





































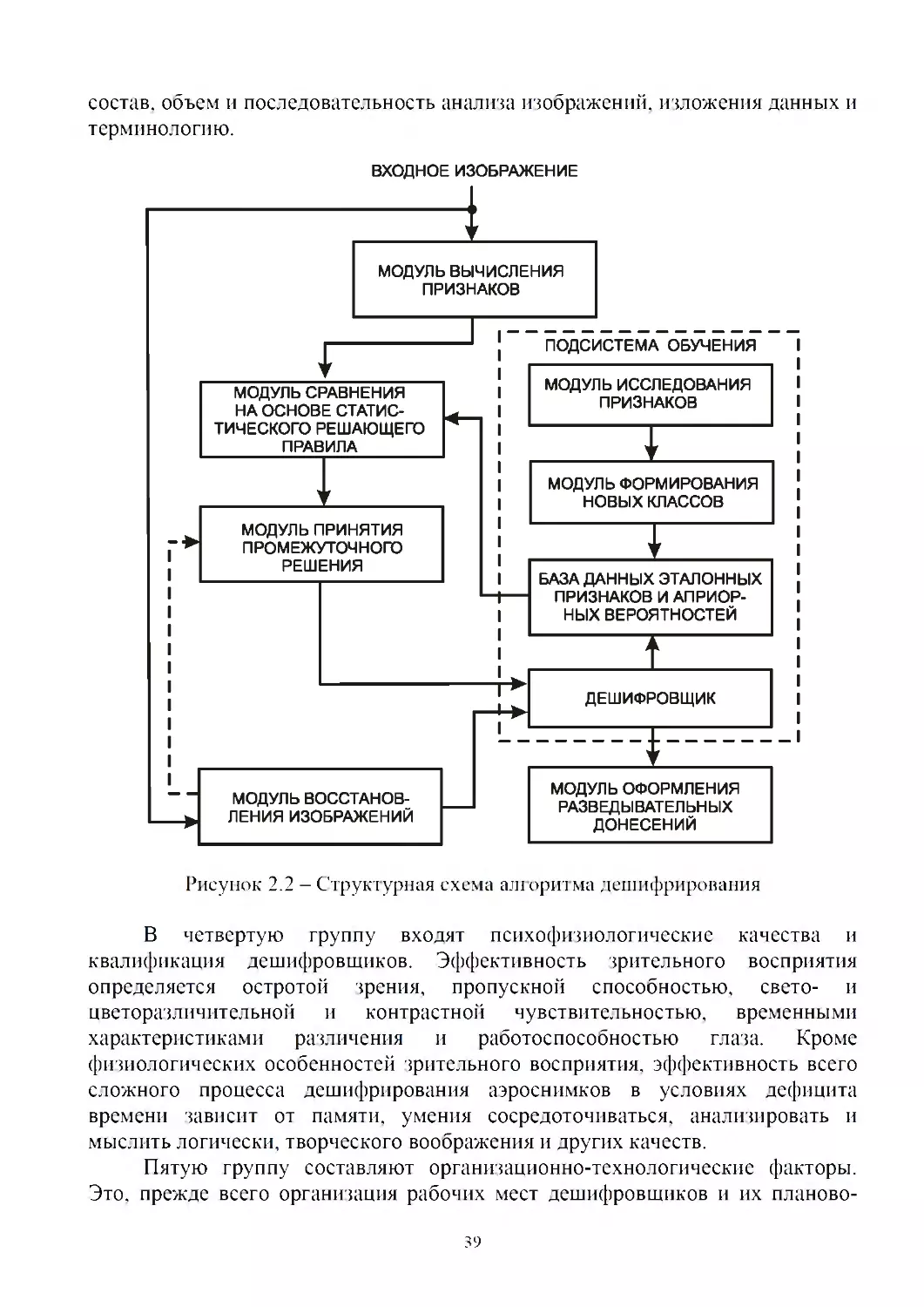



























































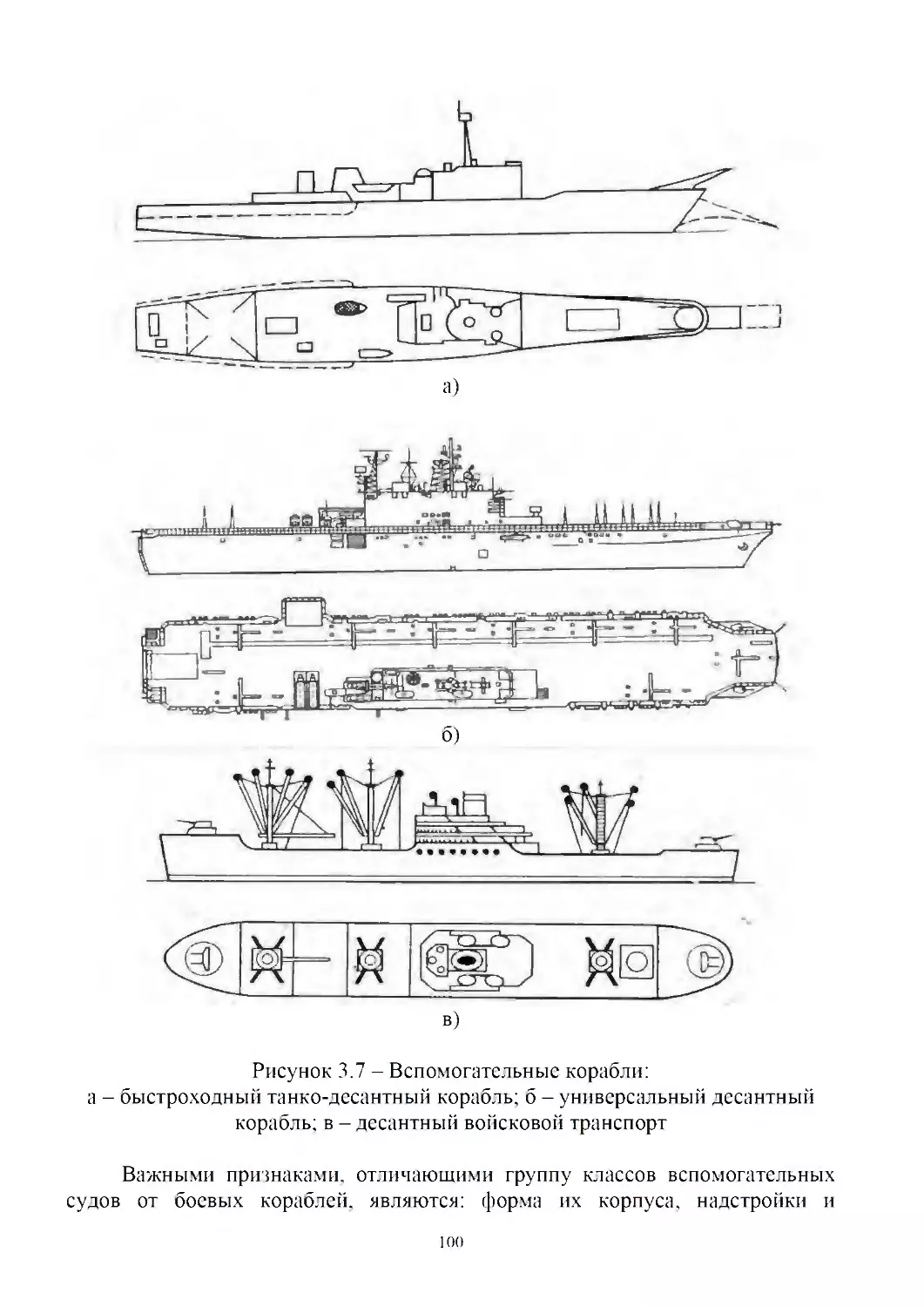



























































































































Автор: Молчанов А.С.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника военное дело военная наука дешифровка военно-морской флот аэроснимки
ISBN: 978-5-00204-652-2
Год: 2022




Молчанов A.C.
ТЕОРИЯ И ПРАКТИКА
РАСПОЗНАВАНИЯ НАДВОДНЫХ
ОБЪЕКТОВ ВОЕННО-МОРСКИХ СИЛ
ПРИ ДЕШИФРИРОВАНИИ
АЭРОСНИМКОВ
Молчанов А.С.
ТЕОРИЯ И ПРАКТИКА РАСПОЗНАВАНИЯ
НАДВОДНЫХ ОБЪЕКТОВ ВОЕННО-МОРСКИХ
СИЛ ПРИ ДЕШИФРИРОВАНИИ АЭРОСНИМКОВ
Монография
1кдательсшо «Перо»
I. Москва
УДК 629.7.066(07)
ББК 68.521.4я7
М761
доктор технических наук, донеди
Молчанов Андрей Сергеевич
Рецензенты:
Ведущий научный сотрудник Государственного летно-испытательного центра
имени В.II. Чкалова, заслуженный деятель науки и техники Российской
Федерации, лауреат Сталинской премии, доктор технических наук, профессор
Шибанов Георгий Петрович
Научный сотрудник Государственного летно-испытателыюго центра имени
В. II. Чкалова, лауреат премии Правительства Российской Федерации в области
науки и техники, заслуженный деятель науки Российской Федерации,
доктор технических наук, профессор Богомолов Алексей Валерьевич
Коллектив авторов:
(в алфавитном порядке)
к.т.п., допет
K.T.1I.
к.т.п.
Абрамов Денис Валерьевич
Волоюв Евгений Михайлович
Геприхеоп Анастасия Николаевна
Евтушенко Ев1ений Валерьевич
Коломиец Вадим Андреевич
Москвич O.iei Витальевич
к.г.п. Чаусов Ев1С11нй Викторович
Утверждено к изданию решением секции №2 Научно-технического совета
войсковой части 15650 18 октября 2022 г., протокол № 39
Молчанов Андрей Сергеевич
М761 Теория и практика распознавания надводных объектов военно-
морских сил при дешифрировании адросннмков. - М.: Издательство
«Перо», 2022. - 224 с.
В монографии дается систематическое изложение теории и практики распознавания надводных
объектов при дешифрировании аэроснимков, полученных цифровыми оптико-электронными системами.
Представлены особенности дешифрирования аэроснимков, классификация и описание признаков
распознавания надводных объектов, требования к результатам дешифрирования, требования к
дешифровшикам и пути повышения их квалификации. практика применения систем
автоматизированного дешифрирования. Существенное место уделено изложению разработанной
авторами классификации надводных объектов и описанию их основных характеристик.
ISBN 978-5-00204-652-2
«Молчанов А.С. 2022
СОДЕРЖАНИЕ
Содержание................................................... 3
Введение..................................................... 5
1 Стратегические концепции, военные доктрины и взгляды ведущих
мировых держав на использования военно-морских сил........... 6
1.1 Новая военно-морская стратегия США и ее основные концепции.
Совместные операции ВМС США с другими видами ВС и сою (никами 6
1.2 . Становление и развитие военно-морского флота России... 15
1.3 Перспективы развития военно-морского флота Российской
Федерации в XXI веке........................................ 22
1.4 Военно-морская деятельность Российской Федерации........ 27
2 Основы дешифрирования аэроснимков, полученных цифровыми
оптико-электронными системами............................... 31
2.1 Классификация аэроснимков и особенности их дешифрирования. 31
2.2 Сущность процесса дешифрирования аэроснимков............ 35
2.3 Признаки классификация объектов дешифрирования.......... 40
2.4 Признаки распознавания объектов на аэроснимках.......... 44
2.5 Трсбования к отчетном) документированию результатов аэросъемки. 53
2.6 Основы подготовки дешифровщиков и пути повышения их
квалификации................................................ 57
2.7 Порядок выполнения дешифрирования....................... 59
2.8 Особенности визуального восприятия и критерии оценки качества
аэроснимков................................................. 62
2.9 Особенности воспроизведения признаков распознавания объектов на
аэроснимках................................................. 77
2.10 Особенности дешифрирования радиолокационных изображений.. 83
3 Классификация надьодных объектов и основные характеристики при
их дешифрировании........................................... 91
3.1 Общая характеристика и признаки распознавания объектов военно-
морских сил................................................... 91
3.2 Пункты базирования кораблей и судов, их оборудование и признаки
распознавания.............................................. 103
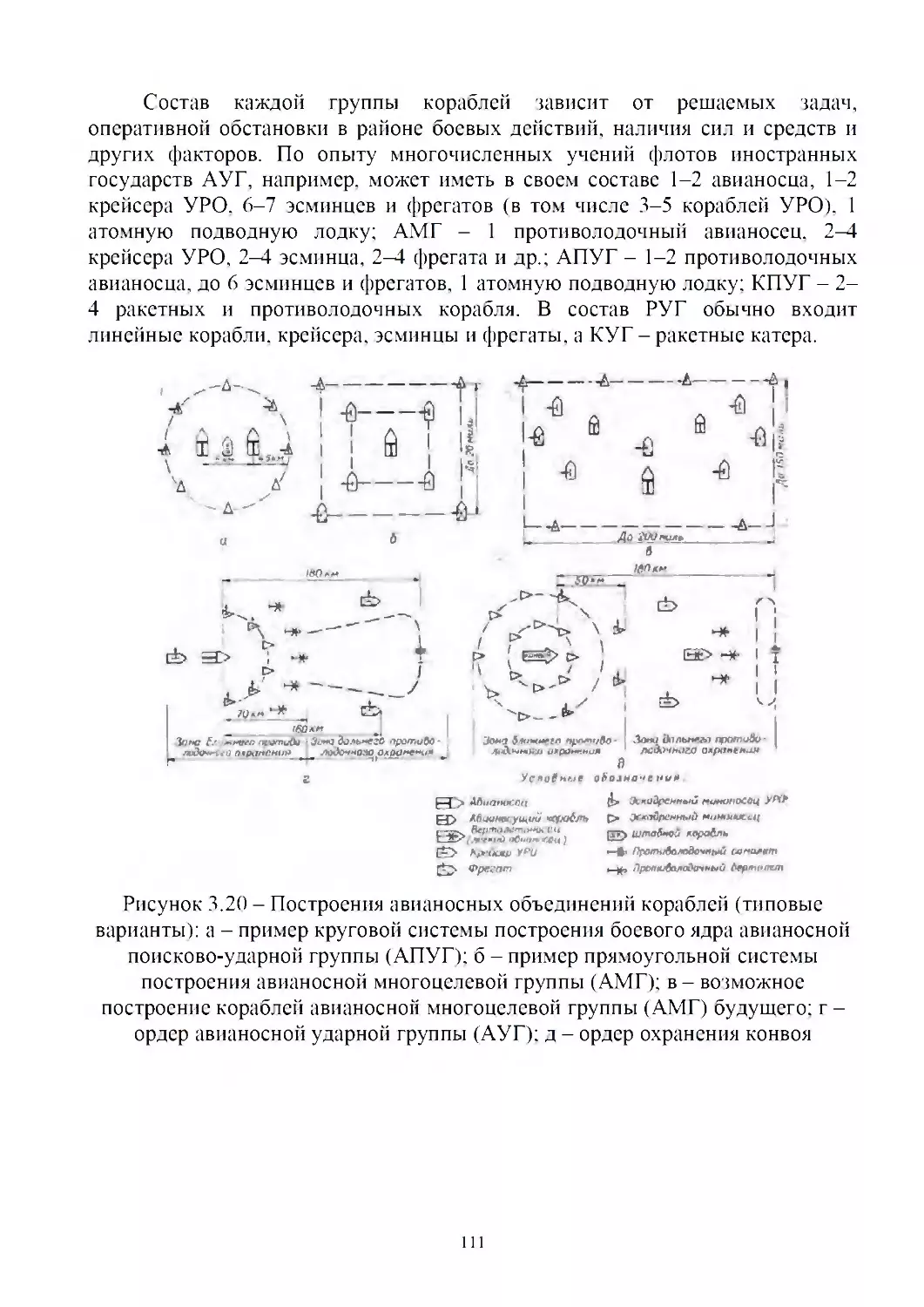
3.3 . Походные и боевые порядки кораблей и судов.............. 111
3.4 Особенности и возможности дешифрирования морских и речных
объектов................................................... 115
3.5 Классификации иностранных кораблей........................ 116
3.5.1 Авианесущие корабли.................................. 117
3.5.2Надводные боевые корабли................................. 118
3.5.3 Подводные лодки......................................... 118
3.5.4 Патрульные корабли...................................... 119
3.5.5 Десантные корабли.................................... 120
3.5.6 Десантные катера..................................... 120
з
3.5.7 Корабли тылового обеспечения............................. 121
3.5.8 Минные заградители и тральщики........................... 121
3.5.9 Корабли береговой обороны................................ 122
3.5.10 Корабли подвижного тыла................................. 122
3.5.11 Вспомогательные суда.................................... 122
3.5.12 Корабли обеспечения..................................... 122
3.5.13 Служебные суда.......................................... 123
3.5.14 Корабли береговой охраны................................ 125
3.6 Общее руководство по классификации военных судов и процедуры
подсчета боевых кораблей....................................... 125
3 7 Категории кораблей, классификация, типы и обозначения типов
кораблей ВМС США............................................... 126
4 Методы автоматического дешифрирования цифровых изображений.. 136
4.1 Основные принципы построения систем распознавания данных
аэросъемки..................................................... 135
4.2 Основные задачи, решаемые при построении систем автоматического
распознавания.................................................. 139
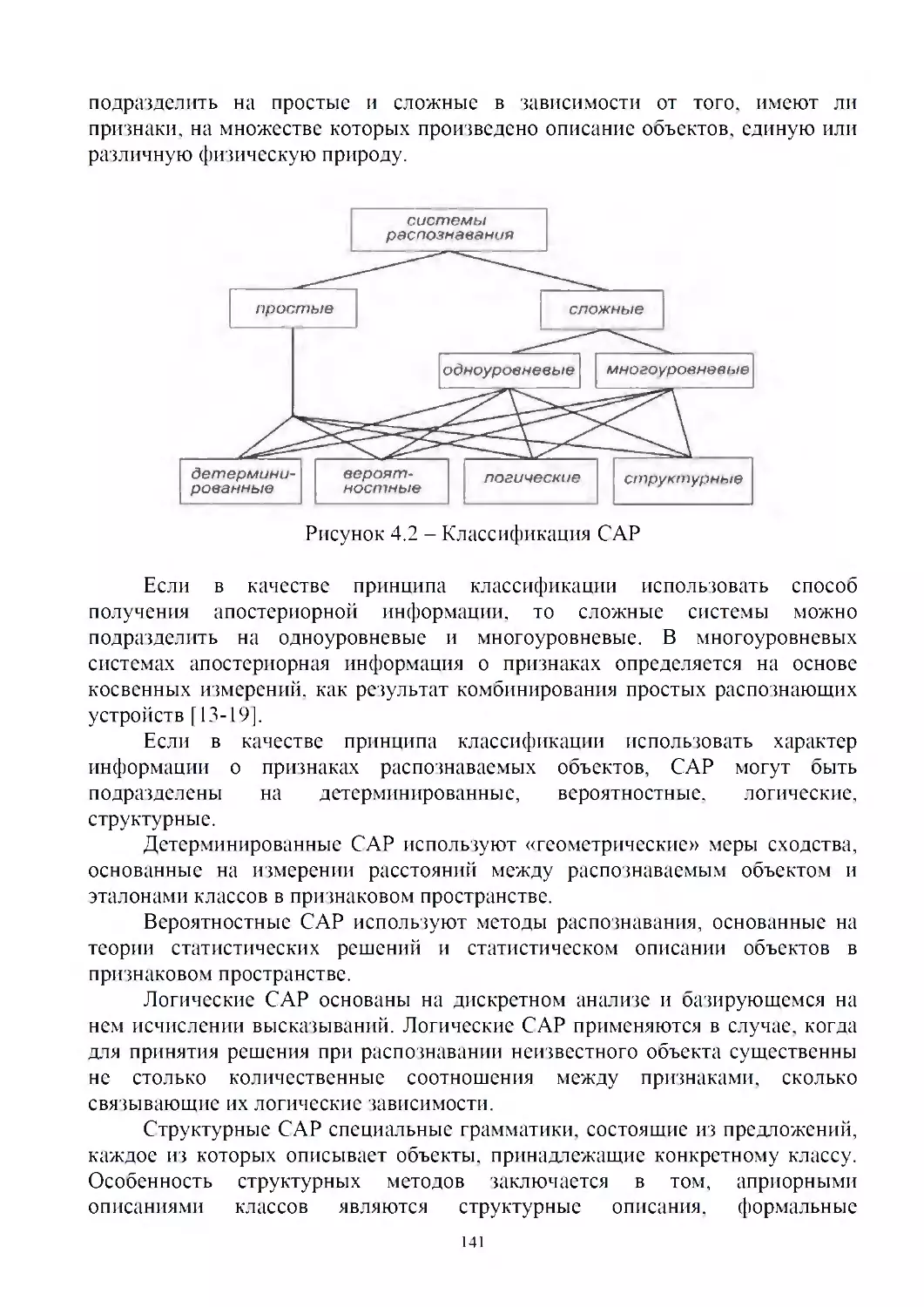
4.3 Классификация систем автоматического распознавания объектов .... 140
4.4 Анализ построения систем автоматического распознавания и
критериев эффективности признаков дешифрирования объектов...... 148
4.5 Критерии выбора эффективных признаков объектов в САР....... 155
4.6 Методы распознавания на основе построения решающих деревьев 161
4.7 Решение задач распознавания объектов с использованием нейронных
сетей.......................................................... 165
5 Организация сбора, обработки и дешифрирования аэроснимков... 169
5.1 Сбор, обработка и дешифрирование аэроснимков на наземных
пунктах приема и обработки информации.......................... 169
5.2 Прием, хранение и визуализация разноспсктральной РИ........ 174
5.3 Раздельная и комплексная обработка, обзорное и детальное
дешифрирование................................................. 175
5.4 Отображение данных подготовка формализованных и
неформализованных отчетных документов.......................... 176
5.5 Накопление и систематизация данных......................... 178
6 Основные характеристики и назначение характеристики объектов
военно-морских сил............................................. 183
Заключение..................................................... 211
Литература..................................................... 212
Список сокращений.............................................. 221
4
ВВЕДЕНИЕ
В настоящее время материалы аэросъемки., полученные цифровыми
оптико-электронными системами, повсеместно находят применение в военной
сфере, различных отраслях народного хозяйства и науки, связанных с
изучением местности и объектов в каком-либо отношении.
Дешифрирование аэроснимков - это целый комплекс взаимосвязанных
организационных, технологических и технических мероприятий. Успешное
решение задачи дешифрирования аэроснимков во многом зависит от
обоснованности и содержания проводимых мероприятий.
В монографии рассмотрены вопросы, связанные с теоретическими
основами и практическими рекомендациями при дешифрировании надводных
объектов ВМС на аэроснимках и подготовке дешифровщиков.
Разработана классификация надводных объектов ВМС которая
позволяет при выполнении процедур обнаружения, выявлении конфигурации,
определении габаритных размеров объектов, систематизировать все
многообразие надводных объектов ВМС к одному из видов, классов,
подклассов или типов гг отразить общие тактические или технические
характеристики.
Представлено описание процессов автоматического распознавания
объектов на основе нейросетевых алгоритмов и автоматизированного
дешифрирования аэроснимков с использованием аппаратно-программного
комплекса обработки видовой информации.
Новыми являются представленные в книге методика и результаты
оценивания вероятности распознавания типовых объектов на основе величин
линейного разрешения на местности. Представлены вероятностные
характеристики распознавания типовых объектов по результатам летных
испытаний. Экспериментальным путем установлена зависимость между
вероятностью распо шавания объекта и величиной линейного разрешения на
местности.
Представлены результаты реализации теоретических исследований при
разработке и испытаниях цифровых оптико-электронных систем,
используемых на современных комплексах с беспилотными летательными
аппаратами «Иноходец»^ «Корсар», «Тахион», «Орлан-10», «Орлан-30»
«Элерон-3», «Элерон-10», наземного комплекса приема и обработки
информации от бортовых комплексов разведки, принятых на снабжение
Вооруженных Сил Российской Федерации.
5
1 СТРАТЕГИЧЕСКИЕ КОНЦЕПЦИИ,
ВОЕННЫЕ ДОКТРИНЫ И ВЗГЛЯДЫ
ВЕДУЩИХ МИРОВЫХ ДЕРЖАВ НА
ИСПОЛЬЗОВАНИЯ ВОЕННО-
МОРСКИХ СИЛ
1.1 Новая военно-морская стратегия США и ее основные концепции.
Совместные операции ВМС США с. другими видами ВС и союзниками
В начале 90-х годов XX века военно-политическая обстановка коренным
образом изменилась. Исчезновение с карты мира СССР как одной из
сверхдержав, и переходу к однополярному миру с главенствующей ролью
США заставило ведущие государства мира пересмотреть свои военно-морские
стратегии.
Эти изменения затронули нс только политические аспекты, но и создали
определенные трудности для органов, вовлеченных в вопросы строительства
Вооруженных сил и планирующих их боевое применение. Эти проблемы
связаны с необходимостью переоценки потенциальных угроз и их источников.
Серверным остается вопрос снижения уровня финансирования военных
расходов. По этому пути пошли практически вес ведущие морские державы.
Сокращение затронуло все виды вооруженных сил. в том числе и ВМС
Нормативные юкументы военного планирования, доктрины и концепции
боевого применения ВМС (прежде всего США) разработаны с учетом
противодействия новым вызовам и угрозам. Речь идет о распространении
оружия массового поражения и опасности дестабилизации обстановки в
некоторых государствах и регионах мира (зона Персидского залива, Россия.
Китай. Корейский полуостров, страны бывшего Советского Союза). Нс
последнее место занимают проблемы наркотрафнка. международного
терроризма, миграции [134, 135|.
Обновленная в сентябре 2018 года стратегия Соединённых Штатов,
получившая наименование «Стратегия формирования. реагирования,
постоянной подготовки» гласит, что для реализации целей защиты
национальных и военных интересов США требуется иметь вооруженные силы,
способные решать три ключевых комплекса задач (элементы стратегии):
1. Формирование благоприятной для США внешнеполитической
обстановки посредством демонстрации военной силы и решимости сс
применения;
6
2. Немедленное реагирование на возникающие кризисы, включая
выполнение гуманитарных миссий. а также участие в военных конфликтах
разной степени интенсивности.
3. Обеспечение постоянной готовности к любым вызовам будущего,
включая вероятность дополнительного финансирования вооруженных сил или
их переоснащения с учетом передовых научно-технических достижений.
Решение этих задач обеспечивается реализацией следующих
стратегических концепций [134. 135]:
1. «Стратегическая гибкость» - концентрация военной мощи США в
любой точке планеты с такой скоростью, при которой противник уже ничего нс
сможет ей противопоставить.
2. «Постоянное присутствие ВС США в передовых районах мира» - для
американских воснно-мооских сит такими регионами определены Персидский
залив. Средиземное море, воды Арктики и морская зона Атлантического и
Тихого оксанов.
3. «Переброска сил (средств)» - создание условий, способствующих
быстрой доставке сил (средств) в любую точку земного шара с целью
своевременного реагирования на возникающие угрозы национальным
интересам США.
4. «Решающие силы» - своевременная концентрация ВС США в
количестве, обеспечивающем изменение военно-политической обстановки в
регионе в пользу Вашингтона.
Военно-политическое руководство США ориентируется, прежде всего, на
ведение конфликтов малой и средней интенсивности в различных регионах
мира, проводимых пол формальной эгидой ООН (конфликты в зоне
Персидского залива), но под фактическим руководством Вашингтона и
операций, осуществляемых непосредственно под американским
командованием (война в Югославии).
В официальных документах декларируется утверждение о том. что в
случае отказа от своих международных обязательств или утраты военного
превосходства американских вооруженных сил над противником, риски
безопасности для США и их союзников многократно возрастут.
Для реализации этих концепций Вашингтон взял на себя функции
«мирового жандарма». США оставляют за собой право вести боевые действия
по своему усмотрению в любой точке мира, сели это необходимо для
обеспечения своих национальных интересов.
В качестве примеров можно привести удары высокоточным оружием по
объектам военной и гражданской инфраструктуры в Ираке (1993. 1996. 1998
гг.). Боснии (1995 г.) Югославии (1999 г.) предприятиям химической
промышленности в Судане (1998 г.), базам боевиков Талибан в Афганистане
(1998 г.).
Вероятность ведения ядерной войны невелика, но полностью нс
исключается. Причиной потенциального конфликта может послужить
7
эскалация регионального противостояния, случайный пуск ядерной ракеты или
применение иного оружия массового поражения. Командование США
регулярно проводит тренировки с ядерными силами страны по вопросам их
массированного или выборочного применения.
Военно-политическое руководство США уделяет пристальное внимание
развитию своих ядерных сил с целью поддержания военного превосходства в
этой сфере.
В области развития вооруженных сил руководство страны ориентируется
на обеспечение военного присутствия США в оперативно важных регионах
мира и ведение одновременно двух крупных военных конфликтов по типу
войны в Персидском заливе. При этом ключевая роль отводится применению
высокоточного оружия.
Назначение ВМС и корпуса морской пехоты - распространение
американского военного воздействия на акватории и прибрежные юны стран
мира, как в мирное, так и в военное время. ВМС планируется задействовать в
оперативно важных регионах с целью реагирования на возникающие угрозы.
Рабочими группами Объединенного комитета начальников штабов
регулярно прорабатываются вероятные снснар! и развития кризисных ситуаций
и порядка использования вооруженных сил в целом и ВМС в частности.
Численность задействованной группировки войск будет определяться
исходя из возможностей противника в потенциальном военном конфликте и
особенностей района возможного ведения боевых действий. Американские
военные эксперты оцениваю численность сил потенциального противника в
400-750 тысяч человек 2-4 тысячи танков. 500-1000 боевых самолетов 100-
1000 тактических ракет, некоторые из которых теоретически могут быть
оснащены ядерными боеголовками. При этом численность морских сил
оценивается в 100-200 боевых кораблей и 50 подводных лодок. Американские
морские аналитики считаю'1' что львиную долю надводных кораблей
противника будут составлять ракетные катера.
Для ведения успешных боевых действий против такой группировки США
планируют привлечь 4-5 авианосных ударных группировок (АУГ) 4-5
экспедиционных бр ггад its состава корпуса морской пехоты, а также
подразделения сил специальных операций (ССО).
Состав привлекаемых сил меняется в зависимости от региона мира. Так.
например, для ведения боевых действий:
в странах Балтии планируется задействовать до 3 АУГ, 1 дивизию
морской пехоты и 40 носителей крылатых ракет класса «Томагавк» с
боекомплектов в 1160 шт.
против народно-освободительной армии Китая США задействуют до 6
АУГ, 30 носителей крылатых ракет с боекомплектом до 1001) шт.,';2 дивизии из
состава корпуса морской пехоты.
8
В ходе своего военного планирования США отводят значительную роль
своим сою шикам в различных регионах мира, чьи силы, безусловно, будут
задействованы в гипнотическом военном конфликте.
Так в ходе уже состоявшихся военных конфликтов США со своими
союзниками удавалось в кротчайшие сроки создать следующие группировки
войск:
А) Операция «Лис пустыни» (Ирак). Морской компонент - до 26 боевых
кораблей от Великобритании и США, в гом числе 2 АУГ, ракетная ударная
группа. 15 носителей крылатых ракет класса «Томагавк» (12 надводных
кораблей и 3 подводные лодки). 138 самолетов ВМС. Всего от 12 стран НАТО
задействовано 121 боевой корабль. 1121 самолет и до 200000 личного состава.
Воздушный компонент - 21 стратегический бомбардировщик В-52Н и В-1В. 149
самолетов других гигов.
Б) операция «Эллайдфорс» (Югославия). Морской компонент - до 40
боевых кораблей из них 2 АУГ (США и Франция), 2 АПУГ (Великобритания и
Италия), десантный отряд и ракетно-ударная группа (США). 8 носителей
крылатых ракет «Томагавк» (3 нк. 5 пла). 108 самолетов палубной авиации;
Воздушный компонент - 21 стратегический бомбардировщик В-52Н. В-2 А и В-
1В. 379 самолетов других типов из 13 стран НАТО.
Опыт проведенных ранее операций показывает, что США делают упор на
применение многонациональных группировок войск под единым
командованием, состоящие из всех видов вооруженных сил. Военно-
политическое руководство прилагает усилия для совершенствования их боевых
возможностей с учетом особенностей выполняемых задач в различных
регионах мира.
Ключевые моменты решения этих задач:
совершенствование вопросов интеграции всех видов вооруженных сил
для совместного выполнения поставленных задач.
формирование эффективного механизма интеграции различных
компонентов ВС союзников в единую с ВС США структуру.
внедрение передовых и усовершенствованных технологий.
Вместе с тем взят курс на изменение подходов ведения боевых действий.
Вместо формирования крупных группировок войск и последовательного
ведения боевых действий, американское командование рассчитывает решать
стратегические задачи за счет быстрого развертывания сил в любом регионе
мира. Меньшая численность личного состава должна быть компенсирована за
счет технологического превосходства применения высокоточного оружия и
получения точной разведывательной информации.
Исходя из этих тенденций, сформированы единые для всех видов
вооруженных сил взгляды:
«Господствующий маневр» - масштабное применение рассредоточенных
группировок войск (включая наземные, морские, воздушные и космические
компоненты), менвших по составу, но обладающих повышенными огневыми
9
возможностями и активно применяющих возможности по информационному
сопровождению и маневру для решения возложенных на них задач.
«Высокоточное сражение (бой)» - применение новейших разработок в
области высокоточных вооружений (оружия избирательного действия:, а также
всепогодных средств нанесения ударов без необходимости вхождения в зону
поражения противником) [134. 135].
В практической реализации взглядов военно-политического руководства
США ведущая роль уделяется военно-морскому флоту, как наиболее
маневренному, жг вучему, босготовому и универсальному виду вооруженных
сил. ВМС способны решать стратегические задачи, как на морских просторах,
так и приморских театрах боевых действий.
Морские силы несут постоянную угрозу практически любому региону
мира. ВМС США располагают половиной ядерного потенциала ВС. мощной
штурмовой авиацией и мобильной морской пехотой.
После распада СССР и Организации Ваошавского договора исчезла
угроза глобальной мировой войны, в связи с чем. изменились и взгляды США
использование военно-морского флота и корпуса морской пехоты, которые
отразились в новой военно-морской стратегии, принятой в сентябре 1994 года.
Документ получил название «Действия с моря в передовых районах».
Изменились приоритеты использования ВМС с действий в открытом морс на
проведение совместных военных операции в прибрежных районах глубиной до
650 миль, то есть в зонах досягаемости средств поражения морского
базирования. Американские военные специалисты оценили, что. 70%
населения Земли живет нс далее 370 км от береговой черты. 80% мировых
столиц государств мира расположены нс далее 550 км от побережья,
большинство городов мира лежит в пределах 200 км от берега, более 92% (для
России - 80%) стратегически важных объектов находятся в прибрежной полосе
1134. 135].
Для Российской Федерации общее количество важных объектов -
потенциальных стратегических целей (столица и населенные пункты с
население более 1.00 тысяч человек, важные объекты нефтяной, газовой и
урановой добывающей промышленности) составляет около 150 (120 в
прибрежной полосе).
Основные концепции новой военно-морской стратегии США:
1. Ядернос сдерживание. Создание условий бессмысленности
применения вероятным противником любых видов оружия.
2. Постоянное присутств! с группировок ВМС в ключевых районах.
Создание корабельных группировок для немедленного реагирования на
внезапно возникающие кризисные ситуации.
Зоны ответственности ВМС США в мирное время:
Северная морская зона в Атлантике (Баренцево и прилегающие северные
моря) - ^-З атомные подводные лодки. 1-2 корабля гидроакустической
разведки;
ю
Средиземное морс - 6-й флот (авианосно-многоцелевая группа,
десантный отряд. 4-5 атомных подводных лодок);
Персидский и Оманский залив - 5-й флот (авианосно-многоцелевая
группа, десантный отряд. 1-2 атомные подводные лодки):
Западная часть Тихого океана и прилегающие к России моря - 7-й флот
(авианосно-многоцелевая группа, десантный отряд. 3-4 атомные подводные
лодки. 1-2 корабля гидроакустической разведки).
В каждый из указанных районов выделяется до одной эскадрильи
самолетов БПА.
Американские военные аналитики считают, что роль ВМС в структуре
ядерной триады США будет только возрастать.
В 1994 голу в ходе слушаний в Конгрессе о перспективах развития
ядерной триады с участием министра обороны У. Перри был сделан
следующий вывод: "Военно-морская составляющая - сильнейшая, а по
показателю "цена - эффективность" - самый выгодный элемент ядерной триады
Вашингтона"
Ключевое содержание новой стратегии США в вопросах применения
флота и морской пехоты (военно-морских экспедиционных сил) заключается в
постоянном поддержании их способности к ведению совместных операций
(экспедиционных войн) с ВВС и СВ в составе объединенных группировок
войск.
Основная задача ВМС при проведении таких операций заключается в
обеспечении господства в акватории района боевых действий и небе над ней. а
также прилегающими прибрежными районами на дальности действия
высокоточного оружия (ОКОЛО 1 ОСЮ км от береговой черты).
Военные эксперты принимают в расчет, что особенности приморских
регионов, действия ВМС направленные на завоевание господства в них. могут
коренным образом отличаться от классических операций в открытом морс, как
своим масштабом, так и в силу целого ряда сопутствующих "прибрежных
угроз. Значительные трудности могут возникнуть с малозаметными
дизельными подводными лодками (в том числе сверхмалыми), минами и
береговые противокорабельные ракетами. По этой причине на первый план
выходят вопросы подготовки ВМС к нанесению ударов по береговым целям
мощным высокоточным оружием, организации нале кной ПРО и ПВО на ТВД.
проведению десантных операций, ведению минной войны и обеспечению
безопасности морских коммуникаций [134, 135].
Состав экспедиционных сил определяется исходя из складывающейся
военной обстановки. Он может включать оперативное соединение (авианосно-
ударную группу, десантный отряд с силами морской пехоты на борту группу
материально-технического обеспечения, самолеты базовой патрульной
авиации и подразделения сил специальных операций), отдельный отряд
десантных кораблей с подразделениями морской пехоты на борту или
корабельную j дарную группу с крылатыми ракетами «Томагавк».
11
Командование ВМС США пересмотрело подходы к вопоосам
взаимодействия с военными флотами иностранных государств. В Пентагоне
считают целесообразным еще в мирное время проведение мероприятий по
поддержанию отношений партнерства и организации практического
взаимодействия с флотами дружественных и невраждебных США государств.
Это позволит прсдс авить варианты развития гипотетического военного
конфликта, и выработать совместные меры оперативного реагирования.
Активно внедряется практика совместного боевого дежурства в
отдаленных районах Мирового оксана. Возросло количество проводимых
коллективных мероприятий оперативной и боевой подготовки на всех театрах.
Наибольшая активность (|>лота США и союзников отмечается в зоне
Персидского залива, а также на Балтике, Средиземном морс и Юго-Восточной
Азии.
Предполагается включение в силы быстрого реагирования (СБР) ОВМС
НАТО на Атлантике оперативное объединение (две авианосно-ударные группы
(АУГ), одна авианосно-поисковая ударная группа (АПУГ). два десантных
отряда, одна корабельно-тральная группа (КТГ).
Обший состав: 59 боевых кораблей; 18 самолетов базовой патрульной
авиации. Силы, действующие в составе многоцелевых оперативных групп и
самостоятельно: 44 корабля; 58 самолетов базовой патрульной авиации и
разведывательной авиации; 12 истребителей ПВО. Согласно требованиям ВТК
ОВС НАТО в Европе срок прибытия в назначенный район: СНР -1-2 суток;
СБР - 7-10 суток.
Реальность такова, что в эти нормативы силы НАТО нс вкладываются. В
ходе всевозможных мероприятий было установлено, что сроки значительно
превышаются. Они составляют: СНР - 5-7 суток; СБР - 14 суток.
Задачи главных оборонительных сил НАТО.
сдерживание разрастающегося конфликта,
завоевание и удержание господства на морс;
поддержка сухопутных войск и ВВС на приморских флангах совместно с
силами быстрого реагирования.
В зависимости от складывающейся обстановки состав главных сил может
меняться. Дополнительно к двум действующим в Атлантике и Средиземном
морс группам может добавляться третье многонациональное формирование.
Полный состав главных оборонительных сил в Атлантическом океане
включает:
оперативное объединение (2 авиационно-ударные группы."2 авиационно-
поисковые ударные группы 10 корабельно-ударных групп/корабсльно-
поисковых ударных групп и 6 корабельно-тральных групп (всего 122 боевых
корабля и 36 самолетов БПАГ
силы, действующ! с в Атлантическом океане, или зональные
формирования (72 боевых корабля. 72 самолета базовой патрульной и
12
разведывательной авиации. 14 тяжелых бомбардировщиков. 60 истребителей-
бомбардировщиков. 54 истребителя ПВО).
Военное командование НАТО установило срок развертывания этих сил -
12-30 суток.
Силы усиления будут включаться в состав ОВС/ОВМС НАТО только в
случае затяжного конфликта высокой интенсивности. Их основное
предназначение - защита морских коммуникаций и восполнение потерь
Время развертывания - от 30 до 90 суток и болсс.
Состав - до 80 боевых кораблей. 66 самолетов БПА. 12 истребителей
ПВО.
Постоянно меняющаяся воснно-политичсская обстановка в мире
заставляет военное руководство США вносить коррективы во взгляды по
применению ВМС в региональных конфликтах.
К концу переходного периода воснно-морск! с силы должны быть готовы
выполнять следующее задачи:
сохранить ракетно-ядерный потенциал как "гарантию мира" по
периметру границ СНГ и в перву ю очередь России как ядерной сверхдержавы;
порашть в случае конфликта группировки вооруженных сил любого
противника (в том числе России) на всю глубину их оператг вного построения;
нарастить в кратчайшие сроки в передовых (ключевых) районах ударные
группировки сил общего назначения;
блокировать в случае конфликта ВМС любого противника у своего
побережья и воспрепятствовал ь его развертыванию на океанские
коммуникации;
захватить и удерживать стратегическую инициативу в начале войны.
К концу переходного периода военно-морские силы должны быть готовы
выполнять следующие задачи:
сохранить ракетно-ядерный потенциал как "гарантию мира" по
периметру границ СНГ, и в первую очередь России как ядерной сверхдержавы;
пооазить в случае конфликта группировки вооруженных сил любого
противника (в том числе России) на всю глубину их оператл вного построения:
нарастить в кратчайшие сроки в передовых (ключевых) районах ударные
группировки сил общего назначения;
блокировать в случае конфликта ВМС любого противника у своего
побережья и воспрепятствовать его развертыванию на океанские
коммуникации;
захватить и удерживать стратегическую инициативу в начале войны.
Военно-политическое руководство большинства стран
Североатлантического альянса разделяют коалиционные взгляды на
использование своих ВС в целом и ВМС в частности. Главной угрозой
безопасности национальным интересам принято считать региональные
конфликты
13
В ходе военного строительства и планирования подготовки войск ставка
делается на создании высокомобильных групп, включающих все виды ВС.
Руководство главных членов альянса Франции и Великобритании главными
формами применения вооруженных сил считают проведение миротворческих
миссий и операций вторжения (интервенции). Боевые действия планируется
вести либо самостоятельно, либо в составе коалиционных сил НАТО и
дружественных государств, в рамках концепции «Партнерство ради мира».
Стоит отмстить, что в последнее воемя наметилась тенденция
использования военно-морских сил для охраны территориальных вод.
исключительных экономических зон. пресечения попыток браконьерства,
исследовательских миссий в арктических водах. Ранее ВМС стран НАТО такие
задачи выполняло лишь эпизодически.
Военно-морские силы государств Альянса стали неотъемлемой частью
операций по поддержанию мира в различных регионах мира и в ближайшее
воемя эта функция ?а ними сохранится (Таити. Ирак. Югославия, Сомали -
показательные примеры).
Военное руководство Японии придерживается так называемого
регионального подхода к обеспечению собственной безопасности. Суть его
заключается в самостоятельном реагировании на возникающие вызовы, а
также участие ВС страны в различных миссиях пол эгидой ООН.
Япония рассматривается руководством страны, как классическая морская
держава, поэтому наличие адекватной морской моши является неотъемлемым
условием обеспечения национальной безопасности и реализации
стратегических национальных интересов, как на региональном, так и
глобальном уровне.
Концепция применения ВМС страны полностью соответствует
положениям военной доктрины Японии 1992 года и тесно увязывается с
взглядами США на необходимость «передового присутствия». Исходя из этого,
основной задачей морских сил Японии является обеспечение быстрого
развертывания ВМС США на предполагаемом театре военных действий.
Военная доктрина Китая учитывает возрастающую роль страны на
международной арене и рассматривает военно-морские силы, как действенный
инструмент защиты национальных интересов в Азиатско-Тихоокеанском
регионе и за его пределами. Военно-политическое руководство КНР считает
именно морское направление самым вероятным направлением возможных
угроз, поэтому зона действия ВМС перенесена за пределы прибрежной
акватории.
С целью мгновенной реакции на возникающие кризисные ситуации в
Китае созданв! силв! быстрого реагирования, в состав которв1х вошли
КОМПОНСНТВ1 всех видов ВС.
ВМС в СНР Китая прсдставлснв! в следующем составе: 42 ракетных
надводных корабля; 73 самолета; подразделения морской псхотв!
числснноствю 4 тыс. человек.
14
1.2. Становление и развитие военно-морского флота России
История российского военно-морского флота началась в 1696 году с
высочайшего повеления (указа) Петра Великого «Морским судам быть».
Начавшееся строительство военного флота того времени приняло во внимание
те грубые просчеты которые были допущены ранее. Военно-Морской Флот
(ВМФ) находился в непосредственном подчинении царя (в последующем -
императора). ВМС строились и развивались на долгосрочной, плановой основе.
Кораблестроительные программы были рассчитаны на 5. И) и 20 лет.
Финансирование осуществлялось из государственного бюджета. Дтя того
времени это было прогрессивным решением и позволило в кротчайшие сооки
превратить Россию в ведущую морскую державу. Государственное
финансирование позволяло нс только планомерно развивать военно-морской
флот, но и своевременно восполнять потери после Крымской войны (1853-1856
годов) и Русско-Японской войны (1905 года). Такая практика продолжалась
вплоть до революционных событий 1917 года и падсн 1я Российской империи
[134. 135].
В период существования советского воснно-мооского флота,
командование осуществлялось министром обороны СССР, но государственное
планирование и финансирование сохранялось. Такая практика
продемонстрировала свою высокую эффсктивност,. благодаря которой
удалось в период с 194b по 1986 год построить флот, мощь которого позволила
защитить интересы Советского Союза в годы «холодной воины».
С началом перестройки в 1986 году строительство ВМФ проводилось по
отдельным заказам, так как генеральный секретарь СССР Михаил Горбачев
отказался от государственной программы долгосрочного морского
строительства. После распада Советского Союза флот вообще мало заботил
руководство страны по объективным сложным экономическим причинам.
Такая ситуация привела к тому, что за десять лет ВМФ утратил свои
Л1 дируюшис позиции и уже нс мог эффективно отстаивать интересы страны в
мировом океане.
1986 год стал знаковым в истории отечественного флота по причине
прекращения прямого государственного финансирования военно-морских
оборонных программ. С 1992 года вопросы строительства ВМФ были
полностью во итожены на Министерство обороны России.
Трехсотлетняя история российского флота красноречиво
свидетельствовала о том. что утрата инициативы в вопросах военно-морского
строительства неизбежно npi водила к плачевным последствиям. Тем нс менее,
в середине 80-х и в 90-е годы XX века наблюдалась полная деградация ВМФ
Начало «холодной войны» и противостояние двух мировых
политических систем послужило толчком к развитию советского флота.
Впервые со времен императора Петра масштабы строительства вышли на
государственный уровень. В результате страна получила мощный океанский
15
ракетно-ядерный флот, который смог защитить национальные интересы и
безопасность Советского Союза.
После окончания Второй Мировой войны монополия Соединенных
Штатов Америки на ядерной! оружие подталкивало советское руководство к
созданию действенных инструментов прот! водействия возникшей угрозе.
Ответом на вызовы со стоооны США стало создание в кротчайшие сроки
стратегических ядерных сил страны, в которых военно-морскому флоту
отводилась одна из ключевых ролей. В течение 70-80 годов в Северодвинске
советская военно-морская промышленность смогла построить 83
стратегических атомных подводных ракетоносна, главным конструктором
которых стал С.Ковалев. Темпы, а главное масштабы строительства позволили
достигнуть полного паритета в гонке вооружений с СШ^.
Параллельно шло активное развитие и надводных видов боевых кораблей
для противодействия морским силам США и НАТО ь мировом океане.
Этот период отмечен беспрецедентными темпами развития
отечественного ВМФ. За короткий срок произошла его полная модернизация.
Качественно изменились взгляды на применение ВМС. усовершенствовалось
опсрат! внос искусство.
Реализация четырех десятилетних государственных программ по
строительству флота позволила построить 3600 боевых кораблей различного
назначения и создать группировки сил в океанских и ближних морских зонах.
Состав военно-морских группировок:
Океанская зона:
500 боевых кораблей (253 крупных надводных корабля. 247 атомных
подводных лодок. 156 из них с ракетным вооружением).
Ближняя морская зона:
3100 боевых кораблей (2048 надводных кораблей и катеров. 557
тральщиков 495 десантных кораблей и катеров.).
Состав военно-морской авиации:
5 дивизий морской ракетоносной авиации;
9 полков противолодочной авиации.
В составе морской пехоты находилась одна дивизия и три бригады.
Обшая численность ВМФ СССР составляла до 500 тыс. человек.
С распадом СССР военно-морской флот потерял нс только часть
кораблей, которые перешли в распоряжение бывших союзных республик, но и
значительную часть военно-морской инфраструктуры (военно-морских баз.
судоремонтных заводов, системы управления и др.).
По мере строительства советского военно-морского флота развевались и
научные подходы применения ВМС Появились прогрессивные формы военно-
морского искусства:
Участие в стратегической операции СЯС;
Стратегическая операция на океанском ТВД при ведущей роли флота.;
Операции флотов и морские операции.
16
ВМФ СССР нсс боевое дежурство во всех ключевых акваториях мира.
С распадом Советского Союза эра ракетно-ядерного флота бесславно
закончилась. Сегодня о его былой славе напоминают только остовы ржавых
кораблей в местах отстоя.
Будущее воснно-мооского флота страны неразрывно связанно с
развитием самого российского государства. Под видом прогрессивных реформ
произошла элементарная реставрация капитализма. Такие тенденции
неумолимо превращают России в сырьевой придаток Запада и переводят ес в
ранг третьеразрядных государств. Такое «развитие» страны нс могло нс
отразится на состоянии ее вооруженных сил.
Пои сохранении существующих тенденций способность военно-морского
флота будет постоянно сокращаться и в конечном итоге приведет к
исчезновению ВМФ как вида ВС России.
Главные причиной такого положения стало резкое сокращение
финансирования ВМФ. С 1990 года объем государственного заказа сократился
более чем в 20 раз. Всего за пять лет доля ВМФ в общем финансировании МО
РФ сократилась с 23% до 9,2%. При этом около 70% средств расходуется на
содержание ВМФ На pa jbi тис ВМФ в 1999 году было выделено всего 5% от
запланированных объемов.
В результате прекращения финансирования за короткий срок военно-
морской флот растерял практически весь свои боевой потенциал. Были
ликвидированы Средиземноморская. Индийская и Тихоокеанская эскадры.
Россия потеряла сьои базы на Кубе в Африке и Ближнем Востоке. Влияние в
стратегически важных районах земного шара было утрачено Престижу
России, как великой морской державе был нанесен значительный ущерб.
Проанализировав состояние ВМФ можно увидеть, что с 1990 года:
Численность боевых кораблей уменьшилось в 1.6 раза (с 428 до 273);
численность кораблей на боевой службе уменьшилось в 7.5 раз (с 210 до 28);
численность личного состава уменьшилась в 2,5 раза (с 424 до 169 тыс.
человек).
Наиболее бедственное положение сложилось в вопросах ввода в строй
новых кораблей, на строительство которых выделялось всего 3-5% их
стоимости (требовалось 25%).
С течением времени все более острым становится вопрос старения флота.
Количество кораблей со сроком эксплуатации свыше 15 лет достигло 55%.
Постоянно возрастает численность ограниченно боеспособных кораблей и
судов с просроченными межремонтными сроками.
В настоящий момент этот показатель составляет: для боевых кораблей
составляет - более 50%; для вспомогательных судов - 70%; для морской
авиации - 60%.
При сохраняющихся тенденциях к 20.30 году в составе ВМФ России
останется около 6() кораблей, из которых 20 атомные. 10 дизельных подводных
лодок и 30 надводных кораблей. В таком составе ВМФ полностью утратит
17
возможность решать стратегические задачи по защите национальных
интересов страны, что неизбежно приведет к катастрофическим для России
последствиям.
В настоящее восмя введена в строб Новая подводная лодка «Магадан»,
большая дизель-элсктричсская подводная лодка Б-602 «Магадан» проекта
06363 Тихоокеанского флота (ТОФ) прибыла в пункт базирования во
Владивосток. Подводная лодка завершила межфлотский переход с Балтийского
флота на Тихоокеанский Северным морским путем, преодолев более девяти
тысяч морских миль. Подводная лодка Б-602 «Магадан» (заводской номер
01616) является третьей, построенной по контракту на строительство серии из
шести больших дизсль-элсктрических подводных лодок проекта 06363 для
Тихоокеанского флота ВМФ России, заключенному с АО «Адмиралтейские
верфи». Закладка первых двух лодок Б-274 «Петропавловск-Камчатский» и Б-
603 «Волхов» (заводские номера, соответственно. 01614 и 01615) проекта
06363 для Тихоокеанского флота была npoi звсдсна на «Адмиралтейских
верфях» в 2017 году.
7 октября 2022 года в Выборге на ПАО «Выборгский судостроительный
завод» состоялась торжественная церемония спуска на воду строящегося для
Береговой охраны Пограничной службы ФСБ Российской Федерации
головного пограничного сторожевого корабля 1-го ранга ледового класса
«Пурга» проекта 23550 (шифр «Ермак») с заводским номером 235.
Пограничный сторожевой корабль (ПСКР) 1-го ранга ледового класса
«Пурга» является головным из двух единиц, заказанных для Береговой охраны
Пограничной службы ФСБ России по проекту 23550 (шифр «Ермак»),
представляющему собой модифицированный вариант проекта 23550 (шифр
«Арктика»), по которому на АО «Адмиралтейские верфи» в Санкт-Петербурге
ведется строительство двух многофункциональных патрульных кораблей
ледового класса для ВМФ России. Разработчиком проекта 22350 в обоих
вариантах является АО «ЦМКБ «Алмаз».
30 сентября 2022 года в Санкт-Петербурге на АО «Судостроительная
фирма «Алмаз» состоялась церемония поднятия флага пограничных кораблей,
катеров и судов обеспечения на пограничном патрульном корабле 2-го ранга
ППК-831 проекта 22120 (шифр «Пурга») с заводским номером 057 (бортовой
номер «457»), вошедшем в состав Береговой охраны Пограничной службы
ФСБ Российской Федерации. Он стал восьмым в серии кораблем проекта
22120. Введенный в состав Пограничной службы ФСБ России восьмой
пограничный патрульный корабль ППК-Х31 (заводской номер 057) проекта
22120 должен получить название «Роман Чемерюк».
Облик универсального десантного корабля проекта 23900 представили на
экспозиции в Кубинке восьмого Международного военно-технического
форума «Армия-2022». Представлена модель, демонстрирующая облик
строящихся для ВМФ России универсальных десантных кораблей проекта
23900. Корабли проекта 2291)0 должны иметь полное водоизмещение около 20
18
тысяч тонн наибольшую длину 204 м и наибольшую ширину 47 м. Церемония
официальной закладки для ВМФ России двух универсальных десантных
кораблей (УДК) «Иван Рогов» и «Митрофан Москаленко» проекта 23900
(заводские номера 01901 и 01902) состоялась на ООО «.Судостроительный
завод «Залив» в Керчи 20 июля 2020 года
С точки зрения современной геополитики, самые вероятные причины
возможных противоречий между государствами в будущем станут глобальные
проблемы человечества. Стремительно растущее население Земли приведет к
быстрому истощению имеющихся природных запасов, что в свою очередь
обострит проблемы распределения продовольствия, энергетики, топливно-
энергетических. минеральных, биологических ресурсов пресной воды и пр.
Стремительный рост потребностей человечества приведут к обострению
борьбы ведущих держав мира за богатства мирового оксана. Уже сейчас более
20% нефти добывается из подводных шельфов.
Отсутствие действенных инструментов противодействия нарастающим
угрозам в Мировом океане приведет к ущемлению интересов России.
Главные угрозы национальной бе (опасности:
Попытки ограничение доступа к ресурсам и водам Млрового океана,
международным транспортным морским коммуникациям (особенно к
жизненно важным для России в Черном и Балтийском морях).
Изменение соотношения сил на ключевых морских театрах боевых
действий нс в пользу России (в настоящий момент соотношение сил с НАТО
составляет 1 -4.5. в 2010 году - 1:10)
Страны Запада применяют все имеющиеся у них рычаги воздействия для
полного вытеснения России из всех сфер морской деятельности:
Усиливается попытки получите несанкционированный доступ к морским
ресурсам, оказывается деструктивное воздействие на отечественную морскую
отрасль экономики.
Опасность этих угроз в значительной степени усиливается сложной
социально-экономической обстановкой в стране, что в свою очередь приводит
к ослаблению контроля за морской деятельностью.
С целью ликвидации просчетов Российской Федерации в морской сфере
необходимо принять ряд безотлагательных мер:
принять и выполнять десятилетний план строительства ВМФ;
разработать и внедрить единую стратегию защиты национальных
интересов в мировом океане (государственную морскую стратегию);
обеспечить бесперебойное финансирование программ российской
морской деятельности.
закрепление правового статуса России в морской сфере.
Основные источники угроз, способные изменить геополитическую
ситуацию в регионах Мирового оксана:
Отсутствуют четкие договоренности. определяющие границы
континентального шельфа и исключительных морских зон. В настоящий
19
момент существуют только откровенно устаревшие советско-американские
соглашения так как большинство 200-мильных зон перекрываются
прибрежными странами.
Существуют неурегулированные территориальные претензии, связанные
со спорными островами и другими естественными образованиями суши в
акваториях мирового океана.
Открытое пренебрежение со стороны США нормами морского права,
принятого конвенцией ООН в 1982 году и как следствие, двойные стандарты в
определении границ морского дна, находящегося за пределами национальной
юрисдикции приморских стран.
Регулярное развертывание в ключевых районах мирового оксана военно-
морских группировок с целью демонстрации возможности применить силу для
защиты своих интересов может привести к реальному столкновению
противоборствующих сторон.
Постоянное декларирование со стороны США своего полного господства
в водах мирового океана.
В результате анализа развития военно-морских сил государств-членов
Североатлантического альянса, можно сделать вывод, что все они идут по пути
постоянного совершенствования своих ВМС с целью подготовки их к ведению
воины шестого поколения.
В сложившихся обстоятельствах ВМС России должны находиться на
необходимом уровне готовности к противодействию возникающим угрозам за
счет внедрения передовых информационных технологий и высокоточного
оружия.
С цель решения этой задачи выделяются три основные стратегические
концепции боевого применения ВМС России:
Ядсрное сдерживание и обеспечение полной безопасности морской
деятельности;
Обеспечение действенного влияния на обеспечение безопасности
экономической деятельности в мировом оксане;
Надежная защита России с морского направления. ВМФ должен
эффективно действовать в противостоянии «Берег - Флот,,, а также «Флот-
Флот». Кроме того, военно-морские силы должны быть способны
противостоять любой группировке ВМС. угрожающих безопасности
государства.
Задачи военно-морских сил вытекают из общих задач, возложенных на
Вооруженные силы России:
1. Ядсрное сдерживание вероятного противника.
2. Реагирование на агрессивные действия в отношении России.
3. Нанесение своевременных и действенных удароь возмездия с целью
лишения противника возможности продолжать ведение боевых действий и
уничтожения его военно-экономического потенциала.
20
4. Своевременное реагирование на попытки вторжения с любых
направлений и разгром группировок агрессора, удержание важных
стратегических регионов на территории страны.
5 Полное искоренение всооятности возобновления агрессии.
Основными формами применения ВС России в конфликтах шестого
поколения станут:
стратегическая оборонительная операция;
воздушно-космическо-морская операция, в которой военно-морской флот
совместно с другими видами ВС будет проводить морскую операцию по срыву
попыток нанести удар авианосно-ударными группами высокоточным оружием
из районов Северной Атлантики и Тихого оксана, а также противолодочную
морскую операцию по срыву попыток нанести удар силами подводных лодок
высокоточным оружием из районов Арктики
Опыт локальных конфликтов прошлого века с участием ВМФ внес
существенные короективы в вопросы его боевого применения и развития
оперативного искусства.
Техническое переоснашение флота на высокоточные ракеты дальнего
радиуса действия и совеошенствование системы управления позволило
полностью преобразовать характер будущей войны. Основными целями для
поражения становятся объекты экономической инфраструктуры, центры
принятия решений и коммуникаций. Воина шестого поколения будет вестись с
использованием высокоточного оружия космического, воздушного и морского
базирования.
К сожалению, распад СССР и последующий за этим тяжелейший
экономический кризис не позволил своевременно внести коррективы в
развитие военной науки и полностью раскрыть характер будущей войны.
Военно-морской флот СССР готовился к ведению войны четвертого и
пятого поколения где успех гарантировался достижением перевеса в
численности кораблей и их огневой моши, в том числе - ядерной. Имелись
явные упущения в вопросах управления силами флота в режиме реального
времени.
Технологическую трансформацию в военном деле России попросту
проспала, что самым негативным образом сказалось на дальнейшем развитии
отечественных ВМС. Бесчисленные кладбища кораблей и груды ржавеющего
железа военной техники свидетельствуют о просчетах стратегического
планирования.
Именно по этой причине так важно извлечь уроки из горького опыта
прошлого и нс повторять соковых ошибок. Военной науке необходимо нс
просто изучить и принять на вооружение теорию военно-морского дела XX
века, но ц приступить к разработке новых положений развития военного
искусства и развития армии и флота.
21
1.3 Перспективы развития военно-морского флота
Российской Федерации в XXI веке
Развитие ВМФ России ь ближайшей перспективе будут основываться на
военной доктрине государства, в которой учитываются существующие
факторы риска и основные условия обеспечения боевой готовности морских
сил. а также сопутствующие политические и экономические факторы.
Россия должна создать флот, который станет действенным аргументом
защиты экономических интересов и национальной безопасности. Морская
стратегия декларирует две ключевые концепции применения ВМФ:
В условиях мирного времени - ядсрнос сдерживание вероятного
противника и военно-морское сотрудничество с союзниками;
В условиях военного времени - эффективная оборона, пресечение
агрессии и последующее се отражение.
Анализ прошедших военных конфликтов, складывающейся военно-
политической обстановки, состава морских сил НАТО и США. позволяет
сделать вывод, в настоящий момент формируются новые формы ведения
боевых действий на море. Главным средством поражения стало высокоточное
оружие. Удары наносятся с боевых кораблей и с использованием авиации. При
этом широко задействуются космические и воздушные средства разведки
целей. Активное применение автоматизированных систем управления
позволяет отдавать указания силам в режиме реального времени и поражать
морских целей и важных объектов на побережье.
Главной! целью морского строительства должна стать качественная
трансформация флота на основе новейших достижений в науке и технике.
ВМС должны быть сбалансированы как по родам сил. так и составу
вооружений. Флот должен быть оснашсн высокоточным оружием,
автоматизированными системами управления, действовать на базе единого
информационного поля и противостоять любым группировкам ВМС
вероятного противника, включая НАТО и США. Создание флота должно
опираться на сформированную в стране материально-техническую базу и
морскую мощь России.
Ключевая составляющая военной моши государства, судостроение, из-за
губительных реформ оказалась в крайне затруднительном положении.
Сохранение морских производственных мощностей должно стать задачей
национального масштаба. В противном случае позиции России, как великой
морской державы будут утеряны.
Судостроительная отрасль дает импульс для развития машиностроения,
электроники и приборостроения. Без поступательного развития этих
направлений производства невозможно создать сбалансированный военно-
морской флот. На строительство одного корабля уходит 8-10 лет. Поэтому
строительство флота нужно начинать заблаговременно. России, для сохранения
своих позиций в мире, необходимы корабли XXI века, отвечающие самым
современным требованиям и вызовам нового времени. Дтя решения этих задач
необходимо сохранить научно-технический потенциал, который в настоящий
момент находится в критическом состоянии.
Флот для России - историческая необходимость, гарант обеспечения
безопасности и один из ключевых факторов се успешного экономического и
культурного развития. ВМС один из ключевых атрибутов государственности.
В настоящий момент он как никогда нуждается в поддержке со стороны
государства. Внутренних резервов флота практически нс осталось. Без
экстренного государственного вмешательства ВМС могут стать лишь красивой
легендой) о былом величии России.
В западных странах морские силы становятся нс только аргументом
обеспечения стабильности, но и силоьым фактором национальной!
безопасности. Мо мере роста значения Мирового океана, как источника
ресурсов, возрастает и значение ВМФ ведущих держав. В перспективе стоит
ожидать, что государства попытаются закрепиться в океанских районах,
богатых полезными ископаемыми. Противоречия будут только нарастать.
Одним из главных аргументов, решения возникающие споры станет реальная
морская мощь, способная отстоять национальные интересы государства.
Военно-морской флот должен оставаться тем аргументом, с которым
будут вынуждены считаться во всем мире, той реальной силой!, которая
обеспечит России статус великой державы.
Новый сбалансированный флот должен стать логическим продолжением
ракетно-ядерного флота СССР. Следует четко понимать, что это ключевое
направление обеспечения национальной безопасности. Для того, чтобы
успешно решить эту задачу необходимо принятие федерального закона о
создании Адмиралтейской коллегией (Совета) возглавляемого лично главой!
государства.
Даже без детального рассмотрения конкретных стратегических задач
военно-морского ф юта. возможностей! вероятного противника, легко
определить главный тезис для понимания текущего вопроса: ВМФ России
должен быть полностью готов к противодействию современным надводным,
подводным и воздушным силам и средствам иностранных государств. Речь
идет нс только о территориальных водах России, но и о любых регионах
Мирового оксана, где могут возникнуть стратегические интересы страны.
В мирное время флот должен, как трутне виды Вооруженных сил,
оставаться действенным (фактором сдерживания вероятного противника,
проводить внешнеполитические акции, связанные с обязательствами России
перед мировым сообществом по поддержанию мира и стабильности на
планете. Важными функциями ВМФ остаются выполнение миссий под эгидой
ООН, проведение совместно с другими видами вооруженных сил мероприятий!
по локализации конфликтов в приграничных регионах России, оказание
помощи гражданскому населению в случае возникновения чрезвычайных
ситуаций, выполнение других специфических задач.
Учитывая современное состояние ВМФ. а также приведенные
положения, предполагается, что современный сбалансированный флот,
способный эффективно решать стоящие перед ним задачи, будет построен в
ближайшие десять лет (Указ Президента РФ «О совершенствовании морской
деятельности» № 471 от 4 марта 2000 года).
Для решения геостратегических и военно-политических задач. ВМФ
России должен структурно состоять из двух океанских флотов
(Тихоокеанского и Северного), двух морских (Черноморского и Балтийского) и
одной флотилии, действующей в закрытой акватории Каспийского моря.
Океанские флоты должны стать оперативно-стратегическими
объединениями, предназначенными для решения широкого спектра задач на
отдельных стратегических направлениях. Стоит принять во внимание, что
каждый флот должен быть сбалансирован исходя из специфики решаемых
задач и прогнозируемого развития ситуации.
Качественные изменения морских СЯС должны быть осуществлены
путем повышения из технических характеристик до уровня самых высоких
современных требований. Одновременно количественный состав МСЯС
должен сократиться нс менее чем в 1.5 раза из-за вступления в силу договора
СНВ-2.
Многоцелевые стратегические подводные лодки. выслужившие
установленные сроки, необходимо оперативно менять. Ежегодно должны
вводится в состав флота нс менее, чем по одной атомной и одной дизельной
подводной лодке. Строительство новых серийных субмарин возможно только
на промышленных мощностях в Северодвинске. В советские времена таких
предприятий было четыре. Новые подводные лодки должны быть оснащены
самыми передовыми видами высокоточного оружия, способными наносить
удары по подводным, надводным и береговым целям в зависимости от
поставленных задач.
Нс менее активно следует развивать надводные корабли, в том числе и
авианесущие. Необходимо продолжать начатое строительство ракетных
кораблей на базе эсминца проекта 956 и его модификаций, а также
перспективных сторожевых кораблей нового поколения. Дтя эффективной
защиты прибрежных районов следует сделать ставке на строительство
принципиально новых типов противолодочных, ударных и минно-тральных
кораблей относительно небольшого водоизмещения, оснащенных различными
видами высокоточного оружия большого радиуса действия.
Требует качественного обновления и морская авиация, в том числе и
корабельного базирования. В самой ближайшей перспективе требуется создать
новый самолет берегового базирования, который будет способен освещать
надводную обстановку в оперативной зоне, выдавать целеуказания, решать
иные задачи.
Необходимо проработать вопросы повышения маневренности береговых
сил. в том числе для совместных действий с мобильными силам России.
24
Реализация намеченных планов позволит в самой ближайшей
перспективе получить качественно новый флот, боевой потенциал которого
сможет компенсировать сокращения других видов ВС и позволит действенно
отстаивать национальные интересы России и быть менее обременительным для
бюджета страны.
В данный! период ВМС России находятся в установленной боевой
готовности. Обеспечение осуществляется в полном объеме, хотя и с большим
трудом. Морские силы ограниченным составом несут боевое дежурство.
Одиночные кооабли привлекаются для выполнения задач в стратегически
важных районах.
Военно-морской флот - важнейший атрибут государственности. Наша
общая задача сохранить ВМС для нашей страны, Россия не должна скатиться
до уровня третьесортной страны, о национальные интересы которой можно
вытирать ноги.
Вся история России свя занна с практически непрекрашающимпся
нашествиями и войнами. Бесчисленные враги неоднократно пытались
поставить страну на колени. Запад нс желает иметь на Востоке мощного
соперника в лице России, который нс дает продолжать экспансию на земли
Украины. Белоруссии. Кавказа. Дальнего Востока и Средней Азии.
Только со воемен Петра Великого, в период существования Российской!
империи, страна приняла участие в 22 воинах, в которых ВМФ провел 87
сражении. из которых проиграл только дважды (второе Рочснсальманскос в
1790 году и Цусимское в 1905 году).
Военно-морской флот должен оставаться той действенной силой, которая
будет до конца отстаивать национальные интересы России, и с которой нс
смогут не считаться ведущие государства мира. Могучие ВМС - один из
важнейших факторов, обеспечивающих стране статус великой державы.
Мы помним из истории Российского государства, какие усилия
прилагали недоброжелатели, чтобы воспрепятствовать появлению и развитию
ВМФ. Аналогичная ситуация будет повторяться и в наше время. Для
сохранения своей огромной территории, на которой сосредоточено 34%
запасов полезных ископаемых, необходимо опираться на собственную
военную мощь, в том числе и на морс.
Следует отмстить, что все ведущие морские державы имеют
долгосрочные программы развития национальных ВМС, которые
предусматривают нс только вывод из боевого состава старых кораблей и
замены их на новые модели, но и оснащение флота самыми перспективными
образцами высокоточных вооружений.
Проанализировав существующие долгосрочные кораблестроительные
программы государств НАТО можно сделать вывод, что развит!.с флота идет
по пути сокращения численности кораблей за счет поьышения их боевой
мощи. Активно развивается многофункциональная автоматизированная
система боевого управления. Идет процесс унификации и стандартизации
25
проектов новых кораблей. созданных в результате межнационального
сотрудничества. Совершенствуются системы, отвечающие за восстановление
боеготовности и боеспособности флота, его ремонтного и технического
обслуживания.
В обозримом будущем стоит ожидать стремительного развития флота
западных держав для достижения им готовности вести войну шестого
поколения.
Основой ВМС западных держав будут оставаться авианосцы,
многоцелевые атомные подводные лодки ракетные крейсера и фрегаты,
десантные и минно-тральные корабли, основу огневой! моши которых будут
составлять высокоточные крылатые ракет, а также вспомогательные суда
различных типов.
Авианосцы ВМС США. Франции, Великобритании и других стран
останутся основой сил реагирования и передового присутствия НАТО в
стратегически важных регионах мира.
Перспективные атомные многоцелевые подводные лодки станут
малозаметными. а по своему боевому потенциалу в некоторых случаях будут
способны решать стратегические задачи в бесконтактных конфликтах шестого
поколения.
Надводные боевые корабли станут более универсальными и менее
уязвимыми для противокорабельных ракет, которые в последнее время
получили самое широкое распространение. Некоторые типы кораблей
вероятнее всего станут способны участвовать в системе ПРО на ТВД. В
обозримым будущем самым массовым типом кораблей ВМС останутся
«эсминцы-фрегаты».
Сокращение численности кораблей в США и других странах, в
результате сокращения бюджетного финансирования и вывода из боевого
состава флота устаревших типов кораблей нс отразится на боевых
возможностях и уровне боевой и технической! готовности ВМС. Такие
показатели будут достигнуты за счет повышения численности новых кораблей
с расширенным боевым потенциалом.
ВМС ведущих морских держав остаются в высокой степени боевой
готовности. Они способны в кротчайшие сроки развернуть крупные
группировки на любом операционном направлении, что создаст серьезную
угрозу любому вероятному противнику.
1.4 Военно-морская деятельность Российской Федерации
Перенос решения проблем ВМФ на более подходящий; период,
неизбежно приводило Россию к катастрофе. тормозившим ее поступательное
экономическое и культурное развитие.
26
Формирование единой скоординированной государственной! политики в
области создания и развития ВМФ всегда оставалась одной из сложнейших и
важнейших задач для России.
Отсутствие или недооценка важности долгосрочной! политики в
отношении роли военно-морского флота неизбежно приводило Россию к
трагическим последствиям.
Многолетний опыт российского государственного строительства и
связанная с ним история ВМФ. красноречиво свидетельствует, что повышение
морской мощи возможно только при непосредственном участии государства.
Национальные интересы России на морс определяются геополитической!
значимостью Мирового оксана для государства и представляют собой
совокупность политических, экономических и собственно военных интересов
страны
Основные факторы, определяющие значение военно-морской!
деятельности России:
огромная протяженность морской государственной границы и наличие на
прибрежном шельфе полезных ископаемых и биологических ресурсов;
более половины жителей страны проживает в прибрежных районах;
возрастающее противоречие между ведущими державами за доступ к
ресурсам Мирового океана;
повышение роли военно-морского потенциала стран, в том числе
ядерного. на соотношение сил в мире.
Стратегические интересы Российской Федерации в Мировом океане
предусматривают:
1. С политической точки зрения:
Гарантированный доступ России к ресурсам и пространствам Мирового
океана. Пресечение любых попыток дискриминации в этом вопросе;
Решение на приемлемых для государства условиях возникающих
противоречий в вопросах использования Мирового океана.
2. В экономической сфере:
Освоение и рациональное использование морских ресурсов для
поступательного экономического развития страны. Обеспечение непрерывного
функционирования морских коммуникаций;
Сохранение высокого научно-технического и промышленного
потенциала, обеспечивающего военно-морскую деятельность.
Собственно военные интересы Российской Федерации в Мировом оксане
преследуют цель гарантировать защиту своих национальных интересов в
Мировом оксане
Основные угрозы безопасности России в области морской деятельности:
попытки ограничить возможности выхода к ресурсам и пространствам
Мирового оксана, международным магистральным морским коммуникациям,
особенно в Балтийском и Черном морях;
27
активизация военно-морской деятельности ведущих морских держав и
изменение состояния ВМС нс в пользу России. Повышение боевых
возможностей ВМС иностранных государств за счет внедрения высокоточного
оружия;
экономическое, политическое и международно-правовое давление на
Россию с целью исключения или существенного ограничения се морской
деятельности.
Для защиты своих национальных интересов Россия должна обладать
значительным морским потенциалом, основу которого составляют:
Военно-морской флот;
Органы морской охраны пограничной! службы;
Гражданский морской флот;
Навигационно-гидрографические системы.
Гидрометсорологические системы;
Системы связи.
ВМФ - основа морского потенциала страны. Он решает задачи защиты
государства с морских направлений и обеспечивает защиту стратегических
интересов в Мировом оксане.
Для решения задач политики в области морской деятельности
руководства России и сходит из следующих принципов:
государственное управление военно-морской деятельностью'
постоянный анализ и составление на его основе прогноза возникающих
военных угроз;
поступательное развитие МСЯС и сил общего назначения.
Приоритетные направления политики России:
усиление государственной поддержки, регулирование и контроль военно-
морской деятельности:
поддержание и качественное обновление сил и средств морской
составляющей стратегических ядерных сил. обеспечение их количественного
уровня, требуемого для ядерного сдерживания:
поддержание и качественное обновление сил и средств общего
назначения с учетом характера будущей войны:
поддержание и развитие систем разведки и целеуказания, связи и боевого
управления. а также гидрометеорологического и навигационно-
гидрографического и обеспечения военно-морской деятельности;
охрана принадлежащих России природных ресурсов, а также ресурсов за
пределами исключительной экономической зоны России, где в соответствии с
международными договорами она обладает правами на их сохранение и
использование
обеспечение военно-морского присутствия России в Мировом океане;
создание благоприятных международно-правовых условий для
деятельности Военно-морского флота в Млровом океане.
28
Приоритетные направления поддержания и развития морской техники и
вооружения ВМФ:
стратегические ракетные подводные лодки;
многоцелевым подводным лодкам;
универсальные боевые надводные корабли;
системы освещения обстановки, разведки и целеуказания, боевого
управления, в первую очередь космическим системам.
Военно-морскому флоту принадлежит ведущая роль в защите морских
границ государства.
Военно-морской флот - это ключевая составляющая и основа морского
потенциала Российской Федерации
Задачи ВМФ:
1 Защита стратегических интересов государства в мировом океане;
2 Поддержание боевой готовности и потенциала на уровне, необходимом
для выполнения задач по предназначению.
3 . Мониторинг деятельности ВМС иностранных государств
представляющих угрозу для военной безопасности государства;
4 . Выявление, предупреждение и предотвращение вероятных военных
угроз, а также отражение агрессии против России с приморских направлений;
5 Участие в действиях по предотвращению и локализации вооруженных
конфликтов на ранних этапах их зарождения.
5 Своевременное наращивание сил в районах, представляющих угоозу
национальной безопасности России.
6 . Обеспечение условий для безопасной экономической и других видов
деятельности.
Для решения указанных задач ВМФ России структурно разделен на
региональные объединения: Северный флот: Тихоокеанский флэт; Балтийский
флот; Черноморский флот; Каспийская флотилия.
Боевой состав каждого из флотов определятся спецификой выполняемых
ими задач в конкретном регионе. Применение ВМФ осуществляется в порядке,
установленном для Вооруженных сил России, связанной с выполнением в
мирное и военное время поставленных задач.
Формы боевого применения ВМФ в мирное время:
боевая служба;
боевое дежурство;
участие в ядерном сдерживании.
Формы боевого применения ВМФ ь военное время:
готовность морских стратегических ядерных сил участвовать в первом
ядерном ударе стратегических ядерных сил страны;
морские операции и систематические боевые действия.
Рассмотрев взгляды ведущих мировых держав на пспольюванпе ВМФ
можно сделать следующие выводы:
29
1. Изменились подходы к применению ядерного оружия, результатом
воздействия которого станет мировая катастрофа. Поэтому на первое место
выдвинуто высокоточное оружие, как главный инструмент вооруженной
борьбы.
2. Распад Советского Союза и Организации Варшавского договора
ускорил процесс внедрения высокоточного оружия, военные доктрины
ведущих держав мира были уточнены.
3. Основные усилия ВМС США и НАТО перенаправлены против важных
экономических объектов на континентальных театрах войны;
4. ВМФ России стал прибрежным, утратив позиции в Мировом океане из-
за недостаточного финансирования.
5. Разработанная ГШ ВМФ России программа ВМД в случае ее успешной
реализации может возвратить России статус великой морской державы, в
противном случае ВМФ как вид ВС потеряет свое значение.
6. Война шестого поколения будет бесконтактной, и вестись с активным
применением высокоточного оружия и передовых информационных
технологий.
К ведению войны нового поколения готова лишь ограниченная группа
высокоразвитых стран. Большая часть государств мира в настоящий момент
способны вести войну только четвертого поколения.
В связи с существующими реалиями ведущие морские державы готовят
свои ВМС к ведению войны, четвертого, пятого и шестого поколений.
30
2 ОСНОВЫ ДЕШИФРИРОВАНИЯ
АЭРОСНИМКОВ, ПОЛУЧЕННЫХ
ЦИФРОВЫМИ ОПТИКО-
ЭЛЕКТРОННЫМИ СИСТЕМАМИ
2.1 Классификация аэроснимков и особенное! и их дешифрирования
Роль и место аэросъемки в современном мире, находящемся на этапе
резкого обострения экологической ситуации в мире, противостояния ведущих
держав за ресурсы и сферы влияния, стремления к переделу установившейся
геополитической картины мира, существенно возросла в начале XXI века.
Трансформация видов и способов вооруженного противостояния,
обусловленная интенсивным развитием технологий в области
микроэлектроники, оптики, материалов, предусматривает ведение боевых
действий в едино.м информационном пространстве в любой точке земного
шара. Аэросъемка, как средство информационного обеспечения, в таких
условиях становится ключевым элементом сетсцснтричсской системы при
принятии решений, как стратегического, так и оперативно-тактического уровня
во всех аспектах жизнедеятельности человечества [1. 21. В ходе вооруженных
конфликтов роль аэросъемки только увеличивается, так как резко возрастает
номенклатура и количество объектов, сведения о состоянии которых
необходимо получить в кратчайшие сроки.
Получение необходимой информации реализуется в ходе наблюдения за
предполагаемым противником и проведением аэросъемки. Это предполагает
выполнение систематического контроля над отдельными районами местности,
в которых могут произойти события, представляющие интерес и получения
сведений конкретного плана о деятельности противоборствующей стороны,
сбора данных о ее военно-промышленном потенциале, о географических,
метеорологических и других характеристиках ее территории 11].
Особенно большое значение аэросъемке придается в военной сфере в
связи с резким повышением уровня боевого потенциала войск, при котором
уже нс является проблемой высокоточное поражение объектов противника,
сохраняется лишь проблема своевременного получения информации об их
состоянии и местоположении.
Важнейшее место в системе получения информации о противнике как в
военное, так и в мирное время отводится воздушной разведке, способной
обеспечить оперативное наблюдение за деятельностью противника на
обширных территориях и в короткое время доставить получаемую
информацию заинтересованным потребителям.
31
Развитие цифровых технологий стало основой разработки цифровых
оптико-электронных систем (ЦОЭС), отличительной особенностью которых
явилось использование матричные многоэлементных приемников излучения. В
последние годы ЦОЭС усиленно разрабатываются многими фирмами США.
Фоанции. Англии и Японии и ряда других стран. Цифровтация изображений
позволила все данные отображать на электронной карте боевых действий
мониторов командных пунктов и планшетах командиров боевых частей.
Актуальность совсошснствования ЦОЭС в настоящее время во многом
определяет прогресс в освоении ряда приоритетных направлений развития
науки и техники. Расширяются области и непрерывно создаются новые ЦОЭС,
решающие разнообразные сложные задачи в интересах обороны и обеспечения
безопасности. В соответствии с Указом Президента Российской Федерации от
К) октября 2019 г. № 490 «О развитии искусственного интеллекта в Российской
Федерации» утверждена Национальная стратегия развития искусственного
интеллекта в Российской Федерации, которая предполагает повышение
эффективности процессов планирования, прогнозирования и принятия
управленческих решении, автоматизацию рутинных (повторяющихся)
операций, использование автономного интеллектуального оборудования и
робототехнических комплексов, интеллектуальных систем управления и т.д.
Постановлением Правительства Российской Федерации от 28 октября
2020 г. № 1750 утвержден перечень технологий, применяемых в рамках
экспериментальных правовых режимов в сфере цифровых инноваций, который
предполагает развитие нейротехнологий и технологий искусственного
интеллекта в области компьютерного зрения, цифрового проектирования,
математического, информационного моделирования и управления жизненным
циклом изделия или продукции производственной или сервисной системы
цифровых компонент робототехники для человеко-машинного
взаимодействия: нейросенсорики: сенсоромоторной координации и
пространственного позиционирования: сенсоров и обработки сенсорной
информации; систем сбора и обработки информации для эффективного
функционирования робототехнических систем; интеллектуальных систем
управления робототехническими системами; систем автоматизации
управления. В связи с этим разработка требований к дешифрированию
аэроснимков, полученных ЦОЭС является актуальной задачей.
Аэроснимок - это двумерное изображение, полученное в результате
дистанционной регистрации техническими системами собственного или
отраженного излучения и предназначаемое для обнаружения, качественного и
количественного изучения объектов, явлений и процессов путем
дешифрирования, измерения и картографирования.
На аэроснимках одновременно отображаются различные компоненты
геосферы - литосфера. гидросфера, биосфера. атмосфера. что позволяет
изучать их взаимодействие и взаимосвязи.
32
К основным свойствам и особенностям, присушим аэроснимкам, можно
отнести масштаб, обзорность (площадь охвата территории одним снимком),
разрешение (минимальная линейная величина объекта, которая отображается
на снимке). Отдельными особенностями снимков также являются
охватываемый спектральный диапазон и вид или технология съемки.
По масштабу аэроснимки делятся на следующие группы:
- мелкомаси/табные Ц: 10000000 до 1:100000000) - получаемые с
геостационарных и метеоспутников на околоземных орбитах;
- среднемасштабные (1:1000000 до 1:10000000) - получаемые с
пилотируемых кораблей и орбитальных станций;
- крупномасштабные (крупнее 1:1000000) - получаемые со специальных
картографических спутников и АТ различных типов.
По обзорности различают аэроснимки:
- глобальные, схватываюшис освещенную часть одного полушария и
получаемые с межпланетных космических кораблей и геостационарных
спутников (территориальный охват их состав 1яст десятки и сотни млн. км2);
- региональные, на которых изображается часть материка или крупный
регион: получают с метеорологических и ресурсных спутников. Охват
исчисляется млн. км2. Ширина зоны охвата варьирует от 500 км до 3 000 км;
- локальные, на которых изображается часть региона; получают с
пилотируемых кораблей, орбитальных станций, ресурсных и картографических
спутников. Такие снимки охватывают десятки тысяч км.
По разрешению аэроснимки классифицируются следующим образом:
- снимки очень /никого разрешения (десятки километров) - в настоящее
время снимки с таким разрешением редки, в основном, это радиометрические
снимки;
- снимки низкого разрешения (несколько километров) - широко
распространены, к ним относятся телевизионные и сканерные снимки с
метеоспутников, а также с ресурсных спутников;
- снимки среднего разрешения (сотни метров) - такие снимки получают
сканирующей аппаратурой среднего разрешения и тепловой инфракрасной
аппаратурой ресурсных спутников'
- снимки высокого разрешения (десятки метров) - характерны для
широко используемых фотографических снимков с пилотируемых и
беспилотных ЛА. пилотируемых космических кораблей, автоматических
картографических спутников и орбитальных станций, а также для сканерных
снимков с ресурсных спутников. Эта группа снимков делится еще на снимки
относительно высокого разрешения (50 - 100 м). высокого (20 - 50 м). очень
высокого (10 - 20 м) и сверхвысокого (меньше 1 м) разрешения.
По спектральному диапазону аэроснимки подразделяются на три
основные группы: снимки в световом (видимом и ближнем инфракрасном)
диапазоне, снимки в тепловом инфракрасном диапазоне и снимки в
радиодиапазонс:
- аниики в цветовом диапазоне.. Этот диапазон включает видимый
(VNIR), ближний (SWIR) и средний (MWIR) ИК-диапазоны и на него
приходится большая часть солнечной! энергии. На качество снимков в этом
диапазоне влияет облачность и рассеивающее влияние атмосферы. В
зависимости от технологии получения выделяют снимки:
а) фотографические, получаемые с помошью фотоаппарата,
находящегося на борту авиационного или космического носителя;
б) теяевилюнные, получаемые с помощью телекамеры, находящейся на
борту носителя’
в) сканерные, получаемые с помощью специальных сканеров в виде
качающегося зеркала, для которых характерна многозональная съемка, когда
применяется несколько зеркал, каждое из которых воспринимает
определенную зону спектра:
г) многопементные ПЗС-снимки, получаемые с помощью электронных
ПЗС-сканеров, для которых характерно высокое разрешение и минимум
геометрических искажений;
- снимки в те/иовилюнном ЩСдиапалте (TIR или LWIR - Thermal или
Long Wave Infra Red). Этот диапазон достаточно широк и охватывает
спектральную зону от 3 до 1000 мкм. где большая часть световых волн нс
пропускается атмосферой. Имеются только три окна прозрачности с длинами
волн 3-5. 8—14. 3()-§0 мкм. первые два из которых и используются для съемки
Съемка в тепловом диапазоне может вестись ночью и обычно дополняет
другие виды съемки. Она используется при изучении различных явлений,
связанных с выделением тепловой энергии, например, при мониторинге
лесных пожаров, тепловых или атомных электростанций;
- снимки в радиодиапазоне. Для дистанционного зондирования
используют ультракоротковолновый диапазон радиоволн с длинами волн 1 мм
- 1 м (СВЧ или микроволновый диапазон). Этот диапазон в значительной
степени свободен от влияния атмосферы и погодных условий.
Различают пассивную радиометрию, при которой фиксируется
собственное излучение Земли (радиометрические снимки), и активную, когда
фиксируется отраженное искусственное излучение (радиолокационные
снимки):
а) пассивная радиометрическая съемка осуществляется с помощью
микроволновых радиометров, которые регистрируют СВЧ-излучение. По
сигналам радиоизлучения строится радиометрический снимок, на котором
изображаются объекты, характеризующиеся различными излучательными
свойствами в зад энном диапазоне. Например, излучение металлов очень
незначительно, излучение растительности и сухой почвы характеризуется
коэффициентом 0.9. воды - 0.3. Радиометрические снимки позволяют выявить
почвы с различной влажностью, воды с разной степенью солености,
определить степень промерзания грунтов, возраст морских льдов и т.д.;
34
б) для получения радиолокационных снимков на носителе
устанавливается активный источник радиоизлучения с антенной!, действующий
по принципу просмотра местности поперек маршрута. Посылаемый к Земле
сигнал по-разному отражается поверхностью и улавливается регистрирующей
аппаратурой. На полученных снимках отражается шероховатость поверхности,
микрорельеф, состав пород. Такие снимки могут применяться в геологии для
поиска линз подземных вод. в сельском хозяйстве для изучения состояния
растительности, а также для картографирования земель
Процесс дешифрирования аэроснимков считается наиболее важным и
сложным этапом обработки материалов, полученных с помощью ЦОЭС.
Дешифрирование аэроснимков имеет сложный психофизиологический
характер и предполагает несколько уровней! умственной! активности, различной!
сложности логические решения и определенные виды труда человека.
Дешифрирование аэроснимка опирается на зрительное восприятие, в
результате которого в сознании человека во шикают образы и представления,
на базе которых распинается и интерпретируется изображение. Это
достигается путем сопоставления увиденного с зафиксированными в памяти
образами и отличительными признаками объектов.
С точки зрения психологии дешифрирование по своей! форме,
представляет специфический информационно-логический процесс изучения
аэроснимков, в результате которого получаются сведения об объекте, которые
в той или иной степени отражают его действительное состояние. Степень
отражения действительности зависит как от информативности изображения,
так и от многих личных качеств дешифровшика. По содержанию
дешифрирование представляет сложную эвристическую деятельность в
условиях избытка или недостатка информации и дефицита времени.
Избыток информации связан с изображением на аэроснимках мелких
деталей и множества топографических объектов, распознавание которых
вообще либо на отдельных этапах не входит в задачу дешифрирования.
Недостаток информации объясняется потерей многих деталей объектов в связи
с недостаточной разрешающей способности ЦОЭС или отсутствием
отображения определенных признаков (например, цвета, температуры,
материма и др.) у отдельных видов изображений. Кроме того,
дешифрирование связано с распознаванием очень малых по размерам и мало
контрастных изображений! объектов на фоне шумов, а их геометрические и
оптические характеристики искажены и непостоянны по сравнению со
свойствами объектов в натуре [1. 2* 3].
2.2 Сущность процесса дешифрирования аэроснимков
Процесс дешифрирования аэроснимков складывается из нескольких
уровней! и этапов, которые ведут дешифровшика от обнаружения к
распознаванию и классификации объектов, а затем к их обшей! оценке,
35
выявлению сущности сложного объекта и формированию оценочной
информации о нем. В зависимости от свойств исследуемых изображений,
характера местности и расположенных на ней объектов, квалификации
дешифровшпка и других факторов уровни и этапы могут четко разделяться или
незаметно переходить один в другой. Тем не менее, вес они взаимосвязаны
между собой и образуют несколько локальных систем [1,2. 3. 4, 5J.
В общем виде структура процесса дешифрирования аэроснимков
представляется четырьмя уровнями (рисунок 2.1). На первом уровне
происходит своеобразный психологический настрой дешифровщика, уяснение
подлежащих обработке bi дов информации, оценка стоящей задачи и
формирование модели ее решения [ 1 2, 3. 4. 5].
На втоиом уровне осуществляется поиск на аэроснимке заданных
объектов. В зависимости от ситуации, особенностей объекта и характера
местности поиск происходит от частного и более простого к общему и
сложному или наоборот
Из множества объектов, изображенных на аэроснимке, на этом уровне
выбираются необходимые или заданные объекты. Поиск объекта может
совершаться симультанно (одномоментно) или путем более или менее
длительного перебора ряда признаков и образов Обычно здесь применяются
самые общие групповые и комплексные признаки. На этом уровне
совершаются поисковые и операции эвристического характера, и применяется
вероятностно-модальная логика типа: в этом районе большая вероятность
расположения такого-то объекта.
На третьем уровне производится детальный анализ аэроснимка:
распознавание и интерпретация простых и сложных объектов. Этот уровень
связан с операциями смыслового восприятия и более сложной, чем на 2-ом
уроьнс. вероятностно-модальной логикой. В данном случае симультанно
распознаются только открытые простые объекты. Замаскированные объекты и
элементы сложных объектов, состояние и характер их деятельности
определяются в результате сложной умственной работы с привлечением
обобщений, анализа изображении и синтеза полученной информации.
Большую роль при этом играет интуиция.
В процессе дешифрирования изображений непрерывно происходит
переход от распознавания простых объектов к распознаванию более сложных
объектов и наоборот. При этом обнаруживается взаимосвязь между объектами,
происходит переход от дешифрирования отдельных объектоь к распознаванию
и интерпретации ситуаций. Понимание и интерпретация ситуации,
изобразившейся на аэроснимке, позволяет опять перейти к распознаванию
отдельных объектов но уже на более высоком уровне обработки информации.
На всех этапах этого уровня производится распознавание по аналогии,
экстраполяция информации о распознанных объектах и участках местности на
еще нс изученные и не распознанные.
36
Рисунок 2.1 - Структурная схема процесса сшнфрнрования
37
Психологическая природа дешифрирования нефотографических (ИК-.
радиолокационных) аэроснимков близка к распознаванию фотографических.
Однако в этом процессе сеть много особенностей. В частности, при
распознавании нефотографических изображений происходит активизация
логической деятельности. связанная с преодолением загубленного
изображения с меньшим количеством деталей и строчной структурой, с
необходимостью декодирования специфических особенностей теплового или
радиолокационного контраста, а также радиолокационных теней и остаточного
тсп ювого нагрева. Обычно при рассматривании нефотографических
изображений происходит известный! переход к оптическим образам. Особое
значение имеет общий структурный анализ изображений с широким
использованием косвенных признаков, позволяющий в определенной степени
снять условность [1,2, 3].
На четвертом уровне формируется представление об отдельных объектах,
их группах и объекте дешифрирования в целом, делается окончательный вывод
о характере, состоянии и деятельности объекта, а также кратко формулируется
и записывается извлеченная информация с указанием количественных
характеристик объекта.
Успех дешифрирования аэроснимков зависит от целого ряда
объективных и субъективных факторов, которые по характеру и существу
влияния на психофизиологическую деятельность дешифровщиков могут быть
разбиты на пять групп.
В первую группу входят характеристики материалов, предъявляемых для
дешифрирования. К ним относятся информативность аэроснимков, их
количество, вид. характер изображения и его искажений, схема расположения
последовательно перекрывающихся аэроснимков, качество расчетов на
выполнение аэросъемки.
Во вторую группу включаются показатели технического оснащения
дешифровочного процесса. Наряду с объективным состоянием оборудования
для дешифрирования в эту группу входят такие субъективные факторы, как
степень использования имеющихся технических средств и обеспечение
распознавательного процесса вспомогательными материалами (базами данных,
справочниками, эталонами, топографическими картами и др.). Эта группа
факторов оказывает как непосредственное влияние на качество и сроки
дешифрирования, так и косвенное, в большой степени определяя
работоспособность дешифровщика и его желание работать.
Третью группу составляют требования к классификации объектов,
полноте и подробности дешифрирования. В зависимости от постановки задачи
на дешифрирование эти факторы могут активизировать или замедлять
распознавательную деятельность, тем самым оказывая влияние на качество
информации и скорость дешифрирования. Чем полнее классификаиия и
требования соответствуют задачам дешифрирования, тем больше они
способствуют формализации распознавательной деятельности, определяют
38
состав, объем и последовательность анализа изображений, изложения данных и
терминологию.
ВХОДНОЕ ИЗОБРАЖЕНИЕ
Рисунок 2.2 - Структурная схема алгоритма дешифрирования
В четвертую группу входят психофизиологические качества и
квалификация дешифровщиков. Эффективность зрительного восприятия
определяется остротой зрения пропускной способностью свсто- и
цветоразличительной и контрастной чувствительностью временными
характеристиками различения и работоспособностью глаза. Кроме
физиологических особенностей зрительного восприятия, эффективность всего
сложного процесса дешифрирования аэроснимков в условиях дефицита
времени зависит от памяти, умения сосредоточиваться, анализировать и
мыслить логически, творческого воображения и других качеств.
Пятую группу составляют организационно-технологические факторы.
Это. прежде всего организация рабочих мест дешифровщиков и их планово-
39
предупредительное обслуживание, технология и методика дешифрирования,
санитарно-гигиенические условия труда, организация работ и управление
дешифрированием. Правильная и четкая организация работ с хорошим
оборудованием и обслуживанием рабочих мест определяют не только
качество, но и сроки дешифрирования.
На рисунке 2.2 представлена структурная схема алгоритма
дешифрирования, которая представляет собой совокупность модулей, в
которых алгоритмы реализованы в виде программного кода и интерфейсу
пользователя: модуля вычисления признаков; модуля сравнения; модуля
принятия промежуточного решения; модуля восстановления изображений;
подсистемы обучения; модуля оформления донесений.
2.3 Принципы классификации объектов дешифрирования
Дешифрирование аэроснимков относится к тому немногочисленному
виду познавательной деятельности, которая связана с огромным числом
различных по значению объектов и ситуаций. Из всего многообразия
изображенных на аэроснимке объектов дешпфровщпк часто в стрессовой
ситуации, должен найти, распознать, классифицировать и описать изображения
только тех объектов, которые заданы.
Вее объекты, расположенные на поверхности Земли, можно
сгруппировать по различным принципам: по соотношению и абсолютному
значению линейных размеров - на компактные (малоразмерные), протяженные
(линейные) и площадные; по положению относительно земной (водной)
поверхности - на наземные (надводные), полуназемные и подземные
(подводные); по степени подвижности - на стационарные, малоподвижные и
подвижные. Однако для теории и практики дешифрирования наибольшее
значение имеет классификация в зависимости от сложности и состава
объектов. учитывающая сущность распознавательного процесса и
подразделяющая их на простые и сложные [2,4, 5].
Простыми объектами называются отдельные естественные или
искусственные предметы (сооружения, образования), находящиеся на земной
или водной поверхности и выполняющие одну определенную функцию (танк,
самолет, корабль, дом, дерево, луг и т.д.).
Сложными объектами называются естественные или искусственные
комплексы, занимающие значительные по размерам площади, выполняющие
конкретные функции н состоящие из совокупности одинаковых или различных
простых объектов, находящихся в определенной взаимосвязи (аэродром,
сосредоточение войск, порт, участок местности и т.д.).
Объектами дешифрирования являются, как правило, сложные объекты
Полнота информации о сложном объекте, степень раскрытия его сущности,
состояния и характера действий зависят от подробности информации о
составляющих его простых объектах. В процессе дешифрирования по
40
различным причинам (низкому разрешению, перспективным искажениям,
маскировке и др.) ряд изображений, может быть, невозможно отнести ни к
одному из известных простых объектов. Для того чтобы не потерять
информацию, нс исказить характеристики сложного объекта, нужно
оперировать более общими понятиями, чем понятие отдельного объекта -
понятиями групп простых объектов. Помочь во веем этом может только
классификация.
В основу классификации объектов дешифрирования положены признаки,
предназначение и основные характеристики простых объектов. В ней учтены
существующие в вооруженных силах и хозяйстве всех стран систематизации
техники и других простых объектов. Классификация предусматривает четыре
категории простых объектов, соответствующие четырем уровням подробности
информации о них: вид. класс, подкласс и тип. Классификация объектов
приведена на рисунке 2.3 и в таблице 2.1.
Признаки, положенные в основу классификации, облегчают операцию
классифицирования объектов при дешифрировании. выступая как
определители для распознавания изображений. Четыре уровня подробности
информации о простых объектах соответствуют требованиям, предъявляемым
к информации при решении практических задач дешифрирования, и вполне
достаточны для характеристики объектов и выполнения анализа сложного
объекта.
Первичная категория классификации - тип. обозначает простой объект,
имеющий одному ему присущие форму, размеры и положение деталей,
тактико-технические данные и наименование (проект). Например, крейсер
«Петр Великин», катер «Раптор» (проект 03160) и т.д. С классификацией
изображений до типа связана наиболее полная их характеристика. Каждый тип
распознается по индивидуальным признакам, которыми являются нс столько
форма объекта в целом, сколько форма, расположение и размеры отдельных
деталей. Так самолеты-истребители, имея примерно одинаковые размеры и
форму, различаются формой и длиной носовой части, формой гоои зонтального
оперения, формой, размерами и расположением кабины летчика и
воздухозаборников и т.д. Определителями для распознавания изображений до
типа являются точные размеры, форма объекта, размеры и точное положение
деталей, конструкция (проект).
Подкласс - категория классификации, объединяющая типы с близкими
тактико-техническими данными и габаритными размерами, массой,
грузоподъемностью и мощностью (тяжелые, средние и легкие танки и т.д.).
Классификация изображений объектов до подкласса дает менее подробную
информацию о них. так как эта категория объединяет определенную группу
типов Основными признаками подкласса являются границы габаритных
размеров и тептового излучения, средняя отражающая поверхность, форма,
размеры и распо тожснис основных деталей. Основными определяющими
признаками для распознавания до подкласса являются боевые свойства
41
тактическое (производственное) назначение. масса, мощность
груюподъемность. форма, размеры и расположение основных деталей.
или
Рисунок 2.3 - Классификация объектов по уровням подробности информации
Класс - категория, объединяющая однородные подклассы (в некоторых
случаях типы) с одинаковым боевым или производственным назначением
(танки, самолеты-бомбардировщики, автомобили-самосвалы и т.д.). Объекты
одного класса обладают общими характерными для них формой и характером
расположения основных детален и значительно отличаются размерами и
тактико-техническими характеристиками.
Классификация изображений до класса дает еще менее подробную
информацию об объекте, так как эта категория объединяет большую группу
объектов, чем подкласс. Признаками классов являются более широкие, чем у
подклассов, границы габаритных размеров, теплового излучения и
отражающей поверхности, а также наличие и расположение определенных
деталей, например двигателей у самолетов, орудийных башен у танков
Вид - категория классификации, объединяющая родственные классы
относящиеся, как правило, к одному виду вооруженных сил или производства
и объединенные сферой боевого применения (боевая техника СВ. АТ и т.д.).
Классификация изображений до вида даст наиболее общую информацию
об объектах с наименьшей степенью подробности. Признаками видов являются
общее предназначение, среда передвижения (местоположение), конфигурация,
отношение размеров, границы теплового излучения и отражающей
поверхности. Для АТ например. характерна стрелообразная или
крестообразная форма со средним отношением размаха крыла к длине
самолета 1:1 и расположение на ровных открытых площадках.
Классификация объектов позво 1яст при обнаружении и выявлении их
конфигурации, определении габаритных размеров и т. д. отнести к одному из
bi дов и выразить сущность точным понятием, отражающим самые общие
тактические или технические характеристики. При необходимости и
возможности получения более подробной информации нужно выявить
дополнительные признаки, характерные для классов, подклассов пли типов.
42
Распознавание изображения до типа требует наиболее детального изображения
и самого подробного п продолжительного дешифрирования.
Таблица 2.1 - Категории и признаки классификации объектов дешифрирования
Категории классификации I[ризнаки (основания) классификации
Функциональные Видовые
Вид 1 - общее предназначение; 2 - отношение к виду вооруженных сил или производства; 3 - среда передвижения (местоположение), сфера боевого применения 1 - конфигурация; 2 - оз ношение габаритных размеров; 3 - границы теплового излучения и мощности ограженного радиосигнала
Класс. 1 - общее (одинаковое) боевое или производственное назначение 1 - форма; 2 - границы габаритных размеров; 3 - наличие и расположение крупных (основных) деталей; 4 - границы теплового излучения и мощности отраженного радиосигнала
Подкласс 1 - общие боевые свонст ва и близкие тактико-зехнические характеристики; 2 - общее тактическое (прои родственное) на значение 1 - мощность и грузоподъемность; 2 - форма, га б ар из ы и расположение основных деталей; 3 - границы габаритных размеров; 4 - i-раницы теплового излучения и мощности отраженного радиосигнала
Тип 1 - конкретные тактико- гехнические харам ериетики; 2 - индивидуальное тактическое (производственное) назначение; 3 - установившиеся зако но м ер н ы е вза и мое вя зи, определенное местоположение в системе объем ов 1 - конкретная форма; 2 - точные размеры; 3 - форма, размеры и точное расположение всех деталей; 4 - конструкция (проект'
Таким образом, чстырсхуровнсвая классификация объектов
обеспечивает:
- систематизацию всего многообразия объектов, встречающихся при
дешифрировании различных видов изображений;
- систематизацию знаний дешифровщиков. облегчение их
ориентирования в многочисленных простых объектах, возможность
43
оперировать при необходимости более общими категориями, чем единичным
объект (тип);
- стандартизацию названий простых объектов, ускоряющую обработку
информации.
2.4 Признаки распознавания объектов на аэроснимках
При зрительном восприятии аэроснимков простые и сложные объекты
обнаруживаются и распознаются по тем отличительным свойствам и
характерным чертам, которые отображаются на аэроснимках. [I 4. 6. 7].
Признаки распознавания, по которым различают между собой изображения
объектов в теории и практике дешифрирования принято называть
демаскирующими или дешифровочными признаками.
Дешифровочные признаки дают возможность различать аэроснимки. В
них проявляются характерные особенности изображений. По степени охвата
объектов, сложности и специфике проявления, составу и постоянству
отображения признаки можно разделить на пять основных групп: 1 - общие
прямые. 2 - индивидуальные (частные) признаки типов объектов, 3 -
групповые. 4 - косвенные, 5 - комплексные.
Общие прямые признаки распознавания - такие свойства простых
объектов, которые непосредственно передаются на аэроснимках и
воспринимаются человеческим глазом. Такими признаками являются
элементарные свойства объектоь: форма, размер, детали, структура, тон или
цвет и тень изображения объектов. Они присущи каждому простому объекту.
Однако эти признаки нс однозначны, т.е. один и тот же признак, например
прямоугольная форма, соответствует многим различным объектам или один и
тот же объект в разных ситуациях может иметь разный тон или цвет.
Форма изображения является основным прямым признаком, поскольку
зрз тельная система человека в первую очередь выделяет именно линии,
очертания, контуры и уже после этого переходит на обследование деталей
(элементов1, которые привлекают внимание или. по его мнению, могут
содержать характеристики, полезные для распознавания изображения.
Быстрота, достоверность и подробность распознавания формы зависят нс
только от контраста изображения, но и от сложности самой формы.
Различаются формы геометрически определенные и неопределенные,
компактные и вытянутые (линейные), простые и сложные, плоские и
объемные. На рисунке 2.4 представлены примеры таких форм:
I - геометрически определенные (|юрмы;
II - геометрически неопределенные формы;
III - вытянутые (линейные) формы;
IV - простая и сложная формы.
Геометрически определенная форма характерна для большинства видов
техники и сооружений и является характерным признаком распознавания.
44
Рисунок 2.4- Примеры некоторых форм изображения объектов
Неопределенная форма присуща, как правило, природным объектам и
образованиям (деревьям, озерам, оврагам и др.), а также таким искусственным
объектам, как сельскохозяйственные угодья карьеры, и нс может часто
служить постоянным и существенным признаком.
45
Компактная форма наблюдается у большинства искусственных объектов
(военной и гражданской техники, промышленных и жилых зданий), а
вытянутая (линейная) - характерна для таких простых объектов, как впетно-
посадочныс полосы и рулежные дорожки аэродрома, насыпи, дороги, каналы и
траншеи, а также для естественных образований - рек и ручьев. Вытянутые
формы обнаруживаются и распознаются при более мелких масштабах, чем
компактные. Вытянутая форма, например дороги и реки, является важным
признаком распознавания, отличаюшим их от других объектов.
Возможности распознавай! я объектов поостых и сложных форм зависят
от информативности изображения. Простые формы при соответствии размеров
изображения величине линейного разрешения распознаются практически при
тюбом масштабе аэроснимка. Детали сложной формы с ухудшением
разрешения постепенно исчезают, контуры изображения сглаживаются, и при
определенных его значениях изображение может превратиться в пятно или
полосу.
Плоские фигуры отличаются от объемных тем. что в обшем случае они
обычно однотонны. Объемные объекты всегда имеют определенное
распределен ic светлых и темных тонов. Пространственная форма объекта
является хорошим признаком распознавания, особенно при стереоскопическом
рассматривании аэроснимков.
Размер изображения и определяемые по нему истинные размеры объекта
и его деталей являются важным признаком распознавания так как
способствуют более точной классификации изображения и повышению
подробности распознавания. Так, например, определен ie длины и размаха
крыла транспортного самолета позволяет более определенно назвать его
подкласс или тип. а размера резервуаров на складе горючего - их емкость.
Необходимая точность определения размеров зависит от разницы в габаритах,
существующей между классами, подклассами или типами распознаваемых
объектов.
Абсолютные значения и соотношения линейных размеров объектов делят
все объекты на три группы: компактные (точечные), линейные (протяжные) и
площадные. Эта классификация особенно хорошо согласуется с особенностями
восприятия изображения глазом человека.
Компактные объекты имеют исключительно малые размеры, часто
соизмеримые с ЛРМ. К ним относятся отдельные постройки и сооружения,
родники, колодцы, памятники, небольшие мосты и т.д. большинство
компактных объектов являются деталями других совокупностей объектов.
К линейным объектам относятся такие, у которых длина более, чем в три
раза превосходит ширину: реки и ручьи, дороги, улицы, длинные мосты и т.п.
Пр! отнесении объекты к данному классу большую роль играет абсолютное
значение линейных размеров. Например, жилой дом в сельской местности,
имеющ! й размеры 20x5 м, несмотря на значительное соотношенье размеров,
следует считать компактным.
46
Площадные объекты имеют большие размеры. К ним относятся лесные
массивы, рощи, луга, болота, населенные пункты аэродромы и т.д.
В процессе распознавания изображений обычно определяется длина и
ширина объекта или его деталей, реже высота. Во многих случаях значение
размера как признака распознавания будет очень велико. Он может оказаться
единственным важным признаком для выдачи более полной и подробной
информации об объекте или для правильного представления об изображенной
местности. Так. если форма изображения объекта и его деталей в силу ряда
причин недостаточно четко выражена или применение маскировки скрывает
особенности формы, то определение размеров позволит более определенно
сделать вывод о его классе. Действительную величину объекта можно
определить по масштабу аэроснимка или путем сравнения размера
распознаваемого изображения с размерами известного объекта.
Масштаб аэроснимка, который обычно известен, нс дает наглядною
представления о действительных размерах объектов. Дешифревщик,
рассматривая изображение, нс воспринимает правильно размеры, если нс
имеет некоторого эталона. Поэтому рассматривая аэроснимок, нужно найти на
нем такие объекты, размеры котопых точно известны, и с ними сравнивать все
другие изображения простых объектов. Для этой цели можно использовать,
например, ширину железнодорожного полотна, длину тепловозов и
электровозов, изображения домов и деревьев пли ранее распознанных
объектов.
С помощью таких эталонов размеры объектов и расстояния между ними
воспринимаются более правильно. Если на местности нет объектоь. размеры
которых известны, то для удобства восприятия можно использовать в качестве
эталона расстояния между характерными ориентирами, определенные с
помощью топографической карты.
Детали объектов, их характер, и количество дают представление о
сложном объекте, позволяют отличать данный объект от ему подобных. Так,
данные о характере насыпей, выемок, мостов и переездов помогают
классифицировать дороги. а количество и состав производственных корпусов,
складов сырья и готовой продукции и т.п. позволяют определять типы
промышленных предприятий.
Некоторые детали объекта (простые объекты) могут быть
самостоятельными объектами со своими л .'талями Таковы элементы
населенных пунктов: микрорайоны, кварталы, парки и т п.
Текстура (структура) поверхности объектов и его июбражения является
совокупностью нескольких признаков (формы. размеров, тона,
взаимоположения и др.), образующей поверхность элемента. Например,
внешний вид поверхности леса, образуют кроны '.срсвьсв. Структура
изображения объекта - важный признак многих естественных элементов
местности, нс имеющих характерной формы. Этот признак очень устойчив; на
него в меньшей степени, чем на другие прямые признаки, влияют свойства
47
полученных аэроснимков На аэроснимке изображение леса выглядит в виде
зернистой структуры. Характер этой структуры обусловлен главным образом
формой кроны, ее размерами и сомкнутостью. Масштабные преобразования
почти нс меняют характер зернистости структуры Это объясняется тем. что по
мере уменьшения абсолютного значения разрешения снимка в качестве
образующего элемента структуры начинают выступать нс отдельные кроны, а
их совокупности, ограниченные естественными разрывами сомкнутости крон.
В результате размер зерен структуры изображения леса продолжает
превосходить размер зерен других структур, например кустарника.
Структура изображения классифицируется по геометрическому,
оптическому и генетическому принципам.
Геометрическая классификация основана на системе и взаимном
положении точек, линий и площадей объекта и его изображения. В
зависимости от геометрического типа структуры (точечный, линейный,
площадной и комбинированный) приняты соответствующие названия
структуры (зернистая, струйчатая, пятнистая, пятнисто-зернистая).
Оптическая классификация основана на свойствах тона, образующих
геометрическую форму структуры (крон деревьев и кустарников, участков
поверхности природно-территориального комплекса и т.п.).
Генетическая классификация имеет в своей основе известные различия в
свойствах структуры растительного покрова и геологических образований.
Тон изображения или степень почернения фотографического слоя так же.
как цвет при фотографировании с натуральной или условной цветопередачей,
зависит от коэффициента яркости, отражательной или излучательной
способности и состояния объекта, освещенности местности, состояния
атмосферы, свойств оптической! системы и приемника излучения, режима
обработки материалов. Все эти факторы очень изменчивы, поэтому тон
изображения даже однотипных объектов может меняться в значительных
пределах и сам по себе нс может служить надежным признаком распознавания.
Однако на аэроснимках полученных с помощью одной и тог же системы
объекты, резко различающиеся в натуре по яркости, имеют устойчивые тона
изображения и еще более постоянные их соотношения. Эти соотношения и
обеспечивают обнаружение и распознавание изображений объектов.
Обнаружение на аэроснимках одних объектов на фоне или среди других
зависит от наличия оптического, теплового или радиолокационного контраста
между ними. Если его нс г. то изображение объекта обнаружить невозможно,
так как нельзя выявить и определить его форму и размеры. Контрасты могут
быть самые различные - от минимальных (0.05 - 0.1) до максимальных (0,9 -
1.0).
Человеческий глаз, как установлено опытным путем, при нсрсзкостп
границы сосс; них разнотонных участков может визуально различать до 25
ступеней серого тона. Однако практически, особенно в условиях дефицита
48
времени, четко различимы обычно 7-10 тонов, которые и используются
обычно при дешифрировании.
Объекты редко изображаются однородным ровным тоном. Только
гладкие, очень однообразные природные поверхности (снежная, песчаная,
глинистая) или укатанный грунт дают однородный тон. Большинство же
простых объектов, природных образований и комплексов дают неровный тон
изображения в связи с тем. что имеют большое количество разнообразных
деталей, дающих множество мелких светлых и темных пятен и бликующих
участков.
Цвет изображения может выступать как прямой и условный признак в
зависимости от того, в натуральных или искаженных цветах получен
аэроснимок. Существенно, что фактура поверхности, детали объекта и условия
получения изображения вызывают незначительные преобразования нс в
цветах, а только в их насыщенности и яркости. 4i ело различимых глазом
цветовых тонов и оттенков на цветных аэроснимках значительно больше, чем
серых тонов на черно-белом, что предопределяет их высокие дешифровочные
качества. Однако из-за влияния высоты стояния Солнца и направления
освещения, состояния атмосферы, масштаба изображения и качества
формирования изображения цвета отклоняются от натуральных и нс могут
отождествляться с реальным цветом объектов, необходима определенная
корректировка.
Цветовые признаки на спсктоозональных аэроснимках имеют условный
характер. Изображение ряда объектов, неразличимых или плохо различимых
на черно-белых аэроснимках, на спсктрозональных резко выделяются по цвету.
Несмотря на общую положительную сторону цветоделение создаст
дополнительный источник некоторых ошибок, так как появляется еще одна
задача - дешифрирование самих цветов, которые менее стабильны чем
цветное изображение в естественных тонах.
Тень от объекта является непостоянным и противоречивым признаком
распознавания. Она может одновременно способствовать и мешать
распознавай! ю объектов. В одних случаях только по тени можно распознать
объект и определить такие важные характеристики, как форма и высота.
Объекты с большим разнообразием деталей и освещенные направленным
светом имеют множество теневых участков, которые увеличивают контраст,
что способствует повышению вероятности распознавания. Например, часто
только тень позволяет увидеть некоторые небольшие детали и выступы формы
объекта и распознать его тип. Нередко тень закрывает объекты и их детали,
снижает контраст, искажает форму и затрудняет обнаружение и распознавай!.с.
Различают тени собственные и падающие. Собственной называется тень,
покрывающая неосвещенную часть объекта. Переходы от света к тени
передают строение поверхности Плавные изгибы передаются постепенным
переходом светлого тона освещенной стороны к темному тону теневой
49
стороны. Резкие границы между разными тонами свидетельствуют о наличии
угловых изгибов поверхности.
Падающей называется тень, отбрасываемая объектом на земную
поверхность. Она передает форму объекта в виде, близком к привычному. Тень
характеризуется формой* размером, направлением и тоном. Вытянутые вверх
объекты хорошо распознаются по падающей тени, которая передает его силуэт,
а нередко и конструкцию. Часто при этом различаются объекты, которые в
плане выгтядят одинаково. Однако между формой тени и видом объекта сбоку
нет абсолютного подобия, так как тени проектируются на поверхность косыми
тучами, направление котопых меняется в течение суток. Так, например если
тень от самолета падает нс по оси вперед, а наискось назад, то она может нс
подчеркивать, а скрывать конфигурацию, затрудняя определение его формы.
Форма тени зависит также от направления и. угла наклона солнечных лучей.
Чем ниже Солнце над горизонтом, тем длиннее тени от объектов.
Если тень падает на скат, обращенный к Солнцу, то она укорачивается,
при падении на противоположный - удлиняется по сравнению со случаем
падения на горизонтальный участок.
В зав iCiimocth от рельссра местности тени от объектов могут искажаться
самым различным образом. Микрорельеф искажает форму тени Падение ее на
промоины, канавы бугры и другие неровности нарушает прямолинейные
линии тени, создаст впечатление наличия у объекта выступоь inn деталей,
которых нет на самом деле.
Тон падающих теней изменяется от светло-серого до очень темного в
зависимости от свойств поверхности, на которую тени падают, используемого
диапазона электромагнитного спектра, вида аппаратуры и условий ее
применения. На светлых поверхностях тени выступают отчетливо, на темных
почти сливаются с фоном. Если тень падает на слабо изучающую
поверхность, то может быть почти незаметной или совсем исчезнуть. В
зависимости от интенсивности рассеянного освещения тени в той или иной
мере осветляются. Наиболее светлыми они получаются в утренние и вечерние
часы
Общие признаки распознавания находят свое конкретное выражение в
изображении простых объектов. У каждого простого объекта они выражаются
по-своему в зависимости от специфики конструкции и материала, а также
метеорологических условий, в которых получено изображение Такие признаки
можно назвать индивидуальными,. Это признаки конкретных типов объектов,
для распознавания которых могут быть важны даже мелкие, на первый взгляд
незначительные стали.
Нс все индивидуальные признаки одинаково пригодны для
распознавания объектов во всех масштабах. Более того, при определенном
разрешении на местности инднвг дуальные признаки вообще могут оказаться
непригодными для распознавания объектов. Кроме того,
психофизиологический механизм распознавания человека построен так. что.
50
рассматривая изооражснис. он прежде всего ооращастся нс к индивидуальным,
а к групповым признакам, позволяющим распознать, к какой группе относится
объект, начиная с наиболее обобщающей - вида и переходя к классу, а затем и
к подклассу.
Признаки распознавания подклассов образуются путем обобщения
индивидуальных признаков входящих в них простых объектов: формы,
размеров, отражательных способностей, а также формы и местоположения
основных деталей. Признаки распознавания классов и видов формируются
путем обобщения признаков подклассов и классов соответственно. Ими
являются граничные показатели этих групп объектов. Таким образом,
признаки, положенные в основу классификации объектов, являются
групповыми признаками распознавания видов, классов и подклассов.
Косвенные признаки распознавания - признаки, которые через одни
объекты и их свойства указывают на наличие и свойства других объектов нс
изобразившихся на аэроснимке. Косвенные признаки непосредственно к
объекту нс относятся. Они основаны на закономерных взаимосвязях между
природным ландшафтом и расположенными на нем объектами, сложными и
простыми объектами, а также между элементами сложных объектов.
Косвенные признаки проявляются в следах деятельности, в поиурочснности
одних объектов к другим, в изменении свойств и характеристик одних
объектов в результате влияния на них других.
Вее простые и сложные объекты в зависимости от индивидуальных
особенностей в процессе деятельности или производства вносят в
окружающую природную среду определенные характерные изменения,
отображающиеся на аэроснимках. На этом основан признак распознавания
деятельности. Люди и техника, передвигающиеся вне дорог, оставляют следы,
которые с течением времени превращаются в тропы и дороги, нс отмеченные
ранее на аэроснимках и топографических картах. Наличие таких следов так же,
как прокладка и наличие вновь построенных дорог, могут указать на
возможный район расположения замаскированной техники, складов, стартовых
и огневых позиций ракетных и артиллерийских частей и других объектов.
Вместе с тем отсутствие следов от движения техники вблизи размещения
стартовых и огневых позиций ракетных и артиллерийских частей может
явиться одним из признаков ложного объекта.
По принадлежности одних объектов к другим распознаются
замаскированные объекты и тс. прямые признаки которых проявляются
неполно или недостаточно четко. Так. наличие отвалов земельной породы
позволяет предполагать присутствие вблизи шахт, фортификационных или
подземных сооружений. Распознавание оборудованного для посадки самолетов
участка автомобильного шоссе говорит о том, что где-то вблизи может
располагаться стоянка АТ.
По изменениям свойств одних объектов в результате влияния на них
других, нс имеющих прямо выраженных признаков, могут распознаваться
51
объекты, закрытые другими или отсутствующие на поверхности земли. Так.
заболоченные участки в лесах демаскируются меньшей высотой деревьев,
более светлыми кронами и меньшей их сомкнутостью. Подземные и
полуподземные сооружения, скрытые от обнаружения в видимом диапазоне
спектра, могут быть распознаны по температурному контрасту с окружающей
местностью в ИК-диапазонс.
Найти на аэроснимке косвенные признаки объектов сложнее, чек
прямые. Требуется всесторонняя подготовка дешифровщика и тщательный
анализ изображения в ходе работы. Широкое использование косвенных
признаков - свидетельство высокой квалификации дешифровщика.
В таблице 2.2 представлены обобщенные данные о частоте
использования прямых и косвенных дешифровочных признаков, используемых
для решения различных задач.
Таблица 2,2 - Частота использования дешифровочных признаков
№ п/п Разновгдности дешифрированнэ Частота использования признаков
прямых косвенных
1 Tonoiрафичсскос 0.65 0.35
2 Военное Г 0.55 0.45
з Ландшафтное 0.25 0.75
4 Дешифрирование грунтов 0.15 0.Х5
Комплексные признаки распознавания - это признаки сложных
объектов. К ним относятся сочетания прямых признаков: пространственное
распределение на местности элементов сложного объекта; соотношение
площадей, занятых различными объектами; число и соотношение простых
объектов различного назначения и размера; сочетание и видоизменение форм
отдельных объектов и занимаемых ими площадей и др. Вее это определяется
типовыми схемами сложных объектов и их численным составом, принципами
боевого или производственного использования и особенностями
функционирования.
Применение комплексных признаков распознавания требует хорошего
знания состава и назначения, устройства и способов использования всех
объектов дешифрирования, а также общих закономерностей расположения на
местности как стационарных, так и особенно подвижных объектов в различных
условиях окружающей обстановки. При этом необходимо учитывать влияние
местности на изменение типовых схем расположения и применения, а также
изменения на местности, вносимые самими объектами в процессе их
деятельности. Знание всех закономерностей позволяет с использованием
косвенных признаков разыскать на аэроснимках объекты и даже
ориентировочно подсчитать количество замаскированных простых объектов и
с достаточной полнотой и достоверностью дать их характеристику.
52
2.5 Требования к отчетному документированию результатов аэросъемки
Качество выполненного дешифрирования должно обеспечивать решение
стоящих перед ним задач. Требования к качеству дешифрирования
формулируется в общегосударственных ведомственных документах,
регламентирующих этот вид работы В основном требования к отчетному
документу (ОД) сводятся к следующим: полнота, подробность, достоверность,
свосвосмснность и наглядность результатов дешифрирования [1, 7].
Полнота определяет процесс дешифрирования аэроснимка или сложного
объекта в отношении детальности даваемой им при дешифрировании
характеристики. В результате дешифрирования аэроснимков дается описание
различных сторон сложных объектов. Ими могут быть такие сведения, как
наименование и местоположение объекта, его состав, характер деятельности и
состояние, степень маскировки и т.п. Полнота отражения этих сторон объекта,
т.е. полнота дешифрирования, в различных ситуациях может быть различной.
Все зависит от постановки задачи, а если полнота нс оговорена, то от
информативности изображения, личных качеств дешифровщика и наличия у
него запаса времени.
Полнота дешифрирования может быть охарактеризована как степень
насыщенности ОД сведениями, определяющими сущность сложного объекта.
Полнота дешифрирования N выражается следующим соотношением
4-=^. (1 1)
где Ад - количество элементов полноты информации, выданной
дешифровщиком; Кт- требуемое количество элементов.
Подробность характеризует процесс дешифрирования в отношении
степени точности определения функционального назначения простого объекта
(т.е. его отношения к той. или иной группе объектов по принятой
классификации), а также пространности и глубины описания его состояния и
характера деятельности. Различные стороны сложного объекта могут
отражаться с различной степенью подробности. Например, можно указать
общее количество техники, входящей в состав объекта, а можно подсчитать ее
количество по видам, классам, подклассам и даже типам. Чем подробнее дастся
описание каждой стороны объекта, тем больше времени при прочих равных
условиях необходимо для дешифрирования аэроснимков.
Следовательно, подробность дешифрирования отражает степень
детализации сведений о сложном объекте, его элементах и простых объектах
(таблица 2.3).
Подробность определяется отношением фактически выданного
количества информации ко всему требуемому или фактически содержащемуся
на аэроснимке количеству полезной информации.
Требуемая и выданная информация представляется суммой слов и чисел,
составляющих характеристику каждой отдельно или всех вместе сторон
53
сложного объекта. Таким образом, наиболее объективная оценка полноты и
подробности дешифрирования может быть дана только при условии
формализации всех документов. разрабатываемых в результате
дешифрирования.
Поскольку шформатг вность изображения - величина переменная,
дешифровшик работает в условиях дефицита времени, а максимальная полнота
и подробность информации требуются нс всегда, целесообразно выделить три
категории ОД. каждая из которых содержит определенный уровень
информации, как представлено в графах 3-5 таблицы 1.3.
Таблица 2.3 - Общие требования к полноте и подробности дешифрирования ОД
№ п/п Элементы ПОЛНОТЫ информации Элементы подробности информации
1 -я категория ОД 2-я категория ОД 3-я категория ОД
1 2 3 4 5
1 Наименование объекта Вид или условный номер сложного объекта Вид или условный номер сложного объекта Вид или условный номер сложного объекта, тин (имя собственное)
2 Местоположение Удаление от характерного ориентира или коордш та гы общего ценз ра Удаление от характерного ориентира или ко- ординаты центров основных элементов Коорд ина т ы I tempoв основных элементов
з Классификация и количество основных простых объектов Классы и количество с ошибкой не более 15% I [одклассы и количество с ошибкой не более 10% Подклассы (типы) и количес 1 во с ошибкой пе более 5%
4 Классификация и количество второстепенных простых объектов Вид и количество с ошибкой пе более 25% Классы и количество с ошибкой не более 20% Классы (подклассы) и количество с ошибкой пе более 15%
5 Характер деятельности Общий характер деятельности Характер деятельности отдельных элементов сложного объекта Характер деятельности отдельных элементов и основных простых объектов
6 Наземная и противо воздушна я оборона Наличие обороны, количество районов и позиций Класс и количество объектов обороны I Тодкласс, количество и координаты объектов обороны
7 Степень маскировки Замаскировано, не замаскировано Вид и количество замас Кирова! п тых элементов Класс и количество замаскированных элементов и простых объектов, приемы маскировки
8 Характерно 1ика основных элементов - Наименование и количество основных элементов Наименование, количество и сос тав основных элементов
9 Инженерное - Вид и количество Класс и количество
54
оборудование основных инженерных сооружений ос нов ных и I гжс1 тер i 1 ых сооружений, их удаление от центра объекта
10 Ха pa кт еристика ложных элементов и простых объектов - - Класе, количество и коор дина ты ложных элементов и простых объектов
и Изменения. происшедшие на объекте и окружающей местное I и - - Координа ты Iюжаров, разрушений и затоплений, ра змеры площадей, степень разрушений
Первая категория ОД предусматривает выдачу первоочередной
минимально необходимой информации. требуемой в минимально короткие
сроки. В этом случае дастся неполное описание сложного объекта и
характеристика его основных сторон.
Вторая категория ОД включает более полное описание объекта и требует
на дешифрирование аэроснимков нсскотько больше времени, чем первая. Эта
категория предусматривает более подробное описание тех же сторон объекта,
что и первая, а также наращивание информации за счет описания новых его
сторон
Третья категория ОД требует наиболее полного и подробного описания
сложного объекта. Для этого требуется наибольшее количество временг:.
Информацию этой категории наиболее целесообразно выдавать в виде
графических и фотодокументов, а также при повторном, в основном
комплексном, дешифрировании различных видов изображений.
Достоверность - это характеристика качества дешифрирования в
отношении их соответствия действительности; это соответствие должно быть
максимальным как по определению назначения объекта, так и по определению
их количества. Существенное повышение достоверности достигается при
комплексном дешифрировании изображений, полученных с помощью
различных технических систем в видимом, инфракрасном и радиолокационном
диапазонах электромагнитного спектра.
В понятие достоверности дешифрирования входит правильность
классификации и подсчета простых объектов, а также точность определения
координат. Высокая достоверность информации - это безусловное требование
к дешифрированию в любой обстановке. Прп этом все сомнительные объекты,
в правильности распознавания которых дешифровщик нс уверен, должны быть
соответствующим образом оговорены как в письменном, так и в графическом и
фотодокументе.
Достоверность распознавания простых объектов определяется опытным
путем для конкретных условий получения изображения и технических систем.
Она оценивается через отношение правильно распознанных объектов к общему
55
их количеству; действительно имеющемуся на местности. Более точно и
универсально достоверность дешифрирования выражается вероятностью
распознавания объектов в зависимости от разрешения на местности.
В процессе распознавания приходится определять размеры объектов и
расстояния между ними, подсчитывать количество простых объектов и
определять их координаты Независимо от применяемых методов точность
измерений и расчетов должна быть максимально высокой и независимо от
наличия времени соответствовать требованиям, предъявляемым к уровням
информации.
Своевременность дешифрирования характеризует выполнение работ в
установленные сроки. Сроки дешифрирования являются одним из основных
показателей эффективности работы. Время, потребное на дешифрирование
аэроснимков, зависит от информативности изображения, размеров заснятой
площади, характера местности, особенности сложного объекта и степени его
маскировки категории требований к информации. квалификации
дешифровшика и условий его работы. Каждый из этих факторов по-своему и в
разнос время по-разному влияет на сроки дешифрирования.
Практикой установлено, что время дешифрирования (распознавание
объектов, определение координат и составление ОД) одного сложного объекта,
помещающегося на 1 - 5 аэроснимках размером 30x30 см. при масштабе
изображения в пределах 1:1 000 -1:12000 составляет от 2 до 10 минут.
Наглядность результатов дешифрирования обеспечивается простотой и
удобством их практического использования. Вее ОД должны быть наглядно
оформлены, что обеспечивает простоту и удобство их практического
использования. При составлении письменных донесений, а также легенд к
графическим и фотодокументам важным требованием является краткость и
лаконичность информации, применение терминологии, условных знаков и
сокращений, предусмотренных соответствующими документами. Пространные
формулировки, применение неустановленных условных знаков, терминологии
или сокращений осложняют и даже препятствуют передаче документов по
техническим средствам связи.
ОД должен включать:
наименование страны (района), номер объекта, название объекта,
наименование пункта дислокации, ориентированье объекта относительно
известных населенных пунктов. географические координаты (при
необходимости и прямоугольные), превышение объекта над уровнем моря,
дату и го. разработки ОД;
текстуальную часть (легенда), г де излагаются общая характеристика,
наиболее важные элементы, защищенность и уязвимость объекта, основные
демаскирующие признаки. возможность маскировки. оценка
противовоздушной обороны;
56
карты (вырезки из карт) района объекта с координатной сеткой,
поднятыми контурами цеди и нанесенными средствами противовоздушной
обороны;
изображение объектов на плановых и перспективных аэроснимках, а
также в виде схем, планов и других материалов, характсрыующих внешний
вид объекта и его положение на местности.
Аэроснимки объекта, помещенные в ОД. должны быть разного масштаба.
Для общей ориентировки и изучения характера местности в районе объекта
наиболее целесообразным являются фотоснимки масштаба 200 - 300 м в одном
сантиметре, а для детального изучения самой цели и ее элементов 18 - 40 м в
одном сантиметре.
Вее аэроснимки, помещаемые в ОД. должны быть ориентированы
относительно сторон света; на них наносятся масштаб, названия населенных
пунктов, рек и озер, направления основных дорог. На крупномасштабных
снимках должны быть обозначены основные элементы объекта. Наиболее
важные из них поднимаются более ярким цветом. К аэроснимкам прилагается
текст (легенда), котопый должен раскрывать и пояснять отдельные элементы
объекта.
При распознании надводных объектов ВМС необходимо ответить на
следующие вопросы:
1. Классифицировать род войск.
2. Определить местоположение (координаты) надводных объектов
(группы надводных объектов) ВМС.
3 Оценить количество и класс или подкласс боевых, транспортных и
других надводных объектов.
4. Определить характер деятельности: направление движения надводных
объектов, сосредотачиваются, находятся в районе сосредоточения на рейде,
находятся на погрузке или выгрузке.
5. Определить характер района сосредоточения, степень маскировки.
6. Оценить состояние объекта, степень поражения.
7. Оценить характер изменений на местности в районе расположения,
разрушения, затопления.
2.6 Основы подготовки дешифровшиков и пути повышения их
квалификации
Сложный психофизиологический процесс дешифрирования аэроснимков
прсдъявляс’1' большие требования к общим и специальным знаниям
дешифровщиков. к системе профессионально важных для них
физиологических и психологических качеств. Знания составляют основу
содержания процесса обучения дешифровшиков. Они включают теоретические
основы как общеобразовательных дисциплин (математики, физики, гсограсрьи,
химии. электроники и т.п.). так и специальных (топографии,
57
аэрофотограмметрии, геологии и др.). Большое значение имеет общая
эрудиция. знание основ военного дела. промышленного и
сельскохозяйственного производства. Первостепенное значение имеет знание
принципов организации и боевого применения подразделений всех видов
вооруженных сил, устройства, функционирования и признаков распознавания
всех сложных объектов, а также классификации простых объектов, их
взаимосвязей и взаимозависимостсй [1, 2, 5. 7].
На первой ступени повышения квалификации дешифровщиков
необходимо нс только изучать специальные вопросы, но и развивать умения и
навыки посредством тренировок с различными тестами.
На втором этапе повышения специальных знаний и навыков необходимо
ставить более сложные задачи, например: быстрое распознавание простых и
сложных объектов с последующим анализом по памяти признаков, по которым
они были распознаны: чтение аэроснимков и карты, сравнение изображения с
районом на карте: привязка плановых и перспективных аэроснимков к карте и
их ориентирование с постепенным увеличением района поиска и сокращением
времени на задачу; привязка к одному или нескольким аэроснимкам
небольших вырезок из них; поиск на карте по памяти основных ориентиров,
изображенных на аэроснимках, и др.
Для индивидуальных и групповых тренировок в быстром распознавании
надводных объектов может быть создан и использоваться простейший
тренажер с комплектом изображений типовых надводных объектов
аэросъемки, который по определенной программе в неожиданном для
обучаемого месте показывает один из объектов. Задача дешифровщика -
быстро распознать изображение.
С целью формирования и развития необходимых зрительных качеств
должны проводиться тренировки различной сложности по различению
деталей, находящихся на границе видения, по дифференцировке тонов и
цветов, различению на глаз изображений с близкими размерами и контролем
измерения с помощью приборов.
Очень большое влияние на эффективность дешифрирования оказывают
психические свойства дешифровщика, к которым относятся: память (в том
числе и зрительная), наблюдательность, умение анализировать и мыслить
логически, сообразительность. творческое воображение, внимание,
способность к пространственному представлению. В процессе обучения
дешифрированию и практической работы эти качества должны развиваться и
совершенствоваться с помощью решения, как общих психологических задач,
так и специальных упражнений с использованием аэроснимков. При этом
сначала нужно решать более простые задачи и отводить на них максимально
необходимое время, а потом, по мере накопления опыта и развития
определенных качеств, следует задачи усложнять, а время на их решение
сокращать.
58
В качестве специальной задачи по развитию способностей структурного
анализа можно производить дешифрирование аэроснимков, на которых
постепенно закрывать 30 %, 50 % или ’70 % простых объектов, оставляя
косвенные и комплексные признаки, способствующие распознаванию
сложного объекта, выявлению его состояния и характера деятельности. В
заключение определенного курса тренировок целесообразно проводить
соревнования между специалистами по решению зачетных задач.
2.7 Порядок выполнения етифрирования
В совокупности приемы, пути и способы организации и выполнения
дешифрирования должны быть направлены на эффективное использование сил
и средств подразделения дешифрирования с целью решение двух важных
задач: получение информации высокого качества в минимально короткие
сроки и максимальное использование информации изображений [1 2. 4. 5, 7,
8J.
В зависимости от поставленной задачи, возможностей подразделения и
отведенного времени дешифрирование может выполняться один раз с выдачей
первоочередной или сразу полной и подробной информации, а также в два и
даже в три этапа с постепенным увеличением ее полноты и подробности.
Порядок выполнения дешифрирования состоит из следующих этапов:
1) изучение условий получения изображений и подготовка материалов к
дешифрированию:
2) поиск сложных объектов и определение их элементов, привязка к
топографической карте и ориентирование объектов:
3) определение координат объектов:
4) распознавание поостых объектов, оценка и обобщение его результатов;
5) определение состояния объектов и их количественных характеристик;
6) оформление результатов дешифрирования.
Первые три-четыре этапа обычно резко различаются между собой и
выполняются последовательно, последующие в процессе работы могут
частично или полностью вклиниваться в предыдущие, выполняться в
комплексе, составляя единый сложный процесс.
Процесс составления фотодокумента и выполнение по аэроснимкам
измерительных работ, связанных с определением масштаба аэросъемки,
ориентированием относительно сторон света и местности и определение
коопдинат объектов называется (фотограмметрической обработкой.
Получив аэроснимок, дешифроьщик должен, прежде всего, изучить по
отчетному листу условия, при которых было получено изображение. В целях
экономии времени изучаться должно только то. что необходимо для
дешифрирования, и в порядке изложения данных. Для этого нужно хорошо
знать структуру отчетного листа и задачу дешифрирования. При изучении
необходимо записать в соответствующем месте и запомнить тип и параметры
59
системы, определяющие вид. масштаб и качество изооражения. время вид и
способ съемки местности. район и объект аэросъемки. Запоминание
необходимых данных облегчит и ускорит работу, так как в процессе ее нс
придется отвлекаться и затрачивать время на их поиск в отчетном листе [36].
После этого с помощью счетного прибора, графиков или таблиц нужно
определить средний масштаб изображения по элементам внешнего и
внутреннего ориентирования аэроснимков, что значительно облегчит
дальнейшие действия по поиску и определению элементов сложного объекта и
привязке его к топографической карте. Если получено несколько фотосхем или
на одной фотосхсмс сфотографировано несколько сложных объектов с
различных высот и с применением различных способов, то условия нужно
изучать перед дешифрированием каждого объекта (комплекта аэроснимков).
Подготовка аэроснимка к дешифрированию заключается в установке его
в устройство просмотра. Аэроснимок с перспективным изображением при
дешифрировании нужно расположить так. чтобы перспектива была направлена
от дешифровщика. с планово-перспективным, панорамным, ПК-
изображениями - в обе стороны от него. Радиолокационный снимок
ориентируется всегда тенями от дешифровшика.
Перед дешифрированием аэроснимки должны быть предварительно
разобраны по комплектам (сложные объекты, маршруты и т.д.) а в комплектах
по номерам. При разборе их необходимо одновременно одинаково
ориентировать по направлению перспективы и теней. Затем все комплекты
нужно уложить на столе в порядке их просмотра по одну сторону от
дешифровшика. При этом направление теней от объектов должно совпадать с
направлением освещения на рабочем месте.
Поиск сложного объекта следует начинать с первого изображения,
просматривая их последовательно одно за другим, пока нс будет обнаружен он
сам или составляюш! е его простые объекты. В основу поиска должен быть
положен дедуктивный принцип: от общего к частному. Просмотр каждого
изображения (аэроснимка) нужно начинать с быстрого общего обзора его
невооруженным глазом и/или с помощью использования увеличения
изображения. Часть сложных объектов или их элементов обнаруживается
сразу, и тогда дальнейший просмотр материалов, поиск элементов и простых
объектов строится от них. К таким объектам относятся: аэродромы, порты и
военно-морские базы, боевые и походные порядки кораблей, стационарные
позиции зсн1 тных ракет, стационарные склады, железнодорожные станции,
районы обороны, промышленные комплексы [ 1. 4. 7, 8, 9].
При аэросъемке других сложных объектов обнаружить их на
аэроснимках сразу нс всегда представляется возможным. Распознать сложный
объект в этом случае можно только после обнаружения и распознавания
основных или почти всех входящих в него простых объектов. Такими
сложными объектами являются: войска и боевая техника в различных условиях
боевой обстановки, пункты управления, узлы связи и радиотехнического
60
обеспечения, ракетные комплексы оперативного и тактического назначения,
зенитные ракетные комплексы Если эти объекты располагаются на открытой
местности, то их поиск следует вести от верхнего левого угла аэроснимка по
спирали в направлении движения часовой стрелки или по линиям,
параллельным веохнему и нижнему краям. Если местность закрытая и сильно
пересеченная, то аэроснимок для просмотра нужно разбить на| участки,
ограниченные какими-либо естественными или искусственными границами:
реками, дорогами, оврагами, опушками леса и т.д.
Дешифровщик, нс имеющий большой! практики, должен просмотреть в
намеченной! им последовательности каждый! из участков, рассматривая их
слева направо параллельными рядами. Этот способ может потребовать много
времени, однако он гарантирует отсутствие пропуска объектов при их
естественной и i ''кусствснной маскировке. Квалифицированный дешифровщик
должен работать более эффективно. Часть участков, на которых заведомо нс
может быть объектов, например, занятых болотами, он может пропускать или
просматривать быстрее, чем другие. Производя поиск объектов, дешифровщик
должен быть дисциплинирован и нс отвлекаться от намеченной им
последовательности просмотра, даже если на соседнем участке ему бросится в
глаза какой-либо выделяющийся объект. Нужно приучиться работать
последовательно, четко, контролировать свои действия и поступки.
Если по прямым признакам объект не обнаружен, то это не всегда
означает, что его на аэроснимке нет. Его может быть на первый взгляд не
видно в связи с удачным использованием маскирующих свойств местности или
маскировочных средств. Поэтому нужно всегда искать косвенные и
комплексные признаки. Надо помнить, что как бы тщательно нс был
замаскирован объект, на местности всегда остаются следы деятельности людей!
и техники. Рассматривая аэроснимки, нужно обращать внимание на различного
рода нарушения природных образований границ сельскохозяйственных
угодий и других объектов природного ландшафта, а также социально-
географических объектов. При поиске объекта нужно обращать внимание на
характер местности и делать предположения, как ее можно использовать для
расположения элементов сложного объекта и составляющих его простых
объектов.
Обнаружив объект, определяются границы его расположения. После
выявления границ сложного объекта выделяются его основные элементы и
группы простых объектов в них.
После обозначения границ сложного объекта производят его
ориентирование - определение направления истинного меридиана (север - юг)
и привязке к топографической карте. Выполнение этих операций облегчается,
если имеется текущие координаты самолета, имеется схема выполнения полета
или район выполнения аэросъемки. При любой полноте регистрации элементов
внешнего и внутреннего ориентирования привязка объекта к карте и
61
ориентирование относительно сторон света, в конечном счете, сводятся к
визуальному отождествлению характерных ориентиров.
Ооиснтированис относительно местности (привязка к топографической
карте) заключается в определении и обозначении, сели необходимо, на карте
границ участка, занимаемого сложным объектом или аэроснимком. За
характерные ориентиры можно принимать углы земельных участков и лесных
массивов, пересечения дооог. элементы населенных пунктов, отдельно
стоящие местные предметы и т.п. Однако при этом необходимо учитывать
возможные изменения на местности: появление новых дорог предприятий,
населенных пунктов, а также изменение облика многих объектов и их
уничтожение.
После распознавания характерных ориентиров площадь, занимаемая
объектом, обозначается на карте. Отбивка района осуществляется либо по
контурам местности, либо переносом узловых точек площади объекта с
аэооснимка на карту одним из известных фотограмметрических способов.
2.8 Особенноеiи визуальною восприятия
и критерии опенки качества аэроснимков
Полная модель, учитывающая вес свойства зрительного анализатора, до
настоящего времени не разработана, поэтому при составлении и оценке
алгоритмов аналого-цифрового преобразования основные особенности
зрительного анализатора учитываются раздельно, а нс в совокупности.
Особенности зрения выявляются при этом с помощью относительно поостых
тестовых изображений (штрихов, резких перепадов яркости и т.п.).
Полученные результаты затем распространяются на изображения с более
сложной структурой [9].
Сетчатка, которая содержит сложную сеть нейоонов. свя!ываюших
перекрестно фотоосцсптооы и соединяющихся с ганглиозными клетками,
аксоны которых образуют зрительный нерв, а также связывающих друг с
другом ганглиозные клетки, осуществляет преобразование оптического
изображения в нейронное. представляющее собой распределение
11HTCHCI внести возбуждения нейронов. образующих сетчатку. Это
преобразование является нелинейным и определяется химическими
процессами в фоторецепторах и в системе взаимосвязанных клеток сетчатки,
расположенных сразу после фоторецепторов. Изменения, происходящие при
этом с изображением, моделируются путем его поэлементного преобразования
нелинейной функцией, обычно логарифмической или степенной, с показателем
степени 1/3. Использование логарифмической функции удобнее с
методической! точки зрения так как она согласуется с законом Всбсра-
Фсхнсра. который сам является приближенным, применение же степенной
функции позволяет получить несколько более точные результаты [2. 13 18.
44).
62
Существует три типа колбочек, входящих в сетчатку, называемых
«красные», «синие», «зеленые», которые различаются по чувствительности к
различным участкам длины волн X светового излучения. На рисунке 2.5
приведены кривые спектральных чувствитсльностсй трех типов колбочек,
выраженных в процентах, поглощенных зрительными пигментами квантов
[18].
При построении функциональной модели зрительной системы это
обстоятельство учитывается включением в нее трех ’всньсв. "сигналы' с
которых соответственно вычисляются по формулам
еДт. г) = J. /.(.V. г.
<?,(.¥. Г) = J Z(.Y,
ес(.v, г) = J /.(г, г. A)et(Л)ЛЛ,
(2.2)
20-
0,44 0,52 0,6 X, Мкм
Рисунок 2.5 - Кривые спектральных
чувствительность колбочек
где Цх.у.А) - распределение яркости (светового потока) по координатам г, i и
длин волн света е^Л'уе^л'^е^Л)- спектральные чувствительности «красных»,
«зеленых» и «синих» колбочек. е4(х..т).е1(л-,.г),<%(л-,у) - сигналы с «красных»,
«зеленых» и «синих» фоторецепторов (колбочек).
В сетчатке глаза происходит
первичная обработка изображения, в
результате которой формируется
ахроматическая (черно-белая) и
цветностные составляющие
изображения, причем, последние не
зависят от яркости наблюдаемого
изображения. Сформированные таким
образом составляющие изображения
фильтруются сетчаткой. При
фильтрации ахроматической
(яркостной) составляющей имеет
место ослабление нижних ПЧ за счет
латерального торможения. Степень
ослабления определяется условиями
наблюдения. Если яркость изображения не меняется во времени, то это
ослабление максимально. В случае наблюдения мелькающих изображений
ослабление нижних ПЧ оказывается тем меньше, чем выше частота мелькания,
а при частотах мелькания fM>6 Гц ослабление вообще отсутствует.
Верхние ПЧ как ахроматической, так и цветностных составляющих
изображений ослабляются в процессе фильтрации глазом. Процесс ослабления
формализуется экспериментальными графиками передаточных функций,
представляемых обычно в виде зависимостей контрастной чувствительности
63
зрительной системы в децибелах от пространственной частоты
пространственно-гармонического сигнала [2. 10].
Таким образом, в процессе описанного преобразования оптического
изображения в нейронное уменьшается зависимость зрительного ошушения от
освещенности сцены, «срезаются» пространственные частоты, сужается
спектр, что приводит к сокращению количества информации, поступающей в
зрительный нерв за счет устранения всего несущественного. Это сокращение
потока информации можно оценить, если учесть, что число колбочек равно 6,5
- 7 млн., а число волокон зрительного нсова 0,8 - 1 млн. т.е. оно составляет 6,5
- 8,75 раз.
Полная функциональная модель зрительной системы на уровне сетчатки,
в которой были бы отражены все известные в настоящее время ее
характеристики, хотя и может быть построена, но она оказывается слишком
сложной и представляет скорее теоретический интерес. При построении
модели, пригодной для практического использования, делается ряд
упрощающих допущений. Основными из них являются допущения об
инвариантности к сдвигу и повороту, а также допущение относительно
нспосрывности мозаики сетчатки.
При описании модели ахроматического зрения было сделано
предположение, что нелинейная реакция глаза на изменение интенсивности
имеет логарифмический характер. Нелинейное преобразование осуществляется
после проецирования изображения на сетчатку. Преобразованию подвергаются
сигналы рецепторов (палочек и колбочек) до того, как
Рецептор
Рисунок 2.6 - Логарифмическая модель
одноцветного зрения
они вступают во
взаимодействие друг с
другом. На рисунке 2.6
приведена простейшая
логарифмическая модель
глаза для одноцветного
зрения. Эта модель позволяет удовлетворительно предсказать реакцию
зрительно!' системы в широком диапазоне интенсивностей. Однако на высоких
пространственных частотах и очень низких или очень высоких интенсивностях
наблюдаемая реакция отличается от предсказанной на основе модели,
изображенной на рисунке 2.6. Для того чтобы получить более точную модель
необходимо детально рассмотреть процессы в зрительной системе.
Нелинейная реакция палочек и колбочек на изменение интенсивности вес
еще служит предметом активных исследований. Были выдвинуты гипотезы о
том, что механизм этой нелинейности объясняется химической активностью,
электрическими эффектами и нервной обратной связью. Если входной и
выходной сигналы обозначить как /Дх.(х. г). соответственно, то основная
логарифмическая модель предполагает, что
= *1 19g[A-? + К Д(х, у)]. (2.3)
где К,.К,.К, - постоянные В другой модели [3] предполагается следующая
64
зависимость выходного сигнала от входного
= [А;/„(л- у)]/[А\ + /„(л-. у)]. (2.4)
где А.'.Л'. - постоянные. В настоящее время используется также степенная
функция 13 ]. когда
^M = l7«> (л-.г)Г. (2.5)
где .S' - постоянная величина, обеспечивающая хорошее согласие между
вычисленной вероятностью и субъективной оценкой качества изображения.
Подбором постоянных коэффициентов, входящих в выражения (2.3) - (2.5),
соответствующие кривые могут быть хорошо сближены в •’иапазонс средних
интенсивностей.
На рисунке 2.7 приведена функциональная модель зрительной: системы
(глаза) [12. 18, 44]. В этой модели колбочки трех типов создают сигналы
изображения, определяемые соотношениями (2.2).
Колбочки
Рисунок 2.7 - Функциональная модель зрительной системы (глаза)
Далее эти изображения преобразуются тремя фильтрами - оптическими
передаточными функциями оптической системы глаза в этих световых
диапазонах. Затем они подвергаются логарифмическому преобразованию и
комбинируются, образуя цветоразностные Ht_A.r.y)JZt_jy,.v) и ахроматические
С/,(л'.у) сигналы (изображения) в соответствии с формулами
(х, у) = </[« log(<?t (.V, у)) + рlogO',, (.v, з>)) + у log(eC; (.v, у))] =
= "log[<;(.v, y)e£(.v. v)ei](.v..r)] ;
U^ix.y) = b [log(etj (.v, y)) - k'gfy. (.v,y))] = b, log^ (.v. y) (e. (.v.y)] ;
Ult_r(x.y) = A,[log(etj (.v.y))- log(eQj (,v, y))] = b_ log[b>tj (v.y)/<j.;(.v.y)],
где a =0.612.p = 0.396,у = 0.019. а коэффициенты a.p.b, подобраны так. чтобы
пороговые различия при восприятии света или цвета представлялись сферой
единичного радиуса в пространстве сигналов (изображений)
Г/о(л-, у), r),Ut_4(.v, у) |20]. Ахроматический и цвстностныс сигналы
(изображения) U„(x,y),Ut_,(x y\Ut_c(x. у) поступают на вход фильтров с
65
оптическими передаточными функциями -«jJ, И
»' («в,.,«,).<», = ’xV,, ®„ =Л',, Д',- ПЧ. лин/мм. /„ - частота
мелькания изображения. Гц. После фильтрации изображения через зрительный
нерв поступают в высшие отделы зрительной системы.
Изменение яркости изображения без изменения его спектрального
состава вызывает изменение компоненты (/„(л-.т). в то время как компоненты
.г).P^|_c(jc,_л ) остаются без изменения, что согласуется с опытом.
В соответствии с теорией линейных систем ФИМ зрительного анализатора
(ЗЛ) можно получить из ОПФ ио следующей формуле:
Н'(19) =
(2.7)
где 7 (2л’1?).,0) = 7 (2жУ) - одномерная ОПФ, вычисляемая по ФРЛ Л(.т)
+ Z
7 ( 2л-,9.) = f h(x)e~J2:ra' </.v. ЭТО выражение в грубом приближении есть
зависимое!ь контраста от часзозы. Гак как, контраст не может быть равным
единице, поэтому можно выполншь нормирование на ^(О.О)!.
ФПМ ЗА учитывает передаточные свойства как оптической системы глаза,
так и передаз очные свойства, обусловленные нервными процессами в сетчатке,
дифракцией на входном зрачке, аберрацией хрусталика, конечных размеров
фоточувезвительиых рецензоров и др. Однако <1’1 IM ЗА не унизывает
пространственный шум, фоновую освещенность, положение оператора
относительно монитора и времени экспонирования. Гем не менее, каждый из этих
иарамезров влияез на качество восприятия изображения, поэтому эмпирические
зависимости, характеризующие ФПМ. зрительного анализатора, являются лишь
аппроксимацией реальной МВФ. Преобразование сигналов в сетчатке связано с
процессом их «усиления» за счет биологической энергии. При этом
коэффициент «.усиления» принимается
Эквивалентную модель ЗА как канала передачи информации можно
представить в виде, приведенном на рисунке 2.8, где - ФПМ
оптической системы глаза. йфя;.(,9) - эквивалентная ФПМ сетчатки, полученная
путем деления на - спектральная плотность
дисперсии эквивалентного шума зрительного анализатора. В 1анмодсйствис
этих двух фильтров и определяет общую ФПМ зрительного анализатора.
Энергия шумов зрительной системы распределена неравномерно в диапазоне
пространственных частот.
ЗА представлен в виде эквивалентного фильтра низких ПЧ. состоящего
из двух звеньев, и источника помех. Сетчатка обладает свойствами
эквивалентными фильтру высоких пространственных частот и имеет
66
характеристики, близкие к характеристикам
дифференцирующего звена.
пространственного
' >кбн(;а.и'ннпшк npociiipant таенный
филыир tpHMie.lbHih'O (IHtLlH i(lillt)pa
оптически^
с игнт
Оптическая
система глаза
Сетчатка
^ip [^СЕ7^1
Экьиап чемшмын мешочник
помех tpume.ibno.4t
аналнчинора
Рисунок 2.8 - Эквивалентная модель зрительного анализатора как канала
передачи информации
ЗА обладает врожденной и приобретенной способностью специальной
организации рецепторов. Поля фоторсисптороь подсознательно изменяются в
зависимости от яркости изображений. В этом заложена потенциальная
возможность зрения изменять свою ФПМ в зависимости от формы
рассматриваемых деталей! изображения и условий наблюдения [3. 14].
В работе Шадэ проведены исследования реакции глаза на тест-объект с
синусоидальным изменением яркости по пространственной координате и
приведена зависимость контрастной! чувствительности глаза (звена
формирования- изображения) от пространственной частоты наблюдаемых
объектов, полученная при условии порогового восприятия [4. 14]. В качестве
наблюдаемых объектов использовались пространственные синусоидальные
миры, что наиболее понятных и хорошо исследованных характеристик,
используемых в физиологии зрительного восприятия. Для анализа желательно
рассматривать процесс зрения как линейный, чтобы можно было использовать
аппарат линейной фильтрации. Однако зрительные процессы нс всегда
линейны, как. например, в случае рффекта Маха, когда наблюдаются верхний и
нижний выбросы в восприятии резкого края детали высокого контраста при
переходе от светлого к темному. В тех случаях когда глаз наблюдает
достаточно резкий переход яркости от светлого поля к темному, на границе
изменения градиента на темном фоне субъективно появляется еще более
темная линия, а на светлом - более светлая линия. При низких контрастах
зрительные процессы обычно приближенно считают линейными. В этом
случае ФПМ определялась как обратная величина порогового контраста для
каждой пространственной частоты миры приведенной в плоскость сетчатки.
Полученные результаты нормировались относительно минимального
67
контраста. Характеристики свидетельствуют об увеличении порогового
контраста нс только при увеличении ПЧ решетки, но и пои сс уменьшении.
Относительно реакции глаза на тсст-объскт с синусоидальным
изменением яркости можно сделать следующие основные выводы [4. 14. 17]:
1. Наблюдаемые пространственно-частотные характеристики глаза не
являются результатом действия множества узкополосных резонансных
фильтров, а нс одного пространственного фильтра. Каждый из этих фильтоов
настроен на свою среднюю частоту, и они взаимно стохастически независимы.
Каждый фильтр может быть выбран независимо, и мозг с известным
приближением конструирует оптимальный для решения данаой задачи
обнаружения фильтр, выбирая соответствующие резонансные фильтры из
имеющегося их набора.
2. Оптимальные для решения данной задачи наборы фильтров имеют
огибающие типичной формы для одной определенной совокупности условий.
Чувствительность зрительного анализатора мала при постоянном сигнале резко
возрастает до максимума на низких частотах и спадает примерно по закону
Гаусса на высоких частотах. Пространственная частота, на которой
наблюдается максимум, увеличивается с ростом яркости поля адаптации, и
реакция глаза в целом охватывает широкий частотный диапазон. Диапазон
максимума яркостей наблюдается в интервале 0.1...0.4 мрад1.
.3 При постоянном'увеличении максимум яркостей сдвигается в сторону
высоких частот с увеличением расстояния аккомодации глаза. Реакция глаза
расширяется с увеличением расстояния в связи с меньшей кривизной
хрусталика и устранением лучей, идущих под большими углами к оси.
4. Пороговый контраст повышается, сели положение штрихов
синусоидального тест-объскта составляет угол 45 с вертикалью или
горизонталью. Пороговый контраст понижается с ростом яркости поля
адаптации и расстояния аккомодации.
Рисунок 2.9 - ФПМ ЗА при восприятии синусоидального тест-объскта: 1 -
освещенность тест объекта 1000 Лк; 2 - средняя яркость тест-объскта 0,1 Кд/м2
68
Наличие зрительных порогов объясняется воздействием специфических
помех (шумов) ЗА, определяемых спонтанной активностью сетчатки и
флуктуацией проводимости нервных каналов Таким образом ФПМ.
зрительного анализатора для случая порогового наблюдения характеризует
величину шумов зрительной систс ы и их завг симость от ПЧ наблюдаемой
миры.
Результаты экспериментов ФПМ зрительного анализатора при
восприятии синусоидальных тест объектов приведены на рисунке 2.9. Отмечен
выраженный максимум при частоте i9=10...15 лин/мм на сетчатке глаза и
уменьшение ФПМ при меньших частотах. Последнее связано с особенностями
движения глаза при рассматривании тест объектов [14].
Пои воспоиятии более разнообразных изображений и случайных
структур уменьшение ФПМ (рисунок 2.10) на низких частотах нс отмечается.
В этих случаях двумерную ОПФ зрительного анализатора аппооксимировать
амплитудным спектром читающего пятна. имеющего постоянную
чувствительность в пределах круга диаметром 50 мкм. ОПФ в этом случае
имеет круговую симметрию и ФПМ (рисунок 2.10, кривая 1) [107]:
7)(.V) = [2I1(2xiiIbr)]l2xi/IN, (2.8)
где J - функция Бесселя 1-го рода первого порядка; d, =0,025 мм.
Анализ приведенных на рисунке 2.10 экспериментальных данных
показывает, что более высокую точность можно получить аппроксимировав
ФПМ зрительного анализатора амплитудным спектром экспоненциального
импульса f(x) = —e 'Ал-е(-=с;+х). а именно (рисунок 2.10. кривая 3)
Л
При диаметре зрачка глаза d =3 мм и освещенности фона 500 Лк
параметр рз= 25^30 мкм. Сопоставление ФПМ зрительного анализатора с
ФПМ его оптической системы и сетчатки показывает (рисунок 2.10), что все
элементы вносят существенный вклад в результирующую ФПМ.
Имеющиеся экспериментальные данные указывают на способность
зрительного анализатора человека перестраивать свои рецепторные поля. т.е.
как бы изменять размер, форму и закон пропускания отождествляемой со
зрительным анализатором сканирующей апертуры глаза в зависимости от
формы рассматриваемых объектов и их деталей. Это дает основание применять
для описания визуального восприятия (обнаружения) методы линейной
фильтрации.
69
Рисунок 2.10 - Функции передачи модуляции зрительного анализатора
человека: 1 - в соответствии с формулой (2.8); 2 - обобщенные
экспериментальные данные [108] при диаметре зрачка э, = з мм и освещенное! и
поля адаптации 500 Лк; 3 - спектр (1.9) при Pi = п мкм; 4 - Ф1IM = тг/т 5 -
ФИМ т = Г Trm; 6 - ФИМ сет натки глаза Trm как рассеивающей среды; 7 - Ф1IM
оптической системы глаза тоt (идеальной) при диаметре зрачка d1 = 3 мм.
Для описания чувствительности к свету зрительного анализатора
человека используют так называемый дифференциальный порог - отношение
минимальной воспринимаемой визуальной разноси фона и расположенной
на нем круглой или квадратной площадки (стимула) Lc к яркости фона
А-,=|4-^|/^ = Л7./^. (2.10)
Рисунок 2.11 - Зависимость дифференциального порога зрения от
яркости фона: 1 - а’ = 500 угл. мин? (350х350мкм2), 2 - = 100 угл. мин2 (50x50
мкм2). 3 - а- = К) угл. мин (16x16 мкм2)
70
Экспериментальные данные показывают [16], что дифференциальный
порог зависит от яркости поля адаптации 1Л} углового размера стимула на
сетчатке глаза «, степени размытия границы между стимулом и фоном,
продолжительности наблюдения, степени флюктуации яркости в пределах
фона и стимула и от зоны сетчатки глаза, на которую проецируется стимул.
Если фон и стимул однородны, граница между ними резкая, а
продолжительность наблюдения не ограничена, то в фовеальной зоне [21] при
яркостях более 10 Кд/м2 (дневное зрение) и размерах стимула более 100 угл.
мин2 дифференциальный порог достигает сравнительно небольших значений -
0,02 - 0,04 (рисунок 2.11 [21]).
При уменьшении размера стимула дифференциальный порог возрастает и
при наибольшей остроте зрения (а = 1 угл. мин. I... > ядакд/м2) он равен
примерно десяти. Если граница между фоном и стимулом нерезкая, порог
увеличивается.
Дифференциальный порог может быть выражен в значениях контраста, а
именно: при к, <0.10.к *2С где C = |Z#-Z + 2 ).
Отношение ai./l называется отношением Вебера. В практических
приложениях принимают отношение Вебера, равным 0,02.
Восприятие цветных изображений характеризуется порогом
цветоразличпя. Чувствительность зрительного анализатора к изменению цвета
наибольшая, когда цвет детали примерно совпадает с цветом окружающего ее
фона. Зрительный анализатор может различать несколько тысяч цветов, в
пределах которых при наилучших условиях наблюдения цвета деталей с
угловыми размерами, равными 2° воспринимаются как одинаковые [20, 21,
22]. Пороги цветоразличпя можно считать примерно равными размерам этих
областей. Трсуготьнпк «красный-зеленый-синий» ограничивает область
цветов, воспроизводимых ЦОЭС. Величина порогов цветоразличпя в
значительной мере зависит нс только от положения в цветовом теле, но и от
направления координатных осей, т.е. от цветовой системы. Это обстоятельство
может быть использовано для повышения эффективности аналого-цифрового
преобразования путем перехода от одной цветовой системы к другой.
Зрительный анализатор как правило, более чувствителен к изменению
яркости деталей, чем к изменению их цветности. Этим, в частности,
объясняется то что в каналах цветности допускается обычно более высокий
уровень шумов, чем в канале яркости. Относительная видность шумов в канале
передачи зеленой составляющей изображения выше, чем в канале передачи
красной составляющей, а в канале красной составляющей выше, чем в канале
передачи синей составляющей [109]. При уменьшении угловых размеров
деталей изображения контрастная чувствительность зрения падает. Пороговый
контраст необходимо учитывать, отмечая конкретно, к каким деталям
изображения он относится.
Зависимость порога цветоразличпя от размеров деталей и
71
пространственной частоты изображения имеет примерно тот же характер, что и
зависимость порогового контраста от этих величин. Установлено, что
зрительный анализатор удовлетвооитсльно различает цвет крупных деталей,
линейные размеры которых более 12 элементов разрешения изображения.
Детали, угловые размеры которых равны 6-18 угловым минутам,
воспринимаются как окрашенные цветами от оранжевого до зелено-синего.
Детали с меньшими угловыми размерами воспринимаются как неокрашенные.
Порог цветоразличия растет с увеличением ПЧ изображения независимо от его
цвета. Поэтому прн оценке уровней помех в каналах цветности широко
используются взвешивают! е характеристики помех.
Контрастная чувствительность зрительного анализатора зависит также от
частоты изменений яркости деталей во времени. Такие изменения могут
возникнуть как паразитный эффект при передаче многокадровых изображений.
Чем меньше размеры деталей, тем слабее это влияние. С увеличением частоты
мелькании их заметность вначале увеличивается, а затем падает. Прн частоте,
превышающей 40 Гц. мелькания незаметны. Изменения яркости могут
повысить контрастную чувствительность зрения к обнаружению крупных
деталей на порядок. Такое повышение имеет место при частоте мельканий,
равной 3 - 15 Гц.
При кодировании изображений, хранения и передачи в цифровом коде, а
также при использовании тех или иных алгоритмов улучшения изображений
необходимо оценивать качество результата. Во всех этих задачах общим
является вопрос о качестве и юбражения о том. чтобы в процессе обработки
изображений поддерживать, повышать и восстанавливать его.
Для оценки качества передачи изображений любого типа удобно было бы
иметь единый обобщенный критерий Известно, что два цвета практически
неразличимы при величине 4-6 ед. МКО. В качестве численного значения
цветового различия используется пороговая величина, равная 6 ед. МКО [2 21
221. При любом методе передачи необходимы экспериментальные оценки
изображений по нескольким критериям, перечень которых согласуется с
общими свойствами трактов передачи данного типа и с перечнем возможных
искажений сигналов в таких трактах. При оценке качества передачи
изображений на практике иногда используется критерий СКО.
Приближенный характер оценок по приведенным выше критериям делает
необходимой субъективную экспертизу качества на реальных изображениях.
В настоящее время субъективное качество оценивается двумя способами:
тибо определяется верность воспроизведения. тибо оценивается
дсшифрирусмость изображения.
Верность воспрои (ведения характеризует степень отклонения
обработанного изображения от некоторого эталонного. Например, при
оцифровке и визуализации изображения на мониторе компьютера могут
возникать погрешности, проявляющиеся в потере PC. уменьшении контрастов
и т.д Некоторые погрешности воспрои введения улучшают дсшифрирусмостг
72
поэтому существуют различные процедуры подчеркивания границ,
дифференцирования, цветовой коррекции изображений.
Очевидно, что количественные меры верности и дешифрирусмости
изображений очень необходимы для проектирования и оценки систем
воспроизведения изображений. Эти меры во многом помогут избавиться от
трудоемкости и подчас неточной современной! методики оценки изображений
посредством субъективной! экспертизы. Кроме того, на основе количественных
мер можно развивать методы оптимизации систем обработки изображений.
В разработке количественных критериев верности и дешифрирусмости
изображений достигнуты значительные успехи. Однако введенные критерии нс
являются достаточно совершенными: очень часто можно привести примеоы
изображений, качество которых формально оценивается как высокое, а
субъективно как низкое и наоборот.
В настоящее время наиболее распространенным способом определения
качества изображений является субъективная экспертиза. В качестве экспертов
привлекают наблюдателей-неспециалистов. Их оценки определяют качество
изображения именно так. как его воспринимает средний наблюдатель.
Кроме того, проводятся опыты со специалистами, имеющими опыт
обработки изображений, от которых следует ожидать более обоснованных
оценок качества. Предполагается, что опытные наблюдатели замечают
небольшие погрешности изображения, которые неспециалист может
проглядеть.
Существуют два вида экспертных оценок: абсолютные и сравнительные.
В первом случае наблюдатель должен оценить качество изображения по какой-
го заранее определенной шкале. При некоторых методиках процесс
оценивания облегчается тем, что наблюдателю предоставляется также набор
эталонных изображений. Существуют н другие методики, когда наблюдатель
вынужден принимать решение только на основании своего собственного
опыта. При сравнительных оценках наблюдатель должен ранжировать набор
конкретных изображений, т.с. расставить их в ряд по убыванию качества.
Изображения оцениваются экспертами по шкалам снижения н оценки
качества. Шкала снижения качества применяется для сравнительной оценки
изображений до и после преобразований. Шкала оценки качества применяется
для оценки преобразованного изображения при отсутствии opi гинала. Как
правило, пользуются следующими пятибалльными шкалами [2. 9].
Шкала снижения качества
5 - искажения незаметны.
4 - искажения заметны, но нс мешают;
3 - искажения заметны, немного мешают;
2 - искажения мешают, надоедают;
1 - искажения сильно мешают.
Шкала оценки качества
5 - отличное качество;
73
4 - хорошее;
3 - удовлетворительное
2 - плохое(неприемлемое);
1 - очень плохое (совсошснно неприемлемое).
На основании опенок, данных различными наблюдателями, вычисляется
среднеарифметическая оценка.
Распространенным видом шкалы оценок является шкала «обшего
качества», когда изображениям приписываются баллы, котооыс соответствуют
градациям от «неудовлетворительно» до «отлично», приведенным в таблице
2.5 [2. 110]. На практике каждое изображение поступает к наблюдателю и он
выставляет балл той категории, которая, по его мнению, в наибольшей степени
соответствует качеству изображения. Вариантом данной шкалы является шкала
«места в группе», или относительная шкала (таблица 2.5). когда наблюдатель
оценивает качество изображения, сравнивая его со всеми другими
изображениями, входящими в рассматриваемую группу.
Таблица 2.4 - Шкала общего качества изображения
Шкала общего качества (абсолютная шкала)____
5. Отлично
4. Хорошо
3. Посредственно
2. Плохо
1. Неудовлетворительно
Таблица 2,5 - Относительная шкала качества изображения
Шкала места в группе (относительная шкала)_________
7. Лучшее место в группе
6. Заметно лучше среднего для данной группы
5. Несколько лучше среднего для данной группы
4. Среднее по группе
3. Несколько хуже для данной группы
2. Существенно хуже среднего для данной группы
1. Самос плохое в группе
Еще одной распространенной шкалой оценок является шкала
погрешностей (таблице 2.6), согласно которой наблюдатель должен оценить в
баллах степень искажений, изменяющихся от «незаметных» до «крайне
нежелательных» [2, 9].
Результаты экспертных оценок обычно выражают с помощью среднего
балла, определяемого как:
(111)
74
где nt - число изображений А-й категории; Ct - соответствующий ей балл.
Таблица 2,6 - Шкала пог рсшностей_________________
Шкала пог| >сшностсй______________________________
1. Незаметные
2. Ете заметные
3. Вполне заметные, но слабо ухудшающие изображение
4. Ухудшающие изображение, но допустимые
5. Несколько нежелательные
6. Определенно нежелательные
7, Крайне нежелательные
о.о-
0.1-
0.2-
0.3-
0.4-
0.5-
0.6-
0.7-
0.8-
0,9-
1.0-
Отлично
Хорошо
Посредственно
Плохо
Неудовлетворительно
Не видно никаких
погрешностей
Еле видно
Определенно
видно
Незаметно
Еле заметно
-з.о
Заметно, но слабо
ухудшает снимок _ 4.0
Ухудшает снимок, но
допустимо
- 5.0
Несколько
нежелательно
.. Определенно
нежелательно
Крайне
х нежелательно
-6.0
-7.0
-8.0
- 9,0
-0.1
Рисунок 2.12 - Сравнение шкал качества и погрешностей, применяемых для
субъективной оценки изображений
Считается, что для получения надежной оценки качества изображения
необходимо опросить нс менее двадцати наблюдателей. Одной из трудностей,
связанных с балльными оценками, является возможная нелинейность шкалы
На рисунке 2.12 для сравнения помешены шкала абсолютного (общего)
качества (таблица 2.4). шкала погрешностей: (таблица 2.6) и ешс одна шкала
погрешностей, состояшая из трех градаций. Сравнение шкал выполнено на
основе субъективных оценок [9].
75
Для сравнения и оценки качества съемочных систем в США успешно
используется Национальная шкала дешифрирусмости снимков (National
Imagery Interpretability Sente, NIIRS). которая первоначально разрабатывалась
для военных организаций, имеющих в своем штате опытных специалистов и
использующих визуальные методы дешифрирования. Шкала NIIRS основана,
прежде всего, на пространственном разрешении снимков, но в ней
учитываются также факторы, связанные с отношением сигнал/шум и функцией
рассеяния точки. Краткое описание 10-уровневой шкалы NURS, разработанной
для панхроматических снимков, приведено в таблице 2.7. Более подробное
описание содержится в работе Лихтснауэра (Leachlenauer и др., 1997) и в
документации IRARS (1996). Была также разработана шкала NIIRS для оценки
многоспсктральиых снимков (IRARS. 1995). Сама процедура оценки
заключается в том. что снимок отдают опытному специалисту по
дешифрованию (имеющему сертификат NIIRS) и просят его определить
уровень деталей, которые он может распознать. Описание этой процедуры дл
панхроматических снимков, полученных системой IKONOS с разрешением 1
метр, приведено в работе Райана (Ryan и др.. 2003). Средний балл этих
снимков по шкале NIIRS составил 4.5.
абл 1'ца 2.' - Нашюналона шкала дешифрироваг и; (NIIRb)
Баллы Критерий
0 Дешифрирование невозможно из-за присутствия облаков или плохого качества снимка
1 Дешифрируются рулежные дорожки и взлетно-посадочные полосы аэродромов
2 Дешифрируются крупные здания
3 Можно определить тип крупного морского судна
4 Дешифрируются отдельные пути в железнодорожном депо
5 Можно определить тип железнодорожного состава
6 Можно определить тип кузова автомобиля: седан или универсал
7 Дешифрируются отдельные шпалы железнодорожного полотна
8 Дешифрируются дворники на лобовом стекле транспортного средства
9 Дешифрируются отдельные костыли в шпалах
На первый взгляд, шкала NIIRS нс очень полезна для тех задач, которые
решаются в области гражданского применения данных дистанционного
зондирования. Однако при существующей тенденции к увеличению
разрешающей способности многоспсктральиых датчиков до уровня таких
систем как IKONOS. QuickBird и Orb View, можно ожидать, что одни и тс же
данные будут использоваться как для военных, так и для гражданских целей.
Кроме того, положенная в основу NIIRS идея о необходимости связывания
характеристик съемочной системы и параметров решаемой задачи может
оказаться очень полезной для количественного анализа ЦОЭС. В частности.
76
предлагается математически связать параметры датчиков со шкалой NIIRS и
оценивать возможность использования той или иной съемочной системы с
помощью обобщенной формулы качества изображения (Lcachlcnaucr и др..
1997).
На результаты субъективных экспертных оценок влияют характер
рассматриваемых изображений и окружающая обстановка (условия
эксперимента). Если наблюдатель видел подобные изображения, то он склонен
более строго оценивать погрешности, поскольку имеет сложившееся
представление о структуре изображения. С другой стороны, в незнакомом
изображении искажения могут оставаться незамеченными, пока наблюдателю
не будет на них указано. Условия эксперимента должны в максимально
возможной степени соответствовать условиям наблюдения в реальной
обстановке. Следует с осторожностью пользоваться экспертными оценками,
если изменились условия наблюдения. Так. качество изображения на экране
обычного телевизионного монитора может быть расценено как «хорошее», с
«еле заметными» искажениями. Однако если то же самое изображение будет
представлено в виде фотографии, снятой с помощью высококачественной
аппаратуры, то все погрешности, ранее скрытые нелинейностями
телевизионного устройства, неожиданно могут стать очень заметными.
2.9 Особенности воспроизведения признаков
распознавания объектов на аэроснимках
На аэроснимках, полученных в различных спектральных диапазонах,
общие признаки распознавания проявляются по-разному. В настоящее время
только фотографические аэроснимки непосредственно отражают объекты со
всеми деталями, напоминая визуально наблюдаемую с самолета картину
местности. Близкие к ним по геометрическому подобию изображения объектов
получаются на инфракрасных (тепловых) аэроснимках. Однако они имеют
непривычные для человека сочетания тонов и распределения контрастов.
Радиолокационные аэроснимки имеют отличную от всех предыдущих
точечную структуру, своеобразный контурный характер изображения
площадных и геометрическую неопределенность формы малоразмерных
объектов, искаженную передачу тонов и пониженный контраст изображения
[1.2.4. 6, 7].
Форма объектов наиболее правильно и подробно передастся на
фотоизображении. Однако и на нем полное подобие формы объекта
сохраняется только в центральной части планового аэроснимка. По мерс
удаления от центра (точки надира) планового, а также по всему полю
перспективного аэроснимка формы изображений объектов подвергаются
перспективным искажениям, и тем больше, чем выше объект. На краях
планового и на всем перспективном аэроснимках изображаются не только
горизонтальные и наклонные плоскости но и боковые грани объектов (стены
77
домов и башен, борта танков). Такие высокие объекты, как башни, трубы и
мачты, изображаются как бы наклоненными по радиусам, расходящимся от
центра к краям аэроснимка. Видимость боковых граней необходимо учитывать
при определении, как формы объекта, так и его размера. Наибольи. не
искажения, особенно объемных объектов, образуются на перекрывающихся
частях соседних аэроснимков, что может затруднить распознавание форм
идентичных изображений, привязку аэроснимков друг к другу и к
топографической карте.
На ИК-аэроснимках форма объектов передается менее детально и
правильно как в связи с меньшей, чем у АФА. разрешающей способностью
ЦОЭС. так и с получением ПК-изображения способом линейного
сканирования местности малым пучком лучей и формированием его с
помощью цилиндрической! проекции. Контуры объектов выражаются более
обобщенно, без деталей, внутренняя структура (башни, кабины и пр.) обычно
нс выделяется или изображается пятнами неправильной формы.
Сканирование широкой полосы местности и ошибки самого процесса
сканирования приводят к геометрическим искажениям изображения. для
плоских объектов. У объемных объектов искажения усугубляются наложением
на них измененных форм вертикальных и наклонных плоскостей!, а также все
увеличивающейся перспективой! по осн. перпендикулярной направлению
полета носителя ЦОЭС В ряде случаев из-за нарушений работы аппаратуры и
различных эволюций самолета соседние строки изображения не совпадают, в
результате чего образуются неровные изломанные линии контуров объектов.
Все это приводит к тому, что параметры формы однотипных объектов
меняются от точки к точке аэроснимка.
ИК-аэроснимки кроме геометрических искажений могут иметь
искажения тона изображения. Они возникают в результате наложения на
изображение местности изображения облаков, следов потока воздуха,
регулярно повторяющихся радиоимпульсов, излучаемых РЛС, а также следов
интерференции радиоволн, излучаемых радиопередатчиком самолета.
Размер изображения на фото- и ИК-аэроснимках изменяется по полю в
зависимости от угла захвата (2/J) системы или угла визирования на объект. В
пределах угла 40° изменения размера изображения незначительны, с трудом
воспринимаются при измерениях и практически на точность распознавания
влияния нс оказывают. Пои средних захватах (2/?<80*’) и особенно больших (2/?
до 120° - 180°). когда размер изображения интенсивно изменяется и на краю
составляет всего от ]/_2.до 1/8 и менее размера такого же объекта в центре
аэроснимка, этот факт нс учитывать нельзя.
Тон изображения объектов и фонов независимо от используемого
диапазона ЭМВ определяется тремя общими основными факторами:
освещенностью местности (мощностью излучения сигнала), свойствами
вещества поглощать и отражать (излучать) энергию, структурой поверхности и
характером распространения отраженного света (излучения). Эти факторы в
78
различных условиях и диапазонах спектра играют неодинаковую роль.
Местность может быть освещена прямым и рассеянным солнечным или
искусственным светом. Рассеянное солнечное освещение имеет место при
низком стоянии Солнца, сплощной облачности или при нахождении объекта в
тени от облаков. В этом случае на аэрофотоснимках и ИК-аэроснимках тени от
объекта и его деталей! отсутствуют изображение малоконтрастно. На
фотоизображении некоторое разнообразие плотностей создается за счет
закрытия одних деталей другими и большей! яркости выпуклых деталей!. На
ИК-аэроснимках разница тонов создается в основном за счет излучательной!
способности поверхностей, собственного излучения нагретых объектов и их
деталей.
В случае прямого солнечного освещения объектов тон на
аэрофотоснимках и нс имеющих собственного излучения на ИК-аэроснимках
определяется углом падения лучей! на его поверхность. Чем круче падают
солнечные лучи на поверхность, тем больше ес освещенность и более светлый!
тон изображения. Более темным изобразится участок, на который! лучи падают
под острым углом.
Диапазон тонов на ночных аэроснимках, как правило, невелик, переход
от светлого к темному обычно резкий, без полутонов, проработка деталей на
темных тонах плохая. Светящиеся объекты изображаются наиболее светлым
тоном.
Тон изображения объектов зависит также от свойств вещества
поверхности поглощать и отражать падающие на нее лучи, а также излучать
тепловую энергию. Поверхности, отражающие большую часть падающих на
них лучей, изображаются светлыми тонами, отражающие малую часть -
темными. Аналогичное действие производит и излучение тепла.
Тон аэроснимков во многом зависит от способности поверхности
отражать свет. Способность объектов отражать белый (видимый!) свет
выражают коэффициентом отражения или коэффициентом яркости, которые
завися! от ряда факторов и непостоянны. Они в различных условиях
отличаются друг от друга и численно равны только для случая рассеянного
отражения коэффициенты колеблются от 0,02 - 0.15 у почв и растительных
покровов 0.2 - 0.5 у различных искусственных покрытий и строительных
материалов, до 0,8 - 1 у снежного покоова.
Структура поверхности объекта ес фактурные свойства оказывают
существенное влияние на тон изображения, так как определяют
распространение в пространство всех видов лучистой энергии: солнечного и
искусственного света, радиолокационных лазерных и ИК-лучей.
В зависимости от характера распространения отражаемой или
излучаемой энергии выделяют четыре основные группы поверхностен
(рисунок 2.13. а). Характер отражения зависит от высоты неровностей, длины
волны излучения, угла облучения поверхности и их соотношений.
Зеркальные поверхности отражают падающие на них лучи
79
преимущественно в одном направлении (в плоскости их падения). С
изменением угла падения изменяется и направление отражения. К таким
поверхностям относятся вода, снежный наст, обнаженный базальт и сухой
солончак, полированный металл и глянцевые эмалевые окраски. Если
отраженные от них лучи попадают в объектив или на приемную антенну, то
такая поверхность изобразится очень светлым тоном.
Ворсистая (изрытая) поверхность
а 5
Рисунок 2.13 - Отражательные свойства и яркость поверхности: а -
типы фактур поверхностей и схемы их отражательных свойств; б-
завгсимость яркости от направления наблюдения
Гладкие поверхности отражают падающую или излучаемую энергию во
все стороны почти одинаково (диффузно). К ним относятся укатанная земля и
снег, проезжая часть шоссейных дорог матовые окраски металлических
поверхностей. В зависимости от положения отражающей плоскости и угла сс
наблюдения она изображается разным, но ровным тоном - от серого до
черного.
Шероховатая поверхность значительное количество лучистой энергии
отражает в сторону ее источника Поэтому яркость тона изображения зависит
80
от направления на наблюдаемую поверхность. Наиболее светлыми
изображаются поверхности при наблюдении их со стороны падения лучей,
наиболее темными - при наблюдении против. К таким поверхностям относятся
вспаханная или свежевырытая земля, щебень, шлак и низкая травяная
растительность.
Изрытые (ворсистые) поверхности имеют смешанное рассеянно-
направленное отражение. Элементы структуры поверхности обычно
opi оптированы одинаково, и тон их изображения меняется в зависимости от
угла падения лучей и направления наблюдения. К этой группе относятся
поверхности со значительной величиной элементов: лесные и кустарниковые
массивы, засеянные хлебные поля, местность, покрытая валунами. Наиболее
светлой такая поверхность изобразится при визировании со стороны падения
лучей, наиболее темной - с противоположной) (рисунок 2.13. б).
Существует также много поверхностей со смешанной отражательной
способностью, сочетающих общую шероховатость или изрытость с
зеркальностью отдельных элементов и частей.
Большинство объектов имеют разнообразную окраску, часто
изменяющуюся в течение времени. В зависимости от свойств объектов
природных и погодных условий участки спектра различной длины волны
поглощаются и отражаются по-разному. Кроме того, одни поверхности в
разной степени отражают до 6 - 7 цветовых участков спектра, другие - всего 3
- 4. Тс лучи, которые больше отражаются, чем поглощаются, определяют цвет
объекта. Поскольку многие объекты отражают лучи нескольких участков,
наблюдается большое разнообразие оттенков цветов.
Ближнее ПК-излучение, обладая всеми физическими свойствами
видимого света, имеет иное распределение оптических характеристик фонов и
объектов, создавая своеобразное распределение тонов и контрастов. В связи с
этим в ближнем ПК-диапазоне обнаруживаются и распознаются объекты,
изображения которых нс выделяются тоном или цветом на обычных
аэрофотоснимках. Так. существенные изменения спектральной яркости
поврежденной и срезанной зелени в ПК-диапазоне позволяют вскрыть
использование ее для маскировки объектов. Срезанные ветви деревьев и трава
дадут более темный тон изображения, чем нетронутая растительность.
Сравнен).е кривых спектрального отражения естественной зелени и
маскировочных покрытий показывает, что при фотографировании в ближнем
ПК-диапазоне окрашенный или покрытый маскировочной сетью объект
изобразится более темным тоном и выяви гея на светлом фоне окружающей
растительности
Тон аэроснимков, полученных ЦОЭС. работающих в средней и
длинноволновой областях ПК-спектра (4-15 мкм). определяется действием
двух составляющих - отраженной солнечной энергией и других внешних
источников, а также собственным излучением объектов, обусловленным
излучательной способностью и температурой. В дневных условиях на тон
81
изображения влияют обычно оба фактора, ночью - в основном второй. Каждая
из этих составляющих в определенных условиях и диапазонах ИК-спсктра
может преобладать одна над другой, создавая изображение, имеющее от 3 - 4
до 8 - 10 градаций тонов.
Вее природные образования имеют высокий коэффициент ПК-
излучения в пределах 0,8 - 0,95 и создают светлые тона изображения; металлы
и некоторые строительные материалы имеют коэффициент порядка 0,05 - 0,2 и
изображаются темными тонами. В дневных условиях на них накладываются
более светлые тона изображений нагретых фонов и объектов.
Собственное излучение, зависящее от свойств вещества и температуры
объектов даже в полной темноте позволяет получать изображен! с различной
тональности. Чем больше нагрет объект, тем больше он излучает, и на
аэроснимке его изображение будет более светлым. Это позволяет вскрывать
прогретую или с работающими двигателями технику, обнаруживать
замаскированную технику, полуподземные и подземные сооружения. Однако
соотношсн11С температур, а следовательно, и тонов изображения изменяется в
течение суток. Полученные в разнос время после захода Солнца изображения
одних и тех же объектов имеют разный тон. что необходимо учитывать для
предотвращения ошибок распознавания.
При отсутствии температурных перепадов различный тон изображения
создается за счет различий в излучательной способности поверхностей
объектов и фонов. Даже при получении изображения в полной темноте на
более светлом фоне неметаллических поверхностей темным тоном будут
выделяться неокрашенные и шероховатые металлические объекты. Плохим
излучателем является также спокойная водная поверхность, она изображается
темным тоном. В ПК-диапазоне хорошо излучают морские волны и буруны
изображающиеся светлым тоном.
РЛ-аэроснимки отличаются точечной структурой, своеобразным
контурным характером изображений и геометрической неопределенностью
формы малоразмерных объектов, искаженной передачей тонов и пониженным
контрастом изображения. На РЛ-аэроснимках передается форма только
крупных объектов. Малоразмерные объекты (самолеты, танки, автомобили и
др.) изображаются в виде копотких полосок или трудноразличимых силуэтов.
Поскольку масштаб РЛ-аэроснимка считается практическим постоянным по
полю изображения, то размер объектов нс изменяется, на каком бы месте
аэроснимка они нс располагались. Тон на РЛ-аэроснимках обычно имеет до 4 -
5 градаций от белого до темно-серого и почти черного в зависимости от
электромагнитных свойств и структуры поверхности, угла падения ЭМВ и
других факторов. Тени от объектов на РЛ-аэроснимках имеют существенное
отличие от теней на других аэроснимках. Радиолокационные тени направлены
всегда перпендикулярно продольной стороне аэроснимка и имеют одинаковый
темный тон. Объекты, расположенные в области тени, на аэроснимке нс
изображаются.
82
2.10 Особенности дешифрировании радиолокационных из Сражений
Простые и сложные объекты воспроизводятся на РЛ снимках
совокупностью отметок, по своему контрасту превышающих общий тон РЛ
изображения.
Поостыс объекты на РЛИ воспроигодятся различным образом в
зависимости от их габаритных размеров, формы сложности поверхности,
материала и других факторов. Малоразмерные простые объекты, относягщ сся
к категории точечных РЛ целей, изображаются в виде отдельных контрастных
точечных отметок. Элементарные точечные цели (уголковые отражатели, шары
и т. д.) дают отметки: устойчивой интенсивности в широком диапазоне
ракурсов и углов места облучения. Точечные цели со сложной формой
поверхности (самолеты танки, автомашины и т. д.), напротив, дают отметки,
интенсивность которых резко меняется при изменении ракурсов облучения и
углов места.
Группа простых целей со средними габаритами (бомбардировщики,
средние корабли и т. д.) может воспроизводиться в виде удлиненных отметок
или в виде группы точечных, примыкающих друг к другу отметок
Крупногабаритные простые цели (ж д. составы, крупные корабли. ВПП и
т. I.) воспроизводятся в виде протяженных или площадных отметок, часто
отражающих форму отметок и геометрические размеры целей.
Сложные объекты воздушной разведки воспроизводятся на РЛ
изображениях совокупностью точечных отметок, которая передает структуру
сложного объекта и характеризует площадь, занимаемую объектом. Наличие
значительного числа отметок простых объектов характеризует количественный
состав отдельных групп поостых объектов и общее количество элементов в
сложном объеме. Изображение сложного объекта. как правило,
характеризуется налич, ем изображений подъездных путей. линий
электропередач, ограждений и других характерных элементов сложного
объекта. Например. РЛ изображение аэродрома содержит четко
воспроизводимую по форме и размерам взлетно-посадочную полосу)
изображение рулежных дорожек и стоянок самолетов, отметки от служебных
построек и ангаров, группы отметок, соответствующих самолетам на стоянках,
четко выраженные изображения проволочного ограждения, дорог линий
электропередач.
3 качестве распознавательных признаков различных объектов можно
использовать:
- степень почернения РЛ отметки;
- конфигурацию РЛ отметки;
- количество разрешаемых элементов объекта и их взаимное
расположение;
- размеры РЛ изображения объекта;
- наличие РЛ тени;
83
- состояние цели (в движении, неподвижная);
- косвенные признаки, указывающие на принадлежность объекта к
данной группе объектов (места расположения, подъездные пути и т. д.).
Из всех перечисленных признаков к признакам поостых объектов можно
отнести лишь степень почернения отметки, состояние объекта и некоторые
косвенные признаки. Пои этом состояние объекта можно определить шшь
тогда, когда РЛС БО снабжена системой! селекции движущихся целей (СДЦ).
Как правило, простые объекты нс распознаются по их РЛ отметкам, а только
обнаруживаются.
РЛ изображения сложных объектов характеризуются всеми
вышеперечисленными признаками. Главный признак распознавания -
конфигурация РЛ изображения, остальные играют вспомогательную роль.
Например, распознавание аэродрома пооизводится прежде всего по наличию
изображения взлетно-посадочной! полосы, по длине и ширине которой! можно
сделать ориентировочный вывод о классе аэродрома. Наличие большого
количества отметок от точечных целей и строений, наличие ограждения, общая
территория, занимаемая объектом, наличие подъездных путей и линий
электропередач, расположение объекта на открытой местности - все это
дополняет предположение о том. что обнаруженный объект - аэродром.
Сложные военные объекты в большинстве случаев относятся к
стационарным режимным объектам. Характерным косвенным признаком таких
объектов является наличие проволочного ограждения, обнаруживаемого РЛС
БО с большой! вероятностью.
Степень почернения отметки цели зависит от многих факт от ЭПР. от
ракурса цели, от дальности «РЛС - цель», от условий обработки и т. д. В
настоящее время из-за недостаточности статистических данных нелыя
привести конкретные цифры, характеризующие степень почернения
изображений! различных объектов. Дешифровщикам РЛИ предлагается самим
проводить повседневную работу по набору и анализу степени почернения РЛ
отметок типовых военных объектов.
Детальное дешифрирование представляет процесс снятия
неопределенности в сведениях о противнике и местности и является сложной
задачей, решение которой зависят от множества различных факторов. К таким
факторам для РЛ дешифрирования относятся:
- огромное разнообразие объектов военного и невоенного назначения,
расположенных на различных фонах местности;
- большое количество дешифровочных признаков для большинства
объектов;
- наличие помех искусственного и естественного происхождения,
маскирующих цели и вызывающих ложные представления о реальном поле
объектов
- непривычное для глаза воспроизведение изображений объектов на РЛ
снимках и т. д.
84
Дешифрирование является сложным психофизиологическим процессом.
Возможности обнаружения и распознавания объектов зависят нс только от
качества РЛ изображения, аппаратуры дешифрирования, но и от
различительной чувствительности глаз дешифровшиков.
При работе с РЛИ дешифровщик, изучая РЛ изображение, представляет
себе мысленно информационную модель, отображаюшую обстановку с какой-
то степенью правдоподобия. Для такой модели свойственна большая
информативная емкость, случайное распределение оптических плотностей!
целей, неоднозначная связь знаков кодирования с признаками реальных целей.
По мере дешифрирования неопределенность о районе разведки уменьшаете;
Получаемая информация при этом характеризуется степенью снижения
энтропии:
(2.D
где IY^r - извлекаемая информация об объектах разведки по их
демаскирующим признакам Л ;
//() ) - полная энтропия дешифрируемого района разведки;
- условная энтропия дешифрируемого района при использовании
признаков А .
До начала процесса дешифрирования //(}’)= 77 (^,) и 7^,. =0.
После окончания дешифрирования и при распознавании объектов до типа,
и состояния 1^. = т. с. количество информации становится равным
исходной энтропии.
Процесс дешифрирования имеет иерархическую структуру и состоит из
нескольких этапов взаимосвязанных между собой.
Дешифрирование начинается с этапа общего ознакомления с
дешифровочной обстановкой. На этом этапе дешифровщик подробно изучает
задание на разведку, знакомится с районом разведки по топографической
карте, прокладывает маршрут полета. Затем он приступает к изучению
априорных сведений о районе разведки, изучает данные, облегчающие
дешифрирование (координаты кадров, время съемки, высоту, скорость
носителя, режим работы РЛС и другие данные). Подготовительная работа
завершается выбором определенных кадров с РЛ изображением конкретного
района поиска объектов противника.
Этап просмотра района поиска заключается в структурно-ландшафтном
анализе местности, в обнаружении крупных сложных объектов и в их
распознавании. При выполнении детального анализа района поиска
дешифровщик производит обнаружение и распознавание простых объектов,
опираясь на их прямые и косвенные демаскирующие признаки и используя
85
информацию, полученную при дешифрировании ландшафта и сложных
объектов.
Определив координаты обнаруженных объектов дешифровщик
переходит к синтезу всех сведений дешифрирования, делает вывод о характере,
свойстве и состоянии разведывательной) обстановки, о замыслах противника.
Для повышения полноты и достоверности развсддонссения я также для
сокращения сроков его получения большое значение имеет закрепление за
дешифровитками определенных районов и участков территории разведки.
Постоянно работая над РЛ снимками одного и того же района, дешифровщик
способен уловить мельчайшие изменения в обстановке.
Вее объекты наблюдения характеризуются очень большим числом
признаков. Совокупность существенных признаков составляет образ объекта.
Радиолокационное изображение является отображением объекта и обладает
признаками, которые определенным образом связаны с признаками собственно
объекта. Эта связь может быть весьма сложной. Ряд признаков объекта может
не иметь аналогов в радиолокационном изображении. Существенные признаки
радиолокационного изображения объекта составляют его радиолокационный
образ.
При преобразовании пространства признаков объекта в пространство
признаков РЛ изображения значительная часть признаков теряется. Эти потери
обусловлены как самим принципом радиолокационного наблюдения, так и
ограниченностью характеристик прибора (радиолокатора) например конечной
разрешающей способностью ограниченной динамическим диапазоном, и т. д.
При дешифрировании выявляется радиолокационный образ
обнаруженного объекта. Он может быть опознан в тех случаях, когда имеется
набор радиолокационных образов, с которыми производится сравнение
полученных результатов либо известна функциональная связь между объектом
и его радиолокационным образом.
Основные демаскирующие признаки:
- интенсивность почернения (тон) изображения:
- текстура изображения:
- конфигурация (форма) РЛ изображения объекта;
- размер изображения:
- количество и взаимное расположение отдельных разрешаемых
элементов изображения;
- радиолокационные гени;
- состояние цели (движущаяся, неподвижная);
- косвенные признаки, указывающие на принадлежность объекта к
данной группе объектов (места расположения, подъездные пути и т. л.).
Интенсивность почернения (тоном) РЛ изображения в дешифрировании
передастся градациями черного и белого тонов, т. с. той или иной степенью
почернения (плотностью) ее. Тон изображения в основном зависит от
86
отражающих свойств объекта, характеристик РЛС, выноса полосы разведки,
дальности до цели и ее ракурса относительно линии полета носителя РЛС.
Объект может быть обнаружен на радиолокационном изображении в том
случае, если его тон отличен от тона окружающей местности.
Под текстурой РЛ изображения понимается внутренний рисунок
плошадного объекта. Текстура связана с характером поверхности объекта и
отличается большим многообразием. Особенно многообразна текстура
топографических объектов. Например, лес дает зернистую текстуру РЛ
изображения, барханы - характерную волнистую текстуру.
Конфигурация РЛИ объекта связана с конфигурацией (формой) объекта.
Связь этих конфигураций определяется характеристиками радиолокационного
устройства и объекта и зависит в первую очередь от разрешающей
способности РЛС и отражающих свойств объектов. Характеристики и
классификация надводных объектов при выполнении поиска и обнаружения
типовых надводных целей в районах боевого предназначения при ведении РЛ
разведки в режиме синтезированной апертуры антенны приведены в таблицах
2.8, 2.9.
\ аблина 2,8 - Характеристики надводных объектов
Наименование цели Основные характерно!ики
тоннаж р.т. длина м ширина м высота м скорость хода макс., узлы средняя ЭПР. м2
танкер ир. 1545 3000 84.0 6.5 18.0 14.5-15 10 000
морской буксир 900 47,7 10.3 9,0 13 3 000
ПСКР пр.205 240 40 7.8 9.15 33 280
малый сейнер 51.2 18.5 5 3 9,5-10.0 50
ИСКА пр. 1400 36 23.7 5 5.5 33 35
шлюпка ЯЛ-4 - 5,25 1.56 0.6 7-10 5.0 1
лодка «Казанка» - 4 0.12 0.5 50 3.5
катер пр. 371Б 8.7 11,9 3,06 3.29 14 15
пловец - - - - 0.3 - 0.5 0.5
пловец на подручных средствах - - - - 0,25 - 0.4 0,5
о дно-двухместная резиновая надувная лодка - 1.5 0,6 0.45 2.5 - 3,0 1.5
Т аблина 2,9 - Клас сифи к ания надводных объект о в_
Классификация ц ад вод пых 11сл е й Типы надводных целей Водоизме- щение (per. тонн) Средняя ЭПР, См3)
Большие цели (БЦ) Крейсера, ВПК, БДК. БРЗК, ЭМ, СКР ИСКР пр. 1 1351.97П. 11662. танкеры, сухогрузы, паромы. БМРТ. >2000 >1500
Средние цели (СЦ) мрк, МПК. III(. МРЗК. С.ДК. СРТМ. ИСКР пр. 12412. 1124II. 10410. 745 <2000 250-1500
87
Малые цели (МЦ) МДК, ИСКР пр. 133. пр.205, ИСКА пр. 1400. пр. 1176, СЧС ПЛА (ПЛ) в надводном положении <200 50-250
Сверхмалые цели (СМИ) II[.попка, рыболовная лодка (резиновая лодка), плавающая мина, морской буй, швартовая бочка, веха, перископ ИЛ < 10 До Ю
Размеры изображения объекта определяются размерами и ракурсом
объекта относительно линии полета самолета, масштабом и разрешающей
способностью радиолокационных станций воздушной разведки. Размер РЛ
изображения объекта позволяет отличать один объект от другого, когда они
имеют одинаковый тон. но различные по величине отметки, и получить
ориентировочные размеры объекта.
Размеры объектов на РЛИ определяются с ценой деления до десятых
долей миллиметра. Количество объектов, воспроизводимых на РЛИ. зависят от
числа объектов, расстояния между ними, тактико-технических характеристик
РЛС (в первую очередь от се разрешающей способности), характеристик цели
и фона местности.
Для сложного объекта расположение отдельных простых объектов в
группах и групп между собой является характерным признаком, связанным с
существом объекта, его назначением и состоянием. Особенно важно взаимное
расположение распознанных простых объектов внутри сложного.
Расположение изображения объекта относительно характерных
ориентиров и рельефу местности является одним из основных косвенных
признаков и помогает дешпфровщикам распознавать объект.
Важнейшей категорией состояния цели является ее подвижность
Движение цели обусловливает изменение структуры обнаруженного сигнала и
при наличии в РЛС системы селекции движущихся целей позволяет выделять
подвижные цели на фоне неподвижных объектов, способствуя вскрытию
передислокации войск и боевой техники.
Дешифрирование сложных военно-морских объектов (военно-морских
баз. ордера кораблей и т. л.) производится в целях:
- обнаружения и распознавания местоположения сложных военно-
морских объектов;
- определения местоположения причалов и стоянок кораблей;
- определения количества кораблей на рейде;
- определения количества кораблей в ордере;
- определения количества и класса аэродромов, зходят состав военно-
морских баз.
Военно-морские базы и ордера кораблей в открытом морс легко
обнаруживаются на РЛИ при любых масштабах изображения, а также на
различных дальностях и ракурсах.
Основными демаскирующими признаками военно-морской базы (ВМБ)
являются:
88
- наличие большого количества темных отметок от причалов, кораблей,
стоящих у причалов:
- наличие темных точечных отметок от бонов и вешек, применяемых для
установки заградительных сетей у входа в базу и ограждения опасных мест;
- наличие темных продолговатых отметок от кораблей!, стояших на рейде;
- наличие отметок с повышенной! плотностью почернения вблизи
береговой! черты от различных железобетонных сооружений! (ремзавода,
складов, служебных, жилых зданий н т. п.);
- наличие подходящих к базе дорог и линий электропередач;
- наличие аэродромов в районе базы.
По РЛИ можно ориентировочно определить количество причалов. По
длине н ширине темной! вытянутой! отметки у береговой! черты можно
определить наличие судов у причалов, по наличию небольших темных
точечных отметок, расположенных в линию - местоположение заградительной
сети у входа в бухту.
Небольшие темные точечные отметки, расположенные по периметру
квадрата (по окружности), указывают на наличие н местоположение опасных
мест прн входе кораблей в бухту.
Отдельные вытянутые темные отметки у входа в бухту определяют
местоположение кораблей на внутреннем рейде Темные отметки различной!
конфигурации у береговой линии указывают местоположение береговых
сооружений (ремзаводов, ангаров, окладов, служебных н жилых зданий и т. л.).
Основными демаскирующими признаками ордера кораблей являются:
- наличие продолговатых темных отметок на водной поверхности:
- наличие кильватерного следа.
Корабли различных классов, идущие одним курсом, на РЛИ отличаются
по величине отметок. Однако ввиду зависимости величины ЭПР кораблей от
направления излучения прн изменении ракурса корабля величина отметки на
РЛИ изменяется. По кильватерному следу определяется направление движения
корабле!! н структура строя.
Дешифрирование движущихся простых п сложных объектов
производится в целях:
- определение количества движущихся единиц боевой и транспортной!
техники;
- определения направления движения войск;
- вскрытия передислокации войск:
- определения начала перехода войск и боевой техники СВ в
наступление;
- определения начала н направления отступления войск н боевой техники
СВ противника.
Выделение движущейся техники возможно только с помощью РЛС БО. у
которых предусмотрен режим селекции движущихся целей (СДЦ). на тех
масштабах дальности, где предусмотрен режим СДЦ. на любом подстилающем
89
фоне, за исключением движущейся техники, скрытой летним лесным массивом
и РЛ тенями.
Основными демаскирующими признаками движущихся простых и
сложных объектов являются:
- наличие темных точечных отметок (на подавленном с помощью
системы СДЦ фоне подстилающей поверхности) от движущихся простых
объектов боевой техники, находящихся на расстояниях больших, чем
разрешающая способность РЛС:
- наличие продолговатых узких темных отметок от колонн движущейся
боевой техники, когда простые объекты расположены на расстояниях,
меньших, чем разрешающая способность РЛС;
- наличие утолщенных продолговатых темных отметок от движущихся
железнодорожных составов.
По РЛИ Ошибка! Ошибка связи.на подавленном фоне подстилающей
поверхности, можно установить направление движения железнодорожных
составов, колени боевой техники и простых объектов при дискретном об юре.
Неполное подавление фона в ряде случаев облегчает дешифрирование и
привязку РЛ изображения к топографической карте с помощью неподавленных
линейных ориентиров (рек, железных и шоссейных дорог) и площадных
ориентиров (населенных пунктов городского типа, озер и т. п.).
По РЛИ. полученному с помощью РЛС БО в режиме СДЦ. можно
определить количество движущихся ж.-д. составов, колонн техники, простых
объектов, расположенных на расстояниях, больших, чем разрешающая
способность РЛС
Количество простых объектов, движущихся в колонне на расстояниях
менее разрешаемых РЛС БО. определяется ориентировочно по длине
продолговатой отметки.
Движение кораблей! и речных судов можно определять при работе РЛС
БС как в режиме обзора (по киловатерному следу), так и в режиме СДЦ.
90
3 КЛАССИФИКАЦИЯ
НАДВОДНЫХ ОБЪЕКТОВ И
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРИ
ИХ ДЕШИФРИРОВАНИИ
3.1 Обтай характеристика и признаки распознавании
объектов военно-морских сил
По основному назначению, характеризующего главную функцию и
отношение к экономике, весь корабельно-судовой состав делится на военный и
гражданский (коммерческий).
В вооруженных силах всех государств на военно-морские силы (ВМС)
возлагается нанесение ударов по береговым объектам, поддержка сухопутных
войск на приморских направлениях, высадка морских десантов и т. д. Дтя
решения этих задач ВМС оснащаются разнообразными боевыми кораблями и
вспомогательными судами, которые для ведения боевых действий сводятся в
различные соединения и группы.
Морской транспорт соединяет все виды транспорта в единую систему,
осуществляет значительную долю торговых перевозок На торговый флот
возлагается подвоз стратегического сырья, обеспечение всеми видами
снабжения многочисленных военных баз. Вся деятельность ВМС и торгового
флота обеспечивается системой берегового базирования и плавучих баз.
Строительство гидроузлов на реках и объединение их каналами в единую
воднотранспортную систему связало многие порты разных морей и океанов. В
связи с этим на реках появились крупнотоннажные суда и суда, которые могут
использоваться как на реках, так и на море, а многие пооты в устьях рек
превратились в крупные транспортные узлы.
Дешифрирование портов, военно-морских баз (ВМБ). кораблей и судов в
морс обычно представляет самостоятельную задачу. Попутно она может
решаться лишь при получении информации о войсках, производящих высадку
или обороняющих побережье. При дешифрировании портов (ВМБ) от
дешифровщика может потребоваться следующая информация:
1) классификация пункта базирования;
2) местоположение (координаты) центра объекта, назначение порта
(ВМБ);
3) количество, местоположение стоянок кораблей и судов, количество их
по классам (подклассам и типам), особенно крупных боевых кораблей и
десантно-высадочных средств;
4) количество причалов и их размеры на временных пунктах
базирования;
91
5) назначение и местоположение складов;
6) противовоздушная и наземная оборона, местоположение и количество
боевой техники;
7) характер деятельности в порту: обслуживание кораблей и судов,
погрузка войск и техники, выход кораблей из базы и пр.;
8) состояние порта (базы), наличие разрушений и пожаров.
В процессе дешифрирования группировок кораблей и судов в морс может
потребоваться определить:
1) координаты центра;
2) классификацию группировки (АУГ, конвой, десант);
3) количество кораблей и судов по классам, подклассам и типам;
4) характер деятельности группировки (в движении, пополнение запасов,
сосредоточение и пр.);
5) направление движения.
Корабельно-судовой состав ВМС по признаку преимущественного
назначения и характера использования подразделяются на три основные
группы: боевые корабли, выполняющие главные боевые задачи на морс;
вспомогательные суда. осуществляющие материально-техническое
обеспечение боевых кораблей: базовые плавучие средства, предназначенные
для обеспечения деятельности первых групп кораблей и судов в портах и
базах. Гражданский флот состоит из большого количества групп основными из
которых являются: грузовые, грузопассажирские и пассажирские суда,
рыбодобывающие обрабатывающие, научно-исследовательские и др
Однако такая классификация дает только общую ориентировку в
корабельно-судовом составе флотов и недостаточна для целей
дешифрирования. Для детального распознавания изображений необходима
классификация, связанная с внешними признаками и особенностями
конструкции объектов, которыми являются: форма, размеры корпуса и их
соотношения: характер, форма и расположение надстроек, а для военных
кораблей и вооружение. Наиболее приемлемой! для дешифрирования
классификацией является деление всех кораблей и судов в зависимости от
назначения, особенностей использования или рода перевозимых грузов
(таблица 3.1).
Главным признаком почти всех классов боевых кораблей является узкий
корпус ровными параллельными или чаше чуть выгнутыми бортами, плавно
сужающимися к концам. Носовая часть заостренная, кормовая - обычно
закругленная или тупая. Исключение из этого правила составляют авианосцы,
имеющие неровные угловатые борта и обычно тупые оконечности, а также
подводные лодки, отличающиеся обоими заостренными концами. Размерь!
боевых кораблей колеблются в оченв широких пределах, однако между
классами и подклассами все же сохраняются определенные различия, которые
в совокупности с особенностями конструкции обеспечивают их распознавание.
92
Таблица 3.1 - Классификация кораблей и судов
1. Авианосцы Тяжелые (ударные)
Cpe.iiще (про I иволодочпые)
Леч кие (верто.тетоносные)
Многоцелевые авианесущие
2. Линейные корабли
3. Крейсера Вертолетоносцы
Тяжелые
Легкие
4. Подводные лодки Сверхбольшие-
Большие
Средние
Малые
Сверхмалые
5. )скадренные миноносцы
6. Фрегат ы Большие
Малые
7. Сторожевые корабли Большие
Малые
8. Корабли РЯД
9. Противолодочные корабли Большие
Малые (корветы)
К). Минные лпрадители Большие (эскадренные)
Средние (базовые)
Малые
И. Сетевые лпрадителн Большие
Средние
Малые
12. Тральщики Большие (эскадренные)
Средние (базовые)
Катера -тральщики
Малые (рейдовые)
13. Торпедные катера Большие
Средние
Малые
14. Ракетные катера Большие
Средние
Малые
15. Десантные катера
16. Противолодочные катера
17. Сторожевые Kai ера Большие
Средние
Малые
18. Канонерские Морские
Речные
93
19. Корабли управления Большие (стратегические)
Средние(объединения)
Малые (соединения)
20. Десан I ио-верголетныс корабли-доки
21. I анко-десантные- корабли Большие
Малые
22. I [лавучие базы
23. Десантные войсковые транспорты Большие
Средние
Малые
24. У и и версия ы 1ы е тра испортим е снабжения
25. Десантные транспорты-доки
26. Десашиые ipysoiibie грасиорш
27. Десанmo-высадочные средства Танко-дееашные плашкоуты
Десантные баркасы
Десантные катера
Десантные баржи-амфибии
28. С ухотрузные транспор! ные суда Сверхбо 1ЫИИС
Большие
Средние
Малые
Сверхмалые
29. Наливные суда (танкеры) Сверхбольшие (супер-1 анкеры)
Большие
Средние
Малые
Сверхмалые
30. Грузопассажирские суда Сверхбольшие
Большие
Средние
Малые
Сверхмалые
31. Ледокол ьно-трансиортныс суда
32. Ледоколы Линейные
Портовые
33. Рыбопромысловые базы
34. Сейнеры-траулеры Большие
Средние
Малые
35. Плавучие мастерские Большие
Средние
Малые
36. Госииталыю-саиитариые суда Большие
Средние
Малые
37. Спасательно-судоподъемные суда Большие
Средние
Малые
94
38. Суда тдро1рафичеекой службы
39. Кабельные суда Океанские
Морские
Рейдовые
Малые
40. Опытовые суда.
41. Гидрометеоро! ические суда
42. Буксиры Морские
Рейдовые
Порювые
Речные
43. Боно дпрадительиые суда
44. Плавучие доки Большие
Малые
45. Плавучие станции обслуживания
46. Противопожарные средства Суда
Катера
47. Плавучие краны Большие
Средние
Малые
48. Дноуглубительные средеi ва । яжелые
Средние
Малые
49. Килекторы Морские
Рейдовые
I [ортовые
50. I [лавучие склады Большие
Малые
51. Плавучие казармы
52. Плавучие причалы Большие
Средние
Малые
53. Плавучие копры
54. Сухогрузные Большие
Средние
Малые
55. Наливные баржи Большие
Средние
Малые
56. Катера Большие
Малые
57. Шлюпки Большие
Малые
Характерной особенностью боевых кораблей (рисунки 3.1-3.4) является
наличие массивных передних надстроек, обычно совмещающихся в единый
комплекс с дымовой трубой и мачтой а также свободными носовыми и
кормовыми частями. В носовых частях, как правило, размешаются пусковые
установки УР, ЗУР и ПЛУР пли орудийные башни, а в кормовой - они же лгбо
95
взлетно-посадочные площадки для вертолетов. У некоторых кораблей,
например крейсеров-вертолетоносцев и десантных кораблей-доков открытые
площадки занимают почти всю заднюю половину палубы и имеют размер
70x26 м.
96
в)
Рисунок 3.2 - Класс крейсеров:
а - тяжелый крейсер; б - средний крейсер; в - легкий крейсер
Рисунок 3.3 - Класс эскадренных миноносцев (эсминцев)
Рисунок 3.4 -Малый фрегат
97
На кораблях может быть одна или две мачты, имеющие вид треноги,
башенной или ферменной конструкции. На них, а также на специальных
подставках и надстройках располагается от 4 до 8 антенн РЛС. некоторые из
которых находятся в защитных сферических колпаках диаметром до 8-11 м.
В отличие от всех боевых кораблей авианосцы имеют с правой стороны
одну сравнительно небольшую островную надстройку (рисунок 3.5). а
подводные лодки в средней части корпуса - продолговатую в плане,
гладкостенную рубку (рисунок 3.6). Классы минных и сетевых заградителей,
тральщиков, катеров и других кораблей имеют свои особенности конструкции,
которые могут быть выявлены из описаний и справочников.
98
в)
Рисунок 3.5 - Класс авианосцев: а - средний авианосец типа «GERALD R
FORD» (США); б - средний (противолодочный) авианосец (Великобритания);
в - легкий авианосец
Рисунок 3.6 - Класс ПЛ: а - сверхбольшая ПЛ; б - большая ПЛ; в - средняя ПЛ
Вее большее развитие и распространение в ВМС разных стран получают
корабли на воздушной подушке. На вооружении состоят десантные и
сторожевые корабли. Они имеют отличный от традиционного вид: форма
прямоугольная пли квадратная с закругленными углами, отсутствуют
массивные палубные надстройки, трубы и мачты. Размеры их сравнительно
невелики, а отношение сторон равно примерно 1:2.
99
a)
Рисунок 3.7 - Вспомогательные корабл,
а - быстроходный ганко-дссантный корабль; б - универсальный десантный
корабль; в-десантный войсковой транспорт
Важными признаками отличающими группу классов вспомогательных
судов от боевых кораблей, являются: форма их корпуса, надстройки и
100
погрузочно-разгрузочные механизмы. Отношение ширины корпуса этих судов
к длине в основном меньше, чем у боевых кораблей, поэтому они кажутся
более широкими. Носовая часть у них сужается более резко, кормовая -
закругленная или тупая.
Настоойки и подъемные механизмы занимают почти всю площадь
верхней палубы оставляя место только для взлетно-посадочной площадки
вертолета или установки какой-либо техники. Плавучие мастерские,
транспорты снабжения, спасательные и судоподъемные суда, кроме того,
имеют от трех до шести балочных грузовых стрел или высоких портальных
(мостовых) кранов (рисунок 3.7).
Базовые плавучие средства имеют самое маленькое отношение ширины
к длине. В основном все они отличаются большой шириной корпуса,
прямоугольными (доки, краны на понтонах) или округлыми (буксиры, суда-
краны) носовыми и кормовыми частями. Плавучие краны, дноуглубительные
снаряды и грунтоотводныс средства характерны наличием балочных или
ферменных стрел с кранами и черпаками, а также наличием переплетающихся
стоек, распорок, тяг, лебедок и других механизмов, создающих контрастный
внутренний мелкоструктурный рисунок.
Многочисленный гражданский флот очень разнообразен как по
назначению и конструкции, так и по размерам судов. Главными
опознавательными признаками большинства классов являются прямые
параллельные борта с крутыми закруглениями к носу и корме (рисунок 3.8),
корма часто срезана. Отношение ширины к длине корпуса у современных
грузовых и грузопассажирских судов примерно такое же. как и у боевых
кораблей, и нс является достаточным опознавательным признаком.
Существенными при знаками классов судов являются внутренние детали, их
конструкция и архитектура надстроек. У каждого класса судов они имеют свои
особенности. Так для сухогрузных судов характерно наличие небольших и
невысоких надстроек в средней части корпуса. Иногда их две. и они
разобщены: одна, низкая и с трубой, располагается в средней части, другая,
повыше. - ближе к носу. Палуба сводная и имеет большое количество
грузовых стрел.
Танкеры имеют обычно одну надстройку в коомовой части и ровную
палубу по осевой линии или бортам которой проходят узкие переходные
мостки Некоторые суда в средней части имеют еще одну надстройку - рубку.
Пассажирские и грузопассажирские суда характерны высокими четырех-,
дсвятимстровыми бортами, многоярусными надстройками, занимающими
почти всю палубу, и большим количеством шлюпок и катеров вдоль бортов.
Грузопассажирские суда, кроме того, имеют в носовой части и на корме
подъемные краны.
Описание особенностей конструкции: и внешних отличительных
признаков других классов и подклассов кораблей и судов, а также дополнение
101
и уточнение приведенных выше можно наПти в различных справочниках
корабельного и судового состава флотов.
в)
Рисунок 5.8 - Гражданские торговые суда:
а - наливное судно (танкер); б - комбинированное нсфтснавалочнос судно;
в - океанский транспортный рефрижератор
102
Распознавание типов плавакяшгх средств - весьма сложная задача,
разных годов постройки могут мало или существенно отличаться друг от
друга, что требует осторожного подхода к их классификации, подробного
анализа деталей изображения и сравнения его каждый! раз с эталонным
изображением типов в таблицах-ключах.
Для определения характера деятельности кораблей и судов существенное
значение имеет ИК-аэроснимок. на котором тон изображения корабля зависит
от состояния енлоьон установки. Чем большую мощность развивают
двигатели, тем светлее будет ИК-изображснис корабля ил судна. Наиболее
светлый тон изображение будет иметь в месте расположения машинного
отделения и дымовых труб. Машинное отделение боевых кораблей
пассажирских и грузопассажирских судов обычно располагается в средней
части корпуса, танкеров и сухогрузов - в корме.
На РЛ-изображении плаваюш! с средства хорошо видны на фоне
спокойной водной поверхности, как в открытом морс, так и у причалов в виде
отметок, размеры и тон которых зависят от величины эффективной
отражающей поверхности (ЭОП линейного корабля 2000-5000, крейсера 1000-
2000, подводной лодки в надводном положении -50-100). По размерам
отметки при определенном навыке можно определять классы крупных боевых
кораблей и судов. Однако с увеличением волнения на морс возможность
обнаружения. А тем более определения класса кораблей существенно
снижается.
3.2 Пункты базирования кораблей и судов, их оборудование
н признаки распознавания
Повседневная деятельность военного и торгового флотов, а также боевые
действия ВМС в военное время обеспечиваются системой пунктов базирования
различного назначения (рисунок 3.9).
юз
В гражданских портах общего назначения выполняются операции с
самыми разнообразными грузами, в специализированных - с определенными:
углем, нефтью, лесоматериалами и др. Порты-убежища служат для защиты
судов
от непогоды, морские станции - для снабжения судов быстро расходуемыми
видами материальных средств. В ряде случаев порты имеют военные гавани,
выполняющие роль ВМБ или пунктов снабжения военных кораблей.
ВМБ общего назначения обеспечивают базирование всех классов
кораблей и судов, специальные - какого-либо одного класса (подводных лодок,
фрегатов и др.). Постоянные и временные морские станции и опорные пункты
служат для снабжения корабельных группировок быстро расходуемыми
материально-техническими средствами.
Современный порт - сложное и высокомеханизированное предприятие
на берегу моря или реки с прилегающей водной площадью (акваторией),
комплексом сооружений, обеспечивающих безопасную стоянку судов,
прои щодство погрузочно-разгрузочных работ, ремонт и снабжение их всеми
видами материальных средств. С конструктивной! точки зрения любой! порт
(ВМБ) состоит из двух основных частей!: водной акватории и сухопутной
(береговой!) территории:, которые в свою очередь состоят из многих отдельных
элементов.
Водная акватория представляет совокупность подходов к порту,
внешнего и внутреннего рейдов, гаваней и внутренних бассейнов. Внешняя
часть акватории, называемая внешним рейдом, используется для якорной
стоянки судов. Внутренняя акватория включает гавани порта. Естественные
гавани встречаются редко, искусственные создаются при помощи
оградительных сооружений - молоь и волноломов. Они представляют собой
длинные узкие железобетонные или каменные стенки и насыпные дамбы
уходящие от берега далеко в морс. Мол одним концом coi диняется с берегом,
волнолом не соединяется.
Выступами суши и гидротехническими сооружениями внутренняя
акватория делится на бассейны, которые могут быть открытыми и свободно
сообщаться
с гаванью широкими проходами, а в портах, подверженных приливам и
отливам. - закрытыми док-басссйнами. снабженными шлюзовыми воротами.
Размеры их такие, что вписываются окружности диаметром 3.5 длины
наибольшего судна, которое может входить в порт.
На береговой части порта (БМВ) располагаются главные его элементы:
причалы, склады различного назначения, предприятия, по ищии средств
различных видов обороны и другие объекты. По размерам акьаторш. и
береговой терри горни, количеству и размеру бассейнов, доков и складов, а
также количеству причалов и длине причального фронта, которые определяют
104
грузооборот, порты подразделяются на крупнейшие (рисунок 3.10). крупные
(рисунок 3.11). средние (рисунок 3.12) и малые (рисунок 3.1.3).
Рисунок 3.10 - Схема крупнейшего
торгового порта
Рисунок 3.11- Схема крупного
торгового порта
Рисунок 3.12 - Схема среднего
торгового поота
Рисунок 3.1.3 - Схема малого
торгового порта
Причалы являются основными сооружениями порта, оборудованными
для стоянки кораблей и судов, выполнения погрузочно-разгрузочных работ,
посадки и высадки пассажиров. Получили распространение следующие формы
причальных сооружений: причальные стенки, пирсы молы, плавучие рейдовые
причалы и буи. Причальные стенки образуются набережными гаваней. Пирсы
посдставляют собой специальные причальные сооружения небольшой длины,
расположенные перпендикулярно или под углом к береговой черте, выступая в
морс в виде четырехугольников. Если молы используются для причала судов,
то они делаются широкими и могут оборудоваться пирсами. Плавучие и
рейдовые причалы устраиваются на понтонах и с берегом нс соединяются.
105
Погрузочно-разгрузочные работы на. причалах осуществляются с помощью
башенных и портальных кранов, транспортеров, черпаковых подъемников,
перемещаются по рельсам.
Склады бывают Прикорлонныс (расположенные на причалах) и тыловые.
Склады на причалах представляют обычно закрытые пакгаузы большой длины,
расположенные вдоль причальных линии. На причалах могут также
располагаться открытые площадки, на которых устанавливается различная
техника или емкости нефтехранилищ. Тыловые склады размешаются на
материковой части порта.
Судостроительные и судоремонтные предприятия располагаются
непосредственно на территории порта (ВМБ) и представляют сложный
комплекс бассейнов, доков, слипов, эллингов заводских цехов, подъемно-
транспортных механизмов и вспомогательных судов. Основными признаками
предприятий являются слипы, эллинги и заводские корпуса, располагающиеся
вблизи доков и бассейнов. Слип (рисунок 3.14) - сооружение для подъема
судна из воды с помощью стапелей и отвоза его в сторону по проложенным
вдоль берега путям, а также спуска судна на воду после ремонта пли окончания
строительства. Эллинг (рисунок 3.15) - это тот же слип, но имеющий верхнее
перекрытие.
Рисунок 3.14- Типовые схемы слипов:
а - поперечны!, б - с поворотным кругом; в - поперечно-гребенчатый
Стапель является наклонным и частично уходящим под воду
устройством из нескольких двухрельсовых путей железнодорожной колеи с
передвигающимися по ним тележками, на которых устанавливаются
106
строящиеся или ремонтируемые суда. Стапель бывает продольным, когда
судно располагается перпендикулярно к береговой линии, и поперечным, когда
судно размешается параллельно береговой линии.
На горизонтальной! части слипа собираются корпуса кораблей и судов,
для чего на ней имеются специальные ферменные конструкции с башенными и
козловыми кранами. Вблизи слипов и эллингов располагаются
производственные цеха, имеющие размеры от 100x250 м до 150x350 м.
Помимо портов с сильно развитым хозяйством вес большее
распространение, особенно в ВМС. Получают небольшие береговые и
подвижные пункты базирования. Они обладают лишь небольшой
оборудованной стоянкой для кораблей и минимум береговых средств
обеспечения.
Рисунок 3.15 - Типовыс схемы эллингов:
а - поперечный; б, в - продольный; г - для ремонта судов среднего и малого
тоннажа
Постоянные пункты базирования имеют небольшие стационарные
причалы, небольшой склад горючего и боеприпасов. Располагаются они
обычно в небольших узких естественных бухтах, фиордах и шхерах. Для
укрытия кораблей в крутостях и отвесных стенах берегов могут быть
прорублены тоннели. Признаком распознавания входа в такое сооружение
может служить отверстие в скале с прямоугольными формами и ровными
краями и обычно укрепленные железобетонными блоками или плотно
уложенными камнями.
107
Пункты временного базирования кораблей и базы снабжения создаются с
помощью собираемых из понтонов и плавучих причалов размером 80x6.5 м и
более (рисунок 3.16). В арктических условиях может применяться плавучий
лед. прикрепленный тросами к береговой кромке. Для размещения на берегу
складов, электростанций и других средств обеспечения широко используются
пневматические сооружения, легкие фургоны, складывающиеся боксы и
сооружения контейнерного типа.
а
Pi сунок 3.16 - Оборудование пунктов временного базирования кораблей и баз
снабжения: а - устройство плавучего причала: 1 - баржа или понтон;
2- разборный перегрузочный мосток' 3 - швартовые тросы; 4 - стрелы-свайки;
б - плавучая платформа тримаранного типа для обеспечения кораблей и
самолетов (вертолетов) материально-техническими средствами и ремонтом
Как на постоянных, так и на временных пунктах базирования причалы,
корабли и береговые сооружения могут быть замаскированы. Причалы и
стоящие около них корабли обычно маскируются под продолжение берега, для
чего маскировочная сеть укрепляется на берегу и натягивается на стойках над
причалом. При благоприятных условиях освещения края сети могут быть
обнаружены по разнице плотностей. Особенно хороший эффект может быть
получен при стереоскопическом рассматривании изображения. Признаком
пункта базирования могут также служить устанавливаемые на подходах к нему
волногасящис устройства состоящие из гибких матерчатых цилиндрических
элементов или плавающих полотнищ, крепящихся на якорях (рисунок 3.17).
108
Рисунок 3.17 - Легкие волногасящис устройства на акватории пункта
базирования кораблей: 1 - плавучее полотнище 2 - полые плавающие шары;
3 - аморти шторы; 4 - якоря
Основу оперативного обеспечения кораблей составляют универсальные
транспорты снабжения, сочетающие в себе качества и функции транспортов
оружия и боеприпасов, продовольствия и горючего (рисунок 3.18).
Рисунок 3.18 - Принцип передачи топлива с танкера (плавбазы) на авианосец и
эскадренный миноносец траверзным способом
Для решения совместных задач однородными силами флота применяются
простые и сложные строи в которых корабли и суда располагаются на одной
или нескольких прямых линиях. Наиболее часто применяются следующие
строи (рисунок 3.19): простые - кильватер, фронт, пеленг, уступ; сложные -
клин, двойной фронт, сложный кильватер. Расстояния между кораблями и
судами обычно колеблются от нескольких десятков до сотен метров
109
О —
г
Рисунок 3.19 - Простые и сложные строи кораблей и судов:
а - кильватер; б - фронт: в - пеленг; г - уступ; д - клин; с - двойной фронт;
ж - сложный кильватер
Для решения боевых задач разнородными силами флота корабли и суда
сводятся в группы, применяющие сложные боевые и похо; ныс порядки.
Такими группами являются: авианосные ударные группы (ДУГ), авианосные
многоцелевые группы (АМГ). корабельные ракетные ударные группы (РУГ),
корабельные ударные группы (КУГ), авианосные противолодочные поисково-
ударные группы (АПУГ). корабельные поисково-ударные группы (КПУГ).
амфибийно-десантные соединения (АДС). конвои и силы обслуживания.
Каждая группа может действовать самостоятельно или входить в оперативное
соединение, решающее одну общую задачу. В обоих случаях расстояния между
группами составляют многие десятки и даже сотни километров и поэтому они
могут рассматриваться как о дельные объекты.
Все указанные группы кораблей и судов для перехода морем и решения
боевых задач строят походный или боевой порядок, называемый ордером
(рисунок 3.20). Отличие боевого ордера от похо. ного состоит в основном в
более рассредоточенном расположении кораблей. Существует круговая и
четырехугольная (прямоугольная) система построения ордеров. В основу
круговой системы (рисунок 3.21) положен принцип распределения кораблей по
концентрическим окружностям, проверенным из условного центра походного
или боевого ордера через определенное количество километров (миль). В
основу четырехугольной системы положено распределение кораблей и судов
(рисунок 3.22) по периметрам геометрических фигур (прямоугольник, ромб и
др.) и удержание ими заданных расстояний по фронту и по глубине (в
колонне). Круговая система обычно применяется дл построения группировок
боевых кораблей. Четырехугольная система построения чаше применяется
конвоями, десантами и вспомогательными силами флота.
1 ю
Состав каждой группы кораблей зависит от решаемых задач,
оперативной обстановки в районе боевых действий, наличия сил и средств и
других факторов. По опыту многочисленных учений флотов иностранных
государств АУГ, например, может иметь в своем составе 1-2 авианосца, 1-2
крейсера УРО. 6-7 эсминцев и фрегатов (в том числе 3-5 кораблей УРО). 1
атомную подводную лодку; АМГ - 1 противолодочный авианосец. 2—4
крейсера УРО. 2—4 эсминца, 2—4 фрегата и др.: АПУГ - 1-2 противолодочных
авианосца, до 6 эсминцев и фрегатов. 1 атомную подводную тодку; КПУГ - 2-
4 ракетных и противолодочных корабля. В состав РУГ обычно входит
линейные корабли, крейсера, эсминцы и фрегаты, а КУГ-ракетные катера.
УсоиВнме
Мианвесц
Лбшно/ ущий «сую&Ъ
Йер'till.<1«
Фрегат
[|> &, кадренный г»ин0иоССц
> эотдренный битник. сц
fS7> штабной корабль
•—<1 Преит/ббладоьнь^ (Л налет
Лролшвалоданьыи Лгр-тюлс-и
Рисунок 3.20 - Построения авианосных объединений кораблей (типовые
варианты): а - пример круговой системы построения боевого ядра авианосной
поисково-ударной группы (АПУГ); б - пример прямоугольной системы
построения авианосной многоцелевой группы (АМГ)’ в - возможное
построение кораблей авианосной многоцелевой группы (АМГ) будущего; г-
ордср авианосной ударной группы (АУГ); д - ордер охранения конвоя
in
SSO-7SOH
Рисунок 3.21 - Построение ордера транспортных судов (вариант)
Походные порядки транспортных конвоев и десантных отрядов
значительно отличаются от порядков ударных сил флота, они более компактны
и громоздки.
Рисунок 3.22 - Построение походного порядка конвоя (вариант)
Конвои по численности судов подразделяются на малые (до 10 судов),
средние (до 30 судов), большие (до 90 судов), гигантские (более 90 судов).
Наиболее распространенным построением походного ордера судов считается
строй сложного кильватера с короткими колоннами по 5-6 судов (рисунок 24).
112
При этом в небольших конвоях ширина их (фронта в 2-3 раза превышает
глубину строя.
Рисунок 3.23 - Боевой порядок десантного отряда в районе высадки (вариант)
В больших и гигантских ордерах преобладает форма квадрата или
многоугольника. Охранение судов состоит из трех зон. Непосредственное
охранение составляют эсминцы и фрегаты (сторожевые корабли),
располагающиеся вокруг охраняемых судов по периметру неправильного
многоугольника. Ближнее охранение (средняя зона) включает обычно эсминцы
или фрегаты, располагающиеся по окружности. При этом впереди
располагаются корабли УРО. Вместо них в зоне могут действовать КПУГ, а
впереди судов находиться в воздухе корабельные противолодочные вертолеты
Впереди зоны дальнего охранения следует АМГ АУГ. АПУГ или КПУГ, а на
флангах и сзади - до 3-5 КПУГ. Находясь на больших удалениях от
охраняемых судов (150-200 миль), они будут представлять самостоятельные
объекты.
Для проведения десантных операций амфибийные силы флота сводятся
в оперативные амфибийно-десантные соединения (АДС) с количеством от 20
до 50 кораблей и судов. Походный порядок амфибийных сил при проведении
крупной десантной операции может состоять из 2-3 таких соединений. АДС
может включать 1 штабной корабль. 2—4 корабля управления. 3-5 десантно-
вертолетных корабля-дока. 4-5 войсковых десантных транспортов. 4-5
грузовых десантных транспортов. 8-10 больших танкодесантных кораблей и
другие суда. Для непосредственного прикрытия и огневой поддержки каждого
соединения при переходе морем и в районе высадки десанта создается отряд
кораблей из 1-2 авианосцев и 8-10 эскадренных миноносцев и фрегатов.
113
3.4 Особенности и возможности дешифрирования морских и
речных объектов
Главной задачей при обнаружении кораблей и судов является
определение основной группировки и распознавание классов п подклассов
плавающих средств, составляющих ее основное ядро. Обнаружить п опознать
плавающие средства обычно значительно прошс. чем наземные, так как они
имеют болыьой размер, обладают характерной формой п их невозможно пли
трудно замаскировать. Даже стоящие у причалов порта корабли и суда
опознаются при значительно более мелких масштабах, чем техника на фоне
земной поверхности. Особенно отчетливо выделяются на фоне во: ы
1Вижущпсся корабли и суда за счет каймы вспененной воды вокруг корпуса и
бурунного следа за кормой. Видимость подводных лодок
в подв_>дном положении зависит от состояния моря и глубины погружения.
При благоприятных условиях на фоне песчаного дна они опознаются до
глубины 15-20 м. В движении подводные лодки демаскируются бурунным
следом от перископа.
В таблице 3.1 приведены ориентировочные разрешения на местности и
масштабы изображения, нсобхо: 1мыс для распознавания некоторых классов и
подклассов кораблей, находящихся в неподвижном состоят и на фоне
спокойной водной поверхности.
Таблица 3.1 - Примерные линейные разрешения на местности и масштабы
изображения, необходимые для распознавания некоторых классов и
подклассов кораблей
Наименование классов и подклассов кораблей Разрешающая способность системы R, лнн/мм Разрешение на местост и масштаб, необходимые для распознавания
класса подкласса типа
Км м Me, М/СМ R .m м Мс, м/см Rji, м Мц м/см
Авианосцы, линкоры 10 25 14.0-16.0 14.0 16,0 280 .320 700 800 9.0 - 11,0 9.0- 11.0 180 220 450- 550 4.0 6,0 4.0 6.0 80-120 200- 300
Крейсера, фрегаты, эсминцы, большие сторожевые корабли 10 25 9,0-11.0 9.0 11.0 180- 220 450- 550 4,0-6,0 4.0-6.0 80-120 200- .300 2.0 .3.0 2,0 .3.0 40-60 100- 150
Подводные лодки (большие и средине) 10 25 8,0-9,0 8.0 -9,0 160- 180 400- 450 4.0-6.0 4,0-6,0 80 120 200- .300 1.5-2.5 1.5-2.5 .30-50 75-125
Малые сторожевые корабли, базовые тральщики и минные заградители Г 10 25 4.0-5.0 4,0-5,0 80-100 200- 250 2.0-3.0 2,0-3,0 40-60 100 150 1,0-1,5 1,0 1.5 20-30 50 75
114
При определении класса, подкласса и типа корабля нельзя пользоваться
каким-либо одним или двумя показателями. Только комплекс признаков может
обеспечить правильную классификацию изображения корабля или судна. Для
правильного опознавательного типа особое значение имеют индивидуальные
особенности, часто сравнительно мелкие детали: антенны РЛС. их
расположение и размеры: расположение и класс оружия; конфигурация и
размеры надстооск; расположение и конструкция мачт. Тип корабля легче
определяется по перспективному изображению, на котором наиболее четко
выделяются внешние очертания, особенности архитектуры надстроек.
Обнаружение и опознавание портов и ВМБ, за исключением временных
стоянок, нс представляет трудностей, так как такие сооружения как молы,
волноломы, причалы, выступая далеко в морс, образуют в отличие от
естественной береговой черты прямые линии с резкими изломами.
Дешифрирование морских и речных пунктов базирования нужно
начинать с определения главной части территории, на которой располагаются
основные причалы, наибольшее количество кораблей и судов важнейших
классов, военные гавани, арсеналы, судостроительные и судоремонтные
предприятия. Базы (гавани) ВМС легко отличаются от стоянок грузовых и
пассажирских судов тем. что корабли одного класса обычно стоят борт к борту,
что нс свойственного торговым (гражданским) судам.
3.5 Классификации иностранных кораблей
Таблица Т2 - Категории типовых объектов разведки военно-морских сил
Категория типовых объектов воздушной разведки
Вид 1 Класс 1 [рдкласс Гии
Боевые корабли Авианосцы тяжелые Мрдели типа: «Рональд Рейган» (США); «Джордж Буш» (США)
Средине Модели типа: «Адмирал Кузнецов.»; «Шарль де Голь» (Франция): «Ляонин» (Китай); «Сап- 1 [аулу» (Бразилия )4$Викрама.1игья» (Индия)
Лет кие Модели типа: «Джузеппе Гарибальди» (Италия); Лакри Парубет» (Таиланд)
Крейсера Вертеле тено сцы Модели типа: «Уосп», «Тарава»), «Америка» (США); «Мистраль» (Франция); «Хюга» (Япония)
'яжелые Модели типа: ТАРКР «Петр Великий»; CG-73 Port Roval (США)
Раке I ные Модели типа: <&1осква»
Подводные лодки Сверхболып не Модели типа: Проект 941 «Акула»; «Трафальгар» (Ант шя): «Лос-Анджелес» (США), «Вирджиния» (США)
Большие Модели водоизмещением от 1700 до 5800 г. длиной от. 81 до 120 м и шириной oj 8 до 10,5 м
Средние Модели водоизмещением от 600 до 38()О г, длиной от; 51 до 80 м и шириной от 4.7 до 9.6 л
Малые Модели водойтмещеипем ог 370 до 520 1.
115
длиной от 35 до 50 м и шириной ОТ 3.5 до 4.7 м
Сверхмалые Модели водоизмещением до 100 1, длиной отб до 25 м и шириной от 2 до 3 м
Эскадрени ые миноносцы Модели 1ииа: проекта 956' «Сарыч»; «Спрюэнс» (США): «Арли Берк» (США)
Фрегата Большие Модели тина: проекта 22350 «Адмирал Горшков»; «Оливер Перри» (США.)
Малые Модели 1ииа: Лафайет» (Франция)
Сторожей ы екорабли Большие Модели тина: проект 11540; проект 1249
Малые Модели водоизмещением до 526 до 1180 1. длиной от 61 so 95 м и шириной 10,5 м
Тральщики Б- лыпие Модели водоизмещением от 637 до 923 1, длиной от 47 до 70 м и шириной от 10 до 12 м
Средние Модели водоизмещением or 312 до 470 I, длиной от 36 до 50 м и шириной от. 7 до 9,5 м
Малые Модели водоизмещением or 100 до 230 1, длиной от 30.5 до 47.5 м и шириной от 5 до 8 м
Кат ера- тралыцики Модели водоизмещением о г 40 до 45 г. длиной от 19 до 25 м и шириной от 3.4 до 5 м
Горпедные катера Большие Модели водоизмещением oi 105 до 215 I, длиной от 30 до 46 м и шириной от 6 до 8 м
Средине Модели водоизмещением or50 до 85 г. длиной ОТ 22 до 34.5 м и шириной от6 до 7.5 м
Малые Модели водоизмещением от 20 до 45 г. длиной от 19 до 25 м и шириной от 3 до 4.5 м
Ракетные катера Большие Модели водоизмещением от 350 до 1370 г. длиной от 56 до 62 м и шириной от 7 до 15 м
Средине Модели водоизмещением от 200 до 270 т. длиной от 39 до 47 м и шириной от 7 до 14.5 м
Малые Модели водоизмещением ijt-62 до 150 г. длиной от 22 до 37 м и шириной от 5,5 до 12 м
В США для обозначения кораблей используется классификация по
бортовому номеру (иногда называется бортовой код) - англ. Hull number.
ВМС Великобритании, как и флоты некоторых европейских стран и
стран Содружества (всего 19 флотов) применяют название номер вымпела
(англ. Pennant number). В отличие от тактических номеров, применяемых в
ВМФ России (ранее СССР), бортовой номер сохраняется за кораблем на вес
время службы.
Кораблям, которые прошли г лубокую модернизацию или были
переведены в другой класс, может быть присвоен новый класс, также им может
быть присвоен новый идентификационный номер, так и оставлен старый Из-за
того что система классификации менялась несколько раз с 1907 г, некоторые
корабли меняли свой класс, хотя и нс проходили никаких физических
изменений.
116
Обозначение каждого корабля представляет собой буквенную
аббревиатуру его класса вместе с идентификационным номером. Вее
аббревиатуры в классификации США состоят как минимум из двух букв. Эта
же классификация принята в семействе морских справочников «Джейн» (англ.
Jane's Information Group), где она применяется к кораблям всех стран, для
удобства сравнения. Для остальных флотов характерны опнобуквенные коды.
Им присвоены расшифровки (например ВВ = Big Battleship для линкоров), хотя
они в значительной мере условны.
Если аббревиатура класса корабля начинается с буквы «W». то он
относится к Береговой охране. Если ей предшествует «Т-», то судно
принадлежит Командованию морских перевозок ВМС и его команда в
основном состоит из гражданских моряков.
Аббревиатура USS значит United States ship (корабль США).
3.5.1 Авианесущие корабли
Авианесущие корабли - это корабли, в основном предназначенные для
ведения боевых действий с помощью самолетов (вертолетов) против морских,
воздушных и наземных целей. Несмотря на расхожее мнение, обозначение
«CV»
в классификации по бортовому номеру нс расшифровывается как «Carrier
Vessel». Обозначение «CV» произошло от слова Cruiser (крейсер), так как
раньше авианосцы рассматривались как тяжелые крейсера, имевшие тс же
задачи по господству на морс и воспрещению действий противника на
океанском ТВД. Литера «V» произошла от французского глагола «voter»
(летать). С 1935 г. по 1975 г. обозначение «CV» используется в качестве
универсального обозначения для авианесущих кораблей. Авианосцам
присваиваются номера в двух последовательностях:
1) от CV-1 USS Langley и далее для большинства авианосцев;
2) обозначение «CVE» для эскортных авианосцев - от CVE-1 Long Island
до CVE-128 Okinawa (с 1955 обозначение «CVE» нс используется).
ACV Вспомогательный эскорты» авианосец (Эскортный авианосец) 1942 г.
CV Тяжелый авианосец (1921 - 1975) С 1975 1. - многоцелевой авианосец
CVA Ударный авианосец Эта категория объединена с CV
(VAN Ударный авианосец с ядерной энергетической установкой (ЯЭУ) Эта категория объединена с. CVN
CVB Крупный авианосец В 1952 1. эта категория объединена с CVA
(AN Атомный многоцелевой авианосец (АВМА) с яэу
11.7
3.5.2 Надводные боевые корабли
Надводные корабли в основном предназначены для ведения боевых
ДСЙСТВИЙ в открытом морс. Основными боевыми кораблями являются линкоры,
крейсера и эскадренные миноносцы (эсминцы). Линейные корабли имеют
тяжелое вооружение и бронирование; крейсера - немного меньше; а эсминцы и
более мелкие корабли - еще меньше. До 1920 года корабль обозначали «<тип>
номер X.». полностью называя тип корабля. Класс корабля часто сокращали по
типу «В-Х.» «С-Х.» «D-Х» и т.д. - например, то 1920 года. USS Minnesota ВВ-
22 при устном произношении назывался бы «USS Minnesota. Battleship number
22», а писался бы «USS Minnesota. В-22» после 1920 года, название корабля
произносилось и писалось одинаково: «USS Minnesota (ВВ-22)».
В Линейный корабль, броненосец До 1920 г.
в в Линейный корабль (’ЛК)
Д( R Крейсер от Armoured Cruiser- 6poi шроваш Iый крейсер До 1920 г.
С Крейсер (КР) После 1920 г.
се; Крейсер УРО С 1975 г.
с <;\ Крейсер УРО с ЯМУ Г С 1975 г.
D Эсминец До 1920 г.
D1) Эсминец (ЭМ)
DDG Эсминец УР() (ЭМ УР())
Большинство DLG и DLGX были переклассифицированы как CG и
CGN. 30 июня 1975 года. Однако DLG 6-15 стал DDG 37-46. Старые DL к тому
времени уже были выведены из состава (|>лота.
II Фрегат
11 G Фрегат УРО
III. Лёгкий фрега т
LCS Боевой корабль прибрежной зоны ('Littoral combat ship) С 2003 г.
М Монитор 1880-е- 1920 гг.
3.5.3 Подводные лодки
Подводными лодками называют самоходные аппараты предназначенные
для передвижения под водой, независимо от того, являются они боевыми,
вспомогательными или исследовательскими кораблями с незначительными
боевыми возможностями. Хотя некоторые классы подводных лодок включая
все субмарины с ДЭУ, уже нс используются ВМС США. другие флоты
продолжают использовать классы SS. SSA, SSAN SSB. SSC, SSG. SSM' и SST.
С появлением новых силовых установок, независимых от атмосферного
воздуха, возникли обозначения SSI и SSP, чтобы показать отличия разных
серий подводных лодок, но аббревиатура SSP является предпочтительной.
118
Класс SSK. который нс используется в ВМС США. используется в обиходе как
взаимозаменяемый с американским SS для дизельных ударных и патрульных
лодок. Болес широко он используется в ВМС Великобритании и британскими
фирмами, такими как Jane’s Information Group.
SS Ударная многоцелгвая подводная лодка (с ДЭУ)
SSA Вспомоги .тт.пая t рутовая подводная лодка тс ДЭУ)
SSAN Вспомогательная грузовая подводная лодка (с ЯЭУ)
SSB Подводная лодка с баллистическими ракетами на борту (с дизельной Э8йр1 этической установкой (ДЭУ))
SSB5 Атомная подводная лодка с баллистическими ракетами на борту (ПЛАРБ)
SSC Подводная лодка прибрежною плавания (с ДЭУ), больше 150 гони
Подводная лодка с крылапями ракшами (е ДЭУ)
SSGN Подводная лодка е крылатыми ракшами (с ЯЭУ)
SSI Ударная многоцелевая подводная лодка с воздухо- независимой ЭУ (дизельная) (Diesel Ajr-lndependent Propulsion)
ssm Сверхмалая подво -пая .лодка (до 150 гони)
SSN Многоцелевая атомная подводная .лодка (с ЯЭУ)
ssp Многоцелевая подводная лодка с воздухо-независимой ЭУ (неядерная) В другом варианте, подводный Iрапспорт
IXSS I{еклассифицированная вспомогательная подводная лодка
MTS У черный корабль-блокшив Ядерный учебный цент флота - бывшая SSBN
3.5.4 Паьрульпые корабли
Патрульными считаются корабли, назначение которых может выходить
за рамки прибрежных действий, имеющие достаточную мореходность и
автономность для самостоятельных действий в открытом морс нс свыше 48
часов. И: них наиболее известны речные/прибрежные силы времен Вьетнама.
Очень немногие из них остались в строю.
PBR Речной сторожевой катер РтЬЬегилн РНК Вьепктм
PC Сторожевой корабль прибрежного действия Первоначально - морской охотник
Р( I Быстроходный шорожевой катар Вьетнам
РЕ Морской 0X01 ник Первой мировой войны
1’1 Сторожевой корабль Второй мировой войны Па основе британского типа Riser
PEG Первоначальное обозначение USS «Оливер Хазард 11ерри» FFG-7
PG Канонерская лодка, позже пазрульный катер «Patrol combatant»
PGII Сторожевой артиллерийский катер на 110ДВОД11ых крыл 1>ЯX Patrol Combatant. Hydrofoil
РИМ Сторожевой ракетный катер па подводных Patrol. Hydrofoil Missile
119
крыльях
PR Речная канонерская лодка Patrol. River, например en:U$S Panay (PR-5)
PI Торпедный катер Времён Второй мировой войны
i к; Малый ракетный катер
Monitor 1 яжело вооруженный речной катер Вье! нам
ASI’B Патрульный катер от невой поддержки десанта «Alpha Boat»; также использовался во Вьетнаме как речной минный тральщик
РАСУ Сторожевой ватер на воздушной подушке Patrol. Air Cushion Стай, Brown Water Navy (Вьетнам)
PB Сторожевой катер
3.5.5 Десаи шые корабли
Вид боевых кораблей-амфибий включает в себя все корабли специально
построенные для ведения боевых действий с моря против суши, причем
способные действовать в открытом морс. Существует два класса кораблей:
десантные корабли, способные пересекать оксаны и десантные катера,
предназначенные для доставки войск с крупных кораблей на побережье, в
момент высадки.
ICC Штабной корабль .тесан:пых сил ЩКДРС
I.HA Универсальный десантный корабль Attack Assault, ДК'У
I.Ill) Универсальный .тесан гный корабль Подобен LHA, но с упором на вместимость но десантным катерам
I.PA Десантно-вертолётный корабль-док ДВКД. Landing Platform. Amphibious Посадочная площадка, амфибия
I.PI) Десаи тный транспорт-док ДТД. aka Landing Platform. Dock
LSI) / [ееан 1 ио-вер толе 1 ный корабль-док
I.SII. Большой пехотный десантный корабль Бывший [.СП.
I. -I. Десантный корабль снабжения Landing Ship. Logistic..
LSM Средний десантный корабль 11 ери од Второй мировой войны
I.SM(R) Средний десантный корабль с ракетным вооружением I Териод Второй мировой войны
I.SSI Корабль оптовой поддержки десанта Бывший I..CSL периода Второй мировой войны
LSI 1 апкодесантпый корабль 1ДК
LSV Десантный корабль колесной техники Обычно ролкер. RO-RO
3.5.6 Десантные катера
Десантные катера для скорое!ной переброски по иоде, высадки на
необорудованный берег подразделений морского десанта с вооружением и
120
гусеничной или колёсной боевой бронированной или другой техникой. Также
могут использоваться для снабжения воинских частей, дислоцирующихся на
побережье.
IX А Штурмовой десашпый катер Landing Craft. Assault
I < АС Десантный катер на Воздушной Подушке Landing Craft Air-Cushioned (Lcac5
IX I I Флагманский десантный катер Flot ilia Flagship, период Второй мировой войны
IX II Тяжелый десантный катер Landing Craft. Heavy, период Вюрой мировой войны
IX I «;)(!)( M)(R) Десантный катер пехоты Landing Craft, Infantry, и модификации (Канонерка: Gunboat) (Большой: Large) (Минометный: Mortar) (Реактивных снарядов: Rocket) Период Второй мировой войны
IX М Десантный катер боевой техники Landing Craft, Mechanized, период Второй мировой войны
I X Р Десашпый катер личного состава Landing Craft. Personnel
LCS1I.) Десантный катер поддержки Landing Craft, Support (Large) (период Вюрой мировой войны)
IX Г Гайко десантный катер 11ериод Второй мировой войны,
IX 1 Многон-левой десашпый катер Landing Craft. Utility
IX У Р Десашпый катер, личного состава и техники Landing Craft Vehicle and Personnel
3.5.7 Корабли тылового обеспечения
Эти корабли предназначены для пополнения запасов на ходу в морс.
AE Плавучий склад боеприпасов
AES Транспорт снабжения I Р
AO )скадреш1ый 1 анкер-заправщик
AGE Быстроходный универсальный транспорт снабжения БУ I PC ”1
AOR Универсальный 1 анкер-заправщик TH
AW Пл изучая опреснительная станция
AKE Универсальный ipancnop: снабжения и боеприпасов У I PC с 2002 г.
3.5.8 Минные заградители и тральщики
Основное назначение минных заградителей и тральщиков - минная и
противоминная война на морс.
AM Минный тральщик Всномо! а1ельный
АМЬ Рейдовый тральщик
АМс Базовый 1ра.1ыник
змеи 11одводный разведчнк мин
MSO Тральщик океанской зоны
MSC Тральщик прибрежной зоны
УК I Противоминный корабль
УК S Корабль противоминного обеспечения
УШ(( )(I)(O)(S) 1 ралыпик-искатель мин (Coastal) (Inshore) (Ocean)
121
(I lunter and Sweeper. I .eneral)
см Минный заградитель
3.5.9 Корабли береговой обороны
Основной задачей кораблей! береговой обороны является патрулирование
прибрежной зоны и воспрещение ее для противника.
I’В Патрульный Kai ep Вьетнам
I’BR Речной шнру.тьный как-р Вьетнам
PC 1 (рибрежный сторожевой катер С 2002 1. в берег свой охране
PI Фрегат, выполняющий функции сходные с корветом Великобритании Времен Второй мировой войны
3.5.10 Корабли подвижною тыла
Корабли подвижного тыла способны обеспечивать материальными
средствами корабли, которые действуют на значительном удалении от своих
военно-морских баз.___________________________________________________
AR 1 Ьтавучая маеiерекая
AS Плавучая база подводных лодок
3.5.1’ Вспомогательные суда
Вспомогательные корабли предназначены для множества ролей по
поддержке боевых кораблей и действий на морс в целом._______________
AN Сетевой 3aipa.THie.ib
iRE Плавучая мастерская лёгких сил - катеров или лес а и гн ых с ре: ic тв Период В юрой мировой войны
АГЕ ()кеанский буксир
AGIIS Судно обеспечения патрульных сил - океанских или прибрежных
3.5.12 Корабли обеспечения
Корабли обеспечения нс предназначены для ведения боя и в основном нс
вооружены. Корабли и суда обеспечения предназначены для действий в
открытом морс, в широком диапазоне ветров и волнения, обеспечивая общую
поддержку боевых соединений или береговых сооружений Включают и малые
вспомогательные суда, которые по роду деятельности должны покидать
прибрежные воды.
ACS Вспомо! акльный плавучий кран
AG Вспомогательное судно В СУ
AGDE )кс11ернл1енгальный с горожевой корабль
AGDS Судно обеспечения глубоководных работ
AGER Опытовый корабль для ведения исследований
влияния окружающей среды
AGP BcuoMoraie.ibiii.iii корабль упраттения IIIK
AGI I Экспериментальный фрегаз
AGM Плавучая ie.неметрическая станция
AGOR Океанографическое научно-исследовательское судно
AGOS САлпо разведки океанских акваторий
AGS Гидро, рафическое судно ГИСУ
AGSS Вспомогательная опытовая подводная лодка
AGTR Корабль электронной разведки В переводе техническое исследовательское судно (КТ IT .’ЗК)
All 1 осни 1 алыюе судно . с
A К 1рузовой транспорт
AKR Транспорт самоходной техники
AKS Cyxoipy тный ipaiicnopi
aog Танкер-бензовоз
AOT 11еф 1 епаливпой танкер
AP Войсковой транспорт
ARC Кабеиеремон гное судно
API. Плавучая катарма II КЗ
ARI. Плавучая мастерская ..ечкил сил им
A RS Спасательное судно сс
AS Плавучая база подводных лодок 1'ЬС ил
ASR Спасательное судно подводных лодок сс пл
AT Морской буксир
ATA Всномо! ательпый морской буксир
AH Эскадренный морской буксир
AIS Универсальное спаса, ельное судно
AVB Корабль тылового обеспечения авиации
AVI Учебный корабль для отработки посадки авиации ВМС Учебный авианосец, УЧЛВ
3.5.13 Служебные суда
Служебные суда (включая несамоходные) являются частью ВМС. Они
предназначены для обслуживания как боевых сил флота, так и военно-морских
баз. Литера «N» относится к несамоходным вариантам. Литера «У»
присваивается вспомогательным плавсредствам верфей (англ. Yard craft).
АВ 11лавучий кран
AI 1)В Большой плавучий док ид !
И 1)1. Малый плавучий док
Al 1)М Средний плавучий лок
АРВ Самоходная плавучая казарма
API. Плавучая казарма
ARI) Ремонтный плавучий док
A RDM Средний ремой 1 ный сухой док
АГА Вспомогательный морской буксир
1)SR\ Глубоководный спасательный аппарат
DSV 1 дубоководпый аппарат
NR I Ьаучно-ислаедовательская подводная полка
vc Беспалубный лихтер
Y([ Желе итодорожпый паром
YCV Лихтер для перевозки самолётов
YD Плавучий крап
Y 1)1 Водолазный бот
Y Палубный лихIер
y: в Паром или катер
YU) Верфевый плавучий лок
y: n Палубный лихтер Несамоходный
y; nb Большой палубный лихтер 11есамоходпт>1Й
Y! ND Вспомогательное плавсредство сухою дока 11ссамоходпое
YINX Лихтер Сттеииальытлй. несамоходный
Y 1’ 1[лавучая тлсктростаппия
Yl R Крытый лих 1 ер-рефрижераюр
y; rn Кры । ый л их 1 ер-рефрижера гор Несамоходный
Yl Ri I [олигоштый тендер
Yl li Портовая рабочая баржа
YG Мусорный лихтер
YGN Мусорный лихтер I [есамоходиый
YI.C Судоподьёмпоесудно СПС
YM Земснаряд
YMN Земснаряд I [есамоходиый
YNG Боновое судно Брандвахта
YNl Сетевой тендер
YO 11еф1 еиаливная баржа
YOG Беп тиионаливная баржа
Y'OGN Бенишопа нищая баржа I [есамохолпая
YON 11еф1 еиаливная баржа I [есамохолпая
YOS Баржа-хранилище нефтепродуктов
Yl Учебный патрульный катер
YTD 1[лавучий копёр
YR 1 Ьтавучая мае т ерская ИМ
Y RB 1 ьтавучая мастерская и дебаркадер
YRBM Баржа для ремонта, размещения личного состава и приёма нищи
YRDII 1 Ьтавучий док-мас т ерская Корпусная
Y RDM 1 Ьтавучий док-мастерская Механическая
Y RR Судоремонтная баржа для ремонта судов с ЯЭУ
YRST I сидер спасательно-судоподъёмных судов
ysd Крап ;ття ут тли тапни самолётов
YSR I рун 1 оотвозная баржа
YT Портовый буксир Этот класс быт позже разбит па классы Y’ l B. V Г1. и Y'TM
Y IB Большой портовый буксир
Y IL Малый портовый буксир
Y I' I Средний ттортовт.тй буксир
Y IT Опытовое судно испытания торпед
124
YW Водоналивная баржа
YVVN Водоналивная баржа 11есамохо.шая
IX I [еклассифинированные суда
х Подводный аппарат
USS Constitution Бывший IX 21 Был переклассифицирован в класс «noiw 1 сентября 1975 г.
3.5.14 Корабли береговой охраны
До 1965 г. корабли Береговом охраны США использовали те же
обозначения, что и ВМС США._______________________________________________
WIIEC Сюрожевон корабль большой авюпомносш
WMEC Сторожевой корабль средней автономности
Wl’B СI орожевой ка тер
3.6 Общее руководи во по классификации военных судов
и процедуры подсчета боевых кораблей
В соответствии с инструкцией департамента военно-морских сил
управления министра военно-морских сил флота (1000 NAVY PENTAGON
WASHINGTON DC 20350 1000) привотится инструкция, которая применяется
Управлением министра военно-морских сил (SECNAV). начальником военно-
морских операций (CNO). Командующим корпусом морской пехоты, а также
во всех объектам ВМС США (USN). корпусах морской пехоты США,
командах, региональных отделениях и других организационных единицах в
Департаменте военно-морских сил.
Основное назначение Инструкции:
1. Учет боевых сил. Боевые корабли - это военные корабли Соединенных
Штатов (USS). построенные или вооруженные для морского боя и способные
участвовать в боевых действиях, или другие военно-морские корабли, включая
корабли ВМС США. которые непосредственно участвуют в боевых действиях
ВМС или в вспомогательных миссиях Учет боевых сил будет вестись в
Регистре военно-морских судов (NVR).
2. Процедуры подсчета боевых сил. Точный подсчет боевых сил
необходим для поддержки требований к отчетности по ссылке (а). Подсчет
боевых кораблей будет включать только боеспособные корабли и корабли,
которые участвуют в боевых миссиях, определенных миссиях боевой
поддержки или миссиях сервисной поддержки.
2.1 Количество боевых кораблей будет включать:
2.1.2 Типы судов, перечисленные в приложении (1), которые
классифицируются как активные. Корабли военного командования морских
перевозок CMSC;. которым назначен сокращенный рабочий статус до 45 дней
или менее, могут учитываться в каждом конкретном случае в соответствии с
рекомендациями CNO с одобрения SECNAV.
125
2.2 .2 Типы кораблей, нс включенные в приложение (1). которые обычно
запрашиваются командующим войсками и распределяются в соответствии с
Глобальным планом распределения сил (GFMAP). могут учитываться в каждом
конкретном случае в соответствии с рекомендациями CNO и утверждается
SECNAV. Это будет временное разрешение на вк тючение этих судов в подсчет
судов, и оно останется в силе до тех пор, пока суда больше нс будут
запрашиваться в GFMAP или нс будут выведены из эксплуатации (в
зависимости от того, что произойдет раньше). Рекомендации для действий в
соответствии с этим правилом будут подготовлены Управлением начальника
военно-морских операций (OPNAV) судостроения и переоборудования,
управляющим ВМС. по согласованию с начальником главного оперативно-
планового управления.
2.2 Все остальные вспомогательные корабли и плавсредства,
перечисленные в приложениях (2) - (5). нс включаются в число боевых
кораблей.
2.3 Учитываются корабли, входящие и выходящие из реестра боевых сил.
2.4 Боевые корабли учитываются как часть активного реестра ВМС
вступающего в силу после принятия принимающим органом ВМС. О принятии
CNO будет немедленно уведомлен морским сообщением в соответствии со
ссылкой 2.5.
2.5 Корабли больше нс будут учитываться как часть реестра боевых сил,
вступившего в силу в официальную дату вывода корабля из эксплуатации,
«выведенного из эксплуатации» или, если это корабль с ядерной силовой
установкой!, в начале деактивации корабля. CNO будет уведомлен о выводе
судна из эксплуатации морским сообщением.
2.6 При подсчете боевых сил в Годовом перспективном плане
строительства военно-морских кораблей, корабли будут учитываться в тот
финансовый год. когда они были приняты ВМС но нс учитывается тот
финансовый год. когда они были выведены из эксплуатации.
3.7 Категории кораблей, классификация, типы и обозначения типов
кораблей ВМС США
К IA ('С БОЕВЫХ КОРЛ Б. ЧЕЙ
1. Класс боевых кораблей!. Любой введенный в эксплуатацию корабль,
построенный или вооруженный для морского боя. Эти корабли учитываются в
реестре боевых сил.
а. у) вианоссц. Все корабли, предназначенные в первую очередь для
ведения боевых действий авиации по нанесению ударов по воздушным,
надводным, подводным и береговым целям.
Ь. Авианосец самолетов обычного взлета и посадки. Многоцелевой
авианосец (атомный) (CVN).
126
с. Надводный боевой корабль. Надводные корабли, предназначенные
в первую очередь, для поражения воздушных, надводных, подводных и
береговых целей.
(1) Крейсеры. Крей сер с управляемым ракетным оружием(СС).
(2) Эсминцы. Эсминец с управляемым ракетным оружием (DDG).
(3) Фрегаты. Фрегат с управляемым ракетным оружием (FFG).
(4) Боевые корабли прибрежной! зоны. Прибрежный боевой корабль
(LCS).
d. Подводная лодка. Вее самоходные, подводные типы, независимо от
того, используются ли они в качестве боевых, вспомогательных, научно-
исследовательских и опытных подводных лодок, обладающие хотя бы
остаточной боеспособностью.
(1) Многоцелевые подводные лодки. Подводная лодка (атомная) (SSN).
(2) Ракетные подводные крейсеры стратегического назначен!!?
Подводная лодка с баллистическими ракетами (атомная) (SSBN).
(3) Ракетные подводные лодки с крылатыми ракетами. Ракетная
подводная лодка (атомная) (SSGN).
с. Морские десантные силы. Все корабли спроектированные с
возможностью участия во всех доктринальных типах десантных операций в
разных средах и имеющие характеристики, позволяющие проводить
длительные, распределенные морские операции между театрами военных
действий.
(1) Универсальный десантный корабль (LHA)
(2) Многоцелевой десантный корабль (LHD).
(3) Десантно-вертолётный транспортный док (LPD).
(4) Десантный транспорт-док (LSD).
2. Прочие корабли и суда, относящиеся к классу боевых кораблей.
Корабли, которые могут напрямую участвовать в боевых действиях ВМС или
участвовать в других боевых операциях и миссиях поддержки.
а. Минно-тральные силы. Вее корабли, основной функцией которых
является борьба с минами: Корабль противоминной обороны (МСМ).
Ь. Силы материально-технического обеспечения. Вспомогательные
корабли, способные обеспечить пополнение запасов подразделений флота на
ходу в морс.
(1) Эскадренный танкер-заправщик (АО).
(2) Быстроходный универсальный транспорт снабжения (АОЕ).
(3) Легкий эскадренный танкер-заправщик (AOL). Смотри пункт 4.
(4) Сухогрузы и транспорты с боеприпасами (АКЕ).
с. Обеспечение флота. Группа кораблей, предназначенных для
действий в открытом океане для оказания непосредственной поддержки
боевым силам или операциям.
(1) Командные корабли. Командный корабль (LCC).
127
(2) Корабли материального обеспечения. Плавучая база для
обслуживания подводных лодок (AS).
(3) Разведывательные корабли. Разведывательный корабль (AGOS).
(4) Спасательные суда и эскадренные морские буксиры.
(а) Спасательное судно (ARS).
(Ь) Эскадренный морской буксир (ATF).
(с) Многофункциональное спасательное судно (ATS).
(5) Экспедиционные и морские вспомогательные суда.
(а) Сухогрузы и транспорты с боеприпасами (АКБ).
(Ь) Экспедиционный быстроходный транспорт (EPF).
(с) Экспедиционная морская плавучая база (ESB).
(d) Экспедиционный транспортный док (ESD).
(е) Средний десантный корабль (LSM.).
3. Корабли из этого приложения учитываются в Регистре военно-
морсгих судов (NVR).
4. AOL являются частью программы логистических кораблей
следующего поколения, в рамках которой могут быть разработаны
дополнительные типы кораблей помимо средних танкеров (например, для
пополнения запасов).
5. АКБ предназначены для поддержки морских сил подвижного
тылового обеспечения.
КЛАСС BOEIIIIO-BC1!' УМОГАТЕЛ >1 ЫХ КОРАБЛЕЙ
1. Военно-вспомогательное судно. Любой военный корабль
предназначенный для работы в открытом оксане при различных состояниях
моря для оказания косвенной поддержки боевым силам или обслуживания
береговых объектов и инфраструктуры Классы кораблей, указанные в
параграфе (а) ниже, нс являются частью реестра боевых сил.
2. Суда обеспечения. Группа судов, предназначенная для оказания
косвенной поддержки воюющим силам или обслуживания береговых объектов
и инфраструктуры. Тс вспомогательные суда, которые обеспечивают
поддержку военно-морских операций, но нс участв) ют в боевых действиях,
боевых действиях ВМС или миссиях боевой поддержки, перечислены ниже.
а. Плавучий кран (ACS).
b. Военно-вспомогательный, общий (AG).
с. Корабль измерительного комплекса ракетного полигона (AGM).
d. Океанографическое научно-исследовательское судно (AGOR).
с. Гидрографическое судно (AGS).
Г. Госпитальное судно (АН).
g. Сухогрузный транспорт (АК).
h. Грузовой транспорт боевой техники (AKR).
128
i. Танкер-заправщик (AOT).
j. Кабслсремонтнос судно (ARC).
k. Корабль авиационного тылового обеспечения (AVB).
1. Быстроходный транспорт (HST).
in. Корабль сопровождения подводных лодок (AGSEY
п. USS Conslilution (вне классификации - учебный парусный корабль).
3. Корабли в этом корпусе будут учитываться в NVR.
4. SECNAV распорядился изменить классификацию USS Conslilution
на «вне классификации» с 1 сентября 1975 года.
КА "ГОРНЯ BOt ihlXl Я РОВ
1. Классификация боевых катеров. Боевые катера специально
разработаны для выполнения различных задач, связанных с боевыми
действиями, включая десантную войну, высадку, патрулирование, наблюдение,
а также передвижение в устьях рек и прибрежных районах. Боевые катера нс
являются частью реестра боевых сил.
а. Стопожсвой катер. Катера, задачи которых могут выходить за
рамки охраны прибрежных территорий, и чьи характеристики включают
достаточную автономность и мореходность, обеспечивающие возможность
операций в открытом морс без поддержки. Стооожсвыс катера, такие как
патрульные прибрежные катера входят в эту категорию.
Ь. Морской десантный катер. Суда, которые имеют штатные силы и
средства для десантных операций и предназначены для работы в основном в
прибрежных водах или могут перевозиться на борту более крупных боевых
единиц.
(1) Десантный катер на воздушной подушке (LCAC).
(2) Десантный катер многоцелевой (LCU).
с. Патрульные катера. Суда различных размеров и конструкций,
используемые для выполнения задач патрулирования, наблюдения и
воспрепятствования действиям противника, сопровождения ценных грузов,
способные передвигаться по рекам и в прибрежных районах.
(1) 36-футовый патрульный катер (36РВ).
(2) 64-футовыи патрульный катер (64РВ).
(3) 87-футовьй. патрульный катер (87РВ).
d. Катер специальных операций. Боевой корабль Командования сил
специальных операций, находящийся в ведении специальных операций! ВМС
(Naval Special Warfare NSW).
(1) 36-футовып водолазный катер (DSB).
(2) Штурмовой десантный катер (ССА).
(3) Средний десантный катер (ССМ).
(4) Тяжелый десантный катер (ССН).
129
(5) Надувная резиновая лодка специального назначения с жестким
набором корпуса NSW (NSW RHIB).
(6) Плавсредство доставки морских котиков (SDV).
(7) Боевой подводный! аппарат для мелковод'я (SWCS).
(8) Судно надводного обеспечения (SSC).
2. Необходимо обращаться к базе данных системы поддержки
кораблей и лодок (CBSS) для получения информации о текущем реестре
боевых кораблей, за исключением боевых кораблей!, находящихся в ведении
Нового Южного Уэльса. CBSS обслуживается дивизией Кардсрокского центра
надводных боевых действий ВМС, отрядом Норфолк, дивизией боевых
кораблей (NSWCCD Det Norfolk, CCD).
3. За исключением патрульных прибрежных катеров, боевые катера
перечисленные в этом приложении не учитываются в реестре NVR.
' ' IA СС г 'ПК (ИНЫХ МОРСКИХ II. ЧА / Ф1,,'\1
1. Классификация беспилотных морских платформ. Беспилотные
морские суда и транспортные средства представляют собой платформы
предназначенные для удаленной работы, независимо или совместно с
пилотируемыми платформами. Эти системы могут обладать разной степенью
автономности в зависимости от требований к платформе и системному уровню.
Беспилотные надводные аппараты (USV) и беспилотные подводные
аппараты (UUV) подразделяются на категории в соответствии с конкретными
характеристиками.
Некоторые беспилотные морские транспоотныс средства могут в
будущем стать частью реестра боевых сил (дополнительную информацию см. в
параграфе 4 настоящего приложения).
2. Класс USV. USV классифицируются по длине.
а. Большое беспилотное надводное плавсредство (LUSV) (см. пункт 4
настоящего приложения). LUSV имеет длину более 210 футов и запускается с
пирса.
Ь. Средний беспилотный надводный аппарат (MUSV) (см. пункт 4
настоящего приложения). Категория MUSV варьируется от 45 футов до 210
футов в длину и спускается с пирса.
с. Малый беспилотный надводный аппарат (SUSV). Категория SUSV
варьируется от 23 футов до 45 футов по длине и может быть спущен на воду и
поднят с боевого ведущего корабля или другого более крупного судна, а также
с пирса.
d. Самый малый беспилотный надводный аппарат (VSUSV). VSUSV
классифицируется как USV длиной менее 23 футов, который может
запускаться и подниматься с боевого ведущего корабля, других крупных судов
или с небольших платформ. а также с пирса.
130
3. Класс UUV. UUV классифицируются по величине диаметра
корпуса и могут запускаться или подниматься с ведущей платформы или с
пирса.
а. Сверхбольшой! беспилотный подводный аппарат (XLUUV) (см.
пункт 5). К классу XLUUV относятся UUV с диаметром корпуса более 84
ДЮЙМОВ.
Ь. Большой беспилотный! подводный! аппарат (LUUV). К классу LUUV
относятся UUV с диаметром корпуса от 21 дюйма до 84 дюймов.
с. Средний беспилотный! подводный аппарат (MUUV). К классу
MUUV относятся UUV с диаметром корпуса от 10 дюймов до 21 дюйма.
d. Малый беспилотный подводный аппарат (SUUV). К классу SUUV
относятся UUV с диаметром корпуса отЗ до 10 дюймов.
4. Беспилотные платформы в настоящее время нс учитываются в
боевых силах и нс входят в реестр NVR.
5. Специальные беспилотные платформы, перечисленные выше, нс
учитываются в боевых силах. Продолжаются испытания этих платформ и
продолжают разв! ваться концепции их использования. Когда эти платформы
будут сочтены способными участвовать в боевых действиях, CNO
отрекомендует их реклассификацию и включение в подсчет боевых сил для
утверждения SECNAV.
А. ЛСС СУПОВ ОБЕСПЕЧЕНИЯ
1 Класс судов обеспечения. Вспомогательные суда — это нестроевые
суда и плавсисдства. предназначенные для обеспечения поддержки военно-
морских операций илз! береговых объектов и нс являющиеся частью реестра
боевых сил. Суда обеспечения являются активами, находящимися под
управлением командования.
2. Служебное судно. Служебные суда (в том числе несамоходные) —
утилитарные суда, предназначенные для действий в прибрежных и закрытых
акваториях, обеспечения общей поддержки как строевых кораблей, так и
береговых объектов.
а. Сухие доки (несамоходные)
(1) Малый вспомогательный плавучий сухой док (AFDL).
(2) Средний вспомогательный ремонтный сухой док (ARDM).
(3) Средний вспомогательный плавучий сухой док (AFDM).
Ь. Буксиры (самоходные)
(1) Рейдовый буксир (YT).
(2) Большой рейдовый буксир (YTB).
(3) Малый рейдовый буксир (YTL).
с. Лихтсрыибаржи
(1) Беспалубный лихтер (YC).
(2) Лихтер для перевозки самолетов (YCV).
(3) Палубный лихтер (YFN).
131
(4) Лихтер специального назначения (YFNX).
(5) Большой палубный лихтер ( YFNB).
(6) Нефтеналивная баржа (YON).
(7) Баржа для хранения нефтепродуктов (YOS).
(8) Водонативная баржа (YVN).
(9) Баржа для отработанных нефтепродуктов (YWO).
d. Прочие суда (самоходные)
(1) Быстроходный морской катамаран (FSF).
(2) Плавучая радиолокационная станция (SBX).
(3) Паром (YFB).
(4) Учебный сторожевой катер (YP).
(5) Плавучий кран для подъема поврежденных гидросамолетов (YSD).
(6) Водолазный бот (YDT).
(7) Опытовое судно для испытания торпед (YTT)
е. Прочие катера(несамоходные)
(1) Плавучая казарма (APL).
(2) Плавучий кран (YD).
(3) Судно обслуживания сухого дока (YFND).
(4) Плавучая электростанция (YFP).
(5) Плавучая мастерская (YR).
(6) Ремонтная баржа-плавказарма (YRB).
(7) Ремонтная баржа-плавказарма-столовая (YRBM).
(8) Плавучий док-мастсрская (корпус) (YRDH).
(9) Плавучий док-мастсрская (силовая установка) (YRDM).
Г. Прочие рассекреченные. Прочие рассекреченные единицы (IX).
3. Суда обеспечения морских перевозок. Платформы обеспечения
морских перевозок включают плавучие системы и суда, предназначенные для
доставки грузов на необорудованное побережье для поддержки боевых сил
Смотреть пункт 7 данного приложение при необходимости более подробной
информации.
а. Усовершенствованная военно-морская лихтерная система (INLS)
Ь. Десантный катер механизированный (LCM 8).
с. Десантный грузовой лихтер, грузоподъемность 5 тонн (LARC V).
d. Вспомогательный катер подвижного тылового обеспечения (MPF
UB).
с. Морское вспомогательное судно сбора нефтепродуктов (OPDS).
4. Лодки. Лодки военно-морских сил - это самоходные плавсредства,
нс предназначенные специально для использования в качестве боевых
кораблей, служебных судов или судов обеспечения, оборудованные для спуска
на воду с борта кораблей или береговых сооружений для действий в районе
военно-морских операций. Лодки бывают разных типов и размеров, начиная от
небольших лодок с подвесным двигателем и заканчивая крупными
нестроевыми плавсредствами (например, учебные вспомогательные суда.
предназначенные для оснащения центров боевой подготовки и морских
полигонов). Большие лодки — это подкатегория лодок длиной от 85 футов и
более. К лодкам берегового базирования относятся лодки для выполнения
конкретных задач, котооые могут быть погружены на борт корабля, но нс
включены в комплектность корабля (например, десантная группа готовности
(ARG) и морское экспедиционное подразделение (MEU). обнаружение и
задержание судов, ведущих незаконную деятельность на море (VBSS) жесткие
надувные лодки (ARG/MEU VBSS RHIB). Следующие суда являются
предметом снабжения и не управляются централизованно:
а. Корабельные шлюпки. Прочие суда боевого класса в этой!
категории - это суда, которые предназначены для работы в основном с боевых
кораблей.
(1) 5-метровая надувная лодка с жестким корпусом (5MRB).
(2) 7-мстровая надувная лодка с жестким корпусом (7MRB или 7MRX).
(3) ll-метровая надувная лодка с жестким корпусом (11M.RB
илиИМРХ).
Ь. Лодки берегового базирования. Класс сторожевых катеров в этой
категории представляют собой надводные патрульные катера,
предназначенные для использования относительно вблизи побережья или в
защищенных гаванях или реках с целью обеспечения безопасности гавани,
защиты сил. транзита и сопровождения судов. Сторожевые катера охраны
гавани:
(1) 27-футовый катер охраны гавани (2?ZHS).
(2) 28-футовый катер охраны гавани (28HS).
(3) 32-футовый катер охраны гавани (32HS).
(4) 33-футовый катер охраны гавани (33HS).
(5) 11-метровый катер охраны гавани (11MHS).
(6) 35-футовый катер охраны гавани (35HS).
(7) 36-футовый катер охраны гавани (36HS).
5. База данных CBSS содержит имеющиеся в реестре служебные суда,
суда и лодки обеспечения морских перевозок, за исключением лодок,
эксп туатируемых NSW CBSS поддержа вастся NSWCCD Det Norfolk. CCD.
6. Служебные суда будут учитываться в NVR. Лодки ВМС нс будут
учитываться в NVR.
7. Судно, предназначенное для подвижного тылового обеспечения.
Проведен анализ основных распознавательных признаков используемых
при оценке изображений, получаемых от иконичсских оптико-электронных
систем воздушной разведки; разработана классификация надводных обьсктов
военно-морских сил и рассмотрены основные характеристики при
дешифрировании их июбражений; представлены результаты применения
дешифрирования надводных объектов военно-морских сил при проведении
летных испытаний комплексов воздушной разведки.
Классификация надводных объектов военно-морских сил позволяет при
выполнении процедуры обнаружения (распознавания), выявлении
конфигурации объектов, определении габаритных размеров, отнести объекты к
одному из видов классов, подклассов или типов и отразить общие тактические
или технические характеристики.
Классификация надводных объектов военно-морских сил обеспечивает:
- ci схематизацию всего многообразия надводных объектов военно-
морских сил. встречающихся при дешифрировании различных видов
изображений;
- систематизацию знаний дешифровщиков. облегчение их
ориентирования в многочисленных поостых объектах, вошожность
оперировать при необходимости более общими категориями, чем единичный
объект (тип);
- стандартизацию названий простых объектов, ускоряющ} ю обработку
информации.
Реализация полученных результатов, при проведении испытаний,
позволит повысить эффективность дешифрирования изображений, получаемых
от иконических оптико-электронных систем воздушной разведки.
134
4 МЕТОДЫ АВТОМАТИЧЕСКОГО
ДЕШИФРИРОВАНИЯ ЦИФРОВЫХ
ИЗОБРАЖЕНИЙ
4.1 Основные принципы построения систем распознавания
данных аэросъемки
Общая схема системы распознавания данных аэросъемки для решения
прикладных задач состоит из блоков, представленных на рисунке 4.1.
1. Нормализация изображении
2. Визуализация и комплексный
анализ данных
3. Построение схемы распознавания
4. Выделение признаков
5. Классификация изображении
6. Тематическая интерпретация
результатов
7. Поегклассификациоццая обработка
8. Получение количественных оценок
по классам
9. «Нормирования карт
Рисунок 4.1 - Общая схема тематической обработки данных
Наиболее важные особенности каждого из этапов.
1. Нормализация включает процедуры, устраняющие основные типы
искажений исходных данных. На этом этапе следует псполь ювать только тс
135
процедуры, которые нс приводят к значительным потерям информации: еще
неизвестно, какие характеристики изображения наиболее существенны для
решения задачи, а какими можно пренебречь. Нужно помнить, что
геометрические преобразования могут привести к искажению исходных
яркостных характеристик объектов подстилающей поверхности. На этом этапе
их следует выполнять только в тех случаях, когда имеются наземные
измерения, требующие строгой координатной привязки тестовых участков к
изображению. Тем более нельзя трансформировать изображение в какую-то
картографическую проекцию, если предполагается выполнение его
классификации по спектральным признакам.
2. Визуализация. и комплексный анализ данных. На этом этапе
производится анализ информативности имеющихся данных с точки зрения
поставленной задачи и выбор принципа декомпозиции системы распознавания.
По, наличии нескольких изображений на обследуемую территорию
выполняется их пространственное совмещение (приведение к единой системе
координат). Для визуального анализа обычно применяются процедуры
поднятия контраста (растягивание ненулевого интервала значений яркости на
весь динамический диапазон). При анализе многозональных изображений
применяется RGB-синтсз в удобной для анализа цветовой палитре, а также
анализ главных компонент, который мы рассмотрим в соответствующем
разделе. Описание основных методов улучшения качества изображений можно
найти в 151.52. 53]. а также в разделе «Enhancement» руководства пользователя
по пакету ERDAS Imagine.
Процедуры улучшения визуального восприятия могут, однако,
отрицательно повлиять на качество распознавания, если они хоть каким-то
образом связаны с пересчетом значений яркости на исходном изображении.
Выполняя подобные преобразования цифрового изображения, всегда
необходимо проверять, нс изменяет ли оно тс свойства объектов исследования,
которые будут ^пользоваться в системе распознавания.
3. На основе комплексного анализа данных формируется общая схема
решения задачи. Схема включает основной набор процедур классификации,
последовательность их применения, перечень входных и выходных данных и
вспомогательных процедур их обработки и анализа. Как уже говорилось выше,
выбор таких процедур обработки изображений должен быть согласован с
принципами классификации и нс должен приводить к искажению тех
характеристик изображения, которые могут быть использованы как признаки в
системе распознавания.
4. Выделение признаков представляет собой интерактивный процесс,
включающий ряд автоматических процедур преобразования видеоданных. В
системах распознавания. основанных на классификации пикселов
изображения, очень важно правильно выбрать количество классов в системе
координат признаков. Если выбранное количество классов значительно
меньше количества различающихся по этим измерениям объектов земной
136
поверхности, ошибки классификации могут оказаться недопустимо высокими.
Для выбора необходимого количества исходных классов в таких системах
применяется неконтролируемая кпррсификация и сегментация изображений
[55, 56]. При большом количестве измерений-признаков для сокращения
размерности задачи применяется корреляционный и факторный анализ данных.
При распознавании по интегральным признакам в системе кооодинат
изображения часто важно усиление определенных структурных и текстурных
признаков. В этих случаях в качестве вспомогательных обычно используются
процедуры низкочастотной и высокочастотной фильтрации и различные
операторы для подчеркивания гсоиндиканионных признаков [51] При
использовании структурных признаков объектов необходимо предварительное
устранение геометрических искажений.
5. Классификация - это основной блок распознавания для решаемой
задачи, хотя отдельные процедуры распознавания могут присутствовать и на
этапе выделения признаков, и на этапе постклассификационной обработки. Но
именно результат полученный на этапе классификации изображения, является
основой для интерпретации и последующих процедур перехода от
изображения к тематической карте. Процесс классификации может
осуществляться в несколько этапов или в несколько итераций, в зависимости
от выбранной схемы распознавания. В ряде случаев результаты, полученные на
этом этапе, требуют пересмотра всей схемы обработки в целом.
6. Тематическая интерпретация заключается в сопоставлении каждому
из выделенных классов некоторой тематической категории определенной
совокупности объектов земной поверхности. Здесь оцениваются реальные
ошибки классификации, то есть достоверность результата. При неудачном
выборе количества или описаний исходных классов может быть принято
решение о повторной классификации на основе другого набора классов и
системы признаков. При удовлетворительном результате выбирается схема
постклассифнкационной обработки для перехода к тематической карте.
7. Постклассификациопная обработка представляет собой набор
интсракт! вных и автоматических процедур, необходимых для формирования
карты объектов исследования, расклассифицированных в соответствии с
тематикой задачи. К таким процедурам относятся группировка и
редактирование выделенных классов, устранение обнаруженных ошибок
классификации. В процессе постклассификационной обработки также могут
быть использованы процедуры распознавания, в том числе структурные.
8. Подсчет количественных характеристик включает площадные оценки
по выделенным классам объектов, а также точечные оценки в соответствии с
физическими моделями исследуемых процессов и явлений, оценки динамики
процессов при обработке мультиврсмснных данных и т.п. Этот этап, нс
имеющий прямого отношения к процессу распознавания, тем нс менее, важен
для его оптимизации. Накопление и анализ характеристик выделяемых классов
объектов позволяет совсршснствоватъ как саму систему распознавания, так и
137
отдельные се этапы.
9. Процесс получения тематических карт на основе результата
обработки включает процедуры преобразования изображения к нужной
картографической проекции, интерактивное редактирование результата в
соответствии с точностными требованиями к картографическим материалам
заданного масштаба, а также растрово-векторное преобразование при
использовании векторных ГИС Выполнение растрово-векторного
преобразования требует, как правило, сглаживания результата в пределах
некоторых участков для получения однородных по классам контуров. Именно
с точки зрения этого этапа наиболее эффективны такие процедуры
классификации. которые обеспечивают наибольшую однородность
изображения по классам и наиболее четкие границы между объектами
определенных тематических категорий. Если результат классификации не
удовлетворяет этим условиям, пооцедуры сглаживания могут привести к
искажению реальных границ между классами.
В настоящее время существует большое количество спсциалишрованных
пакетов, содержащих набор необходимых автоматических процедур для
построения систем тематической! обработки данных ДЗ. Наиболее известные
профессиональные продукты - ERDAS Imagine ER Mapper (Австралия).
EASY/PAGE (PCI) (Канада), ILVIS GIS (Голландия). Наиболее
распространенными на отечественном рынке программных продуктов
являются пакеты ERDAS Imagine и ER Mapper, а также небольшие настольные
системы для PC - IDRISI. EPPLE7, GRASS. С начала 90-х все большее
распространение получает пакет ENVI (США), включающий некоторые новые
средства анализа данных аэросъемки и позволяющий формировать гибкие
схемы обработки благодаря наличию внутреннего объектного языка.
Все такие пакеты включают стандартный набор классификаторов
многозональных (многослО1 ных) растровых данных и в этом аспекте
различаются в основном интерфейсом и сервисными процедурами
интерактивного анализа. Несколько отличается также способ реализации
отдельных алгоритмов. С точки зрения построения прикладной системы
распознавания наибольший интерес представляют два инструментальных
аспекта этих пакетов: 1) функции, обеспечивающие предварительный анализ
данных и обучение классификаторов; 2) функции, обеспечивающие
тематическую интерпретацию результатов классификации и их
редактирование.
В первом аспекте наибольшее значение имеет способ визуализации
многозональных изображений, то сеть выбор линейной комби нации каналов и
цветовой палитры для результата синтеза. Неудачный выбор способа синтеза
каналов приводит к потере информации при визуальном анализе и, как
следствие ограничивает возможности выбора необходимых классов и
описания их признаков. Поэтому при предварительном визуальном анализе
изображения часто бывает необходимо апробировать достаточно большое
1.38
количество различных режимов визуализации.
Следующим важным фактором является набор процедур,
обеспечивающих процесс описания классов в заданной системе признаков.
При классификации пикселов многозонального изображения большое значение
имеет определение наиболее точных границ между классами в признаковом
пространстве, то есть в пространстве спектральных яркостей. Возможность
формирования этих границ только путем выделения на изображении
эталонных участков изначально ограничивает точность классификации любым
алгоритмом, так как границы выделяемых тематических категорий в
пространстве признаков далеко нс всегда можно точно аппроксимировать
известными аналитическими функциями, которые обыкновенно используются
в стандартных классификаторах. Более того некоторым классам может
соответствовать несколько нс связных ограниченных областей признакового
пространства. В этом случае большой интерес представляет анализ положения
классов непосредственно в пространстве спектральных признаков и
возможность предварительной неконтролируемой! классификации
(кластеризации) в различных режимах с последующим анализом спектральных
сигнатур полученных кластеров.
Для проведения исследований с целью построения эффективной схемы
классификации наиболее удобны средства пакета ERDAS Imagine Растровый
редактор (Viewer) обеспечивает большое коянчесаро различных средств
интерактивного визуального анализа и способов формирования обучающих
данных. В пакете имеется достаточно большое количество средств настройки
классификаторов, анализа обучающих выборок и оценки качества
классификации.
Для знакомства с основными процедурами классификации изображении
и построения небольших, но гибких схем тематической обработки можно
использовать пакет IDRISI. В этом пакете имеется достаточно широкий набор
средств тематического анализа и классификации, хотя возможности настройки
самих алгоритмов несколько ограничены в сравнении с ERDAS Imagine. То же
самое можно сказать и о классификационном блоке пакета ER Mapper.
4.2 Основные задачи, решаемые при построении систем
автоматического распознавания
Процесс разработки систем автоматического распознавания требует
построения математической модели процесса распознавания, наличие которой
позволяет реализовать итеративную процедуру построения прообразов САР.
приближающихся по своим характеристикам (точностным, временным и т.д.) к
требуемым характеристикам, задаваемым на стадии разработки тактико-
технических требований к системе. Рассмотрим основные задачи, связанные с
построением систем распознавания.
1. Определение полного набора признаков, характеризующих объекты.
139
для распознавания которых разрабатывается данная САР. Названная
совокупность признаков должна быть сформирована без каких-либо
ограничении, связанных как с получением априорной информации,
необходимой для исходного описания классов объектов, так и с получением
апостериорной информации о конкретных объектах. подлежащих
распознаванию
2 Первоначальная классификация распознаваемых объектов (обучение),
составление априорного набора классов = 1....,/. Основное в данной
задаче - выбор соответствующего принципа классификации^ который
определяется требованиями, предъявляемыми к системам распознавания,
которые в свою очередь зависят от того какие решения могут приниматься
получателем информации по результатам распознавания неизвестных
объектов.
3. Построение (выбор) решающего правила (классификатора),
обеспечивающего отнесение распо шавасмого объекта к тому или иному классу
или их некоторой совокупности. Решающие правила основываются на
сравнении той или иной меры близости или меры сходства распознаваемого
объекта с каждым классом D,j = i..../. Решающее правило должно быть
выбрано в некотором смысле оптимальным образом, например, так. чтобы при
этом обеспечивалось минимальное количество ошибок распознавания
поступающих на вход системы неизвестных объектов.
4. Выбор показателей эффективности САР и возможность оценки их
значений.
Решение задач 1 - 3 эквивалентно построению модели процесса
распознавания. Решение задачи 4 подразумевает оценку качества
распознавания.
Рассмотрим существующие подходы к решению указанных выше задач с
учетом особенностей построения САР.
4.3 Классификация систем автоматического распознавания объектов
В настоящее время известно большое число подходов к построению
модели процесса распознавания. Подавляющее большинство из них имеют
чисто эвристический характер и содержат в своей основе интуитивные
принципы распознавания. Именно эвристический характер указанных
подходов является причиной того, что до настоящего времени отсутствует
единая математическая теория распознавания изображений, что в свою
очередь, препятствует обоснованным и систематизированным разработке,
выбору и сопоставлению различных САР. а также получению обоснованной и
надежной оценке их эффективности [13].
Приведенная в работах [13, 14. 15] классификация САР опирается в
качестве классификационного принципа на свойства информации,
используемой в процессе распознавания (рисунок 4.2). САР можно
140
подразделить на простые и сложные в зависимости от того, имеют ли
признаки, на множестве которых произведено описание объектов, единую пли
различную физическую природу.
Если в качестве принципа классификации использовать способ
получения апостериорной информации, то сложные системы можно
подразделить на одноуровневые и многоуровневые. В многоуровневых
системах апостериорная информация о признаках определяется на основе
косвенных измерений, как результат комбинирования простых распознающих
устройств [13-19].
Если в качестве принципа классификации использовать характер
информации о признаках распознаваемых объектов, СаР могут быть
подразделены на детерминированные, вероятностные. логические,
структурные.
Детерминированные САР используют «геометрические» меры сходства,
основанные на измерении расстояний между распознаваемым объектом и
эталонами классов в признаковом пространстве.
Вероятностные САР используют методы распознавания основанные на
теории статистических решений и статистическом описании объектов в
признаковом пространстве
Логические САР основаны на дискретном анализе и базирующемся на
нем исчислении высказываний. Логические САР применяются в случае, когда
для принятия решения при распознавании неизвестного объекта существенны
нс столько количественные соотношения между признаками, сколько
свя бывающие их логические зависимости.
Структурные САР специальные грамматики, состоящие из предложений,
каждое из которых описывает объекты, принадлежащие конкретному классу.
Особенность структурных методов заключается в том, априорными
описаниями классов являются структурные описания. формальные
141
конструкции, при получении которых последовательно проводится принцип
учета иерархичности структуры объекта и учета отношений, существующих
между отдельными элементами этой! иерархии, в пределах одних и тех же
уровней и между ними.
Для построения модели процесса распознавания выберем вероятностный
подход, так как указанный подход нашел наиболее широкое применение в
создании систем технического зрения и дистанционном зондировании. Этот
факт может быть объяснен тем. что. во-первых, анализируемые изображения и
их описания имеют, как правило, случайный характер и, следовательно,
принятие решений имеет случайную природу, а. во-вторых, универсальность
вероятностных моделей по отношению к стохастическим описаниям,
базирующимся на случайных признаках. Логические и структурные методы
распознавания могут успешно использоваться для повышения качества
распознавания в многоуровневых САР (например при распознавании сложных
объектов и др.). Однако и ь этом случае первоначальная обработка
информации по выделению структуры или логических описаний объектов
должна быть осуществлена на основе вероятностных или других методов.
В вероятностных САР описаниями классов являются условные плотности
распределения вероятностей! значений векторов признаков д- = (,v,....vs)r для
каждого класса £>,.у =/....,/, то сеть функции Р(Х | £>д,. а также априорные
вероятности р<р л появления объектов соответствующих классов.
При построении плотности Р(А |О ) различают две ситуации. В первой
ситуации априори известен аналитический вид функции плотности,
содержащей некоторой количество параметров которое и требуется оценить
(параметрическая оценка). Во второй! ситуации вид функции плотности
неизвестен. В этой более сложной ситуации необходимо произвести оценку и
вида функции плотности, и их параметров (непараметрическая оценка).
Параметрическая оценка функции плотности может быть полечена на
основе методов математической статистики, например, метода моментов,
метода наибольшего правдоподобия и другие [IX, 19].
Для получения непараметрической оценки функции P(.\'\D)
применяются соответствующие методы: гистограммный метод, метод к-
ближайших соседей, метод полигонных оценок и др. [ 18,20].
Выбор решающего правила в вероятностных САР производится в
соответствии с Tcopircii статистических решений, в зависимости от имеющейся
априорной информации. Согласно указанной теории, вес решающие правила
для / > э классов основаны на сравнении между собой или определенными
порогами отношений правдоподобия
Вопрос о том. в каком порядке и с какими порогами сравнивать
несколько отношений правдоподобия, должен решаться в зависимости от того.
142
какой вид решений нужен а также об имеющейся априорной информации о
распознаваемых объектах. Это учитывается путем выбора наиболее
подходящего рещающего правила из имеющихся критериев: байесовского,
Неймана-Пирсона, минимаксного, максимума апостериорной вероятности,
максимального правдоподобия.
Пои использовании байесовского критерия отношения правдоподобия Ln
для / = 2 сравнивается с порогом
с ,ПГ-II,, Р,
° П,,-П}2 ’
(11,, 11
где II = I '\ - матрица потерь, элементы
(4.2)
которой количественно
выражают потери от принятия решения. - априорные вероятности классов
объектов D, и £>. соответственно.
При L,, >СО принимается решение об отнесении наблюдаемого объекта к
классу I),, при £,,<( „ - к классу D,. Применение байесовского критерия
минимизир) ст средний риск R [27].
Х = (4.3)
<7=/ }=1
где Pjq - вероятность принять решение о принадлежности наблюдаемого
объекта к классу '' , когда в действительности он принадлежит классу D . При
j=q принятое решение будс. истинным, в противном случае ложным.
Средний риск (3.3) представляет собой математическое ожидание потерь
в процессе принятия решений.
Когда матрица потерь неизвестна или ее трудно задать численно, вместо
критерия среднего риска можно воспользоваться критерием максимума
апостериорной вероятности СМАВ). Для / = з решающее правило сводится к
сравнению 7ц с порогом С.шв [20, 211.
C.ws=^-, (4.4)
где/)./< - априорные вероятности классов объектов D, и D, соответственно
Иногда, вместо (4.1) и (4.4) для записи решающего правила используют
нс сравнение Ljq с С.шв, а сравнение между собой функционалов
J, = Р(Х \dj)-pj (4.5)
Решение о принадлежности наблюдаемого объекта к классу 1)
принимается в случае, когда j >jv для всех г * j.v = /,.../.
В случае, когда матрицу потерь задать можно, а об априорных
вероятностях классов р нет никаких сведений, целесообразно исполь ювать
минимаксный критерий, сущность которого заключается в том. чтобы принять
решение ориентируясь на самый наихудший случай априорных вероятностей
классов, когда байесовский риск при фиксированных потерях становится
143
наибольшим. Исходя из этих условий, выбирается значение порога Сшв.
При отсутствии информации о вероятностях р и потерях используется
критерий Неймана-Пирсона (Снп) и максимального правдоподобия.
Дтя / = 2 правило по критерию Неймана-Пирсона использует сравнение
L:I с порогом С,,,,, значение которого определяется таким образом, чтобы
вероятность ошибочного решения /ф была нс дольше заданного значения а.
Исполь юванис критерия целесообразно, если по условиям задачи одну из
вероятностей ошибок можно выделить как основную и сделать ее равной
некоторому требуемому значению [201.
Если порог с выбирать так. что с = 1, в том случае решающее правило
принимает вид критерия максимума отношения правдоподобия (МОП). Тогда
принятие решения СВОДИТСЯ К сравнению плотностей />(.?(£) ) между собой.
Среди перечисленных критериев предпочтительным, с точки зрения
качества распознавания, является критерий МАВ применение которого в
качестве решающего правила в системах распознавания позволяет
минимизировать вероятность ошибки распознавания наблюдаемых объектов
[21-29].
Одним из основных этапов построения модели процесса распознавания
является выбор априорного набора признаков. При этом необходимо
учитывать следующие особенности процесса распознавания объектов:
- вся информация о распознаваемых объектах сосредоточена на
аэроснимках, следовательно измерению будет доступны только тс признаки,
которые могут быть получены путем обработки изображений;
- априорный набор признаков должен быть основан на описании формы
объекта, его размеров. спектральной отражательной или излучательной
способности, являющихся прямыми признаками распознавания объектов'
- вычислительные затраты и скорость расчета признаков должна
обеспечить выполнение требовании по времени с момента поступления
первичных данных до момента выдачи отчетных данных по результатам
дешифрирования.
Изображение объекта описывается функцией яркости S’(.v.v), которая
определена в некоторой области двухмерного пространства, где введена
система координат. Это описание является исходным для построения
разнообразных более экономных описаний изображений объектов [2. 8. 19. 30.
31].
Один из способов упрощения полного описания изображений является
выделение и анализ только контура изображения. Предложен целый ряд
методов для выделения контуров с помощью различных операторов,
оценивающих величину градиента функции .S'(x. v). После выделения контура
при известной координате центра формы может быть определена полярная
диаграмма изображения, состоящая из набора радиус-векторов, с помощью
которой могут решаться различные задачи анализа изображений. Недостатков
144
этих методов является слаоая помехозащищенность связанная с
необходимостью дифференцирования изображения.
Для решения задачи распознавания особое значение имеют признаки,
инвариантные к повороту и сдвигу изображения объекта.
Для распознавания объектов по их изображениям предлагается
использовать спектральное описание изображений. Дтя построения
спектрального описания используют ортогональные преобразования функции
г) такие как: Фурье, Уолша-Адамара. Хаара. Хартли п другие [2, 18, 22, 27,
3(1-34]. Широкое применение среди указанных преобразований нашло
представление изображения в виде двухмерного спектра Фурье S(®,.,® ),
связанного с исходным описанием изображения .S’(.v,у) выражением
4-Х
S'(®„®, ) = ||.S'(.v. y)exp{-y(®r.v + ci^y)}dxdy (4.6)
В общем случае все оптические сигналы подразделяются на две группы,
детерминированные и случайные. Детерминированным является сигнал,
который можно представить определенным двумерным коэффициентом
пропускания фотографического изображения какого-либо объекта. Случайные
сигналы представляются случайными двумерными функциями, когда закон
распределения коэффициента пропускания по полю снимка заранее
неизвестен, что имеет место при рассмотрении изображений различных
аэроландшафтов.
В практике часто используют приближенное представление сигналов в
виде двумерных случайных функций, отвечающих условиям стационарности и
эргодичности. При этом существенно упрощается математический аппарат,
используемый для описания характеристик этих функций. В качестве входного
сигнала в разрабатываемой модели предлагается использовать сигнал типа
«белый шум». Если представить изменение коэффициента пропускания в
каждой зоне спектра в пределах снимка как случайный стационарный процесс.
г(т.н) корреляционная функция которого равна дельта-функции, умноженной
на некоторую постоянную величину г] [2, 80]. то можно получить:
1^,11-!!„)= r^(ni-m0.ll-H0) (4.7)
fconpiini = тд,п = n0
где ^(111-1пол-пй) = 1.
Onpillll * lllgjl * По.
Как известно [4]:
| -mgji-n0)dmdn= 1 /(=0°’, (4.8)
0
Отсюда следует что рассматриваемый случайный процесс
характеризуется тем, что значения г(ш.»)в двух несовпадающих, но сколь
угодно близких точках снимка нскоррелированы
145
Обозначая w-w0 = Дш. п-п0=Лп, спектральная плотность
рассматриваемого случайного процесса может быть найдена:
Л[/фДш,.Аи)] = | |(Д/«,Д/?.)й = г2 = const
(4.9)
Таким образом, спектральная плотность случайного процесса постоянна
на всех частотах (рисунок 4.3).
Амплитудно-частотный спектр рассматриваемого процесса также будет
постоянным и равным с0 откуда можно получить:
Рисунок 4.3 - Спектральная плотность случайного процесса
/•'[г(ш. //)] = Г(Ш./()
(4.10)
При воздействии на ФПЛЗ сигнала некоторой яркости и какого-либо
спектрального состава в каналах ФПЛЗ образуется соответствующее
количество накопленного заряда. Заряд ФППЗ в синей, зеленой и красной
зонах видимого спектра будет пропорционален спектральным коэффициентам
отражения на изображении. Яркостям объекта и фона будут соответствовать
свои величины: г*,г'' г' .г^.Л.г
ао ’ ао' ао ’ ф ф ф
В каждой из зон видимого спектра коэффициент отражения объекта и
фона лля одновременного распределения можно представить как (рисунок 4.4):
где г,.г, - значения ПЧ объекта на заданном фона-.
Разбиение системы на отдельные звенья условно и зависит от того,
влияние каких факторов необходимо учесть. При этом учитывается тишь
эквивалентное влияние на сигнал того или иного фактора, независимо от его
физического содержания. Передаточные свойства звена описываются
отношением сигнала на его выходе и входе.
146
В качестве входного сигнала используется, сигнал типа «белый шум» и
спектры I(.»)] и 1 '[гДя]] будут отличаться в каждой зоне спектра лишь
амплитудой сигнала го5у) и r#(v).
Рисунок 4.4 - Распределение коэффициентов отражения объекта и фона в
зависимости от ПЧ
В качестве стандартных сигналов наиболее часто используют единичный
сигнал, единичный импульс («5-функцию) и гармонические колебания.
Аналогом этих сигналов для двухмерных систем являются изображения
полуплоскости, очень тонкой линии и одномерных пространственных
синусоид.
Одномерный спектр «5-функции можно получить из выражения для
спектра одиночного прямоугольного импульса. Одномерным прямоугольным
импульсом для нашего случая будет изображение резкой линии конечной
ширины на равномерном фоне.
Спектральное описание изображения обладает рядом свойств,
позволяюших обеспечить его нечувствительность к преобразованиям сдвига и
поворота, а также хорошую помехозащищенность.
Однако базисные функции преобразования Фурье нс согласуются с
функциями яркости цифровых изображений, имеющие нс гармонический
ступенчатый вид.
Поэтому решением проблемы выбора эффективной системы признаков
является выбор ортогонального преобразования, согласованного с цифровыми
изображениями, нс требующего замены интегрирования суммой, а
дифференцирования конечными разностями, что вносит дополнительную
погрешность.
147
4.4 Анализ построения систем автоматического распознавания и
кри терпев |ффек'1ивиости дешифрирования
В основе автоматического дешифрирования изображений, полученных от
цифровых оптико-электронных систем, лежит теория распознавания образо:
Простейший подход к распознаванию образов заключается в сопоставлении с
эталоном. В этом случае некоторое множество образов, по одному из каждого
класса образов, хранится в памяти ПЭВМ.. Входной (распознаваемый!) образ
(неизвестного класса) сравнивается с эталоном каждого класса. Классификация
основывается на заранее выбранном критерии соответствия или критерия
подобия.
Другими словами, если входной образ лучше соответствует эталонному
образу /-го класса образов, чем любому другому эталону, то входной! образ
ктассифицирустся как принадлежащий /-му классу образов. Такой подход
использовали в ряде уже осуществленных, устройств и программ для ПЭВМ
при чтении печатных букв.
Недостаток этого подхода, т. с. сопоставления с эталоном, заключается в
том. что в ряде случаев трудно выбрать подходящий эталон из каждого класса
образов и установить необходимый критерий соответствия. Эти трудности
особенно существенны, когда образы, принадлежащие одному классу, могут
значительно изменяться и искажаться. Например, при распознавании
изображений эталоны могут нс соответствовать входному изображению по
сдвигу, повороту, масштабу, фону, аддит, вному шуму и т.д.
Болес совершенный подход заключается в том. что вместо сравнения
входного образа с эталонами, классификация основывается на некотором
множестве отобранных характеристик, которые имеют входные изображения
распознаваемых объектов. Эти характеристики, называемые признаками,
предполагаются инвариантными плп малочувствительными по отношению к
обычно встречающимся изменениям и искажениям, и обладающими
небольшой избыточностью.
В распознавании образов возникает т. вс задачи. Первая задача
заключается в выборе количества и качества признаков. Обычно решение о
качестве признаков является в известной степени субъективным, а также
зависящим от практических обстоятельств (например, от возможности
вычисления пли измерений эти:; признаков). В качестве признаков обычно
выбирают яркость гистограммные признаки, площадь, форма, спектральные
коэффициенты, моменты и т.д. По количеству признаков в настоящее время нс
существ) ст общей Tcopi.ii. Вопрос о количестве признаков остается открытым,
так как экспериментальные исследоьания показывают, что процесс
распознавания протекает иногда более успешно с меньшим числом признаков,
чем с большим числом, а иногда - наоборот [34 35, 36].
Вторая задача распознавания образов заключается в классификации (т.с.
в принятии решения о принадлежности входного образа тому или иному
148
классу), которое основывается на вычислениях отобранных признаков
Рассмотрим существующие способы рещения указанных задач.
Методы построения автоматических распознающих систем могут
основываться на различных принципах. Когда класс характеризуется перечнем
входящих в него членов, построение системы распознавания образов может
быть основано на принципе принадлежности к этому перечню, когда класс
характеризуется общими свойствами. присущими всем его членам. Построение
системы распознавания образов может основываться на принципе общности
свойств, когда при рассмотрении класса обнаруживается тенденция к
образованию кластеров в пространстве образов, или на принципе
кластеризации. Под кластером обычно понимают группу объектов (образов),
образующих в пространстве описания компактную в некотором смысле
область
Принцип приналтсжности перечню членов классов является самым
простым для понимания. Классы задаются перечнями членов. Автоматическое
распознавание происходит посредством сравнения с эталоном. Множество
образов. принадлежащих одному классу, запоминаются системой
распознавания. При предъявлении системе незнакомых (новых) образов она
последовательно сравнивает их с эталонами, хранящимися в сс памяти.
Система распознавания образов относит новый образ к тому классу, к
которому принадлежал находящийся в памяти системы образ, совпавший с
новым. Здесь предполагаются очень близкая степень совпадения эталона с
наблюдением.
При распознавании реальных изображений объектов эталонные
изображения могут не соответствовать наблюдению по повоооту: с др игу
шумам и т.д.. поэтому здесь, как правило, сравниваются признаки и
используется принцип общности свойств.
Принцип общности свойств предполагает задание класса с помощью
свойств (признаков), общих для всех входящих в него членов. В процессе
распознавания сравниваются признаки. Здесь используются математ, ечсскпс и
лингвистические методы. В основу математического подхода положены
правила классификации, которые выводятся в рамках определенного
математического аппарата. Детерминистский подход базируется на построении
решающего правила, по которому система распознавания относит наблюдение
к тому или иному классу, с помощью детерминированных чисто
математических методов.
Статистический метод предполагает построение решающего правила с
учетом статистических свойств наблюдаемых и эталонных признаков.
Погрешности обучения (задания эталонов) и погрешности измерения
признаков описываются в виде математических ожиданий, дисперсий, матриц
коьариаций. Вее эти статистические характеристики в итоге используются при
классификации во время распознавания.
Принцип кластеризации имеет место, когда образы некоторого класса
149
представляю’ собой векторы. компонентами которых являются
дсйствитслвныс числа, этот пласе можно рассматривать как кластер и выделятв
толвко его свойства в пространстве образов кластера. Построение систем
распознавания, основанных на реализации данного принципа, определяется
взаимным пространственным расположением отделвных кластеров. Если
кластеры соотвстствующ! с различным классам, разнесены достаточно далеко
друг от друга, то с успехом можно воспользоваться сравнитслвно простыми
схемами распознавания, например, такими как классификация по принципу
минимального расстояния. Если же кластеры перекрываются приходится
обрашатвея к более сложным методам разбиения пространства образов.
Перекрытие кластеров является результатом неполноценности доступной
информации и шумовых искажений результатов измерения. Поэтому степень
перекрытия часто удается уменьшить,, увеличивая количество и качество
измерений, выполненных над образами некоторого класса
Дтя реализации рассмотренных выше основных принципов построения
автоматических систем распознавания образов существуют три основных типа
методологии: эвристическая. математическая и лингвистическая
(синтаксическая). Нередко системы распознавания создаются на основе
комбинации этих методов.
Эвристические методы. За основу эвристического подхода взяты
интуиция и опыт человека. В нем используются принципы перечисления
членов класса и общности свойств. Обычно системы, построенные такими
методами, включают набор специфических процедур, разработанных
применительно к конкретным задачам распознавания. Хотя эвристический
подход играет большую роль в построении систем распознавания образов,
немного может быть сказано относительно общих принципов синтеза, так как
решение каждой конкретной! задачи требует использования специфических
приемов разработки системы. Это означает, следовательно, что структура и
качество эвристической системы в значительной степени определяются
одаренностью и опытом разработчиков.
Математические методы. В основу математического подхода положены
правила классификации, которые формулируются и выводятся в рамках
определенного математического формализма с помощью принципов общности
свойств и кластеризации. Этим данный подход отличается от эвристического, в
котором решения определяются с помощью правил, тесно связанных с
характером решаемой! задачи. Математические методы построения систем
распознавания можно разделить на два класса: детерминистские и
статистические [34. 37].
Детерминистский подход базируется на математическом аппарате, нс
использующем в явном виде статистические свойства изучаемых классов
образов.
Статистический подход основывается на математических правилах
классификации, которые формулируются и выводятся в терминах
150
математической статистики. Построение статистического классификатора в
общем случае предполагает использование байесовского классификационного
правила и его разновидностей. Это правило обеспечивает получение
оптимального классификатора в тех случаях, когда известны плотности
распределения для всех совокупностей обраюв и вероятности появления
образов для каждого класса.
Лингвистические (синтаксические) методы. Если описание образов
производится с помощью нспроизводных элементов (подобразов) и их
отношений, то для построения автоматических систем распознавания
применяется лингвистический или синтаксический подход с использованием
принципа общности свойств. Образ можно описать с помощью иерархической!
структуры подобразов, аналогичной синтаксической структуре языка. Это
обстоятельство позволяет применять при решении задач распошавания
образов теорию формальных языков. Предполагается что грамматика образов
содержит конечные множества элементов, называемых переменными,
нспроизводными элементами и правилами подстановки. Характер правил
подстановки опосделяст тип грамматики. Среди наиболее изученных
грамматик можно отметить регулярные, бесконтекстные и грамматики
непосредственно составляющих. Ключевыми моментами данного подхода
являются выбор нспроизводных элементов образа, объединение этих
элементов и связывающих их отношений в грамматики образов и. наконец,
реализация в соответствующем языке процессов анализа и распознавания.
Такой подход особенно полезен при работе с образами, котопые либо не могут
быть описаны числовыми измерениями, либо столь сложны, что их локальные
признаки идентифицировать нс удается и приходится обращаться к
глобальным свойствам объектов.
Основное внимание будет уделено математическим методам. Хотя, как
отмечалось выше, эвристический подход весьма важен, в целом о нем можно
сказать очень немного. Следует, однако, заметить, что глубокое понимание
других методов является прочной гарант! ей построения систем распознавания
на основании интуитивного подхода.
Выбор метода синтеза системы еще нс решает до конца проблему
составления конкретной программы и проблемы реализации В большинстве
случаев в распоряжении имеются репрезентативные (наиболее
представительные) образы, представляющие каждый! из рассматриваемых
классов. В таких ситуациях можно воспользоваться методами распознавания,
называющимися обучением с учителем. В схеме обучения с учителем система
«обучается» распознавать образы с помощью разного рода адаптивных схем.
Ключевыми элементами такого подхода являются обучающие множества
образов, классификация которых известна, и реализация соответствующей
процедуры обучения.
В некоторых прикладных задачах принадлежность к определенным
классам элементов обучающего множества неизвестна. В таких случаях можно
151
ооратиться к методам распознавания ооразов. называющимся распознаванием
без учителя. Как указывалось ранее, распознавание по схеме «обучение с
учителем» характеризуется тем. что известна правильная классификация
каждого обучающего образа. В случае «обучения без учителя» требуется,
однако, конкретно изучить классы образов, которые имеются в данной
информации.
Обученно происходит только на этапе построения (или коррекции в связи
с поступлением ноьой информации) системы распознавания. Как только
система, работая с обучающим множеством образов, добивается приемлемых
результатов, ей предлагается реальная задача распознавания пробных
объектов, взятых из Toil среды, ь которой системе предстоит работать.
Качество распознавания будет в существенной степени определяться тем.
насколько хорошо обучающие образы представляют реальные данные, с
которыми система будет сталкиваться в процессе нормальной! эксплуатации
137-45].
Рассмотрим вторую задачу распознавания образов, заключающуюся в
классификации (т.с. в принятии решения о принадлежности входного образа
тому или иному классу). Классификация основывается на измерениях
отобранных признаков. Качественное и количественное описание признаков
является самостоятельной проблемой. Предположим, что признаки уже
отобраны и измерены.
Рассмотрим детерминированную модель дешифрирования. Допустим,
что у каждого входного образа измеряется N признаков. Каждое множество из
признаков можно рассматривать как вектор называемый вектором
признаков, или как точку в TV-мерном пространстве признаков Qv Задача
классификации заключается в рассмотрении всех возможных векторов или
точек в пространстве признаков по соответствующим классам образов. Это
можно трактовать как разбиение пространства признаков на взаимно
нспсрссскающисся области, каждая из которых соответствует некоторому
классу образов.
Математически задача классификации может быть сформулирована с
помощью разделяющей функции.
Пусть £>,,£>.__DJ.....D, обозначают / возможных классов образов,
подлежащих распознаванию, и пусть ,V = (.v;,.v_,rv). сеть вектор вычисленных
(измеренных) признаков, где .у представляет собой /-ыс измерен!.с. Тогда
разделяющая функция относящаяся к классу образов Dr / = 7,2___________/
такова, что сели входной образ, представленный вектором признаков Д',
принадлежит классу Д, то величина J,(X) должна быть наибольшей. Пусть
X ~ L) обозначает, что вектор npi наков Л' входного образа принадлежит
классу Д. Тогда можно записать для всех Х~т,
J,{X)>JJ{X)> i.j = !....! ,*j. (4.12)
152
Таким образом, в пространстве признаков граница разбиений,
называемая решающей границей, между областями, относящимися
соответственно к классам Z) и /),. выражается следующим уравнение
Jt(x)-Jj(x)=o (4.13)
Рассмотрим статистическую модель дешифрирования. В
детерминированной модели предполагалось, что измерения признаков дают
детерминированные величины v,,.v_______,vv. Однако во многих случаях
измеренные признаки образов одного класса могут претерпевать большие
изменения, и, кроме того, нельзя пренебрегать шумами (помехами),
возникающими при измерениях. При этих условиях можно рассматривать
.V,.л-,,...,xv как случайные величины, где v- результат измерения /-ого
признака в условиях помех.
Классификатор представляет собой устройство, относящее каждый
поступающий на его вход набор случайных признаков к одному из конечного
числа классов.
Считается, что система распознавания допускает ошибку в том случае,
если она относит к классу />, объект, на самом деле принадлежащий
отличному от Dj классу. Считается, что система распознавания лучше
системы распознавания А .если вероятность совершить ошибку для системы
меньше, для системы К. Датчик или некоторая процедура выдает информацию
о виде вектора признаков .Y = (.v;,.v,_,yv)r, где v- число характеристик
каждого объекта дешифрирования. Предполагается, что вектор наблюдений X
принадлежит одному из / классов образов /),, /)_О,.
Примем допущения о том. что априорные вероятности появления
объектов каждого класса одинаковы, т.с. вектор X может с равной
вероятностью относиться как к одному, так и к другому классу. Пусть
Р(Х/1) )= р (Л') есть плотность распределения для вектора X при условии, что
он принадлежит классу D:. В этом случае вероятность того, что на самом деле
вектор X принадлежит классу Dt, является вероятностью ошибки и
определяется выражением:
Ли)
й=/
Решающая функция представляет собой функцию относящую X
точно к одному из / заданных классов. Оптимальной считается решающая
функция которая дает наименьшую вероятность ошибки при всех
допустимых значениях X. Значение /, при котором величина /-/’ будет
наименьшей, совпадает с тем значением /, которому соответствует
наибольшее значение вероятности /’(.Y/7? ). Итак, оптимальная решаюшая
153
функция </°(.Y) относит набор Д'к классу D, в том и только в том случае, если
выполняются неравенства:
/’(X/П, )>/-’(.¥/nJ V./*/
(4.15)
или
При />(.Y/n,) = /’(.\'/nJ и P(X/Dl.)>p{x/DJ\j = IJ.../,
оптимальная решающая функция может отнести вектор Л' как к классу
I), так и классу Dk. Для заданного значения А'классификатор определяет
оптимальную решающую функцию
Пусть измеренные значения распределены нормально и соответствующие
ковариационные матрицы всктороь признаков имеют вид:
(R,
С =
(4.17)
* R
где Rv - ковариация компонент вектора
измерений A' R„ - дисперсия /-ый
(4.18)
компоненты вектора измерений А'.
Поскольку в случае нормального распределения имеем
где вектор математического ожидания, отношение двух плотностей
/’(Л'/nJ и /’(.Y/nJ определяется выражением
4г—= )Х'(А'(4.19)
Так как ковариационная матрица симметрична, данное отношение
условных вероятностей сводится к следующему
Т(А /П,) _ у7 r- -,ц + /и -1,/ г (4.20)
/-*(.¥/П ) L - J
Введем величину
Тогда получим выражение для разделяющей функции
/;.(.¥)=.¥ R' (in, - in,}- +1н1УR^'iiii, - in,}
(4.21)
(4.22)
Для определения оптимальной разделяющей функции следует вычислить
1(1-1) значений функции /J.Y) для всех и выбрать наибольшее из
полученных значений. Если окажется, что этот максимум равен то относим
А' к классу Д. Схема оптимального распознавания, воспроизводящая
154
описанный метод приведена на рисунке 4.5.
В основе автоматического дешифрирования изображений, лежит теория
распознавания образов, которая основывается на некотором множестве
отобранных характеристик и имеют входные изображения распознаваемых
объектов. Эти характеристики, называются признаками, предполагаются
инвариантными или малочувствительными по отношению к обычно
встречающимся изменениям и искажениям, и обладающими небольшой
избыточностью.
Рисунок 4.5 - Статистическая модель распознавания
Таким образом, задача распознавания образов САР решается в выборе
количества и качества признаков и в их классификации (т.с. в принятии
решения о принадлежности входного образа тому или иному классу), которое
основывается на вычислениях отобранных признаков.
4.5 Критерии выбора аффективных признаков объектов в САР
Для повышения эффективности работы автоматических распознающих
систем исходный набор признаков подвергается преобразованию, которое
заключается в уменьшении количества признаков при сохранении величины
вероятности ошибочного распознавания на заданном уровне.
С теоретической точки зрения является наилучшим критерием
эффективности признаков, однако, недостатком этого критерия является то,
что за исключением очень небольшого числа частных случаев для него нс
существует явного математического выражения. Даже для нормальных
распределений вычисление требует численного интегрирования. Поэтому
155
обычно вводятся другие критерии эффективности признаков - критерии
раздельности, приближенно отражающие В,ш и не требующие численного
интегрирования. Рассмотрим некоторые из этих критериев на основе выбора
признаков на основе теории информации. Эти критерии формируются на
основе понятии энтропии и дивергенции. Энтропия представляет собой
статистическую меру неопределенностей. Мерой рассеяния вектора признаков
гипотезы (класса) д или критерием эффективности набора признаков служит
энтропия
II, = - Г /'(.?/ д) 111 />(А' / д) dx, (4.23)
Л'
где X — гсктор признаков, Д.?/д) условная плотность распределения вектора
А'соответствующая классу D,.
Наиболее эффективным для описания класса Д является набор
признаков, доставляющий минимум величине II . При этом нужно иметь в
виду, что число признаков в эффективном наборе должно быть достаточно
большим для успешного распознавания нескольких объектов. Если классы
объектов D, и Dj характеризуются плотностями нормального распределения
/’(Л7Д) -N(m,.R.), /’(.Y/д) n(ih R.} с векторами математических ожиданий
ш,, и/ и ковариационными матрицами R, R а также при этом R,=1 =R то
минимум величины //, будет достигнут, когда эффективный набор признаков
будет представлен соответствующим минимальным собственным числом
матрицы R.
Дивергенция представляет собой меру расстояния или несходства между
двумя классами. Если плотность распределения вектора признаков класса Д
сеть /’(Л7Д), тогда средняя различающая информация для Д по отношению к
Д определяется выражением
/(Д.Д ) = JР{Х / В )1п^./^^/У. (4.24)
Средняя различающая информация лтя класса /Д определяется
/ I г г I Р(ХН) )
/(Д, Д)= рф¥7Д)1п;,' Jrf.Y. (4.25)
В качестве второго определения дивергенции называют полную среднюю
информацию для различения классов D,,D и задают в виде
J„ = l(l),,Д)+ /(д. Д) = j>(.\-/Д)- р(.\7 д (4.26)
Наиболее эффективным для описания объектов D,,D является набор
признаков, доставляющий максимум величине Д. Если классы D..D
характеризуются нормальными распределениями с математическими
ожиданиями ш, ш и ковариационными матрицами R R ,то
156
Jtj =-^n \(Rl - R ){Rj'-R ;) ] + -y />[., ‘ +, R 1)('".-m )('", (4.27)
В случае R, = R, = R получим
J = {in - int )/C (w - in I.
(4.28)
В [45] предложен критерий выбора эффективных признаков, основанный
на теории информации
, _ , _ f Hv/^И-у/д)
J. P(D, Н¥ !D,)+l\l\ ]p{X !DJ)''
(4.29)
Для нормальных распределений P{m,.R,). Наиболее
эффективным для описания объектов является набор признаков,
доставляющий максимум величине J.
Рассмотренные критерии имеют один недостаток: они нс связаны
непосредственно с вероятностью ошибки классификации.
Существует несколько способов оценки величины 7^ для случая многих
классов. Обычно эту задачу сводят к случаю оценки величины Рош для пары
классов, как уже указывалось выше общее математическое выражение для Рош
в явной форме отсутствует, поэтому часто применяют способ, заключающийся
в оценке верхней границы Раш для случая двух классов, получившей название
верхней границы Чернова[51|
рт„ =b’7A,]'/’exp(-//),
где р-р, - априорные вероятности классов
// = -lnJp(.Y/Z?/)'/’p(.Y'/r>ii)'/</.¥; р(.у/г>7). P(.Y/7?J - условные
А'
распределения признаков для классов dj и D(j, соответственно.
(4.30)
М,-
плотности
В случае нормального распределения признаков
7/ V 1„ , „ W \ Л
// = — \к,+л I [т-т + —In—z f
(4..31)
где R R^mjn^- ковариационные матрицы и векторы математических
ожиданий признаков для классов DI и D
Если ковариационные матрицы RrRq одинаковы R =R =R. то
Нижняя граница Рош определяется неравенством
Р^Р„Ц[-(1-4Р;Г] (4.32)
Далее проведем исследования реальных цифровых изображений с целью
разработки системы признаков минимизирующих вероятность ошибки.
Предлагаемый метод обработки коррелированных случайных дискретных
полей с произвольным распределением вероятностей отсчетов выделяет
статистически независимые признаки для систем распознавания образов [80].
157
Примером таких полей служат изображения. Доказана теорема, которая
позволяет получить дискретное случайное поле с независимыми нормально
распределенными значениями коэффициентов. Эти результаты достигаются с
помощью преобразования Уолша-Адамара.
На рисунке 4.6 приведены различные изображения с гистограммами
распределения яркости. На рисунке 4.7 представлены расчетные значения
модуля спектра преобразования Уолша-Адамара исходных изображений с
гистограммами распределения спектральных коэффициентов.
Рисунок 4.6 - Исходные изображения (а, б, в) и их гистограммы
распределения яркости (г, <). е.)
Рисунок 4.7 - Модуль спектра преобразования Уолша-Адамара исходных
изображений (а, б, в) и их гистограммы распоеделения спектральных
коэффициентов (г, д. е)
Сравнивая гистограммы распределения яркости исходных изображений с
гистограммами распределения спектральных коэффициентов тех же
изображений, отметим, что гистограммы яркости отличны от нормального
распределения и зависят от изображения, а гистограммы спектральных
коэффициентов хорошо аппроксимируются нормальным распределением и
158
различаются лишь параметрами.
Проверка гипотезы о нормальности распределения проводилась по
критерию /2 (хи-квадрат), который показал, что при = 6,803 с
вероятностью 0,85 гипотезу можно считать правдоподобной.
Экспериментальные результаты дают основание предположить, что
распределение спектральных коэффициентов преобразования Уолша-Адамара
любых полутоновых изображений подчиняется нормальному закону.
Пр1 ведем основные свойства цифровых изображений:
1. Число отсчетов л' представляется достаточно большим.
2. Отсчеты яркости /(г), i = 0.. ..,N — 1 ограничены и для полутоновых
изображений равны
Ъ$/(1)<255, Vi. (4.33)
3. С увеличением расстояния Г(г = |/ —,/| между отсчетами /(7) и /(/)
статистическая зависимость убывает, а с некоторого г коэффициент
корреляции р равен нулю.
Поскольку функции Уолша образуют ортонормированный базис, а
коэффициенты преобразования Уолша-Адамара являются проекциями
цифрового изображения на этот базис, то спектральные коэффициенты будут
взаимно некоррелированными [12,40]. т.с.
= соу(ИЦ7Ц <!>'(/)) = 0. i * j . (4.34)
Номер функции Уолша заменим на верхний индекс /. номер отсчета
заменим на нижний индекс / т.с. функцию Уолша где /;(«,),
т, представим в виде fWalti). Отсчеты строки изображения / - случайные
величины, a Wai (I) - различные детерминированные числа, которые нс влияют
на распределение И'', поэтому лтя вывода плотности распределения
коэффициента преобразования Уолша-Адамара перепишем последнюю
формулу в виде
»;' = £//• (4.35)
7-Ц
Таким образом, распределение/-го коэффициента преобразования
Уолша-Адамара зависит от длины строки N. Обозначение показывает
суммирование случайных отсчетов строки с весами В формуле
(4.35) опущен нормирующий множитель, который также нс влияет на
распределение коэффициента преобразования Уолша-Адамара.
Рисунок 4.8 поясняет физический смысл коэффициентов преобразования
Уолша-Адамара.
159
Скалярное умножение:
W° = (f,Wal°),
W' = (f,Wal'),
W2 = (f,Wal2),
WN~l =(f,WalN~l).
Рисунок 4.8 - Физический смысл коэффициентов преобразования
Уолша-Адамара
Введем обозначения:
- для щспсрсии коэффициента преобразования Уолша-Адамара:
В] = DU'J;
-для математического ожидания вектора коэффициентов преобразования
Уолша-Адамара:
л/и; =
-для функции стандартного нормального распределения:
Ср(л-) = / f ехр| - — \dl; (4.36)
V-’>T i [ 2 )
-для совместной функции распределения случайной величины f
F, = P{f<x,.../><'>}., 6,/ = о./.N-l;
- для совместной! плотности распределения вероятностей коэффициентов
преобразования Уолша-Адамара:
/>(" a' ) = ф'((7“ jr,..., irAv 1)
В случае разнораспрсделснных случайных величин одна из основных
причин, по которой функция распределения суммы И" может не сходиться к
нормальной функции распределения, связана с неравноценностью слагаемых в
сумме и v • Одним из условий, обеспечивающим равномерность вкладов
слагаемых // в нг'. является условие равномерной малости [53]
lim max =0. (4.37)
Наиболее общим (необходимым и достаточным) условием
справедливости предельных распределений для последовательностей,
имеющих конечные .дисперсии (4.37). является условие Линдеберга npi любых
R [53. 54]
160
lim—— У jxJdFt(x) = 0, (4.3 X)
t=0|t|
которое гарантирует что дисперсии отдельных слагаемых Df' малы по
сравнению с суммой И2.., т.е. вероятность того, что какие-нибудь из слагаемых
</ будут того же порядка, что и сумма ИS * 7', должна стремиться к нулю.
4 .6 Методы распознавания на основе построения решающих
деревьев
Методы распознавания основанные на построении решающих деревьев,
относятся к типу логических методов. В данном классе алгоритмов
распознавание объекта осуществляется как прохождение по бинарному дереву
из корня в некоторую висячую вершину. В каждой вершине вычисляется
определенная логическая (функция. В зависимости от полученного значения
функции происходит переход далее по дереву в левую или правую вершину
следующего уровня. Каждая висячая вершина связана с одним из классов, в
который и относится распознаваемый объект, если путь по дереву
заканчивается в данной вершине.
Бинарным корневым деревом (БКД) называется дерево, имеющее
следующие свойства:
а) каждая вершина (кроме корневой ) имеет одну входящую дугу;
б) каждая вершина имеет либо две. тибо ни одной выходящей дуги.
Вершины, имеющие две выходящие дуги, называются внутренними, а
остальные - терминальными или листьями.
Пусть задано N предикатов 7J = ji'; = P1(S)._y, =P,(5),...,yv = /’v(S)J,
определенных на множестве допустимых признаковых описаний [S],
именуемых признаковыми предикатами. Каждый предикат отвечает на вопрос,
выполняется ли некоторое свойство на объекте .S' или нет.
признаковых предикатов могут быть
7. если (/j<x,lS)<32)&MS) = 0)
0. в противном случае,
[ 7. если ().5х, (5) + 7,2х .('$) < 7
[(7, в противном случае.
Каждой! строке £, =(ая,а,,,...ож) таблицы обучения Ттп1 =(ду)
соответствие бинарную строку значений предикатов на
S => Ow,-...>«,).>•„ =Р,(5,). В результате, таблице Т„„, = будет
соответствовать бинарная таблица бинарных «вторичных
описаний» объектов обучения.
Бинарное дерево называется решающим, если выполнены следующие
условия:
1. Каждая внутренняя вершина помечена признаковым предикатом из Р.
(4.39)
(4.40)
поставим в
описании
161
2 Выходящие из вершин дуги помечены значениями, принимаемыми
предикатами в вершине.
3 . Концевые вершины помечены метками классов.
4 . Ни в одной ветви дерева нет двух одинаковых вершин.
Пример подобного дерева для конфигурации из трех классов (рисунок
4.9) приведен на рисунке 4.10.
Рисунок 4.9 - Конфигурация объектов трех классов. Объекты классов
А',,А',.А', обозначены, соответственно, символами X. О, А
Рисунок 4.1.Q - Решающее дерево для классов
На рисунке 4.10 приведено некоторое решающее дерево, позволяющее
правильно распознавать объекты трех классов Вершины дерева помечены
следующими предикатами: v; =".v; >()",г. =".v; + .\ ’ < 7", г, =”л; >л-,",у4 =”л-_. >0'
162
Данному решающему дереву соответствуют характеристические функции
классов ,/'Д5) = л.г.у_, /.(5; = Ry, v v;r_, v, v , ./'.(5) = r;.r, v г;Т.г, vrjjxp,
принимающие значение I на объектах «.своего» класса и 0 на объектах
остальных классов.
Приведем еще один пример решающего дерева (рисунок 4.11).
построенного непосредственно по таблице обучения:
fooiin Л.
е А.
= 11101
10111
4oioioJeA-'=
В качестве признаковых предикатов испотьзуются г, =л-1, у, = .v,.
(4.41)
Рисунок 4.11 - Решающее дерево 61 нарной таблицы обучения
Здесь в качестве приближений для характеристических функций классов
выбраны функции .MS) = .x;.v.v.v;.v,, /,(5) = v;.v?vi,.r,. В данном примере, для
построения решающего дерева использованы только два признака.
4 .7 Решение задач распознавании объектов с использованием
нейронных сетей
Распознавание изображений представляет собой одни из важнейших
компонентов систем управления и обработки информации,
автоматизированных систем и систем принятия решений. Задачи, связанные с
классификацией и идентификацией предметов, явлений и сигналов,
характеризующихся конечным набором некоторых свойств и признаков,
возникают в таких сферах как робототехника информационный поиск,
мониторинг и анализ визуальных данных, исследования искусственного
интеллекта. В настоящий момент в производстве широко используются
системы распознавания рукописного текста, автомобильных номеров,
отпечатков пальцев или человеческих лиц. находящие применение в
163
интерфейсах программных продуктов. системах безопасности и
идентификации личности, а также в других прикладных целях. Актуальным
проблемным вопросом, признанным научным сообществом, остается
распознавание изображений трехмерных объектов под различными углами
зрения, подвергнутых преобразованиям вращения, масштабирования и
трансляции. Современные подходы к решению этого вопроса, такие как
многослойные сверточные нейронные сети (СНС). а также использование
инвариантных детекторов признаков SIFT и ORB. в настоящий момент
предлагают частичные решения, нс обеспечивающие достаточной точности
распознавания и теряющие информацию о структуре объекта [53-60].
Идея моделирования работы живых ci стом в технических приложениях
появилась довольно давно. Уже в середине XX века был известен так
называемый перцептрон Розенблатта, моделировавший работу сетчатки
человеческого глаза. Принцип действия элементов этой модели напоминает
работу сенсора-нейрона - нервной клетки мозга. На вход такого сенсора
подаются сигналы с одних сенсоров, и. в зависимости от поступивших
значений, вырабатывает выходной сигнал, который передастся другим
сенсорам. Этот сигнал либо усиливается - сенсор «возбуждается», либо,
наоборот, уменьшается - сенсор «подавляется». Поимерно по такому же
принципу передается сигнал по синаптическим волокнам наших нейроно!
Возможности вычислительных средств середины XX века не позволяли
строить достаточно эффективные схемы решения задач на основе такой
модели, и про нее забыли. Тем не менее, к началу 90-х годов, когда получили
широкое распространение системы с параллельными вычислениями, интерес к
таким моделям опять возрос они начали применяться в технических и
интеллектуальных системах, в частности, в системах распознавания.
Рисунок 4.12 - Классификация классических нейронных сетей
Теория нейронных сетей (НС) возникла в результате совместных
164
попыток физиологов и кибернетиков понять и смоделировать работу мозга.
Мозг состоит из очень большого числа (порядка 10й) клеток (нейронов),
каждая из которых имеет длинный хвост (аксон) и большое число (порядка Ю4)
ответвлений (дендритов), касающихся аксонов других нейронов и/или входных
ренептооов. Через эти зоны касания (синапсы) может передаваться
информация (электрохимический потенциал) [61-68].
Каждый нейрон является простеньким компьютером: потенциал нейрона
(и его аксона, играющего роль выхода) является функцией от потенциалов
синапсов его дендритов (входов), причем функцией вполне определенного
вида. Каждый нейрон имеет два устойчивых состояния (возбужденное и
невозбужденнос) и соответствующие им значения потенциала, одинаковые для
всех нейронов. Каждый нейрон вычисляет линейную комбинацию потенциалов
входных синапсов сравнивает ее с пороговым значением и переходит в
возбужденное (невозбужденнос) состояние, если эта линейная комбинация
больше (соотьетственно. меньше) порогового значения.
Элементарной ячейкой нейронной сети является модель искусственного
нейрона [69]. Каждый внутренний или реагирующий нейрон имеет множество
входных связей (синапсов), по которым поступают сигналы от других
внутренних нейронов или рецепторов и одну выходящую связь (аксон).
Каждая свя ъ имеет некоторый «вес» и-,. При поступлении на вход нейрона
совокупности сигналов ,v;,.v.,vv они
весами и,,и-..м\.. Нейрон переходит в
вычисляется как z = ^n-,.v,. Величина
«усиливаются» с соответствующими
состояние, числовая оценка которого
выходного сигнала вычисляется как
fCZ}, где f - активационная функция. Примеры активационных функций
приведены на рисунках 4.13 -4.16.
Рисунок 4.13 - Функция единичного
скачка
Рисунок 4.14- Единичный скачок с
линейным порогом
165
Рисунок 4.15 - Гипсрболичсский
тангенс f(x)=th(x)
Рисунок 4.16 - Функция сигмоида
f(x)= l/(l+esp(-ax))
Нейрон считается «возбужденным», седи выходной сигнал отличен от
нуля, а величина y = /(jjr,.v,) характеризует степень возбуждения. Вид
функций и область их изменения отражают априорные представления о
функционировании биологических нейронов: величина возбуждения зависит
монотонно от состояния, ограничена снизу и сверху, и «сильно» меняется в
небольшом интервале значений Z = £v .
1=1
В совокупности мозг вычисляет некоторую вектор-функцию:
зависимость потенциалов нейронов (достаточно рассматривать нс все нейроны
а только связанные своими аксонами с исполнителями) от потенциалов
входных рецепторов. А вся нстривиальность работы мозга состоит в том. что
пороговые значения (по одному на нейрон, итого порядка К)11) и
коэффициенты линейных комбинаций (по одному на дендрит, итого порядка
101'). вообще говоря. различны и могут изменяться со временем. Это
изменение коэффициентов называется обучением. Нейронная сеть прямого
распространения - это ориентированный ациклический граф с множеством
вершин Ни ребер Е. вершины котового разбиты на слон следующим образом:
- нулевой слой состоит из вершин-истоков (входных рецепторов)
VOJ,. э'пд;
- ребра (синапсы), входящие в верш, ны (нейроны) (А_+1)-го слоя, выходят
из вершин (рецепторов или нейронов) А-го слоя.
- все стоки (выходные нейроны) vz.i ..... п..ч принадлежат одному и тому
же
/.-му слою.
Проведенный анализ построения и применения САР при
дешифрировании аэроснимков. показал, что существующие методы
распознавания САР, основанные на теории распознавания образов, повышают
оперативность получения достоверных данных, и своевременность принятия
решения в реальном масштабе времени.
Для обработки больших массивов РИ наряду с развитым арсеналом
166
традиционных вычислительных методов в настоящее время все чаше
применяются нейросетевые подходы с использованием сверточных нейронных
сетей и глубокого обучения. Анализ РИ методами глубоких сверточных сетей
является важной новой подобластью применения нейросетевых подходов.
Привлечение сверточных нейронных сетей с глубоким обучением к задачам
обнаружения (распознавания) объектов позволяет извлечь важную
дополнительную информацию глобального характера от данных, полученных
ЦОЭС. Дополнительное использование многослойных сстсй-автоэнкодсров,
позволяющих осуществлять сжатие данных в сочетании с включением
совместной пространственно-спектральной информации в изображениях,
нередко позволяет получить более точное решение задач классификации
изображений, задач распознавания образов и детектирования объектов в
изображениях. Теория глубокого обучения дополняет обычные методы
машинного обучения специальными алгоритмами, предоставляющими
возможность анализа входной информации на нескольких уровнях
представления. Глубокое обучение способствует всестороннему изучению
предмета, выявляя скрытые взаимосвязи и корреляции признаков. Это
оказывается особенно важным в ситуациях, когда еще нс найдено адекватных
информационных уровней представления данных.
В задачах классификации изображений адекватными оказались так
называемые сети глубокого доверия, позволяющие извлекать иерархически
организованную абстрактную информацию из данных в спектральной области.
В частности, были развиты методы (и построены соответствующие модели
DCNN-сстей). позволяющие выбирать для решения задач аэросъемки наиболее
информативные участки спектра. На этой основе был также построен пример
самоконтролируемого алгоритма классификации, а также модели так
называемых свсрточно-нссвсрточных сетей невязки, использующих обучение с
привлечением пространственно-спектральных характеристик изображения.
Большой интерес представляет построение моделей нейрбнных сетей с
неконтролируемым обучением, использующих накопленные базы данных.
В настоящее время модели нейронных сетей: успешно развиваются и
применяются при решении разнообразных задач. В частности, уже многими
способами удалось включить нейросетевые алгоритмы пространствснно-
сг.сктральную информацию извлекаемую из изображений, в работу наземных
комплексов обработки информации.
Особого внимания заслуживают нсйробиологичсски-мотивированныс
методы анализа изображений высокого разрешения, имитирующие процессы
обработки информации, осуществляемые зрительной корон мозга при
восприятии изображений ipi тельной системой мозга. Именно к такому типу
нейросетевых подходов относятся методы, связанные с привлечением сетей
глубоких архитектур с иерархическими типами машинного обучения.
Перспективными представляются также сетевые подходы, основанные на
принципах работы самоорганизующихся многоагентных систем. В целом
167
можно сказать, что применение методов нейросетевых алгоритмов в задачах
обработки больших данных РИ можно считать одной из наиболее активных
ветвей исследований в области решения задач аэросъемки. Использование
нейросетевых методов с глубоким обучением позволяет также поставить новые
вопросы. связанные с анализом больших спсктрозональных и
гипсрспсктральных изображений высокого разрешения.
Таким образом, особую роль в ближайшем будущем будут играть
интеллектуальные технологии разведки, основанные на методах «умной1»
сшивки. привязки. дешифрирования, интеллектуальной обработки
информации, получаемой от ЦОЭС в том числе киберразведки, подготовки
рекомендаций, разведывательно-информационного обеспечения применения
оружия.
168
5 ОРГАНИЗАЦИЯ СБОРА,
ОБРАБОТКИ И ДЕШИФРИРОВАНИЯ
АЭРОСНИМКОВ
5.1 Сбор, обработка и дешифрирование аэроснимков на наземных пунктах
приема и обработки информации
Сбор обработка и дешифрирование аэроснимков является итоговым
этапом, конечным результатом выполнения аэросъемки. Поэтому при
организации ведения аэросъемки важной и наиболее главной задачей является
представление полной и достоверной информации об объектах в
заинтересованные инстанции в возможно короткие сроки.
Организация сбора и обработки результатов аэросъемки включает
комплекс мероприятий, направленный на создание условий для наиболее
полного и эффективного использования сил и средств отделения обработки
информации (ООП) с целью получения высококачественных данных об
объектах.
Поступление на вооружение самолетов, оборудованных КВР. повлекло
значительное увеличение объема поступающей видовой информации (ВИ) и
резко увеличило время на ос обработку, в том числе связанное с комплексным
дешифрированием материалов, а вместе с этим появились новые особенности в
планировании и организации сбора и обработки данных.
Большой объем поступающей РИ может быть качественно обработан в
нормативные сроки только при условиях:
свосвоемснной постановки задачи подразделению обработки. Эта задача
должна быть поставлена ООП нс менее чем за 2.0 - 2.5 ч до вылета ЛА (БЛА);
постоянного информирования ООП о ходе выполнения полетов на
аэросъемку (информации о взлете и посадке экипажей, перенацеливания их в
воздухе на другие объекты и др.);
тесного и постоянного взаимодействия авиационно-инженерной службы
и ООП в ходе подготовки ЛА (БЛА) и в процессе их полетов по вопросам
состояния ЦОЭС и получаемых от них результатов, а также порядка доставки
материалов аэросъемки в ООН;
детально и всесторонне продуманного планирования приема и обработки
данных аэросъемки как передаваемых по радиоканалу, так и поступающих
после посадки самолетов;
высокой профессиональной подготовки специалистов всех категорий, их
слаженности в работе, доведенной до автоматизма;
четкого планирования и организации взаимодействия экипажа ЛА и
расчетов наземных пунктов управления БЛА и приема информации,
передаваемой по радиоканалу;
169
умелого маневрирования личным составом подразделений обработки в
процессе работы и максимального использования взаимозаменяемости
специалистов;
максимально эффективного использования машинной и автоматической
обработки, а также средств малой! механизации;
внедрения прогрессивных методов обработки и комплексного
дешифрирования;
постоянной, независимо от объема поступающей информации жесткой
диспетчер г- аинн процессов npi ема и обработки результатов аэросъемки.
Обработка материалов аэросъемки - это цепь последовательных,
технологически связанных, между собой операций. Нарушение хотя бы одного
из звеньев этой цепи ведет к безвозвратной! потере времени, ухудшению
качества получаемых данных об объектах. Поэтому прн организации
обработки материалов аэросъемки вышеперечисленные условия одинаково
важны: один из них требуют постоянной, ежедневной тренировки личного
состава подразделений обработки, накопления опыта по крупицам и
систематизации его, другие - только организационных мероприятий,
принципиального и бескомпромиссного отношения к нх выполнению.
В зависимости от поставленной задачи на аэросъемку и принятого
решения возникает целый ряд вариантов организации приема и обработки
материалов аэросъемки, основными из которых является организация
обработки при выполнении аэросъемки всем составом.
В зависимости от объема предстоящих работ по обработке информации,
продолжительности выполнения аэросъемки, вариантов развертывания
наземных пунктов приема обработки информации (НППОИ) может
применяться и различная организация распределения специалистов. В свят с
этим можно рекомендовать следующие варианты организации обработки
материалов аэросъемки.
Вариант 1 («ручьевой» способ). Этот способ наиболее целесообразно
применять при обработке материалов оптико-электронной аэросъемки. Для
работы этим способом снехшалнсты комплектуются в специализированные
группы во главе со старшими с таким расчетом, чтобы каждая группа
обеспечивала полную обработку поступающей информации всего
технологического процесса до изготовления отчетных документов
включительно. За каждой такой группой закрепляются несколько летных
экипажей, причем по возможности тех. которые выполняют аэросъемку
о; нотипных объектов. В зависимости от штатной структуры подразделения
обработки информации определяются состав групп и их количество. Для
достижения эффекта полного взаимодействия и взаимопонимания,
сплоченности специализированной группы личный состав в ней должен быть
постоянным. Особенностью этого способа является сравнительная простота
планирования обработки и диспетчеризации в ходе ее, а также возможность в
зависимости от количества полетов на аэросъемку в этот день задействовать на
170
обработку минимальное количество специализированных групп с полной
загруженностью, а остальные группы использовать на выполнение другой
работы.
Вариант 2. Поточная обработка материалов аэросъемки
технологическими бригадами, который состоит в том, что создаются бригады
обработки, дешифрирования. изготовления ОД. При этой методике обработка
материалов ведется по объектам аэросъемки. К положительным моментам
этого метода работы следует отнести в первую очередь возможность
дифференцировать обработку материалов в создаваемых бригадах. Например,
расставить специалистов по объектам: одних - на обработку материалов
потокового видео, других - объектов видимого диапазона, третьих - объектов
инфракрасного диапазона. Такой! способ обеспечивает более высокое качество
обработки материалов. так как специалисты выполняют типовую работу но он
требует детального планирования и четкой организации процесса обработки, а
также вызывает сложности сс диспетчеризации. Поточный метод обработки
материалов с развертыванием технологических бригад целесообразен при
недостаточном количестве личного состава в подразделении.
Для четкого управления обработкой! материалов все рабочие места
НППОИ оборудуются двусторонней связью диспетчера и должна быть
обработана система лаконичных докладов.
Рабочее место диспетчера должно иметь:
пульт диспетчера, оборудованный громкоговорящей связью с рабочими
местами специалистов и настенным план-графиком обработки материалов
аэросъемки;
схему расположения стоянок самолетов и маршрутов доставки
материалов аэросъемки в зависимости от направления старта, план доставки
этих материалов на день полетов;
схему рабочих мест специалистов с индикацией их занятости;
расчет личного состава подразделения обработки информации по
группам на день полетов .
таблицы, графики, номограммы с нормативными и достигнутыми
сроками обработки информации;
планы и схемы обеспечения работы подразделения обработки
информации, аварийное электро- и водоснабжение и др.
Диспетчер контролирует ход обработки материалов аэросъемки,
используя громкоговорящую связь, фиксирует прохождение всех процессов И Б
случае отклонения от запланированного времени корректирует процесс
обработки через начальника НППОИ или его замести гелей.
На НППОИ возлагаются следующие задачи:
сбор данных, передаваемых экипажами с бортов ЛА (БЛА) по
радиоканалу;
прием устных докладов экипажей после посадки самолетов;
прием и учет письменных донесений экипажей за каждый полет;
171
прием данных дешифрирования от подразделений ООИ;
контроль и учет полноты выполнения задач аэросъемки экипажами,
сроков представления отчетных данных;
анализ, обобщение и доклад своему командованию результатов
выполнения задач аэросъемки;
нанесение поступающей информации на карту, сс анализ и доклад
заинтересованным штабам;
составление и представление ОД и отчетной карты результатов
аэросъемки, а также других ОД в заинтересованные штабы.
НППОИ состоит из двух рабочих групп: группы сбора информации и
группы обработки и анализа информации.
Группа сбора РИ осуществляет прием данных аэросъемки от экипажей с
бортов ЛА (БЛА) по радиоканалу и устных докладов экипажей после посадки
самолетов: сбор донесений от групп дешифрирования и передачу принятой
информации в группу обработки и анализа.
В состав группы сбора информации могут входить:
техник, осуществляющий руководство работой! группы и
непосредственно участвуют! й в раскодировании бортовой РИ;
техник по приему донесений от экипажей ЛА (БЛА) после посадки:
техник по приему данных от групп дешифрирования.
Рабочие места группы обооудуются радиостанциями и приемниками
УКВ и KB-диапазонов длин волн, записывающей аппаратурой и средствами
связи в количестве, обеспечивающим уверенный сбор информации в сложных
условиях обстановки.
Группа обработки и анализа информации предназначена для обработки,
анализа и нанесения на карту данных аэросъемки, поступающих из группы
сбора информации, доклада их в заинтересованные штабы, составления
итоговых и отчетно-информаи ионных документов.
В состав группы могут входить:
специалист по опросу экипажей и анализу добытой РИ;
техник по нанесению результатов аэросъемки на карту:
специалист для передачи результатов и приема распоряжений;
техник по нанесению данных на отчетную карту и ведению план-графика
полетов на аэросъемку.
Начальник НППОИ лично организует работу пункта, следит за
своевременностью получения и доведения информации, непосредственно
проводит анализ поступающих данных аэросъемки и готов! т итоговые
донесения (за вылет, день. ночь, сутки).
В состав НППОИ. как привило, входит аппаратно-программный
комплекс автоматизированной обработки видовой информации (АПК АОВИ).
который предназначен для управления процессом параллельной
распределенной обработки больших потоков РИ. В процессе работы с АПК
АОВИ последовательно решаются следующие задачи:
172
- подготовка оостановки для выполнения задачи;
- прием аэроснимков;
- обзорное дешифрирование загруженных изображений, включая
их обработку и коррекцию;
- детальное дешифрирование изображений;
- формирование отчетных документов по результатам детального
дешифрирования и передача отчетных документов потребителю.
АПК АОВИ обеспечивает реализацию следующих функций:
- прием, хранение и визуализация разноспектральной РИ;
- раздельная и комплексная обработка, оперативное и детальное
дешифрирование оптико-электронных и радиолокационных аэроснимков;
- отображение данных аэросъемки, подготовка формализованных и
неформализованных отчетных документов;
- накопление и систематизация данных об объектах;
- обеспечение тренажного режима по заранее сохраненным результатам
полетев на аэросъемку:
- хранение в базах данных цифровой картографической и опорной
геопространственной информации в зоне ответственности. фото-,
радиолокационных и оптико-электронных изображений, дешифрированных
изображений. ОД. формализованных и неформализованных донесений;
- автоматизированное управление базами данных. поддержка
целостности и непротиворечивости данных в базах, синхронизация таблиц,
архивация и восстановление данных:
- поддержка резервной записи данных в модулях хранения данных.
АПК АОВИ представляет собой комплекс средств автоматизации
детального дешифрирования (КСА ДД). который может включать в себя
унифицированные автоматизированные рабочие места (УАРМ), сервер
хранения данных (СХД) и программное обеспечение (общее и специальное).
АПК АОВИ принимает данные, полученные с помощью ЦОЭС. которые
сохраняются в базе данных (БД) СХД. Для работы с сохраненной информацией
предварительно должна быть выполнена ее загрузка из БД. Вся сохраненная в
базе данных информация является атрибутом (входит в состав) какой-либо
обстановки. Обстановка - это совокупность информации, которая хранится в
базе данных и включает в себя:
- данные о ЦИ ц ее характеристиках, дате и времени полета;
- видовую информацию, полученную во время полета;
- априорную информацию района и объектов аэросъемки.
Обстановка создается заранее, хранится в БД и загружается перед
началом работы. Вее получаемые данные сохраняются в составе обстановки,
выбранной перед началом загрузки данных. Подготовка обстановки
выполняется однократно для каждого нового района ответственности.
При дальнейшем применении АПК АОВИ обстаноька может уточняться в
173
результате проведения детального дешифрирования, а также при внесении
дополнительной информации средствами редактирования обстановки.
Таким образом, если обстановка создана и актуальна, то работа
с АПК АОВИ начинается с се загрузки.
АПК АОВИ обеспечивает файловый ввод, регистрацию, визуализацию и
раздельную и комплексную обработку изображений радиолокационного,
видимого и инфракрасного диапазонов спектра. Полученные изображения и
результаты обработки сохраняются в БД.
Результатом работы АПК АОВИ является подготовленный отчетный
документ, содержащий данные комплексной! обработки полученной
информации, представленный в формате PDF или GDT.
Схема информационного взаимодействия компонентов АПК АОВИ
приведена на рисунке 5.1.
Рисунок 5.1 - Схема информационного взаимодействия
компонентов АПК АОВИ
5.2 Прием, хранение и визуализация разиосиек'тра.тыюй РИ
Прием входных данных осуществляется в автоматическом режиме.
Программный комплекс ввода-вывода информации, входящий в состав
АПК АОВИ. по умолчанию находится в режиме ожидания поступления
данных. При поступлении информации от ЦОЭС в АПК АОВИ происходит се
автоматическое считывание с сохранением в БД. при этом автоматически
формируется уведомление о факте получения данных.
При приеме изображений АПК АОВИ решает следующие задачи:
174
ввод из заданного каталога файловой системы аэроснимков
радиолокационного, видимого и инфракрасного диапазонов спектра, их
предварительная обработка и сохранение в базе данных СХД;
- отображение полученных изображений в интерфейсе программного
комплекса.
Визуализация изображений может выполняться как с помощью
инструмента «Оповещения», так и с помощью функций поиска и загрузки
изображений из БД. которые могут выполняться в автоматическом
или автоматизированном режиме. Результатом данной операции является
визуализация полученных данных в рабочей области АПК АОВИ.
С использованием средств АПК АОВИ могут быть отображены все
полученные данные одновременно или задан состав отображаемой
информации, что обеспечивает возможность обработки отдельно каждого
изображения или всех выбранных изображений при комплексной обработке
информации. Пример визуализации изображения приведен на рисунке 5.2.
5.3 Раздельная и комплексная oopaooiKa. обзорное и детальное
дешифрирование
Основной задачей обзорного дешифрирования является повышение
дешифровочных характеристик полученных изображений путем применения
к ним инструментов АПК АОВИ для обработки изображеншй.
Обзорное дешифрирование загруженных изображений включает в себя
выполнение следующих задач:
- управление видимостью изображеншй в интерфейсе программного
комплекса, включая фильтрацию списка загруженных изображении
по различным критериям и настройку прозрачности изображений:
- фильтрация шумов различной природы на изображениях:
- обрезка (кадрирование) изображеншй:
- уточнение навигационных данных для изображений на основе модели
датчика и данных пилотажно-навигационного комплекса:
- корректировка координатной привязки изображений по опорным
точкам на местности с использованием опорной геопространственной!
информации.
Зсс задачи обзорного дешифрирования изображений решаются в ручном
режиме с помощью программных инструментов, предоставляемых изделием.
Задачей детального дешифрирования является обнаружение
и классификация объектов на полученных изображениях и сохранение
объектов в БД сервера хранения данных. Детальное дешифрирование
изображении, прошедших этап обзорного дешифрирования, включает в себя
выполнение следующих задач:
- автоматизированное обнаружение и классификация на изображениях
объектов, для которых в базе данных имеются эталонные вектора признаков;
175
- визуальное обнаружение и классификация объектов;
- сохранение результатов дешифрирования в базе данных СХД.
Рисунок 5.2 - Пример визуализации изображения
Задача автоматизированного обнаружения и классификации объектов
запускается по команде интерфейса пользователя ПК АОРВИ. после чего
обработка изображения проходит в автоматическом режиме. При выполнении
задачи визуального обнаружения объектов предоставляется визуальная
поддержка дешифрирования для классов объектов, по которым в базе данных
присутствует эталонная информация.
Сохранение результатов как автоматизированного, так и ручного
дешифрирования выполняется по команде интерфейса пользователя.
Пример обнаружения и классификации объектов в автоматическом
режиме приведен на рисунке 5.3.
По результатам детального дешифрирования формируется ОД
5.4 Отображение данных, подготовка формализованных и
неформализованных отчетных документов
АПК АОВИ в части отображения данных, подготовки формализованных
и неформализованных отчетных документов обеспечивает:
- отображение оперативно-тактической обстановки (ОТО), включая зоны
интереса, запретные юны. коридоры, полосы и маршруты полета, вскрытые
объекты, на фоне пдфровой картографической информации;
- автоматизированное формирование формализованных и
неформализованных донесений с сохранением полученного документа в файл.
176
Рисунок 5.3 - Пример обнаружения и классификации объектов
Отображение оперативно-тактических данных осуществляется после
выбора и загрузки обстановки.
Предоставляется возможность корректировки ОТО в процесс работы с
изделием при помощи диалогового окна «Диспетчер объектов». Также
уточнение ОТО происходит в процессе дешифрирования изображения путем
добавления обнаруженных и классифицированных объектов.
По сформированной ОТО средствами АПК АОВИ может быть
подготовлен формализованный документ, включающий текстовую и
графическую часть и содержащий информацию об обнаруженных в заданном
районе объектах.
Результатом формирования ОД является (]>айл в формате PDF или ODT,
пригодный для вывода на печать или для передачи потребителю.
Формирование отчетных документов осуществляется с помощью
специализированного редактора отчетных документов из состава ПК АОРВЧ.
который решает следующие задачи:
- предоставление интерфейса для формирования ОД;
- получение исходных данных для составления отчетного документа,
включая изображения, обнаруженные на них объекты;
- формирование и сохранение графических и текстовых ОД с
автоматическим заполнением максимально возможного количества полей;
- предоставление возможности редактирования отчетных документов.
Передача сформированных и сохраненных ОД потребителям и вывод
документов на печать осуществляются с использованием стандартных средств
файлового обмена и печати, предоставляемых операционной системой.
177
5.5 Накопление и систематизация данных
Традиционные подходы при разработке алгоритмов классификации
сводятся к выбору формального описания объектов, построению базы данных
(БД) с наиболее характерными описаниями (эталонными векторами признаков)
для каждого класса и дальне} шим сопоставлением векторов признаков
объектов с БД эталоном. Они представляют портрет цели (объекта) в
различном диапазоне длин волн: оптическом. инфракрасном,
радиолокационном. Формирование БД портрета цели (эталона) является самой
трудоемкой частью такого подхода и требует экспертных знаний по разработке
системы распознавания.
Одним из наиболее активно развивающихся подходов в области
распознавания в последнее время является применение нейронных сетей, в
частности различных моделей нейронных сетей, например для распознавания
наземных объектов на радиолокационных изображениях [56]. По сравнению с
традиционными подходами для нейронных сетей не требуется экспертное
построение формальных описаний объектов - используются непосредственно
изображения объектов и для распознавания нс нужна БД эталонных векторов
признаков - знание о классах находится непосредственно в параметрах
обученной нейронных сетей. Кроме этого, нейронные сети достаточно
устойч! вы к зашумлению обрабатываемых изображений. Для обучения
нейронных сетей требуется значительный набор изображений объектов
каждого класса.
Известны работы по распознаванию надводных объектов на
радиолокационных изображениях с использованием нейронных сетей. Для
оптических изображений таких работ существенно меньше, что связано в
первую очередь с отсутствием качественного доступного набора изображений
надводных объектов ВМС. Исследование возможностей распознавания
надводных объектов ВМС на изображениях и оценки вероятностей
правильного распознавания в зависимости от типоь и количества выбранных
классов являются актуальными. Одной из основных задач применения
классификаторов, основанных на нейросетевых методах, является создание
обучающего набора данных достаточного объема, который может составлять
десятки тысяч объектов, разбитых на классы.
АПК АОВИ в части накопления и систематизации данных обсспсчивае :
- формирование обучающего набора данных для классификации по
условиям съемки, типам и количества выбранных классов надводных объектов;
- обобщение и анализ обработанной информации сведением базы данных
надводных объектов ВМС;
- хранение в базах данных СХД цифровой картографической и опорной
геопространственной информации на зону ответственности,
радиолокационных и оптико-электронных изображений, дешифрированных
изображений. ОД. формализованных и неформализованных донесений.
178
Средствами АПК АОВИ обеспечивается возможность выполнения поиска
объектов в базе данных ОТО по различным критериям. Примерный перечень
типов надводных объектов ВМС представлен в таблице 5.1.
Таблица 5.1 - Типовые надводные объекты ВМС
Подводные водки проекта 955
«Борей», серия российских
стратегических атомных
подводных лодок 4-го
поколения
Подводные лодки проекта 971
«Щука-Б» ('обозначение
НА ГО -«Akula») - серия
советских многоцелевых
атомных ПЛ третьего
поколения
11олволные лодки проекта 885
«Ясень» (885М.«Ясень-МЕ>) —
серия российских
многоцелевых атомных 11Л с
крылатыми ракетами 4-го
поколения.
Подводные лодки проекта 885
«Ясень» J8S5M «Ясень-М»> -
серия российских
многоцелевых атомных
подводных лодок с крылатыми
ракетами 4-го поколения.
Корветы проекта 20380
(20.385) типа «Стеретуший» -
серия российских
многоцелевых корветов с
управляемым ракетным
вооружением ближней и
дальней морской зоны
Ракетные крейсера типа
«Тикондерога» (англ.
Ticonderoga-class of guided-
missile cruisers) — т ип
ракетных крейсеров, стоящих
на службе Военно-Морских
Сил США.
Авианосцы типа «Нлмиц» -
тип атомных авианосцев
США. Авианосцы «Нимиц» с
максимальным
водоизмещением до 106 тыс.
тонн являются самыми
большими военными
Фрегаты типа «Лафайет1» —
серия фрегатов с
управляемым ракетным
оружием. ВМС Франции.
Позднее корабли типа
поставлялись па экспорт в
ВМС Саудовской Аравии.
Корветы типа «Висбю»
(щвед. Korvell typ Visby) —
тип многоцелевых корветов
ВМС Швеции. «Висбю»
называют первым в мире
«настоящим» боевым
кораблём, ное троенным но
179
«Уосп» (1 Г$'8 asp. l.IID-l)
многоцелевой десан i ный
корабль ВМС США, головной
корабль своего класса.
Корабли проекта МЕКС). ОКР
SIq/ak (241) - Сторожевой
корабль ВМС Польши .
Корабли проекта МЕКО.
Фрегаты типа Valour. ЮАР.
Авна несущие крейсера
проекта 1143 «Кречет» - серия
советских многоцелевых
тяжёлых авианесущих
крейсеров с ракетным
вооружением дальней морской
и океанской зоны. «Адмирал
Кузнецов»
Тяжёлые атомные ракетные
крейсера проекта 1144
«Орлан» - серия советских и
российских многоцелевых
атомных ракетных крейсеров
с управляемым ракетным
вооружением дальней
морской 11 океанской зоны
Фрегаты типа «Оливер
Хазард Перри» ВМФ США
способны осуществля 1 ь
противолодочную и
про 1 нвовоздушную оборону
транспортных конвоев,
амфибийных соединений и
llpoi инолодочных 1 рх пп
АПК АОВИ обеспечивает возможность обучения поль юватслсй путем
формирования учебной обстановки и сохранения рс 1ультатов контрольно-
тестовых полетов. Программные комплексы из состава изделия используются в
тренажном режиме в полном объеме и поддерживают все функции,
применяемые в штатном режиме работы.
В составе СХД АПК АОВИ реализовано две базы данных: база данных
ОТО и база геопространственных данных (БГД). База данных ОТО
используется для хранения ОТО. Доступ к данной БД осуществляется с
помощью про!раммного комплекса совместной визуализации разнородной
информации, входящего в состав ПК АОРВИ.
Для управления данными БГД используется специальное программное
обеспечение формирования геопространственных баз данных (СПО ФГБД),
входящее в состав ПК АОРВИ. СПО ФГБД предназначено для организации
функционирования программного обеспечения в режиме защищенного портала
с поддержкой клиент-серверной технологии обработки данных.
СПО ФГБД обеспечивает следующие возможности:
- формирование данных для предварительного просмотра;
- формирование базы геопространственных данных;
180
- управление базой геопространственных данных.
Функция формирования данных для предварительного просмотра,
обеспечивает преобразование данных, хранящихся или добавляемых в БГД. в
визуальное представление, удобное для предварительного просмотра и оценки
корректности данных.
Функция формирования БГД предназначена для автоматического,
автоматизированного и ручного контроля корректности исходных
геопространственных данных, преобразования различных данных в
унифицированные форматы хранения, а также для обеспечения эффективной
организации хранимых данных с целью оптимизации доступа.
Функция управления БГД предназначена для управления формированием
и редактированием базовой опоонон геопространственной информации (ГПИ),
которая в дальнейшем используется в процессе работы.
В процессе подготовки опорной! геопространственной информации
с помощью СПО ФГБД последовательно решаются следующие задачи:
- ввод данных в БГД;
- управление базовыми слоями опорной ГПИ'
- управление исходными данными, введенными в БГД.
Ввод исходных геопространственных данных в БГД включает в себя
выполнение следующих задач:
- ьвод изображений различных типов (аэрокосмические опорные
изображения высокого разрешения, растровые электронные топографические
карты):
- ввод картографической информации (векторные топографические карты
формата SXF. векторные морские навигационные карты, электронные карты
формата «OpcnSlrcclMap»H3 открытых источников);
- ввод цифровых моделей рельефа.
Все задачи ьвода данных в БГД решаются в ручном режиме
с помощью инструментов, предоставляемых СПО ФБГД.
Управление базовыми слоями опорной ГПИ включает в себя выполнение
следующих задач:
- добавление базовых слоев редактирование свойств и удаление
добавленных слоев:
- расчет двухмерного покрытия базового слоя;
- просмотр файлов данных, включенных в базовый слой, удаление
(файлов . анных из состава слоя;
- генерация и перегенерация непрерывного двухмерного покрытия
на заданных масштабных уровнях, удаление сгенерированного покрытия
масштабного уровня.
Вее задачи управления базовыми слоями опорной ГПИ решаются в
ручном режиме с помощью инструментов, предоставляемых СПО ФБГД.
Управление исходными данными, введенными в БГД включает в себя
выполнение следующих задач:
181
- поиск данных в БГД;
- добавление данных в состав созданного базового слоя;
- вывод данных на просмотр н экспорт данных из БГД;
- удаление данных из БГД.
Все задачи управления исходными данными, введенными в БГД.
решаются в ручном режиме с помошью инструментов, предоставляемых
СПО ФБГД.
АПК АОВИ предоставляет возможность настройки перечня
используемых слоев геопространственных покрытий, загружаемых из БГД. н
визуализацию требуемой картографической информации.
Условия функционирования ПК АОРВИ
Сервер хранения данных должен обладать следующими
характеристиками:
количество ядер процессора - не менее 10;
объем оперативной памяти - нс менее 32 Гб;
внешняя память на базе SSD с объем- нс менее 4 Тб;
интерфейс Ethernet 1 Гбпт/й- не менее 2.
Унифицированные АРМ. должны обладать следующими
характеристиками:
количество ядер процессора - не менее 4;
объем оперативной памяти - нс менее 8 Гб;
наличие видеокарты с объемом видеопамяти - нс менее 4 Гб;
внешняя память на базе SSD с объем - не менее 500 Гб;
интерфейс Ethernet 1 Гбпт/с - нс менее 2.
На СХД и УАРМ целесообразно использование видеокарты
с поддержкой технологии NVIDIA CUDA версии 7.5 и выше.
Реализация функциональных процедур АПК АОВИ осуществляется с
помощью специального программного обеспечения УАРМ и СХД.
Входными данными являются:
- аэроснимки видимого. ИК и радиолокационного диапазонов спектра;
- данные пилотажно-навигационного комплекса носителя ЦОЭС:
- геопространственная информация. включая электронные
топографические карты матрицы высот, опорные изображения и бесшовные
сплошные покрытия высокого разрешения.
Выходными данными являются:
- формализованные и неформализованные донесения. ОД:
- результаты обработки и дешифрирования изображений, сохраненные в
базу данных.
182
6 ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
И НАЗНАЧЕНИЕ ОБЪЕКТОВ
ВОЕННО-МОРСКИХ СИЛ
ПОДВОДНАЯ . 1ОДКА ПРОЕКТА 636 С РАКЕТНЫМ КОМПЛЕКТОМ «( EVB-S»
Нормальное водоизмещение 2350 м3
Длина 73,8 м. Ширина 9,9 м
Скорость полного подводного хода
около 18 уз.
Автономность 45 сут
Экипаж 52 чел.
Предельная глубина шируження 300 м
Торпедные аппараты калибра 533 мм 6
ед.
Боезапас ракет/торпед/мнн 18 ед.
Предназначена для уничтожения подводных, лодок, надводных кораблей, судов
и наземных целей противника.
Важнейшим достоинством подводной лодки проекта 636 являются:
ма.тошумность; совершенная архитектура; мощное миппо-торнедное и ракетное
вооружение; хорошие условия обитаемости для жнпажа; простота
обслуживания подводной лодки.
ПОДВОДНАЯ ЛОДКА «АМУР 1650»
Нормальное водоизмещение 1765 м’
Длина 66,8 м
Диаметр прочного корпуса 7.1 м
Скорость полного подводного хода около
21 уз.
Автономность 45 с.ут.. Экипаж 35 чел.
Предельная глубина погружения 300 м
Торпедные аппарату калибра 533 мм 6
ед.
Боезапас ракет/иэрпед/мин 18 ед.
Предназначена для уничтожения подводных лодок, надводных кораблей, судов,
наземных целей противника и ведения разведки
183
ПОДВОДНАЯ ЛОДКА «АМУР 1650»
Нормальное водоизмещение 2450 м’. Длина 83,3 м, Диаметр прочного корпуса 7,1 м
Скорость полного подводного хода около 19 уз.. Автономность 60 сут., Экипаж 38 чел.
Предельная глубина погружения 300 м., Торпедные аппараты калибра 533 мм 6 ед.
Боезапас ракет'торпе д/мин 18 ед.
Предназначена для уничтожения подводных лодок, надводных кораблей, судов, наземных
целей и ведения разведки.
ДИ ЗЕЛЬ-ЭЛЕКЛ РИЧЕСКАЯ ПОДВОДНАЯ ЛОДКА «АМУР 950»
Нормальное водоизмещение 1065 м3
Длина 56,8 м
Диаметр прочного корпуса 5,65 м
Скорость полного подводного хода 20 уз.
Автономность 30 сут
Экипаж 19 чел.
Предельная глубина погружения 300 м
Торпедные аппараты калибра 533 мм 4 ед.
Боезапас ракет/торнед/мин 16 ед.
Кол-во вертикальных пусковых
установок 10 ед.
Предназначена для уничтожения подводных лодок, надводных кораблей, судов.
ракетных
наземных
целей и ведения разведки.
МАЛАЯ ПОДВОДНАЯ ЛОДКА «ПИРАНЬЯ»
Водоизмещение (нормальное) 220 м’
Длина 30 м. Ширина 4.7 м. Осадка 3.9 м
Скорость подводного хода
полная !экономическая 6,6 / 4 уз.
Дальность плавания 1000 миль
Автономность 10 сут.. Экипаж 3 чел.
Группа боевых пловцов 6 чел.
Предельная глубина потружения 200 м
Дизель-генератор 1 х 160 кВт
Гребной электродвигатель 1 х 65 кВт
400-мм торпеды 2 ед.Мины 2 ед.
Скрытная транспортировка в подводном положении, высадка и возвращение боевых
пловцов, несение патрульной службы у побережья в условиях мелководья, борьба с
судами и одиночными надводными кораблями, постановка минных заграждений, ведение
разведки.
184
МАЛАЯ ПОДВОДНАЯ .ЛОДКА «П-550»
Водоизмещение (нормальное) 610 (650) м’
Длина 49 (51) м, Ширина 6,4 м
Скорость подводного хода,
полная / экономическая 15,5 (21,0) / 4 уз.
Дальность плавания 2000 миль
Автономность 20 еут., Экипаж 9 чел.
Группа боевых пловцов 6 чел.
Предельная глубина погружения 300 м
Дизель-генератор 2 х 350 кВт
Гребной электродвигатель 1 х 900 (1700) кВ г
533-мм торпеды, ракеты 4 ед., 400-мм торпеды 8
ед., мины 12 ед., средства самообороны 4 ед.
морских границ путем скрытого
одиночных надводных кораблей и
Охрана и защита прибрежных и
патрулирования, уничтожение одиночных надводных кораблей и судов,
уничтожение подводных лодок, высадка (обратный прием) разведывательно-
диверсионных групп, постановка минных заграждений, ведение разведки в
назначенных районах и наведение своих сил на силы противника, ведение
радиотехнической разведки, эвакуация людей и материальных ценностей из зон
локальных конфликтов, нанесение ударов по береговым стационарным
объектам противника, расположенным на побережье и в глубине его
территории.
МА. 1АЯ ПОДВОДНАЯ . ЮДКА «ПИРАНЬЯ-Г»
Охрана и защита прибрежных и морских ipanmi
путем скрытного патрулирования, уничтожение
одиночных надводных кораблей и судов,
у ни чтожен не i ю дво дн ых лодок. в ыса дка
(обратный прием) разведывательно-
диверсионных фу пн. постановка минных
заграждений, ведение разведки в назначенных
районах и наведение своих сил на силы
I ipornBi тика, ведение ралиотех! ш чес кой
разведки, эвакуация людей и материальных
ценностей из зон локальных конфликтов,
нанесение ударов но береговым стационарным
объект ам i ipo т ив i i и ка, pa с i юл ожег п 1ым на
побережье и в глубине его территории.
Водоизмещение (нормальное) 245 мя
Длина 30 м
Ширина 4.7 м
Осадка 3,9 м
Скорость подводного хода
полная / экономическая 12/4 уз.
Дальность плавания 2000 миль
/ непрерывная под водой 260 миль
Автономность 20 еут
Экипаж 3 чел.Группа боевых пловцов 6 чел.
Предельная глубина погружения 200 м
Дизель-генератор 1 х 160 кВт
Гребной электродвигатель 1 х 250 кВт
533-мм торпеды, ракеты 2 ед.
400-мм торпеды 8 ед., мины 4 ед.
185
МАЛАЯ ПОДВОДНАЯ . К >, IKA «П-650 )»
Охрана и защита прибрежных и морских границ Водоизмещение (нормальное) 245 м’
путем скрытного патрулирования, уничтожение Длина 30 м. Ширина 4.7 м. Осадка 3.9 м
одиночных надводных кораблей и судов,
уничтожение подводных лодок. высадка
(обратный прием) разведывательно-
диверсионных ipynn. постановка минных
за1раждеиий. ведение разведки в назначенных
районах и наведение своих сил на силы
противника, ведение радиотехнической
разведки, эвакуация людей и материальных
ценностей из зон локальных конфликтов,
нанесение ударов по береговым стационарным
объектам противника, расположенным на
побережье и в глубине его территории.
скорость подводного хода
полная f экономическая 12 / 4 уз.
Дальность плавания 2000 миль
/ непрерывная под водой 260 миль
Автономность 20 сут
Экипаж 3 чел., Группа пловцов 6 чел.
Предельная глубина погружения 200 м
Дизель-генератор 1 х 160 кВт
Гребной электродвигатель 1 х 250 кВт
533-мм торпеды, ракеты 2 ед.
400-мм торпеды 8 ед.
Мины 4 ед.
К КАДРЕННЫЙ МИНОНОС ЕЦ ПРОЕКТА 21956
Корабль предназначен для борьбы с надводными и подводными кораблями противника и
для ПВО кораблей и судов в океанских и морских районах в составе ipynn и соединений.
Водоизмещение стандартное около 7660т, Длина 163 м. Ширина 19 м, Осадка 4.8 м.
Скорость полного /экономического хода 29.5 / 14 уз.
Дальность плавания экономической скоростью 4000 миль
Автономное®, суток 30 сут., Спальных мест около 360
Главная энергетическая установка: Газотурбинная мощность 54420 кВт
Вооружение ударное ракетное: 1 х «Москит-МВ®>, 8 ракет.
Зенитное: 2 х ЗРК «Клинок#. 64 ракеты; 1 х ЗРАК «Каштан-М».
Артиллерийское: 1 х АУ АК130Э.
186
МНОГОЦЕЛЕВОЙ ФРЕГАТ ПРОЕКТА 22356
Корабль предназначен для решения
— следующих задач: поражения
надводных кораблей и судов: поиска
и уничтожения подводных лодок
прошвпнка: поражения наземных
целей в глубине территории
противника, на побережье и
I островах: противовоздушной,
противолодочной и прошвока верной
обороны кораблей и судов; огневой поддержки высадки морских десантов и ведения боевых
действий сухопутными войсками на приморских направлениях.
Водоизмещение нормальное около 4550 т.
Длина 135 м. Ширина 16,4 м, Осадка 4.53 м, Снорошь полного хода 29,5 уз.
Дальность плавания экономической скоростью 4500 миль. Автономность 30 сут.
Главная энергетическая установка: Тип дизель-газотурбинпая
Вооружение: Ударное ракетное: 1 х «Калибр-НКЭ» 16 ракет
1 х корабельный комплекс ракетного оружия с ИКР «Яхонт». 16 ракет
Зепнтиое: 1 х «Рн<|>-М>, 32 раке™ / 1 х «Штиль-1», 36 ракет
Артиллерийское: 1 АУ, 130-мм. 2 АУ 30-мм. Противолодочное: 1 х «Калибр-НКЭ», 8 ракет.
1 х «Пакет-Э/НК». Средства противодействия: 1 х ТК-25Э, 1 х КТ-308-05
Авиационное: 1 х Ка-28/ Ка-31. ангар. ВППл, комплект авиационного боезапаса
Радиотехническое: РЛС «Фрегат-М2ЭМ» / «Фрегат-МАЭ-3», РЛК «Мннерал-М')»
БИУС «Сигма-Э22356» / «Требование-М}>.
СТОРОЖЕВОЙ КОРАБЛЬ ПРОЕК ТА 11541 «КОРСАР»
Корабль предназначен для
борьбы с надводным,
подводным и воздушным
про1ивпиком, выполнения
конвойных операций, несения
дозорной службы.
Водоизмещение полное 4400-4500 г
Длина (ВЛ) 117,6 м. Ширина 14.3 м.
Осадка (с обтекателем) 8.4 м
Скорость хода полного / крейсерского 29-30 / 1g уз.. Дальность плавания (14 уз) 5100 миль
Рекомендуемый экипаж 210 чел.
Главная -энергетическая установка: Тип COGAG
Мощность 6600 кВт 2 ед...Мощность 14300 кВт 2 ед.
Вооружение Ударное ракетное: 4 х <.<Уран-Э)>д. 16 ракет, 2 х «Яхонт», 8 ракет. 1 х «Калибр-
НКЭ». 8 ракет, 2 х «Москит-Е», 8 ракет.
Зенитное: 4 х ЗРК«Клинок». 1 х ЗРАК«Каштан» /2х ЗАК «Пальма».
Артиллерийское: 1 х АУ А-190Э.100 мм. Противолодочное: 6 х ТПУ/1, 1 х РПК.-8Э.
Стрелковое: 2 х МТПУ, 14,5 мм. Средства противодействия: 1 х МЛ-4073. 8 х ПК-10.
Авиационное: 1 х Ка-28 /Ка-3 1. ангар. ВППл. комплект авиационного боезапаса
Радиотехническое: РЛС «Фрегаг-МАЭ-З», ИРЛС МР-212/201-1. ИНС «Горизонт-25Э»,
БИУС Сш ма-Э».
187
СТОРОЖЕВОЙ КОРАБЛИ» (ФРЕГАТ) ПРОЕКТ К 11356
Корабль предназначен для ведения
в океанских и морских районах
боевых действий против надводных
кораблей и подводных лодок
противника, а также отражения атак
средств воздушного нападения, как
самостоят ельно, так и в состав®
соединения кораблей в качестве
декор I нот о корабля.
Водоизмещение стандартное 3620 т
Длина 124.8 м. Ширина 15.2 м. Осадка 4.2 м
Скорость экономического хода 14 уч.
Дальность плавания экономической скоростью 4850 миль
Автономность 30 еут., Экипаж 193 чел.
Главная энергетическая установка: Гии газотурбинная. Максимальная мощность 41220 кВт
Вооружение Ударное ракетное: 1 х «Club-N», 8 ракет, Зенитное: 1 х «Штиль-1» 24 ракеты
2 х «Каштан», 8 х ПЗРК «Пгла>>.
Артиллерийское: 1 х АУ А190Э. 100 мм.
Противолодочное: 2 х ДТА-53-1 1356, 1 х РБУ-6000.
Средства противодействия: 1 х «АСОР-11356». 1 х ПК-10.
Авиационное: 1 х Ка-28 /Ка-31. ангар, ВПП.и. комплект авиационного бое тапаса
Радиотехническое: РЛС}«Фрегат-М2ЭМг>. НРЛСМР-212'201-1. БПУС «Требоваште-М».
МАЛЫЙ ПРОТИВОЛОДОЧНЫЙ КОРАБЛЬ ПРОЕКТА 23420
Корабль предназначен для ведения
боевых действий против
подводного. надводного и
воздушного противника,
пунктов базирования
поражения береговых
артиллерийским оружием. для
охраны государственной траиицы и
экономической тоны.
охранения
кораблей,
объектов
Водоизмещение 1300 т. Длина 75 м. Ширина 1.3 м. Скорость 25/30 уз.
Дальность плавания около 2500 миль, Автономность 15 еут-.. Экипаж около 60 чел.
Вооружение противолодочное: 1 х МП ГК «Пакег-Э/НК» / 1 х РПК-8Э.
Артиллерийское: 1 х АУ АК-176МА. 76 мм / 1 х АУ АК-306 30 мм
Зенитное: 1 х ЗМ-47 «Гибка». 20 х ПЗРК «Иг.та(-С)».
Стрелковое: 2 х пулемёта 12,7 мм.
Средства противодействия: 1 х ПК-10 120 мм. 1 х ГАС «Анапа-МЭ» / 1 х ГАС «Ловать»
2 х ДП-64.
Авиационное: БЛА «Горттзонт-ЭИР-S-lOQ» (2 х БЛА)
Радиотехническое: 1 х БПУС «Снгма-Э». 1 х РЛС «Позтчнв-МЭ1.2», 1 х ИНС «Горитонт 25»
Гидроакустическое: 1 х ГАК MIК-335ЭМ-03. 1 х ГАС «Виньетка-ЭМ».
188
ФРЕГАТ «ГТПАРД-3.9» (ПА БАЗЕ СТОРОЖЕВОГО КОРАК1Я ПРОЕМ А 11661)
Борьба с надводным, подводным и воздушным противником самостоятельно и
в составе группы, постановка минных заграждений, охрана и патрулирование
морской государственной границы и экономической зоны, участие в морских
операциях, сопровождение и охрана конвоев, демонстрация флага, в районах,
представляющих государственный интерес.
Водоизмещение полное до 2500 т.. Длина около 102,4 м, Ширина около 15 м, Осадка
около 5,7 м., Скорость полн.фкономического хода около 29 / 10 уз.
Дальность плавания коном, ходом (10 уз), миль около 4000 миль.
Автономность не менее 20 сут., Рекомендуемый экипаж 94 чел.
Главная энергетическая установка: двухвальная COD0G с ВФ1Ц, 2 х 14300 + 1 х
6000
Вооружение Ракетное: КРК «Уран-Э» с ИКР Х-35Э или «Калибр-НКЭ» (е ракетами
ЗМ-54ТЭ1 / ЗМ-14ГЭ).
Зенитное: 1 х ЗРК «Штиль-1» / 1 х ТУ ЗМ-47 / «Гибка» / 16 х ЗРК «Игла(-С)» 1 х ЛУ
ЛК-176МА, 76,2 мм / Л190-01, 100 мм, 1,2/3 АУ АК-630М-06, 30 мм /1,2 или 3 АУ
АК-306-09 /1,2 или 3 ЗАК «Пальма» е ЗУР «Сосна-Р» или их сочетание; управление
АУ РЛСУ 5П-1О-03Э с УВК-1 / СУ МР-123-02/3 / ОЭСУ СП-520 М2 или СУ
«Пальма-СУ» или их сочетание.
Противолодочное: МТГГК «Пакет-Э/НК» с СУ «Пакет-Э» или ГПУ ТР-203/2 с СУ
«Пурга-3.9».
Гидроакустическое: МГК-.335ЭМ-03 с подкильной атешюй / ГАС «Виньетка-ЭМ» С
буксируемой антенной или их сочетание.
Средства противодействия: ГК-25Э2/ МН-405-1Э. буксируемый прибор
гидроакустического подавления торпед БОТ-Э или «Змей».
Авиационное: А ГС, Bill 1л для приема вертолета Ка-28 или Ка-3 1.
Радиот ех ни чес кое: АРДС «Поли тив-МЭ 1».
189
МАЛЫЙ СТОРОЖЕВОЙ КОРАБЛЬ (КОРВЕТ) ПРОЕКТА 203X2 «ТИГР»
Корабль предназначен для ведения боевых действий против надводного,
подводного н воздушного противника, боевого охранения корабельных
группировок, поражения береговых объектов артиллерийским оружием, для
охраны морской государственной 1ранипы и экономической зоны.
Водоизмещение 2430 г. Длина 106,3м , Ширина 13,0 м. Скорость до 30 30 уз.
Дальность плавания около 4000 миль. Автономность до 30 «ут.4 Экипаж 100 чел.
Энергетическая установка: Вариант 2 х дизель-дизе.тьных агрегата (2 х дизеля.
Вооружение Ударное ракетное: Вариант 1 - 1 х «Уран-Э» С8 ракет); Варианты 2 и 3 - -
«Калибр-НКЭ» (8 ракет) / «Яхогт» (8 ракет).
Зенитное: Варианты 1, 2 и 3 — 8 х ПЗРК «Игла(-С)»; Вариант 1 — ЗРАК «Каштанф
М)» / ЗАК «Пальма».(Варианты 2 и 3 - ЗРК «Риф-М»
Артиллерийское: Варианты 1 и 3 — 1 х АУ А190Э, 100 мм: Вариант 2 — 1 х АУ АК-
176М, 76 мм; Варианты 1, 2 и 3 — 4 х АУ АК-630М / 2 х АУ АК-630М
и 2 х ПУ «Шгурм-В» (16 ракет).
Стрелковое: Варианты 1, 2 и 3 — 2 х М ГПУ 14,5 мм.
Противолодочное: Варианты 1, 2 и 3 — 1 х МП ГК <«Пакет-Э/НК» (2 х ПУ, 8 х (анш)
торпед) / 2 х ДТА-53 (4 торпеды) / 1 х РПК-8Э (48 ракет); Вариант 1 — 1 х ГАС, МГК
335ЭМ-03
Варианты 2 и 3 — 1 х ГАС «Заря-МЭ» и 1 х ГАС «Виньетка-ЭМ».
Средства противодействия: Вариант 1 1 х МП-105-1 Э. 1 х прибор «Змей», 1 х
станция Р-709; Варианты 2 и 3 — ТК-25Э / Ml 1-405-1Э-АМАР; Варианты 1. 2 и 3 - 1
х НК-10 (80 выстрелов) 1 х ГАС ПДСС:;_«Паллада» / «Анапа-МЭ», 2 х ДП-64 (240/360
выстрелов).
Авиационное: Варианты 1, 2 и 3 — 1 х вертолёт ангарного хранения Ка-28 /
Ка-.31 / типа Super Еуих,
Радиотехническое: Варианты 1 и 2 — 1 х БИУС. «Сигма-Э», 1 х Р ГК «Монумент-Э» /
РЛК «Минерал-МЭ», 1 х РЛС; «Фуркэ-Э» / РЛС «Позитив-МЭ 1»; Вариант 3 — 1 х
боевой и информационный центр CIS Thales, 1 х РЛС SEASTAR Thales, 1 х РЛС
SMIEE Thales; Варианты 1, 2 и 3 — 1 х ИПС «Горизонт-25»; Вариант 1 — 1 х ГАК
МГК-335ЭМ-03, Варианты 2 и 3 — 1 х ГАС «Заря-МЭ». 1 х ГАС «Виньетка-ЭМ».
190
МАЛЫЙ ПРОТИВОЛОДОЧНЫЙ КОРАБЛЬ ПРОЕКТА 1124М (МОДИФИКАЦИЯ:
КОРАБЛЬ ОГНЕВОЙ ПОДДЕРЖКИ 1124М1)
Борьба с надводным, подводным и воздушным
противником самостоятельно и в составе группы:
огневая поддержка сухопутных войск,
действующих на приморском направлении:
защита морских прибрежных коммуникаций и
нарушение морских коммуникаций противника:
сопровождение и охрана конвоев: содействие
силам береговой охраны в охране границы;
демонстрация флага в районах, представляющих
государственный интерес.
Водоизмещение полное 1300 т., длина 84 м. ширина 10,7 м.
Осадка около 5.2 (е обтекателем)/ около 3,0 м.
Скорость полного/экономического хода около 30/14 / около 24/12 уз.
Автономность 20 сут.. Дальность плавания (V=14 уз.) около 2500 / около 4000 миль
Рекомендуемый экипаж 70 / 50 чел.
Главная энергетическая установка: Вариант 1 - двухвальная CODELAD или трехвальная CODAG,
WARP / двухпальная CODAI) с BPIII: Вариант 2 —двухвальная CODAI) / CODELAG с ВРШ.
Вооружение Ракетное: Вариант 2 — КРК «Уран-Э» с ПКР Х-35Э, СУ ЗР-60УЭ1
Неуправляемое ракетное: Вариант 2 — ПУ МС-73М е заряжающим устройством
Артиллерийское: 1 х АУ АК-176МА, 76,2 мм, 1 х АУ АК-630М-06. 30 мм с управлением АУ РЛСУ
5П-10-03Э.
Зенитное: Вариант 1 —МАЗАК «Пальма», 8-16 ед. ПЗРК «Игла»
Стрелковое: Вариант 2 — 2 х МТПУ, 14.5 мм. 2 х ПКМБ. 7,62 мм
Противолодочное: Вариант 1 — 2x2 ТПУ ТР-203/2 е СУ «Пурга-1124М»
Гидроакустическое: Вариант 1 —МГК-335ЭМ-03, ГАС МГК-543ЭМ-05
Средства противодействия: Вариант 1 — комплекс МП-405-1Э, 4x10 ПУ ПК-10
Авиационное: Вариант 1 —АТС, Bill 1л для приема вертолета, «Тюльнан-Bl»Э
Радиотехническое: APJIC «Позитив-МЭ1». ИНС «Горизонт-25Э», ИМНС «Кама-НС»,
станция «Минерал-МЭЗ».
С ТОРОЖЕВОЙ КОРАБ. 1Ь ПРОЕКТ ГА 22500
Корабль предназначен для охраны
кораблей, судов и коммуникаций от
боевых кораблей и ПЛ противника,
отражения атак средств воздушного
нападения как самостоятельно, так и
в составе группы кораблей, поиска и
уничтожения ПЛ. огневой поддержки
десанта. погранично-патрульной
службы по охране территориальных
вод и экономической зоны.
Водоизмещение 950 т. Длина 84 м, Ширина 13,7 м. Осадка 3,2 м.
Скорость полного / экономического хода 28-33 / около 16 уз.
Дальность плавания экономической скоростью до 4000 миль. Автономность 20 сут.
Места для личного состава в зависимости от назначения (в том числе с учетом запасных) до
80 чел. Главная энергетическая установка: Мощность около 18000 кВт
Вооружение ударное ракетное: 1 х «Калибр-НКЭ». 8 ракет. Артиллерийское: 1 х АУ А-190Э,
100 мм. 2 х ЗАК «Пальма». Зенитное: 8 х ПЗРК «Игла». Стрелковое: 2 х МТПУ 14.5 мм.
Противолодочное: 1 х РПК-8. Средства противодействия: 1 х ТК-25Э, 1 х ПК-10.
Авиационное: Взлетно-посадочная площадка со средствами обеспечения взлета, посадки и
обслуживания боевого или поисково-спасательного вертолета массой до 12 тонн.
Радиотехническое: РЛС «Позитив-МЭ1», ИРЛС «Пал-П1», оптико-электронный комплекс
освещения ближней надводной и воздушной обстановки МТК-201МЭ.
191
РАКЕТНЫЙ KOPAb. lI> ПА ВОЗДУШНОЙ ПОДУШКЕ ПРОЕКТА 1239
Ракетный корабль на воздушной подушке предназначен для борьбы с боевыми
надводными кораблями, быстроходными катерами и транспортами противника на
всей акватории закрытых морских театров военных действий и в ближней зоне
открытых морей как самостоятельно, так и в качестве флагманского корабля в составе
однородных и разнородных корабельных тактических групп.
Водоизмещение около 1000 т, Длина 64 м. Ширина 17,2 м. Осадка 3,8 м.
Скорость около 45 уз. Дальность плавания: на воздушной подушке около 800 миль, в
водоизмсшаюшем режиме около 2500 миль.
Автономность 10 с.ут;.
Славная энергетическая установка: Дизсль-редукторный агрегат марки М511А 2 ед.
Газо турбинный агрегат марки М10Д1 2 ед., Дизель марки М527ОМЗ 2 ед.
Вооружение ударное ракетное:
Вариант 1 — 1 х «Москит-Е», 8 ракет
Вариант 2 - - 1 х «Уран-Э», 16 ракет
Вариант 3 - - 1 х ракетный комплекс с ракетами «Яхонт» в ГНС, 12 ракет
Вариант 4 - - 1 х «Яхонт», 12 ракет и 1 х «Уран-Э», 8 ракет
Зенитное: 1 х «Каштан-М», 16 х ПЗРК «Игла».
Артиллерийское: 1 х АУ А-190, 100 мм. Стрелковое: 2 хМТПУ, 14,5 мм.
Иротиводивереионное. 1х противодиверсионный гранатомет ДИ-64
Средства противодействия: 1 х комплекс РЭИ ГК-253. 1 х комплекс постановки
пассивных помех НК-10, 1 х ГАС. ПДСС «Анапа-МЭ».
Радиотехническое: к/ОЗРадиолокационный комплекс обнаружения и выдачи
целеуказания.
Варианты 1 и 2 — 1 х «Монолит-К», Варианты 3 и 4 — 1 х РЛК «Монумент-Э», 1 х
РЛС: «Позигив-МЭ!», 2 х ИРЛС «Горизонт-25» / 2 х ИРЛС ПАЛ-Н4 / 2 х ИРЛС
«Bridge Master» 1 х БИУС» «Сигма-Э».
192
КОРАБЛЬ ПРОЕМ А 21635 «САРСАР» (В МОДИФИКАЦИЯХ: МАЛЫЙ РАКЕ ГПЫЙ,
СТОРОЖЕВОЙ, МАЛЫЙ ПРОТИВОЛОДОЧНЫЙ)
Охрана и оборона территориальных вод и
исключительной экономической зоны
государства, защита морских
коммуникаций. В модификации «Малый
противолодочный корабль» 4
обеспечение развертывания и боевой
устойчивости ПЛ и других сил флота,
охрана водного района, пунктов и
районов базирования сил флота.
Водоизмещение 1000 г. Длина 74.1 м. Ширина 11.1 м. Осадка около 3,2/ 4.7 (с обтекателем)
Скорость полногофкономнческого хода около 22 12 уз. Дальность плавания экономическим
ходом 2200 миль. Автономность 10 сут. Мореходность, баллы: Пребывание в море до 8.
Использование оружия 5. Экипаж 53 чел. Главная энергетическая установка (гаи. кВт): Тип
двухвальная СОГ)АГ). Мощность 2880 кВт 2x2 ед. Движители водометные.
Вооружение ударное ракетное: Вариант 1 — 1 х 8ПУ «Калибр-НКЭ».
Зенит ное: Варианты 1 и 3 - турельная установка «Комар» для ПЗРК «Игла».
Артиллерийское: Варианты 1 и 2 - 1 х АУ А190-01 100 мм. 1 х АК-630М-2 30 мм управление
от РЯСУ 511-10-039, Вариант .3 - 1 х А-220М 57 мм управление от РЯСУ 5П-10-039.
Противолодочное: Вариант .3-2x4 ТА МП ГК «Пакет - Э/НК_».
Средства противодействия: Варианты 1 2 и .3 — 2 х 10Г1У К'Г-216-Э комплекса ПК-К)
РЭП ГК-2592. Авиационное: Вариант 2 - легкий многоцелевой вертолет массой до 4.5т.
авиационно-технические средства / 2 БЛА.
Радиотехническое: АРЛС «Потитив МЭ 1.2» ИРЛС «Пал-11-4». «Подзаголовок-23».. СИ14С
^Ладога-МЭ» / «Кама-ПС-В», визир наблюдения и целеуказания >.<Сандал-В»
Противодиверснонное: Ручной гранатомет 2 х ДП-64, ГАС «Анапа-МЭ».
МА 1ЫЙ РАКЕ ГПЫЙ (API И.П. 1ЕРИЙК КИЙ) КОРАЬ П> ПРОЕК ТА 21632 «ТОРНАДО»
(МОД.: АРГПЛЛЕРИЙСКИЙ. РАКЕ ГПЫЙ ( РК «УРАП-Э», РАКЕТНЫЙ (РК «ЯХОНТ»)
Ведение боевых действий в морях и
на судоходных реках, решение
задач мирного времени в зоне
ответственности объединения.
Водоизмещение полное 560 т.
Длина 61.45 м. Ширина 9,6 м.
Осадка 2,0 м. Скорость
полного/экопомического хода около
26.'12 уз.
Дальность плавания экономическим ходом 150рр 2300 миль. Автономность 10 сут.
Рекомендуемый экипаж 39 / 36 чел. Главная энергетическая установка: Тип двухвальная
CODOG, Мощность 2720 кВт 4 ед. Движители водометные.
Вооружение противокорабельное раке:ное: Варнаш 2 - 2 х 4 ПУ КРК «Уран-Э» управление
of КАСУ ЗР-60УЭ1. 2x2 ПУККРО «Яхонт» управление, от КАСУ.
Артиллерийское: 1 х 1 АУ А190. 100 мм. 2x6 АУ АК-306, 30 мм. Управление от РЛСУ 511-
10-ОЗЭ. Зенитное.: турельная установка 3М-4р(Гибка» для ПЗРК типа «Игла»
Реактивное неуправляемое оружие: Вариант 1 — 1 х 40 ПУ МС-73 комплекса НУРО, А-215
«Град-М». Стрелковое: 2 х М ГПУ 14.5 мм. .3 х 11КМБ 7,62 мм. Противодиверснонное:
ГАС «Анапа.-МЭ». ручной трапатомет ДП-64. Средства противодействия: 2 х К) ПУ КТ-2169
комплекса ПК-10 Радиотехническое: АРЛС. «Позитив МЭ 1.2». РЛСУ 5П-1О-ОЗЭ. ИРЛС МР-
231Э, СИНС,«Ладога.-МЭ».
193
МЛ. 1ЫЙ РАКЕ П1ЫЙ КОРАБЛЬ (МАЛЫЙ К()РВЕТ) IIPOEKTA22800 ) «КАРАКУРГ-Э»
Корабль предназначен для поражения критически важных объектов противника в
береговой зоне; для уничтожения боевых надводных кораблей, судов и катеров
противника самостоятельно и во взаимодействии с другими силами* для уничтожения
искусетаенных стационарных и плавучих объектов противника; для отражения ударов
средств воздушного нападения противника собственными средствами.
Водоизмещение около 870 (вар. 1) / около 860 (вар. 2) / около 900 (вар.З) г
Длина около 67,0 м, Ширина около 11.0 м
Скорость до 30 (вар. 1J / до 35 (вар. 2 и 3) уз.
Дальность плавания около 2500 (вар. 1 и 2) / около 2800 (вар.З) миль
Автономность 12 еут. Экипаж 39 че I.
. тавпая энергетическая установка: 3 х дизеля М-5О7Д-1 - Вар. 1, 2 х дизеля М-5О7Д-1
и 1 х газовая турбина М70ФРУ - Вар. 2, 2 х дизеля МТИ 20V4000TB93 / 20V1163ТВ93
и 1 х газовая турбина GE LM1500 - Вар 3.
Вооружение ударное ракетное: 1 х «Калибр - НКЭ» / «Яхонт» (8 ракет) - Вар. 1 и 2,
1 х «Брамос» (8 ракет) - Вар. 3.
Зенитное: 1 х ЗРАК «.Кашian-М»: 16 ЗУР,до 1000 выстрелов (30 мм) -Вар. 1,
1 х ЗРАК «Панцирь-МЕ» (без АК-630М): 32 ЗУР до 1000 выстрелов (30 мм) - Вар. 2,
1 х ЗАК «Пальма»: 8 ЗУР, 1000 выстрелов (30 мм) /.1500 выстрелов без ЗУР - Вар. 3,
8 х ПЗРК «Игла-С»-Вар. 1 2 и 3.
Артиллерийское: 1 х АУ АК-176МА — Вар. 1, 2, 1 х АУ ОТО Mclara (76 мм) - Вар. 3
2 х АУ АК-630М / 1 х АУ АК-630М2 - - Вар. 2.
Стрелковое оружие: 2 х М ГПУ калибра 14,5 мм (2000 выстрелов)
Иротиводивереионное: 1 х ГАС МГ-757.1, 1 х гранатомёт ДП-64.
Радиотехническое: 1 х ;ИУС «Сигма-Э» / «Требование-МЭ», 1 х РЛК «Минерал-
МЭ», 1 х РЛС «Позигив-МЭ 1.2» — Вар. 1 и 2, 1 х активная РЛС с ФАР SEASTAR
1 lalej (диапазон X), 1 х боевой и информационный центр CIS компании Thales (в
составе интегрированной модульной мачты - ИММ), 1 х трехкоординатная РЛС
SMILE Thales (в составе ИММ, диапазон S), — Вар. 3, 1 х комплекс МП-405-Г). 1 х
комплекс НК-10 (4 ПУ) — Вар. 1, 2 и 3.
194
РАКЕТНЫЙ КАТЕР ПРОЕКТА 12421
Ракетами катер предназначен для уничтожения боевых кораблей, транспортов и
десантных средств противника в открытом море.
Водоизмещение 550 т, Длина 56,9 м, Ширина 10,2 м, Осадка 2,5 м. Скорость 38 уз.
Дальность плавания 2400 миль. Автономность 10 сут.
Главная энергетическая установка: Газотурбинный агрегат ГТ ГА М15Э.1 1 ед.
Вооружение ударное ракетное: 1 х <<Mqcki;t-E», 4 ракеты
Артиллерийское: 1 х АУ АК-176М, 76,2 мм, 2 х АУ АК-630М, 30 мм.
Зенитное: 12x113PK типа «Игла». Средства противодействия 1хМП-405-1Э, 1х11К-10.
Радиотехническое: 1 х ЗЦ-251'1 / ЗЦ-25Э, 1 х РЛС «Позитив-Э» / «По:зип:в-М?1»
1 х РЛС МР-123-02 (Ц), 1 х ИНС. «NaviBridge-2400».
ПАТРУЛЫЮ-СТОРОЖЕВОЙ КОРАБЛЬ ПРОЕКТА ПС-500
Корабль предназначен для
поиска и уничтожения ПЛ,
охраны кораблей, судов и
коммуникаций от боевых
кораблей и катеров противника,
сопровождения, защиты и
огневой поддержки .десанта в
ближней морской зоне,
патрульно-пограничной службы
по охране территориальных вод
и экономической зоны.
Водоизмещение стандартное 520 т, Длина 62 м. Ширина 11 м. Осадка 2,4 м
Скорость полного / экономического хода 28-35 / около 14 уз.
Дальность плавания на экономической скорости до 3500 миль. Автономность 30 сут
Места для личного состава (в том числе для досмотровых групп и задержанных) до 49
чел. Главная энергетическая установка: Тип дизельная Мощностью 11520 кВт
Вооружение артиллерийское: 1 х АУ А-220М, 57 мм. Зенитное: 16 х ПЗРК «Игла».
Стрелковое: 2 х 14.5 мм пулеметный установки М ГПУ. Противолодочное: 1 х РПК-8.
Радиотехническое: РЛС «Позитив-МЭ 1», НРЛС «Пал-111»
Авиационное: В злетно-посадочная площадка с оптическими средствами обеспечения
в счета и посадки легкого поисково-спасательного вертолета маетой до 4 тонн.
195
РАКЕТНЫЙ катер прое
К ГА 12418
Катер предназначен для
уничтожения боевых
надводных кораблей, катеров
и транспортов противника
самостоятельно и во
взаимодействии с ударными
силами ([слота.
Водоизмещение 580 г, Длина 56,9 м,, ширина 10,2 м, Скорость около 29 ув»
Дальность плавания около 2900 миль. Автономность 10 сут.
Главная энергетическая установка: 2 х дизель-редукторных агрегата М521
Вооружение ударное: 1 х «Уран», 8 ракет. Артиллерийское: 1 х АУ АК-176МА, 2 х
АУ АК-630М. ПЗРК: 12 х типа «Игла». Средства противодействия: 1 х МП-405-1Э
Радиотехническое вооружение: 1 х «Минерал-МЭ». 1 х «Позитив-МЭ1», 1 х МР-123-
02/3.
ПРОТИВОМИННЫЙ КОРАБЛЬ ПРОЕКТ А 12701 А.ПЕКХ АНДРИ Г-Э»
Корабль предназначен для
противоминной зашиты морских
баз, прибрежных морских
территорий, обнаружения и
уничтожения мин всех типов,
обеспечения противоминной
защиты кораблей на переходе
морем, экономической зоны и
месторождений поле шых
ископаемых в море, проведения противоминной разведки, постановки минных
заграждений. В периоды ни>кой вероятности минной угрозы корабли могут
использования как для охраны водного района, так и для учебных целей.
Водоизмещение 890 г, длина 61,6 м, ширина 10,3 м. Осадка около 3,1 м
Скорость 16 уз. Дальность плавания 1500 миль. Автономность 10 сут. Экипаж 44 чел.
Главная энергетическая установка: 2 х дизеля мощностью по 2500 л.с. каждый,
2 х винта регулируемого шага, 2 х носовых подруливающих устройства 1ТУ-100Ф,
2 х кормовые выдвижные поворотные колонки ВПК-90Ф/70.
Специальное оборудование: Система динамического позиционирования
Вооружение артиллерийское: 1 х АУ АК -306. Зенитное: 8 х ПЗРК.
Стрелковое 1 х МТПУ 14,5 мм или 2 х пулемета па установке и стойке 6П59 калибра
12,7 мм.
Противоминное: 1 х контактный трал ГК'Г-2 / ГО.< Г-1, 1 х акустический трал ШАТ-У,
Противоминная система поиска и уничтожения мин: 1 х АСУ НМД «Дне i-12700'Э», 1
х ГАС миноиекапия «Ливадия-МЭ», 2 х автономных противоминных подводных
аппарата типа Alister 9, 2 х управляемых подводных аппарата типа K-Sier 1, 10 х
однораювых телеуправляемых подводных аппарата-уничтожителя мин K-Ster С, 1 х
противоминный телеуправляемый катер тина lnspector-MK2.
196
ПА ГРУ. 1Ы1ЫЙ КА ГЕР ПРОЕКТА 20970 «КА ГР КПй
Катер предназначен для борьбы с
надводными кораблями и
боевыми катерами противника,
несения патрульной службы по
охране морского района в
открыт ых прибрежных
акваториях морей, океанов и во
внутренних морях.
Водоизмещение 2X0 т, Длина около 44,2 / около 46,1 м. Ширина около Х,2 м
Осадка около 1,9 / около 2,1 м. Скорость 42 / 35 уз. Дальность плавания около 2100 /
около 2200 миль. Автономность 5 с Vi. Энергетическая установка (Варианты 1 / 2): 2 х
дизеля типа М503, 1 х ГГТА / 3 х дизеля типа М520Б ТМ5.
Вооружение ударное ракетное: 1 х' «Уран-Э», X ракет. Зенитное: 1 х «Каштан», X х
ПЗРК типа «Игла». Артиллерийское: 1 х АУ АК-306, 30 мм. Средства
противодействия: 1 х ПК-10. Радиотехническое: 1 х «Позитив-МЭК» / РЛС «Фуркэ-Э»
(вариант 1), 1 х РЛС ЗЦ-25Э с ВЗОИ-ВЗОР-СИУ (вариант 2), 1 х ИНС^«Горизонт-25» /
НРЛСМР-231Э.
РЕПОВЫЙ 1 РА. 1ЫЦИК IIPOI
•:К1 А 10750Э
Рейдовый тральщик предназначен
для противоминных действий на
море в районе акваторий портов,
баз, выходов из них. прибрежной
шельфовой зоны до глубины 100 м.
а также ме тково.тных популярных
туристских маршрутов и
фарватеров между островами -
курортами стран.
Водоизмещение 169 т. Длина около 32,4 м. Ширина около 6,9 м. Осадка около 1,75 м.
Скорость около 11. yj. Дальность плавания 650 миль. Автономность 5 сут. Экипаж 14
чел.Энергетическая установка: 2 х дизеля MAN D2866EXE40 мощностью ио 379 л.с.
каждый винт фиксированного шага 2 ед., 1 х рулевая система типа СЕ.В-301 / 4п
Носовое ПУ: 400В Г-Н, Выдвижная поворотная колонка: A500-I-IS
Специальное оборудование:
1 х лебёдка электрическая специальная ЛЭС 67
1 х гидравлический кран YQ7.S0.65/1.0.1
1 х мобильный контейнерный водолазный комплекс (МКВК)
1 х размагничивающее устройство.
Вооружение артиллерийское: 1 х АУ АК-306, 30 мм
Зенитное: ПЗРК типа «Игла». Стрелковое: 1 х пулемёт калибра 12,7 мм.
Противодиверсионное: 1 х ручной иротиводиверсионный гранатомёт ДП-64
Противоминное: Противоминная система «K-Ster — Alisler 9» в составе: техсредства
корабельной системы управления; - 2 х управляемых ПА «К-Ster 1»; 2 х АНПА
«Alisler 9». Обеспечена вОзможноедь приёма до 10 управляемых ПА «К-Ster С»
Широкополосный акустический трал ШАТ-У, Контактный гралГКТ-ЗМО
Радиотехническое: ИНС «Горизонт-25».
197
БОЛЬШОЙ ДЕСАНТНЫЙ КОРАБЛЬ ПРО1
Водоизмещение (с максимальным грузом) около 6600 т, Д.
/КТ A 117113
Б ол ьш oii десант ы й
корабль предназначен
для высадки десанта,
перевозки боевой
техники и оборудования.
пша около 135 м
Ширина по КВЛ около 16,5 м. Осадка при полном водоизмещении около 3,8 м.
Высота борза около 11 м. Скорость полного/экопомического хода около IX/ 16 ус.
Дальность плавания (16-уз. ходом) около 3500 миль. Автономность 30 сут.
Личный состав корабля около 100 чел. Пассажировместимость около 300 чел.
Техника большой массы до 13 ед. Техника средней массы до 20 ед.
Грузовые автомобили до 30 ед. Главная энергетическая установка:
ДРРА-3700 мощностью 3700 кВт 2 ед. Подруливающее устройство ПУ 100ФМ 1 ед.
( 1’ЕДПИИ ДЕ( ЧИ ПЫ! I К’ОРАБ. И>
ПРОЕК ТА 21810
Корабль предназначен для
транспортировки морем н
высадки десанта и боевой
техники на необорудованный
берег, уничтожения сил
противника па берету перед
высадкой.
Ширина 11 м. Скорость
полного/экономического хода 16 / около 14 уз. Дальность плавания экономической
скорость до 2500 миль. Автономность до 30 сут. Экипаж до 47 чел.
Десантовмеетимость: Ганки 5 ед. (по 55 т). Десант и экипажи танков до 200 чел.
Общий военный гру? 300 г.
Главная энергетическая установка: Дизельная мощностью около 5400 кВт
Вооружение ударное ракетное: 1 х «Огонь», 110 реактивных снарядов / 1 х «Град-М»,
110 реактивных снарядов. Артиллерийское: 2 х АК-630М, 30-мм / 2 х «Пальма».
Зенитное: 8 х ПЗРК «Пгла». Средства противодействия: 1 х ГК-25Э, 1 х ПК-10.
Авиационное: Взлетно-посадочная площадка с оптическими средствами обеспечения
взлета и посадки вертолета массой до 12 тонн.
Радиотехническое: РЛС «Позитив-МЭ 1.2», ИРЛС «Вайгач-У-Наяда-М» / «Пал-Н-4».
Оптико-электронный комплекс освещения ближней надводной и воздушной
обстановки М ГК-201МЭ.
198
Водоизмещение около 555 т.
ДЕСАНТНЫЙ КОРАБЛЬ I[А ВОЗДУШНОЙ ПОДУШКЕ ПРОЕКТА 12322 «ЗУ БР»
Корабль предназначен для
приема е оборудованного или
необорудованного берега боевой
техники и личного состава
передовых отрядов морских
десантов, перевозки их морем,
высадки на необорудованное
побережье и огневой поддержки,
а также для приема и перевозки
мин, постановки активных
мини ы хза гр аж де н и й.
Скорость 60 уз., Дальность плавания 300 миль.
Автономность 5 сут. Экипаж 27 чел. Десантовместимость: 3 средних танка / 10 Б ГР и
140 чел. десанта / 8 БМН и 140 чел. десанта / 500 чел. десанта. Главная энергетическая
установка: Тяговый ГГТА М35-1 (10 000 л.с. каждый) 3 ед. Нагнетательный ГГТЛ
М35-2 (10 000 л.е. каждый) 2 ед. Нагнетатель НО 10 4 ед. Воздушный винт АВ-98 3 ед.
Вооружение неуправляемое ракетное: 2 х 140 мм корабельные ПУ МС-227
(скрывающиеся). Артиллерийское: 2 х АК-630М калибра 30 мм. Радиотехническое:
РЛС - 1 х система МР-123-01, 1 х ИНС ч^Гориюнт-25» с приемоипдикатором (IPS NT-
3001).
ПАГРУ.ПЫ1ЫЙ КОРАБЛЬ ПРОЕКТА 22160
Корабль
несения
службы
территориальных
патрулирования
экономической зоны
предка шачен для
погранично-па1руяьной
охране
вод,
200-мильной
по
в открытых
пресечения
пиратской
и оказания
и закрытых морях,
кошрабандной и
деятельности, поиска
помощи пострадавшим.при морских катастрофах, экологического мониторинга
окружающей среды. В военное время выполняет задачи по охранению кораблей и
судов на переходе морем, а также военно-морских баз и водных районов с целью
предупреждения о нападении различных сил и средств противника
Водоизмещение нормальное около 1500 т, длина 94 м. ширина 14 м, осадка 3.4 м.
Скорость полного 25-30 уз. Дальность плавания патрульной скоростью до 6000 миль.
Автономность 60 сут. Места для личного состава в зависимости от назначения до 80 чел.
Энергетическая установка: Дизельный двигатель MTU 20V4000 около 5400 кВт 1 ед.
Газотурбинный двигатель VT7O около 10000 кВт / 2 ед. Газотурбинный двигатель М75 около
5000 кВт 2 ед.
Вооружение артиллерийское: 1 х АУ А-220М, 57-мм. Зенитное: 8 х ПЗРК «Пыла».
Стрелковое: 2 х МГПУ 14,5. Средства противодействия: 1 х ТК-25Э, 1 х ПК-10.
Авиационное: Телескопический ангар и взлёто-посадочная площадка со средствами
обеспечения взлёта, посадки и обслуживания поисково-спасательного вертолёта массой др 12
тонн типа Ка-27 ПС. Радиотехническое: РЛС.<<Г1ошшв-МЭ1» / «Фрегат-МАЭ-4к», 1-1РЛС
типа «Наяда» / «Пал-Н».
199
«МУР1.11 )»
ДЕСАНТНЫЙ КАТЕР НА ВОЗДУШНОЙ ПОДУШКЕ ПРОЕКТА 12061Э, ШИФР
Десантный катер на воздушной
подушке амфибийного типа
Предназначен для приема с
оборудованного или
необорудованного берега или
больших десантных кораблей и
транспортов боевой техники или
личного состава передовых отрядов
морского десанта, перевозки их
морем и высадки на
необорудованное побережье.
Водоизмещение около 150 г, Длина 3 1.3 м, ширина 14,6 м, Скорость 55 уз.
Дальность плавания 200 миль скоростью 50 уз.
Экипаж 12 чел. Дееантовмеетимоеть: 2 боевые машины пехоты / 2
броне транспортера/ 3 бронемашины плавающих танка / 1 средний танк/ 130
человек.
Главная энергетическая установка: Газотурбинная 2 х ГГТА МТ-70М е трансмиссией.
Вооружение артиллерийское: 2 х АУ АК-306, 30 мм. Зенитное: X х типа «Игла».
Радиотехническое: 1 х ИНС «Горизонт-25».
П А ГРУ. 1Ы1ЫЙ КОРАЬ. 1Ь ПРОЕКТА 224603
Корабль предна знатен для
несения погранично-па:рульной
службы по охране
терри 1 ориальных вод,
патрулирования 12-мильной
пограничной зоны в открытых и
закрытых морях, охранения
кораблей и судов на переходе
морем, а также военно-морских
баз и водных районов с целью предупреждения о нападении различных сил и средств
противника в военное время, пресечения контрабандной и пиратской деятельности,
поиска и оказания помощи пострадавшим при морских катастрофах, экологического
мониторинга окружающей среды.
Водоизмещение стандартное около 600 т. Длина 62,5 м, Ширина 1 1 м, Осадка 2,6 м.
Скорость полного / патрульного хода 28-33 / около 10 уз. Дальность плавания
патрульной скоростью до 3500 миль. Автономность 30 сут. Места для личного состава
в зависимости от назначения (в том числе е учетом запасных) до 30 чел.
Главная энергетическая установка: Тип дизельная. Мощностью 1 1520 кВт.
Вооружение артиллерийское: 1 х 30-мм АУ АК-630М. Зенитное: 8 х ПЗРК типа
«Игла»
Стрелковое: 2 х МТПУ 14,5 мм. Авиационное: Укрытие и взлетно-посадочная
площадка со средствами обеспечения взлета, посадки и обслуживания легкого
поисково-спасательного вертолета массой до 5 тонн.
200
ПА ГРУ. >ПЫЙ КОРАБЛЬ ПРОЕКТА 21635.4 «( АР( АР»
Несение патрульной службы
по охране морского района в
открыт ы х 11 рибрежп ых
акваториях морей и океанов,
во внутренних морях, на
мелководье, уст ьях рек.
Водоизмещение полное 1000 т. Длина 74,1 м, Ширина 11,1 м, Осадка около 3,2 м
Скорость полного/экономичсского хода около 22/12 уз. Дальность плавания
экономическим ходом 3500 миль. Автономность 30 сут. Рекомендуемый экипаж 33
чел.
Главная энергетическая установка: Тип двухвальная CODAD, Мощность 28X0 кВт 2 х
2 ед. Движители водометные
Вооружение зенитное: 2 поста ПЗРК типа <<Игла». Артиллерийское 1 х А-220М 57
мм, управление от РЛСУ 5П-10-03Э. Стрелковое: 2 х МП ГУ 14,5 мм.
11ротиводивереионное:
ГАС, «Анапа-МЭ», ручной гранатомет 2 х ДП-64. Авиационное: легкий многоцелевой
вертолет (взлетной массой до 4,5 т-J, авиационно-технические средства / 2БЛА.
Радиотехническое. НРЛС «Пал-14-4», СИПС «’Дадога-МЭ» / «Кама-1 IC-В», визир
наблюдения и целеуказания «Сандал-В».
Радиомониторинг: комплекс ЧВА-001-04PI1-Э.
Штурманское: горизонткомнас ДС-83, ГКУ-5, ЛИ2-1, ЭППС «Аляека-Ч», НЭЛ-
20К, ГЛОНАСС, (IPS: «АКВА-БОРТ-12». Связь и наблюдение: АКС. «Рубин-ЭГ», КС
Г'МС.ОБ, ИКВС П-409, KIC Б ГС. «Сандал-В», СИМ и др. Системы управления:
«Мостик-21635», КО ГС.
( ГОРОЖ’ЕВОЙ КАТЕР ПРОЕКТА 10412
Сторожевой катер
предназначен для несения
патрульной службы в
прибрежной зоне.
Водоизмещение около 370 т, Длина 49,5 м. Ширина 9,2 м. Скорость около 30 уз
Дальность плавания 2200 миль. Автономность 10 сут. Главная эиер.етичеекая
установка:
Дизель типа М520 3 ед.
Вооружение Артиллерийское: 2 х АУ АК-306 е системой управления стрельбой.
Возможна установка в носу АУ АК-176М. Зенитное: 16 х ПЗРК тана «Игла>).
Стрелковое: 2 х МТПУ с пулеметом калибра 14,5 мм. Радиотехническое: 1 х
навигационная РЛС типа ER-2150 W. 1 х интегрированная навигационная система
«Горизонт-25».
201
ПАТРУЛЬНЫЙ КОРАБЛЬ ПРОЕКТА 22300
Корабль предназначен для
несения погранично-патру плюй
службы по охране
территориальных вод,
патрулирования 12 мильной
пограничной зоны в открытых и
закрытых морях, пресечения
контрабандной и пиратской
деятельности, поиска и оказания
помощи пострадавшим при морских катастрофах, экологического мониторинга
окружающей среды.
Водоизмещение стандартное около 300 т„ длина 55,5 м, ширина 9 м. осадка 2 м.
Скорость полного / патрульного хода 33-35 / около 10 уз. Дальность плавания
патрульной скоростью до 2500 миль. Автономность 10 еут. Места для личного состава
в зависимости от назначения (в том числе е учетом запасных) до 30 чел.
Энергетическая установка: Дизельный двигатель мощностью около 2700 кВт 4 ед.
Вооружение артиллерийское: 1 х АУ АК-630М, 30 мм. Зенитное: 4 X ПЗРК «Игла».
КАТЕР( ПЕЦИА.1Ы1ОГО НАЗНАЧЕНИЯ ПРОЕКТА 21980 )
Катер предназначен для
борьбы с диверсионно-
террористическими силами и
средствами в акваториях и
пунктах базирования и
ближних подходах к ним.
Водоизмещение формальное) 138,69 т, Длина наибольшая 31,04 м, Ширина
наибольшая 7,4 м, Высота борта 3,7 м, Осадка при полном водоизмещении 1,86 м.
Скорость хода полного /экономического 23/16 уз. Дальность плавания при скорости
16 узлов 200 миль. Автономность по запасам провизии 5 еут. Экипаж/меет 6 чея./Т4.
Кран гидравлический РК4501М фирмы «Pallinger». Энергетическая установка:
Двухвальная дизель-редукторная. Главные двигатели мощностью 1790 кВт 2 ед.
Вооружение стрелковое: 1 х пулемет 14,5мм МТИУ. Иротиводивереионное: 1 х
гранатомет ДП-65; 2 х гранатомет переносной ДН-64.
Вооружение зенитное: 4 к ПЗРК «Игла». Радиотехническое: IIPJ1C МР-231.
Гидроаккустичеекое: ГАС «Ml -750». Оптико-электронные средства: МТК -201МЗ.
Поисковое: ПОК «Кальмар». Штурманское: Компас магнитный электронный ДС-83К
гирокурсоуказатель PGM- -009, лаг JIH2-1, навигационный эхолот НЭЛ-20К, ЭКИНС
«Аляека-Ч», аппаратура СПС С1Р57ГЛОНАСС£<(Бриз-КМ-К».
Средства связи: Автоматизированный комплекс связи — «Рубин-ЭГЗ».
Средства связи ГМССБ: УКВ радиостанция с ЦПВ «Sailor RГ-6222», УКВ аппаратура
двухсторонней радиотелефонной связи (носимая УКВ радиостанция) «Sailor SP 3520»,
приемник НАВТЕКС «NX-700A», АРБ МКС «Афалина».
Средства видеонаблюдения: Комплекс подводного телевидения «Осмотр», Комплекс
видеонаблюдения «Архив-21980». Средства связи е водолазами: Станция
гидроакустической связи SSB-1001B. Водолазная телефонная станция D8802.
202
ПАТРУЛЬНЫЙ КА ГЕР ПРОЕК ТА 14310 «МИРАЖ»
Катер предназначен для охраны
морекуй границы и
территориальных вод, действия
по вызову в экономической зоне,
несения дозорной службы на
ходу и на якоре, обеспечения
службы морских контрольно-
пропускных пунктов (досмотр
судов, полицейские, таможенные
операции и т.д.), обнаружения и преследования нарушите... й границы,
контрабандистов, пиратов, в т.ч. действующих на быстроходных катерах.
Водоизмещение 120,3 т. Длина 35,45 м. Ширина 6,6 м. Осадка около 2,7 м. Скорость
47 50 уз. Дальность плавания около 1500 миль. Автономность 5 сут. Главная
чкргетичеекая установка: Дизель типа М520Б 2 ед.
Вооружение ударное ракетное: 1 х комплект «Штурм», 6 ракет «Атака».
Артиллерийское: 1 х АУ АК-306, 30 мм. Зенитное: 8 х ПЗРК типа «Игла».
Стрелковое: 2 х МТПУ, 14,5 мм. Радиотехническое: 1 х интегрированная
навигационная система.
АРТИ 1.1ЕРИЙС КИЙ КАТЕР ПРОЕКТА 1213" )
Несение пограничной службы на реках, озерах, крупных водохранилищах.
Корпус и ходовая рубка имеют броневую защиту.
Водоизмещение полное около 91 т. Длина 33,4 м. Ширина 4.2 м. Осадка 0,81 м
Скорость полного хода не менее 36 км час. Дальность плавания 500 км. Мореходность
использование оружия 3 балла. Автономность 6 суток. Экипаж 18 человек.
Главная энергетическая установка: Тин М401Б. Мощность 735 кВт2 од.
Вооружение артиллерийское: 2 х АУ АК-306 кал. 30 мм; Управление от «Кояонка-
219» ’
Зенитное: 4 х ПЗРК «Игла-1», Стрелковое: 2 х ПКМБ кал. 7,62 мм
РЛС: навигационная <*1иман-18М1». Ill гурманское: гирокомпас «. юне», магнитный
компас КМ-1 15; эхолот НЭЛ-20К, лаг ДГЛ-1. Оптико-электронное вооружение: визир
В1Щ-452.
203
ДЕС AH I ПЫЙ КАТЕР ПРОЕКТА 1176
Катер предназначен для
перевозки подвижной техники и
грузов е судов на
необорудованный берег и
обратно. Может использоваться
как бортовое средство.
Возможно использование катера
для транспортных операций в
портах базирования, для
паромных переправ и др.
Водоизмещение (полное) 130,7 т, Длина габаритная (с поднятой аппарелью) 30,5 м
Длина расчетная 28,5 м. Ширина габаритная (е привальными брусьями) 5,7 м
Ширина корпуса 5,5 м. Скорость хода 11,5 уз. Дальность плавания 1 100 миль
Мощность главных двигателей 2 х 190 кВт. Десантовмеетимоеть: Гусеничная и
колесная техника 2 ед. 'Ганк типа Т-90 1 ед. Места для личного состава / гусеничная и
колёсная техника 50 чел. / 1 единица.
Вооружение стрелковое: 1 х М ГПУ-14,5. Зенитное: 2 х ПЗРК «Игла». Штурманское: 1
х магнитный компас FURl’NO «PG-500». Средства внешней связи: 1 х УКВ/ДЦВ
радиостанция R&S «MR3000U», Носимая радиостанция е зарядным устройством
Sailor «5Р352О». Внутрикорабельная связь и сигнализация: Громкоговорящая
установка е приборами Е ГВ-100.
Электрический тифон ZETFON 400/3.10 DC. Переносной электромегафон ЭМ-1
Радиотехническое: НРЛС FURUNO «NAVNET 3D».
ПАТРУЛЬНЫЙ КАТЕР ПРОЕКТА 12200 «( ОЬОЛЬ»
Катер предназначен для
действий по вызову и несения
дежурной службы в
терри г ориальных водах,
осуществления контроля над
соблюдением кораблями и
судами установленного режима
плавания на внешнем и
внутреннем рейдах портов и
гаваней, а также в прилегающих
к ним прибрежных районах мор г
Водоизмещение около 57 т. Длина 30,3 м. ГПирина 5,82 м. Осадка, около 1,3 м.
Скорость около 47 уз. Дальность плавания около 700 миль. Автономность 3 сут.
Главная энергетическая установка: Дизель MTU марки 16V2000M90 2 е.д. Привод
Арнееона марки ASD-15 2 ед.
Вооружение Стрелковое-: 1 х МГПУ, 14,5 мм.
Радиотехническое: 1 х РЛС «Лиман 18М1>>.
204
СКОРОСТНОЙ ПАТРУЛЬНЫЙ КАТЕР ПРОЕКТА 12150 «МАШУТ Т»
Катер предназначен для
действий по вызову и несения
дежурной службы в
территориальных водах,
осуществления контроля над
соблюдением кораблями и
судами установленного режима
плавания на внешнем и
внутреннем рейдах портов
и гаваней, а также в прилегающих к ним прибрежных районах морей, для проведения
аварийно-спасательных работ, спасение экипажей и пассажиров при авариях ЛЛ,
кораблей, катеров, судов и иных плавсредств, для обеспечения экологической
безопасности.
Водоизмещение 32,2 т, Длина 19,8 м. Ширина 4,6 м, Осадка 1,05 м. Скорость около
50 уз.
Дальность плавания 400 миль. Автономность 1 день.
Главная энергетическая установка: 2 х дизеля типа М470К / 2 х дизеля МТИ
10V2000M94 / 2 х дизеля типа MAN V12-155O, 2 х привода Арнееона марки ASD-14 /
водомёты 1 х дизель-генератор 25 кВI.
Вооружение стрелковое: 1 х БДМ «Управа-Корд» / 1 х МТПУ 14,5 мм, 1 - 2 х
автоматических гранатомета АТС-17 калибра 30 мм. Противодиверс.ионное:
1 х ручной противодиверсионный гранатомет ДП-64. Зенитное: 2 х ПЗРК типа
«Игла».
Радиотехническое: 1 х интегрированная навигационная система.
СТОРОЖЕВОЙ КАТЕР «ТЕРЬЕР» ПРОЕКТ А 1417(13
Сторожевой катер предназначен
для патрулирования в
прибрежных районах внутренних
морей, на реках и озёрах и
выполняет следующие функции:
охрана береговых объектов,
кораблей и катеров, стоящих на
рейде' пресечение
контрабандных и
террористических действий, совершающихся с плавучих средств; сопровождение
кораблей и судов при выполнении функций. дозора; осуществление поисково-
спасательных операций и оказание первой помощи терпящим бедствие.
Водоизмещение 8,6 т, Длина 10 м, Ширина 3,14 м, Осадка 0,53 м. Скорость 27 уз.
Дальность плавания (при приеме 0.6 т топлива в перегруз) 300 (600) км. Экипаж 3 чел.
Главная энергетическая установка: Гии двухвальная CODAD. Мощность 221 кВт 2 ед.
Вооружение стрелковое оружие: 1 х ПКМБ 7,62 мм. Радиотехническое: ПРЛС
«Галс».
205
МАЛЫЙ СКОРОСТНОЙ ПА ГРУ Ы1ЫЙ КАТЕР ПРОЕКТА 12260 «Ж ГРЕБЯ
Катер предназначен дня
действий по вы юву в
прибрежной зоне морских
территориальных вод, на
акваториях и рейдах портов, в
otepax и устьях судоходных рек е
целью быстрой доставки
епецперсонала, осуществляющего
инспекционно-контрольные
мероприятия по соблюдению установленного законодательством режима плавания
судов, транспортировки грузов или ведения промысла на подконтрольных акваториях.
Катер также может быть использован в качестве разъездного или спасательного.
Водоизмещение 9,74 т. Длина 12,97 м. Ширина 3,06 м. Осадка 0,66 м, Скорость 39 уз.
Дальность плавания 300 миль. Автономность 1 еут. Главная энергетическая
установка:
Дизель 2 ед. Водомёт 2 ед. Вооружение стрелковое: 1 х пулемет Калашникова
модернизированный бронетранспортерный (ИКМ'Б). Радиотехническое: 1 х
навигационная система.
МА 'ЫЙП МТУ. IbllbliiK.VIKPI'AUOJ.IMIlHOlillO.IMIIKI IIIXIEKIА2091(»«ЧИ 1ИМ»
Катер предназначен для круглогодичных действий по охране государственной
границы в прибрежной зоне морских территориальных вод на удалении до 25 миль от
места убежища.
Водоизмещение 9,5 г, длина 12 м, ширина 5,9 м. Скорость около 43 уз. Дальность
плавания 350 миль Автономность 1 еут. Экипаж 2 чел. Главная энергетическая
j становка: Дизельный двигатель ВГХГ513 фирмы Deutz 2 ед.
Вооружение стрелковое: 1 х пулемет Калашникова модернизированный
броне транспортерный, 7,62 мм. Радиотехническое: 1 х ИРЛС «Гале».
206
(ПАСАТЕЛЫЮЕ СУДНО ДЛЯ ( ГАСЕНИЯ ЭКИПАЖЕЙ АВАРИЙНЫХ
ПОДВОДНЫХ ЛОДОК ПРОГ
ЖТА 21301
Спасательное судно
предназначено для допоиека и
обследования аварийной ПЛ,
лежащей на грунте или
находящейся в надводном
положении, поддержания
жизнедеятельности и спасения
экипажей аварийной ПЛ,
лежащей на грунте, оказания
помощи и спасения аварийной ПЛ и ПК в надводном положении, выполнения
подводно-технических и водолазных работ е использованием водолазов, обитаемых и
необитаемых подводных аппаратов.
Водоизмещение стандартное 5800 г. длина около 117 м. ширина около 18.2 м.
Осадка около 4,9 м. Скорость не менее 1 7 уз. Дальность плавания не менее 5000 миль
Автономность: для экипажа 45 сут., для спасенных 10 сут. Экипаж 97 чел.
Электроэнергетическая система: Гребных электродвигателей по.топоворот пых
винторулевых колонок мощностью 3500 кВт 2 ед. Подруливающих устройств по 850 кВт 2
ед. ГЭРШ 2 ед. Система распределения и управления ЕЭЭС 1 ед. Специальное оборудование:
1 х глубоководный спасательный комплекс на 300 м. 1 х рабоче-спасательный катер на 12
чел., 1 х дежурная шлюпка, 1 х глубоководный водолазный комплекс для работ на глубинах
до 300 м методом «насыщенных потружений.», 4 х жилые барокамеры. 1 х водолатный
колокол на 3 чел., 1 х гипербарический спасательный бот. 2 х элекгрогидравличеекий кран
г/н 12,5 т.с. 1 х рабочий телеуправляемый подводный аппарат для работ, на глубинах до 1000
м. 1 х оборудование для эпизодического приема вертолета.
СУДНО РАЗМАГНИЧИВАНИЯ ПРОЕКТА 1799 )
Размат ннчнвапие и контроль
магнитного и акустического полей
кораблей н судов.
Водоизмещение (полное) 1400 т.
Длина наибольшая 64,76 м. Ширина
наибольшая 11,73м. Высота борта
5,5 м, Осадка 3,9 м. Скорость хода
полного 12.5 уз. Дальность
плавания 2000 миль.
Экипаж 35 чел. Энергетическая установка: Главный дизель-генератор 2 ед. х 1350 кВт.
Гребной электродвигатель 1 ед. х 1000 кВт.
Специальные-устройства: Магнитометрическая аппаратура М121Э, М091Э. Аппаратура для
измерения акустического поля корабля — СИ ГАП «НЕВА НПФ Э», Аппаратура
вибрационного и акустического котпроля «Брюлль и Кьер». Комплекс оборудования для
размагничивания кораблей и судов: спец-энергоустановка, импульсный агрегат, кабель
временных обмоток.
Средства святи: Средства внешней радиосвязи, обеспечивающие эксплуатацию судна в
морских районах АЗ в соответствии с МК СОЛА&74 и ГМССБ, Средства святи но каналам
«Буран-Э». Радиотехническое: РЛС NAVI-RADAR-4000. Средства навигации:
Приемоинликатор ГЛОНАС GPS GP-150/G LONAS, Магнитный компас RI 1 1.LCTA-2. Лаг
DI. 850. Эхолот GDS 101. УАИС ТЮЗ. Система приема внешних звуковых сит налов SR
8200 ЭКПИС NAVI-SAILOR-4000. Метеокомплекс — ZENO-3200.
207
МОРС КОЕ ЭКС ЕДИЦИОННОЕ ИССЛЕДОВАТЕЛЬСКОЕ СУДНО
«ПРОФЕССОР МОЛЧАНОВ»
НИС «Профессор Молчанов» оборудован с учетом проведения научных исследовании
и работ в Арктической морской зоне Российской Федерации. Ледовый класс -УЛ, по
новой классификации Аге 5. Район плавания - неограниченный, ограничений но
метеоусловиям плавания нет.
НИС «Профессор Молчанов» подготовлено к выполнению морских экспедиционных
работ и научных исследований широкого спектра. 4 специально оборудованных
лаборатории, а при необходимости дополнительно оборудуемая мобильная
лаборатория контейнерного типа, 2 гидрологические лебедки, судовые плавсредства -
катера «Зодиак», «Фрегат». Вместимость судна составляет 80 человек, из них 20 и
более членов экипажа и до 60 человек научного персонала.
Судно названо в честь советского метеоролога, ученого-аэролога, профессора Павла
Александровича Молчанова.
В 1919 году Молчанов возглавил Главную физическую обсерваторию. При его
непосредственном участии разрабатывались новые приборы велись наблюдения -
закладывались основы для многих исследований по физике свободной атмосферы и
синоптической метеорологии. Благодаря инициативе и изобретательности Молчанова
обсерватория создала новые образцы метеорографов - змейковый (1920), зондовый
(1921), самолетный (1922). а также прибор для обработки шаропилотных наблюдений:
знаменитый «круг Молчанова».
30 января 1930 года с. территории Аэрологической обсерватории был запушен первый
в мире радиозонд. Эго означало колоссальный прорыв в технике метеорологических
наблюдений - открылась возможность получать сведения о состоянии свободной
атмосферы до высот в 25-30 километров. Радиозонд Молчанова стал пионером в
международных исследованиях атмосферы, и прежде всего в арктических: областях.
Летом 1933 года в бухте Тихой на Земле Франца-Иосифа была установлена первая в
мире автоматическая метеорологическая станция конструкции Молчанова. С. 1935 года
изготовление радиозондов было поставлено на промышленную основу, а в
Гидрометеорологической службе была организована система станций
аэрологического зондирования атмосферы.
208
СУДНО КОНТРОЛЯ ФИЗИЧЕС КИХ ПОЛЕЙ ПРОЕКТА 1 «065
Судно предназначено для
измерения акустического,
электромагнитного,
электрического, магии г него
полей надводных кораблей и ITJJ.
Водоизмещение полное около
1450 т- Длина 80 м, Ширина 1 1,4
м. Осадка 3,25 м. Скорость
полного хода около 14 уз.
Дальность плавания 10-ти узловым ходом при наибольших запасах топлива и масла
около 2500 миль. Автономность не менее 15 сут. Мореходность: Пребывание в море
неограниченное, Измерение параметров ноля до 2 баллов.
Главная энергетическая установка: Тип двухвальная дизельная, Мощность 1030 кВт 2
ед. Расчётные параметры внешней среды: Воздух от +5 ’С до +$3"С, Вода от+1.4°С до
+25QC. Устройства: Специальные постановки и выборки забортных тел
измерительных систем. Измерительная аппаратура: .ГАС-496Э, К-739Э / ЦУ 7002, К-
751Э. К-719Э. М-12ГЭ. ВСВ 205. Радиотехническое: 1IIIC «Горизонт-25Э»,
аппаратура 6701 Р-3. Гидроакустическое: ГАС МГК-335ЭМ-05 (Веета-К).
БОЛЬШОЙ гаДРОГРАФИЧЕ' КИЙ КАТЕР ПРОЕКТА 19920 )
Выполнение гидрографических и
картографических работ в
морских районах, отнесенных
Российским Морским Регистром
судоходства к R2-RSN району
плавания. Водоизмещение
порожнем 279 г. Длина
наибольшая 36,44 м. Ширина
габаритная 7,80 м.
Высота борта 3,6 м, Осадка с полными запасами 2.10 м. Осадка с наибольшими тапасами
2.19 м. Дальность плавания 1000 миль. Автономность 10 сут. Скорость хода 11.0 ут.
Экштаж/мест 11 чея./15. Кратт СК2Г-3.5 грузоподъемностью 3.5 т вылет до 10 м.
Энергетическая установка: Дтиельная с двумя дитель-редукторными агрегатами одной
модели. I лавиые двигатели 2 х 248 кВт.
Штурманское: Магнитный компас КМ 145-М1. гирокомпас PGM-C-009, лаг SAL
Ria,навигационный тхолот GDS-101. метеостанция «Перископ», АИС Т-104.
Средства связи ГМССБ: УКВ радиоустановка с ЦИВ «Sailor 6222», ПВ/КВ
радиоустановка с ПИВ «Sailor System 6Q00 25OW», носимая УКВ радиостанций: типа
«Sailor SP 3520», станция ИНМАРСАТ-С «Sailor 6110 Mini-С». приемник НАВТЕКС
«NT-1800». факсимильный приемник иогоды «.1АХ-9В». аварийный радиобуй системы
КОС ПАС-САРСАТ типа «Афалина», радиолокационный ответчик типа «Дрейф», АКС
«Rohde & Schwarz GmbH & Со.KG». Радиотехническое: НРЛС ЕСАТ 25V6/MK/VM2
ЭКП11С. СОЭ ПКИ 270. Спутниковая система ГЛОНАС. Т-701.
Специальное гидрографическое вооружение: Многолучевой эхолот See Bat 7125;
Выдвижное устройство Hall Unit для антенны; Интегрированная навигационная система
Applanix POSMV320E; Измеритель скорости звука в воде Mini SVP; Измеритель скорости
твука SVR 70; Одио.тучевой эхолот ЕА400; Буксируемый гидролокатор бокового обзора
Edge Tech 4125; Комплект навигационных приёмников Trimble.
209
МАЛОЕ ГИДРО: ТАФИЧЕС КОЕ СУДНО ПРОЕКТА 199103
Постановка и снятие с мели
навигационных морских буев и
вех всех типов; обслуживание
береговых и плавучих средств
навигационного оборудования;
выполнение гидрографических
работ в объеме возможностей
устанавливаемого оборудования:
перевозка различных грузов для
обеспечения работ береговых СПО и гидрографических подразделений на
необорудованном побережье.
Водоизмещение нормальное е грузом буев, запасами 50% 995 т, Длина наибольшая
56,40 м
Ширина габаритная 1 1,18 м. Высота борта 5,40 м. Осадка 2,91 м. Дальность плавания
при скорости 10 узлов 2000 миль. Автономность по запасам топлива, смазочного
масла и провизии 10 сут. Скорость хода 12 уз. Экипаж/мест 17 чел./21. Кран с жесткой
стрелой МЗЗЦ/рА вылет до 15 м, грузоподъемность X т. Главная энергетическая
установка: дизель-электрическая, с двумя винто-рулевыми колонками с винтами
фиксированного шага мощност ь главных двигателей 2 х 1000 кВт.
Вооружение штурманское вооружение: С>Р5/ТЛОНАСС;.Т-701; магнитный компас КМ
145-М1 лаг SAL Ria; гирокомпас PGM-C-009; метеостанция «ПериекснЦ, АИС Т-104.
Вооружение связи и трансляции (в т.ч. комплекс связи ГМССБ ): УКВ радиоустановка
с ЦИВ «Sailor 6222» ПВ/КВ радиоустановка с ЦИВ «Sailor System 6000 250W носимая
УКВ радиостанция типа «Sailor SP 3520» станция HHMAPCAT-C:.<4Sailor 6110 Mini-
С.» приемник НАВТЕКС «NT - 1800» аварийный радиобуй системы КОСПАС-
САРСАГ типа «Sailor SI- 406-11» факсимильный приемник погоды «.1АХ-9В»
радиолокационный ответчик «Sailor Sail II» 2 к-та.
Основные средства связи: автоматизированный комплекс связи AK(. «Rohde &
Schwarz GmbH & Со.KG». Средства радионавигации: 2 х ИРЛС I-CAT
25L6/MK/VM2, 2 х ЭКНИС СОЭНКЛ 270.
Специальное гидрографическое вооружение: Многолучевой эхолот ЕМ2040 Compact
I); Однолучевой эхолот ЕА400; Датчик перемещений судна MUR-5; Навигационная
система SEAPA TII-20NAV; Корректирующий приемник МВХ-4; Измеритель
скорости звука miniSVP; Навигационный приемник TRIMBLE R7 (передвижной);
Навигационный приемник TRIMBLE R7 (базовый); Блок бесперебойного питания.
210
ЗАКЛЮЧЕНИЕ
В результате выполненных исследований разработаны и успешно
апробированы теория и методы:
дешифрирования аэроснимков полученных системами и КВР;
классификации и описания признаков распознавания надводных
объектов ВМС, требований к результатам дешифрирования, требований к
дешифровщикам и пути повышения их квалификации;
восприятия дешифровщиком объектов надводных объектов ВМС;
автоматизированного дешифрирования цифровых изображений,
проблемы распознавания образов и существующие методы их решения.
По результатам анализа дешифрирования типовых объектов авторами
разработана классификация надводных объектов ВМС, которая позволяет при
выпотненпп процедуры обнаружения, выявлении конфигурации, определении
габаритных размеров объектов, отнести их к одному из видов, классов, или
типов и отразить общие тактические или технические характеристики.
Группирование надводных объектов ВМС в соответствии с
разработанной классификацией обеспечивает: систематизацию всего
многообразия наземных надводных объектов ВМС, встречающихся при
дешифрировании различных видов аэроснимков систематизацию знаний
дешифровщиков, облегчение их ориентирования в многочисленных простых
объектах, возможность оперировать более общими категориями, чем
единичный объект (тип); стандартизацию названий простых надводных
объектов ВМС, ускоряющую обработку информации.
Результаты теоретических исследований реализованы при разработке и
испытаниях КВР, используемых на современных комплексах с беспилотными
летательными аппаратами «Иноходец», «Корсар», «Тахион», «Оолан-10»,
«Орлан-ЗО» «Элерон-3», «Элерон-10», наземного комплекса приема и
обработки информации от бортовых комплексов разведки, принятых на
снабжение Вооруженных Сил Российской Федерации.
Реализация полученных результатов позволила:
повысить эффективность дешифрирования типовых надводных объектов
ВМС. за счет использования разработанной классификации объектов, системы
независимых инвариантных нормально распределенных признаков и описания
основных характеристик надводных объектов ВМС;
повысить достоверность результатов оценивания характер! стик
цифровых оптико-электронных систем при проведении натурных работ;
сократить затраты за счет экономии средств на количестве натурных
экспериментов (полетов и пусков беспилотных летательных аппаратов).
ЛИТЕРАТУРА
1. Карпович 14.Н. Военное дешифрирование аэрофотоснимков. - М..
Воениздат, 1990. - 544 с.
2. Молчанов А.С Теория построения иконических систем воздушной
разведки. Волгоград: Издательство «Панорама», 201 7. - 224 с.
3. Аковецкий В.И. Дешифрирование снимков. - М.: Недра, 1983. - 376 с.
4. Молчанов А.С., Чаусов К.В., Абрамов Д.В., Каспии В.Г. Анализ процесса
дешифрирования изображений штриховых мир видимого диапазона при
проведении испытаний аэрофотосистем дистанционного зон парования Земли.
Сборник научных работ 34-й Международной научной конференции
Евразийского Научного Объединения «Итоги науки в теории и практике 2017». -
М.: ЕНО, 2017. -С. 54-56.
5. Молчанов А.С., Чаусов Е.В. Структура процесса дешифрирования
изображений иконических систем технического зрения при проведении
испытаний. Научно-технический журнал «Информация и космос». - № 2 -
Санкт-Петербург, 2019. - С. 113-116.
6. Топотрафичеекое дешифрирование снимков: Учебное пособие / О.А.
Мищенков |н др. |. - СПб.: В КА имени А.Ф. Можайского, 2007. - 192 с.
7. Живичин А. Н. Дешифрирование фотографических изображений. - М .
Недра, 1980. - 253 с.
8. гебрин Ю.К. Оптико-электронное разведывательное оборудование
летательных аппаратов. - Киев: Киевское ВВАИУ. 1988. -450 с.
9. Трофимов Б.Е., Куликовский О.В. Передача изображений в цифровой
форме. - М.: Связь, 1980. - 120 с.
10. Прэтч У. Цифровая обработка изображений. В 2-х книгах. Перевод с
английского под ред. Д.С. Лебедева. - М.: Мир, 1982. - 422 с.
1 1. Кошкин Р.П. Беспилотные авиационные системы. - М.: С тратегические
приоритеты, 2016. - 676 с.
12. Корчепко А.Г., Ильяш О.С. Обобщенная классификация беспилотных
летательных аппаратов. Сборник научных трудов Харьковского университета
Воздушных Сил, 2012, выпуск 4 (33). С. 27-35.
13. Физиология сенсорных систем. Часть первая. Физиология зрения. Под
ред. Е.В. Гершуни. - Л.: Наука, 1971. - 140 с.
14. Гонсалес Р., Дж. Ту. Принципы распознавания образов. Перевод с
английского под ред. ТО.И. Журавлева. - М.: Мир 1978. - 290 с.
15. Рубахин В.Ф. Психолот ические основы обработки первичной
информации. - Л.: Наука, 1974. - 182 с.
1$. Справочник по теории автоматического управления под ред. А.А.
Красовского. - М.: Наука, 1987. - 380 с.
17. Васи.II нко Г.II., Тараторин А.М. Восстановление изображений. - М
Радио и связь, 1986. -224 с.
18. Грапрат Д. Дж. Роль моделей зрения человека в обработке изображений
// ТИПЭР, 1981, т.69. №5. - С. 65-77.
? 1 ?
19. Красильников Н.П. Теория передачи и восприятия изображений. - М.:
Радио и связь, 1986. - 164 с.
20. Труфанов И.В. Синтез двухкоординатных фильтров оптимальных в
смысле максимума вероятности обнаружения и минимума дисперсии. В кп.
Цифровая обработка изображений в задачах распознавания и определения
местоположения объектов / Иод ред. И.Н. Белоглазова. - М.: ВВИА им. Н.Е.
Жуковского, 1992. - 164 с.
21. Глазер В.Д., Цукерман И.II Информация и зрение. - М.: АИ СССР,
1961.-84 с.
22. Горбунов В. А. Эффективность обнаружения целей. - М.: Воепиздат,
1979.-16 с.
вЗ. В. Anbaroglu. Parcel Delivery In An Urban Environment Using Unmanned
Aerial Systems: A Vision Paper // ISPRS Annals of the Photogrammetry, Remote
Sensing and Spatial Information Sciences, Volume 1V-4/W4, 2017 4th International
GeoAdvances Workshop, 14-15 October 2017, Safranbolu, Karabuk, Turkey.
24. Верещака T.B., Зверев А. Г. и др. Визуальные методы дешифрирования.
- М.: Недра, 1990.
25. Л. Erceg, В. Erceg, Л. Vasili. Unmanned aircraft systems in logistics legal
regulation and worldwide examples toward use in Croatia // 17 International Scientific
Conference Business Logistics in Modern Management. 12-13 October 2017. Osijek.
Croatia, pp. 44-62.
26. Молчанов Л.С., Шорсткий II.В. Исследования по возможности
обнаружения и распознавания объектов целевым оборудованием БЛА в практике
летных испытаний. Материалы Всероссийской научно-практической
конференции «АВИАТОР». Актуальные вопросы исследований в авионике:
теория, обслуживание, разработки. - Воронеж 2014. - С. 63-65.
27. Chase С. Murray, Amanda G. Chu. The Hying sidekick traveling salesman
problem: Optimization of drone-assisted parcel delivery // Transportation Research Part
C. 54 (2015)pp. 86-109.
28. Молчанов A.( , Растегаев И.Г., Емельянов Л.М. Анализ
производительности каналов связи радиолинии управления и контроля
беспилотными летательными аппаратами. Журнал «Известия Тульского
государственного университета». Технические науки. Тульский государственный
университет - Тула, 2019. Вып. 10. - С. 92-102.
29. Ferrandez, Т. Ilarlrson, I . Weber, R. Sturges, R Rich. Optimization of a
Truckdrone in Tandem Delivery Network Using К-means and Genetic Algorithm //
Journal ol Industrial Engineering and Management, 2016 - 9(2): pp. 374-388.
30. Анисимов Б.В., Курганов В.Д., Злобин В.К. Распознавание и цифровая
обработка изображений. - М.: Высшая школа, 1983.
31. Горелик Л.JI. Скрипкин В.А. Построение систем распознавания. - М
Сов. радио, 1974.
32. Горелик A.JI., Гуревич И.Б., Скрипкин В.Л. Современное состояние
проблемы распознавания. - М.: Радио и связь, 1985.
33. Казанцев В.С. Задачи классификации и их программное обеспечение. -
М.: Паука, 1990.
34. Козлов JO М. Адаптация и обучение в робототехнике. - М.: Наука, 1990.
35. Павлов И.М., Якубов Н. Г. Аэрофотография. -М.: Недра, 1991. - 335 с.
36. Фукунага К Введение в статистическую теорию распознавания образов
/ Под ред. А.Л. Дорофеюка. - М.: Гауда, 1979.
37. Крамер Г. Математические методы статистики. - М.: Мир, 1968.
38. Фомин Я.А., Тарловский Г.Р. Статистическая теория распознавания
образов. - М.: Радио и связь, 1986.
39. Лйвозяпс С.Л., Бежаева З.Н., Староверов О.В. Классификация
многомерных наблюдений. - М.: Статистика, 1974.
40. Айвозяпс С.А. Прикладная статистика. Классификация и снижение
размерности. - М.: Статистика, 1989.
41. Куа<5>е Ф. Взаимодействие робота с внешней средой: Пер. с апт. / Под
ред. А.Н. Колмогорова. - М.: Мир, 1975.
42. Молчанов Л.С. Простраисгвенно-частогная математическая модель
цифровой оптико-электроппой системы воздушной разведки. Сборник научных
статей девятой всероссийской научно-практической конференции по
имитационному моделированию и его применению в пауке и промышленности
«Имитационное моделирование, теория и практика» (ПММОД-2019). -
Екатеринбург, 2019.
43. Casasen'. D., Psaltis I). Hybrid processor to compute invariant moments for
pattern recognition. - Optics letteis, 1987, vol. 5, pp. 395-397.
44. Труфанов И.В. Опенка эффективности автоматизированных систем
распознавания образов. В жури. Оптимизация, управление, интеллект. Сиен,
выпуск: Груды Международной конференции «Математика, информатика и
управление». - Иркутск: ИГУ, 2000.
45. Чулюк С.Г. Обзор способов выбора эффективного набора признаков для
авгоопгических систем распознавания. Цифровая обработка изображений в
задачах распознавания и определения местоположения объектов. Под ред. И.И.
Белоглазова. - М.: ВВИА нм. Н.Е. Жуковского, 1992.
46. Ни М.К Visual pattern recognition by moments invariants. - IEEE Trans.
Inf. Theory, vol. IT - 8, 1962, pp. 179-187.
47. Труфанов И.В., Онацкий ATI. Цифровая обработка растровых
изображений. - Иркутск: Иркутское ВАИИ. 2003 - 240 с.
48. Андерсон 1. Введение в многомерный статистический анализ. Перевод с
англ. - М.: Физматгнз. 1963.
49. Белоглазов И.II. Алгоритм комплексного автоматического
дешифрирования и оценка его эффективности. В кп. Применение ЭВМ для
автоматизации процессов сбора и обработки информации. Под ред. И.И.
Белоглазова. - М.: ВВИА им. Н.Е. Жуковского, 1984.
50. Залманзоп Л.А. Преобразования Фурье, Уолша, Хаара и их применение
в управлении, связи и других областях. - М.: Наука, 1989.
51 .Чабан Л.II. Теория и алгоритмы распознавания образов. Учебное
пособие. - М.: МПИГАиК. 2()04. - 70 с.
52. Обработка изображений при помощи ЦВМ. Под ред. Г. Эндрюса и Л.
Инл.0 (перевод с английского). - М.: Мир, 1973.
214
53. Адзерихо К.С.. Киселевский Л.И., Коспокевич С.Б Краспопропшп В .В.
Физические основы дистанционного зондирования. - Минск, Уп-т, 1991.
54. 11атрнк 9. Основы теории распознавания образов - М.: Сов.радио, 1980.
55. Дистанционное зондирование: количественный подход. Иод ред.
Ф.Свейн. III.Д >йвис. -М.: Недра, 1983.
56. Артемьев А.А., Казачков Е.А., Мапогип С.II., Шаронов В.В.
Классификация надводных объектов па изображениях видимого оптического
диапазона. Вестник Концерна В КО «Алмаз - Антей». 2020;( 1):87-95.
https://doi.Org/l 0.38013/2542-0542-2020-1 -87-95.
57. Колмогоров А.I I., Фомин С.В. Элементы теории функций и
функционального анализа. - М.: Наука, 1981.
58. Aly М., Wehnder I’., Munir h М., Perona I'. Towards automated large scale
discovery of image Families // Computer Vision and Pattern Recognition. 2009. pp. 9-
16.
59. Bellman R.E. Perturbation techniques in mathematics, engineering and
physics. Cornier Corporation, 2003
60. Bengio Y.. Courvlle A. Vincent P. Representation learni ig: A review and
new perspectives // Pattern Analysis and Machine Intelligence. 2013. No. 35(8). pp.
1798-1828.
61. Bengio Y., Ethan D. Why does unsupervised pre-training help deep learning?
// The Journal of Machine Teaming Research. 2010. No. 1 1. pp. 625-660.
62. Bengio Y. I.earning deep architectures for Al // Foundations and trends in
Machine Learning. 2009. No. 1. pp. 1-127.
63. Bishop C.M. Neural networks for pattern recognition. Oxford: Oxford
tin'versify press, 1995.
64. Bishop C.M. Pattern recognition and machine learning. New York: Springer,
2006.
65. Brads/j G. The OpenCV library // Doctor Dobbs Journal. 2000. No. 25.11.
pp. 120-126.
66. Brown M.S., Seales W.B. Image restoration of arbi'rarily watped documents
// Pattern Analysis and Machine Imelligence. 2004. pp. 1295-1306.
67. Bundy A., Wallen I Difference of Gaussians // Catalogue of Artificial
Intelligence Tools. 1984. pp. 30-35.
68. Canny J. A computational approach to edge detection // Pattern Analysis and
Machine Intelligence, IEEE Transactions on. 1986. No. 6. pp. 679-698.
69. Changizi M A. Percei’ ing the present and a systematization ol illusions //
Cognitive science. 2008. No. 32(3). pp. 459-503.
70. Cheng X., Dale C., Lui J. Statistics and ocial network of youtube videos //
Quality of Service, 16th International Workshop on. 2008. pp. 113-121
71. Ciresan D., Meier U. Schmidhuber J. Multi -column deep neural networks for
image classification // Computer Vision and Pattern Recognition (CVPR). 2012. pp.
3642-3649.
72. Cootes I .F., Edwards G.J., Taylor C J. Active appearance models // IEEE
Transactions on pattern analysis and machine intelligence. 2001. No. 23('6). pp. 681-
685.
215
73. Журавлев 10.И., Рязанов В.В., Сенько О.В. Распознавание.
Математические методы. Программная система Практические применения. - М
издательство ФАЗИС,! 2005. - 159 с.
74. Cybenko G. Approximation by superposition of sigmoidal functions //
Mathematics of Control, 1 ignals and Systems, No. 2.4, 1989. pp. 303-314.
75. Dementhon D.F., Davis I ,S. Model-based object pose in 25 lines of code //
International journal of computer vision. 1995. No. 15.1-2. pp. 123-141.
76. Коломиец JI.В., Федоров M.B., Богомолов А.В., Мережко Л.Н.,
Солдатов Л.С., Есев А.А. Метод поддержки принятия решений по управлению
ресурсами при испытаниях авиационной техники // Информационно-
измерительные и управляющие системы. 2010. Т. 8. № 5. С 38-40.
77. Макаренко В.Г., Подорожняк Л.Л., Рудаков С.В., Богомолов Л.В.
Инерциально-спутниковая наши анионная система управ шння транспортными
средствами//Проблемы управления. 2007. № 1. С. 64-71.
78. Droniou A., Sigaud О. Gated autoencoders with tied input weights //
International Conference on Machine Learning. 2013. pp. 17-24.
79. Duda R.O., Hart P.E., Stork I) G. Pattern classification. John Wiley & Sons,
2012.
80. Duin R.P., Pekalska E. Open issues in pattern, recognition // Computer
Recognition Systems. 2005. pp. 27-42.
81. Farneback G. Two-frame motion estimation, based on polynomial expansion
// Image Analysis. 2003. pp. 363-370.
82. Fei-Fei L., Fergus R., Perona P One-shot learning of object categories //
Pattern Analysis and Maclrne Intelligence, IEEE Transactions. 2006. No. 28(4). pp.
594-611.
83. Fei-Fei I.., Yao B., Khosla A. Combining randomization and discrimination
for fine-grained image categorization // Computer Vision and Pattern Recognition.
2011. pp. .1577-1584?
84. Felzenszwalb P.F., Huttenlocher D.P. Efficient graph-based image
segmentation // International Journal of Computer Vision. 2004. No. 59.2. pp. 167-181.
85. Fergus R., Perona P., Zisserman A. A sparse object category model for
efficient learning and exhaust™ e recognition // Computer Vision and Pattern
Recognition. 2005. No. 1. pp. 380-387.
86. Fukushima K. Neocognicron: A hierarchical neural network capable of visual
pattern recognition//Neural networks. 1988. JYo. 2. pp. 119-130.
87. Fusiello A., Тиссо E., Verri A. A compact algorithm for rectification of
stereo pairs // Machine Vision and Applications. 2000. No. 12.1. pp. 16-22.
88. Драган С.П., Боюмолов А.В., Дроздов С.В., Харитонов В.В. Облик
информационно-измерительной системы квалимегрии средств коллективной
зашиты от авиационного шума. Международная конференция по мягким
вычислениям и измерениям.2022. Т. 1. С.222-225.
89. Солдатов С.К., Драган С.П., Богомолов А.В., Пирожков М.В.
Скрябин С.IO., Городенко О.В., Синельников И.А. Гигиенические аспекты
шума, генерируемого аэродромным оборудованием. Авиакосмическая и
экологическая медицина. 2022. 1 56. № 2. С. 85-89.
216
90. Молчанов А.С. Чаусов Е.В. Методика калибровки математической
модели цифровых оптико-электронных систем дистанционно! о зондирования
земли при проведении летных испытаний. В сборнике: Управление развитием
крупномасштабных систем (MI.SD'2021). Груды Четырнадцатой международной
конференции. Под общей редакцией С.II. Васильева, Л.Д. Цвиркуна. Москва,
2021. С. 1176-1183.
91. Веселов Ю Г., Островский А.С., Молчанов А.С., Сельвесюк II.И.
Методика оценки возможностей средств получения видовой информации при их
комплексированнн. Научные чтения но авиации, посвященные памяти Н.Е.
Жуковского. 2015. № 3. - С. 301-304.
92. Молчанов А.С Чаусов Е.В. Методика оценивания линейного
разрешения авиационных цифровых оптико-электронных систем в процессе
летных испытаний // Известия Тульского государственного университета.
Технические науки. 2019. № 2. - С.203-209.
93. Кучко А.С. Аэрофото! рафирование. Основы и метрология. - М.: Недра,
1974.-272 с.
94. Молчанов А.С Чаусов Е.В. Применение математического
моделирования для опенки авиационных оптико-электронных систем при
проведении летных испытаний // Сборник тезисов докладов научной III
всероссийской научно-технической конференции «Моделирование авиационных
систем». Государственный научно-исследовательский институт авиационных
систем. - Москва, 2() 18. - С.288-289.
95. Чаусов Е.В., Молчанов А.С., Минько Р.Н., Краснов Р.В. Основные
показатели качества оптико-электронных систем дистанционного мониторинга
Земли и способы их оценки при проведении испытаний // Вектор ГеоНаук. 2019.
TjS №1.-С. 60-67.
96. Дубинский Г.П., Кононов В.И., (Федоровский А.Ф. Методы оценки
качества оптических систем. - М.: Машиностроение, 1978. - 231 с.
97. Молчанов А.С Веселов IO.Г., Гулевич Ci.II. Повышение вероятности
поиска типовых объектов воздушной разведки в процессе проведения летных
испытаний 1>ЛА. Научные чтения по авиации, посвященные памяти Н.Е.
Жуковского. 2015. № 3. - С. 441 -446.
98. Корсуп О.II., Николаев С.В. Технология моделирования беспилотных
летательных аппаратов в целях решения задач испытаний и оценки
эффективности. Cloud ol Science. 2020. 'Г. 7. № 2, С. 106-119.
99. Николаев С.В. Моделирование вероятности обнаружения наземных
объектов. Автоматизация. Современные технолоиш. 2019. Т. 73. № 4. - С. 172-
176.
100. Молчанов А.С. Методика оценки линейного разрешения на пиксель
аэрофотосистем военного назначения при проведении летных испытаний //
Известия высших учебных заведений. Геодезия и аэрофотосъемка. - 2018. - Т. 62,
№ 4. - С. 390 - 396.
101. Чаусов Е.В., Молчанов А.С. Программно-методический комплекс
обработки изображений при проведении летных испытаний пкопическпх оптико-
электронных систем.// Геодезия и картография. - 2020. - Т. 81. -№ 1. - С. 26-33.
2Г
DOI: 10.22389/0016-7126-2020-955-1-26-33
102. Молчанов А.С., Николаев С.В., Журавель В.И., Чаусов Е.В., Кожухин
И.В. Программно-методический комплекс опенки цифровых оппико-электроппых
систем с использованием функции передачи модуляции. Свидетельство о
регистрации программы для ЭВМ КН 2019613652, 20.03.2019. Заявка
№ 2019612392 от 11.03.2019.
103. Кононов В.И., Федоровский А.Ф., Дубинский Г.П. Оптические
системы построения изображений. - К.: Техника, 1981. - 134 с.
104. Комар В.Г. Критерий резкости изображения и ее оценка в различных
системах кинематографии // Успехи научной фотографии, 1964, т. 10. - С 79-99.
105. Якушенков Ю.Г. Теория и расчет оптико-электронных приборов.
Учебник для ву%ов. - М.: Логос, 201 1. - 568 с.
106. Тарасов В.В., Якушенков Ю.Г. «Двух- и мпогодиапазонпыс оптико-
электронные системы», Логос, 2007 - 337 с.
107. Молчанов А.С. Теория и практика дешифрирования объектов
авиационной техники иконических оптико-элекгроппых систем. М.: Перо, 2020. -
171с. ISBN 978-5-00171-491-0.
108. Якушенков Ю.Г. «Основы оптико-электронного приборостроения»,
Логос., 2013.
109. Ишанин Г.Г., Панков Э.Д., Андреев А.Л., Полыциков Г.В.
«Источники и приемники излучепияиТПолитехиика, 1991.
110. Зарубежная военная техника. Обзоры «НГЦ «Пнформгехника».
Выпуск 2(126). Ракетная техника, 1991.
111. Молчанов А.С. Метод расчета оценки вероятности распознавания
типовых наземных объектов воздушной разведки. Журнал «Вопросы оборонной
техники. Серия 16: Технические средстаа противодействия терроризму». 2021. №
7-8 (157-158). С. 37-47.
112. Мельканович А.Ф. Фотографические средстаа и их эксплуатация. -
М.: Мин. обороны СССР, 1984.
113. Молчанов А.С., Чаусов Е.В. Теория и практика распознавания
объектов бронетанковой техники при дешифрировании аэроснимков / А.С.
Молчанов, Е.В. Чаусов // М.: Перо, 202 1. - 246 с.
114. Чаусов Г.В., Молчанов А.С. Методика синтеза функции передачи
модуляции цифровых онтико-электронных систем дистанционного зондирования
земли по результатам летных испытаний // Научный рецензируемый журнал
«Научные ведомости Белгородского государственного университета». Экономика.
Информатика. Т.46. № 1. - Белгород: издательский дом «Белгород», 2019. -
С 138-148.
1 15. Левин Б.Р. Теоретические основы статистической радиотехники. В 2-х
книгах. - М.: Советское радио, 1968.
116. Аб.тамейко С.В., Лагуновский Д.М. Обработка изображений.
Технология, методы, применения. «Амалфея», Минск, 2000.
117. Веселов, ЮГ., Гулевич C..IT, Молчанов А.С. Исследование
линейности аэрофотосистем, построенных па основе фоточувствигельных
приборов с переносом заряда // Наука и образование. № 9. 2013. С 313-324.
218
1 18. Веселой, ЮГ., Глушко В.Л. Молчанов А.С. Математическая модель
аэрофотосистемы, построенной на основе фоточувствителышх приборов с
переносом заряда // Наука и образование. № К). 2013. С. 259-268.
119. Молчанов А.С. Оценка качества аэрофот оспстем методом
математического моделирования с использованием критерия Шадэ // Известия
высших учебных заведений. Геодезия и аэрофотосъемка. Том № 61 №1. 2017. С.
28-33.
120. Молчанов А.С., Чаусов Е.В. Математическое моделирование
цифровых оптико-электронных систем и их оценка при проведении летных
испытаний // Сборник материалов XIV международной научно-технической
конференции «.Оптико-электронные приборы и устройства в системах
распознавания образов, обработай изображений и символьной информации.
Распознавание- 2018». - Курск: издательство «Юго-Западный государственный
университет», 201 8. - С. 178-181
121. Молчанов АЛ. Оценка качества аэрофотосистем дистанционного
зондирования Земли с использованием частото-колориметрического показателя
// Информация и космос. № 2, 2017. С. 28-33.
122. Молчанов Л.С. Оценка цифровых оптико-электронных систем
дистанционного наблюдения и зондирования Земли с использованием методов
теории информации // Информация и космос. № 2. 2017. С 33-49.
123. Молчанов А.С., Чаусов Е.В. Методика синтеза функции передачи
модуляции цифровых оптико-электронных систем дистанционного зондирования
земли по результатам летных испытаний // Научные ведомости Белгородского
Iосударственпого университета. №2. 2019. С. 138-148.
124. Молчанов А.С., Чаусов Е.В. Методика оценки качества цифровых
оптико-электронных систем па основе фоточувст витальных приборов с
переносом заряда с использованием апостериорной информации летных
испытаний // Информационно-измерительные и управляющие системы. 2019. Т.
17. №3. С. 45-51.
125. Молчанов, А.С. Метод оценки линейного разрешения па пиксель
цифровых аэрофотосистем при различном угловом положении штриховой миры
относительно приемника оптического излучения // Известия Тульского
государственного университета. № К). 2019. С. 338-348.
126. Молчанов А.С. Способ определения .линейного разрешения па
местности па пиксель оптико-электронной системы летательного аппарата.
Патент на изобретение 2732784 С1, 22.09.2020.
Заявка № 2020111049 от 17.03.2020.
127. Chausov E.V., Molchanov A.S. Cyber-Pny steal Resolution Evaluation
System for Digital Aerophotographic Systems // Studies in Systems, Decision and
СопГго1яЙ021, pp 247-254.
128. Хабпбуллин Г.А., Молчанов А.С., Коронков С.О. Отделяемая оптико-
электронная система ведения воздушной разведки с помощью вертолета // пат.
193634U1 Рос. Федерация: МИК G01S 13/04.
129. Молчанов А.С.. Николаев С.В., Журавель В.И., Чаусов Е.В. Расчет
частотно-колориметрического показателя оценки качества аэрофотосистем па
219
основе фогочувствительных приборов с переносом заряда // Свидетельство о
государственной регистрации программы для ЭВМ № 2018614357.
Зарегистрировано в Реестре программ для ЭВМ ФИПС 4.04.2018 г.
130. Молчанов Л.С.., Николаев С.В., Журавель В.И., Чаусов Е.В., Кожухин
И.В. llpoi раммно-методический комплекс опенки цифровых оптико-электронных
систем с использованием функции передачи модуляции / А.С. Молчанов, //
Свидетельство о государственной регистрации программы для ЭВМ №
2019613652. Зарсч истрировано в Реестре программ для ЭВМ ФИПС 20.03.2019 i.
131. Молчанов А.С., Чаусов Е.В., Николаев С.В., Кожухин И.В., Журавель
В.И., Минько Р.П. Компьютерная модель цифровых оптико-электронных систем
воздушной разведки // Свидетельство о государственной регистрации программы
для ЭВМ № 2019617396. Зарегистрировано в Реестре программ для ЭВМ ФИПС
06.06.2019 г.
132. Молчанов, Л.С. Модель зрительного анализатора дешифровщика в
виде эквивалентного фильтра пространственных частот на основе функции
передачи модуляции // Сборник тезисов докладов научно-технической
конференции «Техническое зрение в системах управления - 2019», М.: ИКИ РАН,
2019. С. 61-62.
133. Молчанов А ,С.? Чаусов Е.В. Информационная техполошя
автоматизированного распознавания типовых наземных объектов воздушной
разведки // Сборник материалов VIII Международной научно-технической
конференции «Информационные технологии в науке, образовании и производстве
(ИТПОП-2020)». Белгород, 2020. С. 107-1 К).
134. Капитанец П.М. Война па морс. Актуальные проблемы развития
военно-морской науки. — М.: Вагриус, 2001.
135. Капитапеп П.М. Морской державе быть! Стратегическое сдерживание
па морском театре военных действий — М.: Вече, 2017. - 448 с.
136. Богомолов А.В., Ларкин Е.В., Климов Р.С., Молчанов А.С., Коронков
С.О. Устройство для мониторинга состояния оператора эрратической системы в
условиях воздействия химического фактора. Патент па полезную модель
№ 202552 U1, 24.02.2021. Заявка № 2020134207 от 19.10.2020.
137. Courbariaux М. et al. Binarized neural networks: Training deep neural
networks with weights and activations constrained tq+ 1 or-1 //arXiv preprint
arXiv: 1602.02830. 2016.
138. Ioffe S„ Szegedy C. Batch normalization: Accelerating deep network
traini ig by reducing internal covariate shill'/ZarXiv preprint arXiv: 1502.03167. 2015.
220
СПИСОК СОКРАЩЕНИИ
АПК АОВИ - апнаратно-пршраммпый комплекс автоматизированной обработки
в и д о в ой 1111 <j) op м а ци и
АСУ - автоматизированная система управления
АТ - авиационная техника
АФА - аэрофогоаппарат
БАК - беспилотный авиационный комплекс
БАС - б е сг I и л о it I ая а в и an и oi 111 ая e и e re м a
БГД - база геопространственных данных
БД - база данных
БЛА - беспилотный летательный аппарат
БТР - бронетранспортер
БЦВМ - бортовая цифровая вычислитецТйВая машина
ВА - военная авиация
ВзР - в оз д у I иная раз вед ка
ВИ - видовая информация
ВПП - взле тно-посадочная полоса
ГПИ - геопространственная информация
вкс - воздушно-космические силы
ВМС - военно-морские силы
ВПП - взлетно-посадочная полоса
ДРЛО - дальнее радиолокационное обнаружение
ПК- - инфракрасный
ИНС - искусственная нейронная сеть
КБЛА - комплекс с беспилотным летательным аппаратом
КСА ДД - комплекс средств автоматизации детального дешифрирования
ЛА - летательный аппарат
ЛРМ - линейное разрешение на местности
МАВ - максимум апостериорной вероятности
МКО - международная колориметрическая организация
МНС - многослойная нейронная сеть
МОП - максимум отношения правдоподобия
МОЭС - многофункциональная оптико-электронная система
НС - нейронная сеть
нтд - пормат ивно-техиическая документация
НУР - неуправляемые ракеты
ОТО - оперативно-тактическая обстановка
ОТТ - общие технические требования
ОЭР - оптико-электронная разведка
ОЭС - оптико-электронные системы
оэцн-лпц - оптико-электронная целевая нагрузка с лазерным подсветом
С Н С - с в ерто ч 11 ая не й poi 111 ая с е г ъ
СХД - сервер хранения данных
221
УАРМ - унифицированное автоматизированное рабочее место
ЦОЭС - цифровая оптико-электронная система
ПД - поршневой двига тель
ПЗС - прибор с зарядовой связью
ПЛИС - программируемая логическая интегральная схема
ПТУР - противотанковые управляемые ракеты
ПЭВМ - персональная электронно-вычислительная машина
РИ - разведывательная информация
P IP - радиолокационная разведка
РЛС- радиолокационная система
PC - разрешающая способность
РЭЬ - радиоэлектронная борьба
САР - система автоматического дешифрирования
СВ - сухопутные войска
СВЧ - сверхвысокая частота
СКО - среднее квадратическое отклонение
СПО - специальное программное обеспечение
твд- турбов и 11 тов о й д в и гаге л ь
ТРД- турбореактивный двигатель
ТРДД - турбореактивный двухконтурный двигатель
УРО - управляемое ракетное оружие
ЭМВ - эл е к тро м а гн и тн ы е в о л и ы
ЭОП - эффективная отражающая площадь
ЯЭУ - ядерная энергетическая установка
ТЕОРИЯ И ПРАКТИКА РАСПОЗНАВАНИЯ
НАДВОДНЫХ ОБЪЕКТОВ ВОЕННО-МОРСКИХ
СИЛ ПРИ ДЕШИФРИРОВАНИИ АЭРОСНИМКОВ
Монография
Об авторе:
доктор технических паук, доцент Молчанов Андрей Сергеевич,
родился 17 марта 1981 года в г Ахтубинеке Астраханской области.
Окончил Военно-воздушную инженерную академию имени профессора
Н.Е. Жуковского в 21)03 году. Автор более 100 научных и учебно-
методических трудов в области в области испытаний цифровых
оптико-электроппых, а орофотографических систем и комплексов
наблюдения, интеллектуальных систем информационной безопасности,
автоматизированного дешифрирования видовой информации па основе
нейросетевых алгоритмов, распознавания образов и оценивания
технического состояния систем получения видовой информации.
е-пн. i 1: andryoefajyandex.ru
Молчанов А.С.
ТЕОРИЯ И ПРАКТИКА РАСПОЗНАВАНИЯ
НАДВОДНЫХ ОБЪЕКТОВ ВОЕННО-МОРСКИХ СИЛ
ПРИ ДЕШИФРИРОВАНИИ АЭРОСНИМКОВ
Монография
Издательство «Перо»
109052; Москва, Нижегородская ул., д. 29-33 стр. 27, ком. 105
Гел.: (.495) 973-72-28, 665-34-36
www.pero-priin.ru e-mail: info@pero-priin.in
Подписано в печать 26.10.2022. Формат 60x90/16.
Бумага офсетная. Усах псч! Яж4. Тираж 3000 жз. Заказ 889.
Отпечатано в ООО «Издательство «Перо»
ISBN 978-5-00204-652-2