




































































































































































































































































































































































































































Автор: Комков В.А. Райкунов Г.Г. Мельников В.М. Харлов Б.Н.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) энергетика авиация космонавтика космическая энергетика
ISBN: 978-5-9221-1129-4
Год: 2009




Г. Г. Райкунов, В. А. Комков,
В. М. Мельников, Б. Н. Харлов
ЦЕНТРОБЕЖНЫЕ
БЕСКАРКАСНЫЕ
КРУПНОГАБАРИТНЫЕ
КОСМИЧЕСКИЕ
КОНСТРУКЦИИ
УДК 629.788.523.43
ББК 39.67
Ц38
Авторский коллектив:
Райкунов Г.Г., Комков В.А., Мельников В.М., Харлов Б.Н.
Центробежные бескаркасные крупногабаритные космические кон-
струкции. - М : ФИЗМАТЛИТ, 2009. - 448 с. - ISBN 978-5-9221 1129-4.
В книге представлены общие проектно-конструкторские концепции созда-
ния бескаркасных формируемых центробежными силами космических кон-
струкций для широкого круга перспективных прикладных задач, таких как
создание солнечных батарей для малых и средних космических аппаратов
и крупномасштабных космических солнечных электростанций для трансляции
СВЧ-энергии на Землю для решения проблемы энергетического кризиса и
стабилизации погоды; отражателей солнечного света с орбиты для освещения
городов Заполярья; солнечных парусов для межпланетных перелетов; тросовых
рамочных СНЧ-антенн для исследования ионосферы; технологических экранов
и проч. Рассмотрены вопросы динамики раскрытия конструкций из уложенного
состояния с компенсацией кинетического момента, динамики их переориента
ции в пространстве, длительной прочности материалов при многофакторном
воздействии отражающих характеристик покрытий и технологии изготовления
конструкций. Представлены этапы подготовки и проведения наземных и кос-
мических экспериментов и их результаты. Даются примеры конструктивных
решений агрегатов раскрытия для космических аппаратов различной размер-
ности и назначения.
Книга предназначена студентам и преподавателям вузов, а также специали-
стам по ракетно-космической технике, занимающимся вопросами космической
энергетики.
Рецензенты:
член-корреспондент РАН, декан аэрокосмического факультета МАИ.
профессор О. М. Алифанов;
доктор технических наук, Главный ученый секретарь Федерального
космического агентства, профессор А. Г. Милованов
ISBN 978-5-9221-1129-4
© ФИЗМАТЛИТ, 2009
© Коллектив авторов, 2009
ОГЛАВЛЕНИЕ
Принятые сокращения..................................... 8
Предисловие.............................................. 11
Введение................................................. 14
I. Проектирование формируемых центробежными
силами крупногабаритных космических конструкций
Глава 1. Актуальность, цели и задачи разработки........ 21
1.1. Энергетический кризис и космонавтика.............. 21
1.2. Актуальные прикладные задачи космической техники .... 28
1.3. Бескаркасные формируемые центробежными силами кон-
струкции ............................................. 34
1.4. Цели и задачи разработки.......................... 36
Глава 2. Обзор теоретических, проектных и эксперимен-
тальных работ по крупногабаритным космическим кон-
струкциям ........................................... 43
2.1. Теоретические работы.............................. 43
2.2. Проектно-конструкторские разработки............... 52
2.3. Работы по подготовке и проведению космических и назем-
ных экспериментов с крупногабаритными конструкциями. . . 60
2.4. Заключение по разделу............................. 71
4
Оглавление
Глава 3 Динамика разворачивания из уложенного состоя-
ния. .... .................................... 73
3.1 Принципы укладки и разворачивания из уложенного состо-
яния. Требования к укладкам, вращающему моменту и ско-
рости роспуска.......................................... 73
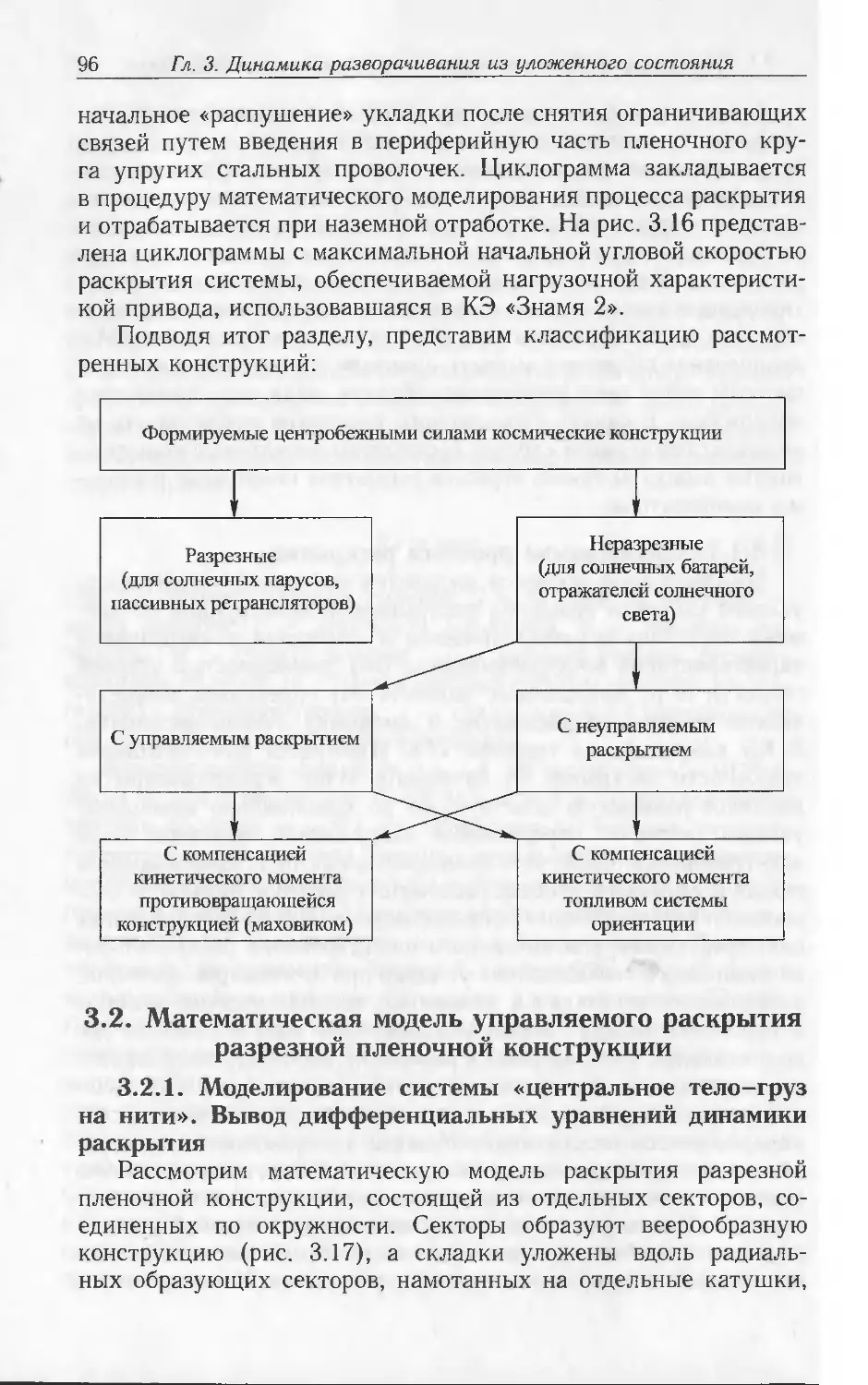
3.2. Математическая модель управляемого раскрытия разрезной
пленочной конструкции. ...................... 96
3.3. Математическая модель неуправляемого раскрытия нераз-
резной пленочной конструкции...........................114
3.4. Математическое моделирование раскрытия тросовых систем 131
3.5. Математическое моделирование двухэтапного роспуска
неразрезного полотнища................................ 141
3 6. Моделирование нагрузок на электроприводы при наземной
отработке............................................ 143
3.7. Заключение по разделу ............................ 145
Глава 4. Переориентация в пространстве формируемых
центробежными силами конструкций ..................... 148
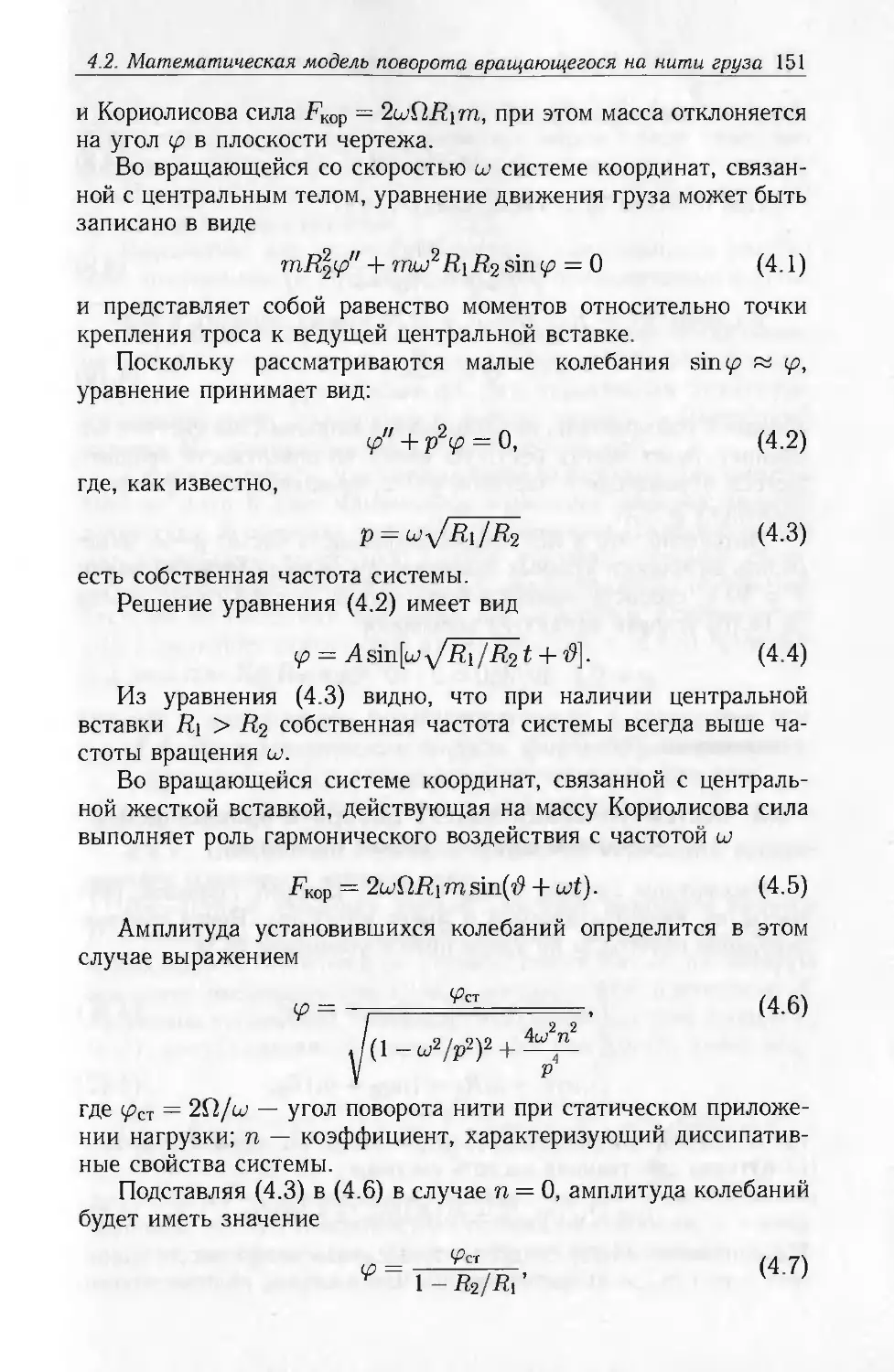
4 1. Общие положения 148
4.2. Математическая модель поворота вращающегося на нити
груза. .............................................. 150
4.3. Математическая модель поворота вращающейся весомой ни-
ти с грузом на конце................................... 152
4.4. Математическая модель формообразования вращающегося
сплошного полотнища при его переориентации в простран-
стве ............................................... 153
4.5. Заключение по разделу...... 168
Глава 5. Проектно-конструкторская проработка крупнога-
баритных космических конструкций...................... 169
5.1. Проектная оценка эффективности формируемых центробеж-
ными силами пленочных аморфно-кремниевых солнечных
батарей для КА различной размерности................. . 169
5.2. Сравнительный анализ различных конструктивных вариан-
тов для Глобальной системы космической связи............179
5.3. Проект солнечного парусного корабля.............. 184
5.4. Проект каркасного отражателя . . ........... 186
5.5. Проект отражателя для эксперимента «Знамя 3»...... 191
Оглавление
5
5.6. Проект отражателя для системы освещения городов Заполя-
рья .............................................. 192
5 7. Проект рамочной тросовой антенны D=300 м 195
5.8. Особенности проектирования и конструирования конструк-
ций для различных целевых задач. Общие проблемные во-
просы .............................................. 195
5.9. Проектные концепции космических солнечных электростан-
ций ............................................. .... 206
Приложение 5.1. Оценочные выражения напряженного со-
стояния вращающейся мембраны . ............. 212
Приложение 5.2. Возможность создания сектора с двухос-
ным напряженным состоянием поверхности..............213
II. Конструкции, материалы и технология
изготовления пленочных отражателей, экранов
и солнечных батарей.
Конструкции агрегатов раскрытия для различных
задач
Глава 6. Конструкции, материалы и технология изготовле-
ния пленочных отражателей. Обеспечение прочностных
и отражающих характеристик ...........................217
6.1. Условия эксплуатации пленочных конструкций.........217
6 2. Пленочные материалы, их характеристики...........220
6.3. Экспериментальное определение коэффициента зеркального
отражения металлизированной полимерной пленки при двух-
осном плосконапряженном состоянии......................223
6.4. Экспериментальные и теоретические исследования ползуче-
сти и длительной прочности полиимидных пленок..........229
6.5. Радиационная стойкость пленочных материалов 234
6.6. Конструкции пленочных полотнищ.................... 236
6.7. Технология изготовления и укладки..................242
6.8. Выбор прочностных характеристик, точность изготовления
поверхности ....................................... 247
6.9. Заключение по разделу..............................248
Глава 7. Разработка формируемых центробежными силами
солнечных батарей.................................... 250
7.1. Ожидаемые результаты и их применение...............250
6
Оглавление
7.2. Основные особенности разработки формируемых центробеж-
ными силами конструкций для пленочных солнечных бата-
рей КА................................................ 251
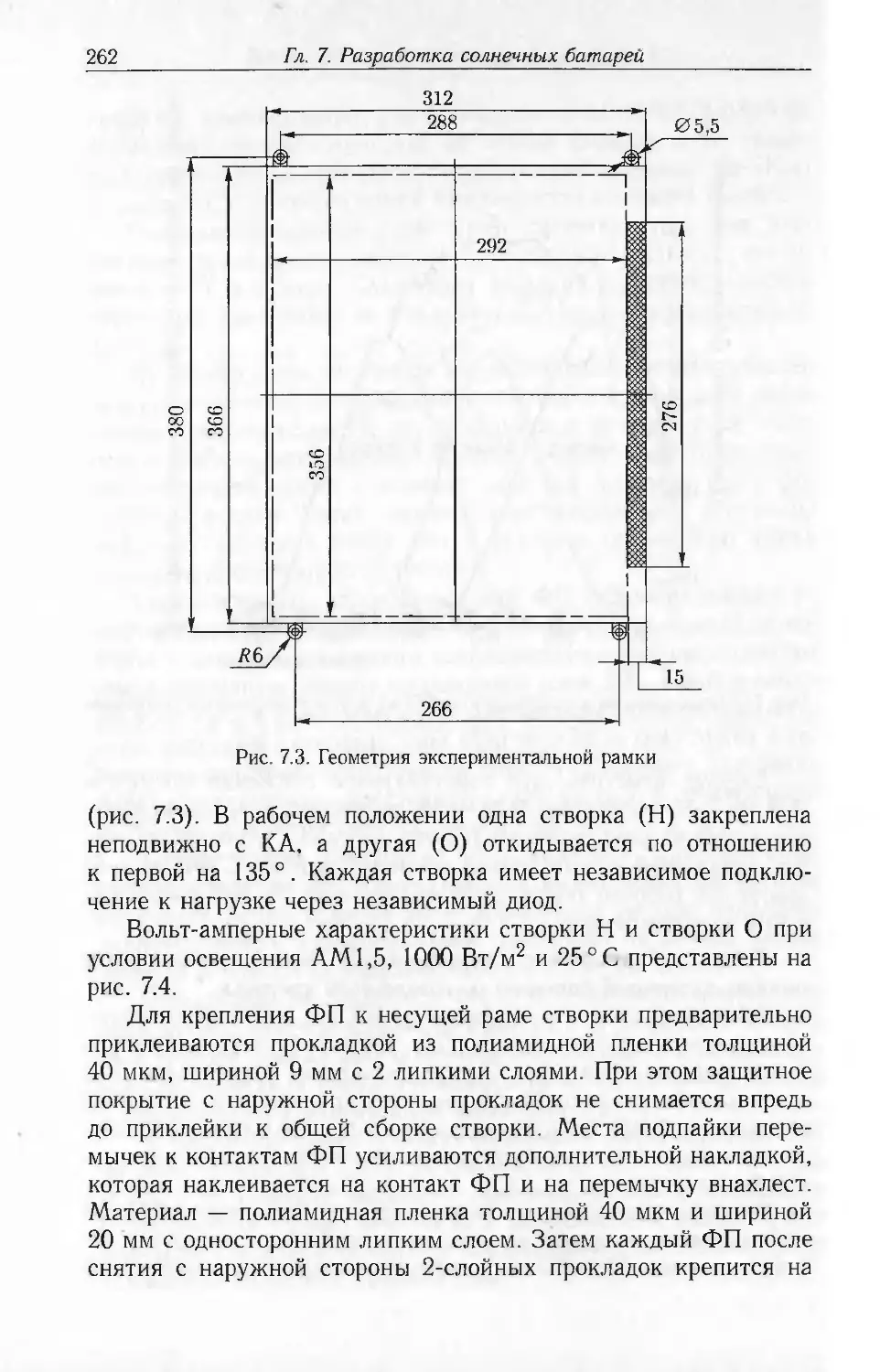
7.3. Конструктивные решения СБ, оценка прочности . . 257
7.4. Конструкция и технология создания СБ . . ..... 259
Глава 8. Конструкции агрегатов раскрытия для различных
задач. Комплексный анализ проблемы. . . ..... 272
8.1. Комплексный анализ проблемы создания агрегатов раскры-
тия для различных прикладных задач.....................272
8.2. Однокатушечный агрегат неуправляемого раскрытия сплош-
ного полотна для малых и средних КА ...................280
8.3. Многокатушечный агрегат раскрытия отражателя для сол-
нечных парусов........................................ 284
8.4. Агрегат раскрытия полотна, состоящего из секторов, намо-
танных на один барабан для солнечных батарей и техноло-
гических экранов на малых и средних КА................ 289
8.5. Агрегат развертывания полотна, состоящего из секторов, на-
мотанных на катушки для крупномасштабных отражателей
и солнечных батарей................................. . . 293
8.6. Агрегат раскрытия тросовой системы................300
III. Наземная и орбитальная экспериментальная
отработка
Глава 9. Наземные модельные экспериментальные иссле-
дования тросовых и пленочных конструкций............ 305
9.1. Экспериментальные исследования тросовых систем.... 305
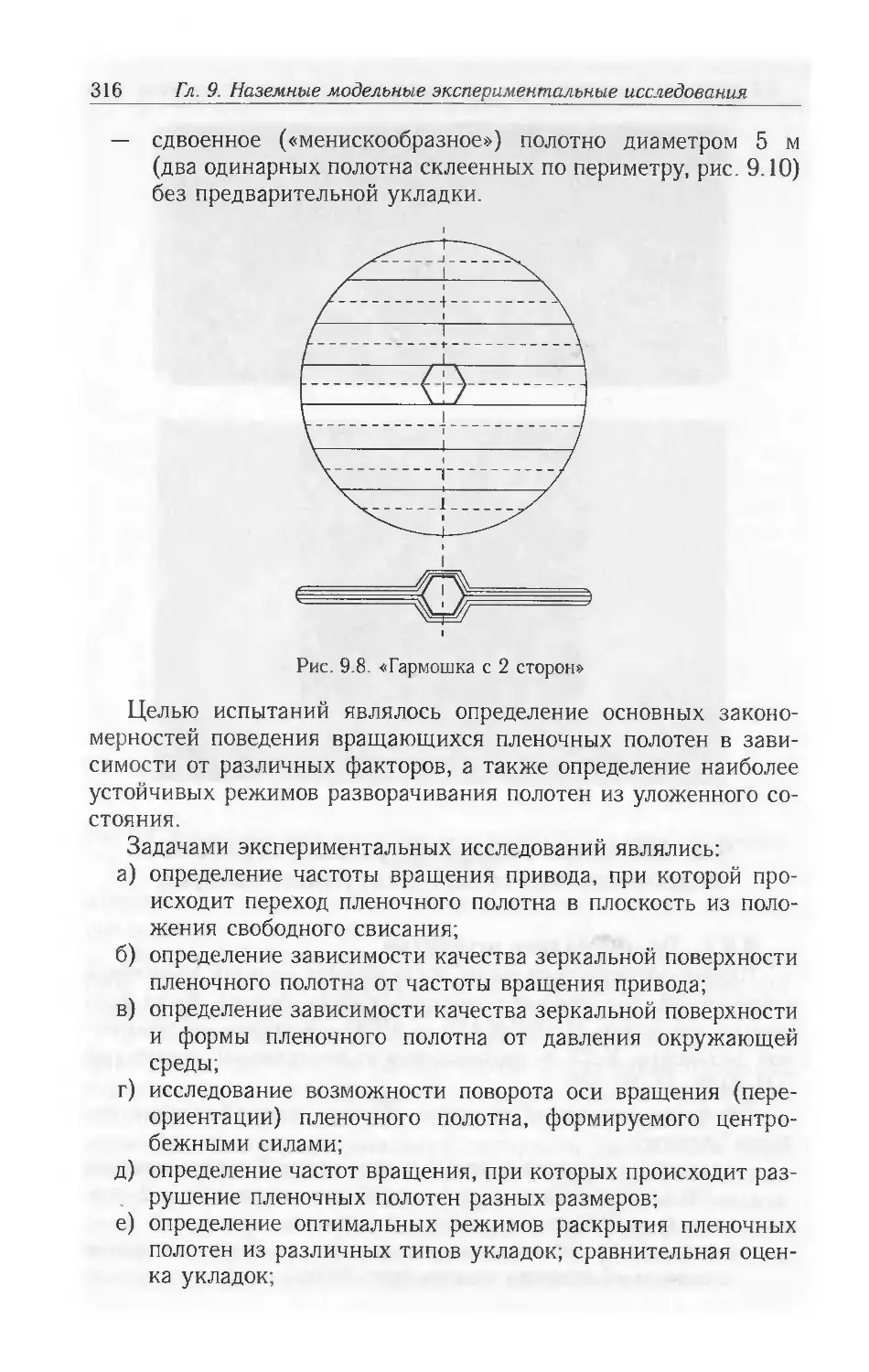
9.2. Наземная экспериментальная отработка пленочных полот-
нищ в вакуумных камерах ......... ........... 315
9.3. Разработка и испытания наземного прототипа агрегата рас-
крытия модели СБ ................................... 332
9.4. Заключение по разделу.......................... 339
Глава 10. Наземная и орбитальная экспериментальная от-
работка солнечных батарей............................341
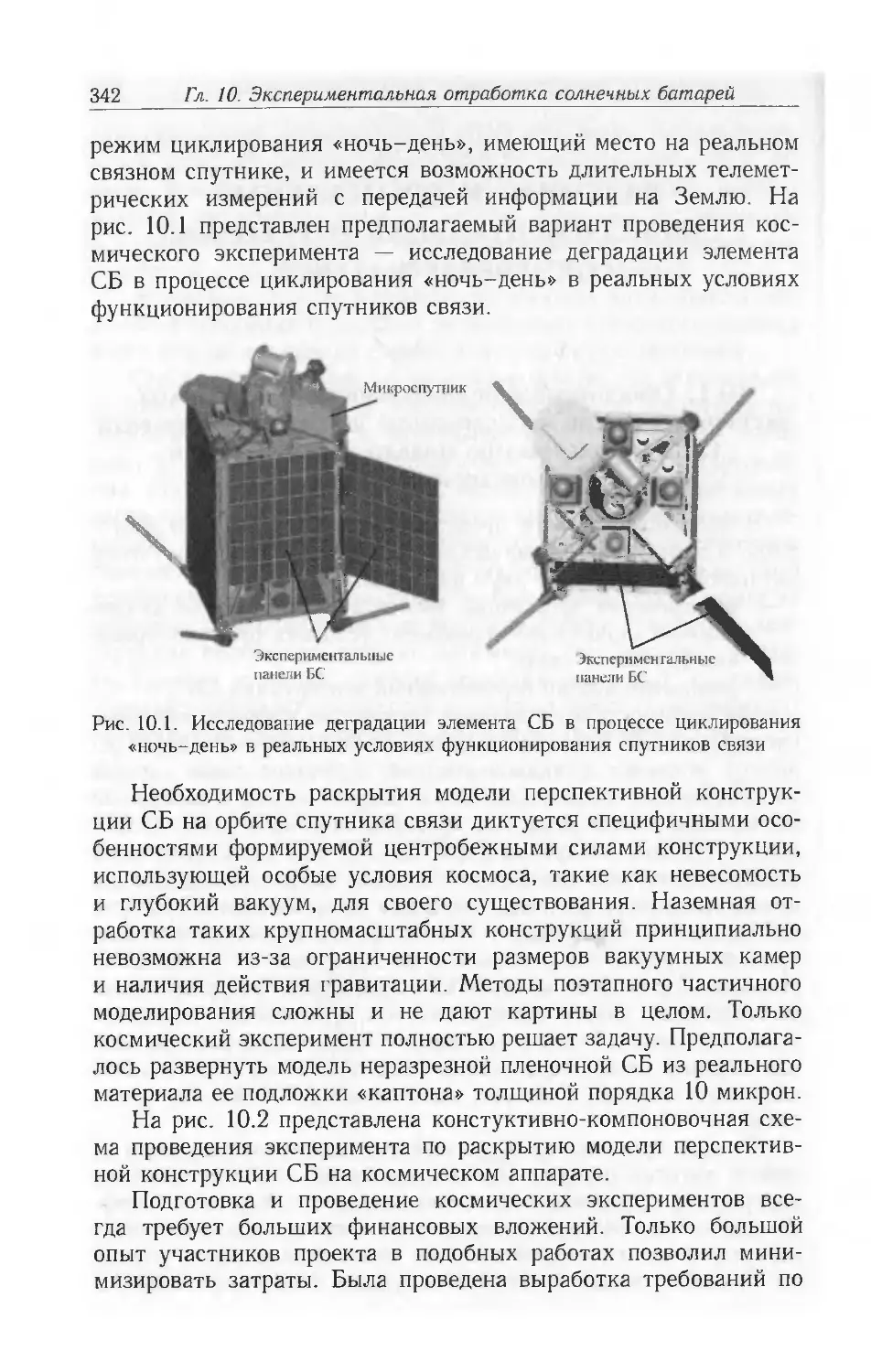
10.1. Обоснование необходимости космических экспериментов по
исследованию деградации элемента СБ и по раскрытию мо-
дели перспективной конструкции СБ..................... 341
Оглавление
7
10.2. Испытания на деградацию в космосе образцов солнечных
батарей ...................................................343
10.3. Наземная отработка и адаптация к микроспутнику модели
солнечной батареи и агрегата ее раскрытия..................345
Глава 11. Подготовка, проведение и результаты косми-
ческого эксперимента по развертыванию отражателя
D=20 м на ТГК «Прогресс» (эксперимент «Знамя 2») 357
11.1. Цели и задачи космического эксперимента «Знамя 2» . 357
11.2. Концепции разработки научной аппаратуры и организации
эксперимента. 357
11.3. Конструкция отражателя............................. 358
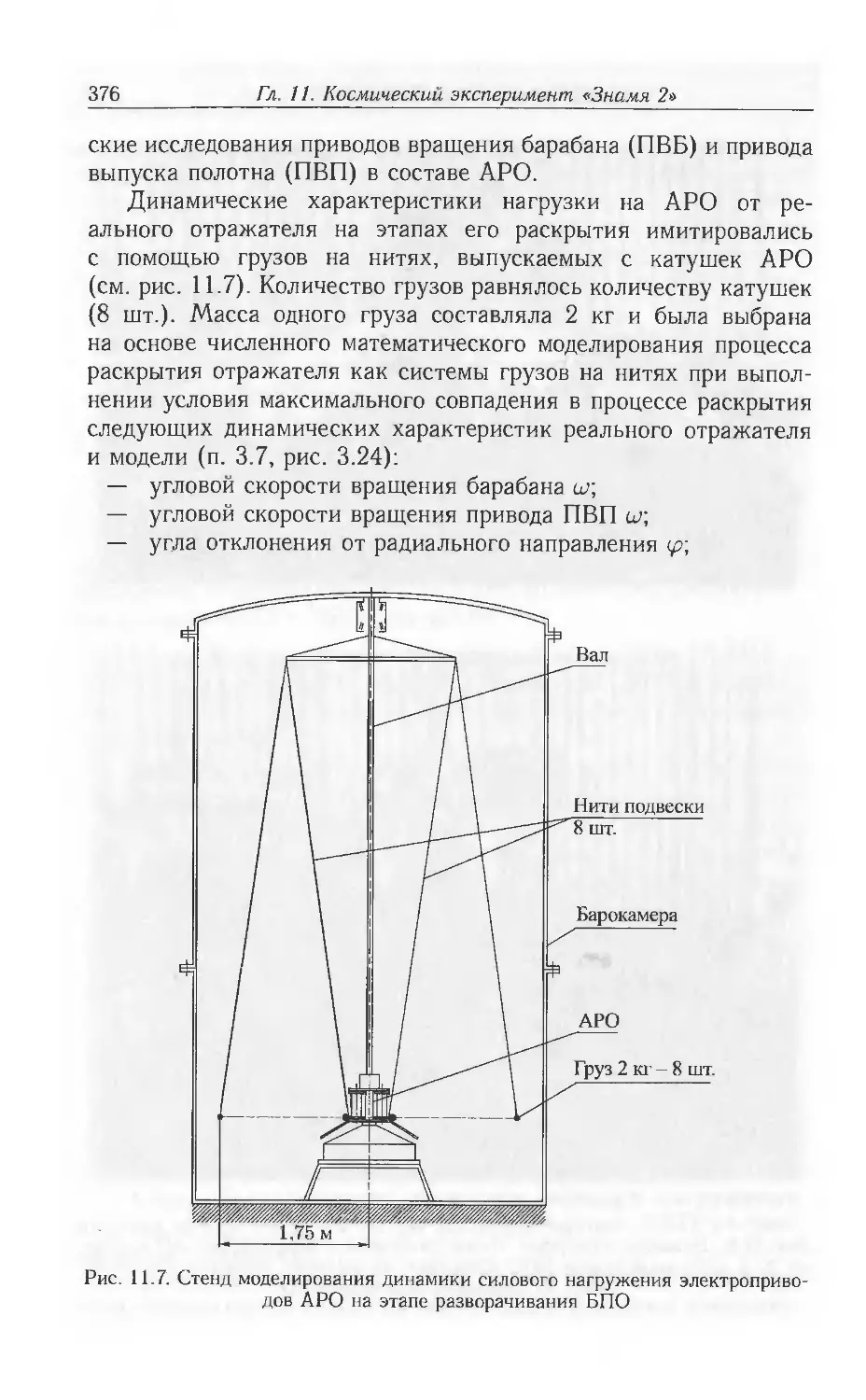
11.4. Конструкция агрегата раскрытия отражателя (АРО) .... 362
11.5. Средства управления АРО (СУ АРО) 369
11.6. Наземная отработка АРО..............................369
11.7. Отработка математического обеспечения научной аппарату-
ры «Знамя 2»...............................................379
11.8. Температурный режим БПО......... .... 382
11.9. Баллистическое обеспечение КЭ «Знамя 2».............385
11.10. Программа и методика проведения эксперимента «Знамя 2» 394
11.11. Результаты анализа телевизионной и телеметрической ин-
формации, визуальных и радиолокационных наземных на-
блюдений ...................................... 406
11.12. Сравнение теории и эксперимента..................417
11.13. Выводы и рекомендации............................. 424
Заключение.............................................. 426
Литература................................................428
Принятые сокращения
AMO — стандартный спектр солнечного излучения;
АРО — агрегат раскрытия отражателя;
АРСБ — агрегат раскрытия солнечной батареи;
БКС — бортовая кабельная сеть;
БСКУ — бортовая система комплекса управления;
БУК — барабан установки катушек;
БЦВМ — бортовая цифровая вычислительная машина;
БЦВК — бортовой цифровой вычислительный комплекс;
ГВт - 109 Вт;
ГО — грузовой отсек;
ГОГУ — главная оперативная группа управления;
ГС — гиростабилизаторы;
ДЭЗ — дистанционное зондирование Земли;
ДУС — датчик угловых скоростей;
ДКБА — Долгопрудненское конструкторское бюро автоматики;
ДМВ — московское время;
ДО — двигатель ориентации;
ДОС — долговременная орбитальная станция;
ДТА — динамическая тросовая антенна;
ЗУНКУ — запоминающее устройство наземного комплекса
управления;
ИЗМИРАН — Институт земного магнетизма и распространения
радиоволн Российской академии наук;
ИРЭРАН — Институт радиоэлектроники Российской академии
наук;
ИО — исполнительные органы;
ИСК — инерциальная система координат;
К — кинетический момент;
КДИ — конструкторско-доводочные испытания;
КЗО — коэффициент зеркального отражения;
КО — космический отражатель;
КЭ — космический эксперимент;
КИС — контрольно-испытательная станция;
КС — комплексный стенд;
КРЛ — контрольная радиолиния;
КРТ-10 — космический радиотелескоп диаметром 10 м;
Принятые сокращения
9
ЛОИ — лабораторно-отработочные испытания;
ЛПР-1 — лазерный дальномер;
М — момент силы;
Мд — момент движущий;
Мс — момент сопротивления;
МТКС — многоразовая транспортная космическая система;
МНТЦ — Международный научно-технический центр;
НА — научная аппаратура;
НКУ — наземный комплекс управления;
НИИ — наземный измерительный пункт;
НИИЯФ — Научно-исследовательский институт ядерной фи-
зики;
НКО — наземный комплекс отработки;
НПОИТ — Научно-производственное объединение измеритель-
ной техники;
ОКД — отсек компонентов дозаправки;
ОС — орбитальная станция;
ОСК — орбитальная система координат;
ПВБ — привод вращения барабана;
ПВП — привод выпуска полотна;
ПК — привод качания;
ПЛ — полная Луна;
ПМ — полиимидная пленка;
ПЭТФ — полиэтилентерефталатная полимерная пленка;
ПО — программное обеспечение;
ПП — полимерные пленки;
ППО — плоский пленочные отражатель;
ПСИ — приемо-сдаточные испытания;
ПЧК — преобразователь код-частота;
РАН — Российская академия наук;
СБ — солнечная батарея;
СКО — система космического освещения;
СУД — система управления движением;
ССВП — система стыковки с внутренним переходом;
ССК — связанная система координат;
с/с — спутник связи;
СУ — система управления;
СУАРО — система управления агрегатом раскрытия отражателя;
СР — спутник-ретранслятор;
СтА — стыковочный агрегат;
СЭП — система электропитания;
СЭС — система электроснабжения;
СПЭ — система преобразования электроэнергии;
10 Принятые сокращения
СУБ К — система управления бортовым комплексом;
СУБА — система управления бортового питания;
ТашКБМ — Конструкторское бюро машиностроения, г. Ташкент;
Т° — температура;
ТГК — транспортно-грузовой корабль;
ТК — телекамера;
ТМ — телеметрия;
ТММ — теория механизмов и машин;
УФ — ультрафиолетовое излучение;
ФЭУ — фотоэлектронный умножитель;
ФЭП — фотоэлектронный преобразователь;
ФП — фотопреобразователь;
ЦУП — Центр управления полетом;
ЦП К — Центр подготовки космонавтов;
ЭМИ — электромагнитное излучение;
ЭВТИ — экранно-вакуумная тепловая изоляция;
ШИМ — широтно-импульсный модулятор.
Предисловие
В последние годы с все возрастающей остротой во всем мире
и в России встают проблемы энергетического и экологического
кризисов, а также проблема управления погодой. Для решения
этих проблем предлагается использование природных, альтерна-
тивных традиционным, источников энергии, таких как: энергия
Солнца, ветра, геотермальных вод, приливов, а также исполь-
зование энергосберегающих технологий. Широко обсуждаемые
водородные технологии базируются на получении водорода элек-
тролизом и требуют низковольтных сильноточных источников
электроэнергии. Ведущие страны мира, такие как США, Япония,
Канада, страны Скандинавии, Западной Европы и Азии в насто-
ящее время в значительной мере (до 30%) возмещают недостаток
энергии за счет использования альтернативных источников, сре-
ди которых на первом месте стоит энергия Солнца. Лауреат Но-
белевской премии по физике академик Ж И. Алферов считает,
что «ставка на солнечную энергетику должна рассматриваться
как беспроигрышный, но в долговременной перспективе и как
безальтернативный выбор для человечества».
С начала космической эры рассматриваются вопросы созда-
ния космических солнечных электростанций (КСЭС) и транс-
ляции электроэнергии на Землю, в том числе переход большей
части энергопотребления человечества на КСЭС, решающий од-
новременно вопрос стабилизации погоды.
Крупномасштабность КСЭС в значительной мере осложняет
их создание и требует поиска нетрадиционных подходов, кото-
рые, в свою очередь, могут быть использованы для решения ши-
рокого круга других перспективных задач космической техники.
Авторы предлагаемой книги знакомят читателя с таким
нетрадиционным направлением создания крупногабаритных кос-
мических конструкций, как центробежные бескаркасные кон-
струкции. В авиации создание вертолетов было начато практиче-
ски одновременно с началом создания крылатых аппаратов. Эф-
фективность вертолетостроения бесспорна В космической тех-
нике создание вращающихся конструкций только начинается и,
как в вертолетостроении, может в значительной мере удешевить
и повысить эффективность решения многих задач.
12
Предис овие
В методическом аспекте книга разделена на три части: про-
ектирование, конструкция и экспериментальная отработка фор-
мируемых центробежными силами конструкций.
В первой части книги приводится аналитический обзор ли-
тературы по математическим методам, аналогичным проектным
проработкам и космическим экспериментам. Подробно обсужда-
ются функционально-технологические аспекты создания новых
конструкций. На наиболее наглядных и оптимальных по затра-
там машинного времени математических моделях проводится ре-
шение задачи раскрытия конструкции из уложенного состояния
с компенсацией кинетического момента и задачи переориентации
вращающейся конструкции в пространстве. Приводятся примеры
проектных проработок, в том числе сравнительный анализ исто-
рически создававшихся проектов КСЭС.
Во второй части книги представлены конструктивно-техно-
логические аспекты создания указанных конструкций. Пока-
заны возможности использования пленочных материалов при
длительном воздействии широкого спектра факторов окружаю-
щей среды. Обсуждаются технологические особенности укладки
конструкций в транспортном состоянии на носителе. На базе
комплексного анализа особенностей прикладных задач и оп-
тимального использования функционально-технологических воз-
можностей проводится конструкторская проработка основных
конструктивных решений агрегатов раскрытия для различных
прикладных задач, в том числе оригинальной конструкции агре-
гата раскрытия для КСЭС неограниченной размерности.
В третьей части книги описываются этапы наземной отра-
ботки тросовых и пленочных конструкций, а также уникальный
в космической технике эксперимент по раскрытию на космиче-
ском корабле «Прогресс» рядом с орбитальной станцией «Мир»
модели солнечного паруса диаметром 20 м (эксперимент «Зна-
мя 2»),
Книга обобщает опыт разработки формируемых центробеж-
ными силами космических конструкций за последние 25 лет.
Авторы книги Г. Г. Райкунов, В. А. Комков и В. М. Мельников —
доктора технических наук, имеют большой опыт педагогической
деятельности, являются профессорами МАИ. Этим определяется
высокий научный и методический уровень изложения материала
книги. Четвертый автор, Б. Н. Харлов, работает Главным кон-
структором одного из направлений Завода экспериментального
машиностроения при РКК «Энергия», прошел большую школу
конструкторской и производственной деятельности.
Предисловие
13
Материалы книги основываются на большом количестве эс-
кизных проектов и научно-технических отчетов, участниками
которых были авторы, разрабатывавшихся в основном в РКК
«Энергия» им. С. П. Королева, а также в других организациях.
Подготовке книги предшествовал выход в свет более 100 публи-
каций и 2 монографий авторов по данному направлению.
Книга предназначена студентам и преподавателям вузов,
а также специалистам по ракетно-космической технике, занима-
ющимся вопросами космической энергетики.
Книга несомненно вносит значительный вклад в научную
и учебно-методическую литературу по космической технике.
Представленные основы проектирования, конструирования и от-
работки формируемых центробежными силами конструкций бу-
дут способствовать широкому внедрению в космическую технику
этого перспективного направления для эффективного решения
широкого круга новых актуальных задач.
Академик РАН А. С. Коротеев
Введение
Исчерпание в ближайшем будущем таких традиционных ис-
точников энергии, как нефть и газ, постоянный рост затрат на
их разведку, добычу и транспортировку, загрязнение окружаю-
щей среды, а также проблема парникового эффекта, связанная
с использованием традиционных источников энергии, уже сейчас
ставят вопрос о резком ограничении их потребления и перехо-
де к альтернативным источникам энергии. Решение проблемы
энергетического кризиса космическими средствами устраняет од-
новременно техногенные воздействия на экологию окружающей
среды как причину дестабилизации погоды. Основоположник
космонавтики К. Э. Циолковский более 100 лет назад начал
развитие космонавтики для решения именно проблем энергети-
ческого и экологического кризисов и указал путь решения —
овладение солнечной энергией. Обеспечение разумного времени,
требуемого на создание крупномасштабных космических энерге-
тических систем, их низкой стоимости и высокой эффективности
требует использования новейших научно-технических достиже-
ний, разработки новых направлений и широкой международной
кооперации в связи с глобальностью проблемы в целом. С тра-
диционными подходами, выработанными в прошлом веке, нельзя
шагнуть в третье тысячелетие. Авторы настоящей книги ставят
перед собой задачу показать новые пути решения проблемы.
Поисковые работы по обоснованию наиболее целесообразных
областей применения космических крупногабаритных конструк-
ций и определению их конструктивного облика были начаты
в СССР в начале 80-х годов прошлого века в рамках государ-
ственных научно-исследовательских тем. Был проведен сравни-
тельный анализ по массогабаритным характеристикам, стоимо-
сти разработки и изготовления, возможностям укладки в транс-
портное состояние и эффективности целевого использования сле-
дующих конструкций: различного вида каркасных, бескаркасных
формируемых центробежными силами, надувных и формируемых
электростатическими силами конструкций. По комплексу опре-
деляющих проектных параметров и возможностям приложений
наиболее перспективными были признаны бескаркасные форми-
руемые центробежными силами конструкции, отличающиеся от
Введение
15
каркасных аналогов рядом важных преимуществ: низкая стои-
мость и масса из-за отсутствия каркаса, возможность укладки
в малый объем при транспортировке и автоматическое развер-
тывание на орбите при малых энергозатратах, приемлемая точ-
ность поверхности, возможность переориентации на гироскопи-
ческом принципе без затрат рабочего тела, возможность эффек-
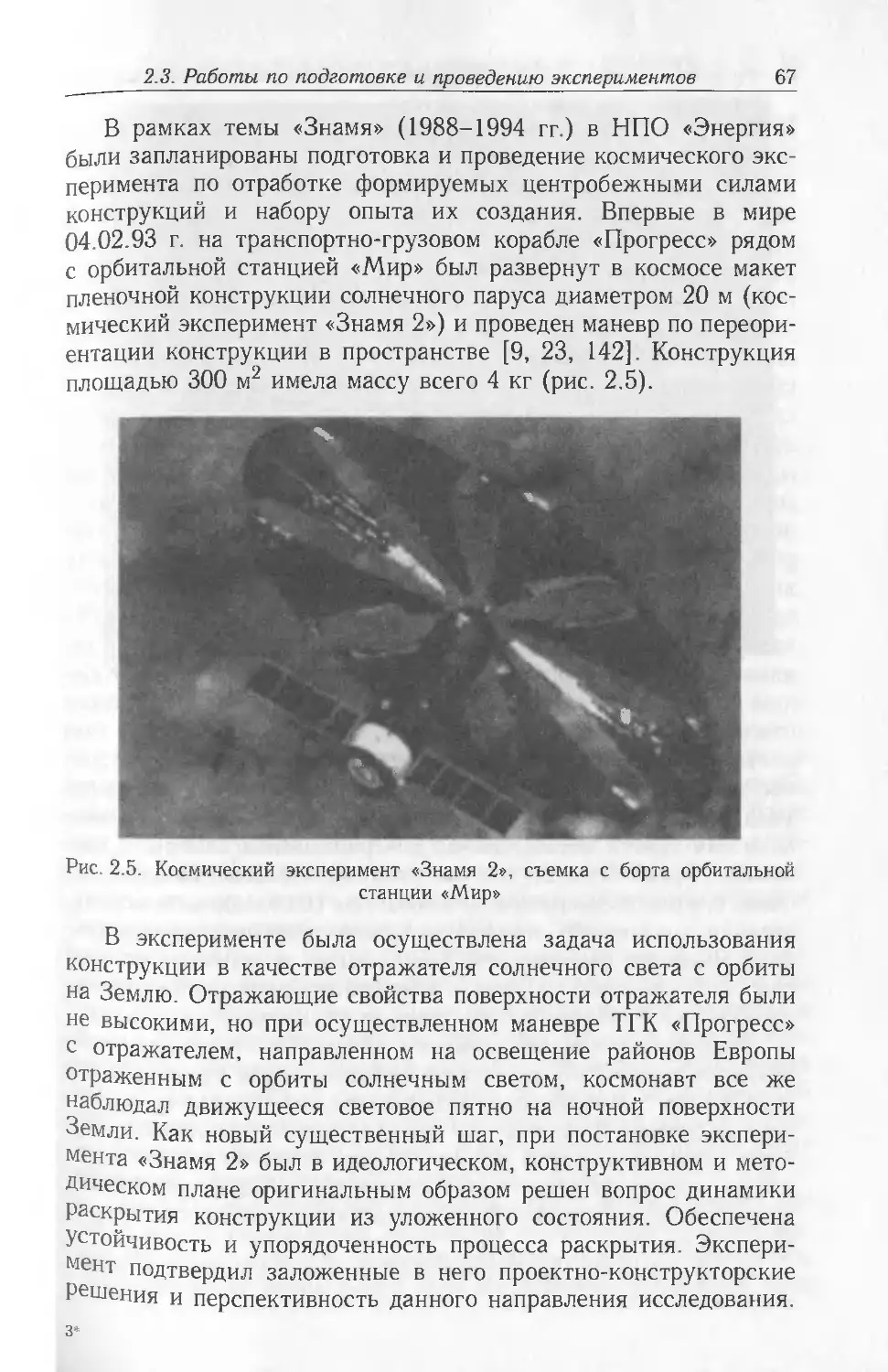
тивной наземной отработки и прочее. В рамках темы «Знамя»
(1988-1994 гг.) были запланированы подготовка и проведение
космического эксперимента для подтверждения расчетных ме-
тодик и конструктивных принципов, закладываемых в проекты
перспективных систем, а также для отработки формируемых
центробежными силами конструкций и набору опыта в их со-
здании. Впервые в мире 04.02.93 г на транспортно-грузовом
корабле «Прогресс» рядом с орбитальной станцией «Мир» был
развернут в космосе макет пленочной конструкции солнечного
паруса диаметром 20 м (космический эксперимент «Знамя 2»)
и проведен маневр по переориентации конструкции в простран-
стве. В эксперименте была осуществлена задача использования
конструкции в качестве отражателя солнечного света с орбиты
на Землю. Средства массовой информации всего мира переда-
ли транслируемое с орбитальной станции «Мир» телевизионное
изображение пленочного отражателя, катящегося по подстилаю-
щей облачной поверхности над океаном, и сообщили об успеш-
ном проведении эксперимента «Знамя 2» как об открытии нового
направления в космической технике. Эксперимент подтвердил за-
ложенные в него проектно-конструкторские решения и перспек-
тивность данного направления, продемонстрировав техническую
реальность проектов крупномасштабных систем в приложении
к широкому кругу актуальных прикладных задач:
— высокоэффективных крупногабаритных солнечных батарей
нового поколения для малых и средних спутников, Мар-
сианской миссии и освоения Луны, а также для космиче-
ских солнечных электростанций, транслирующих энергию
на Землю в СВЧ-диапазоне в проблеме энергетического
кризиса и стабилизации погоды;
— отражателей для освещения районов Земли отраженным
с орбиты солнечным светом;
— солнечных парусов для межпланетных перелетов;
— технологических экранов для новых космических техноло-
гий;
— рамочных СНЧ-антенн для разведки полезных ископаемых
и исследований ионосферы;
16
Введение
— пассивных космических ретрансляторов;
— солнечных концентраторов и прочее.
К подготовке эксперимента, длившейся 6 лет, был привлечен
широкий круг специалистов ракетно-космической техники и выс-
ших учебных заведений. Эксперимент стал возможен благодаря
слаженной работе специалистов из 36 отделов НПО «Энергия»
(проектанты, конструкторы, управленцы, материаловеды, испы-
татели), Приборного производства и Контрольно-испытательной
станции (КИС) НПО «Энергия», Центра подготовки космонавтов
(ЦПК), полигона Байконур, ЦНИИМАШ, Центра управления
полетом (ЦУП) в составе ЦНИИМАШ, ЦНИИСтальконструк-
ции, а также вузов: МАИ. МВТУ, КИСИ (г. Киев), ЗИИ (г. За-
порожье). Основные этапы проведенных к тому времени работ
были изложены в книге V. М. Melnikov, V. A. Koshelev. Large
Space Structures Formed by Centrifugal Forces. Gordon and Breach
Science Publishers. Amsterdam, 1998, 157 p. В последующие годы
были рассмотрены вопросы использования подобных конструк-
ций в качестве отражателей солнечного света с орбиты для
управления погодой в локальном регионе и увеличения урожай-
ности сельскохозяйственных культур и морепродуктов. С 2000 г.,
в силу недостатка финансирования, круг рассматриваемых при-
ложений был сужен до разработки наиболее перспективного
в приложении к задачам космической энергетики направления
создания эффективных тонкопленочных солнечных батарей.
Продолжением и развитием работ по формируемым цен-
тробежными силами космическим конструкциям в приложении
к солнечным батареям явилась книга В. А. Комкова, В.М. Мель-
никова, Б.Н. Харлова «Формируемые центробежными силами
солнечные батареи», — М.: «Черос», 2007, 188 с. Руководитель
Федерального космического агентства, доктор технических наук,
генерал-полковник А. Н. Перминов в предисловии к книге пи-
шет: «Книга подводит итог работам по крупногабаритным фор-
мируемым центробежными силами космическим конструкциям,
проводимым в России в госледние 25 лет. Другие страны опыта
подобных разработок не имеют. Сложившийся приоритет России
в этом перспективном направлении космической техники должен
поддерживаться и развиваться ведущими российскими космиче-
скими фирмами».
Поскольку первая изданная по данной тематике книга, в силу
сложностей экономической ситуации 90-х годов, не смогла быть
издана на русском языке, то основы проектирования и кон-
струирования новых космических систем для широкого круга
прикладных задач, а также опыт их разработки были недоступны
Введение
17
отечественному читателю. Авторы сочли необходимым воспол-
нить этот пробел, объединив и доработав материал обеих книг.
В настоящей книге представлены общие проектно-конструк-
торские концепции создания формируемых центробежными си-
лами космических конструкций для широкого круга перспек-
тивных прикладных задач, таких как: солнечные батареи для
малых и средних КА, программы освоения Луны, Марсианская
миссия и крупномасштабная космическая солнечная электро-
станция (КСЭС), отражатели солнечного света с орбиты для
освещения городов Заполярья и других, солнечные паруса для
межпланетных перелетов, тросовые рамочные СНЧ-антенны для
исследования ионосферы и разведки полезных ископаемых, тех-
нологические экраны. Рассмотрены вопросы динамики раскры-
тия конструкций из уложенного состояния с компенсацией ки-
нетического момента, динамики переориентации в пространстве,
длительной прочности материалов при многофакторном воздей-
ствии, отражающих характеристик покрытий и технологии изго-
товления конструкций. Представлены этапы подготовки и прове-
дения наземных и космических экспериментов и их результаты.
Даются примеры конструктивных решений агрегатов раскрытия
конструкций для космических аппаратов различной размерности
и назначения.
ПРОЕКТИРОВАНИЕ
ФОРМИРУЕМЫХ
ЦЕНТРОБЕЖНЫМИ СИЛАМИ
КРУПНОГАБАРИТНЫХ
КОСМИЧЕСКИХ КОНСТРУКЦИЙ
Глава 1
АКТУАЛЬНОСТЬ, ЦЕЛИ И ЗАДАЧИ
РАЗРАБОТКИ
1.1. Энергетический кризис и космонавтика
В течение 15-20 последних лет наблюдается снижение тем-
пов развития космической техники. В то же время имеются
неотложные общечеловеческие проблемы энергетического и эко-
логического кризисов и управления погодой, которые могут
быть успешно решены космической техникой при том науч-
но-техническом потенциале, который накоплен за предыдущие
60-70 лет. В энергетику в мире вложены наибольшие средства,
5,5-6 триллионов долларов, включая затраты на разведку, до-
бычу и транспортировку топлива. История развития общества,
политика и экономика — это, в конечном счете, борьба за энер-
гетические ресурсы. Объективная общечеловеческая востребо-
ванность энергетики, как важнейшего фактора развития циви-
лизации, и кризисное состояние энергетики в ближайшем буду-
щем являются главными причинами необходимости концентра-
ции возможностей космонавтики над энергетическими проблема-
ми [1-4, 7]. Основоположник космонавтики К. Э. Циолковский
более 100 лет назад начал развитие космонавтики для реше-
ния именно проблем энергетического и экологического кризисов
и указал путь решения — овладение солнечной энергией. Лауре-
ат Нобелевской премии по химии академик Н.Н. Семенов еще
в 1931 году выступал с обоснованием необходимости глобально-
го использования солнечной энергетики. В 1973 г. в его работе
«Об энергетике будущего» говорится: «Использование энергии
Солнца не вызывает перегрева земли, изменений климата, не
несет никаких опасностей отравления земли и воздуха вредными
веществами. Оно является вечным источником энергии». Ту же
позицию занимает лауреат Нобелевской премии по физике ака-
демик Ж. И. Алферов: «Ставка на солнечную энергетику должна
Рассматриваться как беспроигрышный, но в долговременной пер-
спективе и как безальтернативный выбор для человечества».
Запасы нефти и газа, на которых работают 63% электро-
станций, через 30-40 лет иссякнут в связи с ростом населения
22 Гл. 1. Актуальность, цели и задачи разработки
на планете и ростом энергопотребления на. душу населения.
В общем энергобалансе 17% занимают гидростанции, 18,5%
атомные электростанции и около 1% ветровые, геотермальные,
солнечные и прочие Нефть, газ, ядерное топливо являются эко-
логически вредными энергоносителями, способствуют парнико-
вому эффекту и потеплению климата на планете. Не находит
решения проблема утилизации ядерных отходов. Чернобыльская
авария остановила реализацию ряда проектов создания атомных
электростанций в густонаселенных районах. Авария на Японской
атомной электростанции в конце 2005 г. вновь напомнила Хиро-
симу. В проблему управляемого термоядерного синтеза с начала
50-х годов прошлого века развитые страны внесли огромный ин-
теллектуальный и финансовый вклад. Разработкой направления
занимаются крупнейшие и влиятельнейшие ведомства. Несколь-
ко раз в средствах массовой информации проводились кампании,
когда активно говорилось, что решение проблемы совсем близко,
однако затем на десятилетия все замирало. Новые усилия ока-
зывались безрезультатными. Историческим фактом является то,
что, если научное направление имеет право на жизнь, то от вы-
сказывания идеи до широкого технического внедрения проходило
10-15 лет. Так было с атомной бомбой, ядерными реакторами
деления для электростанций и подводных лодок, жидкостными
ракетными двигателями, лазерной и компьютерной техникой. Не
исключено, что термоядерная реакция, так хорошо идущая на
Солнце, может оказаться в управляемом виде не реализуемой на
Земле. Если все же проблема найдет решение, следует помнить,
что в конечном счете термоядерный реактор, как и атомный
реактор, работает по обычному тепловому циклу как широко
распространенные тепловые станции, сжигающие продукты пе-
реработки нефти, и из-за низкого КПД интенсивно нагревающие
окружающую среду.
Проблема управления погодой и климатом теснейшим об-
разом связана с проблемой техногенных воздействий на эко-
логию среды обитания наземными энергетическими системами
и возможностью решения проблемы энергетического кризиса.
Становится особенно ясно значение развития космической техни-
ки, способной если не решить полностью, то внести значитель-
ный вклад в решение указанных проблем, носящих глобальный
характер. Перевод наземной энергетики с углеродосодержащих
и ядерных топлив на космические солнечные батареи исключает
первопричину техногенных воздействий на среду обитания:
— последствия использования органического топлива, сжига-
ние которого оказывает вредное воздействие на биосферу
/. 1. Энергетический кризис и космонавтика
23
(выбрасываются в атмосферу СО, СОг, окислы азота, серы,
свинец, мышьяк, радиоактивные элементы, забирается из
атмосферы огромное количество кислорода воздуха в про-
цессе сжигания, нагревается окружающая среда);
— последствия использования ядерного топлива, способству-
ющего парниковому эффекту, ставящего проблему утилиза-
ции ядерных отходов, а также проблему аварий, при кото-
рых катастрофические последствия наносят ущерб, много-
кратно превышающий выгоды от эксплуатации АЭС, и про-
блему неконтролируемой выработки плутония как страте-
гического материала для ядерного оружия;
— последствия использования гидроэлектростанций, связан-
ных с затоплением больших сельскохозяйственных площа-
дей, селений, уроном рыбного хозяйства.
За счет выноса в космос первичных преобразователей солнеч-
ной энергии в электрическую появляется возможность повысить
пороговую величину энергопотребления, обусловленную опасно-
стью теплового загрязнения планеты. Передача энергии с орбиты
непосредственно в районы потребления исключает наземные ли-
нии электропередач большой протяженности и связанный с их
постройкой экологический ущерб (вырубка лесов, неиспользова-
ние земель). Вынесение на орбиты энергоемких и экологически
вредных производств в большой мере снизит нагрузку на био-
сферу.
Первые годы текущего столетия ознаменовались чрезвычайно
масштабными погодными катастрофами на всех континентах,
суммарный ущерб от которых в десятки раз превышает стои-
мость самых крупных космических программ. Во многом это
произошло по причине превышения допустимой нормы техно-
генных воздействий на окружающую среду. Вынесение на кос-
мические орбиты энергоемких и экологически вредных произ-
водств, создание орбитальных солнечных электростанций боль-
шой мощности и трансляция электроэнергии на Землю — вот
путь развития большой космической энергетики и космонавтики
в перспективе и одно из эффективных направлений в решении
проблемы энергетического кризиса и стабилизации погоды [1-4].
Следует особо подчеркнуть взаимосвязь этих проблем: решая
проблему энергетического кризиса космическими средствами, мы
Устраняем одновременно техногенные воздействия на экологию
окружающей среды как причину дестабилизации погоды. Ре-
ально решить глобальную проблему чрезвычайной важности,
наукоемкую, а не металлоемкую, и вновь поставить космонавти-
КУ в ряд ведущих в научно-техническом прогрессе наукоемких
24 Гл. 1. Актуальность, цели и задачи разработки
отраслей. За последние годы появились новые концепции и под-
ходы к созданию космических энергосистем, отсутствовавшие
еще 8-10 лет назад, базирующиеся’ на новейших научно-техни-
ческих достижениях в физике и технологии полупроводников
и создании бескаркасных космических конструкций, к которым
все в возрастающей мере привлекается внимание мировой на-
учно-технической общественности и которые могут гарантиро-
вать при создании космических солнечных энергосистем значи-
тельное снижение финансовых затрат и времени на их реали-
зацию по сравнению с альтернативными проектами. Большой
интерес представляет возможность создания на базе нанотех-
нологий полупроводниковой структуры, объединяющей генери-
рующие в СВЧ-диапазоне и излучающие свойства. В докладе
директора Американского Института Аэрокосмических Иссле-
дований (AIAA) Д. Грея о возможности реализации проекта
передачи солнечной энергии из космоса, представленного еще
в 2000 г. подкомитету по авиакосмическим исследованиям в па-
лате представителей США. Эта задача отмечается в качестве
приоритетной [5]. Еще раньше, в 1984 г., эта проблема поднима-
ется в [11]. Использование таких полупроводниковых структур
позволит чрезвычайно эффективно осуществлять генерирование
и трансляцию энергии в СВЧ-диапазоне в космических энер-
гоустановках, исключив громоздкие традиционные СВЧ-преоб-
разующие приборы и токоподводы. В космической солнечной
электростанции генерируемая по площади солнечной батареи
СВЧ-энергия может фокусироваться путем фазировки [144] на
наземную ректенну, в Марсианской миссии генерируемая по
площади солнечной батареи СВЧ-энергия может фокусировать-
ся на расположенный в центре батареи плазменный двигатель
с СВЧ-накачкой на циклотронном резонансе [6, 145]. Предло-
женная технология развертывания центробежными силами круп-
номасштабной космической электростанции практически любой
размерности путем объединения агрегатом раскрытия с «тяну-
щим роликом» непосредственно на орбите индивидуально до-
ставленных туда на катушках секторов полотнища солнечной
батареи [135] является технической находкой, которая по своей
простоте и возможностям реализации превзойдет все практиче-
ски возможные альтернативы [21].
Энергетический кризис в Калифорнии в начале 2001 г. пока-
зал, что уже сейчас потребность в электроэнергии начинает пре-
восходить имеющиеся в наличии ресурсы. Это заставило США
по-новому взглянуть на проблемы электроснабжения и присо-
единиться к странам, активно изучающим проблемы создания
1.1 Энергетический кризис и космонавтика
25
космических солнечных электростанций (КСЭС), таким как Япо-
ния, Франция, Германия, Канада.
Разработка КСЭС была начата практически сразу с началом
космической эры. Запуск первого спутника и первого человека
в космос пробудили интерес к большим космическим энерго-
системам, первый инженерный проект которых был разработан
Глейзером в 1968 г. в США [10]. В проекте была показана
целесообразность создания энергетического объекта в космосе
на чрезвычайно большую мощность, превышающую мощность
самых крупных электростанций на Земле (порядка 10 ГВт),
и передачи электроэнергии на Землю в СВЧ-диапазоне [11-12]
(рис. 1.1).
Рис 1.1. Космическая солнечная электростанция, передающая энергию на
Землю в СВЧ-диапазоне
Солнечная батарея Глейзера представляла собой ферменную
конструкцию размером 13,1 х 4,93 км и массой 12,3 тысяч тонн,
выходной мощностью 5 ГВт на кремниевых солнечных элементах
с КПД = 13, 7%. Создание такой конструкции даже по сегодняш-
ним меркам представляется нереальным. Техника не была готова
в то время к реализации подобных проектов даже тогда, когда
человек ступил на поверхность Луны (1969 г., программа «Апол-
26 Гл. 1. Актуальность, цели и задачи разработки
лон» США). Не созрело острой потребности общества. Сейчас
положение сильно изменилось. Энергетический кризис и природ-
ные катаклизмы заставляют искать средства противодействия.
Техника не стояла все это время на месте и с различной сте-
пенью детализации проработки КСЭС проводились все последу-
ющие годы [П, 12]. Вновь создаваемые проекты космических
солнечных электростанций, осуществление которых возможно
будет через десятилетие, а эксплуатация будет продолжаться
до середины века, должны базироваться на новейших достиже-
ниях и технических решениях в области физики и технологии
полупроводников, техники СВЧ и создании крупногабаритных
космических конструкций. Дадим предварительную оценку стои-
мости системы. При удельной мощности 1 кг/кВт энергосистемы
ее масса при мощности N = 1О10 Вт составит т — 107 кг;
стоимость при цене 104 дол./кВт составит 100 млрд, долларов;
стоимость выведения на орбиту при цене 103 дол./кг составит
10 млрд, долларов. Оценка стоимости проекта дает цифру в три
раза меньшую годового военного бюджета США, что указыва-
ет на ее реальность. Более подробные оценки дают стоимость
единицы вырабатываемой электроэнергии, примерно равную сто-
имости ее выработки на атомной электростанции. При выведе-
нии 100 тонным носителем потребуется 100 ракет. Это может
быть носитель «Магнум» на базе стартового комплекса «Спейс
Шаттл», где вместо спускаемого самолета добавляется стартовый
блок и система без доработок использует наземную инфраструк-
туру «Спейс Шаттла». В перспективе создания многих КСЭС
в течение 30-50 лет более перспективным является использо-
вание электромагнитного ускорителя с полосой разгона порядка
10 км, который должен строится рядом с крупной электростан-
цией и использовать горный рельеф местности (например, около
Саяно-Шушенской ГЭС).
Известно, что вклад средств в космические программы потом
многократно окупается за счет использования новейших дости-
жений в смежных отраслях, как было, например, в программе
«Аполлон».
Многие крупные промышленные компании активно зани-
маются разработкой проектов по использованию альтернатив-
ных источников энергии (геотермальной, ветровой, солнечной
и т. д.) в рамках международных программ в области солнеч-
ной энергетики таких, как: Всемирная солнечная программа
ЮНЕСКО; Программа NASA по космической солнечной энер-
гетике SERT; Программа Японии SPS-2000 и другие програм-
мы. При этом только финансирование программы ЮНЕСКО
1.1. Энергетический кризис и космонавтика
27
составляет 600 млн долларов США на 3 года. Япония в настоя-
щее время уже проводит работы по созданию КСЭС на мощность
1 ГВт. Согласно планам NASA Международная космическая
станция будет использована для испытания беспроволочной пе-
редачи энергии в 2007-2008 гг. В это же время планируется
построить испытательную станцию на 100 КВт. К 2012 г. пла-
нируется вывести в космос платформу на 1 МВт для передачи
энергии другим КА и на Землю. В дальнейшем мощность стан-
ций будет наращиваться и через 15-20 лет достигнет 10 МВт.
В октябре 2007 г. Министерство обороны США обнародовало
долгосрочную программу создания КСЭС, транслирующих энер-
гию на Землю в СВЧ-диапазоне, для того чтобы в перспективе
избавить страну от импорта нефти, что является целью адми-
нистрации президента Буша [149]. Это в значительной степени
повышает актуальность проблемы. На рис. 1.2 показана приве-
Рис. 1.2. Схема космической солнечной электростанции [149]
денная в [149] схема космической солнечной электростанции,
где симметрично расположенные относительно центральной оси
шестигранные параболические внешние зеркала концентрируют
солнечную энергию на внутренних вторичных зеркалах, разво-
рачивающих поток света на 90° и направляющих его на цен-
тральную круговую конструкцию, где находятся совмещенные
конструктивно солнечная батарея, преобразующие в СВЧ-эле-
менты и передающая антенна. В программе рассматривается пер-
спектива создания космических солнечных электростанций на
мощность, покрывающую энергопотребление всего человечества
Использование солнечных батарей в энергосистемах на Земле
в 6-15 раз менее эффективно, чем их использование в космосе
28 Гл. 1. Актуальность цели и задачи разработки
из-за режимов освещения «день-ночь» и «зима-лето», поглоще-
ния в атмосфере из-за дождей, снега, пылевых бурь, широты
местности, загрязнения и эрозии поверхности солнечной батареи.
В космосе все эти факторы отсутствуют.
Сочетание «водородных технологий» с наземными солнечны-
ми батареями [13] при крупномасштабном производстве элек-
троэнергии не эффективно как по вышеназванным причинам,
так и из-за больших затрат энергии для получения водорода,
сложности его хранения и опасности образования «гремучего
газа», как сильного взрывчатого вещества, при утечках водорода.
1.2. Актуальные прикладные задачи космической
техники
Важная роль крупногабаритных космических конструкций
в технике будущего определяется перспективами развития энер-
гетики на 2010-2050 гг., где основными концепциями являются:
— увеличение потребления электроэнергии в 2-3 раза по
сравнению с современным уровнем из-за роста населения
на планете и роста энергопотребления на душу населения
в основном за счет развития третьих стран;
— снижение использования нефти, газа и угля из-за ограни-
ченности запасов и экологических последствий;
— снижение использования атомных электростанций в связи
с трудностями утилизации ядерных отходов, возможностью
крупномасштабных аварий с тяжелыми экологическими
последствиями, тепловым воздействием на окружающую
среду;
— вынесение энергоемких и экологически вредных произ-
водств на околоземные орбиты и поверхность Луны;
— широкое использование практически бесконечных запасов
солнечной энергии путем создания солнечных электростан-
ций, солнечных концентраторов и отражателей космическо-
го базирования как для обслуживания производств в кос-
мосе, так и для передачи энергии на Землю.
Солнечные батареи площадью несколько десятков гектаров
займут в энергетике будущего и космической технике видное
место при создании КСЭС Однако уже сегодня с помощью таких
конструкций может быть решен ряд актуальных задач, таких
как
— ретрансляция энергии, телерадиосвязь;
1.2. Актуальные прикладные задачи космической техники 29
— освещение районов Земли отраженным солнечным светом
(городов и промышленных районов Заполярья, мест ката-
строф и прочее);
— управление погодой в локальном регионе, влияние на уро-
жайность в районах производства сельскохозяйственной
и лесной продукции, а также морепродуктов;
— очистка космоса от технологических осколков;
— создание солнечного паруса для межпланетных перелетов;
— создание НЧ- и СНЧ-рамочных антенн для исследования
ионосферы, залежей полезных ископаемых и связи с глубо-
ководными аппаратами;
— создание параболических концентраторов и радиоантенн;
— создание технологических орбитальных экранов для полу-
чения сверхвысокого вакуума в новых космических техно-
логиях;
— создание эффективных солнечных батарей на малых
и средних спутниках, в энергосистеме Марсианской
миссии и при освоении Луны, где требуются масштабные
электростанции, эксплуатирующиеся в условиях глубокого
вакуума и пониженной гравитации, требующие возможно-
сти мобильного раскрытия и свертывания при изменении
дислокации и ремонте.
Задачи полетов с солнечным парусом и освещения районов
Земли отраженным с орбиты солнечным светом были поставлены
и обоснованы в 20-х годах прошлого века основоположника-
ми космонавтики К.Э. Циолковским, Ф.А. Цандером [14-17].
Однако только в настоящее время они становятся технической
реальностью.
Рассматривая проблему ретрансляции, следует отметить, что
при больших потоках информации и при большом количестве
потребителей пассивные ретрансляторы (какими могут являться
рассматриваемые отражатели) имеют преимущества перед актив-
ными орбитальными ретрансляторами.
Эффективность освещения в период полярной ночи Заполяр-
ных районов с орбиты отраженным солнечным светом обуслов-
лена следующими обстоятельствами:
— психологическим воздействием благодаря организации сол-
нечного освещения в период полярной ночи;
— экологической чистотой-освещения с орбиты по сравнению
с искусственным электрическим освещением, когда исполь-
зуется 1% теплотворной способности углеродного топлива;
30 Гл. 1. Актуальность, цели и задачи разработки
— экономической эффективностью, т. к. доставка топлива или
прокладка линий электропередачи в этих районах связана
с большими затратами и экологическими нарушениями;
— безотходностью получения энергии
Последние три пункта также относятся к трансляции энергии на
Землю в СВЧ-диапазоне от космических солнечных электростан-
ций (КСЭС).
При обосновании программы «Спейс Шаттл» в качестве при-
кладной задачи рассматривался вопрос увеличения производства
морепродуктов в локальном регионе. Утверждалось, что если
космическим отражателем стабилизировать температуру воды
в Карибском море в районе площадью 300 х 300 км, то белковых
морепродуктов хватит на пропитание всего человечества [18]
(рис. 1.3).
Рис. 1.3. Освещение районов Земли с орбиты отраженным солнечным светом
Задача очистки космоса от технологических осколков чрез-
вычайно актуальна, т. к. за историю практической космонавтики
на наиболее интересных орбитах накопилось столько обломков
ранее существовавших систем, что уже в настоящее время по-
леты небезопасны из-за высокой вероятности столкновения с ча-
стицами «космического мусора». Известны случаи соударения
металлической частицы с иллюминатором «Спейс Шаттла», по-
вреждения системы управления радиотелескопа Хаббл, разгер-
1.2.-----Актуальные прикладные задачи космической техники 31
—---------
метизации большого научного модуля на станции «Мир». Однако
при столкновении таких частиц с крупногабаритным экраном
при высоких относительных скоростях, они размельчаются до
безопасных размеров и переходят на другие орбиты [19-20].
Создание технологических орбитальных экранов для полу-
чения сверхвысокого вакуума в новых космических технологи-
ях представляет большой интерес. Технология получения новых
сверхчистых материалов и элементы нанотехнологий требуют
вакуума 10 9-10 11 мм рт. ст., не достижимого при крупно-
масштабном производстве на Земле. На высоких орбитах и на
поверхности Луны вопрос снимается, но это дорого. На низких
орбитах перед экраном необходимых размеров в набегающем
свободномолекулярном потоке остаточной атмосферы возникает
избыточное давление, а за экраном (при условии достаточного
обезгаживания экрана) образуется конусная зона сверхнизкого
давления, в которой возможно осуществление требуемых техно-
логических процессов.
Создание НЧ- и СНЧ-рамочных антенн для исследования
ионосферы, поиска залежей полезных ископаемых и связи с глу-
боководными аппаратами открывает новые прикладные возмож-
ности космической техники. Низкие частоты способны распро-
страняться под соленую воду и под поверхность Земли, отра-
жаться от неоднородностей и, аналогично радиолокации, нести
важнейшую информацию. Эффективность системы определяется
величиной магнитного момента, или произведения тока, про-
текающего по периферии контура антенны, на площадь этого
контура (А-м2). Можно представить себе пленочную круговую
солнечную батарею диаметром 500-1000 м, внешним контуром
которой является низкочастотная антенна с магнитным момен-
том 1012- 10*4А-м2, питаемая этой солнечной батареей. Возможен
вариант, когда тросовая круговая антенна выполняет одновре-
менно роль компенсирующего кинетический момент солнечной
батареи тросового маховика.
В существующих условиях расширения областей применения
космических аппаратов, особенно для предоставления телеком-
муникационных услуг, актуальной задачей является повышение
эффективности солнечных батарей (СБ), используемых на спут-
никах в качестве источников электрической энергии. Таким об-
разом, имеется возможность отработки новых солнечных батарей
на космических аппаратах малой размерности, также остро нуж-
дающихся в повышении эффективности энергосистем (рис. 1.4).
32
Гл. 1. Актуальность, цели и задачи разработки
Рис. 1.4. КА с формируемой центробежными силами СБ
В последние годы интерес к освоению Луны вспыхнул с но-
вой силой в связи с принятием в США, Японии, Китае и Рос-
сии соответствующих правительственных программ. В средствах
массовой информации сообщается, что США выделяет на бли-
жайшее десятилетие 100 миллиардов долларов на освоение Лу-
ны, как стратегического объекта. Это в 3 раза больше стоимости
программы «Спейс Шаттл». К Лунной электростанции предъ-
является комплекс нетрадиционных требований, обусловленных
спецификой технологии Лунного производства и внешних усло-
вий. Внешними условиями являются:
— отсутствие атмосферы, наличие глубокого вакуума;
— радиационные и метеоритные воздействия, связанные с от-
сутствием экранирующего слоя атмосферы;
— наличие пониженной гравитации, в 6 раз меньшей, чем на
Земле;
— резкие перепады температуры на освещенных Солнцем и на
не освещенных участках Луны (от +120°C до —170°C).
Специфика Лунного производства требует выработки страте-
гии кампании, особенностью которой являются:
— ограниченные средства и время на решение столь масштаб-
ной проблемы, требующей неординарных подходов;
1.2. Актуальные прикладные задачи космической техники 33
— необходимость создания достаточно простых, надежных
и относительно дешевых электростанций, возможности их
мобильного развертывания и сворачивания при изменении
дислокации, замены при повреждении или для ремонта;
— минимизации длины традиционных линий электропередачи
из-за радиационных (высоковольтные наводки в контурах)
и метеоритных воздействий; использование СВЧ-трансля-
ции электроэнергии;
— использование электростанций, базирующихся как на по-
верхности Луны, так и на окололунных орбитах;
— возможность использования разработок в других актуаль-
ных, аналогичных по масштабу задачах.
В приложении к Лунным энергетическим задачам форми-
руемые центробежными силами солнечные батареи наилучшим
образом отвечают специфике производства и внешних усло-
вий [21]:
— просты конструктивно и дешевы в производстве из-за от-
сутствия жесткого каркаса;
— имеют тонкопленочные электрогенерирующие элементы,
обладающие малой массой на единицу генерируемой мощ-
ности и возможностью укладки в малый объем при транс-
портировке;
— требуют малых энергозатрат на раскрытие из уложенного
состояния;
— позволяют обеспечивать мобильное обратное сворачивание
из раскрытого в уложенное состояние и изменение дисло-
кации;
— используют для своего существования глубокий вакуум
и пониженную гравитацию;
— практически не чувствительны к метеоритной опасности;
— могут служить одновременно солнцеотражающим экраном
большой площади для размещения под ним производствен-
ного оборудования и технологических линий;
— фотоэлекрические преобразователи (ФЭП) солнечных ба-
тарей могут изготавливаться в лунных условиях без ваку-
умных камер;
— имеют широкие области аналогичного использования.
Лунные производственные цеха должны быть максимально
автоматизированы и в качестве крыши, для обеспечения тепло-
вого режима, могут иметь формируемый центробежными силами
экран.
В книге [22] подводится итог предыдущим разработкам по
пилотируемой экспедиции на Марс и приводятся последние под-
Г.Г. Райкунов и др.
34 Гл. 1. Актуальность, цели и задачи разработки
ходы к решению задачи. Для используемой в проекте каркасной
солнечной батареи мощностью 15 МВт размером 400 х 400 м
может быть предложена формируемая центробежными силами
бескаркасная солнечная батарея, что, с одной стороны, позволит
более эффективно решить поставленную задачу по сравнению
с каркасным аналогом, с другой стороны, набрать опыт для
создания в дальнейшем более масштабной КСЭС.
Для создания крупномасштабных космических энергетиче-
ских систем естественна необходимость набора практического
опыта создания на космических энергосистемах меньшей раз-
мерности. Именно поэтому в качестве этапов достижения конеч-
ной цели необходимо использование предлагаемых конструкций
на малых и средних спутниках, в энергосистеме Марсианской
миссии и при освоении Луны, где требуются масштабные элек-
тростанции, эксплуатирующиеся в условиях глубокого вакуума
и пониженной гравитации, требующие возможности мобильного
раскрытия и свертывания при изменении дислокации и ремонте.
1.3. Бескаркасные формируемые центробежными
силами конструкции
Создание конструкций площадью несколько десятков гекта-
ров и управление положением их в пространстве является слож-
ной научно-технической задачей, не имеющей аналогов в назем-
ной и космической технике и требующей для своего эффектив-
ного решения нетрадиционных подходов.
Сочетание космических условий (глубокого вакуума, невесо-
мости, потоков солнечного излучения) с принципами формиро-
вания поверхности за счет центробежных сил открывает новые
возможности создания «чисто космических» крупногабаритных
солнечных батарей, отражателей, солнечных парусов, рамочных
антенн и концентраторов.
Формирование поверхности (т. е. раскрытие из уложенного
состояния и дальнейшее поддержание формы) за счет центро-
бежных сил исключает необходимость использования жестких
каркасов для натяжения поверхности По этой причине бескар-
касные формируемые центробежными силами конструкции вы-
годно отличаются от своих каркасных аналогов рядом важных
преимуществ [23]:
— малым отношением массы к площади поверхности (до
5-10 г/м2);
— возможностью укладки в малый объем при транспорти-
ровке;
/ 3 Бескаркасные формируемые центробежными силами конструкции 35
— автоматическим раскрытием на орбите при малых-энерго-
затратах;
— возможностью создания поверхности площадью порядка
105-106 м2 при незначительных размерах раскрывающего
устройства;
— возможностью управления в пространстве на гироскопиче-
ском принципе без расхода рабочего тела;
— высокой точностью формы поверхности;
— нечувствительностью к метеоритной опасности;
— простотой и надежностью конструкции, ее низкой стоимо-
стью;
— возможностью эффективной наземной отработки.
Следует подчеркнуть, что отсутствие жесткого каркаса кон-
струкции является чрезвычайно важной, принципиальной осо-
бенностью для вновь создаваемых энергосистем с характерным
геометрическим размером порядка нескольких сотен метров или
1 км, поскольку определяет реальность создания таких систем,
их стоимость. Основной особенностью таких конструкций явля-
ется принципиальная невозможность полномасштабной наземной
отработки из-за отсутствия столь больших вакуумных камер
и наличия гравитации. Доставка на орбиту и робототехническая
сборка каркасных конструкций большой размерности представ-
ляется значительно более сложной, дорогостоящей и неперспек-
тивной проблемой по сравнению с той изящностью и эффектив-
ностью решения этой проблемы при использовании формируемых
центробежными силами бескаркасных конструкций. Финансовые
затраты по обеспечению надежности разворачивания в космосе
этих систем будут не соизмеримы. Это как раз тот случай, когда
надо резко отказываться от традиционности и консерватизма.
При переходе к столь крупногабаритным космическим конструк-
циям традиционные «земные» способы создания конструкций
становятся неэффективными и следует использовать новые спо-
собы создания «истинно» космических конструкций, органически
использующих для своего существования особенности окружа-
ющих космических условий, таких как невесомость и глубокий
вакуум.
Если 30-50 лет назад усилия в космической технике, в ос-
новном, были направлены на увеличение массы выводимого на
орбиту полезного груза, то в настоящее время к изделиям кос-
мической техники предъявляются требования минимальных за-
тратах на создание образцов новой техники при максимальной
эффективности для решения важнейших народнохозяйственных
и научных задач. Этим требованиям в наибольшей мере отве-
2*
36 Гл. 1. Актуальность, цели и задачи разработки
чают крупногабаритные космические конструкции, формируемые
центробежными силами.
1.4. Цели и задачи разработки
Целью настоящей работы является комплексное исследование
проблем создания крупногабаритных формируемых центробеж-
ными силами конструкций, обусловленных спецификой этих сил,
особенностью внешних условий и крупномасштабностью изде-
лия, а также функционально-технологическими возможностями
современной космической техники применительно к различным
прикладным задачам.
Для вышеуказанных прикладных задач формируемые центро-
бежными силами конструкции имеют конструктивные особенно-
сти, вытекающие из специфики решаемой прикладной задачи,
необходимыми для этого точностями поверхности системы и ее
ориентации в пространстве.
Для задач ретрансляции и связи ставятся не слишком жест-
кие требования по точности поверхности отражателя и его ори-
ентации в пространстве. Для дециметровых и метровых волн
поверхность может быть выполнена из токопроводящей сетки
с размером ячейки меньше, чем 0,05А (где А — длина вол-
ны), а широкая диаграмма направленности излучения позволяет
иметь допуск по точности ориентации в несколько градусов.
Напротив, для задач освещения отраженным солнечным све-
том районов Земли предъявляются чрезвычайно жесткие требо-
вания по точности формы поверхности и ее ориентации (менее
КУ), что связано с необходимостью обеспечения максимальной
концентрации энергии в световом пятне. Требуется поверхность
с максимальными отражающими свойствами (например, перио-
дически напыляемая на орбите на полимерную подложку натри-
евая пленка с коэффициентом отражения 0,98).
При создании параболического концентратора солнечной
энергии также требуется точная поверхность с высокими
отражающими свойствами, напротив, параболическая антенна
в дециметровом и метровом диапазоне может быть изготовлена
из металлической сетки с крупной ячейкой и низкими требо-
ваниями к точности изготовления поверхности. Конструкция
может быть разрезная из отдельных секторов, сегментов или
ячеек с зазорами, не превышающими 0,05А (где А — длина
волны).
При создании солнечного паруса не предъявляется жестких
требований по точности поверхности и ее отражающим свой-
1.4. Цели и задачи разработки 37
--__---„ . . - - -
ствам. Поверхность может быть выполнена из отдельных секто-
ров или лент как скрепленных по периферии, так и не скреплен-
ных (рис. 1.5) [8]. Сектора могут поворачиваться вокруг своей
радиальной оси за один оборот вокруг основной оси вращения
конструкции, давая возможность управлять конструкцией путем
изменения положения центра масс по отношению к центру сол-
нечного давления. Здесь имеется аналогия с функцией агрегата
перекоса в вертолете. Отражающие свойства поверхности могут
изменяться в широком диапазоне, от полного отражения до пол-
ного поглощения, при этом тяга паруса изменяется только в два
раза.
Управление положением в пространстве осуществляется за
счет гироскопических сил при изломе оси в шарнире 7.
К ориентации и точности поверхности экрана для очистки
космоса от осколков космического мусора предъявляются наи-
меньшие требования в силу широких диаграмм направленности
распределения скоростей осколков.
Для тросовых рамочных антенн НЧ- и СНЧ-диапазонов дли-
на волны составляет сотни километров, однако окружающая
космическая плазма уменьшает длину волны и для лучшей под-
стройки под генератор требуется возможность изменения площа-
ди охватываемого контура. Требуется также нахождение самого
контура и отдельных его частей в одной плоскости, чаще все-
го в плоскости орбиты. Тросовые рамочные антенны на этапах
раскрытия и эксплуатации могут иметь как петлевую, так и кру-
говую форму (рис. 1.6).
Путем соответствующего раскроя может быть создан пара-
болический профиль поверхности формируемой центробежны-
ми силами конструкции (рис. 1.7). При этом на оси враще-
ния должна располагаться раздвижная жесткая ферма связанная
с основной поверхностью вантами или аналогичной прозрачной
поверхностью. Так может быть создан концентратор солнечной
энергии или параболическая антенна.
В конструкциях солнечных батарей, отражателей, концен-
траторов, солнечных парусов и экранов используются как пле-
ночные (сеточные) элементы, так и тросовые элементы. В кон-
струкциях рамочных тросовых антенн и маховиков используются
только тросовые элементы.
Космический аппарат с раскрываемой центробежными си-
лами конструкцией помимо традиционных корабельных систем
в своем составе должен иметь контейнер, в котором уложенная
конструкция транспортируется на орбиту, и устройство (агрегат
38
Гл. 1. Актуальность, цели и задачи разработки
Рис. 1.5. Солнечный парусный корабль
1. Пленочная поверхность паруса
2. Маховик противовращения
3. Электропривод паруса
4. Ось вращения паруса
5. Электропривод маховика
6. Ось вращения маховика
7. Шарнир излома осей вращения
раскрытия), обеспечивающее раскрытие этой конструкции со
средствами своего питания и управления.
Существенными особенностями вращающихся конструкций
является необходимость парирования противовращения корабля
системой компенсации кинетического момента и компенсация
дисбаланса. За счет технологических погрешностей изготовле-
ния и производственных допусков на толщину используемого
1.4. Цели и задачи разработки
39
Рис. 1.6. Тросовые рамочные антенны различной формы
Рис. 1 7. Параболический концентратор или антенна: 1 — раздвижная ферма;
2 — ванты; 3 — пленочная поверхность
пленочного материала конструкции дисбаланс неизбежен. Воз-
можны два случая:
— дисбаланс не влияет на решение целевой задачи КА и его
устранения не требуется;
— необходимо устранение дисбаланса.
Устранение дисбаланса возможно активным и пассивным спо-
собом. Активный способ — когда через систему управления
процессом с обратной связью решается задача с использованием
датчиковых элементов (катушечные агрегаты раскрытия подтяги-
вают или отпускают соответствующие сектора, совмещая центр
масс конструкции с осью вращения). Пассивный способ — когда
в конструкции имеется специфический механический элемент,
в котором естественным образом организуется требуемая обрат-
ная связь. Оба способа требуют разработки соответствующих
систем.
Важным фактором является масштабность системы, опреде-
ляющая возможность ее изготовления и отработки в наземных
условиях, а также возможность ее транспортировки на орбиту
носителем.
40 Гл. 1. Актуальность, цели и задачи разработки
Методология проектирования и конструирования летатель-
ных аппаратов с формируемыми центробежными силами кон-
струкциями для различных прикладных задач включает решение
следующих вопросов (задач разработки):
— разработку общих концепций, проектных критериев, эта-
пов создания, основных принципиальных конструктивных
решений;
— разработку конструктивной увязки формируемой центро-
бежными силами конструкции с космическим аппаратом,
решающим целевую задачу;
— выбор рациональных конструкций пленочных полотнищ,
схем укладки, обеспечивающих плавное, упорядоченное
(без ударов, колебаний, запутывания, потери геометриче-
ской симметрии), управляемое на всех стадиях раскры-
тие из уложенного (транспортного) состояния и требуемую
форму раскрытого полотнища;
— обеспечение динамики управляемого раскрытия техниче-
скими средствами (агрегатами раскрытия) с компенсаци-
ей кинетического момента, математическое моделирование
процесса раскрытия, динамическое моделирование при на-
земной отработке;
— обеспечение управления положением в пространстве рас-
крытых конструкций с предъявляемыми для конкретных
задач требованиями к точности поверхности и ее ориента-
ции, организация активного или пассивного демпфирова-
ния колебаний от гироскопических сил, подбор параметров
конструкции, при которых в конкретной задаче такие ко-
лебания допустимы; устранение дисбаланса вращающейся
конструкции;
— обеспечение эффективных отражающих покрытий и проч-
ностных характеристик пленочных материалов в услови-
ях комплексного воздействия параметров внешней сре-
ды и эксплуатационных нагрузок при длительном ресур-
се (глубокий вакуум, циклическая температура с Ттах ~
« 100°С, УФ-излучение, потоки протонов, нейтронов, вы-
сокоэнергетичных частиц и прочее);
— обеспечение создания эффективных пленочных солнечных
батарей, их конструктивной привязки к формируемой цен-
тробежными силами конструкции;
— отработку технологий изготовления и укладки пленочных
полотнищ (подбор раскроя, режимов сварки, склейки или
иного вида соединения швов, равнопрочных основному
1.4. Цели и задачи разработки
41
материалу, обеспечение точности изготовления, укладка
в минимальный объем);
— выбор рациональных схем крепления и намотки для тросо-
вых элементов конструкций или для тросовых конструкций
в целом (антенны, маховики), обеспечение динамики их
управляемого раскрытия и невозможности запутывания;
— обеспечение рациональной увязки систем и агрегатов, вхо-
дящих в состав собственно конструкции, формируемой цен-
тробежными силами, с традиционными системами косми-
ческого корабля, организация их раздельной и совместной
наземной отработки.
Конструктивные проработки формируемых центробежными
силами конструкций под конкретные космические аппараты
должны базироваться на предшествовавшем проектно-конструк-
торском заделе и учитывать специфику, особенности и ограни-
чения, связанные с новым использованием этих конструкций.
Схема этапов создания изделия приведена на рис. 1.8.
42
Гл. 1. Актуальность, цели и задачи разработки
Рис. 1.8. Схема этапов создания изделия
Глава 2
ОБЗОР ТЕОРЕТИЧЕСКИХ, ПРОЕКТНЫХ
И ЭКСПЕРИМЕНТАЛЬНЫХ РАБОТ ПО
КРУПНОГАБАРИТНЫМ КОСМИЧЕСКИМ
КОНСТРУКЦИЯМ
2.1. Теоретические работы
Наиболее полная классификация разворачиваемых крупнога-
баритных космических конструкций дана в [24].
По принципу развертывания подобные конструкции разделе-
ны на следующие группы:
1) механические, в которых элементы конструкции шарнирно
соединены в единую кинематическую систему. При укладке эти
элементы плотно соединяются между собой и удерживаются
с помощью специальных связей. После снятия связей под вли-
янием энергии пружин элементы системы занимают заданное
положение;
2) вращающиеся, в которых раскрытие и сохранение формы
происходит за счет центробежных сил, возникающих при враще-
нии конструкции;
3) пневматические, в которых раскрытие и сохранение формы
происходит за счет создания избыточного давления во внутрен-
них полостях конструкций;
4) особые, в которых форма поддерживается благодаря созда-
нию электростатического поля;
5) комбинированные, в которых раскрытие происходит за счет
создания давления или вращения, а сохранение формы за счет
каркаса.
Широкое применение в настоящее время находят механиче-
ски развертываемые конструкции [25-32]. Основным их преиму-
ществом является точность получения заданной формы, достига-
емая за счет жесткости конструкции. Отечественные разработки
по этой группе конструкций представлены, например, в [25-27],
зарубежные — в [28]. Главным принципиальным недостатком
механически развертываемых конструкций является сравнитель-
но невысокий коэффициент развертывания (отношение разме-
ров конструкции в развернутом и сложенным состояниях), что
ограничивает их использование для создания крупногабаритных
объектов, ограничивая возможности компоновки в уложенном
44 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
(транспортном) состоянии на носителе. Например, как показано
в [29], в настоящее время предельный диаметр механически
раскрывающейся антенны не может быть более 100 м. Серьезным
технологическим недостатком является возможность заедания
в многочисленных сочленениях, доходящих до нескольких тысяч,
когда заедание даже в одном из них может приводить к нерас-
крытию конструкции в целом.
В [27] исследуются космические конструкции большой пло-
щади. Анализируются методы построения этих конструкций. Вы-
явлена перспективность использования модульных конструкций
при разработке больших отражающих поверхностей.
Большие коэффициенты развертывания (порядка десятка
и даже сотен) могут быть получены применением надувных
конструкций [33, 34]. Недостатком таких конструкций является
возможность выхода из строя при нарушении ее геометричности
вследствие попадания микрометеора и требующая отверждения
конструкции. Практическое применение надувные конструкции
нашли, например, в ИСЗ типа «Эхо» Главным недостатком на-
дувных конструкций является сложность обеспечения требуемой
формы из-за технологических допусков на раскрой конструк-
ции и неизбежных конструкционно-технологических неоднород-
ностей материала конструкции в процессе наддува и дальнейше-
го отверждения, необходимого для последующей эксплуатации
первоначально мягкой конструкции.
Указанных недостатков лишены конструкции, в которых для
получения форм заданной конфигурации используются гибкие
элементы, жесткость которых в развернутом состоянии обес-
печивается созданием в них растягивающих напряжений под
действием центробежных сил.
Примером практического использования таких конструкций
является развертывание четырех гибких плеч антенны ИСЗ
«Эксплорер-4», которое осуществляется укрепленными на их
концах грузами за счет центробежных сил, возникающих вслед-
ствие вращения спутника вокруг своей оси. Такой же метод
развертывания применен на ИСЗ ИК-2. Скорость выпуска плеч
длиной 39 м регулируется для предохранения от заматывания
антенн вокруг корпуса ИСЗ [34].
Обзор методов построения развертываемых антенн, предна-
значенных для использования на космических аппаратах дан
Фрилендом (Freeland) в [35]. Применение новых подходов к по-
строению таких антенн позволяет в перспективе создать развер-
тываемые антенны с размером до 1000 м. Конструкции таких
антенн являются уникальными
2 I. Теоретические работы
45
Как отмечалось выше, одним из основных моментов при раз-
работке разворачиваемых конструкций является выбор способа
укладки [36—38]. Здесь важным требованием является техноло-
гичность способа.
В [36] описан способ складывания гибкой поверхности для
последующего развертывания центробежными силами и образо-
вания конструкции заданной формы. Одним из недостатков этого
способа можно считать достаточно низкую технологичность.
Важное значение при разработке, особенно антенных
устройств, имеет выбор материала К материалам отражающих
поверхностей антенн предъявляются специфические требования,
обусловленные конструктивными особенностями складных
антенн и необходимостью работы в космическом пространстве:
гибкость и эластичность; минимальная масса; необходимая
прочность; минимальная разрушаемость; устойчивость к воздей-
ствию факторов космической среды. Необходимые данные по
материалам изложены в [28] и [39]. Среди наиболее перспектив-
ных материалов следует отметить современные композиционные
материалы с использованием волокна из графита, кевлара или
карбида бора с эпоксидной смолой [28]. Также следует отметить
металлизированные пленки, металлизированные материалы
из текстильных тканей, металлизированные трикотажные
материалы из полимерных нитей, трикотажные материалы из
металлических нитей [39].
При развертывании гибких конструкций возникает ряд про-
блем, связанных прежде всего с возможностью;
1) заматывания гибкой конструкции вокруг центрального те-
ла, приводящего систему во вращение;
2) превышения допустимых напряжений в развертываемой
гибкой конструкции, вызванных действием центробежных
сил;
3) возникновения автоколебаний, параметрических колеба-
ний, резонансов.
Решение этих проблем связано с глубокими теоретическими ис-
следованиями.
В [40-56] описаны основные аспекты математического моде-
лирования динамики систем, содержащих твердые тела и мягкие
компоненты.
В [41-44] изложены положения и методы механики гибких
нитей. Приведены основные соотношения статики, кинематики
и динамики нитей для плоского и пространственного движения.
Рассмотрены задачи, связанные с исследованием стационарных
режимов движения, описаны методы численного решения задач.
46 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
Монография [46] посвящена изложению тех вопросов теории
абсолютно гибкой нити, которые наиболее близки к инженерным
задачам. В связи с этим особое внимание обращено на выбор
рациональных форм дифференциальных уравнений равновесия
или движения нити, построение граничных условий, сравнение
и оценку различных методов.
В работах [47-63] рассмотрены проблемы, связанные с иссле-
дованием динамики систем, содержащих гибкие деформируемые
элементы, приведены методы математического моделирования
этих систем, учета влияния изменяемости гибких элементов под
действием различных силовых факторов, в основном инерцион-
ных, на движение систем в целом, устойчивость этого движения.
Методы исследования движения гибко связанных космиче-
ских объектов (твердых тел, связанных гибкой нитью) рассмот-
рены в [47]. Особое внимание уделено изучению качественных
структур и бифуркаций динамических систем, определяющих
движение связки, и характеристике основных закономерностей
движения связанных объектов.
Вопросы движения летательных аппаратов при значительных
углах поворота, когда деформируемые гибкие элементы под дей-
ствием массовых сил совершают колебательные перемещения,
изложены в [48]. Здесь освещены наиболее важные аспекты
составления математической модели пространственного движе-
ния системы, которая представляется нелинейными дифферен-
циальными уравнениями. Получены необходимые и достаточные
условия устойчивости стационарных движений таких систем.
Анализ влияния колебаний упругих элементов на ориента-
цию центрального тела спутника является важной и сложной
задачей [57]. Для упрощения задачи строится упрощенная ме-
ханическая модель спутника с другими элементами, например
в виде центрального твердого тела и двух идентичных симмет-
рично расположенных консольных стержней с жесткой заделкой.
В данной статье для механической модели спутника указан
способ построения математической модели, который заключает-
ся в следующем. Формируется замкнутая краевая задача для
упругих поперечных колебаний стержня, описываемая интегро-
дифференциальным уравнением с частными производными. При-
ведено решение этой задачи. Таким образом, влияние колебаний
упругих элементов с распределенными массами на ориентацию
спутника сведено к моментам — известным функциям времени,
приложенным к центральному твердому телу спутника.
В [58-60] исследуется движение систем твердых и гибких
тел. Разработаны математические модели системы и проведены
2.1. Теоретические работы
47
численные исследования. В [59] проводятся исследования де-
формирования и колебаний гибкого кольца. Метод исследова-
ний базируется на совместном использовании метода Ньютона-
Канторовича и алгоритмов Рунге-Кутта численного интегри-
рования дифференциальных уравнений. Разработана методика
численного исследования упругого равновесия и собственных
колебаний пространственно искривленных гибких стержней при
заданных режимах их движения.
В работе [61] исследуются колебания стабилизируемого гиб-
кого диска. На основе экспериментальных исследований процес-
са аэростабилизации и поведения диска построена динамическая
модель системы. По данной модели составлена соответствующая
нелинейная математическая модель и исследованы нерезонанс-
ный и резонансный случаи колебания стабилизируемого диска.
Получены в первом приближении соответствующие частные ре-
шения.
Л. В. Докучаев и О. П. Клишев [63] решают задачу об устой-
чивости вращения твердого тела с гибкими элементами. Заменяя
путем дискретизации общие уравнения системой обыкновенных
дифференциальных уравнений, получают уравнения движения,
и в плоскости конструктивных параметров строятся точные обла-
сти асимптотической устойчивости вращения аппаратов с двумя
наклонными упругими штангами. Получены необходимые и до-
статочные условия устойчивости «нетривиального» равновесно-
го положения стержней, наклоненных под произвольным углом
к оси вращения тела.
В работах В. В. Белецкого, Е.М. Левина [64-66] поднимают-
ся вопросы механики тросовых систем. В качестве модели рас-
смотрена гибкая линейно растяжимая нить, замкнутая в кольцо
вокруг притягивающего центра [64]. Рассмотрен вариант ста-
билизирующего управления стационарно вращающейся гибкой
нити, построенный по образцу природных колец и отличающийся
простотой реализации. В [66] рассматривается движение связки
двух спутников с токопроводящим тросом на геоцентрической
орбите. С помощью двух материальных точек, соединенных рас-
тяжимой и весомой гибкой нитью, исследуется влияние рас-
пределенных вдоль троса электромагнитных сил на динамику
тросовой системы. За счет управления силой тока в тросе может
быть достигнута стабилизация системы.
В [67] на примере спутника, образованного согнутым в коль-
цо упругим стержнем, в линейном приближении изучена устой-
чивость стационарных движений с учетом деформируемости си-
стемы. Из внешних воздействий учитываются гравитационные
48 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
и аэродинамические. В общем случае уравнения в частных про-
изводных сводятся к обыкновенным дифференциальным уравне-
ниям методом Галеркина. Как оказывается, действие аэродина-
мических сил приводит к неустойчивости стационарного движе-
ния
В статье [68] дан анализ динамической системы, состоящий
из стабилизированного вращения корпуса спутника и выпуска-
емой из него с ускорением гибкой антенны. Получено решение
тремя методами. Показано, что существует критическое ускоре-
ние развертывания антенны, выше которого ее движение ста-
новится неустойчивым. Получено характеристическое уравнение
для собственных значений, которым соответствуют моды вибра-
ции антенны.
А. Г. Кушнер в [69] рассматривает задачу об изгибе нити,
закрепленной одним концом на экваторе вращающейся планеты.
Выводится дифференциальное уравнение кривой, вдоль которой
изогнется нить. Методом факторизации находится ее решение.
Модель абсолютно гибкой нити широко используется при
решении многих технических задач. В связи с этим желательно
построение точных аналитических решений уравнений движений
такой нити. Однако нахождение решений в общем случае свя-
зано со значительными математическими трудностями. Поэтому,
приняв те или иные гипотезы, упрощающие общую систему
уравнений, можно построить отдельные классы точных решений
для получения описания процессов движения нити в реальных
условиях. В [70] с учетом гипотезы о неизменности формы оси
абсолютно гибкой нерастяжимой нити в процессе анализа воз-
можности построения точного решения уравнений ее движения
найдены дополнительные условия, при выполнении которых воз-
можно построение аналитического решения.
Исследование форм замкнутой гибкой нити проводится в ра-
ботах [44, 71-73] (ленточный радиатор, баллистическая антен-
на). В [71] задача рассматривается в общей постановке, когда
тяжелая замкнутая гибкая нить движется вдоль себя и одновре-
менно вращается в сопротивляющей среде. Получено замкнутое
решение краевой задачи о форме и натяжении замкнутой гибкой
нити, стационарно движущейся и одновременно вращающейся
вокруг вертикальной оси, с учетом сил тяжести и сопротивления
среды.
В статье Г. Г. Ефименко и Н.В. Кривоносова [74] рассматри-
ваются либрационный и ротационный режимы движения гибкой
нити с грузами на концах в ньютоновском поле сил. Уравне-
ние возмущенного движения нити преобразуются к уравнениям
2.1. Теоретические работы
49
Хилла, которые затем исследуются асимптотическим и числен-
ным методами. В плоскости параметров системы, характеризую-
щих собственную частоту колебаний и уровенв энергии относи-
тельно движения нити, строятся области динамической неустой-
чивости.
Задача о вращении нерастяжимой весомой пространственной
нити, один конец которой закреплен, а второй свободен от натя-
жения, вокруг неподвижной оси моделируется нелинейной кра-
евой задачей для обыкновенных дифференциальных уравнений
второго порядка в [75].
В [76] рассмотрены качественные характеристики, опреде-
ляющие форму однородной и нерастяжимой нити, стационар-
но вращающейся в поле тяжести, для нескольких вариантов
крепления на оси вращения ее нижнего конца. Определяется
факт выпуклости и вогнутости участков нити, а также наличие
и месторасположение особых точек равновесной кривой.
А. А. Иванов [77] с учетом факторов геометрической нели-
нейности исследовал колебание гибкой нити как системы с 2-мя
и 3-мя степенями свободы.
В работе [78] в рамках модели полярной цепной линии иссле-
дуется распределение напряжений во втулке маховика, образо-
ванного проволокой, намотанной на радиальные спицы. Выведено
уравнение движения нити в поле центробежной силы, нелиней-
ное относительно радиуса вращения элемента нити, решение ко-
торого при заданных граничных условиях может быть получено
в виде степенного ряда.
Статья [79] посвящена исследованию вынужденных изгиб-
ных колебаний вращающегося мембранного диска, связанных
с периодическими движениями центральной жесткой круговой
вставки, вызванными ее поступательными колебаниями вдоль
оси вращения, периодическими поворотами относительно одного
из диаметров и движением оси вставки по круговой конической
поверхности, ось которой совпадает с осью симметрии систе-
мы. Для каждого случая получены формы колебаний диска при
различных значениях угловой скорости его вращения и частоты
колебаний вставки.
Аналитические выражения для скоростей распространения
волн в плоской круглой мембране, вращающейся вблизи жест-
кой базовой плиты приведены в [80]. Выделены два типа волн,
возникающих в мембране, в распространяющихся в направлении
(первый тип) и против (второй тип) вращения. Первый тип ха-
рактеризуется малым затуханием и скоростью, равной половине
скорости вращения. Второй тип волн быстро демпфируется.
50 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
Очень часто проведение теоретических исследований невоз-
можно без экспериментальной проверки результатов. А иногда
на основе экспериментальных исследований строятся математи-
ческие модели исследуемых систем [81]. Вопросам эксперимен-
тальных исследований вращающихся гибких дисков посвящены
работы [81-82]. Например, в [81] изложена методика и описаны
средства для экспериментального исследования колебаний вра-
щающегося гибкого диска. Представлены зависимости колебаний
от ряда параметров устройства. Определено влияние внешних
возмущений на амплитуду поперечных колебаний диска.
Несмотря на обилие работ по теории расчета мягких обо-
лочек [51-56, 83, 85], актуальной задачей остается создание
и программная реализация алгоритмов расчетов пленочных по-
верхностей, учитывающих физическую нелинейность, появление
зон складок и другие особенности работы пленочных конструк-
ций. Работы проектного характера по пленочным каркасным
отражателям, а также отражателям, формируемым при помощи
электростатических и центробежных сил, выполнены в 80-х го-
дах в ЦНИИПроектстальконструкция по хоздоговорам с НПО
«Энергия» под руководством и при участии идеолога конструк-
ции космического радиотелескопа КРТ-10, лауреата Ленинской
премии, д. т. н. А. С. Гвамичавы.
В работе [86] даны алгоритмы динамического расчета полной
антенной системы параболической антенны, формируемой элек-
тростатическими силами. На базе жестких и надувных элемен-
тов даны конструктивные решения для антенны диаметром до
1000 м.
В работе [87] рассмотрены некоторые вопросы раскрытия
пленочных отражателей, формируемых центробежными силами,
возможности создания сферической поверхности и вопросы рас-
кроя пленки. Проведен расчет формообразования и напряжен-
но-деформированного состояния с учетом пластической дефор-
мации круглых пленочных отражателей, образованных как из
двух плоских пленочных дисков круглой формы, так и из по-
лос или секторов. Проведен расчет амплитуды отклонения края
вращающегося отражателя, при разворотах объекта при нулевой
центральной вставке с учетом конструкционного демпфирования.
Проработана конструкция параболического отражателя, диамет-
ром 30 м, состоящего из двух круглых пленочных поверхностей
специального раскроя, склеенных по периферии и размещен-
ной между полотнищами раздвижной телескопической штанги.
Одно полотнище выполняется из прозрачной пленки, а дру-
гое имеет отражающее покрытие. Итоговой в этом направлении
2.1. Теоретические работы
51
в ЦНИИПСК является работа [88]. В ней обобщаются методи-
ки расчета напряженно-деформированного состояния пленочных
конструкций с учетом физической нелинейности и особенностей
паскроя. Рассмотрен алгоритм сматывания с барабана тяжелой
нити, представляемой звеньями из точечных масс и невесомых
нитей. Составленный в неподвижных координатах алгоритм в си-
лу трудоемкости не был реализован, однако для одного зве-
на были получены численные решения для различных законов
приложенного момента, выявившие колебания параметров про-
цесса. Проведен расчет ускорения раскрытого пленочного дис-
ка, определены параметры, при которых начинается образование
складок. Дано подробное исследование искажений поверхности
вследствие технологических ошибок изготовления. Предложены
методики наземной отработки пленочных полотнищ.
Примерно с середины 80-х годов к работам по пленочным
конструкциям, формируемым центробежными силами, активно
подключился Киевский инженерно-строительный институт. Ра-
боты проводились под руководством и при участии д. т. н., проф.
В. И. Гуляева и д. т. н., проф. П. П. Лизунова по хоздоговорам
с НПО «Энергия» и носили исключительно расчетный характер.
В работе [89] исследуется движение относительно центра масс
твердых и гибких тел в центральном силовом поле. Получены
формы стационарных движений вращающегося твердого тела
на круговой орбите. Решается задача о колебании вращающей-
ся круговой пленочной мембраны при различных периодиче-
ских возмущениях от центральной жесткой вставки. Приводятся
два возможных способа укладки гибких мембран: «гармошка»
и 6-лучевой. Указывается не необходимость отбора избыточной
энергии от разворачивающейся мембраны.
В работах [90—92] рассмотрены нелинейные колебания вра-
щающегося твердого тела на круговой и эллиптической орбитах.
Подробно, с большим количеством иллюстраций различных ва-
риантов численного расчета рассмотрены колебания вращающей-
ся мембраны с центральной жесткой вставкой, двух мембран,
вращающихся в разные стороны, двух мембран, скрепленных по
периферии и разведенных в районе центральной жесткой вставки
на некоторое расстояние.
В работе [93] даются расчеты потери устойчивости большого
количества конструктивных форм тросовых систем, приводится
Решение задачи динамики раскрытия тросовой конструкции в ви-
Де^ вышеуказанной тросовой нити на основе уравнений Лагран-
• Задача раскрытия внешнего контура петлевой тросовой си-
мы не была решена. Рассмотрены плоские пространственные
52 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
свободные колебания тросового кольца со спицами. Решается
задача управляемого разворачивания круговой мембраны, свя-
занной с вращающимся твердым телом для различных зако-
нов приложенного вращающего момента. Уравнения выведены
с использованием уравнений Лагранжа. Новой важной задачей
в работе была задача исследования динамики вращающейся мем-
браны при сложном нестационарном повороте оси для различных
законов поворота оси. Полученные результаты были в дальней-
шем подтверждены в КЭ «Знамя 2». Также в [93] дан вариант ре-
шения задачи об ускоренном вращении мембраны и оптимальном
управлении движением двух вращающихся мембран. Приведена
постановка задачи о движении тела, обладающего магнитным
моментом, в магнитном поле Земли.
2.2. Проектно-конструкторские разработки
Впервые указания на нецелесообразность перенесения зем-
ного опыта создания крупногабаритных конструкций в космос
и необходимость создания крупногабаритных космических кон-
струкций, использующих специфические условия космоса, такие
как невесомость и глубокий вакуум, и конкретно центробежные
силы для раскрытия из уложенного состояния и дальнейшего
поддержания формы в раскрытом состоянии при эксплуатации,
встречаются у основоположников космонавтики К. Э. Циолков-
ского и Ф А. Цандера. Конструкции предназначались для ис-
пользования в качестве солнечных парусов для межпланетных
полетов и отражателей солнечного света для освещения ло-
кальных районов Земли [16-17]. Проектных и технологических
проработок в то время не проводилось, однако предлагалось
использовать для таких конструкций тончайшие листы никеля
толщиной всего 1 микрон, полученных электролизом Эдисоном
и продемонстрированных им на выставке в Брюсселе в 1900 году.
Удельные, массогабаритные и прочностные параметры круп-
ногабаритных космических конструкций для различных прило-
жений обсуждаются в зарубежной и отечественной технической
литературе более 40 лет. Основными приложениями являлись
солнечные паруса, космические солнечные электростанции, си-
стемы освещения районов Земли отраженным солнечным све-
том. Лаборатория JPL (США) в кооперации с 16-ю фирмами,
в число которых входили Мартин-Мариетта, Дюпонт, Локхид,
с начала 70-х годов разрабатывала 2 конструкции солнечно-
го паруса бескаркасную, формируемую центробежными силами
(«Гелиоротор»), с вращающимися лопастями, длиной до 7,5 км,
2.2. Проектно-конструкторские разработки
53
и с крестообразным ферменным каркасом. Обе разработки не
были доведены до космического эксперимента даже на моделях.
Однако по обеим схемам был проведен большой комплекс про-
ектно-конструкторских и технологических работ. Таким образом,
первой и наиболее масштабной проектно-конструкторской и тех-
нологической разработкой формируемой центробежными силами
конструкции являлся проект «Гелиоротора» — солнечного па-
руса, предназначенного для полета к комете Галлея [106, 147]
(1978 г). Аппарат представлял собой солнечный парус, выпол-
ненный в виде 8 лент шириной 8 м и длиной 7500 м из аллю-
минизированной пленки каптон, натягиваемой на легкий дефор-
мируемый титановый каркас. Конструкция представляла собой
два ряда лопастей на одной оси, вращавшихся в разные стороны
(рис. 2.1). Предлагалось осуществить раскрытие конструкции
Рис. 2.1. Формируемая центробежными силами конструкция «Гелиоротор» —
солнечный парус, предназначенный для полета к комете Галлея
путем вращения в два этапа: в начале за счет плазменных дви-
гателей, а затем за счет солнечного давления. Тем же способом
предполагалось поддерживать форму в течение всего полета.
Проект оценивался в 62 млн долларов и не был осуществлен
из-за высокой степени риска. Основным недостатком проекта
являлась невозможность сохранения одинакового угла наклона
поверхности лопасти к солнечным лучам на очень большой длине
не жесткой конструкции лопасти Технологические погрешно-
сти с большой вероятностью привели бы к тому, что по длине
лопасти разные ее участки были бы под различными углами
к солнечным лучам, что делало процесс раскрытия и дальней-
54 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
шего поддержания формы лопасти неопределенным. Возможные
колебания поверхности увеличивали неопределенноств.
В 1989 г. в Ташкентском конструкторском бюро машиностро-
ения (ТашКБМ г. Ташкент) был разработан эскизный проект
малоразмерного автономного спутника с пленочным отражате-
лем D = 20 м, выводимого в космическое пространство через
шлюзовую камеру орбитальной станции (ОС) «Мир» [98]. Габа-
риты спутника 320 х 580 мм определялись габаритами шлюзовой
камеры, масса составляла 24 кг. В качестве привода предпола-
галось использовать электродвигатель. Стабилизацию спутника
предполагалось осуществлять за счет предварительно разогнано-
го маховика, входящего в состав спутника Расчеты динамики
разворачивания не были проведены, а электропривод не был
обеспечен питанием. По этим причинам проект в дальнейшем не
получил развития.
Аналогичный проект малоразмерного спутника на базе га-
зового привода был разработан в 1989 г. в НПО «Энергия»
(эксперимент «Знамя 1»). От эксперимента в дальнейшем отказа-
лись из-за невозможности наземной отработки газового привода
в вакуумной камере, расчетной не устойчивой динамике раскры-
тия, и значительно больших возможностях при проведении экс-
перимента на транспортно-грузовом корабле (ТГК) «Прогресс»,
который в сочетании со станцией «Мир» представлял собой
уникальную космическую научную лабораторию.
В течение 1990 года в НПО «Энергия» было выпущено два
варианта эскизных проектов по аппаратуре и методике прове-
t дения космического эксперимента на борту ТГК «Прогресс» по
разворачиванию пленочного формируемого центробежными си-
лами отражателя (эксперимент «Знамя 2») [96, 99]. Проекты
отличались конструкцией пленочного полотнища и соответствен-
но конструктивным исполнением агрегатов раскрытия полотни-
ща. Оба проекта были доведены до рабочих чертежей и мето-
дик отработки узлов агрегатов. Первоначально был выполнен
проект неразрезного отражателя с укладкой «патент Франции»
[30] и должен был служить прототипом отражателя для систем
освещения и ретрансляции. Агрегат раскрытия был выполнен по
«неуправляемой» схеме и содержал отражатель из полиэтилен-
терефталатной пленки ПЭТФ, намотанный на один центральный
барабан с электроприводом [99].
Однако, в связи с развернувшимися к этому времени ра-
ботами по солнечному парусному кораблю и выработанными
конструктивными концепциями, было решено переделать про-
ект «Знамя 2» под разрезной 8-секторный вариант поверхности
2.2. Проектно-конструкторские разработки 55
-----------------------------------------------------------
отражателя и сделать агрегат разворачивания отражателя и сам
отражатель маломасштабной моделью солнечного парусного ко-
рабля [96].
Агрегат раскрытия был выполнен по управляемой двухпри-
водной схеме. Центральный барабан вращался электроприводом
вращения для обеспечения центробежных сил, а установленные
на центральном барабане 8 катушек с уложенными на них сек-
торами отражателя были объединены приводом роспуска.
Работы были инициированы объявленным в США конкурсом
на проект солнечного парусного корабля для полета к Марсу
в честь 500-летия открытия Америки Колумбом. Датой праздно-
вания был октябрь 1992 г.
В связи с этим в 1990 г. в РКК «Энергия» был выпущен
эскизный проект солнечного парусного корабля (СПК) [101].
На проект было затрачено 1,5 млн руб. в ценах 1990 года
и привлекалось около 500 специалистов различных направлений
и систем. Проект СПК содержал 21 том пояснительной записки,
охватывая все вопросы разработки, создания и эксплуатации
столь сложного и нового космического аппарата. В основу раз-
работки было положен патент РФ [8] на конструкцию СПК
(рис. 1.5), состоящего из двух вращающихся во взаимно проти-
воположных направлениях гибких систем (двух пленочных по-
лотнищ или одного полотнища и компенсирующего тросового ма-
ховика) и управления положением в пространстве путем излома
оси, связывающей вращающиеся конструкции, и возникающей
при этом прецессии всей системы.
В СПК была принята разрезная конструкция паруса, состо-
ящая из отдельных секторов, скрепленных по периферии [103],
в связи с ее большой технологичностью, а также дополнительной
возможностью управления СПК путем введения «пропеллерно-
сти» паруса, т. е. возможности поворота лопасти относительно
радиальной оси в течение одного оборота паруса вокруг цен-
тральной оси. При этом за счет смещения центра масс относи-
тельно центра давления возникала возможность дополнительно-
го управления системой в пространстве.
Возможные варианты конструкции СПК и ряд проблемных
вопросов, связанных с его созданием, таких как технология из-
готовления, динамика раскрытия паруса и маховика, дисбаланса
и технологичеких искажений поверхности паруса, воздействий
кориолисовых сил, оценка сил и моментов, действующих на
паРус, были проработаны предварительно на этапе выпуска тех-
нических предложений по СПК [104].
56 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
Проект СПК занял на международном конкурсе в США
призовое место, однако обещанных средств на его реализацию
(200 млн дол.) выделено не было и проект не был реализован.
Одновременно представленные на конкурс проекты Франции,
Японии и США базировались на каркасных конструкциях. Ни
один из этих проектов также не был реализован. Конкурс в честь
500-летия открытия Америки (1990 г.) подвел итог зарубежным
разработкам, построенным на каркасных схемах без вращения
[112, 118, 119], не осуществленным до настоящего времени.
Однако маломасштабная модель СПК (эксперимент «Знамя 2»)
была спроектирована, изготовлена, прошла наземную отработку
и была успешно раскрыта на ТГК «Прогресс М» N215 04.02.93 г.
[9, 23], подтвердив техническую реальность создания крупномас-
штабных космических конструкций, формируемых центробежны-
ми силами.
По заданию НПО «Энергия» в Долгопрудненском КБА бы-
ли разработаны технология изготовления и конструкторская
документация на пленочные отражатели диаметром до 200 м
[100]. Отработана технология изготовления и укладки из пленки
ПЭТФ толщиной 5 мкм по схеме «патент Франции». Были изго-
товлены несколько образцов отражателей диаметром D = 20 м.
Образцы отражателей О = 2миО = 5мпо различным схемам
укладки изготавливались и поставлялись в НПО «Энергия» для
проведения экспериментальных исследований в вакуумной каме-
ре.
В 1990-1991 гг. РКК «Энергия» принимала участие в разра-
ботке темы «Лампа» (головной разработчик НИИТП) по освеще-
нию районов Земли из космоса отраженным солнечным светом
[7, 131]. В этой работе к проектно-конструкторской проработке
конструкции космического крупногабаритного отражателя при-
влекался ЦНИИСтальконструкция, как специализированная ор-
ганизация по пространственным ферменным конструкциям. От-
ветственным исполнителем с их стороны являлся д. т. н., лауреат
Государственной премии за KPT-10 А. С. Гвамичава. Проводился
сравнительный анализ различных конструктивных схем косми-
ческого крупногабаритного отражателя. Критериями являлись
минимум удельной массы поверхности отражателя и возмож-
ность получения требуемой точности поверхности отражателя
при ее переориентации в пространстве и обеспечении ее отража-
ющих характеристик. По минимуму удельной массы поверхности
первое место занимают бескаркасные, формируемые центробеж-
ными силами конструкции. Однако по точности изготовления
поверхности, из-за влияния сил Кориолиса при переориентации,
2.2. Проектно-конструкторские разработки
57
они уступали каркасным вариантам и требовали специальной си-
стемы демпфирования колебаний, принцип которой был отрабо-
тан позже в КЭ «Знамя 2». В каркасных вариантах сравнивались
схемы с периферийным жестким каркасом (типа пантографа),
и схемы с каркасом из различного количества ферменных лу-
чей, выходящих из одного центра. При одинаковом натяжении
полотна отражателя, определяемого жесткостью каркаса, масса
периферийного каркаса была тяжелее в 3-5 раз по сравнению
с каркасом из лучей, выходящих из одного центра. По этой
причине, а также ряду технологических обстоятельств, перифе-
рийная схема была признана не перспективной для дальнейшей
проработки. Наилучшими характеристиками обладала 6-лучевая
схема.
В конце 1992 г. были выпущены технические предложе-
ния по системе освещения городов Заполярья НПО «Энергия»
и НИИТП по теме РАН «Лампа» [7]. По причине высоких
требований к отражающим характеристикам поверхность (угло-
вая точность выше 10 минут) и не решенному до настоящего
времени вопросу демпфирования колебаний от гироскопических
сил крупномасштабных систем, формируемых центробежными
силами, к проработке была принята каркасная конструкция отра-
жателя. Цельный отражатель из полиимидной пленки по схеме
укладки ДКБА имел форму шестигранника и натягивался на
шесть лучей в виде раскладных пространственных трехгранных
ферм, длиной 120 м каждая, выходящих из одного центра. Масса
пленки составляла около 500 кг, масса каркаса 3300 кг. Для раз-
ворачивания конструкции из уложенного состояния и управления
ее положением в пространстве было предложено использовать
центробежные силы, величина которых, однако, значительно
меньше, чем в случае формирования поверхности только за счет
центробежных сил.
Проработка каркасного варианта представляла большой ин-
терес для сравнения с параллельно прорабатываемой для тех же
целей бескаркасной конструкцией, формируемой центробежны-
ми силами [131], где в качестве базовой использовалась кон-
струкция солнечного парусного корабля с вариантами разрезного
и неразрезного отражателя.
В 1994 г. в РКК «Энергия» были разработаны технические
предложения по экспериментальной системе генерации НЧ-элек-
тромагнитного излучения на базе ТГК «Прогресс М» с использо-
ванием динамической тросовой антенны (ДТА) диаметром 300 м
для исследования ионосферы в рамках темы «Параметр» [143].
Работы были инициированы Институтом земного магнетизма
58 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
и распространения радиоволн (ИЗМИРАН). Были разработаны
конструкция агрегата раскрытия тросовой рамочной антенны
и конструкция низкочастотного генератора. Был проведен расчет
динамики раскрытия антенны и разработана программа-методика
космического эксперимента. В силу прекращения финансирова-
ния космический эксперимент не был осуществлен.
Основные этапы проведенных к 1996 г. работ в РКК «Энер-
гия» по формируемым центробежными силами космическим кон-
струкциям были изложены в книге [23]. В ней представле-
ны общие проектно-конструкторские концепции разработки кон-
струкций под различные целевые задачи, кроме солнечных ба-
тарей. Разобрана динамика раскрытия конструкций без ком-
пенсации кинетического момента. Представлены метериаловед-
ческие и конструктивно-технологические вопросы создания пле-
ночных конструкций. Приведен комплекс экспериментальных ра-
бот с тросовыми и пленочными моделями. Описаны этапы подго-
товки и проведения космического эксперимента «Знамя 2». Дан
анализ его результатов. Представлены несколько перспективных
проектов.
В патенте РФ 2003 г. [133] продемонстрированы принципи-
альные возможности использования формируемых центробежны-
ми силами конструкций под пленочные солнечные батареи (СБ)
космических аппаратов. Патент был подан в связи с проведен-
ной в РКК «Энергия» разработкой Технических предложений
по тяжелому телекоммуникационному спутнику массой порядка
8 тонн (рис. 2.2) [146]. Спутник был снабжен вращающейся сол-
нечной батареей из аморфного кремния на подложке из нержаве-
ющей стали толщиной 20 микрон. Мощность батареи на начало
ресурса составляла 120 кВт. Стоимость спутника оценивалась
в 2 миллиарда долларов. Удельная мощность солнечной батареи
составляла 300 Вт/кг. Поскольку заказчик на разработку найден
не был, она не была осуществлена.
В первые годы текущего столетия в Японии был разрабо-
тан проект космической солнечной электростанции на мощность
порядка 5 МВт. Конструкция представляла собой раздвижную
ферменную пространственную сборку, по форме аналогичную
треугольной крыше дома со стороной длиной 320 м. Такая форма
выбрана из условия ограниченной ориентируемости конструкции
и возможности освещения Солнцем ее различных сторон, где
располагаются пленочные аморфно-кремниевые солнечные бата-
реи. Предполагается сбор электроэнергии с солнечной батареи
на СВЧ-преобразователь, находящийся в центре нижней части
конструкции, и сброс энергии СВЧ-антенной на наземную рек-
2 2. Проектно-конструкторские разработки
59
Солнечная батарея космического аппарата
Рис. 2.2. Тяжелый телекоммуникационный спутник с формируемыми центро-
бежными силами солнечными батареями (1)
тенну, вариантом которой является сетка, натянутая на столбах
в море между островами.
В заявке [138] показана возможность стабилизации поверх-
ности СБ за счет силы Ампера. В патенте [135] представлен
способ объединения СБ в сплошную конструкцию на орбите из
отдельных секторов, докладывавшийся на конгрессе в Японии
и вызвавший большой интерес [134].
Продолжением и развитием работ по формируемым цен-
тробежными силами космическим конструкциям в приложении
к солнечным батареям явилась книга [21]. В книге представлены
возможности эффективного использования бескаркасных форми-
руемых центробежными силами космических солнечных батарей
в широком круге перспективных прикладных задач, таких как
малые и средние космические аппараты, Марсианская миссия,
освоение Луны и космические солнечные электростанции для
трансляции СВЧ-энергии на Землю в проблеме энергетического
кризиса и стабилизации погоды. Рассмотрены общие проектно-
конструкторские концепции создания таких батарей, включая
привязку к космическому аппарату, раскрытие из уложенного
60 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
состояния и переориентацию в пространстве, и ряд этапов техно-
логической, а также наземной и орбитальной экспериментальной
отработки.
2.3. Работы по подготовке и проведению космических
и наземных экспериментов с крупногабаритными
конструкциями
Наиболее ранней (начало 60-х гг.) разработкой крупнога-
баритной конструкции, формируемой центробежными силами,
следует считать антенны на американских ИСЗ «Эксплорер-4»
и «ИК-2» в виде 4 тросов длиной 39 м с грузами на концах,
распускаемых за счет вращения корпуса спутника [122].
Одними из первых крупногабаритных бескаркасных пленоч-
ных космических конструкций были также надувные спутни-
ки-баллоны [123]. Например, спутник «Echo-Ь, разработанный
Центром Langly (NASA) как пассивный ретранслятор, пред-
ставлял собой надувной шар диаметром 30 м из полимерной
пленки типа «Mylar» толщиной 13 мкм с алюминиевым по-
О
крытием толщиной 2200 А; начальное давление в оболочке со-
ставляло 2,8 - 10-6 атм., температура поверхности колебалась от
-62° С до +115° С.
Этот спутник был запущен в 1960 г. и просуществовал на
орбите высотой 1600 км восемь лет, несмотря на то, что рассчи-
тывался на эксплуатацию в течение одной недели [124]. Столь
долгое время существования объясняется тем, что при полной
потере прочности пленочный материал не распадался вследствие
отсутствия внешних воздействий (кроме светового давления)
Однако, не вызывает сомнения, что спутник неоднократно проби-
вался метеоритами. Подобные спутники-баллоны использовались
также для целей спутниковой геодезии.
В 1990 г. на ТГК «Прогресс» был проведен эксперимент
«Зонд 2» с использованием научной аппаратуры, разработанной
и изготовленной в ТашКБМ, по созданию надувного шара диа-
метром 10 м [125]. Однако из-за неотработанности динамики
раскрытия в процессе надува шар лопнул, вследствие чего про-
изошло частичное опутывание ТГК «Прогресс» пленочной обо-
лочкой, грозившее закрыть датчики системы ориентации. В ко-
нечном итоге, остатки пленочного шара были отделены от ТГК
струями его собственных двигателей системы ориентации.
Одной из первых разворачиваемых крупногабаритных кар-
касных конструкций был космический радиотелескоп КРТ-10,
2.3. Работы по подготовке и проведению экспериментов
61
установленный в 1979 г. на люк переходного отсека орбитальной
станции «Салют-7» [126]. Радиотелескоп имел параболическое
зеркало диаметром 10 м из металлической сетки, натянутой
на раму, состоящую из большого количества складывающихся
элементов, и раскрывался в космосе за счет пружин. При по-
мощи этого телескопа осуществлялся прием радиосигналов на
длинах волн Л = 12 см и А = 72 см. В сочетании с назем-
ными радиотелескопами он использовался в качестве элемента
радиоинтерферометра с большой базой. При отстреле КРТ-10 от
орбитальной станции произошло зацепление за элементы ее кон-
струкции, вследствие чего понадобился выход экипажа в космос
для устранения нештатной ситуации (был обрезан зацепившийся
провод).
Разрабатывался в ТашКБМ, но не был реализован дорогосто-
ящий проект космического радиотелескопа КРТ-30 с диаметром
антенны 30 м, раскрываемого при помощи 12400 пружин.
В автоматическом режиме, по запланированной программе,
раскрывались панели солнечных батарей: «СБ» на ОС «Мир»
в 1986 г. — за счет пружинного механизма; в 1989 г. на ОС
«Мир» была применена система раскрытия многоразовых сол-
нечных батарей («СРМСБ») с управляемым раскрытием двух
панелей размером 15 м при помощи электропривода; в 1987 г. на
ОС «Мир» из шлюзовой камеры была раскрыта ферма агрегата
АВШ-10 длиной 10 м, сделанная на базе чечевицеобразного про-
филя, распускаемого электроприводом в автоматическом режи-
ме. Конструкция, подобная последней, использовалась в 1990 г.
в американских и французских проектах солнечного парусного
корабля для полета к Марсу [127]. Эти проекты не были осу-
ществлены, однако, проводилась наземная отработка каркасно-
пленочной конструкции.
В ряде экспериментов по разворачиванию в космосе фермен-
ных конструкций планировалось участие космонавтов: на ОС
«Мир» в 1987 г. за два выхода в открытый космос экипажем
была установлена дополнительная солнечная батарея; там же
в 1990 г. была вынесена и установлена телескопическая грузовая
стрела; и в 1991 г. была собрана и развернута 12-метровая
ферменная конструкция, в которой применялись материалы с эф-
фектом памяти (эксперимент «Софора») [128].
Интересен опыт наземной отработки и автоматического раз-
ворачивания в космосе серии кольцевых рамочных антенн диа-
метром до 30 м на грузовом корабле «Прогресс»: экспери-
мент «Модель» — каркасная конструкция из упругого профи-
ля (1980 г.); «Модель-2» — каркас с токопроводящей лентой
62 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
(1981 г.); под тем же названием в 1983 г. проводился космиче-
ский эксперимент с модернизированным каркасом и токопрово-
дящей лентой. Во всех трех экспериментах не удалось получить
удовлетворительного раскрытия перечисленных конструкций.
В 1986 г. снова под названием «Модель-2» был проведен
эксперимент по созданию на орбите надувной круговой антенны
(два кольца диаметром 30 м, симметрично расположенных от-
носительно продольной оси ГК). Конструкция была, в конечном
итоге, полностью развернута, но в процессе раскрытия имелись
отклонения от заданной программы: в начале роспуска имело ме-
сто резкое, ударное раскрытие конструкции вместо планируемого
плавного, что привело к опасности опутывания ГК десятками
метров резинового рукава. Однако, зацепления и запутывания по
случайности не произошло, и после подачи давления в рукава
антенны конструкция развернулась и работала в качестве пере-
дающей НЧ-антенны.
При подготовке космическрго эксперимента «Модель-2» с на-
дувной конструкцией был проведен комплекс работ по наземной
отработке разворачивания конструкции, которая проводилась на
поверхности воды в бассейне большого размера, в просторном
помещении (путем обезвешивания) и в вакуумной камере.
В бассейне удалось достичь плавного раскрытия рукава из
прорезиненной ткани, уложенного в виде гармошки в контейнер.
Разворачивание происходило под действием давления воздуха,
подаваемого внутрь рукава и регулировалось двумя прижимаю-
щими весь пакет укладки планками. Темп раскрытия зависел от
степени поджатия планками разворачиваемого пакета.
В крытом спортивном зале большого размера было проведено
раскрытие конструкции и контроль ее формы в развернутом
состоянии. При этом конструкция обезвешивалась при помо-
щи большого количества привязанных к ней метеорологических
воздушных шаров. Была получена правильная круговая форма
конструкции с малой степенью отклонения ее из плоскости.
Почти плоская форма колец была также и в самом космиче-
ском эксперименте, что противоречило теоретическим прогнозам
о неизбежности получения конфигурации типа «восьмерка» при
использовании конструкций с малой строительной высотой, т. е.
с малым отношением диаметра рукава из прорезиненной ткани
d=0,15 м к диаметру образованного им в пространстве кольца
D=30 м. Здесь d/D=0,005, т. е. очень мало; считалось же, что
для поддержания плоской формы d/D должно быть около 0,1.
При испытаниях в вакуумной камере был получен эф-
фект «ударного» раскрытия, когда из-за остаточного давления
2.3. Работы по подготовке и проведению экспериментов
63
в рукавах при недостаточных усилиях поджимающих планок
конструкция «выстреливалась» с большой скоростью из контей-
нера. Степень затяжки было трудно проконтролировать, и в кос-
мическом эксперименте реализовался именно ударный механизм
раскрытия: внешние слои рукава после снятия удерживающих
связей с большой скоростью вышли из-под прижимающих пла-
нок, увлекая за собой остальную часть конструкции. Сложенный
вдвое рукав за доли секунды вытянулся на полную длину пер-
пендикулярно продольной оси ГК и затем в обратном движении
ударил по кораблю, опутав его. Однако потом, под действием
подаваемого в рукав давления он позвенно начал отделяться от
ГК без зацепления за элементы конструкции корабля и при-
нял правильную круговую форму. После этого была аналогично
раскрыта вторая, симметричная круговая часть рукава-антенны
с другой стороны ГК.
Следует отметить, что этап разворачивания был недостаточно
отработан, несмотря на наземное исследование и моделирование
в течение длительного времени.
Последним в серии отработки конструкций типа «Модель»
был эксперимент «Краб» — создание на орбите рамочной антен-
ны, разворачиваемой за счет использования материалов с эф-
фектом памяти [129]. И здесь вновь имело место нештатное
разворачивание конструкции: электроэнергии на борту ГК не
хватило для расчетного разогрева элементов с эффектом памяти,
однако, после нескольких витков вокруг Земли, вследствие до-
полнительного разогрева конструкции от Солнца до необходимой
температуры, в конечном счете антенна полностью раскрылась.
Также необходимо упомянуть о неудачных экспериментах по
разворачиванию 4-х ферменных антенн длиной по 2 м на малых
автономных спутниках «МАК-1» и «МАК-2» разработки МАИ,
которые выводились в космос из шлюзовой камеры орбитальной
станции «Мир» в 1992 г. Антенны представляли собой крестооб-
разную конструкцию из первоначально уложенных «гармошкой»
стержней. После пережигания удерживающих связей при назем-
ной отработке стержни раскрывались, фиксируясь прямолинейно
в плоскости, перпендикулярной оси спутника. В космических
экспериментах на обоих спутниках все стержни после непродол-
жительных колебаний фиксировались каждый в своем, отлич-
ном от других стержней пространственном положении в виде
ломаной линии, сильно выходящей из перпендикулярной оси
спутника плоскости.
Следует особо остановиться на работах по созданию мо-
дели солнечного парусного корабля, проводимых в США па-
64 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
раллельно с разработкой космического эксперимента «Знамя 2»
в НПО «Энергия». Эта модель представляла собой каркасную
конструкцию в виде 4 штанг из упругих профилей, выдвигае-
мых из центрального корпуса, куда укладывалось неразрезное
квадратное полотнище пленочного отражателя (рис. 2.3). Длина
Рис. 2.3. Модель солнечного паруса на «Спейс Шаттле» по разработке в США
стороны квадрата составляла 20 м (диаметр отражателя в экспе-
рименте «Знамя 2» тоже составлял 20 м). Предполагалось про-
вести эксперимент по раскрытию конструкции на МТКС «Спейс
Шаттл». Описание наземной отработки и фотографии пленочного
полотна приведены в [127] (рис. 2.4).
Из [127] следует, что в 1990 г. в США уже был создан
образец модели солнечного паруса, прошедший наземную отра-
ботку, однако до настоящего времени о предполагаемых сроках
его запуска в космос не сообщалось.
В связи с высокой стоимостью космических экспериментов,
проводимых на кораблях МТКС «Спейс Шаттл», а также пред-
шествовавшей гибелью аппарата и экипажа, приостановившей
программу, исполнительный директор Американского Планетар-
ного Общества Лоус Д. Фридман вышел в 1990 г. на НПО
«Энергия» с предложением о проработке возможности испытания
модели солнечного паруса, разработанной в США, на ГК «Про-
2.3. Работы по подготовке и проведению экспериментов
65
Рис. 2.4. Фотография наземной отработки солнечного паруса [127]
гресс». В НПО «Энергия» этот вопрос был проработан и дан
положительный ответ, однако дальнейших шагов с американской
стороны не последовало.
Как один из вариантов крупногабаритных космических кон-
струкций можно рассматривать тросовые системы. В 49-м полете
М.ТКС «Спейс Шаттл» 5 августа 1992 г. была произведена попыт-
ка выведения в открытый космос итальянского исследовательско-
го спутника стоимостью 379 млн долларов, который должен был
буксироваться на тросе длиной 19 км. Однако после сматывания
262 м троса произошло заедание редуктора, попытки продолжить
разматывание не привели к успеху, и спутник был втянут назад
в грузовой отсек [130]. Несколько позже эксперимент был по-
вторен. На этот раз удалось размотать почти всю длину троса,
но на конечной стадии накопленное от трения в катушке стати-
ческое электричество пережгло трос разрядом на корпус «Спейс
Шаттла». Очевидцы наблюдали в небе Калифорнии сгорание
троса при входе в верхние слои атмосферы в виде змееобразной
горящей линии.
В середине 80-х годов к проектным и экспериментальным
Работам по конструкциям, формируемым центробежными сила-
ми, было привлечено Ташкентское конструкторское бюро ма-
шиностроения (Таш КБМ). Там был разработан и изготовлен
электропривод для разворачивания пленочного полотнища в ва-
куумной камере мощностью 150 Вт и массой 5 кг, со скоростью
3 г Г. Райкунов и др.
66 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
вращения оси до 1000 об/мин. Привод позволял осуществлять
качание оси вращения. Эксперименты с этим приводом бы-
ли проведены в крупномасштабной вакуумной камере (диаметр
12 м) ЦНИИМАШ [95], где исследовались возможности раз-
ворачивания пленочных полотнищ из различных типов укладок
диаметром до 5 м, отражающие свойства поверхности при раз-
личных угловых скоростях вращения и качание оси вращения
полотнища. Основными результатами этой работы был вывод
о невозможности использования схемы укладки типа «гармош-
ка» ввиду ее неустойчивого раскрытия и необходимости ис-
пользования только многолучевых схем укладки. Были получе-
ны удовлетворительные результаты по отражающим свойствам
поверхности и чрезвычайно интересный результат отсутствия
колебаний полотнища под действием гироскопических сил при
качании оси вращающегося полотнища. Очевидцами на всех
режимах поворотов оси полотнища не фиксировались какие-
либо колебания. Полотнище поворачивалось как жесткое тело.
В отчете [95] даже не говорится о возможности таких колеба-
ний. Как сейчас представляется, исследователи случайно попали
в область пассивного демпфирования колебаний благодаря малой
массе электропривода и недостаточной жесткости элементов его
подвеса. При этом, каким-то образом возникла обратная связь,
полностью демпфировавшая колебания. На приводимых в отче-
те [95] фотографиях отчетливо видна зона около центральной
жесткой вставки диаметром примерно в три диаметра вставки,
поверхность которой размыта и за которой следует идеально
отражающая поверхность. Можно предположить, что сложный
процесс колебаний в этой зоне и образует обратную связь, демп-
фирующую основные колебания.
Более массивный привод (массой более 50 кг) с более жест-
кими элементами крепления был спроектирован и изготовлен
при участии авторов в МАИ [96]. Привод развивал мощность до
1,5 кВт, скорость вращения полотнища доходила до 2200 об/мин.
Регулировалась скорость качания полотнища. Привод был уста-
новлен в вакуумную камеру диаметром 5,5 м НПО «Энергия».
Были повторены эксперименты по разворачиванию из различных
типов укладок и подтверждены ранее полученные выводы. Но
в экспериментах с качаниями оси были получены колебания под
действием гироскопических сил, зафиксированы их амплитуда
и период обратной бегущей волны [97]. Работа дала толчок
исследованиям по возможности активного и пассивного демпфи-
рования колебаний полотнища при управлении его ориентацией
в пространстве.
2.3. Работы по подготовке и проведению экспериментов
67
В рамках темы «Знамя» (1988-1994 гг.) в НПО «Энергия»
были запланированы подготовка и проведение космического экс-
перимента по отработке формируемых центробежными силами
конструкций и набору опыта их создания. Впервые в мире
04.02.93 г. на транспортно-грузовом корабле «Прогресс» рядом
с орбитальной станцией «Мир» был развернут в космосе макет
пленочной конструкции солнечного паруса диаметром 20 м (кос-
мический эксперимент «Знамя 2») и проведен маневр по переори-
ентации конструкции в пространстве [9, 23, 142]. Конструкция
площадью 300 м2 имела массу всего 4 кг (рис. 2.5).
Рис. 2.5. Космический эксперимент «Знамя 2», съемка с борта орбитальной
станции «Мир»
В эксперименте была осуществлена задача использования
конструкции в качестве отражателя солнечного света с орбиты
на Землю. Отражающие свойства поверхности отражателя были
не высокими, но при осуществленном маневре ТГК «Прогресс»
с отражателем, направленном на освещение районов Европы
отраженным с орбиты солнечным светом, космонавт все же
наблюдал движущееся световое пятно на ночной поверхности
Земли. Как новый существенный шаг, при постановке экспери-
мента «Знамя 2» был в идеологическом, конструктивном и мето-
дическом плане оригинальным образом решен вопрос динамики
раскрытия конструкции из уложенного состояния. Обеспечена
Устойчивость и упорядоченность процесса раскрытия. Экспери-
мент подтвердил заложенные в него проектно-конструкторские
Решения и перспективность данного направления исследования.
з*
68 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
Конструкция, реализованная в эксперименте «Знамя 2», являлась
моделью солнечного паруса и отвечала его специфике (рис. 1.5).
Конструкция состояла из отдельных секторов, скрепленных по
периферии, для возможности управления парусом в пространстве
относительно центра масс путем изменения угла наклона секто-
ра в его основании. В соответствии с «разрезной» концепцией
паруса был создан агрегат раскрытия, в котором каждый сектор
укладывался на отдельную катушку, объединенную с другими
аналогичными катушками по числу секторов электроприводом,
обеспечивающим независимую от основного привода вращения
скорость роспуска всех секторов. Организовывалась так назы-
ваемая «управляемая» схема раскрытия, когда математическим
моделированием подбирались режимы работы двух приводов
(вращения и роспуска), обеспечивающие устойчивое и упорядо-
ченное, без недопустимых колебаний, развертывание всех секто-
ров конструкции в единое разрезное скрепленное по внешнему
контуру круговое полотнище. Устойчивости и упорядоченности
процесса раскрытия способствовало использование «падающей»
нагрузочной характеристики электропривода вращения и специ-
альный способ укладки пленочных секторов на катушки. Каж-
дый сектор перед намоткой на катушку складывался гармошкой
относительно своей продольной оси. Такой способ укладки был
результатом длительных экспериментальных и технологических
исследований, т. к. оказалось, что из огромного числа вариантов
укладок лишь очень ограниченное число может быть использо-
вано для задачи формирования центробежными силами, и еще
меньше технологичны, т. е. могут быть изготовлены даже на
очень специализированном производстве. Необходимость исполь-
зования «падающей» нагрузочной характеристики электропри-
вода вращения (зависимости вращающего момента от угловой
скорости) следовала из общего в машиноведении принципа обес-
печения устойчивости работы привода на нагрузку.
Реализованная в эксперименте «Знамя 2» «разрезная» кон-
струкция пленочного полотнища обладала одним существенным
недостатком, исключающим возможность перенесения ее на сол-
нечные батареи и отражатели для освещения отраженным с ор-
биты солнечным светом районов Земли. Таким недостатком яв-
лялось отсутствие растягивающих тангенциальных напряжений,
приводивших к продольной волнистости пленочной поверхности
каждого сектора.
На фотографии, представленной на рис. 2.6, хорошо видна
эта волнистость.
2.3. Работы по подготовке и проведению экспериментов
69
Рис. 2.6. Эксперимент «Знамя 2», фото со станции «Мир».
Видна волнистость поверхности секторов.
В применении к солнечному парусу это обстоятельство не
имело существенного значения, поскольку тяга паруса слабо
зависит от волнистости поверхности. Но для солнечных бата-
рей это недопустимо, поскольку резко снижает выработку элек-
троэнергии. Для отражателей волнистость поверхности сильно
ослабляет зеркальность отражения и препятствует концентрации
отраженной световой энергии в пятне на Земле.
Эксперимент в целом подтвердил заложенные в него про-
ектно-конструкторские решения и перспективность данного на-
правления исследования. К подготовке эксперимента, длившейся
6 лет, был привлечен широкий круг специалистов ракетно-кос-
мической техники и высших учебных заведений. Эксперимент
«Знамя 2» в 1993 г. был выполнен полностью по намеченной
программе без нештатных ситуаций. Эксперимент является уни-
кальным в космической технике, и ему в настоящей работе будет
посвящен самостоятельный раздел (см. Глава 11).
Попытка повторить эксперимент в 1999 г., приуроченная к на-
чалу нового тысячелетия, не удалась из-за методической ошиб-
ки. Использовался 2-й, запасной экземпляр агрегата раскрытия,
изготовленный летом 1992 г. для эксперимента «Знамя 2». При
70 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
раскрытии пленочного полотнища на корабле «Прогресс» не была
убрана штыревая антенна системы «Курс», используемая при
стыковке корабля со станцией «Мир». Антенна располагалась
примерно в полуметре от продольной оси корабля перпендику-
лярно плоскости раскрытия полотнища, на его пути. При сма-
тывании с катушек периферийная часть полотнища уперлась
в антенну и стала распушаться. Процесс был остановлен и ан-
тенна убрана, но поскольку обратная намотка в первоначальное
состояние была невозможна, то вновь включенное сматывание из
распушенного состояния не началось.
Примерно в это же время в Центре им. Г. Н. Бабакина
в г. Химки был проведен комплекс проектно-конструкторских
и технологических работ по созданию надувной модели сол-
нечного паруса, по размерам и форме аналогичной приведен-
ной на рис. 2.5 конструкции, использованной для космического
эксперимента «Знамя 2». Конструкция состояла из отдельных
треугольных секторов, в отличие от эксперимента «Знамя 2» не
скрепленных по периферии. Внешним контуром каждого сектора
служил надувной шланг, задающий жесткость контура секто-
ра и натягивающий поверхность светоотражающей аллюмини-
зированной полимерной пленки ПЭТФ. В наземной отработке
была получена устойчивая картина раскрытия одного сектора
из уложенного состояния путем наддува периферийного шланга.
В космическом эксперименте на орбите удалось осуществить
раскрытие всех секторов конструкции. Однако каждый сектор
принял собственную пространственную форму, достаточно силь-
но отличающуюся от требуемой плоскости (в особенности один
из секторов вышел из плоскости на несколько метров). Главным
недостатком надувных конструкций является сложность обеспе-
чения требуемой формы из-за технологических допусков на рас-
крой и неизбежных конструкционно-технологических неоднород-
ностей материала конструкции в процессе наддува и дальнейше-
го отверждения, необходимого для последующей эксплуатации
первоначально мягкой конструкции. В данном случае материал
надувного шланга из-за допуска на толщину самого материала
шланга и ширину технологических швов принципиально неодно-
роден. Также имеются технологические допуски на размеры рас-
кроя присоединенного к шлангу пленочного полотнища, допол-
нительно влияющие при натяжении на форму конструкции. При
больших размерах конструкции эти факторы становятся столь
критичными, что в НПО «Энергия» ранее отказались от перспек-
тивы использования надувных конструкций для соответствую-
щих задач и сосредоточились на формируемых центробежными
2.4. Заключение по разделу 71
силами бескаркасных конструкциях. Бескаркасность конструк-
ции принципиально снимает ряд трудностей, таких как затраты
на разработку и изготовление каркаса, неточность его формы
и прочее. Надувной шланг является в данном случае каркасом.
Однако каркасные конструкции продолжают развиваться,
и последним значительным достижением в создании каркасных
солнечных батарей является конструкция из 8 элементов массой
по 400 кг и площадью по 150 м2 фирмы «Локхид-Мартин»,
установленная на МКС. Удельная мощность этой батареи не
превышает 60 Вт/кг.
28.10.05 г. на орбиту высотой 1000 км была выведена по-
следняя ступень ракеты-носителя с установленной на спутнике
«Можаец-4» научной аппаратурой для исследования раскрытия
центробежными силами модели солнечной батареи сплошной
конструкции (аналогичной ранее упомянутой аппаратуре для
первого варианта космического эксперимента «Знамя 2» [99]).
Эксперимент проводился в рамках Проекта №2620 «Разработка
технологии и конструкции раскрываемых центробежными сила-
ми солнечных батарей из аморфного кремния на основе тонкой
полимерной пленки для спутников связи и дистанционного зон-
дирования Земли» Международного научно-технического центра
(МНТП,). Из-за не отделения спутника от ракеты аппаратура
не включилась [21, 136], однако этапы подготовительных работ
несомненно представляют интерес для дальнейших разработок.
Созданный в рамках Проекта №2620 МНТП, наземный про-
тотип агрегата раскрытия солнечной батареи использовался для
исследований динамики раскрытия СБ из различных укладок
в Проекте №2620 [21, 148], и используется в учебном процессе
на кафедре ТММ МАИ.
2.4. Заключение по разделу
Анализ теоретических работ показывает, что имеется значи-
тельный задел по механике трансформируемых систем, достаточ-
ный для начала конкретных проектных разработок.
Следует отметить в целом менее высокий уровень проведен-
ных к настоящему времени экспериментальных работ по сравне-
нию с другими направлениями космической техники, например,
с автоматическими или пилотируемыми аппаратами. В подав-
ляющем большинстве орбитальных экспериментов имели место
нештатные ситуации, связанные с недостаточными проектно-кон-
структорской проработкой и наземной отработкой. Опыт неудач-
ных разработок оставался достоянием узкого круга исполнителей
72 Гл. 2. Обзор работ по крупногабаритным космическим конструкциям
предприятий-разработчиков. Указанная ситуация — обычная для
новых направлений, находящихся в стадии становления. Круп-
номасштабные проекты существуют, но до настоящего времени
не реализовывались.
Глава 3
ДИНАМИКА РАЗВОРАЧИВАНИЯ ИЗ
УЛОЖЕННОГО СОСТОЯНИЯ
3.1. Принципы укладки и разворачивания из
уложенного состояния. Требования к укладкам,
вращающему моменту и скорости роспуска
3.1.1. Требования к укладкам
При решении задачи разворачивания гибкой системы (как
пленочной, так и тросовой) из уложенного состояния центробеж-
ными силами, основными требованиями являются:
— конструктивное исполнение, обеспечивающее устойчивость
симметрии геометрии разворачиваемой конструкции на
всех этапах роспуска к возмущениям, следствием которых
может явиться не востанавливаемая потеря формы разво-
рачиваемой конструкции;
— минимальные габаритные характеристики в уложенном со-
стоянии;
— технологичность укладки;
— недопустимость образования замкнутых воздушных объе-
мов, обеспечение откачки воздуха при вакуумировании из
любого участка укладки;
— выбор способа приложения вращающего момента (место
приложения, величина или закон изменения), обеспечива-
ющего разворачивание без недопустимых колебаний, запу-
тывания и разрушения конструкции;
— подбор технических средств, обеспечивающих требуемый
вращающий момент и возможность надежной наземной от-
работки;
— определение закона изменения скорости роспуска и обеспе-
чивающих этот закон технических средств с возможностью
их наземной отработки;
— подбор дополнительных технических средств, препятству-
ющих или исключающих возможность запутывания систе-
мы (обгонные или моментные муфты, обратная связь);
— надежная увязка обеспечивающих разворачивание техниче-
ских средств с другими системами космического корабля.
74 Гл. 3. Динамика разворачивания из уложенного состояния
Для некоторых задач ограничивается время раскрытия си-
стемы и требуется определенная форма поверхности системы на
этапах разворачивания и сразу после них.
Понимание указанных аспектов складывалось во взаимодо-
полняющих друг друга теоретических и экспериментальных ис-
следованиях. Отметим, что на ранних этапах разработок очевид-
ные на первый взгляд решения, предлагаемые опытными кон-
структорами и проектантами, оказывались в дальнейшем прин-
ципиально неприемлимыми или малоэффективными. Причина
этого заключалась в том, что предметом исследований по су-
ществу является устойчивость гибкого гироскопа с присущей ей
специфической динамикой и практически полным отсутствием
житейских аналогий.
3.1.2. Типы укладок пленочных и тросовых конструкций
Примером укладки пленочного отражателя, теряющей гео-
метрическую симметрию на этапах развертывания центробежны-
ми силами, является укладка типа «гармошка» (рис. 3.1), когда
полотнище первоначально складывается вдоль оси в складки,
а полученные два конца радиальных жгутов спирально нама-
тываются на ведущий центральный барабан. Предполагаемое
раскрытие должно было бы происходить в обратной последова-
тельности: при придании вращения ведущему центру и снятии
удерживающих связей радиальные жгуты расходятся спирально
каждый в свою сторону и после полного разматывания жгутов
и занятия ими положения вдоль одной осевой линии происходит
раскрытие половинок полотнища в разные стороны. Указанная
схема рассматривалась у нас и в США.
Рис. 3.1. Укладка типа «гармошка», этапы сворачивания
3.1. Принципы укладки и разворачивания из уложенного состояния 75
Проведенные в крупномасштабных вакуумных камерах
в ЦНИИМАШ и НПО «Энергия» [95, 97] исследования разво-
рачивания полотнищ диаметром 5 м из данной схемы укладки
дали совершенно иную картину: в половине экспериментов
радиальные жгуты на этапе разматывания слипались в один
жгут и раскрытия конструкции не происходило совсем; во
второй половине экспериментов жгуты раскрывались раздельно,
но в конце раскрытия не вставали в одну линию, а приходили
в положение под некоторым углом друг к другу, при этом
две половины полотнища раскрывались не в разные, а в одну
сторону обе. Процесс при этом носил неуправляемый, ударный
характер. Исследование схемы укладки типа «патент Франции»
[30] (рис. 3.2) дало устойчивую и упорядоченную картину
раскрытия.
На основании проведенных экспериментальных исследований
был сделан вывод о необходимости использования многолучевых
схем укладки, обладающих благодаря многозвенности устойчи-
востью и упорядоченностью при раскрытии в поле центробежных
сил.
3.1.3. Управляемое и неуправляемое раскрытие
При разработке проекта солнечного парусного корабля [101]
встала задача одновременного разворачивания двух противовра-
щающихся систем и остро выявилась необходимость организа-
ции процесса управляемого раскрытия, независимого от центро-
бежных сил. Под управляемым раскрытием понимается процесс,
динамические параметры которого могут быть проконтролиро-
ваны, изменены или заданы по определенному закону. Вводит-
ся управление скоростью выпуска конструкции и определен-
ный закон приложения вращающего момента. В укладке типа
«гармошка» раскрытие на втором этапе носило неуправляемый
ударный характер, в укладке типа «патент Франции» скорость
разворачивания зависела от скорости ведущего вала (в два раза
превышала). Было предложено организовать управление развора-
чиванием из этой укладки путем введения окатывающих роликов
по радиальным образующим [105] (рис. 3.3).
Управляя скоростью обкатывания роликов, принципиально
можно было организовать полностью управляемый роспуск. Од-
нако сама укладка по схеме «патент Франции» являлась нетех-
нологичной и чрезвычайно трудоемкой, а попытка введения об-
катывающих роликов натолкнулась на сложность организации
качения ролика по толстому мягкому жгуту укладки. При этом
возникали замины и относительные сдвиги укладки. Устранить
76
Гл. 3. Динамика разворачивания из уложенного состояния
в)
Рис. 3.2. Укладка «патент Франции» [30] в раскрытом состоянии (а) и в фазе
формирования центробежными силами (б), фото модели укладки (с)
это явление можно было введением прокладки в виде узкого
луча из жесткой несминаемой пленки на длину радиуса укладки.
Однако это усложняло и без того достаточно сложную схему
изготовления и укладки полотнищ. По этой причине, а также
по причине возможности поворота лопасти относительно ради-
альной оси, дальнейшие исследования были сосредоточены на
укладке полотнища, состоящей из отдельных секторов, скреп-
ленных по периферии [103]. Каждый сектор укладывался в «гар-
мошку» аналогично схеме укладки «патент Франции», только не
3.1. Принципы укладки и разворачивания из уложенного состояния 77
Рис. 3.3. Принципиальная схема управляемого раскрытия неразрезной пленоч-
ной конструкции: 1 — пленочная поверхность; 2 — окатывающий ролик
под углом к радиусу, а параллельно ему, и наматывался на свою
катушку. Эта укладка являлась разновидностью укладки из от-
дельных лент, описанной в проекте «гелиоротора» [106]. Роспуск
с катушек, объединенных единым приводом, являлся полностью
управляемым и экспериментально отрабатывался при наземных
испытаниях аппаратуры «Знамя 2» и космическом эксперименте.
Дальнейшие разработки типов укладок проводились для от-
ражателей системы освещения Земли отраженным солнечным
светом, где использовалась неразрезная конструкция солнечного
отражателя для получения максимальных отражающих характе-
ристик поверхности.
В технические предложения по теме «Лампа» [10] впервые
была заложена конструкция укладки неразрезного полотнища по
схеме ДКБА (рис. 3.4). Схема является полностью управляемой
на этапе разворачивания центробежными силами путем управ-
ления скоростью роспуска удерживающих тросов. Рассмотрим
схему подробнее и покажем, как при возможных модификациях
схемы происходит потеря ее устойчивости.
Схема относится к типам схем с укладкой «от периферии».
В процессе изготовления первоначально организуется подтяги-
вание складываемых в «гармошку» соединенных между собой
секторов к центральному барабану (рис. 3.5).
Элемент укладки типа «гармошка» не образует замкнутых
газовых объемов при обезгаживании в вакууме. Получившиеся
радиальные лучи могут быть далее различными способами так-
78
Гл. 3. Динамика разворачивания из уложенного состояния
Рис. 3.4. Принципиальная схема раскрытия неразрезного пленочного
полотнища за счет управляющих тросов
Рис. 3.5. Подтягивание складываемых в «гармошку» соединненых между собой
секторов к центральному барабану: 1 — люверса; 2 — трос; 3 — полотнище
4 — ограничитель
же подтянуты к ведущему барабану может быть организована
спиральная намотка лучей на барабан (рис 3.6), лучи могут
быть уложены «змейкой» (рис. 3.7) или намотаны на катушки
3.1. Принципы укладки и разворачивания из уложенного состояния 79
Рис. 3.6. Спиральная намотка лучей на барабан: 1 — спирально намотанные
сектора; 2 — центральный барабан; 3 — технологические проставки
Рис. 3.7. Укладка лучей «змейкой»: 1 — уложенные «змейкой» лучи; 2 —
центральный барабан; 3 — технологические проставки
Рис. 3.8. Намотка лучей на катушки
(рис. 3.8). Особенностью схемы является необходимость органи-
зации роспуска в 2 этапа: вначале раскрываются лучи, а затем
сектора. Если на центральном барабане установить катушки
80 Гл. 3. Динамика разворачивания из уложенного состояния
< намотанными на них тросами, объединенными единым приво-
дом, а концы тросов объединить с внешними катушками, или
трос продеть через «змейку» луча и подтянуть к центральной
катушке, то может быть сначала организован управляемый ро-
спуск лучей. Далее аналогичный блок катушек с намотанными
тросами может быть использован для роспуска секторов.
Для этого тросы должны быть продеты или перекинуты через
подтянутый сектор и закреплены на его периферии. Покажем
возможный вариант потери устойчивости схемы. Предположим,
что мы отказались от секторных тросов и пытаемся сразу ор-
ганизовать раскрытие в один этап путем роспуска тросов, удер-
живающих лучи, намотанные на катушки (рис. 3.8). При этом
одновременно с роспуском лучей с катушек в радиальном на-
правлении за счет центробежных сил пойдет секторная масса
пленки, распределенная по периферийной части раскрываемой
конструкции. Поскольку сматывание пленки с внешних кату-
шек происходит свободно, то быстро наступит момент, когда
центральная масса секторов самопроизвольно начнет под дей-
ствием центробежных сил оттягиваться к периферии, сматыва-
ясь с внешних катушек независимо от управляющих выпуском
катушек тросов, которые ограничивают положение внешних ка-
тушек, но не возможность их вращения. Из-за технологических
неоднородностей конструкции процесс пройдет на всех секторах
в разное время и приведет к ударному неравномерному по вре-
мени частичному раскрытию конструкции до состояния, когда
основная секторная масса пленки займет максимально удаленное
от центрального барабана положение, ограниченное длиной уже
размотанных лучевых тросов.
В случае, если секторные тросы отсутствуют, а лучи собраны
«змейкой» и через них продет трос, скрепленный с периферией
луча, процесс роспуска секторов вообще невозможен. Продетый
через «змейку» трос препятствует выходу массы секторов. Силы
трения в люверсах продетой «змейки» не контролируемы. Воз-
можно заедание в различных лучах на разных этапах роспуска.
В случае надевания внешнего «мешка» на «змейку» луча ситу-
ация ничем не отличается от потери устойчивости в варианте
намотки луча на катушку: из «мешка» также будет спонтанно
вытягиваться пленка под действием натяжения центробежных
сил, приложенных к массе основного сектора.
И только при управлении последовательно сначала лучевыми,
а потом секторными тросами процесс роспуска принципиально
устойчив на всех этапах. При этом на первом этапе выпуска
лучей во всех трех случаях (продетая «змейка», луч на ка-
3 1 Принципы укладки и разворачивания из уложенного состояния 81
тушке и луч в «мешке») также имеется устойчивость процесса.
В случае продетого через люверс луча троса, в люверсах нет
большого сопротивления трения из-за отсутствия больших тан-
генциальных усилий. Безусловно все этапы должны проходить
скурпулезную наземную отработку.
Еще одним важным требованием является большое число
секторов (практически большее или равное 8). Поскольку в слу-
чае технологического заедания механизма роспуска тросов или
слеживания пленки даже на принципиально устойчивой схеме
может произойти потеря устойчивости. Например, если имеется
только 3 сектора, а при раскрытии одна катушка с секторными
тросами по какой-либо причине заела или пленка слежалась и не
отделилась от центрального барабана, то образуется геометри-
чески несимметричная картина распределения усилий и укладка
теряет устойчивость, сбиваясь в одну сторону. В случае большо-
го колличества секторов, остальные потянут за собой дефектный.
Отметим также рассматривавшуюся на ранних этапах разра-
боток схему [38] (рис. 3.9) с укладкой неразрезного полотнища
Рис. 3.9. Схема с укладкой неразрезного полотнища «от центра» и пульсирую-
щим выпуском
«от центра» и пульсирующим выпуском. Схема является чисто
теоретической и не нашла применения, поскольку особенностью
изготовления крупногабаритных полотнищ является их укладка
в процессе изготовления. Нельзя каким-либо образом изготовить
полотнище диаметром 100-200 м, разложить его в цеху, а затем
уложить по какой-либо схеме. Проблематичным представлялся
82 Гл. 3. Динамика разворачивания из уложенного состояния
и процесс пульсирующего роспуска, поскольку при относитель-
ном движении с трением слоев пленки должны были бы неиз-
бежно возникать задиры на швах и нарушение отражающего
покрытия
Выше приведенные типы укладок обсуждались и исследова-
лись при проектных проработках и были выбраны из значительно
большего колличества вариантов.
Подводя итог исследованным типам укладок, можно их клас-
сифицировать по следующим признакам:
— разрезные, не разрезные;
— связанные, не связанные по периферии;
— уложенные «от центра» или «от периферии»;
— намотанные на отдельные катушки или на центральный
барабан, спирально или «змейкой»;
— полностью управляемые, управляемые частично или не
управляемые.
Предпочтительность того или иного типа укладки опреде-
ляется спецификой прикладной задачи. Например, в проекте
«гелиоротора» [106] солнечный парус выполнен в виде отдельных
лент, не связанных по периферии. В этом случае вопрос устой-
чивости конструкций на этапе разворачивания не стоял, мог
возникнуть только дисбалланс при несимметричном роспуске
лент с катушек. Напротив, в эксперименте «Знамя 2» [9] для
скрепленных по периферии секторов была выбрана устойчивая
8-лучевая схема. При разворачивании в космосе 3 из 8 секто-
ров слежались вследствие длительного хранения и развернулись
только в конце этапа раскрытия под влиянием соседних секторов,
благодаря устойчивости схемы в целом.
Способы укладки пленочных полотнищ были результатом
длительных экспериментальных и технологических исследова-
ний, т. к. оказалось, что из огромного числа вариантов укладок
лишь очень ограниченное их число может быть использовано
для задачи формирования центробежными силами, и еще мень-
ше технологичны, т. е могут быть изготовлены даже на очень
специализированном производстве.
Большую роль в понимании процессов разворачивания гиб-
ких систем (в том числе и пленочных полотнищ) сыграли экс-
периментальные и теоретические исследования динамики разво-
рачивания тросовых систем. Возможные конструкции круговой
тросовой системы приведены на рис. 3.10, отличающиеся спосо-
бом крепления периферийного кругового контура к радиальным
связям.
3.1. Принципы укладки и разворачивания из уложенного состояния 83
Рис. 3.10. Конструкции круговой тросовой системы: / — периферийный контур;
2 — радиальные связи; 3 — передающее вращающий момент центральное тело;
4 — скользящее кольцо
В работе [91] теоретически исследованы возможности поте-
ри устойчивости формы на этапе разворачивания конструкции.
Показано, что для обеспечения устойчивости при скользящей
конструкции необходимо помещать в подвижные узлы крепления
массу грузов, суммарно в 3,14 раза меньшую чем масса тросов.
При экспериментальных исследованиях, проведенных на возду-
хе [92], исследовались 24 варианта схем тросовых конструк-
ций, в большинстве случаев наблюдалась потеря устойчивости
контуров на этапах разворачивания. Был подтвержден вывод
о стабилизирующем действии дополнительных грузов. Из работы
следовало, что только одна схема (рис. 3.10а) с первоначально
жестко скрепленными периферийными и радиальными тросами
является наиболее устойчивой, простой и технологичной. До-
бавление стабилизирующих масс еще в большей мере должно
было стабилизировать схему. Поэтому дальнейшее приложения
(по разработке тросовой антенны) основывались именно на этом
варианте.
Исследования с тросовыми системами проводились на воз-
духе, из-за слабого влияния газодинамического сопротивления,
и отличались значительно меньшей трудоемкостью по сравнению
с экспериментами в вакуумных камерах с пленочными полот-
нищами, и по этой причине были очень информативны. Было
проведено несколько сотен запусков в широком диапазоне изме-
нения конструктивных и динамических параметров, использова-
лись 4 варианта приводов раскрытия.
84 Гл. 3. Динамика разворачивания из уложенного состояния
В дальнейшем этот опыт был использован при конструиро-
вании и отработке аппаратуры «Знамя 2» и других агрегатов
раскрытия.
3.1.4. Приложение вращающего момента
Принципиально вращающий момент может быть приложен
как к ведущему центральному барабану, так и к периферии
конструкции. Можно представить пару реактивных двигателей,
размещенных диаметрально противоположно на разворачиваю-
щемся пленочном отражателе или круговой тросовой антенне
[91]. Однако такой способ требует наличия у двигателей соб-
ственной системы ориентации, поддерживающей движение дви-
гателя в плоскости вращения (стабилизация по углу тангажа).
В упомянутом проекте «гелиоротора» [106], солнечное давление
разворачивало конструкцию паруса из отдельных лент, действуя
на выпущенную площадь лент по всей длине. Предполагалось
осуществить «пропеллерность» лопасти путем разворота ее во-
круг радиальной оси. Указанный способ возможен при обеспе-
чении достаточной жесткости лопасти и обеспечении начального
этапа раскрытия каким-либо иным способом (в [106] приме-
нены электроплазменные двигатели). Приложение вращающего
момента к ведущему барабану отличается наибольшей универ-
сальностью. Принципиально вращающий момент может быть ор-
ганизован по любому закону и с использованием обратной связи
(следящий привод). В работе [94] рассматривается возможность
приложения вращающего момента от различных технических
средств: предварительно разогнанного до большой скорости ма-
ховика, от порохового или газового привода (при изменении
тяги по различным законам в зависимости от времени), от элек-
троприводов с жесткими и мягкими характеристиками электро-
двигателей. Использование накопленной кинетической энергии
маховика признано нецелесообразным, поскольку при разворачи-
вании системы центробежными силами сохраняется не кинети-
ческая энергия, а кинетический момент. При этом избыточную
кинетическую энергию следует отбирать от системы в процессе
раскрытия. В противном случае избыток энергии может привести
к нежелательным колебаниям или разрушению системы [87-93].
Действительно, если принять, что сама конструкция отражателя
в уложенном состоянии разгоняется и сама служит маховиком,
и затем разворачивается, то на основе закона сохранения кине-
тического момента можно записать:
3.1. Принципы укладки и разворачивания из уложенного состояния 85
где Jo и ш0 — момент инерции и угловая скорость отражателя
в уложенном состоянии (маховика);
Jo = mR2o/2, (3.2)
где т — масса отражателя; Йо — начальный радиус укладки;
Jfc и ufc — момент инерции и угловая скорость отражателя
в раскрытом состоянии; J^ = mRk/2 (где т — масса отражателя;
Rk — конечный радиус раскрытой укладки).
Кинетическая энергия в начальном Ео и конечном Ek состо-
янии соответственно будет:
Ео = Jow2/2; Ек = Jfc^/2. (3.3)
Выражая шк через ш0 по (3.1) и беря отношение Е0/Ек по
(3.3), имеем:
Е0/Ек = й|/й2о. (3.4)
Сравнивая кинетическую энергию, накопленную в маховике
Ео с кинетической энергией Ек, видим, что Ек составляет ни-
чтожно малую часть Ео, и практически всю энергию Ео следует
каким-либо образом отводить от системы. Технический вопрос
подсоединения вращающегося маховика к разворачиваемой пле-
ночной системе также является проблематичным.
Другое дело, если саму разворачивающуся систему на раз-
личных этапах раскрытия использовать в качестве маховика
с накопленным кинетическим моментом, который уже был сооб-
щен системе каким-либо образом. Если в уложенном состоянии
разогнать систему и затем разворачивать, то ситуация аналогич-
на вышеприведенному примеру с маховиком: необходим отбор
избыточной энергии, а при максимально возможной начальной
скорости конечная скорость будет в любом случае низка и мо-
жет не удовлетворять требованиям прикладной задачи. Однако,
если система каким-либо способом уже частично раскрыта, то
ее дораскрытие может быть эффективно осуществлено за счет
первоначально накопленного кинетического момента. Этот слу-
чай встречается в задаче поэтапного разворачивания тросовой
системы.
Использование газового или порохового привода имеет одну
важную особенность по сравнению с электроприводами. Это
накопление кинетического момента в процессе разворачивания
системы при отсутсвии необходимости его компенсации проти-
вовращающейся системой. Теоретическое решение задачи ди-
намики разворачивания с приложенным постоянным моментом
86 Гл. 3. Динамика разворачивания из уложенного состояния
или с моментом, изменяющимся по времени, дает колебательную
картину разворачивания. Наземная отработка сопряжена с труд-
ностями поддержания достаточного вакуума в камере при работе
газового привода и, по-видимому, может проводиться только
без самого полотнища с массами, его моделирующими. Газовые
струи будут воздействать па полотнище, изменяя его форму.
Указанные особенности, однако, могут с успехом решить задачу
создания «бликующих» отражателей. При массовом производстве
таких конструкций сложности разовой наземной отработки бу-
дут оправданы, а простота и надежность конструкции газового
привода и системы одиночного отражателя для этой задачи оче-
видны.
Принципиально возможные нагрузочные характеристики
приводов приведены на рис. 3.11
Рис. 3 11. Принципиально возможные нагрузочные характеристики приводов:
а — угловая скорость не зависит от момента; b — угловая скорость уменьшает-
ся с увеличением момента (падающая характеристика): с — момент не зависит
от угловой скорости
Использование жесткой характеристики электропривода, т. е.
практически постоянной угловой скорости в зависимости от раз-
виваемого момента, обладает следующими недостатками:
— для обеспечения прочностных характеристик полотнища
в конце процесса разворачивания весь процесс должен про-
водиться именно при этой минимальной угловой скорости,
при этом увеличивается время разворачивания, а из-за
малых центробежных сил сложно организовать начальный
этап разворачивания;
— расчеты дали колебательный процесс динамики развора-
чивания: в процессе разворачивания имеет место процесс
частичного периодического сматывания-наматывания отра-
жателя, что недопустимо по технологическим соображени-
ям, поскольку разматывание идет из заводской укладки,
а без специальных направляющих при наматывании может
3.1. Принципы укладки и разворачивания из уложенного состояния 87
произойти хаотизация укладки; в конце разворачивания
имеется тенденция к обратной намотке полотнища (которая
может быть исключена постановкой обгонной муфты).
Использование мягкой падающей характеристики электро-
привода (т. е. с увеличением момента угловая скорость падает)
лишено вышеназванных недостатков использования жесткой ха-
рактеристики и обладает следующим преимуществами.
— на начальном этапе раскрытия угловая скорость может
быть достаточно высокой для обеспечения инициирования
начального этапа раскрытия;
— может быть обеспечена достаточно высокая скорость рас-
крытия и короткое время раскрытия;
— расчеты показали, что на всех этапах раскрытия имеет
место плавный характер раскрытия без колебаний типа
сматывание-наматывание на промежуточных и конечных
этапах разворачивания;
— на конечном этапе может быть обеспечена низкая скорость
вращения в соответствии с прочностными характеристика-
ми материала системы.
В этом случае имеет место саморегулируемый устойчивый
процесс разворачивания системы. Устойчивость в течение всего
процесса разворачивания определяется именно спецификой па-
дающей характеристики привода. При возможных случайных от-
клонениях в динамике системы характеристика привода возвра-
щает систему в устойчивое состояние. Например, если по каким-
либо причинам система локально замедлилась, то это приведет
к снижению скорости привода и увеличению момента, который
в свою очередь вновь разгонит систему; наоборот, если система
ускорилась, то это приведет к уменьшению момента и торможе-
нию системы. Целесообразность использования «падающей» на-
грузочной характеристики электропривода вращения (зависимо-
сти вращающего момента от угловой скорости) следует из обще-
го в машиноведении принципа обеспечения устойчивости работы
привода на нагрузку. Поясним сказанное примером. Представим
себе центральный вал с моментом инерции J, вращающийся
с некоторой производной угловой скорости Со К валу приложены
движущий момент Мд = М(ш) от привода и момент сопротив-
ления Мс = М(ш) от нагрузки. Нагрузкой в данном случае
является разворачиваемая центробежными силами конструкция.
Движение системы описывается основным уравнением динамики
JCo = Ма — Мс.
(3.5)
88
Гл. 3. Динамика разворачивания из уложенного состояния
Рассмотрим два случая, приведенные на рис. 3.12 (а) и (б):
а) б) е)
Рис. 3.12 а) Устойчивый режим, б) Неустойчивый режим, в) Устойчивый
режим
1) движущий момент MR с увеличением угловой скорости
уменьшается, а момент сопротивления с увеличением угловой
скорости возрастает (рис. 3.12 (а));
2) движущий момент МЛ с увеличением угловой скорости
возрастает, а момент сопротивления с увеличением угловой ско-
рости уменьшается (рис. 3.12 (б)).
В первом случае (рис. 3.12 (а)) рассмотрим три режима:
Л/д > Л/с; Л/д = Л/с; Л/д < Л/с. В случае первого режима при
Л/д > Мс из уравнения (3.5) следует, что ш > 0, т. е. система на-
чинает ускоряться и стремится вернуться в положение Л/д — Мс.
В случае третьего режима при Л/д < Л/с из уравнения (3.5) сле-
дует, что ш 0, т. е. система начинает замедляться и стремится
вернуться в положение Л/д = Л/с. Таким образом, при любом
отклонении системы от положения Л/д = Л/с и w = wq в поло-
жения ш = u>i или ш = и?2 образуется обратная связь, стремяща-
яся вернуть систему в первоначальное положение, т. е. система
устойчива.
Во втором случае (рис. 3.126) рассмотрим три режима:
Л/д < Л/с; Л/д = Л/с; Л/д > Мс. В случае первого режима при
Л/д < Л/с из уравнения (3.5) следует, что ш О, т. е. система
начинает замедляться и стремится еще больше уйти из положе-
ния Л/д = Л/с и остановиться. В случае третьего режима при
Л/д > Л/с из уравнения (3.5) следует, что ш 0, т. е. система
начинает ускоряться и стремится еще больше уйти из положения
Л/д = Л/с. Таким образом, при любом отклонении системы от
положения Л/д = Л/с и ш = ц в положения w = wi или ш = а>2
образуется обратная связь, стремящаяся еще больше удалить си-
стему от первоначального положения, т. е. система неустойчива
Отметим, что условия устойчивости системы, рассмотренные
в первом случае (рис. 3.12а), могут выполняться и не при
столь ярко выраженных зависимостях Л/д = М(ш) и Л/с = Л/(ш),
3.1. Принципы укладки и разворачивания из уложенного состояния 89
но и таких, как приведены на рис. 3.12в, где рассмотрение трех
режимов Ма Мс‘, МЛ = Мс\ МЛ Мс также дает устойчивую
картину процесса.
Аналогичные процессы имеют место в других устойчивых
саморегулирующихся системах. Например, электрическая дуга
с восходящей вольт-амперной характеристикой устойчиво горит
на падающей вольт-амперной характеристике генератора посто-
янного тока. Любое случайное отклонение параметров дуги при-
водит к изменению электрических параметров генератора, воз-
вращающих дугу в прежнее состояние [107].
В отличие от электрической дуги, где имеется организация
устойчивости горения в одной (рабочей) точке характеристики
генератора, в случае падающей характеристики электропривода
имеется устойчивость процесса разворачивания во всех точках
характеристики, т. е. устойчивость по процессу. Указанные пре-
имущества использования электропривода с мягкой (падающей
зависимостью МД = М(о>)) характеристикой легли в основу ав-
торского свидетельства [108]. Мягкой характеристикой облада-
ют широко используемые в технике, в том числе космической,
двигатели постоянного тока. Преимуществами электропривода
на базе двигателя постоянного тока также являются надежность,
удобства наземной отработки, хорошая совместимость с другими
системами корабля: системами управления, питания, бытовыми
системами (не травит газ, не взрывается) и др.
Электропривод с мягкой характеристикой был успешно ис-
пользован в КЭ «Знамя 2» и закладывался во все остальные
проекты.
Для сложных систем, требующих поэтапного разворачива-
ния, принципиально может быть создан следящий привод с лю-
бым законом изменения параметров и обратной связью через
датчики и БЦВМ. Однако, многие режимы могут быть организо-
ваны путем использования простых обгонных и моментных муфт
(в КЭ «Знамя 2» для большей надежности использовались обе
муфты).
Принцип использования обгонной муфты проиллюстрируем
на следующем примере. Представим себе развернутую гибкую
конструкцию, вращающуюся на центральном валу, к которому
приложен вращающий момент. Конструкция жестко связана с ва-
лом. При остановке вала конструкция, благодаря инерционности,
продолжает вращательное движение и снова намотается на вал.
Но если конструкция связана с валом через обгонную муф-
ту, то при остановке вала конструкция будет продолжать свое
вращение. Здесь имеется аналогия с велосипедистом, который
90
Гл. 3. Динамика разворачивания из уложенного состояния
крутил педали, сообщая заднему колесу вращающий момент.
При остановке вращения педалей колесо продолжает вращаться
благодаря обгонной муфте.
Моментная муфта срабатывает при превышении приклады-
ваемым моментом определенной требуемой величины, сохраняя
момент на постоянном уровне.
Приведенные концепции использовались при поиске устойчи-
вых режимов на математических моделях формируемых центро-
бежными силами систем и в основном себя оправдали.
3.1.5. Обеспечение управляемого раскрытия
Приложение вращающего момента к разворачиваемой си-
стеме должно сочетаться с возможностью изменения системой
своих размеров. В противном случае система будет не разво-
рачиваться, а ускоряться. Процесс изменения размеров может
быть неуправляемым, частично управляемым и полностью управ-
ляемым. Примером неуправляемого процесса является процесс
разворачивания грузов на нитях, когда нити намотаны на сво-
бодно вращающиеся катушки, установленные на центральный
вращающийся барабан. При сообщении центральному барабану
вращения и снятии удерживающих связей грузы разлетаются
по касательной к вращающемуся центральному барабану. Если
длина нитей ограничена, то в конце процесса произойдет удар,
и если система не разрушится, то произойдет обратное наматы-
вание нитей на центральный барабан (не на катушки). Примером
частично управляемого раскрытия является процесс сматывания
грузов на нитях с центрального барабана. Скорость сматывания
зависит от скорости центрального барабана. В конце процесса,
если не установлена обгонная муфта, то произойдет обратное
наматывание нити с грузом на центральный барабан. Примером
полностью управляемого роспуска является процесс принуди-
тельного выпуска грузов на нитях, намотанных на катушки,
установленные на центральном вращющемся барабане и объ-
единнные собственным приводом. Скорость привода роспуска не
может быть произвольной, во избежание запутывания системы
(под запутыванием понимается процесс отклонения элементов
раскрывающийся системы более чем на 90° от радиального по-
ложения). Представим себе чрезвычайно быстрый роспуск нитей
с грузами с катушек при относительно медленном вращении
центрального барабана. Ясно, что при этом центробежных сил
может оказаться недостаточно для оттягивания грузов, и грузы
потеряют связь с ведущим центром, т. е. произойдет запуты-
вание.
3.1 Принципы укладки и разворачивания из уложенного состояния 91
Для обеспечения устойчивости процесса необходимо, чтобы
центробежная сила, растягивающая нить в радиальном направле-
нии Дцб = miv2R, значительно превышала действующую в боко-
вом направлении силу Кориолиса FK = 2mVw (где V — скорость
выпуска) и инерционную силу Fu — muR, независимо от закона
приложенного вращающегося момента, т. е.:
ttuv2R 3> 2mVai или ujR/2V » 1; (3.6)
mcv2R mwR или w2/ш 1. (3.7)
Практически указанные условия легко выполнимы и скорость
выпуска подбирается на этапе решения математической задачи
динамики роспуска с необходимым запасом по углу отклоне-
ния от радиального направления. Скорость выпуска может быть
постоянной, плавно изменяемой или изменяемой ступенчато.
Уменьшение скорости выпуска в процессе разворачивания стаби-
лизирует процесс, однако препятствует требуемому иногда доста-
точному снижению угловой скорости вращения по прочностным
или еще каким-либо соображениям. Например, в КЭ «Знамя 2»
из-за изменения радиуса катушки при сматывании с нее пленки
скорость роспуска уменьшалась в процессе раскрытия более,
чем в 2 раза, что препятствовало снижению скорости вращения
основного барабана и переходу на вторую (низкоскоростную) ха-
рактеристику привода. Потребовалось введение дополнительного
сопротивления в цепь питания основного привода для увеличе-
ния крутизны его характеристики.
В задачах динамики роспуска сложных тросовых систем,
находящихся на пределе устойчивости, встречаются варианты,
когда система раскрывается до определенного состояния, затем
роспуск прекращается и система разгоняется для накопления
запаса по устойчивости, затем роспуск продолжается с умень-
шенной скоростью выпуска.
Подводя итог разделу, сделаем вывод, что динамика разво-
рачивания из уложенного состояния конструкций, формируемых
центробежными силами, зависит от типа укладки, приложенного
вращающего момента и скорости роспуска системы. Для принци-
пиально устойчивой конструкции укладки путем математическо-
го моделирования в большинстве случаев могут быть подобраны
режимы, обеспечивающие раскрытие системы.
3.1.6. Компенсация кинетического момента вращающей-
ся конструкции
Использование электропривода требует компенсации кине-
тического момента разворачиваемой системы, т. е. если ротор
92 Гл. 3. Динамика разворачивания из уложенного состояния
электродвигателя скреплен с разворачиваемой системой, то его
статор будет вращаться в противоположную сторону и должен
быть скреплен с системой, способной скомпенсировать кинетиче-
ский момент. В случае раскрытия отражателя на ГК «Прогресс»
[9] момент инерции корабля в 40 раз превышал момент инерции
раскрытого полотнища. Скрепленный со статором электроприво-
да корпус корабля поворачивался в сторону, обратную вращению
отражателя с незначительной скоростью. При этом система ори-
нетации включала химические двигатели системы управления,
останавливающие это вращение.
В случае солнечного парусного корабля (см. Глава 1, рис. 1.4)
[8] кинетический момент отражателя компенсируется противо-
вращающимся тросовым маховиком или вторым отражателем, не
затеняющим первый.
Возможны три различные схемы компенсации кинетического
момента вращающейся гибкой конструкции:
— две одинаковые конструкции располагаются в одной или
параллельных плоскостях на выносных штангах по разным
сторонам КА (рис. 3.13);
— одна конструкции, располагаемая непосредственно на КА,
компенсируемая соосным маховиком противовращения
(рис. 3.14);
— компенсация ракетными двигателями системы ориентации
КА (рис. 3.15)
Рис. 3.13. Схемы компенсации кинетического момента, когда две одинаковые
конструкции располагаются в одной или параллельных плоскостях на вынос-
ных штангах по разным сторонам КА
В первом случае необходимо создание двух желательно
одинаковых полотнищ и одинаковых агрегатов их раскрытия
(рис. 3.13), что является определенным плюсом системы. Но
наличие выносных штанг, скорее всего раздвижных, вносит
3.1. Принципы укладки и разворачивания из уложенного состояния 93
Рис. 3.14. Схема компенсации кинетического момента, когда одна конструкция,
располагаемая непосредственно на КА, компенсируется соосным маховиком
противовращения
Рис. 3.15. Схема компенсации кинетического момента ракетными двигателями
системы ориентации КА
каркасный элемент, нежелательный при создании бескаркасных
конструкций.
Во втором случае (рис, 3.13), к сожалению, на одной оси
нельзя разместить две одинаковые противовращающиеся кон-
струкции, как это сделано в конструкции «Гелиоротора», по-
скольку произойдет затенение одной из конструкций. Поэтому
вводится маховик противовращения, конструктивно более про-
стой по сравнению с основной конструкцией. Это может быть
тросовое кольцо (см. Глава 1, рис. 1.5) или грузы на тросах
с управляемым раскрытием. В этом случае также могут быть
использованы две противовращающиеся конструкции разного
диаметра, не затеняющие друг друга.
94
Гл. 3. Динамика разворачивания из уложенного состояния
В третьем случае (рис. 3.15) требуется расход массы топлива
двигателей ориентации КА, который по отношению к програм-
ме полета КА может оказаться весьма малым, как это было
в эксперименте «Знамя 2». Этот способ компенсации предпо-
чтительнее двух предыдущих, если такой расход массы топлива
возможно запланировать в программе полета. При этом отсут-
ствует система противовращения, может использоваться схема
неуправляемого раскрытия и неразрезная конструкция полотни-
ща. Приведем численную оценку массы топлива, потребовавшей-
ся для компенсации кинетического момента полотнища системой
ориентации транспортного корабля «Прогресс» в эксперименте
«Знамя 2». Масса топлива т находится из выражения равенства
кинетических моментов вращающегося полотнища и истекающей
струи топлива:
Joj = mvr, (3.8)
где J — момент инерции полотна; J — ME2/2; М = irphE? —
масса полотна, р — плотность материала, h — толщина ма-
териала, R — радиус полотна; ш — рабочая угловая скорость
вращения полотна; т — масса топлива системы ориентации; v —
скорость истечения топлива; г — плечо момента (расстояние от
оси вращения до центра струи топлива).
В эксперименте «Знамя 2» р — 1,4 • 103 кг/м3; h = 5 • 10 6 м,
R=10 м, ш = 2 рад/с, v = 2 • 103 м/с, г = 1 м. Тогда для массы
топлива получим т = 0,1 кг. Относительно высокая скорость
истечения (удельная тяга) связана с использованием самовоспла-
меняющихся диметилгидрозина и азотного тетраксида в качестве
горючего и окислителя. У наименее эффективных холодных газо-
вых двигателей удельная тяга только в 3 раза меньше. Площадь
полотна в эксперименте «Знамя 2» составляла 300 м2 и при
использовании в качестве СБ могла дать мощность 30 кВт.
Приведенные цифры показывают высокую эффективность рас-
сматриваемого способа компенсации кинетического момента при
малой толщине и массе пленочного полотнища, что демонстри-
рует перспективность исследуемого в настоящей работе научно-
технического направления. С увеличением массы полотна эффек-
тивность такого способа компенсации снижается и при подложке
СБ из фольги нержавеющей стали для значительной мощности
СБ расход топлива будет недопустимо высоким и для компен-
сации кинетического момента полотнища следует использовать
противовращающуюся систему (маховик или вторую СБ).
3.1. Принципы укладки и разворачивания из уложенного состояния 95
В случае необходимости при раскрытии одновременной ком-
пенсации кинетического момента второй системой, вращающейся
в противоположенную сторону, с точки зрения эффективности
организации процесса управления раскрытием двух систем из
общих соображений выгоднее иметь наличие дополнительного
независимого параметра, что имеет место в управляемой схеме
раскрытия. Математическое моделирование раскрытия двух про-
тивовращающихся систем в настоящем исследовании осуществ-
лено для «управляемой» и «неуправляемой» схем раскрытия. Мо-
делирование позволяет выявить диапазон параметров, в котором
системы ведут себя устойчивым образом, если это оказывается
возможным. В случае управляемого раскрытия устойчивость не
вызывает сомнений и следует рассмотреть возможные конструк-
тивные варианты такого агрегата раскрытия полотнища и систе-
мы компенсатора.
3.1.7. Циклограмма процесса раскрытия
Циклограммой процесса раскрытия называется зависимость
угловой скорости вращения раскрываемой конструкции от вре-
мени w(t). Циклограмма процесса в сочетании с нагрузочной
характеристикой электропривода ш (М) (зависимостью угловой
скорости ш от вращающего момента М) определяет энергети-
ческие затраты на раскрытие и динамику этапов раскрытия.
В КЭ «Знамя 2» на тяжелом ТГК «Прогресс» для повышения
надежности раскрытия на начальном этапе агрегат раскрытия
разгонял уложенную конструкцию до максимально возможной
угловой скорости, определяемой нагрузочной характеристикой
электропривода, после чего проводилось снятие ограничивающих
связей и начинался процесс раскрытия с большой начальной ско-
ростью и соответственно с большими усилиями от центробежных
сил, требуемыми для начального инициирования раскрытия из-
за возможного «слеживания» укладки при длительном хранении,
электростатических сил и возможных технологических заминов
и сцеплений между слоями укладки. При этом в качестве до-
полнительных инициирующих раскрытие мер предусматривалось
предварительное частичное сматывание (на длину 50 см) внеш-
ней части отражателя. При планировании раскрытия модели сол-
нечной батареи на спутнике «Можаец-4», приближенного к ре-
альным условиям раскрытия на спутниках связи, предварительно
разогнать конструкцию перед раскрытием не представлялось воз-
можным. Циклограмма раскрытия начиналась с нулевой угловой
скорости и требовались дополнительные специальные меры для
начального инициирования процесса раскрытия. Использовалось
96 Гл. 3. Динамика разворачивания из уложенного состояния
начальное «распушение» укладки после снятия ограничивающих
связей путем введения в периферийную часть пленочного кру-
га упругих стальных проволочек. Циклограмма закладывается
в процедуру математического моделирования процесса раскрытия
и отрабатывается при наземной отработке. На рис. 3.16 представ-
лена циклограммы с максимальной начальной угловой скоростью
раскрытия системы, обеспечиваемой нагрузочной характеристи-
кой привода, использовавшаяся в КЭ «Знамя 2».
Подводя итог разделу, представим классификацию рассмот-
ренных конструкций:
3.2. Математическая модель управляемого раскрытия
разрезной пленочной конструкции
3.2.1. Моделирование системы «центральное тело-груз
на нити». Вывод дифференциальных уравнений динамики
раскрытия
Рассмотрим математическую модель раскрытия разрезной
пленочной конструкции, состоящей из отдельных секторов, со-
единенных по окружности. Секторы образуют веерообразную
конструкцию (рис. 3.17), а складки уложены вдоль радиаль-
ных образующих секторов, намотанных на отдельные катушки,
Рис. 3.17. Системы координат управляемого раскрытия разрезного отражателя
размещенные на центральном барабане. Центральный барабан
начинает вращаться вместе с катушками, и инициируется управ-
ляемое развертывание секторов отражателя, намотанных на
4 Г Г. Райкунов и др.
98 Гл. 3. Динамика разворачивания из уложенного состояния
катушки, в соответствии с искомым законом. Анализируется
система, состоящая из центрального барабана, гибких элементов
отражателя и двух приводов, характеристики которых обеспе-
чивают реализацию закона изменений крутящего момента, дей-
ствующего на центральный барабан (привод вращения), и закона
изменения скорости выпуска пленочного полотна при его сходе
с катушки (привод роспуска). Поскольку скорость схода всех
секторов модели равная, уравнение движения приведено только
для одного сектора, при этом общее значение для всех секторов
суммируется при расчете усилия, воздействующего на централь-
ный барабан от секторов.
Вначале рассмотрим математическую модель системы, состо-
ящей из центрального барабана и нерастяжимой нити с прикреп-
ленным к ее концу грузом. Такая модель физически наглядна,
однако обладает многими свойствами системы с распределенной
массой.
Основные предположения, используемые для разработки ма-
тематической модели данной системы:
— система развертывается симметрично относительно цен-
тральной оси,
— радиальные нити прямые и нерастяжимые,
— относительные переходы в системе осуществляются в плос-
кости, параллельной оси вращения системы,
— рассеянием энергии системы, вызванной деформацией, тре-
нием и внешними эффектами, пренебрегается.
Введем правые ортогональные базисы (рис. 3.17): инерци-
альную систему отсчета ~е и свободные базисы "ё^1) и "ё^2).
Введем начало базиса ~е в центр системы 0, направим с5>з
вдоль оси вращения, следовательно "?], и 'ey будут находиться
в плоскости развертывания системы. Жестко привяжем базис
к центральному барабану и помещаем его начало в точке
О, совместив ось "ё*?^ с "ё*з. Начало базиса в точке А,
—>(2) —>
где выходит нить, направление вектора е i ’ аналогично е з,
—»(2)
направление вектора е ) вдоль радиальной нити.
Угол отклонения от радиального направления, у>2> будет далее
обозначаться, как у?, чтобы упростить уравнение.
Тогда радиус-вектор массы выражается как:
Д=Го+£, (3.9)
где го — радиус центрального барабана, L — радиус-вектор
массы в базисе ~е% (длина развернутого участка нити).
3.2. Математическая модель управляемого раскрытия
99
Далее первая производная от радиус-вектора:
v
R — UJ У. Г Q L (и + )
х L,
(3.10)
где о) — угловая скорость центрального барабана относительно
инерциальной системы; «V» обозначает частную производную
в базисе ~е®.
Вторая производная от радиус-вектора:
v
R = lv х fo + ш х (ш х fo) + L +2 + фе%^ х L+
+ + 93) х L + х х Lj . (3.11)
Выразим основное уравнение динамики для массы как:
mR = F. (3.12)
Записывая проекции на оси базиса ~е^2\ используя (3.11),
получим
т
•• 2
го (ш2 cos 93 — й sin 93) — L + L (w + 9З2)
-TV,
го (й cos 93 + w2 sin 99) + 2 (w + ф) L + (cL> + 93) L = 0,
(3.13)
(3.14)
где N — напряжение на корневом поперечном сечении, L, L —
искомые законы управления развертыванием нити.
Выразим теорему изменения кинетического момента для цен-
трального барабана как:
Ki = М + п (г0 х N),
(3.15)
где М — искомый закон управления изменением внешнего мо-
мента, сообщаемого приводом; п — количество подвешенных на
нити грузов.
Путем проекции на ось вращения получаем:
JCj — М + п tqN sin 93, (3.16)
где J — момент инерции центрального барабана.
Системы уравнений (3.13, 3.14, 3.16) показывают развертыва-
ние механической системы, состоящей из центрального барабана,
подвешенных на нити грузов и приводов управления с опреде-
ленными характеристиками.
4*
100
Гл. 3. Динамика разворачивания из уложенного состояния
3.2.2. Модель процесса управляемого роспуска с кату-
шек пленочного полотнища
Для получения уравнений движения для сектора отражателя
запишем массу элемента сектора как
dm = — (l+Lk- L) dl,
n
где I — текущая длина развертываемого сектора, L — длина
выпущенной части сектора, Lk — конечная длина сектора, п —
число секторов, /3 — масса единицы поверхности пленки, кг /м2.
Выражение учитывает факт того, что основная масса сектора,
заключенная в его периферийной части, начинает раскрывать-
ся в первоначальный момент времени раскрытия конструкции.
По этой причине результаты расчета для системы «центральное
тело-груз на нити» и для системы сплошного полотнища сов-
падают с точностью порядка 30% при условии равенства массы
груза массе полотнища и равенства размеров систем.
Путем замещения т на dm в (3.12) и интегрирования вдоль
развернутого участка сектора в проекциях на ось базиса
получаем:
—- ^LkL — ~ (го (щ2 cos <р - w sin —£) +
+ —+ vf = N-, (3.17)
n \ 2 b J
[’’o cos <P + u2 sin 9?) + 2 (w + 93) L] +
+ Йг - т) + й = °' <3 I8)
где N — натяжение в корневом сечении сектора.
Уравнение для центрального барабана аналогично (3.16).
Система уравнений (3.16, 3.17, 3.18) описывает развертыва-
ние механической системы, состоящей из центрального барабана,
уложенных на катушки секторов с распределенной массой и си-
стемы управления, состоящей из привода вращения центрального
барабана и привода роспуска катушек с определенными характе-
ристиками. Путем численного решения системы рассматривалась
возможность соответствующего управления. В качестве парамет-
ров управления были взяты: 7Й — внешний момент привода;
L — скорость развертывания гибкого звена. В качестве приме-
ра на рис. 3.18 приведены результаты численного расчета при
3.2. Математическая модель управляемого раскрытия
101
Рис. 3.18. Динамические параметры управляемого развертывания разрезной
пленочной конструкции: — угловое отклонение от радиального направления;
ц> — угловая скорость вращения центрального барабана; N — натяжение
в корневом сечении; R — радиус конструкции
использовании в качестве внешнего момента «падающей» (мо-
мент уменьшается с увеличением угловой скорости) характери-
стики электродвигателя постоянного тока. Имеет место плавное
увеличение угла отклонения от радиального направления 99. В
случае использования параметров управления (задача решается
методом перебора), при которых имеют место интенсивные ко-
лебания угла 99, или угол превышает 90° (что может привести
к запутыванию системы), такие режимы считались неприем-
лемыми. По этой методике подбирались приводы для успешно
реализованного космического эксперимента «Знамя 2» в 1993 г.
Полученные уравнения справедливы для случая, когда мо-
мент инерции центрального тела слабо зависит от массы сматы-
ваемой с катушек пленки. Этот случай имел место при расчетах
КЭ «Знамя 2». В случае легких катушек с центральным бара-
баном и с большой массой пленки следует учитывать изменёние
в процессе сматывания момента инерции центрального тела J]
из-за схода пленки.
При расчете динамики раскрытия полотнища определяемыми
параметрами являются характеристики электроприводов враще-
ния отражателя и его роспуска, обеспечивающие устойчивость
геометрии разворачиваемой конструкции на всех этапах роспус-
ка и дальнейшего функционирования. Численный расчет дает
основание для выработки требований к электроприводам. Под-
бирается закон приложенного вращающего момента и скорости
выпуска полотнища таким образом, чтобы обеспечить разворачи-
вание за требуемое время без нежелательных крутильных коле-
баний и запутывания гибкой системы. Электроприводы должны
102
Гл. 3. Динамика разворачивания из уложенного состояния
обеспечивать: разгон основного барабана с уложенным полотни-
щем до начальной скорости, при которой начинается раскрытие
полотнища; плавное раскрытие полотнища; вращение на этапе
функционирования с конечной угловой скоростью, определяемой
прочностными характеристиками материала пленки. При спе-
циальном инициировании начала процесса раскрытия он может
быть начат с нулевой начальной угловой скорости привода.
3.2.3. Математическая модель динамики управляемого
раскрытия с компенсацией кинетического момента
Выше была рассмотрена динамика управляемого раскрытия
многосекторной пленочной конструкции под действием центро-
бежной силы, подбирались режимы работы двух приводов (вра-
щения и роспуска), обеспечивающие устойчивое и упорядочен-
ное, без недопустимых колебаний, развертывание всех секто-
ров конструкции в единое разрезное, скрепленное по внешнему
контуру круговое полотнище. Устойчивости и упорядоченности
процесса раскрытия способствовало использование «падающей»
нагрузочной характеристики электропривода вращения и специ-
альный способ укладки пленочных секторов на катушки. При
этом однако предполагалось, что раскрывающаяся конструкция
находится на неподвижной платформе. Таким образом, прене-
брегалось эффектом обратного воздействия разворачивающейся
конструкции на несущий ее космический аппарат (КА). В ре-
альной ситуации такое воздействие приведет к закручиванию
КА в направлении, обратном направлению вращения пленочной
конструкции. Этот эффект является нежелательным, так как
приводит к нарушению ориентации КА и необходимости ее вос-
становления с включением двигателей коррекции КА и допол-
нительной затратой топлива. Поэтому желательно уже на этапе
раскрытия конструкции минимизировать закручивание КА с ис-
пользованием какой-либо компенсирующей схемы. В качестве
такой схемы можно предложить одновременно с раскрытием пле-
ночной конструкции раскрывать компенсирующую конструкцию
с вращением в противоположную сторону. Такое вращение при-
ведет к воздействию на КА противоположно направленного вра-
щательного момента, что уменьшит угловую скорость вращения
КА. Идеальным решением проблемы является такой подбор па-
раметров и динамики раскрытия компенсирующей конструкции,
при котором КА остается неподвижным. Одновременно следует
обеспечить малость отклонения секторов пленочной конструкции
от радиального направления в процессе раскрытия. Это является
необходимым условием стабильного развертывания конструкции
3 2 Математическая модель управляемого раскрытия
103
без колебаний и запутывания. При этом нагрузки в корневом
сечении конструкции не должны превышать допустимое напря-
жение для данного материала Также важным условием является
минимизация энергопотребления установки. Таким образом, воз-
никает задача об условной минимизации с ограничениями, для
решения которой, видимо, перспективно использование методов
теории оптимального управления. В настоящем разделе реше-
на задача управляемого раскрытия многосекторной пленочной
конструкции с учетом ее обратного влияния на несущий КА,
оценена величина этого влияния. Рассмотрены некоторые схемы
компенсации кинетического момента и на основе решения ряда
модельных задач сделаны выводы о возможности использования
этих схем в системах компенсации вращения КА.
3.2.3.1. Раскрытие пленочной конструкции без исполь-
зования компенсирующей схемы
Для оценки степени влияния процесса раскрытия пленочной
конструкции на несущий КА рассмотрим вначале динамику рас-
крытия многосекторной конструкции без применения компенси-
рующего противовращения. Постановка задачи и механическая
модель системы в основном сходна с рассмотренной в п. 3.2.2,
и изображена на рис. 3.19. КА (центральное тело) представляет
Рис. 3.19. Схема без применения компенсирующего противовращения
104
Гл. 3. Динамика разворачивания из уложенного состояния
собой круговой цилиндр с массой М и радиусом R. Блок раскры-
тия (ротор) — круговой цилиндр с массой uiq и радиусом тр. Он
соединен с КА осью и раскручивается двигателем постоянного
тока. Раскрываемый сектор пленочной конструкции моделирует-
ся прямолинейным стержнем с переменными длиной, линейной
плотностью и полной массой т. Его длина возрастает при вра-
щении блока раскрытия под действием центробежной силы по
заданному закону L(t) вплоть до своего максимального значения
Ly в момент времени t = ty. Правомерность такой аппроксимации
обосновывается результатами моделирования динамики раскры-
тия в космическом эксперименте «Знамя». Вращение централь-
ного тела и ротора описывается уравнениями, вытекающими из
закона изменения кинетического момента механической системы.
J°~di = + 7Vrosin<A
до
= -M(t),
M(t) =
\ /
(3.19)
где Jq = тоГц/2, J = MR2/2 — моменты инерции ротора и цен-
трального тела (вычисленные в предположении равномерного
распределения их масс по объему); Q, щ — угловые скорости их
вращения, противоположные по знаку вращения и в сумме рав-
ные скорости вращения ротора электропривода относительно его
статора (угловая скорость на характеристике электропривода);
у? — угол отклонения сектора от радиального направления; N —
сила натяжения сектора; Л?(/) — вращающий момент, создава-
емый двигателем постоянного тока, а величины Mq, ivq опреде-
ляются характеристиками этого двигателя. Выражение для силы
N и уравнение, определяющее угол отклонения сектора, были
получены выше (3.17 и 3.18) и могут быть записаны в виде;
N = 771 / ~k-2~kfc9—— [гр (—ш sin у? + <ц2 cos у?) — L] +
I L'k
L2(Lk — L/3), .,2
+ Т2 +
Lk
(2Ly — L) {го (w cos у? + o'2 sin у?) + 2L (щ + ф)} +
+ L(Lfc - L/3) (w + 0) = 0. (3.20)
3.2. Математическая модель управляемого раскрытия 105
Уравнения (3.19), (3.20) представляют собой замкнутую си-
стему обыкновенных дифференциальных уравнений относитель-
но неизвестных и, fi, ip. Если считать, что пленка состоит
из набора идентичных секторов и все сектора, составляющие
пленку, раскрываются одинаково, то для описания динамики
системы достаточно заменить в формуле (3.20) массу сектора на
полную массу пленки. Будем считать, что в начальный момент
времени ротор раскручен до угловой скорости шд, пленка нахо-
дится внутри него в сложенном состоянии, а центральное тело
неподвижно. Таким образом, уравнения (3.19), (3.20) следует
решать с начальными условиями:
w (0) = щ0,
Q (0) = 0,
НО) = о.
3.2.3.2. Компенсатор вращения с независимым приводом
Рассмотрим схему компенсации вращения центрального те-
ла с помощью дополнительной раскрывающейся конструкции,
расположенной соосно основной, как показано на рис. 3.20.
Дополнительный ротор (2) вращается независимым приводом (2)
в направлении, противоположном вращению основного ротора
(1) и создает противоположный вращательный момент, препят-
ствующий вращению центрального тела. В качестве компенси-
рующей раскрывающейся системы может быть взята, например,
точечная масса на тросе переменной длины. Будем считать, что
в начальный момент времени основной и компенсирующий рото-
ры вращаются в противоположных направлениях с характеристи-
ческими угловыми скоростями соответствующих электроприво-
дов, а центральное тело покоится. Уравнения, описывающие ди-
намику этой системы, составляются аналогично разделу 3.2.3.1
и имеют вид (принятые обозначения понятны из рис. 3.20):
т duJi . г (, u?i — , лг
Л-Ц- = Afoi 1----------------+ М г01 smy?i,
at \ wqi /
= -Af02 (1 +
dt
-------- + Г02 sin <^2,
4)2
। wi — Q
4)1
Л Г ( Л . ^2 —
+ AEq2 (1 3----------
\ <4)2
Рис. 3.20. Компенсатор вращения с независимым приводом
7V1 = 77Z1 |Ll ^2L^2—— [ri (-W1 sin ^1 + cos ) - Li] +
I ^kl
bfci
N2 = m2 |г2 (—<^2 sin <P2 + ш2 cos ^2) — -^2 + ^2 (ш2 + 02)2 } ,
(2Lfci - Li) {и (wicos^i +ujsin9?i) + 2£] (wj +0i)} +
+ L\(Lki — L\/3) (u>i + £>1) = 0,
^2 COS tf>2 + ^2 sin^2) + 2^2 (^2 "b 02) + ^2 (^2 + Ф2) = 0-
(3.21)
3.2. Математическая модель управляемого раскрытия
107
Система (3.21) решалась с начальными условиями:
(0) = шю,
(0) — — ш20>
Q (0) = 0,
</?1 (0) = </?2 (0) = о.
3.2.3.3. Компенсатор и блок раскрытия на общем при-
воде
Можно предложить также схему компенсации, не требую-
щую дополнительного электропривода (см. рис. 3.21).
Рис. 3.21. Компенсатор и блок раскрытия на общем приводе
Оси вращения блока раскрытия и компенсирующего устрой-
ства проходят через корпус центрального тела вдоль оси его
вращения и соединены со статором и ротором общего элек-
тродвигателя постоянного тока. При работе двигателя основ-
ной и компенсирующий блоки вращаются в противоположные
стороны. Закручивание центрального тела происходит под дей-
108
Гл. 3. Динамика разворачивания из уложенного состояния
ствием разности моментов сил трения осей в его корпусе. Для
минимизации вращения центрального тела эти моменты должны
быть по возможности точнее взаимно скомпенсированы. Это до-
стигается оптимальным подбором параметров компенсирующей
системы. Считая, что моменты сил трения в осях пропорцио-
нальны относительным угловым скоростям вращения, получим
уравнения, описывающие динамику рассматриваемой системы:
dt \
О>[ — О?2
WQ
— К\ (и1, — Q) + TVi rot sin</?i,
= _Мо (1 - _ К2 (Ш2 _ Q) + tv2 Го2 sin V2,
at \ uio /
J у = K{ (ш, - Q) + К2 (^2 -
(3.22)
где I<i,2 — коэффициенты трения в осях. Выражения для сил
натяжения N\ 2 и уравнения динамики сектора и компенсиру-
ющей массы идентичны последним четырем уравнениям систе-
мы (3.21). В качестве начального состояния системы выберем
стационарное решение системы, в котором центральное тело не
вращается, а сектор и компенсирующая масса находятся в нерас-
крытом состоянии. Для такого состояния из (3.22) получим:
Мо (1 - = О,
X )
Отсюда получим начальные условия для системы (3.22):
1С\\ — К2Мо
М ) - Ч) + к^м + ,
/QX _ _ AiMo______
^o^Kl+K^Mo + KlK2Uj(]’ (3 23)
Q (0) = 0,
V1 (0) = V2 (0) = 0.
3.2.3.4. Результаты численных исследований
Системы (3.20)-(3.23) представляют собой замкнутые си-
стемы обыкновенных нелинейных дифференциальных уравнений
2-го порядка. Они решались численно методом Рунге-Кутта
4-го порядка при параметрах, приведенных в таблице 3.1,
3.2. Математическая модель управляемого раскрытия 109
характерных для солнечных батарей микроспутников (мощно-
стью порядка 300 Вт и 3000 Вт), а третий вариант для солнечной
батареи Марсианской миссии мощностью 15- 106 Вт.
Параметры, приведенные в скобках, выбирались для схемы
компенсации вращения с общим приводом (раздел 3.2.3.3).
О.рад/с
Рис. 3.22 Раскрытие без компенсации вращения, СБ 300 Вт
-0,002
-0,015
-0,025
Рис. 3.23. Раскрытие без компенсации вращения, СБ 3000 Вт
Результаты расчетов приведены на рис. 3.22-3.30. Из них
видно, что при отсутствии мер по стабилизации центрального
тела (рис. 3.22-3.24), оно приобретает существенное враща-
тельное движение в направлении, противоположном направле-
нию блока раскрытия. Так, полный угол поворота за все время
раскрытия пленки для варианта на рис. 3.22 составляет 134°.
Результаты расчетов с использованием компенсирующей схемы
(рис. 3.25-3.30) показывают, что можно подобрать ее параметры,
ПО
Гл. 3. Динамика разворачивания из уложенного состояния
Таблица 3.1.
О s-01
сч КГ М ; 1,73- 0,005 606
Т, с 260 260 1320
СО
О «г 1 О , < Ю 0,0125 0,174
СО
э рад/с со о 0,48 (2,0) 0,3
Н'М т о , < о
со о со
со р < CN
см X
в кг 0,3 0,145 (0,16) 3,3 1,67 (1,05) 6- 10; (4,6 х 103
М, кг 100 800 901
S 0,2 о 20
то, кг 1,5 О V—< о со
S LQ LO о
о" о'
СБ 300 Вт СБ 3000 Вт СБ 15- 106 Вт
3.2. Математическая модель управляемого раскрытия
111
Рис. 3.24. Раскрытие без компенсации вращения, СБ 15 106 Вт
Рис. 3.25. Компенсация вращения с независимым приводом, СБ 300 Вт
рад/с
10
50 100150 200 с
<£>1,град
О, рад/с
0,002
0.001
50100150 200
Рис. 3.26. Компенсация вращения с независимым приводом, СБ 3000 Вт
112 Гл. 3. Динамика разворачивания из уложенного состояния
L\, м
Рис. 3.27. Компенсация вращения с независимым приводом, СБ 15 • 106 Вт
Рис. 3.28. Компенсация вращения с общим приводом, СБ 300 Вт
например, таким образом, чтобы на начальном этапе раскры-
тия центральное тело раскручивалось в направлении вращения
компенсирующей массы, затем по мере раскрытия сектора тор-
мозилось и в конце раскрытия (t = tp) останавливалось. Мак-
симальная величина угловой скорости вращения центрального
тела также может быть значительно уменьшена (на рис. 3.24 по
сравнению с рис. 3.23 — на порядок). Результаты расчетов пока-
зывают также, что в большинстве случаев в процессе раскрытия
угол отклонения сектора остается в приемлемых границах, не
превышая 25°.
3.2 Математическая модель управляемого раскрытия
113
Q, рад/с
0,0002
0,00015
0,0001
0.00005
50 100 150 200
Рис. 3.29. Компенсация вращения с общим приводом, СБ 3000 Вт
Рис. 3.30. Компенсация вращения с общим приводом,
СБ 15 • 106 Вт
3.2.3.5. Заключение по разделу
Показана принципиальная возможность использования пред-
ложенных схем компенсации кинетического момента для опти-
мизации «управляемого» процесса раскрытия пленочных кон-
струкций. Приведенные результаты являются иллюстративными
и последовательное решение задачи оптимизации компенсиру-
ющей системы должно являться предметом самостоятельного
исследования.
114
Гл. 3. Динамика разворачивания из уложенного состояния
3.3. Математическая модель неуправляемого
раскрытия неразрезной пленочной конструкции
3.3.1. Особенности неуправляемого раскрытия пленоч-
ной конструкции
В предыдущем разделе была рассмотрена динамика раскры-
тия секторов многосекторной пленочной конструкции, разматы-
вающихся с катушек согласно заданной временной зависимости.
Это так называемое «управляемое раскрытие» с компенсацией
кинетического момента. Альтернативным техническим решени-
ем является так называемое «неуправляемое раскрытие», при
котором полотнище намотано непосредственно на центральный
цилиндр и сматывается при его вращении под действием центро-
бежной силы. Характерной особенностью этого процесса явля-
ется то, что временная зависимость процесса раскрытия заранее
неизвестна, а определяется из решений уравнений движения
системы.
3.3.2. Моделирование неуправляемой системы «цен-
тральное тело-груз на нити». Вывод дифференциальных
уравнений динамики раскрытия
При исследовании процесса развертывания неразрезной пле-
ночной гибкой конструкции вначале предположим, что это си-
стема «центральное тело-груз на нити», где нить сходит с цен-
трального тела под воздействием инерционных сил, создаваемых
вращением системы. Эта система отличается от рассмотренно-
го выше процесса развертывания с управляемым сходом нити
с катушек, отсутствием знания закона развертывания, поскольку
это зависит от процесса развертывания и определяется законом
движения в целом. Определяем положение радиус-вектора груза
как (рис. 3.31):
R = г о “Ь L.
Первая производная от радиус-вектора:
v
R= (ы + у х Ко + L) + L, (3.24)
где ы — угловая скорость центрального барабана относительно
инерциальной системы; — угол отклонения от радиального на-
правления (далее обозначается как ср); го — радиус центрального
цилиндра; L — длина развернутого участка; «V» — обозначает
локальную производную в базисе
3.3. Математическая модель неуправляемого раскрытия
115
Рис. 3.31. Системы координат неуправляемого развертывания неразрезного
отражателя (роспуск с центрального барабана)
Вектор ускорения вычисляется путем дифференцирования:
R =
vy
+ L +2
го + L
v
х L.
(3.25)
Для получения уравнений движения основное уравнение ди-
намики проектируется на оси базиса ~е^- Таким образом, полу-
чаем:
(ш + ф} L + 2 (ш + 0) L - го (сы + ф)2 = 0, (3.26)
N — т [г0 (сь> + </?) + L (ш + ф)2 — L
(3.27)
где N — натяжение троса; т — масса груза. Изменение кинети-
ческого момента для центрального барабана в проекциях на ось
вращения системы:
Juj = М — п vqN,
(3.28)
где J — момент инерции центрального барабана; п — количество
грузов; М — внешний момент; N — натяжение в корневом сече-
нии; го — радиус центрального барабана. Траектория движения
116
Гл. 3. Динамика разворачивания из уложенного состояния
веса относительно центрального барабана является эвольвентой
окружности радиуса гр, выраженной уравнением:
L — го<р. (3 29)
Следовательно:
L = то<Д (3.30)
L — гоф. (3.31)
Подставив (3.29) в (3.26, 3.27), получаем:
(ш + ф) <р -Р ф2 — ш2 = 0, (3 32)
N —mrQ й + уз(щ + ф)2
(3.33)
Уравнения (3.28, 3.30, 3.33) являются уравнениями движения
рассматриваемой системы, где нить прямолинейная, невесомая
и не растягивающаяся.
3.3.3. Математическая модель неуправляемого раскры-
тия неразрезного полотна
3.3.3.1. Модель неуправляемого раскрытия неразрезного
полотна
Для получения уравнений движения неразрезного полотна
возьмем переменную L (3.32, 3.33) и предположим, что I теку-
щая длина развернутого участка сектора длиной L. Элементная
масса сектора:
dm = ^-{l + Lk-L}dl, (3.34)
п
где /? = р8 — плотность поверхности пленки, Lk — полная длина
сектора. Подставляя dm вместо т в (3.33) и интегрируя по всей
длине развернутого участка, получаем
L
2-кд '
п
О
Tpij 1 (щ -р 0) (I -р Lk — L) di —
^-L
п
[(Lk - L/2) гой + - (3Lk - L) (щ + <^)2] . (3.35)
3.3. Математическая модель неуправляемого раскрытия
117
Аналогично, из (3.32) получаем:
L
Г, . I .9 9
(щ + <р)------F ф — и)
о
(l + Lk- L) dl =
= ~ (u> + ф) (3Lk - L) + (ф2 - u?) (Lk ~ f) = 0.
(3.36)
Уравнения (3.28, 3.35, 3.36) являются уравнениями движения
для полотна, развертываемого из одной из веерообразных конфи-
гураций (рис. 3.31).
3.3.3.2. Две стадии неуправляемого процесса раскрытия
Далее будем считать, что блок раскрытия (ротор) — круго-
вой цилиндр с массой tuq и радиусом rG. Он раскручивается
двигателем постоянного тока. Раскрываемый сектор пленочной
конструкции имеет массу т. Процесс раскрытия можно разде-
лить на две стадии. На первой стадии направление центральной
радиальной оси сектора совпадает с касательной к окружности
ротора. Его длина возрастает при вращении блока раскрытия под
действием центробежной силы по закону L(t) — вплоть до
своего максимального значения Lk в момент времени t = tk. Вра-
щение ротора и разматывание полотнища описывается уравнени-
ями, вытекающими из закона изменения кинетического момента
механической системы. На второй стадии процесса происходит
поворот полностью размотанного полотнища из касательного
в радиальное положение и его возможные последующие коле-
бания. Целью математического моделирования является подбор
оптимальных параметров, при которых полотнище раскрывается
в радиальном направлении без существенных остаточных коле-
баний.
Система уравнений неуправляемого раскрытия на первой ста-
дии имеет вид:
M(t) + Tr0,
M(t) = Мо (1 - — V
(3.37)
где Jo — moro/2 — момент инерции ротора (вычисленный
в предположении равномерного распределения его массы по объ-
ему); ср — угловая скорость его вращения; Т — сила натяжения
сектора, A/(t) — вращающий момент, создаваемый двигателем
постоянного тока, а величины Mq, ujq определяются характери-
стиками этого двигателя. Выражение для силы Т и уравнение,
118 Гл. 3. Динамика разворачивания из уложенного состояния
определяющее угол отклонения сектора 92, были получены выше
в п 3.3.3.1, и могут быть представлены в виде:
2
Т =
Lk
1- , +
2Lk) Lk
2Lk
м2
(3.38)
Для решения систем (3.37), (3.38) необходимо задать началь-
ные условия Начальные условия для угла отклонения имеют
вид:
¥>(0) = 0,
</(0) = 0.
(3.39)
Начальное условие для угловой скорости вращения ротора
задавалось в двух различных вариантах, соответствующих раз-
личным вариантам раскрытия. В первом из них ротор предвари-
тельно раскручен до характерной угловой скорости двигателя шо
и начальное условие имеет вид:
ш(0) = ш0- (3 40)
Во втором варианте ротор в начальный момент времени поко-
ится и раскрытие полотнища начинается одновременно с началом
его вращения'
ш(0) = 0. (3 41)
Решение системы (3.37)-(3.41) производится вплоть до мо-
мента времени tk, определяемого из условия:
L(tfc) - Lk. (3.42)
На второй стадии процесса угол отклонения сектора от ради-
ального направления и угловая скорость вращения ротора опре-
деляются из следующей системы уравнений;
Jo = М(t) + Т го sin
м(t) = м0 (1 - — У
\ n г
m / 9 , . \ 2mLk , ,х9
1 = mrQ (о/ cos 92 — 02 sin 92) -I--— (02 + 92) ,
Го (022 sin 92 + 02' cos 92) + (02' + 92") = 0.
(3.43)
3.3. Математическая модель неуправляемого раскрытия 119
Начальные условия для системы (3.43) определяются конеч-
ными значениями переменных полученными из
решения системы уравнений (3.37), (3.38) для первой стадии рас-
крытия. Численное решение систем (3.37)-(3.43) производилось
методом Рунге-Кутта 4-5 порядка для различных характеристик
двигателя постоянного тока: шо = Юрад/с, Mq = 2, 0,4; 0,2 Н-м.
3.3.3.3. Неуправляемое раскрытие, вращение централь-
ного тела не учитывается
Результаты расчета приведены на рис. 3.32-3.37.
Из приведенных результатов видно, что использование двига-
телей с характеристическими моментами 0,4 и 0,2 Н-м обеспечи-
вает вполне удовлетворительную динамику раскрытия полотни-
ща: амплитуда колебаний невелика и они быстро затухают. При
максимальном моменте 2 Н-м процесс раскрытия неустойчивый:
происходят интенсивные слабозатухающие колебания раскрыто-
го сектора, скорости вращения ротора и силы натяжения сектора.
3.3.3А. Учет противовращения центрального тела
Важной проблемой является эффект обратного воздействия
разворачивающейся конструкции на несущий ее космический
аппарат (КА) (в данной модели КА — это центральное тело).
Такое воздействие приведет к закручиванию КА в направлении,
обратном направлению вращения пленочной конструкции. Для
количественной оценки данного эффекта системы уравнений бы-
ли модифицированы с тем, чтобы учесть динамику КА, который
моделировался цилиндрическим телом радиусом 0,3 м и массой
100 кг, равномерно распределенной по его объему. Блок раскры-
тия и КА закреплены и могут вращаться без трения под действи-
ем вращательного момента двигателя постоянного тока. Система
уравнений, описывающих динамику такой системы, аналогична
уравнениям, использованным в предыдущем разделе, и имеет
вид:
ш
Шо /
w — Q
= М° (1 “
3LkJ
Т = 2т^
Lk
V
Lk
(3.44)
Р- — ш
120 Гл. 3. Динамика разворачивания из уложенного состояния
Стадия 1
рад/с
11
10,5
10
9,5
V 2 4 "б 8 10
Рис. 3.32. Раскрытие из состояния стационарного вращения, <д(0) = ш0,
Мо = 2 Н м; tk = 2,04 с
В системе J — момент инерции КА, Q — угловая скорость
его вращения.
Целью расчетов была оценка скорости возникающего в про-
цессе раскрытия противовращения КА, поэтому расчет прово-
дился только для первой стадии раскрытия. Результаты расчета
представлены на рис. 3.38-3.43.
3.3. Математическая модель неуправляемого раскрытия
121
Стадия 1
Рис. 3.33. Раскрытие из состояния стационарного вращения, w(0) = шо>
Mq = 0,4 Н-м; th = 2,18 с
1. Неконтролируемое раскрытие, вращение центрального тела
учитывается.
Из результатов расчетов видно, что угловая скорость про-
тивовращения КА составляет не более нескольких сотых долей
рад/с, приводя за время раскрытия (Т й 2 с) к повороту на
несколько градусов, что лежит в приемлемых пределах. При
этом существенного влияния на динамику раскрытия сектора не
наблюдается.
122 Гл. 3. Динамика разворачивания из уложенного состояния
Стадия 2
Рис. 3.34. Раскрытие из состояния стационарного вращения, щ(0) = <до,
Мо = 0,2 Н-м; tk = 2,32 с
3.3.3.5. Использование обгонной муфты
Возможной модификацией рассмотренной выше схемы
является конструкция с обгонной муфтой. Обгонная муфта
представляет из себя кольцо радиуса гр, соосное с ротором
и свободно вращающееся (с малым трением), если его
угловая скорость превышает скорость вращения ротора. Если
угловая скорость обгонной муфты становится равной угловой
скорости вращения ротора, то они вращаются как одно
ш,рад/с
<^.град
Рис 3.35. Раскрытие из состояния покоя, о>(0) = 0, Мо = 2 Н-м; tk = 2,05 с
целое, под действием вращательного момента, создаваемого
двигателем постоянного тока. Таким образом, вращение
обгонной муфты в сторону, противоположную вращению
ротора, блокируется. Блок раскрытия полотнища крепится
на обгонной муфте. Так как различие в схеме с обгонной
муфтой и без нее проявляется только на второй стадии
раскрытия, то результаты расчетов приведены только для
этой стадии. Программная реализация связи между ротором
и обгонной муфтой осуществлялась посредством механиз-
ма несимметричного трения. Он состоит в том, что при
124 Гл. 3. Динамика разворачивания из уложенного состояния
Рис. 3.36. Раскрытие из состояния покоя, ш(0) = 0, Mq = 0,4 Н-м; Д = 2,22 с
относительном вращении ротора и обгонной муфты возникает
момент силы трения Mf, пропорциональный разности угловых
скоростей их вращения, причем коэффициент трения зависит от
знака этой разности: если обгонная муфта вращается быстрее
ротора, то он мал; если медленнее, то очень велик. Таким
образом:
3.3. Математическая модель неуправляемого раскрытия 125
Стадия 2
ф,град
40
Рис. 3.37. Раскрытие из состояния покоя, ш(0) = 0, Мо = 0,2 Н-м; tk = 2,4 с
Mf =
К\ ((Щ — ОЛ?) , Wj >
К? (cJj — W2) > ш 1 < ш2
(3.45)
Ki 2> АЛ2'
Здесь й?1, (л?2 — угловые скорости вращения ротора и муфты
соответственно. Динамика системы определяется из уравнений:
126
Гл. 3. Динамика разворачивания из уложенного состояния
Стадия 2
Рис. 3.38. Раскрытие из состояния стационарного вращения, ш(0) = шо,
Мо = 2 Н м; tk = 2,04 с
Рис. 3.39. Раскрытие из состояния стационарного вращения, ш(0) = ш0,
Мо = 0,4 Н-м; tk = 2,18 с
at \ wo 7 J
^2^ = r0T sin 99 + Mf,
3.3. Математическая модель неуправляемого раскрытия
127
Стадия 1
0,5 1 1,5 2
Рис. 3.40. Раскрытие из состояния стационарного вращения, w(0) = и>о
Мо = 0,2 Н-м; tfc = 2,32 с
Стадия 1
Стадия 2
Рис. 3.41. Раскрытие из состояния покоя, ш(0) = 0, Мо = 2 нм; tk = 2,05 с
/О / • \ / /\2
Т = тгц (сс>2 cos </> — о>2 sin Ч------------------------— + ¥>) .
го (wj sin (р + ш<2 cos </>) + (ш'2 + </>") = 0.
(3.46)
128
Гл. 3. Динамика разворачивания из уложенного состояния
Рис. 3.42. Раскрытие из состояния покоя, ш(0) = 0, Мо = 0,4 Н м; tk = 2,22 с
Q,рад/с
-0,005
-0,015
-0.025
t, с
1,5 2
-0035
0,5
Рис. 3.43. Раскрытие из состояния покоя, w(0) = 0, Мо = 0,2 Н-м; t* = 2,41 с
Параметры, использованные при расчете: суммарный момент
инерции ротора и муфты J\ + J% = Jo, J2 = 0-05 Jo- коэффициен-
ты трения: К\ подбирался таким, чтобы блокировать встречное
движение муфты и ротора (К\ — 15OMq/u?o); К2 = 0,01 Mq/wq.
Результаты расчета представлены на рис. 3.44-3.46. Угловая
скорость вращения муфты изображена сплошной линией, рото-
ра — пунктиром. Обращает на себя внимание то, что нали-
чие обгонной муфты стабилизирует систему с максимальным
вращательным моментом двигателя 2 нм: амплитуда колебаний
сектора существенно уменьшается и они быстро затухают. Для
3 3. Математическая модель неуправляемого раскрытия 129
Рис. 3.44. Раскрытие из состояния стационарного вращения, о>(0) = о>о.
Мо — 2 Н м
вращательных моментов 0,4 и 0,2 нм стабильность раскрытия не
ухудшается, хотя возникают высокочастотные колебания малой
амплитуды
В случае раскрытия из состояния покоя ротора временные за-
висимости параметров системы получаются практически такими
же, как на рис. 3.44-3.46.
Общие параметры при расчетах:
Радиус пленки; 1 м
Толщина пленки: 5 • 10-6 м
Плотность материала: 1,5 г/см3
Радиус ротора: 5 см
Масса ротора; 1 кг
Масса КА: 100 кг
Радиус КА: 30 см
Характеристика электромотора: cvq — 10 рад/с.
При решении задачи без предварительной раскрутки ротора
выбирались не нулевые, а очень малые значения начальной угло-
вой скорости ротора (например ш(0) = 0,001 шо) и угла раскрытия
мембраны <р = 0,0001 рад. От конкретных значений этих величин
решение практически не зависит.
5 Г. Г Райкунов и др.
130
Гл. 3. Динамика разворачивания из уложенного состояния
Рис. 3.45. Раскрытие из состояния стационарного вращения, ш(0)
ЛГо = 0,4 Н-м
wo,
-20
-40
-60
-80
щ,рад/с
Рис. 3.46. Раскрытие из состояния стационарного вращения, ш(0) = ш0,
Мо = 0,2 Н-м
3.4. Математическое моделирование раскрытия тросовых систем 131
3.3.4. Заключение по разделу
Рассмотренный в разделе способ неуправляемого раскрытия
СБ в виде гибкой пленочной конструкции является более про-
стым по сравнению с управляемым способом раскрытия в кон-
структивном отношении, поскольку требует только одного при-
вода. Математическим моделированием показана возможность
получения устойчивого процесса раскрытия. Способ может быть
рекомендован как перспективный для использования на малых
и средних КА.
3.4. Математическое моделирование раскрытия
тросовых систем
3.4.1. Исследование процесса роспуска круговой тросо-
вой системы
Рассмотрение разворачивания тросовых систем начнем
с частного случая, включающего центральное тело, радиальную
нить, соединитель и окружную нить. Примем также, что форма
радиальных нитей в процессе развертывания — прямая, окруж-
ных — окружность. Соединители принимаем за материальные
точки. Нити считаем нерастяжимыми.
Для определения кинетических соотношений по аналогии с п.
3,2.1, введем базис ё, ё2 (рис. 3.47). Положение соединителя
будем определять как положение груза М радиус-вектора R.
Тогда для системы будут справедливы соотношения (3.15, 3.16,
3.17).
Радиус-вектор бесконечно малого элемента dl радиальной
нити
г = г0 + 1, (3.47)
тогда
г = wi • r0 + wi • (wi • г0) +1 • ё^ + 2(wi + <£2ёд2Ь ’ + (^+
+ ^2ёд2)) • I + (wi + <^2ёд2)) • ((wi + <^2ёд2)) • !))• (3.48)
Изменение кинетического момента для центрального тела
К\ = М + п(г0 • N). (3.49)
Проектируя на ось вращения, имеем:
Дш = М + МеГо sin </?2> (3.50)
где TVix; = nNi (п — число радиальных нитей, N — натяжение
одной нити в точке выхода с центрального тела).
5*
132 Гл. 3. Динамика разворачивания из уложенного состояния
Рис. 3.47. Векторы, определяющие процесс роспуска круговой
тросовой системы
Основное уравнение динамики для элемента радиальной нити
lidlii = dN, (3.51)
где р — линейная плотность нити.
Проектируя (3.51) с учетом (3.48) на ось радиальной нити,
dN = —р [ro(w2 cos ip — w sin ф) — I + Z(w + <^)2] dl.
Откуда интегрированием по всей длине нити
N — N = pL [го(ш2cos^> — wsin<^) — L + l/2Z(w + <^)2] dl,
(3.52)
3.4. Математическое моделирование раскрытия тросовых систем 133
где 7V2 — натяжение радиальной нити в точке связи с соедини-
телем. Основное уравнение динамики для соединителя:
mR = N% + F, (3.53)
где т — масса соединителя, F — сила, действующая на соедини-
тель со стороны окружной нити. Согласно принятому допущению
о круговой форме окружной нити, F направлена перпендику-
лярно R. Примем за положенное направление F, показанное на
рис. 3.47. Тогда, проектируя (3.53), с учетом (3.17), на оси базиса
ё^\ получим
т [го(с51 cos (£2 — sin </2) + 2(cji + <£>г)Ь + (^1 + ^2)-^] dl =
= Feos a, (3.54)
m [tq(c<Ji cos </?2 — wi sin </?г) — L + 1 /2(сщ + <^2)2] =
= Лг2 ~ Fsina,
где, согласно рис. 3.47,
r0 sin <y2
sin a = ———
L + Tn COS
cos a =------------
К
(3.55)
(3.56)
R = L2 + tq + 2Lro cos '/’г- (3.57)
Изменение кинетического момента для окружной нити
^ОК = R-n(-F). (3.58)
Проектируя (3.58) на ось вращения, получаем
^t[J0K^x+^] = -RF^ (3.59)
где J0K = токй2 — момент инерции окружной нити относи-
тельно оси вращения, ток = 2тг/хок(£ + го) — масса окружной
нити; цок — линейная плотность окружной нити; (Дз — угловая
скорость вращения окружной нити относительно центрального
тела; 7Д = nF.
Из (3.59)
[2тфок(£ + r0)F2(wi + Д3)] = -7?FE.
134
Гл. 3. Динамика разворачивания из уложенного состояния
После дифференцирования
2тг^ок [-R2(£(w + Фз) + (L + г0) (й?1 + </?з) +
+ 2(£ + г0)(tvi 4- фз)(£(Ь + /’о cos р) - Ьг0ф2 sin р2)] = ~RF^.
(3.60)
Значения ф% и ф% в (3.60) найдем из соотношения
(см. рис. 3.47)
7?sin<^3 = £sin<^2- (3.61)
Дифференцируя (3.61), имеем:
R sin <^3 + Рсфз cos <^>3 = £ sin <р2 4- Ьф2 cos <^2,
откуда находим <^з, где, согласно (3.61),
(3.62)
(3.63)
COS<^3 =
(Z/rsin <^2)2.
Продифференцировав (3.62), имеем:
(R - Яф1) sin <^з + (2й<Дз + Яфз) cos <^3 =
= (£ — £ф2) sin tp>2 + (2£<^>2 + £<^2)cos Т’г. (3.64)
откуда
7>з = l/(£cos <^3) [(£ - £р2) sin <^2 + (2£ф2 4- Ьф2) cos<^2 -
- (R/R - ф1) tg^ ~ ^R/R] , (3.65)
где, согласно (3.61), (3.63),
tg <^3 = . . 1 . (3.66)
у/ (R/(L sin w))2 - 1
Значения R и R в (3.62) и (3.65) найдем из (3.57)
R — 1!R [£ (£ + т’о cos <^2) ~ £^о sin <^2] > (3.67)
R= 1iR [£2 4- ££ — Д2 — т’о (2£<^2 4- £<^2) sin <^2 4“
4- (£ — £<^2) cos Т’г] • (3.68)
3.4. Математическое моделирование раскрытия тросовых систем 135
При численном расчете во всех режимах имеют место неогра-
ниченно возрастающие колебания угла отклонения от ра-
диального направления с увеличением времени в размерных
параметрах с увеличением радиуса системы, что ограничивает
размер системы и требует специального исследования влияния
параметров системы на динамику развертывания.
Математическая модель круговой тросовой системы исполь-
зовалась только для оценок принципиального характера влияния
параметров на динамику развертывания системы и служила про-
межуточным этапом для создания математической модели петле-
вой тросовой системы, поскольку при проектно-конструкторской
и технологической модельной отработке выявилась невозмож-
ность создания подобной системы из-за различия трения в сколь-
зящих соединителях и большой вероятности «заедания» троса
в каком-либо одном соединителе. В петлевой системе скользящие
соединители были заменены жесткой связью. Пример подбора
параметров в задаче создания тросовой антенны приведен в сле-
дующем разделе.
3.4.2. Исследование процесса выпуска петлевой тросо-
вой системы
Процесс образования контура системы показан на рис. 3.48.
Центральное тело с размещенными на нем катушками, на кото-
рых намотана система, приводится во вращение, после чего под
действием центробежных сил производится поэтапный выпуск
сначала окружных, а затем радиальных нитей. Таким образом,
задача математического моделирования процесса раскрытия си-
стемы решается в два этапа: вначале решается задача динамики
выпуска нитей, которые впоследствии будут формировать окруж-
ной контур, а затем этап выпуска радиальных нитей моделирует-
ся следующим способом: окружная нить заменяется ломаной из
п = 8 прямых стержней постоянной массы т (см. рис. 1.5).
Основные допущения, принимаемые при построении матема-
тической модели данной системы:
1) развертывание системы происходит симметрично относи-
тельно центральной оси,
2) форма нитей — прямая,
3) относительные перемещения в системе происходят в плос-
кости, перпендикулярной оси вращения системы,
4) диссипацией энергии системы, вызванной деформацией,
трением, влиянием внешней среды пренебрегаем.
Введем правые ортогональные базисы: инерциальный базис
ё и подвижные базисы ё^1) и ё(2). Начало базиса ё поместим
136
Гл. 3. Динамика разворачивания из уложенного состояния
Рис. 3.48. Векторы, определяющие процесс роспуска петлевой тросовой
системы
в центре системы 0, вектор ёд направим по оси вращения, тогда
ё1 и будут лежать в плоскости развертывания системы. Базис
жестко свяжем с центральным телом, начало его также
поместим в точку 0, ось ёд совместим с ёд. Начало базиса
ё^2) поместим в точке А выхода нити, вектор ё^ направим
аналогично ёд, вектор ё| направим вдоль нити (рис. 3.48).
Положение центрального тела относительно инерциального
базиса определяется углом y?i, отклонение нити от радиального
направления — углом
Радиус-вектор нити
R = гр + L,
где г0 — радиус центрального тела, L — радиус-вектор нити
в базисе ё^.
3.4. Математическое моделирование раскрытия тросовых систем 137
Тогда
R = х го + L + х L, (3.69)
где = </>1ёз — угловая скорость центрального тела относи-
тельно инерциальной системы; знаком обозначена локальная
производная в базисе ё®.
R = сщ х tq 4-wj х (u>j х гц) + I +2 (сщ 4- </?2ез^) х ^ +
4- (wl 4- </?2е) х L 4- нщ 4- ) х ([ wi + ) х Lj .
7 (3.70)
Этап 1: моделирование процесса раскрытия окружных нитей
(п попарно параллельных нитей со свободными концами).
Запишем теорему об изменении кинетического момента для
центрального тела
Кt = М + п (r0 + N). (3.71)
Проектируя на ось вращения, получаем:
J]Wi = М 4-Мегц sin у?2. (3.72)
где N] — натяжение нити, п — число нитей.
pidlR = dN, (3.73)
pi — линейная плотность нити, кг/м.
Проектируя на оси базиса е^2\ интегрируя по всей длине нити
и умножая на п, получаем
Nis = npiL го (ш2 cos у?2 — sin </?2) — L 4- 1/21/01 4- 02)| >
L (3 74)
Гц 0i cos (/>2 4-Ш1 sin (£2) 4- 2 (сщ 4- 02) 1/4-1/2 0) 4-£2) Ь = 0.
(3.75)
В результате получается система (3.72), (3.74), (3.75).
Этап 2: моделирование процесса раскрытия радиальных ни-
тей.
Начальными данными переменных на втором этапе являются
конечные значения этих переменных, вычисленные на первом
этапе.
138
Гл. 3. Динамика разворачивания из уложенного состояния
Уравнение движения для центрального тела аналогично
(3.72). Аналогично (3.72) для радиальной нити имеем:
Ms — TVgs =
= npi-L |го (wf cos</?2 — <7’i siiic^) — L + l/2£ (wj + 02)2 , (3.76)
где 7V2e натяжение радиальной нити в точке связи с окружной
нитью,
пдЬ (го (<7’1 cos </?2 + T’i sin ^2) +
+ 2 (wi + (^2) £ + 1 /2 (wi + 922) А) = cos a, (3.77)
где Fs — сила, направленная перпендикулярно радиальной нити
и равная силе, с которой окружная нить действует на ради-
альную,
Fy, = nF,
L + rQ cos <£2
COS Ct = ---—-----,
R2 — L2 + r(2 + 2Lro cos tp2.
Теорема об изменении кинетического момента для окружного
троса в проекции на ось вращения запишется:
[Jok (^1 + 0з)] = ~RFe,
где (рис. 3.48)
(3.78)
L sin <г2
Sm9?3 = R ’
Jok (Ryi T Ryi,L + R ) 1
О
Rkn ^Ry/R’t
360°
Rki = Rkn cos $ + Rpn sin & ctg ;
2n
lR.(Rki F) — P'Rkn —
— для одного стержня, т. к.
Rki
JoK = Ri r2dr=^ki-L^ =
О
L
= %(Rki - L)(R2ki + Rki + L2) = piRkn 0,5(R2ki + RkiL + L2).
О
3.4. Математическое моделирование раскрытия тросовых систем 139
Уравнения (3.76), (3.77) содержат 6 неизвестных Ai, А2,
</?2, F^, а.
Три уравнения связи дают седьмое неизвестное R.
Уравнение (3.78) добавляет новое неизвестное </?з.
Для замыкания системы нужно уравнение для силы N%,
которая является проекцией силы натяжения Т в двух соседних
стержнях да направление L. Результирующая сила натяжения —
Т = Т\ + Т% (см. рис. 3.50) равна:
Т = 2fj.Rkn! (Rki -L)x
Rki
х | [го (wf cos</?2 — wi sin</?2) — FL (<^1 + фг)] dl =
L
= 2p,Rkn r0 (wf cos <£2 - wi sin </?2) -L + (wi + ф2)2 (Rki + T) 0,5 ,
A2 — T sin7cosa/(2cos$).
Натяжение радиального троса в точке связи с окружным
тросом определяется выражением:
А2 = 2/iKfcsin7Coso:/(2cos?9)x
х rQ (wf cos </?2
о>1 sin </?2) — L + (ш) + </?2)2 (Rk + R) 0,5
(3.79)
Анализ результатов численного расчета позволил сделать вы-
вод: на первом этапе (моделирование выпуска окружных тросов)
система является относительно устойчивой, т. е. при скорости
выпуска и характеристиках электродвигателя Ml = 1,5(1 —07/8)
М2 = 24(1 — wi/O,75)Ao = 1,1 и имеет место плавный ро-
спуск окружных тросов Ушах — —0,278 рад, Атах — 168 Н,
gjmin = 0,4 рад/с. Время роспуска окружных тросов равно
38 мин. Однако, если начинать роспуск с угловой скоростью рав-
ной 0,4 рад/с и с соответствующим этой точке моментом, на на-
чальных этапах выпуска происходит запутывание системы (угол
99 превосходил тг/2) при конечном радиусе конструкции больше,
чем 60 м. Ставилась задача подбора параметров раскрытия для
конструкции антенны, конечный радиус которой Дк = 270 м
Проведено исследование факторов, влияющих на устойчивость
системы. Такими факторами являются увеличение Rq — радиуса
140 Гл. 3. Динамика разворачивания из уложенного состояния
центрального тела, увеличение до максимально допустимых (ис-
ходя из прочностных характеристик материала) значений угло-
вой скорости со (для RK = 270 м и штах — 0,7 рад/с), умень-
шение момента от электропривода до значений близких к нулю,
увеличение массы центрального тела. Получено, что увеличение
радиуса центрального тела до Rq — 3 м позволяет увеличить
конечный радиус конструкции до RK = 150 м, соответственно,
при Rq = 5 м и RK = 190 м, при Rq — 10 м RK — 230 м
(таблица 3.2). Увеличение массы центрального тела может быть
Таблица 3.2.
№п/п 7?о, м Rk, м Мп.т., кг Кып, м/с ^нач» PWС Л/Нач., Н м
1 1 60 15 0,75 0,17 5,3
2 3 75 15 0,01 0,17 5,3
3 5 100 15 0,01 0,17 5,3
4 10 150 15 0,01 0,17 5,3
5 10 230 15 0,01 0,7 0,1
6 5 190 15 0,01 0,7 0,1
7 3 150 15 0,01 0,7 0,1
8 6 270 50 0,01 0,7 0,1
9 3 270 100 0,01 0,7 0,1
осуществлено путем размещения в объеме этой массы генератора
радиосигнала для питания антенны. Расчеты показывают, что
увеличение массы центрального тела до 800 кг позволяет при
Rq = 3 м осуществить плавный выпуск конструкции, конечный
радиус которой равен 270 м.
Одним из вариантов раскрытия антенны Rq = 10 м,
RK = 230 м является шнач = 0,7 рад/с, Мнач = 0,1 Н-м второго
этапа. Поскольку на этапе выпуска окружной нити угловая
скорость падает до 0,4 рад/с, необходимо, не начиная выпуск
радиальных тросов, разогнать конструкцию до угловой скорости
со = 0,7 рад/с. Как показали расчеты, для этого необходимо
затратить 1 час. После этого начинается этап выпуска ради-
альных тросов. Получены следующие динамические параметры
второго этапа роспуска: <^П1ах = 0,3 10-2 рад, шт;п = 0,62 рад/с,
Мпах = 130 Н (имеется запас прочности в два раза).
Предложенный вариант роспуска антенны является не един-
ственным. Например, можно было, изменяя характеристику дви-
гателя на первом этапе в сторону увеличения момента, добить-
ся, чтобы угловая скорость в конце выпуска окружных тросов
3.5. Математическое моделирование двухэтапного роспуска
141
примерно падала до 0,7 рад/с, что позволит сократить время
роспуска конструкции в целом.
3.5. Математическое моделирование двухэтапного
роспуска неразрезного полотнища
Раскрытие неразрезного полотнища проводится в два этапа:
в начале проводится управляемый роспуск п — лучевой части
полотнища длиной Н = 2тг/?^/277 (рис. 3 4), а затем на вто-
ром этапе производится выпуск оставшейся части полотнища
(рис. 3.49) Математическое моделирование процесса раскрытия
полотнища соответственно проводится в два этапа.
Рис. 3.49. 2-й этап раскрытия отражателя (раскрытие полотнища)
I этап: Моделирование выпуска п лучей. При моделировании
п лучей заменяются п нитями с грузами на концах, линейная
плотность нитей соответствует линейной плотности лучей:
тк
Д =
Нп
Н = -nRk/n,
142
Гл. 3. Динамика разворачивания из уложенного состояния
где m — масса полотнища, п — число разбиений на сектора,
к=1,2 — коэффициент увеличение массы полотнища в связи
с технологическими операциями по отношению к исходной массе
пленки.
Масса грузов на конце 7тггр — (Н - L)w.
Тогда уравнение для центрального тела запишется:
Jwi = М + Ntq sin <£>2 п, (3.80)
где М — внешний момент, N — натяжение пленки, tq — радиус
центрального тела, ш — угловая скорость вращения центрального
тела, 9?2 — угол отклонения от радиального направления.
Уравнения динамики для луча запишутся:
N = пдН [го (wf cos sin </>2) — Z] +
+ (jiH — 0,5L/i) (wi + фг) L, (3.81)
H [r0 (^1 cos ip2 — wf sin (P2) + 2 (wi + Ф2) L\ +
+ (Я - 0,5L) (wi + ф2) L = 0, (3.82)
где L — текущая длина луча.
2 этап раскрытия отражателя (раскрытие полотнища):
Н — HRk/n,
а — RiSinB,
В = 360° /2п,
b = \/Н2 — а2,
L — Ri + 0,5Ь.
Таким образом, получается система уравнений (3.80)-(3.82),
описывающая динамику раскрытия лучей на I этапе раскрытия
неразрезного полотнища.
II этап: На втором этапе п лучей уже раскрыты, проводится
роспуск оставшейся части полотнища (см. рис. 3.49). Для того
чтобы учесть массу выпущенных лучей, текущий радиус полот-
нища заменяется с достаточной точностью
L = L + 0,5b,
где b = VН2 — а2 , а = ВяштЭ, тЭ =
2п
3.6. Моделирование нагрузок на электроприводы
143
Уравнение для центрального тела аналогично (3.80). Уравне-
ния (3.81) и (3.82) для полотнища запишутся:
N = тфП2. (tq (u-’f cos <^2 — ^’i sin (д2) — L) +
+ тг/3 (R2k - 1/3L2) L (wi + ^2) = 0, (3.83)
7F/3.R2 (ro (<^1 cos(/?2 — ^2 sin 992) + 2 (wi + Ф2) L) +
+ tt(3 ^R2 - 1/3L2) L (wi + <p2) = 0. (3.84)
Таким образом, получается система уравнений (3.80), (3.83),
(3.84), описывающая динамику раскрытия неразрезного полотни-
ща на II этапе.
Приведенные уравнения численно решаются методом Рунге-
Кутта 4 порядка. Используется электропривод с падающей ха-
рактеристикой. Максимальная угловая скорость вращения отра-
жателя после раскрытия определяется по формуле (см. Прило-
жение 5.1)
^кон = у 1, Зото/рЛ3 ,
где а — допустимое напряжение для пленки.
Ставится задача подобрать характеристику двигателя и ско-
рость выпуска отражателя такими, чтобы параметры раскрытия
отражателя не превосходили бы заданные величины: угол откло-
нения от радиального положения < 1 рад, N < сг2тг(7?^ — Ri)h.
3.6. Моделирование нагрузок на электроприводы при
наземной отработке
Основной принципиальной особенностью создания космиче-
ских крупногабаритных конструкций, формируемых центробеж-
ными силами, является невозможность полномасштабной назем-
ной отработки из-за влияния гравитации и отсутствия вакуум-
ных камер столь большого размера.
Ряд первых попыток создания подобных орбитальных си-
стем окончился неудачно. Например, в сорок девятом полете
МТКС «Спейс Шаттл» 5 августа 1992 г. при попытке выве-
дения итальянского исследовательского спутника стоимостью
379 млн долл, на тросе длиной 19 км произошло «заедание»
барабана с намотанным на него тросом после выпуска первых
нескольких сотен метров троса.
144
Гл. 3. Динамика разворачивания из уложенного состояния
В орбитальном эксперименте по развертыванию пленочного
бескаркасного отражателя D=20 м на ТГК «Прогресс» (экспери-
мент «Знамя 2»), успешно проведенном 4 февраля 1993 г., впер-
вые в мире была раскрыта сложная пленочно-тросовая система
из 32 тросов и 8 пленочных секторов.
Помимо традиционно проводимых при наземной отработке
изделий космической техники лабораторно-отработочных и кон-
структорско-доводочных испытаний была разработана и осу-
ществлена методика динамического моделирования. Задача за-
ключалась в том, чтобы в вакуумной камере ограниченных раз-
меров создать с помощью грузов на нитях нагрузки на элек-
тромеханические приводы агрегата развертывания отражателя,
аналогичные тем усилиям, которые будут в орбитальном полете
от пленочного отражателя на этапах развертывания и дальней-
шего функционирования. Дополнительно, в вакуумной камере
специально отрабатывалась механика схода пленочно-тросового
массива из уложенного на катушки состояния на начальном,
промежуточном и конечном этапах развертывания отражателя.
Методика динамического моделирования базируется на реше-
нии системы дифференциальных уравнений 2-го порядка, описы-
вающих динамику развертывания сплошного пленочного полот-
нища и системы «груз на нити» с подбором таких масс грузов,
которые бы с максимальной точностью моделировали основные
динамические параметры процесса развертывания полотнища:
изменяемый закон силового нагружения на привод; угол откло-
нения от радиального направления; угловую скорость вращения.
В результате было получено, что динамическое воздействие
на электропривод с фиксированной характеристикой от развер-
тываемого полотнища массой 4,5 кг и конечным радиусом 10 м
моделируется грузом на нити массой 16 кг, распускаемым на
радиусе 1,7 м. При этом время развертывания сократилось с 200
с до 30 с. Динамические параметры раскрывающегося отражате-
ля и моделирующей отражатель системы грузов для выбранной
в эксперименте характеристики электропривода приведены на
рис. 3.50. Для осуществления отработки агрегата развертывания
была использована вакуумная камера отделения 09 НПО «Энер-
гия» диаметром 5,5 м и высотой 10 м.
Указанная методика должна использоваться при отработке
формируемых центробежными силами конструкций большой раз-
мерности.
Следует также подчеркнуть, что в целом подход следует
использовать и для других разворачиваемых в космосе систем
(тросовых, каркасных и пр.). Специфика динамики развертыва-
3.7. Заключение по разделу
145
ш,
рад/с
10
8
6
4
2
1,5 4,5 7,5 10 5 13,5 16,5 t. с (грузы на нитях)
Рис. 3.50. Моделирование динамических характеристик раскрывающегося от-
ражателя в КЭ «Знамя 2» с помощью грузов на нитях
ния должна моделироваться при наземной отработке обязательно
в вакуумных камерах, поскольку, как показывает анализ большо-
го количества неудачных экспериментов, отработки на воздухе
оказывается недостаточно. Нагрузки должны в максимальной
степени соответствовать штатным и иметь запас, обеспечиваю-
щий надежность срабатывания системы.
Оценку усилия и обоснование способа можно провести, ис-
пользуя выражение для центробежной силы F ~ murR, где в на-
шем случае гп — масса моделирующего полотнище груза, равная
массе полотнища, R — 2/3 радиуса полотнища (центр тяжести
сектора), угловая скорость ш есть функция момента ш = щ(Л/)
и является характеристикой агрегата раскрытия, а произведение
mR, как в задаче дисбаланса, позволяет уменьшить радиус R
и увеличить массу т моделирующего груза, чтобы проводить
испытания в вакуумной камере ограниченных размеров. Масса
моделирующего груза т разбивается на число катушек т/п, где
п — число катушек.
3.7. Заключение по разделу
В заключении настоящей главы, посвященной созданию ме-
тодологии развертывания из уложенного состояния формируемых
центробежными силами космических конструкций, подчеркнем,
146
Гл. 3. Динамика разворачивания из уложенного состояния
что предложенные методы основаны на вышесформулированных
ограничениях (п. 3.5, 3.6), определяющих преобладание в рас-
сматриваемых процессах именно центробежных сил, их стабили-
зирующего и формирующего действия. Это позволило упростить
процесс, введя предположение о радиальной прямолинейности
складки, отсутствии диссипации, отсутствии необходимости уче-
та конкретной формы складки и ее пространственного изменения
во времени.
Справедливость подобного подхода подтверждается сравнени-
ем расчетных данных, полученных по вышеприведенным мето-
дикам и результатов измерения соответствующих характеристик
в наземном и орбитальном экспериментах.
Разработанная методология объединяет выбор типа укладок
полотнищ и тросовых систем, подбор технических средств, обес-
печивающих вращение и роспуск, методики математического
моделирования и динамического моделирования при наземной
отработке. Методология может использоваться в широком круге
практических задач, где не предъявляются требования высокого
темпа развертывания конструкций летательных аппаратов. При-
веденные методы использовались для исследования динамики
разворачивания и подбора приводов в следующих прикладных
задачах:
— расчета динамики раскрытия разрезного полотнища из от-
дельных секторов, скрепленных по периферии, в косми-
ческом эксперименте «Знамя 2» для отражателя D=20
и D=25 м;
— расчета динамики раскрытия разрезного варианта полот-
нищ для КЭ «Знамя 3» для отражателя D=70 м,
— двухэтапный расчет разворачивания варианта неразрезного
полотнища для КЭ «Знамя 3» при двух конструктивных ис-
полнениях укладок на первом этапе разворачивания: лучи
укладки по схеме ДКБА уложены «змейкой»; лучи спи-
рально намотаны на центральное тело;
— аналогичные выполненным для КЭ «Знамя 3» вариантным
расчетам проведены расчеты для системы космического
освещения (СКО) для отражателя D=200 м (разрезного
и неразрезного);
— для КЭ «Знамя 3» и СКО проведены расчеты тросового
компенсирующего маховика, раскрываемого таким образом,
чтобы корпус корабля оставался неподвижным при развора-
’ чивании на нем двух противовращающихся систем (систе-
ма управления на основании сигналов с датчиков угловых
3.7. Заключение по разделу
147
скоростей делает разность вращающих моментов равной
нулю за счет управления электродвигателей);
— проведены расчеты динамики разворачивания тросовой пет-
левой радиоантенны СНЧ- и ОНЧ-диапазона D=500 м;
— проведены расчеты динамики разворачивания двух парусов
солнечного парусного корабля (проект СПК).
Глава 4
ПЕРЕОРИЕНТАЦИЯ В ПРОСТРАНСТВЕ
ФОРМИРУЕМЫХ ЦЕНТРОБЕЖНЫМИ СИЛАМИ
КОНСТРУКЦИЙ
4.1. Общие положения
Специфической особенностью формируемых центробежны-
ми силами конструкций является возможность переориентации
в пространстве без расхода рабочего тела на гироскопическом
принципе, поскольку сами вращающиеся конструкции основной
системы, и системы, компенсирующей кинетический момент,
представляют собой тяжелый гироскоп. Гироскопические силы,
возникающие при «изломе оси» двух противовращающихся кон-
струкций могут использоваться для управления положением си-
стемы в пространстве. При полной компенсации кинетического
момента основной системы К[ кинетическим моментом компен-
сирующей системы их вектора равны и противоположны по
направлению (рис. 4.1). При изломе связывающей вектора оси на
Рис. 4.1. «Излом оси» двух противовращающихся конструкций для управления
положением системы в пространстве
требуемый малый угол а возникает результирующий вектор К-А,
вокруг которого вся система начинает вращаться с необходимой
для ее управления в пространстве угловой скоростью Q3. На
рис. 4.1 показано, что первоначально К\ = и при изломе оси
на угол а
КА = 2К\ sin а = 2К\ а.
Если момент инерции основной системы Ji значительно пре-
вышает момент инерции компенсирующей системы J% (Ji J2)
(например, используется быстровращающийся тросовый махо-
4.1. Общие положения
149
вик), то J3 = 0,5J] • Тогда угловая скорость переориентации Q3
определится из равенства:
/<з = J3Q3 = 2Jiuia; Q3 = 4сща.
Гироскопический момент, который необходимо при этом преодо-
левать, будет иметь величину порядка М = 0,5J1Q3W1.
При управлении положением в пространстве вращающихся
пленочных отражателей и тросовых систем имеет место воздей-
ствие на гибкие системы гироскопических сил, приводящее к из-
менению формы их поверхности, вырожающейся в возникнове-
нии на вращающейся конструкции коссосимметричной бегущей
волны в сторону, обратную вращению системы. Амплитуда вол-
ны максимальна на периферии конструкции А = CRk&Rk/uR0
и зависит от геометрических характеристик конструкции: отно-
шения Rk/R0, где Rk — внешний радиус системы, Ro — ради-
ус ведущего центра, через который на конструкцию передается
поворачивающий момент; и отношения Q/cu скорости поворо-
та системы в пространстве Q к скорости ее вращения вокруг
центральной оси ш. Коэффициент С зависит от Rk/R0 и при
Rk/R0 = 10 С = 2 (см.п. 4.4.3). В случае системы двух про-
тивовращающихся конструкций величина амплитуды определяет
возможность зацепления конструкций друг за друга и должна
определять длину базы между вращающимися конструкциями
(с учетом угла излома, или как его принято называть, угла
прокачки). Во вращающихся системах, где предъявляются по-
вышенные требования к точности поверхности и ее ориентации
(например, отражатели для освещения отраженным солнечным
светом районов Земли), ограничения по точности поверхности,
связанные с деформацией поверхности от гироскопических сил,
выступают на первый план. Принципиально возможны два пути
уменьшения нежелательной амплитуды бегущей волны. Первый
путь — это подбор геометрических параметров вращающихся
конструкций и относительных скоростей вращения таким обра-
зом, чтобы результирующая амплитуда была мала. Это возмож-
но, например, если вместо конструкции одного большого отра-
жателя использовать большое количество объединенных между
собой тросовой системой малых отражателей. Поскольку угловая
скорость вращения определяется прочностными характеристи-
ками материала и обратно пропорциональна радиусу системы:
ш = 1 /Ry/сг/р (где <т — предельное напряжение в материале, р —
удельная плотность материала), то для пленочных отражателей
R = 15-30 м угловая скорость вращения может быть относитель-
но высока и тем самым уменьшена амплитуда колебаний.
150 Гл. 4. Переориентация конструкций в пространстве
Второй путь — это организация активного или пассивного
демпфирования колебаний. Принципиальная возможность этого
пути была показана экспериментами по качанию вращающегося
полотнища в вакуумной камере У-22 ЦНИИМАШ. К сожале-
нию, до настоящего времени эта задача до конца теоретически не
решена и вопрос остается проблемным. В КЭ «Знамя 2» успеш-
но осуществлено активное демпфирование колебаний. Однако,
получение высокой точности изготовления поверхности требует
дальнейших экспериментальных и теоретических исследований.
4.2. Математическая модель поворота вращающегося
на нити груза
Поскольку элемент контура отражателя может быть пред-
ставлен как сосредоточенная масса на нити, математическое
рассмотрение задачи поворота в пространстве вращающейся кон-
струкции начнем именно с этой модели, которая, как в задаче
раскрытия вращающейся конструкции из уложенного состояния,
обладает физической и математической наглядностью с одной
стороны, и в то же время обладает многими свойствами систем
с распределенными параметрами.
На рис. 4.2 представлена точечная масса гп на невесомой
Рис. 4.2. Точечная масса т на невесомой нерастяжимой нити длиной R%,
прикрепленной к ведущей жесткой центральной вставке Ro
нерастяжимой нити длиной R%, прикрепленная к ведущей жест-
кой центральной вставке Ro. Масса вращается вокруг централь-
ной оси О]0, с угловой скоростью ш, и поворачивается вокруг
оси, перпендикулярной О]О, и лежащей в плоскости чертежа
с угловой скоростью Q. При этом в положении, показанном на
рис. 4.2 на массу действует центробежная сила FU6 = mw2Ri,
4.2. Математическая модель поворота вращающегося на нити груза 151
и Кориолисова сила FKOp = 2wQ,Rim, при этом масса отклоняется
на угол </? в плоскости чертежа.
Во вращающейся со скоростью ш системе координат, связан-
ной с центральным телом, уравнение движения груза может быть
записано в виде
mR^tp" + muJ^RiR^ sin</? = 0 (4.1)
и представляет собой равенство моментов относительно точки
крепления троса к ведущей центральной вставке.
Поскольку рассматриваются малые колебания sin</? r; ip,
уравнение принимает вид:
^" + р2^ = 0, (4.2)
где, как известно,
Р = uyfR^Rz (4.3)
есть собственная частота системы.
Решение уравнения (4.2) имеет вид
<р = A sin [w y/R\/R<21 + . (4.4)
Из уравнения (4.3) видно, что при наличии центральной
вставки > /?2 собственная частота системы всегда выше ча-
стоты вращения ш.
Во вращающейся системе координат, связанной с централь-
ной жесткой вставкой, действующая на массу Кориолисова сила
выполняет роль гармонического воздействия с частотой ш
FKop = 2uQ/?imsin(?? + mt). (4.5)
Амплитуда установившихся колебаний определится в этом
случае выражением
= Уст (4 6)
Л(1-ш2/р2)2 + ^
у Р
где </?ст = 2Q/m — угол поворота нити при статическом приложе-
нии нагрузки; п — коэффициент, характеризующий диссипатив-
ные свойства системы.
Подставляя (4.3) в (4.6) в случае п = 0, амплитуда колебаний
будет иметь значение
* = Т^- <47>
152 Гл. 4. Переориентация конструкций в пространстве
или, учитывая, что R\ — R? — Ro,
9? = (4.8)
При п — 0 из (4.6) также следует, что
о?(р - w)(p + w) ’
В случае R\ > Rq р ~ щ, и (4.9) можно записать в виде
(4.10)
р - а>
Внешний наблюдатель, находящийся в неподвижной системе ко-
ординат, будет видеть бегущую волну по поверхности вращаю-
щегося отражателя с частотой р — а>, вращающуюся против щ,
поскольку р > ш.
Интересно, что в КЭ «Знамя 2» разность частот р — ш изме-
рялась датчиками угловых скоростей по периоду бегущей волны
Т — 40 с, скорость поворота была задана Q = 0,2 град/с, тогда
по (4.10) угловая амплитуда колебания
= 0,2 • 40/360 = 2 10 2рад = 1,2°,
что находилось в удовлетворительном соответствии с другими
измерениями.
4.3. Математическая модель поворота вращающейся
весомой нити с грузом на конце
Рассмотрим случай, когда нить, к которой привязан груз
массы т, является весомой и имеет массу т0. Вводя соответ-
ствующие интегралы по длине нити в уравнение (4.1)
/ pr^dr + mR.2 = (mo + ш)/?|, (4.11)
о
л2
/ prdr + mR-z = (тог + m)/?2, (4-12)
0
где p — погонная масса нити; //,/?2 — то ~ полная масса нити.
Откуда собственная частота системы
р = шyj(m0/2 + m)R/(m0/3 + m)/?2 . (4.13)
Из выражения (4.13) следует, что в случае малой массы конце-
вого груза т0 » т частота выше, чем в случае наличия только
4.4. Математическая модель формообразования 153
груза (4.3), и следовательно, амплитуда по (4.6) будет меньше.
Таким образом, наличие периферийной массы в виде троса или
сосредоточенных масс на отражателе приведет к нежелательному
увеличению отклонения края полотнища при управлении его
положением в пространстве.
Выражение для угловой амплитуды вынужденного колеба-
ния, аналогичное (4.8), выведено в [109] применительно к лопа-
сти вертолета.
Выражение (4.8) использовалось в технических предложени-
ях и эскизном проекте по солнечному парусу [101, 104] и в кон-
струкции аппаратуры «Знамя 2» для определения амплитуды
отклонения края полотнища и выбора размеров центральной
вставки Ro, организованной в виде тросовых вант.
Следует отметить, что выражение (4.8) выведено для системы
груз на нити и дает минимально возможное значение угловой
амплитуды. В системах с периферийной связью (тросовое кольцо
или неразрезное полотнище) следует учитывать влияние сосед-
них участков (изгибную жесткость), увеличивающих отклонение
системы из плоскости вращения под действием Кориолисовых
сил и величину статической амплитуды (см п. 4.4.3) примерно
в 2 раза при Rp/Ro = 10.
4.4. Математическая модель формообразования
вращающегося сплошного полотнища при его
переориентации в пространстве
4.4.1. Постановка задачи и уравнения колебаний враща-
ющейся пленочной конструкции
Рассмотрим динамику мягкой круговой мембраны радиуса
R и толщины h с центральной жесткой вставкой радиуса а,
вращающейся с постоянной угловой скоростью ш, на которую
действует распределенная сила с поверхностной плотностью F.
Уравнение поперечных колебаний в полярной системе координат
(г, $), жестко связанной с вращающейся мембраной, имеет вид:
d2w dw d2 w
dt or dr
N# / dw 1 S2 w
r \ dr r dfi2
„ о dw „
+ ^re; = F-
(4.14)
где w(r,$,t) — перемещение элемента мембраны из плоскости
вращения, /3 = ph поверхностная плотность мембраны, с - коэф-
фициент демпфирования. Выражения для радиальных и окруж-
ных усилий Nrrf приведены, например, в [85]:
154
Гл. 4. Переориентация конструкций в пространстве
Nr
(3w2
4 (А + 2/z)
2 Д2 (2А + З/t) — а2 (A + /z) /Д2 _ Л
R2 (А + р) + а2р \ г2 J
+ (2А + 3/1) (R2 - г2)
/V Г 2Д2(2А + 3//)-о2(А + р) /Д2 \
- ДлТэд [“^ tf(A+M)+<.V V7 )
+ Д2 (2А + 3/7,) - г2 (2А + /1) . (4.15)
Усилия TVr ,9 связаны соотношением [139]:
d^_ + Nr -N# + = 0 (4 16)
dr г
В случае, когда действующая на мембрану сила возникает
вследствие поворота оси ее вращения с угловой скоростью Q(t),
выражение для F было получено в [79] и имеет вид:
F = —fir [2wQ sin(wt + $) — Q cos(ajt + $)]. (4.17)
Для полной формулировки задачи необходимо еще задать
граничные условия на внутренней и внешней границах мембра-
ны, а также начальные условия. В предположении, что при t < О
F = 0 и колебания мембраны отсутствуют, начальные условия
имеют вид:
(4.18)
™1*=0 =°>
dw I _
dt I t=o
Так как на внутренней границе мембраны находится жесткая
вставка, то смещение w на ней равно нулю:
т=а — 0.
(4.19)
Внешняя граница мембраны свободна и граничное условие
на ней получается из общего условия на свободной границе,
приведенного, например, в [140], которое для круговой мембраны
принимает вид
d2w v
dr2 + г
dw 1 02w\ 1
dr + г d'd2 ) /
= 0.
r=R
(4.20)
4.4. Математическая модель формообразования 155
Уравнение (4.14) с учетом соотношения (4.16) может быть
записано в следующем альтернативном виде:
02и dw 1 д / ЛТ dw\
-т-р- + с— - г/Ц-
dt2 dt г dr \ dr /
Nd d2 w
r2 dr)2
(4.21)
Такая форма записи уравнения наиболее удобна при ре-
шении уравнения методом разложения по собственным модам
свободных колебаний мембраны, так как задача на собствен-
ные значения в этом случае сводится к классической задаче
Штурма-Лиувилля [141].
4.4.2. Решение уравнения колебаний вращающейся мем-
браны
Перед решением уравнения (4.14) (или (4.21)) с граничными
условиями (4.19), (4.20) целесообразно преобразовать их к без-
размерному виду. Введем безразмерные переменные:
е = r = uf, и = 1- (4.22)
гС it
В этих переменных уравнение и граничные условия примут
вид:
^ + 27^ + £М = /К,Лг),
£о < £ < 1; 0 < & < 2тг.
рК) = (>1 -1) +ь2 (1 -е2);
«(0 = -Ь1 - 1) + + ь?.
156
Гл. 4. Переориентация конструкций в пространстве
, 1 д£02[(2А + Зр)-£02(А + //)]
1 4(А + 2М) а+(1+£02)м
. 2А 4- Зд
62 = 4(А + 2д)’
, ___ 2А + р
>3 ~ -4(А + 2//)’
где £о — a/-R, 7 = с / 2 /Зш, f = F / /3ip2R.
Решение системы (4.23) будем искать методом разложения по
системе {иу} собственных функций оператора L [141];
к
L[uk] = XkUk-
(4.24)
Подставляя разложение (4.24) в уравнение (4.23), можно
стандартным методом получить уравнения для амплитуд flfc(t).
Собственные моды свободных колебаний мембраны получаются
из (4 23), (4.24) при / = 0:
Ч(Хт) = ик(^,-&)е ",Т <
cos у/Хк~У2т
Это решение представляет собой затухающее колебание,
причем наличие демпфирования приводит, помимо затухания,
к сдвигу собственных частот мембраны.
Собственные моды мембраны будем искать методом разделе-
ния переменных в виде:
u(r,?9) = e’n!7(r), п = 0,±1,±2,... (4.25)
Радиальная собственная функция /(г) и собственное значе-
ние А определяются из решения одномерной задачи;
(4.26)
4.4. Математическая модель формообразования 157
Имеет место свойство ортогональности собственных функций
fi, jp, отвечающих различным собственным значениям А,, Хр
1
(fi, fk) = ш fk(№ - hkNi. (4.27)
Со
Решив задачу на собственные значения (4.26), можно опреде-
лить собственные частоты колебаний мембраны, которые в при-
ближении малости коэффициента демпфирования 72 А/с рав-
ны:
wt — ш
(4.28)
Для источника возмущений вида (4.17) в разложение (4.24)
входят лишь собственные функции с п — ±1 Однако, учитывая
возможное применение теории для источников более общего
вида, задача (4.13) решалась при произвольных п. Результаты
численного решения для трех низших мод при п — 0, 1, 2,
3 представлены на рис. 4.3-4.12. Для расчетов были выбраны
Рис. 4.3. ФОРМА 1 при п = О
КРУГОВАЯ ЧАСТОТА 6,883 1/с
ЧАСТОТА 1,096 Гц
ПЕРИОД КОЛЕБАНИЙ 0,913 с
значения параметров и — 0,3, о/Д = 0,1. На верхних рисунках
изображены радиальные зависимости f(r), где /(г) — отношение
текущей амплитуды к масимальной, а на нижних — формы
собственных колебаний всей рабочей поверхности /(r)cos(n$),
где /(г) — отношение текущей амплитуды к максимальной. Для
158
Гл. 4. Переориентация конструкций, в пространстве
Рис. 4.4. ФОРМА 2 при п = О
КРУГОВАЯ ЧАСТОТА 22,722 1/с
ЧАСТОТА 3,616 Гц
ПЕРИОД КОЛЕБАНИЙ 0,277 с
Рис. 4.5. ФОРМА 3 при п = 0
КРУГОВАЯ ЧАСТОТА 37,105 1/с
ЧАСТОТА 5,905 Гц
ПЕРИОД КОЛЕБАНИЙ 0.169 с
наглядности приведены собственные частоты и периоды коле-
баний, вычисленные для угловой скорости вращения мембраны
ш = 10с-1 по формуле (4.28).
4.4. Математическая модель формообразования
159
Рис. 4.6. ФОРМА 1 при п — 1
КРУГОВАЯ ЧАСТОТА 10,246 1/с
ЧАСТОТА 1,631 Гц
ПЕРИОД КОЛЕБАНИЙ 0,613 с
Рис. 4.7. ФОРМА 2 при п = 1
КРУГОВАЯ ЧАСТОТА 24,994 1/с
ЧАСТОТА 3,978 Гц
ПЕРИОД КОЛЕБАНИЙ 0,251 с
Анализ полученных результатов свидетельствует о том, что
низшая круговая частота собственных колебаний моды с п = 1
близка по величине к значению угловой скорости собственно-
го вращения ш мембраны (рис. 4.6). Кроме того, видно, что
с увеличением номера формы увеличивается число полуволн на
160
Гл. 4. Переориентация конструкций в пространстве
Рис. 4.8. ФОРМА 3 при п = 1
КРУГОВАЯ ЧАСТОТА 38.900 1/с
ЧАСТОТА 6,191 Гц
ПЕРИОД КОЛЕБАНИЙ 0,162 с
Рис. 4.9. ФОРМА 1 при п = 2
КРУГОВАЯ ЧАСТОТА 15,405 1/с
ЧАСТОТА 2,452 Гц
ПЕРИОД КОЛЕБАНИЙ 0,408 с
поверхности мембраны, длины которых уменьшаются от места
прикрепления мембраны к ее периферии. Отмечена тенденция
к увеличению частоты свободных колебаний мембраны с воз-
растанием числа гармоник п по окружности мембраны. Графики
зависимости собственных частот от номера формы при различ-
ных п приведены на рис. 4.13.
4.4. Математическая модель формообразования
161
Рис. 4.10. ФОРМА 2 при п = 2
КРУГОВАЯ ЧАСТОТА 29,842 1/с
ЧАСТОТА 4,750 Гц
ПЕРИОД КОЛЕБАНИЙ 0,211 с
Рис. 4.11. ФОРМА 3 при п = 2
КРУГОВАЯ ЧАСТОТА 43,351 1/с
ЧАСТОТА 6,900 Гц
ПЕРИОД КОЛЕБАНИЙ 0,145 с
Рассмотрим задачу о возбуждении колебаний мембраны при
нестационарном повороте оси ее вращения. В этом случае рас-
пределение воздействующей силы дается выражением (4.6). Лег-
ко видеть, что безразмерный источник в уравнении (4 23) можно
записать в следующей комплексной форме:
6 Г. Г. Райкунов и др.
162
Гл. 4. Переориентация конструкций в пространстве
Рис. 4.12. ФОРМА 1 при п = 3
КРУГОВАЯ ЧАСТОТА 20,286 1/с
ЧАСТОТА 3,229 Гц
ПЕРИОД КОЛЕБАНИЙ 0,310 с
Рис. 4.13. Зависимости собственных частот от номера формы при различных п
Re
Q(r) = Q/w.
Q + 2iQ) е*(т+й)
(4.29)
Отсюда следует, что в разложение (4.24) входят только соб-
ственные моды мембраны с п — 1 (пропорциональные ехр(±г$)).
Анализ решения задачи на собственные значения, проведен-
ный выше, показал, что собственная круговая частота низшей
4.4. Математическая модель формообразования 163
несимметричной моды при достаточно малых a/R очень близка
к угловой скорости вращения мембраны, которая, в свою оче-
редь, совпадает с частотой воздействующей силы (4.29). Осталь-
ные собственные частоты имеют значительно большие значения
(см. рис. 4.13). Таким образом, имеет место резонансное воз-
буждение низшей несимметричной моды и в разложении реше-
ния по собственным функциям можно, приближенно, оставить
единственное слагаемое, пропорциональное собственной функ-
ции этой моды:
w(£, 19, т) ~ Re [а(т) щ (£) е?!?] . (4.30)
Задача упрощается еще и тем, что функцию i/i(£) можно
с большой степенью точности аппроксимировать линейной зави-
симостью:
«1(0 ~ ~ £о-
(4.31)
Следуя стандартной теории (см., например, [139]) из (4.23)
и (4.29)-(4.31), легко получить уравнение, определяющее а:
~ + 27^ + Л1 а - k (f2 + 2гО) егт,
dr ат \ J
3 — 4^о + 0
(1 ~£о)3(3 + £о)
(4.32)
Это уравнение вынужденных колебаний гармонического ос-
циллятора с линейным трением под действием квазипериодиче-
ской силы Следует отметить, что функция Re[a(r)el1j имеет
простой физический смысл: это угол отклонения мембраны из
плоскости вращения.
Правомерность рассмотренного приближения может быть
обоснована непосредственным численным решением уравнения
в частных производных (4.23) и сравнением этого решения с по-
лученным по формулам (4.30)-(4.32). Такое сравнение было про-
ведено для ряда значений параметра = a/R, коэффициента
демпфирования 7 = 0,01 и для временной зависимости угло-
вой скорости маневра, показанной на рис. 4.14. На рис. 4.14,
4.15 приведены графики временных зависимостей безразмерных
отклонений iz(l,0,т), полученных этими двумя методами при
a/R = 0,01, 0,2, 0,3 (приближенное решение — сплошная линия,
точное — пунктир). Из этих графиков видно, что лишь при
a/R = 0,2 ошибка приближенного метода становится визуаль-
но заметной, а при a/R = 0,3 — значительной. При мень-
ших значениях a/R оба решения практически совпадают Таким
6*
164
Гл 4. Переориентация конструкций в пространстве
Рис 4.14. Временные зависимости угловой скорости маневра и безразмерных
образом, в широком диапазоне параметров системы, представ-
ляющих практический интерес, предложенный приближенный
метод расчета обеспечивает хорошую точность.
Согласно (4.32), интенсивность возбуждаемых колебаний за-
висит от степени близости частоты воздействия и резонансной
частоты. На рис. 4.16 приведен график зависимости отноше-
Рис. 4.16. Зависимость отношения круговой частоты низшей асимметричной
моды к угловой скорости вращения мембраны от отношения a/R
4.4. Математическая модель формообразования
165
ния круговой частоты низшей асимметричной моды к угловой
скорости вращения мембраны от отношения a/R внутреннего
и внешнего радиусов мембраны. Видно, что при малом относи-
тельном размере жесткой вставки частота воздействия ш очень
близка к собственной частоте мембраны, что должно приводить
к интенсивной раскачке колебаний (особенно если коэффициент
демпфирования 7 мал). С ростом a/R расстройка воздейству-
ющей и резонансной частоты резко возрастает, что приводит
к понижению амплитуды колебаний
Из рис. 4.14, 4.15 видно, что временная зависимость от-
клонения элемента пленки из плоскости вращения представляет
собой модулированное колебание с частотой, близкой к частоте
вращения мембраны. На рис. 4.17, 4.18 представлены времен-
Рис 4.17. Временные зависимости максимальной амплитуды колебаний
(на краю пленки) при различных коэффициентах демпфирования 7 системы
I - a/R = 0,01; 2 - a/R = 0,06; 3 - a/R = 0, 1;
Рис. 4.18. Временные зависимости максимальной амплитуды колебаний
(на краю пленки) при различных a/R
ные зависимости максимальной амплитуды колебаний (на краю
пленки) при различных параметрах системы. Из графиков вид-
но, что амплитуда падает с ростом коэффициента демпфирова-
ния и с ростом отношения внутреннего и внешнего радиусов
166
Гл. 4. Переориентация конструкции в пространстве
мембраны. Наблюдающиеся низкочастотные биения амплитуды
объясняются сложением колебаний на двух близких частотах —
собственной частоте мембраны и частоте внешней силы.
4.4.3. Оценка амплитуды колебаний вращающейся мем-
браны в процессе переориентации оси вращения
Как показано в предыдущем разделе, форма колебаний мем-
браны определяется выражением:
0, т) и Re [п(т) (£ - Со) е*9] , (4.33)
где а(т) — безразмерная комплексная амплитуда низшей несим-
метричной моды колебаний которая определяется (при отсут-
ствии конструкционного демпфирования) из уравнения:
^ + Aia = fcfQ + 2?Q)eiT,
d-Г \ /
fc_ 3-4go + go
(1 -£о)3(3 4-Со)’
(4.34)
В уравнениях(4.33), (4.34) введены безразмерные перемен-
ные:
г = w t, Q - fi/w , £ = r/R ,
Со ~ Ro/R ь
Здесь ш, Q — угловые скорости вращения мембраны и ее
переориентации, Rq, R\ — радиусы мембраны и жесткой вставки.
Действительная часть функции а(т) представляет собой угол
отклонения края мембраны из плоскости вращения. В работе
показано, что приближенное решение, выражаемое уравнени-
ями (4.33), (4.34), обладает приемлемой точностью вплоть до
значений Rq/R\ 0,3, т е. во всех случаях, представляющих
практический интерес. Из уравнения легко найти амплитуду
установившихся вынужденных колебаний мембраны:
= 2Q 1 3-4e0+eg
W А, (Со)- 1 L(l-Co)3(3 + £o)
Величина Ai(£o) получается из решения краевой задачи на
собственные значения, поставленной и решенной ранее (см. урав-
нения (4.31)).
С другой стороны, для элементарных инженерных оценок ам-
плитуды колебаний мембраны можно предложить использовать
4.4. Математическая модель формообразования 167
решение простой механической задачи с вращающимся грузом
на нити (п. 4.2). Это решение имеет вид:
2Q /?1 2Q 1
с? =---------------------------=------.
w Rq uj £о
Требуется сравнить (4.35) и (4.36) с тем, чтобы установить
пределы применимости (4.36). Результаты расчетов приведены на
рис. 4.19 (сплошная линия — формула (4.35), пунктир — (4.36)).
Рис. 4.19. Сравнение результатов расчетов: сплошная линия — формула (4.35),
пунктир — (4.36)
Из рисунка видно, что оценочная формула (4.36) дает сильно
заниженное значение угла отклонения при малых относительных
радиусах жесткой вставки. При Rq/Ri 0,2 (4.36) обеспечивает
удовлетворительную для оценок точность.
Воспользовавшись результатами численных расчетов по фор-
муле (4.35), можно построить следующую интерполяционную
формулу для быстрой оценки, уточняющую (4.36):
2^^ Г0 47 + 0 19 (4.37)
w Ro L \RoJl
Формула (4.37) отличается от (4.36) поправочным коэффициен-
том в квадратных скобках.
В число параметров задачи входит коэффициент Пуассона /у
материала мембраны. Расчеты проводились при значении pi = 0,3.
Расчеты для pi = 0,2, 0,4 показали, что ошибка формулы (4.37)
увеличилась до 8-9 %, т. е. осталась в приемлемых границах.
В принципе можно установить зависимость численных коэффи-
циентов интерполяционной формулы от pi, если это имеет смысл.
В решениях (4.35), (4.36) опущены составляющие, соответ-
ствующие собственным колебаниям мембраны. Эти колебания
168 Гл 4. Переориентация конструкций в пространстве
возбуждаются при нестационарном повороте оси вращения и,
складываясь с близкими по частоте вынужденными колебани-
ями, дают низкочастотные биения амплитуды. Использование
решения (4.35) может соответствовать ситуации, когда собствен-
ные колебания уже затухли вследствие слабого демпфирования
или скорость маневра возрастала очень медленно, так что ам-
плитуда собственных колебаний пренебрежимо мала.
4.5. Заключение по разделу
Исследован процесс генерации вынужденных колебаний вра-
щающейся пленочной конструкции при ее переориентации в про-
странстве. Показано, что доминирующим процессом является
возбуждение низшей асимметричной собственной гармоники гиб-
кой конструкции. Это упрощает математическое моделирование,
что в дальнейшем может быть использовано для решения задачи
демпфирования колебаний.
Глава 5
ПРОЕКТНО-КОНСТРУКТОРСКАЯ ПРОРАБОТКА
КРУПНОГАБАРИТНЫХ КОСМИЧЕСКИХ
КОНСТРУКЦИЙ
5.1. Проектная оценка эффективности формируемых
центробежными силами пленочных аморфно-
кремниевых солнечных батарей для КА различной
размерности
5.1.1. Определяющие параметры и конструктивно-ком-
поновочные решения
Проведем оценку основных проектных параметров рассмат-
риваемых СБ для КА различной размерности В качестве основ-
ного варьируемого параметра предлагаем использовать удельную
массу площади поверхности /3 = ph, где р — удельная масса,
h — толщина материала, поскольку этот параметр интегрально
учитывает все технологические особенности СБ с одной стороны,
а с другой стороны определяет все важнейшие проектные пара-
метры СБ: массу СБ, удельную мощность, энергию на раскрытие,
время раскрытия, момент инерции, кинетический момент. Более
строгое математическое обоснование динамики раскрытия и пе-
реориентации в пространстве дано в Главах 3 и 4.
Как показано в п. 3.1.5 (см. Глава 3), возможны три раз-
личные схемы компенсации кинетического момента вращаю-
щейся СБ:
1) две вращающиеся солнечные батареи с параллельными
осями вращения располагаются по разные стороны от КА
(см. рис. 3.13);
2) одна вращающаяся солнечная батарея с маховиком проти-
вовращения в виде грузов на тросе или тросовой кольцевой
системы (см. рис. 3.14), а также двух соосно противовра-
щающихся батарей, не затеняющих друг друга;
3) одна вращающаяся солнечная батарея с компенсацией ки-
нетического момента топливом двигателей системы ориен-
тации (см. рис. 3.15).
Поскольку первый вариант содержит элемент «каркасности»
в виде раздвижной штанги, то имеет недостатки как каркасных,
так и бескаркасных систем По этой причине предпочтитель-
170 Гл. 5. Проектная проработка космических конструкций
ны 2-й и 3-й варианты. 3-й вариант технически проще 2-го,
поскольку может использовать неуправляемую схему агрегата
раскрытия с одним электроприводом вращения. Однако из-за
ограниченности топлива на борту КА может рассматриваться
преимущественно применительно к КА малой и средней раз-
мерности. Второй вариант наиболее универсален хотя и более
сложен, поскольку использует два полностью управляемых элек-
тропривода (привода вращения и роспуска), и применим на КА
любой, и, преимущественно, очень большой размерности.
Рассмотрим подробнее эти последние два варианта. Мето-
дику оценки проиллюстрируем на вариантах СБ на мощность
3000 Вт (для среднего КА).
5.1.2. Массогабаритные характеристики СБ
5.1.2.1. Определение площади поверхности СБ
Используя формулу для площади кольца, имеем:
S = ^R2k-R2),
где Rk — внешний радиус кольца, Ro — внутренний радиус
кольца.
Принимая = 10,
s = TT(Rl - (Q,\Rk)2) = - 0,01) irR2k.
Из этого следует, что Rk — J — .
Площадь S поверхности СБ определяется из величины 7Э =
= 100 Вт/м2 (энергосъем) как S = —, где к — коэффици-
7э
ент использования поверхности (к — 1,1), 7Э — общая площадь
СБ/площадь ФЭП; N — проектная мощность.
По условию N = 3000 Вт, 7Э = 100 Вт/м2. Тогда
„ 1,1-3000 Вт 2
О = --------= 00 м .
100 Вт/м2
Отсюда Rk = J— — \ ™ = 3,24 м и Ro = 32 см, т. к.
V тг у 3,14
= 10.
5.1.2.2. Определение массы и удельной мощности
Массу СБ определяем при значении поверхностной удельной
массы /3=1 кг/м2 (для других /3 расчеты приведены ниже
5.1. Проектная оценка эффективности солнечных батарей 171
в таблице 5.1) по формуле М = (3S, удельную мощность опреде-
ляем по формуле 7 = —, где N — проектная мощность СБ, М —
Л/
масса СБ.
М — (3S — 1 кг/м2 • 33 м2 = 33 кг,
N 3000 Вт пп „ Вт
5.1.3. Угловая скорость вращения СБ
Оценочная формула для максимального тангенциального
и радиального напряжений для однородного диска постоянной
толщины имеет вид:
а = 0,5рш27?2
где р — плотность, и — угловая скорость. Откуда ш = — .
Rkyl 0,5р
Принимая а = 107 Н/м2, имеем для при р = 8 • 103кг/м3
(сталь)
1 / 107Н/м2
Шст ~ 3,24 м у 0,5-8 - 103 кг/м3
Эта скорость может значительно превышать необходимую
для малости амплитуды колебаний угловую скорость.
В качестве условия проекта поставлена малость амплитуды
угла колебаний от Кориолисовых сил при маневре (а 3°).
Амплитуда угла колебаний определяет два важных аспекта про-
ектирования центробежных конструкций: 1) ориентацию СБ на
Солнце; 2) расстояние до компенсирующей кинетический мо-
мент системы противовращения. СБ практически не изменяют
свои электрические характеристики до угла в 12° отклонения
от направления на Солнце. База между противовращающимися
системами, т. е. расстояние между их центрами вращения, долж-
на быть достаточна для того, чтобы при расчетном маневре не
произошло зацепление одной вращающейся системы за другую,
поскольку колебания происходят навстречу друг другу.
Выражение для угловой амплитуды колебаний в сложном
движении имеет вид:
2Q / Л/. \ 2Q Rk Rk , n
Q= —(ТГ-1) = —7Г’ если—= 10,
172 Гл. 5. Проектная проработка космических конструкций
где Q — угловая скорость маневра, ша — угловая скорость СБ
(см. Глава 4, п 4.2). Под маневром понимается программа угло-
вых разворотов плоскости СБ, обеспечивающих ее ориентацию
на Солнце. За период обращения КА вокруг Земли на орбитах
вплоть до геостационарной переориентации не требуется, по-
скольку ориентация сохраняется в требуемых пределах. И только
при годовом цикле эксплуатации СБ требуется ее переориен-
тация на полный оборот, т. е. на угол 2л. Требуемая угловая
скорость маневра при этом Q — 2 • 10-7 рад/с. Эта достаточно
низкая скорость может быть обеспечена в принципиальном плане
за счет использования самой вращающейся СБ с системой ком-
пенсации кинетического момента в качестве управляющего гиро-
скопа. Могут также быть использованы традиционные системы
ориентации КА. При импульсном характере их воздействия необ-
ходимо, чтобы этот импульс не приводил к недопустимо высокой
скорости переориентации. Примем для оценки Q = 10-3 рад/с,
а = 3° = 5 • 10 2 рад. Принятая угловая скорость Q выбрана из
диапазона используемых в настоящее время угловых скоростей
Q = 10 5-6 • 10“3 рад/с на большинстве КА как наиболее харак-
терная.
Откуда угловая скорость СБ
212 Rp
— 5“
a Ro
2 10 3 рад/с
5•102 рад
10 = 0,4 рад/с,
что на полтора порядка ниже угловой скорости, определенной
выше по ст = 107 Н/м2 Для дальнейших оценок угловую ско-
рость вращения СБ примем ш = 0,4 рад/с из соображений ана-
логии с экспериментально проверенной в КЭ «Знамя 2» [9].
Полученная выше угловая скорость годового маневра Q = 2х
х 10“7 рад/с приводит к почти на четыре порядка меньшей
скорости вращения СБ ш, что может оказаться недостаточным
для формирования поверхности СБ центробежными силами, по-
скольку возникающих при этом усилий может не хватить да-
же на расправление незначительных технологических дефектов,
электростатики и прочего.
Отметим, что возможно демпфирование колебаний за счет
воздействия на ось вращения, отработанное в КЭ «Знамя 2» [9,
142]. Из формул для ст и а можно получить предельный размер
конструкции 7?к ~ 1000 км.
5.1.4. Расчет толщины материала подложки
Плотность стали рсталь = 8 103 кг/м3.
Плотность полимера Рполимер = 1,4 • 103 кг/м3.
5.1. Проектная оценка эффективности солнечных батарей
173
Т. к. /3 = 1 кг/м2 = ph, то
деталь = 1,25 10-4М,
^полимер = 7,1-10 М.
5.1.5. Компенсация кинетического момента
Проведем оценку возможностей компенсации кинетического
момента СБ массой истекающего из ракетного двигателя топли-
ва. Процесс описывается выражением:
Ju = mVr,
MR^
где J — момент инерции полотнища СБ, J = % k,
и — угловая скорость СБ,
т — масса истекающего топлива,
V — скорость истечения (V = 1200 м/с),
г — плечо момента (расстояние от оси КА до центра струи г =
= 0,5 м).
Т МR[ 33 кг 3,242 м2 „ 2
J = —— =-------------------= 173,2 кг • м2.
Тогда
Ju = 173,2 кг м2 0,4рад/с2 = 69,3 кг м2 рад/с2.
Следовательно,
тп —
Ju
Vr
69,3 кг м2 • рад/с2
1200 м/с 0,5 м
5.1.6. Кинетическая энергия вращающегося полотнища
СБ, мощность двигателя, время раскрытия
В процессе раскрытия системы из уложенного состояния цен-
тробежными силами происходит увеличение ее кинетического
момента и кинетической энергии за счет энергии электрического
двигателя.
Кинетическая энергия вращающейся СБ определяется выра-
жением:
А-КИН
Ju2
где J — момент инерции, и — угловая скорость СБ.
Е,„„ = J-£ = 173.2 кг • м2^0.16 радг/с^ = [зд Дж
174 Гл. 5. Проектная проработка космических конструкций
Необходимая электрическая мощность может быть оценена
из выражения N = J ш -щ = М • щ, где М — момент от электро-
привода, и> — угловая скорость полотнища.
Величины М и ш переменны по процессу раскрытия и конеч-
ная энергия описывается интегралом:
2 Т°
Ek — = Mojdt,
о
где М = Мо (1------) — характеристика электропривода, щ =
\ М)/
— wo И — — J — изменение угловой скорости в процессе раскры-
тия СБ (рис. 5.1).
Рис. 5.1. Законы изменения момента от угловой скорости а) и угловой скорости
от времени б)
То То
Mudt = [ М0^ш0 (1 - ^}dt =
о о
То \
xjx t2dt I
tdt — I — -MquqTq.
do l о
0 /
Откуда To = T7------время раскрытия.
MqWq
Обычно номинальная мощность электрического двигателя по-
стоянного тока составляет N3J1 = О,25Мощо-
Будем считать N = 0,5 Вт.
5.1. Проектная оценка эффективности солнечных батарей 175
Имеем для времени раскрытия:
3Jfc<j2-0,25 3 • 173,2 кг/м2-16 10-2рад2/с2 • 0,25 . „
Т° = =----------------ад------------------= 41'6 с
v 3,24 м „ _ ,п_9 /
Скорость раскрытия Каско = ТТЛ = ~ ’ Ю м/с.
7о 41,6с
5.1.7. Условия формирования конструкции центробеж-
ными силами
Условия формирования конструкции центробежными силами
заключаются в выполнении условий превышения центробежны-
ми силами сил Кориолиса mw2R 5> 2mVw или — 1, а так-
же тангенциальной динамической составляющей, mw2R mwR,
w2
или — 1.
IV
В нашем случае
wRk _ 4- 10 * -3,24
~2V~ ~ 2-7,7- 10“2 “ ’ ’
^ = (^/£ = 16.
Ш Ю“2
Таким образом, оба условия хорошо выполняются
Для мощности СБ N — 300 Вт для выполнения этих условий
следует мощность электродвигателя уменьшить по крайней мере
на три порядка. В приводимой ниже таблице 5.1 время раскрытия
СБ для N = 300 Вт рассчитано при значении мощности электро-
двигателя N = 0,5 10-3 Вт.
5.1.8. Результаты проектного анализа
Результаты оценок параметров для различных значений
удельной массы поверхности (3 для СБ мощностью N=300 Вт,
3000 Вт, 15 МВт и 109 Вт представлены в таблицах 5.1-5.4,
и в широком диапазоне мощностей на рис. 5.2.
В таблицах 5.1-5.4 представлены следующие параметры: мас-
са СБ, удельная мощность, толщина подложки (сталь и по-
лимер), момент инерции СБ, кинетический момент СБ, масса
топлива на компенсацию кинетического момента, кинетическая
энергия вращающейся СБ и время раскрытия из уложенного
состояния для пяти значений удельной массы поверхности.
Таблица 5.1. N — 300 Вт, Rk = 1,025 м
% кг/м м, кг 7- Вт/кг М ^пол, М Л 9 кг м2 Jcj, кг м2/с т, кг ЕкИН» Дж То, с
0,01 0,03 9091 1,2 10“6 7,143 • 10“6 0,017 7,26 • 10“3 1,21 10~5 1,521 • 10“3 0,004
0,03 0,1 3030 3,75 • 10“6 2,143- 10“5 0,052 0,022 3,63- 10~5 4,562 10“3 0,014
0,1 0,33 909,09 1,25- 10~5 7,143- 10“5 0,173 0,073 1,21 Ю-4 0,015 0,046
0,3 0,99 303,03 3,75- 10~5 2,143 10“5 0,52 0,218 3,63- 10~4 0,046 0,137
1 3,3 90,909 1,25- 10"4 7,143- 10-4 1,733 0,726 1,21 10~3 0,152 0,456
Таблица 5.2. N = 3000 Вт, Rk — 3,241 м
Кг/М“ м, кг 7- Вт/кг Л>ст» М h пол, м J, 9 кг м2 Jcj, кг м2/с т, кг Екни, Дж То, с
0,01 0,33 9091 1,25- 10~6 7,143- IO"6 1,733 0,726 1,21 10-3 0,152 0,456
0,03 0,99 3030 3,75- 10“6 2,143 10“5 5,2 2,178 3,63 • 10“3 0,456 1,368
0,1 3,3 909,09 1,25 10“5 7,143 • IO-5 17,332 7,26 0,012 1,521 4,562
0,3 9,9 303,03 3,75 • 10“5 2,143 • 10“4 51,996 21,78 0,036 4,562 13,685
1 33 90,909 1,25 • 10~4 7,143- 10-4 173,32 72,6 0,121 15,205 45,616
Гл. 5. Проектная проработка космических конструкций
5.1. Проектная оценка эффективности солнечных батарей
177
Рис. 5.2. Массогабаритные характеристики СБ в широком диапазоне мощно-
стей
1. /3 = 0,01 кг/м2; -у = 9090 Вт/кг,
2. 0 = 0,03 кг/м2; 7 = 3030 Вт/кг,
3. 0 = 0 1 кг/м2; 7 = 909 Вт/кг,
4. 0 — 0, 3 кг/м2; 7 = 303 Вт/кг,
5. 0 = 1 кг/м2; 7 = 90,9 Вт/кг,
6. R, м
Результаты оценок для различных значений /3 для СБ Марси-
анской миссии мощностью N — 15 106 Вт представлены в таб-
лице 5.3.
Результаты оценок для различных значений (3 для СБ солнеч-
ной электростанции мощностью N = 1 ГВт = 109 Вт представле-
ны в таблице 5.4.
5.1.9. Заключение по разделу
При разработке нового направления создания высокоэффек-
тивных солнечных батарей (СБ) путем объединения новейших
космических технологий создания крупногабаритных бескаркас-
оо
Таблица 5.3.
№ Р, кг/м2 М, кг 7, Вт/кг h (нерж, ст.), 10~6 м h (полимер), 10~6 м J. кг-м2 Ju, г-м2/с М, кг Екнн — = Ju2/2, Дж То, мин.
1 10- 10~3 1,65 • 103 9000 1,2 7 4,2- 107 1,26- 106 60 1,8- 104 2,2
2 30- 1СГ3 5- 103 3000 3,6 21 1,26 • 108 3,8- 106 180 5,5- 104 6,8
3 100- 1(Г3 16,5- 103 900 12 70 4,2- 108 1,26- 107 600 1,8- 105 22
4 300.10“3 50- 103 300 36 210 1,26- 109 3,8- 107 1800 5,5- 105 68
5 1000-10“3 165- 103 90 120 700 4,2- 109 1,26-10® 6000 1,8- 106 220
Таблица 5.4.
№ Р, кг/м2 М, кг 7, Вт/кг h (нерж, ст.), 10-6 м h (полимер), 10“6 м J, кг-м2 Ju, г-м2/с М, кг Дкин — = Jw2/2, Дж То, мин.
1 10- 10~3 1, 1 • 105 9090 1,2 7 2- 10” 6- 109 3,1 • ю4 9- 107 1,1 • 104
2 30-10~3 3,3- 105 3030 3,6 21 6- 10” 18- 109 9,3- 104 27- 107 3,3- 104
3 100-10-3 1,1 106 909 12 70 2- 1012 6 Ю10 3,1 • 105 9- 108 1, 1 • 105
4 300-10“3 3,3- 106 303 36 210 6- 1012 18- 10’° 9,3- 105 27 • 10® 3,3- 105
5 1000 • 10~3 1,1 ю7 90,9 120 700 2- 1013 6 • 10” 3,1 • 106 9- 109 1,1 • 106
Гл. 5. Проектная проработка космических конструкций
5.2. Сравнительный анализ различных вариантов солнечной батареи 179
них формируемых центробежными силами конструкций и по-
следних достижений в технологии создания аморфно-кремни-
евых тонкопленочных электрогенерирующих элементов могут
быть существенно улучшены параметры энергосистем в примене-
нии к космическим аппаратам различной размерности, от малых
и средних спутников связи и дистанционного зондирования Зем-
ли до крупномасштабных космических электростанций. Пред-
ставлены вариантные оценки основных проектных параметров
этих систем. При удельной массе поверхности (принятой в ка-
честве определяющего варьируемого параметра) (3 = 0,1 кг/м2,
реальной для технической реализации, могут быть получены
рекордные характеристики по удельной мощности 7 = 900 Вт/кг,
что может быть реализовано при толщине подложки СБ из
стальной фольги /rCTaJlb = 1,25 • 10-4м или /гПОлимер = 7,1 • 10 4м
на полимере. Перспективно использование фольги титана анало-
гичной толщины или уменьшение толщины полимера в два раза.
При этом удельная мощность возрастет до 7 = 1800 Вт/кг.
Возможность получения рекордных удельных характеристик,
отсутствие затрат на создание жесткого каркаса никогда ранее
не создававшегося масштаба космической конструкции (Л' = 15х
х 106 Вт — Марсианская миссия; N = 109 Вт — солнечная элек-
тростанция), проблематичность обеспечения высокой надежно-
сти раскрытия каркасной конструкции из уложенного состояния
и ее дальнейшего функционирования дают несомненные преиму-
щества рассмотренной бескаркасной конструкции над каркасны-
ми аналогами.
Приведенные оценочные результаты могут использоваться на
начальных этапах проектирования СБ Для получения конечных
результатов следует использовать уравнения и методики, приве-
денные в главах 3, 4.
5.2. Сравнительный анализ различных
конструктивных вариантов для Глобальной системы
космической связи
5.2.1. Варианты конструкций солнечной батареи и тре-
бования к ней
На этапе разработки в РКК «Энергия» Технического пред-
ложения по Глобальной системе космической связи [146] было
предложено пять вариантов конструкций солнечной батареи:
1) пленочная бескаркасная, формируемая центробежными си-
лами, на базе фотоэлектрических преобразователей из
аморфного кремния;
180 Гл. 5. Проектная проработка космических конструкций
2) пленочная каркасная, на крестообразной раздвижной кон-
струкции, на базе фотоэлектрических преобразователей из
аморфного кремния;
3) каркасная с раздвижными концентраторами и фотоэлектри-
ческими преобразователями из арсенида галлия;
4) пленочная каркасная с периферийным пантографом и фото-
электрическими преобразователями из аморфного кремния;
5) традиционные сотовые панели с фотоэлектрическими пре-
образователями из кристаллического кремния.
Возможность выведения на геостационарную орбиту аппарата
глобальной космической связи ставит требование высокой удель-
ной мощности солнечной батареи (СБ) и ее хорошей компонуе-
мое™ на носителе в транспортном состоянии.
Определяющими требованиями к СБ являются:
— высокая надежность, обеспечивающая ресурс автономной
работы 20 лет при электрической мощности на конец ре-
сурса 75 кВт;
— малая деградация характеристик за указанный ресурс ра-
боты;
— высокая точность управления аппарата с СБ,
— низкая стоимость, возможность создания, наземной и ор-
битальной отработки за короткий срок (2-3 года).
5.2.2. Сравнение вариантов конструкции
На основе проведенных исследований по теме «Лампа»
[7, 131] (см. Глава 2, п. 2.2), схему с пантографом №4 следует
отвергнуть как обладающую в 3-4 раза большей массой по
сравнению с крестообразной при одинаковой жесткости.
Традиционная схема разворачиваемых сотопанелей (№5) име-
ет почти в 10 раз худшие характаристики по удельной мощности
и плохую компонуемость на носителе в уложенном (транспорт-
ном) положении.
Схема №3 с концентратором и фотопреобразователями из
арсенида галлия обладает следующими принципиальными недо-
статками:
— практическая невозможность создать точный и легкий рас-
кладной концентратор с малой деградацией отражающих
характеристик за 20 лет, деградация поверхности из-за
микрометеоритной эрозии;
— необходимость использования теплового контура на тепло-
вых трубах для охлаждения фотопреобразователей с потен-
циальной опасностью пробоя его метеоритами за большой
ресурс эксплуатации.
5.2. Сравнительный анализ различных вариантов солнечной батареи 181
Первый принципиальный недостаток связан с невозможно-
стью использования пленочных материалов в качестве отража-
ющих поверхностей, поскольку для обеспечения коэффициента
зеркального отражения (КЗО) на уровне 0,6-0,7 они должны
находиться в двухосном напряженном состоянии на уровне пре-
дела упругой деформации. Последнее создать на параболической
поверхности механическим натяжением невозможно Даже ес-
ли бы это было каким-либо образом реализовано, то явления
длительной прочности и ползучести заставят непрерывно под-
тягивать конструкцию, что на параболоиде вдвойне проблема-
тично. Не натянутая металлизированная пленка обладает толь-
ко диффузной отражательной способностью. Указанные вопро-
сы остро стояли в задаче отражения солнечного света из кос-
моса пленочным отражателем для освещения районов Земли.
Сложности с обеспечением точности параболической поверхно-
сти концентратора и его отражающих характеристик застави-
ли ведущих специалистов этого направления у нас в стране
еще 30 лет назад отказаться от параболических зеркальных
концентраторов применительно к задачам космической техни-
ки и обратиться к линзам Френеля, которые также лишены
второго недостатка — необходимости охлаждения тепловыми
трубами. Однако стоимость их на порядок выше пленочных
аморфно-кремниевых систем а удельная мощность в 5-7 раз
ниже. Имеются только лабораторные образцы. Промышленное
производство отсутствует. Принципиальная возможность созда-
ния жесткого каркаса с требуемыми отражающими характери-
стиками за счет увеличения его массы и толщины ухудшит
удельные характеристики и компонуемость в уложенном со-
стоянии. Важнейшим недостатком концентраторной схемы яв-
ляется также малый опыт создания подобных систем пред-
приятием, в том числе отсутствие опыта орбитальной отра-
ботки.
Таким образом, остается выбор между первым и вторым вари-
антами, анализ преимуществ и недостатков которых приводится
ниже.
5.2.3. Сравнение каркасного и бескаркасного вариан-
тов СБ
Ниже приводятся соображения проектно-конструкторского
плана по обоим вариантам для их сравнения.
1) . По идеологической основе бескаркасная вращающаяся
конструкция базируется на собственном уникальном опыте пред-
приятия, на 10-20 лет опережающем американский. Крестовая
182 Гл. 5. Проектная проработка космических конструкций
каркасная конструкция заимствована из американских разрабо-
ток 30-летней давности, так и не реализованных в космосе.
2) . Наиболее важным преимуществом бескаркасной кон-
струкции является отсутствие самого жесткого каркаса и, как
следствие, отсутствие трудностей с его изготовлением и отработ-
кой и отсутствие затрат на эти цели.
3) . Общим элементом обеих конструкций является пленочная
конструкция фотопреобразователей из аморфного кремния, укла-
дываемая в транспортном положении на идентичные барабаны,
диаметр которых выбирается из условия отсутствия растрески-
вания кремниевого слоя при перегибе (D=700 мм), и исполь-
зующих одинаковую схему укладки при намотке на барабан
(схему укладки типа «гармошка», предложенную ДКБА на осно-
вании многолетнего опыта работы с аналогичными конструкци-
ями).
4) В качестве жесткого каркаса целесообразно использовать
имеющуюся на предприятии в настоящее время разработку «Гру-
зовая стрела модернизированная ГСт М 362ГК.151Ю 2000А-0
№1» в виде крестообразной конструкции, в которой 3 луча
собственно грузовые стрелы, а один луч является продолжением
центральной раздвижной штанги спутника связи. Эта штанга
изготавливается на базе конструкции и технологии грузовой
стрелы, но имеет вдвое большую длину и должна обеспечивать
большую жесткость. Использование грузовой стрелы обусловле-
но тем, что начинать какую-либо новую аналогичную разработку
или возвращаться к старым разработкам предприятия, коопе-
рация по которым в настоящее время утеряна, представляется
нецелесообразным ввиду сжатых сроков и ограниченности фи-
нансирования.
В настоящее время грузовая стрела не имеет электрического
привода выдвижения летного исполнения. Однако его создание
не представляет сложностей.
Масса грузовой стрелы с приводом оценивается в 90 кг.
Для 6 лучей 2-х СБ масса каркаса составит 540 кг. Элементы
крепления незначительно увеличат эту цифру. Грузовая стрела
может иметь длину на одну секцию меньшую штатного варианта
(15 м), поскольку требуется растягивать полотнище площадью
600 квадратных метров, соответственно со стороной квадрата
24,5 м.
5) . Масса пленочной части в обоих вариантах составит 360 кг
(два полотнища по 180 кг). Два барабана для укладки пленочной
части СБ с приводами вращения или с механическими тормозами
составят массу 100 кг.
5.2. Сравнительный анализ различных вариантов солнечной батареи 183
6) . Динамика раскрытия не отрабатывалась для каркасной
конструкции, однако использует укладку, ранее рекомендован-
ную для конструкций, формируемых центробежными силами.
Особенностью раскрытия является требование одновременного
увеличения длины всех 4 лучей каркаса, что приводит к необ-
ходимости 2-этапного раскрытия центральной раздвижной штан-
ги. Вначале выдвигается основная силовая часть штанги, а за-
тем ее часть, являющаяся лучом квадрата ферменного карка-
са СБ. Скорость раскрытия при отсутствии жесткости укладки
в направлении перпендикуляра к плоскости СБ в раскрытом
состоянии должна быть много выше скорости углового манев-
ра КА.
7) . Формируемый центробежными силами вариант имеет
в своем составе два вращающихся токосъемника с приводом
вращения, преодолевающем момент от сопротивления трения
в токосъемнике. На спутнике связи аналогичные функции вы-
полняет система ориентации солнечных батарей. Масса двух
вращающихся токосъемников составляет 100 кг. Важно то, что
токосъемник не является вновь разрабатываемой системой с ее
жесткими требованиями, а независимо уже входит в состав
спутника связи в систему ориентации СБ. Предполагается один
разработчик и изготовитель.
8) Массовая сводка для сравнения вариантов каркасной СБ
и СБ, формируемой центробежными силами.
Каркасный Бескаркасный
вариант вариант
Раздвижной каркас 540 кг отсутствует
Барабаны укладки 100 кг 100 кг
Пленочная СБ 360 кг 360 кг
Токосъемники отсутствуют 100 кг
Итого: 1000 кг 560 кг
9). Бескаркасный вариант допускает возможность гибко из-
менять размерность системы в сторону как уменьшения, так
и увеличения на предполагаемой разработке, а также следую-
щих более энергоемких модификациях, вплоть до размерности
перспективных солнечных космических электростанций или СБ
пилотируемой экспедиции на Марс. Каркасная конструкция не
обладает такой гибкостью
184 Гл. 5. Проектная проработка космических конструкций
5.2.4. Заключение по разделу
Сравнительный анализ различных конструкций СБ для си-
стемы глобальной космической связи показывает, что бескар-
касная формируемая центробежными силами конструкция имеет
преимущества по комплексу проектных параметров и характери-
стик, таких как:
— наибольшая удельная мощность (300 Вт/кг с тенденцией
дальнейшего увеличения при совершенствовании техноло-
гии создания подложки ФП), минимум в 2 раза лучше
каркасного аналога;
— отсутствие жесткого каркаса и, как следствие этого, наи-
лучшая компонуемость в транспортном состоянии, возмож-
ность вывода на орбиту одним носителем вместе с основ-
ным спутником связи;
— наименьшая стоимость из-за отсутствия затрат на создание
и отработку жесткого каркаса;
— отсутствие необходимости использования тепловых труб
для охлаждения и, как следствие, большая надежность из-
за стойкости к метеоритному пробою;
— уникальный в мировой практике опыт разработки предпри-
ятием подобных конструкций, доведенных до орбитального
эксперимента;
— возможность гибкого изменения размерности СБ как в сто-
рону увеличения, так и уменьшения;
— возможность использования в перспективных разработках
вплоть до модулей солнечных космических электростанций
на мощности порядка ГВт.
В условиях ограниченности финансирования, сжатых сроков
на создание и отработку, организационных сложностей, связан-
ных с государственной технической политикой в целом, бескар-
касная конструкция удовлетворяет предъявляемым требованиям
в наибольшей мере.
Предприятием был получен патент России на указанную кон-
струкцию [133].
5.3. Проект солнечного парусного корабля
Проект солнечного парусного корабля, выполненный
в 1990 г., базировался на проведенных к этому времени
в НПО «Энергия» исследованиях и был инициирован конкурсом,
объявленном в США в честь 500-летия открытия Америки [101,
102, 104]. Отражатель был выполнен в виде двух противовраща-
ющихся круговых пленочных полотнищ из отдельных секторов,
5.3. Проект солнечного парусного корабля
185
скрепленных по периферии. Система предполагала наличие ну-
левого кинетического момента и управлялась за счет излома оси,
связывающей два вращающихся отражателя, и возникающей
при этом прецессии. Заложенные в систему конструктивные
принципы были предметом авторских свидетельств [17,
103], впоследствии запатентованных. Прототипом разработки
служила конструкция гелиоротора [106], представлявшая собой
вращающуюся формируемую центробежными силами систему
радиально расположенных отдельных лент, выходящих из одного
центра, длиной 8000 м и шириной 4 м.
Основным недостатком гелиоротора была нежесткость от-
дельных лент, которая не позволяла осуществлять заложенный
в систему принцип управления путем изменения угла атаки
лопасти-ленты и смещения тем самым центра масс относительно
центра давления, создаваемого солнечным светом. Вторым недо-
статком гелиоротора была необходимость начальной закрутки
системы для ее роспуска, предпологавшая использование плаз-
менных движителей и требовавшая наличие на борту запаса
рабочего тела.
В проекте СПК указанные недостатки гелиоротора были
устранены путем объединения отдельных секторов по перифе-
рии и обеспечением тем самым жесткости конструкции пару-
са, формируемого центробежными силами. При этом принцип
управления углом атаки лопасти был сохранен и осуществлялся
простым и оригинальным способом. Для управления парусом
в пространстве использовался принцип прецессии гироскопа для
чего вводился противовращающийся управляющий парус наруж-
ным D = 50 м и внутренним D = 20 м. Наружный диаметр
основного паруса составлял D = 200 м, внутренний D — 20 м.
В управляющем парусе было организовано управление углом ата-
ки отдельных секторов-лопастей для возможности дополнитель-
ного управления кораблем и компенсации накопленных моментов
от внешних воздействий. Конструкция основного и управляюще-
го паруса были одинаковы, состояли из 12 отдельных секторов
(рис. 5.3) из полиимидной пленки ПМ, скрепленных по пери-
ферии. Внутренний контур обоих парусов крепился по вантовой
схеме с катушками, расположенными на центральном барабане.
На рис. 1.4 приведен вариант конструкции аппарата, в которой
вместо управляющего паруса используется тросовый маховик.
Основной и управляющий парус имели два агрегата развора-
чивания аналогичной конструкции, состоящей из центрального
барабана и установленном на нем катушек с уложенными на них
в транспортном состоянии парусами, приводимыми во вращение
186
Гл. 5. Проектная проработка космических конструкций
Рис. 5.3. Солнечный парусный корабль
электрическими приводами на базе безредукторных вентильных
двигателей мощностью 2 Вт. Время раскрытия парусов, выбран-
ное на основании вариантных расчетов по методике, приведенной
в п. 3.3.2, составляло 5,5 часов.
По условию конкурса масса всей системы не превышала
500 кг. В систему помимо пленочно-парусной части входили все
традиционные подсистемы автономных космических кораблей.
Система предназначалась для полетов к Марсу. Была выпущена
полная техническая документация. Пояснительная записка эс-
кизного проекта содержала 21 том. Проект занял на конкурсе
среди проектов США, Японии, Франции призовое место. Од-
нако американская сторона не обеспечила первоначально обе-
щанного финансирования в 200 млн долларов, и проект не был
реализован. Агрегат развертывания и конструкция отражателя
в успешно проведенном орбитальном эксперименте «Знамя 2»
были моделью 1:10 СПК.
5.4. Проект каркасного отражателя
Формирование поверхности пленочного крупногабаритного
отражателя в известных к настоящему времени проектах
5.4. Проект каркасного отражателя
187
подобных конструкций осуществлялось одним из двух способов:
формирование только за счет центробежных сил (бескаркасные
конструкции) и за счет натяжения на жестком каркасе. Наиболее
проработанными к настоящему времени проектами являются
проекты солнечных парусных кораблей для полета к Марсу,
представленные США, Японией, Францией и бывшим СССР
на конкурс, приуроченный к 500-летию открытия Америки
Колумбом. Проект от СССР представлялся НПО «Энергия»
и содержал конструкцию, формировавшуюся центробежными
силами. Остальные проекты базировались на каркасных
конструкциях. Главной особенностью настоящего проекта
являются значительно более высокие требования к точности
формы поверхности (отражающим свойствам), чем те, которые
требовались в проекте солнечного парусного корабля. Угол,
внутри которого, наблюдатель с Земли видит Солнце, составляет
30', поэтому угловая точность изготовления и ориентации
поверхности отражателя должна составлять меньшую величину
(выбраны 10') для обеспечения максимальной концентрации
световой энергии в пятне на Земле.
В настоящий момент не представляется возможным обеспе-
чение подобной точности поверхности в бескаркасных конструк-
циях, формируемых центробежными силами, обладающих рядом
специфических особенностей, в том числе уникально малыми
массогабаритными характеристиками и простотой. К недостат-
кам таких конструкций относится нерешенный до настоящего
времени вопрос управления (подавления) широкого спектра коле-
баний поверхности, возникающих от разного рода динамических
воздействий (разворачивание из уложенного состояния, переори-
ентация). По этой причине в настоящем проекте рассматрива-
лись различные варианты каркасных конструкций, отличающи-
еся формой конструкции и расположением жесткой рамы. Для
каждого варианта проводилась предварительная конструктивная
проработка, а также оценка прочностных и массогабаритных
характеристик и возможности управляемости положением в про-
странстве.
За исходные параметры принимались: площадь отражаю-
щей поверхности S = 4 • 10 м2 и усилие натяжения пленки
q = 35 Н/м.
Рассмотрены следующие конструктивные варианты каркас-
ных конструкций отражателя:
— жесткая рама по периметру конструкции в виде треуголь-
ника;
188 Гл. 5. Проектная проработка космических конструкций
— жесткая рама в виде трех лучей, выходящих из одного
центра;
— круговая рама, расположенная по периферии отражателя;
— жесткая рама в виде 6 лучей из одного центра.
Рассмотрена также гибридная схема: пространственная жест-
кая рама, в углах которой располагается большое количество
попарно взаимокомпенсирующих друг друга небольших круго-
вых отражателей, формируемых центробежными силами. Осо-
бенностью последней схемы является ее модульное построение,
определяющее простоту изготовления и отработки одного моду-
ля; отсутствие необходимости ориентации платформы на рабо-
чем участке (платформа ориентируется в орбитальной системе
координат, в рабочий момент каждый отражатель наводится ин-
дивидуально по маяку с Земли) и, как следствие, пониженные
требования к жесткости общей фермы (допускается разориента-
ция в несколько градусов).
Первая схема была отклонена, поскольку длина 3 ферм по
периферии в 2 раза больше, чем суммарная длина ферм во 2-й
схеме, а также расположение силовой массы фермы по пери-
ферии приводит к нерационально большой величине моментов
инерции относительно трех основных осей управления. По этой
же причине отклонена 3 схема.
Вторая схема также была отклонена из следующих соображе-
ний: для набора необходимой площади пленки приходится делать
очень длинную ферму луча h = 200 м при относительной стре-
ле прогиба пленки 0,05. При этом строительная высота фермы
в основании порядка 20 м. Возможности укладки такой фермы
не отвечают габаритам носителя.
Шестилучевая схема и гибридная схема имели примерно оди-
наковые удовлетворительные характеристики по массе и компо-
нуемое™. Поэтому за базовый вариант была принята 6-лучевая
схема как более традиционная и менее громоздкая по сравнению
с гибридной, а также из-за того, что основной недостаток ги-
бридной схемы (неуправляемые колебания поверхности, форми-
руемой центробежными силами при динамических воздействиях)
сохранялся и требовал своего решения. Проблематичной на этапе
предварительной проработки показалась задача одновременной
ориентации большого количества малых отражателей с одной
недостаточно жесткой рамой в одну точку на Земле
Была выбрана конструкция раскладывающихся ферм из набо-
ра шарнирно связанных углепластиковых трубок с пружинными
механизмами разворачивания на основе сравнительного анализа
с конструкцией фермы из цельного металлического упругого
5.4. Проект каркасного отражателя 189
профиля, обладавшего большей массой при обеспечении требуе-
мой жесткости (рис, 5.4).
Рис. 5.4 Каркасная конструкция отражателя: 1 — отражатель; 2 — каркасная
ферма; 3, 4, 5 — элементы фермы
Проработка возможностей управления ориентацией космиче-
ского аппарата подобного масштаба с помощью традиционных
гироскопических средств показала неразрешимость этой задачи.
Потребовались гироскопы в 6 раз большей размерности, чем
имеются в настоящее время. Управление с помощью плазменных
двигателей требовало создания системы хранения и подачи мас-
сы рабочего тела 2-3 т, системы энергопитания и собственного
двигателя для работы в течение 10 лет.
Аналогичная задача рассматривалась в проекте Универсаль-
ной Космической Платформы (УКП). Только наземная отработка
плазменной системы управления УПК оценивалась в 27 млн руб.
в ценах 1989 г.
Для рассматриваемого каркасного отражателя используется
гироскопический принцип управления, когда вся конструкция
190
Гл. 5. Проектная проработка космических конструкций
отражателя закручивается вокруг центральной оси. Возникаю-
щий кинетический момент компенсируется при этом малым ма-
ховиком, находящимся в противовращении основной конструк-
ции. Управление в пространстве осуществляется за счет излома
оси, связывающей отражатель и маховик, и возникающим при
этом вращении всей системы.
Поскольку вращение конструкции используется только для
управления положением системы в пространстве, а не для фор-
мирования поверхности центробежными силами, то необходи-
мые угловые скорости — вращения и кинетические моменты
невелики.
Для изготовления плоского пленочного отражателя предла-
гается использовать технологический задел ДКБА, накопленный
при разработке солнечного паруса и отражателя для эксперимен-
та «Знамя 2». Опыт работы по данному направлению в ДКБА
уникален в нашей стране и приближается к мировому уровню.
Плоский пленочный отражатель (ППО) представляет собой
сплошной пленочный шестигранник со стороной 120 м и толщи-
ной пленки 8 мкм. Используется полиимидная пленка ПМ с на-
триевым напылением, возобновляемым в процессе эксплуатации.
Полотно укладывается по схеме укладки ДКБА (см. п. 6.7).
Развертывание ППО в рабочее положение осуществляется
одновременно за счет жесткости пружин фермы и центробежных
сил от раскрутки барабана, являющегося частью КА, относитель-
но продольной оси и путем одновременного с раскруткой бара-
бана синхронного разматывания шнуров управляемого роспуска
секторов, что обеспечивает более плавное и упорядоченное, с за-
данной скоростью, развертывание НПО.
Раскрытие системы с одновременным раскручиванием имеет
ряд преимуществ по сравнению с возможной схемой раскрытия
и последующего раскручивания: центробежные силы упорядочи-
вают динамику раскрытия, снижают требования к надежности
срабатывания пружин в первой половине длины фермы, считая
от центра.
Раскрытие системы «рама-отражатель» только за счет жест-
кости пружин фермы может произойти не полностью и несиммет-
рично. Динамика последующего закручивания системы в этом
случае представляется проблематичной.
Раскручивание системы «рама-отражатель» сопровождается
развертыванием и раскручиванием тросового маховика проти-
вовращения, обладающего значительно меньшими массогабарит-
ными характеристиками по сравнению с другими возможными
вариантами.
5.5. Проект отражателя для эксперимента «Знамя 3» 191
В раскрытом состоянии маховик представляет собой тросовое
кольцо, связанное с ведущим центром 4-мя крестообразными
тросовыми спицами, жестко скрепленными с основным кольцом.
В уложенном состоянии конструкция маховика наматывается на
4 катушки, расположенные на центральном барабане и объ-
единенные приводом раскрытия. Раскрытие тросового маховика
происходит в 2 стадии (см. п. 3.4.1).
Масса конструкции космического аппарата с отражателем
составила 3800 кг, основную часть массы составила складываю-
щаяся ферма
5.5. Проект отражателя для эксперимента «Знамя 3»
После успешного проведения КЭ «Знамя 2» в НПО «Энергия»
было принято решение продолжить орбитальную отработку пле-
ночного отражателя на модели большего масштаба. Из условия
возможности управления ТГК «Прогресс» размер отражателя
был ограничен D=70 м. Агрегат разворачивания при этом не
помещался в габариты стыковочного механизма ТГК и был раз-
мещен в виде кольца вокруг ТГК «Прогресс».
Основной задачей эксперимента «Знамя 3» является отработ-
ка конструкции пленочного бескаркасного отражателя и систе-
мы его развертывания и управления положением в простран-
стве с целью создания крупномасштабного прототипа аппарата
системы космического освещения районов Земли отраженным
Солнечным светом.
Анализ результатов орбитального эксперимента «Знамя 2»
показал, что разрезная конструкция отражателя не может обес-
печить высокие требования к точности поверхности. Для по-
лучения максимальной концентрации световой энергии в пятне
на Земле на основании лабораторных исследований зависимости
коэффициента зеркального отражения от двухосного натяжения
металлизированных пленок и проведенных исследований и раз-
работок необходима неразрезная конструкция пленочного отра-
жателя на ТГК «Прогресс» (рис. 5.5)
Предлагаемая конструкция агрегата развертывания не требу-
ет переделки отсеков ТГК «Прогресс», изготавливается и отраба-
тывается независимо от ТГК и может быть установлена снаружи
любого ТГК, не влияя на его основные целевые задачи.
В проекте используются принципы конструирования, мето-
дики численного расчета динамики развертывания отражателя
и программы наземной отработки, подтвержденные орбиталь-
ным экспериментом «Знамя 2». Представленные материалы дают
основание считать, что космический эксперимент «Знамя 3» мог
быть осуществлен в 1995-1996 гг.
5.6. Проект отражателя для системы освещения
городов Заполярья
В проекте системы космического освещения (СКО) для
предприятия «Ямбурггаздобыча», разрабатываемом консорциу-
мом «Космическая регата», принята концепция максимального
использования технического задела по СПК. Разработаны раз-
резной и неразрезной варианты конструкции отражателя и прове-
дена замена управляющего паруса маховиком противовращения
ввиду отсутствия необходимости в управляющем парусе, боль-
ших паразитных моментах, вносимых им, и простотой, надеж-
ностью и меньшими массогабаритными характеристиками тросо-
5.6. Проект отражателя для системы освещения городов Заполярья 193
вого маховика применительно к задаче переориентации системы
для обеспечения освещения отраженным солнечным светом рай-
онов Земли.
Диаметр отражателя в неразрезной и разрезной конструкции
составлял 200 м, диаметр компенсирующего маховика — 180 м,
масса пленки — 350 кг, масса маховика — 70 кг.
Разработанный вариант агрегата раскрытия отражателя прин-
ципиально мог разворачивать как разрезную конструкцию отра-
жателя, так и неразрезную. В первом случае сектора отражателя
наматывались на катушки, во втором случае катушки использо-
вались для укладки тросов, с помощью которых осуществлялось
управляемое развертывание отражателя, уложенного по схеме
ДКБА, на вводимый внешний технологический кожух.
Проведен выбор проектных параметров маховика и динамика
развертывания вариантов конструкции отражателя и маховика.
Основными требованиями к электроприводам, определяемы-
ми целевыми задачами системы СКО и динамикой разворачива-
ния полотнища являются:
— обеспечение вращающего момента в диапазоне М = 0-
1,7 Н-м на этапе разворачивания отражателя;
— обеспечение начальной максимальной угловой скорости пе-
ред разворачиванием отражателя — 6 рад/с;
— обеспечение конечной угловой скорости развернутого отра-
жателя — 1 рад/с и поддержание этой скорости в течение
всего периода эксплуатации (Т — 5 лет);
— обеспечение пускового момента М — 1,7 Н-м и этапа
разгона конструкции с величиной момента инерции J =
= 760 кг-м2;
— обеспечение скорости роспуска V < 0,005 м/с и времени
раскрытия 5,6 часа;
— обеспечение приводом роспуска тормозного момента от на-
тяжения 1800 Н-м.
Основываясь на опыте разработки приводов в НПО «По-
люс» (г. Томск), предлагается использовать безредуктор-
ный вентильный электродвигатель, обеспечивающий пус-
ковой и основной режимы работы;
— привод роспуска полотна со скоростью роспуска 0,005 м/с.
Указанный выбор электроприводов связан с использованием раз-
дельной кинематической схемы вращения и роспуска полотнища.
При использовании объединенной кинематической схемы
вращения и роспуска может быть использован только один при-
вод, т. к. в этой схеме привод роспуска исключается.
7 Г. Г. Райкунов и др.
194 Гл. 5. Проектная проработка космических конструкций
На этапах разворачивания полотнища отражателя и его вра-
щения в течение компании циклограмма работы электроприводов
выглядит следующим образом:
— включение электропривода;
— разгон барабана с уложенным полотнищем до скорости щ =
= 6 рад/с за время Т = 2,5 ч;
— контроль скорости начала разворота в течение 30 с;
— включение привода роспуска;
— выключение привода роспуска через 5,5 ч;
— поддержание угловой скорости 0,5 рад/с электроприводом
в течение всего времени эксплуатации.
На рис. 5.6 приведен вариант компоновки отражателя на ТГК.
Рис. 5.6. Вариант размещения отражателя на ТГК «Прогресс» между БО
и ОКД
5.8. Особенности проектирования конструкций
195
5.7. Проект рамочной тросовой антенны D=300 м
Для исследования генерации и распространения радиоволн
на частотах 3-70 кГц в ионосфере ИЗМИРАН инициировал
работы по созданию рамочной динамической тросовой антенны
диаметром D=300 м.
Приведенные на основе разработанных методик расчеты ди-
намики разворачивания указали на невозможность организации
процесса без введения дополнительных средств, увеличиваю-
щих ведущий центральный барабан. Предложено использовать
конструкцию, аналогичную агрегату разворачивания «Знамя 3»,
с четырьмя или восемью раздвижными штангами из упругих
стальных профилей чечевицеобразной формы длиной до 10 м.
Эксперимент целесообразно проводить на ТГК «Прогресс» по
методике, аналогичной КЭ «Знамя 2», с разницей в том, что
плоскость вращения антенны должна сохранять свое положение
в пространстве. Планируемое время эксперимента порядка меся-
ца при импульсном характере отбора энергии от сети электропи-
тания с мощностью в импульсе до 10 кВт. Установка приемной
аппаратуры предполагается на ДОС «Мир». Схема эксперимента
приведена на рис. 5.7.
Для обеспечения максимальной надежности конструкции
и ее минимальной стоимости целесообразно максимально ис-
пользовать конструкторскую документацию, опыт изготовления,
наземной и орбитальной отработки агрегата разворачивания
«Знамя 3», который должен быть проведен раньше запуска на
орбиту тросовой системы.
Целесообразно агрегат разворачивания «Знамя 3» констру-
ировать таким образом, чтобы на нем могла быть размещена
конструкция тросовой системы. По проектным оценкам массо-га-
баритные характеристики антенны для требуемых электрических
параметров в несколько раз меньше размера пленки отражателя.
Выпущены технические предложения по тросовой антенне [143],
расчет динамики развертывания антенны приведен в п. 3.4.2,
Глава 3
5.8. Особенности проектирования и конструирования
конструкций для различных целевых задач. Общие
проблемные вопросы
5.8.1. Основные проектные критерии и параметры
На рис. 1.7 (Глава 1) приведена схема основных этапов со-
здания космического аппарата на базе раскрываемой крупногаба-
196
Гл. 5. Проектная проработка космических конструкций
Рис. 5.7. Эксперимент «Параметр». Динамическая тросовая рамочная радио-
антенна D=300 м, формируемая центробежными силами для исследования
генерации и распространения радиоволн ОНЧ- и СНЧ-диапазонов в плазме
ионосферы
ритной конструкции, имеющая ряд особенностей, связанных со
спецификой изделия.
Как и при разработке других типов летательных аппаратов
[200-202], проектирование начинается с анализа целевой задачи,
выработки критериев эффективности и требований к изделию,
вытекающих из целевой задачи.
Рассмотрим задачу создания солнечного парусного корабля.
Как транспортный космический аппарат, солнечный парус дол-
жен создавать определенное характеристическое ускорение (по-
рядка а ~ 10~3 м/с2), что ограничивает допустимую удельную
массу аппарата, включая парус и служебные системы, величи-
ной порядка р = 5 • 10-3 кг/м2, что крайне сложно обеспечить.
5.8. Особенности проектирования конструкций 197
Возможность выведения аппарата на орбиту предъявляет требо-
вания к компоновке его на носителе, определяемые коэффици-
ентом укладки К сборки и габаритом максимального элемента.
Размеры проектируемого аппарата с солнечным парусом ограни-
чены сверху размерами грузового отсека носителя, а снизу —
минимально возможными размерами для принципиального осу-
ществления полета.
Создаваемая парусом тяга зависит от качества отражающей
поверхности: при зеркальном покрытии воспринимается вдвое
больший импульс от квантов солнечного света, чем при чер-
ном покрытии. Отражение света может быть как зеркальным,
так и диффузным. Длительность перелетов ставит задачу обес-
печения прочностных и отражающих характеристик материала
паруса при комплексном воздействии космических и эксплуата-
ционных факторов.
Необходимо, чтобы орбиты находились вне радиационных
поясов Земли.
Ко всем системам парусного корабля предъявляются требо-
вания повышенной надежности как к автономному автоматиче-
скому аппарату, рассчитанному на длительный ресурс эксплуа-
тации. Надежность обеспечивается выбором проектно-конструк-
торских решений и комплексным планом отработки изделия на
надежность.
Такой важный критерий, используемый при проектировании
носителей, как цена килограмма выводимого на орбиту полезного
груза, при проектировании целевых аппаратов выступает в роли
цены килограмма научной аппаратуры для получения определен-
ной научной информации или решения той или иной целевой
задачи.
Динамические характеристики процессов раскрытия из уло-
женного состояния характеризуются параметрами w/ш2 и ojR/2v
(см. Глава 3, п. 3.1.5). Переориентация в пространстве определя-
ется параметрами Q/w и /?fc/Ro (см. Глава 4, п. 4.1).
Возмущения, вносимые градиентом гравитационного поля,
оцениваются параметром ш орб/ш, где ш — орбитальная ско-
рость вращения. Напряжения, возникающие во вращающей-
ся конструкции, имеют порядок а — pu2R2, запас прочности
п = (т/сгдоп, где <Тдоп — допустимое напряжение, определяемое
при испытаниях на длительную прочность и ползучесть с учетом
комплексного воздействия орбитальных факторов.
Ресурс изделия выступает в роли важнейшего парамет-
ра, определяющего проектно-конструкторскую увязку, выбор
198 Гл. 5. Проектная проработка космических конструкций
конструкционных материалов, объем наземной отработки и, в ко-
нечном счете, стоимость изделия
Таким образом, при разработке солнечного парусного корабля
обеспечение характеристического ускорения а определяет всю
направленность разработки: стремление уменьшить удельную
массу паруса р, увеличить степень зеркальности поверхности,
хотя оставляет возможность решения задачи даже при черном
покрытии, а следовательно, без высоких требований к отражаю-
щим характеристикам поверхности и ее ориентации в простран-
стве.
Конструкция полотнища паруса может быть как сплошной,
так и разрезной. Разрезное полотнище из-за малой величины
тангенциальных напряжений имеет меньшую зеркальность по
сравнению со сплошным.
Аналогичные требования к конструкции полотнища отра-
жателя имеются в задаче создания пассивного ретранслятора
для теле-радио и лазерной связи, а также экрана для очистки
космоса от технологических осколков. Во всех этих задачах не
предъявляется жестких требований к точности и зеркальности
поверхности и ее ориентации в пространстве
Напротив, при проектировании отражателя системы освеще-
ния районов Земли отраженным солнечным светом качество от-
ражающей поверхности и точность ориентации зеркала выступа-
ют на первый план. В этом случае главным целевым параметром
является интенсивность освещения заданного района, зависящая
от площади отражателя, коэффициента зеркального отражения
его поверхности, поглощающих и рассеивающих свойств атмо-
сферы, угла падения света на поверхность Земли. Коэффициент
зеркального отражения по всей поверхности отражателя жела-
тельно иметь максимально близким к единице, а точность наве-
дения луча с орбиты должна значительно превышать угол, под
которым наблюдатель видит с Земли Солнце. Указанные пара-
метры являются определяющими при проектировании отражате-
ля, они определяют его конструкцию и сложность системы его
наведения. Важной особенностью является необходимость непре-
рывной переориентации отражателя при движении по орбите
с заданной точностью наведения на требуемый район Земли, что
дополнительно усложняет систему управления. Для обеспечения
высокого коэффициента зеркального отражения конструкция по-
лотнища отражателя должна находиться в двухосном напряжен-
ном состоянии, близком к пределу упругой деформации по обеим
осям. Это возможно осуществить в каркасной конструкции от-
ражателя при низком значении удельной массы аппарата, или
5.8. Особенности проектирования конструкций
199
в бескаркасной конструкции со специальными мерами, обеспе-
чивающими равномерность двухосного напряжения по большей
части площади поверхности отражателя и активном демпфиро-
вании колебаний от воздействия гироскопических сил. Следует
отметить, что задача освещения является наиболее сложной из
возможных прикладных задач.
Имеется ряд важных задач, где не ставится требование пере-
ориентации конструкции. Например, использование вращающе-
гося бескаркасного пленочного параболического концентратора
в задаче пополнения озонового слоя вокруг Земли. Оценки пока-
зывают, что для решения этой задачи необходимо 30 наведенных
на Солнце концентраторов диаметром 1 км расположить на сол-
нечно-синхронной орбите Н=1680 км. В фокусе концентратора
располагается парогенератор энергоустановки, питающий мощ-
ный лазер, работающий на длине волны, возбуждающей энерге-
тические уровни кислорода в верхней атмосфере и способству-
ющий образованию озона под воздействием излучения Солнца.
Восстановление орбитального слоя солнечными отражателями
путем направления отраженного солнечного света по касатель-
ной к поверхности Земли, как показано на рис. 5.8, по-видимому,
проще и эффективнее (предложено Реш Г. Ф.).
Рис. 5.8. Восстановление орбитального слоя солнечными отражателями
200 Гл. 5. Проектная проработка космических конструкций
Не переориентируется тросовая СНЧ/ОНЧ-антенна. Ее плос-
кость располагается в плоскости орбиты. Антенна при решении
целевой задачи как бы «катится» по орбите.
Чрезвычайно привлекательно использование бескаркасных
вращающихся конструкций в будущих Лунных технологиях. Лу-
на лишена атмосферы и имеет в 6 раз меньшее, чем на Земле,
гравитационное притяжение. В плане использования вращаю-
щихся бескаркасных конструкций Луна является уникальным
небесным телом. Архитектура лунных энергетических сооруже-
ний должна базироваться именно на таких конструкциях. Это
могут быть поверхности солнечных батарей, солнечных кон-
центраторов энергоустановок, приемных и передающих антенн
большой мощности. Влияние гравитации на Луне оценивается
критерием o^R/q, где q — ускорение свободного падения на
поверхности Луны. По сегодняшним прогнозам Луна должна
будет играть большую роль в энергоснабжении Земли благодаря
значительно большим запасам термоядерного топлива. Плани-
руется поэтапное освоение Луны, вынесение туда с Земли эко-
логически вредных и энергоемких технологий. США выделило
100 млрд, долларов на освоение Луны, как стратегического объ-
екта, в ближайшее десятилетие. Это в 3 раза больше, чем затра-
ты на программу «Спейс Шаттл». Использование бескаркасных
вращающихся крупногабаритных конструкций несомненно дает
больший эффект снижения капиталовложений.
Для большинства рассматриваемых задач целесообразно при-
менение агрегатов раскрытия электромеханического типа, осно-
ванных на использовании электроприводов, из-за их высокой
надежности и удобства наземной отработки. Однако в задачах
создания технологических экранов предпочтительнее использо-
вание газового привода из-за отсутствия необходимости пере-
ориентации раскрытого полотнища, отсутствия противовращаю-
щейся конструкции и оправданности более сложной наземной
отработки при массовом производстве изделий. Газовый привод
может обеспечить высокий темп раскрытия конструкций и бли-
кующую поверхность. Агрегаты раскрытия могут базироваться
на многокатушечных или однокатушечных схемах укладки пле-
ночных полотнищ. Однокатушечная схема позволяет получить
большой коэффициент укладки.
Переориентация вращающихся крупногабаритных конструк-
ций строится на гироскопическом принципе управления, когда
сама конструкция выполняет роль гироскопа. За счет введе-
ния противовращающейся пленочной или тросовой конструкции
обеспечивается равенство нулю суммарного кинетического мо-
5.8. Особенности проектирования конструкций 201
мента системы, и переориентация осуществляется за счет излома
оси, связывающей противоращающиеся конструкции, и возника-
ющей при этом прецессии. Излом оси осуществляется в двухсте-
пенном шарнире, управляемом прецизионными приводами. Зада-
чи управления требуют проводить излом оси на очень малый
угол (—1°) с высокой точностью по требуемому закону. При-
вод работает в реверсном режиме, осуществляя «прокачку» угла
управления. Перспективно использование приводов на базе пье-
зокристаллов, обладающих большим моментом при малом ходе,
возможностью прецизионного управления и отсутствием люфта,
неизбежного в зубчатых передачах.
5.8.2. Возмущения и ограничения, связанные с орби-
тальными воздействиями
Рассмотрим воздействие различных орбитальных факторов на
крупногабаритную конструкцию, таких как: остаточная атмосфе-
ра на различных высотах, градиент гравитационного поля Земли
и других небесных тел, радиационные потоки от Солнца и га-
лактического излучения, радиационные пояса Земли, магнитное
поле Земли и т. д. Эти факторы влияют на эксплуатационные
характеристики аппарата, такие как его ресурс, возможность
переориентации в пространстве и точность поверхности.
Состав остаточной атмосферы на различных высотах колеб-
лется в среднем на полтора порядка в зависимости от большого
количества различных факторов: времени года, солнечной актив-
ности, географической широты и прочее. Остаточная атмосфера
создает аэродинамическое сопротивление летательному аппарату
и определяет коррозионное взаимодействие с элементами кон-
струкции, деструкцию пленочных материалов.
В таблице 5.5 приведены ориентировочные данные по сум-
марной плотности (по всем компонентам) остаточной атмосферы
на высотах Н= 100-2500 км.
Таблица 5.5.
Н, км 100 200 300 400 1000 2000 2500
р, кг/м3 510“7 8-10-“ 210-18 810~14 5-10~15 ю-15 510"16
На высотах более 300 км длина пробега частиц значительно
превышает возможные размеры аппарата и течение является
свободно-молекулярным. Усилие лобового сопротивления в этом
случае может быть оценено по выражению:
Хп = CxqS,
202 Гл. 5. Проектная проработка космических конструкций
где Сх — коэффициент сопротивления, зависит от аккомодации
частиц на различных поверхностях (Сх = 2), q = pV2/2 — ско-
ростной напор, S — площадь перпендикулярной потоку поверх-
ности.
В точных расчетах для тел сложной формы Сх определяется
экспериментально при продувках в барокамере, моделирующих
реальное течение и форму тела.
В случае отражателя на орбите оценку его сопротивления
можно провести, принимая что его форма плоская площадью
S, V — орбитальная скорость (V=8 км/с), р — плотность по
таблице 5.5, Сх — 2.
Для S = 104 м2 и высоты 350 км (высота орбитальной стан-
ции «Мир»), Хп = 0,2 Н, для высоты 2000 км (ниже радиаци-
онных поясов Земли) ХП — 6 • 10-4 Н, т. е. пренебрежимо мало.
Для S = 106 м2 на высоте 350 км лобовое сопротивление состав-
ляет значительную величину Хг = 20 Н. Для высоты 2000 км
Х„ — 6 102 Н, т. е. по-прежнему мало.
Для бокового обтекания в свободно-молекулярном потоке для
пластины оценку сопротивления можно провести на основе вы-
ражения [203]:
Хт = o/i^^pCmCS,
где <т — коэффициент диффузного отражения, Ст — наиболее ве-
роятная скорость частиц газа(Ст = (2/сТ/т)1 2), С — скорость
движения поверхности.
Оценки дают для Хт величину, примерно на порядок мень-
шую, чем для Хп.
Момент трения, действующий на вращающуюся поверхность
по обеим ее сторонам, оценивается по выражению:
М — 0,57г1 2стрСтшНк\
где Rk — радиус системы, ш — круговая скорость вращения.
Для Н = 350 км, Rk = 100 м, ш = 0,1 рад/с, М = 10-3 Н- м,
что значительно меньше трения в подшипниках.
На низких орбитах, Н = 300-400 км, остаточный кислород
приводит к интенсивной деструкции всех видов взаимодейству-
ющих с ним пленочных материалов, ограничивая ресурс пленоч-
ной конструкции временем порядка нескольких десятков часов
в зависимости от ориентации поверхности пленки к набегающе-
му потоку. На высотах Н > 1000 км эффекта взаимодействия
с кислородом не наблюдается, и деструкция в основном опре-
деляется потоком солнечного УФ-излучения. В диапазоне высот
5.8. Особенности проектирования конструкций 203
Н = 2000-6000 км вклад в деструкцию вносят радиационные
пояса Земли.
Тормозящий момент от влияния магнитного поля Земли на
вращающийся проводящий диск оценивается выражением, учи-
тывающим экранировку возникающего электромагнитного поля
окружающей плазмой:
М = 2(п,В)|/2/(еС)тг1^Ж3,
где щ — концентрация плазмы; m-i — средняя масса иона; В —
напряженность магнитного поля Земли; е — заряд электрона;
С — скорость света.
Величина этого момента получается на четыре порядка мень-
ше момента трения
Протяженная конструкция на орбите стремится развернуться
под действием градиента гравитационного поля и занять положе-
ние в направлении на центр Земли.
Для диска, находящегося под углом а к вектору орбитальной
скорости, величина момента относительно оси, проходящей через
его центр, оценивается выражением:
Mq = 7Г / IbqfiRk4 / 7?3sin2a,
где q = q^R^/Ro)2 — ускорение свободного падения на орбите
радиуса Ro, R3 — радиус Земли, q% = 9,8 м/с2, /г — поверхност-
ная плотность диска, кг/м2.
Для а — 45°, р — 5 • 10“~3 кг/м2, Rk = 100 м, Н = 1000 км,
Mq = 0,2 Нм, что меньше на порядок момента, требуемого для
переориентации с орбитальной скоростью Q: М = [iRk4bjO> =
= 5 Н-м для w = 1СГ1 рад/с и Q = 10-4 рад/с.
Оценки влияния орбитальных факторов, включая притяже-
ние Луны и Солнца, а также конструктивно-технологических
факторов, таких как внутреннее трение между волокнами про-
вода и остаточных напряжений в нем, показывают практическую
пренебрежимость этими факторами в реальных инженерных кон-
струкциях [204, 205].
5.8.3. Общие концепции и проблемные вопросы
Подводя итог представляемой проектной проработки на осно-
вании вышеизложенного материала проведем обобщение основ-
ных концепций разработки крупногабаритных космических кон-
струкций, формируемых центробежными силами, которые сво-
дятся к следующему:
204 Гл. 5. Проектная проработка космических конструкций
1. Отход от традиционного конструирования, использование
специфических орбитальных условий (высокий вакуум, невесо-
мость) и центробежных сил для создания конструкций, под
конкретные целевые задачи.
2. Обеспечение нулевого кинетического момента системы пу-
тем введения противовращающихся гибких элементов для созда-
ния возможности раскрытия системы из уложенного состояния
и переориентации, раскрытой вращающейся системы без затрат
рабочего тела.
3. Организация переориентации раскрытых вращающихся
конструкций в пространстве на гироскопическом принципе за
счет прецессии, возникающей при «изломе» оси, связывающей
противовращающиеся элементы конструкции.
4. Использование многолучевых укладок пленочных и тросо-
вых систем, обладающих благодаря многозвенности и симметрии
устойчивостью на этапах раскрытия. Использование связи по
внешнему круговому контуру в пленочных конструкциях.
5. Использование неразрезных пленочных конструкций с до-
полнительными конструктивными мерами, обеспечивающими
равномерность двухосного напряженного состояния, в задачах
создания отражателей.
6. Организация раскрытия конструкций из уложенного со-
стояния за счет использования обратной зависимости момента
от угловой скорости электроприводов на базе математического
моделирования динамики раскрытия.
7. Использование полиимидных пленочных материалов с воз-
обновлением натриевым покрытием в системах с отражателем,
обеспечивающим длительный ресурс эксплуатации.
8. Организация активного демпфирования колебаний вра-
щающейся поверхности при переориентации в пространстве от
воздействия гироскопических сил или выбор модульной системы,
при которой эти колебания несущественны.
9. Реализация комплексного плана разработки изделия на
надежность. Поэтапная наземная отработка с моделированием
силового воздействия на элементы конструкции на базе матема-
тических моделей и организацией наиболее ответственных эта-
пов отработки электромеханики.
10. Организация четкой программно-методической взаимо-
связи между орбитальным комплексом и наземными измеритель-
ными пунктами.
Основным проблемным вопросом при создании пленочных
отражателей является высокая точность формы и ориентации по-
5.8. Особенности проектирования конструкций
205
верхности отражателя, высокое качество отражающей поверхно-
сти. Этим определяется круг основных исследовательских работ:
— материаловедческие исследования длительной прочности
и ползучести материала пленки и деградации отражающего
покрытия;
— разработка систем возобновления отражающего покрытия
в космических условиях, контроль отражающих свойств;
— разработка системы управления положением аппарата
в космическом пространстве с высокой точностью ориента-
ции (10');
— разработка системы контроля и управления формой поверх-
ности отражателя.
Длительный ресурс эксплуатации изделия (Т=10-20 лет)
предъявляет высокие требования к его надежности. Материало-
ведческие исследования должны быть направлены на разработку
методик ускоренных испытаний и методов прогнозирования при
комплексном воздействии эксплутационных условий. Необходи-
мы дополнительные исследования изменений оптических и меха-
нических свойств металлизированной полиимидной пленки при
комплексном воздействии ЭМИ солнца, протонов и электронов
но методикам, достоверно имитирующим условия эксплуатации.
Управление космическим аппаратом со столь высокой точно-
стью требует построения соответсвующих алгоритмов управле-
ния и их аппаратурной реализации. Необходимо провести боль-
шой объем расчетно-теоретических исследований по оптимиза-
ции задач управления.
Задачи контроля состояния поверхности и наведения в нуж-
ный район подсветки требуют своего аппаратурного решения.
Главной особенностью экспериментальной отработки штат-
ной конструкции является невозможность отработки основных
ее элементов — пленочного отражателя и тросового маховика
противовращения в наземных условиях из-за отсутствия столь
крупногабаритных вакуумных камер (D=200-2000 м) и наличия
сил гравитации.
По этой причине все узлы штатной конструкции, обеспечива-
ющие динамику раскрытия отражателя и маховика из уложенно-
го в рабочее состояние и обеспечивающие управляемый поворот
отражателя в пространстве, должны быть испытаны с имитацией
натурных нагрузок по всему необходимому комплексу стандарт-
ных испытаний (ЛОИ, КДО, ПСИ).
Высокие требования по надежности, предъявляемые к изде-
лию, ставят задачу создания комплексных испытательных стен-
206
Гл. 5. Проектная проработка космических конструкций
дов и требуют проведения большого объема работ. Требуется
создание следующих стендов:
— стенд для отработки приводов раскрытия и вращения фер-
мы с отражателем и маховика, предназначен для испыта-
ний и отработки системы приводов, включая электромеха-
нику, на этапах отработки, приемо-сдаточных испытаний,
а также при комплексной отладке штатной конструкции
и программного обеспечения бортовой вычислительной ма-
шины;
— стенд для отработки механизма «ломки» оси вращения
с имитацией кинетических моментов предназначен для ис-
пытаний и отработки электромеханических приводов двух-
степенного силового шарнира на вышеуказанных этапах;
— стенд имитации динамики разворачивания фермы должен
содержать системы обезвешивания и имитации нагрузки от
центробежных сил.
Испытания пленочного отражателя должны включать:
— испытания на прочность при транспортировании в упако-
ванном виде;
— механические испытания, имитирующие нагрузку в полете
на уложенный отражатель;
— испытания кинетические, имитирующие среду, в которой
возможно нахождение и хранение полотнища.
Узлы и агрегаты системы должны проходить испытания на
вибропрочность и термоциклирование по программам и методи-
кам, общепринятым при создании изделий космической техники.
5.9. Проектные концепции космических солнечных
электростанций
Вновь создаваемые проекты космических солнечных электро-
станций (КСЭС), начало осуществления которых возможно будет
через десятилетие, а эксплуатация будет продолжаться до конца
века, должны базироваться на новейших достижениях и техни-
ческих решениях в области физики и технологии полупровод-
ников, техники СВЧ и создании крупногабаритных космических
конструкций.
Проследим исторические этапы предложений по разработке
КСЭС и изменение основных проектных концепций, связанных
со стремлением повысить эффективность, снизить стоимость
и повысить надежность системы. При комплексном анализе про-
блемы необходимо рассмотрение взаимосвязи всех основных эта-
пов создания системы, таких как:
5.9. Проектные концепции космических солнечных электростанций 207
— проектная увязка и определение конструктивного облика;
— наземное изготовление и отработка;
— компоновка в транспортном состоянии и вывод ракетой-
носителем на орбиту;
— орбитальная сборка систем и ее эксплуатация.
Крупномасштабность системы в значительной мере осложня-
ет ее создание и требует поиска нетрадиционных подходов.
Разработка КСЭС была начата практически сразу с началом
космической эры. Запуск первого спутника и первого человека
в космос пробудили интерес к большим космическим энерго-
системам, первый инженерный проект которых был разработан
Глейзером в 1968 г. в США [10, И]. В проекте была показана
целесообразность создания энергетического объекта в космосе
на чрезвычайно большую мощность, превышающую мощность
самых крупных электростанций на Земле (порядка 10 ГВт),
и передачи электроэнергии на Землю в СВЧ-диапазоне (рис. 5.9).
Рис. 5.9 Передача СВЧ-луча на Землю [149]: а) от орбитальной станции;
б) с поверхности Луны
Солнечная батарея Глейзера представляла собой ферменную
конструкцию размером 13,1 х 4,93 км и массой 12,3 тысяч тонн,
выходной мощностью 5 ГВт на кремниевых солнечных элементах
с КПД = 13,7%. На рис. 5.10 представлен вариант КСЭС из
оригинального патента Глейзера, приведенный в [149]. Описания
нет, но похоже, что конструкция формируется центробежными
силами. С различной степенью детализации проработки КСЭС
проводились все последующие годы [11, 12]. На рис. 5.11 при-
веден пример разработки КСЭС 1978 г. [11]. В целом конструк-
тивная схема подобна схеме Глейзера 1968 г. Имеется жест-
кая каркасная конструкция солнечной батареи, электрический
ток постоянного напряжения с большой поверхности солнечной
208
Гл. 5. Проектная проработка космических конструкций
Рис. 5.10. Вариант конструкции КСЭС из патента Глейзера
батареи по тоководам собирается в расположенный в центре
преобразующий СВЧ-блок и сбрасывается СВЧ-передающей ан-
тенной. Отличием от схемы Глейзера являются использование
для солнечной батареи арсенида галлия, обладающего по срав-
нению с кремнием более высоким КПД, и введение в схему
плоского отражателя, обеспечивающего двукратную концентра-
цию излучения. Дальнейшее совершенствование схемы КСЭС
шло по пути увеличения концентрации излучения и значитель-
ного уменьшения каркасной рамы солнечной батареи, а также
изменения компоновки с целью исключения из конструкции гро-
моздких тоководов. Варианты более поздних конструкций КСЭС,
предложенных в НАСА, представлены на рис. 5.12.
В октябре 2007 г. Министерство обороны США выдвину-
ло проект долгосрочной программы создания КСЭС, трансли-
рующих энергию на Землю в СВЧ-диапазоне [149], для того,
Рис. 5.11. Схема КСЭС (1978 г.) с плоскими отражателями (размеры указаны
в метрах): / — панели солнечных батарей из арсенида галлия; 2 — плоские
отражатели; 3 — передающая антенна
5.9. Проектные концепции космических солнечных электростанций 209
Рис. 5.12. Варианты конструкций НАСА [149]
чтобы в перспективе избавить страну от импорта нефти. Рас-
сматривается перспектива создания большого количества косми-
ческих солнечных электростанций на мощность, покрывающую
энергопотребление всего человечества к 2100 г. На рис. 5.13
показана приведенная в [149] схема КСЭС, которая сформиро-
валась к 2003 г., и где симметрично расположенные относи-
тельно центральной оси шестигранные параболические внешние
зеркала концентрируют солнечную энергию на внутренних вто-
ричных зеркалах, разворачивающих поток света на 90° и на-
правляющих его на центральную круговую конструкцию, где
находятся совмещенные конструктивно солнечная батарея, пре-
образующие в СВЧ-элементы и передающая антенна. В новой
схеме отсутствуют громоздкие тоководы, однако введены новые
элементы — поворотные зеркала и параболический солнечный
концентратор, размерность которого определяется КПД солнеч-
ной батареи и проектной мощностью системы, а конструкция
представляет собой два связанных жесткими элементами шести-
гранника 2 х 3 км с расстоянием между дальними краями 5 км.
Концентратор с поворотными зеркалами должен изготавливаться
Рис 5 13. Схема космической солнечной электростанции [149]
210 Гл. 5. Проектная проработка космических конструкций
и наводиться в процессе работы на Солнце с большой точностью
(порядка градуса), что сильно усложняет проблему создания
КСЭС по данной схеме в целом. Управление, заключающееся
в постоянном изменении положения концентратора в простран-
стве для наведения его на Солнце при движении по геостацио-
нарной орбите в течение года, может осуществляться в данной
схеме только химическими или плазменными двигателями, тре-
бующими периодического подвоза рабочего тела, усложняющего
эксплуатацию системы.
Разработчики данной схемы перенесли центр тяжести раз-
работки КСЭС с солнечной батареи с системой преобразования
и излучения, которые выглядят достаточно реальными, на систе-
му концентратора с поворотными зеркалами, создание и отработ-
ка которых при представленных масштабах, точности и опыте
предыдущих разработок крупногабаритных конструкций пред-
ставляются весьма проблематичными.
За последние годы появились новые концепции и подходы
к созданию космических энергосистем, отсутствовавшие еще
8-10 лет назад, базирующиеся на новейших научно-технических
достижениях в физике и технологии полупроводников и со-
здании бескаркасных космических конструкций, которые могут
гарантировать при создании космических солнечных энергоси-
стем значительное снижение финансовых затрат и времени на
их реализацию по сравнению с альтернативными проектами.
Большой интерес представляет возможность создания на базе
нанотехнологий полупроводниковой структуры, объединяющей
генерирующие в СВЧ-диапазоне и излучающие свойства. Ис-
пользование таких полупроводниковых структур позволит чрез-
вычайно эффективно осуществлять генерирование и трансляцию
энергии в СВЧ-диапазоне в космических энергоустановках, ис-
ключив громоздкие традиционные СВЧ-преобразующие приборы
и токоподводы. В космической солнечной электростанции гене-
рируемая по площади солнечной батареи СВЧ-энергия может
фокусироваться путем фазировки [144] на наземную ректенну.
Предложена технология развертывания центробежными си-
лами крупномасштабной космической электростанции практиче-
ски любой размерности путем объединения агрегатом раскрытия
с «тянущими роликами» непосредственно на орбите индиви-
дуально доставленных туда на катушках секторов полотнища
солнечной батареи [135]. Эта технология является технической
находкой, которая по своей простоте и возможностям реализации
превзойдет все практически возможные альтернативы (рис. 5.14).
5.9. Проектные концепции космических солнечных электростанций 211
а) б)
Рис. 5.14. Концептуальная схема агрегата раскрытия полотна СБ, состоящего
из отдельных секторов, уложенных на катушки, объединяющая сектора в еди-
ное полотнище в процессе раскрытия: а) в уложенном состоянии; б) в начале
раскрытия, 1 — полотно; 2 — катушки; 3 — корпус; 4 — вытягивающие
и соединяющие отдельные сектора ролики
В приложении к КСЭС по сравнению с каркасной схемой
КСЭС с концентратором формируемая центробежными силами
схема обладает следующими преимуществами:
— в схеме полностью отсутствуют крупногабаритный каркас
и затраты на его создание и отработку;
— переориентация КСЭС в пространстве осуществляется за
счет прецессии самой конструкции, которая является тя-
желым гироскопом, при этом не требуется расход рабочего
тела;
— точность ориентации на Солнце в безконцентраторной схе-
ме составляет ±12° (по сравнению с ±1 ° по схеме [149]);
— центр тяжести разработки сосредоточен на солнечной бата-
рее, генерирующей и излучающей в СВЧ-диапазоне, кото-
рая может быть отработана на Земле на маломасштабных
образцах в рамках развивающихся нанотехнологий, что
практически выгоднее создания в космосе крупногабарит-
ного каркаса концентратора размерностью 5 км и точно-
стью ориентации ±1 °.
Генерирующие в радиодиапазоне солнечные батареи окупятся
ранее при использовании на спутниках связи и других ЛА.
212 Гл. 5. Проектная проработка космических конструкций
В перспективе создания многих КСЭС в течение 30-50 лет
для выведения КСЭС в космос перспективным является ис-
пользование электромагнитного ускорителя с полосой разгона
порядка 10 км, геометрически подобной лыжному трамплину.
Ускоритель должен строится рядом с крупной электростанци-
ей и использовать горный рельеф местности (например, около
Саяно-Шушенской ГЭС).
Необходимо начать проектно-конструкторские и технологиче-
ские работы в этом направлении, которые с одной стороны поз-
волят России идти без отставания по сравнению с другими стра-
нами в решении проблемы энергетического кризиса, а с другой
стороны получить возможность экспортировать энергию в любые
нуждающиеся в ней государства.
Приложение 5.1. Оценочные выражения
напряженного состояния вращающейся мембраны
Распределение напряжений во вращающемся кольце постоян-
ной толщины оцениваются выражениями 9:
ог — pw2(3 + р.)(Д| + Ro2 — Ro2R$./t2 - r2}/3,
crt = pw2(3 4- М)(Д2 + д02 _ RozRl/r4 _ (1 + зм)/(з + м)г2)/8,
где Ro — внутренний радиус кольца, Rk — внешний радиус
кольца, р — плотность материала, р — коэффициент Пуассона,
ш — угловая скорость вращения. Для Ro — 0,IRp, г — Ro, р = 0,3
O"tmax = 6/8pcU Rp-
Для Ro = O.lRp, г = 0,3Rk, p = 0,3
ffrmax ~ 3/3ptP Rj...
Для вращающегося отдельного сектора максимальное напряже-
ние находится в его основании
СВпах = 0,ЗЗрШ2й|/До.
Откуда
w = (ZoRo/pR^/Rp.
Для вращающегося троса
о = p^2Rp.
') В. И. Феодосьев. Сопротивление материалов. — М: «Наука», 1970. —
544 с.
5.9. Приложение 5.2. Возможность создания сектора
213
Приложение 5.2. Возможность создания сектора
с двухосным напряженным состоянием поверхности
Рассмотрим формируемый центробежными силами сектор
пленочной конструкции радиуса R, вращающийся вокруг оси О с
угловой скоростью ш (рис. 5.15). В точке А соединения сосед-
Рис. 5.15. Формируемый центробежными силами сектор пленочной конструк-
ции радиуса R, вращающийся вокруг оси О
них секторов прикреплен груз массой т. На границы сектора
действует распределенная нагрузка д. Боковая сторона сектра
имеет стрелу прогиба Д, внешняя сторона сектора имеет стрелу
прогиба /2- Используя известное из сопротивления материалов
выражение, связывающее растягивающее усилие F\ и стрелу
прогиба /1, запишем:
F[ = rnw2R — 2gR2/8 /1 + gL.
В качестве примера, проведем оценку массы т, которую сле-
дует приложить в точку А для получения равномерного по
площади сектора напряжения, используя данные из космическо-
го эксперимента «Знамя 2»: R = 10 м, ш = 2 рад/с, толщина
пленки 6 = 10“5 м, напряжение а — 107 Н/м2, распределенная
нагрузка д = du = 102 Н/м. Принимая /1 = 0, 1 R и L = R
имеем т = 88 кг и для шести секторов 528 кг, что не ре-
ально.
По этой причине разрезные секторные конструкции не могут
быть использованы в приложении к задачам, где требуется вы-
сокое качество плоскости поверхности (солнечные отражатели,
солнечные батареи). Для таких задач необходимо использование
214 Гл. 5. Проектная проработка космических конструкции
цельных полотнищ. Это обстоятельство привело к разработке
агрегата раскрытия, объединяющего отдельные сектора в еди-
ное полотнище в процессе раскрытия конструкции (см. Глава 8,
п. 8.5).
Часть II
КОНСТРУКЦИИ, МАТЕРИАЛЫ
И ТЕХНОЛОГИЯ ИЗГОТОВЛЕНИЯ
ПЛЕНОЧНЫХ ОТРАЖАТЕЛЕЙ,
ЭКРАНОВ И СОЛНЕЧНЫХ
БАТАРЕЙ.
КОНСТРУКЦИИ АГРЕГАТОВ
РАСКРЫТИЯ ДЛЯ РАЗЛИЧНЫХ
ЗАДАЧ
Глава 6
КОНСТРУКЦИИ, МАТЕРИАЛЫ И ТЕХНОЛОГИЯ
ИЗГОТОВЛЕНИЯ ПЛЕНОЧНЫХ ОТРАЖАТЕЛЕЙ.
ОБЕСПЕЧЕНИЕ ПРОЧНОСТНЫХ
И ОТРАЖАЮЩИХ ХАРАКТЕРИСТИК
6.1. Условия эксплуатации пленочных конструкций
Для различных прикладных задач и космических экспери-
ментов рассматриваются низкие орбиты с высотой менее 400 км
и высокие орбиты с высотой от 1600 и до геостационарной
орбиты. При межпланетных перелетах с солнечным парусом
имеются условия эксплуатации дальнего космоса, в основном
определяемые удаленностью от Солнца. Основным фактором,
ограничивающим ресурс эксплуатации пленочных материалов на
низких орбитах является химическое взаимодействие с компо-
нентами остаточной атмосферы, в основном атомами и ионами
кислорода. Отражающие характеристики покрытий зависят от
относительной деформации подложки и максимальны при вели-
чинах относительной деформации, близкой к пределу текуче-
сти материала, при этой деформации устраняются неточности
поверхности, связанные с допусками на ее изготовление (т. е
при эксплуатации поверхности отражателя в двухосном напря-
женном состоянии). В зависимости от расстояния от Солнца
и Земли и ориентации в пространстве на пленочную конструк-
цию падают прямой и отраженный потоки солнечной радиации
в широком спектре длин волн, приводящие к нагреву пленки и ее
структурным изменениям. В зависимости от сочетания величины
поглощательной способности солнечной радиации и степени
черноты поверхности eq в случаях одно и двухсторонней ме-
таллизации могут быть получены температуры поверхности от
Т = 270 ° С до минусовых на околоземных орбитах. При этом
из-за вращения отражателя по орбите температура изменяется
на различных участках орбиты вследствие различного углового
расположения по отношению к Солнцу. В зависимости от высоты
орбиты на материал отражателя, помимо солнечной радиации,
воздействуют:
— заряженные частицы космического галактического излуче-
ния;
218
Гл. 6. Технология изготовления пленочных отражателей
— протоны и электроны внутреннего радиационного пояса
Земли (на высоте больше 1000 км).
Галактическое космическое излучение состоит из протонов
и тяжелых ядер сверхвысоких энергий, приходящих из удален-
ных областей Галактики. Интенсивность потока 2-4,5 1/см-с. За
10 лет эксплуатации интегральная доза не превысит 250 рад и не
скажется на работоспособности пленки.
Электроны и протоны радиационного пояса Земли имеют
широкий спектр энергий. Плотность потоков электронов имеет
максимальное значение на высоте 2750 км, а плотность протонов
возрастает с увеличением высоты.
На высотах 1000-5000 км основной вклад в суммарную по-
глощенную дозу дают электроны. Скорость набора дозы и сум-
марная поглощенная доза для круговых орбит разной высоты
приведены в таблице 6.1. Там же приводятся данные по инте-
гральным потокам (флюенсам) протонов с энергией 40-500 кэВ.
Таблица 6.1.
Высота орбиты, км 1000 2000 2750 4000 5000
Скорость набора дозы, рад/день, в т.ч. за счет электро- нов 4 - 105 103 4- 105 2 - 104 5- 107 8 - 105 2- 107 106 5 -106 2 • 106
Суммарная поглощенная доза, рад за 5 лет за 10 лет 7- 108 1,4- 109 7 109 1,4- 10ю 1011 2- 1011 3,5 • Ю10 7 10ю Ю10 2 • Ю10
Плотность потока протонов, 1/см2- с 4 -102 5 - 104 105 2 - 106 107
Флюенс, 1/см2 за 5 лет за 10 лет 7 Ю10 1,3 -10*1 8 1012 1,6- 1013 1,6- 1013 3,2 • 1013 3,2- 1013 6,4- 1014 1,6- 1015 3,2 1015
Данные по изменению коэффициента зеркального отражения
и индикатрисы при радиационном воздействии отсутствуют пол-
ностью.
Таким образом, особенностью условий эксплуатации пленоч-
ного материала конструкции отражателя является комплексное
6.1. Условия эксплуатации пленочных конструкций
219
воздействие эксплуатационных факторов (постоянная нагрузка
на уровне предела текучести материала и периодически меняю-
щаяся температура от минусовых до 100 °C и факторов косми-
ческого пространства (вакуум, радиационные воздействия, оста-
точная среда атмосферы).
Их воздействие носит синергетический характер, т. е. одно-
временное воздействие двух или более факторов неадекватно
их поочередному или усиленному воздействию. Поэтому наи-
более корректными являются комплексные исследования по од-
новременному облучению материалов УФ-радиацией, протонами
и электронами с энергиями, имитирующими распределение по-
глощенной дозы по толщине материала в условиях напряженного
состояния материала и термоциклирования. Данные по проведе-
нию подобных экспериментов отсутствуют полностью.
Большой практический интерес представляют данные о стой-
кости полимерных материалов в космических условиях, накоп-
ленные за более чем 30-летнюю историю использования этих
материалов в различных орбитальных программах. Однако по
подобного рода данным чаще всего может быть сделана оценка
действия какого-либо одного или нескольких наиболее критич-
ных факторов, на фоне комплекса воздействий в целом. На-
пример, есть данные экспонирования пакета экранно-вакуумной
тепловой изоляции (ЭВТИ) на низких орбитах в течение двух
месяцев. При этом первые 3-4 слоя полиэтилентерефталатной
пленки (ПЭТФ) превратились в серое вещество, рассыпающе-
еся при малейшем прикосновении. По данным нельзя сделать
вывод о кинетике процесса, т. е. после скольких часов наступа-
ло определенное ухудшение прочностных характеристик плен-
ки, однако налицо тенденция взаимодействия с кислородом, и,
наряду с другими данными, были основания считать возмож-
ным эксплуатацию этого материала в конструкции отражателя
в условиях низких орбит в течение не более 2 суток. То же
относилось и к полиимидным пленкам. В космическом экспери-
менте «Знамя 2» телевизионная камера в течение 4 витков по
90 мин. смотрела на поверхность пленки ПЭТФ с расстояния
3 метра. Материал пленки находился под действием нагрузки
от центробежных сил, кислородного потока, солнечного нагрева
и УФ-радиации. На последнем витке можно было с телеэкрана
наблюдать эффект текучести материала конструкции отражателя
по увеличению кривизны боковых сторон отдельных пленочных
секторов, из которых был изготовлен отражатель. Продолжение
эксперимента сверх утвержденных 4 витков грозило разрывом
отражателя и в политическом аспекте перечеркиванием всех по-
220
Гл. 6. Технология изготовления пленочных отражателей
ложительных результатов эксперимента. При этом максимальная
нагрузка была в 20 раз меньше предела упругой деформации
при 100°С, измеренного в наземных лабораторных условиях
в отсутствии остальных факторов воздействия.
Указанные факты указывают на необходимость чрезвычай-
но осторожного подхода к выбору прочностных характеристик
пленочных материалов, определяющих ресурс эксплуатации кон-
струкции, ее управляемость в пространстве, качество отражаю-
щих характеристик поверхности.
6.2. Пленочные материалы, их характеристики
К полимерным пленкам (ПП) на основе синтетических поли-
меров относятся: полиолефиновые, полиимидные, поливинилхло-
ридные, полистирольные, полиэтилентерефталатные и другие.
Пленки толщиной от 0,005 до 0,1 мм получают в основном
следующими способами: поливом раствора на полированную по-
верхность, поливом дисперсии полимера на полированную по-
верхность, экструзией расплавов, мокрым формованием, каланд-
рированием.
Отечественная промышленность выпускала пленку:
— полиэтилентерефталатную ПЭТФ (ГОСТ 24234-80);
— политетрафторэтиленовую ПТФЭ (ГОСТ 24222-80);
— полимитнофторопластовую ПМФ (ТУ 6-19226-83);
— поликарбонатную (ТУ 6-05-1668-80);
— полиимидную ПМ-1ЭУ (ТУ-6-19,121-79)
Зарубежная промышленность выпускает аналогичные пленки.
Так, в частности, фирма «Du Pont» (США) выпускает поли-
пиромеллитимидную пленку «Каптон», близкую по свойствам
к пленке ПМ. Выпускается пленка «Майлар» — аналог пленки
ПЭТФ. Фирма «Нитто электрик» и «УБЭ индастриз» (Япония)
разработали аналогичные «Каптону» полимерные пленки с тор-
говыми марками «У-фильм» и «Упилекс», отличающиеся более
высокими характеристиками по комплексу свойств. Пленка «кап-
тон» шириной менее 100 мм поставлялась из-за рубежа партиями
по несколько сотен тонн в год для электроизоляции изделий
электротехнической промышленности. Аналогичная пленка ши-
риной более 500 мм и толщиной 8-12 мкм считалась за рубежом
стратегическим материалом и не поставлялась для нужд отече-
ственной промышленности. Есть основание считать ее основным
полимерным материалом в программе СОИ. По комплексу физи-
ко-механических характеристик и технологичности для создания
космических отражателей на основании рекомендаций отече-
6.2. Пленочные материалы, их характеристики 221
ственных и зарубежных специалистов выбраны два материала —
пленка ПЗТФ (аналог «майлар») и пленка ПМ (аналог «каптон»).
В работе [НО] на основании анализа отечественных и за-
рубежных исследований по двум выбранным материалам, теоре-
тическому исследованию методами квантовой химии структуры
связей в материалах и собственным экспериментальным измере-
ниям сделан вывод о более высоких механических характери-
стиках пленки ПЭТФ в области температур, не превышающих
200 ° С, по сравнению с пленкой ПМ (предел упругой деформа-
ции, предел прочности, усилие на раздир); близких характери-
стиках по радиационной стойкости, большей стойкости полии-
мида к УФ-излучению и сильному отличию в термостойкости.
Рекомендуется использование пленки ПЭТФ при температуре
эксплуатации изделий до 200 ° С в условиях космоса, и пленки
ПМ при температуре до 300 ° С. Отмечено, что металлизация
улучшает прочностные и радиационные характеристики пленок.
В проекте «гелиоротора» [106] в 1978 году указывалось, что
после длительного анализа свойств пленочных материалов для
межпланетного перелета в течение нескольких лет предпочтение
было отдано «каптону», как единственному материалу, пригодно-
му для этих целей.
При разработке проектов солнечных парусных кораблей для
полета к Марсу в честь 500-летия открытия Америки авто-
ры настоящей работы имели личный контакт с приезжавшими
в Москву американскими и французскими специалистами, имев-
шими прямое отношение к этим разработкам, на предмет выбора
и обеспечения разработок пленочными материалами. Француз-
ская сторона однозначно использовала «каптон» толщиной 8 мкм
[112]. В проекте США в качестве основного материала исполь-
зовался также «каптон», в качестве альтернативы предлагался
«майлар» с двухсторонней металлизацией [113].
Высокая термическая стабильность полиимидных пленок,
в сочетании с высокой радиационной стойкостью [114], находят
широкое применение в различных областях техники, в том числе
и аэрокосмической. При выполнении космической программы
«Апполон» металлизированная алюминием пленка «каптон» была
использована для покрытия костюмов космонавтов для выхода
в космическое пространство, а также для защитного покрытия
лунных модулей кораблей «Апполон-10» и «Апполон-11» и изо-
ляции проводов в лунной кабине [115]. Еще в 1977 году авторы
[116] предлагали полиимидную пленку для создания солнечного
паруса
222
Гл. 6. Технология изготовления пленочных отражателей
В разработках ДКБА для решения кратковременных при-
кладных задач в течение многих лет использовалась пленка
ПЭТФ. Основные физико-механические характеристики пленок
ПЭТФ и ПМ при нормальных условиях представлены в таб-
лице 6.2.
Таблица 6.2.
наименование показателя единица измерений материал
полиэфир ПОЛИ И МИД
Плотность кг/м3 1,38- 103 1,39-1,42- 103
Разрушающее напряжение Па
продольное 2,12 - 108 1,31 • 108
поперечное 2,78 108 1,32- 108
Относительное удлинение при разрыве %
продольное 113 17
поперечное 85 12
Сопротивление раздиру при толщине 12 мкм Н/м
продольное 5,0 1,4
поперечное 6,0 1,3
Модуль упругости Па 3- 109 3.1 109
Прочностные характеристики (предел упругой деформации as
и предел прочности <тБ) при Т = 100° С для двухсторонней ме-
таллизированной алюминием полиимидной пленки ПМ-1ЭУ-ДА
приведены в таблице 6.3.
Таблица 6.3.
Ко марка пленки ТОЛЩ. мкм направл. испытаний механические свойства
crs, Па е,% егв, Па е,%
1. ПМ-1ЭУ-ДА 8 продольное 2,5 107 1,8 7,11 • 107 20
поперечное 2,5 • 107 1,8 7,55 107 22
2. ПМ-1ЭУ-ДА 12 продольное 2,5 107 1,5 1,041 108 30
поперечное 2,5 • 107 1,5 0,917 108 29
3. ПМ-1ЭУ-ДА 20 продольное 2,5 107 1,3 1,06- 108 50
поперечное 2,5 107 1,3 1,023- 108 48
6.3. Экспериментальное определение коэффициента отражения 223
Тепловые радиационные характеристики металлизированных
пленок определяются по ОСТ-92-0909-69:
— поглощательная способность солнечной радиации As,
— полная нормальная степень черноты £0
Таблица 6.4.
параметр состояние поверхности пленка пленка
ПЭТФ-ОА ПМ-1ЭУ-ОА
As с металлизацией 0,15 0,13 - 0,15
Ео 0,05 - 0,06 0,03 - 0,04
As без металлизации 0,17 0,28 - 0,31
Ео 0,2 0,49 - 0,54
6.3. Экспериментальное определение коэффициента
зеркального отражения металлизированной
полимерной пленки при двухосном
плосконапряженном состоянии
Основной задачей космического отражателя (КО) является
создание максимальной освещенности в обслуживаемом районе
Освещенность зависит от площади отражателя, высоты орбиты,
положения Солнца, угла места и прямо пропорциональна коэф-
фициенту зеркального отражения (КЗО).
Под КЗО в расчетах КО понимается отношение отраженно-
го потока солнечного света в угле 31'59" ± 32" (0,00931 рад)
к полному падающему потоку. Угол 31'59" ±32" (0,00931 рад)
соответствует угловой расходимости солнечного света. В общем
случае среднее значение КЗО, %, отнесенное ко всей площади
отражателя можно записать в виде:
X = 1/S* • /хп • Хф • Хм • Хс ’ dS,
где S — площадь КО, хп — КЗО отражающего покрытия; хф —
КЗО динамической макроформы КО; хм — КЗО материала; ус —
КЗО статической макроформы КО;
Хп = 1 - е - q,
где е — степень черноты покрытия; q — коэффициент пропуска-
ния.
Для алюминиевых покрытий полимерных пленок ве-
личина хп равна 0,90-0,95 и определяется толщиной
224
Гл. 6. Технология изготовления пленочных отражателей
и сплошностью покрытия, т. е. величиной q. Для А1
е = 0,05.
Хф — определяется деформацией поверхности КО при управ-
лении его ориентацией. В данном случае он не рассматривается.
Хс — определяется допусками на раскрой и при углах между
отдельными участками КО и его базовой плоскостью в напря-
женном состоянии меньшими 0, 16', его можно принять равным
единице.
Исходя из условий эксплуатации и целевого применения
космических пленочных рефлекторов, формируемых центробеж-
ными силами, были сформулированы технические требования
к пленочным материалам, одним из которых было требование по
обеспечению коэффициента зеркального отражения в пределах
0,5-0,7.
Была разработана и изготовлена специальная эксперимен-
тальная установка по созданию двухосного напряженного состо-
яния пленочных образцов в областях упругой и пластической
деформаций.
Проведены экспериментальные исследования коэффициента
зеркального отражения полиамидных металлизированных пленок
толщиной 12 мкм. Изучалось влияние на коэффициент зеркаль-
ного отражения натяжения пленки, наличие на ней складок
и швов при трех углах падения светового излучения.
Полученные результаты относятся к экспериментальному
определению хм> точнее произведения хп • Хм- Но т. к. хп бли-
зок к единице, то результаты можно относить к хм- Измеренный
Хм характеризует КЗО материала в мелком масштабе (диаметр
исследуемой области был <4 — 30 мм).
6.3.1. Описание экспериментальной установки
В связи с тем, что металлизированные полимерные пленки
предназначены для работы в световом потоке реального Солнца,
установка для измерения КЗО должна обеспечивать соответ-
ствие условий измерения и реальных условий эксплуатации.
Оптическая схема экспериментальной установки изображена
на рис. 6.1. Световой поток, формируемый имитатором солнечно-
го излучения (/), направляется под углом ап на образец пленки
установленный в специальном устройстве (2), обеспечивающем
регулируемое равномерное натяжение. Отраженный от образца
световой поток регистрируется измерительным фотометром (3),
установленным под тем же углом ап относительно нормали к по-
верхности образца.
6.3. Экспериментальное определение коэффициента отражения 225
Рис. 6.1. Оптическая схема измерения КЗО: 1 — имитатор Солнца; 2 —
устройство натяжения образцов пленки; 3 — измерительный фотометр ЭФО-1;
4 — эталонное оптическое зеркало
В имитаторе Солнца источником излучения «S» служит ки-
нопроекционная лампа. Световой поток от лампы, пройдя через
линзовый конденсор и диафрагму di, формируется двухлинзовым
объективом с фокусным расстоянием /ф — 1000 мм. Диаметр
выходного пучка излучения равен 100 мм, угловая расходимость
2(3 — 31'30" (она определяется диаметром диафрагмы di, что
соответствует среднему угловому размеру реального Солнца).
Для ограничения площади измеряемой поверхности образцов
пленки перед объективом измерительного фотометра (3) установ-
лена диафрагма dg, которая ограничивает измеряемый световой
поток. Диаметр диафрагмы d% равен 30 мм.
Световой поток, ограниченный диафрагмой d%, фокусируется
объективом фотометра в плоскости диафрагмы d%, которая опре-
деляет угловое поле зрения 2(3 фотометра на уровне 30' ± 10". За
диафрагмой d^ установлен фотоприемник ФЭУ, электрический
сигнал с которого поступает в блок регистрации.
Для обеспечения точного направления светового потока в из-
мерительную диафрагму d% в фотометре имеется визуальный ка-
нал наблюдения, через окуляр которого контролируется точность
совмещения диска «Солнца» и измерительной диафрагмы d%.
Имитатор Солнца и измерительный фотометр установлены
в специальных координатно-поворотных устройствах, позволяю-
щих задавать углы ап с точностью ±1'.
8 Г. Г. Райкунов и др.
226
Гл. 6. Технология изготовления пленочных отражателей
Для контроля стабильности светового потока излучателя
(имитатора Солнца) и обеспечения юстировки перед каждым
циклом измерений применялось эталонное оптическое плоское
зеркало (4), коэффициент зеркального отражения (КЗО) которо-
го был измерен на этой же установке для углов ап = 30 °, 45 °,
60 °. КЗО эталонного зеркала не зависит от углов ап и равен
0,906.
Изготовлено устройство, предназначенное для исследования
отражающей способности покрытий на пленочных материалах
при их контролируемом и регулируемом натяжении.
Устройство обеспечивает равномерное двухосное напряжен-
ное состояние, контролируемое в области упругих и пластиче-
ских деформаций пленочных материалов на полимерной основе
(пленки ПМ, каптон и т. д.).
Принципиальная схема изображена на рис. 6.2.
Рис. 6.2. Схема устройства по двухосному натяжению пленки: а) исходное
положение нажимного фланца; б) рабочее положение нажимного фланца; 1 —
исследуемая пленка; 2 — нажимной фланец; 3 — верхний крепежный фланец;
4 — нижний крепежный фланец; 5 — индикатор перемещения нажимного
фланца; 6 — индикатор перемещения, регулирующий сжатие пружины; 7 —
штурвал поджатия; 8 — пружина поджатия
Принцип работы: исследуемая пленка (/) крепится через кре-
пежные фланцы (3), (4), обеспечивающие первоначальное раз-
глаживание нажимного фланца пленочного образца по принципу
на «пяльцах» и затем зажимает пленку по рабочим зажимным
плоскостям. Вращением штурвала поджатия (7) к пленке под-
водится нажимной фланец (2). Усилие тарировочной пружины
поджатия (3) регистрируется по ходу штока индикатора переме-
6.3. Экспериментальное определение коэффициента отражения 227
щений (6), а высота подъема нажимного фланца регистрируется
по ходу штока индикатора перемещений нажимного фланца (2).
Исследования проводились на полиимидной пленке с одно-
сторонней металлизацией марки ПМ-1ЭУ-ОА ТУ 17 Латвийской
ССР 0306-87 толщиной 12 мкм.
6.3.2. Методика проведения оптических измерений
Исследования зависимости КЗО полиимидной пленки от ее
натяжения проводились на вышеописанной экспериментальной
установке. КЗО измерялся при трех углах падения светового из-
лучения ап = 30° , 45° , 60° . Угол ап отсчитывался от нормали
к поверхности пленочного образца (см. рис. 6.1).
Исследуемый пленочный образец закреплялся в устройстве
по его натяжению (рис. 6.2). Затем вращением штурвала под-
жатия проводилось предварительное натяжение пленки, целью
которого было исключение ошибок вычисления натяжения плен-
ки вносимых неточностью предварительного закрепления пле-
ночного образца в установке, некачественным предварительным
разглаживанием пленочного образца, наличием крупных складок
и начальным провисанием пленочного образца. Предварительное
натяжение констатировалось началом движения индикатора пе-
ремещений, регулирующего сжатие пружины натяжения пленки.
Для контроля стабильности светового потока излучателя
(имитатора «Солнца») и обеспечения юстировки перед каждым
циклом измерений применялось эталонное оптическое плоское
зеркало (4), коэффициент зеркального отражения которого был
измерен на этой же установке для углов ап — 30°, 45°, 60°
и равен Кэ = 0,906.
Таким образом, КЗО определяется отношением лучистого по-
тока, отраженного от испытуемого образца, к лучистому потоку,
падающему на образец.
Измерение КЗО производится путем определения отношения
фототоков приемника излучения, пропорциональных отраженно-
му и падающему потокам
КЗО =/"//',
где I" — фототок, вызываемый отраженным лучистым потоком;
al' — фототок, вызываемый падающим лучистым потоком.
Вращением штурвала поджатия проводилось дальнейшее на-
тяжение пленки с определенным шагом. Для каждого шага
проводилась регистрация показания фотометра I" и измерение
индикаторов перемещения, регулирующего сжатие пружины F
8*
228 Гл. 6. Технология изготовления пленочных отражателей
и индикатора подъема нажимного фланца / и далее по методике,
указанной выше, проводилось вычисление КЗО.
6.3.3. Результаты измерений
Проведенные экспериментальные исследования показали:
1) Максимальные значения КЗО чистой полиимидной плен-
ки с односторонней металлизацией промышленного изго-
товления толщиной 12 мкм лежат в пределах 0,58-0,66
(рис. 6.3).
2) Минимальные значения КЗО чистой полиимидной пленки
с односторонней металлизацией промышленного изготовле-
ния толщиной 12 мкм лежат в пределах 0,465-0,471.
3) Максимальные значения КЗО бессистемно мятой полии-
мидной пленки с односторонней металлизацией промыш-
ленного изготовления толщиной 12 мкм лежат в пределах
0,22-0,23.
4) Минимальные значения КЗО бессистемно мятой полии-
мидной пленки с односторонней металлизацией промыш-
ленного изготовления толщиной 12 мкм лежат в пределах
0,12-0,13.
6.4. Исследования ползучести и прочности полиимидных пленок 229
5) КЗО полиимидной пленки растет от угла падения светового
потока, отсчитываемого от нормали к поверхности пленки.
6) КЗО полиимидной пленки растет с увеличением ее натяже-
ния (относительного удлинения) выходя на плато в конце
зоны ее упругой деформации (рис. 6.3).
7) При натяжении пленки в области пластической деформа-
ции наблюдается медленное снижение КЗО.
8) Швы значительно снижают КЗО.
9) Складки незначительно снижают КЗО.
10) При сканировании пленочного полотна вдоль шва по на-
правлению светового потока КЗО были ниже, чем при
сканировании по шву перпендикулярно световому потоку.
11) При ширине складки 10 мм ее влияние на КЗО пленки
распространяется приблизительно на 100 мм в сторону его
снижения.
12) КЗО образца с крестообразным швом в точке на рассто-
янии 50 мм был незначительно ниже, чем КЗО чистого
образца.
13) При нагружении пленки существует определенное время
установления натяжения, в течение которого наблюдались
колебания КЗО на ±1 %.
14) Относительная деформация экспериментального пленочно-
го образца в области упругости ~ 0,8% При повторных
нагружениях наблюдается рост ее величины.
15) Наличие швов и складок приводит к увеличению относи-
тельной деформации пленочного образца в зоне упругости.
Таким образом, эксперименты показали, что
— двухосное равномерное натяжение пленки позволяет значи-
тельно увеличить КЗО;
— увеличение угла падения светового излучения улучшает
зеркальные характеристики пленки;
— двухосное равномерное натяжение пленки позволяет рас-
править складки и минимизировать их влияние на ее КЗО.
6.4. Экспериментальные и теоретические
исследования ползучести и длительной прочности
полиимидных пленок
6.4.1. Метод оценки долговечности
На экспериментальной базе ВНИИГОССТАНДАРТ с привле-
чением кафедры «Деталей машин» МАИ были проведены экспе-
риментальные исследования ползучести, длительной прочности
и усталости полиимидных пленок, разработана структурно-фено-
230 Гл. 6. Технология изготовления пленочных отражателей
менологическая модель оценки и прогнозирования долговечности
при изменяющейся циклической температуре и постоянном си-
ловом нагружении. Предложен метод ускоренных испытаний на
долговечность при названных условиях [155]. В работе ставилась
задача обосновать выбор прочностных характеристик пленочных
материалов космических отражателей при длительном ресурсе
эксплуатации, особенностью которого является циклически из-
меняющаяся температура, связанная с изменяющейся ориентаци-
ей отражателя на орбите по отношению к Солнцу, и постоянная
нагрузка. Для тонких полимерных пленок оценку ползучести при
циклически изменяющейся температуре предложено проводить
на основании уравнения:
£с = (l/crn)1/,m[TM(l + атв) - (Тв - Тн)1/т + (Тв - Тн)/Е,
где Тв — верхняя температура цикла, Тв — нижняя температура
цикла, Тм — средняя температура цикла; с, т, а, в — постоянные
материала, определенные из диаграммы мгновенного температур-
ного деформирования и кривой ползучести.
На основании экспериментов получено, что относительная
деформация ползучести при разрушении постоянна и составляет
70-80% от деформации разрушения при кратковременном нагру-
жении.
Время до разрушения, т. е. долговременность, определяется
выражением:
ТР = BQ/TM(K - (Тв, -Тм)/Е)м
где Bq — а/см; А = )еР|.
Скорость ползучести определяется как
ес = авТм/Е//т1“в.
6.4.2. Экспериментальное оборудование и методика ис-
пытаний
Испытания на одноосное растяжение пленочных образцов
проводились на модернизированной испытательной машине
АИМА-5-2, у которой была отсоединена рычажная система
и переделаны захваты. Для нагружения образцов прямым
нагружением были изготовлены специальные маломерные грузы-
диски от 200 до 500 г. Разъемные захваты изготавливались
из текстолита толщиной 10 мм. К внутренней стороне зажима
наклеивалась накладка из писчей бумаги, что, как показал
6.4. Исследования ползучести и прочности полиимидных пленок 231
опыт, является оптимальным материалом. Использовалось
10 модернизированных таким образом машин АИМА-5-2.
Учитывая, что в реальных условиях эксплуатации пленочные
материалы работают в условиях плоского двухосного напряжен-
ного состояния, было разработано, изготовлено и отработано
специальное приспособление для закрепления круглых образцов
из тонких пленок, и испытаний пленочных образцов под внут-
ренним давлением газа (аргона) в диапазоне от 0,1 до 10 атм
(рис. 6.4.) Деформация испытуемого образца измерялась инди-
катором часового типа, установленным в середине образца.
Рис. 6.4. Установка для исследования ползучести пленки
Температура испытаний обеспечивалась с помощью нагрева-
телей реостатного типа РПШ-О.6. Выход на режим до 100°С
проходил за время 20 минут и заданная температура поддержи-
валась с погрешностью ±5 ° С в течение длительного времени.
Температура контролировалась двумя термопарами «хромель-
алюмель» в местах, отстоящих на 10 мм от захватов, с помощью
электроизмерительного контактного прибора МЗЗЗК. Пленочные
образцы соответствовали ГОСТ 25,601-80.
Для проведения циклических температурных испытаний ис-
пользовалось автоматическое устройство, позволяющее поддер-
живать заданную циклическую температуру.
232
Гл. 6. Технология изготовления пленочных отражателей
Проводились следующие виды испытаний при одноосном рас-
тяжении и при двухосном нагружении от внутреннего давления:
— кратковременные, цель испытаний — определение разруша-
ющего напряжения и относительного удлинения;
— длительные, цель испытаний — построение диаграмм дли-
тельной прочности и кривых ползучести при постоянных
стационарных нагрузках;
— циклические (нестационарные) при ступенчатом изменении
нагрузки, цель испытаний
— оценка длительной прочности к ползучести.
В таблице 6.5 приведены параметры циклов ускоренных испыта-
ний.
Таблица 6.5.
Режим Ti (нагрев) Т2 (выдержка) тз (охлаждение) Т4 (выдержка)
I 20 мин. 20 мин. 2-20 мин. 20 мин.
2 ч 2 ч 4 ч 16 ч
8 ч 8 ч 4 ч 4 ч
II 20 мин. 0 2-20 мин. 20 мин.
2 ч 0 4 ч 18 ч
8 ч 0 4 ч 12 ч
6.4.3. Результаты испытаний
Результаты испытаний на ползучесть по режиму I пред-
ставлены на рис. 6.5 при Ттах = 75 °C за 500 часов. Данные
1
• »3
♦ 4
-пж *Т| 5
-б—1 0 —О И— ° u д Д О “О и U— 6 7-
Е, %
80
60
40
20
0 8 14 24 32 40 400 425 450 475 т, час
Рис. 6.5. Ползучесть образцов при Ттах = 75° С
1 — ст] = 0,8сгр, 2 — аг = 0,5<тр, 3 — аз = 0,35сгр, 4 — а$ = 0,Зсгр, 5 — аз =
= 0,25сгр, 6 — erg = 0,2сгр, 7 — aj = 0,11<7Р
6.4. Исследования ползучести и прочности полиамидных пленок 233
использовались для прогнозирования на 5 и 10 тыс. часов.
Ускоренные испытания на долговечность (рис. 6.6)
проводились в режиме стационарного нагружения при темпе-
Рис. 6.6. Долговечность образцов при стационарных и циклических темпера-
турных испытаниях
ратуре 20, 75, 100 °C (кривые 1, 2, 3), а также в условиях
циклического изменения температуры при Ттах = 75 ° С, 100° С
(кривые 4,5).
Прогнозирование проводилось в три этапа.
На I этапе определяется величина деформации разрушения.
За критерий работоспособности принято постоянство деформа-
ции ползучести при разрушении, т. е. ер = const при заданной
максимальной температуре цикла. Анализ экспериментальных
данных показывает:
1) деформация разрушения при длительных испытаниях
при Тисп = 20 °C в условиях стационарного, двухступенчатого
и трехступенчатого нагружения примерно одинакова и составля-
ет ер = 40-55%;
2) деформация разрушения при равномерном нагреве от 20° С
до 100° С и различных нагрузках на образцах практически по-
стоянна и равна е = 75%;
3) в условиях кратковременных испытании Тисп = 75 °C, £р =
= 80%, при длительных циклических температурных испытаниях
по режиму I £р = 70%.
В запас долговечности следует принимать наименьшую ве-
личину, полученную при различных режимах нагружения при
заданной максимальной температуре.
На II этапе проводятся ускоренные циклические испытания
с построением кривой долговечности (на базе 300-400 ч) без
доведения образцов до разрушения (кривые 4 и 5, рис. 6,6).
234
Гл. 6. Технология изготовления пленочных отражателей
Испытания №1-3 доведены до разрушения.
Испытания №4-7 без разрыва образцов прекращаются при
установлении постоянной скорости ползучести.
На втором этапе определяется предел длительной прочности
для заданной долговечности, например, для 5 или 10 тыс. часов.
Результаты прогнозирования приведены на рис. 6.6. (кривые
4', 5').
Приведенные цифровые данные меньше результатов, полу-
ченных на основе соотношений длительной прочности, использу-
емых при прогнозировании металлических материалов. Следует
отметить, что ресурсные материаловедческие исследования свя-
заны с большим объемом длительных испытаний, проводимых
одновременно на большом количестве образцов. Аналогичные
испытания следует продолжить для набора статистики и увели-
чения продолжительности на цельных образцах и повторить весь
комплекс работ на сварных и клееных соединениях. Прогнозиро-
вание долговечности пленочного материала на ресурс 5-10 лет
(50-100 тыс. часов) при испытаниях в течение времени поряд-
ка 1000 часов безусловно сопряжены с определенным риском.
Требуется обеспечение больших запасов прочности при констру-
ировании изделий, покрывающих неопределенность прогнозиро-
вания.
6.5. Радиационная стойкость пленочных материалов
Работоспособность материала принято оценивать по измене-
нию свойств при облучении ускоренными электронами. Экспе-
риментальные данные по изменению механических (<тр) и опти-
ческих (Rs — отражающая способность) свойств полиимидной
пленки при облучении электронами энергий 5-10 МэВ от мощ-
ности дозы облучения приведены на рис. 6.7с [111]. В реальных
условиях эксплуатации отражателей основной вклад в поглощен-
ную дозу дают электроны с энергиями десятки и сотни КэВ и бо-
лее низкой скоростью набора дозы. Изменение свойств металли-
зированной полиимидной пленки может существенно отличаться
от приведенных на рис. 6.7с в сторону ухудшения свойств.
Имеются данные по воздействию протонов (Е 500 КэВ) на
механические свойства металлизированной полиимидной пленки
и данные по воздействию УФ-радиации на механические свой-
ства (до 200 эсс) и на интегральный коэффициент отражения
солнечной радиации (до 600 эсс) [111]. Эти данные приведены
на рис. 6.76 и 6.7в.
6.5. Радиационная стойкость пленочных материалов
235
Рис. 6.7. Радиационные свойства полиимидных пленок:
а) изменение свойств металлизированной полиимидной пленки при воздей-
ствии электронов;
б) изменение свойств металлизированной полиимидной пленки при воздей-
ствии протонов;
в) изменение свойств металлизированной полиимидной пленки при воздей-
ствии ЭМИ Солнца
Пленка ПЗТФ по данным [ПО] устойчива к действию элек-
тронного облучения высоких (более 1 МэВ) энергий, практиче-
ски не изменяет своих свойств при облучении дозами порядка
Ю10 рад, в то же время интенсивно поглощает коротковолновую
часть излучения. Приводятся данные, свидетельствующие о раз-
рушении пленки под действием УФ-излучения в лабораторных
236
Гл. 6. Технология изготовления пленочных отражателей
условиях с образованием многочисленных газовых продуктов,
в том числе толуола и бензальдегида. Данные по ухудшению
механических свойств полиэтиленовых пленок под действием
УФ-излучения и выдержке в озоне обсуждаются в [115].
Рис. 6.8. Сводные данные по ухудшению прочностных и оптических характе-
ристик пленок ПМ-ДА и ПЗТФ-ДА от действия УФ-излучения
На рис. 6.8 приводятся сводные данные по ухудшению
прочностных и оптических характеристик пленок ПМ-ДА
и ПЗТФ-ДА от действия УФ-излучения.
Для пленки ПМ доза излучения приводится в эквивалентных
солнечных сутках (эсс), а для пленки ПЭТФ в эквивалентных
солнечных часах (эсч). Прочностные характеристики представ-
ляются отношением <7р/сгр0 разрушающего напряжения под дей-
ствием УФ-излучения к начальному разрушающему напряже-
нию. Имеет место существенно большая стойкость к УФ-излуче-
нию полиимидной пленки. Металлизация алюминием не значи-
тельно улучшает приведенные характеристики.
6.6. Конструкции пленочных полотнищ
Основными требованиями к конструкциям пленочных полот-
нищ ЯВЛЯЮТСЯ'
1) обеспечение возможности управляемого раскрытия;
2) обеспечение укладки во время изготовления;
3) минимум швов на единицу площади поверхности;
4) максимальное использование пленочного исходного мате-
риала (минимум отходов из-за высокой стоимости пленки);
5) возможность использования при изготовлении технологи-
ческих шаблонов и ограниченных производственных поме-
6.6. Конструкции пленочных полотнищ
237
щений для раскроя и соединения полотнищ (склейки или
сварки, автоматизированных или ручных);
6) возможность свободной откачки воздуха из любого объ-
ема укладки при вакуумировании, отсутствие в укладке
замкнутых газовых полостей.
Исторически в ДКБА первой обрабатывалась конструкция
пленочного полотнища по схеме «гармошка» (рис. 3.1), которая
в наибольшей степени из всех последующих конструкции отве-
чала вышеприведенным технологическим требованиям пп. 2-6.
Однако, как выяснилось впоследствии, не отвечала первому тре-
бованию. На последующем этапе усилия были сосредоточены на
укладке типа «патент Франции» (рис. 3.2), была разработана
техническая документация [100] на конструкцию и техноло-
гию изготовления полотнища диаметром 100 м и изготовлено
несколько полотнищ диаметрам 5 м и 20 м из пленки ПЭТФ.
При отработке изготовления выяснилась низкая технологичность
и чрезвычайная трудоемкость схемы «патент Франции». Наи-
более сложным оказалось изготовление последнего продольного
шва из-за набегавших технологических допусков.
На третьем этапе работ отрабатывались разрезные полотни-
ща, конструкция которых была принципиально проще и техно-
логичнее цельных полотнищ [103]. Для эксперимента «Знамя 2»
было изготовлено 3 комплекта катушек разрезного полотнища
D=25 м и два комплекта катушек с полотнищем D=20 м.
Конструкция отдельного сектора заимствовала схему укладки
«вниз-вверх» из схемы «патент Франции», с тем лишь отличием,
что линии складок имели радиальное, а не касательное направ-
ление. Каждый сектор наматывался на собственную катушку.
Конструкция была успешно раскрыта в космическом эксперимен-
те «Знамя 2». Однако сами специалисты ДКБА признали заим-
ствование схемы укладки «вниз-вверх» из «патента Франции»
нецелесообразным из-за низкой технологичности для дальней-
ших разработок разрезных конструкций, и в дальнейшем плани-
ровалось изготовление разрезного варианта отражателя D=75 м
для КЗ «Знамя 3» с секторами, выполненными из разных по-
лотнищ (рис. 6.9), укладка которых не сопряжена с чрезвычай-
но трудоемким ручным процессом расправления углов укладки
«вниз-вверх» (рис. 6.10).
Для сплошного отражателя рассматривалась конструкция
ДКБА, предложенная еще в 1989 году в технических предложе-
ниях по солнечному парусу [104] (рис. 3.4). Конструкция собира-
ется из предварительно изготавливаемых секторов из тангенци-
ально расположенных полотнищ пленки. Сектора укладываются
238
Гл. 6. Технология изготовления пленочных отражателей
Рис. 6.9. Сектора, выполненные из отдельных полотнищ, уложенных на
катушки.
а) формирование складок на секторе;
б) формирование сектора в ленту;
в) начало намотки ленты на катушку;
г) окончание намотки ленты на катушку;
д) варианты укладки сектора на катушку;
1 — массив сектора; 2 — угловые петли
предварительно в «гармошку» параллельно швам в процессе из-
готовления и элементы «гармошки» соединяются между собой
в процессе окончательной сборки и укладки на основной барабан
(рис. 3.5). Середины каждого полотнища сектора подтягивают-
ся к центральному барабану тросом, продетым через отверстие
в центре каждого полотна (рис. 6.11). Трос используется затем
для управляемого роспуска полотнища.
6.6. Конструкции пленочных полотнищ
239
13 2 13 1 1
Рис. 6.10. Укладка «вниз-вверх» («Патент Франции»): 1 — внешние образую-
щие секторов; 2 — центральный барабан; 3 — внутренние образующие секторов
Рис. 6.11. Сектора, подтягиваемые к центральному барабану тросом, продетым
через отверстие в центре каждого полотна
а) укладка сектора в ленту;
6) сборка и соединение секторов;
в) укладка концов соединенных секторов;
г) отражатель в собранном виде;
240 Гл. 6. Технология изготовления пленочных отражателей
Недостатком такого способа является неизбежность скольже-
ния конструкции сектора при раскрытии по тросу с неизвестным
трением и возможность заедания на микрошероховатостях троса
или прорезания люверс полотнищ. Рассматривается вариант пет-
ли из двух тросов, переброшенной через укладку. Внешняя петля
исключает механизм скольжения укладки по тросу в процессе
раскрытия, однако на последних этапах раскрытия при несим-
метрии конструкции, связанной с технологическими допусками,
не исключается возможность потери устойчивости схемы, ме-
нее опасная в свою очередь при большом количестве секторов
(8, 12, 16).
Проводились работы по наземной модельной отработке эта-
па раскрытия конструкции, которая позволит принять оконча-
тельный вариант схемы. Из 4 возможных вариантов укладки
«хвостов» («змейка», «в мешке», намотка на отдельные катушки,
спиральная намотка на барабан) после детальных проработок
как конструкции полотнища, так и агрегата его раскрытия, пред-
почтение может быть отдано варианту со спиральной намоткой.
Этот вариант максимально прост в технологическом отношении,
не требует второго яруса тросов управляемого роспуска (что
практически вдвое усложняло конструкцию агрегата раскрытия
из-за необходимости полного дублирования тросов, катушек,
приводов), не ставит проблемы уничтожения контейнера и тросов
первого яруса после раскрытия. Поскольку динамика разворачи-
вания «хвостов» из спиральной намотки не является полностью
управляемой, то сложность процесса ее организации перенесе-
на на тросовый маховик, т. е. в задаче трех вращающихся тел
(отражателя, корпуса корабля и маховика) управление на этапе
разворачивания будет вестись за счет характеристики привода
вращения и скорости выпуска тросового маховика. Организация
управляемого выпуска «хвостов» путем периферийного бандажа
или зацепления каждого конца «хвоста» тросом также требо-
вала дублирования конструкции агрегата раскрытия и вводила
неисследованый процесс относительного скольжения в процессе
разворачивания жгутов пленки относительно друг друга, что
неизбежно должно было сопровождаться задирами на швах,
нарушением качества отражающей поверхности, возможностью
сбивания всей укладки в какую-либо сторону и появлению дис-
баланса.
В конструкцию полотнищ, формируемых центробежными си-
лами, входят тросовые элементы крепления по вантовой схеме
к центральному ведущему барабану (рис. 1.4) как в разрезной,
6.6. Конструкции пленочных полотнищ
241
так и в цельной схеме отражателя, и тросовые элементы крепле-
ния секторов отражателя между собой в разрезной схеме.
Во всех зарубежных проектах для натяжения полотнища ис-
пользуется жесткий каркас, в том числе и в проекте «гелиорото-
ра» [106], где конструкция формируется центробежными силами
(лопасти длиной 7,5 км и шириной 4 м имеют каптоновую плен-
ку, натягиваемую на тонкий металлический пружинный каркас).
Эта конструкция была прототипом СПК [106], где отказались от
пружинного каркаса и ввели связь секторов-лопастей по пери-
ферийному контуру, исключив крутильные колебания лопастей,
являвшиеся большим недостатком «гелиоротора». В совместном
проекте солнечного паруса Франции и Испании [112] исполь-
зуется пленка каптон толщиной 8 мкм, площадь квадратного
паруса 4000 м2 (рис. 6.12).
Рис. 6.12. Каркасная конструкция солнечного паруса в проекте Франции
и Испании
Полотнище укладывается в квадратную стопку по схеме «гар-
мошки» по двум перпендикулярным направлениям. При окон-
чательной сборке проводится вакуумирование укладки и дости-
гается чрезвычайно высокий коэффициент укладки (отношение
объема укладки к объему материала пленки), близкий к 1. Изго-
товление ведется на площадях и оборудовании фирмы Du Pont.
Фотография наземной отработки солнечного паруса приведена на
рис. 2 4 [127]
Интересно, что приезжавший в ДКБА представитель этой
фирмы, отметил высокий технологический уровень ДКБА, близ-
кий к уровню фирмы Du Pont.
242
Гл. 6. Технология изготовления пленочных отражателей
Аналогичные конструкции на жестких каркасах из упру-
гих металлических профилей и углепластиковых ферм описаны
в [112-113]. В нашей разработке [131] на жесткую разворачива-
емую ферму из 6 лучей, выходящих из одного центра по 120 м
длиной из углепластиковых складывающихся трубок, натягива-
ется шестиугольное цельное полотнище по схеме укладки ДКБА
из пленки ПМ (рис. 5.4).
Следует отметить, что описанные разработки проводились
в конце 80-х-начале 90-х годов прошлого века. В это же время
была высказана идея объединения полотнища на орбите из от-
дельных секторов устройством типа одежная «молния». Эта идея
в дальнейшем привела к разработке агрегата раскрытия с «тяну-
щими роликами» [21, 135], где укладка должна осуществляться
с гофрами, параллельными боковой образующей сектора, которая
по предварительным проработкам показала себя не технологич-
ной. Встает задача совершенствования технологии укладки.
Подводя итог разделу, следует подчеркнуть, что выбор кон-
струкции полотнища возможен только на основе комплексного
анализа конструктивных, технологических, динамических и экс-
плуатационных вопросов как по полотнищу, так и по агрегату
его раскрытия.
6.7. Технология изготовления и укладки
Технология изготовления отдельного сектора разрезного по-
лотнища, разработанная в ДКБА с участием НПО «Энергия»
[103], начинается с разметки отдельных полотнищ (отрезов)
сектора. Затем производят оборку сектора, начиная с крайнего
отреза. Соединяя продольные швы, контролируют совпадение
технологических монтажных линий (разметок), которые наносят-
ся при раскрое полотнищ на расстоянии приблизительно 1 м друг
от друга. Таким образом, погрешность изготовления связана
с неточностью, набегающей по ширине полотнищ при их соеди-
нении (клейке или сварке) и неточности нанесения и совмещения
разметок по длине каждого отреза и определяется изготовителем
как 9-й класс точности (т. е. достаточно низкий, погрешность на
1 м длины составляет 4 мм или 0,4 %).
Одновременно со сборкой сектора производится его укладка
Соединив несколько отрезов, их сразу укладывают в пачку в ви-
де ленты продольными складками на столе, имеющем разметку
под укладку и ограничители ширины ленты. Складки фиксиру-
ются технологическими зажимами. После изготовления послед-
6.7. Технология изготовления и укладки
243
него шва сектор отражателя оказывается уложенным в пачку
в виде ленты.
При сборке сектора угловые отрезы заранее снабжаются пет-
лями усиления по контуру сектора, состоящими из ленты и нити,
выполняемых цельными по всему контуру. Укладка сектора на
катушки начинается с намотки несущих нитей. Концы нитей
маркируют, соединяют с катушкой и с концами внутренних
кромок сектора. Нити наматывают с помощью приспособления
с равномерным натягом, обеспечивая одинаковое количество вит-
ков для всех катушек. Далее производят намотку ленты уложен-
ного сектора полотна на катушку. С целью уменьшения объема
укладки и количества воздуха между слоями пленки сектора
пропускают через систему калибровочных нажимных валиков
и наматывают под натяжением на катушку.
Сектора собирают из отдельных отрезов пленки (рис 6.9)
основных и боковых. Основные отрезы выполняются с прямыми
кромками в виде прямоугольника с шириной, равной ширине
рулона пленки и длиной 7-10 м. Боковые отрезы выполняются
в виде 4-угольника со скошенными кромками. Швы отрезов
образуют на поверхности сектора сетку и выполняют роль ар-
мирующих элементов. Набор отрезов производят параллельно
биссектрисе угла сектора. Края секторов усилены лентой шири-
ной 20 мм из того же материала, из которого сделаны отрезы.
Под лентами проложены усилительные аримидные нити. В углах
сектора закреплены петли из аримидных нитей. Концы нитей от
петли соединяют с боковыми усилительными нитями и заделыва-
ют между двух слоев пленки. Конструкция углов уточняется при
проведении экспериментальной отработки элементов конструк-
ции. Используется аримидная нить сечением 10 4 м2. Несущие
нити крепят следующим образом: продевают конец нити в петлю
на внутреннем угле сектора, другой в кольцо, продетое в реборду
катушки, завязывают самозатягивающимся узлом и свободный
конец нити пришпаговывают к основной нити более тонкими
аримидными нитями.
В качестве примера отечественной разработки конструкции
и технологии изготовления приведем технологию изготовления
полностью цельного (без центрального отверстия) отражателя
диаметром D = 200-400 м [131].
Отражатель состоит из 8 одинаковых секторов 5 (рис 6.13)
и центрального полотнища 6 в форме многоугольника с количе-
ством сторон 8, который по размерам является описанным вокруг
поверхности барабана 2, на который производится укладка по-
лотна отражателя 1, заворачивание оберткой 3 и заневоливание
244 Гл. 6. Технология изготовления пленочных отражателей
технологической лентой 4 до окончательной установки в кос-
мический аппарат (рис. 6.14). Сектор 5 (рис. 6.15) собирается
из прямолинейных полотнищ рулонной пленки, направленных
параллельно основанию 7. Процесс сборки сектора из полотнищ
проходит одновременно с укладкой складками параллельно ос-
нованию 7. Швы являются ориентиром укладки (рис. 6.16).
Рис 6 13. Отражатель из 8 секторных (5) и одного центрального полотнища
(6)
Рис 6.14. Барабан (2), на который производится укладка полотна отражателя
(/), заворачивание оберткой (3) и заневоливание технологической лентой (4)
до окончательной установки в космический аппарат
Для обеспечения управляемого роспуска через все складки
насквозь протянут шнур 8 через отверстия 9. При этом сектор
оказывается как бы нанизан на шнур. Возможно использование
петли из двух шнуров, перекинутой через сектор и закрепленной
на его вершине в середине. После сборки и укладки секторов 5
(рис. 6.17) получается лента длиной, равной хорде сектора.
6.7. Технология изготовления и укладки
245
Рис 6.15. Сектор (5), собираемый из прямолинейных полотнищ рулонной
пленки с отверстиями (9), направленными параллельно основанию (7)
Рис. 6.16. Швы, являющиеся ориентиром укладки
Рис. 6.17. Сборка и укладка секторов
Таким образом изготавливаются и укладываются все сектора.
Далее производят соединение секторов между собой. Концы сек-
торов подгибают и попарно соединяют боковыми сторонами друг
с другом, начиная от основания 7 к периферии. Правильность
стыковки боковых сторон контролируют метками, нанесенными
в процессе раскроя полотнищ. После этого производят при-
стыковку отражателя к центральному полотнищу и крепление
последнего к барабану (рис. 6.18), при этом концы соединен-
ных секторов (лучей) можно намотать на поверхность барабана
(рис. 6.19а) или уложить лучи в пачку «гармошкой» (рис. 6.196).
246
Гл. 6. Технология изготовления пленочных отражателей
Также можно лучи намотать каждый на свою катушку. Ана-
логично может быть изготовлено цельное полотнище с цен-
тральным отверстием. В этом случае по внутреннему периметру
полотнища крепятся тросы, связывающие его с центральным
корпусом.
Рис. 6.18. Пристыковка отражателя к центральному полотнищу и крепление
его к барабану
Рис. 6.19. Укладка лучей: а) — спирально; б) — «змейкой»
6 8. Выбор прочностных характеристик, точность изготовления поверхности^!
Соединение элементов конструкции отражателя из пленки
ПЭТФ осуществляется стыковым швом с накладной лентой,
выполненной из односторонне металлизированной алюминиевой
пленки из того же материала. Шов может быть клеевой. В этом
случае на ленту шириной 20 мм со стороны неметаллизирован-
ной поверхности нанесен полиэфирный клеевой состав. Может
быть сварной шов. в этом случае на неметаллизированную по-
верхность наносится полимерное покрытие на основе фторполи-
меров. Для увеличения прочности шва может быть осуществлено
оба вида соединении — двусторонний шов.
При использовании полиимидной пленки применяется нахле-
сточный сварной шов. Сварка производится разогретым роликом
шириной 6-8 мм через металлизацию. Сварка ведется через
присадочную пленку — ЧМВ толщиной 15 мкм и шириной 10
и 20 мм или ленты ПКС-171 толщиной 0,06 мм и шириной 3 мм.
Нахлесточное сварное соединение выполняется односторонней
контактной сваркой на термоимпульсной сварочной установке
МСП-13 При налаженной технологии прочность шва составляет
0,8-1,0 от прочности основного материала, т. е. коэффициент
сохранения свойств 80%-100%.
Режимы сварки:
Для пленки толщиной 12 мкм 20 мкм
температура сварки, °C 210 300
время сварки, с 30 30
давление, кгс/см2 2,5 3,0
время охлаждения, мин. 3 3
6.8. Выбор прочностных характеристик, точность
изготовления поверхности
Следует отметить достаточно низкую точность изготовления,
обеспечиваемую производством ДКБА, которая соответствует
9-му классу точности (на 1 м допуск 4 мм). Известен зарубеж-
ный опыт изготовления пленочных конструкций поверхностей те-
лескопов с точностью, на порядок превышающую отечественную
на изделиях с характерным размером до 15 м. Так, с исполь-
зованием предварительного натяга и машинного раскроя фирма
Contravers (Швейцария) изготавливает поверхность пленочного
параболического зеркала диаметром 6 м с точностью 0,8 мм,
а фирма JPL (США) диаметром 15 м с точностью 1,5-1,8 мм.
248 Гл. 6. Технология изготовления пленочных отражателей
Проведенные исследования отражающих характеристик ме-
таллизированных пленок показали, что коэффициент зеркально-
го отражения достигает максимума при значениях относительной
деформации материала пленки, близкой к пределу текучести,
т. е при относительной деформации порядка 1,5-1,8 %, что почти
в четыре раза превышает погрешности, вязанные с точностью
изготовления. При этом неоднородности, связанные с неточно-
стью изготовления, практически не скажутся на отражающих
характеристиках.
Учитывая также, что требования управляемости конструк-
цией и вносимые при этом макронеровности, например, в виде
бегущей по кругу волны от действия гироскопических сил, при-
водят к необходимости обеспечения высокого натяжения пленки
в конструкции отражателей, формируемых центробежными сила-
ми. Таким образом, приходим к выводу, что существует предел,
далее которого не представляется необходимым уменьшать на-
тяжение пленки, и, как следствие, совершенствовать точность
изготовления пленочного отражателя. Сказанное в равной мере
относится к каркасным конструкциям, где необходимость натя-
жения пленки для обеспечения ее отражающих характеристик
определяет достаточно большие массогабаритные характеристи-
ки рамы для обеспечения ее достаточной жесткости [10]. Однако
динамические воздействия, приводящие к макронеровностям по-
верхности, связанные с переориентацией изделия в пространстве,
в каркасных конструкциях меньше, чем в конструкциях, форми-
руемых центробежными силами. По этой причине при совершен-
ствовании технологии нанесения покрытия и мерах, обеспечива-
ющих высокое качество подложки, может быть получен высокий
коэффициент зеркального отражения при меньших значениях
относительной деформации материала подложки. Это даст воз-
можность уменьшить жесткость каркаса и его массогабаритные
характеристики и приведет к необходимости совершенствования
технологии изготовления поверхности отражателя.
6.9. Заключение по разделу
Для различных прикладных задач могут быть использованы
два пленочных материала:
1) полиимидная пленка ПМ и полиэтилентерефталатная плен-
ка ПЭТФ. Определяющими деструкцию полимера факто-
рами на низких орбитах является остаточный кислород,
на высоких орбитах — УФ-излучение, обусловливающие
ресурс изделия.
6.9 Заключение по разделу
249
2) Максимальный коэффициент зеркального отражения полу-
чен при двухосном натяжении при деформациях, близких
к пределу упругости.
3) Прочностные характеристики пленок определяются по из-
меренным зависимостям по ползучести, длительной проч-
ности и усталости с учетом комплексного воздействия
внешних факторов.
4) Разработаны конструкции и технологии изготовления пле-
ночных полотнищ диаметром до 200 м.
Глава 7
РАЗРАБОТКА ФОРМИРУЕМЫХ
ЦЕНТРОБЕЖНЫМИ СИЛАМИ СОЛНЕЧНЫХ
БАТАРЕЙ
7.1. Ожидаемые результаты и их применение
В настоящем разделе приводится обоснование подходов и на-
учно-технических принципов создания космических солнечных
батарей (СБ) нового поколения из аморфного кремния (a-Si) на
основе бескаркасных тонкопленочных конструкций, формируе-
мых центробежными силами, в которых предполагается обеспе-
чить ряд существенных преимуществ по сравнению с аналогами,
в том числе:
— 10-кратное увеличение удельной мощности по сравнению
с наилучшими аналогами (не менее, чем 1000 Вт/кг);
— наилучшая компонуемость в транспортном состоянии;
— наименьшая стоимость из-за отсутствия затрат на созда-
ние и отработку жесткого каркаса и в 10 раз меньшей
стоимости аморфно-кремниевой структуры по сравнению
с аналогами;
— возможность гибкого изменения размерности солнечной ба-
тареи;
— высокая надежность для автономной работы на ресурс
20 лет;
— малая деградация на конец ресурса, высокая радиационная
стойкость;
— простота конструкции, возможность быстрого изготовле-
ния, а также наземной и орбитальной отработки;
— возможность использовать вращающуюся солнечную бата-
рею в качестве силового гироскопа и передать ей частично
функции системы управления ориентацией аппарата отно-
сительно центра масс;
— возможность подбора динамических параметров, при кото-
рых вращающаяся солнечная батарея с точки зрения управ-
ления КА аналогична жесткой статической конструкции.
Такие батареи могут использоваться для космических аппа-
ратов размерностью от малых спутников до солнечных электро-
станций мощностью порядка 1 ГВт (109 Вт), включая энерго-
7.2. Основные особенности разработки конструкций 251
системы для освоения Луны, где требуются масштабные элек-
тростанции, работающие в условиях глубокого вакуума и по-
ниженной гравитации, а также для полетов к Марсу и другим
планетам.
7.2. Основные особенности разработки формируемых
центробежными силами конструкций для пленочных
солнечных батарей КА
7.2.1. Невозможность использования ранее разработан-
ных для космического эксперимента «Знамя 2» конструкций
полотнища и агрегата раскрытия
Конструкция, реализованная в эксперименте «Знамя 2», яв-
лялась моделью солнечного паруса и отвечала его специфике
(см. Глава 2, рис. 2.6). Конструкция состояла из отдельных
секторов, скрепленных по периферии, для возможности управ-
ления парусом в пространстве относительно центра масс путем
изменения угла наклона сектора в его основании. В соответствии
с «разрезной» концепцией паруса был создан агрегат раскрытия,
в котором каждый сектор укладывался на отдельную катушку,
объединенную с другими аналогичными катушками по числу
секторов электроприводом, обеспечивающим независимую от ос-
новного привода вращения скорость роспуска всех секторов.
Организовывалась так называемая «управляемая» схема раскры-
тия, когда математическим моделированием подбирались режи-
мы работы двух приводов (вращения и роспуска), обеспечиваю-
щие устойчивое и упорядоченное, без недопустимых колебаний,
развертывание всех секторов конструкции в единое разрезное
скрепленное по внешнему контуру круговое полотнище. Устой-
чивости и упорядоченности процесса раскрытия способствовало
использование «падающей» нагрузочной характеристики элек-
тропривода вращения и специальный способ укладки пленочных
секторов на катушки. Каждый сектор перед намоткой на ка-
тушку складывался гармошкой относительно своей продольной
оси. Такой способ укладки был результатом длительных экспе-
риментальных и технологических исследований, т. к. оказалось,
что из огромного числа вариантов укладок лишь очень огра-
ниченное число может быть использовано для задачи форми-
рования центробежными силами и еще меньше технологичны,
т. е. могут быть изготовлены даже на очень специализированном
производстве Необходимость использования «падающей» нагру-
зочной характеристики электропривода вращения (зависимости
вращающего момента от угловой скорости) следовала из общего
252
Гл. 7. Разработка солнечных батарей
в машиноведении принципа обеспечения устойчивости работы
привода на нагрузку.
Реализованная в эксперименте «Знамя 2» «разрезная» кон-
струкция пленочного полотнища обладала одним существенным
недостатком, исключающим возможность перенесения ее на СБ
Это отсутствие растягивающих тангенциальных напряжений,
приводивших к продольной волнистости пленочной поверхности
каждого сектора (см. Глава 2, рис. 2.6). В применении к сол-
нечному парусу это обстоятельство не имело существенного
значения, поскольку тяга паруса слабо зависит от волнистости
поверхности. Но для СБ это недопустимо, поскольку резко сни-
жает выработку электроэнергии.
7.2.2. Принципиальные особенности организации каче-
ства поверхности для конструкционной пары с сильно отли-
чающимися модулями упругости
Для пленочных СБ вопрос качества поверхности полимерной
подложки является принципиальным и определяющим. Здесь
имеет место стеклоподобное полупроводниковое покрытие и по-
лимерная подложка. Эта конструкционная пара обладает силь-
но отличающимися по величине модулями упругости (модулями
Юнга). Сильно удлиняющийся полимер с низким модулем упру-
гости и почти не удлиняющийся полупроводник с высоким мо-
дулем упругости. Такая конструкционная пара может существо-
вать только в двухосном напряженно-деформированном состоя-
нии пленки полимера, при котором осуществлялось напыление
стеклоподобного полупроводника. При изменении этого состоя-
ния произойдет отслоение разномодульных структур, или, что
более вероятно, растрескивание при растяжении и вспучивание
при сжатии более тонкого стеклоподобного покрытия. Примене-
ние промежуточной прослойки со средним модулем упругости,
используемое в технике в аналогичных случаях, улучшает си-
туацию, но не решает проблемы. Поддержание определенного
двухосного напряженно-деформированного состоянии пленки по-
лимера связано с двумя большими трудностями:
— необходимость организации жесткого каркаса, на который
пленка полимера напыляется и проходит все технологиче-
ские стадии создания и эксплуатации СБ, что исключает
бескаркасную концепцию СБ и, соответственно, все ее пре-
имущества над каркасными аналогами;
в полимерных пленках достаточно быстро происходит про-
цесс релаксации напряжений, особенно при повышенных
температурах, т. е. имеет место проявление интенсивной
7.2. Основные особенности разработки конструкций 253
ползучести, когда пленка за достаточно короткое время
относительно ресурса СБ растягивается и теряет напряжен-
ное состояние
При использовании жесткого каркаса процесс ползучести
требует введения непрерывного контролируемого двухосного на-
тяжения пленки, что для больших размеров СБ является доволь-
но сложной задачей.
На возможный выход из указанной ситуации указывают
аморфно-кремниевые СБ на подложке из нержавеющей стали
толщиной порядка 20 мкм. Хотя в этом случае имеет место кон-
струкционная пара с близкими коэффициентами упругости, но
в технологическом и эксплуатационном состоянии напряженно-
деформированное состояние подложки может практически отсут-
ствовать. Натяжение конструкции, требуемое для поддержания
ее формы и ориентации, может осуществляться за счет растя-
жения технологических связей между элементами СБ и быть
относительно небольшим. По аналогии может быть взята пленка
полимера толщиной не 10 мкм, а хотя бы 20-30 мкм, которая
в конструкционном плане значительно технологичнее, поскольку
имеет большую жесткость. За счет в 5 раз меньшей удельной
массы полимера по сравнению со сталью выигрыш по удельной
мощности будет значительным.
В принципиальном плане для подложек a-Si СБ не исклю-
чено создание высокомодульных полимеров, однако здесь сле-
дует учесть, что в 2000 г. была присвоена Нобелевская пре-
мия за открытие полимерных полупроводников, КПД которых
в 2003-2004 гг. возрос с 1% до 5% (фирма Siemens, Прин-
стонский университет). Сдвинут с мертвой точки вопрос по-
движности носителей в полимере. В электронике их исполь-
зование для дисплеев сулит снижение стоимости в 10 раз по
сравнению с a-Si, и, несомненно, последние будут вытеснены.
При условии повышения КПД полимерных полупроводников до
сегодняшнего уровня a-Si (7-10%), их использование для СБ
станет предпочтительнее при условии решения вопроса их малой
деградации в космических условиях (радиационной стойкости),
который пока остается открытым. Есть основания считать, что
их радиационная стойкость будет высокой.
7.2.3. Устранение волнистости поверхности
Устранение волнистости поверхности пленочной СБ принци-
пиально решается путем создания тангенциальных напряжений
на ее поверхности (при наличии радиальных напряжений от
центробежных сил), для чего необходимо чтобы поверхность на-
254 Гл. 7. Разработка солнечных батарей
ходилась в двухосном напряженно-деформированном состоянии,
которое может быть обеспечено двумя способами:
1) профилированием (дугообразностью) сектора по его длине;
2) сплошной поверхностью СБ, т, е. отсутствием радиальных
секторных разрезов на ее поверхности.
Проведенные оценки показывают, что для получения тан-
генциальных напряжений, близких по величине к радиальным,
а только при этом устраняется волнистость, следует делать
слишком большую стрелу прогиба дуги сектора, при этом теря-
ется большая часть потенциально рабочей поверхности сектора
(см. Глава 5, Приложение 5,2). Для набора площади необходимо
увеличивать длину сектора, а значит и длину токоподводов и их
сечение, поскольку основная площадь СБ сосредотачивается на
периферии конструкции. Проведенные более точные численные
расчеты напряженного состояния поверхности при профилиро-
вании сектора усилили негативное отношение к этому способу
устранения волнистости поверхности [86-88].
Более предпочтительным является организация раскрытия
неразрезной конструкции СБ. При этом наилучшим образом
используется рабочая поверхность СБ и минимальны потери на
токоподводах. Конструкция позволяет использовать хорошо из-
вестные методы расчета напряженного состояния и, что особенно
важно, прошла большой комплекс экспериментальной наземной
отработки в вакуумных камерах, описанный в п. 9.2.
Разворачивались, вращались и доводились до разрушения
пленочные полотнища диаметром до 5 м. При этом контролиро-
валась отражающая способность аллюминизированной поверхно-
сти пленки, сильно зависящая от ее напряженного состояния. На
приведенных в п 9.2 фотографиях видна возможность получения
качества поверхности, много лучшей, чем это нужно для СБ.
Этим запасом можно компенсировать потенциальные неточности
изготовления.
7.2.4. Обеспечение укладки СБ в транспортном состоя-
нии без критического радиуса изгиба
Стеклоподобность полупроводникового электрогенерирующе-
го покрытия исключает возможность его перегиба больше радиу-
са, при котором происходит образование трещин на поверхности.
Такой радиус называется критическим. Аморфнокремнивое по-
крытие на нержавеющей стали имеет критический радиус 35 см
и может колебаться в зависимости от толщины покрытия и тол-
щины и материала подложки. Организовать укладку полотнища
с учетом указанного фактора можно двумя способами:
7.2. Основные особенности разработки конструкций
255
— конструировать полотнище таким образом, чтобы перегибы
проходили по местам, где отсутствует покрытие;
— конструировать геометрию зон укладки, превышающую
критический радиус.
В реальной конструкции могут использоваться оба способа
одновременно.
7.2.5. Способы передачи электроэнергии на космический
аппарат и компенсации дисбаланса вращающейся СБ
Вопрос передачи электроэнергии на космический аппарат,
в отличие от предыдущих, не является принципиально новым
при создании спутников связи и ДЭЗ, поскольку при обороте
вокруг Земли солнечные батареи всех спутников ориентируются
на Солнце, а аппаратура спутника ориентируется «в надир» на
Землю, т. е. осуществляется вращение плоскости батареи отно-
сительно корпуса спутника. При этом передача электроэнергии
на космический аппарат осуществляется двумя способами: через
вращающийся токосъемник, аналогичный щеточному контактору
электрической машины; через спиральный кабель, который за
счет своей длины позволяет осуществлять поворот на 360 °,
а в момент прохождения тени Земли позволяет возвращать кор-
пус спутника в исходное состояние. Последний способ к фор-
мируемых центробежными силами батареям применить сложнее
чем первый, поскольку он сопровождается достаточно резким
импульсом, влияющим на ориентацию СБ. Первый способ, как
хорошо отработанный и применявшийся на ряде изделий, может
быть использован с меньшими сложностями для системы ори-
ентации. Существуют фирмы, специализирующиеся на подобных
вращающихся контакторах.
В перспективе создания СБ для Марсианской миссии на
мощность 15 МВт, СБ для освоения Луны и электростанции на
мощность порядка 1 ГВт проблема вращающегося токосъемника
может быть снята принципиально при условии создания много-
слойных полупроводниковых структур, объединяющих генериро-
вание электроэнергии, преобразование и излучение в СВЧ-диа-
пазоне. Работы по этому направлению ведутся в США. Для элек-
тростанции излучение путем фазировки направляется на Землю
с высокой степенью фокусировки, а для Марсианской миссии
СВЧ-энергия, собираемая по площади диска СБ, фокусируется
на плазменный двигатель, располагаемый в центре диска, и осу-
ществляется его прямая накачка [5, 6].
256
Гл. 7 Разработка солнечных батарей
Вопрос дисбаланса вращающейся СБ является принципиаль-
ным и новым. За счет технологических погрешностей изготовле-
ния СБ дисбаланс неизбежен. Возможны два случая:
— дисбаланс не влияет на решение целевой задачи КА и его
устранения не требуется;
— необходимо устранение дисбаланса
Устранение дисбаланса возможно активным и пассивным спо-
собом. Активный способ — когда через систему управления
процессом с обратной связью решается задача с использованием
датчиковых элементов. Пассивный способ — когда в конструкции
имеется специфический механический элемент, в котором есте-
ственным образом организуется требуемая обратная связь. Оба
способа требуют разработки соответствующих систем. Одним из
способов решения задачи является изменение центра масс вра-
щающейся конструкции в катушечных агрегатах раскрытия за
счет изменения длины тросов, связывающих сектора пленочных
полотнищ с катушками.
7.2.6. Заключение по разделу
Основной особенностью разработки формируемых центро-
бежными силами конструкций пленочных солнечных батарей
является необходимость обеспечения двухосного напряженного
состояния поверхности СБ, которое оптимальным образом реа-
лизуется в сплошной (не разрезной) круговой конструкции СБ
и требует разработки новой конструкции агрегата раскрытия,
отличной от ранее разработанной для солнечного паруса.
Второй особенностью является необходимость компенсации
кинетического момента вращающейся конструкции, отсутство-
вавшая при проведении эксперимента «Знамя 2» на 8-тонном
грузовом корабле «Прогресс», поскольку система управления ко-
рабля без специальных мер в автоматическом режиме справилась
с этой задачей. Для спутников связи и КА с большой площадью
СБ этот вопрос требует специального рассмотрения вариантов
решения.
Третьей особенностью пленочных СБ является ограничение
по радиусу изгиба пленочной стеклоподобной поверхности из-за
возможности ее растрескивания и потери электрогенерирующей
способности. Это обстоятельство осложняет конструкцию уклад-
ки и компоновку СБ на КА в уложенном состоянии и предъяв-
ляет дополнительные требования к агрегату раскрытия.
Четвертой особенностью пленочных СБ является необходи-
мость минимизации массы агрегата раскрытия, его оптимального
объединения с конструкцией ЛА. В привязке к конкретному КА
7.3. Конструктивные решения СБ, оценка прочности 257
конструкция агрегата раскрытия должна конструктивно органи-
чески сочетаться с конструкцией спутника (например, использо-
вать в качестве корпуса агрегата раскрытия корпус самого спут-
ника), для уменьшения массы элементов, которые не являются
элементами собственно СБ и ухудшают удельную мощность СБ.
Все указанные особенности требуют пересмотра концепций
создания конструкции полотнища и агрегата его раскрытия, вы-
работки новых требований к ним, поиску вариантов конструктив-
ных решений и оптимальных путей их технической реализации.
Указанные особенности при создании нового агрегата раскрытия
выступают в виде взаимосвязанных требований, подлежащих
одновременному удовлетворению.
7.3. Конструктивные решения СБ, оценка прочности
7.3.1. «Паутинная» схема, решающая проблемы разли-
чия модулей упругости и текучести полимерной подложки
и ФП
Примем конструктивную схему СБ в виде сети (или
«паутины») из высокомодульного материала типа «кевлар»
(<т = 200кг/мм2), в ячейках которой располагаются элементы
фотопреобразователя (ФП) (рис. 7.1). Таким образом может
Рис. 7.1. Эпюры напряжений и «паутинная» схема силовой основы СБ
быть организована силовая основа конструкции СБ, когда
сами пластины ФП являются полностью не нагруженными
какими-либо усилиями, а всю нагрузку от центробежных сил
воспринимает силовая сеть («паутина»). Так можно решить
проблему различия модулей упругости материала полимерной
9 Г. Г. Райкунов и др
258
Гл. 7. Разработка солнечных батарей
подложки и стеклоподобного покрытия ФП и проблему текучести
полимерной подложки.
7.3.2. Оценка прочности, определение массы упрочняю-
щей основы
Проведем оценку прочности и определение массы упрочняю-
щей основы. Эпюры тангенциальных и радиальных напряжений
для диска постоянной толщины приведены на рис 7 1 (для диска
с отверстием см. В. И. Феодосьев «Сопротивление материалов»,
1960 г.). Среднее значение напряжений приближенно дается фор-
мулой:
Су, = <тг = 0,5рш2/?^. (7.1)
Задача решается по следующей схеме. Для любого материала
подложки (сталь, полимер) определяются напряжения в зависи-
мости от радиуса СБ, затем пересчитываются в усилия, которые
должны восприниматься кевларовыми нитями.
Тогда для напряжения от стальной подложки в СБ на мощ-
ность 3000 Вт (см. Глава 5, п. 5.1)
ст = 0,5рш2Д| = 0,5 • 8 • 103 • 16 10"2 • 3,242 = 6,7 • 103 Н/м2.
Усилие на длине 1 м для толщины /гсталь = 1,25 10 4м
F = h 1 м • а = 1,25 • 10~4 • 1 • 6,7 • 103 = 0,84 Н.
Для кевлара <т = 200 кг/мм2 = 2 • 109 Н/ м2 достаточно се-
чения:
S = - = = 0,42 • 10 9м2 = 0,42 • 10"Змм2.
о 2 109
Для п нитей эту площадь надо разделить на п, т. е. сечение
одной нити будет
_ 0,42 10~3
— -----------
71
Эту величину следует увеличить на запас прочности. Массу
кевлара можно оценить следующим образом.
Сечение S - - = -^4 = 0,42 • 10"9м2 = 0,42 • 10 Змм2
<т 2 109
можно представить как 1 м 0,42 • 10 9 м, т. е эффективная
толщина h — 0,42 10“9 м.
7.4. Конструкция и технология создания СБ
259
Тогда, принимая для кевлара р = 103кг/м3, имеем /5 = ph =
= 103 • 0,42 • 10“9 = 0,42 10“6.
Умножая на площадь поверхности СБ S = 33 м2, имеем массу
кевлара:
И = 33 0,42 • 10~6 = 1,4 • 10 5кг.
Эта величина ничтожно мала по сравнению с массой СБ
и можно сделать 10-кратный запас прочности.
Таким образом, предложена «паутинная» схема силовой ос-
новы СБ из кевларовых нитей, принципиально позволяющая
эксплуатировать ФП СБ без их силового нагружения и решить
проблему разномодульности подложки и электрогенерирующего
полупроводникового слоя, а также проблему устранения ползу-
чести при использовании полимерного материала подложки.
7.4. Конструкция и технология создания СБ
7.4.1. Разработка конструкции и схем коммутации сол-
нечной батареи из аморфного кремния на подложке из
нержавеющей стали
7.4.1.1. Описание базовой технологии изготовления ФП
на основе a-Si. Технологические задачи, связанные с пере-
ходом от ФП наземного применения к ФП космического
применения
Высокие удельно-массовые характеристики, потенциально
высокая стабильность параметров, повышенная радиационная
стойкость и другие особенности стали причиной интереса к тон-
копленочным фотопреобразователям (ФП) на основе аморфного
кремния (a-Si) в аспекте использования их в космической
фотоэнергетике. В этой связи проведенный впервые в мире
в 1999 году эксперимент на орбитальной станции «Мир»
с тонкопленочными ФП на основе a-Si представляет большой
интерес. В результате анализа полученных данных выявилась
необходимость продолжения технологических исследований,
в том числе в плане создания конструкции солнечной батареи
(СБ) с минимальным снижением коэффициента заполнения (FF)
вольт-амперной характеристики (ВАХ) при работе в космосе.
В качестве базовой технологии изготовления ФП на основе
Q-Si была выбрана технология, разработанная фирмой United So-
lar Ovonic Corporation (USOC) (1100FF. Maple Rd., Troy, Michi-
gan 48084, USA) и освоенная в ООО «Совлакс», учрежденном
совместно с ФГУП НПП «Квант» и USOC. Эта технология обес-
9*
260
Гл. 7. Разработка солнечных батарей
печивает формирование 3-х каскадной nl-il-pl/n2-i2/n3-i3-p3
фотоэлектрической структуры на основе сплавов a-Si, гидро-
генезированного аморфного сплава кремний-германий (a-SiGe)
и слоев гидрогенезированного микрокристаллического (мк-Si).
Сильнолегированные слои мк-Si сформированы для реа-
лизации туннельного перехода для последовательного соеди-
нения p-i-n структур. Суммарная толщина фотоэлектрической
структуры, нанесенной на подложку, составляет приблизительно
1,5 мкм.
На поверхность подложки из нержавеющей стали нанесен
текстурированный слой алюминия и буферный слой ZnO, явля-
ющийся рефлектором. Не поглотившееся в фотоактивной части
структуры излучение доходит до этого рефлектора и, отражаясь
под некоторым углом к нормали, еще раз проходит через фо-
тоактивные слои. Таким образом, текстурированный рефлектор
позволяет повысить более чем в два раза оптическую длину
поглощения солнечного излучения.
Таким образом, рассматриваемый ФП содержит каскад из
трех последовательно включенных p-i-n структур, каждая из ко-
торых с целью более полного использования солнечного спектра
имеет различную ширину запрещенной зоны ДЕд. Подбор шири-
ны зоны ДЕд в каждом из слоев обеспечивает чувствительность
всего каскада в интервале длин волн от 0,35 до 0,95 МКМ и хо-
рошо соответствует стандартному спектру солнечного излучения
АМО. Спектральная характеристика ФП из a-Si и спектральное
излучение при АМО представлены на рис. 7.2.
С точки зрения применения на космических солнечных бата-
реях конструкция ФП должна быть оптимизирована для спектра
излучения АМО, должны быть разработаны методы нанесения
дополнительного защитного слоя, например, на основе оксида
кремния и повышена надежность контактных соединений.
Характерной особенностью ФП из o-Si является наличие так
называемого эффекта Стеблера-Вронского, в результате которо-
го в течение первых 200-600 часов эксплуатации ФП наблюда-
ется деградация оптимальной мощности приблизительно на 15%
с последующей стабилизацией характеристик.
В настоящее время стабилизированная эффективность ФП
из a-Si составляет 7,5-9 % для условий освещения AM 1,5
и 250 С в условиях массового производства. Есть сообщения
о.достижении эффективности 12% на отдельных лабораторных
образцах, свидетельствующей о возможности совершенствования
технологии массового производства.
7.4. Конструкция и технология создания СБ
261
Рис. 7.2. Спектральная характеристика ФП из a-Si и спектральное излучение
при АМО
Следует отметать, что температурное снижение мощности
ФП из a-Si составляет 0,25-0,3% на градус и вдвое меньше,
чем у ФП из монокристаллического кремния. Это означает, что
при одинаковой установленной мощности при 25 ° С ФП из a-Si
имеют при рабочей температуре мощность на 15-20% выше, чем
у ФП из монокремния.
7.4.1.2. Разработка конструкции экспериментальной,
панели солнечной батареи из аморфного кремния
Энергомассовые характеристики ФП из a-Si определяются
в основном массой подложки. Для улучшения этой характери-
стики фирма United Solar Ovonic Corporation разработала a-Si
с толщиной подложки 20-25 мкм, что при эффективности ФП
в условиях АМО 8,5% позволяет достичь удельную мощность
космической солнечной батареи в начале срока эксплуатации до
450 Вт/кг.
Экспериментальная солнечная панель на основе ФП из
a-Si состоит из двух створок, на которых располагаются по
7 ФП размером 40 х 350 мм, скоммутированных последовательно
262
Гл. 7. Разработка солнечных батарей
Рис. 7.3. Геометрия экспериментальной рамки
(рис. 7.3). В рабочем положении одна створка (Н) закреплена
неподвижно с КА, а другая (О) откидывается по отношению
к первой на 135°. Каждая створка имеет независимое подклю-
чение к нагрузке через независимый диод.
Вольт-амперные характеристики створки Н и створки О при
условии освещения АМ1,5, ООО Вт/м2 и 25 ° С представлены на
рис. 7.4.
Для крепления ФП к несущей раме створки предварительно
приклеиваются прокладкой из полиамидной пленки толщиной
40 мкм, шириной 9 мм с 2 липкими слоями. При этом защитное
покрытие с наружной стороны прокладок не снимается впредь
до приклейки к общей сборке створки. Места подпайки пере-
мычек к контактам ФП усиливаются дополнительной накладкой,
которая наклеивается на контакт ФП и на перемычку внахлест.
Материал — полиамидная пленка толщиной 40 мкм и шириной
20 мм с односторонним липким слоем. Затем каждый ФП после
снятия с наружной стороны 2-слойных прокладок крепится на
7.4. Конструкция и технология создания СБ
263
Рис. 7.4. Вольт амперная характеристика экспериментальной панели СБ
несущие ленты, предварительно натянутые и закрепленные к ра-
ме створки.
Блокирующий диод 2ДСБ-150-ЗБ-1 АЛВУ.432 129,001 ТУ
применяется в солнечных батареях для защиты от обратных на-
пряжений. Диод планарный, диффузионно-эпитаксиальный, бес-
корпусной. Выходные соединители от каждой створки представ-
ляют собой провода М.ГТФ 0,14 длиной 20 см каждый. К одно-
му из проводов каждой пары выводных соединителей припаяно
сопротивление величиной 5 ом. Фотоснимок конструкции СБ
представлен на рис. 7.5.
Общий вид экспериментальной сборки, монтируемой на борту
спутника «Университетский» приведен на рис. 7.6.
7.4.1.3. Измерения электрических характеристик и ис-
пытания экспериментальной панели
Методика измерения электрических параметров солнечных
панелей на основе ФП из a-Si в предполагаемых космических
условиях эксплуатации имеет ряд особенностей.
Специфическая спектральная характеристика ФП из a-Si
(рис. 7.2) не допускает использования имитатора излучения
непрерывного действия на основе инфракрасных источников све-
та, поскольку суммарный ток трехкаскадного ФП определяет-
ся преимущественно током 1-го каскада, обращенного к свету
и чувствительного в области длин волн 0,35-0,6 мкм. Эталоны
264
Гл. 7. Разработка солнечных батарей
Рис. 7.5. Общий вид раскрытой экспериментальной панели после срабатывания
электрического замка
из ФП на основе a-Si, калиброванные как принято для монокри-
сталлических или GaAs в условиях космоса или высокогорных,
в настоящее время в мировой практике отсутствуют. В данном
случае имеются:
а) импульсный имитатор солнечного излучения SPI, позво-
ляющий с хорошей точностью измерять электрические харак-
теристики ФП и модулей на основе a-Si в условиях AM 1,5
и освещенности 1000 Вт/м2, что характерно для систем наземной
фотоэнергетики;
б) импульсный имитатор внеатмосферного Солнца (АМО)
на ксеноновых лампах со спектром, близким к спектральному
распределению солнечного излучения вне атмосферы. Наличие
в спектре излучения данного имитатора характерных ксеноновых
линий в ближней ПК-области спектра не оказывает существен-
ного влияния на измерения электрических характеристик ФП
из a-Si в силу указанной выше специфики его спектральной
чувствительности, когда ток определяется в основном первым
каскадом, не чувствительным к ПК-области спектра излучения.
Исходя из сказанного была предложена и опробована следу-
ющая методика определения электрических характеристик ФП
из a-Si в условиях освещения АМО.
1) Измерение вольт-амперной характеристики ФП первона-
чально проводится на импульсном имитаторе SP1 в услови-
ях АМ1,5 и 25° С.
7.4. Конструкция и технология создания СБ
265
Рис. 7 6. Конструкция экспериментальной панели СБ на спутнике «Универси-
тетский» для исследования деградации элемента СБ в процессе циклирования
«ночь-день» в реальных условиях функционирования спутников связи
2) Далее ФП измеряется под импульсным имитатором на ксе-
ноновых лампах, после чего устанавливается коэффициент
перехода от данных под имитатором AM 1,5 к данным под
имитатор АМО по основным точкам вольт-амперной харак-
теристики.
3) При измерении под импульсным имитатором АМО послед-
ний настраивается по калиброванному на АМО эталону из
монокристаллического кремния.
Для оценки возможных погрешностей, связанных с по-
добной настройкой, используется следующая процедура:
спектральная характеристика ФП из a-Si по известной
методике пересчитывается на стандартное распределение
в спектре излучения внеатмосферного Солнца.
Для этого, как указывалось выше, достаточно исполь-
зовать ту чувствительность спектральной характеристики
ФП, которая определяется первым каскадом. Рассчитанное
таким образом значение плотности фототока сравнивается
266
Гл. 7. Разработка солнечных батарей
с реально получаемой плотностью фототока на импульсном
имитаторе АМО.
Было установлено, что погрешность составляет около 3%
и определяется перераспределением тока в последователь-
ной цепи 3-х каскадов. Реально получаемое значение тока
несколько выше наименьшего, проходящего в данной цепи.
Окончательные результаты корректируются с учетом дан-
ной погрешности.
4) После измерения указанным образом 7 последовательно со-
единенных ФП в каждой сборке рассчитывается суммарная
вольт-амперная характеристика.
С целью подтверждения соответствия конструкции экспе-
риментальной панели ФП из cv-Si требованиям космических
солнечных батарей были проведены испытания технологической
панели на механические воздействия. Испытания проводились
в следующей последовательности:
1) Испытания на воздействия вибраций в трех положениях.
Предварительно были определены резонансные частоты колеба-
ний ФП относительно каркаса (23-24 Гц) (см. Таблица 7.1.).
2) Испытания на воздействие одиночных ударов величиной
40g по 5 ударов в каждом из трех направлений (см. Табли-
ца 7.2.).
3) Испытание на транспортирование. Общее количество уда-
ров 20 000 (см Таблица 7.3).
4) Испытание на воздействие линейных ускорений:
— 10 g в плоскости панели в течение 10 мин.;
— 2g перпендикулярно плоскости панели (на отрыв) в тече-
ние 10 мин.
Дополнительно после всех видов механических воздействий
определены резонансные частоты колебаний относительно кар-
каса панели Резонансные частоты составили 20 и 25 Гц.
После каждого вида испытаний измерялись вольт-амперные
характеристики технологической панели. Изменений вольт-ам-
перных характеристик не наблюдалось.
Таблица 7.1.
Диапазон частот, Гц 5-10 10-30 30-80 800-1500 1500-2500
Виброперегрузка, g 08 0,8 4-3 3 4-6 6-10 10
Примечание: Время воздействия вибрационных перегрузок в каждом из трех
взаимно перпендикулярных направлений не менее 2 мин. на октаву.
7.4. Конструкция и технология создания СБ
267
Таблица 7.2.
Перегрузка, ед. «g» Количество ударов в одном направлении Длительность ударного импульса, мс
40 3 4t?
Таблица 7.3.
Перегрузка, ед. «g» Длительность удар- ного импульса, мс Количество уда- ров Общее количество ударов
10 15000 20000
15 4t1 5000
Спутник был успешно запущен на орбиту и в течение дли-
тельного времени передавал на Землю информацию о деградации
СБ (см. Глава 10).
7.4.2. Разработка конструкции и схем коммутации сол-
нечной батареи, формируемой центробежными силами
Описанная выше технология создания плоской панели СБ
на основе ФП из a-Si может являться базой для разработки
конструкции и схем коммутации солнечной батареи, формируе-
мой центробежными силами, к которой предъявляются дополни-
тельные требования, обусловленные бескаркасностью конструк-
ции и возможностью разворачивания конструкции из уложенного
(транспортного) состояния в рабочее состояние центробежными
силами:
1) выбор схемы укладки конструкции, обладающей сплош-
ной круговой формой в развернутом состоянии, обеспечивающей
перегибы не по структуре ФП из a-Si в уложенном состоянии,
имеющей радиус кривизны более 350 мм или бесконечный и име-
ющей минимальный объем в уложенном состоянии;
2) выбор схемы коммутации элементов ФП из a-Si, обеспе-
чивающей максимальный коэффициент заполнения поверхности
СБ и минимальные электрические потери на коммутационные
и токоподводящие линии;
3) выбор схемы укладки конструкции, отвечающей возмож-
ности использовать «неуправляемый» способ развертывания цен-
тробежными силами, наиболее целесообразный для использова-
ния на малых КА.
Обоснование особенностей создания формируемых центро-
бежными силами СБ дано в п. 7.1.
Традиционная форма СБ является прямоугольной. К этой
форме в зависимости от размерности и требуемых парамет-
ров на выходе СБ осуществляется параллельно-последователь-
268
Гл. 7. Разработка солнечных батарей
ная коммутация ФП. Переход к круглой форме СБ приводит
к необходимости рассмотрения расположения ФП на секторах
рассматриваемой конструкции, т. е. секторной компоновки ФП
Дополнительно компоновку осложняет необходимость учитывать
линии перегиба в укладке, число которых зависит от размерно-
сти СБ. Поэтому в каждом конкретном случае размерности СБ
приходится решать свою задачу по компоновке ФП, исходя из
имеющихся типоразмеров ФП, выходных параметров СБ и воз-
можности размещения укладки СБ на поверхности КА
Пример секторной компоновки ФП приведен на рис. 7.7,
на котором изображена ультралегкая гибкая солнечная батарея
Ultraflex компании АЕС — Able Engineering (г. Голета, Кали-
форния), стоимостью 6,9 млн долларов, запуск в космос которой
запланирован на 2008 г. [137].
Рис. 7.7. Ультралегкая гибкая солнечная батарея Ultraflex компании АЕС —
Able Engineering
Приведенная на рис. 7.7 СБ использует секторную компонов-
ку ФП, однако натягивается на легкий каркас, и поэтому не
отвечает специфике формирования центробежными силами. Эту
специфику в наилучшей мере отражает укладка «патент Фран-
ции», приведенная на рис. 3.2 [30] (см. Глава 3), отвечающая
вышеприведенным требованиям.
7.4. Конструкция и технология создания СБ
269
Энергомассовые характеристики СБ из аморфного кремния
определяются в основном массой подложки. Для улучшения этой
характеристики разработана технология утонения подложки из
нержавеющей стали, которая позволяет на 65-70% уменьшить
вес СБ. Благодаря этому достигается удельная мощность кос-
мической солнечной батареи в начале срока эксплуатации до
450-470 Вт/кг.
Предлагается конструкция космической солнечной батареи,
раскрываемой в космосе центробежными силами, которая со-
стоит из облегченных аморфных ФП, скоммутированных таким
образом, чтобы обеспечить заданные электрические характери-
стики.
В основу разработки конструкции солнечной батареи для
секторной (треугольной) конфигурации применительно к укладке
(патент Франции), положен принцип максимального коэффици-
ента заполнения и возможность последовательной коммутации
ФП для получения необходимого напряжения.
В качестве примера выбрана конструкция каркаса солнечной
батареи, которая представляет собой шестигранник, на который
намотан блок треугольников различной площади. При раскрытии
такого каркаса образуется круг радиусом 23,75 м. Общий вид та-
кой солнечной батареи показан на рис. 7.8 и рис. 7.9. Последова-
тельное соединение ФП осуществляется в рамках одного стринга
для получения ЭДС 42В, что соответствует 21 солнечному эле-
менту из аморфного кремния. Токовыводы от каждого стринга
запараллеливаются проводами плоского сечения 20 х 0,05 мм
в два слоя, после чего распаиваются на плате с развязывающими
диодами.
На каждый элемент треугольной конструкции каркаса сол-
нечной батареи устанавливаются секции ФП, которые закреп-
ляются методом приклейки с помощью лент из полиимидной
пленки толщиной 40 мкм с двумя липкими слоями. Ширина лент
9 мм.
Электромонтаж от «—» шин солнечной батареи выполняется
ленточными проводами типа ЛМППМ сечением 2 мм2, толщи-
ной по изоляции 0,32 мм, шириной по изоляции 25 мм и специ-
ально изготовленными перемычками сечением 0,6 мм2.
Магистральные ленточные провода, идущие по краям ство-
рок, предварительно сплющиваются в «гармошку» с шагом скла-
дывания всех створок.
Длина силовых лент и шаг сплющивания проводов выбира-
ется таким образом, чтобы при раскрытии солнечной батареи
сплющенные места проводов и перемычки не разгибались пол-
270
Гл. 7. Разработка солнечных батарей
Рис. 7 8. Вариант схемы компоновки ФП СБ с использованием схемы укладки
[30]
Площадь шестиугольника 0,415 м2
Площадь круга 17,7 м2
Плошадь 1 элемента 0,0149 м2
Площадь всех элементов 11,3 м2
Коэффициент заполнения 0,65 м2
Рис. 7.9. Вариант компоновки круглой СБ с использованием схемы укладки
[30]
ностью при многократном складывании и раскрытии солнечной
батареи. Перемычки последовательного соединения ФП также
заранее изгибаются на приспособлении.
При складывании створок лицом к лицу между створками
устанавливаются прокладки из полиимидной пленки толщиной
40 мкм, закрепленные по длинной стороне на основании шести-
гранника.
Раскрытие солнечной батареи из уложенного (транспортно-
го) состояния в рабочее положение осуществляется агрегатом
раскрытия, конструкция которого обсуждалась ранее. В привяз-
ке к конкретному КА конструкция агрегата раскрытия должна
7.4. Конструкция и технология создания СБ
271
конструктивно органически сочетаться с конструкцией спутника
(например, использовать в качестве корпуса агрегата раскрытия
корпус самого спутника), для уменьшения массы элементов,
которые не являются элементами собственно СБ и ухудшают
удельную мощность СБ.
7.4.3. Заключение по разделу
1. Разработана экспериментальная панель солнечной батареи
на основе ФП из a-Si, состоящая из двух створок, каждая
из которых содержит по 7 последовательно соединенных ФП
размером 40 х 350 мм.
2. Применены новые методы крепления ФП на каркас солнеч-
ной панели для достижения минимальных энергомассовых ха-
рактеристик, расчетная величина которых составляет 450 Вт/кг.
3 Разработана методика пересчета электрических параметров
ФП солнечных панелей, измеренных при условии освещения
АМ1,5 на условия освещения АМО.
4. Испытания технологической панели на основе ФП из a-Si
на механические воздействия, соответствующие требованиям для
космических солнечных батарей, показали положительные ре-
зультаты.
5. Рассмотрены требования к укладке формируемой цен-
тробежными силами конструкции СБ и схеме ее коммутации.
Предложены схема укладки и секторный вариант компоновки
и коммутации ФП.
Глава 8
КОНСТРУКЦИИ АГРЕГАТОВ РАСКРЫТИЯ ДЛЯ
РАЗЛИЧНЫХ ЗАДАЧ. КОМПЛЕКСНЫЙ АНАЛИЗ
ПРОБЛЕМЫ
8.1. Комплексный анализ проблемы создания
агрегатов раскрытия для различных прикладных
задач
8.1.1. Постановка задачи комплексного анализа
Космический аппарат с раскрываемой центробежными сила-
ми конструкцией, помимо традиционных корабельных систем,
в своем составе должен иметь агрегат раскрытия со средствами
своего питания и управления, в котором уложенная конструкция
транспортируется на орбиту и которое обеспечивает раскры-
тие этой конструкции из уложенного (транспортного) состояния
и поддержание раскрытого состояния в период эксплуатации.
Проведем комплексное исследование проблем создания агре-
гатов раскрытия крупногабаритных формируемых центробежны-
ми силами конструкций, обусловленных спецификой этих сил,
особенностью внешних условий и крупномасштабностью изделия
применительно к различным прикладным задачам, что в свою
очередь определит конструктивные особенности агрегатов рас-
крытия этих конструкций. Также исследуем функциональные
и конструктивные особенности и технические возможности обес-
печения высокой эффективности функционирования агрегатов
раскрытия, взаимосвязи с КА, а также наземной отработки для
обеспечения высокой надежности.
Важным фактором является масштабность системы, опреде-
ляющая возможность ее изготовления и отработки в наземных
условиях, а также возможность ее транспортировки на орбиту
носителем. Особенностью конструкций размером более несколь-
ких десятков метров является принципиальная невозможность
полномасштабной наземной отработки из-за отсутствия столь
масштабных вакуумных камер и наличия гравитации. Требуется
обоснование поэтапной и модельной отработки.
При комплексном анализе в качестве надсистемы выступа-
ют многочисленные выше перечисленные прикладные задачи во
взаимосвязи с особенностью внешних условий. В качестве под-
8.t. Комплексный анализ проблемы создания агрегатов раскрытия 273
систем выступают различные конструктивные и функционально-
технологические решения систем агрегатов раскрытия, обеспечи-
вающих решение этих задач.
Для вышеуказанных прикладных задач формируемые центро-
бежными силами конструкции имеют конструктивные особенно-
сти, вытекающие из специфики решаемой прикладной задачи, ко-
торая определяет необходимую точность и качество поверхности
системы и ее ориентации в пространстве, которые в свою очередь
ставят соответствующие требования к конструкциям агрегатов
раскрытия.
8.1.2. Требования к агрегатам раскрытия, следующие из
специфики прикладных задач
8,1.2.1. Ретрансляция, связь и солнечный парус
Для задач ретрансляции и связи ставятся не слишком жест-
кие требования по точности поверхности отражателя и его ори-
ентации в пространстве. Для дециметровых и метровых волн по-
верхность может быть выполнена из токопроводящей сетки с раз-
мером ячейки меньше, чем 0,05А (где Л — длина волны), а ши-
рокая диаграмма направленности излучения позволяет иметь до-
пуск по точности ориентации в несколько градусов. Конструкция
может быть разрезная из отдельных секторов, сегментов или яче-
ек с зазорами, не превышающими 0,05А (где Л — длина волны)
Агрегат раскрытия для такой конструкции отражателя может
быть как однокатушечный, так и многокатушечный, с отдельны-
ми секторами отражателя, не объединяемого на орбите в единое
полотнище, что достаточно просто в конструктивном и техно-
логическом плане Аналогичная конструкция агрегата раскрытия
может быть использована для солнечного паруса, где также не
предъявляется жестких требований к точности формы поверхно-
сти и ее ориентации в пространстве. При создании солнечного
паруса не предъявляется жестких требований по точности изго-
товления поверхности и ее отражающим свойствам. Поверхность
может быть выполнена из отдельных секторов или лент как
скрепленных по периферии, так и не скрепленных (рис. 1.4). Сек-
тора могут поворачиваться вокруг своей радиальной оси за один
оборот вокруг основной оси вращения конструкции, давая воз-
можность управлять конструкцией путем изменения положения
центра масс по отношению к центру солнечного давления Здесь
имеется аналогия с функцией агрегата перекоса в вертолете.
Отражающие свойства поверхности могут изменяться в широком
диапазоне, от полного отражения до полного поглощения, при
этом тяга паруса изменяется только в два раза.
274 Гл. 8. Конструкции агрегатов раскрытия для различных задач
8.1.2.2. Отражатель для освещения отраженным сол-
нечным светом районов Земли, солнечные батареи для кос-
мической солнечной электростанции (КСЭС), программ Лу-
ны и Марса
Для задач освещения отраженным солнечным светом районов
Земли предъявляются чрезвычайно жесткие требования по точ-
ности формы поверхности и ее ориентации (менее 10 мин.), что
связано с необходимостью обеспечения максимальной концен-
трации энергии в световом пятне. Требуется поверхность с мак-
симальными отражающими свойствами (например, периодически
напыляемая на орбите на полимерную подложку натриевая плен-
ка с коэффициентом отражения 0,98), что не допускает исполь-
зования разрезных (многосекторных) конструкций полотнища,
обладающих одноосным напряженно-деформированным состоя-
нием и продольной волнистостью, и требует сплошной поверх-
ности с двухосным напряженно-деформированным состоянием
(см. Глава 5, Приложение 5.2). Агрегат раскрытия для такой кон-
струкции отражателя должен быть многокатушечный, с отдель-
ными секторами отражателя, объединяемыми на орбите в еди-
ное полотнище, что значительно сложнее предыдущего варианта
конструктивно и технологически. Такая конструкция агрегата
раскрытия определяется крупномасштабностью системы, когда
одним носителем на орбиту может быть доставлен не весь отра-
жатель, а только его часть, например, одна катушка с уложен-
ным на нее и изготовленным в наземных условиях одним секто-
ром отражателя. Следует отметить, что требование объединения
отдельных секторов на орбите в единое полотнище следует так-
же из технологических возможностей изготовления полотнища.
Технологически невозможно даже на очень специализирован-
ном производстве изготовить цельное полотнище размерностью
несколько сотен квадратных метров, однако можно изготовить
отдельный его сектор. Неотъемлемым технологическим условием
изготовления таких конструкций является укладка в процессе
изготовления, т. е. невозможно склеить (сварить) конструкцию
площадью несколько сотен квадратных метров, а затем уложить
ее каким-либо образом. Поскольку любые укладки базируются
на элементах типа «гармошка», то после изготовления очеред-
ного гофра он сразу укладывается в окончательное состояние
в укладке. Система требует компенсации кинетического момента
системой противовращения. Такая же конструкция необходима
для крупномасштабной солнечной батареи КСЭС, а также сол-
нечных батарей для программ Луны и Марса.
8 /. Комплексный анализ проблемы создания агрегатов раскрытия 275
8.1.2.3. Параболический концентратор солнечной энер-
гии, антенны и технологические экраны
При создании параболического концентратора солнечной
энергии также требуется точная поверхность с высокими
отражающими свойствами, напротив, параболическая антенна
в дециметровом и метровом диапазоне может быть изготовлена
из металлической сетки с крупной ячейкой и низкими требовани-
ями к точности изготовления поверхности. Конструкция может
быть разрезная из отдельных секторов, сегментов или ячеек
с зазорами, не превышающими 0,05А (где А — длина волны).
При малом масштабе конструкции может быть использована
однокатушечная схема агрегата раскрытия с компенсацией
кинетического момента газовым приводом. Такая схема наиболее
проста в изготовлении.
К ориентации и точности поверхности технологического экра-
на для получения сверхвысокого вакуума предъявляются наи-
меньшие требования. Может использоваться однокатушечная
схема агрегата раскрытия. В качестве системы компенсации ки-
нетического момента целесообразно использовать аналогичную
противовращающуюся систему, поскольку технологически проще
изготавливать две одинаковые системы.
К ориентации и точности поверхности экрана для очистки
космоса от осколков космического мусора предъявляются наи-
меньшие требования в силу широких диаграмм направленности
распределения скоростей осколков. Конструктивная схема агре-
гата раскрытия аналогична предыдущей.
8.1.2.4. Тросовая рамочная антенна НЧ- и СНЧ-диапа-
зонов
Для тросовых рамочных антенн НЧ- и СНЧ-диапазонов дли-
на волны составляет сотни километров. Однако окружающая
космическая плазма уменьшает длину волны и для лучшей под-
стройки под генератор требуется возможность изменения пло-
щади охватываемого контура. Требуется также нахождение са-
мого контура и отдельных его частей в одной плоскости, чаще
всего в плоскости орбиты. Тросовые рамочные антенны на эта-
пах раскрытия и эксплуатации могут иметь как петлевую, так
и круговую форму (рис. 1.6). Для уменьшения габаритов весь
массив провода целесообразно укладывать не на много отдель-
ных катушек, а на одну катушку привода раскрытия, вокруг
которой вращается элемент конструкции, обеспечивающий по-
звенный управляемый роспуск или обратное сворачивание для
лучшей подстройки контура антенны под генератор. В качестве
276 Гл. 8. Конструкции агрегатов раскрытия для различных задач
системы компенсации кинетического момента антенны целесооб-
разно использование солнечной батареи, запитывающей рамоч-
ную СНЧ-антенну. Батарея и антенна должны иметь вращающи-
еся токоподводящие устройства.
8.1.2.5. Функциональные и конструктивно-технологиче-
ские требования
Использование центробежных сил для раскрытия конструк-
ций предъявляет дополнительно ряд специфических функцио-
нальных и конструктивно-технологических требований, которые
определяют (см. п. 3.1; 7.2):
— принципы укладки и раскрытия из уложенного состояния;
— упорядоченность при раскрытии различных укладок пле-
ночных и тросовых конструкций;
— управляемое и неуправляемое раскрытие;
— приложение вращающего момента;
— циклограмму процесса раскрытия;
— компенсацию кинетического момента вращающейся кон-
струкции;
— дисбаланс конструкции;
— волнистость поверхности;
— обеспечение укладки солнечной батареи в транспортном
состоянии без критического радиуса изгиба;
— передачу электроэнергии на космический аппарат.
Практически в космосе только однажды была успешно раз-
вернута аналогичная конструкция — эксперимент «Знамя 2»
(рис. 2.6), где разворачивалось полотно диаметром D — 20 м,
являвшееся моделью солнечного паруса и состоящее из секторов,
связанных между собой по периферии.
Как видно из рис. 2.6, развернутое полотно имеет много-
численные радиальные складки. Это обусловлено отсутствием
тангенциальных связей между секторами. Это случай так назы-
ваемого одноосного растяжения полотна. Наличие таких складок
в случае использования развертываемой центробежными силами
конструкции в качестве солнечного паруса вполне допустимо,
т. к. тяга паруса слабо зависит от зеркальности поверхности.
Однако для солнечной батареи волнистость ведет к снижению
эффективности в несколько раз. Для отражателя такая конструк-
ция абсолютно не применима, т. к. не имеет требуемого зеркаль-
ного отражения, а обеспечивает отражение, близкое к диффуз-
ному. Именно по этой причине целью дальнейших разработок
являлось создание конструкций агрегатов раскрытия космиче-
ских солнечных батарей и отражателей, обеспечивающих мини-
8.1. Комплексный анализ проблемы создания агрегатов раскрытия 277
мальную неплоскостность развертываемой конструкции создани-
ем в ней двухосного напряженного состояния, которое оптималь-
ным образом реализуется на сплошной (неразрезной) круговой
пленочной конструкции (см. Глава 5, Приложение 5.2).
Отрицательным фактором являлось то, что долгое время
к неразрезной конструкции не удавалось применить концепцию
управляемого раскрытия и сконструировать требуемый агрегат
раскрытия, хотя два варианта схем такого раскрытия приведены
выше (рис. 3.3, 3.1.4) (см. Глава 3), но представляются малопер-
спективными. В первом варианте (рис. 3.3) задающий раскрытие
окатывающий ролик должен иметь радиус больше критического
радиуса изгиба, что для малых КА неприменимо. Во втором
варианте (рис. 3.4) нетехнологична тросовая система подтягива-
ния секторов, а также не решается управляемым образом вопрос
начального этапа раскрытия.
Поиск эффективного конструкторского решения для управля-
емого двухприводного способа раскрытия неразрезной конструк-
ции круговой гибкой СБ или отражателя, формируемых центро-
бежными силами, привел к разработке новой схемы с «тянущим
роликом» [135] (рис. 8.1).
Рис. 8.1. Принципиальная схема управляемого раскрытия неразрезной кон-
струкции пленочного полотнища с «тянущим роликом»: 1 — пленочная поверх-
ность; 2 — тянущий ролик
В новой схеме скорость раскрытия полотнища задается кру-
говой системой тянущих роликов, объединенных одним при-
водом. Роль роликов аналогична роли катушек в катушечном
агрегате раскрытия — задавать скорость раскрытия. Но полотно
в новой схеме может быть уложено как на центральный барабан,
что удобно как для малых КА, так и на отдельные катушки, что
предпочтительнее для систем большой размерности. Конструк-
ция полотнища в укладке может быть как цельной неразрезной,
278 Гл. 8. Конструкции агрегатов раскрытия для различных задач
так и состоящей из отдельных секторов, что удобнее с техноло-
гической стороны. В последнем случае при прохождении через
ролики двух соседних секторов организуется их соединение. Это
может быть перфорирование, сваривание, сшивание, соединение
типа «молния» и прочее. Сектора после укладки на центральный
барабан также могут связываться элементами крепления между
собой с некоторым шагом. Тогда «сшивание» с помощью роли-
ков не требуется. Схема интересна в силу многовариантности,
и в дальнейшем будет дана ее более детальная конструктивная
проработка.
Для неразрезной схемы конструкции полотнища наиболее
простой является схема «неуправляемого» раскрытия, когда вся
конструкция наматывается на один барабан, приводимый во вра-
щение только одним приводом вращения, и после снятия огра-
ничивающих связей конструкция свободно сматывается с цен-
трального барабана. Разработана математическая модель тако-
го процесса и проведен комплекс наземной экспериментальной
отработки. Однако при больших габаритах и необходимости
компенсации кинетического момента системой противовращения
обеспечение устойчивости процесса раскрытия может оказать-
ся достаточно сложным или невозможным. Поэтому необходи-
мо использование управляемой двухприводной схемы раскрытия
с компенсацией кинетического момента.
8.1.3. Итоги комплексного анализа. Основные концеп-
ции создания агрегатов раскрытия и их классификация
Подводя итог комплексному анализу проблемы создания аг-
регатов раскрытия формируемых центробежными силами кон-
струкций, представим схему комплексного анализа, основные
концепции создания агрегатов раскрытия и классификацию рас-
смотренных принципиальных схем конструкций агрегатов рас-
крытия для различных прикладных задач с учетом рассмотрен-
ных выше функционально-технологических особенностей, требо-
ваний и ограничений.
Основными концепциями являются:
— необходимость использования неразрезных поверхностей
для крупномасштабных систем, требующих высокой степе-
ни точности поверхности (солнечных батарей и отражате-
лей солнечного света), и, как следствие, в качестве этапа
их создания необходимость организации в процессе рас-
крытия их объединения на орбите из отдельных секторов,
индивидуально изготовленных и уложенных на отдельные
катушки в наземных условиях и доставленных на орбиту,
8.1. Комплексный анализ проблемы создания агрегатов раскрытия 279
т. е. организации автоматизированной сборки электростан-
ции на орбите многокатушечным агрегатом раскрытия с си-
стемой объединения отдельных секторов на орбите, опре-
деляемой технологическими возможностями изготовления
части изделия в наземных условиях и ее транспортиров-
ки на орбиту (при возможности транспортировки системы
одним носителем может использоваться однокатушечная
конструкция агрегата раскрытия);
— возможность использования разрезных поверхностей для
систем, не требующих высокой степени точности изготов-
ления поверхности (для солнечных парусов, пассивных ре-
трансляторов) и в качестве этапа их создания разработки
многокатушечных агрегатов раскрытия без систем объеди-
нения отдельных секторов на орбите;
— необходимость использования неразрезных поверхностей
для технологических экранов для получения сверхвысокого
вакуума и в качестве этапа их создания разработки одно-
катушечных агрегатов раскрытия без систем объединения
отдельных секторов на орбите;
— организация управляемого раскрытия с компенсацией кине-
тического момента дополнительной механической системой
(тросовой системой или аналогичной конструкцией, не за-
теняющей основную) для крупномасштабных систем;
— использование многолучевых схем укладки и двигателей
постоянного тока с падающей нагрузочной характеристи-
кой для обеспечения устойчивости и упорядоченности про-
цесса раскрытия;
— осуществление, помимо традиционно проводимых этапов
наземной отработки изделий ракетно-космической техники,
этапа отработки силового воздействия от центробежных
сил и динамического моделирования.
Представим классификацию конструктивных схем агрегатов
раскрытия и для различных прикладных задач в порядке возрас-
тания размерности системы и соответственно увеличения слож-
ности агрегата раскрытия:
1) однокатушечная схема с неуправляемым раскрытием
сплошной поверхности для солнечных батарей малых и средних
КА и технологических экранов;
2) многокатушечная схема с управляемым раскрытием мно-
госекторной поверхности с компенсацией кинетического момента
для солнечных парусов;
3) однокатушечная схема с управляемым раскрытием мно-
госекторной поверхности и объединением отдельных секторов
280 Гл. 8. Конструкции агрегатов раскрытия для различных задач
в единое полотнище в процессе раскрытия для крупномасштаб-
ных солнечных батарей и отражателей размерностью несколько
сотен метров (вариант, когда можно одним носителем вывести
на орбиту весь агрегат раскрытия);
4) многокатушечная схема с управляемым раскрытием мно-
госекторной поверхности и объединением отдельных секторов
в единое полотнище в процессе раскрытия для крупномасштаб-
ных солнечных батарей и отражателей размерностью несколько
сотен метров (вариант, когда нельзя одним носителем вывести
на орбиту весь агрегат раскрытия);
5) однокатушечная схема с управляемым раскрытием тросо-
вой системы размерностью несколько сотен метров для рамочных
СНЧ-антенн и систем компенсации кинетического момента.
8.2. Однокатушечный агрегат неуправляемого
раскрытия сплошного полотна для малых
и средних КА
8.2.1. Определение конструктивного облика агрегата
раскрытия сплошного полотна
На основе проведенного комплексного анализа с учетом выяв-
ленных функционально-технологических особенностей и требо-
ваний проведена проектно-конструкторская проработка основных
конструктивных решений агрегатов раскрытия для всех приво-
димых в классификации прикладных задач.
Их рассмотрение проведем в порядке возрастания размер-
ности раскрываемой конструкции и соответственно увеличения
сложности конструкции агрегата раскрытия.
В соответствии с итогами комплексного анализ и выработан-
ной классификацией конструктивных схем агрегатов раскрытия
для различных прикладных задач (п. 8.1.3), начнем с первой
позиции классификации:
— однокатушечная схема с неуправляемым раскрытием
сплошной поверхности для солнечных батарей малых и средних
КА и технологических экранов.
Наиболее простым решением создания двухосного напряже-
ния в развертываемом центробежными силами полотне являет-
ся разворачивание сплошного полотна по неуправляемой схеме
При этом полотно по какой-либо многолучевой схеме укладки
наворачивается на один центральный барабан с одним приводом
вращения. Математическая модель процесса приведена в Главе
3, п. 3.3. По причине простоты такая схема может быть рекомен-
дована для использования на малых и средних КА, где возможна
Схема комплексного анализа проблемы создания агрегатов раскрытия
формируемых центробежными силами конструкций для различных целевых задач
Надсистема - целевая задача Система - агрегаты раскрытия Подсистемы
8.2. Однокатушечныи агрегат неуправляемого раскрытия
СО
№
282 Гл. 8. Конструкции агрегатов раскрытия для различных задач
компенсация кинетического момента газовыми струями двигате-
лей системы ориентации.
В качестве примера, содержащего основные конструктивные
решения этого класса агрегатов раскрытия, приведем разработку
агрегата раскрытия модели сплошной солнечной батареи на ма-
лом спутнике «Можаец-4» [21].
Ввиду относительно небольших массово-инерционных харак-
теристик малых спутников и характерной величины мощности
СБ N=300 Вт, агрегат создавался для развертывания макета
солнечной батареи в виде двухметрового сплошного полотна.
Агрегат содержал барабан с уложенным полотном, привод враще-
ния барабана, створки, удерживающие полотно от выпадения из
барабана. Аналогичная конструкция была разработана в качестве
варианта конструкции агрегата раскрытия для КЭ «Знамя 2»
[99] на базе электропривода в привязке к ТГК «Прогресс» и для
неосуществленного КЭ «Знамя 1» на базе газового привода
в 1989 г.
8.2.2. Конструкция агрегата
По результатам расчета динамики развертывания и с уче-
том возможности использования бортового напряжения малого
спутника от 12 до 30 В были приняты следующие параметры
агрегата раскрытия: диаметр намотки барабана 90 мм, диаметр
створок 130 мм, скорость вращения барабана 100-200 об/мин.,
в качестве электродвигателя для привода вращения использо-
вался двигатель постоянного тока Д82А, имеющий падающую
механическую характеристику и механическую мощность 5 Вт.
Конструктивная схема агрегата представлена на рис. 8.2.
Макет солнечной батареи представляет собой полотно 1 диа-
метром 2 м из полиимидной пленки толщиной 8 мкм с алюми-
ниевым напылением, уложенное (намотанное) на барабан 2. Для
защиты полотна 1 от повреждения оно на барабане 2 закрыто
шестью створками 3, имеющими ось качания 4 относительно
барабана 2. Створки 3 снабжены пружинами кручения, действу-
ющими на раскрытие (поворот вокруг осей 4) створок. Барабан
установлен с одной стороны на подшипник 5, а с другой стороны
закреплен на выходном валу 6 привода 7. Привод 7 прикреплен
к кронштейну 8, служащему так же для закрепления всего агре-
гата к изделию. На кронштейне 8 установлены для каждой створ-
ки 3 ролики 9, удерживающие створки 3 в закрытом положении.
Также в конструкции створок 3 должно быть предусмотрено
следующее: а) арретир для удержания барабана 2 от враще-
ния до момента завершения всех испытаний и проверок, после
6409 0
Рис. 8.2. Конструктивная схема агрегата для малого спутника
8.2. Однокатушечный агрегат неуправляемого раскрытия
284 Гл. 8. Конструкции агрегатов раскрытия для различных задач
которых арретир должен быть снят; б) фиксатор с определенным
моментом удержания от раскрытия створок 3 на время вывода
на орбиту и до начала развертывания полотна 1. При подаче
напряжения питания на агрегат включится привод 7 и барабан
2 начнет вращаться, створки 3 выходят из-под роликов 9 и рас-
крываются, полотно / разворачивается центробежными силами
в раскрытое положение. Через определенное время, необходимое
для разворачивания полотна 1 и фиксации на видеокамеру рас-
крытого полотна (например 5-6 мин.), питание с агрегата можно
снять. Полотно 1 некоторое время будет крутиться по инерции,
так как в составе привода 7 предусматривается муфта обгона.
В составе агрегата имеется только одно электротехническое
изделие — двигатель коллекторный постоянного тока типа Д82А.
Предлагается только один разъем типа PC 10, закрепленный или
на торце Б кронштейна 8, или на кабеле, выходящем из фланца,
диаметром 60 мм.
Для удешевления проведения эксперимента в составе агре-
гата не предусматривается никаких датчиков телеметрии. Для
фиксации процесса развертывания и вращения полотна предпо-
лагается использование записи на видеокамеру.
По результатам согласования с представителями федерально-
го государственного унитарного предприятия «Производственное
объединение «Полет» габаритов, механических и электрических
интерфейсов агрегата и малого спутника «Можаец-4» был опре-
делен конструктивный облик изделия, представленный на габа-
ритно-установочном чертеже (рис. 8.3).
Разработка проводилась в системе трехмерного твердотельно-
го проектирования Pro/Engineer, позволившей легко интегриро-
вать агрегат в конструкцию малого спутника.
На рис. 8.4 представлен агрегат в составе малого спутника.
Аналогичная однокатушечная конструкция агрегата раскры-
тия использована при создании наземного прототипа агрегата
раскрытия модели солнечной батареи [21] (см. Глава 9. п. 9.4).
8.3. Многокатушечный агрегат раскрытия отражателя
для солнечных парусов
8.3.1. Определение конструктивного облика агрегата
раскрытия отражателя
В соответствии с итогами комплексного анализа и выработан-
ной классификацией конструктивных схем агрегатов раскрытия
для различных прикладных задач (п. 8.1.3), рассмотрим вторую
позицию классификации — многокатушечную схему с управля-
Положение с раскрытыми
створками и выпушенным
полотном
0 20000
232.3
1. Масса 2,4 кг
2. Штатная установка - по поверхности диаметра Б.
Штатная крепление - тремя винтами в резьбу В,
3. Напряжение питание подавать: на 1,2 контакт, а
на 9. 10 контакт вилки PC 10.
4. Для управления агрегатом необходимо:
I) Для раскрытия - подать напряжение питания от 12 до 34 В
(пусковой ток ~2 А, номинальный ток - 0,5 А).
2) Для выключения - снять питание - через 5 мин.
после подачи питания.
5. После всех испытаний перед запуском вывернуть винт Д
с красной головкой.
6. Массово-ннерционное характеристики соответствуют
переданным ранее файлам PR.O/E
7. Условия эксплуатации: +/- 50вС, вакуум до 10' мм. рт. ст.
Рис. 8.3. Габаритно-установочный чертеж агрегата для малого спутника
8.3. Многокатушечный агрегат раскрытия отражателя_285
286 Гл. 8. Конструкции агрегатов раскрытия для различных задач
Рис. 8.4. Агрегат с развернутым полотном в составе малого спутника
емым раскрытием многосекторной поверхности с компенсацией
кинетического момента для солнечных парусов.
Примером разработки конструкции многокатушечного агре-
гата раскрытия является агрегат раскрытия отражателя (АРО)
на ТГК «Прогресс» в КЭ «Знамя 2».
Агрегат АРО устанавливался на месте механизма стыковки
«штырь-конус» грузового корабля «Прогресс М» с обеспечени-
ем электрической совместимости с ГК. Агрегат АРО является
взаимозаменяемым с механизмом стыковки, при этом установка
АРО производится космонавтами. Это требование было одним
из определяющих при разработке конструкции агрегата АРО.
АРО обеспечивал раскрытие отражателя, поддержание враще-
ния отражателя в течение всего эксперимента и возможность
качания отражателя вокруг осей «У» и «Z». Конструктивно-
кинематическая схема АРО приведена на рис. 8.5.
8.3. Многокатушечный агрегат раскрытия отражателя
287
Рис. 8.5. Конструктивно-кинематическая схема АРО
Особенностью конструкции агрегата является построение от-
ражателя из восьми секторов, намотанных на катушки. Для
этого катушки расположены на барабане равномерно по его
окружности. Все катушки при сматывании полотна вращаются
синхронно, без проскальзывания, от одного привода.
На штанге (2), установленной в корпусе (/) на подшип-
никах, закреплен барабан (3) с катушками (4). Оси катушек
через зубчатую передачу связаны с приводом выпуска полотна
(ПВП) (6). Здесь же расположен механизм раскрытия шторок.
Каждая шторка прижимает наружный край намотанных секто-
ров отражателя при хранении и транспортировке АРО. Корпус
АРО имеет форму ступенчатой трубы с фланцами и закреплен
в сферической обойме конуса, заимствованного от стыковочного
механизма. Обойма и, следовательно, корпус имеют возможность
поворачиваться на некоторый угол вокруг осей «У» и «Z». При-
вод вращения барабана (ПВБ) (5) закреплен на корпусе с помо-
щью охватывающего кронштейна и кинематически соединен со
288 Гл. 8. Конструкции агрегатов раскрытия для различных задач
штангой через обгонную муфту (7), построенную на резервиро-
ванном храповом механизме.
Со стороны, противоположной барабану с катушками, корпус
связан с тягами приводов качания (S). Эти приводы смонтирова-
ны на внутренней части конуса стыковочного механизма.
Токосъемник (9) установлен внутри корпуса, его ротор связан
со штангой, а статор — с корпусом АРО. Штанга является
полой, и внутри нее проходит электрический кабель к приводу
ПВП. Внутри корпуса размещены кабели электрических цепей,
пиросредства для отстрела АРО после завершения эксперимента.
В конструкцию входят датчики оборотов приводов вращения ба-
рабана и выпуска полотнища (10), а также датчики температуры
электродвигателей приводов (11).
Привод вращения барабана является двухдвигательным: один
двигатель щеточный — типа Д82А (8 Вт), второй — бесконтакт-
ный двигатель постоянного тока типа БК 1414 (4 Вт). Оба дви-
гателя через суммирующий дифференциал работают на один вы-
ходной вал привода. В номинальном режиме двигатель БК1414
обеспечивает скорость вращения выходного вала 14 об/мин.
(i = 283), а двигатель Д82А — 80 об/мин. (i = 50), т. е. в но-
минальном режиме скорость выходного вала привода составляет
приблизительно 94 об/мин. В этом режиме скорость вращения
барабана — 66 об/мин. Двигатель Д82А рассчитан на крат-
ковременную работу в высоком вакууме (20 мин.). Двигатель
БК1414 обеспечивает длительную работу привода в условиях
космического пространства.
Привод может работать отдельно от любого двигателя. Для
этого в кинематическую схему включены две муфты необрати-
мого вращения. Достоинствами такой схемы являются:
— наличие резервирования;
— возможности изменения скорости выходного вала в ши-
роких пределах; автоматическое регулирование скорости
вращения во время раскрытия отражателя.
Такая схема позволяет в начале раскрытия отражателя со-
здать повышенную центробежную силу, когда еще мала масса
и радиус выпущенного пленочного полотна. Если в якорную сеть
двигателя Д82А включить добавочное сопротивление (50 Ом),
то можно изменять степень падения скорости вращения барабана
при выпуске полотна. Привод ПВБ соединен со штангой через
понижающую зубчатую передачу с i = 1,415.
Привод выпуска полотна построен на щеточном двигателе
типа Д118, работоспособном в высоком вакууме в течение 1 часа.
Выходная мощность двигателя — 5 Вт, пусковой момент — не
8.4. Агрегат раскрытия полотна, состоящего из секторов
289
менее 6 Н-см, номинальная скорость — 2200 об/мин. Выходной
вал ПВП должен быть самотормозящимся, поэтому в редукторе
используется червячная передача с однозаходным червяком. Для
повышения КПД и надежности червячное колесо изготовлено из
антифрикционной бронзы БРОФ с покрытием ВНИИНП-230 (на
основе диосульфида молибдена). В приводе помещен резистив-
ный датчик числа оборотов выходного вала, номи нальная ско-
рость вращения которого — 35 об/мин. ПВП соединен с катуш-
ками через понижающую передачу с г = 2. Поэтому выпуск по-
лотна происходит при скорости вращения катушек 17,5 об/мин.,
что соответствует линейной скорости 0,1 м/с с последующим
замедлением до 0,03 м/с.
Конструкция АРО более подробно описана в Главе 11,
п. 11.4, посвященной КЭ «Знамя 2».
8.4. Агрегат раскрытия полотна, состоящего из
секторов, намотанных на один барабан для солнечных
батарей и технологических экранов на малых
и средних КА
8.4.1. Определение конструктивного облика агрегата
раскрытия
В соответствии с итогами комплексного анализ и выработан-
ной классификацией конструктивных схем агрегатов раскрытия
для различных прикладных задач (п. 8.1.3), рассмотрим третью
позицию классификации:
— однокатушечная схема с управляемым раскрытием много-
секторной поверхности и объединением отдельных секторов
в единое полотнище в процессе раскрытия для крупномас-
штабных солнечных батарей и отражателей размерностью
несколько сотен метров (вариант, когда можно одним носи-
телем вывести на орбиту весь агрегат раскрытия).
Конструкция сплошного полотна имеет специфические осо-
бенности: сложно технологически изготовить полотно значитель-
ных размеров и еще более сложно уложить такое полотно на
барабан. К тому же агрегат для малого спутника не управляет
процессом выпуска полотна. Выпуск осуществляется в соответ-
ствии с расчетной динамической схемой. Поэтому такой вариант
конструкции приемлем только для небольших размеров полотна.
Для раскрытия полотна значительных размеров, обладаю-
щего в развернутом виде двухосным напряженным состоянием,
необходимо разработать агрегат, соединяющий отдельные секто-
ра в сплошное полотно в процессе раскрытия и дополнительно
10 Г. Г. Райкунов и др.
290 Гл. 8. Конструкции агрегатов раскрытия для различных задач
управляющий раскрытием полотна. Отметим, что таким агре-
гатом может быть осуществлено управляемое раскрытие также
сплошного полотнища.
Была разработана концепция агрегата, соединяющего края
отдельных секторов полотна при его выпуске и управляющего
выпуском при помощи вытягивающих роликов.
На рис. 8.6 представлена схема агрегата раскрытия СБ: по-
лотно 1 в уложенном на барабан 2 положении (а) и в начале
выпуска вытягивающими роликами 3 (б).
Рис. 8.6. Схема агрегата раскрытия
8.4.2. Конструкция агрегата
Можно рассматривать несколько схем укладки отдельных
секторов полотна в агрегате раскрытия, соединяющего отдельные
сектора в сплошное полотно в процессе раскрытия и дополни-
тельно управляющего раскрытием полотна:
1) с намоткой всех секторов на один центральный барабан
2) с намоткой каждого сектора на отдельную катушку.
Первый вариант актуален для полотна больших размеров,
когда одним носителем можно вывести на орбиту сразу все
полотнище СБ.
На основе существующего технического уровня изготовления
фотоэлектрических преобразователей и ориентацию на проведе-
ние эксперимента с установкой на изделие типа ТГК «Прогресс»
были приняты следующие положения по разработке конструкции
агрегата развертывания:
— все сектора наматываются на один барабан;
— допустимый минимальный радиус загиба полотна не менее
300 мм;
8.4 Агрегат раскрытия полотна, состоящего из секторов 291
— полотно может быть как пленкой, так и сеткой с навешен-
ными ФП.
На рис. 8.7 представлен агрегат раскрытия, состоящий из
барабана 1, на который намотаны сектора 2 полотна. Барабан
установлен на подшипниках 3, закрепленных на оси 4. Барабан
приводится во вращение приводом вращения 5, установленным
на основании 6. На оси 4 закреплен токосъемник 7 для создания
электрического контакта между основанием 6 и барабаном /. На
барабане / на опоре вращения 8 установлен механизм выпуска 9,
кинематически соединенный с приводом выпуска 10. Механизм
выпуска 9 имеет в своем составе диск 11с присоединенными
к нему посредством осей 12 кронштейны 13, количество которых
равно количеству секторов 2. На кронштейнах 13 уставлены
приводы роликов 14, на выходном валу которых закреплены
приводные ролики 15. На шарнирно закрепленных относительно
кронштейнов 13 рычагах 16 установлены прижимные ролики
17 и направляющие 18. Пружина 19 обеспечивает поджатие
приводных 15 и прижимных 17 роликов. На радиальных краях
секторов 2 закреплены соединительные элементы 20. Причем,
наружные края секторов соединены между собой элементами 20,
и завершение этих соединений находится между приводными
15 и прижимными 17 роликами, а выходящие из роликов 15
и 17 свободные хвосты секторов 2 уложены на барабан 1 по-
верх направляющих 18. Цилиндрическая поверхность барабана
1 закрыта створками 21, шарнирно закрепленными относительно
барабана 1 и имеющими пружины 22, стремящимися раскрыть
створки 21. На створках 21 установлены ролики 23, взаимо-
действующие с упорами 24 на основании 6. На диске 11 и на
барабане 1 установлены контактные кольца 25 и контактные
группы 26 для электрического соединения барабана 1 и приводов
роликов 14. В составе приводов роликов 14 имеется муфта пре-
дельного момента, а в составе привода выпуска 10 имеется муфта
необратимого вращения, передающая вращение от двигателя на
выходной вал и удерживающая выходной вал от вращения при
приложении внешнего момента. Эту функцию в приводе может
выполнить также червячная самотормозящаяся передача.
Развертывание секторов 2 начинается с включения привода
вращения 5, который приводит в движение барабан /. При этом
ролики 23 створок 21 сходят с упоров 24, и створки 21 раскрыва-
ются пружинами 22. Под действием центробежных сил свобод-
ные хвосты секторов 2 распушаются, а кронштейны 13 поворачи-
ваются относительно диска 11. Направляющие 18 обеспечивают
определенный радиус кривизны секторов с целью обеспечения
ю*
292 Гл. 8. Конструкции агрегатов раскрытия для различных задач
целостности ФЭП на полотне. После временной задержки, необ-
ходимой для раскрутки барабана /, включается привод выпуска
10, вращающий механизм выпуска 9, и привод 14 роликов 15
Ролики 15 зацепляют соединительные элементы 20 и совместно
с прижимными роликами 17 соединяют соединительные элемен-
ты 20 соседних секторов 2 и вытягивают их с барабана. При этом
скорости вращения роликов 15 и механизма выпуска 9 таковы,
что линейная скорость роликов 15 должна превышать скорость
схода секторов 2 с барабана 1, то есть вытягивать сектора. Раз-
ница в скоростях компенсируется проскальзыванием муфт пре-
дельного момента приводов 14. В процессе выпуска секторов 2 на
механизм выпуска 9 действует помогающий вращению момент,
который старается раскрутить механизм 9. Для обеспечения
определенной скорости выпуска в приводе 10 срабатывает муфта
необратимого вращения, передающая вращение от двигателя на
выходной вал и удерживающая выходной вал от вращения при
приложении внешнего момента. Приводы выпуска 10 и роликов
14 работают до полного схода полотна с барабана 1. Тем са-
мым осуществляется создание единого полотна для обеспечения
двухосного напряжения полотна и организуется управляемый
выпуск полотна. После выпуска полотна работает только привод
вращения 5 для обеспечения растянутой формы раскрывшегося
полотна. С целью экономии ресурса работы привода в него может
быть встроена муфта обгона, что позволит выключать привод
5 и включать его только для поддержания скорости вращения
в некотором диапазоне скоростей.
На рис. 8.7 представлена конструктивная схема агрегата рас-
крытия в транспортном положении.
Рис. 8.7. Агрегат в транспортном положении
8.5. Агрегат развертывания полотна, состоящего из секторов 293
А
увеличено
Рис. 8.8. Выносной элемент А
С-С
увеличено
Рис. 8.9 Разрез С-С
На выносном элементе А (рис. 8.8) показан кронштейн 13
с рычагом 16 и роликами 15, 17. На рис. 8.9 показан разрез С-С
по секторам 2 и соединительным элементам 20. На выносном
элементе В (рис 8.10) показан механизм раскрытия створок 21.
На рис. 8 11 показан агрегат в начале выпуска секторов.
8.5. Агрегат развертывания полотна, состоящего из
секторов, намотанных на катушки для
крупномасштабных отражателей и солнечных батарей
8.5.1. Конструктивная концепция агрегата
В соответствии с итогами комплексного анализа и выработан-
ной классификацией конструктивных схем агрегатов раскрытия
для различных прикладных задач (п. 8.1.3), рассмотрим четвер-
тую позицию классификации:
294 Гл. 8. Конструкции агрегатов раскрытия для различных задач
В
увеличено
Рис. 8.10. Выносной элемент В
Рис. 8.11. Агрегат в процессе выпуска секторов
— многокатушечная схема с управляемым раскрытием много-
секторной поверхности и объединением отдельных секторов
в единое полотнище в процессе раскрытия для крупномас-
штабных солнечных батарей и отражателей размерностью
несколько сотен метров (вариант, когда нельзя одним но-
сителем вывести на орбиту весь агрегат раскрытия).
Для раскрытия полотна значительных размеров, обладаю-
щего в развернутом виде двухосным напряженным состоянием,
необходимо разработать агрегат, собирающий сплошное полотно
из отдельных секторов и управляющий выпуском полотна.
Возможны варианты сборки полотна из секторов, намотанных
на один центральный барабан, и из секторов намотанных на от-
дельные катушки. Вариант с отдельными катушками для секто-
ров привлекателен возможностью сборки полотна очень больших
8.5. Агрегат развертывания полотна, состоящего из секторов 295
размеров, так как в этом случае каждый сектор укладывается
на свою катушку и имеется возможность эту катушку доставить
отдельно на орбиту и установить в агрегат раскрытия в космиче-
ском пространстве.
Предлагается конструктивная концепция агрегата, соединяю-
щего края отдельных секторов полотна при его выпуске и управ-
ляющего выпуском при помощи вытягивающих роликов. На
рис. 8.12 представлено полотно 1 в уложенном состоянии на
катушки 2, установленные на барабан 3, (рис. 8.12с) и в нача-
ле выпуска, когда ролики 4 соединяют и вытягивают полотно
(рис. 8.126).
Рис. 8.12. Концептуальная схема агрегата раскрытия полотна, состоящего из
отдельных секторов, уложенных на катушки
8.5.2. Конструктивная схема агрегата
Конструктивная схема агрегата в исходном положении (до
начала раскрытия) представлена на рис. 8.13.
Схема агрегата в начале раскрытия представлена на рис. 8.14.
Агрегат состоит из барабана /, на который установлены катушки
2 с секторами полотна 3. Барабан установлен на подшипниках
4, закрепленных на оси 5. Барабан приводится во вращение
приводом вращения 6, установленным на основании 7. На оси 5
закреплен токосъемник 8 для создания электрического контакта
между основанием 7 и барабаном /. На барабане 1 на опорах
вращения 9 установлено зубчатое колесо 10, кинематически со-
единенное с приводом выпуска 11 и шестернями 12 катушек
2. Барабан 1 имеет в своем составе присоединенные к нему
посредством осей 13 кронштейны 14, количество которых равно
количеству катушек 2. На кронштейнах 14 уставлены приводы
296 Гл. 8. Конструкции агрегатов раскрытия для различных задач
А
увеличено
М
увеличено
С
увеличено
В
увеличено
Рис. 8.13 Агрегат в исходном положении
Рис. 8.14. Агрегат в начале раскрытия
роликов 15, на выходном валу которых закреплены приводные
ролики 16. На шарнирно закрепленных относительно кронштей-
нов 14 рычагах 17 установлены прижимные ролики 18. Пружина
19 обеспечивает поджатие приводных 16 и прижимных 18 роли-
ков. На радиальных краях секторов 2 закреплены соединитель-
ные элементы 20. Причем, наружные края секторов соединены
между собой элементами 20, и завершение этих соединений
8.5. Агрегат развертывания полотна, состоящего из секторов 297
находится между приводными 16 и прижимными 18 роликами,
а выходящие из роликов 16 и 18 свободные хвосты секторов
3 уложены на барабан / поверх катушек 2 Цилиндрическая
поверхность барабана 1 закрыта створками 21, шарнирно закреп-
ленными относительно барабана 1 и имеющими пружины 22,
стремящиеся раскрыть створки 21. На створках 21 установлены
ролики 23, взаимодействующие с упорами 24 на основании 7.
В составе приводов роликов 15 имеется муфта предельного мо-
мента, а в составе привода выпуска 11 имеется муфта необрати-
мого вращения, передающая вращение от двигателя на выходной
вал и удерживающая выходной вал от вращения при приложении
внешнего момента. Эту функцию в приводе может выполнить
также червячная самотормозящаяся передача
Развертывание секторов 3 начинается с включения приво-
да вращения 6, который приводит в движение барабан /. При
этом ролики 23 створок 21 сходят с упоров 24, и створки
21 раскрываются пружинами 22. Под действием центробежных
сил свободные хвосты секторов 2 распушаются, а кронштейны
14 поворачиваются относительно барабана /. После временной
задержки, необходимой для раскрутки барабана 1, включаются
привод выпуска 11, вращающий зубчатое колесо 10, и кинема-
тически связанные через шестерни 12 катушки 2, и приводы
15 роликов 16. Ролики 16 зацепляют соединительные элементы
20 и совместно с прижимными роликами 18 соединяют соеди-
нительные элементы 20 соседних секторов 3 и вытягивают их
с катушек 2. При этом скорости вращения роликов 16 и катушек
2 таковы, что линейная скорость роликов 16 должна превышать
скорость схода секторов 3 с катушек 2, то есть вытягивать секто-
ра. Разница в скоростях компенсируется проскальзыванием муфт
предельного момента приводов 15. В процессе выпуска секторов
3 на привод выпуска 11 действует помогающий вращению мо-
мент, который старается раскрутить привод 11. Для обеспечения
определенной скорости выпуска в приводе 11 срабатывает муфта
необратимого вращения, передающая вращение от двигателя на
выходной вал и удерживающая выходной вал от вращения при
приложении внешнего момента. Приводы выпуска 11 и роликов
15 работают до полного схода полотна с катушек 2. Тем са-
мым осуществляется создание единого полотна для обеспечения
двухосного напряжения полотна и организуется управляемый
выпуск полотна. После выпуска полотна работает только привод
вращения 6 для обеспечения растянутой формы раскрывшегося
полотна. С целью экономии ресурса работы привода в него может
быть встроена муфта обгона, что позволит выключать привод 6
298
Гл. 8. Конструкции агрегатов раскрытия для различных задач
и включать его только для поддержания скорости вращения
в некотором диапазоне скоростей.
Важным элементом предлагаемого агрегата раскрытия явля-
ется узел вытягивающих роликов, объединяющих два соседних
сектора. Схема в силу многовариантности процесса объединения
требует выбора наиболее рационального варианта. Необходим
анализ особенностей соединений путем сварки, перфорирова-
ния, склейки, сшивания, соединения типа «молния» и прочее
в конкретных условиях функционирования агрегата. Требуется
макетирование и наземная и орбитальная отработка как узла вы-
тягивающих роликов, так и всего агрегата в целом. На рис. 8.15
представлена схема технологических этапов раскрытия конструк-
ции. Этапы сборки следующие: уложенный на катушку сектор
СБ ракетой-носителем доставляется на орбиту, работотехникой
устанавливается в агрегат раскрытия, и объединяется с другими
секторами в единое полотнище в процессе раскрытия. Агрегат
при некоторой доработке позволяет осуществлять и обратное
свертывание СБ.
8.5.3. Заключение по разделу
Разработана схема агрегата раскрытия солнечной батареи
или отражателя, позволяющая объединять отдельные сектора
в процессе раскрытия конструкции. Такая конструкция в наи-
большей мере подходит для энергосистем КА очень большой
размерности, когда одним носителем может быть выведена на
орбиту не вся конструкция, а только ее часть, например, от-
дельный сектор СБ, уложенный на катушку при изготовлении
в наземных условиях. Таким образом, данная конструктивная
схема агрегата раскрытия может служить базой для создания
технологии автоматизированной сборки на орбите космической
солнечной электростанции любой мощности. Этапы сборки сле-
дующие: уложенный на катушку сектор СБ ракетой-носителем
доставляется на орбиту, робототехникой устанавливается в аг-
регат раскрытия и объединяется с другими секторами в еди-
ное полотнище в процессе раскрытия. Агрегат при некоторой
доработке позволяет осуществлять и обратное свертывание СБ,
что может быть использовано при создании электростанций на
Луне, где отсутствие атмосферы, глубокий вакуум и в 6 раз
меньшая, чем на Земле, гравитация позволяет использовать фор-
мируемые центробежными силами конструкции, а возможность
предложенной схемы осуществлять раскрытие-свертывание СБ
позволит осуществлять мобильные операции по разворачиванию
8.5. Агрегат развертывания полотна, состоящего из секторов 299
г.1
Рис. 8.15. Схема этапов раскрытия конструкции агрегатом раскрытия с «тя-
нущими роликами»: а) агрегат без катушек; б) агрегат с установленными
катушками; в) агрегат в начальной фазе раскрытия: г) объединение роликами
соседних секторов; д) раскрытая конструкция
300 Гл. 8. Конструкции агрегатов раскрытия для различных задач
электростанции и ее обратному свертыванию в связи с измене-
нием дислокации или ремонтом.
8.6. Агрегат раскрытия тросовой системы
8.6.1. Конструктивная концепция агрегата
В соответствии с итогами комплексного анализа и выработан-
ной классификацией конструктивных схем агрегатов раскрытия
для различных прикладных задач (п. 8.1.3), рассмотрим пятую
позицию классификации:
— однокатушечная схема с управляемым раскрытием тросо-
вой системы размерностью несколько сотен метров для ра-
мочных СНЧ-антенн и систем компенсации кинетического
момента.
Агрегат раскрытия тросовой системы прорабатывался до-
статочно подробно в рамках Технического предложения НПО
«Энергия» [143] параллельно созданию математической модели
динамики раскрытия 4-петлевой системы (см.п. 3.4). В осно-
ву разработки была поставлена задача реализации управляемой
двухприводной схемы (рис. 8.16). В силу специфики тросо-
Рис. 8.16. Конструктивная схема агрегата раскрытия тросовой антенны: I —
массив троса на одной центральной катушке; 2 — рамочная конструкция
«беличья клеть»; 3 — привод вращения; 4 — привод роспуска; 5 — катушка
для укладки чечевицеобразных раздвижных штанг; 6 — чечевицеобразные
раздвижные штанги в уложенном состоянии
вой намотки удалось отказаться от многокатушечной концеп-
ции агрегата раскрытия, разместив весь массив троса на одной
центральной катушке 1, а управление 4 распускаемыми петля-
ми осуществлять вращающейся относительно основной катушки
8.6. Агрегат раскрытия тросовой системы 301
рамочной конструкцией «беличьей клети» 2 с приводом роспуска
4. Такое решение, в отличие от катушечного варианта наземного
прототипа, использованного при наземной отработке (см.п. 9.1.2,
Глава 9), сильно уменьшило габариты агрегата Важной особен-
ностью конструкции явилась необходимость организации боль-
шого размера ведущего центра (D=20 м), выявленная при мате-
матическом моделировании. Предложено использовать разматы-
ваемые с расположенной на оси агрегата катушки 5 4 штанги
из стальной фольги чечевицеобразного профиля 6, использован-
ного ранее в разработке агрегата АВШ предприятия, а также
предполагавшихся к использованию в зарубежных каркасных
вариантах солнечных парусов в конкурсе Космическая регата
в 1990 г.
Часть III
НАЗЕМНАЯ И ОРБИТАЛЬНАЯ
ЭКСПЕРИМЕНТАЛЬНАЯ
ОТРАБОТКА
Глава 9
НАЗЕМНЫЕ МОДЕЛЬНЫЕ
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
ТРОСОВЫХ И ПЛЕНОЧНЫХ КОНСТРУКЦИЙ
9.1. Экспериментальные исследования тросовых
систем
9.1.1. Цель и задачи экспериментальных исследований
тросовых систем
Целью настоящих экспериментальных исследований явля-
ется физическое моделирование вращающихся деформируемых
систем, развертывание которых возможно в воздушной среде
в поле сил тяготения.
В задачи исследований входит:
1) визуальное наблюдение систем;
2) выявление систем, способных образовать устойчивые фор-
мы требуемой конфигурации.
Схемы тросовых систем, для которых проводились экспери-
менты, приведены на рис. 9.1.
9.1.2. Конструкции агрегатов разворачивания тросовых
систем
При реализации целей и задач экспериментальных исследо-
ваний разработаны и созданы пять модификаций эксперимен-
тальных моделей «Протон». Функциональные возможности этих
моделей соответствуют определенным этапам исследований.
В связи с тем, что основные исследования выполнялись
на экспериментальных моделях «Протон-4» и «Протон-5», ниже
приводится описание только этих моделей.
Модель «Протон-4» (рис. 9.2) создана с целью исследования
движения нити в процессе образования из нее контура заданной
формы, устойчивости движения этого контура при изменении
плоскости его вращения.
Конструкция модели представлена на рис. 9.3. Синхронный
электродвигатель 2 установлен на крышке 3 корпуса 1, которая
одновременно является корпусом двухступенчатого редуктора 4.
Вращение стакана 7, насаженного на выходной вал редуктора,
происходит на подшипниках качения, сидящих на неподвижном
стакане 6, установленном на крышке 5 редуктора. К стакану
306
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.1. Схемы тросовых систем, для которых проводились эксперименты
закреплен фланец 8. Между фланцами 8 и 9, соединенными
между собой стойками 10, расположены трехъярусные катушки
16, которые собраны на выходных валах одноступенчатого ци-
линдрического редуктора 15.
Выпуск нити осуществляется электродвигателем 13 посред-
ством планетарного редуктора 14 и редуктора 15. Электродви-
гатель с планетарным редуктором установлен на фланце 12,
который стойками 11 крепится к фланцу 9. Редуктор 15 соби-
рается между фланцами 9 и 12. Питание электродвигателя 13
осуществляется через токосъемные кольца 18.
Изменение ориентации плоскости вращения контура нити
осуществляется электродвигателем 21 через закрытый червячно-
цилиндрический редуктор 22 и открытый цилиндрический ре-
дуктор 23. Колесо редуктора 23 закреплено на оси 24, установ-
9.1. Экспериментальные исследования тросовых систем
307
Рис. 9.2. Модель «Протон-4»
ленной на крышке 3 корпуса 1. Оси 24 опираются на стойки
основания 20.
Управление электродвигателями модели «Протон-4» произво-
дится с выносного пульта.
Модель «Протон-5» (рис. 9.4) создана с целью обеспече-
ния возможности проведения экспериментальных исследований
динамики, одновременно вращающихся в противоположных на-
правлениях, контуров нити с независимым управлением выпуска
радиальных и окружных нитей. Кроме того, при проектировании
модели была предусмотрена возможность проведения простей-
ших экспериментов с мембранами и оболочками.
Конструкция модели представлена на рис. 9.5. Два одина-
ковых устройства установлены на вал 1. Вращение происходит
на подшипниках 2, посаженных на неподвижном стакане 3. На
фланцах 4 и 5, прикрепленных к корпусам 6 подшипников,
установлены основные двигатели 7, которые через зубчатую пе-
редачу 8 приводят во вращение устройство. При помощи шпилек
к фланцу 5 крепится блок катушек 9. Блок катушек состоит из
четырех наборных катушек, каждая из которых имеет две части,
вращающиеся независимо друг от друга. Все четыре катушки
введены между собой в зубчатое зацепление, что позволяет, при-
308
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.3. Конструкция модели «Протон-4»
водя в движение одну катушку, вращать все остальные. Привод
катушек осуществляется электродвигателями 10, закрепленными
на фланце 5. Оси // катушек установлены с возможностью вра-
щения во фланцах 12 блока катушек. Питание электродвигателя
подается через кольцевой токосъем 15. Все устройство помещено
в корпус 16
9.1.3. Экспериментальное оборудование
Наблюдения за процессом формообразования вращающего-
ся контура нити при проведении экспериментов на моделях
«Протон» проводились с помощью стробоскопического тахометра
2ТСт32-456.
Для синхронизации числа оборотов с частотой вспышек им-
пульсной лампы тахометра на моделях «Протон-4» и «Протон-5»
смонтировано синхронизирующее устройство.
Фиксирование форм образующегося контура производилось
фотоаппаратами «Киев-20» и «Киев-88ТТ» в свете импульсной
лампы стробоскопического тахометра.
9.1. Экспериментальные исследования тросовых систем 309
Рис. 9.4. Модель «Протон-5»
Рис. 9.5. Конструкция модели «Протон-5:
310
Гл. 9. Наземные модельные экспериментальные исследования
В связи с недостаточной мощностью излучения импульсной
лампы стробоскопического тахометра 2ТСт32-456 при фотогра-
фировании быстроменяющихся процессов было сконструирова-
но и изготовлено стробоскопическое устройство. Мощность из-
лучения импульсной лампы стробоскопического устройства со-
ставляла 8 кВт. В осветителе смонтирована импульсная лампа
ИФП-80000, высоковольтный трансформатор, формирующий за-
жигающие импульсы, воздушный автотрансформатор и вентиля-
тор для охлаждения лампы.
Контроль частоты вращения осуществляется частотомером
43-35А.
Управление экспериментальной моделью «Протон-5» осу-
ществлялось со специального пульта.
9.1.4. Результаты экспериментов
Результаты экспериментов изложены в порядке, приведенном
в таблице 9.1.
Таблица 9.1.
N серии Система Кол-во эксперим. Цель экспериментов Особенности и результаты экспериментов
1 СН1 17 Получение контура круговой формы Скорость выпуска нитей 0,01 м/с при варьировании массами соединителей от 10~4 до 10~2 кг и угловой скоростью от 10 рад/с до 100 рад/с круговую форму нити получить не удалось
2 СН4 34 Получение круговой формы изменяемого радиуса При зависимых и независимых скоростях выпуска радиальных нитей и нитей контура контур принимал заданную устойчивую форму. Масса соединителей подбиралась по формуле (9.1)
3 СН4 10 Изучение случая, когда длина радиальной связи больше радиуса круговой формы Удлинение нити контура привело к последовательно изменяемым формам контура. Система неустойчива
9.1. Экспериментальные исследования тросовых систем
311
Таблица 9.1 (продолжение)
N серии Система Кол-во эксперим. Цель экспериментов Особенности и результаты экспериментов
4 СНЧ 20 Процесс восстановления круговой формы путем уменьшения длин нитей контура и радиальных связей Круговая форма восстанавливалась дольше, чем в серии 1-3, в каждом отдельном эксперименте формы не повторялись. Система неустойчива
5 СН4 5 Восстановление круговой формы путем уменьшения длины контурных нитей Невозможно
6 СН5 26 Получение круговой формы контура изменяемого радиуса Выпуск радиальных связей соединителей и нитей контура проводился независимо. При варьировании массами соединителей в диапазоне 7 10“5-2 10“3 кг получена прямая зависимость массы соединителя от радиуса кругового контура
7 СН6 10 Получение круговой формы нити изменяемого радиуса Невозможно
8 СН7 30 Получение круговой формы нити изменяемого радиуса При первоочередном выпуске нитей контура с последующим выпуском радиальных связей с соединителем круговой формы получить не удалось. При попеременном выпуске тех и других нитей удалось получить круговой контур D — 1,5 м, дальнейший выпуск приводил к потере круговой формы
312
Гл. 9. Наземные модельные экспериментальные исследования
Таблица 9.1 (продолжение)
N серии Система Кол-во эксперим. Цель экспериментов Особенности и результаты экспериментов
9 СН4 10 Изучение выпуска только нитей контура Получить круговой контур невозможно
10 НН Получение круговой формы контура фиксируемого радиуса Получена круговая форма, устойчивая к малым мущениям. Наклоны оси радиуса вращения на 30 градусов зримых изменений формы не вызывает
11 НН 20 Исследование устойчивости системы в случае, если радиальные нити длиннее радиуса кругового контура При увеличении длины нитей на 1/5-1/3 радиуса контура происходила потеря устойчивости круговой формы
12 НН1 5 Получение круговой формы контура заданного радиуса Невозможно
13 СН2 15 Получение круговой формы контура заданного радиуса Варьирование массами соединителей и угловой скоростью вращения к поставленной цели не привело
14 СНЗ 27 Получение круговой формы нити заданного радиуса Масса соединителя рассчитывалась по формуле (9.1) и составила 1,3 • 10-3 кг. Полученные формы контура устойчивы к возмущениям и наклонам плоскости вращения
15 СН4 20 Реализация системы с нулевым кинетическим моментом Получены устойчивые системы, зацепления одного контура за другой не происходило
9.1. Экспериментальные исследования тросовых систем
313
Все эксперименты проводились с гибким медным многожиль-
ным проводом в фторопластовой оплетке с линейной плотностью
р = 1,925 • 10-3 кг/м диаметром d — 5 • 10-4 м.
Фотосъемки производились при синхронизированном им-
пульсном освещении. Угловая скорость вращения изменялась
в пределах от 10 рад/с до 100 рад/с, максимальное значение угла
отклонения оси от вертикали при наклонах плоскости вращения
составляет 30°
Скорость изменения угла равна 0,1 рад/с.
Во всех проведенных экспериментах наблюдались некоторые
свойства, общие для систем с гибкими нитями. Сопротивление
воздуха принципиально не влияет на формы системы, однако
вызывает угловое смещение нитей в сторону, противоположную
вращению. Это ограничивает область экспериментальных иссле-
дований систем с гибкими нитями в воздушной среде, поскольку
отклонение нити больше чем на 90 градусов может привести
к запутыванию нити при ее выпуске. Увеличение линейной плот-
ности нити уменьшает величину отклонения, а увеличение раз-
меров системы увеличивает ее. При изменении угловой скорости
в указанных выше пределах, при наклонах оси вращения на угол
30° зримых изменений форм системы не наблюдалось.
Из-за относительно меньшей трудоемкости исследований тро-
совых систем на воздухе, по сравнению с барокамерными иссле-
дованиями пленочных систем, имелась достаточная статистика
на большом количестве вариантов (таблица 9.1).
Из анализа экспериментальных результатов следовало, что
устойчивая форма системы на этапах разворачивания получена
только в двух случаях: для системы СНЧ с массами соедините-
лей, подбираемыми по формуле
m = ncnppRp, (9.1)
где:
т — общая масса соединителей;
пс — число соединителей;
пр — число нитей (тросов), проходящих через соединитель;
ц — линейная плотность нити (троса);
Rk — конечный радиус системы;
и в случае системы НН без соединителей с жесткой связью
радиальной и контурной нити (троса).
Последняя система была более простой и технологичной,
поскольку не требовала масс соединителей, практически равных
массе тросов, входящих в систему, а также в ней отсутствовал
314
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.6. Фотография потери устойчивости системы СНЧ в свете стробоскопи-
ческой лампы
элемент скользящего контакта в соединителе с тросом и потен-
циальная возможность заедания.
На рис. 9.6. приведены фотографии в свете стробоскопиче-
ской лампы потери устойчивости системы СНЧ. На рис. 9.7
приведены этапы формирования устойчивой системы НН.
В заключение отметим, что экспериментальные исследования
тросовых систем сыграли большую роль в понимании процессов
разворачивания гибких систем (в том числе и пленочных). На ос-
нове этих исследований были выбраны типы конструкций, устой-
чивые на этапах разворачивания, которые в дальнейшем были
предложены в качестве маховиков противовращения пленочных
полотнищ и тросовых рамочных радиоантенн СНЧ- и НЧ-диапа-
зона. Лабораторные механизмы разворачивания тросовых систем
во многом служили прототипами агрегатов разворачивания, за-
ложенных в последующие проекты космических систем.
9.2. Наземная экспериментальная отработка пленочных полотнищ 315
а) б)
в)
Рис. 9.7. Этапы формирования устойчивой системы НН
9.2. Наземная экспериментальная отработка
пленочных полотнищ в вакуумных камерах
9.2.1. Цели и задачи отработки
Первые экспериментальные исследования моделей пленочных
отражателей, формируемых центробежными силами, были про-
ведены совместно ЦНИИМАШ и НПО «Энергия» на вакуум-
ной установке У-22 в соответствии с программой испытаний
ПМ-0485-34-85 [95].
Объектом испытаний являлись образцы тонкопленочных по-
лотен (дисков):
— одинарные пленочные полотна диаметром 5 м без укладки,
а также уложенные двумя способами: «гармошка с 2 сто-
рон» (рис. 9.8) и «гармошка с 4 сторон»;
— одинарное пленочное полотно диаметром 2 м, уложенное
способом «6-лучевая звезда» (рис. 9.9);
316 Гл. 9. Наземные модельные экспериментальные исследования
— сдвоенное («менискообразное») полотно диаметром 5 м
(два одинарных полотна склеенных по периметру, рис. 9.10)
без предварительной укладки.
Рис. 9.8. «Гармошка с 2 сторон»
Целью испытаний являлось определение основных законо-
мерностей поведения вращающихся пленочных полотен в зави-
симости от различных факторов, а также определение наиболее
устойчивых режимов разворачивания полотен из уложенного со-
стояния.
Задачами экспериментальных исследований являлись:
а) определение частоты вращения привода, при которой про-
исходит переход пленочного полотна в плоскость из поло-
жения свободного свисания;
б) определение зависимости качества зеркальной поверхности
пленочного полотна от частоты вращения привода;
в) определение зависимости качества зеркальной поверхности
и формы пленочного полотна от давления окружающей
среды;
г) исследование возможности поворота оси вращения (пере-
ориентации) пленочного полотна, формируемого центро-
бежными силами;
д) определение частот вращения, при которых происходит раз-
. рушение пленочных полотен разных размеров;
е) определение оптимальных режимов раскрытия пленочных
полотен из различных типов укладок; сравнительная оцен-
ка укладок;
92. Наземная экспериментальная отработка пленочных полотнищ 317
Рис 9.9 Одинарное пленочное полотно диаметром 2 м, уложенное способом
«6-лучевая звезда»
Рис. 9.10. Сдвоенное («менискообразное») полотно D= 5 м
ж) исследование сдвоенных пленочных полотен;
з) исследование режимов ускорения пленочных полотен.
Программа экспериментальных исследований была построена
таким образом, что можно было решать одновременно несколько
экспериментальных задач.
9.2.2. Экспериментальный стенд. Состав оборудования
Экспериментальные исследования вели в ЦНИИМАШ на
вакуумной установке У-22 (рис. 9.11) [95]. Рабочей частью уста-
новки является барокамера 1 диаметром 8 м и высотой около
20 м. Барокамера оснащена вакуумной станцией 9, позволяющей
создавать разрежение 5 • 10 4 мм рт. ст , предохранительным
318
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.11. Вакуумная установка У-22 ЦНИИМАШ
устройством 12, системой напуска 11 и системой вентиляции
10. На боковых стенках барокамеры предусмотрены специальные
патрубки 16 для установки на них гермоплат, через которые
осуществляется ввод электрокоммуникаций систем управления
и измерения. В верхней части расположены оптические панели 3,
позволяющие размещать на них оптические окна-иллюминаторы
различных диаметров (800 мм, 400 мм, 230 мм). В средней части
располагается подставка 7, в верхней и нижней частях барока-
меры устанавливаются вертикальные стойки 17 с площадками
обслуживания 18, перемещающиеся по внутреннему периметру
барокамеры.
При проведении испытаний на верхнюю крышку барокаме-
ры был установлен механизм вертикального перемещения 2,
на котором монтируется экспериментальный электропривод 15,
9.2. Наземная экспериментальная отработка пленочных полотнищ 319
разработанный и изготовленный в ТашКБМ и обеспечивающий
вращение и поворот пленочного полотна 14.
На уровне подставки 7 был натянут светорассеивающий
экран 8 общей площадью 36 м из белой ткани. Над экраном
(около его центра) на высоте около 0,7 м расположены кон-
трольные сетки 19, предназначенные для исследования качества
зеркальной поверхности металлизированного пленочного полотна
путем их фотографирования через нее. Используются контроль-
ные сетки 2 типов: рамы 80 х 200 см с системой натянутых
резиновых шнуров, образующих квадратные ячейки 10x10 см,
и деревянные щиты 150 х 150 см с нарисованной аналогичной
сеткой. По стенкам барокамеры на расстоянии 0,5 м от плос-
кости экрана были закреплены восемь светильников «К-1000»
13. На подставке 7 были установлены кинокамера АКС-2 5
и фотокамера АНФ 6 для ведения кино- и фотосъемок. Снаружи
использовалась кинокамера АКС-2 5, установленная напротив
одного из иллюминаторов, расположенных вдоль оптической ли-
нии, совпадающей с плоскостью раскрытого пленочного полотна.
Для ракурсной съемки снаружи был использован фотоаппарат
«Зенит-ЕТ».
Для раскручивания пленочных полотен и поворота оси
их вращения использовалось электромеханическое устройство
(рис. 9.12) на основе вакуумного электродвигателя Д-149
мощностью 150 Вт, разработанное и изготовленное в ТашКБМ.
Экспериментальное устройство состоит из привода 1 для
раскручивания пленочного полотна 2, прикрепленного к катушке
3 или уложенного на нее; устройства сброса бандажа 4
и поворота оси вращения 5. Особенностью механизма поворота
оси вращения является закрепление привода вращения полотна
в подвесе, освобождаемом по команде оператора. При этом сам
поворот происходит за счет действия момента силы, создаваемого
грузом массой 244 г на рычаге длиной 21 см. Привод снабжен
импульсным датчиком числа оборотов катушки.
Исследуемые пленочные полотна, изготовленные в ДКБА,
представляют собой диски из металлизированной полимерной
пленки ПЭТФ-К-ОА толщиной 5 мкм, которые набирались из
полос шириной 600 мм, соединенных встык; швы проклеивались
термоклейкой лентой шириной 20 мм. Расчетные частоты враще-
ния пленочных полотен приведены в таблице 9.2.
Перед проведением экспериментов выполнялся монтаж экс-
периментального оборудования и схем управления и измере-
ния; затем на привод устанавливалась катушка со свободно-
висящим или уложенным пленочным полотном. Полотна диа-
320
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.12. Электромеханическое устройство для раскручивания пленочных по-
лотен и поворота оси их вращения
Таблица 9.2.
D, м Рабочие частоты, об/мин. Критическая частота, об/мин.
2 743-1050 3322
5 297-420 1328
метром 5 м укладывались вручную на свободном ровном участке
помещения; полотно диаметром 2 м было уложено в ДКБА
заводским способом (укладка типа «6-лучевая звезда»). После
этого производилась откачка вакуумной камеры до давления
10-1 - Ю 3 мм рт. ст. Затем, в экспериментах со свободнови-
сящими полотнами, оператор при помощи ручного регулятора
напряжения привода производил раскрутку до требуемой частоты
вращения, после чего проводилась кинофоторегистрация враща-
ющегося пленочного полотна. Одновременно снимались показа-
ния с контрольных приборов.
При исследовании влияния давления на форму полотна
проводилось ступенчатое увеличение давления, начиная
9.2. Наземная экспериментальная отработка пленочных полотнищ 321
с 10-2 мм рт. ст., при этом велось фотографирование полотна
и регистрация параметров привода.
В экспериментах по раскрытию пленочного полотна из раз-
личных видов укладок проводилось раскручивание катушки до
заданной частоты, затем по команде оператора происходил сброс
ниточного бандажа с катушки и раскрытие пленочного полотна
(с одновременной кинорегистрацией).
При исследовании процесса поворота оси вращения пленоч-
ного полотна производилась его раскрутка до 500-600 об/мин.,
затем по команде оператора происходила расфиксация привода
вращения в подвесе, и под действием момента силы, возника-
ющего вследствие действия груза на рычаге, привод со враща-
ющимся пленочным диском отклонялся от вертикали на угол
около 20°; процесс фиксировался кинофотоаппаратурой.
9.2.3. Экспериментальные результаты
В ходе экспериментальных исследований, проведенных на
установке У-22, были получены следующие результаты:
а) установлено, что частота вращения барабана привода,
при которой происходит переход свисающего пленочного по-
лотна в плоскость, во всех экспериментах составляла около
100 об/мин.; на рис. 9.13а-а приведены фотографии, показываю-
щие этапы перехода пленочного полотна в плоскость из свобод-
новисящего состояния;
б) образование зеркальной поверхности на вращающемся пле-
ночном полотне диаметром 5 м происходило при частотах выше
400 об/мин., причем наименьшие искажения наблюдались при
600-700 об/мин.; следует отметить, что в центральной области
полотна, в районе его крепления к барабану (0,5—0,7 м), были
зафиксированы небольшие искажения, обусловленные, по-види-
мому, напряжениями в области крепления вследствие влияния
силы тяжести и вибрациями приводного вала; при аналогич-
ных испытаниях полотен диаметром 2 м искажения наблюда-
лись по всей поверхности, наиболее контрастное изображение
контрольных сеток при фотографировании их через зеркальную
поверхность удалось получить при частоте вращения привода
1000 об/мин.; при дальнейшем увеличении частоты из-за ви-
зуально наблюдаемых вибраций привода качество зеркальной
поверхности резко ухудшилось; на рис. 9.14 приведена ракурсная
фотография раскрытого пленочного отражателя диаметром 5 м
с зеркальной поверхностью, фотография на рис. 9.15 получена
путем съемок контрольной сетки через пятиметровый отража-
11 Г. Г. Райкунов и др.
322 Гл. 9. Наземные модельные экспериментальные исследования
Рис 9 13. Этапы перехода пленочного полотна в плоскость из свободновися-
щего состояния
тель при частоте вращения около 600 об/мин., что иллюстрирует
хорошее качество зеркальной поверхности;
в) исследования влияния давления на вращающееся пленоч-
ное полотно в диапазоне 10-0,5 мм рт. ст. показали, что качество
зеркальной поверхности ухудшается с увеличением давления;
при давлении выше 0,5 мм рт. ст. происходит потеря плоской
формы полотна, при этом оно принимает различные простран-
ственные конфигурации и, в конечном итоге, запутывается;
г) при исследовании процесса поворота оси вращения пленоч-
ное полотно с частотой вращения 570 об/мин. поворачивалось на
угол около 20° с угловой скоростью около 5 град/с; в процессе
поворота наблюдалось некоторое ухудшение качества зеркальной
поверхности, однако, этот этот эффект спустя 2-3 с после окон-
чания поворота исчез, и зеркальные свойства восстановились;
д) было создано «менискообразное» сдвоенное пленочное по-
лотно, конструктивно представляющее собой два одинарных,
склеенных по периметру и разнесенных в центральной части
на 19 см; такое полотно приняло расчетную форму при частоте
9.2. Наземная экспериментальная отработка пленочных полотнищ 323
Рис. 9.14. Фотография раскрытого пленочного отражателя диаметром 5 м
с зеркальной поверхностью
Рис. 9.15. Съемка контрольной сетки через пятиметровый отражатель
вращения 150-200 об/мин., при 300 об/мин. начали проявляться
его зеркальные свойства, однако, при 380 об/мин. произошел
разрыв пленочного полотна.
Отдельно следует отметить серию экспериментов по развора-
чиванию пленочных полотен из различных типов укладок.
Две попытки раскрытия полотен диаметром 5 м, уложен-
ных способом «гармошка с 2 сторон», начинались при часто-
те вращения 1100 об/мин. Во время раскрытия частота упала
и*
324
Гл. 9. Наземные модельные экспериментальные исследования
до 60 об/мин., после чего произошло опадение и запутывание
полотен. Следует отметить, что в данной укладке выявилась
тенденция неполного раскрытия, преимущественно в продольном
направлении «гармошки», т. е. укладываемые ленты пленочного
полотна сохраняют свою форму в процессе раскрытия, не растя-
гиваясь в поперечном направлении.
Раскрытие пятиметрового полотна, уложенного способом
«гармошка с 4 сторон» начиналось при частоте вращения
1400 об/мин., в процессе раскрытия частота упала до
120 об/мин. Полотно частично раскрылось, причем площадь
раскрытой части составляла приблизительно 80 % от пол-
ной площади полотна; центральная его часть имела форму
короткого жгута, начинающегося у катушки. Этот эффект
можно объяснить тем, что не было равномерного раскрытия
по всем направлениям. Следует отметить, что сравнение
процессов раскрытия полотен с 4 и 2 сторонней укладкой
выявило несомненные преимущества укладки типа «гармошка
с 4 сторон».
Хорошие результаты дало раскрытие полотна диаметром 2 м
из укладки типа «6-лучевая звезда». Раскрытие начиналось при
частоте вращения 1200 об/мин., происходило равномерно по всем
направлениям и закончилось при 480 об/мин.; время раскрытия
составляло 1 с, что было зафиксировано киносъемкой (рис. 9.16).
Экспериментальное оборудование производства ТашКБМ не
позволило провести исследования пленочных конструкций, фор-
мируемых центробежными силами, в полном объеме.
Так, мощность привода вращения была недостаточной и не
позволяла проводить испытания полотен диаметром 5 м при
частотах вращения от 800 об/мин. и вплоть до частоты разру-
шения полотна По этой же причине нельзя было в полной мере
проводить испытания сдвоенных полотен.
Устройство поворота оси вращения не обладало достаточной
жесткостью в зафиксированном состоянии, что ощутимо влияло
на исследования качества зеркальной поверхности при больших
частотах вращения вследствие появления значительной вибра-
ции.
Так же, как конструктивный недостаток, можно отметить
неудачное расположение устройства сброса бандажа, что в от-
дельных экспериментах по раскрытию полотен приводило к их
повреждению.
В связи с этим выявилась необходимость продолжения ис-
следований моделей пленочных отражателей с использованием
более совершенной экспериментальной базы.
9.2. Наземная экспериментальная отработка пленочных полотнищ 325
№1 №2
Рис. 9.16. Раскрытие полотна диаметром 2 м из укладки типа «6-лучевая
звезда»
Наземные экспериментальные исследования моделей бескар-
касных пленочных конструкций, формируемых центробежными
326 Гл. 9. Наземные модельные экспериментальные исследования
силами, были продолжены в 1990 г. в НПО «Энергия» на базе
барокамеры ЭН-85-16 отделения 09 [97].
Программа проведения экспериментов в целом совпа-
дала с программой исследований, осуществленных ранее
в ЦНИИМАШ; схема экспериментальной установки приведена
на рис. 9.17. Однако, между двумя сериями экспериментальных
исследований имелись и существенные различия.
Во-первых, в качестве устройства для раскрутки пленочных
полотен в НПО «Энергия» был применен мощный электропри-
вод, разработанный и изготовленный в МАИ, в состав кото-
рого входят (рис. 9.18): привод раскрутки на основе серий-
ного электродвигателя МСШ2М мощностью 1 кВт, размещен-
ный в гермокорпусе /; мотор-редуктор наклона оси вращения,
размещенный в гермокорпусе 2; пьезооптический датчик 3 для
измерения частоты вращения катушки 7; механизм расчековки
уложенных пленочных полотен 4\ электромагнитная тормозная
9.2. Наземная экспериментальная отработка пленочных полотнищ 327
Рис. 9.18. Электропривод, разработанный и изготовленный в МАИ
муфта мотора-редуктора поворота 5 и связанный с ней датчик
угла поворота 6. Гермокорпус 1 размещен в подвесном каркасе 8,
гермокорпус 2 крепится к несущему каркасу 9.
Такой электропривод позволил исследовать пленочные полот-
на в широком диапазоне частот вращения вплоть до частоты их
разрушения (около 1330 об/мин.).
Во-вторых, в отличие от экспериментов в ЦНИИМАШ, где
поворот оси вращения осуществлялся в свободном подвесе,
в данной экспериментальной серии для этой цели был применен
мотор-редуктор, обеспечивающий постоянную угловую скорость
поворота. В связи с этим, встал вопрос об определении па-
раметров бегущей волны и декремента затухания колебаний,
возникающих в пленочном полотне при повороте оси вращения
с постоянной угловой скоростью.
В-третьих, были исследованы полотна не только с различны-
ми укладками, но и с разными типами раскроя поверхности.
328
Гл. 9. Наземные модельные экспериментальные исследования
Технология проведения экспериментов в целом была сохра-
нена. Можно лишь добавить, что при исследовании поворота
оси вращения пленочного полотна и определения декремента
затухания колебаний частота вращения полотна доводилась до
1000 об/мин., затем при помощи мотора-редуктора проводился
поворот электропривода раскрутки. Ось вращения, таким об-
разом, отклонялась от вертикали на 15° с угловой скоростью
1 об/мин.; после успокоения пленочного полотна реверсивным
ходом мотора-редуктора обеспечивался возврат к первоначаль-
ному вертикальному положению. Амплитуда колебаний полотна,
его форма, колебательные процессы фиксировались кинокамера-
ми, отмечалось также время полного затухания бегущей волны.
Настоящая серия экспериментальных исследований пленоч-
ных конструкций, формируемых центробежными силами, дала
следующие результаты.
Было получено раскрытие полотна из укладки типа «гармош-
ка с 2 сторон» с помощью ручного управления частотой вра-
щения привода. Раскрытие начиналось при частоте 100 об/мин.
Полотно начало раскрываться неравномерно, стала заметна тен-
денция раскрытия пленочного диска на одну сторону. Поэто-
му пришлось встряхивать пленочное полотно методом быстрого
останова привода, а затем плавного вращения со скоростью при-
вода, примерно равной инерционной скорости вращения полотна.
Только после 3 таких встряхиваний полотно приобрело форму
диска.
В другом эксперименте также использовалось пленочное по-
лотно с укладкой типа «гармошка с 2 сторон». Раскрытие на-
чиналось при частоте вращения 200 об/мин. и проходило без
участия оператора. На третьей секунде от начала раскрытия
пленочное полотно образовало горизонтально расположенный,
сложенный пополам диск, причем частота вращения уменьши-
лась до 140 об/мин. Спустя 7 с после раскрытия пленочное
полотно оторвалось от катушки в месте крепления, что, по-
видимому, явилось следствием надреза пленки металлическими
краями катушки.
В третьем эксперименте использовалась укладка типа «фран-
цузский патент», отличающаяся поворотной симметрией, слож-
ной радиальной структурой складок. По теоретическим сообра-
жениям такая укладка имеет значительные преимущества при
раскрытии по сравнению с укладками типа «гармошка», т. к.
поворотная симметрия и множественность складок обеспечива-
ет равномерное раскрытие пленочного полотна-диска по всем
9. 2. Наземная экспериментальная отработка пленочных полотнищ 329
направлениям. По окончании раскрытия в пленочном материале
не происходит резкого удара
Однако, раскрытие из такой укладки не удалось: из-за слож-
ной структуры складок и длительного срока хранения в плотной
укладке внутри нее образовались стойкие зацепления пленоч-
ного материала, препятствующие раскрытию. После вскрытия
барокамеры складки и зацепления пленки были тщательно рас-
правлены, затем эксперимент был повторен со свободновисящим
полотном. При испытании данного полотна определялась крити-
ческая частота вращения пленочного полотна. Частота медленно
увеличивалась, и при достижении 1400 об/мин. произошло раз-
рушение полотна. Это практически совпадает с теоретическими
расчетами, в соответствии с которыми разрушение полотен диа-
метром 5 м должно происходить при 1330 об/мин.
В экспериментах по исследованию процесса поворота оси
вращения пленочного полотна использовались два типа полотен
с различным раскроем поверхности. Поворот оси вращения начи-
нался при 1000 об/мин. в пределах 15°. При повороте возникала
прецессия пленочного диска, сопровождаемая колебаниями его
поверхности. Основные характеристики процесса поворота оси
вращения приведены в таблице 9.3, где То — период прецес-
сии, с; А — максимальная амплитуда колебаний края диска, см;
Ао — амплитуда колебаний диска в спокойном состоянии, см;
t — время затухания колебаний, с; <5 — декремент затухания
колебаний, определяемый по формуле б — lnA{/Ai+\.
Таблица 9.3.
N пленки То t А Ао 6
НМ0002-0 60 600 30 1,5 5,0- 10“4
НМ0003-02 50 450 20 0,3 5,8- 10 4
Сравнивая два типа раскроя пленочных полотен, можно сде-
лать вывод, что раскрой мало влияет на динамику вращения
и переориентации полотен. Отмечено, что чем меньше угловая
скорость в конце поворота, тем меньше максимальная амплитуда
колебаний края пленочного диска
В эксперименте по исследованию полотна с двойной поверх-
ностью типа «мениск» было установлено, что такое полотно при-
нимает рабочую форму при частоте вращения 300-600 об/мин.
При 1000 об/мин. была сделана попытка поворота оси вращения
полотна, закончившаяся его разрушением, по-видимому, из-за
напряжений в пленочном материале, возникших во время пово-
рота. Полотно типа «мениск» обладает вдвое большей массой
330
Гл. 9. Наземные модельные экспериментальные исследования
и является более жесткой конструкцией по сравнению с одинар-
ным пленочным диском, поэтому возникновение сильных напря-
жений в таком полотне неизбежно.
9.2.4. Исследование режимов ускорения пленочных по-
лотен
Этап ускорения (разгона) полностью развернутого полотнища
отражателя требует особого рассмотрения. Численные расчеты
в строгой постановке в этой области не проводились в свя-
зи с возможностью появления волнистости на полотне в рай-
оне крепления к катушке, связанной с появлением касательных
напряжений при ускорении полотна. Возможность появления
волнистости (сжимающих напряжений) на мягкой оболочке су-
щественно отличает задачу от традиционной задачи ускорения
жесткого диска.
В [87] проведено рассмотрение возможности ускорения пле-
ночного полотна на основе использования общеизвестной теории
для жесткого диска при условии отсутствия сжимающих напря-
жений.
Получено выражение для относительного ускорения диска
в виде:
е = w/w2 —
Z/+1
где т/о = R0/(2Rk).
Время разгона определяется как
_ — о
^'шах^ &
Где (У, — CJmin/^max-
Для Rq — 0,15 м, Rk = 10 м, v = 0,4 — коэффициент Пуас-
сона, а — 0,5; аулах = 7, 7 рад/с; е — 8 • 10 5; t = 50 мин.
Время t=50 мин. не удовлетворяло программе КЭ «Знамя 2».
Встал вопрос о применимости этого выражения и обосновании
возможности сокращения времени разгона. Экспериментальные
результаты (см. п.9.2) указывают на возможность увеличения
ускорения более чем на порядок.
Проведем анализ экспериментальных результатов, получен-
ных при вращении полотнища в вакуумной камере. Прямых
измерений ускорения в экспериментах не проводилось, однако
из-за относительно плохого вакуума (10 ~2 мм рт. ст.) и связан-
ного с этим газодинамического сопротивления диска наблюда-
лось значительное потребление мощности электроприводом при
9.2. Наземная экспериментальная отработка пленочных полотнищ 331
фиксированных угловых скоростях вращения Например, для по-
лотна Rp = 2,5 м, Ro = 0,03 м, ш — 700 об/мин при Р — 120 Вт.
Было показано, что сопротивление в подшипниках прене-
брежимо мало. Таким образом, газодинамическое сопротивле-
ние приводило к наличию момента на валу двигателя, который
создавал в районе крепления диска к ведущему валу неко-
торую картину сложнонапряженного состояния, равносильного
действию некоторого эффективного ускорения. Действительно,
из уравнения момента количества движения имеем Ju — М, где
J=0,57r/i/?fc — момент инерции диска; ц = 6,5 10-3 кг/м2 —
поверхностная плотность пленки. Умножая обе части уравнения
на угловую скорость ш, имеем уравнение для мощности
Jo)U — шМ = Р,
откуда ш = Р/(Ju)
Для вышеприведенного режима имеем:
J = 4 10 1 кг м2,
и = 4 рад/с2,
£эксп =10
Теоретическое значение относительного ускорения составля-
ет при этом
Етеор = 5- ю 5.
Следовательно, отношение экспериментального и теоретиче-
ского относительных ускорений равно:
Еэксп/Етеор — 20.
При проведении экспериментов не удалось получить разру-
шения полотна из-за недостаточной мощности электродвигателя.
Следовательно, экспериментальное значение эффективного уско-
рения не является предельным.
В работе [88] продолжено теоретическое исследование вопро-
са ускорения гибкого диска на базе многостержневой модели,
позонно теряющей устойчивость в процессе ускорения. Получено
ограничение по относительному ускорению е < 5 10 3—10 2,
подтверждаемое вышеприведенными экспериментальными дан-
ными.
Для режима ускорения в эксперименте «Знамя 2» е = 10 3,
т. е. подходило под приведенный в [88] диапазон.
332 Гл. 9. Наземные модельные экспериментальные исследования
Физически выражение для относительного ускорения е =
= ш/ш2 — есть отношение инерционных сил к центробежным,
и при малых отношениях является углом поворота складки от
радиального направления.
На основании этих фактов может быть обосновано ускорение,
которое будет иметь место в космических системах.
9.3. Разработка и испытания наземного прототипа
агрегата раскрытия модели СБ
9.3.1. Проектно-конструкторская разработка и изготов-
ление наземного прототипа агрегата раскрытия модели СБ
9.3.1.1. Определение конструктивного облика наземного
прототипа агрегата раскрытия
Проведена проектно-конструкторская проработка наземного
прототипа агрегата раскрытия, основными этапами которой яви-
лись;
— расчет аэродинамического сопротивления раскрывающейся
в наземных условиях формируемой центробежными силами
модели солнечной батареи;
— выбор размерности и мощности электропривода;
— разработка модели солнечной батареи;
— выбор и привязка электропривода к разработанной модели
солнечной батареи.
Аэродинамическое сопротивление вращающегося с угловой
скоростью ш кольцевого элемента круга шириной dr определяется
выражением:
F = 3,14pC(rw)2rdr, (9.2)
где г — текущий радиус, р — плотность воздуха, С — коэффи-
циент аэродинамического сопротивления, щ — угловая скорость
вращения.
Момент от кольцевого элемента М = Ft. Умножая это вы-
ражение на угловую скорость ш и интегрируя по длине радиуса
круга, имеем формулу для мощности электропривода:
М = 2/5-3,14-pC-tZR5. (9.3)
Коэффициент 2 учитывает две поверхности круга. Принимая
р = 2 кг/м3, С = 0,05, R = 1 м, ш = 10 рад/с, имеем для
N — 100 Вт, что вполне приемлемо. При этом угол прогиба а
вращающегося полотнища от силы тяжести составит не более
а = g/uj2R, (9.4)
9.3. Разработка и испытания наземного прототипа агрегата
333
где д — ускорение свободного падения. Для приведенных пара-
метров а = 0,1 рад = 5,73°., что также допустимо Из оценок
следует, что если взять привод мощностью 500 Вт, характерный
для бытовой техники, то он с запасом раскрутит круг радиусом
1 м. Для отработки раскрытия необходима плавная регулировка
угловой скорости, так как полотно модели СБ может изготавли-
ваться из различных материалов и иметь различную конструк-
цию.
Агрегат предназначен для демонстрации в помещениях воз-
можностей раскрытия центробежными силами модели солнечной
батареи из различных типов укладок по циклограмме, особенно-
стью которой является нулевая начальная угловая скорость.
Полотно модели СБ может иметь в своем составе фото-
электрические преобразователи, в связи с этим агрегат должен
иметь токосъемник для электрической связи между барабаном
и основанием агрегата.
Для упрощения процесса укладки полотна перед раскрытием
и после раскрытия конструкция барабана принята четырехгран-
ной и имеет 4 створки.
Для снижения трудозатрат в качестве базовой конструкции
использован привод кухонного процессора «Энергия», доосна-
щенный ШИМ-регулятором скорости и понижающим редукто-
ром 1:10, на выходном валу которого установлен барабан для
укладки полотна. На выходном валу также установлен токосъем-
ник на 2 цепи для вывода электроэнергии с солнечных батарей.
9.3.1.2. Конструкция наземного прототипа агрегата
раскрытия
Агрегат состоит из четырехгранного барабана 1 для уклад-
ки полотна (рис. 9.19). Барабан 1 через основание барабана
2 установлен на выходном валу 3 редуктора 4. Выходной вал
3 через зубчатое колесо 5, вал-шестерню 6, зубчатое колесо
7 и шестерню 8 кинематически соединен с выходным валом 9
привода кухонного процессора 10.
На выходном валу 3 совместно с изоляторами И установлены
контактные кольца 12 токосъемника, а на корпусе редуктора 4
закреплены щетки 13 токосъемника, контактирующие с контакт-
ными кольцами 12. К контактным кольцам подпаяны провода,
идущие к барабану /, а к щеткам — идущие на полезную
нагрузку или на индикатор напряжения.
Поверхность барабана / закрыта 4 створками 14, шарнирно
закрепленными на осях 15 относительно барабана 1 и имеющими
в своем составе пружины, стремящиеся раскрыть створки 14. На
334
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.19. Общий вид наземного демонстрационного прототипа агрегата
раскрытия
створках 14 имеются упорные пластины 16, взаимодействующие
с роликами 17, закрепленными на осях 18, установленных на ре-
дукторе 4. На упорных пластинах 16 имеются пазы 19, обеспечи-
вающие при взаимодействии с роликами 17 удержание барабана
/ в исходном положении от несанкционированного вращения. На
основании 2 барабана установлены упоры 20 с контргайками 21,
определяющие положение створок 14 при раскрытии.
Агрегат снабжен пультом управления 22, на котором рас-
положены кнопки «ПУСК», «СТОП» и «МГНОВ», включающие
и выключающие электродвигатель привода кухонного процессора
10. Кроме того, рукоятка 23 задает уровень скорости вращения
барабана 1.
Развертывание начинается с нажатия кнопки «ПУСК» пульта
управления 22, включающей привод кухонного процессора 10,
9.3. Разработка и испытания наземного прототипа агрегата
335
который через кинематические передачи деталей 3, 5, 6, 7, 8,
9 редуктора 4 вращает барабан 1. При этом пазы 19 упорных
пластин 16 выходят из взаимодействия с роликами 17, и створки
14 поворачиваются под действием пружин на осях 18 до упоров
20. Тем самым производится раскрытие вращающегося барабана
1 с уложенным полотном.
Проведено изготовление демонстрационного наземного про-
тотипа агрегата раскрытия.
Фотография изготовленного агрегата раскрытия представлена
на рис. 9.20.
Рис. 9.20. Изготовленный демонстрационный наземный макет агрегата рас-
крытия солнечной батареи, показаны управляемый электропривод (справа)
и корпус для размещения укладки модели солнечной батареи (слева)
9.3.2. Отработка наземного прототипа агрегата
раскрытия
Отработка агрегата раскрытия включала два этапа: на функ-
циональную работоспособность без модели полотнища солнеч-
ной батареи; на функционирование с моделью солнечной бата-
реи. Таким образом, на первом этапе отрабатывалась собственно
конструкция агрегата раскрытия. После сборки агрегата и его
настройки первый этап был успешно пройден.
336
Гл. 9. Наземные модельные экспериментальные исследования
Для второго этапа требовалось оснащение агрегата моделью
полотнища СБ Из соображений удобства осуществления мно-
гочисленных укладок диаметр первого полотнища был выбран
1,2 м. Следует отметить, что ранее, при подготовке космического
эксперимента «Знамя 2», отрабатывалось раскрытие полотнищ
диаметром 1 м и 5 м только в крупномасштабных вакуумных
камерах по циклограмме, особенностью которой была достаточно
высокая начальная угловая скорость вращения. Отработка рас-
крытия на воздухе полотнищ диаметром более метра по цикло-
грамме с нулевой начальной угловой скоростью ранее никогда
не проводилась. Интерес представлял как сам факт возмож-
ности упорядоченного раскрытия из различных типов укладок,
так и режимы с наименьшей затратой электроэнергии. Полот-
нище было изготовлено (сшито из двух кусков по диаметру)
из синтетической тентовой ткани с удельной массой 110 г/м2,
имело круглую форму и окантовочный шов по периметру. После
установки полотнища на посадочные места в агрегате раскры-
тия и пробных запусков оправдалось предположение, что без
дополнительных грузов по периметру из-за сильного влияния
аэродинамического сопротивления полотнище не раскроется при
любой укладке. Введение 4 свинцовых грузов по 8 г в окантовку
полотнища, отстоящих друг от друга на 90 градусов, практи-
чески не изменило картину раскрытия: при любом возможном
начальном напряжении полотнище не раскрывалось, а сбивалось
в бесформенный вращающийся ком. И только при доведении
каждого груза до 40 г начало наблюдаться устойчивое раскрытие
полотнища из любых геометрически симметрично упорядочен-
ных укладок. Укладка типа «патент Франции» [30] в наилучшей
степени позволяла использовать центробежные силы для своего
раскрытия, однако для проведения большого количества повто-
ряющихся запусков оказалась чрезвычайно трудоемкой в техно-
логическом отношении. Веерная укладка с большим количеством
гофров, закрученных на барабан против направления враще-
ния электропривода, была проще в технологическом отношении,
позволяла проводить раскрытие, но была не перспективна для
крепления к ней электрогенерирующих ФП. По ходу отработки
была найдена и использована новая, ранее не рассматривав-
шаяся укладка, значительно менее трудоемкая, однако также
обеспечивавшая упорядоченное раскрытие полотнища. Укладка
осуществлялась следующим образом: полотнище расправлялось
на 4 створках агрегата раскрытия (створки для этого были спе-
циально спроектированы снизу контейнера), далее полотнище
с 4 сторон поднималось на барабан и закрывалось створками при
9.3. Разработка и испытания наземного прототипа агрегата
337
их подъеме и фиксации, далее 4 образовавшиеся «хвоста» обво-
рачивались вокруг барабана и заправлялись под створки в на-
правлении, обратном вращению от электропривода. Грузы распо-
лагались на концах «хвостов». Укладка оказалась чрезвычайно
удобной для размещения на полотнище 4 аморфокремниевых ФП
на подложке из нержавеющей стали. ФП размером 356 х 80 мм
приклеивались к полотнищу над створками и в дальнейшем при
укладке закрывались этими створками. ФП коммутировались
параллельно и выводились через вращающийся токосъемник на
фотодиоды. При достаточном освещении конструкция работала
как солнечная батарея, демонстрируя свое назначение.
На рис. 9.21 представлен агрегат раскрытия, оснащенный
уложенным на контейнер полотнищем по вышеописанной уклад-
ке с закрытыми створками. На рис. 9.22 представлен агрегат
раскрытия с раскрытыми створками. На рис. 9.23 представлен
агрегат раскрытия с вращающимся раскрытым полотнищем.
Рис. 9.21. Агрегат раскрытия, оснащенный уложенным на контейнер полотни-
щем по вышеописанной укладке с закрытыми створками
9.3.3. Заключение
Впервые в практике разработки формируемых центробежны-
ми силами солнечных батарей создан демонстрационный назем-
ный прототип агрегата раскрытия модели солнечной батареи,
работающий в условиях влияния гравитации и аэродинамиче-
ского сопротивления атмосферы. Проведен большой объем экс-
периментов по раскрытию модели солнечной батареи, позволив-
ший набрать опыт работы с рассматриваемыми конструкциями,
который в дальнейшем будет использован при создании ана-
логичных космических систем. Экспериментально подтвержден
ряд основополагающих проектных концепций: возможность рас-
крытия сплошного круглого полотнища СБ по «неуправляемой»
338
Гл. 9. Наземные модельные экспериментальные исследования
Рис. 9.22. Агрегат раскрытия с раскрытыми створками
Рис. 9.23. Агрегат раскрытия с раскрытым вращающимся полотнищем
схеме; раскрытие по циклограмме с нулевой начальной угловой
скоростью вращения, предпочтительной для малых и средних
КА; возможность раскрытия из любых геометрически симмет-
рично упорядоченных укладок; необходимость дополнительно-
го инициирования начального этапа раскрытия (с помощью -
9.4. Заключение по разделу
339
дополнительных периферийных грузов, или упругих проволочек,
как планировалось в космическом эксперименте). Не вызывает
сомнения то, что если удалось упорядоченно раскрывать кон-
струкцию в условиях сильного влияния аэродинамического со-
противления и гравитации, то при их отсутствии надежность
раскрытия будет значительно выше.
9.4. Заключение по разделу
Экспериментальные исследования моделей пленочных отра-
жателей, формируемых центробежными силами, проведенные
в 1986-1990 гг., имели важное значение для определения тех-
нического облика космического отражателя, определения его
динамических параметров.
В данных экспериментах впервые в наземных условиях был
создан пленочный отражатель, формируемый центробежными
силами, что подтвердило возможность реализации подобного
крупногабаритного отражателя в космосе, тем более, что там от-
сутствуют неблагоприятные условия (сила тяжести, остаточное
давление атмосферы), от которых невозможно было избавиться
в условиях наземных испытаний.
Было показано, что вращающийся пленочный металлизиро-
ванный диск способен образовывать зеркальную поверхность;
можно также изменять степень кривизны зеркальной поверхно-
сти, используя сдвоенные («менискообразные») пленочные дис-
ки. Таким образом, было доказано, что подобные пленочные кон-
струкции могут применяться в качестве переотражателей элек-
тромагнитного излучения в широком диапазоне длин волн.
Экспериментальные исследования показали, что отрабатыва-
емые конструкции можно переориентировать в пространстве; это
свойство имеет огромное значение, т. к. иначе пленочные бескар-
касные отражатели, формируемые центробежными силами, не
имели бы перспектив в целевых использованиях. Следует отме-
тить, что в двух экспериментальных сериях выявлено два прин-
ципиально разных динамических режима процесса переориента-
ции, имеющих в своей основе различные способы организации
поворота оси вращения пленочного отражателя. Как сейчас пред-
ставляется, при проведении экспериментов в ЦНИИМАШ иссле-
дователи случайно попали в область пассивного демпфирования
из-за нежесткости подвеса экспериментального электроприво-
да, вращавшего полотнище, и малой массы этого электропри-
вода. Случайным образом возникла обратная связь, приведшая
к практически полному демпфированию возможных колебаний.
340
Гл. 9. Наземные модельные экспериментальные исследования
При повторении эксперимента в НПО «Энергия», где использо-
вался тяжелый, жестко закрепленный электропривод, был по-
лучен спектр колебаний и экспериментально показана необхо-
димость их демпфирования. С другой стороны, эксперименты
в ЦНИИМАШ указали на возможность полного демпфирования
колебаний и необходимость дальнейших исследований.
Экспериментальные исследования доказали возможность уве-
личения ускорения полностью развернутого пленочного полотна
более чем на порядок по сравнению с расчетным значением.
Серия экспериментов по раскрытию пленочных отражателей
из уложенного состояния выявила несомненные преимущества
многолучевых укладок с радиальной структурой. Этот вывод
имел в дальнейшем основополагающее значение для определе-
ния типа укладки отражателя, используемого в космическом
эксперименте, и проведения расчетов динамики раскрытия пле-
ночной конструкции. Исследования сопровождались решением
ряда методических и технологических вопросов, таких как: темп
ускорения полотнища, влияние степени разрежения вакуума на
вращение полотнища, влияние толщины пленки полотнища, кон-
струкции полотнища, степени натяжения при заводской уклад-
ке, времени хранения, степени покрытия тальком от слипания.
Накопленный опыт впоследствии использовался в программах-
методиках наземной отработки крупномасштабных систем.
Глава 10
НАЗЕМНАЯ И ОРБИТАЛЬНАЯ
ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА
СОЛНЕЧНЫХ БАТАРЕЙ
10.1. Обоснование необходимости космических
экспериментов по исследованию деградации элемента
СБ и по раскрытию модели перспективной
конструкции СБ
В настоящем разделе представляются материалы по подго-
товке и проведению космических экспериментов для получения
научной информации по двум направлениям:
— исследование деградации элемента СБ в процессе цикли-
рования «ночь-день» в реальных условиях функционирова-
ния спутников связи;
— раскрытие модели перспективной конструкции СБ.
Необходимость исследования деградации элемента аморфно-
кремниевой СБ в процессе циклирования «ночь-день» в ре-
альных условиях функционирования спутников связи связана
со следующими обстоятельствами. Единственный космический
эксперимент такого рода был проведен на относительно низкой
орбите станции «Мир» высотой 350 400 км, где существенно
влияние остаточной атмосферы. Сложная конфигурация станции
имела специфику режимов затенения и организации процесса
циклирования «ночь-день». Известно, что физико-химические
процессы проходят в реальном времени и зависят от внешних
условий. Стремление уменьшить время цикла в «ускоренных»
испытаниях на Земле недопустимо, что существенно осложняет
такие испытания. Также в наземных испытаниях имеется не пол-
ная картина из-за отсутствия реального спектра космического
излучения и других факторов, характерных для орбит спутников
связи.
По этим причинам проведение космического эксперимента на
орбите высотой порядка 1000 км на малом спутнике является
интересным и необходимым новым шагом к внедрению аморф-
но-кремниевых батарей в космическую технику. Данная орбита
характерна для спутников связи по своим параметрам и услови-
ям. Также на малом спутнике наилучшим образом реализуется
342 Гл. 10. Экспериментальная отработка солнечных батарей
режим циклирования «ночь-день», имеющий место на реальном
связном спутнике, и имеется возможность длительных телемет-
рических измерений с передачей информации на Землю. На
рис. 10.1 представлен предполагаемый вариант проведения кос-
мического эксперимента — исследование деградации элемента
СБ в процессе циклирования «ночь-день» в реальных условиях
функционирования спутников связи.
Рис. 10.1. Исследование деградации элемента СБ в процессе циклирования
«ночь-день» в реальных условиях функционирования спутников связи
Необходимость раскрытия модели перспективной конструк-
ции СБ на орбите спутника связи диктуется специфичными осо-
бенностями формируемой центробежными силами конструкции,
использующей особые условия космоса, такие как невесомость
и глубокий вакуум, для своего существования. Наземная от-
работка таких крупномасштабных конструкций принципиально
невозможна из-за ограниченности размеров вакуумных камер
и наличия действия гравитации. Методы поэтапного частичного
моделирования сложны и не дают картины в целом. Только
космический эксперимент полностью решает задачу. Предполага-
лось развернуть модель неразрезной пленочной СБ из реального
материала ее подложки «каптона» толщиной порядка 10 микрон.
На рис. 10.2 представлена констуктивно-компоновочная схе-
ма проведения эксперимента по раскрытию модели перспектив-
ной конструкции СБ на космическом аппарате.
Подготовка и проведение космических экспериментов все-
гда требует больших финансовых вложений. Только большой
опыт участников проекта в подобных работах позволил мини-
мизировать затраты. Была проведена выработка требований по
10.2. Испытания на деградацию в космосе образцов солнечных батареи 343
Рис. 10.2. Констуктивно-компоновочная схема проведения эксперимента по
раскрытию модели перспективной конструкции СБ на космическом аппарате
разработке и установке экспериментальной научной аппаратуры:
габаритные размеры, координаты мест креплений, масса, уро-
вень напряжения на выходе СБ, количество телеметрируемых
параметров, срок активного существования и т. д., для привяз-
ки к возможным КА, запуск которых планировало КБ «Полет»
г. Омск.
10.2. Испытания на деградацию в космосе образцов
солнечных батарей
В течение всего 2005 г. и 2006 г. проводился летный экспе-
римент по исследованию деградации вольт-амперных характери-
стик плоских экспериментальных солнечных батарей из аморф-
ного кремния и арсенида галлия на борту микроспутника «Уни-
верситетский». Проводилась обработка экспериментальных дан-
ных от системы телеметрии спутника. Проведен анализ больших
массивов информации, поступающей из 3 различных центров:
КБ «Полет», Калужский центр и центр НИИЯФ. В результате
анализа за первые 2 года эксплуатации аморфно-кремниевой сол-
нечной батареи в космических условиях деградации не выявлено,
что согласуется с теоретическими предпосылками возможности
эксплуатации подобных батарей на срок до 15-20 лет. Солнечная
панель из арсенида галлия за тот же период также показала
344 Гл. 10. Экспериментальная отработка солнечных батарей
стабильность характеристик. При анализе телеметрических дан-
ных установлено:
— Реальные температуры на створках экспериментальной па-
нели соответствуют расчетным данным с учетом того, что
фиксированная на микроспутнике створка панели за счет
отсутствия сброса тепла излучением имеет температуру на
10-20 ° С выше, чем откидная створка, которая работает
в условиях теплового излучения с тыльной поверхности.
— Расчетные значения токов наблюдаются при условии одно-
временной засветки обеих створок и реализации на них
положительных температур Этому случаю соответствуют
значения токов 0,5 4- 0,65 А, которые близки к данным
ПСИ с учетом погрешности, связанной с неперпендикуляр-
ным падением солнечного излучения на обе створки.
— Какой-либо дополнительной деградации электрических па-
раметров панели из-за длительного облучения ФП из a-Si
не выявлено.
— Предыдущий вывод подтверждается также регистраци-
ей стабильного напряжения на экспериментальной панели
в течение рассмотренного периода времени проведения экс-
перимента (с 21.01.2005 по 02.12.2006).
Технология получения данных по солнечным батареям КА
«Университетский» включает:
1) Определение состояния бортовых систем КА и готовности
их к проведению эксперимента
2) Планирование эксперимента — составление циклограммы
работы КА с учетом потребления энергии бортовых систем
и порядка включения и выключения контрольно-дозимет-
рического модуля, других бортовых систем, ориентации КА
3) Подготовка НКУ к сеансу связи
4) Ввод команд в ЗУ НКУ
5) Проведение сеанса связи с КА
6) Закладка запланированной циклограммы на борт КА
7) Проверка правильности записи циклограммы в память
БСКУ
8) Коррекция циклограммы
9) Подготовка НКУ к сеансу связи с КА
10) Прием информации с борта КА во время сеанса связи
11) Контроль бортовой телеметрии и состояния бортовых си-
стем
12) Первичный анализ принятой информации
13) Повторение сеанса связи при необходимости
14) Обмен принятыми файлами между НКУ
10.3. Адаптация к микроспутнику модели солнечной батареи
345
15) Анализ и первичная обработка информации специальным
ПО
16) Окончательная обработка информации при помощи специ-
ального ПО
17) Представление полученной информации потребителю.
На рис. 10.3-10.6 приведены вольт-амперные характеристики
солнечной батареи из аморфного кремния, полученные в резуль-
тате обработки телеметрической информации с микроспутника
1 — Максимальный (08:41:45)
2— Промеж. 89% (08:41:14)
3—Промеж 78% (08:40:24)
4— Промеж. 68% (08:40:14)
5— Промеж. 51% (08:40:04)
б — Промеж. 38% (08:17:21)
7 — Промеж. 22% (08:39:54)
8 — Промеж 22% (08:39:54)
9 — Минимальный (07:40:41)
Рис. 10.3. Вольт-амперные характеристики солнечной батареи из аморфного
кремния, полученные 1 сентября 2005 г.
На рис. 10.7 и рис. 10.8 приведены значения напряжения хо-
лостого хода и тока короткого замыкания по месяцам 2005 г. для
панели из арсенида галлия (GaAs) и аморфного кремния (a-Si).
Колебания связаны с изменяемой ориентацией спутника На от
сутствие деградации указывают повторяющиеся максимальные
значения параметров.
10.3. Наземная отработка и адаптация
к микроспутнику модели солнечной батареи
и агрегата ее раскрытия
10.3.1. Изготовление и испытания агрегатов раскрытия
По разработанной конструкторской документации (см. Гла-
ва 8, п. 8.2) были изготовлены 2 агрегата развертывания (один
как резервный). В процессе изготовления проводилась отработка
346
Гл. tO. Экспериментальная отработка солнечных батарей
7 — Максимальный (03:15:39)
2— Промеж. 89% (03:13:47)
3 — Промеж. 78% (03:12:37)
4— Промеж. 66% (03:10:56)
5— Промеж. 55% (03:08:35)
6 — Промеж. 45% (03:05:23)
7— Промеж. 34% (03:02:11)
8 — Промеж. 22% (03:00:50)
9 — Минимальный (02:24:10)
Рис. 10.4. Вольт-амперные характеристики солнечной батареи из аморфного
кремния, полученные 6 октября 2005 г.
7 — Максимальный (12:53:00)
2 — Промеж. 38% (12:52:50)
3 —Промеж. 12% (12:52:40)
4 — Минимальный (12:52:30)
Рис. 10.5. Вольт-амперные характеристики солнечной батареи из аморфного
кремния, полученные 4 ноября 2005 г.
конструкции на технологичность, надежность и функционирова-
ние с внесением изменений в чертежи. Внешний вид изготовлен-
ных агрегатов приведен на рис. 10.9.
Для подтверждения работоспособности агрегатов в различ-
ных условиях эксплуатации и определения технических характе-
10.3. Адаптация к микроспутнику модели солнечной батареи
347
1 — Максимальный (11:19:36)
2 — Промеж. 89% (11:15:54)
3 — Промеж. 78% (11:14:03)
4 — Промеж. 67% (11:13:02)
5 — Промеж. 57% (11:12:22)
6 — Промеж. 47% (11:12:02)
7 — Промеж. 31% (11:11:32)
8 —Промеж. 22% (11:11:12)
9 — Промеж. 11% (11:10:31)
10 — Минимальный (11:08:50)
Рис. 10.6. Вольт-амперные характеристики солнечной батареи из аморфного
кремния, полученные 2 декабря 2005 г.
ристик изделий были проведены испытания агрегатов по ниже-
приведенной программе.
Определить ток, потребляемый приводом, при температуре
20° С и заторможенном барабане:
А) при напряжении (13+/-1) В.
Б) при напряжении (27+/-1) В.
Напряжение подавать «+» на 1, 2 контакты РС10, «—» — на
9, 10 контакты.
Время удержания — не более 5 с.
Для удержания барабана применяется арретир.
Определить ток, потребляемый приводом, и скорость враще-
ния барабана при температуре 20° С:
А) при напряжении (13+/-1) В.
Б) при напряжении (27+/-1) В.
Напряжение подавать «+» на 1, 2 контакты РС10, «—» — на
9, 10 контакты.
Створки барабана раскрыть перед испытаниями.
Определить ток, потребляемый приводом, и скорость враще-
ния барабана при температуре —50° С:
А) при напряжении (13+/-1) В.
Б) при напряжении (27+/-1) В.
Напряжение подавать «+» на 1, 2 контакты РС10, «—» — на
9, 10 контакты.
348
Гл. 10. Экспериментальная отработка солнечных батарей
1 Июнь
2 Июль
3 Август
4 Сентябрь
5 Октябрь
б Ноябрь
7 Декабрь
1—, Сутки от
350 начала года
Рис. 10.7. Значения напряжения холостого хода (L4, В) и тока короткого
замыкания (Д, А) по месяцам 2005 г. для панели из арсенида галлия (GaAs)
Створки барабана раскрыть перед испытаниями.
Определить момент проворачивания муфты обгона (направ-
ление, обратное вращению от привода).
Для удержания створок от раскрытия барабан обмотать лен-
той ПВХ.
На рис. 10.10 показана фотография прохождения испытаний.
10.3.2. Наземная отработка агрегата раскрытия
В плане подготовки к космическому эксперименту по раскры-
тию центробежными силами модели солнечной батареи на кос-
мическом корабле в 2005 г. была проведена наземная отработка
разработанного и изготовленного агрегата раскрытия модели СБ
(см. п. 8.2), при которой были выполнены следующие испытания:
— динамические испытания;
— модельные испытания;
— испытания на функционирование при температуре ±50° С.
iO 3. Адаптация к. микроспутнику модели солнечной батареи 349
Рис. 10.8. Значения напряжения холостого хода (Ux, В) и тока короткого
замыкания (Iz, А) по месяцам 2005 г. для панели из аморфного кремния (a-Si)
Рис. 10.9. Фотография агрегатов раскрытия
350
Гл. 10. Экспериментальная отработка солнечных батарей
Рис. 10.10. Испытания агрегатов раскрытия
10.3.2.1. Динамические испытания
Динамические испытания включали вибрационные испыта-
ния по стандартной программе с учетом требований КБ «Полет»
применительно к конкретному носителю. После каждого цикла
динамических воздействий проводились испытания на работо-
способность агрегата раскрытия. Испытания проводились по раз-
работанной «Программе конструкторско-доводочных испытаний
(КДИ) экспериментальной СБ» с использованием следующих
методик:
1) Методика испытаний на прочность при воздействии линей-
ных ускорений.
2) Методика испытаний на прочность при воздействии вибра-
ций.
3) Методика испытаний на прочность при воздействии удар-
ных ускорений.
10.3.2.2. Модельные испытания
Модельные испытания проведены с целью исследования рас-
крытия центробежными силами модели СБ в виде двух диамет-
рально противоположенных грузов массой 25 г на нитях длиной
по 1 м, обладающих близким моментом инерции к реальной СБ,
но имеющих значительно меньшее аэродинамическое сопротив-
ление по сравнению с реальной СБ, что позволило проводить
испытания без вакуумной камеры (т. е. на воздухе). Испытания
подтвердили заложенную в эксперимент «неуправляемую схему»
динамики раскрытия модели СБ по заданной временной цикло-
грамме раскрытия в диапазоне напряжений питания 16-34 В.
Одновременно была выявлена необходимость дополнительного
J0.3. Адаптация к микроспутнику модели солнечной батареи
351
инициирования начальной стадии раскрытия и доработки кон-
струкции полотнища. К сожалению, из-за тонкости нитей и ма-
лых размеров грузов на фотографиях этапы раскрытия отобра-
зить не представилось возможным, но визуально спираль Архи-
меда, по которой раскрывались грузы, была очень хорошо видна.
Особенностью циклограммы являлась нулевая начальная уг-
ловая скорость, при которой начинается процесс раскрытия СБ,
в отличие от ранее реализованной в КЭ «Знамя 2» циклограммы
с максимальной начальной угловой скоростью, соответствовав-
шей нагрузочной характеристике электропривода. Новая цикло-
грамма не требует предварительного разгона барабана агрегата
раскрытия и по этой причине предпочтительнее для использо-
вания на малом космическом аппарате. Однако, поскольку по-
добная циклограмма используется впервые, она внесла необходи-
мость начального дополнительного инициирования процесса рас-
крытия, поскольку при начальной нулевой угловой скорости от-
сутствуют центробежные силы. При этом из-за эффекта «слежи-
вания» гибкой оболочки, возможных технологических микроза-
цепов, электростатики и прочее, уложенная на барабан оболочка
будет сохранять первоначальную уложенную форму после снятия
внешних ограничивающих связей, и процесс раскрытия может
не начаться. Избежать это отрицательное явление предложено
путем введения в конструкцию кругового полотнища 8 тонких
(диаметр 0,5 мм) прямолинейных стальных проволочек длиной
по 150 мм, радиально приклеенных по периферии пленочного
круга через равные угловые интервалы. За счет упругости сталь-
ных проволочек и их дополнительной инерционной массы по-
сле снятия внешних связей происходит начальное «распушение»
укладки и инициирование процесса развертывания.
На основании испытаний была проведена доработка агрегата
раскрытия по следующим позициям:
— в конструкцию введен магнитный замок створок удержания
полотнища;
— доработаны элементы конструкции крепления агрегата
к спутнику.
Разработана сопроводительная документация к агрегату рас-
крытия:
— инструкция по эксплуатации;
— формуляр;
— программы и методики испытаний и отработки.
Изготовлена модель СБ в виде круглого полотнища из пленки
«майлар» (полиэтилентерефталатная пленка ПЭТФ) толщиной
12 мкм с приклейкой липкой пленочной лентой по периферии
352
Гл. 10. Экспериментальная отработка солнечных батарей
полотнища через равные угловые интервалы 8 радиальных тон-
ких прямолинейных стальных проволочек длиной по 150 мм
и толщиной 0,5 мм для начального инициирования процесса
раскрытия. Модель была уложена на агрегат раскрытия. Фото-
графия полотнища представлена на рис. 10.11.
Рис. 10.11. Пленочное полотно перед укладкой на барабан агрегата раскрытия
Рис. 10.12. Элементы конструкции агрегата раскрытия перед сборкой
Проведена окончательная сборка двух экземпляров агрегата
раскрытия СБ и проведена полная их подготовка для передачи
в КБ «Полет». На рис. 10.12 показаны элементы агрегата перед
сборкой. Фотография прохождения испытаний агрегата раскры-
тия показана выше на рис. 10.10.
Осуществлена поставка агрегата раскрытия из НПОИТ,
г. Королев М/О в КБ «Полет», г. Омск для установки на спутник
«Можаец-4».
10.3.3. Адаптация агрегата раскрытия к малому спутни-
ку «Можаец-4»
В плане подготовки к космическому эксперименту по раскры-
тию центробежными силами модели солнечной батареи на малом
спутнике «Можаец-4» в 2005 г. были проведены следующие
10.3. Адаптация к микроспутнику модели солнечной батареи 353
работы по обеспечению функционирования агрегата раскрытия
СБ на малом спутнике:
— закончена разработка объемной модели малого спутника,
на котором будет установлена модель экспериментальной
модели СБ, снабженная центробежным механизмом разво-
рачивания;
— проведена адаптация модели экспериментальной панели
СБ, снабженной центробежным механизмом разворачива-
ния, к малому спутнику;
— для обеспечения условий функционирования в составе ма-
лого спутника принята схема установки модели экспери-
ментальной панели СБ с использованием поворотной штан-
ги и замка для удержания штанги на участке выведения
малого спутника и раскрытия;
— разработана конструкция поворотной штанги и замка;
— проведены прочностные расчеты конструкции малого спут-
ника и элементов установки модели экспериментальной СБ;
— проведено изготовление отдельных элементов конструкции
малого спутника, служебных систем, узлов установки мо-
дели экспериментальной СБ;
— проведено изготовление широкоугольной панорамной каме-
ры для наблюдения процесса разворачивания модели экс-
периментальной панели.
Были завершены работы по созданию малого спутника, на
котором была установлена экспериментальная панель с центро-
бежным механизмом раскрытия СБ, в том числе:
— испытана и подготовлена к запуску в составе малого спут-
ника штанга с механизмом разворота и замок для установ-
ки экспериментальной СБ;
— испытана и подготовлена к запуску в составе малого спут-
ника широкоугольная панорамная камера для наблюдения
процесса разворачивания экспериментальной панели;
— проведены электрические и транспортировочные испытания
в составе малого спутника штанги с механизмом разворота
с замком для установки экспериментальной СБ, самой экс-
периментальной СБ и широкоугольной панорамной камеры.
Малый спутник с установленными на нем экспериментальной
панелью с центробежным механизмом раскрытия СБ и панорам-
ной камерой были доставлены самолетом на космодром «Пле-
сецк».
В ходе авиационной транспортировки осуществлялись изме-
рения механических нагрузок, действующих на малый спутник
с установленной экспериментальной СБ.
12 Г. Г. Райкунов и др.
354
Гл. 10 Экспериментальная отработка солнечных батарей
На космодроме «Плесецк» специалистами КБ «Полет» были
проведены работы по подготовке спутника к пуску, в том числе:
— комплексные электрические испытания штанги для уста-
новки экспериментальной СБ, самой СБ и панорамной ка-
меры;
— сборка головного блока ракеты-носителя, в состав которого
входил спутник с экспериментальной СБ.
По результатам проделанной работы штанга с эксперимен-
тальной СБ и камера для наблюдения процесса раскрытия экс-
периментальной СБ были полностью подготовлены к запуску.
На рис. 10.13 приведен общий вид спутника с эксперимен-
тальной СБ. Снимок сделан в помещении технического комплек-
са космодрома «Плесецк».
Рис. 10.13. Общий вид малого спутника «Можаец-4» с моделью солнечной
батареи
На рис. 10.14 показан спутник с экспериментальной СБ в со-
ставе головного блока.
С участием специалистов КБ «Полет» был осуществлен за-
пуск ракеты-носителя с малым спутником, на котором была уста-
10.3. Адаптация к микроспутнику модели солнечной батареи
355
Рис. 10.14. Общий вид малого спутника «Можаец-4» в составе головного блока
новлена экспериментальная СБ, и выведение головного блока
с установленными на нем 7 спутниками на заданную орбиту.
Выведение ракетой-носителем головного блока на орбиту про-
шло успешно. В результате в ходе запуска были подтверждены:
— правильность технических решений по компоновке и уста-
новке экспериментальной СБ в составе спутника;
— достаточная прочность штанги для установки эксперимен-
тальной СБ, самой СБ и камеры для съемки СБ при воздей-
ствии вибромеханических нагрузок на участке выведения.
К сожалению, на околоземной орбите высотой 1000 км по
техническим причинам 28.10.05 не произошло отделение спут-
ника «Можаец-4» от адаптера (ракеты-носителя). По этой при-
чине спутник не начал функционировать [136]. Установленная
на спутнике «Можаец-4» аппаратура для демонстрации дина-
мики формирования солнечной батареи центробежными сила-
ми не включилась и не выполнила свою задачу. Однако опыт
подготовки эксперимента несомненно представляет интерес для
последующих разработок.
10.3.4. Заключение по разделу
Обработка телеметрических данных о деградации аморфно-
кремниевой батареи с успешно запущенного малого спутника
«Университетский» указывает на факт того, что за первые два
года эксплуатации СБ практически не изменила свои характери-
стики, что подтверждает теоретические прогнозы о потенциально
высокой стабильности и радиационной стойкости исследуемой
12"
356 Гл. 10. Экспериментальная отработка солнечных батареи
структуры и возможности ее использования в широком круге
задач.
Проведен большой объем работ по подготовке научной аппа-
ратуры и адаптации ее к спутнику для космического эксперимен-
та по демонстрации динамики формирования солнечной батареи
центробежными силами. Разработаны, изготовлены, прошли на-
земную отработку и установлены на малый спутник «Можаец-4»
агрегат раскрытия модели солнечной батареи и система передачи
на Землю цифрового изображения динамики раскрытия.
Глава 11
ПОДГОТОВКА, ПРОВЕДЕНИЕ И РЕЗУЛЬТАТЫ
КОСМИЧЕСКОГО ЭКСПЕРИМЕНТА ПО
РАЗВЕРТЫВАНИЮ ОТРАЖАТЕЛЯ D=20 М НА
ТГК «ПРОГРЕСС» (ЭКСПЕРИМЕНТ «ЗНАМЯ 2»)
11.1. Цели и задачи космического эксперимента
«Знамя 2»
Целью эксперимента «Знамя 2» являлась отработка конструк-
ции формируемого центробежными силами крупногабаритного
космического бескаркасного пленочного отражателя (БПО) диа-
метром 20 м и агрегата раскрытия отражателя (АРО), а также
подтверждение проектных подходов и конструктивных решений,
закладываемых в проекты аналогичных систем.
Задачами эксперимента являлись:
— изучение динамики раскрытия и формообразования БПО;
— изучение динамики БПО при управлении ориентацией БПО
в пространстве;
— изучение возможностей освещения поверхности Земли от-
раженным от БПО солнечным светом,
— отработка методики проведения радиолокации БПО;
— проверка работоспособности БПО при комплексе воздей-
ствий в реальных космических условиях в течение продол-
жительности эксперимента;
— подтверждение расчетных методик.
11.2. Концепции разработки научной аппаратуры
и организации эксперимента
В соответствии с принятыми в НПО «Энергия» конструктив
ными концепциями конструкция отражателя для космического
эксперимента «Знамя 2» была выбрана в виде разрезного 8 сек-
торного диска так, чтобы отражатель с агрегатом раскрытия яв-
лялись маломасштабной моделью солнечного парусного корабля.
В основу разработки были положены следующие принципы:
— использование в качестве орбитальной базы управляемого
транспортно-грузового корабля «Прогресс М» (рис. 11.1)
с его уникальными возможностями для проведения раз-
личных космических экспериментов, а также технических
358
Гл. 11. Космический эксперимент «Знамя 2»
и регистрационных возможностей орбитальной станции
«Мир»;
— максимальное использование в конструкции АРО узлов
и агрегатов, ранее многократно использовавшихся в кон-
струкции кораблей «Союз Т» и «Прогресс М», привлечение
к разработке АРО коллективов специалистов, ранее разра-
батывавших и эксплуатировавших эти конструкции;
— максимальное использование опыта и методик наземной
отработки и проведения космических экспериментов на
грузовых кораблях и орбитальной станции;
— организация управления летным экспериментом;
— в вопросах, не имеющих аналогов в мировой практике, ис-
пользовались максимально простые и надежные решения.
Рис. 11.1. ТГК «Прогресс М» с АРО: 1 — отражатель; 2 — ванты крепления
отражателя к АРО; 3 — корпус АРО
Последнее относилось к выбору способа укладки отражателя,
организации динамики раскрытия пленочного полотнища и спо-
собу активного демпфирования колебаний поверхности полотни-
ща при разворотах грузового корабля.
11.3. Конструкция отражателя
Выбор пленочного материала для изготовления полотнища
отражателя производился, исходя из того, что он должен обес-
печивать:
11.3 Конструкция отражателя
359
а} наилучшие массогабаритные характеристики пленочного отра-
жатели диаметром 20-25 м;
б) наличие отработанной технологии изготовления и укладки
крупногабаритных пленочных полотнищ;
в) прочностные характеристики, необходимые для обеспечения
динамических режимов в космическом эксперименте «Знамя 2»;
г) необходимую длительность существования конструкции в ра-
ботоспособном состоянии в условиях космического пространства.
Рассматривались два типа материалов: полиэтилентерефта-
латная пленка ПЭТФ-ОА и полиимидная пленка ПМ-Э. Их
сравнительные характеристики приведены в п.5.2.
Хотя пленка ПМ обладает лучшими эксплуатационными
характеристиками, из соображений большей технологичности
и дешевизны для изготовления БИО была выбрана пленка
ПЭТФ-ОА.
ПЭТФ-ОА значительно дешевле, чем ПМ, и технология изго-
товления из нее пленочных полотен была тщательно отработана
в течение нескольких лет, в то время как для материала ПМ
требовались дополнительные дорогостоящие исследования в этой
области.
Пленка ПЭТФ-ОА толщиной 5 мкм является нестойкой
к действию ультрафиолетового излучения Солнца (по прогнозам,
она должна была распасться на орбите через трое суток), однако,
так как длительность космического эксперимента планировалась
в районе нескольких витков, это условие не имело существенно-
го значения.
Плоский БПО, примененный в эксперименте «Знамя 2», пред-
ставляет собой вращающийся пленочный диск диаметром 20 м.
Отражатель изготовлен из металлизированной полиэтилентереф-
талатной пленки (ПЭТФ) толщиной 5 мкм (ТУ 17 Латв. ССР
0273-86).
БПО собирался и укладывался посекционно из отдельных
полотнищ пленки в виде секторов с последующей намоткой сек-
торов на катушки, закрепленные на барабане агрегата раскрытия
отражателя (АРО), при этом соединялись внешние края каждых
двух соседних секторов между собой.
Развертывание в рабочее положение осуществляется под дей-
ствием центробежных сил путем раскручивания барабана АРО
с одновременным развертыванием БПО посредством синхрон-
ного вращения катушек с намотанными на них полотнищами
пленки (секторами).
Конструктивно БПО состоит из восьми автономных секто-
ров 1 (рис. 11.2а), связанных между собой концами внешних
360
Гл. 11. Космический эксперимент «Знамя 2»
кромок 2. Концы внутренних кромок 3 сектора нитями 4 свя-
заны с ребордами обеих сторон катушки (рис. 11.26). Сектор
1 (рис. 11.2в) собирают из полотнищ пленки шириной 450 мм,
края которых раскраивались индивидуально. Набор полотнищ
производится параллельно боковым сторонам сектора /.
Полотнища соединяют между собой клеем ТМ-60 (инструк-
ция ВИАМ № 938-75) по инструкции ДКБА N И95.113. В углы
2 и 3 сектора закреплены петли длиной 50 мм, предназначенные:
в углах 2 — для связи секторов между собой; в углах 3 — для
связи секторов с катушкой. Края сектора по всему контуру уси-
лены лентой 7 из пленки ПЭТФ толщиной 12 мкм и капроновой
нитью 8 марки ЗК, пропущенной под усилительной лентой. Нить
неразрывно связана по всему контуру.
После сборки секторов производят их укладку в ленту 9
складками («гармошкой»), сгибая пленку поочередно по лини-
ям 10, параллельным радиальным сторонам и швам соедине-
ния полотнищ в секторе и по биссектрисе сектора (рис. 7.2в).
После укладки в ленту ее укладывают на столе и производят
соединения углов 3 нитями 4 с катушкой 5. Нити отмаркирова-
ны и присоединяются согласно схеме, приведенной на чертеже.
Далее производят намотку ленты на катушку, предварительно
намотав нити 4.
С це/шю уменьшения объема укладки и количества воздуха
между слоями, намотку сектора на катушку производят при
помощи приспособления, которое выдавливает лишний воздух из
складок.
При наматывании сектора на катушку считают количество
оборотов ленты-сектора на катушку с помощью специально раз-
работанного счетчика. Намотку сектора и счет количества обо-
ротов производят до метки, нанесенной на ленте, отступив от
внешнего края 0,5 м.
При сборке АРО после установки катушек на барабан соеди-
няют края внешних кромок 2 каждых двух соседних секторов,
используя петли 6, которые связывают шнуром ШКП-60, узлы
пропитывают клеем ТМ-60, и оставшиеся после привязки концы
прибандажируют капроновыми нитками к шнуру. При соедине-
нии секторов между собой, вытягивают часть ленты до метки,
сделанной при укладке сектора на катушку, наматывают после-
довательно по поверхности барабана и закрепляют с помощью
технологической ленты. После сборки АРО технологическую
ленту удаляют.
После изготовления секторов отражателя на них при помо-
щи красочного покрытия была нанесена реклама организаций
11.3. Конструкция отражателя
361
Рис. 11.2. Конструкция БПО. а) 8 секторов, скрепленных по периферии;
б) вантовое крепление катушки с сектором; в) укладка сектора; / — сектор;
2 — внешняя кромка; 3 — внутренняя кромка; 4 — нити; 5 — катушка; 6 —
петля; 7 — усилительная лента; 8 — капроновая нить
362
Гл. 11. Космический эксперимент «Знамя 2»
НПО «Энергия», Консорциум «Космическая регата», Ямбурггаз-
добыча, АвтоВАЗ, COLUMBUS 500, размещенная по радиусу
БПО в периферийных областях секторов отражателя.
В связи с этим возникла необходимость дополнительного ис-
следования отражателя на слипаемость слоев краски в процессе
хранения БПО в уложенном состоянии.
При проверке одного из комплектов отражателя были обна-
ружены многочисленные слипания пленки в местах нанесения
краски; практически комплект был непригоден к использованию
в космическом эксперименте. Поэтому было принято решение
увеличить длительность просушки красочного покрытия с 7 ча-
сов до 7 суток, а также увеличить количество талька, которым
пересыпается укладываемое полотно, с 1 г/м2 до 10 г/м2. При
последующей проверке доработанных таким образом и уложен-
ных пленочных полотен было сделано заключение о пригодности
их для эксперимента «Знамя 2».
Однако, более тщательные исследования, проведенные на
образцах — фрагментах пленочного полотна, показали, что то-
чечные слипания пленки в местах нанесения краски все-таки
возможны. В конструкции отражателя это могло бы привести
к точечному слипанию рекламных надписей (это впоследствии
и произошло в эксперименте) и клиновидным местным вырывай
пленки площадью 0,01-0,5 см2, но такие локальные повреждения
вряд ли могли повлиять на выполнение основной программы
эксперимента «Знамя 2».
Следует особо отметить, что время хранения уложенного
БПО в составе АРО значительно превысило планируемое: в свя-
зи с переносом сроков эксперимента оно составило более 3
месяцев вместо полутора. К тому же некоторое время БПО
хранился на станции «Мир» в условиях повышенной влажности,
последствия чего трудно было предугадать, т. к. соответствую-
щих исследований пленочного материала с красочным покрытием
не проводилось. Если бы участки с красочным покрытием были
покрыты дополнительно прозрачной пленкой ПЭТФ толщиной
3 мкм, имевшейся в наличии, то проблем не возникло бы.
11.4. Конструкция агрегата раскрытия отражателя
(АРО)
Агрегат АРО устанавливался на месте механизма стыковки
грузового корабля «Прогресс М» «штырь-конус» с обеспечением
электрической совместимости с системой ССВП ГК. Агрегат
FJ 4. Конструкция агрегата раскрытия отражателя (АРО)
363
АРО является взаимозаменяемым с механизмом стыковки, при
этом установка АРО производится космонавтами. Это требова-
ние было одним из определяющих при разработке конструкции
агрегата АРО Для выполнения заданной функции — раскрытия
отражателя, поддержания вращения отражателя в течение всего
эксперимента и обеспечения возможности качания отражателя
вокруг осей «У» и «Z» конструкция АРО (рис. 11.3) включала
в себя следующие элементы и устройства:
АГРЕГАТ РАСКРЫТИЯ ОТРАЖАТЕЛЯ
(8 штук)
штанга
привод выпуска
отражателя
створка (8 штук)
катушка с отражателем
токосъемник
барабан
узел качания
муфта обгона
привод качания
(2 штуки)
Рис. 11.3. Конструкция АРО
привод вращения
барабана
разрывной разъем
(2 штуки)
пироболт
(4 штуки)
— Корпус агрегата.
— Штанга для установки барабана.
— Барабан для установки катушек.
— Катушки с секторами отражателя.
— Привод вращения барабана
— Привод выпуска полотна.
— Обгонная муфта для цепи «барабан-привод».
— Приводы качания ПК1, ПК2.
— Токосъемник (ТК) для подачи питания и съема информа-
ции с привода выпуска полотна.
— Датчики оборотов приводов.
— Датчики температуры электродвигателей приводов
Кинематическая схема АРО приведена на рис. 11.4.
Раскрытый отражатель с АРО на ТГК «Прогресс» и техниче-
ские характеристики АРО приведены на рис. 11 5.
364
Гл. 11. Космический эксперимент «Знамя 2»
11.4.1. Конструкция агрегата раскрытия отражателя
Особенностью конструкции агрегата (рис. 11.3) является по-
строение отражателя из восьми секторов, намотанных на катуш-
ки. Для этого катушки расположены на барабане равномерно по
его окружности. Все катушки при сматывании полотна вращают-
ся синхронно, без проскальзывания, от одного привода выпуска
полотна.
Исходя из принципа обеспечения устойчивости процесса рас-
крытия конструкция агрегата АРО построена на использовании
fi 4- Конструкция агрегата раскрытия отражателя (АРО)
365
ХАРАКТЕРИСТИКИ
1. Масса агрегата.........46 кг
2. Масса отражателя.......3 кг
3. Диаметр отражателя.............20 м
4. Скорость вращения барабана
начальная...............60 об/мин.
конечная............14 обх мин.
5. Время раскрытия
отражателя............200 с
6. Угол качания отражателя
по двум осям.... .....±3°
7. Скорость качания...до 25 '/с
Рис 11.5. Раскрытый отражатель с АРО на ТГК «Прогресс» и технические
характеристики АРО
падающей характеристики электропривода с двигателем посто-
янного тока (см. п. 3.1.4, Глава 3).
На штанге, установленной в корпусе на подшипниках, за-
креплен барабан с катушками. Оси катушек через зубчатую
передачу связаны с приводом выпуска полотна. Здесь же распо-
ложен механизм раскрытия шторок. Каждая шторка прижимает
наружный край намотанных секторов отражателя при хранении
и транспортировке АРО. Корпус АРО имеет форму ступенчатой
трубы с фланцами и закреплен в сферической обойме конуса,
заимствованного от стыковочного механизма. Обойма и, следо-
вательно, корпус имеют возможность поворачиваться на неко-
торый угол вокруг осей «Y» и «Z». Привод вращения барабана
закреплен на корпусе с помощью охватывающего кронштейна
и кинематически соединен со штангой через обгонную муфту,
построенную на резервированном храповом механизме.
Со стороны, противоположной барабану с катушками, корпус
связан с тягами приводов качания ПК1, ПК2. Эти приводы смон-
тированы на внутренней части конуса стыковочного механизма.
Токосъемник установлен внутри корпуса, его ротор связан со
штангой, а статор — с корпусом АРО. Штанга является полой,
366
Гл 11. Космический эксперимент «Знамя 2»
и внутри нее проходит электрический кабель к приводу выпуска
полотнища. Внутри корпуса размещены кабели электрических
цепей и пиросредства для отстрела АРО после завершения экс-
перимента.
Сердечник катушки имеет две полуоси, на которых уста-
новлены реборды Реборды устанавливаются на подшипниках
скольжения из антифрикционных материалов, работоспособных
в условиях высокого вакуума. Осевой зазор реборд строго регла-
ментирован и не превышает 0,2 мм. Для привязки внутренних
вершин секторов полотна каждая реборда снабжена 6 парами
отверстий диаметром 3 мм. На сердечнике катушки имеется
паз, в котором помещается шпилька для обеспечения сборки
изделия. После укладки полотна шпилька снимается. В ребордах
установлены также технологические винты для удобства укладки
полотна и транспортировки. После установки катушек в агрегат
АРО винты снимаются.
Привод вращения барабана (ПВБ) является двухдвигатель-
ным: один двигатель щеточный — типа Д82А (8 Вт), второй —
бесконтактный двигатель постоянного тока типа БК 1414 (4 Вт).
Оба двигателя через суммирующий дифференциал работают на
один выходной вал привода В номинальном режиме двига-
тель БК 1414 обеспечивает скорость вращения выходного вала
14 об/мин. (?. = 283), а двигатель Д82А — 80 об/мин. (г = 50),
т. е. в номинальном режиме скорость выходного вала привода
составляет приблизительно 94 об/мин. В этом режиме скорость
вращения барабана — 66 об/мин. Двигатель Д82А рассчитан на
кратковременную работу в высоком вакууме (20 мин.). Двига-
тель БК 1414 обеспечивает длительную работу привода в услови-
ях космического пространства.
Привод может работать отдельно от любого двигателя Для
этого в кинематическую схему включены две муфты необрати-
мого вращения. Достоинствами такой схемы являются:
— наличие резервирования;
— возможности изменения скорости выходного вала в широ-
ких пределах,
— автоматическое регулирование скорости вращения во время
раскрытия отражателя.
Такая схема позволяет в начале раскрытия отражателя со-
здать повышенную центробежную силу, когда еще мала масса
и радиус выпущенного пленочного полотна Если в якорную сеть
двигателя Д82А включить добавочное сопротивление (50 Ом),
то можно изменять степень падения скорости вращения барабана
И.4. Конструкция агрегата раскрытия отражателя (АРО)
367
при выпуске полотна. Привод ПВБ соединен со штангой через
понижающую зубчатую передачу с г = 1,415
Привод выпуска полотна построен на щеточном двигателе
типа Д118, работоспособном в высоком вакууме в течение 1 часа.
Выходная мощность двигателя — 5 Вт, пусковой момент — не
менее 6 Н-см, номинальная скорость — 2200 об/мин. Выходной
вал привода вращения полотнища (ПВП) должен быть самотор-
мозящимся, поэтому в редукторе используется червячная пере-
дача с однозаходным червяком. Для повышения КПД и надеж-
ности червячное колесо изготовлено из антифрикционной бронзы
БРОФ с покрытием ВНИИНП-230 (на основе дисульфида молиб-
дена). В приводе помещен резистивный датчик числа оборотов
выходного вала, номинальная скорость вращения которого —
35 об/мин. ПВП соединен с катушками через понижающую пе-
редачу с i = 2. Поэтому выпуск полотна происходит при скорости
вращения катушек 17,5 об/мин., что соответствует линейной
скорости 0,1 м/с с последующим замедлением до 0,03 м/с.
Заметим, что в первый момент после включения ПВП катуш-
ки не вращаются до тех пор, пока не откроются их шторки. Это
обеспечивается механизмом регламентированного свободного хо-
да между ПВП и катушкой. Для проведения проверок работоспо-
собности ПВП без раскрытия шторок имеется технологическая
ось, на которую устанавливается металлический флажок-упор.
Привода качания ПК1 и ПК2 построены на основе шагового
двигателя ДШ-48. Частота отработки ДШ > 250 шаг/с, число
шагов на один оборот вала двигателя — 16, выходная мощность
на валу — 1,1 Вт. Используется прямозубая мелкомодульная зуб-
чатая передача с i — 87. Через сектор и тягу приводы соединены
с корпусом АРО Для стопорения выходного вала в приводы
введена стопорная муфта. Имеются также резистивные датчики
угла поворота выходного вала.
Токосъемник служит для подачи питания на привод ПВП
и съема информации о числе оборотов вала и температуре элек-
тродвигателя. Токосъемник построен по схеме «ротор-статор» на
резервированных скользящих контактах с дублированием кон-
тактной точки; использовались бронзовые кольца с покрытием
сплавом «палладий-никель», щетки — проволочки из сплава
ПлИ-25. Конструкция имеет закрытое исполнение.
Устройство для открытия шторок представляет собой пру-
жинный механизм с храповым фиксатором открытого положения
шторки. Шторка, установленная на оси пружинного механизма,
своим рычагом после монтажа на барабане опирается на кулачок,
который кинематически связан с приводом ПВП. После поворота
368
Гл. 11. Космический эксперимент «Знамя 2»
кулачка на угол 10° рычаг освобождается и пружина повора-
чивает шторку на угол больше 150° и освобождает полотно на
катушке. В открытом положении шторка фиксируется храповым
механизмом. Сама шторка выполнена из алюминиевого листа
методом штамповки. Для равномерного нажатия на полотно,
уложенное на катушку, на прилегающую поверхность шторки
наклеена губка из резины.
Барабан установки катушек (БУК) выполнен сборным из
трех фрезерованных плат и центрального цилиндра с винтовым
соединением; материал — алюминиевый сплав типа АМГ6. Две
верхние платы образуют корпус редуктора катушек и механизма
открытия шторок. Для исключения взаимного влияния катушек
последние разделены тонкими перегородками из листовой стали.
Перегородки фиксируются в радиальных пазах двух смежных
плат. Опоры для катушек выполнены на шарикоподшипниках.
Перед функционированием агрегат АРО должен находиться
в исходном положении: шторки должны быть закрыты, штанга
должна быть перпендикулярна к установочной плоскости с по-
грешностью не более 30'. Флажок-упор на технологической оси
привода ПВП должен быть снят.
Электрическое питание подается на привод ПВБ, сразу на
оба его электродвигателя. Барабан начинает вращаться. Через
2 мин. подается питание на привод ПВП. При начале движения
вала привода освобождаются шторки, и пружины отводят их
от катушек, поворачивая вокруг оси на угол 150°. Начинается
выпуск полотна, вследствие чего растет момент инерции бара-
бана, и вращение его начинает замедляться. По числу оборотов
катушки, равному числу витков намотки полотна, определяют
момент полного раскрытия отражателя. После этого выключают-
ся двигатель Д82А привода ПВБ и привод ПВП. При полностью
развернутом отражателе число оборотов барабана должно быть
не более 17 об/мин.
Развертывание отражателя возможно только в вакууме, при
давлении не более 10-2 мм рт. ст. и в состоянии невесомости.
Качание отражателя вокруг осей «Y» и «Z» производится подачей
импульсов на соответствующий привод качания.
АРО был изготовлен приборным производством НПО «Энер-
гия», прошел наземную отработку и соответствующую приемку
и использовался в космическом эксперименте «Знамя 2».
11.6. Наземная отработка АРО
369
11.5. Средства управления АРО (СУ АРО)
СУ АРО предназначены для управления АРО при проведении
КЭ «Знамя 2». При проектировании СУ АРО было предусмотре-
но обеспечение максимальной преемственности и заимствование
ранее разработанных и испытанных узлов, устройств и блоков
управления. Так, в СУ АРО использовались блоки управления
и БКС системы ССВП. Кроме того, с незначительной доработкой
использовались приводы и устройство отделения, применяемые
в ССВП.
В состав СУ АРО, кроме агрегата АРО, входят:
— блок БУ 12-1-4-06 — 2 шт.;
— кабели БКС.
Блоки БУ 12-1-4-06 предназначены для управления шаго-
выми двигателями приводов качания АРО. На вход каждого
блока от СУД поступает последовательность импульсов. Частота
следования импульсов определяет скорость вращения приводов
качания (один импульс соответствует одному шагу двигателя);
требуемые частоты определяются СУД.
В СУД передаются сигналы обратной связи с потенциометров
приводов качания АРО и привода выпуска полотна (ПВП).
Управление приводами ПВП и ПВБ осуществляется непо-
средственно подачей и снятием напряжения питания от СУБК.
Для передачи ТМ параметров СУ АРО также используются
цепи ССВП, освобождающиеся после демонтажа стыковочного
механизма.
11.6. Наземная отработка АРО
11.6.1. Этапы наземной отработки
Наземная отработка АРО включала два основных этапа:
— отработка работоспособности по общепринятым штатным
программам и методикам, применяющимся при создании
подобных образцов космической техники (виброиспытания,
термоциклирование, электропрочность и т. д.);
— отработка специфических механических и динамических
воздействий при разворачивании собственно пленочного от-
ражателя.
Последний этап разделялся, в свою очередь, на два подэтапа:
— изучение механики сматывания пленочно-тросовой кон-
струкции полотна отражателя на начальном, промежуточ-
ном и конечном этапах (т. е. сход уложенного на катушку
370
Гл. И. Космический эксперимент «Знамя 2.
сектора БПО с тросами, узлами креплений тросов, швами
материала сектора, его окантовкой и т. д.);
— исследование динамики силового воздействия центробеж-
ных сил на электроприводы в процессе разворачивания
БПО (отработка динамики приводов, проведенная без само-
го пленочного полотна, путем его замены моделирующими
грузами на нитях).
Последовательность наземной отработки АРО была такова:
1) отработка и испытания отдельных узлов, элементов элек-
тромеханики АРО на этапе изготовления;
2) лабораторно-отработочные испытания, включавшие два
подэтапа отработки специфики схода пленки и ее силового
воздействия на электроприводы;
3) конструкторско-доводочные испытания (после проведения
всех доработок), включавшие виброиспытания, термоцик-
лирование, электропрочность и т. д.;
4) отработка схемы управления АРО на наземном комплексе
отработки (НКО).
На этапе изготовления первого образца АРО проводилась
отработка основных его элементов: привода вращения барабана
(ПВБ) и привода выпуска полотна (ПВП) с определением их ха-
рактеристик, окончательным выбором передаточного отношения
редуктора и типов электродвигателей.
В ДКБА отрабатывались технология изготовления БПО и на-
несения на него рекламных надписей.
11.6.2. Лабораторно-отработочные испытания
На этапе ЛОИ проверялась правильность принятых кон-
структорских и схемных решений, проверка взаимодействия ос-
новных узлов и элементов. Проверялась работоспособность при-
водов АРО без выпуска полотна БПО и с частичным (до 1 м)
выпуском на воздухе.
После первой сборки АРО и установки в него катушек с отра-
жателем диаметром 25 м было проведено контрольное включение
привода вращения, разогнавшего барабан до расчетной угловой
скорости 10 рад/с, и затем включение привода роспуска с целью
контроля принципиальной работоспособности конструкции на
начальном этапе раскрытия (испытания проводились на возду-
хе, в помещении сборочного цеха). При этом роспуск секторов
с катушек не произошел, наблюдалось распушение секторов, пре-
пятствующее вращению. Причиной этого являлось то, что из-за
ограниченности расстояния между соседними катушками и недо-
статочно плотной намотки секторов отражателя происходило
11.6. Наземная отработка АРО
371
касание поверхностей укладки соседних секторов, и трение
между ними было так велико, что внешние слои укладки не
поворачивались, а разворачиваемые приводом внутренние- слои
распушали укладку, приводя к еще большему заклиниванию.
Это явление попытались устранить с помощью более плотной
намотки секторов на катушки и устранения возможного прямого
контакта между секторами соседних катушек путем введения
разделительных пластин из нержавеющей стали толщиной 1 мм.
Это сопровождалось разборкой и доработкой АРО. Испытывае-
мые отражатели были повторно уложены в ДКБА с усиленным
контролируемым натягом и установлены в доработанный АРО.
Также, для обеспечения большей надежности раскрытия, учиты-
вая при этом, что принятие решения о нанесении рекламы на
отражатель изменило массовые характеристики и объем укладки
пленочного полотна, диаметр отражателя снизили с 25 м до 20 м.
Удаление 2,5 м пленки с периферии отражателя значительно
уменьшило объем укладки и полностью исключило возможное
касание секторов катушек с разделительными пластинами.
Отметим, на всех этапах проектирования АРО и БПО рас-
сматривался вопрос наличия распушения укладки при вакууми-
ровании из-за остаточного воздуха в складках БПО. Выбранная
укладка типа «гармошка», с радиальными ребрами, исключала
возможность образования закрытых полостей в укладке и давала
возможность выхода воздуха в обе стороны катушки.
После этапа отработки принципиального вращения катушек
с пленкой был начат этап испытаний собственно сматывания
секторов с катушек. Для инициирования начального натяжения
в периферийной части каждого сектора прикреплялся груз в виде
металлического стержня массой 20 г. Хотя при этом процесс
сматывания происходил надежно, от концевых грузов пришлось
отказаться, поскольку они приводили к дополнительному си-
ловому воздействию на отражатель и электропривод роспуска
при дальнейшем раскрытии полотна до полного размера. Сбра-
сывать же эти грузы после начального этапа раскрытия было
нежелательно из-за засорения космического пространства вблизи
станции «Мир», что могло бы привести к столкновению ее со
сброшенными грузами.
По этой причине вместо грузов для первоначального ини-
циирования роспуска секторов было предложено использовать
периферийную часть самих секторов. Наиболее рациональным
было признано заматывание выпущенной части каждого секто-
ра по спирали на основной барабан с катушками в сторону,
противоположную направлению вращения в процессе раскрытия
372
Гл. 11. Космический эксперимент «Знамя 2»
отражателя. Все сектора были связаны друг с другом по углам,
и заматывание выпущенных частей в виде распушенных «гар-
мошек» из 24 гофров на сектор осуществлялось одновременно,
после чего эта конструкция закрывалась внешними шторками.
В связи с отработкой этого этапа встал также вопрос о длине
изначально выпущенной части сектора, которая могла суще-
ственно влиять на динамику разворачивания. Эта длина выби-
ралась на основе экспериментального исследования динамики
разворачивания отражателя в вакуумной камере с различным
размером выпущенной части полотна (0,1 м, 0,3 м, 0,5 м, 0,75 м).
Особенностью роспуска являлось одновременное начало подачи
следующих частей секторов, поскольку конструктивно в АРО
была заложена одновременность раскрытия шторок и начала
вращения катушек. Задача динамики сматывания сектора с од-
новременной его подачей представляла большие теоретические
трудности и ранее не рассматривалась, т. к. при этом не могла
быть использована проверенная модель прямолинейной сматыва-
ющейся складки; реальное движение складки напоминало пове-
дение «хлыста».
В эксперименте испытания с каждой последующей длиной
выпущенной части секторов требовали развакуумирования круп-
ногабаритной барокамеры, подматывания и установки очередной
длины, закрытия шторок и вновь откачки барокамеры до давле-
ния 3-10-3 мм рт. ст.
Первоначально установленная длина в 50 см дала удовле-
творительные результаты по динамике: после открытия шторок
плавные дуги выпущенных частей секторов, которые не связы-
вались между собой в этом эксперименте, за 1,5-3 с занимали
радиальное положение без значительных захлестываний и коле-
баний, далее продолжался плавный роспуск.
Попытка увеличить длину выпущенной части до 75 см приве-
ла к значительному изменению динамики процесса: наблюдалось
сильное перехлестывание сектора за радиальное направление
и затухающие волнообразные колебания около него. При этом за
счет резкого возрастания момента инерции полотна наблюдалась
почти полная остановка двигателя вращения и его последующий
разгон. Из-за действия силы тяжести колеблющийся конец сек-
тора на короткое время выходил из горизонтальной плоскости на
угол до 30°. Такой режим признан неудовлетворительным.
. Эксперимент с длиной выпущенной части сектора 30 см дал
удовлетворительную динамическую картину раскрытия отража-
теля; перехлестывания за радиальное направление практически
не наблюдалось.
11.6. Наземная отработка АРО
373
Начальная длина в 10 см неожиданно также дала устойчивую
картину начала раскрытия, хотя казалось что такого размера
недостаточно для инициирования процесса.
На основе вышеописанных экспериментов окончательно была
выбрана длина начального распушенного участка секторов в 45-
50 см, чтобы обеспечить достаточный запас для инициирования
начала разворачивания БПО при проведении КЭ.
Необходимость отработки конечного этапа роспуска отража-
теля была связана с тем, что сектора заканчивались 4 тросами
вантовой схемы крепления БПО к катушкам АРО. Сомнения
вызывал этап схода узлов тросов в местах крепления к по-
лотну и их дальнейшее разматывание. Полагалось, что после
успешного прохождения начального участка при сходе средней
части отражателя никаких осложнений для собственно сматы-
вания быть не может. Особенностью конечного этапа являлась
необходимость моделирования нагрузки от центробежных сил
с почти полностью развернутого БПО. При этом самого полот-
на в полном размере не могло быть вследствие недостаточного
размера барокамеры (5 м), а угловая скорость вращения была
близка к начальной (10 рад/с), поскольку при меньшей скорости
имело место провисание полотна под собственным весом. Для
указанной начальной скорости вращения угол составлял для
радиуса 1 м 6°. Длина выпускаемой части на каждом этапе огра-
ничивалась размерами барокамеры и не превышала 2 м. После
проверки каждого этапа раскрытия пленки перед последующим
этапом проводилось отрезание выпущенной части (1,7-1,8 м).
При расчетной конечной скорости вращения развернутого
полотна л = 1,8 рад/с угол а стремится к 90°, т. е. полная
отработка не могла проводиться без обезвешивания БПО, что
не представлялось возможным. Поэтому необходимо было по-
добрать массу концевых грузов, которые, находясь на радиусе
1,5-2 м при скорости вращения 10 рад/с, обеспечивали бы та-
кое же натяжение, как от реального полотна, вращающегося со
скоростью 1 рад/с. На основе расчетов масса единичного груза
составила 23 г.
Таким образом, сектора БПО после предыдущих эксперимен-
тов были обрезаны до конечного размера 1,8 м, периферийные
углы секторов отражателя были соединены нитями, в местах
соединения закреплялись грузы расчетной массы. При прове-
дении роспуска такой модели БПО в барокамере имело место
запутывание тросов на начальном этапе их схода с катушек,
связанное с тем, что тонкие тросы попадали в технологические
зазоры на катушках. На нескольких катушках имело место
374
Гл. 11. Космический эксперимент «Знамя 2»
неправильное крепление тросов к ребордам катушки, явившееся
следствием недосмотра при сборке. Это привело к необходимости
замены тросов на более толстые (толщиной 3 мм), также было
изменено количество мест их привязки к катушке с 4 до 2, т. е.
в одно отверстие на каждой реборде крепилось по два троса.
Тем самым снижалась вероятность перепутывания тросов при
заводской сборке.
После выявления недостатков было изготовлено специальное
пленочное полотно уменьшенного диаметра (5 м), имитирую-
щее часть реального полотнища на конечном этапе раскрытия,
с утолщенными тросами и измененной схемой их крепления
к ребордам катушки. К полотну были прикреплены грузы рас-
четной массы и проведено контрольное раскрытие такой системы
в барокамере, прошедшее успешно и без замечаний.
В процессе всех этапов раскрытия отражателя проводился
визуальный контроль развертывания и киносъемка. На пульте
управления контролировались токи потребления электродвигате-
лей приводов ПВБ и ПВП (рис. 11 6)
11.6.3. Конструкторско-доводочные испытания (КДИ)
КДИ проводились на агрегате, прошедшем ЛОИ и дорабо-
танном с учетом замечаний на этом этапе. При этом проводились
следующие испытания:
— Проверка электрической схемы и сопротивления изоляции.
— Проверка функционирования приводов в нормальных усло-
виях; функционирование привода ПВП осуществлялось
в ограниченном технологическом упорном угле поворота,
исключающем раскрытие шторок и выпуск полотна отра-
жателя.
— Испытания на имитацию транспортирования в 3 направле-
ниях при воздействии ударных перегрузок 9 g в течение
8 мс (6000 ударов) Испытания на вибростенде с частотами
от 2 до 2000 Гц.
— Испытания на ударную стойкость в 3 направлениях при
воздействии перегрузки 40 g в течение 3,2 мс.
— Испытания на ресурс в нормальных условиях ПВБ1
(БК1414) - 20 час, ПВБ2 (Д82А) - 3 мин.
Все виды испытаний прошли без замечаний.
11.6.4. Моделирование динамики силового нагружения
на электроприводы на этапе разворачивания БПО из уло-
женного состояния
В целях подтверждения работоспособности АРО в космиче-
ском эксперименте «Знамя 2» также были проведены динамиче-
11.6. Наземная отработка АРО
375
а)
б)
Рис. 11.6. Наземная отработка этапов раскрытия отражателя на АРО «Зна-
мя 2» в вакуумной камере НПО «Энергия»: а) частично раскрытое состояние
БПО; б) уложенное состояние БПО
376
Гл. 11. Космический эксперимент «Знамя 2»
ские исследования приводов вращения барабана (ПВБ) и привода
выпуска полотна (ПВП) в составе АРО.
Динамические характеристики нагрузки на АРО от ре-
ального отражателя на этапах его раскрытия имитировались
с помощью грузов на нитях, выпускаемых с катушек АРО
(см. рис. 11.7). Количество грузов равнялось количеству катушек
(8 шт.). Масса одного груза составляла 2 кг и была выбрана
на основе численного математического моделирования процесса
раскрытия отражателя как системы грузов на нитях при выпол-
нении условия максимального совпадения в процессе раскрытия
следующих динамических характеристик реального отражателя
и модели (п. 3.7, рис. 3.24):
— угловой скорости вращения барабана щ;
— угловой скорости вращения привода ПВП щ;
— угла отклонения от радиального направления у?;
Рис. 11.7. Стенд моделирования динамики силового нагружения электроприво-
дов АРО на этапе разворачивания БПО
11.6. Наземная отработка АРО
377
— нагрузки на привод ПВП, обусловленной действием цен-
тробежных сил.
Исследования проводились в барокамере при давлении
1 • 10-3-3 • 10-2 мм рт. ст. для исключения влияния газодина-
мического сопротивления атмосферы.
На начальном этапе испытаний была проведена проверка вли-
яния газодинамического сопротивления атмосферы на вращение
конструкции.
При первом включении приводов вращения в условиях нор-
мального атмосферного давления наблюдалось срабатывание
предохранительной муфты. Вращение привода ПВБ происходило
на холостом ходу со скоростью около 20 об/мин. вместо проект-
ных 100 об/мин. в результате выхода из строя предохранитель-
ной муфты по причине выработки ресурса.
В дальнейшем, после восстановления рабочего момента
предохранительной муфты, удавалось раскручивать привод
ПВБ до большей скорости холостого хода (около 80 об/мин.)
и проводить полный плавный роспуск грузов на нитях. При
этом имело место резкое снижение угловой скорости вращения
системы по мере выпуска грузов, связанное с газодинамическим
сопротивлением, и малые значения натяжения нитей от
центробежных сил N = mw2R, когда ш мало.
В целом этот экспериментальный этап подтвердил необходи-
мость создания вакуума 1 10“3-3 • 10 2 мм рт. ст. для прове-
дения исследований, а также указал на сильное влияние любого
вида сопротивлений, вносимых в процесс, будь то газодинами-
ческое сопротивление атмосферы или омическое сопротивление
в цепи питания приводов вращения, на динамику работы приво-
дов.
После создания в барокамере вакуума 1-10 -3 х
х 10-2 мм рт. ст. наблюдался разгон барабана за время
6-8 с до проектной скорости холостого хода, фиксируемой
по стабильному значению тока. Предохранительная муфта
при этом не срабатывала. При испытании в барокамере на
давлении 3 • 10~2 мм рт. ст., когда грузы в исходном положении
были поджаты к барабану (R < 0,2 м), наблюдалась жесткая
зависимость работоспособности привода ПВП от величины
добавочного сопротивления Ra в цепи быстроходного двигателя
ПВБ. До величины Ra < 30 Ом наблюдалось торможение
ПВП и его остановка при длине нитей до 1 м. Визуально
рассчитанная скорость вращения во время остановки составляла
приблизительно 2 рад/с, суммарное усилие — 66 Н, момент
378
Гл. 11. Космический эксперимент «Знамя 2»
на катушке — 1 Н-м, что в 3-5 раз ниже проектной величины,
полученной при автономных испытаниях червячного редуктора.
Поскольку сопротивление вращению барабана с грузами
было очень малым (только из-за трения в подшипниках),
а инерционность системы была велика, то требовалась выдержка
вращения системы в течение 15-20 мин. для снижения ее
угловой скорости до такого уровня, при котором можно было
вновь начинать сматывание грузов на нитях.
Проводились раскрытия системы с грузами при различных
напряжениях питания. При введении в цепь питания быстроход-
ного привода ПВБ сопротивления 10 Ом наблюдалась остановка
привода ПВП сразу после его включения (при всех напряжениях
> 23 В).
Только с Яд = 40 Ом при напряжении питания 27 ± 0,5 В гру-
зы достаточно плавно отходили от барабана до радиуса 1,75 м.
Из теоретических расчетов следовало, что на начальном эта-
пе раскрытия системы грузов на нитях имеет место превышение
моделируемого в отражателе натяжения в несколько раз. По
этой причине было принято решение пропустить начальный этап
и начать раскрытие с некоторого начального радиуса положения
грузов (30 см от центра вращения) и с соответствующей этому
начальной угловой скорости ш = 4,3 рад/с, что соответствует
напряжению 19 В.
После установления (визуально) исходного режима одновре-
менно включался привод ПВП и напряжение поднималось до
очередного значения из диапазона 27-34 В. Начальная угловая
скорость 1ШБ находилась в диапазоне 3,5-4,3 рад/с.
При такой корректировке и добавочном сопротивлении 10 Ом
вновь наблюдалась остановка привода ПВП при нахождении гру-
зов на радиусе 0,65 м и усилии на нити 25 Н. При этом с начала
раскрытия до остановки привода ПВП угловая скорость привода
ПВБ практически не изменялась (4,2 рад/с).
В дальнейшем были проведены испытания при Нд = 50 Ом;
при всех напряжениях питания наблюдался плавный выпуск
грузов на нитях, динамические характеристики были близки
к расчетным. Максимальное усилие на нити 10,6 Н наблюда-
лось в начальный момент раскрытия и в дальнейшем снижалось
в процессе раскрытия из-за падения угловой скорости привода
ПВБ.
Угол отклонения выпускаемой нити с грузом от радиального
направления определялся визуально по отклонению одной из
нитей от радиальной планки. Во всех экспериментах угол не
превышал 10° .
11.7 Отработка математического обеспечения научной аппаратуры 379
При Кд=50 Ом была определена скорость холостого хода
ПВБ в зависимости от напряжения питания: 50-85 об/мин. для
23-34 Б
В результате проведенных исследований была установлена
возможность работы АРО во всем диапазоне напряжений пита-
ния при условии введения в цепь питания быстроходного дви-
гателя привода ПВБ АРО (ДВ2А) добавочного сопротивления
50 Ом.
Установлено, что поскольку натяжение от центробежных сил
прямо пропорционально квадрату угловой скорости (N — mw2R),
то привод ПВП чувствителен к изменению угловой скорости
барабана. При введении дополнительного сопротивления харак-
теристика двигателя постоянного тока М = f(w) снижается,
и процесс раскрытия системы проходит при меньших угловых
скоростях и, следовательно, меньших усилиях.
Следует отметить, что введение дополнительного сопротивле-
ния незначительно снижает начальную скорость вращения бара-
бана Условия для инициирования раскрытия отражателя с вве-
дением добавочного сопротивления практически не изменяются.
Проведенные испытания указали на необходимость введения
добавочного сопротивления 50 Ом в цепь питания двигателя
привода ПВБ для исключения заедания червячного редуктора,
критическое усилие для которого при работе в вакууме оказалось
в 3 раза меньшим по сравнению с измерениями на воздухе (при
соответствующей вакуумной смазке).
11.7. Отработка математического обеспечения
научной аппаратуры «Знамя 2»
В соответствии с программой эксперимента «Знамя 2» СУД
ГК «Прогресс М» № 215 обеспечивала решение следующих
задач:
1) выполнение маневра ГК после расстыковки для обеспече-
ния благоприятных условий наблюдения эксперимента со
стороны станции;
2) построение инерциальной ориентации ГК с продольной
осью «X» по нормали к плоскости орбиты и осью «У»,
совпадающей с проекцией вектора направления на Солнце
на плоскость орбиты, обеспечивающей минимальную ве-
личину внешних возмущающих моментов и максимальную
освещенность солнечных батарей;
380
Гл. 11. Космический эксперимент «Знамя 2»
3) выдачу последовательности команд для раскрытия отража-
теля и стабилизацию ГК в ИСК, с использованием ДО во
время раскрытия отражателя;
4) тестовый разворот ГК с отражателем на 9° по рысканию
с использованием ДО для проверки управляемости системы
«ГК+отражатель»;
5) разворот ГК на большой угол для эксперимента «Новый
свет» (при положительных результатах тестового разворо-
та);
6) качание оси вращения отражателя на углы от —3 до +3°,
возбуждения колебаний БПО, определение их характери-
стик, демпфирование колебаний с помощью приводов кача-
ния;
7) фиксирование результатов проводимых динамических ре-
жимов через ТМ дискретного контура ГК «Прогресс М»;
8) построение ориентации для отстрела отражателя и выдачу
команд на отключение и отстрел АРО;
9) проведение маневра центра масс после отстрела для обес-
печения безопасности ГК.
Для решения поставленных задач была проведена следующая
модификация штатной СУД:
— в состав СУД введен прибор ПКЧ (преобразователь код-
частота) для управления шаговыми приводами качания
вала АРО из БЦВК (максимальной скорости разворота
0,4 град/с соответствует частота 200 Гц);
— доработана кабельная сеть для стыковки БЦВК с прибо-
рами;
— доработано программное обеспечение СУД: разработаны
программы-вставки, решающие поставленные по программе
эксперимента задачи.
На первом этапе отработка программного обеспечения осу-
ществлялась с использованием математических моделей, описы-
вающих как динамику разворачиваемого и развернутого полотна,
так и логику работы АРО. При этом использовалась прибли-
женная динамическая модель вращающегося пленочного диска,
являющаяся, по сути дела, моделью гиростабилизатора в упруго-
вязком подвесе. Рассчитанная для данной модели частота попе-
речных колебаний во вращающейся с парусом системе координат
составляла 1,05-1,1 от частоты вращения. При этом в связан-
ной с ГК системе координат частота прецессионных колебаний
составляла 0,05-0,1 от частоты вращения.
По результатам моделирования режимов разворота ГК с ис-
пользованием ДО, максимальная допустимая угловая скорость
117- Отработка математического обеспечения научной аппаратуры 381
разворота, при которой амплитуда колебаний отражателя не
превышает 3°, составила 0,2 град/с в случае частоты попереч-
ных колебаний паруса, составляющей 1,05 от частоты враще-
ния). Данное ограничение на угловую скорость было заложено
в ПО СУД при проведении эксперимента.
По результатам исследования различных циклограмм кача-
ния оси вращения была выбрана циклограмма качания, включа-
ющая 3 полных цикла качания на угол от —3 до +3°, с угловой
скоростью 0,4 град/с. Данная циклограмма позволяет провести
«раскачку» БПО до такой степени, чтобы было возможно за-
фиксировать динамические процессы на ТМ-датчиках угловых
скоростей ГК «Прогресс М». В то же время, колебания БПО
при данной циклограмме не превышают допустимой величины
4°, (угол тросовых растяжек-вант БПО).
Для проверки возможности демпфирования колебаний отра-
жателя ИО СУД был разработан и введен в ПО алгоритм демп-
фирования угловых колебаний БПО. В данном алгоритме управ-
ляющий сигнал, подаваемый на приводы качания ПК1 и ПК2,
формируется по следующей логике. Угол поворота соответствую-
щего привода качания пропорционален проекции угловой скоро-
сти ГК на ось поворота привода. На основе проведенных теоре-
тических исследований показана асимптотическая устойчивость
выбранного алгоритма. Коэффициенты в законе управления были
окончательно выбраны по результатам проведенного моделирова-
ния.
На втором этапе отработки ПО СУД были проведены сов-
местные испытания СУ АРО и СУД на НКО. Данные испытания
проводились с целями:
— проверки электрического сопряжения сигналов обмена
между СУ АРО и СУДом;
— проверки фазировок управляющих сигналов и сигналов об-
ратных связей;
— отработки режимов СУ АРО с СУДом с модифицирован-
ным программным обеспечением
Программа совместных испытаний включала проверки следу-
ющих режимов:
1) циклограммы раскрытия БПО;
2) поворотов ПК1 и ПКЕ на фиксированные углы;
3) непрерывного управления ПК1 и 1Ш2;
4) тестового режима АРО (проводимого в полете перед отсты-
ковкой ГК от станции для проверки правильности сборки
кабельной сети АРО);
5) циклограммы отстрела.
382
Гл. 11. Космический эксперимент «Знамя 2»
Для проведения испытаний была собрана штатная схема СУД
и СУ АРО. Ввиду отсутствия в составе НКО СУБК. подача
и снятие напряжений питания СУ АРО и СУДа осуществлялась
оператором СУ АРО по командам оператора СУДа.
По результатам совместных испытаний были проведены дора-
ботки ПО и кабельной сети, ПКЧ. После чего испытания были
проведены повторно с положительными результатами.
11.8. Температурный режим БПО
В общем виде температура развернутого пленочного диска,
изготовленного из полимерной пленки с односторонней метал-
лизацией ПЭТФ-ОА марки «К» толщиной 5 мкм, описывается
выражением:
T = (AsQs/(£M + £n)^ + To)1/4-
где Qs — суммарный тепловой поток, падающий на диск; £м =
= 0,05 — степень черноты со стороны металлизации; £п = 0,20 —
степень черноты со стороны полимерной подложки; As = 0,16 —
коэффициент поглощения солнечного излучения (эта величина
приблизительно одинакова для обеих сторон пленки); То = 4 К —
температура окружающей среды; а = 5,67 • 10 8Вт/( м2 • А'4) —
постоянная Стефана-Больцмана.
Суммарный тепловой поток Qs состоит из следующих ком-
понентов:
1) прямой солнечный поток;
2) солнечный поток, отраженный Землей;
3) собственное тепловое излучение Земли;
4) тепловой поток, возникающий вследствие аэродинамиче-
ского торможения:
Qs = 0,5Sq(cosy-b [cos'y|) + 0,25(1 - A)So<£>i+
+ О,5А5о^2 + 0,5<7д(соз7д + |со87д|).
Здесь So = 1367 Вт/м2 — солнечная постоянная для орбиты
Земли; А = 0,38 — среднее альбедо Земли; (pi и — угло-
вые коэффициенты собственного излучения Земли; q = 15 Вт/м2
(для орбиты высотой 320 км) — тепловой поток, обусловленный
аэродинамическим торможением; 7д — угол между нормалью
к плоскости диска и вектором орбитальной скорости; 7 — угол
между нормалью к поверхности диска, освещаемой Солнцем,
и направлением на Солнце.
11.8. Температурный режим БПО
383
Рис. 11.8. Расчетная температура развернутого полотна отражателя в зависи-
мости от ориентации к Солнцу
На рис. 11.8 приведены графики температуры пленочного
диска в зависимости от углов 7 и 7S, где 7S угол между на-
правлениями на диск и на Солнце из центра Земли, при усло-
вии, что солнечный поток падает на металлизированную сторону
(это условие учитывалось при планировании эксперимента «Зна-
мя 2»),
В связи с тем, что пленочный диск состоит из восьми сек-
торов, уложенных в исходном состоянии на барабаны (структу-
ра укладки может моделироваться системой продольных гофров
(см. рис. 11.9), то при раскрытии конструкции возникает особый
температурный режим в силу следующих причин:
а) изменяются характеристики As и е;
б) клинообразная структура складок-гофров способствует
концентрации светового потока и увеличивает поглоща-
тельную способность пленочной поверхности.
Температура гофрированной поверхности вычисляется по вы-
ражению:
MW44H?;4)1/4; е' = 1/(1 4- (1/е - l)sin(«/2)];
где A!s = 1 — (1 — As)n, п = л/а — число отражений в гофре,
а — угол раскрытия гофра (рис. 11.10).
384
Гл. 11. Космический эксперимент «Знамя 2»
Рис. 11.9. Клинообразная структура складок при развертывании полотнища
отражателя
Формулы для вычисления е^ и £zn аналогичны.
Следовательно, температура при различных режимах зависит
от отношения A's/е' , где е' = е'п + е^.
11.9. Баллистическое обеспечение КЭ «Знамя 2»
385
Рассмотрим случай 75 = 0, когда температура максимальна
(верхняя кривая на рис. 11.10). Для этого случая в таблице 11.1
приведены значения A's /е' в зависимости от углов а и 7.
Таблица 11.1.
а, град + -м 7 = = 0° 7 = = 0° 7 = = 10° 7 = = 10° 7 = = 30° 7 = = 30°
As A's/e' As As/^ As As/e'
180 0,25 = 0.05 + 0,20 0.15 0,60 0,15 0,60 0,15 0,60
90 0.33 = 0.07 + 0,26 0,28 0,85 0,23 0,70 0,18 0,54
60 0,42 = 0.09 + 0,33 0,39 0,91 0,31 0,73 0,22 0,51
30 0,65 = 0,16 + 0,49 0,62 0,95 0,44 0,68 0,28 0,43
10 1,11 = 0,37 + 0,74 0,95 0,85 0,62 0,56 0,34 0,31
2 1,68 = 0,75 + 0,93 0,99 0,59 0,73 0,44 0,38 0,22
На рис. 11.10 приведены графики соответствующих темпера-
тур. Их анализ показывает, что при 7 = 0-20° имеется максимум
отношения A's /s' (и, соответственно, температуры) при а = 40° .
За счет этого температура диска при раскрытии увеличивается
по сравнению с плоским развернутым диском на 20-50° С,
в зависимости от 7.
При 7 > 20° графики температуры не имеют максимума.
Это означает, что при таких 7 температура раскрывающегося
пленочного диска будет всегда ниже, чем температура полностью
раскрытого диска.
Из вышесказанного можно сделать вывод, что температу-
ра раскрытого диска не выходит за пределы эксплуатационных
температур пленки ПЭТФ-ОА-К толщиной 5 мкм (-80° —
+ 150° С).
Однако в процессе раскрытия пленочного диска нужно из-
бегать отвесного падения солнечного потока на его плоскость,
хотя даже при этом температура выходит за допустимые пределы
только в течение 50 с на 10 °C, что не должно привести к разру-
шению диска.
Для обеспечения запасов по прочности пленочного полотна
можно выбрать при проведении космического эксперимента та-
кую его ориентацию на орбите, при которой температура будет
заведомо находиться в допустимых пределах (это соответствует
7 = 45°-90° С).
11.9. Баллистическое обеспечение КЭ «Знамя 2»
При разработке баллистического обеспечения эксперимента
были проанализированы и взаимоувязаны следующие аспекты:
13 Г. Г. Райкунов и др.
386
Гл. 11. Космический эксперимент «Знамя 2»
относительное движение всех объектов на орбите; светотеневая
обстановка на орбите и в подобъектовой зоне; необходимая зона
видимости на витках проведения эксперимента.
Для видео-фоторегистрации процесса формирования отра-
жателя и рекламных надписей раскрытие отражателя должно
происходить на светлой части витка в зоне видимости НИПов,
оснащенных аппаратурой приема телевизионного сигнала; это же
условие должно выполняться также для динамических режимов
переориентации отражателя.
В ходе проведения эксперимента должно быть гарантировано
не соударение станции, корабля и отражателя (после отстрела
НА) друг с другом.
Исходя из совместных соображений по аэродинамике, СЭП
и условиям регистрации в период проведения эксперимента угол
отклонения Солнца от плоскости орбиты должен составлять 10-
30°.
Раскрытие отражателя должно начаться на удалении 100—
200 м от станции, при этом угол «Солнце-станция-корабль»
должен превышать 90°; длительность процесса раскрытия до
5 мин.
Должны быть обеспечены условия наблюдения со станции
освещенного пятна на темной поверхности Земли, полученного
соответствующей ориентацией отражателя.
Общая продолжительность эксперимента не должна превы-
шать трое суток.
Цикличность совпадения направления на Солнце с орбиталь-
ной плоскостью станции составляет около месяца. В районе дат
совпадения наклон Солнца к орбитальной плоскости меняется со
скоростью около 5° в сутки.
В частности, по данным долгосрочного прогноза такое совпа-
дение должно было произойти 12.12.1992 г.; 10 и 15 декабря на-
клон Солнца к орбитальной плоскости составит 10° — в первую
дату Солнце будет справа от плоскости орбиты (со стороны оси
«+Z» ОСК), во вторую — слева.
Учитывая возможность проведения КЭ в течение 3 суток,
предполагалось за дату его начала принять 10.12.92 г. — при
этом можно было обеспечить подсветку отражателя Солнцем со
стороны станции, а через двое суток наклон Солнца к орбиталь-
ной станции должен был стать нулевым.
В районе дат совмещения Солнца с орбитальной плоскостью
степень затенения орбиты в зоне видимости зависит от времени
года: летом орбита в зоне практически светлая, а зимой затенена
несколько больше, чем на половину. При этом, если в некоторую
11.9 Баллистическое обеспечение КЭ «Знамя 2»
387
дату совмещения в зонах видимости находится граница перехода
«тень-свет», то в соседние даты, отстоящие на месяц вперед-
назад, в зонах видимости будет расположена граница перехода
«свет-теньа.
Требованиям КЭ удовлетворяют даты совмещения с перехо-
дом из тени на свет, поскольку:
— расстыковку и необходимые перед раскрытием операции
можно проводить в орбитальной тени, но в зоне видимости;
— начало раскрытия отражателя можно приурочить к момен-
ту выхода корабля из орбитальной тени и далее иметь
потенциальную возможность наблюдения со станции на
всей светлой части витка с начальным этапом наблюдения
в зоне видимости.
На основании проведенного рассмотрения были выработаны
рекомендации по схеме, циклограмме и условиям реализации
эксперимента для штатного варианта расстыковки ГК (со сторо-
ны АО ДОС).
Исходя из требований безопасности полета, обеспечения
условий для телерегистрации (15 мин.) процесса раскрытия от-
ражателя и других этапов эксперимента, была предложена сле-
дующая схема операций, выполняемых после отстыковки ГК от
ДОС «Мир» (компоненты импульсов даны в ОСК): исходная
ориентация связки к моменту расстыковки — продольная ось по
оси «X» ОСК, корабль впереди по ходу полета связки; вокруг
продольной оси связка развернута так, чтобы ось «—Y» станции
была направлена по нормали к орбитальной плоскости в сторону
«от Солнца» (оси «—Z» ОСК);
tQ = 3 мин. — выдается команда на расстыковку;
tQ = 0 мин. — физическое срабатывание толкателей, Vx —
= 0,165 м/с (не позднее, чем через 3 мин. после выдачи команды
на расстыковку); к моменту расстыковки ОСК комплекса пере-
хвачена БЦВК корабля;
to + 3 мин. — разворот ГК в исходную ориентацию, со-
стоящий из двух составляющих: а) разворот ГК по крену до
совмещения плоскости СБ с орбитальной плоскостью так, что-
бы рабочая поверхность СБ была направлена в сторону «—Z»
ОСК; б) разворот продольной оси корабля на 90° для выставки
стыковочного шпангоута в сторону оси «—Z» ОСК, а рабочей
поверхности СБ в сторону Солнца;
to + 6 мин. — отработка импульса увода корабля в боковом
направлении в сторону от Солнца для организации условий на-
блюдениях Vx = —0,4 м/с, Vy = —0,1 м/с, Vz = —0,9 м/с;
to + 9 мин. — начало раскрытия отражателя.
13*
388
Гл 11. Космический эксперимент «Знамя 2»
Характеристики относительного движения для этой схемы
приведены в таблицах 11.2, 11.3; в первой информация дана
с шагом 1 мин., во второй — с шагом 5 мин. В таблицах
приняты следующие обозначения: TN — время, отсчитываемое
от момента отделения, мин.; X, Y, Z координаты корабля в ОСК
станции, км; AL, BL — курсовой угол и угол места корабля
в ОСК станции, град; Pq — удаление корабля от станции, км.
Анализируя расчетные данные, полученные при реализации
этой схемы, можно сделать следующие выводы:
— раскрытие отражателя начинается на удалении около
160 м;
— условия наблюдения корабля с отражателем обеспечива-
ется на всей светлой части первого витка эксперимента
вплоть до входа в тень приблизительно при t = 63 мин.
и Ро = 3 км,
— до t = 24 мин. (Ро = 780 м) и после t = 60 мин.
(Ро = 2,8 км) корабль с отражателем наблюдается на фоне
космоса;
— после t — 55 мин. (Pq = 2,3 км) может наблюдаться обрат-
ная сторона отражателя (со стороны вне корабля);
— условия наблюдения вновь будут обеспечены на светлой
части следующего витка (Ро = 4,2 км).
Рис. 11.11 и рис. 11.12 иллюстрируют схему проведения экс-
перимента «Новый свет» (подсветка Земли отраженным солнеч-
ным светом). Предполагалось, что проводиться он будет в районе
утреннего терминатора (на выходе корабля из тени в Северном
полушарии); можно считать, что к периоду проведения экспери-
мента Солнце находится близко к плоскости орбиты корабля.
Эксперимент «Новый свет» должен проводиться на участке
пролета между границей орбитальной тени и прохождением над
терминатором Длительность такого участка составляет в районе
дат совмещения около 5 мин Если предположить, что локаль-
ные отклонения поверхности отражателя от идеально плоской
не превосходят 1 °, то уровень освещенности в пятне подсветки
составит 1-2 ПЛ (ПЛ освещенность от полной Луны, равная
0,2 люкс), при этом диаметр пятна будет составлять около 5 км.
Для обеспечения подсветки фиксированного района земной
поверхности по трассе полета в интервале времени порядка
нескольких минут, корабль должен отрабатывать программу
разворота продольной оси с переменной угловой скоростью до
0,5 град/с. Поскольку такая отработка нереальна, пришлось
согласиться с выставкой продольной оси корабля в некото-
ром заданном направлении и стабилизацией этого направления
11.9. Баллистическое обеспечение КЭ «Знамя 2»
389
Таблица 11.2.
TN X Y Z AL BL PQ
5 0,06 0,02 0,00 0,00 17,56 0,06
10 0,00 0,02 -0,21 269,08 4,58 0,21
15 -0,07 -0,04 -0,46 261,44 -4,48 0,46
20 -0,08 -0,13 -0,65 262,68 -11,34 0,67
25 -0,02 -0,26 -0,76 268,37 -18,57 0,81
30 0,13 -0,40 -0,79 279,46 -26,50 0,90
35 0,38 -0,55 -0,73 297,70 -33,36 0,99
40 0,75 -0,67 -0,59 321,14 -35,67 1,16
45 1.15 -0,77 -0,38 341,90 -32,42 1,44
50 1,63 -0,83 -0,12 355,70 -26,83 1,83
55 2.13 -0,84 0,15 3,92 -21,40 2,29
60 2,62 -0,80 0,40 8,65 -16,74 2,76
65 3,06 -0,71 0,60 11,17 -12,84 3,20
70 3,44 -0,59 0,74 12,19 -9,56 3,56
75 3,72 -0,45 0,80 12,07 -6,76 3,83
80 3,91 -0,30 0,76 10,97 -4,38 3,99
85 4,00 -0,17 0,63 9,00 -2,41 4,05
90 4,01 -0,06 0,44 6,22 -0,91 4,03
95 3,95 0,00 0,19 2,76 0,07 3,96
100 3,87 0,02 -0,08 358,85 0,36 3,87
105 3,79 0,00 -0,34 354,93 -0,06 3.81
НО 3,75 -0,08 -0,56 351,54 -1,17 3,79
115 3,77 -0,19 -0,71 349,26 -2,84 3,84
120 3,87 -0,33 -0,79 348,47 -4,73 3,97
125 4.08 -0,47 -0,78 349,22 -6,50 4,18
130 4.37 -0,61 -0,67 351,26 -7,88 4,47
135 4.76 -0,73 -0,49 354,09 -8 64 4,84
140 5,21 -0,81 -0,26 357,18 -8,78 5,28
145 5,71 -0,84 0,01 0,09 -8,37 5,77
150 6,20 -0,83 0,27 2,52 -7,58 6,26
390
Гл. 11. Космический эксперимент < Знамя 2»
Таблица 11.3.
TN X Y Z AL BL PQ
1 0,02 0 0 0 1,39 0,02
2 0,03 0 0 0 5,55 0,03
3 0,04 0,01 0 0 9,07 0,04
4 0,05 0,01 0 0 12,96 0,05
5 0,06 0,02 0 0 17,56 0,06
6 0,06 0,02 0 0 20,74 0,07
7 0,05 0,03 -0,05 311,21 19,84 0,08
8 0,03 0,02 -0,11 285,57 12,56 0,11
9 0,01 0,02 -0,16 274,63 7,75 0,16
10 -0 0,02 -0,21 296,08 4,58 0,21
11 -0,02 0,01 -0,26 265,87 2,21 0,27
12 -0,03 0 -0,32 263,89 0,26 0,32
13 -0,05 -0,01 -0,36 262,64 -1,45 0,37
14 -0,06 -0,02 -0,41 261,87 -2,96 0,42
15 -0,07 -0,04 -0,46 261,44 -4,48 0,46
16 -0,08 -0,05 -0,5 261,29 -5,85 0,51
17 -0,08 -0,07 -0,54 261,36 -7,28 0,55
18 -0,09 -0,09 -0,58 261,62 -8,5 0,59
19 -0,09 -0,11 -0,61 262,06 -10 0,63
20 -0,08 -0,13 -0,65 262,68 -11,34 0,67
21 -0,08 -0,15 -0,68 263,46 -12,76 0,7
22 -0,07 -0,18 -0,7 264,41 -14,18 0,73
23 -0,06 -0,2 -0,73 265,54 -15,63 0,76
24 -0,04 -0,23 -0,75 266,86 -17,11 0,78
25 -0,02 -0,26 -0,76 268,37 -18,57 0,81
26 0 -0,29 -0,78 270,1 -20,17 0,83
27 0,03 -0,31 -0,79 272,05 -21,73 0,85
28 0,06 -0,34 -0,79 274,25 -23,32 0,87
29 0,09 -0,37 -0,8 276,71 -24,92 0,88
30 0,13 -0,4 -0,79 279,46 -26,5 0,9
11.9. Баллистическое обеспечение КЭ «Знамя 2»
391
Рис. 11.11. Схема подсветки Земли отраженным солнечным светом (экспери-
мент «Новый свет»)
в инерциальном пространстве на время эксперимента. Тогда зем-
ной наблюдатель по трассе полета сможет наблюдать кратковре-
менную яркую вспышку от отражателя.
На рис. 11.11 точки 1 и 2 соответствуют моментам выхода
корабля из орбитальной тени и прохождения над терминато-
ром. К периоду проведения эксперимента корабль опередит стан-
цию. Поэтому ориентацию отражателя предлагалось построить
из условия совпадения центра пятна подсветки с подспутниковой
точкой корабля в момент прохождения терминатора (точкой 3).
Тогда до этого момента отраженный луч будет отклонен назад
от местной вертикали на некоторый угол, что будет обеспе-
чивать отставание центра пятна от подспутниковой точки на
расстоянии L. При выходе корабля из тени эти величины будут
уменьшаться равномерно во времени до нуля по мере движения
корабля к точке 2. Кроме того, будет уменьшаться и размер пятна
подсветки, т. е. с возрастанием утренней освещенности на Земле
будет возрастать и освещенность подсветки отражателем.
392
Гл. 11. Космический эксперимент «Знамя 2»
Рис. 11.12. Схема проведения эксперимента по подсветке ночной поверхности
Земли отраженным солнечным светом
В районе терминатора возможность наблюдения пятна со
станции исчезает. Однако возможность увидеть «вспышку» отра-
жателя для земного наблюдателя, находящегося на трассе прохо-
да «пятна», должна сохраняться и после терминатора, поскольку
угол «Солнце-наблюдатель-отражатель» составит 90° (точка 4).
Выставка плоскости отражателя для подсветки из исходного
положения, в котором плоскость отражателя совпадает с орби-
тальной плоскостью, производится разворотом продольной оси
корабля на 90° (рис. 11.14). Исходное положение отражателя
восстанавливается при необходимости обратным разворотом на
тот же угол вокруг того же направления.
tl.9. Баллистическое обеспечение КЭ «Знамя 2»
393
Возможность выдачи команд на прямой и обратный разво-
роты корабля в зоне видимости определяется длительностью
разворота корабля с отражателем и результатами предыдущих
этапов эксперимента.
Расхождение корабля и отражателя предполагалось провести
на 4 суточном витке третьих суток полета после расстыковки со
станцией с тем, чтобы к спуску корабля обеспечить подзарядку
его батарей в режиме солнечной закрутки и сеанс радиоконтроля
орбиты.
Приведенная выше баллистическая схема КЭ «Знамя 2» была
спроектирована в начале 1992 года. Однако, в связи с измене-
нием программы полета, за 1-1,5 месяца до начала КЭ в схему
были внесены изменения.
Выяснилось, что дата проведения, на которую строилась бал-
листическая схема — 10.12.92 г., нереализуема. С учетом ослаб-
ления требований по СЭП решено было назначить дату начала
КЭ вначале на 05.02.93 г., а затем на 04.02.93 г. (наклон Солнца
к орбитальной плоскости — около 30°). При этом основным
требованием к проведению являлось:
— наличие полностью освещенной зоны НИПов;
— наклон Солнца к плоскости орбиты станции — около 30°;
— обеспечение благоприятных условиий для телефотореги-
страции;
— оптимальный температурный режим пленки.
За несколько дней до проведения эксперимента «Знамя 2»
было принято решение провести эксперимент в течение одних
суток после расстыковки. Это требование диктовалось следую-
щими условиями:
— уход ДУСов ГК на 1 град/час, поэтому проведение экспе-
римента «Новый свет» в следующие сутки после расстыков-
ки фактически не обеспечивает возможности наблюдения
пятна отраженного солнечного света вследствие неопреде-
ленности его местоположения на поверхности Земли;
— в случае нештатного отстрела пленочной конструкции
с АРО от ГК на третьи сутки после расстыковки и за-
хлестывании пленки вокруг корабля, спуск ГК с учетом
значительного ухода ДУСов будет проведен с большими
погрешностями.
Некоторые изменения в схеме произошли также из-за отсут-
ствия в контуре управления НИПа, расположенного в г. Евпа-
тория.
394
Гл. 11. Космический эксперимент «Знамя 2»
Предварительные баллистические данные по организации
расхождения корабля и станции при переносе КЗ с декабря на
февраль практически не изменились.
11.10. Программа и методика проведения
эксперимента «Знамя 2»
Основными этапами КЭ «Знамя 2» являлись:
I — раскрытие БПО из уложенного состояния.
Этап считался успешно выполненным при расчетном раскры-
тии БПО с его регистрацией телефотосредствами.
II — исследование динамики БПО при поворотах ГК с БПО
на малые углы (в пределах 3°) с угловой скоростью до
0,2 град/с.
III — исследование динамики БПО при поворотах оси враще-
ния.
БПО приводами АРО на малые углы (в пределах 3°) с угло-
вой скоростью 0,4 град/с.
Этапы II, III считались успешными при регистрации ста-
бильных колебаний БПО, не приводящих к соприкосновению
отражателя и элементов корпуса ГК «Прогресс М», либо при
отсутствии таких колебаний. По результатам этапов II и/или III
принималось оперативное решение о возможности поворотов ГК
с отражателем на большие углы порядка 90-110° (для подготов-
ки к проведению этапа IV космического эксперимента).
IV — эксперимент по подсветке ночной стороны Земли отра-
женным от БПО солнечным светом (этап «Новый свет»).
Этап считался успешным при обнаружении и регистрации
с пятна переотраженного солнечного света на теневой поверхно-
сти Земли (или на облачном покрове).
Решение о проведении каждого этапа КЗ принималось по
результатам предыдущих этапов и контроля формы БПО.
Программа КЭ, последовательность этапов КЭ и примерное
время их регистрации приведены в таблице 11.4.
Состав используемой регистрирующей аппаратуры опреде-
лялся необходимостью проведения следующих измерений и опе-
раций:
— телефоторегистрация процессов раскрытия и формообразо-
вания БПО в видимом диапазоне длин волн, обнаружение
и телерегистрация пятна отраженного от БПО солнечного
света на ночной поверхности Земли или облачном покрове;
11.10. Программа и методика проведения эксперимента «Знамя 2» 395
Таблица 11.4. Основные этапы эксперимента «Знамя 2»
N сут. витка Этап КЭ Регистрирующие средства Время реги- страции, мин.
04.02.93
16 с.в. Расстыковка ДОС И ГК, расхождение, маневр Т/к Кл-ЮЮТ 3
Раскрытие БПО (этап 1) LIV, т/к КЛ-140СТП ОСН, т/к КЛ-140СТП ДОП ф-т «Хассельблад» ЛПР-1, «Нева» 20 0,5 5,5
01 Повороты ГК с БПО на т/к КЛ-140СТП ДОП 15
3° (этап 11) LIV 10
02 Проведение разворота на 110° для эксперимента по подстветке Земли т/к КЛ-140СТП ДОП 15
03 Эксперимент по АСП-Г-М 6
подстветке Земли(«Новый свет»! (этап IV) т/к КЛ-140СТП ДОП 5
Повороты оси БПО на 3° т/к КЛ-140СТП ДОП 10
Острел АРО с БПО, конец т/к КЛ-140СТП ОСН 5
эксперимента LIV 10
— проведение контроля формы БПО на всех этапах экспери-
мента;
— регистрация, хранение и передача полученной информации.
Регистрация процесса раскрытия и формирования БПО про-
водилась аппаратурой ДОС «Мир» и ГК «Прогресс М». Изучение
динамики БПО при управлении ориентацией БПО в простран-
стве, а также оперативный контроль формы поверхности БПО
проводились дополнительно устанавливаемой на ГК телекаме-
рой.
Обнаружение и регистрация пятна на поверхности Земли от
освещения отраженным от БПО солнечным светом проводилась
телеаппаратурой станции «Мир».
При управлении ориентацией отражателя в пространстве ис-
следовалась возможность активного управления формой поверх-
ности, гашение (демпфирование) колебаний. Форму поверхности
БПО в эксперименте предполагалось регистрировать телеаппара-
турой ГК путем использования метода «муара» и последующей
математической обработки телеизображения, для чего на один из
Циклограмма проведения эксперимента «Знамя» 4 февраля 1993 года
Дата Время Выполняемые операции на орбите Дальность (м) от ОС до ТКГ Светотене- вая обстановка Телеви- дение ТКГ Телеви- дение ОС
29.01.93 15.17 Установка АРО на крышку СТА 18.28
30.01.93 08.00 Тестовые электрические проверки работы АРО 20.45
31.01.93 11.30 Закрытие крышки ПХООС «Мир» 12.09
4.02.93 00.40 Сброс давления в ТКГ «Прогресс»
4.02.93 02.12 Закладка уставок на проведение эксперимента 03.11 ТЕНЬ
4.02.93 03.42 Расстыковка ТКГ с ОС 03.45 СВЕТ
4.02.93 03.48 Построение базовой ориентации 30 03.49 03.47
4.02.93 03.51 Работа LGJ на отвод 65
4.02.93 03.53 Появление ТКГ в обзоре иллюминатора №9 ОС 90
4.02.93 03.54 Начало развертывания БПО 160
4.02.93 03.57 Конец развертывания БПО 300
4.02.93 04.15 Появление ТКГ в обзоре иллюминатора №5 ОС 800 04.02
396 Гл. 11. Космический эксперимент «Знамя 2»
продолжение
Дата Время Выполняемые операции на орбите Дальность (м) от ОС до ТКГ Светотене- вая обстановка Телеви- дение ТКГ Телеви- дение ОС
4 02.93 04.16 Уход ТКГ в обзоре иллюминатора №9 ОС 1000
4.02.93 04.44 Вход ТКГ в тень 2700 04.44 ТЕНЬ 04.44
4.02.93 05.17 Качание БПО на ДПО ТКГ 4000 05.17 СВЕТ 05.17 04,56
4.02.93 05.31 Конец этапа 4500 06.18 ТЕНЬ 05.37 05.26
4.02.93 06.50 Разворот на эксперимент «Новый 8000 06.50 СВЕТ 06.52 06.13
свет»
4.02.93 06.58 Конец этапа 8300 07.49 ТЕНЬ 07.07 07.02
4.02.93 08.22 Эксперимент по подстветке ночной стороны Земли «Новый свет» 12100 08.22 СВЕТ 08.24 08.14
4.02.93 08.25 Качание БПО проводами АРО 12500
4 02.93 08.28 Выход солнечного зайчика на освещенную поверхность Земли 13300
4.02.93 08.37 Отстрел АРО от ТКГ 16000 09.21 ТЕНЬ 08.37 08.40
4.02.93 10.05 Закрутка ТКГ на Солнце Конец эксперимента 20000 09.54 СВЕТ
11.10. Программа и методика проведения эксперимента «Знамя 2» 397
398
Гл. И. Космический эксперимент «Знамя 2»
секторов БПО путем снятия слоя металлизации была нанесена
система реперных линий.
Для телерегистрации с ГК использовались две телекамеры:
одна штатная телекамера, используемая для контроля стыковки
и направленная по оси «—X» ГК; вторая дополнительно устанав-
ливалась в приборном отсеке под углом 43° к оси «—X» ГК.
Информация с телекамер, установленных на ГК, поступала
в режиме непосредственной передачи.
Было предусмотрено использование спутника-ретранслятора
для трансляции и сброса видеоинформации, переговоров эки-
пажа.
Состав и характеристики регистрирующей аппаратуры, ис-
пользуемой для проведения эксперимента, приведены в табли-
це 11.5.
В транспортном положении АРО был установлен в грузовом
отсеке ГК на раме, все необходимое оборудование и инструменты
были уложены в контейнеры. После доставки АРО на ДОС
в соответствии с программой полета перед отделением кораб-
ля от станции была проведена сборка АРО на крышке стыко-
вочного механизма. Люки стыковочных агрегатов закрывались,
обеспечивая герметичность ДОС и ГК. Перед расстыковкой из
межузловой полости стравливалось давление с использованием
клапана КСД-СУ.
Габариты АРО были выбраны из условия размещения в поло-
сти между пассивным и активным агрегатами стыковки, электри-
ческие связи с системами корабля обеспечивались через гермо-
вводы на крышке СтА, освободившиеся после снятия механизма
стыковки.
Для осуществления более продолжительной программы КЗ
была предусмотрена возможность стабилизированного полета ГК
с относительно малым электропотреблением, для чего на базе
приборов системы управления движением был реализован ана-
логовый контур стабилизации ГК.
В случае нерасчетного раскрытия отражателя либо его запу-
тывания вокруг корпуса ГК аварийный спуск корабля обеспечи-
вался по специальной программе БЦВК СУД.
По результатам моделирования, в котором были использова-
ны НУ N 781, была выбрана следующая баллистическая схема
и циклограмма проведения эксперимента.
Расстыковка ГК и станции «Мир» была запланирована на
04.02.93 г. на витке N 3837(16). Перенос даты эксперимента с 5
на 4 февраля объясняется более лучшими условиями освещен-
ности при проведении эксперимента, а перенос с 1-го суточного
Таблица 11.5. Состав и характеристики регистрирующей аппаратуры в эксперименте «Знамя 2»
Наименование Угол обзора (прокачки) отн. оси «—У» ССК, град Поля зрения (в кадре) Примечания
диагональ (диаметр), град длинная сторона, град короткая сторона, град
1. Наблюдательный прибор «Нева» Увеличение 4 40 раз
2. Телеаппаратура LIV (ДОС) +20 ...-20 1-12
3. ТВ-камера КЛ-101СТ «X» (ДОС) — 81 17 64 14 50 10 Широкоуг. объектив Узкоуг. объектив
4. ТВ-камера КЛ-140СТ-П «-Х» ОСН (ГК) — 81 17 64 14 50 10
5. ТВ-камера КЛ-140СТ-П ДОП 43 град к «—X» ГК — 81 17 64 14 50 10
6. Лазерный дальномер ЛПР-1 Дальность 150-5000 м ±10 м
7. Фотоаппарат «Хассельблад» Fi = 150 мм F% = 500 мм
11.10. Программа и методика проведения эксперимента «Знамя 2» 399
400
Гл. 11. Космический эксперимент «Знамя 2»
витка на 16-й возможностью односуточной реализации экспери-
ментов «Знамя 2» и «Новый свет» и проведением эксперимента
«Новый свет» над Европой (Испания, Франция, ФРГ, Польша).
Сложность реализации намеченной циклограммы проведения
эксперимента значительно возросла из-за стыковки ГК со стан-
цией «Мир» по оси «—Y» связанной системы координат (ССК)
ДОС, что привело к резкому изменению положения осей инерции
ДОС и несовпадению их с ССК ДОС. Это не позволило провести
эксперимент с минимальными расходами рабочего тела (РТ),
используя на ДОС в качестве исполнительных органов только
гиродины (ГС). Регулярное подключение двигателей ориентации
(ДО) для разгрузки ГС и проведения разворотов ДОС потребо-
вали оптимизации циклограммы не только по зонам связи через
спутник-ретранслятор (СР) и приходам электроэнергии через
солнечные батареи ДОС (СЭП ДОС), но и для минимизации
расходов РТ.
Выполнение целевой задачи эксперимента потребовало также
получения максимального объема видеоинформации о прохожде-
нии эксперимента и оперативного «сброса» полученной информа-
ции в ЦУП.
Обеспечение безопасного расхождения ДОС и ГК гарантиро-
валось отделением корабля по направлению полета станции со
сложным маневром увода ГК вбок от плоскости орбиты ДОС.
На витке ДОС 3837(16) начало 7-градусной зоны первого ко-
мандного наземного пункта (НИЛ) N 25-3.41.00, поэтому коман-
да на открытие крюков ГК была выдана в 03.42.00 ДМВ после
сообщения экипажа о том, что ДОС заняла требуемую для рас-
стыковки ориентацию. Проведение сеанса связи (с/с) через СР
на этом этапе не гарантировалось из-за динамических режимов
ДОС и малой вероятности вхождения в связь с СР, и с/с дубли-
ровался через наземные средства связи. Физическая расстыковка
объектов наступила приблизительно в 03.44.48 ДМВ
На момент разделения ДОС находилась в индикаторном ре-
жиме в орбитальной ориентации ГК (OCK+R6) по направлению
полета станции, а ось «—Y» ДОС (ось иллюминатора N 9 ДОС)
перпендикулярно плоскости орбиты станции в сторону «от Солн-
ца», в место планируемого появления ГК. После отхода ГК на
безопасное расстояние от ДОС и снятие экипажем индикатор-
ного режима СУД ДОС перешла к поддержанию инерциальной
ориентации MCK+R7, которая обеспечила наблюдение экипа-
жем процесса раскрытия через 9-й иллюминатор ДОС, причем
появление ГК в поле зрения иллюминатора предусматривалось
за 3-4 минуты до начала раскрытия.
11.10. Программа и методика проведения эксперимента «Знамя 2» 401
Через шесть минут после физической расстыковки ГК отрабо-
тал с помощью ДПО импульс увода, который обеспечивал задан-
ное относительное движение ДОС и ГК, появление корабля в по-
ле зрения иллюминатора за 1 минуту до начала эксперимента,
а в дальнейшем довольно значительное несовпадение расчетной
дальности между ГК и ДОС с замерами экипажем с помощью
лазерного дальномера ЛПР-1 позволяют сделать вывод о том,
что разложение выданного импульса в координатах орбитальной
СК не соответствовало расчетному. Это может быть связано либо
с ошибкой отработки ДПО-импульса, либо с ошибкой построе-
ния ориентации ГК перед выдачей импульса, что маловероятно.
В дальнейшем это привело к значительно более медленному
расхождению объектов, но не оказало существенного влияния на
выполнение эксперимента.
С целью минимизации расходов топлива на ДОС и обес-
печения более длительного наблюдения ГК с раскрытой кон-
струкцией из 9-го иллюминатора базового блока ДОС в 04.10.0
СУД ДОС перешел к поддержанию ориентации ИСК+RS. Это
позволило продолжить наблюдение ГК всю светлую часть витка
до входа в тень Земли. Для обеспечения режима с/с через СР,
и в дальнейшем для перехода в наиболее благоприятную для
ДОС дежурную ориентацию ИСК+RIO, в вечернем терминаторе
без разворота был осуществлен переход к ориентации OCK+R6.
С/с через СР прошел по плану в 04.53.00-05.23.00. Это позво-
лило оперативно выдать целеуказания экипажу ДОС для наблю-
дения ГК по выходу из тени 05.17.00 и сбросить записанную
информацию. С/с через СР в 06.10.00-07.01.00 также прошел
без замечаний.
Экипаж несколько раз наблюдал ГК с раскрытой конструк-
цией под разными ракурсами и проводил его видеосъемку из
разных иллюминаторов ДОС, а также используя платформу
АСПГ-М.
В 08.07.00-08.08.20, при наличии с/с через СР, проводился
этап «Новый свет» по подсветке затененной поверхности Земли
отраженным солнечным светом. Для обеспечения условий для
этого эксперимента ГК осуществил разворот и выставку оси
«+Х» СОК под определенным углом к Солнцу. Разворот осу-
ществлялся от текущей инерциальной СК корабля таким обра-
зом, чтобы обеспечить выполнение целевой задачи эксперимента
и в дальнейшем — безопасное отделение конструкции от ГК.
Экипаж наблюдал разворот ГК и визуально оценил колебания
конструкции и правильность построения ориентации ГК.
402
Гл. 11. Космический эксперимент «Знамя 2»
Эксперимент «Новый свет» проводился в районе утреннего
терминатора витка 3840(3). Появление переотраженного луча
Солнца от отражателя на подстилающей поверхности Земли
(«зайчик») ожидалось приблизительно в 08.22.30. Луч света от-
брасывался назад и влево от подспутниковой точки ГК. Такое
положение луча позволяло обеспечить угол между линией визи-
рования с ДОС на «зайчик» и направлением на Солнце более
92°, и угол между осью 5-го иллюминатора (ось «—X» ССК
ДОС) и направлением на Солнце более 94°, но оказалось, что
этого недостаточно из-за влияния бликов от элементов конструк-
ции ДОС.
Для проведения эксперимента СУД ДОС без разворота
в 08.01.00 перешел к поддержанию OCK+R11, ось 5-го илл. —
в точку ожидаемого появления «зайчика», а в 08.22.14 — в ори-
ентацию MCK+R12 с целью сопровождения полем зрения ил-
люминатора «бегущего» по подстилающей поверхности Земли
«зайчика». Переход к поддержанию инерциальной ориентации
облегчил для экипажа также селекцию «зайчика» от огней горо-
дов, так как его положение в поле зрения иллюминатора должно
было оставаться неподвижным.
Через несколько минут после окончания эксперимента было
проведено отделение АРО с отражателем от ГК в соответствии
с утвержденной программой и выполнением всех намеченных
этапов. Благодаря наличию сеансов связи через спутник-ретранс-
лятор и оперативной выдачи целеуказаний экипажу, а также
четким действиям экипажа, процесс отделения был заснят те-
лекамерой «LIV» и оперативно передан в ЦУП. Дальность до
объекта съемки превышала 6,5 км. Из видеосъемки хорошо вид-
но, что элементы разрушившейся конструкции были отброшены
в заднюю полусферу ГК и не причинили ему вреда. Продолжение
эксперимента сверх программы могло привести к разрушению
пленочного отражателя при комплексном воздействии внешних
условий и грозило перечеркиванием всех положительных резуль-
татов эксперимента в целом.
Общие затраты РТ на выполнение всей циклограммы экспе-
римента составили 28,1 кг.
Перед проведением эксперимента «Знамя 2» измерительные
и оптические оси регистрирующих приборов ДОС были направ-
лены по оси «—Z» ОСИ; продольные оси модулей «Д» и «Т»
соответственно по осям «+Z» и «—Z» ОСК.
Расстыковка ГК «Прогресс М» производилась от ДОС вперед
по ходу полета. Видеофиксация процесса раскрытия и формооб-
разования отражателя, поворотов БПО происходила на светлой
11.10 Программа и методика проведения эксперимента «Знамя 2» 403
части витка в зоне видимости НИПов, оснащенных аппаратурой
приема телевизионного сигнала.
Раскрытие отражателя начиналось на удалении 140 м от
дос.
СтА ГК перед раскрытием отражателя был расположен по
оси «—Z» ОСК так, что в процессе раскрытия отражателя «Про-
гресс М» находился между БПО и станцией «Мир», а плоскость
отражателя приблизительно совпадала с плоскостью орбиты.
Для обеспечения условий для качественной телефотореги-
страции раскрытия отражателя и оптимального температурного
режима пленочного отражателя, в период проведения экспери-
мента угол отклонения Солнца от плоскости отражателя со-
ставлял около 30° (это условие в частности, осуществлялось
выбором даты проведения КЗ — 04.04.93 г.).
Для изучения динамики БПО при управлении его ориен-
тацией в пространстве проводились повороты ГК вокруг оси
«У» на угол 3° со средней угловой скоростью 0,2 град/с, затем
осуществлялся режим стабилизации по всем осям с возвраще-
нием в исходное угловое положение после записи динамических
параметров БПО по ТМ СУД. Также проводились повороты оси
вращения БПО при помощи приводов АРО на угол 3е с угловой
скоростью 0,4 град/с.
Ориентация ГК в эксперименте по подсветке отраженным
солнечным светом поверхности Земли осуществлялась из усло-
вия примерного совпадения центра пятна подсветки с подспут-
никовой точкой корабля в момент прохождения терминатора.
Отстрел НА «Знамя 2» производился из текущей ориентации
ГК после проведения этапа «Новый свет». Такая схема вполне
гарантировала безопасное расхождение НА «Знамя 2», ГК и ДОС
после отстрела отражателя с АРО.
Управление аппаратурой «Знамя 2» осуществлялось по КРЛ
ГК и по командам, формируемым БЦВК в соответствии с задан-
ной циклограммой. Схема движения и проведения разворотов ГК
реализовывалась в соответствии со специальной программой, за-
кладываемой в БЦВК СУД перед каждым этапом эксперимента.
Относительное положение ДОС и ГК с БПО во время рас-
крытия отражателя приведено на рис. 11.13.
В интервале времени от to — 60" (<о ~ момент расстыковки)
до to + 5' ГК с установленной НА «Знамя 2» регистрировалось
стационарной выносной телекамерой КЛ-101СТ на ДОС, направ-
ленной по оси «X» ССК.
В интервале времени от £1 — 30" (£1 — момент начала рас-
крытия БПО) до /1 +20' регистрировался процесс раскрытия
404
Гл. 11. Космический эксперимент «Знамя 2»
КОСМИЧЕСКИЙ ЭКСПЕРИМЕНТ «ЗНАМЯ»
ЭТАПЫ ЭКСПЕРИМЕНТА:
Расстыковка и расхождение,
нулевая минута
Разворот космического корабля «Прогресс»,
3-я минута
Увод корабля «Прогресс» от комплекса «Мир»,
6-я минута
Развертывание Солнечного паруса при удалении
корабля «Прогресс» до 320 метров,
9-12-я минута
Проведение съемок и трансляция
изображения на Землю.
9-30-я минута
Рис. 11.13. Расположение ГК относительно ДОС
БПО и ГК с раскрытым БПО с помощью ручной телекамеры
LIV с записью на видеомагнитофон через иллюминатор ДОС,
направленный по оси «—Z» ОСК.
В интервале времени от to + Т Д° Д + 20' проводился поиск
и отслеживание объекта (ГК с БПО) при помощи прибора «Нева»
или бинокля ЕПЛ в поле зрения иллюминатора N9.
Процесс раскрытия БШ в интервале времени от tl — 30" до
tl + 10' регистрировался также с грузового корабля основной
и дополнительной телекамерами КЛ-140СТ-П. После раскрытия
БПО была проведена его съемка фотоаппаратом «Хассельблад».
В интервалах времени от t% (fo — моменты начала телереги-
страции при переориентации БПО) до + 10' с помощью допол-
нительной телекамеры на ГК регистрировалась форма и отклоне-
ние края БПО при управлении его ориентацией в пространстве.
11.10. Программа и методика проведения эксперимента «Знамя 2» 405
В процессе большого разворота для этапа «Новый свет»,
а также в интервале времени от t3 (t3 — начало эксперимента
по подсветке Земли) до 43 + 10' форма БПО фиксировалась
с помощью дополнительной телекамеры, установленной на ДОС.
Пятно солнечного света на ночной поверхности Земли (в слу-
чае его обнаружения экипажем станции «Мир») должно было
регистрироваться с записью на видеомагнитофон с борта ДОС
аппаратурой платформы АСПГ-М.
Экипаж станции «Мир» проводил в связи с экспериментом
«Знамя 2» следующие работы:
— изучение задания на эксперимент и бортовой документа-
ции;
— перезарядка, проверка работы аппаратуры;
— регламентные работы с телеаппаратурой;
— проведение (контроль выполнения) динамических операций
по начальной выставке осей станции в заданное положение;
— подготовка и монтаж аппаратуры «Знамя 2» на СтА ГК
(СтА — стыковочный агрегат);
— установка специальной заглушки с жиклером на клапане
сброса давления для обеспечения заданного темпа сброса
давления;
— проведение сброса давления из АРО с БПО на СтА перед
расстыковкой в течение не менее 3-х часов;
— подготовка ГК и ДОС к расстыковке;
— снятие ручной блокировки на пульте ПЕК;
— проведение наблюдения и телефоторегистрации этапов экс-
перимента.
Можно выделить следующие особенности организации кос-
мического эксперимента «Знамя 2»:
а) успешная реализация эксперимента «Знамя 2» и его этапа
«Новый свет» в конечной части реализации была обес-
печена благодаря четкому взаимодействию групп ГОГУ
ЦУПа, хорошей предварительной проработке эксперимента
в части моделирования ГММ и составления динамической
схемы ГП;
б) наличие трех запланированных сеансов связи через спут-
ник-ретранслятор позволило оперативно сбросить получен-
ную информацию и выдать дополнительные целеуказания
экипажу ДОС;
в) более медленное расхождение объектов не повлияло на
решение целевой задачи экспериментов, но в дальнейшем
для избежания таких отклонений рекомендуется выдавать
импульс увода на ДПО с отсечкой по акселерометрам или
406
Гл. 11. Космический эксперимент «Знамя 2»
двигателем СКДУ, как при реализации эксперимента «Бо-
лид», где ошибка от расчета на дальности 2,3 км составила
всего 60 м при двухимпульсном маневре ГК;
г) значительное усложнение реализации динамической схемы
такого сложного эксперимента произошло из-за стыковки
ТК N 101 по оси «—Y» ССК ДОС. Желательно такие
эксперименты планировать при симметричной связке ДОС;
д) для избежания засветок на поверхности иллюминатора от
бликов освещенных частей конструкции ДОС при прове-
дении аналога эксперимента «Новый свет» рекомендуется
увеличить угол между осью иллюминатора и направлением
на Солнце до 105-110°.
11.11. Результаты анализа телевизионной
и телеметрической информации, визуальных
и радиолокационных наземных наблюдений
При просмотре и изучении видеоматериалов, полученных при
проведении раскрытия отражателя в эксперименте «Знамя 2»,
можно выделить следующие особенности:
— в первоначальный момент (на 1-3 секунде этапа раскры-
тия) имел место выход всех секторов в зону видимости: т. е.
на начальном этапе происходило симметричное раскрытия
отражателя;
— до достижения диаметра 8 м оставались частично нерас-
крытыми по внешнему периметру (в поперечном направле-
нии) 3 сектора (размер периферийной внешней части этих
секторов составлял около 1/3 от раскрытых секторов, а их
центральная часть имела вид ленты с ориентировочной
шириной, равной 1/10 от аналогичной части раскрывшихся
секторов);
— после достижения диаметра 8 м и до 12 м нераскрывшиеся
два сектора раскрылись полностью по внешнему периметру,
а последний раскрылся полностью при диаметре БПО 18 м;
— один сектор при полном раскрытии по внешнему периметру
имел форму острого клина вместо усеченного (возможной
причиной являлось неправильное крепление несущих нитей
при укладке);
— в отличие от выполненного прямого раскроя боковые сто-
роны секторов имели прогибы разной степени кривизны,
причем кривизна боковых сторон с размещенной рекламой
уменьшалась в течение 10-15 мин. после раскрытия;
11.11. Результаты анализа информации 407
— внешний контур отражателя не являлся правильным кру-
гом (имели место небольшие провалы в местах соединений
секторов);
— из нанесенных рекламных знаков хорошо читаемой была
надпись «COLUMBUS 500» (черными буквами на желтом
фоне); остальные рекламные надписи были либо не чита-
емы из-за неполного раскрытия пленки, либо их не было
видно совсем;
— отчетливо наблюдался сектор с нанесенными муаровыми
полосами; на этом же секторе, судя по расположению муа-
рового рисунка, пленка в месте расположения рекламы не
раскрылась;
— после раскрытия БПО на одном из секторов было замечено
неправильное крепление тросов-вант к ребордам катушки,
вследствие чего внутренняя периферийная часть этого сек-
тора была повернута на 90° .
В ходе эксперимента было подтверждено положение о необхо-
димости использования многолучевых типов укладки отражате-
ля, обеспечивающих устойчивость системы на этапе раскрытия.
Первоначальное неполное раскрытие 3 из 8 секторов БПО
могло быть связано со слеживанием пленки, обусловленным дли-
тельным хранением (при различных климатических условиях)
в уложенном состоянии с момента укладки и до начала эксплуа-
тации в ходе КЭ.
Нераскрытие пленки в местах расположения рекламы мо-
жет быть обусловлено недостаточностью поперечного растяже-
ния в радиальных периферийных областях секторов БПО, где
и была расположена реклама; также возможной причиной этого
эффекта может быть слипание пленочного материала отражателя
в местах нанесения красочного покрытия.
В будущем можно рекомендовать покрывать место нанесения
красочного слоя прозрачной пленкой ПЭТФ толщиной 3 мкм
и размещать рекламу преимущественно в областях положитель-
ных напряжений пленочного полотна.
Полученная ТМ информация с ДУСов не выявила дисбаланса
пленочной конструкции, несмотря на некоторые отклонения от
симметрии при раскрытии БПО. Это можно объяснить тем, что
пять нормально раскрывшихся секторов отражателя способство-
вали раскрытию оставшихся трех секторов.
Учитывая это обстоятельство, можно сделать вывод о необхо-
димости создания БПО с количеством секторов не менее восьми.
На рис. 11.14 приведены фотографии этапов раскрытия БПО.
На рис. 11.15 приведены фотографии грузового корабля «Про-
408
Гл. 11. Космический эксперимент «Знамя 2»
Рис 11.14. Раскрытие отражателя Фотографии с видеоизображения
гресс М» с раскрытым отражателем, сделанные с борта ор-
битальной станции «Мир» фотоаппаратом «Хассельблат». Кадр
первый и единственный, поскольку на втором кадре фотоаппарат
заклинило и последующие кадры, снятые космонавтом, были
наложены один на другой.
Имеющаяся ТМ-информация представляет собой 4 интервала
записи параметров угловой скорости ГК «Прогресс»:
1) 03.50.00-04.04.00 — раскрытие, стабилизация в ИСК;
2) 05.17.00-05.36.40 — тестовый разворот на ДО, 5-минутный
участок свободного движения с отключенными от
управления ДО, стабилизация на ДО, возвращение
в ориентацию в ИСК;
3) 06.54.00-07.07.20 — разворот для этапа «Новый свет»;
4) 08.26.00-08.40.00 — качание оси вращения БПО, демпфи-
рование колебаний отражателя, отстрел.
11.11. Результаты анализа информации
409
Рис. 11.15. Отражатель после раскрытия Фотография с ОС «Мир» камерой
«Хассельблат»
Раскрытие отражателя проходило в режиме стабилизации
ГК с использованием ДО. Начало раскрытия 03.54.02. Оконча-
ние раскрытия 03.57.05. За интервал времени 03.54.04-03.57.05
зафиксировано одно срабатывание ДО в 03.54.33 вокруг оси
«X» для компенсации кинетического момента ВПО. По каналам
Y, Z угловые скорости ГК во время раскрытия не превышали
0,03 град/с. Через I мин. 40 с после начала раскрытия вокруг
оси «X» возбудились колебания с частотой 1 Гц и амплитудой до
0,02 град/с, продолжавшиеся 2,5 мин.
Кратковременные колебания вокруг оси «X» длительностью
20-60 и амплитудой до 0,02 град/с возникали и в дальнейшем
на некоторых участках программных разворотов. Также при-
мерно через 1 мин. 40 с после начала раскрытия возбудились
колебания вокруг осей «У», «Z» с частотой, равной частоте
вращения БПО, и амплитудой 0,01 град/с, что можно объяснить
наличием эксцентриситета пленочного полотна. Через 1 минуту
амплитуда данных колебаний уменьшилась в два раза и оста-
валась такой на частоте вращения до окончания эксперимента.
По проведенным оценкам, величина эксцентриситета БПО после
раскрытия составляла 0,2-0,3 м.
410
Гл. 11. Космический эксперимент «Знамя 2»
Тестовый разворот на 3°, вокруг оси «Y» не привел к возбуж-
дению колебаний БПО. Вообще следует отметить, что величина
колебаний отражателя по обработке первых трех участков ТМ.
информации не превышала 1°. После проведения разворота дви-
гатели ориентации были отключены от управления. Участок сво-
бодного движения системы «ГК+отражатель» 05.19.30-05.24.30
соответствовал расчетному.
Разворот ГК для подготовки к этапу «Новый свет» про-
исходил с 06.57.10 до 07.05.30 со средней угловой скоростью
0,2 град/с.
Наибольший интерес для определения динамических харак-
теристик БПО представляет «раскачка» оси вращения приводами
качания. На рис. 11.16 представлены ТМ. изменения углов при-
водов качания ПК1 и 1Ш2. Максимальным отклонениям привода
ПК1 соответствует значение 3°. Три цикла качания ПК1 про-
исходили с 08.27.30 по 08.29.00. При этом амплитуда угловых
скоростей достигала по осям «У», «Z» 0,04 град/с (рис. 11.17),
чему соответствует амплитуда колебаний БПО, равная 3 гра-
дусам. После проведения 3 циклов качания, в 08.29.00 был
подключен алгоритм демпфирования колебаний БПО. Изменение
углов качания ПК1 и ПК2 в режиме демпфирования с 08.29.00
до 08.31.00 приведено на рис. 11.16. Из рисунка видно, что демп-
фирование колебаний было осуществлено за 2 минуты, после
чего колебания были в пределах нечувствительности ДУС и не
вызывали поворотов приводов качания.
По результатам проведенных тестов частота поперечных ко-
лебаний превышала частоту вращения на 10%, а период пре-
цессионных колебаний был равен 40 секундам. Данные пара-
метры находились в диапазоне характеристик БПО, в котором
проводилось исследование динамики системы «ГК+отражатель»
и отработка на НКО.
Анализ телеметрии на участке качания БПО приводом кача-
ния (после чего ДУС ГК «Прогресс М» были достаточно надежно
зафиксированы колебательные процессы) позволили определить
частоту первого тона колебаний БПО. Она оказалась на 10%
выше угловой скорости вращения отражателя. Из рис. 11.17
следует, что на участке полета ГК, соответствующем времени
05.19.30-05.24.30, когда на 5 минут был отключен автомат ста-
билизации ГК, амплитуда колебаний БПО составляла 0,5 град.
Данные по углам отклонения края отражателя при переори-
ентации БПО в пространстве, полученные в С.-Петербургском
ФТИ РАН им. А. Ф. Иоффе путем компьютерной обработки
Рис. 11.16. Телеметрические данные по углам приводов качания
11.11. Результаты анализа информации
1,000 град/с параметр: омега X шаг разметки: 0,100 град/с значений: 260
Рис. 11.17. Телеметрические данные на участке полета ГК
412 Гл. 11. Космический эксперимент «Знамя 2»
11.11. Результаты анализа информации 413
видеозаписи телевизионного изображения этапов КЭ, также со-
ответствовали расчетным данным.
В соответствии с х/д №1019 от 03.01.1992 г., в ФТИ РАН
им. А. Ф. Иоффе была разработана методика определения углов
отклонения вращающегося БПО в КЭ «Знамя 2» на основе ме-
тода муаровой топографии.
В соответствии с разработанной методикой на поверхность
пленочного отражателя путем снятия металлизации были на-
несены концентрические дуги (в пределах одного сектора), на-
блюдение которых в ходе эксперимента должно было позволить
определить утлы отклонения края БПО. Сущность метода муа-
ровой топографии состоит в анализе муаровой картины, возника-
ющей при наложении картины концентрических дуг, получаемой
с помощью бортовой телевизионной аппаратуры, на изображение
тестовой системы полос.
В ходе эксперимента было установлено, что качество изоб-
ражения, даваемого бортовой телекамерой, установленной на ГК
«Прогресс М», не позволяет наблюдать контрастное изображе-
ние рисунка концентрических дуг на поверхности вращающего-
ся БПО. Поэтому использование метода муаровой топографии
для определения углов отклонения края вращающегося отра-
жателя оказалось невозможным. Рассмотрение альтернативных
возможностей определения углов отклонения позволило найти
способ их измерения. Анализ видеозаписи этапов эксперимен-
та с использованием компьютерной техники позволил оценить
углы отклонения края вращающегося БПО в ходе эксперимента,
в том числе, в моменты поворота ГК с отражателем на ДПО
ГК, качания БПО приводами АРО и большого разворота для
эксперимента «Новый свет». Ниже приведены результаты оценки
углов отклонения вращающегося отражателя, включая времена
07.01.30, 05.32.30, за исключением времени 08.27.30-08.34.10 по
причине отсутствия телевизионной информации.
Видеоизображение вращающегося БПО вводилось в компью-
тер с разрешением 260 х 288 элементов. По изменению ярко-
сти изображении производилась оценка положения края враща-
ющегося БПО. Далее, как показано на рис. 11.18, определя-
лось расстояние от начала телевизионной строки до найденного
края изображения вращающегося БПО в точке его пересечения
с горизонтальной реперной линией (горизонтальная пунктирная
линия на рис. 11.18), введенной в изображение при записи теле-
визионного сигнала в ходе эксперимента «Знамя 2». После этого
осуществлялась привязка видеоизображения к геометрии взаим-
414
Гл. 11 Космический эксперимент «Знамя 2»
ного расположения вращающегося отражателя и телевизионной
камеры.
Рис. 11.18. Определение отклонения края при переориентации по телевизион-
ному изображению
Погрешность определения положения края вращающегося
БПО обусловлена изменением его освещенности при вращении
и отклонением формы края от окружности. Величина погрешно-
сти составила + 6 элементов на строке. Обработка и определение
углов отклонения БПО проводилась по 130 кадрам, выбранным
из полученной при эксперименте видеозаписи. В таблице 11.6
приведены результаты оценки положения края вращающегося
БПО в точке пересечения края с реперной линией в числе эле-
ментов изображения.
На основании приведенных данных можно с уверенностью
утверждать, что за время периодов эксперимента, записанных на
видеопленке, угловые отклонения плоскости вращения БПО не
превышали + 1°.
Информация о наблюдениях отражателя начала поступать
4 февраля 1993 г., в основном из районов Центральной Европы.
Таблица 11.6.
Кадр Положение Кадр Положение
1 173 70 184
10 178 80 172
20 179 90 170
30 184 100 169
40 173 НО 177
50 172 120 174
60 182 130 167
lt.tl. Результаты анализа информации
415
Солнечный зайчик пересек Европу через города Тулузу,
Лион, Женеву, Берн, Штутгарт, Мюнхен, Прагу, Лодзь, Брест,
Гомель. Расчетная трасса прохождения пятна переотраженного
солнечного света приведена на рис. 11 19.
Рис. 11.19. Трасса прохождения пятна переотраженного солнечного света
В большинстве мест, к сожалению, в этот день была сильная
облачность. Однако, сразу после эксперимента из разных мест
все же поступили сообщения о кратковременном наблюдении на
небе яркого светящегося объекта. Особенно хорошая видимость
объекта была на юге Франции, где в это время была ясная
погода. Световое пятно, расчетный диаметр которого около 5 км,
а освещенность — порядка 0,2-0,4 люкс, двигалось по поверхно-
сти Земли со скоростью 8 км/с.
Очевидец в Тулузе описал это явление как «два сияющих
алмаза, летящих друг за другом по небу с юга на северо-восток»
(орбитальная станция «Мир» при этих условиях тоже была до-
статочно хорошо видна).
Хотя небо в большей части районов Центральной и Восточ-
ной Европы было закрыто облаками, сотрудники метеорологиче-
ской станции, расположенной на самой высокой горе Германии
Цугшпитце, сообщили, что наблюдали свет от отражателя около
6 ч. 20 мин. по местному времени.
Экипаж орбитальной станции «Мир» отождествил и наблю-
дал световое пятно на ночной поверхности Земли уже на послед-
416
Гл. 11. Космический эксперимент «Знамя 2»
нем участке траектории прохождения пятна, который пришелся
на покрытую снегом Белоруссию.
После отстрела отражателя, на 6-м Суточном витке, 3 ярких
объекта (ДОС, ГК и отражатель) наблюдались в Северной Ка-
наде.
Сообщение об эксперименте было передано средствами мас-
совой информации всего мира, вызвало живейший интерес и по-
лучило высокую оценку у отечественных и зарубежных специа-
листов
Одной из задач проведения эксперимента «Знамя 2» явля-
лась отработка методики наблюдения ГК «Прогресс М» с БПО
при помощи радиолокационной установки Б-6С (г. Фрязино
Московской области), эксплуатируемой совместно ИРЭ РАН
и НИИДАР.
Целями радиолокации являются:
а) проведение радиолокационных (РЛ) измерений величины
комплексного радиосигнала, отраженного от системы «ГК-
БПО» (далее «объект») с темпом 100 мс на длине волны
4 см с помощью РЛ-установки Б-6С (рабочая мощность
установки — 50 кВт).
б) анализ полученных данных для решения следующих задач:
- определение интегрального ЭПР объекта; построение
радиоизображения объекта;
- определение статистических характеристик флуктуа-
ции принятого сигнала с выявлением их связи с соб-
ственными колебаниями и формой поверхности ЕЛО.
Радиолокация объекта может проводиться на любом этапе КЭ
в зоне видимости установки Б-6С, эксперименты по радиолока-
ции проводятся без участия экипажа.
Радиолокация отражателя проводилась на участках орбиты,
находящихся в семиградусной зоне видимости РЛ установки
Б-бС, приблизительно совпадающей с зоной НИП-34 при даль-
ности до объекта не более 2000 км. Перед проведением РЛ
измерений производится включение автоответчика 20Гб на ГК.
Данные по целеуказанию выдавались в НИИДАР балли-
стической группой ЦУПа; магнитные записи результатов экс-
периментов по радиолокации проходили дальнейшую обработку
в ИРЭ РАН,
Методика проведения РЛ-наблюдений, порядок обмена ин-
формацией между организациями-участниками были полностью
отработаны на этапе подготовки КЭ. За 2-3 недели до КЭ прово-
11.12. Сравнение теории и эксперимента 417
дилась предварительная радиолокация ГК в составе орбитальной
станции.
Однако, непосредственные РЛ-измерения ГК с отражате-
лем не получились по техническим причинам: из двух витков
04.02.93 г. пригодных для проведения радиолокации отражателя
(2-й и 3-й суточные витки), на одном из витков на ГК не был
включен автоответчик 20Гб в зоне НИП-34, на другом про-
изошел сбой по питанию на РЛ-установке Б5-С, что привело
к полной потере РЛ-информации.
11.12. Сравнение теории и эксперимента
Рассмотрим применимость предложенной технической теории
развертывания из уложенного состояния и переориентации в про-
странстве формируемых центробежными силами космических
конструкций.
Одной из задач космического эксперимента «Знамя 2» было
подтверждение методик расчетов динамических параметров про-
цесса развертывания из уложенного состояния и переориентации
в пространстве пленочного отражателя, формируемого центро-
бежными силами. Эксперимент был успешно проведен 4 февраля
1993 г. на ТГК «Прогресс М» N 215 по полной программе без
нештатных ситуаций.
Вблизи ОС «Мир» был развернут пленочный отражатель диа-
метром 20 м, состоящий из восьми отдельных секторов, скреп-
ленных по периферии. На Землю была передана и зафиксирова-
на телевизионная и телеметрическая информация, позволяющая
определить в процессе развертывания временные зависимости
таких важных параметров, как угловая скорость ш, угол отклоне-
ния от радиального направления <р, текущий радиус отражателя
R, угол отклонения края отражателя из плоскости вращения при
переориентации отражателя в пространстве.
Угловая скорость ш фиксировалась с высокой точностью по
периоду сигналов с датчиков угловых скоростей (ДУС), уста-
новленных по осям У и Z ТГК «Прогресс М», реагировавших
на малый дисбаланс пленочного отражателя, возникший после
начала его развертывания.
Заведенный в систему телеметрии потенциометрический дат-
чик угловой скорости дал значительно меньшую точность изме-
рений.
Угол отклонения средней линии раскрываемых секторов от
радиального направления оказалось возможным определить по
видеозаписи процесса развертывания отражателя, сделанной
14 Г. Г. Райкунов и др.
418
Гл. 11. Космический эксперимент «Знамя 2»
космонавтами через иллюминатор N 9 с помощью видеоком-
плекса «LIV». На стоп-кадре можно отчетливо определить угол
отклонения средней линии сектора от плоскости хорошо ви-
димых радиально расположенных панелей солнечных батарей.
Ориентация ТГК «Прогресс М» при развертывании отражателя
была такова, что видеокамера фиксировала торец ТГК «Про-
гресс М», за ним панели солнечных батарей с размахом в 10 м,
задававшим размер для сравнения с раскрываемым отражателем,
находящемся на заднем плане кадра на стыковочном узле ТГК
«Прогресс М». Корабль в процессе 200-секундного разверты-
вания отражателя непрерывно удалялся от станции, при этом
космонавт-оператор периодически корректировал резкость изоб-
ражения, по которому фиксировался угол отклонения и текущий
радиус по отношению к размеру солнечных батарей в реальном
масштабе времени.
Важным одновременно фиксируемым фактом являлось от-
сутствие колебаний между отдельными секторами в плоскости
вращения и прямолинейность складок пленки на секторах (от-
сутствие серповидности). На рис. 11.20 приведены полученные
вышеописанным способом экспериментальные данные и расчет-
ные зависимости по методике (Глава 3, п.3.2).
Угол отклонения полотнища из плоскости вращения, возни-
кающий из-за прецессии вращающегося полотнища при пере-
ориентации в пространстве измерялся в эксперименте «Знамя 2»
путем обработки видеозаписи телевизионного изображения, сня-
той телекамерой, установленной на ТГК «Прогресс М» таким
образом, чтобы фиксировать отклонение края полотнища.
Одновременно велась запись телеметрических показаний дат-
чиков угловых скоростей (ДУС) по осям Y и Z ТГК «Про-
гресс М», реагировавших на амплитуду, период и направление
бегущей волны, связанной с прецессией отражателя.
В эксперименте планировались два этапа углового поворота
ТГК «Прогресс М» с вращающимся полотнищем (угловая ско-
рость вращения ы по данным ДУС составила 1,82 рад/с) при
угловых скоростях переориентации Q = 0,2 град/с и 0,4 град/с.
При разработке конструкции пленочного отражателя и под-
готовке космического эксперимента для расчета угла отклоне-
ния отражателя из плоскости вращения использовалось выраже-
ние, выведенное из уравнения вынужденных колебаний системы
«груз на нити» </? = 2Q Ro/wjRk. где Rk — конечный радиус
отражателя (/?j< = 10 м), Ro — радиус центральной вставки
(Ro= 1,25 м). На рис. 11.21 приведены экспериментальные дан-
ные угла отклонения, полученные по обработке телеизображения
11.12. Сравнение теории и эксперимента
419
Рис. 11.20. Процесс развертывания пленочного полотнища: щ — угловая ско-
рость, рад/с — угол отклонения, рад- R — текущий радиус, м; □, Q —
телеметрия с ДУС; х — видеосъемка;------------теоретический расчет
и телеметрических данных. Сплошная линия нанесена по выра-
жению (4.8).
Также в КЭ «Знамя 2» разность частот р — ш измерялась дат-
чиками угловых скоростей по периоду обратной бегущей волны
Т — 40 с, скорость поворота была задана Q = 0,2 град/с, тогда
по (4.10) угловая амплитуда колебания р = 0,2 • 40/360 = 2х
х 10 2 рад = 1,2°, что находилось в удовлетворительном соот-
ветствии с другими измерениями.
При подготовке космического эксперимента «Знамя 2» прово-
дился комплекс работ по наземной отработке агрегата раскрытия
отражателя, включавший этап динамического моделирования
нагрузок на агрегат раскрытия от пленочного отражателя с по-
мощью грузов на нитях. При этом на основе вариантного чис-
ленного расчета по методике для модели «груз на нити» (Глава
3, п.3.2) были подобраны массы 8 грузов, с достаточной точно-
стью обеспечивавшие расчетные значения натяжения в корневом
сечении N, угла отклонения р и диапазона изменения угловой
скорости (ш) (за меньшее время) при раскрытии модельной си-
стемы в условиях ограниченного размера вакуумной камеры
14*
420
Гл. 11. Космический эксперимент «Знамя 2»
Рис. 11.21. Максимальная угловая амплитуда отклонения края полотнища при
переориентации в пространстве: О — телеметрия с ДУС; О — видеосъемка;
-----------------------------расчет по формуле
В эксперименте с помощью шлейфового осциллографа изме-
рялось изменение угловой скорости ш в зависимости от времени
по сигналу с потенциометрического датчика. Угол отклонения
от радиального направления измерялся визуально по отклонению
нити с грузом от легкой деревянной рейки, расположенной ра-
диально и закрепленной на вращающейся части агрегата развер-
тывания. С помощью шлейфового осциллографа фиксировалась
также скорость раскрытия системы. Экспериментальные данные
по системе «груз на нити» в сравнении с результатами численно-
го расчета по методике (Глава 3, п. 3.2) приведены на рис. 11.22
В проведенных в барокамере экспериментах по переориента-
ции неразрезного полотнища в пространстве пленочное полот-
нище радиусом Rk - 2,5 м с центральной жесткой вставкой
Ro = 0,03 м, вращалось со скоростью 1000 об/мин. и поворачи-
валось с угловой скоростью Q = 4-7 град/с. При этом амплитуда
колебаний края отражателя составила 20-30 см, период обратной
бегущей волны составил 60 с. Экспериментальные результаты
приведены на рис. 11.23, где сплошной линией приведена зави-
симость (4.8)
Перейдем к обсуждению применимости и ограничений рас-
четной методики. Методика создавалась не как всеобъемлющая
теория пространственного движения гибких тросово-пленочных
систем, охватывающая бесчисленное количество всевозможных
11.12. Сравнение теории и эксперимента
421
Рис. 11.22. Развертывание системы «груз на нити».----шлейфовый осцил-
лограф; О — визуальные измерения:-----------теоретические расчеты
Рис. 11.23. Максимальная амплитуда отклонения края полотнища: х — визу-
альные измерения;------------------расчет по формуле
422
Гл. 11. Космический эксперимент «Знамя 2*
динамических режимов, а как относительно простой и физически
наглядный математический аппарат для обеспечения наиболее
целесообразных динамических режимов раскрытия в практиче-
ских инженерных задачах. На первый план при этом ставилась
надежность раскрытия, обеспечиваемая именно центробежны-
ми силами. Подчеркнем, что разрабатывается новое направле-
ние космической техники — формируемые центробежными си-
лами конструкции. Этот термин носит не формальный характер,
а определяет внутреннюю сущность, особенности и преимуще-
ства этих конструкций. Поле центробежных сил носит цен-
тральный характер и препятствует любому выходу системы из
плоскости вращения и отклонению от радиального направления.
Стабилизирующее действие центробежных сил следует исполь-
зовать при организации развертывания конструкций. Режимы
развертывания следует организовывать таким образом, чтобы
центробежные силы в процессе значительно преобладали над
другими динамическими силами.
Для обеспечения устойчивости необходимо, чтобы растяги-
вающая нить в радиальном направлении центробежная сила
Пцб = rnw2R (где т — масса тела, ш — угловая скорость, R —
радиус вращения тела), должна значительно превышать танген-
циальную динамическую составляющую Fu = mw'R, определяю-
щую темп разгона (торможения) системы, и действующую в бо-
ковом направлении силу Кориолиса FK = 2mVw, возникающую
при выпуске системы со скоростью V, а также условие обеспече-
ния устойчивости «падающей» зависимости закона приложенного
вращающего момента М(ш), т. е.:
mw2R 2mVш или u>R/2V 1;
mw2R mw'R. или w2/w' 1.
Указанная особенность позволяет принять упрощенную мате-
матическую модель (Глава 3, п.3.2), в которой приняты следую-
щие допущения:
— прямолинейность складки полотна;
— отсутствие колебаний между пленочными секторами
в плоскости вращения;
— в расчет заводится суммарная масса всех секторов или
грузов на нитях;
— не учитывается конкретная форма складок и изменение
формы складок по времени.
Справедливость модели достаточно хорошо подтверждается
экспериментально, что дает основание переносить методику рас-
11.12. Сравнение теории и эксперимента 423
чета на конструкции значительно большего размера. Динами-
ческие характеристики пленочного полотнища в орбитальном
эксперименте «Знамя 2» приведены на рис. 11.20 и рис. 11.21.
Динамические характеристики системы «груз на нити» в экс-
перименте в барокамере представлены на рис. 11.22.
Компьютерные рисунки начала раскрытия формируемой цен-
тробежными силами конструкции на ТГК «Прогресс» приведены
на рис. 11.24.
в) г)
Рис. 11.24. Компьютерные рисунки начала раскрытия формируемой центро-
бежными силами конструкции на ТГК «Прогресс»: а) защитные створки АРО
закрыты; б) створки АРО раскрыты; в) начало раскрытия пленочной конструк-
ции; г) промежуточный этап раскрытия конструкции
424
Гл. 11. Космический эксперимент «Знамя 2»
11.13. Выводы и рекомендации
1. Проведенный 4 февраля 1993 г. по полной программе, без
сбоев и нештатных ситуаций, космический эксперимент «Зна-
мя 2» подтвердил принципиальную реализуемость бескаркасных
пленочных конструкций, формируемых центробежными силами,
правильность направления проектных разработок, принятых кон-
структивных решений и подходов к наземной отработке, мето-
дик расчета организации динамики раскрытия БПО и способа
активного демпфирования колебаний вращающейся пленочной
поверхности при разворотах грузового корабля.
2. Была доказана работоспособность конструкции агрегата
раскрытия отражателя и БПО, примененных в КЭ «Знамя 2»;
эксперимент подтвердил также, что динамический режим рас-
крытия БПО был выбраны в пределах, допустимых для обес-
печения устойчивости и упорядоченности процесса раскрытия
отражателя из уложенного состояния.
3. Исследование формы раскрытого БПО выявило ряд осо-
бенностей, присущих разрезной восьмисекторной конструкции
пленочного отражателя. Полностью раскрытый отражатель имел,
в целом, плоскую поверхность, однако, между секторами на-
блюдались значительные щели, что привело к волнистости по-
верхности и, как следствие, к снижению ее зеркальности. Та-
кие отражатели могут быть применены в целевых задачах, не
требующих высоких отражающих свойств БПО, таких как по-
лет с солнечным парусом, очистка околоземного пространства
от «космического мусора» и т. д. Однако для применения БПО
в качестве элемента системы космического освещения или сол-
нечных батарей необходимо использовать неразрезную конструк-
цию пленочного полотна БПО, обеспечивающую более высокое
качество зеркальной поверхности.
4. Отклонение края БПО из плоскости вращения под дей-
ствием кориолисовых сил при разворотах отражателя по данным
обработки телевизионной информации не превышает 0,5°, что
находится в допустимых пределах и свидетельствует о большой
жесткости системы с периферийной связью.
Была показана возможность демпфирования колебаний пле-
ночной поверхности, возникающих при повороте оси вращения
БПО, с помощью приводов качания АРО.
5. При изучении результатов КЭ было получено соответствие
между теоретическими моделями определения угла отклонения
края БПО при повороте оси вращения с методикой нахождения
утла отклонения края путем обработки телевизионного изоб-
11.13. Выводы и рекомендации 425
ражения БПО, разработанной в ФТИ им. А. Ф. Иоффе РАН
(С.-Петербург).
6. Использование пленочного материала ПЭТФ-ОА-«К»-
5 мкм оправдано при планировании краткосрочных космических
экспериментов, осуществляемых в пределах нескольких витков.
При более продолжительных сроках экспериментов, а также для
целевых систем с длительным сроком эксплуатации необходим
переход на полиимидную пленку типа ПМ-Э.
7. Сообщение об эксперименте было передано средствами
массовой информации всего мира, вызвало живейший интерес
и получило высокую оценку у отечественных и зарубежных
специалистов Таким образом, было привлечено общественное
внимание к этому новому направлению космической техники.
Следует отметить, что этап передачи телевизионного изображе-
ния всеми телевизионными станциями мира не планировался
в программе эксперимента. Из этого следует, что любое трансли-
руемое со станции телевизионное изображение принимается не
только ЦУПом, но также и телевизионными системами других
стран
8 В дальнейшем, при проведении подобных экспериментов
рекомендуется выдавать импульс увода на ДПО с отсечкой по
акселерометрам или двигателем СКДУ для обеспечения требуе-
мой скорости расхождения объектов.
Значительное усложнение реализации динамической схемы
эксперимента произошло из-за стыковки ТК N 101 по оси «—У»
ССК. Желательно такие эксперименты планировать при симмет-
ричной связке ДОС.
9 Для избежания засветок на поверхности иллюминатора от
бликов освещенных частей конструкции ДОС при проведении
аналога эксперимента «Новый свет» рекомендуется увеличить
угол между осью иллюминатора и направлением на Солнце до
105-110°.
10. Космический эксперимент показал, что целесообразно за-
ранее оповещать заинтересованные стороны о траектории и вре-
мени прохождения пятна переотраженного солнечного света по
поверхности Земли, чтобы разместить наблюдателей с целью
замера освещенности. Это будет служить также хорошей рекла-
мой для эксперимента.
11. При проведении радиолокационных наблюдений в целях
предотвращения сбоев необходима более согласованная работа
радиолокационных средств и НИПов.
Заключение
Развитие ракетно-космической техники должно быть направ-
лено на решение крупномасштабной актуальной общечеловече-
ской проблемы, требующей консолидации возможностей косми-
ческой отрасли со смежными отраслями, академической наукой
и высшей школой. Такой проблемой является в настоящее время
противодействие энергетическому кризису и стабилизация пого-
ды, которые могут быть решены путем создания космических
солнечных электростанций (КСЭС) и трансляции энергии на
Землю. Для этого потребуется развитие направлений разработки
бескаркасных солнечных батарей нового поколения, многократно
превышающих каркасные аналоги по эффективности и осно-
ванных на использовании формируемых центробежными сила-
ми бескаркасных крупногабаритных космических конструкций.
Предложена технология развертывания центробежными силами
крупномасштабной КСЭС практически любой размерности пу-
тем объединения агрегатом раскрытия с «тянущими роликами»
непосредственно на орбите индивидуально доставленных туда на
катушках секторов полотнища солнечной батареи. Эта техноло-
гия является технической находкой, которая по своей простоте
и возможностям реализации превзойдет все возможные альтер-
нативы.
На сегодняшний день разработки по формируемым цен-
тробежными силами бескаркасным крупногабаритным космиче-
ским конструкциям являются только российскими достижениями
и позволяют значительно превзойти зарубежные проекты в при-
ложении к широкому кругу прикладных задач.
В авиации создание вертолетов было начато практически
одновременно с началом создания крылатых аппаратов. Эффек-
тивность вертолетостроения бесспорна. В космической технике
создание вращающихся конструкций только начинается и может
в значительной мере, как при использовании вертолетов, удеше-
вить и повысить эффективность решения многих задач.
Для создания крупномасштабных космических энергетиче-
ских систем естественна необходимость набора практического
опыта создания на космических энергосистемах меньшей размер-
ности. Именно поэтому в качестве этапов достижения конечной
Заключение
427
цели необходимо использование предлагаемых конструкций на
малых и средних спутниках, в энергосистеме Марсианской мис-
сии и при освоении Луны, где требуются масштабные элек-
тростанции, эксплуатирующиеся в условиях глубокого вакуума
и пониженной гравитации.
Необходима разработка полупроводниковых пленоч-
ных структур, генерирующих и одновременно излучающих
в СВЧ-диапазоне. Разработка таких полупроводниковых
структур позволит чрезвычайно эффективно осуществлять
генерирование и трансляцию энергии в СВЧ-диапазоне в косми-
ческих энергоустановках, исключив громоздкие традиционные
СВЧ-преобразующие приборы и токоподводы. В КСЭС гене-
рируемая по площади солнечной батареи СВЧ-энергия может
фокусироваться путем фазировки на наземную ректенну.
Требуется объединение усилий предприятий ракетно-косми-
ческой отрасли, институтов Академии наук и многих других
отраслей. Будет востребована разработка тяжелых носителей
для обеспечения большого грузопотока, связанного с создани-
ем и эксплуатацией электростанций на орбите. Станет необхо-
дим бесценный опыт, накопленный космонавтами, для монтажа
и эксплуатации КСЭС. Возрастет престиж инженерных профес-
сий. Потребуются высококвалифицированные кадры, владеющие
наукоемкими технологиями и соответствующая их подготовка
в вузах.
В октябре 2007 г. Министерство обороны США обнародовала
долгосрочную программу создания КСЭС, транслирующих энер-
гию на Землю в СВЧ-диапазоне, для того, чтобы в перспективе
избавить страну от импорта нефти. Это в значительной степени
повышает актуальность проблемы.
Необходимо начать проектно-конструкторские и технологи-
ческие работы в этом направлении, которые, с одной стороны,
позволят России идти без отставания по сравнению с другими
странами в решении проблемы энергетического кризиса, а с дру-
гой стороны, получить возможность экспортировать энергию
в любые нуждающиеся в ней государства.
Литература
1. Семенов Ю.П., Соколов Б. А., Сенкевич В.П., Ком-
ков В. А., Мельников В.М., Каган М.Б. Перспективы
большой космической энергетики // Конверсия в машино-
строении. № 6. 2002. С. 11-16.
2. Райкунов Г. Г., Сенкевич В. П., Мельников В. М., Ком-
ков В. А., Добрачев Ю. П. Влияние на погоду космическими
средствами // Конверсия в машиностроении. № 2. 2003.
С. 9-13.
3. Мельников В. М., Комков В. А. Энергетический кризис
и космонавтика. Полет. — М.: Машиностроение. № 9.
2004. С. 18-22.
4. Банке В. А., Лесков Л. В., Лукьянов А. В. Космические
энергосистемы. — М.: Машиностроение, 1990. — 144 с.
5. Презентация Джерри Грея по солнечным энергетическим
спутникам на солнечных батареях на слушаниях в Комите-
те по науке в Белом доме. 7 сентября 2000 г. Press release.
6. Мельников В. М., Намиот В. А. СВЧ вместо тоководов сол-
нечной батареи Марсианской миссии для прямой накачки
плазменного двигателя // Наука и технология в России.
№ 2-3, 2004, С. 17-19.
7. Система освещения с орбиты приполярных городов (тема
«Лампа»): Технические предложения / НПО «Энергия»,
НИИТП; Руководитель В.Ф. Семенов. Инв. № 1558, —
М., 1992. - 217 с.
8. Космический аппарат с солнечным парусом /В. Н. Бранец,
В. А. Кошелев, А. С. Гвамичава, М. Б. Черток, О. Е. Мака-
рьев, В. М. Мельников, В. С. Сыромятников // Патент РФ
1758988 B64G 1/40, 1/44. 1989.
9. Космический эксперимент по развертыванию пленочно-
го бескаркасного отражателя D = 20 м («Знамя 2») /
Ю. П. Семенов, В. Н. Бранец, Ю. И. Григорьев, В. А. Коше-
лев, В. М. Мельников, В. С. Сыромятников // Космические
исследования. — 1994. — Т. 32, № 4-5. С. 186-193.
10. Glaser P.F. Power from the Sun: its future. Science, 1968,
vol. 168, Nov., p. 857-861.
Литература
429
11. Грилихес В. А., Орлов П.П., Попов Л. Б. Солнечная энер-
гия и космические полеты. — М.: Наука, 1984 — 216 с.
12. Бурдаков В. П. Электроэнергия из космоса. — М.: Маши-
ностроение, 1991. — 152 с.
13. Пивнюк В. А. Солнечно-водородная энергетика, состояние
и перспективы развития. Наука и технологии в промыш-
ленности. № 1-2. 2007. С. 72-75.
14 Цандер Ф.А. Проблема полета при помощи реактивных
аппаратов. Межпланетные перелеты. — М.: Оборонгиз.
1961. - 459 с.
15. Оберт Г. Пути осуществления космических полетов. —
М.: Оборонгиз. 1947. — 418 с.
16. Полякова Е. Н. Космический полет с солнечным парусом. —
М.: Наука. 1986. - 304 с.
17. Лукьянов А. В. Пленочные отражатели в космосе. —
М.: МГУ. 1977. - 69 с.
18. Эрике Краффт А. Будущее космической индустрии. —
М.: Машиностроение, 1979. — 200 с.
19. Гринберг Э.И. Загрязнение космоса и космические полеты.
Природа. 1992. № 8. С. 12-17.
20. Очистка ближнего космоса при помощи крупногабаритных
бескаркасных экранов, формируемых центробежными сила-
ми /В. С. Сыромятников, В. А. Кошелев, В. М. Мельников
и др. // Космические исследования. 1994. Т. 32, № 4-5.
С. 218-220.
21. Комков В. А., Мельников В. М., Харлов Б. Н. Формируемые
центробежными силами солнечные батареи. — М.: «Черос».
2007. - 188 с.
22. Пилотируемая экспедиция на Марс. Под ред. А. С. Ко-
ротеева. — М.: Российская академия космонавтики
им. К. Э. Циолковского. 2006. — 320 с.
23. Melnikov V.M., Koshelev V. A. Large Space Structures
Formed by Centrifugal Forces. Gordon and Breach Science
Publishers. Amsterdam, 1998, 157 p.
24. Соколов А. Г, Гвамичава А. С. Решения инженерных кон-
струкций космических радиотелескопов // Антенны: Сбор-
ник научн. тр. — М.: — 1981. — Вып. 29. С. 3-10.
25. Богомолов А. Ф. Космическая складная антенна // Антен-
ны. Сборник науч. тр. — М.: — 1981 Вып. 29. С. 10-20.
26. А.с. 502431 СССР, МКИ HOIQ 15/14. Складной каркас
двухсетчатой оболочки / А. Г. Соколов, В. А. Савельев,
А. С. Гвамичава. 1973.
430
Литература
27. Космические конструкции большой площади: Отчет
о НИР /Институт физ.-техн, пробл. (ИФТП); Руководитель
Буякас В. И. - N ГР0185О075642; Инв. № 02850074567. -
М„ 1985. - 48 с
28. Зеркальные антенны: Обзор // Радиоэлектроника за рубе-
жом М. — 1985 — Вып 4. — 78 с.
29. Буякас В. И. Неограниченно наращиваемый космический
радиотелескоп // Космич. исслед — 1978, Т. 16,
№ 6. С. 924-936.
30. Patent 2486722(France), HOIQ 15/20. Reflecteur d’antenne
deployable/ Nationale industrielle aerospatiale. 1980.
31. Patent OS 3315111 (BRD), HOIQ 15/20. Faltbarer Reflektor,
insbesondere fur Raumfahrzeuge/ Gee, David Peter; Edwards,
Bernard John. 1983.
32. Patent OS 3128978 (BRD), HOIQ 15/20. Falbater rotations
symmetrischer Strahlungs reflektor/ Reiter, Rudolf(BDR);
Messerschmitt-Bolkow-Blohm BmbH. 1981.
33. Patent 230965 (DDR), HOIQ I/OS. Parabolspiegel zur Infor-
mation sgewinnung/ Ustinow, Nikolai. 1983.
34. Резников Г. Б. Антенны летательных аппаратов. — М.: Со-
ветское радио, 1967. — 416 с.
35. Freeland R. Е. Survey of deployable antenna con-
cepts //Satell. Commun. Antenna Technol. Proc. Summer.
Sch.,Eindvhoven, 23-27 Aug. 1982 — Amsterdame, 1983.
P. 613-652
36. Patent 2186944 (France),B65H 45/00 Repliage et enrouler-
nent rationnels de surfaces circulaires I Scheel Hen.(BDR).
1972.
37. Patent 4445121(USA),HOIQ 1/28.Single membrane lens for
space radar using microstrip antenna radiating elements /
Joseph P. Hancock; Robert R. Henry; General Dynamics
Corporation, 1981.
38 Положительное решение от 17.06.88 no заявке 4340194-
31-12 на а.с. СССР, МКИ В65Н45/00. Способ складыва-
ния изделий круговой формы / Ю. Н Кузнецов, Н Н. Пру-
денко, В. А. Кошелев и др. (СССР). — Заявл. 8.12.87.
39. Материалы для отражающих поверхностей космических
складных антенн / Ю А. Кисанов, Н. М. Фейзулла,
Л. А. Кудрявин и др. // Антенны: Сборник научн. тр. —
М.: 1981. - Вып 29. С 20-25
40. Лурье А. И. Аналитическая механика. — М.: Гос. изд. Физ-
матгиз, 1961. — 824 с.
Литература
431
41. Минаков А. П. Основы механики нити // Научн.-иссл. тру-
ды Моск, текстильного ин-та. М.: 1941. — Т. 9, вып. 1. —
87 с.
42. Щедрое В. С. Основы механики нити. — М.: Машгиз,
1941. - 212 с.
43. Алексеев Н. И. Статика и установившееся движение гибкой
нити. — М.: Легкая индустрия, 1970. — 270 с.
44. Светлицкий В. А. Механика гибких стержней и нитей. —
М.: Машиностроение, 1978. 222 с.
45. Светлицкий В. А. Механика трубопроводов и шлангов. —
М.: Машиностроение, 1982. 279 с.
46. Меркин Д. Р. Введение в механику гибкой нити. —
М.: Наука. Гл. ред. физ.-мат. лит., 1980. — 240 с.
47. Иванов В. А., Ситарский С. И. Динамика полета системы
гибко связанных космических объектов. — М.: Машино-
строение, 1986. — 248 с.
48. Докучаев Л. В. Нелинейная динамика летательных аппара-
тов с деформируемыми элементами. — М.: Машинострое-
ние, 1987. - 232 с.
49. Горошка О. А., Савин Г. Н. Введение в механику дефор-
мируемых одномерных пил переменной длины. — Киев:
Наукова думка, 1971. — 224 с.
50. Дегтярев Г. Л., Сиразетдинов Т. К. Теоретические основы
оптимального управления упругими космическими аппара-
тами. — М.: Машиностроение, 1986. — 216 с.
51. Вольмир А. С. Нелинейная динамика пластинок и оболо-
чек. — М.: Наука, Гл. ред. физ.-мат. лит., 1972. — 432 с.
52. Вольмир А. С. Гибкие пластины и оболочки. — М.: Гостех-
издат, 1956. — 419 с.
53. Амбарцумян С. А. Теория анизотропных оболочек. —
М.: Физматгиз, 1961. — 384 с.
54. Гольденвейзер А. Л. Теория упругих тонких оболочек. —
М.: Наука. Гл. ред. физ.-мат. лит., 1976. — 512 с.
55. Кильчевский И. А. Основы аналитической механики оболо-
чек. - Киев: Изд. АН УССР, 1963. - 354 с.
56. Корнишын М. С. Нелинейные задачи теории пластин и обо-
лочек и методы их решения. — М.: Наука, 1964. — 191 с.
57. Злочевский С. П., Кубышкин Е. П. О влиянии колебаний
упругих элементов с распределенными массами на ориен-
тацию спутника // Космич. исслед. — 1987. — Т. 25. № 4.
С. 537-544.
58. Разработка математических моделей и численное иссле-
дование движение твердых и гибких тел; Отчет о НИР
432
Литература
по теме 1-87 / Киевский инж.-строит. ин-т.; Руководи-
тель Г. Д. Исаханов, В. И. Гуляев. — ГРО 18400201435
Инв. № 02870040857. - Киев, 1987. - 315 с.
59. Методика и численное исследование деформирования и ко-
лебаний трехгранной фермы: Отчет о НИР по теме 1-87/
Киевский инж.-строит. ин-т.; Руководитель В. И. Гуляев. —
ЫГР01860069920; Инв. № 02870061056. - Киев, 1987,
128 с.
60. Методика и численное исследование деформирования и ко-
лебаний гибкого кольца: Отчет о НИР по теме 1-87 /
Киевский инж.-строит. ин-т.; Руководитель В. И. Гуляев. —
ЫГРО1860069920; Инв. № 02870061057. - Киев/1987. -
128 с.
61. Бачкаускас В. А., Гяцявичус Ю.Ю, Казла А. А. Исследо-
вание колебаний стабилизируемого гибкого диска / Каунас-
ский политехи, ин-т. — Каунас, 1983. — 10 с.: ил. — Деп.
в ЛИТНИИТИ 08.12.1983, № 1152Л4-ДВЗ.
62. Гуан Г., Тэрнер Дж.Д., Чунь Х.М. Решения в конечном
виде для задачи управления с обратной связью и ограниче-
ниями на конечное состояние // Аэрокосмическая механи-
ка. - 1985. № 12. С. 86-92.
63. Докучаев Л. В., Клишев О. П. Об устойчивости вращения
твердого тела с гибкими элементами // Изд. АН СССР.
Механика твердого тела. 1982. — № 2. С. 10-15.
64. Белецкий В. В., Левин Е. М. Устойчивость вращения спут-
никового кольца //Прикл. математика и механика. — 1985.
№ 2. С. 678-688.
65. Белецкий В. Е., Левин Е. М. Механика орбитальной тросо-
вой системы // Космич. исслед. — 1986. — Т. 12, № 5.
С. 52-56.
66. Левин Е. М. Об устойчивости стационарных движений
электромагнитной тросовой системы на орбите // Космич.
исслед. — 1987. — Т. 25, № 4. С. 491-501.
67. Сидоренко В. В. Об устойчивости стационарных движений
упругого кольца в плоскости круговой орбиты // Космич.
исслед. — 1987. — Т. 25, № 4. С. 483-490.
68. Fujii Hiroruri, Tashiro Shinichi. Effect of deploying accele-
ration in a flexible antenna of a spin satellite // End.Sci.and
Meeh. Proc. Int. Symp., Tainan, Dec 29-31,1981. Pt. 1-San
Diego Col if., 1983. P. 409-419.
69. Кушнер А. Г. Дифференциальные уравнения формы движе-
ния нити // Дифференциальные уравнения. Качественная
теория. — Рязань, 1980. С. 69-76
Литература
433
70. Ростовцев В. А., Шоркий В С. Об одном классе точных
решений уравнений движения абсолютно гибкой нерастя-
жимой нити // Работы по мех. деформ, твердого тела. —
Тула, 1981. С 86-90.
71. Светлицкий В. А., Мирошник В. А., Куркин В. И. Опре-
деление форм стационарного движения замкнутой гибкой
нити при вращении вокруг вертикальной оси // Приклад-
ная механика. — 1985. Т. 21, № 5. С. 106-110.
72. Стасенко А. Л. форма гибкой нити в поле центробежных
сил // Изв. АН СССР. Механика и машиностроение. —
1962. № 6. С. 122-124
73. Стасенко А. Л. Равновесные формы и малые колебания
гибкой нити, вращающейся в бессиловом поле // Изв.
АН СССР. Механика и машиностроение. — 1964. № 1.
С. 174-179.
74. Ефимиенко Г. Г., Кривоносова Н.В. Об устойчивости дви-
жения гибкой нити с грузами в ньютоновском поле сил //
Изв. АН СССР. Механика твердого тела. — 1982. № 5.
С. 22-27.
75 Luntng С. D., Perry W. L. Iterative solution of a non-linear
boundary value problem far rotating string / J. Non-Linear
Mechanics. — 1984. — № 1. P. 83-92.
76 Митрофанов В. П., Ну ген Ван Туен. Формы равновесия
однородной нерастяжимой нити, стационарно вращающейся
в поле тяжести // Изв вузов. Машиностроение. — 1983.
№ 11. С. 20-25.
77. Иванов А. А. Исследование нелинейных колебаний гибкой
нити /Тульский политехнический ин-т. Тула, 1984. — 8 с.:
Деп. В ВИНИТИ 24.07.1984, № 5369-84 ДЕП.
78. Genta В. Spape of a wire in a centrifugal field applikation to
guasi-circular bare filament flywheels //Trans. ASMF J.V.:
br. Acowst. Stress, and Reliab.Des. 1983. № 2 P. 221-226.
79. Колебания вращающегося мембранного диска с централь-
ной жесткой вставкой / В. А. Баженов, В. И. Гуляев,
С. Г. Кравченко, И. И Лизунов // Проблемы прочности. —
Киев, 1986. № 6. С. 108-113.
80. Sato Y. Dynamic behavior of a very flexible membrane rotat-
ing on a gas film next to a wall // Actamech — 1985. № 12
P. 95-104.
81. Казла А. А. Экспериментальное исследование колебаний
вращающегося гибкого диска/ Каунасский политехи.
Ин-т. - Каунас, 1982. - 12 с.: Деп. Лит НИИНТИ
04.11.1982, № 981 Ли-Д82.
434
Литература
82. Денисов Г. Г., Сидяков Д. Ф. Экспериментальное исследо-
вание устойчивости вращающегося гибкого диска с закреп-
ленным в его середине твердым телом // Машиноведе-
ние. - 1978. № 1. С. 11-15.
83. Алексеев С. А. Основы общей теории мягких оболо-
чек // Расчет пространственных конструкций. Сб. ст. —
М.: Стройиздат, 1966. Вып. 11.
84. Усюкин В. И. Техническая теория мягких оболочек: Дисс.
докт. техн. наук. — М., 1971. — 357 с.
85. Вайнберг Д. В. Справочник по прочности, устойчивости
и колебаниям пластин. — Киев: Буд1вельник, 1973. —
488 с.
86. Исследование складных параболических антенн из тон-
ких и гибких оболочек Отчет о НИР по теме х/д
№ 474 / ЦНИИПСК; Руководитель А. С. Гвамичава. —
NPPX26781; инв. № Г26193. - М., 1981. - 286 с.
87. Объект «Знамя»: Отчет о НИР по теме х/д № 474 /
ЦНИИПСК; Руководитель А. С. Гвамичава. — N ГРФ5638;
инв. № Е64О87. — М., 1984. — 96 с.
88. Конструкции, формируемые центробежными силами: Пояс-
нительная записка / ЦНИИПСК; Руководитель А. С. Гва-
мичава. - 4-Ф5692-1 КМ (ТП). - М„ 1988. - 215 с.
89. Разработка математических моделей и численное исследо-
вание движения твердых гибких тел: Отчет о НИР по теме
1-84 /Киевский инж.-строит. ин-т; Руководитель В. И. Гу-
ляев. - ИГР 01840020143, инв. № 03840031026. - Киев,
1984. - 218 с.
90. Разработка математических моделей и численное иссле-
дование движения твердых и гибких тел: Отчет о НИР
по теме 1-84 /Киевский инж.-строит. ин-т. Руководитель
В. И. Гуляев. - N ГР 01840020143; инв. № 0384003107. -
Киев, 1986. - 220 с.
91. Численное исследование деформирования и управления
движением систем гибких тел: Отчет о НИР по теме 1-87 /
Киевский инж.-строит. ин-т.; Руководитель В. И. Гуляев. —
N ГР 01870016586; инв. № 02S70061058. - Киев, 1987. -
134 с.
92. Исследование динамики вращающихся деформируемых си-
стем; Отчет о НИР по теме 23-3/86 / Запорожский ин-
дустриальный институт; Руководитель Н. Н. Пруденко. —
N ГР 01860080342; инв. № 02880056087. - Запорожье,
1988. - 285 с.
Литература
435
93. Численное исследование деформирования и управления
движением систем гибких тел: Отчет о НИР по теме 1-87/
Киевский инж.-строит, ин-т; Руководитель В. И. Гуляев. —
N ГР 01870016586; инв. № 02890054066. - Киев, 1989. -
309 с.
94 Обоснование способа раскрытия и выбор силового при-
вода бескаркасного пленочного отражателя, формируемо-
го центробежными силами: Отчет о НИР по теме «Зна-
мя» / п/я В-2572; Руководитель В. М. Мельников. —
N ГРП27769-782; инв. № 12487. — Калининград (М.о),
1988. - 48 с.
95. Экспериментальное исследование процессов развертыва-
ния и функционирования пленочных конструкций, фор-
мируемых центробежными силами: Отчет о НИР по те-
ме «Знамя»/ ЦНИИМАШ, НПО «Энергия»; Отв. ис-
полн. И Н. Мазин. - N ГР 8623-2686-16080-1/27703;
инв. № 15206. — Калининград (М.о.), 1986. — 70 с.
96. Научная аппаратура для космического эксперимента «Зна-
мя 2» по раскрытию и управлению пленочного бескаркас-
ного отражателя D=25 м / Эскизный проект НПО «Энер-
гия»; П5856-782. — Калининград (М.о.), 1990. — Кн.70. —
222 с.
97. Теоретические и экспериментальные исследования про-
цессов управления и раскрытия пленочных отражающих
конструкций, формируемых центробежными силами: Отчет
о НИР по теме «Знамя» / НПО «Энергия», Отв. исп.
В.М. Мельников. - 782-9/496-90; N ГР В34688;
инв. № Г46381. — Калининград (М.о.), 1990. — 68 с.
98. Блок отражателя: Эскизный проект / п/я В-8216; Отв. исп.
О. И. Семов. 374225.008. ПЗ. — Ташкент, 1985 — 116 с.
99. Научная аппаратура для эксперимента по созданию форми-
руемого центробежными силами бескаркасного пленочного
отражателя: Эскизный проект /НПО «Энергия»; — Отв.
исп. В.М. Мельников. — П 28691-782. — Калининград
(М.о.), 1990. - 335 с.
100. Исследование возможности создания и укладки крупно-
габаритных плоских отражателей: Отчет о НИР по теме
«Знамя»/ ДКБА МАП; Отв. исп. Н.Н. Татарникова. —
N ГР 621039537; инв № 17619. — Долгопрудный (М.о.),
1990. - 117 с.
101. Солнечный парусный корабль. Конструкция парусного ко-
рабля: Эскизный проект / НПО «Энергия», Консорци-
ум «Космическая регата»; Руководитель В. С. Сыромятни-
436
Литература
ков. — СПК-0000-0. ПЗ 2. — Калиниград (М.о.), 1990. —
208 с.
102. Солнечный парусный корабль. Экспериментальная отра-
ботка: Эскизный проект / НПО «Энергия», Консорциум
«Космическая регата»; Отв. исп. В. М. Мельников. —
СПК-0000-0. ПЗ-16. — Калининград (М.о.), 1990. — 116 с.
103. А.с. № 1713221 (СССР) МКИ 5В64 1/22. Крупногабарит-
ная плоская пленочная конструкция космического аппарата
и способ ее укладки и развертывания на орбите /П. П. Де-
ментьев, В. М. Мельников, В. С. Сыромятников и др. —
1989. Д.с.п.
104. Технические предложения по конструкции солнечного па-
руса /ЦНИИПСК; Руководитель А. С. Гвамичава. — 93-4-
89-М, М., 1989. - 192 с.
105. А.с. № 1697374 (СССР)МКИ В65Н 45/00. Устройство для
развертывания полотна /В. А. Кошелев, В. М. Мельников,
В. С. Сыромятников и др. — 1990. Д.с.п.
106. Реальные возможности полета с солнечным парусом: Экс-
пресс-информация /Л. Фридман, В. Каррол, Р. Голдстэйн
и др. //Астронавтика и ракетодинамика. М.: ВИНИИТИ,
1978. № 38. С. 43-58.
107. Капцов И. А. Электрические явления в газах и вакууме. —
М. — Л.: Госиздат ТТЛ. 1950. — 836 с.
108. А.с. № 1655072 (СССР)МКИ В65Н 45/00. Устройство для
развертывания в космосе мягкого полотна /В. А. Кошелев,
В. М. Мельников, Н.Н. Пруденко и др. — 1989. Д.с.п.
109. Вертолеты /М.Л. Миль, А. В. Некрасов и др. — М.: Ма-
шиностроение, 1966. Книга 1. — 454 с.
НО. Исследование радиационных свойств полимерных пленок:
Отчет о НИР по теме 1-85 /Харьковский политехнический
ин-т; Руководитель В. М. Кошкин. N ГР 0185,0005677;
инв. № 02860 006841. - Харьков, 1986. - 230 с.
111. Исследование радиационной стойкости полимерных мате-
риалов: Отчет о НИР по теме 782/84 / НИИПМ; Руково-
дитель В. М. Петров. — N ГР NK16382; инв. № Г82640.
М., 1985. - 187 с.
112. Heiss К. Columbus 500 Space Sail Cup // Solar-Sail Work-
shop, DLR. Kolu-Porz, Mai, 1993.
113. Mars-race spacecraft need 10 million funding // Flightlnt. —
1990. № 4210. P. 28.
114. «Kapton» polyimide filmtype. Summary of properties /Du
Pontbull, H-ID, E-33798, - 1969. - 16 p.
Литература
437
115. Polyimid top candidate for solar sails //Plast. World. —
1977. - V. 35, № 9. P. 10
116. Rowe W.M., Luedke E.E Thermal radiative properties of
solar sail film materials //AIAA Pap. — 1978. № 852. P. 1-8.
117. Исследование прочности и надежности электроприводов:
Отчет о НИР по теме № 24600/ Моск, авиац.. ин-т; Руко-
водитель Г. И Рощин. — N ГРХ63852, инв. № Г18748. —
М : 1990. - 73 с.
118. Prado J.Y. Solar Testing and Earth Moon Race // Int.
Aerospace Symp. 90, Nagoya (Japan), 1990. P. 32-41.
119. Norvart I., Carrol K.A. The Canadian Solar Sail
Project //Conf, on Astronauticas, 6-th Ottava (Canada),
1990. P. 11-16.
120. Тимошенко С.П., Юнг Д. Инженерная механика. —
М.: Машгиз, 1960. — 508 с.
121. Магнус К. Гироскоп. — М.: Мир, 1974. — 526 с.
122. Резников Г. Б. Антенны летательных аппаратов. — М.: Со-
ветское радио, 1967. — 416 с.
123. Wilson A. A history of bail loon satellites // J. Brit.
Int. Sac., - 1981. V. 34, Ke 1. P. 24-28.
124. Искусственные спутники и космические аппараты, запу-
щенные США. — Б.М., 1963. — 293 с.
125. Программа и методика проведения космического экспери-
мента «Зонд-2» на изделии 27КС /НПО «Энергия»; Руко-
водитель В. П. Полуэктов — П29775-051. — Калининград
(М.о.), 1989. - 34 с.
126. Космический радиотелескоп КРТ-10 /В. Н. Арсентьев,
В И. Бержатый и др. //Доклады АН СССР, — 1982.
Т. 264, № 3 С. 23-28.
127. Project solar sail /Edited by Arthur C. Clarke. — New York:
Roc, 1990. — 246 p.
128. Эксперимент «Софора»/А. П. Арцебарский, А. Ю. Банщи-
ков и др. //Актуальные проблемы прочности: Материа-
лы XXVI Межреспубликанского семинара. — Новгород,
1992. С. 32.
129. Экспериментальные исследования раскрытия кольцевых
рамочных конструкций /Б.Е. Патон, Ю. П. Семенов,
А. Г. Чернявский и др. // Космическая наука и техника.
1991. - № 6 С 56-61.
130. США — Зап Европа: 49-й полет МТКС «Спейс Шаттл»
(STS-46): Экспресс-информация // РКТ. — 1992. — Се-
рия 1. № 34(1710).
438
Литература
131. Система освещения приполярных районов с помощью
космических переотражателей.: Отчет о НИР по теме
«Лампа»/НПО «Энергия», Консорциум «Космическая
регата»; Руководитель В. А. Кошелев. — N ГРУ46188;
инв. № 321. — Калининград (М.о.), 1991. — 157 с.
132. Динамика разворачивания круговой мембраны /В. И. Гуля-
ев, В. А. Кошелев, П. П. Лизунов, В. М. Мельников //Со-
противление материалов и теория сооружений. Киев, 1989.
Вып. 55. С. 20-24.
133. Солнечная батарея космического аппарата / Н. В. Бранец,
А.В. Вовк, А. Г. Железняков, В.П. Легостаев, В.М. Мель-
ников, Ю. П. Семенов, Б. А. Соколов // Патент РФ
2200115. 2003.
134. Pichkhadze К.М., Melnikov V. М. Design of frameless SA
deployed by centrifugal forces and its deployment mechanism
as a basis of new technology of in-orbit power plant assem-
bling 56-th international Astronautical Congress (IAC2005),
October 17-21, 2005, Fukuoka (Japan).
135. Способ формирования бескаркасной центробежной
конструкции (варианты) и устройство для его осу-
ществления /Мельников В. М., Комков В. А // Заявка
№ 2006105264/11(005692) от 20.02.2006. Патент РФ
№ 2309875 от 10.11.2007.
136. Копик А. «Можаец» не отделился от «Космос-ЗМ». Ново-
сти космонавтики. — 2005. № 12. С. 43-47.
137. Павельцев П. Задачи проекта ST-5. Новости космонавти-
ки. - 2005. № 3. С. 59.
138. Способ раскрытия и стабилизации гибкой пленочной то-
когенерирующей конструкции на борту космического ап-
парата /Чмырев В.М., Сорокин В.М., Ященко А. К., Ко-
стенко В. И., Мельников В.М // Заявка № 200413577 от
07.12.2004.
139. Timoshenko S. Р., Goodier J. N. Theory of Elasticity, McGraw
Hill, New York, 1970.
140 Ландау Л.Д, Лифшиц E.M., Теория упругости, М : Нау-
ка, 1987. - 246 с.
141. Morse Р.М., Feshbach Н. Methods of theoretical physics,
McGraw Hill, New York, 1953.
142. Разработка и наземные испытания, программно-методиче-
ское обеспечение и результаты космического эксперимента
на ГК «Прогресс М» № 215 и ОК «Мир» по развертыванию
пленочного бескаркасного отражателя D=20 м (экспери-
мент «Знамя 2»); Отчет о НИР по теме «Знамя» /НПО
Литература
439
«Энергия»; Руководитель и отв. исп. В. М. Мельников. —
КГРУ78199; инв. NP31434. - Калининград (М.о.), 1993,
172 с.
143. Экспериментальная система генерации НЧ-электромагнит-
ного излучения на базе ТГК «Прогресс М» с использо-
ванием динамической тросовой антенны диаметром 300 м:
Технические предложения / РКК «Энергия»; Руководитель
В. М. Мельников. — П32139-782. Калининград (М,о.),
1994. - 123 с.
144. Бахрах Л.Д., Степаненко С.Н., Поваренкин Н.В. Ис-
пользование квазиволн для фазирования антенных решеток
с произвольным расположением модулей. Электромагнит-
ные волны и электронные системы. — 1997. Т. 2, № 6.
С. 55-62.
145. Герценштейн М. Е., Клавдиев В. В. Проблемы создания
маршевого двигателя, использующего принцип теплового
сопла. Электромагнитные волны. — 1997. № 6. С. 50-56.
146. Глобальная Система Космической Связи. Техническое
предложение / РКК «Энергия». — Королев (М.о.). —
2001. - 376 с.
147. Wright J. L. Space Sailing. Gordon and Breach Science Pub-
lishers. Amsterdam. 1992. — 200 p.
148. Разработка технологии и конструкции раскрываемых цен-
тробежными силами солнечных батарей из аморфного
кремния на основе тонкой полимерной пленки для спутни-
ков связи и дистанционного зондирования Земли. Итоговый
отчет по Проекту № 2620 Международного научно-техни-
ческого центра (МНТЦ). Рук. Мельников В. М. Москва.
2006. — 220 с. (на англ, и рус. яз.)
149. Space-Based Solar Power As an Opportunity for Strategic
Security. Phase о Architecture Feasibility Study / Report to
the Director, National Security Space Office. 10 October 2007.
150. Динамика разворачивания круговой мембраны / В. И. Гу-
ляев, В. А. Кошелев, П. П. Лизунов, В. М. Мельников //
Сопротивление материалов и теория сооружений. — Киев,
1989. — Вып. 55. С. 20-24.
151. Аппаратура для проведения космического эксперимента
с отражателем, формируемым электростатическими сила-
ми: Эскизный проект / НПО «Энергия»; Руководитель
В. А. Кошелев. — П5856-7В2. — Калининград (М.о.),
1990. - Кн. 71. - 182 с.
152. Динамика связки двух тел, несущих маховики / В. И. Гу-
ляев, В. А. Кошелев, А. А. Гром, В. А. Кошкин, В. М. Мель-
440
Литература
ников //Крупногабаритные конструкции: Тезисы докладов
научно-технической Всесоюзной конференции. — Севасто-
поль, 1990. С. 43.
153. Кошелев В. А., Мельников В. М. Космические крупнога-
баритные конструкции, формируемые центробежными си-
лами // Крупногабаритные конструкции: Тезисы докладов
научно-технической Всесоюзной конференции. — Севасто-
поль, 1990. С. 61.
154. Кузнецов Ю.Н., Пруденко Н.Н., Мельников В.М. Экс-
периментальные исследования формообразования тросовых
систем // Крупногабаритные конструкции: Тезисы докладов
научно-технической Всесоюзной конференции. — Севасто-
поль. 1990. С. 62.
155. Проведение ускоренных испытаний. Прогнозирование ре-
сурса: Отчет о НИР по теме № 24600 / Моск, авиац. ин-т;
Руководитель Г. И. Рощин. — N ГРУ37012; инв. № Г18636,
М, 1991. С 137.
156. Комплексный план экспериментальной отработки научной
аппаратуры «Знамя 2» / НПО «Энергия»; Отв. исполн.
В. М. Мельников. — П30934-782, — Калининград (М.о.),
1992. 18 с.
157. Программа и методика проведения КЭ «Знамя 2» /НПО
«Энергия»; Руководитель В. М. Мельников. — П30595-
782, — Калининград (М.о.), 1992. — 32 с.
158. Математическое моделирование процесса раскрытия отра-
жателя в КЭ «Знамя 2». Отчет о НИР по теме «Зна-
мя» / НПО «Энергия»; Руководитель В. М. Мельников. —
П-30613-782; инв. № 1162. — Калининград (М.о.), 1992. —
33 с.
159. Наземные экспериментальные исследования динамических
характеристик приводов раскрытия отражателя (АРО)
в эксперименте «Знамя 2». Экспресс-отчет / НПО
«Энергия»; Отв. исполн. Г. В. Чуков. — 093-14/2-92, —
Калининград (М.о.), 1992. — 25 с.
160. Севастьянов Н. Н., Кошелев В. А., Мельников В. М. Систе-
ма космического освещения районов Заполярья отражен-
ным солнечным светом //Деловые люди и хозяйственное
освоение космоса: Сборник докладов I Научно-практиче-
ской конференции. М., 1992. С. 54-57.
161. Очистка ближнего космоса от технологических осколков
при помощи крупногабаритных бескаркасных пленочных
экранов, формируемых центробежными силами / В А. Ко-
шелев, В.М. Мельников, С.Ю. Зайцев, О.Ю. Криволапо-
Литература
441
ва // Деловые люди и хозяйственное освоение космоса:
Сборник докладов 2-й Международной научно-практиче-
ской конференции. — М., 1992. С. 51.
162. Космические крупногабаритные конструкции, формируе-
мые центробежными силами / В. А. Кошелев, В. М. Мель-
ников, С. Ю. Зайцев, О. Ю. Криволапова // Ракетно-косми-
ческая техника. — 1992. — Серия 12, № 4. С. 32-38.
163. Кошелев В. А., Мельников В.М. Тросовая бескаркасная
антенна, формируемая центробежными силами // Тезисы
докладов научно-технической конференции Технического
Университета связи и информатики. — М.: 1993. С. 18.
164. Кошелев В. А., Мельников В.М. Очистка космоса от тех-
нологических осколков //Тезисы докладов научно-техниче-
ской конференции Технического Университета связи и ин-
форматики. — М., 1993 С. 19.
165. Методика проведения радиолокационных измерений ГК
«Прогресс М» в период подготовки и проведения КЗ «Зна-
мя 2» / НПО «Энергия»; Отв. исполн. С. Ю. Зайцев. —
П30823-782. — Калининград (М.о.), 1993. — 12 с.
166. «Znamia-2»: from mathematical deploument simulation to
p respects for space bulky structures formed by centrifu-
gal forces / V. A. Koshelev, V. M. Melnikov, S.Yu. Zaitsev,
O. Yu. Krivolapova, G. Pignolet // 44-th International Astro-
nautic Congress. — Paris (France), 1993. P. 246-248.
167. Формируемые центробежными силами крупногабаритные
пленочные космические отражатели /В. С. Сыромятников,
В. А. Кошелев, В. М. Мельников и др. //Деловые люди
и хозяйственное освоение космоса: Доклады 3-й Между-
народной научно-практической конференции. — Москва,
1993. С. 25.
168. Система космического освещения. Космический экспе-
римент по разворачиванию на борту ГК «Прогресс М»
экспериментального пленочного отражателя диаметром
20 м (эксперимент «Знамя 2»): Результаты обработки
телевизионной и телеметрической информации /Государ-
ственное предприятие «Ямбурггаздобыча»; Руководитель
В.М. Мельников. — 782-9/151, — Калининград (М.о.),
1993 - 205 с.
169. Кошелев В. А., Мельников В.М., Зайцев С. Ю. Создание
на орбите пленочного отражателя, формируемого центро-
бежными силами (эксперимент «Знамя 2») //Материалы
Международной конференции по крупногабаритным кос-
442
Литература
мическим конструкциям (ICOLASS-93). — Новгород, 1993.
С 24
170. Зайцев С.Ю., Кошелев В. А., Мельников В.М. Назем-
ная отработка динамических систем (отражателей и ан-
тенн), формируемых центробежными силами //Материалы
Международной конференции по крупногабаритным кос-
мическим конструкциям (ICOLASS-93). — Новгород, 1993.
С 73
171. Мельников В.М., Криволапова О. Ю. Математическое мо-
делирование процесса раскрытия отражателя в экспери-
менте «Знамя 2» //Материалы Международной конфе-
ренции по крупногабаритным космическим конструкциям
(ICOLASS-93). — Новгород, 1993. С. 69.
172. Кошелев В. А., Мельников В.М., Лизунов П.П. Форма
динамического равновесия тросовых кольцевых антенн при
орбитальном движении // Материалы Международной кон-
ференции по крупногабаритным космическим конструкци-
ям (ICOLASS-93). — Новгород, 1993. С. 42.
173. Кошелев В. А., Мельников В.М. Космические крупногаба-
ритные конструкции, формируемые центробежными сила-
ми // Материалы Международной конференции по крупно-
габаритным космическим конструкциям (ICOLASS-93). —
Новгород, 1993. С. 9.
174. Кошелев В. А., Мельников В.М., Криволапова О. Ю. Тро-
совая динамическая радиоантенна диаметром D=500 м //
Материалы Международной конференции по крупногаба-
ритным космическим конструкциям (ICOLASS-93). — Нов-
город, 1993. С. 27.
175. Семенов Ю. П., Кошелев В. А., Мельников В.М. Как колес-
ница Фаэтона // Энергия, экология. — 1993. — № 7.
176. Разработка и наземные испытания, программно-методиче-
ское обеспечение и результаты космического эксперимента
на ГК «Прогресс М» № 215 и ОК «Мир» по развертыванию
пленочного бескаркасного отражателя D=20 м (экспери-
мент «Знамя 2»). Отчет о НИР по теме «Знамя» /НПО
«Энергия»; Руководитель и отв. исп. В. М. Мельников. —
МГРУ78199; Калининград (И.о.), 1993, 172 с.
177. Подготовка и проведение космического эксперимента на
ГК «Прогресс М» № 215 и ОК «Мир» по разворачива-
нию тонкопленочного бескаркасного отражателя диаметром
20 м, формируемого центробежными силами: Отчет о НИР
по теме «Лампа»/НПО «Энергия», НИИТП; Руководитель
Литература
443
В.М. Мельников. - ЖРУ82118; Инв. № 33172В. М„
1993. - 208 с.
178. Кошелев В. А., Мельников В.М., Зайцев С.Ю. Свет из
космоса //Наука в России. — 1994. — № 2.
179. Расчет динамики раскрытия отражателя и маховика проти-
вовращения системы космического освещения / С. Ю. Зай-
цев, В. А. Кошелев, О. Ю. Криволапова, В. М. Мельни-
ков // Ракетно-космическая техника. 1993. — Серия 12,
№ 3. С. 34-50.
180. Проектирование космических конструкций, формируемых
центробежными силами / С. Ю. Зайцев, В. А. Кошелев,
О.Ю. Криволапова, В.М. Мельников // Ракетно-космиче-
ская техника. 1993. — Серия 10. С. 28-32.
181. Мельников В.М., Зайцев С.Ю., Криволапова О.Ю. Мо-
дельная наземная отработка и технология изготовления
крупногабаритных конструкций // Ракетно-космическая
техника. — 1994. — Серия 12, № 4. С. 20-24.
182. Космический аппарат системы космического освещения.
Агрегатный отсек. Конструкция. Отражатель. Маховик.
Центральный вал. Эскизный проект/ Консорциум «Косми-
ческая регата»; Руководитель В. С. Сыромятников. — 307
ГК, КА. 0000-0 ПЗ-2. - Калининград (М.о)., 1993. -
184 с.
183. Экспериментальное исследование зависимости коэффици-
ента зеркального отражения металлизированной полиимид-
ной пленки от ее натяжения: Отчет о НИР по теме «Лам-
па»/ НПО «Энергия», НИИТП; Руководитель В. А. Коше-
лев. - NFPY768485 Инв. № 33173В. М., 1993. - 149 с.
184. Создание космического пленочного отражателя диаметром
20 м (эксперимент «Знамя 2») / С. Ю. Зайцев, В. А. Ко-
шелев, О. Ю. Криволапова, В. М. Мельников. В. С. Сы-
ромятников // Ракетно-космическая техника. — 1993. —
Серия 12, М 3. С. 3-22.
Васильев Е. И., Кошелев В. А., Мельников В. М. Экспери-
ментальное определение коэффициента зеркального отра-
жения металлизированной полимерной пленки при двухос-
ном плосконапряженном состоянии // Ракетно-космическая
техника. — 1993. — Серия 12, № 3. С. 51-61.
185. Melnikov Vitali М. Large Space Constructions Formed by
Centrifugal Forces // Space Bulletin. — 1994. — Vol. 1, № 3.
P. 13-15. (Перевод: Мельников В.М. Космические круп-
ногабаритные конструкции, формируемые центробежными
444
Литература
силами // Космический бюллетень. — 1994. — Том I, № 3.
С. 18-20.)
186. Мельников В.М., Зайцев С.Ю., Криволапова О.Ю. Ди-
намическое моделирование при наземной отработке круп-
ногабаритных конструкций, формируемых центробежными
силами // Ракетно-космическая техника. — 1994. — Се-
рия 12, № 4. С. 13-19.
187. Космический аппарат системы космического освещения.
Динамика раскрытия отражателя и компенсирующего
тросового маховика. Выбор электроприводов: Эскизный
проект/ Консорциум «Космическая регата»; Руководитель
В.М. Мельников. - 307 ГК. КА. 0000-0 ПЗ-4. -
Калининград (М.о.), 1993. — 122 с.
188. Мельников В.М. Исследовательские и проектно-конструк-
торские работы по крупногабаритным космическим кон-
струкциям, формируемым центробежными силами // Ра-
кетно-космическая техника. — 1994. — Серия 12, № 4.
С. 3-12.
189. Мельников В.М., Зайцев С.Ю., Криволапова О.Ю. Пер-
спективы создания бескаркасного пленочного отражате-
ля диаметром 70 м // Ракетно-космическая техника. —
1994. - Серия 12, № 4. С. 25-34.
190. Мельников В.М., Зайцев С.Ю., Криволапова О.Ю. Дина-
мика конструкций, формируемых центробежными силами:
теория и эксперимент // Ракетно-космическая техника. —
1994. — Серия 12, № 4. С. 36-44.
191. Мельников В.М., Зайцев С. Ю., Криволапова О. Ю. Косми-
ческая динамическая радиоантенна диаметром до 500 м //
Ракетно-космическая техника. — 1994. — Серия 12, № 4.
С. 45-51.
192. Мельников В.М. Космический эксперимент «Знамя 2» //
Тезисы докладов научно-технической конференция Техни-
ческого Университета связи и информатики. М., 1994.
С. 13.
193. Система освещения с орбиты приполярных городов. Про-
ектирование наземной экспериментальной установки для
исследования динамических режимов отражателя и изме-
рения его коэффициента зеркального отражения: Отчет
о НИР по теме «Лампа»/ НПО «Энергия», НИИТП; Ру-
ководитель В.М. Мельников. — ЫГРУ82301; инв. № 782-
9/250. — Калининград (М.о), 1993. — 112 с.
194. Кошелев В. А., Мельников В.М., Зайцев С.Ю. Математи-
ческое моделирование развертывания центробежными си-
Литература
445
лами космических конструкций //Космич. исслед.61994. —
Т. 32, № 4-5. С. 213-215.
195. Koshelev V.A., Melnicov V.M., Zaitsev S. Y. Large, deploy-
able space reflectors formed by centrifugal effects-design, de-
velopment and dynamics // 45-t Congress of the International
Astronauticas Federation. — Jurusalem (Israel), 1994. P. 118.
196. Melnicov V. M. Design of large frame and frameless film
reflectors of the diameter up to 200 m and tethered dynamic
SLF antennas of the diameter up to 500 m //International
Forum of Informatization IFI-94, — Moscow (Russia), 1994.
P. 42.
197. Melnicov V. M, Zaitsev S.Ju., Krivolapova O.Ju. Dynamics
of space structures formed by centrifugal forces //Interna-
tional Aerospace Congress (IAS-94). — Moscow (Russia),
1994. P. 191.
198. Проведение анализа основных особенностей и техниче-
ских возможностей создания космических крупногабарит-
ных конструкций, формируемых центробежными силами,
для различных целевых задач- Отчет о НИР по теме
«Знамя» / РКК «Энергия»; Руководитель В.М. Мельни-
ков. — NFPY9464O; инв. № 782-9/339-94. — Калининград
(М.о.), 1994. - 113 с.
199. Исследование принципов построения и оценка основных
характеристик крупногабаритных космических солнечных
электростанций с использованием тонкопленочных кон-
струкций: Отчет о НИР по теме «Космос-Ц» / РКК
«Энергия»; Руководитель В. М. Мельников. — NFPY94638;
инв. № 782-9/328-94. — Калининград (М.о.), 1994. —
66 с.
200. Основы проектирования летательных аппаратов / В. П. Ми-
шин, В. К. Безвербый, Б.М. Панкратов и др — М.: Маши-
ностроение, 1985. — 360 с.
201. Проектирование и испытание баллистических ракет / Под
ред. В. И. Варфоломеева. — М.: Воениздат, 1970. — 391 с.
202. Проектирование самолетов / А. А. Бадягин, С.М. Егер,
В. П. Мишин и др. — М.: Машиностроение, 1973. — 515 с.
203. Абрамович Г.Н. Прикладная газовая динамика. — М.: На-
ука, 1969 — 824 с.
204. Усюкин В. И. Строительная механика конструкций косми-
ческой техники. — М.: Машиностроение, 1988. — 399 с.
205. Белецкий В. В., Левин Е.М. Динамика космических тросо-
вых систем. — М.: Наука, 1990. — 336 с.
446
Литература
206 Программно-методическое обеспечение проведения назем-
ных модельных экспериментов: Отчет о НИР по теме «Зна-
мя» / РКК «Энергия»; Руководитель В. М. Мельников. —
МГРУ95116; инв. № 782-9/38994 — Калининград (М.о.),
1994 - 53 с.
207. Мельников В. М. Проектные критерии вращающихся
космических конструкций для различных прикладных
задач // Тезисы докладов научно-технической конференции
Технического университета связи и информатики. М.,
1995. С. 34.
208. Пленочная солнечная батарея (СБ) из аморфного кремния
на мощность 60 кВт, формируемая центробежными силами.
Техническое предложение. РКК «Энергия» П 36369-051.
г. Королев (М.о.), 2003. — 29 с.
209. Мельников В М., Харлов Б. Н. Разработка динамической
тросовой вращающейся антенны D=300 м // Тезисы докла-
дов научно-техничской конференции Московского техниче-
ского университета связи и информатики. М., 1996 г.
210 Melnikov V. М., Komkov V.A., Kharlov B.N. Space-bazed
solar power stations against energy crisis //56-th Interna-
tional Astronautical Congress (IAC2005), October 17-21,
2005, Fukuoka (Japan).
211. Мельников B.M., Комков В. А., Харлов Б. И. Космиче-
ские солнечные электростанции против энергетического
кризиса //5-й Международный аэрокосмический конгресс
IАС-06. Москва, август 2006 г. (на англ, и рус. яз.).
212. Райкунов Г. Г., Мельников В.М., Рембеза А. И., Ива-
нов И. И, Комков В. А., Харлов Б. И. Итоги российско-
американского проекта по формируемым центробежны-
ми силами бескаркасным космическим солнечным батаре-
ям // П-я Международная научно-техническая конферен-
ция «ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В НАУКЕ,
ТЕХНИКЕ И ОБРАЗОВАНИИ» Абхазия, сентябрь 2006 г.
213 Райкунов Г. Г., Мельников В. М., Рембеза А. И., Ива-
нов И.Н., Комков В. А., Харлов Б. И. Крупногабаритные
тонкопленочные бескаркасные формируемые центробежны-
ми силами космические солнечные батареи для программы
освоения Луны, экспедиции на Марс и трансляции энер-
гии на Землю в противодействие энергетическому кризису.
«Информационно-управляющие системы-2006» // Юбилей-
ная научно-техническая конференция ФГУП НПО ИЗМЕ-
РИТЕЛЬНОЙ ТЕХНИКИ. Королев (М/о), 12-13 октября
2006 г.
Литература
447
214. Мельников В.М., Комков В. А., Харлов Б.Н. Солнечные
батареи нового поколения для космических электростанций
в проблеме энергетического кризиса и управления погодой,
освоения Луны и полета на Марс // Ш-я Международ-
ная научно-техническая конференция «ИНФОРМАЦИОН-
НЫЕ ТЕХНОЛОГИИ В НАУКЕ, ТЕХНИКЕ И ОБРАЗО-
ВАНИИ». Абхазия, сентябрь 2007 г.
215. Кабдулин Г. В., Комков В. А., Мельников В.М., Хар-
лов Б. И. Динамика раскрытия формируемой центробежны-
ми силами конструкции космической энергосистемы с ком-
пенсацией кинетического момента //Королевские чтения.
Тезисы докладов. Москва, январь 2008 г.
216. Харлов Б. И., Комков В. А., Кабдулин Г. В., Мельни-
ков В. М. Космическая технология сборки орбитальной
солнечной электростанции на базе формируемой центро-
бежными силами бескаркасной солнечной батареи // Коро-
левские чтения. Тезисы докладов. Москва, январь 2008 г.
217. Мельников В.М., Комков В. А., Рембеза А. И., Ива-
нов Н. И., Харлов Б. Н. Солнечные пленки //Новости
космонавтики. 2006. № 10. С. 38-39.
218. Райкунов Г. Г., Мельников В.М., Комков В. А., Рем-
беза А. И., Иванов И. И., Харлов Б. И. Разработка бескар-
касных космических солнечных батарей нового поколения
для освоения Луны и экспедиции на Марс //Конверсия
в машиностроении. 2007. № ЕС. 44-51.
219. Мельников В.М., Комков В.А., Харлов Б.Н. Бескар-
касные конструкции космических солнечных энергоси-
стем //Международный журнал «Актуальные проблемы
авиационных и аэрокосмических систем», 2007. № 2(24),
т. 12. С. 89-104, Казань-Дайтона Бич (на англ, и рус. яз.).
220. Мельников В.М. Что может дать космическая энергети-
ка //3-я международная научная конференция «Ракетно-
космическая техника: фундаментальные и прикладные про-
блемы» (РКТ-2007), МГТУ им. Баумана. 19-23 ноября
2007 г.
221. Харлов Б. И., Кабдулин Г. В., Мельников В.М., Ком-
ков В. А. Комплексный анализ, концепции разработки
и классификация агрегатов раскрытия формируемых цен-
тробежными силами бескаркасных космических конструк-
ций //3-я международная научная конференция «Ракет-
но-космическая техника: фундаментальные и прикладные
проблемы» (РКТ-2007), МГТУ им. Баумана. 19-23 ноября
2007 г.
Научное издание
РАЙКУНОВ Геннадий Геннадьевич.
КОМКОВ Владимир Александрович
МЕЛЬНИКОВ Виталий Михайлович
ХАРЛОВ Борис Николаевич
ЦЕНТРОБЕЖНЫЕ БЕСКАРКАСНЫЕ КРУПНОГАБАРИТНЫЕ
КОСМИЧЕСКИЕ КОНСТРУКЦИИ
Редактор В.Д. Боксер
Корректор В.Р. Игнатова
Оригинал-макет: М.С. Ярыкина
Оформление переплета: Н.В. Гришина
Подписано в печать 17.06 09 Формат 60x90/16. Бумага офсетная.
Печать офсетная. Усл. печ. л. 28. Уч.-изд. л. 30,8. Тираж 300 экз.
Заказ № 992
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано
в ООО «Чебоксарская типография W? 1»
428019, г. Чебоксары, пр. И. Яковлева, 15
РАЙКУНОВ
Геннадий Геннадьевич
Доктор технических наук, профессор, Генеральный
директор ФГУП ЦНИИМАШ, действительный член
Российской академии космонавтики им. К. Э. Циол-
ковского, заслуженный машиностроитель России
КОМКОВ
Владимир Александрович
Доктор технических наук, профессор, заведующий
кафедрой ТММ Московского авиационного инсти-
тута, специалист по длительной прочности конст-
рукционных материалов, действительный член
Российской акалемии космонавтики им. К. Э. Циол-
ковского
МЕЛЬНИКОВ
Виталий Михайлович
Доктор технических наук, профессор Московс-
кого авиационного института. Действительный член
Российской академии космонавтики им. К. Э. Циол-
ковского
ХАРЛОВ
Борис Николаевич
Кандидат технических наук, являлся Главным
конструктором товаров народного потребления
Завода экспериментального машиностроения
при РКК "Энергия". Им сконструированы все
приводимые в книге агрегаты раскрытия