/















































































































































Текст
А.А ЯКУШЕНКОВ
сновы
ИНЕРЦИАЛЬНОЙ
НАВИГАЦИИ
Канд. техн. наук ЯКУШЕНКОВ А. А.
ОСНОВЫ
ИНЕРЦИАЛЬНОЙ
НАВИГАЦИИ
ИЗДАТЕЛЬСТВО
МОРСКОЙ ТРАНСПОРТ»
МОСКВА — 1963
Scan, DjVu:
Dmitry7
656.605: 62=563
В работе излагаются основы теории инерциальных систем,
предназначенных для морской навигации, принцип действия их составных
элементов и вопросы перспективного развития инерциальной нави-
гации для морского флота.
В основу книги положены несколько расширенные и
дополненные материалы лекций, прочитанных автором в 1960 г. в ЛВИМУ
им. адм. С. О. Макарова. В ней впервые рассмотрена кинематика
систем инерциальной навигации, ориентированных в некоторых
координатных системах, представляющих интерес для морского флота,
составлены структурные схемы инерциальиых ориентиров в этих
координатных системах, рассмотрены некоторые специфические
ошибки морских инерциальиых систем, изложены принципы
автоматического судовождения с применением инерциальиых систем.
Книга рассчитана на учащихся и преподавательский состав
высших учебных заведений ММФ, инженеров-судоводителей и
работников организаций морского флота, интересующихся перспективами
развития науки и техники судовождения. Она может также
оказаться полезной работникам приборостроения, создающим
навигационную аппаратуру для морского флота.
ВВЕДЕНИЕ
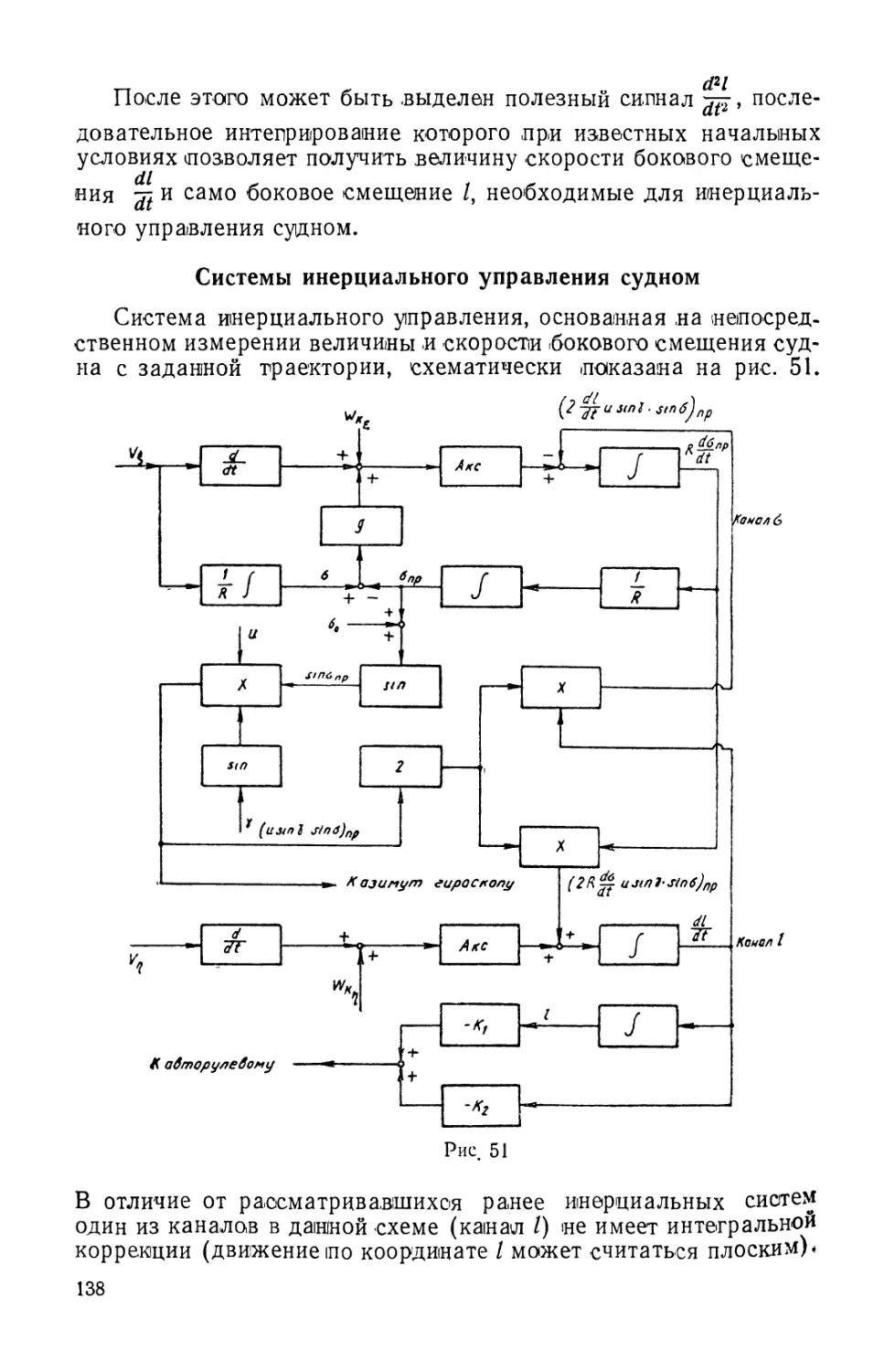
Под термином «инерциальная навигация» понимается
определение координат и элементов движения объекта (судна,
самолета, космического корабля), основанное на инерционных
свойствах движущихся тел. Устройства, с помощью которых
осуществляют эти определения, 'получили название инерциальных
навигационных систем.
Физические явления, связанные с инерцией тел и
используемые в инерциальной навигации, 'подчиняются законам механики,
которые справедливы по отношению к инерциальной системе
координат, неподвижной относительно звезд или перемещающейся
относительно них прямолинейно и равномерно. В инерциальных
навигационных системах производится искусственная
материализация инерциальной координатной системы с точностью до
приборных ошибок соответствующих устройств. Этим, по-видимому,
и объясняется происхождение термина «инерциальная
навигация».
Определение инерциальной навигации (показывает, что она
является автономной, т. е. не связанной с внешними ориентирами,
поскольку для обнаружения и использования инерционных
эффектов на движущемся объекте не нужно прибегать к внешним
источникам информации. В этом отношении плавание с ломощью
инерциальных систем можно уподобить плаванию по счислению;
отличие состоит в способе определения вектора (путевой скорости
объекта.
Автономная навигация в настоящее время приобретает
большое значение, в том числе и для морского транспортного флота.
Известно, что одним из перспективных направлений развития
морского флота является строительство подводных транспортных
судов. Естественно, что подводное судовождение по своей
природе должно быть автономным, так как под водой внешняя
информация, необходимая для навигации, не может быть получена с
3
(помощью каких-либо известных в настоящее время науке
средств*.
Автономная навигация необходима и для надводного флота.
С ее применением можно отказаться от строительства сложного
и дорогостоящего радионавигационного оборудования,
автоматизировать получение координат и избежать помех и искажений
извне.
Одним из основных преимуществ автономной навигации
является простота решения проблемы автоматического управления
движением судна (автоматизация судовождения). Решение этой
проблемы позволит существенно увеличить провозоспособность
транспортного флота (по подсчетам экономистов—до 7%), а
также повысить безопасность плавания судов **.
Координаты движущегося объекта можно определить одним
из трех автономных методов:
непосредственным определением положения объекта;
измерением его скорости с последующим интегрированием;
измерением его ускорения с последующим двойным
интегрированием по времени.
При использовании двух последних методов в систему
автономной навигации необходимо ©водить информацию о
начальных условиях движения объекта.
В морской навигации широко применяется второй метод,
основанный на измерении скорости (счисление пути). Приборы,
используемые для счисления, — (компасы и лаги—позволяют
определять вектор относительной скорости судна. Вектор же
переносной скорости (перемещение воды относительно Земли) пока
остается неизвестным или известным с малой точностью.
Компасы и лаги в настоящее время находятся в такой стадии, когда
дальнейшее повышение их точности нецелесообразно до создания
эффективных дрейфомеров и измерителей элементов течения.
Таким образом, счисление пути не обеспечивает точного
определения координат, удовлетворяющего требованиям судовождения.
Для дальнейшего развития методов счисления некоторые
ученые предлагают использовать магнитное поле Земли. Однако
попытки создать соответствующие приборы, называемые
геомагнитными лагами, еще не дали положительных результатов.
Первый метод автономной навигации основан на
использовании суточного вращения Земли. Измерение составляющих
земного вращения в стабилизированной относительно Земли системе
координат позволяет определить географическую широту объек-
* За исключением звуковых и низкочастотных электромагнитных
колебаний, но первые можно использовать только на небольших раостояних от
источника, а вторые — только на небольших глубинах.
** Важное значение автономные системы навигации имеют в
самолетовождении и ракетоплавании. Они, по-видимому, явятся основным средством
навигации в космических полетах, особенно за пределами дальности
радиоизлучений с Земли или межпланетных станций.
4
та. Для получения географической долготы необходима
дополнительная информация (например, о времени).
Имеются различные косвенные способы определения
координат, общим для которых является гироскопическая стабилизация
измерителя по определенным направлениям. В настоящее время
предложено много заявок на изобретения, реализующие эти
принципы, но практически пригодных гироориентаторов или «гиро-
широт» еще никто не создал. Основные трудности заключаются
в высоких требованиях к гиростабилизации и необходимости
обнаруживать очень малые изменения составляющих угловой
скорости Земли с изменением широты места.
Остается третий метод автономной навигации — метод
непрерывного измерения ускорений объекта с последующим двойным
интегрированием по времени, который и положен в основу
инерциальной навигации. Измерение ускорений в автономных
системах можно производить только по отношению к инерциальной
системе координат. Поэтому дрейф или течения для
инерциальной навигации не имеют значения: с помощью инерциальных
систем можно непосредственно получить абсолютную скорость
движения объекта.
Часто к инерциальным системам относят и упомянутые
гироскопические системы. Это справедливо в том смысле, что
гироскопические эффекты также являются следствием инерции
вращающихся масс. Однако такое смешение вносит некоторую
путаницу.
Разделим все автономные методы навигации на три группы:
обычное счисление;
гироскопическая автономная навигация;
инерциальная навигация.
В данной работе мы рассмотрим исключительно метод и сред*
ства инерциальной навигации.
Принципы инерциальной навигации заложены в законах
механики, сформулированных еще Ньютоном. Однако теория
инерциальных систем до недавнего времени почти не
разрабатывалась, так как техническое их осуществление наталкивалось на,
казалось, непреодолимые трудности. Только с развитием
радиоэлектроники и точного приборостроения стало возможным
создать элементы инерциальной системы, в какой-то степени
отвечающие предъявляемым к ней требованиям. После этого были
уточнены и доработаны некоторые теоретические вопросы.
Среди ученых и инженеров, внесших вклад,в развитие
инерциальной навигации, следует отметить немецкого физика М.
Шулера, сформулировавшего в 1923 г. теорему, на которой основан
способ получения инерциальной вертикали, нечувствительной ^к
знешним возмущениям, а также американского ученого Ч. Дрей-
пера, под руководством которого была разработана
инерциальная система с применением двухстепенных интегрирующих
гироскопов.
5
В Советском Союзе работы в области инерциальных систем
были начаты еще в 30-х годах, когда инженер Е. Левенталь
впервые разработал метод интегральной коррекции
стабилизированной платформы инерциальных систем. Большой вклад в
разработку основ инерциальной навигации внесли советские ученые
Б. Н. Булгаков, академик А. Ю. Ишлинский, профессор Г. О.
Фридлендер и др.
Гла(ва I.
ОСНОВНЫЕ ПОНЯТИЯ ИНЕРЦИАЛЬНОЙ
НАВИГАЦИИ
В навигации мы встречаемся с двумя основными задачами:
определение координат движущегося объекта (в вы)бранной
системе координат) и управление движением объекта во заданной
траектории. Эти задачи допускают ручное, полуавтоматическое и
автоматическое решения; .последние два случая относят к
автоматической навигации. Как
будет видно из дальнейшего, инер-
циальная навигация гго своей
сущности является
автоматической. Инерциальный метод
навигации наиболее универсален,
так как он одинаково пригоден
для использования в
пространстве и на поверхности Земли
или других небесных тел и
является автономным. Однако
следует учитывать и существенные
особенности применения инерцн-
ального метода при движении по Земле и в пространстве,
связанные с влиянием поля земного тяготения.
Наземная навигация осуществляется по поверхности геоида,
представляющего собой неправильное геометрическое тело,
поверхность которого в каждой точке нормальна к направлению
отвесной линии. Отвесная линия совпадает с направлением силы
тяжести, т. е. равнодействующей силы гравитационного поля
Земли и центробежной силы инерции, вызываемой вращением
Земли. Отвесная линия только в некоторых точках геоида
соответствует -направлению к .центру Земли.
В прикладных вопросах поверхность Земли условно
принимают за поверхность эллипсоида вращения, называемого земным
7
сфероидом (p'Hlc. 1). Его малая ось соответствует'оси вращения
Земли. Плоскость, проходящая через эту ось, при пересечении со
сфероидом образует на поверхности «последнего меридианный
эллипс. Половина меридианного эллипса, отсекаемая малой осью
сфероида, ^представляет собой земной меридиан. Окружность,
описываемая концом большой полуоси эллипса при его вращении
вокруг малой, называется земным экватором.
Сжатие Земли характеризуется эксцентриситетом земного
сфероида
где а и b—большая и малая полуоси меридианного эллипса,
соответственно.
Принятый в СССР референц-эллшгсоид Краеовкжого имеет
следующие размеры: а=6378,245 км; 6=6366,863 км; е = 0,0818.
Геоид
, Эллипсоид „
Меридианная
проекция
астро номической
вертикали
Геодезическая
вертикаль
Рис. 2
Движение объекта на земном сфероиде можно отнести к
различным системам координат. Одной из наиболее
распространенных систем, применяющихся в наземной навигации, является
географическая, с широтно-долготной координатной сеткой.
Положение объекта в этой (системе определяется географическими
координатами — широтой и долготой.
Географической широтой <р какой-либо точки Р (см. рис. 1)
называется угол, составляемый нормалью к поверхности Земли
с плоскостью экватора (этот угол лежит в плоскости меридиана).
Географической долготой X называется двугранный угол между
плоскостью меридиана, проходящего через точку Р, и плоскостью
нулевого (Гринвичского) меридиана.
Для некоторых задач инерциальной навигации (например,
для инерциального управления объектом) географическая
система координат не самая удобная. В дальнейшем будут
рассмотрены другие координатные системы.
Большое значение в инерциальной навигации имеет понятие
вертикали. Различают астрономическую, или истинную, и
геодезическую вертикали. Истинной вертикалью называется направлен
8
Z7-U*(u*Rp)
Рис. 3
ние линии, образуемой подвешенным на нити грузом при
неподвижной относительно Земли точке (подвеса. Иначе говоря,
истинная вертикаль является нормалью к поверхности геоида.
Нормаль к поверхности земного сфероида называется геодезической
вертикалью.
Геодезическая и астрономическая вертикали о)бычно не
совпадают одна с другой (рис. 2), так <как земной сфероид является
только (приближенной
моделью реального геоида. По
этой же причине
астрономическая вертикаль не
лежит в .плоскости меридиана,
а отклонена от него на
некоторый небольшой угол.
Соответственно различают
геодезическую и
астрономическую широты точки;
астрономическая широта 9о
представляет собой угол
между проекцией
астрономической вертикали на плоскость меридиана и плоскостью эк*
ватора. Однако в большинстве навигационных задач
принимают, что геодезическая и астрономическая вертикали совпадают
по направлению и объединяют их в (понятии географической
вертикали. Ошибка в определении координат в этом случае не
превосходит долей дуговой минуты.
Истинная вертикаль однозначно определяет положение точки
на поверхности Земли — обстоятельство, имеющее большое
значение в инерциальной навигации. Величина и направление
истинной вертикали в какой-либо точке Р (рис. 3) определяется
векторным равенством
i=io —их(й"хЛр),
где J?—ускорение силы тяжести;
gQ— ускорение, создаваемое гравитационным полем
__ в точке Р;
и — угловая скорость вращения Земли относитель-
__ но инерциальной системы .координат;
_ RP— геоцентрический радиус-вектор точки Р;
— и X {и X Rp) — центробежное ускорение точки Р, вызываемое
(Вращением Земли (равное
.центростремительному с обратным знаком).
Это равенство выражает собой геометрическую сумму двух
векторов — вектора ускорения гравитационного поля,
направленного приблизительно к центру Земши *, и вектора .центробежного
* Гравитационное поле вследствие неоднородности масс Земли не
является центральным.
9
ускорения, направленного по нормали к оси вращения. Вектор
угловой скорости вращения Земли направлен ;по ее оси
вращения в сторону Северного полюса и равен и =0,00007292 сек"1.
Геоцентрический радиус-вектор образует с плоскостью
экватора угол, называемый геоцентрической широтой <Pi-
Геоцентрическая и географическая широты связаны соотношением [5]
tg?i — 0 — *3)tg<P.
Кроме названных, -в теории инерциальной навигации
встречаются понятия кажущейся, приборной и программной вертикалей.
Кажущаяся вертикаль .представляет со1бой направление
равнодействующей силы тяжести и силы инерции, возникающей при
движении объекта; по этому
направлению устанавливается
отвесная линия, если точка
подвеса произвольным образам
движется 'по поверхности Земли.
Под приборной вертикалью
подразумевается направление,
определяемое с помощью
инерциальной навигационной системы; это-
направление в общем случае
несовпадает с направлением
истинной вертикали вследствие-
присущих системе ошибок.
Программной вертикалью называется
вертикальное направление в заданных точках траектории
объекта (т. е. на запрограммированной траектории).
Рассмотрим связь между географическими координатами
точки, перемещающейся по поверхности Земли, и кинематическими
элементами ее движения. Движение точки можно разложить на
составляющие в плоскости меридиана и в плоскости,
параллельной экватору. Основной характеристикой движения точки
является линейная скорость. Вектор v линейной скорости точки Р
направлен по касательной к траектории (рис. 4). Проведя в той
же точке касательные к меридиану и параллели и раскладывая
v по направлениям этих касательных, получим
Рис. 4
Vn = v cos С;
vE = v sin С,
где С—угол между касательной к меридиану точки Р и векто-
ро'М ее линейной скорости, называемый путевым углом.
Меридиональная составляющая скорости точки вызывает
изменение широты, а составляющая вдоль параллели — изменение
долготы.
10
Обозначим радиус кривизны меридиана точки Р буквой р
отрезок нормали 'К поверхности Земли РОх буквой R\.
Изменение широты можно рассматривать как угловую
скорость вращения точки Р ло меридианному эллипсу с радиусом
кривизны р0 т. е.
d<? _^n v cos С
dt ~ о — о ' \[Л)
Изменение долготы определяется вращением по параллели
радиуса r=R\ cos <р, т. е.
d\ ve vsinC /19V
~df ~ Яг cos cp ~~ Rx cos <p # ( Z'
Равенства (1.1) и (1.2) представляют собой систему двух
обыкновенных дифференциальных уравнений первого -порядка,,
решение которых относительно ср и X позволяет определить
географические координаты точки Р по меридиональной и
параллельной составляющим ее скорости.
При этом следует иметь в виду, что величины р и R\
являются функциями широты. Радиус кривизны меридиана
определяется оо формуле
р =— , (1.о)
Г "/(1 — £2Sin2<p)3 V
а величина Ri —по формуле
/?1 = -Г- й — - (1.4)
1 /l — ^ Sin2cp V '
Выражения р и R\ легко получить из уравнения эллипсоида
вращения [1].
В различных задачах навигации часто допускают, что Земля
представляет собой геометрически правильную сферу. Это
значительно упрощает теоретические основы навигации; кроме того,
при движении со сравнительно невысокой скоростью геоид можно
заменить аферой без особого ущерба для точности.
Если считать Землю правильной сферой, то е=0 и p=Ri =
= a=R== const. Следовательно,
t/cos С
dt R
dX v sin С
dt ' Rcosy
(1.5)
(1.6)
Здесь ср и X можно рассматривать как сферические
координаты точки Р.
Как видно из уравнений (1.5) и (1.6), для определения
географических координат движущегося объекта недостаточно иметь
величину его скорости: необходимо знать также направление
1Ь
С+дс
Рис. 5
движения, или путевой угол. Иначе говоря, скорость объекта
должна -быть известна как вектор.
Вектор v можно представить как геометрическую сумму двух
векторов — относительной скорости объекта в среде,
перемещающейся по отношению к Земле, и переносной скорости самой
среды (воздуха или воды). При обычном, неинерциальном
счислении вел-ичииу относительной скорости определяют
непосредственно, например с помощью лагов. Для измерения же переносной
скорости объекта эффективных средств в настоящее время нет.
Преимущество инерциальной навигации состоит в том, что инер-
щальный метод позволяет определить
величину абсолютной скорости объекта
независимо от перемещения среды.
Направление движения в обычной
навигации определяют с помощью различных
курсоуказателей, измеряющих угол между
плоскостью меридиана и продольной осью
объекта, т. е. его курс. Однако путевой угол
в общем случае не равен курсу *, а
эффективных средств для измерения соответстч
вующей поправки (угла сноса) также еще
не создано. Преимущество инерциалъного
метода заключается з том, что он
позволяет непосредственно вычислять путевой угол объекта и курсо-
указатель поэтому становится принципиально ненужным.
Непрерывное сравнение измеренного путевого угла с
заданным является характерной особенностью автоматической
навигации. Результат этого сравнения используется для
регулирования направления движения так, чтобы объект перемещался по
заданной траектории.
Навигация решает задачу наиболее экономичного
перемещения объекта из пункта отправления в пункт прибытия.
Отвлекаясь от влияния гидрометеорологических факторов, наиболее
экономичным следует считать перемещение по кратчайшему
расстоянию между пунктами. Таким расстоянием на сфере
является дуга большого круга (ортодромия). При движении по
ортодромии путевой угол С непрерывно изменяется, если только
плоскость ортодромии не совпадает с плоскостью меридиана или
экватора. Текущее значение величины С можно определить,
используя зависимость между изменением путевого угла и
скоростью объекта. На рис. 5 ММ\— элементарная дуга большого
круга на траектории точки Р; РкМ и РМ\— отрезки
меридианов точек траектории М и М\. Дуга меридианного круга РпМ
равна о* —Ф- Изменение курсового угла можно характеризовать
В результате дрейфа объекта и перемещения среды.
12
элементарным приращением АС; (соответствующее изменение
долготы — углом при полюсе ЛЯ.
В элементарном сферическом треугольнике РкММ\ между
углами Pn, М и внешним углом М\ (в точке Mi), -существует
соотношение
Мх' — М « PN cos PNM.
Следовательно,
Д С = ДХ cos (-^ ср \ = ДХ sin ср.
Переходя к дифференциалам, получим
rfC= rf X sin <p,
или, используя уравнение (1.6),
______ tgcp. (i.7>
Уравнение (1.7) совместно с уравнениями (1.5) и (1.6) дает
возможность вычадлить все навигационные данные,
необходимые для движения объекта по ортодромии
сферической Земли: текущие координаты и
значение мгновенного путевого угла. Для
этого необходима информация о скорости
объекта. Величина скорости v в инерциальной
навигации определяется непрерывным
интегрированием во времени кинетического
ускорения, сообщаемого объекту при его
движении по поверхности Земли.
Уравнения (1.5), (1.6), (1.7) можно представить и в другой
форме, связывающей навигационные данные с изменением
направления вертикали. Пусть (рис. 6) ф—центральный угол, соот.
ветствующий перемещению S объекта по поверхности сфериче-
„ о ~ 5 dS v d<l>
скои Земли- Так как $ = %, v = ~St > т0 £ = ^ и уравнения
(1.5), (1.6), (1.7) примут вид
-i.-gW; (,.8)
^ = -^sinCsec?; (1.9)
dt dt
dC dA
dt ~ dt
dC=4-sinCtg?. (I.IO)
В уравнениях (1.8), (1.9), (I.IO) величина ^
представляет собой скорость изменения центрального угла, или, иначе го-
ia
воря, направления геоцентрической вертикали. Это значит, что
для .получения необходимой «навигационной информации
измерение и интегрирование ускорения объекта можно заменить
измерением скорости наклонения местной геоцентрической
вертикали, вызванной перемещением объекта <ло поверхности Земли
относительно какого-либо неизменного направления.
Однако для построения вертикали в инерциальных
навигационных системах также иаполшуется метод измерения и
интегрирования кинетического ускорения, шоэтому Ьба способа
идентичны. Принципиально можно представить навигационную
систему с использованием искусственной, например
гироскопической, вертикали, изменение направления которой относительно
«неподвижного» пространства позволяет получить все данные,
необходимые для управления движением объекта.
Глава II
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
Общие замечания
Инерциальная навигация основана на способности материи
противодействовать изменению движения, т. е. на свойстве
инерции. В природе это свойство проявляется в вцде инерции
поступательного движения и инерции вращения. Такое разделение
объясняется тем, что всякое свободное тело имеет три
вращательные и три поступательные степени свободы. К этчм шести
•степеням свободы можно привести любые возможные
перемещения тела.
В инерциальиой навигации инерция вращения используется
для стабилизации отсчетной системы координат, а инерция
поступательного движения — для измерения ускорения в этой
системе. Измеренное ускорение путем последовательного
интегрирования \по времени преобразуется в навигационную
информацию о скорости и положении объекта. Эти операции основаны
на некоторых теоремах механики и следствиях из них.
Теорема об изменении количества движения
системы материальных точек
Навигационный объект можно рассматривать как систему
материальных точек, находящуюся иод воздействием внешних
сил. Движение центра инерции объекта в этом случае
определяется в соответствии со следующей основной теоремой
механики: векторная производная по времени от количества движе-
14
пая системы материальных точек равна главному 'вектору
внешних сил, приложенных к системе, т. е.
где G — количество движения системы;
F — (главный вектор внешних сит.
В свою очередь __
G = Mvf
где Af— масса системы;
v— скорость центра инерции системы.
Если масса системы 'постоянна, то закон изменения
количества движения можно выразить в форме
Mw = F,
где w — ускорение центра инерции системы.
В соответствии с этой теоремой необходимую навигационную
информацию «принципиально можно получить, измерив внешние
силы, /приложенные к объекту. Определение элементов
движения ino измеренным силам относится к одной из основных задач
механики. Для этого производят интегрирование уравнения
(2.1) по времени при известных начальных условиях
(начальных значениях координат и их первых производных).
Измерять приложенные к объекту внешние силы весьма
сложно. Например, если рассматриваемым объектом является
морское судно, то к нему прикладываются следующие силы:
движущая сила, развиваемая винтом; сопротивление движению
(зависящее, в частности, от скорости судна); различные
возмущающие силы, не поддающиеся точному описанию. Однако
измерять эти силы и не обязательно. Для изучения движения
объекта- достаточно поместить на нем определенным образом
подвешенную малую массу и измерять реакцию этой массы
на ускоренное движение ее подвеса вместе с объектом.
Соответствующие устройства известны под названием
акселерометров.
Теорема об изменении количества движения, как и другие
законы механики, справедлива лишь в инерциальной системе
координат. Следовательно, для использования законов механики
в инерциальной «навигации необходима материализация
инерциальной системы отсчета (или какой-либо другой, движение
которой относительно инерциальной известно). Допустим, на
объекте имеется фиксированная система неподвижных осей xyz.
Если вдоль каждой оси установить измерительные оси
акселерометров, то можно измерить .проекции ускорения объекта wx,
wy и wz на эти оси.
15
Дважды интегрируя измеренные ускорения по времени,
получим
vx = ]wxdt+vXo
о
}
(2.2)
J
(2.3)
v =\w dt + vy,
о '
t
vz = $wzdt + vZt>
о
00
tt
Sy = Я wydt> + vyo (t-0) + Sj.
S, = Я ze.z<tf2 + x>,, (* - 0) + S*
0 0
где vXtytZ— проекции линейной скорости объекта на оси х, у, z\
Sx,y,z—проекции на те же оси пройденного расстояния;
vo\ S0—начальные ('при *=0) значения скорости и
'пройденного расстояния.
Таким образом, для инерциального определения скорости и
положения объекта, принципиально необходимо:
материализовать инерциальную систему отсчета (т. е.
построить систему координат, неподвижную относительно звезд
или перемещающуюся относительно них прямолинейно и
равномерно) ;
непрерывно измерять проекции ускорения объекта на оси
этой системы;
дважды интегрировать измеренные ускорения по времени при
известных начальных условиях.
Сразу же заметим, что в качестве фиксированной отсчет-
ной системы координат можно выбрать систему, вращающуюся
относительно инерциальной по известному, наперед заданному,
закону. В этом случае необходимо преобразовывать
измеренную информацию для получения кинематических элементов
движения тела в выбранной системе координат.
Теорема моментов количества движения
Для материализации отсчетной системы координат в
инерциальной навигации попользуются свойства «быстровращающих-
ся тел — гироскопов. В соответствии с теоремой моментов,
векторная производная по времени от главного момента количе-
16
ства движения ^системы равна главному моменту всех внешних
сил, приложенных к ней, т. е.
тг-1- <">
где И— главный момент количества движения (кинетический
момент) системы в ее движении по отношению к центру
_ инерции;
L— главный момент всех внешних сил, приложенных к
системе, относительно центра инерции.
В свою очередь для вращающегося твердого тела
где У— момент инерции тела относительно оси вращения;
5— угловая скорость -вращения.
Если главный момент внешних сил относительно какой-либо
инерцчальной оси равен нулю, то вектор главного момента
количества движения системьмэтнссительно этой же оси сохраняет
постоянное значение, т. е. #=const. Это следствие теоремы
моментов объясняет основное свойство быстро вращающегося
тела — сохранять неизменным в пространстве направление оси
вращения.__Действчтельно, 'постоянство вектора кинетического
момента Н равносильно неизменяемости вектора угловой
скорости вращения тела &. _
У быстровращающегося тела (тироакопа) вектор Н
направлен приблизительно вдоль оси собственного вращения
(поскольку все другие, кроме собственного вращения, угловые скорости
достаточно малы). Это значит, что ось собственного вращения
гироскопа инерциально устойчива и гироскоп может быть
использован для искусственного построения инерциальной
системы координат. Однако, как будет показано ниже, для
большинства задач инерциальной навигации предпочтительнее не инер-
циальная (неподвижная в пространстве) координатная система,
а в'ращающаяая относительно нее по определенному, наперед
заданному -закону.
Для материализации системы координат, вращающейся
относительно «неподвижного» .пространства, также используется
теорема моментов количества движения. С этой целью гироскопу
искусственно сообщают внешний момент, вызывающий
изменение вектора кинетического момента Н -по направлению, _или,
иначе говоря, прецессию гироскопа. Действительно, при ЬфО
имеем __ _
H=lLdt.
Если величина вектора Н сохраняется постоянной, а
величина вектора L меняется по заданному закону, то направление
2 А А. Якушенков 17
вектора Н также будет изменяться ло определенному
закону.
Для быстровращающегося гироскопа изменение направления
вектора кинетического момента равносильно изменению
направления оси собственного /Вращения. Следовательно, прикладывая
(к гироскопу внешний момент, можно обеспечить непрерывную
переориентацию его оси собственного вращения относительно
«неподвижного» пространства.
Понятие об относительном движении. Теорема об относительном
изменении векторов
Законы механики, исрользуемые в инерциальной навигации,
справедливы лишь ло отношению к инерциальной системе
координат, в то время как для многих задач навигации более
выгодны другие координатные системы, вращающиеся относительно
«неподвижного» пространства. Поэтому необходимо установить
связь между кинематическими элементами движения в той и
другой координатных системах.
Основным кинематическим элементом инерциальной
навигации является ускорение. Ускорение точки, измеренное в
инерциальной координатной системе, отличается от ускорения в
координатной системе, вращающейся относительно
инерциальной. Как правило, движение во вращающейся системе
координат представляется более сложным, чем в инерциальной.
Однако по смыслу навигационной задачи часто требуется определить
элементы движения именно во вращающейся
координатной-системе. Например, если навигация осуществляется по
поверхности Земли, целесообразнее измерять ускорение в системе
координат, связанной с вращающейся Землей, чш в системе,
неподвижной относительно звезд. Но при этом измеренное ускорение
будет формально отличаться от ускорения в неподвижной
системе.
Навигационная информация, получаемая с помощью
инерциальной навигационной системы, небезразлична к выбранной
системе координат, а так как эта информация нуждается в
последующей обработке, осуществляемой с помощью
вычислительных устройств, то и сама конструкция инерциальной
навигационной системы существенно зависит от выбранной системы
координат. Подробнее эти вопросы будут изложены ниже.
С точки зрения механики, рассматриваемые вопросы связаны
с понятием об относительном движении. Инерциальную систему
координат можно условно принять за абсолютную систему
отсчета; выбранную координатную систему, вращающуюся
относительно инерциальной — за относительную. Зная движение
относительной системы отсчета по отношению к абсолютной,
требуется 'найти связь между элементами движения точки в той и
другой координатных системах.
18
Пусть обе системы отсчета имеют общее начало 0 (рис. 7),
причем система координат xyz вращается ^относительно
неподвижной системы £**£ с угловой скоростью <*>.
Пусть, далее, Р—некоторая материальная точ.ка,
перемещающаяся ото отношению .к системе xyz с относительной линейной
скоростью vr. В соответствии с теоремой сложения скоростей,
скорость точта* Р по отношению к системе 5?]С (абсолютная
скорость va складываетая из относи- 2
тельной скорости vr и скорости (некоторой
точки Q, неподвижной по отношению к
системе xyz и совпадающей в данный
момент с точкой Р. Последняя скорость
(переносная) по известной формуле
механики определяется как
v* = ® X г,
где г — радиус-вектор точки Q.
Таким образом,
vn
■vr + <»Xr,
или
dr d'r , — ч, —
-Ж = -аГ+<»Хг,
(2.5)
(2.6)
dr
где л = ^а—векторная производная от вектора г по времени
_ в системе координат ??£,
rf'r —
-jf =vr — векторная производная от вектора г /по времени
в системе координат xyz.
Равенство (2.6) можно распространить на произвольный век-
юр а (теорема об относительном изменении векторов)
da
~аТ
а1'а , — ч . —
dt
(2.7)
Иначе говоря, векторные производные по времени от
некоторой векторной функции в инерциальной и вращающейся
системах координат отличаются одна от другой на векторное
произведение угловой скорости вращения на усам лектор.
Эта теорема имеет большое значение в инерциальной
навигации.
Ускорение точки в относительном движении
Для определения ускорения в относительном движении
продифференцируем по времени равенство (2.5)
dva
dt
dvr , — dr .
+ " Х-7Г +
dt
dt
dm . , —
19
При со = const, что обычно «принимается в задачах инерциаль-
*ной навигации, (получаем
dva _ dvr , - df
В соответствии с равенством (2.6) имеем
dr
<■> X -jf = <■> X *, + • X (со X г).
Учитывая формулу (2.7), имеем также
dvr d'vr . — v „ -
Обозначим df =wa* тогда
^ = ^ + 2шХ^; + шХЙг). (2.8)
Первое слагаемое в лравой части уравнения (2.8)
представляет ускорение точки Р в системе координат xyz, т. е.
относительное ускорение.
Третье слагаемое определяет центростремительное
ускорение точки, имеющей радиус-вектор г, т. е. ускорение
той точки Q, неподвижной в системе xyz, с которой з
данный момент совпадает точка Р. В рассматриваемом случае
(.при отсутствии «поступательного движения системы xyz) это
ускорение является переносным ускорением точки Р.
Второе 'слагаемое определяет кориолисово, или поворотное,
ускорение точки Р.
Обозначая wr = -~£; wc = 2а> X vr\ we — ш X (» X г), имеем
следующее равенство, известное в механике тюд названием
теоремы Кориолиса:
wa = wr + we + wc. (2.9)
В отношении Кориолисоза ускорения следует заметить, что
оно является исключительно следствием перехода от
неподвижной системы координат к вращающейся, которая с точки зрения
механики не является 'правомерной системой отсчета.
Теорема Кориолиса имеет принципиальное значение в инерци-
альной навигации, та,к как в основу имерщиальных
навигационных систем положено измерение ускорений во вращающихся
координатных системах.
Измерители ускорений — акселерометры — не обладают
свойством избирательности; если оии ориентированы в системе
координат, вращающейся ino отношению к -шерциальной, они изме-
20
ряют проекции на оси этой системы полного (абсолютного)
ускорения движущегося объекта. Поэтому для получения 'нужной
навигационной информации необходимо обрабатывать выходные
данные акселерометров, .компенсируя «лишние» компоненты
ускорения.
Рис 8
Некоторые сведения из прикладной теории гироскопов
Гироскоп является одним из основных элементов инерциаль-
ной навигационной системы, с помощью которого производится
стабилизация отсчетной системы 'координат. В .прикладных
вопросах под гироскопом понимают симметричное быстровращаю-
тееся тело, подвешенное таким
образом, что ось его
собственного -вращения может
поворачиваться в любом направлении
вокруг некоторой лежащей на
оси неподвижной точки. Свобода
вращения вокруг этой точки в
большинстве случаев применения
гироскопов обеспечивается кар-
дановым подвесом или подобным
ему устройством (рис. 8). В
качестве быстровращающегося
тела используется ротор
электродвигателя.
Если устройство -подвеса таково, что ось собственного
вращения гироскопа может независимо вращаться вокруг двух
взаимно перпендикулярных осей, гироскоп называется
трехстепенным, т. е. имеющим три степени свободы *. Бели одна из
степеней свободы отсутствует, гироскоп называется
двухстепенным **. В инерциальных навигационных системах
преимущественное распространение получили двухстепенные гироскопы.
Гироскоп имеет ряд свойств, 'вытекающих из теоремы
моментов количества движения. Выше уже упоминались (прямые
следствия этой теоремы — способность гироскопа сохранять
неизменное направление оси вращения в пространстве при отсуг-
ствии моментов внешних сил и способность лрецессировать под
влиянием внешнего момента в плоскости, перпендикулярной к
линии действующей силы. Особенностью гироскопа является
реактивное сопротивление вцепшей силе, стремящейся изменить
направление оси вращения. Прецессия, вызываемая внешним
моментом, приводит к появлению гироскопической реакции или
гироскопического момента, уравновешивающего внешний
момент.
В американской литературе — двухстепенным; третья степень
свободы — собственное вращение.
В американской литературе — одностепенным.
21
Гироскопический момент имеет инерционное происхождение;
он является моментом кориолисовой силы инерции и,
следовательно, возникает как результат перехода от инерциальной к
вращающейся системе координат. По отношению к последней
он проявляется как реально действующий момент.
В дальнейшем нам придется рассматривать устройство ста4*
билизации инерциальной системы в выбранной координатной
системе и составлять дифференциальное уравнение движения
гироскопа. Проще всего это уравнение можно получить, пользуясь
теоремой об относительном изменении векторов.
Пусть 5*]С — инерциальная система координат, a xyz —
система координат, жестко связанная с гироскопом. По
отношению >к системе fyc изменение вектора кинетического момента
гироскопа происходит по закону
<Ш т
В соответствии с теоремой об относительном изменении
векторов
dH d'H . -^tv
где о)— угловая скорость вращения системы xyz по отношению
__ к системе £*)С,
d'H -
—£ скорость изменения вектора Н по отношению к
системе xyz.
После подстановки получим
^ + шХ7? = Г. (2.10)
Равенство (2.10) известно (под названием Эйлерова
дифференциального уравнения движения твердого тела в векторной
форме. Оно может быть распространено на случай, когда
система осей xyz не связана с гироскопом жестко, а перемещается
относительно него, например, когда ось х направлена по оси
собственного вращения гироскопа, а оси ц и z в этом вращении
не участвуют.
Второй член в левой части уравнения (2.10), взятый с
обратным знаком, является гироскопическим моментом, т. е.
# = tfXw. (2.11)
Как видно, гироскопический момент возникает только с пояз*
лением угловой скорости <*>, т. е. с появлением прецессии
гироскопа. Гироскопический момент направлен перпендикулярно
векторам со и Я и стремится повернуть положительный конец
вектора кинетического момента, или оси собственного враще-
22
кия гироскопа, в сторону совмещения с положительным концом
оси прецессии гироскопа. На этом свойстве основано
устройство гирокомпаса Фуко, имеющего две степени свободы. Его ось
собственного вращения может поворачиваться только в
горизонтальной плоскости. Вращение Земли вызывает вынужденную
прецессию гироскапа вокруг полущенной линии, по которой
направлена горизонтальная составляющая угловой скорости
земного вращения. Благодаря этому гироскоп развивает
гироскопический момент, стремящийся совместить ось собственного
вращения с полуденной линией.
Как следует из теоремы моментов, изменение положения оси
гироскопа происходит только в тех случаях, когда вектор
момента внешней силы не параллелен вектору кинетического
момента гироскопа. Если эти векторы параллельны, изменяется
лишь величина кинетического момента, но не его направление.
Это значит, что гироскоп не реагирует на угловые скорости,
сообщенные ему вокруг оси собственного вращения, а реагирует
лишь на угловые скорости вокруг нормальных к ней осей.
Поэтому с помощью одного гироскопа с тремя степенями свободы
можно осуществить стабилизацию только по двум
направлениям, перпендикулярным его оси собственного вращения. Для
полной пространственной стабилизации необходимо иметь по
крайней мере два трехстепенных гироскопа.
При наземной навигации целесообразно не сохранять
неизменной в пространстве ориентанцию отсчетной системы
координат, а ^непрерывно изменять ее ориентировку по отношению к
неподвижной системе. Для этого к стабилизирующим гироскопам
необходимо прикладывать соответствующие внешние моменты
(иначе говоря, вводить внешнюю коррекцию).
Создание корректируемых гироскопов — весьма сложная
техническая задача. Главные трудности состоят в устранении
паразитных моментов в осях стабилизации, вызываемых
трением опор и дебалансом чувствительных элементов. Задача
упрощается, если использовать двухстепенные гироскопы, имеющие
только по одной оси стабилизации. Правда, пространственная
стабилизация координатной системы в этом случае требует
применения по крайней'мере трех таких гироскопов, но
соответствующее усложнение инерциальной системы все же выгодно.
Глава III
ОСНОВНЫЕ ПРИНЦИПЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ
Общие замечания
Исходной информацией для инерциальной навигационной
системы является ускорение объекта. По смыслу навигационной
задачи измеряемое счстемой ускорение должно соответствовать
изменению поступательного движения объекта. Однако это дви-
23
жение в общем «случае происходит в сложном толе
инерционных сил. Наряду с па!езной составляющей ускорения
измерительные органы инерциальной системы отмечают и другие
составляющие, вызываемые возможными вращательными и
колебательными движениями объекта, например качкой, рысканьем
и вибрацией корпуса.
Поэтому, если рассматривать инерциальную систему только
с точки зрения навигационной задачи, необходимо различать
полезное ускорение объекта (назовем его кинетическим
ускорением) от других, подлежащих устранению или компенсации.
Выделение полезной составляющей из суммы измеряемых
сигналов можно осуществить двумя способами:
аналитическим, т. е. путем вычислений соответствующих
поправок; при это'м инерциальная система может 'быть жестко
связана с объектом и участвовать во всех его перемещениях;
способом геометрической стабилизации инерциальной
системы; при этом ее измерительные органы изолируются от
сопутствующих /перемещений объекта.
Рассматривая вопрос о необходимой исходной информации,
следует подчеркнуть отличие инерциальных систем для
навигации в лространстве от систем для навигации по поверхности,
например по поверхности Земли. В первом случае кинетическое
ускорение имеет три компоненты по трем направлениям,
образующим пространственную систему координат. Отсюда
следует, что пространственная инерциальная система должна
содержать три канала входной информации, т. е. три акселерометра,
установленных по трем взаимно перпендикулярным
направлениям.
Во -втором случае кинетическое ускорение можно разложить
на две составляющие, направленные по касательным к
поверхности, вдоль которой происходит движение объекта.
Следовательно, соответствующая инерциальная система может
содержать лишь два канала входной информации (два акселерометра,
установленных по двум взаимно перпендикулярным
направлениям) при условии, что плоскость измерений является касательной
к поверхности движения. Последнее ограничение вызывает
необходимость геометрической стабилизации инерциальной
системы.
В дальнейшем мы будем рассматривать исключительно
наземные навигационные системы, т. е. системы, предназначенные
для навигации по (поверхности земного геоида.
Влияние силы тяжести и метод исключения гравитационной
составляющей ускорения в наземных инерциальных системах
При наземной навигации движущийся объект испытывает
воздействие силы тяжести, так как его движение происходит в
гравитационном поле Земли. По характеру воздействия на из-
24
мерительные органы инерциальных систем гравитационное толе
ничем не отличается от поля сил инерции. Иначе говоря,
никакое устройство, измеряющее ускорение объекта, не может
различить кинетическое ускорение, вызванное изменением скорости,
от ускорения силы тяжести.
Эквивалентность гравитационного и кинетического
ускорений можно наглядно подтвердить следующим примером.
Допустим, мы находимся* в лифте. Если лифт стоит, а мимо него
падает какая-либо масса, нам будет казаться, что она
неподвижна, а мы поднимаемся вверх. Если же масса
неподвижна, а лифт падает, можно подумать, что мы неподвижны, а
'поднимается масса. Очевидно, что отри измерениях на
плоскости, если только .плоскость не нормальна к направлению силы
тяжести, к кинетическому ускорению 'присоединится
составляющая ускорения силы тяжести, которая будет воспринята с
противоположным знаком.
Одним из 'возможных методов исключения гравитационной
составляющей является строгое нивелирование плоскости
измерений *.
Определим, на какую величину можно допустить отклонение
плоскости измерений от плоскости'горизонта. Предварительно
вычислим допустимую величину ошибки в измерении
кинетического ускорения для конкретной навигационной задачи. Примем, что
ошибка AS составляет 1 милю за время движения ^=10 час.
Ошибка положения связана с ошибкой ускорения формулой
bS = \lbwdt\
При этих условиях допустимая ошибка ускорения составит
A^ = i^ = 3.10-4 см/сек2.
Таким должен быть порог чувствительности устройств,
измеряющих ускорение объекта, если не учитывать других факторов.
^Если плоскость измерений наклонена к горизонту на
некоторый малый угол а (рис. 9), измеритель отметит «(ложное»
ускорение ga, даже когда объект неподвижен. При указанной
выше допустимой ошибке наклон плоскости измерения
(допустимая ошибка вертикали) равен
а = — = 0,06".
В условиях движущегося объекта построение вертикали с
такой точностью практически невозможно. Трудности
усугубляются тем, что плоскость измерений должна непрерывно
поворачиваться в пространстве в соответствии с движением объекта и
вращением Земли. Этим и объясняется, что со времени откры-
Возможно и аналитическое решение задачи.
25
тия Ньютоном основного закона динамики, на котором
базируется инерциальная навигация, (никаких устройств,
реализующих рассматриваемые принципы, до последнего времени не
появлялась.
Рис. 9 Рис. ю
Выход из этого положения был найден в пршщжшально
новом методе горизонтальной стабилизации плоскости измерений.
Представим себе невращающуюся сферическую Землю, то
поверхности которой перемещается объект. Пусть траектория
движения совладает с дугой большого круга Земли (рис. 10).
Свежем с центрам инерции субъекта две системы .координат:
неподвижную в пространстве систему £**] и систему ху, ориентирр-
ванную так, что ось х направлена по касательной 'к траектории
(т. е. вдоль вектора скорости объекта), а ось ц является
продолжением радиуса Земли, проведенного через центр инерции.
Ось х служит измерительной осью инерциальной системы.
Пусть в начальный момент объект /находился .в точке О,
а через некоторое время переместился в точку 0\. В точке 0\
система ху образует с системой \ц некоторый угол ф. Как
видно, этот угол связан с пройденным расстоянием S соотношением
Следовательно, для сохранения строго горизонтального
положения оси измерений необходимо повернуть систему
координатных осей ху относительно неподвижных осей 1у\ на угол,
пропорциональный пройденному расстоянию S. Это расстояние
можно получить двойным интегрированием ускорения объекта
вдоль оси х, которое теперь уже не содержит гравитационной
составляющей. Рассмотренный метод коррекции координатной
системы, в которой производятся измерения, по отношению к
неподвижной системе координат, носит название метода
интегральной коррекции. Величина вносимой коррекции служит
мерой пройденного расстояния. В этом и состоит основной принцип
26
инерциальнои навигационной системы, предназначенной для
наземной навигации.
Принцип построения невозмущаемой вертикали.
Теорема Шулера
Горизонтальная стабилизация инерциальнои системы
равносильна искусственному построению истинной вертикали. Как
указывалось в главе I, направление истинной вертикали
движущейся точки, ориентированной по отношению к неподвижной
системе отсчета, однозначно определяет положение этой точки
на поверхности Земли. Таким образом, искусственное
построение вертикали является характерной
особенностью инерциальнои системы,
предназначенной для наземной
навигации.
Принципиально истинную
вертикаль можно построить с (помощью
физического маятника, который поэтому
можно рассматривать в качестве
модели стабилизируемого блока
инерциальнои системы. Однако обычный фи- ' Wи \
зический маятник подвержен
инерционным возмущениям, возникающим
при движении его опоры. Если период
свободных колебаний такого
маятника достаточно мал, он устанавливается приблизительно вдоль
кажущейся .вертикали и, следовательно, для целей навигации-
не пригоден. Если же период колебаний достаточно велик по-
сравнению с временем действия возмущающей силы, положение
маятника близко к направлению истинной вертикали [7]. При
некоторых условиях, сформулированных М. Шулером, маятник
становится невосприимчивым к внешним возмущениям и
сохраняет направление истинной вертикали независимо от характера
движения его опоры.
Рассмотрим движение математического маятника,
эквивалентного упомянутому физическому, в 'гравитационном поле
Земли, которую по-прежнему будем считать сферической, не-
зращающейся и однородной. Примем, что длина маятника /
достаточно велика (соизмерима с величиной радиуса Земли);
это необходимо для получения большого периода свободных
колебаний. Положение маятника относительно истинной
вертикали будем определять буквой х (рис. И).
Пусть в начальный момент маятник расположен на
истинной вертикали и касается поверхности Земли в точке G.
Движение маятника происходит под действием аилы тяжести mg, силы
dv %fi
инерции m—[f- и центробежной силы/ю-^-, где т— масса
27
маятника, a v — скорость горизонтального перемещения точки
опоры. Соответствующие моменты сил относительно оси
качания маятника равны
т (g*— -£-)/sin Ф;
dv , .
— m-jflcosty,
где ф—виешний угол треугольника OG\0\ при вершине G\.
Заметим, что для не слишком высоких скоростей
Сумма упомянутых моментов уравновешивается моментом
количества движения
mi dt* '
Следовательно, уравнение колебаний маятника имеет вид
19 <& 1 г / ^2 \ / . . dv *
ml ч£ + т\£~-^-)/sin*=/n^r/cos*-
Обозначим центральный угол GOG\ буквой 6 и б^дем
считать колебания маятника малыми. В этом случае дугу GG\,
описываемую маятником, мо)Ж1но заменить отрезком прямой. Из
треугольника OGG\ имеем
GGX = R tg6 = /?e.
С другой стороны из треугольника 0\GG\:
GG> = /x.
Следовательно,
*=x(i + i).
Таким образом, уравнение маятника можно записать в виде
dP ' ^ \R T I )L I dP '
Период соответствующих свободных колебаний равен
2*
7 =
•/«(т+т)
Как видно из полученного уравнения, маятник становится
невосприимчивым к ускорению опоры только в случае, когда
у =0, или /->оо. При этом период свободных колебаний равен-
(3.1)
Если, кроме того; выполняются нулевые начальные условия
то имеем тождество
х=о.
Иначе говоря, математический маятник, удовлетворяющий,
•перечисленным условиям, будет непрерывно следить за
направлением истинной вертикали, независимо от характера
перемещения его опоры. Если начальные условия не нулевые,
маятник будет совершать незатухающие колебания около истинной
вертикали с периодом Г=84,4 мин, оставаясь инвариантным к
внешним возмущениям. Условие инвариантности (3.1) носит
название теоремы Шулера, имеющей 'принципиальное значение в,
инер'циальной навигации.
Реализовать равенство (3.1) с помощью эквивалентного
физического маятника практически невозможно *, однако это^
сравнительно просто выполнить с помощью гироскопических
устройств, обладающих большим динамическим моментом
инерции.
Величина Г=84,4 мин является наибольшим теоретически
возможным значением .периода математического маятника,
установленного в гравитационном поле Земли; гиромаятники
могут иметь и больший период.
Классификация инерциальных навигационных систем
Инерциальные навигационные системы можно классифициро^
Еать по ряду навигационных и конструктивных признаков.
Общим для всех систем является совокупность следующих
элементов или узлов:
гироскопический узел, предназначенный для стабилизации,
отсчетной системы координат;
блок акселерометров для измерения составляющих ускорения
объекта;
вычислительное устройство для интегрирования ускорений,
и преобразования информации.
* Период колебаний физического маятника равен Т = 2^1/ —.
где /— момент инерции;
I'—длина.
Требуется либо значительно увеличить момент инерции, либо уменьшить
длину маятника; то и другое технически ограничено.
29^
В соответствии с навигационной задачей инерциальную
систему можно использовать либо только для автоматического
контроля за движеним объекта (в этом случае она играет роль
вычислителя координат и работает в индикаторном режиме),
либо еще и для автоматического управления движением объекта
{в этом случае ее включают в общую систему управления). При
инерциальном управлении определение координат становится
•побочной задачей. Основная функция вычислительного устрой *
ства состоит в выработке сигналов управления, соответствующих
смещению объекта с заданного пути, для последующего ввода в
схему авторулевого или автопилота.
Такш образом, инерциальные, навигационные системы можно
разделить на два больших класса: инерциальные ориентаторы и
системы инерциального управления. В дальнейшем мы
рассмотрим принцип действия и особенности тех и других.
В соответствии с соображениями, изложенными в начале
главы, можно выделить группы инерциальных
систем,предназначенные для наземной (-морской и воздушной) навигации, и систем
космической навигации.
Характерной особенностью наземных инерциальных систем
является использование истинной вертикали в качестве базового
направления, формирующего одну из осей отсчетной
координатной системы. По этой причине все наземные инерциальные
системы можно называть горизонтными. Естественно, что от-
счетная система координату них вращается по отношению к инер-
диальному пространству, так как в инерциальной системе
координат истинная вертикаль не сохраняет неизменным свое
положение, за исключением точек на полярной оси Земли.
Космические инерциальные системы удобнее ориентировать
по отношению к «неподвижному» пространству; для них понятие
вертикали теряет смысл. Влияние гравитационных составляющих
ускорения (при полете в гравитационных полях Земли, планет
•и т. д.) в таких системах можно устранить не геометрически, как
в наземных системах, а аналитически, с помощью
вычислительных устройств *.
Инерциальные системы можно также подразделить в
зависимости от способа введения интегральной коррекции. По этому
признаку они делятся на системы с интегральной коррекцией по
скорости и системы с интегральной коррекцией по расстоянию.
Применяющиеся на морском флоте иностранные инерциальные
системы (типа СИНС) относятся к классу горизонтных
инерциальных систем с интегральной коррекцией по скорости.
Наконец, следует различать чисто инерциальные системы и
навигационные системы, в которых инерциальный блок является
только необходимой составной частью. Последний может соче-
* Гравитационные поправки являются функциями координат, т. е. могут
быть вычислены по выходной информации инерциального ориентатора.
30
таться с другими, например радиоастрономическими или ,радио-
навигацонными, средствами и образовывать так называемую
гибридную навигационную систему.
Приведенная классификация является, конечно, условной и
может быть расширена по ряду второстепенных признаков, на
которых мы здесь останавливаться не будем.
Понятие о горизонтной инерциальной системе
с интегральной коррекцией по расстоянию
В торизонтной системе с интегральной коррекцией по
расстоянию отсчетная система координат tvfi создается с
помощью некорректируемых свободных гироскоиов. С гироскопами
через следящие системы связана некоторая стабилизированная
платформа (иногда называемая инерциальной платформой),
неподвижная в пространстве. На платформе установлены два ак-
селерометрнческих устройства, выполненные так, что их оси
чувствительности могут .поворачиваться относительно
платформы в двух взаимно перпендикулярных плоскостях.
и
Рис. 12
Для понимания сущности работы такой системы
предположим, что объект движется «по дуге большого круга сферической
н невращающейся Земли. В этом случае необходимую навига-
31
ционную информацию можно получить с помощью только
одного гироскопа и одного акселерометра и не требуется (коррекция
за вращение Земли. Схематически это устройство показано на
рис. 12. На этом рисунке fy —оси неподвижной в
пространстве системы координат; ху — оси горизонтной системы
координат.
Свободный (трехстепенный) гироскоп 1 ориентирован вдоль
оси ?] неподвижной системы координат, в начальный момент
совпадающей с направлением местной вертикали. Инерциаль-
ная платформа 2 с 'помощью следящей системы (датчик угла 3—
усилитель 4 — двигатель 5 — редуктор 6) непрерывно следит
за гироскопом и сохраняет свою первоначальную ориентацию в
.пространстве. Акселерометр 7 может поворачиваться
относительно платформы в плоскости Stj с помощью сигнала интегральной
коррекции (обратной связи), выключающей два интегратора,
двигатель 8 и редуктор 9.
Пусть в начальный момент объект неподвижен, т. е. v0 = 0r
S0=0. Положение акселерометра относительно платформы бу-
лем определять углом х между плоскостью платформы и осью
чувствительности акселерометра, измеряемым в плоскости
движения объекта. Примем, что в начальный момент Х==Хо==0.
Положение акселерометра относительно плоскости
истинного горизонта будем определять углом а между
горизонтальной осью х и осью чувствительности акселерометра.
Как видно из рис. 12, <х = ф — х* гДе Ф = ~#~ (см- Рис- Ю)-
В общем случае ось чувствительности акселерометра не
совпадает по направлению с осью х. Поэтому акселерометр
измеряет некоторое (приборное) ускорение, отличающееся от кине-
тичеокого ускорения объекта -^,
^пР (t) = g sin a + -g£- cos а.
Это ускорение в виде некоторого сигнального напряжения
поступает в первый интегратор, с выхода которого снимается
сигнал, пропорциональный интегралу от входного сигнала.
Следовательно, снимаемый сигнал соответствует приборной
скорости объекта
Vup(t)= \wnp(t)dt.
о
С первого интегратора напряжение подводится ко второму,
который вырабатывает напряжение, пропорциональное
двойному интегралу от измеренного акселерометром ускорения.
Следовательно, снимаемый со второго интегратора сигнал
соответствует приборному пройденному расстоянию
tt
SnP=$$WnP(t}dt2.
32
Дважды проинтегрированный таким образом «сигнал
акселерометра используется для приведения в действие двигателя S,
который через зубчатый редуктор 9 разворачивает
акселерометр относительно платформы на угол X* При работе
двигателя в режиме пропорционального управления имеем
/ t
X:=cSnp = c^wnp(t)dt2f
00
где с — коэффициент пропорциональности (шередаточное число
интегральной коррекции).
Таким образом, положение акселерометра по отношению к
плоскости истинного горизонта выражается равенством
^ = ^-X = ^-c\')wav{t)dt\
о о
Дифференцируя это равенство дважды, получим следующее
уравнение движения акселерометра по координате а:
d*a_ 1 (PS (,
~dV—~R-W~ CW** (t'>
или, подставляя значение wnp (0,
-_+cersino=(T-ccoso)^r. (3.2)
Уравнение (3.2) является неоднородным дифференциальным
уравнением второго порядка. Для малых углов а это уравнение
можно переписать в форме
лг+^а=(л--с)-да- t3.3)
Положим
с = \. (3.4)
В этом случае правая часть уравнения (3.3) обратится в нуль
/г\\ da(0) ~
и при нулевых начальных условиях а(0) =—dt~=== получим
сс = 0. Иначе говоря, при £=~тг ось чувствительности
акселерометра будет сохранять горизонтальное положение независимо от
характера 'изменения функции S (t).
Но при а = 0
Следовательно, vnp =v и Snp = S, т. е. 'сигналы, снимаемые
па выходе первого и второго интеграторов, будут соответство-
Еать действительной скорости и действительному пройденному
о А А. Якушенков 33
расстоянию объекта и могут быть попользованы для индикации
навигационных данных.
Условие (3.4) носит название условия невоэмущае-мости
инерциальной системы.
В общем случае, при а=^0, приборное значение 'пройденного
расстояния отличается от действительного. Соответствующая
ошибка равна
tt
es = 5 — 5Пр = S — IJ wnp (t) dt2 =
00
= /?(-!._* S$ wnp(t)dA = Ra.
Величина а определяется решением полученного выше
дифференциального уравнения (3.3) при ненулевых начальных
условиях и соблюдении равенства (3.4). Это решение имеет вид
/а\ 4. i I da(Q) . ,
а = а (0) cos ш01 + — —^ sin % f,
где
Как мы .видим, акселерометр совершает незатухающие
колебания относительно плоскости истинного горизонта с
периодом
7=2*1/— =84,4 мин.
Таким образом, ошибка в определении пройденного
расстояния вследствие ненулевых начальных условий носит
колебательный характер с периодом Шулера.
Итак, благодаря управлению движением акселерометра с
ломощью дважды .проинтегрированного ускорения, которое он
измеряет, образуется механическая колебательная система; при
выполнении условия невозмущаемости эта система ведет себя
так же, как математический маятник с периодом Шулера, т. е.
становится невосприимчивой к инерциальным возмущениям.
Описанное устройство мож^о также рассматривать, как
замкнутую систему автоматического регулирования.
Принципиальная блок-схема этой системы изображена на рис. 13.
Обратная связь (интегральная коррекция) здесь вводится
после повторного интегрирования, т. е. по расстоянию,
проходимому объектом. Поэтому рассматриваемый тио инерциальной
системы и называется системой с интегральной коррекцией по
расстоянию.
Механизм настроенной на частоту Шулера инерциальной
системы можно «наглядно пояснить с помощью структурной схемы
инерциальной системы с интегральной 'коррекцией по расстоя-
34
нию, представленной на рис. 14. На этой схеме в
прямоугольниках показаны символы преобразования входных величин в
выходные; связи между прямоугольниками изображают процессы
(Акселерометр
А
W
I
интегратор
1
К
интегратор
Сигнал интегральной коррекции
Рис. 13
преобразования. Структурную схему нужно читать слева на-
право. Каждая величина, изображенная на связях,
представляет собой преобразованную предыдущую величину, причем
способ преобразования показан в соответствующем прямоугольнике.
ч
+
Г~ "1+ "
1 .
4-ff
RJJ
9
i
Ч>
ч-
'*
А кс
*
-
WV'
)
I
1
Vnp(<)
L
"
J
Snp(t) J
Рис. 14
На структурной схеме рис. 14 к реалыно существующим
звеньям относятся только акселерометр и следующие за ним
интеграторы. Все остальные звенья — чисто условные. Первый
прямоугольник слева является изображением механизма
образования величина
Ч^^И^И'1"6*
просто
выражает факт движения объекта по дуге большого круга
неподвижной и сферической Земли. В следующей за ним точке
показано пошучение величины а, как разностиф — х; величина а
затем умножается на g, так что /на вход акселерометра подается
сумма w(t) +ga.
Величина на выходе акселерометра соответствует
приборному ускорению wnp (t) (фактически после акселерометра
снимается электрический сигнал, пропорциональный приборному
ускорению).
Все последующие звенья объясняют механизм получения
величины X.
Пользуясь структурной схемой инер-циалыной системы, можнс
легко проследить за проходящими в ней процессами и получить
пРедста,вление о характере преобразований в любой точке си-
3* 35
стемы, не прибегая к математическому описанию в форме
уравнений движения.
Понятие о горизонтной инерциальной системе
с интегральной коррекцией по скорости
Отличие этой системы от предыдущей состоит в том, что в
ней в качестве стабилизирующих гироскопов применены
корректируемые гироскопы, ориентирующие инерциальную
платформу в горизонтной
системе координат.
Акселерометры при этом жестко
связываются с
инерциальной платформой.
Возможность реализации
такого устройства основана
на интегрирующих
свойствах самих гироскопов.
На рис. 15
представлена схема горизонтной
инерциальной системы с
обратной связью по
скорости, причем вновь
рассматривается случай
плоского движения объекта
по дуге большого круга
и предполагается, что
Земля не имеет
вращения. Гироскоп 1
подвешен на инерциальной
платформе 2 с помощью
Рис. 15
•колец карда1нов,а подвеса 3 и может прецесскровать в
плоскости £т). Инерциальная платформа ориентируется, как и в
предыдущей системе, с помощью следящего устройства, включающего
датчик угла 4, усилитель 5, двигатель 6 и редуктор 7, так,
чтобы ее плоскость всегда оставалась нормальной к вектору Н
собственного кинетического момента гироскопа.
С осью внешнего кольца карданова подвеса связано
некоторое электромеханическое устройство, называемое датчиком
момента §, предназначенное для сообщения гироскопу внешнего
момента, вызывающего его прецессию. Датчик момента
включен в цепь интегральной коррекции системы, состоящую из
акселерометра 9 и интегратора. Акселерометр жестко связан с
инерциальной платформой.
Обозначая угол отклонения акселерометра (вместе с
платформой) от неподвижной в пространстве оси £ символом х
имеем по-прежнему
X,
36
где а—угол, образованный плоскостью платформы с
плоскостью горизонта.
С_другой стороны координата х определяет положение зек-
тора Н относительно неподвижной оси f\. Поэтому в
соответствии € законом прецессии гироскопа имеем
^ = £Ф (35)
где L(t) — сообщаемый гироскопу момент.
Момент, сообщаемый гироскопу, образуется следующим
образом.
Алекселерометр измеряет ускорение
d2S
wnp(t) = gsma + -^Tcos(z.
Это ускорение в виде некоторого напряжения поступает в
интегратор. С выхода последнего снимается сигнал,
пропорциональный интегралу от wnp (t) по времени. При нулевых
начальных условиях снимаемый сигнал соответствует приборной
скорости объекта
vnp {t) = $wnp(t)dt.
о
Снятое с интегратора напряжение подается на датчик
момента, который развивает пропорциональный ему «вращающий
момент
t
L(t) = k\wnp(t)dt,
о
где k — коэффициент пропорциональности.
Подставляя L(t) в формулу (3.5), получим
о
откуда (лри X (0) =0)
t t
t t
"oo
Таким образом,
11
о о
Сравнивая это равенство с соответствующим равенством для
предыдущей системы, замечаем, что они полностью совпадают.
k
если принять ji = c- Следовательно, мы можем повторить все
рассуждения и придти к тем же результатам. Отличие состоит
М
лишь в том, что в рассматриваемом случае незатухающие
колебания около плоскости горизонта совершает не один
акселерометр, а вся инерциальная платформа вместе с укрепленным на
ней акселерометром.
V
Акселерометр
1
W
_...,.„..jp.
/
интегратор
1
Сигнал интегральной
коррекции
А
111 W W
Л инте- \
ератор |
Рис. 16
Использование в цели интегральной коррекции только одно-
го интегратора позволяет непосредственно определить лишь
скорость объекта. Для определения пройденного расстояния
измеренную скорость нужно подать на второе интегрирующее
устройство. Однако в рассматриваемой схеме второй
интегратор принципиально не нужен для стабилизации инерциалыной
платформы по горизонту.
w(t)
t
i
Ли
. . . .
ft
9
v_
+
i*
Ане
X
-
I
Hv(t)_
A
j
1
V«f
(t)
I -
Рис. 17
Принципиальная схема инерциальной системы с интеграль*
ной коррекцией по скорости показана на рис. 16, а структур-
ная схема — на рис. 17. Сравнивая эти схемы с
соответствующими схемами предыдущей инерциальной системы, легко
обнаружить различие между ними: на структурной схеме рис. 17
пройденное расстояние S не участвует в механизме образования
величины X • К реально существующим звеньям относятся только
акселерометр и следующий за ним интегратор. Второй
интегратор в этой цепи является условным; он изображает
преобразование скорости прецессии гироскопа ^ в угловое
перемещение платформы х» т- е- 'п0 существу выражает факт
использования управляемого гироскопа вместо свободного гироскопа
предыдущей системы.
Обе рассмотренные системы имеют свои преимущества и
недостатки. Преимуществом интегральной коррекции по расстоя-
38
нию является более гибкое выполнение условия невозмущае-
люсти платформы с =5", так как параметр с зависит только от
передаточных коэффициентов в цепи интегральной коррекции;
в случае коррекции по скорости этот -параметр зависит еще от
зеличины кинетического момента гироскопа. Преимуществом
системы -с интегральной коррекцией по скорости является
сравнительная ттростота, меньшие габариты и вес всего
устройства.
Глава IV
КИНЕМАТИКА ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ
СИСТЕМ
Общие замечания
Рассмотренные выше схемы инеродальных систем лишь
иллюстрируют принципы инерциальной навигации, но не
пригодны для использования при произвольном движении объекта по
поверхности Земли. Измерительные оси акселерометров в
рассмотренных системах должны быть стабилизированы вдоль
вектора скорости объекта, направление которого в пространстве
гепрерьгвно изменяется вследствие вращения Земли и
движения самого объекта. Кроме того, обратная связь, полученная
интегрированием измеренного ускорения, в общем случае,
например при движении сто дуге малого круга, не обеспечивает
стабилизации измерительного устройства в плоскости
горизонта без ввода дополнительной информации.
Все это .показывает, что чнерциальная система,
предназначенная для наземной навигации, должна быть надлежащим
образом ориентирована в системе координат, связанной с Землей,
и в ней необходимо предусмотреть коррекцию за вращенче
Земли. Возможно и аналитическое решение задачи с
использованием пространственной мнерциальной системы.
В дальнейшем мы будем рассматривать главным образом
ориентированные по отношению к Земле инерциашьные
системы.
Структурная схема и конструкция инерциальной системы
существенно зависят от способа ориентации ее измерительных
устройств. Дело в том, что кинематические элементы
движущегося тела, инвариантные в различных инерциальных
координатных системах, -по-разному определяются в системах
координат, вращающихся относительно инерциального пространства.
А так ка:к любая координатная система, связанная с Землей,
вращается по отношению к «неподвижному» пространству, то
соотношения между кинематическими элементами движущегося
тела в такчх координатных системах различны и зависят от
этого вращения.
39
Для наземной инерциальной навигации целесообразно
применять горизонтные координатные системы, т. е. такие, у
которых одна из координатных осей совпадает с направлением
истинной вертикали. Что касается двух других координатных осей
(будем называть их навигационными осями), их выбор зависит
от конкретных навигационных задач,— например, района
плавания судов, способов задания линии пути и степени
автоматизации управления судном при движении по заданному пути.
Могут быть использованы следующее горизонтные системы
координат.
1. Географическая система «широта—долгота»; -в
дальнейшем будем «называть ее нормальной географической системой
координат. В этой системе навигационные осч инерциальной
системы ориентируются в плоскости истинного меридиана и
в (Плоскости первого вертикала, т. е. по направлениям N—S
и Е—W. Есл.и Земля принимается за правильную -сферу, то
положение точки в этой системе определяется двумя сферическими
координатами <р и А.
2. Географическая система координат, повернутая на
^относительно нормальной, т. е. основанная на поперечной
географической сетке*. В этой системе навигационные оси
инерциальной системы ориентируются по направлениям, вдвинутым
тс
относительно линий N—S и Е—W на -^ , положение точки
определяется «повернутыми» широтой и долготой (сферическими
координатами <р' и //)•
3. Система с инерциальной ориентацией навигационных осей,
т. е. неподвижных по отношению к инерциальному пространству.
4. Система с маршрутной ориентацией навигационных осей,
т. е. с ориентацией вдоль и поперек заданной траектории
объекта. Если заданная траектория—отрезок дуги большого
круга, эта система называется ортодромической (или система
направляющей плоскости). Для небольших отклонений с
заданной траектории положение точки в этой системе определяется
цилиндрическими координатами: центральный угол и смещение.
Общим для всех перечисленных координатных систем
является использование истинной .вертикали в качестве базового
направления одной из осей. Направления двух других осей
зависят от выбранной координатной системы. За исключением
системы с инерциальной ориентацией навигационных осей,
последние во всех перечисленных координатных системах
определенным образом связаны с вращающейся Землей. При
инерциальной ориентации они неподвижны по отношению к
инерциальному пространству и поэтому видимым образом вращаются по
отношению к Земле. Как будет показано ниже, наиболее уни-
* В картографии принято эти прямоугольные сферические координаты в
поперечной системе называть координатами Зольднера.
40
версальной является координатная система с инерциальной
ориентацией навигационных осей; из нее можно получить все
остальные координатные системы при соответствующем
преобразовании навигационной информации, используемой для
стабилизации инерциальной -платформы.
При инерциальном управлении движением объекта
предпочтительнее других маршрутная, например ортодромическая,
координатная система.
Прежде чем (перейти к рассмотрению конкретных схем инер-
циального ориентатора, необходимо определить соотношение
между кинематическими элементами движущейся по Земле
точки (центра инерции инерциальной системы) в зависимости
от выбранной системы координат. Ниже этот вопрос
рассматривается применительно к первым трем координатным
системам. Четвертая система будет рассмотрена в разделе об
инерциальном управлении движением объекта.
Кинематика горизоитной инерциальной системы, ориентированной
в географической системе «широта—долгота»
Пусть какое-либо тело произвольным образом
перемещается по поверхности Земли, которую будем считать эллипсоидом
вращения. Свяжем с центром
инерции тела Р (рис. 18)
прямоугольную географически
ориентированную систему
координат £?]Сс началам в
точке Р. Ось С направим вдоль
истинной вертикали вниз по
направлению вектора силы
тяжести; ось£ —по касательной
к меридианному эллипсу на
север; тогда ось ^ в правой
системе координат 'будет
направлена по касательной к
параллели точки Р на восток.
Пусть точка Р движется с
линейной скоростью v; проек-
кии вектора v на оси системы
Ь) С будут соответственно
^cosC; v sin C: 0, где С — путевой угол. Требуется определить
проекции на те же оси угловой скорости трехгранника £^С. Эта
Угловая скорость создается в результате вращения Земли вокруг
полярной оси ,с улловой скоростью и ц собственного вращения
трехгранника, вызванного перемещением объекта по
криволинейной поверхности Земли. Собственное вращение
характеризуется .изменением географических координат точки Р—ср и ?..
Рис 18
41
Как видно из рис. 18, проекции угловой скорости
трехгранника равны
a)E=(w + -§-)COScP'
,C = -(" + ^)sinT.
Если воспользоваться соотношением (1.1) и (1.2), найдем
, vslnC
>^=ttCOScp-| £—-
t/cos С
>- = _ [u, sm cp -] ^— tgcp J
(4 1)
Напомним, что р представляет собой радиус кривизны
меридианного эллипса в точке Р; R\ —главный радиус кривизны,
направленный по нормали к эллипсоиду, т. е. по оси С.
Теперь определим проекции на оси системы ^С
абсолютного линейного ускорения точки Р. Эти проекции
соответствуют значениям ускорений, измеряемых идеальными
акселерометрами, ориентированными в географической системе
координат.
Абсолютное движение точки Р будем рассматривать, как
состоящее из переносного, вместе с вращающимся земным
сфероидом, и относительного. По теореме сложения ускорении
(2.9) имеем ______
wa = wr + we-\-wc,
где w_a— ускорение абсолютного движения;
wr— ускорение относительного движения:
we—ускорение переносного движения;
•^—поворотное, или кориюлиоово, ускорение.
Кориолисово ускорение, являясь следствием взаимодействия
собственного движения точки Р по Земле и поворота
координатной системы £т£ в результате вращения Земли,
выражается формулой _ _ _
_ _ ' Г у k
w/t = 2uyiv = 2 | wcoscp 0 — usincp
vcosC и sin С 0
Первая строка определителя составлена из единичных
векторов осей системы Ет)С.
42
Раскрывая определитель, получим следующие выражения
проекций кориолисова ускорения на оси системы irf,:
wc $ = 2uv sin С sin cp
wCt] = — 2uv cos С sin cp
wcz = 2uv sin С cos cp
Ускорение переносного движения появляется_вследствие
вращения точки Р с угловой скоростью Земли и, т. е. является
центростремительным ускорением, и определяется по формуле
Это ускорение геометрически складывается (с обратным
знаком) с ускорением гравитационного поля Земли в точке Р,
и полученный таким образом суммарный вектор ускорения силы
тяжести g направлен по нормали к земному сфероиду, т. е. по
оси С. Следовательно, суммарный вектор ускорения силы
тяжести имеет ^следующие проекции на оси системы £?]С
соответственно 0; 0; g.
Заметим, что если бы ось С была ориентирована
геоцентрически, т. е. по радиусу-вектору /?р, вектор центростремительного
ускорения имел бы проекции на оси ? и ^ , которые в этом
случае не были бы горизонтальными. В инерциальньгх системах с
такой ориентацией навигационных осей это обстоятельство
учитывается.
Ускорение относительного движения является ускорением
начала координат Р относительно Земли, если считать ее
неподвижной. Поскольку относительное движение (происходит по
криволинейной поверхности Земли, трехгранник Е^С при этом
-вращается относительно Земли с угловой скоростью б>\ проекции
dl dy
которой на оси координатной системы равны --- cos cp:— ~ и
— jt sin'ср. Ускорение w r можно определить по формуле
относительного изменения «вектора (2.7), которая в данном случае
имеет вид
i J k
— dv . — r ч, — dv ,
d\ dv d\
— COS? _____ __;
ijcosC vsinC 0
о dv 0 -.
одесь -г — производная линейной скорости точки Р в не-
вращающейся системе; она была бы равна относительному
ускорению точки Р, если бы Земля была плоской. Заметим, что
43
' dv \ d{v cos C) dv „ . ,, dC )
dv \ d(vs\nC) dv . ^ . ^ dC
dt
dv
~dt
■)«-»
Раскрывая определитель, имеем
^к:
dv n . „ dC , v2sm^C .
cosC—i>sinC —+ —w—tgcp
dt
iv
dt
dt
Ri
dv . ^ . -, dC v2 sin С cos С, ,
^r^=-^7-SinC + ^C0sC-^ £■ tgcp }
t;2sin2C , a2cos2С
W'C =—«Г- + ——
*i
ИЛИ
Я0Г
dv ~ . ^ / dC v sin С , \ I
dv s „ . r> ( dC v sin С . \
v4 = -5rsinC + t»cosC(-5r ^-tg?)
sin^C , t/g cos2 С
#i + P J
^rC:
г;2 sin2 С
Суммируя проекции составляющих ускорения w по осям
системы координат frjC, получим
dv
dt
dv
dt
I'Sin С ,
dv /о , о • ^ , . л/ dC и sine, \
-^-cosC + 2wi;smCsincp — v sin CI-^ ^— tgcp)
dt
dC v sin С .
• л о •-♦ • i л/ «С {/sine , \ 7J л
sin С—2uv cos С sin cp + i; cos Ci-jt ^— tgcp J }(4.2)
t;2 sins С
те^== 2uv sin С с os cp -| о f-
v2 cos2 С
+ *
Выражения (4.2) определяют значения ускорений,
измеряемых идеальными акселерометрами, установленными по осям
географической системы координат при произвольном
движении объекта по поверхности вращающейся Земли, 'принимая ее
за эллипсоид вращения*.
Интересно отметить, что если объект перемещается с посто-
/ dv л* / dC пч
яннои скоростью (-^-=0)на постоянном курсе (^р —и),
акселерометры тем не менее будут отмечать ускорение объекта,
соответствующее так называемым скоростным членам в
выражениях (4.2).
* Следует заметить, что в соответствии с упомянутым выше принципом
эквивалентности гравитационных и инерциальных сил, реальный акселерометр
воспримет ускорение g с отрицательным знаком, поскольку сила тяжести в
выбранной нами системе координат имеет положительное направление.
41
Принимая Землю за геометрически правильную сферу, но по-
прежнему ориентируя ось С по направлению ускорения силы
тяжести, которое теперь уже не будет нормально к поверхности
Земли, имеем
и
w\ = -jf cos С + 2uv sin С sin <p — v sin С (~jt °SI° tg cp) I
dv . ~, n ^ , , o/ dC v sin С. \ I
«y= -5p sin С — 2кг/ cos С sin cp + v cos С (-^ ^- tg cp J} (4.3)
^ = 2uv sin С cos cp + -^- -{- g-
Если же объект перемещается ino ортодромии, то
dC v sin С ,
И
^ = -^- cos С + 2&<u sin С sin <р 1
адч = —£- sin С — 2uv cos С sin cp
t^ 1
ге/<:'= 2ai> sin С cos cp -j- ~ + g I
Для нормальной работы инерциальной системы с
интегральной коррекцией по скорости необходимо, чтобы сигналы,
поступающие через цепи интегральной коррекции на моментные
датчики гироскопов, в точности соответствовали производным па
времени от проекций линейной скорости на соответствующие
оси. Производная от северной составляющей скорости равна
dvl dv n , п dC
4F = -W(:osC-vs[nC4r>
а от восточной составляющей
dS dv . „ , п dC
dt dt dt
Поэтому в северном канале стабилизированной платформы
необходимо скомпенсировать члены
wiK = 2uv sin С sin cp -| ^— tg cp, (4.4)
а в восточном канале—члены
г> ^ • I/2 Sin С COS С, /лс\
w^K = — 2uv cos С sin cp ^ tg 9 (4.5)
При движении в высоких широтах (околополярных районах
Земли) компенсация этих членов наталкивается на большую
трудность, связанную с быстрым увеличением tgcp. В этом одна
4Г>
из причин непригодности инерциальной системы с
географической ориентацией навигационных осей для плавания в высоких
широтах.
Как видно из выражений проекций угловой скорости
трехгранника £?)С на его оси (4.1), для реализации инерциальной
системы с географической ориентацией навигационных осей
необходимо непрерывно поворачивать стабилизированную
платформу вокруг вертикальной оси с угловой скоростью
, v sin С ,
— О); = И SU1 (р + -# tg Ср.
В этом случае инерциальная система действительно будет
стабилизирована по отношению к Земле и ориентирована в
географической координатной системе. Соответствующая
коррекция называется азимутальной; она производится с .помощью
сигнала, формирующегося в вычислительном устройстве
инерциальной системы. Для выработки этого сигнала необходимо
преобразовывать величину ср в tgcp. Очевидно, что по мере
приближения к полюсам Земли, когща tgcp -*оо,такое
преобразование (практически невозможно.
Кинематика инерциальной системы, ориентированной
в повернутой географической системе координат
Повернутая географическая система координат, сдвинутая
относительно нормальной географической системы на т,,
предпочтительна при плавании
в околополярных районах,
где, вследствие схожденчя
меридианов, обычная
географическая система имеет
упомянутые выше
недостатки.
_ п
В повернутой на тг
системе «шпрота—долгота»
полюс координатной системы
располагается на земном
экваторе, а экватор
совпадает с одним из земных
меридианов. Примем, что
полюс Земли находится в
точке пересечения экватора
повернутой системы координат
с ее нулевым меридианом.
Положение точки Р
определяется координатами <?' и X' (рис. 19), связь которых с
географическими координатами ср и Я для сферической Земл>и
выражается формулами [s]:
Рис 19
46
sin<p' = coscpsinX,
tg>/ = tg<psecX.
Свяжем с точкой Р систему координатных осей V г{ С,
ориентированную следующим образом: ось С—'направлена по
истинной .вертикали вниз; ось V—по касательной к
меридиану/повернутой системы координат к полюсу; ось ч\'— по касательной к
параллели повернутой системы координат, так, чтобы оси V r{Zf
образовали правую координатную систему.
Пусть точка Р перемещается произвольным образом по
поверхности Земл,и с линейной скоростью v, проекции которой на
оси системы 6' %' С равны v cos С; v sin С; 0, где С — угол
между осью V и вектором скорости v (путевой угол в системе
£'-/]Ч')- Движение по параллели повернутой системы координат
соответствует изменению долготы А'; оно вызывается вращением
точки Р вокруг полярной оси системы Vf{V с угловой скоро-
стью п_„,. Движение по меридиану происходит с угловой
R coscp'#
v cos С
скоростью —^—.
Проектируя вектор угловой скорости земного вращения на
оси системы 5'?}'С, получим следующие выражения проекции
угловой скорости трехгранника Vi\f С на его же оси:
0)£'
: — tt COS >/COS (-5 ?') +-Uf COS</
(и .Л df
0) , = — и COS
dkr
пли
av = — ti cos X' cos <f' -^- sin q/
щ, == — и cos X' sin <p'
dt
vsln С
)
# sin X'-
v cos С
\
»V = — к cos X' cos q/ —
R
v sin С
tg<P
(4.6)
Ускорение точки P будем рассматривать как состоящее из
относительного, (переносного и Кориолисова (2.9).
Кориолисово ускорение в рассматриваемом случае равно
wc = 2
i j k
— cosX'sincp' — usinX' — я cos X'cos q/
v cos С v sin С О
и, следовательно,
wci'= 2uv sin С cos Xх cos cp';
^cr/ = — 2иг> cos С cos X/ cos q/
wc v = 2uv sin С cos X/ sin q/ + 2uv cos С sin X'
Переносное ускорение, так же, как при рассмотрении обычной
географической системы координат, следует учитывать только в
проекции на ось С совместно с ускорением гравитационного
поля.
Относительное ускорение равно
— dv , —, ч, — dv .
wr = 4r + (oXv = -dT +
l J k
dk' , dy' dk' . t
— coscp'-^- -^sintf
ijcosC i>sinC 0
и имеет следующие проекции на оси системы V г{ £';
dv nf . n, dC , t/2sin2C . , \
wrv = -^f cos C' — v sin С ~^- Н ^— tgо I
m
Г 73'
"ЗГ
sin
J
ИЛИ
t;2sin2C , t/2cos2C
, / dC v sin С ,
dv „. . n. 1 dL t/sinC , ,\
^ = -^cosC'-i;sinC ^___J?_tgV/)
w = _^ sin C' + <i; cos C' (
tfC t/ sin С
dt
R
Wrv = -
R
I
J
Суммируя -проекции ускорения w по соответствующим осям,
получим
w* = ~- cos С + 2uv sin C cos V cos q/ —
. ~. ( dC vs\nC , Л
Wv
dv
sin О — 2uv cos С cos X/ cos q/
+ *> cos С (
dC vs\nC
«*')
rav =—2ut; sin С cos У sin cp'+ 2wi; cos С sin X'+ -jr
(4.7)
При движении по ортодромии
dC v sin С
<fr
Я
tgq>'»
48
поэтому выражения (4.5) упрощаются
wi> = -^- cos С + 2uv sin С cos X' cos <р' I
®V = ~5Г sin ^' ~~~ ^uv cos ^'cos ^'cos ?' 1
w? = — 2иг; sin С cos X' sin <p' 4- 2uv cos С sin X' -f -тг 1
Выражения (4.6) и (4.7) показывают, почему повернутая
система координат «широта—'долгота» -предпочтительнее при
движении в околополярных районах Земли. В этом случае q/ и tgq/
малы, поэтому для азимутальной коррекции и для компенсация
«лишних» членов .в .величинах измеренных ускорений требуются
весьма малые коррекционные члены. Однако вычислительное
устройство соответствующей инерциальной системы будет несколько
более сложным.
Компенсирующие сигналы должны соответствовать .в канале
V величине
о • r>t \t f . v2 sin2 С, /
Wi>K = 2uv sm С cos X' cos <p' -| R— tg <p ;
в канале r{— величине
о r>t \ r r v2 sin С cos С , ,
'иу* = — 2uv cos С cos X' cos <p' т> tg <p\
В отличие от рассмотренной выше инерциальной системы с
географической ориентацией навигационных осей,
рассматриваемая система не может применяться .при плавании ,в районах
земного экватора. Подобные ограничения имеют место для любой
инерциальной навигационной системы, навигационные оси
которой ориентированы в (поперечной системе координат.
Кинематика горизонтной инерциальной системы
с инерциальной ориентацией навигационных осей
Горизонтная инерциальная система с инерциальной
ориентацией навигационных осей используется в том случае, если
положение стабилизированной платформы по азимуту не
корректируется, т. е. инердиальная система не имеет азимутальной
коррекции. Такая система обладает некоторыми .преимуществами по
сравнению с географически ориентированными системами.
Если азимутальная коррекция не производится, то
инерциальная платформа не стабилизируется ino направлениям N—S и
Е—W, а сохраняет первоначальную ориентацию в
горизонтальной плоскости по отношению к «неподвижному» 'пространству с
точностью до приборных ошибок. Это значит, что по отношению
к Земле .платформа будет непрерывно поворачиваться вокруг
своей вертикальной оси.
Свяжем с платформой трехгранник xyz, ось z которого
направлена по вертикали (т. е. совпадает с осью С и вместе с го-
4 А. А. Якушенков 49
ризонтальными осями х и у образует правую систему координат.
Положение трехгранника xyz относительно географического
трехгранника £т]С будем характеризовать углом А, образованным
положительными направлениями
осей х и £ в горизонтальной
плоскости (рис. 20).
Вращение трехгранника xyz
относительно системы £tqC является
видимым, т. е. происходите угловой
скоростью, равной вертикальной
составляющей земного вращения с
•противоположным знаком.
Следовательно, по формуле (4.1) .имеем:
dA . . vs'mC, ,, оч
4f = iism<? + —£- tgep. (4.8)
Как видно из рис. 20, проекции
линейной скорости центра инерции
платформы на ее горизонтальные
ося равны
vx = vqos (С — Л) )
vy = vsin(C—A) )' (4,9)
где С — путевой угол.
Соответствующие проекции ускорения будут
Рис. 20
■ WiQOsA -f mi] sin A
w,
wy= —wt sin A +w7] cos A
Подставляя в правые части значения w^ и w , определенные
по формулам (4.3), получим
WY
-^-С08(С-Л)-
— чвт(С—А)-[-^- тГ-tgcp — 2^sincpJ
wu
^s«„(C
A) +
+ ?; cos (С — Л)-(^ £~ tgcp — 2bsui<pJ
(4.10)
В дальнейшем нам понадобятся также выражения проекций
угловой скорости трехгранника xyz на горизонтальные оси х и у-
Эти выражения можно получить по формулам (см. рис. 20)
(ох = о>£ cos A + °>ч sin A
а> = — cog sin Л + шч cos ^
50
где а>е и <о — проекции угловой скорости географического
трехгранника EtjC на его оси, определяемые
выражениями (4.1).
После подстановки и преобразований получим
(*>х = и cos 9 cos A + -р- sin (С — Л)
% = — ttcoscpsinA —^-cos(C—A)
Для нормальной работы инерциальной системы часть членов з
выражениях (4.10) необходимо скомпенсировать, с тем чтобы в
цепи интегральной коррекции платформы (поступали сигналы,
соответствующие только первым производным от проекций v
Продифференцируем по времени равенства (4.7):
dvx dv (гч -ч . /г> л\ ( dC dA\
4f = 4rC0S(C-A)-vsm(C-A).{4F--1F)
И V
dvy
df
dv
~df
sin(C-A) + ^cos(C-A).(-g.—^)
dA
Подставляя значение —тг из выражения (4.8), получим
dv.
dt
dv
dt
cos (С—Л) —
•v sin (C — A) • {-^ ^- tgcp — ttsincpj
dvy
dt
dv
\ (4.11)
dt sin(C-A) +
i /^ л\ { dC t/sin С, . \
+ vcos(C—A)-[-j-t _tg? — wsincpj
Сравнивая (4.10) с (4.11), легко заметить, что
соответствующие проекции отличаются только на .величину половины корио-
лисовых ускорений и i>sin(C — Л) sin cp и йг/cos (С—Л) sin ср.
Таким образом, (компенсирующие сигналы должны быть
равиы
(4.12)
Wxk = — vu sin (С — A) sin cp
wyK = vu cos (С — A) sin о
В этом состоит принципиальное отличие горизонтной
инерциальной системы без азимутальной коррекции от рассмотренной
выше инерциальной системы с географически ориентированной
стабилизированной платформой. Там для нормальной работы
инерциальной системы требовалось скомпенсировать все
скоростные члены в выражениях проекций ускорения, в том числе
полные кориолисовы ускорения. Мы уже видели, что при движении
4* 31
в высоких широтах это невыполнимо, так как часть членов,
подлежащих компенсации, пропорциональна tgcp; кроме того, для
азимутальной коррекции там также требуется выработка
'величины, пропорциональной tgcp. Отсюда видны преимущества инер-
циальной системы без азимутальной коррекции.
Если инерциальная система географически не ориентируется,
ортодромический курс объекта можно определить следующим
образом.
Так ка-к .при движении по ортодромии
dC I'sinC,
-3r = -/?-tg<p,
то угловую скорость .видимого движения платформы вокруг
вертикальной оси можно представить как
dA dC .
откуда
dC dA
— =-dF-usin(?'
Следовательно, для определения величины изменения орто-
дромического курса необходимо измерить угловую скорость
видимого движения платформы вокруг вертикальной оси и вычесть
из «ее вертикальную составляющую земного вращения. Для
.получения величины С эту разность необходимо проинтегрировать.
Эти операции производятся в вычислительном устройстве инер-
циальной системы.
Способы оптимальной азимутальной коррекции
горизонтной инерциальной системы
Под оптимальной азимутальной коррекцией инерциальной
системы будем подразумевать такую коррекцию, лри которой
вычислительные операции, необходимые для компенсации части
измеренных ускорений, наиболее просты. В этом смысле самой
оптимальной будет такая азимутальная .'коррекция, сгф'И которой
компенсация ускорений tHe требуется вовсе.
Из рассмотрения выражений (4.10) и (4.11) следует, что в
этом случае вращение стабилизированной платформы вокруг
вертикальной оси должно происходить с угловой скоростью
dAr t/sinC. , о
_ = —£_tg<p + 2ttsin<p.
При отсутствии азимутальной коррекции угловая скорость
платформы равна
dA v sin С , ,
__=___ tgcp + И Sin?.
52
Таким образом, если сообщить .платформе дополнительную
угловую скорость относительно Земли, рав-ную wsinq),
компенсация ускорений, измеренных акселерометрами, не требуется. Эту
скорость можно создать с помощью сигнала управления
платформой, 'пропорционального величине sin ср.
Заметим, что при географическом ориентировании
платформы этот сигнал должен соответствовать величине
. и 5 in С,
ttsin? + —дг- tg?.
Представляет интерес также инерциальная система, не
требующая аналитического вычисления ортодромического курса.
Для этого необходимо, чтобы платформа ориентировалась по
направлению заданной путевой скорости v, т. е. С = А. Это значит,
что угловая скорость вращения платформы вокруг вертикальной
оси должна равняться
dA dC t'sin С, .. 1 оч
-л=чг=-1С{^- (4ЛЗ>
Сравнивая это равенство с выражением (4.8), замечаем, что
азимутальная коррекция (платформы в этом случае должна
вводиться пропорционально величине — и sin ф.
При выполнении условия (4.13) имеем
Wy
dv
dt
vy } wy = — 2uv sin о
Следовательно, в рассматриваемом случае необходимо
скомпенсировать полное кориолисово ускорение в канале у.
Вычислительное устройство также оказывается сравнительно простым,
так как и для азимутальной коррекции и для компенсации
ускорения требуется одно и то же построение и sin ф.
Плавание с помощью ^подобной инерциальной системы
совершенно аналогично плаванию по курсовому гироскопу (гироази-
ч ^ vsin С , rni
муту) без коррекции скоростного члена ^ tgcp [bj, т. е.
происходит по ортодромии.
На основе изложенных соображений можно построить много-
режимную инерциальную систему, в которой азимутальная
коррекция либо вводится годностью (при плава/нии в умеренных
широтах), либо частично ('при плавании то ортодромии и в
-высоких широтах), либо не «водится вовсе. Переход из одного
режима в другой может быть осуществлен соответствующим
переключением цепей азимутальной коррекции и компенсации ускорений,
измеряемых акселерометрами.
53
Глава V.
СОСТАВНЫЕ ЭЛЕМЕНТЫ ИНЕРЦИАЛЬНЫХ
НАВИГАЦИОННЫХ СИСТЕМ
Двухстепенной интегрирующий гироскоп и его применение
для геометрической стабилизации инерциальных систем
Рассмотрим принцип действия основных элементов, из
которых состоит инерциальная система, а именно гироскопов
стабилизации и акселерометров. Предварительно .полезно
остановиться на возможных способах стабилизации инерциалыных
систем.
Геометрическую стабилизацию инерциальной системы, т. е.
сохранение ею заданной ориентации в (пространстве, можно
осуществить следующими способами.
Стабилизация с помощью внешней и н ф о р-
м а ц и и. Внешнюю информацию можно 'получить от
неподвижных -в пространстве ориентиров или ориентиров, положение
которых в пространстве известно в лю(бой момент времени. Типичным
примером является стабилизация .по неподвижным звездам,
которая может быть осуществлена с помощью секстанов с
оптической следящей системой. Другой пример — стабилизация с
помощью радиосекстана, следящего за положением Солнца шы
Лукы, причем необходимо учитывать собственное движение этих
светил по отношению к неподвижной системе координат. В
принципе может быть построена схема пространственной
стабилизации с использованием пеленгов наземных ориентиров. В этом
случае необходимо учитывать движение Земли.
Автономная стабилизация ((без связи с внешними
ориентирами). Возможные способы автономной стабилизации
состоят в использовании земного магнитного поля, для чего
требуется измерение вектора этого поля, и с использованием свойств
гироскопа. Гироскопическая стабилизация наиболее
универсальна, однако вследствие присущих гироскопам недостатков — в
космической навигации, например,—предпочтение, по-видимому,
будет отдано астрономическим методам стабилизации.
Возможно также сочетание автономных и неавтономных
методов.
Существуют два принципиальных способа гироскопической
стабилизации инерциальных навигационных систем. Первый
способ основан на свойстве гироскопа с тремя степенями
свободы сохранять неизменное направление .в пространстве при
отсутствии моментов внешних сил. С помощью двух гироскопов с
тремя степенями свободы возможно осуществить пространственную
стабилизацию системы (одного гироскопа недостаточно, так как
он нечувствителен к моментам, действующим вокруг оси
собственного вращения). Однако при создании прецизионного трехсте-
54
пенного (гироскопа встречаются пока непреодолимые
трудности.
Второй опособ основан на свойствах гироскопа с двумя
степенями свободы. Чувствительный элемент двухстепенного
гироскопа помимо собственного вращения может .поворачиваться
вокруг оси, перпендикулярной к направлению угловой скорости
собственного вращения. В инерциальных системах применяются
так называемые интегрирующие двухстепенные гироскопы, у
которых угол поворота чувствительного элемента пропорционален
интегралу от любого момента, действующего вокруг этой оси.
г
Рис. 21
Схематически устройство интегрирующего двухстепенного
гироскопа показано на рис. 21. Гироскоп состоит из ротора 1 и
рамки 2, в которой он подвешен на подшипниках. Ротор быстро
вращается .вокруг своей оси с постоянной угловой скоростью &.
Рамка в свою очередь может поворачиваться вокруг
перпендикулярной оси внутри корпуса гироскопа 3, к которому она. также
подвешена на подшипниках.
Построим в центре инерции гироскопа две системы
координат: одну SvjC—неподвижную в пространстве, другую
xyz—неподвижную относительно рамки гироскопа. Ось х направим по
оси вращения рамки внутри корпуса гироскопа, а ось у— вдоль
оси собственного вращения гироскопа.
Пусть в начальный момент плоскость ху гироскопа совпадает
с неподвижной в пространстве плоскостью fy. Если сообщить
корпусу гироскопа вращение в этой плоскости вокруг неподвиж-
55
ной оси С, к гироскопу через опоры рамки и ротора будет
приложен .вращающий момент вокруг той же оси. Этот момент .вызовет
появление гироскопической реакции (гироскопического момента),
действующей вокруг оси х.
Угловую скорость вращения гироскопа вокруг неподвижной
оси С обозначим 'буквой °>. Под действием гироскопического
момента гироскоп начнет предессировать в (плоскости yz, т. е.
плоскость ху начнет поворачиваться относительно плоскости fr].
Двугранный угол между этими плоскостями (угол прецессии
гироскопа) обозначим буквой ^. Ось х, вокруг которой совершается
прецессия гироскопа, называется осью .прецессии;
перпендикулярная ей и оси собственного вращения ось z—осью
чувствительности гироскопа.
По изложенным ниже причинам, прецессионное движение
гироскопа вокруг оси х должно демпфироваться; необходимый для
этого момент образуется с подощью установленного на оси х
демпфирующего устройства 4 гидравлического типа. Демпфиру-
du
ющии момент пропорционален угловой скорости прецессии —^-
и натравлен в сторону замедления прецессионного движения.
Вращение рамки гироскопа вокруг оси х в свою очередь
приводит к появлению гироскопических реакций, действующих з
плоскости ху. Эти реакции уравновешиваются боковыми
реакциями опор рамки в корпусе гироскопа и поэтому движения
гироскопа не вызывают.
Движение гироскопа вокруг оси прецессии описывается
дифференциальным уравнением, которое можно получить на
основании теоремы моментов. При этом «к числу действующих вокруг
оси х моментов следует отнести упомянутые выше
гироскопический и демпфирующий моменты. Их сумма равна первой
производной по времени от момента количества движения рамки и
гироскопа вокруг оси х. Другими возможными моментами,
вызываемыми, например, неуравновешенностью гироскопа или
трением в опорах рамки, будем пока пренебрегать.
Гироскопический момент, действующий вокруг оси х, равен
произведению R = HX<*>, т. е. его величина равна H<*>cosd.
Демпфирующий момент равен величине—Jg~dt~'9 гле Jg~~~
, , , г см сек ~
коэффициент демпфирования, ^— Знак минус означает, что
л Рй d®
демпфирующий момент направлен против угловой скорости -^-.
Обозначая момент инерции рам^и и гироскопа относительно
оси х (буквой Jg, имеем
ИЛ И 1 d2§ , г db тт а / г- » ч
^^+Л-5Г==Яо)С08&- (5-1)
56
В инерциальных навигационных системах угол прецессии
гироскопов всегда мал, поэтому cos&=l. В результате получим
линейное дифференциальное уравнение второго порядка
Введем обозначение —^- — Xg, величине tg называется ло-
8
стояннои .времени интегрирующего гироскопа (имеет размерность
времени). При этом обозначении уравнение (5.2) примет вид
Движение гироскопа, описываемое уравнением (5.3), можно
разделить на переходный и установившийся процессы.
Переходный процесс характеризуется решением соответствующего
однородного уравнения без правой части. Это решение можно
написать в виде
-1
апер = с0 + сге zg,
где С0 и Сг—постоянные, определяемые по начальным
условиям.
В общем случае при ^ = 0 ^==^ои^~==="57"> поэтому
(b-*0)nQp = XgSLk(l-e 4).
(5.4)
Постоянная времени интегрирующих гироскопов всегда
выбирается достаточно малой (за счет большого коэффициента
демпфирования). Благодаря этому, выражение .в круглых скобках
правой части решения (5.4) быстро сходится к единице, т. е.
длительность переходного процесса весьма мала. Иначе говоря,
практически всегда имеет место равенство
(»-»о)«р = ъ^ = const. (5.5)
Уравнение (5.5) с точностью до постоянной равносильно
решению однородного уравнения (5.3) без первого, инерционного,
члена. На этом основании мы можем пренебречь инерционностью
гироскопа и при рассмотрении установившегося движения,
определяемого правой частью уравнения (5.3). Следовательно, при
установившемся режиме имеем
d§yCT Н
откуда
ш
(*).
(»-»^=fU(p. (5-6)
57
Полученное выражение показывает, что изменение угла
прецессии гироскопа /пропорционально интегралу от угловой
скорости вращения, сообщенной гироскопу вокруг его оси
чувствительности *.
Если с помощью некоторого электроизмерительного
устройства, установленного по оси х гироскопа, непрерывно измерять
величину приращения угла прецессии, то снимаемый с этого
устройства электрический сигнал будет .пропорционален угловой
скорости вращения гироскопа -вокруг оси z. Упомянутое устройство
носит название датчика сигнала 5.
Пусть (s)(t)=-tffy гле 6—угловое перемещение корлуса
гироскопа вокруг неподвижной оси С. Тогда равенство (5.6)
можно переписать в форме
(»-&о)уст=#^е=Т*(е-во)5
Jg $ Tg
где 60— начальное угловое положение гироскопа.
Это равенство показывает, каким образом с помощью
интегрирующих гироскопов можно осуществить стабилизацию инерци-
альной платформы по отношению к неподвижной системе
координат. Для этого корпус интегрирующего гироскопа жестко
связывают с платформой. При повороте платформы вокруг
неподвижной оси С на некоторый угол 9 = в0 датчик сигнала
гироскопа вырабатывает напряжение, пропорциональное этому углу.
Если сигнал использовать для приведения в действие некоторого
электродвигателя, механически связанного с платформой, то при
соответствующем выборе параметров привода платформа будет
поворачиваться в обратную сторону на тот же угол, т. е.
фактически будет сохранять исходное положение по отношению к
неподвижной оси.
Для стабилизации по трем осям необходимо использовать
три интегрирующих гироскопа с тремя самостоятельными
электроприводами.
Описанный режим работы интегрирующего гироскопа носит
название режима геометрической стабилизации. Характерной
особенностью этого режима является то, что по оси прецессии
гироскопа не действуют никакие внешние моменты.
Рассмотрим движение интегрирующего гироскопа, когда
вокруг его оси прецессии сообщается некоторый внешний
вращающий момент. Этот момент вырабатывается с помощью
специального электрического устройства, называемого датчиком момента.
Датчик момента 6 устанавливают по оси х гироскопа.
Конструктивно он выполнен в виде миниатюрного индукционного
электродвигателя с заторможенным ротором. Устройство датчика мо-
* При принятом выше «допущении cos§ = 1, строго говоря, вокруг
неподвижной оси С
58
мента таково, что развиваемый им вращающий момент пря*мо
пропорционален подводимому сигнальному напряжению.
Обозначим величину вращающего момента, развиваемого
датчиком вокруг оси х, через
M = km(t)9
где k— коэффициент пропорциональности, —-— или '•*■■■
в зависимости от характера подводимого сигнала.
т (t)— сига ал, подведенный извне к датчику момента.
Предположим, что корпус гироскопа неподвижен по
отношению к системе координат fyC, т. е. а> (t) = 0. В этом случае
уравнение движения гироскопа вокруг оси прецессии примет
следующий вид:
или
^4T*+-dt+Tgm{f)^
Если величина i g достаточно мала, при установившемся
режиме имеем
d8уст k
dt
— y-m(t)9
откуда
t
k
{b — %)yct = —y-\m(t)dt
g и
Иначе говоря, угловое перемещение гироскопа вокруг его оси
прецессии пропорционально интегралу от внешнего момента,
приложенного вокруг этой же оси. Это обстоятельство объясняет
название интегрирующего двухстепенного гироскопа.
Свойство гироскопа интегрировать моменты, приложенные по
его оси прецессии, используют в инерциальных системах для
стабилизации инерциальной платформы во вращающейся системе
координат. Для этого к датчику момента подводится сигнал m(t)>
связанный определенной зависимостью с угловой скоростью
вращения упомянутой системы координат. Сигнал, снимаемый с
датчика сигнала, будет пропорционален интегралу от
соответствующего вращающего момента. Этот сигнал подводится к
электродвигателю стабилизирующего привода, который непрерывно
поворачивает платформу так, чтобы она стабилизировалась во
вращающейся системе координат. Подобный режим работы
гироскопа иногда называется режимом пространственного
интегрирования.
В общем случае движение рамки интегрирующего гироскопа
вокруг оси прецессии вызывается каж приложенным вокруг нее
моментом, так и вращением .корпуса гироскопа вокруг егоосичув-
59
ствительности. Уравнение движения гироскопа при этом имеет
вид
Для рассмотрения некоторых динамических свойств
интегрирующего гироскопа представим уравнение (5.7) в операторной
форме. Заменив все члены уравнения их изображениями (ino
формуле преобразования Лапласа), лри нулевых начальных
условиях-получим следующее .преобразованное уравнение:
р{\ +ъ р)Ъ(р) = — <»{р) — -£-т(р).
Jg Jg
Здесь
b(p) = L[b(t)\;
«(/>) = ! И*)];
т{р)^ L \m(t)\.
Следовательно,
Т<°(р) ~гт (Р)
Pi\ + *gp) p(l+*gp) '
Коэффициенты при <*> (р) и т(р) являются передаточными
функциями интегрирующего гироскопа.
Характер движения гироскопа зависит от вида функций <о(р)
и т{р). Пусть 1!>(£) = ю0. \(t); m{t) = 0,т. е. внешнего
момента нет, а сообщенная гироскопу угловая скорость, мгновенно
изменившись от нуля до некоторого значения, остается затем
постоянной. В этом случае
и
И
Ъ(п\= Is
"W> p-<[l + *ep).
Раскладывая правую часть на элементарные дроби, получим
Переходя вновь от изображений к оригиналам, найдем
»(*) = _"а>0т (l_<f ъ)+-?-»о*.
Jg * Jg
Второй член .правой части представляет собой временной
интеграл от функции <*>(£) =ш0; .первый член с увеличением
времени обращается в т—ю0т°-- Таким образом, в рассматри-
tg ь
60
ваемом случае угол прецессии гироскопа при установившемся
режиме не будет в точности равен интегралу от сообщенной
угловой скорости, а будет иметь некоторую статическую ошибку
Эта ошибка тем меньше, чем меньше постоянная времени
гироскопа.
Если же to (/)=0, m,(t)=m0- l(t), т. е. приложенный к
гироскопу момент остается постоянным, а вращения нет, результат
будет тот же при замене Н на k.
Мы рассмотрели работу интегрирующего гироскопа в
предположении, что к нему не приложено никаких паразитных моментов
вокруг оси х. В действительности, 'при такой конструкции
гироскопа, которая изображена на рис. 21, эти моменты всегда будут
иметь место. Паразитные моменты (силы трения в подшипниках,
дебаланс и др.) приведет к искажению всей .картины, т. е. к
ложной отработке следящей системы и, соответственно, к
ложному изменению ориентации гироскопа (так называемому дрейфу
гироскопа). Чтобы предотвратить это нежелательное явление,
были предложены различные конструкции интегрирующих
гироскопов. Наибольший интерес представляет ло'плавковый
интегрирующий гироскоп, который и нашел применение в современных
инерциальных системах.
Поплавковый интегрирующий гироскоп изображен на рис. 22.
Рамка с ротором гироскопа помещена в герметичном
цилиндрическом кожухе и установлена в подшипниках по оси х корпуса
прибора. Цилиндрический корпус заполнен тяжелой и вязкой
жидкостью (фторорганическим соединением). Объем кожуха и
удельный вес жидкости подобраны так, чтобы кожух обладал
нулевой «плавучестью. Благодаря этому нагрузка на подшипники
уменьшается до ничтожно малой величины и трение в них
практически отсутствует. Кожух гироскопа представляет собой как бы
лоплаво.к, почему гироскоп и называется поплавковым.
Тщательной балансировкой добываются, чтобы центр тяжести
поплавка и его центр давления находились в одной точке,
расположенной на оси вращения поплавка.
Демпфирующий момент обеспечивается вязким трением
поверхности поплавка о тонкий слой жидкости. При такой
конструкции всякие возмущающие силы передаются гироскопу через
жидкость, а не через подшипники, благодаря чему гироскоп
обладает высокой удароустойкостью и не боится вибраций.
На оси х поплавка установлены роторы датчика сигнала и
Датчика момента. Их статоры укреплены в корпусе гироскопа.
Конструктивно эти устройства совершенно одинаковы, разница
состоит только в том, что датчик сигнала работает в режиме
генератора, а датчик момента — в режиме заторможенного
двигателя. Роторы обоих датчиков — короткозамкнутые, статоры несут
61
по две обмотки — первичную, всегда находящуюся (под
напряжением от внешнего источника, и вторичную.
При повороте ротора датчика сигнала, во вторичной обмотке
статора возбуждается переменная э.д.с, фаза которой
определяется направлением вращения ротора, а амплитуда
—-величиной угла его -поворота. Датчик момента, наоборот, развивает
вращающий момент при подаче питания на -вторичную обмотку
на статоре. Величина, вращающего момента пропорциональна
току, протекающему через вторичную обмотку. Направление
вращающего момента зависит от фазы напряжения, .питающего
вторичную обмотку.
I
* Р 2 1
Рис. 22
/—ротор гироскопа; 2 — поплавок-. 3 — жидкость; 4 — датчик момента; 5 — датчик
сигнала; 6 — обогреватель; 7 — выходная ось (ось моментов); 8 — корпус гироскопа
В некоторых конструкциях инерциальных систем оба датчика
объединены в одном устройстве (с одним ротором).
В поплавковом гироскопе требуется выдерживать
постоянную температуру поддерживающей жидкости. В противном
случае 'будет изменяться вязкость и удельный вес жидкости, что
приведет к изменению демпфирующего момента и нагрузки на
подшипники. С этой целью весь (прибор помещают в камеру, в
которой автоматически поддерживается заданная температура.
Важнейшими характеристиками'поплавкового пироскопа
являются: собственный кинетический момент гироскопа; скорость
дрейфа, вызванного случайными внешними моментами, не под-
62
дающимися учету; постоянная времени гироскопа; порог
чувствительности к внешней угловой скорости вращения вокруг
измерительной оси; диапазон измеряемых скоростей; характеристики
датчика силнала и датчика момента.
Приведем данные американского поплавкового гироскопа
типа HIG-6[12]:
Кинетический момент .... Ю6^гхмЧек~
Скорость дрейфа, средняя . . . 0,05 град\час
Постоянная времени 3,1 мсек
Порог чувствительности к
воспринимаемой угловой скорости . . . 0,5-10" рад/сек
Диапазон воспринимаемых скоростей -2^. . . . 0,824-106.
^min
Характеристика датчика сигнала
(отношение напряжения на вторичной
обмотке статора к углу поворота
ротора) при токе возбуждения
50 ма, 400 гц 25 мв/мрад.
Характеристика датчика момента
(отношение вращающего момента
к произведению токов, подаваемых
на статорные обмотки) . . 2,55-10~5 гсм/ма2.
Устройство и принцип действия стабилизирующих приводов
инерциальной системы
Общие замечания
Рассмотрим, каким образом с помощью интегрирующих
двухстепенных гироскопов осуществляется геометрическая
стабилизация инерциальной платформы. Прежде всего напомним, что в
соответствии с введенной нами в главе III классификацией гори-
зонтных инерциаль'ных систем геометрическая стабилизация
инерциальной .платформы может производиться либо по
отношению к системе координат, неподвижной в пространстве (для инер-
ниальных систем с интегральной коррекцией по расстоянию),
либо по отношению к вращающейся системе координат (для инер-
циальных систем с интегральной коррекцией по скорости).
В .первом случае стабилизирующие гироскопы являются без-
моментными, если не считать неизбежных паразитных моментов,
действующих относительно осей прецессии. Во втором случае на
гироскопы искусственно накладываются внешние моменты,
величина которых является функцией вращения координатной
системы. В результате этого происходит переориентация инерциальной
платформы по отношению к «неподвижному» пространству.
В горизонтных инерциальных системах с интегральной
коррекцией ло скорости стабилизированная платформа должна
непрерывно поворачиваться в пространстве вместе с истинной
вертикалью места и с той же угловой скоростью. Независимо от
того, вращается или не вращается стабилизированная платформа
63
по отношению .к неподвижной системе координат, устройство
стабилизации инерциальной системы (помимо интегрирующих
гироскопов должно включать также стабилизирующие
электроприводы, связанные с платформой. Именно» сочетание
интегрирующих гироскопов со стабилизирующими .приводами обеспечивает
необходимую геометрическую .ориентацию инерциальной
системы.
Рис. 23
Механизм ориентации инерциальной системы с помощью
интегрирующих гироскопов и стабилизирующих приводов можно
уяснить на примере стабилизации ;по какой-либо одной оси
неподвижной или вращающейся системы координат. Схема
одноосного стабилизатора инерциальной системы (показана на
рис. 23.
Одноосный стабилизатор состоит из интегрирующего
двухстепенного гироскопа 1, корпус которого жестко связан с
платформой 2, стабилизирующего привода, включающего датчик
сигнала (датчик угла) 3, усилитель 4, двигатель 5 и редуктор 6.
С помощью редуктора осуществляется передача вращения
электродвигателя на стабилизированную платформу. На рис. 23
показан также датчик момента 7, с помощью которого производится
наложение на пироскоп внешнего момента, необходимого доя
ориентации стабилизированной платформы во вращающейся системе
координат. Корпус электродвигателя жестко связан с объектом;
64
платформа же при работе электродвигателя может
поворачиваться относительно объекта.
Введем три системы координат: £тг)С ло отношению к которой
производится стабилизация платформы (эта система может быть
неподвижной в пространстве или вращаться относительно
«неподвижного» пространства); xyz, связанную с гироскопом и
XYZ, связанную с платформой.
В рассматриваемом случае ось стабилизации лежит в
плоскости £т); пусть ею будет, например, ось £, с которой в
начальный момент совпадает ось прецессии гироскапа х.
Как видно из рис. 23, ось прецессии гироскапа одновременно
является осью X платформы. Ось Z платформы совпадает с
осью С стабилизируемой системы координат; в начальный
момент эта ось совпадает также с осью чувствительности
гироскопа z.
При повороте объекта вокруг оси С в результате трения з
зубчатой передаче между электродвигателем и платформой
гироскопу вместе с платформой сообщается вращающий момент
вокруг его оси чувствительности. Этот момент создает
'прецессию гироскопа, которая вызывает появление сигнального
напряжения в датчике сигнала, пропорционального углу поворота
гироскопа в его .прецессионном движении. Снятый с датчика
сигнал усиливается и поступает на управляющую обмотку
электродвигателя. Последний приходит во вращение и через редуктор
возвращает платформу с гироскопом в исходное положение,
поворачивая ее вокруг оси Z. При этом гироскоп начинает прецес-
сировать .в обратном направлении, меняет знак и сигнал,
снимаемый с датчика сигнала, а следовательно, изменяется и
направление вращения электродвигателя. Таким образом,
одноосный стабилизатор инерциальной системы является типичным
примером схемы автоматического регулирования. Регулируемым
объектом служит стабилизируемая платформа, регулирующим
воздействием—прецессия гироскопа, регулируемой величиной—
угловое положение олатформы по отношению к неподвижной
системе координат.
Динамика одноосного стабилизатора
инерциальной системы,
ориентируемой в неподвижной системе
координат
Для выявления динамических свойств одноосного
стабилизатора необходимо составить и проанализировать
дифференциальные уравнения его движения. Введем следующие обозначения:
Хо— угловое перемещение объекта, на котором установлена
инерциальная платформа, относительно начального положения
при вращении объекта вокруг неподвижной оси С будем считать,
что это вращение целиком сообщается платформе, когда
стабилизатор не работает);
5 А А. Якушенков
б.:>
Хп — угловое перемещение платформы, вызываемое
отработкой двигателя стабилизации.
Разность Х = Хо — Хп характеризует мгновенное положение
платформы относительно неподвижной оси £. Одноосный
стабилизатор работает таким образом, чтобы эта разность непрерывно
сводилась к нулю. Угол поворота гироскопа вокруг оси прецессии
по-прежнему будем обозначать буквой &.
Движение идеального одноосного стабилизатора (без
нелинейных элементов) можно описать двумя линейными
дифференциальными уравнениями: уравнением интегрирующего гироскопа
и уравнением стабилизации. Уравнение интегрирующего
гироскопа нам уже известно (6.1); его получают сложением моментов,
действующих вокруг оси х.
В рассматриваемом случае полная угловая скорость
вращения, сообщаемая гироскопу вокруг его оси чувствительности (по
отношению к неподвижной в пространстве системе координат),
равна -^cos &, поэтому гироскопический момент, действующий
вокруг оси прецессии гироскопа, равен //—|cos Ь ^ Н-£ш
Следовательно, уравнение интегрирующего гироскопа можно
записать в форме
Уравнение стабилизации может быть составлено сложением
моментов, действующих на валу стабилизирующего
электродвигателя. К действующим моментам относятся: вращающий момент
электродвигателя и демпфирующие моменты в звеньях
стабилизатора, приведенные к валу электродвигателя. Сумма этих
моментов уравновешивается первой производной от момента
количества движения вала.
Вращающий момент электродвигателя образуется с (помощью
сигнального напряжения, снимаемого с датчика сигнала
гироскопа. Этот сигнал пропорционален угловому перемещению
гироскопа в его прецессионном движении &. Сигнальное напряжение
усиливается в усилителе, который будем считать линейным, и
поступает на управляющую обмотку стабилизирующего
электродвигателя. В качестве электродвигателя обычно используют
двухфазный мотор переменного тока с двумя статорными обмотками
и короткозамкнугым ротором, причем главная обмотка статора
всегда находится под напряжением. Вращающий момент такого
двигателя пропорционален напряжению, подводимому на
управляющую обмотку, т. е. в конечном счете величине &.
Следовательно, вращающий момент электродвигателя равен
-Ьдв = /См " 1
где #м— коэффициент пропорциональности, -^р
66
Величина kM зависит от передаточного коэффициента датчика
сигнала, коэффициента усиления усилителя и параметров
электродвигателя, которые .будем считать постоянными.
Демпфирующий момент, (приложенный к валу
электродвигателя, пропорционален угловой скорости вращения вала (точнее—
угловой скорости вращения ротора относительно статора) и
направлен в сторону, .противоположную вращению. Если
обозначить передаточное отношение редуктора буквой п, то угловая
скорость вала равна
dt ~n dt #
Следовательно, демпфирующий момент можно представить в
виде
i-д— JSn dt >
где fs—приведенный коэффициент демпфирования,
складывающийся из коэффициентов демпфирования отдельных
звеньев стабилизатора (с учетом передаточных отноше-
оч г см
нии)> -jwceK-
Демпфирующий момент может быть механического,
электромагнитного или электрического происхождения.
Момент количества движения вала равен произведению
приведенного к валу момента инерции всех вращающихся частей
стабилизатора на угловую скорость вращения вала по отношению
к неподвижной системе координат. Если не учитывать
переносного движения вала вместе с объектом, это произведение равно
dt* '
Isn
где Js— приведенный момент инерции, складывающийся из
моментов инерции платформы вместе с гироскопом, всех звеньев
редуктора и самого вала с учетом соответствующих
передаточных отношений.
По теореме моментов имеем
Таким образом, уравнение стабилизации можно записать з
форме
Л»^-+ />%==-*-». (5.9)
^ /гоч d-i dln dXn
Если в уравнении (5.8) заменить —^- разностью —^ -jf ,
dt dt '
67
его можно переписать в виде
h an ^Je.dt n\dt dt J • 1&ли'
Исключая из уравнений (5.9) и (5.10) координату $
получим следующее уравнение системы одноосного стабилизатора:
с№ у eft 7 d у
J*J?n dF+ Vgf* + W n -Ж+Ш -W +ЬЛх*=кыНХа. (5.11)
Это уравнение связывает угловое перемещение платформы,
вызываемое отработкой стабилизирующего двигателя, с
возмущающим воздействием (угловым перемещением объекта).
Регулирование платформы складывается из (переходного
процесса, определяемого решением уравнения (5.11) без правой
части, т. е. при Хо=0> и установившегося процесса, который
определяется как частное решение уравнения (5.11) при заданной
правой части (Хо в функции времени).
Для исследования переходного процесса составим
характеристическое уравнение, соответствующее однородному уравнению
(5.1il) без правой части
JsJgiP* + (Jgfs + Jsfg) ПР2 + fsfg"P + kMH = 0. (5.12)
Это алгебраическое уравнение третьего порядка имеет 3
корня, которые могут быть ли/бо все вещественными
отрицательными, либо два из них комплексно сопряженными, а один —
вещественным положительным или отрицательным.
Задачей конструктора является такой выбор параметров
автоматического регулятора, при котором переходной процесс быстро
сходится (затухает) после всякого возмущения, иначе говоря,
при котором система регулирования является устойчивой.
Для устойчивости системы, описываемой дифференциальным
уравнением третьего порядка, требуется, чтобы вещественные
части корней характеристического уравнения были
отрицательными. В соответствии с критерием Рауса для этого необходимо,
чтобы все коэффициенты уравнения (5.12) были
положительными и, кроме того, чтобы выполнялось неравенство
\Jgfs ~Ь Jsfg)fsfgn > JsJgkM*!*
Если эти условия соблюдены, переходной процесс может быть
либо апериодическим, либо колебательным (затухающим). В
последнем случае изменение Хп происходит в соответствии со
следующим решением однородного уравнения:
Хппер = Схе-« + Сге~^ sin (nYt+ C3),
где Сь Сг и С3— постоуянные, определяемые по начальным
условиям.
68
Величины q, гпх и Щ связаны с корнями характеристического
уравнения следующим образом:
Pi = — q; p2 = — m1 + inl\ pz-= — ml — inl.
Величина П\ является круговой частотой колебательного
переходного процесса.
Необходимые требования к качеству регулирования
обеспечивают соответствующим подбором параметров регулятора.
Основным требованием является малая длительность переходного
процесса, т. е. быстродействие стабилизатора.
Установившийся процесс регулирования зависит от вида
функции Хо» т. е. от возмущающего воздействия. Если Хо достаточно
медленно меняющаяся функция .времени по сравнению с
периодом колебательного движения в переходном процессе, то частное
решение уравнения (5.11) имеет вид
ХпуСТ == Хо •
Следовательно, в установившемся режиме
Х = Хо — Хп = 0,
т. е. платформа сохраняет озою первоначальную ориентацию по
отношению к неподвижной системе координат.
Для анализа других динамических свойств одноосного
стабилизатора представим уравнение (5.11) в операторной форме,
заменив все его члены через их изображения. Предварительно
введем обозначения:
Л J* кми
V» ~^7Т~— 5>
fs~ *' fg~ *' nfsfi
где ts—постоянная времени инерциальной платформы;
tg — постоянная времени интегрирующего гироскопа.
С учетом этих обозначений уравнение (5.11) примет вид
или, вводя переменную X = Хо — Хп>
тст
^ + <<. + Ъ)5? + -& + *х =
При нулевых начальных условиях решение этого уравнения
может'быть представлено в операторной форме
Y (В\ _ F\^g Рг + К + Tg| Р + 1] , .
KKPJ ^gP^+^s + ^P^ + P + S10^'-
Дробное выражение в правой части является передаточной
функцией одноосного стабилизатора; х(Р) и Хо(Р) ~
изображениями функций х(^) и Хо(*)-
Рассмотрим два случая, когда Хо мгновенно изменяется ог
нуля до некоторого значения Хо и остается постоянным и когда
/о непрерывно и равномерно увеличивается со временем, т. е.
объект вращается с постоянной угловой скоростью. В первом
случае
Хо(р) = ~у
и
у (р)= l^gP*+i*s + *g)P+4 ', , I
L КР) *s*gP* + (^ + **) Р2 + Р + S А0{Р) '3
В соответствии с известной теоремой операционного
исчисления
Umx(t) = Umpx(p).
t—>-°° р ->о
Поэтому при t-+oo х^-^О? T- e- после .переходного
процесса, платформа стабилизируется по отношению к неподвижной
системе координат.
Во втором случае обозначим
Преобразование Лапласа дает
Хо(/>) = ^т.
Следовательно,
При £->оо имеем
xW—г-
Таким образом, лри установившемся режиме платформа
будет стабилизована по отношению к неподвижной системе
координат с -некоторой статической ошибкой. Эта ошибка (среднее
значение коэффициента 5) обратно пропорциональна коэффициенту
усиления регулятора ku и кинетическому моменту гироскопа Н,
которые, следовательно, должны быть по .возможности большими.
Однако, как следует из указанного выше условия устойчивости,
увеличение kM и Н может производиться только до некоторого
лредела, после которого при малой статической ошибке
возможен расходящийся переходной процесс. По той же причине
нельзя уменьшать статическую ошибку стабилизатора за счет
значительного уменьшения коэффициентов демпфирования fs и fg,
70
Если, например, Л=/^=0. уравнение (5.11) при нулевых
начальных условиях примет вид
Хп [р) = pb + SlXoiP)>
где
_ Kh
Sl — JsJgn •
Знаменатель передаточной функции (характеристический
оператор) при Si>0 имеет один или два положительных корня, и,
следовательно, система регулирования при fs=fg — ® является
неустойчивой. Указанное противоречие приводит к
необходимости усложнения схемы стабилизатора путем -введения
добавочных звеньев, позволяющих более гибко распоряжаться
параметрами регулятора [3].
Возвращаясь к схеме идеального стабилизатора, заметим, что
при х= Хо—Хп=0 установившееся значение угла прецессии
гироскопа по уравнению (5.1) будет &=0; это подтверждает
справедливость допущения о малости угла О, принятого при
составлении уравнения интегрирующего гироскопа. Кроме того,
установившемуся режиму стабилизатора соответствует равенство
нулю всех моментов, действующих вокруг оси прецессии
гироскопа. Этим обстоятельством мы будем часто пользоваться в
дальнейшем.
Динамика одноосного стабилизатора
инерциальной системы,
ориентируемой во вращающейся системе
координат
Характерная особенность инерциальной системы с
интегральной коррекцией по скорости состоит в том, что ее
стабилизированная платформа ориентируется не в неподвижной, а во
вращающейся системе координат. Этот эффект достигается с помощью
искусственных моментов, накладываемых на оси прецессии
интегрирующих гироскопов.
Если объект неподвижен по отношению к неподвижной
координатной системе, то внешний момент, направленный по оси
прецессии двухстепенного гироскопа, действует на него так же, как
на любое твердое тело, имеющее свободу вращения вокруг оси
приложения моментов *.
Это значит, что гироскоп изменяет свое положение,
поворачиваясь вокруг оси прецессии. Появляющийся при этом сигнал,
снимаемый с датчика сигнала, используется для приведения в
действие стабилизирующего двигателя, который и вращает платфор-
* Гироскопическая реакция, возникающая в результате того, что вектор
внешнего момента образует прямой угол с вектором собственного
кинетического момента гироскопа, уравновешивается реакцией опор.
Л
му. В данном случае регулирующим воздействием является не
прецессия гироскопа, а эквивалентное ей наклонение гиросксша,
вызванное приложенным воЖруг оси прецессии моментом.
Однако вращение платформы в свою очередь создает прецессию
гироскопа вокруг той же оси. Поэтому сигнал, снимаемый с
гироскопа, будет вырабатываться за счет разности между наклонением,
вызванным приложенным моментом и углом прецессии ъ
результате .вращения платформы.
Внешний момент сообщается гироскшу с помощью датчика
момента, который преобразует подведенную к нему
электрическую энергию в механическую энергию вращения.
Бели же объект вращается по отношению к 'неподвижной
системе коордииат, то к числу действующих вокруг оси прецессии
моментов присоединяется еще и гироскопический момент,
соответствующий угловой скорости вращения объекта.
В любом случае сигнал, поступающий на двигатель
стабилизации, пропорционален угловому (перемещению гироскопа -вокруг
оси прецессии, независимо от того, вызвано это перемещение
вращением объекта или приложенным моментом, или тем и другим
вместе.
Для изучения движения платформы, ориентируемой во
вращающейся системе координат, обратимся вновь к
дифференциальным уравнениям идеального одноосного стабилизатора.
В рассматриваемом случае уравнение интегрирующего
гироскопа имеет вид
J^+fS-W + km^ = H4r> (5-13)
где km{t)—момент, создаваемый датчиком момента вокруг оси
прецессии гироскопа;
k—передаточное число (коэффициент усиления)
датчика момента;
m(t)— единичный момент (при k=\)\
-^ — полная угловая скорость вращения гироскопа вокруг
оси чувствительности; если объект неподвижен ^г==
= -**
dt e
Исключая из уравнений (5.9) и (5.13) координату Ь для
случая, когда объект неподвижен, имеем следующее уравнение
одноосного стабилизатора:
Jsj/Ъ+W' + Jsfg)^+fsfgnde +
+ kuH хп = — kM J km (t) dt (5.14)
В отношении переходного процесса регулирования,
описываемого уравнением (5.14), можно повторить все рассуждения, ка-
72
сающйеся стабилизации платформы по отношению к
неподвижной системе координат, так как левые части уравнений (5.11) и
(5.14) одинаковы.
Установившийся процесс определяется видом функции m(t).
Пусть эта функция формируется в некотором
преобразователе так, что
m(t) = — ^о 4г '
где jt — угловая скорость 'вращающейся системы координат по
отношению к неподвижному (Пространству;
k0—.передаточное число .преобразователя.
Тогда уравнение (5.14) можно переписать в виде
Фу cfi i dy
Mr" -Ш + Ws + Jsfg) nHW+ fsfgn-if+ KHXn = kuk0k 6.
Допустим, что надлежащим вьибором конструктивных
параметров обеспечивается выполнение равенства
kQk = И.
Тогда при достаточно медленно меняющейся величине 6 по
сравнению с периодом собственных колебаний платформы в
переходном режиме имеем
Хпуст = 0.
Иначе говоря, в установившемся режиме платформа остается
стабилизированной во вращающейся системе координат, т. е.
поворачивается по отношению к неподвижной системе координат
с той же угловой скоростью, что и сама вращающаяся
координатная система.
Нетрудна убедиться, что собственное вращение объекта не
изменяет ориентации платформы во вращающейся системе, так
как при отсутствии приложенного к гироскопу момента
платформа сохраняет свое положение по отношению к «неподвижному»
пространству. Изменяется лишь скорость вращения двигателя,
стабилизирующего платформу.
Рассмотренный одноосный стабилизатор, состоящий из
одного двухстепенного интегрирующего гироскопа и связанного с ним
стабилизирующего привода, обеспечивает стабилизацию инерци-
альной платформы лишь по одной оси неподвижной или
вращающейся системы координат. Для материализации всех трех осей
координатной системы необходимо иметь устройство, состоящее
из трех самостоятельных одноосных стабилизаторов с взаимно
перпендикулярными осями стабилизации. Этим будет построена
полностью стабилизированная по отношению к неподвижной или
вращающейся системе координат инерциальная платформа.
Динамика трехосного стабилизатора в принципе ничем не
отличается от динамики одноосного; некоторую сложность созда-
73
ют перекрещивающиеся связи между стабилизаторами в
результате неточного соблюдения ортогональности между осями
чувствительности. Этот и некоторые другие вопросы, связанные с
точностью трехосной стабилизации инерциальных платформ,
изложены в работе [3].
Акселерометры, применяющиеся в инерциальных навигационных
системах
Назначением акселерометра является измерение линейного
ускорения объекта по заданному направлению. Простейшей
моделью акселерометра может служить физический маятник
плоскость колебаний которого совпадает с плоскостью измерений
(рис. 24). Составной частью акселерометра является
преобразователь механического перемещения маятника в электрический
сигнал, пропорциональный этому перемещению. В качестве
такого преобразователя может быть использован, например,
потенциометр. В современных инерциальных системах
применяются индукционные датчики сигнала.
V
Y ^1
66
К прибору
Рис. 24
Рис. 25
Рассмотрим работу одноосного маятникового акселерометра,,
подвешенного в центре инерции стабилизированной платформы,
для случая, когда объект перемещается по дуге большого круга
Земли (рис. 25). Обозначим угловое перемещение центра
маятника относительно отвесной линии буквой а. Дифференциальное
уравнение движения маятника можно составить, суммируя
моменты, действующие вокруг оси качаний маятника,
.направленной нормально к плоскости чертежа. К этим моментам отшсят-
ся: инерционный Ja^jz» г#е J а— момент инерции маятника ртно-
сительно упомянутой оси; момент силы тяжести magl sind, где
74
/—длина маятника, малая по сравнению с радиусом Земли; мо-
tdv
мент касательной силы инерции mal-^-cos а; момент нормальной
(центробежной) силы инерции mal^sma, где v — линейная
скорость центра инерции системы. Будем предполагать, что трение
в подвесе отсутствует. Сумму перечисленных моментов следует
приравнять к нулю, в результате чего получим
т &а , , / V2 \ . , dv /г 1 гч
Ja-^ + mal{g^-^)smcL = mal-4rcoso.. (5.15)
При практически достижимой скорости движения объекта по
Земле выражение в скобках левой части уравнения (5.15)
близко к величине g*. На этом основании уравнение (5.15) можно
упростить и для малых углов а записать в следующем виде
9 2
d2a I 2 /2Г) dv no /Л ,- 1СХ
где
2 mgl /j\ dv
При нулевых начальных условиях и установившемся
режиме имеем
_ w(t)
ауст — g
Таким образом, отклонение маятника от линии отвеса может
служить мерой сообщенного ускорения. В действительности
вопрос осложняется следующими обстоятельствами: если
начальные условия не нулевые, т. е. а(0) ^0;-^~=£0, На вынужденное
движение маятника будут накладываться собственные колебания,
происходящие с частотой по. Если, например, oy=<const; сс(0)=а<>
da(0) da0
и -~^f~==Yt ' то Движение акселерометра будет происходить в
соответствии со следующим решением уравнения (5.16):
* = — + <*о cos n0t + -jf — sin n0t.
Очевидно, собственные колебания маятника должны быть за-
демпфированы.
С другой стороны, приведенное выше уравнение справедливо
только для малых углов а. Если ускорения велики, угол а может
быть большим и ауст уже не будет линейно зависеть от
ускорения, т. е. снимаемый с акселерометра сигнал будет искажен.
Кроме того, маятник окажется чувствительным к ускорению, действу-
* При орбитальном движении, когда сила тяжести уравновешивается
центробежной силой инерции, это выражение обращается в нуль.
75
ющему вдоль отвесной линии, что также внесет некоторую
ошибку.
Таким образом, необходимо ограничивать отклонения
маятника от линии отвеса. Для этого можно использовать
восстанавливающую силу пружины или электромагнита, помещенного
около маятника (см. рис. 24), пропорциональную величине его
отклонения от линии отвеса.
С учетом перечисленных обстоятельств, уравнение
маятникового акселерометра примет вид
d2 а . г d а, , t .
•malw(t),
(5.17)
где fa—удельный демпфирующий момент;
с— удельный восстанавливающий момент пружины
(электромагнита).
Обозначим rnagl + c=nl
Jf- = h- n*Q—h2 = n2
При выполне-
решение уравне-
\к прибору
нии неравенства h<n0 получим следующее
ния (5.17):
«-O-^Jf+^(^СО8Я'+-&4-8,пл0-
Это решение показывает, что независимо от начальных
условий, положение маятника после окончания переходного
процесса будет по-прежнему
определяться угловым
отклонением от вертикальной
линии, прямо пропорциональ'
ным сообщенному
ускорению. Надлежащим выбором
величины с можно
обеспечить как угодно малую
величину этого отклонения, а
также быстрое затухание
колебаний в переходном
режиме.
В рассмотренном акселерометре мерой линейного ускорения
является угловое перемещение маятника. Можно также построить
акселерометр, в котором ускорение определяется по
линейному перемещению чувствительного элемента. Схема такого
акселерометра показана на рис. 26. Здесь чувствительным
элементом является некоторая масса, помещенная в вязкой жидкости
внутри герметичного кожуха и растянутая в нем на пружинах,
причем жидкость используется в качестве демпфера. Ось
чувствительности акселерометра совладает с осью пружин.
Динамика такого акселерометра не отличается от динамики
маятникового, если угловое перемещение маятника по отношению к
отвесной линии заменить линейным перемещением массы по
отношению к кожуху.
Рис 26
76
Однако более удобным оказалось применение маятниковых
акселерометров, конструктивно основанных на схеме паплавко-
вого гироокопа. С этой целью сохраняется устройство датчика
сишала, датчика момента и подвеса поплавжа в корпусе, только
сам поплавок с гироскопом заменяется некоторой
несбалансированной массой, играющей роль маятника. Датчик сигнала
вырабатывает э.д.с, пропорциональную углу отклонения поплавка;
датчик момента создает/на/поплавке восстанавливающий момент;
жидкость играет роль демпфера. Измерительная ось такого
акселерометра соответствует оси шрецеосии шсхплавкового
гироскопа.
От акселерометра требуются: минимашыная начальная
чувствительность, диапазон измерений в пределах возможных
ускорений объекта, линейность
выходного сигнала во всем
диапазоне измерений и
стабильность нулевого ооложенчя.
Нестабильность нуля (дрейф
нуля акселерометра) является
одной из основных помех,
вызывающих погрешности инер-
циальной системы.
Для иллюстрации приведем
некоторые данные
поплавкового акселерометра фирмы
«Миннеаполис—Хонивелл» [12].
Порог чувствительности этого
акселерометра равен 10-5g"; диапазон измерений—0-^10g;
линейность характеристики составляет 0,05%, а дрейф нуля—до 10~4g\
Акселерометр имеет габариты 4,3X4,3 см и весит 200 г.
Наибольший интерес 'представляют конструкции
акселерометров, которые одновременно с измерением ускорений
осуществляют функции интегрирования. Благодаря этому отпадает
необходимость в первых интеграторах инерциальной системы.
Подобные устройства основаны на прецессионных свойствах гироскопа
и получили название гиромаятниковых акселерометров.
Схема гиромаятнижового акселерометра шредставлена на
рис. 27. Гироскоп 1 в рамке 2 подвешен внутри кольца 3 так, что
относительно кольца он имеет две степени свободы: вокруг оси
собственного вращения и вокруг выходной оси х. На выходной
оси установлен ротор датчика сигнала 4.
Гироскоп имеет смещенный относительно точки переселения
осей симметрии центр тяжести. Кольцо 3 может вращаться
вокруг входной оси гироскопа z с помощью следящей системы,
состоящей из датчика сигнала 4, усилителя 5, двигателя 6 и
редуктора 7. Вращение рамки вокруг .выходной оси демпфируется,
например, с помощью жидкостного демпфера.
Если вдоль оси чувствительности (входной оси) гироскопу
3 7 6
Рис. 27
1 /
будет сообщено ускорение w(t), появится момент силы инерции,
приложенной к смещенному центру тяжести, величиной mglw(t).
Гироскоп повернется вокруг выходной оси на некоторый угол &.
благодаря чему в датчике сигнала возникнет переменная э.д.с,
пропорциональная этому углу. Усиленный сигнал поступит на
управляющую обмотку мотора, который заставит кольцо вместе
с гироскопом вращаться вокруг входной оси. Если обозначить
скорость этого вращения через ^, то, как видно из рисунка, к
гироскопу вокруг .выходной оси будет приложен гироскопический
момент Н jtcos Ь. Этот гироскопический момент уравновесит
момент силы инерции, так что практически будет & =0, т. е. рамка
гироскопа останется в исходном положении. В то же время угол
поворота кольца 3 будет пропорционален интегралу от
сообщенного ускорения, т. е. изменению скорости по направлению оси г.
Это рассуждение подтверждается следующим анализом.
Движение гиромаятникового акселерометра можно описать двумя
дифференциальными уравнениями: уравнением гироскопа и
уравнением следящего привода. Уравнение несбалансированного
гироскопа для малых углов $ можно представить в форме
vS-+/.4r+"4f-+ «»-«>-*
где 1„— момент инерции гироскопа относительно выходной оси;
jg— удельный демпфирующий момент.
Интегрируя это уравнение при нулевых начальных условиях,
получим
Уравнение следящего привода с учетом демпфирования в
передаче двигатель — кольцо при пропорциональном управлении
имеет вид
1к dfl ^SK dt —L™ — Ci>.
где Л—момент инерции вращающихся частей,
приведенный к валу мотора;
/к—удельный демпфирующий момент;
£дв = с &— вращающий момент двигателя;
с— коэффициент пропорциональности.
Если из полученной системы исключить &, придем к
следующему уравнению движения по углу 0:
Mr 4F + We + V")S +/*/" 4г + сН$ = - cmlvW- (5-18>
78
Описываемое уравнением (5.18) движение можно разделить .на
переходный и установившийся процессы. При надлежащем
выборе соотношений между коэффициентами переходный процесс
можно сделать быстро затухающим, т. е. обеспечить
быстродействие и устойчивость следящего привода. Установившееся
движение определяется частным решением уравнения (5.18),
соответствующим правой части, т. е. виду функции v (t). Если v(t)
достаточно медленно меняющаяся функция времени, то
ft
уст "
ml , .ч
Иначе говоря, угол поворота кольца 3 действительно
пропорционален линейной скорости объекта по направлению оси г. При
этом два 'последних члена ,в уравнении гироскопа взаимно
уравновесятся, т. е. при установившемся режиме &уст = 0.
Измерение угла р позволит сразу же получить величину v(t)
ml
в масштабе коэффициента
Рис. 28
Идаеются и другие возможности получения комбинированного
акселерометра-интегратора без использования свойств
гироскопа. JB частности, такое устройство можно выполнить, используя
свойство тонкой струны изменять частоту поперечных вибраций с
изменением ее натяжения. Если к свободному концу такой
струны присоединить некоторую массу, то при ускорении, направлен-,
ном вдоль ее длины, натяжение струны будет изменяться.
Измерение частоты поперечных колебаний позволит определить
величину натяжения. Если эти колебания регистрировать с помощью
электрических импульсов, то измерение числа импульсов
определит величину интеграла от ускорения, т. е. скорости вдоль
струны.
Описано также [3] устройство линейного интегрирующего
акселерометра, в котором используется эффект самоцентрирования
вращающейся массы.
Если .некоторое тело, имеющее неодинаковые моменты инерции
По осям симметрии и положительную плавучесть, поместить в
заполненный жидкостью цилиндр (рис. 28), то при быстром
вращении последнего вокруг продольной оси тело будет
стабилизироваться центробежными силами инерции так, что одна из его глав-
79
ных осей инерции совпадает с осью вращения цилиндра.
Благодаря этому линейное перемещение тела внутри цилиндра станет
возможным только вдоль оси вращения, т. е. тело будет
чувствительно к линейным ускорениям только вдоль этой оси.
Если жидкость обладает соответствующей вязкостью,
линейное «перемещение массы будет демпфироваться. Приближенное
уравнение движения центра инерции тела имеет следующий вид:
где т— масса тела, взвешенная в жидкости;
х— линейное перемещение центра инерции тела
относительно цилиадра;
w(t) — ускорение цилиндра по отношению к «неподвижному»
пространству вдоль оси вращения цилиндра;
/—.коэффициент демпфирования.
4 з 1
6 2 ^5
Рис. 29,
/—чувствительная масса; 2 — емкостной датчик: 3 — обогреватель-. 4— т*Р;
мостат, 5 — направляющие втулки; 6 — вращающийся цилиндр, заполненный
жидкостью
Это урав-нение показывает, что вращающееся в жидкости
тело может выполнять функцию интегрирующего акселерометра.
Действительно .при малой постоянной времени j ,
установившаяся скорость линейного перемещения будет пропорциональна
ускорению w(t)\
dx
~1Г
—T-w(').
откуда при
dx (0)
dt
t
x-x^^\w{t)dt = ^jv\tu
f
где v{t)— лилейная скорость цилиндра вдоль оси его вращения
ло отношению к «неподвижному» пространству.
80
Иначе говоря, измеряя величину перемещения вращающейся
массы внутри цилиндра, можно непосредственно определить
величину абсолютной скорости цилиндра. Такое измерение можно
производить с помощью индукционного съемного устройства,
преобразующего механическое перемещение поплавка в
электрический сигнал. Ось вращения цилиндра соответствует одной из осей
стабилизированной инерциальной системы. Описанный принцип
положен в основу интегрирующего гироскопа фирмы «Сперри»
(рис. 29), в котором применен емкостный датчик сигнала. По
сообщениям [8] этот акселерометр при габаритах 10X3 см имеет
порог чувствительности \0~5g и относительную точность
измерений 0,01%.
Глава VI
ОСНОВЫ УСТРОЙСТВА ГОРИЗОНТНЫХ ИНЕРЦИАЛЬНЫХ
СИСТЕМ
Горизонтная инерциальная система с нормально географической
ориентацией навигационных осей (СИНС*)
Общие замечания
Основным узлом системы [8] является инерциальная
платформа, которая с помощью двухстепенных поплавковых гироскопов
и стабилизирующих электроприводов непрерывно ориентируется
во вращающейся системе координат £т]С, связанной с Землей.
Азимутальная стабилизация производится с помощью
азимутального гироскопа, включенного как датчик сигнала в линию
следящего электропривода, осуществляющего вращение
платформы по азимуту.
Стабилизация по горизонту осуществляется с помощью двук
позиционных гироскопов и связанных с ними стабилизирующих
электроприводов. Датчики моментов этих гироскопов включены
в цепи интегральной коррекции и обеспечивают вращение
платформы по отношению к неподвижной системе координат с
угловой скоростью вращения истинной вертикали. Сигналы
интегральной коррекции снимаются с двух акселерометров,
установленных на платформе с взаимно перпендикулярными осями
чувствительности.
Угловое положение инерциальной платформы по отношению
к Земле можно характеризовать положением связанного с
платформой трехгранника XYZ по отношению к географическому
трехгранику StqC. В общем случае эти трехгранники не
совпадают один с другим; их взаимное положение определяется тремя
независимыми угловыми координатами.
* Судовая инерциальная навигационная система (Ship's inertia navigation
system).
6 А. А. Якушенков
81
Для строгого анализа инерциальной системы необходимо
составить систему дифференциальных уравнений, описывающих
угловое движение платформы по всем трем координатам.
Вследствие перекрестных связей эта система получается весьма
громоздкой и малонаглядной. Поэтому мы ограничимся
упрощенным представлением, рассматривая по отдельности устройство
азимутальной и горизонтальной стабилизации инерциальной
платформы, каждый раз предполагая, что переменной является
лишь одна координата, а по двум другим платформа жестко
стабилизирована. Такое идеализированное .представление не
является строгим, но хорошо иллюстрирует назначение и принцип
действия составных элементов инерциальной системы.
Примем также следующее упрощение. Инерциальная
платформа укрепляется на объекте в кольцах карданова подвеса,
наружные оси которого жестко связаны с объектом.
Стабилизирующие электродвигатели механически связаны с осями подвеса.
В общем случае эти оси не совпадают с осями географического
трехгранника, даже если платформа идеально стабилизирована
по отношению к Земле. Поэтому для нормальной работы
инерциальной системы сигналы управления электродвигателями,
снимаемые со стабилизирующих гироскопов, должны быть
преобразованы, т. е. разложены на составляющие по осям карданова
подвеса. Сигнал, подводимый к какому-либо электродвигателю,
может поступать с двух или трех гироскопов, но для простоты
будем полагать, что каждый из электроприводов связан только с
одним гироскопом. Это соответствует расположению кардановых
осей подвеса по географическим осям трехгранника £?£, что
может иметь место только .в некоторых частных случаях, когда
объект перемещается на одном из четырех главных румбов или
если сам карданов подвес инерциальной системы ориентирован
географически.
Обычным допущением остается линеаризация составных
элементов инерциальной системы.
Азимутальная стабилизация инерциальной
платформы
Характерной особенностью работы азимутального гироскопа
является то, что он устанавливается .на стабилизированной в
плоскости горизонта платформе с точностью до малых колебаний
платформы с периодом Шулера.
Свяжем с платформой трехгранник XYZ, ориентированный
ка.к указано на,рис. 23. Примем, что ось чувствительности
(входная ось) азимутального пироскопа (рис. 30), направленная по
оси Z платформы, совпадает с осью С географической системы
координат (истинной .вертикалью), в то время как ось
собственного вращения гироскопа, направленная по оси Y платформы, и
ось прецессии ('выходная ось), направленная по оси X платфор-
82
мы, в общем случае, несовпадают с соответствующими осям.и гео-
графичеакой системы координат. Положение вектора
кинетического момента гироскопа Н относительно оси ч\ или, иначе го-
зоря, положение трехгранника XYZ по отношению к трехгранни-
ку Е7]^ будем определять углом 3.
РГис. 30
Вследствие вращения Земли и дви-жения объекта по ее
поверхности трежгранни,к S ^С вращается по отношению к
«неподвижному» пространству с угловой скоростью, проекции которой
на его оси выражаются формулами (4.1). В частности, .вращение
трехгранника £т] С вокруг оси С происходит с угловой скоростью
/ . , usin С. \
o)Z = — ^«sincpH £—lg?) •
Таким образом, полная проекция -на ось Z угловой скорости
вращения трехгранника XYZ по отношению к неподвижной
системе координат равна
d о . t/sin С ,
со,= —-ttSincp ^-tgcp.
Эту 'проекцию и воспринимает азимутальный гироскоп,
поскольку ось Z является его осью чувствительности. Следователь-
но, уравнение движения азимутального гироскопа можно
записать -в форме
где m(t) —сигнал, подведенный к датчику момента гироскопа.
Выражение в круглых скобках в правой части уравнения
(6.1) соответствует величине «> (0 уравнения (5.7). Поэтому,
приписав -к уравнению (6.1) уравнение стабилизирующего
привода, мы можем повторить все рассуждения в отношении динамики
стабилизации инерциальной платформы по азимуту. Вместо это-
6^
83
го вспомним, что при идеальной работе одноосного стабилизатора»
установившееся значение угла лрецессии гироскопа & равно нулю
и угол лрецессии практически не изме*1яется. Это значит, что
демпфирующий и инерционный моменты, действующие вокруг
оси прецессии и 'появляющиеся с изменением угла^, при
установившемся режи-ме стабилизирующего привода также можно
принять равными нулю.
Следовательно, установившееся движение инерциальной
платформы это азимуту можно описать, если в уравнении движения
азимутального гироскопа отбросить левую часть. Таким
образом, имеем
-3r=ttsm?H jftg<? + -jj-m{t). (6.2)
Интегрируя (6.2) при о (0) =0, получим
t
a^S^ttsinT + ^tg?)-!--!^')]*. (6.3)
Допустим, что сигнал ^(0» поступающий к датчику момента
азимутального гироскопа, пропорционален величине
/ . , и sin С. \
— (ttsincp + —£-tg?J .
Этот сигнал может быть сформирован по величинам ф, v ,и С„
поступающим из выходных каналов инерциальной системы, с
помощью вычислительного устройства. В этом случае имеем
/j.\ и ( ♦ . vsinC. \
m(t) = — kB (^sincp-1 ^-tgc?J ,
где k в — коэффициент пропорциональности.
Если параметры системы рассчитаны таким образом, чт*>
kkB
-тт-=1, то подынтегральное выражение в уравнении (6.3)
обратится в нуль, т. е. будет 8=0. -Следовательно, описанная схема
действительно осуществляет стабилизацию инерциальной
системы по азимуту, т. е. выполняет роль курсоуказателя.
Для получения локсодромического курса достаточно
измерить угол между осью X платформы и продольной осью
объекта. Однако более важной задачей является определение путевого
угла С.
Горизонтальная стабилизация
инерциальной платформы
Для горизонтальной стабилизации инерциальной ллатформьг
требуются два двухстепенных интегрирующих гироскопа,
установленных так, что их оси чувствительности (входные оси) вза*
имно перпендикулярны, а оси собственного вращения направлен
84
ны вертикально. В нормальной географической системе
координат входная ось одного из гироскопов должна быть направлена
по линии N—S, другого по линии Е—W. Будем считать, что эти
направления с помощью азимутального гироскопа фиксируются
совершенно точно.
Д-, Коррекция за скоростные
члены
7h-
-к \К
Рис. 31
Рассмотрим горизонтальную стабилизацию инерциальной
платформы относительно линии Е—W, т. е. в 'плоскости
меридиана. Как «и раньше, с платформой свяжем систему осей XYZ
(рис. 31), причем ось Y (она же ось чувствительности, или
входная ось стабилизирующего гироскопа) совпадает по направлению
с осью *f\ географической системы координат (с линией Е—W).
Положение инерциальной платформы относительно плоскости
горизонта будем определять углом а, образованным выходной
осью гироскопа (осью X инерциальной платформы) с плоскостью
истинного горизонта.
Проекция полной угловой скорости вращения трехгранника
XYZ, связанного с платформой, на ось чувствительности
гироскопа в рассматриваемом случае идеальной стабилизации
платформы по азимуту равна
da г; cos С
(Оу-
dt
R
Следовательно, уравнение позиционного гироскопа,
служащего для горизонтальной стабилизации инерциальной платформы
зокруг линии Е—W, имеет вид
<РЪ t * db тт Г da VC0SC\
J
g
d*v . - d» г. f da t;cosC\ ь*»(4-\
(6.4)
В этом уравнении использованы все обозначения, принятые
при рассмотрении азимутального гироскопа, предполагая, что
85
конструктивно все гироакопы инерциальной системы выполнены
одинаково.
На основании .изложенных выше соображений движение
инерциальной платформы по .координате а отри установившемся
режиме стабилизации может быть описано уравнением
da. vcosC , k ...
В отличие от азимутального гироскопа сигнал tn(t),
поступающий в датчик момента позиционного гироскопа,
вырабатывается в цепи интегральной коррекции системы. Цепь
интегральной коррекции состоит из акселерометра, установленного осью
чувствительности по оси X платформы, т. е. в плоскости
истинного меридиана, интегратора и некоторого -коррекционного
устройства.
Акселерометр измеряет ускорение, представляющее собой
сумму проекций ускорения центра инерции платформы на ось
чувствительности акселерометра.
Предположим, что измерение производится безошибочно.
В этом случае снимаемый с акселерометра сигнал будет
'пропорционален величине
Wx = Wi cos a — wc sin a ^ w^ — w^ a.
Здесь Wi \\ Wi проекции ускорения w на оси S и С системы
I r\ С, определяемые .по формулам (4.2). Напомним, что в эти
формулы наряду с полезными составляющими .входят скоростные
члены ускорения, зависящие от географической широты, скорости
и курса объекта. Эти члены подлежат компенсации, которая
производится с помощью вычислительного устройства инерциальной
системы. Входные данные вычислительного устройства
снимаются в соответствующих каналах инерциальной системы. Сигналы
компенсации в виде электрических напряжений вычитаются из
сигналов, снимаемых с акселерометра, поэтому на входе
интегратора остаются только полезные составляющие измеренного
ускорения.
Величина компенсируемой части ускоренияwi была нами
установлена в главе IV. Что касается ускорения Wt, то ввиду
малости входящих в него скоростных членов .по сравнению с
ускорением силы тяжести g компенсацию их не производят, и можно
считать, что w^= —g. С учетом упомянутой компенсации сигнал,
подводимый к интегратору, будет шропорционален величине
В интеграторе происходит интегрирование сигнала по
времени. Если .интегратор работает без ошибок, выработанный сигнал
будет пропорционален величине
86
0 0
Соответствующий сигнал .поступает в корректор, где
производится масштабное преобразование, т. е. деление сигнала на
величину R (корректор может бы гь составной частью
вычислительного устройства инерциальной системы). Преобразованный
таким образом сигнал и определяет величину m(t), которая
подводится к обмотке датчика момента гироскопа. Следовательно,
величина m(t) определяется равенством
ю(0 = К^- \v cos C+ J gadtj,
где Ли — .передаточное число цепи интегральной коррекции,
учитывающее передаточные коэффициенты отдельных
а
звеньев,—^ сек.
Подставляя выражение m(t) в уравнение движения инерци-
альной платформы, получим
da
lit
v cos С к!ги 1
R И R
t/cos
+ $£«<*')
При выполнении равенства-^- =1, что обеспечивается
соответствующим расчетом элементов инерциальной системы,
последнее уравнение примет вид
t
da , 1
dt
■ + Tf $£*d' = 0
или
dr~ ^ R u KJ'
Это уравнение характеризует свободные колебания
инерциальной платформы в плоскости углов а, т. е. вокруг линии Е—W,
относительно горизонтальной плоскости (ос = 0), происходящие с
периодом Шулера. Пр,и .нулевых начальных условиях имеем
тождество а = 0, т. е. платформа сохраняет свое горизонтальное
положение.
Такой же результат был нами получен ,в главе III при
рассмотрении инерциальной системы с интегральной коррекцией по
скорости для случая, когда объект движется по дуге большого
круга невращающейся Земли.
Теперь рассмотрим, каким образом осуществляется
горизонтальная стабилизация .инерциальной платформы относительно ли-
87
н»ии N—S. Для этой цели используется второй позиционный
гироскоп (рис. 32). Предположим, что инерциальная платформ*
идеально стабилизирована .по азимуту, т. е. ось X платформы и.
соответственно, ось чувствительности гироскопа направлены по
оси S географической системы координат, или по линии N—S.
Положение инерциальной платформы по отношению к плоскости
горизонта будем определять углом Р, измеряемым в плоскости
первого вертикала между осью Y платформы и плоскостью
горизонта.
Рис. 32
Проекция полной угловой скорости трехгранника XYZ,
связанного с платформой, на ось чувствительности гироскопа равна
Поэтому уравнение движения позиционного гироскопа,
служащего для стабилизации инерциальной платформы вокруг линии
N—S, имеет вид
а соответствующее уравнение движения платформы
^- = _^COscp + —— j — -m(t). (6.5)
Сигнал m(t) на управляющую обмотку датчика момента з
этом случае поступает по цепи интегральной коррекции, включа-
* Гироскопический момент взят с отрицательным, а не положительным,
как в формуле (5.7), знаком, так как в рассматриваемом случае он направлен
в отрицательную сторону оси прецессии.
88
ющей: акселерометр с осью чувствительности, направленной по
оси Y платформы (т. е. в плоскости первого вертикала),
интегратор и коррекционное устройство.
Измеряемое акселерометром ускорение определяется
равенством
Wy = Wn COS Р + Wz Sin p « W^ + Wz p,
где о;ч и шс- проекции ускорения w на оси •/] и С системы 6чС,
определяемые сто формулам (4.2).
С учетом компенсации скоростных членов в выражении w^
имеем
d(vsinC) q
Сигнал, пропорциональный .величине ш ок, подводится к
интегратору, а после интегрирования—к корректору. В корректоре
производится преобразование .в соответствии со следующей
формулой:
ек = — (-^- + tfcoscp) ,
где еи—сигнал, снятый с интегратора;
ек—сигнал, снимаемый с корректора.
В корректор необходимо ввести величину ф, снимаемую с
выхода инерциальной системы.
В итоге имеем
t
m(t) — — £и
-£- [v sin С — ] g р dt\ + и cos cp
Уравнение движения платформы (6.5) примет вид
4— («osT + ^)+^(,s,„C-U*) +
+ ttCOScp
kk
а при выполнении условия-^- = 1,
или
4f+^UM^o,
dP ^ R v *
Отсюда следует, что и в плоскости углов Р инерциальная
платформа совершает свободные колебания с периодом Шулера.
При нулевых начальных условиях Р=0, т. е. платформа
сохраняет свое горизонтальное положение.
89
Инерциальная навигационная система,
ориентированная в географической
системе к о о р д и ,н а т
Принципиальная схема инерциальной навигационной
системы, ориентированной в географической системе координат,
представлена на рис. 33.
// / 5 2
sect
Рис. 33
На этом рисунке изображена инерциальная платформа 1,
подвешенная в кардановом подвесе по двум осям стабилизации, соз-
ладающим с направлениями N—S и Е—W. Платформа
стабилизируется с помощью трех поплавковых гироскопов:
азимутального 2 и двух позиционных 3 и 4 («северный» и «восточный»).
Корпусы гироскопов жестко соединены с платформой.
Стабилизирующий привод азимутального гироскопа состоит
из датчика сигнала 5, усилителя и двигателя 6, который через
редуктор связан с платформой по вертикальной оси.
Стабилизирующий привод гироскопа 3 состоит из датчика
сигнала 7, усилителя 8 и двигателя 9, который через редуктор
связан с осью стабилизации платформы в плоскости меридиана.
Стабилизирующий привод гироскопа 4 состоит из датчика
сигнала 10, усилителя 11 и двигателя 12, связанного с осью
стабилизации платформы в плоскости первого вертикала. На
платформе установлены два акселерометра с осями чувствительности,
направленными по осям X и Y платформы. Акселерометры
включены в цепи интегральной коррекции платформы. «Северный*
акселерометр 13 через интегратор и корректор электрически
связан с датчиком момента 14 гироскопа 3. «Восточный»
акселерометр 15 через интегратор и корректор соединен с датчиком
момента 17 гироскопа 4.
К обоим интеграторам подсоединены выходные цепи
вычислительного устройства, предназначенного для исключения ложных
ускорений объекта из показаний акселерометров.
90
К корректору гироскопа 4 подключено также счетное
устройство, автоматически вводящее в цепь интегральной коррекции
величину и cos ср.
Сигналы, снимаемые с первых интеграторов, поступают как в
цепи интегральной коррекции, так и на вход вторых
интеграторов, необходимых для индикации местоположения объекта.
Выходные сигналы вторых интеграторов при a = p = S=0
соответствуют пройденному объектом расстоянию по направлениям N—S
и Е—W. Эти сигналы могут быть преобразованы с целью
индикации географических координат места, для чего на схеме
-показаны соответствующие тригонометрические устройства и
счетчики широты и долготы.
Вычисление координат производится по формулам,
полученным из выражений (1.5) и (1.6),
t
? = То + X J^ndt;
о
t
х = хо + "F J Ve sec ? dt'
где Vn и ve— составляющие скорости объекта по линиям N—S
и Е—W;
ср0: ^о— начальные значения широты и долготы,
устанавливаемые на счетчиках вручную.
Как уже говорилось выше, схема горизонтальной инерциаль-
ной системы в действительности 'будет несколько сложнее,
вследствие того что оси стабилизации платформы на движущемся
объекте связаны не со странами света, а с самим объектом.
Поэтому для правильного распределения сигналов, снимаемых с
гироскопов на стабилизирующие приводы, их .необходимо
разложить на составляющие по продольной и поперечной осям
объекта. Эта операция производится с помощью координатного
преобразователя, связанного с азимутальной осью вращения
'платформы. В координатном преобразователе производится
разложение снятых сигналов в зависимости от курса объекта.
Кроме того, если объект имеет неограниченную свободу
вращения по всем трем координатам, карданов .подвес инерциальной
платформы должен быть дополнен вспомогательным кольцом,
предохраняющим от потери чувствительности по одной из
координат. Если, например, плоскость наружного кольца подвеса при
дифференте 90° совместится с .плоскостью внутреннего кольца,
инерциальная система потеряет чувствительность к бортовой
качке, так -как бортовая качка будет восприниматься только
азимутальным гироскопом, который не связан с двигателем
горизонтальной стабилизации.
На рис. 34 представлена несколько упрощенная структурная
91
схема инерциальной навигационной системы. Верхняя и нижняя
части этой схемы почти полностью повторяют структурную
схему инерциальной системы с интегральной коррекцией по
скорости, рассмотренную в главе III (рис. 17) для случая движения
объекта по ортодромии. Разница состоит ,в том, что на входы
интеграторов, следующих за акселерометрами, -подводятся сигналы
компенсации скоростных членов измеряемых ускорений, которые
в соответствии с формулами (4.4), (4.5) суммируются на входе
системы с величинами
dvx dv}
и—тт- . Кроме того, в канале Е—W
dt
dt
d
7?
if
£
4- \ w*
—»~i
Ate
J
K03u»Vm (tiStnf + %1 t3f}nf>
гироскопу "*
(2uv£stny+ %-*9Г)пр
A *°*
%cc
бы числительное
устроистбо
I
(uC9tf)at \ -
+
и cos f
Akc
1 w*y "
V*M
t
7Г
-*- С
I
Vin
[?uv„S(n<p+ " #• e • tgVJnp
Канал
N-S
Kg нал
E-w
Рис 34
предусмотрен ввод сигнала, и cos ф, необходимый для коррекции
системы за .вращение Земли. Схематически это показано
сравнением в канале Е—W величины и coscp, соообщшной системе
извне, и величины—(и coscp)np, вычисленной самой
инерциальной системой. При отсутствии ошибок результатом
сравнения будет нуль, т. е. система /приводится ik гипотетическому
случаю невращающейоя Земли.
В средней части схемы условно показано вычислительное
устройство инерциальной системы. Входными данными
вычислительного устройства являются составляющие измеренной скорости в
92
каналах N—S и Е—W *. Вычислительное устройство
вырабатывает сигналы компенсации скоростных членов измеряемых
ускорений, сигналы .коррекции азимутального гироскопа и
позиционного гироскопа в канале Е—W, а также выходные данные инерци-
альной системы (фД и С), которые затем могут дистанционно
2usmy+ -%-tj?
(2uvNsiny + ^gtw)
Г.
(2uvestntf+jtgy)
J_
R
! (usiny+~tg4>j
Рис. 35
передаваться на индикаторы. Вычисление географических
координат производится в соответствии с приведенными выше
алгоритмами, вычисление ортодромического путевого угла—по
формуле, полученной из выражения (1.7),
C = C0 + J-^tg?rf/.
и
Возможный вариант структурной схемы вычислительного
устройства показан на рис. 35. Как видно из структурной схемы,
вычислительное устройство должно быть связано с часовым
механизмом, необходимым для выработки величины и.
* Фактически первые интеграторы инерциальной системы также
включаются в вычислительное устройство; т. е. входными данными являются
непосредственно измеренные ускорения.
93
Конструктивно вычислительное устройство инерциальной
системы может быть выполнено в виде аналоговой вычислительной
машины на электромеханических элементах; возможно также
применение дискретных (цифровых) машин.
Рис. 36
Внешний вид инерциальной платформы системы СИНС
с установленными на ней деталями (гироскопами,
стабилизирующими двигателями и акселерометрами) показан на рис. 36.
Другие горизонтные инерциальные системы
Рассмотрим теперь принцип действия инерциальной
системы, ориентированной в повернутой системе координат
«широта—долгота» и инерциальной системы с инерциальной
ориентацией навигационных осей. Кинематические соотношения в этих
координатных системах были установлены нами в главе IV.
Как видно из выражений (4.6) проекции угловой скорости
трехгранника £'ч'С, образующего повернутую систему координат,
вращение инерциальной платформы по отношению к
«неподвижному» пространству должно осуществляться по азимуту (вокруг
оси £') с угловой скоростью
/ >, / v sin С i /
а>; = — U COS У COS <р' о tg? ;
94
по высоте (вокруг оси V) —с угловой скоростью
Щ = — # COS X' Sin ср' ^ ^— ;
то высоте (вокруг оси ?)') —с угловой скоростью
, . ,, v cos С
<*>t) = ~ U Sin Л о .
Отсюда вытекают следующие отличия рассматриваемой инер-
циальной системы от ориентированной в нормальной
географической системе «широта—долгота». Коррекция азимутального
гироскопа должна .производиться в соответствии с первым из
написанных -выражений, г. е. требуется вычисление обеих
«повернутых» координат — широты и долготы, а не только широты.
Требуется также коррекция за вращение Земли обоих позиционных
гироскопов, а не одного, как в предыдущей инерциальной
системе. Коррекция в канале «повернутой» широты должна
производиться в соответствии с формулой
шк. = — wsin>/,
а в канале «повернутой» долготы по формуле
о)Кз = — и cos V sin 9'.
Рассматривая .выражения проекций ускорения объекта на оси
повернутой координатной системы, заметим, что компенсация
скоростных членов измеряемых ускорений та»кже требует
вычисления о)беих «'повернутых» 'координат <р' и ^'-
Таким образом, в разбираемой инерциальной системе
несколько изменяется схема вычиелителыного устройства; оно
усложняется и в том случае, если требуется пересчет повернутых
координат и путевого угла в обычные координаты и путевой угол
объекта. В остальном механизм инерциальной системы,
ориентированной в повернутой системе координат, ничем не отличается
от разобранного ранее.
С учетом указанных отличий можно построить структурную
схему рассматриваемой «инерциальной системы. Эта схема
представлена на рис. 37.
Разберем теперь инерциальную систему с инерциальной
ориентацией навигационных осей (иначе говоря, неподвижных в
пространстве), т. е. не имеющую азимутальной коррекции (см.
главу IV). В этой системе коррекция позиционных гироскопов
должна производиться в соответствии с формулами *
o)Ki = -ttcoscpsin Л;
<»K2=ttC0ScpCOS Л.
* При ;4=0, когда система обращается в географически ориентирозаи-
ь>ю, wK =0, о>к = wcoscp, т. е. корректируется тЪлько восточный
позиционный гироскоп.
95
v*
d
W
.
' "П
if
Каьинут
if
vv
У
d
dt
"',
-ti'.--Wi--J
i
+
9
i
«
/АГГ
+ -
/
Wox
7 ■*"
■ и sin A
+
""*
l-usini')nr%
Co
-(ucosA cosy'- д tgf'jnf
1
f
R
-iy
| У*пр
'
1
R
Вычислительное
устроистбо
л
f» A,
+
fi
9
+
1 +
Wy
(UCOSA
f
SinfJnp
^ f'JVnp)
—»- л (Л„р)
\ш
Л
• и cosA stntp'
A kc
1
X
л
\ W0y
/
Чпр
Канал f
(2uvcosCcosk'cosy ■*■
Рис. 37
w''l
и'. -1
sf |
•+J
*/
К
+ 1
*
4/ГГ
л:
+ —
/
*^]
'•«/ J/Л/ SI/ffC-A)
W'* Г
-*• L
и cos* s</
+
_
^f«l»r^
(<•—
,|
/ 1
*»Р 1
' Г
'
vcosfs
Г-Х>
вычислительно
(/строистбо
*.♦
Си Саха сол А)'„.
*/
i + —
1 -
к„
У
1 *
1 dt
/
1 *
\ +
1 +1 w,
/
+
и cosy cos л
] Ллг
, 4
,
еЕ~*
VSin(C-A)
1 1
[ 1
/
т
1 *+
1 * 1 Wo„ *
С/Л
/
И глеГГ-А
]
Канал X
Конол У
Рис. 38
Компенсация скоростных членов, измеряемых
акселерометрами ускорений, должна производиться по формулам (4.12).
Напомним, что компенсируемые члены представляют собой
половинные значения кориолисовых ускорений.
Другой особенностью рассматриваемой инерциальной
системы является апоосхб получения путевого угла С. Ввиду отсутствия
азимутальной коррекции, путевой угол не может 'быть снят с
системы непосредственно. Для его вычисления требуется
преобразование составляющих скорости объекта, получаемых в
каналах горизонтальной стабилизации платформы после
интегрирования.
vcos(t
-А
1
;
'
е-А
п
i
V Sift (С-А
ч
V
с
и
и-
-
и
I
X
eft
St n у
+ ^
1
Sifl
1 —
1
1
R
Г
+ \
/
+
1 IV
f
X
,
f
/
ч
sec
~*.
\
cos
J
,
[
V
/
о
&i»
■чг1
k
Рис. 39
Структурная схема инерциальной системы (без азимутальной
коррекции -представлена на рис. 38.
На рис. 39 отдельно показан возможный схемный вариант
вычислительного устройства системы. В координатном
.преобразователе П производится преобразование поступающих из каналов
инерциальной системы .величин v cos (С—А) и v sin (С—А) в
величины v и С—А. Остальная часть схемы изо(бражает решение
уравнений
. f v cos С ,.
¥=<Ро+ J—«-»';
c=c0 + J(4r-wsin<p)^
7 А. А. Якушенков
97
Вычисленная величина ср используется для получения и sincp,
dA
что позволяет выделить из сигнала -ц- изменение путевого угла
dC
-^-для последующего интегрирования.
Глава VII
ПОГРЕШНОСТИ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ
СИСТЕМ
Общие замечания
Как всякое сложное электромеханическое устройство, инерци-
альная навигационная система имеет ряд инструментальных
погрешностей, вызываемых несовершенством отдельных элементов
и узлов.
Вследствие того, что в основу системы положено измерение и
интегрирование линейных ускорений, большинство ее
погрешностей являются функциями времени. По той же причине точность
инерциальной системы существенно зависит от ошибок
первоначальной установки (первоначального ориентирования).
Основные инструментальные ошибки инерциальных систем
-вызываются несовершенством стабилизирующих гироскопов,
акселерометров и интеграторов, причем наиболее неблагоприятно
влияние дрейфа гироскопов *. Помимо инструментальных
погрешностей, инерциальная система имеет и ряд методических
ошибок.
Влияние дрейфа позиционных гироскопов
Дрейф гироскопа (платформы) вызывается посторонними
моментами, действующими по его оси прецессии. Эти моменты
могут иметь либо механическое (остаточное трение в опорах, деба-
ланс), либо электрическое происхождение (ошибочная
отработка датчика момента). В общем случае посторонние моменты
носят случайный характер; поэтому дрейф гироскопа оценивается
средней угловой скоростью увода его оси естественного вращения
(оси чувствительности) от некоторого начального положения.
При отсутствии интегральной коррекции дрейф позиционного
гироскопа вокруг оси прецессии непосредственно вызывает дрейф
инерциальной платформы вокруг соответствующей оси
стабилизации. Величину скорости этого дрейфа можно определить из
уравнений одноосного стабилизатора (5.13) и (5.14), если заме-
* Применительно к инерциальной системе в целом этот термин не
вполне точен, так как благодаря стабилизирующим? приводам «дрейфуют» не
гироскопы, а сама инерциальная платформа. Поэтому правильней было бы
говорить о влиянии дрейфа инерциальной платформы. Однако в литературе
чаще встречается термин «дрейф гироскопов», который мы и сохраним в
дальнейшем изложении.
98
нить в них полезный момент m(t), создаваемый датчиком
момента, суммой посторонних моментов, вызывающих дрейф гироскопа.
Обозначим упомянутую сумму моментов через l(t). Считая /
величиной постоянной или медленно меняющейся по сравнению с
постоянной времени стабилизатора, из уравнения (5.14) (получим
следующее выражение для мгновенного положения инерциальной
платформы по отношению к неподвижной оси:
t
О
Соответственно скорость дрейфа платформы вокруг оси
стабилизации, под влиянием постороннего момента относительно оси
прецессии, составит
Такой же результат -можно получить для случая, когда
платформа стабилизируется .во вращающейся координатной системе,
т. е. сохраняя в уравнении (5.13) полезный момент m(t). В этом
случае приведенные выше выражения означают .мгновенное
положение и скорость дрейфа инерциальной '.платформы по
отношению к вращающейся оси. Очевидно, скорость дрейфа платформы
тем меньше, чем выше кинетический момент гироскопа.
Интересно заметить, что с кинематической точки зрения инер-
циальную платформу можно уподобить трехстепенному
гироскопу, прецессирующему с угловой скоростью ^р=—^9 т. е.
благодаря сочетанию двухстепенного интегрирующего гироскопа, со
следящим приводом инерциальная платформа приобретает
свойства трехстепенного гироскопа.
Однако, рассматривая работу инерциальной системы с
учетом интегральной коррекции, нетрудно обнаружить и
существенное различие. При отклонении платформы от плоскости
истинного горизонта с угловой скоростью, определяемой выражением
(7.1), акселерометр измерит ложное ускорение, равное
составляющей ускорения силы тяжести g". Соответствующий сигнал
поступит через цепь интегральной коррекции на датчик момента
гироскопа, в результате чего начнется отработка двигателя
горизонтальной стабилизации /платформы в сторону уменьшения ее
отклонения от плоскости горизонта. Так как платформа обладает
инерцией, она .в своем возвратном движении пройдет плоскость
истинного горизонта, что вызовет появление ложного ускорения
другого знака. Это, в свою очередь, приведет к отработке
двигателя горизонтальной стабилизации в противоположную сторону
и т. д. Инерциальная платформа будет непрерывно колебаться
около своего равновесного положения. Следовательно, соответ-
7*
\)9
ствующая ошибка приборной вертикали, созданной с помощью
инервдальной системы, носит колебательный характер.
Для определения погрешностей инерциальной системы
вернемся к структурной схеме на рис. 34 и рассмотрим на ней канал
N—S. Как видно из схемы, при отсутствии дрейфа платформы
ошибка (приборной вертикали а образуется как разность между
проинтегрированными значениями действительной и измеренной
(приборной) скорости, деленными на радиус Земли:
где i>n—действительная скорость объекта;
^Nnp— измеренное значение скорости.
Иначе говоря, угловая скорость наклонения приборной
вертикали равна
£± _ _%_ %р_ _ jy (70X
dt ~ R R ~ R * l''z>
где ev— ошибка измерения скорости.
С учетом дрейфа даерциальной платформы (7.1) вместо
выражения (7.2) имеем:
dax da _.dln_ sv • M ,7o\
Как было «показано в главе VI, приборная скорость i>Nnp равна
интегралу от приборного ускорения после компенсации
скоростных членов.
Приборное ускорение с учетом компенсации определяется из
выражения
dvN ,
Следовательно,
t t
^Nno = j WnnJt = VH + $gaxdt;
"пр J "np
/
«l/ =^N —^Nnp = — J g «i dt (7.4)
0
Подставляя e„ в уравнение (7.3), получим следующее для
определения ошибки приборной вертикали:
(7.5)
4?+4-$',■*»-
V
Примем скорость дрейфа платформы ">Р постоянной или близ-
кой к этому. Как видно из уравнения (7.5), в момент ^=0-^-=
= о)р (определенный интеграл с равными пределами обращается
100
в нуль). Иначе говоря, в начальный момент отклонения
(приборной вертикали от истинной происходит с угловой скоростью,
разной скорости дрейфа платформы.
Принимая далее при /=0 ai = 0, получим следующее решение
уравнения (7.5):
a^-^sina)^, (7.6)
где о)0—частота Шулера.
Решение (7.6) показывает, что постоянный момент,
действующий по оси процессии позиционного гироскопа, вызывает
незатухающие колебания инерциальной платформы относительно
плоскости горизонта (ai = 0) с периодом Шулера и амплитудой,
прямо пропорциональной действующему моменту. В этом состоит
принципиальное отличие инерциальной вертикали от обычной
гироскопической вертикали.
Наибольшая ошибка инерциальной вертикали равна
амплитуде колебаний, описываемых решением (7.6)
«1.... =
а)0
Если, например, ^р=±0,1 град/час, что соответствует
качеству современных поплавковых гироскопов, то
а, =± 0,022° =± 1',3.
imax — ' — '
Таким образом, современный уровень гироскопической
техники позволяет создать искусственный горизонт с весьма высокой
точностью.
Подставляя найденное решение для он в формулу (7.4),
получим следующее выражение ошибки измеренной скорости ev:
t t
ev= — } g аг dt = — g -^£. J sin <o0 tdt — R <*>p (1 — cos <o01).
Ошибка скорости имеет постоянную и переменную
составляющие, причем последняя изменяется с периодом Шулера. В начале
движения, при £=0,3^=0; через время ^=2^-=21,1 мин Sz,= /?<v
Наибольшая ошибка им.еет место в моменты времени, когда
cos<*>o^ =—1 и составляет
Эта величина при шр=±0,1 град/час достигает 12 узлов.
Наконец, ошибку в измеренном расстоянии можно определить
по формуле
t
1QI
откуда
zs = R<»p{t — — sin V) •
Ошибка положения имеет периодическую составляющую и
составляющую, непрерывно растущую со временем. Скорость
возрастания последней (прямо пропорциональна скорости дрейфа.
На рис. 40 изображен график погрешности инерциальной
системы по (пройденному расстоянию.
Периодическую составляющую ошибки ss можно устранить
демпфированием колебаний инерциальной платформы. Что
касается линейной
составляющей, то единственное средство
ее уменьшения состоит в
улучшении качества позиционных
гироскопов. При дрейфе гиро-
__ ^ £ скопа оу=±0,1 град/час эта
вЩмин ошибка достигает б миль уже
р т через час после начала движе-
ис' ния. Отсюда следует, что к
позиционным гироскопам инерциальных систем предъявляются
высокие требования и современный уровень гироскопической
техники не позволяет создать долгодейотвующую чисто инерци-
алькую систему. Этим, в частности, объясняется появление
смешанных (гибридных) навигационных систем, в которых инер-
циальный блок подвергается систематической корректировке.
Погрешности, вызванные ошибками акселерометров
Акселерометры могут вносить ошибки двоякого рода:
вследствие смещения нуля акселерометра, т. е. некоторый ложный
сигнал на выходе при отсутствии сигнала на .входе, и при измерения
ускорения, пропорционального входному сигналу.
Первую из них удобно выражать в долях ускорения силы
тяжести ng, лде п — малая величина. Таким образом, измеренное
(приборное) ускорение можно представить в .виде
^пР = ng + (w + kxw) = ng + (1 + kx) w,
где w— действительное ускорение объекта;
k\— некоторый коэффициент пропорциональности, зависящий
от точности акселерометра.
Рассмотрим влияние ошибок акселерометра на точность
инерциальной системы, вновь обращаясь к рис. 34.
Как известно из главы VI,
102
следовательно,
*ЧР = tig + (1 + kt) [-£■ + g a),
откуда измеренная (при/борная) скорость равна
t t
'v"»i>=l'w"npdt=§[ng + (l+kM-%r+g*)]dt;
о о
* t
^Nnp = (l+^)^N -r^ngdt + lgadt.
о о
Таким образом, для определения ошибки скорости ev имеем
уравнение
t t
ev = vN—vNnp=k1vN — $ngdt — $gadt. (7.7)
о о
Заменяя в выражении (7.7) величину ег из уравнения (7.2),
имеем
d2aJ- £ п— *1 dV" П8 /7Я\
Примем вначале, что объект движется с постоянной скоро-
dvN
стью, т. е. -^-=0(в этом случае, естественно, &i = 0) и ft=const.
Решение уравнения (7.8) при начальных условиях а(0) =
= ~^-=0 имеет вид
а = — п (1 — cos со01). (7.9)
Следовательно, нестабильность акселерометра вызывает
колебательные движения инерщиальной платформы с периодом
Шулера, относительно смещенного от горизонта положения
равновесия а=—п. Амплитуда колебаний равна ошибке акселерометра
в долях g.
Вызванные ошибкой акселерометра колебания платформы,
как видно, находятся в противофазе с колебаниями в результате
дрейфа позиционного гироскопа.
В современных инерциальных системах нестабильность
акселерометра может составить величину ng=0,001 g, т. е. я=0,001.
В этом случае максимальная ошибка вертикали будет
<W = 12л | = ± 2X0,001 = ± 7',2.
Возвращаясь к уравнению (7.2) после подстановки а из
уравнения (7.9), получим
ev = — Rn ш0 sin <o01.
Таким образом, ошибка в измерении скорости также имеет
характер колебаний с периодом Шулера <и амплитудой, пропор-
103
цисинальной величине смещения нулевого отсчета акселерометра.
Скоростная ошибка системы невелика; при п=0,001 она
составляет всего ±8,5 м/час.
Ошибку пройденного расстояния можно определить
следующим образом:
es =J ev dt= —Rtl (1 — COS ш0 t) .
о
Здесь постоянная составляющая, вызванная нестабильностью
акселерометра, ори п=0,001 имеет порядок ±3 миль.
Допустим теперь, что акселерометр не имеет ошибок
вследствие смещения нуля (я=0), но имеется ошибка в самом
измерении ускорения.
Пусть-77-=='Z2/n =const, т. е. объект движется с /постоянным
ускорением. В этом случае решение уравнения (7.8) при нулевых
начальных условиях имеет вид
а = кг — (1—cos<d0*).
Из уравнения видно, что ошибка вертикали имеет
постоянную составляющую, т. е. погрешность в измерении ускорения
действует на инерциальную платформу так ж,е, как ускорение точки
подвеса и а простой физический маятник; отличие состоит в том,
что период собственных колебаний инерциальной платформы
(период Шулера) значительно выше любого достижимого
периода колебаний физического маятника.
Скоростная ошибка, вызванная погрешностью измерения, в
рассматриваемом случае равна
«» = *! —Sin V,
а ошибка пройденного расстояния
е* =J % dt = Rk± — (1 — cos % t).
0 ь
Величины этих ошибок зависят от точности измерений и для
современных акселерометров, -по-видимому, (невелики.
Изложенное позволяет сделать вывод, что ошибки
акселерометров при современном уровне техники не вызывают
существенных погрешностей инерциальных навигационных систем по
скорости и положению; .во всяком случае, эти погрешности
существенно меньше ошибок, создаваемых дрейфом позиционных
гироскопов.
104
Погрешности, вызванные ошибками интеграторов
Интеграторы горизонтной инерциальной системы, так же как
и акселерометры, могут иметь ошибки двоякого рода: вызванные
нестабильностью нулевого отсчета, т. е. появление ложного
сигнала на выходе при отсутствии сигнала на входе, и вызванные
интегрированием, пропорциональные интегралу от входного
сигнала.
Вследствие включения интеграторов в цепь интегральной
коррекции их ошибки влияют не только .на точность выходной
информации системы, но и на положение самой инерциальной
платформы.
Вновь вернемся к рис. 34. Смещение нулевого отсчета
интегратора обозначим буквой / (имеет размерность скорости).
Очевидно, измеренная скорость с учетом ошибок интегратора
определяется следующим образом:
/ t
*>Nnp =J WNnp dt + k2 J ^Nnp dt +/,
о о
где ^Nnp— ускорение на входе интегратора;
k2— коэффициент пропорциональности.
Отвлекаясь от возможных ошибок акселерометров, т. е.
принимая WNnp = WN, имеем
откуда
t
^пр = (1 + **) 1>n + (1 + k2)$gadt+f.
0
Ошибка в измерении скорости равна
ev = Vx-vN =k2vN — {l+bt)$gadt — f. (7.10)
о
Ошибка вертикали по-лрежнему равна
о
Подставляя величину ev по формуле (7.2) в (7.10), получим
следующее уравнение приборной вертикали:
Ж + d+yfM^^-f (7.11,
Предположим вначале, что скорость объекта постоянна, т. е.
_=0 (при этом, очевидно, и #2=0), и величина / также не
зависит от времени.
105
Как видно из уравнения (7.11), в момент t=0 ■£= —jz.
Принимая также а(0)=0, получим следующее решение уравнения
(7.11):
а = — -4— sin а>в*« (7.12)
Таким образом, нестабильность интегратора вызывает
незатухающие колебания приборной вертикали относительно истинной.
Подставляя значение а из формулы ( 7Л2) в уравнение (7.10)
или (7.2), получим следующее выражение для ошибки скорости:
Bv = —/COSO)0£.
Ошибка пройденного расстояния * равна
г3 = — — Sin<o0£.
Интересно отметить, что благодаря интегральной коррекции
нестабильность интегратора не вызывает увеличивающихся со
временем ошибок системы по положению; в этом состоит одно из
преимуществ инерциальной системы по сравнению с другими
навигационными системами, где производится интегрирование
навигационной информации.
dvn dvN
Теперь допустим, что /=0, но -^- Ф 0, например "^f= ^n =
=»const, т. е. объект перемещается с постоянным ускорением.
Пусть в начальный (момент скорость объекта равна нулю. В этом
случае уравнение (7.М) .примет вид
dt
Решение этого уравнения при начальных условиях а(0) =
=0 дает
^(1-cos co7), (7.13)
dt
1+*2 g
где
= ]/(1+^2)-|г==«>о1/Г1+^.
Как видно, ошибки интегрирования вызывают изменение
частоты колебаний приборной вертикали по сравнению с частотой
Шулера. Кроме того, смещается положение равновесия, т. е.
появляется статическая ошибка вертикали величиной
k2 r^N
1+*2 g
* В предположении, что интегратор скорости (второй интегратор)
работает безошибочно.
106
Из уравнения (7.2) погрешность скорости ори этом будет
равна
•*«-*П?£>'81п.'*,
а погрешность расстояния
Эти ошибки по своему характеру совершенно аналогичны
ошибкам, вызываемым неточностью акселерометров, и имеют
такой же порядок.
Влияние ошибок начального ориентирования
Погрешности, вызываемые
неточной начальной установкой платформы
по высоте
Одним из основных источников погрешностей инерциальных
систем являются ошибки начальной установки. При этом
главную роль играют ошибки начального ориентирования инерциаль-
ной платформы по азимуту (относительно плоскости меридиана)
и по высоте (относительно плоскости горизонта). Ошибки
установки приводят к ненулевым начальным условиям, вызывающим
колебания инерциальной платформы относительно положения
равновесия.
Для определения этих погрешностей обратимся к уравнению
горизонтальной стабилизации инерциальной платформы по
какому-то одному каналу, например N—S. Примем, в
соответствии с принципом суперпозиций, что других ошибок система не
имеет.
Колебания платформы по координате а (вокруг линии Е—W)
происходят в соответствии с решением уравнения
Интеграл этого уравнения равен
а = Сх cos co01 + С2 sin a>01,
где С\ и С2— постоянные интегрирования.
При неточной начальной установке для момента t=0 имеем
где ао — ошибка начального ориентирования.
Примем также -^г =0> что> вообще говоря, может и не быть.
При этих начальных условиях будет
a = a0cos co01.
10?
Это означает, что ошибка вертикали изменяется с
амплитудой, равной ошибке первоначальной установки.
Как было показано в главе VI, ошибка скорости, равная
разности между действительным и измеренным значениями ее, в
рассматриваемом случае определяется равенством
откуда
о о
si/ = — ао •§- sin <о01 = — а >/7?gsIna>0*.
Ошибка пройденного расстояния равна
t
ss= $%dt = —Ra0{l — coso)0^).
о
Как видно, ошибка начальной установки платформы по
высоте вызывает колебательные ошибки инерциальной системы по
скорости и пройденному расстоянию.
Амплитуды последних пропорциональны погрешности
начальной установки. Если, например, а0='±2/,0, амплитудное значение
ошибки пройденного расстояния будет ±0,2 мили.
Входная ось С Г
Погрешности, вызываемые неточным
начальным ориентированием
по азимуту
В отличие от неточной начальной установки платформы по
высоте, неточная азимутальная установка непосредственно не
вызывает погрешностей
инерциальной системы. Однако из-за
перекрестных связей ошибка
в установке платформы по
азимуту приводят к колеба-
w _\-У^-~^ Е тельным ошибкам приборной
вертикали и, соответственно, к
ошибкам инерциальной
системы по скорости и положению.
Для уяснения характера
погрешностей рассмотрим
частный случай, когда объект
находится на экваторе (ср=0) и
неподвижен (vn = ^е=0) .
Если инерциальная платформа установлена по азИхМуту с
некоторой малой погрешностью, горизонтальная составляющая
земного вращения и cos(p = £/ проектируется на оси
чувствительности позиционных гироскопов (см. рис. 41 и 31). Проекция на
ось чувствительности «северного» позиционного гироскопа СГ
108
Входная ось 8Г
равна wsin8 = w8,<Ha ось чувствительности «восточного»
гироскопа ВГ равна и cos8=£/, где 8 — угловое отклонение платформы
от меридиана. Очевидно, погрешности инерциальной системы
создает позиционный гироскоп СГ, поскольку дополнительной
угловой скорости иЬ соответствует дополнительный гироскопический
момент НиЪ, действующий по его оси прецессии. С учетом этого
уравнение движения позиционного гироскопа СГ (6.4) .примет
вид
где а—угловое отклонение платформы от плоскости горизонта
в плоскости меридиана (оши-бка инерциальной
вертикали).
Входная ось азимут
гироскопа
Н
Рис. 42
В рассматриваемом случае «северный» акселерометр
инерциальной системы измеряет только гравитационную составляющую
ускорения ga.. Поэтому сигнал rn(t), подводимый к датчику
момента гироскопа, равен
*и(<) = *„-£- \g*dt.
т-т d§ &Ъ л
Поскольку в режиме стабилизации ^ = -^- =0 и учитывая,
что "77 = 1, из выражения (7.14) получаем следующее
уравнение движения инерциальной платформы по координате а:
4t + tfJ«*"-»8- (7Л5)
Чтобы составить уравнение движения платформы по азимуту,
обратимся к уравнению движения азимутального гироскопа
(6.1). В рассматриваемом случае на ось чувствительности этого-
гироскопа проектируется не только угловая скорость азимуталь-
ного вращения платформы -jt—u sin<p = j^, но также (рис. 42) и
109
составляющая земного вращения —и cosya = —иа. Поэтому
уравнение движения азимутального гироскопа имеет вид
Как было показано в главе VI, коррекция инерциальной
системы рассматриваемого типа производится с помощью
вычислительного устройства, в котором по выходным данным системы
вырабатываются сигналы коррекции и sin ф— для
азимутального гироскопа, и и cos ф — для «восточного» позиционного
гироскопа ВГ. В данном случае вследствие измеренного системой
ложного ускорения ga, она будет вырабатывать ложную скорость
о
ложное пройденное расстояние
J о о
и ложное изменение широты
*/=#-!-]]«<«■• <7Л6>
К датчику момента азимутального гироскопа будет подведен
ложный сигнал коррекции m(t)=u sin<p/ = r/q)/. Сигнал
коррекции позиционного гироскопа ВГ в рассматриваемом случае не
искажается, так как и cos ц;^и.
Таким образом, с учетом условия kkB =H (см. главу VI),
имеем следующее уравнение движения инерциальной платформы по
азимуту:
^ = иа + и?,. (7.17)
Уравнения (7.15) и (7.17) совместно с равенством (7.16)
позволяют определить погрешности инерциальной системы.
Интегрируя по времени уравнение (7.15), найдем
t t t
u + 4-JJ'a^=-« J8^ (7Л8)
или
a = — cjy — и )bdt.
Подставляя это выражение в формулу (7.17), получим
110
ИЛГИ
d-£+a4 = 0. (7.19)
Уравнение (7.19) описывает .незатухающие азимутальные
колебания инерциальной платформы, происходящие с частотой и,
т. е. с периодом, равным —='1 звездным суткам.
Пусть ошибка начальной ycTaiHOiBJKH инерциалыюй платформы
равна о0. При начальных уеловияхЦО) = 80 и — =0 имеем
следующее решение уравнения (7.18):
o = b0cosvut.
Это решение, в частности, показывает, что, если платформа
установлена по азимуту с некоторой ошибкой, она придет в
плоскость меридиана только через б час 'после начала движения.
Подставляя 8 в уравнение (7.Г5), получим
t
-^f + -f" $*dt=-ubQcosiit. (7.20)
Дифференцируя уравнение (7.20) по времени, найдем
д£ 4- -|г а = и2 80 sin lit.
Решение последнего уравнения состоит из суммы решений
соответствующего однородного уравления
а1 = Q C0S ^О ^ + Q S*n ^0 ^ >
где
1 К я »
и частного решения аг, которое 1будем искать в виде
Получим
а2 = Л sin at.
А = -
Учитывая, что ">0 = 1,23.10~3 сек~1\ и = 7,3.Ю-5 се/с™1, можно
записать
А— — 8
Таким образом,
а2
а = С\ cos со0 £ + С2 sin а>01 -| ^ о0 sin #£.
"о
Как следует из урав-нений (7.18) и (7.20), в момент времени
£ = 0 имеем
а = 0; 57" = — и 80.
111
Отсюда
2 <°© V cog; «\о °
И
а = — sin <о0 г-|—2" о0 sin ни
Иначе говоря, неточная на!чальная установка инерциальной
платформы по азимуту приводит к сложным колебаниям ее в
плоскости углов а, которые складываются из гармоник с
частотой Шулера и «с частотой, равной угловой скорости вращения
Земли. Амплитуды колебаний (наибольшие ошибки инерциаль-
ной вертикали), вообще говоря, малы даже при существенной
ошибке начального ориентирования 80 • Если, например, 80 =
= ±Г,0, амплитудное значение первого члеиа равно ±3/,б, а
второго — ±0',2.
Определим теперь ошибки инерциальной системы по скорости
и положению. Эти ошибки будут равны, соответственно,
t
ev= §goLdt = Rub0(cos<»0t— cosat);
о
ts— J evdt=RJL bositn»0t—Rb0sinut.
о °>o
Ошибку в координате ф (ложную широту) можно получить
на основании равенства (7.16), подставив значение S/=e$,
<fy = — 80 sin <о01 — 80 sin tit.
Мы видим, что ошибка положения значительно зависит от
ошибки начального ориентирования платформы по азимуту.
Основную величину погрешности измеренной широты создают
колебания с частотой, равной угловой скорости земного вращения.
Амплитудное значение этой погрешности равно ошибке
начального ориентирования по азимуту. Отсюда следует, что инерци-
альную платформу необходимо устанавливать по азимуту с
возможно высокой точностью.
Влияние дрейфа азимутального гироскопа
Рассмотрим ощять упрощенный случай, когда объект
неподвижен и находится на экваторе. К>к было «показано <в главе VII,
под влиянием посторонних моментов по оси прецессии гироскопа
инерциальная платформа дрейфует вокруг соответствующей оси
стабилизации с угловой скоростью
l(t) c
где t[f) — сумма посторонних моментов;
Й—собственный кинетический момент гироскопа.
112
В нашем случае осью стабилизации является вертикальная
ось платформы, т. е. дрейф происходит по координате б. На этом
основании уравнение (7.17), описывающее движение платформы
по азимуту, мы можем переписать в виде
db
~— = Ua+ii<ff + <i>p,
или, подставляя выражение (7.18), получим
При ^=0 ^==0^, т. е. в начальный момент платформа
отклоняется от меридиана с угловой скоростью, равной скорости
дрейфа.
Пусть также при / = 0 'имеем 8=0. Принимая, как и раньше,
<*>р = const, получим следующее решение уравнения (7.21):
и
Это значит, что постоянный момент вокруг оси прецессии
азимутального пироскопа вызывает незатухающие колебания инер-
циальной платформы по азимуту с периодом, равным звездным
суткам. Если принять ыр = ±0,1 град/час, то амплитудное
значение § будет равно ±30',0.
Как следует из выражения (7.15), ошибка 'инерциальной
вертикали определится решением уравнения
t
Для начальных условий при £ = 0;а(0); = -^- =0 имеем
а = -2£ и (cos ш01 — cos ut).
%
Амплитудное значение ошибки приборной вертикали мало:
при и>р = ±0,1 гра^/час оно составляет всего ±0',1.
Ошибки измерений скорости и пройденного расстояния равны
соответственно
zv = f g a dt = Ru ^- sin (o01 — R со sin ut;
о ^o ¥
es=$evdt^Ru^(l-cosi»0t)~-R^(\-cosut).
0 ^ U
Наибольшую погрешность системы по .положению создает
второй член, 'изменяющийся с частотой земного вращения
относительно положения равновесия R-£. Приа>р = ±0,1 град/час
максимальная ошибка широты составит ±60/,0=±1°Д
8 А. А. Якушенков 113
Для того чтобы эта ошибка не превышала обычно
допускаемых значений ±2,0н-3/,0, необходимо иметь пироскопы со
значительно меньшими «скоростями дрейфа (в 20—30 раз), что
сейчас практически достижимо. Если, однако, инертиальная система
систематически корректируется с помощью каких-либо внешних
источников информации, то при достаточной частоте ввода
коррекции (пока величина cos ut близка к единице) ошибка системы
вследствие дрейфа азимутального гироскопа будет
несущественной.
Влияние несферичности Земли
Если устройство инерциальной системы основано на
допущении о сферичности Земли, она будет иметь ряд методических
ошибок. Эти ошибки возникают по двум причинам.
1. Угловая скорость географического трехгранника,
построенного в точке на геоиде (или земном сфероиде), отличается ог
угловой скорости трехгранника, построенного в соответствующей
точке на сфере. Таким образом, если несферичность Земли
системой не учитывается, ориентация инерциальной платформы по
отношению к географической системе координат будет
производиться с некоторой ошибкой. Влияние этой ошибки равносильно
влиянию дрейфа платформы, так как и в том -и другом случае
платформа имеет некоторую дополнительную угловую
скорость вращения по отношению к географической системе
координат.
2. Ускорения объекта, измеряемые акселерометрами при
движении по геоиду (или земному сфероиду), отличаются от
принимаемых в расчет в предположении, что Земля —сфера.
Следовательно, при компенсации скоростных членов измеренных
ускорений © систему будет знесена .некоторая ошибка, (Которую
можно рассматривать как дополнительную ошибку акселерометров.
Это значит, что появится дополнительная погрешность
инерциальной системы по скорости и положению.
Подробный анализ упомянутых погрешностей весьма сложен
из-за перекрестных связей между каналами инерциальной
системы. Поэтому мы введем некоторые упрощающие предположения,
незначительно влияющие на окончательный результат. Допустим,
что инерциальная платформа стабилизируется по азимуту без
ошибок, а ошибки стабилизации по горизонту вызываются
исключительно тем, что Землю принимают за правильную сферу.
Рассматривая структурную схему инерциальной системы,
ориентированной нормально географически (см. рис. 34), видим, что
ошибки инерциальной вертикали а и Р определяются
выражениями
а= — I Vndt— -n- JifN dt; (7.22)
г о ^ 0
114
И^еЛ-^Ае Л,
пр
где vn и Ve—действительные составляющие скорости
объекта по направлениям N—S и Е—W;
^Nnp и 1>Епр—соответствующие приборные значения скорости;
р—радиус кривизны меридианного эллипса;
/?! — радиус кривизны первого вертикала (см.
главу I).
Рассмотрим канал N—S инерциальной системы, считая что
объект движется по меридиану, т. е. уе=0.
Приборная скорость t>Nnp в выражении для а получается
интегрированием приборного ускорения после компенсации в нем
скоростных членов. В нашем случае приборное ускорение равно
Wnap = wt — Wz'a.
Здесь Wi выражается первым равенством системы (4.2) при
С = 0, a Wa =—g. Поэтому
и, следовательно,
откуда ошибка скорости равна
ev = Vv — vN =— ]gadt, (7.23)
1ф о
а уравнение (7.22) можно переписать в виде
dt
7—kH-^-r)-
Выражая в последнем равенстве а через ^v из уравнения
(7.23), получим следующее дифференциальное уравнение для
определения ошибки измеренной скорости:
d*e7,
£., = -$.,* (l_f). (7.24)
dt2 I R -V R ~" \- p
Интерес представляет случай, когда объект движется с по-
dvN
стоянной или почти постоянной скоростью, т. е. -^~=0- Заметим,
кроме того, что величина I—■- меняется со временем весьма не-
Р
значительно; в частности, величина р при изменении ф от 0 до —
е2
меняется в пределах от R(l—e2) до /?(l+ тр), причем £2=О,0О67.
На этом основании правую часть уравнения (7.24) можно счи-
8* По
тать постоянной, и тогда при нулевых начальных условиях
8^(0) = ^t =^ получим следующий интеграл уравнения
(7'24):
ev = VN(\ — -£.)(l_coso>0*) (7.25)
Сравнивая равенство (7.25) с ошибкой скорости вследствие
дрейфа позиционного гироскопа, легко убедиться, что эти
ошибки по своей структуре совершенно одинаковы, что и понятно, так
как в том и в другом случае инерциальная платформа 'имеет
дополнительную скорость вращения относительно географической
системы координат.
Ошибки приборной вертикали и пройденного расстояния по
меридиану в свою очередь равны, соответственно,
* = YVn(1 "~7~)sin(0o^
Как следует из уравнения (7.26), ошибка пройденного
расстояния растет пропорционально времени, одновременно
изменяясь с периодом Шулера, т. е. подчиняется тому же закону, что и
ошибка, возникающая в результате дрейфа гироскопа. Отличие
состоит в величине множителя перед членами, содержащими
время t. Поэтому для оценки погрешности es достаточно сравнить
ло абсолютной величине упомянутые множители: v^ (1—-) и Rwp
% #
или, что то же самое, -^(1 )иа>р.
Предварительно заметим, что величина (1—-) с точностью
до е2 может быть аппроксимирована в е2(\—-^е2 sin2<f).
Наибольшее значение этой величины составляет £2 = 0,67-10~2. Скорость
Vn примем равной 30 узлам. При этих данных имеем -^ (1—--) =
= ±0,003 град/час, что на 1—2 порядка меньше скорости
дрейфа ®р современных интегрирующих гироскопов. Следовательно,
погрешность в результате неоферичности Земли лишь
незначительно увеличивает погрешность, вызываемую дрейфом
гироскопов.
Обращаясь теперь к восточному каналу инерциальной
системы и повторяя при vn =0 все предыдущие рассуждения, придем
к следующему выражению для ошибки пройденного расстояния
по параллели:
116
Величина (1—^) с точностью до е2 равна —^ът2^ и ее
наибольшее значение будет -^ =0,32 • 10~2, т. е. es, так же как и
«5, составляет лишь незначительную часть погрешности,
вызываемой дрейфом гиросколов.
Рассмотрим ошибки, возникающие из-за неточной
компенсации скоростных членов измеренного системой ускорения.
Как было показано в главе IV, в северном и восточном
каналах 'необходимо скомпенсировать величины, соответственно,
wNk = 2 uvE sin cp + £- tg cp ;
v' v'
^nk = — 2avN sin cp ~-^ tg cp.
В противном случае 'измеренное ускорение не будет равно
дифференциалу от скорости объекта, что необходимо для
безошибочной работы инерциальной системы. Компенсирующие
сигналы вырабатываются в вычислительном устройстве инерциальной
системы и поступают <на входы интеграторов с обратными
знаками.
Поскольку несферичность Земли системой не учитывается,
компенсация будет производиться по формулам
w'nk = — (2uv'E sin cp' + -£- tg cp7);
w'Ek = 2uv'N sin cp' + -^— tg cp7.
В этих выражениях буквы со штрихами означают «приборные
значения соответствующих величин.
Учитывая, что ср'> % и &е мало отличаются от ф, vN и vE
можно принять, что некомпенсированная часть ускорения
составляет: в северном канале
' v\ ( R \
а в восточном канале
bwE = WEK-wEK= —— tgcp(l-£-J.
Эти ошибочные ускорения на входе интеграторов
воспринимаются системой так же, как ошибки акселерометров, влияние
которых было показано в главе VII.
Рассмотрим, .например, северный канал системы. Если
обозначить A^n =^и считать скорость объекта постоянной, то,
повторяя все выводы, касающиеся влияния нестабильности
акселерометров, придем к следующим результатам:
117
а = — я (1 — cos а>0 £) = (1 — cos u>0 /) ;
A wN
z$ = — Rn(\ — cos u)01)^= — R (1 — cos u)0 £).
Аналогичный результат получается и для восточного канала.
Для оценки погрешностей поступим так же, как в предыду-
Ao/N/Ao/E\
щем случае, т. е. сравним ошибку компенсирования —— I——— J
с величиной нестабильности акселерометра п.
Так как рассматриваемая система, в силу изложенных выше
причин, принципиально не может применяться в высоких
широтах, примем ф = 75° (tgcp=3,73). Для скорости объекта ^к=уе =
= 30 узлам получим --^—-—~4,0« 10 , что составляет
ничтожно малую величину по сравнению с .возможной
'нестабильностью акселерометра п.
Таким образом, при современном уровне техники инерциаль-
ной навигации ошибки, вызываемые нейферичиостью Земли, для
сравнительно тихоходных объектов практического значения не
имеют и могут не учитываться по сравнению с ошибками,
вызываемыми дрейфом гироскопов и акселерометров.
Глава VIII
МЕТОДЫ ГИБРИДНОЙ НАВИГАЦИИ
До сих пор инерциальные навигационные системы
рассматривались нами только в качестве вычислителей координат
движущегося объекта, или, как .иногда говорят, в роли инерциальных
ориентаторов.
Между тем определение координат—это только одна из
задач навигации. Как уже указывалось во введении, другой
.важной навигационной задачей, осуществляемой с помощью
инерциальных систем, -является автоматическое управление движением
объекта по заданной траектории.
Принципы инерциального управления будут рассмотрены
ниже; сейчас же важно отметить, что оно сводится к
систематическому сличению инерд.иальной траектории (т. е. траектории
объекта, параметры которой измеряются с помощью 'инерциальной
системы), с заданной ил,и запрограммированной траекторией.
В результате такого сличения, производящегося автоматически, в
системе вырабатываются сигналы коррекции курса, которые
вводятся в устройство управления курсом объекта (авторулевой,
автопилот) так, чтобы совместить обе траектории, т. е. привести
объект :на заданную линию пути. Очевидно, это может быть
выполнено только 1при условии, если инерциальная траектория
118
совпадает с действительной траекторией объекта, или, иначе
говоря, если инерщиальная система не имеет ошибок.
На самом же деле практически невозможно создать
безошибочную инерциальную систему.
Мы видели, что ошибки инерциальной системы
подразделяются на колебательные, линейно увеличивающиеся со временем
и не зависящие от времени. Суммарное действие этих ошибок
приводит к тому, что путь объекта отличается от заданного
(рис. 43), даже если выходные данные системы повторяют
заданные.
Ъствительная
траектория
Рис. 43
Как видно из рис. 43, действительная траектория объекта з
общем случае изображается кривой линией, отклоняющейся от
линии заданного пути и периодически флюктуирующей.
Для того чтобы по возможности уменьшить отклонение
траектории от заданной, необходимо, во-первых, задемпфировать
незатухающие колебания инерциальной системы, во-вторых,
непрерывно или систематически корректировать ее по
действительному местоположению объекта.
Первое требование может быть выполнено в самой системе
включением в нее демпфирующих звеньев. Однако при этом
будет нарушено условие невозмущаемости инерциальной системы
силами инерции, так как период свободных колебаний
инерциальной платформы уже не будет равен периоду Шулера. Это
приведет к появлению новых существенных ошибок.
Кроме того, как показывают некоторые исследования [10]
инерциальная система с внутренним демпфированием в режиме
автоматического управления не обеспечивает устойчивого
движения объекта по курсу. Следовательно, необходимо искать другие
способы демпфирования инерциальной системы. Эта задача
может быть решена с помощью .внешней информации о
действительном .перемещении объекта, получаемой от других навигационных
средств.
По второму требованию также необходимо вводить в
инерциальную систему внешнюю информацию от независимых
источников.
из
Таким образом, мы приходим к необходимости сопряжения
инерциальной системы с другими навигационными средствами.
Такие комбинированные навигационные системы получили
название гибридных, а навигация с помощью гибридных
навигационных систем — гибридной навигации.
Для морского судовождения инерциальную систему можно
сопрягать:
со средствами обычного счисления (гирокомпас — лаг);
со средствами астрономических обсерваций (оптический
секстан с автоматическим сопровождением светил или
радиосекстан);
с радионавигационными системами.
\Фи/1ьтр\
Инерциональная
ллатфорпо
1в
Интегральная коррекция
+ТХ
внешний
\изперитело
расстояния
КЗ
/
интегратор
\Фильтр
Л
интегратор
"в
Внешний
изперитело
скорости
Рис. 44
В авиации перспективной считается комбинация
инерциальной системы с допплер-радиолокатором.
Внешняя информация, необходимая для коррекции
инерциальной системы, может вводиться в нее либо непрерывно, либо
через определенные промежутки времени.
В последнем случае требуемая частота ввода информация
определяется заданной точностью инерциальной системы.
Для полного устранения ошибок инерциальной системы
внешняя информация должна содержать сведения о скорости, курсе
и действительном местоположении объекта. При этом данные о
скорости и курсе используются для демпфирования *
инерциальной системы, а данные о координатах места—для ее коррекций
по положению.
Рассмотрим, каким образом с помощью внешней
информации о скорости и положении можно задемттфировать колебания
с частотой Шулера и устранить позиционные ошибки
инерциальной системы. На рис. 44 показана блок-схема гибридной навига-
* Информация о курсе необходима для демпфирования колебаний, проис^
ходящих с частотой земного вращения [13].
120
ционной системы, в которую, кроме инерциальной системы,
входят средства определения скорости и положения (пройденного
расстояния). Для упрощения рассматривается случай движения
объекта .по дуге .большого круга сферической Земли.
Скорость (после первого интегратора) и пройденное
расстояние (после второго интегратора), измеренные инерциальной
системой, сравниваются со скоростью и пройденным расстоянием,
полученными извне, в сравнивающих устройствах, где
вырабатываются сипналы, пропорциональные их разностям. Эти
сигналы через фильтры подаются на вход первого интегратора
инерциальной системы. Назначение фильтра состоит в устранении
помех.
*«
fc-
Л
I
iff
s
\1'
+
м
14-
4-
1
S
i+-
9
i
т
+
i
£ы
д
-
с,
А нс
/
*i
-
4- 4-
1
-
4-
'
+
"и
■
! с*
J
К
_&
, R
1
R
i
I
[
I
Рис 45
Обозначим скорость, снимаемую с выхода первого
интегратора через яи, пройденное расстояние после второго интегратора
5И, скорость, измеренную внешним источником, vBi пройденное
расстояние 5В. При этом будем считать, что внешние средства
имеют некоторые погрешности: по скорости tv и по расстоянию
Ч , т. е.
v — vB = ev и S —SB = ss,
где v и 5—действительные значения скорости и пройденного
расстояния.
Для исследования гибридной навигационной системы
составим структурную схему, соответствующую блок-схеме рчс. 44,
Структурная схема -гибридной навигационной системы
представлена на рис. 45. Нижняя часть ее совершенно аналогична
схеме, приведенной на рис. 17. Верхняя — отражает сопряже-
121
ние шерциальной системы с внешними средствами определения
скорости и положения.
Интегрирующие звенья в верхних цепях являются
условными; они 'показывают связь между истинными значениями
скорости и пройденного расстояния v и S и ускорением центра
инерции -системы w(t). После введения в эти цепи ошибок ev
и es получаются значением скорости и пройденного
расстояния vB и SB, измеряемые внешними источниками.
Величины vB и SB вычитаются из значений ии и SH>
вырабатываемых инерциальной системой. Соответствующие разности
поступают на вход (первого интегратора инерциальной системы
через звенья, обозначенные С\ и С2. В этих звеньях
производится преобразование сигналов уи—vB и 5И—SB в сигналы,
имеющие размерность ускорения. С\ и С2 являются передаточными
коэффициентами преобразователей. Коэффициент С\ имеет
размерность се/с-1, а коэффициент С2—размерность сек"2.
В общем случае С\ и С2 могут быть определенными
функциями времени (передаточными функциями); в этом случае
гибридная навигационная система становится нелинейной.
Из рассмотрения структурной схемы получим следующее
соотношения:
v" = jl% +g^~C1(vH-v1)-C2(SH-SB)]dt; (8.1)
Дифференцирование последнего равенства дает
Итак, мы имеем
S — SH = Ra.
da jy_ j/„
~Jt~ R R '
r\d a
Поэтому
v* — VB = v* — (v — 4) = — R^a + V,
dt
5„ — SB = SH— (S—es)= — Ra + 4 .
Подставляя эти выражения в уравнение (8.1), получим
или, дифференцируя,
dvu dv r>d*a t/-»r»^ar/-»r» n /^
Sr--dt=~RdW = S^+CiR-at+C2Ra-C1zv-C2ss.
122
Таким образом, для определения ошибки горизонтальной
стабилизации инерциальной (платформы, или, что то же самое,
ошибки в определении истинной вертикали, имеем следующее
неоднородное дифференциальное уравнение:
d2aJLC da Д-( * J-rYr — 6>1 р Л- СЬ
dF +Li-df + V-/T + С*)«— -pf *v + -# *s .
Движение, описываемое таким однородным уравнением, уже
не является незатухающим колебательным с периодом Шулера,
а представляет собой затухающее колебание (при Ci>0; Cs>0).
Еслп Ci = C2 = 0, это уравнение превращается в уравнение
свободных незатухающих колебаний, происходящих с периодом
Шулера, что и понятно, так как при этом гибридная система
становится чисто инерциальной.
Введем следующие обозначения:
Сг = 2h;
g 2
8 <°о
При этих обозначениях имеем
Решение полученного уравнения зависит от начальных
условий и вида функций *v(t) и *s(t).
Если ошибки е^ и s5 не зависят от времени, то общий
интеграл уравнения (8.2) (будет иметь вид
+ £ sin/" o>;U2 — fiH),
где А и В—постоянные интегрирования, определяемые по
начальным условиям.
Соответствующим подбором параметров пи h можно
обеспечить весьма быстрое (Погашение колебаний инерциальной
(платформы. После этого гибридная навигационная система
будет иметь установившуюся погрешность, определяемую
первыми двумя членами.
При выборе значений п я h требуется некоторое
компромиссное решение, с тем чтобы установившаяся погрешность
оставалась малой величиной.
Интересно отметить, что при значениях п, близких к
единице (т. е. при С2^0), установившаяся погрешность системы бу-
123
дет вызываться только щеточной информацией о скорости. С
увеличением п большее значение будет приобретать неточная
информация о положении.
При точности современных морских навигационных средств
можно принять 5^=5% от скорости относительно грунта v;
величину v примем равной 20 узлам. Далее, если положение
определяется с помощью астрономических средств, величина г8
может составить 2—3 мили.
Следовательно, может быть
А4 =0,8-10-7^^0,27. Ю-з-L;
Я ' сек ' сек '
^ = 0,8 -Ю-3 рад ^2',,7.
Примем для быстрого затухания А=0,1 сек-1.
Тогда установившаяся погрешность вертикали будет: при
л=1,0
2 ■ 0,27 • КГ3 ■ 0,1
у (1,23 • КГ3)'* ' '
при п= 10,0
&уст === О ,U.
Этот пример 'показывает, что для устранения ошибок инер-
циальной системы не требуется высокой точности внешней
информации о скорости, в то время как информация о .положении
должна быть по возможности более точной. Демпфирование
инерциальной системы может удовлетворительно
осуществляться с помощью обычных гидравлических лагов. Таким образом
можно получить гибридную систему, в которую скорость от
внешнего источника вводится непрерывно, а
положение—дискретно (по мере астрономических обсерваций). Движение
объекта с помощью такой системы в режиме автоматического
управления будет «пилообразным», причем чем чаще вводится
информация о положении, тем больше форма действительной
траектории объекта приближается <к заданной линии пути.
Если же положение объекта определять «непрерывно с
помощью каких-либо внешних средств, например
радионавигационных систем, траектория объекта теоретически будет в
точности соответствовать заданному пути.
Не останавливаясь пока на методах автоматического
управления объектом, рассмотрим, каким образом можно
осуществлять коррекцию инерциальной системы с помощью средств
радионавигации.
На первый взгляд, сочетание этих средств в едином
комплексе не дает особых преимуществ, так как если имеется
возможность непрерывных радионавигационных обсерваций, то
дополнительное применение инерциальной системы кажется
излишним. Однако анализ погрешностей обеих средств показы-
124
вает, что гибридная система, построенная путем их сопряжения,
будет обладать гораздо большей точностью, чем каждая
система в отдельности.
Действительно, с точки зрения характера случайных
погрешностей инерциальная и радионавигационная системы весьма
удачно дополняют друг друга. Ошибки радионавигационной
системы (так называемые шумы) не зависят от времени и лежат в
высокочастотном спектре; ошибки инерциальной системы растут
со временем и имеют малую частоту. Кроме того, возможны
случаи потери радионавигационной информации на какой-то
промежуток времени, в течение которого инерциальная система
еще не уапеет накопить значительную ошибку.
РИС
Сине
г,
&4>ц +
-J
LL
Ду
Ал
"1
+*
9м *ь
Рис. 46
Таким образом, осредняя навигационную информацию,
поступающую от инерциальной системы и приемника
радионавигационной системы, и используя полученный результат для
коррекции этих систем, можно построить весьма совершенную
гибридную навигационную систему. Эти обстоятельства послужили
причиной разработки гибридной системы, включающей инерци-
альную и фазовую радионавигационную системы [9]. Положение
объекта при использовании последней определяется как точка
пересечений изофаз *.
Разности фаз, измеренные судовым приемоиндикатором,
могут быть пересчитаны в координаты объекта, которые затем
сравниваются с координатами, вырабатываемыми инерциальной
системой. Но более целесообразным оказалось предвыччеление
разностей фаз на основе инерциальной информации. При этом
сравнению подлежат действительно измеренные разности фаз
* Изофаза — линия, в каждой точке которой разность фаз радиоизлуч*»*
ний, приходящих к приемнику на объекте от пары каких-либо внешних
источников, имеет постоянную величину.
125
с вычисленными. Блок-схема гибридной навигационной системы
СИНС—РНС, основанной на этом принципе, представлена на
рис. 46.
Основными элементами системы являются: судовой приемник
фазовой радионавигационной системы 1Ч инерциальная
система 2 и электронная вычислительная машина 3.
Вычислительная машина производит фильтрацию
(сглаживание) шумов радионавигационной информации, вычисление
разностей фаз на основе данных инерциальной системы,
сравнение вычисленных и измеренных разностей фаз,
-вычисление «поправок к координатам, выработанным инерциальной
системой, и ввод необходимых корректирующих данных.
Работа гибридной системы СИНС—РНС происходит
следующим образом. Инерциальная система вырабатывает
географические координаты объекта <ри и ^и. В вычислительной машине
в блоке 4 производится вычисление разности фаз Дф„,
соответствующей измеренным и, как будет показано дальше,
исправленным координатам. Вычисленная разность фаз сравнивается с
действительно измеренной Афи, поступающей от приемника
фазовой радионавигационной системы через сглаживающий
фильтр 5. Полученная ошибка используется для вычисления
поправок к измеренным координатам, которое производится в
вычислительном узле 6.
Вычисленные поправки Аф и ДА, вводятся в блок СИНС для
коррекции и демпфирования инерциальной системы, а также
используются для исправления измеренных значений .координат.
Аналогичным образом может быть построена гибридная
система, использующая в качестве дополнительного источника
информации средства астронавигации, например, радиосекстач.
В этом случае вычислительная машина предвычисляет высоты
и азимуты светил по данным, вырабатываемым инерциальной
системой, которые затем сравниваются с действительно
измеренными. В астро-инерциальной системе инерциальный блок
обеспечивает также отсчетную плоскость искусственного горизонта,
необходимую для измерения высот светил.
Глава IX
ОСНОВЫ ИНЕРЦИАЛЬНОГО УПРАВЛЕНИЯ
Основы автоматического судовождения
Под инерциальным управлением подразумевается
автоматическое регулирование движения объекта вдоль заданной
траектории, осуществляемое с помощью инерциальной
навигационной системы. В (приложении к морскому транспортному флоту
инердиальное управление обеспечивает автоматизацию процесса
судовождения, т. е. автоматическое плавание судна ото
запрограммированному (экономически наиболее выгодному) пути.
126
Автоматическое управление движением судна
осуществляется регулированием воздействия на его рулевой привод.
Изменение положения руля вызывает изменение курса судна или,
иначе говоря, направления вектора скорости. Регулирование
должно производиться таким образом, чтобы вектор скорости судна
непрерывно совмещался с заданным направлением движения.
Если бы движение происходило без внешних возмущений, а
среда была неподвижной, то после выхода на заданную
траекторию судно продолжало бы (перемещаться по ней и дальнейшее
регулирующее воздействие оказалось бы излишним.
В действительности, однако, это неосуществимо,, так как
всегда наблюдаются возмущения, вызываемые
гидрометеорологическими условиями плавания и динамикой самого судна.
Трудность автоматического регулирования усугубляется тем, что
возмущающие силы не поддаются точному измерению; может быть
измерен только их результат, т. е. угловое и поступательное
смещение судна с заданной траектории. При этом, как
показывает теория управляемости судов, оба (перемещения связаны
друг с другом, т. е. изменение заданного курса приводит к
боковому смещению с заданной линии .пути.
Изменение курса относительно заданного можно
регистрировать с помощью какого-либо курсоуказателя, например,
гирокомпаса; снимаемый с него сигнал отклонения попользуется для
воздействия на рулевой привод. Соответствующие устройства
известны под названием авторулевых. Однако для сохранения
заданной траектории движения такого регулирования
недостаточно. Действительно, даже при идеальной стабилизации курса
судно может иметь систематическое боковое смещение с
заданной траектории, вызванное перемещением самой среды
относительно грунта.
Очевидно, для исследования свойств системы
автоматического регулирования необходимо совместно рассмотреть оба
движения, т. е. вращательное движение судна вокруг его центра
тяжести и поступательное движение самого центра тяжести
перпендикулярно заданной траектории.
Строгое исследование движения судна при автоматическом
регулировании связано со значительными трудностями, так как
для этого необходимо знать его гидромеханические
характеристики, которые не только различны для разных типов судов, но
могут изменяться и в течение рейса одного судна. Эти
характеристики зависят от скорости хода, формы и размеров судна,
загрузки, (плотности среды.
Для того чтобы рассмотреть сущность автоматического
судовождения, можно, однако, ввести некоторые упрощающие
предположения. В частности, можно принять, что для современных
крупнотоннажных судов со сравнительно высокой скоростью
хода основным источником невязок (смещения .с заданной
линии пути) является перемещение самой среды, т. е. различного
127
рода течения (рис. 47). При этом уравнение бокового
поступательного движения центра тяжести судна можно представить а
форме.
HI
■*т, (9.1)
dl
dl
где -^— линейная скорость бокового смещения относительно
грунта (абсолютная скорость);
vx— составляющая скорости судна по диаметральной
плоскости (относительная скорость);
vT—боковая составляющая скорости среды (переносная
скорость);
8— угловое отклонение диаметральной плоскости судна
от линии заданного пути.
Уравнение вращательного движения судна вокруг его центра
тяжести можно получить, суммируя моменты, действующие
вокруг вертикальной оси, проходящей через
центр тяжести.
К этим моментам относятся:
восстанавливающий момент М\,
пропорциональный углу отклонения руля р,
момент сопротивления М2,
пропорциональный угловой скорости рыскания,
Ш2 62 dt .
Моменты М\ и М2 направлены
навстречу один другому.
К действующим моментам, строго
говоря, относится также восстанавливающий
момент гидродинамического давления,
пропорциональный углу дрейфа. При этом рав-
Рис 47 нодействующая гидродинамическая сила
направлена вдоль вектора относительной
скорости судна, который в общем случае не лежит в
диаметральной плоскости, а отклонен от нее на упомянутый угол
дрейфа. Этим моментом .в дальнейшем будем пренебрегать.
В соответствии с принципом кинетостатики сумму моментов
Mi и М2 необходимо приравнять динамическому (инерционно'
му) моменту / -jjf , где/—момент .инерции судна
относительно оси вращения. Кроме того, следует учесть произвольное
возмущающее воздействие, вызываемое, например, несимметри-
ей упора гребных -винтов; это воздействие в общем случае
является некоторой функцией времени f(t).
128
Таким образом, уравнение вращательного движения судна
можно записать в виде
/Je = ciP-c>w+^> С9-2»
где £х и г2—гидродинамические коэффициенты, зависящие от
«скорости судна и других перечисленных выше
факторов.
Как следует из уравнений (9.1) и (9.2), движение судна при
автоматическом управлении определяется характером
регулирующего воздействия, т. е. видом функции &(t).
Простейшие авторулевые осуществляют регулирование (по
закону
Р(*) = -М. (9.3)
Это регулирование (пропорционально угловому отклонению
судна от 'курса; -сигнал управления снимается с гирокомпаса.
Совместное решение уравнений (9.1), (9.2) и (9.3)
показывает, что при таком регулировании судно в общем случае не
движется по заданной траектории, хотя регулированче
заданного курса и обеспечивается. Действительно, в этом случае для
углового отклонения 8 имеем уравнение:
I^ + c2^- + k1c1b = f(t). (9.4)
Если k\—.положительная величина, левая часть уравнения
(9.4) описывает динамически устойчивый переходный процесс;
при f{t)=0 с течением времени 8-> 0. Боковое смещение лри
этом постоянно возрастает и равно
t
1= — §vTdt.
о
Качество регулирования курса при упомянутом законе
регулирования будет неудовлетворительным.
Как видно ив уравнения (9.4), затухание переходного
процесса зависит только от динамических характеристик самого
судна и не поддается регулированию, поэтому возвращение
судна на курс будет происходить не оптимальным образом. Из-за
инерционности курсоуказателя и авторулевого система будет
обладать недостаточной чувствительностью к угловому
отклонению. Кроме того, при постоянном возмущающем воздействии
f(t)=f0 .судно на курсе будет удерживаться с некоторой
статической ошибкой
о —-А-
Это означает несимметричное рыскание на курсе и приводит
к дополнительному боковому сносу
1ст = k^cx J v* dt-
9 А А. Якушенков
129
Для повышения качества регулирования в современных
авторулевых предусмотрено управление не только но угловому
отклонению от курса, но также по «скорости отклонения и
временному интегралу от него, т. е. регулирование производится по
закону
Р = - (k2b + k2 § + A, J Z dt). (9.5)
Заменяя этим уравнением равенство (9.3), получим
следующее уравнение движения судна ino курсу:
Уравнение (9.6) «а порядок выше уравнения (9.4). Оно
доказывает, что настройкой авторулевого можно значительно
повысить качество регулирования. При определенных значениях
коэффициентов можно, например, обеспечить почти
апериодический характер возвращения на курс или пер и одический с малым
перерегулированием. Чувствительность системы значительно
повышается, так как скорость углового отклонения появляется
раньше, чем накопится достаточный угол для управления
авторулевым. Благодаря действию интегрирующего узла постоянное
возмущение не вызывает статического отклонения, так как
dftt)_dfo_
dt ~ dt
Однако, как следует из уравнения (9.1), судно по-прежнему
не сможет сохранить заданную траекторию движения.
Очевидно, для этого требуется дополнительное регулирование и,
соответственно, дополнительная информация о движении судна.
Можно показать Ш], что если в качестве дополнительной
регулируемой величины использовать боковое смещение / и
осуществлять регулирование по закону
t — W+k'il), (9.7)
то задача удержания судна на заданной траектории
принципиально может быть решена. При этом судно автоматически
установится своей диаметральной плоскостью под таким углом ,к
заданному направлению движения, при котором вектор
абсолютной скорости судна совместится с заданной траекторией.
Введение сигнала по боковому смещению заменяет управление по
интегралу от углового отклонения; в том и другом случае судно
не будет иметь несимметричного рыскания при постоянном
возмущающем воздействии.
Для регулирования по закону (9.7) требуется непрерывно
измерять величину бокового смещения судна с заданной
траектории.
130
Наиболее целесообразным было бы непосредственное
измерение величины U для чего необходимы средства определения
положения судна в маршрутной системе координат (вдоль и
поперек траектории). Во всех других случаях- требуется
преобразование информации о положении судна в величину бокового
смещения. В этом отношении инерциальная навигационная
система, ориентированная -в маршрутной координатной системе,
имеет определенные преимущества перед другими системами,
так как она может быть непосредственно -включена в систему
управления судном.
Прежде чем перейти к использованию инерциальных систем
для автоматического судовождения, покажем другую
возможную форму регулирующего воздействия, 1при которой не
требуется вводить сигнал по угловому отклонению, а достаточно
воспользоваться информацией о положении и скорости судна.
Допустим, что возможно непрерывно определять величину
бокового смещения и скорость его изменения, т. е. / ит^, и
пусть регулирование производится по закону
P = -(V + *2-§-), (9.8)
где k1 и k2— размерные коэффициенты усиления авторулевого
по расстоянию и скорости, каждый из которых
равен произведению коэффициентов усиления
соответствующих звеньев (например, датчик
положения — усилитель — исполнительный двигатель —
рулевой механизм).
Дальнейшие рассуждения будут проще, если перейти к
операторной форме записи уравнений (9.1), (9.2) и (9.8).
Обозначая г==Т (постоянная времени судна); ~ =г;
d 2 с2
Yt =p, получим следующую систему:
/>/ = г>я8 —tfT; (9.9)
(r^ + p)8 = rp + -i-/G>); (9.10)
$ = -{bi+k2p)l. (9.11)
Структурная схема, соответствующая этой системе,
показана на рис. 48. Как видно из структурной схемы, при
регулировании по закону (9.8) образуется замкнутая система
автоматического регулирования с двумя параллельными ветвями
обратной связи (по расстоянию и ,скорости).
Решение системы (9.1), (9.2) и (9.8) относительно & и /
при нулевых начальных условиях дает:
•9*
131
30*) =
p—f(P) + r(kl + k2p)vT •
i>2
Тръ + Р2+ rk2 vAp + rkxvA
v^f(p)-[Tp* + p)vT
Kp)= ^
V
(9.12)
TpS + pt + rkzVzP + rhVz J
В выражениях (9.2) дробные коэффициенты при f(p) и v-*
представляют собой передаточные функции системы но угловому
отклонению и боковому смещению.
_А
Сг
f(p)
-•—О—4
Тр* + р
\-*г
Pi -h
-*
Рис. 48
VT
Движение судна по координатам 8 и / можно рассматривать
как сумму (переходного и установившегося процессов. О
характере переходного процесса можно судить по знаменателям
передаточных функций, которые для обеих координат одинаковы.
Соответствующее характеристическое уравнение
Тръ + ра + rk2 ViP + rkx vK = 0 (9.13)
показывает, что для обеспечения устойчивого переходного
процесса требуется (по критерию Рауса), чтобы, во-первых, все
коэффициенты уравнения (9.13) |были положительными и,
во-вторых, обеспечивалось выполнение неравенства
i>T'
(9.14)
При выполнении этих условий корни уравнения (9.13) могуч
быть либо все отрицательными, либо один отрицательным, а два
комплексно сопряженными .с отрицательной вещественной ча~
стью. Соответственно переходный процесс по координатам 8 и t
будет либо периодическим, либо периодическим затухающим»
либо монотонным (рис. 49). Правильным выбором коэффицй*
132
ентов k\ и k2 можно обеспечить любую целесообразную форму
возвращения судна на заданный курс и на заданную
траекторию движения.
Рис. 49
Что касается установившихся процессов, то они зависят от
вида возмущающих функций f (p) и vT.
Пусть
f(t) = const =/0 и vr = const = vb.
Тогда
f(p)=ff и vT(p) = ^-
По теореме one-рационного исчисления имеем
x(f)->px(p).
t-+- /?-*0
На основании этого из уравнения (9.9) получим следующие
статические отклонения ло координатам & и /:
а vo . ; /о
СТ~~~^Г' ст — rkxc2'
Статическое отклонение по курсу соответствует отклонению
вектора vA от вектора абсолютной скорости (вдоль заданной
траектории) на угол, равный углу сноса судна под влиянием
переносной скорости Рт. Таким образом, судно как бы
автоматически выбирает нужный угол сноса, при котором не будет
бокового смещения.
Статическое отклонение по смещению не зависит от скорости
среды, а зависит лишь от произвольных возмущающих воздей-
133
ствий вокруг оси вращения судна. Для уменьшения /ст
требуется увеличивать коэффициент ku однако в тажой степени,
чтобы не нарушилось условие (9.14).
Упомянутое возмущение не вызывает статической ошибки по
курсу; следовательно, регулирование по закону (9.8)
обеспечивает такой же эффект, как интегрирующий привод современных
авторулевых. Действительно, в установившемся режиме судно
будет иметь несколько отклоненный руль, что видно из уравнения
(9.8), после подстановки /ст:
в — А_
Рст— •
ГСг
Благодаря этому рыскание на курсе будет происходить
симметрично относительно заданного курса. Это видно из уравнения
(9.10), где при р = рСт правая часть обращается в нуль.
Итак, для автоматического удержания судна на заданной
траектории с точностью до незначительного статического отклонения
достаточно производить регулирование движения судна по
величине бокового смещения 'и первой производной от нее; то и другое
может быть иолучено с помощью инерциальной навигационной
системы, ориентированной в маршрутной системе координат.
Кинематика инерциальной навигационной системы,
ориентированной в маршрутной системе координат
В большинстве навигационных задач программная
траектория представляет собой ортодромию, соединяющую две точки на
заданном маршруте. Поэтому естественно в качестве одной -из
координатных линий маршрутной системы координат выбрать
заданную дугу большого круга. Положение последней будем
определять углом т (рис. 50) между плоскостью ортодромии и
плоскостью земного экватора, или между соответствующим-и
полярными осями. Угол т—постоянная для заданного маршрута
величина.
По смысшу инерциалыного управления, боковое смещение с за.
данного маршрута должно быть достаточно мало. Это значит, что
в качестве второй координатной линии можно вы'брать
образующую цилиндра, описанного вокруг заданной ортодромии,
т. е. считать боковое смещение горизонтальным.
Третьей координатной линией для горизонтной инерциальной
системы должна служить истинная вертикаль, направление
которой в силу только что изложенного предположения параллельно
программной вертикали, т. е. вертикали проекции места объекта
•на плоскость заданной ортодромии.
Выбранным координатным линиям соответствует
прямоугольная цилиндрическая система координат.
На рис. 50 Р — место объекта (точку Р будем считать
совмещенной с центром инерции инерциальной платформы); E0Q0 —
заданная ортодромия, N0 — программная вертикаль. В точке Р
построим трехгранник Ь)С цилиндрической координатной систе-
134
мы, причем ось Е направим параллельно касательной к заданной
ортодромии в точке N; ось ?]—по образующей описанного
цилиндра, проходящей через точку N, ось С—по направлению
истинной вертикали, параллельной программной. Оси bf>
образуют правую систему координат.
Рис. 50
Положение точки Р будем олределять двумя
цилиндрическими координатами:
геоцентрическим углом о (дуга MN) между линией
пересечения плоскости ортодромии и экватора и программной
вертикалью;
горизонтальным смещением / (отрезок NP) перпендикулярно
заданной ортодромии.
Пусть точка Р перемещается ino Земле с линейиой
скоростью v. Проекции вектора v на оаи S, *q и С равны
4 = RTF
vT =
EL
dt
Найдем проекции на те же оси угловой скорости и ускорения
точки Р.
Координате а соответствует вращение точки Р вокруг
полярной оси ортодромии с угловой скоростью
Уд __ dc
R ~ dt '
133
По отношению к пространству плоскость ортодромии
вращается вокруг своей полярной оси с угловой скоростью и cos?.
Проектируя угловые скорости на оси 6, ij и С, получим
»£ = tt sin 7 cos о
0^== — ttCOS-p
' dt
шс = — и sin 7 sin о
Как следует из прямоугольного сферического треугольника
MNC,
sin 7 sin о = sin cp,
где <р—широта точки Р при /=0.
Иначе говоря, <ос=—usincp, что и следовало ожидать, так
как <*>с представляет собой вертикальную проекцию угловой
скорости земного вращения.
Очевидно, для азимутальной коррекции инерциальной
платформы, ориентируемой в маршрутной системе координат,
требуется вводить сигнал, пропорциональный ограниченной величине
sin T sino« Это означает, что маршрутная система координат
одинаково удобна для плавания в^ысоких и низких широтах.
Ускорение центра .инерции w можно получить на основании
теоремы сложения ускорений
w-
■-wr + we + wc
Переносное (центростремительное) ускорение we учитывать
не следует, так как оно входит в ускорение силы тяжести,
направленное вдоль истинной_вертикали (см. главу IV).
Кориолисово ускорение wc определяется из выражения
Wr
da
R~di ^
dl_
dt
k
<i)C
о
где проекции угловой скорости соответствуют только земному
вращению.
Следовательно, имеем
л dl •
">
■**&<
136
или
dl
wci = 2и-7т sin 7 sin о
.d<s
Wc^ = -~ ^uR-jf sin 7 sin о
«to = 2и (^- sin 7 cos о +R "37 cos T )
Относительное ускорение выражается формулой
dv
W
r-w + °>"x«>
где <o"—угловая скорость собственного движения объекта.
Следовательно,
— dv .
i
0
K4t
J
da
dt
dl
dt
k
0
0
или
dv.
d*v
w*=4t=Rlt,
Wi
'V
'' dt ~~ dP
Суммируя все ускорения, получим
w*= ° л75 + 2tt -ТГ sin 7 sin о
^rC
^
Wri = -dP~~2uR~JT sin T Sin a
>-
^c = 2w("5FsinTCOSO+ /?'5FCOST) + ^("57)2 + ^
Акселерометры идеально стабилизированной платформы
измеряют .первые две проекции, причем для -инерциального
управления используется вторая, wT
Очевидно, для нормальной работы системы необходимо
скомпенсировать в канале 1(о) составляющую ускорения 2a^rsin7Sina,
а в канале v\(l) составляющую — 2uR -^ sin 7 sin a.
137
После этого может быть .выделен полезный сишал j^,
последовательное интегрирование которого при известных начальных
условиях позволяет получить величину скорости бокового
смещения j; и само боковое смещение I, необходимые для инерциаль-
ного управления судном.
Системы инерциального управления судном
Система инерциального управления, основанная на
непосредственном измерении величины и скорости бокового смещения
судна с заданной траектории, схематически показана на рис. 51.
W—
jL
<tt
Акс
J
Rdi
if
-»-6-*-
л
/
R
(илтЬ stnd)np
d
dT
-«^ К азипут гироскопу
_t
W„
4
A kc
МНС Л 6
(2Rjj uJtnl'Stn6)np
1 +
/
dl
It
/f абторулебому
-Ki
J
■Кг
Кана/11
Рис 51
В отличие от рассматривавшихся ранее инерциальных систем
один из каналов в дайной схеме (канал /) не имеет интегральной
коррекции (движение по координате I может считаться плоским)*
138
Программная
бертиколь
О
Рис
V
52
Вычислительное устройство системы инерщиального
управления производит выработку текущих координат о и I, а также
сигналов компенсации кориолисовых ускорений и коррекции
азимутального гироскопа.
Входными данными вычислительного устройства являются —
измеренные акселерометрами ускорения, начальные значения
координат и заданная
программой плавания
величина у. При изменении
направления движения необходимо
вводить новое значение у;
взод этой величины может
быть автоматизирован, если
заранее задано изменение
маршрута. Величина
угловой скорости земного
вращения и, как и в других
инер>циальных системах,
поступает от часового
механизма.
Вычисленные значения бокового смещения / и
dl
-щ вводятся с соответствующими передаточными
тами с схему механизма управления рулем (авторулевого),
благодаря чему производится автоматическое регулирование
движения судна вдоль заданной траектории, как это было показано в
начале главы.
Рассмотрим также систему инерциального управления, в
которой не делается упрощающего предположения о том, что
движение по координате / является плоским.
Как видно из рис. 52, смещение судна с заданной траектории
может быть выражено в функции углового отклонения истинной
вертикали от программной.
Обозначая угол между вертикалями через ty получим
dt ~n dt '
можно заменить измерением
вертикалями объекта, а
Истинная
вертикаль
его скорости
коэффициен-
l^Rb
dl
Очевидно, измерение / и -rf
dt
угла между истинной и программной
также скорости изменения этого угла. Принципиально этот угол
может быть получен как разность мгновенного и программного
углового положения инерциальной платформы.
В действительности инерциальная платформа устанавливается
своей вертикальной осью не вдоль истинной вертикали, а вдоль
приборной вертикали, т. е. измеренный угол будет содержать
некоторую ошибку. Измерение угла между программной и
приборной вертикалями может производиться по схеме, изображенной
на рис. 53, т. е. путем двойного интегрирования измеренного
139
ускорения. Введение отрицательной обратной связи позволяет
существенно уменьшить ошибку приборной вертикали.
При смещении объекта с заданной траектории, т. е. при
отклонении .истинной вертикали от программной на величину ф,
акселерометр (с учетом компенсации кориолисова ускорения)
измеряет величину
^ = g* + Rd^ = (g + Rp2)^
Сигнал, соответствующий этому ускорению на входе первого
интегратора, складывается с сигналом обратной связи — g фпр-
Ч^(9+«Г)
+ {
V
1-
1
Rp*
9
Vnp
Рис. 53
Здесь фпр — отклонение приборной вертикали от программной.
Как видно из структурной схемы,
откуда
*пР = 7^2 (Яр3 Ф + £ф - g ф„Р),
(Rp2 + g)U=(Rp2 + g)*.
Величина фПр поступает ъ систему управления судном, туда
же. вводится сигнал, соответствующий величине -~^.
Регулирование производится по закону
Р = -(*,Фпр + *,^) = -(*1+*2Р)Фпр.
Заменяя в уравнениях (9.9) ,и (9.10) / на Rty. получим
следующую систему дифференциальных уравнений, описывающих аз-
торегулирование судна:
Rpty = vAb — vT;
(Tp> + p)b = r$ + -±-f(p);
р = _(^1 + /г2р)ф
rip-
При ф =фпРэта система совершенно аналогична системе
уравнений (9.9), (9.10) -и (9.11). В частности, отклонение вертикали
происходит в соответствии с решением
Ж
i£f{p)-(Tp> + P)^r
Rc
R
Tpz + p2+ rk2Vnp + rkxvK '
140
Если ^>^> то при yT=const и /(0=0 с ростом t имеем
ф -*-0, т. е. судно устойчиво сохраняет заданную траекторию.
Структурная схема инерциального управления по углу
между 'вертикалями показана на рис. 54. Нижняя часть схемы
относится к собственно инерц-иальной системе; входной величиной для
1
у
f
[ St ♦ Rp2\
+ 1
~i
f
i
[ ;
r
1 */>
Rb*
+
\Vt
Уд
Rp
PVnp
6
\кг
ft
У
—7
Tp*+p
i
\
+ +
/
P
'*t
[t
v$p I
Рис. 54
нее является ускорение wy; выходной — отклонение приборной
вертикали от программной фпР. Остальная часть схемы
относится к системе судно—авторулевой. Регулирующее воздействие р
вызывает изменение курса о, благодаря чему и происходит
регулирование по боковому смещению.
Глава X.
ИСПОЛЬЗОВАНИЕ ИНЕРЦИАЛЬНЫХ СИСТЕМ
НА МОРСКОМ ФЛОТЕ
По сравнению с аэронавигацией морское судовождение
предъявляет к инерциальным системам требование значительно
более длительного действия. Однако, как мы видели,
современные инерциалыные системы, работающие .без .введения
коррекции извне, могут быть использованы только очень
непродолжительное время, после чего их ошибки превысят погрешности
обычного счисления. Основным недостатком чисто инерциальных
систем является постоянное накапливание ошибок, причем
главную роль играет несовершенство стабилизирующих устройств —
гироскопов.
Если даже предположить, что необходимая коррекция может
быть произведена дважды в сутки, дрейф стабилизирующих
гироскопов не должен превышать тысячных долей градуса в час.
При этом точность инерциальной системы по положению в кон-
141
це каждого периода работы будет составлять несколько миль, т. е.
будет на уров>не точности астрономических обсерваций.
Инерциальная система, предназначенная для морского флота,
должна удовлетворять следующим условиям:
скорость движения объекта —до 30 миль в час (с учетом
потребностей перспективного флота);
ускорение объекта (относительно Земли) —до 0,05 g;
кориолисово ускорение, .вызываемое вращением Земли, — до
0,22-Ю-3 g:
время между коррекциями — по крайней мере 12 час;
точность системы по скорости — не хуже 0,2 узла.
Для удовлетворения этим условиям к инерциальной системе
должны быть предъявлены следующие требования:
дрейф стабилизирующего гироскопа—менее 0,003 град/час;
точность коррекции за 'вращение Земли — 0,2- 10~3 от
величины максимальной коррекции;
диапазон измерений акселерометров — до 0,05 g;
порог чувствительности акселерометрами — 0,005- 10~3, т. е.
Ю-4 от диапазона измерений;
линейность характеристики акселерометра — 0,1%' от
диапазона измерений;
дрейф нуля интеграторов — 0,005 • 10~"3#.
Точность современных элементов инерциальных систем
приблизительно на порядок ниже, чем требуется. Таким образом,
развитие инерциальной техники для морского флота должно идти в
следующих направлениях: во-первых, повышение точности
составных элементов системы до указанных выше величин,
во-вторых, сопряжение инерциалыных систем с другими средствами
судовождения, т. е. создание гибридных навигационных систем.
•Повышение точности стабилизирующих гироскопов требует
развития совершенно новых принципов. Большой интерес
представляют исследования в области так называемых
корпускулярных гироскопов, б которых используются гироскопические
свойства элементарных частиц, вращающихся в электрическом или
магнитном поле. Огромные скорости таких частиц при
практически полном отсутствии трения позволяют рассчитывать на их
дрейф не более 0,001 град/час, что вполне обеспечит требования
морского судовождения.
Что касается гибридных навигационных систем, то,
по-видимому, наиболее перопектиюым является сопряжение
инерциальной системы с радиоастрономическими средствами, в частности
использующими сигналы искусственных спутников Земли. Такие
средства принципиально обеспечивают дискретный ввод
информации о положении судна в инерциальную систему с
требующейся частотой и независимо от условий видимости.
В настоящее время вопросы навигационного использования
спутников Земли являются предметом многочисленных научных
исследований.
142
Принципы инерциальной навигации могут быть использованы
в судовождении не только для решения основной задачи —
определения места судна и автоматического управления его
движением, но и для решения некоторых частных задач. Например, на
основе инерциальной навигационной системы может быть создан
искусственный горизонт в качестве базы для астрономических
обсерваций. При этом роль стабилизирующих гироскопов могут
выдолнять устройства,
непрерывно следящие за
положением
наблюдаемого светила с помощью
фотоследящих систем или
приема радиоизлучений
светил. Таким образом,
отпадает необходимость
в высоких требованиях к
гироскопам стабилизации.
Возможно также
создание астроинерциально- Рис- 55
го лага. На рис. 55
изображена принципиальная схема такого устройства, состоящего
из поворотной платформы 7, с установленными на ней
телескопом 2 и акселерометром 5, и интелраторов 4 и 5.
Телескоп с помощью фотоэлектрической следящей системы
(фотоумножитель 6, усилитель 7, двигатель 8) непрерывно
удерживается в направлении выбранной звезды С. Вследствие того
что при движении судна направление на звезду остается
параллельным самому себе, угол поворота платформы относительно
телескопа будет мерой пройденного расстояния. Поворот
платформы осуществляется с помощью дважды проинтегрированного
сигнала акселерометра, подводимого к двигателю 9. Пересчет угла
поворота в пройденное расстояние производится в счетном
устройстве 10. Полная схема астраинерциального лага должна
включать два подобных устройства.
Из других возможных применений инерциального метода тз
навигации следует отметить инерциальный курсоуказатель,
выгодно отличающийся от гирокомпаса тем, что он нечувствителен
к возмущающим силам, действующим в любом направлении, а
том числе перпендикулярно оси собственного вращения
гироскопа.
В целом появление инерциальных систем свидетельствует о
большом прогрессе в развитии навигационной техники.
По-видимому, автономная навигация будущего будет широко
использовать инерциальные навигационные системы или .их комбинации
с другими навигационными средствами.
ЛИТЕРАТУРА
1. Булгаков Б. В. Прикладная теория гироскопов. М, Гостехиздат,
1955.
2. И ш л и н с к и й А. Ю. Об уравнениях задачи определения
местоположения движущегося объекта посредством гироскопов и измерителей
ускорения. «Прикладная математика и механика», т. XXI, вып. 6, изд. АН СССР, 1957.
3. Mac Clure. The Inertial Guidance, New York, 1960.
4. Риг лей В. и др. Инерциальная навигация. (Пер. с англ.) М,
изд-во иностранной литературы, 1958.
5. Ю щ е н к о А. П. Картография. Л.—М., изд. Главсевморпути, 1941.
6. ПопекоГ. И. и СоломатинЕ. П Навигация. (Курс
кораблевождения, т. 1). Изд. У ГС ВМФ, 1961.
7. Крылов А. Н. Качка корабля. Собрание трудов, т. XI, изд. АН
СССР, 1951.
8. Hugon P. La Navigation Polaire sous-marine. "Navigation" (Iinst. Fr.
de nav.), apr., 1959, No. 26.
9. Stivenson A. Les applications des techniques de Tinertie a la navigation
automatique. Доклад на Парижской конференции по вопросам автоматической
навигации, 1959.
10. БоД1не(р В. А. и др. К теории инерциальных демпфированных
систем с произвольным периодом, инвариантных по отношению к
маневрированию объекта. Известия АН СССР, ОТН «Энергетика и автоматика», № 3, 1959.
И. ЯкушенковА. А. К вопросу об автоматическом плавании судов по
заданной программе. Труды ЦНИИМФ, Судовождение и связь, вып. 39, Л,
изд-во «Морской транспорт», 1961.
12. Cashmore D. I., Gordon С. N. Instruments for inertial navigation.
"British Communication and Electronics", vol. 6, 1959, № 8/9, 10.
13. ЯкушенковА. А.0 влиянии неточного начального ориентирования
и дрейфа азимутального гироскопа на точность инерциальной навигационной
системы с интегральной коррекцией по скорости. Труды ЦНИИМФ,
Судовождение и связь, вып. 30. Л., из,д-во «Морской транспорт», 1960.
ОГЛАВЛЕНИЕ
Стр.
о
Введение ^
Глава I. Основные понятия инерциальной навигации А
Глава II. Некоторые сведения из теоретической механики {д
Общие замечания
Теорема об изменении количества движения системы материаль- -.
ных точек . Л
Теорема моментов количества движения .
Понятие об относительном движении. Теорема об относительном
изменении векторов 18
Ускорение точки в относительном движении 19
Некоторые сведения из прикладной теории гироскопов ... 21
Глава III. Основные принципы инерциальной навигации . . . . 23
Общие замечания
23
Влияние силы тяжести и метод исключения гравитационной
составляющей ускорения в наземных инерциальных системах . . 24
Принцип построения невозмущаемой вертикали. Теорема Шулера 27
Классификация инерциальных навигационных систем . . . 2J
Понятие о горизонтной инерциальной системе с интегральной
коррекцией по расстоянию 31
Понятие о горизонтной инерциальной системе с интегральной
коррекцией по скорости . 36
Глава IV. Кинематика инерциальных навигационных систем 39
Общие замечания 39
Кинематика горизонтной инерциальной системы, ориентированной
в географической системе «широта — долгота» ..... 41
Кинематика инерциальной системы, ориентированной в повернутой
географической системе координат 46
Кинематика горизонтной инерциальной системы с инерциальной
ориентацией навигационных осей ......... 49
Способы оптимальной азимутальной коррекции горизонтной
инерциальной системы 52
Глава V. Составные элементы инерциальных навигационных систем 54
Двухстепенной интегрирующий гироскоп и его применение для
геометрической стабилизации инерциальных систем .... 54
Устройство и принцип действия стабилизирующих приводов
инерциальной системы 63
Акселерометры, применяющиеся в инерциальных навигационных
системах . . 74
Ю А, А. Якушенков
145
Стр.
Глава VI. Основы устройства горизонтных инерциальных систем 81
Горизонтная инерциальная система с нормально географической
ориентацией навигационных осей (СИНС) 81
Другие горизонтные инерциальные системы ... .94
Глава VII. Погрешности инерциальных навигационных систем 98
Общие замечания 98
Влияние дрейфа позиционных гироскопов 98
Погрешности, вызванные ошибками акселерометров Ю2
Погрешности, вызванные ошибками интеграторов 105
Влияние ошибок начального ориентирования 107
Влияние дрейфа азимутального гироскопа 112
Влияние несферичности Земли 114
Глава VIII. Методы гибридной навигации 118
Глава IX. Основы инерциального управления 126
Основы автоматического судовождения 126
Кинематика инерциальной навигационной системы, ориентированной
в маршрутной системе координат 134
Системы инерциального управления судном 138
Глава X. Использование инерциальных систем на морском флоте . 141
Литература . '. 144
Автор АНДРЕЯ АНДРЕЕВИЧ ЯКУШЕНКОВ
Редактор Л. П. Ющенко
Редактор издательства О. И. Мешков
Обложка художника В. Я. Белякова
Технический редактор Е. А. Тихонова
Корректор В. Б. Этингова
Т—-10497. Сдано в производство 6/III-1963 г.
Подписано к печати 14/VIII-1963 г. Бумага
60x907i6—4,63 бум. л., 9,25 печ. л.
8,38 уч.-изд. л. Тираж 3000 экз.
Изд. № Н—2715. Цена 59 коп. Заказ № 200.
Тип. «Моряк» изд-ва «Морской транспорт»,
г. Одесса, ул. Ленина, 26.
Издательство „Морской транспорт4"
готовит к печати книги
I Родионов А. И. Методы и технические сред-
t ства автоматизации судовождения. I
i *
? Монография рассматривает вопросы рас- i
f хождения судов и методы автоматизации ре- г
? шения ряда задач навигации. В ней описыва- i
I ются -некоторые перспективные технические 1
$ средства, с помощью которых может решаться }
* проблема автоматизации морского судовожде- ?
$ ния. *
4 ?
*
t
Сазонов А. Е. Филиппов Ю. М.
Математические основы автоматизации судовождения.
Ф
Монография обобщает результаты много-
i летней работы авторов в области алгоритмиза-
} 1ции задач судовождения. В ней изложены ма-
J тематические основы обработки исходной ин-
I формации для определения места и управле-
} ния плаванием судна.
\
t
\ , i
59 коп.