/


















































Текст
УДК 656.259.13
Путевые датчики контроля подвижного состава на
рельсовом транспорте. Бухгольц В. П., Красов-
ский Г. А., Штанке А. Э. М. «Транспорт», 1976,
96 с.
В книге изложены назначение, принцип действия и
требования к путевым датчикам счета осей на рельсовом
транспорте. Подробно рассмотрены почти все современ-
ные промышленные типы точечных путевых датчиков сче-
та осей, производимых в СССР и за рубежом. Освещены
основные принципы, способы и технические решения, ха-
рактерные для использования путевых датчиков счета
осей в устройствах автоматики и телемеханики на маги-
стральном, промышленном железнодорожном транспорте
и рельсовом транспорте специального назначения.
Книга рассчитала на научных и инженерно-технических
работников, связанных с проектированием, разработкой и
эксплуатацией устройств железнодорожной и промышлен-
ной автоматики, а также может быть полезна студентам
высших учебных заведений специальности «Автоматика,
телемеханика и связь на железнодорожном транспорте».
Ил. 51, табл. 8, список лит. 41 наев.
к 31802-199 1ОП7С
Ь -------------199-/6
049(01)-76
© Издательство «Транспорт», 1976
ПРЕДИСЛОВИЕ
Непрерывное возрастание пропускной и провозной способ-
ности железных дорог, обеспечивающее увеличение грузо- и
иассажирооборота, осуществляется путем дальнейшего улуч-
шения использования транспортных средств; координации ра-
боты всех видов магистрального и промышленного транспорта;
увеличения перерабатывающей способности станций и узлов;
повышения веса и скорости поездов; улучшения работы про-
мышленного железнодорожного транспорта; усиления верхнего
строения пути; электрификации железных дорог, а также ши-
рокого внедрения современных средств регулирования движе-
ния поездов, среди которых особое место занимают устройства
железнодорожной автоматики и телемеханики.
В настоящее время разрабатываются и внедряются совер-
шенные \геройства автоматического управления и контроля,
позволяющие создать автоматизированную систему управления
железнодорожным транспортом (АСУЖТ), состоящую из от-
дельных, но объединенных информационно-планирующих и
управляющих подсистем. Характерной особенностью техниче-
ского прогресса на железнодорожном транспорте является пе-
реход от автоматизации отдельных операций и процессов к
созданию интегрированных информационно-управляющих ком-
плексов для прогнозирования, оптимального планирования и
автоматического управления всем перевозочным процессом.
В такой комплекс входят многочисленные системы и устройст-
ва, в которых переработка информации и автоматическое уп-
.ранление транспортными процессами осуществляются на
основе, данных о числе осей контролируемых единиц подвижно-
го состава. Это вызвало необходимость в расширении разработ-
ки п использовании главного элемента всех устройств счета
осей — различных по типам датчиков счета осей, удовлетворяю-
щих разным по характеру требованиям систем, где они исполь-
зуются.
За последнее время значительно расширилась область при-
менения и усложнилась функция точечных путевых датчиков
(ТПД) контроля прохода колес (осей) подвижного (состава ’.
1 В дальнейшем под терминами «Точечный путевой датчик (ТПД)»
или «Путевой датчик счета осей (ПДСО)» будет подразумеваться только
такой путевой датчик, который используется в устройствах счета или фикса-
ций осей, обеспечивающий выдачу информации о проследовании через конт-
ролируемую датчиком точку (зону) каждой отдельной оси подвижного со-
става.
3
Л
-50 '
-УО
30
-10
Условная удельная насыщением»
ТПД б действующих системах-
лСТ-5 шт. на. io станционных путей
_ п.П-б шт. на- 100км пути Q
до 1900г 19ЙЬ~~19Ч0 1950 1855 1960~1965 д970'21975~19в0.Г 1985~ 1990 и далееТпрог'н 'оз) j
ЦПодсистемьГдС9ЖТ с регистрацией ЛС~ * — 1
, Механо-электрическая комплексная автоматизация сортировочных станций а горок ' I
1 J автоматизация выявления неисправностей ПС' .................................... |
.нслипи
\путебая блокировка __________________________________
^Контроль сбободности перегонных'и станционных путей по счету осей
^Появление и широкое использование рельсовых цепей б путевой блокировке
Ч Интервальное регулирование движением поездов *> т
Переездная, тоннельная ' ) Регистрация перемещения ОС -*— ---.
\ путевая сигнализация | ^корсетная переездная сигнализация и автомат ограждение *
Преобладающий характер использования тпд при фиксации проследования осей: ~
\Без счета осей'______} ' f С контролем скорости движения осей — —..........
’ ^о счетом осей и контролен направления их движения . ..
Преобладающие типы и конструкции тпд 1
' |С бесконтактным взаимодействием с колесом и сбыходомт мехсноконтактным~у
^Механические с приводом^-'электромеханическим селе_____________________________'.
от воздействия колеса-, | ~ \ - электронным реле ___________ "
от деформации рельса-,1 ’ " р- спец назно чеки я (скоростные, точные, высоко надежные)
с непосредственной передачей;\ ~ ’ ' ' - —
j ^-с промежуточным звеном-, [
Обозначения: Пс-.подвижной состав-,
Периоды использования систем и ТПД начало^использобание prgfrgq;
Рис. 1
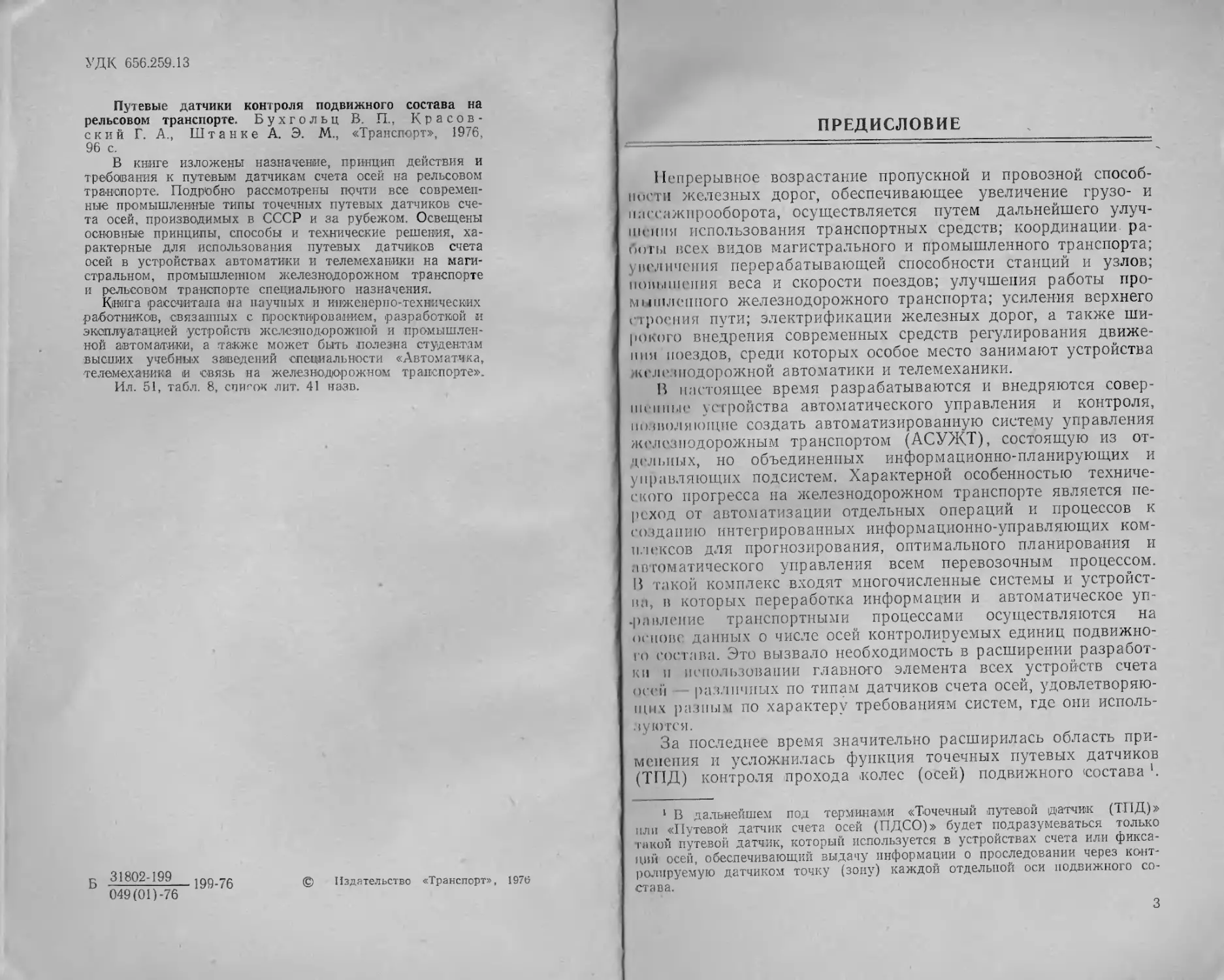
Появились совершенно новые области использования ТПД.
Общая тенденция развития систем автоматического управле-
ния и обработки информации на магистральных железных до-
рогах характеризуется резко увеличившейся и непрерывно воз-
растающей потребностью в ТПД, отвечающих самым различ-
ным технико-эксплуатационным требованиям, специфичным для
каждой из областей их использования.
Так, на диаграмме рис. 1 показаны периоды и тенденции
развития наиболее распространенных систем железнодорожной
автоматики и телемеханики, в которых используются ТПД.
В период до 1950—1960 гг. основными «потребителями» ТПД
были системы механических и электромеханических путевых
блокировок, а также различные устройства переездной, тон-
нельной, путевой сигнализации, в которых находили примене-
ние механические путевые датчики с различными способами
восприятия воздействий подвижного состава и выдачи сиг-
нала.
< I960 I960 гг. начинается развитие и внедрение серий
новых систем железнодорожной автоматики и телемеханики от
4
контроля свебодности станционных и перегонных путей по сче-
ту осей до по [систем АСУЖТ, основанных на регистрации
осей подвижного состава, являющейся первичной информацией
Ц1я л ейс гвня всей системы.
Увеличившаяся при этом потребность в ТПД условно выра-
кенл на диаграмме в количестве ТПД, приходящихся на
10 станционных путей или па 100 км пути на перегонах, обору-
юванпыми сопряженными с ТПД системами. Одновременно,
как показано на диаграмме, в эти же периоды меняются пре-
обладающий характер использования ТПД (контроль скоро-
сти, счет осей, контроль направления), и принципиально-кон-
структивные решения промышленных типов датчиков.
Па промышленном (внутризаводском и рудничном) желез-
но цорожном транспорте также внедряются новые автоматиче-
ские устройства, основанные на широком использовании ТПД,
отвечающих особым для этих железных дорог требованиям.
В настоящей книге рассматриваются теоретические основы
построения и практического использования точечных путевых
датчиков счета осей. Это делает возможным использование
книги, прежде всего, как справочного пособия для проектиров-
щиков и разработчиков новых систем железнодорожной авто-
матики и телемеханики, а также для работников, связанных с
женлуатацией этих устройств, и в качестве учебного посо-
бия для студентов высших учебных заведений.
Все замечания и пожелания по книге просьба направлять,
но адресу: Москва, 107174, Басманный тупик, 6а, Изд-во «Тран-
спорт».
Глава I
НАЗНАЧЕНИЕ, ПРИНЦИП ДЕЙСТВИЯ И ТРЕБОВАНИЯ
К ПУТЕВЫМ ДАТЧИКАМ СЧЕТА ОСЕЙ
НА РЕЛЬСОВОМ ТРАНСПОРТЕ
1. ОСНОВНЫЕ ТРЕБОВАНИЯ К ТОЧЕЧНЫМ
ПУТЕВЫМ ДАТЧИКАМ СЧЕТА ОСЕЙ
Путевые датчики магистрального железнодорожного транс-
порта. На скоростных и грузонапряженных железнодорожных
магистралях значительно расширяются области использования
путевых датчиков счета осей, которые наряду с рельсовыми
цепями, становятся и в ближайшее время станут одним из
основных типов путевых датчиков систем автоматики и теле-
механики магистральных железных дорог. В настоящее время
ТПД счета осей на дорогах применяются в устройствах (табл..!):
путевой перегонной и станционной блокировки — в системах
и устройствах полуавтоматической блокировки (ПАБ), авто-
матической блокировки (АБ), электрической централизации
(ЭЦ) и горочной автоматической централизации (ГАЦ);
контроля скорости движения подвижной единицы — в сис-
темах автоматического регулирования скорости (АРС) на сор-
тировочных горках, автоматических ограждающих устройствах
на переездах (ОУП), в некоторых вариантах систем автомати-
ческого управления движением поездов (АУДП);
выявления и фиксации неисправностей, определения числа
осей физических вагонов и типа единиц подвижного состава
при проследовании его на участках и перегонах: в устройствах
обнаружения нагретых .букс (ПОНАБ) и контроля исправности
колес (КРАП)} в устройствах регистрации времени, числа осей
и вагонов при проследовании подвижного состава (АСБО);
счета осей физических вагонов для станционных и узловых
систем регистрации числа, времени и перемещения подвижного
состава: в автономных горочных контрольно-регистрирующих
устройствах (КРУГ) и ГАЦ; в аппаратуре контроля потери
шунта, выявления длиннобазных вагонов и комплексного
'контроля головной стрелки ГАЦ (УКГС); в аппаратуре реги-
страции перемещения осей подвижного состава (АРПО) АСУ
6
Таблица 1
К ЯЖ‘1 II 'III ни tun Ul’IIIH IIH'll’M Назначение аппаратуры, взаимодействующей с ГПД Использование и назна- чение ТПД
1 2 3
Путедя пере- inun.in и станци- oiiii.iH блокиров- ки - 1 й-рсездная сиг- |1<1лп.'й1ция и ог- раждающие уст- 1 »< > Гн’ пня Система авто- м.пического ре- гулирования ско- рости скатывания нлгопов на cop- ni ровочных гор- ках Системы выяв- к‘ния неисправ- ностей, типа, ре- । петиции под- вижного состава ил участках и пе- регонах Контроль занятия перегона или блок-участка по счету осей Контроль занятия станци- онных путей и стрелочных участков по счету осей Контроль занятия перегона или стрелочного участка по факту входа оси подвижной единицы Сигнализация о приближе- нии поезда Контроль скорости прибли- жения и движения подвижно- го состава Контроль скорости скаты- вающегося отцепа для опре- деления скоростей, ускорений и управления тормозными средствами Контроль подхода скатыва- ющегося отцепа Контроль и регистрация об- щего числа осей в проходя- щих через контрольную точку составах Определение и регистра- ция .физических единиц и ти- па подвижного состава • Счет находящихся на участке осей Подача пускового сиг- нала при проследовании подвижного состава че- рез контрольную точку ТПД Подача пускового сиг- нала при проследова- нии приближающимся поездом контрольной точки ТПД Измерение (скорости) движения подвижного состава по интервалу времени между воздей- ствиями на два смеж- ных ТПД контрольного участка Подача пускового сиг- нала Подача пускового сиг- нала •'при проследова- нии осей состава через контрольную точку ТПД Раздельный счет и регистрация числа осей в тележках, числа те- лежек и физических вагонов двумя ТПД контрольной зоны нор- мативной длины, увя- занной с межосевыми и базовыми расстояния- ми
7
Продолжение табл.
Класс или назна-
чение систем
Назначение аппаратуры,
взаимодействующей с ТПД
Использование и назна-
чение ТПД
Системы счета
числа осей, физи-
ческих (вагонов,
регистрации пере-
мещения осей и
времени на стан-
циях и узлах
Контроль числа осей, длин-
нобазных и физических ваго-
нов, правильности разделения,
нагона отцепов; в системах
комплексной автоматизации
сортировочных горок и гру-
зовых станций
Регистрация числа и вре-
мени перемещения осей, по-
движного состава через кон-
трольные точки станции, узла
в системах слежения сорти-
ровочных горок и станцион-
ных подсистемах АСУЖТ
Подача пусковых сиг
налов при проследова
нии осей подвижной
состава через контроль
ные точки ТПД узла
станции, сортировочно)
горки, погрузочно-раз
грузочных путей
•сортировочной станции, устройствах контроля простоя и числа
вагонов на грузовых станциях и подъездных путях промышлен-
ных предприятий (КПВ-КЧВ).
Помимо основных сфер применения, ТПД на магистраль-
ных железных дорогах используются в ряде вспомогательных
устройств специального назначения (считывания информации с
подвижного состава, аппаратуре 'измерения ходовых свойств ва-
гоно'в и локомотивов, 'в устройствах контроля и сигнализации).
Единой конструкции ТПД, удовлетворяющей всем требова-'
ниям различных автоматических систем и устройств, где при-
меняются ТПД, не имеется (аналогичные по характеру требо-
вания у различных систем в ряде случаев противоречат друг
другу из-за принципиально различного назначения этих уст-
ройств). Поэтому для каждой из систем или групп систем раз->
рабатываются (или приспосабливаются) такие конструкции
ТПД, которые удовлетворяют по своим параметрам специфич-
ным требованиям данной системы.
Комплекс требований к ТПД (табл. 2) состоит из общих
требований, одинаковых по формулировке для всех ТПД, и
специфических требований, конкретизирующих отдельные пара-
метры ТПД конкретных систем. Специфические требова-
ния, являющиеся основными при выборе и разработке конст-
рукции ТПД, определяют: безотказную работу в путевых усло-
виях при возможных колебаниях температуры, влажности и
других разрушающих факторах окружающей среды и нагрузок
(от воздействия подвижного состава на путь и от воздействия
на датчик деталей подвижного состава, волочащихся частей,
8
и.।л 1111.। к и1111 чем с подвижного состава сыпучих грузов и т. д.);
прогону у< i.iiioHKii и обслуживания; устойчивую работу в sa-
il..... iii.iiii;i юно скоростей; надежную работу при возможных
«ин itjiiioiх напряжения источников питания и воздействии по-
........х ы с ктро магнитных полей; быстроту действия и за-
мкнут ючпость фиксации проследования колеса над датчи-
ком Для ГИД, различных систем и устройств, характерен ши-
H.hini in ।пазон изменения одних и тех же параметров. Напри-
н р, в системах автоматизации сортировочных горок для
iipoiii rii регулирования скорости необходимы ТПД, фикси-
рующие с большой точностью (до 10 мм) проследование цент-
ра колесной пары над контрольной точкой пути, но в весьма
।>i р niii'ieiiiioM диапазоне скоростей (от 2 до 60 км/ч) и без
коп । рол । направления движения. Для ряда других устройств
Kin роля роспуска и занятости участков в этих же системах
||<оо.\од||vio, наоборот, обеспечение высокой надежности при
iii.i'iii юльно большей зоне действия датчика и низких скоро-
1Я\ (0 60 км/ч), при этом точность фиксации проследования
колосом контрольной точки значения не имеет.
Аналогичные диапазоны изменения параметров ТПД харак-
к рю । для многих перегонных устройств, где, как правило, по-
вышен верхний предел скоростей фиксации осей (до 200 —
'.!.'>() км/ч), установлены более жесткие требования к габаритуг
tone действия ТПД. В то же время в этих устройствах, как
правило, не предъявляются повышенные требования к точности
работы ТПД, длине зоны его действия, а в ряде систем — к ра-
нни1 врн низких скоростях движения.
В настоящее время разработаны требования и созданы co-
ni iiricснующие им ТПД лишь для некоторых автоматических
। иг гем магистральных железных дорог. Для многих систем и
< тройств, особенно вновь создаваемых, обоснованные требова-
нпч и условия в полном объеме не разработаны, что затруд-
ни*’ । объективную оценку, выбор и разработку ТПД для этих
< ipoi’icTB.
Путевые датчики для железных дорог промышленного тран-
спорга. Области и масштабы применения путевых датчиков
'чсг.| осей на железных дорогах промышленного и рельсового
।рапспорга специального назначения (внутризаводских, руд-
ничных, карьерных и т. д.) существенно отличаются от харак-
icp.i использования ТПД на магистральных железных дорогах
нгледс гвис специфичности условий и особенностей эксплуата-
ции >тих железных дорог. Наряду с наличием систем и уст-
рою । и автоматического управления, где использование ТПД
।нелогично .принципам их применения на магистральных же-
'ir.nibix дорогах, точечные путевые датчики также применяются
и автоматических устройствах специального назначения, спе-
цифичных только для внутризаводских, рудничных, карьерных
н г. и. железных дорог (табл. 3).
9
о Таблица 2
Общие требо- вания к ТПД Специальные требования к ТПД
Характер требований Критерии и их величины для классов систем
СЦБ, перегонных автоматизации сортировочных станций контроля регистрации на участках Подсистем АСУЖТ
на станциях на-участках
1 2 3 4 5 6 7
Обеспечение заданной дос- товерности фиксации про- следования каждой оси по- движного сос- тава через контрольную точку - Уровень достовер- ности реверсивного счета юсей Гд, 1/ось Диапазон скорос- тей движения под- вижного состава, П min—О шах, км/ч Интенсивность дви- жения N103, осей/ч Направление дви- жения подвижного состава: О — односторон- нее Д — двусторон- нее Параметры длины зоны действия: оптимальное зна- чение средней опт ДЛИНЫ, 1 , см ср допустимое от- носительное ос- 1-Н10-Б„.10-б) 0—250 0,2—.1,8 О 40—60 — 1-Ч1О-4...1О-6) 0—50 0,1—1.8 О; Д 40—60 ЖЮ-4 ю-6) 0—25Q 0,8—1,5 О; Д 30—60 1-г-0,5Х'10~6 0—80 0,1—1,8 О 40—65 I1-W0-5 0—160 0,8—4,5 Д 40—70
OfeCse^wse —ед, 4J Ti U' I’'» til Йз-Wi г и ।1 1 ] 1. 1 ' -—- *:
устьзсвЕН 3 требуемой точ- ке железнодо- рожного пути без нарушения правил и норм его содержа- ния с соблюде- нием габаритов приближения строений Обеспечение заданной жи- вучести с уче- том разрушаю- щих воздейст- вий внешней среды и фак- торов эксплуа- тации Тзп шпал: Д—деревянные, Ж-б — железо- бетонные Место установки датчика: перегон (П), стрелочный уча- сток (Стр), пе- реезд (Пр), тон- нель (Тон), мос- ты (М), замедли- тель (Зам) Соеднее время ус- тановки или восста- новления, Тв, ч Стойкость к раз- рушающим ударным и мешающим воздей- ствиями: температуры, °C максимальным суточным коле- баниям темпера- туры, °C максимальным температурам частей, нагретых солнечной радиа- цией, °C влажности, % коротковолно- вой части сол- Д, Ж-б П, Стр, Пр, Тон, М 0,4—1 от —60 до -J-60 40 До 80 !100% - Д Стр, Зам 0,2—0,8 от —50 до 4-60 30 До 85 До Д, Ж-б П, Стр 0,4—1 от —55 до 4-00 30 До 85 полного залива вод Стр, Пр 0,5—1 от —50 до 4-60 30 До 80 ой П Ст-. Пс Тон, М 0,15—1 от —50 4-60 30 До 80
Продолжение табл. '2
Общие требо- вания к ТПД Специальные требования к ТПД
Характер требований Критерии и их величины для классов систем
СЦБ, перегонных автоматизации сортировочных станций контроля регистрации на участках Подсистем АСУЖТ
на станциях на участках
1 2 3 4 5 6 7
Обеспечение работоспособ- ности нормиро- ванием техни- ческого обслу- живания Обеспечение вечной радиации в течение года, 103Х*вл. ч ударным и виб- рационным уско- рениям рельса в диапазоне частот от 10 до 2000 Гц, (g=.9,8.1 м/с2) падающих гру- зов (Гр); воло- чащихся частей подвижного сос- тава — (Под); рабочих органов путевых машин— (Пут) Заданная перио- дичность: внешних осмот- ров, ОСМ/ГОД технического об- служивания, т.осм/год Заданной диапазон !1,5—2,5 До 200 Гр, Под, Пут 40—60 1—2 0,'5—0,8 До 80 Гр, Под 50—150 2—4 1,5—2,5 До 200 Гр, Под, Пут 60—1100 1—2 0,5—0,8 До 80 Пр, Под 50—100 2—4 1,0—2 До 150 Гр, Под, Пут 50—60 2г—3 „в
тающих элек- трических, маг- нитных и Дру- гих факторов внешних влия- ний-воздейст- вий статкческж. \Нст, ’ динамические (импульсные) Д(Д, В провалы ампли- туды ДНПр, % длительность провала tnp, с Заданная макси- мальная длина ли- нии СВЯЗИ 1лс, км Заданное макси- мальное значение тя- гового тока в рель- се, А: постоянного /т переменного ~ 1т 50 Гц Заданное макси- мальное значение на- пряженностей маг- нитного поля тяго- вых двигателей ло- комотивов (на пря- мых участках кре- стовин стрелки); • по вертикали Нв А/см по горизонталь вдоль рельса Нгв, А/см по горизонталь поперек пути Нгп, А/см От —15 -10 500—1000 40—60 0,5 8 2000 430 От — 10 - 400—600 20—40 0,8 0,5 От —15 Ж» 500—1000 30—50 0,4 5 2000 430 V-. -10 400—600 20—40 0,8 6 1000 400 . - ’ - 50 - > О 30—50 0,4 25 2000 400
10 5 20
Па промышленном железнодорожном транспорте, где ши!
рина колеи, тины рельсов * и подвижного состава, в основном!
идентичны магистральному железнодорожному транспорту]
требования к ТПД счета осей отличаются для ряда систем J
связи со следующими особенностями этих железных дорог!
конструктивным отличием электропитания электровозов и тси-|
довозов (и ими создаваемых помех), приспособленностью к|
вождению поездов на более крхлых уклонах (до 40—60%); на-|
личном электрической тяги напряжением 10 кВ с большими
тяговыми токами в рельсах (до 900 А); увеличенными осевыми
нагрузками (до 30—50 тс ось); преимущественно низкими ckoi
ростями движения и небольшим числом вагонов (осей) в со--
ставах; отсутствием пассажирских перевозок, организации nej
рсдвижспий в маневровых маршрутах с заездами на занятые
пути; высокой степенью засорения пути (металлической пылью
и стружкой, химикатами, углем, рудой, горячим и жидким мс]
таллом, шлаками), наличием негабаритных грузов; наличием
в конструкции верхнего строения пути большого количества ме-
талла (стяжек, металлических шпал, плит, металлическое
подрельсового основания на эстакадах, внутрицеховом транс-
порте доменных и сталеплавильных цехов); совмещением ши4
Таблица 3
----• ............— . . .. . -1
Устройство Характеристика использования ТПД 1
Промышленный железнодорожный транспорт
Автоматическое управление сор-
тировкой вагонов у вагопоопроки-
дыватсля
Автоматическое управление стрел-
ками при пошерстном движении со-
ставов
Контроль свободности участка
удаления в релейной централиза-
ции
Автоматизированная установка ва-
гонов на весоизмерительной плат-
форме
Измерение скоростей и ускорений
для автоматического регулирования
скорости вагонов
Подача пускового сигнала при!
подходе подвижного состава для!
перевода стрелки в поп-утное полое
женис а
Фиксация прохода оси и подача!
пускового сигнала I
Фиксация тележки вагона и пота-1
ча сигнала о его точной установке!
Специальный рельсовый транспорт
Диспетчерский контроль со счетом
вагонеток
Автоматическое взвешивание ва-
гонеток на ходу поезда
Раздельный счет по базе вагонет-
ки груженых, порожних и отправ-
ленных вагонеток
Фиксация входа вагонетки и по-'
дача пускового импульса на взвешин
ванне
и i.uku’i колеи, железнодорожного пути с автодорогой;
iiMioindi < к’неныо температурных и химических воздействий, с
попики 1,111 ы.тен ностыо, загазованностью атмосферы, повы-
|||| iiihhi ила ж ностыо; необходимостью систематической пере-
пиьнки путей при наличии их сложных конфигураций и корог-
। IH перегонов.
В целом предъявляемые к ТПД промышленного транспорта
ipHioit.iniiH (по сравнению с магистральными железными до-
|цц »ми) являются более жесткими по условиям живучести,
прочности конструкции и защиты от повреждений, но менее
poi ими по ряду показателей надежности, работоспособности,
। « ник рности и интенсивности счета осей.
К ру шинным ТПД предъявляются повышенные требования
ин < печения электро- и взрывобсзопасности путем исключения
ш тонусгимых утечек, нормирования величин сопротивления
и 1П.1ЯЦИИ, устройства заземлений и блокировок, исключающих
ю.мож кость прикосновения к токоведущим частям, находя-
щимся под напряжением, а также следующим конструктивным
ш полненном ТПД: РВ (взрывобезопасном), при котором взры-
ногн- нпнншость достигается заключением всех элементов схемы
«••» нчрывонепроиицаемый корпус; РИ (искробезопасном), при
ко юром применены параметры элементов схемы, исключающие
и (рыв мсталловоздушной смеси при открытом искрении в мо-
М0нт шмыкания и размыкания электрической цепи; РВИ (ком-
бинированным искро-взрывобезопасным), при котором отдель-
ной взрывоопасные элементы заключаются в корпус исполне-
нии РВ, а все цепи выполняются искробезопасными также в
। >о । не тс гвующем корпусе.
К дополни тельным требованиям ТПД специального рельсо-
пою транспорта относятся: возможность простого и нетрудо-
м много монтажа TIIT одним человеком; отсутствие ухудшения
Состояния верхнего строения пути и снижения прочности рель-
( л при установке ТПД; обеспечение фиксации осей подвижного
остана в диапазоне скоростей движения от нулевой до
’() 25 км/ч; нсчувствигельность датчика и комплектной с ним
ишаригуры к колебаниям питающего напряжения в сети пере-
менного тока с кратковременным (до 1—2 с) снижением (по-
пы шепнем) напряжения до 25% номинального значения и тем-
пера 1уры окружающей среды от —40° до 4~40°С; помехе- и виб-
роусктйчивость ТПД.
Основное внимание при разработке и выборе ТПД специаль-
ною рельсового транспорта уделяется обеспечению искро- и
и1рывобсзопасности и работоспособности датчиков в условиях
комбинированных разрушающих воздействий внешней среды.
Тля многих автоматических систем рельсового транспорта
. ||«)специалыюго назначения на промышленном, шахтном и
карьерном рудничном транспорте четко разработанных трсбо-
H.iiiHii к ТПД (в части их надежности, достоверности и ряда
15
других параметров) нс имеется, что затрудняет выбор прием
лемых решений и разработку специальных конструкций ТЦ[
для таких систем. В системах и устройствах, действующих i
аналогичных магистральным железным дорогам условиях, при]
меняются ТПД этих железных дорог.
2. ПРИНЦИП ДЕЙСТВИЯ И ОСНОВНЫЕ ПАРАМЕТРЫ ТОЧЕЧНЫХ
ПУТЕВЫХ ДАТЧИКОВ СЧЕТА ОСЕЙ
Структура ТПД. Несмотря на различие физических приш
цилов действия и конструкций ТПД, для всех этих типов ха-
рактерна единая структура (рис. 2, о), состоящая, обычно, из
следующих элементов:
рельсового датчика Д, располагаемого непосредср
венно на рельсовом пути, взаимодействующего с каждым коле]
сом, или колесной парой железнодорожного подвижного соста-j
ва в отдельности, и вырабатывающего при этом сигнал (как
правило, электрический);
исполнительного элемента ИЭ, иногда называе-
мого приемником и располагаемого, как правило, в аппарат-
ном помещении, соединенного с рельсовым датчиком и на осно-
ве полученного от него сигнала формирующего и выдающего в
устройство счета осей сигнал о проследовании оси (колеса, ко-
лесной пары);
линии связи Л С, соединяющей рельсовый датчик с ис-
полнительным элементом.
Возможны различные конструктивные варианты компонов-
ки ТПД, в которых отдельные элементы могут отсутствовать
или быть совмещены. Точечные путевые датчики счета осей,
г
Хц4 4 Х||
Воздействие
килеси
Устроаспдо
гчета осей
автоматической
системы
ИС,7
п
Возиеистдиё
помехи
31
Л
I
хд=гад
. 5 линию
гг- ti Злементы, одшие для однокинального
|L——1| и двухкинольноги дитчикиВ
| [ Злсмешпы ВВухконапьиоги датчика
Рельсовый датчик
~1^шГобшйе дня одноканального ид
канального датчиков
-----Сбязи для ддухкинапьного датчика
_ —Связи для однокиналыюго датчика
Рис. 2
16
и. up tин hi nr поставляемые комплектно, в соответствии с
Im । ир< i in 11110Г1 системой промышленных приборов и средств
iiiiir hi । и I nnin (Г(’11) относятся к классу автономных уни-
iii'|ii । ii.hi.is 1..1ГЧПКОВ, в конструкции которых реализуются
.1 IHHIIII к- принципы ГСП: унификация, агрегатирование, сов-
н < iiiMiii и. с другими приборами и системами.
Принцип построения и классификация рельсовых датчиков.
Ни • । р \ к г у р е рельсовые датчики, являющиеся основным
ion 111/1,, подразделяются (рис. 2, б) на одноканальные, у
iniiipi.iK проследование колеса фиксируется методом непосред-
1111 inion оценки входного воздействия на преобразователь дат*
ни I, п двух канальные, фиксирующие воздействие колеса ме-
ц| Юм гр.ппкчтя сигналов от двух самостоятельных (и, как
ipaiiii к», одинаковых) преобразователей.
II и пшканальном рельсовом датчике колесо (колесная па-
ри) и помеха воздействуют на поток связующей энергии Э1,
пырai.,11ываемой источником связующей энергии ИСЭ, кото-
рая ноепрнпимается первичным преобразователем ПП1 и за-
и м преобразуется в изменение выходной физической величины
(наир । kriiiie, гок, сопротивление, перемещение, усилие). Вы-
и тон плп нормирующий элемент рельсового датчика (норми-
пинии 111'реобразо.ватель НП) преобразует сигнал в ун'ифиц'и-
poiirtniii.iH -щектрический с целью передачи его по линии связи.
Iц\ чканальный рельсовый датчик взаимодействует с двумя
iioink.iMii связующей энергии Э1 и Э2 и содержит два первич-
ных преобразователя ПП1 и ПП2, выходы которых подключе-
ны к «леменгу сравнения ЭС таким образом, чтобы постоянные
и мешакицпе составляющие сигналов от первичных преобразо-
п|||глсн компенсировались, а полезные составляющие выделя-
1н<|. и суммировались. При воздействии колеса (колесной па-
ры) и помехи иа поток энергии Э1 преобразователь ПП1 вы-
р КМ1 ЫВ.1СТ комплексный сигнал, состоящий из постоянной
in ।.П1ЛЮО1ЦСЙ сигнала х0, сигнала от воздействия колеса хк (t)
н । in пала от воздействия помехи хп. Преобразователь ПП2, на
। niiipi.iii воздействует только помеха, вырабатывает сигнал,
• nip । loii.iiiiibiu составляющими х0 и хп. Выделяемый элементом
р нипч'и11м ЭС общий сигнал хк (t) нормируется в элементе НП
и ...... на выход датчика в виде унифицированного сигна-
1.1 v,(, представляемого функцией Хц= /?[хк(79].
<) 1 ни.)новые условия работы объединенных в одной конст-
рукции первичных преобразователей ПП1 и ПП2 и идентич-
но! и. п\ параметров определяют следующие положительные
гнингтва двухканальных рельсовых датчиков: устранение в вы-
« Iним сигнале хл постоянной составляющей сигнала х0, что
иг Hi'iiiinier чувствительность ТПД в целом; обеспечение поме-
•. > 1.1 hi и |ц.('пности от влияния комплекса помех; компенсирова-
ние ил ня и пя износа и старения, изменений потоков связующей
.пер! пп и воздействий ряда факторов внешней среды (темпе-
17
Датчики ПДСй
hii i ан pi пн, который в максимальной степени удовлетворяет
| Структура |________
| Одиоканольные | j ДВухканалбные""^
Элементы
(ип\Источник связующей
щ энергии
[Энергия
пп Первичный пре-
111 [ооразователи
М
3
Мехами
ческиц
tin
Ж
И
-j С | СветиВис [
-^(\Инфракрасние\
-\рв\РадиаВолноВое [
-|р [Радиационное [
Физические прии\
[Опт]
Кн
И
Через сВязую
шее поле
Способ взаи
ноВейстбия
с колесом
Энергетический режим
Генери
торный
а
зд:
шип работы
[Инд
Рз
Рис. 3
нп [нормирующей пре - IЭпемо
"" о б розова теле Л српМ
Парапет I Стати
рическии | черкни
Физический^ принцип
\АВтогенера\ [Контакт)
! торный I ныи I
С
К
м
Модуляция.
1
|н они Ишим, предъявляемым к разрабатываемому, проекти-
। him и in приспосабливаемому ТПД. Наиболее распростра-
ни । 114111411 с электромагнитным источником энергии, кото-
1,н1 111н*ицг'1И'!П1ет работоспособность ТПД теоретически в лю-
подвижного состава, в
при наличии мощных
тяговых двигателей и
воздействия на окру-
\пзз
ратуры, влажности и др.). В то же время
I Измен явный пара
метр носителя информации
А
<Р
Ч
\Нм
1им ।Илия кик1 скоростей движения
। । HiiHiop.i 1пы\ климатических условиях,
- и ни।цыч нолей тягового тока и полей
• «и iii.iii.ici заметного биологического
I ИНИНVI" среду.
Но энергетическому ip е ж и му
их преобразователей датчики делятся на !параметр’И-
• нпе, и -которых изменение потока ИСЭ вызывает изменение
। |рцм< три его электрической или магнитной цепи (сопротивле-
IIH емкости, индуктивности, магнитной проницаемости, выяв-
ит,мог с помощью дополнительных схем, что усложняет дат-
нкН и является их основным недостатком), и генераторные
мнер.|горы Холла, пьезоэлементы, магнитоэлектрические,
p'lii-форма горы э. д. с.), электрический сигнал в которых (раз-
oiHiiiiufi, маломощный, искаженный) требует последующего
р» oi.p.i 1О11ЯППЯ для формирования унифицированных сиг-
работы перв'ич-
двухканальные релз
совые датчики по сравнению с одноканальными менее надел
ны по конструкции, требуют наличия симметрирующих ус
ройств, увеличены по габаритам и весу, сложнее и дороже
изготовлении и эксплуатации.
Рельсовые датчики классифицируются по признакам энея
HtlPCKTim ПРадпМ9 nofim-r.T __.____
Ни принципу работы нормирующие преобра-
। о п и । r.'i и (НП) датчиков делятся на автогенераторные, при-
н iiHiiMi.ie, в основном, в одноканальных датчиках и вылолняе-
.1111 п,1 основе регенеративных схем с положительными обрат-
Ц.1МП • нянями; магнитоконтактные (с герконами, поляризован-
ном и репейными вставками в датчиках с ИСЭ в виде постоян-
|и|и м.п нитного поля) и статические (усилители и модуляторы
гетического режима работы, схемному, информационному, коя
структивному и Физическим принципам работы их основнь!
элементов (рис. 3). |
По виду воздействия колеса (
первичный преобразователь датчики подразделяются на мехц
(колесной пары) и
зделяются на мех| (
нически взаимодействующие, не требующие наличия источник
связующей энергии (пьезоэлектрические, механические, гид-
равлические, пневматические, электроконтактные) и взаим(
действующие через связующее поле. Недостатки механическ
взаимодействующих датчиков заключаются в зависимости н,
ТТ ЛХТЛ Т.ТГХГ-'ОТ! YIV ---------
Применение нормирующих преобразователей позволяет:
инфицировать их, повысить помехоустойчивость передачи сиг-
ниш, гальванически развязать и симметрировать относитель-
п» leM iii цени ТПД; согласовать рельсовый датчик с линией
пн in п приемником. Однако при этом неизбежно снижение
। п11ир,i । поп и параметрической надежности ТПД в целом и уве-
orieiiiie за грат на оборудование и эксплуатацию аппарату-
типу элементов сравнения датчики разделя-
дежности их работы от* скорости движ*ения и наТцуз^нТ о1”"и Дифференциальные, требующие наличия двух источни-
подвижного состава, климатических условий работы удавиЛ"’" <с первичными преобразователями генераторного
т.т __•>. _ и > - A нП1Ч|11,| । |( мгттпвмр (е прпйицимм ггпрлбпя.човятолрм пяпяметпи-
и виорационных ускорений, а также наличии значительно!
инерционности механизма, что ограничивает область их пря
менения. г
iiiiin), н мостовые (с первичным преобразователем параметри-
i.hnio типа), для которых характерно повышенное потребле-
йш мощности источника питания моста, некоторое уменьшение
При воздействии колеса (колесной пары) на датчик чер‘
связующую физическую величину., посредством источника евз
зующей энергии ИСЭ появляется возможность выбора таког
18
iy in । пи н'лыюсти и более сложная балансировка плеч моста.
Выходные сигналы точечных путевых датчиков и способы
• к ш пользования. Сигналы рельсовых датчиков разделяются
пн непрерывные (свойственные датчикам без нормирующего
19
преобразователя и с нормирующим преобразователем статиче-
ского типа) и дискретные, вырабатываемые нормирующим!
преобразователями магнитоконтактных и автогенераторньи
типов. Нормирующий преобразователь позволяет переводин
сигнал первичного преобразователя в унифицированные сигиа
лы тока и напряжения заданного уровня.
Некоторые типы генераторных и параметрических датчике?
(дифференциально-трансформаторные, индукционные, индук-
тивные) выдают естественные непрерывные сигналы, мощности
которых обеспечивает достаточную помехоустойчивость их пе
редачи. У непрерывных сигналов носителем информации явля-
ется амплитуда, фаза или частота, которые изменяются в соот-
ветствии с изменением контролируемой связующей энергии.
В ряде случаев в ТПД используются одновременно два носите-
ля информации, например: амплитуда и фаза или амплитуда и
частота. При этом амплитуда выходного сигнала служит дл;
целей обнаружения отказа или контроля работоспособности
ТПД, а второй носитель информации служит для целей фикса-,
ции, контроля направления движения и счета осей подвижного
•состава. В двухканальных дифференциально-трансформаторных
и индукционных датчиках для отметки прохода центра колеса
с повышенной точностью используется переворот фазы сигна-
ла. Импульсы дискретных сигналов характеризуются формой,
амплитудой, длительностью, частотой следования и фазой им-
пульсов. Фаза определяется положением импульсов после сдви-
га во времени относительно их начального положения. Пара-
метры электрических непрерывных выходных сигналов тока и
напряжения и пределы их изменения для исполнительных эле
ментов ТПД (либо автономного рельсового датчика) установ-
лены в соответствии с ГОСТ 9895—69.
Таблица
Назначение (решаемая за- дача) устройств счета-фик- сации осей Назначение сигналов Специфичные требования* । к сигналам
Счет осей
Реверсивный счет
осей
Пусковые сигналы на
включение аппаратуры
Измерение скорости и
ускорения подвижного
состава
Счетные импульсы
Входные сигналы ана-
лизатора направления
движения оси
Сигналы управления
и сигнализации
s. Старт стопные пуско-
вые сигналы измерения
времени
Помехоустойчивость
Помехоустойчивость, |
стабильность зон фикса
ции осей
Аппаратная надеж,
я ость
Повышенная точное г|
и стабильность фикса
ции центра оси (коле-
са) в зоне действий
ТПД
20
11ц । литры дискретных импульсных электрических выход-
III is । in и ijhhi II1Д устанавливаются в соответствии с ГОСТ
1ОЧЗН /!> 'Способы и характер использования iCH-гналов, по-
।уппкиппх от исполнительного элемента ТПД, зависят от наз-
ih ч< пня сигналов в решаемых задачах счета (фиксации) осей
( I <(».'! I).
Компоновка, размещение и основные параметры точечных
пук-пых датчиков. Компоновка рельсовых датчиков определяет
п |(|11М1>р.1(’110ложсние отдельных узлов датчика, а размещение
лиц определяет их конструкции в зависимости от привязки к
। । икр* гным элементам верхнего строения пути: рельсу, под-
р« >ц,1 оному основанию и другим конструкциям. В зависимости
и| компоновки датчика отдельные схемные узлы могут раз'Ме-
Н1 hi.гм ппе элементов пути (в кабельном ящике, релейном шка-
фы । пгцпальных помещениях). Вынос отдельных узлов датч.и-
н . i;i пределы верхнего строения пути повышает надежность
III/!, путем изоляции легкоповреждаемых его элементов от
, пирных п вибрационных воздействий.
11 о г н о с о б у конструктивной КОМПОНОВКИ КОМ-
11 л г к га датчиков рельсовые датчики разделяются на оди-
нарные (с совмещением в ограниченной зоне реверсивного или
и пл преданного счета осей нескольких одинарных ТПД, уста-
навливаемых на одном или разных рельсах) и многокомплект-
ные, ( совмещением в одном блоке двух (сдвоенных) и более
pi чьгопых датчиков.
II <> способам компоновки и вынесения из
рельсового датчика его основных элементов
iHi'iHhit разделяются на конструкции с объединением всех эле-
ми iob в одном блоке и с разнесением элементов, обуславли-
1.11‘мом как требованиями повышения надежности, так и самим
принципом действия (например, у датчиков, основанных на
•ираппровании колесом энергии излучения: электромагнитных,
фото электрических, ультразвуковых, узлы ИСЭ и первичные
преобразователи располагаются по разным сторонам рельса).
Возможность использования ТПД и его элементов в кон-
• рггпы.х системах определяется их техническими и метрологи-
ч . ними характеристиками: информационно-надежностными,
I । л । нческими и динамическими.
К информационно-надежностным параметрам
и пика относятся:
срок службы Тсл — календарная продолжительность экс-
п >iv нации — устанавливается по условиям безопасности, эко-
помическим показателям и др.;
ресурс Тр — наработка до предельного состояния — уста-
пыл птастся ТУ или ГОСТом;
т
коэффициент готовности /<г , где Т„ —среднее
1 Р~Г * В
। 1 см я отыскания и устранения отказов за период 7р ;
21
Таблица I
— Ч
Составляющие достоверно-
сти счета осей
Мероприятия ио повышению достоверности счета осе
Параметрическая на-
дежность
Помехоустойчивость
Аппаратная надеж-
ность
Применение ТПД со стабильной и оптималя
ной средней длиной зоны действия. Оптималя
пая расстановка рельсовых датчиков комплект! I
Стабилизация параметров источников питали»
элементов и узлов ТПД
Применение двухканальных рельсовых датчя
ков. Симметрирование и гальваническая paw
вязка жил линии относительно «земли». Псполь
зование помехозащищенного способ i передач'
сигналов. Компенсация постоянной и квадратур
ной составляющих сигнала. Оптимизация вход
пых характеристик приемника. Применение эле'
ментов с малым уровнем шумов. Использоваюц
экранированного кабеля с парной или звездно/
скруткой. Коммутация входных иди выходные
цепей ТПД с подключением его к исполнитель]
ному элементу только на период прохода фиксц
руемых осей.
Автоматическое переключение реверсивного
комплекта при отказе одного ТПД и
режим фиксации осей выжившим ТПД без опре
деления направления движения. Резервирована
и работа элементов в облегченных э.юктричв
схих, температурных гл механических режима»
Применение элементной базы повышенной hw
дежности. Использование разнесенной копструД
ции рельсового датчика, в котором элемент сраэ
нения и нормирующий преобразователь выносят
ся в релейный ящик или кабельную муфту ]
среднее значение интенсивности потоков информационны!
отказов Q = A’PH. от—усредненное число отказов, 'восстанавли-
ваемого ТПД за единицу времени в период Tf), где \ (ось/ч) -J
интенсивность следования осей; Р». от (1/ось)—вероятност!
информационного отказа, определяемая отказами аппаратуры;
ошибками ложной тревоги и пропуска сигнала, помехами и ни!
стабильностью параметров.
Статически м и параметра м и являются:
dx
чувствительность А ---------крутизна характеристики
«вход — выход», где х0, Уо— соответственно выходная и вход1
пая величины ТПД; чувствительность постоянна только та]
определенном участке характеристики и ограничивается, с од!
ной стороны, пределом преобразования, с другой,— порогом
чувствительности;
предел преобразования УПр — максимальное значение вход-1
ной величины — воспринимаемое датчиком без искажения и по-1
вреждения; обуславливается параметрами преобразователей;!
22
порог чуш гвигельносги У min —минимальное значение вход-
ом п«’ iii'iinii.i, обнаруживаемое преобразователем; определяет-
*1 ппм< ними шумов, неточностью установки, дрейфом нуля
ip*, o/ip । юн целей и др.;
ши решноегь ТПД (паспортная величина) Х = До4-АуУ —
1^111'1111111 огктонений реальной характеристики от номиналь-
ной, гд.*? Ап абсолютная погрешность нуля; _\у— относитель-
ней ши ргшпость чувствительности; У—текущее значение
! ♦ пр .мой величины.
I динамическим параметрам относятся:
полога пропускания и»Пр, оценивается частотным диапазо-
11..»!, при котором динамическая погрешность начинает превы-
। I hi кшустимую входную погрешность;
•ик (отцам передаточная функция №(о) = j , где
(•-•) т/(о>) —амплитудно-частотные характеристики соответст-
нио входного и выходного сигналов;
"| рлпичопия частотного диапазона со!ПЧХ( обуславлива-
• • . параметрами преобразователя и нестабильностью воздей-
IHIH подвижного состава;
нр< мя переходного процесса включения /пер. b»i. и выключе-
i /нФр. пищ , характеризует быстродействие — допустимую ин-
Т1»||Г11виость проследования фиксируемых осей за единицу вре-
пн при заданных амплитудах входных и выходных сиг-
। । ЮН
111Д как техническому устройству свойственны: ремонто-
ipnio цюсть, продолжительность эксплуатации до предельного
о< 1ОНИИЯ; циклически регулярный режим работы; последствия
шформационных отказов, определяемые непосредственными
пытками от отказов и косвенными — от простоя автоматизи-
рованных систем.
Методы повышения надежности и улучшения основных тех-
нических характеристик ТПД указаны в табл. 5.
3 СПЕЦИАЛЬНЫЕ ТРЕБОВАНИЯ К ТОЧЕЧНЫМ ПУТЕВЫМ
ДАТЧИК
Д.ичики реверсивного кош рол я проследования подвижного
пилава. Работа ряда устройств и систем, перерабатывающих
информацию о числе осей, основана на реверсивном счете осей,
при котором оси подвижного состава не только фиксируются,
по и с помощью реверсивного комплекта ТПД [1], структуры
которого даны на рис. 4, определяется направление их дви-
•ю пня.
В состав комплекта «входят два или три ТПД и анализатор
и.травления движения АИД, который представляет собой циф-
23
ровой конечный автома
имеющий входы сигнале
от ТПД, входы от блок
контроля исправности Л]
пни связи и путевого да
чика и выходы сигнала
счета осей четного Ч I
нечетн о го Н н а ир ав л i
ния движения.
При проходе колесно
пары по зонам действи
ПД, на входах аналг
затора появляются chi
налы, логическая оценк
последовательности по
ступления которых по<
своляет определять ш
правление проследования оси при всех вариантах передвиж!
ний колес над датчиками (включая остановку и колебательны
движения) [2].
•В реверсивном 'комплекте ЗТПД с тремя ТПД (рис. 4,
анализатор формирует на выходе импульс счета при наличи]
поочередного прохождения колесной парой независимо распо
ложенных трех зон действия: Z3i, 132, Z33.
В комплекте 2ТПД с двумя ТПД (рис. 4, б) анализато
формирует сигнал счета с информацией о направлении д.вижв
ния оси, при наличии сигналов в последовательности: сначала
от ТПД1, затем от ТПД1 и ТПД2 одновременно, а затем
только от ТПД2 (третья, искусственная зона действия Z3i,
образована наложением зон двух ТПД).
При маневрах — остановках и смене направления движе
ния подвижного состава — па входы анализатора могут по-
ступать различные последовательности сигналов, но анализа-
торы формируют 'счетные импульсы при наличии входных по-
следовательно'стей, соответствующих структуре анализатора.
Основным условием обеспечения работоспособности (пара
метрической надежности) реверсивного комплекта ТПД явля
ется правильный выбор зон действия датчиков и их взаимного
положения на рельсах. В зависимости от требуемого уровня
достоверности счета осей требования к параметрам длин зов
действия ТПД реверсивного счета осей различны. Необходи- /’
мый уровень параметрической надежности может быть обеспе^
чей соответствующим выбором реверсивного комплекта ТПД и
правильным размещением датчиков на путях (табл. 6).
Параметрические сбои реверсивных комплектов ТПД могу г
возникать и при исправных одинарных ТПД из-за нестабиль-
ности длин зон действия ТПД, в результате которой нарушает-
ся последовательность поступления и прекращения сигналов
। n 'it । пыли i.’iTopa, что приводит к пропуску оси. При уста-
и<ип । ли । 'iiihDii па разных рельсах достоверность повышается
,i .ti устранения воздействия от посторонних предметов
и dii ii ihiuihsch деталей вагонов).
Таблица 6
1 1 'Г • ' 1 1, 1 t, И >1 .... | 1 НИ pi’* н |Ш Иппого 1'ИМП К* к 1'11 С пособ уста- новки датчи- ков на рельсах Статистика длин зоп действия Оптимальное расстояние между цент- рами дат- чиков
Среднее значение Z3, мм Отно- ситель- ное основ- ное от- клоне- ние, % Коэффициент корреляции зон действия комплекта ТПД
Ь н> , В одном 0,7—0,8 0,2—0,3
II) Г1Т1Д |1шрл vce 300—750 До 16
1 II) ’ гнч Го же 400—650 14 07—0,8 0,2ь- 0,3
1 III) жид Па разных рельсах 600 12 - 0,4-ь-0,5 0,58—0,62
1 10 11 ’.’ГИД Го же 600 10 -0,4-ь-0,5 0,55- 0,62
lilt III •' ИНД » 350 16 -0,4 0,8-1,2
) KI
1 iK.ni нестабильность вызывается отличиями в силе воздей-
. нпи Кфлес на первичные преобразователи, колебаниями на-
при кгнни питания, флуктуациями параметров ТПД, различ-
ным итогом колес и рельсов.
111 <пчниы катастрофических отказов, параметрических сбо-
। и ни точпиков помех не зависимы друг от друга <и носят слу-
1,111111.11* характер, поэтому общая достоверность фиксации и
|<|.|1Г1ь Irinin направления движения осей подвижного состава
। itpciM'H I 'определяется выражением
-(Рош+Рл) Nf\,
(О
Рд(0 — вероятность достоверной фиксации и пра-
вильного определения направления дви-
жения осей реверсивным комплектом
ТПД;
Р Д1)—вероятность отсутствия аппаратных ката-
строфических отказов реверсивного ТПД
за время t;
л)(. + ?пр — вероятность отсутствия ошибок типа
«ложная ось» и «пропуск оси», обуслов-
ленных воздействием помех;
РСб —вероятность недостоверного определения
направления движения оси (сбоя) анали-
затора направления движения;
N — интенсивность проследования осей подвиж-
ного состава через счетный участок.
25
24
При условии «что /=т=-у, уравнение (1) примет вид
(1 -Лж-^р-ЛоЛ <
Вследствие незначительности величин интенсивностей кат
строфических отказов аппаратуры ТПД с параметром пото!
Ла выражение (2) упрощается
Л= 1 -Л.ОТ= 1 - (-£—гЯ,: Р„?±Рсб) , (
из которого следует, что достоверность реверсивного сче
осей может быть повышена уменьшением интенсивностей пот
ка катастрофических отказов, параметрических сбоев и пов^
шением помехоустойчивости, что обеспечивается комплекс
мероприятий в соответствии с табл. 5.
Параметрическая надежность реверсивного комплек*
2ТПД может быть существенно повышена правильной расст
новкой рельсовых датчиков на оптимальном расстоянии од-
от другого вдоль пути, определяемом выражением,
1ал=1а L1'. , с
’ /1-Г-У1+Г
где /д1,2—оптимальное межцентровое расстояние рельсов!
датчиков реверсивного комплекта ТПД, измере
ное вдоль пути;
13 — среднее значение длины зоны действия путезо,
датчика;
г — коэффициент корреляции длин зон действия пут
вых датчиков реверсивного комплекта.
Датчики комплекса типа «Датчик-аппаратура счета осе
оператор». В ряде железнодорожных автоматических сист<
ТПД применяются в устройствах счета осей, где в цепи обр
ботки информации наряду с автоматическими машинные
звеньями включены операторы («человеческие звенья»5), и
формационная надежность которых должна учитываться п|
постановке общих требований к надежности и достоверное
ТПД подобных устройств (например в устройствах контро.
свободное™ перегонов по визуальному контролю за счет<
осей [3] и других системах). В этом случае метод анализа о
щей надежности как всего устройства в целом, так и конкре
но датчика счета осей исходит из рассмотрения ТПД как эл
мента комплекса «Система контроля-человек», в котором уч
тываются технические параметры, характеризующие работ
способность аппаратуры, а также параметры надежности и л
гические возможности человека-оператора. Расчетную схе\
такого комплекса, позволяющую проанализировать общий ур
вень надежности системы и предъявить требования к ТПД
Рис. 5
• инк'рпостп фиксации осей, целесообразно рассматривать как
•< к>шцую из трех частей (рис. 5): собственно ТПД, аппара-
\pi.i счета осей (счетчик осей с табло выдачи данных) и опе-
iiopi Но сравнению с полностью автоматизированной систе-
оч1 общая достоверность информации, вырабатываемой таким
Lm.ii н’кеом, частично повышается за счет возможности восста-
<>п.Irinin оператором правильности информации, искаженной
oiiPiecKiiM устройством, а в ряде случаев — снижается из-за
о iMoKHbix ошибок оператора. Возможность восстановления
i< п||.|пильной информации обусловлена как техническими воз-
никши глми системы (сигнализацией неисправности рельсового
|.|чньл, контролем наличия питания и др.), так и наличием
ini и и екого контроля объектовой информации со стороны опе-
nioip.i (при предъявлении логически несовместимых данных).
шик шость возможных ситуаций для рассматриваемого
•мп н’кеа обусловлена результатами деятельности оператора
Гн пиппбочиая, ошибочная) и технических средств.
II результате возможны следующие исходы работы систе-
III (нчогказная работа (выдается и воспринимается истинная
|иф|||1м.щия), выдача ложной информации (информация на
.|(нп> ложная, но оператором воспринимается как истинная);
0114,1 искаженной информации (информация на табло не co-
nic гсгвует воздействию подвижного состава на ТПД, но пред-
26
27
ставлена оператору совместно с контрольным сигналом над
чия неисправности); полный отказ (потеря .работоспособное
технических средств). Из структуры перечисленных исход;
следует, что информационная надежность комплекса выраи!
ется уравнением
Рин = ^ин SgPy-Bi , (
где Р“н и Р™—вероятности информационной надежно?!
соответственно комплекса и техническ
средств;
Р6 —вероятность безошибочной работы оператор]
Sgi — вероятность появления неправильной инфо
мации;
Р Н1 — вероятность опознания оператором Henp
вильной информации;
Р Ув1—условные вероятности восстановления опер]
тором правильности информаций.
Развертывая выражение (5) с учетом значений индексов
обозначающих разновидности причин выдачи устройствами
правильной информации (г = Л, И, О, где Л — ложная. И-
искаженная, а О — отсутствующая информация), можно уст,
новить
Р^п—Р^ц Рб^гёл Рцл Рувл I ён ^пи^уви'Ь'^о Рщ "уво • (
Величина Р™ определяется в соответствии с известным
методиками; вероятности появления неправильной информац?
(gi) находятся для конкретной системы по результата
специальных статистических обследований, вероятное1!
безошибочной работы оператора Pq принимается по известны
данным либо также определяется методом статистичесю
го обследования комплекса, когда одновременно могут бьы
получены величины вероятностей опознания (РпН) и восстану
ления оператором (PyDa) неправильной информации, -выдава;
мой устройством.
Из уравнения (6) следует, что требования к вероятное!
безотказной работы ТПД, предъявляемые конкретной системе
включающей в себя аппаратуру счета осей и оператора, опр
деляются выражением
Лтпд — (PL ёл РплРувл ёцРпцРуви ёо Рцо Руво)^АСО» (|
где Лтцд и Р асо—вероятности безотказной работы соответс
венно ТПД и аппаратуры счета осей.
Для ТПД некоторых систем типа «ТПД-аппаратура счеч
осей-оператор» с известными параметрами информационно
надежности и вероятностных характеристик информационно
деятельности оператора могут быть получены ориентировку
28
Таблица 7
' ||И1 II IIIUIIIIIIIC KIIM- II.. II I II, lllltlll- Р . । । |ш । hi 1 к осей oil! |||Н1>|1 Характеристик л функций опера гора Требования к надежности (достоверности информации)
Комплекс тпд Аппарату- ра счета осей Оператор
р к г ин ртпд РАСО рб
У, 1||ц||стио ав- K.M't 1 ll-irciittro !• 1 llpt'MCll И и н й (Л< 1И)) Восприятие и учет информации числа осей с кор- ректировкой осей локомотива 1—10-5 1-2-10- _с 1—'10-6 1—10-3
1 |||||1’н>|> коптро- ГПОООДНОСТИ .и |и । пни но сче- ; in i'll Л мп л |»n гура об- - i|iym< пня пере- ||>ки.к оукс 11 К >11Л1.) Восприятие и сопоставление с сообщенным по телефону числом осей для контро- ля ввободнюсти перегона Восприятие за- регистрированно- го номера выяв- ленной оси 1—2-Ю-4 1—10-5 1—10-5 1—10-с I— 5 -10—6 1-нЮ-6 1-0,5-10-3 1—2-Ю-3
Лнпцрлтура от- li in нагонеток । uni si пом тран- 11. ip 11 Восприятие чис- ла вагонеток для учета и распреде- ления 1-3-10-4 1-2-110- 1—10-4 1—4-Ю-3
nil- 111.'1чспия показателей надежности для ТПД этих систем
н.п- ! /), что позволяет обоснованно выбирать ТПД не только
। ы полностью автоматических, но и для человеко-машинных
и- it-м обработки информации об осях подвижного состава.
Глава II
ПРОМЫШЛЕННЫЕ ТИПЫ ТОЧЕЧНЫХ
ПУТЕВЫХ ДАТЧИКОВ СЧЕТА ОСЕЙ 1
(ПРОИЗВОДСТВА СССР И ЗАРУБЕЖНЫХ ФИРМ)
4. МЕХАНОКОНТАКТНЫЕ ТОЧЕЧНЫЕ ПУТЕВЫЕ ДАТЧИКИ
(ПЕДАЛИ)
Педали выдают электрический сигнал при срабатывание
контактов их выходных элементов в результате воздействия ко-
леса па воспринимающий пружинно-рычажный механизм дат-
чика. В устройствах шахтной СЦБ, на промышленном транс-
порте и на малодеятельных станционных путях в ограниченном
количестве применяются педали: ПКД— путевой контакт на-
жимного действия, роликовый датчик-счетчик, датчик-концевой
выключатель типов ВКВ-380М. и ВВ-6 и др. [4, 5].
Саморегулирующая просадочная педаль ПСП-2 применяет-
ся в устройствах полуавтоматической блокировки и других
устройствах СЦБ магистрального железнодорожного транспор-
та. Педаль ПСП-2 (рис. 6) [6] состоит из корпуса, крепящего-
ся на бетонном основании, оси с фрикционом, контактной сис-
темы с клеммами, предохранительного кожуха и прихвата на
рельсе, соединенным посредством рычага с осью. При въезде
колеса в зону действия педали и просадке рельса (па глубину
2 мм и более) коленчатый рычаг поворачивает ось с коромыс-
лом, переключая контакты педали и возвращая их в исходное
положение при выходе колеса из этой зоны.
Педаль работоспособна при смещении рельса поперек пути в
пределах ±*13 мм, просадке или выпучивании рельса в пределах
+27 мм и продольном угоне рельса в пределах +60 мм, габарит
ные размеры 300X230X140 мм, масса 17 кг.
Рельсовые мембранные педали 10624М и ПР-65, состоящие
из располагаемого под подошвой рельса чугунного корпуса,
1 Систематизация промышленных типов ТПД, применяемых и серийно
изготавливаемых в Советском Союзе и за рубежом, выполнена по виду свя-
зующей энергии и принципу работы первичного преобразователя.
30
Рис. 6
пневматической камеры (объемом 15—30 см2) с регулировоч-
ным устройством и контактной вставки, аналогичны по конст-
рукции и отличаются лишь установочными размерами и регу-
лировочными данными, приведенными ниже.
Технические характеристики педалей
10324 М
ПР-65
Условия срабатывания педали:
рельс типа .......
прогиб, мм..............
Габаритные размеры, мм . . .
Масса, кг............. ,
Р38, Р43, Р50
0,3
390X415X210
48,6
Р65, Р75
0,015
390X415X226
52
При въезде колеса в зону действия педали и прогибе рель-
... через регулировочную гайку, упирающуюся в подошву
рельса, пневматическая камера сжимается, передавая давление
н<ыдуха через клапан на мембрану, которая прогибается, пере-
ключая контакты (переходное сопротивление которых не более
11,03 Ом). При выходе колеса воздух из камеры задерживается
кл.шаном и фильтром, чем обеспечивается замедление на 1—
1 < обратного переключения контактов.
Педали 10624М и ПР-65 могут применяться, как ТПД счета
<н ей, лишь в ограниченном диапазоне нагрузок па ось и скоро-
кч"| подвижного состава. Вне этих пределов педали не фикси-
рую г группу проходящих осей либо не выделяют отдельные оси
(при больших нагрузках и скоростях движения).
Для расширения этого диапазона клапан пневматической
in н:мы педалей 10624М и ПР-65 снимается, а схема педали
кнюлняется формирователем импульсов, фиксирующим крат-
। инрсмеппые срабатывания ее контактов.
31
5. МАГНИТОКОНТАКТНЫЕ ТОЧЕЧНЫЕ ПУТЕВЫЕ ДАТЧИКИ
В магнитоконтактных ТПД ферромагнитная масса колес
БОадействует через магнитное поле источника связующей энер
ГИ11 на .релейную вставку, вырабатывающую при срабатывание
контактов электрический сигнал счета оси. Первичный преоб
Рааователь действует от изменения величины и направление
магнитного потока, протекающего через магнитную систем]
контактно-релейной вставки при прохождении колеса в зон<
чувствительности датчика.
Усилие притяжения ферромагнитного якоря, вызываемо
наличием магнитного потока в зазоре магнитопровода вставки
опРеделяется выражением
F— ф2 = В'2 S
2;л0 S 2р-0
(8)
где 5 — площадь сечения выходящего из якоря магнитного
потока;
В — магнитная индукция в зазоре магнитной системы
вставки;
Цо — магнитная проницаемость вакуума. I
Релейно-контактные вставки таких датчиков (у которые
контактные пластины являются магнитопроводами, упруги!
звеном и электрическими контактами) представляют собой сов-
меЩенпые первичные и нормирующие преобразователи и кон
структивно выполняются в виде высокочувствительной магнит-
ной системы типа механизма поляризованного реле, в виде тиг
ПОВ14х, серийно выпускаемых промышленностью герметичных
мапштоуправляемых контактов-герконов, что позволяет суще
ствецно упростить конструкцию и схему, уменьшить габариты,
мас^у и повысить надежность магнитоконтактных ТПД.
АТагнитоконтактный датчик фирмы Siemens (ФРГ) приме-
няется на сортировочных горках и в устройствах путевой
бло1^ИрОВК]1 по счету осей [7]. Датчик выпуска 1955 г. col
стоит из системы посто-
янных магнитов, создаю-
щих сильное магнитное
поле, поляризованной
контактной вставки и ос-
нования (рис. 7).
Магнитный поток, ко-
торый создается главны-
ми магнитами 2 и 5, со-
единенными между собой
ярмом 6, частично замы-
кается через наконечни-
ки 3, 4 и воздушный за-
зор, в котором помещен
якорь 8.
32
er
Рис. 8
В воздушном зазоре, кроме того, действует незначительный
по силе магнитный поток обратного направления от вспомога-
юльных магнитов 1 и 7, соединенных яр.мом 10. Якорь 8 поля-
ризован и .под воздействием главного магнитного потока при-
тянут к наконечнику 3. При прохождении в зоне датчика коле-
< а часть главного магнитного потока, ответвляющаяся на рельс
и реборду колеса, увеличивается, а часть, действующая в за-
зоре, становится меньше вспомогательного потока, который
преобладает и перебрасывает якорь 8 к наконечнику 4, замы-
кая. электрический контакт. После выхода колеса из зоны дей-
< твия датчика якорь 8 возвращается к наконечнику 3. Магни-
пжонтактная система датчика помещена в герметически
закрываемый корпус из диамагнитного материала, амортизи-
рована от сотрясений и имеет штепсельное соединение с дву-
.к ильным кабелем.
Магнитоконтактные путевые датчики WSSB (ГДР) приме-
няются на сортировочных горках и в ряде систем СЦБ на же-
исзных дорогах ГДР. Магнитоконтактная система датчика
WSSB с поляризованной релейной вставкой собра-
на в диамагнитном корпусе, возвышающемся над головкой
рельса на 30 мм и крепящемся к его подошве (рис. 8, а). Она
«оразована из магнита Ml (рис. 8, б), частично заходящего
иод головку рельса (источник потока Ф1), и магнита М2 (источ-
ника потока Ф2), установленного с зазором 70 мм от боковой
1 рани головки рельса.
Над магнитом М2 размещено поляризованное, настроенное
с преобладанием, 'безобмоточное реле.
В исходном положении части потоков (Ф]в—Фга ) и Фгв
компенсируются. При прохождении реборды колеса в зазоре
между головкой рельса и датчиком из-за увеличения магнит-
ных потоков Ф1а и Ф2а и -уменьшения потоков Ф1В и Фгв *в за-
•оре якоря появляется действующая на якорь механическая
। ила, якорь перебрасывается, переключая контакт. Время сра-
I >1631 33
батывания и отпускания якоря около 2 мс, а длина импульс?
зависит от 'скорости движения колеса вагона (при скорост?
около 100 км/ч продолжительность импульса до 10 мс).
7 Для удлинения импульса независимо от скорости движений
колеса применяется тиратронный формирователь — расшири
тель импульсов (рис. 9). Импульс, поступающий на вход j
контакта ПД датчика, зажигает тиратрон Л1. Разряжающийс!
через него конденсатор С1, кратковременно возбуждает р‘е*
ле А, которое вырабатывает удлиненный импульс (до 200 мй)
обеспечивающий возбуждение нормальных реле всех типов
Удлинение импульса до 3—15 с достигается включением в схе
му реле В, замедление которого создается цепочкой R6—С2 1
Недостатками датчика являются: возвышение конструкций
над головкой рельса и возможность повреждения от ударов, ]
также непрочность и недостаточная герметичность контакте^
С 1967 года изготавливается и широко применяется на сод
тировочных горках в ряде автоматических устройств железиы
дорог ГДР, ПНР, ЧССР датчик WSSB с газозащищен-
ной контактной вставкой — герконом [8]. Литой алм
миниевый корпус 1 датчика, крепящийся к рельсу (рис. 10, а/
содержит компенсационную магнитную цепь с постоянным*
магнитами, залитыми эпоксидным составом и размещенный!
ниже головки рельса, регулировочный винт и геркон 2 с удЛ'й
нителем его включения. Герконовая вставка, заменяемая оди|
Рис. 10
34
I»:ib в два года, связана с магнитной
цепью двумя полюсными наконечника-
ми и катушкой поверх колбы гер-
кбна. Крепление позволяет переме-
щать магнитную цепь горизонтально
и 'вертикально относительно рельса и
предотвращает самопроизвольное сме-
щение геркона.
Удлинитель, размещаемый в рас-
пределительной муфте (рис. 10, б),
о1.'дает дополнительное магнитное
Рис. 11
п’<1ле при разряде конденсатора С
после срабатывания контакта, чем обеспечивается удлинение
н'мпуль'са до 200 м>с при высоких скоростях движения колеса.
Технические характеристики датчиков WSSB
С’релейной вставкой С герконом
Ресурс числа срабатываний , . 106 107
Коммутируемая мощность при напряжении 60 В, В-А . z . 4 12
Скорость колес, при которой датчик срабатывает, км/ч . . 0—160 0—200-
Масса, кг 15 16
Уровень относительно головки рельса, мм Выше на 30 Ниже на 30
Зазор между боковой гранью рельса и датчиком, мм . . . 70
Допустимые ударные ускорения рельса, м/с2 200 700
Магнитоконтактные путевые датчики ELS производятся за-
водами аппаратуры СЦБ в ПНР. Датчик ELS-2 (рис. 11)
< рётоит из основного 3 и вспомогательного 1 магнитов, герко-
на 2, основания 4 с деталями крепления к подошве рельса.
К исходном состоянии части потоков магнитов 1 и 3, идущие
но контактным пластинам геркона, равны и направлены встреч-
но, вследствие чего пластины не притянуты. При появлении
•|»<'рромагнитной массы колеса над датчиком магнитные потоки
перераспределяются: поток магнита 1 уменьшается, а магни-
ia 3 увеличивается, контактные пластины притягиваются друг
в а ругу и замыкаются, выдавая сигнал. Недостатками датчика
I TS 2 является самопроизвольная разрегулировка с изменени-
< м длины зоны действия, а также отсутствие герметичности
ипчика.
( 1969 года заводом СЦБ в г. Катовице для сортировочных
|<‘>рок, автоматической переездной сигнализации и ряда других
35
Рис. 12
устройств железнодорож-
ной автоматики выцус
кается датчик Е L
[9]. На рис. 12 приве-
дена конструкция датчи
ка ELS-3, где / — рельс
2 — корпус, 3 — магнит-
ный экран, 4 — колесо
5 — линия габарита, 6—
клеммная крышка, 7 —
основание, 8 и 10 —: фи-
гурные упоры, 9 — патг
рубок. На одном осно-
вании предусмотрена
возможность установки
одного или двух датчи-
ков с раздельными гер-
конами, что позволяет
осуществить односторон-
ний и реверсивный счет осей, а также дублирование (резер-
вирование) датчиков, которые могут регулироваться относи-
тельно головки рельса по высоте и по горизонтали. Чувстви-
тельность датчика и срок службы геркона -повышены благодаря
наличию магнитного экрана и включению варистора на выходе
датчика.
Техническая характеристика датчиков ELS: устав заливаются
на рельсах 8, S42, S49, S60; необходимое расстояние для установки
датчиков между шпалами 260 мм; устанавливается от стыка па
расстоянии не менее 4 шпал (ELS-2) и 6 шпал (ELS-3); рабо-
тоспособны при скорости движения, колес 160 км/ч; тип геркона
ZW-103; допустимые значения тока 0,2 А, напряжения 120 В.
прикладываемые к геркону; допустимое значение противо-э. д. с.
400 В; допустимая активная нагрузка, подключаемая к датчику,
iliO Вт; гарантированное число срабатываний при нагрузке 0,1 А и
24 В резистивного характера 107; интервал рабочих температур. от
—30 до +70°С; минимальная длительность сигнала при скорости
160 км/ч — 3 мс (ELS-2) и 4 м/с (ELS-3); габаритные разме-
ры, мм: 200X240X490 (ELS-2), 190X300X400 (ELS-3); масса;
21 кг (ELS-2), 11 кг (ELS-3). : г
6. ИНДУКТИВНЫЕ ТОЧЕЧНЫЕ ПУТЕВЫЕ ДАТЧИКИ СЧЕТА ОСЕЛ
Принцип действия индуктивных ТПД основан на изменении
индуктивности (коэффициента самоиндукции) первичного пре-
образователя вследствие изменения магнитного сопротивления
его магнитной цепи. В качестве первичного преобразователя
индуктивных ТПД используется катушка с сердечником, индук-
тивность которой изменяется либо от непосредственного ^оз-
36
действия на нее ферромагнитной массы колеса или оси, либо’
посредством промежуточного (механического, магнитного) пе-
редатчика этого воздействия.
Индуктивность обмотки с сердечником для магнитной цепи
индуктивного датчика <
£_ W2 ________________________W2_________
Яст+А’вз " /стл- , !1 V В ~
/=1 р-стл дета p-о £=1 *->£
TJ72
=—I-------------г- ’ (9>
*СТ.Э___[_ °э
р-ст.э <$СТ.Э ‘ Но 5Э
где W — число витков катушки;
RBS и 7?ст —соответственно магнитные сопротивлениям
воздушных зазоров и стали магнитопрОво-
да датчика;
/ст./ , 5 ст.i , Нети—соответственно длина, площадь поперечного’
сечения и магнитная проницаемость г-го
стального участка магнитопровода дат-
чика;
bi, Si — соответственно ширина и активная пло-
- щадь поперечного сечения г-го воздушного’
зазора магнитопровода датчика;
ро — магнитная проницаемость воздуха;
^ст. э , бэи SCT, э, 5Э—суммарная длина, рассчитываемая по сред-
ней магнитной силовой линии, и активная
площадь поперечного сечения сердечников
и воздушных зазоров магнитопровода дат-
чика и взаимодействующих с ним масс, при
определении которых учтены конфигурация
магнитных цепей, влияние краевых и по-
верхностных эффектов;
Цст.э—эквивалентное значение магнитной прони-
цаемости стали магнитопровода датчика
при учете поверхностного эффекта ('особен-
но при повышенной частоте питания).
Величина тока, протекающего в катушке первичного пре-
образователя датчика под действием приложенного переменно-
го напряжения U:
Z> ~ VRi + ^L‘ ' ' Г
где Z э и R3—соответственно полное и резистивное эквива-
лентные сопротивления катушки датчика;
со — круговая частота питающего напряжения.
Следовательно, величина тока, являющаяся первичным сиг-
налом проследования оси, при неизменных конструктивных,
параметрах датчика (IF, 1СТ, 5ст.э) зависит от переменных ве-'
личин, изменяющихся при воздействии колеса, оси на датчик:
магнитной проницаемости стали магнитопровода датчика, дли-
ны и площади воздушного зазора. В большинстве конструкций
промышленных типов индуктивных ТПД — механоиндуктив-
ных, магнитоиндуктивных, электромагнитных — эти параметры
изменяются либо при непосредственном механическом воздей-
ствии колеса на первичный преобразователь, либо при взаимо-
действии ферромагнитной массы колеса с датчиком через свя-
зующее магнитное поле.
В качестве первичного преобразователя магнитоиндуктив-
ных ТПД используется катушка с подмагничиваемым разомк-
нутым сердечником из магнитомягкого материала с высокой
магнитной проницаемостью (типа пермаллоя), индуктивность
которой изменяется, как правило, от воздействия на нее через
связующее постоянное магнитное поле ферромагнитной массы
колеса, находящегося в зоне действия датчика.
Индуктивность сердечника катушки такого датчика
L^L^K,. a0Z, (И)
где L — индуктивность катушки без сердечника;
ц — действующая магнитная проницаемость сердечника;
цо — начальная магнитная проницаемость сердечника;
ЛД <Д 1 — коэффициент использования магнитных свойств,
зависящий от соотношения и величин форм и раз-
меров сердечника и катушки.
Выделяемый таким датчиком сигнал проследования оси
подвижного состава (при изменении индуктивности Lc) недо-
статочен по мощности для его передачи на расстояние, поэто-
му магнитоиндуктивные ТПД снабжаются, как правило, встро-
енными в них электронными усилителями сигнала.
В электромагнитных ТПД сигнал прохода оси подвижного
состава вырабатывается при воздействии ферромагнитной мас-
сы колеса или оси на длину и площадь воздушного зазора маг-
нитопровода, в результате чего изменяется магнитное сопро-
тивление магнитной цепи первичного преобразователя, индук-
тивное и полное сопротивления его обмотки, и как следствие,
протекающего через нее тока. После преобразования этот сиг-
нал усиливается до значения, достаточного для срабатывания
исполнительного элемента ТПД.
Магнитоупругая бесконтактная рельсовая педаль, разрабо-
танная для релейной полуавтоматической путевой блокировки
системы КБ ЦП1 [10], содержит магнитоупругий первичный
преобразователь дроссельного типа, заключенный в стальной
корпус, который монтируют на плите, прикрепляемой под по-
58
.инивой рельса. Проход колеса
над датчиком, сопровождаю-
щийся изменением усилия .на-
жатия рельса на магнитопро-
нод педали, изменяет магнит-
ную проницаемость сердеч-
ника и соответственно индук-
нпиюе сопротивление обмот-
ки первичного преобразовате-
ля, вызывая пропорциональ-
ное изменение тока, контро-
лируемое размешенной в пу-
тевой коробке электронной
схемой, которая и формирует
выходной сигнал датчика.
Рис. 13
Техническая характеристика педали: время от воздействия на
датчик до выдачи сигнала 0,25 с; минимальный прогиб рельса
для срабатывания педали 0,005 м-м; чувствительность датчика (дав-
ление на рельс) 150 кгс; диапазон рабочих усилий 0,15—5 тс; га-
баритные размеры 1150X^1'00X90 мм; масса (с плитой) 25 кг.
Путевой магнитоэлектронный датчик МЭД-2 применяется
в устройствах реверсивного счета осей [И]. Датчик МЭД-2,
являющийся магнитоиндуктивным сдвоенным ТПД, собран на
общей платформе, прикрепленной к рельсу (рис. 13). Его маг-
нитная система состоит из оснований 4 и 6, двух постоянных
магнитов 3, перекрытых полюсной накладкой 2, двух стальных
шунтов 5, которыми регулируется величина магнитного потока
в рабочем зазоре датчика. Для уменьшения взаимного влияния
магнитных систем датчиков -стальная накладка 2 имеет inocepe-
шпе разграничивающую латунную вставку 1. Корпус магнит-
ных систем изготавливается из диамагнитного материала (си-
|умина). Чувствительным элементом датчика МЭД-2 является
первичный преобразователь — дроссель с железоникелевым
сердечником 8 — и нормирующий преобразователь автогенера-
шрного типа с трансформаторной обратной связью.
При входе ферромагнитной массы колеса в зону действия
ытчика магнитный поток дросселя перераспределяется и
уменьшается, индуктивное сопротивление его обмотки увели-
чивается, что приводит к нарушению условий самовозбуждения
н срыву колебаний автогенератора. Подача сигнального напря-
жения от автогенератора в исполнительный элемент ТПД пре-
кращается до выхода колеса из зоны чувствительности датчи-
ка. Такой режим работы датчика позволяет контролировать
отказы основных элементов ТПД.
Техническая характеристика датчика МЭД-2: установка на
рельсах Р43 и Р50 (со специальными крепежными деталями для
каждого типа рельса не ближе двух шпал дю стыка); превышение-
над головкой рельса 35 мм; расстояние от боковой поверхности
39
головки рельса до 4-12 мм; блоки автогенераторов установлены ни-
же (верха головки рельса на 454-11 мм; непараллельность передней
грани полюсной накладки по отношению к головке рельса не бо-
лее Ц мм; фиксация проходящих колес обеспечивается при скорости
движения подвижного состава от 0 до 120 км/ч; средняя длина
зоны действия каждого датчика 20—22 см, общая длина зоны сдво-
енного датчика 25—-40 см, напряжение питания 12В±110%; потреб-
ляемый ток 211 мА±11О°/о; напряжение переменной составляющей в
режиме генерации не менее 3i>5 В, при срыве не более 0,7 В; рель-
совый датчик может быть установлен от исполнительного устрой-
ства на расстоянии до *800 м; линия связи—четыре жилы теле-
фонного кабеля (с парной или звездной скруткой) на сдвоенный
датчик; диапазон рабочих температур от —40 до 4~60°С; габарит-
ные размеры 3t4OX'245X8i3O мм; масса 23,5 кг. Проверка и регули-
ровка датчиков производится два раза в месяц.
Электромагнитный индуктивный рельсовый датчик ДР для
узкоколейного рельсового транспорта '[5] взаимодействует с
.колесами и осью колесной пары. Датчик состоит из магнито-
провода 1 с обмоткой 2 и размещается поперек пути между
рельсами, не касаясь их (рис. 14, а). При проходе колесной
пары над магнитопроводом датчика общее магнитное сопротив-
ление магнитной цепи уменьшается, вследствие чего изменяется
величина тока, протекающего в обмотке. Схема исполнитель-
ного элемента датчика (рис. 14, б) состоит из дифференциаль-
ного и пик-трансформаторов ТР1 и ТР2, формирующих им-
пульсы напряжения; транзисторов Т1 и Т2, работающих в ре-
жиме ключа, и исполнительного реле Р. Управляющая W1 и
компенсирующая W2 обмотки трансформатора ТР1 запитыва-
ются от общего источника. Трансформатор сравнивает магнит-
ные потоки обмоток W1 и W2, разность которых индуктирует
управляющее напряжение в обмотке W3. В исходном состоянии
транзистор Т1 заперт. При входе колесной пары в зону дейст-
вия датчика полное сопротивление его обмотки ДР увеличи-
вается, фаза управляющего напряжения меняется, транзистор
Т1 открывается, пропуская импульсы от пик-трансформатора,
и реле Р срабатывает. Схема может работать в режимах сра-
батывания или отпускания реле при воздействии колеса на дат-
чик, контролируя обрыв в цепи датчика.
Рис. 14
40
Датчики ДР типоразмеров ДР-600, ДР-750 и ДР-900 приме-
няются в угольных шахтах, не опасных сто газу и пыли, рельсовом
транспорте рудников и шахт горнохимической промышленности..
Датчик работоспособен при расстоянии между полюсами магнито-
провода и ребордами колес 15—20 мм, смещении колесной пары ш
уширении колеи, при повышенной влажности, в диапазоне скоро-
стей движения колесных пар от 0 до 60 км/ч.
Электромагнитный индуктивный путевой датчик «Integra»
(Швейцария) применяется на дорогах 'ряда iCTpa'H -в устройст-
вах автоматической (переездной 'сигнализации и путевой бло-
кировки. Датчик, состоящий из двух раздельных половин, рас-
полагается на стальном основании, крепящемся к рёльса.м, п
взаимодействует с колесами и осью колесной пары (рис. 15).
При отсутствии колесной пары над датчиком 'магнитные пе-
ременные поля обеих половин рельсовых датчиков замыкаются
в основном по воздуху. При наезде колесной пары магнитные
силовые линии полей обеих половин датчика складываются и
замыкаются через их магнитопроводы, стальное основание и
колесную пару, в результате чего индуктивное сопротивление'
половин датчиков увеличивается и ток, протекающий через
исполнительные элементы, уменьшается, что фиксируется схе-
мой. Частота питающего напряжения датчика 1000 Гц, что поз-
воляет обеспечить требуемое быстродействие схемы и работо-
способность датчика при скоростях до 160 км/ч и более.
7. ИНДУКЦИОННЫЕ ТОЧЕЧНЫЕ ПУТЕВЫЕ ДАТЧИКИ
СЧЕТА ОСЕЙ
В индукционных ТПД используются генераторные первич-
ные преобразователи, основанные на принципе электромагнит-
ной индукции, закон которой выражается формулой
е = (12}
4Ь
где е —индуктируемая электродвижущая сила;
W —число витков обмотки;
5Э — эквивалентная площадь катушки;
В — магнитная напряженность потока поля, пронизываю-
щего эквивалентную площадь катушки.
Сигнал проследования колеса через зону действия индук-
ционных датчиков вырабатывается, как правило, при воздейст-
вии ферромагнитных масс колеса на связующее постоянное или
переменное магнитное поле, в результате чего изменяется вели-
чина магнитного потока, сцепленного с электрическими конту-
рами первичного преобразователя, вызывая появление индук-
тируемых э. д. с., которые и являются сигналом счета оси.
Индукционные датчики в силу простоты их схемных и кон-
структивных решений ц, как следствие повышенной надежно-
сти являются наиболее распространенным типом бесконтакт-
ного датчика и применяются на железных дорогах многих стран
в двух основных модификациях: магпитоиндукционных (с
источником связующего поля — постоянным магнитом) и ин-
дукционных электромагнитных (с переменным магнитным по-
лем). Ферромагнитная масса колеса воздействует на первичный
преобразователь индукционных электромагнитных ТПД через
переменное магнитное поле, излучаемое передающей катушкой
датчика, которая запитывается от источника переменного на-
пряжения. Магнитный поток такой катушки определяется вы-
ражением
ф _____F___ УД Ц sin cot___ КД Ц sin
^стН- Rh BqtRe Дт । Д
?'СТ ScT Sg
Подставляя выражение (13) в формулу (12), получим вы-
ражение для э. д. с., наводимой в обмотке первичного преобра-
зователя при воздействии колеса на датчик,
е
KW2 SK2 ид (о/г
Дт ТстЗ'сТ Т" ^В
COS lS)t ,
(И)
где — число витков передающем катушки (источника свя-
зующего переменного магнитного поля);
ИД —число витков .приемной катушки;
S —эквивалентная площадь катушки первичного преоб-
разователя (приемной катушки);
со — круговая частота;
/1 — амплитудное значение переменного тока передаю-
щей катушки;
Х<1—коэффициент связи обмоток, учитывающий соотно-
шение потоков полного и сцепляющегося с прием-
ной катушкой.
42
PiHC. 16
В большинстве таких ТПД ферромагнитная масса колеса,,
воздействующая на связующий переменный магнитный поток,,
изменяет амплитуду и фазу 'магнитного потока, пронизываю-
щего приемную катушку, которая вырабатывает э. д. с., являю-
щуюся сигналом счета осп, выдаваемым ТПД.
Магнитоиндукционная бесконтактная педаль типа ПБМ-56
[12] состоит из магнита размером 60X68X80 мм с на-
саженной на него катушкой (5000 витков, провод ПЭЛШО
0,27 мм) и устанавливается на подошве рельса внутри колеи
так, что верхняя плоскость магнита отстоит на 10 мм от ниж-
ней грани головки рельса.
Приближение ферромагнитной массы колеса к центру маг-
нита датчика увеличивает проводимость путей потока магнита.
В катушке индуктируется э. д. с., амплитуда которой пропор-
циональна скорости движения колеса, а полярность меняется:
от прямой во время приближения колеса до обратной при его
удалении от центра магнита (рис. 16, а). Типовым исполнитель-
ным элементом датчика является поляризованное реле Р типа
РП-7 с искрогасительным контуром RC в цепи контакта
(рис. 16, б), якорь которого при проходе колеса срабатывает
дважды, перебрасываясь вначале в рабочее, а затем в исход-
ное положение.
Недостатками датчика являются: неработоспособность при
малых скоростях движения подвижного состава; незащищен-
Техническая характеристика датчика ПБМ-56: датчик устанав-
ливается на всех -типах рельсов и соединяется с -исполнительным
элементом двумя жилами кабеля, диаметром 0,9 мм, длиной до
4 км; надежная работа с релейной педальной ячейкой обеспечивает-
ся при скорости колес от 1,5 до 30 км/ч, с электронной схемой —
от 1,0 до 200 .км/ч и температуре от —40 до +60°С; массой
7,5 кг.
43
ность от влияния внешних магнитных полей; наличие помех от
вибрации рельса — «микрофонного эффекта», обусловленного
микросмещениями катушки относительно магнита при вибра-
ционных и ударных воздействиях рельса на датчик. Для воз-
можности использования датчика в ряде устройств специаль-
ного назначения разработаны электронные приемники, в кото-
рых частично устранены или компенсированы перечисленные
недостатки педали ПБМ-56 >[13, 37].
Магнитоиндукционные путевые датчики фирм «SERVO»
(№ 7788) и «GENERAL ELECTRIC» (США) применяются на
железных дорогах США и ряда других стран в устройствах
контроля перегретых букс и на сортировочных горках.
Датчик «SERVO» представляет собой размещенный в
диамагнитном корпусе 1 (рис. 17, а) подковообразный постоян-
ный магнит 6 с отдельными обмотками 2 на каждом из его
полюсов. Корпус датчика крепится ниже верха головки рельса
на 45+5 мм посредством специального для каждого типа
рельса основания детали.
При входе ферромагнитной массы реборды 4 колеса 5 в зо-
ну действия датчика (магнитное сопротивление воздушного за-
зора магнита изменяется, что вызывает изменение магнитного
потока 3, сцепленного с катушками датчика, и, как следствие,
индуктирование э. д. с. (в обеих последовательно соединенных
.катушках) с амплитудой, пропорциональной скорости движения
колеса.
Схема исполнительного элемента, используемая в аппара-
туре контроля перегретых букс фирмы «SERVO» (рис. 17, б),
состоит из интегрирующей цепочки RC, диода Д и транзисто-
ра Т, управляемого отрицательной полуволной сигнала датчи-
ка (положительная полуволна закорачивается диодом Д). Це-.
Рис. 17
44
почка RC, включенная на вхо-
де транзистора, отфильтровы-
вает из сигнала высокочастот-
ные составляющие и короткие
импульсы помех, обусловлен-
ные вибрацией датчика и на-
водками от внешних магнит-
ных полей.
Аналогичный по принципу
действия магпитоиндукцион-
ный датчик фирмы «Ge-
neral Electric» состоит
из постоянного -магнита с
электрической обмоткой, за-
литых в корпусе датчика
эпоксидной смолой. Датчик
прикрепляется двумя болта-
ми с внутренней стороны к
шейке рельса (рис. 18). Для
повышения надежности и ис-
ключения ложных сигналов
от вибрации рельса при «мик-
рофонном эффекте» (вызы-
ваемом микросмещениями
внутренних деталей датчика)
между датчиком и шейкой
рельса ставятся резиновые
прокладки. Применяются раз-
личные схемные варианты
электронно - исполнительных
элементов ТПД, которые
обеспечивают надежную фик-
сацию колес подвижного со-
става, движущегося со скоро-
стью от 10 до 140. км/ч.
Индукционный электромаг-
нитный электронный путевой
датчик SEL (ФРГ) предназ-
начен для использования в
различных устройствах СЦБ
на станциях и перегонах. В
состав рельсового датчика
(рис. 19) SEL, имеющего раз-
несенную конструкцию, вхо-
дят: источник связующей
электромагнитной энергии (пе-
редающая катушка) 1, раз-
мещенная на общей чугунной
Рис. 18
Рис. 20
45
раме 4 с внешней стороны рельса 2; первичный преобразова-
тель (приемная катушка) 3, установленный с внутренней сто-
роны рельса. Рама датчика крепится к подошве рельса сталь-
ными скобами 5. Статический нормирующий преобразователь
(резонансный усилитель) и источник питания датчика (гене-
ратор переменного напряжения) располагаются в путевом
ящике, который устанавливается сбоку пути.
Переменное магнитное поле излучающей передающей ка-
тушки W1 (рис. 20) воспринимается на другой стороне рельса
приемной катушкой W2, генерируя в ней э. д. с. выходного сиг-
нала. Форма и расположение обеих катушек и их ферритовых
сердечников образуют два магнитных потока Ф1 и Фг, прохо-
дящих через первичный преобразователь в противоположных
направлениях. При отсутствии колеса преобладает поток Ф1,
который и индуктирует выходной сигнал в виде переменного
напряжения.
Если между катушками датчика проходит колесо, то его
металлическая масса действует как экран для потока Ф], кото-
рый уменьшается до величины потока Ф2, разность э. д. с. в
приемной катушке, индуктируемых обоими потоками, становит-
ся равной нулю, что и является сигналом счета оси, выдавае-
мым ТПД. Комплект из двух рельсовых датчиков SEL (дат-
чики Дат.1 и Дат.2 на (рис. 20), устанавливаемых на разных
рельсах пути со смещением относительно друг друга на
150—200 мм, позволяет считать оси подвижного состава с
определением направления их движения. Передающие катушки
датчиков, соединенные последовательно, запитываются от авто-
генератора прямоугольных колебаний частоты 5,06 кГц со ста-
билизированным питанием. Сигналы с выходов приемных кату-
шек W2 датчиков Дат.1 и Дат.2 через двухкаскадные резонанс-
ные усилители и разделительные трансформаторы фантомных
цепей напряжением 0,5 В поступают в четырехпроводную ли-
нию передачи, допустимое затухание которой не более 1,5 дБ
при частоте 5 кГц, а омическое сопротивление не более 800 Ом.
При двухпроводной линии связи (с омическим сопротивле-
нием не более 300 Ом) один из нормирующих преобразовате-
лей оснащается полосовыми фильтрами и частотным преобра-
зователем, вырабатывающим частоту 9,21 кГц и смешивающим
ее с напряжением сигнала датчика. Возникшая в результате
смешения и усиленная селективным усилителем боковая часто-
та 4,15 кГц поступает через полосовой фильтр в двухпровод-
ный канал связи, по которому одновременно отделяется разде-
лительными конденсаторами откцепей переменного тока напря-
жение 60 В для питания датчика/
Техническая характеристика датчиков SEL: устанавливаются
не ближе 2,5—3 м от стыков (для уменьшения влияния вибрации
рельса) и не,ближе I1®—20 м от .изолирующих стыкав (для исклю-
чения импульсных помех от тяговых токов). Расстояние между
46
датчиками двух контрольных точек должно быть не менее 1 м
(для устранения их взаимного влияния). Промежуток между кор-
пусом приемной головки и боковой поверхностью головки рельса
должен составлять 70 мм, а шейка рельса должна быть предвари-
тельно зачищена. Для каждого типа рельсов разработана своя
модификация датчика, отличающаяся профилем деталей крепления
к рельсу. Габаритные размеры (общие) 385Х'190Х'145 мм, масса
19 кг.
Несмотря на сложность конструкции и схемы, датчик типа
SEL обеспечивает достаточно высокую надежность в работе.
Индукционные электромагнитные электронные путевые
датчики фирмы «Siemens» (ФРГ) серийно изготавливаются
в.виде нескольких разнесенных конструкций датчиков (оди-
нарных, сдвоенных, с креплением к подошве шейки рельса) и
предназначены для использования в устройствах СЦБ.
Источник связующей элек-
тромагнитной энергии (передаю-
щая часть) и первичный пре-
образователь (приемная часть),
размещены один против другого
с разных сторон рельса (рис.
21). Нормирующий преобразо-
ватель с источником переменно-
го напряжения размещается в
путевом ящике сбоку пути. В ис-
ходном состоянии, при отсутст-
вии колеса обмотка W1 переда-
ющей части, запитываемая от
генератора Г напряжением Ur,
частотой 6,5 кГц, излучает пе-
ременное магнитное поле, индук-
тирующее э. д. с. в обмотке W2
приемной части (рис. 22). Фазо-
вращатель Фв поворачивает фа-
зу индуктируемого напряжения
U2 до совпадения с фазой опор-
ного напряжения U3 и выдает
сигнал Г74, меньший по ампли-
туде сигнала t73. Разность сиг-
налов U3—U4, формируемая зве-
ном сравнения ЗС и усиленная
усилителем Ус, преобразуется
формирователем Фр ;в последо-
вательность однополярных им-
пульсов U7, совпадающих по
времени с положительными по-
луволнами напряжения U3. Схе-
ма запрета СЗ посылает импуль-
сы на триггер Тг, с выхода кото-
Рис. 22
47
Рис. 23
рого выдаются, прямоуголь-
ные импульсы Ug половинной
частоты. Фильтр Ф преобра-
зует -их в синусоидальные ко-
лебания частотой 3,25 кГц,
которая является несущей
для сигналов счета осей. При
проходе ферромагнитной мас-
сы колеса в зоне действия
датчика и уменьшении маг-
нитного сопротивления воз-
душного зазора между катуш-
ками 1 и 2 э. д. с. в. приемной
катушке повышается в 2—
3 раза, фаза разностного на-
пряжения изменяется на 180°,
сигналы Uг и U7 совпадают
по времени, в результате че-
го напряжение несущей часто-
ты на выходе фильтра Ф ис-
чезает, что воспринимается
исполнительным элементом
как импульс счета оси.
Контрольная точка ревер-
сивного счета осей оборудует-
ся либо двумя, смещенными
относительно друг друга оди-
нарными датчиками на раз-
ных рельсах, либо сдвоенным,
представляющим собой конст-
руктивное объединение двух
датчиков, с разными фикси-
рованными частотами колеба-
ний 6,5 и 9,8 кГц, что позво-
ляет по одной паре жил ли-
нии связи подавать на гене-
раторы постоянное напряже-
ние питания и одновременно
передавать на исполнитель-
ные элементы несущие часто,-
Рис.. 24 ты 3,25 и 4,9 кГц сигналов
счета осей.
Электронный ТПД фирмы «Siemens» со сдво-
енным рельсовым датчиком импульсов широко при-
меняется в устройствах СЦБ (путевой блокировке по счету
осей). Одна из модификаций такого датчика [14] состоит из
двух частей, устанавливаемых над шпалой под головкой рельса
с разных сторон и прикрепляемых к шейке рельса двумя, болта-
48
ми (рис. 23), что не препятствует работе путевых машин.
В корпусе, находящемся на рельсе с наружной стороны колеи,
размещены источники связующей энергии — излучающие об-
мотки W1 и W1' (рис. 24), а первичные преобразователи (при-
емные обмотки U72 и W2') размещены -в другом корпусе с внут-
ренней стороны колеи.
Нормирующие преобразователи, генератор Г, стабилизатор
Ст, электронная защита ЭЗ >и выходной трансформатор Тр
размещаются на печатных платах в путевом ящике сбоку пути.
Нормирующие преобразователи (делители Rl, R2, усилители
Ус1, Ус2, выпрямители Bl, В2 с цепочками смещения RCM, пре-
образователи напряжения в частоту u2/f2 и полосовые
фильтры Ф1, Ф2) воспринимают индуктированные обмотками
W2 и W2' э. д. с. (100 мВ), выдавая по двухпроводной линии
на исполнительный элемент частоты Л и fz, являющиеся сиг-
налами отсутствия колеса в зоне действия датчиков. При по-
явлении в этой зо!1е ферромагнитной массы колеса магнитные
потоки обмоток W1 шунтируются на рельс; э. д. с, индуктируе-
мые в приемных катушках, уменьшаются (в 1,8 и более раз),
частота колебаний мультивибраторов снижается, на выходе по-
лосовых фильтров никакой сигнальной частоты не выдается,
что воспринимается исполнительными элементами как импульс
счета оси. Схема непрерывно контролирует исправность эле-
ментов датчика, защищает ТПД от попадания посторонних на-
пряжений, помех и наводок.
Техническая характеристика: датчик работоспособен при тем-
пературе окружающей среды от —40 до 4-80°С и при скорости
движения подвижного состава от 0 до 250 км/ч, надежно фиксируя
колеса с толщиной бандажа не менее 90 мм; устанавливается на
рельсах всех типов оо шпалами (в том числе и металлическими);
длина кабечя связи не более 6,5 км (для кабелей СЦБ со звезд-
ной скруткой и диаметром 0,9 мм); напряжение питания 60В±10%;
потребляемая мощность 5 Вт; габаритные размеры 470X285 X
ХЬ80 мм, масса 20 кг.
Датчик предназначен для замены на Государственных же-
лезных дорогах ФРГ мембранных педалей и магнитоконтакт-
ных датчиков фирмы «Siemens» в системах путевой блокиров-
ки по счету осей.
Трансформаторно-компенсационная педаль ТКП — датчик
счета осей трансформаторно-компенсационного типа разрабо-
тан для устройств автоматизации сортировочных стан-
ций [15].
Электромагнитная система датчика помещена в сборный
стеклопластиковый корпус (кожух 1 с боковыми щечками 2
па рис. 25) и закрепляется на диамагнитной ' (силуминовой)
платформе 3, устанавливаемой на подошве рельса. Рельсо-
вый датчик — двухканальный (рис. 26, а) с одним источником
связующей энергии (питающей обмоткой 1) и двумя вервии
14
Рис. 25
пыми преобразователями ге-
нераторного типа (сигнальной
2 и компенсационной 3 об-
мотками), включенными по
дифференциальной схеме и
расположенными на S-образ-
ном магнитопроводе 4. Маг-
нитный поток, создаваемый
питающей обмоткой Л рас-
пределяется на магнитные
потоки Фк и Фс, которые, бу-
дучи частично сцеплены со вто-
ричными обмотками, индукти-
руют в них электродвижущие силы: Ек —компенсационную и
Е с — сигнальную. В датчике, настроенном .магнитным регуля-
тором 5, Ек и Ес равны, поэтому в результате встречного вклю-
чения вторичных обмоток в исходном состоянии (при отсутст-
вии колеса в зазоре) сигнал на выходе датчика равен нулю.
Появление ферромагнитной массы колеса между рельсом и
магнитопроводом датчика вызывает увеличение магнитного по-
тока Фси уменьшение потока Фк, что нарушает равенство ин-
дуктируемых в обмотках 2 и 3 э. д. с. Ес и £к . На выходе
датчика появляется сигнал счета оси, значение которого опре-
деляется выражением
^вых=4,44/(Фс^с-Фк Ю, (15)
где Wc и №к — число витков соответственно сигнальной и
компенсационной обмоток;
f — частота напряжения источника питания;
Фс и Фк — магнитные потоки, сцепленные соответственно
с сигнальной и компенсационной обмотками.
Сигнал счета оси по двух- или трехпроводной линии связи
поступает на вход исполнительного элемента, в качестве кото-
рого применяются: релейная ячейка РЯ-ТКП с поляризован-
ным педальным реле типа РП-7, выпрямительной и искрогася-
щей схемами (рис. 26, б — .для частоты питания 50 Гц и скоро-
стей движения колес от 0 до 50 км/ч); электронный приемник
ЭП-ТКП (рис. 26, г), состоящий из согласующего, разделитель-
ного и помехозащищающего трансформатора Тр, выпрямите-
ля В, двухкаскадного усилителя с коллекторной обратной
связью и нагрузочного каскада, выполненных на инверторах
интегральных схем Т1—ТЗ (для частоты питания 450 Гц и ско-
ростей движения колес от 0 до 250 км/ч); дополнительный блок
схемного контроля исправности датчика, линии связи, источни-
ка питания (рис. 26, с), в котором двумя реле Р1 и Р2 контро-
лируется наличие э. д. с. Ек и Ес.
Датчик ТКП сравнительно прост по схеме и конструкции,
обладает повышенной помехозащищенностью к влиянию внеш-
50
Рис. 26
них электромагнитных полей, снабжен универсальным крепле-
нием для установки на рельсах различных типов.
Техническая характеристика педали ТКП: напряжение пита-
ния рельсового датчика 2120 В +W%, 50 или 450 Гц; потребляемая
активная мощность: при частоте 50 Гц — 20 Вт, реактивная
150 В-А. три частоте 450 Гц — 3 Вт, реактивная 30 В-Л; внутрен-
нее сопротивление: резистивное 15 Ом, индуктивное 750 Ом; мини-
мальное значение э. д. с. выходного сигнала при резистивной па-
грузке 2.7 КОм не менее 2,5 В; «педаль с частотой .питания датчика
50 Гц работоспособна при скорости движения .колес; с релейным
•приемником от 0 до 50 Км/ч; с электронным от 0 дю 70 км/ч; с ча-
стотой питания 450 гц и электронным приемником от 0 до 250 км/ч; ус-
танавливается на рельсах Р43, Р50 и Р65; превышение кожуха пе-
дали над головкой рельса 20 мм, зазор между головкой рельса и
кожухом 90±2 мм; периодичность технического обслуживания —
один-два раза в год при еженедельном внешнем осмотре. Габарит-
ные размеры 420X390X490 мм, масса 17 кг.
8. РЕЗИСТИВНЫЕ ТОЧЕЧНЫЕ ПУТЕВЫЕ ДАТЧИКИ СЧЕТА ОСЕЙ
Принцип действия резистивных ТПД основан на изменении
связующей величиной (магнитной, электромагнитной, давлени-
ем и др.) активного сопротивления электрической цепи преоб-
разователя. Применяются магниторезистивные ТПД, исполь-
зующие гальваномагнитный эффект Гаусса (увеличение со-
противления магниторезистора при воздействии на пего
ферромагнитных масс колес подвижного состава), и электро-
магнитные резистивные ТПД, в которых воздействие ферро-
51
магнитных масс колеса вносит дополнительное затухание и из-
менение сопротивления высокочастотного контура первичного
преобразователя, формируя электрический сигнал счета оси.
К таким ТПД относятся и вихретоковые датчики, действие ко-
торых основано на использовании магнитного поверхностного
эффекта, при котором переменное магнитное поле и вызванные
им вихревые высокочастотные токи, затухая по мере проникно-
вения их в толщу проводящей среды, создают свое магнитное
поле, противодействующее основному.
В электромагнитных резистивных ТПД источник связующей
' энергии и первичный преобразователь совмещены и выполнены
в виде автогенератортюго резонансного колебательного кон-
тура, излучающего высокочастотное электромагнитное поле.
При входе в зону 'Излучающего контура датчика колеса его
металлическая масса воздействует индуктируемыми в ней вих-
ревыми токами па высокочастотное поле датчика, значительно
увеличивая активные потери контура за счет затраты мощно-
сти на создание вихревых токов. Это уменьшает добротность
контура автогенератора и снижает напряжение обратной связи,
которое для поддержания колебаний автогенератора должно
быть
U0C>Kp$KI=KpQ?ft (16)
где 1\—коэффициент обратной связи;
р — коэффициент включения контура в коллекторную
цепь;
/— основная гармоника тока коллектора;
KK=Qp —резонансное сопротивление контура; Q—доброт-
ность контура; р — характеристическое сопротивле-
ние контура на частоте генерации,-
Такое снижение напряжения UGC и нарушение условия
(16) приводит к срыву колебаний автогенераторного нормирую-
щего преобразователя, что фиксируется электрической схемой
в виде прекращения импульса и является сигналом счета оси,
выдаваемым ТПД.
Магниторезистивный путевой датчик RACO № 648-1 (США)
[16] состоит из .постоянных магнитов, создающих подмагничи-
вающее поле, и магниторезистора, помещенных в капроновом
корпусе, прикрепляемом к шейке рельса. В исходном состоянии
магнитная индукция поля в точке расположения магниторези-
стора такова, что его сопротивление обеспечивает отключение
V исполнительного элемента. При проходе колеса его ферромаг-
нитная масса шунтирует магнитный поток, идущий через маг-
ниторезистор, что обусловливает уменьшение сопротивления и
возрастание тока, идущего через магниторезистор, линию связи
и исполнительный элемент, что и является сигналом счета оси.
Магниторезистор, срабатывая за время 0,001 с, включает цепь
52
резистивной нагрузки 210 Ом
с током 75 мА. Напряжение
питания путевого датчика
10 В. Для увеличения дли-
тельности выходных сигналов
при больших скоростях дви-
жения подвижного состава
датчик дополняется блоком
издержки, увеличивающим
продолжительность импульса
« чета оси от 0,01 с до 15 мин.
Недостатками датчика явля-
ются его чувствительность к
помехам внешних магнитных
полей и механическая его
непрочность при воздействии
вибрационных и ударных ус-
корений рельса.
Вихретоковый путевой датчик CSEE № 200 (Франция) при-
меняется в основном в устройствах обнаружения перегретых
букс. В корпусе датчика, который крепится либо посредством
специальной платформы к подошве рельса (рис. 27), либо дву-
мя болтами к шейке рельса, -расположен генератор, магнито-
।провод колебательного контура которого разомкнут и излучает
электромагнитное поле частотой 200 кГц. -При входе в зону
действия датчика колеса в его металлической массе индукти-
Р /ются вихревые токи, вызывающие резкое возрастание экви-
валентного активного сопротивления контура, срыв колебаний
генератора, что и является -сигналом -прохода оси подвижного
состава.
Техническая характеристика путевого датчика CSEE № 200:
установка на расстоянии от внутренней грани головки рельса
9±0,5 мм и ниже головки рельса на 40:Ы мм; выходной сигнал
датчика при нагрузке 12-0 Ом без колеса равен 150 мВ действую-
щего значения; длина зоны действия 25—30 см; датчик работо-
способен при скорости движения осей подвижного состава от 0 до
200 км/ч.
Вихретоковый капсульный путевой датчик типа SSK фирмы
^Siemens» (ФРГ) применяется в системах путевой блокировки
!.• в устройствах автоматизация- на сортировочных станциях
117]. Одинарный датчик SSK состоит из стальной буксы с мед-
ной капсулой, впрессовываемой в головку рельса (в отверстие
диаметром 30 мм, глубиной 45 мм), и кабельной муфты, .при-
крепляемой к шейке рельса. В капсуле помещен залитый эпок-
сидным составом трансформатор с разомкнутым магнитопро-
нодом, а в кабельной муфте установлены схема автогенератора
и ввод кабеля связи. К капсуле провода подводятся через на-
клонное отверстие (диаметром 9,5 мм и длиной 42 мм), высвер-
53
Рис. 28
ливаемое под головко^
рельса. Для реверсивног
счета осей в головке рельса
высверливаются два отвер-.
стия на расстоянии 50-Д
70 мм для двух капсульных-'
датчиков (DSSK) с одной:
кабельной муфтой (рис.\
28). При появлении метал-;
лической массы колеса в.
радиусе 4 мм от центра
капсулы вихревые токи
массы колеса увеличивают
активные потери энергии
контура генератора, коле-
бания которого срываются,
что является сигналом сче-
та оси для исполнительного
элемента датчика. Такой режим обеспечивает контроль исправ-
ности элементов датчика и линии связи.
Техническая характеристика одинарного датчика SSK: напри-.
жс-н.пе питания 8 В; подключение к исполнительному элементу дву-
мя жилами кабеля связи, длина которого при диаметре жил
0.9 мм может достигать 1,7 км (сопротивление жил кабеля не бо-
лее 50 Ом); длина зоны фиксации колеса 60 мм; датчик впрессо-
вывается во все типы рельсов с шириной головки we менее 50 мм
и высотой не менее 35 мм; датчик работоспособен при скоростях •
движения осей подвижного состава от 0 до 25 км/ч — с релейным
исполнительным элементом, и от 0 до 50 км/ч — с бесконтактным
исполнительным элементом.
9. ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ТОЧЕЧНЫЙ ПУТЕВОЙ ДАТЧИК
Принцип действия пьезоэлектрических ТПД основан на ис-
пользовании некоторых диэлектриков (кварца, сегнетовой соли
и др.), обладающих прямым пьезоэлектрическим эффектом:
при воздействии на них механических сил в их кристаллах
электрические заряды разделяются — одна область заряжается
положительно, а другая — отрицательно. Величина такого за-
ряда при поперечном эффекте
Q, = 4" 'Д. (Ю
где I —пьезоэлектрическая постоянная;
Fy — сила;
х и у —- ширина и длина пластинки кристалла.
В пьезоэлектрических ТПД применяются кристаллы кварца,
так как он обладает высокой прочностью, температурной ста-
54
бпльностью и не чувствителен
к влажности и химическим
воздействиям.
Один из вариантов про-
м ышленного пьезоэлектриче-
ского ТПД разработан и из-
готовляется японской фир-
мой «Sumitomo Electric- Indu-
stries, LTD» [18]. Датчик
(рис. 29) состоит из двух оди-
наковых частей, прикрепляе-
мых с обеих сторон рельса к
его шейке. Пьезоэлектриче-
ские элементы 1 размещены в
обоймах 2, а кронштейны 3
крепят части датчика к шей-
ке рельса посредством резино-
вых прокладок 4. Обоймы 2
пьезоэлементов посажены
плотно между головкой и подошвой рельса, в результате
чего вертикальные прогибы рельса от воздействия на-
грузки на ось преобразуются пьезоэлементами в электрические
сигналы прохождения колеса. Переданные по экранирован-
ному кабелю сигналы усиливаются и преобразуются нормирую-
щим преобразователем датчика, находящимся в путевом ящике
сбоку пути. Зона действия (чувствительности) датчика — око-
ло 20 см в обе стороны от точки прикрепления датчика к рель-
су. Датчик регистрирует проходящие колеса, скорость кото-
рых не менее I км/ч и давление на рельс от 1 до 10 тс. Для
каждого типа рельсов изготавливается свой типоразмер дат-
чика.
Глава HI
ПРИМЕНЕНИЕ ПУТЕВЫХ ДАТЧИКОВ СЧЕТА ОСЕЙ
НА СОРТИРОВОЧНЫХ СТАНЦИЯХ
10. ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ ТОЧЕЧНЫХ ПУТЕВЫХ
ДАТЧИКОВ В АВТОМАТИЧЕСКИХ УСТРОЙСТВАХ
СОРТИРОВОЧНЫХ СТАНЦИЙ
Повышение перерабатывающей
способности,
эффективности
и улучшение качества работы сортировочных станций на желез-
ных дорогах СССР и других стран достигается в результате
внедрения систем и устройств комплексной автоматизации а
механизации всего технологического процесса работы при кон-
центрации сортировки вагонов на крупных сортировочных стан-
циях.
Автоматические системы сортировочных станций, взаимо-
действующие с каждым обрабатываемым на станции вагоном^
требуют наличия большого числа ТПД, которые в значитель-
ной степени определяют эффективность работы основных клас-
сов систем комплексной автоматизации сортировочных станций:
систем и устройств автоматизации сортировочных горок, при-,
меняемых автономно и при комплексной их автоматизации
[19], систем автоматизации управления работой сортировочной
станции с использованием информационно-планирующих комп-
лексов (на базе ЭЦВМ), образующих в сочетании с автомати-
зацией сортировочных горок АСУ сортировочных станций [20].,
Горочные ТПД используются в следующих устройствах
(рис. 30):
горочной автоматической централизации (ГАЦ) для конт-
роля занятости стрелочного участка (группа ТПД «Стр»);
трансляции маршрутного задания по межстрелочным и стре-
лочным участкам (группа ТПД «Метр» и «Стр»);
горочных программно-задающих (ГПЗУ), контрольно-реги-.
стрирующих (КРУГ) устройствах с системой автоматического
задания скорости роспуска (АЗСР) для комплексного контро-
ля головной стрелки (УКГС, с группой ТПД «Г»); счета осей,'
тележек, физических вагонов (группы ТПД «Горб» и «Г»)п
слежения за скатывающимися отцепами (группы «Г», «Мстр»р
«Стр»); ”
56
' ГАЦ с контролем роспуска (ГАЦ-КР), выполняющих функ-
ций систем ГАЦ, КРУГ, УКГС;
автоматического регулирования скорости скатывания ваго-
нов (АРС) в устройствах измерения скоростей и подачи пуско-
вых команд при подходе отцепа к замедлителям (группы ТПД
«С», «П», «СП»), измерения ускорений отцепов (группы ТПД—
«У»),
Горочные ТПД должны удовлетворять различным по харак-
теру требованиям;
«Стр» — обеспечеиле безопасности движения (с полностью контро-
лируемыми отказами); «Горб», «Г», «Метр» — обеспечение
заданной достоверности фиксации осей; «С», «СП», «У» —
' = обеспечение заданной точности фиксации осей (по време-
- ; ни и расстоянию)
Эксплуатационные условия, для которых должны выпол-
няться эти требования, подразделяются на три режима: нере-
версивный режим роспуска (учитывает роспуск с движением
вагонов только в направлении от горба горки на подгорочные
пути, в диапазоне скоростей движения от 1,5 до 50 км/ч); ре-
версивный режим роспуска (учитывает весь диапазон скоростей
и реверсирование движения вагонов при роспуске, за исключе-
нием не относящихся к роспуску маневровых передвижений);
реверсивный режим движения (учитывает полный диапазон
скоростей от нуля до максимальных и все виды передвижения
подвижного состава на горке).
В АСУ сортировочной станции ТПД счета осей, помимо сор-
тировочных горок, применяются в устройствах слежения и ре-
гистрации перемещения осей подвижного состава через конт-
рольные пункты в пределах станции и железнодорожного узла.
К ТПД этих систем предъявляются требования обеспечения
фиксации прохода и направления движения осей подвижного
У Л ГС
ГАИ.
КРУГ
tTTVl устройств счета
осей
tTnjl устройств изнере-
гшя скорости иускоре-
। пая с шичсараеи. ктк-
ГАЦ-вр воу оси
Рис. 30
57
состава с высокой достоверностью и надежностью при широком!
скоростном диапазоне (для ТПД на подходах к станции или!
узлу от 0 до 120 км/ч). i
1L ДАТЧИКИ КОНТРОЛЯ СВОБОДНОСТИ ГОРОЧНЫХ
СТРЕЛОЧНЫХ УЧАСТКОВ
Специальные короткие быстродействующие рельсовые цепи
горочных путевых участков не обеспечивают достаточно надеж-
ного их контроля при наличии двух, особо опасных ситуаций:
«потере шунта» (нарушении электрического контакта между
рельсом и колесом) и проследовании длишюбазных вагонов,
«перекрывающих» короткие изолированные участки, кратковре-.
менно дающих сигнал ложной их свободности. Для обеспече-
ния безопасности движения и бесперебойности действия авто-
матических устройств при этих ситуациях дополнительно К'
рельсовым цепям и автономно применяют ТПД с устройствами
фиксации и счета осей.
В системах ГАЦ-ЦНИИ рельсовые цепи дополняются ТПД'
ПБМ-56: для стрелок головной части горки по два дублируюА
щих ТПД, для остальных стрелок — по одному. При возденет-]
вии первой оси отцепа на ТПД контрольная схема обеспечивает’
независимо от рельсовой цепи возбуждение стрелочного путе-'
вого реле (в течение 1,9—2 с) после прохода оси над ТПД, чем
создается искусственный контроль занятия стрелки при'потере
шунта. Для блочных систем ГАЦ-ЦНИИ предложена схема
контроля с учетом скорости движения вагона (по времени
между воздействиями оси на первый и второй ТПД).
Контроль горочных стрелочных участков по счету осей
осуществляется на сортировочных горках, где устройства со
счетчиками осей в контролируемой зоне и в счетной (контроль-
ной) точке.
Зонный счетчик осей (как правило, реверсивный) выделяет-
ся в устройствах автономного контроля стрелки: в блоках кон-
троля свободности (БКС) и блоках контроля свободности с
учетом длишюбазных вагонов (БКСД) [21, 22]; стрелочных
защитных устройствах (СЗУ) [23]; устройствах типа СОВ; ТК
(ПНР) [24]. Каждый счетчик, рассчитанный по емкости на
максимальное число осей, находящихся в контролируемой зо-
не, увязан с ТПД двух счетных точек на границах этой зоны
(рис. 31, а). При 'проходе отцепа и воздействии его колес на
входной и выходной ТПД реверсивный счетчик, суммируя вхо-
дящие и вычитая выходящие оси, выдаст сигнал свободности
участка при отсутствии па нем осей, т. е. при нулевом поло-
жении счетчика.
Счетчик осей контрольной точки выделяется в устройствах
сплошного контроля по счету осей: в электронных счетчиках
58
Рис. 31
WSSB (применяемых в ГДР и ЧССР) [25], в горочном счет-
чике фирмы «Siemens» (ФРГ) [26]. Каждый счетчик (как пра-
вило, кольцевой) соответствует одной счетной точке (рис. 31,6)
и имеет емкость не менее максимального числа осей, которые
могут находиться на контролируемом участке. Счетчик сумми-
рует нарастающим итогом все оси, проходящие над ТПД. По-
казания счетчиков двух соседних счетных точек участка срав-
ниваются схемой увязки, выдающей при -наличии одинаковых
сумм на соседних счетчиках сигнал свободности участка.
Требования к ТПД дополнительного контроля свободности
горочных стрелок по счету осей определяются из условия обес-
печения заданного уровня надежности защиты горочных стре-
лок от перевода их под отцепами при потере шунта на стрелке
[27]. При этом учитывается вероятность наиболее неблагопри-
ятного совпадения событий: потери шунта (отказ рельсовой
цепи); отказ дополнительного контроля (по счету осей) с от-
казом ТПД; 'необходимость расхождения отцепов по стрелке.
В этом случае вероятность схода вагонов (перевода стрелки
.под вагоном) определяется примерным числом осей tit, прохо-
дящих через стрелку за время t, в течение которого в системе
оказывается неисправным хотя бы один ТПД или другой эле-
мент,
ч<.пОа=<2ш(«№[1-дс)/?тпД(01Ре>ч, во
где Ду(0 —• надежность схемных элементов и узлов контро-
ля за время t\
Ятпд(0 — надежность точечного путевого датчика;
P(t>x) — вероятность того, что после возникновения не-
исправности система контроля нс будет восста-
; новлена за время
59
Qm(ni) —«вероятность потерн шунта «на стрелке (sia ряд-1
сортировочных горок с загрязненными рельсамЯ
достигает значения 2-10-4 .на отцеп); 1
Qp — вероятность расхождения отцепов по данной!
стрелке.
Отсюда надежность ТПД определяется из уравнения
Ятпд(0 = JyJ1 - - A - (19)1
Ky\r) I Чгш \nt) хр J
В условиях работы сортировочных горок, где через головную
стрелку проходит (4—6) КБ6 осей в год, величине надежности
^тцд(О соответствует допустимая и’нтен'с,и.вно1сть отказа ТПЦ:
Лтпд=Ы-10-5.
В связи с тем что ТПД, полностью удовлетворяющих предъ-
являемым требованиям по надежности и работоспособности,
ле имеется, для повышения общей надежности устройств наи-
более ответственный входной ТПД дублируется вторым, уста-
навливаемым в створе и включаемым параллельно с основным;
ТПД выходных счетных точек при их отказе опасных ситуаций
нс создают (счетчик осей покажет ложную занятость и, запе-
рев стрелку, вызовет нарушение программы роспуска).
В блоке БК'С (рис. 32), предназначенном для защиты
горочных стрелок от перевода под отцепом при потере шунт!
в процессе одностороннего движения вагонов при роспуске,
стрелку устанавливают три путевых датчика типа ТКП: вход-,
ной (1ТПД) и два выходных (2ТПД, ЗТПД) с соответствуют
щи'ми педальными реле (1ПД, 2ПД, ЗПД). Блок БДС состоит
из входной части (реле сложения PC с формирователем им-.
; 1—l^zj—J j
} 1 РСС I I
1________ZJZ-------
б слеп у управления стрелкой
Рис. 32
пульса сложения ФИС ивы-1
читания РВ с формировать-!
лем импульса вычитания!
ФИВ), реверсивного счетчика!
импульсов СИ емкостью семь!
единиц, выполненного на ти-З
ратропах ТХ4Б и выходной Ч
части — реле свободное™ 1
стрелки РСС, возбужденного4
при нулевом положении счет-
чика (т. е. при свободное™
стрелки) и замыкающего сво- *
им контактом цепь управле-J
ния стрелкой. .j
Устройство СЗУ, пост- 1
роенное на низкочастотных ]
(транзисторах МП 16, дополне-1
по схемами контроля направ-4
ления движения с реверсив- .]
ными датчиками МЭД-2 и 1
60
позволяет обеспечить контроль с защитой стрелки при потере
шунта во всех режимах работы горки. При проходе отцепа по
стрелке и воздействии его колес на ТПД каждый из них выда-
ет разнесенную по времени пару ‘импульсов, которая анализи-
руется устройством определения направления движения с вы-
дачей на его выходе либо суммирующих, либо вычитающих (в
зависимости от направления движения) импульсов. Последую-
щий счет импульсов и выработка сигнала свободности стрелки
осуществляются типовым способом. Для повышения надежно-
сти на каждую стрелку устанавливается комплект из трех
параллельно работающих СЗУ.
В электронном одностороннем счетчике осей WSSB
№ 6382.580—10.003, ТПД (типа WSSB) каждой счетной точки
связан с одним счетным (блоком-сумматором, емкостью 63 еди-
ницы. Стрелочный участок оборудуется одним входным и дву-
мя выходными блоками. Для повы1шения надежности ТПД
входного блока дублируется. Сигнал свободности стрелочного
участка .выдается три равенстве (показаний сумматоров входно-
го, :и одного .из выходных блоков.
В горочном счетчике осей СОВ iRTK применены сдвоенные
реверсивные ТПД ELS-3. При проходе отцепа по стрелке и
воздействии его колес на ТПД входная схема формирует раз-
несенные по времени импульсы, выделяемые амплитудными
дискриминаторами и запоминаемые в фиксаторах входных им-
пульсов. В соответствии с последовательностью зафиксирован-
ных импульсов срабатывает анализатор направления, форми-
рующий в зависимости от направления движения импульсы
суммирования или вычитания, учитываемые реверсивным счет-
чиком осей. Для целей контроля хода роспуска счетчик с сум-
матором осей вагона позволяет вести итоговый, повагонный,
поотцепочпый счет осей и имеет цифровой выход для увязки
с ЭВМ.
В горочном счетчике осей фирмы «Siemens», применяемом
для одностороннего контроля только в направлении роспуска,
на каждую стрелку устанавливается пять магнитоконтактных
ТПД типа «Siemens». Счетчик состоит из трех кольцевых сум-
маторов (емкостью 14 осей) и схем сравнения зафиксирован-
ными ими сумм. При освобождении контролируемых участков
(т. е. совпадении чисел в сумматорах) схемы выдают сигналы
их свободности.
В блоке БКСД, обеспечивающем полный контроль и за-
щиту стрелок .при потере шунта и проходе длиннобазных ва-
гонов, наличие вагона на стрелке контролируется логической
схемой счета тележек вагона с помощью выделяемого двумя
ТПД (типа ТКП) контрольного участка (1ТПД—2ТПД на
рис. 33), длина которого (2,7 м) больше расстояния между
смежными осями любой тележки вагона, но меньше базы ва-
гона. Это обеспечивает при -проходе вагона обязательное
61
Рис. 33
занятие контрольного участка те-
лежками и кратковременное его
освобождение под серединой
всех вагонов. После состоявше-
гося входа и выхода первой те-
лежки из контрольного участка,
кратковременного его освобож-
дения (условие прохода середи-
ны вагона), последующего заня-
тия и освобождения участка
второй тележкой вагона схема
выдает сигнал свободности
стрелки. Электронные узлы
БКСД построены на микросхе-
мах «Вингис» типа К2ЛБ102 с
релейной или бесконтактной
привязкой к ТПД блока.
Структура БКСД позволяет
реализовать три варианта (ти-
па) контроля: упрощенный У
для неответственных стрелок,
односторонний О для пучковых стрелок и реверсивный Р для
головных стрелок. Блок состоит из счетчиков 1С (контроль уча-
стка 1ТПД—2ТПД), 2С (отсчет от 2ТПД числа осей в тележ-
ках), формирователей ФР1, ФР2, схем коммутации СК и триг-
гера ТГ. Сипи а л свободности участка выдается возбуждением
реле КР блока БКСД: типа У при нулевом положении счет-
чиков /Си 2С, сигнале свободности от путевого реле и вы-
держке 'времени 1,2 с после схода последней оси отцепа с
2Т11Д; типа О, дополненного датчиками ЗТПД и 4ТПД, при
свободности стрелки от вагонов и от осей (счетчики 2С и ЗС в
нулевом положении); тина Р, дополненного вторыми комплек-
тами датчиков 1ТПД'—4ТПД', с проверкой тех же зависимо-
стей, что и для БКСД-0, но с учетом направления движения,
контролируемым схемами анализаторов направления САРР
12. ДАТЧИКИ ГОРОЧНЫХ СИСТЕМ ПРОГРАММНОГО
УПРАВЛЕНИЯ И АВТОМАТИЧЕСКОГО КОНТРОЛЯ
С помощью ТПД счета осей выполняются следующие функ-
ции управления и контроля: обеспечение безопасного роспуска
при проследовании вагонов всех типов, включая длиннобазные,
и при потере шунта; контроль проследования и фиксации факта
разделения отцепов перед головной стрелкой в соответствии с
заданной программой и с образованием между ними нормиро-
ванного интервала; извещение .оператора и регистрация сбо-
ев— нарушений программы роспуска, с выработкой команд и
62
Hanpа&ление роспуска
Горб
горки
3,0м Wri 1,5 м
7 ПЛ
£A"itm ггпд.
q Осветитель
ЗТЛД
ГолоВнаа
стрелка
—5----------
Ф.отоёатчин
_______8,См_________
----------------------J
Ш
17,5м
12-15 м от горЦа горки
4.7м
их корректировка; отсчет и .выдача текущей информации о чис-
ле физических вагонов, осей и тележек в отцепе.
В аппаратуре такого контроля используются, как правило,
нереверсивные ТПД.
В системе ГПЗУ—АЗСР ЦНИИ [19] роспуск контроли-
руется релейным устройством, увязанным с комплектом датчи-
ков (типа ПБМ-56 и фотодатчиком), образующих контрольные
и счетные участки (рис. 34): тележек с нормальной базой
(2ТПД—ЗТПД)\ длиннобазных тележек (ДТПД—ЗТПД); фик-
сации длиннобазного вагона (рельсовая цепь 1ДПу, коммута-
ции ТПД контроля отрыва и расцепа (рельсовые цепи 2ДП и
ЗДП), контроля проследования хвоста отцепа (фотодатчик).
При следовании отцепов проверяется длина базы каждого
вагона (участок 1ДП кратковременно освобождается, а реле
1ДП срабатывает только под серединой длиннобазных вагонов)
и отсчитываются его тележки. Занятие участка 2ТПД—ЗТПД
или 1ТПД—ЗТПД при проходе по нему'первой и второй теле-
жек с кратковременным его освобождением под серединой каж-
дого вагона контролируется связанными с ТПД кольцевыми
счетчиками, которые при свободном участке (равенстве, показа-
ний обоих счетчиков) возбуждают реле В. При проследовании
осей над ТПД срабатывают начальное и конечное педальные
реле НПД и КПД, подключаемые к соответствующим ТПД
контактами путевых реле 2ПД и ЗПД участков 2ДП и ЗДП.
Для вагонов с нормальной базой к реле НПД подключен дат-
чик 2ТПД.
63
Для длиннобазовогл
вагона при кратковре!
менном освобождении!
участка 1ДП возбуждая
ется и самоблокируетсяЗ
реле С, подключая к ре-1
ле НПДР датчик 1ТПД\
и образуя счетный уча-!
сток 1ТПД-РЗТПД. Чис-,
ло циклов работы реле-
С, равное числу физиче-
ских вагонов, фиксирует-
ся счетчиком вагонов,:
который в увязке с.
ГПЗУ и фоподатчиком-
(контролирующим выход'
хвоста оторвавшегося от-:
цепа) вырабатывает сиг-]
нал соответствия числа:
вагонов в отцепе, задан-'
Рис- 35 ному программой рос-'
пуска.
Блок комплексного контроля головной стрелки БКГС для-
систем ГАЦ-КР, ГПЗУ, АЗСР и КРУГ основан на использо-1
вании только ТПД, что обеспечивает его действие независимо
от отказов рельсовых цепей и фотодатчиков, а также дополняет
контрольные функции: фиксацией факта нагона отцепов на го-
ловной стрелке и контролем занятости ее при потере шунта;
Блок БКГС (рис. 35) связан с контрольными и нормировоч-
ными участками, образованными ТПД (типа ТКП), и скомпо-
нован из отдельных узлов контроля свободности отсчета осей,
тележек и вагонов (по типу блоков БКС и БКСД). Заданные
маршрут М3 и число вагонов ЧВ отцепа поступают из ГПЗУ в
ГАЦ и в счетчик заданного числа вагонов СЗЧВ, где фиксиру-
ются. При проходе отцепа по участку БКГС его колеса воздей-
ствуют на ТПД участков нормировочного НУ (узел БКСНУ с
1ТПД и ЗТПД), стрелочного (узел КСУ блока БКСД, с 1ТПД
и 4—5ТПД) и счета тележек КУ (узел БКС КУ с 2ТПД и
ЗТПД). Узлы счета числа вагонов СЧВ и СФЧВ отсчитывают .и
сравнивают фактическое их число в отцепе с заданным в счет-
чике СЗЧВ. При несоответствии этих чисел формирователь на-
рушения длины отцепа ФНДО выдает сигнал НД в ГПЗУ,
ГАЦ, на табло, узел БКСНУ участка НУ (длиной 5,2 м, боль-
шей, чем максимальное расстояние между крайними осями двух
сцепленных соседних вагонов) совместно с узлом контроля
разделения отцепов КРО и анализатором направления движе-
ния АН формирует сигнал о разделении (отрыве) смежных
отцепов, если участок НУ освободился после выхода из него
G4
последней оси, вагона. Сигнал, фиксирующий окончание цикла
логических действий для одного отцепа, используется для счета
отцепов (счетчиком СЧО и фиксатором его .номера ФИО).
13. ТОЧЕЧНЫЕ ПУТЕВЫЕ ДАТЧИКИ РЕГУЛИРОВАНИЯ
СКОРОСТИ СКАТЫВАНИЯ ОТЦЕПОВ
Путевые датчики систем АРС сосредоточены в головной ча-
сти сортировочной горки, на измерительных участках, а также
в зоне тормозных позиций, где применяется комбинированное
использование ТПД: для измерения скоростей, ускорений, оп-
ределения осности, длины и других параметров отцепов, а так-
же подачи пусковых команд в исполнительные схемы и контро-
ля свободности участков (при подходе отцепа к замедлителю,
к измерительному участку). Наиболее жесткие требования по
точности работы предъявляются к ТПД устройств измерения
скоростей и ускорений для установления ходовых свойств от-
цепов.
Расстановка и увязка ТПД в системе АРС-ЦНИИ. Система
АРС-ЦНИИ [19] обеспечивает точность регулирования скоро-
стей скатывания отцепов за счет использования высокоточных
измерительных устройств, в которых применены датчики
ПБМ-56, установленные на измерительных участках спускной
части горки (рис. 36). В процессе скатывания каждого отцепа
его ускорение определяется трижды: измерителем ИУ на уча-
стке 1У (ускорение а', характеризующее ходовые свойства от-
Рис. 36
3—1631
65
цепа); измерителем ИСКр на участке 2У (ускорение а'{р для1!
учета сопротивления от кривых и стрелок и измерителем ИНТ]
па участке .ЗУ (ускорение ап для учета интенсивности тормо- 1
жения). Ускорения а (величины а' и ац) и влияние сопротив- J
лсния стрелок-кривых определяются на основе решения "j
уравнений:
а - L - г,2 - (20)
А4(А+А) ’ к₽ 21 " ’’
где /1 и /2 — время прохождения отцепом соответственно пер-
вого и второго (выделяемых тремя ТПД) конт-
рольных участков длиной по L/2; . .
у. и vs — скорости проследования отцепом соответственно
первого и второго контрольных участков 1КУ и .
2КУ; , ... :
/ — расстояние между серединами этих участков...
Каждый измеритель связан с ТПД измерительного участка
и состоит из блоков: коммутации (КУ, ККР, КИ), высокоточно- •-
го дискретного счетчика времени (СУ, СКР, СИ), вычислителя
ускорения (ВУ, ВКР, ВИ) и преобразователя его величины/.в '
код АРС (ПУ, ПКР, ПИ). На участке 4У с измерителем скоро- '1
сти И СВ определяется фактическая скорость и! выхода.: от-
цепа из замедлителей пусковой (второй) тормозной позиции .
ПТП. Подсчитанные и преобразованные измерителями ускоре- •
ний величины передаются в вычислительные и управляющие
блоки системы АРС, где используются для определения -и реа- -)
л из а ции заданных скоростей выхода отцепов ,из тормозных !
позиций.
ТПД всех измерителей ускорения должны обеспечивать вы-
сокую точность фиксации времени и расстояния при воздейст-
вии на них колеса. Незначительное отличие величин А и ДДи
связи с малой абсолютной величиной ускорений па горках) тре-
бует вести их измерение с большой точностью (до 1 мс), и ТПД
не должен вносить дополнительную погрешность в эти измере-
ния. Требования к точности этих ТПД определяются величи-
ной максимально допустимой абсолютной погрешности АД в
фиксации длины участка С, на которо>м измеряются времена
1\ и К (участки L/2, /ку)- Величина lv зависит от разброса
параметров колесных пар, смещений колеса относительно ТПД
и неточности действия самого ТПД. Эти факторы при фиксиро-
ванном пороге срабатывания пусковой схемы определяют раз-
брос между моментами начала и конца счета, времени и про-
хождения колесом условного центра датчика !.
1 За условный центр рельсового датчика принимается точка, в которой
датчик должен фиксировать центр колеса во время его перемещения в зоне
действия ТПД.
66
Требуемая точность ТПД для измерителей ускорения а (ве-
' ' ' определяются из уравнений [19, 28} ico-
личин а' -и а„) и tf
ответственно:
оа£
A IXJ
(21)
и
°а Ау
'4-+1
(22)
относительная погрешность в измерении
где б а—допустимая
ускорения;
L — длина 'измерительного участка, <м;
1] —- соотношение между реальными величинами ускорений
и скоростями входа отцепа на измерительный участок
цвх для условий сортировочной горки, 1/м;
.1 ку—длина контрольного участка, где определяются ско-
рости;
I — расстояние между серединами контрольных участков.
Для условий сортировочной горки, где величина р состав-
ляет 0,025—0,08 (1/м), длина участка L равна 12 м, а допусти-
мая величина погрешности в измерении ускорения ба не должна
превышать 5—6%, требуемая точность ТПД (максимально до-
пустимая величина Д/р) определяется в пределах AZ& — 5-~
— 20 мм.
Обеспечение такой высокой точности работы ТПД в усло-
виях сортировочной горки является сложной технической за-
дачей и из всех разновидностей применяющихся ТПД ее могут
обеспечить механоконтактные датчики (с воздействием ребор-
ды колеса через рычажную систему на контакты датчика) и
магнитоиндукционные ТПД, фиксирующие изменением поляр-
ности сигнала момент прохода
чика.
Механоконтактные датчики применяются в некоторых зару-
бежных системах АРС и для экспериментальных
чажная педаль (используемая в ряде систем АРС США и Ка-
нады) формирует передний фронт импульса (при замыкании
контакта)-для пуска счетчика времени, обеспечивая заданную
точность работы при условии тщательной и ежедневно прове-
ряемой регулировки. Из диаграммы на рис. 37, характеризую-
щей взаимодействие реборды бандажа колеса с таким ТПД,
следует, что разница по длине А/ между моментами выдачи
сигнала при проходе колес с различными диаметрами банда-
жей достигает значений от 0 до 60 мм. Поскольку измерение
скорости отцепа ла участке 1ку ,-н-производится всегда по од-
ной и той же (первой) колесной паре, то погрешности за счет
центра колеса над центром дат-
целей. Ры-
3*
67
нс возникает. Погрешности AZcp за счет овальности гребки
бандажа исключаются выбором длин участков в пределах:
/и ~ 0,75к£) н-тоО; l=~^= nvD,
(23)
где п — целое число, D — диаметр колеса.
При одинаковой регулировке контакты
стка должны срабатывать при одной и той
их рычагов. Допустимое отклонение от
обеспечения пределов А/., = 5-4-20 мм) AZ
печить такую точность работы 'механических ТПД в условиях
сортировочных горок при наличии ударов и механического из-
носа весьма сложно.
Магнитоиндукционные датчики, отвечающие требованиям
обеспечения точности работы (несмотря на их ненадежное дей-
ствие при малых скоростях), широко применяются в системах
АРС. Повышение точности
всех датчиков
же величине
этой величины
ср = 0,8-4-5 мм. (
j уча-
хода
(для
Обес-
их
Рис. 37
действия достигается- путем
фиксации момента нахожде-
ния реборды колеса посереди-
не магнитного потока датчи-
ка, когда полярность выда-
ваемого им сигнала меняется
на обратную. Эта середина
для каждого датчика опреде-
ляется милливеберметром,
маркируется и жестко фикси-
руется при установке ТПД на
измерительном участке. Мо-
мент смены полярности сиг-
нала фиксируется с помощью
схем, выделяющих переход
амплитуды сигнала через,
нуль или начало поступления
второй полуволны {обратной
полярности) сигнала.
Схема педали ПБМ-56 в
измерителях ускорения АРС-
ЦНИИ фиксирует момент
прохождения центра колеса
над серединой датчика с по-
мощью двухкаскадного уси-
лителя ДУ (рис. 38). Комму-
тационные контакты реле ПД
по мере движения колеса по
участку последовательно под-
ключают очередной ТПД к
усилителю. Для защиты от
помех, вызывающих ложное
68
Рис, 38
срабатывание, схема нормально заперта, а в момент подхода
колеса к ТПД и поступления от датчика первой полуволны
(прямой полярности) сигнала схема открывается, вырабатывая
сигнал прохода оси, при поступлении от-датчика второй полу-
волны (обратной полярности, точки А, Б, В на рис. 38) и до-
стижения ее амплитудой порогового значения.
В схеме ТПД типа «General Electric» и SERVO 7788, приме-
няемых на некоторых сортировочных горках США, переход ам-
плитуды сигнала через нуль фиксируется схемой дифференци-
рующей цепочки ДЦ с усилителем Ус, подключенной к рельсо-
вому датчику и выдающей прямоугольный импульс сигнала
прохода оси (точки А', Б', В' на рис. 38), используемый для
пуска или остановки высокоточного счетчика времени.
Педали ПБМ.-56 применяются также в устройствах управ-
ления полуавтоматическими башмаконакладывателями, кото-
рые используются на сортировочных горках в системе АРС (при
частичной автоматизации спускной части горки для дополни-
тельного торможения в глубине подгорочного парка) и в виде
самостоятельных тормозных средств [29] на позициях интер-
вального и 'прицельного торможения. ТПД в таком устройстве,
разработанном КБ ЦШ, используется в качестве пускового
датчика (устанавливаемого на 0,5 м перед каждым башмако-
н а клады® а телем и включающего его при подходе отцепа), а
также датчика контроля свободности, по счету осей, участка
блокировки (длиной 2,6—2,7 м) башмаконакладывателя.
14. ДАТЧИКИ РЕГИСТРАЦИИ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО
СОСТАВА В АСУ СОРТИРОВОЧНОЙ СТАНЦИИ
Подсистемы АСУ сортировочных станций и железнодорож-
ных узлов оснащаются аппаратурой счета осей с ТПД для ав-
томатической регистрации и ввода в ЭВМ информации о числе
69
Рис. 39
и направлении движения осей подвижных единиц, проследо-
вавших через контрольные точки станций. Общее число конт-
рольных точек с ТПД в такой системе зависит от размеров и
путевого развития станции или узла и может достигать 150 и
более (без учета горочных систем) с 15—20 точками, располо-
женным па ближних подходах (рис. 39). Расстояния от ТПД
до ЭВМ в пределах станции или узла могут достигать от 200 м
до 6 км, а для подходов — 10—-12 км.
В большинстве АСУ' сортировочных станций увязка ТПД
контрольных точек с ЭВМ осуществляется с помощью устройств
регистрации перемещения осей — УРПО [30], выдающих ре-
зультат реверсивного счета осей в ЭВМ по ее команде. Аппа-
ратура УРПО (разработанная ЛИИЖТ и КБ ЦШ) состоит из
следующих узлов сопряжения ЭВМ с реверсивными комплекта-
ми ТПД (рис. 40): приемника ПУ сигналов ТПД; устройства
контроля исправности ТПД и линии связи УКИ; анализатора
направления движения АНД; двенадцатиразрядного реверсив-
ного счетчика (емкостью до 4095 осей). Предусмотрена воз-
можность перехода па нереверсивный счет и проверочные уст-
ройства (имитаторы). Реверсивные счетчики опрашиваются
но командам ЭВМ через узлы сопряжения ЭВМ-УРПО и пе-
редают в ЭВМ. результат счета осей. В ряде зарубежных АСУ
сортировочной станции ТПД сопрягаются непосредственно с
ЭВМ [31]. ТПД в этих устройствах является единственным дат-
чиком, выдающим первичную информацию, служащую основой
для работы всей системы и нс дублируемую другими данными,
поэтому главным требованием к ним является повышенная
дос го верность счета, обеспечивающая работоспособность и дос-
товерность действия всей АСУ сортировочной станции в целом.
До с 'Говера гость т а к и х ТПД до л .ж и а б ы ть нс ниже 1 5 • 10е
|32] с учетом условий их использования (см. табл. 2) и обя-
70
От МН К МН
Сброс Опрос Результат счета Признак .аварии’
Рис. 40
зательного выполнения: автоматического контроля его исправ-
ности, помехозащищенности рельсовых цепей и возможности
механизированной уборки снега, обеспечения фиксации осей
при скоростях от 0 до 120 км/ч (для контрольных точек под-
ходов) и при скоростях от 0 до 40 км/ч для многочисленных
внутристанционных контрольных точек.
Конструкции ТПД, удовлетворяющей всем требованиям АСУ
сортировочной станции, в настоящее время не имеется, по-
этому применяются способы логической проверки и программ-
ных методов повышения общей достоверности счета осей, а так-
же оптимальной расстановки и дублирования ТПД [32]. В ап-
паратуре УРПО для железных дорог СССР принят датчик ти-
па ТКП, как наиболее полно из существующих, удовлетворяю-
щий требованиям по надежности и достоверности работы.
Общая достоверность реверсивного счета осей для датчика
ТКП (удовлетворяющая заданному уровню достоверности)
Р дткп = 1-1,3-Ю6 1/ось, с учетом .наихудших условий его рабо-
ты и следующих значений вероятностей отказов (4); вероят-
ность отсутствия ошибок, вызываемых воздействием помех
РО1П = 0,65-ИН 1/ось; вероятность сбоя анализатора направле-
ния движения Pcg =0,6-10-° 1/ось; параметр потока отказов
Za = 5-10~5 1/ч при интенсивности работы N— 1000 осей/ч.
Глава IV
ПРИМЕНЕНИЕ ПУТЕВЫХ ДАТЧИКОВ СЧЕТА ОСЕЙ
НА УЧАСТКАХ МАГИСТРАЛЬНЫХ ЖЕЛЕЗНЫХ ДОРОГ
15. ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ ТОЧЕЧНЫХ ПУТЕВЫХ ]
ДАТЧИКОВ В ПЕРЕГОННЫХ УСТРОЙСТВАХ СЦБ /
И АВТОМАТИЧЕСКОГО КОНТРОЛЯ
Системы перегонных устройств железнодорожной автома- ’
тики и телемеханики, где используются ТПД счета осей, по *1’
характеру и ответственности выполняемых ими функций раз- f
деляются на три класса: системы и устройства СЦБ (путевой £
блокировки, ограждения переездов, контроля); системы автома-
тического контроля технического состояния и выявления не- £
исправностей подвижного состава; информационно-контрольные i
устройства сбора и передачи данных о движущихся поездах, |
применяемые автономно и в подсистемах АСУЖТ. 4
В связи с повышением требований к обеспечению безопас- I
ности движения при высоких скоростях и интенсивностях дви- t
А - JU QtmonamuvecKUx устройстЬ СЦ6
Л -ТПД контрольна -информационных устройств
72
жения поездов и недостаточной надежностью ТПД применение
их в перегонных устройствах СЦБ сокращается, однако в свя-
зи с развитием информационных подсистем АСУЖТ ТПД ста-
новятся основным типом датчика в информационно-контроль-
ной аппаратуре, и в настоящее время они применяются в сле-
дующих устройствах перегонных систем (рис. 41):
в полуавтоматической путевой блокировке (ПАБ) на гра-
ницах блок-участков перегонов для фиксации проследования
оси (ФО) подвижного состава без счета осей через контроль-
ные точки (группа ФБ) и для контроля занятия перегона
(блок-участка) по счету осей (группа СБ);
в автоматической путевой блокировке (АБ) для контроля
занятия блок-участков по счету осей (группа СБ на границах
блок-участков);
в устройствах контроля свободности стрелочных и путевых
участков (на станциях, увязанных с ПАБ и АБ) по счету осей
(группа СБ);
во вспомогательных устройствах визуального контроля
(ВКУ) и обеспечения безопасности движения: контроля прохо-
да хвоста поезда и занятости перегонов по счету осей, скоро-
сти подхода и приближения поезда (группа ВУ);
в ограждающих устройствах на переездах (ОУП) с авто-
матической переездной сигнализацией (АПС) для фиксации
прохода и контроля скорости движения поезда (группа ОП);
в системах контроля и выявления неисправности подвиж-
ного состава: приборов обнаружения нагретых букс (ПОНАБ),
контроля исправности колес (КРАП) (счет и определение числа
осей, типов вагонов — группа ВА);
Рис 41
73
Таблица 8
Функциональное назначе-
ние и наименование
аппаратуры с использо-
ванием ТПД
Характер главных требований
к аппаратуре
к ТПД
Фиксация проследования оси подвижного состава
П ол у авт ом этическая
блокировка:
контроль занятая
перегона поездом
(без учета его пол-
гюсоставностп);
перекрытие сигна-
лов и разделка
маршрута
Ограждающие уст-
ройства па переездах:
контроль приближе-
ния и освобождения
пе р е езд а п о сздо м;
пуск — выключение
устройств
Сигнализация и 'изве-
щение путевых ремонт-
ных йригад о прибли-
жении поезда:
контроль приближе-
ния поезда, пуск —
выключение уст-
ройств
Автоматический конт-
роль и выявление не-
исправностей подвижно-
го состава:
Обеспечение безопас-
ности движения. Конт-
роль отказов всей ап-
паратуры, включая
ТПД. Дублирование
датчиков
'Высокая надежность
фиксации первой и по-
следней осей поезда че-
рез контрольную точку.
Контролируемость от-
казов
подача пусковых
команд включения
устройств;
выделение контро-
лируемой оси (ва-
гона)
Достоверность и бы-
стродействие аппарату-
ры, точность фиксации
осей
То же
Достоверность фикса-
ции первой оси поезда
Достоверность и точ-
ность фиксации каж-
дой оси. Неизменное гь
зон фиксации
Счет осей подвижного состава
Полуавтоматическая
а1втобл'оки1ровка:
контроль занятия
перегона (блок-уч а-
стка) по счету осей
с контролем ПОЛ.НО-
составности поезда;
контроль числа
осей и' времени
проследования поез-
да
• Обеспечение безопас-
ности движения в ре-
версивном режиме ра-
боты
Достоверность фикса-
ции проследования каж-
дой оси через конт-
рольную точку
Высокая надежность
в .реверсивном режиме
движения
Достоверность фикса-
ции осей в реверсивном
режиме работы
74
Продолжение табл. 8
Функциональное назначе- ние и наименование аппаратуры с использо- ванием ТПД Характер главных' требований
к аппаратуре к ТПД
Визуальный контроль Достоверность фикса- То же -
занятия перегона и полносоставнести поез- да по счету осей И Ограждающие устрой- ства .на переездах: •регулирование вре- ции проследования каж- дой оси с учетом до- стоверности -визуально- го контроля оператором Измерение скорости поезда Обеспечение безопас- Надежность фикса-
мен и закрытия пере- ности движения. Конт- ции первой оси поезда
езда в зависимости от скорости движе- ния поезда; визуальный Конт- роль отказов Достоверность изме- Достоверность фикса-
роль скорости под- рения времени прохода ции первой оси поезда
хода поезда к стан- ции Идентификация и фик оси с учетом достовер- ности визуального конт- роля оператором ?ация физических единиц подвижного состава
Летом этический конт- роль и выявление не- исправностей подвиж- ного состава: раздельная регист- Достоверность счета Достоверность фикса-
•рация вагонов и ло- и регистр а дни физике- ции каждой оси ссста»
комотивов Контроль числа осей и времени проследова- ния поезда ских единиц вагонов с выделением локомоти- вов То же ва То же
в аппаратуре отсчета времени и осей (АСВО) для составов,
проходящих через контрольную точку участка (группа ВО).
Общим требованием ко всем ТПД, используемым в перечис-
ленных системах, является обеспечение их устойчивой работы
при скоростях до 200—250 км/ч. Остальные обязательные тре-
бования в связи с различием функций и неодинаковостью ха-
рактера использования ТПД различны и приведены в табл. 8.
75
16. ДАТЧИКИ ПУТЕВОЙ БЛОКИРОВКИ
В системах путевой блокировки на магистральном желез-
нодорожном транспорте СССР ТПД применяются в полуавто-
матической блокировке в качестве дополнительного к конт-
рольной рельсовой цепи датчика для фиксации факта просле-
дования поезда. В некоторых зарубежных системах путевой
блокировки (построенных на счете осей) ТПД используется в
качестве основного путевого датчика.
Рис. 42
76
Полуавтоматическая блокировка РПБ системы ГТСС [331
содержит ТПД на границах контролируемого перегона (блок-
участка), где выделяются контрольные зоны с путевыми дат-
чиками в сочетании с короткой рельсовой цепью (изолирован-
ным рельсом ИР) (рис. 42, а). При вступлении поезда на уча-
сток ИР, воздействии колесной пары на ТПД и замыкании его
контактов возбуждается и самоблокируется реле 1П (рис. 42,
б), фиксируя одновременное срабатывание ТПД и рельсовой
цепи и подавая сигнал в РПБ о вступлении поезда в контроль-
ную зону. После освобождения поездом участка ИР в схемы
РПБ дается сигнал об окончании цикла проследования поезда.
Для повышения надежности работы воздушно-мембранных пе-
далей, используемых в РПБ, и контроля их исправности схема
педали дополнена параметрическим контролем самопроизволь-
ного замыкания контактов или понижения их изоляции от кор-
пуса педали (резисторы /Д, /?о на рис. 42, в), что контро-
лирует работу контакта и исключает в ряде случаев ложные
сигналы проследования поезда. При электротяге, контрольная
зона оборудуется двухсекционным изолированным рельсом с
перемычками для пропуска тягового тока, а в схему педального
реле введены контроль наличия поезда па обеих секциях ИР
и контроль самопроизвольного замыкания контакта ТПД при
свободной рельсовой цепи.
В системе РПБ с использованием педали ПБМ-56 примене-
на педальная транзисторная приставка ППИШ-1 (рис. 42, а).
Защита от ложных сигналов достигается дополнением схемы
ИР (длиной 25 м), а для исключения срабатывания ТПД от
съемных вагончиков датчик установлен на расстоянии 1,5—
2.5 м от ИР. Импульсы от датчика поступают в схему РПБ
через контакт путевого реле 1П только при занятии PIP обыч-
ным подвижным составом. Для повышения чувствительности и
скоростного предела работы датчика ПБМ-56 в схему введены
одновибратор (транзисторы Т2 и ТЗ) и повторитель-усилитель
(транзистор Т1). Реле 1ДП нормально возбуждено и контро-
лирует исправность работы схемы.
Полуавтоматическая блокировка РПБ системы КБ ЦШ
[34] содержит ТПД (воздушно-мембранные педали) в сочета-
нии с частотной рельсовой цепью без изолирующих стыков. Эта
.аппаратура размещается в трансформаторном путевом ящике.
Педаль устанавливается посередине рельсового звена и вклю-
чается по схеме рис. 42, д. В исходном состоянии на схему пе-
дали подается переменный ток напряжением 70 В. С трансфор-
матора ТРЗ и выпрямителя ВЗ напряжение подается на питаю-
щий генератор Г частоты 8 кГц, выход которого через конден-
сатор С4 и регулировочный резистор Рр соединен с бесстыко-
вой рельсовой цепью (зона шунтирования которой 20—30 м).
При вступлении поезда в эту зону и воздействии его колеса на
датчик АТПД путевое реле ПР отпускает якорь, подключая
77
конденсатор С6-С8 в цепь заряда с последующим разрядом его
при освобождении контрольной зоны па обмотку реле ПП, ко-
торое срабатывает, самоблокируется и подает в схему РПБ
сигнал о фактическом проследовании поезда.
Полуавтоматическая блокировка с полярной линейной цепью
системы БПЛЦ содержит ТПД (воздушно-мембранную педаль
со снятым клапаном), увязанную со схемой ИР с контролем
правильности срабатывания ТПД. Педаль устанавливается на
расстоянии не менее 20 м от изолирующего стыка, что обеспе-
чивает устойчивую работу путевого реле, которое при макси-
мальных скоростях движения успевает отпустить якорь после-
въезда поезда на ИР и до подхода первого ската к педали. При
воздействии первого ската па педаль и срабатывании контак-
тов БТПД (рис. 42, е) реле И, возбуждаясь от разряда конден-
сатора СИ, самоблокируется и включает педальное реле ПДР-
После освобождения поездом ИР и возбуждения реле П в схе-
мы РПБ подается сигнал фактического проследования поезда.
Датчики путевой блокировки с контролем занятости блок-
участков по счету осей. На линиях, где применение рельсовых
цепей для контроля занятости блок-участков и примыкающих
к ним станционных путей по техническим причинам затрудне-
но, а иногда и невозможно (загрязнение балласта солями, уг-
лем, рудой; наличие металлических шпал, рельсовых стяжек),
в ряде стран эксплуатируются системы автоблокировки, пост-
роенные на принципе счета осей, в которых ТПД является ос-
новным датчиком, определяющим работоспособность и надеж-
ность всей системы в целом. Свободность или занятость пере-
гона (блок-участка) в этих системах обычно определяется ре-
версивными счетчиками осей, нулевое положение которых вы-
рабатывает сигнал свободности. В ряде систем применены син-
хронные и кольцевые счетчики и моторно-шаговые реле.
Применение в путевой блокировке ТПД со счетчиками осей
при надлежащей их надежности (не более одной ошибки на
6-105-~7- 10s сосчитанных осей) позволит достичь ряда преиму-
ществ: удлинения контролируемых участков (блок-участков) до
8 км независимо от сопротивления балласта и других ограни-
чений, налагаемых рельсовыми цепями; ликвидации изолирую-
щих стыков, возможности сплошной сварки рельсовых нитей;
сокращения затрат на содержание шпал и балласта; исключе-
ния путевых приборов рельсовых цепей (дросселей, соедини-
телей и др.); обеспечения контроля при потере шунта и других
нарушениях электрического контакта в рельсовых цепях.
Путевая блокировка системы ГТСС с контролем перегона
по счету осей [1] основана на использовании датчиков МЭД-2,
устанавливаемых у входных сигналов, ограничивающих конт-
ролируемый перегон (рис. 43). Предусмотрены два варианта
компоновки счетной аппаратуры: с установкой счетно-конт-
рольного устройства СДУ реверсивного счета осей на одной из
78
станций и на каждой станции перегона. Станционные устрой-
ства. соединенные двухпроводной линией связи, состоят из де-
модулятора ДЛ1, кодирующего генератора КГ, линейных уст-
ройств и источника питания ИП.
При движении поезда на перегон и воздействии колес на
датчик 1ТПД в приемное устройство ПУ блока С КУ поступа-
ют импульсы счета осей, которые через триггер ТГ передаются
на реверсивный счетчик PC, где суммируются. При выходе
счетчика PC из нулевого положения срабатывает коммутиру-
ющее устройство КУ, выдавая сигнал занятости перегона и вы-
ключая путевое реле П с повторителем Г1П и а соседней стан-
ции. При входе этого поезда на соседнюю станцию и воздей-
ствии его колес на датчик 2ТПД импульсы счета осей посред-
ством ПУ управляют генератором Г, изменяющим в такт им-
пульсам посылаемую на станцию К частоту с контрольной
на сигнальную f2. Эти импульсы, расшифрованные демодулято-
ром ДМ, управляют триггером Тг, который устанавливает
счетчик PC в режим вычитания и вычитает прибывающие на
станцию М оси из ранее зафиксированного числа осей. После
возвращения счетчика PC в нулевое положение срабатывает
КУ, включая реле ПР и ПП, подающие сигнал свободности
перегона.
Путевая блокировка фирмы «Integra» (Швейцария) приме-
няется на железных дорогах ряда европейских стран [26]. В
качестве ТПД используются датчики «Integra». Для увеличе-
ния пропускной способности участков в системе предусмотрена
возможность разделения перегона с установкой ТПД, проход-
ных сигналов -и с устройством автоматических блок-постов.
Фиксация прибытия поезда на станцию производится по схеме
РПБ: с помощью ТПД и короткой рельсовой цепи. Перегон
79
Рис. 44
разделяется на два блок-участка с размещением аппаратуры
счета осей на станциях (рис. 44). Проходные светофоры 3S и-
J3S с сигнальными роле S3 и S13 оборудованы короткими рель-
совыми цепями с датчиками ЗТПД и 13ТПД. При отправле-
нии поезда со станции 1 и проследовании его за светофор 1S
импульсы 'Счета осей от датчика 1ТПД суммируются реверсив-
ным счетчиком PC 1 и при выходе его из нулевого положения-
срабатывает контрольное реле Д1, приводя светофор 1S посред-
ством схемы S1 в заграждающее положение. При проследо-
вании поезда через проходную точку (сигнал 3S) и воздейст-
вии его колес на датчик ЗТПД импульсы счета одновременно-
подаются на .вход вычитания реверсивного счетчика РС1 и на
вход сложения счетчика РС2, в результате чего перекрывается
светофор 3S. После прохода всего поезда над датчиком ЗТПД
и возвращения счетчика РС1 в нулевое положение срабатывает
реле К1, открывая светофор 1S. При входе всего поезда на
станцию 2 и поступлении на вход вычитания счетчика РС2 чис-
ла импульсов по числу осей поезда счетчик РС2 возвращается
в нулевое положение, возбуждая реле контроля свободности
блок-участка 3S-2S.
Путевая блокировка фирмы SEL (ФРГ) применяется на ря-
де участков железных дорог ФРГ, Индии и других стран [35].
В качестве ТПД в системе используется датчик типа SEL, кото-
рый .позволяет реализовать в системе основные требования
СЦБ: при повреждении схем -переходит в запрещающее состоя-
ние; воспринимает воздействия только колес подвижного со-
80
Cm A
Выходной
света (pop ^тпл
I—СО 'лЛ
^рц А х за
Наполь
ные уст
ройство
Линия
Станцион-
ная апла- Р
ратури(СК)
Ф
ящик___J
Путевой
I Рс
Г,
блок-участок
Проходная точка ПТ
Про_хид-
(12 м
39м
32м
<рт
под
Ус
РЗС
> s
Контроль
исправности
напольных
устройств
Контроль
исправнясти
счетчика
-JBl Реверсивный
4-—] © счетчик
J
“I Zпробода
I Устройства
Входной
I контрольной
I г точки
I Устройства
I выходной
I контрольной
J точки
L____
ДД- й провода
Путевой ящик
РСИ 1
Контроль начала
счета первой оси
и Вычитания по-
следней оси
P,3Ci \ I * Г, i м
Д Ц Схема управления реле J Схема управления репе сводов Г~|
U | занятости счетчика | Пдослш участка исправнести |LlZ~
РСК ркс1-*
° -РКС\
I
Рельс
1J‘' * Счетно-контрольные блоки - СК5 РСК
Точечный путевой датчик/пипа 5£L
Приемная катушка (приемник)
Передающая катушка (излучатель)
Рис. 45
става (свешивающиеся детали и магнитные тормоза воздейст-
вия не оказывают); защищен от воздействия магнитных и элек-
трических полей, вибрации и колебаний напряжения; контро-
лирует искажения в линии передачи с контролем их целостно-
сти; не создает опасные ситуации при выключении устройств.
Перегон (блок-участок) контролируется на основе сигналов
счета осей (с учетом направления движения), выдаваемых ре-
версивным комплектом ТПД в две независимые цепи контроля:
занятости участка с контролем прибытия поездов в полном со-
ставе — по счету осей с использованием электронного ревер-
сивного счетчика (емкостью 511 осей); и свободности участка
по последовательности фиксации факта отправления поездов
(вход поезда на блок-участок) и факта прибытия поезда (вы-
ход поезда из блок-участка), что фиксируется схемой по им-
81
пульсам ТПД. Каждая счетная точка (рис. 45) оборудована
реверсивным комплектом 1ТП Д—2ТП Д и короткой рельсовой
цепью (длиной 30 м) для контроля наличия подвижного соста-
ва в момент счета осей и отключения системы при проходе
съемных путевых вагончиков. Увязка ТПД с аппаратурой вы-
полняется по четырехпроводной (внутри станции) и двухпро-
водной (с перегонными ТПД) линиям. При четырехпроводной
схеме увязки для подачи на ТПД питания (постоянный ток) и
передачи импульсов от ТПД (переменный ток) используются
по два провода для каждого ТПД счетной точки. При двухпро-
водной схеме питание (постоянный ток) и раздельная передача
импульсов от двух ТПД осуществляются по одной паре прово-
дов, а схема счетной точки дополняется усилителями Ус, мо-
дулятором Мод и фильтрами Ф, ФНЧ, ФВЧ для преобразова-
ния сигналов от разных ТПД в импульсы разных частот, ко-
торые расшифровываются в счетно-контрольных блоках (СКБ).
Предусмотрены контроль исправности ТПД. контроль тракта
передачи и непрерывность протекания тока во всех рабочих це-
пях. Выходная схема блока СКВ содержит реле занятости
счетчика РЗС (возбуждающегося при выходе реверсивного
счетчика из нулевого положения) и реле свободности участка—
исправности РСИ, возбужденного при исправности счетчика,
напольных устройств и при условии последовательного поступ-
ления импульсов через приемный преобразователь импульсов
ПИ от первой оси поезда при входе его в контролируемый уча-
сток (переход счетчика от нулевого положения к фиксации
одной оси) и от последней оси поезда при выходе его за пре-
делы контролируемого участка (переход счетчика от фиксации
одной оси в нулевое положение). Общее реле контроля сво-
бодности блок-участка (перегона) РДС возбуждено при усло-
вии нахождения реверсивного счетчика в нулевом положении
(реле РЗС обесточено), свободности участка и исправности ап-
паратуры (реле РСИ возбуждено). Контакты реле РКС, РЗС и
РСИ управляют всеми зависимостями в схемах светофоров, ог-
раждающих блок-участки.
Путевая блокировка фирмы «Siemens» (ФРГ) является наи-
более распространенной в ФРГ системой с общей протяженно-
стью оборудованных линий около 2 тыс. км (на линиях маги-
стральных, и городских железных дорог) [14]. В системе ис-
пользуются ТПД «Siemens» различных типов: магнитоконтакт-
иые, индукционные одинарные и сдвоенные для реверсивного
счета осей. ТПД и система в целом соответствуют требованиям
к устройствам СЦБ, аналогичным системе блокировки фирмы
SEL. По одной паре жил телефонного кабеля или кабеля СЦБ
питаются ТПД счетных точек (постоянным или переменным то-
ком) и передаются импульсы счета осей (рис. 46).
При входе поезда на блок-участок, проследовании колеса
в зоне 1ТПД и последовательном воздействии его на элементы
82
Рис. 46
а и б с выхода ТПД поступают импульсы (кратковременное
прекращение) частот и Д. Эти импульсы воспринимаются
станционной аппаратурой фазорегуляторами ФР, фазовыми
дискриминаторами ФД, генераторами Г, усилителями Ус, фор-
мирователями импульсов ФИ, мультивибраторами М и полосо-
выми фильтрами ПФ, где разделяются (по частотам Д и f2),
усиливаются и раздельно подаются па вход анализатора нап-
равления движения АНД, выдающего импульсы суммирования
(при входе оси на блок-участок и последовательности импуль-
сов Л—/2) или вычитания (при выходе оси из блок-участка и
последовательности импульсов Накопленными в элемен-
тах НС и НВ импульсами суммирования и вычитания посред-
ством распределителя опроса РО запитываются счетные конту-
ры суммирования-вычитания. Счетный контур СК 'Представляет
собой четырехразрядный пятиричный счетчик, запитываемый
тактовыми импульсами 5 кГц. Счетчик образован четырьмя
последовательно включенными делителями частоты 5:1 с общей
83
емкостью 625 единиц, из которых шесть используются для
служебных и проверочных целей, поэтому общая емкость
счетчика составляет G19 осей. Оба счетных контура, работаю-
щие синхронно при отсутствии осей на блок-участке, одновре-
менно выдают 8 раз в секунду выходные импульсы, которые
фиксируются регистром соответствия счета, вырабатывая сиг-
нал свободности участка. При входе первой оси на блок-уча-
сток и передаче в блок С 1(13 одного суммирующего импульса
контур суммирования, получая импульс, досчитывает одну до-
полнительную единицу, фазовая синхронность обоих счетчиков
нарушается, одновременность выдачи контрольных импульсов
перехода обоих счетчиков через пулевое положение прекра-
щается, чем вырабатывается сигнал «участок занят». При вы-
ходе ранее засчитанных осей за пределы блок-участка и фик-
сации их счетчиком вычитания синхронность работы счетных
контуров восстанавливается и на выходе схемы выдается сиг-
нал «участок свободен».
В схеме предусмотрены логический контроль последова-
тельности поступления первого импульса от входного ТПД и
правильности окончания счета, .контроль «минусовой оси» и
колебательного движения колеса -в зоне действия датчика. Об-
щий контроль свободности блок-участка .выдается возбуждени-
ем реле контроля свободности РКС при наличии -сигнала о
нулевом результате счета осей и исправности системы от бло-
ков К1 и 1(2.
Максимальная удаленность аппаратуры счетной точки от стан-
ционных устройств при п-итаиии ТПД постоянным током 60 В
4—12 к.м (при сечении медных .жил кабеля соответственно от 0,9
до .1,4 мм); при (питании переменным током 110 В 7,5-Н 6,5 км.
Специальные линейные устройства, которыми может быть дополне-
на аппаратура, позволяют увеличить это расстояние.
17. ДАТЧИКИ ОГРАЖДАЮЩИХ УСТРОЙСТВ НА ПЕРЕЕЗДАХ
ТПД, используемые в некоторых зарубежных системах ог-
раждения переездов, выполняют функции: подачи пусковых
команд в исполнительные схемы на закрытие и открытие пере-
езда при подходе или удалении поезда; контроля направления
движения; подачи старт-стопных сигналов в устройства изме-
рения времени (скорости) приближения поезда к переезду; по-
дачи сигналов счета осей в устройствах контроля занятости
участков приближения — удаления.
Обобщенная структура ограждающих устройств с типичным
расположением ТПД в пределах участков переезда показана
на рис. 47.
Общая зона приближения — занятия переезда разделяется
на участки измерения скорости (ограничен датчиками
84
Уатинпвленное направление движения
Рис. 47
1-2ТПД1—1-2ТПДИ) и расчетный участок приближения
(1-2ТПДП— переезд), за время следования поезда по кото-
рому должен быть выполнен полный цикл ограждения переезда
(выключение сигнализации, закрытие шлагбаума с соответст-
вующим упреждением по времени). Датчики 1-2ТПД1 и
1-2ТПДЦ увязаны с измерителем ИВ и .преобразователем вре-
мени ИВ, вычисляющим оптимальное значение задержки закры-
тия ограждающих устройств в зависимости от фактической
скорости движения поезда, что позволяет избегать задержки
транспорта у закрытых переездов при медленном движении по-
ездов и повысить безопасность движения при их больших ско-
ростях. Вычисленная уравнителем оптимальная величина интер-
вала задержки передается в блоки исполнительных схем уп-
равления БИС ограждающими устройствами.
Пусковая команда на закрытие переезда формируется дат-
чиком 2ТПДП. Контроль направления, осуществляемый анали-
заторами АНД, соединенными с датчиками 1-2ТПДП (в нача-
ле участка приближения) и 1-2ТПД1У (в конце участка уда-
ления), используется для обеспечения нормального действия
устройств при следовании поездов в установленном направле-
нии движения и для экстренного закрытия переезда при дви-
жении поезда в неустановленном направлении (при движении
по неправильному пути, для хозяйственных поездов и т. п.). На
85
однопутных участках схемы контроля направления приближе-
ния поезда используются для переключения всей системы уп-
равления в соответствующую сторону.
Занятость участков приближения и удаления с проверкой
направления (и с учетом остановки и маневрирования состава)
контролируется счетчиками осей СО1 и СО2, увязанными с'то-
чечными путевыми датчиками. Выходы счетчиков осей (конт-
роль нулевого положения) увязаны с блоками БИС, где про-
изводятся необходимые переключения схем. Посредством бло-
кирующего устройства БУ на основе логического контроля по-
следовательности занятия и освобождения поездом участков
приближения и удаления осуществляется коммутация схем
БИС с различением направления движения поезда и с учетом
маневров в зоне обоих участков.
Точечные путевые датчики в устройствах ограждения и ав-
томатической переездной сигнализации нашли применение на
железных дорогах ПИР, ГДР, ФРГ, Швеции, США и ряда дру-
гих стран.
18. ДАТЧИКИ СЧЕТА ОСЕЙ ДЛЯ КОНТРОЛЯ
И АВТОМАТИЧЕСКОГО ВЫЯВЛЕНИЯ НЕИСПРАВНОСТЕЙ
ПОДВИЖНОГО СОСТАВА
На участках магистральных железных дорог с высокими
скоростями и интенсивностью движения введены в эксплуата-
цию различные устройства для автоматического контроля вы-
явления неисправностей подвижного состава:
перегретых букс в поездах, неисправных колесных пар (ко-
лес с ползунами, выбоинами, отколами, волнообразным изно-
сом и других, при движении которых возникают ударные на-
грузки) с автоматической передачей в контрольные пункты ин-
формации о состоянии подвижного состава, а также подачи
аварийных сигналов о необходимости остановки поезда. ТПД
в этих устройствах выполняют функции:, подачи пусковых сиг-
налов предварительного включения и выключения аппаратуры
при 'подходе или удалении поезда ('вагона, оси); определения
момента контроля колесных пар при следовании их в зоне кон-
троля; идентификации и счета физических вагонов в составе
контролируемого поезда с целью последующей их регистрации;
определения направления движения контролируемого поезда;
измерения скорости движения состава.
Аппаратура обнаружения перегретых букс ПОНАБ-3, раз-
работанная Уральским отделением ЦНИИ МПС, является ти-
повой для железпых дорог СССР и эксплуатируется на ряде
грузонапряженных участков магистральных железных дорог со
скоростным движением [36]. В качестве ТПД этой аппарату-
86
ры используются педали
11БМ-56, обеспечивающие за-
данную надежность работы
при скоростях от 5 до 160 км/ч.
К конструкции датчика ПБМ-56
для работы в устройствах
1ЮНАБ предъявляются до-
полнительные требования:
герметизации обмотки магни-
та с катушкой датчика меха-
нически прочным эпоксидным
компаундом; установки на
рельсах Р65, Р75, Р50; нали-
чия регулировочных уст-
ройств, позволяющих смещать
датчик над поверхностью
шпалы параллельно рельсу на 50 мм; защиты датчика от по-
вреждения гребнем колеса при седлообразном прокате бандажа
колеса величиной более 9 мм.
Для одного комплекта ПОНАБ-3 устанавливаются четыре
ТПД (рис. 48). Датчики 1ТПД и 2ТПД образуют зону строби-
рования для восприятия сигналов только от букс вагонов, ис-
ключая воздействие на напольные камеры НК посторонних
тепловых сигналов и формируя управляющие сигналы для ос-
новной аппаратуры. Сигналы, вырабатываемые этими ТПД, по-
ступают на устройство логической обработки 'сигналов УЛ ОС.
Контроль наличия поезда на участке ПО НАБ осуществляется
с помощью рельсовой цепи РЦН с путевым реле П.
При входе первой оси каждого вагона в зону действия дат-
чика 1ТПД от счетного импульса вырабатывается сигнал, раз-
решающий передачу сигналов от камер НК через усилители
на устройства УЛ ОС. Одновременно с включением и выключе-
нием напольной камеры импульсы первой оси вагона от датчи-
ков 1ТПД и 2ТПД используются для спуска блока распозна-
вания и отметки физических единиц подвижного состава ОФЕ,
Счет физических вагонов блоком ОФЕ основан на фиксации
датчиками осей и тележек вагонов. С этой целью датчики
1ТПД и ЗТПД установлены на расстоянии 3,6 м (большем
максимального расстояния между осями тележки, но меньше
минимального расстояния между крайними внутренними ося-
ми). Блок ОФЕ запоминает отдельно число осей первой тележ-
ки, прошедших над датчиками 1ТПД, ЗТПД, фиксирует по
счету осей момент, когда зона между датчиками 1.ТПД, ЗТПД
освобождается под базой вагона, после чего сравнивает число
осей первой и второй тележек, подсчитанных при их проходе
над ТПД. В момент совпадения числа осей, зарегистрирован-
ных для каждой тележки, вырабатывается сигнал прохода фи-
зической единицы подвижного состава, поступающий в аппа-
87
Рис. 49
ратуру обработки, хране-
ния и передачи информа-
ции ЛОХП и используемый
для передачи информации
о порядковом номере ваго-
на, которая передается вме-
сте с сигналом о перегреве
буксы. Устойчивое действие
всей аппаратуры ПОНАБГ
особенно при высоких ско-
ростях движения, обеспечи-
вается высокой точностью
фиксации и достаточной до-
стоверностью ТПД.
Для повышения точности
и быстродействия форми-
рования импульсов счета
осей и защиты исполни-
тельных элементов ТПД от
помех датчики ПБЛА-56 до-,
полнены специальным по-
лупроводниковым формиро-
вателем сигнала [37], кото-
рый состоит (рис. 49) из
усилителя амплитуды сиг-,
нала Ус, фильтра нижних
частот ФНЧ (с транзисто-
рами Т2—ТЗ, резисторами
R5—R9, конденсаторами
Cl, С2), регулировочного
потенциометра R, ампли-
тудного дискриминатора
(триггера Шмитта) и одно-
вибратора О В, формирую-
щего счетный сигнал стан-
дартной амплитуды и дли-
тельности, независимо от
Рис. 50 скорости движения поезда
и износа колес. Фильтр
ФНЧ подавляет высокочастотные сигналы вибрационного ха-
рактера (при «микрофонном эффекте» датчика) в диапазоне
частот от 150 до 500 Гц, импульсные помехи и помехи от внеш-
них электромагнитных нолей частотой 50 Гц и выше.
Детектор перегретых букс фирмы «SERVO» (США) содер-
жит магпитоиндукционпыс датчики SERVO № 7788, устанав-
ливаемые аналогичным образом па контрольном участке изме-
рения температуры букс и выполняющие функции: подача пус-
ковых импульсов включения-выключения аппаратуры при
88
проходе поезда, определения направления движения состава и
выделения зоны стробирования буксы.
Аналогичные функции выполняют ТПД в ряде эксплуати-
рующихся систем автоматизированного выявления греющихся
букс: фирмы «GENERAL ELECTRIC» (США), GSEE (Фран-
ция) и др.
Аппаратура контроля геометрических неровностей колес
КРАП-1 разработана Уральским отделением ЦНИИ МПС и
эксплуатируется на ряде участков железных дорог СССР [38].
Аппаратура КРАП, позволяющая на ходу поезда выявлять де-
фекты колес, которые создают угрозу безопасности движения,
состоит (рис. 50) из вибродатчиков ВИП и путевых датчиков
ТПД, блоков счета-регистрации физических вагонов, автомати-
ческого управления и коммутации БАУ, измерения скорости —
скоростной коррекции БСК и аппаратуры обработки, хранения,
передачи информации АОХП. ТПД подает пусковые импульсы
включения и выключения виброизмерительной аппаратуры,
измерения скорости движения поезда и счета физических ваго-
нов. Требования к ТПД, их конструкция (ПБМ-56) и схемы в
аппаратуре КРАП аналогичны соответствующим требованиям
и устройствам в аппаратуре ПОНАБ, Датчики 1ТПД, 2ТПД и
ЗТПД, 4ТПД служат для формирования счетных импульсов
числа осей при счете физических вагонов. Расстояние между
датчиками 1ТПД и ЗТПД 3600 мм. Датчики 2ТПД и ЗТПД,
управляющие аппаратурой виброизмерения, расположены на
расстоянии друг от друга, равном длине окружности колеса, и
служат для формирования стробирующего импульса, пропус-
кающего сигнал от вибродатчиков и усилителя на вход порого-
вой схемы только при .наличии колеса в зоне измерения, и обес-
печивают контроль всей поверхности колеса за полный его
оборот. Датчики 1ТПД, 2ТПД, кроме того, используются для
измерения скорости движения поезда путем замера времени
проследования контрольного участка 1ТПД, 2ТПД, равного
500 мм, и коррекции в соответствии с замеренной скоростью,
порогов обнаружения дефектов колес. Импульсы с формиро-
вателей датчиков 1ТПД и 2ТПД поступают на блок скоростной
коррекции БСД, а также на блок БАУ.
19. ДАТЧИКИ КОНТРОЛЬНЫХ ПУНКТОВ УЧЕТА
ПРИБЫТИЯ и СКОРОСТИ ПОДВИЖНОГО СОСТАВА
Па грузонапряженных участках железных дорог, в конт-
рольных пунктах учета подвижного состава, регистрации пере-
хода его через стыковые пункты железных дорог и для других
целей эксплуатируются автоматические устройства счета вре-
мени и осей проходящих составов. В качестве первичных дат-
чиков, от которых зависит достоверность информации и пра-
89
Рис. 51
вилыюсть функционирования всех устройств, в этой аппаратуре
применены ТПД счета осей.
В устройстве автоматического счета времени и осей
(АСВО), эксплуатирующемся па ряде участков железных до-
рог [39], применены датчики ПБМ-56, с помощью которых
устройство автоматически учитывает и после проследования
поезда через контрольный пункт выдает на печать следующие
данные: номер, поезда, время его проследования, направление
движения и количество осей в составе, включая оси локомоти-
ва. ТПД устройства АСВО располагаются в створе с вход-
ным сигналом, т. с. в точке, с которой в большинстве слу-
чаев совпадает административная граница между отделениями
дорог и самими дорогами. В качестве исполнительного элемен-
та ТПД в устройствах АСВО используется полупроводниковый
формирователь, обладающий релейной характеристикой
«вход—выход» (триггер Шмитта) и предназначенный для пре- 1
образования плавно изменяющегося входного напряжения в |
дискретный выходной сигнал установленного уровня. Анало- f
гичиые схемы увязки ТПД с регистрирующей аппаратурой
применены в ряде других систем АСВО.
В устройствах автоматического учета простоя и количества
вагонов (КПВ, КЧВ) [40] применены ТПД, обеспечивающие
счет осей вагонов для последующей обработки и выдачи на пе-
чать и табло диспетчера технологической информации: данных
о количестве условных и физических вагонов, находящихся на
90
контролируемых путях, ответвлениях или участках, ряда дан-
ных для учета простоя вагонов. К ТПД этих устройств, опре-
деляю! них достоверность работы всей аппаратуры, предъявля-
ются специфические требования обеспечения надежности фик-
сации каждой оси вагона в диапазоне скоростей от 0 до 60 км/ч
(с достоверностью не ниже 1 • 10~4) и помехоустойчивость от
»лсктромагнитных влияний, засыпки датчиков грузами, удар-
ных воздействий.. Расстояние между рельсовым датчиком и
исполнительным элементом до 5 км с передачей сигналов по
кабелю СЦБ.
Наиболее полно этим требованиям удовлетворяют педали
'ГКП с релейным приемником и схемой контроля исправности,
принятые в качестве основных датчиков для устройств КПВ—
КЧ.В. Увязка ТПД ^устройствами КПВ-КЧВ (рис. 51) вклю-
чает в себя следующие узлы: датчики Д1—ДЗ с педальными
ячейками ПЯ на контрольном участке, фиксирующие проследо-
вание осей, направление движения (Д1 и Д2) и проход теле-
жек .вагонов (Д2 и ДЗ)-, блоки определения направления, под-
ключающие соответствующие шины счета осей с реверсивными
счетчиками условных 'вагонов, выдающими информацию о ваго-
нах на контролируемых путях; счетчик тележек вагонов, вы-
дающий сигнал только при проходе всей тележки вагона с
триггером Тг, фиксирующим проход через зону Д1—ДЗ физиче-
ских вагонов; реверсивный счетчик физических вагонов, сум-
мирующий или вычитающий физические вагоны и выдающий
непрерывную информацию об их числе. Система охватывает
контролем все вагоны, находящиеся .в зоне за контрольным
участком, с учетом въезда и выезда вагонов из зоны.
На ряде не оборудованных автоблокировкой участков же-
лезных дорог СССР и зарубежных стран эксплуатируются по-
луавтоматические устройства счета осей в .отправляющихся и
прибывающих поездах с выдачей дежурному эксплуатационно-
му персоналу на табло или циферблатах цифровой информации
о числе осей в этих поездах. В соответствии с установленным
регламентом пропуска поездов по этим станциям и отправления
их на перегон, дежурные по станциям регистрируют в специаль-
ных журналах показания счетчиков числа осей на своей стан-
ции (по данным цифровой информации) и на соседних по каж-
дому перегону станциях (по данным телефонных сообщении, пе-
редаваемых по регламенту дежурными соседних станций в про-
цессе передачи уведомлений об отправлении и прибытии со-
ответствующих поездов). При совпадении данных числа осей в
поезде, подсчитанных при его отправлении с данной станции и
после его прибытия на соседнюю станцию — делается .вывод
о .прибытии поезда в полном составе и о свободности
перегона.
Требования к ТПД в этих устройствах определяются на
основе анализа системы «ТПД — аппаратура счета осей —
91
оператор». В СССР на ряде участков железных дорог эксплуа-
тируется прибор такого контроля с использованием датчика
ПБМ-56 ic релейным приемником и электромагнитным счетчи-
ком МЭС-54 [3]. ТПД устанавливаются в контрольной точке
на выходе и входе станции, педальные реле размещены в ре-
лейных шкафах входных сигналов, счетчики осей установлены
на рабочих местах дежурных .по станции.
На участках железных дорог ФРГ, оборудованных полуав-
томатической путевой блокировкой, эксплуатируется разрабо-
танная фирмой аппаратура счета осей с цифровым индикатор-
ным табло, для визуального контроля прибытия поезда на
станцию в .полном составе [41]. ТПД счета осей типа устанав-
ливаются в начале и конце каждого блок-участка. В помеще-
ниях дежурных блок-постов монтируются двоичные индикато-
ры числа осей ® поезде.
На ряде участков счетчики осей дополнены указателями ско-
рости подхода поезда к станции, в которых применены ТПД,
устанавливаемые на контрольном участке измерителя скоро-
сти.
Измерение скорости может быть не только точечное (для
скорости первой оси поезда), но и непрерывное — в процессе
следования всех осей поезда через контрольный участок, что
дает возможность контролировать ускорение и замедление
поезда.
СПИСОК ЛИТЕРАТУРЫ
1. Белязо И. А., Марута П, И. Схемы для определения направ-
ления движения подвижного состава. «Автоматика, телемеханика, связь»,
1969, № 1, с. 4—6.
2. Ив а н ов Н. А. Точечные путевые датчики при реверсивном счете
осей. Сб. трудов ЛИИЖТа. Л., «Транспорт», 1969. Вып. 303, с. 23—32.
3. П о р о х Г. А., Назарова 3. Г. Контроль свободности перегонов
по приборам-счетчикам осей. «Железнодорожный транспорт», 1970. № 6,
с. 16—17.
4. Бухгольц В. П. Путевые датчики автоматического контроля на
рельсовом транспорте. М., «Энергия», 19615. 76 с.
5. Бухгольц Б. П. Датчики и реле автоматического контроля в гор-
ной промышленности. М., «Недра», 1971, 2124 с.
6. Каталог изделий Киевского электротехнического завода «Транссиг-
нал» им. Ф. Э. Дзержинского. М., «Транспорт», 1968, 62 с.
7. Baier Kazimierz. Olieznlku osi jako urzadzeniu dla samoczynnej syg-
nalizagi Konca pociagu, «Przedglad Kolejowy Elektroiechniczny», 1963, N 1,
s. 6—11.
8. Finow Franz. Gleisschallmittel bei der Deutschen Reichsbahn «Eisen-
bahn—Jahrbuch 1970». Transpress. VEB Verlag fur Verkehrswesen Berlin,
s. 121—125.
9. Grzegorz Simon. Magnetyczny czujnik szynowy typu ELS-3 Konstruk-
cji ZWUS-Katowice. «Przedglad Kolejowy Elektrotechniczny» 1970. N 10r
s. 12—47.
10. Магнитоупругая бесконтактная рельсовая педаль. Ш к в а р-
лин Ю. А. н др. «Железнодорожный транспорт», 1970. № 12, с. 34—36.
11. Белязо И. А., /Марута П. И. Путевой магнитоэлектронный
датчик типа МЭД. «Автоматика, телемеханика и связь», 1967, № 3,
с. 17—19.
12. Бесконтактная магнитная педаль типа ПБМ-56. «Автоматика, теле-
механика и связь», 1970, № 3, с. 38—40.
г13 . Иванов Н. А., Гаврилов Г. Н., Филиппов Б. Н. Педаль
ПБМ-56 фиксирует низкие скорости. «Автоматика, телемеханика и связь»,
1975, № 4, с. 19—20.
14. Schmidt. Neue clektronische Achszahler fur selbsttatige Gleisfreimel-
deanlagen (Bauforni Siemens). «Eisenbahningenieur» 1973, 24, N 1, s. 28—29.
.15 . Kp а с о в с к и й Г. А., III танке А. Э. Трансформаторно-компен-
сационная педаль типа ТКП. «Автоматика, телемеханика и связь», 1972,
№ 2, с. 5—8.
16. Белязо И. А., Марута П. И, Путевые датчики зарубежных
железных дорог. «Автоматика, телемеханика и связь», 1968, № 10,
с. 44—47.
17. Siegfried Heuer. Elektronische Schienenkopfschalter in der Gleisfrei-
meldung «Eisenbahningenieur», 1970, 21, N 7, s. 1213.—Й14.
;18 . Traffic cybernetics. Sumitomo'Electric Industries, LTD. Japan, 1969,
13 s.
19. Фонарев H. M. Автоматизация процесса расформирования со-
ставов на сортировочных горках. М., «Транспорт», .197.1, 271 с.
20. Применение вычислительной техники на железнодорожном транс-
порте стран — членов СЭВ. Под ред. Петрова А. П. М., «Транспорт», 1972г.
213 с.
93-
21. Красовский Г. А., Морозов 10. В. Аппаратура контроля сво-
бедности горочных стрелок. М., «Транспорт», 1968, 32. с.
22. Красовский Г. А., Ципи Л. Э. Комплексный контроль свобод-
ное™ горочных стрелок с учетом длинно б аз пых вагонов. «Автоматика, теле-
механика :и связь». 1972, № 10, с. 4—8.
23. Белязо И. А., Марута П. И. Контроль занятости пугевых уча-
стков способом счета осей. «Автоматика, телемеханика и связь». 1968, № 3,
с. .5—8.
24. Dabrowski Tadeusz. Warunki stosowania lieznikow osi dla potreb
automatyeznego stcrowania zwrotnicami л a gorce rozradowej. «PrzcdgTad
Koiejowy elektrotechniczny», 111973, 20 N 5, s. 80 —32.
25. Pokorny Miroslav. Pocitac naprav pro Zjistovani Volnosti useku na
spadovisti. «Zeleznicni dopnava a technika». 1971. 19, N 2, s. 39—41.
|26 '. Puderecki Feliks. Urzadzenia do liczenia osi. «Prace naukowo-ba-
dawcze Ccntralny osrodek В ad an 1 zozwoju techniki kolejnictwa». 1972,
N 55, s. 88—111.
27. Красовский Г. А., Рудаков Б. П., Морозов Ю. В. Допол-
нительный контроль свободности горочных стрелок. «Вестник ЦНИИ МПС».
1967, № 2, с. 52—55.
28. Красовский Г. А. Методика подбора измерительных устройств
для автоматизации горок. «Вестник ЦНИИ МПС», 1957, Ns 6, с. 44—49.
29. Па чес Н. И., Коган Д. А. Полуавтоматический башмаконакла-
лыватель. «Автоматика, телемеханика и связь». 1974, Ns 12. с. 10—15.
30. Аппаратура регистрации перемещения осей подвижного состава для
АСУ сортировочной станции. Высоте к и й А. С.. М а р у т а П. И., Штан-
ке А. Э., Штеерман Л. М. «Железнодорожный транспорт», 1974, № 2.
с. 63—66.
ЗГ. KiP а с ов с к и й Г. А„ Горшков А. Ф. Автоматизация сортиро-
вочных горок с применением вычислительной техники на зарубежных желез-
ных дорогах. ЦНИИТЭИ МПС, Выл. 3, М., 1971, 45 с.
32. Завьялов Б. А. Размещение и контроль датчиков счета осей,
«Автоматика, телемеханика и связь». 1973, № 6, с. 7—10.
' 33. Степанов ,Н. М., В а с,и л ь цов А. М. Системы путевой полу-
автоматической блокировки РПБ и БПЛЦ. М., Трансжелдориздат, 1963,
с. 28—38, 48—il'50.
34. Трехденов В. И., Шимко Г. К. Релейная полуавтоматическая
блокировка системы КБ ЦШ. М., «Транспорт», 1966, с. 27—29.
35. Gupta. К. К. Axle counters define block sections in elecktrified terri-
tory. «Railway Sustem Control», 1973, 4, N Ц., s. 24—28.
36. Алексеев А. Г.. Лозинский С. H. Аппаратура обнаружения
перегретых букс ПОНАБ-З. «Автоматика, телемеханика и связь», 1974,
№ Ю, с. 5—8.
37. Образцов В. Л., Данченко О. А. Формирователи счетных
сигналов к бесконтактной магнитной педали типа ПБМ-56. «Автоматика, те-
лемеханика и связь», 4972, Ns 9, с. 48-—20.
38. Образцов В. Л., Данченко О. А., Л о з и н с к и й С. Н. Осо-
бенности построения виброизмерительной аппаратуры контроля геометриче-
ских неровностей колес на ходу поезда. «Автоматизация контроля ходовых
частей вагонов при движении поездов». Сб. трудов ЦНИИ МПС, М., «Тран-
спорт», 1973. Выл. 494, с. 70—79.
39. Рольщиков Е. П., Овчин ников А. С. Устройство для авто-
матической регистрации времени проследования и количества осей поезда.
Сб. «Автоматизация управления и совершенствования эксплуатационной ра-
боты железных дорог». 19G9. Вып. 13, с. 141—144.
40. Ципи Л. Э., Красовская И. Г. Структура и схема устройств
контроля числа* условных и физических вагонов с учетом их простоя на
грузовых станциях. Сб.: «Совершенствование устройств железнодорожной
автоматики». 1973. Вып. 34, с. 43—48.
41. Huber Richard. Der Sclbsttatigc Zugschlufimcldung nach dem mund-
lichtechnischen Vcrfahrcn. «Signal und Draht», 1971., 63, N 2, s. ?0—32.
94
ОГЛАВЛЕНИЕ
Предисловие . . . . . . . , . , . . 3
Глава I. Назначение, принцип действия и требования к путевым
датчикам счета осей на рельсовом транспорте.....................6
1. Основные требования к точечным 'путевым датчикам счета осей 6
2. Иринин действия и основные параметры точечных путевых
датчиков счета осей . ................................16
3. Специальные требования к точечным путевым датчикам . , 23
Глава II. Промышленные типы точечных путевых датчиков счета
осей (производства СССР и зарубежных фирм) .... 30
4. Меха.н о контактные точечные путевые датчики (педали) . . 30
5. Магнитоконтактные точечные путевые датчики .... 32
6. Индуктивные точечные путевые датчики счета осей . . . 36
7. Индукционные точечные путевые датчики счета о-сей . . 41
8. Резистивные точечные путевые датчики счета осей' *. . . °1
9. Пьезоэлектрический точечный путевой датчик ....
Глава III. Применение путевых датчиков счета осей на сортиро-
вочных станциях................................................56
10. Особенности использования точечных путевых датчиков в ав-
тематических устройствах сортировочных станций . . . *>6
11; Датчики контроля свободности горочных стрелочных участков о8
12. Датчики горочных систем программного управления и авто-
матического контроля ..........................................62
13. Точечные путевые датчики регулирования скорости скатыва-
ния отцепов.................................................. 65
14. Датчики регистрации перемещения -^подвижного состава в
АСУ сортировочной станции ...................................69
Глава IV. Применение путевых датчиков счета осей на участках
магистральных железных дорог .......................................72
15. Особенности использования точечных путевых датчиков в пе-
регонных устройствах С ЦБ и автоматического контроля 72
16. Датчики путевой блокировки...................................76
17, Датчики ограждающих устройств на переездах ... 84
18. Датчики счета осей для контроля и автоматического выявле-
ния неисправностей подвижного состава.............................86
19. Датчики контрольных лу-Н'КТ.ов .учета прибытия .и скорости по- 89
д.в и.ж н ог о с о с гав а......................................93