидательной работе по преобразованию Земли и Вселенной.
Читатель совершил очень короткое путешествие в мир электронных вычислительных машин, познакомился с их устройством, а сейчас мы предлагаем ему самому построить несколько простых вычислительных устройств, которые могут быть использованы в тех случаях, когда необходимо продемонстрировать работу отдельных блоков в ЭВМ, например, при проведении лабораторных работ по вычислительной технике в школах, техникумах и профессионально-технических училищах.
ПРЕОБРАЗОВАТЕЛИ КОДОВ (ШИФРАТОРЫ И ДЕШИФРАТОРЫ)
Для преобразования данных, вводимых в ЭВМ, используются преобразователи кодов-устройства, без которых не может обойтись ни один вычислительный центр. Преобразователи кодов могут быть выполнены на диодах, на реле и на микросхемах.
Мы предлагаем читателям построить две простые действующие модели шифратора и дешифратора, которые на практике помогут читателю овладеть двоичным счислением.
Шифратор преобразует число, записанное в десятичном счислении, в двоичный код. Схема его достаточно проста и доступна для изготовления начинающим радиолюбителям. На лицевой панели имеется десять кнопок,
91
Двоичное число
Рис. 26. Принципиальная схема шифратора
под каждой из которых выгравировано десятичное число от 1 до 10. В качестве индикаторов двоичного числа используется четыре светодиода (VD1-VD4). Светящийся светодиод означает единицу, негорящий (темный)-нуль (рис. 26).
Схема работает следующим образом. При нажатии кнопки SB10 ток, проходя по диодам VD20, VD21, попадает на светодиоды VD1, VD3, которые начинают светиться. Светодиоды VD2 и VD4 остаются темными, следовательно, появляется двоичное число 1010, что соответствует десятичному числу 10. Детали, применяемые в преобразователе кода: светодиоды VD1-VD4 АЛ102А. резисторы R1-R4 МЛ Т-0,25 120 Ом, диоды VD5-VD21, диодные сборки К202НД1 (их можно заменить на диодные сборки К142НД2, К142НДЗ или КД919А), кнопки SB1-SB10 типа КМ2-2-1. Схема питается стабилизированным напряжением 5 В.
92
Дешифратор. Схема двоично-десятичного дешифратора очень проста и может помочь в процессе объяснения принципа действия устройств, которые автоматически переводят числа из двоичной системы в десятичную. В его схеме могут быть использованы диоды или диодные сборки, индикаторная лампа ИН-4 и четыре кнопки. Принципиальная схема приведена на рис. 27.
Положение переключателей SB1-SB4 определяет состояние разрядов: в правом положении (рис. 27) соответствует нулю, в левом-единице.
Когда все переключатели находятся в левом положении, на все катоды ламп ИН-4, кроме «О» напряжение не поступает, они шунтируются диодами, на резисторах R2-R11 падает напряжение. При переводе какого-нибудь переключателя в правое положение (т.е. при выводе единицы соответствующего двоичного разряда) образуется цепь. На один из катодов подается напряжение, и высвечивается цифра десятичного числа. Например, переклю-
Рис. 2 7. Принципиальная схема дешифратора
93
Рис. 28. Принципиальная схема преобразователя двоичного кода в десятичный
чатель SB1 находится в положении «1», а остальные-в положении «О». При двоичном число 0001 на индикаторе ИН-4 загорается цифра 1. При индицировании двоичного числа 1001, т.е. десятичного числа 9, на индикаторе будет гореть цифра 9.
Дешифратор на микросхеме. Читателям, которые захотят попробовать свои силы в конструировании модели на микросхеме, мы предлагаем собрать простой преобразователь двоичного кода в десятичный (рис. 28). Дешифратор можно выполнить на микросхеме К155ИД1 и индикаторной лампе ИН-16. Кнопки SB1-SB4 должны находиться в нормально замкнутом состоянии. При размыкании одной кнопки индицируется цифра 1. Например, при размыкании кнопок SB1-SB4, что соответствует двоичному числу 1001, на цифровой лампе загорается десятичное число 9.
Кнопки SB1-SB4 любого типа, имеют нормально замкнутый контакт. При переключении контакт должен оставаться разомкнутым. Кнопка должна иметь два устойчивых состояния: размыкание и замыкание. Можно использовать в качестве переключателя SB1-SB4 ключи КТРО. Питание схемы должно осуществляться стабилизированным напряжением — 5 В (коэффициент стабилизации 300). Номера выводов микросхемы К155ИД1 приведены на рис. 28.
94
НЕ, ИЛИ, И-ОСНОВНЫЕ ЯЧЕЙКИ ЭВМ
Основное правило, по которому производятся вычисления в ЭВМ,-это последовательное выполнение элементарных логических операций. Вся большая и сложная задача, решаемая на ЭВМ, расчленяется на отдельные простейшие логические операции, выполнение которых происходит в простых электронных устройствах-ячейках ЭВМ, и действительно, логические элементы ячейки в определенной степени напоминают клетку живого организма по тем функциям, которые они выполняют. Как и живая клетка, логический элемент может находиться в одном из двух состояний: «возбужденном» и «невозбужденном». Подобно нервной клетке, логический элемент может проводить или не проводить информационный сигнал. Естественно, что это грубая аналогия; процессы, происходящие в нервной клетке, более сложны. Но об этом речь пойдет впереди. А пока вернемся к логическим устройствам, предназначенным, как уже говорилось, для выполнения определенных элементарных логических операций.
Сейчас читатель увидит, что любую схему, осуществляющую логические преобразования, можно воспроизвести с помощью вполне определенного, узко ограниченного числа элементарных логических элементов.
Каждый такой элемент можно представить себе в виде устройства, имеющего несколько входов и один выход. При выполнении этим устройством логической операции сигнал, получающийся на его «выходе», определяется характером сигналов, поступающих на «входы». Условно логические элементы изображаются обычно в виде прямоугольников, а «входы» и «выходы»-в виде стрелок, как это показано на рис. 21-31.
Полным комплектом является система элементов, реализующая элементарные логические операции И, ИЛИ, НЕ.
Простейшим из логических элементов является элемент НЕ, у которого имеются только один вход и один выход. Он выполняет операцию отрицания или инверсию. Эта операция характеризуется наличием информационного сигнала на выходе элемента лишь в случае отсутствия его на входе и, наоборот, отсутствием сигнала на выходе при появлении его на входе (рис. 29).
В символической логике обычно сигналы («высказывания») обозначаются буквами латинского алфавита, от-
95
Рис. 29. Логический элемент
S)
А в с D AABACAD
0 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
1 1 1 1 1
Рис. 3 0. Логический
элемент И
НЕ
рицание обозначается чертой над буквой. Например, если на вход элемента НЕ поступает сигнал А, то на выходе в результате логической операции, отрицания получается сигнал А (читается «не А» или «А» с чертой).
Логическая операция И характеризуется наличием информационного сигнала на выходе элемента только
в случае появления сигналов на всех входах.
На рис. 30 показан логический элемент И, выпол-
Рис. 31. Логический элемент ИЛИ
няющий операцию логического умножения, или конъюнкцию. У этого элемен
та несколько входов, сигнал на выходе появляется тогда, и только тогда, когда сигналы поступают на первый, второй, третий и четвертый входы. Конъюнкция обозначается в символической логике значком А. Например, если на входы элемента И поступают сигналы А, В, С, D, то на выходе в результате логической опера
ции конъюнкции получаются сигналы АА, BA, CAD.
96
Реализация этого элемента производится с помощью электромагнитного реле: это реле срабатывает только в том случае, если замкнуты ключи SBa, SBb, SBc, SBd, при этом нормально разомкнутый контакт реле замыкается (рис. 3). Логическая операция ИЛИ характеризуется наличием информационного сигнала на выходе элемента в случае появления сигнала хотя бы на одном из его входов.
Элемент ИЛИ выполняет операцию логического сложения, или дизъюнкцию. Сигнал на выходе появляется тогда, когда сигнал поступает хотя бы на один из входов-или на первый, или на второй. Рисунок 33 иллюстрирует это: реле срабатывает, замыкая нормально открытый контакт, если хотя бы один из ключей SBa, SBb, SBc или SBd будет замкнут. Дизъюнкция обозначается значком V или знаком (+). Схема ИЛИ является по сути собирательной схемой, осуществляющей сбор сигналов, поступающих на входы.
КИБЕРНЕТИЧЕСКИЙ АВТОМАТ ДЛЯ ОТГАДЫВАНИЯ ЧИСЕЛ (ВОЗРАСТА) «ЗОДИАК»
Очень интересную и простую математическую машину демонстрировали юные кибернетики города Свердловска на XXVI Всесоюзной выставке радиолюбителей-конструкторов.
Автомат, названный юными конструкторами романтическим именем «Зодиак», привлек внимание многих посетителей. Он отгадывал задуманные человеком числа. Достаточно было произвести в уме несколько простых математических действий и ввести результат вычислений в машину (нажать несколько кнопок), и машина отгадывала задуманное двузначное число (например, возраст), высвечивая его на своей панели двумя большими красными цифрами.
Мы думаем, что многих наших читателей заинтересует эта математическая машина, которая может быть использована в школах, Домах пионеров-везде, где есть необходимость продемонстрировать возможности и принцип действия простых кибернетических машин.
На рис. 32 приведена принципиальная схема автомата для отгадывания двузначных чисел.
Разберем принцип действия автомата. Для того чтобы машина отгадала задуманное двузначное число,
97
4 Библиотечная серия
6
RZ 20K
НИ ИН-4
HLZ ИН-4
VD30 R1 20k
>
SB31 Ответ1
0
100 200 300 400 500 SOO 700 800 900 Сотни
A
--- >
-248
надо с этим числом проделать математические действия: умножить его на 10, затем задумать любое однозначное число и умножить его на 9, после этого из первого произведения вычесть второе. Полученную разность надо ввести в машину, нажимая соответствующие кнопки на лицевой панели автомата, включить тумблер «Ответ», и тогда автомат сообщит задуманное двузначное число. Индикация ответа производится с помощью двух индикаторных ламп ИН-4.
Как же автомат отгадывает задуманное число, ведь мы сообщаем ему всего лишь какое-то определенное для этого числа значение, полученное после вышеприведенных математических действий?
Автомат состоит из двух частей: логического устройства А и индикаторного устройства Б. Логическое устройство выполнено на реле К0-К20, кнопках SB1-SB30, диодах VD1-VD29. Питание этой части схемы производится постоянным напряжением 24 В.
Индикаторное устройство Б содержит индикаторные лампы HL1, HL2 типа ИН-4, выпрямитель (для питания анодов ламп) сетевого напряжения, выполненный на диоде VD30, кнопки SB31.
Работу автомата лучше всего проследить на конкретном примере. Например, вы задумали число 25, умножили его на 10 (25 х 10 = 250), задумали число 4, умножили его на 9 (4 х 9 = 36), затем из первого произведения вычли второе (250 — 36 = 214). Получили разность 214. Теперь эту разность надо сообщить автомату, нажимая соответствующие кнопки. Кнопки группы SB1-SB10- единицы, кнопки группы SB11-SB20-десятки и кнопки группы SB21-SB30-сотни.
На схеме видно, что каждая кнопка соответствует какому-то числовому значению, например кнопка SB1 соответствует числу 0, кнопка SB2- числу 1 и так далее, а кнопка SB30-числу 900.
Чтобы ввести число 214 в автомат, надо замкнуть (нажатием) кнопки SB5, SB12 и SB23 с соответствующими числовыми значениями 4, 10 и 200.
Сначала нажмем кнопку SB5 (число 4); тогда шина, на которую замкнули эту кнопку, окажется под напряжением + 24 В. Замкнем кнопку SB12 (число 10), подав тем самым напряжение на обмотку реле К12, которое срабатывает, при этом замыкаются контакты его контактной группы, содержащей 10 контактов на замыкание. Один из них замкнулся на шину, находящуюся под на-100
пряжением, так что через этот контакт и через диод VD12 напряжение поступает на обмотку реле К5. Реле срабатывает; при этом замыкается его контакт К5.1, через который напряжение 200 В поступает на пятый вывод лампы HL2, и на ней высвечивается цифра 5.
Диоды VD1-VD18 применены как ограничители, чтобы напряжение, поступающее на реле К0-К9, не поступало на реле К10. Нажав кнопку SB23 (число 200), мы тем самым подаем напряжение 200 В на второй вывод лампы HL1 и на ней высвечивается цифра 2. Итак, мы получили задуманное число 25.
В описании действий автомата мы не упомянули о реле К10 с десятью контактами на переключение.
Рассмотрим его значение в схеме. Возьмем уже знакомое нам число 25. Только теперь при вычислительных действиях мы задумаем однозначное число 6, а не 4; вычислив (25 х 10 — 6 х 9 = 196), мы получим число 196, которое сообщим на автомат. Замкнув кнопки SB7 и SB20, мы подали напряжение на обмотку реле К5. Реле сработало, и на лампе HL2 высветилась цифра 5. Допустим, что реле К10 у нас нет; тогда, замкнув кнопку SB22 (100), мы бы подали напряжение на второй катод лампы HL1, на ней высветилась бы цифра 1 и вместо задуманного числа 25 мы бы получили число 15. Но с включением в схему реле К10 все изменяется. Когда мы замыкаем кнопки SB7 и SB20, мы подаем напряжение не только на реле К5, но и на обмотку реле К10 (диоды
Положение А
К10Л
I I I I I I I 1К101°
Положение Б
К10.10
К10.1
ГА ГА ГА ГА ГА ГА ГА СА ГА
О 100 200 300 400 500 600 700 800 900
Рис. 33. Схема переключения контактных групп реле К10 положения А
О 100 200 300 400 500 000 700 800 000
Рис. 34. Схема переключения контактных групп реле К10 положения Б
101
VD20-VD23 включены так, что через них напряжение может поступать только на реле К10).
Реле К10 срабатывает; при этом его контакты переключаются (рис. 33, положение контактных групп А; рис. 34, положение контактных групп Б) так, что первый электрод лампы HL2 замыкается на контакт кнопки SB21 (число 0), второй электрод замыкается на контакт кнопки SB22 (100) и так далее, так что при замыкании кнопки SB22 (число 100) на лампе HL2 высвечивается цифра 2 и таким образом мы получили задуманное число 25.
Детали и конструкции. Автомат собран в корпусе, который изготовляется из листового алюминия, причем вначале изготовляются боковые стенки, а на них по периметру приклепываются алюминиевые угольники 15 х х 15 мм.
Затем на эти угольники крепится лицевая панель. Дно и задняя стенка-съемные. На лицевой панели (рис. 35)
крепятся две индикаторные лампы тлеющего разряда ИН-4 (HL1-HL2), тумблеры «Вкл.», «Ответ» и кнопки SB1-SB30. Кнопки крепятся в три ряда по разрядам. Верхний ряд-кнопки SB21-SB30-cothh, средний ряд-кнопки SB11-SB20- десятки, нижний ряд-кнопки SBl-SBlO-единицы. Остальные детали схемы-реле, диоды и выпрямители-находятся внутри корпуса и укреплены на раме, которая выполнена из стальных угольников 25 х 25 мм. Чертеж рамы приведен на рис. 37. В случае отсутствия таких угольников можно использовать угольники из алюминия 30 х 30 мм.
Реле крепятся на метал-
инВикаторные лампы ин-л-
Рис. 35. Внешний вид автомата «Зодиак»
лических планках размером 270 х 15 мм, которые, в свою очередь, крепятся к раме. Диоды смонтированы на гетинаксовой панели размером 100 х 60 мм. Панели укреплены на раме. Рама крепится на дне корпуса четырьмя болтами М4.
В схеме использованы 32 реле типа РКН (паспорт РС4.500.115Сп) с сопротивлением обмотки 800 Ом (можно заменить реле других типов), 29 диодов типа Д7Ж и две индикаторные
102
лампы тлеющего разряда типа ИН-4, а также 31 кнопка на замыкание с арретиром.
Данные о реле сведены в табл. 2.
Таблица 2
Реле Количество контактных Количество контактных групп на замыкание групп на переключение
К0-К9 По одной контактной —
К11-К20 К10 группе По 10 контактных групп — 10 контактных групп
Выпрямитель для питания логического устройства, дающий напряжение 24 В, выполнен на обычной двух-полупериодной схеме на четырех диодах ДЗО5 или Д242.
Внешний вид прибора показан на рис. 36.
Рис. 3 6. Рама для крепления реле
103
4
В главе читатель совершит путешествие длиной вето пятьдесят лет, узнает, что сердце вырабатывает ток, мышцы являются генераторами электрического напряжения, а искусственные руки могут водить поезда
В принципе автоматы могут обладать всеми основными свойствами самых сложных систем и даже человеческого мозга.
А. Н. КОЛМОГОРОВ
ТОКИ, РОЖДЕННЫЕ В МЫШЦАХ
Энгельс в «Диалектике природы» прославил идеал человеческой руки, которая своим совершенством создала весь материальный мир. В руке великий философ впервые увидел не просто исполнителя человеческой воли, но и воспитателя сознания, строителя, формирующего разумное поведение.
Инженеры-механики изучают руку-совершеннейший инструмент природы. Ведь рука может иметь более 5 тыс. миллиардов различных состояний движений! Да, мы не оговорились, именно 5 тыс. миллиардов. И пока ни один механизм в мире из созданных человеком не может соперничать с мудрой природой.
Механизм управления многосложной машиной человеческой руки до сих пор остается загадкой для нейрофизиологов.
В настоящее время наукой еще не найдены возможности полной замены руки. Однако давайте совершим небольшую экскурсию в Москву 1960 года. В коридорах и аудиториях Московского государственного университета на Ленинских горах раздавалась приглушенная речь на многих языках мира. Ученые, работавшие в области кибернетики, собрались на свой Первый международный конгресс по автоматическому управлению-самый представительный в то время форум по кибернетике. На конгрессе присутствовал Норберт Винер.
...Шел очередной доклад. Вдруг в зале стало тихо.
104
Докладчик сделал паузу, и на сцену вышел юноша. Он медленно подошел к доске, взял мел и написал: «Привет участникам конгресса!» Зал еще несколько минут молчал, а потом грянули аплодисменты, которым могли бы позавидовать эстрадные звезды первой величины. Что же восхитило маститых ученых? Юноша был без руки и написал на доске эти простые слова с помощью протеза, управляемого биотоками. Присутствующие в зале ученые, гости и корреспонденты стали свидетелями рождения новой ветви кибернетики - биэлектрического управления.
Создание электромиографии-регистрации биоэлектрических потенциалов мышц-началось с опытов, которые проводились русскими учеными еще на рубеже XIX-XX веков. Этим вопросом занимались, в частности, исследователи в лабораториях И. Н. Сеченова в Петербурге, изучавшие проблемы возникновения биотоков в мышцах животных. Множество экспериментов по измерению биоэлектрических сигналов кончалось неудачами. Успеха добился русский ученый Н. В. Введенский, ученик знаменитого физиолога И. Н. Сеченова.
В 1883 году у себя в лаборатории он провел интереснейший опыт, в результате которого удалось услышать биотоки мышцы.
Провода от телефонного аппарата были припаяны к двум тонким стальным булавкам, которые вводились в бицепс руки. Приложив чувствительный телефон к уху, ученый услышал ровный гул. Напряжение в мышце вызывало в трубке звук низкого тока, расслабление-высокого.
Биопотенциалы, рожденные в мышцах, очень слабы. Их амплитуда от 20-100 миллионных долей вольта, частота 80-250 колебаний в секунду. Для увеличения мощности этих слабых сигналов необходимо иметь усилитель с коэффициентом усиления в несколько десятков тысяч. Создание таких приборов стало возможным сравнительно недавно, а в то далекое время, когда работал Н. В. Введенский, техника не могла предложить ученым необходимую аппаратуру: еще не было ни электронных ламп, ни транзисторов. Вот почему к проблеме биотоков вернулись лишь в пятидесятые годы нашего столетия.
Ученые установили, что сокращению мышц всегда предшествует электрический сигнал, для изменения которого необходимо послать к мышце приказ, чтобы она сократилась. Уровень сигнала зависит от напряжения или
105
скорости сокращения мышц и может произвольно изменяться, подчиняясь мысленным командам человека.
В 1957 году пять молодых энтузиастов объединили свои усилия и начали поиски в области создания системы биоэлектрического управления. Через год А. Кобринский, Е. Полян, М. Брейдо, В. Гурфинкель, Я. Якобсон, Я. Сла-вуцкий и другие создали протез руки, управляемый с помощью биопотенциалов, снимаемых с мышцы руки. Правда, первый образец усилителя токов был величиной с обеденный стол и управлял шаговым электродвигателем, взятым от станка с программным управлением. В свою очередь, электродвигателю подчинялась действующая модель человеческой руки.
Несмотря на громоздкость конструкции, в то время было сделано самое главное, о чем не смели мечтать авторы самых смелых фантастических рассказов: исследователи принципиально решили проблему управления механическим движением с помощью токов, рожденных в мышцах. Получалась простая, но очень захватывающая картина; мысль (невысказанное желание) управляет сокращением мышцы, рожденные в мускулах биотоки усиливаются и управляют механической моделью (протезом) руки. Правда, большие размеры установки не позволили тогда практически применить это открытие. Со временем ламповые усилители постепенно вытеснялись полупроводниковыми, а изобретение транзисторов помогло во много раз уменьшить объем радиоэлектронной аппаратуры.
Утрата руки трагична. Человек уже не сможет быть ни кузнецом, ни токарем, ни пахарем. Теряется и нечто большее. Созидательные отделы мозга становятся в тупик. Как бы ни пылало, ни буйствовало воображение, оно не заменит рук Родена, Леонардо да Винчи, Паганини.
Поэтому уже много веков назад с неотступной страстью человечество искало способ восстановить потерю руки. Так, древний философ и писатель Плиний Младший (62-114) упоминает о римском воине, потерявшем правую руку во время второй Пунической войны (218-201 в. до н.э.). Этому воину была сделана железная рука, которой он успешно удерживал щит на поле боя.
И еще один пример. В одном из музеев ГДР в городе Эйсфельде автор увидел интересный экспонат, возле которого всегда толпились посетители. Это искусно выполненный средневековым мастером железный протез чело-106
веческой кисти. Экскурсовод рассказывает, что согласно преданиям протез был изготовлен в первой трети XVI века и обнаружен в развалинах монастыря Файльсдорф. Крючкообразный большой палец протеза неподвижен, а остальными четырьмя пальцами можно было двигать попарно, причем каждая пара (мизинец и безымянный, средний и указательный) могла закрепляться в четырех фиксированных положениях, что позволяло владельцу держать предметы. Движениями пальцев управляли с помощью рычажка, расположенного на запястьях. Историки предполагают, что владельцем протеза был знаменитый рыцарь Гец фон Берлихинген, легенду о котором положил в основу своей драмы Гёте.
И вот сейчас, когда создан протез с биоэлектрическим управлением, тысячи людей, потерявших руки, смогут вернуться к труду, обрести веру в свои силы, познать счастье творчества.
Первые протезы управлялись усилителями, укрепленными на поясе, а современные усилители биотоков умещаются в гильзе протеза. В 1970 году советским ученым была присуждена Государственная премия за создание биоэлектрических протезов.
О значении этого открытия очень образно сказал в своей последней книге «Бог и Голем» Норберт Винер.
«Представим себе,-пишет Винер,-что человек лишился кисти руки. Он лишился некоторых мышц, которые помогают ему сжимать и разжимать пальцы, однако большая часть мышц, обычно двигающих рукой, сохранилась в культе локтевой части руки... Эти мышцы, хотя и не могут привести в движение кисть и пальцы, которых нет, вызывают некоторые электрические эффекты, называемые потенциалами действия. Эти потенциалы могут восприниматься соответствующими электродами, а затем усиливаться и преобразовываться транзисторными схемами. Такие потенциалы можно использовать для управления движениями искусственной руки при помощи миниатюрных электродвигателей, которые питаются от батарей и аккумуляторов... Источником управляющих сигналов служит обычно центральная часть нервной системы. Подобные искусственные руки были уже изготовлены в России, и они даже позволили некоторым инвалидам вернуться к производительному труду».
Протезирование-далеко не единственная область, где могут быть применены системы биоэлектрического управления.
107
В наш век космонавтики нетрудно представить себе такую картину. Космический корабль на старте. До пуска остаются считанные секунды. Нажатие на кнопку-и ракета взмыла ввысь. Непреодолимая сила вдавливает космонавта в кресло. Гигантская тяжесть сковала его тело. Перегрузка очень осложняет управление космическим кораблем при взлете и спуске.
У космонавта сохраняется способность рассуждать, но из-за перегрузок, возникающих при взлете, он лишен физической возможности осуществлять управление космическим аппаратом. Представим себе, однако, что на плечи и предплечья космонавтов надеты датчики биоэлектрического управления. Мысленный приказ мышцам-и электрический сигнал поступает в усилитель биотоков, которые и используются для управления электромеханическими приводами.
Как мы уже выяснили, в живом организме управляющие воздействия передаются мышцам посредством биоэлектрических импульсов, которые «зарождаются» в центральной нервной системе.
В системе биоэлектрического управления роль командных сигналов выполняют электрические токи отводимых от мышц-сгибателей и мышц-разгибателей, которые в них возникают под влиянием импульсов, приходящих по нервным волокнам из мозга. Так, если читатель в этот момент держит нашу книгу в руке и захочет положить ее на стол, то соответствующая команда из мозга по двигательному нерву будет передана в мышцы. Возбуждение нерва достигнет мышц руки, передастся им, возникнут биопотенциалы, мышцы сократятся-и книга ляжет на стол. Если импульсы, идущие от мозга, управляют, например, сокращением кисти руки, то частота этих импульсов (от 10 до 300-500 Гц), будет тем выше, чем интенсивнее движется кисть. Амплитуда импульсов остается приблизительно постоянной, она не зависит от уровня возбуждения, а определяется свойствами данного нерва. Скорость распространения импульсов не превышает 100 м/с. Сопротивление кожи между электродами составляет приблизительно 10-400 кОм и зависит от многих факторов: расстояния между электродами, психофизиологического состояния организма и др. Схема передачи командной информации из мозга к исполнительному органу (в нашем случае-руке) изложена здесь упрощенно, но для понимания сущности работы биоэлектрической системы управления этого вполне достаточно.
108
Приведенные примеры проиллюстрировали области применения биоэлектрического управления. В арсенале современной техники имеются новые радиотехнические элементы, с помощью которых стало возможным создание простых и надежных систем биоэлектрического управления.
В настоящее время изготовление биоэлектрической системы может осуществить радиолюбитель средней квалификации. Показ такой системы всегда вызывает живейший интерес присутствующих. Под руководством автора этой книги была построена система биоэлектрического управления, описание которой приведено ниже.
Демонстратор надевает на руку резиновую манжету, под которой находятся токосъемники. Невидимое для глаза сокращение мышц руки-и поезд монорельсовой дороги, расположенной на макете города, зажигает фары, медленно трогается с места, набирая скорость, и движется по замкнутому кругу. Следующее сокращение мышц плавно останавливает поезд или изменяет направление его движения.
Для демонстрации работы системы биоэлектрического управления был использован действующий макет города будущего со смонтированными на нем железной и монорельсовой дорогами. Макет представляет собой планшет размером 1200 х 600 мм, на котором в одну сотую натуральной величины изображена часть города. Усилитель биотоков может переключаться: управление монорельсовой дорогой переходит на двухрельсовую, и наоборот.
Для того чтобы на вход усилителя биотоков поступил достаточный по амплитуде биоэлектрический сигнал, его нужно правильно снять, с мышцы руки. Уровень снимаемого сигнала пропорционален работе, затрачиваемой на сокращение мышцы. Снятие сигнала осуществляется с помощью электродов, представляющих собой пластинки свинцовой или медной фольги, к которым припаян многожильный экранированный провод с трехштырьковым разъемом на конце. Место, куда должны быть наложены электроды (место съема биопотенциалов), протирается спиртом, чтобы удалить кожные жировые выделения. Электроды накладываются на предплечья и укрепляются с помощью резинового жгута. Чрезмерно тугой резиновый жгут может нарушить работу мышц; поэтому нужно следить за тем, чтобы мышца сокращалась легко, без сильного напряжения.
109
Д1
сн>—
Токосъемники
а-^>—
Д2
R1 68к
CZ 5мк«208
МП39Б
>4700
04 5мк«20в
61
Токосъемники
Б2
СЗ
VD1Д809
----К—
—
08 S0MK к Z0 В
R1
О
Обозначение VT1 VT2 VT3 VT4 VTS
Коэффициент усиления 60-90 S0-70 40-60 30-50 20-40
Цбо (икЛ) Z 2 2 г 2
Для тех радиолюбителей, которые впервые приступают к конструированию биоэлектрических систем управления, предлагаем схему усилителя биотоков «Ней-рон-1», выполненных на транзисторах и деталях (рис. 37), имеющихся в широкой продаже и высылаемых по системе Посылторга в любую сельскую местность.
Более подготовленным радиолюбителям мы советуем воспользоваться устройством пропорционального усилителя биотоков «Нейрон-2», выполненной по гибридной схеме; предварительный усилитель смонтирован на микросхеме, а блок детектирования и управления-на транзисторах.
Устройство биоэлектрического управления «Нейрон-1» (рис. 37) состоит из трех узлов: усилителя напряжения, детектора, усилителя постоянного тока (усилитель исполнительного устройства вместе с реле).
Направление вращения электродвигателя исполнительного устройства, приводящего в движение поезд, изменяется, поэтому используются два аналогичных канала А и Б, одинаковых по схеме и устройству. Сигнал, ПО
Рис. 3 7. Принципиальная схема усилителя для биоэлектрического управления моделями «Нейрон-1»
снятый с мышц токосъемниками А1 и А2, поступает на вход усилителя блока канала А. Как известно, для совершения движения необходима работа нескольких мышц (не менее двух). Токосъемники Б1 и Б2 снимают потенциал с другой мышцы руки (по отношению к токосъемникам А1 и А2). Сигнал, снятый с мышцы токосъемниками Б1 и Б2, поступает на второй вход усилителя блока (канал Б).
Таким образом, на входе двух усилителей появятся сигналы, возникающие при сокращении двух мышц. Один сигнал снимается с мышц, сгибающих кисть, другой-с мышц, которые ее разгибают. Первый преобразуется в команду «Ход вперед», второй-«Ход назад». В зависимости от того, с какой мышцы снят больший по уровню сигнал, на выходе соответствующего усилителя будет большее напряжение. Направление вращения двигателя зависит от величины сигнала на входах усилителей. Если уровень биоэлектрического сигнала на токосъемниках Al, А2 больше по амплитуде, чем на токосъемниках Б1, Б2, срабатывает реле К1 усилителя
ill
и электродвигатель начинает вращаться. Если уровень сигнала на токосъемниках Б1, Б2 превысит соответствующий уровень на токосъемниках Al, А2, электродвигатель изменит направление вращения.
Усилитель напряжения собран на трех транзиторах типа МП39Б по схеме с общим эмиттером. На его входе включен трансформатор 1:20, первичная обмотка которого имеет 3500 витков, диаметр провода 0,03 мм, вторичная обмотка 700 витков, диаметр провода 0,04 мм. Трансформатор заключен в пермаллоевый экран, который уменьшает влияние внешних электромагнитных помех. К первичной обмотке трансформатора подключены токосъемники, представляющие собой пластинку, покрытую токопроводящей пастой из смеси глицерина (две части), спирта (одна часть) и очень мелкого абразива (две части). Провода, соединяющие первичную обмотку трансформатора с токосъемниками, должны быть тщательно экранированы. Вторичная обмотка трансформатора включается одним концом на базу транзистора VT1, а другим через электролитический конденсатор С1-на общую шину питания.
Сигнал со вторичной обмотки поступает на базу транзистора VT1, включенного по схеме с общим эмиттером. С коллекторной нагрузки R2 транзистора VT1 через разделительный конденсатор С2 сигнал поступает на базу транзистора VT2 и через оксидный конденсатор С4-на третий каскад усилителя напряжения, собранного на транзисторе VT3.
Общее усиление усилителя напряжения достигает примерно 11000-20000, чувствительность его 30 - 40 мкВ. Для улучшения частотной характеристики усилителя второй каскад охвачен отрицательной обратной связью (конденсатор СЗ, резистор R3). С коллекторной нагрузки транзистора VT3 усиленный сигнал подается через конденсатор С5 на выпрямитель (детектор), выполненный на диодах VD2 и VD3. Для сглаживания пульсаций на выходе детектора включается оксидный конденсатор С6. После детектора сигнал подается на усилитель постоянного тока, собранного на транзисторах VT4 и VT5 типа МП42А. В цепь коллектора транзистора VT5 включено реле РЭС-10 (паспорт РС4. 524.302), которое управляет работой двигателя М.
В том случае, если на входы обоих каналов поступят одинаковые по уровню сигналы, станет возможным одновременное срабатывание реле К1 и К2. Для предот
112
вращения этого в цепь питания усилителей постоянного тока VT4, VT5 включен резистор R10. Усилитель питается от аккумуляторной батереи напряжением 12 В.
Конструктивно усилитель напряжения, детекторы и усилители постоянного тока монтируются на плате из фольгированного стеклотекстолита размером 200 х х 85 мм. При монтаже усилителя напряжения использованы транзисторы с коэффициентом усиления, равным 80-100. Диоды VD2 должны иметь обратное сопротивление не менее 1,5 МОм и могут быть типов VD2, VD9. Можно применить двигатель типа ДП1-13.
Налаживание усилителя биотоков производится с помощью генератора низкой частоты и осциллографа. Усилитель биотоков можно использовать для управления не только монорельсовой дорогой, но и многими другими объектами, которые приводятся в движение с помощью электродвигателей.
ПРОПОРЦИОНАЛЬНАЯ СИСТЕМА БИОЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ «НЕЙРОН-2»
Система «Нейрон-2» адресована тем, кто уже имеет опыт монтажа радиосхем, она сложнее в налаживании, чем усилитель «Нейрон-1», изображенный на рис. 39, но зато имеет более высокие качественные и эксплуатационные показатели.
Система, описание которой приведено на рис. 38, позволяет управлять любыми действующими моделями или устройствами, в которых установлен электродвигатель с током потребления не более 1,5 А. В системе «Нейрон-2» использован принцип пропорционального управления. Наличие этого устройства позволяет исключить присущие релейной системе управления недостатки (в релейной системе нет плавного регулирования скорости перемещения исполнительных механизмов).
В системе биоэлектрического управления «Нейрон-2» использована следующая характеристика преобразования биотоков: при изменении управляющего сигнала от 10 до 40% максимальной электрической активности обеспечивается полный динамический диапазон регулирования скорости перемещения исполнительного механизма. Система биоуправления, так же как ранее описанное устройство «Нейрон-1», имеет два идентичных параллельных канала усиления и преобразования информации. Это сде-
113
лано для того, чтобы исполнительный механизм, реагирующий на уровень сигналов, поступающих с двух «противоположных» (сгибающих и разгибающих) мышц, управлялся тем сигналом, амплитуда которого в данный момент больше. Устройство работает таким образом: если на одном из входов будет более сильный сигнал (выше порогового значения), тот канал и будет управлять движением исполнительного механизма, а соседний канал в это время запирается.
Первый каскад усилителя биопотенциалов выполнен на микросхеме К140УД6 и охвачен обратной связью (включены резисторы R5 и R6 с выходов микросхем 6, 8 на вход 2, 4). На выходе микросхемы включен полосовой фильтр (состоящий из резисторов R8, R14, R10 и конденсаторов С1, С4, С6), который служит для подавления промышленной частоты 50 Гц. Это обеспечивает необхо-
114
<
Рис. 38. Принципиальная схема усилителя для биоэлектрического управления моделями «Нейрон-2»
димую передачу полезного сигнала и значительное подавление помех с частотой 50 Гц вне полосы пропускания. Например, сигнал с частотой 50 Гц ослабляется в 50-70 раз.
На выходе фильтра установлен потенциометр R16, который обеспечивает регулировку уровня усиления сигнала. Эта регулировка необходима в канале управления, так как пределы изменения электрической активности мышц у разных людей неодинаковы. С помощью потенциометра R16 можно настраивать чувствительность системы биоуправления применительно к электрической активности мышц у разных операторов.
После потенциометра R16 усиленный сигнал поступает на следующий каскад, выполненный на транзисторе VT1, и затем попадает на активный детектор, выполненный на транзисторе VT3. Затем сигнал подается на
115
транзисторы VT5, VT7, которые образуют триггер Шмитта. Диод VD1 необходим для разрядки переходной емкости СИ при отрицательном полу периоде сигнала. При достижении порога срабатывания триггер Шмитта опрокидывается и управляющий сигнал через двухкаскадный усилитель постоянного тока, выполненный на транзисторах VT9, VT11, VT12, поступает на электродвигатель, приводящий в движение модель. Выходной каскад усилителя постоянного тока выполнен на комплементарной паре (транзисторы VII типа КТ815А и VT12 типа КТ814А). Параллельно электродвигателю включен стабилитрон VD3 типа КС213Б) для снятия напряжения экстратоков.
Усилитель питается от аккумуляторной батареи типа 10ЦНК-45 напряжением 12 В. Возможно питание и от стабилизированного источника питания с тем же напряжением.
Выше уже говорилось, что усилитель биоэлектрических сигналов имеет два совершенно идентичных канала. Поэтому мы приводим данные для одного из них. Микросхема DAl-типа К140УД6, транзистор VT1 КТ361Б, транзисторы VT3, VT5, VT7, VT9-KT315B, транзисторы VT11-KT815A, VT12-KT814A, стабилитрон
VD3-KC213B, диод VD1 - Д9В; все резисторы, применяемые в схеме, имеют допуск ± 20%. Налаживание усилителя производится с помощью осциллографа и калиброванного генератора сигналов (например, ГЗ-102).
Робот «КИН-2», описанный в начале этой книги, тоже может управляться усилителем биотоков. Такой усилитель может быть применен и для управления моделями автомобилей. Представьте себе автотрек, где происходят соревнования скоростных моделей, управляемых усилителями биопотенциалов. Победителем в таких состязаниях окажется оператор, у которого будут лучше натренированы мышцы руки.
Немного фантазии-и мы можем вообразить биоэлектрическое устройство, легко справляющееся с огромными физическими нагрузками в цехах заводов и фабрик.
В нашей стране системы биоэлектрического управления поставлены на службу гуманизма, помощи человеку, охраны и восстановления здоровья.
Область применения усилителей биотоков огромна. Не за горами время, когда с их помощью человек сможет управлять самыми большими машинами и механизмами, затрачивая минимальные усилия.
116
5
В главе рассказывается о том, что кибернетические машины могут видеть, узнавать и говорить. В этой главе читатель также узнает, как строить машины, имитирующие искусственный разум
Орел видит значительно дальше, чем человек, но человеческий глаз замечает в вещах значительно больше, чем глаз орла.
Ф. ЭНГЕЛЬС
НА ПОДСТУПАХ К ИСКУССТВЕННОМУ РАЗУМУ
Кто читал захватывающий фантастический рассказ Анатолия Днепрова «Суэма», наверняка помнит его сюжет: ученый создал самосовершенствующуюся электронную машину, научил ее слушать, говорить, писать и читать. Вскоре «Суэма» уже умела отвечать на вопросы, реагировать на внешние раздражения подобно людям и даже совместно с изобретателем готовила доклад на тему: «Электронное моделирование высшей нервной деятельности человека», с которым должна была выступить на Всемирном конгрессе по электронным машинам...
...Ученый не продумал в схеме «Суэмы» блока, контролирующего целесообразность и разумность ее действий. Машина решила исследовать мозг изобретателя, и это чуть не окончилось для него трагически.
Несомненно, что все это фантастика, очень занимательная и интересная, однако то, что еще вчера казалось необычайно смелым вымыслом, сегодня становится опытом, попыткой, реальным экспериментом...
Человек осваивает богатства недр Земли и космических пространств, строит тысячи умных машин-своих чудесных помощников. Но во все эпохи и времена он не расставался с мечтой создать машину, умеющую «мыслить», «чувствовать», «ощущать».
Мышление-свойство высокоорганизованной материи. Законы работы мозга и его внутренних связей чрезвычайно сложны. Исследователям необходимо выяснить, каким же образом достигается поразительная универсаль-
117
ность мозга, приобретенная в процессе многовековой эволюции, быстрая перестройка связей и самих элементов. ..
Все человеческие эмоции, мысли, ощущения, движения подчинены мозгу-самой совершенной материи по Вселенной.
Мозг занимает в организме человека привилегированное положение. Системы жизнеобеспечения заботятся о нем больше, чем о других органах. Снаружи его нежнейшие ткани надежно защищает костный панцирь черепа, а от внутренних сотрясений оберегает спинномозговая жидкость. Мозг с его тысячами кровеносных сосудов поглощает 20% получаемого организмом кислорода, через него проходит 0,7 л крови в минуту, хотя его доля в общей массе тела всего 2%. Мозг также получает непропорционально большую часть питательных веществ даже тогда, когда организм голодает. Масса мозга в среднем 1,5 кг. Его нервные клетки генерируют электроэнергию около 25 Вт.
Главной частью человеческого мозга является кора — материальный носитель наших высших способностей: речи, памяти, абстрактного мышления. Толщина коры головного мозга всего 2,5 мм, но в ней очень много складок и извилин. Развернув ее, можно было бы покрыть журнальный столик.
Каждое полушарие коры головного мозга делится бороздами на четыре доли. Лобная доля мозга, расположенная против глаз и лба, ответственна за нашу способность думать о будущем, строить планы и вырабатывать намерения. Она управляет большей частью мышц, необходимых для речи.
Височная доля мозга, находящаяся непосредственно над ушами, отвечает за слух, память, речь.
Теменная доля, расположенная в верхней части мозга, за лобной долей, согласно предположениям ученых имеет отношение к речи и памяти.
В затылочной доле мозга, находящейся в задней части головы, обрабатывается информация, поступающая через органы зрения.
Мозжечок координирует всю произвольную мышечную деятельность, переводя общие инструкции головного мозга в точные команды. Он позволяет приводить в движение одновременно сотни мышц, например, во время бега, и поддерживать их плавную автоматическую работу. Даже очень краткое и поверхностное описание дея-118
тельности человеческого мозга позволяет представить всю сложность и многообразие его функций. Мозг в состоянии обрабатывать сотни импульсов информации. В некоторых его участках на 15 см3 приходится примерно 1006 нервных клеток, каждая из которых соединена приблизительно с 60 тыс. других. Поэтому сравнения мозга человека с ЭВМ, проводимые некоторыми авторами, не выдерживают никакой критики. Как мы уже говорили, мозг состоит из 14 миллиардов нервных клеток, в то время как самая сложная ЭВМ имеет не более миллиона переключающихся элементов. Различаются они и по способу переработки информации, которую мозг может обрабатывать параллельно и большими массивами, что пока недоступно вычислительной машине. Если в ЭВМ выйдет из строя хотя бы один элемент, она начинает давать сбои, а мозг продолжает работать почти без нарушений интеллекта, даже если удалить значительную его часть, исключая область, связанную с функцией речи. Человеческий мозг обладает замечательной способностью производить обобщения, распознавать категории, обучаться, сопоставлять. В обозримом будущем создать такую же совершенную машину будет трудно, почти невозможно. Однако изучать свойства мозга, познавать происходящие в нем процессы человек будет всегда. Поэтому и становятся необходимыми устройства, имитирующие работу нашего мозга.
Итак, в мозгу содержится 14 миллиардов нервных клеток. Предположим, что 10 из них способны одновременно воспринимать информацию. Многими советскими и зарубежными учеными доказано, что каждое нервное волокно пропускает примерно 14 «цифр» в секунду. Будем считать, что каждую секунду по каждому нервному волокну поступает 14 бит информации. Значит, наш мозг одновременно получит 140 млрд, бит информации. Если считать, что продолжительность человеческой жизни составляет примерно 70 лет, то человеческий мозг перерабатывает и хранит информацию, объем которой составляет астрономическое число в миллионы раз большее, чем любая ЭВМ.
Уже сейчас ученые придумали вычислительные машины, работающие быстрее и в чем-то лучше мозга, но, как мы уже говорили выше, нельзя создать устройство, превосходящее его в универсальности. Ведь за миллионы лет своего развития мозг «научился» понимать и сознавать все многообразие мира, основные его законы. Тех
119
ника пока способна только имитировать с помощью ма-пин отдельные «мыслительные человеческие действия». Чтобы достигнуть большего, необходимо развивать теоретические и экспериментальные работы в области кибернетики, изучать законы деятельности головного мозга, функционирования организма и его клеток. Это очень кропотливый труд, требующий высокого уровня развития науки и техники. Чтобы читателю стало ясно, насколько это сложная задача, рассмотрим работу одного из «датчиков» мозга-человеческий глаз.
Ввдеть мир-огромное счастье. Зрение дает человеку возможность получить 85% информации. Великий ученый и изобретатель Леонардо да Винчи говорил: «Глаз есть окно человеческого тела, через которое он глядит на свой путь и наслаждается красотою мира. Глаз движет человека в различные части мира, он государь математических наук, его науки достовернейшие. Глаз измерил высоту и величину светил, он открыл стихии и их расположения... Он породил архитектуру, перспективу и божественную живопись. Он движет людей с востока на запад, он изобрел мореплавание, открыл огонь и обрел то, что отнимает у него мрак».
Восторг перед известным инструментом человеческого тела-глазом продолжается три века. Уже в наше вре-
Рис. 39. Глаз в разрезе
120
мя советский ученый академик Вавилов, написавший книгу «Глаз и Солнце», привел много доказательств исключительности органа зрения. Строением глаза интересовались древние мыслители Платон, Аристотель, средневековые ученые, физиологи наших дней. О зрении написаны сотни книг, но до конца глаз еще не изучен, хотя известно очень многое о его строении.
Каково же устройство глаза? На рис. 39 представлен в упрощенном виде горизонтальный разрез правого глаза человека. Глаз имеет приблизительно шарообразную форму. Диаметр его равен почти 2,5 см. Внешняя белковая оболочка (склера) является твердой и непрозрачной на всем протяжении, за исключением передней открытой части глаза. Здесь склера переходит в прозрачную роговую оболочку (роговицу). С внутренней стороны к склере прилегает сосудистая оболочка, которая в передней части глаза переходит в радужку, окрашенную у разных людей в разный цвет и имеющую в середине отверстие, называемое зрачком. Диаметр зрачка меняется в зависимости от величины светового потока, поступающего в глаз.
К сосудистой оболочке прилегает сетчатая оболочка или сетчатка глаза, имеющая очень сложное строение. Сетчатка является световоспринимающим аппаратом— приемником лучистой энергии, проникающей в глаз. Она выполняет примерно ту же роль, что и фотопленка в фотоаппарате. Оптическая система аппарата создает на пленке скрытое изображение, которое нужно проявить, чтобы сделать видимым. В отличие от фотоснимка изображение на сетчатке представляет собой как бы мозаику из возбужденных и невозбужденных фоторецепторов. Световоспринимающими элементами сетчатки являются окончания волокон зрительного нерва, разделяющиеся на два вида-колбочки и палочки. Колбочки имеют длину около 35 мкм и наибольшую ширину около 5-6 мкм. Палочка имеет длину около 63-81 мкм и диаметр 1,8 мкм. Общее число колбочек в сетчатке глаза составляет около 7 млн, а палочек-около 130 млн. Палочки и колбочки распределены по поверхности сетчатки очень неравномерно. В середине сетчатки имеется несколько углубленный участок овальной формы с горизонтальным диаметром около 1 мм и вертикальным диаметром около 0,8 мм, называемый желтым пятном. В центральной ямке желтого пятна площадью около 0,5 мм2 находятся исключительно колбочки (около 4000). Это место сетчатки характеризуется наиболее четким видением. На сетчатке
121
имеется также участок, на котором колбочки и палочки вовсе отсутствуют. Это то место, где зрительный нерв входит в глазное яблоко; оно имеет приблизительно круглую форму диаметром около 1,5 мкм и называется слепым пятном.
Внутри глаза, за зрачком, расположено прозрачное упругое тело, имеющее форму линзы и называемое хрусталиком. Хрусталик находится в прозрачной сумке, укрепленной в охватывающей его со всех сторон коль-цеообразной мышце. При напряжении этой мышцы хрусталик увеличивает свою кривизну, а следовательно, и оптическую силу. Этот процесс носит название аккома-дации и играет огромную роль в работе глаза, обеспечивая возможность получения на сетчатке изображений различно удаленных предметов. И здесь мы можем сравнить глаз с фотоаппаратом. Чтобы получить резкое изображение на фотопленке, фотографу необходимо передвинуть объектив вперед или назад. Устройство глаза настолько совершенно, что достаточно 5—10 квантов, чтобы вызвать ощущение света. Глазные фоторецепторы обладают свойством адаптации - они способны менять свою чувствительность в зависимости от величины светового потока. Эта способность глаза помогает получить оптимальную остроту зрения при различном освещении. Пока ни одно техническое устройство, в том числе и те-левизонные передающие трубки, не обладают такой поразительной чувствительностью.
Из всего спектра электромагнитных волн человеческий глаз различает лишь небольшую часть-от 350 до 850 ммкм. Разные частоты субъективно воспринимаются глазом человека как разные цвета. В процессе эволюции природа так сформировала орган зрения человека, что он видит только малую часть электромагнитного спектра, например не реагирует на инфракрасные лучи. И это не случайно. Если бы глаз мог видеть инфракрасные лучи, испускаемые нагретыми телами, то собственное тепло внутри глаза воспринималось бы как непрерывный тепловой шум, в котором померк бы свет солнца, и увидеть что-нибудь было бы невозможно.
Мы рассказали далеко не все об особенностях нашего глаза, но из сказанного становится ясным, какой это чудесный аппарат.
Органы зрения животных различаются не только по форме и цвету, но и по функциональным возможностям. Орел и ястреб различают с огромной высоты мелкие
122
движущиеся предметы, гремучая змея видит в инфракрасном свете, а глаза лягушки-это «живая» вычислительная машина, устроенная таким образом, что «не замечает» несущественные признаки изображения, например тень от дерева, и моментально улавливает нужную ей информацию, например летящую муху.
Кибернетикам всегда хотелось иметь такое устройство, которое было бы похоже на зрительную систему. Но воспроизвести его невероятно сложно. Ведь человеческий глаз не только видит, но и анализирует изображение. Зрительный образ появится в мозге только в том случае, если изображение задержится на сетчатке в течение 0,05 с. Вначале происходит опознание зрительного образа, затем обучение.
Одна из многочисленных «заслуг» мозга человека-его способность к обучению. Увиденный однажды образ надолго запоминается и может быть опознан даже при наличии некоторых изменений. Мы узнаем знакомых через несколько лет, вспоминаем разные начертания цифр и букв. В зависимости от опознанного образа человек принимает те или иные решения и в своей практической деятельности.
Иначе обстоит дело с кибернетической машиной, работающей по заданной программе, в которую можно внести команды по запоминанию тех или иных образов. Но стоит хотя бы немного изменить задание-и машина выходит из строя или начинает выдавать неточную информацию.
В таких случаях говорят, что у машины отсутствует способность к обучению. Так возникла проблема создания машин, умеющих самообучаться.
Решая алгебраические задачи, вы, не задумываясь, отличите «А» от «В», а «В» от «С». Увидев знак «А», безошибочно узнаете этот символ, напечатан ли он в книжке строгим типографским шрифтом или написан не очень разборчиво в школьной тетради.
Заманчиво построить машину, которая могла бы подобно человеку распознавать цифры, знаки и т.п. Необходимость в таком техническом устройстве возникает уже сейчас. Появление современных вычислительных машин необычайно расширило наши возможности. Но ЭВМ требуют обязательного присутствия человека, тесного контакта с ним. Нужно, чтобы машина свободно читала формулы и чертежи, переводила их на свой язык без помощи программистов.
123
Но вот беда-языка цифр, привычного нашему глазу, эти машины еще не понимают. Исходные данные приходится полностью кодировать, а это подчас отнимает куда больше времени, чем сам подсчет. Стало быть, необходимо, чтобы машина сама читала формулы и чертежи. И не только читала, но и принимала решения. Для этого и нужны устройства, подобные персептрону.
Процесс узнавания в мозге человека состоит из трех основных частей: восприятия, сопоставления с образами, которые есть в памяти, и, наконец, принятия решения. Живой организм воспринимает окружающий мир органами чувств, в машине их роль играют датчики. В 1957 году американский ученый Ф. Розенблатт предложил проект кибернетической машины, которую он назвал «персептрон». Это название происходит от латинского слова «регсербо»,-что в переводе означает «понимание», «распознавание».
Персептрон содержит чувствительное поле-набор фоторезисторов, каждый из которых может находиться лишь в двух состояниях - возбужденном или невозбужденном, в зависимости от того, падает свет на соответствующий фоторезистор или он затемнен контуром проецируемой фигуры (рис. 40). Все фоторезисторы подключены к ряду элементов, называемых ассоциативными и имеющих несколько входов и один выход. Они производят алгебраическое суммирование сигналов, поступающих на их входы, а полученную сумму сравнивают с пороговой, предельной величиной, заранее установленной для всех элементов. Если уровень превышает порог срабатывания-элемент возбуждается, не превышает-не возбуждается. Подключение фоторезисторов к ассоциативным элементам производится случайно, т. е. их соединяют в произвольном порядке. Однако эта случайно установившаяся связь между элементами остается для персептрона постоянной.
Выходные сигналы с ассоциативных элементов с помощью электронных усилителей умножаются на положительные и отрицательные коэффициенты. В процессе «обучения» персептрона эти коэффициенты можно изменять. Выходные сигналы усилителей поступают на сумматор-устройство, которое их суммирует. Полученная сумма может быть и положительной и отрицательной. Значение этой суммы регистрируется сигнальным элементом, например лампочкой.
Персептрон такой конструкции может распознавать
124
Рассматриваемый объект
Прослеживаемые соединения
Случайные Цепи местной Случайные соединения обратной связи соединения
Сетчатка из фотоэлементов
тиирующая пема (ячейки памяти)
Проекционная область
Реагирующее устройство ВыхоВной сигнал
Организованные соединения
Цепи обратной связи
Случайные соединения
Рассматриваемый объект
персептрона:
а( б)-процесс преобразования зрительных изображений человеком (перспетроном). в-основные элементы перспетрона
125
два различных образа. Делается это так. На поле фоторезисторов проектируется изображение какого-либо символа, допустим цифры 3. Регулируя некоторые умножающие усилители, можно добиться такого состояния, что при проектировании цифры 3 на поле фоторезисторов суммарный сигнал на выходе сумматора всегда будет положителен, т. е. лампочка будет загораться. При проектировании цифры 5 можно регулировкой других умножающих усилителей добиться появления только отрицательного суммарного сигнала. Персептрон «обучен». Горящая лампочка сигнализирует о том, что персептрон «узнал» цифру 3. Стоит показать цифру 5-и лампочка гаснет. Усложнив конструкцию персептрона, можно «научить» его различать гораздо большее количество образов. Таким способом машина может обучаться.
Структура персептрона имеет отдаленное сходство со структурой высшей нервной системы человека. Поле фоторезисторов напоминает чувствительные элементы человеческого глаза. Ассоциативные же элементы имеют некоторое сходство с нейронами и нервными клетками, которые являются элементами порогового действия, т.е. срабатывающими при условии, если входной сигнал превышает некоторый порог.
Построить персептрон в любительских условиях очень трудно. Поэтому юные кибернетики могут создавать кибернетические устройства, в которых алгоритмы управления персептроном закладываются в конструкцию заранее. Эти устройства можно назвать персептронами с некоторой натяжкой, но начинающим кибернетикам такое отступление, пожалуй, можно простить, так как в процессе создания подобного устройства приобретается главное-понимание принципа его действия и накапливается необходимый опыт, для дальнейшей работы.
МЫСЛЯЩИЙ «МАРСИАНИН»
Чтобы познакомить читателя с машинами класса персептрон, приглашаем его мысленно побывать на одной интересной выставке. Около странного и загадочного электронного устройства стоят двое-вихрастый юный конструктор и убеленный сединами академик. Володя Брусницын, член кружка радиоэлектроники Дома пионеров им. В. Дубинина г. Свердловска, волнуясь, объясняет работу построенной кружковцами кибернетической модели известному всему миру ученому-Акселю Ивановичу 126
Бергу, с именем которого неразрывно связано становление и развитие кибернетики в нашей стране. Эта встреча произошла на XXI Всесоюзной выставке радиолюбителей-конструкторов в г. Москве. Академику очень понравился прибор, построенный ребятами. Он с интересом вникал в его устройство, задавал вопросы юному конструктору. Модель действительно выглядела совсем необычно и привлекала внимание многочисленных посетителей выставки.
На шасси-треноге возвышался серебристый цилиндр с красноватым плексигласовым экраном.
- Это персептрон-действующая модель машины для распознавания образов,-объяснял посетителям выставки Володя-Назвали мы ее «Марсианин». В этом цилиндре заключены «глаза» и «мозг» персептрона-набор фоторезисторов, воспринимающих различные изображения, и логическая схема, с помощью которой прибор отличает одни изображения от других. Увиденный и опознанный символ персептрон повторяет на своем экране.
- Вот, смотрите,-и Володя подносит к корпусу «Марсианина» букву «Н», вырезанную из картона. Немного «подумав», персептрон высвечивает увиденный знак на красном экране. Володя показывает другой знак-треугольник, и персептрон безошибочно «узнает» его. Всего «Марсианин» различает восемь образов. Возле этого экспоната на выставке всегда было много посетителей.
- Вот это да!-слышится шепот.
- Забавно,-говорят другие.
- Л как устроена такая машина?-спрашивают третьи. Действительно, для чего нужно устройство, распознающее образы?
Попробуем ответить на этот далеко не простой вопрос и познакомим читателя с принципом действия персептрона, получившего название «Марсианин». Его построила группа свердловских школьников под руководством автора книги в 1967 году. На выставке, посвященной пятидесятилетию Советского государства, персептрон «Марсианин» получил диплом I степени, на ВДНХ СССР модель была удостоена Золотой медали (рис. 41).
Это устройство очень понравилось юным кибернетикам. Его принципиальная схема приведена на рис. 41,а, 6. После выхода первого издания этой книги на многих выставках экспонировались персептроны, построенные в школах, Домах и Дворцах пионеров. Схема была опубликована в книгах: Войцеховский Я. Радиоэлектронные
127
ФК1-ФК9
Рис. 41. Принципиальная схема (а, б), внешний вид (в, г), расположение деталей (д) перспетрона и принципиаль-
128 ная схема выпрямителя (е)
игрушки (М.: Сов. радио, 1976), Мицкевич В. В. Занимательная анатомия робота (М.: Сов. радио, 1980). Поэтому мы сочли нужным разработать еще несколько модификаций персептронов, разных по сложности и функциональным возможностям, и дать в этой книге их описание.
В зависимости от степени подготовки конструкторы могут построить как простую, так и более сложную модель, но лучше всего придерживаться порядка, предложенного в книге: переходить от простой конструкции к более сложной.
Конструктивно модель персептрона «Марсианин-1» состоит из трех блоков: блока фоторезисторов, образующего воспринимающую ячейку; блока реле, образующего модель ассоциативных элементов; светоплана образов - устройства, выдающего информацию.
Корпус персептрона (рис. 41,в, г) выполнен в виде вытянутой полусферы из листового алюминия. Он крепится тремя винтами к треноге.
В полусфере размещены блок фоторезистора, блок реле и выпрямитель. Фоторезисторы типа ФСК-Г2 установлены на алюминиевых платах размером 130 х х 40 мм. Фоторезисторы вставляются в панель, имеющую октальный восьмиштырьковый цоколь.
Все используемые реле-типа РКН (возможно применение других типов), сопротивление обмотки 2000 см, провод ПЭЛ 0,1. Расположение реле и деталей выпрямителя показано на рис. 41Д
Для питания прибора необходим выпрямитель, дающий напряжение 110 В. Он собран по обычной двухполу-периодной схеме (рис. 41,е). Светоплан образов (реагирующее устройство) выполнен в виде овального экрана из органического стекла толщиной 4 мм. В светоплане применены лампы накаливания НОВ, 15 Вт. Как видно из принципиальной схемы (рис. 41), фоторезистор ФК1 соединен последовательно с реле К1, фоторезистор ФЯ2 соединен последовательно с реле К2 и т.д. При попадании света на фоторезистор ФИН его сопротивление резко падает и срабатывает реле К1. Аналогичный процесс происходит при попадании света на другие фоторезисторы.
Машина «Марсианин», построенная радиолюбителями,-это действующая модель персептрона, наглядно объясняющая идеи и принципы, лежащие в его основе.
Если, заинтересовавшись нашим «Марсианином», вы решили его построить, попробуйте усложнить конструк-
129
5 Библиотечная серия
Рис. 42. Внешний вид модели персептрона «Молния»
цию, введя элементы памяти, «научите» персептрон различать большее количество образов.
Коллективом юных кибернетиков Свердловского Дома пионеров им. Володи Дубинина создана еще и другая кибернетическая машина, которая может не только опознавать цифры, но и производить над ними арифметические действия. Машина, получившая название «Мол-ния-1», «знает» четыре цифры: 1, 2, 3, 4. Одновременно опознаются две цифры, причем они могут быть и одинаковыми. Если показать «Молнии» две любые цифры из этого же ряда, она их сложит или умножит. Результаты действий машина запоминает (рис. 42).
«Молния-1» несложна в изготовлении, не содержит дефицитных деталей и может быть без труда собрана в кружке юных кибернетиков. Она состоит из опознающего, решающего устройства, узла питания и индикаторного устройства (светоплан). На рис. 43 показана принципиальная схема опознающего устройства персептрона. Персептрон имеет два аналогичных канала (по числу слагаемых или перемножаемых цифр). Все элементы первого канала имеют индекс «а», второго-индекс «б». Рецепторами персептрона являются две матрицы фоторезисторов. Матрица «а» состоит из фоторезисторов ФК1а, ФИ2а, ФИЗа, ФИ4а; матрица «б»-из фоторезисторов ФВ.56, ФИ66, ФИ76, ФИ86. На рис. 44 показана матрица
130
Рис. 43. Принципиальная схема опознающего устройства персептрона «Молния»
с расположенными на ней цифрами. Как видной из рисунков, каждой цифре соответствует свой, не закрытый цифрой фоторезистор. Так, цифре 1 соответствует ФИ 1а, цифре 2-ФИ2а и т.д. На рис. 43 видно, что последовательно с каждым фоторезистором включено реле, имеющее тот же номер, что и фоторезистор.
Если фоторезистор осветить, то его сопротивление уменьшится. Пусть, например, на матрицу «а» наложена цифра 1 (рис. 44), а на матрицу «б»-цифра 3. Если теперь нажать кнопку счета SB4 (рис. 45), то загорятся осветительные лампочки НЫа и НЫб. Сопротивления фоторезисторов ФВ1а и ФИ76 уменьшатся. Реле К1 и К7 срабатывают, и на светоплане загорится соответствующая лампочка (HL4).
Вот таким образом «Молния-1» опознает предъявленные ей цифры. Как видим, ассоциирующие ячейки и эффекторное устройство слились здесь воедино и выполнены на реле К1-К8. Запоминание предъявленных цифр осуществляется нормально разомкнутые контактами этих реле. Как только реле сработает, его нормально разомкнутые контакты замкнутся и подключат обмотку реле к источнику питания, минуя фоторезистор. После этого можно отпустить кнопку SB4, лампочки НЫа и HL26 гаснут, но машина запомнит введенные в нее цифры, так как реле стало на самоблокировку.
5*
131
Рис. 44. Матрица с расположенными на ней цифрами
Чтобы «стереть» в «памяти» устройства «увиденное», следует нажать кнопку сброса SB2 (рис. 43). При этом контакты реле отключаются от источника питания и обмотки реле обесточиваются.
Решающее устройство модели выполнено на нормально разомкнутых контактах реле К1.2-К4.2 и К5.2-К8.2 (рис. 47). Каждое реле имеет по шесть нормально разомкнутых контактов. Срабатывание любого реле означает, что в решающее устройство введена соответствующая цифра.
ш
Принципиальная схема решающего устройства изображена на рис. 47.
Разбор работы решающего устройства начнем с операции суммирования. Переключатель SB4 устанавливается в положение «Сумма», а при умножении - в положение «П роизведение».
Работу решающего устройства рассмотрим на конкретном случае. Пусть, например, машине предъявлены цифры 2 (канал «а») и 4 (канал «б»). При этом срабатывают реле К2 и К8. Если переключатель SB4 установлен в положение «Сумма», то, как видно из схемы, напряжение поступает на лампочку HL6 и она загорается, подсвечивая цифру 6 на светоплане. Если же переключатель SB4 установлен в положение «Произведение», то напряжение подается на лампочку HL8, подсвечивающую цифру 8. Аналогично действует решающее устройство и в других случаях.
Конструктивно «Молния-1» имеет два блока: логический блок и экран (светоплан).
В логическом блоке размещены реле, фоторезисторы, силовой трансформатор, диоды и осветительные лампочки для освещения вводимых в машину цифр. В приборе применены реле типа РКП. Сопротивление обмотки реле 600 Ом. Для крепления фоторезисторов используются восьмиштырьковые ламповые панели типа ПЛК-8. Ламповые панели монтируются на алюминиевом листе толщиной 1,5 мм, который можно заменить листовой сталью толщиной 1 мм.
В «Молнии-1» применены фоторезисторы типа ФСК-Г2 (или ФСК-Г1), которые перед установкой в схему нужно предварительно испытать. Мощность индикаторных ламп НЫа и HL26 составляет 15 Вт. Расстояние от лампы до фоторезистора 140-150 мм.
Если реле не сработало, следует взять реле с меньшим током срабатывания или увеличить мощность осветительных ламп. Узел питания имеет следующие напряжения: НОВ переменного тока для питания индикаторных ламп, 110 В переменного тока для питания осветительных ламп, 55 В постоянного тока для питания реле и фоторезисторов, 10 В постоянного тока для питания реле в режиме самоблокировки. Выпрямитель собирается по двухполупериодной схеме выпрямления со средней точкой. В нем использованы диоды типа Д226. Возможна их замена на диоды типа Д229. Осветительные лампы питаются от вторичной обмотки трансформатора.
133
Для того, чтобы индицировать ответы, прибор снабжен экраном, выполненным из листового органического стекла толщиной 2,5 мм и матированным наждачной бумагой. Для изготовления экрана может использоваться опаловое оргстекло. Экран является передней стенкой плоского светонепроницаемого кожуха глубиной 70 мм. Кожух выполнен из алюминия толщиной 1,5 мм и разделен на одиннадцать светонепроницаемых ячеек. В верхнем ряду шесть ячеек, в нижнем-пять. Первые девять ячеек имеют размеры 100 х 100 мм, последние две-100 х 150 мм. В ячейки вмонтированы индикаторные лампы. На органическое стекло против каждой ячейки наклеивается черная бумага с вырезанной ци-фрой.Когда загорается лампочка, цифра на экране свето-плана ярко светится. Первая ячейка индицирует цифру 1, вторая 2 и так далее вплоть до девятой ячейки. Десятая ячейка индицирует цифру 12, одиннадцатая-цифру 16. Цифры, которые накладываются на матрицы, вырезаются из любого плотного непрозрачного материала по размерам, приведенным на рис. 45.
ПОЧТОВЫЙ ПЕРСЕПТРОН «ИНДЕКС-1»
Необходимость распознавания цифровых знаков возникает, например, при опознавании шестизначного индекса на почтовых конвертах. Для его написания применяются стилизованные цифры, каждая из которых состоит из девяти элементов. На рис. 46 отдельные элементы цифр обозначены буквами. Для обозначения цифры 1 используются элементы «в», «г», «з»; цифры 134
I
г
т
Рис. 45. Светочувствительная матрица персептрона «Индекс-1» 2-«а», «г», «ж», «и»; цифры 3-«а», «в», «д», «ж» и т.д. Таким образом, каждая цифра состоит из определенной комбинации использованных и отсутствующих элементов. Для машинного опознавания цифр информация, даваемая девятью элементами, является избыточной. В промышленных установках избыточность информации обеспечивает надежность работы автоматического устройства. В описанном ниже упрощенном устройстве каждая цифра опознается сочетанием двух-трех элементов. Например, цифра 1 опознается по сочетанию элементов «в», «г», цифра 3-по сочетанию элементов «в» и «ж».
* а
i 9
«
I
U
Рис. 4 6. Принципиальная схема персептрона «Индекс-1»
Таблица 3
Цифра Сочетание элементов
1 В Г
2 д Ж
3 в Ж
4 а г д
5 а ё ж
6 а е
7 а в е
8 в д е
9 в д ж
0 г д е
135
IM
VT1-VTB -мпзвд VT7-VT1B-KTB0S
R1S-R22-SK
Рис. 4 7. Принципиальная схема решающего устройства персептрона «Молния»
137
В некоторых случаях для опознания цифры важно не наличие, а отсутствие того или другого элемента. Например, цифра О ( [ J ) отличается от цифры 8 ( [-] ) отсутствием элемента «д». Полностью сочетания элементов, применяемых для опознавания цифр, приведены в табл. 3. Если какой-либо элемент отсутствует, над его обозначением ставится черта.
Как видно из таблицы, для опознавания цифр использовано всего шесть элементов: «а», «в», «г», «д», «е», «ж».
В данной модели персептрона для этой цели используются шесть фотосопротивлений. На принципиальной схеме (рис. 47) они обозначены соответственно ФК1, ФЯ2, ФЯЗ, ФК4, ФК5, ФК6. Данные фотосопротивления включены в базовые цепи транзисторов VT1-VT6. Фоторезисторы освещены внешним источником света. При этом токи, протекающие в цепях баз транзисторов VT1-VT6, переводят их в режим насыщения, в результате чего напряжения на коллекторах транзисторов очень малы (логический нуль). При накладывании цифры некоторые из фотосопротивлений затемняются. При этом ток, протекающий по ним, уменьшается до очень малого значения, а напряжение на коллекторах соответствующих транзисторов возрастает до значения, близкого к напряжению стабилизации стабилизатора VT19 (логическая единица).
Микросхемы DD2-DD4 используются для опознавания цифр по двум или трем сигналам, поступающим на их входы. В тех случаях, когда необходимо показать отсутствие какого-либо элемента, используется микросхема DD1, содержащая элементы НЕ, и, следовательно, на выходах микросхемы имеется напряжение высокого уровня при наличии на входе напряжения низкого уровня. Микросхемы DD1-DD3 содержат элементы И-НЕ. Напряжение низкого уровня появляется на выходе этого элемента, на всех входах которого имеются напряжения высокого уровня. Появление напряжения низкого уровня приводит к зажиганию соответствующей цифры цифрового индикатора, для чего выходы микросхем DD2 - DD4 соединяются с эмиттерами транзисторов VT7-VT16, коллекторы которых соединены с соответствующими катодами цифрового индикатора.
Питание схемы осуществляется от стабилизированного источника напряжения 5 В. Индикаторная лампа ИН 14 питается от сети напряжением 220 В через диод и резистор сопротивлением 39 кОм.
138
6
В главе читатель начинает игру, узнает, что игры бывают бесконечными и конечными, коалиционными и полными, с нулевой суммой, сам сможет построить кибернетические игры
Машина была достаточно хороша, чтобы через некоторое время стать способной систематически обыгрывать своего изобретателя, пока тот не выучил про шашки намного больше.
НОРБЕРТ ВИНЕР
Игра сопровождает человека от колыбели до старости. До нас дошли игры, которые появились еще на заре цивилизации, например игральные кости, обнаруженные археологами на Среднем Востоке. Изобретение игры-этого источника развлечений, радостей и несчастий-приписывается разным народам: лидийцам, египтянам, грекам. При раскопках в Египте часто находили игральные кости разной формы: четырехгранные тетраэдры, двенадцатигранные додекаэдры и даже двадцатигранники, но чаще всего археологам попадались кубы, главная причина распространения которых-простота изготовления и удобство счета. Цифры от 1 до 6 не слишком малы и не слишком велики, они не требуют больших умственных напряжений при арифметических подсчетах. По мере развития цивилизации игры совершенствовались, становились более сложными и интересными.
Лучшие писатели мира (А. С. Пушкин, Ф. И. Достоевский, Дж. Лондон, С. Цвейг, О. Бальзак, А. Данте и др.) посвятили играм и тем волнующим коллизиям, которые возникают в их процессе, сотни прекрасных страниц.
Но игра-это не только приятные часы и минуты, проведенные за шахматным столом, партией домино или на хоккейном матче. Игра и игровая ситуация встречаются в нашей жизни на каждом шагу. Играют не только партнеры за шахматной доской или две команды на хоккейном поле, «играет» врач, который ведет борьбу за спасение жизни больного. Он выбирает способ лечения, лекарственные препараты или, другими словами, вырабатывает стратегию и тактику в этой игре-борьбе с бо-
139
лезнью. «Играет» начальник металлургического цеха. В начале рабочего дня он выясняет, сколько слитков осталось в печах от предыдущей смены, какие краны и печи на ремонте и какие могут потребовать ремонта в ближайшее время, сколько плавок будет сделано в мартеновском цехе и передано в нагревательный цех. Иными словами, он изучает ситуацию, сложившуюся к началу игры. Затем игрок обдумывает ход и принимает решение: начать в 10.00 выдачу слитков из печи № 5 краном 3. Следующий этап игры-передвижение «фигур»: машинисту крана 3 направить свой кран к печи № 5; горновой этой печи нажимает рычаг, и электромотор открывает крышку... В это время выходит из строя электромотор крана 3. Ситуация резко меняется, и начальник цеха начинает обдумывать новый ход, разрабатывает новую стратегию и тактику и т.д.
В повседневной жизни игры также встречаются на каждом шагу. Рано утром вы выходите из дому, отправляетесь на работу-и «игра» начинается. Вам необходимо решить множество задач, первая из которых-как добраться до места учебы. Вы можете поехать в метро, на автобусе и в такси. В такси удобно, но дорого. В метро быстро, однако необходимо сделать несколько переходов, которые, возможно, «съедят» выигрыш, полученный во времени. Автобус довезет вас до школы, но в нем ехать неудобно, неизвестно, сколько времени придется его ожидать на остановке. И эту задачу читатель решает каждый день, постепенно выбирая оптимальный вариант.
Решение дипломатических конфликтов-также типичный пример игры. Везде, где возникают конфликтные ситуации, для их решения может быть применена теория игр, а встречаются они в самых различных областях деятельности человека: на палубе корабля-капитан стремится победить морскую стихию; на командном пункте командира части-правильная стратегия, выбранная командиром, поможет воинскому соединению одержать победу над противником и т.д.
И сейчас, когда вы читаете эту книгу, тоже складывается игровая ситуация между автором и читателем. Об этом написал американский математик Дж. Вильямс в своей книге «Современный стратег»: «Интересы читателя и автора противоположны, конечно, не в острой форме, но тем не менее определенно противоположны. Ведь мы (авторы) надеемся вовлечь вас (читателей) в тяжкий процесс мыслительной работы, в то время как вы, рассу-140
дительный человек, у которого достаточно много других забот, жаждете лишь отдыха и удовлетворения своего любопытства». Для того чтобы быть победителем в этой игре с читателем, автор использует различные стратегические средства: увлекательность сюжета, своеобразную манеру изложения, занимательность иллюстраций и прочее. В свою очередь, читатель также может применить различную стратегию: вовсе не читать книгу, бегло полистать ее, просмотреть иллюстрации или внимательно прочитать отдельные главы и отрывки. Но если автору этой книги удается «заставить» читателя прочесть ее от начала до конца и построить все описанные здесь кибернетические приборы, то можно считать, что он-победитель в этой игре. Однако и читатель также не остался в проигрыше. Игру с вами, дорогие читатели, можно назвать неантагонистической, т. е. такой, в которой один из игроков добивается выигрыша не за счет проигрыша своих партнеров. Но существуют также игры антагонистические, в которых каждый из игроков стремится к максимальному выигрышу за счет максимального проигрыша других. К ним относятся почти все азартные игры, многие спортивные состязания, войны, борьба классов в капиталистическом обществе. По числу ходов игры подразделяются на конечные (т.е. заканчивающиеся после конечного числа ходов) и бесконечные. Игры различаются и по количеству участников-игры одного лица (карточные пасьянсы, игра в «пятнадцать»); парные игры («Морской бой», шашки, шахматы, бокс, бильярд); множественные-с тремя и более участниками (домино, карточные игры). В некоторых случаях участники множественных игр образуют коалиции. Две постоянные коалиции при множественной игре фактически превращают игру в парную.
Многие знаменитые ученые в разные годы занимались исследованием игровых алгоритмов (Д. Кардано, Н. Тарталья, Г. Галилей, Б. Паскаль, П. Ферма, Г. Гюйгенс, Н. Бернулли, Я. Бернулли, Л. Эйлер, П. Лаплас). Они и заложили основы теории вероятности, однако стройной теории игр в течение долгого времени не существовало. В 1928 году Джон фон Нейман опубликовал свою знаменитую теорему минимакса, а впоследствии, в 1944 году, совместно с О. Моргенштерном он создает фундаментальное исследование, которое получило название «Теория игр и экономическое поведение». Так возникло новое молодое направление в науке. Основные прин
141
ципы научного анализа действий в конфликтных ситуациях впервые были сформулированы в книге Джон фон Неймана и О. Моргенштерна. Это первое систематическое и фундаментальное исследование по теории игр послужило толчком для интенсивного развития нового направления в кибернетике.
В настоящее время исследования, связанные с созданием играющих машин и разработкой программ для них, ведутся во многих научных учреждениях в нашей стране и за рубежом.
Представьте, дорогой читатель, вы попали в дремучий таежный лес и повстречались с голодным раненым волком, которому необходима пища для того, чтобы выжить. Пища-это вы, читатель. Чтобы сохранить жизнь, вам необходимо убежать от волка. Введем в игру небольшое условие: волк может передвигаться с постоянной скоростью, а жертва-менять скорость и совершать различные маневры. Основной вопрос, который решается в этой игре: какова наилучшая стратегия, необходимая волку для выполнения своего черного замысла, и каким должно быть поведение человека, чтобы спасти себе жизнь?
На первый взгляд может показаться, что страшная картина, нарисованная автором, не имеет никакого отношения к кибернетике, а если и имеет, вряд ли раненый волк во время преследования будет решать в уме дифференциальные уравнения. И тем не менее, приведенная задача типична для одного из разделов кибернетики-теории игр, возникшей немногим менее полувека тому назад.
Если читателю покажется, что автор придумал не совсем реальный пример о голодном волке-преследователе, то жизненность военного варианта этой задачи вряд ли вызовет сомнение. Давайте заменим волка танком, а путешественника-бредущим по лесу солдатом. Тогда картина боя и ее математический расчет будут аналогичными.
Мы уже говорили в предыдущих главах, что кибернетика изучает процессы на моделях. Как можно создать модель боя? Одним из самых распространенных способов обучения настоящим военным действиям является создание модели и проигрывание всех возможных ситуаций. Для этой цели в военных академиях создают учебные полигоны. В ящике с песком воспроизводят топографическую карту местности в определенном масшта
142
бе и по ней разыгрывают упрощенную модель конфликта, используя модель для приближенного анализа реально происходящих военных действий всех родов войск, принимающих участие в сражении. На таких моделях слушатели военных академий учатся военной психологии и логике. Все игры проводятся с таким расчетом, что предполагаемый противник также будет использовать наилучшую с его точки зрения стратегию.
Американский ученый Клод Шеннон в 1950 году изложил основные принципы игры в шахматы с помощью электронно-вычислительной машины. Основной принцип «машинной» игры-перебор всех вариантов первого, второго и так далее ходов.
Поэтому, решая шахматную задачу, ЭВМ «вынуждена» перебирать все возможные варианты. По расчетам теоретика шахмат А. Черноты, существует 1695 188 229 100 544 х 1012 вариантов только первых десяти ходов в шахматах. Для того чтобы сделать столько ходов, все человечество должно было бы передвигать фигуры в течение 217 миллиардов лет. Ясно, что быстродействие существующих ЭВМ не сможет обеспечить перебор всех вариантов за промежуток времени, соизмеримый не то что с продолжительностью жизни, но и со временем существования человечества.
Значит, нужны другие принципы, другие методы.
Шахматист, играя, воспринимает доску как единое целое и интуитивно отвергает множество бесперспективных вариантов. ЭВМ сделать этого не может. Поэтому шахматам как игре еще очень долго не грозит гибель.
Игра в шахматы всегда будет увлекательной для людей, а электронно-вычислительная машина найдет себя в таких сложных «играх», где выигрышем будут сталь, зерно, машины, здоровье и безопасность народа.
Если наших читателей заинтересовала теория игр и им захочется попробовать построить несколько интересных моделей играющих машин, то ниже предлагается ряд относительно несложных конструкций для радиолюбителей разной квалификации. Простые машины может построить даже начинающий, а машины посложнее-радиолюбитель, имеющий опыт конструкторской работы.
Не все парные игры с полной информацией столь же сложны, как шашки или шахматы. В некоторых таких играх число возможных стратегий сравнительно невелико, их нетрудно до конца проанализировать и составить программу (алгоритм) оптимального поведения для
143
одного из игроков. После этого оказывается уже нетрудным «заставить» машину играть. При этом вовсе не обязательно иметь в своем распоряжении большую электронную быстродействующую цифровую машину. Для такой игры, как «Крестики и нолики» и тому подобных, можно в любительских условиях построить небольшие и сравнительно несложные автоматы, собирая их из нескольких микросхем, электромагнитных реле, лампочек, полупроводниковых диодов и других доступных деталей.
При постройке такой машины-автомата в ее «память» вводятся все возможные варианты игры-составляется «словарь» игры, т.е. набор рекомендаций вида: «Если противник пойдет... то надо отвечать ходом...» Это-своеобразный «рецепт» на все случаи игры.
Когда машине во время игры нужно сделать ход, она просматривает свой «словарь» и выбирает наилучший вариант для продолжения игры. Такая машина всегда будет играть оптимально. Самое большее, на что может надеяться ее противник,-это ничья, если только она вообще возможна.
НА ДЕВЯТИ КЛЕТКАХ
Играющие автоматы, подобные тем, о которых рассказывалось выше, по степени сложности доступны для изготовления радиолюбителями. Над их конструированием и монтажом с увлечением работают многие энтузиасты в технических кружках школ и внешкольных учреждений. Они вносят в конструкции и схемы своих моделей все новые добавления, изменения, усовершенствования.
Для начинающих радиолюбителей предлагается простая электрифицированная игра «Крестики и нолики».
Кто из нас в детстве не увлекался этой игрой? Кто не помнит жарких сражений, разгоравшихся на переменах между уроками и в часы досуга на листике бумаги с девятью квадратными клетками: двое играющих ставят по очереди в одной из клеток свой знак-крестик или нолик. Побеждает тот, кто раньше заполнит своими значками строчку, столбик или диагональ игрового поля.
Игру «Крестики и нолики» нетрудно электрифицировать, как это сделали ребята из Дома пионеров им. Володи Дубинина г. Свердловска. Для этого нужно укрепить на панели из оргстекла 9 переключателей и 18 лампочек (окрасив половину из них в красный цвет, а остальные - в зеленый), затем соединить их проводниками, как показа-144
ма электрифицированной игры в «Крестики и нолики»
но на рис. 48. Лампочки лучше взять малогабаритные -от карманного фонаря на 3,5 В, 0,28 А.
Внешний вид такого электрифицированного устройства для игры в «Крестики и нолики» показан на рис. 49. Крестикам и ноликам при игре соответствуют красные и зеленые лампочки. Во время игры каждый из партнеров, занимая какую-либо клетку поля, должен перевести
соответствующий этой клетке переключатель в левое или в правое положение, включая лампочку своего цвета.
Разумеется, такое электрифицированное устройство нельзя называть играющей машиной: оно является удобным и простым инструментом для игры, которая происходит между двумя участниками так же обычно, как и на бумаге.
Для радиолюбителей средней квалификации мы предлагаем модель автоматической машины для игры в «Крестики и нолики».
Рис. 49. Внешний вид корпуса электрифицированной игры «Крестики и но шки»
145
Несмотря на кажущуюся простоту этой игры, число возможных вариантов партий здесь очень велико. В самом деле, тот, кто начинает игру, может сделать ход в любую из девяти клеток, а его партнер в ответ занимает одну из оставшихся восьми клеток. Следовательно, только для первого хода двух партнеров в этой игре имеется 9x8 = 72 варианта; вторым своим ходом первый игрок выбирает одну из семи клеток, второй игрок-одну из оставшихся шести и т.д.
Если считать, что игра заканчивается, когда заняты все клетки, то общее число возможных вариантов игры составит: 9х8х7х6х5х4хЗх2х1= 362 880 (в действительности во многих случаях игра заканчивается победой одного из партнеров до того, как все клетки будут заполнены крестиками и ноликами, поэтому количество вариантов игры несколько меньше приведенного числа, но все же оно остается очень большим).
Все варианты игры можно разбить на несколько серий. Подсчитано, что в каждой серии есть 512 вариантов по четыре хода, придерживаясь которых машина не проиграет. А если ее партнер невнимателен, то 360 вариантов приведут машину к победе. Неудивительно, что для создания играющего в «Крестики и нолики» автомата обычно используется быстродействующая цифровая вычислительная машина. Например, при программировании игры в «Крестики и нолики» на быстродействующей электронно-вычислительной машине «Стрела» таблица стратегий едва-едва размещается в ее оперативной памяти.
Можно сократить объем памяти автомата настолько, чтобы модель машины для игры в «Крестики и нолики» стала доступной для изготовления в любительских условиях.
В автомате право первого хода предоставлено человеку. Наиболее рациональным тактическим ходом в игре «Крестики и нолики» считается ход с занятием центральной (нулевой) клетки.
Выясним, какой стратегии должна придерживаться машина, чтобы выиграть партию у человека или свести ее вничью. Последовательность ходов, совершаемых партнерами (в нашем случае это человек и машина), удобно изображать графически в виде дерева игры. Для этого рассмотрим рис. 50, где изображено дерево игры с оптимальными ходами машины и ходами человека, которые могут быть как верными, так и ошибочными. Если
146
147
н н н 8 В Н Н Н Н Н Н Н МННННННВ8НВВ
человек будет делать оптимальные ходы-машина сведет игру вничью; если человек ошибается-машина выигрывает.
Дерево (или иначе граф) игры состоит из узлов (вершин) и ветвей (дуг). Узлы на дереве игры показаны кружками и обозначены буквой «Ч» (Человек) или буквой «М» (Машина), в зависимости от того, чей ход изображен на дереве игры.
Ветви дерева игры показаны стрелками, возле которых проставлены цифры, обозначающие выбранную клетку игрового поля (рис. 50). Результат игры изображен вершиной в виде заштрихованного кружка. Буквы «Н» или «В» соответственно обозначают: «Ничья» или «Выигрыш машины».
АВТОМАТ ДЛЯ ИГРЫ В «КРЕСТИКИ и нолики»
Корпус автомата представляет собой наклонный пульт, на передней панели которого имеется игровое поле с девятью клетками (рис. 51). Игровое поле выполнено из опалового (молочного) органического стекла. Каждая клетка игрового поля снабжена кнопкой, с помощью которой человек выполняет свой очередной ход. Свой ответный ход машина выполняет автоматически сразу же после хода человека. На передней панели авто-
Рис. 51. Внешний вид автомата для игры в «Крестики и нолики»
148
мата размещены кнопка «Пуск» и тумблер включения сети «Включено». На наклонной панели имеются два световых табло с надписями: «Ничья» и «Вы проиграли». Каждый квадрат игрового поля высвечивается белым или красным цветом. Ход человека автомат фиксирует на клетке игрового поля белым светящимся квадратом, а ход машины-красным.
Игра начинается с того, что человек нажимает кнопку SV1 (рис. 52) «Пуск», при этом замыкается цепь питания реле К1, оно срабатывает и самоблокируется. Тем самым напряжение подается на шину питания блок-контактов реле К1.1-К8.1 (индекс каждого реле соответствует номеру клетки игрового поля). Одновременно на шине «Ход 2» появляется напряжение, которое подается через нормально замкнутые контакты К106.5 и КПб.З. Реле К1 включает лампу HL96 (рис. 53) белого цвета (человек сделал первый ход), и одновременно включается лампа HL1K (машина сделала ответный ход, заняв первую клетку игрового поля).
При нажатии любой из кнопок хода человека SB2-SB8 срабатывает реле К16, переключающиеся контакты которого задают тактовые импульсы, поступающие на вход релейного коммутатора (рис. 52).
В схеме автомата «Крестики и нолики» имеется релейный коммутатор, предназначенный для поочередного включения питающих шин «Ход 3», «Ход 4». Он работает следующим образом. При срабатывании реле К9 контакт К9.1 замыкается на шину «а», при этом реле К10а срабатывает и самоблокируется. В цепи питания реле К106 замыкается контакт реле KlOal, тем самым подготавливается цепь для срабатывания реле К106.
При опускании нажатой кнопки реле К9 обесточивается, его контакт К9.1 возвращается в исходное состояние и подключает питания к шине «б». В этот момент реле К106 самоблокируется и нормально замкнутым контактом обрывает цепь питания реле К106. Коммутатор выполнил один такт, при этом реле К106 своим нормально разомкнутым контактом включит напряжение на шину «Ход 3». При повторном срабатывании реле К9 аналогичным образом поочередно срабатывают реле КПа, КПб, на шине «Ход 4» появляется напряжение.
Рассмотрим работу машины на конкретном примере. Допустим, что после нажатия кнопки «Пуск» человек нажал кнопку на третьей клетке игрового поля, сделав свой
149
очередной ход. При нажатии кнопки SB3 срабатывает реле КЗ и самоблокируется, при этом клетка 3 игрового поля начинает светиться белым цветом. Реле КЗ своим нормально разомкнутым контактом подает напряжение на обмотку реле К17 (рис. 54), которое срабатывает и самоблокируется, включая лампу НЬ7к (рис. 53). Седьмая клетка игрового поля начинает светиться красным цветом, а релейный коммутатор выполняет первый такт. В этот момент на шине «Ход 3» появляется напряжение. Затем следует очередной ход человека на любую свободную клетку. Например, человек выбрал четвертую клетку игрового поля. При нажатии кнопки SB4 срабатывает реле К4 и становится на самоблокировку. Замкнувшиеся контакты реле К17 и К4 образуют цепь питания для реле К18, при этом загораются лампы HL126., НЬ8к (рис. 53).
В этот же момент зажжется табло: «Вы проиграли». Цепь питания лампы этого табло включается через реле К19 схемы блока управления световыми табло (рис. 55). В первом случае, если были выполнены ходы: человек-О, машина-1, человек-3, машина-7, человек-4, машина-8, то в блоке управления будут замкнуты контакты реле К17, К18. Если проанализировать сыгранную партию, то можно обнаружить, что человек допустил ошибку, заняв клетку 4. Если бы он занял клетку 8 и не допустил бы ошибок в последующих ходах, то мог бы свести игру к ничейному результату.
Автомат смонтирован в алюминиевом корпусе размером 500 х 400 х 220 мм.
150
Рис. 5 2. Принципиальная схема блока реле реализации ходов человека
В автомате могут быть применены реле типа РКН. Количество требуемых контактных групп, необходимых для монтажа схемы, приведено в табл. 4. Так как промышленность не выпускает реле с большим набором контактных групп, то для увеличения их количества необходимо включить параллельно несколько однотипных реле.
Рис. 5 3. Игровое поле (а) и схема индикации игрового поля (б)
151
Питание автомата осуществляется от типового двух-полупериодного выпрямителя напряжением 24 В, ток нагрузки 1 А.
Для подсветки игрового поля применяются лампы напряжением 26 В, одна из ламп в каждой клетке игро-
К16.3 КПА
j-KIIM К19.1
„Ничья**
вого поля окрашивается в красный цвет.
Перегородки, делящие игровое поле на клетки, изготовляются из белой жести или алюминия.
При правильном монтаже автомат не требует наладки и начинает работать сразу же после включения.
К 19.2 HL18
„Вы проиграли**
Рис. 55. Принципиальная схема блока управления световым табло игры «Крестики и нолики»
152
Рис. 54. Принципиальная схема блока реле реализации «ответных ходов» автомата
Таблица 4
Контакты
К8 К9 К10 KU К12 К13 К14 К15 К16
Нормально разомкнутые контакты 2 15 16 14 21 12 20 14 —
Нормально замкнутые контакты — — — — — — — — 2
Переключающиеся контакты — — — — — — — — 1
Продолжение табл. 4.
Контакты
К2 КЗ К4 К5 Кб К7 К8 К21 К17 К19 К18 К20
Нормально ра-
зомкнутые контакты 3 10 7388712323
Нормально замкнутые контакты 1111111
Переключающиеся контакты
153
КИБЕРНЕТИЧЕСКАЯ ИГРА «ВОЛК И ОХОТНИКИ»
Многие знают игру, в которую играют на шашечной доске, и называют ее «Волк и овцы» или «Волк и охотники». Нам кажется, что последнее название более правильно отображает ее сущность. Ниже приводится конструкция этой игры, где одним из партнеров является кибернетическая машина (рис. 56).
На шахматной доске в клетках Ь8, d8, 18, h8 расположены четыре пешки (охотники). На другой половине доски в любой из клеток al, cl, el, ql располагается одна пешка (волк). Охотники могут передвигаться только вперед на одну клетку, так же как и при игре в шашки. Волк передвигается до тех пор, пока он не встретится с охотником на смежной клетке. В случае встречи Волк имеет право отойти назад. Задача охотников заключается в том, чтобы «прижать» волка к линии ряда 1. Задача волка-«прорваться» через цепь охотников, достигнув восьмой линии на шахматной доске.
В кибернетической игре ходы охотников выполняются электронным устройством, ходы волка выполняет человек.
Рис. 5 6. Внешний вид автомата для игры «Волк и охотники»
154
Местонахождение каждого охотника обозначается на шахматной доске светящейся клеткой. Ход волка выполняется металлической фишкой, которая вставляется в контактное гнездо, имеющееся на клетках шахматного поля (рис. 57).
Ход охотника (автомата) осуществляется нажатием кнопки SB1 с надписью «Ход охотника» (рис. 57).
Волк должен «прорвать» ряд охотников, но не имеет права перепрыгивать через клетки, занятые охотниками. Задача охотников противоположна.
В этой игре право первого хода может быть предоставлено как человеку, так и машине.
При включении автомата загораются четыре лампы, подсвечивающие клетки Ь8, d8, 18, h8. Это является сигналом готовности машины к игре. Допустим, что право первого хода предоставлено человеку. Он вставляет фишку в любое гнездо ряда 2. После этого нажимает кнопку SB1. Шаговый искатель делает один ход, и щетки его переключаются с контакта 1 на контакт 2, при этом плюс источника питания подается на контакты лампочек, подсвечивающих клетки а7, d8, 18, h8. Клетка Ь8 гаснет, а клетка а7 высвечивается, но остальные три клетки ряду 8 продолжают светиться. Затем переставляется фишка-штеккер, выполняется ход волка и вновь нажимается кнопка SB1 (выполняется ход охотника).
Шаговый искатель переходит на следующую позицию. Итак, поочередные ходы продолжаются до тех пор, пока перед волком не появятся два охотника. Если перед волком окажется только один охотник, то последовательно с реле Ко будет включен только один резистор. Ток для срабатывания реле Ко будет недостаточен. При появлении в соседней клетке второго охотника в эту цепь включится второй резистор параллельно первому. Ток, протекающий через оба резистора, возрастает и станет достаточным для срабатывания реле Ко. Например, волк находится на клетке d4, а охотники-на клетках с5, е5. В этом случае фишка волка замкнула контактное гнездо d4. Через контакты шагового искателя с5, е5 (позиции шагового искателя 12-поля 2 и 3) плюс источника питания подается через контактное гнездо d4, замкнутое фишкой, и включает реле Ко. Зажигается табло «Опасность». При этом волк может продолжить игру, сделав ход назад. В этом случае табло «Опасность» гаснет, так как фишка убирается и размыкает цепь реле Ко. Игра будет продолжаться до тех пор, пока волк не окажется
155
в одной из клеток ряда 1. В этом случае фишка-штеккер волка замыкает цепь реле Кп и, если с двух сторон волка окажутся охотники, включится реле Кп и на табло высветится надпись: «Вы проиграли». Лампа этого табло включается нормально разомкнутым контактом реле Кп.
В кибернетической игре применены следующие детали: шаговый искатель ШИ-25/8 (паспорт РСЗ.250.040 Сп), напряжение срабатывания 24 В; телефонные гнезда 24 шт. (если их в продаже не окажется, их можно изготовить самим из латуни); осветительные лампочки напряжением 26 В типа МН26-012-1 28 шт.: реле Кп, Ко типа
156
abcdefgh
Рис. 5 7. Игровое поле автомата игры «Волк и охотники» (а) и принципиальная схема автомата игры «Волк и охотники» (б)
h2
>—
РЭС-22 (паспорт РФ. 4500163); кнопка КМ1-2 или любая другая с двумя контактами на замыкание.
Сопротивление резисторов, образующих матрицу игрового поля, можно определить по следующей формуле:
_ 2(U — IRp)
Rx- -j ,
где сопротивление резистора матрицы, Ом; U-напряжение источника тока, В; /-ток срабатывания реле, A; Rp-сопротивление обмотки реле, Ом.
157
Рис. 58. Дерево игры «Веришь не веришь»
Правильно собранное кибернетическое устройство начинает работать сразу и не требует наладки. Внешний вид автомата дан на рис. 58.
Корпус автомата изготовлен из оргстекла: основание-из черного, а верхняя часть-из опалового. Сгибание оргстекла удобно производить на трубках ТЭн. которые используются в электрокипятильниках или на металлической трубе, в которую вставлена нагревательная спираль из нихрома.
Склеивание оргстекла следует производить дихлорэтаном, соблюдая технику безопасности.
Табло: «Вы проиграли» подсвечивается лампочкой красного цвета, табло: «Опасность»-зеленого. Лампочки крепятся в коробках, сделанных из белой жести, в которую вмонтированы патроны для крепления ламп.
КИБЕРНЕТИЧЕСКИЕ ИГРЫ «АРБИТР-1» И «АРБИТР-2»
Прототипом этих кибернетических игр является знакомая многим карточная игра «Веришь-не веришь м.
В основу этой игры положен простой алгоритм, следуя которому один из игроков для того, чтобы выиграть, должен передать партнеру все имеющиеся на его руках карты. Любому партнеру засчитывается выигрыш в одно очко в том случае, если ему удается передать одну карту своему противнику.
Карты раздаются поровну между двумя игроками. В первом случае первый игрок кладет на стол карту, не показывая ее партнеру, называя при этом правильно или неправильно ее достоинство. После чего он спрашивает: «Веришь-не веришь?» В случае, если партнер ответил: «Верю» и карта соответствовала названной, она остается у того, кто делал ход. Этим самым завершается один шаг игры.
158
Рассмотрим второй возможный случай. Допустим, что партнер ответил: «Не верю» и на самом деле карта не соответствовала названной, тогда он получает очко в виде карты, оставшейся у своего противника.
Третий случай. Партнер сказал: «Верю», но карта не совпала с названной. Очко засчитывается тому, кто делал ход. Это же происходит в четвертом случае, если партнер сказал: «Не верю», а карта соответствует названной.
Мы рассмотрели четыре варианта развития каждого шага этой игры. Исход каждого шага будет зависеть от сочетания трех следующих факторов: какой картой сделал ход партнер (в нашем случае 0 или 1); правильно ли он назвал свою карту; что ответил противник, верит он или не верит.
Читателю нетрудно догадаться, что число исходов равно 23, т.е. 8. Если представить каждый шаг игры графически, то мы получим дерево игры, на котором кружки обозначают номера партнера, а стрелки-действия игроков. Проследим ход, положив на стол карту условным достоинством «единица», назвав ее «нулем». Противник ответил: «Верю». В этом случае партнер Ш выигрывает очко. На дереве игры, описанной выше, вариант выглядит так. Партнер П1 предъявил карту-это обозначено стрелкой с цифрой 1. Следующая стадия шага игры: партнер П1 назвал карту «нулем»-это обозначено стрелкой, идущей от Ш к П2. Затем ответный ход противника П2. Он ответил снова «Верю»-это обозначено стрелкой «Верю», идущей от П2 к П1. На этом завершается шаг, который обозначен на дереве игры кружком Ш с буквой В (выигрыш) (рис. 58).
Независимо от исхода предыдущего шага игры право каждого последующего хода предоставляется игрокам поочередно. Игра продолжается до тех пор, пока один из партнеров не передаст другому все имеющиеся у него карты. Выигравшим считается тот партнер, на руках у которого не остается карт. В отличие от карточной игры, игра с помощью машины сводится к угадыванию двух состояний: «О» и «1».
Предлагаемое кибернетическое устройство позволяет автоматизировать судейство данной игры. Для введения информации в устройство имеются переключатели с двумя состояниями: «Включено» и «Выключено», а очки суммируются с помощью шаговых искателей.
Устройство представляет собой два наклонных пуль-
159
Кнопка Сброс
Рис. 59. Внешний вид кибернетического автомата «Веришь -не веришь» (вариант на шаговом искателе)
та, расположенных под углом друг к другу таким образом, чтобы партнеры не видели, в каком положении находятся переключатели на пульте своего противника. На каждом пульте расположены по одному переключателю «Ход игрока» с двумя положениями: «О» и «1», и две кнопки с надписью: «Верю» и «Не верю». Над пультом
160
крепятся два световых табло с надписями: «Вы выиграли», «Вы проиграли» (рис. 59).
Устройство работает следующим образом. Допустим, что партнер А установил переключатель в положение «О» (рис. 60) и называет цифру 0. Партнер Б включил свой переключатель в нулевое положение и в том случае, если он верит партнеру, делающему ход, нажимает кнопку «Верю». Напряжение источника питания через замкнувшиеся контакты кнопки SB1, через контакты К1.1 поступают на обмотку шагового искателя SF2, который делает один шаг, засчитывая очко партнеру Б.
Таким образом, во время каждого хода игры партнеры обмениваются ходами. После хода партнера А делает ход партнер Б. Допустим, что партнер Б поставил тумблер в положение «1» и объявил 0, партнер А ставит тумблер в нулевое положение; в этом случае цепь питания реле К1 разомкнута. Если партнер А верит и нажал кнопку SB3 («Верю»), образуется цепь: плюс источника питания, замкнутые контакты К 1.2, обмотка шагового искателя SF2 и минус источника питания. Очко засчитывается партнеру Б.
Таким образом, игра продолжается до тех пор, пока над пультом одного из партнеров не зажжется надпись на табло: «Вы проиграли», автоматически на другом табло зажигается надпись: «Вы выиграли».
Для того чтобы подготовить кибернетическое устройство к следующей партии, необходимо поставить щетки
161
6 Библиотечная серия
шагового искателя в исходное положение. Для этого имеется кнопка сброса SB5. Сброс происходит следующим образом: при нажатии кнопки SB5 плюс от выпрямителя через нормально замкнутые контакты SF1 и SF2, ламели обоих шаговых искателей SF2, подвижные контакты (щетки) подается на обмотки шаговых искателей, в результате чего шаговые искатели срабатывают, возвращаясь в исходное состояние.
В устройстве можно использовать любые кнопки с одним нормально разомкнутым контактом, реле К1, которое имеет два контакта на переключение и должно срабатывать от напряжения 25 В (например, реле РЭС-6, паспорт РФО. 452.143). Кнопка сброса SB5 имеет один контакт на замыкание. В световом табло применяются лампы МН-26. Используются шаговые искатели типа ШИ 25/4 (паспорт РСЗ. 250.040 Сп).
Для питания схемы необходимо два выпрямленных напряжения: 25 В для реле и 60 В для обмоток питания шаговых искателей.
Для тех любителей кибернетики, которые уже овладели основами схемотехники на микросхемах, приводим описание кибернетического устройства «Арбитр-2» (рис. 61).
Предлагаемое кибернетическое устройство «Арбитр-2» также позволяет автоматизировать судейство данной игры. Устройство (рис. 61) представляет собой два идентичных плоских пульта, разделенных панелью
Рис. 61. Внешний вид автомата игры «Веришь-не веришь»
162
сигнализации таким образом, чтобы партнерам А и Б не были видны кнопки вопросов противника «О» и «1». Для угадывания вопроса у каждого партнера имеется две кнопки ответа «О» и «1». Сбоку устройства находится кнопка «Сброс» для установки схемы на «О» перед началом игры. На панели сигнализации для каждого партнера имеется три световых табло с надписями: «Вы выиграли», «Жду ответа», «Вы проиграли».
Устройство работает следующим образом (рис. 62). Допустим, что партнер А нажал кнопку «О» (SB7), назвав при этом цифру 0, у партнера Б загорается табло с надписью : «Жду ответа» (лампа HL2). Если партнер Б верит партнеру А, то кратковременно нажимает кнопку «О» (SB6)-ответ. В этом случае положительный потенциал на период нажатия кнопки переводит триггер (элементы DD6.1, DD6.2) в нулевое состояние, а сформированный триггером сигнал поступает на счетчик, где партнеру Б засчитывается одно очко.
Таким образом, во время каждого хода игры возможна одна из восьми описанных выше ситуаций. Во время игры партнеры обмениваются ходами. Допустим, что партнер Б нажал кнопку «1» (SB3, вопрос) и объявил цифру 0, а партнер А, веря своему противнику, нажимает кнопку «О» (SB2, ответ). В этом случае нулевой потенциал через кнопку партнера Б «1» (SB3, вопрос) и контакты кнопки SB4 переводит триггер (элементы DD2.1, DD2.2) в единичное состояние.
Партнер А, нажимая кнопку «О» (SB2, ответ), переводит триггер на элементах DD1.1 и DD1.2 в нулевое состояние, увеличивая на единицу состояние счетчика DD3 (что равносильно проигрышу партнера А). Партнеру Б засчитывается второе очко. Игра продолжается до тех пор, пока один из партнеров не наберет 10 очков, тогда у него на табло загорится надпись: «Вы выиграли» (лампы HL3 или HL4). После нажатия кнопки «Сброс» двоично-десятичные четырехразрядные счетчики DD3 и DD4 устанавливаются в нулевое состояние (элементы DD5.1, DD5.2), и устройство готово к судейству следующей партии.
В приборе использованы микросхемы серии К155ЛАЗ (5 шт.), микросхемы К155ИЕ2 (2 шт.), диоды КД105 (4 шт.). Последние можно заменить диодами Д226 или любыми другими, рассчитанными на ток 0,3 А. В устройстве применяются также транзисторы VT5, VT6 типа ГТ404Б, которые могут быть заменены на транзисторы
163
КТ608 или КТ603, КТ815 с буквой А или Б. Кнопки необходимы типа КМ1-1 с одним нормально разомкнутым контактом (SB7, SB9, SB1, SB3) и типа КМ1-2 с двумя группами переключающих контактов (кнопки SB2, SB4, SB6, SB8). Питание схемы осуществляется от стабилизированного выпрямителя напряжением 5 В.
ИНФОРМАЦИОННО-ЛОГИЧЕСКОЕ
УСТРОЙСТВО «СОКРАТ»
Кы подходите к прибору, нажимаете кнопку. Верхняя его крышка, сделанная из опалового оргстекла, начинает светиться голубоватым светом, и на ней высвечивается рисунок мозга человека. Одновременно появляется надпись: «Сократ». Так назвали юные кибернетики свое информационно-логическое устройство. На наклонном пульте вспыхивает одно из 12 табло, на котором высвечивается надпись: «Задумайте число». Вы снова нажимаете кнопку, вспыхивает еще одно световое табло, и загораются цифры на двух цифровых индикаторах (рис. 63).
164
Рис. 63. Внешний вид информационно-логического устройства «Сократ»
165
a SF1.1 1 3 5 7 9 11 13 15 1719 21 23 25
< | |Z * 6 8 10 12 1*18162022 2428
Машина дает партнеру (человеку) задание произвести определенные математические действия с числами, ко-
166
SF3.1
__________________SF2.1
1111111111111111111111
| 1111111111111111111111
___________________SF2.2 1111 I 1111 11 11111111 I 11
SF3.2
j [ 1111111111111111111111
_______________________SF2.3 1111 I 11 I 111 111 I i 11 11 11
___________________SF2A
1111 I 11 I 111 111 I i 11 11 11
_____________________SF3.3
Illi III I III III 111111II
SF2.5
I I 11 I I I I I I I I I I I I I I I I I I
SFZ.B
11111111111111111111 И
SFZ.7
1111111111111111111111
SF2.9
_____________________SF2.B
1111 I 11 I 111 111 1111 11 11
♦no в
CS 100MKX100B -оДщ,______
C5 IOOmkxIOOB ♦55B
СБ [+ 500мк>50 В ~Г"
,♦200 В
SF3.4
III 1111 111 I 111 111 111111 11
SF3.6
SF3.5
3
VD1-VD9
b<12*8
i/Ds-i/oe
R156K . 1/09
'-Z20B XlKZ.1
<~Z20B ’KIkI.zI a <!£££!____________
w-
II SB7 ||fui3A Л
J ~22OB 4-
Puc. 64. Принципиальная схема кибернетического автомата «Сократ»
167
торые он задумал, а затем индицирует результат этих вычислений на цифровых индикаторах (решает задачи совместно с человеком).
В основу работы этого автомата положен алгоритм, описанный в книгах: М. Гарднер. Материатические чудеса и тайны (М.: Наука, 1978); А.П. Доморяд. Математические игры и развлечения (М.: Физматгиз, 1961); В. П. Трудное. Считай, смекай, отгадывай (М.: Учпедгиз, 1960) и во многих других книгах по занимательной математике.
Для того чтобы понять, на каком принципе работает кибернетическая машина «Сократ», рассмотрим два простых алгоритма, предложенных А. П. Доморядом в его книге «Математические игры и развлечения».
Первый алгоритм. Предложите кому-нибудь задумать число, прибавить к нему 3, умножить полученную сумму на 6, вычесть из этого произведения задуманное число, затем вычесть еще 8 и, наконец, разделить все это на 5. Если вам скажут результат N, то, вычтя из него 2, вы можете сразу назвать задуманное число.
Как следует из равенства [(х + 3) • 6 — х — 8] : 5 = N — 2, для этого достаточно из полученного результата вычесть число 2.
Второй алгоритм. Предложите кому-нибудь задумать два числа х и у в пределах ста. Это может быть возраст человека, сдача с рубля, полученная в магазине, размер обуви и т.д. Проделайте над данными числами ряд операций, которые определяются левой частью равенства
(2х + 5)-50 +у — 365 = 100х + у — 115 = N.
Тогда, зная N, вы можете определить х и у (прибавив к 115 и разбив полученный результат на два числа, отделив две последние цифры).
Если читатель достаточно хорошо уяснит эти два простых примера, он самостоятельно сможет придумать сколько угодно таких фокусов.
В кибернетической отгадывающей машине «Сократ» собраны программы нескольких таких простых алгоритмов, по которым работает машина. Если на принципиальной схеме (рис. 64) увеличить число шаговых искателей (ламелей), то количество отгадываемых чисел может быть еще большим.
Прибор содержит три шаговых искателя, 12 световых табло, два цифровых индикатора, три реле и блок питания, состоящего из силового трансформатора Т1, двух 168
Рис. 65. Табло кибернетического автомата «Сократ»
диодных мостов (VD1-VD4) и (VD5-VD8) и однополу-периодного выпрямителя на диоде VD9 (рис. 64).
Табло (рис. 65) имеют следующие надписи:
Н1-Задумай число;
Н2-Задумай однозначное число;
• НЗ-Найди сумму цифр полученного числа;
Н4-Напиши трехзначное число;
Н5-Напиши к нему справа то же самое число;
Н6-Полученное шестизначное число раздели на ...
Н7-Умножь на ...
Н8-Раздели на ...
Н9-Прибавь ...
НЮ-Вычти ...
НИ-Задуманное число;
Н12-У тебя получилось.
Вот перечень задач, которые решает машина:
Задача 1:
1) Задумай число. 2) Умножь на 2. 3) Прибавь 48.
4) Раздели на 2. 5) Вычти 6. 6) Вычти задуманное число.
7) У тебя получилось 18.
169
Задача 2:
1) Задумай однозначное число. 2) Умножь на 3. 3) Прибавь 3. 4) Умножь на 3. 5) Найди сумму цифр полученного числа. 6) У тебя получилось 9.
Задача 3:
1) Напиши трехзначное число. 2) Припиши к нему справа то же самое. 3) Полученное шестизначное число раздели на И. 4) Раздели на задуманное число. 5) У тебя получилось 91.
Задача 4:
1) Задумай число. 2) Умножь на 6. 3) Прибавь 50. 4) Раздели на 2. 5) Вычти 4. 6) Раздели на 3. 7) Вычти задуманное число. 8) У тебя получилось 7.
Задача 5:
1) Задумай число. 2) Умножь на 2. 3) Прибавь 12. 4) Раздели на 2. 5) Вычти 5. 6) Вычти задуманное число. 7) У тебя получилось 1.
Задача 6:
1) Задумай однозначное число. 2) Умножь на 3. 3) Прибавь 3. 4) Умножь на 3. 5) Найди сумму цифр полученного числа. 6) У тебя получилось 9.
Задача 7:
1) Напиши трехзначное число. 2) Припиши к нему справа то же самое. 3) Полученное шестизначное число раздели на 11.4) Раздели на задуманное число. 5) У тебя получилось 91.
Задача 8:
1) Задумай число. 2) Умножь на 6. 3) Прибавь 22. 4) Раздели на 2. 5) Вычти 2. 6) Раздели на 3. 7) Вычти задуманное число. 8) У тебя получилось 3.
Задача 9:
1) Задумай число. 2) Умножь на 2. 3) Прибавь 14. 4) Раздели на 2. 5) Вычти 4. 6) Вычти задуманное число. 7) У тебя получилось 3.
Задача 10:
1) Задумай число. 2) Умножь на 3. 3) Прибавь 3. 4) Умножь на 3. 5) Найди сумму цифр полученного числа. 6) У тебя получилось 9.
Задача И:
1) Напиши трехзначное число. 2) Припиши к нему справа то же самое. 3) Полученное шестизначное число раздели на 13. 4) Раздели на задуманное число. 5) У тебя получилось 77.
170
Задача 12:
1) Задумай число. 2) Умножь на 6. 3) Прибавь 24. 4) Раздели на 2. 5) Вычти 6. 6) Раздели на 3. 7) Вычти задуманное число. 8) У тебя получилось 2.
Задача 13:
1) Задумай число. 2) Умножь на 2. 3) Прибавь 36. 4) Раздели на 2. 5) Вычти 8. 6) Вычти задуманное число. 7) У тебя получилось 10.
Задача 14:
1) Задумай однозначное число. 2) Умножь на 3. 3) Прибавь 3. 4) Умножь на 3. 5) Найди сумму цифр полученного числа. 6) У тебя получилось 9.
Задача 15:
1) Напиши трехзначное число. 2) Припиши к нему справа то же самое. 3) Полученное шестизначное число раздели на 13. 4) Раздели на задуманное число. 5) У тебя получилось 77.
Задача 16:
1) Задумай число. 2) Умножь на 6. 3) Прибавь 46. 4) Раздели на 2. 5) Вычти 5. 6) Раздели на 3. 7) Вычти задуманное число. 8) У тебя получилось 6.
Переключение табло (рис. 66) осуществляется контактами шагового искателя SF1.1 и SF1.2; 26-й контакт SF1.5. используется для включения реле КЗ, управляющего работой шагового искателя SF1, производится кнопкой SB1 и реле К1 и К2. Нажатие кнопки приводит к переключению SF1 на один шаг. Полный оборот шагового искателя соответствует 26-ти его шагам. При возвращении щетки шагового искателя на одно положение (первый контакт) переключение осуществляется с помощью реле КЗ, переключаются на один шаг шаговые искатели SF2 и SF2.9 и SF3.5 используются для установки искателей SF2 и SF3 в исходное состояние на пятом цикле искателя SF1. Все остальные контакты шаговых искателей используются для включения цифровых идика-торов HL13 и HL14.
Последовательность включения табло и цифровых индикаторов приводится в табл. 5.
В данном случае полный цикл работ машины осуществляется за 104 такта (шага).
Разнообразие задач можно увеличить за счет использования большого количества контактов шаговых искателей SF2 и SF3. При полном использовании шаговых искателей число тактов (шагов) можно увеличить до 676.
171
Таблица 5
Номер кон- Надпись на табло SF2 и SF3
такта SF1
1 2 3 4
1 Задумай число — — — —
2 Умножь на ... 2 2 2 2
3 Прибавь ... 48 12 14 36
4 Раздели на ... 2 2 2 2
5 Вычти ... 6 5 4 8
6 Вычти задуманное число ... — — — —
7 У тебя получилось 18 1 3 10
8 Задумай однозначное число — — — —
9 Умножь на ... 3 3 3 3
10 Прибавь ... 3 3 3 3
11 Умножь на ... 3 3 3 3
12 Найди сумму цифр полученного
числа ... — — — —
13 У тебя получилось 9 9 9 9
14 Напиши трехзначное число — — — —
15 Припиши к нему справа то же
самое число ... — — — —
16 Полученное шестизначное число
раздели на ... 11 11 13 13
17 Раздели на задуманное число — — — —
18 У тебя получилось 91 91 77 77
19 Задумай число
20 Умножь на ... 6 6 6 6
21 Прибавь ... 50 22 24 46
22 Раздели на ... 2 2 2 2
23 Вычти ... 4 2 6 5
24 Раздели на ... 3 3 3 3
25 Вычти задуманное число ...
26 У тебя получилось 7 3 2 6
Управление шагового искателя осуществляется с помощью кнопки SB1, расположенной на лицевой панели машины и реле KI, К2. При нажатии кнопки происходит переключение шагового искателя на одно положение, что соответствует одной операции машины.
В шаговом искателе используется пять полей. Первым полем осуществляется переключение светящихся табло, дается задание о выполняемой операции (Задумай число, Умножь на ... и т.д.). Вторым и третьим полями осуществляется включение нужных цифр на цифровых индикаторах (десятки и единицы).
Четвертое поле используется для переключения шаговых искателей SF1 и SF2 на одну ступень после того, 172
как шаговый искатель SF1 сделает полный оборот.
С помощью искателей SF2 и SF3 производится переключение (изменение) четырех вариантов программы, причем каждому варианту соответствует своя последовательность цифр на цифровых индикаторах.
Переключение шаговых искателей SF1, SF2, SF3 осуществляется путем разрядки конденсаторов Cl, С2, СЗ через обмотки шаговых искателей SF1-SF3. Прибор питается от выпрямителя, дающего постоянное напряжение ИОВ (диодный мост VD1-VD4), 24В (диодный мост VD5-VD8), постоянное напряжение питания анодов цифровых индикаторов 150-200 В (диод VD9).
Трансформатор намотан на магнитопроводе Ш-32, толщина набора 50 мм. Количество витков обмотки I равно 660 (проводом ПЭЛ 0,2), обмотки II - 330 витков (с отводом от середины) проводом ПЭЛ-10,4, обмотки III-72 витка проводом ПЭЛ 0,8.
Шаговые искатели SF1-SF3 (паспорт РС.335ОО99Д). Сопротивление обмотки 200 Ом, количество витков 4500, провод 0,18 ПЭЛ-0,18.
ИГРАЮЩИЙ АВТОМАТ «РЕФЕРИ»
Случай, случайные явления. Что же это такое? По определению ученых, случайными можно назвать явления и процессы, на ход которых действует огромное количество причин и законов, не всегда учтенных и изученных. Другими словами, случай - это явления, которое мы не можем точно предусмотреть или предсказать, потому что не знаем его причин или из-за разнообразия и сложности этих причин. Классическим примером случайного явления может служить брошенная вверх монета. Может выпасть «аверс», а может «реверс». То и другое зависит от множества факторов: силы толчка при бросании, массы, формы, сопротивления воздуха и т.д.
Еще один пример. Очень трудно, а точнее, просто невозможно предсказать, куда упадет лист, сорванный с дерева бурей. Таких примеров случайных событий можно привести множество. И все же, если подбрасывать монету один, два или десять раз, то невозможно предсказать, что выпадет-«аверс» или «реверс», а вот если подбрасывать монеты несколько тысяч раз подряд, то можно с уверенностью сказать, что в одной половине случаев выпадет «аверс», а в другой половине-«реверс». И чем больше число бросаний тем с большей точностью
173
R191к
будет выполняться это утверждение при том условии, что обе стороны монеты будут одинаковы, без изъянов.
Французский ученый Жорж Бюффон, живший в XVIII веке, подбросил монету 4040 раз, в результате чего аверс выпал 2048 раз. Частота появления события равнялась 0,50693. А вот английский биолог Карл Пирсон для проверки эксперимента Жоржа Бюффона подбросил монету 24000 раз, при этом частота выпадения аверса составила 0,5005. Читатель, наверное, уже обратил внимание, что чем больше число бросаний, тем ближе частота появления случайного события к своему предельному значению 0,5.
174
DD3
Выиграл 1-й игрок'
Выиграл2-йигрок",Ничья” ~24В —...........ух;;....1" >
\| \|^f~24B
DC
НИ ИН 16
16
15
13
14
11
10
5 6
2
3
0RJ1 ЗБк
О
R30 4,3к
R21
8,2к
RZ2 3,9К
705Д18
7Й6Д18 и—
16
15
RZ3 *“
2к I
1 HRZ* I 11к
R32rt ЗБК И HL2 Т ИН18
13 14 Н
io
DD4
DC
ЕН 4
ЕН5
K1.Z
К2.2
12 В
VT7 КТ315Б
R41 10К
К1
VT8 КГ315Б
R42 Юк
тдю R39 5,Бк VT10
КТ361Б
R4D 5,6К
VT11 КТ381Б
-12 В
J—>
R37 1К
R33 20К
R34 150
7712 КТ315Б
R38 1К
VT13 КГ315Б
R35 6,8к
R36 гок
+Z20B Д,4,7В
Рис. 66. Принципиальная схема кибернетического устройства «Рефери»
О
В начале главы мы рассказывали, что имеется ряд игр, которые осуществляются с помощью шестигранного кубика (игральной кости), на гранях которого нанесены цифры от 1 до 6. Подброшенный кубик может «выдать» любое число от 1 до 6. Если кубик будет строго симметричен и сделан без изъянов, то имеется только шесть равновозможных случайных событий, например появление числа 3 может произойти в одном случае из шести. Значит, вероятность того, что выпадет именно цифра 3, будет 0,6. Вероятность появления грани с любой цифрой от 1 до 6 равна единице, а вот вероятность появления
175
цифры 7 равна нулю. Такое событие невозможно, потому что цифры 7 нет на гранях кубика.
Наука, которая изучает случайные процессы и явления, называется теорией вероятностей и широко используется в кибернетике. А теперь вернемся к игре с помощью шестигранного кубика. Бросая кубик, каждый игрок старается набрать наибольшее количество очков. Игральную кость можно рассматривать как простейшее устройство для выдачи случайных ходов.
Аналогичное электронное устройство было создано для кибернетической игры, которую построили ребята из Дома пионеров им.Володи Дубинина г. Свердловска и назвали «Рефери». Схема этого устройства приведена на рис. 66, она состоит из схемы формирования импульсов, двух счетчиков, производящих счет импульсов в течение промежутка времени пока нажата соответствующая кнопка, схемы сравнения, которая производит автоматическое сравнение количества импульсов на счетчиках DD1 и DD2, и схемы индикации, показывающей количество импульсов на том и другом счетчике. На лицевой панели прибора (рис. 67) имеются две кнопки, позволяющие каждому играющему включать свой канал счета, три табло, на которых зажигаются надписи: «Выиграл 1-й игрок, «Выиграл 2-й игрок», «Ничья» в зависимости от результатов сравнения, и два индикатора типа ИН-12, на которых отражается число очков каждого из играющих.
Рис. 67. Корпус автомата «Рефери»
176
Схема формирования импульсов представляет собой триггер Шмитта, собранный на транзисторах VTI, VT2. На базу транзистора VT1 подается переменное напряжение с частотой 50 Гц. Это напряжение вызывает опрокидывание триггера, в результате чего на коллекторе транзистора VT2 формируются прямоугольные импульсы. При нажатии кнопки SB1 или SB2 импульсы поступают на ограничительные каскады, собранные соответственно на транзисторах VT3 и VT4, на коллекторах которых формируются импульсы, форма и амплитуда которых необходима для работы счетчиков. В качестве счетчиков использованы микросхемы DD1, DD2 типа К155ИЕ2. Они осуществляют счет импульсов от 0 до 9. При поступлении большого количества импульсов счет повторяется с нуля. После отпускания кнопок счет прекращается. Окончательные результаты счета сравниваются с помощью резисторной матрицы, собранной на резисторах R19-R30, и усилителя постоянного тока, собранного на транзисторах VT7, VT8; VT10-VT13. Данный усилитель нагружен на реле К1 и К2, контакты которых включают лампочки индикаторного устройства.
Схема индикации состоит из двух дешифраторов, в качестве которых использованы микросхемы DD3, DD4 (К155ИД1), двух цифровых индикаторов HL1, HL2 типа ИН-12 и трех табло с надписями: «Выиграл 1-й игрок» (лампа ЕНЗ), «Выиграл 2-й игрок (лампа ЕН4), «Ничья» (лампа ЕН5), подсвечиваемыми лампочками HL3-HL5 типа СМ-26.
Рассмотрим работу устройства. Через конденсатор С1 и резистор R1 на базу транзистора VT1 триггера Шмитта поступает синусоидальное напряжение частотой 50 Гц. Состояние триггера Шмитта зависит от изменения напряжения на входе. Если напряжение на базе уменьшается, то при некоторой его величине транзистор VT1 открывается, а транзистор VT2 закрывается. Если затем напряжение на базе VT1 растет, то при некотором его значении (более высоком, чем первое) транзистор VT1 закрывается, а транзистор VT2 открывается. В результате на коллекторе транзистора VT2 формируются прямоугольные импульсы. При нажатии кнопок SB1 и SB2 прямоугольные импульсы подаются через резистора R6 и R10 на базы транзисторов соответственно VT3 и VT4. Одновременно другой группой контактов кнопок SB1 и SB2 разрывают цепь питания ламп HL3-HL5. Поэто-
177
Таблица 6
Число импульсов Состояние выходов
12 9 8 11
0 0 0 0 0
1 1 0 0 0
2 0 1 0 0
3 1 1 0 0
4 0 0 1 0
5 1 0 1 0
6 0 1 1 0
7 1 1 1 0
8 0 0 0 1
9 1 0 0 1
му табло не светятся до тех пор, пока хотя бы одна из кнопок SB1 или SB2 останется нажатой.
На коллекторах транзисторов VT3, VT4 типа КТ315Б формируются положительные прямоугольные импульсы, амплитуда которых достаточна для приведения в действие микросхем DD1 и DD2. Данные микросхемы являются двоично-десятичными счетчиками. На выходах этих микросхем формируется напряжение «Лог. О» или «Лог. 1» в соответствии с количеством прошедших импульсов по двоичной системе счисления (табл. 6).
Преобразование двоичной системы в десятичную и управление цифровыми индикаторами осуществляются с помощью дешифраторов DD3 и DD4.
При нажатии кнопок SB1 и SB2 цифры на индикаторах будут меняться с частотой 50 Гц. После отпускания кнопок на индикаторах окажется одна из цифр от 0 до 9, в зависимости от момента отпускания соответствующей кнопки. Поскольку частота смены цифр достаточно велика (50 Гц), предугадать заранее, какая цифра окажется на индикаторе после отпускания соответствующей кнопки практически невозможно.
Для установки в нуль обоих индикаторов применяется кнопка SB3, при нажатии которой напряжение высокого уровня подается одновременно на входы 2 и 3 микросхем DD1 и DD2.
Автоматическое сравнение цифр на индикаторах производится с помощью резисторных матриц, т.е. группы 178
резисторов, рассчитанных таким образом, чтобы напряжение на выходах матриц было примерно пропорционально соответствующим цифрам на индикаторах, а именно напряжение на резисторе R19 было приблизительно пропорционально цифре на индикаторе HL1, а напряжение на резисторе R20 приблизительно пропорционально цифре на индикаторе HL2.
Указанные напряжения управляют работой усилителя постоянного тока, собранного на транзисторах VT7, VT8, VT10-VT13. Данный усилитель с помощью потенциометра R34 балансируется таким образом, чтобы при одинаковых цифрах на индикаторах загоралось табло: «Ничья» (лампочка ЕН5), что осуществляется при обесточенных реле К1 и К2. Для четкой работы схемы пары транзисторов VT7-VT8, VT10-VT11, VT12-VT13 должны быть подобраны с близкими параметрами.
Правила игры очень простые, в ней два участника. Игроки нажимают кнопки SB1 и SB2. Каждый играющий нажимает свою кнопку. Выигравшим считается тот, кто наберет наибольшее число выигрышей при заданном числе попыток или наибольшую сумму цифр на своем индикаторе при заданном числе попыток или быстрее наберет заданную сумму цифр. Кнопку SB3 (установка в нуль) нажимают после окончания игры.
Возможны несколько вариантов игры с помощью машины. Выбор вариантов осуществляется самими играющими.
Вариант 1. Выигравшим считается тот, кто наберет наибольшее число выигрышей при заданном числе попыток. В этом случае очки, набранные в каждой попытке, не учитываются.
Вариант 2. Выигрывает тот, кто наберет наибольшую сумму очков при заданном числе попыток. Число попыток в этом и предыдущем вариантах оговаривается заранее.
Вариант 3. Выигравшим считается тот, кто наберет заранее заданную сумму очков при меньшем числе попыток.
Возможны и другие варианты, которые можно придумать для игры с помощью автомата «Рефери».
Микросхемы DD1, DD2-K155HE2; DD3, ОО4-К155ИД1.
Индикаторные лампы HL1, HL2-HH-12A, их можно заменить на ИН-14.
Транзисторы VT1, VT2-KT361B; VT3, VT4-KT315B
179
(можно заменить на КТ312Б); диоды VD5, VD6, УО9-Д18; транзисторы VT7, VT8, VT12, VT13-KT315B (можно заменить на транзисторы КТ312Б); транзисторы VT10, УТ16-КТ316Б.
Резисторы МЛТ мощностью 0,25 Вт.
Лампы HL3-HL5 типа СМ-28 х 0,1 напряжением 28 В.
Для питания схеме необходимы четыре источника питания. Три из них должны питать соответствующие блоки схемы постоянным током. Четвертый источник напряжением 24 В служит для питания ламп HL3-HL5.
Стабилизированный источник постоянного тока напряжением 5 В питает микросхемы DD1-DD4.
Источник постоянного тока 12 В 0,5 А необходим для питания транзисторов VT1-VT4, VT7-VT8, VT10-VT13 и реле KI, К2. Каких-либо особых требований к пульсации выпрямленного тока здесь не предъявляется, поэтому достаточно емкостного фильтра, состоящего из двух конденсаторов С5, С6 по 200 мкФ напряжением 25 В. Следует не забывать о том, что рабочее напряжение конденсаторов не должно быть меньше указанного на схеме, иначе он может выйти из строя из-за пробоя изоляции (диэлектрика).
Питание анодов ламп HL1, HL2 осуществляется от сетевой обмотки трансформатора через диод Д226 и резистор R31. Сопротивление резистора 36 кОм; его подбирают таким образом, чтобы напряжение на анодах ламп было 200-150 В. Если монтаж произведен без ошибок, устройство начинает работать сразу и не требует наладки.
180
7
В главе читатель узнает, что радуга способна петь, музыку можно увидеть, а сенсорный голод вполне утоляется красками
Чувство цвета является популярнейшей формой эстетического чувства вообще.
К. МАРКС
«...Во мраке лишь слабо мерцал экран и чуть слышался снаружи постоянный шум моря. Где-то в невероятной дали возник низкий, такой густой, что казался ощутимой силой, звук. Он усиливался, сотрясая комнату и сердца слушателей, и вдруг упал, повышаясь в тоне, разбился и рассыпался на миллионы хрустальных осколков. В темном воздухе замелькали крохотные оранжевые искорки...
Нахлынул вал тревожных и нестройных звуков, тысячеголосый хор боли, тоски и отчаяния, дополняя которые, метались и гасли вспышки мутных оттенков пурпура и багрянца...».
Так в фантастическом романе Ивана Ефремова «Туманность Андромеды» описывается исполнение цветомузыкального произведения «Симфония фа-минор цветовой тональности 4,750 мю».
• Действие романа происходит в далеком будущем, но осуществить светомузыку оказалось возможным значительно раньше. В 1960 году в Лондоне на советской промышленной выставке демонстрировалась светомузыкальная установка. Ее создатели-коллектив ученых Института технической кибернетики Академии наук СССР.
Музыка и цвет. Какое это удивительное сочетание! Насколько эмоциональнее воспринимается содержание музыкального произведения, когда оно слито с цветом!
С каждым днем все больше людей знакомилось с необычным экспонатом в советском павильоне. Пресса Англии единодушно выражала восхищение советским изобретением. «Дейли миррор», »Дейли экспресс», «Ивнинг ньюс», «Сан» и «Таймс»-все писали об успехе советской выставки и называли светомузыкальную установку од
181
ним из интереснейших экспонатов. Крупнейшие ученые Западной Европы, в том числе президент Датской Академии наук, специально приезжали в Лондон, чтобы увидеть и услышать светомузыку.
Звук и цвет, связанные воедино в их эмоциональном воздействии на человека,-вот основа нового жанра искусства-светомузыки, начало которой положили первые концерты в Москве и Лондоне. Однако, обратившись к истории, мы увидим, что попытки объединить музыку и цвет делались еще в Древней Греции, за 2500 лет до нашего времени.
А существует ли эта связь? Еще Аристотель (384-322 до н.э.) в философском трактате «О душе» писал: «Цвета при приятности их гармонии могут относиться между собой подобно музыкальным созвучиям и быть взаимно пропорциональными». Проходили века, а ученые продолжали искать подтверждение мысли этого великого философа.
В один из солнечных весенних дней 1666 года Исаак Ньютон (1643-1727) вместе со своим ассистентом выполнил несложный опыт. Закрыв окно темной бархатной шторой, ученый направил тонкий солнечный луч на стеклянную призму. Луч, выходя из призмы, превратился в радужную полоску-спектр. Основных цветов в спектре оказалось семь: красный, оранжевый, желтый, зеленый, голубой, синий и фиолетовый. Направив спектр на лист белой бумаги, Ньютон попросил своего ассистента, очень хорошо различавшего оттенки цвета, отметить границы, разделяющие отдельные цвета. На бумаге получилось семь полосок различной ширины. Самую широкую полосу занимал фиолетовый цвет. Затем полосы сужались, там, где был красный цвет, снова шла широкая полоса. «Если ширину фиолетовой полосы принять за единицу, — рассуждал Ньютон,-то получится следующее соотношение полосок по ширине: фиолетовый цвет-1, синий-8/9, зеленый-2/3, желтый-3/5, оранжевый-9/16, красный-1/2». Изучая это явление, ученый установил, что цвет определяется длиной световой волны, или частотой колебаний. Далее он предположил, что цвет имеет ту же природу, что и звук. Так как октава состоит из восьми звуков (начало и конец ее завершает одна и та же нота), то Ньютону понадобилось в соответствии со своей гипотезой искусственно ввести еще один цвет. Он ввел новый цвет «индиго», название которого дошло и до наших дней.
182
Однако великий ученый ошибался, и его сопоставление звука с цветом было искусственным и неправомерным. Ведь отдельно взятый звук не имеет музыкального смысла и не несет эстетической нагрузки. Один и тот же звук, входя в музыкальную фразу, может образовать разные созвучия, вызывая у слушателей те или иные эмоции. «Гипотеза Ньютона о связи между музыкальной гаммой и спектром ошибочна и потому, что в природе звук и цвет как физические процессы не являются взаимосвязанными. Если между ними и имеется некоторая зависимость в отдельных случаях (например, удар грома и блеск молнии, щелканье электрического выключателя и вспышка света электрической лампы и т.д.), то все же различны закономерности восприятия их человеком»,-так объясняет ошибку Ньютона один из авторов первой советской светомузыкальной установки К. Л. Леонтьев в своей книге «Музыка и цвет».
Искусственный и надуманный подход Ньютона к проблеме соединения музыки и цвета развил и практически реализовал в XVIII веке французский математик пастор Луи Бертран (отец Кастель, 1688-1757 гг.), построивший «цветовой клавикорд». В этом инструменте при нажатии клавиши одновременно с соответствующим звуком на небольшом экране появлялись цветные полосы. Низким звукам соответствовали цвета более длинных оптических волн-красный, середине звукового диапазона-зеленый, высоким-синий и фиолетовый цвета. Всю жизнь посвятил Луи Бертран изобретению цветового клавесина и на склоне лет написал книгу, посвященную светомузыке. Его теорию подверг суровой критике энциклопедист Жан Жак Руссо. Он писал: «Страсть систематизировать внесла путаницу во все, и, не умея рисовать для слуха, люди вознамерились петь для глаза. Я видел тот знаменитый клавесин, на котором якобы создавали музыку с помощью цвета». Неудачливый изобретатель выслушал много справедливых упреков в адрес своего детища. Но поиски в области светомузыки не прекратились.
Идеи монаха Кастеля оказались живучими, и даже в наши дни многие конструкторы создавали и создают подобные светомузыкальные установки, привязывая низкие по частоте звуки к одному цвету, высокие-к другому (по такому принципу, например, действовали снятые ныне с производства радиолы «Гамма» и «Самоцвет»).
183
КИБЕРНЕТИКА И «ПРОМЕТЕЙ»
Москва, 4 февраля 1917 года. Даже в то тревожное и беспокойное время интерес к любому зрелищу был велик. Хотя театр еще оставался парадом бриллиантов, монополией фраков и вечерних туалетов, пиджаки, поддевки и студенческие фуражки уже нередко появлялись в зрительном зале. В этот вечер у подъезда Большого театра толпилось необычно много людей. Давали не оперу, не балет, а ... светомузыкальный концерт. Мало кто в то время знал, что это такое. Исполнялась симфоническая поэма «Прометей» («Поэма огня», 1910 год), сочиненная композитором Александром Николаевичем Скрябиным (1871-1915). В партитуру своего «Прометея» композитор ввел строку «люкс», в которой были записаны обозначения цветов, соответствующих той или иной фразе произведения. Записывая цвета на рукописи партитуры, он руководствовался чувством синопсии-«видения звуков».
Что же это такое? У некоторых людей музыка вызывает зрительные представления цвета, они музыку не только слышат, но и видят. Определенные созвучия (аккорды) окрашиваются в их представлении в свои, присущие только данным созвучиям цвета, причем у разных людей цветовая окраска аккордов может быть различной. Для человека, наделенного таким чувством, музыка всегда существует не сама по себе, а в сочетании с цветом. Это и есть синопсия-способность мозга связывать звуки с определенными цветовыми сочетаниями.
Видением звука обладают многие композиторы и исполнители музыкальных произведений. Известно, что например, чувством синопсии обладал Берлиоз, видели звуки в цвете Римский-Корсаков и Дебюсси. Скрябин попытался с помощью строки «люкс» передать свои цветомузыкальные ощущения и представления.
Скрябин много думал о математической интерпретации музыки. Он обладал особым музыкально-математическим мышлением и прежде, чем записать новую вещь в нотных знаках, записывал ее математическими символами.
Известно, что Скрябин, начиная с «Прометея», рядом с нотной дорожкой писал световую - впервые в истории музыки и науки он пытался связать свет и звук. Однако не все знают, что каждое его произведение программно несет в себе точный сюжет, что Скрябин писал к ним литературный комментарий, часто в стихах. Он синтезиро-184
вал в своем творчестве музыку, поэзию и свет. Но математика?
Это были не те формулы, к которым привыкли физики и математики. Автор использовал особый цифровой код, понятный только ему самому. Иногда после того как произведение было занесено на нотную бумагу, некоторые строчки Скрябин оставлял незаполненными, считая, что здесь обязательно должны быть опеределенные такты, а какие-он еще и сам не знал. И действительно, в окончательной редакции эти такты появлялись.
Несмотря на новизну, публика осталась равнодушной к экспериментам композитора. Вот что писала «Русская музыкальная газета» 5 февраля 1917 года о светомузыкальном концерте: «Как это, может, ни странно, в распоряжении Большого театра оказалось лишь три смены различных цветов. При таком положении, конечно, нечего было и думать о сколько-нибудь приблизительном воспроизведении цветовой партии».
Прошли десятилетия... И вот достижения радиоэлектроники и кибернетики сделали возможным то, о чем многие века-от Аристотеля до Скрябина - мечтали ученые и композиторы.
Какую роль в создании светомузыкальных инструментов сыграло развитие кибернетики?
Кибернетика-наука о передаче, приеме и хранении информации. Несет ли музыка какую-либо информацию тем, кто ее слушает? Безусловно. Музыка воздействует на их чувства, и часто это воздействие бывает весьма сильным: музыка может заставить человека веселиться, грустить, негодовать, любить, сопереживать вместе с любимым героем. Музыка сильна и тем, что она передает информацию людям, которые не объединены знанием одного языка. В то же время восприятие музыки, особенно серьезной (например, симфонической),- процесс, требующий определенной подготовки и музыкальной грамотности слушателя.
Передача «музыкальной информации» происходит по сравнительно простой схеме. Композитор создает музыкальные образы, затем кодирует их-записывает с помощью нотных знаков на бумаге. Исполнитель-музыкант с помощью музыкального инструмента превращает нотные знаки в звуки. Услышанная музыка через слуховой аппарат доходит до человеческого сознания, декодируется-расшифровывается, и содержание музыкального произведения может быть сохранено в памяти. Таким
185
образом, процесс восприятия музыкальной информации аналогичен чтению газеты или книги, но там используется другой канал связи-зрительный. Конечно, эта схема немного упрощена. На самом деле один и тот же человек по-своему расшифровывает одну и ту же мелодию. Естественно задать вопрос: а нельзя ли воспользоваться зрительным каналом связи для передачи информации, содержащейся в музыкальном произведении?
Давно известно, что информация может быть передана и воспринята в форме цвето-световых явлений. Вспомните, например, как передаются сообщения с помощью «морского» телеграфа. Но может ли быть переложена на цвет информация, заключенная в бессмертных творениях Чайковского, Глинки, Бетховена?
Здесь уместно обратиться к работам члена-корреспондента Академии наук СССР, заслуженного деятеля науки С. В. Кравкова (1893-1951), который в течение многих лет проводил опыты по изучению влияния звуковых раздражителей на цветное зрение. Он доказал, что при воздействии на слух человека звуками постоянной громкости можно добиться того, что чувствительность глаза к зелено-голубым тонам повышается, а к оранжевокрасным - снижается. Исследуя, как влияют на чувствительность глаза звуки разной громкости, С. В. Кравков получил поразительные результаты: оказалось, что с нарастанием громкости звука чувствительность к зеленому цвету растет, а к оранжевому-падает.
Своими опытами С. В. Кравков убедительно доказал, что зрительное восприятие человека зависит от воздействия на него звука, а звуковое-от воздействия света. Проникновение в тайны этих закономерностей позволит так соединить музыку и цвет, чтобы их восприятие было наиболее обостренным и эмоциональным. Если же при создании светомузыкальных установок пренебречь этими объективными закономерностями зрения и слуха, то цвет будет только ослаблять восприятие музыки, рассеивая внимание слушателей. Теперь становится понятным, почему не имели успеха попытки создать светомузыкальный инструмент, основанный на механическом принципе привязывания каждого цвета к определенной ноте.
В ПОИСКАХ ПУТЕЙ СВЕТОМУЗЫКАЛЬНОГО СИНТЕЗА
За последние годы светомузыка получила широкое распространение. Конструированием светомузыкальных 186
инструментов и установок с энтузиазмом и увлечением занимаются многие коллективы в нашей стране и за рубежом. Ими проделана большая научно-исследовательская работа. Композиторы все чаще создают произведения специально для светомузыкальных инструментов. Возникло и развивается несколько направлений светомузыки.
Сторонники одного из них разрабатывают методы анализа музыки и перевода ее в цвет с помощью кибернетических устройств на основе общих законов восприятия цвета и музыки. При этом цвет как бы иллюстрирует музыку и имеет подчиненное значение. Эстетическое назначение цвета-создание благоприятных условий для более углубленного восприятия музыки. Это так называемый автоматический перевод.
Другое направление объединяет энтузиастов, которые считают, что при исполнении светомузыкальных произведений в оркестре наряду с музыкантами должны быть и светомузыканты - исполнители партии цветового сопровождения на специальном инструменте. В Казани студенческим конструкторским бюро «Прометей» для этого создан цветовой орган, с помощью которого можно исполнять партию цвета, написанную Скрябиным. Светомузыкальные произведения, рассчитанные на такое исполнение, уже созданы советскими композиторами. Примером может служить работа киевского композитора В. П. Полевого, написавшего поэму для фортепиано и цветового органа.
Вот что пишет руководитель СКВ «Прометей» Б.М. Галеев: «Оставим за собой право мечтать. Может быть, когда-нибудь кибернетическое устройство, уже равноценное человеческому мозгу, и сумеет само сочинить и музыку, и цветовую партию. Но пока, как отмечают исследователи, если говорить о звуковой музыке, машины моделируют «лишь нотные тексты, но не сам процесс композиции». И аналогично в светомузыке-пока автоматы могут моделировать лишь эффект цветозвука в различных его проявлениях, но отнюдь не сам процесс «светомузыкального творчества». Об этом необходимо помнить всем, кто конструирует автоматические светомузыкальные установки. Очень долог путь, который необходимо пройти светомузыканту, чтобы найти определенные связи между музыкой и цветом.
Москвичи и гости столицы с удовольствием смотрят концерты, исполняемые на светомузыкальной установке,
187
смонтированной в концертном зале гостиницы «Россия».
При ее проектировании конструкторы поставили перед собой задачу дать режиссерам и художникам богатую световую палитру для создания «картины», сопровождающей спектакль или эстрадное представление.
В концертном зале установлен огромный панорамный экран, охватывающий горизонт сцены. Восемьдесят четыре мощных цветных прожектора создают динамическую световую палитру. Специальный пульт управления располагается в последнем ряду амфитеатра. Установка работает как в автоматическом режиме, так и в режиме ручного сопровождения. Светооператор может исполнять на ней любую партию цвета. Внутри пульта управления находится небольшое вычислительное устройство, которое автоматически устанавливает величину потока света, чтобы получить нужный оттенок в любой точке экрана.
Свердловскими школьниками под руководством автора этой книги была построена светомузыкальная установка «Радуга-1», в которой анализ звука производился по частоте и громкости. Эта светомузыкальная установка демонстрировалась на ВДНХ и была удостоена Диплома первой степени и Золотой медали. Позднее свердловская «Радуга-1» демонстрировалась на советской выставке детского технического творчества в США, где также вызвала большой интерес. Много похвальных слов было сказано в адрес советских пионеров, создателей этой светомузыкальной установки. По окончании работы Выставки они были награждены грамотами ЦК ВЛКСМ и Министерства просвещения СССР. Впоследствии ими были построены еще несколько светомузыкальных устройств. О некоторых из них будет рассказано ниже.
Научно-популярные журналы предлагают конструкторам-любителям много простых схем светомузыкальных приставок к радиоприемникам, электропроигрывателям, магнитофонам, работающих по принципу разделения звукового диапазона на три (или несколько) поддиапазонов, каждому из которых соответствует свой цвет, но анализ музыкального звука в светомузыке требует учета не только высоты и громкости, но также тембра и характера исполняемого произведения.
ИСТОЧНИКИ СВЕТА И ЭКРАНЫ ДЛЯ ДЕМОНСТРАЦИИ СВЕТОМУЗЫКИ Разные конструкторы с различных творческих позиций подходят к созданию цветомузыкальных инструмен-188
тов. Однако накопленный опыт позволяет сделать некоторые выводы о том, какими должны быть основные технические средства для воспроизведения цвета с помощью светомузыкальной установки.
В любом из сконструированных светомузыкальных инструментов обязательно должны быть источник света и экран. К выбору этих элементов светомузыкальной установки предъявляются повышенные специфические требования, ведь основная цель ее создания-не электронная схема, а эстетическое воздействие на зрителя красочной цветовой гаммой, которая возникает на экране, являясь результатом гармоничного союза электроники и светотехники.
Поэтому к выбору источников света и конструкции экранов необходимо подойти с особым вниманием. Несколько слов об источниках света. Существующие каталоги предлагают на выбор более 1000 наименований электрических ламп, которые различаются по напряжению, мощности, габаритным размерам и т.д. Их световой поток регулируется от нуля до максимального значения при изменении напряжения (или тока), но характер этих параметров нелинейный, и об этом тоже нужно всегда помнить конструктору.
Главный недостаток ламп накаливания-изменения спектрального состава излучения при изменении напряжения питания (чем ниже напряжение, тем цвет, излучаемый лампой, становится более красноватым; с увеличением температуры нити лампы начинают появляться более короткие волны и зритель начинает видеть белый цвет). Но в распоряжении радиолюбителя, как правило, в' качестве источников света бывают только лампы накаливания (или люминесцентные); поэтому мы остановимся на некоторых их специфических особенностях. При конструировании выходного оптического устройства (ВОУ) с малой инерционностью источников света нужно применять лампы с более тонкой нитью накала (напряжение питания 220 В). Если конструктору необходимо плавно изменять свет на экране ВОУ, для этого подходят лампы с более толстой нитью (лампы с низким напряжением и большей силой тока).
В каталоге на электротехнические изделия лампы общего назначения подразделяются на следующие типы: НВ (накаливания вакуумные); НГ (накаливания газонаполненные); НБ (накаливания бесспиральные); НБК (накаливания бесспиральные криогеновые). Эти лампы вы-
189
пускаются напряжением 127 и 220 В, мощностью от 15 до 1500 Вт. Большая номенклатура ламп выпускается для местного освещения (МО), для железнодорожного транспорта (Ж), судов (С), автомобилей и тракторов (А), самолетов (СМ), прожекторов (ПЖ), киноаппаратуры (КПЖ, ПЖК), для иллюминации различных цветов (И), для маяков (ММ), сигнальные (СГ), миниатюрные низкого напряжения (МН).
Кроме этого, при изготовлении мощных установок светомузыки очень хорошие результаты можно получить, применяя лампы с внутренним зеркальным покрытием (ЗС, ЗН, НЗК) мощностью от 300 до 2500 Вт.
Люминесцентные лампы, имеющие хорошую световую отдачу (она значительно больше, чем у ламп накаливания), по своим спектральным характеристикам подразделяются на лампы дневного света (ЛД), с исправленной цветностью (ЛДЦ), холодно-белого (ЛБ), тепло-белого света (ЛТБ) и цветные. Их применение в светомузыкальных установках дает хороший эстетический эффект, но из-за относительно сложной пускорегулирующей аппаратуры (дроссели и резисторы) применение таких ламп доступно только опытным коллективам конструкторов, создающих большие светомузыкальные устройства.
Галогенные лампы дают хорошие результаты благодаря высокой световой отдаче и хорошим спектральным характеристикам. Они маркируются КН, КГ, КГК, КГМ и выпускаются на напряжение 127 и 220 В, а также на более низкие напряжения. Мощности этих ламп 500, 1000, 1500, 2000 и 5000 Вт.
Ксеноновые лампы дугового разряда типов ДКСШ (шаровые) и ДКСТ (трубчатые) используются в кинопроекционной технике и в специальных осветительных установках типа ДКСШ-1000Б (или ДКСШ-200Б). Спектр излучения этих ламп непрерывен и по цветности очень близок к прямым солнечным лучам.
Тем не менее использование ксеноновых ламп в светомузыкальных установках, несмотря на хорошие результаты, затруднено применением сложной пускорегулирующей аппаратуры. Для их поджига требуется импульс в несколько тысяч вольт, лампы взрывоопасны и требуют специальных мер. предосторожности. И все-таки можно рекомендовать опытным радиолюбителям их применение при создании больших светомузыкальных установок для клубов, концертных залов, театров.
Разные конструкторы выбирают различные схемные
190
решения для создания светомузыкальных инструментов, но обязательным элементом для каждого из них будет выходное оптическое устройство, выполненное в виде плоского экрана, объемной конструкции, светящейся панели. Выходное оптическое устройство требует тщательной художественно-конструкторской проработки, от этого во многом зависит успех всей работы в целом.
В простейших конструкциях начинающие любители могут использовать плоские экраны, применяя прямую проекцию света на экран (диапроекцию) или проекцию «на просвет», при которой источники света устанавливаются за экраном. Специальные отражатели и короткофокусная оптика позволяют располагать источники света в непосредственной близости от экрана. Это дает возможность достигнуть большей компактности, что в любительских условиях имеет немаловажное значение.
В качестве экранов светомузыкальных устройств могут быть использованы экраны, выпускаемые для передвижных кинопроекционных установок. Однако следует учесть, что зритель психологически воспринимает эту форму (отношение сторон экрана 3 :4) как киноэкран и «ждет» появления картинки. Лучше всего найти «свою» форму и изготовить специальный экран для светомузыкальной установки, используя повинол или другой светотехнический пластикат.
При прямой проекции экран должен быть непрозрачным. Его можно изготовить из полотна, отбеленной бязи или повинола (хлопчатобумажное полотно с нанесенным на него слоем полихлорвиниловой массы). На поверхность повинола наносится алюминированное отражательное покрытие с тиснением ячейкового профиля.
Чтобы повысить отражательную способность экрана, изготовленного из полотна, на него нужно нанести белое покрытие. Такое покрытие легко изготовить самим, для чего применяют бариевую пасту. Рекомендуем следующий состав пасты (в граммах):
сернокислый барий 59,19;
желатин фотографический 2,19;
глицерин 3,19;
фенол кристаллический 0,036;
ультрамарин 0,094;
вода 35,34 .
Одного килограмма пасты достаточно, чтобы покрыть экран площадью 3 м2. Паста наносится в два слоя. В качестве материала для экранов, работающих «на
191
просвет», можно использовать батистовую ткань, опаловое оргстекло или карандашную кальку. Под кальку подкладывается слой театрального тюля.
Начинающие конструкторы могут проводить свои эксперименты со светомузыкой, используя в качестве экрана матовый шар от электросветильника, используемого для освещения улиц.
Можно придать экрану светомузыкальной установки форму, значительно отличающуюся от сферы, но важно помнить, что он не должен быть похож на экран кино или телевизора. Это вызовет ненужные ассоциации и отвлечет зрителя от восприятия музыки. В то же время не рекомендуются и слишком смелые, «абстрактные» очертания. Ломаные линии экрана будут затруднять восприятие цвета, зрительно перегружать его.
Для небольших установок рекомендуем склеенный из кусков опалового оргстекла экран используемый нами для инструмента «Радуга-1». На расстоянии около метра от экрана располагаются металлические отражатели от медицинской аппаратуры «Соллюкс» с лампами накаливания (220 В, 75 Вт).
Известный интерес представляет экран, созданный в Институте технической кибернетики для светомузыкальной установки, о которой рассказано в начале главы. Он имеет форму неправильного многоугольника, состоящего из отдельных треугольников, обтянутых повинолом. Многоугольник обрамляет черная бархатная рамка, усиливающая контрасность цветовой гаммы. Экран затянут театральным тюлем, сглаживащим тона и создающим дополнительный эффект «мерцания».
По мере увеличения мощности источников света в установках светомузыки экраном станет весь зрительный зал, цвет будет окружать зрителя-слушателя со всех сторон. Такой способ «наполнения» цветом зала кажется нам самым лучшим. В настоящее время такой зал проектирует СКВ «Прометей» в Казани.
Переходной формой от плоскости к сферам могут служить большие объемные экраны. Один из них был создан в Свердловске для светомузыкальной установки «Радуга-2».
Прототипом формы этого экрана является кристалл сапфира, хранящийся в фондах геологического музея и увеличенный примерно в 1000 раз. Экран изготовлен из опалового оргстекла толщиной 4 мм. Он имеет форму многогранника (рис. 68), основой которого является кар
192
кас из восьмимиллиметрового прозрачного оргстекла. Его размеры 2,5 х 1,5 х 1 м.
Опаловое оргстекло крепится к каркасу с помощью винтов М4. Постамент, на котором установлен объемный экран, изготовлен из алюминиевых угольников размерами 30 х 30 мм (рис. 69). В основание постамента вмонтированы источники света, светофильтры
Рис. 68. Внешний вид экрана светомузыкальной установки ^адуга-? ”
и электронная аппаратура. Источниками света служат зеркальные лампы накаливания мощностью 500 Вт, они
охлаждаются тремя вентиляторами (лучший результат могут дать ксеноновые лампы). Постамент облицован
черным оргстеклом.
Вопрос о форме и конструкции экранов для светомузыки вызывает много споров. Для нахождения их оптимальных вариантов требуется много усилий радиолюбителей и дизайнеров.
Еще одна проблема, которую всегда приходится решать конструкторам светомузыкальных установок,-использование светофильтров. При окраске ламп даже самыми высококачественными лаками не удается получить хорошего цвета, хотя мы не исключаем их применения в простых установках. В светомузыкальных устройствах со светофильтром плохого качества трудно добиться правильного цветовоспроизведения. В настоящее время лучшими являются стеклянные светофильтры, выпускаемые нашей оптической промышленностью: для красного цвета-светофильтр КС-13 или КС-14 (толщина 3-5 мм), для зеленого-ЗС-1 или ЗС-6 (толщина 1 мм), для синего-СС-1 или СС-8 (толщина 1-2 мм). Несколько хуже пленочные ацетатные светофильтры, используемые при съемке цветных кинофильмов, в театральной осветительной аппаратуре и телевидении.
Вспомним, что из всех цветов наш глаз менее всего чувствителен к синему. При аддитивном смешении нескольких цветов результирующий зависит от того, в каких пропорциях взяты основные. По международной системе красный цвет имеет длину волны 700 ммкм.
193
7 Библиотечная серия
Рис. 69. Конструкция экрана установки «Радуга-2»
зеленый 546,1 ммкм, синий 435,8 ммкм. Поэтому при использовании светофильтров неодинакова мощность источников цветового излучения: у источника синего цвета она должна быть в 6 раз больше мощности красного излучения. Следовательно, в канале синего цвета необходимо использовать в 3-4 раза более мощные лампы, чем в каналах зеленого и красного цветов. Канал зеленого цвета, в свою очередь, должен превосходить по мощности канал красного цвета. А лучше всего, если конструктор предусмотрит регулировку силы света (по току или напряжению) в каждом цветовом канале своего светомузыкального инструмента. Теперь, когда читатель познакомился с основными требованиями к светомузыкальным экранам, ему предлагается построить простой, но имеющий хорошие технические возможности светомузыкальный инструмент «Цветополяроид». Такой инструмент был изготовлен юными светомузыкантами Дома пионеров города Свердловска.
194
ПРОСТОЙ СВЕТОМУЗЫКАЛЬНЫЙ ИНСТРУМЕНТ
Жесткая программа, заложенная в схему светомузыкальных установок, работающих по принципу разделения цвета в зависимости от частоты, не позволяет конструктору вмешиваться в процесс преобразования музыки в цвет. Хотя в такой светомузыкальной установке анализ музыки и трансформация ее в цвет происходят автоматически, это не удовлетворяет взыскательного зрителя, так как в данном случае многие свойства звука вообще не учитываются.
Многие конструкторы светомузыкальных установок мечтают о таком инструменте, в котором преобразование музыки в цвет происходило бы не автоматически, а в каждом отдельном случае позволяло бы исполнителю выразить свое «видение» музыкального произведения. Возникла потребность в создании светомузыкального устройства, на котором можно было бы исполнять партию цвета подобно тому, как мы играем на обычном музыкальном инструменте. Устройство такого типа, предложенное инженером К. Л. Леонтьевым, вызывает интерес у многих любителей светомузыки. На этом инструменте исполнитель самостоятельно интерпретирует партию цвета, сообразуясь со своим чувством синопсии.
Устройство К. Л. Леонтьева дает возможность сравнить игру нескольких светомузыкантов. Если изготовить два или три таких инструмента, художественные возможности светомузыкального сопровождения заметно возрастут. Можно будет воспроизводить на одном экране две или три меняющиеся во времени цветовые картины. Музыка продиктует исполнителям различные гармонические изменения цветовых сочетаний. Уровень светомузыкального концерта будет целиком зависеть от исполнительского мастерства светомузыканта.
Устройство светомузыкального инструмента несложно. Оно состоит из проектора «Свет» (или другого диапроектора, применяемого для демонстрации диапозитивов или диафильмов) и специального самодельного поляроидного объектива (рис. 70). В цепь питания проектора включается реостат для регулировки силы тока и яркости света. Вместо реостата можно применить регулятор напряжения типа РНШ, выпускаемый заводом Главучтехпрома, или регулятор напряжения типа ЛАТР. Перед объективом диапроектора устанавливаются
Ручка управления цветом
Вращающийся лоляроив
Рис. 70. Простой светомузыка, 1ьный инструмент
Непоббижно закрепленный поляроид и целлофановые пленки
Объектив
Конденсор фильмоскопа
Источник света
Зеркало фильмоскопа
Корпус фильмоскопа
Источник питания лампы
два поляроида. Один из них неподвижен, другой прикрепляется так, чтобы его можно было поворачивать вокруг оптической оси объектива на 180°. При вращении подвижного поляроида относительно неподвижного на небольшой угол происходит изменение окраски светового потока. Так, вращая подвижный поляроид, можно «пройти» весь спектр-от красных лучей до фиолетовых.
Самая существенная часть нашего светомузыкального инструмента-объектив из поляроидной пленки. Для его изготовления нужно взять два куска поляроидной пленки размером 55 х 55 мм и каждому придать форму круга. Чтобы правильно сориентировать поляроидную пленку при сборке объектива, конструктору понадобится монтажный столик, который применяется кинолюбителями при монтаже фильмов.
Если такого столика не окажется, можно изготовить заменяющее его несложное приспособление. Возьмите ящик без дна, укрепите в нем патрон с электрической лампой, накройте ящик калькой и куском стекла. Наше вспомогательное приспособление готово. Теперь один кусок поляроидной пленки положите на стекло и закрепите его неподвижно, сверху наложите прозрачный кусок целлофана (без царапин), на него-второй кусок поляроидной пленки. Теперь медленно вращайте верхний кусок поляроидной пленки-вы увидите, как меняется цвет.
196
Вращением поляроида в одну сторону можно добиться появления синих тонов, в другую - желтоватых. Если цвета будут блеклыми, нужно увеличить количество целлофановых прокладок между поляроидными пленками. Следует добиться того, чтобы поворотом подвижного поляроида можно было получить последовательное появление всех цветов спектра. В положении пурпурного цвета подвижный поляроид нужно точно зафиксировать, зажав его между стеклянными дисками, торцы которых заделываются быстротвердеющей мастикой или горячим сургучом. Так же поступают и с неподвижными поляроидами. Таким образом, у конструктора получатся два объектива: в одном - поляроид с целлофановыми пленками, во втором-одна только поляроидная пленка. К ним нужно сделать объективодержатели. Они изготовляются по диаметру получившихся объектов из бронзы, латуни, дюралюминия или даже из дерева. Объектив, в котором имеются целлофановые пленки, закрепляется неподвижно почти у самого объектива фильмоскопа; второй объектив устанавливается дальше таким образом, чтобы с помощью специальной ручки его можно было поворачивать вокруг оптической оси объектива фильмоскопа. Подвижный объектив ориентируется так, чтобы целлофановые пленки оказались между ним и неподвижным поляроидом.
Далее остается включить фильмоскоп-проектор, направить его световой поток на экран и вращением ручки подвижного поляроида получать цветовые картины.
Играть на нашем светомузыкальном инструменте очень просто. Регулируя ток лампы, получаем на экране свет разной яркости, а вращая ручку объектива с поляроидом, меняющиеся цвета на экране. Остальное зависит от восприятия цвета, вкуса исполнителя и характера музыки, которую он сопровождает.
Цветомузыкальный эффект усиливается, если одновременно использовать две-три такие установки и их световые потоки проектировать на общий экран.
СВЕТОМУЗЫКАЛЬНАЯ УСТАНОВКА «МАЛАХИТ»
Более сложным светомузыкальным инструментом является сконструированная свердловскими школьниками установка «Малахит». Она позволяет светомузыканту создавать богатейшие цветовые партии на фоне причуд
197
ливых транспарантных фигур. Установка удостоена Диплома Всесоюзной выставки радиолюбителей-конструкторов. В отличие от автоматических светомузыкальных инструментов, где чаще всего цвет соответствует высоте звука, а яркость-громкости, «Малахит» позволяет вести самостоятельную «цветовую» партию.
Музыка, цвет, движущиеся причудливые формы разноцветных пятен-все это равноправные элементы светомузыкальной композиции. Внешне «Малахит» отдаленно напоминает телевизор с присоединенной к корпусу клавиатурой-пультом, на котором вместо клавиш располагаются ручки потенциометров.
Однако всякая мысль об этом сходстве исчезает, когда вместо привычной программы мы увидим на экране фантастический мир света и красок.
Распустится на мгновение невиданный цветок, потекут золотистые реки, вспыхнет и разобьется на тысячу искр малиновая звезда. А может быть, вы увидите совсем другие картины, обязательно необыкновенные, даже немного сказочные. Все зависит от мастерства и фантазии исполнителя и от того, как сделан инструмент.
Необычный мир зиждется на очень реальной основе-электродвигателях, светофильтрах, диодах. Рассмотрим, как работает «Малахит» на примере одного из его
Рис. 71. Светомузыкальная установка «Малахит»
198
звеньев (рис. 71). Поворотом ручки потенциометра на пульте изменяется яркость лампочки, свет которой, пройдя через отверстия, прорезанные во вращающемся диске, через неподвижный трафарет и светофильтр попадает на экран, изготовленный из опалового оргстекла. Изображение на экране в основном формирует неподвижный трафарет. Если бы не было вращающегося диска, перед вами то появлялась, то изчезала бы, в зависимости от яркости лампочки, одна и та же фигура. Цвет ее не менялся бы, так как на пути светового потока установлен определенный светофильтр.
Вращающийся диск «оживляет» изображение неподвижного трафарета, заставляет его двигаться пульсировать. А ведь за диском установлены четыре лампочки, четыре светофильтра, четыре трафарета. И таких блоков в инструменте два, поэтому у исполнителя много возможностей для создания световых композиций. Диагонально расположенные лампочки соединены последовательно и «запитаны» через один потенциометр (рис. 72). Таким образом, при повороте рукоятки на экране одновременно будут появляться изображения двух разных трафаретов. Кроме того, потенциометром R5 можно менять скорость и направление вращения дисков (когда ползунок стоит в центре, двигатель не вращается), а потенциометрами R1R4-яркость лампочек.
Диски приводят в движение малогабаритным элек-
Рис. 72. Принципиальная схема светомузыкальной установки «Малахит»
199
тродвигателем постоянного тока типа ДП (или «Пионер»).
Так как у этих двигателей частота вращения вала достигает 3000 об./мин, необходимо ее понизить с помощью редуктора до 5-30 об./мин.
Все элементы конструкции крепятся на одном шасси, изготовленном из дюралевых угольников (рис. 73). Оно установлено на широкие основания, чтобы устройство не качалось и не вибрировало при работе двигателей. Кроме того, передвигая шасси внутри корпуса, можно менять расстояние между ним и экраном, а значит, изменять размеры движущихся фигур.
Сборку инструмента надо начать с установки в горизонтальных перекладинах осей для вращения дисков и подсоединить оси резиновыми пассиками к двигателю. Затем в фиксаторы на вертикальных стойках вставляют рамку с неподвижными трафаретами и светофильтрами. За рамками на шасси крепят рефлекторы с лампами. Электрический монтаж ведется одножильным проводом. Все провода от лампочек и двигателей прозванивают, маркируют и связывают в жгут.
Жгут прокладывают по стойкам шасси и на задней
Рис. 73. Элементы конструкции светомузыкальной установки «Малахит»
200
стенке корпуса электрически соединяют с помощью разъема с кабелем, имеющим длину четыре-пять метров. Рассмотрим конструкцию отдельных узлов установки.
Оси (рис. 74) изготовляются из латуни или железа. На каждой из них укреплен опорный диск, который может быть выточен вместе с осью, или сделан отдельно. Если диск изготовляется отдельно, его можно приварить или приклеить эпоксидным клеем или клеем БФ-2. Конец оси затачивают напильником до прямоугольного сечения (там крепится диск). На оси, расположенной ближе к двигателю, установленному на подставке, укрепляют два шкива. В центре другой оси-один шкив. Резиновые пас-сики передают вращение с вала редуктора на первую ось и с нее-на вторую.
Отверстия в горизонтальных перекладинах шасси необходимо аккуратно зачистить от заусенец и время от времени смазывать машинным маслом. Тогда при работе двигателей оси не будут вибрировать и шуметь.
Рамка (рис. 73) изготовляется из дюраля или белой жести. В вертикальных перекладинах ее прорезаются пазы, по которым края перекладин выгибаются в противоположные стороны. Между вертикальными перекладинами вставляются сложенные вместе светофильтры и неподвижные трафареты. Для установки нужна всегда одна рамка, однако полезно иметь запас. Тогда у исполнителя будет выбор трафаретов и светофильтров и заменить их не составит никакого труда.
Фиксаторы рамки состоят из опорной площади (рис. 73) и прижимной пружины. Площадка изготовляется из дюралевого уголка, а пружина-из упругой стальной пластинки, например куска металлической линейки. Только перед тем, как сверлить в ней отверстия, надо отжечь линейку в огне газовой горелки и медленно охладить на воздухе. Для того чтобы снять рамку с фиксатора, достаточно отогнуть пружину.
Рефлекторы (их в установке два), как и рамки, могут быть сделаны из дюралевой или белой жести. Каждый из них представляет собой коробку, разделенную на четыре секции светонепроницаемыми перегородками (рис. 73). В задних стенках секций сверлятся отверстия, в которые ввинчиваются лампочки.
Отвороты по краям конструкции служат для крепления ее к вертикальным стойкам шасси. При установке на шасси необходимо следить за тем, чтобы между рефлекторами остался зазор, в который проходят оси вращающихся дисков. 7П1
Простейший редуктор для электродвигателя серии ДП можно изготовить следующим образом (рис. 71,6). От старого будильника подбирается шестеренка с числом зубьев 30-50. На токарном станке из стали или латуни вытачивается червяк с шагом, равным шагу шестеренки. Из дюралюминия выгибается корпус редуктора, в котором сверлятся отверстия под оси шестеренки и червяка. Размечать и сверлить эти отверстия необходимо очень тщательно. В случае перекоса осей редуктор будет работать плохо. Ось червяка с помощью полихлорвиниловой трубки присоединяется к валу электродвигателя. На оси шестеренки укрепляется шкив для передачи вращения.
Вместо двигателя ДП можно использовать два электродвигателя переменного тока типа ДСД-60 со встроенным редуктором частота вращения их 60 об/мин. Такой электродвигатель питается от сети 220 В, и для него не нужен выпрямитель. Скорость и направление вращения его вала постоянны. Разумеется, применение такого электродвигателя несколько снизит творческие возможности исполнения цветовой партии, поскольку изменять направление и скорость движения фигур на экране будет невозможно.
Экран лучше всего изготовить из опалового (молочного) или матового оргстекла. Его нетрудно сделать и самому из обычного прозрачного оргстекла. Для этого «бархатную» шкурку прикрепляют к деревянному бруску
Рис. 74. Чертеж оси, рамка для крепления осей
Рис. 75. Развертка пульта управления установки «Малахит»
202
и, начиная от центра, по кругу зачищают поверхность листа. Обработку нужно повторить несколько раз, до тех пор пока вся заготовка не приобретет равномерный матовый оттенок.
Пульт изготовляется из листа дюралюминия или жести (развертка показана на рис. 75). После разметки его сгибают и сваривают (или запаивают).
На пульте установлено пять потенциометров-это клавиатура. Допустимая мощность рассеивания потенциометров должна быть не менее 2 Вт, сопротивление их 100-150 Ом. Сопротивление резисторов R1 и R2 по 50 Ом, мощность рассеивания их 2 Вт.
Кроме потенциометров в пульте устанавливается трансформатор 220/12 В и выпрямитель. Мощность, потребляемая двигателем ДП, мала, поэтому выпрямительные диоды можно монтировать без радиаторов и теплоотводов. Потенциометры крепят с внутренней стороны пульта, а рукоятки их выводят на лицевую сторону.
Установка соединяется с пультом управления гибким кабелем (число жил кабеля на менее семи). Неплохо сделать для него разъем, чтобы было удобнее переносить или перевозить инструмент.
Трафареты (рис. 71) вырезают из ватмана и с двух сторон окрашивают, черной краской или тушью. Фигурные отверстия в них не вырезают а выжигают с помощью обычного прибора для выжигания. Конфигурация узора зависит от творческого замысла исполнителя. Это могут быть точки, прямые и волнистые линии, цветы, силуэты деревьев и т. п. Обязательно позаботьтесь о том, чтобы иметь большой выбор трафаретов.
Вращающиеся диски (рис. 73) изготовляют аналогичным способом. В центре каждого из них вырезается прямоугольное отверстие для насадки на ось.
Советуем при выжигании пользоваться очень простым приспособлением-бруском с цилиндрическим отверстием, в которое вставляется шланг пылесоса. Выжигаемая поверхность должна находиться над отверстием, тогда пылесос будет непрерывно удалять пепел.
Светофильтры могут и должны быть самых разнообразных цветов. Подойдут, например, пленочные светофильтры от театральных прожекторов. Можно использовать и обычную фотопленку без противоореольного слоя (позитивную, ортохроматическую и т.п.) и, не проявляя ее, отфиксировать. Пленка станет прозрачной. Затем в ванночке разводят до нужной концентрации краску
203
(анилиновая-для раскрашивания фотографий или тканей) и в раствор опускают тщательно промытую после фиксирования пленку. Желатиновый слой пропитывают краской в течение нескольких минут. После этого пленку извлекают из ванночки и сушат на воздухе.
Приступаем к первым репетициям. Для них нужно подобрать произведения, написанные в медленном темпе. Погасите свет в комнате и подождите, пока ваши глаза привыкнут к темноте. Установите ручки всех потенциометров в такое положение, когда изображения на экране еще не видно, но небольшого поворота ручек достаточно, чтобы оно появилось. Включите магнитофон и начинайте по очереди вводить и выводить потенциометры. Подбирая наиболее удачные сочетания звука и изображения, не забудьте регулировать и скорость вращения дисков в соответствии с темпом. Не стремитесь одновременно вводить много потенциометров, поскольку экран кажется «забитым» и невыразительным. А первый концерт стоит устраивать лишь тогда, когда весь репертуар тщательно отрепетирован.
В заключение заметим, что «Малахит» - инструмент простейшего типа. Если несколько усложнить его, добавив лампочки, диски, двигатели, его возможности значительно расширяются.
СВЕТОМУЗЫКАЛЬНАЯ УСТАНОВКА «РАДУГА-2»
Существенное достоинство светомузыкальной установки «Радуга-2» - возможность создания очень больших световых потоков. Величина светового потока-важная характеристика светомузыкального инструмента: ведь громкость звука и яркость экрана тесно связаны. Обычно для регулирования яркости свечения экранов в светомузыкальных установках применяются сложные электронные системы (например, магнитные усилители), с помощью которых изменяется ток, протекающий в электрических лампах. Чтобы получить большую яркость экранов, приходится применять регулирующие устройства большой мощности-регулируемый ток в них достигает сотен ампер. А это связано с созданием таких сложных конструкций, изготовление которых не под силу конструктору-любителю.
«Радуга-2» свободна от указанного недостатка. Источники света включают здесь таким образом, что ток 204
Рис. 76. Управление световым потоком с помощью сельсина
Рис. 77. Функциональная схема светомузыкальной установки «Радуга-2»
в лампах регулировать не нужно. Изменение светового потока осуществляют с помощью заслонки, которая приводится в движение сельсином. Сельсины, в свою очередь, управляются электронной схемой (рис. 76).
Функциональная схема светомузыкальной установки приведена на рис. 77. Звуковые сигналы, преобразованные микрофонами 1 в электрические низкочастотные колебания, поступают на входы пяти микрофонных усилителей 2. Затем сигналы подаются на промежуточный усилитель 3, который имеет пять входов и десять выходов. Назначение промежуточного усилителя-согласовать выходы микрофонных усилителей с входами узкополосных усилителей. После промежуточного усилителя низкочастотный сигнал подается на входы десяти узкополосных усилителей 4, в которых происходят разделение низкочастотного сигнала на отдельные узкие полосы частот и усиление их. К выходу каждого узкополосного усилителя подключен сельсин 5, выполняющий роль поворачивающего электромагнита. На валу сельсина укреплена металлическая заслонка 6, перекрывающая световой поток электрической лампы 7 со светофильтром. Свет падает на экран 8.
205
Микрофонные усилители. В установке имеется пять микрофонных усилителей (рис. 78). Это сделано для того, чтобы можно было организовать светомузыкальный концерт в сопровождении не только оркестра малого состава (эстрадного), но и симфонического оркестра. Первый микрофон отводится для солиста, второй предназначен для струнно-смычковой группы оркестра, третий-для струнно-щипковой группы, четвертый устанавливают вблизи группы духовых инструментов, а пятый-вблизи ударной группы.
Если возникает необходимость воспроизведения музыкальной программы с магнитофона или проигрывателя, то на любой из входов микрофонного усилителя через потенциометр следует подать сигнал с выхода источника музыкальной программы. Остальные четыре входа должны быть закорочены.
Микрофонные усилители должны передавать без заметных искажений полосу частот 50-1500 Гц. Неравномерность частотной характеристики должна быть в пределах + 5 дБ. Описанный ниже усилитель удовлетворяет этим требованиям. Его принципиальная схема приведена на рис. 80.
Первый каскад собран на малошумящем транзисторе МП39Б. Применение этого транзистора обеспечивает низкий уровень собственных шумов. Режимы первого и второго каскадов по постоянному току определяются резистором R4 и применением схемы включения с непо-
Рис. 78. Принципиальная схема микрофонного усилителя светомузыкальной установки «Радуга-2»
206
средственной связью коллектора транзистора VT1 с базой транзисторов VT2. Такая схема отличается устойчивостью режима при изменении окружающей температуры. Оба каскада охвачены отрицательной обратной связью. Это достигается с помощью конденсатора СЗ и резисторов R2 и R3, которые образуют цепочку обратной связи. Отрицательная обратная связь обеспечивает хорошую частотную характеристику первых двух каскадов.
Во втором и третьем каскадах применены транзисторы МП42А. Сигнал со второго каскада на третий подается через электролитический конденсатор С5. В коллекторной цепи транзистора VT3 установлен потенциометр, позволяющий регулировать напряжение выходного сигнала. С движка этого потенциометра через конденсатор С7 сигнал подается на промежуточный усилитель.
Налаживание смонтированного усилителя надо начинать с проверки режимов транзисторов. На схеме (рис. 78) приведены напряжения на всех электродах транзисторов VT1-VT3 (эти транзисторы должны иметь коэффициент усиления не менее 70-100). Подбором сопротивления резистора R4 обеспечивается режим транзисторов VT1 и VT2. Напряжение смещения на базу транзистора VT3 подбирается с помощью резисторов R8, R9, R11. Напряжение на транзисторах может отличаться от приведенного на принципиальной схеме не более чем на 0,5 В. После того как проверены режимы транзисторов, на вход усилителя включается микрофон МД-47 (или МД-44), а к выходу присоединяется осциллограф. При произнесении звуков перед микрофоном на экране осциллографа должна появиться сложная, меняющаяся по высоте кривая.
Затем, отключив микрофон, на вход усилителя подают напряжение от звукового генератора 0,001 В частотой 1000 Гц. На выходе усилителя напряжение должно быть около 1 В. Это напряжение можно оценить с помощью осциллографа. Если напряжение на выходе окажется меньше 1 В, нужно увеличить сопротивление резисторов R1 и R5 (Rl-до 15 кОм, а RS-до 3 кОм). При этом нужно также изменить сопротивление резистора R4, чтобы разность потенциалов мажду коллектором и эмиттером транзистора VT2 была немного больше 2 В.
Каждый из усилителей монтируется на печатной плате из фольгированного гетинакса размером 140 х 40 мм. Все микрофонные усилители помещаются в корпус из ли-207
стовой стали толщиной 0,5 мм, имеющий отдельные секции. Это делается для предотвращения самовозбуждения усилителей. Регуляторы потенциометров выводятся под
шлицы.
Промежуточный усилитель (усилитель-распределитель сигнала) предназначен для коммутации и распределения сигналов, поступающих с микрофонных усилителей. На вход промежуточного усилителя (рис. 79) поступают пять сигналов с микрофонных усилителей. На входе промежуточного усилителя имеется пять независимых каскадов с общей нагрузкой (в коллекторных цепях транзисторов VT1 -VT5).
-гав
«гав
R26100K
R3 200
R21 |1к
R27 ЗООк
R1ЮОк
01 15мкх20В
JVT1 МП42Б 1R4 J 470
02 15мк>20В
1VT2 'МЛ42Б
1RB J470
R5 ЮОК ”200
03 |5мк«20В
VT3 МП42Б 1R12 >470
R918OK "I™
04 15мкх20В
IVT4 МП42Б 1R16 >470
R1716DK
R13160к R*5 200
05 15MKXZ0B
R18 ЮК
IVT5 МП42Б
iR20 1470
_С6 50МКХЮВ
R2B ЮОк
R29 ЗООк
R30 ЮОк
R31 ЗООк
R32 ЮОк
R23 ЮК
R24 Зк
R22
07 Имк»20В
R34 ЮОк
R38 ЮОк
VT6 МП42А
06 15МКХ20В
R25
470
R33 ЗООк
R35 ЗООк
R37 ЗООк
R3B ЮОк
R39 ЗООк
R40 ЮОк
R41ЗООК
R42 ЮОк
R43 ЗООк
R44 ЮОк
R45 ЗООк
Рис 79. Принципиальная схема
промежуточного усилителя «Радуга-2»
208
На вход каждого каскада (на базу транзисторов VT1-VT5) подается сигнал от микрофонных усилителей. Резисторы Rl, R2, R5, R6, R9, RIO, R13, R14, R17, R18, включенные в цепи баз транзисторов VT1-VT5, обеспечивают необходимые режимы их работы и температурную стабилизацию. Резисторы R3, R7, Rll, R15, R19 уменьшают взаимное влияние транзисторов. Резистор R21 является общей коллекторной нагрузкой. С него снимается напряжение звуковой частоты и через конденсатор С7 подается на базу транзистора VT6. Резистор R24 является коллекторной нагрузкой. С него снимается напряжение звуковой частоты и через конденсатор С6 подается на резисторы R28, R30, R32, R34, R36, R38, R40 R42, R44, с помощью которых устанавливается нужный уровень напряжения звуковой частоты, подаваемого на узкополосные усилители. Резисторы R27, R29, R31, R33, R35, R37, R39, R41, R43, R45 необходимы для устранения взаимного влияния узкополосных усилителей.
Налаживание промежуточного усилителя и проверка его работы производят путем подачи на каждый из пяти входов напряжения от звукового генератора 0,3-0,5 В. При этом на выходах должно быть напряжение 3-5 В. Проверка выходного напряжения должна производиться с помощью осциллографа или лампового вольтметра с входным сопротивлением не менее 5 МОм.
Промежуточный усилитель монтируют на печатной плате размером 448 х 95 мм, устанавливают в корпус из листового железа толщиной 0,5 мм. Крышку плотно надевают на корпус и соединяют с ним с помощью болтов М3. Корпус является экраном, защищающим усилитель от наводок.
Блок узкополосных усилителей (рис. 80) состоит из десяти усилителей, каждый из которых настроен на определенную полосу частот, так что перекрывается весь звуковой диапазон светомузыкальной установки (50-15000 Гц). Выделение заданной полосы частот в узкополосном усилителе осуществляется регенеративным фильтром, который образуется из усилителя, собранного на двух транзисторах VT1 и VT2 и двойного Т-образного моста, включенного в цепь обратной связи усилителя.
Первый каскад усилителя собран по схеме с общим коллектором. Эта схема характеризуется большим входным сопротивлением. С нагрузки R8, включенной в цепь эмиттера транзистора VT1, сигнал поступает на базу транзистора VT2. Второй каскад собран по схеме
209
с общим эмиттером. Нагрузкой его является резистор R11. В цепь эмиттера транзистора VT2 включен переменный резистор R12, который регулирует глубину обратной связи.
При верхнем (по схеме) положении движка потенциометра R12 усилитель превращается в генератор звуковой частоты, причем частота генерации определяется элементами двойного Т-образного моста (R2-R4; С1-СЗ). При постепенном перемещении движка потенциометра в нижнее положение усиление второго каскада, собранного на транзисторе VT2, уменьшается, что приводит к срыву генерации. В этом положении потенциометра генератор превращается в узкополосный усилитель. Наибольшее усиление получается на частоте, определяемой Т-образным мостом. Поэтому, когда на базу транзистора VT1 от промежуточного усилителя поступает широкий спектр звуковых частот, на коллекторе транзистора VT2 выделяются только те частоты, которые пропускаются фильтром.
С коллектора транзистора VT2 через конденсатор С7 выделенная частота поступает на базу транзистора VT3, который включен по схеме с заземленным коллектором. С эмиттерной нагрузки R16 сигнал поступает на детектор (VD1, VD2), который включен по схеме удвоения напряжения. В результате детектирования на нагрузке детектора R18 выделяется постоянное напряжение, оно поступает на базу транзистора VT4. Транзисторы VT4 210
Рис. 80. Принципиальная схема блока узкополосных усилителей
и VT5 образуют усилитель постоянного тока, общей коллекторной нагрузкой которого является сельсин. Благодаря специальной схеме включения при появлении сигнала в усилителе постоянного тока ротор сельсина поворачивается на определенный угол. Этот угол не превышает 90° из-за ограничителей на корпусе сельсина.
На роторе сельсина укреплена заслонка, которая поворачивается перед источником света с цветным светофильтром. Чем больше напряжение, поступающее на вход усилителя, тем больший ток протекает через обмотку сельсина и тем на больший угол поворачивается заслонка, открывая все больший поток света (рис. 76).
При настройке узкополосных усилителей необходимо строго придерживаться указанной ниже последовательности действий, в противном случае транзисторы, включенные в схему, выйдут из строя:
1. Перед подачей напряжения от источника питания необходимо движок потенциометра R14 поставить в верхнее (по схеме) положение, т.е. установить наибольшее значение переменного сопротивления. Движок потенциометра R12 следует поставить в нижнее (по схеме) положение.
2. В коллекторную цепь транзисторов VT4 и VT5 включить амперметр со шкалой до 1 А.
3. Включить питание, предварительно проверив напряжение источника с помощью вольтметра (оно должно быть равно 10 В, допускаются отклонения не более + ±1 В).
211
4. Проверить напряжение на коллекторе транзистора VT2. Если оно окажется меньше 2 В, подобрать сопротивление резистора R10 таким образом, чтобы это напряжение было равно 2 В.
5. Повернуть движок потенциометра R12 в верхнее положение. При этом ток усилителя постоянного тока должен возрасти до 400-600 мА.
6. Проверить частоту генерации. Для этого нужно на вход вертикального усилителя осциллографа подать сигнал с базы транзистора VT3. Если синусоида на экране осциллографа окажется искаженной, необходимо изменить положение движка потенциометра R12. Частоту генерации можно определить по числу калибрационных меток времени, укладывающихся на одном периоде синусоиды. Изменение частоты генерации осуществляется изменением величины сопротивления резисторов R2-R4 и емкости конденсаторов С1-СЗ. Номинальные значения частот и емкостей конденсатора приведены в табл. 7.
Таблица 7
Частота, Гц С1 С2 сз
100 0.1 мкФ 0,3 мкФ 0,03 мкФ
200 0,05 мкФ 0,15 мкФ 0,015 мкФ
400 0,025 мкФ 0,07 мкФ 7500 пФ
600 0,02 мкФ 0,05 мкФ 0,005 мкФ
1100 0,01 мкФ 0,03 мкФ 3000 пФ
1600 6200 пФ 0,02 мкФ 2000 пФ
2400 5000 пФ 0,015 мкФ 1500 пФ
4000 2400 пФ 7500 пФ 750 пФ
6000 1800 пФ 5000 пФ 500 пФ
10000 1000 пФ 3000 пФ 300 пФ
После установки нужной частоты проверяют ток в коллекторной цепи транзисторов VT4-VT5. Если ток окажется меньше 400 мА, его нужно увеличить, изменяя сопротивление потенциометра R14 до максимального значения, но ток не должен превышать 600 мА. После того как ток будет установлен, нужно медленно поворачивать движок потенциометра R12 до срыва генерации. При этом ток в коллекторной цепи транзисторов VT4 и VT5 резко уменьшается. Момент срыва генерации хорошо заметен на экране осциллографа.
На этом настройку узкополосного усилителя можно считать законченной. Остается зафиксировать ручки потенциометров.
212
Все десять усилителей крепят на общей изолирующей подставке из гетинакса и устанавливают в железном корпусе.
Устройство экрана установки «Радуга-2» было описано выше.
Блок выпрямителей. Для питания узлов светомузыкальной установки необходимы два источника постоянного тока с напряжением 10 В и один источник 15 В. Напряжения для питания микрофонных и резонансных усилителей должны быть стабилизированными. Принципиальная схема блока питания приведена на рис. 81. Все три напряжения снимаются с общего силового трансфор-
>+15 в
и
А VD1-VD4 Д305
Л
+ С1
= 10000МКХ25В
> -15В
S81 FU1 10Д
-ZZ08
v :
VD5-VDB “ Д226
VTZ nzoz
VT1 П42
R2 1к
VT3
П42
СЗ = 50мк
VD13 I J
Д80В “ "
R1
5.1К
С2 =
ZOOOmkxZOB
2000мкх 20В ЕГ
R3 Зк
R5 15к
R4 2-Зк
04 z 5
Г=. В|
-10 В
+10 в
ПГ
VD9-VD12 Д226
VT5 П202 I/T4 МП42Б
R7 1К
JR9 = IZ-JK
T7VD14 L -двое
R6
5.1К
VT6 МП42Д
СВ 50MKXZ08
RB ЗК
----> -10В
2000мкх 20В i
С7
II
С5=Ь
ZOOOmkxZOB
R10 15 к
+10В —>
к
I
I
Рис. 81. Принципиальная схема блока питания светомузыкальной установки «Радуга-2»
213
матора Tl. С обмотки II снимается напряжение 15 В. Выпрямитель собран на диодах VD1-VD4, включенных по мостовой схеме. В качестве выпрямительных элементов использованы диоды ДЗОЗ (или Д304, Д305). Для сглаживания пульсаций на выходе выпрямителя включен конденсатор С1, емкость которого равна 12000 мкФ. Такую емкость можно получить, включая параллельно батарею из шести конденсаторов по 2000 мкФ, 20 В.
Обмотки III и IV одинаковые, с каждой из них снимается напряжение 14 В. Выпрямление осуществляется диодами VD5-VD8 и VD9-VD12 (все диоды типа Д226 или Д7Ж). В этих выпрямителях осуществлена автоматическая стабилизация напряжения на транзисторах. Значение стабилизируемого напряжения не более 10 В. Так как внутреннее сопротивление выпрямителя в основном определяется сопротивлением обмотки трансформатора и сопротивлением диодов, то изменение тока нагрузки будет мало сказываться на стабильности выходного выпрямленного напряжения.
Электронный стабилизатор работает следующим образом. Если изменение напряжения на выходе трансформатора направлено в сторону уменьшения, то уменьшается и разность потенциалов между базой транзистора VT3 и его эмиттером, так как потенциал эмиттера относительно общего провода остается постоянным вследствие того, что в его цепь включен стабилитрон Д808 (мы рассматриваем работу одного из стабилизаторов, другой действует так же). Далее, ток через транзистор VT3 должен уменьшиться, что, в свою очередь, приведет к уменьшению падения напряжения на резисторе R1. Из-за этого разность потенциалов между базой транзистора VT1 и его эмиттером увеличивается. Это ведет к увеличению тока через транзисторы VT1 и VT2 и компенсирует снижение напряжения на выходе выпрямителя.
На выходе электронных стабилизаторов включены конденсаторы С4 и С7, каждый имеет емкость 2000 мкФ.
В схеме блока питания использованы транзисторы VT1, VT3, VT4 и VT6 типа П42, а транзисторы VT2 и VT5 типа П202 или П203. Коэффициент усиления транзисторов 40-70.
Выпрямитель напряжением 15 В питает обмотки сельсинов. Выпрямители с электронной стабилизацией питают микрофонные усилители, промежуточный и резонансные усилители.
214
Блок выпрямителей собран на гетинаксовой плате. На плате укреплены следующие детали: силовой трансформатор Т1, мощные транзисторы VT2 и VT5 с радиаторами и конденсаторы С1, С2, С4, С5, С7. На этой же плате укреплена текстолитовая монтажная панелька с резисторами R1-R10 и транзисторами VT1 - VT4 и VT6, а также стабилитроны VD13 и VD14. Силовой трансформатор Т1 собран на железном сердечнике Ш-40, толщина набора 40 мм. Обмотка I (сетевая) содержит 900 витков провода ПЭВ-1 0,6. Обмотка II содержит 54 витка провода ПЭВ-1 1,8. Если такого провода не окажется, можно выполнить намотку более тонким проводом, используя две или три параллельные ветви (например, можно выполнять намотку в два провода каждый диаметром 1,3 мм). Обмотки III и IV содержат по 50 витков провода ПЭЛ-0,5.
Для настройки электронных стабилизаторов их выходы нагружаются резистором, имеющим сопротивление 200^300 Ом и допускающим рассеяние мощности не менее 2 Вт. Затем выпрямитель включается в сеть. С помощью вольтметра проверяют напряжение на выходе каждого стабилизатора. Оно должно быть равным 10-11 В. Если оно будет другим, нужно воспользоваться потенциометрами R4 и R9 для регулировки. Выпрямитель для питания обмоток сельсинов должен давать напряжение 15-18 В при токе нагрузки 5 А.
КЛУБНАЯ СВЕТОМУЗЫКАЛЬНАЯ УСТАНОВКА «РАДУГА-4»
Для камерных и эстрадных оркестров, дискотек, постановок театральных спектаклей необходим достаточно простой, но имеющий большую выходную мощность (1-3 кВт в каждом канале) светомузыкальный инструмент. Кроме автоматического частотно-амплитудного анализа звука в таком инструменте должен быть предусмотрен не только автоматический перевод музыки в цвет, что очень часто не устраивает взыскательного зрителя, но должна также иметься возможность ручного управления цветом. Иначе говоря, возникает необходимость в светомузыкальном инструменте, на котором можно было бы исполнять партию цвета так же, как исполняется музыкальное произведение на музыкальном инструменте.
Этим условиям удовлетворяет светомузыкальный универсальный инструмент «Радуга-4».
215
Светомузыкальный инструмент «Радуга-4» по своей структуре достаточно прост (рис. 82). Установка состоит из четырех индентичных каналов. Три канала-красный, зеленый, синий-цветовое сопровождение музыки, четвертый золотисто-желтый канал-канал фоновой засветки, введенный для предупреждения утомления глаз. На входе каждого канала имеются полосовые фильтры. После разделения звукового спектра на отдельные полосы сигнал детектируется и попадает на блоки компараторов (схемы сравнения).
После схемы сравнения сигнал подается на блок управления тиристором, который управляет работой гологенных ламп или ламп накаливания.
Звуковой сигнал с выхода источника программ (это может быть магнитофон, усилитель низкой частоты, микшерный усилитель для эстрадного оркестра, выход радиоприемника и т.д.) подается на согласующий трансформатор Т1 1:5 (рис. 83).
Трансформатор устраняет гальваническую связь сети переменного тока между установкой светомузыки и усилителем низкой частоты, с которого снимается сигнал управления цветом. Это необходимо для выполнения требования техники безопасности. Со вторичной обмотки трансформатора низкочастотный сигнал подается на предварительный усилитель низкой частоты, собранный на транзисторе VT1 (КТ315А). На выходе усилительного
Рис. 82. Функциональная схема светомузыкальной установки «Радуга-4»
216
каскада включены резисторы R6, R21, R43, с помощью которых распределяется низкочастотный (НЧ) сигнал на каждый канал цветности, ими можно регулировать уровень НЧ сигнала, подаваемого на входы световых каналов. С движка потенциометра R7 напряжение НЧ поступает на вход первого канала красного цвета, с движка потенциометра R22 НЧ сигнал поступает на второй канал зеленого цвета и т.д. На входе каждого канала имеется двойной Т-образный мост, включенный в цепь отрицательной обратной связи усилителя, собранного на транзисторе VT2 КТ315А (для первого канала).
Как уже отмечалось при описании предыдущих светомузыкальных конструкций, наилучший результат дают активные фильтры. Именно поэтому в установке «Раду-га-4» использованы активные Т-образные мосты. Для первого канала (канал красного цвета) фильтр Ф1 настроен на частоту 150 Гц, для второго канала (канал зеленого цвета) фильтр Ф2 настроен на частоту 1500 Гц, для третьего канала (канал синего цвета) фильтр ФЗ настроен на частоту 5000 Гц.
Точная настройка на резонансные частоты осуществляется резисторами R10 (первый канал), R24 (второй канал), R49 (третий канал). Применение в светомузыкальной установке активных фильтров, имеющих высокую добротность, обеспечивает высокую крутизну фронта, которая составляет около 20 дБ на октаву, а также высокое входное сопротивление и высокую избирательность.
С выхода первого фильтра звуковой сигнал подается на детектор VD1 и VD2, собранный на диодах Д18 (соответственно с выхода фильтра Ф2 сигнал подается на детектор VD4, VD5 и для третьего канала на детектор VD10, VD11).
Продетектированный сигнал поступает на схему сравнения, собранную на транзисторах VT3 и VT4 (соответственно в канале зеленого цвета VT8, VT9, в канале синего цвета VT17, VT18). В компараторе происходит сравнение двух сигналов-напряжения про детектированного низкочастотного сигнала и импульсов с частотой 50 Гц, приходящих с блока компаратора.
Пороговые напряжения срабатывания компараторов устанавливаются с помощью потенциометров R15, R31, R40, R56.
Эти импульсы формируются в блоке, собранном на транзисторах VT21 и VT22, непосредственно от сети переменного тока путем ограничения амплитуды стаби-
217
VT6, VT11, КП5, VTZO, VT22 - КТ315Б VT21-KTZ01A
FU IDA
ня
FU 1A
Рис. 83. Принципиальная схема светомузыкальной установки «Радуга-4»
литронами VD17 и VD18. Импульсы с частотой сети формируются с помощью транзисторов VT21 и VT22 и стабилитронов VD17 и VD18. С эмиттера VT22 остроконечные импульсы подаются на схемы сравнения каждого канала (транзисторы VT3, VT4, VT8, VT9, VT12, VT13, VT17, VT18), собранных на транзисторах типа КТ315А.
С коллектора транзистора VT3 первого канала (соответственно VT8 для второго канала, VT12 для третьего канала, VT17 для четвертого канала) сигнал поступает на схему в блок управления тиристором, представляющую собой эмиттерный повторитель, собранный на транзисторах VT5 и VT6 (КТ315А и КТ815А). С эмиттера транзистора КТ815А сигнал положительной полярности подается на управляющий электрод тиристора VD3 (КУ202М), который открывается и включает галогенные лампы (1000 Вт, 220 В).
На входе канала фона включены диоды VD7, VD8, которые включают канал в музыкальных паузах.
Кнопка SB2 установления в первом канале (соответственно во втором канале SB3, в третьем канале SB4 и четвертом канале SB5) предназначена для ручного управления светомузыкальной установкой.
Все резисторы, применяемые в светомузыкальном инструменте,-типа МЛТ-0,25, резисторы R65, R66 имеют мощность рассеивания 2 Вт. Транзисторы VT1-VT5, VT7-VT10, VT12-VT14, УТ16-УТ19-типа КТ315Б. Транзисторы VT6, VT11, VT15, VT20, УТ22-типа КТ815А, VT21-KT201A. Кнопки SB2-SB5 типа К. Они сдвоенные, имеют две группы на замыкание и включены параллельно для надежности.
Кнопки установлены на отдельной панели и сверху закрыты клавишами от пианино. Можно применить и другие клавиши, например от аккордеона.
Трансформатор Т2 силовой напряжением 220/12 В, намотанный на магнитопроводе Ш-32, набор 50 мм. Первичная обмотка 660 витков, провод ПЭЛ 0,5, вторичная обмотка 36 витков провод ПЭЛ 0,8. Электролитические конденсаторы С9, С15, С17, С23, С27-типа К-50-6.
Тиристоры КУ202Н монтируются на радиаторе.
Большая светотехническая мощность данной установки позволяет получать интересные цветовые решения исполняемого музыкального произведения. Вариантов технического исполнения также очень много. Это отдельно стоящие на полу прожектора, проецирующие цветовое 220
изображение на экран. Возможен вариант, когда электрические лампы небольшой мощности (40-100 Вт) будут укреплены по всему полю экрана и закрыты опаловым оргстеклом (так называемая «светящаяся панель»). Все зависит от вкуса, фантазии и возможностей конструктора. Но необходимо помнить, что мощность ламп накаливания (или галогенных ламп) в каждом канале не должна превышать 2 кВт.
В канале красного цвета желательно иметь суммарную мощность 0,8-1 кВт, в канале зеленого цвета 0,5-0,8 кВт, в канале синего цвета 1-1,5 кВт, в канале фона мощность не должна превышать 200-300 Вт.
ВЗГЛЯД В БУДУЩЕЕ
Конструируя первые светомузыкальные установки, ученые Института технической кибернетики преследовали весьма обширные цели. Не случайно в плане работы института эта тема исследований числилась под многозначительным названием: «Преобразование звуковой информации в цветовую». Ученым уже тогда было ясно, что трансформация звуков в цвет может найти применение не только в искусстве, но и в различных областях науки, техники и производства.
На помощь может прийти взаимосвязь между слухом и зрением. Комбинируя определенным образом световые и звуковые сигналы, можно достичь концентрации внимания человека на наиболее важных приборах или, наоборот, переключения его внимания с одних объектов на другие. Еще одна интересная область применения светомузыки-архитектурное оформление городов. Например, светомузыкальные фонтаны-это сотни переливающихся всеми цветами радуги струй, высота которых изменяется в зависимости от характера музыкального произведения. Принцип работы светомузыкального фонтана достаточно прост. Музыка и команды о высоте регулируемых струй фонтана синхронно записываются на магнитофон, и в зависимости от характера музыки происходит «танец струй». Одновременно переключаются цветные источники света, подсвечивающие фонтан.
В нашей стране светомузыкальные фонтаны действуют в Ереване, Сочи, Кисловодске, Донецке, Свердловске, а через несколько лет будут построены и в других городах. Музыка поющего цвета используется не только
221
для украшения городов и интерьеров. Она уже сегодня широко применяется в ряде отраслей науки и техники, начинает проникать в физиологию, педагогику и психологию. Пройдет еще немного времени-и засветятся экраны множества светомузыкальных установок.
Перенесемся мысленно в 199... год.
Представьте себе архитектурный ансамбль Кремля теплым майским вечером. Только что отгремел торжественный салют, и вдруг над площадью зазвучала музыка. Десятки мощных звуковых излучателей доносят до каждого стоящего на площади чудесные музыкальные аккорды. И словно по волшебству, над головами праздничной толпы возникает фантастический цветовой шатер, меняющий окраску в такт с музыкой. Зеленые и красные сполохи мечутся по небу. Площадь то погружается в золотистые тона восходящего солнца, то утопает в зеленовато-желтом цвете безбрежных полей и лесов... С последними аккордами музыки над толпой проносятся пурпурно-синие молнии, затем грандиозное зрелище исчезает, вспыхивают лампы освещения. Но долго еще не расходятся люди, очарованные великолепием увиденного.
ПРОЩАЯСЬ С ЧИТАТЕЛЕМ
Вот и перевернута последняя страница книги. Закончилось путешествие в огромную страну-Кибернетику, и хотя оно было коротким, наш рассказ об этой быстро развивающейся науке все же дает представление о том, какое большое место занимает кибернетика в современной жизни. Сейчас уже почти нет ни одного крупного производства, где не применялись бы ЭВМ, не внедрялись роботы, не использовались АСУ. А пройдет совсем немного времени, и наш читатель, возможно, придет на производство и будет управлять еще более сложными кибернетическими машинами. В этой книге вы прочли о роботах, о создании и работе ЭВМ, познакомились с перцептронами, биоэлектрическим управлением и другими не менее интересными устройствами.
Однако кибернетика бурно развивается, в ней появляются новые разделы и направления. Значит, и наш читатель, усвоив азы этой науки, научившись строить простейшие кибернетические устройства, смело может приступать к чтению более сложных книг, конструированию более сложных приборов.
Автор ставил перед собой задачу не только рассказать о некоторых разделах кибернетики, но и помочь чи-222
тателю научиться строить простые кибернетические приборы и модели. Это нелегкое дело. Некоторые устройства вы сможете изготовить сразу, к другим обратитесь позже, когда пополнится запас ваших знаний и умений. Овладение кибернетикой требует труда, настойчивости, терпения. Кибернетические приборы не всегда начинают работать сразу, им необходима настройка, тщательная проверка схемы. Конструктору важно не разочаровываться, не оставлять начатое дело, не бросать его на полпути и добиваться победы.
Страна Кибернетика-быстро растущее «государство», оно развивается семимильными шагами. То, что сегодня кажется новым, совершенным, интересным, завтра может безнадежно устареть. Нужно непрерывно углублять и совершенствовать свои знания. На этом пути вашими добрыми помощниками станут научно-популярные книги и журналы.
Пройдет совсем немного времени, и многие из вас создадут замечательные кибернетические машины, совершат новые открытия, будут управлять робототехническими устройствами, сядут за пульты электронно-вычислительных машин, за штурвалы космических кораблей.
Творите, думайте, дерзайте. Расстояние от первых самодельных кибернетических приборов до новых открытий в кибернетике не так уж велико. И если наша книга хоть чуть-чуть поможет вам, значит, задача, которую автор ставил перед собой, выполнена.
СПИСОК ЛИТЕРАТУРЫ
Антономов Ю. Г., Харламов В. А. Кибернетика и мозг,- М.: Советская Россия, 1968.-328 с.
Венцель Е. С. Элементы теории игр.-М.: Физматгиз, 1961.-68 с.
Галеев Б. М., Сайфуллин Р. Ф. Светомузыкальные устройства,-М.: Энергия, 1978.-176 с. '
ГординА. Б. Пульт управления-мозг.-Моделист-конструктор, 1970, № 8, с. 17-18.
Гордин А. Б., Фрейдии Я. А. Семь нот радуги.- Моделист-конструктор, 1971, № 3, с. 15.
Гордин А. Б. Симфония света.-Юный моделист-конструктор, 1965, № 12, с. 48-57.
Дне Ф. Янг. Робототехника.-Л.: Машиностроение, 1969.
ДолгорядА. П. Математические игры и развлечения,-М.: Физма-тиздат, 1961.-128 с.
Кобринский А.Е. Вот они-роботы.-М.: Наука, 1972.-е.
Отряшенков Ю. М. Юный кибернетик.-М.: Детская литература, 1978.-е. 141-153.
Хейзерман Д. Как самому сделать робот.-М.: Мир, 1979.-196 с.
Шеннон К. Э. Играющие машины.-Кибернетический сборник, 1960, № 1, с.
223
ОГЛАВЛЕНИЕ
Другу-читателю (вместо предисловия)..................... 3
Глава первая, в которой читатель совершит путешествие в глубь веков, побывает в разных странах, встретится с человекоподобными андроидами, а затем отправится в будущее.................................... 5
Глава вторая, в которой читатель совершит путешествие в мир понятий кибернетики и познакомится с Алгоритмом, Информацией, Черным ящиком и другими не менее интересными и загадочными терминами .................................................... 64
Глава третья, из которой читатель узнает, что машина может думать, управлять,, считать и разговаривать с человеком..................................... 71
Глава четвертая, в которой читатель совершит путешествие длиной в сто пятьдесят лет, узнает, что сердце вырабатывает ток, мышцы являются генераторами электрического напряжения, а искусственные руки могут водить поезда........................................... 104
Глава пятая, в которой рассказывается о том, что кибернетические машины могут видеть, узнавать и говорить. В этой главе читатель также узнает, как строить машины, имитирующие искусственный разум .... 117
Глава шестая, в которой читатель начинает игру, узнает, что игры бывают бесконечными и конечными, коалиционными и полными, с нулевой суммой, сам сможет построить кибернетические игры................. 139
Глава седьмая, из которой читатель узнает, что радуга способна петь, музыку можно увидеть, а сенсорный голод вполне утоляется красками................... 181
Прощаясь с читателем...................................222
Список литературы......................................223