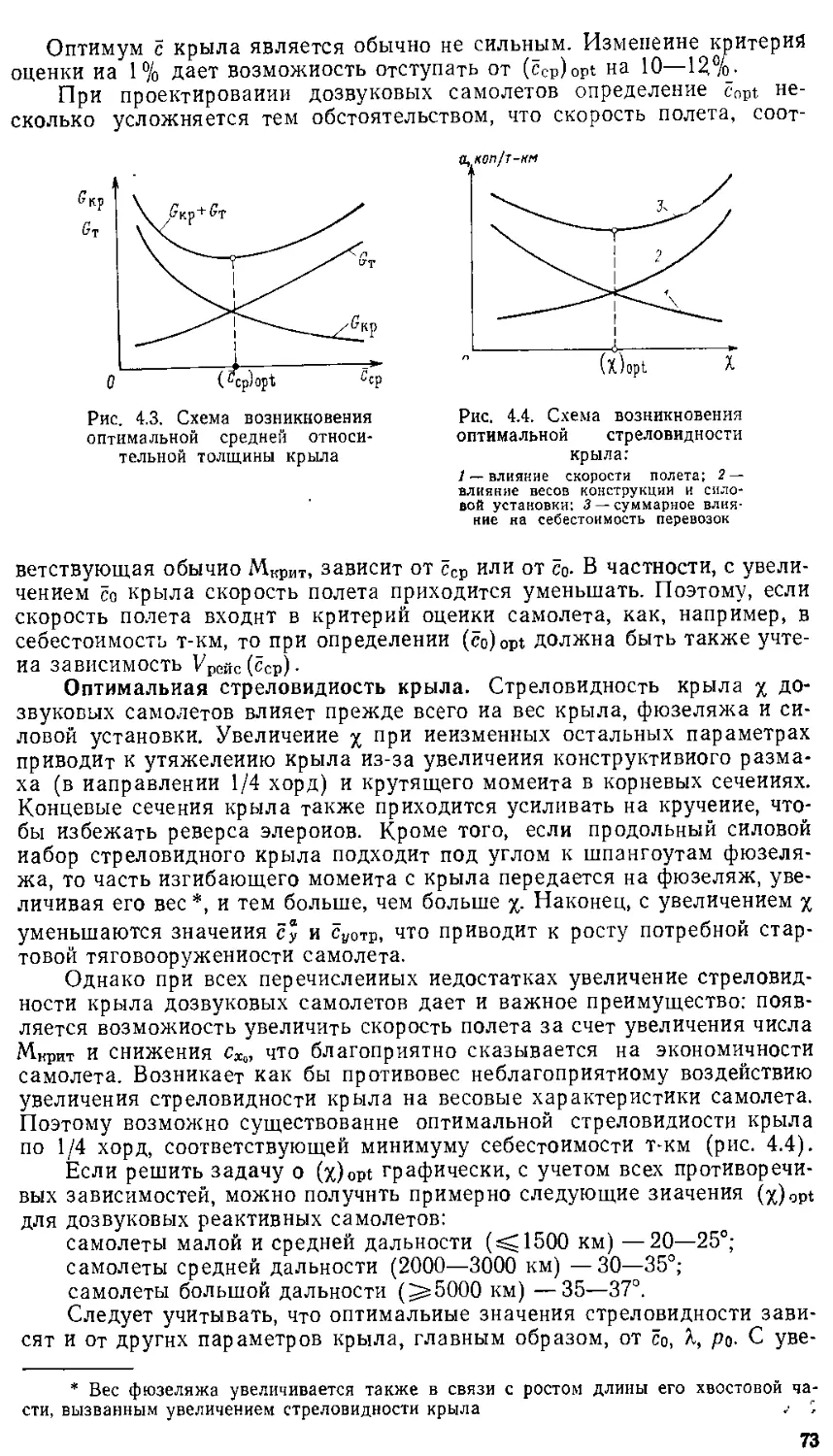
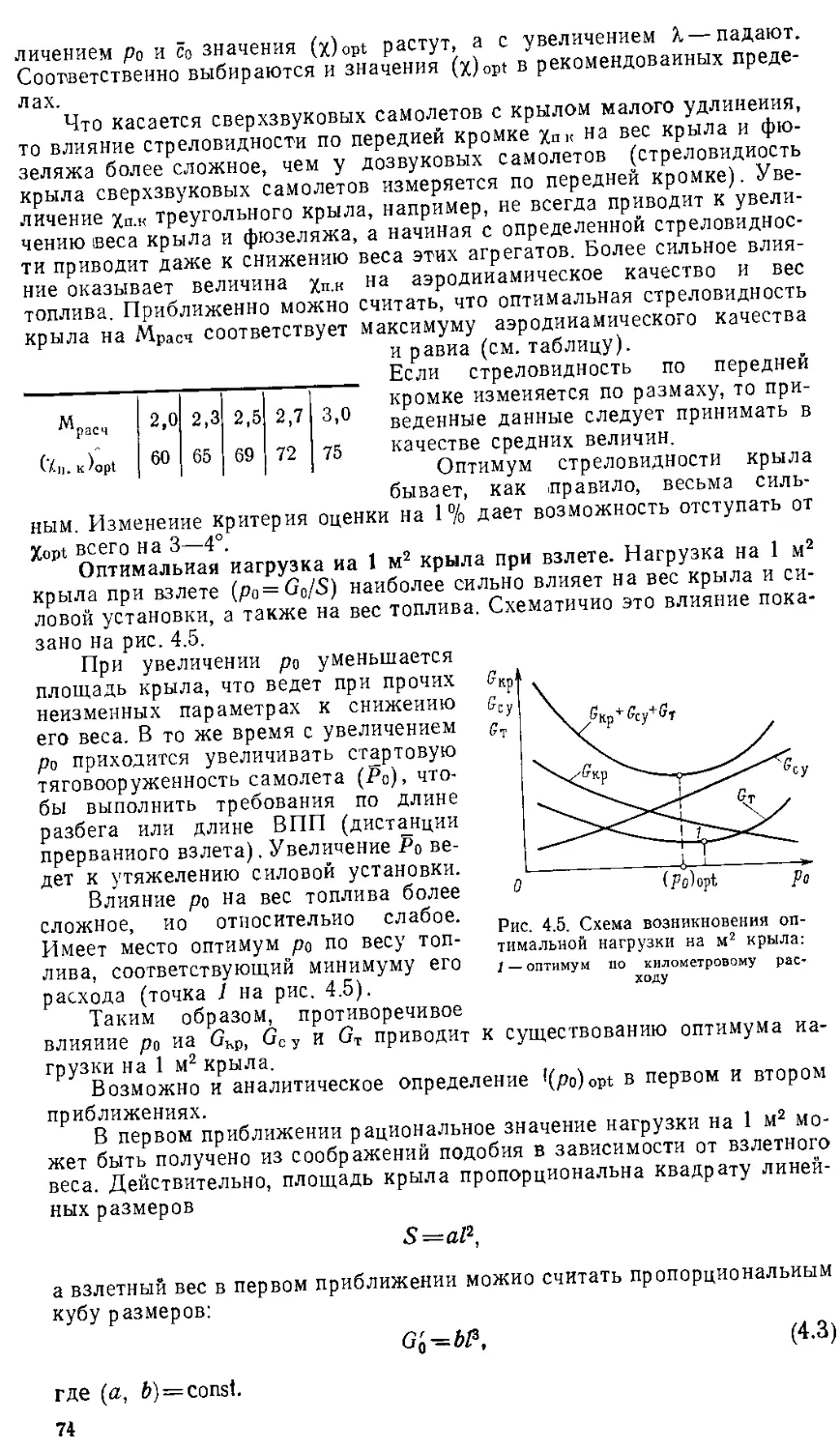
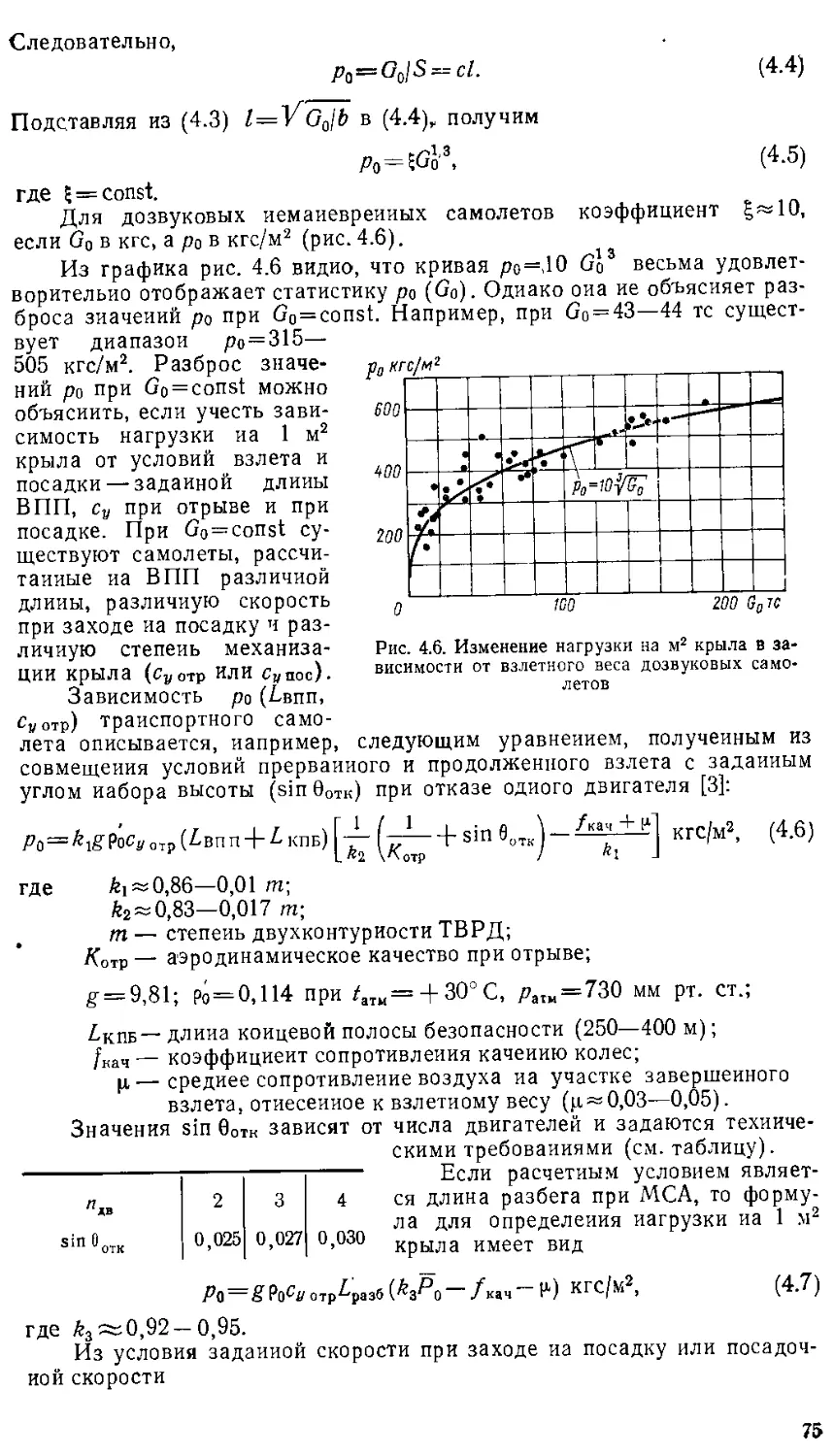
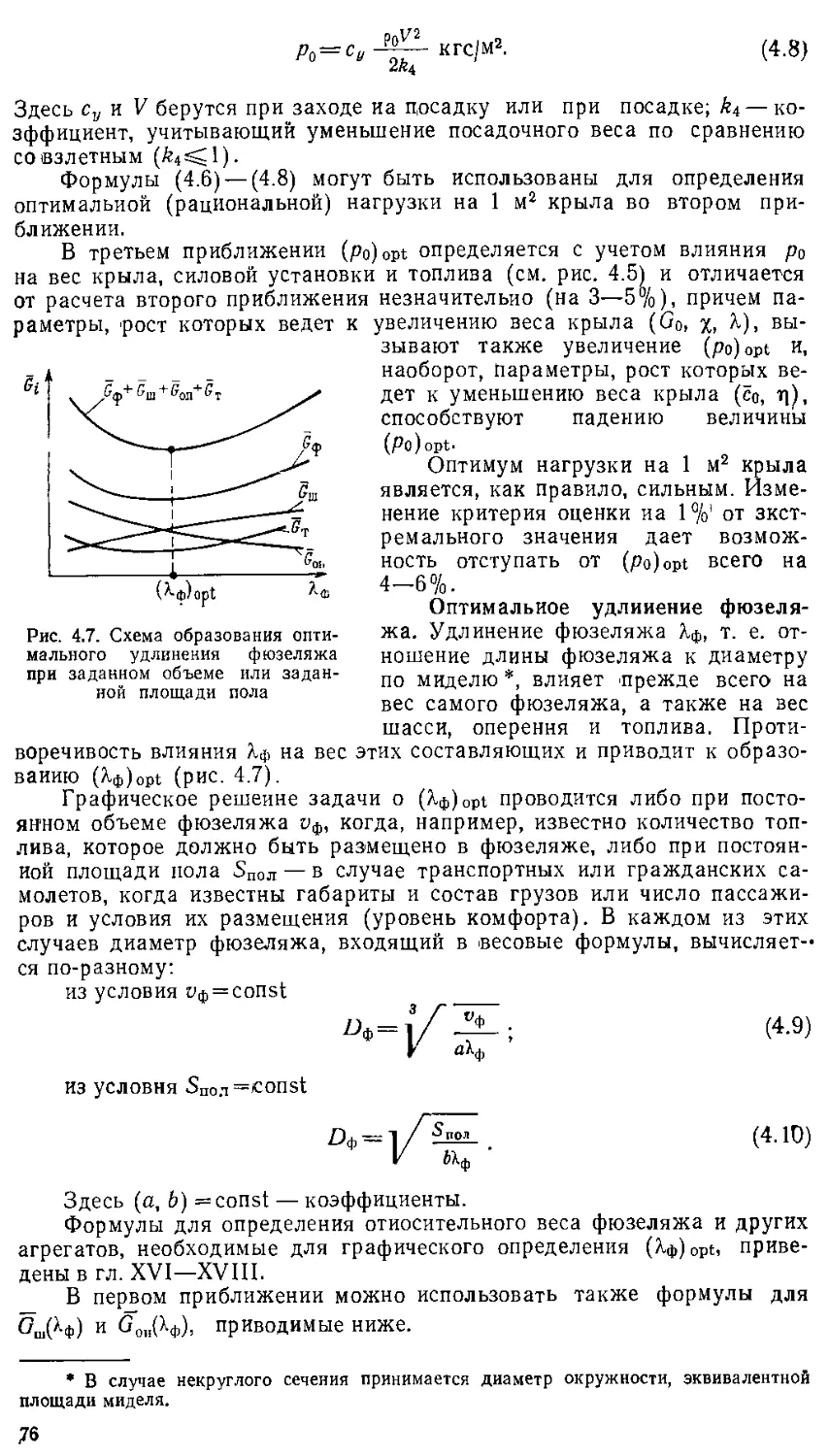
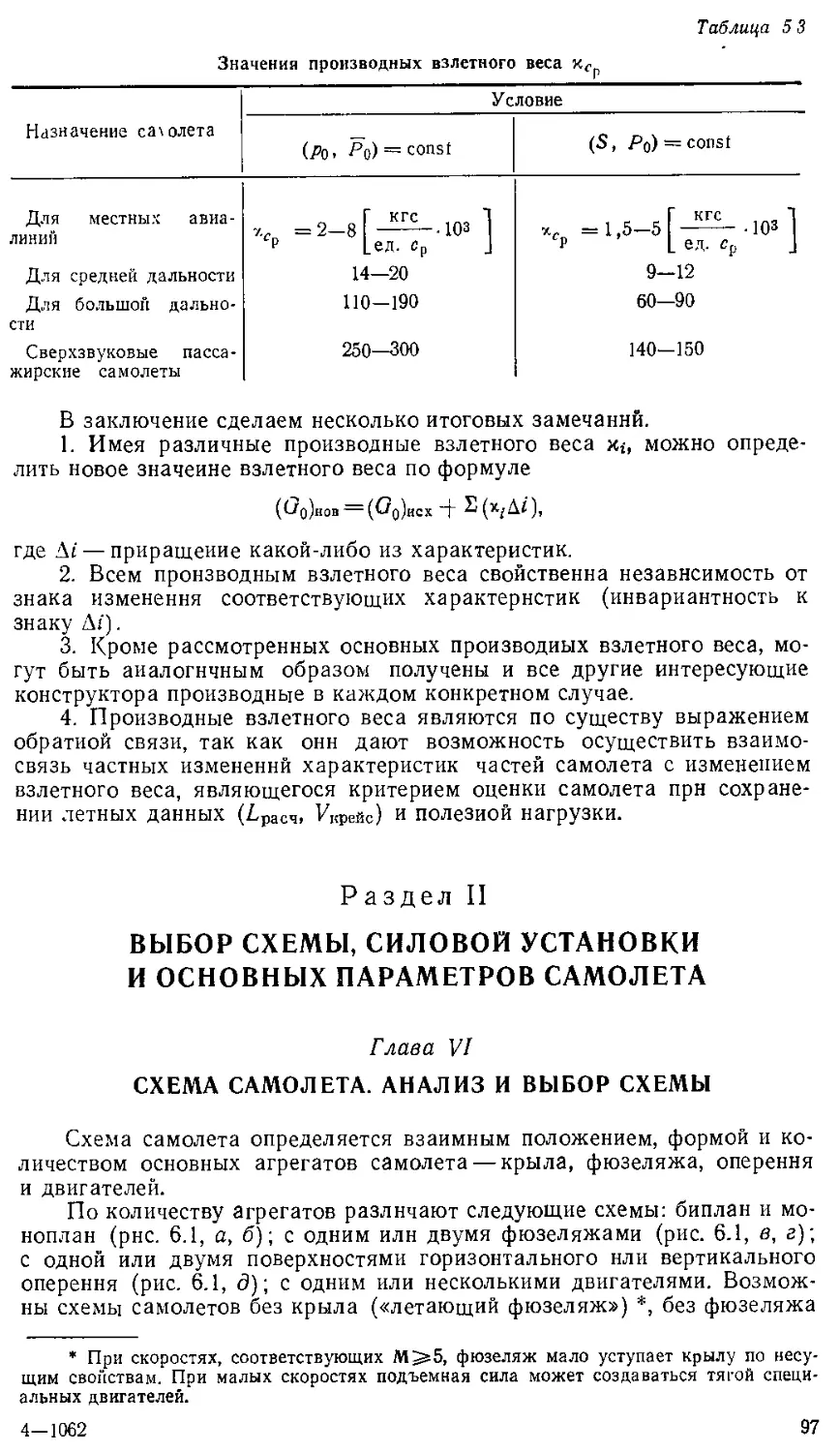
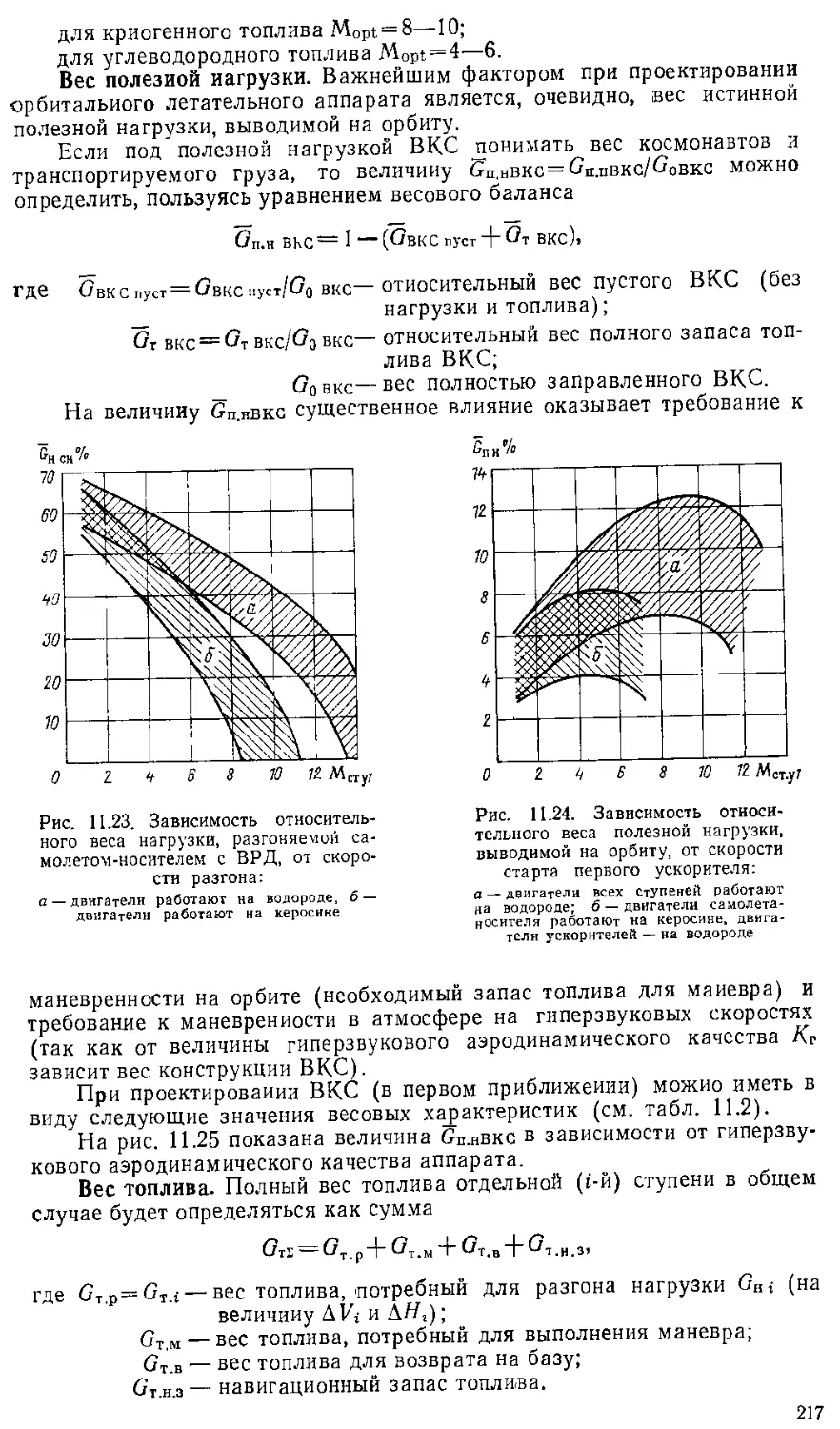
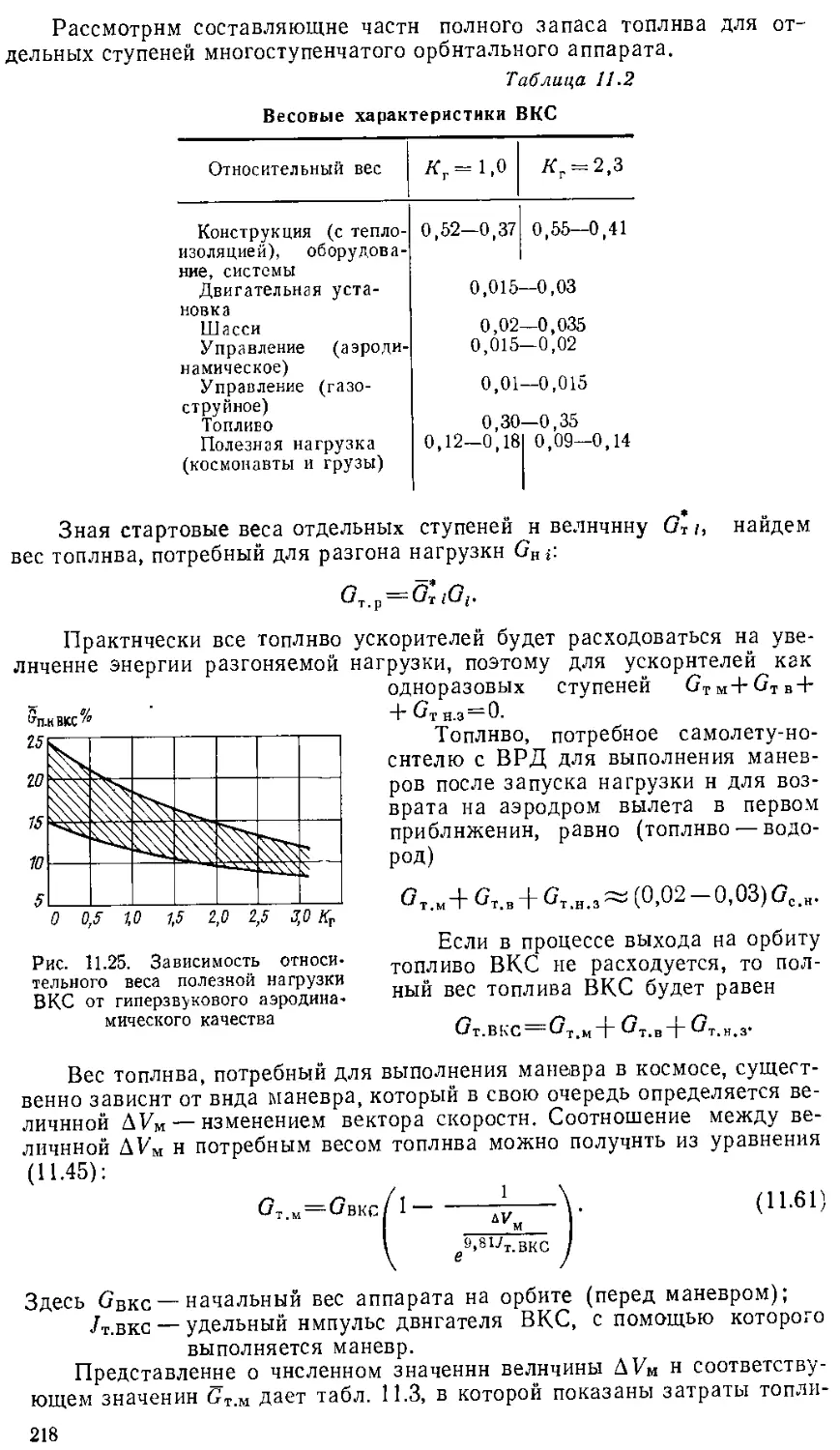
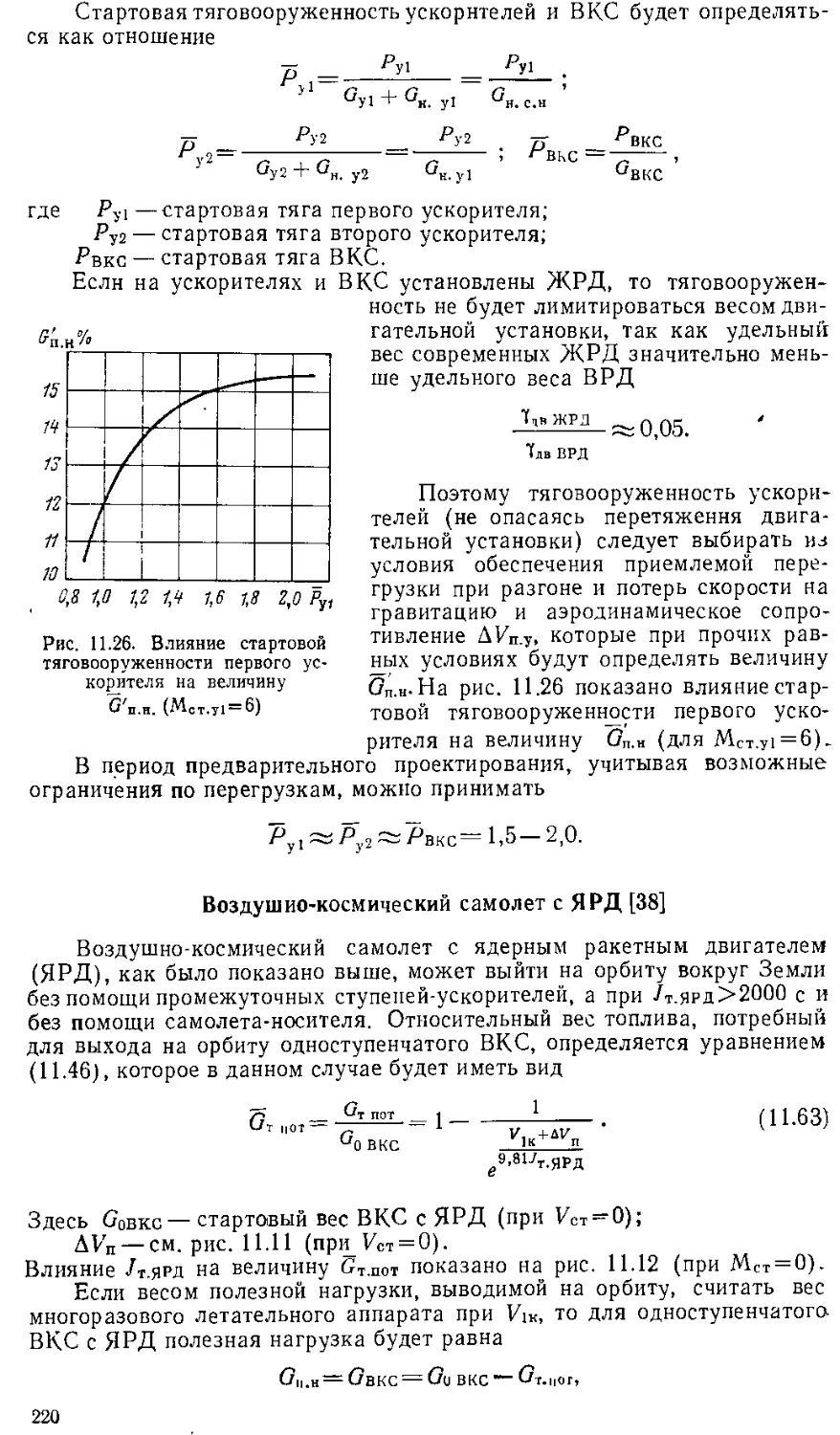
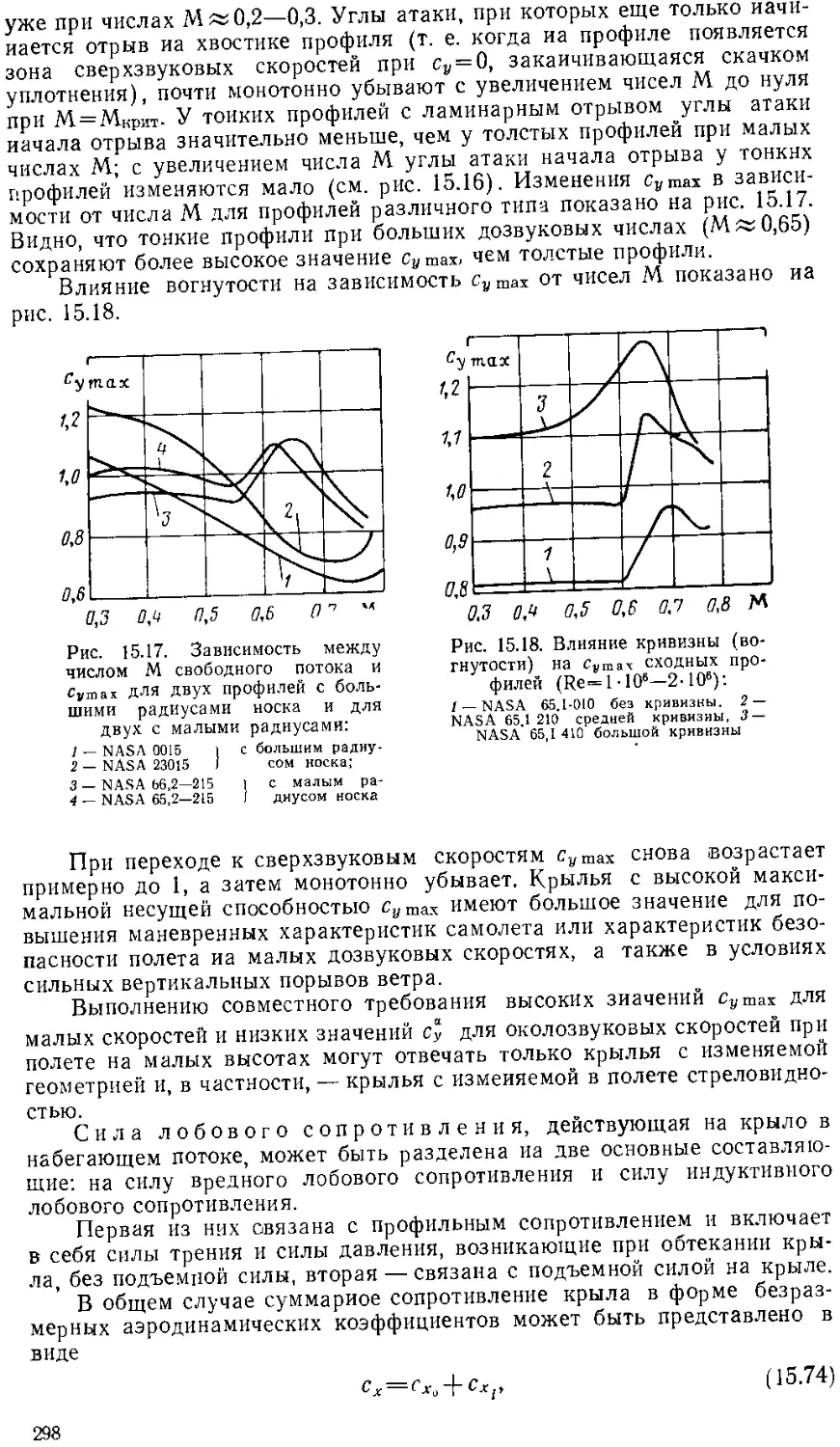
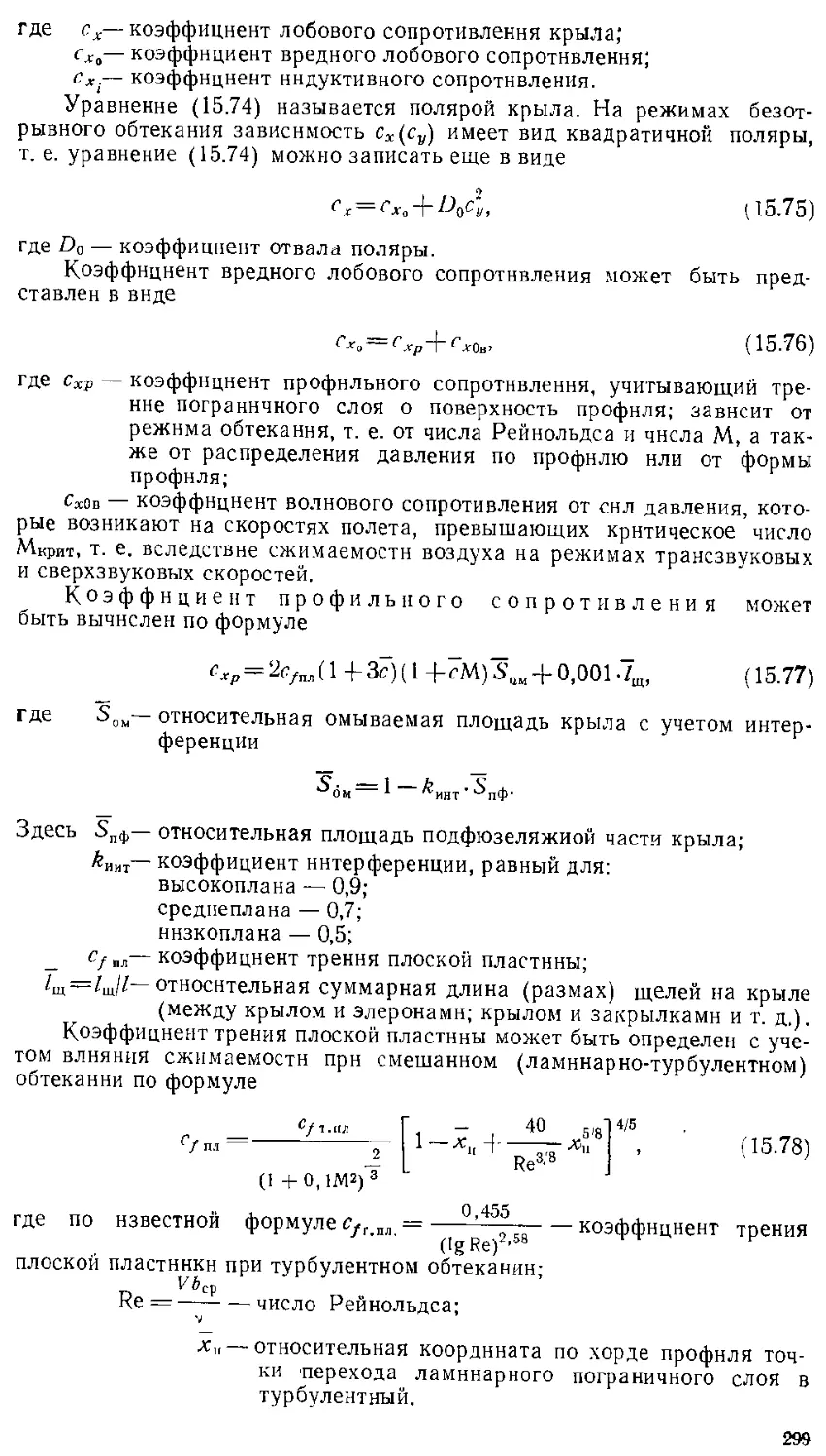
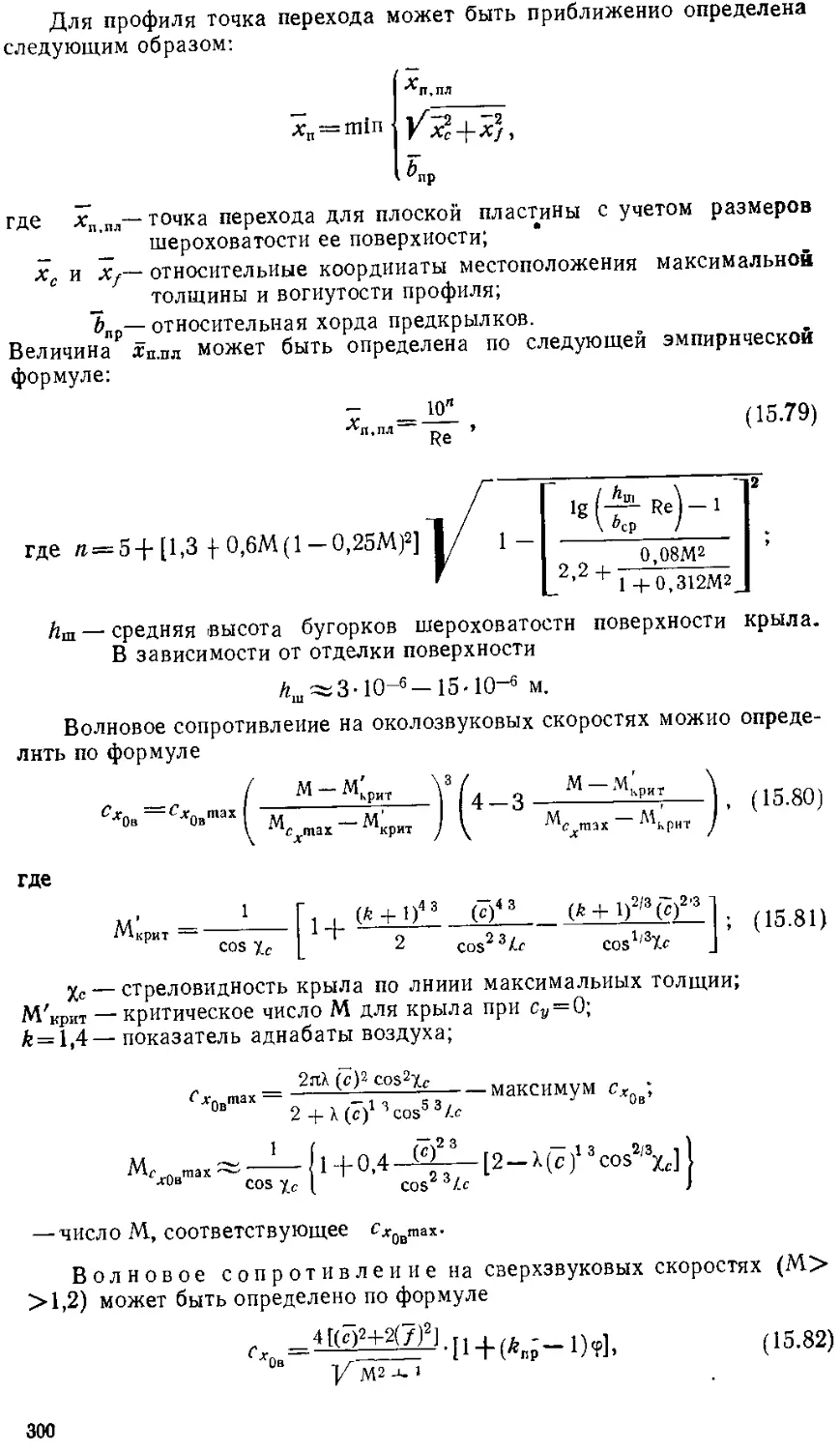
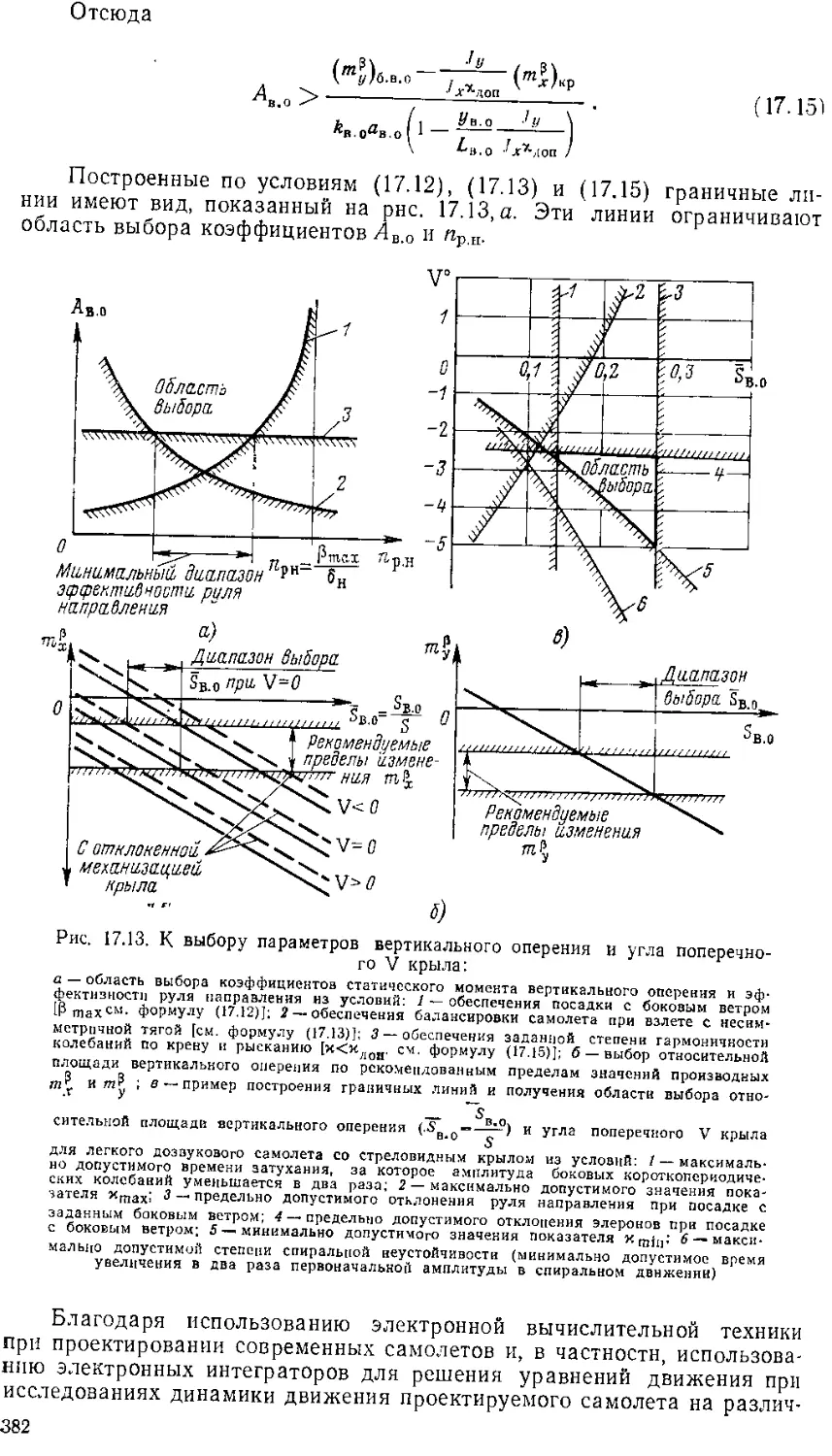
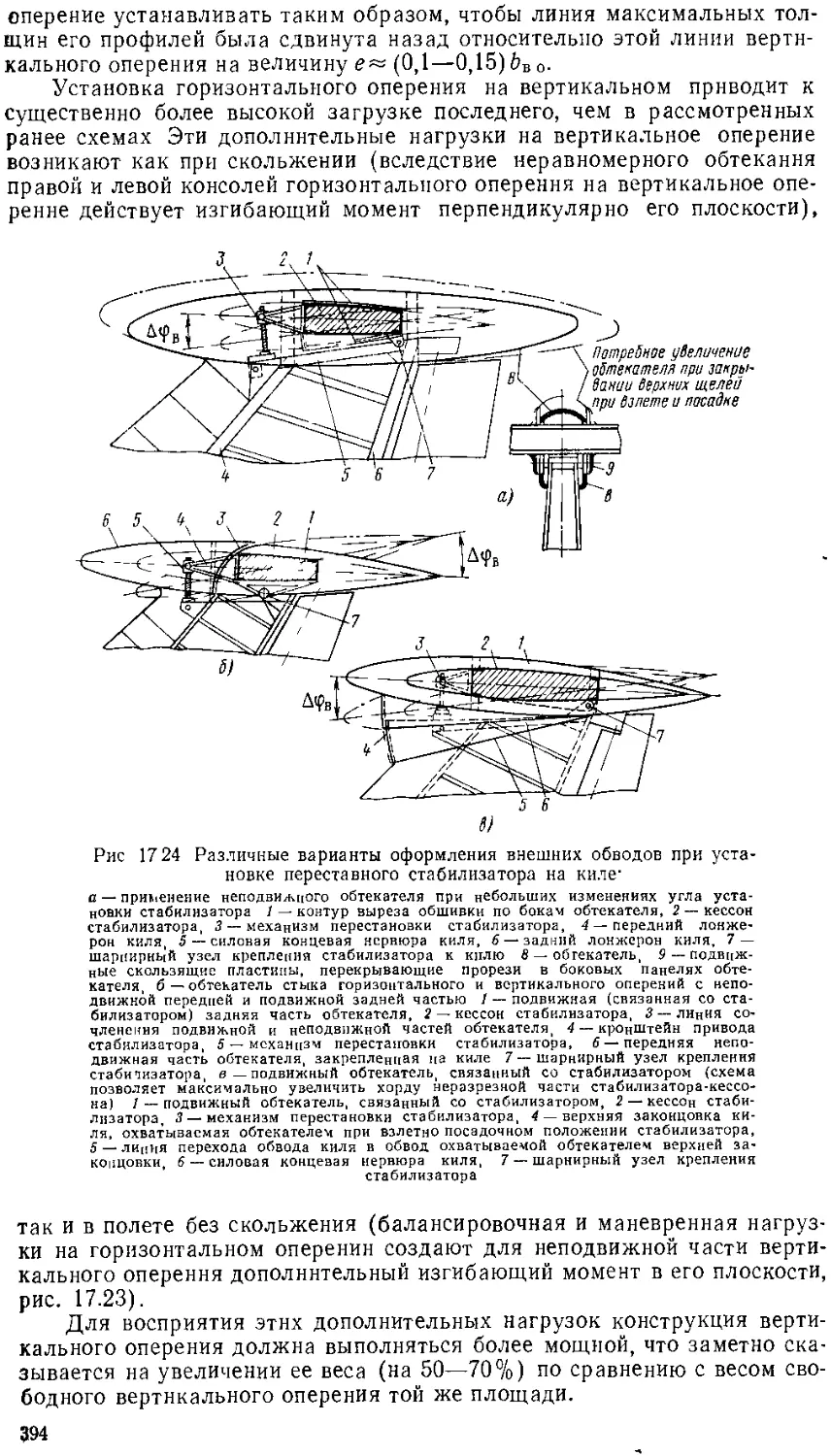
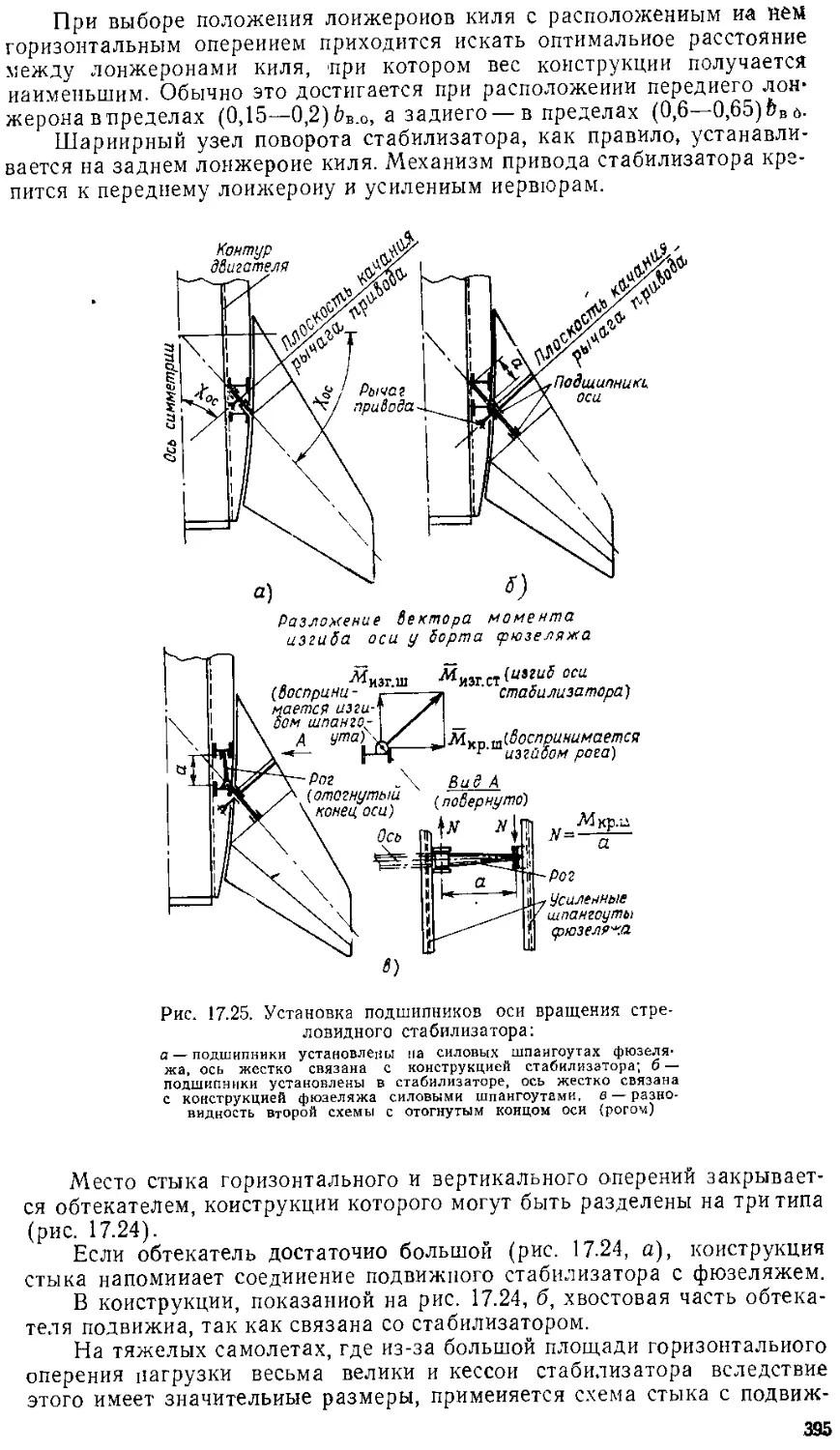
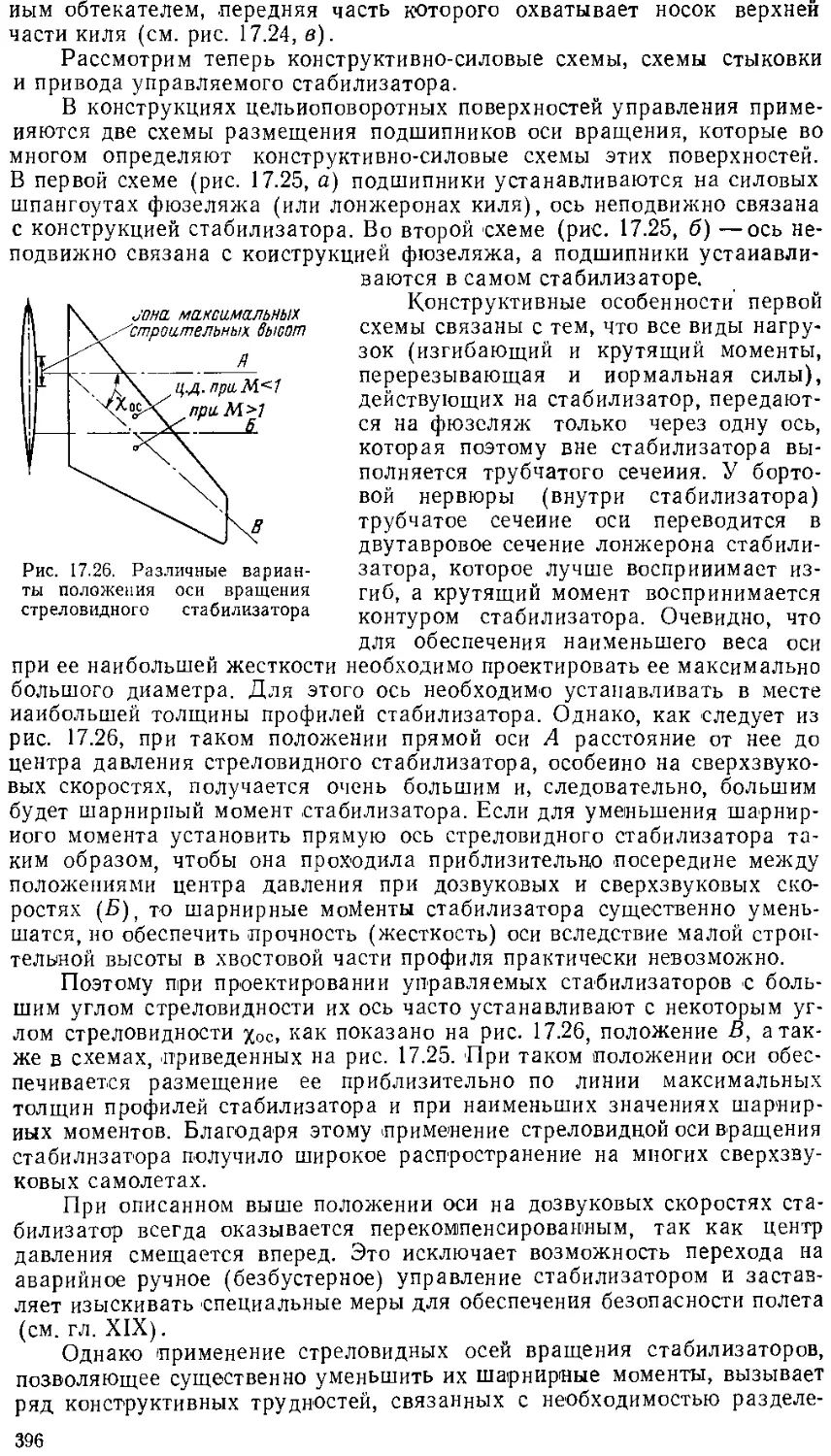
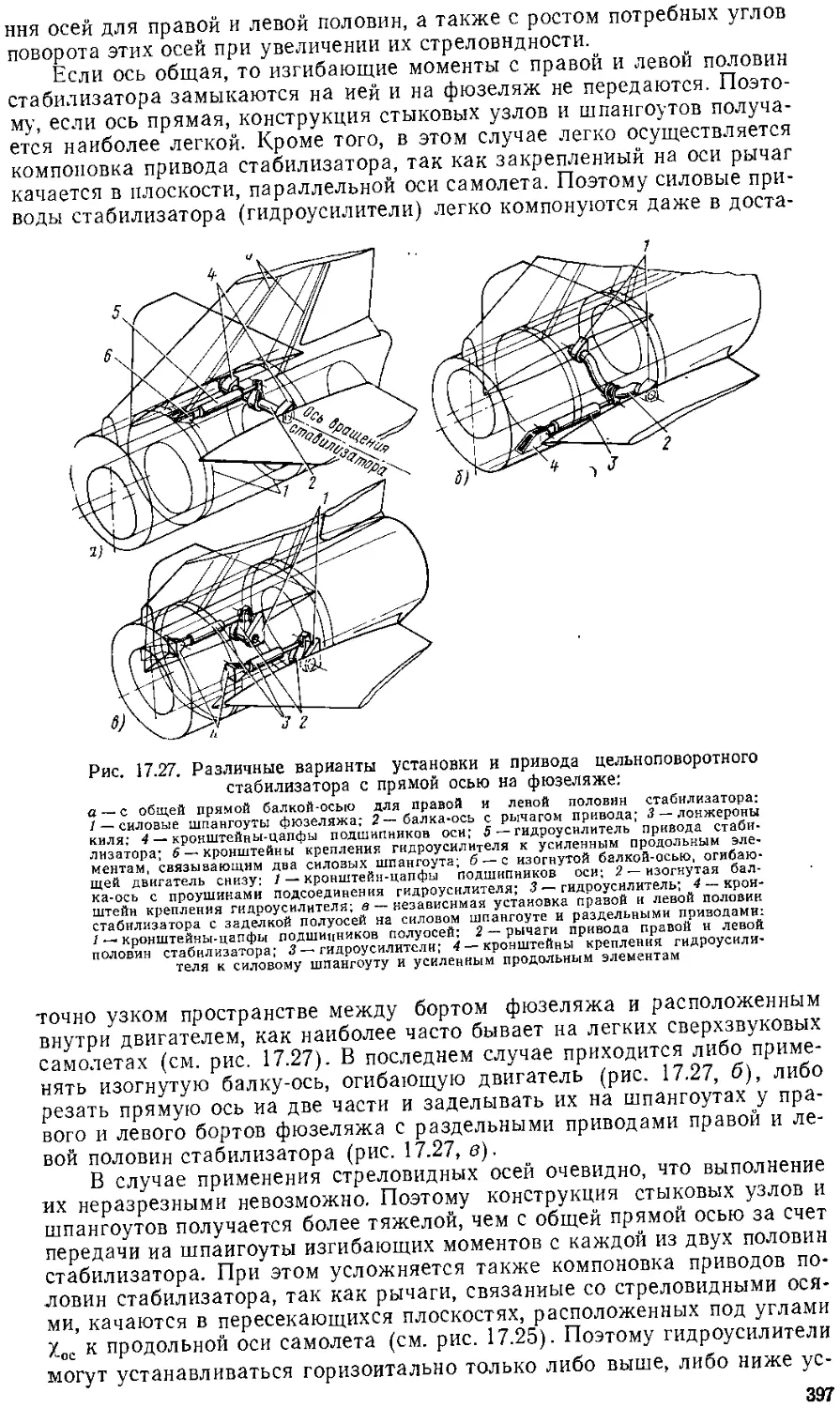
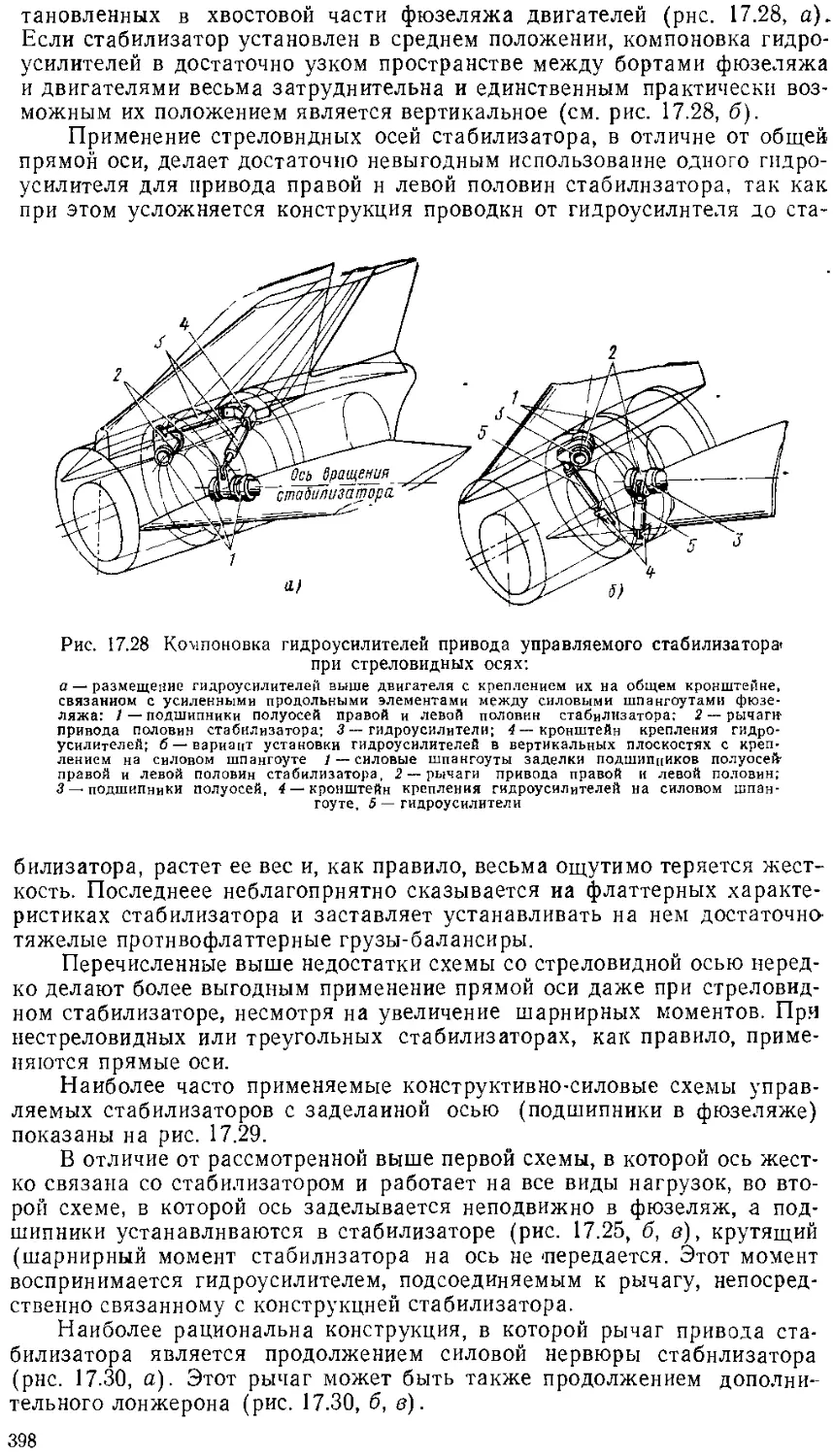
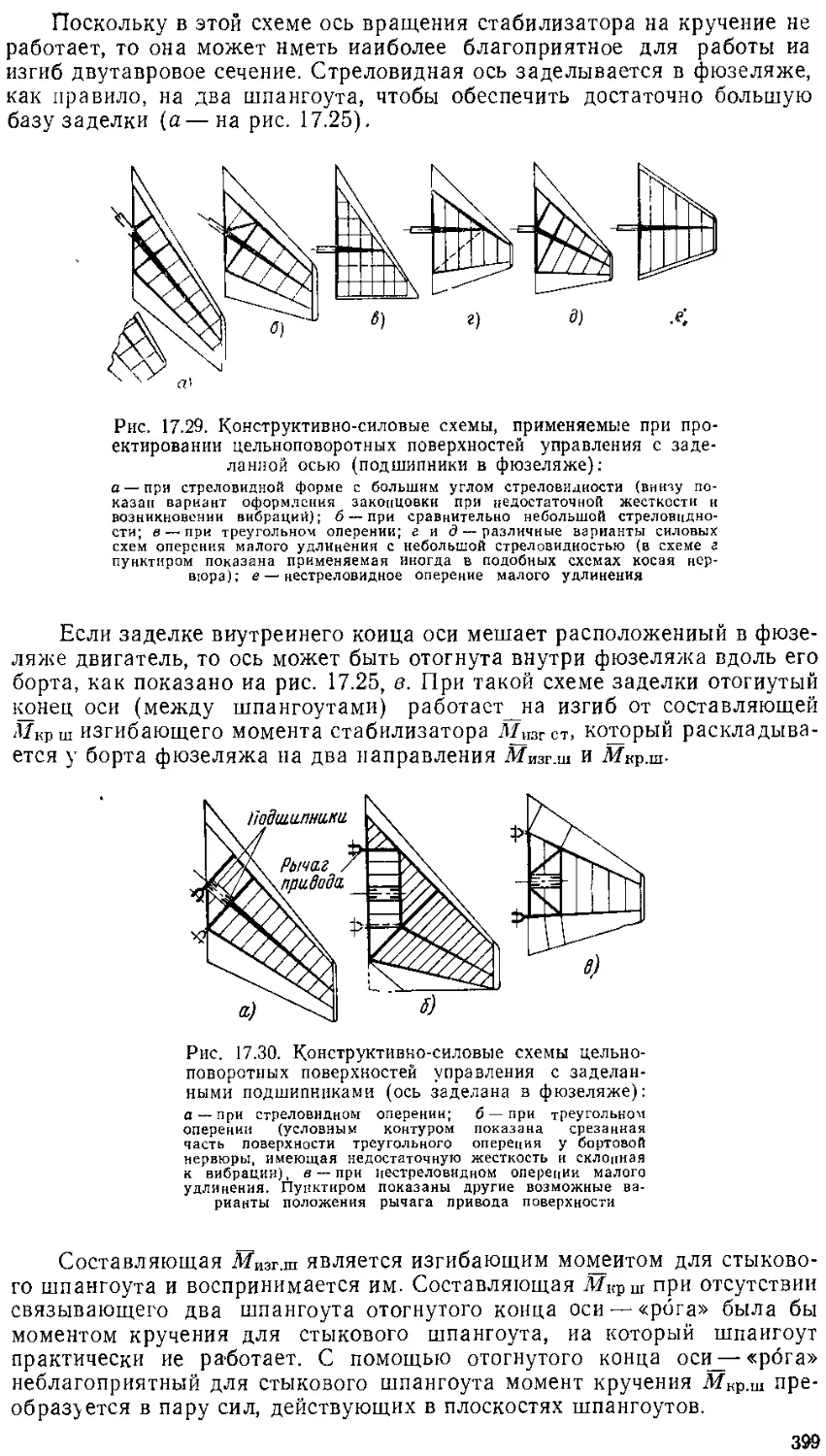
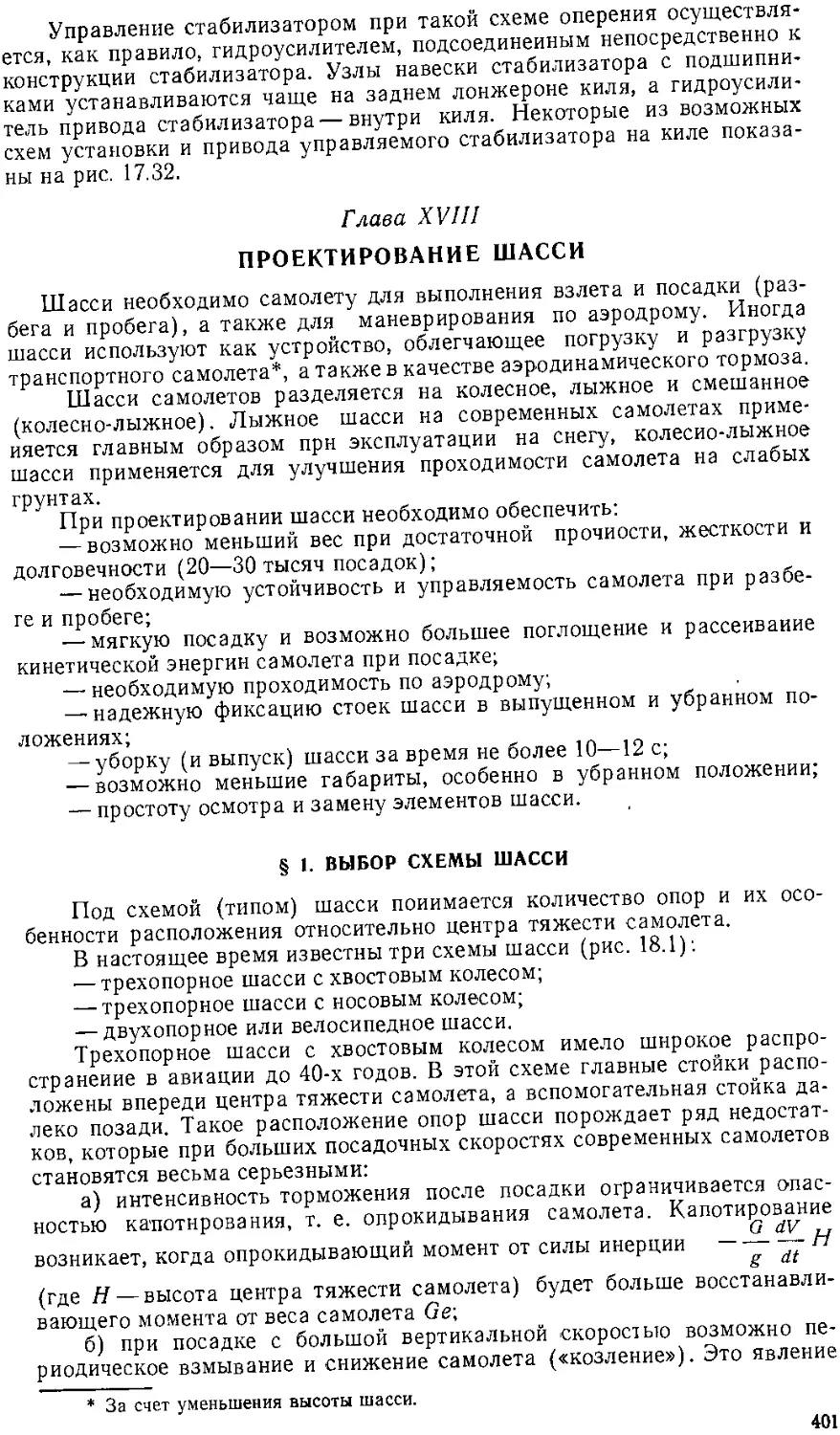
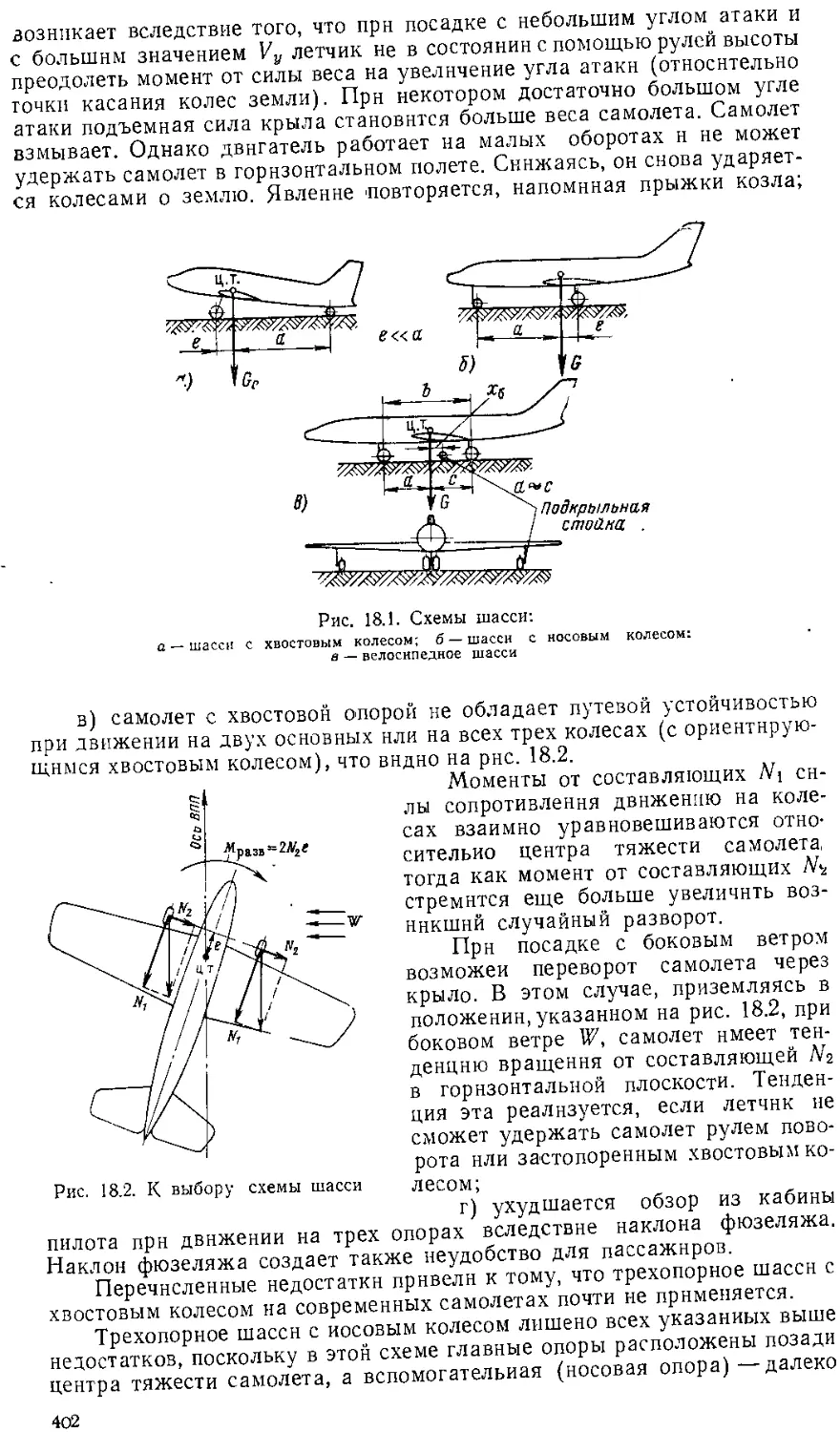
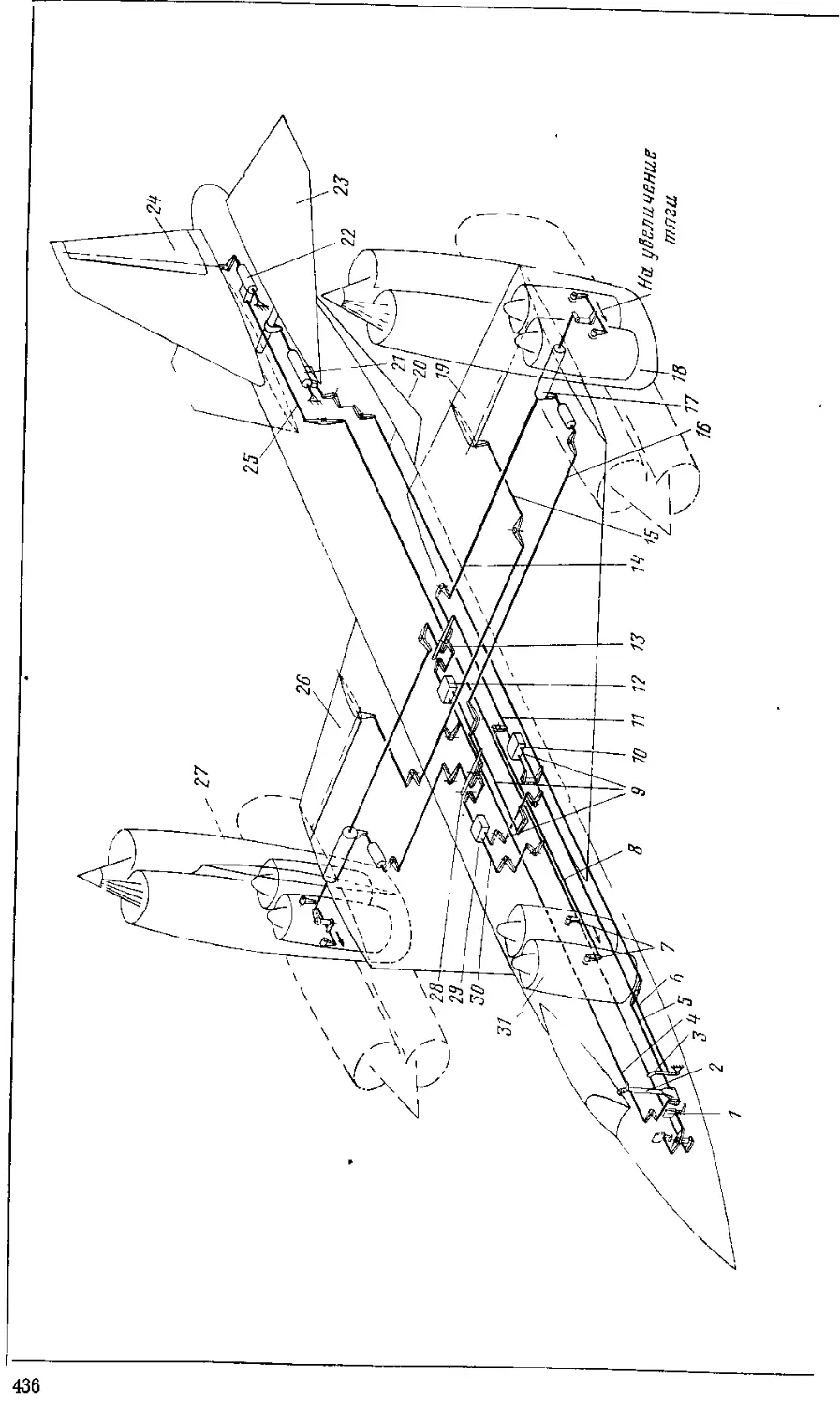
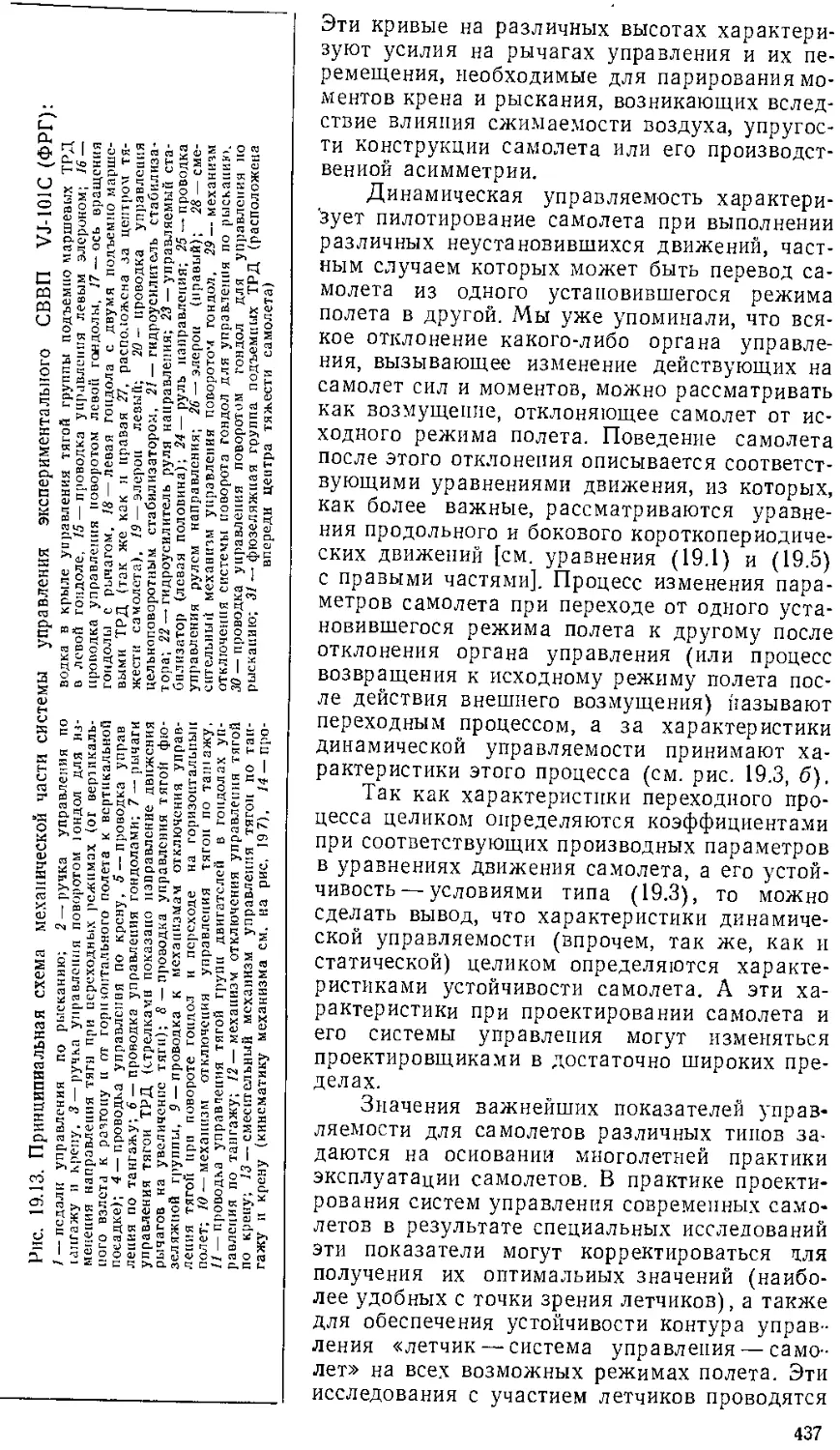
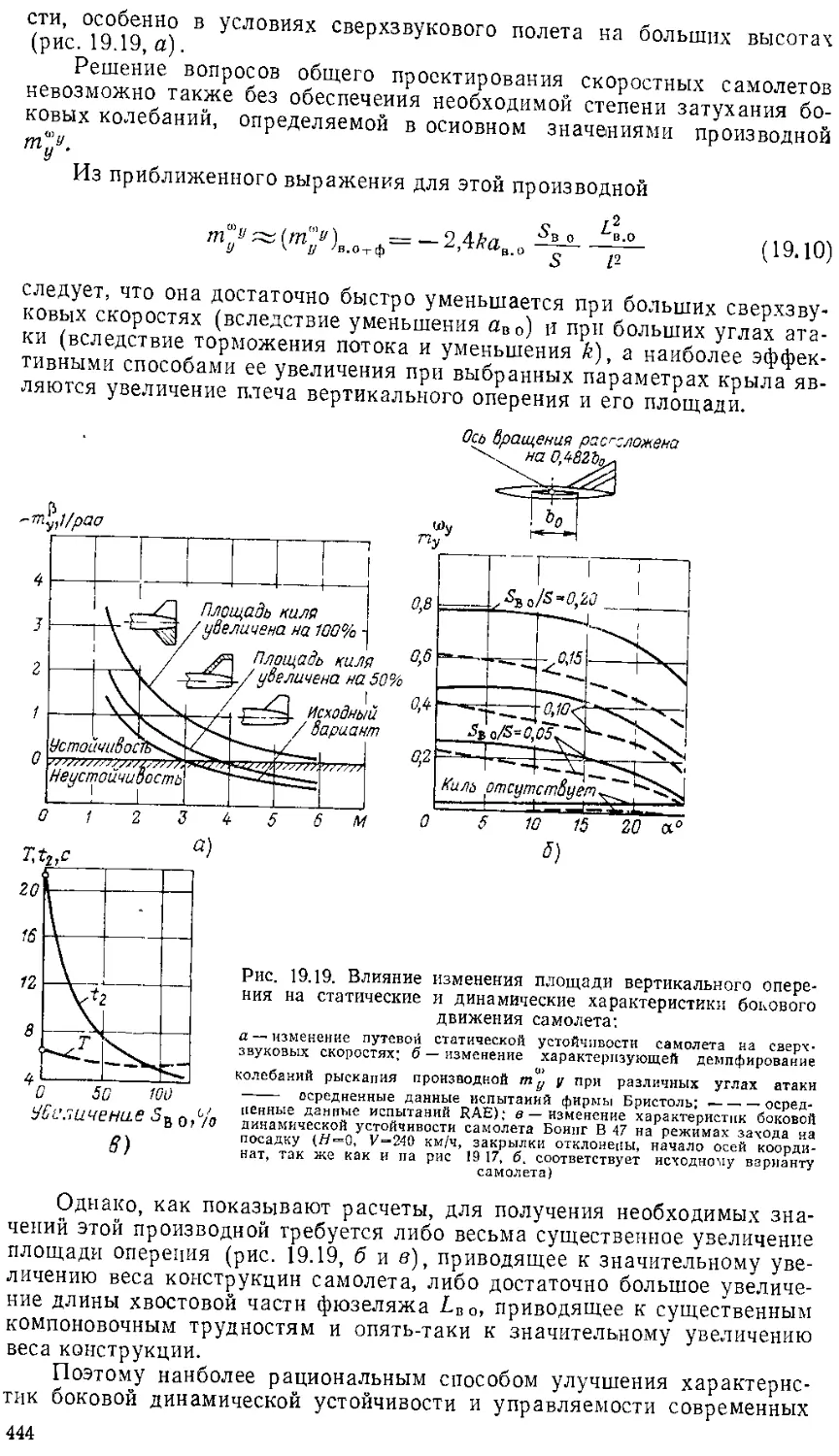
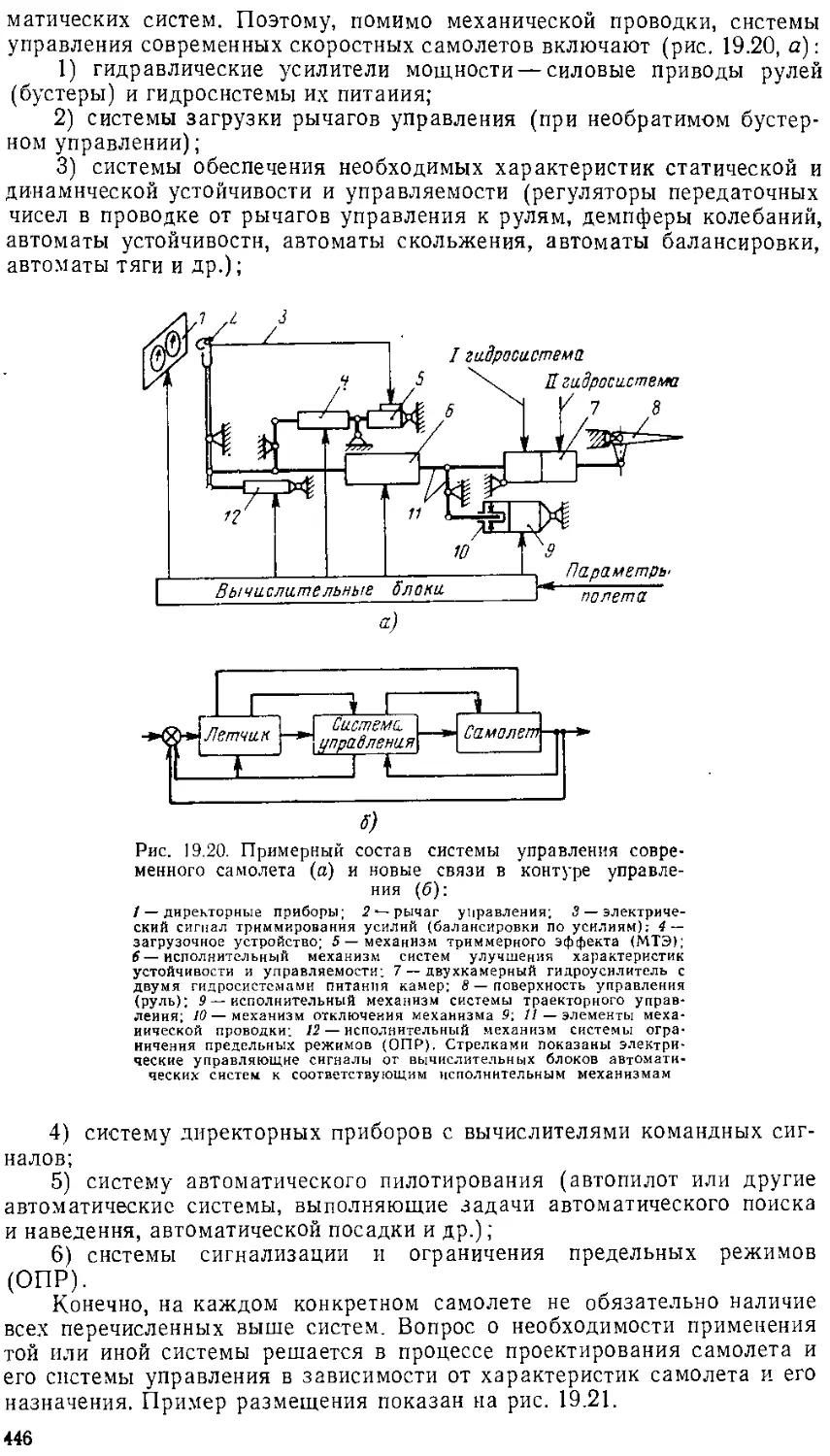
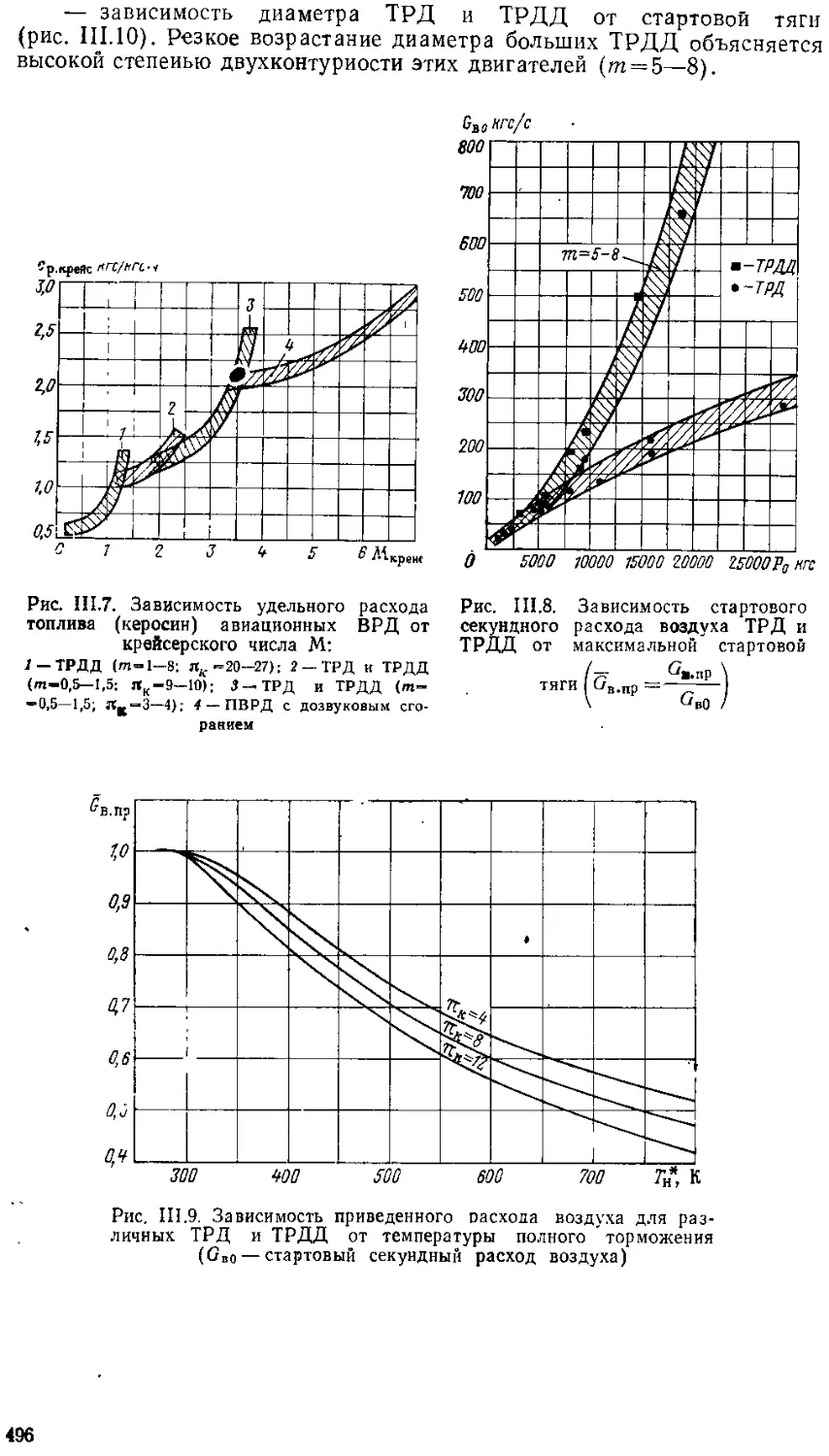
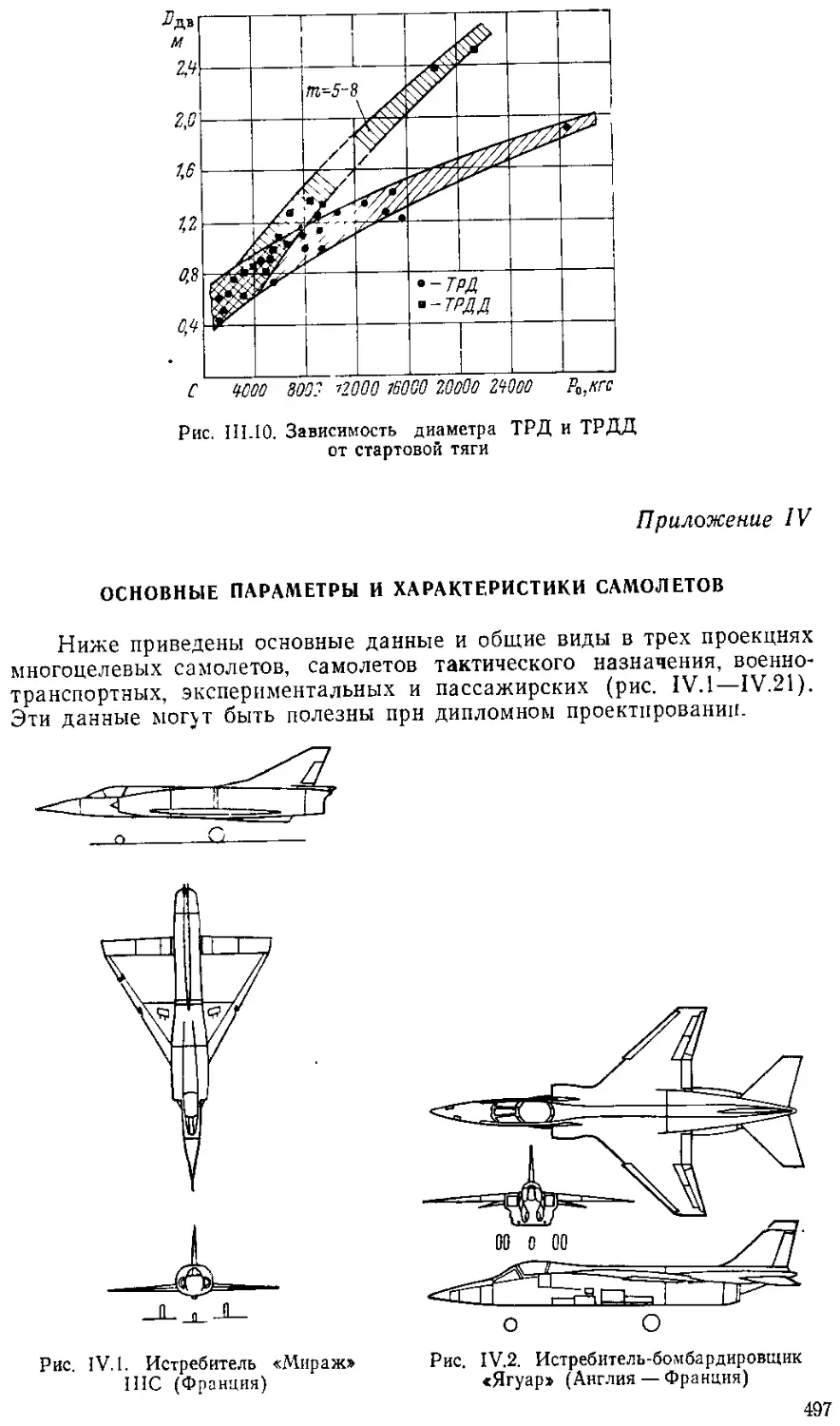
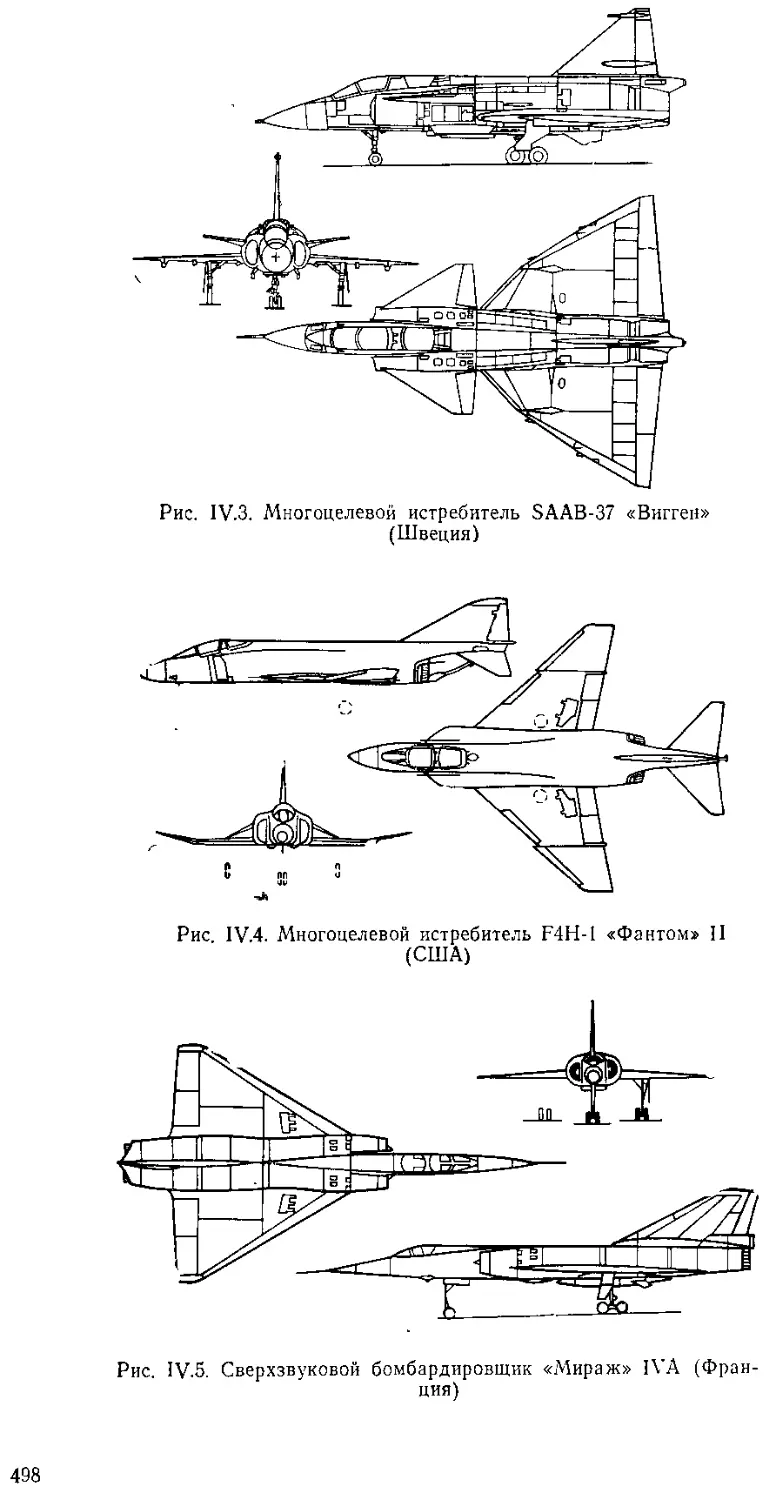
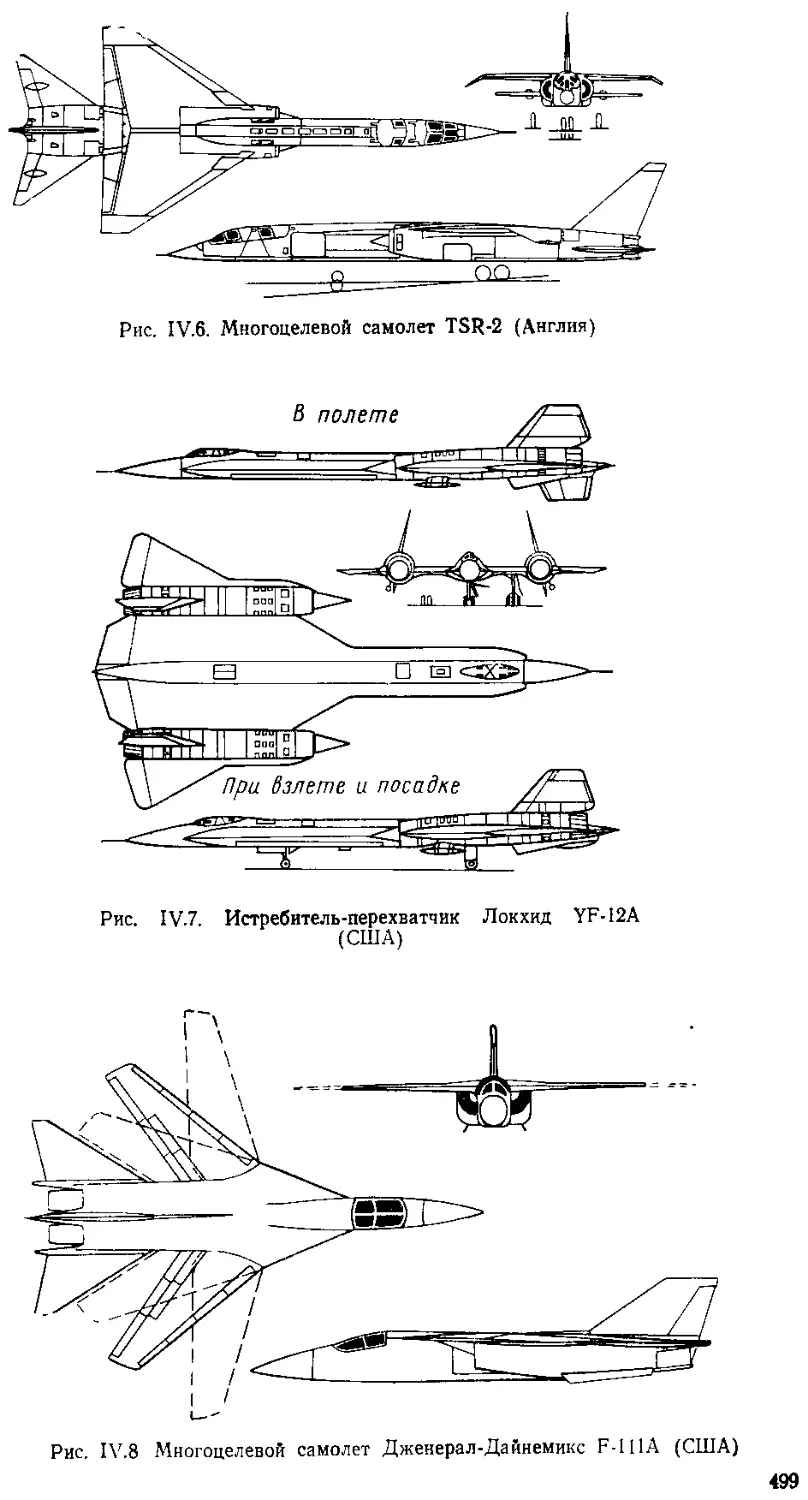
/
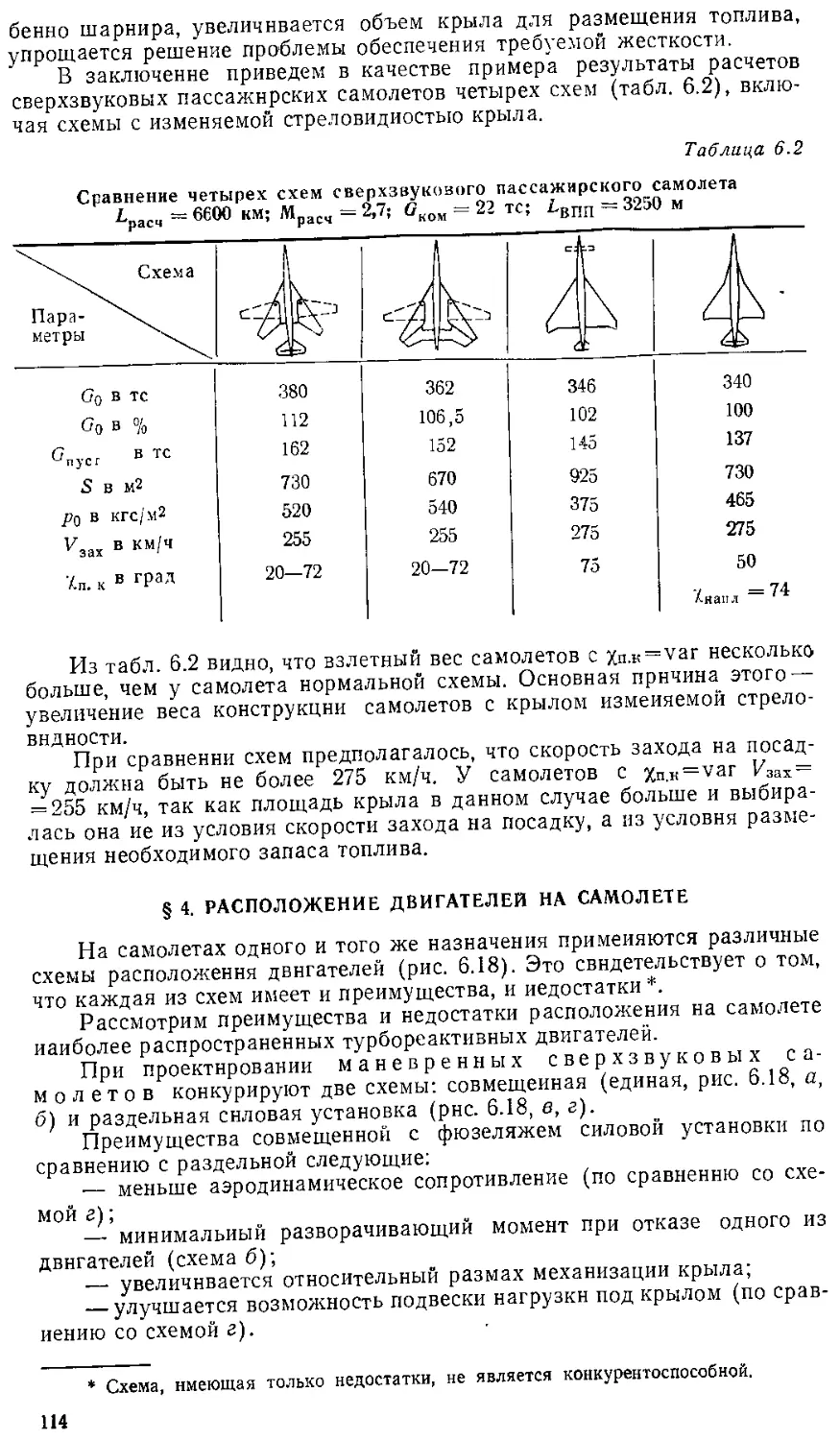
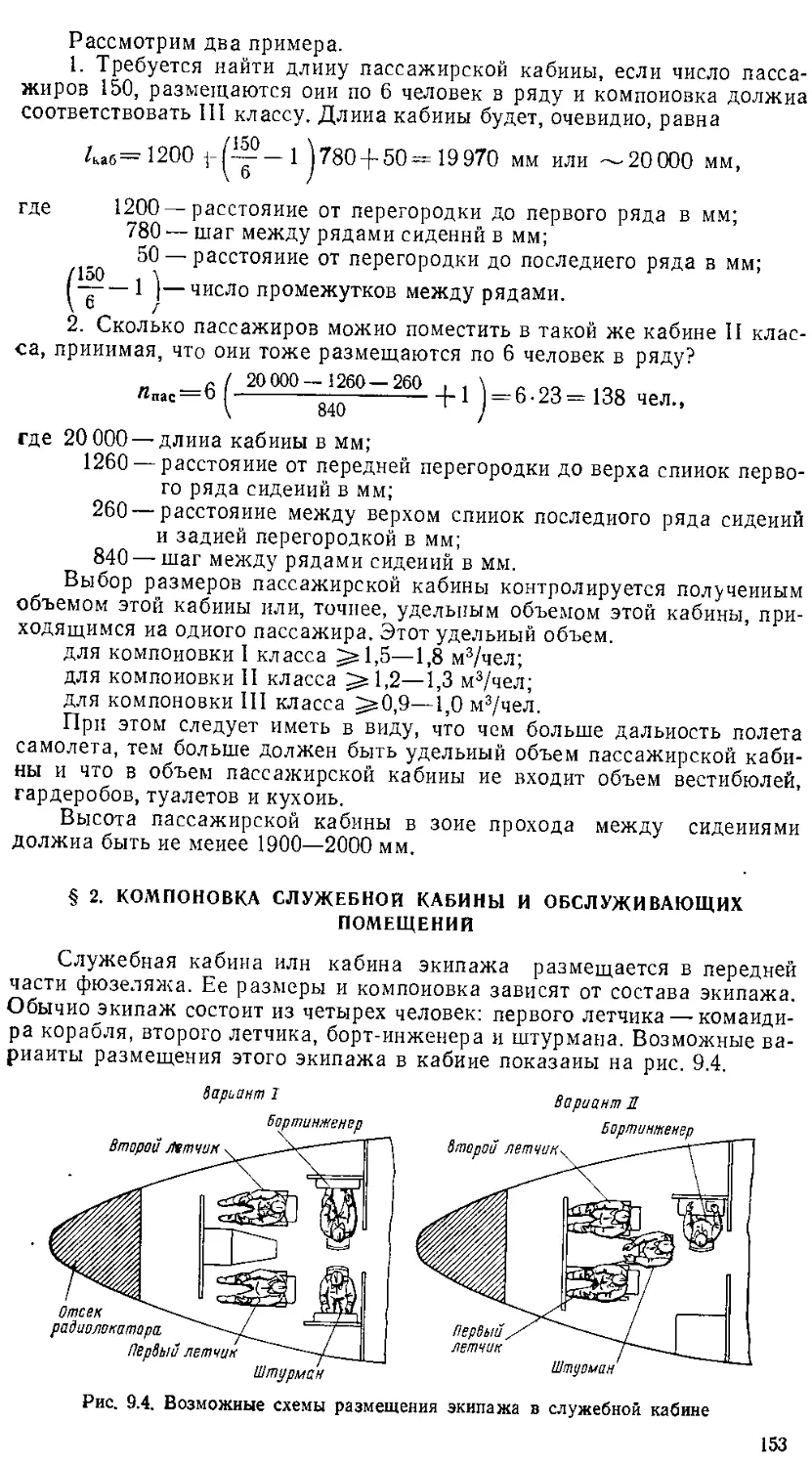
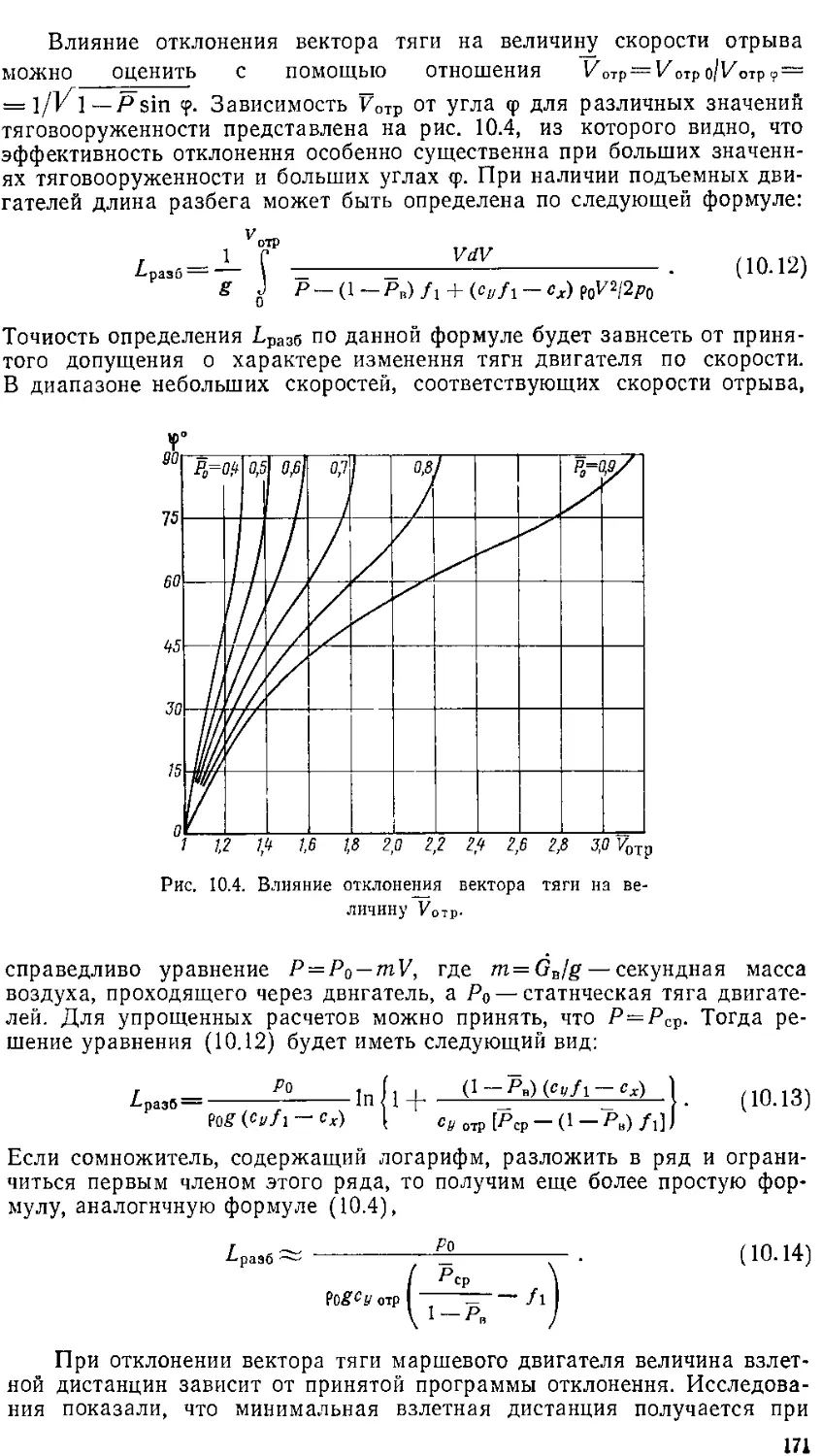
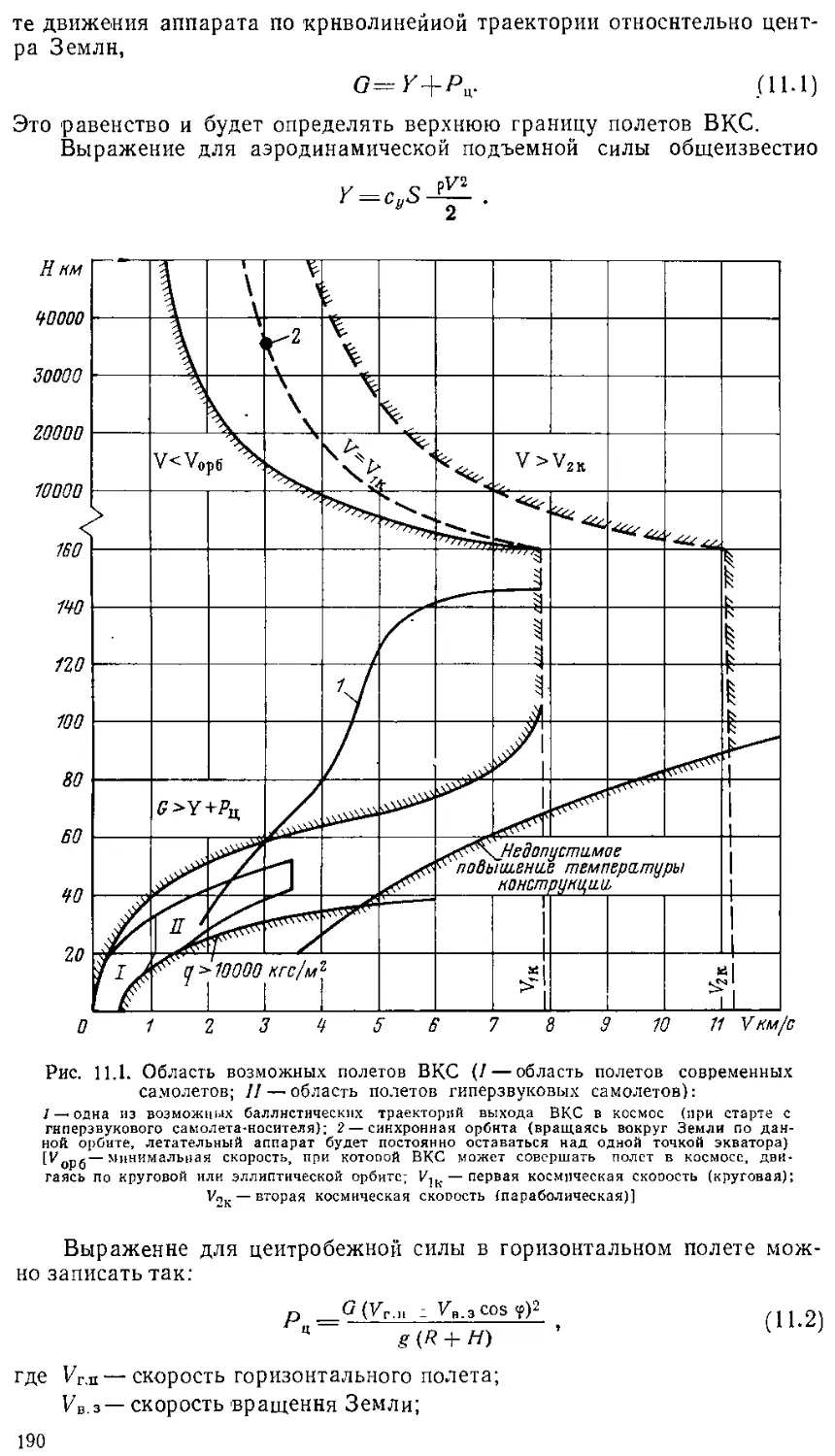
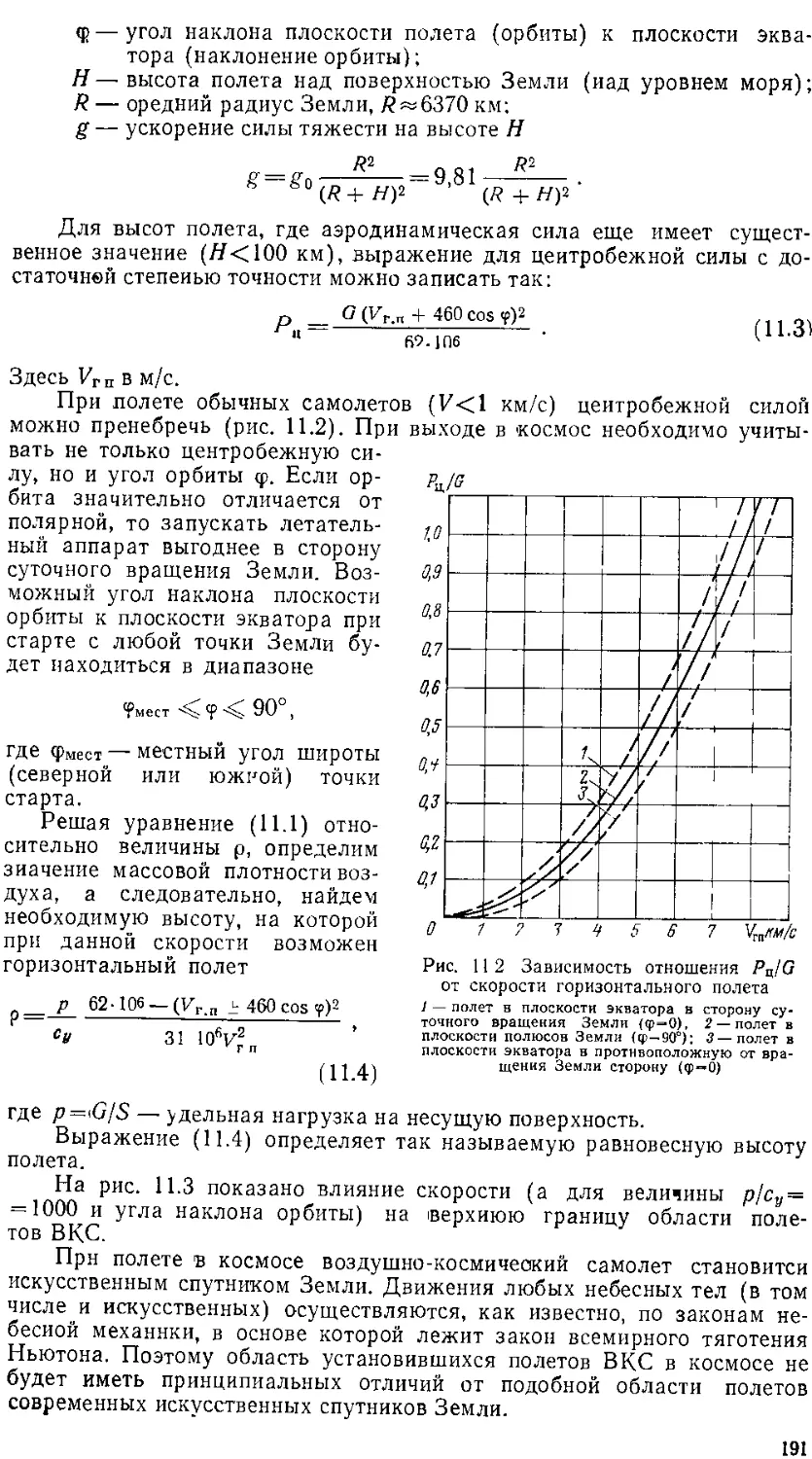
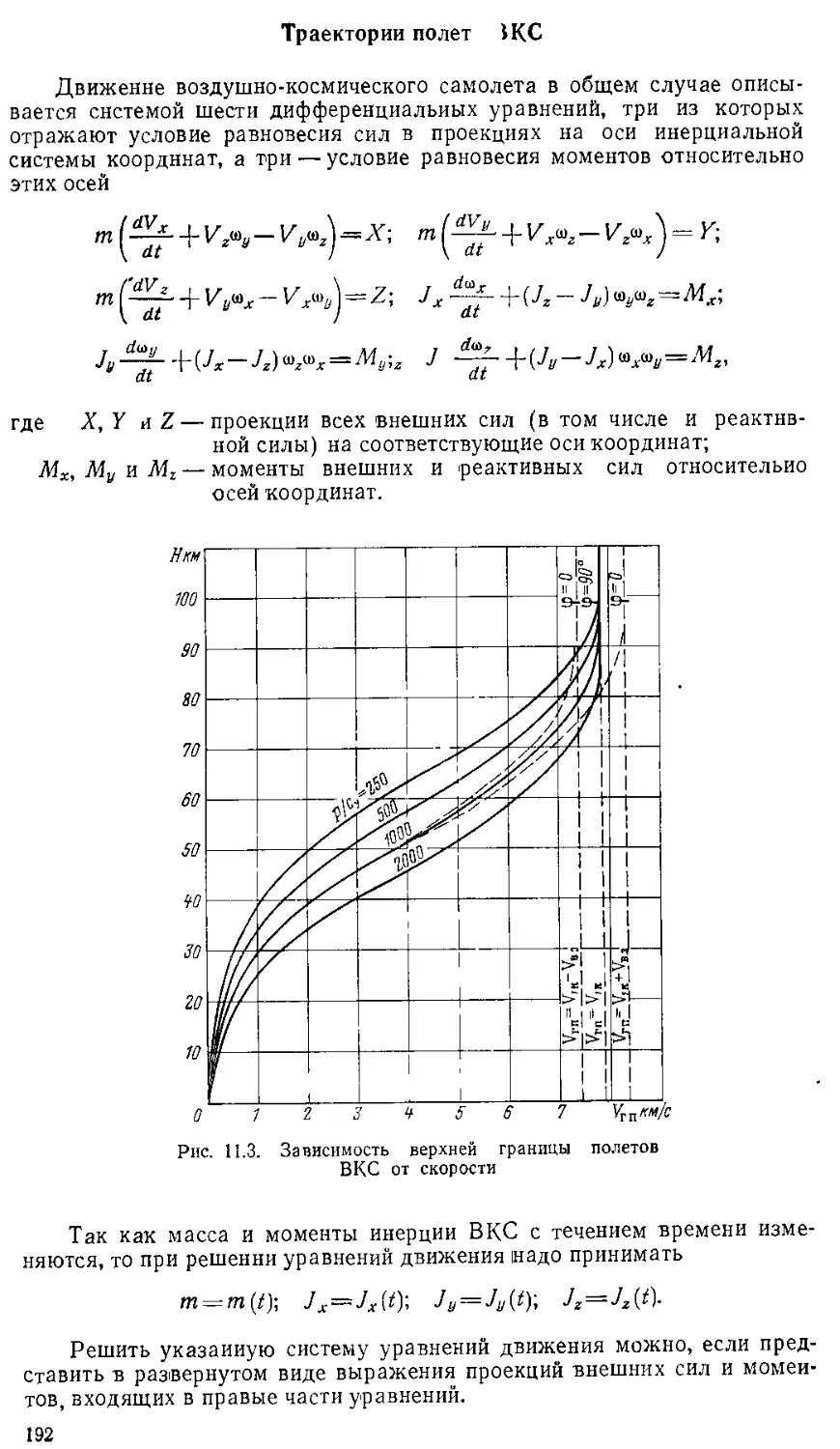
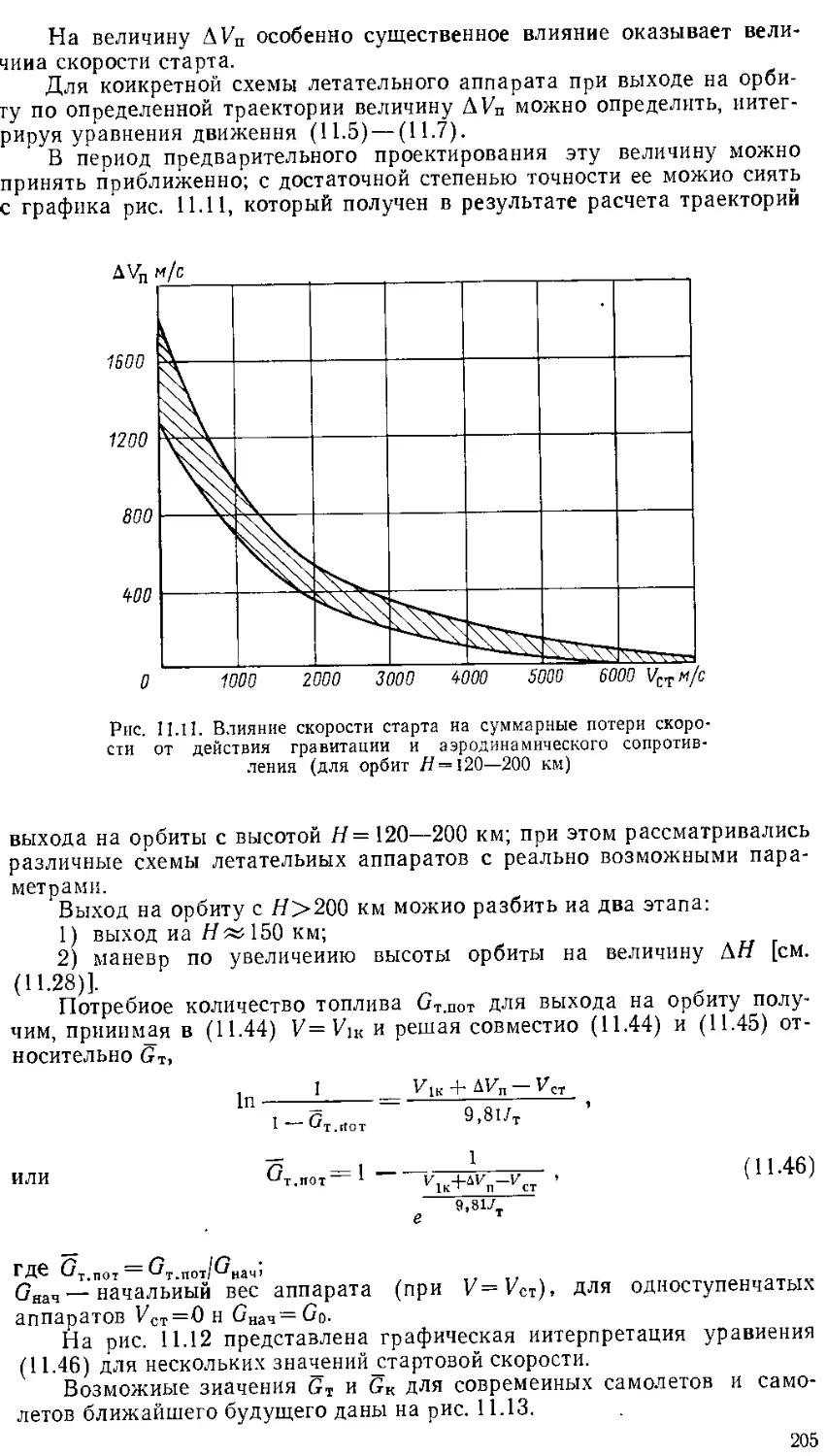

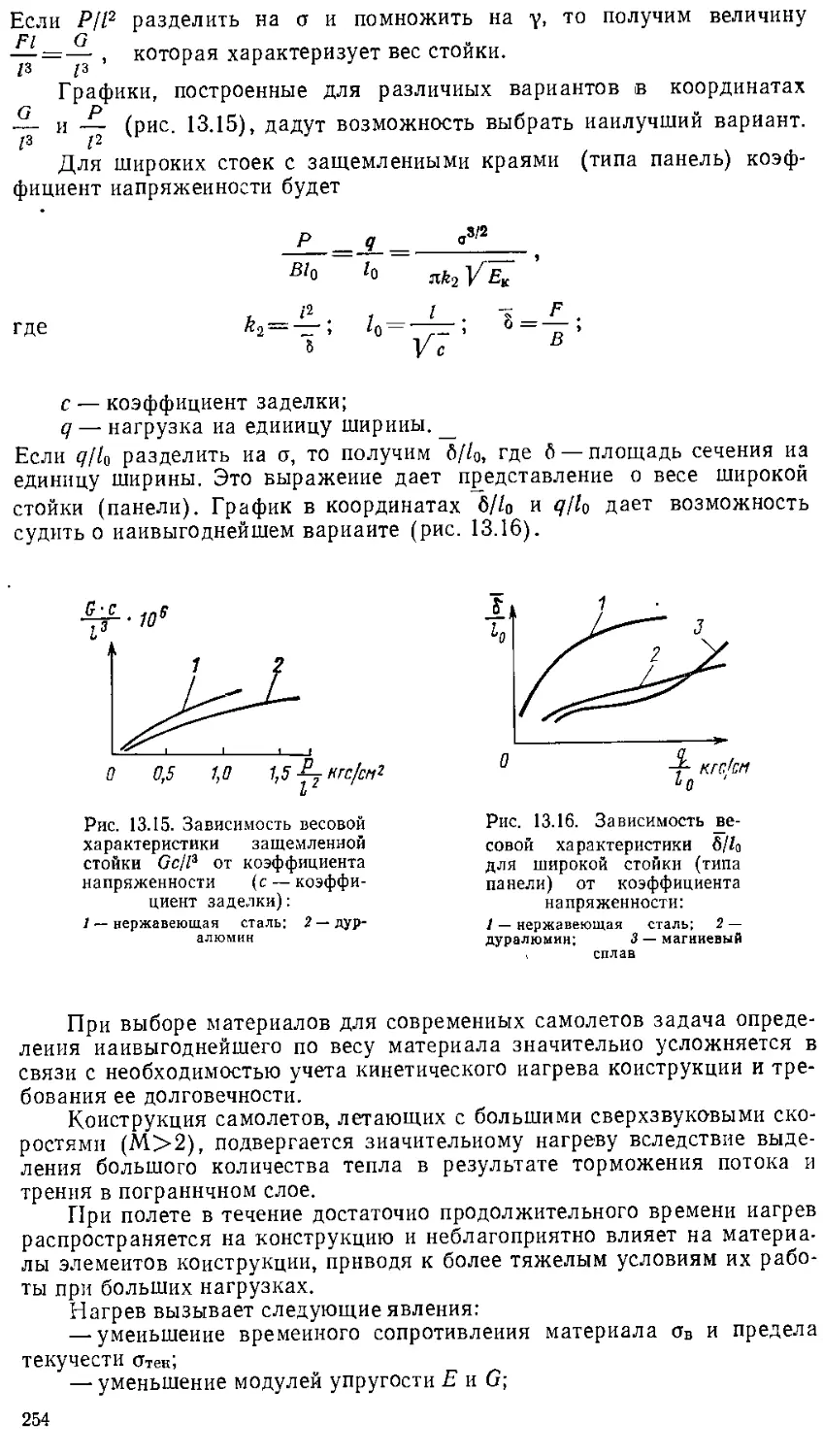
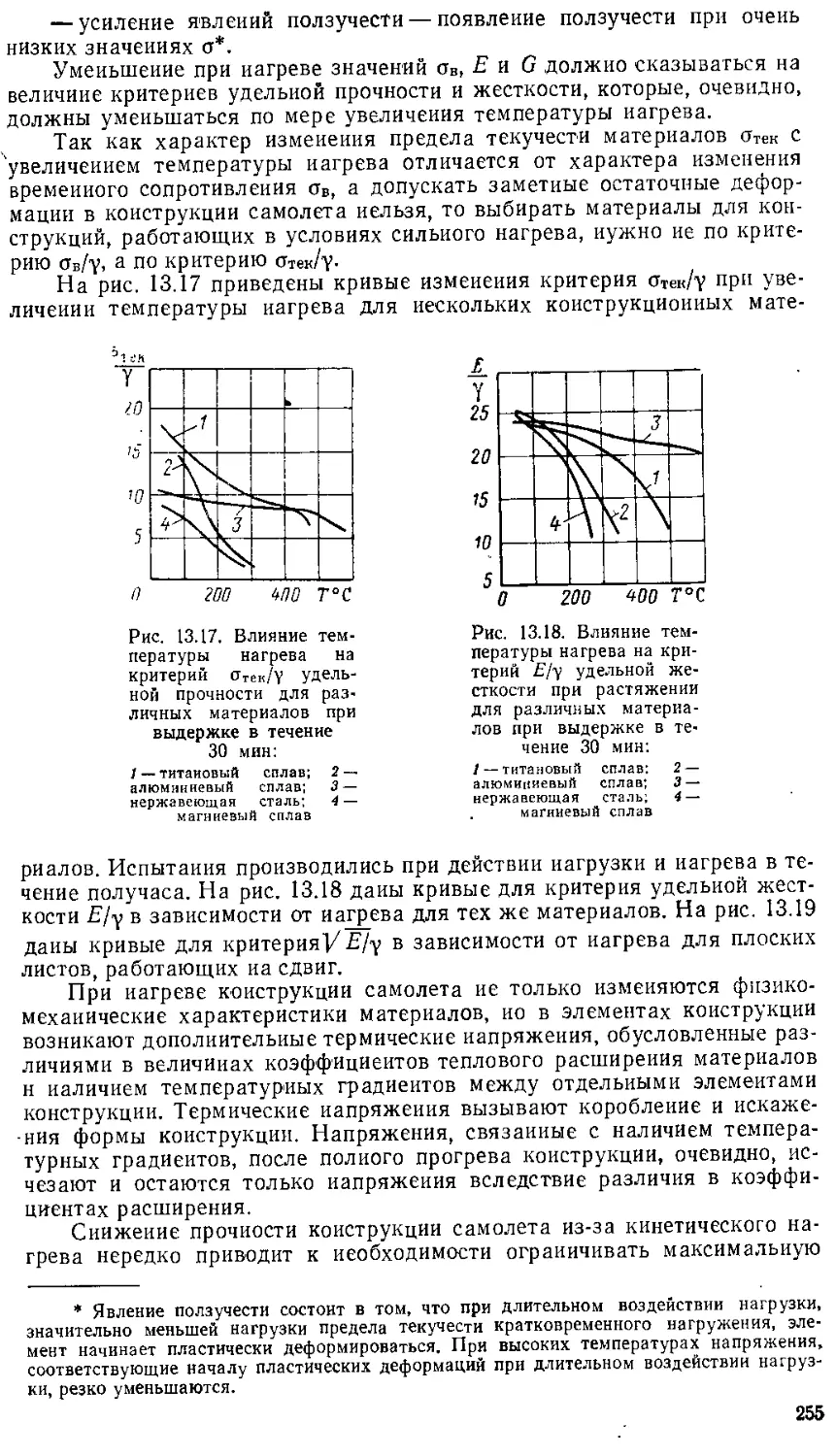
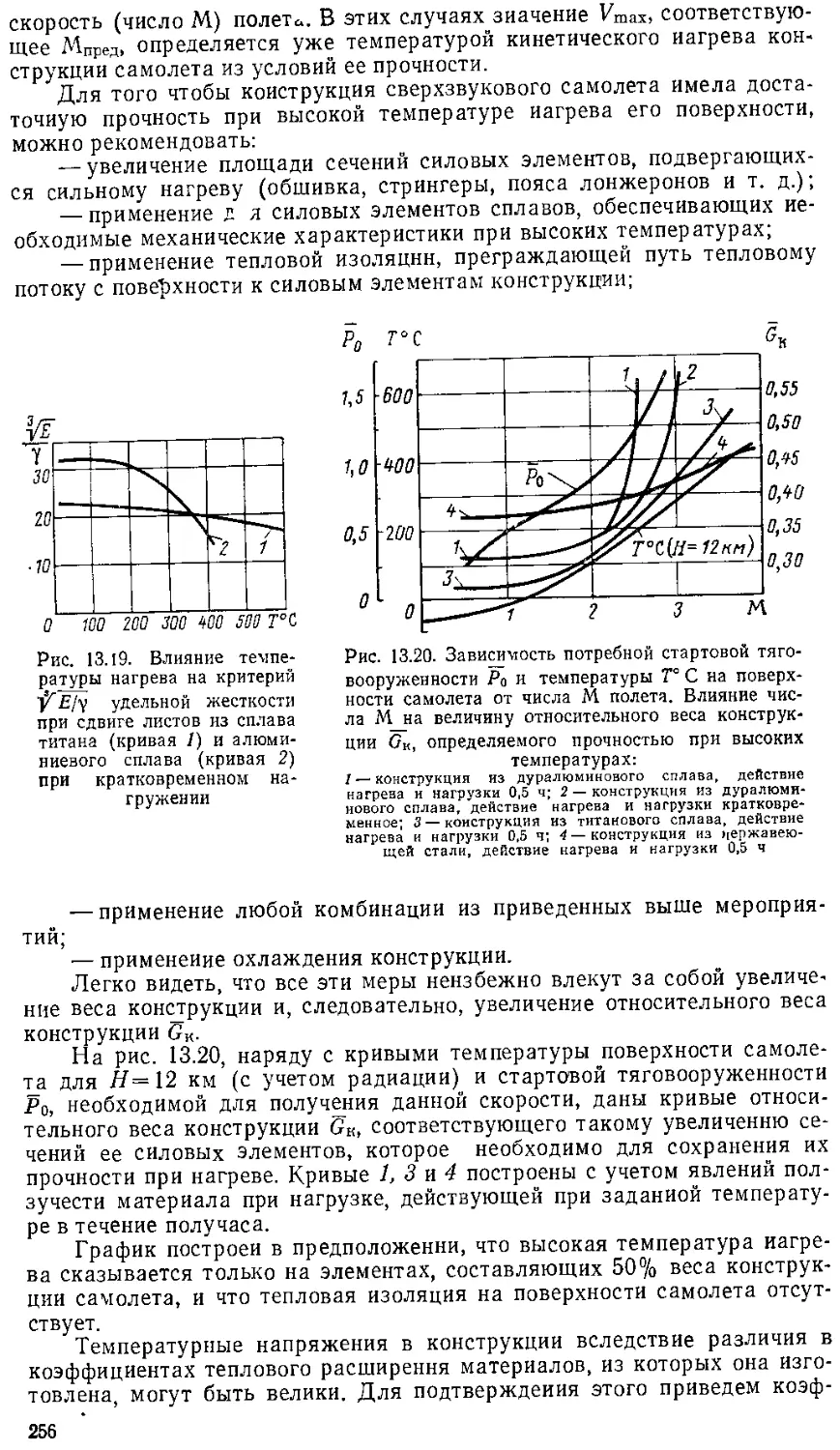
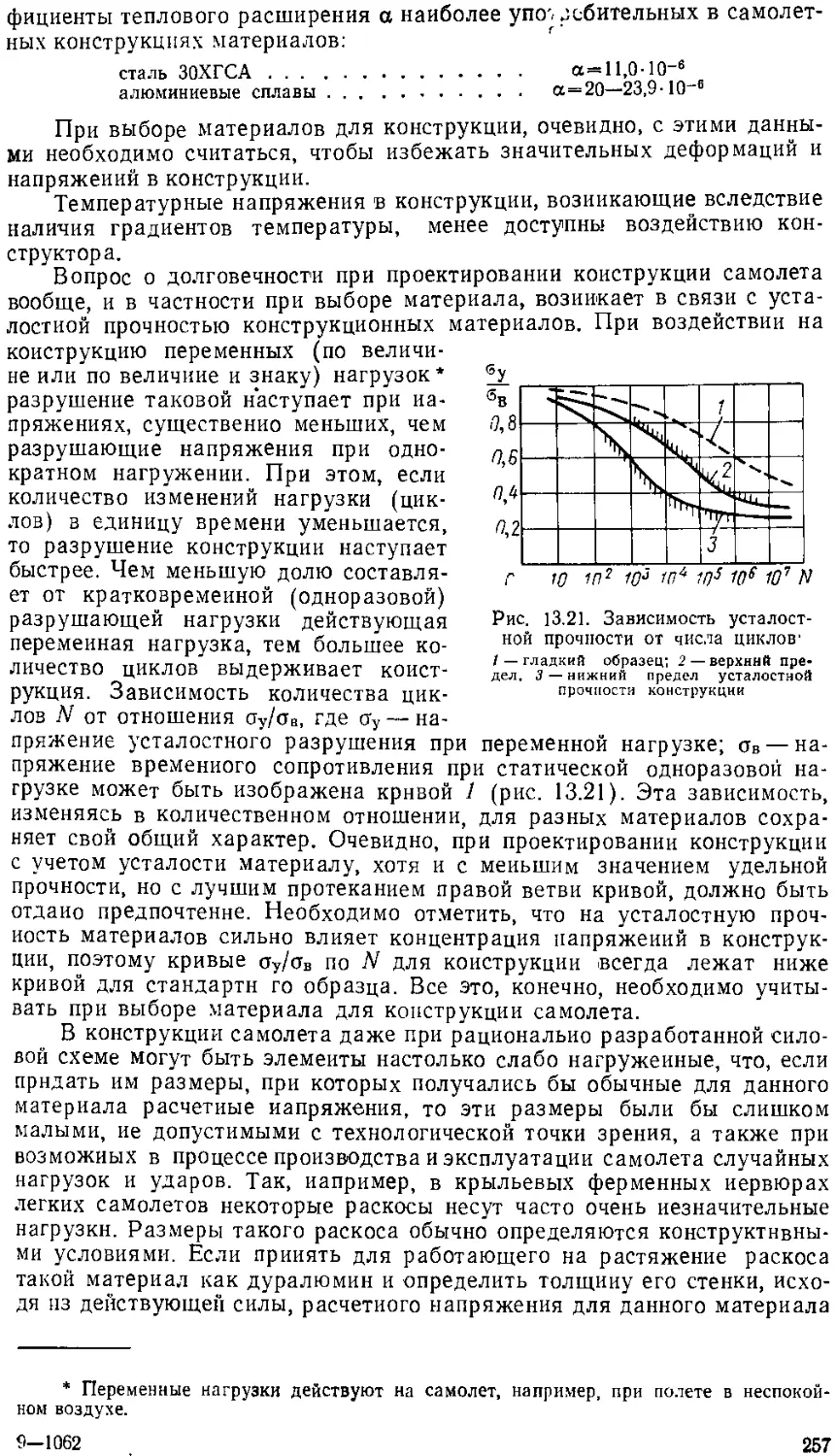
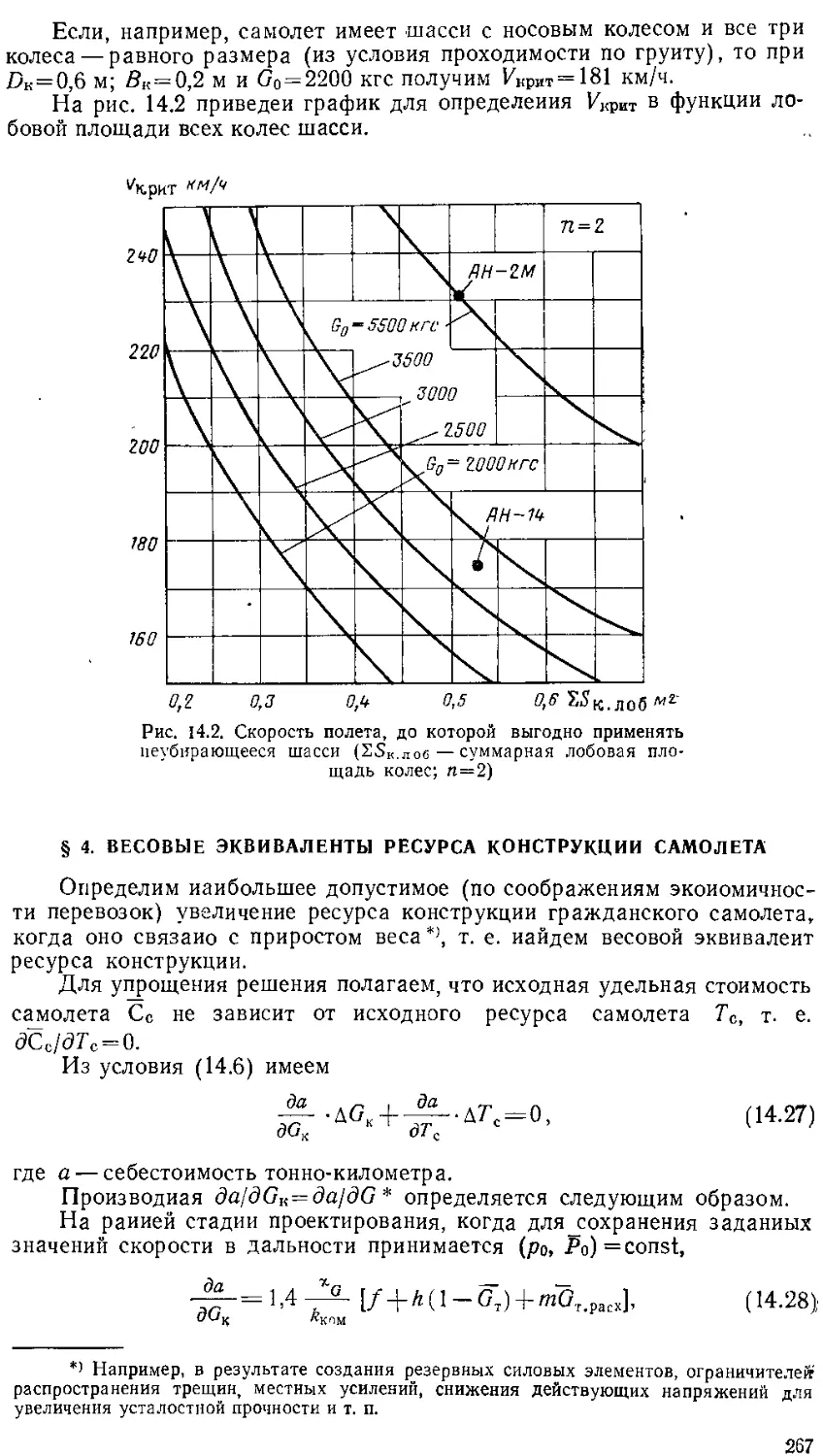
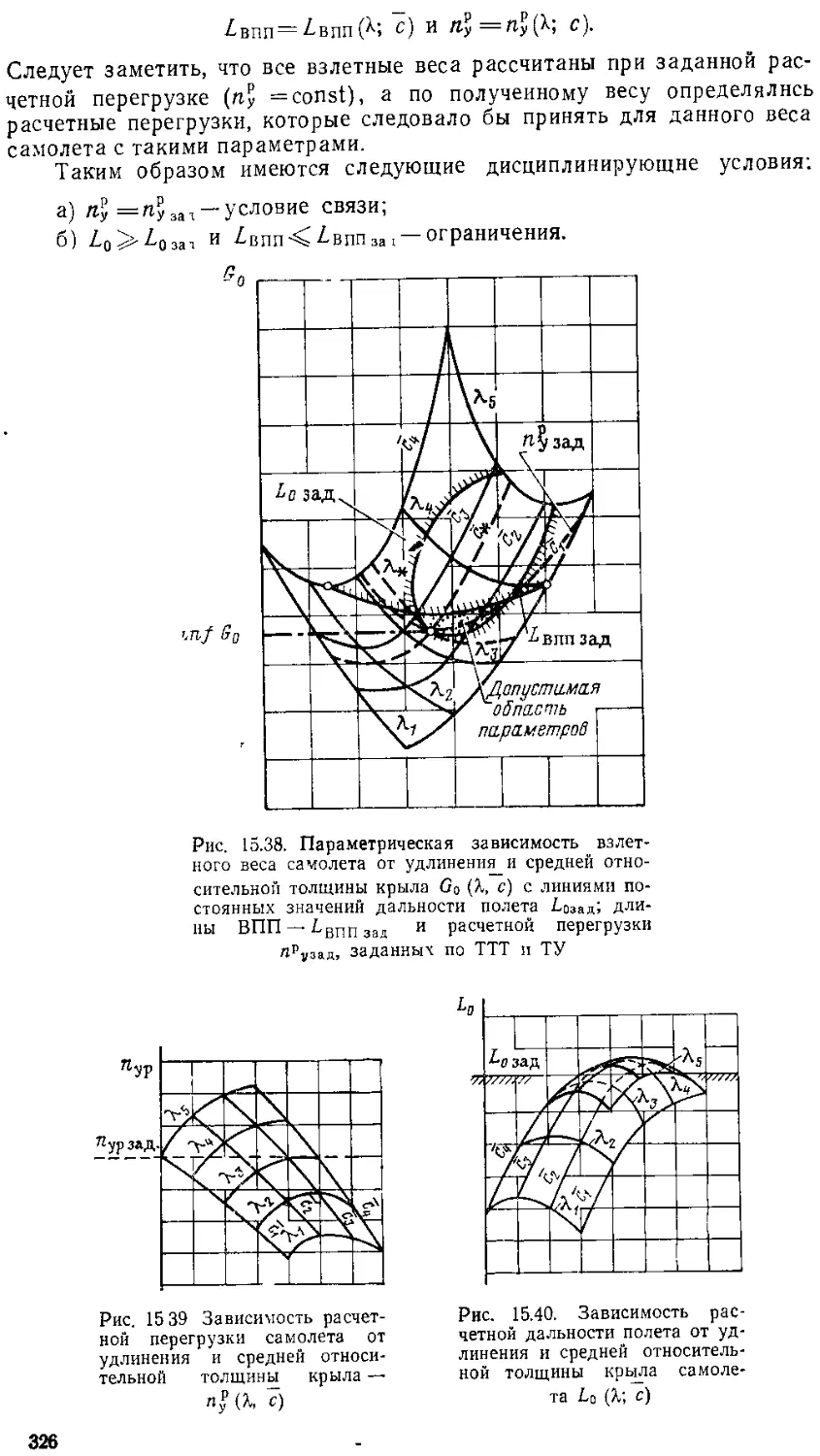
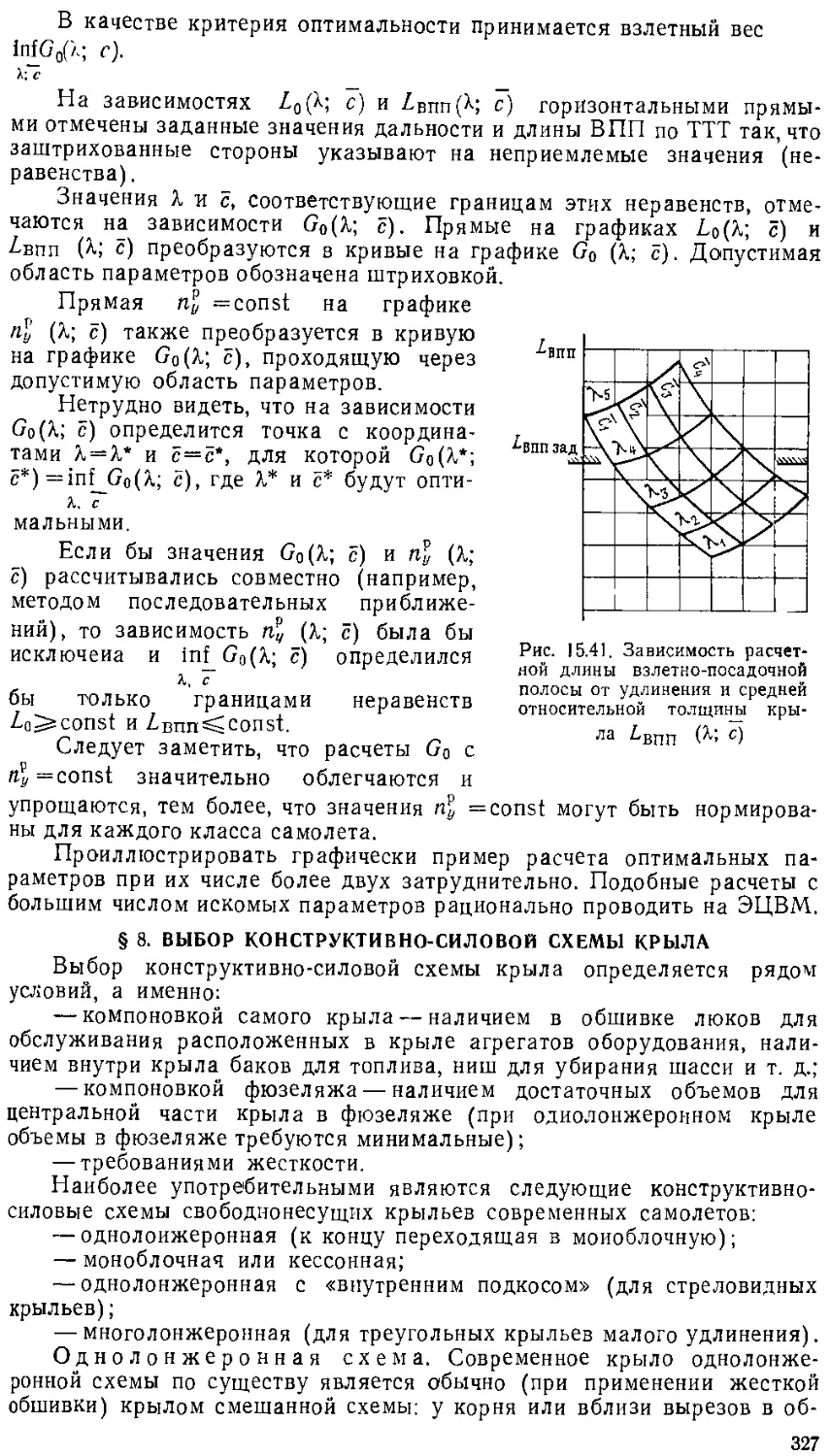
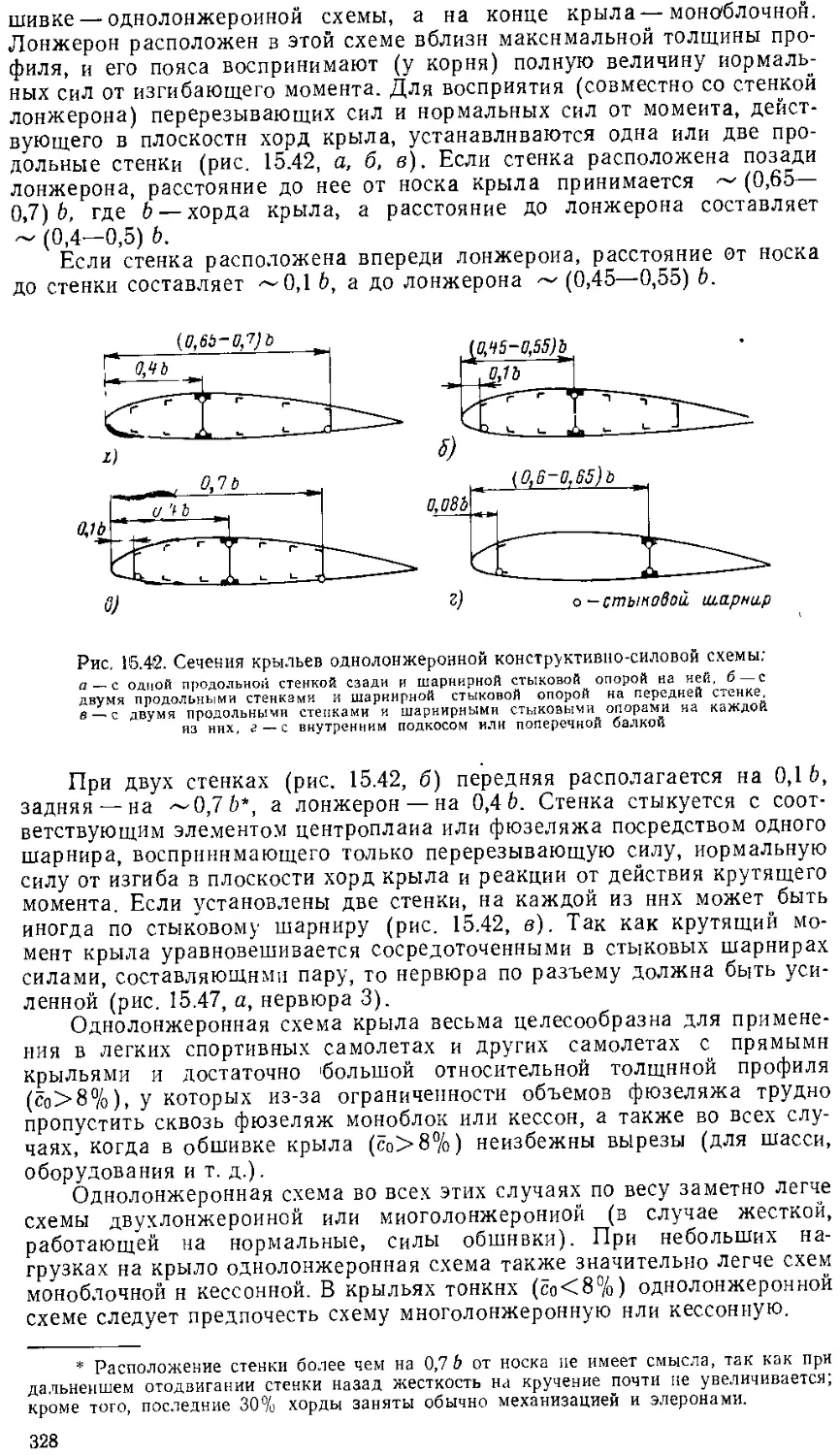
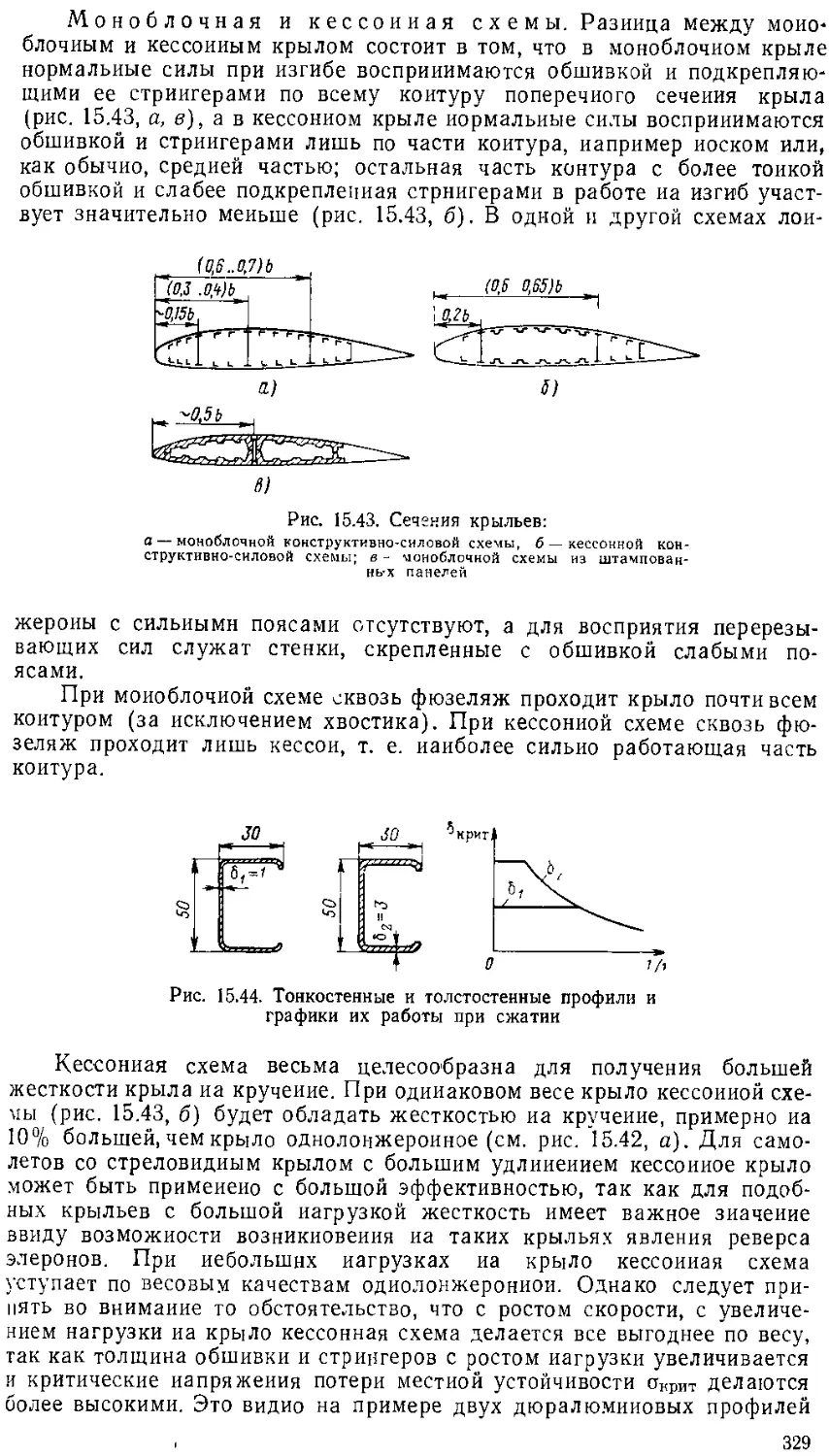
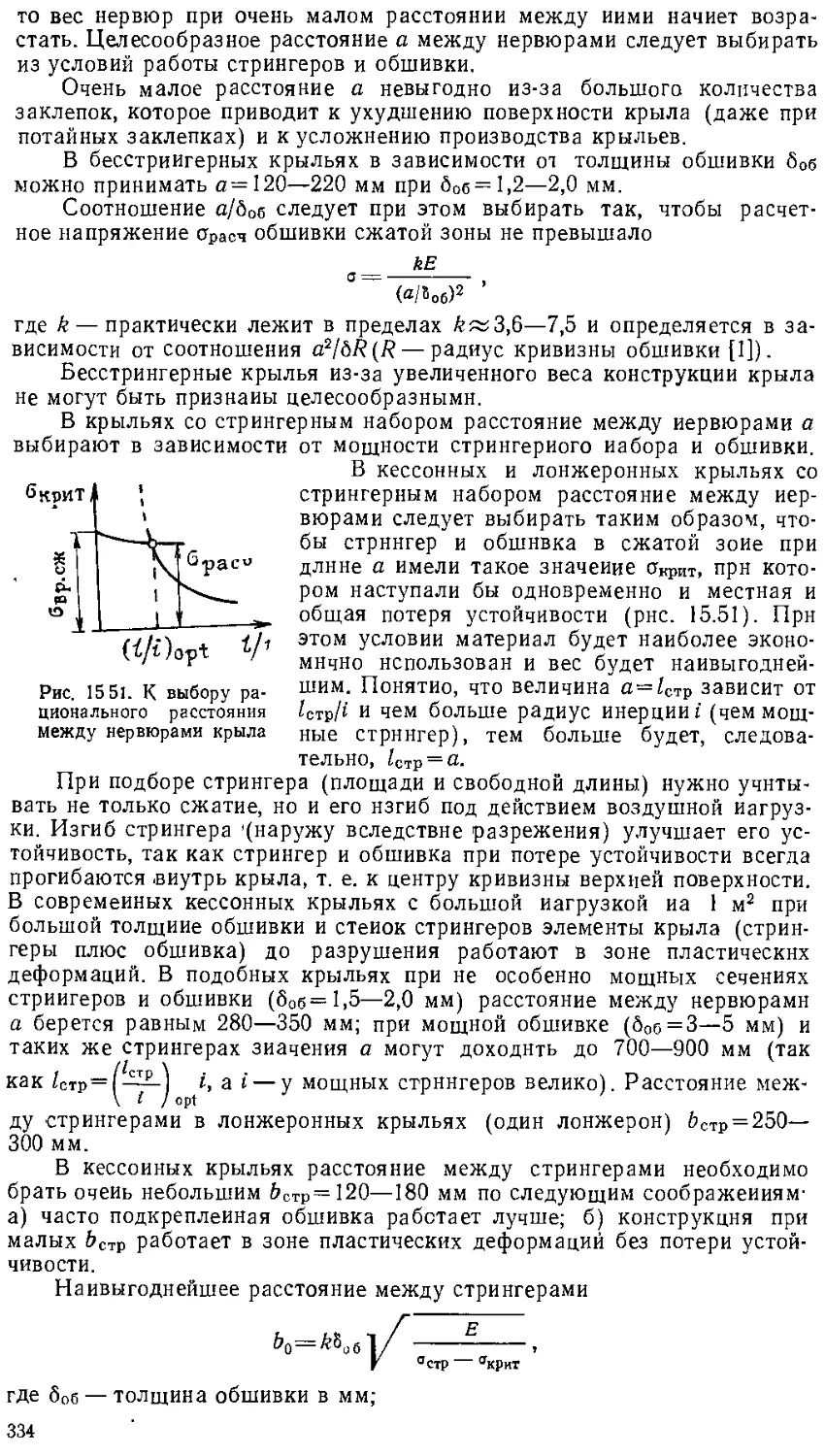
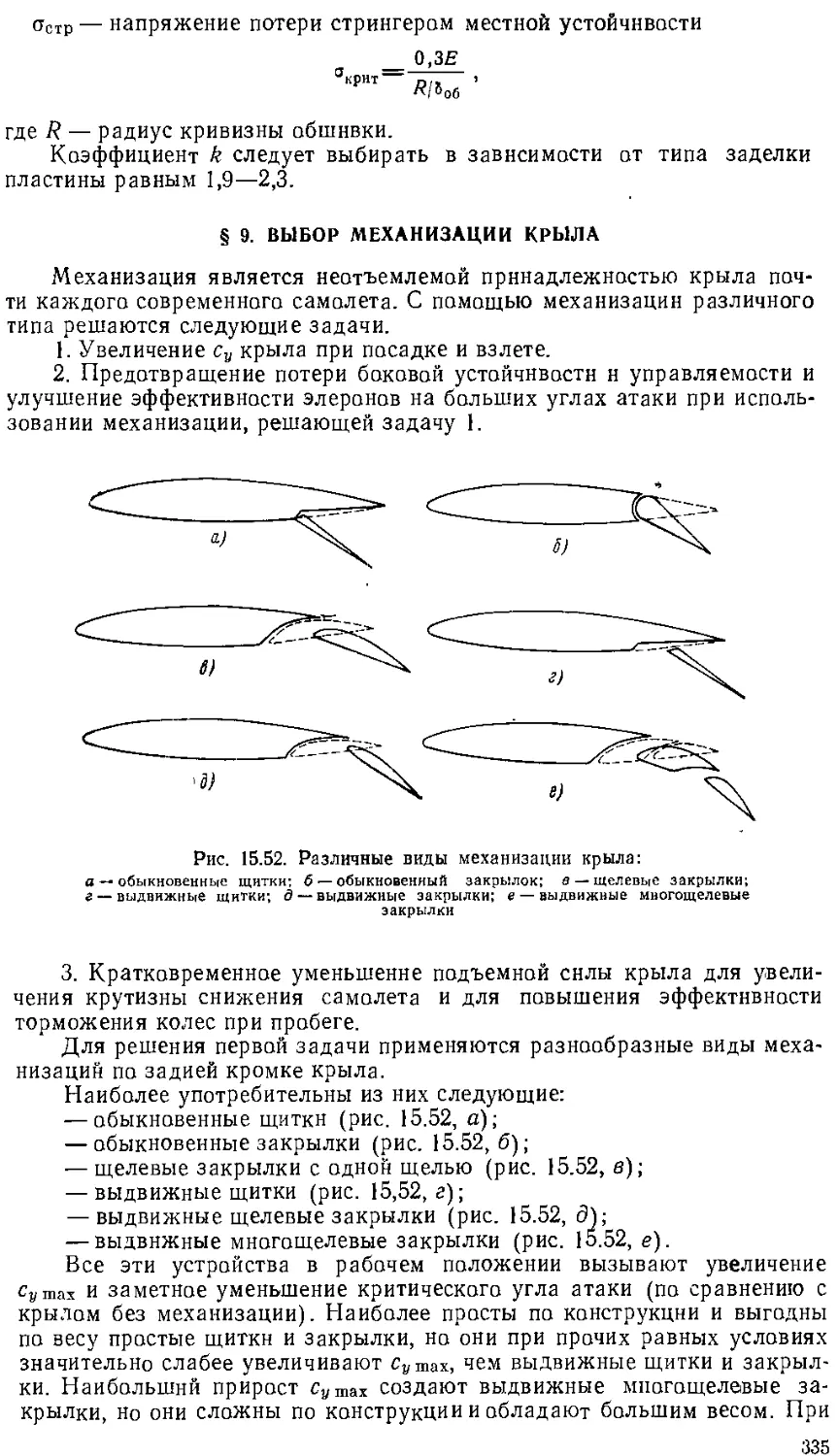
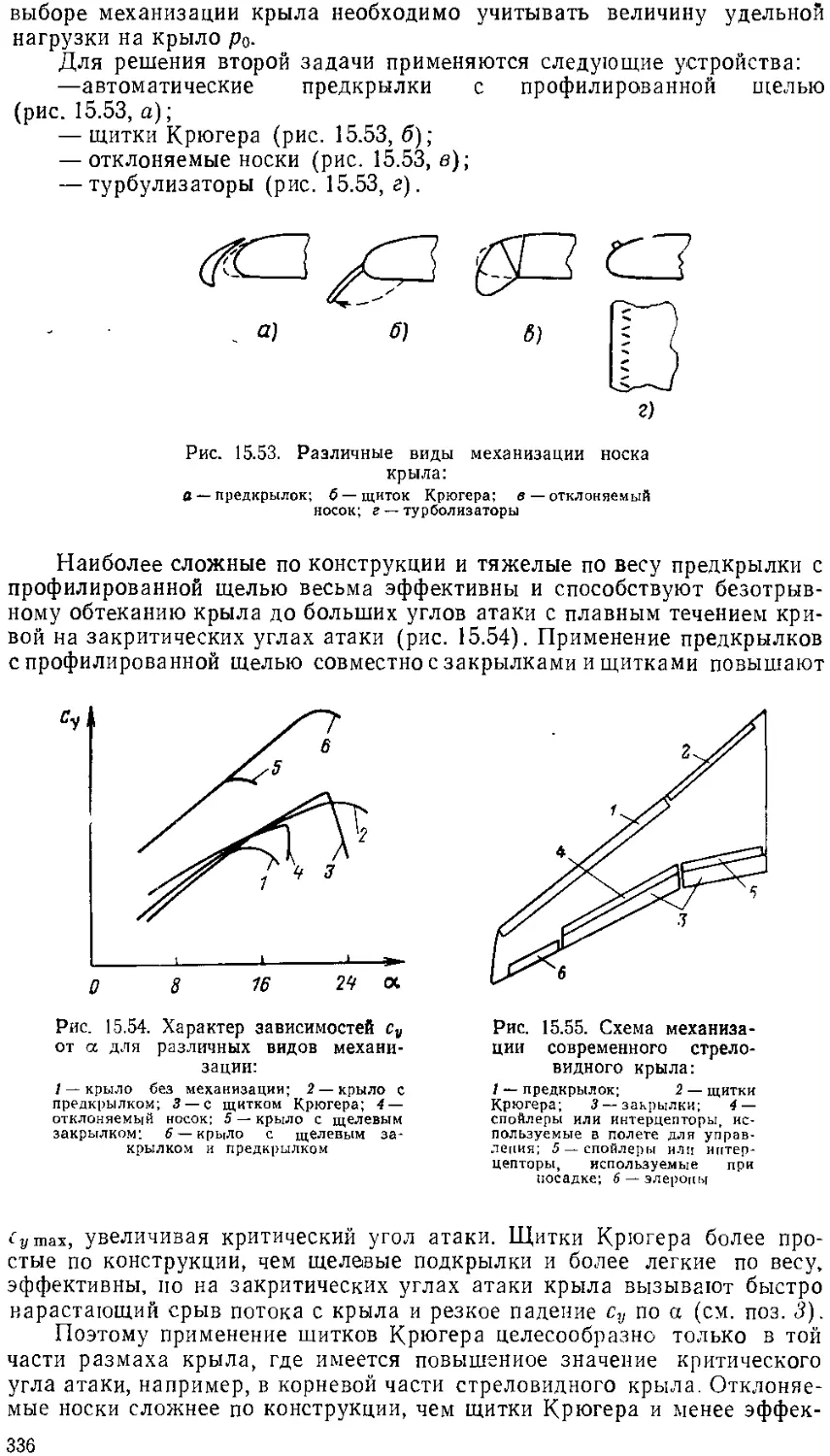
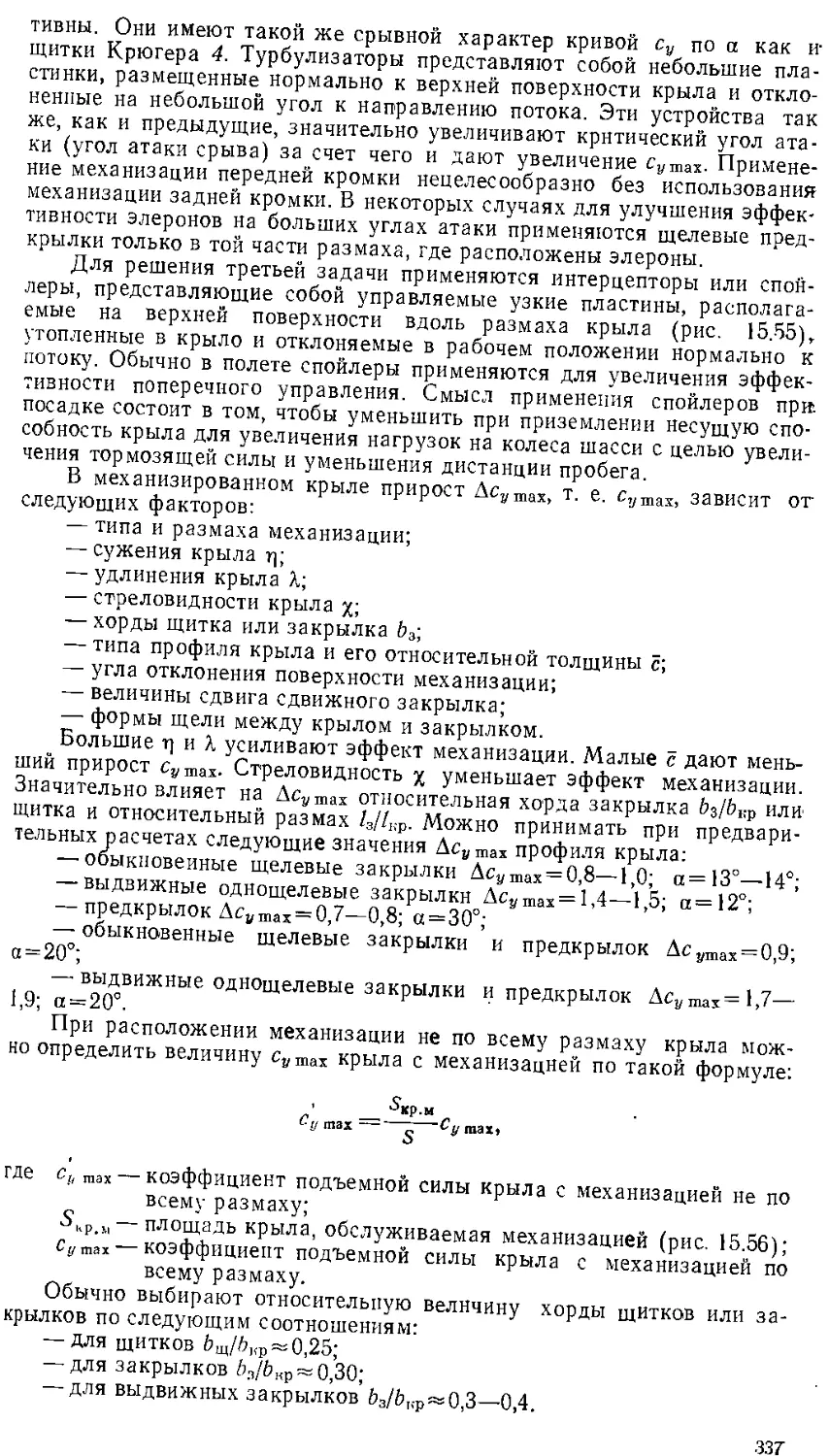
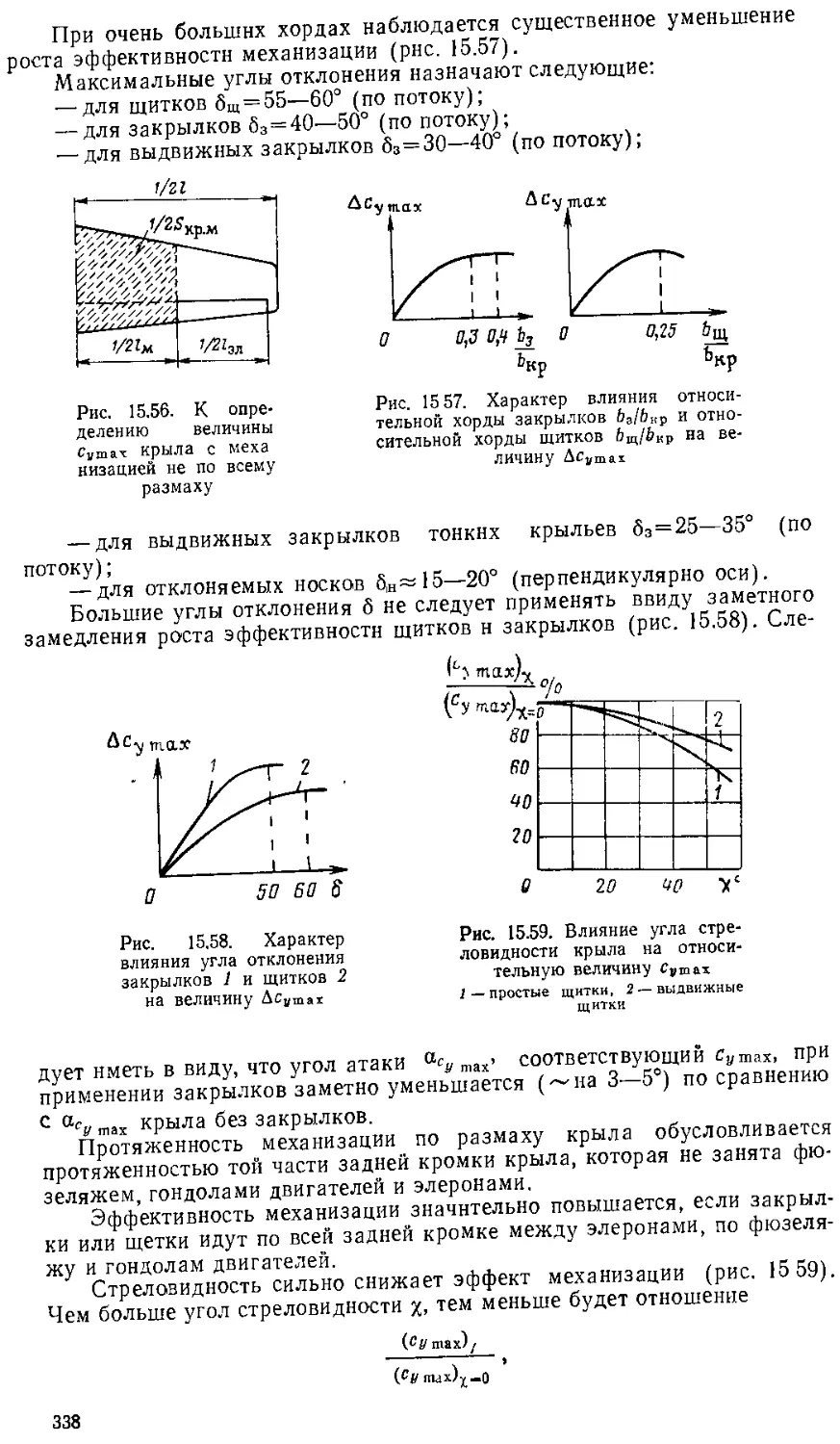
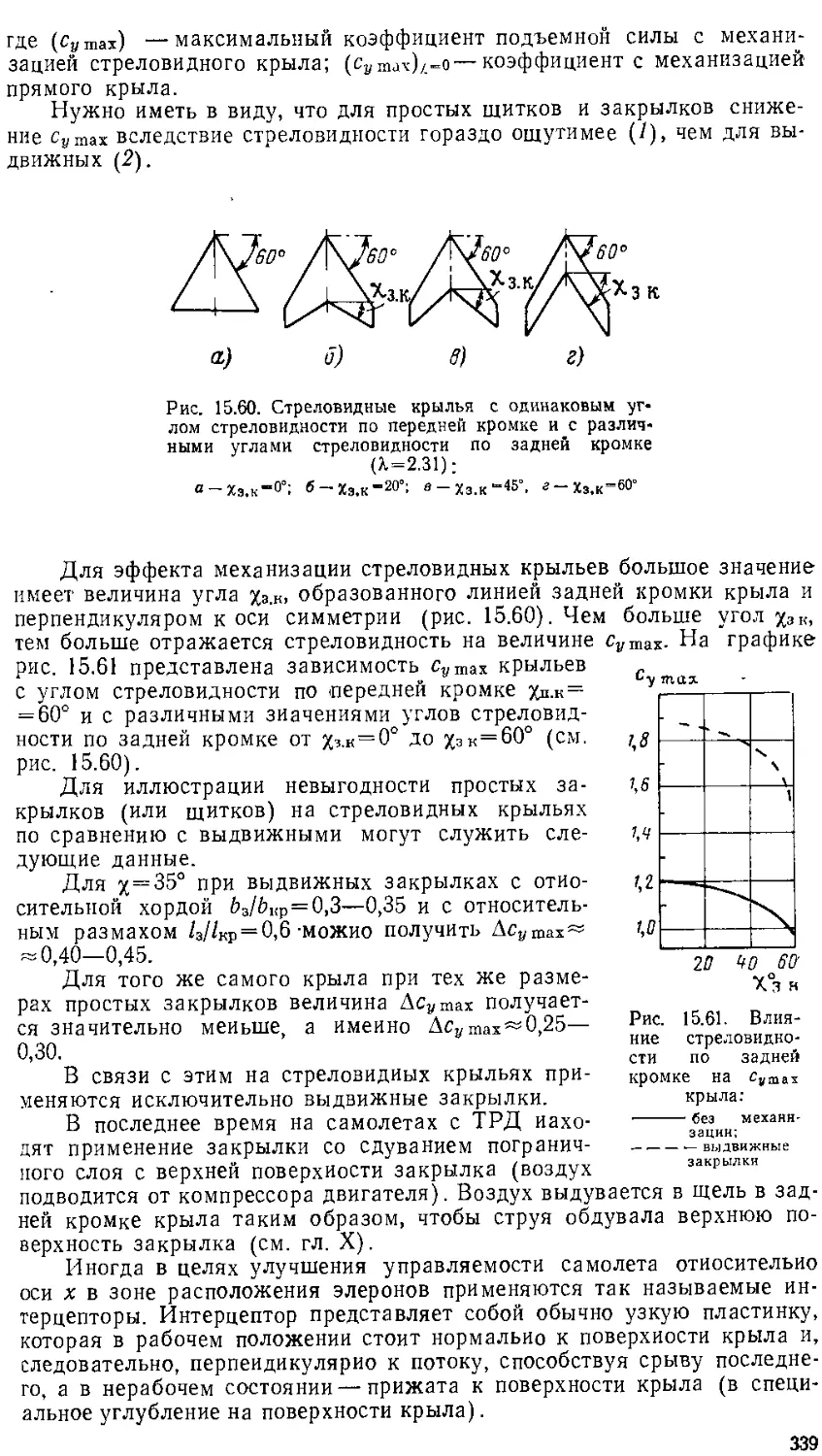
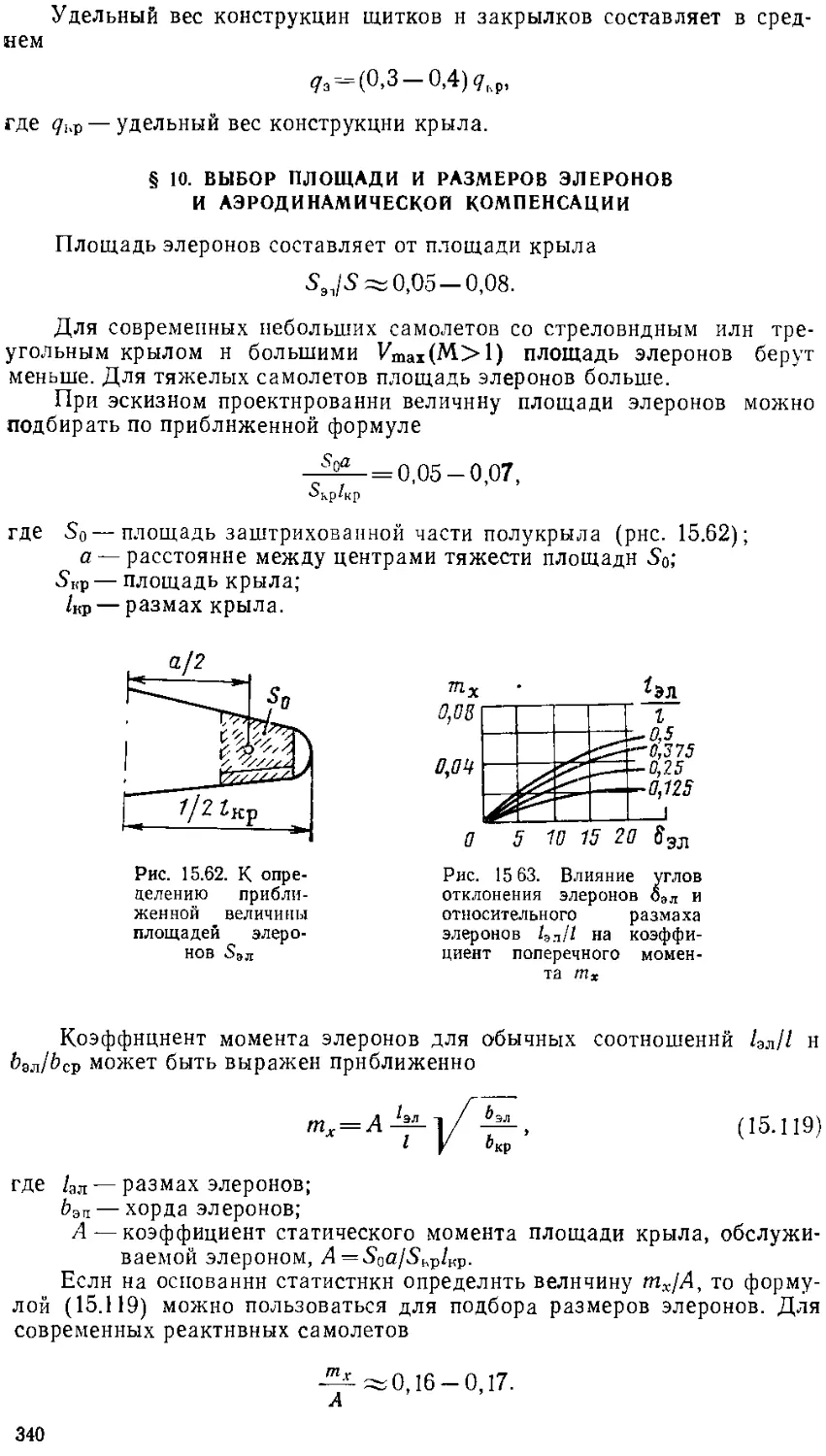
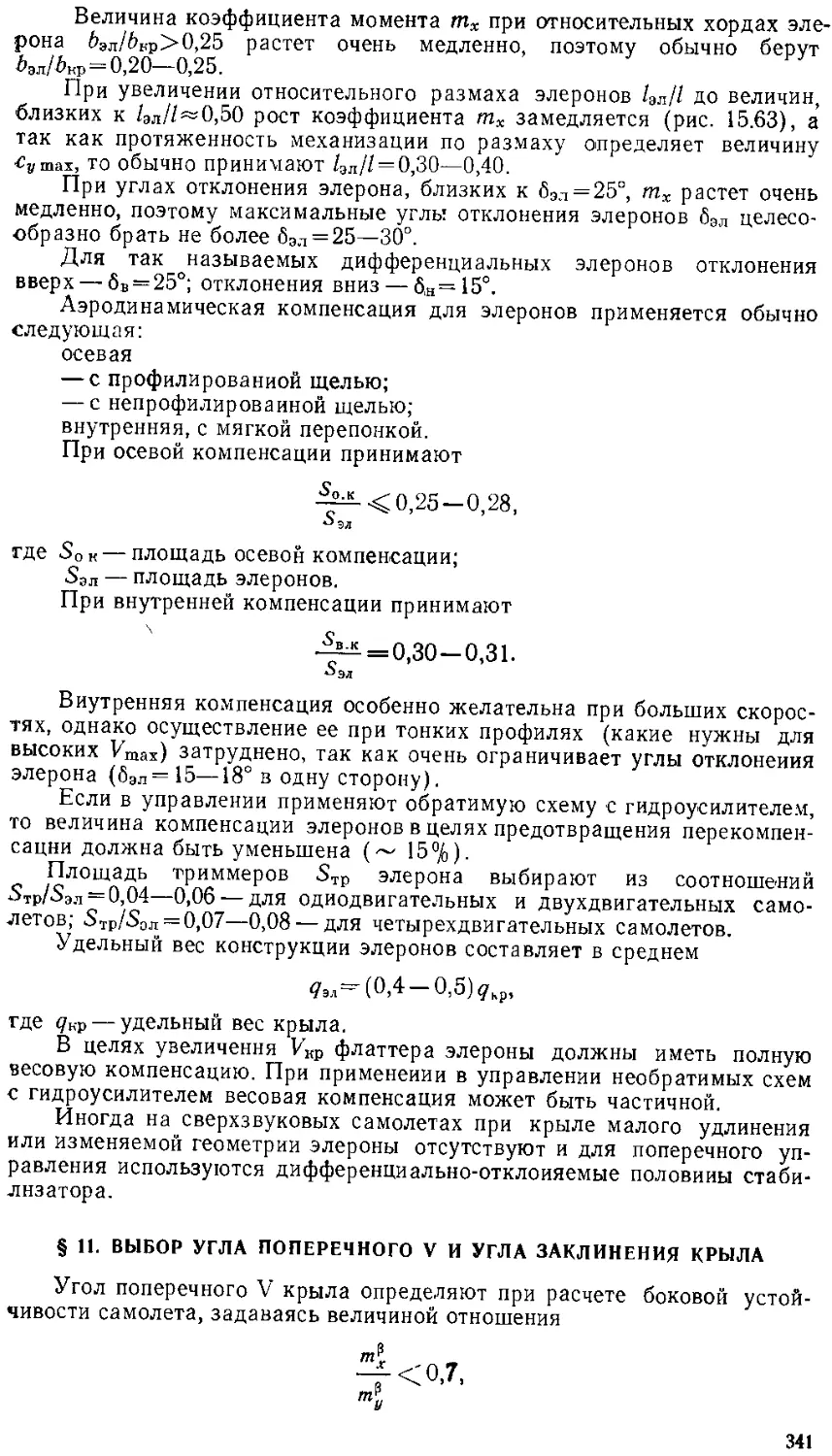
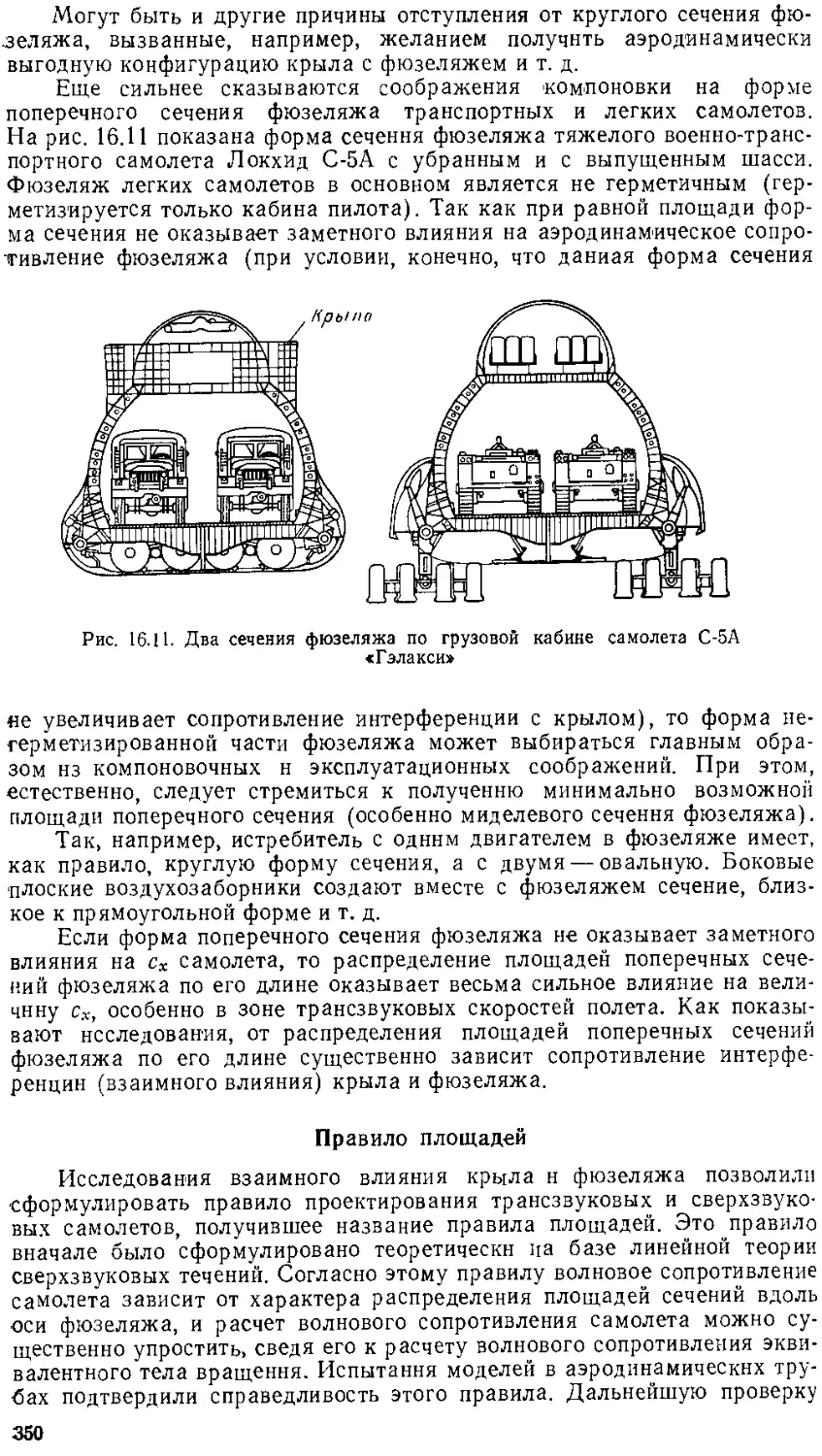
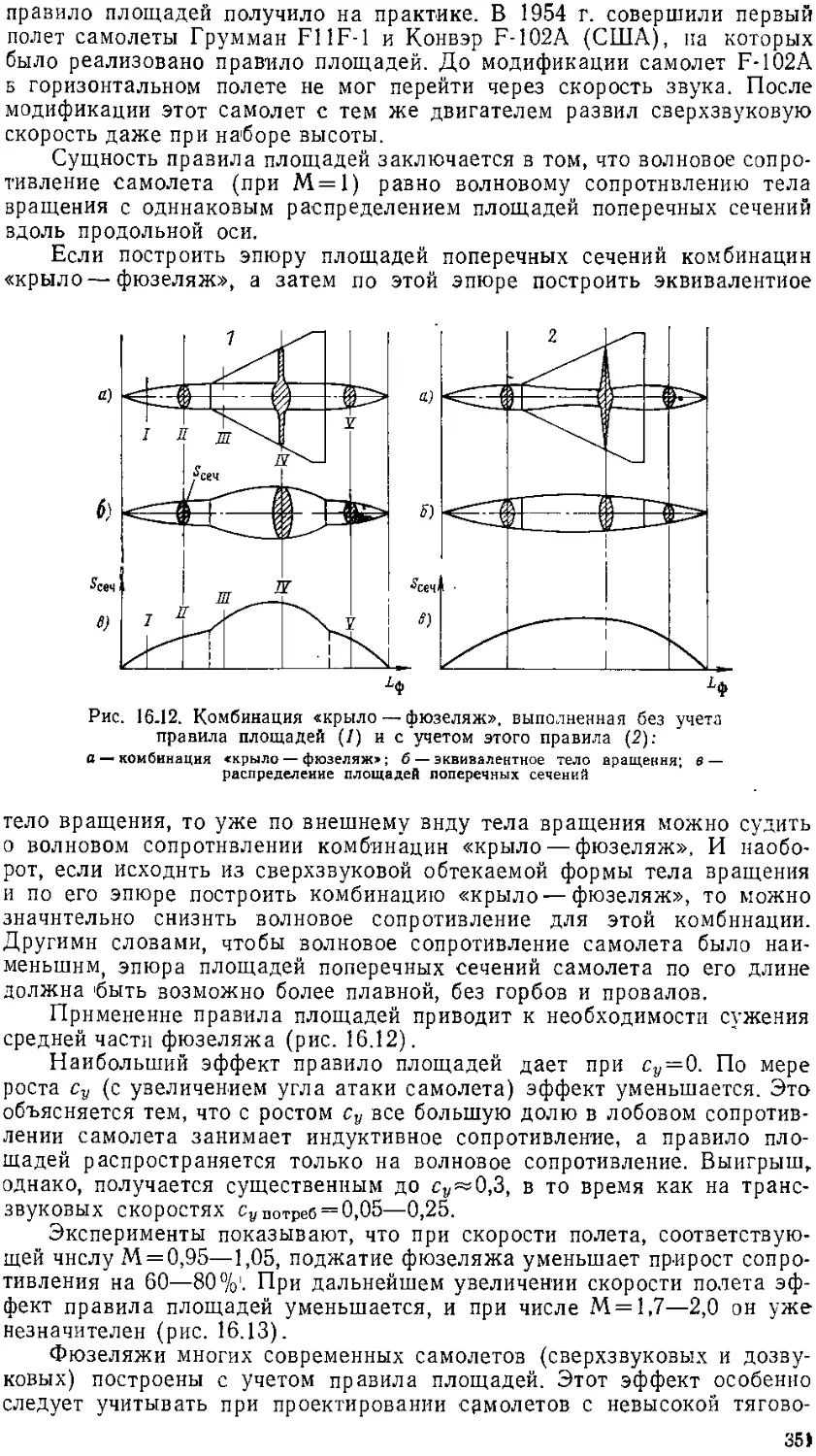
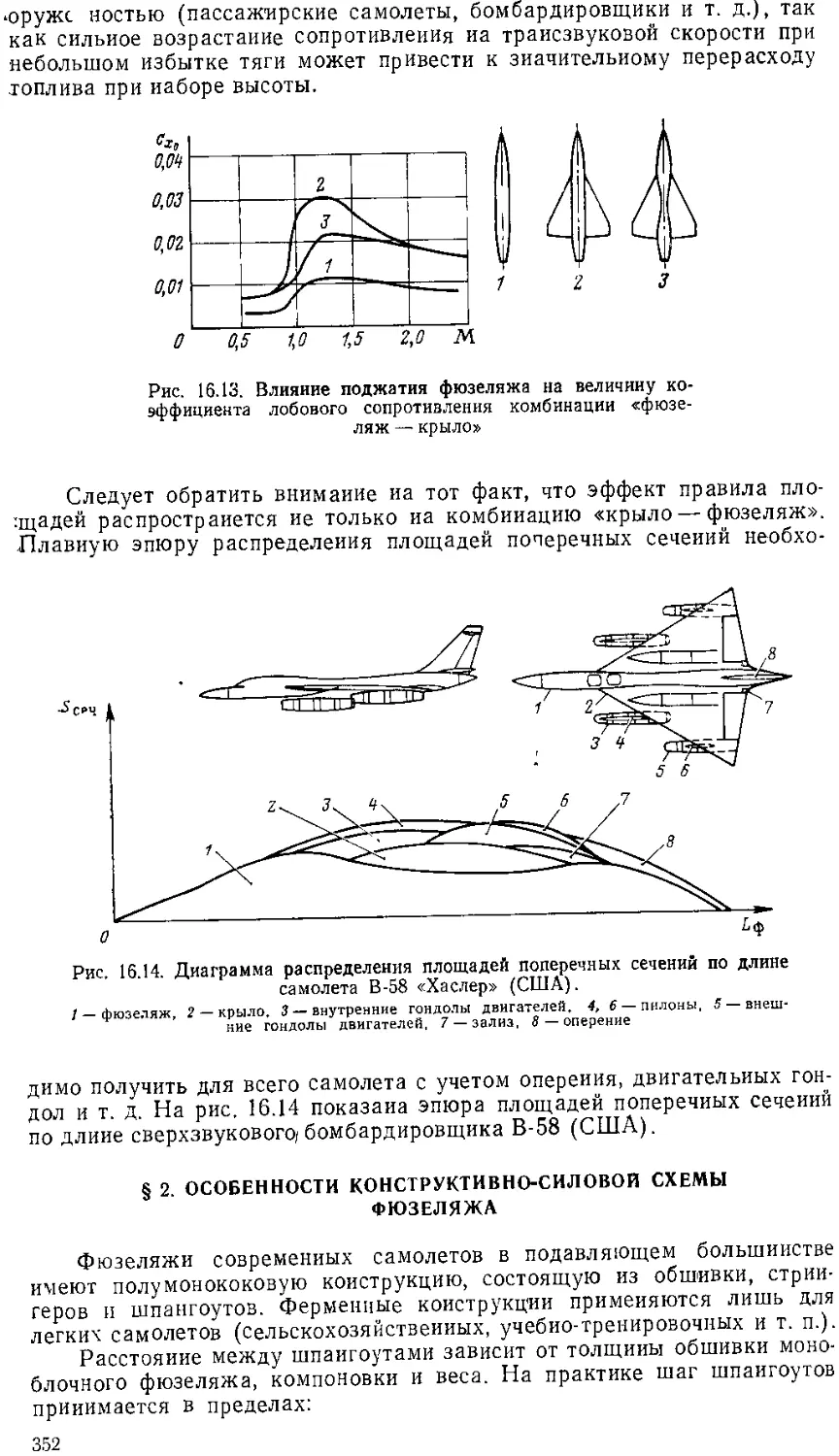
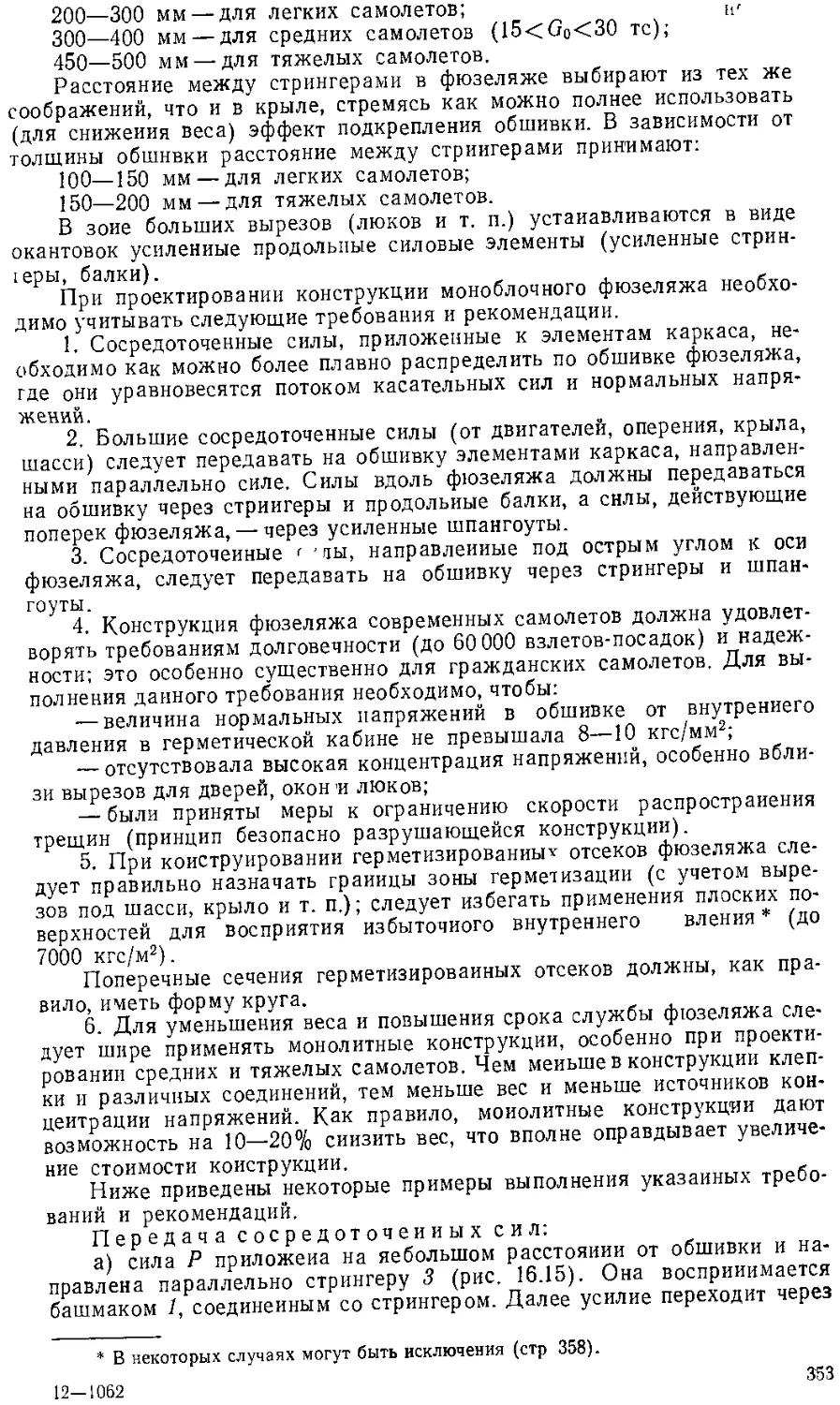
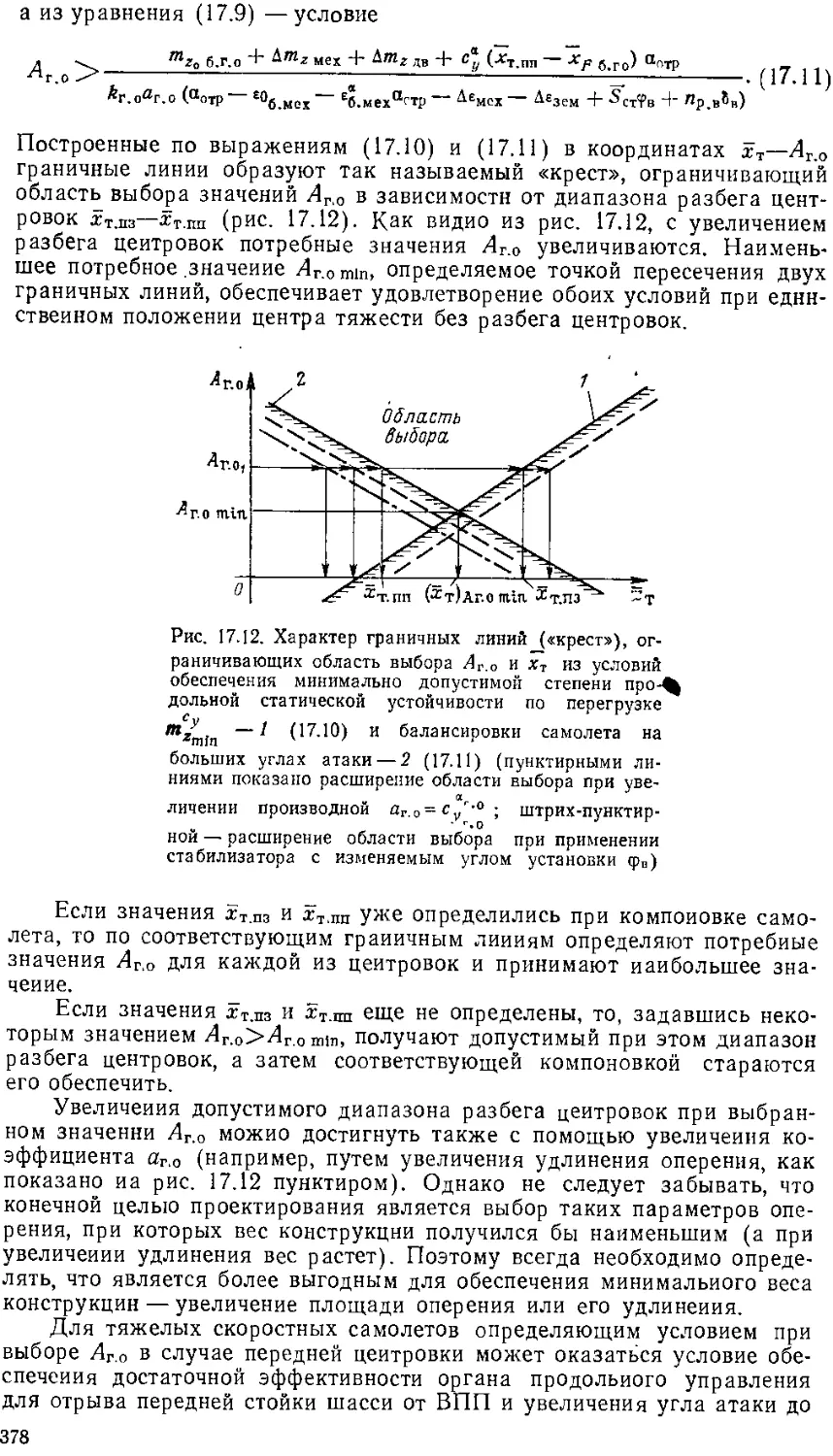
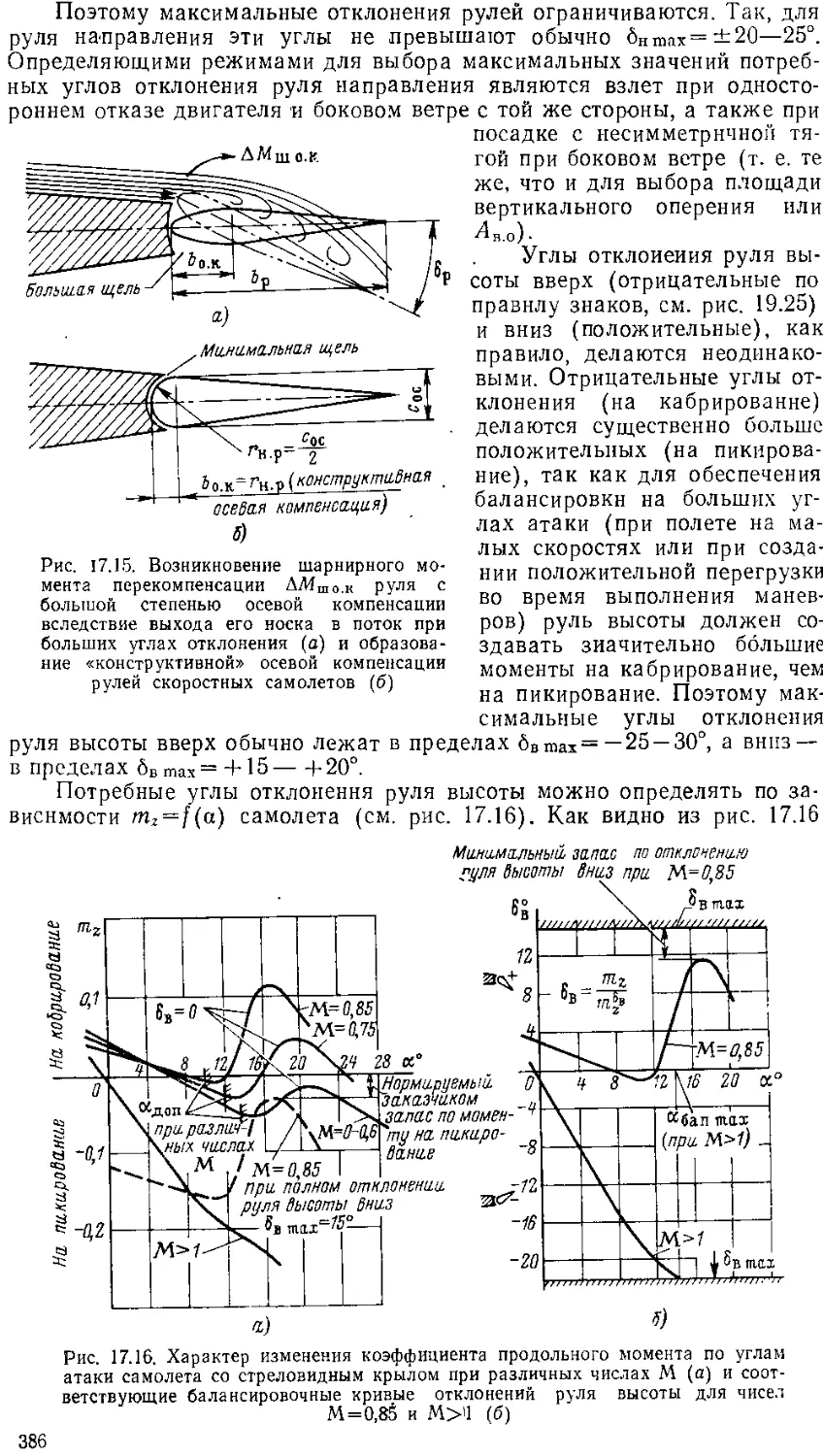
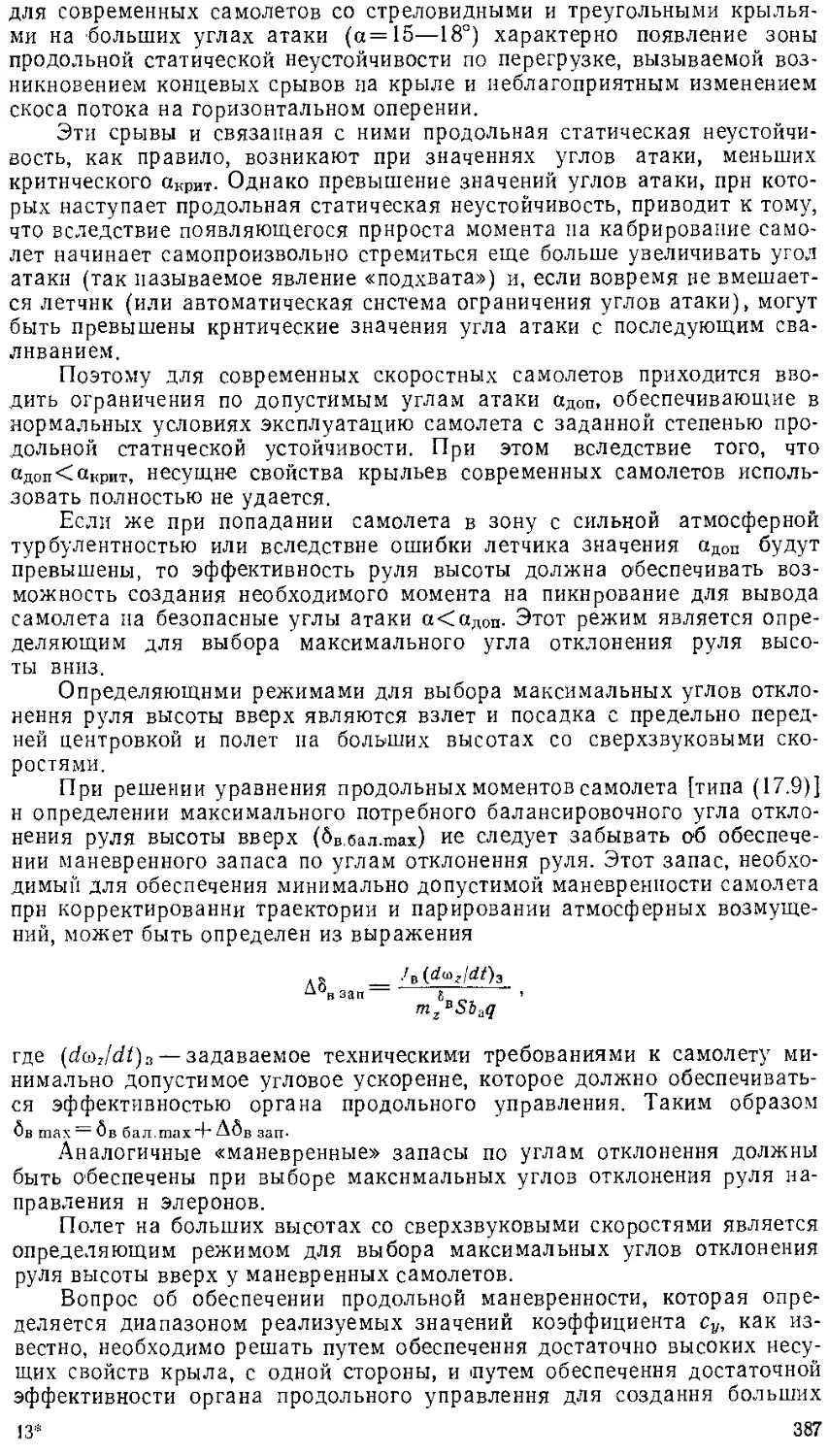
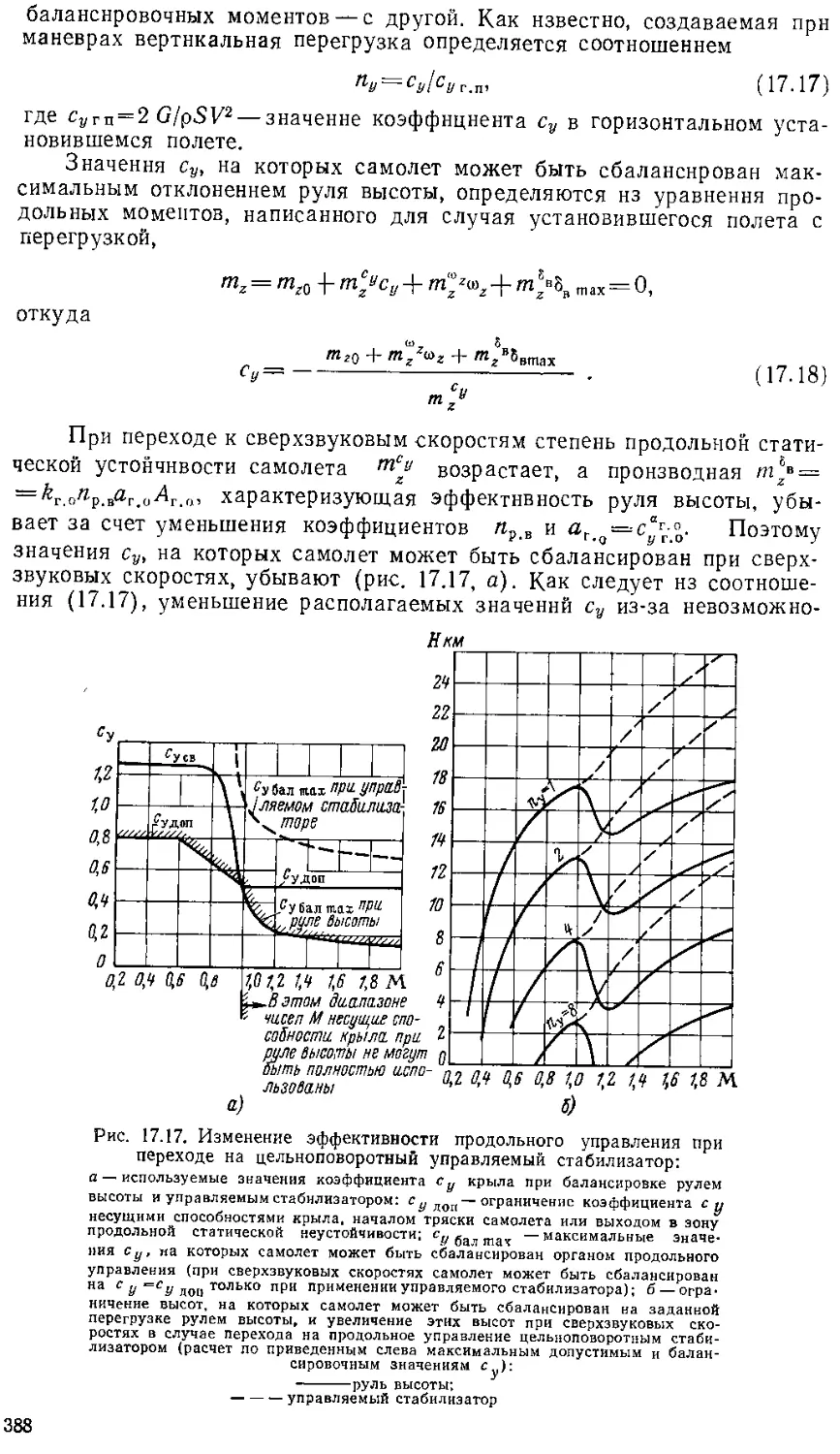
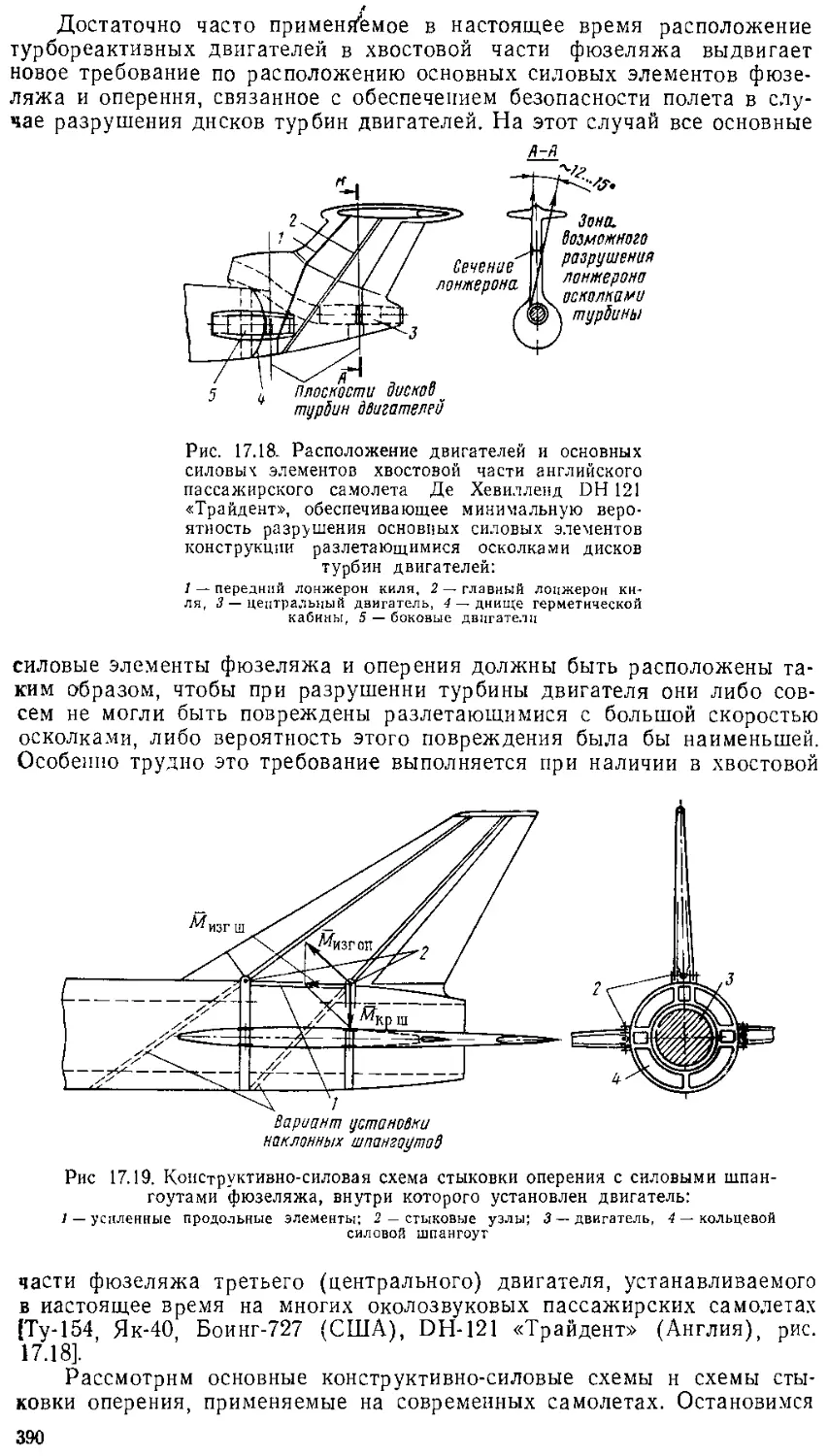
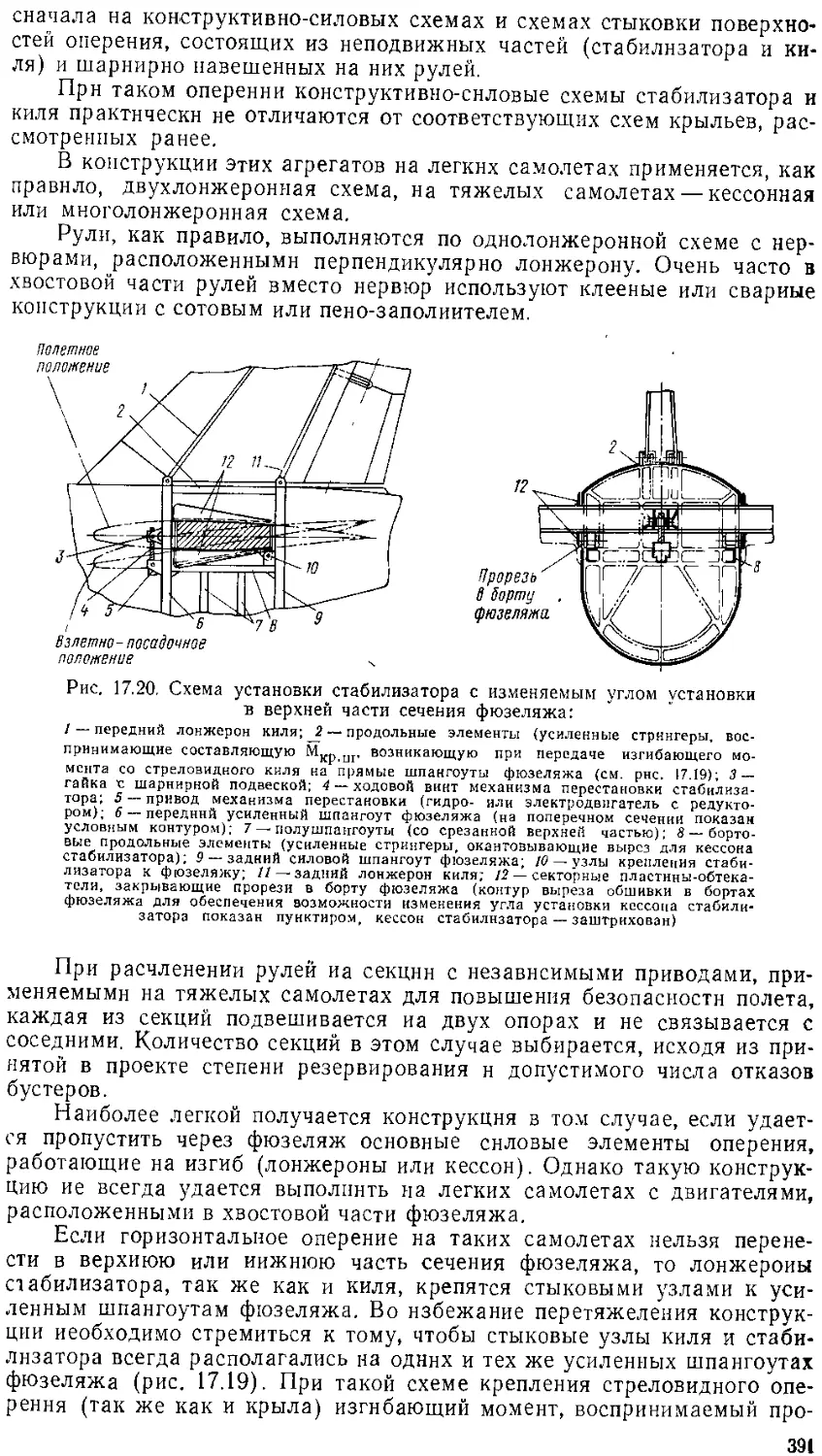
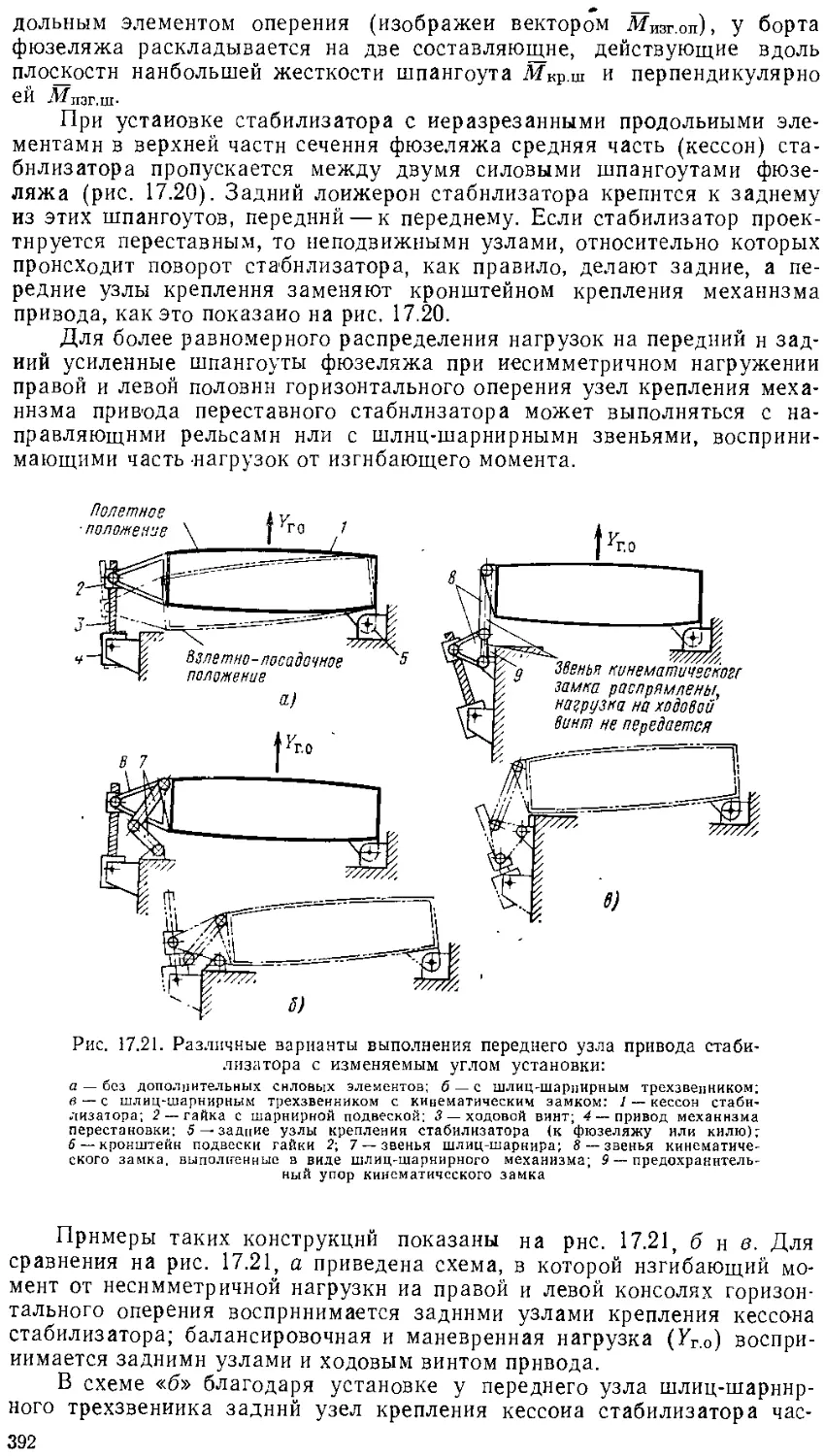
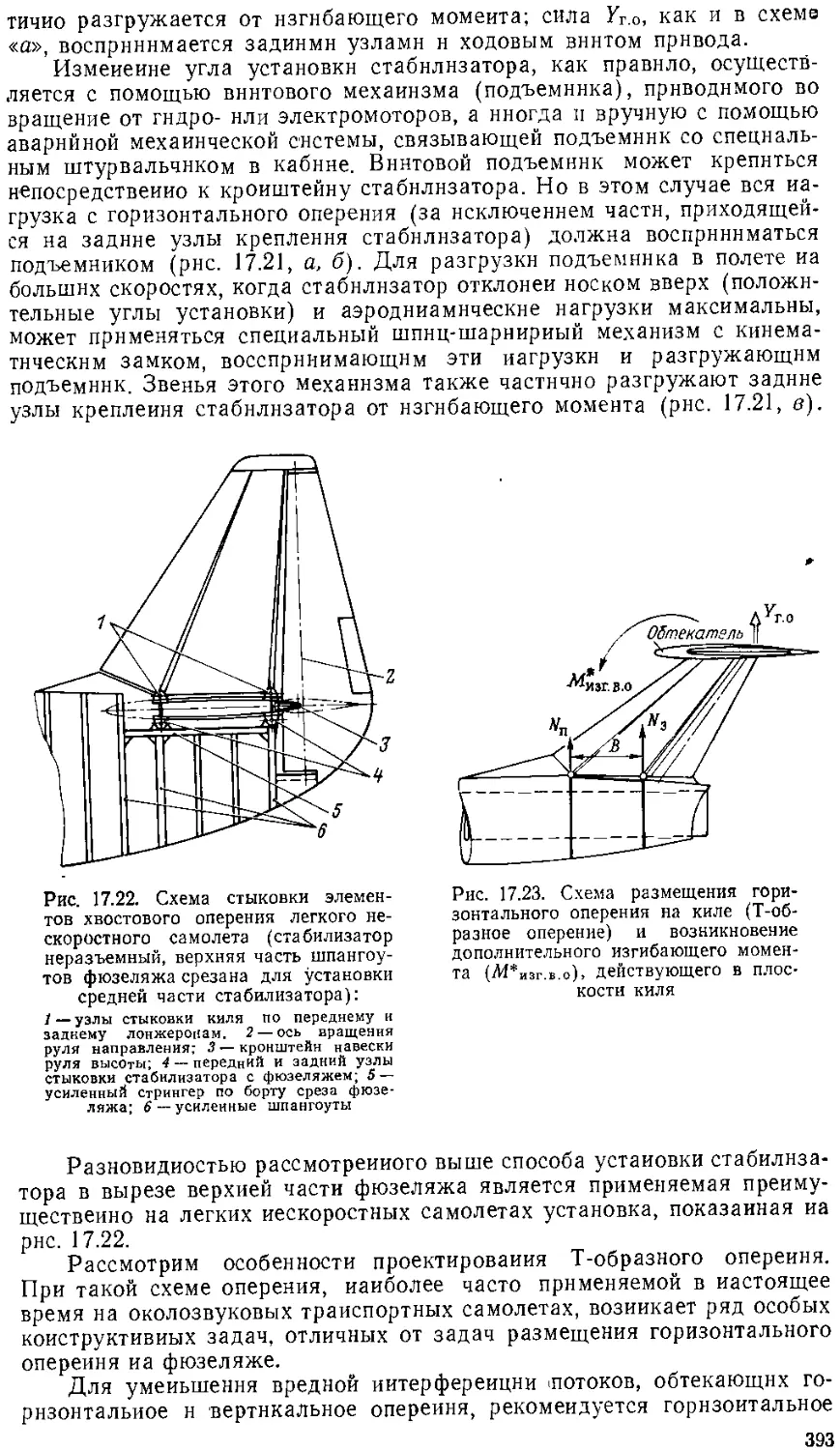


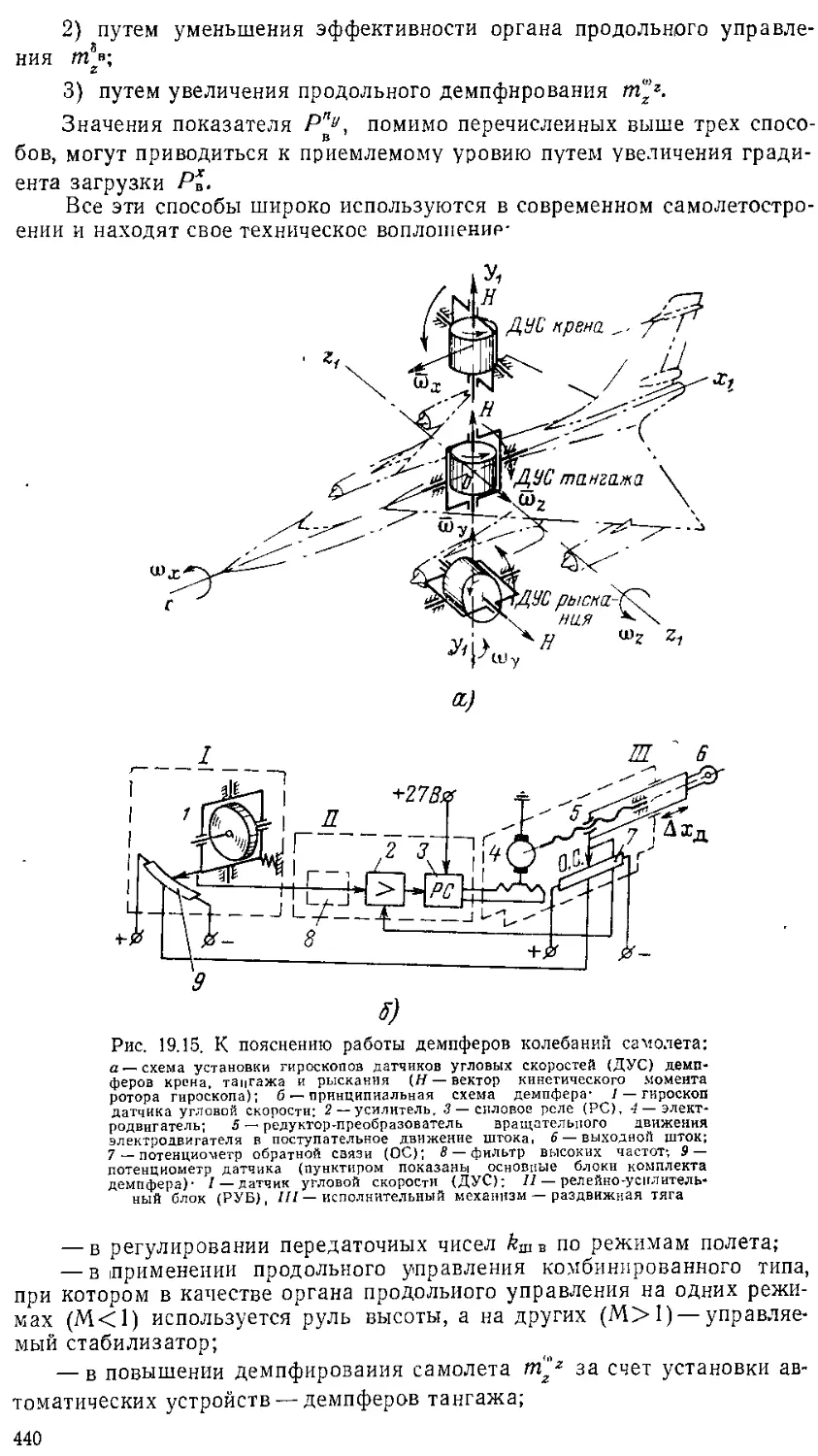
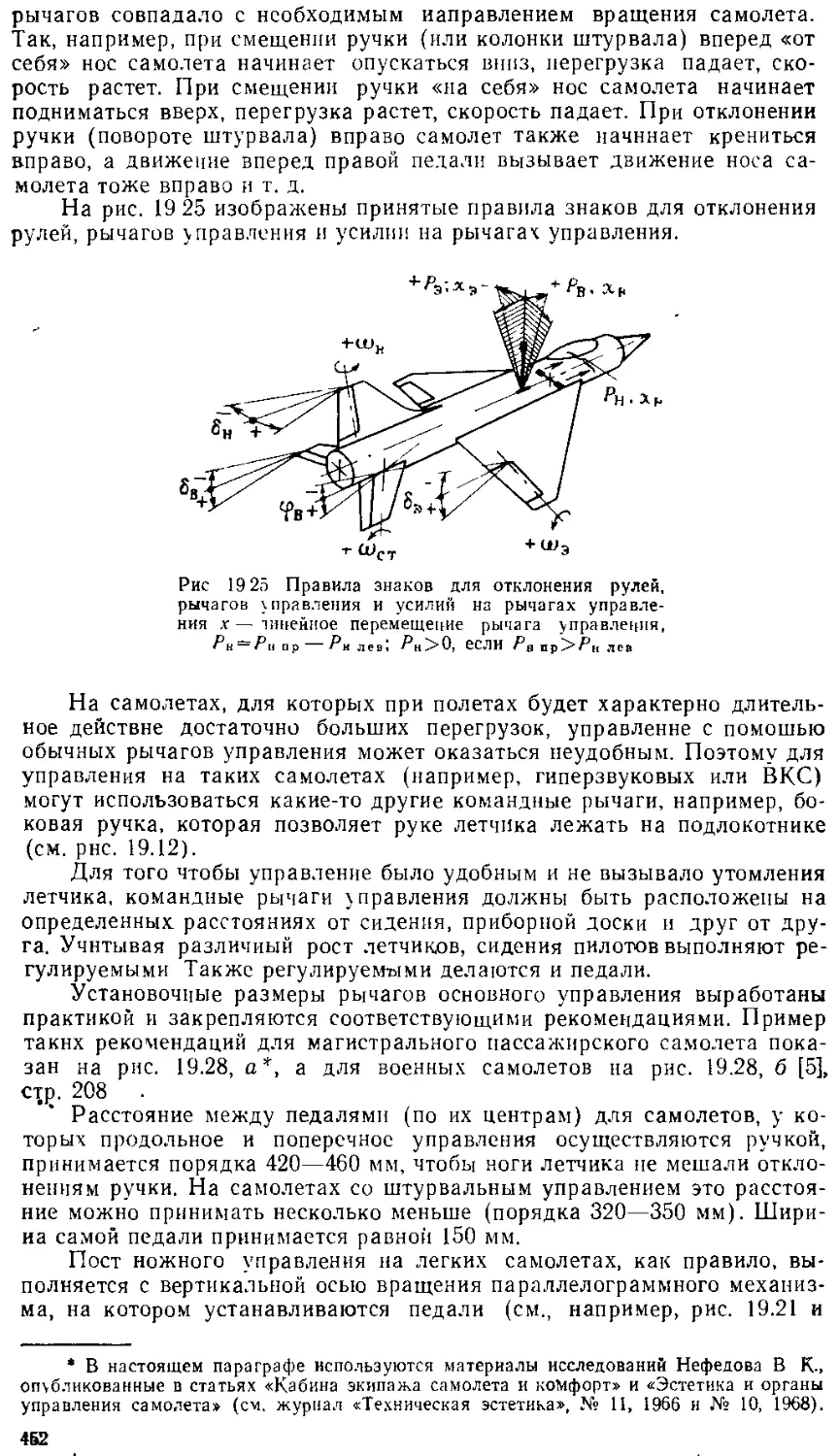
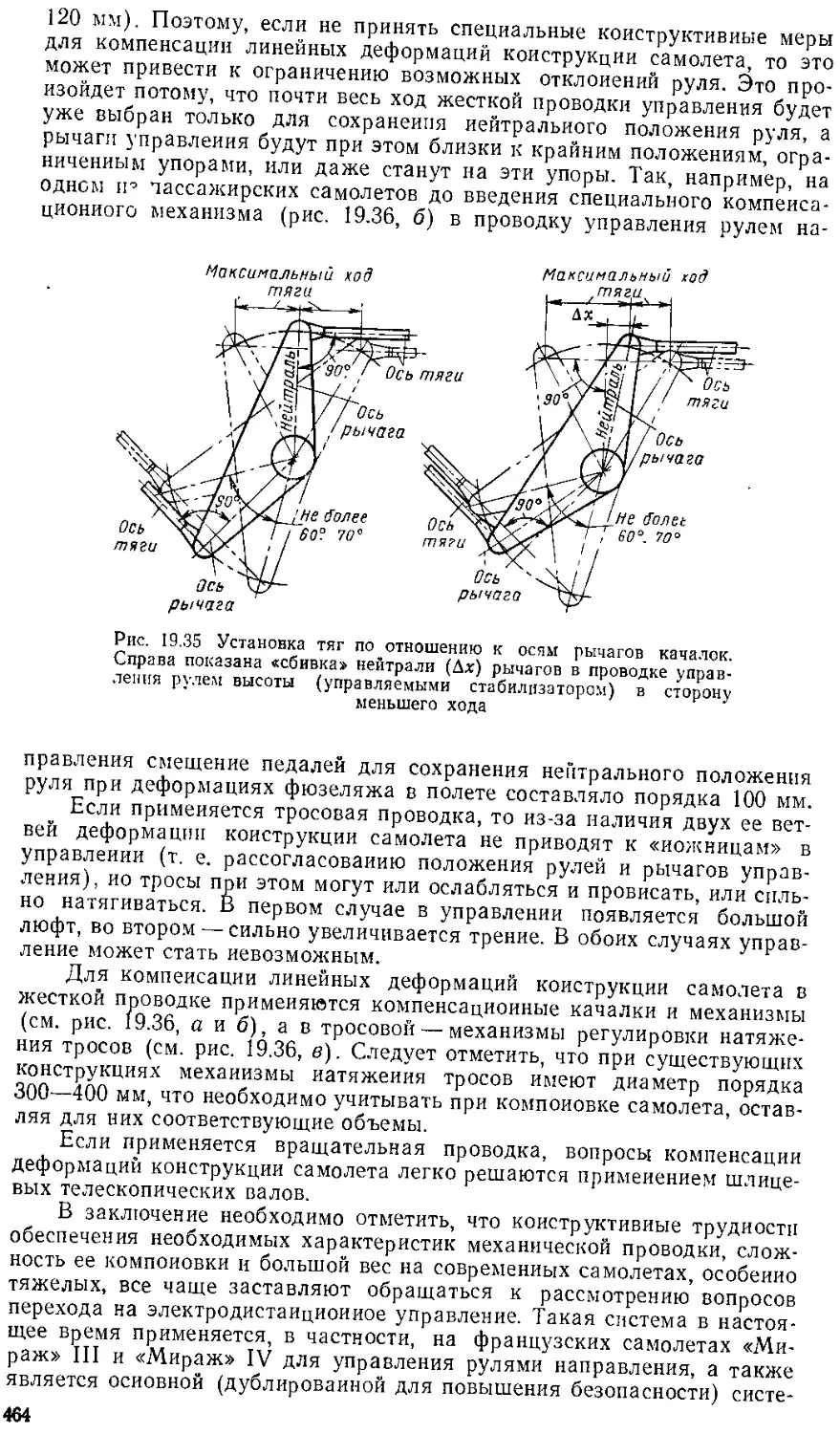
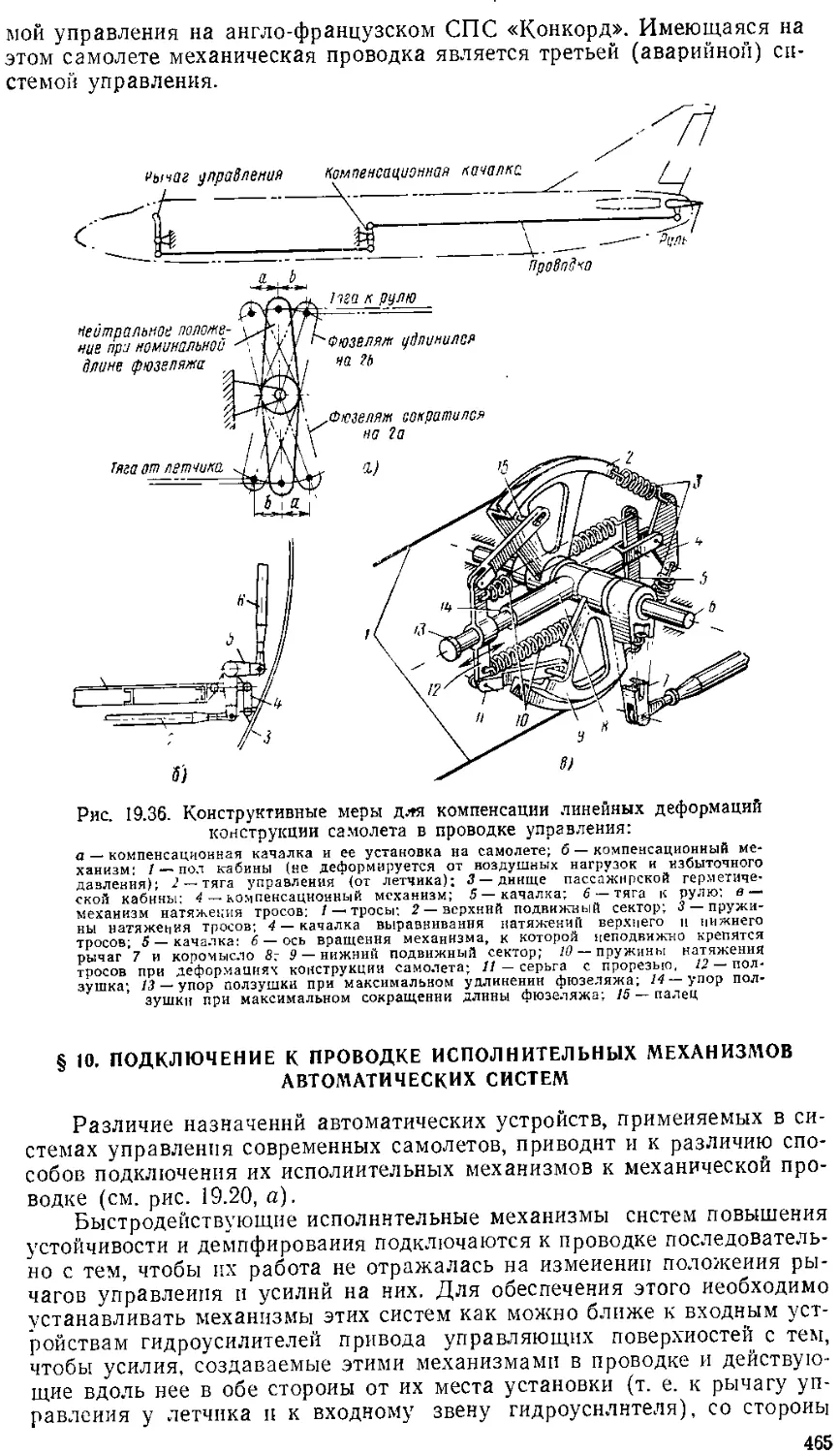
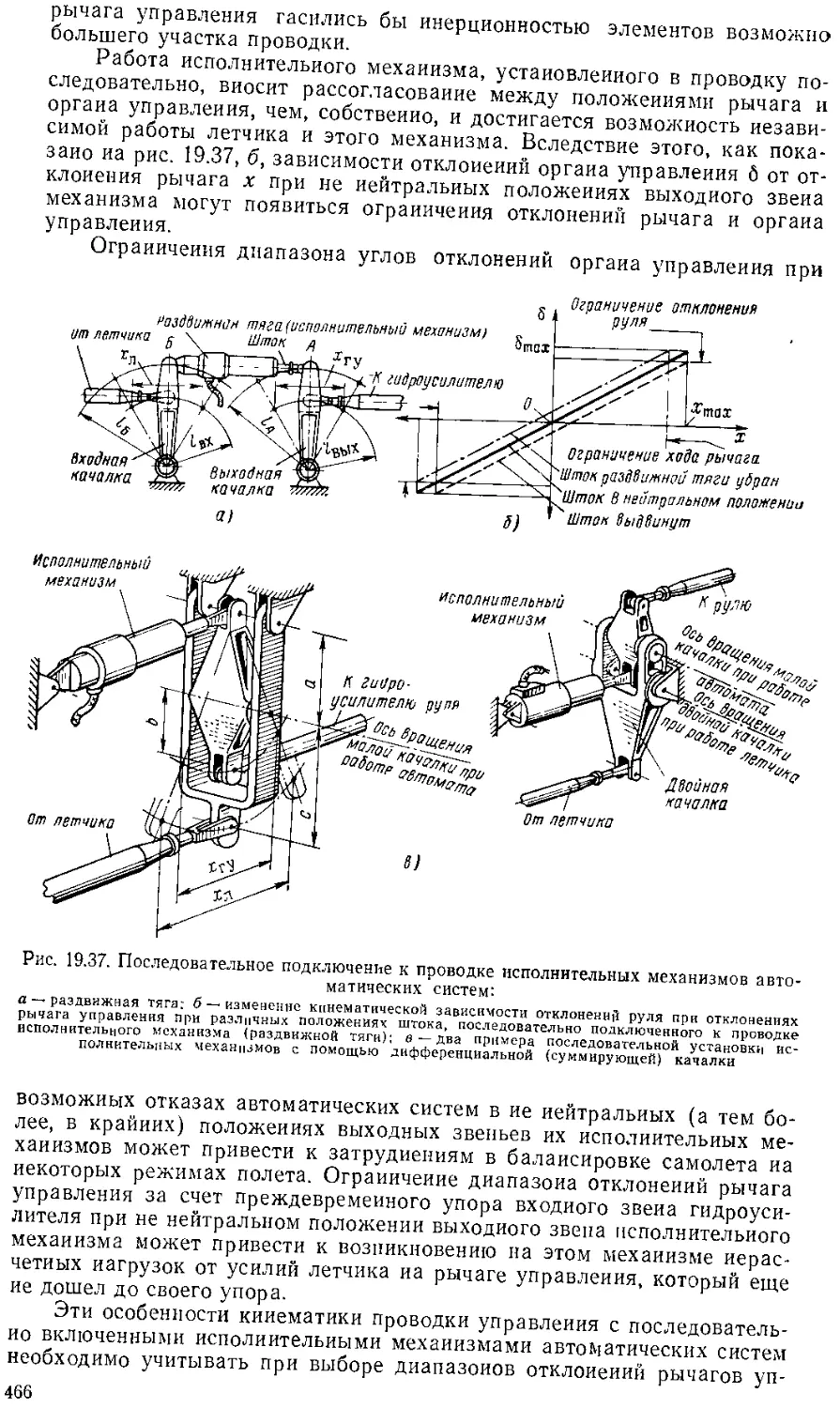
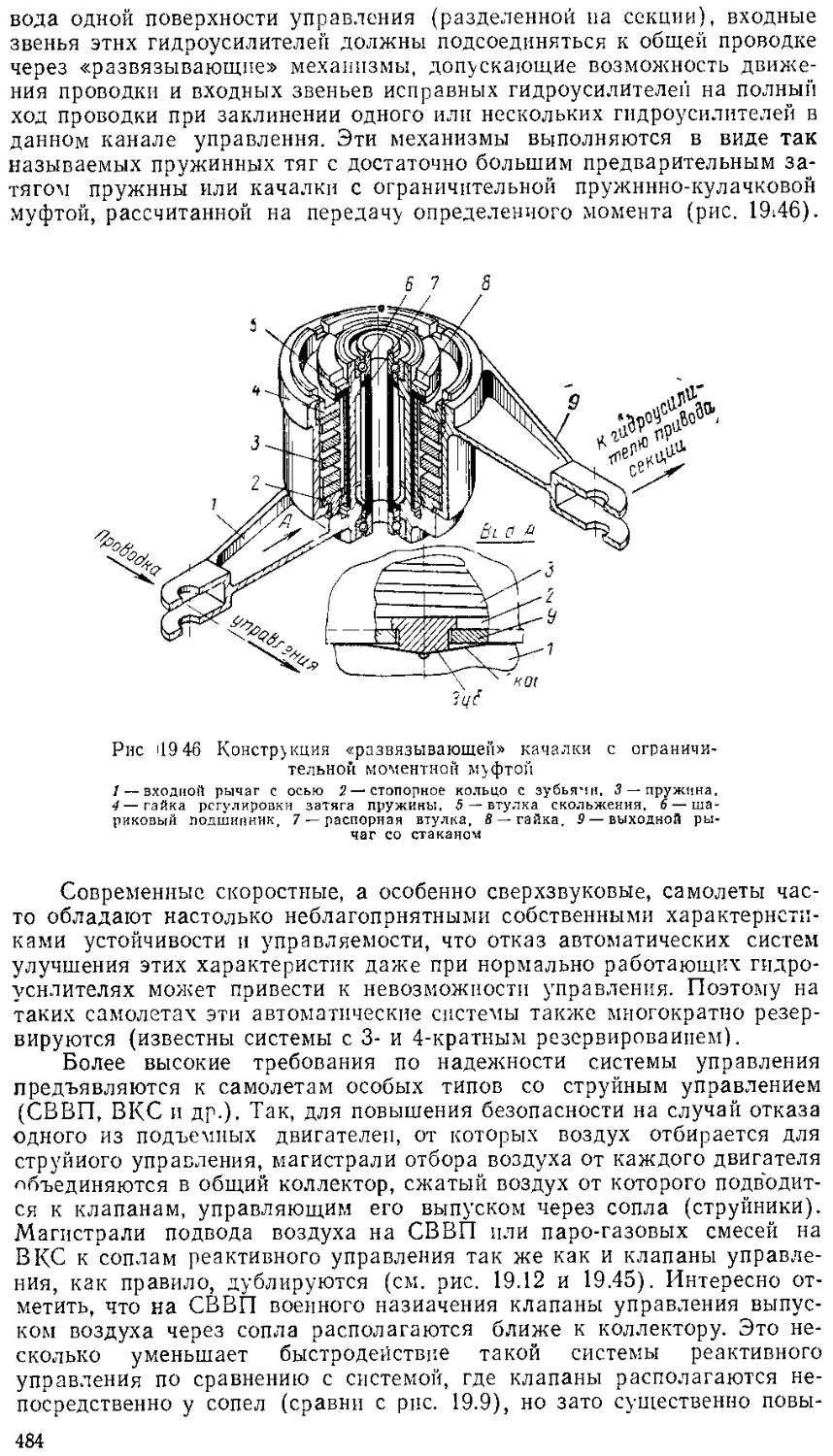




Текст
А. А. БАДЯГИН, С. M. ЕГЕР, В. Ф. МИШИН,
Ф. И. СКЛЯНСКИЙ, Н.-А. ФОМИН
ПРОЕКТИРОВАНИЕ
САМОЛЕТОВ
ИЗДАНИЕ 2-е. ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено
Министерством высшего и среднего специального образования СССР
в качестве учебника для студентов
специальности «Самолетостроение»
высших учебных заведений
УДК 629.735 33.001.2(075.8)
Проектирование самолетов. Б а д я г и н А. А.,
Егер С. М., Мишин В. Ф., Ск л янский Ф. И., Фо-
мин Н А, М. «Машиностроение». 1972, стр 516
В книге изложены общие основы и методы проектирова-
ния самолетов, рассмотрен выбор схемы, силовой установки
и основных параметров самолета. Второе издание включает
новые материалы: методы оптимального проектирования с ис-
пользованием ЭВМ, метод градиентов взлетного веса для
опенки проектировочных решений и пересчета весовых харак-
теристик, особенности проектирования самолетов с укорочен-
ным и вертикальным взлетом, пассажирских и воздушно-кос-
мических самолетов.
Значительно расширены и переработаны разделы, относя-
щиеся к учету требований экономики и к проектированию ос-
новных агрегатов.
Приложения к книге дополнены характеристиками авиаци-
онных двигателей, типовой весовой сводкой и перечнем типо-
вого радиотехнического оборудования
Книга предназначена для студентов авиационных вузов и
может быть полезна инженерам авиационной промышлен-
ности.
Табл. 30. Иллюстр. 393. Список лит. 37 назв
Рецензент д-р техн, наук Я. С. Щербак
Научный редактор канд. техн, наук А. И. Свердлов
3-18-6
180-72
ПРЕДИСЛОВИЕ
За годы, прошедшие со времени издания учебного пособия Н. А. Фо-
мина «Проектирование самолетов» (1961 г.), существенно вырос уро-
вень авиационной науки и техники. Появились сверхзвуковые тяжелые
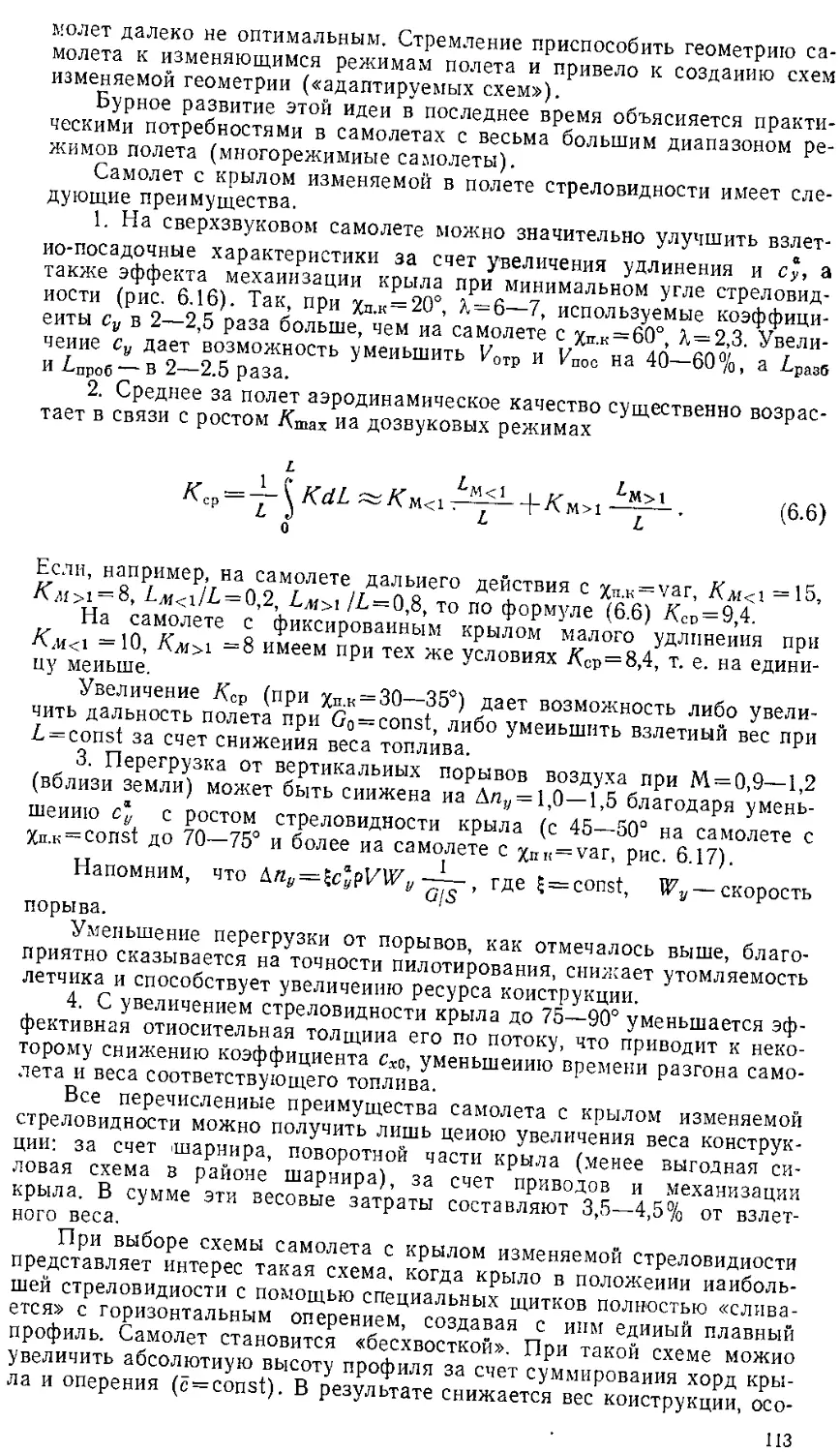
самолеты, в том числе пассажирские, обычными стали самолеты с изме-
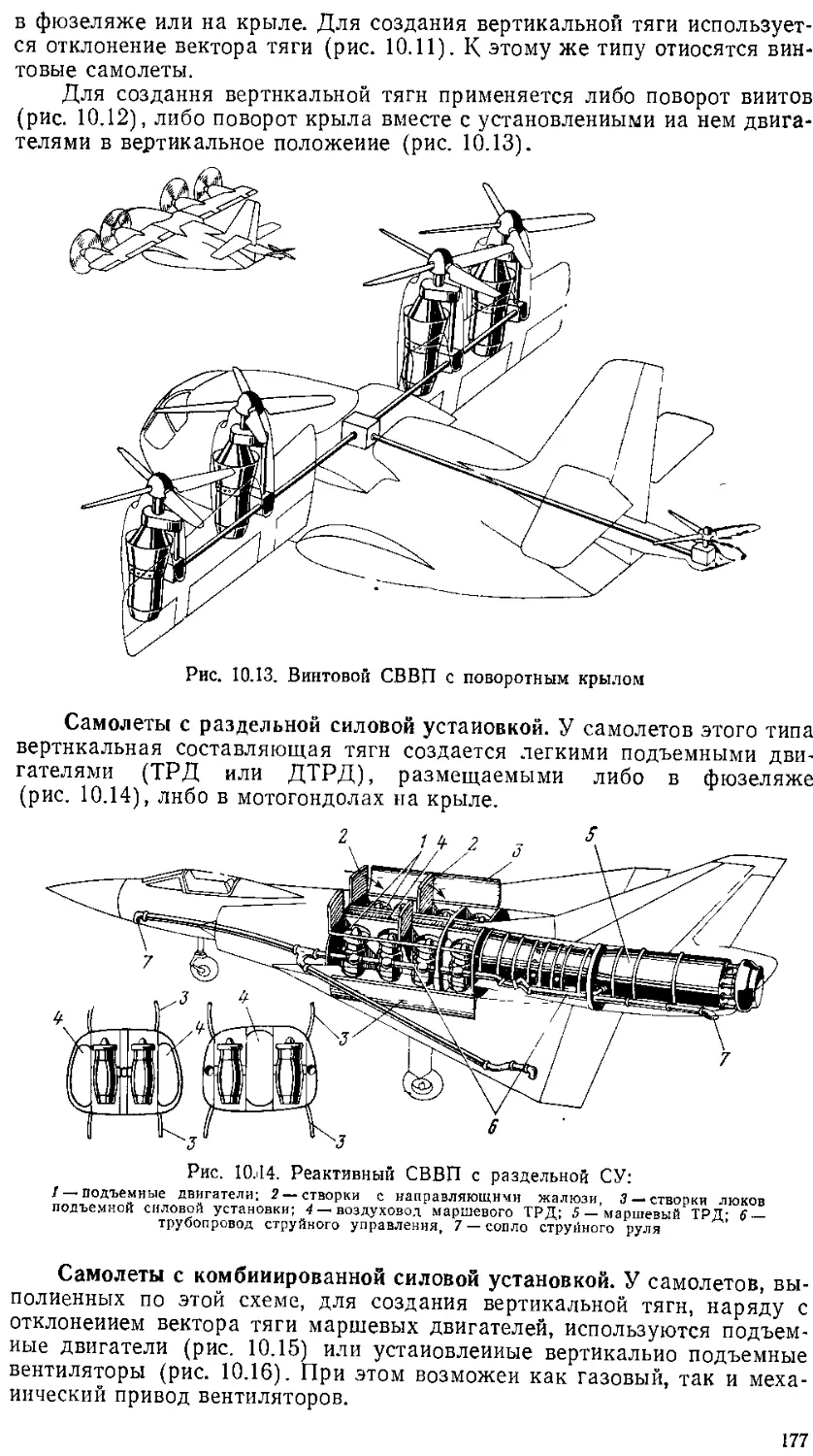
няемой в полете стреловидностью крыла, внедряются самолеты с верти-
кальным взлетом и посадкой.
Вопросы проектирования самолетов за это время также получили
существенное развитие. Широко применяется метод оптимального проек-
тирования, системный подход, использование ЭВМ и т. д.
Авторы отдавали себе отчет в том, что напнеать стабильный учеб-
ник по проектированию самолетов чрезвычайно трудно. Каждое десяти-
летие в авиации теперь целая эпоха! Поэтому в данной книге по сравне-
нию с аналогичными предшествующими пособиями большое внимание
уделено фундаментальным методическим вопросам, которые не подвер-
жены столь быстрому старению. В то же время авторы стремились дать
и материал справочного характера, необходимый для дипломного или
предэекизного проектирования самолетов.
Предлагаемый учебник соответствует программе курса «Проекти-
рование самолетов» для вузов.
Учебник состоит из двух разделов — общего проектирования само-
лета и проектирования его частей.
В первом разделе книги три части. В первой части изложены общие
основы н методы проектирования самолета. Здесь авторы стремились в
доходчивой форме показать эволюцию методов общего проектирования,
изложить основы методики оптимального проектирования при выборе
параметров самолетов. Здесь же дана методика использования малых
приращений параметров и характеристик самолета, позволяющая срав-
нительно просто решать большой круг задач.
Во второй части рассмотрен выбор схемы, силовой установки и ос-
новных параметров самолета. Основное внимание здесь уделено проек-
тированию реактивных самолетов. Отдельные главы посвящены особен-
ностям общего проектирования пассажирских самолетов, самолетов с
укороченным и вертикальным взлетом и посадкой, а также проектирова-
нию воздушно-космических самолетов.
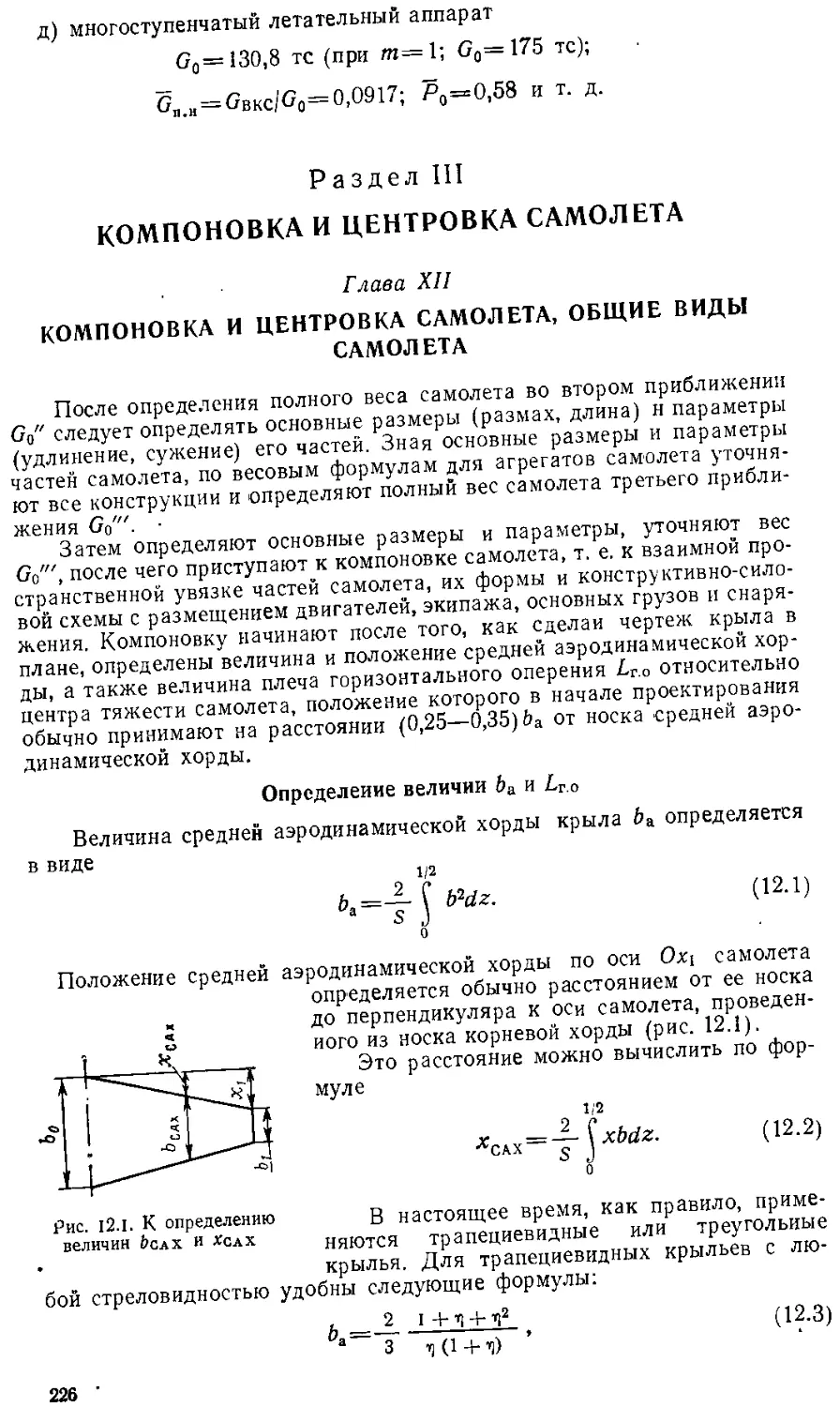
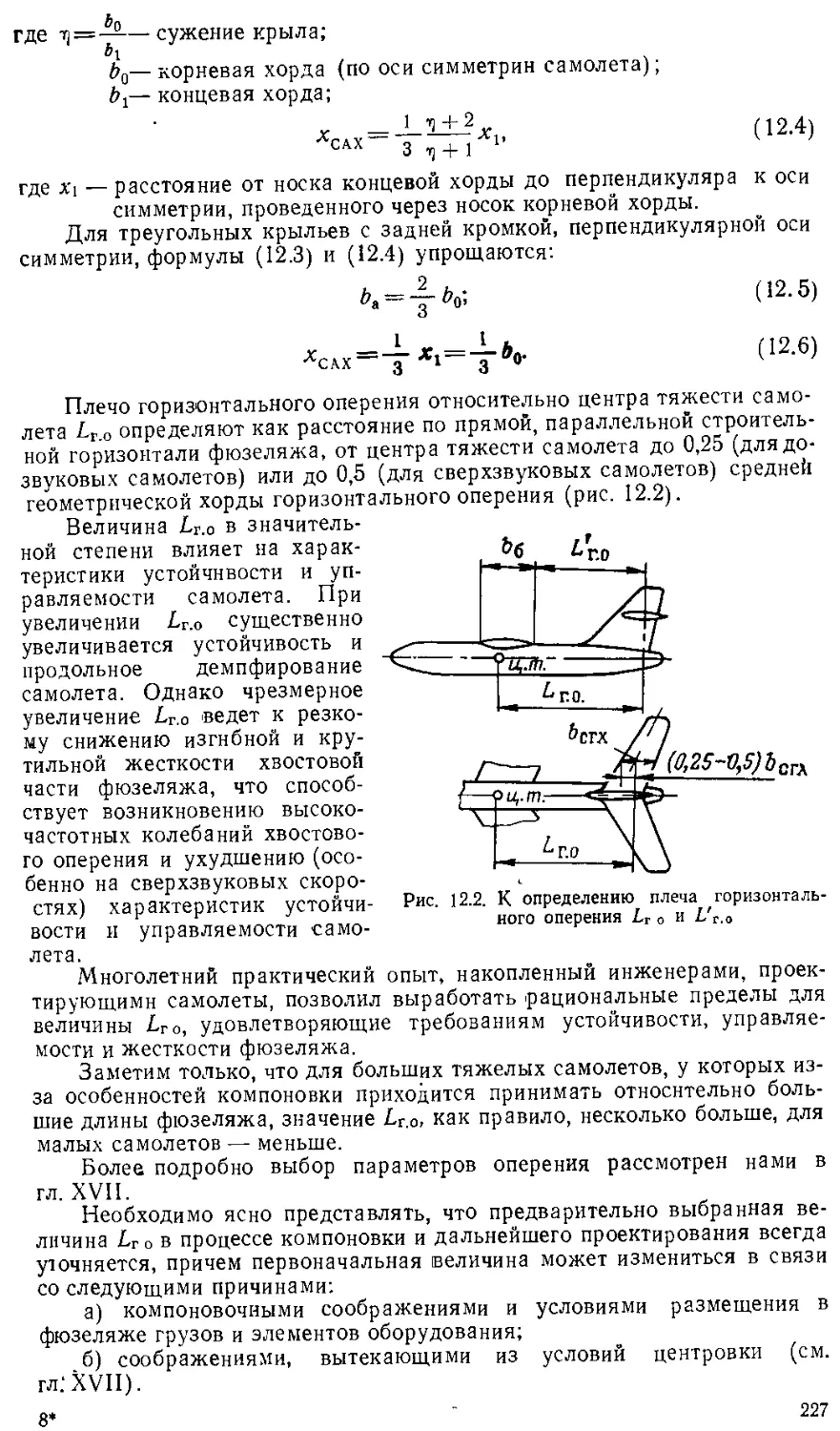
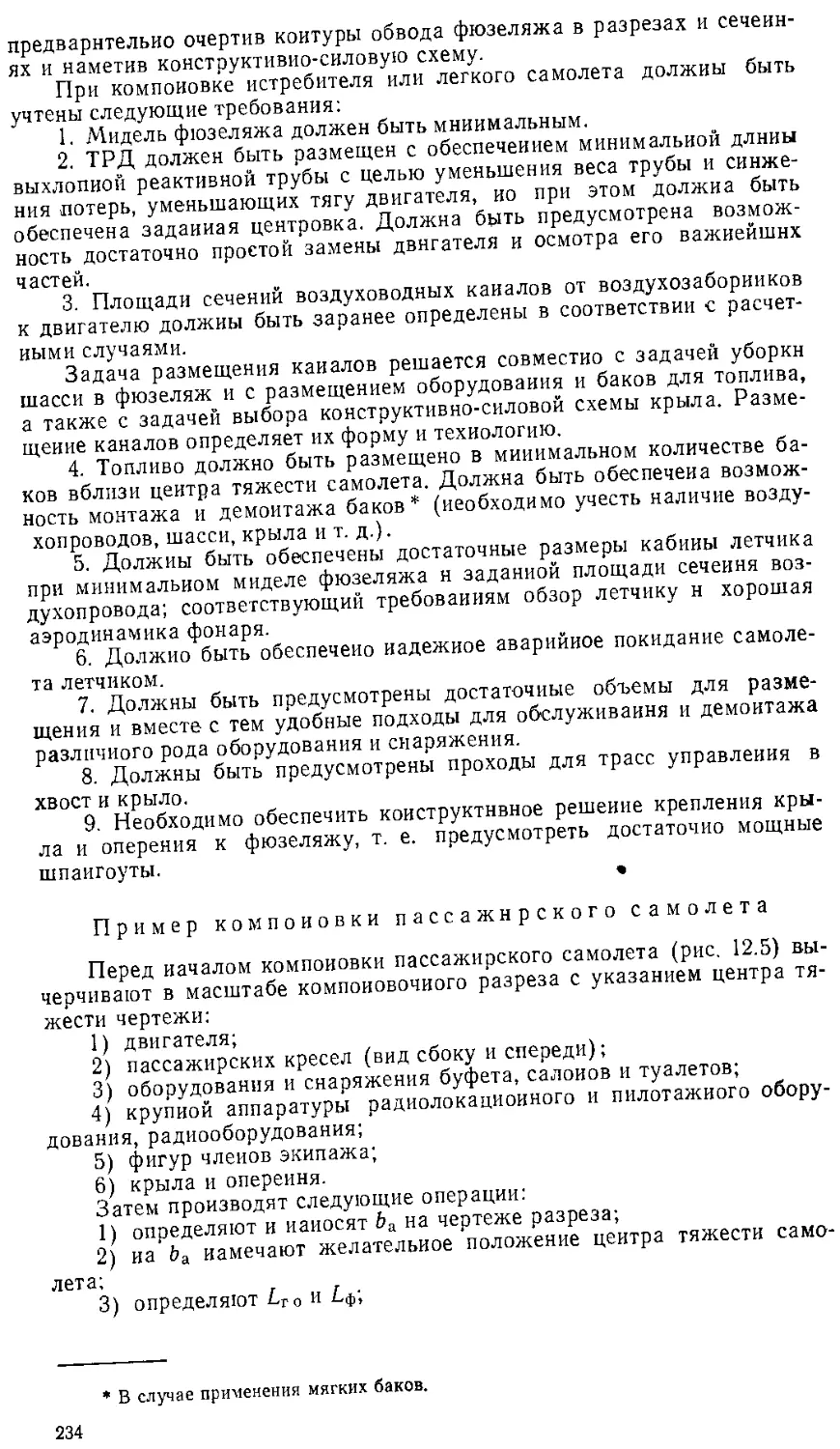
В третьей части первого раздела рассмотрена компоновка и цент-
ровка самолета.
ваются общие основы проектирования частей самолета и основы проек-
тирования системы его управления.
Главы I, III, IV, V, VI, XIV написаны А. А. Бадягиным, Введение,
главы II, VIII, XII, XIII — Н. А. Фоминым, глава IX написана С. М. Еге-
ром, главы VII, XI—В. Ф. Мишиным, главы XVII, XIX — Ф. И. Склян-
ским. Главы XVI и XVIII написаны А. А. Бадягиным и В. Ф. Мишиным,
глава X написана Н. А. Фоминым и Н. К. Лисейцевым, глава XV —
Н. А. Фоминым и В. Е. Ротииым.
Приложения к учебнику написаны А. А. Бадягиным и В. Ф. Ми-
шины м.
• Все конкретные сведения по проектированию самолетов и выбору
двигателя в период предварительной разработки самолета опубликованы
в открытой отечественной н зарубежной печати. Авторы с благодар-
ностью примут замечания по книге, которые следует направлять по
адресу: Москва, Б-66, 1-й Басманный пер., 3, издательство «Машино-
строение».
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
а —скорость ьвука, расходы на 1 тонно-километр;
а — угол атаки крыла;
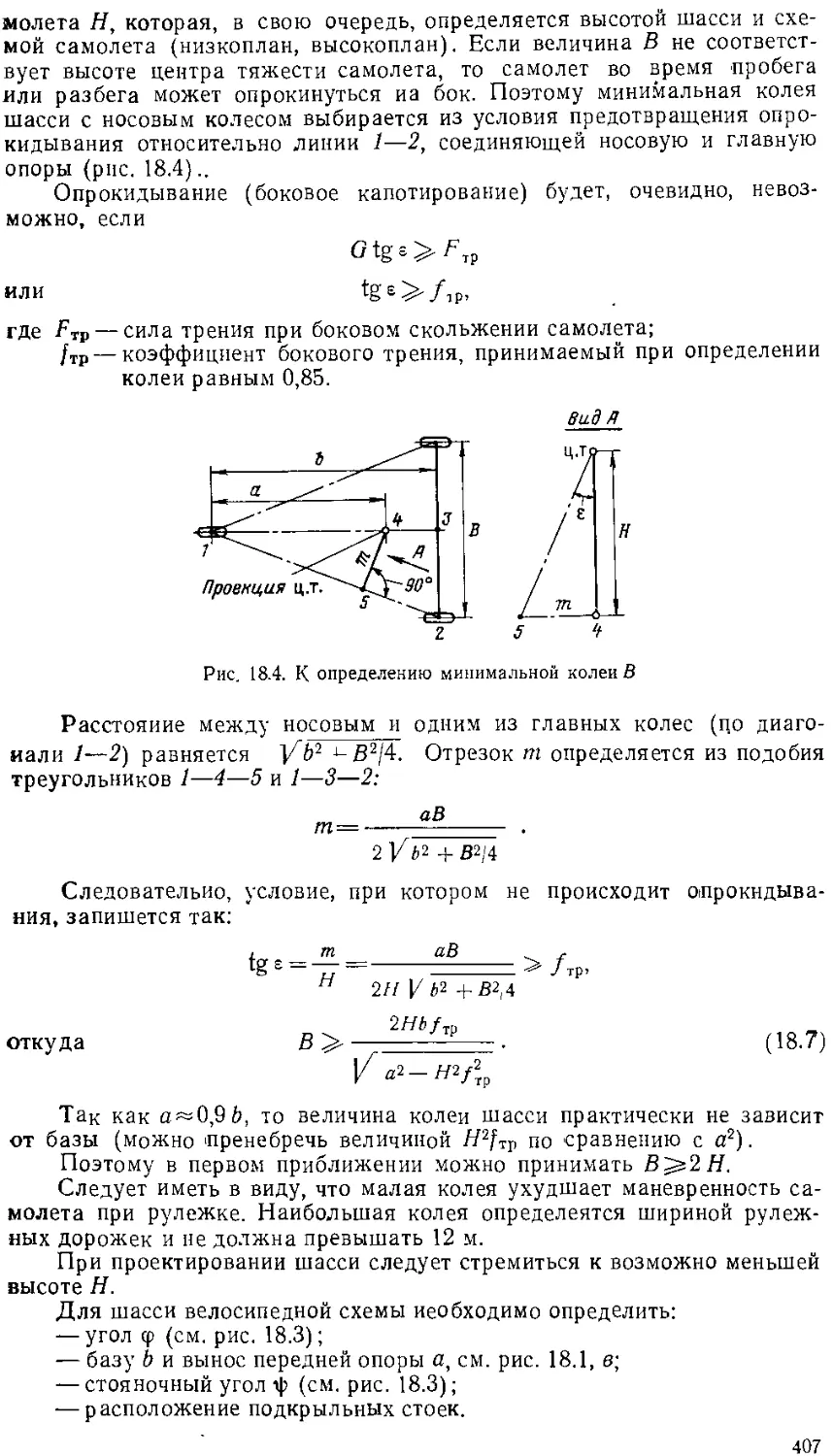
В — колея шасси;
b —хорда крыла, база шасси;
Ьо — корневая хорда крыла;
6К —концевая хорда крыла;
С — стоимость;
Со — относительная толщина крыла у корня;
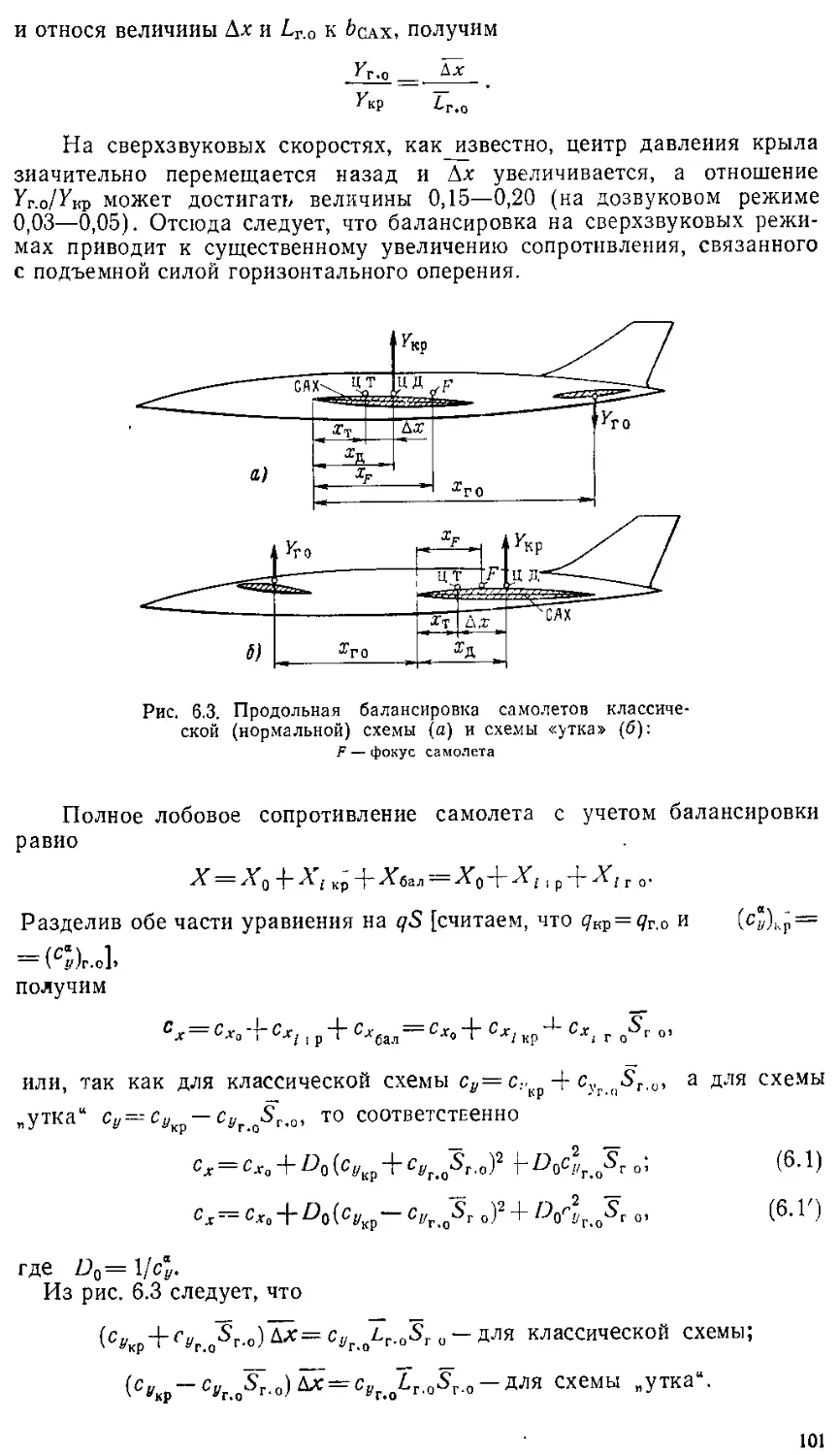
ск — относительная толщина на конце крыла;
Cf —аэродинамический коэффициент трения;
ст—коэффициент аэродинамического продольного момента про-
филя крыла;
ст —коэффициент ст при с„ = 0;
сР —коэффициент тяги;
ср —удельный часовой расход топлива ТРД;
се — удельный часовой расход топлива ТВД;
сх —коэффициент лобового сопротивления;
Схо —коэффициент лобового сопротивления при св=0;
сХ[ —коэффициент индуктивного сопротивления;
Схв —коэффициент волнового сопротивления;
сХр —коэффициент профильного сопротивления,
Су —коэффициент подъемней силы,
Ср—производная су по углу атаки а;
D* —диаметр фюзеляжа;
6 —угол отклонения какого-либо органа управления;
Е —-модуль нормальной упругости материала.
F —площадь омываемой потоком поверхности.
f —коэффициент трения, коэффициент безопасности;
G —вес самолета;
Go —стартовый (взлетный) вес самолета;
GK — вес конструкции;
'/к — Д— — относительный вес конструкции;
Gq
GT —вес топлива;
—
('т = — относительный вес топлива-
Go
S — ускорение силы тяжести; вес 1 м2 поверхности агрегата;
Y — удельный вес;
Н —высота полета;
X — угол стреловидности крыла (по четверти хорд);
Хп к — угол стреловидности (по передней кромке крыла);
К —аэродинамическое качество;
k — коэффициент;
L —дальность полота, длина;
I —размах крыла;
X —удлинение крыла;
Xi — удлинение какой-либо части самолета;
М — число М;
т— масса^ летательного аппарата; степень двухконтурностн
тх. т». тг —коэф ициенты аэоо инамическо о момента сямплетя (п гм.
No — стартовая мощность двигателей (при У=0; /7 = 0);
Noi — стартовая мощность одного двигателя;
- No
No = ~х~ —относительная стартовая мощность-
Go
п₽, п3, nv, пх, пг, Па, пе —коэффициенты перегрузки;
ПдВ — число двигателей;
Ндас —количество пассажиров;
Р —суммарная тяга двигателей;
Ро —стартовая тяга двигателей (при У=0; Н=0);
Ро{ —стартовая тяга одного двигателя;
Pq = —-— стартовая тяговооруженность;
Go
—удельная тяга силовой установки;
р —удельная нагрузка на крыло (pQ — при взлете);
Q —часовой расход топлива;
q —скоростной напор, километровый расход топлива;
р — массовая плотность воздуха; р0 — у поверхности моря;
о
д «= —---относительная плотность воздуха;
Ро
Р — радиус Земли, радикс виража и т. д.;
S — площадь крыла (с подфюзеляжной частью);
5,—относительная площадь какой-либо части самолета (отне-
сенная к площади крыла);
т| — сужение крыла;
тр, — к. п. д. винта;
Т, К —температура в градусах Кельвина;
Т —амортизационный срок службы; ресурс;
( — время, температура в градусах Цельсия;
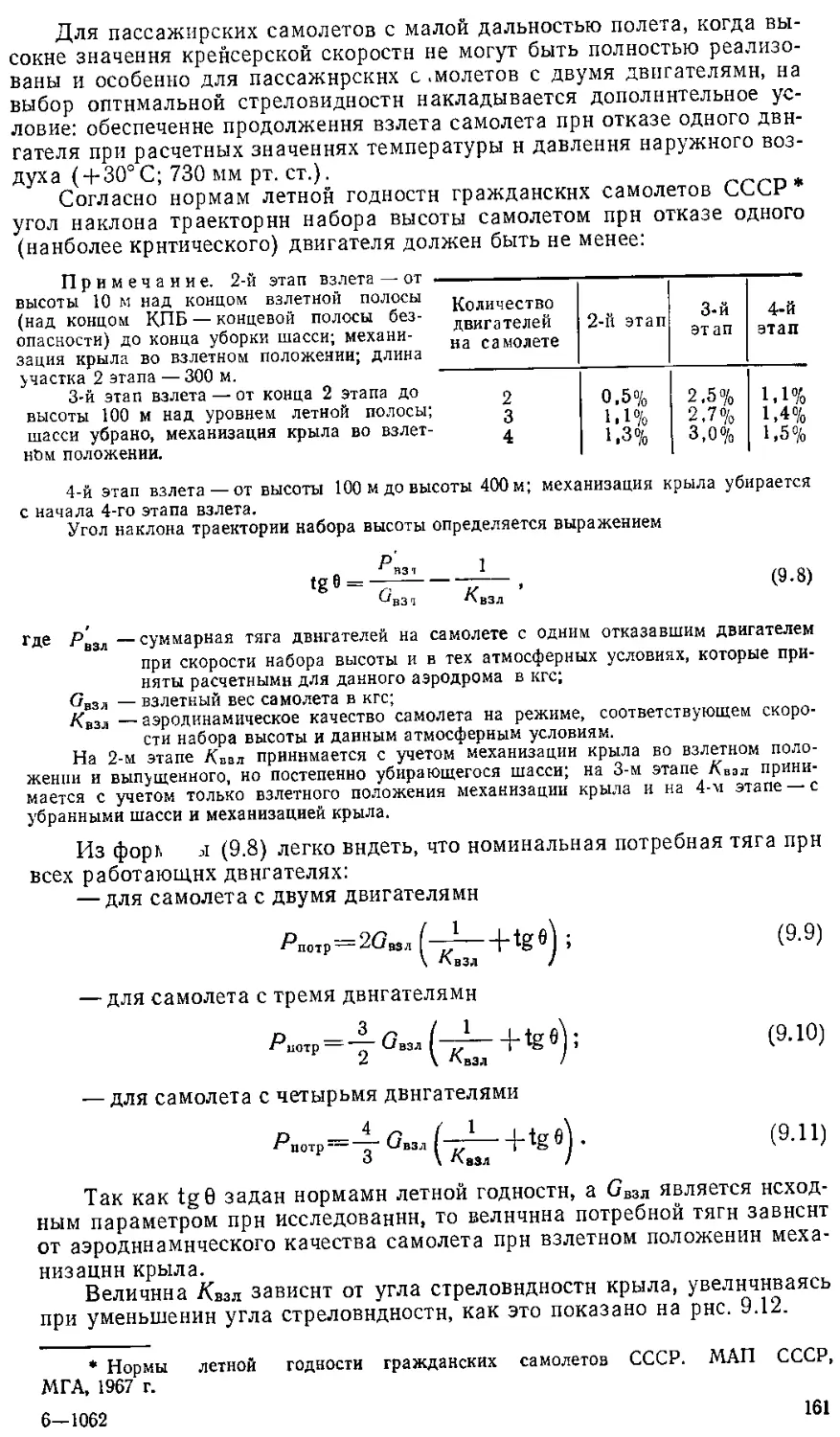
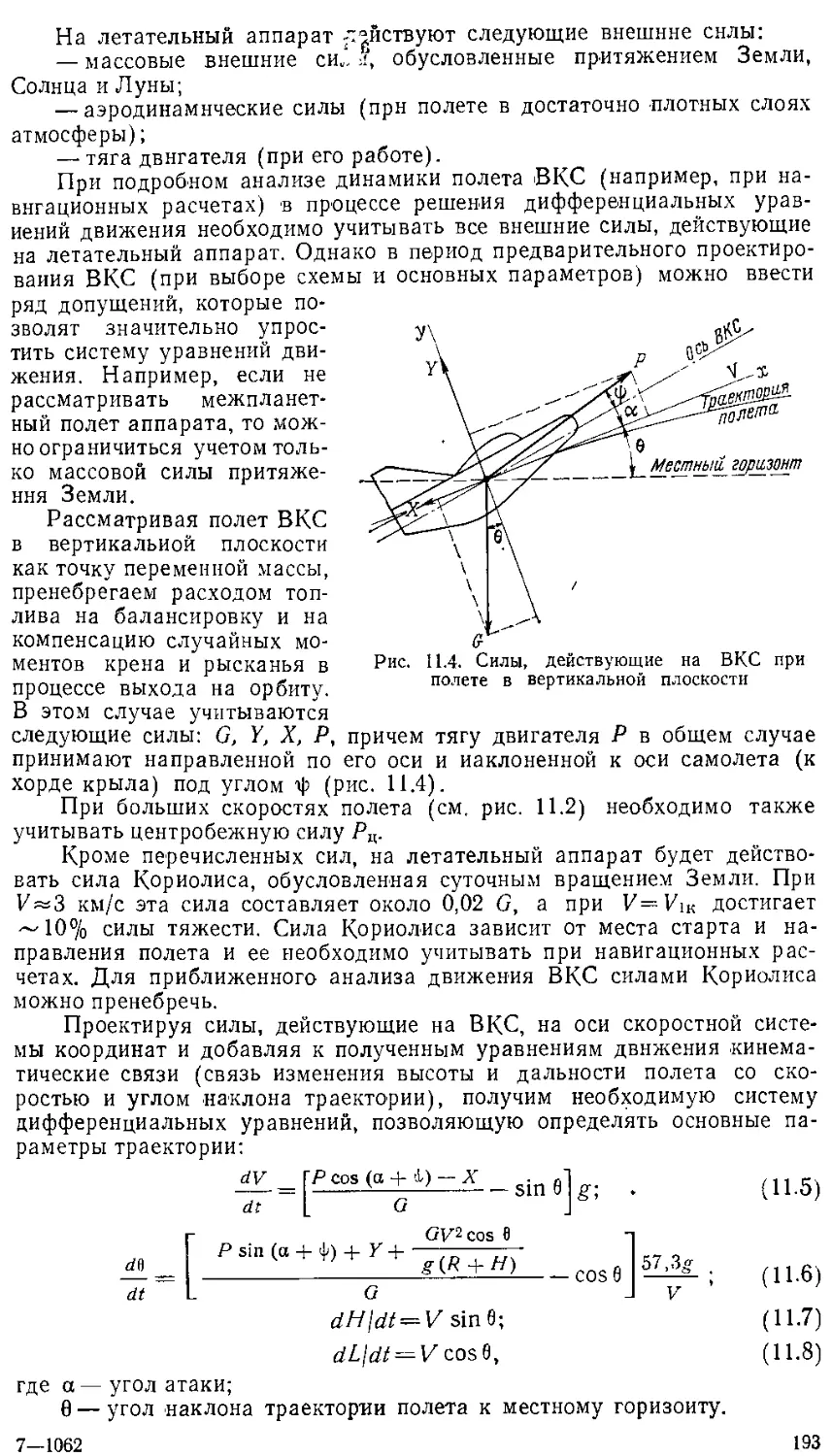
0 — угол наклона траектории полета к горизонту;
V — скорость полета;
—первая космическая скорость;
Vy —вертикальная скорость;
X —сила аэродинамического сопротивления;
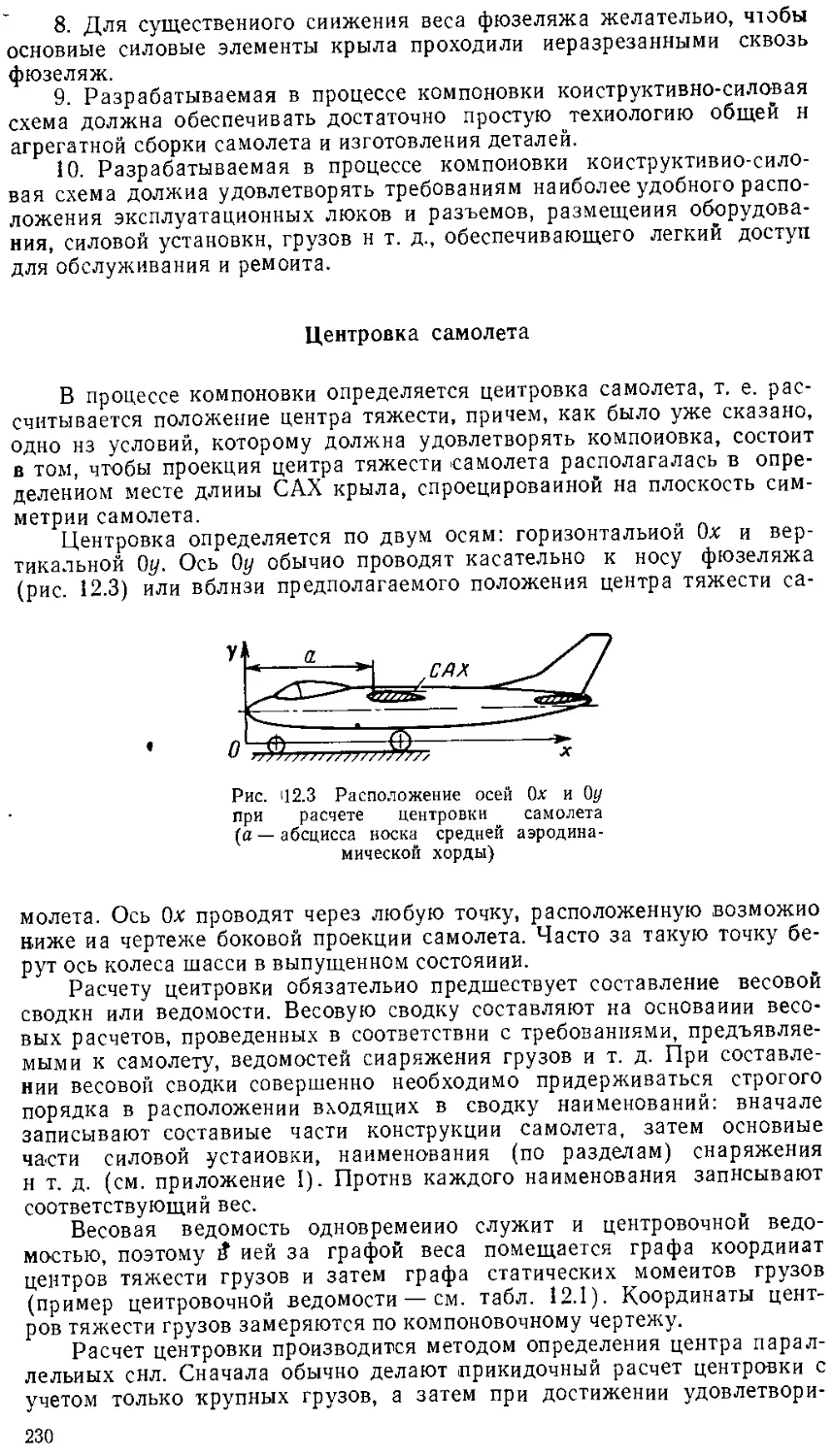
хт — положение ц. т. самолета от носка САХ;
Хр —положение фокуса самолета от носка САХ;
Y —аэродинамическая подъемная сила.
Сокращения
ВКС — воздушно-космический самолет;
ВПП — взлетно-посадочная полоса;
Г1Д — газотурбинный двигатель;
ДТРД —двухконтурный турбореактивный двигатель;
ЖРД — жидкостный ракетный двигатель;
ЛПС — летно-подъемный состав;
ПВРД — прямоточный воздушно-реактивный двигатель;
ПД — поршневой двигатель;
ПРД — пороховой ракетный двигатель;
СА — стандартная атмосфера;
САХ — Средняя аэродинамическая хорда;
СПС — сверхзвуковой пассажирский самолет;
ТВД — турбовинтовой двигатель;
ТВРД — турбовентиляторный двигатель;
ТРД — турбореактивный двигатель;
ТРДФ —турбореактивный двигатель с форсажной камерой;
ЭВМ—электронная вычислительная машина;
УПС— управление пограничным слоем;
СВВП — самолет вертикал:-.--,го взлета-посадки;
СУВП— самолет укороченного взлета и посадки.
Индексы
в — волновой;
взл. —взлетный (Go — взлетный вес);
в.о — вертикальное оперение;
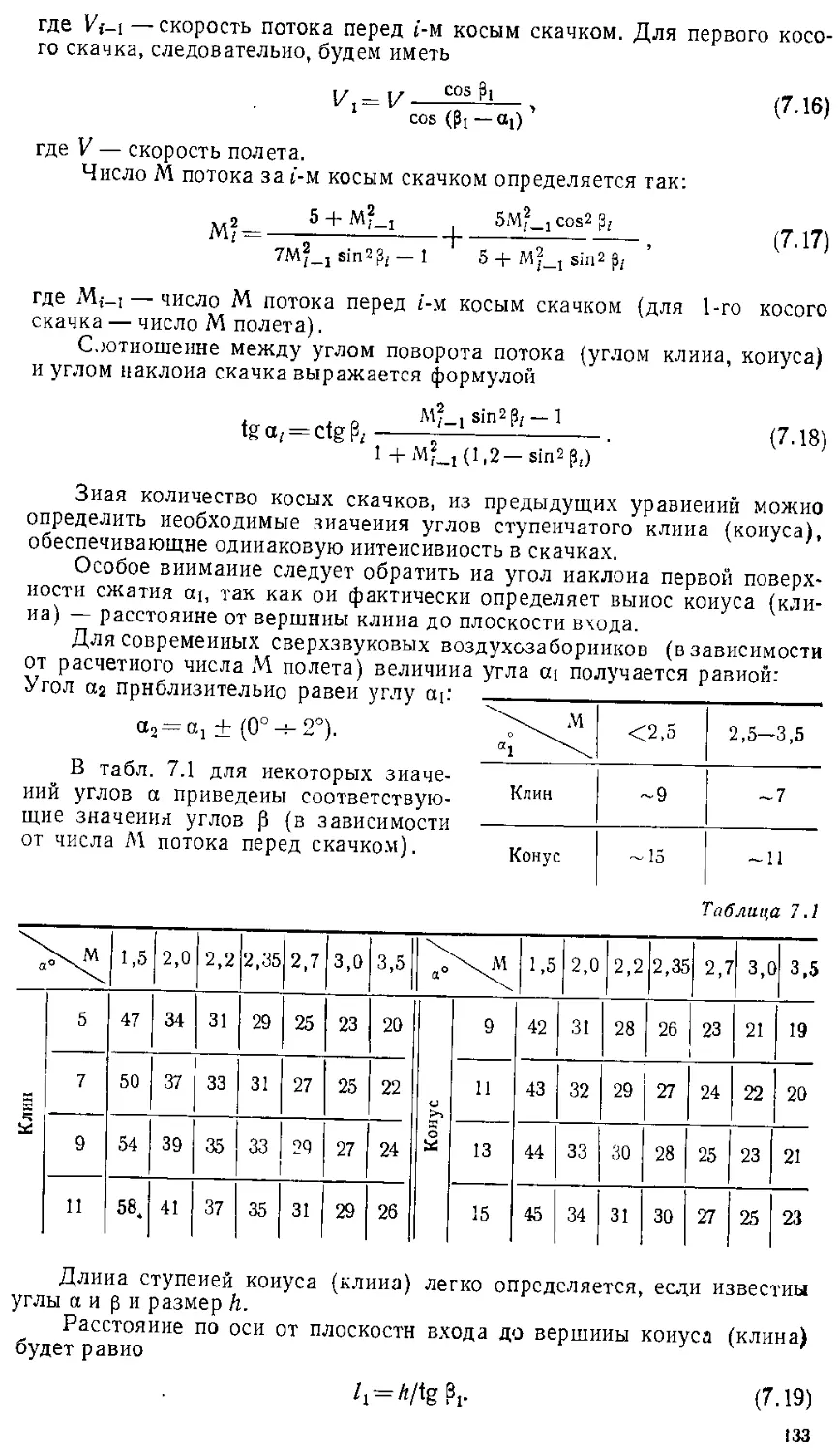
г —гондола, груз, горло;
го —горизонтальное one ение;
кач — качение;
ком —коммерческий;
кр — крыло;
крейс —крейсерская;
Крит—критическое (значение);
м — миделевый;
м.ф —мидель фюзеляжа.
О — начальное значение величины (или при старте);
н — нагрузка;
н.в — набор высоты;
н.з — навигационный запас;
об. упр — оборудование и управление;
омыв —омываемая поверхность;
оп — оперение;
ост — остановка;
отр — отрыв;
пас — пассажир;
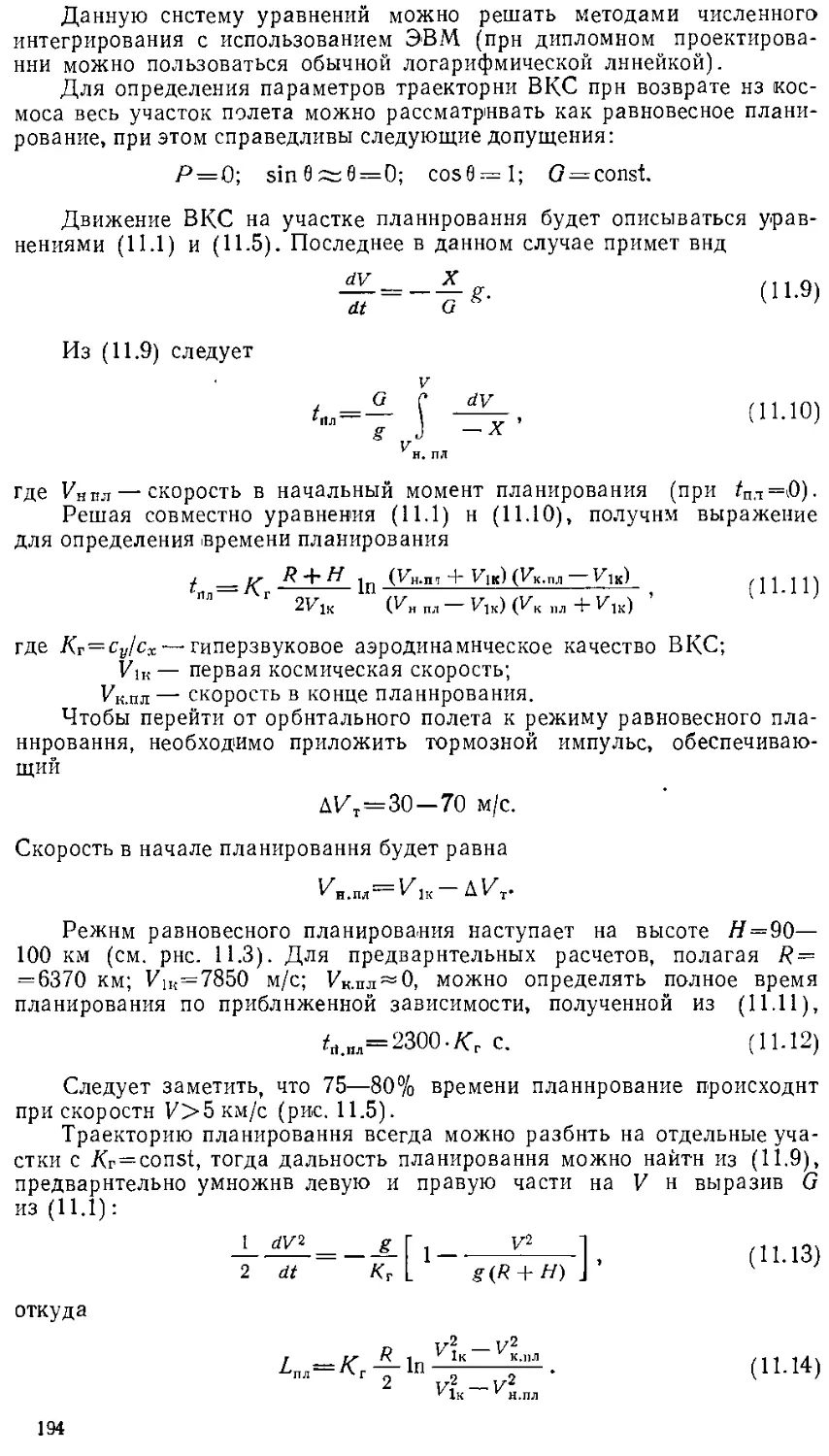
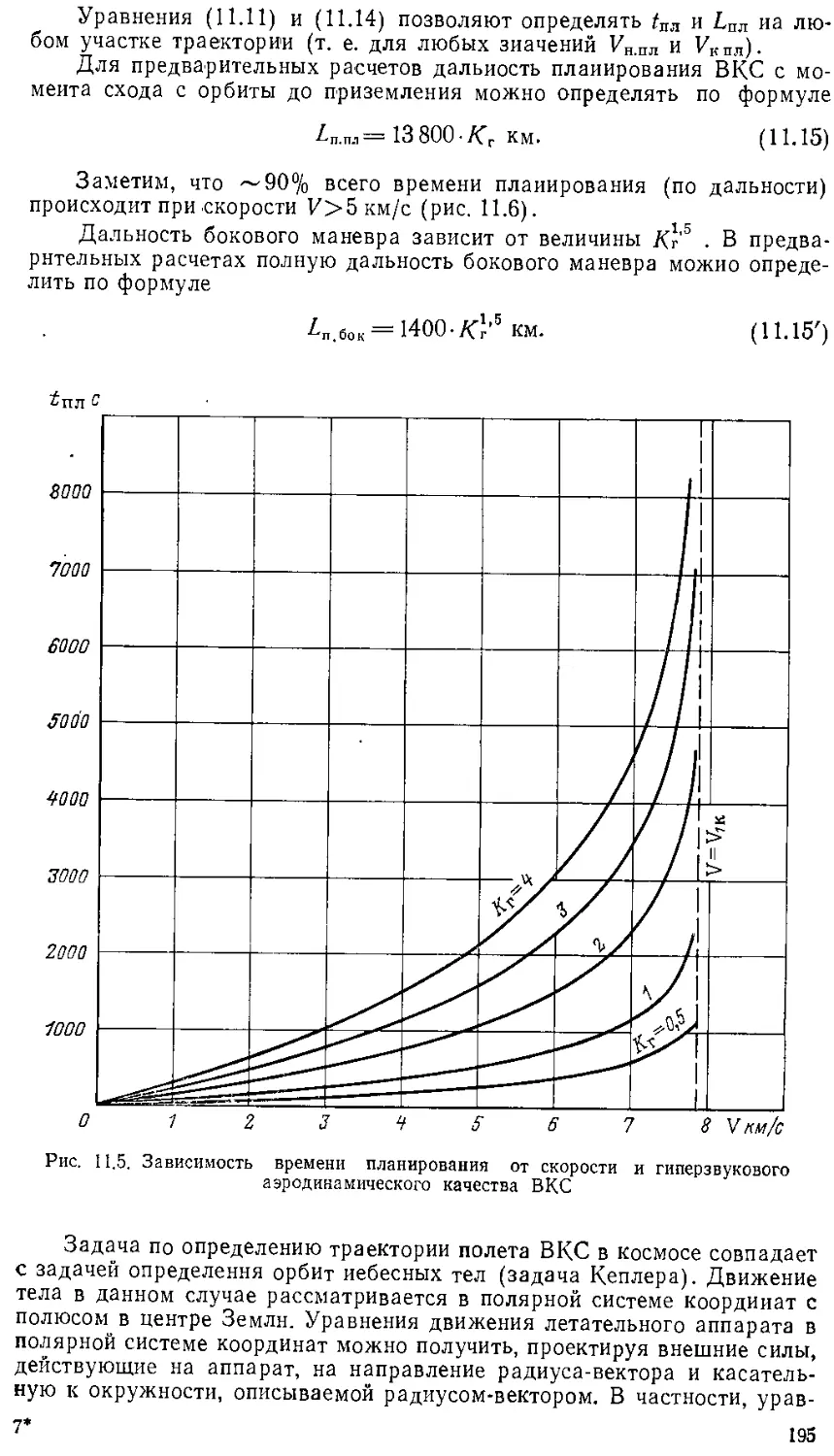
пл — планирование;
п.н —полезная нагрузка;
пос —посадочный;
пот — потолок;
прерв — прерванный;
прив — приведенный;
проб — пробег;
пуст — пустой;
расч — расчетный;
рейс —рейсовая скорость;
разб — разбег;
расх —расходуемый;
рл — руль;
рч — ручка;
с.г —сбрасываемый груз (в полете);
ск — скольжение;
служ —служебный;
сн — снаряжение;
с.у — силовая установка;
ф — фюзеляж;
ш — шасси;
эк — экипаж.
ВВЕДЕНИЕ
Под проектированием самолета обычно понимают процесс разработ-
ки технических материалов (документации), определяющих его летио-
технические характеристики, схему и конструкцию отдельных агре-
гатов.
Назначение, условия эксплуатации и летно-технические характери-
стики проектируемого самолета определяются заказчиком и оформляют-
ся в виде специальных требований.
Процесс проектирования самолета включает в себя разработку эс-
кизного и рабочего проектов. Работа по уточнению требований к самоле-
ту и возможности их выполнения, проводимая до начала разработки эс-
кизного 'проекта, называется предварительным (предэскизным) проекти-
рованием.
Эскизное проектирование заключается в разработке основных ха-
рактеристик самолета, его аэродинамических и конструктивных схем,
которые позволяют судить о целесообразности дальнейшего проектиро-
вания.
В эскизное проектирование самолета входит:
а) разработка общих видов и компоновочных разрезов;
б) сокращенная разработка конструкции важнейших частей (аг-
регатов) ;
в) разработка принципиальных схем, систем оборудования и уп-
равления, а также силовой установки;
г) расчет силы тяжести (веса) и центровки;
д) аэродинамический расчет, расчет устойчивости и управляемости;
е) приближенный расчет на прочность важнейших частей само-
лета.
Одновременно с разработкой эскизного проекта строят макет само-
лета в натуральную величину. Для рассмотрения макета заказчиком на-
значается комиссия из различных специалистов, включая и экипаж.
После заключения макетной комиссии, которая рассматривает и ут-
верждает эскизный проект и макет самолета, осуществляется оконча-
тельная увязка конструкции с размещением управления и оборудования,
уточняются внешние обводы. Затем ведут более полные расчеты са-
молета на прочность, изготавливают и продувают в аэродинамических
трубах модели и по результатам продувок моделей уточняют аэродина-
мический расчет, расчет устойчивости, штопора и флаттера. На основа-
нии результатов продувок уточняется схема самолета, проводятся уточ-
ненные весовые расчеты, при этом устанавливаются весовые лимиты
(наибольшие значения веса конструкции самолета и его частей, допусти-
мые из соображений проектирования).
Рабочее проектирование — это завершающий процесс разработки
технической документации. Рабочий проект дает все необходимые мате-
8
риалы о летно-технических данных будущего самолета, о его прочности
и надежности; он содержит спецификации оборудования и все необходи-
мые сведения для разработки технологии производства самолета. Сле-
дует заметить, что рабочее проектирование опытного самолета обычно
заканчивается после того, как построенный образец самолета прошел
испытания.
В рабочее проектирование входит:
а) разработка сборочных и деталировочных чертежей конструкции
отдельных агрегатов (частей) самолета;
б) разработка чертежей общих видов агрегатов самолета;
в) уточнение расчетов на прочность всех силовых элементов;
г) уточнение расчетов веса конструкции;
д) проведение исследовательских и экспериментальных работ, свя-
занных с внедрением новых конструкций, материалов и т. п.
Разработка рабочего проекта современного самолета чрезвычайно
трудоемкий и сложный процесс, выполнение которого под силу только
большому коллективу квалифицированных инженерно-технических ра-
ботников различных специальностей.
Экспериментально-исследовательскими работами занимаются лабо-
ратории конструкторских бюро и научно-исследовательские институты.
Заключительным этапом экспериментально-исследовательских работ яв-
ляются обычно статические и динамические испытания конструкции на
прочность, долговечность, безотказность работы отдельных агрегатов и
систем. Гидросистемы и другие системы оборудования, системы управ-
ления и средства спасения экипажа самолета в обязательном порядке
подвергаются стендовым испытаниям в условиях, близких эксплуата-
ционным.
Весь громадный объем знаний, необходимый для проектирования
современного самолета, был накоплен в результате более чем полувеко-
вого труда ученых различных стран — аэродинамиков, прочнистов, ме-
таллургов— и инженерной практики проектирования, конструирования
и производства самолетов.
Накопление знаний и инженерного опыта способствовало совершен-
ствованию самолета, сопровождавшемуся изменением основных пара-
метров и улучшением его основных летных характеристик.
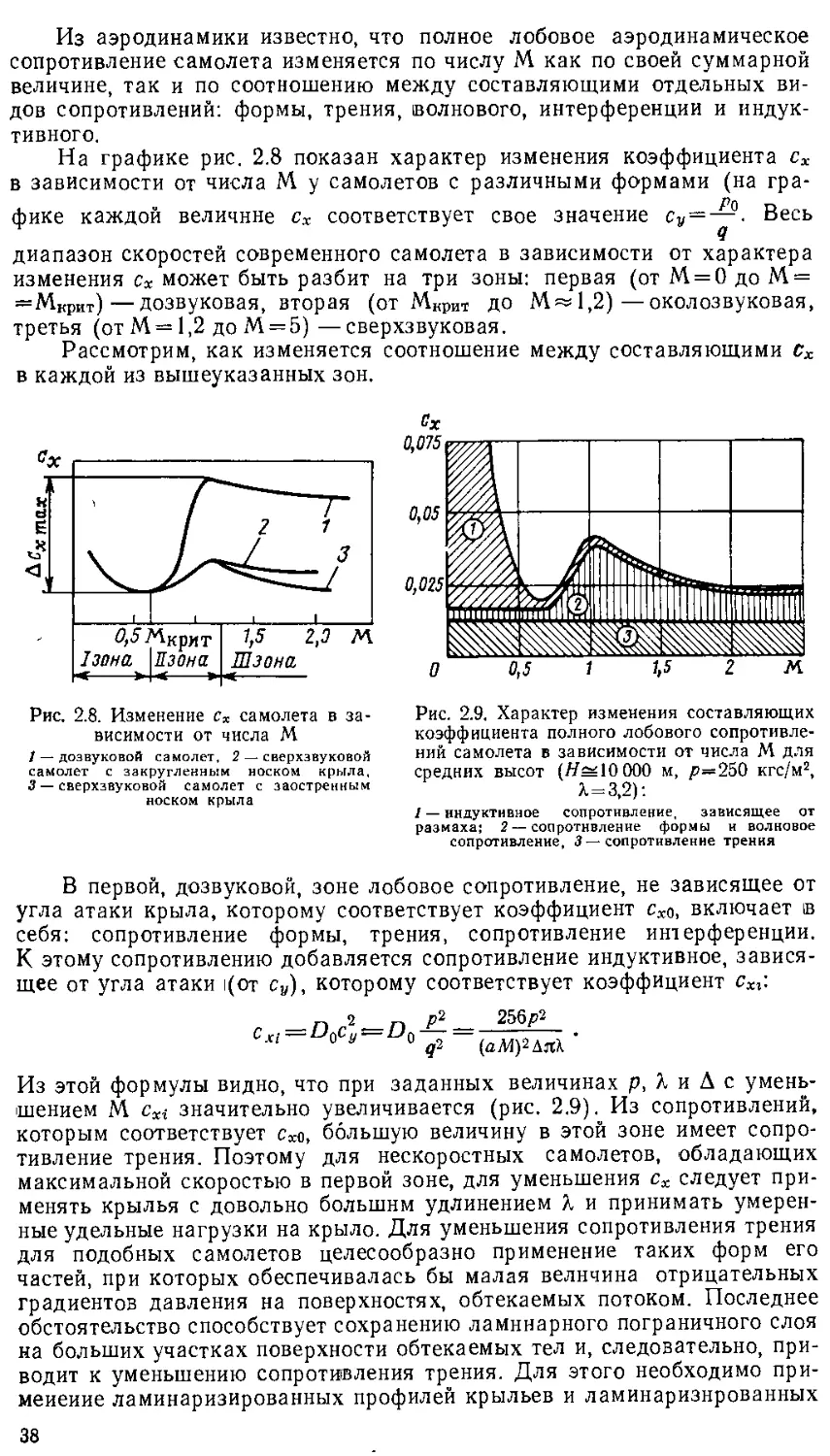
Под основными летными характеристиками самолета обычно пони-
мают максимальную скорость горизонтального полета 1/тат, потолок
/7Пот, максимальную вертикальную скорость и максимальную
дальность полета Lmax. К основным же параметрам самолета относятся
такие параметры, изменение которых существенно отражается на ха-
рактеристиках самолета, а именно: взлетный вес самолета Go, площадь
крыла S, удельная нагрузка на крыло р0=-^, нагрузка на лошадиную
силу — или тяговооруженность
N Go
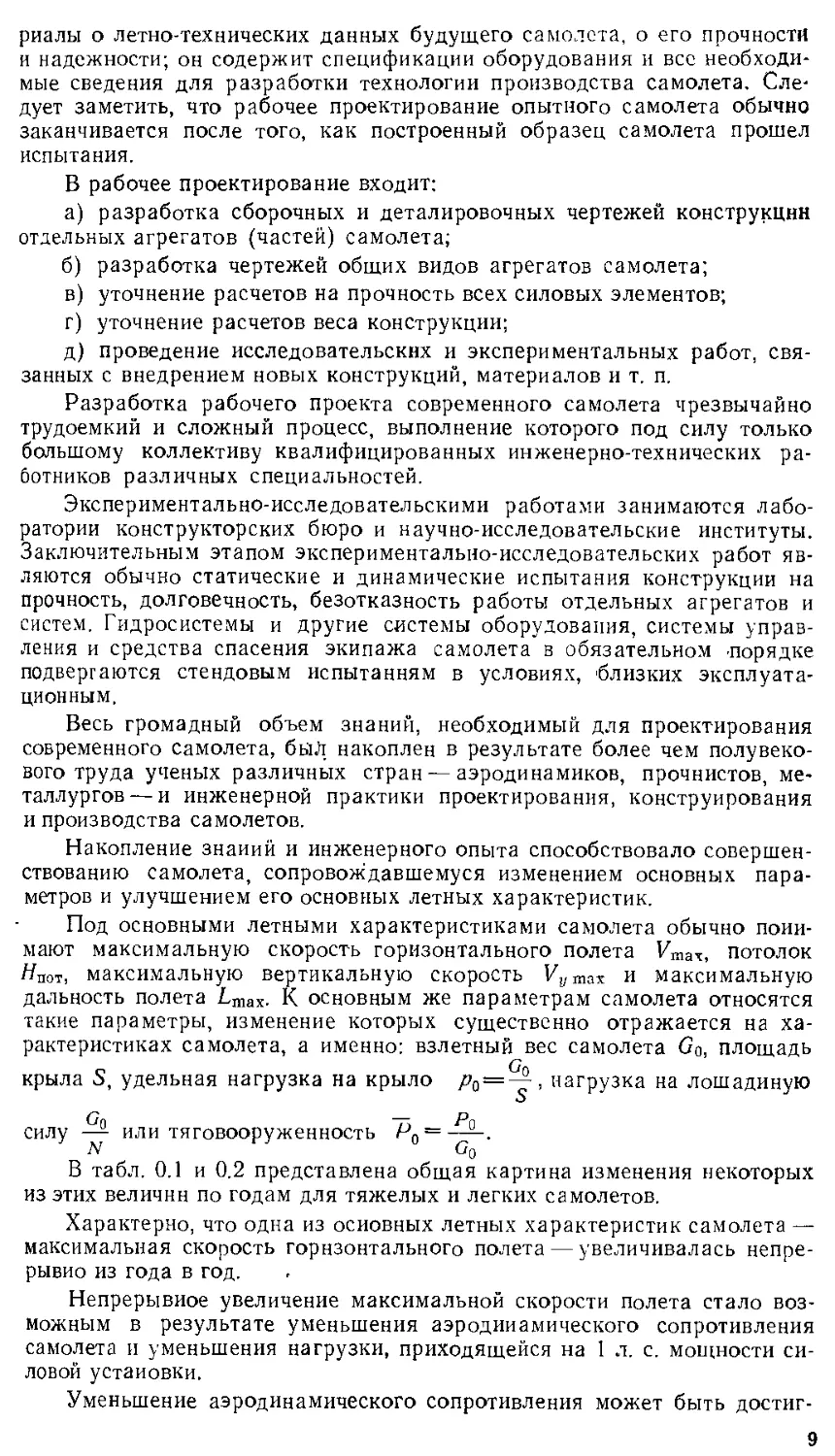
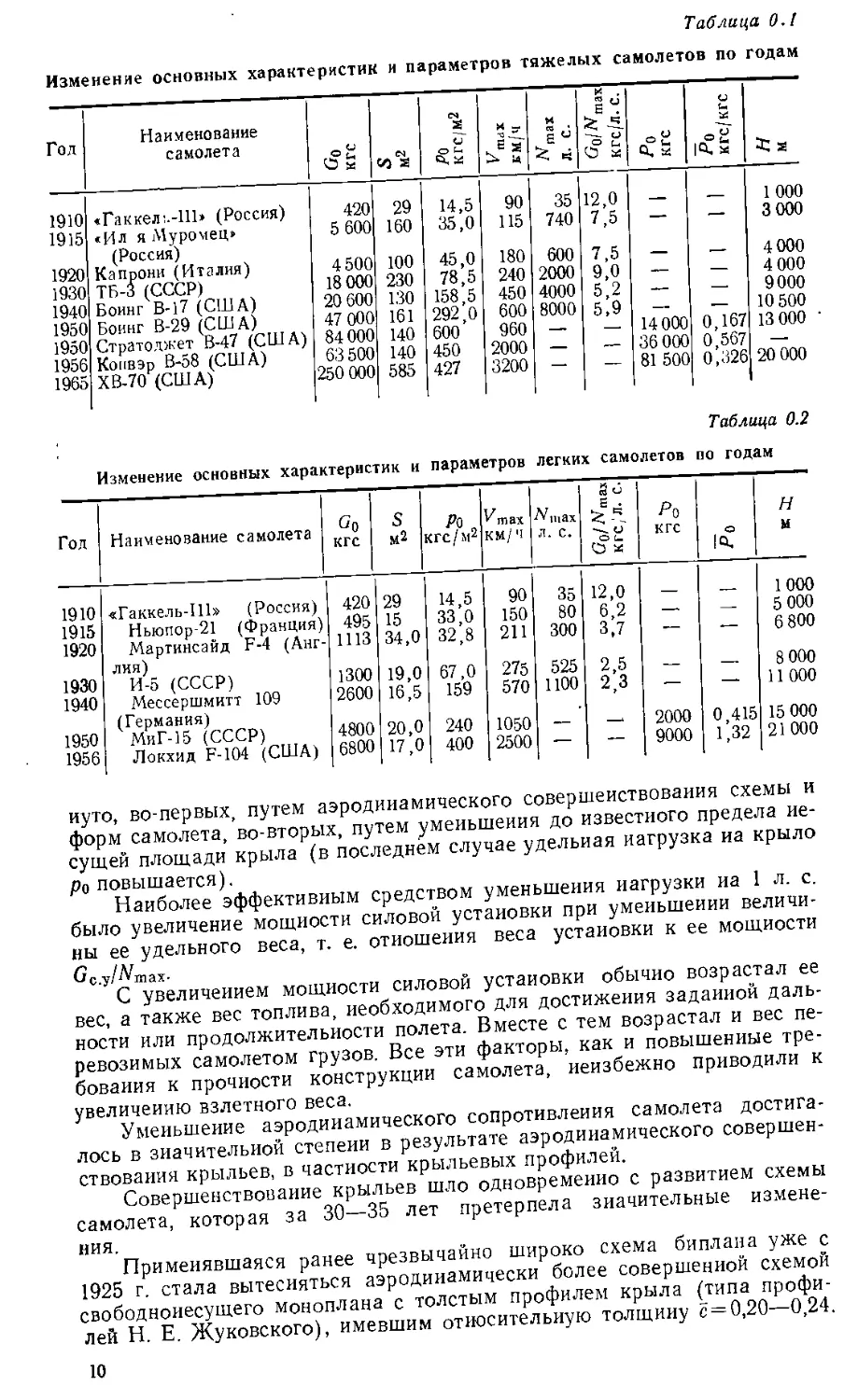
В табл. 0.1 и 0.2 представлена общая картина изменения некоторых
из этих величин по годам для тяжелых и легких самолетов.
Характерно, что одна из основных летных характеристик самолета —
максимальная скорость горизонтального полета — увеличивалась непре-
рывно из года в год.
Непрерывное увеличение максимальной скорости полета стало воз-
можным в результате уменьшения аэродинамического сопротивления
самолета и уменьшения нагрузки, приходящейся на 1 л. с. мощности си-
ловой установки.
Уменьшение аэродинамического сопротивления может быть достиг-
9
Таблица 0.1
Изменение основных характеристик и параметров тяжелых самолетов по годам
Гол Наименование самолета СО 2 ги/эля Об у r max км/ч м В d 1 кгс/л. с. а U |й. X
1910 <Гаккел:.~111» (Россия) 420 29 14,5 90 35 12,0 . 1 000
1915 *Ил я Муромец» 5 600 160 35,0 115 740 7,5 — — 3 000
1920 Капрони (Италия) 4500 100 45,0 180 600 7,5 4 000
1930 ТБ-3 (СССР) 18000 230 78,5 240 2000 9,0 — 4 000
1940 Боинг В-17 (США) 20 600 130 158,5 450 4000 5,2 — —— 9000
1950 Боинг В-29 (США) 47 000 161 292,0 600 8000 5,9 — 10 500
1950 Стратолжет В-47 (США) 84 000 140 600 960 — _— 14 000 0,167 13 000
1956 Конвэр В-58 (США) 63500 140 450 2000 — — 36 000 0,567 —
1965 ХВ-70 (США) 250 000 585 427 3200 — — 81 500 0,326 20 000
Таблица 0.2
Изменение основных характеристик и
параметров легких самолетов по годам
Гол Наименование самолета G» кгс S м2 Ро кгс/м2 ^тах км/ ч А шах % я и О (_ Ъ X Л) кгс а:» 1
1910 «Гаккель-Ш» (Россия) 420 29 14,5 90 35 12,0 1000
1915 Ньюпор-21 (Франция) 495 15 33,0 150 80 6,2 — — 5 000
1920 Мартинсайд F-4 (Анг- 1113 34,0 32,8 211 300 3,7 — — 6 800
1930 И-5 (СССР) 1300 19,0 67,0 275 525 2,5 8 000
1940 Мессершмитт 109 2600 16,5 159 570 1100 2,3 — — 11 000
1950 МиГ-15 (СССР) 4800 20,0 240 1050 2000 0,415 15 000
1956 Локхид F-I04 (США) 6800 17,0 400 2500 — — 9000 1,32 21 000
иуто, во-первых, путем аэродинамического совершенствования схемы и
форм самолета, во-вторых, путем уменьшения до известного предела не-
сущей площади крыла (в последнем случае удельная нагрузка иа крыло
Ро повышается).
Наиболее эффективным средством уменьшения нагрузки иа 1 л. с.
было увеличение мощности силовой установки при уменьшении величи-
ны ее удельного веса, т. е. отношения веса установки к ее мощности
^с.у/^тах-
С увеличением мощности силовой установки обычно возрастал ее
вес, а также вес топлива, необходимого для достижения заданной даль-
ности или продолжительности полета. Вместе с тем возрастал и вес пе-
ревозимых самолетом грузов. Все эти факторы, как и повышенные тре-
бования к прочности конструкции самолета, неизбежно приводили к
увеличению взлетного веса.
Уменьшение аэродинамического сопротивления самолета достига-
лось в значительной степени в результате аэродинамического совершен-
ствования крыльев, в частности крыльевых профилей.
Совершенствование крыльев шло одновременно с развитием схемы
самолета, которая за 30—35 лет претерпела значительные измене-
ния.
Применявшаяся ранее чрезвычайно широко схема биплана уже с
1925 г. стала вытесняться аэродинамически более совершенной схемой
свободноиесущего моноплана с толстым профилем крыла (типа профи-
лей Н. Е. Жуковского), имевшим относительную толщину с = 0,20—0,24.
10
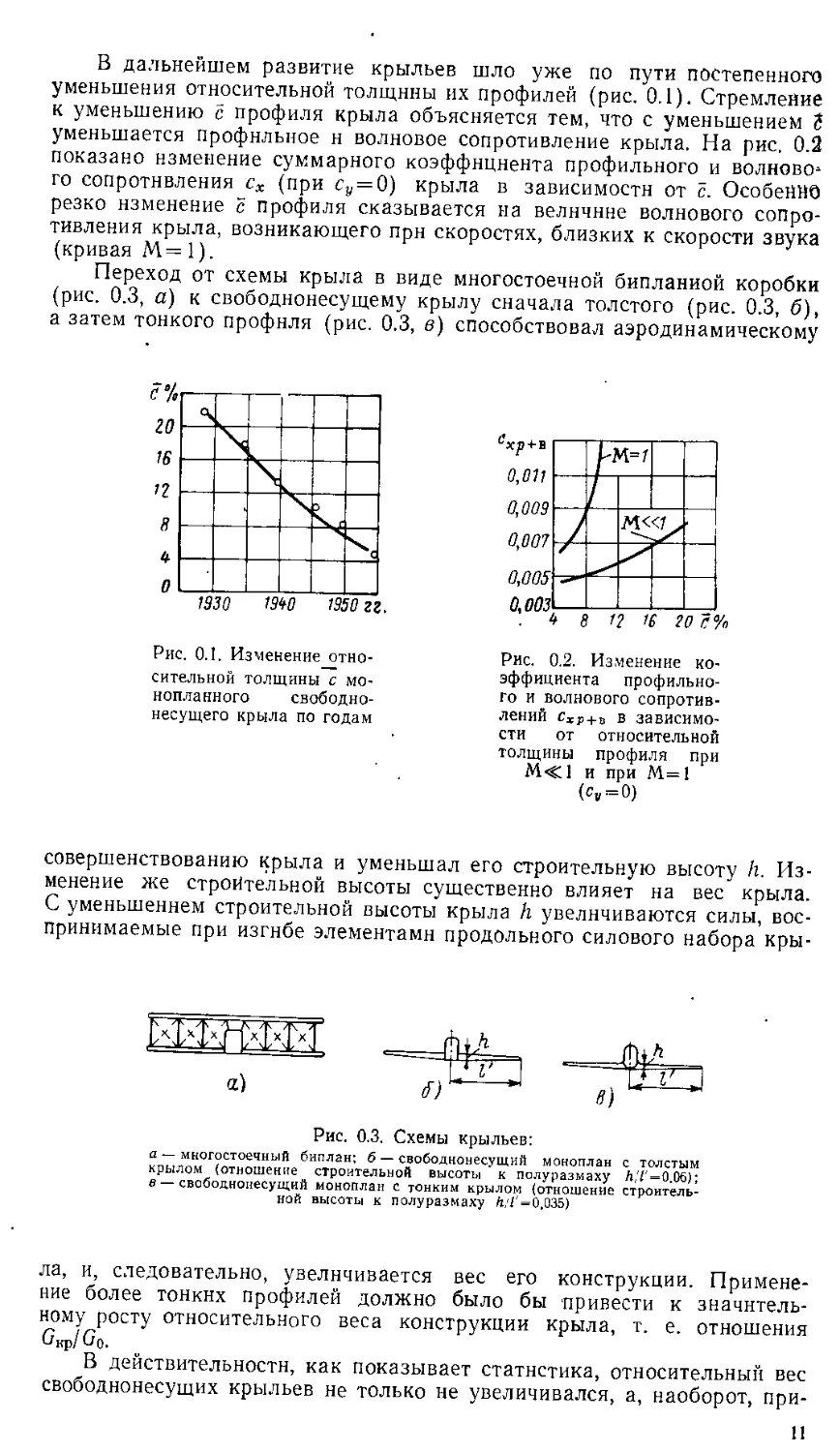
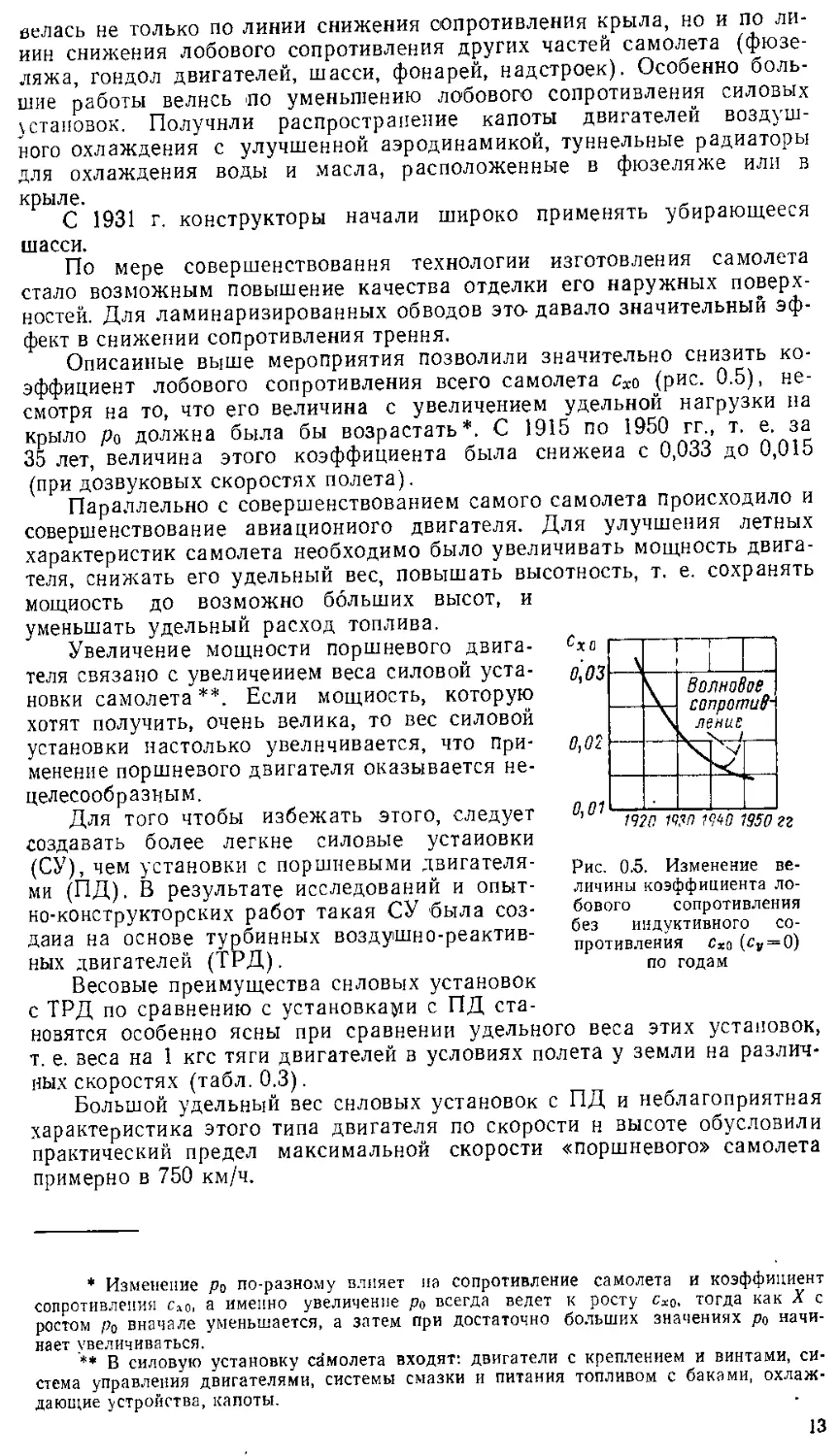
В дальнейшем развитие крыльев шло уже по пути постепенного
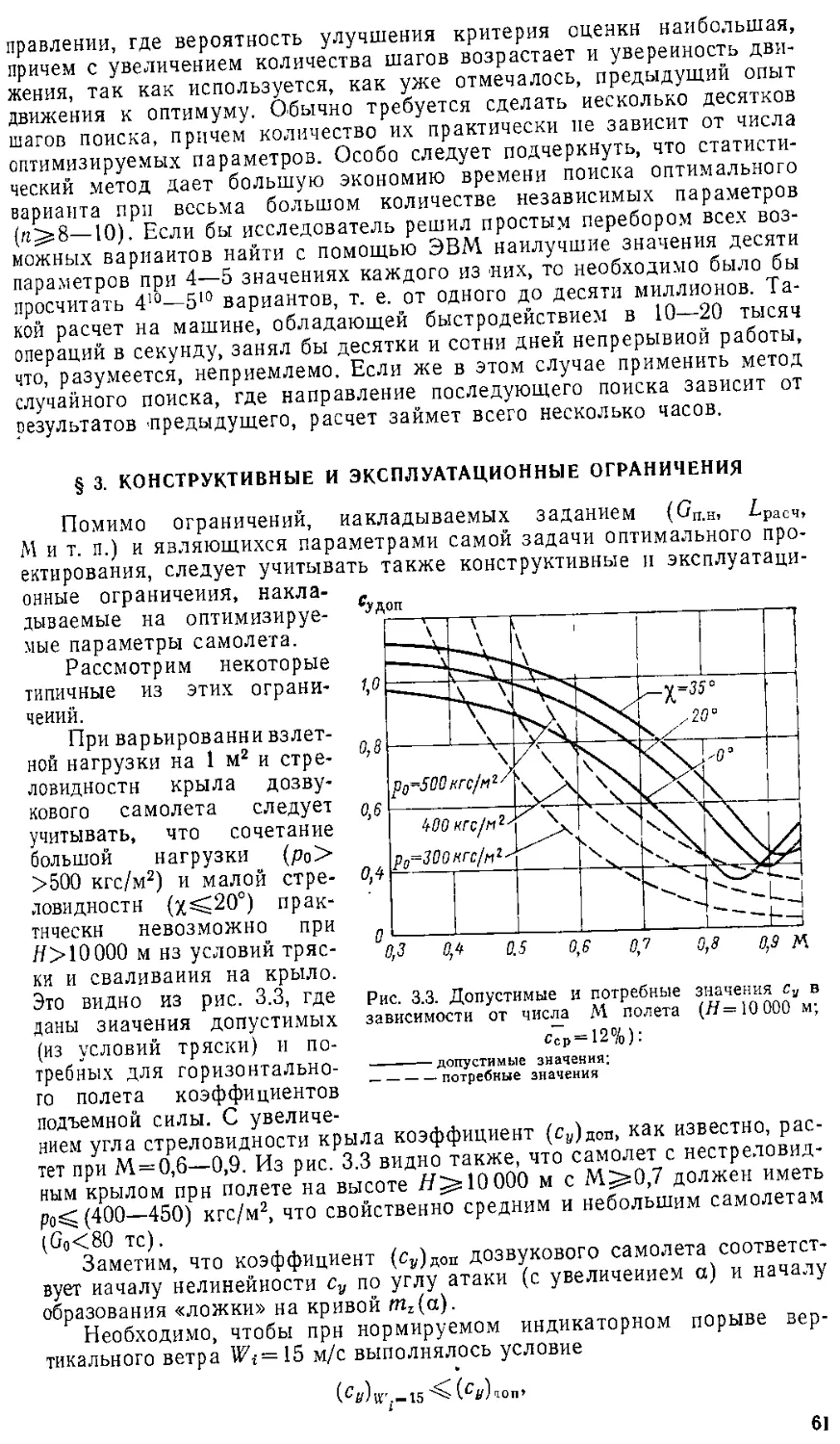
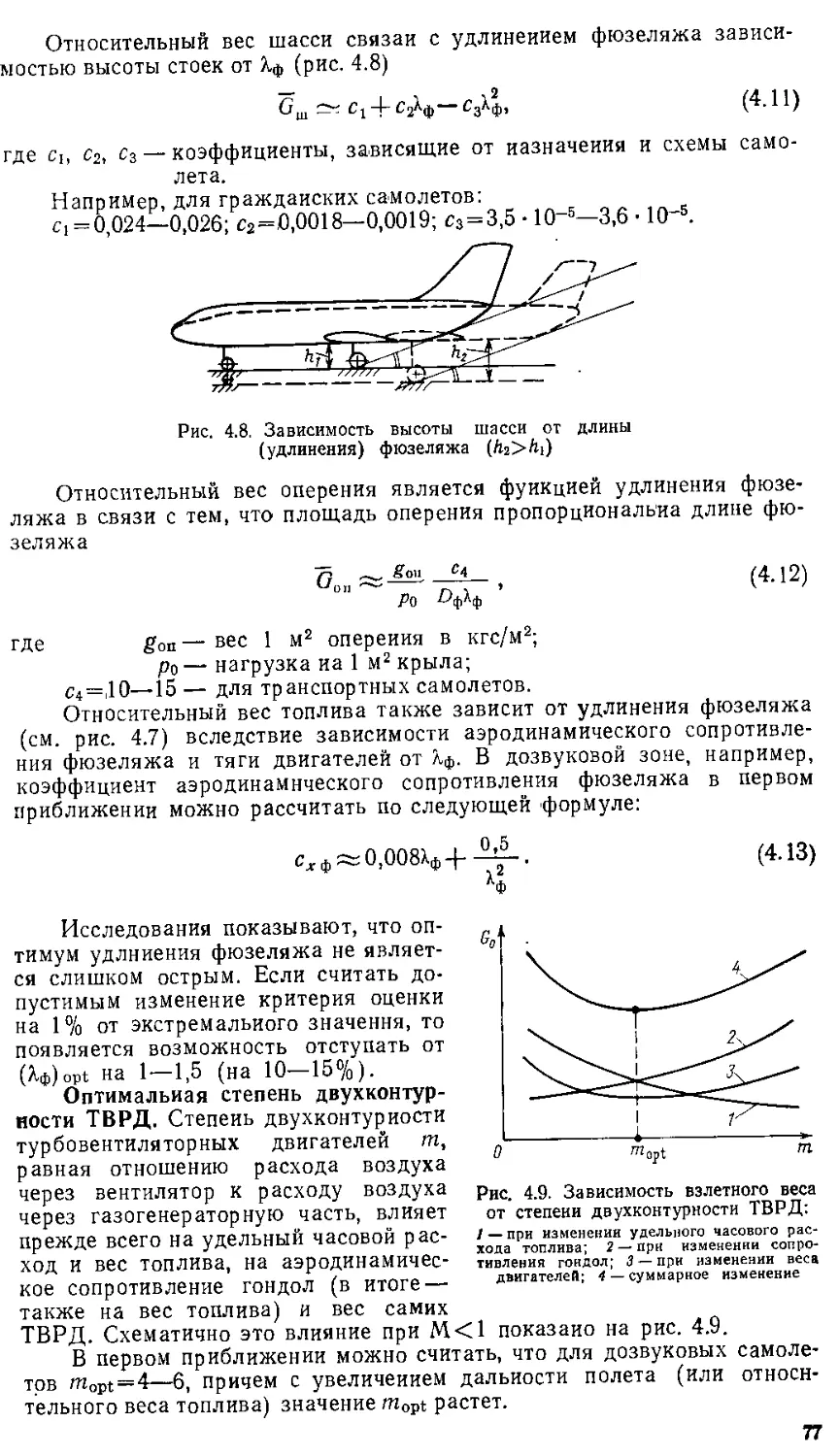
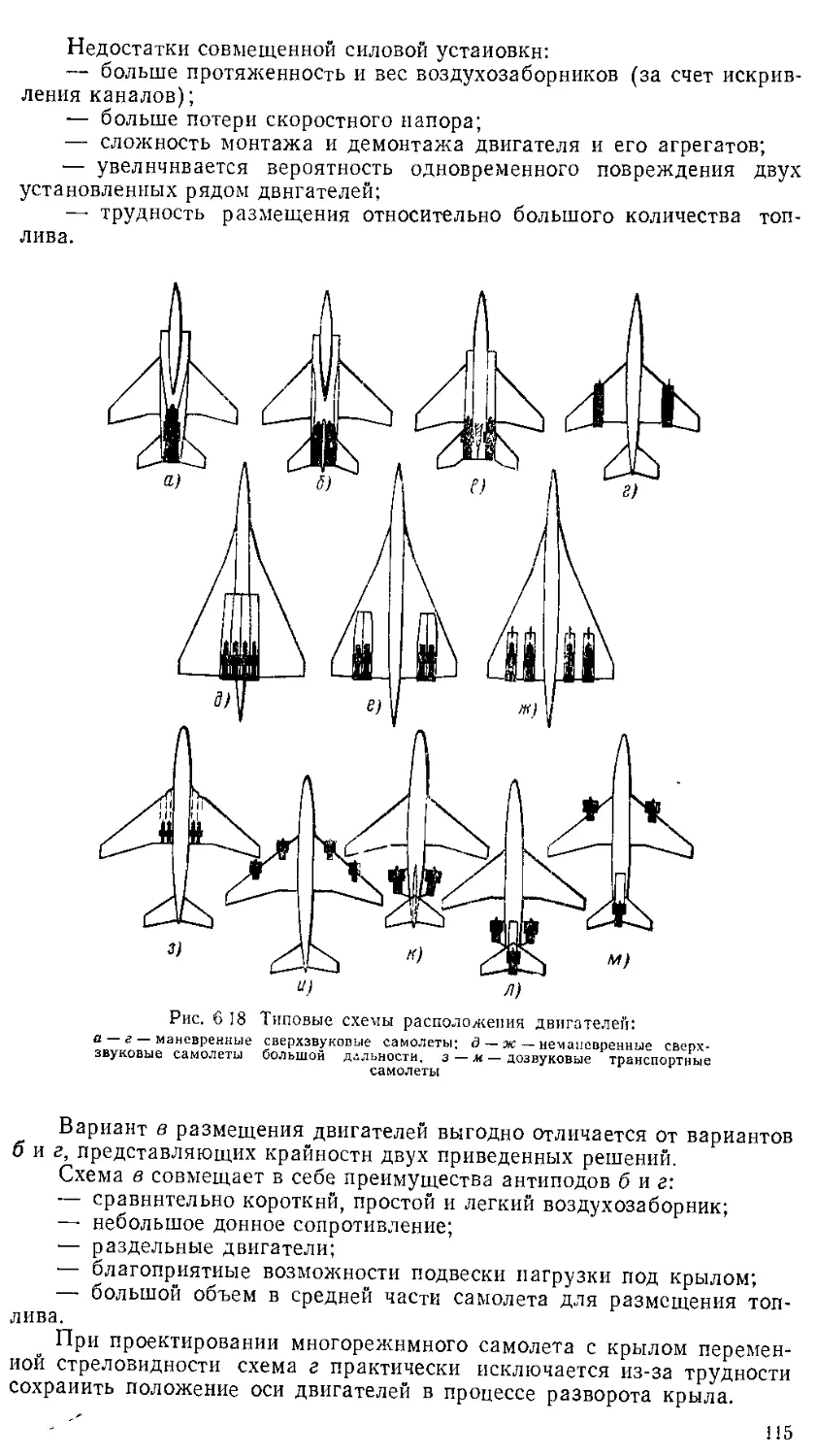
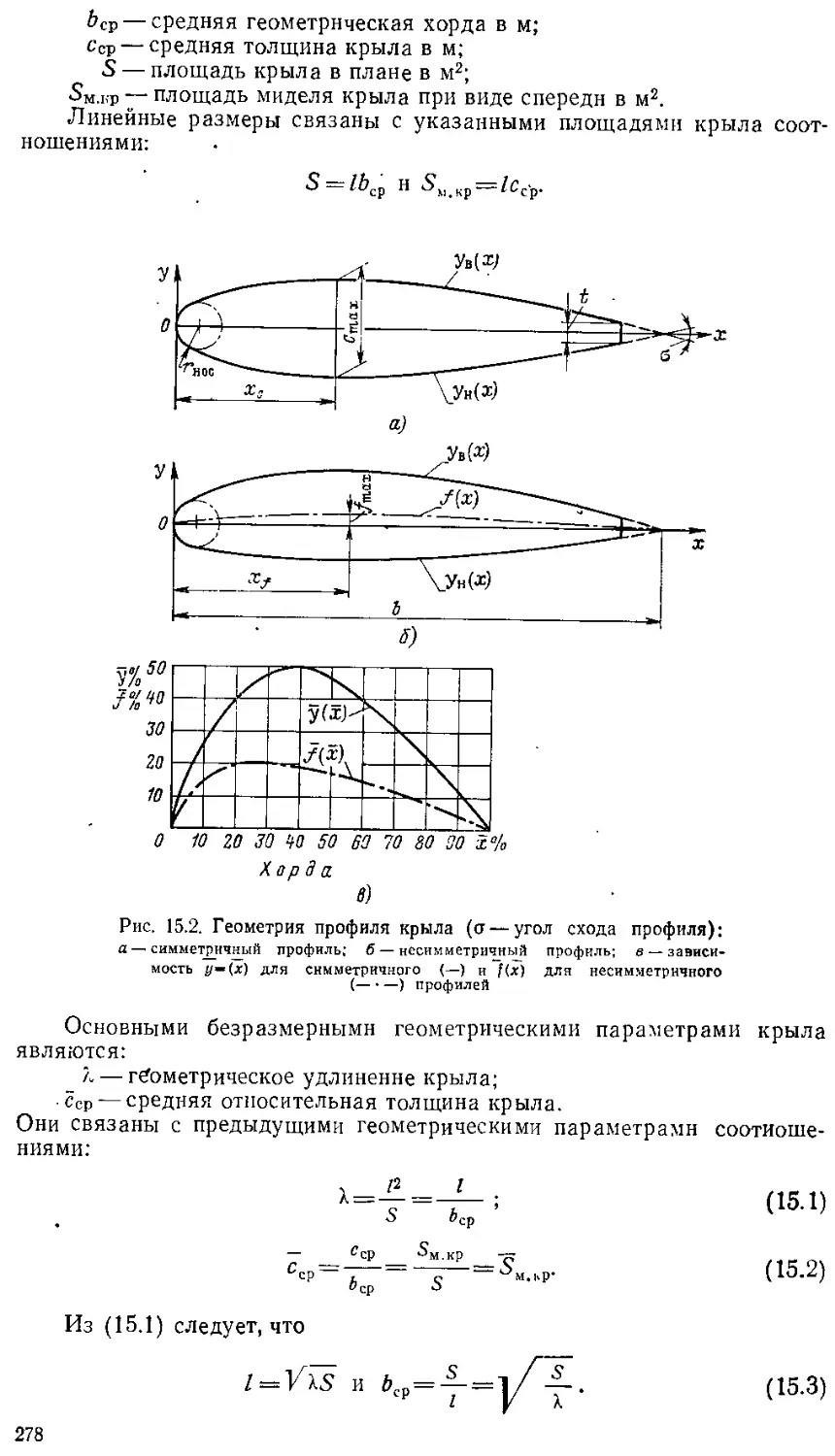
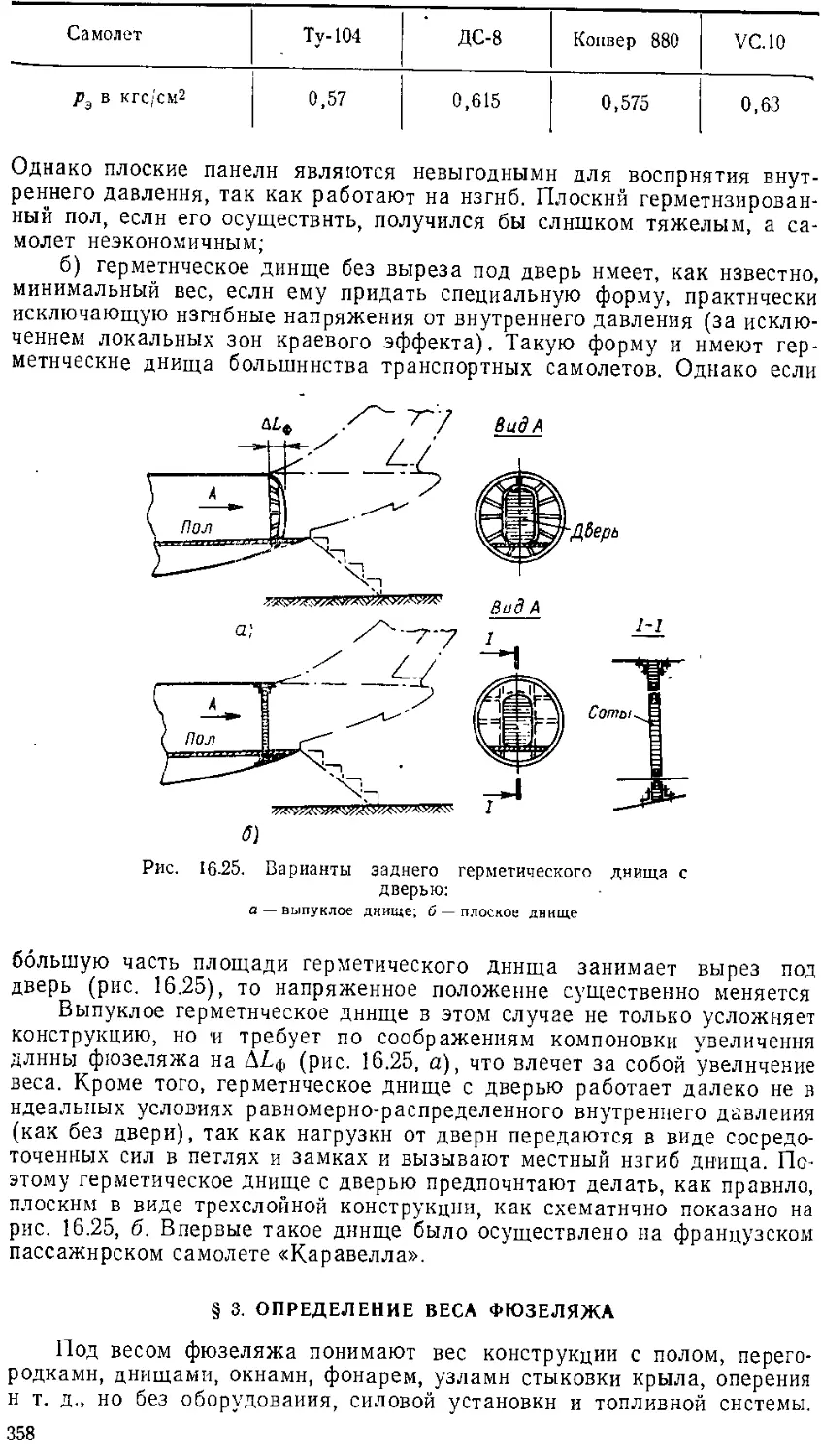
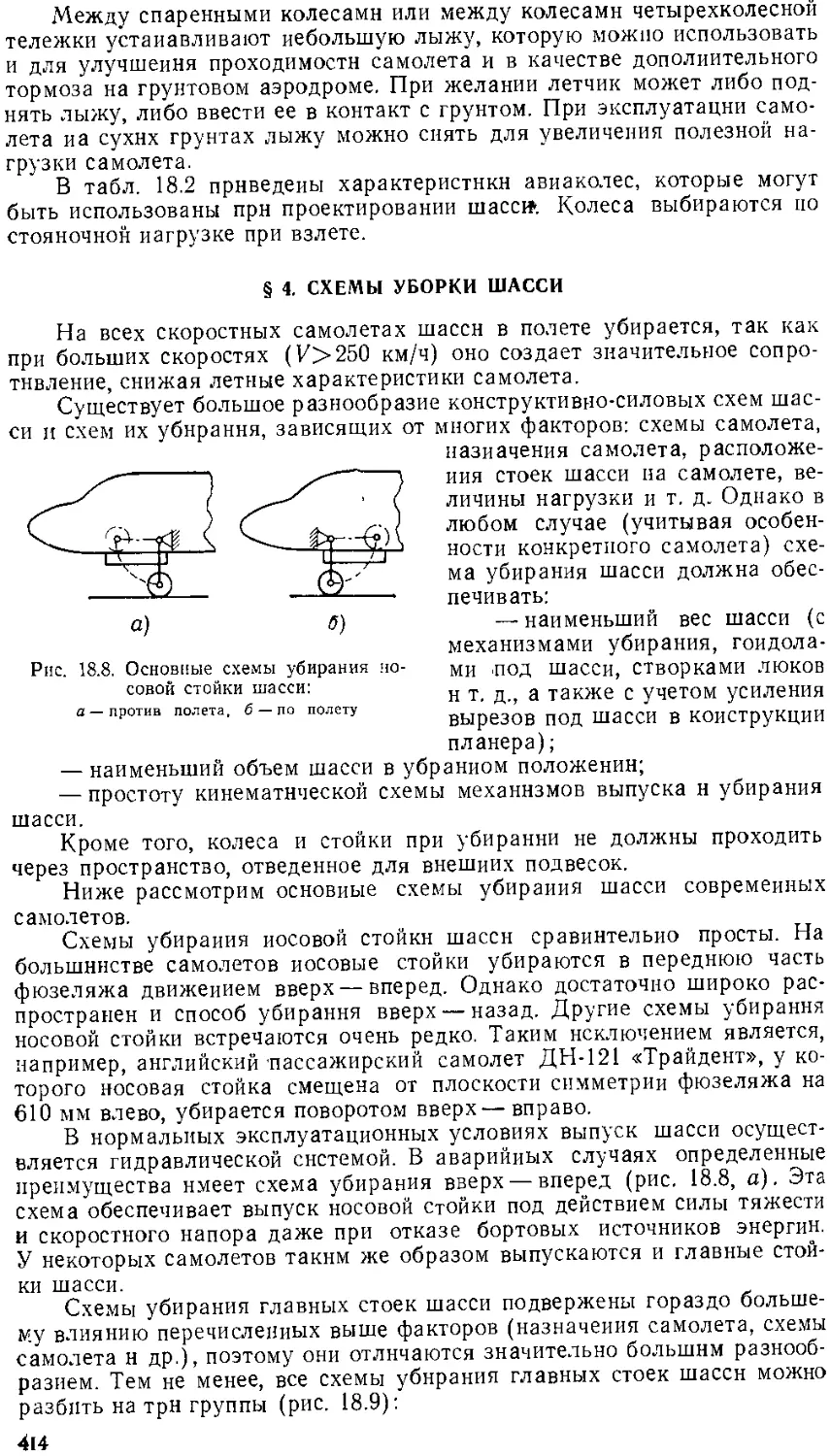
уменьшения относительной толщины их профилей (рис. 0.1). Стремление
к уменьшению с профиля крыла объясняется тем, что с уменьшением ?
уменьшается профильное и волновое сопротивление крыла. На рис. 0.2
показано изменение суммарного коэффициента профильного и волново*
го сопротивления сх (при су = 0) крыла в зависимости от с. Особенно
резко изменение с профиля сказывается на величине волнового сопро-
тивления крыла, возникающего при скоростях, близких к скорости звука
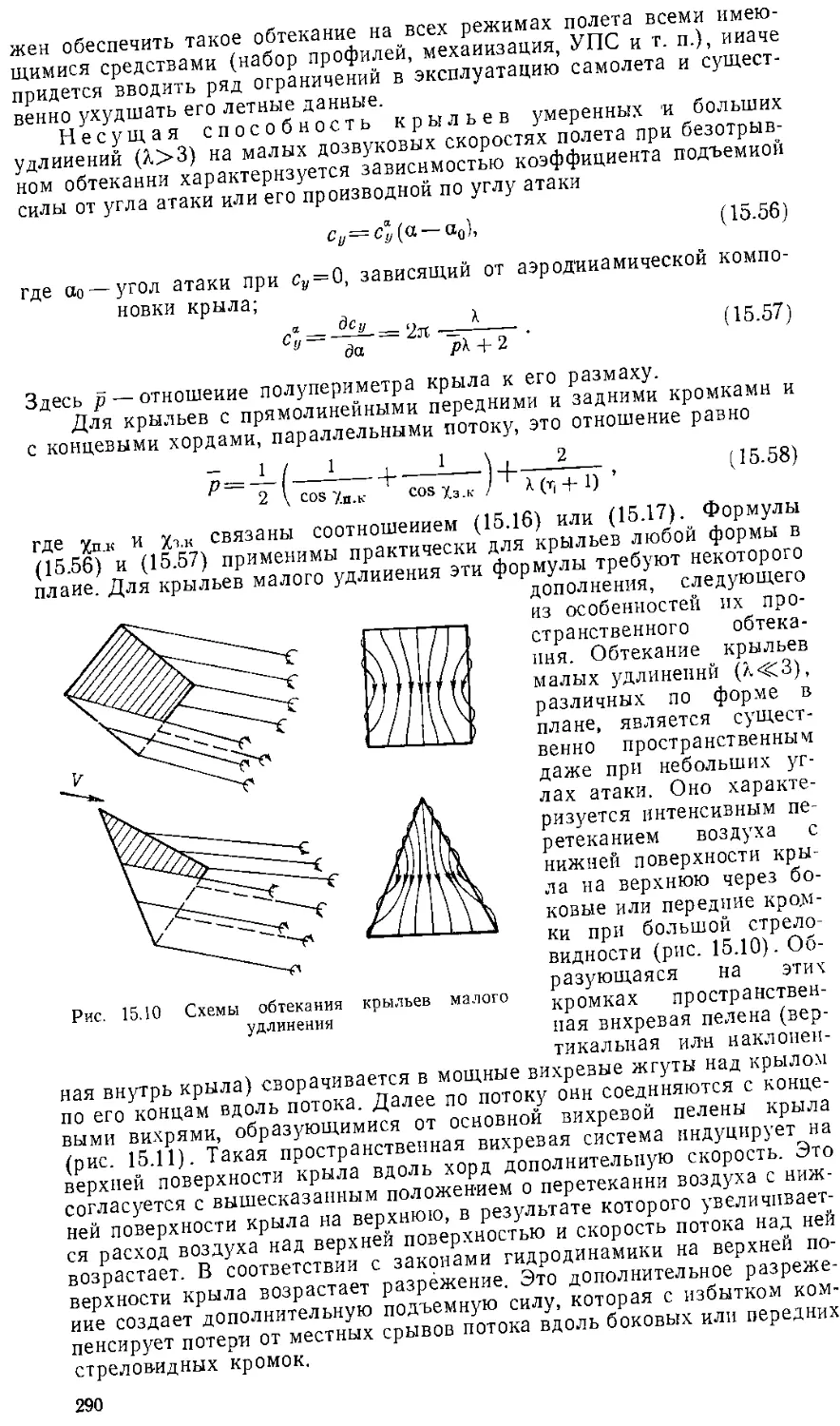
(кривая М= 1).
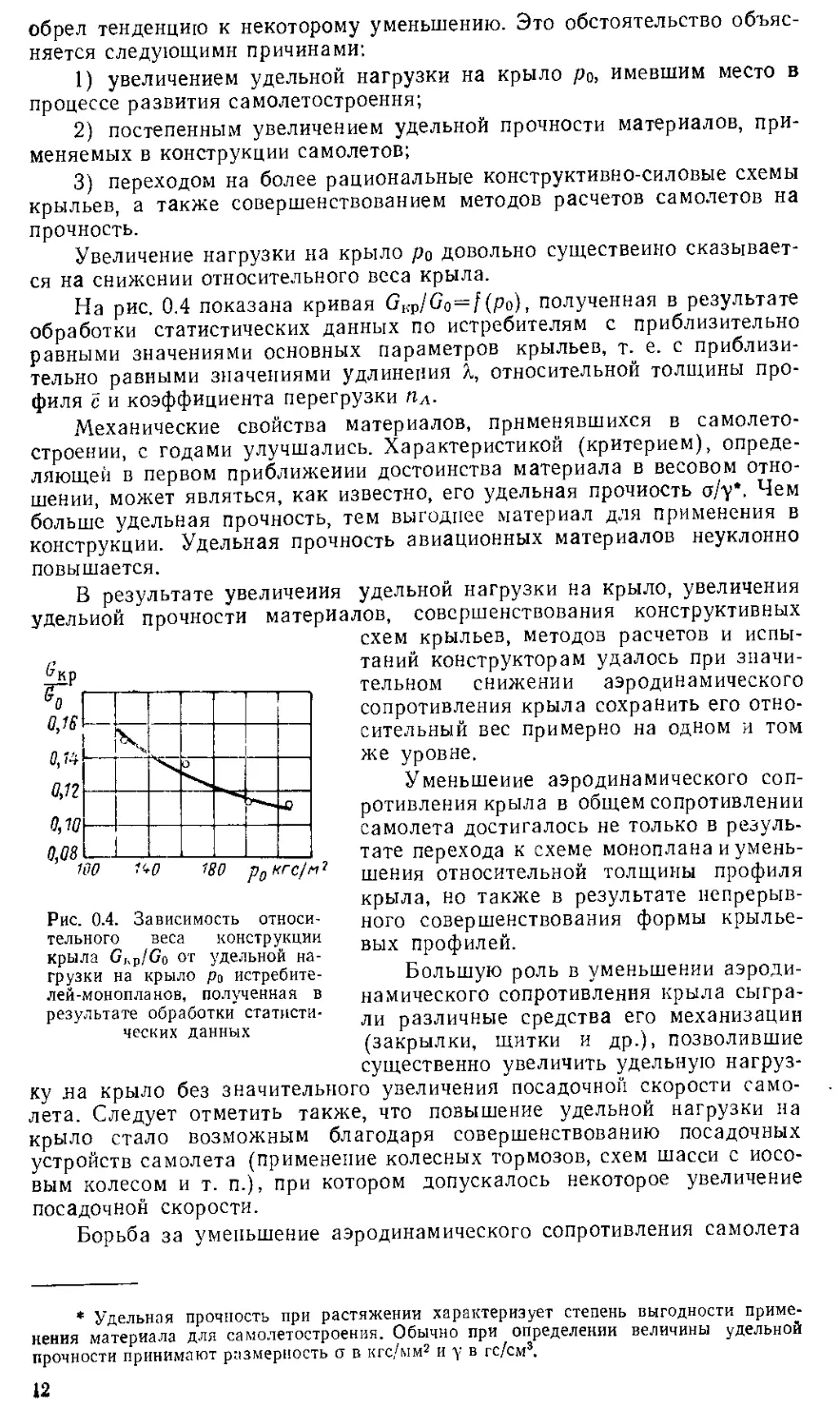
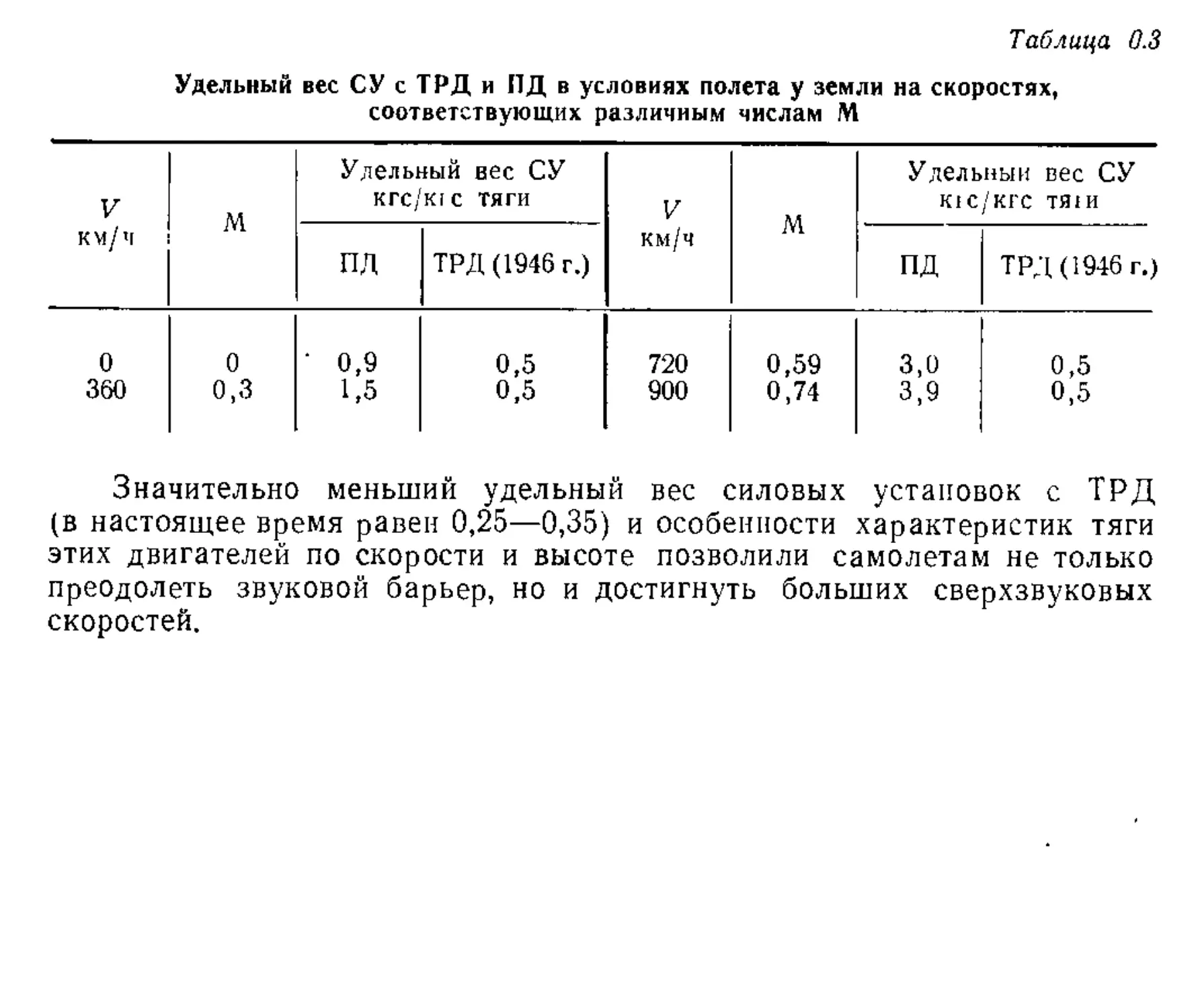
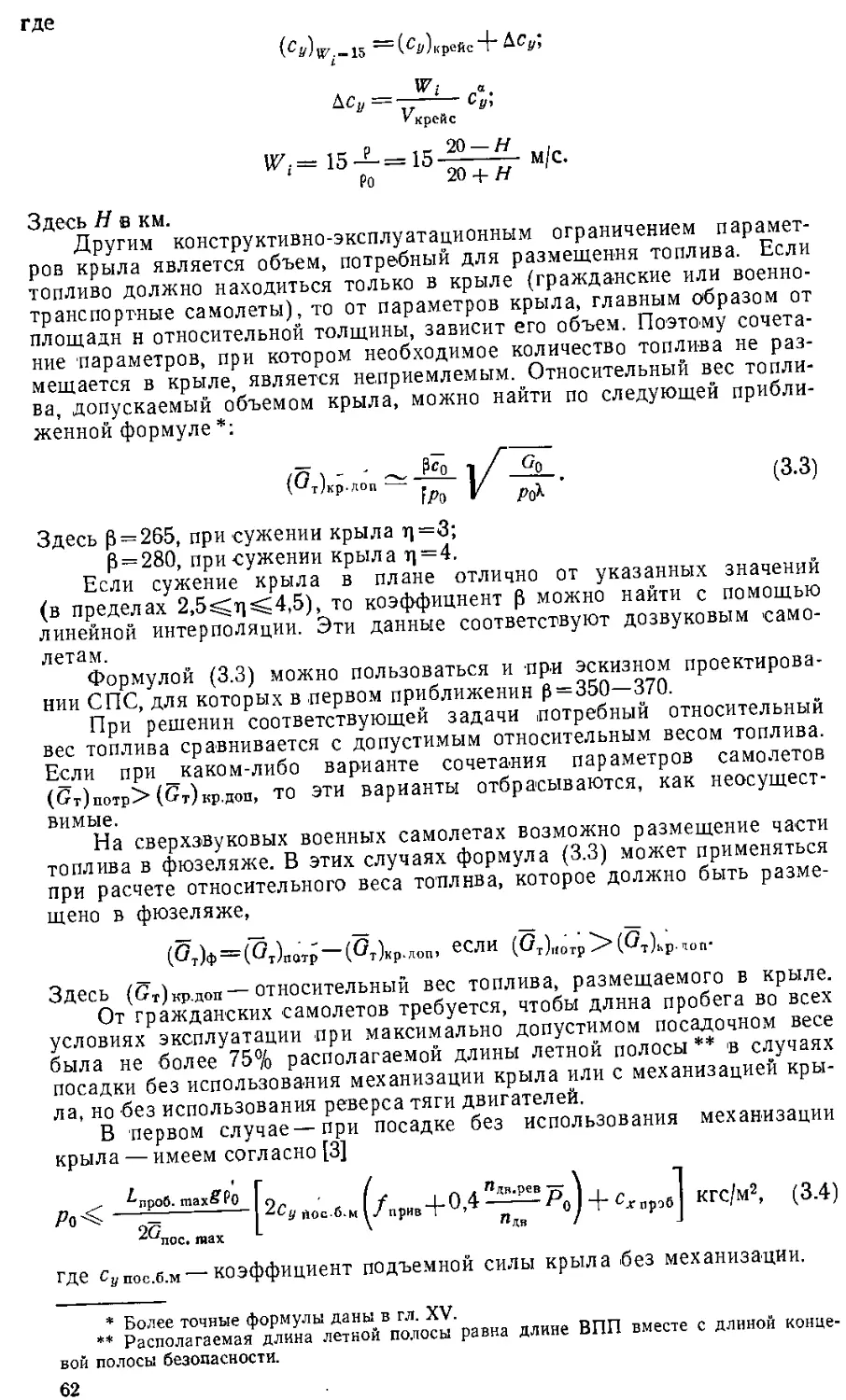
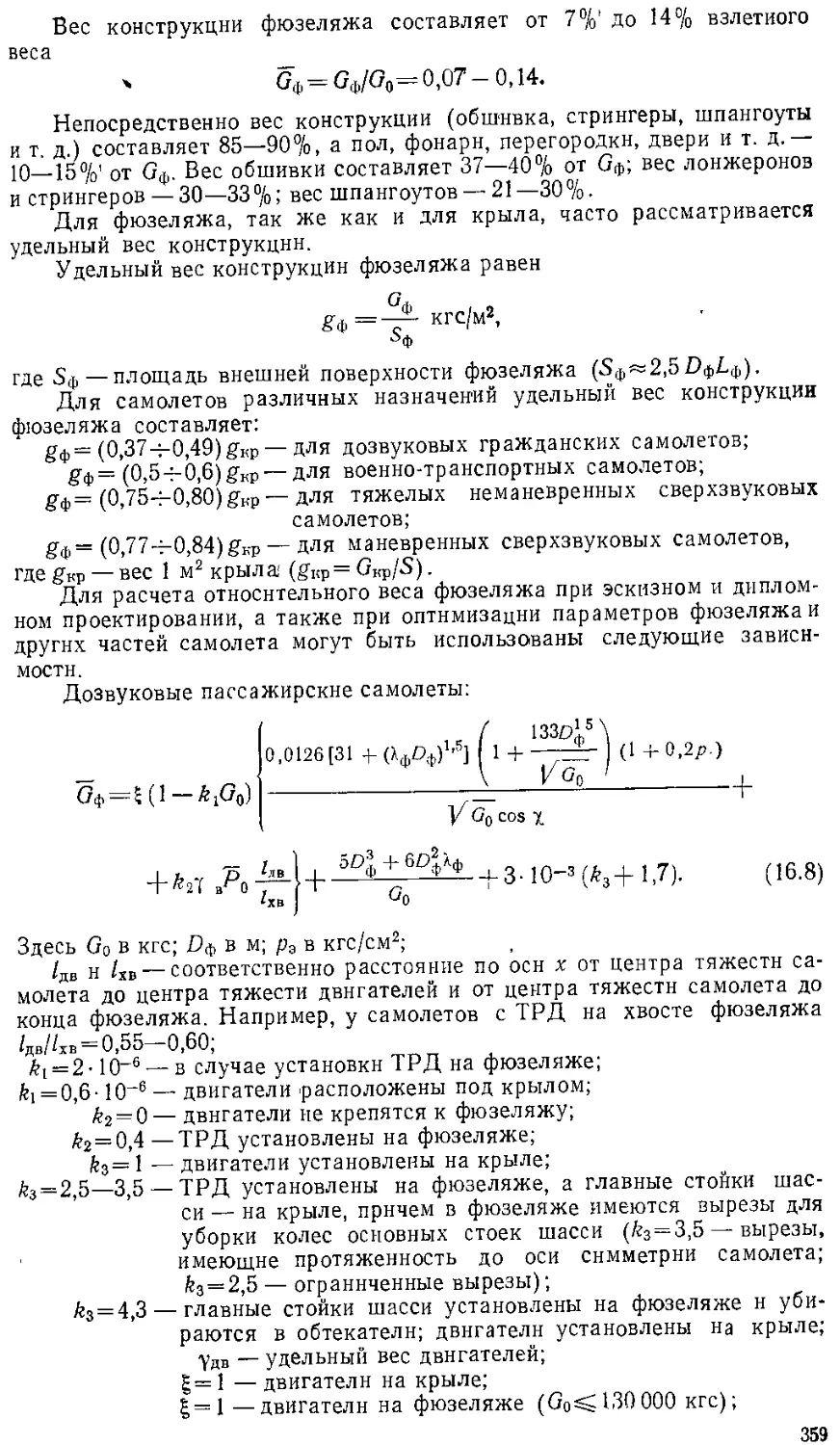
Переход от схемы крыла в виде многостоечной бипланиой коробки
(рис. 0.3, а) к свободнонесущему крылу сначала толстого (рис. 0.3, б),
а затем тонкого профиля (рис. 0.3, в) способствовал аэродинамическому
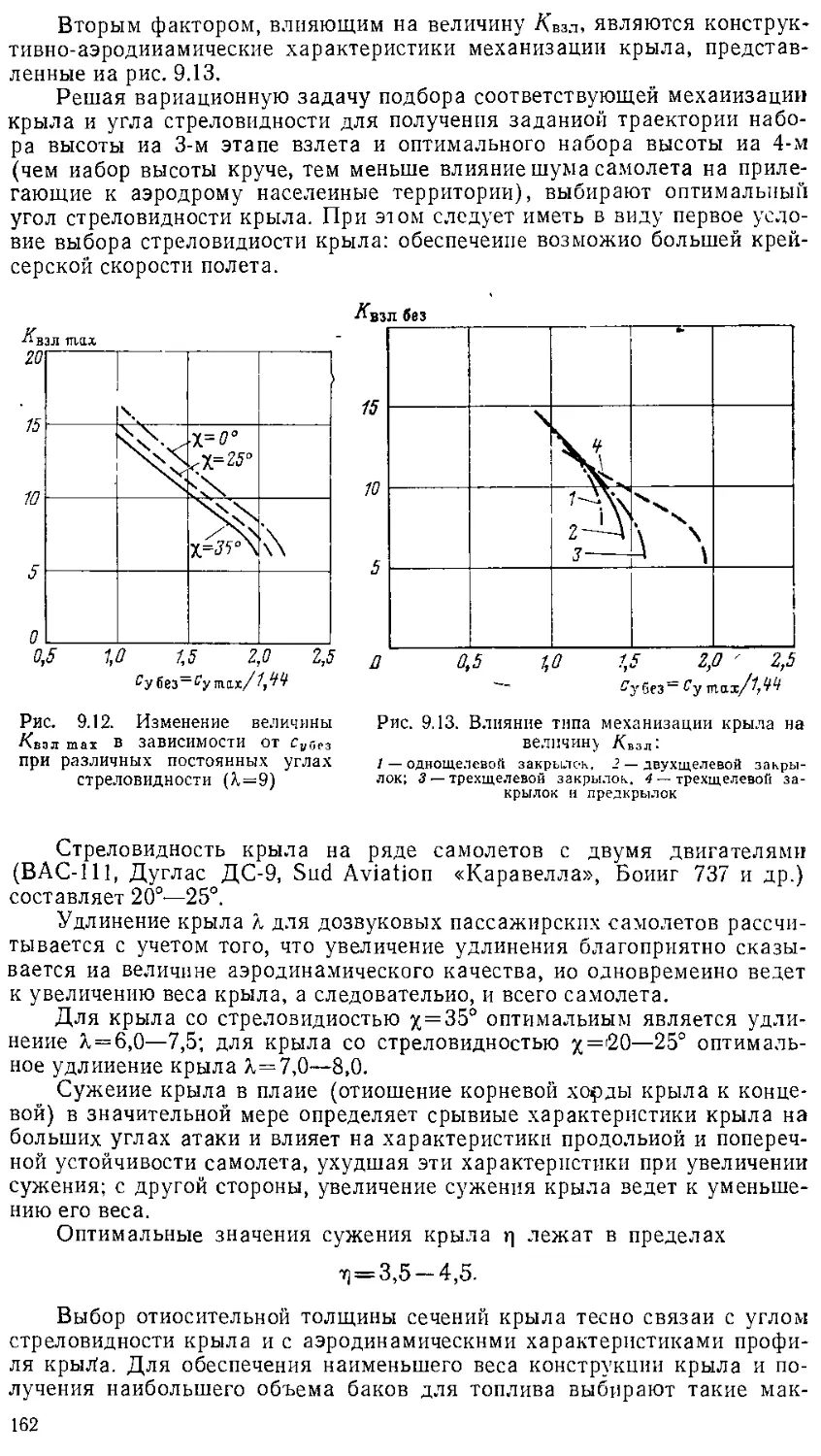
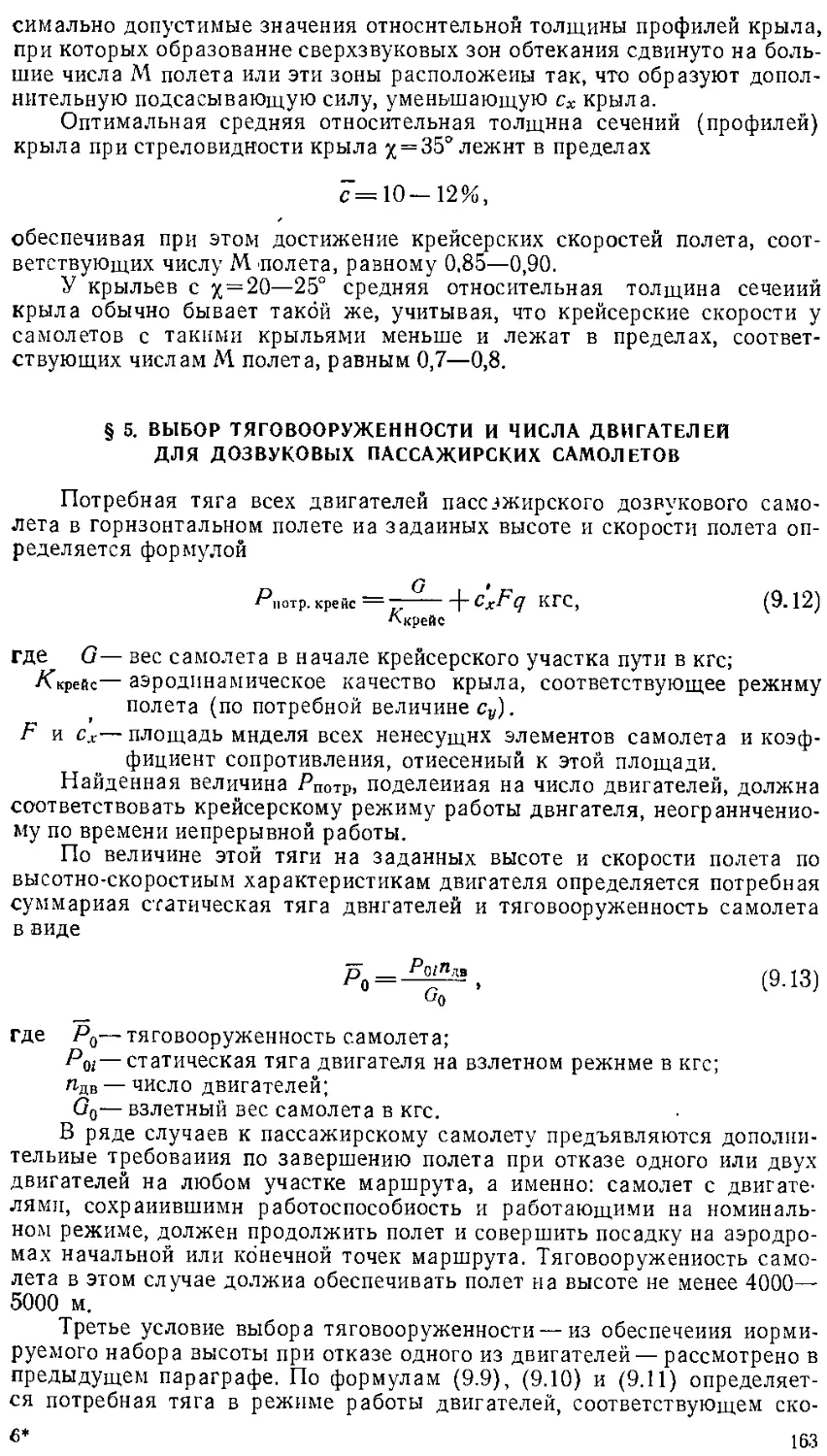
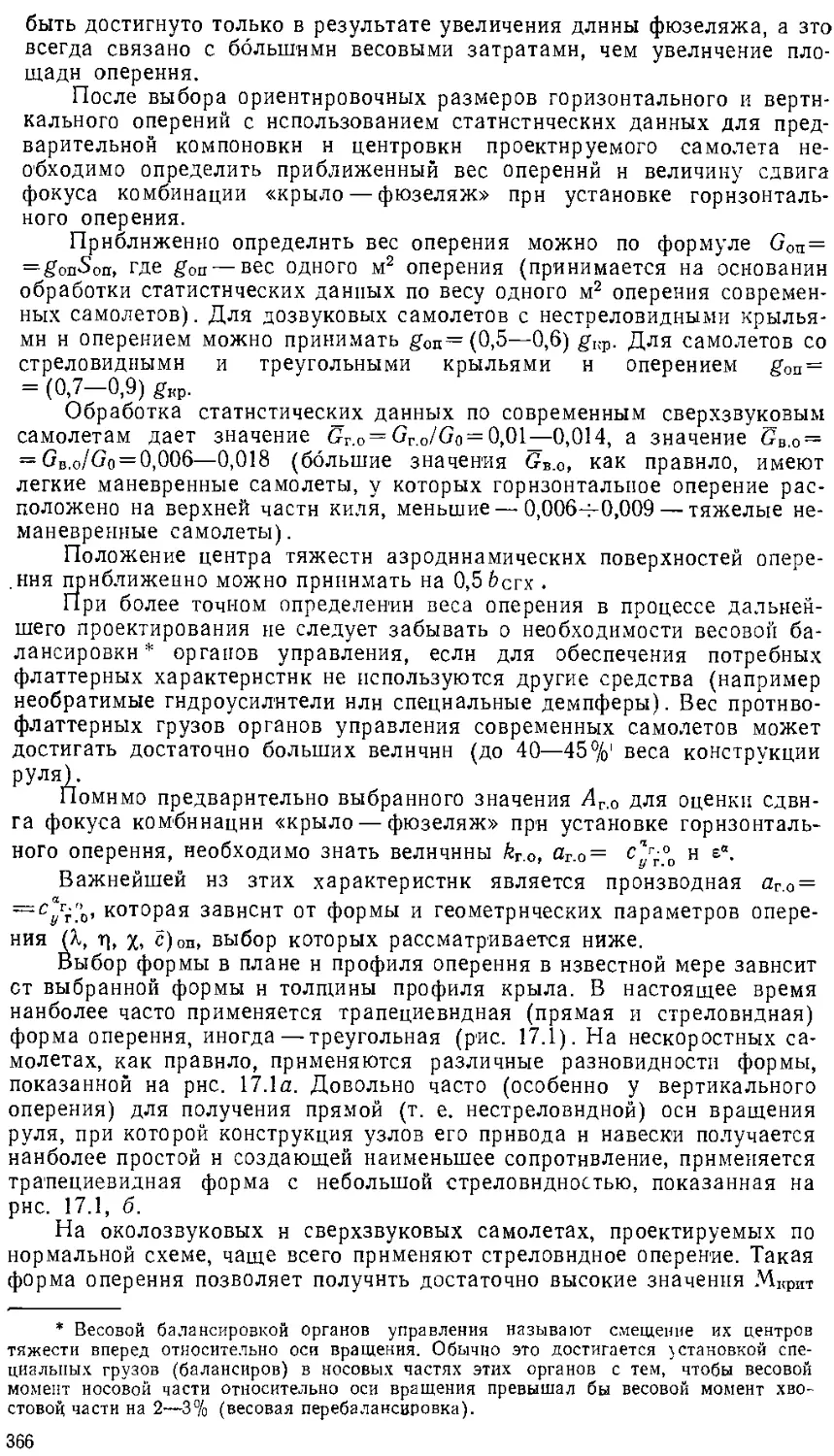
Рис. 0.1. Изменение отно-
сительной толщины с мо-
нопланного свободно-
несущего крыла по годам
Рис. 0.2. Изменение ко-
эффициента профильно-
го и волнового сопротив-
лений схр+,з в зависимо-
сти от относительной
толщины профиля при
М.«С1 и при М=1
(с„ = 0)
совершенствованию крыла и уменьшал его строительную высоту h. Из-
менение же строительной высоты существенно влияет на вес крыла.
С уменьшением строительной высоты крыла h увеличиваются силы, вос-
принимаемые при изгибе элементами продольного силового набора кры-
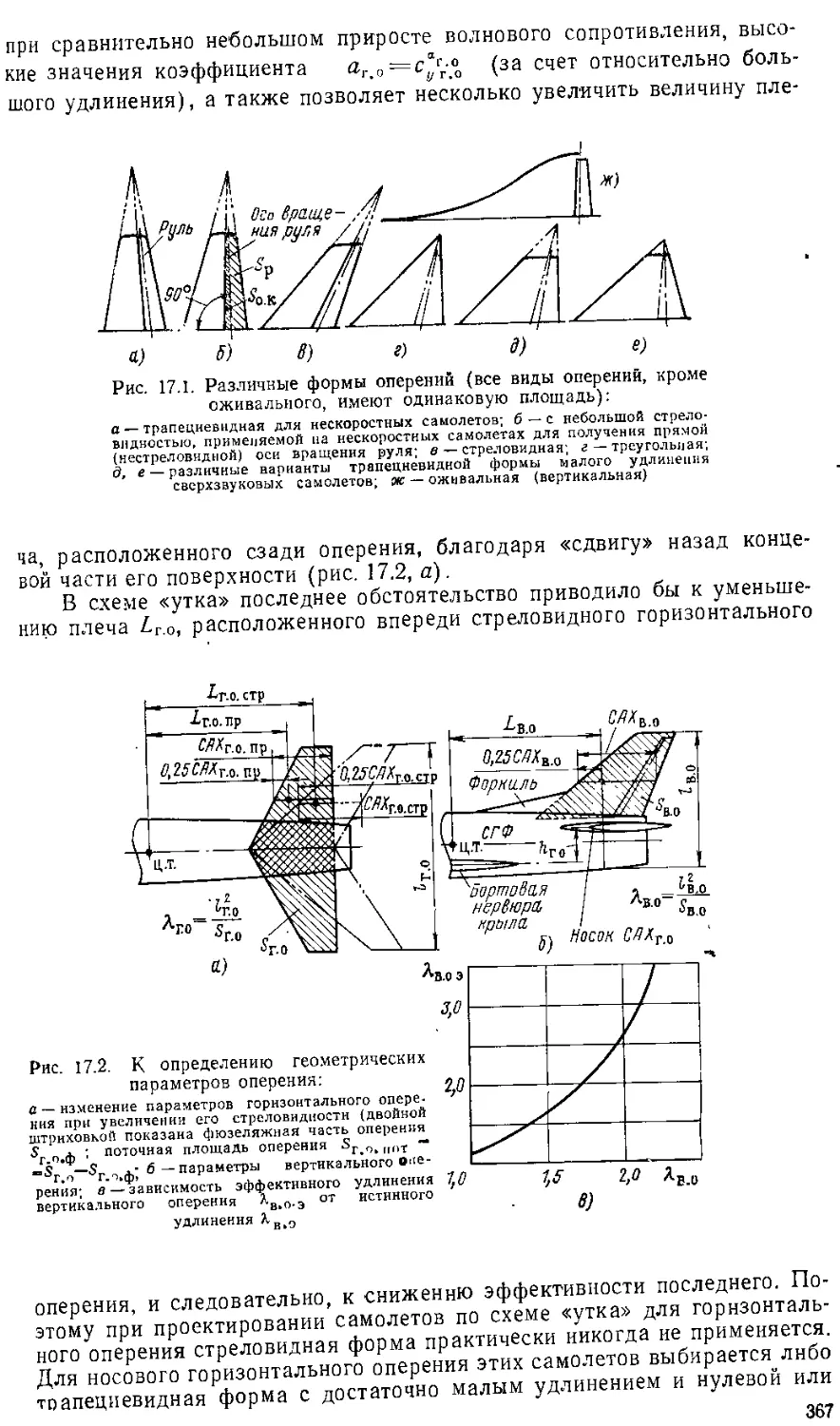
а)
Рис. 0.3. Схемы крыльев:
а — многостоечный биплан: б — свободнонесущий моноплан с толстым
крылом (отношение строительной высоты к полуразмаху Л,7'-0,06);
в — свободнонесущий моноплан с тонким крылом (отношение строитель-
ной высоты к полуразмаху й,7'-0,035)
ла, и, следовательно, увеличивается вес его конструкции. Примене-
ние более тонких профилей должно было бы привести к значитель-
ному росту относительного веса конструкции крыла, т. е. отношения
бкр/ Go.
В действительности, как показывает статистика, относительный вес
свободнонесущих крыльев не только не увеличивался, а, наоборот, при-
11
обрел тенденцию к некоторому уменьшению. Это обстоятельство объяс-
няется следующими причинами:
1) увеличением удельной нагрузки на крыло ро, имевшим место в
процессе развития самолетостроения;
2) постепенным увеличением удельной прочности материалов, при-
меняемых в конструкции самолетов;
3) переходом на более рациональные конструктивно-силовые схемы
крыльев, а также совершенствованием методов расчетов самолетов на
прочность.
Увеличение нагрузки на крыло р0 довольно существенно сказывает-
ся на снижении относительного веса крыла.
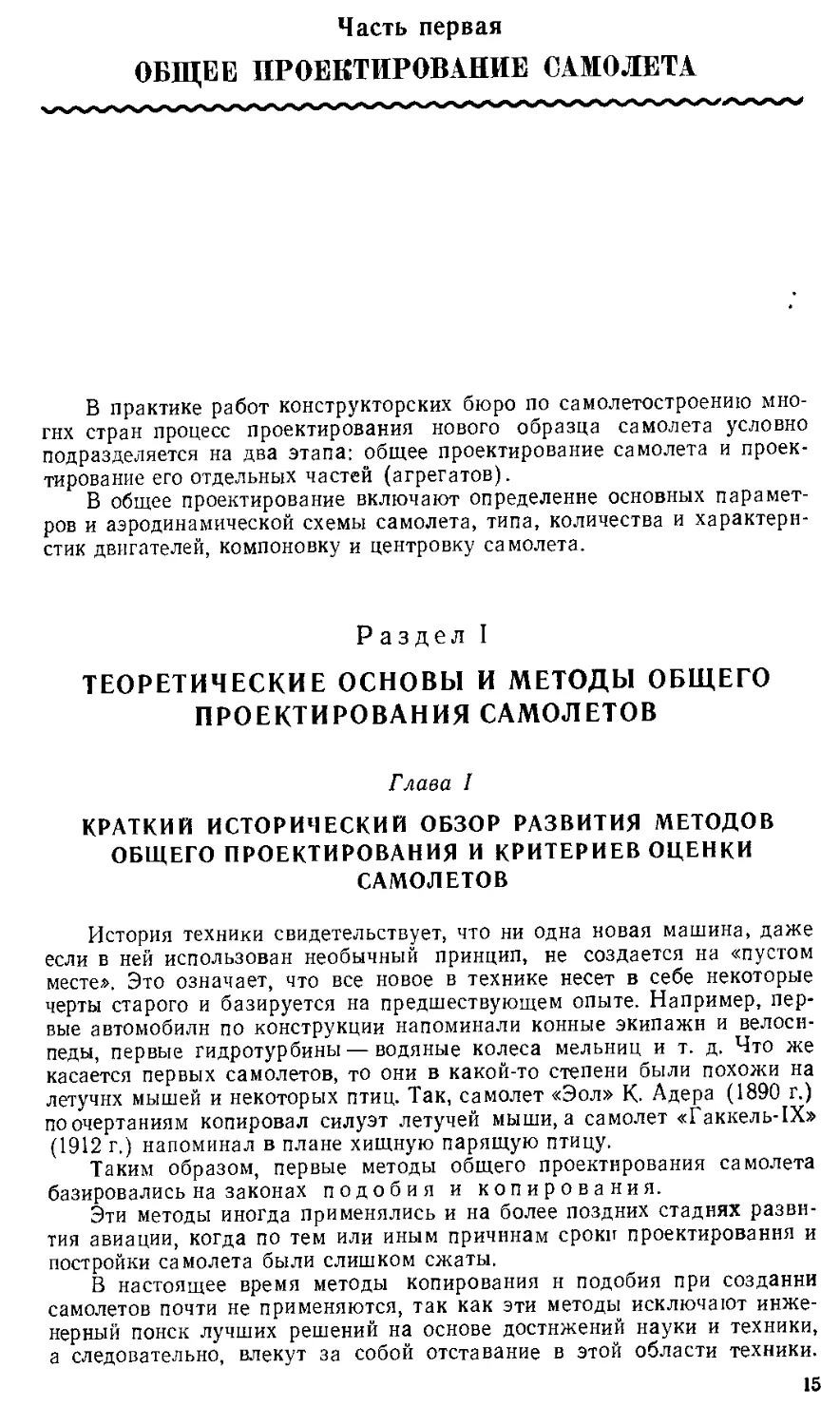
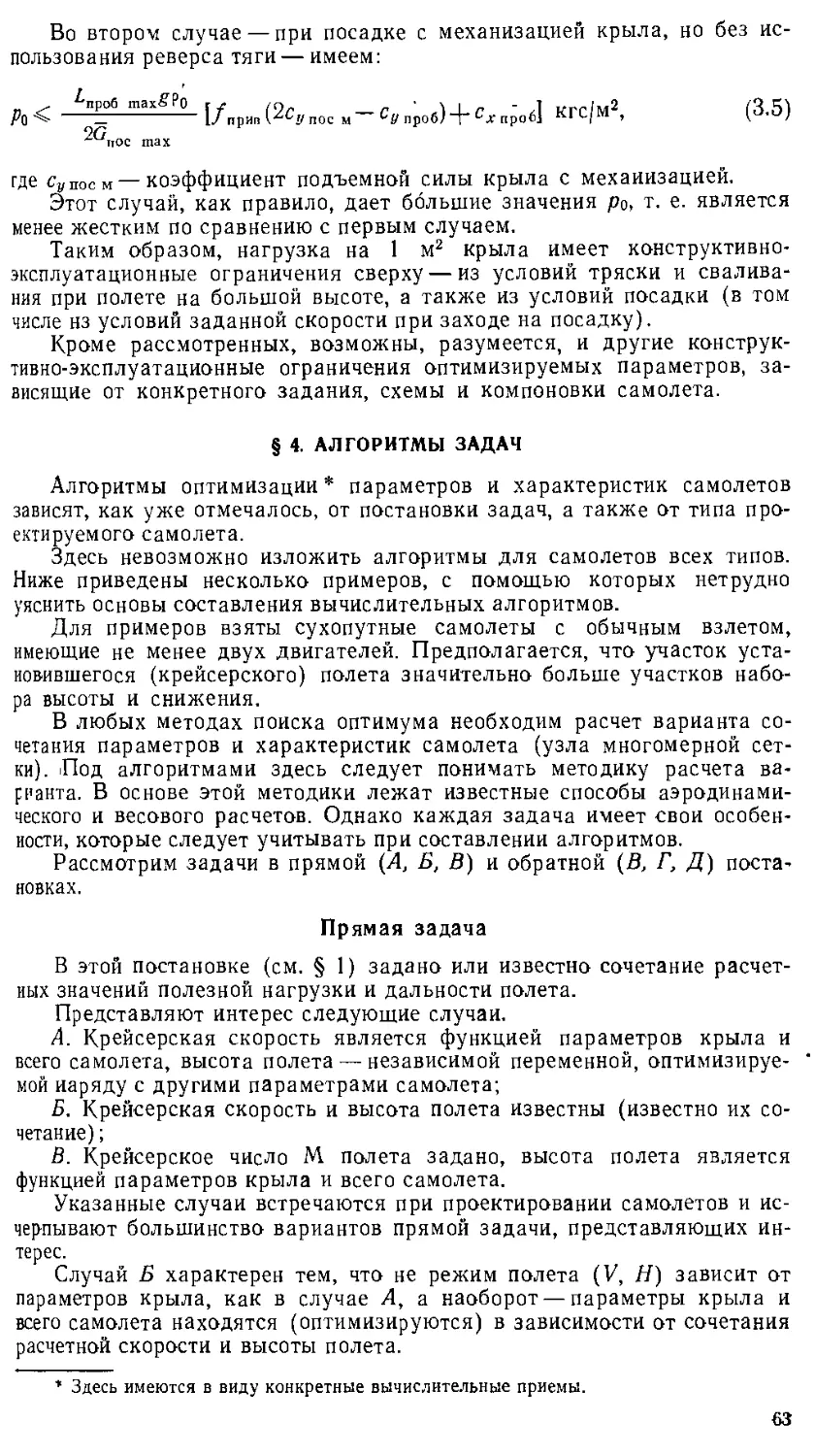
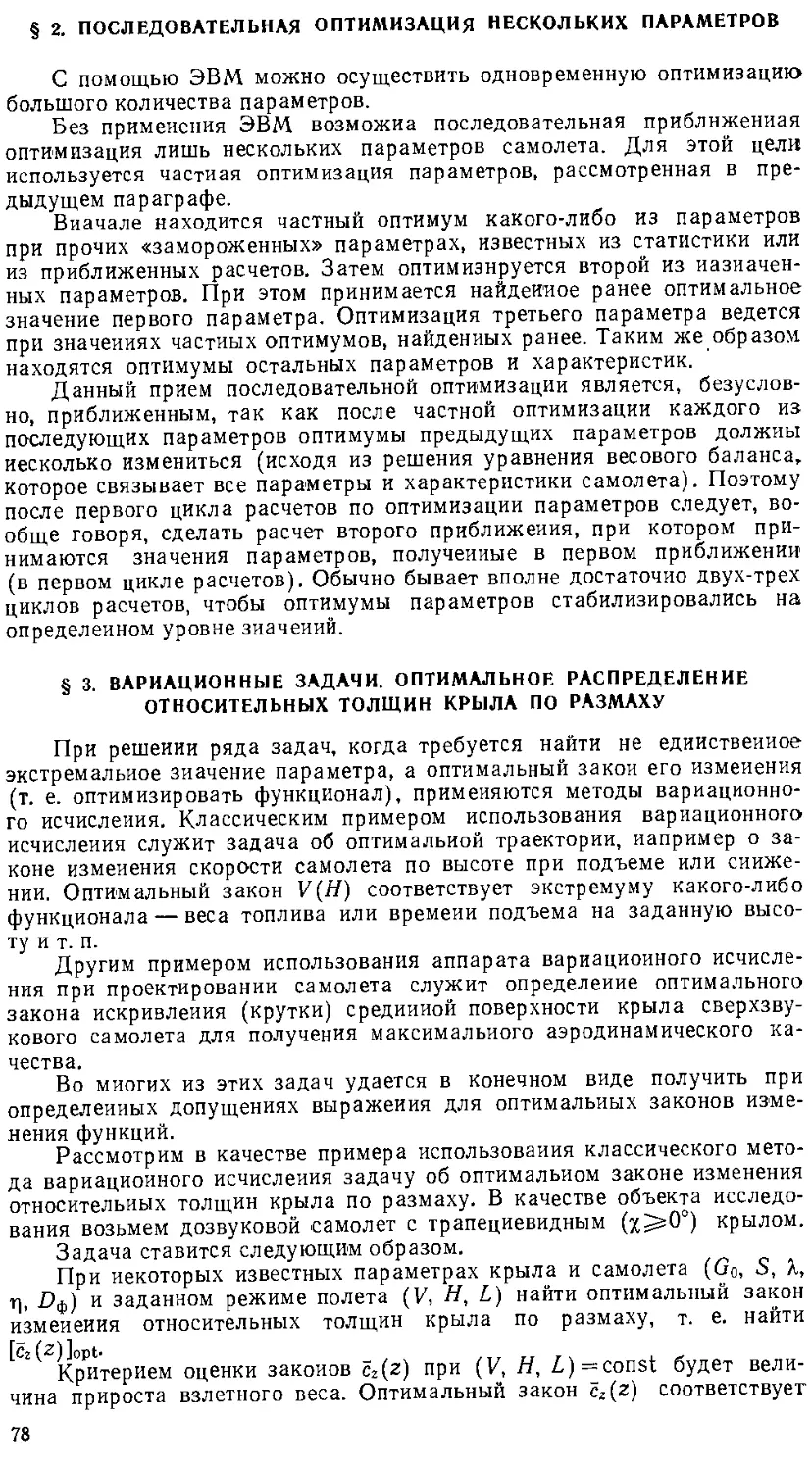
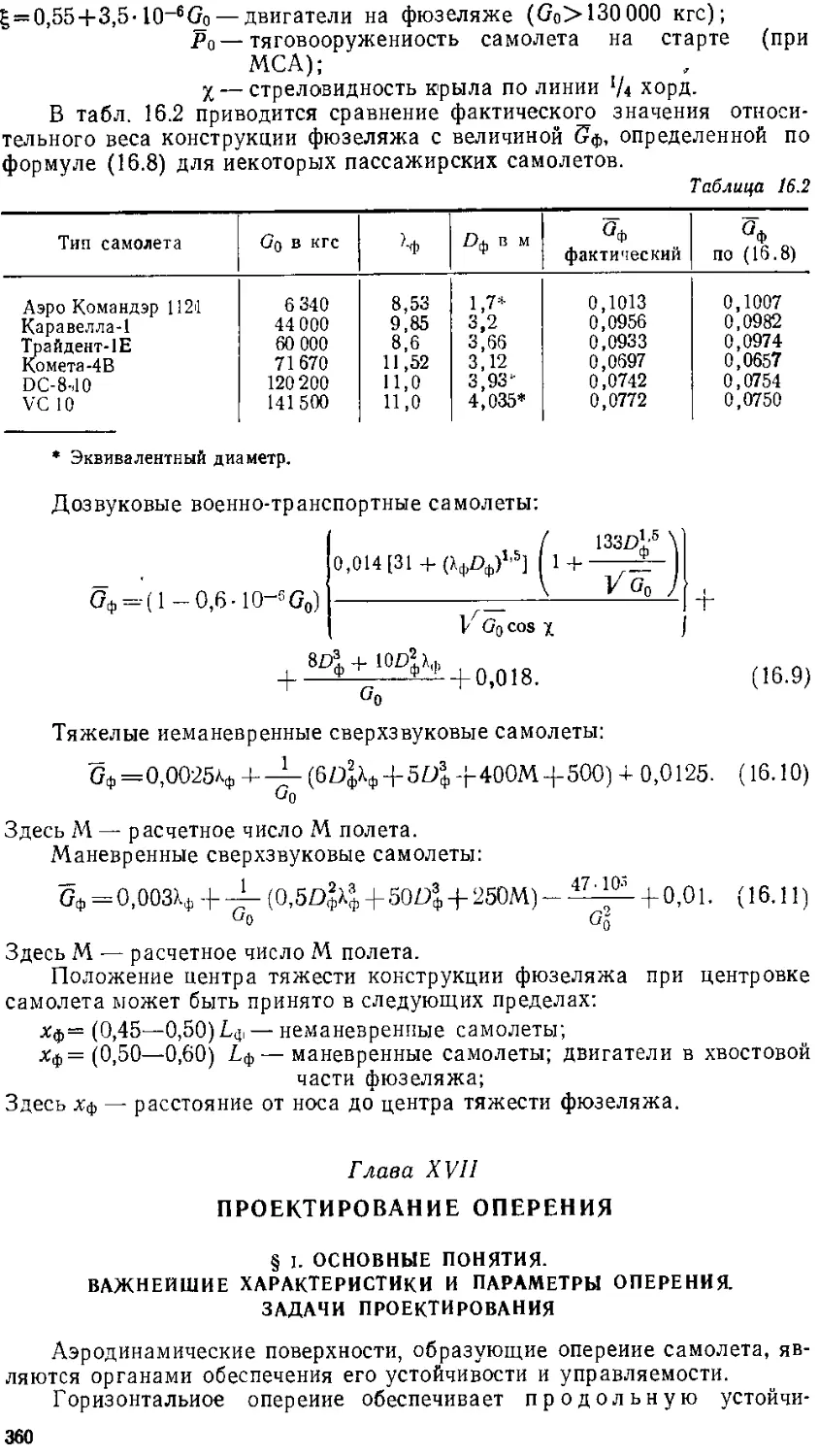
На рис. 0.4 показана кривая (?кр/бо=/(ро), полученная в результате
обработки статистических данных по истребителям с приблизительно
равными значениями основных параметров крыльев, т. е. с приблизи-
тельно равными значениями удлинения X, относительной толщины про-
филя с и коэффициента перегрузки п.л.
Механические свойства материалов, применявшихся в самолето-
строении, с годами улучшались. Характеристикой (критерием), опреде-
ляющей в первом приближении достоинства материала в весовом отно-
шении, может являться, как известно, его удельная прочность <т/у*. Чем
больше удельная прочность, тем выгоднее материал для применения в
конструкции. Удельная прочность авиационных материалов неуклонно
повышается.
В результате увеличения удельной нагрузки на крыло, увеличения
удельной прочности материалов, совершенствования конструктивных
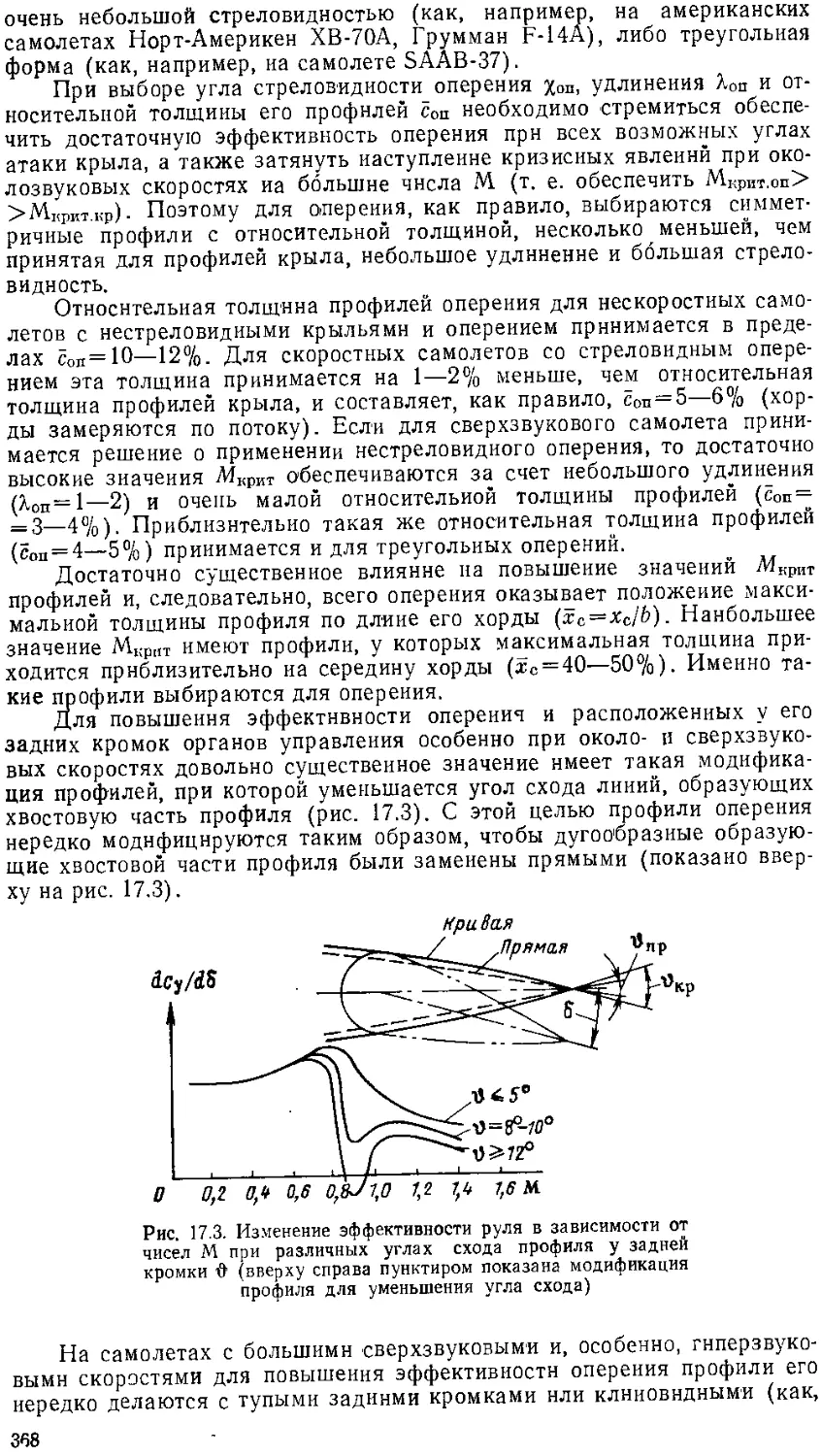
Рис. 0.4. Зависимость относи-
тельного веса конструкции
крыла G,,p/Go от удельной на-
грузки на крыло ро истребите-
лей-монопланов, полученная в
результате обработки статисти-
ческих данных
схем крыльев, методов расчетов и испы-
таний конструкторам удалось при значи-
тельном снижении аэродинамического
сопротивления крыла сохранить его отно-
сительный вес примерно на одном и том
же уровне.
Уменьшение аэродинамического соп-
ротивления крыла в общем сопротивлении
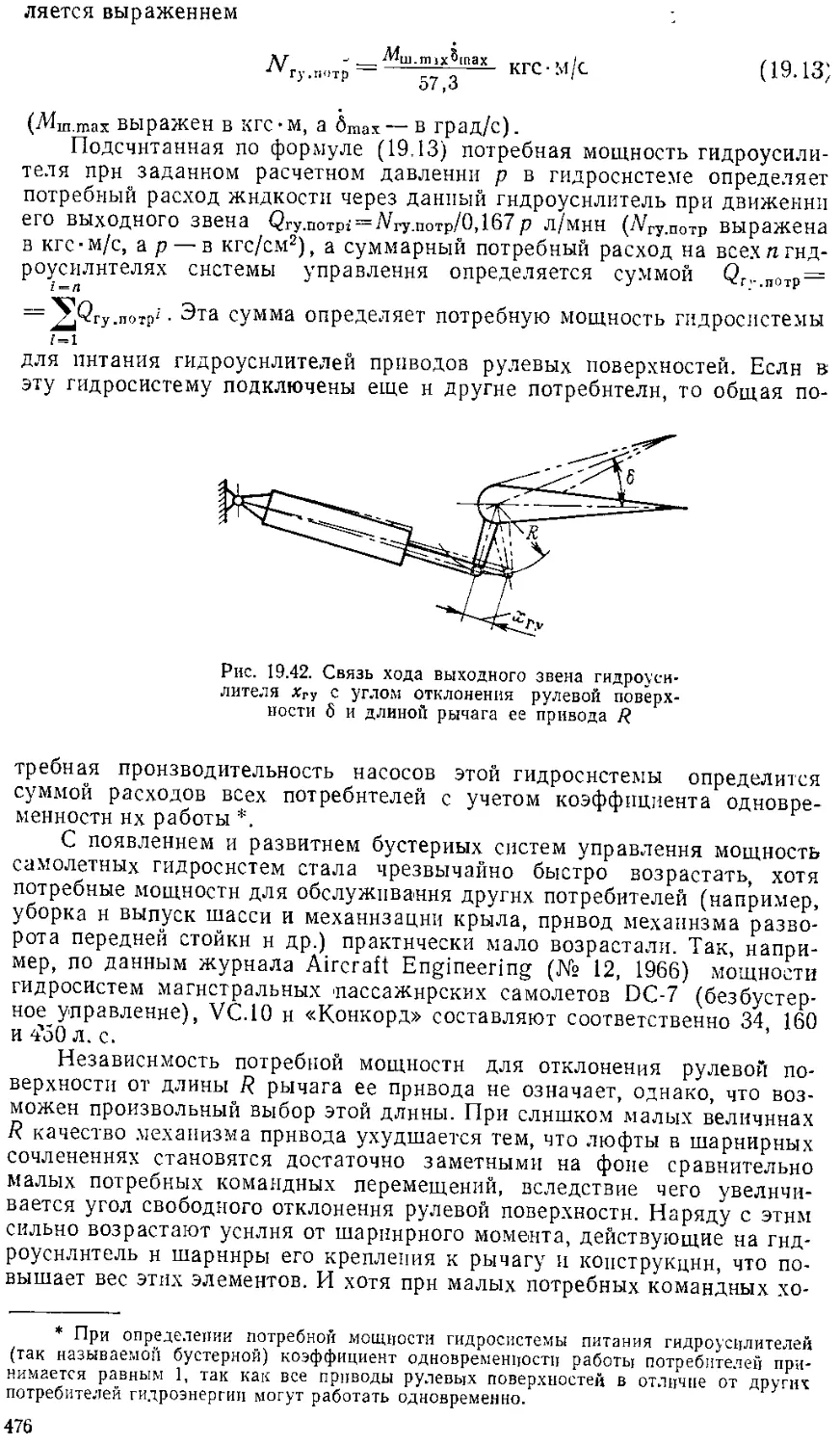
самолета достигалось не только в резуль-
тате перехода к схеме моноплана и умень-
шения относительной толщины профиля
крыла, но также в результате непрерыв-
ного совершенствования формы крылье-
вых профилей.
Большую роль в уменьшении аэроди-
намического сопротивления крыла сыгра-
ли различные средства его механизации
(закрылки, щитки и др.), позволившие
существенно увеличить удельную нагруз-
ку на крыло без значительного увеличения посадочной скорости само-
лета. Следует отметить также, что повышение удельной нагрузки на
крыло стало возможным благодаря совершенствованию посадочных
устройств самолета (применение колесных тормозов, схем шасси с носо-
вым колесом и т. п.), при котором допускалось некоторое увеличение
посадочной скорости.
Борьба за уменьшение аэродинамического сопротивления самолета
* Удельная прочность при растяжении характеризует степень выгодности приме-
нения материала для самолетостроения. Обычно при определении величины удельной
прочности принимают размерность о в кге/мм^ и у в гс/см3.
12
велась не только по линии снижения сопротивления крыла, но и по ли-
нии снижения лобового сопротивления других частей самолета (фюзе-
ляжа, гондол двигателей, шасси, фонарей, надстроек). Особенно боль-
шие работы велись по уменьшению лобового сопротивления силовых
установок. Получили распространение капоты двигателей воздуш-
ного охлаждения с улучшенной аэродинамикой, туннельные радиаторы
для охлаждения воды и масла, расположенные в фюзеляже или в
крыле.
С 1931 г. конструкторы начали широко применять убирающееся
шасси.
По мере совершенствования технологии изготовления самолета
стало возможным повышение качества отделки его наружных поверх-
ностей. Для ламинаризированных обводов это-давало значительный эф-
фект в снижении сопротивления трення.
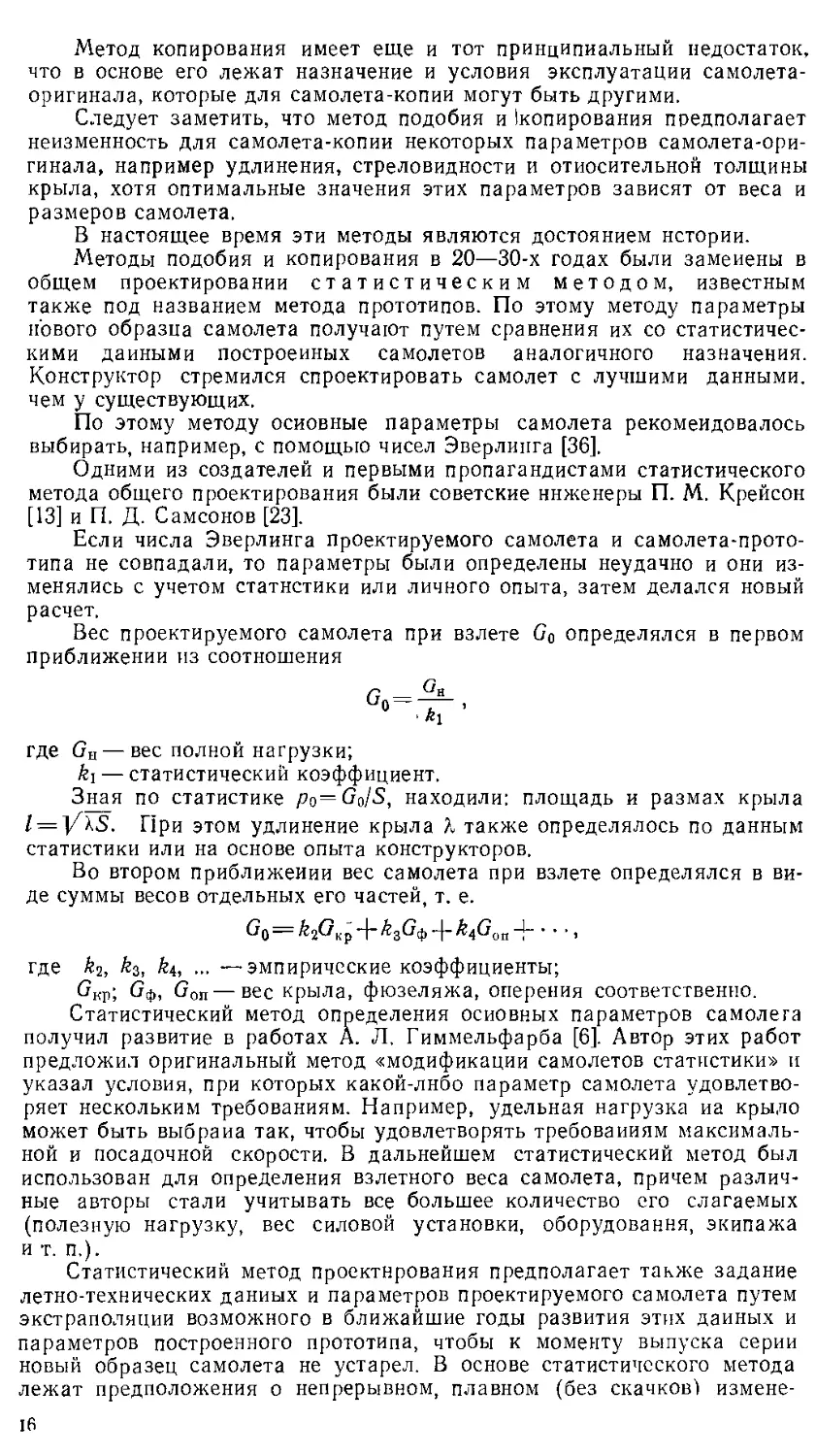
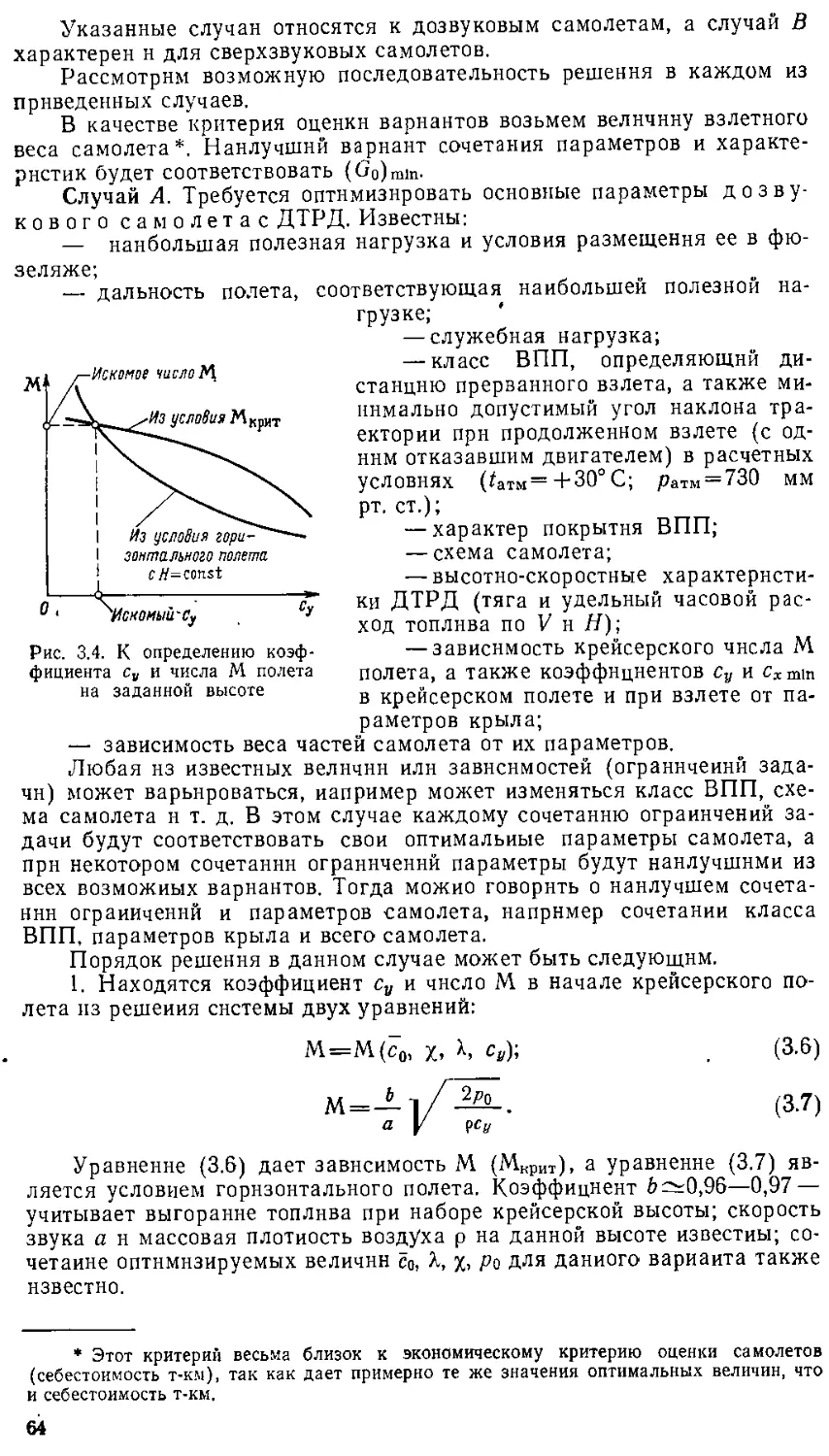
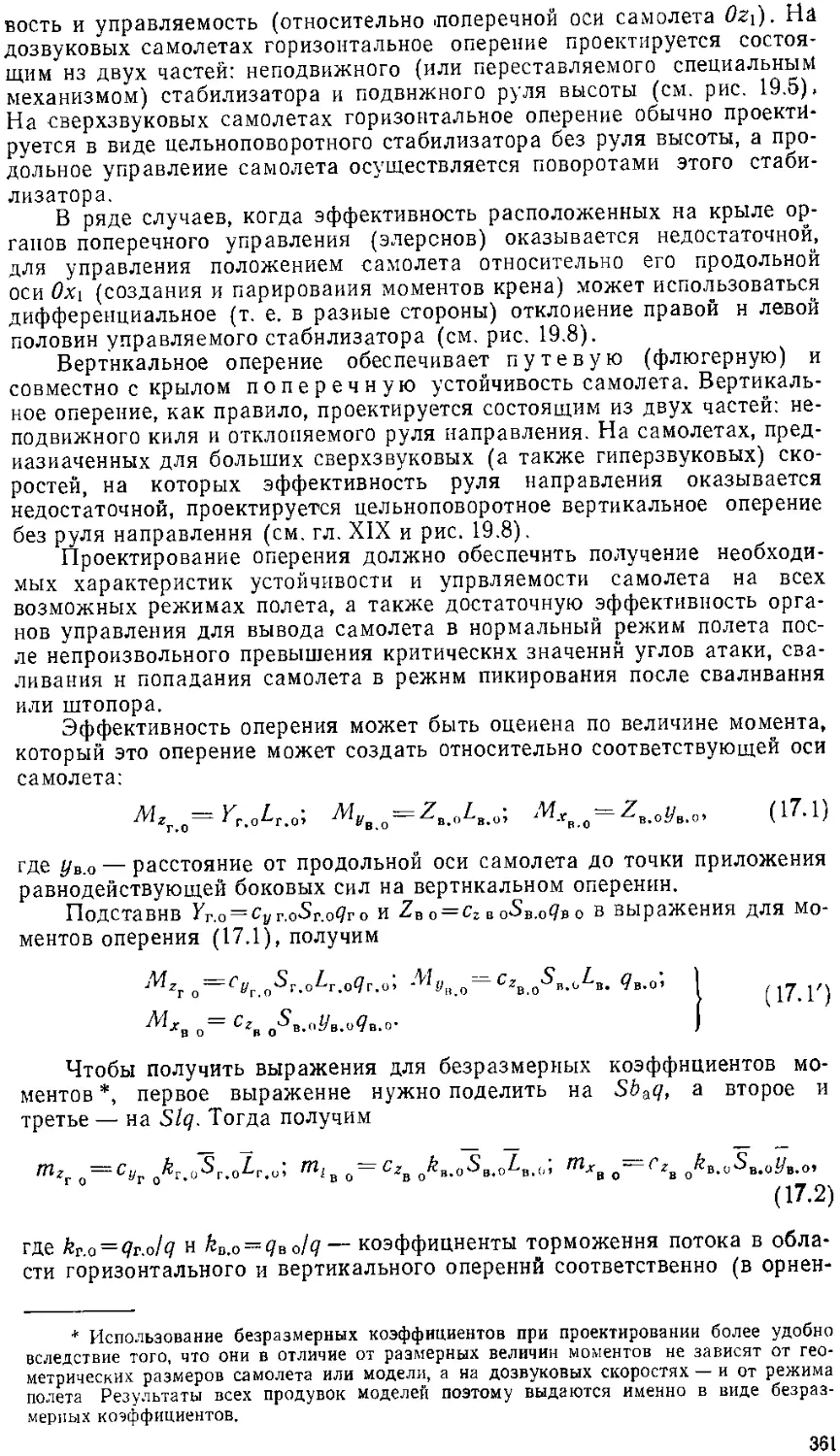
Описанные выше мероприятия позволили значительно снизить ко-
эффициент лобового сопротивления всего самолета схо (рис. 0.5), не-
смотря на то, что его величина с увеличением удельной нагрузки на
крыло ро должна была бы возрастать*. С 1915 по 1950 гг., т. е. за
35 лет, величина этого коэффициента была снижена с 0,033 до 0,015
(при дозвуковых скоростях полета).
Параллельно с совершенствованием самого самолета происходило и
совершенствование авиационного двигателя. Для улучшения летных
характеристик самолета необходимо было увеличивать мощность двига-
теля, снижать его удельный вес, повышать высотность, т. е. сохранять
мощность до возможно больших высот, и
уменьшать удельный расход топлива.
Увеличение мощности поршневого двига-
теля связано с увеличением веса силовой уста-
новки самолета**. Если мощность, которую
хотят получить, очень велика, то вес силовой
установки настолько увеличивается, что при-
менение поршневого двигателя оказывается не-
целесообразным.
Для того чтобы избежать этого, следует
создавать более легкие силовые установки
(СУ), чем установки с поршневыми двигателя-
ми (ПД). В результате исследований и опыт-
но-конструкторских работ такая СУ была соз-
дана на основе турбинных воздушно-реактив-
ных двигателей (ТРД).
Весовые преимущества силовых установок
с ТРД по сравнению с установками с ПД ста-
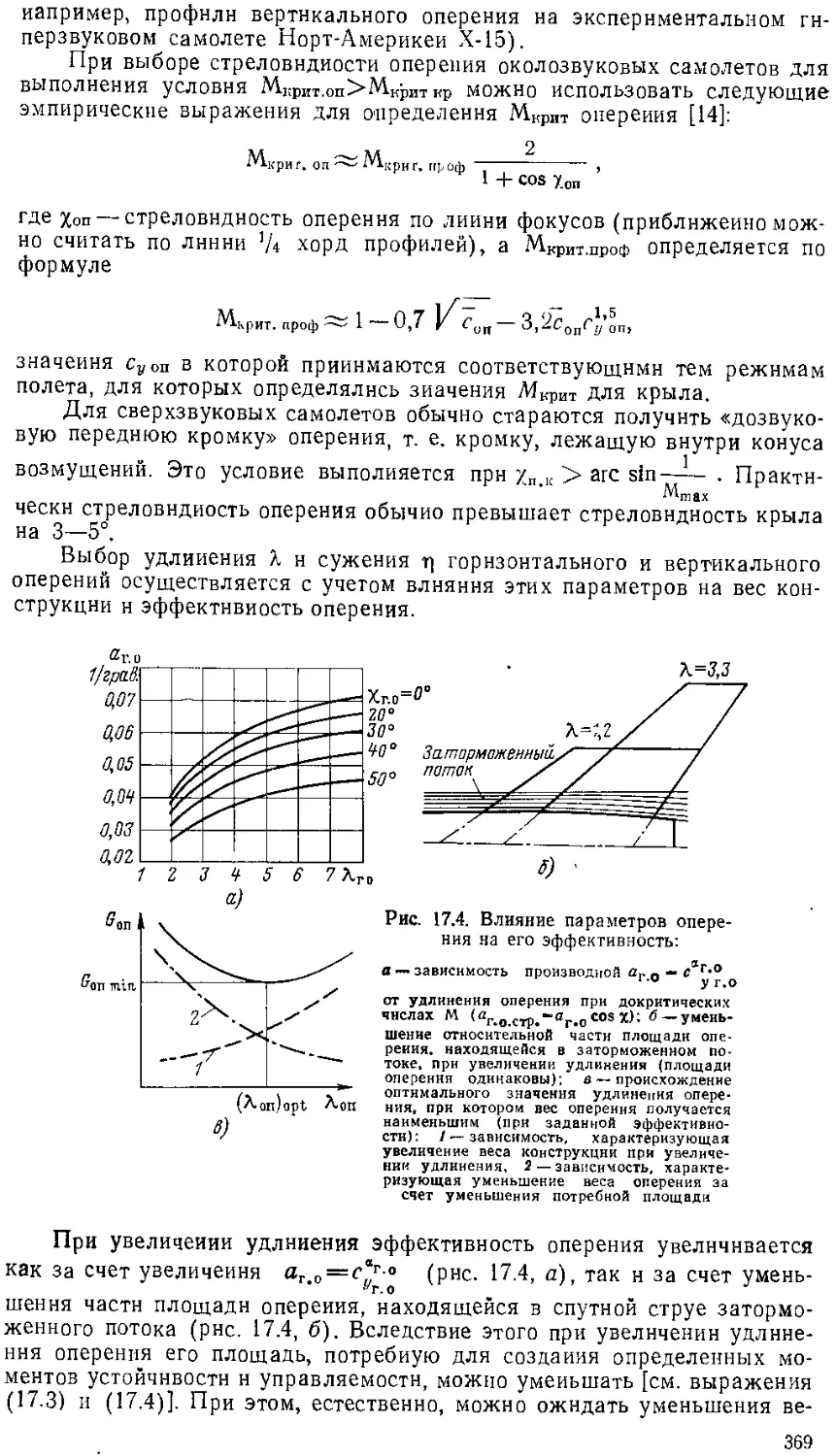
Рис. 0.5. Изменение ве-
личины коэффициента ло-
бового сопротивления
без индуктивного со-
противления СхО (Cv = 0)
по годам
новятся особенно ясны при сравнении удельного веса этих установок,
т. е. веса на 1 кгс тяги двигателей в условиях полета у земли на различ-
ных скоростях (табл. 0.3).
Большой удельный вес силовых установок с ПД и неблагоприятная
характеристика этого типа двигателя по скорости н высоте обусловили
практический предел максимальной скорости «поршневого» самолета
примерно в 750 км/ч.
* Изменение Ро по-разному влияет ла сопротивление самолета и коэффициент
сопротивления сл0, а именно увеличение р0 всегда ведет к росту ся0, тогда как X с
ростом /?о вначале уменьшается, а затем при достаточно больших значениях ро начи-
нает увеличиваться.
** В силовую установку самолета входят: двигатели с креплением и винтами, си-
стема управления двигателями, системы смазки и питания топливом с баками, охлаж-
дающие устройства, капоты.
13
Таблица 0.3
Удельный вес СУ с ТРД и ПД в условиях полета у земли на скоростях,
соответствующих различным числам М
V км/ч м Удельный вес СУ кгс/kic тяги V км/ч М Удельный вес СУ KIC/KFC ТЯ1И
ПД ТРД (1946 г.) ПД ТРД (1946 г.)
0 0 ’ 0,9 0,5 720 0,59 3,0 0,5
360 0,3 1,5 0,5 900 0,74 3,9 0,5
Значительно меньший удельный
(в настоящее время равен 0,25—0,35) и
этих двигателей по скорости и высоте
вес силовых установок с ТРД
особенности характеристик тяги
позволили самолетам не только
преодолеть звуковой барьер, но и достигнуть больших сверхзвуковых
скоростей.
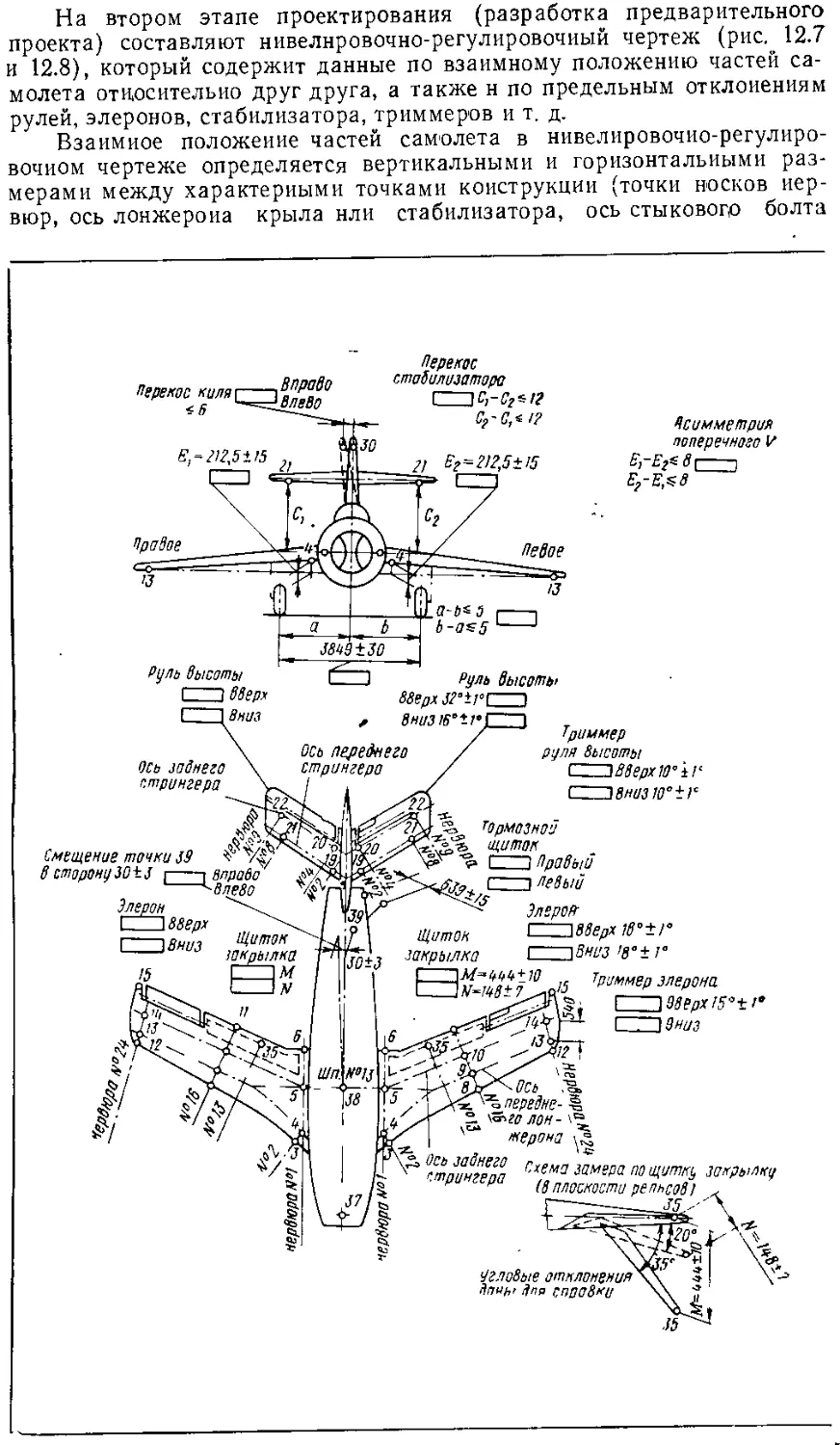
Часть первая
ОБЩЕЕ ПРОЕКТИРОВАНИЕ САМОЛЕТА
В практике работ конструкторских бюро по самолетостроению мно-
гих стран процесс проектирования нового образца самолета условно
подразделяется на два этапа: общее проектирование самолета и проек-
тирование его отдельных частей (агрегатов).
В общее проектирование включают определение основных парамет-
ров и аэродинамической схемы самолета, типа, количества и характери-
стик двигателей, компоновку и центровку самолета.
Р аз дел I
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ И МЕТОДЫ ОБЩЕГО
ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
Глава I
КРАТКИЙ ИСТОРИЧЕСКИЙ ОБЗОР РАЗВИТИЯ МЕТОДОВ
ОБЩЕГО ПРОЕКТИРОВАНИЯ И КРИТЕРИЕВ ОЦЕНКИ
САМОЛЕТОВ
История техники свидетельствует, что ни одна новая машина, даже
если в ней использован необычный принцип, не создается на «пустом
месте». Это означает, что все новое в технике несет в себе некоторые
черты старого и базируется на предшествующем опыте. Например, пер-
вые автомобили по конструкции напоминали конные экипажи и велоси-
педы, первые гидротурбины — водяные колеса мельниц и т. д. Что же
касается первых самолетов, то они в какой-то степени были похожи на
летучих мышей и некоторых птиц. Так, самолет «Эол» К. Адера (1890 г.)
поочертаниям копировал силуэт летучей мыши, а самолет «Гаккель-1Х»
(1912 г.) напоминал в плане хищную парящую птицу.
Таким образом, первые методы общего проектирования самолета
базировались на законах подобия и копирования.
Эти методы иногда применялись и на более поздних стадиях разви-
тия авиации, когда по тем или иным причинам сроки проектирования и
постройки самолета были слишком сжаты.
В настоящее время методы копирования н подобия при создании
самолетов почти не применяются, так как эти методы исключают инже-
нерный поиск лучших решений на основе достижений науки и техники,
а следовательно, влекут за собой отставание в этой области техники.
15
Метод копирования имеет еще и тот принципиальный недостаток,
что в основе его лежат назначение и условия эксплуатации самолета-
оригинала, которые для самолета-копии могут быть другими.
Следует заметить, что метод подобия и 'копирования предполагает
неизменность для самолета-копии некоторых параметров самолета-ори-
гинала, например удлинения, стреловидности и относительной толщины
крыла, хотя оптимальные значения этих параметров зависят от веса и
размеров самолета.
В настоящее время эти методы являются достоянием истории.
Методы подобия и копирования в 20—30-х годах были заменены в
общем проектировании статистическим методом, известным
также под названием метода прототипов. По этому методу параметры
нового образца самолета получают путем сравнения их со статистичес-
кими данными построенных самолетов аналогичного назначения.
Конструктор стремился спроектировать самолет с лучшими данными,
чем у существующих.
По этому методу основные параметры самолета рекомендовалось
выбирать, например, с помощью чисел Эверлипга [36].
Одними из создателей и первыми пропагандистами статистического
метода общего проектирования были советские инженеры П. М. Крейсон
[13] и П. Д. Самсонов [23].
Если числа Эверлинга проектируемого самолета и самолета-прото-
типа не совпадали, то параметры были определены неудачно и они из-
менялись с учетом статистики или личного опыта, затем делался новый
расчет.
Вес проектируемого самолета при взлете Go определялся в первом
приближении из соотношения
где GH— вес полной нагрузки;
k\ — статистический коэффициент.
Зная по статистике po=Go(S, находили: площадь и размах крыла
l = При этом удлинение крыла К также определялось по данным
статистики или на основе опыта конструкторов.
Во втором приближении вес самолета при взлете определялся в ви-
де суммы весов отдельных его частей, т. е.
С0=А2Окр4-А3Оф4-А4СОп-1- • • •,
где ^2, &з, ^4, ••• —эмпирические коэффициенты;
GKp; Сф, GOn — вес крыла, фюзеляжа, оперения соответственно.
Статистический метод определения основных параметров самолета
получил развитие в работах А. Л. Гиммельфарба [6]. Автор этих работ
предложил оригинальный метод «модификации самолетов статистики» и
указал условия, при которых какой-либо параметр самолета удовлетво-
ряет нескольким требованиям. Например, удельная нагрузка на крыло
может быть выбрана так, чтобы удовлетворять требованиям максималь-
ной и посадочной скорости. В дальнейшем статистический метод был
использован для определения взлетного веса самолета, причем различ-
ные авторы стали учитывать все большее количество его слагаемых
(полезную нагрузку, вес силовой установки, оборудования, экипажа
и т. п.).
Статистический метод проектирования предполагает также задание
летно-технических данных и параметров проектируемого самолета путем
экстраполяции возможного в ближайшие годы развития этих данных и
параметров построенного прототипа, чтобы к моменту выпуска серии
новый образец самолета не устарел. В основе статистического метода
лежат предположения о непрерывном, плавном (без скачков) измене-
16
нии параметров и характеристик самолетов-прототипов. В истории раз-
вития авиации такой период (до реактивных самолетов) имел место и
для него статистический метод был оправдан. Одиако в последовавший
затем период бурного скачкообразного развития авиации, статистичес-
кий метод в общем проектировании самолета утратил свое значение,
так как самолетов-прототипов либо вовсе нет, либо их слишком мало*.
На характер развития авиации большое влияние оказывают два обсто-
ятельства— увеличение полного цикла создания нового образца само-
лета (от начала проектирования до выпуска серии) и колоссальный рост
его стоимости.
Если в 1940 году этот цикл составлял в среднем четыре года, то в
настоящее время он вырос до 6—10 лет. Очевидно, что экстраполяция
летных характеристик прототипов по данным статистики на 6—10 лет —
дело весьма ненадежное.
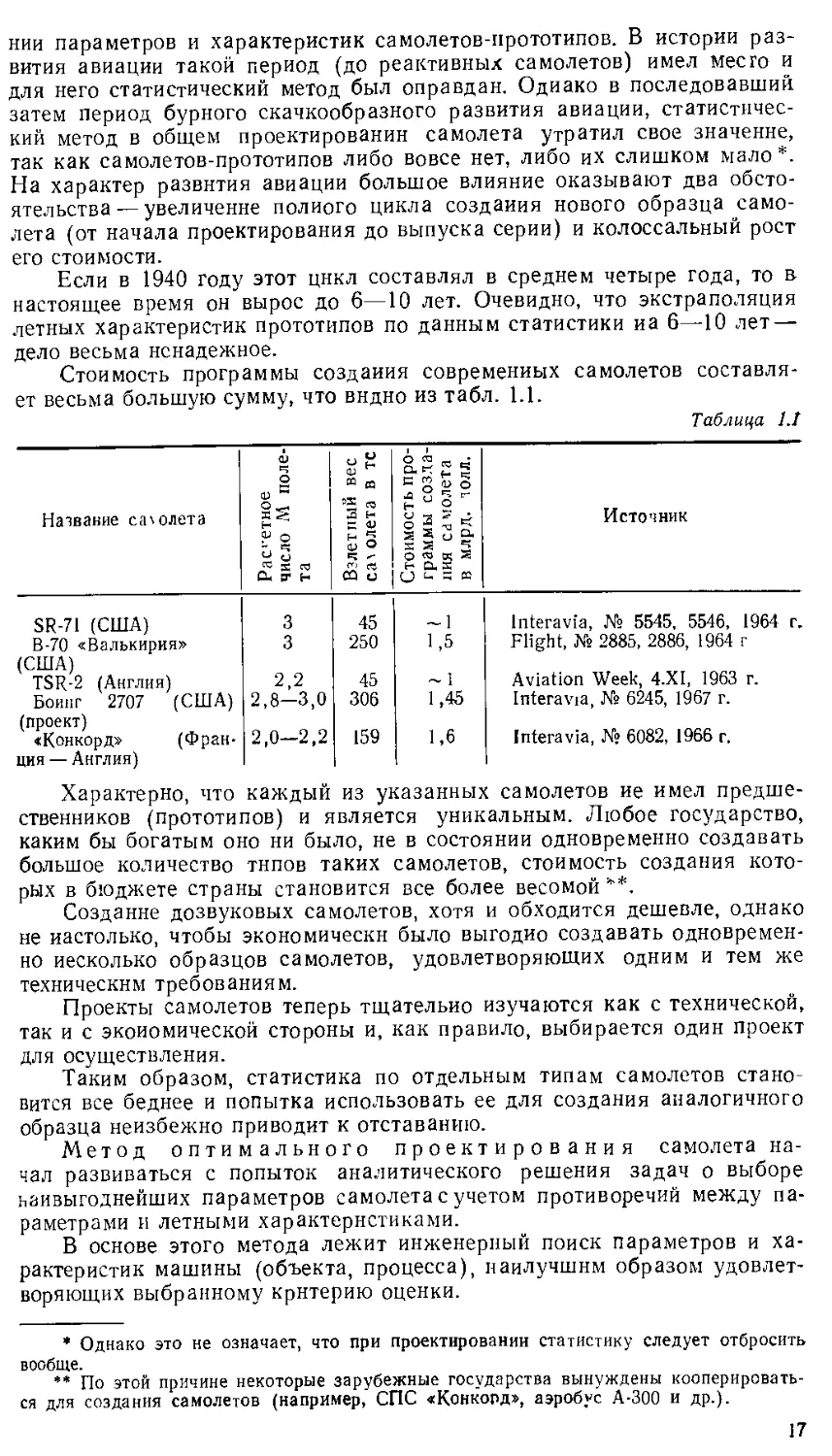
Стоимость программы создания современных самолетов составля-
ет весьма большую сумму, что внцно из табл. 1.1.
Таблица 1J
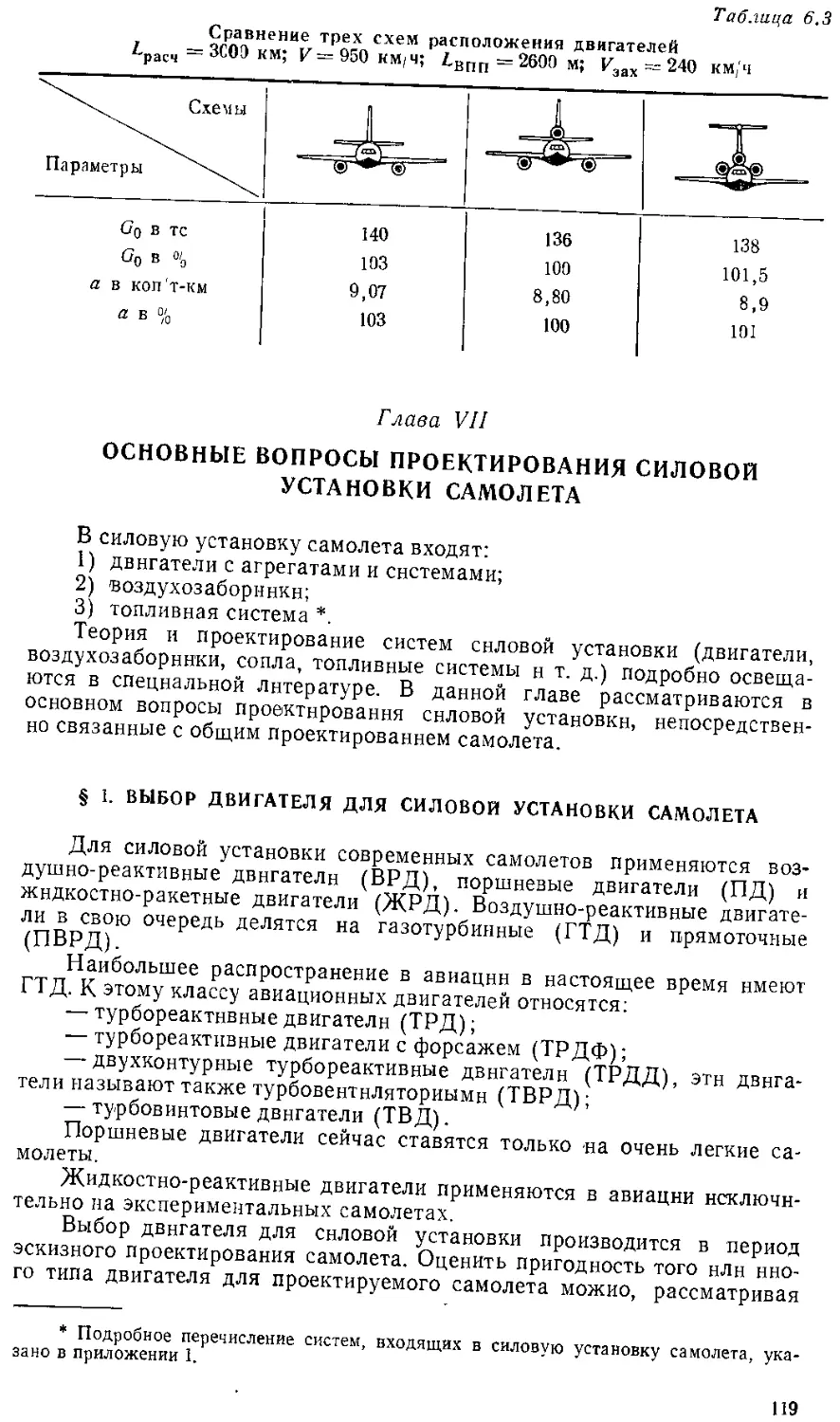
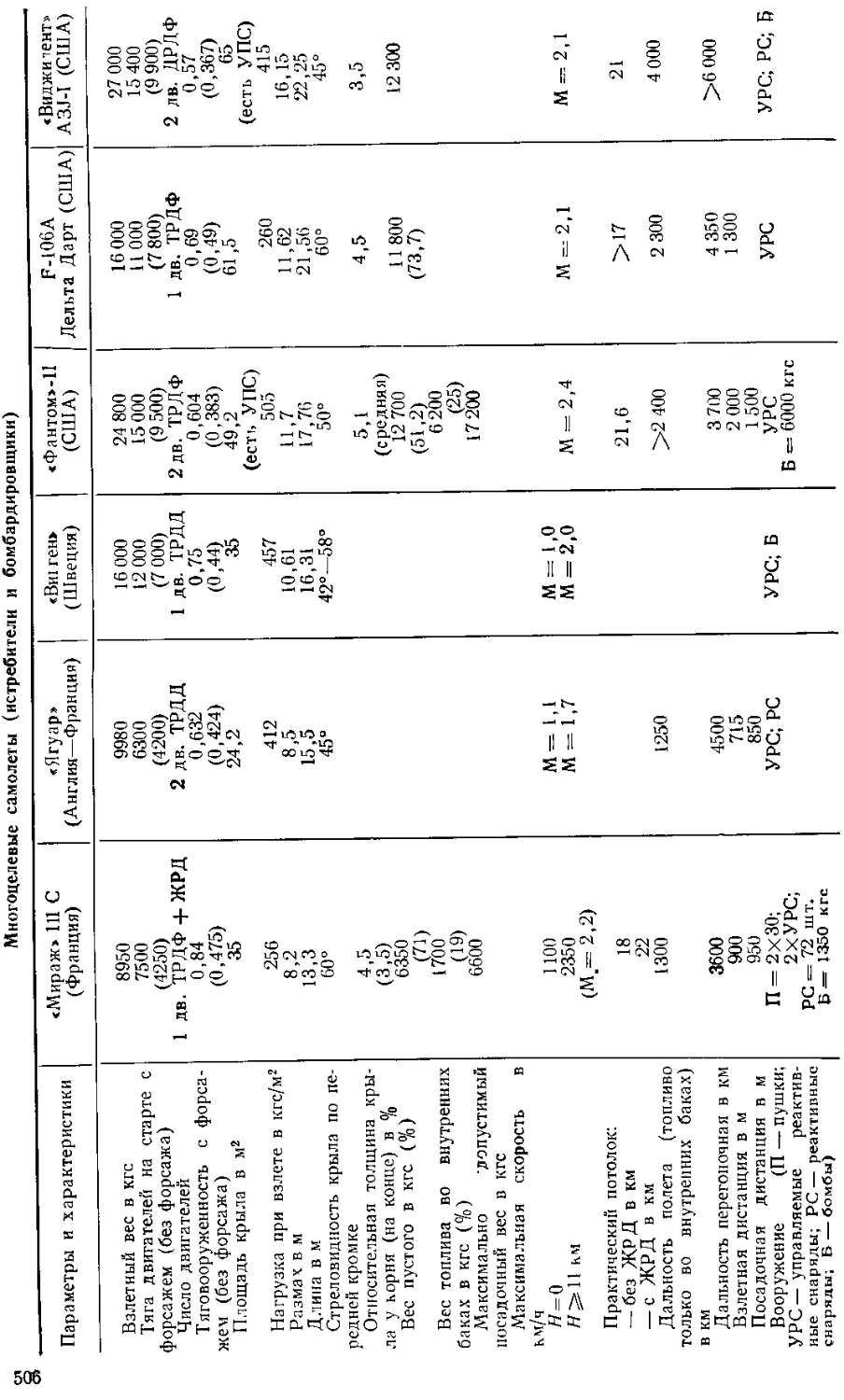
Название са\олета Расетное число М поле- । та Взлетный вес самолета в тс Стоимость про- граммы созда- ния самолета в млрд. толл. Источник
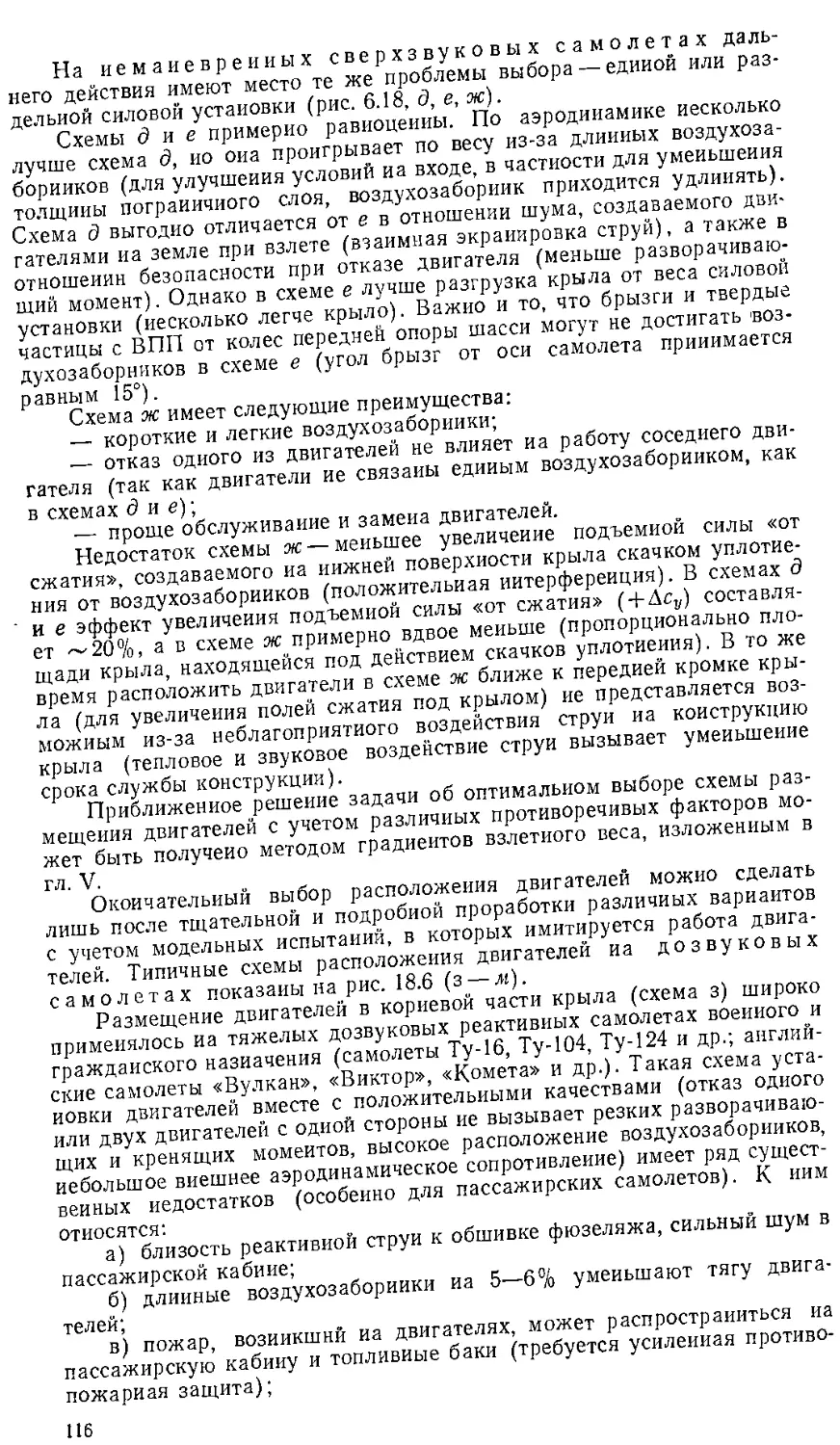
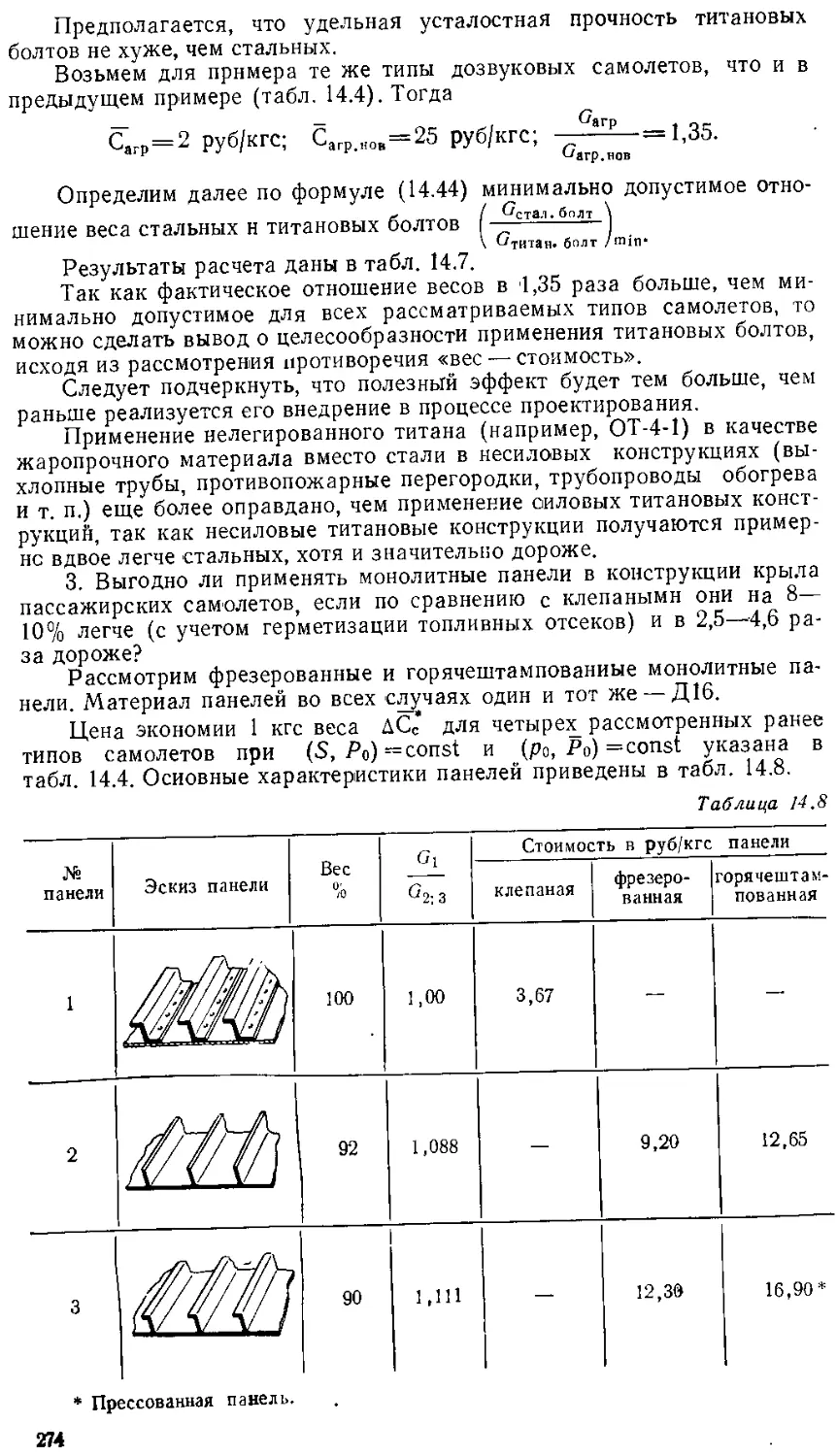
SR-7I (США) В-70 «Валькирия» (США) TSR-2 (Англия) Боинг 2707 (США) (проект) «Конкорд» (Фран- ция — Англия) 3 3 2,2 2,8—3,0 2,0—2,2 45 250 45 306 159 -1 1,5 — I 1,45 1,6 Interavia, № 5545, 5546, 1964 г. Flight, № 2885, 2886, 1964 г Aviation Week, 4.XI, 1963 г. Interavia, № 6245, 1967 г. Interavia, К? 6082, 1966 г.
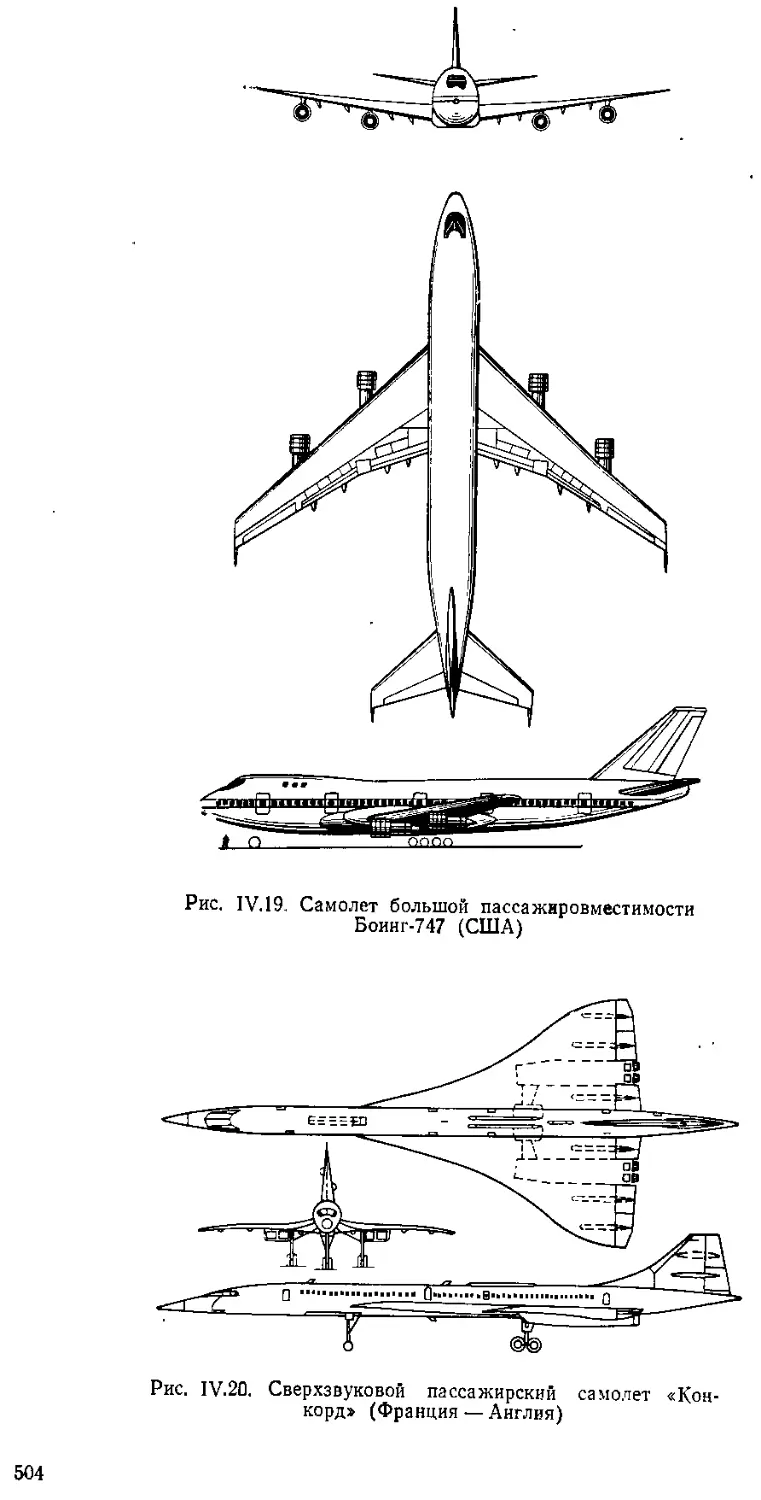
Характерно, что каждый из указанных самолетов не имел предше-
ственников (прототипов) и является уникальным. Любое государство,
каким бы богатым оно ни было, не в состоянии одновременно создавать
большое количество типов таких самолетов, стоимость создания кото-
рых в бюджете страны становится все более весомой**.
Создание дозвуковых самолетов, хотя и обходится дешевле, однако
не настолько, чтобы экономически было выгодно создавать одновремен-
но несколько образцов самолетов, удовлетворяющих одним и тем же
техническим требованиям.
Проекты самолетов теперь тщательно изучаются как с технической,
так и с экономической стороны и, как правило, выбирается один проект
для осуществления.
Таким образом, статистика по отдельным типам самолетов стано-
вится все беднее и попытка использовать ее для создания аналогичного
образца неизбежно приводит к отставанию.
Метод оптимального проектирования самолета на-
чал развиваться с попыток аналитического решения задач о выборе
ьаивыгоднейших параметров самолета с учетом противоречий между па-
раметрами и летными характеристиками.
В основе этого метода лежит инженерный поиск параметров и ха-
рактеристик машины (объекта, процесса), наилучшнм образом удовлет-
воряющих выбранному критерию оценки.
* Однако это не означает, что при проектировании статистику следует отбросить
вообще.
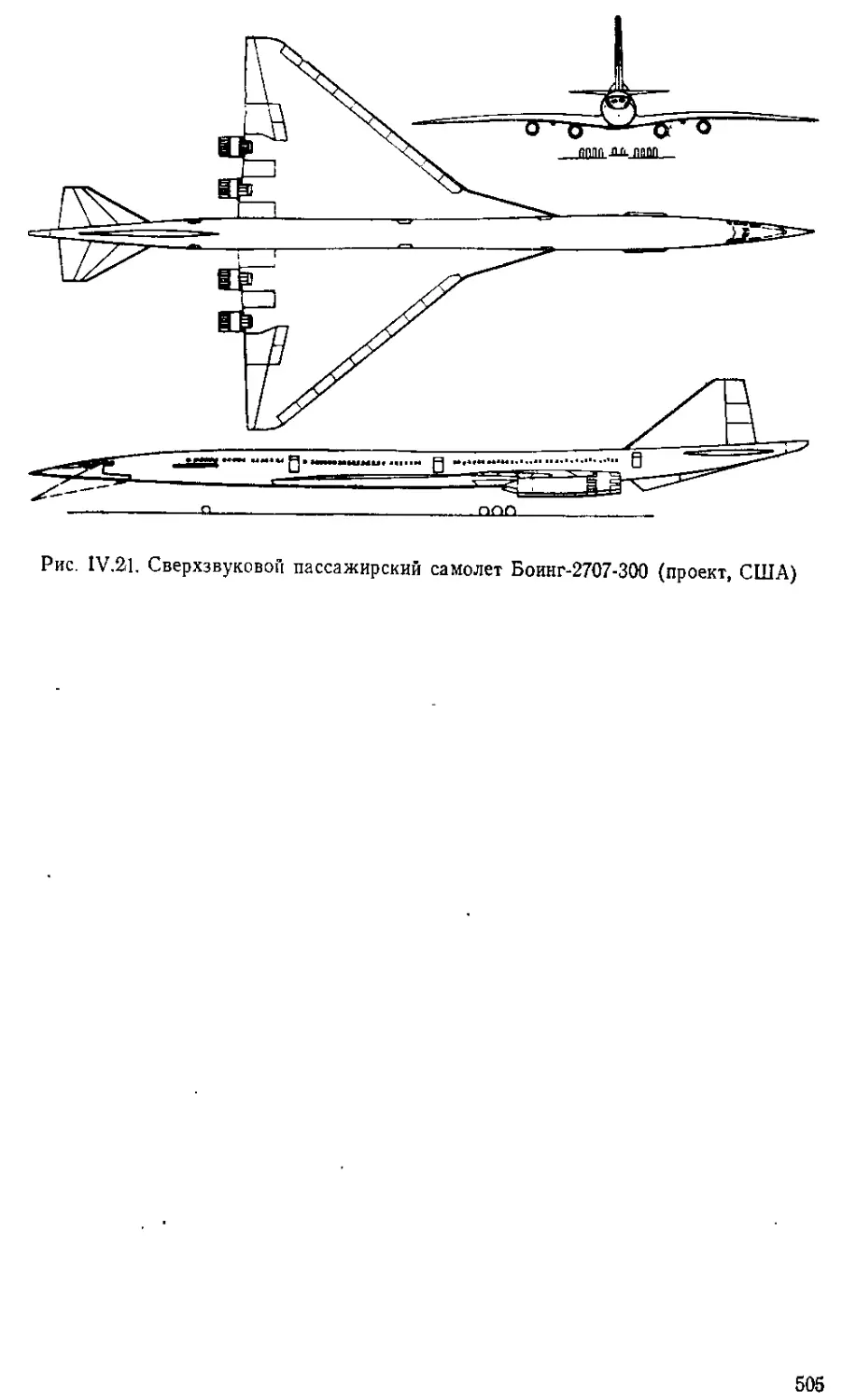
** По этой причине некоторые зарубежные государства вынуждены кооперировать-
ся для создания самолетов (например, СПС «Конкорд», аэробус А-300 и др.).
17
Под критерием оценки подразумевается некоторая целевая функ-
ция, выражающая основное качество объекта проектирования (напри-
мер, самолета).
Первой отечественной работой, посвященной оптимизации парамет-
ров самолетов, является работа советского инженера Н. Н. Фадеева
«Изыскание рациональных размеров самолета» (1939 г.). Затем, в
1940—1942 гг. появились аналогичные работы других авторов. С этого
времени особую остроту и важность приобрел вопрос о критериях оцен-
ки самолетов, поскольку оптимальное проектирование без критериев не-
возможно.
В указанной работе Н. Н. Фадеев впервые указал выход из много-
численных противоречий при выборе характеристик и параметров само-
лета. Ои предложил все противоречащие друг другу параметры и харак-
теристики объединить в некоторый обобщенный критерий.
Позднее к такому же выводу о необходимости единого комплексно-
го критерия пришли С. И. Зоншайи, В. Ф. Болховитинов и др.
Если для статистических методов интуиция конструктора играла
существенную роль, так как с помощью интуиции более или менее верно
находились компромиссные решения, то с появлением метода оптималь-
ного проектирования роль интуиции конструктора существенно сужает-
ся, уступая место иаучио обоснованному решению (что, разумеется, не
исключает творческого начала в изысканиях, постановке и методах ре-
шения задач проектирования).
Развитие метода оптимального проектирования было по существу
внедрением в изыскательскую работу конструктора диалектического ме-
тода, в основе которого лежит идея о взаимозависимости и взаимообус-
ловленности всех качеств самолета.
В 1946 году советский конструктор В. Ф. Болховитинов впервые
показал [4], что если в уравнении весового баланса самолета выразить
составляющие веса через летные характеристики и другие параметры, то
в преобразованном уравнении, названном уравнением существования,
можно ие только видеть связи между различными свойствами самоле-
та, ио и судить о возможности реализации этих свойств на уровне раз-
вития авиационной техники в данный период. Это означает, что то или
иное качество самолета может быть достигнуто лишь при определенном
весовом совершенстве частей самолета.
С помощью уравнения существования можно ответить и на вопрос,
возможно ли осуществление летательного аппарата вообще.
В конце сороковых годов при проектировании летательных аппара-
тов возникла и стала развиваться идея комплексных исследований.
Сущность этой идеи заключалась в том, чтобы найти аналитическую
связь между качественно различными свойствами самолета, например
между весом и стоимостью.
До широкого использования ЭВМ в проектировании самолетов ме-
тод оптимизации параметров развивался в основном по линии изыска-
ния новых и совершенствования известных связей между параметрами
самолета. Оптимизация большого количества параметров при расчетах
вручную представляла и представляет большую вычислительную труд-
ность, особенно при одновременной оптимизации нескольких параметров.
Выход, правда, был в приближенной, последовательной оптимизации
ряда параметров. Однако подлинное решение этой задачи оптимизации
стало возможным лишь с применением электронных цифровых вычисли-
тельных машин (1960—1961 гг.), которые могут за несколько часов сде-
лать расчет тысяч и десятков тысяч вариантов сочетаний параметров и
характеристик самолетов, могут автоматически обработать результаты
18
расчетов и выдать их в удобной для конструктора форме (в форме таб-
лиц, графиков или чертежей).
Благодаря ЭВМ открываются новые качественные и количественные
возможности решения различных задач при проектировании любой ма-
шины и, в частности, при выборе параметров самолета, так как выбор
параметров сводится к сравнению н оценке различных вариантов. ЭВМ
позволяет на один-два порядка увеличить число обследуемых вариантов
проекта и выбрать наиболее подходящий вариант. Суммарное число
возможных сочетаний параметров выражается, как известно, произве-
дением
= nanbnc. ..nt,
где па, пъ, пс, ..., п,. — числа вариантов исследуемых (искомых) парамет-
ров или компоновок а, Ь, с, ..., i. Если, например, исследуются четыре
варианта значений для каждого из шести искомых параметров, то общее
количество комбинаций равно 46 = 4096.
В сжатые сроки, которые обычно предоставляются для эскизного
проектирования самолета, исследовать несколько тысяч сочетаний па-
раметров и компоновок, чтобы выбрать наилучший вариант, практически
можно лишь с помощью ЭВМ.
Таким образом, ЭВМ позволяет в значительно большей степени,
чем при ручном расчете, осуществить принцип оптимального проекти-
рования.
Применение ЭВМ дает возможность отказаться от осреднений и уп-
рощений в расчетах, обычно применяемых прн ручном счете, дает воз-
можность учесть не только влияние основных, но и второстепенных за-
висимостей критерия оценки самолета от аэродинамических, весовых и
других характеристик.
Как уже указывалось, вопрос о критерии или критериях оценки
проектируемого самолета является одним из важнейших вопросов, по-
скольку от него зависит не только численное значение параметров и ха-
рактеристик, но и судьба проектируемого или построенного самолета
вообще.
Неудачно выбранные критерии могут привести к совершенно непра-
вильной оценке самолета.
Известны случаи, когда неудачно сформулированные критерии за-
держивали развитие хороших самолетов и поощряли развитие самоле-
тов, отвергнутых в дальнейшем практикой. Например, отечественный
самолет-штурмовик Ил-2, построенный в 1938 году, считался некоторы-
ми военными специалистами неудачным, исходя из его летных характе-
ристик. Применение Ил-2 в Отечественной войне показало выдающиеся
боевые качества этого самолета. Неудачным оказался не самолет, а по-
пытка оценить его только по летным данным.
Известны и противоположные примеры.
Отсюда следует важный вывод: критерий оценки самолета должен
учитывать не только летные свойства, но и условия применения (экс-
плуатации).
Первые самолеты оценивались по отдельным характеристикам Са-
молет считался лучшим, если имел по сравнению с прототипами боль-
шую скорость, лучшую весовую отдачу при равной дальности и т. д.
Распространенным было сравнение самолетов по числам Эверлинга
(числам скорости, дальности, высоты). В дальнейшем советским ученым
В. С. Пышновым были предложены аналогичные числам Эверлинга ко-
эффициенты [21], позволяющие судить о величине полезной нагрузки, ве-
се конструкции, аэродинамическом совершенстве самолета, о том, стре-
мился ли конструктор к получению максимальной скорости, макси-
мальной грузоподъемности или принимал компромиссное решение.
Коэффициенты В. С. Пышнова, кроме этого, давали возможность оце-
19
нить расход топлива на тонно-километр перевозимого груза, а также ка-
чество воздушного винта.
Числа Е. Эверлинга, как и коэффициенты В. С. Пышнова, исполь-
зовались при проектировании самолета иа основе статистического мето-
да выбора основных его параметров и характеристик и в свое время иг-
рали прогрессивную роль.
Следует заметить, что числа Эверлинга и коэффициенты Пышнова
давали возможность оценивать и сравнивать самолеты по различным
критериям (кроме экономических), но не давали возможности объек-
тивно оценить самолет в целом.
В самом деле, допустим, что имеется какое-то количество критери-
ев оценки. Если бы критерии одинаково оценивали качества самолета,
было бы легко сделать выбор. Но как быть, если числа или коэффици-
енты самые различные? Одни критерии дают высокую оценку, другие —
низкую.
В этих случаях рекомендовались такие способы:
— принять некоторое среднее компромиссное решение, основанное
на опыте и интуиции;
— применить оценку по системе баллов, располагая критерии в по-
рядке их важности.
Первый способ является чисто субъективистским и не приводит обя-
зательно к наилучшему решению. Еще в 1952 г. Н. Н. Фадеев отмечал,
что не средние, а «крайние решения зачастую являются наилучши-
ми» [29].
Второй способ претендует на некоторую объективность, однако в ос-
нове его все тот же субъективизм, на котором основано определение
важности критериев и присвоение им «удельного веса». Этот метод ста-
новится совершенно неэффективным в случаях, когда основные требова-
ния к самолету выполняются, а остальные, более многочисленные, не
выполняются. Неясно, что важнее — удовлетворить первому, основному
требованию, или всем остальным?
Очевидно, что все эти затруднения можно преодолеть, если принять
единый, достаточно общий критерий оценки, где будут отражены все
интересующие конструктора и эксплуатационника характеристики и па-
раметры самолета. Этот общий, синтетический, критерий не должен
быть искусственным. Необходимо, чтобы он выражал главную задачу,
ради которой создается летательный аппарат. Для военного самолета'—
это боевая эффективность или степень (полнота) выполнения боевого
задания, для гражданского самолета — экономичная перевозка пасса-
жиров и грузов при заданном уровне комфорта и выполнении всех тре-
бований безопасности и регулярности полетов.
Вскоре, после появления чисел Эверлинга, которые были, по сущест-
ву, техническими показателями, были сделаны предложения об эконо-
мической оценке транспортных самолетов. Первый экономический кри-
терий был предложен К. Рокка в работе «Воздушное сообщение с точки
зрения экономики» (1929 г.).
Известный в настоящее время критерий — себестоимость тонно-кило-
метра— ввел в отечественную авиационную литературу П. Н. Толмазов
в работе «Основные вопросы эксплуатации воздушных линий», ОНТИ,
1934. Затем разработке критерия экономической оценки транспортных
самолетов посвятил монографию Е. А. Овруцкий [16].
В качестве критерия сравнительной оценки гражданских са-
молетов Е. А. Овруцкий принимает себестоимость тонно-километра а,
как величину, непосредственно отражающую необходимые издержки на
создание и эксплуатацию самолета [см. формулу (1.2)].
Этот критерий является достаточно общим и в то же время не слиш-
ком сложным, вполне доступным при проектировании самолета. Себе-
стоимость тонно-километра учитывает весовые характеристики самолета
20
н его частей, характеристики двигателей (тягу, удельный расход топли-
ва, стоимость, ресурс), аэродинамические характеристики самолета (че-
рез вес топлива), режим полета (V, И, L), стоимость и ресурс конструк-
ции самолета, расходы иа проектирование самолета, иа содержание
летного состава и бортпроводников, цену топлива, аэропортовые расхо-
ды, среднегодовой коэффициент загрузки. Взлетно-посадочные характе-
ристики для аэродрома любого заданного класса учитываются косвенно,
так как тяговооруженность и нагрузка иа квадратный метр крыла, от
которых зависит тяга двигателей и вес самолета, влияют иа уровень се-
бестоимости тонно-километра. Косвенно учитываются также требования
безопасности и комфорта пассажиров, так как одним из условий выбо-
ра тяговооружеииости является отказ двигателя. В вес топлива входит
аварийный навигационный запас, предусматривается увеличение веса
конструкции фюзеляжа за счет организации аварийных люков и других
средств спасения. От заданного уровня комфорта пассажиров (вариан-
ты: первый класс, туристский, экономический) зависят либо размеры фю-
зеляжа (вес конструкции, аэродинамика) и вес бытового оборудования
при заданном числе пассажиров, либо вес коммерческой нагрузки и вес
бытового оборудования при неизменных размерах фюзеляжа.
Сравнительная оценка гражданских самолетов по себестоимости пе-
ревозок является официальной и у нас и за рубежом. В США и других
странах имеются стандартные методы определения прямых эксплуата-
ционных расходов для сравнительной оценки транспортных самолетов.
Более общим экономическим критерием, по сравнению с себестои-
мостью тонно-километра, является критерий, предложенный Д. Л. Тома-
шевичем [25]. Он имеет вид:
где Р — величина, определяющая общественную полезность или целе-
вую отдачу летательного аппарата;
В — затраты на изготовление летательного аппарата и поддержание
его работоспособности в период эксплуатации.
Критерий Д. Л. Томашевича применим к любым летательным аппа-
ратам илн изделиям вообще. Однако в приложении к гражданским са-
молетам рассматриваемый критерий представляет не что иное как вели-
чину, обратную полной себестоимости тонно-километра 1/а.
В случае сравнения самолетов при постоянных значениях дальности
полета, крейсерской скорости, полезной нагрузки, стоимости и ресурса
частей экономические критерии трансформируются в более простой
критерий — взлетный вес самолета. Наилучший вариант соответствует
минимуму взлетного веса самолета при прочих равных условиях. Во
многих случаях весовой критерий б?о существенно упрощает решение
задач по оптимизации параметров и конструктивно-проектировочных
решений.
Для военных самолетов в ряде стран разрабатываются общие крите-
рии, учитывающие вероятность (степень) выполнения задания, завися-
щую от характеристик боевой нагрузки и оборудования, летных харак-
теристик самолета, а также характеристик наземного оборудования для
обеспечения полета [4, 25].
Изложенное позволяет сделать следующие выводы:
— методы общего проектирования самолетов развивались по пути
анализа от простого к более сложному — от методов копирования и по-
добия к статистическому методу и затем — к методу оптимального про-
ектирования;
21
— критерии оценки самолетов развивались по пути синтеза от част-
ного к общему — от оценки по отдельным признакам до оценки самолета
в целом.
В заключение приведем методику расчета современного критерия
оценки гражданских самолетов — приведенных затрат, в основе которых
лежит себестоимость тонио-километра, но учитываются также капиталь-
ные вложения.
Приведенные затраты, выраженные относительно одного самолета»
равны
а11р = я4 Якапвл коп/т-км. (1.1)
Здесь а — себестоимость перевозок в коп/т-км;
йкап.вл — приведенные капиталовложения в коп/т-км.
Себестоимость перевозок рассчитывается по формуле
А ,
------:-------коп/т-км,
^комбком^рейс
(1.2)
где А —расходы на эксплуатацию самолета в течение одного летно-
го часа в коп/ч;
Оком — коммерческая нагрузка в тс, соответствующая данной
дальности полета;
Vneftc — рейсовая скорость самолета в км/ч;
Кком — коэффициент коммерческой нагрузки, учитывающий сред-
негодовую неполную загрузку самолета из-за сезонности
перевозок.
• Значения К1(ОМ даиы в табл. 1.2.
Рейсовая скорость самолета или скорость полета по расписанию
учитывает потери времени на следующие этапы полета: запуск и про-
грев двигателей, рулежка до взлетно-посадочной полосы (ВПП) перед
взлетом н после посадки, взлет и набор высоты, маневрирование в воз-
духе после взлета и перед посадкой, снижение и посадка. Для сверх-
звуковых самолетов дополнительно учитывается время на разгон само-
лета до крейсерской сверхзвуковой скорости полета и иа торможение.
Рейсовая скорость определяется по следующей формуле:
рейс
£ ^в.п4'(^в.1г + А^м) Укрейс
(1.3)
где L — расстояние между аэропортами взлета и посадки в км;
/В1П — время, затрачиваемое на взлет, набор высоты, снижение и
посадку, в ч;
LB.n — горизонтальная проекция пути, проходимого самолетом за
время ^в.п, в км;
Укрейс —крейсерская скорость полета в км/ч;
Д/м—время, затрачиваемое иа запуск и прогрев двигателей, иа
рулежку и маневрирование после взлета и перед посад-
кой в ч.
Время на набор высоты и снижение, на разгон самолета до крейсер-
ской скорости и торможение и соответствующая этому времени горизон-
тальная проекция пути самолета берутся из аэродинамического рас-
чета.
Д/м принимается равным:
для самолетов с ТРД— 10 Мии (0,167 ч),
для самолетов с ТВД— 15 мин (0,25 ч).
22
Для грубых расчетов можно принимать, что рейсовая скорость
равна:
'/ре“ A|Vkp»c + Л/
IVкрейс
L + Д/17крейс
км/ч,
(1.4)
где Д/=20 мии для самолетов с ТРД (0,33 ч); — 35 мии для магистраль-
ных самолетов с ТВД (0,58 ч); — 10 мин для легких многоцелевых само-
летов с ПД и ТВ Д (0,167 ч).
Максимальная коммерческая нагрузка определяется в зависимости
от количества пассажирских мест и емкости багажных и грузовых по-
мещений на самолете
Ок«„=90гамс + 29о/%аг
20п™£_'|
120 }
(1-5)
где лПас — число пассажирских мест;
90 — средний вес пассажира (75 кгс) и личного багажа пассажи-
ра (15 кгс);
290 — средний удельный вес почты и груза в кгс/м3;
^баг — объем багажных и грузовых помещений в м3;
120 — средний удельный вес багажа пассажиров в кгс/м3.
Максимальную коммерческую нагрузку пассажирский самолет мо-
жет перевозить иа определенную, так называемую расчетную, дальность,
зависящую от максимального взлетного веса и от запаса топлива на са-
молете. При заданном максимальном взлетном весе полет иа даль-
ность, большую расчетной, выполняется с уменьшенной коммерческой
нагрузкой вследствие соответствующего увеличения запаса топлива.
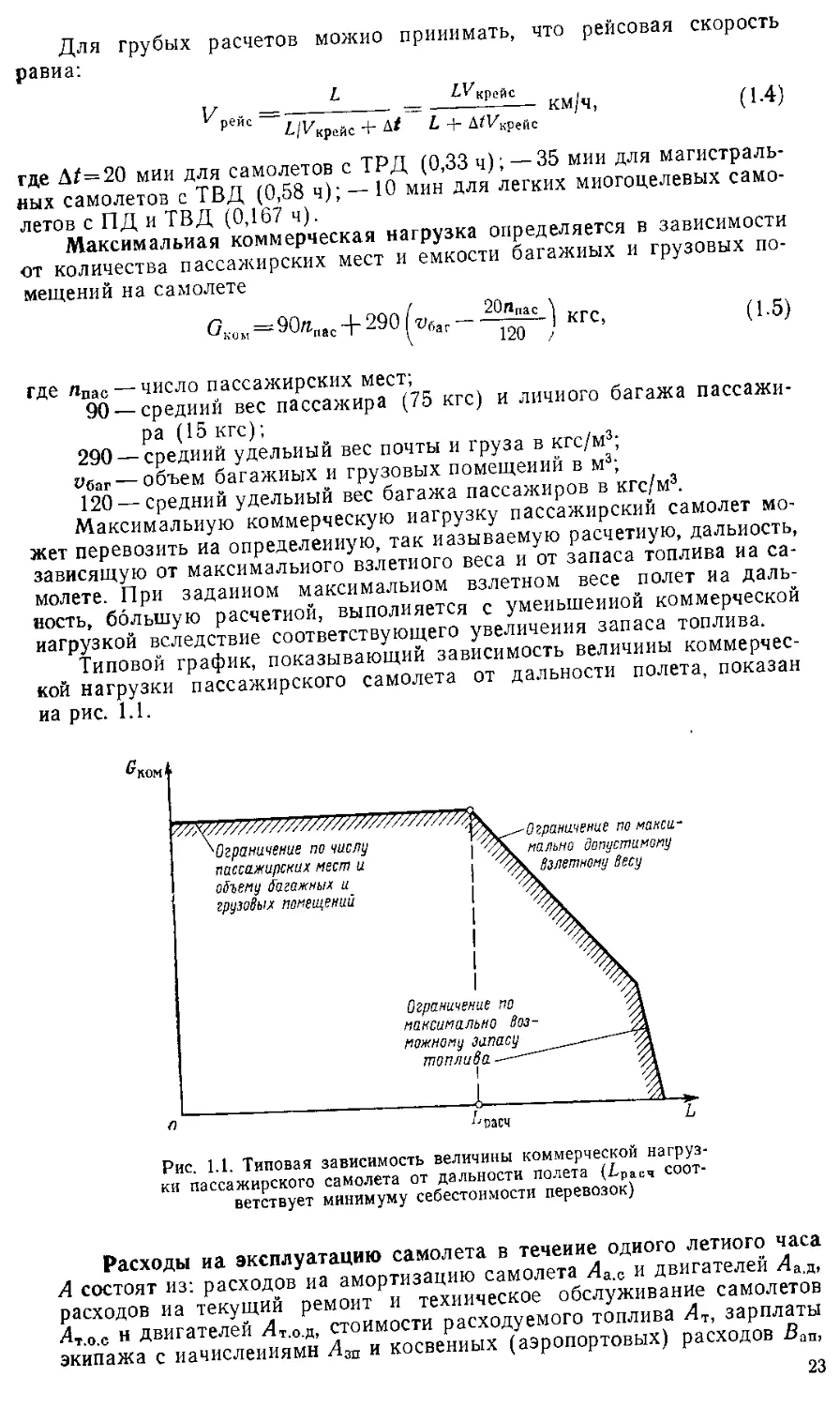
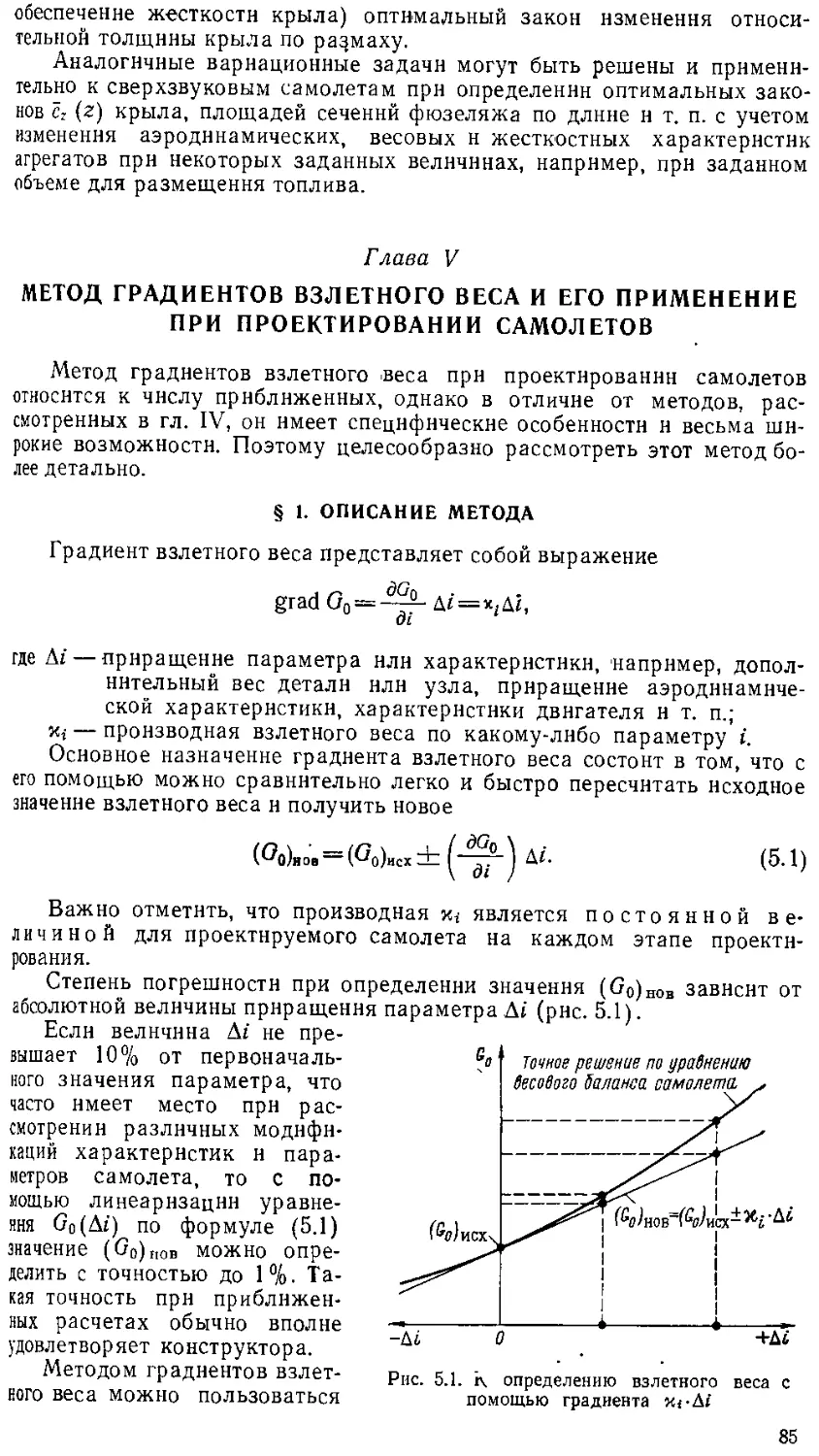
Типовой график, показывающий зависимость величины коммерчес-
кой нагрузки пассажирского самолета от дальности полета, показан
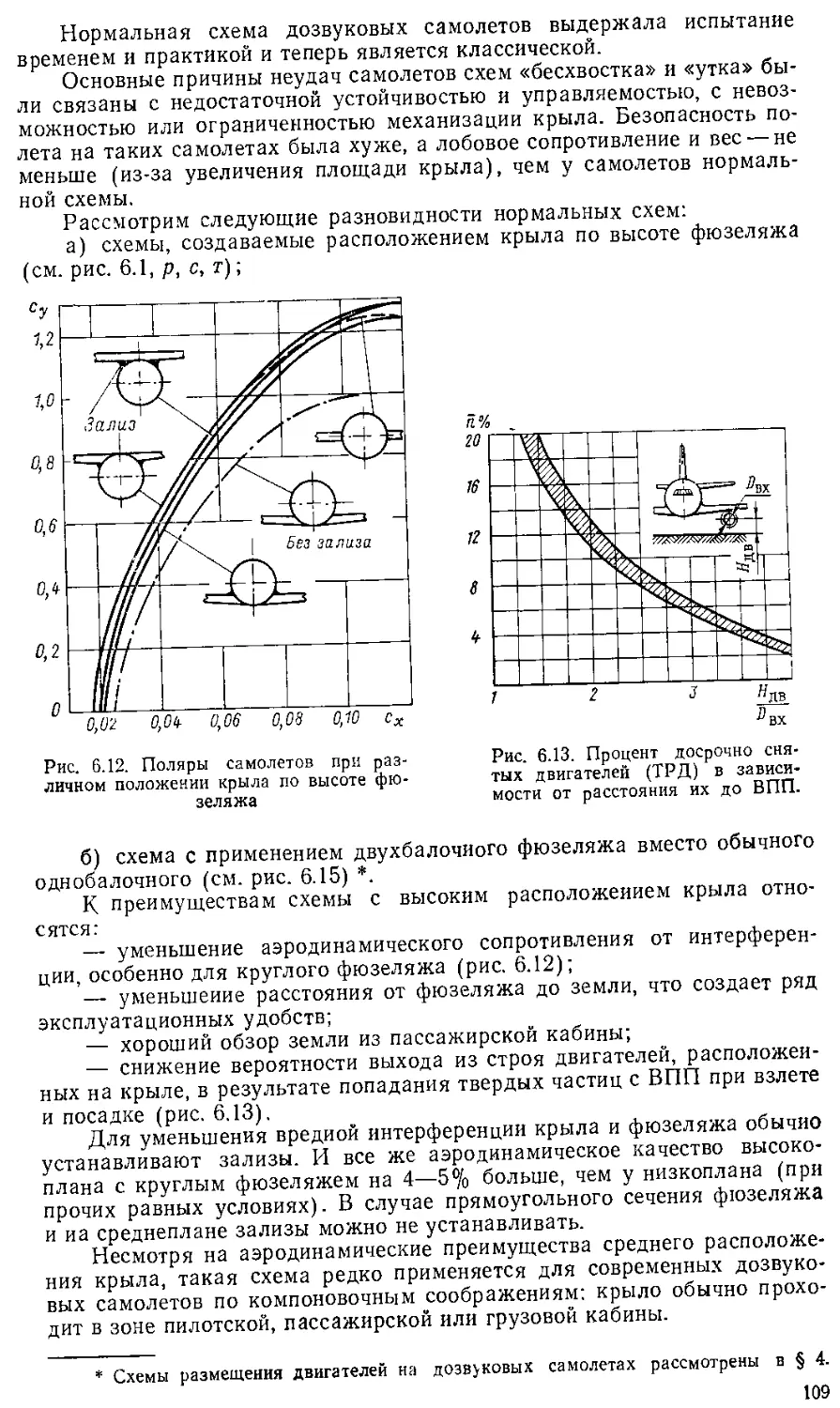
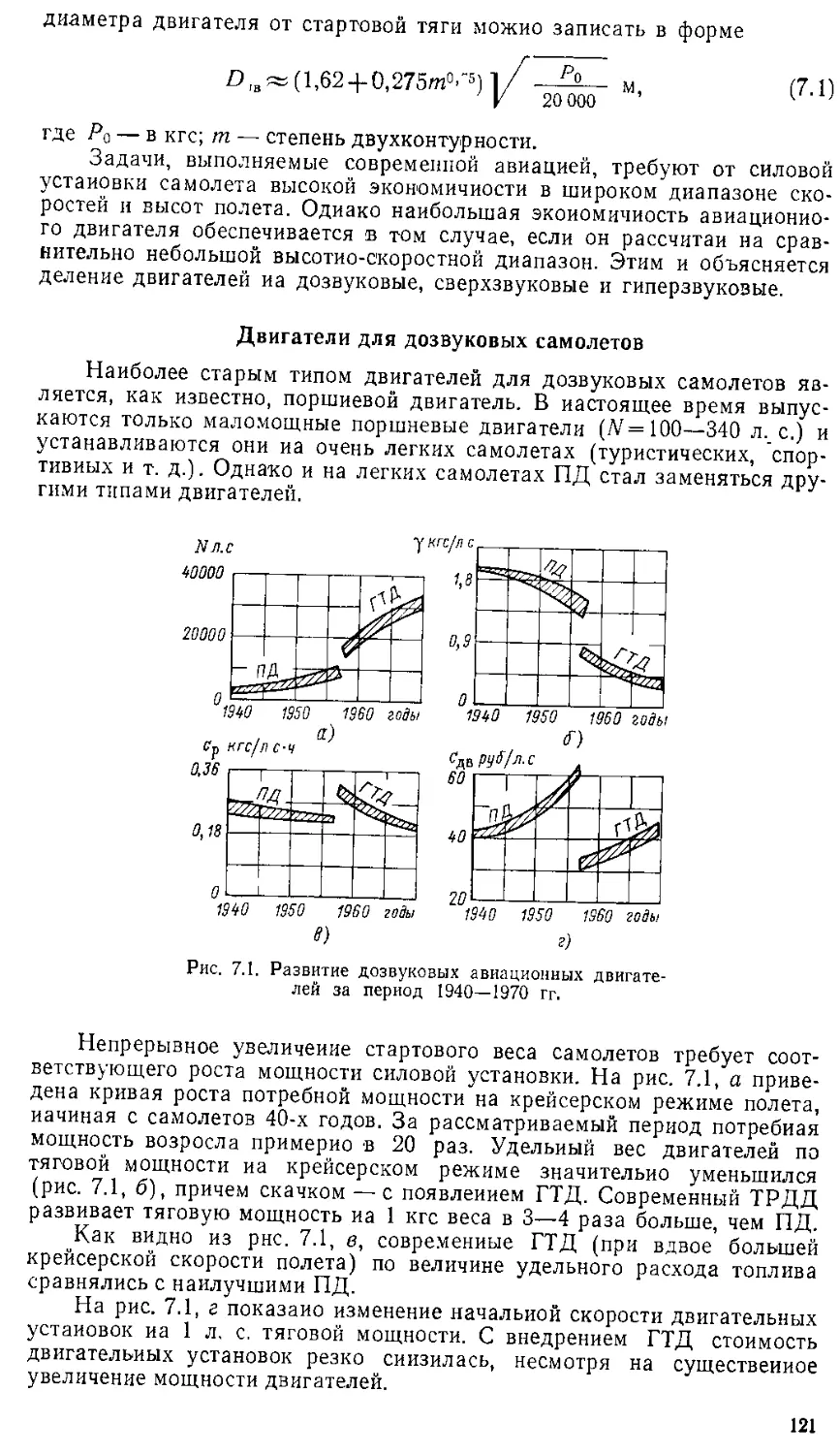
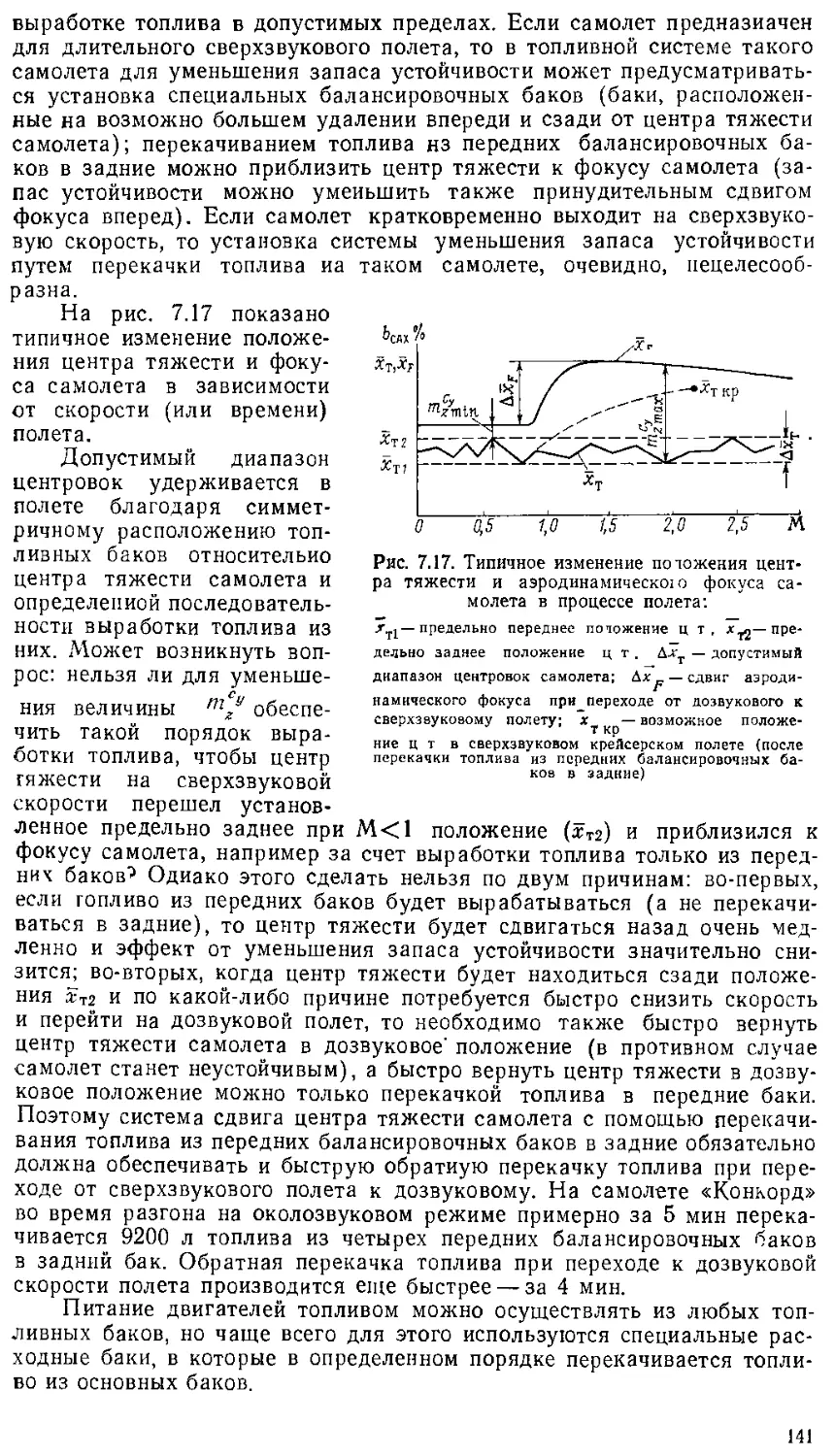
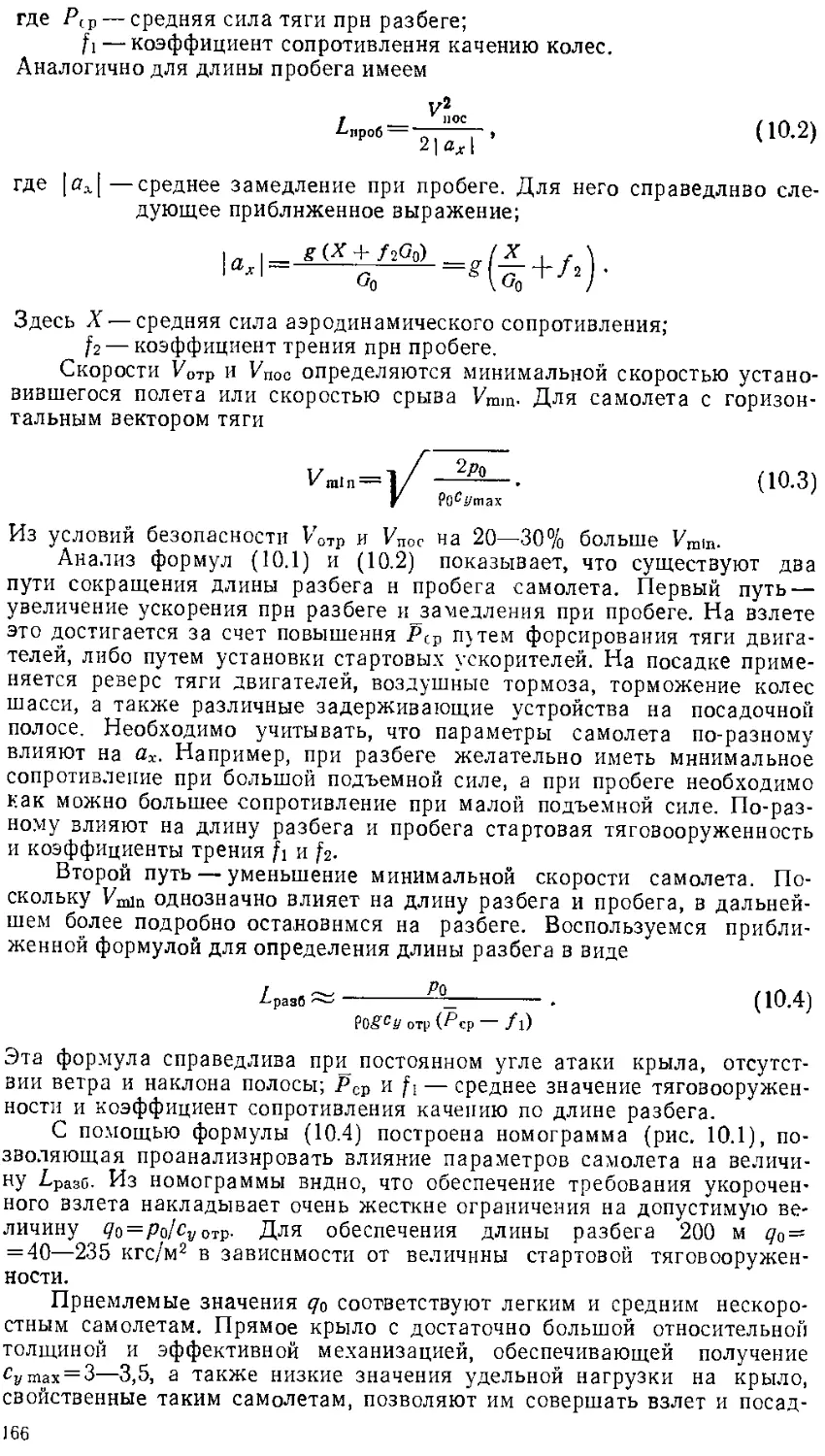
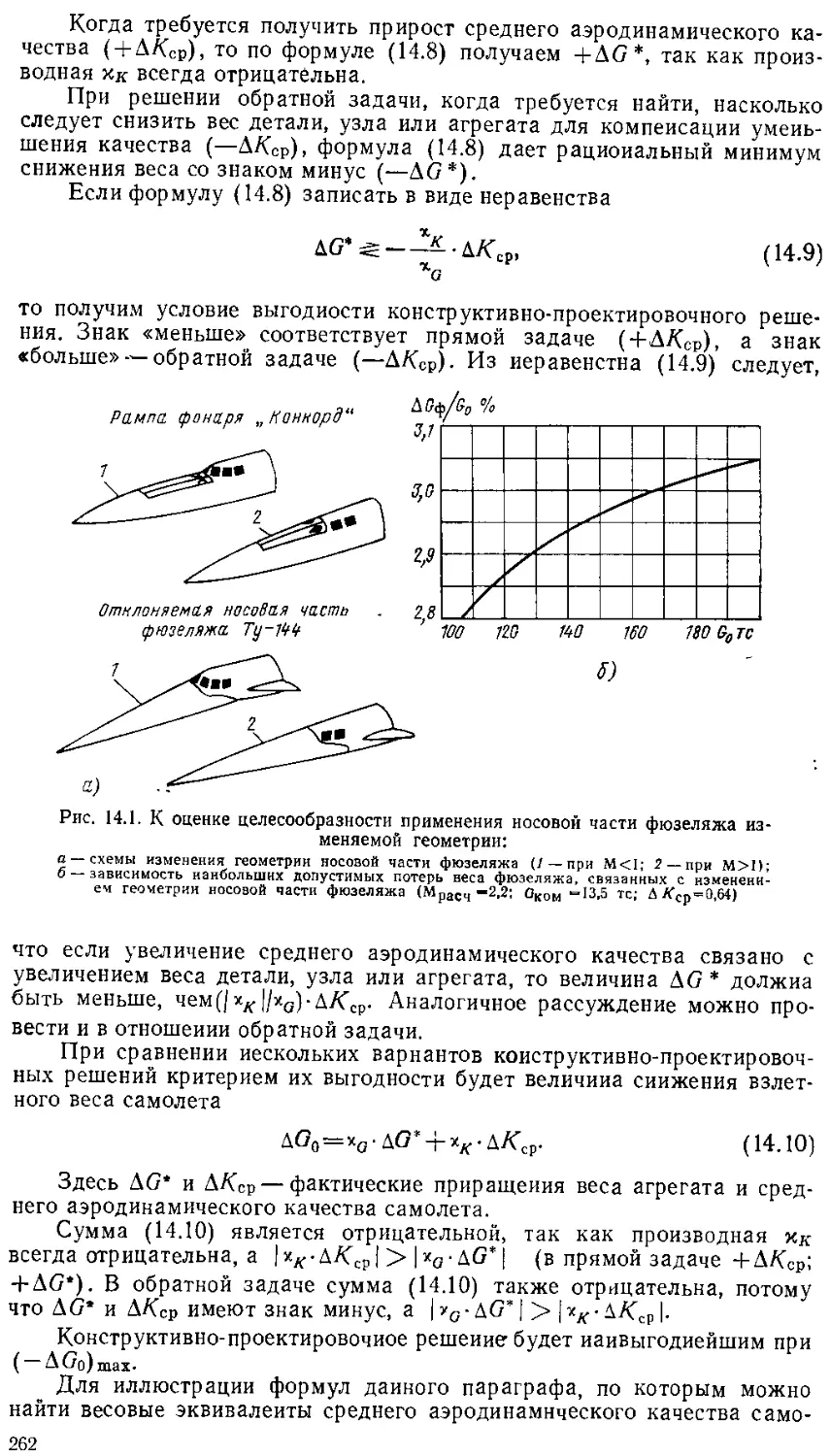
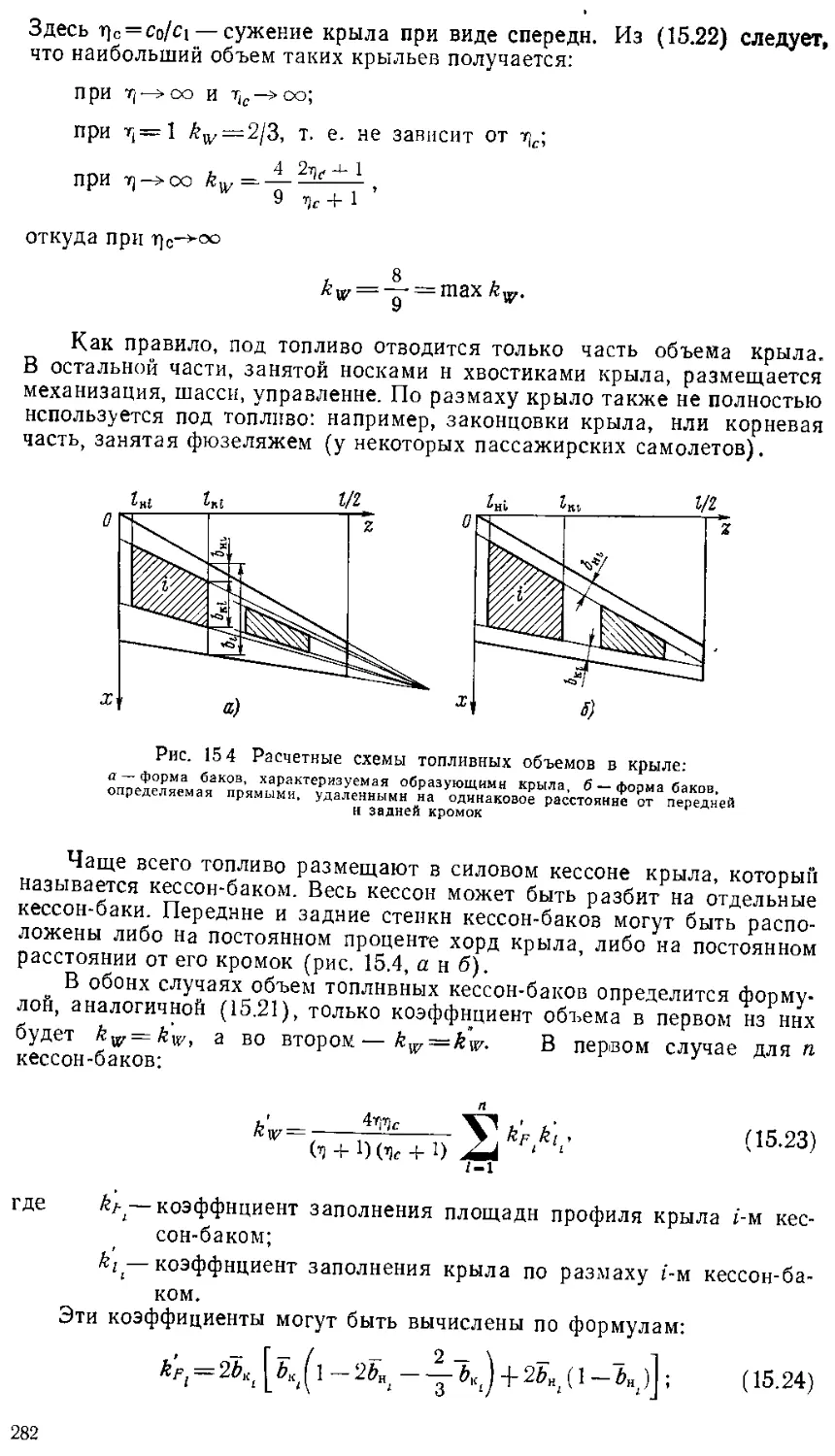
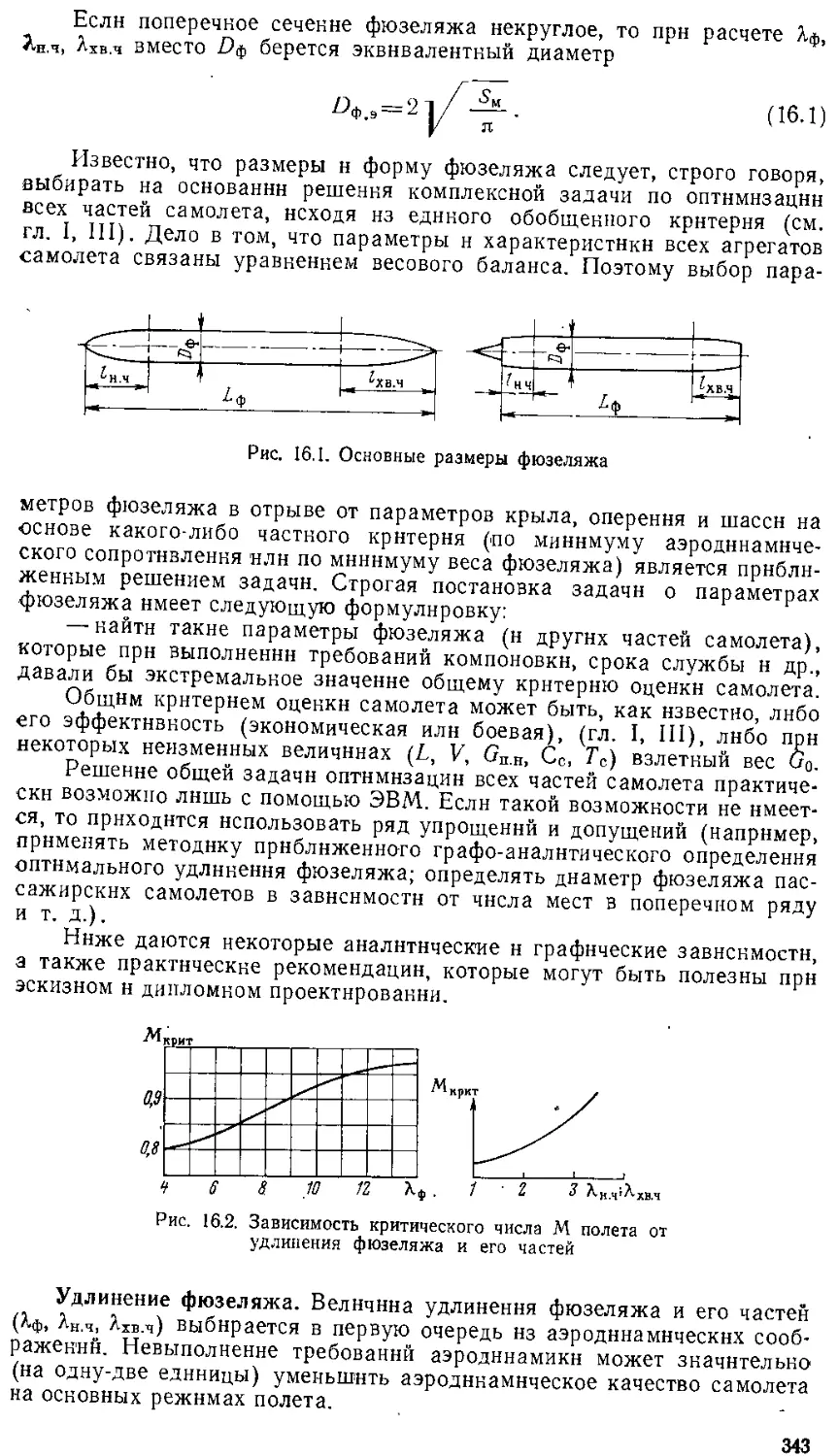
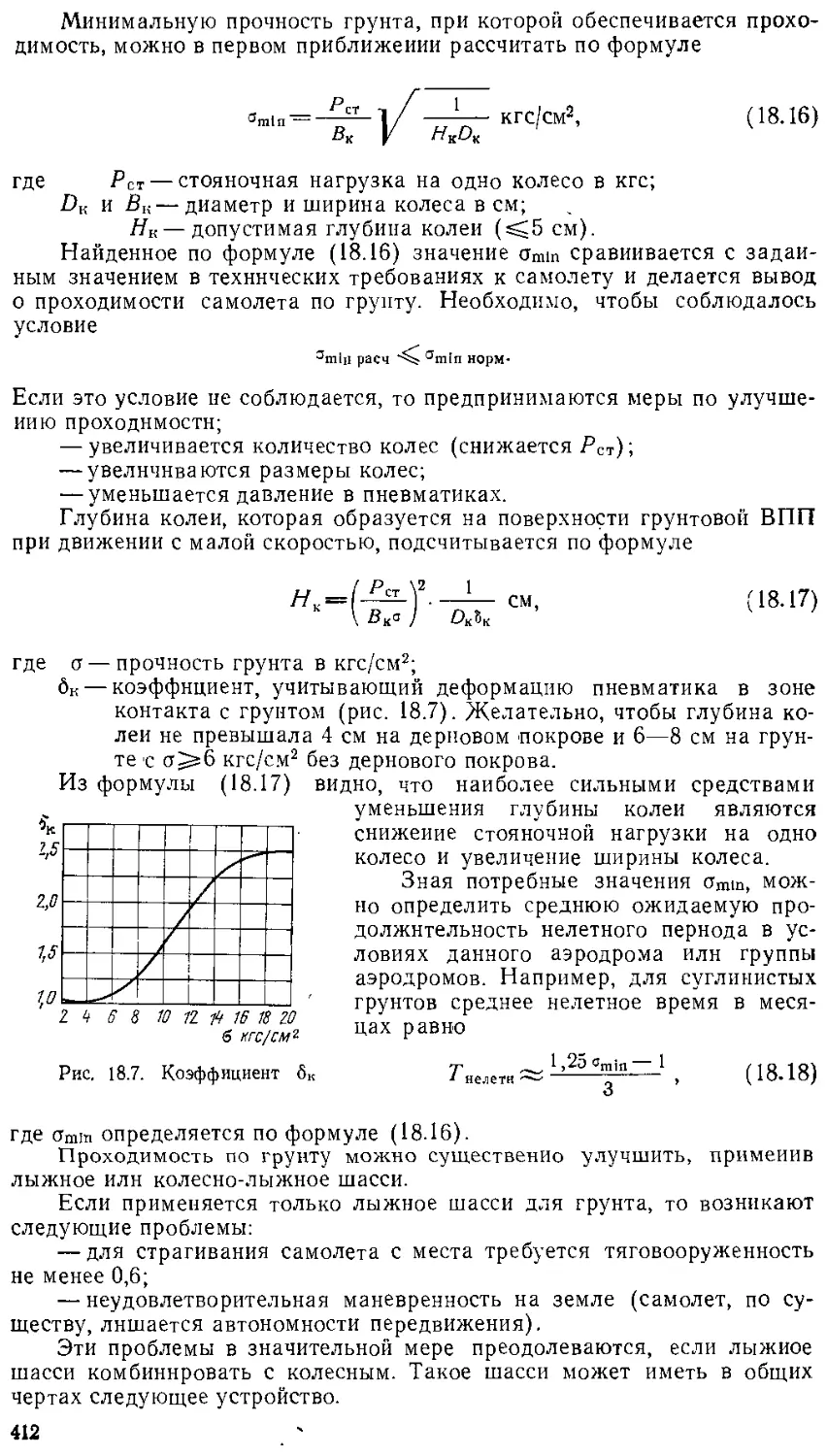
иа рис. 1.1.
^ком'
"МСЧ
Рис. 1.1. Типовая зависимость величины коммерческой нагруз-
ки пассажирского самолета от дальности полета (Драсч соот-
ветствует минимуму себестоимости перевозок)
Расходы иа эксплуатацию самолета в течение одного летиого часа
А состоят из: расходов на амортизацию самолета Ла-С и двигателей Да.д»
расходов на текущий ремонт и техническое обслуживание самолетов
4т.о.с и двигателей Лт.0.д, стоимости расходуемого топлива 4Т, зарплаты
экипажа с начислениями Дзд и косвенных (аэропортовых) расходов Вап,
23
учитывающих затраты на содержание аэропортов и различных админи-
стративно-технических служб авиакомпании. Таким образом
А Аа с 4~ Яа1д4" -^т о с 4~ -^Г о ч 4- -^Т 4- -^эк + ^ап коп/ч. (1.6jI
Расходы иа амортизацию самолета рассчитываются по формуле
Л,с = К,С.----------------=-------------- К011/Ч,
‘ с
(1-7)
где /<].= 1,05 — коэффициент, учитывающий непроизводственный налет
(тренировки, обучение, облет н т. п.);
Сс — стоимость самолета без двигателей в коп:
Ct = Ксср tKvG„)C, (3340 + 0,077G„,„- 1,05- (1.8)
Здесь Сцуст в кгс; Ксер.с и Kv— коэффициенты, учитывающие серийность
и расчетную скорость полета проектируемого самолета:
Ксер с
35 1Q5 \°’
^пуст^Ле J
2 \ 4 800 Г
(1.9).
(1.10)
где 2«с — количество самолетов в серии;
Укрейс — крейсерская скорость в км/ч.
В формуле (1.7) коэффициент Крс— отношение стоимости одного-
капитального ремонта к первоначальной стоимости самолета — может
быть рассчитан по формуле
Крс = 0,11
С с
(111)
где Тс — амортизационный или полный срок службы самолета в ч;
tc — срок службы самолета между капитальными ремонтами в ч.
Для магистральных самолетов в среднем Гс = 30000 ч, tc — 5000 ч. Для
самолетов местных воздушный линий Гс=25000 ч, ?с = 5000 ч.
По аналогии с (1 7) рассчитываются и расходы на амортизацию дви-
гателей
-1)
Aa, = K2ri„C,„-------—5=-----L коп/ч, (1.12)
1 IR
где Кг =1,07 — коэффициент, учитывающий непроизводственный налет;
/гдв— число двигателей, установленных на самолете;
СдВ — стоимость одного двигателя в коп.
Для ТРД можно принимать
С„=КсхКс.р, л (3400- 10 г 7\) коп, (1.13)
где Poi —взлетная тяга одного двигателя в кгс;
Ксх и Ксердв —коэффициенты, учитывающие тип (схему) двигате-
ля и серийность, Ксх=1— Для ТРД; КС1=1,15 —
для ДТРД при М<1, Ксх=1,5 — для двигателей
сверхзвуковых пассажирских самолетов;
(U4)
Здесь 5ндВ — количество двигателей в серии.
24
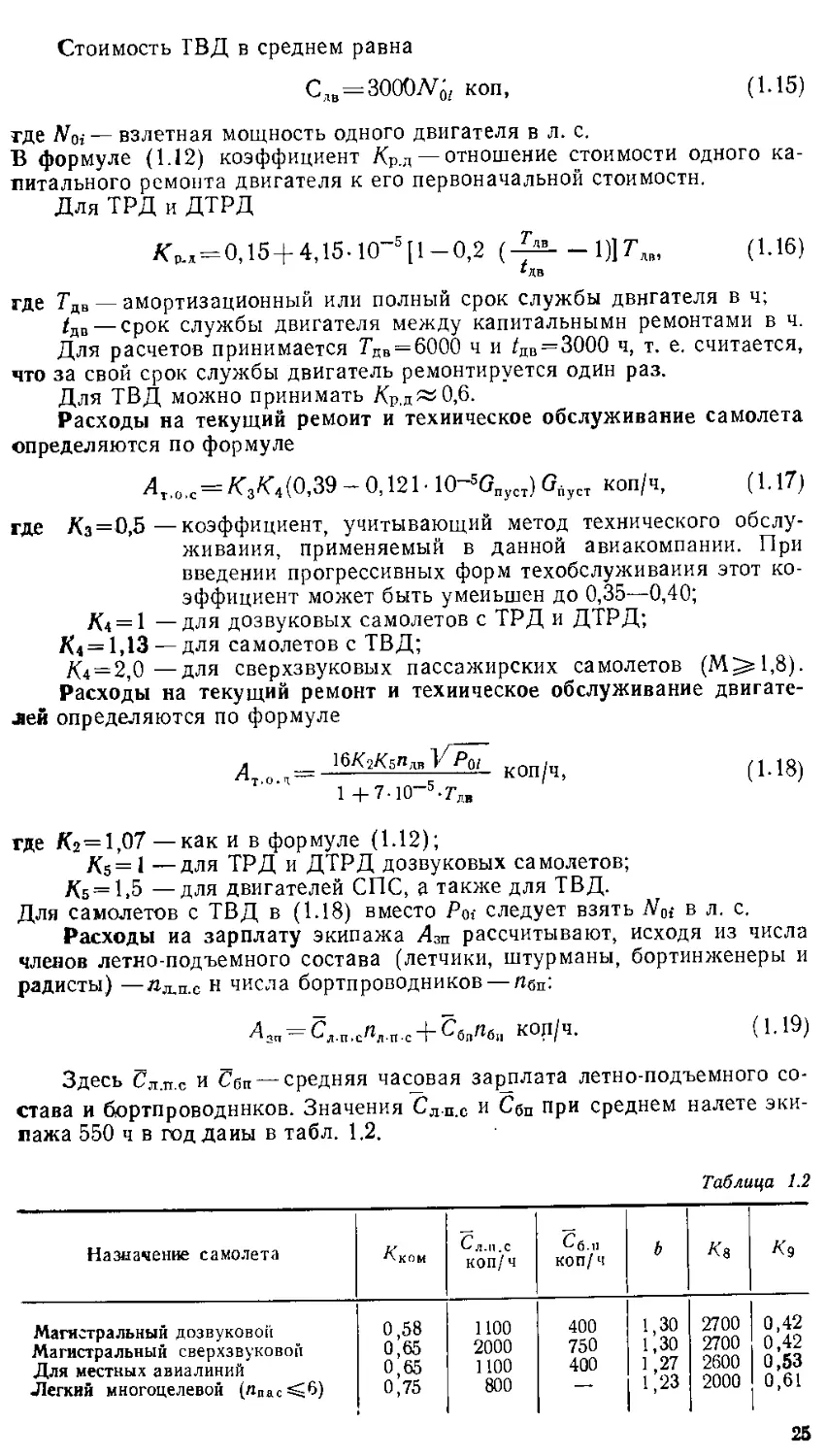
Стоимость ТВД в среднем равна
Сдв=3000Л^ коп, (1.15)
где Noi— взлетная мощность одного двигателя в л. с.
В формуле (1.12) коэффициент Кр.д— отношение стоимости одного ка-
питального ремонта двигателя к его первоначальной стоимости.
Для ТРД и ДТРД
Кр.« = 0,15+ 4,15-10~5[1 -0,2 (-pi5--1)]7\„ (1.16)
*дв
где Тдв — амортизационный или полный срок службы двигателя в ч;
/Дв — срок службы двигателя между капитальными ремонтами в ч.
Для расчетов принимается Тдв = 600б ч и /дв=3000 ч, т. е. считается,
что за свой срок службы двигатель ремонтируется один раз.
Для ТВД можно принимать КР1Д^0,6.
Расходы на текущий ремонт и техническое обслуживание самолета
определяются по формуле
Дт.о.с = ^4(0,39-0,121-10^GnyCT)GriycT коп/ч, (1.17)
где Кз=0,5—коэффициент, учитывающий метод технического обслу-
живания, применяемый в данной авиакомпании. При
введении прогрессивных форм техобслуживания этот ко-
эффициент может быть уменьшен до 0,35—0,40;
Кл = 1 —для дозвуковых самолетов с ТРД и ДТРД;
Х4 = 1,13 — для самолетов с ТВД;
К4=2,0—для сверхзвуковых пассажирских самолетов (М^1,8).
Расходы на текущий ремонт и техническое обслуживание двигате-
лей определяются по формуле
Лг „ , = ]/р’“ коп/ч, (1.18)
1 4- 7- 10“5.Гдв
где К2=1,07 — как и в формуле (1.12);
К5=1 —для ТРД и ДТРД дозвуковых самолетов;
Х5=1,5 —для двигателей СПС, а также для ТВД.
Для самолетов с ТВД в (1.18) вместо Рщ следует взять NOi в л. с.
Расходы иа зарплату экипажа Л3п рассчитывают, исходя из числа
членов летно-подъемного состава (летчики, штурманы, бортинженеры и
радисты) —Лл.п.с н числа бортпроводников — пва:
Л3„ = Сл.„.спя.„.с-\-С6ап6„ коп/ч. (1.19)
Здесь Сл.п.с и £бп — средняя часовая зарплата летно-подъемного со-
става и бортпроводников. Значения Сл п.с и Сбп при среднем налете эки-
пажа 550 ч в подданы в табл. 1.2.
Таблица 1.2
Назначение самолета ^ком коп/ч Сб.и коп/ч b Кц Кд
Магистральный дозвуковой 0,58 1100 400 1,30 2700 0,42
Магистральный сверхзвуковой 0,65 2000 750 1,30 2700 0,42
Для местных авиалиний 0,65 1100 400 1,27 2600 0,53
Легкий многоцелевой («пас ^6) 0,75 800 — 1,23 2000 0,61
25
Стоимость расходуемого в полете топлива определяется по фор-
муле:
Ат = 5,1 -Ks —коп/ч, (1.20)
£расч
где GT,pacx—расходуемое в полете топливо в кгс, берется из аэродина-
мического расчета с учетом дополнительного расхода за
время Д/ [см. формулу (1.4)];
5,1 — стоимость 1 кгс топлива (с учетом непроизводственных
затрат иа опробование двигателей, на тренировочные в
контрольные полеты) в коп/кгс;
Лб= 1,0 —Для дозвуковых самолетов с ТРД и ДТРД;
Кб = 1,03 — для самолетов с ТВД;
Кб =1,06 —для сверхзвуковых пассажирских самолетов.
Косвенные (аэропортовые) расходы принимаются равными:
В,„^К7 (0,45-7- 10_4/О№ коп/ч, (1-21)
где Go —в кгс; К?=1,0 —для дозвуковых самолетов; К7=1,5 — для
сверхзвуковых.
Приведенные капиталовложения, входящие в (1.1), определяются
по формуле
Е (1,05Сс Ч- !,03СдВП1в^) I ,<
„ /-,0-----4L-liL- коп/т-км. (1.22)
Аком'^ком V рей сОгОД
Здесь Е— нормативный коэффициент эффективности капиталовложений;
£=0,121/год (£=1/Ток, где Tov — нормативный срок окупаемости капи-
таловложений в годах);
Сс и СДв — стоимость самолета и двигателя [формулы (1.8), (1.13),
(1.15)] в коп;
ком, GK0M, V^pciic CM. (1.2),
b — отношение числа двигателей, предназначенных для эксплуа-
тации самолета с учетом замен, к числу двигателей, установ-
ленных на самолете. Для Тдв^4000 ч значения b даны в
табл. 1.2;
•Ягод — налет часов на самолет в год,
где ДРасч — расчетная дальность полета для проектируемого самолета
(см. рис. 1.1) в км;
Vpeflc — рейсовая скорость в км/ч;
^8; Кэ — коэффициенты (см. табл. 1.2).
Глава 11
ОСНОВНЫЕ И ОТНОСИТЕЛЬНЫЕ ПАРАМЕТРЫ САМОЛЕТА,
УРАВНЕНИЕ ОТНОСИТЕЛЬНЫХ ВЕСОВ. ВЛИЯНИЕ
ВАЖНЕЙШИХ ПАРАМЕТРОВ САМОЛЕТА НА ЕГО ЛЕТНЫЕ
ХАРАКТЕРИСТИКИ
Важнейшая задача проектирования самолета — определение его ос-
новных параметров: взлетного веса Go; площади крыла S; тяги Ро или
мощности силовой установки, потребной для получения заданных
летных характеристик. Эти параметры служат исходными величинами
26
для разработки всего проекта самолета, и правильный их выбор обус-
ловливает оптимальные технические показатели и летные данные са-
молета.
В некоторых случаях при проектировании удобнее пользоваться от-
носительными параметрами: удельной нагрузкой на площадь крыла
р0=— ; тяговооружеиностью 5 тягой, отнесенной к площади
S G$
крыла ; нагрузкой на мощность .
§ 1. УРАВНЕНИЕ ОТНОСИТЕЛЬНЫХ ВЕСОВ САМОЛЕТА
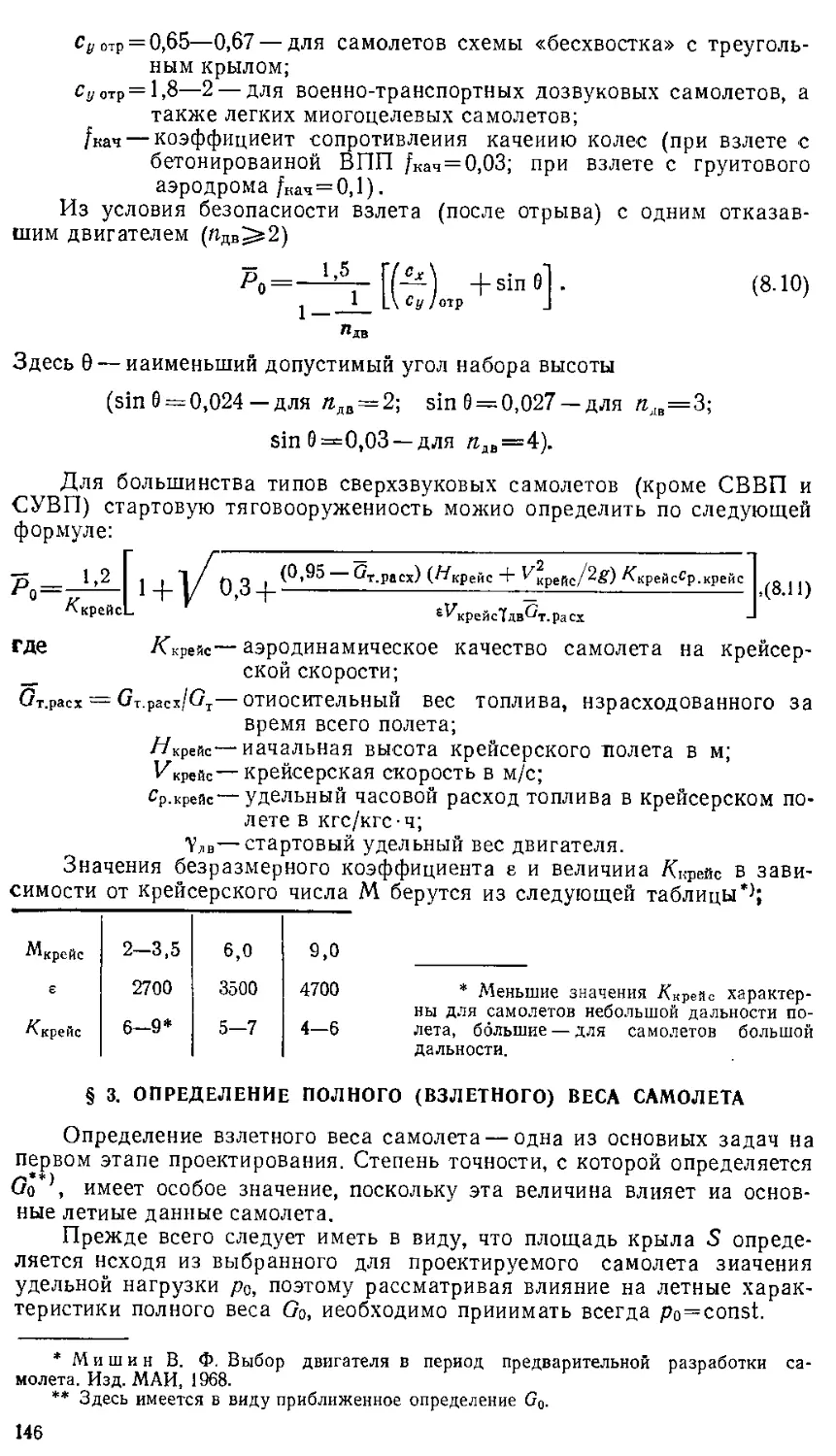
Полный (взлетный) вес самолета складывается из нескольких отли-
чающихся по своим особенностям частей
Go=0K-|- 0с.у-|-6т-!-0с э,г,
где GK— вес конструкции самолета;
Ge y — вес силовой установки;
GT — вес топлива;
Ос.э.г—вес снаряжения, оборудования, экипажа и грузов.
Величина GK зависит от ряда параметров самолета и его частей,
главным образом, от удельной нагрузки иа крыло ро, от удлинения кры-
ла X, от коэффициента расчетной перегрузки пр, от веса самолета и т. д.
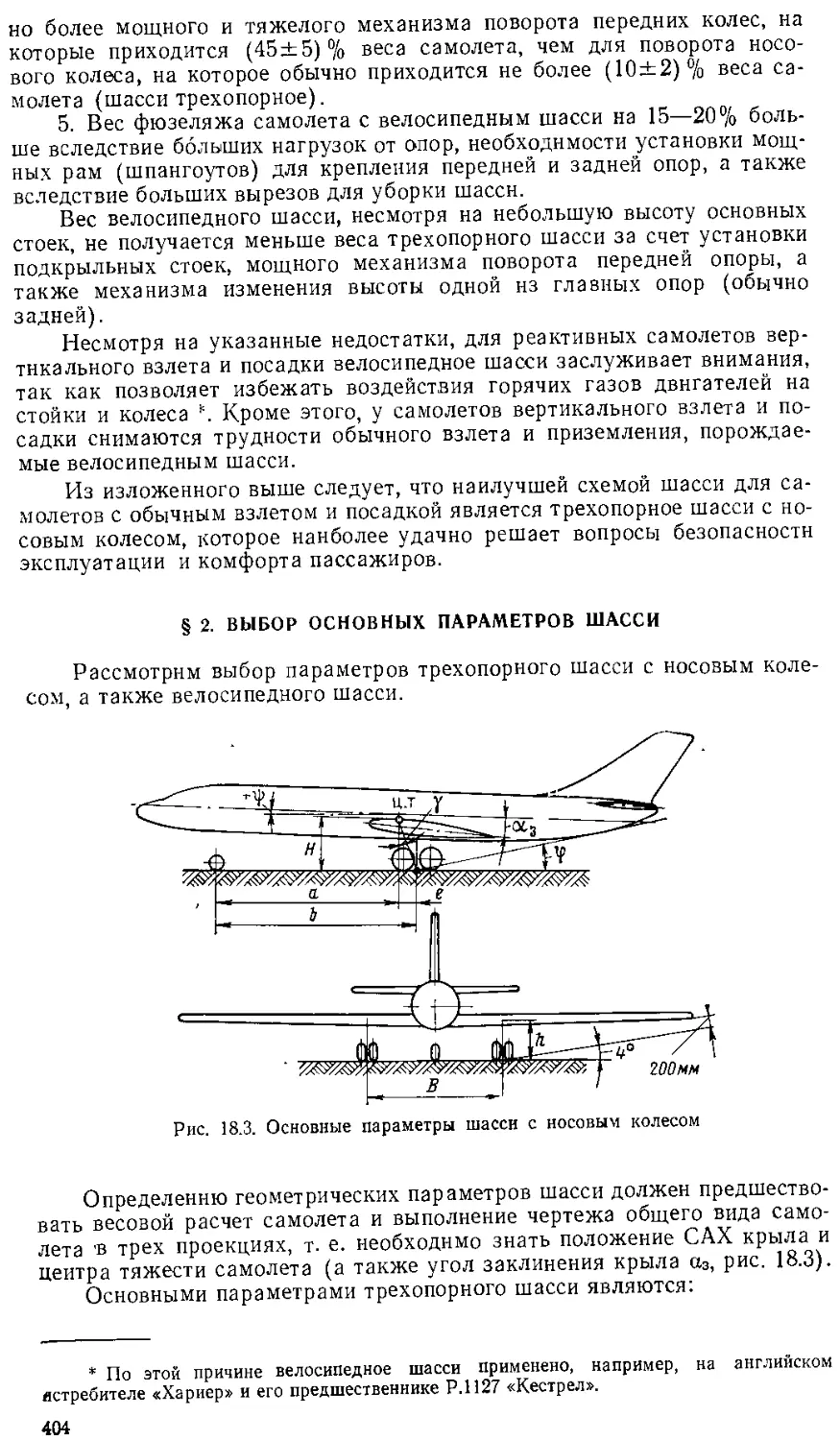
Величина Gc.y зависит от удельного веса двигателя, от величины тяги са-
молета, от веса баков и т. д.; GT— от удельного расхода топлива, даль-
ности самолета, от его крейсерской скорости, от веса самолета и т. д.
Величина Gc.a.r непосредственно с параметрами и характеристиками са-
молета и его весом не связана и определяется в зависимости от типа
самолета и его назначения.
Если разделить обе части приведенного равенства иа Go, то будет
получено равенство
1=ок+ёс.у+о,-ьос.э,,
называемое уравнением относительных весов самолета или уравнением
весового баланса самолета. При этом соотношения
_ G — Gc.y _ G, — (7С...Г
GK =----; Gc =------; GT =—; Gc9r =---------
Gq * Gq Gq Gq
являются соответственно относительными весами конструкции самолета,
силовой установки, запаса топлива, снаряжения, экипажа и грузов.
Уравнение относительных весов, как' будет показано ниже, играет зна-
чительную роль в раскрытии зависимости между параметрами н летны-
ми характеристиками самолета.
§ 2. ЗАВИСИМОСТЬ ОСНОВНЫХ ЛЕТНЫХ ХАРАКТЕРИСТИК САМОЛЕТА
ОТ ОТДЕЛЬНЫХ ПАРАМЕТРОВ
Максимальная скорость
Максимальная скорость горизонтального полета реактивного само-
лета (когда она не ограничивается нагревом конструкции, безопасно-
стью полета и т. п.) иа высоте Н может быть определена по формуле
где Р—максимальная тяга силовой установки самолета иа данной
ВЫСОте Н При СКОрОСТИ Ушах',
27
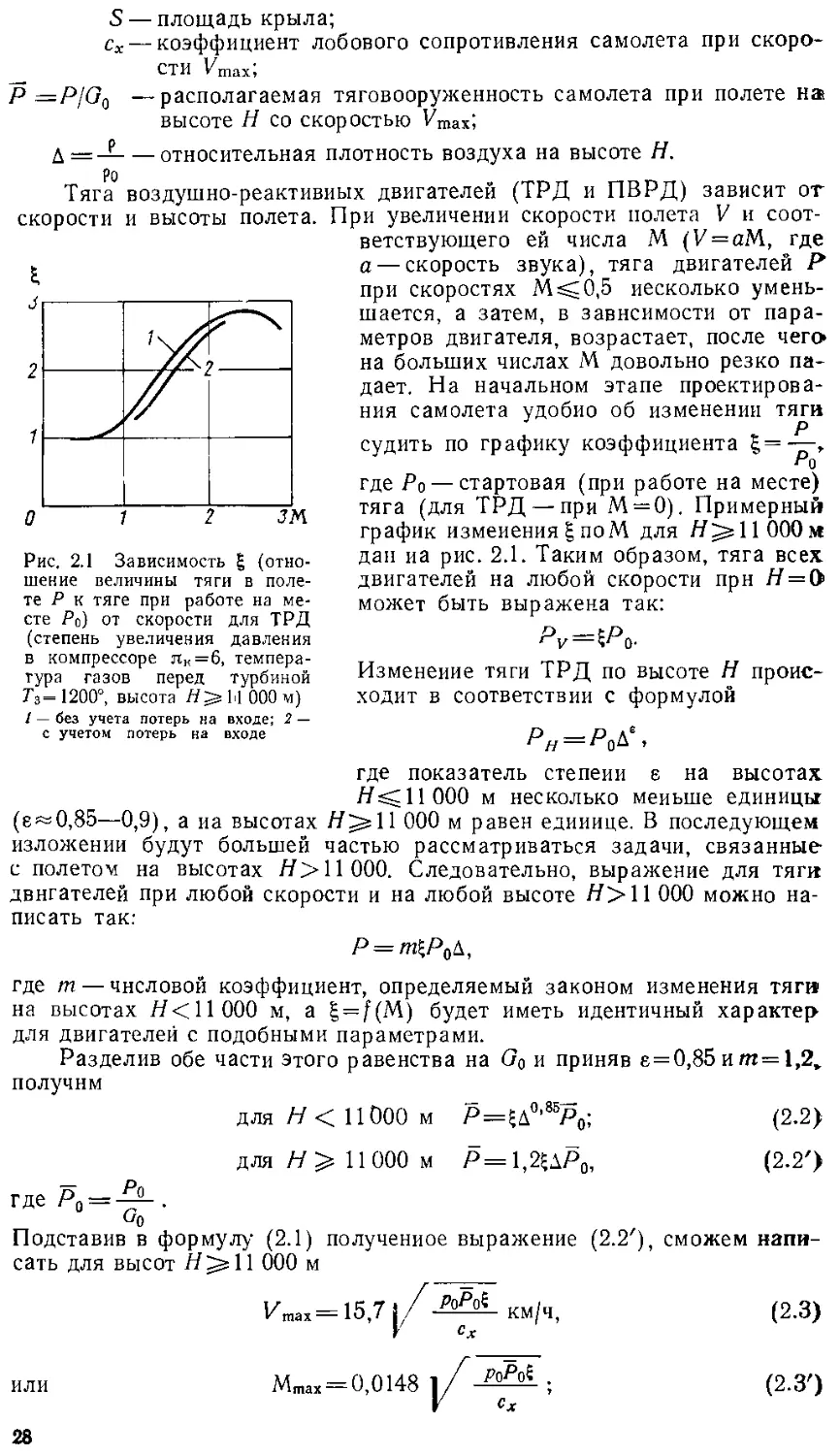
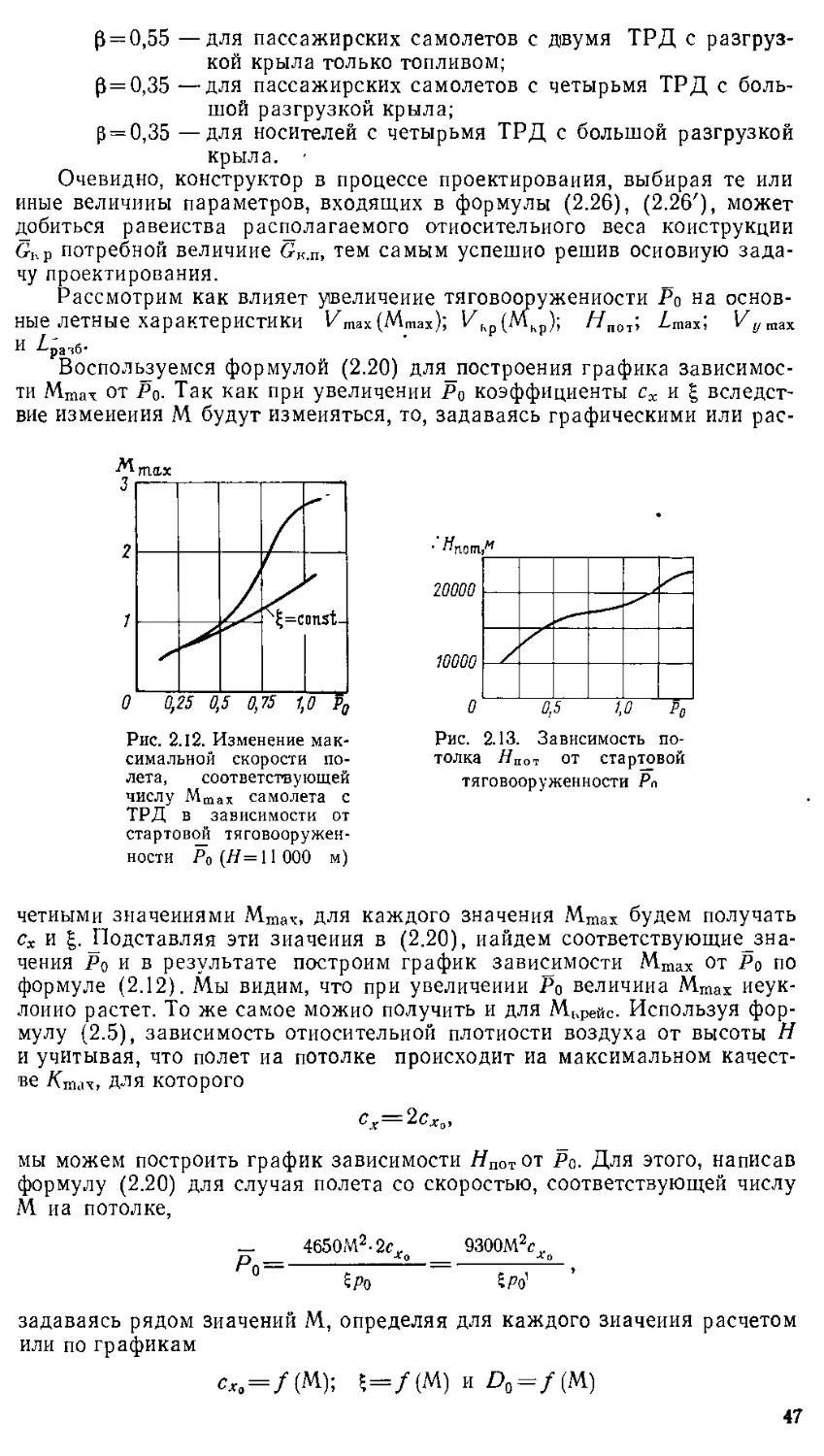
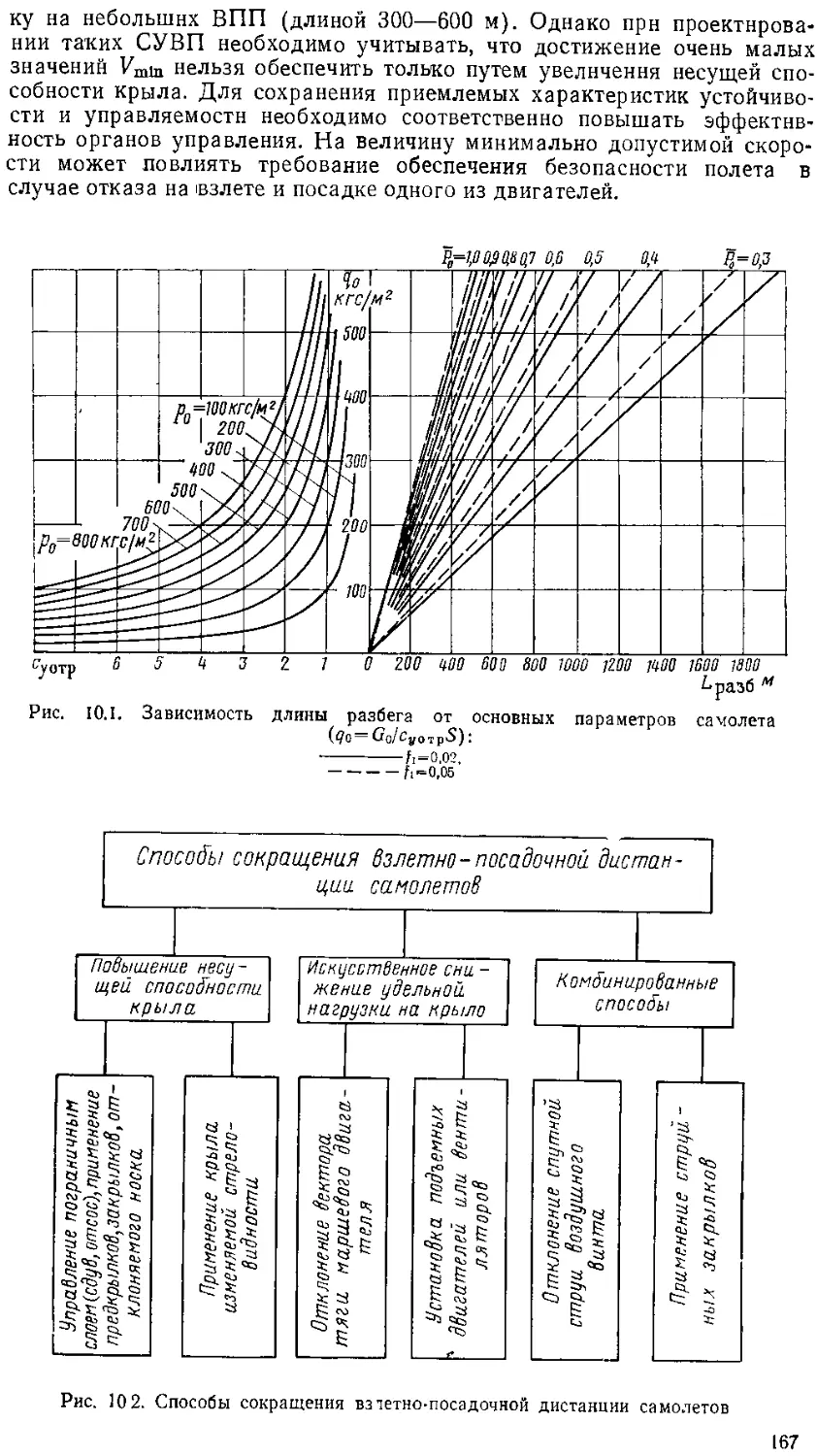
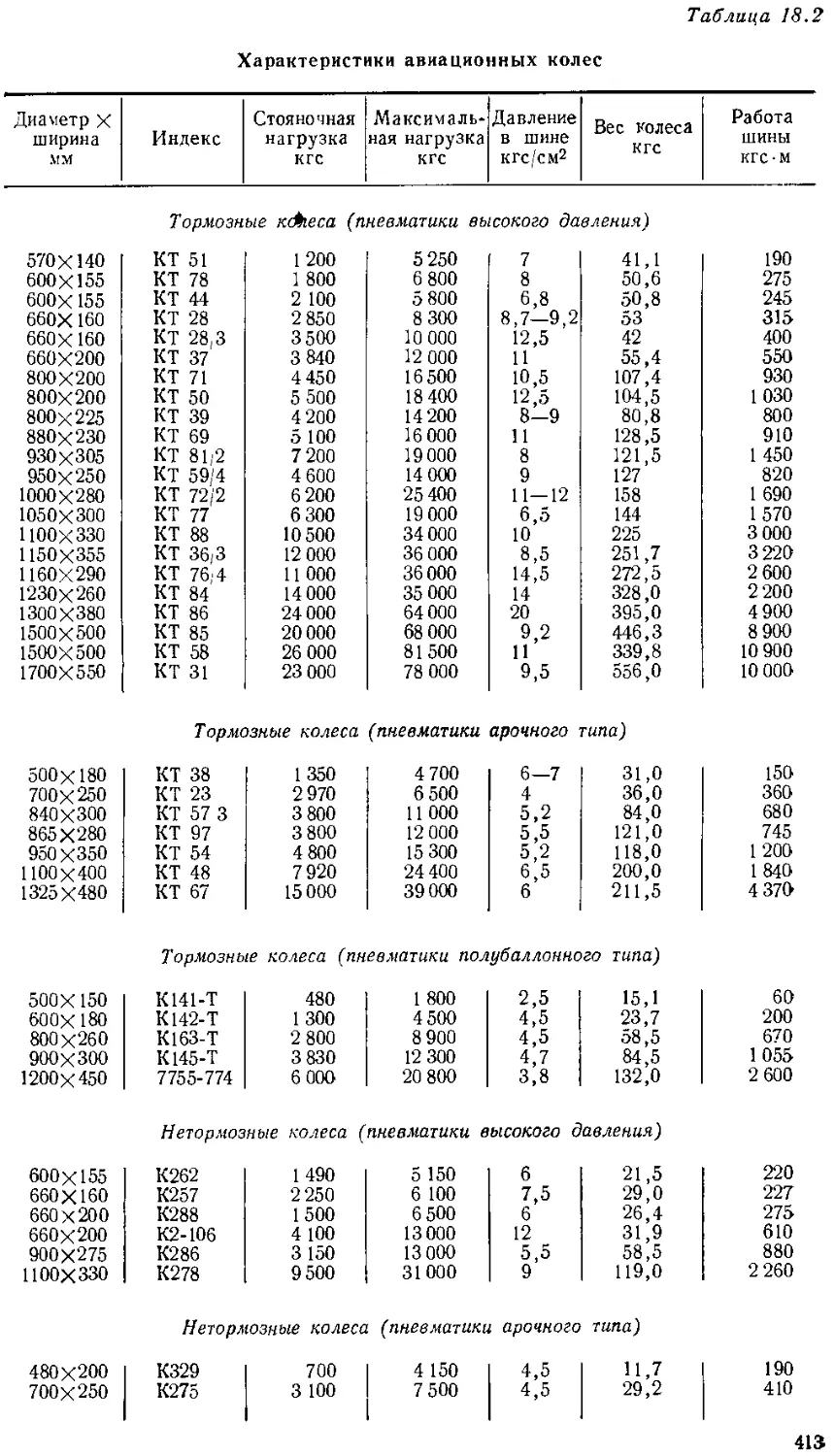
скорости и высоты полета.
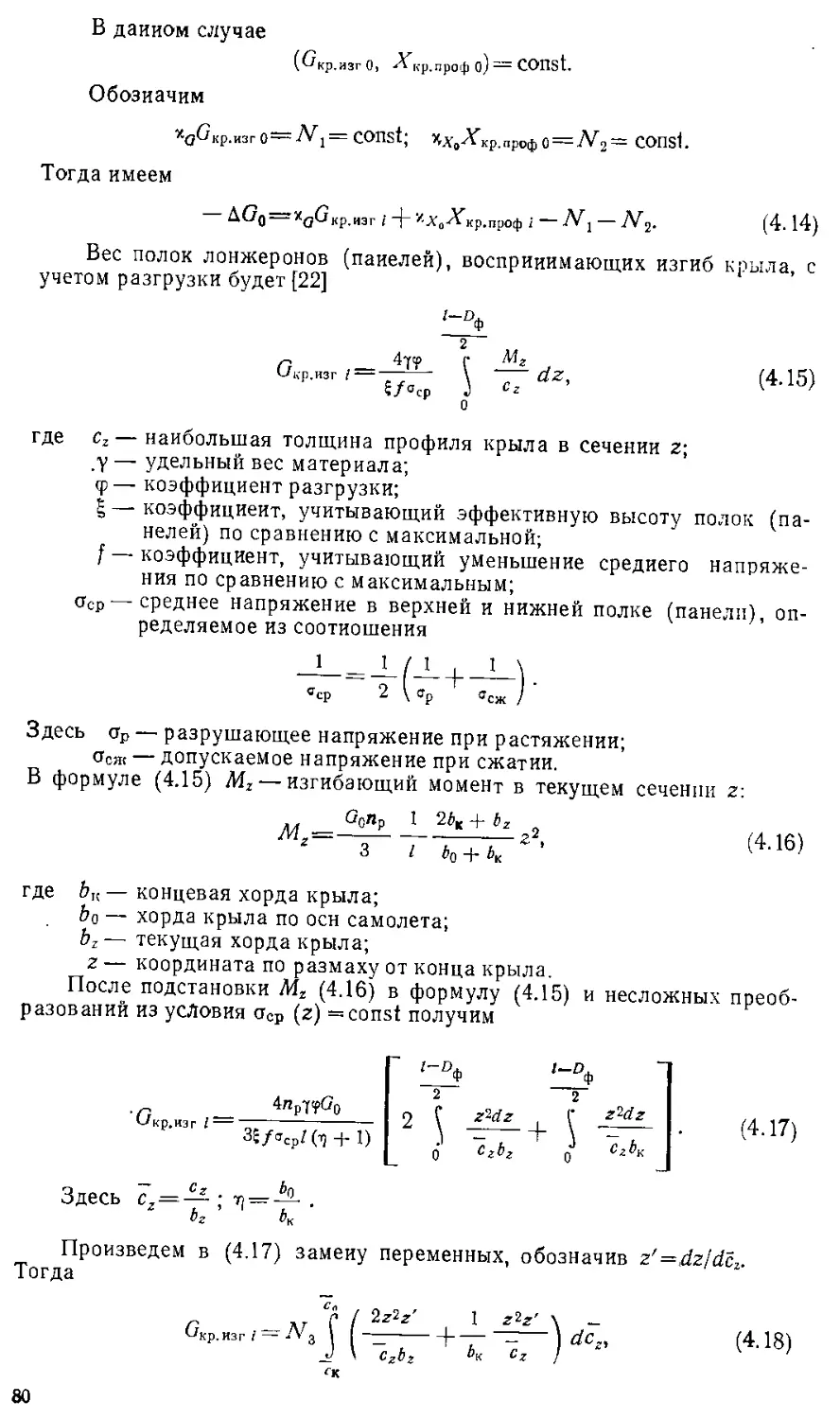
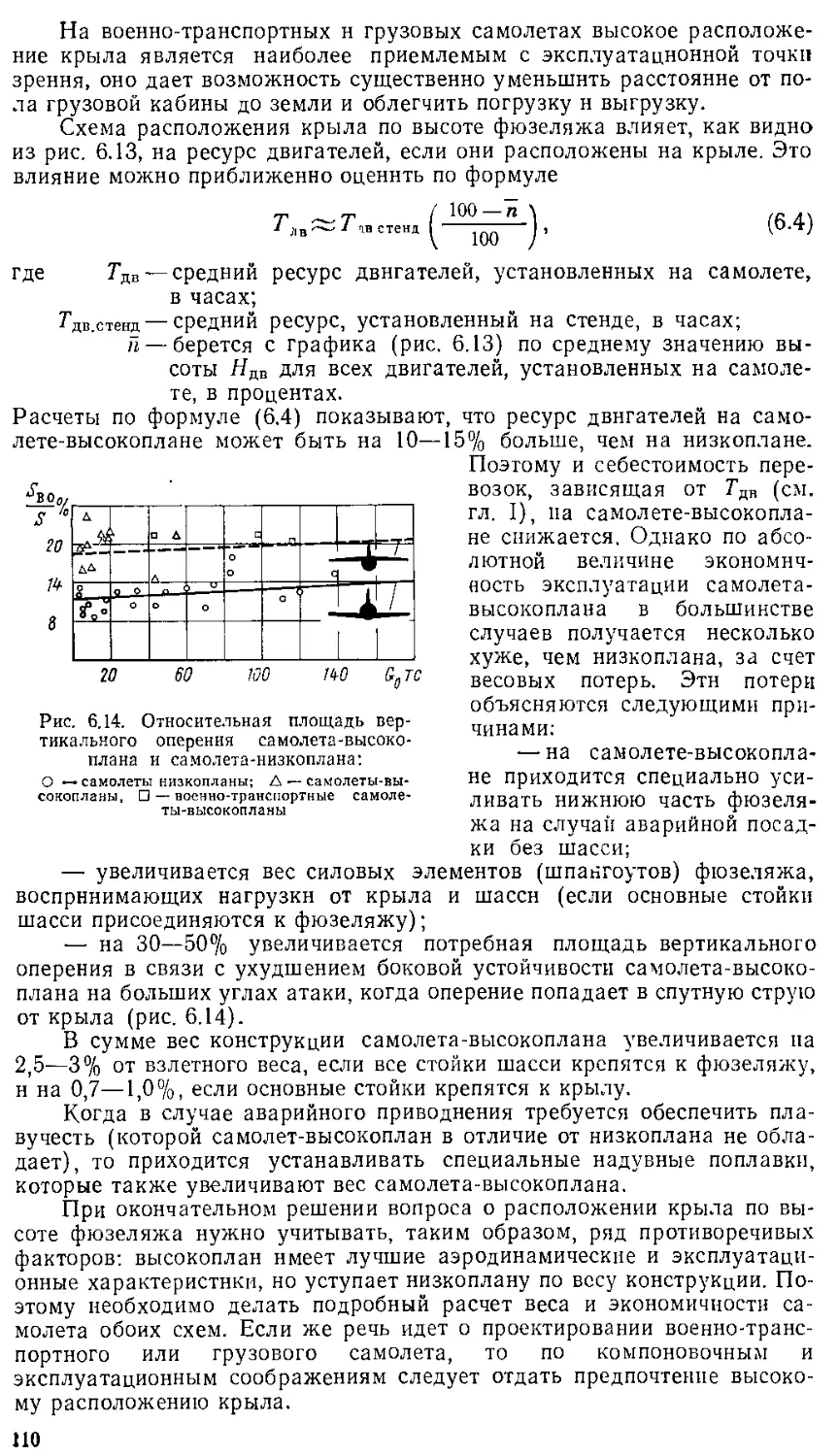
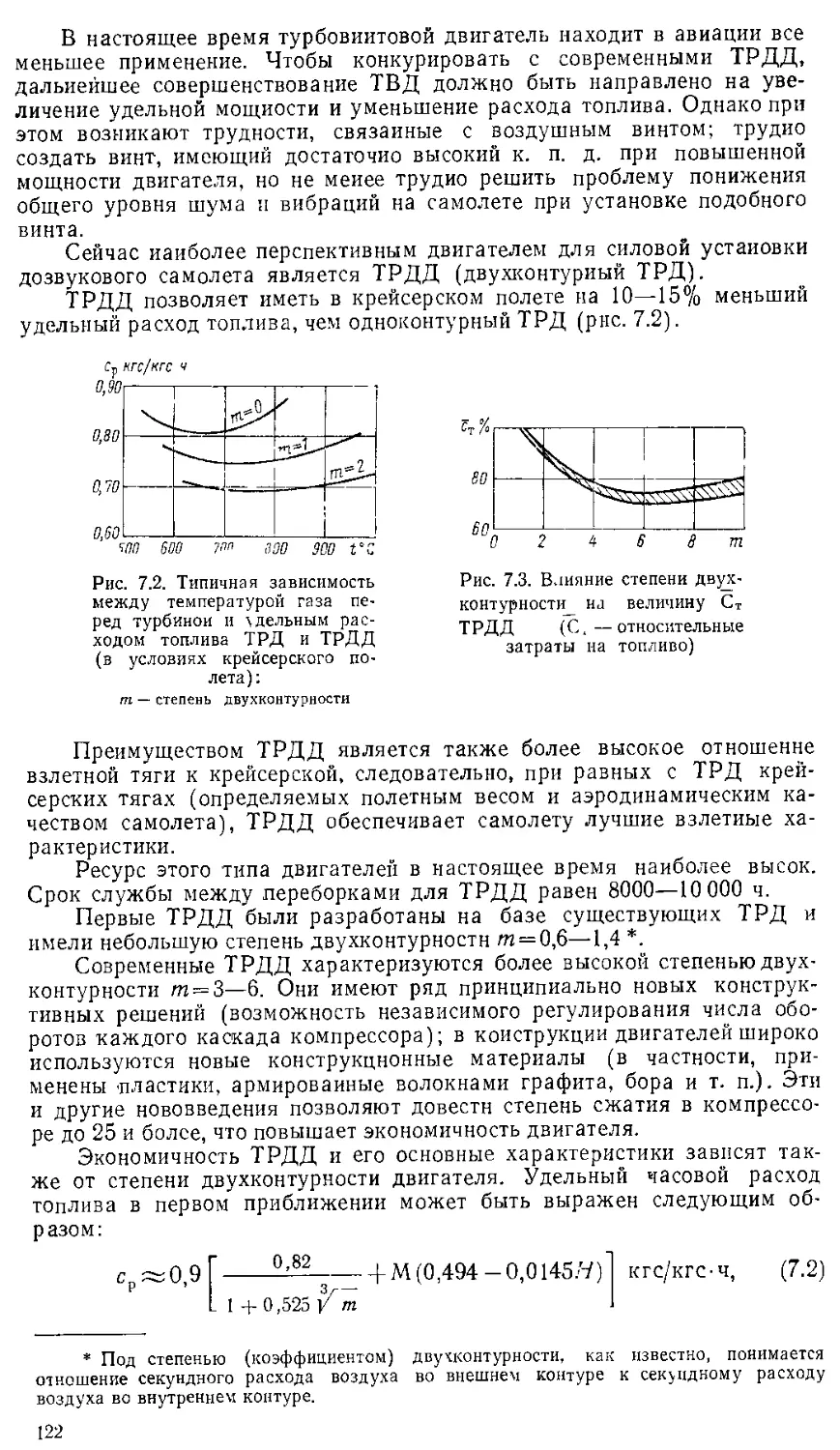
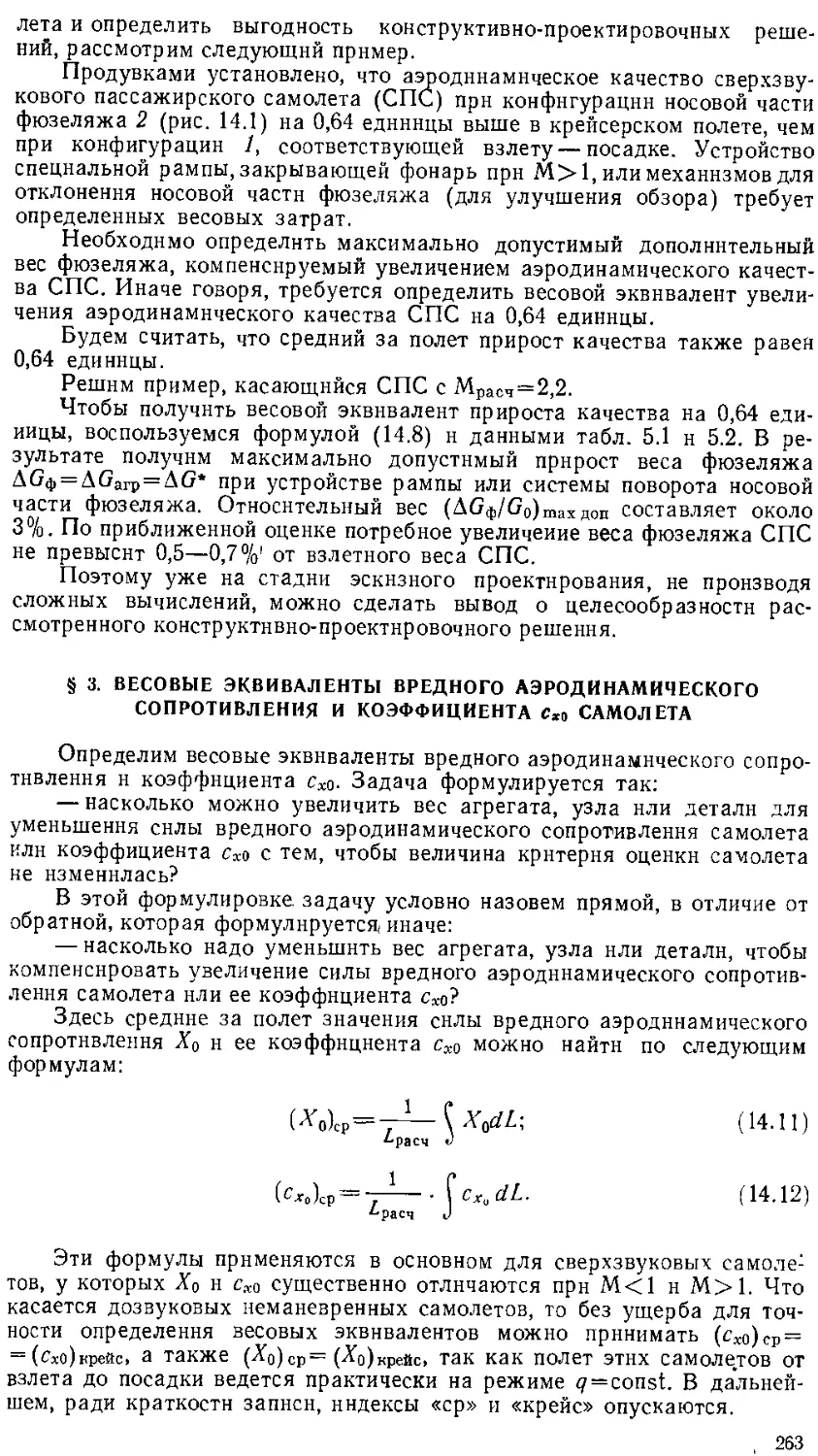
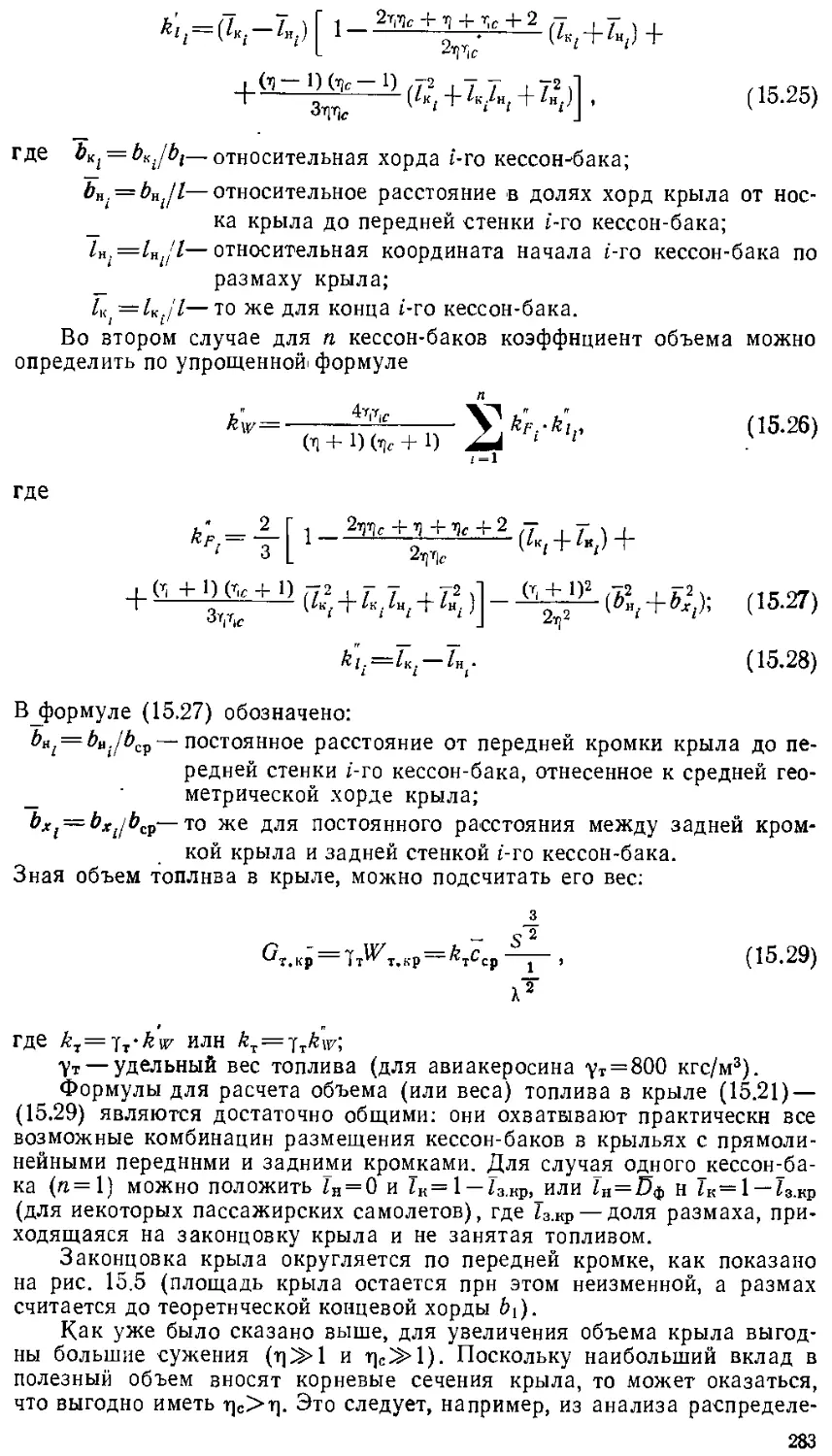
Рис. 2.1 Зависимость £ (отно-
шение величины тяги в поле-
те Р к тяге при работе на ме-
сте Ро) от скорости для ТРД
(степень увеличения давления
в компрессоре лн=б, темпера-
тура газов перед турбиной
Гз—1200°, высота //Jsbl 000 м)
/ — без учета потерь на входе; 2 —
с учетом потерь на входе
S — площадь крыла;
сх— коэффициент лобового сопротивления самолета при скоро-
_ СТИ Ушах;
Р =Р{0(} —располагаемая тяговооруженность самолета при полете на
высоте Н со скоростью Vmaxi
д== —----относительная плотность воздуха на высоте Н.
Ро
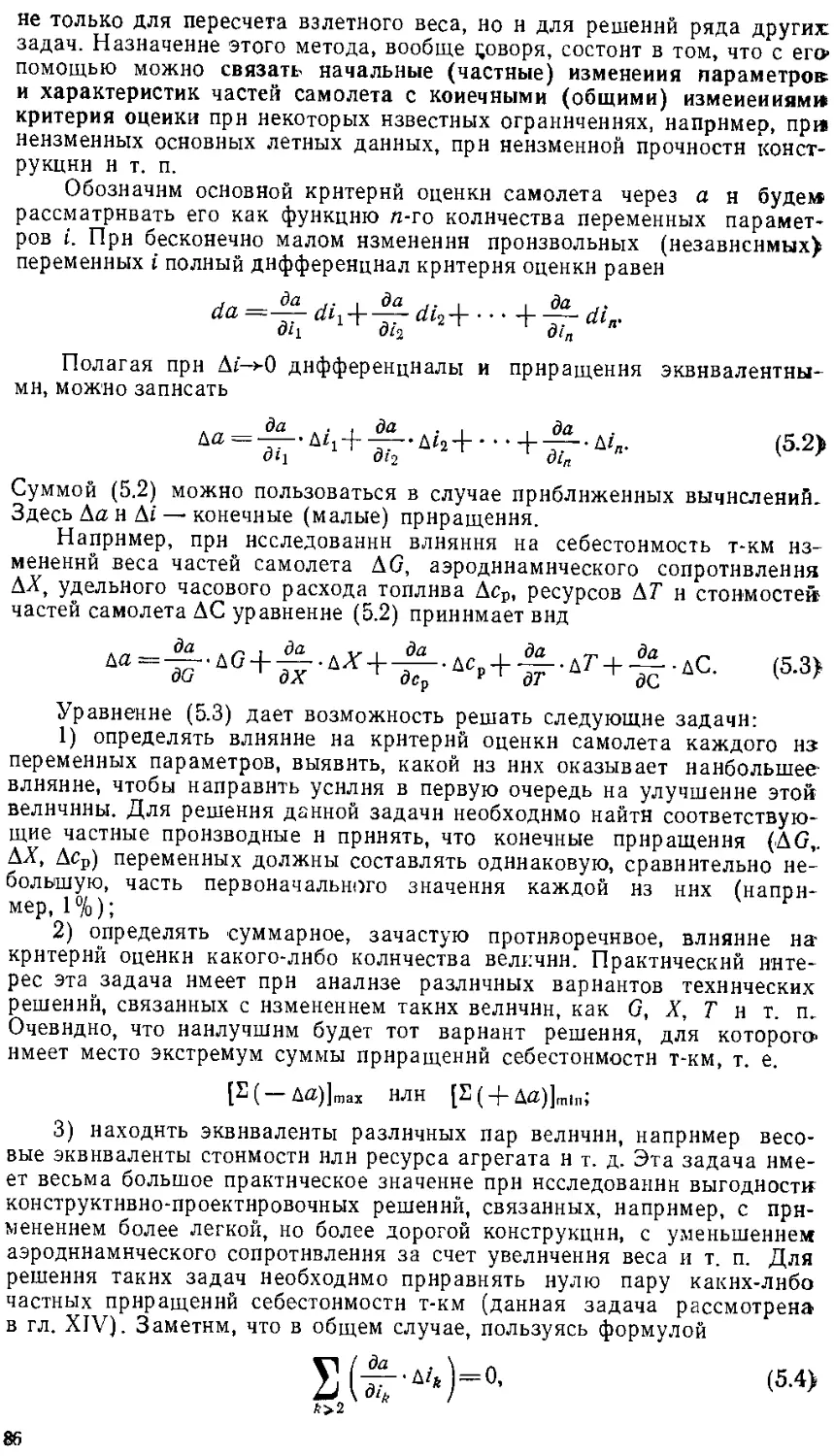
Тяга воздушно-реактивных двигателей (ТРД и ПВРД) зависит от
При увеличении скорости полета V и соот-
ветствующего ей числа М (V = aM, где
а — скорость звука), тяга двигателей Р
при скоростях М^0,5 несколько умень-
шается, а затем, в зависимости от пара-
метров двигателя, возрастает, после чего»
на больших числах М довольно резко па-
дает. На начальном этапе проектирова-
ния самолета удобно об изменении тяги
судить по графику коэффициента £=-—,
ро
где Ро — стартовая (при работе на месте)
тяга (для ТРД — при М = 0). Примерный
график изменения £ поМ для 11 000 м
дан иа рис. 2.1. Таким образом, тяга всех
двигателей на любой скорости прн H = d>
может быть выражена так:
Изменение тяги ТРД по высоте Н проис-
ходит в соответствии с формулой
где показатель степени е на высотах
Н^Л\ 000 м несколько меньше единицы
(е«0,85—0,9), а иа высотах 000 м равен единице. В последующем
изложении будут большей частью рассматриваться задачи, связанные
с полетом на высотах //>11 000. Следовательно, выражение для тяги
двигателей при любой скорости и на любой высоте //>11 000 можно на-
писать так:
P = mtPQb,
где т— числовой коэффициент, определяемый законом изменения тяги
на высотах //<11 000 м, a £ = f(M) будет иметь идентичный характер
для двигателей с подобными параметрами.
Разделив обе части этого равенства на Gq и приняв е=0,85 ит= 1,2„
получим
для Н< 11000 м Р=и0’85?о: (2.2)
для Я > 11000 м Р=1,2уР0, (2.2')
где Ро = -^-.
Подставив в формулу (2.1) полученное выражение (2.2'), сможем напи-
сать для высот //^11 000 м
Ишах= 15,7 км/ч, (2.3)
ИЛИ
(2.3')
28
для высот //<11 000 м
14,4 ^£4 км/ч> (2'4>
где а — скорость звука иа высотах //<11 000 м.
При этом сх = схо-\-сХг = сха+ОаСу2,
СХ1
где Do = —~~.
Потолок
Для самолетов с ТРД статический потолок НПот определяется ве-
личиной относительной плотности на потолке, которую можно получить
по формуле
(2.5)
вытекающей из очевидного равенства Р — Используя (2.2') и пола-
/Gnax
гэ.я Кта&х~[—\ — 0,5/Т//Лс-г , получим формулу (2.5).
X Сх /тах
Вертикальная скорость набора высоты
Максимальная вертикальная скорость приближенно может быть
выражена так [5]:
V - 2 Р
^тах~ 3 Go |/ 3pcXiS •
Полагая для // = 0 Р/$ = PqP&,
8
получим
V, т.х = 1,53 (2.6)
, . , 1 го 1 А0 (роф5)3
или для двигателя с форсажем и y max =1,53 у ------------,
где Роф — тяговооружеииость с форсажем.
Максимальная дальность при скорости VKpe«c
Работа, производимая тягой двигателя при полете самолета на рас-
стояние L, может быть выражена так:
1,53
где Рср — средняя тяга на пути L.
Эта же работа, выраженная через механический эквивалент тепла
сгоревшего топлива, определяется выражением
Ж427СТ//А
29
где H.r — теплотворная способность топлива;
6Т — вес сгоревшего топлива;
Т|о — полный к. п. д. силовой установки.
Приравняв правые части полученных выражений, найдем
L= 427|,;^Д° , (2.7)
Рср
откуда, в частности, видна зависимость дальности L от теплотвор-
ной способности И?. Формула (2.7), однако, не может служить основой
для рассмотрения влияния различных параметров самолета на его даль-
ность и потому обратимся к подробному анализу следующей формулы
[13] для самолетов с реактивными двигателями (ТРД и ПВРД);
оа
~ V км, (2.8)
01 р х
где V — скорость в м/с;
С], — удельный часовой расход топлива в кгс на 1 кгс тяги;
Gj — вес самолета в конце пути; если считать, что в пути вес изме-
няется только за счет расхода топлива, то
G1 = G0~Gt-
При проектировании самолета большой интерес представляет мак-
симальная дальность полета. Очевидно, что для достижения максималь-
ной дальности необходимо, чтобы при заданном отношении Gi/G0 про-
изведение ----— И в формуле (2.8) имело бы наибольшую величину.
ср сх
Выясним, при каких условиях выражение----------— V имеет максимум.
Ср сЛ
Рассмотрим для этого факторы, влияющие на входящие в него ве-
личины.
/7= const
О V
а)
Ср ^^^V^const
о
S)
Ср
в)
Р
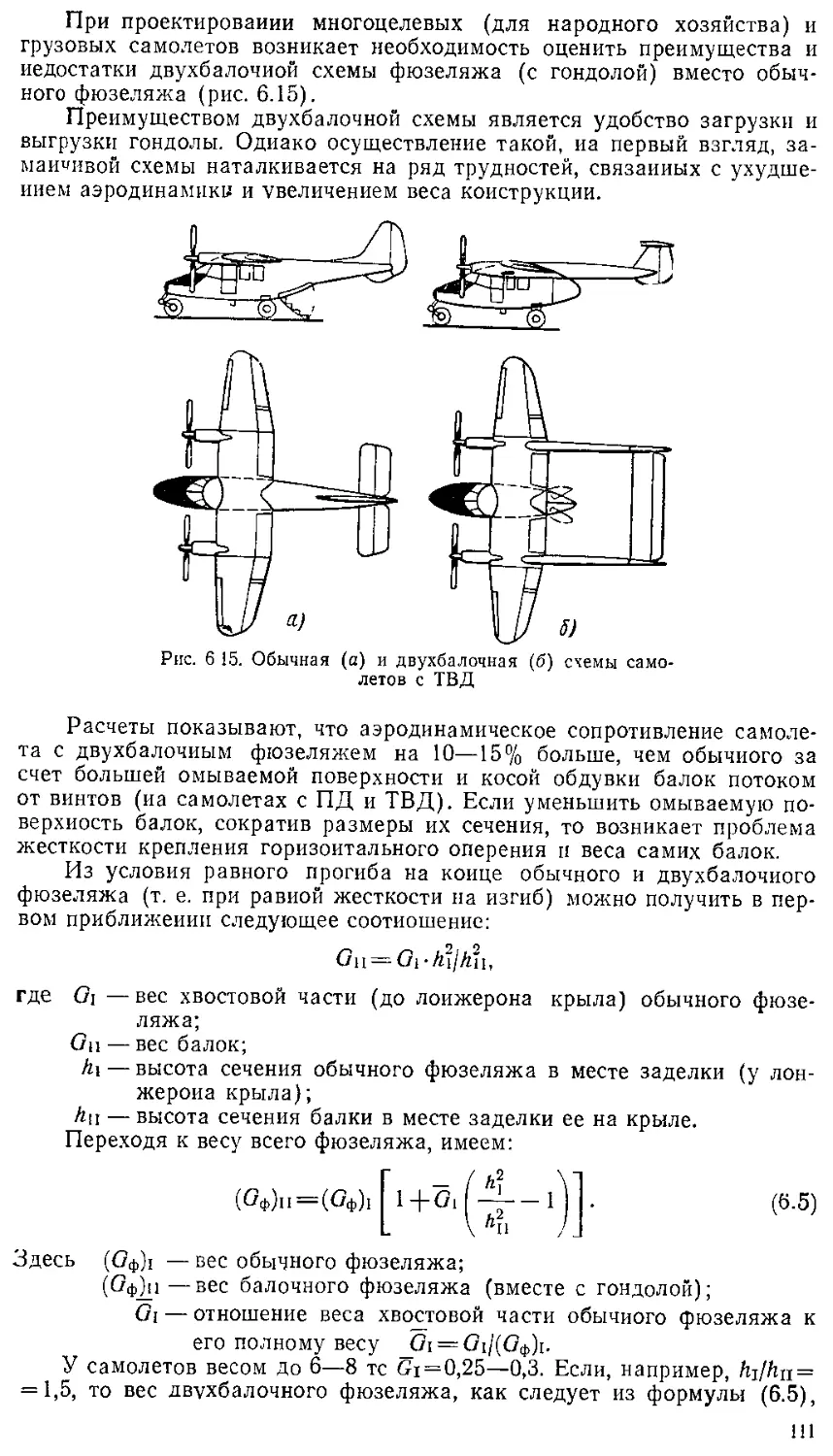
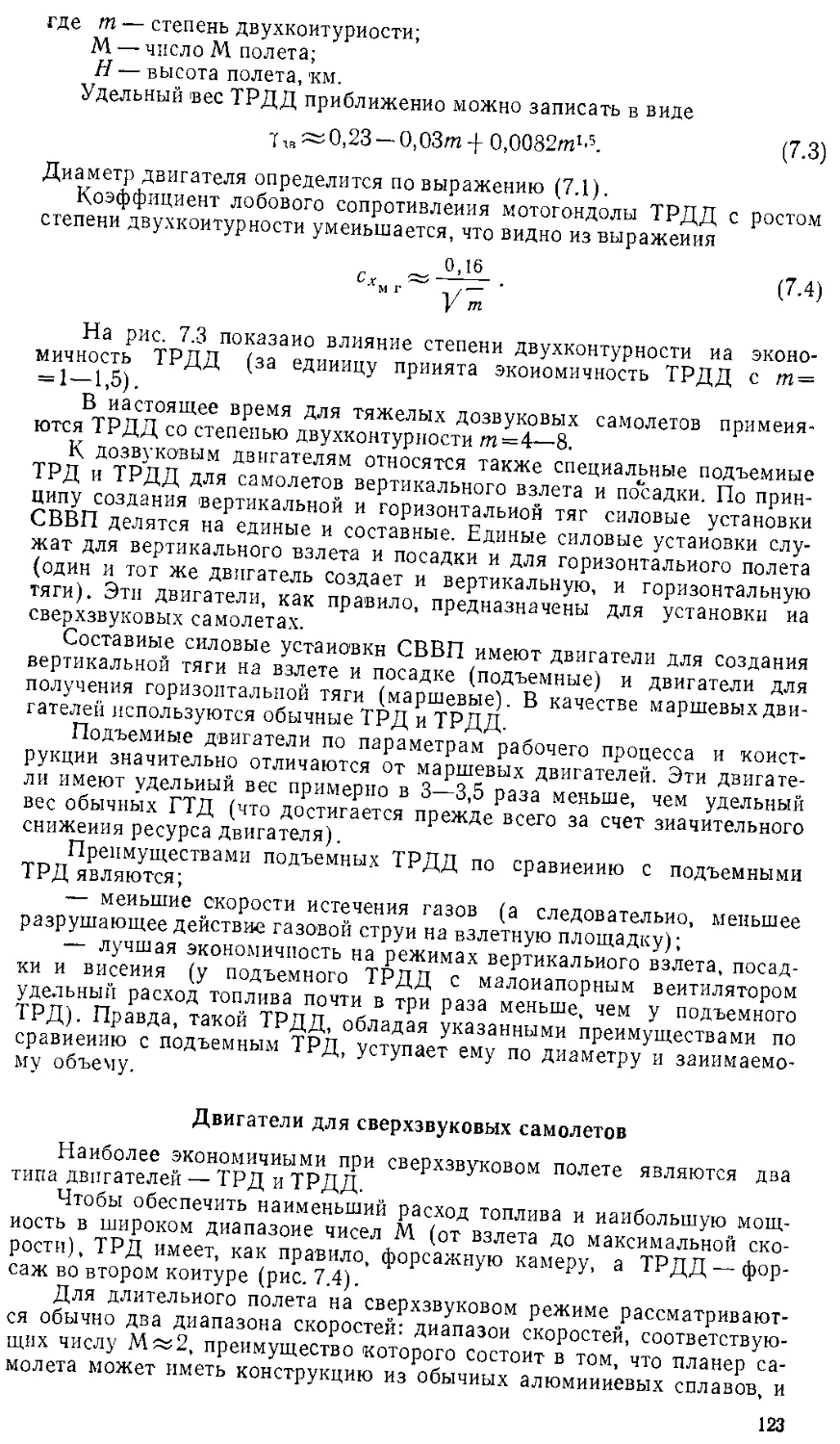
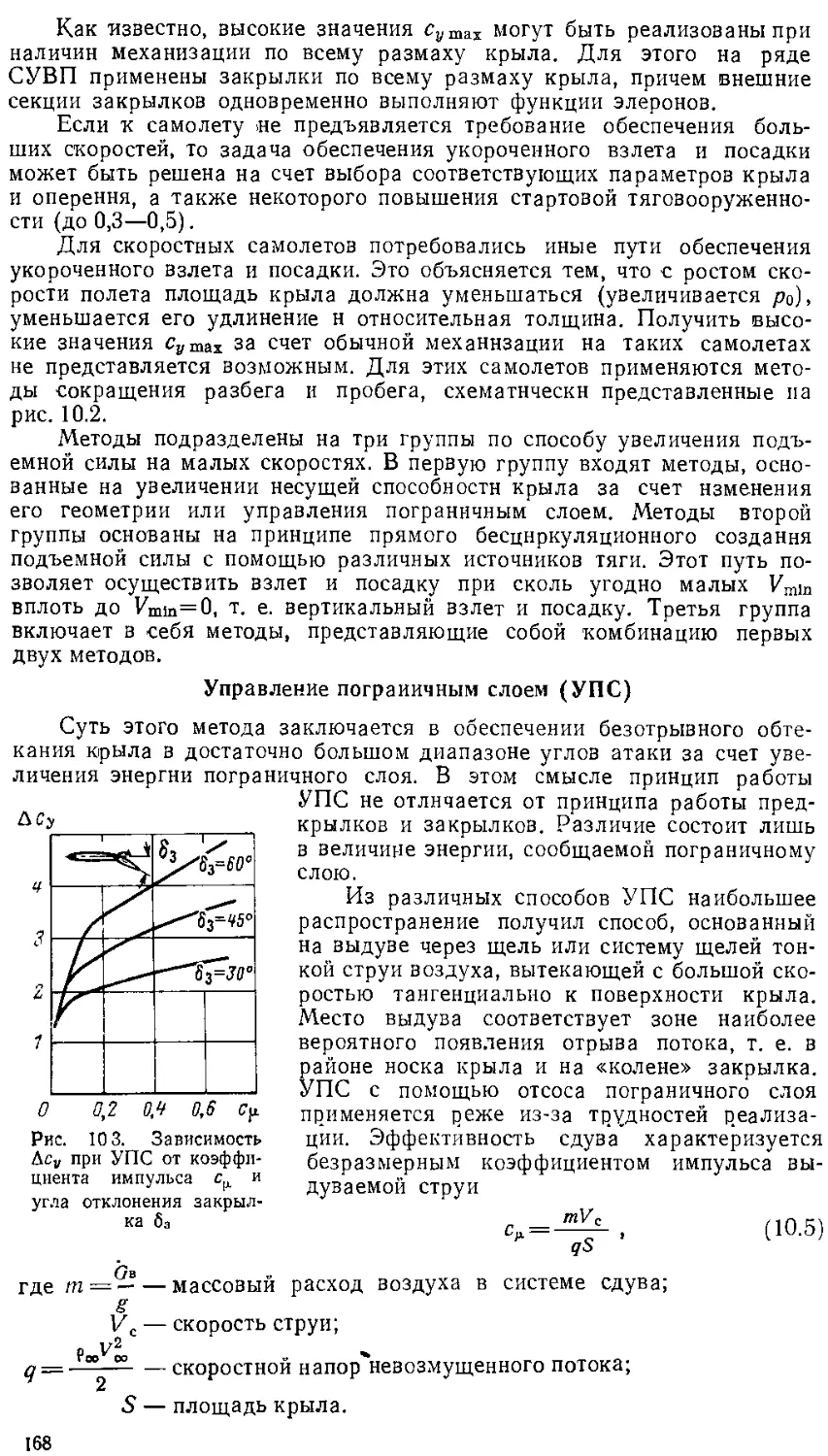
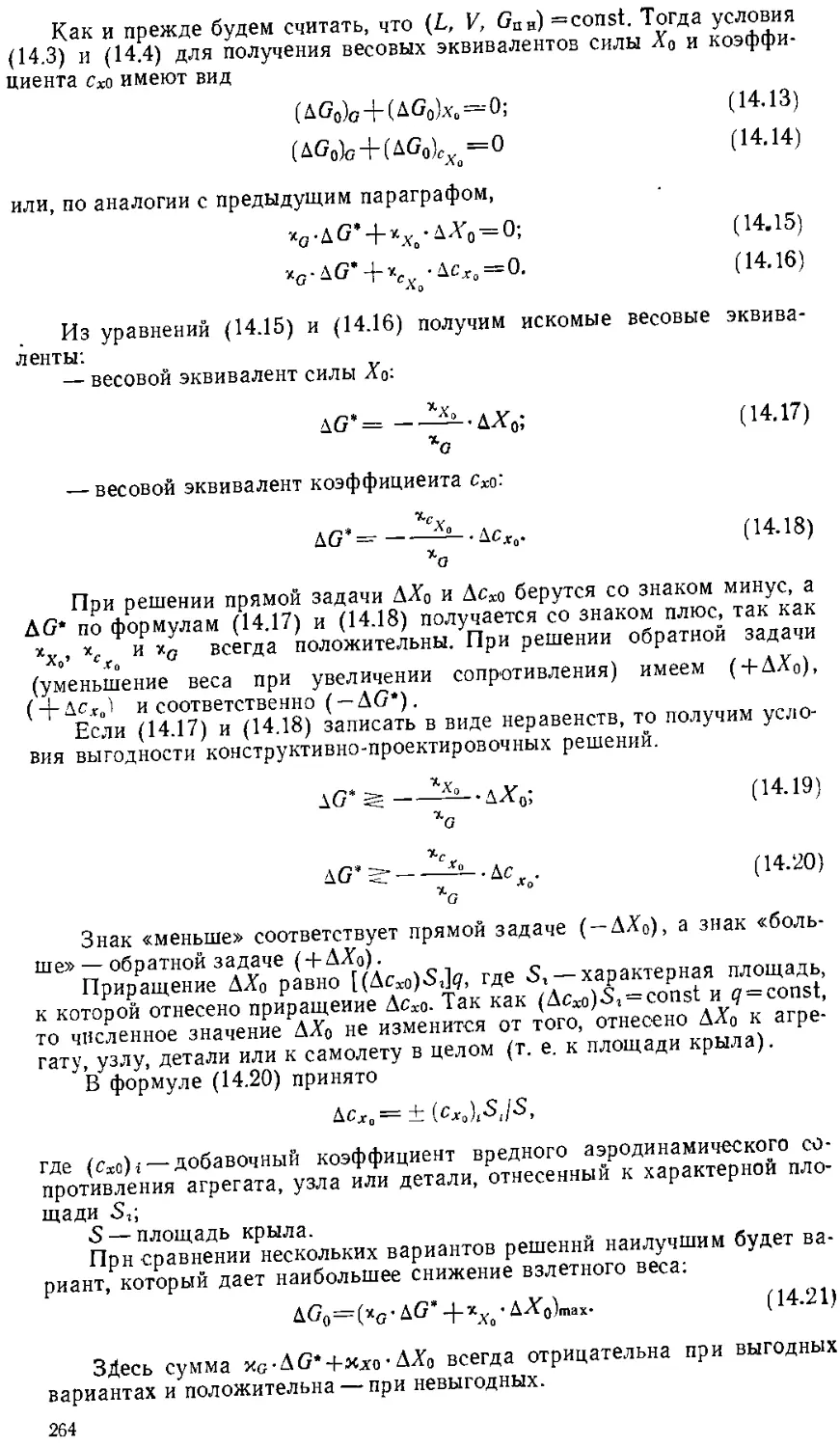
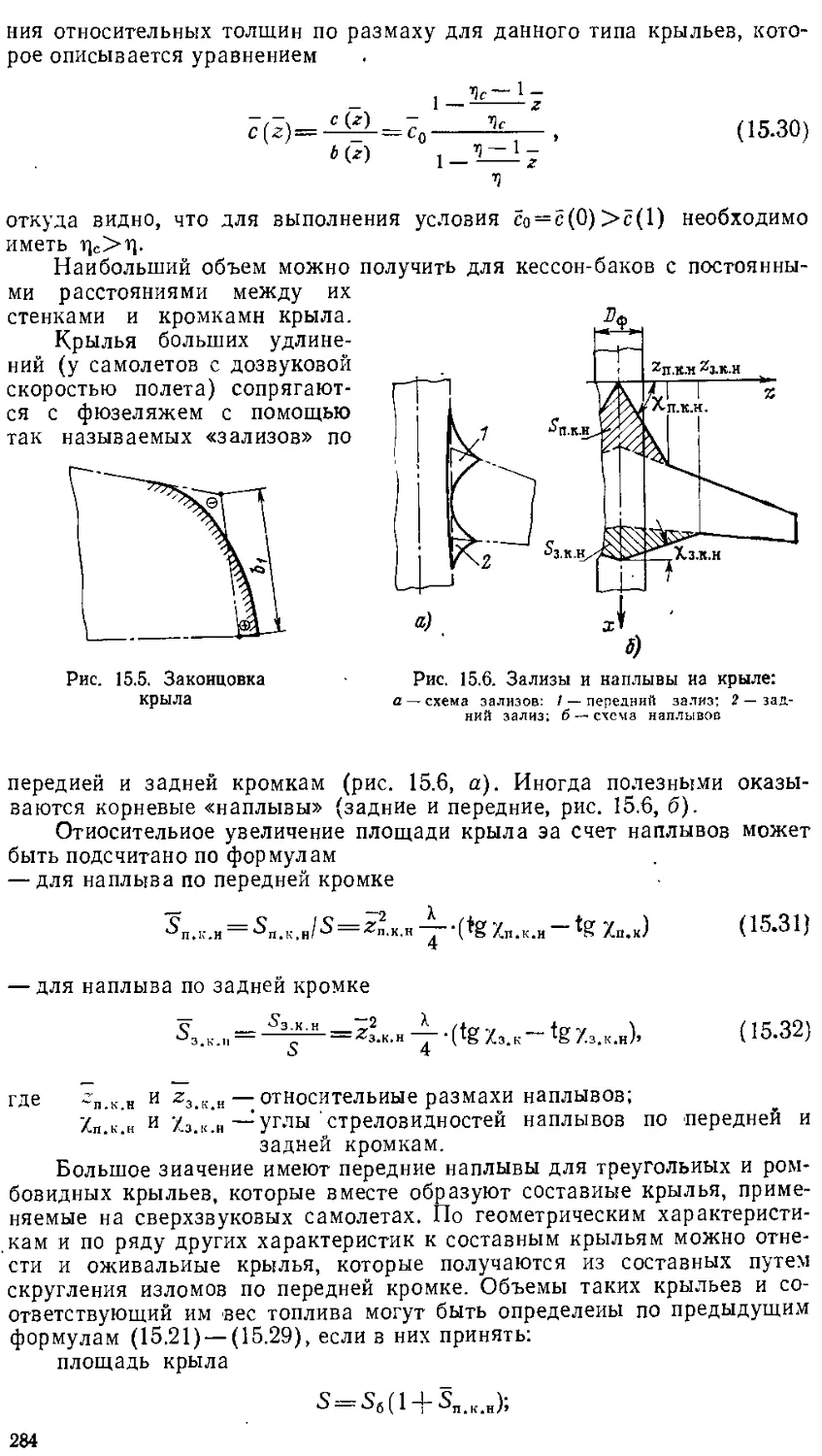
Рис, 2 2. Зависимость ср от скорости V (а), высоты Н(б)
и числа оборотов ТРД п (в) для одноконтурных двига-
телей
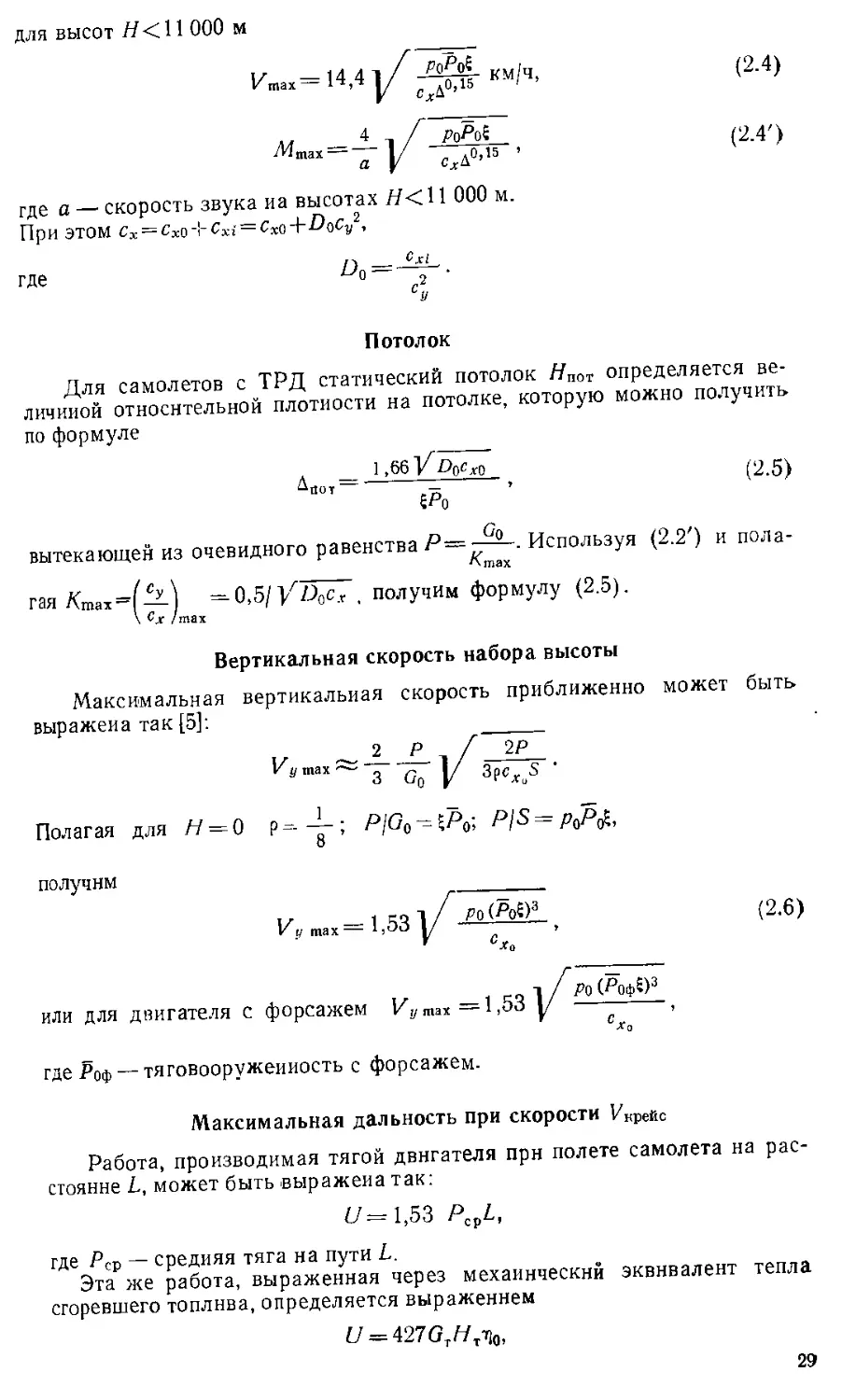
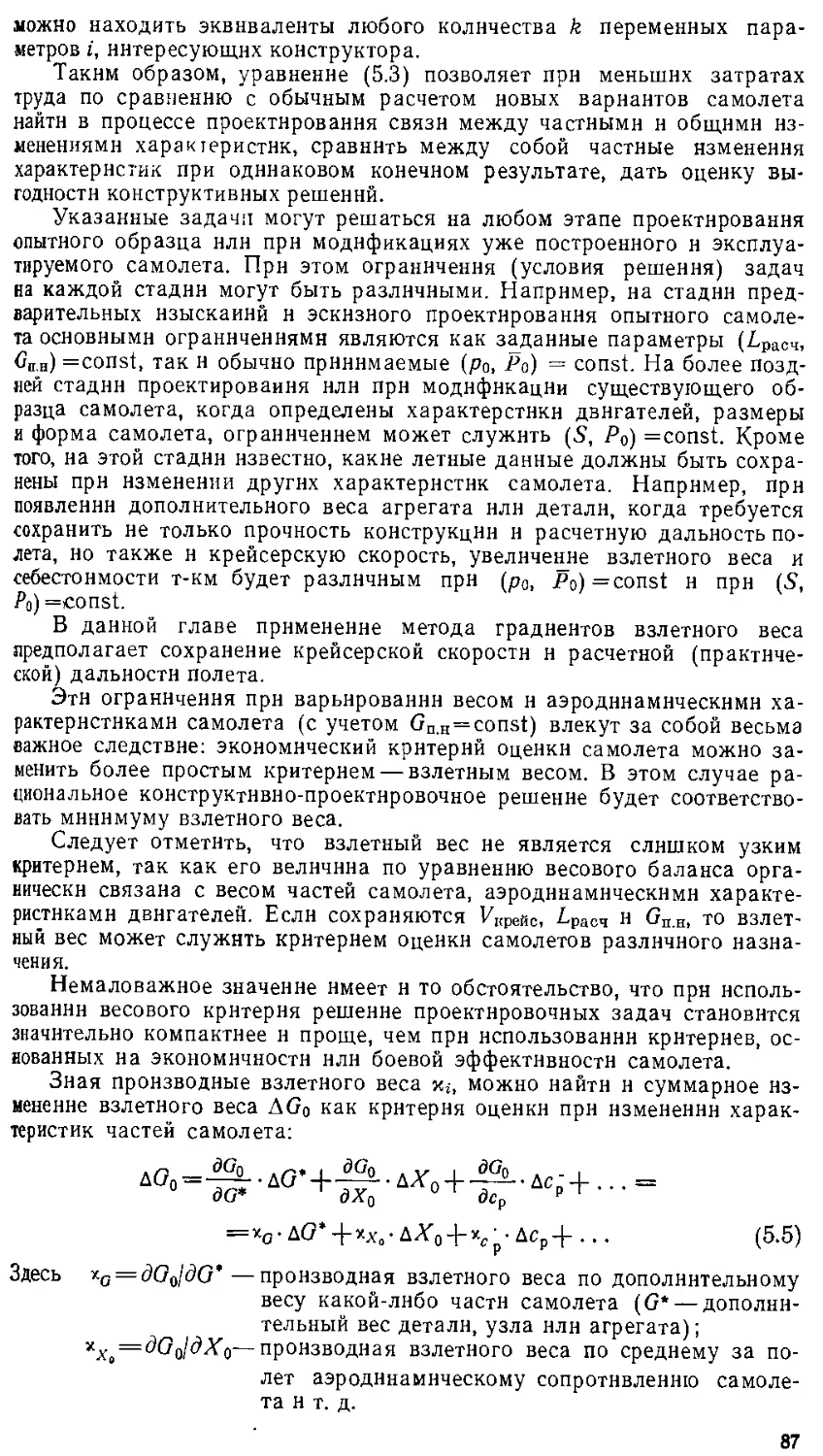
Из теории ТРД известно, что удельный расход топлива зависит от
скорости полета V, высоты Н (или Д) и степени дросселирования дви-
гателя (или числа оборотов л). Графически эти зависимости представ-
лены на рис. 2.2. Как видно из этого графика, ср с увеличением V уве-
личивается (см. рис. 2.2, а), с увеличением же высоты до /7=11 000 м —
постепенно уменьшается, на высотах //>11 000 м ср остается постоян-
ным (см. рис. 2.2, б).
При дросселировании двигателя, т. е. при уменьшении числа оборо-
тов и, ср заметно изменяется, вначале уменьшаясь, при этом минималь-
ное значение ср достигается при небольшой степени дросселирования на
так называемом крейсерском режиме двигателя, а затем быстро увели-
чиваясь (см. рис. 2.2, в).
30
Величина отношения су/сх зависит от режима полета, т. е. от коэф-
фициента су, на котором совершается полет. Выражение, определяющее
су, можно получить из соотношений
gy Gg . *
«.г Р ’ Р Р
Отсюда ср=4г .
Р
Заменяя в этом равенстве сх его выражением через сх> и DQcl,
получим
сха + D^y
откуда
Подставив выражения для (2.2) и (2.2х)
PoU0’85 1/ Рр^1’7
2О0 Г 40* Do
в формулу (2.8'), получим
(Н < 11000 м);
0,6PQU 1/ 0,Збр2$2Д2
DQ * D*
(/7> 11 000 м).
Dq
Эти формулы показывают, что cv зависит от р0, высоты Н (или Д) н от
скорости полета V, от которой в свою очередь зависят %, сх0, а при
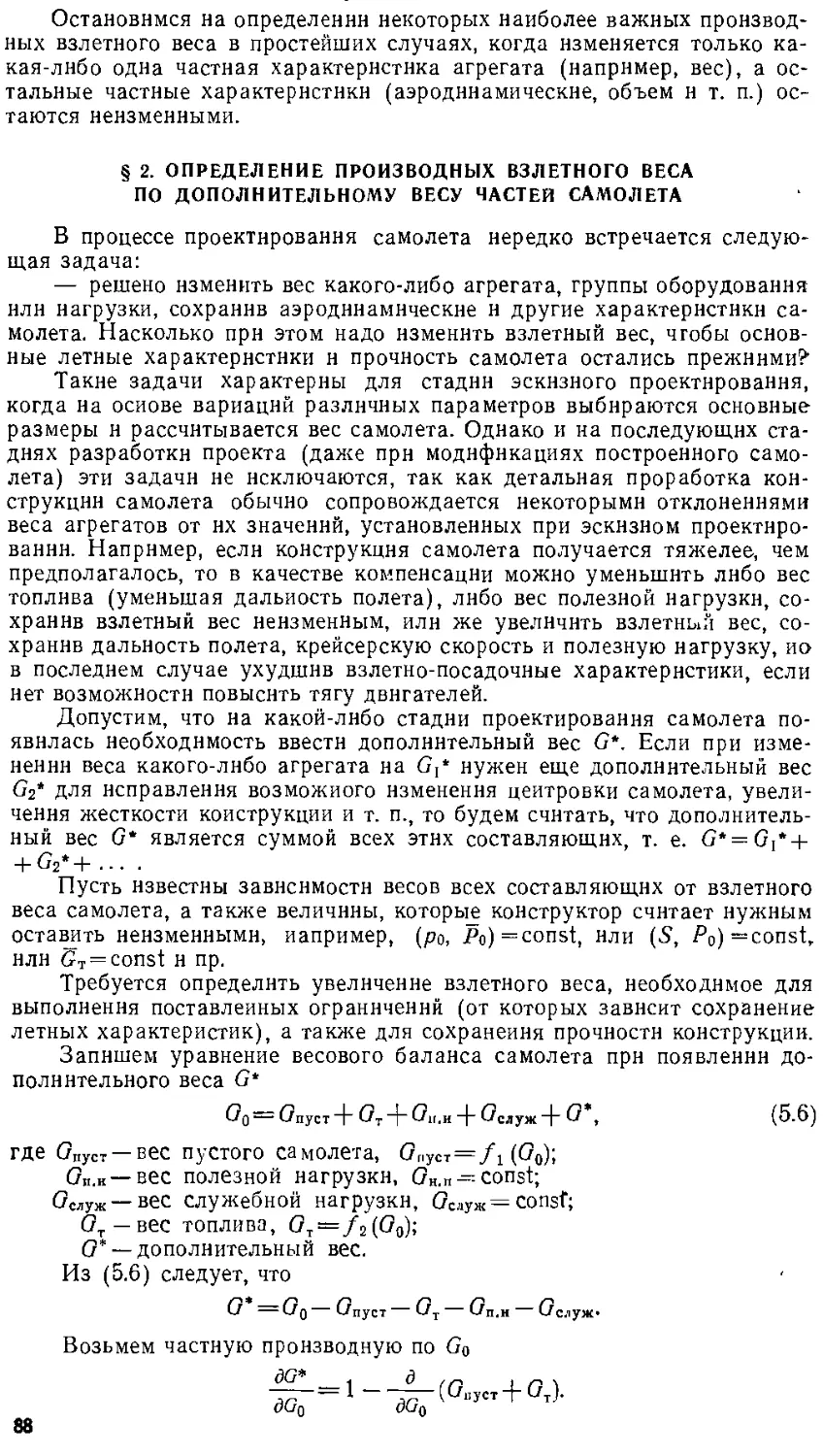
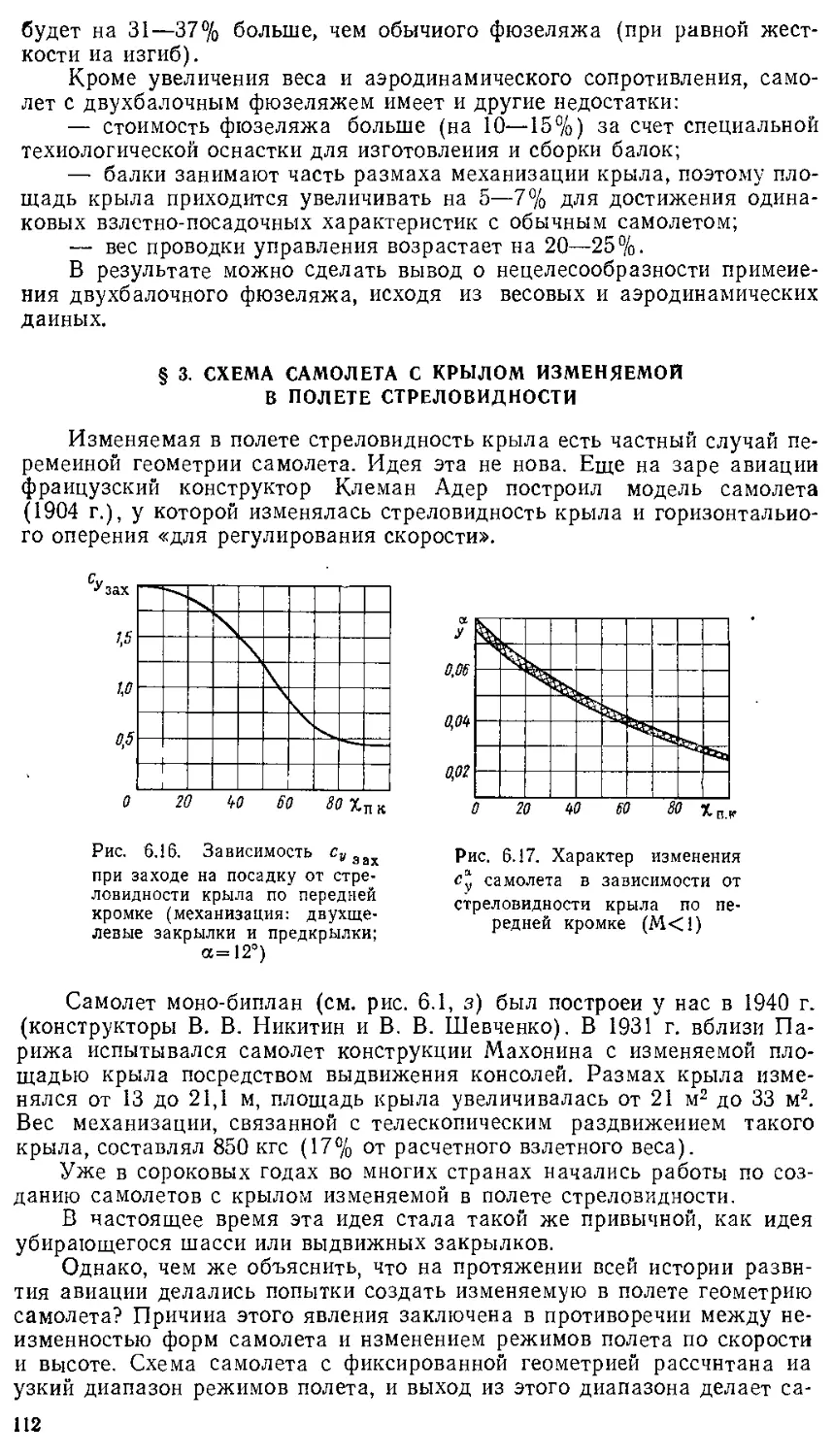
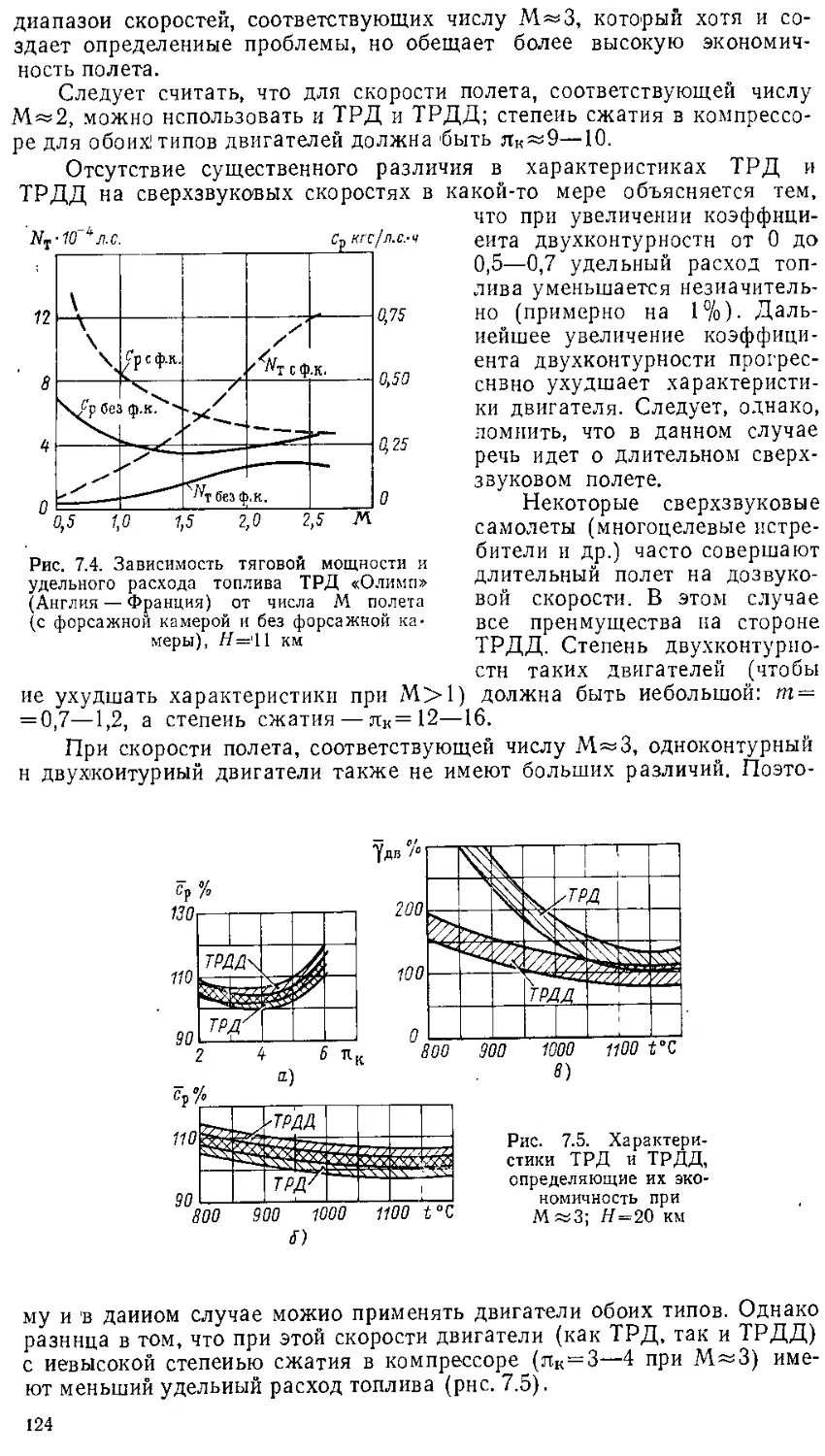
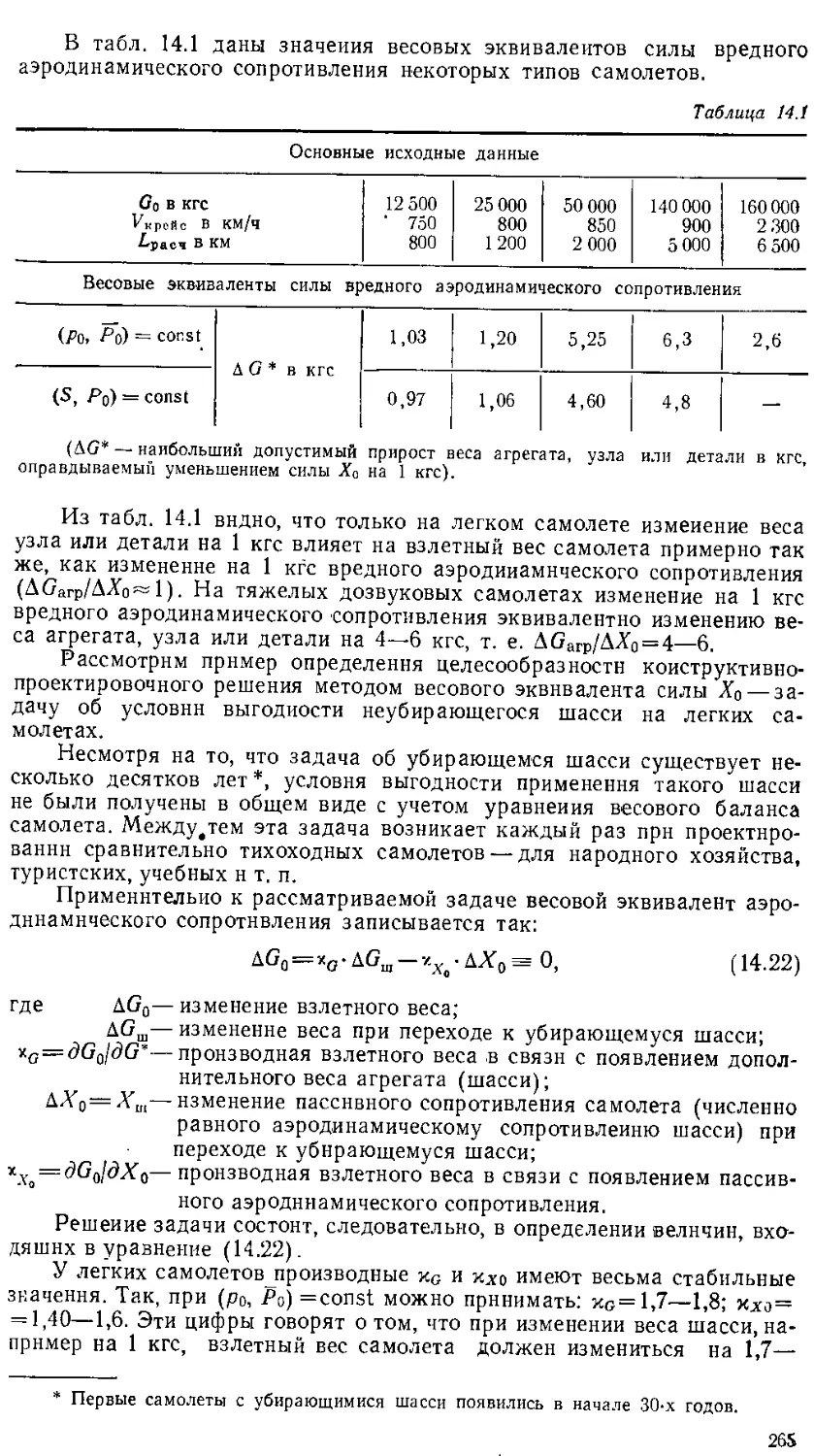
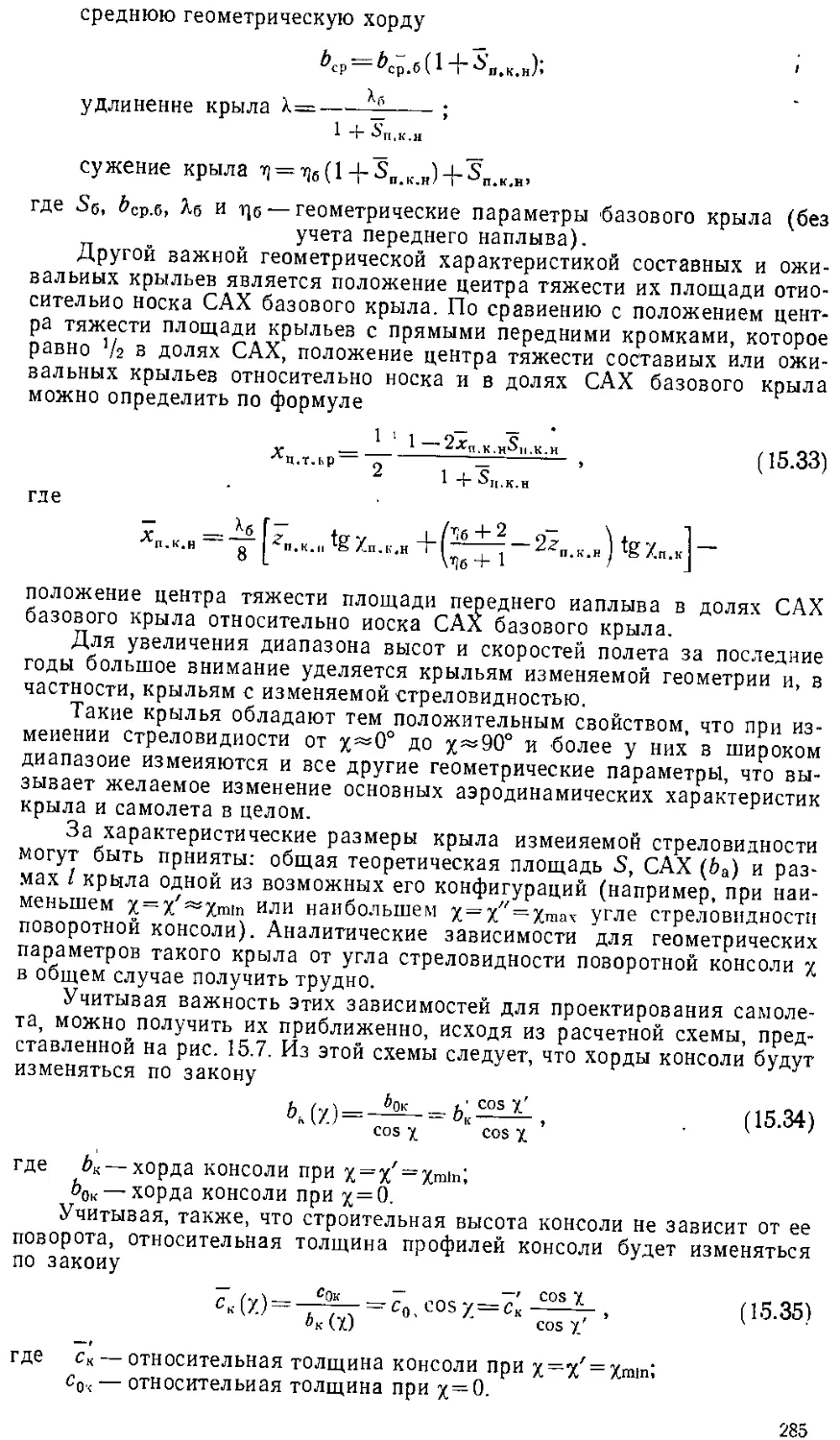
Рис. 2.3. Изменение cv горизон- Рис. 2.4. Характер
тального полета при полностью изменения макси-
открытом дросселе ТРД в зависи- мальной скорости
мости от высоты Н (Янв— наивы- в зависимости от
годнейшая высота) высоты Н-
1 — околозвуковой са-
молет. 2 — сверхзву-
ковой самолет
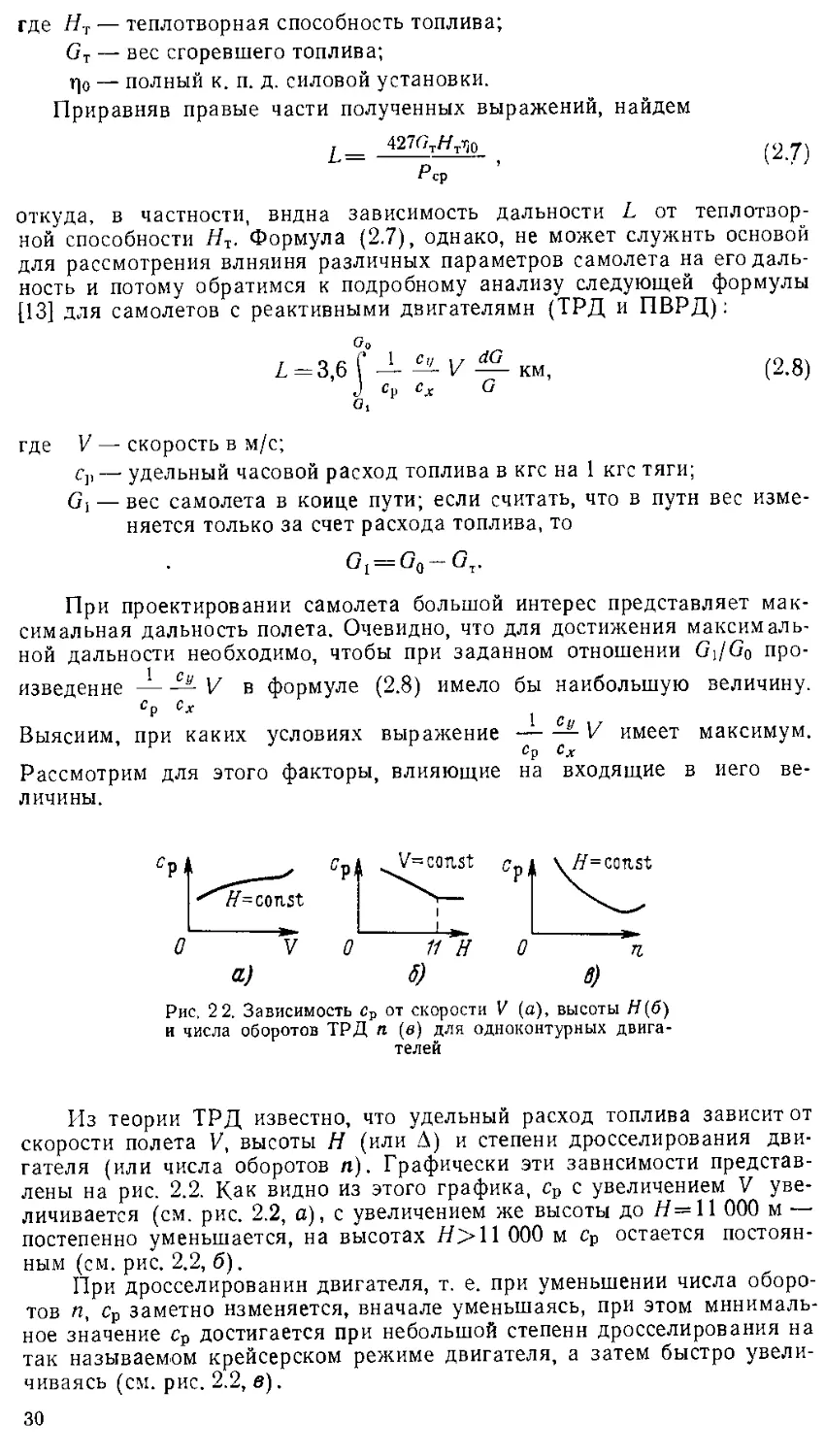
На рис. 2.3 изображена кривая, дающая представление о характе-
ре изменения су горизонтального полета по высотам на крейсерском
режиме ТРД. Очевидно, су на потолке ЯПот достигнет наибольшего зна-
чения Супах—Суо^ч, т. е. его значения при Лтах. С уменьшением высо-
ты Н коэффициент cv уменьшается и соответственно уменьшается каче-
ство Cyjcx. Скорость горизонтального полета Vmax на данной высоте
31
для самолета с ТРД, как указывалось, может быть выражена формула-
ми (2.3) и (2.4).
Воспользовавшись значениями сх самолета по продувке или при-
ближенному расчету и кривыми зависимости коэффициента £ от скоро-
сти, можно графически определить скорости горизонтального полета на
разных высотах.
В этом случае для ряда выбранных высот в диапазоне от Я=0 до
//=11 000 м, задаваясь значениями скоростей Узад, определяем соответ-
ствующие им величины сх и £ и, подставляя в формулу (2.4), находим
значения Уист, по которым строим кривую в координатах Узад и УИст-
Затем, используя формулу (2.3), проделаем такую же операцию для
высот //>11 ООО м. Для каждой выбранной высоты получим график в
координатах Узад и Уист. Проведя на каждом графике из начала коор-
динат луч под углом в 45°, мы получим в точке пересечения луча и кри-
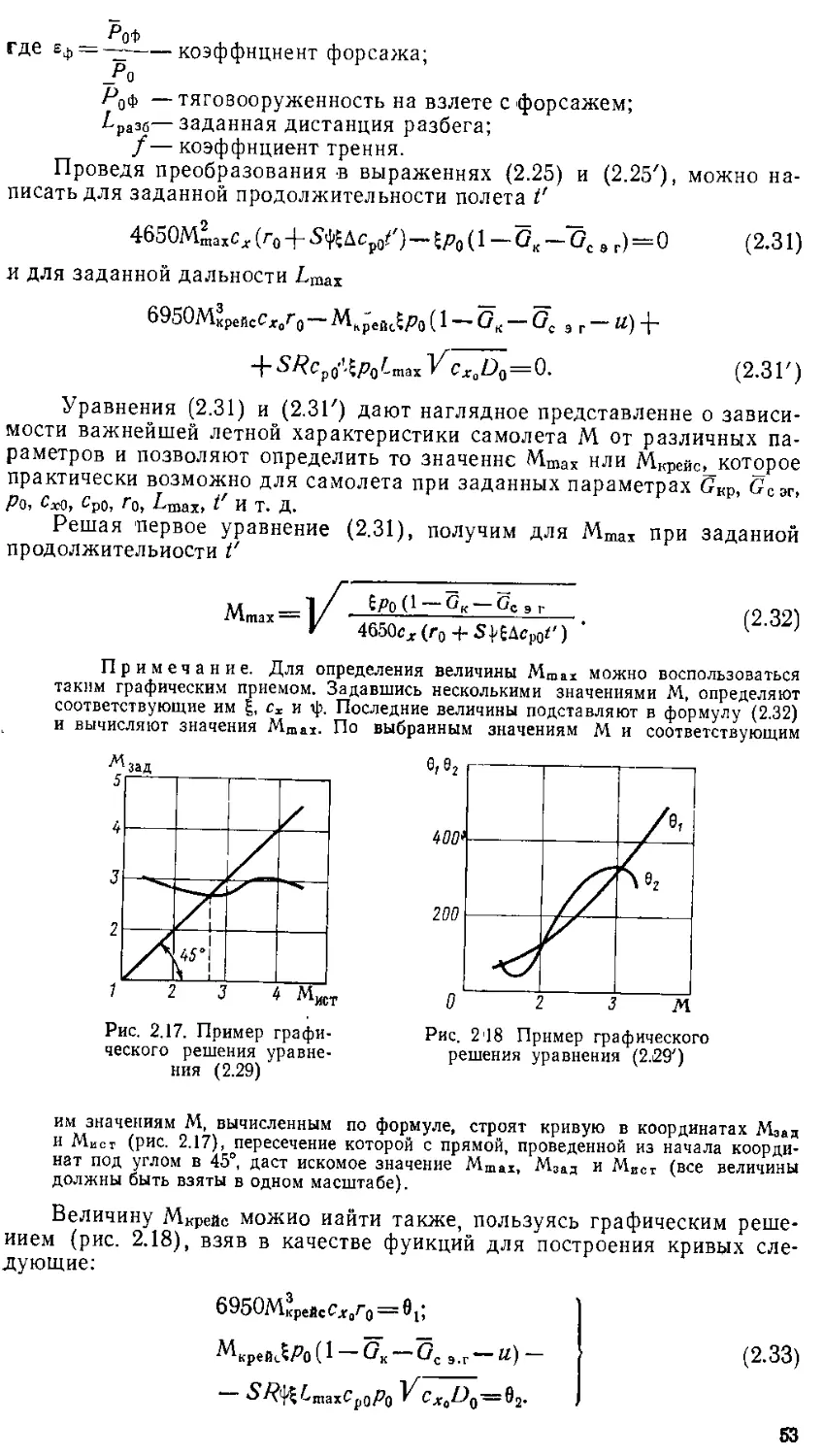
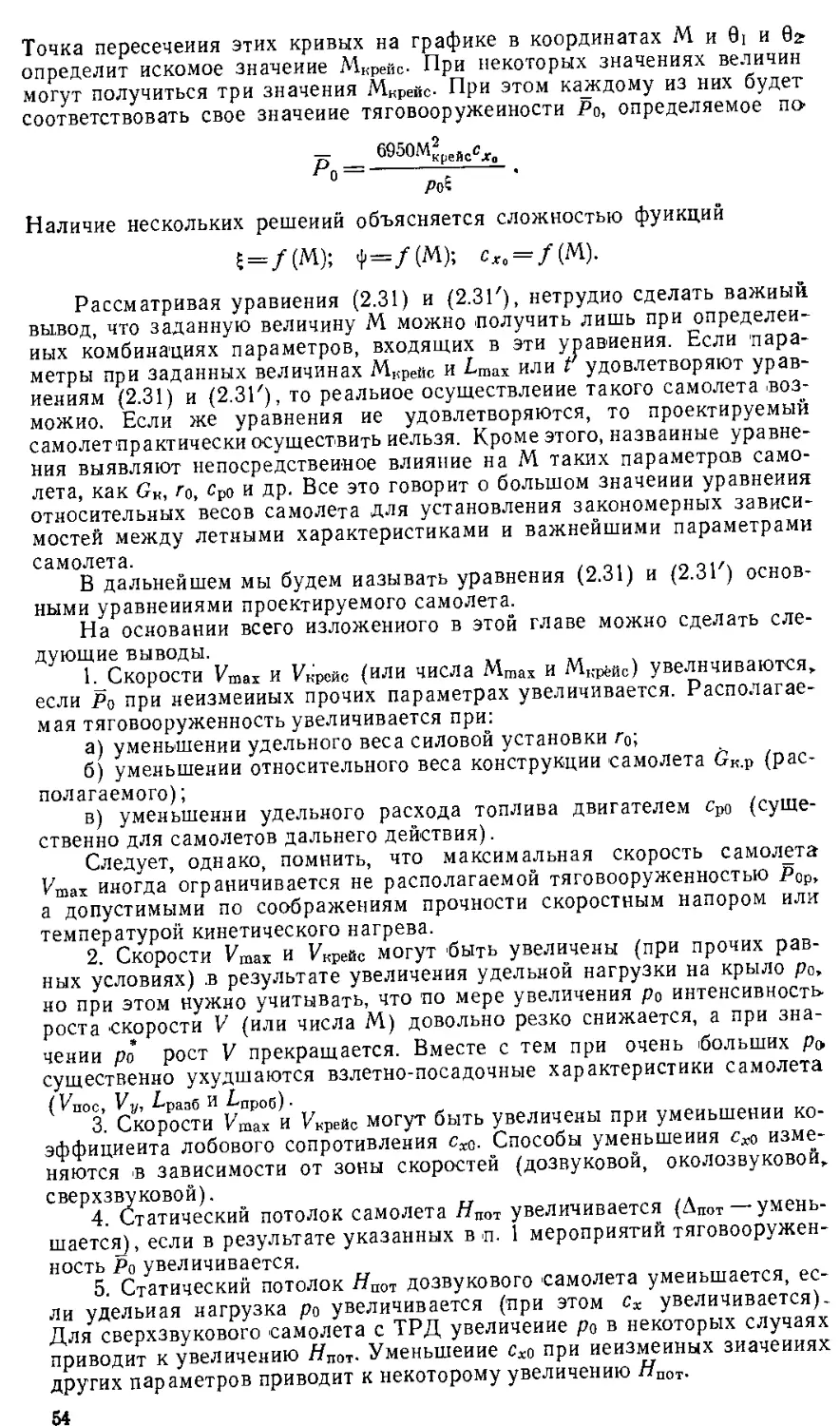
вой V значение скоростей V на выбранных высотах Н.
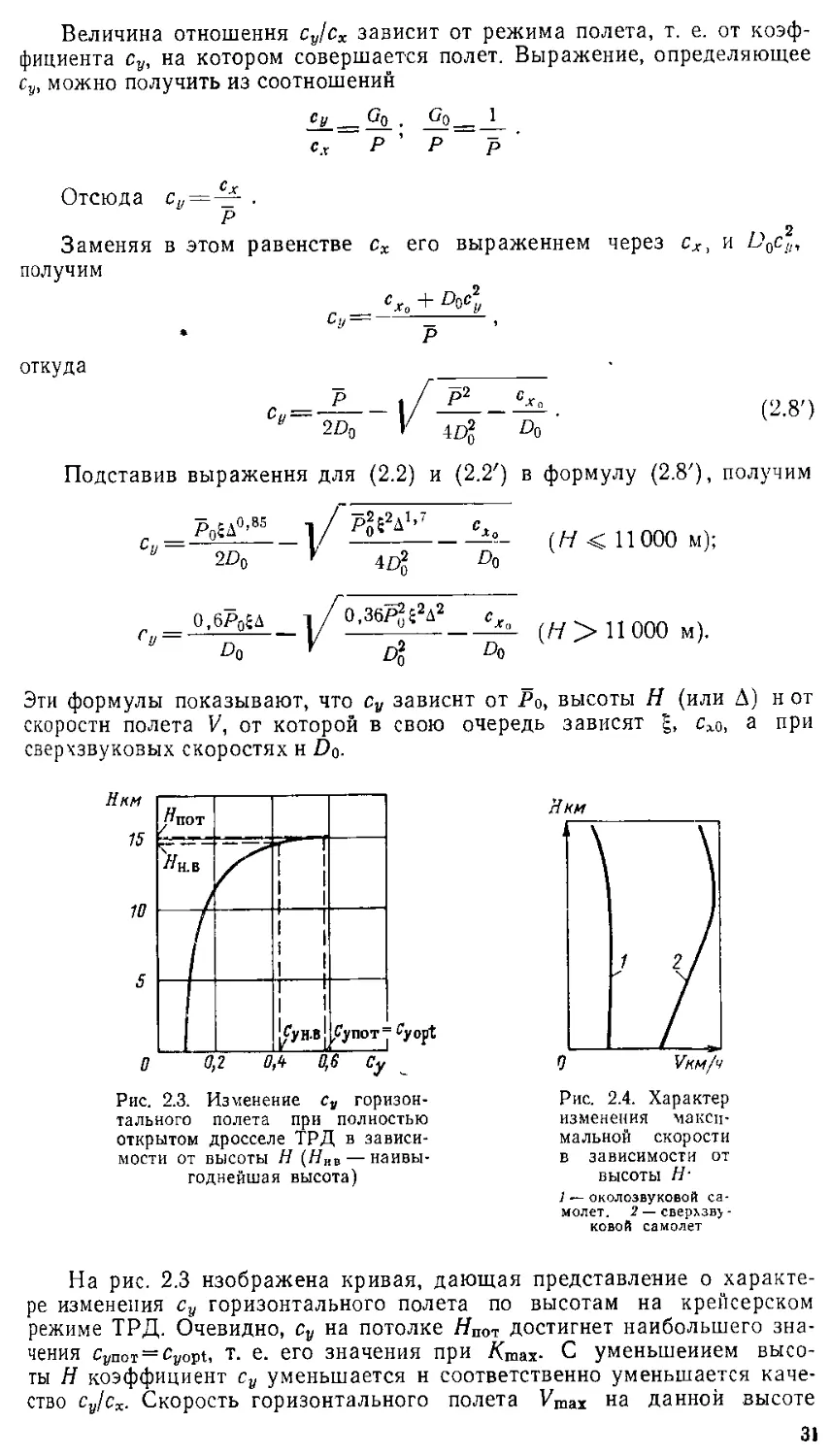
На рис. 2.4 приведены типичные кривые измеиеиия по высоте мак-
симальной скорости для дозвукового (/) н сверхзвукового (2) самоле-
тов. Для обоих типов самолетов характерным является увеличение ско-
рости по высота м до Н = 11 000 м.
На основании сказанного выше для самолетов с ТРД справедливы
следующие выводы:
а) удельный расход топлива Ср с увеличением высоты до Я=
= 11 000 м уменьшается и на высотах //>11 000 м становится постоян-
ным (см. рнс. 2.2);
б) коэффициент су, соответствующий горизонтальному полету, по
мере увеличения высоты Н увеличивается до cvopt (см. рис. 2.3), дости-
гая этого значения на статическом потолке. Вместе с су с увеличением
высоты увеличивается и качество самолета с/сх, которое на потолке
принимает максимальное значение;
в) скорость горизонтального полета V с увеличением высоты до
// = 11 000 м увели«ивается.
Учитывая приведенные выводы, можно утверждать, что произведе-
ние----— V, а следовательно, и дальность полета достигают МакСИ-
Ср сх
мального значения на высотах //> 11 000 м.
Полагая, что удельный расход топлива ср для высот Н^ЛЮОО м
может быть выражен так:
Ср = Д Срд,
где ф = 1,05+0,1М4-0,05М2 учитывает приближенно влияние числа М
полета в диапазоне от 0,8 до 3,0 на удельный часовой расход;
А — относительная плотность воздуха;
6=0,12;
сРо — стартовый удельный расход (А! = 0; Н = 0),
мы можем для 11 000 м написать
cp=O,863'^Cpo,
т. е. на высотах //>11 ООО м удельный расход не зависит от высоты.
Формулу (2.8) теперь можно получить в следующем виде:
Go
/. = 4,17'1 км. (2.9)
.1 Фс_ сх G
Gt ' Ро
Имея в виду, что— V от изменения веса G не зависит, проинтегрируем
это выражение, полагая, что Gi = Go—GT, V=const:
32
£=4,17—In—%—,
Ф«р, <=« Go —GT
или £ = 4,17 —— I/In------(2.9')
Ф«Ро cx 1-Gt
Максимальная величина дальности Lmax будет иметь место при
максимальном значении ( — I/)
\ сх /max
Подставляя вместо V выражение (2.3), получим
£t^=i5j7^L_j/^r
с* У
откуда следует, что, поскольку величина ро-Ро для данного самолета
может быть принята неизменной (“ V) , будет иметь место при
\ сх /max
I-— ;0,о| . Следовательно, для получения максимальной дальне-
\ 4’5 /max
сти Лтах самолет с ТРД должен летать на режиме, при котором
/ СУ Д5 \
С1'5 ? /
\ /max
Определим су, который соответствует этому режиму. Очевидно,
/ 45 \
наибольшая дальность будет получена при |—х-?) • Возведя эту
\ Cyi ’ / mtn
дробь в степень 2/з и используя аналитическое выражение поляры
= (2.10)
получим .1
( С1'5 У'3 сг ?3
Hid (2-Ц)
\ м°’5 J с3'3Е113 Е1'3
Для дозвукового самолета коэффициент £ по скорости изменяется мало
и можно в первом приближении принять a DQ=——=cons1 и сх
Жэф
зависит только от су. Продифференцируем выражение (2.11) по су, при-
равняем нулю и получим иаивыгоднейшее значение сунв для режима
Дпах:
с//нв= 1,252 |/Л/-эфСд-0.
Величина cyOpt, соответствующая максимальному качеству, как извест-
но, будет равна
Су .,-|=/А^= 1,773 (2.12)
Следовательно,
Таким образом, полет на максимальную дальность дозвукового са-
молета должен производиться на режиме, при котором суНв = 0,71 су opt,
а высота Янв несколько меньше Яп<?т (см. рис. 2.3) при работе двигате-
ля на крейсерском режиме.
2-1062
зз
Подставляя (2.12) в теоретическое выражение поляры (2.10), по-
лучим после простых преобразований значение сХнв для режима макси-
мальной дальности
слнв— 11*5сЛо.
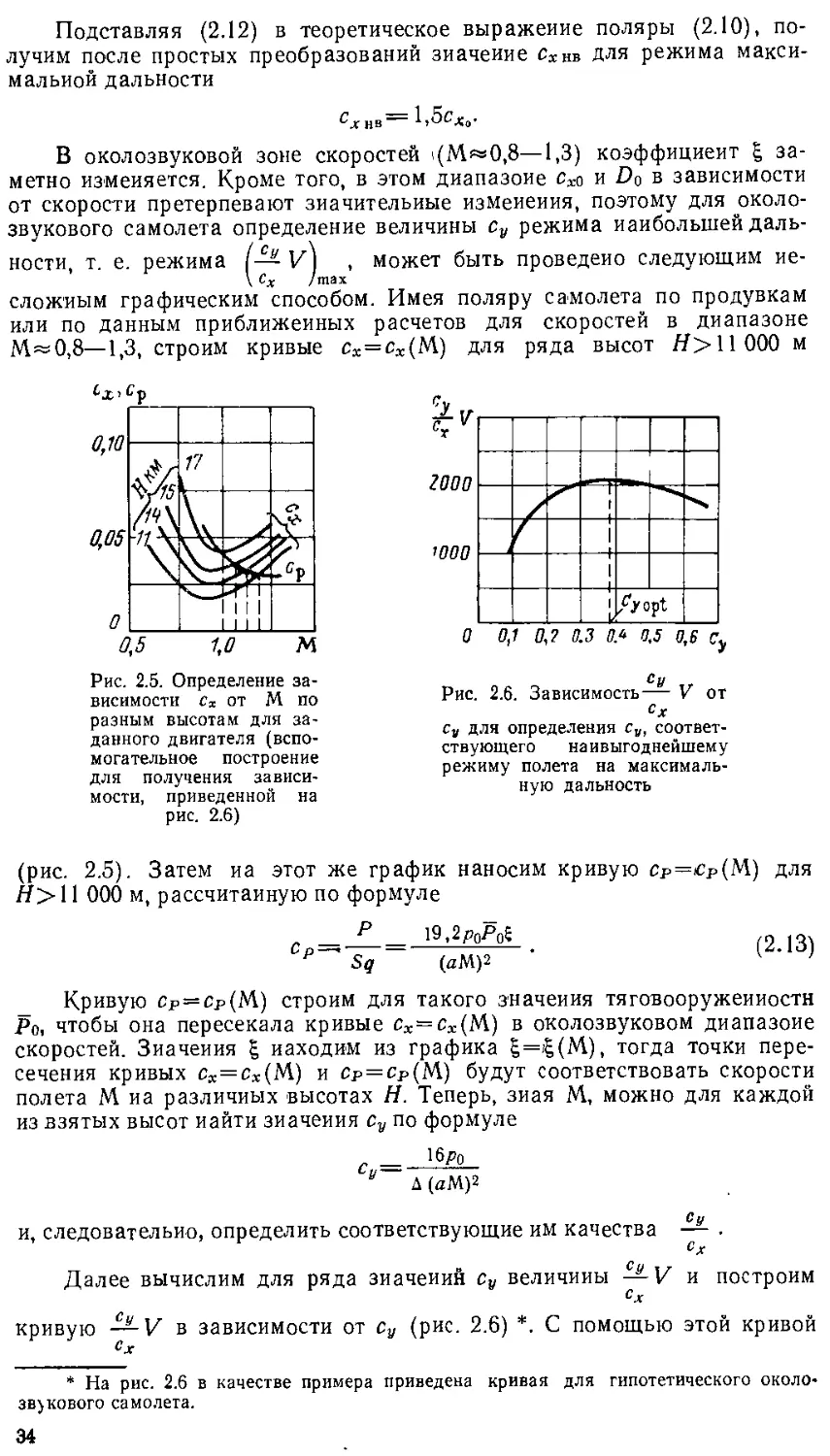
В околозвуковой зоне скоростей (М«0,8—1,3) коэффициент £ за-
метно изменяется. Кроме того, в этом диапазоне схо и Do в зависимости
от скорости претерпевают значительные изменения, поэтому для около-
звукового самолета определение величины су режима наибольшей даль-
ности, т. е. режима IZ) , может быть проведено следующим ие-
\ Сх /max
сложным графическим способом. Имея поляру самолета по продувкам
или по данным приближенных расчетов для скоростей в диапазоне
М~0,8—1,3, строим кривые cx=cx(M) для ряда высот //>11000 м
Рис. 2.5. Определение за-
висимости Сх от М по
разным высотам для за-
данного двигателя (вспо-
могательное построение
для получения зависи-
мости, приведенной на
рис. 2.6)
Су
Рис. 2.6. Зависимость— V от
сх
cv для определения су, соответ-
ствующего наивыгоднейшему
режиму полета на максималь-
ную дальность
(рис. 2.5). Затем иа этот же график наносим кривую Ср=€р(М) для
//> 11 000 м, рассчитанную по формуле
Sq
19,2р0Р0£
(аМ)2
(2.13)
_ Кривую сР=Ср(М) строим для такого значения тяговооружеииостн
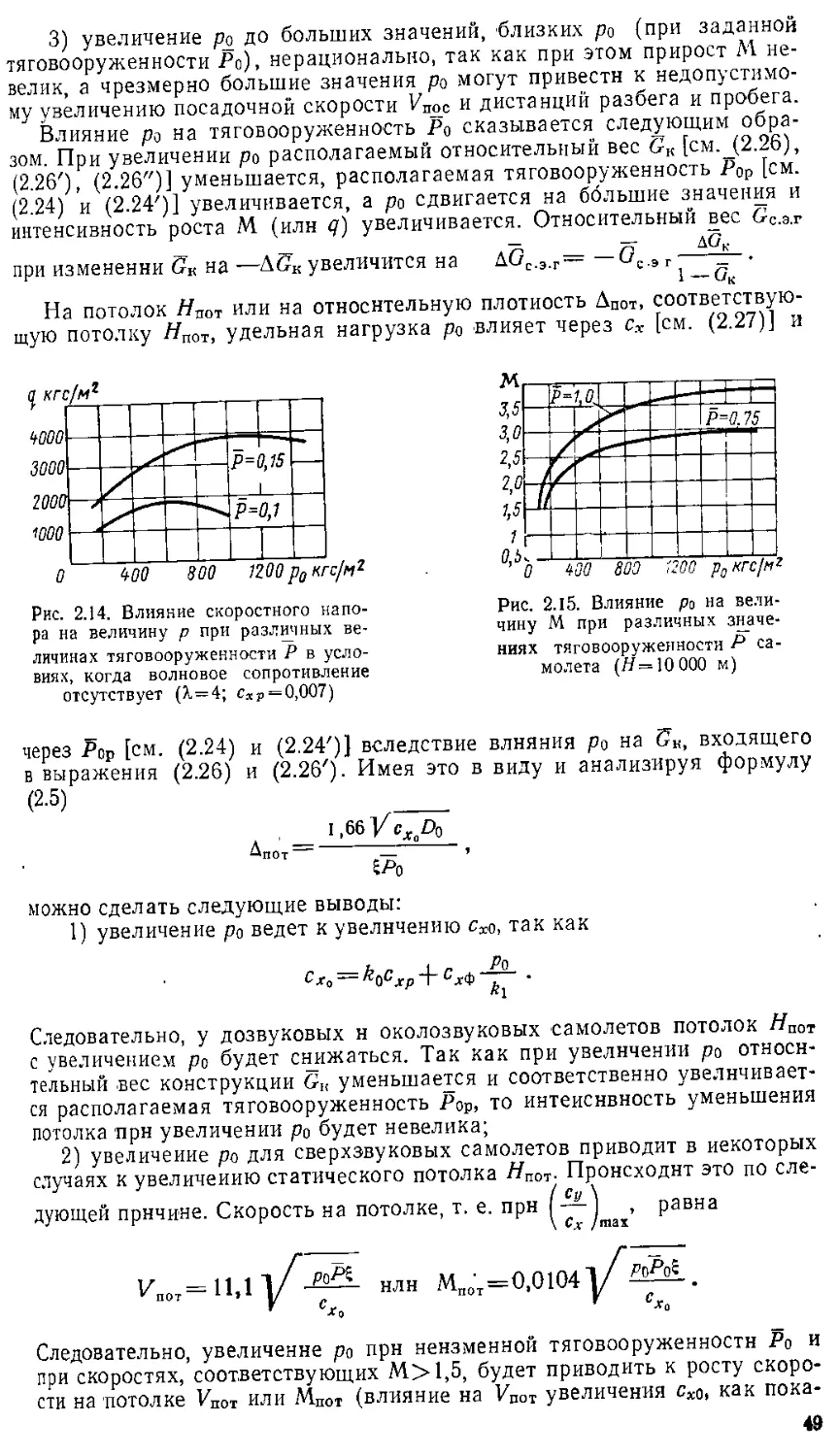
Ро, чтобы она пересекала кривые сх=Сх(М) в околозвуковом диапазоне
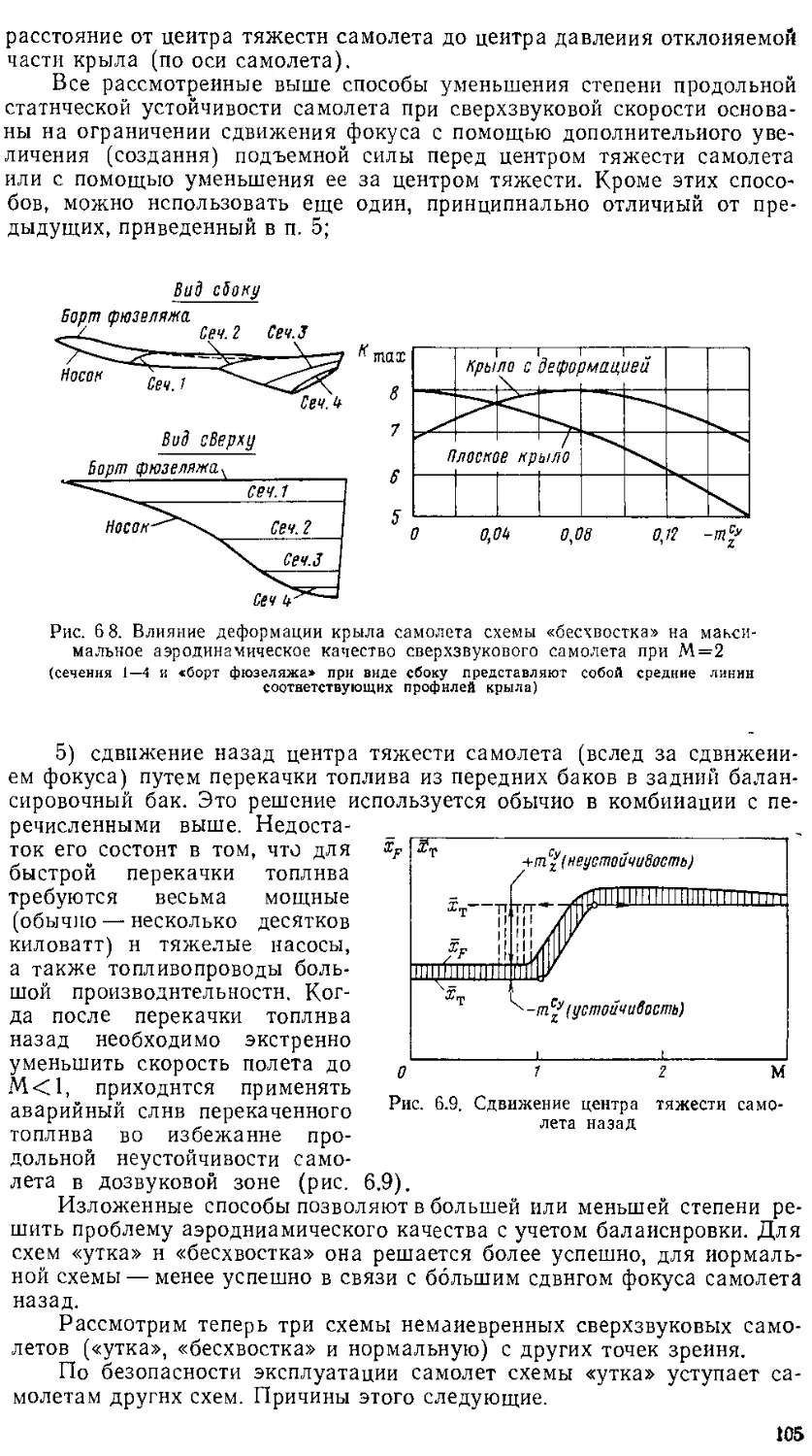
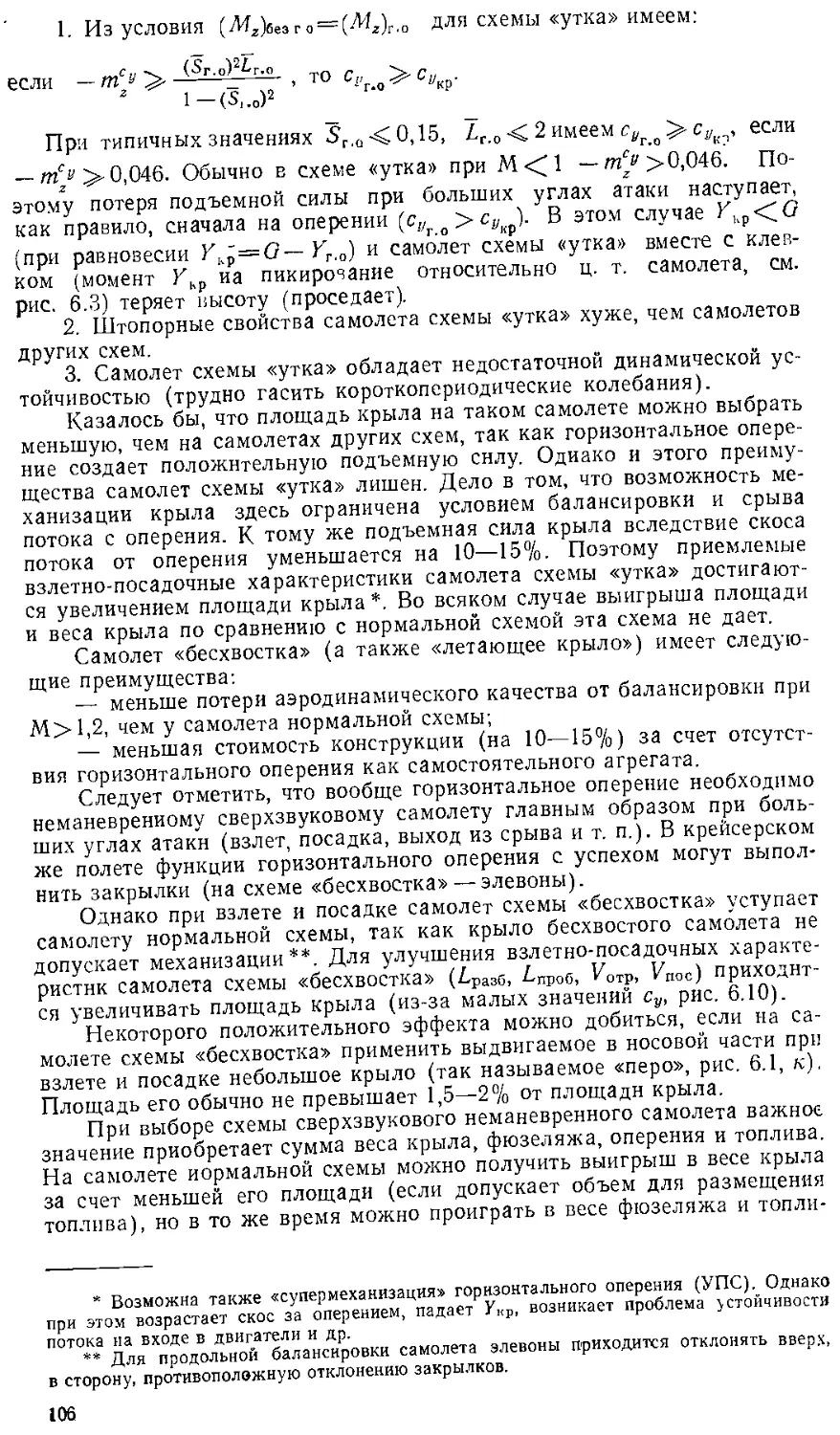
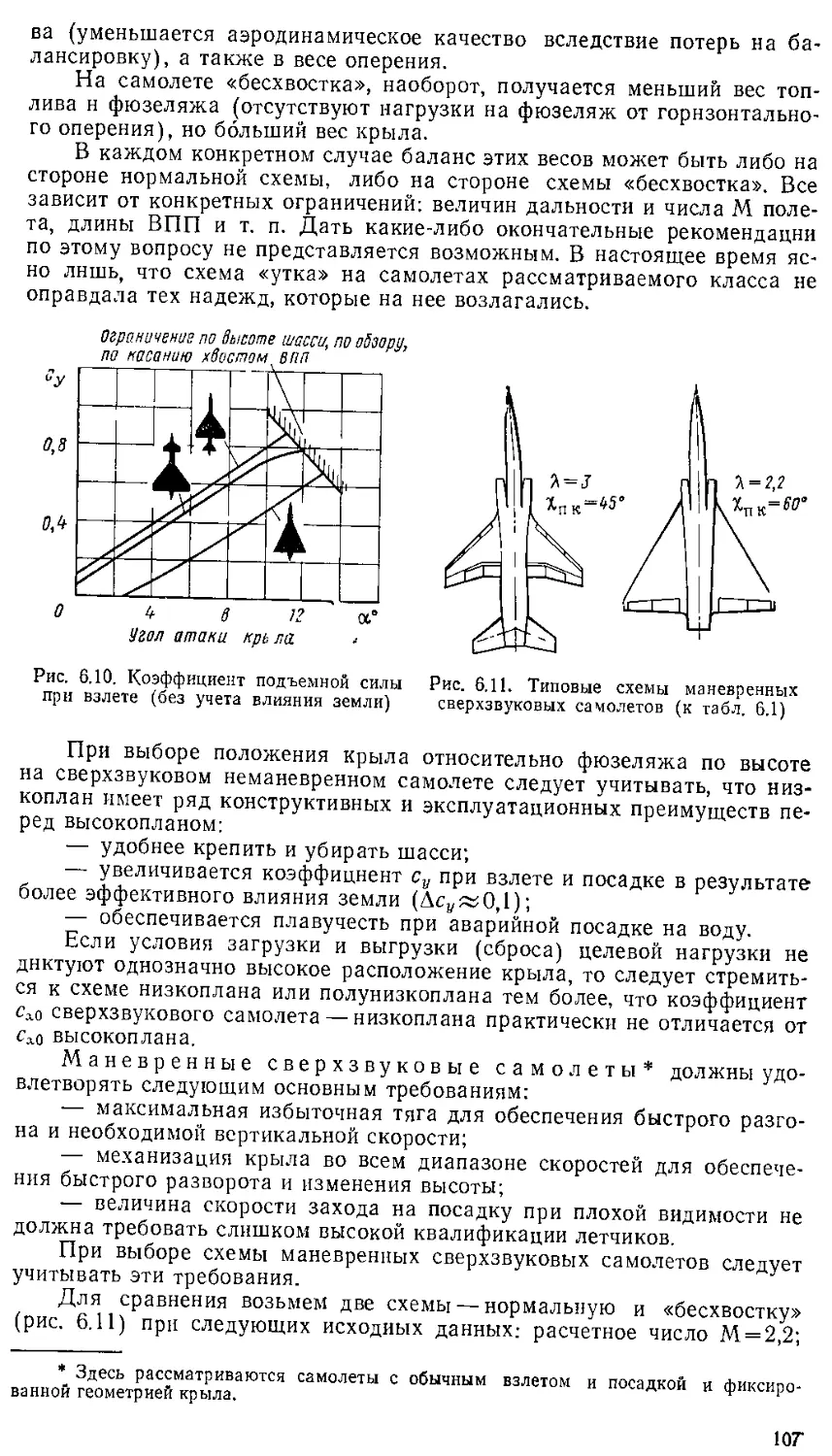
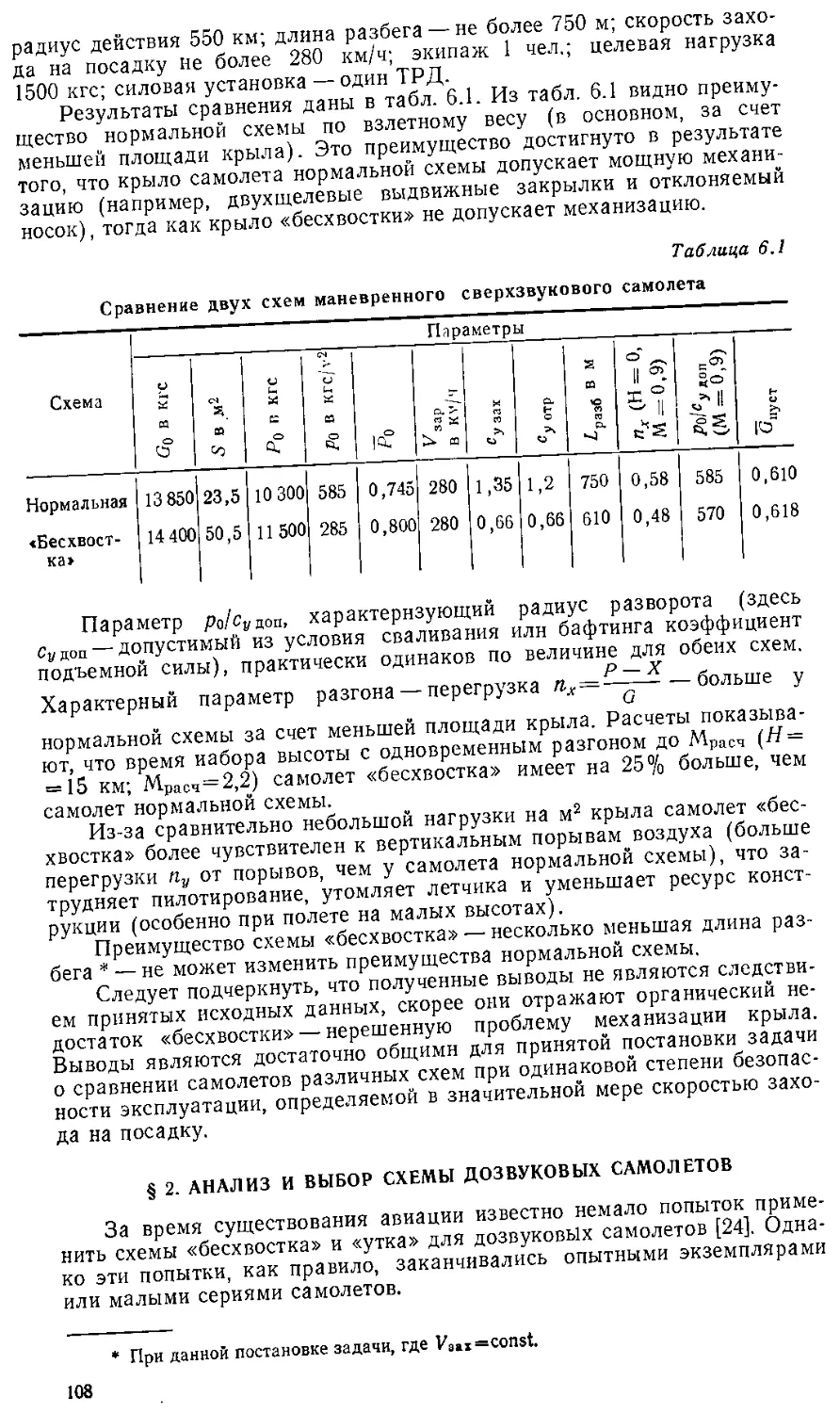
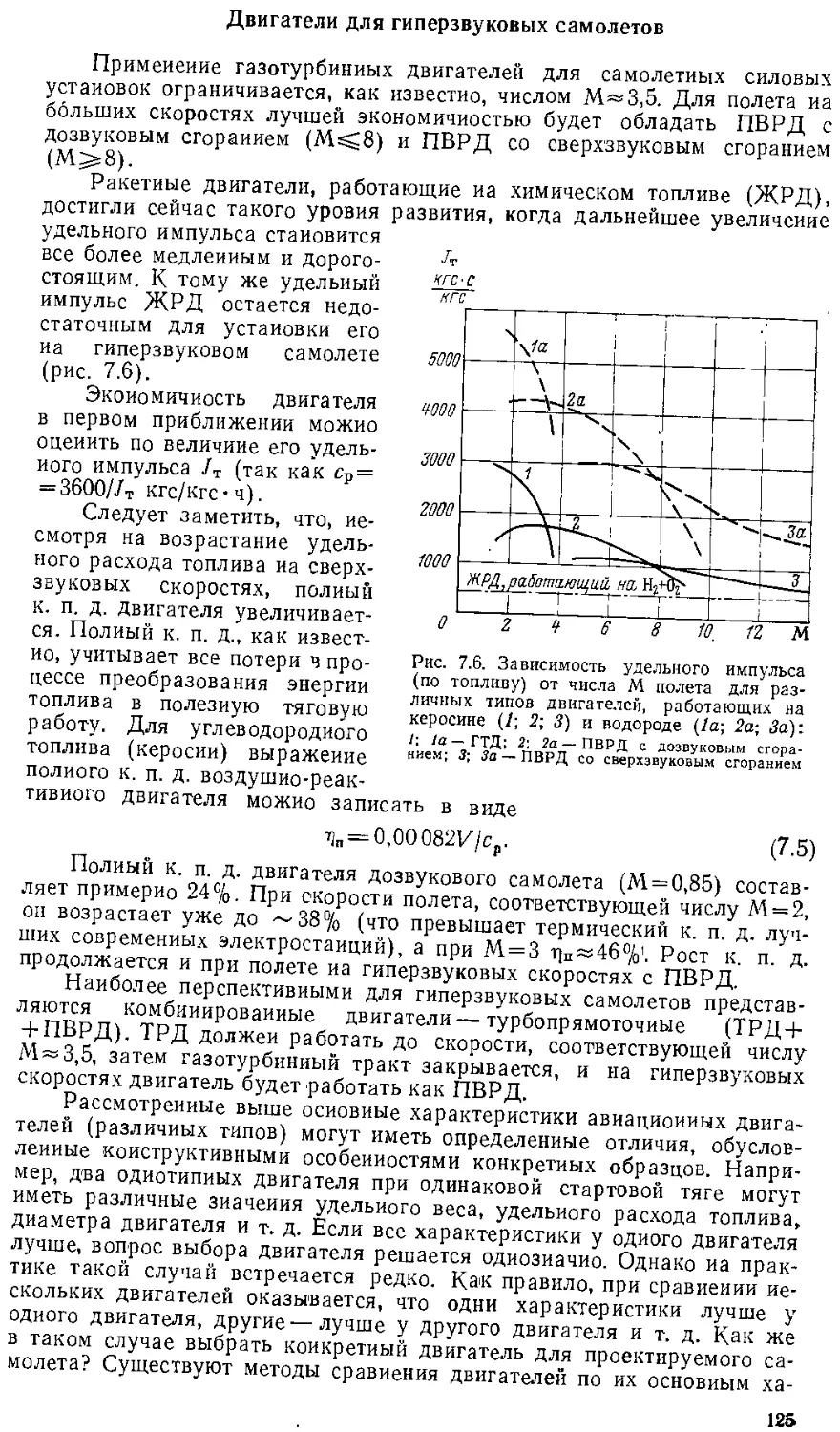
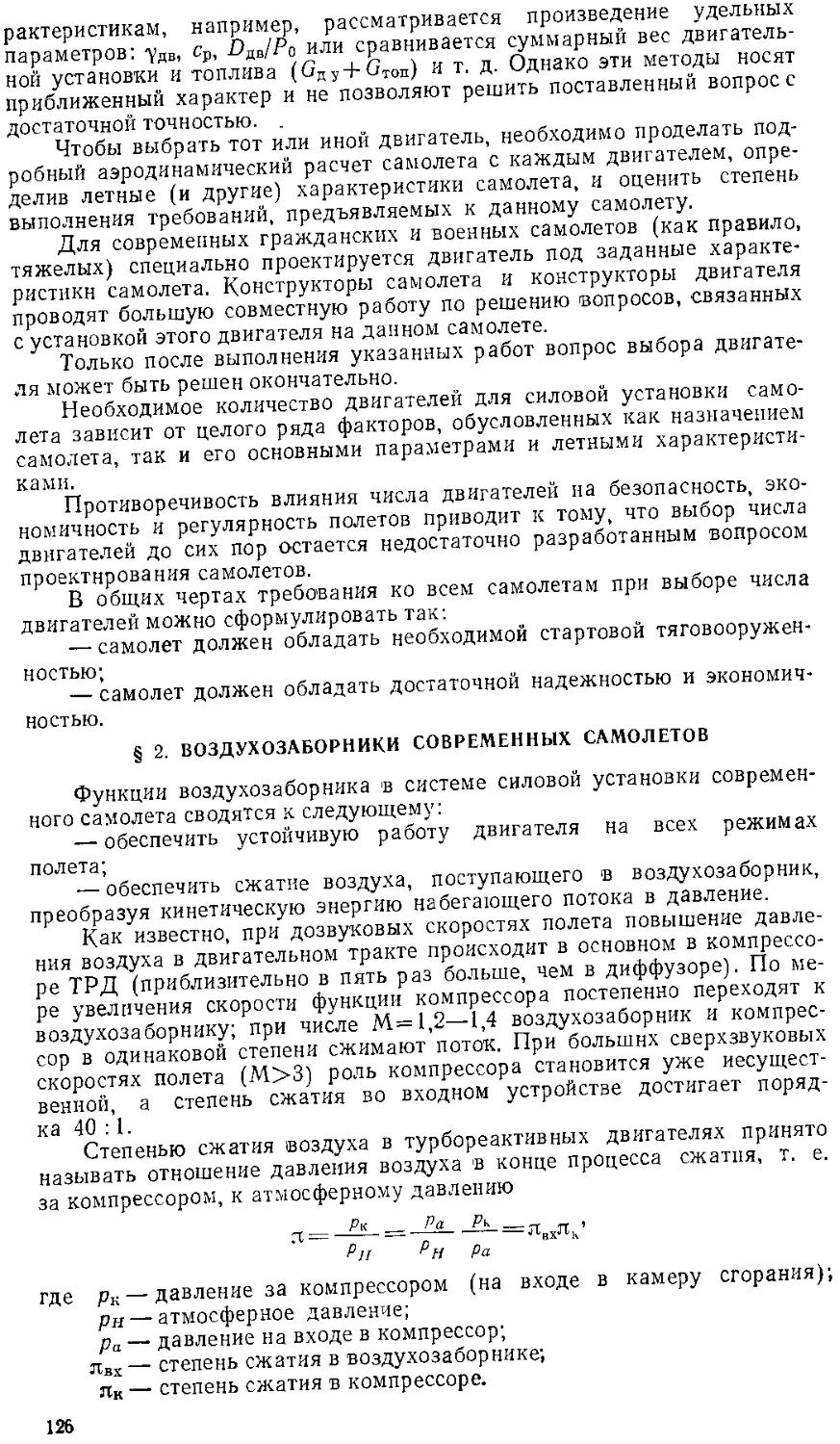
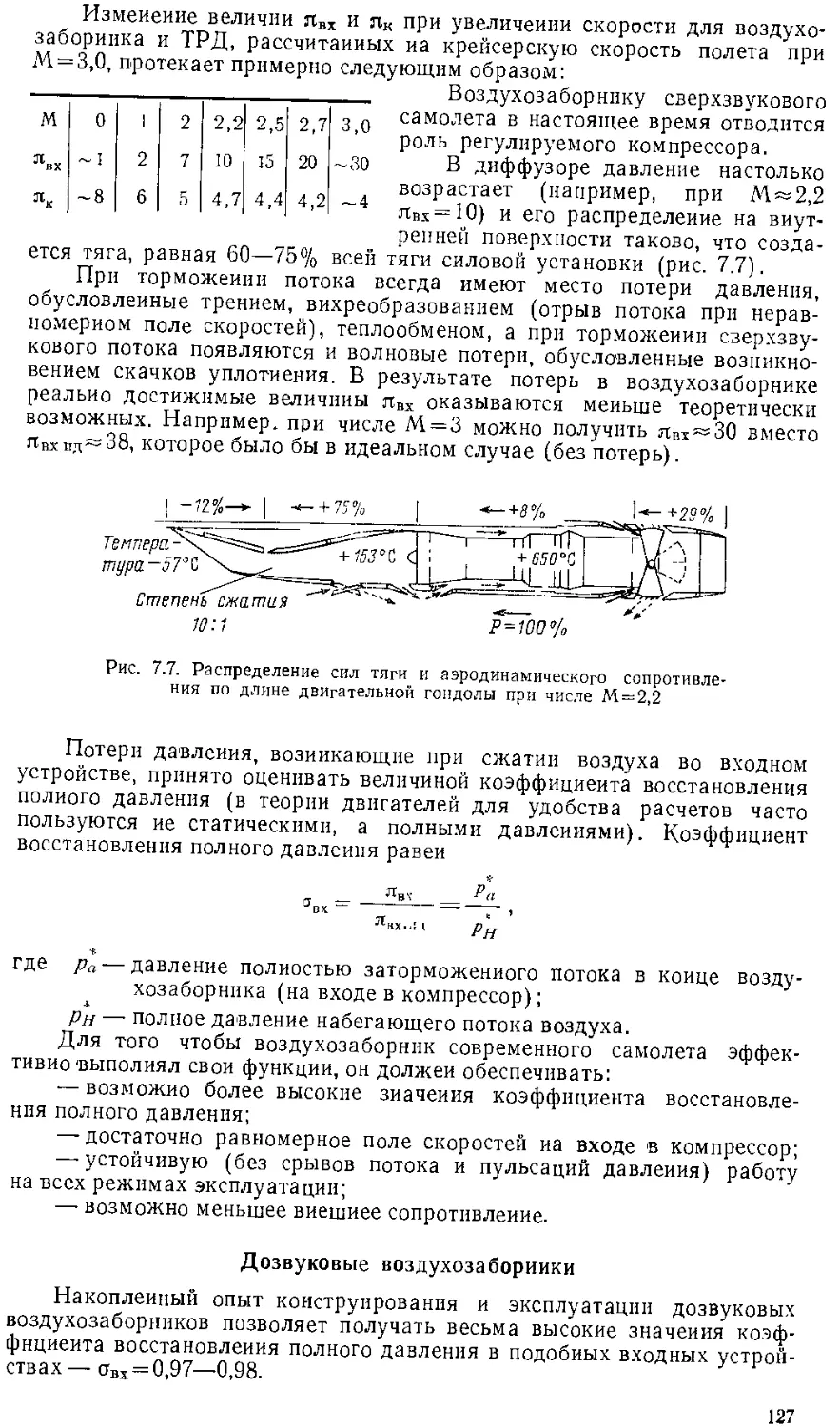
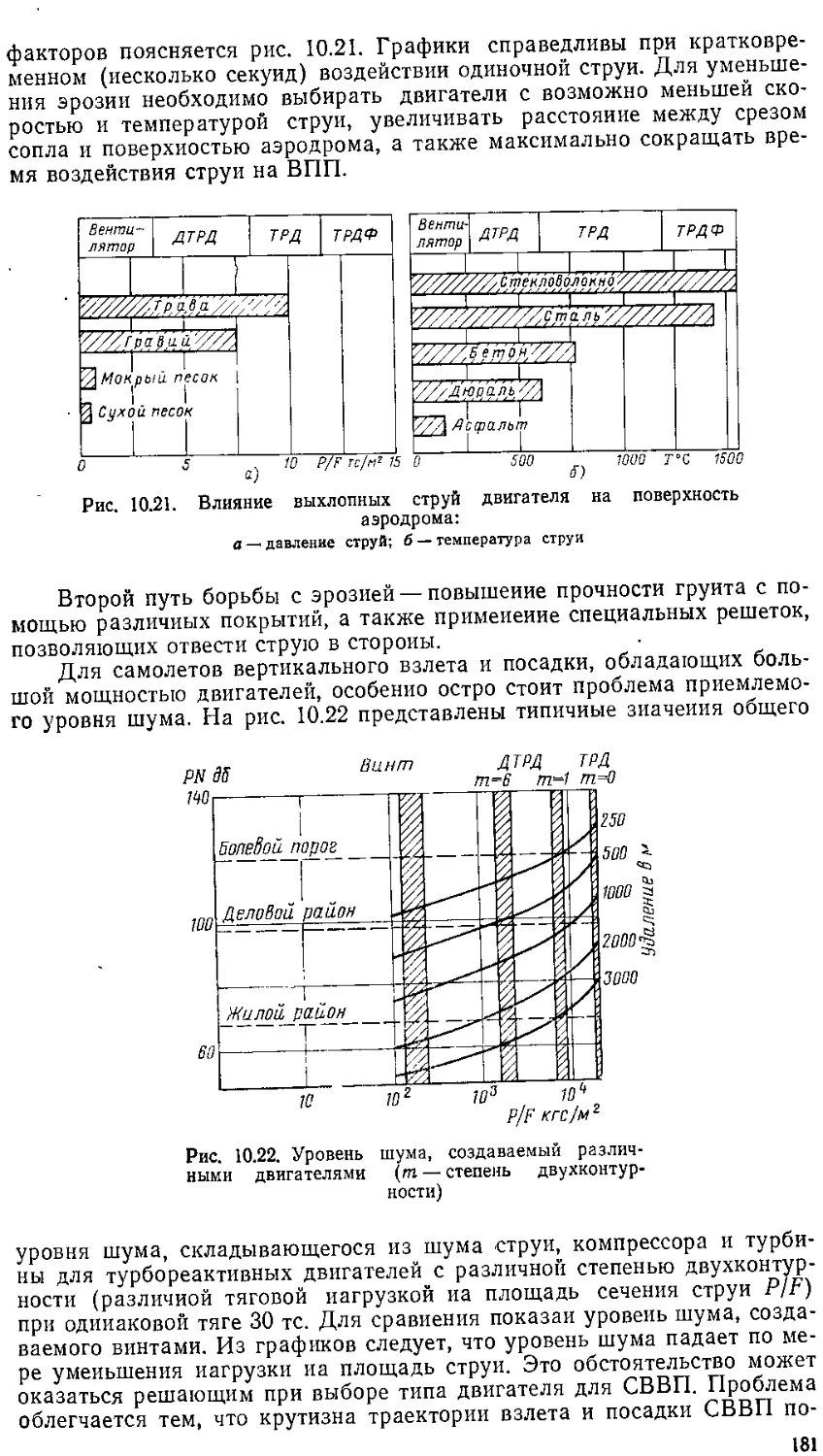
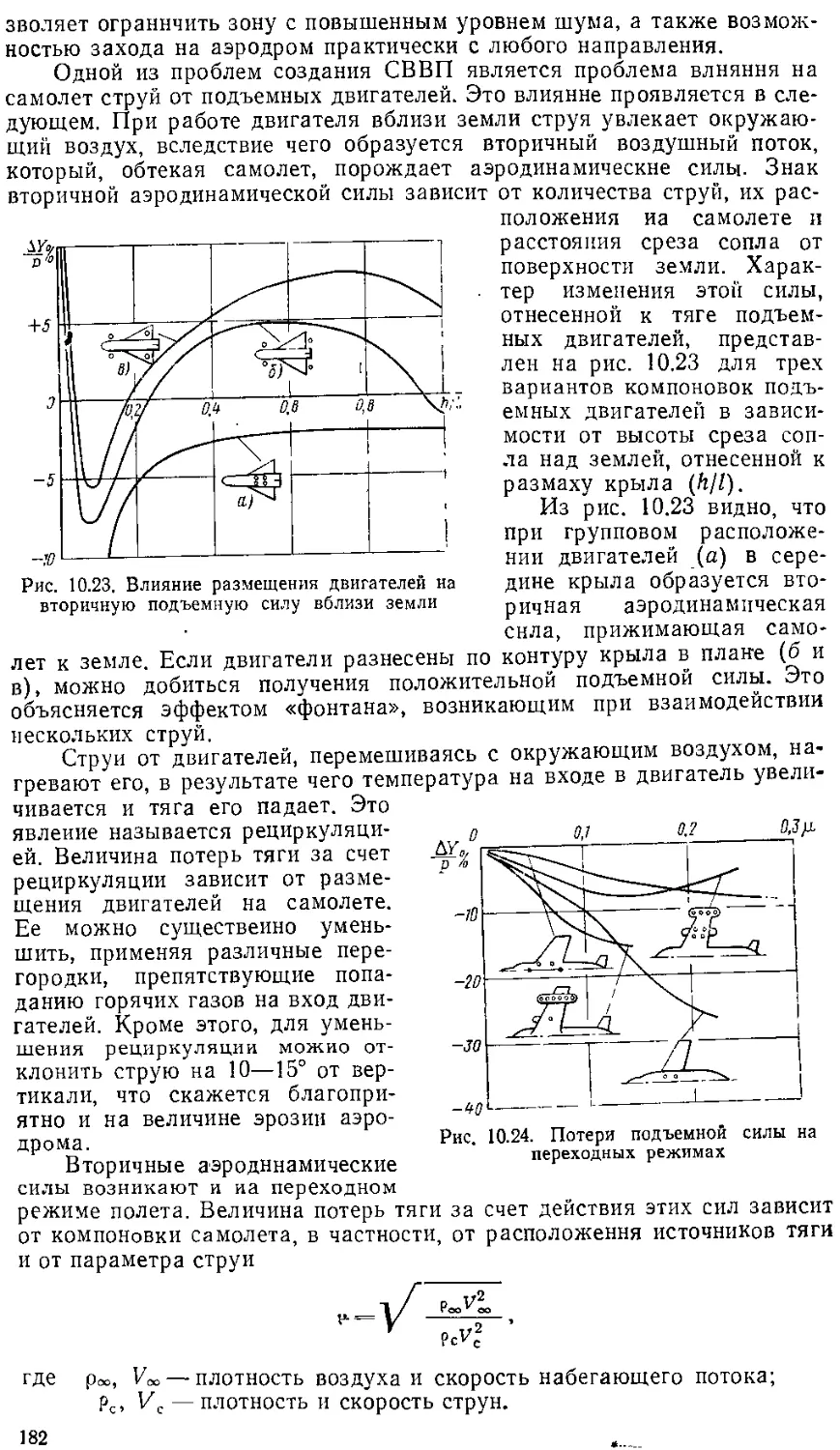
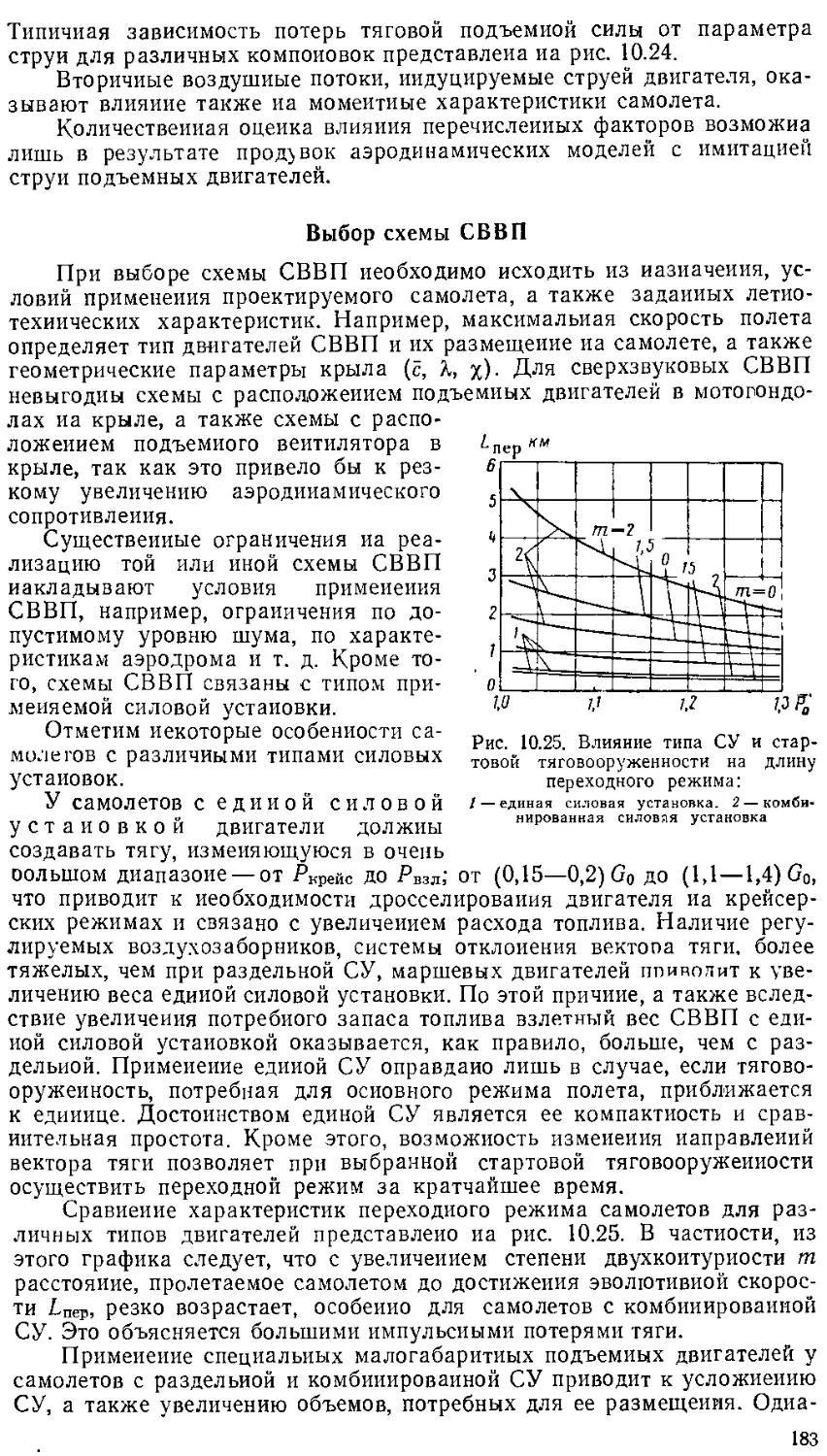
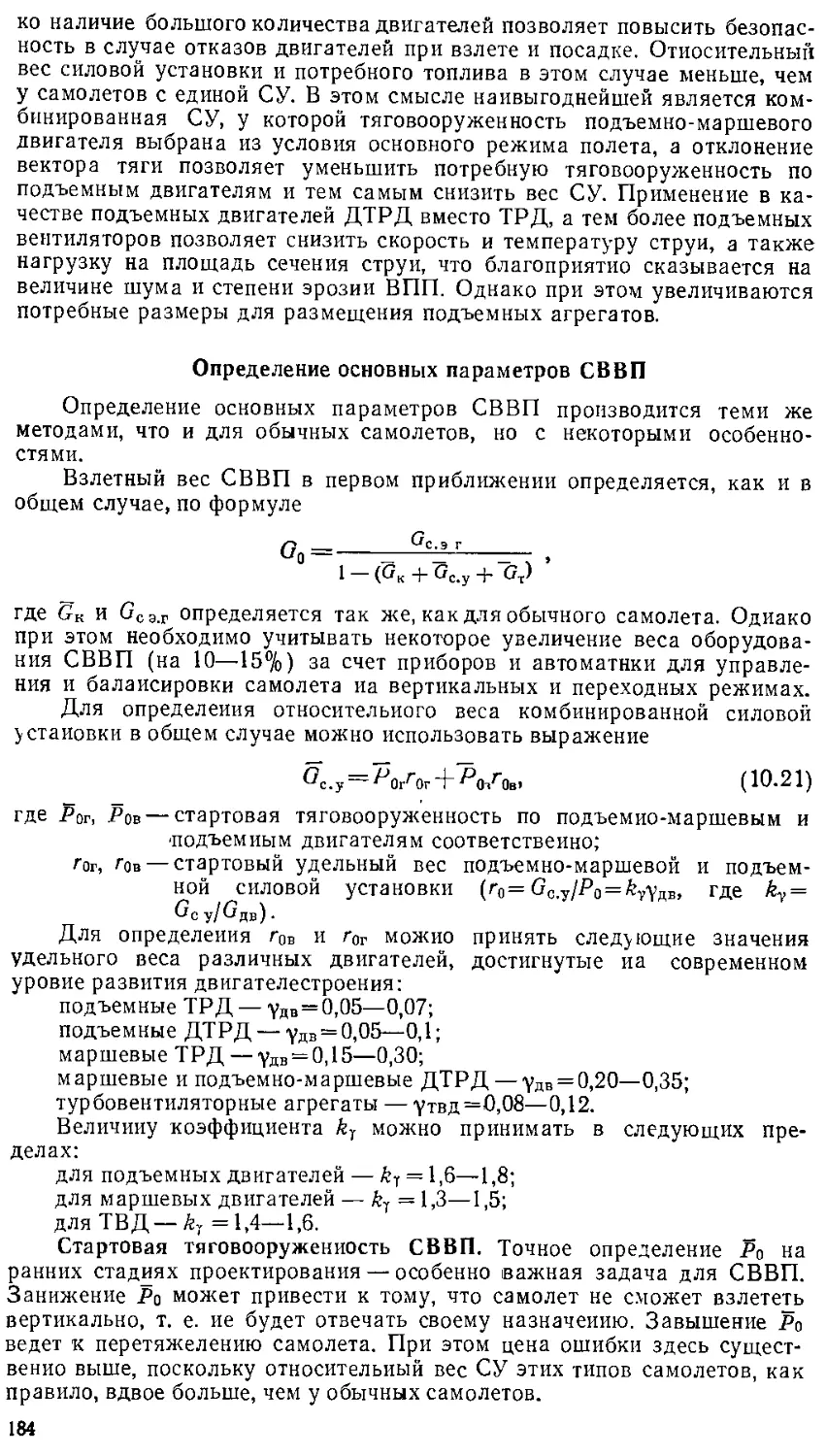
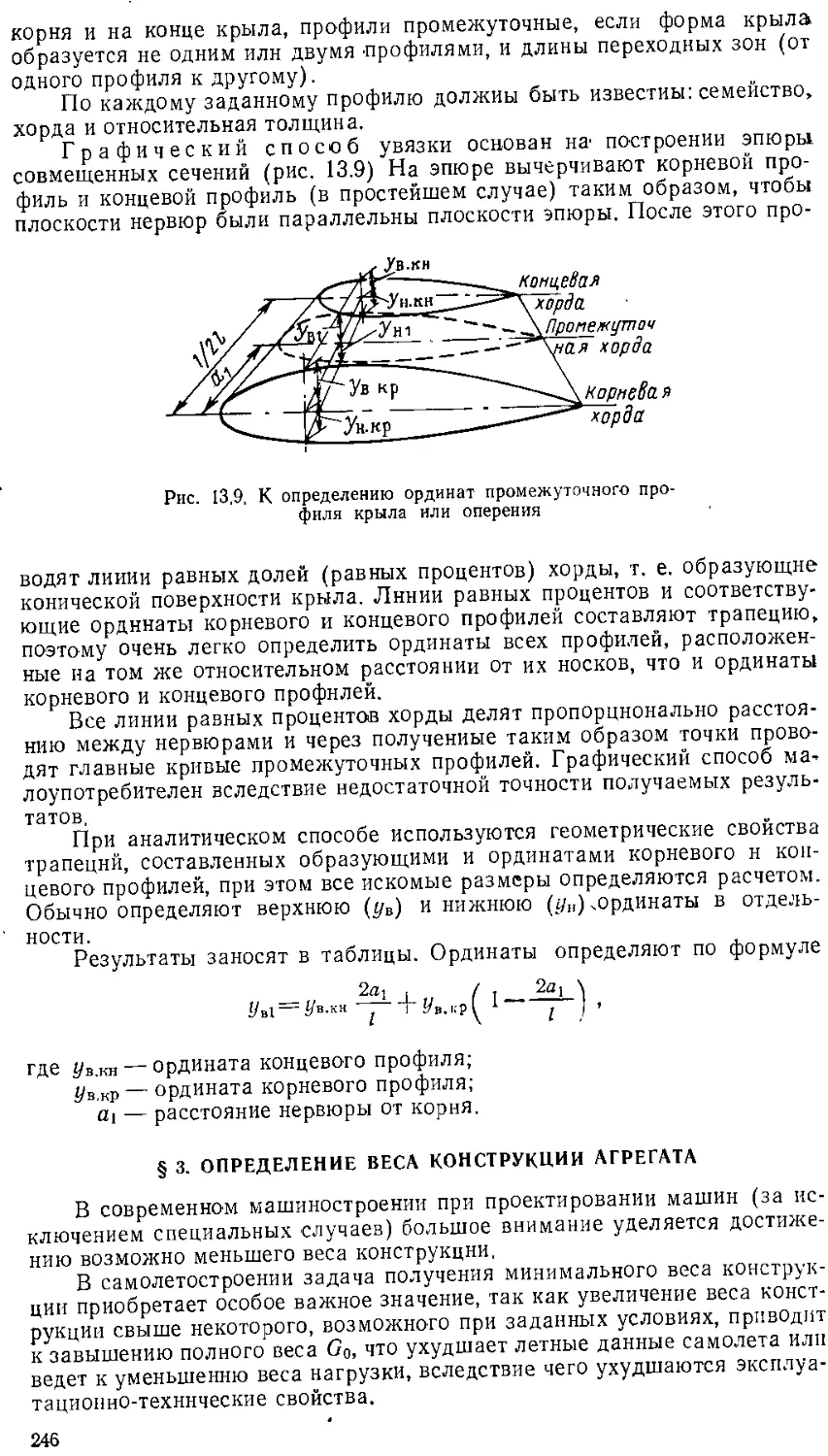
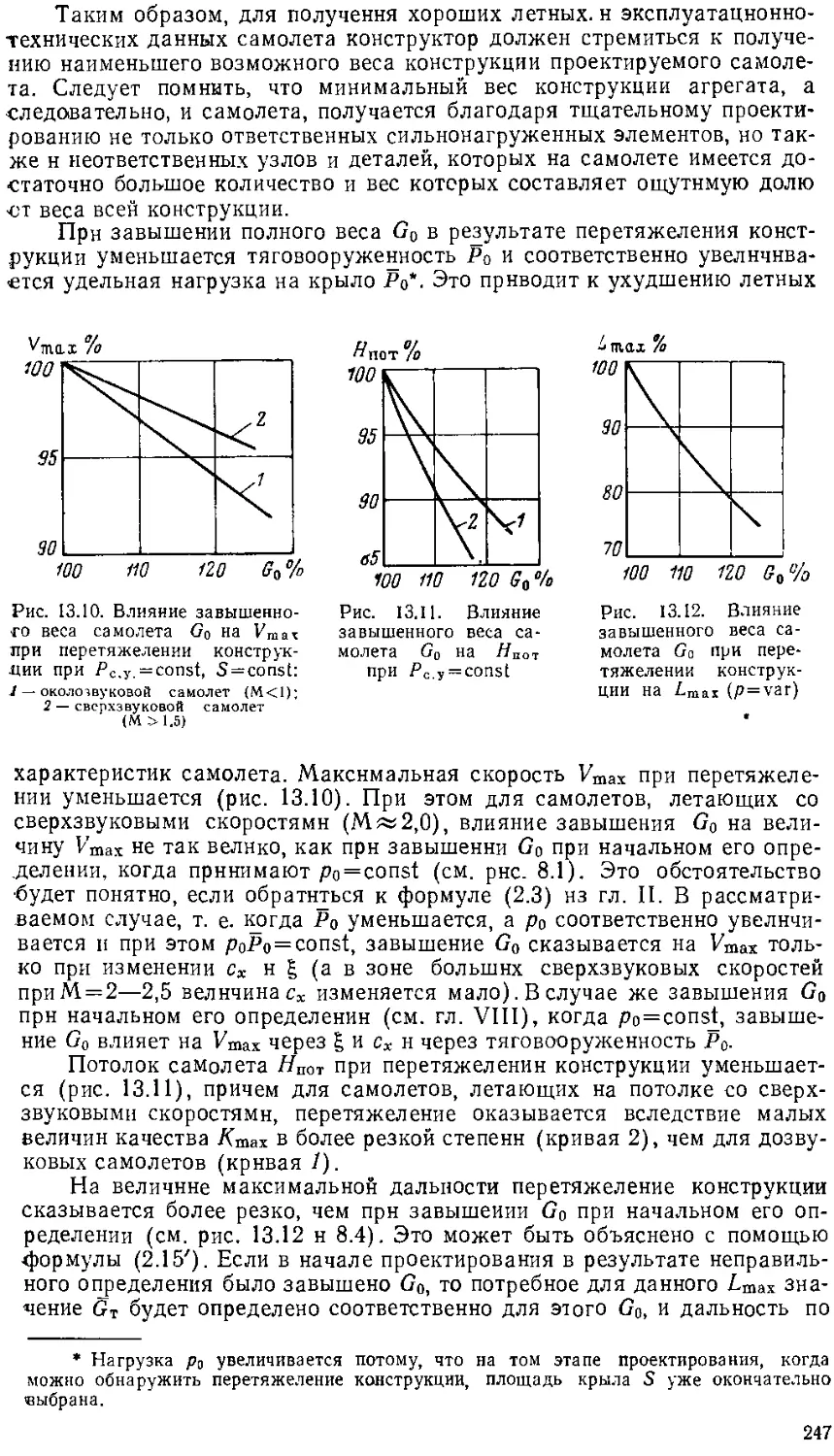
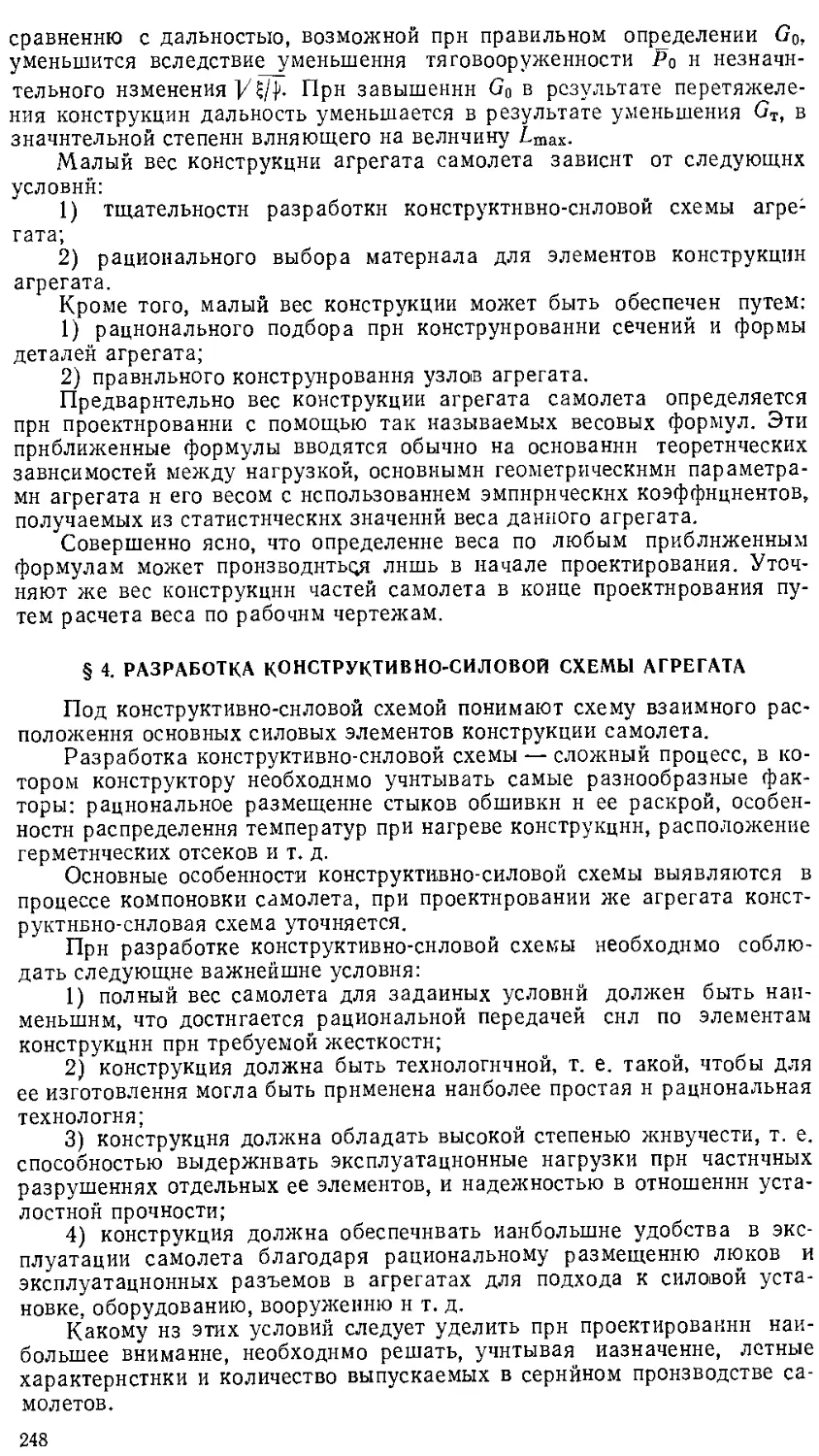
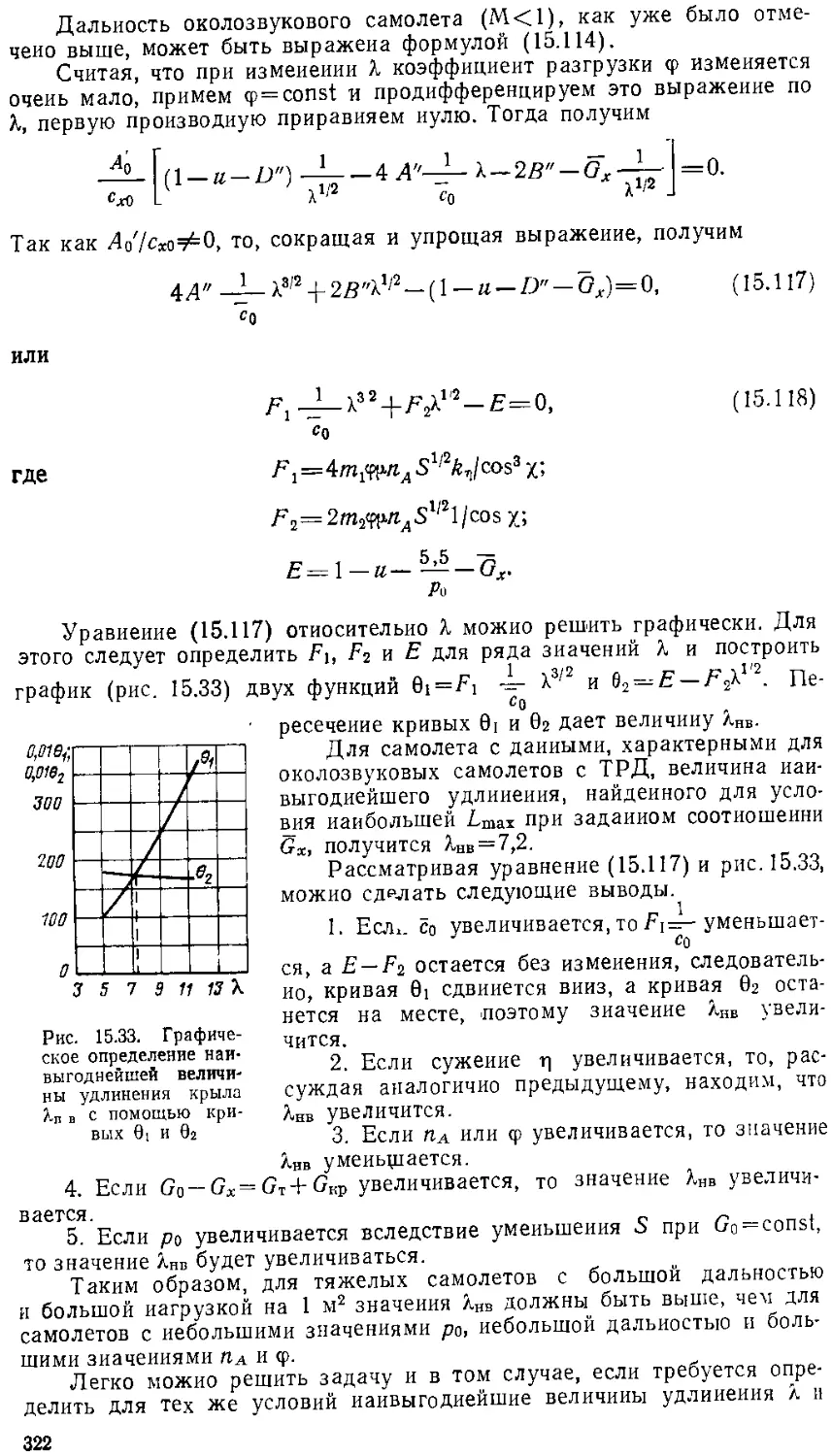
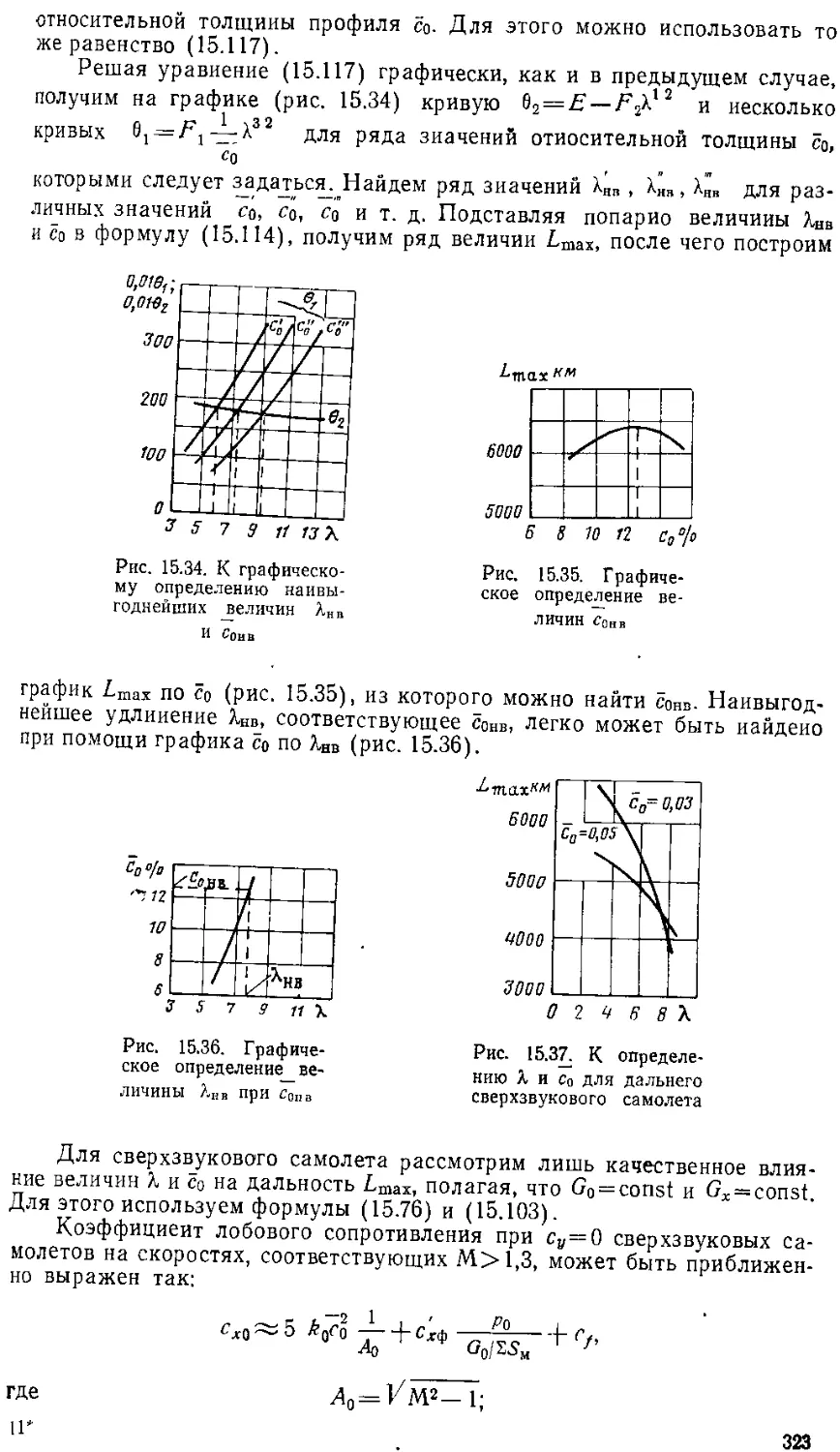
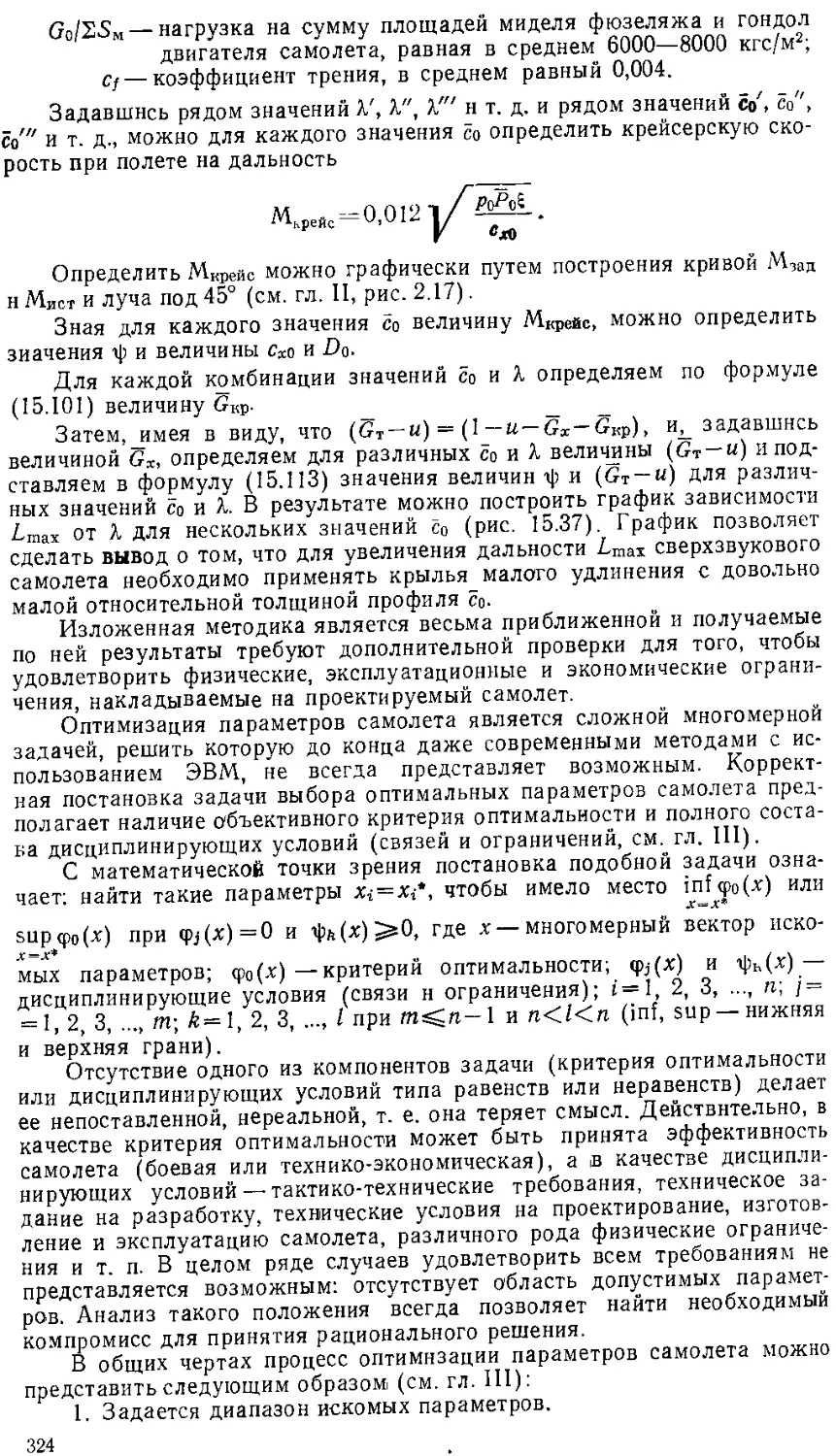
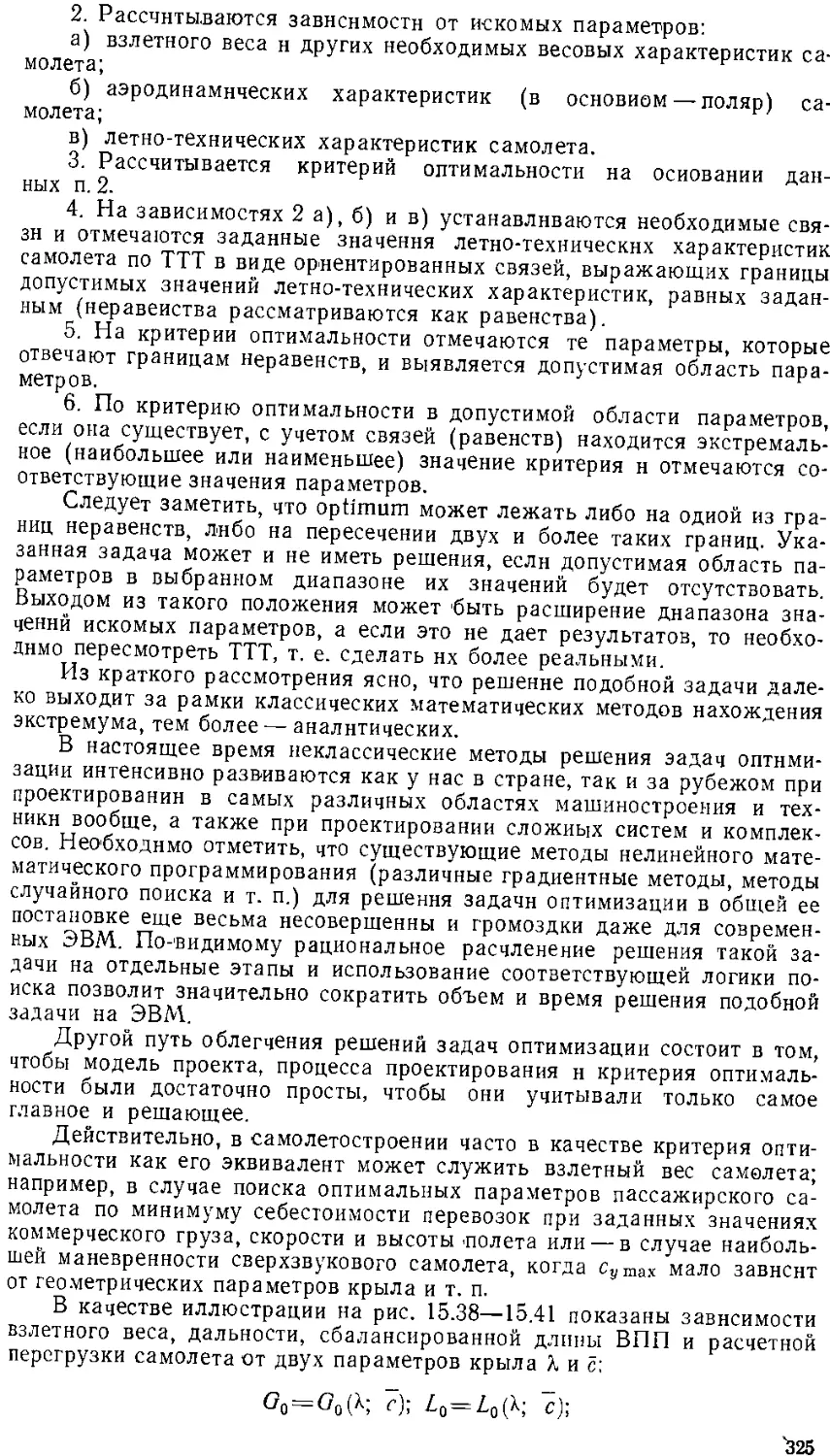
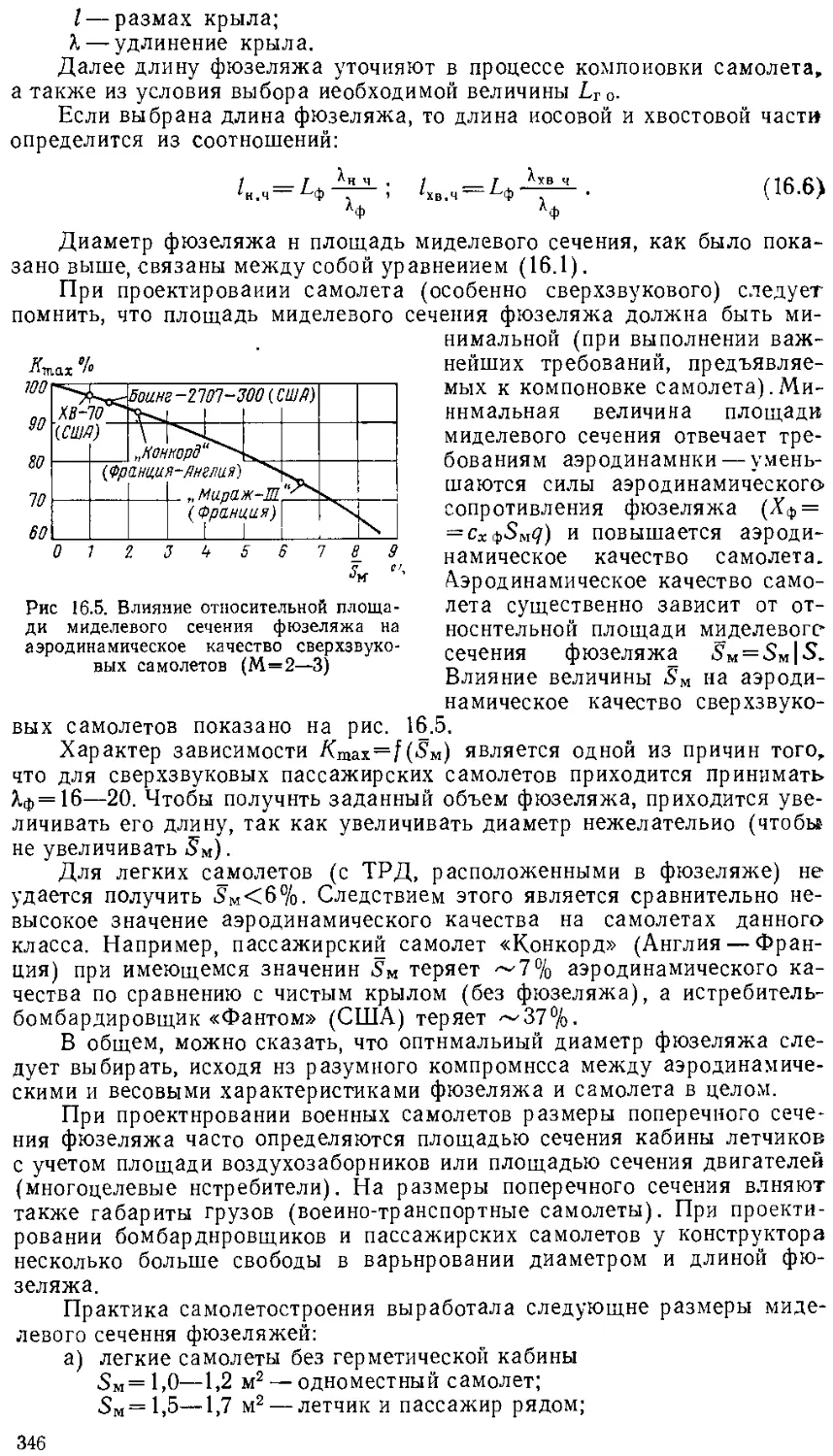
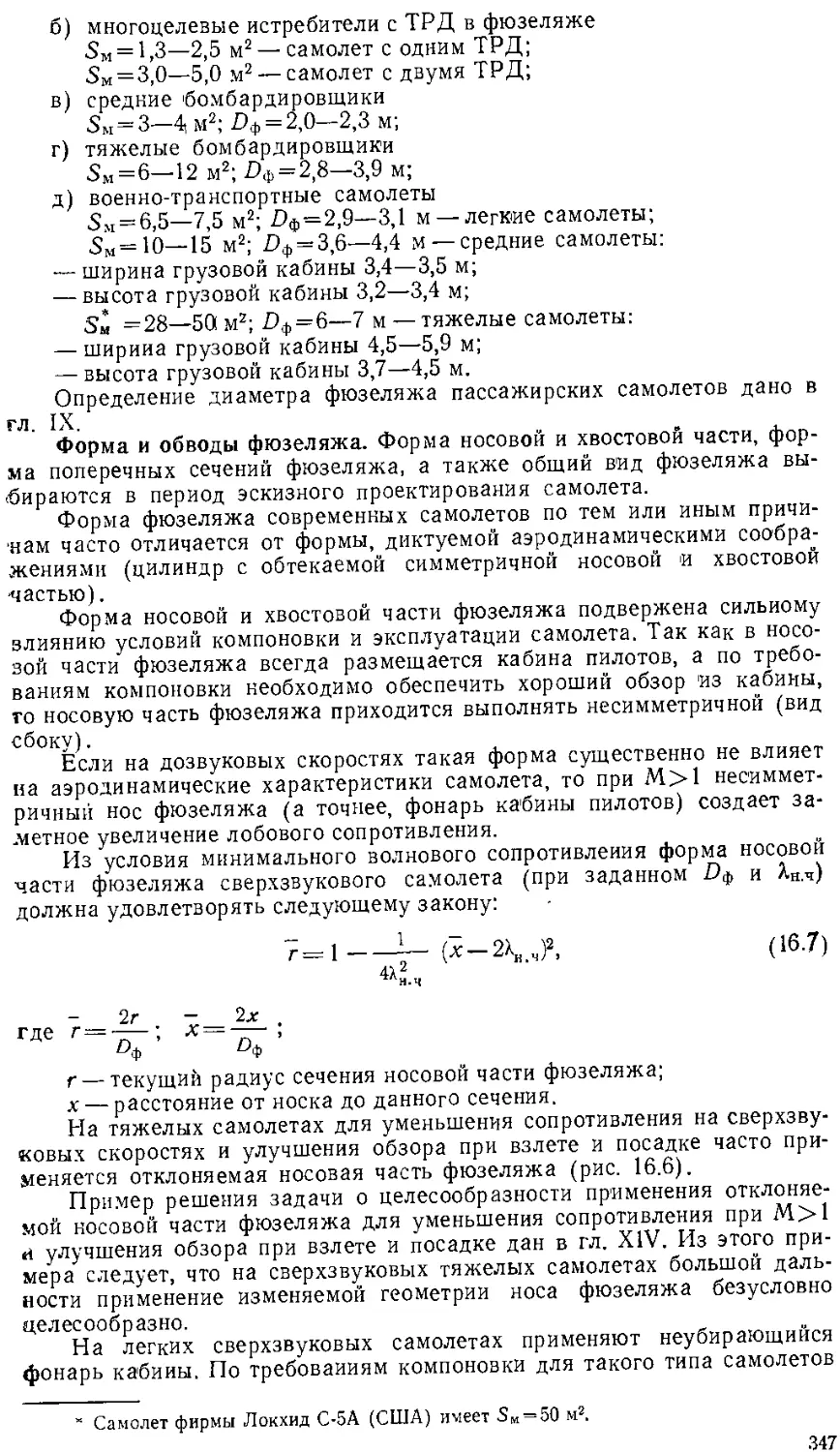
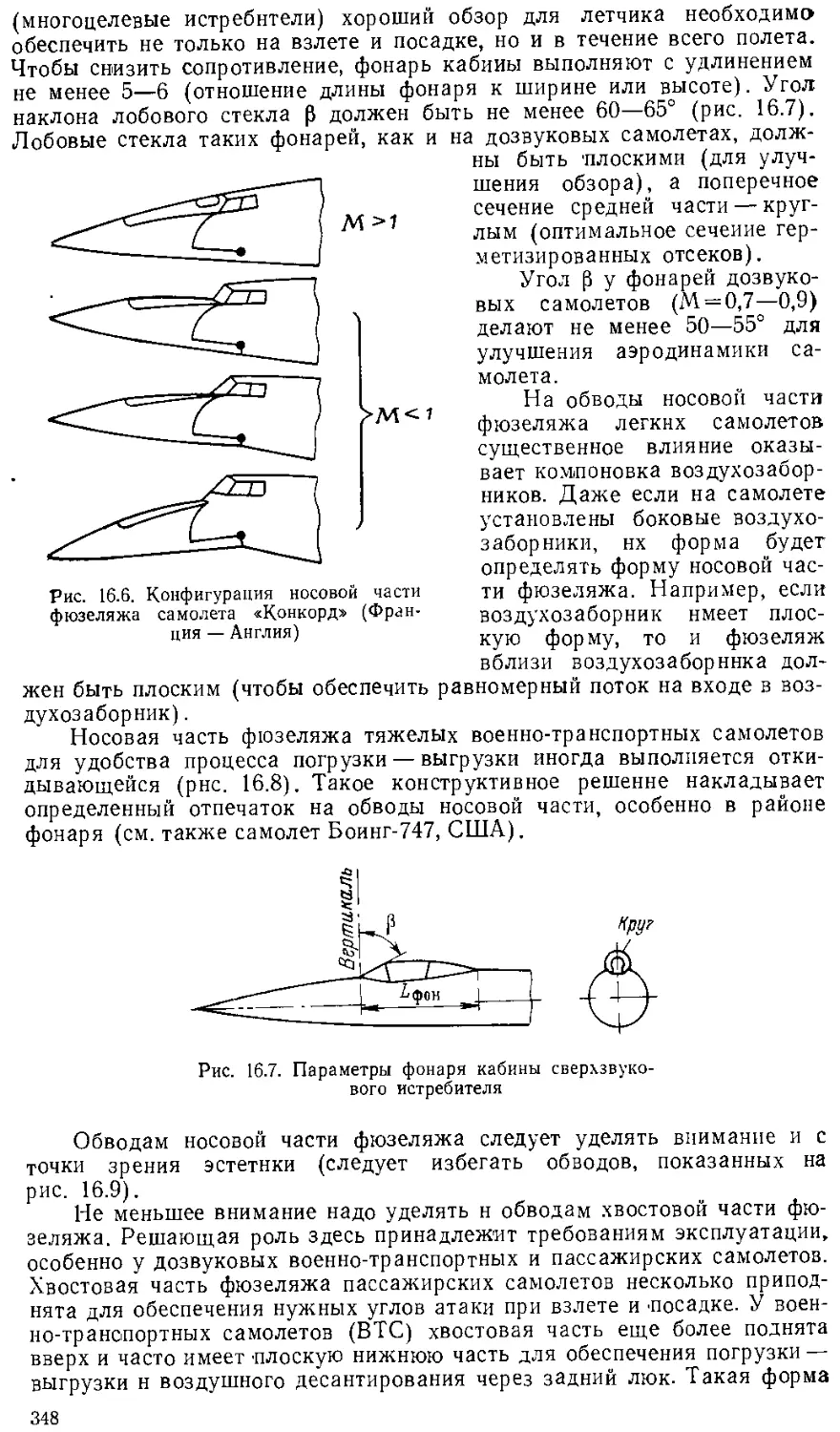
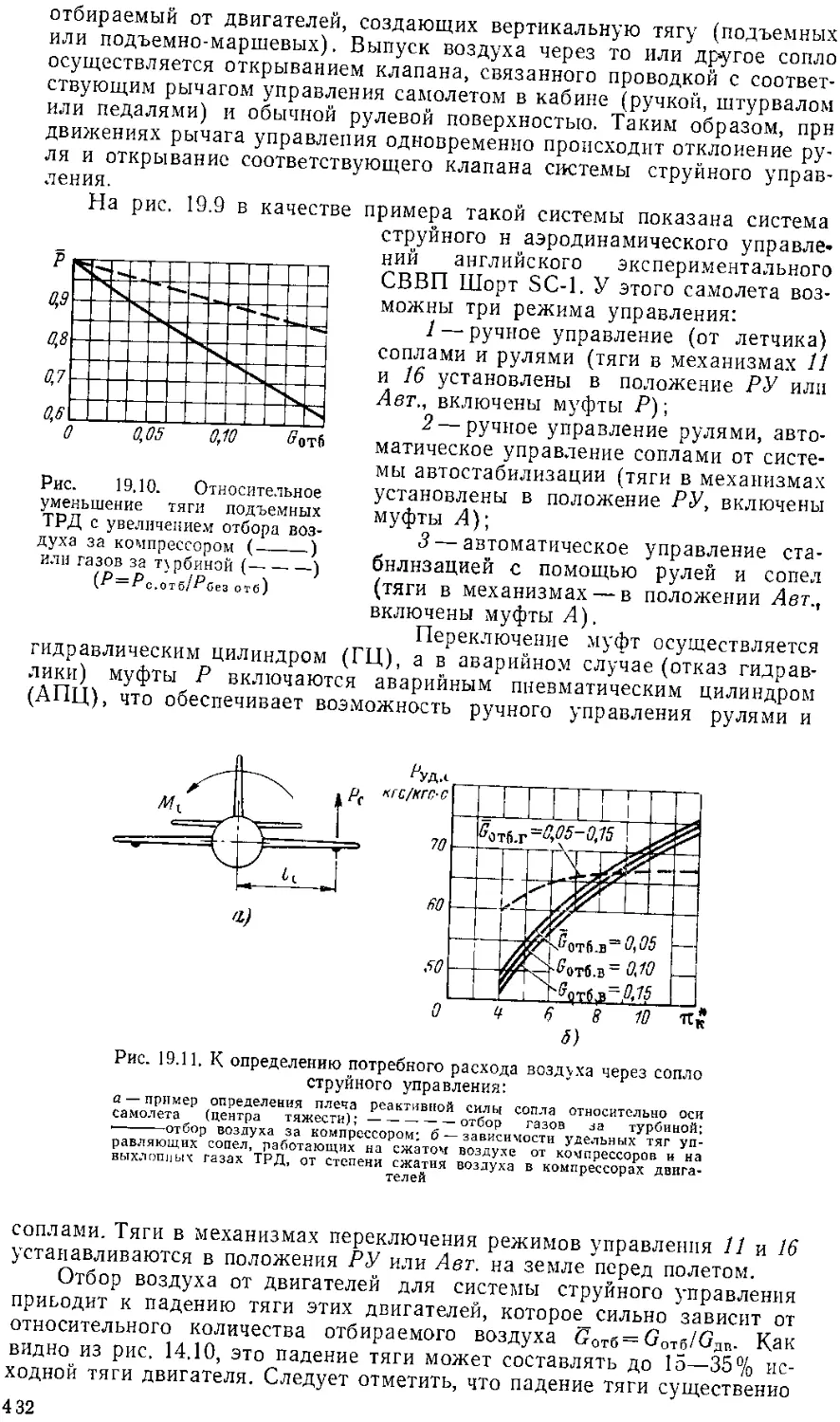
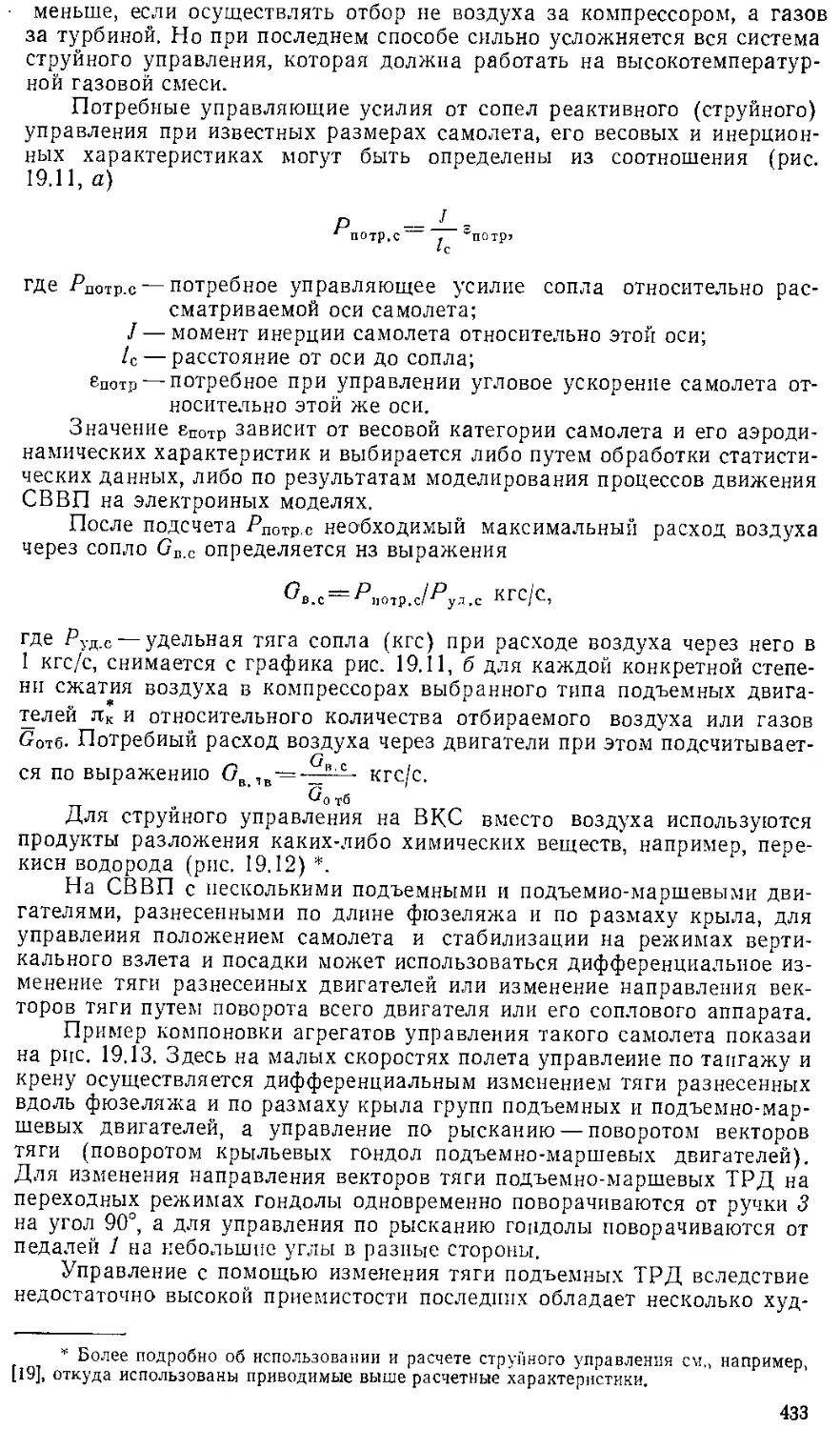
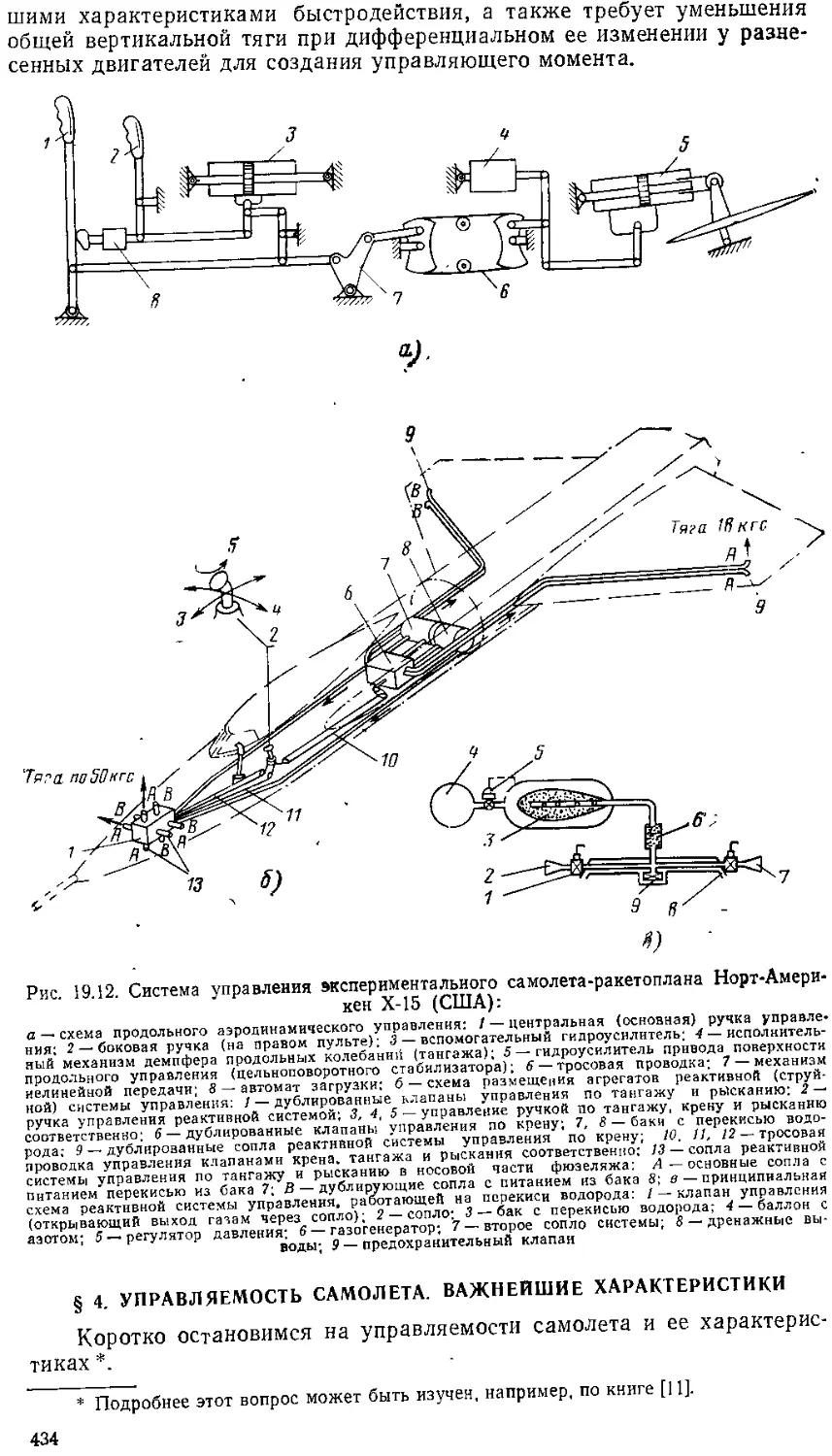
скоростей. Значения £ находим из графика £=£(М), тогда точки пере-
сечения кривых сх=сх(М) и Ср=ср(М) будут соответствовать скорости
полета М иа различных высотах Н. Теперь, зная М, можно для каждой
из взятых высот найти значения су по формуле
16ро
Д (аМ)2
и, следовательно, определить соответствующие им качества — .
Далее вычислим для ряда значений су величины — V и построим
кривую —V в зависимости от су (рис. 2.6) *. С помощью этой кривой
* На рис. 2.6 в качестве примера приведена кривая для гипотетического около-
звукового самолета.
34
определим коэффициент СуНв. которому соответствует
р» и
\ Сх /так
и при этом убедимся, ЧТО Су Нв opt.
Следовательно, в околозвуковой зоне наивыгоднейшим режимом
для полета (при H^const) будет режим максимального качества, т. е.
для достижения £Шах полет должен происходить прн
Если полет околозвукового самолета происходит на скорости, при
которой возникает довольно заметное волновое сопротивление, то ре-
жим при Су opt с полностью открытым дросселем нз-за резкого увеличе-
ния волнового сопротивления становится невыгодным и наибольшая
дальность получается при некотором дросселировании двигателей, боль-
шем, чем на крейсерском режиме.
Для сверхзвуковой зоны СуНв можно найти графическим методом
так же, как это описано выше.
Результаты определения по этому методу суяв показывают, что
максимум У") имеет место при
с1/ня— 0.73с, opt,
т. е. можно приближенно считать, что режим наибольшей дальности для
сверхзвукового самолета аналогичен режиму наибольшей дальности
дозвукового самолета. Допуская некоторую несущественную неточность,
можно при определении сверхзвукового самолета в первом при-
ближении принимать
СУ на — Opt.
Таким образом, будем полагать, что режим максимальной дально-
сти характеризуется как для дозвуковых, так и для сверхзвуковых са-
молетов с ТРД коэффициентами cvи сХНвв1.5 схо. Этим
значениям ив и схнв соответствует значение (—) •
\ Сх /Н8
(си\ 0,472
\ СХ /нВ *0
илн, так как Cyopt=l/ —,
• МЭ
_ 0,472 . (2.14)
\ сх /нв cxD0
Подставляя (2,14) в (2.9'), получим
г 4 1 0,472 «/ - < 1 /о ie\
•imax — 4,17 —. — Укрейс ’ (2.15)
Усх£)ь 1-Ст.крейс
ИЛИ
Л„а, =7,0 -----2_— 1П-------2----- ,
^Р<Ао 1^т.крейс
нлн
b-„=584-L- МУ* In-------------2----, (2.15')
• СРо сх0 Do 1 ^т.крейс
2*
35
где крейсерская скорость
ККреЯс=12,8 ]/—к“/ч (2-16)
' сха
Рис. 2.7. Зависимость отно-
сительной дальности £тах
от числа Мвв
МкрМс = 0,0121/^.
' СХй
(2.16')
Формулы (2.16) и (2.16х) могут быть
получены путем подстановки в (2.3) и
(2.3') значений сх нв — 1,6 СхО.
Используя расчетные или эксперимен-
тальные данные для ф, сро, сяо и Dq для за-
данного значения (7т.крейс, можно с помощью
формулы (2.15) получить зависимость Lmax
ОТ Мкрейс (Рис« 2-7)-
Дистанция разбега £разб при взлете
Дистанция разбега £разб выражается следующей формулой [13]:
отр
,. I С dV2
разб~ 2g - q
о Р-/-----ч- (cx-fce)
рп
(2.17)
Если принять тяговооруженность Р на разбеге неизменной и рав-
ной стартовой тяговооруженности Р = Ро, а выражение сх—fcy=Q ввиду
его малости, то интеграл (2.17) может быть вычислен аналитически в
виде
1 v2
г - 1 отр
р,зб_ к p0-f -
Так как величина скоростного напора при отрыве
pV2 у2
• _ г отр _ отр
~
а
то
и
или при форсаже
(2.17')
О,82ро
^разб"— —
СУ отр (^Оф /)
Зависимость летных характеристик от параметров самолета
Сх, Схо, Dq, Pq, ро 'И g
Рассматривая формулы (2.3), (2.3'), (2.4), (2.4'), (2.5), (2.7),
(2.16), (2.16'), (2.17), (2.17х), мы можем сделать вывод о том, что ве-
личины ОСНОВНЫХ ЛеТИЫХ Характеристик Vmax; Укрейс; ^-maxi Vy; Нпот;
36
1Разб зависит от следующих параметров и коэффициентов: сх и схо; ^о;
Ро, р и £.
Рассмотрим каждый из приведенных параметров и постараемся
установить, от каких факторов зависит их величина и каким образом
оии влинют иа основные летные характеристики самолета.
Коэффициент лобового сопротивления сх соответствует полному
аэродинамическому сопротивлению самолета X и может быть выражен
следующим образом:
X Хр 4- Ав.кр + Хоп + ^в.оп + + -^п.ф + Хт 4- -YB,r 4- Х[ 4- -^и
х — ~ gS ’
е q—скоростной напор набегающего потока;
Хр — сопротивление формы и трения крыла;
Хвкр — волновое сопротивление крыла;
A’qq — сопротивление формы и треиин оперении;
^в.оп— волновое сопротивление оперения;
Хф — сопротивление формы и трения фюзеляжа;
Яв.ф— волновое сопротивление фюзеляжа;
Х.т — сопротивление формы и трения гондол двигателей, гондол
шасси и т. д.;
Хвг — волновое сопротивление гондол двигателей, гондол шасси;
Xi— индуктивное сопротивление, т. е. сопротивление, зависящее
от угла атаки или су;
Хи — сопротивление интерференции, возникающее вследствие
взаимного влиянии крыла, фюзелнжа, оперении, гондол
двигателей при обтекании.
Пользуясь соответствующими безразмерными коэффициентами, за-
пишем коэффициент полного лобового сопротивлении самолета в сле-
дующем виде:
сх = схр~}~ сх В.1 р+(сх О1Т + СХ в он) 4“
S S
4~ ф 4" сх В.ф) 4“ (сх г + СХ п-г) 4“ Cxi 4* сх и»
где сло'п; Схв.оп — коэффициенты сопротивления, отнесенные к пло-
щади оперения Son;
схф\ схв.ф5 слг; схвг— коэффициенты сопротивлении, отнесенные к соот-
ветствующим площаднм миделя фюзелнжа 5м.ф
и гондол 5м.г.
Удобно длн анализа представить коэффициент полного лобового со-
противлении самолета сх в виде суммы двух коэффициентов схо и cxi, из
которых
с
С.гО = Схр4’ Сх„ кр4 <п 4“Са-« сп) “4"
4“ (Схф4"сх в ф) —4“ (Сх г 4“ Сх в г) —-—сх и
соответствует лобовому сопротивлению самолета, которое он имеет при
Су-0, a cXi=D0cy2 соответствует дополнительному лобовому сопротивле-
нию крыла, которое добавлнетсн при су^=0. Прн этом считается, что до-
полнительное сопротивление, понвляющеесн у оперении, фюзеляжа, гон-
дол в результате изменения угла атаки, пренебрежимо мало.
Таким образом, коэффициент лобового сопротивлении самолета сх
можно с достаточным приближением рассматривать состоящим из двух
частей ex = Cxo4-Cxi.
37
Из аэродинамики известно, что полное лобовое аэродинамическое
сопротивление самолета изменяется по числу М как по своей суммарной
величине, так и по соотношению между составляющими отдельных ви-
дов сопротивлений: формы, трения, волнового, интерференции и индук-
тивного.
На графике рис. 2.8 показан характер изменения коэффициента сх
в зависимости от числа М у самолетов с различными формами (на гра-
фике каждой величине сх соответствует свое значение су= —. Весь
Я
диапазон скоростей современного самолета в зависимости от характера
изменения сх может быть разбит на три зоны: первая (от М = 0 до М =
=Мкрит)—дозвуковая, вторая (от Мнри1 до М~1,2)—околозвуковая,
третья (отМ=1,2 доМ = 5) —сверхзвуковая.
Рассмотрим, как изменяется соотношение между составляющими сх
в каждой из вышеуказанных зон.
Рис. 2.8. Изменение сх самолета в за-
висимости от числа М
I — дозвуковой самолет. 2— сверхзвуковой
самолет с закругленным носком крыла,
3— сверхзвуковой самолет с заостренным
носком крыла
Рис. 2.9. Характер изменения составляющих
коэффициента полного лобового сопротивле-
ний самолета в зависимости от числа М для
средних высот (ЯайОООО м, />=250 кгс/м2,
А=3,2):
! — индуктивное сопротивление, зависящее от
размаха; 2 — сопротивление формы и волновое
сопротивление, 3~ сопротивление трения
В первой, дозвуковой, зоне лобовое сопротивление, не зависящее от
угла атаки крыла, которому соответствует коэффициент схо, включает в
себя: сопротивление формы, трения, сопротивление интерференции.
К этому сопротивлению добавляется сопротивление индуктивное, завися-
щее от угла атаки i(ot су), которому соответствует коэффициент сХ1:
П C^—D р2 - 256/12
и у дЪ (аМрклк
Из этой формулы видно, что при заданных величинах р, А и Д с умень-
шением М cxi значительно увеличивается (рис. 2.9). Из сопротивлений,
которым соответствует схо, большую величину в этой зоне имеет сопро-
тивление трения. Поэтому для нескоростных самолетов, обладающих
максимальной скоростью в первой зоне, для уменьшения сх следует при-
менять крылья с довольно большим удлинением А и принимать умерен-
ные удельные нагрузки на крыло. Для уменьшения сопротивления трения
для подобных самолетов целесообразно применение таких форм его
частей, при которых обеспечивалась бы малая величина отрицательных
градиентов давления на поверхностях, обтекаемых потоком. Последнее
обстоятельство способствует сохранению ламинарного пограничного слоя
на больших участках поверхности обтекаемых тел и, следовательно, при-
водит к уменьшению сопротивления трения. Для этого необходимо при-
менение ламинаризированных профилей крыльев и ламинаризнрованных
38
обводов фюзеляжей и гондол. Однако следует помнить, что для ламина-
ризированных профилей характерны пониженные значения сутах, поэто-
му выигрыш в сопротивлении трения может быть значительно снижен
вследствие необходимости увеличения S для удовлетворения требований,
предъявляемых к взлетно-посадочным характеристикам.
Во второй, околозвуковой, зоне сопротивление, которому соответст-
вует коэффициент сх0, прн достижении числа М, называемого критиче-
ским Мирит вследствие возникновения и бурного роста волнового сопро-
тивления, резко увеличивается (см. рис. 2.8). Для дозвукового самолета
Рис. 2 10. Форма крыла в плане, его профиля и форма фюзеляжа, применяю-
щиеся на околозвуковых самолетах (MasI,0):
а — стреловидное крыло, б — трапециевидное крыло малого удлинения, в — треугольное
крыло малого удлинения, г — фюзеляж с большим удлинением; д — профиль крыла (ла-
минарный), относительная толщина с=0,10
с дозвуковыми формами крыла, фюзеляжа, гондол и оперения такое
увеличение может быть в десять и более раз. Увеличение сопротивления
происходит довольно резко, поэтому явление получило характерное наз-
вание «звуковой барьер». Для самолетов, величина максимальной ско-
рости которых находится во второй зоне, целесообразно применение
форм, способствующих уменьшению роста волнового сопротивления
(рис. 2.10), т. е. стреловидных крыльев и оперения, крыльев и оперения
малого удлинения (при М>1), особенно треугольной формы в плане, а
также применение для крыльев и оперения профилей с небольшой отно-
сительной толщиной (с = 0,06—0,08) и с малой вогнутостью и фюзеля-
жей с большим удлинением.
НП
в) г)
Рис. 2.11. Формы профилей крыла (а, б и в) и фюзеляжа (г), це-
лесообразные для сверхзвуковых скоростей (М^ 1,5)
Применение этих форм может обеспечить сравнительно небольшую
величину приращения Асхтах (см, рис. 2.8).
В третьей, сверхзвуковой, зоне волновое сопротивление, вызываемое
головными скачками уплотнения, составляет значительную долю в пол-
ном сопротивлении самолета, которому соответствует cx~cxo + cxi. При-
дание частям самолета — крылу, фюзеляжу, оперению и т. д. — особых
сверхзвуковых форм, обеспечивающих возникновение косых головных
скачков, т. е. применение тонких профилей крыла и оперения (с = 0,03—
0,05) с заостренными передними кромками, обводов фюзеляжей с остро-
конечной, сильно вытянутой носовой частью и большим удлинением
и т. п. (рис. 2.11) существенно снижает волновое сопротивление самоле-
39
та. Одиако следует учитывать, что профили крыла с острыми передними
кромками обладают неудовлетворительными свойствами в отношении
посадочных характеристик самолета и потому применять их без специ-
альной механизации крыла (отклоняемые носки) не следует. В сверхзву-
ковой зоне относительно велико сопротивление трения, на величину ко-
торого, как известно, влияет гладкость обтекаемой поверхности тела и
потому крылья и фюзеляж сверхзвукового самолета должны иметь воз-
можно меньшую шероховатость поверхности. Для сверхзвуковых само-
летов целесообразно применение крыльев малого удлинения (Л<2,5),
ибо последнее на сверхзвуковых самолетах играет в увеличении cXi не-
значительную роль. С другой стороны, крылья такого типа позволяют в
сверхзвуковом диапазоне снизить волновое сопротивление. Учитывая при
проектировании влияние на величину сх и сх0 рассмотренных выше фак-
торов, конструктор должен помнить также, что величина схо зависит от
удельной нагрузки на крыло ро. Предположим, что спроектированы со-
вершенно подобные самолеты одного и того же веса Go, но с разными
по площади крыльями (Go=const; SKP=var). Площади мнделевых сече-
ний фюзеляжа и гондол двигателей (5м.ф и SM.r) будут одинаковыми, а
отношения площадей опереиня и площади их крыльев постоянны
Son/S = const.
Можно также принять, что
Cx.n + Cf ..on = = const
Сх р + сх в.кр
И Сх ф 4" Сх в.ф == Сх г н-г‘
Кроме того, для подобных самолетов справедливо равенство
^м.ф . ^м. г Ро PQ
S ' S ~~ Gq IStt — Al ’
где SSM — сумма площадей мнделевых сечений фюзеляжа и гоидол дви-
гателей
4,=-^.
25м
Тогда, полагая
1-Н^=- = *о
и пренебрегая коэффициентом схи, можем иапнсать
= ^0 “Ь (*-х ф гхв.ф)“^ •
Для дозвуковых скоростей (схв.Кр=0; сХв.ф=0) будет применима сле-
дующая формула:
Схо = ^ + слф^*, (2.18)
а для сверхзвуковых скоростей может быть использована приближенная
формула
с^б.Оу + (2.18')
И М2— 1
где сХф = сх ф Сх в .ф‘
* В практике предварительного (эскизного) проектирования сх<з определяется или
расчетом по приближенным методам, или из продувок сходных по схеме самолетов.
40
На основании формул (2.18) и (2.18') можно судить о'влиянии на
Схо удельной нагрузки на крыло ро- Формула (2.18х) дает представление
о значительном влиянии иа величину cxq на сверхзвуковых скоростях от-
носительной толщины профиля крыла с, которая входит в формулу во
второй степени.
Вторым коэффициентом, характеризующим аэродинамические свой-
ства самолета, является коэффициент Do, входящий в формулу, доста-
точно точную для летного диапазона скоростей самолета
сх ~ сл0 4" Dfjpy — С г0 “Ь •
Величина Do зависит от различных факторов в зависимости от того, к
какой зоне относится скорость проектируемого самолета. В первой зоне
(дозвуковой) коэффициент Го* равен
где ^2=1,02 для трапециевидных крыльев с удлинением А>3;
^2= 1,6 для треугольных крыльев с удлинением /.~2.
Следовательно, как уже было отмечено выше, для самолетов, ско-
рости которых могут быть отнесены к первой зоне, должны применяться
средине (Х=4—7) и большие (% = 7—12) удлинения крыльев. Особенно
важно применение больших X для самолетов с большой дальностью по-
лета.
В сверхзвуковой, третьей, зоне коэффициент может быть выра-
жен так:
O0=0,25S0V М2-1.
Коэффициент Во выражается следующими формулами:
для прямого трапециевидного крыла
2Х ]/М2— 1
для треугольного крыла со сверхзвуковыми передними кромками
£о=1;
, для треугольного крыла с дозвуковыми кромками
л V]/M2 — 1 1-8 J
Таким образом, Do на дозвуковых и околозвуковых скоростях
(М<1) выражает зависимость аэродинамического сопротивления при
су=0 от формы крыла в плане (X и т|), а на сверхзвуковых скоростях —
от формы крыла в плане и скорости (М). Следовательно, конструктор
может добиться уменьшения схо н Do путем отработки аэродинамической
формы крыла, фюзеляжа, оперения самолета. При этом, как мы видели
выше, для каждого диапазона скоростей характерны особые формы про-
филей, крыла в плане, фюзеляжа и т. д. Уменьшение же сх0 и DQ (при
неизменных значениях других параметров), как следует из рассмотрения
формул (2.3); (2.3'); (2.5); (2.6); (2.15); (2.15'); (2.16); (2.16'), приво-
дит к улучшению летных характеристик самолета
V max (Л4тах); Vhpeftc (Л4крейс); от» V^max, Z-max-
* Напомним, что Do = 1/с*.
41
Следующим параметром, значительно влияющим на все основные
летные характеристики, является тяговооруженность
Go
или рассматриваемая при проектировании стартовая (для ТРД) или
начальная (ПВРД) тяговооруженность
Р„=-р-. (2.19)
Легко видеть, что выражение (2.19) имеет определенный смысл толь-
ко в том случае, если определены и Ро и Go. При проектировании же са-
молета эти величины должны быть найдены, причем задача осложняется
тем, что Gq оказывается величиной, зависимой от Ро, а Ро, в свою оче-
редь, зависит от Gq. Таким образом, для проектируемого самолета опре-
делить Ро по формуле (2.19) невозможно. Если выразить Ро, воспользо-
вавшись формулами (2.3') и (2.16'), тогда '
— 4650М^ахсх
^Оп ------ёТ ’
- _ 6950М=рейЛ11
‘ oil — .
(2.20)
(2.20')
будут определять те значения тяговооруженности, которые потребныдля
получения соответственно заданных Мтах и МКрейс при заданных сх; схо;
ро и Тяговооруженность, выраженную (2.20) и (2.20'), будем называть
потребной тяговооруженностью. Определив величину потребной тягово-
оружеиности Роп, обеспечивающей заданную величину А1тах или Мкрейс,
конструктор должен хорошо знать пути, которые приводят к равенству
Роп и тяговооруженности «располагаемой» Рор, т. е. тяговооруженности,
которую возможно практически обеспечить при принятых значениях па-
раметров самолета и силовой установки и при заданной ^прочности
конструкции. Обеспечение равенства значения Pop значению РОп и явля-
ется одной из основных задач проектирования самолета, которую конст-
руктор в конечном итоге должен решить в процессе проектирования. Что-
бы зиать, каким образом можно повлиять на величину_РоР, нужно выяс-
нить зависимость располагаемой тяговооруженности Pop от различных
параметров, для чего воспользуемся уравнением относительных весов
самолета
GK + Gcy + GT + Gc3r='l.
Получим для второго и третьего членов левой части уравнения Gc.y
и GT выражения, устанавливающие их зависимость от различных пара-
метров.
Для Gc,y следует из определения
(2.21)
G^y
где г0=-------удельный вес силовой установки самолета (отнесенный к
Ро
стартовой тяге Ро). _
Для относительного веса топлива Ст можно получить зависимость
от параметров следующим образом. Полиый_ запас топлива на самолете,
которому соответствует относительный вес Gt, состоит: из топлива, рас-
ходуемого в крейсерском полете GT.Kpettc, топлива, потребного на рулеж-
42
ку, разбег, взлет, подъем и посадку GT.n, топлива, потребного на разгон
бт.р и навигационного запаса GT,H,3. Следовательно, полный запас
От = Сткрейс+ °т.п+ °т.р+ Оти.з-
Переходя к относительным весам, будем иметь
GT=GT.hpeftc + + 4-GT.H,3.
Для самолетов с ТРД и ПВРД относительный вес топлива, расходуемого
на крейсерский полет (прн заданной Lmax). получим, решая уравнение
__^тах
(2.15) относительно ёт.крейс: <Л.ьрейс=1 — е А ,
где
. _ Л 1 -•/ -тт 1 584Мкрейс
А =7,0 -----1 -----—г==----------------
^р° сХо V Dq фср0)/сХо/?0
или по линеаризированной формуле (замена логарифмической кривой
двумя прямыми)
n, - ^max VcxoD0 .
^т.крейс — *^р0 --П--------1"И’
мкрейс
где и—'Коэффициент, зависящий от значений £т.крейс; # = 0,00145 и и=
= 0 при Ст.крейс^ОД # = 0,00100 И U = 0,09 при 0,5>^т.крейс>0,3.
При заданной продолжительности полета f будет действительна фор-
мула (для Н, соответствующего д) От.Крейс=^#>оД^- Зная От.Крейс, мож-
но определить далее GT „, От р и GT н,э. GT.n = 0,0009//крейс, где //крейс
определяют, найдя
/ 1,76/^
Прн больших числах М^2 относительный вес запаса топлива, по-
требного на разгон GT.P, определяется по формуле
vt
— — 1 с dV
где е=—\ -----------— ,
г г F Р ______ р
° У ‘ расп “пот
а Л соответствует высоте разгона. Для самолетов дозвуковых и около-
звуковых (7Т.р очень мало и может не учитываться.
Относительный вес навигационного запаса топлива определяется по
приближенной формуле [30]
б1н з=0,10От.крейс (Для военных самолетов);
GT.H.3==(0,15—0,20)От.|(рейс (для пассажирских самолетов).
Таким образом, для относительного веса топлива на самолете GT
могут быть записаны следующие формулы.
Если задана дальность полета, то
__ f __________^шах\
OT = S\l-e A (2.22)
где 5=1,1; и = О,ООО9Якрейс + '(ср^Р0Д/' (если Мкрейс>2,0);
5=1,15-1,2; и = 0,0009Якрейс (если Мкрейс<2,0).
43
Если От.крейс < 0,5, то
О, = 5/?<„0 4-и, (2.23)
Мкрейс
где 5 = 1,1; и=0,О009Нкр.йс+фср0ЕР0Д/' (если От.крейс<0,3 и М„рсйс>2,0);
5=1,15—1,2; и=0,0009/7кр!Яс (если От.кр.йс <0,3 и М,1рейс <2,0);
и=О,ООО9Нкрейс + '(1Ср0?РоД1'4-0,09 (если От.крейс>0,3 и М.рейс>2,0);
/г = 0,0009//|р..,,с J-0,09 (если От.,1рейс > 0,3 и Мкрсйс<2,0).
Если задана продолжительность полета f, то
(7г = 5гЦР оДСро^ 4"и, (2.23')
где 5 = 1,1; и = 0,0009 Я|[рейс.
Для самолетов с ТВД можно применять формулу
Gr = 0,000575imaxc, р/(2.23")
где S= 1,15—1,2.
Используя формулы (2.21), (2.23) и (2.23') и уравнение относитель-
ных весов,_получим следующие формулы для располагаемой тяговоору-
женности РОр:
если задана продолжительность полета t', то
и если задана дальность полета Lmax, то
1—О, —Gc,.,r___1_ Г SR^cmLma у с^До
г0 Гр L Мер
(2.24')
Эти формулы дают ясное представление о зависимости располагаемой
тяговооруженности Pop от ряда конструктивных параметров.
Для определения количественного влияния изменения того или дру-
гого параметра на располагаемую тяговооруженность Pop могут быть ис-
пользованы следующие формулы:
1 — Ок I — ог
р р 1 — b3GT , р' Ро
Ро — "о ---Z— , Ро — —----- ,
I — От 1+Осу(ч_1)
СРО ^тах Г0
где • 61 = —; £2 ——г3^=-------------; £4 = —;
, GK ср0 ^-тах г0
Ро — новое значение /%, получаемое, если О( увеличить на ДОГ
Если увеличить тяговооруженность Ро путем установки на самолете
двух двигателей вместо одного, то при Lmax = const
С?еЭГ = const и ^ = 8^;
р' __ 1 — (<?ке1 +<?т)
0,5Сс.а.г
_ + г0Е4
Ро
44
Вышеприведенные формулы легко могут быть получены из уравне-
ния относительных весов, которое мы напишем в отвлеченном виде
+^2+&з+£4 = 1; если увеличить на то G2', (h и G4 изменятся и
уравнение запишется так:
ох + 02 + 63 + 04= 1-
Тогда
Gi=o,. Л. ; до,= ,
\ 1-Gj / ‘ 1-Gj
а Оо = О0-----.
AGi
1 —---+"
I -Gj
Полагая, что Р'-=Р, получим
А5=А (1- ++).
или вообще
Р'о = рА 1---^+).
\ 1 —G//
Рассматривая формулы (2.24) и (2.24'), можно сделать заключение,
что равенство тяговооруженности располагаемой Pop и тяговооруженнос-
ти потребной Роп при данных значениях всех прочих параметров, входя-
щих в указанные формулы, возможно лишь при одном определенном
потребном значении относительного веса конструкции самолета бгк.п, вы-
раженне для которого получим из формул (2.24) и (2.24'):
6К.П = 1 — 6С.Э г — GOp (r0 + ),
’или
Ок.„ = 1 -Ос,г-Р0рг0 -- -У-"0-0- -U.
Мкр
Если самолет с данными параметрами и характеристиками осущест-
вить возможно, то тогда будет удовлетворяться равенство
По формулам (2.20) и (2.20') можем найти величину относительного ве-
са конструкции С?к.п> потребную для обеспечения заданных величин
Мтах, А1кр и Lmax при заданных параметрах схо, Ро, Сро и прочих,
Ок.„= 1 - Ос , г - (г„ + ; (2.25)
прн заданном времени tr полета или
= (2.25')
ZPO Л1кр
при заданной Дтах-
45
Располагаемый относительный вес конструкции <?к.р может быть вы-
ражен приближенно формулой (2.26) для самолетов с прямым нли стре-
ловидным крылом большого или среднего удлинения
Ок'=(0,027^ — 1/ —+—1(1+?1Ч"Ч-?2) + 0,065 (2.26)
COS х у Ро Ро /
или для самолетов с треугольным крылом малого удлинения
GKr=(o,049w«40o2]/ —4-^(1+?iX*m+₽2)+0,065. (2.26')
\ У ро Ро '
Здесь (p=l—^-~-\2181GT-p22e2Oc „) —коэффициент разгрузки крыла,
1+2
где л — сужение крыла;
81 —доля топлива, располагаемого в крыле;
zi — относительная, в долях полуразмаха, координата
центра тяжести топлива в крыле (относительно оси
симметрии самолета);
62 — доля веса силовой установки в крыле;
Z2 — относительная координата в долях полуразмаха
ц. т. силовой установки;
— коэффициент утяжеления конструкции самолета
вследствие учета кинетического нагрева;
8 — отношение веса силовых нагруженных в полете эле-
ментов к весу всей конструкции самолета (в первом
приближении можно принимать е = 0,5);
«т
Т — отношение пределов текучести при нормальной тем-
пературе и при кинетическом нагреве;
Па —коэффициент расчетной перегрузки;
Go — полный вес самолета тв тс;
₽1 = 0,07—0,09 —для сверхзвуковых самолетов;
01=0,065—0,08 — для тяжелых дозвуковых и околозвуковых само-
— летев;
pi = 0,08—0,115 — для околозвуковых транспортных самолетов;
т = 1 —для сверхзвуковых самолетов;
т—1,2—1,3 —для дозвуковых и околозвуковых самолетов;
02 = 0,27 —для сверхзвуковых самолетов;
02=0,15 — для дозвуковых и околозвуковых самолетов;
Аф — удлинение фюзеляжа.
Для самолетов определенного типа и с известной разгрузкой крыла
может быть применена приближенная упрощенная формула (2.26")
+ 0,065, (2.26")
Ро/2
где Go — в тс;
0 = 1,6 —для истребителей;
0=0,7—0,8 —для пассажирских самолетов с двумя ТВД с разгруз-
кой крыла;
0 = 0,4—0,5 —для пассажирских самолетов с четырьмя ТВД с боль-
шой разгрузкой крыла*;
* Большая разгрузка — разгрузка крыла большим количеством грузов (двигатели,
топливо). Большой разгрузке соответствует малое значение коэффициента разгрузки ф.
46
0 = 0,55 —для пассажирских самолетов с двумя ТРД с разгруз-
кой крыла только топливом;
0=0,35 —для пассажирских самолетов с четырьмя ТРД с боль-
шой разгрузкой крыла;
р = 0,35 —для носителей с четырьмя ТРД с большой разгрузкой
крыла. -
Очевидно, конструктор в процессе проектирования, выбирая те или
иные величины параметров, входящих в формулы (2.26), (2.26'), может
добиться равенства располагаемого относительного веса конструкции
£ьр потребной величине GK.n, тем самым успешно решив основную зада-
чу проектирования.
Рассмотрим как влияет увеличение тяговооружениости Ро на основ-
ные летные характеристики Итак (Мтах); ^кр(Мьр); //пот; Z-maxl Vy max
И ^-разб*
Воспользуемся формулой (2.20) для построения графика зависимос-
ти Мтах от Ро. Так как при увеличении Ро коэффициенты сх и g вследст-
вие изменения М будут изменяться, то, задаваясь графическими или рас-
Рис. 2.12. Изменение мак-
симальной скорости по-
лета, соответствующей
числу Мщах самолета с
ТРД в зависимости от
стартовой тяговооружен-
ности Ро (Н= 11 000 м)
тяговооружениости Рп
четными значениями Мтах, для каждого значения Мтах будем получать
сх и g. Подставляя эти значения в (2.20), найдем соответствующие_зна-
чения Ро и в результате построим график зависимости Мтах от Ро по
формуле (2.12). Мы видим, что при увеличении Ро величина Мтах неук-
лонно растет. То же самое можно получить и для М1чрейс. Используя фор-
мулу (2.5), зависимость относительной плотности воздуха от высоты Н
и учитывая, что полет иа потолке происходит иа максимальном качест-
ве Ктах, для которого
<\=2с_г0,
мы можем построить график зависимости Нпотот Ро. Для этого, написав
формулу (2.20) для случая полета со скоростью, соответствующей числу
М иа потолке,
— 4650М2-2си 9300М2си
р _____________±2___________
0 еро еро’ ’
задаваясь рядом значений М, определяя для каждого значения расчетом
или по графикам
^х0 = /(М); $ = /(М) и £>0 —/(М)
47
и, подставив эти значения в формулу (2.5), получим данные для графика
Haoi=f(PQ\
из которого видно, что по мере возрастания Ро потолок ЯПот самолета
увеличивается (рис. 2.13).
На величину Lmax тяговооруженность Ро влияет через Мкрейс. Под-
ставляя в формулу (2.15') значения MKpeec = f(Po) и соответствующие
значения сх0, Dq и ф, можно получить график £max=f(Po) (см. рис. 2.7),
из которого видно, что дальность Lmax сначала увеличивается, а затем
при появлении волнового сопротивления (иа околозвуковых скоростях)
начинает резко уменьшаться, при дальнейшем же росте Ро опять начина-
ет расти до какого-то предела.
Аналогичным путем легко прийти к заключению, что_Уутах с увели-
чением Ро растет, а длина разбега Lpa36 при увеличении Ро уменьшается.
Величину параметра конструктор обычно выбирает в начале проектиро-
вания на основании общих соображений или специальных расчетов. Этот
размерно-весовой параметр оказывает сложное влияние иа основные
летные характеристики как непосредственно, входя в формулу, опреде-
ляющую величину характеристики, так и через другие параметры (Ро
И Схо)•
Рассмотрим, сначала, какое влияние оказывает иепосредствеиио из-
менение ро на приведенные выше летиые характеристики самолета без
учета влияния этого изменения иа другие его параметры (Ро, с«о).
Исходя из зависимостей, выражаемых формулами (2.18) и (2.19),
можно написать
= + + (2.27)
Разделив обе части (2.27) иа су — —, получим выражение для по-
Я
требиой тяговооружеииостн
+ -«о— , (2.28)
Ро * q
ГДе £ Схо.. + Сг..»п ,
5 схр + сх
откуда
Ро4" “7“ — =
Do \ k /
ИЛИ
й = (2-29)
2£>о V k ' у 4Z?o \ А / £>0
Пользуясь формулой (2.29), можно построить график зависимости
q нли М по ро при условии независимости Ро от ро (т. е. при 5’K = const
с измеиеиием ро) (см. рис. 2.14, 2.15). Кривые дают возможность сде-
лать следующие выводы:
1) увеличение ро ведет к росту М (нли р) *, но до некоторого преде-
ла ро, который увеличивается по мере увеличения Ро;
2) с увеличением ро интенсивность роста М т. е. — или q
~п
уменьшается; по мере увеличения Ро ---- растет;
dpo
* Кроме специально оговоренных случаев, везде имеется в виду увеличение ро
при уменьшении S и co=const.
48
3) увеличение р_о до больших значений, близких ро (при заданной
тяговооружениости Ро), нерационально, так как при этом прирост М не-
велик, а чрезмерно большие значения ро могут привести к недопустимо-
му увеличению посадочной скорости Vnoc и дистанций разбега и пробега.
Влияние ро на тяговооруженность Ро сказывается следующим обра-
зом. При увеличении ро располагаемый относительный вес GK (см._(2.26),
(2.26'), (2.26")] уменьшается, располагаемая тяговооруженность Рор [см.
(2.24) и (2.24')] увеличивается, а ро сдвигается на большие значения и
интенсивность роста М (или q) увеличивается. Относительный вес Сс.э.г
при изменении на —AGK увеличится на Д0с.3.г— — О э г------г-.
1-GK
На потолок /Лот или на относительную плотность ДПот, соответствую-
щую потолку //пот, удельная нагрузка ро влияет через сх [см. (2.27)] и
Рис. 2.14. Влияние скоростного напо-
ра на величину р при различных ве-
личинах тяговооружениости Р в усло-
виях, когда волновое сопротивление
отсутствует (Х=4; схр — 0,007)
Рис. 2.15. Влияние ро на вели-
чину М при различных значе-
ниях тяговооружениости Р са-
молета (77=10000 м)
через Pop [см. (2.24) и (2.24')] вследствие влияния ро на (7К, входящего
в выражения (2.26) и (2.26'). Имея это в виду и анализируя формулу
(2-5)
можно сделать следующие выводы:
1) увеличение ро ведет к увеличению схо, так как
^о = А0с +с,ф^-.
Следовательно, у дозвуковых и околозвуковых самолетов потолок /Лот
с увеличением ро будет снижаться. Так как при увеличении ро относи-
тельный вес конструкции GI{ уменьшается и соответственно увеличивает-
ся располагаемая тяговооруженность Pop, то интенсивность уменьшения
потолка при увеличении ро будет невелика;
2) увеличение ро для сверхзвуковых самолетов приводит в некоторых
случаях к увеличению статического потолка /Лот- Происходит это по сле-
дующей причине. Скорость на потолке, т. е. прн ( —) , равна
\ Сх /max
^=11.1]/-^- нлн МП01=О.ОЮ4]/^-.
Следовательно, увеличение ро прн неизменной тяговооружениости Ро и
при скоростях, соответствующих М>1,5, будет приводить к росту скоро-
сти на потолке Лот или МПОт (влияние на Лот увеличения схо, как пока-
49
зывают расчеты, меньше, чем влияние увеличения р0). Но с ростом ско-
рости (при М>1,5) будет увеличиваться до некоторого предела коэф-
фициент | зависимости тяги двигателя по скорости. Это увеличение при
М = 1,5—2,5 (а при форсировании ТРД и на больших М) будет столь
ощутимо, что
Аиот —
1,
iPo
при увеличении ро и, следовательно, росте сх0 все же будет уменьшаться,
потолок //„от будет при этом увеличиваться. При увеличении ро распола-
гаемый относительный вес конструкции GK будет, как мы уже видели,
уменьшаться, располагаемая Pop будет увеличиваться, а ДПот будет
уменьшаться, т. е. Нпот будет увеличиваться.
При возрастании ро увеличивается Vwmax—максимальная вертикаль-
ная скорость у земли. Это легко видеть из формулы
Vy max =1,53
/Ро (Р£)3
сх
Так как , то можно записать так: ----------— ,
ki сх0 kQ схф
—схр+‘т~
Ро *1
откуда видно, что при увеличении pQ дробь р0/сХв —увеличивается, т. е.
Vymax — увеличивается. V^max увеличивается и потому, что уменьшается
при этом Ок и, следовательно, растет располагаемая тяговооруженность
Ар-
Увеличение ро способствует росту Lmax- При этом возрастание Lmax
будет иметь место до некоторого довольно большого зиачеиия ро, после
которого дальность начнет уменьшаться. Для дозвукового и околозву-
кового самолетов в формуле
Z,„„=7,0 V -----------L—-1Л __L—
ФсрОЧо VM) 1—Gt
величины i|) и Do можно принять независящими от скорости (изме-
няются оии на околозвуковой скорости мало), тогда, очевидно, _Lmax
достигнет наибольшего значения при таком ро, при котором V Ро\сх0
достигнет своего максимального значения, а ——минимального зиа-
УРо
чеяия. Приравняв первую производную —по ро нулю и используя
У Ро
формулу (2.18), получим
Однако это решение не учитывает^ влияния ро на и, в итоге, на рас-
полагаемую тяговооружеииость Pop. Применяя графические способы,
можно найти ронв с учетом влияния р0 иа Ро.
Для сверхзвукового самолета величину роНв при полете на максималь-
ную дальность найдем графически, построив кривую функции Lmax-
584МК(!ейс 1
i-max==------- ' 1п ~
фСро У cxDo 1“GT
so
по аргументу ро- При этом следует учитывать, что входящие в формулу
величины Мкрейс, схо, Gt являются функциями ро, аф, схо, Ро изменяются
в зависимости от М.
Задавшись ро, Мкрейс и схо определим, используя формулы (2.26") и
(2.20'), располагаемое <?к.р
OK.p=fl-4^+—+ °,065,
а,
— 6950М2 йсс
потребную тяговооруженность РОп =---------,
£>о= О,25Во /м2-1
и Ос.у=Лг0-
При удовлетворительном решении задачи проектирования располагае-
мая тяговооруженность Pop будет равна потребной тяговооруженности
Роп, располагаемый относительный вес топлива будет
От.р= 1—Ок—Gc у—Ос э.г,
где значением Gc э г задаемся.
т т 584МкрейС 1
Тогда Атах =-------1п-----=— и рй будут служить координатами
ФСро/су.До 1-°т
первой точки кривой Z.max по Pq. Далее задаемся новым значением р'й
и, используя принятые и вычисленные выше значения для Ро; Ок; GT,
найдем
Й=ОКН дёк=₽1^1+4- + 0,065;
( Ро) Ро
м’ревс = 0,012]/
C^kaCxp-\-Cxi,^-, =
*1 1 - ок
где G’o = Go---.
t АО,
1-ок
Мкрейс находим графическим способом, построив
=/(М™йс. эаО и луч из начала координат под
Кривую Мкрейс. ист —
углом в 45° к осям.
При этом Мкрейс.зад—число М, которым мы задаемся, выбирая значения
мы получаем по формуле
и определив £)0, | и GT по
, а Мкрейс. ист — число м, которое
ДЛЯ Мррейс — 0,012
. Зная Мкрейс
о;
Ок-Ок\
-----—) , найдем для р->
1-Ок )
384М’
1
•'-max—--------- ~ 111--------—Г~ •
_______ Vc’x„D0
* По кривым £=»/(М) и c'xo=f(M), которые заданы или вычислены.
51
На рис. 2.16 приведена кривая, построенная таким способом. При
этом учитывалось увеличение (?к на больших числах М, получающееся
вследствие кинетического нагрева.
Как можно видеть по рис. 2.16, дальность по мере увеличения ро
все время растет вплоть до очень больших значений р0 (pOpt=900 кгс/м2).
Уменьшение дальности при дальнейшем увеличении ро снизано с паде-
нием коэффициента £.
Примечание. В практике проектирования дальних самолетов столь боль-
шие значения ро (ров9О0 кгс/м2) не применяются по следующим соображениям:
1) максимум Дтах=/(ро) очень пологий, т. е. /.шаг растет вблизи popt слабо;
2) очень большие значения ро ухудшают взлетно-посадочные характеристики
самолета.
Прн увеличении ро длина разбега £рааб увеличивается.
Рассматривая формулу (2.17')
г- _ 0,82рр
^разб — >
^отр (Po—f)
можно сказать следующее. При увеличении р0 увеличивается распола-
гаемая Pop вследствие уменьшения располагаемого Gv. Коэффициент ло-
бового сопротивления
+ сх ф + £>0 (у У
при увеличении Ро увеличивается, ибо po/^i — увеличивается, а ро(Я — см
остается неизменным, так как угол атаки самолета на разбеге зависит
только от геометрических параметров
шасси и остается неизменным.
Сопоставляя же формулы (2.17'),
(2.26) и (2.25'), нетрудно сделать вы-
вод, что при увеличении р0 знаменатель
дроби (2.17') растет медленнее, чем
числитель и, следовательно, Дразб уве-
личивается с увеличением ро.
Коэффициенты | и ф, характеризу-
ющие зависимость тяги и удельного
расхода топлива двигателя от скорости
полета, определяются выбранными па-
раметрами двигателя и практически,
при проектировании самолета под су-
ществующий двигатель, находятся вне
Рис. 2.16. Зависимость максималь-
ной дальности 1Шах от удельной
нагрузки ро с учетом влияния ро
на относительный вес конструкции
(p0=var; G«=var)
влияния конструктора самолета.
Из формул (2.3); (2.5); (2.6); (2.15') видно, что увеличение коэффи-
циента £ при неизменных значениях других параметров ведет к увеличе-
нию Мтах; Мкрейс; //пот; Kymax; /-max. Однако следует иметь в виду, что
рациональным значением | будет такое, которое прн заданных Мтах
или Мкрейс будет определяться по формуле
4650M2„,xCj или , ~ 6950МхрейесХо
РоРо РоРО
При этом должно соблюдаться условие
— O,82^o + ffipf
Pq — - -
*-разбс£ отреф
S3
где £ф——------коэффициент форсажа;
_? о
Л’оФ —тяговооруженность на взлете с форсажем;
Гразб—заданная дистанция разбега;
f— коэффициент трения.
Проведя преобразования в выражениях (2.25) и (2.25х), можно на-
писать для заданной продолжительности полета V
4650МтахСх (го -J- ')—(1 — GK — Gc e r) = 0 (2.31)
и для заданной дальности £.гаах
6950М.КрейсСхоГ0 — ^крейс^Ро (1" @с э г W)"F
(2.31')
Уравнения (2.31) и (2.31х) дают наглядное представление о зависи-
мости важнейшей летной характеристики самолета М от различных па-
раметров и позволяют определить то значение Mmax или Мкрейс, которое
практически возможно для самолета при заданных параметрах GKp, ССэг,
Ро, СхО, Сро, Го, i-max, I' И Т- Д.
Решая первое уравнение (2.31), получим для Мтах при заданной
продолжительности t'
Примечание. Для определения величины Мшах можно воспользоваться
таким графическим приемом. Задавшись несколькими значениями М, определяют
соответствующие им сх и ф. Последние величины подставляют в формулу (2.32)
и вычисляют значения Мтах. По выбранным значениям М и соответствующим
ческого решения уравне- решения уравнения (2.29')
ния (2.29)
им значениям М, вычисленным по формуле, строят кривую в координатах Мэад
и Мист (рис. 2.17), пересечение которой с прямой, проведенной из начала коорди-
нат под углом в 45°, даст искомое значение Мтах, Мзад и МВСт (все величины
должны быть взяты в одном масштабе).
Величину Мкрейс можно найти также, пользуясь графическим реше-
нием (рис. 2.18), взяв в качестве функций для построения кривых сле-
дующие:
6950МкрейССлог0 = 01;
МКрейЛРо (1 GK Qz э.г *— W)
S/?^f,maxCpQpQ Cx0/.)Q —92-
(2.33)
63
Точка пересечения этих кривых на графике в координатах М и 9i и 9г
определит искомое значение Мкрейс- При некоторых значениях величин
могут получиться три значения Мкрейс- При этом каждому из них будет
соответствовать свое значение тяговооружениости Ро, определяемое по-
р ___________________________ 6950М^ейссХо
Наличие нескольких решений объясняется сложностью функции
е = /(М); Ф = /(М); сХо = /(М).
Рассматривая уравнения (2.31) и (2.31'), нетрудно сделать важный
вывод, что заданную величину М можно получить лишь при определен-
ных комбинациях параметров, входящих в эти уравнения. Если пара-
метры при заданных величинах Мкреис и Lmax или г удовлетворяют урав-
нениям (2.31) и (2.31х), то реальное осуществление такого самолета воз-
можно. Если же уравнения не удовлетворяются, то проектируемый
самолетпрактически осуществить нельзя. Кроме этого, названные уравне-
ния выявляют непосредственное влияние на М таких параметров само-
лета, как (?к, го, сро и др. Все это говорит о большом значении уравнения
относительных весов самолета для установления закономерных зависи-
мостей между летными характеристиками и важнейшими параметрами
самолета.
В дальнейшем мы будем называть уравнения (2.31) и (2.31х) основ-
ными уравнениями проектируемого самолета.
На основании всего изложенного в этой главе можно сделать сле-
дующие выводы.
^Скорости Кщах и Ккрсйс (или числа Мтах и М^йс) увеличиваются»
если Ро при неизменных прочих параметрах увеличивается. Располагае-
мая тяговооруженность увеличивается при:
а) уменьшении удельного веса силовой установки Го;
б) уменьшении относительного веса конструкции самолета 6К.Р (рас-
полагаемого);
в) уменьшении удельного расхода топлива двигателем сРо (суще-
ственно для самолетов дальнего действия).
Следует, однако, помнить, что максимальная скорость самолета
Vmax иногда ограничивается не располагаемой тяговооруженностью Рор,
а допустимыми по соображениям прочности скоростным напором или
температурой кинетического нагрева.
2. Скорости КШах и Укрейс могут быть увеличены (при прочих рав-
ных условиях) .в результате увеличения удельной нагрузки на крыло ро»
но при этом нужно учитывать, что по мере увеличения ро интенсивность-
роста скорости У (или числа М) довольно резко снижается, а при зна-
чении ро рост У прекращается. Вместе с тем при очень больших Ро
существенно ухудшаются взлетно-посадочные характеристики самолета
(Упос, Уу, ^-разб И i-проб) •
3. Скорости Утах и Укрейс могут быть увеличены при уменьшении ко-
эффициента лобового сопротивления сх0. Способы уменьшения схо изме-
няются в зависимости от зоны скоростей (дозвуковой, околозвуковой»
сверхзвуковой).
4. Статический потолок самолета ЯПОт увеличивается (ДПОт — умень-
шается), если в результате указанных в п. 1 мероприятий тяговооружен-
ность Ро увеличивается.
5. Статический потолок /7ПОт дозвукового самолета уменьшается, ес-
ли удельная нагрузка ро увеличивается (при этом сх увеличивается)-
Для сверхзвукового самолета с ТРД увеличение ро в некоторых случаях
приводит к увеличению Япот. Уменьшение схо при неизменных значениях
других параметров приводит к некоторому увеличению Нпот.
54
6 Вертикальная скорость Vymax интенсивно увеличивается при уве-
личении Ро. Уменьшение схо при неизменных значениях других парамет-
ров увеличивает Vy max-
7 Максимальная дальность Дтах с ростом крейсерских значений
МКрейс в дозвуковом диапазоне увеличивается [см. формулу (2.15) и
рис. 2 7]; при дальнейшем росте Мкрейс (при сохранении прочих условий)
в околозвуковом диапазоне Lmax резко уменьшается, а при дальнейшем
увеличении Мьрейс в сверхзвуковом диапазоне Lmax постепенно растет.
Увеличение удельной нагрузки на крыло ро, ведущее к увеличению
МКрейс, уменьшению и, следовательно, к увеличению <7Т, в дозвуковом
и сверхзвуковом диапазоне (М<1 и М>1,5) до некоторого значения
poopt (СМ рис. 2.16) приводит к росту Lmax.
8. Дистанция разбега Lpa36 увеличивается с увеличением ро и умень-
шается с увеличением Ро-
9 Основные уравнения самолета показывают, что между летными
характеристиками и важнейшими параметрами самолета существуют
закономерности, анализируя которые можно находить рациональные ре-
шения.
Глава III
методика оптимального ПРОЕКТИРОВАНИЯ
САМОЛЕТОВ
В предыдущей главе выявлена взаимная зависимость всех парамет-
ров н характеристик самолета, связанных уравнением весового баланса.
Задача конструктора при разработке эскизного проекта состоит в том,
чтобы выбрать оптимальное сочетание схемы самолета, силовой установ-
ки, геометрических, весовых и летных параметров и характеристик. '
Таким образом, современная метолнка проектирования самолета
предусматривает не просто выбор параметров и характеристик на основе
статистических данных, а выбор оптимальных параметров, исходя из
единого обобщенного критерия. Методы, прн помощи которых решают
эту задачу, называются методами оптимального проектирования.
Значение оптимизации параметров и характеристик самолетов труд-
но переоценить. Известны примеры, когда неоптимальный выбор пара-
метров крыла вынуждал уменьшать на 15—20% полезную нагрузку и
тем самым значительно ухудшать эффективность самолета.
Каждый процент уменьшения экономичности пассажирского само-
лета среднего тоннажа эквивалентен потере за год свыше 1 млн. рублей
на парке в сто самолетов. Поэтому не следует при выборе параметров
пренебрегать возможность увеличения эффективности самолета даже
на один процент.
§ 1. ПОСТАНОВКА ЗАДАЧ
Задачи о выборе параметров н характеристик самолетов, как и си-
стемы решения (алгоритмы) этих задач, могут быть разными в зависи-
мости от конкретных условий (тип самолета, стадия проектирования
и т. п.). Например, на стадии эскизного проектирования задача состоит
в следующем. При определенной величине полезной нагрузки (коммерче-
ской или военной) для всех возможных и интересующих конструктора
схем самолетов н типов двигателей определить оптимальные значения
основных параметров и характеристик самолета таких, как взлетный вес,
тяговооруженность н нагрузка на 1 м2 при взлете, параметры крыла
(удлинение, стреловидность, относительную толщину), параметры фюзе-
ляжа и оперения, число двигателей и параметры их, режим полета (ско-
рость, высоту и т. д.).
55
Считаются известными общие требования к комфорту пассажиров
(для гражданских самолетов) и безопасности полета, схема взлета и
посадки (вертикально взлетающие или с разбегом), а также характе-
ристики аэродрома, иа котором предполагается эксплуатировать само-
лет. Задача решается либо при заданной (варьируемой) дальности по-
лета, либо при заданном (варьируемом) времени полета.
Такую задачу, в которой известно сочетание величин полезной на-
грузки и дальности (или времени полета) и требуется определить взлет-
ный вес, тягу двигателей н другие указанные выше параметры и харак-
теристики, называют прямой задачей в отличие от обратной *, которая
формулируется ииаче: известен взлетный вес и расчетная дальность по-
лета (или полезная нагрузка). Найти полезную нагрузку (или дальность,
полета, если задана полезная нагрузка), соответствующую оптимальным
значениям параметров и характеристик самолета.
При выборе параметров проектирование самолета нередко ведется-
под заданный двигатель. Эта задача по постановке является также об-
ратной, так как заданные взлетно-посадочные условия и основные режи-
мы полета однозначно определяют взлетный вес самолета, а величиной,
зависящей от оптимизируемых параметров, будет либо дальность полета
(при полезной нагрузке Gn.H=const), либо полезная нагрузка (при
2-расч = Const).
Обратная задача является в известной степени искусственной по-
постановке, так как в ТТТ обычно указывается величина полезной нагруз-
ки и основные летиые данные. Кроме того, желательно подбирать опти-
мальный двигатель к самолету, а ие наоборот. Тем ие менее задачей в
обратной постановке нередко пользуются при расчетах, особенно когда
нет возможности применить ЭВМ. Дело в том, что трудоемкость расче-
тов при G0 = const значительно меньше, чем при изменении взлетного ве-
са. Решение прямой задачи связано с определением взлетиого веса из
уравнения весового баланса самолета в каждом из вариантов расчета.
Решение этого уравнения относительно Go удается получить лишь тру-
доемким методом последовательных приближений. Если же применяет-
ся ЭВМ, то эта трудность отпадает.
Из формулировок задач видно, что количество оптимизируемых па-
раметров и, следовательно, глубина оптимума зависят от того, сколько
наложено ограничений на выбор параметров и характеристик самолета.
Очевидно, что наилучшие результаты решения могут быть достигнуты
при наименьшем количестве ограничений и наибольшем числе оптимизи-
руемых параметров и характеристик.
С другой стороны, стремление к наименьшему количеству ограни-
чений прн оптимизации параметров не означает, что можно решить зада-
чу без ограничений вообще. Нельзя забывать, что рассматриваемые за-
дачи являются иижеиерными, касаются вполне конкретных объектов и
рассчитаны на уровень технических возможностей данного времени и
ближайшей (видимой) перспективы развития техники (металлургия,
технология, тип силовой установки).
Особенностью задач оптимального проектирования является также и
то обстоятельство, что оптимизация параметров и характеристик всех
частей самолета производится одновременно. Параметры частей связаны
между собой, а также с параметрами и характеристиками всего само-
лета уравнением весового баланса (см. гл. II). Поэтому оптимизация
параметров отдельных агрегатов в отрыве от оптимизации других агре-
гатов является сугубо приближенным приемом.
При решении экстремальных задач проектирования важно не только
выбрать критерий оптимизации (см. гл. I), но и условиться, что пони-
мать под оптимальным решением.
* Термины «прямая» и «обратная» задача имеют смысл в связи с обратимостью
задач (одинаковыми результатами) при одних и тех же данных.
56
С чисто математической точки зрения понятие оптимума достаточно
ясно — это точка (узел) или место точек на гиперповерхности в огра-
ниченном пространстве n-го измерения (п — число оптимизируемых ве-
личин), где критерий оценки принимает экстремальное значение. Одиако
в технических инженерных задачах такое понимание оптимума является
узким и часто недостаточным для окончательного решения. Все зависит
от характера оптимума. Если оптимум пологий, то незначительное от-
ступление от него зачастую дает возможность получить различные пре-
имущества, не заложенные в условия задачи (компоновочные, эксплуа-
тационные и т. п.). Поэтому под оптимальными решениями в технике
понимают решения, которые либо соответствуют математическому опти-
муму, либо весьма близки к нему, т. е. не выходят за пределы допусти-
мых отклонений (иногда эти решения называют рациональными).
§ 2. МЕТОДЫ ПОИСКА ОПТИМУМА
Вследствие большой трудоемкости расчета точное решение задач на
одновременную оптимизацию даже трех-четырех параметров самолета
практически возможно лишь с использованием ЭВМ.
В настоящее время известно несколько методов решения многопа-
раметрических задач оптимизации с помощью ЭВМ:
— классические методы анализа (методы экстремумов или вариа-
ционного исчисления);
— методы детерминированного поиска (сканирование или перебор
зариаитов, методы градиентов, наискорейшего спуска и т. п.) [7];
— метод вероятностного (случайного) поиска.
Сделаем краткий обзор этих методов.
Метод экстремумов, применительно к выбору параметров самолетов,
требует решения системы уравнений вида
-^=0; -^-=0;.
di} di2 din
Zn);
^2 (Zj, Zj, • • • i
(3.1)
где a — критерий оценки вариантов;
i — параметр самолета;
k — ограиичение (эксплуатационное, конструктивное и т. п.);
п—число искомых (оптимизируемых) параметров самолета;
т — число ограничений.
Метод экстремумов требует, чтобы все функции, связывающие кри-
терий оценки и независимые переменные, их первые производные, а так-
же все функции ограничений параметров были непрерывными в иссле-
дуемом и-мерном пространстве, а критерий оценки должен иметь в этом
пространстве частные экстремумы одного вида по каждому из парамет-
ров. Только при этих условиях может быть получено общее решение
задачи (например, минимум себестоимости тонно-километра). При ис-
пользовании даииого метода следует прежде всего убедиться (путем
предварительных расчетов и логических рассуждений), что требуемые
условия выполняются.
При решении системы (3.1) необходимо следить за тем, чтобы ни
одни из оптимизируемых параметров не определялся однозначно постав-
ленными ограничениями. Если такие параметры имеются, то производ-
ные критерия оценки самолета по этим параметрам должны быть, ра-
зумеется, исключены из системы (3.1).
57
Рассматриваемый классический метод экстремумов непрерывных
функций обладает рядом недостатков, ограничивающих его практиче-
ское применение для оптимизации параметров самолетов с помощью
ЭВМ. Такими недостатками являются: громоздкость уравнений, особен-
но системы производных da/ch’i = 0; daldi2 = 0, ..., dafdin', метод не до-
пускает разрывов или угловых точек функций и их производных, что вы-
нуждает отказываться от оптимизации этим методом некоторых из па-
раметров.
Решение классическим методом становится еще более громоздким,
когда некоторые из оптимизируемых величин связаны дифференциаль-
ными уравнениями, например уравнениями движения, и приходится по-
этому применять методы вариационного исчисления.
Если число оптимизируемых независимых параметров невелико
—8), то чаще всего при расчетах на ЭВМ применяется метод пере-
бора всех допустимых вариантов, известный также под названием мето-
да сканирования или слепого поиска. Преимущество метода сканирова-
ния по сравнению с классическими методами экстремумов и экстрема-
лей состоит в том, что он -ие предъявляет особых требований к виду
функций, связывающих искомые параметры с критерием оценки. Функ-
ции и их производные не обязательно должны быть непрерывными, их
можно задавать как аналитическими, так н табличными способами.
Следует подчеркнуть, что сканирование является единственным на-
дежным методом поиска глобального экстремума, т. е. -самого оптималь-
ного среди локальных экстремумов. Для этого метода не имеет особого
значения и характер экстремума: является ли экстремум точечным (вер-
шина, впадина) или линейным (овраг, хребет).
Недостаток сканирования — большие потери времени на поиск, ког-
да число независимых оптимизируемых параметров превышает шесть-
восемь.
Потери времени на поиск при сканировании можно существенно
уменьшить, если ввести простое ограничение в счете: при поочередном
изменении параметров считаются лишь те варианты, которые ведут к
благоприятному изменению критерия оценки (например, к уменьшению
себестоимости тонно-километра). Для уменьшения времени счета при
переборе вариантов можно, кроме того, уменьшать количество значений
параметров (увеличивать шаг поиска) и вначале грубо, а затем все более
точио отбирать с помощью ЭВМ оптимальный вариант, сужая область
поиска. Если при этом ребро и-мерного куба делится пополам, то эту раз-
новидность метода перебора вариантов можно назвать методом последо-
вательного сужения областей поиска. В этом методе обследуется вначале
широкая, но разреженная область, границы которой определены крайни-
ми значениями параметров, обычно известными из конструктивных и
эксплуатационных ограничений. В этой области машина запоминает пер-
вый квазиоптимальиый вариант и затем автоматически переходит ко вто-
рому циклу расчета в области куба с уменьшенным вдвое ребром и с
центром в первой квазиоптимальной точке. Процесс сужения областей
ведется до тех пор, пока разность между последним и предыдущим зна-
чением критерия оценки наилучших вариантов не будет превышать за-
данной величины, например 0,5%. Последний квазиоптимальиый вариант
считается оптимальным. Практически бывает достаточно двух-трех суже-
ний областей поиска.
Плоскостная схема этого метода дана иа рис. 3.1.
Преобразование значений любого нз оптимизируемых параметров
(х<) при сужении области поиска можно найти по следующей рекуррент-
ной формуле:
58
где z=0, 1, 2, т — порядковый номер цикла сужения области;
(Дх2)г=о— начальный шаг изменения параметра (при г=0);
xiopt — оптимальное значение параметра при сужении
области (при z=0, 1, 2,т\;
N = Qf 1, 2, ..., k— 1;
k — число значений параметра при сужении области
поиска (обычно равное начальному числу значе-
ний параметра при z=0).
При использовании метода сужения областей поиска следует учи-
тывать, что он может эффективно применяться лишь тогда, когда есть
уверенность в существовании единственного и достаточно пологого экст-
ремума в допустимом пространстве.
В противном случае экономия вре-
мени на поиск за счет разрежения
узлов пространственной сетки мо-
жет'привести к тому, что самый оп-
тимальный вариант не будет «заме-
чен» ЭВМ при первом обходе узлов
(он как бы проскочит через сито со
слишком большими отверстиями).
Существенным преимуществом
метода перебора вариантов являет-
ся простота исследования окрестно-
стей оптимума. Как уже отмечалось,
не всегда строгий математический
оптимум параметров можно реали-
зовать на практике. Поэтому пред-
ставляет интерес изменение пара-
метров в районе оптимума. Прн по-
логом оптимуме иногда бывает вы-
годно несколько отступить от него
по каким-либо соображениям. С по-
мощью перебора вариантов можно
последовательного сужения областей
поиска:
!, 2, 3 — кзазиоптимальные варианты; 4 —
оптимальный вариант при трех циклах су-
жения; х2- —значение параметра в узле
многомерной сетки
исследовать также влияние на кри-
терий оценки самолета каждого нз независимых (оптимизируемых) па-
раметров.
Другим распространенным методом решения с 'помощью ЭВМ за-
дач многопараметрической оптимизации является метод градиента.
Сущность его состоит в следующем.
Известно, что вектор градиента скалярной функции направлен в
сторону наибольшего увеличения этой функции (в данном случае —кри-
терия оценки). Поэтому оптимизация по методу градиента сводится к
движению в сторону, обратную градиентному. При этом критерий опти-
мизации будет уменьшаться наиболее сильно. Поиск разбивается на два
этапа: сначала вычисляются частные производные критерия по оптими-
зируемым параметрам, затем система смещается в направлении, проти-
воположном градиентному, делается рабочий шаг, и т. д.
Метод градиента хорошо приспособлен к решению линейных задач,
когда критерий оптимизации линейно связан с параметрами. При реше-
нии методом градиента нелинейных задач*, называемых также задача-
ми нелинейного или динамического программирования, исследователь
становится перед таким выбором: либо направление поиска будет ие
всегда ианлучшим, если шаг поиска большой, либо надо уменьшить шаг
поиска и соответственно увеличить время поиска. Вообще градиентный
метод не отличается экономичностью по времени, так как перед каждым
* К этому классу задач относится и оптимизация параметров самолета.
59
рабочим шагом необходимо предварительно анализировать критерий
оптимизации (делать большое количество пробных шагов)*.
Для снижения потерь времени иа поиск применяется метод наиско-
рейшего спуска. От градиентного метода он отличается тем, что после
первого рабочего шага (в наиболее благоприятном направлении) даль-
нейшие шаги делаются в том же направлении до тех пор, пока критерий
оценки системы изменяется благоприятно. В этом последнем узле много-
мерной сетки снова производится поиск наилучшего направления даль-
нейшего движения по методу градиента н т. д. Таким образом, время
поиска здесь уменьшается за счет сокращения объема анализа. Однако
точность поиска не гарантируется, так как направление его может быть
в стороне от глобального оптимума, если таковой существует.
Линии равны*
уровней, критерия
оценки
движение по градиенту
наискорейший спуск
5 Числе
шагов поиска
Рис. 3.2. Плоскостная схема методов градиентов и
наискорейшего спуска
Плоскостная схема методов градиента и иаискорейшего спуска да-
на на рнс. 3.2.
В последнее время прн выборе оптимальных параметров различных
машин н процессов получил распространение метод случайного (статис-
тического) поиска, основанный на вероятностном принципе. Распростра-
нением этот метод обязан развитию технической кибернетики, появле-
нию быстродействующих вычислительных машин, без которых практи-
чески невозможно было выполнить и статистически обработать большое
количество вычислений (случайных проб).
В методах, описанных выше, либо полностью игнорируется преды-
дущий опыт поиска оптимума, либо берется за основу предыдущий удач-
ный результат. В отличие от них, статистический метод предусматривает
накопление и использование информации при поиске, этот метод приспо-
соблен к самообучению.
Как и в градиентном методе, при поиске статистическим методом
расчет начинается от случайно выбранного неоптимального варианта,
лежащего, однако, в допустимой области параметров. Путем статисти-
ческой обработки случайных проб делается последующий шаг в том на-
60
правлении, где вероятность улучшения критерия оценки наибольшая,
причем с увеличением количества шагов возрастает и уверенность дви-
жения, так как используется, как уже отмечалось, предыдущий опыт
движения к оптимуму. Обычно требуется сделать несколько десятков
шагов поиска, причем количество их практически ие зависит от числа
оптимизируемых параметров. Особо следует подчеркнуть, что статисти-
ческий метод дает большую экономию времени поиска оптимального
варианта при весьма большом количестве независимых параметров
(п:>8—10). Если бы исследователь решил простым перебором всех воз-
можных вариантов найти с помощью ЭВМ наилучшие значения десяти
параметров при 4—5 значениях каждого из них, то необходимо было бы
просчитать 410—510 вариантов, т. е. от одного до десяти миллионов. Та-
кой расчет на машине, обладающей быстродействием в 10—20 тысяч
операций в секунду, занял бы десятки и сотни дней непрерывной работы,
что, разумеется, неприемлемо. Если же в этом случае применить метод
случайного поиска, где направление последующего поиска зависит от
результатов предыдущего, расчет займет всего несколько часов.
§ 3. КОНСТРУКТИВНЫЕ И ЭКСПЛУАТАЦИОННЫЕ ОГРАНИЧЕНИЯ
Помимо ограничений, накладываемых заданием Lpacu,
М и т. п.) и являющихся параметрами самой задачи оптимального про-
ектирования, следует учитывать также конструктивные п эксплуатаци-
онные ограничения, накла-
дываемые на оптимизируе-
мые параметры самолета.
Рассмотрим некоторые
типичные из этих ограни-
чений.
При варьировании взлет-
ной нагрузки на 1 м2 и стре-
ловидности крыла дозву-
кового самолета следует
учитывать, что сочетание
большой нагрузки (ро>
>500 кге/м2) и малой стре-
ловидности (х^20°) прак-
тически невозможно при
//>10000 м нз условий тряс-
ки и сваливания на крыло.
Это видно из рис. 3.3, где
даны значения допустимых
(из условий тряски) и по-
требных для горизонтально-
го полета коэффициентов
Рис. 3.3. Допустимые и потребные значения су в
зависимости от числа М полета (Я=10 000 м;
с7Р = 12%):
------- допустимые значения;
-------потребные значения
подъемной силы. С увеличе-
нием угла стреловидности крыла коэффициент (су)дОп, как известно, рас-
тет при М=0,6—0,9. Из рис. 3.3 видно также, что самолет с нестреловид-
ным крылом прн полете на высоте 10 000 м с М^0,7 должен иметь
ро^(400—450) кге/м2, что свойственно средним и небольшим самолетам
(G0<80 тс).
Заметим, что коэффициент (су)доП дозвукового самолета соответст-
вует началу нелинейности су по углу атаки (с увеличением а) и началу
образования «ложки» на кривой ги2(а).
Необходимо, чтобы прн нормируемом индикаторном порыве вер-
тикального ветра Wi= 15 м/с выполнялось условие
гоп»
61
где
—(Ср)крейс“Ь Afyo
^Су —
Wj
^крейс
«7,.= 15-^-=15-20-~-У-
Ро 20 + Н
м/с.
Здесь Н в км.
Другим конструктивно-эксплуатационным ограничением парамет-
ров крыла является объем, потребный для размещения топлива. Если
топливо должно находиться только в крыле (гражданские или военно-
транспортные самолеты), то от параметров крыла, главным образом от
площади н относительной толщины, зависит его объем. Поэтому сочета-
ние параметров, при котором необходимое количество топлива не раз-
мещается в крыле, является неприемлемым. Относительный вес топли-
ва, допускаемый объемом крыла, можно найти по следующей прибли-
женной формуле *:
- Fp° 1/ м •
(3.3)
Здесь 0 = 265, при сужении крыла )]=3;
0 = 280, при сужении крыла я=4.
Если сужение крыла в плане отлично от указанных значений
(в пределах 2,5^4,5), то коэффициент 0 можно найти с помощью
линейной интерполяции. Эти данные соответствуют дозвуковым само-
летам.
Формулой (3.3) можно пользоваться и при эскизном проектирова-
нии СПС, для которых в первом приближении 0=350—370.
При решении соответствующей задачи потребный относительный
вес топлива сравнивается с допустимым относительным весом топлива.
Если при _каком-либо варианте сочетания параметров самолетов
(Ст)потр-> (Ст)кр.доп, то эти варианты отбрасываются, как неосущест-
вимые.
На сверхзвуковых военных самолетах возможно размещение части
топлива в фюзеляже. В этих случаях формула (3.3) может применяться
при расчете относительного веса топлива, которое должно быть разме-
щено в фюзеляже,
(^т)ф— (^т)патр (^т)кр.доп> еСЛИ (GT)Tf0Tp (C?T)hp. д0п‘
Здесь (бт)кр.доп — относительный вес топлива, размещаемого в крыле.
От гражданских самолетов требуется, чтобы длина пробега во всех
условиях эксплуатации при максимально допустимом посадочном весе
была не более 75% располагаемой длины летной полосы** в случаях
посадки без использования механизации крыла или с механизацией кры-
ла, но без использования реверса тяги двигателей.
В первом случае—при посадке без использования механизации
крыла — имеем согласно [3]
Ро<
^лроб. тах^Ро
2G
4пос. max
[2csnoc.6.M(/„р„.+0,4+ ^ор,в] кгс/м2,
(3.4)
где супос.б.м — коэффициент подъемной силы крыла без механизации.
* Более точные формулы даны в гл. XV.
** Располагаемая длина летной полосы равна длине ВПП вместе с длиной конце-
вой полосы безопасности.
62
Во втором случае — при посадке с механизацией крыла, но без ис-
пользования реверса тяги — имеем:
< maxgPo (2Св пос _ + Сх п -об] кгс/м2, (3.5)
2G
пос max
где Су поем — коэффициент подъемной силы крыла с механизацией.
Этот случай, как правило, дает большие значения ро, т. е. является
менее жестким по сравнению с первым случаем.
Таким образом, нагрузка на 1 м2 крыла имеет конструктивно-
эксплуатационные ограничения сверху — из условий тряски и свалива-
ния при полете на большой высоте, а также из условий посадки (в том
числе нз условий заданной скорости при заходе на посадку).
Кроме рассмотренных, возможны, разумеется, и другие конструк-
тивно-эксплуатационные ограничения оптимизируемых параметров, за-
висящие от конкретного задания, схемы и компоновки самолета.
§ 4. АЛГОРИТМЫ ЗАДАЧ
Алгоритмы оптимизации* параметров и характеристик самолетов
зависят, как уже отмечалось, от постановки задач, а также от типа про-
ектируемого самолета.
Здесь невозможно изложить алгоритмы для самолетов всех типов.
Ниже приведены несколько примеров, с помощью которых нетрудно
уяснить основы составления вычислительных алгоритмов.
Для примеров взяты сухопутные самолеты с обычным взлетом,
имеющие не менее двух двигателей. Предполагается, что участок уста-
новившегося (крейсерского) полета значительно больше участков набо-
ра высоты и снижения.
В любых методах поиска оптимума необходим расчет варианта со-
четания параметров и характеристик самолета (узла многомерной сет-
ки). Под алгоритмами здесь следует понимать методику расчета ва-
рианта. В основе этой методики лежат известные способы аэродинами-
ческого и весового расчетов. Однако каждая задача имеет свои особен-
ности, которые следует учитывать при составлении алгоритмов.
Рассмотрим задачи в прямой (А, Б, В) и обратной (В, Г, Д) поста-
новках.
Прямая задача
В этой постановке (см. § 1) задано или известно сочетание расчет-
ных значений полезной нагрузки и дальности полета.
Представляют интерес следующие случаи.
А. Крейсерская скорость является функцией параметров крыла и
всего самолета, высота полета — независимой переменной, оптимизируе-
мой наряду с другими параметрами самолета;
Б. Крейсерская скорость и высота полета известны (известно их со-
четание) ;
В. Крейсерское число М полета задано, высота полета является
функцией параметров крыла и всего самолета.
Указанные случаи встречаются при проектировании самолетов и ис-
черпывают большинство вариантов прямой задачи, представляющих ин-
терес.
Случай Б характерен тем, что не режим полета (V, Н) зависит от
параметров крыла, как в случае А, а наоборот — параметры крыла и
всего самолета находятся (оптимизируются) в зависимости от сочетания
расчетной скорости и высоты полета.
* Здесь имеются в виду конкретные вычислительные приемы.
63
Рис. 3.4. К определению коэф-
фициента cv и числа М полета
на заданной высоте
Указанные случаи относятся к дозвуковым самолетам, а случай В
характерен н для сверхзвуковых самолетов.
Рассмотрим возможную последовательность решения в каждом из
приведенных случаев.
В качестве критерия оценки вариантов возьмем величину взлетного
веса самолета*. Нанлучшнй вариант сочетания параметров и характе-
ристик будет соответствовать (G0)min.
Случай А. Требуется оптимизировать основные параметры дозву-
кового самолетас ДТРД. Известны:
— наибольшая полезная нагрузка и условия размещения ее в фю-
зеляже;
— дальность полета, соответствующая наибольшей полезной на-
грузке; *
— служебная нагрузка;
— класс ВПП, определяющий ди-
станцию прерванного взлета, а также ми-
нимально допустимый угол наклона тра-
ектории прн продолженном взлете (с од-
ним отказавшим двигателем) в расчетных
условиях (/атм=+30°С; ратм = 730 мм
рт. ст.);
— характер покрытия ВПП;
— схема самолета;
— высотно-скоростные характеристи-
ки ДТРД (тяга и удельный часовой рас-
ход топлива по V и Н);
— зависимость крейсерского числа М
полета, а также коэффициентов су и cxmin
в крейсерском полете и при взлете от па-
раметров крыла;
— зависимость веса частей самолета от их параметров.
Любая из известных величин или зависимостей (ограничений зада-
чи) может варьироваться, иапример может изменяться класс ВПП, схе-
ма самолета н т. д. В этом случае каждому сочетанию ограничений за-
дачи будут соответствовать свои оптимальные параметры самолета, а
прн некотором сочетании ограничений параметры будут нанлучшнми из
всех возможных вариантов. Тогда можно говорить о нанлучшем сочета-
нии ограничений и параметров самолета, например сочетании класса
ВПП, параметров крыла и всего самолета.
Порядок решения в данном случае может быть следующим.
1. Находятся коэффициент су и число М в начале крейсерского по-
лета из решения системы двух уравнений:
М=М(с0, х, X, сц)\
№.=±--1/^2£s._
а V
(3.6)
(3-7)
Уравнение (3.6) дает зависимость М (Мкрит), а уравнение (3.7) яв-
ляется условием горизонтального полета. Коэффициент 6^0,96—0,97 —
учитывает выгорание топлива при наборе крейсерской высоты; скорость
звука а н массовая плотность воздуха р на данной высоте известны; со-
четание оптимизируемых величин со, Л, %, ро для данного варианта также
известно.
* Этот критерий весьма близок к экономическому критерию оценки самолетов
(себестоимость т-к.м), так как дает примерно те же значения оптимальных величин, что
и себестоимость т-км.
64
Определение числа М полета и коэффициента су иллюстрируется
рис. 3.4.
Если в определенном диапазоне су (0<су<;0,8) разность М(з7) —
— М(зб)>0, то эти варианты сочетания (р0, со, X, %) исключаются, так как
уравнения ие имеют решения. Здесь М(з7} и М(зв) — числа М из уравне-
ний (3.7) и (3.6).
2. При известных значениях Н и а и найденном числе М определя-
ется крейсерская скорость полета Укрейс = аМ.
3. Находится удельный часовой расход топлива ср = ср(М, Н, т, Адр),
где т — степень двухконтурности ДТРД (оптимизируемая величина),
£др — коэффициент дросселирования двигателей.
4. Из решения системы уравнений (3.8) определяются величины
<К Ро, К, Qt, (711уст.
1 = О„1СТ(О0, X, P0,...)4-GT(cp, Лра„. tx* ...)+°-'- + Озд-
Go
Сх mln — Сх mtn (Cg, Re> ^мид,
^0 ~ ^0 (^прерв> ®отк» im ^крейс’ mtn» • • .)»
К=-----------;
(Су — Сур)2
<-хппп+ .
яЛэф
GT GT(Cp, ^расч» ^крейс, К, •••)>
ci ^пуст (<?0> Рй> ^0, X» Л), . . .).
(3.8)
Первое из уравнений системы (3.8) является уравнением суммы от-
носительных весов частей самолета. Оно, как правило, не решается в яв-
ном виде относительно Go вследствие сложной зависимости Сдует (Go).
Поэтому взлетный вес приходится находить методом последовательных
приближений.
Минимальное значение коэффициента вредного сопротивления само-
лета cxm5n (при су=Суо) является функцией взлетного веса, параметров
крыла и летных характеристик, так как число Рейнольдса равно
Взлетная тяговооруженность Ро, входящая в систему (3.8), опреде-
ляется из всех интересующих конструктора условий (прерванного раз-
бега, продолженного взлета с 9 = 9ОТк, обеспечения найденного ранее
числа М полета на высоте Н, из условия потолка и т. п.). Значения Ро,
найденные из этих условий,сравниваются и в качестве расчетного бе-
рется наибольшее значение Ро при каждом варианте сочетания оптими-
зируемых величин (Н, ра, К, %, со, т, пдв, ...).
Аэродинамическое качество К, необходимое для расчета относитель-
ного веса потребного топлива GT [см. (3.8)], определяется по найденному
ранее из системы (3.6) — (3.7) коэффициенту подъемной силы су [су0 —
известно из аналогичных поляр, су0~0,1—0,_15; ХОф=лОф(Х, %, М, ..)].
Относительный вес пустого самолета бПуст, входящий в систему
(3.8), определяется как сумма относительных весов крыла, фюзеляжа,
оперения, шасси, оборудования и управления, силовой установки по со-
ответствующим весовым уравнениям.
В краткой записи алгоритм задачи в рассматриваемом случае вы-
глядит так:
(М, Су) -> V\pefic -> Ср -* (Go, Сх mill) Pq, К, О-,, GnyCT)
-> GII} ет — GH 3 GT расх. (3.9)
3—1062
65
В узком диапазоне изменения площадей крыла (взлетных весов) и
летных данных числа Рейнольдса и относительные мндели частей само-
лета изменяются мало. Если ради упрощения задачи пренебречь влия-
нием площади крыла (взлетного веса) на коэффициент сжт1п, то все ве-
личины удается определять строго последовательно. Алгоритм задачи в
этом случае имеет вид
(М, Су) —* IXКрейс ^р- * win ”* Pq ~К •
- от - Go - GrtyCT - Он.3 GT.pacx.... (3.10)
Примеры всех зависимостей, предусмотренных алгоритмами (3.9) и
(3.10), даны в гл. VIII—IX, XV—XVIII.
Случай Б. В этом случае прямой задачи известны высота и скорость
полета. Требуется найти наилучшее сочетание параметров частей само-
лета (ро, X, %, со, Лдв, Хф, ...) при заданных ограничениях (Gn.H, Драсч,
^ггрерв, •••) •
Порядок решения в этом случае представляется следующим.
1. Для каждого возможного сочетания Н, М, р0 по формуле (3.7)
определяется коэффициент подъемной силы самолета су.
2. Используя зависимость (3.6), при известных значениях М, су(р0)
находится сочетание со, х> X, обеспечивающее заданное число М полета.
Например, вначале определяется со при (ро, X, х) =const, затем х при
(ро, X, co)=const и т. д. При этом на параметры крыла (со, х. X) накла-
дываются ограничения:
(Co)mtn Cq (СО)тах^
(x)mtn X (x)max> (X)min X (Х)тах,
исходя из конструктивных и эксплуатационных соображений. Сочетания
(со, х» X), в которых не выполняются эти ограничения, отбрасываются.
3. Определяется удельный часовой расход топлива в крейсерском
полете.
4. Из системы уравнений (3.8) определяются Go, cxm(n, Pq, К,
Q4, GnyCT. Порядок дальнейших расчетов такой же, как и в случае А.
Таким образом, в краткой записи алгоритм задачи в случае Б вы-
глядит так:
—(с0, х, А)-» ср-> (О0, cxmln, Ро, к, От, ^пуст)
-»0«усг-»0..з->0гр.и- (З-И)
Здесь предполагается, что схы«=Схтп(с0, Re, 5м.ф, Son) или, что
то же самое, cXmin=Cxmm(Co, Go, Ро, 5«.Ф, 5»п) ПРИ (Н, V) = const.
Если возможно пренебречь влиянием взлетного веса на коэффици-
ент Схшш (или осреднить это влияние в узком диапазоне изменения чи-
сел Re), то в случае Б возможно, как и в (3.10), последовательное опре-
деление всех необходимых для решения задачи величин
X» Х)->ср->т[П->Ро->GT->
Go -> GnyCT -> Gn, -> GT.pacx. (3.12)
Случай В. Этот случай для дозвуковых самолетов рассмотрен ниже,
применительно к обратной задаче [когда (Go, Gn.H)=const; Трасч=^аг].
Рассмотрим порядок расчетов в случае В, применительно к прямой
задаче [когда (6'п.н, Трасч) = const; Go = var] для сверхзвукового
пассажирского самолета.
66
Допустим, для определенности, что требуется оптимизировать сле-
дующие независимые параметры СПС:
— среднюю (эквивалентную) относительную толщину крыла сср;
— среднюю геометрическую стреловидность крыла по передней
кромке хп.к*:
— нагрузку на 1 м2 крыла при взлете ро.
Задано: число М полета; наибольшая коммерческая и служебная
нагрузка; дальность беспосадочного полета, соответствующая Ско.м.служ;
класс аэродрома и условия обеспечения безопасности перевозок; уро-
вень комфорта пассажиров (размеры кабины и кресел).
Известны: зависимости веса агрегатов и аэродинамических ко-
эффициентов от искомых (оптимизируемых) параметров крыла и числа
М; схема самолета и размеры фюзеляжа; характеристики двигателей;
ресурсы и удельные стоимости двигателей и планера; состав экипажа;
количество капитальных ремонтов двигателей и планера за амортизаци-
онный срок службы. Кроме этого, известны конструктивные и эксплуата-
ционные ограничения значений искомых параметров крыла СПС.
В качестве критерия оценки вариантов принимается себестоимость
т-км или приведенные затраты (см. гл. I).
Последовательность расчета варианта СПС (при любом допустимом
сочетании оптимизируемых параметров) в рассматриваемом случае
следующая.
1. Из системы уравнений (3.13) находят О0, сх min, cj,
/Стах, *^омыв’ /%> //, ^пуст*
1 = ^пУст + + GK0 JO0 -|- Ослуж/О0;
Gt=Q,(K, ср, Храсч, М);
/С^/С (Сд-mln, Су, Суд);
Ср=ср(М, Гф);
с^ = Су(Хп.к> ^омыв»
С _ё X. (3.13)
^омыв — *^омыв(^0> А), Xrt-к)»
Cxmm = Cx m[n (сср, хп.к, М, 50МЫв, 50п, £мф, Go, Pq);
С?Пусх(О(), Сср, Хи.К, Ah /^0, М),
/%— /^о(Х.Прерв, /прод, ®отк» ^лв» М, » Cxmln, А))>
Н = Н(р(}, схт\п, Су, М).
2. Определяется навигационный запас топлива
°н-з = °н.з10о, (ср)м-1, Лрасч].
3. Находится вес пустого самолета и расходуемого топлива:
С^пуст С?ПуСТОд, От.расх = GTG0 Он з.
4. Вычисляется рейсовая скорость Урейс-
5. Для данного сочетания параметров крыла и ограничений задачи
находится себестоимость перевозок. Оптимальные параметры самолета
соответствуют минимуму себестоимости т-км или минимуму приведен-
ных затрат.
* Удлинение крыла в этом случае определяется законом изменения стреловидности
по передней и задней кромкам при заданном размахе и сужении.
3‘ 67
В краткой записи алгоритм задачи для СПС в случае В можно вы-
разить так:
(G0, Cxmin, 4» 5омыв, Н, GT, G1IyCT)->
“* GH 3 —» GnyCT —* ^т-расх Vрейс —» а- (3. 14)
Обратная задача
Рассмотрим следующие случаи обратной задачи, представляющие
практический интерес:
Г. Ограничение крейсерского режима соответствует случаю А пря-
мой задачи [когда (Go, Gn.H) = const; L=var].
Д. Ограничение крейсерского режима соответствует случаю А пря-
мой задачи [когда (Ро, Gn.H) = const; L=var].
Случай Г. Допустим, что как и в прямой задаче (в случае Л), неза-
висимыми переменными (оптимизируемыми параметрами) дозвукового
самолета являются парамеры р0, X, %, cq, лдв, т, Хф и высота полета Я.
Крейсерское число М полета является функцией р0, %, со, X. Кроме того,
(Go, Gh.h) = const, a Lpac4 является функцией параметров самолета.
Известны те же зависимости и ограничения, что и в прямой задаче.
Последовательность расчета варианта самолета при любом допустимом
сочетании независимых переменных в данном случае представляется
следующей.
1. Как и в случае А, из уравнений (3.6) и (3.7) находятся число М
полета и коэффициент су.
2. При известных М, Я, а определяется Укрейс.
3. Находится коэффициент
Сх min==^x mtn (^q, *^м.ф, '“’on),
Где 50П '-’on (^$р Д^т)‘ _
Следует также учитывать, что SOn зависит от схемы самолета.
4. Как и во всех предыдущих случаях, определяется стартовая тяго-
вооруженность из нескольких условий: прерванного разбега, продолжен-
ного взлета, обеспечения крейсерской скорости на высоте Н и др. Для
дальнейших расчетов принимается наибольшее из всех условий значе-
ние Ро.
5. При известных Go, X, ро, X, со, Ро определяется относительный вес
пустого самолета Grryct.
6. Имея су, Схпнп, можно найти аэродинамическое качество в крей-
серском полете
,
{Су — Суо)2
хт{п+ пХзф
где л3ф = Хэф(л, у, М).
7. Определяется удельный часовой расход топлива в крейсерском
полете гр = Ср(М, Н, т).
8. Из уравнения относительных весов самолета определяется сум-
марный относительный вес топлива:
1 = GnyCT + GT 4- Gn н/Go + GeJlyJjG0,
откуда GT= 1 GnyCT Gn,H GejjyHt.
9. Определяется дальность полета при известном запасе топлив_а.
10. Определяются относительные веса навигационного запаса GH3 и
расходуемого топлива £т.расх.
68
11. Имея <7пуст, Страсх, Go, можно найти абсолютные значения
бпуст, Gr.pacx-
Если проектируется гражданский самолет, то найденные параметры
и характеристики используются для определения себестоимости перево-
зок—критерия оценки вариантов.
В краткой записи алгоритм задачи в случае Г выглядит так:
(М, Су) * JZкрейс —* С* mln сг —> К ’ Ср —>
_Gr-Z^GH3^GTpaeX^GT.pacv^GIIJCf. (3.15)
Случай Д. В этом случае (Ро, GnH) = const. Независимыми перемен-
ными являются параметры крыла и высота полета. Число М и дальность
полета являются функциями оптимизируемых независимых переменных.
Расчет варианта в этом случае может проводиться в такой последо-
вательности:
1) из уравнений (3.6) и (3.7) находятся число М полета и коэффи-
циент Су',
2) определяется крейсерская скорость полета;
3) нз системы уравнений (3.16) находятся р01 cXmin, Go:
>°0 ^0(^itpepe> ^'JTio ^ib> ^крейс» ^»'-),
Cx mtn==:Cx mtn (Cg, X, Re, 5м.ф, 50n);
(3.16)
Здесь, как и раньше, Ро определяется из нескольких условий и для
дальнейших расчетов берется наибольшее значение Ро-
Формула G0=Po/Po определяет максимально допустимый взлетный
вес*, который принимается в качестве расчетной величины.
Последовательность дальнейшего расчета, начиная с определения
относительного веса пустого самолета, не отличается от схемы (3.15).
Таким образом, алгоритм задачи в случае Д имеет вид
(М, Су) —> V\peflc —* (^0, mln, Gg) *К ’ ср —> GT —> L —> G(1 з
^т.расх GT раСх * @пуст’
(3.17)
Аналогичным образом можно составить алгоритмы и при других по-
становках задач Для самолетов любого типа.
Примеры различных зависимостей, входящих в вычислительные ал-
горитмы (определение Go, Ро, 0^^, GT и т. и.), даны в главах VIII—XI,
XV—XVIII.
Глава IV
ПРИБЛИЖЕННЫЕ МЕТОДЫ ОПТИМИЗАЦИИ ПАРАМЕТРОВ
САМОЛЕТА
В предыдущей главе были рассмотрены методы одновременной оп-
тимизации основных параметров и характеристик самолетов, основанные
на использовании ЭВМ. Однако при проектировании встречаются слу-
* При еще большем взлетном весе и Po=const фактическая стартовая тяговоору-
женность будет меньше допустимой.
69
чаи, когда не имеется возможности использовать ЭВМ и приходится вы-
бирать основные параметры самолета, применяя приближенные методы
оптимизации. Наиболее употребительные из этих методов рассмотрены
в настоящей главе.
§ 1. ОПРЕДЕЛЕНИЕ ЧАСТНЫХ ОПТИМУМОВ ПАРАМЕТРОВ САМОЛЕТА
Задача ставится следующим образом. Известны
— назначение самолета и его схема;
— тип н характеристики двигателей;
— величина полезной нагрузки и основные летные характеристики,
предусмотренные требованиями к самолету.
Требуется определить частные оптимумы каких-либо интересующих
конструктора параметров, например параметров крыла, фюзеляжа или
силовой установки. При отыскании частного оптимума какого-либо из
параметров остальные параметры считаются известными нз статистики
или предшествующих приближенных расчетов и рассматриваются как
величины постоянные. Такой метод, называемый методом «заморажива-
ния» параметров, применяется при оптимизации одного из ннх.
Если определяется оптимум какого-либо из параметров при задан-
ных значениях полезной нагрузки, дальности и числа М полета, то при-
ближенным критерием оптимизации, как отмечалось в гл. I, может яв-
ляться величина взлетного веса самолета- В этом случае оптимум пара-
метра будет соответствовать минимуму взлетного веса.
Когда известными величинами являются полезная нагрузка и взлет-
ный вес (заданный или найденный в первом приближении), то критери-
ем оптимизации может быть дальность полета и оптимум параметров
будет соответствовать в этом случае максимуму дальности.
Возможны и другие более сложные критерии, учитывающие эконо-
мичность самолета, например, себестоимость перевозок.
При нахождении оптимумов следует учитывать ограничения, накла-
дываемые на параметры и характеристики самолета (см. гл. III).
Алгоритмы, приведенные в гл. III, особенно когда осредняется коэф-
фициент cXo(Go), могут использоваться, разумеется, н для оптимизации
нескольких параметров самолета на основе расчетов без использова-
ния ЭВМ.
Представляет интерес процесс возникновения оптимумов отдельных
параметров частей самолета.
В качестве примеров рассмотрим возникновение и приближенное
графо-аналитическое определение частных оптимумов следующих пара-
метров самолета:
— удлинения крыла X;
— относительной толщины крыла с;
— угла стреловидности крыла %;
— нагрузки на 1 м2 крыла при взлете ро;
— удлинения фюзеляжа Хф;
• — степени двухконтурности ТВРД т.
Оптимальное удлинение крыла. От удлинения крыла зависят, в ос-
новном, две величины — вес крыла и вес топлива. С увеличением удлине-
ния (Х^З) растет вес крыла при прочих неизменных параметрах (в том
числе и площади крыла), так как увеличиваются изгибающие и крутя-
щие моменты, а также перерезывающие силы. Если в качестве критерия
оптимизации принять взлетный вес, то увеличение X неблагоприятно
скажется на этом критерии (взлетный вес будет увеличиваться).
С другой стороны, с увеличением X индуктивное сопротивление кры-
ла [17], потребная тяга двигателей и вес потребного топлива будут умень-
шаться. Вес силовой установки можно приближенно считать независя-
щим от удлинения крыла. Таким образом, оптимум удлинения крыла
70
приближенно можно определять по минимуму суммы весов крыла и
топлива.
Графическое решение задачи о выборе XOpt дается на рис. 4.1 и не
требует особого пояснения.
Полученный оптимум % крыла является, как правило, умеренным по
остроте, а изменение критерия оценки иа 1% по сравнению с его экстре-
мальным значением дает возможность
отступать от /-opt на 8—10%.
Кроме графического, возможно и
приближенное аналитическое решение,
определяемое из условия экстремума при
ДОкр <ют
д\ + Л
(4.1)
Например, для дозвуковых неманеврен-
ных реактивных самолетов, учитывая вы-
полнение условия (4.1), можно получить
следующее уравнение:
Рис. 4.!. Схема возникновения
оптимального удлинения крыла
Xopt[l 4 (0,018-|-0,14храл)1(р1] =
Ю4(°х)„|„ (Ср)1’5 (Гг. cos //>)'
87G0
^(^рейе — 50)
1 + 1
=Е, (4.2)
где /рал и х —стреловидность крыла по 1/4 хорд в ра-
дианах и в градусах соответственно;
(Ср)ср= (0,92-0,94) ЫкрейС —средний за время полета удельный часо-
вой расход топлива в кгс/кгс-ч;
<р — коэффициент разгрузки крыла;
Ь = 1,05—1,20— коэффициент, зависящий от типа само-
лета (с уменьшением тоннажа значения b
уменьшаются; приближенно Ь«1,05+
4-Go- ICh3, где Go в тс).
График для определения Xopt по формуле (4.2) приведен на рис. 4.2.
Анализ формулы (4.2) позволяет сделать следующие выводы:
Рис. 4.2. График для определения оптимального удли-
нения крыла дозвуковых неманевренных самолетов
И
— с увеличением расчетной дальности полета Драсч и удельного ча-
сового расхода топлива ср растет н оптимальное удлинение крыла. Для
дозвуковых самолетов наметившееся направление развития ТВРД, пре-
дусматривающее снижение ср, влечет за собой уменьшение Xopt при про-
чих неизменных параметрах самолета;
— при увеличении самолета (или сх0 прн отсутствии крутки
крыла) оптимальное удлинение крыла увеличивается;
— с увеличением расчетной крейсерской скорости Xopt снижается;
— увеличение при Lpac4=const взлетного веса (Go) в результате по-
вышения полезной нагрузки уменьшает оптимальное удлинение крыла;
— с увеличением значений таких параметров как Ро, со, i), а также с
уменьшением угла % значение 7.0Pt увеличивается. Вообще, если измене-
ние какого-либо параметра ведет к уменьшению относительного веса
крыла, то это изменение увеличивает X0Pt, и наоборот;
— наибольшее влияние на Aopt оказывают нагрузка иа крыло и
его стреловидность %.
Как показывают результаты расчетов, точность определения A,opt по
приближенной формуле (4.2) составляет ±10%.
Оптимальная относительная толщина крыла. Рассмотрим, как влия-
ет средняя по размаху относительная толщина крыла ёср на взлетный
вес самолета при заданных значениях полезной нагрузки и дальности по-
лета. Будем считать, что закон изменения относительных толщин крыла
по размаху известен*.
Изменение сер оказывает влияние главным образом на вес крыла н
его аэродинамическое сопротивление. С увеличением сср вес крыльев со-
временных самолетов при прочих неизменных его параметрах уменьша-
ется в результате увеличения строительной высоты h крыла. С увеличе-
нием h при неизменном значении изгибающего момента AfH3r осевые
силы Р = Л4изг/й, приложенные к полкам лонжерона (или панелям кессо-
на), уменьшаются и соответственно уменьшаются потребные сечения и
вес продольных силовых элементов**.
Таким образом, увеличение сср приводит к уменьшению взлетного ве-
са самолета.
С другой стороны, с увеличением сср растет профильное и волновое
сопротивление крыла, что повышает потребную тягу и расход топлива
при заданном числе хЧ полета.
Следовательно, при некоторых значениях параметров и характери-
стик самолета возможно существование оптимального значения сср
(рис. 4.3).
Имея зависимости GKp(ccp) и G4(Pn,)Tp), где Pu()Tp==G — и сх~
— _
= f(cc^, можно графически найти (ccp)opt.
Решение этой задачи приводит к следующим результатам (с — вез-
де по потоку):
для сверхзвуковых самолетов
(C.P)«pt ——3,5)%; №pf=(3-4)%;
для дозвуковых самолетов с ТВРД
= (9- 12)%; (U„pi= 10- 13%.
* Решение задачи об оптимальном законе изменения с по размаху крыла приве-
дено в § 3 данной главы
** Для некоторых конструкций крыла увеличение сср влечет за собой повышение
веса нервюр. Однако это обстоятельство не имеет существенного значения, поскольку
относительный вес продольного силового набора современных крыльев значительно
больше, чем относительный вес нервюр.
7?
Оптимум с крыла является обычно не сильным. Изменение критерия
оценки иа 1% дает возможность отступать от (ccp)oPt на 10—1Я°/о_.
При проектировании дозвуковых самолетов определение eopt не-
сколько усложняется тем обстоятельством, что скорость полета, соот-
Рис. 4.3. Схема возникновения
оптимальной средней относи-
тельной толщины крыла
Рис. 4.4. Схема возникновения
оптимальной стреловидности
крыла:
/ — влияние скорости полета; 2 —
влияние весов конструкции и сило-
вой установки: 3 —суммарное влия-
ние на себестоимость перевозок
ветствующая обычно Мкрит, зависит от сср или от со- В частности, с увели-
чением СО крыла скорость полета приходится уменьшать. Поэтому, если
скорость полета входит в критерий оценки самолета, как, например, в
себестоимость т-км, то при определении (co)opt должна быть также учте-
на зависимость Урейс(ссР)-
Оптимальная стреловидность крыла. Стреловидность крыла % до-
звуковых самолетов влияет прежде всего иа вес крыла, фюзеляжа и си-
ловой установки. Увеличение % при неизменных остальных параметрах
приводит к утяжелению крыла из-за увеличения конструктивного разма-
ха (в направлении 1/4 хорд) и крутящего момента в корневых сечениях.
Концевые сечения крыла также приходится усиливать на кручение, что-
бы избежать реверса элеронов. Кроме того, если продольный силовой
набор стреловидного крыла подходит под углом к шпангоутам фюзеля-
жа, то часть изгибающего момента с крыла передается на фюзеляж, уве-
личивая его вес *, и тем больше, чем больше %. Наконец, с увеличением %
уменьшаются значения ёу и суОтР, что приводит к росту потребной стар-
товой тяговооруженности самолета.
Однако при всех перечисленных недостатках увеличение стреловид-
ности крыла дозвуковых самолетов дает и важное преимущество: появ-
ляется возможность увеличить скорость полета за счет увеличения числа
Мирит и снижения сХй, что благоприятно сказывается на экономичности
самолета. Возникает как бы противовес неблагоприятному воздействию
увеличения стреловидности крыла на весовые характеристики самолета.
Поэтому возможно существование оптимальной стреловидности крыла
по 1/4 хорд, соответствующей минимуму себестоимости т-км (рис. 4.4).
Если решить задачу о (%) opt графически, с учетом всех противоречи-
вых зависимостей, можно получить примерно следующие значения (%)opt
для дозвуковых реактивных самолетов:
самолеты малой и средней дальности (^1500 км) —20—25°;
самолеты средней дальности (2000—3000 км) —30—35°;
самолеты большой дальности (^5000 км) —35—37°.
Следует учитывать, что оптимальные значения стреловидности зави-
сят и от других параметров крыла, главным образом, от со, К Ро- С уве-
* Вес фюзеляжа увеличивается также в связи с ростом длины его хвостовой ча-
сти, вызванным увеличением стреловидности крыла , ",
73
личением ро и значения (x)opt растут, а с увеличением А, — падают.
Соответственно выбираются и значения (x)opt в рекомендованных преде-
лах.
Что касается сверхзвуковых самолетов с крылом малого удлинения,
то влияние стреловидности по передней кромке Хпк на вес крыла и фю-
зеляжа более сложное, чем у дозвуковых самолетов (стреловидность
крыла сверхзвуковых самолетов измеряется по передней кромке). Уве-
личение хп.к треугольного крыла, например, не всегда приводит к увели-
чению веса крыла и фюзеляжа, а начиная с определенной стреловиднос-
ти приводит даже к снижению веса этих агрегатов. Более сильное влия-
ние оказывает величина хп.к на аэродинамическое качество и вес
топлива. Приближенно можно считать, что оптимальная стреловидность
крыла на Мрасч соответствует максимуму аэродинамического качества
и равна (см. таблицу).
Если стреловидность по передней
кромке изменяется по размаху, то при-
веденные данные следует принимать в
качестве средних величин.
Оптимум стреловидности крыла
бывает, как правило, весьма силь-
ным. Изменение критерия оценки на 1% дает возможность отступать от
Xopt всего на 3—4°.
Оптимальная нагрузка иа 1 м2 крыла при взлете. Нагрузка на 1 м2
крыла при взлете (р0=бдА$) наиболее сильно влияет на вес крыла и си-
ловой установки, а также на вес топлива. Схематично это влияние пока-
зано на рис. 4.5.
При увеличении ро уменьшается
площадь крыла, что ведет при прочих
неизменных параметрах к снижению
его веса. В то же время с увеличением
ро приходится увеличивать стартовую
тяговооруженность самолета (Ро), что-
бы выполнить требования по длине
разбега или длине ВПП (дистанции
прерванного взлета). Увеличение Ро ве-
дет к утяжелению силовой установки.
Влияние ро на вес топлива более
сложное, ио относительно слабое.
Имеет место оптимум ро по весу топ-
лива, соответствующий минимуму его
расхода (точка 1 на рис. 4.5).
Таким образом, противоречивое
влияние ро иа <?кр, Gcy и <?т приводит
грузки на 1 м2 крыла.
Возможно и аналитическое определение {(po)opt в первом и втором
приближениях.
В первом приближении рациональное значение нагрузки на 1 м2 мо-
жет быть получено из соображений подобия в зависимости от взлетного
веса. Действительно, площадь крыла пропорциональна квадрату линей-
ных размеров
Мрасч
(/•и. K^opt
2,0
60
2,3
65
2,5
69
2,7
72
3,0
75
Рис. 4.5. Схема возникновения оп-
тимальной нагрузки на м2 крыла:
/ — оптимум по километровому рас-
ходу
к существованию оптимума иа-
5=aZ2,
а взлетный вес в первом приближении можио считать пропорциональным
кубу размеров:
(4-3)
где (a, 6)=const.
74
Следовательно,
Ро—OJS=- cl.
(4.4)
Подставляя из (4.3) l^Vo^b в (4.4), получим
Ро=^о3’
где 5 = const.
Для дозвуковых иемаиевреииых самолетов
если Go в кгс, а ро в кгс/м2 (рис. 4.6).
Из графика рис. 4.6 видно, что кривая ро=1О
(4-5)
коэффициент 9—10,
Go3 весьма удовлет-
ворительно отображает статистику ро (Go). Однако она ие объясняет раз-
броса значений ро при Go=const. Например, при Go = 43—44 тс сущест-
вует диапазон р0=315—
505 кгс/м2. Разброс значе-
ний ро При Go = const можно
объяснить, если учесть зави-
симость нагрузки иа 1 м2
крыла от условий взлета и
посадки — заданной длины
ВПП, су при отрыве и при
посадке. При G0=const су-
ществуют самолеты, рассчи-
танные иа ВПП различной
длины, различную скорость
при заходе иа посадку и раз-
личную степень механиза-
ции Крыла (Сротр ИЛИ Супос).
Зависимость ро (Двпп,
Суотр) транспортного само-
лета описывается, например,
совмещения условий прерванного и продолженного взлета с заданным
углом набора высоты (sin0OTK) при отказе одного двигателя [3]:
Рис. 4.6. Изменение нагрузки на м2 крыла в за-
висимости от взлетного веса дозвуковых само-
летов
следующим уравнением, полученным из
/'о = *1?Рос„„р(/-впп + /-кпб)[7-(7Г— + sine„T,') — Aix±£l кгс/м2, (4.6)
L«2 \Лотр / «1 J
где /21^0,86—0,01 т\
fe2~0,83—0,017 m;
т — степень двухконтуриости ТВРД;
Кот? — аэродинамическое качество при отрыве;
g = 9,81; ро = О,114 при /атм = Н-30°С, рам1=730 мм рт. ст.;
£кпб— длина концевой полосы безопасности (250—400 м);
Гкач — коэффициент сопротивления качению колес;
ц—среднее сопротивление воздуха иа участке завершенного
взлета, отнесенное к взлетному весу (it — 0,03—0,05).
Значения sin 0Отк зависят от числа двигателей и задаются техниче-
"л. 2 3 4
si”0„K 0,025 0,027 0,030
скими требованиями (см. таблицу).
Если расчетным условием являет-
ся длина разбега при MCA, то форму-
ла для определения нагрузки иа 1 я2
крыла имеет вид
Л = 5'Р0<:«<,тр^азН*3Р0-Лач-|1) Кгф2, (4.7)
где Л3 £к0,92 — 0,95.
Из условия заданной скорости при заходе иа посадку или посадоч-
ной скорости
75
КГС/М2.
(4.8)
Здесь cv и V берутся при заходе иа посадку или при посадке; k4— ко-
эффициент, учитывающий уменьшение посадочного веса по сравнению
со взлетным (/?4^1).
Формулы (4.6) — (4.8) могут быть использованы для определения
оптимальной (рациональной) нагрузки на 1 м2 крыла во втором при-
ближении.
В третьем приближении (po)opt определяется с учетом влияния р0
на вес крыла, силовой установки и топлива (см. рис. 4.5) и отличается
от расчета второго приближения незначительно (на 3—5%), причем па-
раметры, рост которых ведет к /z>
Рис. 4.7. Схема образования опти-
мального удлинения фюзеляжа
при заданном объеме или задан-
ной площади пола
увеличению веса крыла (Go, %, X), вы-
зывают также увеличение (po)opt и,
наоборот, Параметры, рост которых ве-
дет к уменьшению веса крыла (со, я),
способствуют падению величины
(Po)opt-
Оптимум нагрузки на 1 м2 крыла
является, как правило, сильным. Изме-
нение критерия оценки иа 1%' от экст-
ремального значения дает возмож-
ность отступать от (po)opt всего на
4—6%.
Оптимальное удлинение фюзеля-
жа. Удлинение фюзеляжа Хф, т. е. от-
ношение длины фюзеляжа к диаметру
по миделю *, влияет 'Прежде всего на
вес самого фюзеляжа, а также на вес
шасси, оперения и топлива. Проти-
воречивость влияния Хф на вес этих составляющих и приводит к образо-
ванию (Хф)орг (рис. 4.7).
Графическое решение задачи о (Хф)орг проводится либо при посто-
янном объеме фюзеляжа с»ф, когда, например, известно количество топ-
лива, которое должно быть размещено в фюзеляже, либо при постоян-
ной площади пола 5п0л — в случае транспортных или гражданских са-
молетов, когда известны габариты и состав грузов или число пассажи-
ров и условия их размещения (уровень комфорта). В каждом из этих
случаев диаметр фюзеляжа, входящий в весовые формулы, вычисляет-*
ся по-разному:
из условия ^ф = СОП51 ____
(4.9)
ИЗ условия Suon=const
Оф~
(4.Ю)
Здесь (а, 6) = const — коэффициенты.
Формулы для определения относительного веса фюзеляжа и других
агрегатов, необходимые для графического определения (Хф)орь приве-
дены в гл. XVI—XVIII.
В первом приближении можно использовать также формулы для
Ош(Хф) и G0Ii(4), приводимые ниже.
* В случае некруглого сечения принимается диаметр окружности, эквивалентной
площади миделя.
76
Относительный вес шасси связан с удлинением фюзеляжа зависи-
мостью высоты стоек от Лф (рис. 4.8)
бш ~ Ci -4- — сз^ф> (4- И)
где ci, с2, с3 — коэффициенты, зависящие от назначения и схемы само-
лета.
Например, для гражданских самолетов:
С1 = 0,024—0,026; с2=0,0018—0,0019; с3=3,5 • 10“5—3,6 • 10~5.
Рис. 4.8. Зависимость высоты шасси от длины
(удлинения) фюзеляжа (Й2>Л1)
Относительный вес оперения является функцией удлинения фюзе-
ляжа в связи с тем, что площадь оперения пропорциональна длине фю-
зеляжа
f-j ________ Son ^4
'-'on •—' ~ ,
РО Ь>фЛф
(4.12)
где gon—вес 1 м2 оперения в кгс/м2;
ро — нагрузка иа 1 м2 крыла;
с4=,10—15 — для транспортных самолетов.
Относительный вес топлива также зависит от удлинения фюзеляжа
(см. рис. 4.7) вследствие зависимости аэродинамического сопротивле-
ния фюзеляжа и тяги двигателей от Лф. В дозвуковой зоне, например,
коэффициент аэродинамического сопротивления фюзеляжа в первом
приближении можно рассчитать по следующей формуле:
схф^0,008ХФ+ Ц-.
хф
(4.13)
Исследования показывают, что оп-
тимум удлинения фюзеляжа не являет-
ся слишком острым. Если считать до-
пустимым изменение критерия оценки
на 1 % от экстремального значения, то
появляется возможность отступать от
(Хф)орг на 1 — 1,5 (на 10—15%).
Оптимальная степень двухконтур-
ности ТВРД. Степень двухконтуриости
турбовентиляторных двигателей т,
равная отношению расхода воздуха
Рис. 4.9. Зависимость взлетного веса
от степени двухконтуриости ТВРД:
/ — при изменении удельного часового рас-
хода топлива; 2 —при изменении сопро-
тивления гондол; 3 — при изменении веса
двигателей; 4~ суммарное изменение
через вентилятор к расходу воздуха
через газогенераторную часть, влияет
прежде всего на удельный часовой рас-
ход и вес топлива, на аэродинамичес-
кое сопротивление гондол (в итоге —
также на вес топлива) и вес самих
ТВРД. Схематично это влияние при М<1 показано на рис. 4.9.
В первом приближении можно считать, что для дозвуковых самоле-
тов mopt=4—6, причем с увеличением дальности полета (или относи-
тельного веса топлива) значение mOpt растет.
77
§ 2. ПОСЛЕДОВАТЕЛЬНАЯ ОПТИМИЗАЦИЯ НЕСКОЛЬКИХ ПАРАМЕТРОВ
С помощью ЭВМ можно осуществить одновременную оптимизацию
большого количества параметров.
Без применения ЭВМ возможна последовательная приближенная
оптимизация лишь нескольких параметров самолета. Для этой цели
используется частная оптимизация параметров, рассмотренная в пре-
дыдущем параграфе.
Вначале находится частный оптимум какого-либо из параметров
при прочих «замороженных» параметрах, известных из статистики или
из приближенных расчетов. Затем оптимизируется второй из назначен-
ных параметров. При этом принимается найденное ранее оптимальное
значение первого параметра. Оптимизация третьего параметра ведется
при значениях частных оптимумов, найденных ранее. Таким же образом
находятся оптимумы остальных параметров и характеристик.
Данный прием последовательной оптимизации является, безуслов-
но, приближенным, так как после частной оптимизации каждого из
последующих параметров оптимумы предыдущих параметров должны
несколько измениться (исходя из решения уравнения весового баланса,
которое связывает все параметры и характеристики самолета). Поэтому
после первого цикла расчетов по оптимизации параметров следует, во-
обще говоря, сделать расчет второго приближения, при котором при-
нимаются значения параметров, полученные в первом приближении
(в первом цикле расчетов). Обычно бывает вполне достаточно двух-трех
циклов расчетов, чтобы оптимумы параметров стабилизировались на
определенном уровне значений.
§ 3. ВАРИАЦИОННЫЕ ЗАДАЧИ. ОПТИМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ
ОТНОСИТЕЛЬНЫХ ТОЛЩИН КРЫЛА ПО РАЗМАХУ
При решении ряда задач, когда требуется найти не единственное
экстремальное значение параметра, а оптимальный закон его изменения
(т. е. оптимизировать функционал), применяются методы вариационно-
го исчисления. Классическим примером использования вариационного
исчисления служит задача об оптимальной траектории, например о за-
коне изменения скорости самолета по высоте при подъеме или сниже-
нии. Оптимальный закон V(H) соответствует экстремуму какого-либо
функционала — веса топлива или времени подъема на заданную высо-
ту и т. п.
Другим примером использования аппарата вариационного исчисле-
ния при проектировании самолета служит определение оптимального
закона искривления (крутки) срединной поверхности крыла сверхзву-
кового самолета для получения максимального аэродинамического ка-
чества.
Во многих из этих задач удается в конечном виде получить при
определенных допущениях выражения для оптимальных законов изме-
нения функций.
Рассмотрим в качестве примера использования классического мето-
да вариационного исчисления задачу об оптимальном законе изменения
относительных толщин крыла по размаху. В качестве объекта исследо-
вания возьмем дозвуковой самолет с трапециевидным (%^0°) крылом.
Задача ставится следующим образом.
При некоторых известных параметрах крыла и самолета (Go, S, X,
т], Рф) и заданном режиме полета (V, Н, L) найти оптимальный закон
изменения относительных толщин крыла по размаху, т. е. найти
[с2 (z)]opt.
Критерием оценки законов c2(z) при (V, Н, £)= const будет вели-
чина прироста взлетного веса. Оптимальный закон c2(z) соответствует
78
минимуму прироста взлетного веса или минимуму самого взлетного ве-
са при заданных условиях. Вариационный характер рассматриваемой
задачи вытекает из физических соображений.
В самом деле, если, например, относительная толщина сг остается
постоянной по размаху [при (5, X, -q) =iconst], то вес крыла будет мень-
ше, чем в случае, когда cz уменьшается от корня к концу при eo = const.
Однако аэродинамическое сопротивление «толстого» крыла с сг=со =
=const больше, чем сопротивление крыла с убывающим значением cz
по размаху. Известно также, что от величины аэродинамического сопро-
тивления зависит взлетный вес самолета, т. е. имеется вполне опреде-
ленный весовой эквивалент сопротивления (см. гл. V), причем измене-
ние аэродинамического сопротивления значительно сильнее влияет иа
Go, чем такое же по величине изменение веса крыла. Из этих соображе-
ний видно, что вариант cz(z) —const, по-видимому, не будет наилучшим.
С другой стороны, если интенсивно уменьшать толщину крыла по
размаху, то аэродинамическое сопротивление уменьшится, а вес крыла,
наоборот, увеличится при co=const. Очевидно, должен существовать
оптимальный закон изменения сг(з), при котором взлетный вес будет
минимальным.
Составим функционал задачи, исходя из расчета крыла на и^гиб и
расчета профильного сопротивления его при М^Мкрит.
Воздушные нагрузки считаем пропорциональными хордам. Вслед-
ствие малости относительных весов стенок лонжерона (условной балки)
и нервюр, а также из-за малости влияния зависимости сг(з) на вес сте-
нок и нервюр при решении задачи не будем учитывать их вес. Считаем
также, что материал, работающий на общий изгиб крыла, вместе со
стенками образует кессон, достаточный для восприятия крутящих мо-
ментов.
Таким образом, при составлении функционала будем учитывать
лишь вес материала, работающего на общий изгиб крыла, а также со-
ставляющую аэродинамического сопротивления, зависящую от сг, т. е.
профильное сопротивление (при М^Мкрит). Подсчет полного веса кры-
ла или общего аэродинамического сопротивления (с учетом индуктив-
ного) в данном случае не является необходимым.
Воспользуемся связью между изменением веса и аэродинамическо-
го сопротивления крыла, с одной стороны, и изменением взлетного ве-
са — с другой:
. Д^Кр изг —— проФ 7ТТ Жр изгх(7 “1“ А^кр пртФк-Хо»
«^кр.изг «Лкр.ПрОф
где AGo — изменение взлетного веса самолета;
%g — производная взлетного веса в связи с измене-
нием веса частей самолета (см. гл. V), в дан-
ном случае — веса крыла (х0 = дС()1д61«
Хх0—производная взлетного веса в связи с измене-
нием вредного аэродинамического сопротив-
ления частей самолета (см. гл. V), в данном
случае — профильного сопротивления крыла
(Ххо — ^Go/дА'цр.проф).
Д^кр нзг ~^кр.кзг 0 — ^кр нзг h Л-^кр.проф =-^кр.профО‘“-^кр.проф г?
£нр.изго и Хкрлрофо — вес материала, работающего на изгиб крыла,
и профильное сопротивление исходного крыла
соответственно;
вкрлзп- И Хкрпрофг — то же для крыла, отличающегося от исходного
зависимостью с (г).
79
В данном случае
(^кр.изг 0, А^кр.проф о) = COnst.
Обозначим
*<?ОКр.ИЗг о=TV j = constj ххо^кр.проф о==-Л^2 — const.
Тогда имеем
A0(j=x(jGKp.H3r i ?-ха ^кр.проф 1 — N1 2* (4.14)
Вес полок лонжеронов (панелей), воспринимающих изгиб крыла, с
учетом разгрузки будет [22]
1—D.
Ф_
2
4*^ф р Л4 9
О1ч-р.изг i==- \ ~~ dz, (4.15)
5/°сР J Сг
о
где сг— наибольшая толщина профиля крыла в сечении z;
.Y — удельный вес материала;
<р — коэффициент разгрузки;
t—коэффициент, учитывающий эффективную высоту полок (па-
нелей) по сравнению с максимальной;
f — коэффициент, учитывающий уменьшение среднего напряже-
ния по сравнению с максимальным;
аСр—среднее напряжение в верхней и нижней полке (панели), оп-
ределяемое из соотношения
дср 2 \ Ср ссж /
Здесь Ор — разрушающее напряжение при растяжении;
Осж — допускаемое напряжение при сжатии.
В формуле (4.15) Мг — изгибающий момент в текущем сечении г:
/И _ °с”р 1 + bz
3 I io + bK
(4.16)
где bK — концевая хорда крыла;
Ьо — хорда крыла по осн самолета;
bz— текущая хорда крыла;
z — координата по размаху от конца крыла.
После подстановки Mz (4.16) в формулу (4.15) и несложных преоб-
разований из условия Сер (z) — const получим
г —
Кр-ИЗг/_3^аср/^ + 1)
(4-17)
Здесь =
t’z *К
Произведем в (4.17) замену переменных, обозначив z'=dz!dcz.
Тогда
>г С / %Z2z’ I z*z’ X -
С^кр.изг i ~ Л з I I -----------1—~ — I dC~^
_d 1 Cgbz Cz /
(4.18)
80
где со — относительная толщина крыла у борта фюзеляжа* без учета
наплывов;
Здесь у принята в кгс/м3; Go — в кгс; оср — в кгс/м2; I в м; £ = 0,85—0,90;
[=0,80—0,85.
Изменяемая часть аэродинамического сопротивления крыла
Л'ьрпрофй входящая в уравнение (4.14), может быть найдена следующим
образом:
Л\р.гроф i — (4.19)
Для определения коэффициента профильного сопротивления кры-
ла при М^Мкрит воспользуемся известной формулой А. А. Дородницы-
на — Л. Г. Лойцянского [15]
CxP='2c/Vh, (4.20)
где Cf — коэффициент трения пластинки;
th — эмпирический коэффициент (/ц» 1,485);
xtY
xt — относительная координата перехода ламинарного погранично-
го слоя в турбулентный (в долях хорды от носка).
Для значений яг = 0,25—0,30:
-ric ~ 1 + 3,3с..
Значение 2с/ принимаем по Шлихтингу [15]:
2с - °’91
7 (lg Re)2,58
Подставляя значение
для крыла с cz = const
коэффициентов в формулу (4.20), получим
1,35(1 +3,3сг)
(lg Re)2'58
Если с.-- c2(z), то
1,35 [1 + 3,3 (сг)Ср]
Схр~ (lg Re)2'58
(4.21)
где среднее значение с2 равно
(4.22)
Подставляя (4.21) и (4.22) в (4.19), после преобразований получим
АДр.проф I — Sg
8,9 Г - , 1,35
---------------------- c,z de, 4
(lg Re)2'58 (Z- йф) J (lg Re)2’
(4.23)
* Предполагается, что от борта фюзеляжа до оси самолета относительная толщи-
на крыла не изменяется.
81
Формула (4.14) с учетом (4.18) и (4.23) примет вид
„ Г ( 2z7z' 1 z^z' \ - ,
-ДО0=»оЛгз \ ---------+ -7~^г—рс2 +
3 \ Czbz Сг /
с0
+ 4Л4 \ c2z'dcz^-^x0N5 — —
(4.24)
де ЛД =---------8,9Sg----=const;
(/-Дф)(18 Re)2’58
1,35S^ *
—-—1— = const.
(1g Re)2,58
Объединим первое и второе слагаемое в (4.24)
г Г / 2z2z' 1 z^z' \ — 1 _
— Дб0= \ '-O-V.J—----——|4-«ХоЛ,'4с2г' dc24-
L \ Сг>>г С г / J
Н-х^-Л^-Л^, (4.25)
Здесь (кх„ N5, NIt N2) = const.
Окончательно функционал данной задачи имеет вид
= + + (4.26)
сгЬг сг
Условием оптимума с2(г) является уравнение Эйлера [35], которое
в развернутом виде записывается так:
d2F dF _g
“ dz
d^F „ . d^F , .
— z' -|-----------------z -4- _
(dz')2 dz'dz dz'dc.
(4.27)
Вычислив производные, предусмотренные (4.27), получим
2х0ЛГ3
2^1-^- + х„^=0.
(СгУ
(4.28)
Так как функционал (4.26) является линейным относительно первой
производной z t то решение (4.28) получается вырожденным и имеет
вид обычного алгебраического уравнения, где bz — известная функция
от z. _ ,
Из (4.28) имеем искомый оптимальный закон cz (г)
(4.29)
Более удобно, однако, иметь дело не с абсолютными значениями
координаты z, а с относительными
z=------.
2
соответствующую замену. Кроме это-
Произведем в формуле (4.29)
го, возьмем Ьк и bz в виде:
q + 1 V
. 2 S
Ь^—^—. —
82
а в коэффициенте Лг4 возьмем плотность воздуха по формуле Ветчннкн-
на В. П.
20 —Я
₽~Ро
где Н в км.
Тогда решение (4.29) после преобразований примет вид
f (- Ч +'] (4-30>
где
(1-^* /5) [1& Re]2’58. (4.3!)
В формулах (4.30) и (4.31) рдзмах /=1/ —
г Ро
60—в кгс, pQ— в кгс/м2, И —в км, И — в м/с, Оф — в м.
В пределах одного класса самолетов (lg Re)2-58 изменяется незна-
чительно н можно принимать его равным: 180 — для самолетов малой
дальности; 200 — для самолетов средней дальности; 220 — для самоле-
тов большой дальности.
При г=1 имеем (<?0)opt:
(0г-_. = кои=^(/(-U1 ). (4.32)
Из формул (4.32) и (4.31) видно, что с ростом ср, xG, Н, % оптимальная
относительная толщина крыла у корня (у борта фюзеляжа) увеличи-
вается; с ростом V, xxfl, значения (со) opt уменьшаются; с увеличением
Ро значения (со) opt уменьшаются; с увеличением Go значения (со) opt
увеличиваются.
Таким образом, если увеличение параметра ведет к росту веса кры-
ла, то это увеличение приводит также и к увеличению (со) opt и
наоборот.
Следует заметить, что решение (4.30) не зависит от стреловидности
крыла, так как площадь S прн (bz, z) — const не зависит от %, если хор-
ды берутся по потоку.
Характерной особенностью полученного решения является то, что
при z = 0 (на конце крыла) оптимальная относительная толщина также
должна быть равна нулю. Это объясняется тем, что изгибающий момент
на конце крыла равен нулю. Между прочим, если учитывать не только
прочность крыла на изгиб, но также и на кручение, то указанная осо-
бенность решения не изменится, поскольку крутящий момент на конце
крыла также равен нулю.
Практически, однако, невозможно сделать с2=0 = 0, так как не будет
достигнута необходимая жесткость концевых сечений на кручение (воз-
можен реверс элеронов и флаттер крыла). Кроме этого, прн сг^0,08
несущие свойства профилей резко падают, затрудняется механизация
крыла, возникают и другие конструктивные трудности. С учетом удов-
летворения всех этих требований и выбирается величина ск.
Таким образом, формула (4.30) может быть практически использо-
вана лишь в корневых сечениях крыла, на 30—35% размаха, а для
остальной части крыла следует принимать либо с2 = ск=0,08—0,09 =
83
=const, либо закон, близкий к линейному *, при этом на конце крыла
необходимо обеспечить ск = 0,08—0,09.
Примеры теоретического оптимального закона cz(z), построенного
по формуле (4.30), и практического оптимального закона, где в конце-
вых и средних частях крыла cz=CK=const, даны на рис. 4.10.
Кроме рассмотренного выше случая, когда средние расчетные на-
пряжения oCp='Const по размаху крыла, представляет также интерес
Рис. 4.10. Схема изменения оптимальных значений отно-
сительной и наибольшей абсолютной толщины трапецие-
видного крыла по размаху:
—---------теоретический оптимум с учетом прочности крыла
иа изгиб;
----------- практический оптимум с учетом жесткости крыла
на кручение и изгиб
„ „ (°ср)?
случаи, характерный для стреловидных крыльев, когда ---------= const =
Cz
=d по размаху. Решение в этом случае не отличается принципиально от
(4.29) — (4.30) и имеет вид
= const;
(4.33)
где
47<рО0пр%о
Stfdl (7) + 1)
Const.
Сравнение показывает, что при условии (бср)г/сг = const оптимальные
значения с2 в среднем на (5—7) % больше, чем при условии (оср)г =
= const.
Таким образом, рассмотренная вариационная задача дает возмож-
ность обосновать теоретически и получить практически (с поправкой на
* Так как необходимо учитывать потребный объем крыла для размещения топлива.
84
обеспечение жесткости крыла) оптимальный закон изменения относи-
тельной толщины крыла по размаху.
Аналогичные вариационные задачи могут быть решены и примени-
тельно к сверхзвуковым самолетам прн определении оптимальных зако-
нов Cz (г) крыла, площадей сечений фюзеляжа по длине и т. п. с учетом
изменения аэродинамических, весовых н жесткостных характеристик
агрегатов прн некоторых заданных величинах, например, при заданном
объеме для размещения топлива.
Глава V
МЕТОД ГРАДИЕНТОВ ВЗЛЕТНОГО ВЕСА И ЕГО ПРИМЕНЕНИЕ
ПРИ ПРОЕКТИРОВАНИИ САМОЛЕТОВ
Метод градиентов взлетного веса прн проектировании самолетов
относится к числу приближенных, однако в отличие от методов, рас-
смотренных в гл. IV, он имеет специфические особенности и весьма ши-
рокие возможности. Поэтому целесообразно рассмотреть этот метод бо-
лее детально.
§ 1. ОПИСАНИЕ МЕТОДА
Градиент взлетного веса представляет собой выражение
grad Go==-^~ AZ=хгAZ,
oi
где Аг— приращение параметра или характеристики, например, допол-
нительный вес детали или узла, приращение аэродинамиче-
ской характеристики, характеристики двигателя и т. п.;
— производная взлетного веса по какому-либо параметру i.
Основное назначение градиента взлетного веса состоит в том, что с
его помощью можно сравнительно легко и быстро пересчитать исходное
значение взлетного веса н получить новое
(0«).и=(0о).ех±(-^-)^ (5.1)
Важно отметить, что производная х< является постоянной ве-
личиной для проектируемого самолета на каждом этапе проекти-
рования.
Степень погрешности при определении значения (С0)НОв зависит от
абсолютной величины приращения параметра At (рис. 5.1).
Если величина ДГ не пре-
вышает 10% от первоначаль-
ного значения параметра, что
часто имеет место прн рас-
смотрении различных модифи-
каций характеристик и пара-
метров самолета, то с по-
мощью линеаризации уравне-
ния О0(Аг) по формуле (5.1)
значение (G0)nOB можно опре-
делить с точностью до 1%. Та-
кая точность прн приближен-
ных расчетах обычно вполне
удовлетворяет конструктора.
Методом градиентов взлет-
ного веса можно пользоваться
Рис. 5.1. К определению взлетного веса с
помощью градиента х<-ДГ
85
не только для пересчета взлетного веса, но н для решений ряда других
задач. Назначение этого метода, вообще цоворя, состоит в том, что с его»
помощью можно связать начальные (частные) изменения параметров
и характеристик частей самолета с конечными (общими) изменениям!*
критерия оценки прн некоторых известных ограничениях, например, при
неизменных основных летных данных, прн неизменной прочности конст-
рукции н т. п.
Обозначим основной критерий оценки самолета через а н будем
рассматривать его как функцию п-го количества переменных парамет-
ров i. Прн бесконечно малом изменения произвольных (независимых^
переменных i полный дифференциал критерия оценки равен
, да । да . да
da ——- di^— di2-\----+ — din.
d/i 0Z2 oin
Полагая прн Д£->0 дифференциалы и приращения эквивалентны-
ми, можно записать
да . . , да . . . да
---7^’(5-2)
oil di% dtn
Суммой (5.2) можно пользоваться в случае приближенных вычислений.
Здесь Да и Д!— конечные (малые) прнращення.
Например, прн исследовании влияния на себестоимость т-км из-
менений веса частей самолета ДО, аэродинамического сопротивления
ДХ, удельного часового расхода топлива Дср, ресурсов ДГ н стоимостей
частей самолета ДС уравнение (5.2) принимает вид
йа=_^..д0 + ^|..й^ + _^_.дСр + ^_.йГ + ^..дС. (5.3}
д(а оХ дс9 д! оС
Уравнение (5.3) дает возможность решать следующие задачи:
1) определять влияние на критерий оценки самолета каждого нз
переменных параметров, выявить, какой нз них оказывает наибольшее
влияние, чтобы направить усилия в первую очередь на улучшение этой
величины. Для решения данной задачи необходимо найти соответствую-
щие частные производные н принять, что конечные прнращення (Дб,.
ДХ, Дср) переменных должны составлять одинаковую, сравнительно не-
большую, часть первоначального значения каждой нз них (напри-
мер, 1 %);
2) определять суммарное, зачастую противоречивое, влияние на-
критерий оценки какого-либо количества величин. Практический инте-
рес эта задача имеет прн анализе различных вариантов технических
решении, связанных с изменением таких величин, как G, X, Т и т. п.
Очевидно, что нанлучшнм будет тот вариант решения, для которого
имеет место экстремум суммы приращений себестоимости т-км, т. е.
]S( —да)] max нлн [2( + да)]т|П;
3) находить эквиваленты различных пар величин, например весо-
вые эквиваленты стоимости нлн ресурса агрегата и т. д. Эта задача име-
ет весьма большое практическое значение прн исследовании выгодности
конструктивно-проектировочных решений, связанных, например, с при-
менением более легкой, но более дорогой конструкции, с уменьшением
аэродинамического сопротивления за счет увеличения веса и т. п. Для
решения таких задач необходимо приравнять нулю пару каких-либо
частных приращений себестоимости т-км (данная задача рассмотрена
в гл. XIV). Заметим, что в общем случае, пользуясь формулой
= (5-4)
86
можно находить эквиваленты любого количества k переменных пара-
метров I, интересующих конструктора.
Таким образом, уравнение (5.3) позволяет прн меньшнх затратах
труда по сравнению с обычным расчетом новых вариантов самолета
найти в процессе проектирования связи между частными н общими из-
менениями характеристик, сравнить между собой частные изменения
характеристик при одинаковом конечном результате, дать оценку вы-
годности конструктивных решений.
Указанные задачи могут решаться на любом этапе проектирования
опытного образца нли прн модификациях уже построенного н эксплуа-
тируемого самолета. Прн этом ограничения (условия решения) задач
на каждой стадии могут быть различными. Например, на стадии пред-
варительных изысканий н эскизного проектирования опытного самоле-
та основными ограничениями являются как заданные параметры (£расч,
(?пн) =const, так и обычно принимаемые (ро, Pq) = const. На более позд-
ней стадии проектирования нли прн модификации существующего об-
разца самолета, когда определены характерстнкн двигателей, размеры
и форма самолета, ограничением может служить (S, PQ) =const. Кроме
того, на этой стадии известно, какие летные данные должны быть сохра-
нены прн изменении других характеристик самолета. Например, прн
появлении дополнительного веса агрегата или детали, когда требуется
сохранить не только прочность конструкции н расчетную дальность по-
лета, но также н крейсерскую скорость, увеличение взлетного веса и
себестоимости т-км будет различным прн (р0, Ро) = const н прн (S,
Ро) =const.
В данной главе применение метода градиентов взлетного веса
предполагает сохранение крейсерской скорости и расчетной (практиче-
ской) дальности полета.
Эти ограничения прн варьировании весом н аэродинамическими ха-
рактеристиками самолета (с учетом Gn.H=const) влекут за собой весьма
важное следствие: экономический критерий оценки самолета можно за-
менить более простым критерием — взлетным весом. В этом случае ра-
циональное конструктивно-проектировочное решение будет соответство-
вать минимуму взлетного веса.
Следует отметить, что взлетный вес не является слишком узким
критерием, так как его величина по уравнению весового баланса орга-
нически связана с весом частей самолета, аэродинамическими характе-
ристиками двигателей. Если сохраняются УКрейс, £расч н 6п.н, то взлет-
ный вес может служить критерием оценки самолетов различного назна-
чения.
Немаловажное значение имеет и то обстоятельство, что прн исполь-
зовании весового критерия решение проектировочных задач становится
значительно компактнее н проще, чем прн использовании критериев, ос-
нованных на экономичности нли боевой эффективности самолета.
Зная производные взлетного веса хг, можно найти н суммарное из-
менение взлетного веса Л60 как критерия оценки прн изменении харак-
теристик частей самолета:
ДО„ • ДО- + • ДУ0 + ^• дср + . . . =
oG OzCq мСр
==хо* дО* -}-хх0- дХо4“х4?р’ • • • (5-5)
Здесь х0 = dO^jdG*—производная взлетного веса по дополнительному
весу какой-либо части самолета (G*— дополни-
тельный вес детали, узла нли агрегата);
*Xe=dG0/^A'o—производная взлетного веса по среднему за по-
лет аэродинамическому сопротивлению самоле-
та и т. д.
87
Остановимся на определении некоторых наиболее важных производ-
ных взлетного веса в простейших случаях, когда изменяется только ка-
кая-либо одна частная характеристика агрегата (например, вес), а ос-
тальные частные характеристики (аэродинамические, объем и т. п.) ос-
таются неизменными.
§ 2. ОПРЕДЕЛЕНИЕ ПРОИЗВОДНЫХ ВЗЛЕТНОГО ВЕСА
ПО ДОПОЛНИТЕЛЬНОМУ ВЕСУ ЧАСТЕЙ САМОЛЕТА
В процессе проектирования самолета нередко встречается следую-
щая задача:
— решено изменить вес какого-либо агрегата, группы оборудования
или нагрузки, сохранив аэродинамические н другие характеристики са-
молета. Насколько прн этом надо изменить взлетный вес, чтобы основ-
ные летные характеристики н прочность самолета остались прежними?
Такне задачи характерны для стадии эскизного проектирования,
когда на основе вариаций различных параметров выбираются основные
размеры н рассчитывается вес самолета. Однако и на последующих ста-
диях разработки проекта (даже прн модификациях построенного само-
лета) эти задачи не исключаются, так как детальная проработка кон-
струкции самолета обычно сопровождается некоторыми отклонениями
веса агрегатов от нх значений, установленных при эскизном проектиро-
вании. Например, если конструкция самолета получается тяжелее, чем
предполагалось, то в качестве компенсации можно уменьшить либо вес
топлива (уменьшая дальность полета), либо вес полезной нагрузки, со-
хранив взлетный вес неизменным, или же увеличить взлетный вес, со-
хранив дальность полета, крейсерскую скорость и полезную нагрузку, ио
в последнем случае ухудшив взлетно-посадочные характеристики, если
нет возможности повысить тягу двигателей.
Допустим, что на какой-либо стадии проектирования самолета по-
явилась необходимость ввести дополнительный вес G*. Если при изме-
нении веса какого-либо агрегата на G/ нужен еще дополнительный вес
G2* для исправления возможного изменения центровки самолета, увели-
чения жесткости конструкции и т. п., то будем считать, что дополнитель-
ный вес G* является суммой всех этих составляющих, т. е. G* = Gj* +
+ G2* + ....
Пусть известны зависимости весов всех составляющих от взлетного
веса самолета, а также величины, которые конструктор считает нужным
оставить неизменными, например, (ро, Po)=const, или (S, Po)==const,
или GT = const н пр.
Требуется определить увеличение взлетного веса, необходимое для
выполнения поставленных ограничений (от которых зависит сохранение
летных характеристик), а также для сохранения прочности конструкции.
Запишем уравнение весового баланса самолета прн появлении до-
полнительного веса G*
Gq — ОпустН- GT-|-G1(.H -|- Ослуж-Ь G*, (5.6)
где Gnycr —вес пустого самолета, GfiycT= /1
Gn.H —вес полезной нагрузки, Оп.п-- const;
Ослуж —вес служебной нагрузки, (7Служ = const;
GT — вес топлива, GT=/2(Go);
G* —дополнительный вес.
Из (5.6) следует, что
G ^Gq — GnycT — GT — Gn.H — Gc.iyx*
Возьмем частную производную по Go
dG* _______________________. д ,г . п \
~АГ~--- 1-АГ~ (GliyCT 4"GT).
dt/Q OGq
88
Так как требуется определить производную dGddG*, показываю-
щую влияние G* на Go, то на основании предыдущего имеем
Нов.ое значение взлетного веса самолета определяется с помощью
у-g По формуле *
(5-8)
(Gq)hob---(Gq)hCX ± VqO •
Здесь (Оо)исх—исходный взлетный вес прн G* = 0; знак плюс перед
вторым слагаемым берется в случае начального прироста веса (ч-G*),
а минус — в случае уменьшения веса (— G*).
Численные значения xG могут изменяться, вообще говоря, от едини-
цы до бесконечности. Последнее возможно, когда------(ОПуСтН- Gr) = 1 [см.
дОо
формулу (5.7)]. Если же
—(Gnycr г Gr) 0, то 70 = 1. При этом
(GnycTi GT) — const и (Gq)hob — (Gq)hcx i G ,
что соответствует случаю, когда изменяются все летные характеристики
самолета и прочность его агрегатов**.
В общем случае одна часть составляющих веса самолета зависит от
взлетного веса, причем известны все функции (Л(Go) и ограничения, на-
кладываемые на них, а другая часть составляющих веса остается посто-
янной Тогда уравнение весового баланса (5.6) можно записать так:
т п
1 ГП-J-1
где 2 Gh= const.
m-}-l
Если проделать те же операции, что и при выводе формулы (5.7),
получим в общем случае
Обычно функции Ог(Оо) представляют собой весовые формулы, напри-
мер, крыла, фюзеляжа, шасси, силовой установки, топлива и т. д. По-
скольку все производные GGjdGo^O, то, очевидно, чем больше величи-
ы и число этих производных, тем больше и величина xG. Заметим, что
величины dGildGf) зависят не только от вида функций Gt(Go), но и от
характера ограничений, накладываемых на парамеры самолета. Среди
всех ограничений, как упоминалось выше, наибольший интерес представ-
ляют ограничения вида (р0, P0)=const или (5, Po)=const, при которых
сохраняются все или часть летных характеристик самолета.
Важно также отметить, что величина xG может быть больше едини-
- лишь в том случае, когда с введением дополнительного веса G* кон-
структор стремится сохранить неизменными какие-либо заданные свой-
ства самолета: летные данные, прочность и т. п.
* В литературе производная xg известна под названием «коэффициент роста».
"* Этот случай имеет место при модификации построенных самолетов
89.
Рассмотрим физическую сущность возникновения производной
когда xG>l.
Допустим, что на проектируемом самолете потребовалось устано-
вить дополнительное оборудование весом G*, которое не ухудшает аэро-
динамику самолета и не требует дополнительных объемов. Необходимо,
сохранив основные летные характеристики, полезную нагрузку, а также-
прочность агрегатов, модифицировать самолет. Для сохранения летных,
характеристик, очевидно, нужно сохранить нагрузку на 1 м2 крыла ро и
тяговооруженность Ро при взлете.
С увеличением веса самолета на G* возрастет и нагрузка на крыло,
фюзеляж, шасси и оперение. Следовательно, для сохранения прочности
этих агрегатов требуется увеличить размеры и вес их силовых элементов-
Далее, для выполнения условия po=Go/S=const необходимо с измене-
нием Go соответственно увеличить размеры крыла, и при Ро= const — и
тягу двигателей (если невозможно увеличить тягу другими способами),
что само по себе повлечет за собой увеличение веса крыла и силовой
установки. Далее, с увеличением размеров крыла, приходится увеличить
также размеры и вес оперения для сохранения неизменными характери-
стик устойчивости самолета. Наконец, для сохранения дальности поле-
та потребуется, очевидно, увеличить и первоначальный запас топлива,
учитывая условие GT — GT/Go—const. Приведенное увеличение веса от-
дельных частей самолета и исходного запаса топлива приведет к увели-
чению взлетного веса самолета, которое, в свою очередь, повлечет за
собой повышение нагрузки на агрегаты и увеличение их веса. В резуль-
тате потребуется новое, вторичное, увеличение веса агрегатов и топ-
лива.
Процесс заканчивается тогда, когда взлетный вес достигает значе-
ния полученного из решения уравнений весового баланса (5.6) или
(5.8).
Таким образом, приращение веса самолета О* повышает взлетный
вес на значительно большую величину kqG*.
Производная дОдуст/дбо, входящая в формулу (5.7), определяется
по формуле
д^пуст _ д0*Р | дСф | ^еп . . ^С.у ()(7об.уп:>
dG0 ~ dGQ dG0 + dGQ dG^
Здесь Окр, Оф, Ооп, Ош, 6су, боб.упр — вес крыла, фюзеляжа, оперения,
шасси, силовой установки, оборудования и управления соответственно.
Весовые формулы крыла и других агрегатов в зависимости от О®
обычно известны.
При определении производной dGT/dGo, также входящей в (5.7),
следует учитывать, что вес топлива линейно связан с взлетным весом,
т. е.
dGr___q ____GT
dGQ — т — Go
(5.10)
Для приближенных расчетов можно использовать следующую за-
висимость, вытекающую из известной формулы Бреге, определяющей
дальность полета,
_ ^расц(ср)ср
-^L=OT=1 — В УРейс*ср +ОН13-
<Х70
(5.11)
Если GtC0,2, то формулу (5.11) можно упростить. Раскладывая
второе слагаемое в ряд и ограничиваясь двумя первыми членами разло-
90
жения, получим с погрешностью ±2%
dGT
dGo
GT
1 Л^расч (tfp)cp
^рейс^ср
H-Gh 3i
(5-12)
где 1,1 — поправочный коэффициент.
Производная xG приближенно может быть определена из принципа
линейного подобия [20] по формуле
«0 =-------Ц--------, (5.13)
1-0г-у 0„у„
где fen — коэффициент линейного подобия (fen=2,2—2,6).
В табл. 5.1 приведены расчетные значения производной взлетного
веса хс Для пассажирских самолетов с ТВРД.
Таблица 5.1
Значения производной взлетного веса у.а пассажирских самолетов
Тип самолета Значен при условии (А>> Ро) ~ ~ const ия при условии (S, Ра) = = const Практическая дальность полета при максимальной коммерческой нагрузке в км
Местных авиалиний Средний магистральный Тяжелый магистральный Сверхзвуковой 2,1—2,2 2,3—2,6 3,2—3,8 8—10 1,5—1,6 1,7—1,8 2,2—2,6 3,5—4,0 600—1200 1600—2200 4500-5500 6000-6500
Из данных табл. 5.1 видно, что при (5, Ро) = const величина xG зна-
чительно меньше, чем при (р0, Ро)= const. Это объясняется тем, что
дополнительный вес G* при (р0, P0)=const влечет за собой увеличение
веса всех входящих в Go составляющих, кроме коммерческой СКом и слу-
жебной Сслуж нагрузок, тик как обычно (GK0M, Селу».) ~const. При
(S, Ро)= const вес силовой установки н часть веса крыла, зависящая от
его площади, остаются неизменными.
Если дополнительный вес G* не влечет за собой необходимости ис-
правления центровки самолета, не требует увеличения объема какого-
либо из агрегатов и его появление не изменяет непосредственно аэро-
динамических характеристик самолета, то численное значение xG не
зависит от происхождения дополнительного веса G*. В какой бы части
самолета или его оборудования ни образовался дополнительный вес,
изменение взлетного веса будет одинаковым и равным AGo=±xgG*.
Однако, далеко небезразлично, образовался ли дополнительный вес
6* за счет полезной нагрузки, топлива или пустого самолета. Во всех
этих случаях, при равных значениях xG, величина общего кри-
терия оценки самолета (например, экономичности или боевой эффек-
тивности) будет различной. В этом смысле производная взлетного веса
Xg весьма многолика.
Роль производной хс ие только в том, что она упрощает определе-
ние нового взлетного веса на любой стадии проектирования, ио и позво-
ляет судить о весовом совершенстве проектируемого самолета. Очевид-
но, что чем больше величина xG, тем внимательнее должно быть отно-
шение к весовому совершенству самолета, тем больше требуется затрат
времени н средств на уменьшение веса каждого агрегата, узла и детали.
91
§ 3. ОПРЕДЕЛЕНИЕ ПРОИЗВОДНЫХ ВЗЛЕТНОГО ВЕСА
ПО АЭРОДИНАМИЧЕСКИМ ХАРАКТЕРИСТИКАМ САМОЛЕТА
Рассмотрим, как влияет аэродинамическое качество К, лобовое со-
противление /о (при су = 0) и коэффициент сх0 на взлетный вес самолета.
Основные исходные условия, как и прежде: (Драсч, (?п.в) =const, а
также (р0, Ро) = const или (S, Ро) = const. Нетрудно показать, что при
вариациях Xq, К и сх0 крейсерская скорость за счет изменения высоты
полета ’ > может остаться неизменной, т. е. УКрейс = const, что означает
Урейс = const, так как Lpac4 = const.
Задача состоит в том, чтобы подобно найденной в § 2 производной
dGo/dG* определить OGolOK, dGojdXo, dGD!dcx0.
Для этого воспользуемся уравнением весового баланса самолета в
относительных величинах (все составляющие веса отнесены к величине
взлетного веса)
1 = GnyCT 4" От 4" Gn.H -\-G служ,
_ ^расч <гр\р
где О1=0т.расх + Он.,= 1 -е +G„.s;
/(Ср и (Ср)ср — средние за время полета значения аэродинамического ка-
чества и удельного часового расхода топлива.
Следовательно, имеем
^расч^р^ср
1 = Опуст 4" Оп.н 4" (?служ 4- Сн.з 4“ 1 — & ₽ейС с₽ •
Из этого уравнения среднее потребное значение аэродинамического
качества равно
Л'ер- =---------_ - £р-ас<С|,)ср-_-----------— . (5.14)
^рейс 1° (^пуст ^п.н ^служ "t" ^н.з)
Аэродинамическое качество здесь является не только явной функци-
ей величин, стоящих в правой части равенства (5.14), но зависит также
н от размеров самолета **>.
Подъем и снижение дозвуковых самолетов ведутся, как правило,
при аэродинамическом качестве, которое мало отличается от крейсер-
ского. Поэтому для дозвуковых самолетов с достаточной точностью мож-
но принимать КСр~Хкрейс.
Возьмем частную производную КСр по и запишем ее в виде об-
ратной, интересующей нас, величины dGo/d/Ccp- В результате получим,
считая GH3=const,
г’расч(<7р)ср Э60 ^пуст + °п.н + GciyiK)
^рейс Пп (СПуст "Ь Gn,a + t?ciyjK + Он.з)]2 (Gnycr + Gn.H + Сслуж + С7Н,3)
-О) Г1-
\ dGo ' * ।
*) Предполагается малое изменение всех величин, в том числе высоты полета.
В этом случае VCp = V’peftc!:=const. ,
**) Проявление «масштабного эффекта», если изменение О0 связано с, изменением
размеров самолета.
Э2
Здесь (dKcp/dGo) * выражает «масштабный эффект», когда вместе с
изменением веса самолета Go изменяются и его размеры [при условии
(ро, Ро) =const]*>.
В случае, когда размеры самолета не изменяются при изменении
аэродинамического качества, т. е. при условии (S, Po)=const, производ-
ная (d/<Cp/dGo)* = O и
___ Урейс tln (GnycT + Gn.H + ^служ + з)]2 (gnycr + Gn.H + ^служ + ^н-з)
^(О„уег+О...я + Ое«уж)
(5.16)
Если относительный вес расходуемого топлива Ст.расх^0,2, то с точ-
ностью ±2%
^расч (ср )ср
Vрейс^Сср
и формула для хк приводится к более простому виду
^рейс (1 — GnyCT — Gn,H белу» GH,a)2 _
хк --------------------------------------------. (5.1 / )
1 ’1£ра" (Ср)'Р (<?„,„ + О„.я + <^уж)
UUq
Найдем теперь, как изменяется взлетный вес при изменении силы
аэродинамического сопротивления самолета Хо (при cv=0)**).B этом
случае, как нетрудно показать, можно сохранить скорость полета, если
(сх, су, р, X) = const при М<1, или (сх, су, р, Су) «const при М>1.
Частная производная dG^dXa выражается через хк:
dG^ OGq __________1___________18)
dXQ ~ a/<Cp ' (дХ01дКср) ~ dXoldKCp ' 1 '
При дозвуковой скорости
iz гл <Z e e- GcpKcpCx
Xq—X —cxSq cxiSq— ч
Лер
где Gcp — средний за время полета вес самолета;
G(:р Go — GT.Pacx;
(ЧФ, = const.
При этих условиях и числе М<1
-^ = -Оср + (5.19>
дКср \ /<2р я*эф /
а при числе М> 1
-^-=-Ос.(—!----------(5.20)
оКрр cpUp ‘И
* Для дозвуковых самолетов в приближенных расчетах можно принимать Л’Ср =
= 12,5 + 0,0331 Go0,344 и, следовательно, (дКсp/dGtj)» 0,0114/Goe,65e, где Go берется в кгс;
для сверхзвуковых (^Cp/<5Go).«O,l73/Go 8, где Go в тс.
** Здесь имеется в виду средняя за время полета сила ^о = сяо5<?~ (^о)нр, так как
(Схо, <?)~const в течение всего полета.
93
Подставляя в (5.18) дХ0/дКср из (5.19) или (5.20), получим при чис-
ле М<1
при числе М> 1
(5.22)
Иногда более удобно определять изменение взлетного веса не в за-
висимости от изменения силы аэродинамического сопротивления Хо, а в
зависимости от изменения ее коэффициента cxq.
В этом случае, принимая, как и ранее, при числе М<1 (сх> сур, Z) =
= const, а при числе М>1 (сх, сур, c*)=const, нетрудно получить
dG0 6Gq дКср дКср __
дсх дК™ дсх дсх k '
'г Хо Хо
При М<1 из уравнения поляры имеем
ЯЛ эф
откуда c„=V лХ,ф(сх—сх,).
Следовательно, при М<1
(5М>
По аналогии при М>1
(5-25>
Учитывая, что при числе М<1
_ 1 / л*эф
/Стах~Т|/ —
(здесь Лтах — исходное значение качества до изменения сх0, при котором
сх—cxo!=cxi = cxo), из (5.24) имеем
4^ =----------1/ (5.26)
дсх. 2сх V сх
Соответственно и при М>1 получаем
дХер 1 т/ ___ Хтах
dcxQ ~ с*~сха ' сх
Подставив в (5.23) дКср1дсхо из (5.26) или (5.27) и обозначив
^OQldcxa = ^CtX , получим при числе М< 1
(5.28)
94
при числе М> 1
Ч=— <5-29) 2сл г сх сХ1) сх В табл. 5.2 приведены примерные расчетные значения производных Ч, \ и для пассажирских самолетов. Таблица 5 2
Значенн производных взлетного веса *к, \Yo,
Производные Условие
Назначение самолета
взлетного веса (Ро- Ро) = const (S, Рр) = const
Для местных авиа- в кге/ед.кач — (300—700) — (200—400)
линий в кге/кге 2,0—3,0 1,3—1,8
Чг.-Ю-5 2—6 1,2—4,0
Для средней дальности *к — (2500—3000) — (1700—1900)
11—12 7—8
•10-5 25—30 17—19
Для большой дальне- -(14-103—19.103) — (7.103—9.103)
сти 19-26 11—13
Чт,,’10-5 140—220 80—110
Сверхзвуковые пасса- -(6-104—7-104) -(3.104—3,5-104)
кирские самолеты 22—27 10-11
250—280 120—130
Из сравнения значений xg н х%. (табл. 5.1 н 5.2) видно, что увели-
чение Хр на 1 кгс влечет за собой прн прочих равных условиях значи-
тельно большее увеличение взлетного веса Go, чем перетяжепне на 1 кгс
какого-либо агрегата. Этот вывод особенно нагляден для тяжелых са-
молетов.
Следует заметить, что возможен случаи, когда изменение веса аг-
регата или узла связано с изменением его объема, причем известна зави-
симость силы вредного аэродинамического сопротивления Л'о от объе-
ма v. Тогда формула для определения xg с учетом изменения объема аг-
регата примет внд
____ dGp __ dGp ди____ dGp dXp dv \Хр by ft: Qn\
G~ dG* ~ du ‘ dG* ~ dX0 ' dv ' dG* Av " At?* ’ 1
Аналогично могут быть получены формулы для Xg в случаях, когда
изменение веса и объема агрегата связано с изменением каких-либо дру-
гих аэродинамических характеристик (аэродинамического качества
ит. д.).
§ 4. ОПРЕДЕЛЕНИЕ ПРОИЗВОДНЫХ ВЗЛЕТНОГО ВЕСА
ПО УДЕЛЬНОМУ ЧАСОВОМУ РАСХОДУ ТОПЛИВА
Из всех характеристик двигателя наибольший интерес при проекти-
ровании самолета представляют: удельный вес двигателя (вес двигате-
ля, отнесенный к взлетной тяге), удельный часовой расход топлива, ре-
сурс н стоимость. Полагая, что вес двигателя не зависит от удельного
часового расхода топлива, можно найти dGp/dGaB по формуле (5.7). Ре-
сурс и стоимость двигателя влияют на экономику, но не влияют на взлет-
95
ный вес самолета, поэтому рассмотрим влияние только удельного часо-
вого расхода топлива иа взлетный вес самолета.
Из формулы (5.14) следует, что
(Ср)ср =------— In (Опуст 4- Оп.н -фОслуж 4- GH.3), (5-31)
ьрасч
где (Ср)ср и /(ср — средние за время полета потребные значения
удельного часового расхода топлива и аэродинамического качества.
Принимаем, что
(ZpacMj (7п.н, 14рейс> Ок.л) ==COHst.
Если при вариации (ср)Ср, кроме изменения взлетного веса, должны
изменяться также н размеры самолета, например при наложении усло-
вия (р0, Ро) = const, то Ксрв/(ср(<?о) в результате проявления «масштаб-
ного эффекта».
Продифференцируем (5.31) по Go
а(ср)ер__ УреррКср 157(0"уст + °."" + °с,уж) !
^расч (GnycT + Gn>K + GCflyjK (7н.э)
+ _tw/a/fppj 1п(011У„+0„,к+0„уж + 0«.3)1.
Ьрасч \ «Ц) /* J
-г (Ср) Ср
Так как нас интересует не -------- , а обратная величина, то нз пре-
дыдущего имеем
д _
\7 - к' ьг (^нУСт 4“ С7,1.н + *^слУж)
___ OUq__________иреисЛср dGp________________________
Р д(Ср)ср _ £расч (GnyCT + GlbH 4~ ССлуЖ 4-Gh 9)
1п(3;ус1+о.,.„+ос.1у11< + о„.3)Г1. (5.32)
Ьрасч \ uGq ) J
Приближенное определение производной (------ (учет «масштаб-
\ dG0
кого эффекта») дано выше, в § 3.
Если с изменением ср размеры самолета остаются постоянными, на-
(^^Сср \
• • =0 н формула (5.32) упрощается:
dG0 Д
dGo £расч
д (^р)ср Ерейс^ср
^пуст + Gn.H 4~ С?служ 4- GH.3
(5.33)
(^ПУСТ + Gn.H + Сслуж)
оо0
Типичные значения *ср для гражданских самолетов даны в табл. 5.3,
Г кгс .«-.s’!
где у-Ср имеет размерность ---- 10 .
Из табл. 5.3 видно, что прн (р0; -Ро) =const величина *Ср больше, чем
прн (S, Ро) =const. Причина этого та же, что и причина различия xg при
указанных ограничениях (см. § 2).
96
Таблица 5 3
Значения производных взлетного веса
Назначение сахолета Условие
(й>. /3o) = consf (S, PQ) = const
Для местны.х авиа- линии Для средней дальности Для большой дально- сти Сверхзвуковые пасса- жирские самолеты 7.е = 2—8 Г —• Ю3 1 р [ел. ср J 14—20 110—190 250—300 = 1,5-5 Г-^ -103 1 р L ед. ср J 9—12 60—90 140—150
В заключение сделаем несколько итоговых замечаний.
1. Имея различные производные взлетного веса хь можно опреде-
лить новое значение взлетного веса по формуле
((J'o)hob = (Gq)hcx Т ^(Х/Д^),
где At— приращение какой-либо из характеристик.
2. Всем производным взлетного веса свойственна независимость от
знака изменения соответствующих характеристик (инвариантность к
знаку АГ).
3. Кроме рассмотренных основных производных взлетного веса, мо-
гут быть аналогичным образом получены и все другие интересующие
конструктора производные в каждом конкретном случае.
4. Производные взлетного веса являются по существу выражением
обратной связи, так как они дают возможность осуществить взаимо-
связь частных изменений характеристик частей самолета с изменением
взлетного веса, являющегося критерием оценки самолета прн сохране-
нии летных данных (Драсч» Укрейс) и полезной нагрузки.
Раздел II
ВЫБОР СХЕМЫ, СИЛОВОЙ УСТАНОВКИ
И ОСНОВНЫХ ПАРАМЕТРОВ САМОЛЕТА
Глава VI
СХЕМА САМОЛЕТА. АНАЛИЗ И ВЫБОР СХЕМЫ
Схема самолета определяется взаимным положением, формой и ко-
личеством основных агрегатов самолета — крыла, фюзеляжа, оперения
и двигателей.
По количеству агрегатов различают следующие схемы: биплан и мо-
ноплан (рис. 6.1, а, б); с одним или двумя фюзеляжами (рис. 6.1, в, г);
с одной или двумя поверхностями горизонтального нли вертикального
оперения (рис. 6.1, б); с одним или несколькими двигателями. Возмож-
ны схемы самолетов без крыла («летающий фюзеляж») *, без фюзеляжа
* При скоростях, соответствующих М>5, фюзеляж мало уступает крылу по несу-
щим свойствам. При малых скоростях подъемная сила может создаваться тягой специ-
альных двигателей.
4-1062
97
Рис, 6,4. Типовые схемы самолетов
(«летающее крыло»), а также без горизонтального оперения («бесхвост-
ка»), Этн схемы даны на рнс. 6.1, е, ж, о, п, ф.
Форма агрегатов может изменяться в полете (трансформируемые
схемы, рнс. 6.1, з, и, к).
Попутно заметим, что самолет, спроектированный по схеме «бес-
хвостка», впервые в мире был создан в нашей стране (самолет БИЧ-3,
1926 г., конструктор Черановскнй Б. И.).
Характерный признак схемы создается формой крыла в плане — са-
молеты с прямым, стреловидным, треугольным крыльями, с крылом пе-
98
ременной по размаху стреловидности (рис. 6.1, л— п). Отличительную
особенность схемы создает и расположение крыла относительно фюзе-
ляжа по высоте (рис. 6.1, р, с, т) —низкоплан, среднеплан, высокоплан.
Наиболее важные различия по аэродинамическим, весовым и экс-
плуатационным характеристикам создает взаимное расположение крыла
и горизонтального оперения по длине фюзеляжа — схемы нормальная,
нли классическая (рис. 6.1, у), «бесхвостка» (рис. 6.1, ф) * и схема
«утка» (рис. 6.1, х). Не менее важным признаком схемы является и рас-
положение двигателей на самолете (см. §4).
Рис. 6.2. Несимметричный самолет BV-I41 фирмы
Блом и Фосс. Основные данные:
Go-4400 кгс; ©цуст-2670 кгс, 3-53,1 м5; /-17,46 м; Vmax-
—450 км/ч; PKpeflc—350 км/ч. мотор BMW-801. №=1600 л. с,
Чем же объяснить такое многообразие схем? Основная причина —
в многообразии требований к самолетам, в непрерывном развитии воз-
можностей их удовлетворения. Каждая из схем отражает стремление
конструктора иаилучшим образом удовлетворить тактико-техническим
требованиям при данном состоянии развития авиационной науки и тех-
ники.
Это стремление приводит иногда и к решениям, не оправдывающим
себя на практике. Примером такого решения может служить схема не-
симметричного самолета BV-141 (фирма Блом и Фосс), построенного в
Германии в 1938 г. (рис. 6.2).
Интересной в этой схеме представляется идея радикально улучшить
обзор летчика на одномоторном самолете-разведчике.
Из всего многообразия вопросов, связанных с выбором схемы само-
лета, рассмотрим далее следующие наиболее важные и актуальные;
— анализ и выбор схемы сверхзвуковых самолетов;
— анализ и выбор схемы дозвуковых самолетов;
* Роль горизонтального оперения здесь выполняют элевоны на задней кром-
ке крыла.
4* 99
— схема самолета с крылом изменяемой в полете стреловидности;
— расположение двигателей на самолете.
Постановка задачи о выборе схемы и параметров самолета рассмот-
рена в § 1 гл. III. Напомним лишь, что при заданных тактико-техничес-
ких требованиях и других ограничениях, накладываемых нормами проч-
ности, жесткости и эксплуатации, необходимо среди всего многообразия
схем и параметров самолета выбрать такие, которые приводили бы к
экстремальному значению критерия оценки самолета. В качестве крите-
рия оценки принимаются: экономичность эксплуатации (гражданские
самолеты), боевая эффективность или стоимость выполнения операции.
Приближенным критерием является величина взлетного веса. Наилуч-
шая схема самолета любого назначения в первом приближении соответ-
ствует минимуму взлетного веса* при всех заданных ограничениях [4,25].
Среди множества схем вначале отбираются (на основе предвари-
тельных расчетов и опыта) несколько наиболее интересных, конкурирую-
щих. Затем они подробно исследуются количественно (по критерию
оценки) и качественно (по признакам, ие вошедшим в алгоритм оптими-
зации) .
§ 1. АНАЛИЗ И ВЫБОР СХЕМЫ СВЕРХЗВУКОВЫХ САМОЛЕТОВ
Рассмотрим неманевренные самолеты дальнего действия
с фиксированным крылом**, а также самолеты маневренного
класса. Будем считать, что самолеты имеют обычный взлет с разбегом
и посадку с пробегом ***.
При выборе схемы иеманевренного самолета дальнего действия
большое внимание уделяется величине максимального аэродинамическо-
го качества Ктах в крейсерском полете, так как от него непосредственно
зависит либо дальность полета при известном относительном весе топли-
ва (GT = const), либо величины (7Т и Go при L = const.
Максимальное аэродинамическое качество можно увеличить, напри-
мер, за счет уменьшения миделей ненесущих частей, уменьшения омы-
ваемой поверхности самолета, а также путем снижения так называемого
балансировочного сопротивления. Первые два способа не требуют спе-
циальных пояснений. Остановимся более подробно на зависимости аэро-
динамического качества от балансировочного сопротивления, которое
существенно зависит от схемы самолета.
Рассмотрим классическую (нормальную) схему и схему «утка».
Из условия балансировки самолета получим:
— для классической схемы (рис. 6.3, а)
Ут.о хк хт .
Пр *г.о хт
— для схемы «утка» (рис. 6.3, б)
Полагая, что хд—Хт = Дх,
%го — Хт = ЬТ0 (для классической схемы);
хг.о+Хт = о (для схемы «утка»),
* При более подробном сравнении следует учитывать также влияние схемы на
технологичность и ремонтопригодность конструкции, удобство эксплуатации и комфорт
экипажа и пассажиров.
** Схема самолета с изменяемой стреловидностью крыла рассмотрена в § 3
данной главы.
*•* Схемы СВВП и СУВП рассмотрены в гл. X, схемы воздушно космических са-
молетов — в гл. XI.
100
и относя величины Ах и Lr.o к бсдх, получим
Гг.0=
Гг.о '
На сверхзвуковых скоростях, как известно, центр давления крыла
значительно перемещается назад и Ах увеличивается, а отношение
Уг.о/^кр может достигать величины 0,15—0,20 (на дозвуковом режиме
0,03—0,05). Отсюда следует, что балансировка на сверхзвуковых режи-
мах приводит к существенному увеличению сопротивления, связанного
с подъемной силой горизонтального оперения.
Рис. 6.3. Продольная балансировка самолетов классиче-
ской (нормальной) схемы (а) и схемы «утка» (б):
F — фокус самолета
Полное лобовое сопротивление самолета с учетом балансировки
равно
Х = *0 -Ь Х£ к'4’Агбал = Л'04-А'£, рЦ-Х£ г о-
Разделив обе части уравнения на qS [считаем, что £7Кр = ^г.о и
получим
С и С у —L- С х 4- С у —С Хл “4“ С х с х kS г г.,
х '•'Хо I t р I идбал 0 1 Х1 кр xi г о г °’
или, так как для классической схемы су= с:. 4- сУг (15г.о» а дЛЯ схемы
„утка“ су~ Сук? — Суг о^г.о, то соответственно
<:х=';х0+Оо(<:»Вр+ч.Л'”)2 (б-1)
с,0 + О0(Чр- cr.Sr 0)2 + О„Ч. Д о. (6-1')
где Da= \1с'.
Из рис. 6.3 следует, что
{с^кр + 'Х о^г.о)о^г.05г 0 — для классической схемы;
(с^р-сУг1Д.о) Дх^с^о^г.о^г.о —для схемы „утка“.
101
Из этих выражений получим
Си Г,АХ
«кр
СУ =~-------------- •
Г'° Sr.0 (ir.o Т Лх)
Для классической схемы в знаменателе берется минус, для схемы
«утка» — плюс.
Подставим значение сУг о в (6.1) и (6.1'). После преобразования
получим для классической схемы
> fl J___________
'KPL + (Дг.о-А-И2
2Ах
,о — А*
для схемы «утка»
cx=^ + Oo4KP I 1 + -,- (6.2')
PL (Z.r.o + Ах)2 \ 5г.о / Z-r.o + Ax J
Таким образом, сх—сХа 4-£>o&m*c*kP«
где /20бал = (1 -Н)^0’
причем со — коэффициент, учитывающий влияние балансировки на со-
противление самолета.
Для классической схемы
ш= _ Ах2_ (1+ _ Ах _ ; (6.3)
(Дг.о — Ах)2 \ Sr,0 ' Lr,0—&х
для схемы «утка»
Максимальное аэродинамическое качество самолета, как известно,
равно
С учетом балансировочного сопротивления
Лтах = Т1/-т-й-------- ’
2 у сж/-'Обал
ИЛИ
= ~ |/ <,/>„(!+«.) •
Приведенные выше формулы позволяют сделать вывод о значн
тельном влиянии величины со на аэродинамику самолета. Чем больше со,
тем больше балансировочное сопротивление н тем больше потеря аэро-
динамического качества.
Прн анализе балансировочного сопротивления удобно использовать
понятие фокуса самолета. Как известно, х? — хт= — mrzv, где тги—
производная коэффициента продольного момента самолета по су (запас
продольной статической устойчивости);
Хр =х? ^сах! Xr — xjbckx-
102
Чем больше запас устойчивости тем больше и балансировоч-
ные потери аэродинамического качества, так как увеличивается
— хт=(Дл: ± Sr.QL )---------— (здесь в скобках знак плюс соответст-
1 + Sr.о
вует нормальной схеме, а минус — схеме «утка»).
Для обеспечения устойчивости сверхзвукового самолета на дозву-
ковом режиме величину тс» собирают в пределах 0,02—0,05, но на
сверхзвуковых режимах вследствие передвижения фокуса назад про-
дольная статическая устойчивость значительно увеличивается (если не
принять специальных мер, указанных ниже), особенно на самолете нор-
мальной схемы. Самолет «бесхвостка» занимает некоторое среднее по-
Рис. 6.4. Изменение степени продоль-
ной статической устойчивости само-
лета нормальной схемы и схемы «ут-
ка» (крыло плоское)
Рис. 6.5. Зависимость относительного
аэродинамического качества от степе-
ни продольной статической устоичи-
вости (крыло плоское):
^тах — ^тах/(^'тах) m с w g
ложение по наибольшему сдвигу фокуса назад при переходе от М<1 к
М>1 (рис. 6.4). Для самолета этой схемы с плоским крылом (плоская
поверхность хорд крыла) яр«0,35 и дт~0,3 прн М<1, а при
7f~0,5. Таким образом, «бесхвостка» с плоским крылом имеет при
= — 0,15, если хт = 0,30.
Влияние щСу на относительное максимальное аэродинамическое ка-
чество /Стах =/Стах/(/Стах) тс^ = 0 СЗМОЛеТОВ ДВуХ СХеМ ПОКЭЗЭНО ИЗ
рис. 6.5. Эти графики построены при типичных значениях ЛГ10 и 5Г0
самолетов нормальной схемы и схемы «утка». Видно, что самолет клас-
сической схемы (с плоским крылом) имеет большие потери максималь-
ного аэродинамического качества, чем самолет схемы «утка».
Это обстоятельство и привело в недалеком прошлом к мысля о це-
лесообразности применения схемы «утка» для тяжелых дальних самоле-
тов (например, самолет ХВ-70 «Валькирия», США). Затем выяснилось,
что потерн /Стах от балансировки можно существенно уменьшить или
даже ликвидировать для рассматриваемых схем, если применить следу-
ющие конструктивные решения:
1) «плавающее» или убирающееся при М<1 горизонтальное опе-
рение в носовой части самолета. Прн дозвуковой скорости это оперение
103
либо убирается в фюзеляж, либо, как флюгер, устанавливается под ну-
левым или некоторым постоянным положительным углом атаки и ие
влияет, таким образом, на положение фокуса самолета. Самолет схемы
«утка», например, с таким оперением при М<1 и аго = 0° (Уг.о=0) яв-
ляется, по существу, «бесхвосткой». На сверхзвуковой скорости оперение
защемляется иа определенном угле атаки и смещает фокус самолета
вперед на величину Дхр=6'г.0£<г.о (здесь 5г.о и £г.о относятся к опере-
нию— дестабилизатору). В этом случае щ г при Л1<1 и при Л13>1 мо-
жет иметь одинаковые значения порядка 0,03—0,05, что и требуется
(рис. 6.6);
2) корневые наплывы на крыле (рис. 6.7) перед центром тяжести
самолета. При М>1 эффективность наплывов за счет роста(с£ НаиЛ) уве-
личивается. Поэтому с увеличением числа М полета фокус самолета
перемещается вперед и при расчетном числе М. степень продольной ста-
тической устойчивости уменьшается до приемлемых размеров;
3) деформация срединной поверхности крыла (поверхности хорд).
Крыло как бы настраивается иа основной режим (су, М) полета, при
котором потери на балансировку сведены до минимума (рис. 6.8);
4) отклоняемые при М^>1 концы стреловидного или треугольного
крыла; концы крыла превращаются в дополнительные кили и не участ-
вуют в создании подъемной силы. Фокус самолета при этой операции
сдвигается вперед иа величину Дхр=5кД?, где 5К — отношение площади
отклоняемой части крыла к полной площади крыла; L^ — Lk/Ьсах', Lk —
104
расстояние от центра тяжести самолета до центра давления отклоняемой
части крыла (по оси самолета).
Все рассмотренные выше способы уменьшения степени продольной
статической устойчивости самолета при сверхзвуковой скорости основа-
ны на ограничении сдвижения фокуса с помощью дополнительного уве-
личения (создания) подъемной силы перед центром тяжести самолета
или с помощью уменьшения ее за центром тяжести. Кроме этих спосо-
бов, можно использовать еще один, принципиально отличный от пре-
дыдущих, приведенный в п. 5;
Вид сбоку
Рис. 6 8. Влияние деформации крыла самолета схемы «бесхвостка» на макси-
мальное аэродинамическое качество сверхзвукового самолета при М=2
(сечения 1—4 и «борт фюзеляжа» прн виде сбоку представляют собой средние линии
соответствующих профилей крыла)
3?^ +т%(неустойчи8ость)
хт—п Г
4-тс* (устойчивость) 1 2 М
5) сдвижение назад центра тяжести самолета (вслед за сдвижени-
ем фокуса) путем перекачки топлива из передних баков в задний балан-
сировочный бак. Это решение используется обычно в комбинации с пе-
речисленными выше. Недоста-
ток его состоит в том, что для
быстрой перекачки топлива
требуются весьма мощные
(обычно — несколько десятков
киловатт) и тяжелые насосы,
а также топливопроводы боль-
шой производительности. Ког-
да после перекачки топлива
назад необходимо экстренно
уменьшить скорость полета до 0
М<1, приходится применять
аварийный слив перекаченного Рис- 6-9- слвижение центра тяжести само-
г , 1 лета назад
топлива во избежание про-
дольной неустойчивости само-
лета в дозвуковой зоне (рис. 6.9).
Изложенные способы позволяют в большей или меньшей степени ре-
шить проблему аэродинамического качества с учетом балансировки. Для
схем «утка» и «бесхвостка» она решается более успешно, для нормаль-
ной схемы — менее успешно в связи с большим сдвигом фокуса самолета
назад.
Рассмотрим теперь три схемы немаиевренных сверхзвуковых само-
летов («утка», «бесхвостка» и нормальную) с других точек зрения.
По безопасности эксплуатации самолет схемы «утка» уступает са-
молетам других схем. Причины этого следующие.
105
I. Из условия (^Иг)безго=(^г)г.о для схемы «утка» имеем:
если —тсу^> (-$г.о)2£г.о т0 с .
г ‘г-° №
При типичных значениях *$(.<, <0,15, Лг.о < 2 имеем , если
— /^>0,046. Обычно в схеме «утка» при М<1 — /лО>0,046. По-
этому потеря подъемной силы при больших углах атаки наступает,
как правило, сначала на оперении (с#г ° > су \ В этом случае Ккр<<?
(при равновесии ГЛ'=G — Кг,0) и самолет схемы «утка» вместе с клев-
ком (момент Гкр иа пикирование относительно ц. т. самолета, см.
рис. 6.3) теряет высоту (проседает).
2. Штопорные свойства самолета схемы «утка» хуже, чем самолетов
других схем.
3. Самолет схемы «утка» обладает недостаточной динамической ус-
тойчивостью (трудно гасить короткопериодические колебания).
Казалось бы, что площадь крыла на таком самолете можно выбрать
меньшую, чем на самолетах других схем, так как горизонтальное опере-
ние создает положительную подъемную силу. Одиако и этого преиму-
щества самолет схемы «утка» лишен. Дело в том, что возможность ме-
ханизации крыла здесь ограничена условием балансировки и срыва
потока с оперения. К тому же подъемная сила крыла вследствие скоса
потока от оперения уменьшается на 10—15%. Поэтому приемлемые
взлетно-посадочные характеристики самолета схемы «утка» достигают-
ся увеличением площади крыла*. Во всяком случае выигрыша площади
и веса крыла по сравнению с нормальной схемой эта схема не дает.
Самолет «бесхвостка» (а также «летающее крыло») имеет следую-
щие преимущества:
— меньше потери аэродинамического качества от балансировки при
М> 1,2, чем у самолета нормальной схемы;
— меньшая стоимость конструкции (на 10—15%) за счет отсутст-
вия горизонтального оперения как самостоятельного агрегата.
Следует отметить, что вообще горизонтальное оперение необходимо
неманеврениому сверхзвуковому самолету главным образом при боль-
ших углах атаки (взлет, посадка, выход из срыва и т. п.). В крейсерском
же полете функции горизонтального оперения с успехом могут выпол-
нить закрылки (на схеме «бесхвостка» — элевоны).
Однако при взлете и посадке самолет схемы «бесхвостка» уступает
самолету нормальной схемы, так как крыло бесхвостого самолета не
допускает механизации**. Для улучшения взлетно-посадочных характе-
ристик самолета схемы «бесхвостка» (Дразб, £проб, 1%Тр, Vnoc) приходит-
ся увеличивать площадь крыла (из-за малых значений су, рис. 6.10).
Некоторого положительного эффекта можно добиться, если на са-
молете схемы «бесхвостка» применить выдвигаемое в носовой части при
взлете и посадке небольшое крыло (так называемое «перо», рис. 6.1, к).
Площадь его обычно не превышает 1,5—2% от площади крыла.
При выборе схемы сверхзвукового неманевренного самолета важное
значение приобретает сумма веса крыла, фюзеляжа, оперения и топлива.
На самолете нормальной схемы можно получить выигрыш в весе крыла
за счет меньшей его площади (если допускает объем для размещения
топлива), но в то же время можно проиграть в весе фюзеляжа и топли-
* Возможна также «супермеханизация» горизонтального оперения (УПС). Однако
при этом возрастает скос за оперением, падает Укр, возникает проблема устойчивости
потока на входе в двигатели и др.
** Для продольной балансировки самолета элевоны приходится отклонять вверх,
в сторону, противоположную отклонению закрылков.
106
ва (уменьшается аэродинамическое качество вследствие потерь на ба-
лансировку), а также в весе оперения.
На самолете «бесхвостка», наоборот, получается меньший вес топ-
лива н фюзеляжа (отсутствуют нагрузки на фюзеляж от горизонтально-
го оперения), но больший вес крыла.
В каждом конкретном случае баланс этих весов может быть либо на
стороне нормальной схемы, либо на стороне схемы «бесхвостка». Все
зависит от конкретных ограничений: величин дальности и числа М поле-
та, длины ВПП и т. п. Дать какие-либо окончательные рекомендации
по этому вопросу не представляется возможным. В настоящее время яс-
но лишь, что схема «утка» на самолетах рассматриваемого класса не
оправдала тех надежд, которые на нее возлагались.
Угол атаки крь ла
Рис. 6.10. Коэффициент подъемной силы
при взлете (без учета влияния земли)
Рис. 6.11. Типовые схемы маневренных
сверхзвуковых самолетов (к табл. 6.1)
При выборе положения крыла относительно фюзеляжа по высоте
на сверхзвуковом неманевренном самолете следует учитывать, что низ-
коплан имеет ряд конструктивных и эксплуатационных преимуществ пе-
ред высокопланом:
— удобнее крепить и убирать шасси;
— увеличивается коэффициент су при взлете и посадке в результате
более эффективного влияния земли (Acy^0,l);
— обеспечивается плавучесть при аварийной посадке на воду.
Если условия загрузки и выгрузки (сброса) целевой нагрузки не
диктуют однозначно высокое расположение крыла, то следует стремить-
ся к схеме низкоплана или полунизкоплана тем более, что коэффициент
Схо сверхзвукового самолета — низкоплана практически не отличается от
cxq высокоплана.
Маневренные сверхзвуковые самолеты* должны удо-
влетворять следующим основным требованиям:
— максимальная избыточная тяга для обеспечения быстрого разго-
на и необходимой вертикальной скорости;
— механизация крыла во всем диапазоне скоростей для обеспече-
ния быстрого разворота и изменения высоты;
— величина скорости захода на посадку при плохой видимости не
должна требовать слишком высокой квалификации летчиков.
При выборе схемы маневренных сверхзвуковых самолетов следует
учитывать эти требования.
Для сравнения возьмем две схемы — нормальную и «бесхвостку»
(рис. 6.11) при следующих исходных данных: расчетное число М=2,2;
* Здесь рассматриваются самолеты с обычным взлетом и посадкой и фиксиро-
ванной геометрией крыла.
107
радиус действия 550 км; длина разбега — не более 750 м; скорость захо-
да на посадку не более 280 км/ч; экипаж 1 чел.; целевая нагрузка
1500 кгс; силовая установка — один ТРД.
Результаты сравнения даны в табл. 6.1. Из табл. 6.1 видно преиму-
щество нормальной схемы по взлетному весу (в основном, за счет
меньшей площади крыла). Это преимущество достигнуто в результате
того, что крыло самолета нормальной схемы допускает мощную механи-
зацию (например, двухщелевые выдвижные закрылки и отклоняемый
носок), тогда как крыло «бесхвостки» не допускает механизацию.
Таблица 6.1
Сравнение двух схем маневренного сверхзвукового самолета
Схема Параметры
Go в кгс ‘г. а СО X с си X а о у зар В KV/'f £р»эб в И о’ II X ° II go г и го
Нормальная 13 850 23,5 10 300 585 0,745 280 1,35 1,2 750 0,58 585 0,610
«Бесхвост- ка» 14 400 50,5 11500 285 0,800 280 0,66 0,66 610 0,48 570 0,618
Параметр ро1су^а, характеризующий радиус разворота (здесь
Су доп — допустимый из условия сваливания илн бафтинга коэффициент
подъемной силы), практически одинаков по величине для обеих схем.
Характерный параметр разгона — перегрузка п*——---------больше у
нормальной схемы за счет меньшей площади крыла. Расчеты показыва-
ют, что время набора высоты с одновременным разгоном до Мрасч (Я=
= 15 км; Мрасч=2,2) самолет «бесхвостка» имеет на 25% больше, чем
самолет нормальной схемы.
Из-за сравнительно небольшой нагрузки на м2 крыла самолет «бес-
хвостка» более чувствителен к вертикальным порывам воздуха (больше
перегрузки пу от порывов, чем у самолета нормальной схемы), что за-
трудняет пилотирование, утомляет летчика и уменьшает ресурс конст-
рукции (особенно при полете на малых высотах).
Преимущество схемы «бесхвостка» — несколько меньшая длина раз-
бега * — не может изменить преимущества нормальной схемы.
Следует подчеркнуть, что полученные выводы не являются следстви-
ем принятых исходных данных, скорее они отражают органический не-
достаток «бесхвосто»— нерешенную проблему механизации крыла.
Выводы являются достаточно общими для принятой постановки задачи
о сравнении самолетов различных схем при одинаковой степени безопас-
ности эксплуатации, определяемой в значительной мере скоростью захо-
да на посадку.
§ 2. АНАЛИЗ И ВЫБОР СХЕМЫ ДОЗВУКОВЫХ САМОЛЕТОВ
За время существования авиации известно немало попыток приме-
нить схемы «бесхвостка» и «утка» для дозвуковых самолетов [24]. Одна-
ко эти попытки, как правило, заканчивались опытными экземплярами
или малыми сериями самолетов.
* При данной постановке задачи, где V8»xeconst.
108
Нормальная схема дозвуковых самолетов выдержала испытание
временем и практикой и теперь является классической.
Основные причины неудач самолетов схем «бесхвостка» и «утка» бы-
ли связаны с недостаточной устойчивостью и управляемостью, с невоз-
можностью или ограниченностью механизации крыла. Безопасность по-
лета на таких самолетах была хуже, а лобовое сопротивление и вес — не
меньше (из-за увеличения площади крыла), чем у самолетов нормаль-
ной схемы.
Рассмотрим следующие разновидности нормальных схем:
а) схемы, создаваемые расположением крыла по высоте фюзеляжа
(см. рис. 6.1, р, с, т);
Рис. 6.12. Поляры самолетов при раз-
личном положении крыла по высоте фю-
зеляжа
Рис. 6.13. Процент досрочно сня-
тых двигателей (ТРД) в зависи-
мости от расстояния их до ВПП.
б) схема с применением двухбалочиого фюзеляжа вместо обычного
однобалочного (см. рис. 6.15) *.
К преимуществам схемы с высоким расположением крыла отно-
сятся:
— уменьшение аэродинамического сопротивления от интерферен-
ции, особенно для круглого фюзеляжа (рис. 6.12);
— уменьшение расстояния от фюзеляжа до земли, что создает ряд
эксплуатационных удобств;
— хороший обзор земли из пассажирской кабины;
— снижение вероятности выхода из строя двигателей, расположен-
ных на крыле, в результате попадания твердых частиц с ВПП при взлете
и посадке (рис. 6.13).
Для уменьшения вредной интерференции крыла и фюзеляжа обычно
устанавливают зализы. И все же аэродинамическое качество высоко-
плана с круглым фюзеляжем на 4—5% больше, чем у низкоплана (при
прочих равных условиях). В случае прямоугольного сечения фюзеляжа
и иа среднеплане зализы можно не устанавливать.
Несмотря на аэродинамические преимущества среднего расположе-
ния крыла, такая схема редко применяется для современных дозвуко-
вых самолетов по компоновочным соображениям: крыло обычно прохо-
дит в зоне пилотской, пассажирской или грузовой кабины.
Схемы размещения двигателей на дозвуковых самолетах рассмотрены в § 4.
109
(6-4)
Рис. 6.14. Относительная площадь вер-
тикального оперения самолета-высоко-
плана и самолета-низкоплана:
О — самолеты низкопланы; Д — самолеты-вы-
сокопланы, □ — военно-транспортные самоле-
ты-высокопланы
На военно-транспортных н грузовых самолетах высокое расположе-
ние крыла является наиболее приемлемым с эксплуатационной точки
зрения, оно дает возможность существенно уменьшить расстояние от по-
ла грузовой кабины до земли и облегчить погрузку и выгрузку.
Схема расположения крыла по высоте фюзеляжа влияет, как видно
из рис. 6.13, на ресурс двигателей, если они расположены на крыле. Это
влияние можно приближенно оценить по формуле
т / 100 —п
7 —7 ’В стенд 100
где Тдв —средний ресурс двигателей, установленных на самолете,
в часах;
Тдв.стенд — средний ресурс, установленный на стенде, в часах;
п— берется с графика (рис. 6.13) по среднему значению вы-
соты Ядв для всех двигателей, установленных на самоле-
те, в процентах.
Расчеты по формуле (6.4) показывают, что ресурс двигателей на само-
лете-высокоплане может быть на 10—15% больше, чем на низкоплане.
Поэтому и себестоимость пере-
возок, зависящая от Тдв (см.
гл. I), па самолете-высокопла-
не снижается. Однако по абсо-
лютной величине экономич-
ность эксплуатации самолета-
высокоплана в большинстве
случаев получается несколько
хуже, чем низкоплана, за счет
весовых потерь. Эти потери
объясняются следующими при-
чинами:
— на самолете-высокопла-
не приходится специально уси-
ливать нижнюю часть фюзеля-
жа на случай аварийной посад-
ки без шасси;
— увеличивается вес силовых элементов (шпангоутов) фюзеляжа,
воспринимающих нагрузки от крыла и шасси (если основные стойки
шасси присоединяются к фюзеляжу);
— на 30—50% увеличивается потребная площадь вертикального
оперения в связи с ухудшением боковой устойчивости самолета-высоко-
плана на больших углах атаки, когда оперение попадает в спутную струю
от крыла (рис. 6.14).
В сумме вес конструкции самолета-высокоплана увеличивается па
2,5—3% от взлетного веса, если все стойки шасси крепятся к фюзеляжу,
н на 0,7—1,0%, если основные стойки крепятся к крылу.
Когда в случае аварийного приводнения требуется обеспечить пла-
вучесть (которой самолет-высокоплан в отличие от низкоплана не обла-
дает), то приходится устанавливать специальные надувные поплавки,
которые также увеличивают вес самолета-высокоплана.
При окончательном решении вопроса о расположении крыла по вы-
соте фюзеляжа нужно учитывать, таким образом, ряд противоречивых
факторов: высокоплан имеет лучшие аэродинамические и эксплуатаци-
онные характеристики, но уступает низкоплану по весу конструкции. По-
этому необходимо делать подробный расчет веса и экономичности са-
молета обоих схем. Если же речь идет о проектировании военно-транс-
портного или грузового самолета, то по компоновочным и
эксплуатационным соображениям следует отдать предпочтение высоко-
му расположению крыла.
МО
При проектировании многоцелевых (для народного хозяйства) и
грузовых самолетов возникает необходимость оценить преимущества и
недостатки двухбалочиой схемы фюзеляжа (с гондолой) вместо обыч-
ного фюзеляжа (рис. 6.15).
Преимуществом двухбалочной схемы является удобство загрузки и
выгрузки гондолы. Однако осуществление такой, иа первый взгляд, за-
манчивой схемы наталкивается на ряд трудностей, связанных с ухудше-
нием аэродинамики и увеличением веса конструкции.
Рис. 6 15. Обычная (а) и двухбалочная (б) схемы само-
летов с ТВД
Расчеты показывают, что аэродинамическое сопротивление самоле-
та с двухбалочиым фюзеляжем на 10—15% больше, чем обычного за
счет большей омываемой поверхности и косой обдувки балок потоком
от винтов (иа самолетах с ПД и ТВД). Если уменьшить омываемую по-
верхность балок, сократив размеры их сечения, то возникает проблема
жесткости крепления горизонтального оперения и веса самих балок.
Из условия равного прогиба на конце обычного и двухбалочиого
фюзеляжа (т. е. при равной жесткости на изгиб) можно получить в пер-
вом приближении следующее соотношение:
Gn=Oi-A^Aii,
где G[ — вес хвостовой части (до лонжерона крыла) обычного фюзе-
ляжа;
Оп — вес балок;
h\ — высота сечения обычного фюзеляжа в месте заделки (у лон-
жерона крыла);
Ли — высота сечения балки в месте заделки ее на крыле.
Переходя к весу всего фюзеляжа, имеем:
(Оф)1.=(Оф)>
(6.5)
Здесь (<7ф)1 — вес обычного фюзеляжа;
(Оф)и —вес балочного фюзеляжа (вместе с гондолой);
Gi — отношение веса хвостовой части обычного фюзеляжа к
его полному весу Jji = (7i/((j4,)i.
У самолетов весом до 6—8 тс Gi=0,25—0,3. Если, например, hi/hn=
= 1,5, то вес двухбалочного фюзеляжа, как следует из формулы (6.5),
111
будет на 31—37% больше, чем обычного фюзеляжа (при равной жест-
кости иа изгиб).
Кроме увеличения веса и аэродинамического сопротивления, само-
лет с двухбалочным фюзеляжем имеет и другие недостатки:
— стоимость фюзеляжа больше (на 10—15%) за счет специальной
технологической оснастки для изготовления и сборки балок;
— балки занимают часть размаха механизации крыла, поэтому пло-
щадь крыла приходится увеличивать на 5—7% для достижения одина-
ковых взлетно-посадочных характеристик с обычным самолетом;
— вес проводки управления возрастает на 20—25%.
В результате можно сделать вывод о нецелесообразности примене-
ния двухбалочного фюзеляжа, исходя из весовых и аэродинамических
данных.
§ 3. СХЕМА САМОЛЕТА С КРЫЛОМ ИЗМЕНЯЕМОЙ
В ПОЛЕТЕ СТРЕЛОВИДНОСТИ
Изменяемая в полете стреловидность крыла есть частный случай пе-
ременной геометрии самолета. Идея эта не нова. Еще на заре авиации
французский конструктор Клеман Адер построил модель самолета
(1904 г.), у которой изменялась стреловидность крыла и горизонтально-
го оперения «для регулирования скорости».
Рис. 6.16. Зависимость £?эах
при заходе на посадку от стре-
ловидности крыла по передней
кромке (механизация: двухще-
левые закрылки и предкрылки;
а=12°)
Рис. 6.17. Характер изменения
Су самолета в зависимости от
стреловидности крыла по пе-
редней кромке (М<1)
Самолет моно-биплан (см. рис. 6.1, з) был построен у нас в 1940 г.
(конструкторы В. В. Никитин и В. В. Шевченко). В 1931 г. вблизи Па-
рижа испытывался самолет конструкции Махонина с изменяемой пло-
щадью крыла посредством выдвижения консолей. Размах крыла изме-
нялся от 13 до 21,1 м, площадь крыла увеличивалась от 21 м2 до 33 м2.
Вес механизации, связанной с телескопическим раздвижением такого
крыла, составлял 850 кгс (17% от расчетного взлетного веса).
Уже в сороковых годах во многих странах начались работы по соз-
данию самолетов с крылом изменяемой в полете стреловидности.
В настоящее время эта идея стала такой же привычной, как идея
убирающегося шасси или выдвижных закрылков.
Однако, чем же объяснить, что на протяжении всей истории разви-
тия авиации делались попытки создать изменяемую в полете геометрию
самолета? Причина этого явления заключена в противоречии между не-
изменностью форм самолета и изменением режимов полета по скорости
и высоте. Схема самолета с фиксированной геометрией рассчитана иа
узкий диапазон режимов полета, и выход из этого диапазона делает са-
112
молет далеко не оптимальным. Стремление приспособить геометрию са-
молета к изменяющимся режимам полета и привело к созданию схем
изменяемой геометрии («адаптируемых схем»).
Бурное развитие этой идеи в последнее время объясняется практи-
ческими потребностями в самолетах с весьма большим диапазоном ре-
жимов полета (многорежимиые самолеты).
Самолет с крылом изменяемой в полете стреловидности имеет сле-
дующие преимущества.
1. На сверхзвуковом самолете можно значительно улучшить взлет-
но-посадочные характеристики за счет увеличения удлинения и с*, а
также эффекта механизации крыла при минимальном угле стреловид-
ности (рис. 6.16). Так, при Хп.к=20°, 7=6—7, используемые коэффици-
енты су в 2—2,5 раза больше, чем иа самолете с %п.к=60°, 7=2,3. Увели-
чение cv дает возможность уменьшить V0Tp и Vnoc на 40—60%, а £Разб
и -£Проб — в 2—2.5 раза.
2. Среднее за полет аэродинамическое качество существенно возрас-
тает в связи с ростом /Стах иа дозвуковых режимах
£ L L
K.,-=-~\KclL (6.6)
о
Если, например, на самолете дальнего действия с %n.K = var, /См<1 = 15,
Км>1 = 8, Ij/<i/£ = 0,2, /Л=0,8, то по формуле (6.6) ЛСО = 9,4.
На самолете с фиксированным крылом малого удлинения при
= 10, Км>1 =8 имеем при тех же условиях Лср=8,4, т. е. на едини-
цу меньше.
Увеличение Кср (при Хп.к = 30—35°) дает возможность либо увели-
чить дальность полета при Go = const, либо уменьшить взлетный вес при
£ = const за счет снижения веса топлива.
3. Перегрузка от вертикальных порывов воздуха при М = 0,9—1,2
(вблизи земли) может быть снижена иа Д/гу = 1,0—1,5 благодаря умень-
шению с* с ростом стреловидности крыла (с 45—50° на самолете с
Xn.K==const до 70—75° и более иа самолете с xni<=var, рис. 6.17).
Напомним, что , где £ = const, Wy — скорость
порыва.
Уменьшение перегрузки от порывов, как отмечалось выше, благо-
приятно сказывается на точности пилотирования, снижает утомляемость
летчика и способствует увеличению ресурса конструкции.
4. С увеличением стреловидности крыла до 75—90° уменьшается эф-
фективная относительная толщина его по потоку, что приводит к неко-
торому снижению коэффициента схо, уменьшению времени разгона само-
лета и веса соответствующего топлива.
Все перечисленные преимущества самолета с крылом изменяемой
стреловидности можно получить лишь ценою увеличения веса конструк-
ции: за счет шарнира, поворотной части крыла (менее выгодная си-
ловая схема в районе шарнира), за счет приводов и механизации
крыла. В сумме эти весовые затраты составляют 3,5—4,5% от взлет-
ного веса.
При выборе схемы самолета с крылом изменяемой стреловидности
представляет интерес такая схема, когда крыло в положении наиболь-
шей стреловидности с помощью специальных щитков полностью «слива-
ется» с горизонтальным оперением, создавая с ипм единый плавный
профиль. Самолет становится «бесхвосткой». При такой схеме можно
увеличить абсолютную высоту профиля за счет суммирования хорд кры-
ла и оперения (с «const). В результате снижается вес конструкции, осо-
113
бенно шарнира, увеличивается объем крыла для размещения топлива,
упрощается решение проблемы обеспечения требуемой жесткости.
В заключение приведем в качестве примера результаты расчетов
сверхзвуковых пассажирских самолетов четырех схем (табл. 6.2), вклю-
чая схемы с изменяемой стреловидностью крыла.
Таблица 6.2
Сравнение четырех схем сверхзвукового пассажирского самолета
£расч = 6600 км; Мрасч = 2,7; GK0M = 22 тс; Ьвпп == 3250 м
Схема Пара- метры 5> Z Z 4 V
Gq в тс 380 362 346 340
0 % 112 106,5 102 100
Gnjcr в тс 162 152 145 137
S в м2 730 670 925 730
PQ В КГС/'м2 520 540 375 465
V3M в км/ч 255 255 275 275
7.п. к в гРаД 20- -72 20- -72 75 Хнапл 0 = 74
Из табл. 6.2 видно, что взлетный вес самолетов с Xn.n=var несколько
больше, чем у самолета нормальной схемы. Основная причина этого —
увеличение веса конструкции самолетов с крылом изменяемой стрело-
видности.
При сравнении схем предполагалось, что скорость захода на посад-
ку должна быть не более 275 км/ч. У самолетов с %n.n=var |Z3ax=
= 255 км/ч, так как площадь крыла в данном случае больше и выбира-
лась она ие из условия скорости захода на посадку, а из условия разме-
щения необходимого запаса топлива.
§ 4. расположение двигателей на самолете
На самолетах одного и того же назначения применяются различные
схемы расположения двигателей (рис. 6.18). Это свидетельствует о том,
что каждая из схем имеет и преимущества, и недостатки *.
Рассмотрим преимущества и недостатки расположения на самолете
наиболее распространенных турбореактивных двигателей.
При проектировании маневренных сверхзвуковых са-
молетов конкурируют две схемы: совмещенная (единая, рис. 6.18, а,
б) и раздельная силовая установка (рнс. 6.18, б, г).
Преимущества совмещенной с фюзеляжем силовой установки по
сравнению с раздельной следующие:
— меньше аэродинамическое сопротивление (по сравнению со схе-
мой г);
— минимальный разворачивающий момент при отказе одного из
двигателей (схема б);
— увеличивается относительный размах механизации крыла;
— улучшается возможность подвески нагрузки под крылом (по срав-
нению со схемой г).
* Схема, имеющая только недостатки, не является конкурентоспособной.
114
Недостатки совмещенной силовой установки:
— больше протяженность и вес воздухозаборников (за счет искрив-
ления каналов);
— больше потери скоростного напора;
— сложность монтажа и демонтажа двигателя и его агрегатов;
— увеличивается вероятность одновременного повреждения двух
установленных рядом двигателей;
— трудность размещения относительно большого количества топ-
лива.
Рис. 6 18 Типовые схемы расположения двигателей:
а — г — маневренные сверхзвуковые самолеты: д — ж — немаиевренные сверх-
звуковые самолеты большой дальности, з— м—дозвуковые транспортные
самолеты
Вариант в размещения двигателей выгодно отличается от вариантов
б и г, представляющих крайности двух приведенных решений.
Схема в совмещает в себе преимущества антиподов биг:
— сравнительно короткий, простой и легкий воздухозаборник;
— небольшое донное сопротивление;
— раздельные двигатели;
— благоприятные возможности подвески нагрузки под крылом;
— большой объем в средней части самолета для размещения топ-
лива.
При проектировании многорежнмного самолета с крылом перемен-
ной стреловидности схема г практически исключается из-за трудности
сохранить положение оси двигателей в процессе разворота крыла.
115
На иемаиевреииых сверхзвуковых самолетах даль-
него действия имеют место те же проблемы выбора — единой или раз-
дельной силовой установки (рис. 6.18, д, е, ж).
Схемы дне примерно равноценны. По аэродинамике несколько
лучше схема д, ио она проигрывает по весу из-за длинных воздухоза-
борников (для улучшения условий иа входе, в частности для уменьшения
толщины пограничного слоя, воздухозаборник приходится удлинять).
Схема д выгодно отличается от е в отношении шума, создаваемого дви-
гателями иа земле при взлете (взаимная экранировка струй), а также в
отношеиин безопасности при отказе двигателя (меньше разворачиваю-
щий момент). Однако в схеме е лучше разгрузка крыла от веса силовой
установки (несколько легче крыло). Важно и то, что брызги и твердые
частицы с ВПП от колес передней опоры шасси могут не достигать воз-
духозаборников в схеме е (угол брызг от оси самолета принимается
равным 15°).
Схема ж имеет следующие преимущества:
— короткие и легкие воздухозаборники;
— отказ одного из двигателей не влияет иа работу соседнего дви-
гателя (так как двигатели не связаны единым воздухозаборником, как
в схемах дне);
— проще обслуживание и замена двигателей.
Недостаток схемы ж — меньшее увеличение подъемной силы «от
сжатия», создаваемого иа нижней поверхности крыла скачком уплотне-
ния от воздухозаборников (положительная интерференция). В схемах д
и е эффект увеличения подъемной силы «от сжатия» (+Acv) составля-
ет ~20%, а в схеме ж примерно вдвое меньше (пропорционально пло-
щади крыла, находящейся под действием скачков уплотнения). В то же
время расположить двигатели в схеме ж ближе к передней кромке кры-
ла (для увеличения полей сжатия под крылом) не представляется воз-
можным из-за неблагоприятного воздействия струи иа конструкцию
крыла (тепловое и звуковое воздействие струи вызывает уменьшение
срока службы конструкции).
Приближенное решение задачи об оптимальном выборе схемы раз-
мещения двигателей с учетом различных противоречивых факторов мо-
жет быть получено методом градиентов взлетного веса, изложенным в
гл. V.
Окончательный выбор расположения двигателей можно сделать
лишь после тщательной и подробной проработки различных вариантов
с учетом модельных испытаний, в которых имитируется работа двига-
телей. Типичные схемы расположения двигателей иа дозвуковых
самолетах показаны на рис. 18.6 (з — лф
Размещение двигателей в корневой части крыла (схема з) широко
применялось иа тяжелых дозвуковых реактивных самолетах военного и
гражданского назначения (самолеты Ту-16, Ту-104, Ту-124 и др.; англий-
ские самолеты «Вулкан», «Виктор», «Комета» и др.). Такая схема уста-
новки двигателей вместе с положительными качествами (отказ одного
или двух двигателей с одной стороны не вызывает резких разворачиваю-
щих и кренящих моментов, высокое расположение воздухозаборников,
небольшое внешнее аэродинамическое сопротивление) имеет ряд сущест-
венных недостатков (особенно для пассажирских самолетов). К ним
относятся:
а) близость реактивной струи к обшивке фюзеляжа, сильный шум в
пассажирской кабине;
б) длинные воздухозаборники иа 5—6% уменьшают тягу двига-
телей;
в) пожар, возникший иа двигателях, может распространиться иа
пассажирскую кабину и топливные баки (требуется усиленная противо-
пожарная защита);
116
г) в случае разрушения лопаток компрессора или турбины возмож-
но поражение пассажирской кабины и топливных баков (требуется спе-
циальное бронирование);
д) наличие заборников иа передней кромке крыла и выхлопных
труб на задней кромке уменьшает возможности механизации крыла;
е) затрудняется создание устройств для реверсирования тяги;
ж) затрудняется подход к двигателям;
з) существенно уменьшается объем крыла для размещения топлива.
Перечисленные недостатки привели к тому, что установка двигате-
лей в корневой части крыла сейчас не применяется.
Размещение двигателей на пилонах под крылом (схема и) широко
распространено на дозвуковых самолетах. Такая схема установки дви-
гателей имеет следующие преимущества:
— двигатели разгружают конструкцию крыла в полете, уменьшая
изгибающий и крутящий моменты от внешних нагрузок, что приводит к
уменьшению веса крыла на 10—15%;
— двигатели демпфируют колебания крыла при полете в турбулент-
ной атмосфере;
— двигатели являются протнвофлаттерными балансирами;
— удобство замены одного типа двигателя другим (с большими раз-
мерами) ;
— легкий доступ к двигателю при обслуживании.
Размещение двигателей на пилонах имеет и недостатки:
— в случае отказа двигателя, особенно внешнего, создается боль-
шой разворачивающий момент в горизонтальной плоскости;
— для того чтобы при посадке с креном (до 4°) внешние двигатели
ие касались земли, требуется создание поперечного угла V крыла (2—
3°), что ухудшает характеристики устойчивости и управляемости самоле-
та со стреловидным крылом;
— при низком расположении двигателей относительно поверхности
аэродрома возможно попадание в воздухозаборники песка, пылн и мел-
ких камней, что влияет на ресурс двигателей [см. формулу (6.4)]. Для
устранения этого необходимо применять специальные меры, например,
отсечку вертикальных потоков воздуха, поднимающихся от земли к за-
борникам, струей воздуха, отбираемого от компрессора двигателя, что
связано с увеличением веса и уменьшением тяги двигателей;
— пилониая подвеска двигателей затрудняет использование за-
крылков по всему размаху крыла, так как при взлете реактивные струи
двигателей могут их разрушить ( —ДсУогр = 0,08—0,12).
Размещение двигателей на хвостовой части фюзеляжа было впер-
вые применено фирмой Сюд-Авиасьон (Франция) иа самолете «Кара-
велла». Эта схема установки двигателей (схемы к и л) получила широ-
кое распространение на отечественных и зарубежных пассажирских са-
молетах (Ил-62, VC-10, Як-40, Ту-154 н др.).
Размещение двигателей на хвостовой части фюзеляжа позволяет:
— обеспечить аэродинамически чистое крыло, что повышает аэро-
динамическое качество самолета на 6—9%;
— максимально использовать размах крыла для размещения
средств механизации (закрылки, предкрылки и т. д.), что улучшает
взлетно-посадочные характеристики самолета;
— определять поперечное V крыла из условий обеспечения опти-
мальных характеристик поперечной н путевой устойчивости и управляе-
мости;
— уменьшить разворачивающий момент при остановке одного из
двигателей.
Кроме этого, схемы к и л позволяют:
— улучшить комфорт пассажиров за счет уменьшения шума, так
117
как двигательные гондолы в данном случае устанавливаются позади
герметической кабины;
• — повысить пожарную безопасность, так как двигатели удалены от
пассажирской кабины и от топливных баков (пламя от загоревшегося в
полете двигателя уходит назад, ие задевая каких-либо силовых элемен-
тов конструкции самолета);
— повысить (по сравнению с установкой двигателей в корне крыла)
эксплуатационные характеристики силовой установки и всего самолета
в целом за счет достаточно хороших условий для подхода к двигателям;
— предохранить двигатели от попадания в них посторонних пред-
метов благодаря высокому расположению воздухозаборников от земли
(увеличивается ресурс двигателей);
— создать лучшие условия аварийной посадки самолета.
Однако схема установки двигателей иа хвостовой части фюзеляжа
имеет и существенные недостатки, связанные с увеличением веса конст-
рукции самолета вследствие:
а) усиления конструкции хвостовой части фюзеляжа из-за дополни-
тельных массовых и инерционных нагрузок от двигателей (вес конструк-
ции фюзеляжа увеличивается примерно на 10—15%);
б) увеличения веса крыла (примерно па 10—15%) из-за отсутствия
разгрузки крыла двигателями;
в) увеличения длины фюзеляжа из-за необходимости крепления
двигателей.
Кроме того, при данной схеме центры тяжести пустого и загружен-
ного самолета существенно ие совпадают, вследствие чего возникают
трудности компоновки (требуется либо четвертая опора при стоянке, ли-
бо большое и тяжелое горизонтальное оперение для отрыва при взлете),
возникает также необходимость прокладывать топливопроводы от баков
к двигателям вблизи пассажирской кабины, что вызывает опасность по-
падания паров керосина в кабину и увеличивает вес трубопроводов.
Следует отметить, что при степени двухкоитуриости двигателей бо-
лее 3,5—4,0, когда существенно возрастает диаметр вентилятора, уста-
новка четырех двигателей по схеме к становится чрезвычайно затруд-
нительной. В этом случае лучше применять либо схему д, либо комби-
нированную схему м. Последняя схема сочетает в себе преимущества
подкрыльной и кормовой установок двигателей. Недостатком двух по-
следних схем является трудность модификации силовой установки: для
двигателя с большим диаметром требуется переделка хвостовой части
фюзеляжа вместе с воздухозаборником.
В табл. 6.3 приведен пример сравнения по взлетному весу и эконо-
мичности эксплуатации гипотетического самолета на 300 пассажирских
мест с тремя вариантами расположения двигателей. Практическая даль-
ность полета с наибольшей коммерческой нагрузкой предполагалась
равной 3000 км. Сравнение проводилось при (tf, V, Двпп, V3ax) = const.
Из табл. 6.3 видно, что по взлетному весу и экономичности перево-
зок самолет с двигателями, расположенными по схеме м, имеет преиму-
щество по сравнению со схемами и и л. Преимущество получено, в ос-
новном, за счет меньшего относительного веса силовой установки * по
сравнению со схемой и и меньшего веса конструкции по сравнению со
схемой л **.
В заключение следует подчеркнуть, что выбор схемы самолета яв-
ляется сложным творческим процессом, в котором больше чем где-либо
раскрываются все знания, опыт и способности конструктора.
* Тяговооруженность меньше из условия отказа одного двигателя, поэтому мень-
ше и вес силовой установки.
** В схеме м крыло разгружается весом двигателей, а фюзеляж испытывает мень-
шие нагрузки от одного двигателя.
"8,
Таблица б.З
Сравнение трех схем расположения двигателей
Лрасч = ЗС09 км; К= 950 км/ч; Лвпп = 2600 м; Кэах ~ 240 км/ч
Схемы Параметры II
Gq в тс 140 136 138
Go в % 103 100 101,5
а в коп'т-км 9,07 8,80 8,9
<г в % 103 100 101
Глава VII
ОСНОВНЫЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ СИЛОВОЙ
УСТАНОВКИ САМОЛЕТА
В силовую установку самолета входят:
1) двигатели с агрегатами и системами;
2) 'воздухозаборники;
3) топливная система *.
Теория и проектирование систем силовой установки (двигатели,
воздухозаборники, сопла, топливные системы н т. д.) подробно освеща-
ются в специальной литературе. В данной главе рассматриваются в
основном вопросы проектирования силовой установки, непосредствен-
но связанные с общим проектированием самолета.
§ 1. ВЫБОР ДВИГАТЕЛЯ ДЛЯ СИЛОВОЙ УСТАНОВКИ САМОЛЕТА
Для силовой установки современных самолетов применяются воз-
душно-реактивные двигатели (ВРД), поршневые двигатели (ПД) и
жидкостно-ракетные двигатели (ЖРД). Воздушно-реактивные двигате-
ли в свою очередь делятся на газотурбинные (ГТД) и прямоточные
(ПВРД).
Наибольшее распространение в авиации в настоящее время имеют
ГТД. К этому классу авиационных двигателей относятся:
— турбореактивные двигатели (ТРД);
— турбореактивные двигатели с форсажем (ТРДФ);
— двухконтурные турбореактивные двигатели (ТРДД), этн двига-
тели называют также турбовентиляторными (ТВРД);
— турбовинтовые двигатели (ТВД).
Поршневые двигатели сейчас ставятся только на очень легкие са-
молеты.
Жидкостно-реактивные двигатели применяются в авиации исключи-
тельно на экспериментальных самолетах.
Выбор двигателя для силовой установки производится в период
эскизного проектирования самолета. Оценить пригодность того или ино-
го типа двигателя для проектируемого самолета можно, рассматривая
* Подробное перечисление систем, входящих в силовую установку самолета, ука-
зано в приложении 1.
119
изменение основных характеристик двигателя в заданном диапазоне
скоростей и высот полета.
Характеристики авиационных двигателей
Основными характеристиками, по которым осуществляется сравни-
тельная оценка при выборе двигателя, являются: высотно-скоростные
характеристики Р=/(М, Н) и cp=f(M, Н), секундный расход воздуха
GB, удельный вес двигателя удв и габаритные размеры (длина и макси-
мальный диаметр) двигателя *.
Первые ТРД (с центробежным компрессором) имели стартовую
тягу (при V—0 и 7/=0) менее 2700 кгс и довольно большой удельный
расход топлива. В настоящее время авиационные двигатели способны
развивать стартовую тягу до 30 000 кгс (GE 4/J5). Не следует, конечно,
полагать, что ТРД с небольшой тягой постепенно отмирали. Современ-
ные авиационные двигатели в зависимости от назначения могут иметь и
очень небольшую тягу, например ТРДД АИ-25, установленный на само-
лете Як-40, развивает тягу 1500 кгс, а тяга ТРД Бристоль Сиддлн
BS-347 равна всего 63,6 кгс (вес двигателя 13,6 кгс).
Современные ГТД в зависимости от назначения могут иметь стар-
товую тягу, равную Рота^~5О кгс — наименьшая максимальная тяга;
Ротах~ЗО 000 кгс — наибольшая максимальная тяга.
Одновременно с увеличением стартовой тяги уменьшался старто-
вый удельный расход топлива ГТД. До 1946 г. большинство ТРД с одно-
ступенчатым центробежным компрессором имели степень сжатия, рав-
ную примерно четырем, и поэтому удельный расход топлива этих ТРД
(иа нефорсажном режиме) превышал 1,3 кгс/кгс • ч.
Современные ГТД имеют стартовый удельный расход топлива, из-
меняющийся в диапазоне
ср = 0,5—0,7 кгс/кгс • ч — нефорсажный режим;
Ср=1,7—2,0 кгс/кгс-ч— форсажный режим.
Можно предполагать, что в результате дальнейших совершенство-
ваний ТРДД будет достигнут удельный расход топлива менее
0,5 кгс/кгс • ч, а на ТРДД с большой степенью двухконтурности (т =
= 5—8) величина 'Стартового удельного расхода топлива приблизится к
0,3 кгс/кгс • ч.
Важным параметром, характеризующим совершенство двигателя,
является его удельный вес по стартовой тяге, т. е. отношение сухого ве-
са двигателя к максимальной стартовой тяге удв = Одв/Ро-
Современные ГТД могут иметь удельный вес удв = 0,15—0,23.
Следует отметить, что удельный вес современных ТРД практически
не зависит от величины стартовой тяги, например, ТРД GE 4/J5 (Ро=
=28 700 кгс) имеет удв = 0,166; ТРД J85 = 13 (Ро=185О кгс) имеет
удв = 0,163. Удельный вес ТРДД пропорционален величине ~Ро°':5, а
также зависит от степени двухконтурности.
Иногда вместо удельного веса двигателя рассматривается обрат-
ная величина (т. е, отношение тяги к весу), которую называют весовой
удельной тягой двигателя Гуд=1/удв.
Основными габаритными размерами двигателя являются его длина
и максимальный диаметр (по компрессору, по входу, по соплу и т. д.).
Диаметр двигателя часто определяет лобовую площадь фюзеляжа или
гондолы, что в конечном счете отражается на аэродинамическом каче-
стве всего самолета. Поэтому при прочих равных условиях всегда от-
дается предпочтение двигателю с меньшим диаметром. Зависимость
* Характеристики авиационных двигателей, необходимые для выполнения диплом-
ного проекта, приведены в приложении 111.
120
диаметра двигателя от стартовой тяги можно записать в форме
+ м, (7.1)
где Ро — в кгс; т — степень двухконтурности.
Задачи, выполняемые современной авиацией, требуют от силовой
установки самолета высокой экономичности в широком диапазоне ско-
ростей и высот полета. Одиако наибольшая экономичность авиационно-
го двигателя обеспечивается в том случае, если он рассчитан на срав-
нительно небольшой высотио-скоростной диапазон. Этим и объясняется
деление двигателей иа дозвуковые, сверхзвуковые и гиперзвуковые.
Двигатели для дозвуковых самолетов
Наиболее старым типом двигателей для дозвуковых самолетов яв-
ляется, как известно, поршневой двигатель. В настоящее время выпус-
каются только маломощные поршневые двигатели (W=100—340 л. с.) и
устанавливаются они иа очень легких самолетах (туристических, спор-
тивных и т. д.). Однако и на легких самолетах ПД стал заменяться дру-
гими типами двигателей.
Рис. 7.1. Развитие дозвуковых авиационных двигате-
лей за период 1940—1970 гг.
Непрерывное увеличение стартового веса самолетов требует соот-
ветствующего роста мощности силовой установки. На рис. 7.1, а приве-
дена кривая роста потребной мощности на крейсерском режиме полета,
начиная с самолетов 40-х годов. За рассматриваемый период потребная
мощность возросла примерно в 20 раз. Удельный вес двигателей по
тяговой мощности иа крейсерском режиме значительно уменьшился
(рис. 7.1, 6), причем скачком — с появлением ГТД. Современный ТРДД
развивает тяговую мощность иа 1 кгс веса в 3—4 раза больше, чем ПД.
Как видно из рнс. 7.1, в, современные ГТД (при вдвое большей
крейсерской скорости полета) по величине удельного расхода топлива
сравнялись с наилучшими ПД.
На рис. 7.1, г показано изменение начальной скорости двигательных
установок иа 1 л. с. тяговой мощности. С внедрением ГТД стоимость
двигательных установок резко снизилась, несмотря на существеииое
увеличение мощности двигателей.
121
В настоящее время турбовинтовой двигатель находит в авиации все
меньшее применение. Чтобы конкурировать с современными ТРДД,
дальнейшее совершенствование ТВД должно быть направлено на уве-
личение удельной мощности и уменьшение расхода топлива. Однако при
этом возникают трудности, связанные с воздушным винтом; трудно
создать винт, имеющий достаточно высокий к. п. д. при повышенной
мощности двигателя, но не меиее трудно решить проблему понижения
общего уровня шума и вибраций на самолете при установке подобного
винта.
Сейчас наиболее перспективным двигателем для силовой установки
дозвукового самолета является ТРДД (двухконтуриый ТРД).
ТРДД позволяет иметь в крейсерском полете на 10—15% меньший
удельный расход топлива, чем одноконтурный ТРД (рис. 7.2).
кгс/кгс V
Рис. 7.3. Влияние степени двух-
контурности_ на величину Ст
ТРДД (С. —относительные
затраты на топливо)
Рис. 7.2. Типичная зависимость
между температурой газа пе-
ред турбиной и хдельным рас-
ходом топлива ТРД и ТРДД
(в условиях крейсерского по-
лета):
т — степень двухконтуриости
Преимуществом ТРДД является также более высокое отношение
взлетной тяги к крейсерской, следовательно, при равных с ТРД крей-
серских тягах (определяемых полетным весом и аэродинамическим ка-
чеством самолета), ТРДД обеспечивает самолету лучшие взлетные ха-
рактеристики.
Ресурс этого типа двигателей в настоящее время наиболее высок.
Срок службы между переборками для ТРДД равен 8000—10 000 ч.
Первые ТРДД были разработаны на базе существующих ТРД и
имели небольшую степень двухконтурностн т = 0,6—1,4 *.
Современные ТРДД характеризуются более высокой степенью двух-
контурности т = 3—6. Они имеют ряд принципиально новых конструк-
тивных решений (возможность независимого регулирования числа обо-
ротов каждого каскада компрессора); в конструкции двигателей широко
используются новые конструкционные материалы (в частности, при-
менены пластики, армированные волокнами графита, бора и т. п.). Эти
и другие нововведения позволяют довести степень сжатия в компрессо-
ре до 25 и более, что повышает экономичность двигателя.
Экономичность ТРДД и его основные характеристики зависят так-
же от степени двухконтуриости двигателя. Удельный часовой расход
топлива в первом приближении может быть выражен следующим об-
разом:
^р~0,9 Г-------|-М(0,494-0,0145/7)1 кгс/кгс-ч, (7.2)
L I + 0,525 т 1
* Под степенью (коэффициентом) двухконтуриости, как известно, понимается
отношение секундного расхода воздуха во внешнем контуре к секундному расходу
воздуха во внутреннем контуре.
122
где т — степень двухконтурности;
М — число М полета;
Н — высота полета, км.
Удельный вес ТРДД приближенно можно записать в виде
70,23-0,03m0,0082m1-5.
Диаметр двигателя определится по выражению (7.1).
Коэффициент лобового сопротивления мотогондолы ТРДД с
степени двухконтурности уменьшается, что видно из выражения
0,16
(7.3)
ростом
(7.4)
эконо-
с т =
На рис. 7.3 показано влияние степени двухконтурности иа
мичность ТРДД (за единицу принята экономичность ТРДД
= 1—1,5).
В настоящее время для тяжелых дозвуковых самолетов применя-
ются ТРДД со степенью двухконтурности т=4—8.
К дозвуковым двигателям относятся также специальные подъемные
ТРД и ТРДД для самолетов вертикального взлета и посадки. По прин-
ципу создания вертикальной и горизонтальной тяг силовые установки
СВВП делятся на единые и составные. Единые силовые установки слу-
жат для вертикального взлета и посадки и для горизонтального полета
(один и тот же двигатель создает и вертикальную, и горизонтальную
тяги). Эти двигатели, как правило, предназначены для установки иа
сверхзвуковых самолетах.
Составные силовые установки СВВП имеют двигатели для создания
вертикальной тяги на взлете и посадке (подъемные) и двигатели для
получения горизонтальной тяги (маршевые). В качестве маршевых дви-
гателей используются обычные ТРД и ТРДД.
Подъемные двигатели по параметрам рабочего процесса и конст-
рукции значительно отличаются от маршевых двигателей. Эти двигате-
ли имеют удельный вес примерно в 3—3,5 раза меньше, чем удельный
вес обычных ГТД (что достигается прежде всего за счет значительного
снижения ресурса двигателя).
Преимуществами подъемных ТРДД по сравнению с подъемными
ТРД являются;
— меньшие скорости истечения газов (а следовательно, меньшее
разрушающее действие газовой струи на взлетную площадку);
— лучшая экономичность на режимах вертикального взлета, посад-
ки и висеиия (у подъемного ТРДД с малоиапорным вентилятором
удельный расход топлива почти в три раза меньше, чем у подъемного
ТРД). Правда, такой ТРДД, обладая указанными преимуществами по
сравнению с подъемным ТРД, уступает ему по диаметру и занимаемо-
му объему.
Двигатели для сверхзвуковых самолетов
Наиболее экономичными при сверхзвуковом полете являются два
типа двигателей — ТРД и ТРДД.
Чтобы обеспечить наименьший расход топлива и наибольшую мощ-
ность в широком диапазоне чисел М (от взлета до максимальной ско-
рости), ТРД имеет, как правило, форсажную камеру, а ТРДД — фор-
саж во втором контуре (рис. 7.4).
Для длительного полета на сверхзвуковом режиме рассматривают-
ся обычно два диапазона скоростей: диапазон скоростей, соответствую-
щих числу М«2, преимущество которого состоит в том, что планер са-
молета может иметь конструкцию из обычных алюминиевых сплавов, и
123
диапазон скоростей, соответствующих числу М«3, который хотя и со-
здает определенные проблемы, но обещает более высокую экономич-
ность полета.
Следует считать, что для скорости полета, соответствующей числу
М*2, можно использовать и ТРД и ТРДД; степень сжатия в компрессо-
ре для обоих типов двигателей должна быть лк~9—10.
Отсутствие существенного различия в характеристиках ТРД и
ТРДД на сверхзвуковых скоростях в какой-то мере объясняется тем.
Рис. 7.4. Зависимость тяговой мощности и
удельного расхода топлива ТРД «Олимп»
(Англия — Франция) от числа М полета
(с форсажной камерой и без форсажной ка-
меры), Я='Ц км
не ухудшать характеристики при М>
= 0,7—1,2, а степень сжатия — лк=12-
что при увеличении коэффици-
ента двухконтурностн от 0 до
0,5—0,7 удельный расход топ-
лива уменьшается незначитель-
но (примерно на 1%). Даль-
нейшее увеличение коэффици-
ента двухконтурностн прогрес-
сивно ухудшает характеристи-
ки двигателя. Следует, однако,
помнить, что в данном случае
речь идет о длительном сверх-
звуковом полете.
Некоторые сверхзвуковые
самолеты (многоцелевые истре-
бители и др.) часто совершают
длительный полет на дозвуко-
вой скорости. В этом случае
все преимущества на стороне
ТРДД. Степень двухконтурио-
стн таких двигателей (чтобы
) должна быть небольшой: т—
16.
При скорости полета, соответствующей числу М«3, одноконтурный
н двухкоитуриый двигатели также не имеют больших различий. Поэто-
Рис. 7.5. Характери-
стики ТРД и ТРДД,
определяющие их эко-
номичность при
М ~3; Н=20 км
му и в данном случае можно применять двигатели обоих типов. Однако
разница в том, что при этой скорости двигатели (как ТРД, так и ТРДД)
с невысокой степенью сжатия в компрессоре (лк=3—4 при М~3) име-
ют меньший удельный расход топлива (рнс. 7.5).
124
Двигатели для гиперзвуковых самолетов
Применение газотурбинных двигателей для самолетных силовых
установок ограничивается, как известно, числом М«3,5. Для полета иа
больших скоростях лучшей экономичностью будет обладать ПВРД с
дозвуковым сгоранием (М^8) и ПВРД со сверхзвуковым сгоранием
(М>8).
Ракетные двигатели, работающие иа химическом топливе (ЖРД),
достигли сейчас такого уровня развития, когда дальнейшее увеличение
удельного импульса становится
все более медленным и дорого-
стоящим. к тому же удельный
импульс ЖРД остается недо-
статочным для установки его
на гиперзвуковом самолете
(рис. 7.6).
Экономичность двигателя
в первом приближении можно
оценить по величине его удель-
ного импульса 7Т (так как ср=
= 3600//т кгс/кгс • ч).
Следует заметить, что, не-
смотря на возрастание удель-
ного расхода топлива иа сверх-
звуковых скоростях, полный
к. п. д. двигателя увеличивает-
ся. Полный к. п. д., как извест-
но, учитывает все потери в про-
цессе преобразования энергии
топлива в полезную тяговую
работу. Для углеводородного
топлива (керосин) выражение
полного к. п. д. воздушно-реак-
тивного двигателя можно заш
Рис. 7.6. Зависимость удельного импульса
(по топливу) от числа М полета для раз-
личных типов двигателей, работающих на
керосине (/; 2; <?) и водороде (7а; 2а; За):
/; 1а — ГТД; 2; 2а—ПВРД с дозвуковым сгора-
нием; 3; За — ПВРД со сверхзвуковым сгоранием
в виде
^-0,000821//^. (7.5)
Полный к. п. д. двигателя дозвукового самолета (М=0,85) состав-
ляет примерно 24%. При скорости полета, соответствующей числу М=2,
он возрастает уже до ~38% (что превышает термический к. п. д. луч-
ших современных электростанций), а при М=3 Г1п=4б%’. Рост к. п. д.
продолжается и при полете иа гиперзвуковых скоростях с ПВРД.
Наиболее перспективными для гиперзвуковых самолетов представ-
ляются комбинированные двигатели — турбопрямоточные (ТРД+
+ ПВРД). ТРД должен работать до скорости, соответствующей числу
М®3,5, затем газотурбинный тракт закрывается, и на гиперзвуковых
скоростях двигатель будет работать как ПВРД.
Рассмотренные выше основные характеристики авиационных двига-
телей (различных типов) могут иметь определенные отличия, обуслов-
ленные конструктивными особенностями конкретных образцов. Напри-
мер, два однотипных двигателя при одинаковой стартовой тяге могут
иметь различные значения удельного веса, удельного расхода топлива,
диаметра двигателя и т. д. Если все характеристики у одного двигателя
лучше, вопрос выбора двигателя решается однозначно. Однако на прак-
тике такой случай встречается редко. Как правило, при сравнении не-
скольких двигателей оказывается, что одни характеристики лучше у
одного двигателя, другие — лучше у другого двигателя и т. д. Как же
в таком случае выбрать конкретный двигатель для проектируемого са-
молета? Существуют методы сравнения двигателей по их основным ха-
125.
рактеристикам, например, рассматривается произведение удельных
параметров: удв, ср, Ьдв/Ро или сравнивается суммарный вес двигатель-
ной установки и топлива (Сду+бтоп) я т. д. Однако эти методы носят
приближенный характер и не позволяют решить поставленный вопросе
достаточной точностью. .
Чтобы выбрать тот или иной двигатель, необходимо проделать под-
робный аэродинамический расчет самолета с каждым двигателем, опре-
делив летные (и другие) характеристики самолета, и оценить степень
выполнения требований, предъявляемых к данному самолету.
Для современных гражданских и военных самолетов (как правило,
тяжелых) специально проектируется двигатель под заданные характе-
ристики самолета. Конструкторы самолета и конструкторы двигателя
проводят большую совместную работу по решению вопросов, связанных
с установкой этого двигателя на данном самолете.
Только после выполнения указанных работ вопрос выбора двигате-
ля может быть решен окончательно.
Необходимое количество двигателей для силовой установки само-
лета зависит от целого ряда факторов, обусловленных как назначением
самолета, так и его основными параметрами и летными характеристи-
ками.
Противоречивость влияния числа двигателей на безопасность, эко-
номичность и регулярность полетов приводит к тому, что выбор числа
двигателей до сих пор остается недостаточно разработанным вопросом
проектирования самолетов.
В общих чертах требования ко всем самолетам при выборе числа
двигателей можно сформулировать так:
— самолет должен обладать необходимой стартовой тяговооружен-
ностью;
— самолет должен обладать достаточной надежностью и экономич-
ностью.
§ 2. ВОЗДУХОЗАБОРНИКИ СОВРЕМЕННЫХ САМОЛЕТОВ
Функции воздухозаборника в системе силовой установки современ-
ного самолета сводятся к следующему:
—обеспечить устойчивую работу двигателя на всех режимах
полета;
— обеспечить сжатие воздуха, поступающего в воздухозаборник,
преобразуя кинетическую энергию набегающего потока в давление.
Как известно, при дозвуковых скоростях полета повышение давле-
ния воздуха в двигательном тракте происходит в основном в компрессо-
ре ТРД (приблизительно в пять раз больше, чем в диффузоре). По ме-
ре увеличения скорости функции компрессора постепенно переходят к
воздухозаборнику; при числе М=1,2—1,4 воздухозаборник и компрес-
сор в одинаковой степени сжимают поток. При больших сверхзвуковых
скоростях полета (М>3) роль компрессора становится уже несущест-
венной, а степень сжатия во входном устройстве достигает поряд-
ка 40 : 1.
Степенью сжатия воздуха в турбореактивных двигателях принято
называть отношение давления воздуха в конце процесса сжатия, т. е.
за компрессором, к атмосферному давлению
где рк — давление за компрессором (на входе в камеру сгорания);
рн — атмосферное давление;
Ра — давление на входе в компрессор;
Лвх— степень сжатия в воздухозаборнике;
Лк — степень сжатия в компрессоре.
126
Изменение величии лвх и лк при увеличении скорости для воздухо-
заборника и ТРД, рассчитанных иа крейсерскую скорость полета при
М=3,0, протекает примерно следующим образом:
Воздухозаборнику сверхзвукового
2,2
10
4,7
2,5
15
4,4
2,7 3,0
20 ~30
4,2 —4
самолета в настоящее время отводится
роль регулируемого компрессора.
В диффузоре давление настолько
возрастает (например, при М«2,2
Лих = Ю) и его распределение на внут-
ренней поверхности таково, что созда-
ется тяга, равная 60—75% всей тяги силовой установки (рис. 7.7).
При торможении потока всегда имеют место потери давления,
обусловленные трением, вихреобразованием (отрыв потока при нерав-
номерном поле скоростей), теплообменом, а при торможении сверхзву-
кового потока появляются и волновые потерн, обусловленные возникно-
вением скачков уплотнения. В результате потерь в воздухозаборнике
реально достижимые величины лвх оказываются меньше теоретически
возможных. Например, при числе М.=3 можно получить Лв-х^ЗО вместо
Лвх нд~ 38, которое было бы в идеальном случае (без потерь).
Рис. 7.7. Распределение сил тяги и аэродинамического сопротивле-
ния по длине двигательной гондолы при числе М=2,2
М О J
лвх ~ I 2
лк ~8 6
2
7
5
Потери давления, возникающие при сжатии воздуха во входном
устройстве, принято оценивать величиной коэффициента восстановления
полного давления (в теории двигателей для удобства расчетов часто
пользуются ие статическими, а полными давлениями). Коэффициент
восстановления полного давления равен
-------— —г >
лнх..м рн
где р\— давление полностью заторможенного потока в конце возду-
хозаборника (на входе в компрессор);
Рн — полное давление набегающего потока воздуха.
Для того чтобы воздухозаборник современного самолета эффек-
тивно выполнял свои функции, он должен обеспечивать:
— возможно более высокие значения коэффициента восстановле-
ния полного давления;
— достаточно равномерное поле скоростей на входе в компрессор;
— устойчивую (без срывов потока и пульсаций давления) работу
на всех режимах эксплуатации;
— возможно меньшее внешнее сопротивление.
Дозвуковые воздухозаборники
Накопленный опыт конструирования и эксплуатации дозвуковых
воздухозаборников позволяет получать весьма высокие значения коэф-
фициента восстановления полного давления в подобных входных устрой-
ствах — сгвх=0,97—0,98.
127
При проектировании дозвуковых воздухозаборников их параметры
выбираются для основного режима полета.
Размеры входного отверстия диффузора определяются
расходом воздуха через площадь входа. Согласно закону сохранения
массы секундный весовой расход воздуха в сечении Н— Н а вх— вх
(рис. 7.8) будет одинаковый:
^в = ‘>Н = вх7вх>
где V — расчетная скорость лолета иа высоте Z/.
Рис. 7.8. Схема дозвукового воздухозаборника
Площадь входа можно выразить так:
где GB — секундный расход воздуха двигателем, под который про-
ектируется воздухозаборник (задан в характеристиках
двигателя);
1/вХ — скорость воздуха иа входе в воздухозаборник;
7вх— Рвх^ — удельный вес воздуха на входе.
Величину V’bx в первом приближении можно определить в виде ,
где —0,7 — относительная скорость воздуха иа входе в возду-
хозаборник. _
Меньшие значения величины VBz принимаются для длинных и ис-
кривленных каналов (чтобы иметь небольшие гидравлические потери),
большие значения 7ВХ— Для коротких каналов и ГТД с большими ско-
ростями на входе в компрессор.
Увеличение плотности воздуха рвх при торможении от V до
определяется по специальным газодинамическим таблицам.
В период предварительных расчетов (а также при дипломном про-
ектировании) размеры входного отверстия можно определить через от-
носительный диаметр входа
1-У2„ ! (7'7)
' 1 — М2
Здесь D„=DJDt;
D„, — диаметр входа воздухозаборника;
Dr — максимальный наружный диаметр гондолы, причем
РГ«(1,2-1,3)ОВ„
где Овд — максимальный внутренний диаметр гоидолы.
128
Можно принимать РВн~^дв — диаметр двигателя (по компрессору).
Профилирование входной кромки осуществляется для
гого, чтобы получить плавное обтекание гондолы и избежать срывов по-
тока иа входе.
Угол притекания внешнего контура потока ко входу в воздухоза-
борник относительно его оси в первом приближении можно определить
через относительную скорость входа
Р„ = 22У 1, (7.8)
где рвх — в градусах.
Радиус кривизны входной кромки воздухозаборника, обеспечиваю-
щий плавное обтекание, приближенно можно принимать
rmllI = (0,04 - 0,05) V~F~ (7.9)
Профилирование воздушного канала предусматри-
вается для получения наибольшего значения величины овх и равномер-
ного поля скоростей на входе в компрессор (сечение А—А).
Если расширение канала (после входа) слишком велико или канал
имеет резкие повороты и изгибы, поток может оторваться от стенок, что
приведет к значительным вихревым потерям. Другая причина потерь в
дозвуковом диффузоре — трение воздуха о стенки канала. Одиако если
отрыва потока ие происходит, то потери от трения оказываются сравни-
тельно небольшими.
Если диффузор делается с прямолинейными стенками, то полуугол
его раствора должен быть
а<4-5°.
Если канал имеет повороты и изгибы, то на последнем участке (пе-
ред двигателем) ось канала должна совпадать с осью компрессора.
Длина этой цилиндрической части канала должна быть ие менее (0,5—
0,1)Г>дв.
Профилирование внешних обводов воздухозаборника
должно обеспечить ему минимальное лобовое сопротивление. Поэтому
наружные обводы воздухозаборника профилируются независимо от
виутреииих.
Относительная наружная длина входа, целесообразная с точки зре-
ния внешнего обтекания, может^быть выражена как функция числа М.
полета
Г=Л//9г^1,5М2, (7.10)
где L — расстояние от носка гоидолы до цилиндрической части.
Следует заметить, что приведенные выше зависимости, определяю-
щие основные параметры воздухозаборника, являются приближенными.
Теоретически весьма сложно учесть все особенности реального течения,
поэтому рекомендации по профилированию, например воздушного кана-
ла, устанавливаются в основном экспериментально.
Сверхзвуковые воздухозаборники
В сверхзвуковом воздухозаборнике потери, возникающие при сжа-
тии воздуха, складываются из волновых потерь (в системе скачков),
вихревых потерь и потерь от трения. Однако основную величину состав-
ляют волновые потери
’Вх = (0,9 —0,95)зск,
5-1062
129
где аСк=а1з2.. ,ол= П <з£ —коэффициент восстановления полного дав-
ления в системе скачков;
Of — коэффициент восстановления полного дав-
ления в одном скачке.
В зависимости от формы поперечного сечения входа сверхзвуковые
воздухозаборники могут быть разделены иа два типа: двухмерные
(плоские) и трехмерные (круглые, полукруглые и др.). В зависимости
от положения косых скачков воздухоза-
борники бывают внешнего, внутреннего и
смешанного сжатия (все три типа могут
быть и двухмерными, и трехмерными,
рис. 7.9).
Первые многоскачковые воздухоза-
борники сверхзвуковых самолетов были
внешнего сжатия. По сравнению с возду-
хозаборниками внутреннего сжатия они
достаточно просты в регулировании, не
требуют сложной системы запуска, обла-
дают весовыми преимуществами, однако
к. п. д. у них ниже (воздухозаборники с
внешним сжатием имеют также наиболь-
шее аэродинамическое сопротивление).
Например при М=3, получено
авх = 0,7о— внешнее сжатие;
бхв=0,95— внутреннее сжатие;
<звх=0,85 — смешанное сжатие.
Параметры и размеры сверхзвуково-
го воздухозаборника выбираются для ос-
новного режима полета (как правило,
сверхзвуковой крейсерский полет).
Площадь входа. Пропускная
способность воздухозаборника (диффузо-
ра) оценивается коэффициентом расхода ср, представляющим собой от-
ношение действительного расхода воздуха к максимально возможному,
т. е.
Рис. 7.9. Способы образования
скачков уплотнения:
а — воздухозаборник с внешним
сжатием — все косые скачки распо-
ложены снаружи; б — воздухоза-
борник смешанного сжатия — косые
скачки расположены и снаружи, и
внутри воздухозаборника; а —воз-
духозаборник с внутренним сжати-
ем — все косые скачки расположе-
ны внутри
^в. шах
Коэффициент расхода <р численно равен отношению площади струи
воздуха в невозмущенном потоке (сечение Н — Н) к площади входа в
воздухозаборник (рис. 7.10)
причем площадью входа сверхзвукового воздухозаборника считается
полная площадь сечеиия вх— вх. Площадь непосредственно входной
щели определяется как
F =F —F
где FT — площадь сечеиия тела, создающего систему скачков уплот-
нения.
Для создания системы скачков в воздухозаборниках могут приме-
няться как плоские тела (клии)—для плоских воздухозаборников, так
н круглые тела (коиус, полуконус, четверть конуса) —для трехмерных
воздухозаборников соответствующей формы. Одиако геометрические
параметры всех воздухозаборников аналогичны, поэтому продольное
130
сечение, например полукруглых и плоских воздухозаборников, будет
практически одинаково, а продольное сечение круглого воздухозабор-
ника будет отличаться только симметричностью нижней и верхней части
сечения.
На расчетном режиме работы воздухозаборника внешние косые
скачки уплотнения фокусируются на передней кромке обечайки, т. е.
имеет место равенство
- = ^4^1,
откуда F =—Й!—, f7.ll)
где G3 — секундный расход воздуха;
V — скорость полета самолета;
ря — плотность воздуха на высоте полета;
g = 9,81 м/с2.
косью сначки скачок
(заныкающий)
Рис. 7.10. Схема сверхзвукового воздухозаборника смешанного
сжатия (расчетный режим течения)
Полный расход воздуха через воздухозаборник равен
GbS == GB Gg.n.c Ов.пер»
где GB — расход воздуха через двигатель;
Ов.п.с—воздух пограничного слоя, сливаемый с поверхностей сжатия
(клина, коиуса и т. д.);
6в.пер — воздух, перепускаемый из диффузора обратно в атмосферу
через перепускные (противопомпажные) створки.
Однако с достаточной для эскизного проектирования точностью можно
принимать
GbS^Gb.
Расход воздуха (физический) через двигатель равен
(7.12)
Ро V тн
где GB.np — приведенный расход воздуха;
Ра~Рнавх->
Р о» Т'о—соответственно давление и температура окружающего воз-
духа при Н=0; V==0.
5*
131
Выражая давление и температуру полного торможения через число
М полета
Рн = Рн (1 + 0>2М2)3'5; Тн = Тн (1 + 0,2М2),
где Рн, Тн—соответственно давление и температура полного тормо-
жения избегающего потока на высоте полета;
/?я, Тп—соответственно давление (статическое) и температура
окружающего воздуха на высоте полета,
овх/>я(14-0,2М2)з /
получим 0в = 0зпр-----------------I/ —— • (/-I3)
1 , WOO f 1
Окончательное выражение для определения площади входа сверх-
звукового воздухозаборника будет иметь вид
гнх —и»пр 10,14VP// |/ тн ’
где FBX—выражается в м2;
GB.np — в кгс/с (значения приведенного расхода воздуха даны в
приложении III);
Рн — в кгс/см2;
V — в м/с;
рн— в кгс • с2/м4;
Тн-в К.
Минимально необходимое число скачков в воздухозаборнике сверх-
звукового самолета (в зависимости от расчетной скорости полета)
должно быть;
М^ 1,3 — один прямой скачок;
М^1,5 — система 1 косой скачок +1 прямой скачок;
М^2,0 — система 2 косых скачка +1 прямой скачок;
М^2,5 — система 3 косых скачка + 1 прямой скачок;
М^З,0— система 4 косых скачка +1 прямой скачок;
М^3,5 — система 5 косых скачков-Ь 1 прямой скачок.
Расположение косых скачков, как было отмечено выше, зависит от
типа воздухозаборника. При смешанном сжатии обычно 1—3 косых
скачка располагают снаружи, остальные — внутри воздухозаборника.
Углы ступенчатого клина (конуса) —а;, аг, аз и т. д.
выбирают таким образом, чтобы на расчетном режиме работы воздухо-
заборника наружные косые скачки (первый обязательно) фокусирова-
лись иа передней кромке обечайки. Сфокусировать скачки можно, оче-
видно, при различных углах а, так как углы наклона скачков р зависят
от этих углов. Однако наибольшее значение коэффициента оск получает-
ся только при одинаковой интенсивности скачков, которая определяется
как отношение скорости потока перед скачком к скорости потока за
скачком.
Поэтому углы аь аг, аз и т. д. должны обеспечить равенство
V Ух _
V1 — “ Уз ~ ’
где V — скорость невозмущенного потока (скорость полета);
Vi — скорость потока за 1-м косым скачком;
У2— скорость потока за 2-м косым скачком н т. д.
Скорость потока за i-м косым скачком Vt связана со скоростью потока
перед скачком следующей зависимостью:
с<Мг , (7.15)
cos (£/—а/)
132
где Vi-i —скорость потока перед i-м косым скачком. Для первого косо-
го скачка, следовательно, будем иметь
V. = V —, (7.16)
cos (J, — «О
где V — скорость полета.
Число М потока за i-м косым скачком определяется так:
М?= , (7.17)
7M^_xsin2^—I 5+M?_xsin2^
где Mi-i — число M потока перед t-м косым скачком (для 1-го косого
скачка — число М полета).
Соотношение между углом поворота потока (углом клина, конуса)
и углом наклона скачка выражается формулой
tgaz = ctg р.
sin2 р/ — 1
4-ML1G.2—sin2^)
(7.18)
Зная количество косых скачков, из предыдущих уравнений можно
определить необходимые значения углов ступенчатого клина (конуса),
обеспечивающие одинаковую интенсивность в скачках.
Особое внимание следует обратить иа угол наклона первой поверх-
ности сжатия ai, так как он фактически определяет вынос конуса (кли-
на) — расстояние от вершины клииа до плоскости входа.
Для современных сверхзвуковых воздухозаборников (в зависимости
от расчетного числа М полета) величина угла ai получается равной:
Угол аг приблизительно равен углу си:
± (0°-ь2°).
В табл. 7.1 для некоторых значе-
ний углов а приведены соответствую-
щие значения углов р (в зависимости
от числа М потока перед скачком).
Таблица 7.1
''Ху 1,5 2,0 2,2 2,35 2,7 3,0 3,5 ^ху 1,5 2,0 2,2 2,35 2,7 3,0 3,5
Клик | 5 47 34 31 29 25 23 20 Конус 9 42 31 28 26 23 21 19
7 50 37 33 31 27 25 22 И 43 32 29 27 24 22 20
9 54 39 35 33 29 27 24 13 44 33 30 28 25 23 21
11 58. 41 37 35 31 29 26 15 45 34 31 30 27 25 23
Длина ступеней конуса (клииа) легко определяется, если известны
углы а и р и размер h.
Расстояние по оси от плоскости входа до вершины конуса (клина)
будет равно
= (7.19)
133
Расстояние от плоскости входа до начала второй ступени конуса
(иа рис. 7.10 — размер /2) найдем, проведя из точки фокусирования
2-го скачка луч под углом (cn + fc) к набегающему потоку и т. д.
Площадь горла воздухозаборника Fr (в сечении г—г)
должна уменьшаться при увеличении скорости полета. Физически это
вполне очевидно: с увеличением числа М полета возрастает степень по-
вышения давления воздуха в системе скачков, а следовательно, повы-
шаются давление и плотность воздуха в горле, что и приводит к необхо-
димости уменьшения его площади (в противном случае воздух в горле
расширится и лВх снизится).
Обычно рассчитывается необходимая относительная площадь горла
вх
Значение величины Fr в зависимости от числа М полета в первом
приближении можно принимать
Найденные в результате эскизного
проектирования параметры сверхзву*
кового воздухозаборника обязательно
проверяются и корректируются в про-
цессе экспериментальных испы*
танин.
м 1,5 2,0 2,5 3,о 3,5
0,5 0,42 0,35 0,32 0,3
Регулирование сверхзвуковых воздухозаборников
Сверхзвуковые воздухозаборники должны обеспечивать высокие
значения коэффициента восстановления полного давления авх в значи-
тельно большем диапазоне скоростей, чем дозвуковые заборники. По-
этому оии имеют систему регулирования, задача которой состоит в том,
чтобы обеспечивать согласованную работу воздухозаборника и двигате-
ля (пропускная способность воздухозаборника должна соответствовать
пропускной способности двигателя).
В противном случае может возникнуть неустойчивая пульсирую-
щая работа (помпаж, «зуд» воздухозаборника). При этом сильно сни-
жается коэффициент Ствх. На сверхзвуковых скоростях задача регулиро-
вания воздухозаборника сводится к тому, чтобы удержать систему скач-
ков (особенно замыкающий прямой скачок за горлом) в заданном
положении. Это можно сделать изменением площади горла и перепуском
лишнего воздуха в окружающую атмосферу. Перепуск воздуха в атмо-
сферу осуществляется открытием специальных створок, установленных
иа поверхности канала (за горлом) воздухозаборника. Эти створки по-
лучили название протнвопомпажиых или перепускных. При сверхзвуко-
вом крейсерском полете створки перепуска воздуха приоткрыты и часть
воздуха стравливается в атмосферу, предотвращая тем самым возникно-
вение помпажа воздухозаборника.
При взлете и небольших дозвуковых скоростях полета потребная
площадь горла оказывается больше величины Л-тах, определяемой кон-
структивными возможностями (это объясняется относительно малой
плотностью воздуха в горле). Поэтому несмотря иа полностью раскры-
тое горло, двигателю для нормальной работы не хватает воздуха. Чтобы
не нарушать режим работы двигателя, при взлете и при малых дозвуко-
вых скоростях полета открываются дополнительно вспомогательные
(взлетные) створки и дополнительный воздух поступает к двигателю,
минуя горло (вспомогательные и перепускные створки показаны на
рис. 7.16). Конструктивно система регулирования выполняется:
а) для изменения площади горла:
134
— перемещением конуса вперед — назад (круглые воздухозабор-
ники) ;
— перемещением подвижных рамп '(плоские воздухозаборники);
— изменением диаметра центрального тела (круглые воздухоза-
борники) ;
б) для дополнительного всасывания или перепуска воздуха:
— открыванием дополнительных отверстий в канале за горлом
(вспомогательные и перепускные створки — иа всех сверхзвуковых воз-
духозаборниках) .
Регулирование воздухозаборника осуществляется автоматической
системой. Схема подобной системы показана на рис. 7.11. В системе
имеются две основные цепи
управления центральным те-
лом и створками перепуска,
с помощью которых осу-
ществляется регулирование
числа М в горле и положе-
ния замыкающего скачка
уплотнения.
3. РАЗМЕЩЕНИЕ ВОЗДУХО-
ЗАБОРНИКОВ НА САМОЛЕТЕ
На современных само-
летах двигатели часто раз-
мещаются в специальных
наружных гондолах, где воз-
духозаборник непосредст-
венно примыкает к компрес-
сору двигателя. В данном
случае компоновка двигате-
ля и воздухозаборника вы-
полняется совместно с ком-
поновкой двигательной гон-
Рис. 7.11. Гипотетическая система регулирова-
ния сверхзвукового воздухозаборника (показа-
ны основные и вспомогательные функции):
I — датчик числа М в горле, 2—регулятор цент-
рального тела; 3 — ручное управление; 4 — датчик
помпажа; 5 — центральное тело; 6 — датчик «срыва»;
7 — управление запуском; 8 — датчик числа И; Р —
датчик положения скачка; 10 — регулятор перепуск-
ных створок; 11— перепускные створки; 22—-двига-
тель;
------------>-основные функции;
— — I—*--->— вспомогательные функции.
ДОЛЫ.
При установке двигателя внутри фюзеляжа или крыла воздухоза-
борник отделяется от двигателя воздушным каналом и компоновка воз-
духозаборника выполняется отдельно.
Главным требованием, предъявляемым к компоновке воздухозабор-
ников иа реактивных самолетах, как уже было отмечено, является:
обеспечение равномерного поля скоростей иа входе в компрессор и по-
лучение высоких значений коэффициента восстановления полного дав-
ления цвк.
Существенная неравномерность поля скоростей потока может выз-
вать вибрацию лопаток компрессора и их поломку. Даже допустимая
неравномерность поля скоростей снижает ресурс компрессора и двига-
теля в целом. Основным источником, вызывающим иеравиомериость
поля скоростей в воздухозаборнике, является трение (обусловленное
вязкостью воздуха). Наличие трения, как известно, вызывает появление
пограничного слоя на обтекаемой поверхности, скорость в котором рез-
ко падает от скорости невозмущеииого потока до нуля.
При сверхзвуковом обтекании пограничный слой, взаимодействуя
со скачками уплотнения, нарушает их четкость: появляются местные
отрывы потока от стенок; пограничный слой, проходя через скачки, еще
больше увеличивает свою толщину; в местах вздутия пограничного слоя
образуются новые слабые косые скачки (А-скачки) и т. д,
Отклонение от расчетной схемы течения, вызванное вязкостью воз-
духа, в конечном счете и приводит к неравномерности поля скоростей и
135
снижению Ствх Поэтому все современные воздухозаборники имеют си-
стему отвода (слива) пограничного слоя Удаляется как пограничный
слой, образовавшийся на поверхности фюзеляжа (или крыла), так и по-
граничный слой, возникший на поверхностях сжатия — конусе (клине)
и внутренней поверхности обечайки (рис 7 12)
Рис 712 Схема отвода пограничного слоя
Толщина пограничного слоя б, как известно, зависит от скорости
потока, от коэффициента вязкости воздуха и от длины контакта потока
с омываемой поверхностью
8=/(Н х)
При проектировании воздухозаборника для надежного удаления
погра шчного слоя высоту сливных щелей (М, ) принимают
/7^0,01/,
где / — длина поверхности, на которой образуется пограничный слой
Рис 7 13 Пилонная подвеска ТРДД под крытом
Если, например, воздухозаборник будет вплотную прилегать к по
верхности фюзеляжа (т е /n=0), то коэффициент восстановления пол-
ного давления при М=2,5 уменьшится на 23—30%, чт^ приведет в ко
нечном счете к снижению тяги двигателя иа ~45% и к увеличению
удельного расхода топлива на ~ 15%
Для окончательного выравнивания поля скоростей за горлом
свеохзвукового воздухозаборника устанавливаются турбулизаторы (ие
большие плас1иики). Место и необходимость установки турбулизаторов
определяется в процессе доводки воздухозаборника (при испытаниях в
аэродинамических труба <)
Обеспечение слива пограничного слоя является одной из особенно-
стей компоновки современных воздухозаборников
В зависимости от места размещения на самолете применяются сле-
дующие основные типы воздухозаборников
136
1) лобовые воздухозаборники (главным образом, круглые);
2) боковые воздухозаборники (круглые, полукруглые, плоские
и др-); , .
3) подкрыльные воздухозаборники (главным образом, плоские)..
Лобовые воздухозаборники размещаются либо в иосу фю-
зеляжа иа легких самолетах, либо в носу двигательной гондолы, подве-
шенной на пилоне под крылом тяжелых самолетов (рис. 7,13). Основ-
ное преимущество лобовых воздухозаборников состоит в том, что она
обеспечивают высокую равномерность поля скоростей, а лои сверхзву-
ковом полете на расчетном режиме, кроме того, позволяют строго вы-
держивать заданное положение системы скачков уплотнения.
Рис. 7.14. Двигательная гон-
дола самолета ТУ-134
Рис. 7.15. Воздухозаборник истре-
бителя-бомбардировщика Фан-
том-11 (на поверхности фюзеляжа
видна ниша для размещения раке-
ты «Сперроу». На внутренней сто-
роне обечайки установлен ПВД
системы регулирования воздухо-
заборника)
Однако лобовые воздухозаборники имеют и ряд недостатков. Если
на тяжелых немаиевреиных самолетах в течение всего крейсерского по-
лета угол атаки не меняется, а следовательно, система скачков на входе
в воздухозаборник сохраняет заданное положение, то на легких самоле-
тах при выполнении маневра с большой перегрузкой, когда угол атаки
значительно увеличивается, фокусировка скачков нарушается, что при-
водит к неравномерности поля скоростей и к снижению коэффициента
восстановления полного давления. Короче говоря, лобовые воздухоза-
борники иа больших углах атаки работают недостаточно эффективно.
Второй недостаток лобовых воздухозаборников носит компоновоч-
ный характер. Размещая воздухозаборник в иосу фюзеляжа, приходит-
ся занимать большие внутренние объемы в фюзеляже под воздушный
канал (фактически весь фюзеляж от носа до хвоста прорезан воздуш-
ным и двигательным трактом), что, естественно, усложняет компоновку
самолета. Кроме того, лобовой воздухозаборник не позволяет размещать
в носу фюзеляжа антенну радиолокатора большого диаметра (антенна
ограничивается размерами конуса воздухозаборника).
Боковые воздухозаборники по форме входа отличаются
большим разнообразием. На дозвуковых самолетах в основном приме-
137
няются либо круглые воздухозаборники, либо воздухозаборники, форма
входа которых близка к прямоугольной (отклонение от круга в данном
случае объясняется стремлением сохранить профиль крыла); эти возду-
хозаборники называются также крыльевыми, так как они фактически
расположены в корневой части крыла.
Наличие пограничного слоя на поверхности фюзеляжа требует соз-
дания сливных щелей при компоновке боковых воздухозаборников на са-
молете, для чего вся двигательная гондола отодвигается и крепится к
фюзеляжу на пилоне (рис. 7.14).
Общее устройство
Рис. 7.16. Компоновочная схема двигательной гондолы тяже-
лого сверхзвукового самолета:
.' — щель для слива пограничного слоя с поверхности крыла; 2 —непо-
движная плоскость клина, 3 — подвижные рампы; 4— дозвуковой ка-
нал воздухозаборника. 5—дополнительные заборники воздуха, в~
первичное сопло. 7— реверсер тяги. 8 — регулируемое вторичное сопло,
S — глушитель; /0—форсунки форсажной камеры. 11 — стейка под
двигателем; /2 — перепускная (противопомпажная) створка; 13 — вспо-
могательная (взлетная) створка. 14 — обечайка; 15 — вертикальная пе-
регородка, разделяющая воздухозаборники двух двигателей, а — щель
для слива пограничного слоя с плоскости клина, в —воздух погра-
ничного слоя
Следует заметить, что пилон в данном случае позволяет лишь орга-
низовать слив пограничного слоя, не обеспечивая, однако, условий ра-
боты лобового воздухозаборника, так как скосы потока за крылом,
спутная струя от крыла и других частей самолета создают местные ус-
ловия течения, отличные от невозмущенного потока.
На сверхзвуковых самолетах в основном применяются плоские
(рис. 7.15) и полукруглые боковые воздухозаборники (хотя встречаются
н другие формы входа). Размещение воздухозаборников по бокам фю-
зеляжа не только значительно сократило длину воздушного канала, но
и полностью освободило нос фюзеляжа для установки радиолокационной
станции. При четкой организации слива пограничного слоя боковые воз-
духозаборники работают весьма эффективно (однако при выполнении
138
маневра иа сверхзвуковой скорости с большими углами скольжения
один из воздухозаборников может оказаться затемненным носовой ча-
стью фюзеляжа).
Подкрыльные воздухозаборники иа существующих са-
молетах (ХВ-70, Ту-144, «Коикорд») имеют плоский вход Воздухозабор-
ник в данном случае является передней частью двигательной гондолы,
установленной под крылом. На рис. 7.16 показано продольное сечение
двигательной гоидолы самолета «Конкорд».
Недостатком подкрыльных воздухозаборников является плохая ра-
бота иа больших отрицательных углах атаки (в этом случае они затеня-
ются крылом).
§ 4. ТОПЛИВНАЯ СИСТЕМА САМОЛЕТА
Топливная система современного самолета включает в себя следую-
щие основные элементы: топливные баки, трубопроводы, иасосы, клапа-
ны, краны, фильтры и систему различных автоматов, датчиков, измери-
тельных приборов и т. д.
Назначение топливной системы — обеспечить подачу топлива к дви-
гателям иа всех возможных для данного самолета режимах полета (по
высоте, скорости, перегрузкам и т. д.) в нужном количестве и с необхо-
димым давлением. На сверхзвуковых самолетах (особенно предназна-
ченных для длительного сверхзвукового полета) топливная система вы-
полняет еще ряд важных функций, обеспечивая охлаждение системы
коидициоиироваиия, гидравлической системы и др., а также может умень-
шать запас устойчивости самолета, парируя сдвиг фокуса при переходе
от дозвукового к сверхзвуковому полету (см. гл. VI).
В качестве основного топлива для воздушно-реактивных двигателей
современных самолетов применяется углеводородное топливо (улучшен-
ные сорта керосинов). Для гиперзвуковых и воздушно-космических само-
летов представляют интерес криогенные топлива (в основном жидкий
водород).
На больших скоростях полета, когда направление теплового потока
в конструкции самолета изменяется на противоположное, топливо (осо-
бенно размещенное в крыльевых баках-отсеках) нагревается. Например,
в крейсерском полете со скоростью, соответствующей числу М = 3, тепло-
вой поток, исходящий от оошивки, становится настолько существенным
(средняя температура обшивки ~260°С), что он мог бы нагреть керо-
син до температуры кипения. Применение теплоизоляции (слоистая
конструкция с сотовым заполнителем также значительно снижает теп-
ловой поток) позволяет избежать чрезмерного нагрева топлива, однако
температура его при больших скоростях (М>3) все же настолько повы-
шается, что углеводородное топливо не может выполнять роль хладаген-
та для охлаждения конструкции и систем самолета.
Одним из недостатков углеводородного топлива является его тер-
мическая неустойчивость при высоких температурах (например, для ке-
росина этот предел равен приблизительно 200°С). Если указанный пре-
дел достигается даже иа короткое время, то может образоваться неко-
торое количество отложений твердых частиц в теплообменниках,
фильтрах, форсунках двигателей и т. д с возможным их блокированием.
В этой связи следует сказать о превосходстве жидкого водорода как топ-
лива для гиперзвуковых самолетов
На гиперзвуковых скоростях водород перед подачей в двигатель
может быть использован для охлаждения конструкции самолета. И тог-
да значительные трудности, связанные с применением водорода, будут
в какой-то степени компенсированы Дело в том, что жидкий водород,
обладая неоспоримым преимуществом перед керосином: энергосодержа-
ние иа единицу веса примерно в 2,5 раза больше, удельная теплоемкость
139
в 7 раз выше (жидкий водород — отличный охладитель), имеет и ряд
существенных недостатков. Большой недостаток водорода — низкая
плотность в жидком состоянии, составляющая 0,1 плотности керосина,
поэтому энергосодержание иа единицу объема у водорода примерно в
4 раза меньше. Другим недостатком является низкая температура кипе-
ния жидкого водорода, равная —253° С. Поэтому летательные аппараты
с таким топливом будут иметь большие объемы, причем топливо необхо-
димо размещать в криогенных баках, дополнительно увеличивающих
вес и объем аппарата.
Сравнение характеристик керосина и водорода приводится в
табл. 7.2.
Таблица 7.2
Характеристика топлива Керосин Водород
Теплота сгорания в ккал/кгс 10 290 28 700
Теплота сгорания в ккал/л 8 700 2 100
Плотность в жидком состоянии в гс/см3 0,833 0,0735
Удельная теплоемкость, в ккал/кгс-град Температура кипения (при давлении 1 кгс/см2) в °C 0,46 2,7—3,7 —253
4-187—4-237
Различия физических и термодинамических свойств водорода и ке-
росина оказывают большое влияние на возможные компромиссные ре-
шения, увязывающие летиые характеристики и конструкцию самолета.
Размещение топлива в значительной мере определяет общую компо-
новку самолета, так как запас топлива иа современных самолетах мо-
жет достигать 50% и более от взлетного веса (иа Ил-62 величина
£т.тах = 0,51; на ХВ-70 — GT.max = 0,57). Размещается топливо в специ-
альных топливных баках, которые делятся на основные, расходные и
балансировочные (в зависимости от назначения и типа самолета рас-
ходные и балансировочные баки в топливной системе могут и ие преду-
сматриваться).
По конструктивным признакам топливные баки делятся иа три ти-
па: жесткие, мягкие и баки-отсеки конструкции самолета. Основное
преимущество мягких резиновых баков состоит в том, что оии позволя-
ют лучше, чем жесткие баки, использовать объем, более технологичны
н удобны в производстве и эксплуатации (их можно свертывать и мон-
тировать через небольшие люки). Мягкие баки, кроме того, ие боятся
вибраций, ие дают рваных краев при простреле (небольшие пробоииы
даже затягиваются специальным слоем резины), обладают хорошими
теплоизоляционными свойствами.
Достоинством жестких баков является меньший вес по сравнению
с мягкими баками (вместе с контейнерами). Жесткие баки автономны
от конструкции самолета, их можно сравнительно легко ремонтировать.
Герметичные баки-отсеки (бак-конструкция) позволяют наиболее
рационально использовать внутренние объемы самолета, так как топлив-
ного бака как такового иет, а топливо заливается в отсек крыла или
фюзеляжа, покрытый изнутри керосииостойким (и температуростойким)
герметиком. Применение баков-отсеков позволяет увеличить запас топ-
лива иа борту самолета. Одиако баки-отсеки обладают повышенной по-
ражаемостью, что понижает надежность топливной системы, их трудно
ремонтировать. Топливо в баках-отсеках непосредственно подвергается
воздействию низких температур при полете на дозвуковых скоростях и
высоких температур при полете на больших сверхзвуковых скоростях.
Одним из основных требований к компоновке топливных баков иа
самолете является обеспечение положения центра тяжести самолета при
140
выработке топлива в допустимых пределах. Если самолет предназначен
для длительного сверхзвукового полета, то в топливной системе такого
самолета для уменьшения запаса устойчивости может предусматривать-
ся установка специальных балансировочных баков (баки, расположен-
ные на возможно большем удалении впереди и сзади от центра тяжести
самолета); перекачиванием топлива нз передних балансировочных ба-
ков в задние можно приблизить центр тяжести к фокусу самолета (за-
пас устойчивости можно уменьшить также принудительным сдвигом
фокуса вперед). Если самолет кратковременно выходит на сверхзвуко-
вую скорость, то установка системы уменьшения запаса устойчивости
путем перекачки топлива иа таком самолете, очевидно, нецелесооб-
разна.
На рис. 7.17 показано
типичное изменение положе-
ния центра тяжести и фоку-
са самолета в зависимости
от скорости (или времени)
полета.
Допустимый диапазон
центровок удерживается в
полете благодаря симмет-
ричному расположению топ-
ливных баков относительно
центра тяжести самолета и
определенной последователь-
ности выработки топлива из
них. Может возникнуть воп-
рос: нельзя ли для уменьше-
ния величины тгу обеспе-
чить такой порядок выра-
ботки топлива, чтобы центр
тяжести на сверхзвуковой
ра тяжести и аэродинамическою фокуса са-
молета в процессе полета:
хт1—предельно переднее положение ц т, пре-
дельно заднее положение ц т . Дхт — допустимый
диапазон центровок самолета: — сдвиг аэроди-
намического фокуса при переходе от дозвукового к
сверхзвуковому полету;
ткр
— возможное
положе-
ние ц т в сверхзвуковом крейсерском полете (после
перекачки топлива из передних балансировочных ба-
ков в задние)
скорости перешел установ-
ленное предельно заднее при М<1 положение (хтз) и приблизился к
фокусу самолета, например за счет выработки топлива только из перед-
них баков'5 Одиако этого сделать нельзя по двум причинам: во-первых,
если топливо из передних баков будет вырабатываться (а не перекачи-
ваться в задние), то центр тяжести будет сдвигаться назад очень мед-
ленно и эффект от уменьшения запаса устойчивости значительно сни-
зится; во-вторых, когда центр тяжести будет находиться сзади положе-
ния £т2 и по какой-либо причине потребуется быстро снизить скорость
и перейти на дозвуковой полет, то необходимо также быстро вернуть
центр тяжести самолета в дозвуковое' положение (в противном случае
самолет станет неустойчивым), а быстро вернуть центр тяжести в дозву-
ковое положение можно только перекачкой топлива в передние баки.
Поэтому система сдвига центра тяжести самолета с помощью перекачи-
вания топлива из передних балансировочных баков в задние обязательно
должна обеспечивать и быструю обратную перекачку топлива при пере-
ходе от сверхзвукового полета к дозвуковому. На самолете «Конкорд»
во время разгона на околозвуковом режиме примерно за 5 мин перека-
чивается 9200 л топлива из четырех передних балансировочных баков
в задний бак. Обратная перекачка топлива при переходе к дозвуковой
скорости полета производится еще быстрее — за 4 мин.
Питание двигателей топливом можно осуществлять из любых топ-
ливных баков, но чаще всего для этого используются специальные рас-
ходные баки, в которые в определенном порядке перекачивается топли-
во из основных баков.
141
Топливная система с расходным баком имеет определенные преи-
мущества, особенно для самолетов военного назначения: она обладает
большей надежностью, так как при выходе из строя основных баков в
запасе остается расходный бак (до 20% всего топлива), защиту которо-
го можно обеспечить путем бронирования; один расходный бак (или
несколько) легче оборудовать специальными устройствами для беспе-
ребойного питания двигателя при выполнении фигур высшего пилота-
жа и т. д.
Топливные баки могут размещаться как в фюзеляже, так и в крыле
самолета. И та, и другая компоновка имеет определенные преимущества
Рис. 7.18. Размещение топливных баков на сверхзвуко-
вом пассажирском самолете «Конкорд», Франция —
Англия1
1: 2; 8— балансировочные баки; 3, 7 —расходные баки, 4, S, 6,
9, /0 —основные баки
и недостатки. Поэтому для одних самолетов топливо размещается в ос-
новном в крыле, для других — в фюзеляже. Крыльевые топливные баки
имеют большую площадь поражаемой поверхности, что приводит к мень-
шей живучести топливной системы. Это основной недостаток такого рас-
положения топливных баков. Однако при размещении топлива в крыле
его вес разгружает крыло в полете, благодаря чему получается опреде-
ленный выигрыш в весе конструкции крыла. Кроме того, при размеще-
нии топлива в крыле фюзеляж практически полностью можно занять
под полезную нагрузку, что имеет большое значение в первую очередь
для пассажирских и транспортных самолетов. Поэтому на всех пасса-
жирских, транспортных и тяжелых военных самолетах топливные баки
размещаются главным образом в крыле (рис. 7.18).
Размещение топлива в фюзеляже может оказаться более целесооб-
разным для военных самолетов (особенно низколетящих). Располагая
топливные баки в фюзеляже над центропланом, двигателем, шасси
и т. д., которые служат как бы защитным экраном от зенитного огня,
можно повысить живучесть самолета.
Глава VIII
ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ПАРАМЕТРОВ САМОЛЕТА
В настоящей главе дается определение основных параметров глав-
ным образом военных самолетов. Определение параметров пассажирских
самолетов, вертикально-взлетающих и воздушно-космических самолетов
приводится в специальных главах книги.
Как уже отмечалось, основными параметрами самолетов являются:
— полный (взлетный) вес Go;
142
— площадь крыла S;
— тяга Pq или мощность No СУ, потребные для получения заданных
летных данных.
Для определения этих параметров на начальной стадии проектиро-
вания самолета находят относительные параметры ро и Ро.
§ 1. ОПРЕДЕЛЕНИЕ ВЕЛИЧИНЫ УДЕЛЬНОЙ НАГРУЗКИ НА КРЫЛО
В гл. И было показано, что величина удельной нагрузки иа крыло
Ро существенно влияет иа летные характеристики самолета и иа его
взлетный вес Go- В частности, заданные взлетно-посадочные характерис-
тики могут иметь решающее значение при определении ро. К взлетно-
посадочным характеристикам самолета относятся:
посадочная скорость
К»=4 ]/
у СУ ПОС
скорость отрыва при взлете
yf
г СУ отр
скорость захода и а посадку
F сУзах
где А, В и С—постоянные коэффициенты, учитывающие плотность
воздуха и влияние земли иа су самолета;
Рпос — удельная нагрузка иа крыло при посадке;
^пос; с^отр—коэффициенты подъемной силы, соответствующие по-
садочному углу атаки и углу атаки при отрыве само-
лета;
—коэффициент подъемной силы иа угле атаки, соответ-
ствующем скорости захода иа посадку.
Большая скорость Упос ведет к необходимости создания больших
аэродромов и усложняет пилотирование самолета при посадке. Боль-
шая скорость Уотр приводит к увеличению размеров аэродрома или же
к необходимости применения взлетных ускорителей, а большая скорость
Узах затрудняет пилотирование при посадке самолета, что снижает
эксплуатационные качества проектируемого самолета.
Допустимая величина УВос зависит от назначения самолета и воз-
можности применения на ием посадочных парашютов и подобных им
тормозных устройств, а также устройств для реверса тяги.
В первом приближении иа основе статистических данных, опублико-
ванных за рубежом, можно принимать следующие величины Упос*-
для военных самолетов....................... 180—250 км/ч
для военно-транспортных самолетов......... 120—150 »
для учебных и спортивных самолетов .... 60—100 »
Допустимая скорость Уаах обычно определяется из условий безопас-
ности полета. Для военных самолетов можно принимать следующие ве-
личины:
Узах = 200—280 км/ч.
* Максимальное значение VnOc ограничивается допустимыми для камер колес
окружными скоростями (Vnoc меньше 400 км/ч).
143
Обычно считается, что скорость V3ax должна превышать скорость
срыва, соответствующую сутах, на 20—30%, т. е.
Су sax — ^2^-1 3)2 0’6) су max-
В первом приближении значение ро следует выбирать в соответствии
с величиной скоростей УПос или Узах.
Так как расходуемая в полете нагрузка (топливо, сбрасываемые
грузы и т. д.) составляет 25—60% взлетного веса и, следовательно, са-
молет к моменту посадки оказывается значительно облегченным, то це-
лесообразно величину удельной нагрузки рпос? определяемую по весу
самолета в момент посадки, связать с Vnoc и УЭах. Учитывая это, можно
пользоваться для определения величины ро следующими формулами:
п — Су ПОсУПОС /п , ч
Ро—-----------—---Z , (&• 1)
180(1— 0,8GT — Gc.r)
пли /,'q—--------—----—-- , o.XI
208(1—0,8GT—Gc.r)
где GT — относительный вес топлива (GT=GT/G0);
(7. г — относительный вес сбрасываемых грузов (Gc Г=(7С r/G0).
При отсутствии на начальной стадии проектирования продувочных
данных можно пользоваться следующими приближенными величина-
ми Супос-
— для прямых крыльев с мощной механизацией (предкрылок и двух-
щелевой выдвижной закрылок) <?уПОС = 2,2—2,5;
— для стреловидных крыльев (%=25—35°) с мощной механизацией
£упос= 1,8—2,0;
— для стреловидных крыльев (х=40—45°) со сдвижными двухще-
левыми закрылками и предкрылками СуП0С = 1,5—1,8;
— для треугольных крыльев (%пк=55—60°) с мощной механизацией
Супос = 1,0—1,2.
Необходимая величина удельной нагрузки р0 в большинстве случаев
определяется из условий посадки. Вместе с тем следует проверить, на-
сколько найденное значение ро обеспечивает другие заданные летные ха-
рактеристики. Если, например, задана крейсерская скорость или число
Мкрейс НЗ ВЫСОТе //крейс (Дкрейс), ТО
ЗЭбОМкрейсДкрейс 1/ КГС/М2, (8.3')
V Do
где
^О = ^0-Рсхф^-; (8.3) ,
*о= 1,35; *1=-^--
С учетом (8.3') формула (8.3) приводится к квадратному уравнению
относительно ро. При решении берется действительный корень (-гРо).
Ниже приведены примерные статистические значения удельных на-
грузок ро на крыло:
истребители нормальной схемы.............. 400—600 кгс/м2;
истребители бесхвостой схемы ........... 250—300 »
бомбардировщики средние ....................... 350—550 »
бомбардировщики тяжелые...................... 550—650 *
144
военно-транспортные самолеты с ТРД тяже
лые....................................
легкие транспортные, спортивные и трениро
вочные самолеты........................
учебные, переходные (с ТРД)............
самолеты для сельского хозяйства ....
500-650 »
150—180 »
100—150 »
80—120 >
§ 2. ОПРЕДЕЛЕНИЕ ПОТРЕБНОЙ ТЯГОВООРУЖЕННОСТИ САМОЛЕТА
При проектировании потребная тяговооруженность самолета
Pq=PqIGq определяется обычно из обеспечения заданных условий:
— скорости (числа М) полета на расчетной высоте Ярасч;
— длины разбега или дистанции прерванного взлета;
— разгона за определенное время от скорости, соответствующей
числу М<1 до скорости, соответствующей числу МраСч>1, а также из
других условий.
В качестве расчетной- тяговооруженности принимается наибольшее
из этих условий значение Ро.
При заданных величинах AfpaC4, Я>11 км н выбранном значении Ро
потребная тяговооруженность
_4650м“асчсж
---
(8.4)
где
До---------------
294-105М*асчД2
(8.5)
5 = — (см. стр. 28);
Д— относительная плотность воздуха на заданной высоте Н.
Если известно крейсерское число Мкреяс иа высоте ЯКрейс>И км, то
стартовая потребная тяговооруженность
— 6950М’ ,гс.
ра =------, (8.6)
(8.7)
а величина Якрейс может быть найдена по Дкрейс:
1,7бК£>о сх,
Дкрейс-------__Z-- .
^0
Для самолетов, предназначенных для малых высот, стартовая тяго-
вооруженность определяется по следующей формуле-
- 7200М2с
Л)------Г~
(8-8)
где сх = Сх, I ,
525-П^М4
(число М задано).
Из условия обеспечения заданной длины разбега стартовая тяго-
вооруженность равна
Ро
nQ , +1,1/кач.-0,033,
О.УСр отрРо^Дразб
(8.9)
где fy0Tpe],l—1,2 — для сверхзвуковых самолетов нормальной схемы
с крылом умеренной стреловидности (35—45°);
145
с^отр = 0,65—0,67 — для самолетов схемы «бесхвостка» с треуголь-
ным крылом;
Су отр = 1,8—2 — для военно-транспортных дозвуковых самолетов, а
также легких многоцелевых самолетов;
/кая — коэффициент сопротивления качению колес (при взлете с
бетонированной ВПП /Кач=0,03; при взлете с грунтового
аэродрома /кач=0,1).
Из условия безопасности взлета (после отрыва) с одним отказав-
шим двигателем (пдв^2)
?о = —Ц-ГМ + sin 01. (8.10)
।___1 L\ Су /отр J
лдв
Здесь 0 — наименьший допустимый угол набора высоты
(sin 6 —0,024— для /гдв = 2; sin 6 = 0,027 — для /zJB = 3;
sin 6=0,03 —для /гдв=4).
Для большинства типов сверхзвуковых самолетов (кроме СВВП и
СУВП) стартовую тяговооруженность можно определить по следующей
формуле:
Л=^-[1+]/
ЛкрейсЬ
0 3-}- (0’95 (Мкрейс + ^Kpefic/^ff) ^крейс^р.крейс j jj
6^крейс7дв^т.расх -I
где АГкрейс—аэродинамическое качество самолета на крейсер-
ской скорости;
<7т.расх = От.расх/^т—относительный вес топлива, израсходованного за
время всего полета;
•7/крейс—начальная высота крейсерского полета в м;
Укрейс—крейсерская скорость в м/с;
£р.крейс—удельный часовой расход топлива в крейсерском по-
лете в кгс/кгс-ч;
улв—стартовый удельный вес двигателя.
Значения безразмерного коэффициента е и величина Ккрейс в зави-
симости от крейсерского числа М берутся из следующей таблицы* **1’,
Мкрейс 2—3,5 6,0 9,0
€ 2700 3500 4700
^крейс 6—9* 5-7 4-6
* Меньшие значения Лкрейс характер-
ны для самолетов небольшой дальности по-
лета, большие — для самолетов большой
дальности.
§ 3. ОПРЕДЕЛЕНИЕ ПОЛНОГО (ВЗЛЕТНОГО) ВЕСА САМОЛЕТА
Определение взлетного веса самолета — одна из основных задач на
первом этапе проектирования. Степень точности, с которой определяется
(7о*), имеет особое значение, поскольку эта величина влияет иа основ-
ные летные данные самолета.
Прежде всего следует иметь в виду, что площадь крыла «S опреде-
ляется исходя из выбранного для проектируемого самолета значения
удельной нагрузки р0, поэтому рассматривая влияние на летные харак-
теристики полного веса Go, необходимо принимать всегда p0=const.
* Мишин В. Ф. Выбор двигателя в период предварительной разработки са-
молета. Изд. МАИ, 1968.
** Здесь имеется в виду приближенное определение Gq.
146
Завышение взлетного веса проектируемого илн построенного само-
лета всегда ухудшает его летные характеристики. Расчет показывает,
например, что при увеличении веса Go на 10% число Мтах снижается
при сверхзвуковых скоростях приблизительно на 12%. Завышение веса
Go может быть получено или на начальном этапе проектирования — при
определении полного веса, или в процессе проектирования конструкции.
Если завышение веса получилось только вследствие утяжеления кон-
струкции, то при неизменности Go GK увеличится, GT, Gcy и тяговоору-
женность Ро уменьшатся и летные характеристики будут ухудшаться.
Рис. 8.1. Схема разбивки полного веса самолета Go на составляю-
щие части
Как известно, полный вес самолета включает в себя вес пустого са-
молета Gnycr и вес полной нагрузки GH. В свою очередь вес пустого
самолета СПуст включает в себя вес конструкции самолета GK, вес сило-
вой установки Gc.y, вес оборудования и управления ООбУПр. Вес полной
нагрузки GB состоит из веса топлива GT, веса полезной нагрузки Сп.н»
представляющей собой вес различного рода грузов, пассажиров и веса
служебной нагрузки Сслуж (экипаж и снаряжение) (рис. 8.1). Таким об-
разом,
Оо~^иУст Н-Gtl~-G-;-t-Gc.y -}-Go6.ynp-}-GrGa и -t-GCy1y«-
Определение полного веса усложняется тем, что некоторые из его
слагаемых являются функциями самого веса Go, кроме того, определение
Gc.y и GT непосредственно в самом начале проектирования невозможно,
так как для этого нужно знать величину веса Go.
Для определения веса конструкции самолета GK также необходимо
знать Go, так как достаточно точное определение веса конструкции GK
возможно лишь тогда, когда известны основные размеры самолета; раз-
меры же можно определить только исходя из веса Go. Поэтому в первом
приближении полный.вес лучше всего определять из уравнения относи-
тельных весов:
G,[+Gcy + GI + ^r=l,
где Gc.a.r=Goe.ynp-}- G„ н-1-Ослуж—сумма, определяемая достаточно точно
на основании перечней оборудования, каталогов и данных статистики,
причем Ghh н_ОслУж — задаются; Gc.y и Gt определяются по формулам.
Определение GK возможно только при условии, что в первом приближе-
нии полный вес самолета известен. Расчет ведется следующим образом.
По формулам (2.21) и (2.23) определяют Сс.у и Ст, затем по формуле
147
(2.26); (2.26х) или (2.26"), задавшись вероятной величиной полного веса
самолета Gq (используя статистику), находят величину относительного
веса конструкции в первом приближении GK'. Поскольку вес Gc.3.r извес-
тей, получают GcadGb' и находят сумму
+ Gc,y 4- От + 6с.э.г —
которая будет больше или меньше единицы (или равна единице). Если
сумма будет равна единице, то Go явится первым приближением иско-
мой величины полного веса самолета. Если сумма не равна единице,
задаются вторым значением полного веса Go", находят G* и <7сл.г/<?о
и подсчитывают сумму Gk-}-Gc y + GT + Gc.3.r/Go=^G*. Далее строят
G0=f(SG) (рнс. 8.2) наносят точки с координатами
Go, 2G', Go, EG" и проводят через эти
точки плавную кривую. Пересечение кри-
вой с осью Go дает значение полного веса
самолета в первом приближении Go1.
зависимость
Рис. 8.2. Графический способ
определения полного веса са-
молета Go при эскизном проек-
тировании
Для определения Gcy необходимо
знать потребную тяговооруженность Ро и
удельный вес СУ. Потребная тяговоору-
женность Ро определяется так, как ука-
зывалось выше. Удельный вес силовой
установки го можно определить для ТРД
по формуле
го~ ТдвН- ДТтв» (8-12)
где AbB—vGJPo (ф=0,09 для небольших самолетов с фюзеляжными
баками; ф—0,13 для больших самолетов с крылье-
выми баками);
GT и Ро берутся по статистике или приведенному
выше расчету;
Удв — удельный вес двигателей можно принимать по
статическим данным (уДв = 0,16—0,20).
Относительный вес топлива 6’т определяется в соответствии с тем,
задана ли продолжительность полета t' или дальность Lmax—по форму-
лам (2.22) или (2.23) и (2.23').Входящие в формулы коэффициенты £иф
определяются по соответствующим графикам. Коэффициент сХа в зависи-
мости от скорости может быть взят из продувки модели сходного с про-
ектируемым самолета или вычисляется по приближенным формулам.
Коэффициент сх равен сх—сх<)4-Dt$/q*. Для самолетов с поршневы-
ми и турбовинтовыми двигателями относительный вес топлива опреде-
ляется по формуле (2.23").
Часто двигатель для проектируемого самолета, бывает задан. Тогда
в начале проектирования будут точно известны удв, сХа, функции £=fi(M)
и ф=/2(М) и задача сводится к тому, чтобы проверить расчетом в пер-
вом приближении, будут лн выполнены требования к летиым характе-
ристикам. Если при проектировании самолета не задан конкретный дви-
гатель, то приходится делать выбор из нескольких подходящих. Для. ре-
шения в первом приближении вопроса об удовлетворении требований по
Мшах строят графики функций сх(М) и Ср(М). Коэффициент тяги ср оп-
ределяется по формуле
Р HinwPo
Ср— ’ ,
а'<Я
148
где Phi—тяга двигателя на расчетной высоте Н при заданном числе
М полета;
Ллж—количество двигателей;
Go—полный вес самолета в первом приближении;
q—скоростной напор.
По характеристикам выбранного двигателя находят вес силовой ус-
тановки Gc.y — Poin,^ro{Poi — стартовая тяга двигателя) н вес топлива
О,» Оо ( + « )
\ Л1крейс /
где фср0—удельный расход топлива на /7Крейс и М.<рейс, сХо и Do —для
7/Крейс И Мкрейс (СМ. ГЛ. И).
Значение числа М:(рвйС определяется графически построением в ко-
ординатах Мзад и Ми-т кривой Мкрейс, подсчитываемой по формуле
МкрейС=0,012 1 / , и луча из начала координат под углом 45°
I
к осям (см. рис. 2.17). Пересечением кривой и луча определится зна-
чение МКрейс на крейсерской высоте /7Крейс, которой будет соответство-
вать
Дкрейс~~Днв —
1,76С; |/>хР0
где POil — тяга выбранного двигателя на Мкрейс по характеристике дви-
гателя для Н=0 (коэффициент | учитывает изменение тяги
по скорости, а также потери тяги во входных устройствах СУ
при М>1).
Уточнив величины Gc.y, Gt и £н, определяют полный вес во втором
приближении
Затем находят величину S=Oq1/pq.
Зная <S, приступают к компоновке самолета, выбирают и уточняют
все размеры и параметры частей самолета, разрабатывают и уточняют
его общий вид и рассчитывают вес конструкции частей самолета, ис-
пользуя для этого весовые формулы (для крыла, фюзеляжа, оперения,
шасси и т. д.). После этого определяют полный вес в третьем прибли-
жении:
Gj" = Oc.,.r+Oe.y+OI+Ok
и далее составляют весовую сводку (см. приложение 1).
Глава IX
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ПАССАЖИРСКИХ
САМОЛЕТОВ
§ I. КОМПОНОВКА ПАССАЖИРСКОЙ КАБИНЫ
При компоновке пассажирского самолета важно обеспечить разме-
щение на самолете заданного числа пассажиров (коммерческой нагруз-
ки) при наименьшем весе пустого самолета. В первую очередь решение
этой задачи связаносвыбором оптимальных размеров фюзеляжа, пасса-
жирской кабины и вспомогательных помещений.
149
В настоящее время в практике воздушных пассажирских перевозок
применяются трн различных класса кабин, отличающихся друг от друга
комфортом размещения пассажиров н условиями обслуживания пасса-
жиров в полете.
В высшем, I классе, увеличена ширина сидений и расстояние между
рядами (шаг сидений), пассажиры чаще получают питание (увеличен
объем кухонь) и т. п.
Во II, или туристском, и III, или экономическом, классах соответ-
ственно более узкие сидения и меньший шаг между рядами сидений.
Размеры пассажирской кабины определяются числом пассажиров,
конструкцией и размерами пассажирских сидений.
Рис. 9.1. Основные размеры пассажирских сидений
Основные размеры пассажирских снденнй приведены в следующей
таблице (рис. 9.1).
Классы
пассажирских
сидений
Ширина
блока
сидений
I класс
Туристский
Экономический
1200 1420
1030 1520
970 1430
Все размеры даны в мм.
Следует иметь в виду, что:
а) пассажирские сидения обычно делаются в виде блоков из двух
илн трех сидений. Для I класса применяются только блоки с двумя си-
дениями; для II н III классов возможны блоки как с двумя, так н с тре-
мя сидениями;
б) сидения I класса должны иметь спинку, откидывающуюся назад
на угол до 55°—65° от вертикали, н съемную площадку — подножку, что-
бы обеспечить полулежачее положение пассажира для отдыха;
в) сидения II и III классов должны иметь спинку, свободно откиды-
вающуюся вперед с тем, чтобы при аварии пассажир заднего ряда не
мог удариться головой о спинку переднего сидения;
г) сидения III класса из-за малого шага между сидениями должны
быть откидными;
д) каждое сндение I класса обязательно должно иметь два подло-
котника шириною не менее 70 мм. В блоках сидений II и III классов
средние подлокотники делаются по одному между сидениями; ширина их
составляет соответственно не менее 60 мм и не менее 40 мм;
150
е) при установке в одном ряду нескольких блоков сидений ширина
прохода между этими блоками должна быть:
для I класса — не менее 500 мм;
для II класса — 450—500 мм;
для III класса — 390—400 мм.
Весовые характеристики сидений приведены в табл. 9.1.
Если учесть, что расстояние от
подлокотника сидения до внутренней
поверхности фюзеляжа должно быть
не менее 50—60 мм и толщина стенки
фюзеляжа составляет обычно 120 мм
(конструкция, теплозвукоизоляция, де-
коративное покрытие), то легко рас-
считать потребную ширину фюзеляжа
в зоне размещения сидений.
Например, для размещения шести
сидений II класса в ряду (два блока
по три сидения) потребная ширина фюзеляжа (или диаметр фюзеляжа
при круглом сечении)
Вф = 440-6 + 50-8 + 400+60 • 2+420-2 = 3800 мм,
где 440 — ширина сидений;
50 — ширина подлокотников;
400 — ширина прохода;
60 — зазор до стенок;
120 — толщина стенок.
Расчеты, сделанные подобным образом для различного числа сиде-
ний в ряду, сведены в табл. 9.2.
Таблица 9.1
Класс сидений Вес блока из двух сидений в кгс Вес блока из трех сидений в кгс
1 22—30
11 18—25 27—35
П1 15—20 22—30
Таблица 9.2
Минимально необходимая ширина фюзеляжа
Число сидений в ряду Количество и тип бло- ков Ширина прохода в мм Ширина и ко- личество под- локотников В ряду Зазор между внешним под- локотником и стенкой Ширина фюзеляжа в зоне пассажир- ских сидений или диаметр фюзеляжа в мм
3 1+2 390 50 (2+3) 50X2 2300
4 2+2 400 50(3+3) 50X2 2800
5 2+3 400 50(3+4) 50X2 3300
6 з+з 400 50 (4+4) 60X2 3800
7 2+3+2 480+480 50 (3+4+3) 60X2 4900
8 9 2+3+3 з+з+з 485+485 490+ 490 50(3+4+4 50(4+4+4) 60x2 60x2 5400 5900
10 3+2+2+3 500+500 50(4+3+3+4) 60x2+140 6600
Примечания. 1. Ширина сидения между подлокотниками 440 мм; толщи-
на одной стенки фюзеляжа 120 мм.
2. При числе сидений в ряду 9 и компоновке по схеме 3+2+2+2 за счет
дополнительного подлокотника и зазора между средними блоками сидений шири-
на фюзеляжа увеличивается до 6000 мм.
Размеры пассажирской кабины определяются в основном числом
пассажиров. По числу пассажиров в одном ряду и, следовательно, опре-
деленной ширине пассажирской кабины и ширине фюзеляжа опреде-
ляется потребное число рядов сидений.
Длина пассажирской кабины находится с учетом следующих ус-
ловий:
151
а) расстояние или шаг между рядами сидений:
в I классе —960—1080 мм;
во II классе —840 — 870 мм;
в 111 классе —750 — 810 мм;
б) первый ряд сидений должен размещаться не ближе чем иа 1200—
1300 мм от передней перегородки кабины, если считать этот размер от
плоскости перегородки до верха спинки сидения при ее нормальном по-
ложении (угол наклона 15—18°), как это показано на рис. 9.2.
Рис. 9.2. Схема установки пассажирских сидений относительно передней
и задней перегородок кабины
Если первый ряд сидений размещен спинками по полету (пассажи-
ры сидят лицом к хвосту самолета), то второй ряд сидений должен на-
ходиться не ближе чем на 2000—2200 мм от передней перегородки, как
это показано на рис. 9.3. Такая компоновка целесообразна во всех слу-
чаях, если в кабине нет таких средств развлечения, как кино; пассажиры
первого ряда при этом не утомляются в полете от вида близко располо-
женной перегородки;
2000... 2200 !8 экономическом классе 1750...2000)
Рис. 9.3. Вариант размещения передних рядов пассажирских сидений друг
против друга
в) для возможности отклонения спинки сидения иа максимально
допустимый угол между верхом с-пинки сидения заднего ряда и плос-
костью задней перегородки расстояние должно быть не менее 235—
250 мм в компоновках I и II классов и не менее 35—50 мм в компоновке
III класса (см. рис. 9.2).
152
Рассмотрим два примера.
1. Требуется найти длину пассажирской кабины, если число пасса-
жиров 150, размещаются оии по 6 человек в ряду и компоновка должна
соответствовать III классу. Длина кабины будет, очевидно, равна
1200 1 )780-|-50 —19970 мм или —20000 мм,
где 1200 — расстояние от перегородки до первого ряда в мм;
780 — шаг между рядами сиденнй в мм;
50 — расстояние от перегородки до последнего ряда в мм;
/150 , \
f —— 1 |—число промежутков между рядами.
2. Сколько пассажиров можно поместить в такой же кабине II клас-
са, принимая, что оии тоже размещаются по 6 человек в ряду?
с( 20000—1260 — 260 . , \ с по 1О£Э
/гпас=6-------------------И =6-23= 138 чел.,
\ 840 /
где 20 000 — длина кабины в мм;
1260 — расстояние от передней перегородки до верха спииок перво-
го ряда сидеиий в мм;
260 — расстояние между верхом спииок последнего ряда сидеиий
и задней перегородкой в мм;
840 — шаг между рядами сидеиий в мм.
Выбор размеров пассажирской кабины контролируется полученным
объемом этой кабины или, точнее, удельным объемом этой кабины, при-
ходящимся иа одного пассажира. Этот удельный объем.
для компоновки I класса 7^1,5—1,8 м3/чел;
для компоновки II класса ^1,2—1,3 м3/чел;
для компоновки III класса ^0,9—1,0 м3/чел.
При этом следует иметь в виду, что чем больше дальность полета
самолета, тем больше должен быть удельный объем пассажирской каби-
ны и что в объем пассажирской кабины ие входит объем вестибюлей,
гардеробов, туалетов и кухонь.
Высота пассажирской кабины в зоне прохода между сидениями
должна быть ие меиее 1900—2000 мм.
§ 2. КОМПОНОВКА СЛУЖЕБНОЙ КАБИНЫ И ОБСЛУЖИВАЮЩИХ
ПОМЕЩЕНИЙ
Служебная кабина илн кабина экипажа размещается в передней
части фюзеляжа. Ее размеры и компоновка зависят от состава экипажа.
Обычно экипаж состоит из четырех человек: первого летчика — команди-
ра корабля, второго летчика, борт-инженера и штурмана. Возможные ва-
рианты размещения этого экипажа в кабине показаны на рис. 9.4.
вариант I
Вариант 2
Рис. 9.4. Возможные схемы размещения экипажа в служебной кабине
153
В пассажирских самолетах, предназначенных для эксплуатации на
средних и коротких маршрутах, оборудованных наземными радиомаяка-
ми, состав экипажа обычно уменьшается до трех человек за счет снятия
штурмана. В дальних магистральных пассажирских самолетах, наобо-
рот, состав экипажа может увеличиваться за счет введения в него спе-
циального радиста.
В пассажирских самолетах для местных авиалиний экипаж обычно
состоит только из двух летчиков.
В служебной кабине, как правило, предусматривается еще одно или
два запасных места с привязными ремнями для размещения на них ин-
структоров, инспектора или штурмана-лоцмана.
Рис. 9.5. Схема размещения летчиков в пассажирском самолете с пультом управ-
ления между летчиками
Наиболее важным элементом компоновки служебной кабины яв-
ляется размещение летчиков и обеспечение им необходимого обзора.
Типовая компоновка места летчика показана на рис. 9.5 и 9.6. Ниже
приведены требования к обзору летчика.
1. Зона беспрепятственного обзора по азимуту:
влево — 20°;
вправо — от 20° до 30°;
вниз — ие менее 16°;
вверх — 10°—20°.
2. В диапазоне между 20°—45° левого борта допускается установка
одной силовой стойки.
3. Обзор назад должен обеспечивать видимость половины концево-
го обтекателя консоли крыла.
4. Ширина затенения основных силовых стоек — ие более 70 мм.
5. Размер Lc = 500 мм и более с обеспечением угла обзора ие менее
16° вниз и не менее 20° вверх.
6. При снятии диаграммы обзора от точки С-, допускается переме-
щение головы (в пределах вытяжки привязных ремней) по/? = 100—
120 мм.
154
В состав экипажа для поддержания порядка в пассажирском по-
мещении, приготовления и раздачи питания пассажирам в полете, ин-
структажа по пользованию теми или иными средствами пассажирского
оборудования и аварийными системами и оказания первой медицинской
помощи входят бортпроводники.
Число их в самолете определяется из следующих условий:
а) два бортпроводника на отделение I класса с числом пассажиров
до 30;
б) один бортпроводник на 50 пассажиров в кабинах II и III класса.
Рис. 9.6. Требуемый нормами летной годности пассажирских самолетов обзор из
кабины летчика:
Ci—положение глаза летчика при взлете н посадке самолета; Сг — положение глаза лет-
чика при полете самолета;
------зона_ обязательного обзора;
— — — зона; желательная для обзора
Каждый бортпроводник должен обязательно иметь место с привяз-
ными ремнями; оно может быть откидным.
В самолете должен быть гардероб для верхней одежды бортпровод-
ников и летного экипажа.
Для размещения багажа пассажиров в пассажирском самолете пре-
дусматриваются багажные помещения. Они, как правило, должны на-
ходиться под полом пассажирской кабины или в нижнем этаже н иметь
высоту не менее 1100 мм. Объем багажных помещений выбирается так,
чтобы в них можно было перевозить, кроме нормируемого багажа пасса-
жиров (20 кгс иа каждого пассажира прн удельном весе багажа
120 кгс/м3), почту и срочный груз. Обычно принимается, что необходи-
мый объем багажных помещений
Убаг ~ (0,23 —0,25) «пас м3, (9.1)
где «пас — число пассажиров.
При диаметре фюзеляжа, меньшем 2800 мм, багажные помещения
под полом находиться не могут н тогда их размещают спереди и сзади
пассажирского помещения для того, чтобы, регулируя их загрузку, можно
было бы сохранять положение центра тяжести самолета (центровку) в
заданных пределах.
Для обеспечения погрузки багажа и почты в стандартных контей-
нерах багажные люки должны иметь размеры, указанные на рис. 9.7.
155
Багажные помещения обязательно должны находиться в зоне гермети-
ческой кабины.
Для обеспечения питанием пассажиров в полете в пассажирском по-
мещении предусматриваются одна или две кухни, в которые на аэродро-
ме загружаются контейнеры с расфасованной пищей и напитками. В по-
лете бортпроводники лишь разогревают необходимое количество пищи и
разносят или развозят иа специальных тележках сервированные подносы
к пассажирам, у которых на сидениях, стоящих впереди, имеются от-
кидные столики.
Видя
Рис. 9.7. Основные рекомендуемые размеры багажных люков
Одна кухия в самолете делается в том случае, если имеется одно-
типная компоновка пассажирской кабины и число пассажиров не превы-
шает 100 человек. Если в пассажирской кабине имеются салоны, то не-
зависимо от числа пассажиров в самолете должно быть две кухии, об-
щий объем которых составляет
TJKyx (0,12—0,14) /г„ас м3. (9.2)
Количество туалетных помещений в пассажирском самоле1е зависит
от числа пассажиров и от продолжительности полета. При продолжи-
тельности полета менее двух часов следует делать один туалет на 50 пас-
сажиров; при продолжительности полета от двух до четырех часов —
один туалет на 40 пассажиров при числе пассажиров 120 и менее, один
туалет на 45—50 пассажиров при числе пассажиров более 120; при про-
должительности полета более четырех часов — один туалет на 30 пасса-
жиров при их числе менее 120, на 40 пассажиров — при их числе от 120
до 200 и на 45—50 пассажиров — при числе пассажиров более 200.
Площадь пола туалетного помещения должна быть 1,5—1,6 м2, ши-
рина— ие менее 1 м.
Наиболее неопределенной в компоновке пассажирских самолетов яв-
ляется проблема гардеробов. Она является актуальной лишь для само-
летов, эксплуатирующихся на авиалиниях СССР, Канады, Аляски и
Скандинавских стран в зимнее время; в летнее время в этих странах и
во все времена года в остальных странах пальто и головные уборы могут
размещаться иа багажных полках.
Требуется, чтобы для гардеробов отводилось помещение с площадью
пола
5гард=(0,035 - 0,050) ЛлаС м2, (9.3)
а объем этого помещения должен составлять
т/гард <(0,05— 0,08) Лпас м3. (9.4)
Наиболее рациональным решением этой задачи является организа-
ция гардеробов со съемными перегородками с тем, чтобы в летнее время
156
вместо гардеробов в самолете можно было бы устанавливать дополни-
тельные пассажирские места. Поэтому гардеробы следует размещать
либо в вестибюлях у входных дверей, либо в зонах, где шум внутри
пассажирской кабины является наибольшим.
§ 3. ОБЕСПЕЧЕНИЕ АВАРИЙНОЙ ЭВАКУАЦИИ ПАССАЖИРОВ.
ДВЕРИ И ОКНА В ПАССАЖИРСКОМ ПОМЕЩЕНИИ
При проектировании пассажирского самолета должна обеспечивать-
ся возможность:
— аварийной эвакуации всех пассажиров и экипажа иа земле в те-
чение 90—120 секунд при выпущенном и убранном положении шасси;
— аварийной высадки пассажиров в бортовые аварийные плаваю-
щие средства (надувные плоты) при вынужденной посадке самолета иа
водную поверхность.
Для выхода пассажиров в условиях срочной эвакуации иа земле с
каждого борта фюзеляжа должны быть созданы аварийные выходы
(табл. 9.3).
Табласа 9-3
Количество пассажиров Люк I типа Люк 11 типа Люк Ш типа Люк IV типа Количество пассажиров Люк I типа Люк 11 типа Люк III типа Люк IV типа
7-19 ! 140—179 2 2
20-39 I 1 180—219 2 2
40-59 1 _- 1 220—249 3 2 —
60-79 1 — 1 — 250—279 3 2 _-
80-109 I I 1 280—309 4 2
110-139 2 — 1 1
Люк I типа — размеры в свету 610X 1220 мм; люк располагается иа
уровне пола кабины вне зоны крыла.
Люк II типа — размеры в свету 510x1120 мм; люк располагается
илн иа уровне пола вне зоны крыла, или в зоне крыла, имея высоту ниж-
ней кромки от уровня пола кабины ие более 250 мм и от поверхности
крыла ие более 430 мм.
Люк III типа — размеры в свету 510x915 мм; люк располагается в
зоне крыла, имея высоту нижней кромки от уровня пола ие более 510 мм
и от поверхности крыла ие бодее 685 мм.
Люк IV типа — размеры в свету 480x700 мм; люк размещается в
зоне крыла, имея высоту нижней кромки от уровня пола не более 735 мм
н от поверхности крыла ие более 915 мм.
Под размерами в свету понимаются размеры дверного проема в
плоскости его хорды.
Примечания. 1. Углы люков должны быть скруглены радиусом не более
!/з ширины.
2. Основные входные двери учитываются в числе аварийных выходов I типа.
3. При увеличении в два раза ширины аварийных выходов ! типа для обес-
печения одновременного прохода через него двух человек общее число аварийных
выходов может быть сокращено на ]/з.
4. На самолетах с верхним расположением крыла, кроме указанного в
табл. 9.3 числа аварийных люков с каждого борта фюзеляжа, должны быть ава-
рийные выходы 111 типа наверху фюзеляжа из расчета 1 люк на 35 пассажиров.
В непосредственной близости от аварийных выходов I и II типов, не
находящихся в зоне крыла, размещаются либо аварийные резино-
вые трапы, автоматически надувающиеся при выбрасывании (рис. 9.8),
либо натяжные полотняные (авиабрезеитовые) желоба.
157
Для обеспечения безопасности пассажиров и экипажа при полете
над морем (при времени полета от берега в сторону моря более 90 мин)
должны быть предусмотрены спасательные надувные плоты (лодки) в
количестве и суммарной грузоподъемности, соответствующие числу пас-
сажиров и экипажа.
Рис. 9.8. Размещение аварийного надувного трапа:
/ — полетное положение (крышка ниши для трапа закрыта); //— трап в
положении «Готов к сбросу»: III— дверь открыта, трап выброшен; IV —
трап автоматически надут и готов для спуска пассажиров
Нормальный вход пассажиров в кабину осуществляется через двери,
расположенные, как правило, по левому борту (на самолетах с числом
пассажиров более 250 двери могут размещаться на обоих бортах). Двер-
ной проем снизу ограничивается плоскостью пола. Порог ие допускается.
Размеры дверных проемов указаны на рис. 9.9.
Рнс. 9.9. Рекомендуемые размеры проемов входных
дверей
158
Двери должны открываться наружу с тем, чтобы в аварийной об-
становке пассажиры не мешали бы их открытию. Вместе с тем желатель-
но, чтобы закрытые двери прижимались внутренним давлением в кабине
к окантовке дверного проема, что предупреждает самопроизвольное от-
крывание дверей в полете при нарушении работоспособности замков.
Окна пассажирской кабины должны представлять собой сплошную
световую линию. Конструктивно это выполняется в виде отдельных не-
больших окон (ширина 200—230 мм, высота 320—350 мм), расположен-
ных между шпангоутами (шаг окон 500—510 мм). При такой конструк-
ции возможность обзора через окна обеспечивается при любом шаге си-
дений пассажиров тем более, что в практике эксплуатации возможны
изменения компоновок пассажирской кабины с соответствующим изме-
нением шага сидений.
§ 4. ВЫБОР ОСНОВНЫХ РАЗМЕРОВ КРЫЛА
ДОЗВУКОВЫХ ПАССАЖИРСКИХ САМОЛЕТОВ
Площадь крыла дозвукового пассажирского самолета выбирается,
исходя из обеспечения режима полета на заданной высоте, соответствую-
щего максимальному аэродинамическому качеству, а также из обеспече-
ния заданной скорости захода на посадку.
1. Из первого условия
S =----22— М2, (9.5)
Qcy max крейс
где С?ср— средний вес самолета на маршруте в кгс;
q—скоростной напор на заданной высоте и прн заданной ско-
рости полета в кгс/м2;
max крейс—значение су, соответствующее максимальному значению
Ккрейс,
(9.6)
где F—площади миделя иенесущих элементов самолета (фюзеляжа,
гондол, двигателей н т. п.);
сх—коэффициент аэродинамического сопротивления какой-либо
части самолета, отнесенный к соответствующей площади ми-
деля;
— коэффициент отвала поляры
dc
в формуле сх—Сх0-\-Е>ъСу.
2. Из второго условия
5 =------2Z°£I»=----- м2,
V2 с
* элос^у max пос
(9.7)
где С?пос—посадочный вес самолета в кгс;
VVnoc—заданная скорость захода иа посадку в м/с;
Су max пос—максимальное значение Су при посадочном положении меха-
низации крыла.
При проектировании самолета за расчетную площадь крыла прини-
мается большая из величин, определенных из указанных выше двух ус-
ловий. Для того чтобы получить самолет с минимальными размерами (а
следовательно, н наиболее экономичный) согласно формулам (9.5) и
(9.7), нужно иметь:
159
— возможно большее значение су при максимальном значении К,
т. е. коэффициент отвала поляры Do должен быть минимальным. Коэф-
фициент Dq прямо пропорционален потерям на балансировку самолета и
обратно пропорционален удлинению крыла;
— возможно большее значение сутах при посадочном положении ме-
ханизации крыла. Непременным условием этого является механизация
не только задней кромки (закрылки), но и передней кромки (щелевые
Рис. 9.10. Изменение аэродинамического качества
крыла /Стах в зависимости от угла стреловидности
крыла х и от числа М. полета
Для пассажирских самолетов большой и средней дальности с тремя
двигателями и больше выбор стреловидности крыла однозначно опреде-
ляется задаваемой величиной крейсерской скорости полета. Так как по
условию получения наибольшей экономичности величина крейсерской
скорости должна быть возможно большей и наряду с этим самолет одно-
временно должен иметь максимально возможное аэродинамическое каче-
ство, то по данным рис. 9.10 и 9.11 следует, что дозвуковой самолет мо-
жет иметь крейсерские скорости полета, соответствуют.! "’’числу М =
= 0,85—0,90, и стреловидность крыла при этом по линии ’Д хорд долж-
на быть
z=35°-40D.
X-ff” , Х=20°
/7
Су=0,3 / Х=Ж°
Мдрит
~ 0,4 0,5 0,6 0.7 0,8 0,9 М
Рис. 9.11. Влияние угла стреловидности крыла х на величину Л{крит.
160
Для пассажирских самолетов с малой дальностью полета, когда вы-
сокие значения крейсерской скорости не могут быть полностью реализо-
ваны и особенно для пассажирских с.молетов с двумя двигателями, на
выбор оптимальной стреловидности накладывается дополнительное ус-
ловие: обеспечение продолжения взлета самолета прн отказе одного дви-
гателя при расчетных значениях температуры и давления наружного воз-
духа ( + 30° С; 730 мм рт. ст.).
Согласно нормам летной годности гражданских самолетов СССР*
угол наклона траектории набора высоты самолетом прн отказе одного
(наиболее критического) двигателя должен быть не менее:
Примечание. 2-й этап взлета — от высоты 10 м над концом взлетной полосы (над концом КПБ — концевой полосы без- опасности) до конца уборки шасси; механи- зация крыла во взлетном положении; длина участка 2 этапа — 300 м. 3-й этап взлета — от конца 2 этапа до высоты 100 м над уровнем летной полосы; шасси убрано, механизация крыла во взлет- ном положении.
Количество двигателей на самолете 2-й этап 3-й этап 4-й этап
2 3 4 0.5% 1.1% 1.3% 2.5% 2.7% 3,0% 1.1% 1,4% 1,5%
4-й этап взлета —от высоты 100 м до высоты 400 м; механизация крыла убирается
с начала 4-го этапа взлета.
Угол наклона траектории набора высоты определяется выражением
tge = _J!iL------—
^В31 ^ВЗЛ
(9.8)
где Рвзл —суммарная тяга двигателей на самолете с одним отказавшим двигателем
при скорости набора высоты и в тех атмосферных условиях, которые при-
няты расчетными для данного аэродрома в кгс;
Свзл — взлетный вес самолета в кгс;
Хвзл —аэродинамическое качество самолета на режиме, соответствующем скоро-
сти набора высоты и данным атмосферным условиям.
На 2-м этапе КВ8Л принимается с учетом механизации крыла во взлетном поло-
жении и выпущенного, но постепенно убирающегося шасси; на 3-м этапе Квзл прини-
мается с учетом только взлетного положения механизации крыла и на 4-м этапе — с
убранными шасси и механизацией крыла.
Из форь я (9.8) легко видеть, что номинальная потребная тяга прн
всех работающих двигателях:
— для самолета с двумя двигателями
Рп.,р=2Омл ; (9.9)
— для самолета с тремя двигателями
/З«„р=4|3.=4^!- + ‘ее'): (9Л°)
— для самолета с четырьмя двигателями
(9Л1>
0 \ Авзл /
Так как tg0 задан нормами летной годности, а СВЗл является исход-
ным параметром прн исследовании, то величина потребной тяги зависит
от аэродинамического качества самолета при взлетном положении меха-
низации крыла.
Величина Квзл зависит от угла стреловидности крыла, увеличиваясь
при уменьшении угла стреловидности, как это показано на рис. 9.12.
* Нормы летной годности гражданских самолетов СССР. МАП СССР,
МГА, 1967 г.
6-1062 161
Вторым фактором, влияющим на величину /Свзл, являются конструк-
тивно-аэродинамические характеристики механизации крыла, представ-
ленные иа рис. 9.13.
Решая вариационную задачу подбора соответствующей механизации
крыла и угла стреловидности для получения заданной траектории набо-
ра высоты иа 3-м этапе взлета и оптимального набора высоты иа 4-м
(чем набор высоты круче, тем меньше влияние шума самолета на приле-
гающие к аэродрому населенные территории), выбирают оптимальный
угол стреловидности крыла. При этом следует иметь в виду первое усло-
вие выбора стреловидности крыла: обеспечение возможно большей крей-
серской скорости полета.
Л’взл без
Рис. 9.12. Изменение величины
Хвал max В ЗаВИСИМОСТИ ОТ Суг,ез
при различных постоянных углах
стреловидности (Х=9)
0,5 1,0
1,5 2,0 z 2,5
^убез=
Рис. 9.13. Влияние типа механизации крыла на
величину КвзЛ:
/ — однощелевой закрылок, 2 — двухщелевой закры-
лок; 3 — трехщелевой закрылок. 4— трехщелевой за-
крылок и предкрылок
Стреловидность крыла на ряде самолетов с двумя двигателями
(ВАС-111, Дуглас ДС-9, Sud Aviation «Каравелла», Боинг 737 и др.)
составляет 20°—25°.
Удлинение крыла к для дозвуковых пассажирских самолетов рассчи-
тывается с учетом того, что увеличение удлинения благоприятно сказы-
вается иа величине аэродинамического качества, ио одновременно ведет
к увеличению веса крыла, а следовательно, и всего самолета.
Для крыла со стреловидностью % = 35° оптимальным является удли-
нение Х = 6,0—7,5; для крыла со стреловидностью %='2О—25° оптималь-
ное удлинение крыла Х=7,0—8,0.
Сужение крыла в плане (отношение корневой хорды крыла к конце-
вой) в значительной мере определяет срывиые характеристики крыла на
больших углах атаки и влияет на характеристики продольной и попереч-
ной устойчивости самолета, ухудшая эти характеристики при увеличении
сужения; с другой стороны, увеличение сужения крыла ведет к уменьше-
нию его веса.
Оптимальные значения сужения крыла q лежат в пределах
71 = 3,5-4,5.
Выбор относительной толщины сечений крыла тесно связан с углом
стреловидности крыла и с аэродинамическими характеристиками профи-
ля крыла. Для обеспечения наименьшего веса конструкции крыла и по-
лучения наибольшего объема баков для топлива выбирают такие мак-
162
симально допустимые значения относительной толщины профилей крыла,
при которых образование сверхзвуковых зон обтекания сдвинуто на боль-
шие числа М полета или эти зоны расположены так, что образуют допол-
нительную подсасывающую силу, уменьшающую сх крыла.
Оптимальная средняя относительная толщина сечений (профилей)
крыла при стреловидности крыла % = 35° лежит в пределах
с= 10- 12%,
обеспечивая при этом достижение крейсерских скоростей полета, соот-
ветствующих числу М полета, равному 0.85—0,90.
У крыльев с %=20—25° средняя относительная толщина сечеиий
крыла обычно бывает такой же, учитывая, что крейсерские скорости у
самолетов с такими крыльями меньше и лежат в пределах, соответ-
ствующих числам М полета, равным 0,7—0,8.
§ 5. ВЫБОР ТЯГОВООРУЖЕННОСТИ И ЧИСЛА ДВИГАТЕЛЕЙ
ДЛЯ ДОЗВУКОВЫХ ПАССАЖИРСКИХ САМОЛЕТОВ
Потребная тяга всех двигателей пассажирского дозвукового само-
лета в горизонтальном полете иа заданных высоте и скорости полета оп-
ределяется формулой
Астр. крейс —~~-\-С*хРд КГС, (9.12)
Акрейс
где G— вес самолета в начале крейсерского участка пути в кгс;
Ккрейс— аэродинамическое качество крыла, соответствующее режиму
полета (по потребной величине су}.
F и сх—площадь мнделя всех ненесущнх элементов самолета и коэф-
фициент сопротивления, отнесенный к этой площади.
Найденная величина Рпотр, поделенная на число двигателей, должна
соответствовать крейсерскому режиму работы двигателя, неограниченно-
му по времени непрерывной работы.
По величине этой тяги на заданных высоте и скорости полета по
высотно-скоростным характеристикам двигателя определяется потребная
суммарная статическая тяга двигателей и тяговооруженность самолета
в виде
^0=-^. (9-13)
Go
где PQ—тяговооруженность самолета;
Pqi—статическая тяга двигателя на взлетном режиме в кгс;
пдв— число двигателей;
Gq— взлетный вес самолета в кгс.
В ряде случаев к пассажирскому самолету предъявляются дополни-
тельные требования по завершению полета при отказе одного или двух
двигателей на любом участке маршрута, а именно: самолет с двигате-
лями, сохранившими работоспособность и работающими на номиналь-
ном режиме, должен продолжить полет и совершить посадку на аэродро-
мах начальной или конечной точек маршрута. Тяговооруженность само-
лета в этом случае должна обеспечивать полет на высоте не менее 4000—
5000 м.
Третье условие выбора тяговооруженности — из обеспечения норми-
руемого набора высоты при отказе одного из двигателей — рассмотрено в
предыдущем параграфе. По формулам (9.9), (9.10) и (9.11) определяет-
ся потребная тяга в режиме работы двигателей, соответствующем ско-
€*
163
рости набора высоты и расчетным атмосферным условиям. По найден-
ной потребной тяге (по соответствующим характеристикам двигателя)
находится и потребная суммарная статическая тяга двигателей.
Наконец, четвертым условием, которое может определять выбор тя-
говооруженности пассажирского самолета, являются требования заказ-
чика к длине разбега самолета при взлете.
В этом случае
P„.Tpsl,O75Go F-—1,172-----+ v т- + 2/р^1 кгс- (9.14)
[ /разбор тах взл \ Хвэл / J
где /Раэб—заданная длина разбега в м;
Су тах взл—максимальное значение Су при взлетном положении механиза-
ции крыла;
—аэродинамическое качество самолета с выпущенным шасси с
механизацией крыла во взлетном положении и с учетом влия-
ния земли;
/разб — коэффициент трения при разбеге (/Раэб=0,03—0,05).
Из перечисленных выше четырех условий и выбирается максималь-
ная величина потребной статической тяги двигателей или тяговооружен-
ности самолета.
Число двигателей выбирается, исходя из следующих противореча-
щих друг другу условий. Из формул (9.9), (9.10) и (9.11) следует, что
чем больше число двигателей, тем меньше может быть тяговооружен-
ность самолета и меньше эксплуатационные расходы, однако при равной
тяговооруженности более экономичным является самолет с меньшим
числом двигателей.
Решение этой задачи с учетом обоих условий позволяет выбрать
наиболее рациональное число двигателей. Опыт решения подобных за-
дач показывает, что:
— для дальних магистральных самолетов, эксплуатирующихся, как
правило, на аэродромах с большими длинами ВПП (аэродромах классов
А и Б) целесообразно устанавливать четыре двигателя (самолеты Ил-62,
Боинг 707 и Боинг 747, Дуглас DC-8 и др.);
— для магистральных самолетов средней дальности, имеющих неко-
торые ограничения по аэродромам (класс В), оптимальным является
установка трех двигателей (самолеты Ту-154), Боинг 727, Дуглас DC-10,
Ьокхид L-1011, Хаукер Сиддли «Трайдент» и др.);
— для магистральных самолетов малой дальности и для самолетов
Местных линий, предназначенных для эксплуатации на аэродромах с
с короткими ВПП (класс Г) и даже на грунтовых аэродромах, наиболее
целесообразна установка двух двигателей (самолеты Ту-134, Боинг-737,
Дуглас ДС-9, БАК-111 и др.).
Глава X
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
ВЕРТИКАЛЬНОГО И УКОРОЧЕННОГО ВЗЛЕТА И ПОСАДКИ
В процессе развития самолетостроения конструкторы, как известно,
стремились к увеличению максимальной скорости полета. В гл. 11 было
показано, что достижение этой цели возможно при увеличении удельной
нагрузки на крыло ро и тяговооруженности Ро.
Удельная нагрузка за период времени с 1925 г. по настоящее время
увеличилась с /?о = 5О—100 кгс/м2 до ро=45О—700 кгс/м2. При этом уве-
личивалась и минимальная скорость, определяющая скорости отрыва и
посадки самолета, которая достигла величин Упос=250—350 км/ч. Соот-
164
ветственно увеличились значения скорости отрыва. Все это влекло за
собой, кроме усложнения пилотирования, увеличение взлетно-посадочной
дистанции. Если в 1940 г. взлетная полоса могла быть длиною в 700—
800 м, то к 1965 г. длина увеличилась до 2500—3000 м. Наряду с этим
осложнением возникла проблема проходимости для колес шасси. Стрем-
ление к увеличению Ушах приводило к необходимости уменьшения аэро-
динамического сопротивления, которое достигалось за счет общего улуч-
шения обтекания, а также за счет уменьшения лобовой площади самоле-
та (применение более тонких крыльев, уменьшение сечення фюзеляжа
и т. д.).
С другой стороны, увеличение Ушах приводило к росту веса самоле-
та н к увеличению нагрузок на колеса. При неизменном давления в пнев-
матнках это ведет к значительному увеличению размеров колес. Поэтому
с ростом максимальной скорости приходилось постепенно повышать дав-
ление в пневматнках колес, что ухудшало их проходимость по грунту.
Это обстоятельство потребовало применения на аэродромах бетониро-
ванных взлетно-посадочных полос. Аэродромы превратились в сложные
технические сооружения, требующие огромных затрат на их строитель-
ство и эксплуатацию. К тому же из соображений потребного простран-
ства и ограничений по допустимому уровню шума аэродромы приходит-
ся строить на значительном расстоянии от городов. Вследствие этого
время доставки пассажиров и грузов на аэродром зачастую соизмеримо
со временем полета, что приводит к уменьшению скорости доставки «от
двери до двери» н снижает экономичность перевозок, особенно прн по-
летах на короткие расстояния.
Отрицательным следствием роста Ущщ является также увеличение
затрат на обеспечение необходимого уровня безопасности прн взлете и
посадке.
Вполне очевидны трудности использования самолетов, «привязан-
ных» к стационарным аэродромам и в военное время.
Таким образом, перед современной скоростной авиацией как граж-
данской, так и военной, возникла проблема аэродрома.
Решение этой проблемы в настоящее время осуществляется по двум
направлениям. Первое направление — создание самолетов укороченного
взлета и посадки (СУВП) —дает неполное решение, позволяя лишь су-
щественно сократить потребные размеры ВПП. Второе направление —
создание летательных аппаратов вертикального взлета и посадки
(АВВП), в том числе самолетов вертикального взлета н посадки
(СВВП), которым для взлета и посадки необходимы размеры площадки,
соизмеримые с размерами аппарата.
§ 1. САМОЛЕТЫ УКОРОЧЕННОГО ВЗЛЕТА И ПОСАДКИ
В настоящее время любой самолет имеет средства сокращения
взлетно-посадочной дистанции. Отличие СУВП от обычного самолета
заключается лишь в величине такого сокращения.
Рассмотрим, от каких параметров самолета зависит взлетно-поса-
дочная дистанция.
Длина разбега определяется следующей формулой:
7-рззб ~ Р^отр/Зйд., (10.1)
где ах — среднее ускорение при разбеге. Оно определяется соотношени-
ем сил разгона и торможения.
В первом приближении, пренебрегая влиянием аэродинамических
сил при разбеге, можно записать
g(Pcp — /1Со)
ах=-------z------
Оо
165
где Ptp — средняя сила тяги прн разбеге;
fi — коэффициент сопротивления качению колес.
Аналогично для длины пробега имеем
/-проб — ' » (10.2)
I аХ I
где |ах| —среднее замедление при пробеге. Для него справедливо сле-
дующее приближенное выражение;
Здесь X— средняя сила аэродинамического сопротивления;
f2— коэффициент трения прн пробеге.
Скорости VOTp и Vnoc определяются минимальной скоростью устано-
вившегося полета или скоростью срыва Угаш. Для самолета с горизон-
тальным вектором тяги
Г Ростах
(10.3)
Из условий безопасности Готр и Vnoc на 20—30% больше Игат.
Анализ формул (10.1) и (10.2) показывает, что существуют два
пути сокращения длины разбега н пробега самолета. Первый путь —
увеличение ускорения прн разбеге и замедления при пробеге. На взлете
это достигается за счет повышения п\тем форсирования тяги двига-
телей, либо путем установки стартовых ускорителей. На посадке приме-
няется реверс тяги двигателей, воздушные тормоза, торможение колес
шасси, а также различные задерживающие устройства на посадочной
полосе. Необходимо учитывать, что параметры самолета по-разному
влияют на ах. Например, при разбеге желательно иметь минимальное
сопротивление при большой подъемной силе, а при пробеге необходимо
как можно большее сопротивление при малой подъемной силе. По-раз-
ному влияют на длину разбега и пробега стартовая тяговооруженность
и коэффициенты трения fa и fa.
Второй путь — уменьшение минимальной скорости самолета. По-
скольку Vmin однозначно влияет на длину разбега и пробега, в дальней-
шем более подробно остановимся на разбеге. Воспользуемся прибли-
женной формулой для определения длины разбега в виде
Л,.,з8 ~ ------- - (Ю.4)
отр <Рср — /о
Эта формула справедлива при_ постоянном угле атаки крыла, отсутст-
вии ветра и наклона полосы; Рср и fa — среднее значение тяговооружен-
ности и коэффициент сопротивления качению по длине разбега.
С помощью формулы (Ю.4) построена номограмма (рис. 10.1), по-
зволяющая проанализировать влияние параметров самолета на величи-
ну £Разб- Из номограммы видно, что обеспечение требования укорочен-
ного взлета накладывает очень жесткие ограничения на допустимую ве-
личину до = ро/Су0тр. Для обеспечения длины разбега 200 м д0 =
= 40—235 кгс/м2 в зависимости от величины стартовой тяговооружен-
ности.
Приемлемые значения соответствуют легким и средним нескоро-
стным самолетам. Прямое крыло с достаточно большой относительной
толщиной и эффективной механизацией, обеспечивающей получение
сутах = 3—3,5, а также низкие значения удельной нагрузки на крыло,
свойственные таким самолетам, позволяют им совершать взлет и посад-
166
ку на небольших ВПП (длиной 300—600 м). Однако прн проектирова-
нии таких СУВП необходимо учитывать, что достижение очень малых
значении Vmtn нельзя обеспечить только путем увеличения несущей спо-
собности крыла. Для сохранения приемлемых характеристик устойчиво-
сти и управляемости необходимо соответственно повышать эффектив-
ность органов управления. На величину минимально допустимой скоро-
сти может повлиять требование обеспечения безопасности полета в
Рис. Ю.1. Зависимость длины разбега от основных параметров самолета
(?о= Go/CyotpS):
167
Как известно, высокие значения су1аах могут быть реализованы при
наличии механизации по всему размаху крыла. Для этого на ряде
СУВП применены закрылки по всему размаху крыла, причем внешние
секции закрылков одновременно выполняют функции элеронов.
Если к самолету не предъявляется требование обеспечения боль-
ших скоростей, то задача обеспечения укороченного взлета и посадки
может быть решена на счет выбора соответствующих параметров крыла
и оперения, а также некоторого повышения стартовой тяговооруженно-
сти (до 0,3—0,5).
Для скоростных самолетов потребовались иные пути обеспечения
укороченного взлета и посадки. Это объясняется тем, что с ростом ско-
рости полета площадь крыла должна уменьшаться (увеличивается р0),
уменьшается его удлинение н относительная толщина. Получить высо-
кие значения сушах за счет обычной механизации на таких самолетах
не представляется возможным. Для этих самолетов применяются мето-
ды сокращения разбега и пробега, схематически представленные па
рис. 10.2.
Методы подразделены на три группы по способу увеличения подъ-
емной силы на малых скоростях. В первую группу входят методы, осно-
ванные на увеличении несущей способности крыла за счет изменения
его геометрии или управления пограничным слоем. Методы второй
группы основаны на принципе прямого бесциркуляционного создания
подъемной силы с помощью различных источников тяги. Этот путь по-
зволяет осуществить взлет и посадку при сколь угодно малых Vmin
вплоть до Vmin=0, т. е. вертикальный взлет и посадку. Третья группа
включает в себя методы, представляющие собой комбинацию первых
двух методов.
Управление пограничным слоем (УПС)
Рис. 10 3. Зависимость
Дсу при УПС от коэффи-
циента импульса Ср. и
угла отклонения закрыл-
ка бз
Суть этого метода заключается в обеспечении безотрывного обте-
кания крыла в достаточно большом диапазоне углов атаки за счет уве-
личения энергии пограничного слоя. В этом смысле принцип работы
УПС не отличается от принципа работы пред-
крылков и закрылков. Различие состоит лишь
в величине энергии, сообщаемой пограничному
слою.
Из различных способов УПС наибольшее
распространение получил способ, основанный
на выдуве через щель или систему щелей тон-
кой струи воздуха, вытекающей с большой ско-
ростью тангенциально к поверхности крыла.
Место выдува соответствует зоне наиболее
вероятного появления отрыва потока, т. е. в
районе носка крыла и на «колене» закрылка.
УПС с помощью отсоса пограничного слоя
применяется реже из-за трудностей реализа-
ции. Эффективность сдува характеризуется
безразмерным коэффициентом импульса вы-
дуваемой струи
mV с
Ср. = —^~ .
расход воздуха в системе сдува;
(10.5)
(/в
где т =-----массовый
g
Ус — скорость струи;
р V2 X
q= — скоростной напор невозмущенного потока;
S — площадь крыла.
168
Приращения коэффициента подъемной силы при УПС в основном
определяются двумя параметрами — величиной коэффициента импуль-
са и углом отклонения закрылка бз.
Кривые Дсу=/(сц) (рис. 10.3) имеют характерный излом, за кото-
рым иитеисивность приращения Дсу резко уменьшается. Точка излома
определяет величину коэффициента импульса cva, при которой обеспе-
чивается безотрывное обтекание профиля. Дальнейшее увеличение
Дсу происходит за счет изменения циркуляции.
Представляет интерес определение величины коэффициента им-
пульса с^а, соответствующего собственно управлению пограничным
слоем. В общем случае с^а зависит не только от угла отклонения за-
крылка, но н от ширины щели, угла атаки а и соотношения скоростей
Кс/К». Для приближенных расчетов можно воспользоваться следующей
формулой:
С„Л ~(1,5-2,0)8з-10'= (10.6)
(здесь б3 — в градусах).
При этом более высокие значения соответствуют большему
значению относительной ширины щели sib (s — ширина щели; b — хор-
да крыла).
Зная величину сил» можно определить величину импульса mVc,
обеспечивающую при выбранной удельной нагрузке на крыло потреб-
ное значение cv.
Действительно, су=— • — , а Ср.=-^с , откуда
S q qS
mVa~G-^. (10.7)
cv
Связь между величиной импульса и параметрами воздуха, вы-
дуваемого через щель, при условии изэнтропического расшире-
ния определяется следующим соотношением:
X—1
mVe—-—-RT, fl-—) ‘ тЛ, (10.8)
1 \ Рд /
Ср
где х=-----отношение теплоемкостей (для воздуха х«1,4);
cv
R— газовая постоянная (для воздуха /? = 29,27 м/К)',
Тд — абсолютная температура воздуха в канале, подводящем
воздух к соплу в К;
роо—давление воздуха в свободном потоке;
рл — полное давление воздуха в канале перед соплом;
Тв — удельный вес воздуха (в стандартных условиях ув=
= 1,224 кгс/м3);
— площадь щели в м2.
Варьируя величиной давления в канале, а также площадью щели,
можно получить потребную величину импульса при умеренных количе-
ствах воздуха, отбираемого от компрессора двигателя.
Потери тяги двигателя за счет отбора воздуха можно оценить с по-
мощью следующей приближенной формулы
P=1-£GB, (10.9)
где Р=Р0Тб/Р—отношение тяги при отборе к тяге без отбора;
OB=GJGB2—отношение весового расхода отобранного воздуха к
суммарному расходу;
k = 1,5 — 2,0—коэффициент, зависящий от степени двухконтурности
двигателей (большие значения k соответствуют боль-
шей степени двухконтурности двигателя).
169
Следует учитывать, что выбор высокого давления воздуха в канале
при большой скорости истечения является наивыгоднейшим путем до-
стижения заданного значения импульса струи, так как это позволяет
обойтись меньшим количеством воздуха (меньшие потерн тяги), облег-
чает проблему размещения трубопроводов в крыле, а также ведет к по-
вышению эффективности сдува за счет увеличения отношения Vc/V<».
Расчеты, а также результаты, полученные на реальных самолетах,
показывают, что за счет УПС можно получить с^тах=5—6. Реализация
столь высоких значений сутах возможна при соответствующем повыше-
нии эффективности оперения, в частности, за счет применения УПС на
самом оперении.
Важной проблемой применения УПС является обеспечение равно-
мерности выдува на левой и правой половинах крыла и оперения, в том
числе и при отказах двигателей. Кроме того, УПС может быть исполь-
зовано для улучшения летных характеристик иа крейсерском режиме.
Изменение геометрии крыла
Особенности самолета с изменяемой в полете геометрией крыла
рассмотрены в гл. VI. Изменяемая геометрия позволяет приблизить гео-
метрические параметры крыла к оптимальным в широком диапазоне
скоростей и высот, в том числе на взлетно-посадочных режимах.
При взлете и посадке крыло устанавливается в положение мини-
мальной стреловидности. При этом не только уменьшается угол %, но и
увеличивается размах крыла, т. е. его удлинение, а также эффективная
относительная толщина профиля. Все это, как известно, повышает несу-
щую способность крыла на малых скоростях и тем самым улучшает
взлетно-посадочные характеристики самолета.
Как правило, такое крыло имеет обычную механизацию в виде зак-
рылков и предкрылков. В сочетании с высокой стартовой тяговооружен-
ностыо зто позволяет удовлетворить требованиям укороченного взлета
н посадки.
Искусственное снижение удельной нагрузки на крыло
Рост тяговооружениости самолетов, появление двигателей с откло-
няемым в большом диапазоне углов вектором тяги, а также легких подъ-
емных двигателей создает предпосылки для улучшения взлетно-посадоч-
ных характеристик самолетов за счет использования тяги двигателей
непосредственно для создания поддерживающей силы при малых ско-
ростях.
Вертикальную составляющую тяги Рв можно получить, либо откло-
няя на угол ср вектор тяги маршевого двигателя, либо за счет установки
специальных подъемных двигателей. Возможна также комбинация ука-
занных способов. При наличии Рв минимальная скорость становится
равной __________
Vmln=1/<2/,°(-~P-), (10.10)
У max
где PB = Pa/G0. _____
Из формулы (10.10) видно, что Ртщ в Kl — меньше, чем при
отсутствии вертикальной составляющей тяги. При Рв~1 скорость при-
ближается к нулю, т. е. становится возможным взлет и посадка с не-
большим разбегом н пробегом.
При взлете с отклоненным на угол ф вектором тяги
. (io.li)
У ?0сУ отр
170
Влияние отклонения вектора тяги на величину скорости отрыва
можно оценить с помощью отношения Иотр=У’отро/У©тр?=
= 1/1^1 — Psin Зависимость Уотр от угла для различных значений
тяговооруженности представлена на рис. 10.4, из которого видно, что
эффективность отклонения особенно существенна при больших значени-
ях тяговооруженности и больших углах <р. При наличии подъемных дви-
гателей длина разбега может быть определена по следующей формуле:
^разб
g J р__ (1 __рв) Л + (Су/1 _ Сх) povw
(10.12)
Точность определения Lpa36 по данной формуле будет зависеть от приня-
того допущения о характере изменения тяги двигателя по скорости.
В диапазоне небольших скоростей, соответствующих скорости отрыва,
Рис. 10.4. Влияние отклонения вектора тяги на ве-
личину Уотр-
справедливо уравнение P = P0 — mV, где m=G^g — секундная масса
воздуха, проходящего через двигатель, a Ро— статическая тяга двигате-
лей. Для упрощенных расчетов можно принять, что Р—Рсг. Тогда ре-
шение уравнения (10.12) будет иметь следующий вид:
£ б=---------------1п(1Ч-----(1 .1 (10.13)
Если сомножитель, содержащий логарифм, разложить в ряд и ограни-
читься первым членом этого ряда, то получим еще более простую фор-
мулу, аналогичную формуле (10.4),
(10.14)
При отклонении вектора тяги маршевого двигателя величина взлет-
ной дистанции зависит от принятой программы отклонения. Исследова-
ния показали, что минимальная взлетная дистанция получается при
171
следующей программе: самолет разбегается при ф=0 до наивыгодней-
шей скорости отрыва V0Tp , зависящей от 70 и Р самолета, затем вектор
тяги поворачивается на угол <poPt=arccos (^OTp/^o)opt---Р » обеспе-
L ^отр J
чивающий набор высоты без траекторного ускорения. Типичная зависи-
мость _ от стартовой тяговооруженной Ро представлена на
\ ?0 /opt
рис. 10.5. При таком способе взлета длина разбега определяется сле-
дующим уравнением:
отр
, 1 f VdV
2-разб— I — , ’
J Р — f\ + (Cyfi — Сх) PqV2/2pq
(10.15)
Если принять ранее оговоренные допущения о характере изменения тяги
двигателя по скорости, то получим следующие уравнения для определе-
ния длины разбега:
г Ро 1„Г, ! О— "^ср Sin ?opf) — сх)1
Ipas6=-------------- Ш 1 --------=------------- , (10.16)
(Су fl — Сх) L (РСр~/1)^01р) J
ApSin?opf)
ИЛИ Аразб ~. (10.17)
?0ёсУ отр (Рср — /1)
Длину набора заданной высоты препятствия Нпр можно определить,
исходя из следующих соображений.
Набор высоты осуществляется за счет постоянного избытка подъем-
ной силы У'^Суотр^отрЗ + ЛфЗш ф над весом самолета Go
ДГ = г-G0=G0 + Рср sin 7-1).
Зная избыточную силу ДУ и вес самолета, можно вычислить время набо-
ра заданной высоты //пр, а затем, умножив его на скорость при отрыве,
л тт <&Н ДУ
определить длину набора. Из уравнения —— = — получаем /Наб =
dt* тп
1 /"^oMip
== j/ —, длина набора
/'_____________2G0Hnp_____________
_ / ?ОТр —. \
£<А) \ + Рср 51П ? ~ /
Подставляя значение форе и произведя преобразования, получим
^наб
?отр/^пр
Ро£
(10.18)
= 2
Общая длина взлетной дистанции Ьпзл = Ьразб + ЬНаб-
На рис. 10.6 представлен график зависимости взлетной дистанции от
qo для различных значений стартовой тяговооружеиности. Расчет про-
изводился по приближенным формулам для случая /1 = 0,05, Лотр=4 при
взлете в стандартных условиях до высоты препятствия //пр=15 м.
Из графика видно, что отклонение вектора__тягн — весьма эффектив-
ный путь сокращения взлетной дистанции при Ро^О,5. Вместе с тем рас-
172
четы показывают, что при больших значениях удельной нагрузки на кры-
ло для обеспечения укороченного взлета требуется стартовая тягово-
оруженность, приближающаяся к единице. При этом скорость отрыва
становится недостаточной для обеспечения требований устойчивости и
управляемости без применения струйных рулей. Такой самолет по своим
параметрам приближается к самолету вертикального взлета и посадки,
а ввиду большей гибкости применения СВВП может оказаться более вы-
годным, чем СУВП.
Комбинированные методы
К этим методам можно отнести отклонение спутной струи от винтов
с помощью закрылков и повышение несущей способности крыла с по-
мощью реактивного закрылка.
Рис. 10.7. Отклонение спутной струи от
винтов с помощью закрылков.
Рис. 10.8. Характер по-
ляры для крыла, обду-
ваемого потоком от вин-
тов:
/ — без обдува: 2 —с обду-
вом •
Первый метод является весьма эффективным средством сокращения
взлетно-посадочных дистанций для винтовых самолетов. Суть его заклю-
чается в предотвращении срыва потока при весьма больших углах от-
клонения закрылков за счет энергии струи винтов, увеличении эффектив-
ной скорости обдувки крыла и поворота с помощью механизации вектора
тяги. Все это позволяет получить весьма большие значения сутах,
вплоть до 6.
В качестве примера может быть назван французский самолет Бре-
ге 941, крыло которого имеет трехщелевой закрылок, обдуваемый пото-
173
ком от четырех винтов, приводимых во вращение четырьмя ТВД
(рис. 10.7). При отклонении закрылка на угол 63 = 45° можно получить
сутаХ>5 (рис. 10.8). Применение такой механизации на самолете Бре-
ге 941 при взлетном весе 21 тс обеспечивает взлетную дистанцию £Взл =
=285 м и посадочную — LnOc=255 м.
Реактивный закрылок представляет собой плоский поток воздуха,
вытекающего с большой скоростью через заднюю кромку крыла под уг-
лом 0 к нижней поверхности крыла (рис. 10.9). За счет реактивного
закрылка увеличивается эф-
фективная площадь крыла,
изменяется характер обте-
кания профиля, кроме того,
за счет импульса вытекаю-
щей струи mVc создается
вертикальная составляю-
щая силы mVcsinO, разгру-
жающая крыло. Эффектив-
ность реактивного закрылка
зависит от коэффициента
импульса выдаваемой струи
и угла 6. Для приближен-
подъемной силы при реактив-
следующеп интерполяционной
формулой:
Рис. 10.9. Схема реактивного закрылка
ных расчетов приращения коэффициента
ном закрылке можно воспользоваться
3,9]/сиsin 9.
(10.19)
Применение реактивных закрылков позволяет получить очень боль-
шие значения коэффициента подъемной силы, однако при этом требует-
ся с.А, существенно большие, чем для УПС. Эффективность реактивного
закрылка очень сильно падает с уменьшением удлинения крыла, кроме
того, вблизи земли, т. е. как раз там, где ои должен использоваться, ре-
активный закрылок не обеспечивает получение расчетных значений ДсР.
Этим объясняется тот факт, что реактивный закрылок пока не получил
широкого распространения и находится в стадии экспериментальных и
теоретических разработок. При этом исследуются различные варианты
места выдува струи.
§ 2. САМОЛЕТЫ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ
Основные типы аппаратов вертикального взлета и посадки (АВВП}
представлены на рис. 10.10. В основу классификации положен способ
создания подъемной силы в крейсерском полете. По этому признаку все
АВВП разделяются на вертолеты, винтокрылы и самолеты вертикально-
го взлета и посадки. Далее летательные аппараты объединены в группы
по способу создания тяги в крейсерском полете и способу создания
подъемной силы на вертикальных режимах. Это позволило определить
диапазоны их минимальных скоростей, а также средние значения макси-
мального аэродинамического качества.
Вертолет на режимах висения не имеет конкурентов среди АВВП.
Вместе с тем большой удельный вес силовой установки вертолета, низ-
кое аэродинамическое качество, резко уменьшающееся с ростом скорости
полета, ограничивают его дальность и скорость.
Винтокрыл, обладая достоинствами вертолета на режимах висения,
может иметь в 1,5—2 раза большую скорость и дальность, однако сло-
жен по конструкции и имеет низкую весовую отдачу. Самолеты верти-
кального взлета и посадки, в отличие от двух предыдущих типов
174
Способ сознания тяги Способ создания подъемной силы Тип летатель кого аппарата Возможная схема, летательного аппарата. ^max км/ч ^max
Горизонталь- ные режимы вертикальные режимы
Несущий винт с механическим или реактивным приводом «3 gj 280... 350
воздуш- ный винт Несущий винт и крыло Несущий винт Винто- крыл 055 -05<J Z '"9
Воздушный винт (винт 8 кольце) •а Поворот винтов Винтовой 1 Самолет 1 OSP "'059 gj
Поворот двигательной установки
Поворот крыла, с двигательной установкой
Подъемные ТРД(ДТРД) Комбинированный 700... 860
Турбореактивный двигатель (трд;дтрд) Агрегат усиления тяги (АУТ) Подъемные вентиля- торы
Эжекторное устройство | Реактивный Л
Отклонение вектора тяги маршевого двигателя
Подъемные ТРД (ДТРД)
Подъемные ТРД (ДТРД) Поворот маршевого двигателя
Подъемные ТРД (ДТРД) Отклонение вектора тяги маршевого двигателя
Рис. 10.10. Классификация АВВП
175
АВВП, могут иметь скорости и дальности полета, свойственные обычным
самолетам. Это и определяет перспективу их применения.
Необходимо подчеркнуть, что нн один из перечисленных типов АВВП
нельзя рассматривать как универсальный, исключающий другие типы.
В данной главе основное внимание уделено самолетам с силовыми
установками на базе турбореактивных двигателей. Отличительной осо-
бенностью СВВП является наличие двух систем, не свойственных обыч-
Рис. 10.11. Реактивный СВВП с единой СУ:
/ — переднее сопло, 2 — заднее сопло
Рис. 10.12. Винтовой СВВП с поворотными винтами
ному самолету. Это система создания подъемной силы и система обеспе-
чения устойчивости и управляемости при нулевых и малых скоростях.
Подъемная сила на указанных режимах создается вертикальной состав-
ляющей тяги двигателей.
Остановимся на основных типовых методах и схемах получения вер-
тикальной тяги.
Самолеты с единой силовой установкой. Это самолеты с одним нли
несколькими двигателями одного типа {ТРД и ДТРД), располагаемыми
176
в фюзеляже или на крыле. Для создания вертикальной тяги использует-
ся отклонение вектора тяги (рис. 10.11). К этому же типу относятся вин-
товые самолеты.
Для создания вертикальной тяги применяется либо поворот винтов
(рис. 10.12), либо поворот крыла вместе с установленными иа нем двига-
телями в вертикальное положение (рис. 10.13).
Рис. 10.13. Винтовой СВВП с поворотным крылом
Самолеты с раздельной силовой установкой. У самолетов этого типа
вертикальная составляющая тяги создается легкими подъемными дви-
гателями (ТРД или ДТРД), размещаемыми либо в фюзеляже
(рис. 10.14), либо в мотогондолах на крыле.
Рис. 10.14. Реактивный СВВП с раздельной СУ:
/ — подъемные двигатели: 2— створки с направляющими жалюзи, 3 —створки люков
подъемной силовой установки; 4 — воздуховод маршевого ТРД; 5 — маршевый ТРД; 6 —
трубопровод струйного управления, 7 — сопло струйного руля
Самолеты с комбинированной силовой установкой. У самолетов, вы-
полненных по этой схеме, для создания вертикальной тягн, наряду с
отклонением вектора тяги маршевых двигателей, используются подъем-
ные двигатели (рис. 10.15) или установленные вертикально подъемные
вентиляторы (рис. 10.16). При этом возможен как газовый, так и меха-
нический привод вентиляторов.
177
Наряду с созданием части подъемной силы подъемные агрегаты мо-
гут использоваться для разгона самолета за счет отклонения вектора
тяги. Это позволяет улучшить характеристики переходных режимов. Для
обеспечения управления н стабилизации СВВП на переходных режимах
в настоящее время применяются следующие способы реактивного управ-
ления, зависящие от количества и расположения двигателей на самолете
(схематично они разделены на три группы, представленные на рис. 10.17).
Рис. 10 15. Реактивный СВВП с комбинированной СУ:
/ — подъемные двигатели, 2 — подъемно маршевые двигатели, 3 — сопловые патрубки
вертикальной тяги
Рис. 10.16. Реактивный СВВП с подъемными вентиляторами:
/—носовой вентилятор для балансировки самолета, 2 — маршевый ТРД 3 —
подъемный вентилятор, 4— труба для подвода газов к вентиляторам
Первый способ применим для самолетов, у которых двигатели или
группы двигателей расположены в районе центра тяжести (рис. 10.17, а).
В этом случае управление обеспечивается с помощью системы струйных
рулей, представляющих собой либо реактивные сопла, либо управляю-
щие вентиляторы, расположенные на концах крыла и фюзеляжа. Воздух
для струйных рулей отбирается от двигателей или от специальных газо-
генераторов. Стабилизирующие и управляющие моменты создаются за
счет дифференциального изменения площади сечения реактивных сопел
(или перестановки лопастей вентилятора) и соответствующего расхода
воздуха. Воздух для управления может отбираться как за компрессо-
ром, так и за турбиной.
Если двигатели расположены эксцентрично (рис. 10.17, б), то для
управления относительно продольной и поперечной осей используется
дифференциальное изменение тяги подъемных двигателей (модуляция
178
тяги), а для управления относительно вертикальной оси — отклонение
вектора тяги.
Третий способ представляет собой комбинацию двух предыдущих
(рис. 10.17, в) и применяется, если двигатели расположены на одной
из главных осей самолета, но имеют большое плечо относительно его
центра тяжести.
а) 5) в}
Рис. 10.17. Способы реактивного управления СВВП:
/ — струйный руль; 2 —подъемный двигатель
Мощность системы управления определяется, исходя из обеспечения
потребных для приемлемой управляемости значений линейных и угло-
вых ускорений, а также степени одновременности воздействия макси-
(70 тс
Рис. 10.18. Потребные угловые ускорения относи-
тельно оси х:
/ — размах крыла I—5 м; 2 — 2=10 м; 3-2—20 м; 4 —
/“40 м
Для предварительных расчетов потребные угловые ускорения гх, еу,
ег можно определить с помощью графиков (рнс. 10.18—10.20). Зная уг-
ловые ускорения, находят потребные управляющие моменты, а затем,
определив плечо реактивного руля, — величину управляющей тягн
, (10.20)
Др Др
где J — момент инерции относительно одной из осей;
е —угловое ускорение относительно той же оси;
Lp — плечо реактивного руля.
Наивыгоднейшей системой управления будет та, которая обеспечивает
потребную управляемость при минимуме собственного веса и потерь тяги
на управление.
179
Методы проектирования СВВП в основном не отличаются от мето-
дов проектирования обычных самолетов. Вместе с тем имеется ряд спе-
цифических особенностей проектирования СВВП, в основе которых ле-
жат следующие причины.
Создание подъемной силы, а также обеспечение работы системы уп-
равления на вертикальных н переходных режимах, требует определен-
ных затрат мощности силовой установки и, следовательно, связано с
увеличением веса конструкции, силовой установки и топлива. Для раз-
Рис. 10.19. Потребные угловые ускорения относи-
тельно оси z:
Z—длина фюзеляжа £. =5 м; 2—L& =10 и; 3— L. —
—20 м; 4 —£ф—40 м
Рис. 10.20. Потребные угловые ускорения относи-
тельно оси у.
1 — 1=5 м; Тф -10 м; 2 — 1=10 м; Дф=20 м; 3—1=
=20 м; £ф -30 м; 4 — 1=30 м, L$ =40 м
объемы, что может привести к ухудшению аэродинамических характери-
стик самолета. Кроме этого, специфика взлета и посадки изменяет
функции некоторых агрегатов СВВП. Например, к крылу не предъявля-
ется требование создания большой подъемной силы на малых скоростях.
Изменяются требования, предъявляемые к шасси СВВП.
В связи с разработкой СВВП возник ряд проблем. Это прежде всего
проблема эрозии поверхности аэродрома. При вертикальном взлете и по-
садке выхлопные струи двигателей, обладающие большой скоростью и
температурой, разрушают поверхность аэродрома. Степень разрушения
зависит от вида покрытия аэродрома, параметров струи, определяемых
типом двигателя, и времени воздействия струи. Влияние перечисленных
180
факторов поясняется рис. 10.21. Графики справедливы при кратковре-
менном (несколько секунд) воздействии одиночной струи. Для уменьше-
ния эрозии необходимо выбирать двигатели с возможно меньшей ско-
ростью и температурой струи, увеличивать расстояние между срезом
сопла и поверхностью аэродрома, а также максимально сокращать вре-
мя воздействия струи на ВПП.
струй двигателя на поверхность
Рис. 10.21. Влияние выхлопных
аэродрома:
а — давление струй; б — температура струи
Второй путь борьбы с эрозией — повышение прочности грунта с по-
мощью различных покрытий, а также применение специальных решеток,
позволяющих отвести струю в стороны.
Для самолетов вертикального взлета и посадки, обладающих боль-
шой мощностью двигателей, особенно остро стоит проблема приемлемо-
го уровня шума. На рис. 10.22 представлены типичные значения общего
Рис. 10.22. Уровень шума, создаваемый различ-
ными двигателями (т — степень двухконтур-
кости)
уровня шума, складывающегося из шума струи, компрессора и турби-
ны для турбореактивных двигателей с различной степенью двухконтур-
ности (различной тяговой нагрузкой иа площадь сечения струи P/F)
при одинаковой тяге 30 тс. Для сравнения показан уровень шума, созда-
ваемого винтами. Из графиков следует, что уровень шума падает по ме-
ре уменьшения нагрузки иа площадь струи. Это обстоятельство может
оказаться решающим при выборе типа двигателя для СВВП. Проблема
облегчается тем, что крутизна траектории взлета и посадки СВВП по-
181
зволяет ограничить зону с повышенным уровнем шума, а также возмож-
ностью захода на аэродром практически с любого направления.
Одной из проблем создания СВВП является проблема влияния на
самолет струй от подъемных двигателей. Это влияние проявляется в сле-
дующем. При работе двигателя вблизи земли струя увлекает окружаю-
щий воздух, вследствие чего образуется вторичный воздушный поток,
который, обтекая самолет, порождает аэродинамические силы. Знак
вторичной аэродинамической силы зависит от количества струй, их рас-
положения иа самолете и
расстояния среза сопла от
поверхности земли. Харак-
тер изменения этой силы,
отнесенной к тяге подъем-
ных двигателей, представ-
лен на рис. 10.23 для трех
вариантов компоновок подъ-
емных двигателей в зависи-
мости от высоты среза соп-
ла над землей, отнесенной к
размаху крыла (h/l).
Из рис. 10.23 видно, что
при групповом расположе-
нии двигателей (а) в сере-
дине крыла образуется вто-
ричная аэродинамическая
сила, прижимающая само-
лет к земле. Если двигатели разнесены по контуру крыла в плане (б и
в), можно добиться получения положительной подъемной силы. Это
объясняется эффектом «фонтана», возникающим при взаимодействии
нескольких струй.
Струи от двигателей, перемешиваясь с окружающим воздухом, на-
гревают его, в результате чего температура на входе в двигатель увели-
чивается и тяга его падает. Это
явление называется рециркуляци-
ей. Величина потерь тяги за счет
рециркуляции зависит от разме-
щения двигателей на самолете.
Ее можно существенно умень-
шить, применяя различные пере-
городки, препятствующие попа-
данию горячих газов на вход дви-
гателей. Кроме этого, для умень-
шения рециркуляции можно от-
клонить струю на 10—15° от вер-
тикали, что скажется благопри-
ятно и на величине эрозии аэро-
дрома.
Вторичные аэродинамические
силы возникают и иа переходном
режиме полета. Величина потерь тяги за счет действия этих сил зависит
от компоновки самолета, в частности, от расположения источников тяги
и от параметра струи
pcvc2
где р», Vac — плотность воздуха и скорость набегающего потока;
рс, Ус — плотность и скорость струн.
182
Типичная зависимость потерь тяговой подъемной силы от параметра
струи для различных компоновок представлена иа рис. 10.24.
Вторичные воздушные потоки, индуцируемые струей двигателя, ока-
зывают влияние также иа момеитиые характеристики самолета.
Количественная оценка влияния перечисленных факторов возможна
лишь в результате продувок аэродинамических моделей с имитацией
струи подъемных двигателей.
Выбор схемы СВВП
При выборе схемы СВВП необходимо исходить из иазиачеиия, ус-
ловий применения проектируемого самолета, а также заданных летио-
техиических характеристик. Например, максимальная скорость полета
определяет тип двигателей СВВП и их размещение иа самолете, а также
геометрические параметры крыла (с, %). Для сверхзвуковых СВВП
невыгодны схемы с расположением подъемных двигателей в мотогондо-
лах иа крыле, а также схемы с распо-
ложением подъемного вентилятора в
крыле, так как это привело бы к рез-
кому увеличению аэродинамического
сопротивления.
Существенные ограничения иа реа-
лизацию той или иной схемы СВВП
накладывают условия применения
СВВП, например, ограничения по до-
пустимому уровню шума, по характе-
ристикам аэродрома и т. д. Кроме то-
го, схемы СВВП связаны с типом при-
меняемой силовой установки.
Отметим некоторые особенности са-
молетов с различными типами силовых
установок.
У самолетов с единой силовой
установкой двигатели должны
товои тяговооруженности на длину
переходного режима:
/ — единая силовая установка. 2 —комби-
нированная силовая установка
создавать тягу, изменяющуюся в очень
оольшом диапазоне — от РКрейс до Рвзл,' от (0,15—0,2) Go до (1,1—1,4) Go,
что приводит к необходимости дросселирования двигателя иа крейсер-
ских режимах и связано с увеличением расхода топлива. Наличие регу-
лируемых воздухозаборников, системы отклонения вектооа тяги, более
тяжелых, чем при раздельной СУ, маршевых двигателей ппиволит к уве-
личению веса единой силовой установки. По этой причине, а также вслед-
ствие увеличения потребного запаса топлива взлетный вес СВВП с еди-
ной силовой установкой оказывается, как правило, больше, чем с раз-
дельной. Применение единой СУ оправдано лишь в случае, если тягово-
оружеиность, потребная для основного режима полета, приближается
к единице. Достоинством единой СУ является ее компактность и срав-
нительная простота. Кроме этого, возможность изменения направлений
вектора тяги позволяет при выбранной стартовой тяговооружеииости
осуществить переходной режим за кратчайшее время.
Сравнение характеристик переходного режима самолетов для раз-
личных типов двигателей представлено иа рис. 10.25. В частности, из
этого графика следует, что с увеличением степени двухконтурности т
расстояние, пролетаемое самолетом до достижения эволютивиой скорос-
ти Lnep, резко возрастает, особенно для самолетов с комбинированной
СУ. Это объясняется большими импульсными потерями тяги.
Применение специальных малогабаритных подъемных двигателей у
самолетов с раздельной и комбинированной СУ приводит к усложнению
СУ, а также увеличению объемов, потребных для ее размещения. Одна-
183
ко наличие большого количества двигателей позволяет повысить безопас-
ность в случае отказов двигателей при взлете и посадке. Относительный
вес силовой установки и потребного топлива в этом случае меньше, чем
у самолетов с единой СУ. В этом смысле наивыгоднейшей является ком-
бинированная СУ, у которой тяговооруженность подъемно-маршевого
двигателя выбрана из условия основного режима полета, а отклонение
вектора тяги позволяет уменьшить потребную тяговооруженность по
подъемным двигателям и тем самым снизить вес СУ. Применение в ка-
честве подъемных двигателей ДТРД вместо ТРД, а тем более подъемных
вентиляторов позволяет снизить скорость и температуру струи, а также
нагрузку на площадь сечения струи, что благоприятно сказывается на
величине шума и степени эрозии ВПП. Однако при этом увеличиваются
потребные размеры для размещения подъемных агрегатов.
Определение основных параметров СВВП
Определение основных параметров СВВП производится теми же
методами, что и для обычных самолетов, но с некоторыми особенно-
стями.
Взлетный вес СВВП в первом приближении определяется, как и в
общем случае, по формуле
--------»
1 — (Ок + ^с.у +
где GK и Ссэ.г определяется так же, как для обычного самолета. Однако
при этом необходимо учитывать некоторое увеличение веса оборудова-
ния СВВП (на 10—15%) за счет приборов и автоматики для управле-
ния и балансировки самолета иа вертикальных и переходных режимах.
Для определения относительного веса комбинированной силовой
установки в общем случае можно использовать выражение
Ос,у=РоЛ.+Аь'о.. (10-21)
где Рог, Ров — стартовая тяговооруженность по подъемно-маршевым и
^подъемным двигателям соответственно;
гот, гов — стартовый удельный вес подъемно-маршевой и подъем-
ной силовой установки (го= Сс.у/Ро=^тУдв, где ky =
Go у/^дв).
Для определения гОв и гОт можно принять следующие значения
удельного веса различных двигателей, достигнутые иа современном
уровне развития двигателестроения:
подъемные ТРД — удв—0 Д5—0,07 ;
подъемные ДТРД — удв«0,05—0,1;
маршевые ТРД — уДв = 0,15—0,30;
маршевые и подъемно-маршевые ДТРД — удв = 0,20—0,35;
турбовентиляторные агрегаты — утвд=0,08—0,12.
Величину коэффициента ky можно принимать в следующих пре-
делах:
для подъемных двигателей — ky = 1,6—1,8;
для маршевых двигателей — ky = 1,3—1,5;
для ТВД— ky =1,4—1,6. _
Стартовая тяговооруженность СВВП. Точное определение Ро на
ранних стадиях проектирования — особенно важная задача для СВВП.
Занижение Ро может привести к тому, что самолет не сможет взлететь
вертикально, т. е. ие будет отвечать своему назначению. Завышение Ро
ведет к перетяжелению самолета. При этом цена ошибки здесь сущест-
венно выше, поскольку относительный вес СУ этих типов самолетов, как
правило, вдвое больше, чем у обычных самолетов.
184
Обеспечение безопасности на вертикальных режимах при отказе
двигателей диктует особенно жесткие требования к СУ. Вместе с этим
силовая установка СВВП должна обладать необходимым запасом тяги
для осуществления переходных режимов с учетом ограничений, накла-
дываемых на траекторию взлета и посадки. Эти ограничения могут быть
продиктованы характеристиками аэродрома, допустимым уровнем шу-
ма в зоне аэродрома, величиной перегрузки и т. д. При этом должны
быть учтены импульсные потери тяги, потери за счет поворота вектора
тяги, а также потери на преодоление вторичных аэродинамических сил
и моментов, возникающих при взаимодействии струй от двигателя с на-
бегающим потоком. Степень влияния перечисленных выше факторов в
сильной мере зависит от назначения самолета, условий его эксплуата-
ции, компоновки самолета, в частности, от типа и количества двигате-
лей (вентиляторов) и их размещения на самолете.
Из сказанного следует, что стартовая тяговооруженность СВВП —
функция большого количества переменных, зависящих от выбранных
исходных условий. Величина Pq определяется потребной тягой, обеспе-
чивающей наиболее тяжелые условия взлета и посадки, с учетом отка-
за двигателей.
Поскольку требование безопасности является основным при проек-
тировании любого самолета, вначале определяется потребная величина
Ров из условия отказа двигателей при вертикальном взлете.
Это условие выполняется, если при отказе двигателей тяга рабо-
тающих двигателей позволяет совершить безопасную посадку, т. е. са-
молет в этом случае располагает вертикальной составляющей тяги,
уравновешивающей вес самолета, и удовлетворяет требованиям управ-
ляемости и устойчивости.
Затем, проведя расчет переходных режимов, необходимо выявить
потребный минимум Ро, удовлетворяющий требованиям переходных ре-
жимов. За искомую величину Pq принимается большая из двух рассмот-
ренных.
Определим Ро для комбинированной СУ, состоящей из подъемно-
маршевых (ПМД) и подъемных (ПД) двигателей.
Если Рг.н — номинальная тяга одного ПМД, то его эффективная
тяга, используемая для создания поддерживающей силы, равна
Рг.э = Л ,н^ф^0^у5»
где кф 1 — коэффициент форсирования тяги;
— коэффициент, учитывающий отличие условий на входе
двигателя от стандартных;
ку I — коэффициент затрат тяги иа управление;
$—коэффициент потерь при отклонении вектора тяги.
Аналогично, для ПД можно записать
^в.э = /?в.н^Ф^у
Если на самолете установлено пг ПМД и пв ПД, то суммарная старто-
вая тяга будет равна
а стартовая тяговооруженность
Т) flfPн.г "h Я^Ри.в 77 [ "п
Ч —------~' Ог “Г 'Ов’
Go
где Рог — горизонтальная стартовая тяговооруженность, создаваемая
ПМД;
Ров — вертикальная стартовая тяговооруженность, создаваемая ПД.
185
В случае отказа или отключения ir и iB двигателей эффективная верти-
кальная тяговооруженность будет равна
р».= Р<А + Ров , (10.22)
пг п0
где
Для предварительных расчетов величину коэффициентов и kv
можно принимать в следующих пределах: Лф=1,07—1,1; &у=0,85—1,0.
Коэффициент ko рассчитывается обычным способом.
Величина Роэ может быть определена, исходя из следующих сооб-
ражений. Если из условий безопасности требуется, чтобы самолет в
аварийной ситуации мог висеть, то Роэ=1- Если при этом допускается
спуск с некоторой скоростью, то Роэ=О,95—0,98. Величина рОг может
быть найдена обычным способом из условия обеспечения заданных ха-
рактеристик на крейсерском режиме. Это позволяет избежать дроссели-
рования ПМД и ведет к снижению расхода топлива
где Gcp=GCp/Go; К — аэродинамическое качество па крейсерском ре-
жиме;
f(V, Н) —функция, характеризующая изменение тяги дви-
гателя по скорости и высоте.
Решив уравнение (10.22) относительно РОв, получим
Роэ—
<°0в = ~
kn
Пг — 'г
Пг
Яв /в
(10.24)
Поскольку вероятность отказа подъемных двигателей больше, так
как таких двигателей обычно больше, в дальнейшем можно ограничить-
ся случаем, когда хг=0, а /в^1. Тогда
Л>, = Po,~f°r""£ —• (10.25)
k„ п.-‘.
Приведенные уравнения позволяют определить стартовую тягово-
оруженность СВВП в зависимости от типа и количества источников тя-
ги, их компоновки на самолете, способа управления на вертикальных
режимах, уровня требований безопасности. На рис. 10. 26 представлены
типичные зависимости Ров от пв, рассчитанные по формуле (10.25). Гра-
фики построены для случая взлета при р=730 мм рт. ст. и f=4-30°C
при различных значениях коэффициентов ky" и k$, для iB = l и fB = 2.
При этом было принято, что Рог = О,37; Роэ =1,0; &ф,,==1,0. Считается, что
одновременный отказ двух двигателей при I^50 ие происходит, однако
в зависимости от компоновки СУ иногда при отказе одного двигателя
для парирования 'Несбалансированного момента приходится отключать
симметрично расположенный двигатель (iB=2).
Графики показывают, что величина стартовой тяговооруженности
СВВП изменяется в довольно широком диапазоне. За счет рациональ-
ного выбора типа и количества источников тяги и их компоновки на са-
молете можно существенно снизить Ро без ущерба для безопасности по-
лета на вертикальных режимах.
Рассматривая раздельную и единую СУ как частный случай комби-
нированной, можно записать, используя уравнение (10.24), для раздель-
ной СУ
-------; (10.26)
kn ПЯ ZB
186
для единой СУ
РрэП
к'л1(п-Г)
(10.27)
Если потребная стартовая тяговооруженность определена из каких-
либо других соображений, например, из условия разгона иа переходном
режиме, то полученные формулы могут быть использованы для опреде-
ления потребного количества двигателей, удовлетворяющего условию
безопасности. Для этого достаточно решить уравнения (10.24) —(10.27)
относительно пг или пв.
тяговооружениости от количества двигателей
Вес топлива. Относительный вес топлива следует определять как
сумму относительных весов топлива для вертикального взлета и посад-
ки и для горизонтального полета:
От = От>в-}-От_г.
При этом для комбинированной СУ
Gt.r= (Гт.го Рг0 + cT.B(A0V', (10.28)
где ст го, ст во — удельные расходы топлива у земли ПМД и ПД соответ-
ственно;
t'—суммарное время, затрачиваемое на взлетно-посадочный
и переходный режимы.
Для раздельной СУ (7ТеВ = ст.в0Рв/. (10.29)
Для единой СУ (7T.n — cToPof. (10.30)
Относительный вес топлива Стг определяется как для обычного самоле-
та с заданной дальностью или продолжительностью полета.
187
Удельная нагрузка на крыло. Величина удельной нагрузки иа кры-
ло ро для СВВП, за исключением особых случаев, должна удовлетво-
рять следующим требованиям.
1) обеспечение заданной скорости крейсерского полета на задан-
ной высоте;
2) обеспечение заданной минимальной горизонтальной скорости пе-
реходного режима при ограниченном значении су преа.
Исходя из первого требования, удельная нагрузка ро в первом при-
ближении может быть определена по следующей формуле:
/?0 = 396ОМкрейсДкреЯс 1/ , (10.31)
г ^0
где МКрейс — число М, соответствующее заданной крейсер-
ской скорости Укрейс;
Дкрейс — относительная плотность воздуха на заданной
крейсерской высоте Нкрецс’,
сХо — коэффициент лобового сопротивления лрн су=
=0;
Р0=1/лХ9ф — для дозвуковых скоростей;
DQ='/cy —для сверхзвуковых скоростей.
Для определения ро поступают следующим образом. Задавшись не-
которым значением ро, определяют схо по формуле cxo=cxpko+cxppo/k
(#о=1,35; # = G0/SSM; SM — площадь миделевого сечения). Затем по
формуле (10.31) определяют ро для нескольких разных значений ро и
строят кривую в координатах рзад и рИСт- Искомое значение ро опреде-
лится точкой пересечения этой кривой и луча, проведенного из начала
координат под углом 45° к осям координат. Удельная нагрузка на кры-
ло ро, удовлетворяющая требованию получения минимальной скорости
горизонтального полета в начале переходного режима, может быть най-
дена по следующей формуле;
ро=О,О62су пред!/2,
где пред—предельное значение коэффициента подъемной силы само-
лета по условиям обтекания. Заметим, что при су>суПред начинаются
срывы с крыла, вызывающие «дрожание» оперения или «сваливание».
Можно принимать суПред=(0,75—0,85) сутах, а скорость У=65—75 м/с.
Таковы основные особенности проектирования самолетов верти-
кального и укороченного взлета и посадки.
Оптимизацию параметров этих самолетов производят как и для
обычных самолетов. Однако критерий оптимальности таких самолетов
обязательно должен включать в себя факторы, учитывающие особенно-
сти их взлета и посадки. К числу этих факторов необходимо отнести
стоимость ВПП, расстояние аэродрома от центра города, регулярность
воздушных сообщений, безопасность при взлете и посадке. Что касается
последнего фактора, то необходимо отметить следующее. Из-за большей
сложности конструкции СВВП, вызванной наличием дополнитель-
ных систем, вероятности отказов, ведущих к аварийным ситуациям, у
СВВП выше, чем у обычного самолета.
Учет вышеперечисленных факторов позволяет определить рацио-
нальные области применения СУВП и СВВП различных схем, а также
нх конкурентоспособность с обычными самолетами в областях, где воз-
можно применение различных типов самолетов.
188
Глава XI
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ
ВОЗДУШНО-КОСМИЧЕСКОГО САМОЛЕТА
Непрерывный рост космических полетов остро ставит вопрос стои-
мости доставки в космос полезного груза ракетными системами. Это
приводит к поиску принципиально новых систем, которые позволили бы
получить экономически приемлемую стоимость полетов.
Такой системой является воздушно-космический самолет (ВКС).
Кроме доставки людей и грузов с Земли на орбитальные станции и об-
ратно, ВКС будет необходим для обслуживания научных космических
лабораторий, для сборки межпланетных космических аппаратов или
для их разгрузки после возвращения на земную орбиту и т. д. [38].
Чтобы выполнить поставленные задачи, воздушно-космический са-
молет должен удовлетворять следующим основным требованиям.
1. ВКС должен быть многократно используемым летательным аппа-
ратом.
2. ВКС должен выводить полезную нагрузку на орбиту высотой
//=150—500 км.
3. ВКС должен обладать хорошей маневренностью в атмосфере для
ликвидации возможного параллакса орбиты (после старта) и для вы-
полнения посадки на заданный аэродром (как обычный самолет).
4. ВКС должен обладать достаточной маневренностью в космосе,
чтобы совершить встречу иа орбите и осуществить стыковку с заданным
объектом.
Использование аэродинамической подъемной силы позволит суще-
ственно снизить перегрузки и выбрать траекторию планирования, при-
емлемую по аэродинамическому нагреву. Расчеты показывают, что да-
же при гиперзвуковом аэродинамическом качестве самолета Кг = 0,5—1
спуск с орбиты можно осуществить с перегрузкой меньше 2, при этом
не потребуется специальной ориентации экипажа относительно вектора
перегрузки и существенно снизится удельный тепловой поток по срав-
нению с баллистическим входом.
Проблема обеспечения посадки ВКС в назначенном месте Земли
будет сводиться к обеспечению необходимой боковой дальности в про-
цессе гиперэвукового планирования, так как обеспечение продольной
дальности по-видимому не вызовет осложнений.
§ 1. ОСОБЕННОСТИ ПОЛЕТА ВОЗДУШНО-КОСМИЧЕСКОГО САМОЛЕТА
Для воздушно-космического самолета существует определенная
область возможных полетов в атмосфере н в космосе. Верхняя граница
полетов в атмосфере для ВКС как крылатого летательного аппарата
определяется совместным действием силы тяжести, аэродинамической
силы и центробежной силы, обусловленной сферической поверхностью
Земли. Нижняя граница полетов определяется прочностью конструкции
и допустимой температурой аэродинамического нагрева (рис. 11.1).
Нижняя граница области полетов является общей для всех крыла-
тых летательных аппаратов. Верхняя граница области зависит от осо-
бенностей схемы (от величины удельной нагрузки на крыло и коэффи-
циента аэродинамической подъемной силы).
Определить верхнюю границу полетов ВКС в атмосфере можно,
рассматривая условия горизонтального полета (планирования) на дан-
ной высоте. В горизонтальном полете, как известно, вес крылатого ле-
тательного аппарата уравновешивается двумя силами — аэродинамиче-
ской подъемной силой и центробежной силой, возникающей в результа-
189
те движения аппарата по крнволинеииои траектории относительно цент-
ра Земли,
(11-1)
Это равенство и будет определять верхнюю границу полетов ВКС.
Выражение для аэродинамической подъемной силы общеизвестно
Рис. 11.1. Область возможных полетов ВКС (/ — область полетов современных
самолетов; И — область полетов гиперзвуковых самолетов):
} — одна из возможных баллистических траекторий выхода ВКС в космос (при старте с
гнперзвукового самолета-носителя); 2 — синхронная орбита (вращаясь вокруг Земли по дан-
ной орбите, летательный аппарат будет постоянно оставаться над одной точкой экватора)
[Корб—минимальная скорость, при котооой ВКС может совершать полет в космосе, дви-
гаясь по круговой или эллиптической орбите; —первая космическая скооость (круговая);
14,—вторая космическая скорость (параболическая)]
Выражение для центробежной силы в горизонтальном полете мож-
но записать так:
р _g(^r.n - ^R.sCOS у)2
где Vr.n — скорость горизонтального полета;
Ув.з— скорость вращения Земли;
(11.2)
190
q> — угол наклона плоскости полета (орбиты) к плоскости эква-
тора (наклонение орбиты);
Н—высота полета над поверхностью Земли (иад уровнем моря);
R — средний радиус Земли, £ — 6370 км:
g — ускорение силы тяжести на высоте Н
R? АО1 &
g = Яп ------- 9,81-------.
5 &0(Я+/У)2 (/?+//)2
Для высот полета, где аэродинамическая сила еще имеет сущест-
венное значение (Ж 100 км), выражение для центробежной силы с до-
статочней степенью точности можно записать так:
G ОЛ-.п + 460 cos у)2
fi9.]06
(11.3)
Здесь Vrn в м/с.
При полете обычных самолетов (К<1 км/с) центробежной силой
можно пренебречь (рис. 11.2). Пр:
вать не только центробежную си-
лу, но и угол орбиты <р. Если ор-
бита значительно отличается от
полярной, то запускать летатель-
ный аппарат выгоднее в сторону
суточного вращения Земли. Воз-
можный угол наклона плоскости
орбиты к плоскости экватора при
старте с любой точки Земли бу-
дет находиться в диапазоне
'рмест ¥ -С 90 ,
где фмест—местный угол широты
(северной или южной) точки
старта.
Решая уравнение (11.1) отно-
сительно величины р, определим
значение массовой плотности воз-
духа, а следовательно, найдем
необходимую высоту, на которой
при данной скорости возможен
горизонтальный полет
Р=р 62-106 — (УГп 2: 460 cos у)2
31 10fiVpn
(11-4)
Рис. 112 Зависимость отношения Рп/О
от скорости горизонтального полета
1 — полет в плоскости экватора в сторону су-
точного вращения Земли (<р=0), 2 — полет в
плоскости полюсов Земли (ф—90°); 3— полет в
плоскости экватора в противоположную от вра-
щения Земли сторону (Ф—0)
где p=<G/S — удельная нагрузка на несущую поверхность.
Выражение (11.4) определяет так называемую равновесную высоту
полета.
На рис. 11.3 показано влияние скорости (а для величины р!су =
= 1000 и угла наклона орбиты) на верхнюю границу области поле-
тов вкс.
Прн полете в космосе воздушно-космический самолет становится
искусственным спутником Земли. Движения любых небесных тел (в том
числе и искусственных) осуществляются, как известно, по законам не-
бесной механики, в основе которой лежит закон всемирного тяготения
Ньютона. Поэтому область установившихся полетов ВКС в космосе не
будет иметь принципиальных отличий от подобной области полетов
современных искусственных спутников Земли.
191
Траектории полет 1КС
Движение воздушно-космического самолета в общем случае описы-
вается системой шести дифференциальных уравнений, три из которых
отражают условие равновесия сил в проекциях на оси инерциальной
системы координат, а три — условие равновесия моментов относительно
этих осей
т(^- + ИЛ-ИЛ) = Х;
at
dt
где X, Y и Z— проекции всех внешних сил (в том числе и реактив-
ной силы) на соответствующие оси координат;
Мх, Му и Mz— моменты внешних и реактивных сил относительно
осей координат.
Рис. 11.3. Зависимость верхней границы полетов
ВКС от скорости
Так как масса и моменты инерции ВКС с течением времени изме-
няются, то при решении уравнений движения надо принимать
m = Jx=Jx(ty Jy=Jy(ty Jz-'W}-
Решить указанную систему уравнений движения можно, если пред-
ставить в развернутом виде выражения проекций внешних сил и момен-
тов, входящих в правые части уравнений.
192
На летательный аппарат умствуют следующие внешние силы:
— массовые внешние си/.обусловленные притяжением Земли,
Солнца и Луны;
— аэродинамические силы (прн полете в достаточно плотных слоях
атмосферы);
— тяга двигателя (при его работе).
При подробном анализе динамики полета ВКС (например, при на-
вигационных расчетах) в процессе решения дифференциальных урав-
нений движения необходимо учитывать все внешние силы, действующие
на летательный аппарат. Однако в период предварительного проектиро-
вания ВКС (при выборе схемы и основных параметров) можно ввести
ряд допущений, которые по-
зволят значительно упрос-
тить систему уравнений дви-
жения. Например, если не
рассматривать межпланет-
ный полет аппарата, то мож-
но ограничиться учетом толь-
ко массовой силы притяже-
ния Земли.
Рассматривая полет ВКС
в вертикальной плоскости
как точку переменной массы,
пренебрегаем расходом топ-
лива на балансировку и на
компенсацию случайных мо-
ментов крена и рысканья в
процессе выхода на орбиту.
В этом случае учитываются
Рис. 11.4. Силы, действующие на ВКС при
полете в вертикальной плоскости
следующие силы: G, Y, X, Р, причем тягу двигателя Р в общем случае
принимают направленной по его оси и наклоненной к оси самолета (к
хорде крыла) под углом ф (рис. 11.4).
При больших скоростях полета (см. рис. 11.2) необходимо также
учитывать центробежную силу Рк.
Кроме перечисленных сил, на летательный аппарат будет действо-
вать сила Кориолиса, обусловленная суточным вращением Земли. При
V~3 км/с эта сила составляет около 0,02 G, а при К=1Лк достигает
~10% силы тяжести. Сила Кориолиса зависит от места старта и на-
правления полета и ее необходимо учитывать при навигационных рас-
четах. Для приближенного анализа движения ВКС силами Кориолиса
можно пренебречь.
Проектируя силы, действующие на ВКС, на оси скоростной систе-
мы координат и добавляя к полученным уравнениям движения кинема-
тические связи (связь изменения высоты и дальности полета со ско-
ростью и углом наклона траектории), получим необходимую систему
дифференциальных уравнений, позволяющую определять основные па-
раметры траектории:
dV ГР cos (а + i) — X • д! ,,, Сч
= ---L------sin0jg; . (ц.5)
[ОУ2 COS 6 1
cJ«a;
G J V
dHldt^V sin9; (11.7)
dLldt^Vcose, (11.8)
где а— угол атаки;
0 — угол наклона траектории полета к местному горизонту.
7—1062
193
Данную систему уравнений можно решать методами численного
интегрирования с использованием ЭВМ (прн дипломном проектирова-
нии можно пользоваться обычной логарифмической линейкой).
Для определения параметров траектории ВКС прн возврате нз кос-
моса весь участок полета можно рассматривать как равновесное плани-
рование, при этом справедливы следующие допущения:
Р=0; sin6^6 = O; cos6 = l; G = const.
Движение ВКС на участке планирования будет описываться урав-
нениями (11.1) и (11.5). Последнее в данном случае примет вид
Из (11.9) следует
/ЛЛ = - f (11-10)
н. пл
где Кнпл — скорость в начальный момент планирования (при /Пл=9).
Решая совместно уравнения (11.1) н (11.10), получим выражение
для определения времени планирования
ta=Kr -R + H (V"-n’ + V|l,) (У,-ПЛ ~ , (11.11)
2V1K (VH„-V1K)(VK +V1K)
где Kr=cv!cx —- гиперзвуковое аэродинамическое качество ВКС;
К1К— первая космическая скорость;
Кк.пл — скорость в конце планирования.
Чтобы перейти от орбитального полета к режиму равновесного пла-
нирования, необходимо приложить тормозной импульс, обеспечиваю-
щий
ДУт=30 —70 м/с.
Скорость в начале планирования будет равна
^н.пл = ^1«-
Режим равновесного планирования наступает на высоте Я=90—
100 км (см. рис. 11.3). Для предварительных расчетов, полагая R —
= 6370 км; К1к=7850 м/с; Кк.пл~0, можно определять полное время
планирования по приближенной зависимости, полученной из (11.11),
пл=2300-АГг с. (11.12)
Следует заметить, что 75—80% времени планирование происходит
при скорости К>5 км/с (рис. 11.5).
Траекторию планирования всегда можно разбить на отдельные уча-
стки с Kr=const, тогда дальность планирования можно найти из (П.9),
предварительно умножив левую и правую части на V н выразив G
из (11.1):
откуда
L^—K, — In V1K~V>-"J . (Ц.14)
пл г О 9 . ,2 v '
2
194
Уравнения (Н.П) и (П.14) позволяют определять /пл и Дпл иа лю-
бом участке траектории (т. е. для любых значений Кн.пл и УКпл).
Для предварительных расчетов дальность планирования ВКС с мо-
мента схода с орбиты до приземления можно определять по формуле
£п.пл= 13 800 /Сг км. (11.15)
Заметим, что ~90% всего времени планирования (по дальности)
происходит при скорости К>5км/с (рис. 11.6).
Дальность бокового маневра зависит от величины Кг'5 • В предва-
рительных расчетах полную дальность бокового маневра можно опреде-
лить по формуле
in.6»« = 1400.к1/ км.
(11.15')
Рис. 11.5. Зависимость времени планирования от скорости и гиперзвукового
аэродинамического качества ВКС
Задача по определению траектории полета ВКС в космосе совпадает
с задачей определения орбит небесных тел (задача Кеплера). Движение
тела в данном случае рассматривается в полярной системе координат с
полюсом в центре Земли. Уравнения движения летательного аппарата в
полярной системе координат можно получить, проектируя внешние силы,
действующие на аппарат, на направление радиуса-вектора и касатель-
ную к окружности, описываемой радиусом-вектором. В частности, урав-
7’
195
нения движения ВКС в космосе (при отсутствии аэродинамических сил
и силы тяги) будут иметь вид
—= 0; (11.16)
dt 1 ' at
iXi—V
dt
di _ №
S dt~ g° Г2
(11.17)
где Vs — тангенциальная составляющая скорости;
Vr — радиальная составляющая скорости;
х — угол поворота радиуса-вектора (полярный угол), отсчитывае-
мый от полярной оси, некоторого начального неизменного в
пространстве направления радиуса-вектора;
г — расстояние от ВКС до центра Земли (радиус-вектор).
Рис. 11.6. Зависимость дальности планирования от скорости и гиперзвукового
аэродинамического качества ВКС
Теория движения тела в условиях космоса под действием сил грави-
тации носит название эллиптической теории. Наибольшее применение в
настоящее время эллиптическая теория находит при решении таких ос-
новных задач космонавтики, как определение орбит искусственных спут-
196
ников Земли, орбит межпланетных летательных аппаратов и т. д. Эта
теория определяет и траектории полета ВКС в космосе. Так, уравнение
орбиты в полярных координатах можно получить, решая систему диффе-
ренциальных уравнений (11.16) и (11.17):
________Р_________
1 + е cos (х — х0)
(11.18)
где р — фокальный параметр орбиты;
е — эксцентриситет орбиты;
х0 — начальное значение угла х.
При движении в земном поле тяготения, когда фокус орбиты рас-
положен в центре Земли, значения фокального параметра и эксцентри-
ситета будут равны
К’г? cos2
р fM3 ’
2V§r0 cos2 в0 Vjrjj cos2
(11.19)
(11.20)
Подставляя эти значения в (11.18), получим окончательное уравнение
орбиты ВКС (искусственного спутника Земли)
1 +
V^cos2e0
ТМ~з
jCpCOS2»;
;м3
vJrQCos2e0
/2Л4|
COS (х — Xq)
(П-21)
где r0=R+H — начальное расстояние от центра Земли;
Ко — начальная скорость на орбите (на высоте Н от поверх-
ности Земли);
0о — угол наклона траектории к местному горизонту в на-
чальной точке;
/Л1з—константа поля тяготения Земли;
f — гравитационная постоянная;
Мз— масса Земли.
Согласно закону всемирного тяготения вес любого тела на высоте Н
от поверхности Земли равен
О = /----—
(/? +/У)2
(11.22)
где т — масса тела.
Константа поля тяготения, следовательно, будет равна
Известно, что вид кривой второго порядка обусловлен величиной ее экс-
центриситета. Прн е=0 уравнение (11.18) представляет собой уравнение
окружности, при е<1— уравнение эллипса, при е=1—уравнение па-
раболы и, наконец, при е>1 —уравнение гиперболы.
Одним из условий выведения на орбиту ВКС будет равенство 0о = О,
поэтому в данном случае можно считать, что эксцентриситет орбиты оп-
ределяется скоростью и высотой в начальной точке орбиты
e = e(V%, Н).
197
Найдем необходимую начальную скорость для движения по круговой
орбите. Эта скорость носит название круговой, или первой космической
(И1к)-
Для случая е=0 нз (11.20) получим
= = (11-23)
Круговая орбита является особым случаем. Для осуществления ее
необходимы определенные условия (У©= Уц{ н Оо = О). Кроме того, вслед-
ствие возмущений, вызываемых главным образом сплюснутостью формы
Земли, возникают отклонения, искажающие форму орбиты. Поэтому
строго круговую орбиту можно получить лишь в экваториальной плос-
кости. Однако при определении параметров ВКС форму Земли можно
считать сферой и первую космическую скорость определять по формуле
(11.23).
Например, для высоты Я=100 км численное значение первой косми-
ческой скорости (при <р = 90°)
lZ]it=7,85 км/с.
При значениях эксцентриситета
0<е<1
уравнение (11.18) представляет собой уравнение эллипса. Эллипс, как
известно, кроме эксцентриситета и фокального параметра, характеризу-
ется еще большой (а) и малой (Ь) полуосью
а — —-— ; b — а V1 — е2.
1— £2
Уравнения (11.19) и (11.20) позволяют найти большую ось эллипти-
ческой орбиты
При движении по эллиптической орбите высота полета будет непре-
рывно изменяться от минимальной Н (перигей) до максимальной
Н+&Н (апогей).
Из выражения (11.24) видно, что при Vo=--ViK большая ось эллипса
будет равна 2a = 2(R+H), т. е. орбита превращается в окружность.
При скорости, равной параболической, или второй космической
(Кгк)> траектория полета становится параболой. Летательный аппарат,
развивший скорость полета на Землю не возвращается.
Вторая космическая скорость определяется так:
^,-/2-^ = ]/ (П.25)
Г К + п
Для высоты 100 км V2k=H,1 км/с.
На рис. 11.7 показаны возможные орбиты космического летательного
аппарата.
Время одного оборота ВКС вокруг Земли прн круговой орбите иа
высоте Н равно
= + = 2я--(/? + /7)*'-. (11.26)
V1« V geW
198
Для эллиптических орбит период обращения определяется анало-
гично, но вместо (R+H) в выражение (11.26) надо подставить величи-
ну большой полуоси эллипса
/,л=—= (11.27)
ПГоЯ2
После выхода в космос может возникнуть необходимость в некото-
ром изменении параметров орбиты. Изменить параметры орбиты (т. е.
перейти с круговой орбиты на эллиптическую и обратно, или изменить
угол наклона плоскости орбиты) можно, меняя величину и направление
скорости полета.
Рис. 11.7. Схема выведения летательного аппарата
на экваториальную орбиту (ср = О) при максималь-
ном использовании суточного вращения Земли:
П — перигей орбиты; А —апогей орбиты, П* — перигей но-
вой орбиты (при V0<Vjk и при достаточно большом зна-
чении Н)
Если требуется, например, увеличить высоту полета на величину
ЛЯ, то необходимо сообщить летательному аппарату дополнительную
скорость ДУН, равную
Орбита в данном случае будет эллиптической и скорость полета бу-
дет меняться от Утах на высоте Н (перигей орбиты) до Утщ на высоте
Я+ДЯ (апогей орбиты).
При движении тела по орбите изменение кинетической энергии рав-
но изменению потенциальной энергии
где h—высота точки орбиты, скорость полета в которой равна У. Так
как масса летательного аппарата остается постоянной, то
= const. (11.29)
2 R+h ' '
199
Данное выражение, называемое интегралом энергии, показывает,
что скорость полета будет зависеть только от высоты траектории в дан-
ной точке
Из уравнения (11 29) получим скорость в апогее орбиты (на высоте
Я+ДЯ)
. (11.30)
где Ушах — скорость в перигее орбиты
Скорость в перигее орбиты (т е новая скорость иа высоте Я), бу-
дет, очевидно, равна Vmax= Ко + ДКя-
На высоте (Я+ДЯ) имеет место неравенство Vmtn<KiK, поэтому,
если требуется увеличить высоту полета, сохранив при этом круговую
орбиту, то скорость полета на высоте (Я + ДЯ) необходимо увеличить
до значения ViK на данной высоте
Простейший маневр по изменению угла наклона орбиты на угол Дф,
ие меняя высоту полета, можно выполнить изменением направления
скорости полета на угол Дф Для подобного маневра летательному аппа-
рату необходимо сообщить дополнительную скорость ДК^ направлен-
ную под углом (90°4-^-) К плоскости исходной орбиты (рис. 11.8).
Величина дополнительной скорости в этом случае будет равна
AV't=l/0 51-Дт-. (11.31)
Дф
COS---
2
При проектировании ВКС возможное изменение скорости для того
или иного маневра в космосе необходимо учитывать, так как оно требу-
ет дополнительного расхода топлива иногда весьма существенного.
Рис. 118 Изменение плоскости орбиты при H=const
1 — исходная орбита 2 —- новая орбита
Аэродинамический нагрев
Отличительной особенностью полета ВКС в атмосфере является по-
лет в условиях высоких температур. Внешними источниками нагрева яв-
ляются аэродинамический (кинетический) нагрев, солнечная радиация,
радиация Земли и ее атмосферы. Кроме того, имеются еще источники
тепла, размещенные внутри летательного аппарата Определяющее зна-
чение для ВКС будет иметь аэродинамический нагрев Другими (внеш-
ними н внутренними) источниками нагрева в данном случае можно пре-
небречь
200
Основное количество тепла к обшнвке аппарата подводится из по-
граничного слоя. Температура воздуха в пограничном слое близка к
температуре торможения. Рассматривая воздух как идеальный газ (прн
Т<2000К) и учитывая теплообмен в пограничном слое, можно найти
температуру на внутренней границе пограничного слоя:
а) ламинарный пограничный слой Гпс = Ти (1Ц- 0,17 М2);
б) турбулентный пограничный слой ГП1С = Тн (1 -f- 0,18 М2).
Здесь Тн — температура воздуха на высоте Н.
Определение температуры нагрева обшивки. При условиях, когда
теплообмен определяется совместным действием конвекции, теплопро-
водности и лучеиспускания, температура обшивки летательного аппара-
та может быть определена из уравнения баланса тепла:
(П.ЗЗ)
at
W 7п.с —удельный тепловой поток из пограничного слоя, т. е. коли-
чество тепла, поступающего к обшивке на единицу площади
в единицу времени в ккал/м2с;
^изл — удельный тепловой поток, излучаемый обшивкой в окружа-
ющее пространство;
с — удельная теплоемкость материала обшивки в ккал/кгсХ
Хград;
у— удельный вес материала обшивки в кгс/м3;
6 —толщина обшивки в м;
t — время в с;
Л)б — температура внешней поверхности обшивки в град К.
Уравнение (11.33) описывает нестационарный тепловой процесс, при
котором температура поверхности тела изменяется с течением времени.
Решение этого нелинейного дифференциального уравнения можно полу-
чить методами численного интегрирования.
Наибольшая температура обшивки будет при dTQ^ldt=Q. В этом
случае имеет место установившийся теплообмен и равновесная темпера-
тура обшивки, которая устанавливается при длительном полете в неиз-
менных условиях. При ЭТОМ ^гг.с = ^изл.
Излучаемый обшивкой удельный тепловой поток определяется по за-
кону Стефана — Больцмана
= (11.34)
где е — коэффициент излучения, илн степень
черноты обшивки;
о= 1,37- 10“и ккал/м2с • град4 — коэффициент излучения абсолютно
черного тела.
Коэффициент е оценивает излучающую способность тела (обшивки)
по сравнению с абсолютно черным телом. Он зависит от материала по-
верхности и ее обработки, а также от температуры. Для обшивки ВКС
можно принимать е»0,8.
Удельный тепловой поток, поступающий к обшивке из пограничного
слоя, в соответствии с законом Ньютона, определяется так:
?п.с=а(7'.,.о-7'об), (11.35)
где а—местный коэффициент конвективной теплопередачи на границе
воздух — обшивка в ккал/мс • град.
Учитывая равенство дИзл и дп.с, получим уравнение, позволяющее оп-
ределить температуру обшивки при установившемся теплообмене,
soTle 4- аГоб - агпс = 0. (И .36)
201
Коэффициент конвективной теплопередачи а имеет различные значе-
ния для пластины и для критической точки сферического тела. Прибли-
женное выражение коэффициента теплопередачи для пластины имеет
вид:
а 0,5g рУ с рсуРг“1/в, (11.37)
где ср—теплоемкость воздуха при постоянном давлении
в ккал/кгс-град;
Cj — коэффициент трения воздуха о поверхность обшивки,
зависящий от числа Рейнольдса и структуры погра-
ничного слоя;
Pr = pcpg/A — число Прандтля;
р — коэффициент вязкости воздуха в кгс-с/м2;
X—коэффициент теплопроводности воздуха в ккал/м «сХ
Хград.
Физические константы воздуха ср, ц, А, зависящие от температуры, не-
обходимо брать для так называемой определяющей температуры
ТМ = ТН + ^>{Т^-ТН). (11.38)
Число Прандтля зависит от температуры воздуха (табл. 11.1). При
больших температурах (ТОп>1250К)
Таблица 11.1 число Прандтля можно считать посто-
Рг турбулег где 500 0,69 ТНЫЙ 750 0,665 погра янным. 1000 1250 Для приближенной оценки темпе- „ ратуры обшивки коэффициент а мож- 0,655 0,65 н0 определить так: ламинарный пограничный слой a = 31,6gpVc/pVxM)“0’5 Рг-0’67; (11.39) ннчный слой a = 0,184gpVCp(pVx/p.)'"0,*Pr~0’67, (11.40; х~ . (ц.41) (1+-)рМ
Приведенные формулы справедливы для определения температуры
обшивки крыла, оперения и цилиндрической части фюзеляжа (корпуса).
Для коэффициента конвективной теплопередачи вблизи критической
точки при ламинарном пограничном слое можно принять следующее вы-
ражение:
а = 0,54 Pr-°-n'vrc„ /? рцУ/г, ’ (11.42)
где г — радиус иосовой части тела;
1
(1 + 0,2М2)2’5 ‘
(11.43)
Здесь р и рс — давление потока перед и за прямым скачком давления.
Отношение р[рс определяется по известной формуле газовой динамики
_Р__ 3 G +0,2М2)3’5 Г 2,43(1 + 0,2М2) —2,5 'I3’5
pz~~ 1.167М2 — 0,167 [ М2 J *
Пользуясь уравнением (11.36) и приведенными выше формулами,
можно рассчитать равновесную температуру обшивки ВКС (а также лю-
бого другого самолета) при аэродинамическом нагреве.
202
На рис. 11.9 приводятся приближенные значения равновесной тем-
пературы для вероятной области полетов ВКС (для небольших углов
атаки).
Интенсивность аэродинамического нагрева поверхности существенно
уменьшается при увеличении расстояния от передней кромки крыла (от
Рис. 11.9. Равновесная температура плоской поверхности на расстоянии х=1,5 м
от передней кромки (е=0,8)
Рис. 11.10. Установившаяся температура на поверхности
самолета (в °C) при длительном полете (У=2400 м/с
Я=34 км)
ния). На рис. 11.10 показаны изотермы на поверхности гиперзвукового
самолета в крейсерском полете на высоте 34 км при М=8. Следует об-
ратить внимание на распределение температуры по нижней плоскости
воздухозаборника (распределение температуры на плоскости при посто-
янном угле атаки и нулевом угле стреловидности).
§ 2. ВЫБОР СХЕМЫ ВОЗДУШНО-КОСМИЧЕСКОГО САМОЛЕТА
Если под полезной нагрузкой понимать вес аппарата, выводимого
на орбиту (не считая, естественно, веса конструкции последней ступени
ускорителя, которая также будет достигать орбитальной скорости), то-
203
наиболее подходящим критерием для анализа и выбора схемы будет от-
носительный вес полезной нагрузки
0».и = 0„.и/Со>
где Оп.н — вес аппарата, выводимого на орбиту;
Go — стартовый вес системы.
Хотя этот критерий не является исчерпывающим (более общим кри-
терием является стоимость системы), все же ои играет главную роль, по-
скольку от Сп.н зависит при прочих равных условиях стоимость доставки
1 кгс полезного груза иа орбиту.
При заданном значении веса полезной нагрузки критерием оценки
схемы ВКС будет, очевидно, величина стартового веса системы.
Возможные схемы воздушно-космических самолетов. Важнейшей
характеристикой летательных аппаратов для доставки груза на орбиту
является минимально необходимая скорость полета на орбите К0Рб (для
высоты полета Н<_500 км Vopo^Vik). Строгое обеспечение заданной
скорости полета ии для одного летательного аппарата не имеет такого
важного значения, как для космических аппаратов. Например, если са-
молет проектировался на скорость полета V=3185 км/ч (М=3), а в
действительности скорость оказалась на 1% меньше, т. е. V —3153 км/ч
(М = 2,97), то это практически никак не отразится на эффективности
данного самолета. Для орбитального аппарата ошибка в скорости на
1 % (т. е. вместо 7,8 км/с получить 7,72 км/с) означает запуск вхолостую,
так как аппарат не будет держаться на орбите и совершит посадку, не
выполнив ни одного витка вокруг Земли. Поэтому важнейшим и необ-
ходимым условием лолета по орбите является достижение соответствую-
щей скорости полета. Это условие и будет в значительной степени опре-
делять схему и основные параметры орбитальных летательных аппа-
ратов.
Найти связь орбитальной скорости с основными параметрами лета-
тельного аппарата можно, анализируя процесс разгона и набора высо-
ты при выходе на орбиту,
В процессе разгона и набора высоты летательный аппарат приобре-
тает скорость, которая в общем случае может быть записана так;
К = 1/н-Д1/п4-1/ст, (11.44)
где Va — идеальная скорость аппарата, т. е. скорость, которую аппа-
рат получил бы при отсутствии силы земного притяжения и
силы аэродинамического сопротивления;
ДУп — суммарные потери скорости от действия гравитации и аэро-
динамического сопротивления;
Уст—стартовая скорость аппарата (для одноступенчатых аппа-
ратов при старте с Земли, очевидно, V'CT = Oj-
Идеальная скорость аппарата определяется по известной формуле
К. Э. Циолковского
V„ = U"clnm„,JmK0B,
где We —эффективная скорость истечения продуктов сгорания;
тнач —начальная масса аппарата;
Wkoh —конечная масса аппарата (после выгорания топлива).
Выражая эффективную скорость истечения через удельный импульс
(удельную тягу двигателя), а массу летательного аппарата через вес,
получим
In -^-=9,817, (П-45)
С'кон 1 ит
где —удельный импульс двигателя (по топливу);
Ст==Ст!'Снач— относительный вес топлива.
$04
На величину AVn особенно существенное влияние оказывает вели-
чина скорости старта.
Для конкретной схемы летательного аппарата при выходе на орби-
ту по определенной траектории величину ДУП можно определить, интег-
рируя уравнения движения (11.5) — (11.7).
В период предварительного проектирования эту величину можно
принять приближенно; с достаточной степенью точности ее можно сиять
с графика рис. 11.11, который получен в результате расчета траекторий
Д«1 м/с
О 1000 2000 3000 4000 5000 6000 Vctm/c
Рнс. II.И. Влияние скорости старта на суммарные потери скоро-
сти от действия гравитации и аэродинамического сопротив-
ления (для орбит //=120—200 км)
выхода на орбиты с высотой Я= 120—200 км; при этом рассматривались
различные схемы летательных аппаратов с реально возможными пара-
метрами.
Выход на орбиту с //>200 км можно разбить иа два этапа:
1) выход иа //«150 км;
2) маневр по увеличению высоты орбиты на величину Д// [см.
(11.28)].
Потребное количество топлива 6Т.ПОТ для выхода на орбиту полу-
чим, принимая в (11.44) V=V)H и решая совместно (11.44) и (11.45) от-
носительно Ст,
У1к + ДУП — Уст
1 GT.rt0T
9,81/,
или
6Т.ПОТ = 1
(11.46)
Где б?тп0т ^т.пот/^нач!
(?нач—начальный вес аппарата (при V=VCt), для одноступенчатых
аппаратов VCT=0 н 6Нач = 6о.
На рис. 11.12 представлена графическая интерпретация уравнения
(11.46) для нескольких значений_стартовой скорости.
Возможные значения GT и GK для современных самолетов и само-
летов ближайшего будущего даны на рис. 11.13.
205
Для выхода на орбиту летательный аппарат с ЖРД при JT =
= 250—450 с должен иметь относительный вес топлива GT=0,98-^0,87
при МСТ=А (см. рис. 11.12).
Если летательный аппарат будет стартовать с гнперзвукового само-
лета-носителя (например, при Мст = 6—12), то необходимый запас топ-
Рис. 11.12. Зависимость относи-
тельного веса топлива, потребно-
го для выхода на орбиту (Я=
= 120—200 км), от удельного им-
пульса двигателя
Рис. 11.13. Изменение относитель-
ного веса топлива и конструкции
самолета в зависимости от рабо-
чей температуры конструкции
Рис. 11.14. Возможные схемы лета-
тельных аппаратов для доставки по-
лезного груза на орбиту (в качестве
горючего для всех двигателей ис-
пользуется жидкий водород);
/ — космический корабль с баллистическим
входом в атмосферу, 2 —ВКС
лива для выхода на орбиту уменьшится, однако и в этом случае он бу-
дет равен 6т.пот=0,78—0,64 для /т = 450 с (топливо Н2+О2).
Лишь старт с MctSS'IS дает возможность выхода на орбиту
(Gt пот 0,45).
Поэтому можно сделать вывод относительно схемы аппарата: до-
ставить полезный груз на орбиту и совершить возврат н посадку на Зем-
206
лю в настоящее время (при 7т=»450 с) могут только многоступенчатые
летательные аппараты. На рис. 11.14 показаны возможные схемы таких
летательных аппаратов.
Полезной нагрузкой в схеме / является космический аппарат с бал-
листическим входом в атмосферу; посадка на Землю производится с ис-
пользованием парашютов. Аппараты схем II, III и IV имеют одинако-
вую полезную нагрузку — воздушно-космический самолет, 'Совершаю-
щий планирующий вход в атмосферу и горизонтальную посадку иа
Землю.
Схемы / и II идентичны и
отличаются только полезной на-
грузкой. Эти схемы основаны на
принципе максимального исполь-
зования существующих конструк-
ций ракет. Высокая стоимость ра-
кеты-носителя приводит к необ-
ходимости поисков повторного
использования ступеней. Наибо-
лее целесообразно спасение пер-
вой ступени, так как в этом слу-
чае от 75 до 80% веса всей конст-
рукции ракеты-носителя возвра-
щается обратно.
Наилучшне возможности в
создании многократно использу-
емых космических систем дает ги-
перзвуковой самолет-носитель
(разгонщнк), пилотируемый эки-
пажем и самостоятельно возвра-
щающийся к месту старта после
запуска космического аппарата
(схемы III и IV). При переходе
от баллистических к крылатым
воздушно-космическим системам
многократного применения стои-
мость доставки полезного груза
на орбиту значительно снизится.
Схема /// представляет со-
бой один нз возможных вариан-
тов спасения первой ступени ра-
кеты-носителя с ЖРД.
Схема IV является наибо-
Рис. 11.15. Зависимость относительной
энергии, сообщаемой полезной нагрузке
при выходе на орбиту, и относительного
расхода топлива от скорости для схем
111 и IV на рис. 11,14 (в качестве горю-
чего для всех двигателей используется
жидкий водород):
с — самолет-носитель с ВРД; б — первая сту-
пень с ЖРД: в —вторая ступень с ЖРД: г —
третья ступень с ЖРД:
------------ gt-gtIg0
лее перспективной. Прн использовании в процессе разгона высокого
удельного импульса ВРД может быть получен весьма большой выигрыш
в весе нагрузки, выводимой на орбиту, по сравнению с носителями, осна-
щенными ЖРД. Носитель с ВРД будет близок к самолету по схеме и
выполнению операций.
Эффективность носителя с ВРД видна из рис. 11.15.
Некоторое представление о распределении веса аппаратов рассмот-
ренных схем дает рис. 11.16.
Следует отметить, что схема IV обеспечивает не только многократ-
ное использование дорогостоящей первой ступени, оиа позволяет суще-
ственно повысить значение (?п,н. Для вывода на орбиту одной и той же
полезной нагрузки стартовый вес летательного аппарата, спроектиро-
ванного по схеме IV, будет в два раза меньше по сравнению с лучшими
образцами современных ракет-носителей:
(?п.н=0,Ю—0,12 (схема/V);
Gn.H=0,05—0,06 (схема 1,11).
207
При использовании ядерных ракетных двигателей (ЯРД), удель-
ный импульс которых будет значительно превосходить удельный им-
пульс ЖРД. схема IV будет изменяться в сторону уменьшения количе-
ства ступеней.
Так, при 1000 с ВКС с ЯРД. стартовав с самолета-носителя,
выйдет на орбиту без дополнительных ускорителей. При /т~2000 с от-
падет потребность и в самолете-носителе, так как ВКС в данном случае
согласно уравнению (11.46) может самостоятельно (стартуя с Земли)
выходить на орбиту.
(7% 100 30- во- 70 ЬП 40 3D 20- 10- 0 Схема Ш Схема UTa Схема lift Схема 1а; На
Полезная на грузка констоикичя + СИ Полезная нпгмзкп Полезная нагрузка
1ШмЪ&аа№,1!» Третья ступень аппарата
Топливо Третья ступень аппарата
Топливо констрипцая + СУ Топливо Конструкция Силовая установка Топливо констрикаия + сз вторая ступень аппарата
Топливо вторая ступень аппарата Первая ступень аппарата
Конструкция Силовая установка Топливо Пер вая ступень аппарата
Рис. 11.16. Диаграмма распределения веса летательных аппара-
тов для доставки полезного груза на орбиту (при старте с Зем-
ли); в схемах I, П» IV все двигатели работают на жидком водо-
роде, в схемах la, Па, IVa все двигатели работают на керосине
При широком использовании ЯРД с удельным импульсом ~ 2000 с
эра ракет как летательных аппаратов для вывода полезной нагрузки
иа орбиту, по-видимому, кончится, так как главное преимущество ракет-
ных ступеней — высокая весовая отдача по топливу — потеряет свою
ценность, ибо потребный вес топлива для выхода на орбиту при
/т>2000с будет Ст.пот<0,4 (см. рис. 11.12).
Схема воздушно-космического самолета должна обеспечивать;
— получение необходимого значения аэродинамического качества
на гиперзвуковых и дозвуковых режимах полета;
— небольшие тепловые нагрузки при входе в атмосферу.
Аппарат с Лг=0 испытывает при входе в атмосферу перегрузку от
8 до 10. Увеличение аэродинамического качества всего до 0,5 позволяет
уменьшить перегрузку на всей траектории снижения до двух.
Исследования показали, что в большинстве случаев гиперзвуковое
аэродинамическое качество ВКС можно ограничить значением
ЛГг=1-2.
На рис. 11.17 показано изменение физических характеристик ВКС
в зависимости от величины Кг. Увеличение веса аппарата при повыше-
нии гиперзвукового аэродинамического качества связано с увеличением
208
отношения площади поверхности к полезному объему, с увеличением
продолжительности полета, что приводит к большим общим тепловым
нагрузкам.
Приемлемые посадочные характеристики ВКС обеспечиваются при
величине дозвукового аэродинамического качества не менее четырех.
В настоящее время проводятся широкие исследования аэродинами-
ческих форм маневренных воз-
душно-космических аппаратов
многократного применения,
при этом особое внимание уде-
ляется аппаратам с несущим
корпусом. Основным преиму-
ществом таких аппаратов (в
сравнении с крылатыми) явля-
ется менее сложное решение
проблемы теплоизоляции кон-
струкции. Для улучшения до-
звуковых и посадочных харак-
теристик ВКС с несущим кор-
пусом предлагается использо-
вать специальное крыло с до-
звуковым профилем (при М>1
крыло убирается).
Эволюция схемы ВКС по-
казана на рис. 11.18.
G г
ТЩШШс
| Охлаждение излучением |
Охлаждение уно- 1
сом массы I
Ори. посадке
требуются
вспомогатель
ные устрой-
ства.
Выполняют посадку
самостоятельно
2
3 4
Рис. 11.17. Влияние гиперзвукового аэро-
динамического качества на характеристики
ВКС
Рис 11.18. Эволюция схемы ВКС:
J~затупленный полуконус с углом раствора 60°. 2 — затуплен-
ный полуконус с углом раствора 30°, 3 — полуконус с концевы-
ми шайбами, 4 — ВКС с несущим корпусом (нижняя поверх-
ность овальная), 5 —крылатый ВКС; б — ВКС с несущим кор-
пусом (нижняя поверхность плоская)
Схема М > 10 М < 1 Схема М > 10 М< 1
1 лу - 0,5 К - 0,8 4 - 1.з К - 4
2 К - 1,2 К 2 5 КГ - 2 К - 8
3 *7-1,2 К * 4 6 *7-2 К ~ 8
§ 3. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ПАРАМЕТРОВ
ВОЗДУШНО-КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Рассмотрим основные параметры для наиболее перспективных
схем.
209
Будем считать, что оптимальные параметры соответствуют
(Gn.H)max при разгоне до VKb
На рис. 11.19 показан проект ВКС, рассчитанный на 10—12 человек.
Рис. 11.19. ВКС фирмы «Локхид», США (р1к\иок)
Аппарат многоступенчатой схемы
Схему аппарата в общем случае будут определять: самолет-иоси-
тель (сохраняемая ступень), ускорители (несохраняемые ступени) и
ВКС (сохраняемаяступень) (см. рис. 11.14, схема IV).
Стартовый вес аппарата в данном случае равен
G0=Gc., + GyI+ • • +G}m + GBKc, (11.47)
где 6с.н — вес самолета-носителя;
Су1 —вес первого ускорителя;
G^-rn — вес т-го ускорителя;
Свкс — вес ВКС;
т —число ускорителен.
Для определения оптимальных значений параметров подобного ле-
тательного аппарата необходимо ответить на два вопроса:
1) какую полезную нагрузку н до какой скорости (при данных па-
раметрах) способен разогнать самолет-носитель;
2) какая часть от этой нагрузки способна выйти на околоземную
орбиту. Другими словами, необходимо, обеспечивая максимум критерия
Сцн= 6вкс/6о, найтн минимальный стартовый вес системы, если задан
конкретный вес ВКС или, если имеется в виду конкретный самолет-но-
ситель, найти максимально возможный вес ВКС, способного выйтн на
орбиту при старте с данного самолета-носйтеля.
Введем следующие понятия и обозначения;
Gi — вес i-й ступени;
Gai — вес нагрузки, разгоняемой i-й ступенью до скорости
К= Кстг + Д Vi И ВЫСОТЫ Н = НСч i+\Hi(VCt г Н HCTi—
соответственно скорость и высота старта i-й сту-
пени; A Vi и ДЯг— дополнительные скорость и высота,
приобретаемые нагрузкой GHi за счет топлива i-й сту-
пени);
<?Ti — вес топлива i-й ступени, потребный для разгона на-
грузки весом Gtti (на величину AV< и ДЯг);
От, = —°т'—;
Gi + Ов i Gi
Для самолета-носителя будем иметь:
Си. с.н~^у1“Ь • • + т + Свкс;
ОТфС.н От с.н . 75* От,
^т.с.н — “7 7 ’ Ut,CH—
Ос.н + Он. с.н Gq Qi
210
Для первого ускорителя:
Gh. у1 —(?у2+ . • • Н-Оут + ^вкс;
7=7 _ GT.yl 4 °Т У1
М‘ Gyl+GK.yl’ Т'У1 Gy. '
Для m-ro ускорителя:
<?н. у m = <7вкс; (7т.у m — “7; ~7- ’ ^т.у m ——•
Uym + UBKC Uym
Дополнительная скорость, сообщаемая i-й ступенью разгоняемой
нагрузке, в общем случае будет равна
где Vni — идеальная скорость, которую сообщает i-я ступень нагруз-
ке GHi;
AVni — потерн скорости от действия гравитации и аэродинамиче-
ского сопротивления на участке разгона от УСтг до УСт*+ь
Легко показать, что
а следовательно, согласно уравнению (11.46), будет иметь место ра-
венство
ah
1-----) - 1-----------!—
g. + gJ A'7+av„i
. 8.84,
Из этого равенства найдем вес аппарата прн Уст<, т- е. в момент
включения двигателей i-й ступени (после отделения от i—1 ступени),
G’
Ot + Си, =-----------О,(11.48)
о*, _ 1 + ——:—
9,ШТ i
е
Так как для каждой предыдущей ступени разгоняемой нагрузкой
является сумма всех последующих ступеней, то на основании зависимо-
сти (11.48) стартовый вес многоступенчатого летательного аппарата бу-
дет равен
(11.49)
где п — число ступеней аппарата;
Л—1
знак П —означает произведение (п—1) членов;
/-1
п— 1 = m —|- 1— число «работающих» ступеней аппарата (топливо кото-
рых расходуется в процессе разгона);
<7П1Н — вес полезной нагрузки, выводимой на орбиту.
Как было принято, 6Пн=Свкс, т. е. воздушно-космический самолет
является последней ступенью многоступенчатого орбитального аппара-
211
та, причем топливо этой ступени в процессе разгона не расходуется
(скорость ViK достигается в конце работы m-го ускорителя). Если ВКС
на конечном участке траектории выходит на орбиту за счет собственно-
го топлива, то т-ii ускоритель в данном случае будет разгонять ВКС до
скорости
И-^-дУвкс.
Величина Д Уикс определяется как
ДУ вкс = 9,81Л. вкс In-z-----Д И,,, вкс» (11-50)
1 — Дбт.вкс
Д GT вкс
где Д(7т.вкс = —-г-----относительный вес топлива ВКС, расходуемо-
^вкс
го в процессе выхода на орбиту;
ДК|.вкс=/(И —пРн V > 6,5 км/с ДУ„.вкс~0.
Следует заметить, что в данной схеме (многоступенчатый аппарат)
использование топлива ВКС для разгона прн выходе на орбиту нецеле-
сообразно, так как это увеличивает вес конструкции ВКС н существен-
но снижает его маневренность в открытом космосе.
Решение задачи на оптимизацию параметров летательного аппара-
та по минимуму значения Go при заданной величине GnH сводится к ре-
шению системы rfGo/rfi'i,..., л = 0 прн известных ограничениях (здесь i —
параметр). Строгое решение этой задачи весьма громоздкое, так как
большинство переменных, определяющих величину Go, является в свою
очередь функциями искомых параметров н характеристик отдельных
ступеней летательного аппарата, например:
дил; = дип,(^,;, Д, к„ e„
A.e.„ = A.c.»(W, V, Д,, Ср, Т Н Т. Д.
Данную задачу в процессе эскизного проектирования лучше ре-
шать приближенным методом, который значительно упрощает решение
и вместе с тем дает необходимую для эскизного проектирования точ-
ность.
Сущность метода заключается в том, что в уравнении (11.49) пере-
менные фиксируются. Дело облегчается тем, что некоторые перемен-
ные с достаточной точностью можно определить на основании опыта
проектирования идентичных летательных аппаратов, другие переменные
прн отклонении от оптимума оказывают незначительную погрешность
на решение задачи в целом.
Для предварительного проектирования можно принимать
(7*у=Оч85 — 0,92 (такое значение весовой отдачи по топливу имеют
верхние ступени современных ракет-носителей); /т у— const (например,
для топлива Н2+О2, /Tyss450 с);
или Д1/У — ... = ДИУ = — 1<?ту’ ДУвь— (если часть топлива ВКС
затрачивается на разгон),
где Кету —скорость старта первого ускорителя (т. е. скорость, кото-
рую сообщает самолет-носитель разгоняемой нм нагрузке).
Приращение ДУпг=/(Уст<) берется либо нз графика на рнс. 11.11,
либо нз расчета оптимальной траектории выхода на орбиту.
212
Число всех ступеней летательного аппарата найдем, определив чис-
ло ускорителей, так как n = m+2.
Величина Gn.a будет, очевидно, тем больше, чем больший процент
будет составлять вес полезной нагрузки, выводимой на орбиту, от веса
нагрузки, разгоняемой самолетом-носителем (и соответственно меньший
процент будет составлять вес ускорителей). Из этого условия и следует
определять величину т.
Критерий Gn.H можно представить как
Оп.н =Gilh(1'-Oc.h),
где
Величину Gn,H легко определить
данном случае примет вид
из уравнения
(11,49), которое в
9,81/т;
П
G*.
(11.51)
Из уравнения (11.51) можно определить, какая часть от нагрузки,
разгоняемой самолетом-носителем, способна выйти на околоземную ор-
биту.
Варьируя скоростью старта первого ускорителя и числом т, можно
определять соответствующие значения величины G’^.
На рис. 11.20 показано графическое решение уравнения (11.51).
Анализируя полученную зависимость, можно сделать вывод: для
реальных значений параметров ускорителей увеличение числа т>2
практически к увеличению критерия Сп.н не приводит, поэтому для мно-
гоступенчатого орбитального аппарата следует принимать число ускори-
телей т=2 н число всех ступеней, следовательно, п = 4.
Уравнение (11.49), определяющее стартовый вес многоступенчатого
аппарата, в таком случае примет вид
6/ВКС-
(11.52)
Очевидно, для каждого значения ^ст.у, существует оптимальное зна-
чение Уст.уа определяющее оптимальное распределение суммарного веса
ускорителей (между первым и вторым ускорителем). Однако погреш-
ность в определение максимума критерия Сп.н, получаемая при замене
оптимального значения Уст.у рекомендуемой величиной
V'er.y. = V'er.y, + AVS, ,
будет незначительна (рнс. 11.21).
213
Таким образом, решая поставленную задачу предлагаемым прибли-
женным методом, можно найти с достаточной точностью оптимальную
величину Go н ряд важных параметров орбитального аппарата, не при-
бегая к нахождению экстремума функции многих переменных.
Определяя оптимальный вес i-й ступени из уравнения (11.48)
/;----------------------MG»,, (11.53)
О". — 1 + --------- I
I т! т I
\ , 9'814j /
найдем веса отдельных ступеней многоступенчатого летательного аппа-
рата.
Рис. 11.20. Влияние числа ускорителей и скоро-
сти старта с самолета-носителя на величину
С'п.н. (топливо Нг+О2, Ут,у.=450 с):
--------------------G * у •= 0,9;
------" 0-85
Рис. 11,21. Влияние скорости стар-
та второго ускорителя на величи-
ну G'n.a.-
opt
х -VCT.y2
Если задан вес полезной нагрузки Gbkc выводимой на орбиту, и
требуется определить минимальный стартовый вес Go, то последователь-
ность определения веса отдельных ступеней должна быть такой: вес вто-
рого ускорителя; вес первого ускорителя; вес самолета-носителя.
Из уравнения (11.53) получим:
— вес второго ускорителя
Оу2=Л-----------2^*—i---------Левке; (11.54)
I - 1 + ДИу.-М?,,.,, I
— вес первого ускорителя
оу1=Л--------------------1 W+Obkc);
I °,.yl - 1 + ДИУ1+А|/„.~ I
\ . 9'81VyI /
(11.55)
214
— вес самолета-носителя
(<?у1 Н~ ^у2 Н" 0вкс)-
(11.56)
Из уравнения (11.56) можно определить, какую нагрузку н до какой
скорости способен разогнать самолет-носитель
Он.с.н
Gh.c
(11.57)
Чтобы решить систему уравнения (11.52)—(11.57), необходимо
знать величину GT н величину JT для всех работающих ступеней. Если
для ускорителей величина б?т.у определяется только совершенством
конструкции и ее возможное значение фактически известно (это весовая
отдача по топливу верхних ступеней современных многоступенчатых
ракет), то для самолета-носителя величину От.с.н=С?т>с>н/С?с>н опреде-
лить на этапе эскизного проектирования значительно сложнее. Необхо-
димый вес топлива в данном случае будет зависеть (кроме совершенст-
ва конструкции) от характеристик силовой установки, от максимальной
скорости полета, от параллакса орбитьц_от условий взлета и т. д. Поэто-
му окончательное значение величины (Л.с.кможно установить только в
результате рабочего проектирования.
Точно также обстоит дело и с удельным импульсом по топливу. Для
силовой установки с ЖРД величина JT=const, а ее значение для различ-
ных топлив известно. Для силовой установки самолета-носителя с ВРД
величина 7Т.С.Н в приведенных уравнениях не является истинным удель-
ным импульсом по топливу для ВРД. В данном случае /т.с.н — потреб-
ный условный импульс ВРД, т. е. это удельный импульс условного ЖРД,
который, выполняя ту же работу, израсходовал бы такое же количество
топлива (по весу), что н ВРД. Значения потребного истинного и услов-
ного удельных импульсов ВРД не совпадают нз-за различной величины
•оптимальной тяговооруженности самолета с ВРД н ЖРД. Истинный
удельный нмпульс ВРД, определяемый как
. 3600
А.врд = *~ ,
ср
.должен быть значительно больше величины Д.сп, чтобы компенсировать
большой вес ВРД. _
В период предварительного проектирования значения (7т.с.к и Дс.в
•можно найти, определив относительный вес топлива, потребный для раз-
гона н набора высоты, т. е. величину б?т>с>н = (7т>с>н/б?0.
С достаточной для эскизного проекта точностью
(Яст.у1 + Ует.у1/2г)срст РаК„
1300VCT,yl Р<зКС1 — 1
(11.58)
где Яст.л и Уст.у! — высота н скорость старта первого ускорителя соот-
ветственно в м и м/с;
Ср.ст — удельный расход топлива двигателями самолета-
носителя в момент старта первого ускорителя в
кгс/кгс.ч;
215
— стартовая (взлетная) тяговооруженность летатель-
ного аппарата;
Кст — аэродинамическое качество аппарата (самолет с
разгоняемой нагрузкой) в момент старта первого
ускорителя.
Для предварительного (нли дипломного) проектирования можно
воспользоваться данными рис. 11.22.
Рис. 11.22. Зависимость величин Лет и <гр ст. от числа М
Величину (7т.с.я найдем, решая уравнение весового баланса
5т*.е.» = - °Т С , (11.59)
^с.н.пуст Ч* @1 с.н
Gc н.пуст
где Gc н.пуст z. ,
Go
Gc н.пуст — вес самолета-носителя без разгоняемой нагрузки и без
топлива, затраченного на разгон до Уст.уь
Для тяжелых сверхзвуковых и гиперзвуковых самолетов
Ос.н.1„ст=0,3-0,4.
Потребный условный импульс ВРД самолета-носителя легко опреде-
лить из уравнения (11.46), зная величину Ет.сль
9,81 In----=;-
1-GTCH
Определив таким образом для всех ступеней летательного аппарата
величины Ст и JT, можно решить уравнения (11.52) — (11.57).
На рис. 11.23 и 11.24 показано влияние скорости старта первого ус-
% GH.e.H 7=Г GBKC
корителя иа величину Ся. с.« = —~— и Опн=——— (для рекомендо-
Gq g0
ванного выше диапазона характеристик самолета-носителя и ускорите-
лей) .
Уравнения (11.52) — (11.57) для рассматриваемой схемы летатель-
ного аппарата позволяют определить оптимальную скорость разгона с
помощью самолета-носителя (скорость старта первого ускорителя):
216
для криогенного топлива Mopt = 8—10;
для углеводородного топлива Mopt=4—6.
Вес полезной нагрузки. Важнейшим фактором при проектировании
орбитального летательного аппарата является, очевидно, вес истинной
полезной нагрузки, выводимой на орбиту.
Если под полезной нагрузкой ВКС понимать вес космонавтов и
транспортируемого груза, то величину £а.ивкс=6а.ивкс/6овкс можно
определить, пользуясь уравнением весового баланса
С?п.н вкс= 1 — (Gbkc пуст 4-Gt вкс)>
где Овкс1гУСт = Овкс„уст/Оо вкс—относительный вес пустого ВКС (без
нагрузки и топлива);
GT bkc = Gt bkc/Gq вкс— относительный вес Полного запаса топ-
лива ВКС;
_ вкс—вес полностью заправленного ВКС.
На величину Сп.нвкс существенное влияние оказывает требование к
Рис. 11.23. Зависимость относитель-
ного веса нагрузки, разгоняемой са-
молетом-носителем с ВРД, от скоро-
сти разгона:
а — двигатели работают на водороде, б —
двигатели работают на керосине
Сп и
74----
0 2 4 6 8 10 12 Мст.у;
2
Рис. 11.24. Зависимость относи-
тельного веса полезной нагрузки,
выводимой на орбиту, от скорости
старта первого ускорителя:
а — двигатели всех ступеней работают
на водороде; б — двигатели самолета-
носителя работают на керосине, двига-
тели ускорителей — на водороде
маневренности на орбите (необходимый запас топлива для маневра) и
требование к маневренности в атмосфере на гнперзвуковых скоростях
(так как от величины гиперзвукового аэродинамического качества
зависит вес конструкции ВКС).
При проектировании ВКС (в первом приближении) можно иметь в
виду следующие значения весовых характеристик (см. табл. 11.2).
На рис. 11.25 показана величина Gh.hbkc в зависимости от гиперзву-
кового аэродинамического качества аппарата.
Вес топлива. Полный вес топлива отдельной (i-й) ступени в общем
случае будет определяться как сумма
GTs = GT.p-J- От.м4- От.в + ^т.и .з,
где GT,p=GT.i — вес топлива, потребный для разгона нагрузки Gai (на
величину AVi и ДЯг);
6т,м — вес топлива, потребный для выполнения маневра;
Gt.b — вес топлива для возврата на базу;
6т.н.з — навигационный запас топлива.
217
Рассмотрим составляющие части полного запаса топлива для от-
дельных ступеней многоступенчатого орбитального аппарата.
Таблица 11.2
Весовые характеристики ВКС
Относительный вес
1,0
Кг = 2,3
Конструкция (с тепло-
изоляцией), оборудова-
ние, системы
Двигательная уста-
новка
Шасси
Управление (аэроди-
намическое)
Управление (газо-
струйное)
Топливо
Полезная нагрузка
(космонавты и грузы)
0,52—0,37 0,55—0,41
0,015—0,03
0,02—0,035
0,015—0,02
0,01—0,015
0,30—0,35
0,12—0,181 0,09—0,14
Зная стартовые веса отдельных ступеней и величину (7Т /, найдем
вес топлива, потребный для разгона нагрузки Gni:
G^G^G,.
Практически все топливо ускорителей будет расходоваться на уве-
личение энергии разгоняемой
Рис. 11.25. Зависимость относи-
тельного веса полезной нагрузки
ВКС от гиперзвукового аэродина-
нагрузки, поэтому для ускорителей как
одноразовых ступеней б»м+бт»+
+ Gt н.з = 0-
Топливо, потребное самолету-но-
сителю с ВРД для выполнения манев-
ров после запуска нагрузки и для воз-
врата на аэродром вылета в первом
приближении, равно (топливо — водо-
РОД)
<?т.м+ ~ (0,02-0,03) Ос.„.
Если в процессе выхода на орбиту
топливо ВКС не расходуется, то пол-
ный вес топлива ВКС будет равен
мического качества
Ст.вкс = С?т.м+ С?т.в + б?т.н.з-
Вес топлива, потребный для выполнения маневра в космосе, сущест-
венно зависит от вида маневра, который в свою очередь определяется ве-
личиной AVM — изменением вектора скорости. Соотношение между ве-
личиной AVM н потребным весом топлива можно получить из уравнения
(11.45):
О,.и = ОвкС/1----------------Y (11.61)
I *м I
I ^9,8IJT.BKC J
Здесь бвкс — начальный вес аппарата на орбите (перед маневром);
/т.вкс — удельный импульс двигателя ВКС, с помощью которого
выполняется маневр.
Представление о численном значении величины AVM и соответству-
ющем значении £т.м дает табл. 11.3, в которой показаны затраты топли-
218
ва (при /т.вкс=450 с) на увеличение высоты АН или на изменение угла
наклона А<р орбиты.
Таблица 11.3
Исходная орбита: //=200 км; Vz— Vik = 7790 м/с
Д Н в км 10 100 300 Д 1 7 15
Д VM = Д Vff в м/с 10 85 200 Д V„ = A Vr в м/с 140 950 2050
Gr. M/GBKC 0,002 0,02 0,05 Gt. m/GBKC 0,03 0,19 0,38
возврата в данном случае будет складываться из
трех
Топливо для
частей:
^т.в ^т.сх Н” ^т.стаб Н” ^т.пэс’
топлива для схода с орбиты (для создания тормозного
где 6Т.СХ — вес
импульса);
^т.стаб — топливо для стабилизации (и управления) на начальном
этапе планирования;
GT.noc— топливо для посадки на заданный аэродром.
Величина GT.CX определяется уравнением (11.61), в данном случае
необходимо иметь АУм=АКт=30—70 м/с (см. § 2).
В период предварительного проектирования ВКС можно принимать:
^т.стаб ~ (0,015 — 0,025) Go вкс!
GT.nnc^ (0,015-0,030) О0 икс;
Ст.н.з~(0,010-0,015)Go вкс.
Потребная тяговооруженность многоступенчатого аппарата. Стар-
товая тяговооруженность многоступенчатого летательного аппарата оп-
ределяется как отношение
Gc.h + ^Н.с.н G0
где Ро — суммарная стартовая тяга двигателей самолета-носителя.
В данном случае оптимальное_значение величины Ро Должно соот-
ветствовать максимуму критерия С?п.н- Поэтому выбирать стартовую тя-
говооруженность многоступенчатого летательного аппарата следует та-
ким образом, чтобы при прочих равных условиях получить максималь-
ное значение величины Gh.c.h, а это можно сделать, обеспечив для само-
лета-носителя МИНИМУМ СуММЫ (Gt.c.h+Сдв.у).
Так как GT.c.a=f(Pd) и бдв.у=ф(Ро), то выражая указанные вели-
чины через характеристики самолета и решая уравнение
/5н.с.Н
4Ро
получим функциональную связь оптимальной стартовой тяговооружеино-
сти с основными характеристиками самолета-носителя:
V2 ,
у ст.у!
"•У1+ 2g
(11.62)
1690 V ст у17дв^ст
где Кст и Срст — см. (11.58) и рис. 11.22;
Удв •— удельный вес двигателя силовой установки самолета-носи-
теля.
219
Стартовая тяговооруженность ускорителей и ВКС будет определять-
ся как отношение
р ~ РуХ = РуХ .
jl Gyl + GH yI GH C H
P _ P^ __ P^ . p рвкс
У2- ~n TTt----------7----- ’ ’
Gy2 + GH_ y2 GH yj GfiKC
где Pyi —стартовая тяга первого ускорителя;
Ру2 — стартовая тяга второго ускорителя;
Рвкс — стартовая тяга ВКС.
Если на ускорителях и ВКС установлены ЖРД, то тяговооружен-
ность не будет лимитироваться весом дви-
гательной установки, так как удельный
вес современных ЖРД значительно мень-
ше удельного веса ВРД
7,*жрд SC 0,05.
Рис. 11.26. Влияние стартовой
тяговооружениости первого ус-
корителя на величину
О'п.н. (Мст.у1 = 6)
7дв ВРД
Поэтому тяговооруженность ускори-
телей (не опасаясь перетяження двига-
тельной установки) следует выбирать из
условия обеспечения приемлемой пере-
грузки при разгоне и потерь скорости на
гравитацию и аэродинамическое сопро-
тивление ДКп.у, которые при прочих рав-
ных условиях будут определять величину
Оп.н.На рис. 11.26 показано влияние стар-
товой тяговооружениости первого уско-
рителя на величину (7п.н (для МСт.у1 = 6)>
В период предварительного проектирования, учитывая возможные
ограничения по перегрузкам, можно принимать
Рвкс-1,5-2,0.
Воздушно-космический самолет с ЯРД [38]
Воздушно-космический самолет с ядерным ракетным двигателем
(ЯРД), как было показано выше, может выйти на орбиту вокруг Земли
без помощи промежуточных ступеней-ускорителей, а при Л.ярд>2000 с и
без помощи самолета-носителя. Относительный вес топлива, потребный
для выхода на орбиту одноступенчатого ВКС, определяется уравнением
(11.46), которое в данном случае будет иметь вид
» __ GT пот ____
т ПОТ-----—--------—
^ОВКС у1к~|~аип
^9,81/т.ЯРД
(11.63)
Здесь Gqbkc — стартовый вес ВКС с ЯРД (при Кст^0);
ДУП — см. рис. 11.11 (при_УСт = 0).
Влияние /т.ярд на величину Ст.пот показано на рис. 11.12 (при Мст = 0)-
Если весом полезной нагрузки, выводимой на орбиту, считать вес
многоразового летательного аппарата при ViK, то для одноступенчатого.
ВКС с ЯРД полезная нагрузка будет равна
<7ц.н=(7вКС = бД| ВКС — Фики,
220
а величина Оп.н равна
_£вкс_____ 1
G0BKC~ W
е9,81Ут.ЯРД
(11.64)
Если полезную нагрузку для одноступенчатого ВКС понимать так
же, как и для обычного самолета, то в таком случае полезная нагрузка
будет определяться уравнением весового баланса, решая которое сов-
местно с (11.63), можно найти относительный вес истинной полезной на-
грузки, выводимой на орбиту, а следовательно, и вес одноступенчатого
ВКС с ЯРД
Gn.H =-~~ = у 1 у------------(Овкс.пуст+От.резерв), (11.65)
°0ВКС Г1к+ЛУп
е9>81А.яРд
где GT.резерв=б?т—б?тл10т —относительный вес резервного топлива.
В период предварительного проектирования ВКС с ЯРД ориентиро-
вочное значение относительного веса пустого самолета (с учетом биоло-
гической защиты) можно принимать в пределах Свкс.пуст = 0,40—0,65.
Величина От.Резерв будет равна
G — м + G-г в + °т.н.з _ 77 177
'-'т.резерв— —ит.м ит.в иг.н.з'
и0 ВКС
Вес топлива для выполнения маневров в космосе в данном случае
также определяется уравнением (11.61), а_величину (?т.в и <?т.н.з в пер-
вом приближении можно принимать Gt.b+Ст.н.з—0,03—0,06. Если одно-
ступенчатый ВКС имеет комбинированную двигательную установку
(ВРД+ЯРД) и ЯРД включается при Рст#=0, то относительный вес
истинной полезной нагрузки, выводимой на орбиту, аналогично (11.65)
будет определяться так:
Сп.н
Gn.H
^овкс
(11.66)
, 9’81ут.ЯРД
Здесь От.врд = -—J---- —относительный вес топлива ВРД, потребный
Go вкс
для_выхода на высоту н скорость, при которой включается ЯРД- Величи-
на G-r.врдопределяется из уравнения (11.58), в котором момент старта
первого ускорителя в данном случае является моментом включения
ЯРД;
ДРп — соответствует величине Уст (см. рис. 11.11)
$ = б?в КС. пуст + СЛв.у.ВРД,
где 5„.у.вгд = 0«в.у.врд/бовкс~ 1,ЗтлвРовгд [коэффициент 1,3 учиты-
вает вес воздухозаборников, воздушных каналов и т. д_]. Стартовая тяго-
вооруженность Ро врд —Pq врд/Go вкс определяется уравнением (11.62).
Наконец, если ВКС имеет ЯРД с Л. ярд<2000 с и для выхода на ор-
биту требуется самолет-носитель, разгоняющий ВКС до необходимой
величины Рст, то такой летательный аппарат можно рассматривать как
многоступенчатый при /п=0. За счет собственного топлива ВКС должен
увеличить скорость на величину ДУвкс=У1к— Уст. Полный вес топлива
221
ВКС в этом случае будет равен От.вкс = б7г.Пот + ^т.м + ^т.в+^т.н.з»
где Ст.пот — вес топлива, потребный для выхода ВКС на орбиту после
старта с самолета-носителя [см. (11.46)]. Все параметры двухступенчато-
го летательного аппарата определяются приведенными выше зависимо-
стями.
Особенности выбора геометрических параметров ВКС
На геометрию ВКС оказывают одновременное влияние требования,
предъявляемые к летным характеристикам при гиперзвуковом плани-
ровании, и требования, предъявляемые к посадочным характеристикам
аппарата. Те и другие требования в конечном счете выражаются величи-
ной гиперзвукового и дозвукового аэродинамического качества (взлет-
ные характеристики в данном случае имеют меньшее значение, так как
для взлета воздушно-космического летательного аппарата целесообраз-
нее применять специальную стартовую тележку).
Рис. П.27. Схема ВКС VL-3A
Немаловажное влияние на геометрию ВКС будет оказывать аэро-
динамический нагрев при входе в плотные слои атмосферы. Решение за-
дачи требует компромиссов между геометрией при гиперзвуковых и до-
звуковых скоростях полета. Изменение гиперзвуковой конфигурации
влияет на дозвуковые характеристики и наоборот. Эта взаимозависи-
мость и несовместимость характеристик для гиперзвукового и дозвуково-
го полета существенно усложняет аэродинамическую разработку н тре-
бует зачастую применения изменяемой геометрии. Поэтому большое зна-
чение в проектировании ВКС получила идея «разделения гиперзвуковых
и дозвуковых режимов». Конфигурация аппарата, спроектированного по
такому принципу облегчает проблему аэродинамических исследований и
обеспечивает достижение дозвуковых летных характеристик, близких к
обычным самолетным.
Примером ВКС с разделенными режимами полета может служить
проект аппарата VL-3A (рис. 11.27).
Данный ВКС имеет выдвигаемые крылья для разделения гипер-
звуковых и дозвуковых режимов. Гиперзвуковое аэродинамическое каче-
ство аппарата равно Лг=2,3, прн дозвуковой скорости с выдвинутыми
крыльями К=8.
222
После завершения гиперзвуковой фазы планирования крылья частич-
но выдвигаются для управлении положением центра давления в транс-
звуковой области. При дозвуковой скорости крылья выдвигаются полно-
стью. Выдвигаются и запускаются два ТРД, обеспечивающие самолет-
ную посадку. Имеется запас топлива (иа 10 мин полета при
максимальной тяге) для управления прн заходе на посадку, «подтягива-
ния» и ухода иа второй круг. Для аварийной посадки и посадки на воду
применяется парашют. Удар при посадке с парашютом поглощается хво-
стовой частью аппарата, которая касается земли первой.
Одним нз важнейших геометрических параметров летательных ап-
паратов является удельная нагрузка на крыло нлн на несущую поверх-
ность (для аппаратов с несущим корпусом). В данном случае под несу-
щей поверхностью понимается площадь проекции аппарата в плане. Для
ВКС прн гнперзвуковом полете удельная нагрузка на несущую поверх-
ность будет обусловливаться уравнением (11.1), следовательно, величину
этого параметра, необходимую для равновесного полета (планирования)
при данной скорости на данной высоте, можно определить нз уравнения
(11.4)
31-10epV? „с,
р~--------------------------------
62 • 106 — (1/г.п ± 460 cos
(11.67)
Значения су(а) и Кг(а) даны иа рис. 11.28. Для расчета нагрузки на м2
поверхности ВКС следует принимать су, соответствующий Кгтах.
Рис. 11.28. Гиперзвуковые аэроди-
намические характеристики ВКС с
несущим корпусом при сбаланси-
рованном положении ц. т. (аппа-
рат VL-3A, V=6080 м/с; Н =
=60,8 км)
Рис. 11,29. Дозвуковые аэродинамиче-
ские характеристики ВКС с несущим
корпусом (аппарат VL-3A; 5НП =
«28,1 м2; SKP=9,7 м2):
-------------крылом;
------без крыла
Задача выбора удельной нагрузки на крыло, необходимой для полу-
чения приемлемых дозвуковых характеристик ВКС (главным образом
посадочных), не имеет принципиальных отличий от аналогичной задачи
для обычного самолета. На рис. 11.29 приводится пример дозвуковых
аэродинамических характеристик ВКС с несущнм корпусом.
На внешнюю форму ВКС существенное влияние оказывает аэро-
динамический нагрев. Удельный тепловой поток, поступающий к обшив-
ке из пограничного слоя, как известно, пропорционален местному коэф-
фициенту конвективной теплопередачи на границе воздух-обшивка
[см. уравнение (11.35)], который существенно зависит от стреловидности
тела (при увеличении стреловидности коэффициент теплопередачи резко
уменьшается, рнс. 11.30). Поэтому все выступающие в поток части ВКС
должны иметь большую стреловидность (нз этих соображений управляю-
щие поверхности, следовательно, ие должны отклоняться на большие
углы). Угол стреловидности следует принимать не менее 70—75°.
223
Коэффициент конвективной теплопередачи вблизи критической точ-
ки зависит от радиуса носовой части тела. Решая совместно уравнение,
описывающее теплопередачу путем теплоизлучения, и уравнение, описы-
вающее аэродинамический нагрев в критической точке на сфере, можно
получить приближенную зависимость, связывающую радиус носовой
части корпуса ВКС с параметрами гиперзвукового полета
_0,00019-g [(V/1000)2 + 0,6Гппв/1000]2
Г~
(11.68)
где г — радиус носовой части в м;
q — скоростной напор в невозмущенном потоке в кгс/м2; 'г
V — скорость полета в м/с;
Люв — температура внешней поверхности в °К;
е — коэффициент теплоизлучения материала носовой части.
При проектировании внешней формы ВКС обычно рассматриваются
две системы теплозащиты от аэродина-
мического нагрева — абляционная и ра-
диационная. Считается, что для аппара-
тов с Кг<1,3 преимущество в весовом от-
ношении имеет абляционная система теп-
лозащиты, тогда как для аппаратов с бо-
лее высоким значением гиперзвукового
аэродинамического качества требуется
более сложная радиационная система.
Заслуживает большого внимания комби-
нированная теплозащита, когда абляци-
онная система используется только для
защиты иижней поверхности ВКС. Съем-
ный нижний тепловой экраи, покрытый
абляционным материалом, хорошо защи-
Рис. 11.30. Зависимость коэф-
фициента теплопередачи в зоне
передней кромки от угла стре-
ловидности
щает конструкцию ВКС от высоких температур иа нижней поверхности.
Примером комбинированной системы теплозащиты может служить
система теплозащиты ВКС VL-3A (рис. 11.31 и 11.32).
Приведенные в настоящей главе рекомендации не являются, конеч-
но, исчерпывающим материалом по проектированию воздушно-космиче-
Максимальная
670 615 I 600 I температура, в °C Таллина
Ц,9Ч 0,76 1,31 теплоизоляции 6 см
7Н00°С
5,85 I 0*6 I з,и I 2,67 I Толщина теплоизоляции 6 см Толщина абляционного покрытия 6 см
5 г
1600 .1580 1380 Максимальная температура 8°0>
Рис. П.31. Система теплозащиты аппарата LV-3A (аб-
ляционное покрытие — пурпурная смесь NASA, плот-
ность i650 кгс/м3; теплоизоляция — микрокварц, плот-
ность 70 кгс/м3
224
ских самолетов. Тем не менее они позволяют в период предварительного
проектирования аппарата решать многие важные вопросы.
Например, требуется спроектировать многоступенчатый летательный
аппарат, способный доставлять на околоземную орбиту Нж 150 км
10 космонавтов и 500 кг груза (Сп.нвкс= 1-J0 кгс). Последняя ступень
аппарата — ВКС должна увеличивать высоту орбиты до 500 км и изме-
нять наклонение орбиты на угол до 7°. При возврате, в процессе гипер-
звукового планирования, ВКС должен пролетать ие менее 6500 км и
совершать боковой маневр, достигая при этом боковую дальность
^п.бок=40"> км. Максимальная равновесная температура на поверхности
ВКС, ие защищенной абляционным покрытием, не должна превышать
1400° С, а время действия температуры ^>1000° С ие должно превышать
Рис. 11.32. Конструкция ВКС VL-3A
70 мни. Требуется определить оптимальные значения основных парамет-
ров и летных характеристик ВКС и многоступенчатого летательного
аппарата в целом. В качестве горючего в дв, гателях всех ступеней при-
нять жидкий водород.
Используя приведенные в данной главе формулы и графические за-
висимости, находим:
а) воздушно-космический самолет
^овкс~12 тс; Ои.я. вкс = ОЛ 25; Рвкр=20 тс;
От.вкс=3520 кгс; Gt.bkg~0,3; 5вкс—52 м2
Рвкс=230 кгс/м2; ЛГг = 2; VjK = 7810 м/с;
д1^= 109,4 м/с; ДУТ=954 м/с;
б) вт? ~й ускоритель
Оу2= 11,9 тс; Ру2=41 тс; GT_y2= 10,7 тс;
VCTty2=5255 м/с; AVy2=2555 м/с;
в) первый ускоритель
Gyl=29,2 тс; Ру1=90 тс; Gr.yl=24,9 тс;
VCT.yl=2700 м/с; Д^у1=2555 м/с;
г) гиперзвуковой самолет-носитель
<А.,.=77,7 т; Рсн=Р0=76 тс; О?.с.н=33,8 тс;
От.е..=0,244; О,’.с.и=0,411; JT.C.,= 1422 с; М„ах=9;
8-1062
225
д) многоступенчатый летательный аппарат
Gq = 130,8 тс (при m=l; G0=175 тс);
н==4?вкс/С0==О,О917; Ро = О,58 и т. д.
Раздел III
КОМПОНОВКА И ЦЕНТРОВКА САМОЛЕТА
Глава XII
КОМПОНОВКА И ЦЕНТРОВКА САМОЛЕТА, ОБЩИЕ ВИДЫ
САМОЛЕТА
После определения полного веса самолета во втором приближении
Gq" следует определять основные размеры (размах, длина) н параметры
(удлинение, сужение) его частей. Зная основные размеры и параметры
частей самолета, по весовым формулам для агрегатов самолета уточня-
ют все конструкции и определяют полный вес самолета третьего прибли-
жения Gq" .
Затем определяют основные размеры и параметры, уточняют вес
Gq", после чего приступают к компоновке самолета, т. е. к взаимной про-
странственной увязке частей самолета, их формы и конструктивно-сило-
вой схемы с размещением двигателей, экипажа, основных грузов и снаря-
жения. Компоновку начинают после того, как сделай чертеж крыла в
плане, определены величина и положение средней аэродинамической хор-
ды, а также величина плеча горизонтального оперения Lr.o относительно
центра тяжести самолета, положение которого в начале проектирования
обычно принимают на расстоянии (0,25—0,35) Ьа от носка средней аэро-
динамической хорды.
Определение величии Ьа и Дго
Величина средней аэродинамической хорды крыла Ьа определяется
в виде
1/2
(12.1)
о
Положение средней
аэродинамической хорды по оси Oxi самолета
определяется обычно расстоянием от ее носка
до перпендикуляра к оси самолета, проведен-
ного из носка корневой хорды (рис. 12.1).
Это расстояние можно вычислить по фор-
муле
1/2
(12-2)
о
Рис. i2.1. К определению в настоящее время, как правило, приме-
величин &сах н хсдх няются трапециевидные или треугольные
’ крылья. Для трапециевидных крыльев с лю-
бой стреловидностью удобны следующие формулы:
’5(3+’?)
(12.3)
226 ’
Ьл
где у=——сужение крыла;
bQ—корневая хорда (по оси симметрии самолета);
bt— концевая хорда;
1 ''] + 2
ХР.у =-----Хц
САХ 3 7) + 1
(12.4)
где Х\ — расстояние от носка концевой хорды до перпендикуляра к оси
симметрии, проведенного через носок корневой хорды.
Для треугольных крыльев с задней кромкой, перпендикулярной оси
симметрии, формулы (12.3) и (12.4) упрощаются:
(12'5)
:СЛХ— 3 3 »0-
(12.6)
Плечо горизонтального оперения относительно центра тяжести само-
лета Lr.o определяют как расстояние по прямой, параллельной строитель-
ной горизонтали фюзеляжа, от центра тяжести самолета до 0,25 (для до-
звуковых самолетов) или до 0,5 (для сверхзвуковых самолетов) средней
геометрической хорды горизонтального оперения (рис. 12.2).
Величина Lr.o в значитель-
ной степени влияет на харак-
теристики устойчивости и уп-
равляемости самолета. При
увеличении Lr.o существенно
увеличивается устойчивость и
продольное демпфирование
самолета. Однако чрезмерное
увеличение Lr.o ведет к резко-
му снижению изгнбной и кру-
тильной жесткости хвостовой
части фюзеляжа, что способ-
ствует возникновению высоко-
частотных колебаний хвостово-
го оперения и ухудшению (осо-
бенно на сверхзвуковых скоро-
стях) характеристик устойчи-
вости и управляемости само-
Рис. 12.2. К определению плеча горизонталь-
ного оперения Lr о и L'r.o
лета.
Многолетний практический опыт, накопленный инженерами, проек-
тирующими самолеты, позволил выработать рациональные пределы для
величины Lro, удовлетворяющие требованиям устойчивости, управляе-
мости и жесткости фюзеляжа.
Заметим только, что для больших тяжелых самолетов, у которых из-
за особенностей компоновки приходится принимать относительно боль-
шие длины фюзеляжа, значение Lr.Ot как правило, несколько больше, для
малых самолетов — меньше.
Более подробно выбор параметров оперения рассмотрен нами в
гл. XVII.
Необходимо ясно представлять, что предварительно выбранная ве-
личина Lro в процессе компоновки и дальнейшего проектирования всегда
уточняется, причем первоначальная величина может измениться в связи
со следующими причинами:
а) компоновочными соображениями и условиями размещения в
фюзеляже грузов и элементов оборудования;
б) соображениями, вытекающими из условий центровки (см.
гл: XVII).
8*
227
Аэродинамический момент горизонтального оперения относительно
центра тяжести самолета может быть выражен таким образом:
Мгг,о = 9СУе^аг.о$г,о£г'О, (12w7)
где аЛ0 — угол атаки оперения
Из выражения видно, что при заданной величине ЛГ2по и уменьше-
нии Lr.o площадь оперения Sr.o при прочих равных условиях должна уве-
личиваться и, наоборот, при увеличении Lro площадь Sro должна умень-
шаться. С увеличением £г.о вес конструкции оперения будет уменьшать-
ся. При уменьшении же Lr.o и, следовательно, увеличении Sr.o вес
фюзеляжа будет уменьшаться, а вес конструкции оперения будет увели-
чиваться. С другой стороны, при изменении величины £г.о и Sr.o будет из-
меняться величина аэродинамического сопротивления как фюзеляжа,
так и оперения. Очевидно, можно подобрать такую комбинацию величин
Lr.o и Sr.o (при заданном значении -М* ), при которой тяга Рф+г.о,
потребная на преодоление аэродинамического сопротивления фюзеляжа
и оперения и на поддержание в воздухе веса их конструкции будет ми-
нимальная.
Расчеты показывают, что в пределах рекомендуемых величин
Ьг.о/^а = 1,5—3,5 величина тягн Рф+г.о близка к наименьшей и изменяется
очень мало.
Компоновка самолета
При компоновке самолета окончательно определяется взаимное рас-
положение его основных частей (крыла, фюзеляжа и оперения), а также
определяются: схема силовой установки, схема шасси, схема размеще-
ния основных грузов, пассажиров, экипажа, схема размещения оружия
и боеприпасов, схема размещения специального оборудования, радио-
оборудования, радиолокационного оборудования и основных антени,
схема средств спасения экипажа. При этом должны быть учтены усло-
вия эксплуатации силовой установки, различных агрегатов и аппарату-
ры оборудования и вооружения, а также их взаимное влияние. При
компоновке пассажирских самолетов необходимо учитывать также усло-
вия комфорта и безопасности пассажиров.
В процессе компоновку решаются вопросы выбора конструктивно-
силовой схемы, вопросы передачи и увязки сил, идущих с одного агре-
гата самолета на другой, а также рассматривается передача сил от раз-
личных грузов на конструкцию агрегата.
Конструктору следует хорошо уясиить себе, что от тех или других
решений при компоновке самолета зависят вес и технологичность его
конструкции, эксплуатационные свойства и даже аэродинамические ха-
рактеристики.
Компоновка производится с помощью компоновочного продольного
разреза самолета, поперечных сечений и разреза в плановой проекции.
Компоновочный разрез вычерчивается обычно в крупном масштабе
(1 :2; 1 : 5; 1 : 10).
На компоновке в значительной степени сказывается:
а) выбранная схема самолета;
б) выбранные параметры крыла и фюзеляжа;
в) тип и расположение силовой установки;
г) относительный вес запаса топлива;
д) требования по размещению топлива, основных грузов и пасса-
жиров.
При компоновке очень важно соблюдать требования к такому раз-
мещению расходуемых в полете грузов, при котором не было бы большой
разбежки центровки по мере расходования.
228
Размещение топлива в крыле приводит к разгрузке крыла и умень-
шению коэффициента разгрузки <р=1---------[см. также гл. II, фор-
0, IGqZ
мула (2.26)],
где 2Мс.г—сумма моментов грузов в крыле относительно оси само-
лета;
I — размах крыла,
что приводит, как известно, к уменьшению относительного веса конст-
рукции крыла. Поэтому при компоновке следует возможно большую
часть топлива размещать в крыле. Наибольший относительный вес топ-
лива, размещенного в крыле, будет
у=? _ 850пс VGo
*А.кр —
(12.8)
___ GT Кр
где От кр= —----относительный вес топлива в крыле;
Go
n=Sf/S—отношение площади занятой крыльевыми баками S'
ко всей площади крыла S.
Относительный вес топлива, размещаемого в фюзеляже, будет
От.ф°т —
Важнейшие требования, которые должны
выполняться при разработке компоновки
самолета
1. Центровка * * самолета должна быть такой, чтобы значение
mcv=x7—хР было минимальным на сверхзвуковой скорости, а на до-
звуковой скорости обеспечивалась продольная статическая устойчи-
вость. »
2. При компоновке возможно большую часть топлива следует раз-
мещать в крыле для получения разгрузки и уменьшения GK.
3. Запас топлива нужно размещать так, чтобы его центр тяжести
был возможно ближе к центру тяжести самолета без топлива.
4. Двигатели нужно располагать таким образом, чтобы направле-
ние их силы тяги проходило вблизи центра тяжести и центра давления
всех лобовых сил. Это будет способствовать уменьшению влияния тяги
на устойчивость самолета и в некоторых случаях уменьшит потери на
балансировку.
5. Крыло должно быть расположено так, чтобы центр тяжести са-
молета располагался на 0,25—0,35 величины Ь& от носка средней аэро-
динамической хорды.
6. Величина Lr0 в соответствии со схемой самолета должна укла-
дываться в диапазоне
Гг.0=(1,2 —3,5)6а **.
7. Разбег центровок*** желательно иметь в пределах, не превы-
шающих
е=(0,1-0,2)6а.
* В практике под словом «центровка» понимают выраженное в процентах или
долях САХ отношение расстояния от спроецированного на плоскость симметрии носка
САХ до центра тяжести самолета х- к величине САХ — Ьа : х^=Хт!Ьа.
** Следует помнить, что от LT 0 зависят величины плеч ряда значительных по
весу элементов конструкции и грузов, расположенных в хвостовой части фюзеляжа,
а потому при компоновке нужно учитывать влияние Lr о на положение центра тяже-
сти самолета.
*** Разбегом центровок называется разница между передней и задней центров-
ками, имеющими место при нормальной эксплуатации самолета (см. гл. XVII).
229
8. Для существенного снижения веса фюзеляжа желательно, чтобы
основные силовые элементы крыла проходили неразрезанными сквозь
фюзеляж.
9. Разрабатываемая в процессе компоновки конструктивно-силовая
схема должна обеспечивать достаточно простую технологию общей н
агрегатной сборки самолета и изготовления деталей.
10. Разрабатываемая в процессе компоиовки конструктивно-сило-
вая схема должна удовлетворять требованиям наиболее удобного распо-
ложения эксплуатационных люков и разъемов, размещения оборудова-
ния, силовой установки, грузов н т. д., обеспечивающего легкий доступ
для обслуживания и ремонта.
Центровка самолета
В процессе компоновки определяется центровка самолета, т. е. рас-
считывается положение центра тяжести, причем, как было уже сказано,
одно нз условий, которому должна удовлетворять компоновка, состоит
в том, чтобы проекция центра тяжести самолета располагалась в опре-
деленном месте длины САХ крыла, спроецированной на плоскость сим-
метрии самолета.
Центровка определяется по двум осям: горизонтальной Ох и вер-
тикальной Оу. Ось Оу обычно проводят касательно к носу фюзеляжа
(рис. 12.3) или вблизи предполагаемого положения центра тяжести са-
Рис. 42.3 Расположение осей Ох и Оу
при расчете центровки самолета
(а—абсцисса носка средней аэродина-
мической хорды)
молета. Ось Ох проводят через любую точку, расположенную возможно
ниже иа чертеже боковой проекции самолета. Часто за такую точку бе-
рут ось колеса шасси в выпущенном состоянии.
Расчету центровки обязательно предшествует составление весовой
сводки или ведомости. Весовую сводку составляют на основании весо-
вых расчетов, проведенных в соответствии с требованиями, предъявляе-
мыми к самолету, ведомостей снаряжения грузов и т. д. При составле-
нии весовой сводки совершенно необходимо придерживаться строгого
порядка в расположении входящих в сводку наименований: вначале
записывают составные части конструкции самолета, затем основные
части силовой установки, наименования (по разделам) снаряжения
н т. д. (см. приложение I). Против каждого наименования записывают
соответствующий вес.
Весовая ведомость одновременно служит и центровочной ведо-
мостью, поэтому $ ией за графой веса помещается графа координат
центров тяжести грузов и затем графа статических моментов грузов
(пример центровочной ведомости — см. табл. 12.1). Координаты цент-
ров тяжести грузов замеряются по компоновочному чертежу.
Расчет центровки производится методом определения центра парал-
лельных снл. Сначала обычно делают прикидочный расчет центровки с
учетом только крупных грузов, а затем при достижении удовлетвори-
230
Таблица 12 1
Наименование G кгс м Gx кгсм У м ау кгс-м
1. Конструкция Крыло 5700 16,5 82500 2,5 12 500
Фюзеляж 4500 16,0 72 000 4,1 18 400
Горизонтальное оперение 300 30,0 9 000 4,5 1350
Вертикальное оперение 258 28,0 7 200 8,2 2 ПО
Передняя стойка (шасси выпущено) 140 4,0 560 1,5 210
Главные стойки (шасси выпущено) 1520 16,5 25 000 1,2 1 820
Передняя стойка (шасси убрано) 140 3,1 434 2,5 350
Главные стойки (шасси убрано) 1520 14,6 22200 2,0 3 040
11. Силовая установка Двигатели Средние 7200 3600 14,8 53 300 2,0 7 200
Крайние 3600 15,2 54 700 2,5 9000
111. Оборудования и т. д.*
* Подробнее список наименований весовой ведомости см. приложение I.
тельных результатов производят окончательный расчет с учетом всех
грузов, входящих в весовую сводку.
Абсциссу центра тяжести от начала координат можно найти по вы-
ражению
а ординату центра тяжести — по выражению
Центровку или относительное положение центра тяжести на САХ
(от носка) определяют в виде
где а — расстояние от начала координат до носка САХ.
Абсцисса хт определяется для следующих вариантов:
а) взлетный вес самолета;
б) вес с (0,15—0,2) 6Т без целевой нагрузки;
в) вес самолета без расходуемой нагрузки;
г) при перегрузочном весе (прн наличии такого варианта);
д) вес пустого самолета;
е) перегоночный вес самолета (для транспортных самолетов);
ж) с топливом, но без полезной нагрузки.
Варианты а), б), в), г) и е) определяются как с убранным, так и с
выпущенным шасси, варианты д) и ж) —только с выпущенным шасси.
Для самолетов с большим запасом топлива, размещаемого в фюзе-
ляже или крыле, иногда требуется определять крайнее переднее и край-
нее заднее положения центра тяжести по мере расходования топлива.
Такой расчет дает возможность судить о необходимости программного
расходования топлива с заданной последовательностью опорожнения
баков *.
* При использовании программного расходования топлива из баков обязательно
составляется график изменения центровки по мере выработки топлива из баков.
231
Ордината центра тяжести самолета ут определяется для вариантов
а) и в). Если при компоновке центр тяжести самолета ие совпал с тре-
буемым положением, то в зависимости от величины отклонения для ис-
правления центровки можно воспользоваться одним из следующим спо-
собов:
1) смещением средней аэродинамической хорды крыла: либо путем
смещения крыла по оси симметрии самолета, либо путем изменения
угла стреловидности крыла (не более чем на 2—3°);
2) перемещением грузов по оси (перекомпоновкой);
3) изменением параметров оперения.
Изменение угла стреловидности не рекомендуется при значительной
величине несовпадения. Второй способ следует применять, имея в виду
тактические и эксплуатационные требования, предъявляемые к передви-
гаемым грузам. Иногда прн значительных несовпадениях полученной н
потребной центровок перемещение грузов по оси Ох приходится соче-
тать с удлинением носа или хвоста фюзеляжа.
При стремлении получить нужную центровку путем перемещения
грузов полезно знать, насколько сдвинется центр тяжести самолета при
смещении груза Gv на заданную величину и, с другой стороны, насколь-
ко нужно переместить груз, чтобы получить заданное смещение центра
тяжести самолета.
Это можно легко решить, пользуясь двумя простыми формулами:
ёг (xQ — Xq)
дхт =------------,
где &хх—отнесенная к Ь& величина смещения центра тяжести само-
лета;
GP — относительный вес груза;
х0 — координата груза Gr в старом положении;
Хо — координата груза Gr в новом положении;
Ьа — средняя аэродинамическая хорда;
GT
Известно, что взаимное расположение центра тяжести н фокуса
самолета определяет его устойчивость. При этом для обеспечения устой-
чивости необходимо, чтобы центр тяжести располагался впереди (по по-
лету) фокуса самолета. Положение фокуса' самолета иа САХ крыла
изменяется в зависимости от сужения, удлинения и формы крыла в пла-
не *. Поэтому величина допустимой по запасу устойчивости (хт—xF)
центровки самолета в значительной степени зависит от геометрических
параметров крыла. Учитывая все сказанное, можно принимать следую-
щие диапазоны центровки (при полном весе) для современных само-
летов:
хт = 0,18—0,28 — для самолетов с прямым крылом;
хт =,0,26—0,30 — для самолетов со стреловидным крылом, т; > 2,0,
Х~40°;
Хт = 0,30—0,34 — для самолетов со стреловидным крылом, ri 2,0,
Х^55°;
хт = 0,32—0,36 — для самолетов с треугольным крылом малого уд-
линения;
хт = 0,30—0,32 — для самолетов схемы «бесхвостка» с треуголь-
ным крылом малого удлинения;
* От этих же параметров зависит и величина сдвига фокуса назад при переходе
на сверхзвуковые скорости.
232
хт = 0,10—0,15 — для самолетов схемы
«утка» с треугольным
крылом малого удли-
нения (горизонтальное
оперение ие «плаваю-
щее» прн М<1).
Пример компоновки истребителя
или легкого самолета
Перед разработкой компоновки истре-
бителя (рис. 12.4) или легкого самолета
должны быть изготовлены следующие чер-
тежи (с указанием положения центра тя-
жести) в масштабе компоновочного раз-
реза:
1) двигателя;
2) важнейшего оборудования и снаря-
жения;
3) крыла н оперения (в первом прибли-
жении) ;
4) фигуры летчика.
К этому времени должны быть извест-
ны вес двигателей и важнейшего снаряже-
ния; вес крыла и оперения должен быть из-
вестен хотя бы в первом приближении. Вес
летчика следует принимать 100 кгс для во-
енных самолетов и 80 кгс — для граждан-
ских самолетов. Вес пассажиров следует
принимать 75 кгс.
Затем необходимо:
1) определить Ь& и наметить ее поло-
жение иа чертеже разреза;
2) наметить иа Ьй желаемое положение
центра тяжести самолета;
3) иайти Дг.о и длину фюзеляжа Дф
(предварительно определяют диаметр мнде-
левого сечения фюзеляжа Д>м.ф);
4) вычертить иа разрезе и в сечениях
двигатель, фигуру летчика, оборудование,
предусмотреть необходимые объемы для
топливных баков, воздухопроводов, кабины
летчика.
Все главные грузы следует располагать
так, чтобы их общий центр тяжести пример-
но совмещался с заданным центром тяжес-
ти самолета и осталось место для силовых
элементов крыла;
5) определить количество топлива и
его центр тяжести, намечая бак и его центр
тяжести иа чертеже с соблюдением требо-
вания
е, < 0,056,;
6) определить центровку по оси Ох.
В случае удовлетворительной величины
центровки размещают оборудование и пр..
Рис. 12.4. Пример компоновки легкого самолета
233
предварительно очертив контуры обвода фюзеляжа в разрезах и сечени-
ях и наметив конструктивно-силовую схему.
При компоновке истребителя или легкого самолета должны быть
учтены следующие требования:
1. Мидель фюзеляжа должен быть минимальным.
2. ТРД должен быть размещен с обеспечением минимальной длины
выхлопной реактивной трубы с целью уменьшения веса трубы и сниже-
ния потерь, уменьшающих тягу двигателя, ио при этом должна быть
обеспечена заданная центровка. Должна быть предусмотрена возмож-
ность достаточно простой замены двигателя и осмотра его важнейших
частей.
3. Площади сечений воздуховодных каналов от воздухозаборников
к двигателю должны быть заранее определены в соответствии с расчет-
ными случаями.
Задача размещения каналов решается совместно с задачей уборки
шасси в фюзеляж и с размещением оборудования и баков для топлива,
а также с задачей выбора конструктивно-силовой схемы крыла. Разме-
щение каналов определяет их форму и технологию.
4. Топливо должно быть размещено в минимальном количестве ба-
ков вблизи центра тяжести самолета. Должна быть обеспечена возмож-
ность монтажа и демонтажа баков* (необходимо учесть наличие возду-
хопроводов, шасси, крыла и т. д.).
5. Должны быть обеспечены достаточные размеры кабины летчика
при минимальном миделе фюзеляжа н заданной площади сечеиня воз-
духопровода; соответствующий требованиям обзор летчику и хорошая
аэродинамика фонаря.
6. Должно быть обеспечено надежное аварийное покидание самоле-
та летчиком.
7. Должны быть предусмотрены достаточные объемы для разме-
щения и вместе с тем удобные подходы для обслуживания и демонтажа
различного рода оборудования и снаряжения.
8. Должны быть предусмотрены проходы для трасс управления в
хвост и крыло.
9. Необходимо обеспечить конструктивное решение крепления кры-
ла и оперения к фюзеляжу, т. е. предусмотреть достаточно мощные
шпангоуты.
Пример компоновки пассажирского самолета
Перед началом компоновки пассажирского самолета (рис. 12.5) вы-
черчивают в масштабе компоновочного разреза с указанием центра тя-
жести чертежи:
1) двигателя;
2) пассажирских кресел (вид сбоку и спереди);
3) оборудования и снаряжения буфета, салонов и туалетов;
4) крупной аппаратуры радиолокационного и пилотажного обору-
дования, радиооборудования;
5) фигур членов экипажа;
6) крыла и опереиня.
Затем производят следующие операции:
1) определяют и наносят ba на чертеже разреза;
2) иа &а намечают желательное положение центра тяжести само-
лета;
3) определяют £го и £ф;
* В случае применения мягких баков.
234
Рис. 12.5. Пример компоновки магистрального пассажирского самолета
4) вычерчивают пассажирский салон, буфет, туалеты, гардеробы и
багажные помещения; одновременно решают вопрос о размещении сило-
вых элементов крыла;
5) вычерчивают на разрезе и в сечениях кабины экипажа, двигате-
ли, оперение; при этом предусматривают объемы для топливных баков;
6) определяют количество и места размещения топлива, стремясь к
тому, чтобы разбег центровки не превышал величины
et=-~a,0,05bt.
GT
На дозвуковых самолетах топливо не должно располагаться в фю-
зеляже. На сверхзвуковых самолетах, где практически невозможно раз-
местить весь запас топлива в крыле, допускается расположение его в
фюзеляже (в центроплане крыла и в хвостовой части);
7) приближенно определяют центровку по оси Ох;
8) в случае удовлетворительного результата центровки, пользуясь
разрезами и сечениями, начинают размещение пассажирских мест, всего
оборудования и снаряжения, корректируя попутно центровку до точного
соответствия заданной величине.
При компоновке пассажирского самолета необходимо учесть следу-
ющие требования.
1. Должно быть обеспечено получение оптимального миделя фюзе-
ляжа для заданного количества пассажиров в одном поперечном ряду
(см. гл. IX). Необходима увязка расположения пассажирского салона с
центральной частью крыла, так как в полу и потолке салона ие должно
быть никаких уступов и порогов.
2. Не следует помещать людей в плоскости винтов, если на самолете
установлены винтовые двигатели.
3. Число, размеры и размещение основных и аварийных дверей и
люков должно выбираться в зависимости от числа пассажиров в соответ-
ствии с требованиями (см. гл. IX).
4. Следует стремиться разместить топливо в крыле, так как это по-
вышает безопасность, а также приводит к разгрузке крыла и уменьше-
нию веса конструкции самолета. При размещении топлива в стреловид-
ном крыле необходимо предусматривать расход топлива из баков в оп-
ределенной последовательности во избежание большого разбега
центровок. Для этой цели может применяться автомат выработки топ-
лива.
5. Размеры гардеробов, туалетов и багажных помещений (для руч-
ной клади) должны быть выбраны в соответствии с требованиями в за-
висимости от числа пассажиров (см. гл. IX). Багажные отсеки (для
крупногабаритного багажа и грузов) размещаются, как правило, под
полом пассажирского салона.
6. В носовой части фюзеляжа помимо кабины экипажа должна быть
расположена радиолокационная аппаратура.
7. При размещении экипажа и пассажиров должны быть приняты
во внимание требования, изложенные в гл. IX.
В процессе компоновки должна быть проведена увязка основных
узлов конструкции (соединение крыла с фюзеляжем, крепление стоек
шасси и ниш для их уборки и др.) с размещением пассажирской каби-
ны, багажников и пр.
Общий вид и иивелировочио-регулировочный чертеж самолета
Предварительный чертеж общего вида самолета в трех проекциях
вычерчивают обычно перед тем, как приступить к компоновке после оп-
ределения в первом приближении основных размеров и параметров са-
молета и его частей. В процессе компоновки и центровки, а также в ре-
236
зультате аэродинамического расчета н расчета устойчивости в чертеж
общего вида самолета вносят необходимые изменения и дополнения, по-
сле чего чертеж, являющийся одной из важнейших составных частей
эскизного (или дипломного) проекта, оформляется окончательно. Три
Рис. 12 6. Чертеж общего вида самолета
Рис. 12.7. Пример нивелировочно-регулировочного чертежа легкого самолета
проекции самолета на чертеже общего вида располагают обычно так,
как показано на рис. 12.6. На чертеже проставляют только основные
размеры самолета.
237
На втором этапе проектирования (разработка предварительного
проекта) составляют нивелировочно-регулировочный чертеж (рис. 12.7
и 12.8), который содержит данные по взаимному положению частей са-
молета относительно друг друга, а также в по предельным отклонениям
рулей, элеронов, стабилизатора, триммеров и т. д.
Взаимное положение частей самолета в нивелировочно-регулиро-
вочном чертеже определяется вертикальными и горизонтальными раз-
мерами между характерными точками конструкции (точки носков нер-
вюр, ось лонжерона крыла нли стабилизатора, ось стыкового болта
и т. д.) или специально намеченными на поверхности агрегата так назы-
ваемыми реперными точками и базовыми плоскостями. Указанные точки
выбирают с таким расчетом, чтобы вертикальные размеры, обычно за-
даваемые от базовой плоскости, проходящей через строительную гори-
зонталь фюзеляжа *, удобно было определять в готовом самолете с по-
мощью нивелира н рейки, а горизонтальные размеры, задаваемые меж-
* Строительная горизонталь фюзеляжа — след плоскости на боковой проекции
фюзеляжа, проходящей перпендикулярно к шпангоутам и плоскости чертежа через ось
фюзеляжа или какие-либо приметные его точки, используемый как базовая линия.
угол устаповпи стдЬиЛиаатора Jj'tiO
В-А = ?0±? D-C=10,5±<
Правый г i ЛравыйГ~~\
Левый l i Левый i i
Рис. 12.8. Пример нивелировочно-регулировочного чертежа самолета. Разница
в углах атаки крыла, измеряемая превышением соответствующих нивелиро-
вочных точек, между правым и левым крыльями не должна превышать:
2 мм между точками 9—10 п 13—14; 1 мм между точками 4—5 (прямоугольные клетки
на чертеже предназначены для замеренных значений)
234
ду указанными точками, — с помощью отвесов н измерительной ленты
(рулетки).
Заклинение крыла и стабилизатора, т. е. наклон хорды профиля кры-
ла и стабилизатора по отношению к строительной горизонтали фюзеля-
жа, задают двумя вертикальными размерами от базовой плоскости до
двух точек, намечаемых на нижней или верхней поверхности крыла или
стабилизатора в плоскости нервюры.
Отклонения рулей, элеронов и т. д. задают углами в градусах вверх
и вниз от нейтрального положения и одновременно размерами в мм,
проставляемыми между положениями какой-либо точки задней кромки
руля в нейтральном положении и в отклоненных положениях.
Все размеры и углы задают в нивелировочно-регулировочном чер-
теже с плюсовыми и минусовыми допусками (иногда только плюсовы-
ми). Величину допусков устанавливают, согласуясь с аэродинамически-
ми соображениями и учитывая технологические возможности
производства (агрегатной и общей сборки). Часто в нивелировочно-регу-
лировочном чертеже дают таблицу допусков на отклонения обводов аг-
регатов от теоретической формы. Составленный при предварительном
проектировании нивелировочно-регулировочный чертеж служит в каче-
стве исходного материала прн разработке рабочих чертежей агрегатов
самолета. Контрольным документом прн общей сборке самолета и при
приемке его отделом технического контроля служит нивелировочно-регу-
лировочный чертеж, составленный на основе рабочих чертежей.
Часть вторая
ПРОЕКТИРОВАНИЕ ЧАСТЕЙ САМОЛЕТА
В этом разделе рассматривается главным образом выбор основных
размеров и расчет веса таких агрегатов как крыло, фюзеляж, оперение
и шасси, а также основы проектирования систем управления самолетом.
Глава XIII
ОБЩИЕ ОСНОВЫ ПРОЕКТИРОВАНИЯ ЧАСТЕЙ САМОЛЕТА
При проектировании частей или агрегатов самолета должны быть
произведены следующие операции:
1) определение и выбор основных параметров и геометрических
размеров;
2) определение н увязка формы;
3) определение веса конструкции;
4) разработка конструктивно-силовой схемы.
§ 1. ОСНОВНЫЕ ПАРАМЕТРЫ ЧАСТЕЙ САМОЛЕТА
Под основными параметрами какой-либо части самолета понимают
такие геометрические или весовые соотношения, изменение которых су-
щественно отражается на аэродинамических свойствах, весе конструк-
ции самолета и т. д. Для крыла, например, основными параметрами
являются удлинение А, сужение т), площадь крыла S, относительная тол-
щина с, стреловидность %, удельная нагрузка на крыло ро> являющаяся
одновременно основным параметром всего самолета, влияющим на
его летные характеристики и т. д.
Для фюзеляжа основными параметрами являются удлинение Аф и
площадь миделевого сечения Зф.
§ 2. ОПРЕДЕЛЕНИЕ И УВЯЗКА ФОРМЫ
И ТЕОРЕТИЧЕСКИЕ ЧЕРТЕЖИ ОТДЕЛЬНЫХ ЧАСТЕЙ САМОЛЕТА
Форма той или иной части (агрегата) самолета определяется рядом
требований, а именно: аэродинамическими, компоновочными, весовыми,
эксплуатационными, тактическими и технологическими.
Так, например, стреловидная форма крыла или оперения определя-
ются необходимостью уменьшения волнового сопротивления, т. е. аэро-
динамическими требованиями. Форма фюзеляжа современного самолета
также в большей степени определяется аэродинамическими соображе-
ниями и назначением самолета. Форма крыла в плане с уширенной кор-
невой частью (рис. 13.1) может применяться, в частности, для облегче-
ния уборки шасси в крыло при его малой относительной толщине, т. е.
из компоновочных соображений. Вместе с тем такое крыло по техноло-
гичности хуже простого трапециевидного.
241
того чтобы
Рис. 13.1. Пример
влияния компоновки
самолета на форму
крыла в плане. На-
плыв крыла у корня
вызвано размещени-
ем колеса убираю-
щегося шасси в кор-
невой части крыла
Иногда форма диктуется требованиями наименьшего веса и наи-
большей жесткости конструкции, как например, в случае крыла тре-
угольной формы (в плане), позволяющей без значительного увеличения
веса и уменьшения жесткости применять очень тонкие профили.
Примером влияния эксплуатационных требований на форму агрега-
та может служить фюзеляж грузового самолета с грузовым люком в
заднем торце фюзеляжа и оперением, закрепленным на балке, являю-
щейся продолжением фюзеляжа. Иногда при выборе формы агрегата
учитывают и технологические требования. Фюзеляж круглого сечения,
например, технологически выгоднее овального фюзеляжа. Назначение н
летные .характеристики самолета обычно определяют, каким из перечис-
ленных выше требований нужно отдать предпочтение.
” " удовлетворить требования аэродинамики, формы
агрегатов и частей самолета должны быть очень
плавными, без резких изменений кривизны.
Известно, что для того, чтобы по поверхности
тела ламинарный пограничный слой имел воз-
можно большую протяженность н, следователь-
но, чтобы сопротивление трения было как можно
меньше, необходимо давать частям самолета об-
воды с постепенным, плавным нарастанием кри-
визны (рнс. 13.2, б). Неплавиые очертания с рез-
ким нарастанием кривизны (рис. 13.2, а) ведут к
образованию турбулентного пограничного слоя н
к повышенному сопротивлению трення.
То же самое требуется и для обеспечения
высоких значений критического числа МКрит н
малых значений Дихтах, определяющих величину
волновых потерь при околозвуковых скоростях.
Так, например, очертание фонаря на рнс. 13.3, а
в большей степени отвечает требованиям полета
с околозвуковой скоростью, чем очертание фонаря на рис. 13.3, б, где
могут быть повышенные местные скорости, влекущие за собой появление
скачков уплотнения и волнового сопротивления.
При сверхзвуковых скоростх (М>1,5) существенное значение имеет
степень остроконечности формы носовой части агрегата (фюзеляжа, гон-
дол, фонаря и т. д.), обеспечивающей появление косых скачков вместо
прямых (рис. 13.3, а).
Рис. ’13.3. Очертание фонаря:
а —для самолетов с околозвуковы-
ми и сверхзвуковыми скоростями;
б —только для самолетов с дозву-
ковыми скоростями
Рис. 13.2. Очертания обтекае-
мых частей самолета:
а —с повышенным сопротивлением
трения прн большой протяженности
турбулентного пограничного слоя;
б—с пониженным сопротивлением
трения при большой протяженно-
сти ламинарного пограничного слоя
Высокие требования к форме отдельных частей самолета при увяз-
ке их формы вызывают необходимость применения кривых, выражаемых
уравнениями или строящихся с помощью точных графических методов.
Под увязкой формы понимают аналитическое или графическое опреде-
242
ление координат обводов агрегата н сеченнй по ряду 'плоскостей с графи-
ческой (вычерчивание на плазе) последующей проверкой (прн надобно-
сти) взаимного соответствия обводов и сеченнй в различных проекциях.
В результате увязки оформляется теоретический чертеж, содержа-
щий все данные по контурным обводам и сечениям агрегата самолета
и полностью определяющий его форму (рис. 13.4). В теоретическом чер-
теже обычно дается и разбивка конструктивно-силовой схемы агрегата.
Теоретический чертеж служит основой для разработки конструкции агре-
гата, разработки чертежей приспособлений н изготовления шаблонов.
Рис. 13.4. Пример теоретического чертежа
К увязке формы агрегата приступают после того, как установлены
его основные размеры н очерчены хотя бы приблизительно обводы в бо-
ковой и плановой проекциях.
Увязка формы таких агрегатов, как фюзеляж и гондола, может
быть произведена одним нз следующих способов:
1) графическим способов батоксов н горизонталей;
2) графо-аналнтнческнм способом;
3) аналитическим способом.
Ось сипнгтрии и плос
кость нулевого famoj/co
г Строитель
' нал гори
зонталь
Шпангоуты
Нулевой г НосоЬая
оатокс Ьатоксы часть
Нулевой Гатокс-
Следы
г- л плоскостей
соковая проекция горизонталей..
Шпангоуты ^олуш.ироты/Горизонтали
Хвостова.»
часть
п о шпанго-
Ппрновая проекция уть/
Следы плоскостей.//Эпеора сов не-
далпоксов —г щечных сече-
ний
Рис. 13.5. Увязка формы фюзеляжа графическим способом батоксов
и горизонталей
Графический способ батоксов н горизонталей — наименее совершен-
ный, так как отличается небольшой точностью н значительной трудоем-
костью. Этот способ основан на методах начертательной геометрии.
Обводы агрегата, форму которого следует увязать (например, фюзеляж),
вычерчивают в боковой н плановой проекциях. Затем приступают к увяз-
ке с помощью эпюры совмещенных сеченнй (рнс. 13.5), эпюр линии ба-
токсов на боковой проекции н линии горизонталей на плановой проек-
243
ции. Процесс увязки состоит в том, что на эпюре совмещенных сечений
откладывают по вертикальной и горизонтальной осям точки, определяе-
мые обводами в боковой и горизонтальной проекциях (нулевыми баток-
сами и полуширотами), а затем эти точки соединяют кривыми, дающими
обводы шпангоутов. Одновременно в боковой и плановой проекциях
строят линии батоксов и горизонталей.
Графический способ батоксов и горизонталей для увязки формы
скоростных самолетов вследствие своей неточности почти ие применяет-
ся. Более точен графический способ, основанный иа построении кривых
второго порядка, вытекающий из положений проективной геометрии
(теорема Паскаля). Для построения кривой второго порядка необходи-
мо, чтобы были заданы три точки, например А, В, С (рис. 13.6) и так на-
зываемый дискриминант кривой /= -^—-,ED — медиана хорды АС,
Увязка с помощью этого графического способа начинается с того же,
с чего начинается увязка с помощью
способа батоксов и горизонталей —
в боковой и плановой проекциях
очерчивают на глаз линии нулевого
батокса и полушироты. Каждую из
этих линий разбивают на отрезки
кривых. Используя на каждом от-
резке кривой по три точки АВС н
задаваясь дискриминантом f, стро-
ят кривые второго порядка, близкие
к кривым, очерченным на глаз. По-
лучив таким образом линии нулево-
го батокса и полуширот, начинают
Рис. 13.6. Построение кривой второго
порядка, заданной точками Л, Д С
и дискриминантом f=BDjED
аналогично предыдущему увязку
поперечных сечений (шпангоутов).
Графо-аналитический способ увязки основан на вычислении коорди-
нат кривых второго порядка с использованием так называемого графика
a m. m.o d 0,20,^0,50,3 с
Рис. 13.7. Единичная кривая
второго порядка. Координаты
даны в относительных величи-
нах (*, у)
Рис. 13.8. К определению координат
точек кривой второго порядка, задан-
ной точками Д, В, С и дискриминан-
том f=BD/ED
единичных кривых, аффинно соответствующих искомым кривым*. Гра-
фик единичных кривых второго порядка (рис. 13.7) вычерчивают в отно-
сительных прямоугольных координатах для ряда «стандартных» дискри-
* График единичных кривых вычерчивается таким образом, чтобы медиана хорды
была перпендикулярна к хорде ас (рис. 13.7). Всякая кривая, у которой медиана не-
перпендикулярна хорде, но которая имеет величину дискриминанта J, равную дискри-
минанту единичной кривой, будет аффинно соответствовать единичной кривой. При
аффинном соответствии кривых сохраняется порядок кривых и сохраняется отношение
между хордами, проведенными через соответственные точки, а также отношение между
отрезками хорд, отсекаемыми какой-либо хордой.
244
мннантов, например 0,30; 0,31; 0,32 и т. д., до значения, определяемого
потребностью, причем за осн принимаются стягивающая кривую хорда
ас н медиана ed.
Координаты кривой второго порядка определяют следующим обра-
зом. На чертеже увязки наносят оси Ох и Оу (рис. 13.8), относительно ко-
торых замеряют координаты заданных точек А, С и Е н точки В, поло-
жение которой можно определить по заданному дискриминанту f.
Ордината некоторой точки К с абсциссой х кривой АВС выразится,
очевидно, так:
У=Ул+1х~ ^)tga+l*m4,
где a — угол наклона хорды АС к оси 0х\
mk— отрезок, взятый по графику единичной кривой (см. рис. 13.7);
[Л — масштабный множитель для перехода от единичной кривой и
увязочной кривой.
Отрезок mk можно найтн, отложив от точки d (начало координат
единичной кривой) отрезок
dm =
DM
~DC
х xd
ХС~ХА
и отрезок
Если соединить то и е прямой и провести прямую, параллельную
ето через точку т, соответствующую точке М увязочного чертежа, то
можно замерить величину отрезка mk.
Масштабный множитель р, определяют по отношению
ето
где ЕМо — замеряют на увязочном чертеже в мм, а ето — в долях еди-
ницы чертежа единичной кривой (за единицу принимают обычно отре-
зок de, равный отрезку ed).
Можно также найти отрезок ЕМ0 по формуле
ЕМ„= Уе- [УА -(ХЕ~хл) tg “!>
а етй по формуле
em0 = V 1 + (dm0)2.
Этим способом определяют ординаты кривых — нулевых батоксов,
полуширот и шпангоутов.
Аналитический способ увязки формы состоит в том, что кри-
вые нулевых батокосов, полушнрот и шпангоутов задают уравнениями,
по которым и вычисляют все необходимые координаты, определяющие
форму агрегата. Очень часто для увязки кривых шпангоутов используют
уравнения окружности или эллипса.
Приведенные выше способы целесообразны для увязки формы таких
агрегатов, как фюзеляж, гондолы и т. д. Увязку формы агрегатов, подоб-
ных крылу, оперению и т. д., обычно производят способами, основанны-
ми на свойствах конических поверхностей. Увязка формы крыльев и опе-
рения, трапециевидных в плане, довольно проста и может быть произве-
дена графическим или аналитическим способами. Для увязки должны
быть заданы: форма крыла в плане, разбивка нервюр, профили крыла у
245
корня и на конце крыла, профили промежуточные, если форма крыла
образуется не одним илн двумя профилями, и длины переходных зон (от
одного профиля к другому).
По каждому заданному профилю должны быть известны: семейство,
хорда и относительная толщина.
Графический способ увязки основан на- построении эпюры
совмещенных сечений (рис. 13.9) На эпюре вычерчивают корневой про-
филь и концевой профиль (в простейшем случае) таким образом, чтобы
плоскости нервюр были параллельны плоскости эпюры. После этого про-
Рис. 13,9, К определению ординат промежуточного про-
филя крыла или оперения
водят линии равных долей (равных процентов) хорды, т. е. образующие
конической поверхности крыла. Линии равных процентов и соответству-
ющие ординаты корневого и концевого профилей составляют трапецию,
поэтому очень легко определить ординаты всех профилей, расположен-
ные на том же относительном расстоянии от их носков, что и ординаты
корневого и концевого профилей.
Все линии равных процентов хорды делят пропорционально расстоя-
нию между нервюрами и через полученные таким образом точки прово-
дят главные кривые промежуточных профилей. Графический способ ма-
лоупотребителен вследствие недостаточной точности получаемых резуль-
татов,
При аналитическом способе используются геометрические свойства
трапеций, составленных образующими и ординатами корневого н кон-
цевого профилей, при этом все искомые размеры определяются расчетом.
Обычно определяют верхнюю (t/B) и нижнюю (i/H) ^ординаты в отдель-
ности.
Результаты заносят в таблицы. Ординаты определяют по формуле
_____ 2д; , / . 2а1 \
//в! — i/в.кн — I ^В.кр( 1 1 [’
где Ув.кн — ордината концевого профиля;
#в,кр — ордината корневого профиля;
ai — расстояние нервюры от корня.
§ 3. ОПРЕДЕЛЕНИЕ ВЕСА КОНСТРУКЦИИ АГРЕГАТА
В современном машиностроении при проектировании машин (за ис-
ключением специальных случаев) большое внимание уделяется достиже-
нию возможно меньшего веса конструкции.
В самолетостроении задача получения минимального веса конструк-
ции приобретает особое важное значение, так как увеличение веса конст-
рукции свыше некоторого, возможного при заданных условиях, приводит
к завышению полного веса Go, что ухудшает летные данные самолета или
ведет к уменьшению веса нагрузки, вследствие чего ухудшаются эксплуа-
тационно-технические свойства.
246
Таким образом, для получения хороших летных, н эксплуатационно-
технических данных самолета конструктор должен стремиться к получе-
нию наименьшего возможного веса конструкции проектируемого самоле-
та. Следует помнить, что минимальный вес конструкции агрегата, а
следовательно, и самолета, получается благодаря тщательному проекти-
рованию не только ответственных сильнонагруженных элементов, но так-
же и неответственных узлов и деталей, которых на самолете имеется до-
статочно большое количество и вес которых составляет ощутимую долю
•ст веса всей конструкции.
Прн завышении полного веса Go в результате перетяжеления конст-
рукции уменьшается тяговооруженность Ро и соответственно увеличива-
ется удельная нагрузка на крыло Ро*. Это приводит к ухудшению летных
Рис. 13.10. Влияние завышенно-
го веса самолета Go на Vmax
при перетяжелении конструк-
ции при Pc.y. = const, S=const:
/ — околозвуковой самолет (М<1);
2 — сверхзвуковой самолет
Рис. 13.11. Влияние
завышенного веса са-
молета Go на //пот
при Pc.y = const
Рис. 13.12. Влияние
завышенного веса са-
молета Go при пере-
тяжелении конструк-
ции на /-max (p = var)
характеристик самолета. Максимальная скорость Vmax при перетяжеле-
нии уменьшается (рис. 13.10). При этом для самолетов, летающих со
сверхзвуковыми скоростями (М«2,0), влияние завышения GQ на вели-
чину Vmax не так велико, как прн завышении Gq при начальном его опре-
делении, когда принимают p0=const (см. рис. 8.1). Это обстоятельство
будет понятно, если обратиться к формуле (2.3) нз гл. II. В рассматри-
ваемом случае, т. е. когда Ро уменьшается, а ро соответственно увеличи-
вается и при этом poPo=const, завышение Go сказывается на Vmax толь-
ко при изменении сх н £ (а в зоне больших сверхзвуковых скоростей
приМ=2—2,5 величина сх изменяется мало). В случае же завышения Go
прн начальном его определении (см. гл. VIII), когда po=const, завыше-
ние Go влияет на Vmax через £ и сх н через тяговооруженность Ро-
Потолок самолета //пот при перетяжелении конструкции уменьшает-
ся (рис. 13.11), причем для самолетов, летающих на потолке со сверх-
звуковыми скоростями, перетяжеление оказывается вследствие малых
величин качества /Стах в более резкой степени (кривая 2), чем для дозву-
ковых самолетов (кривая /).
На величине максимальной дальности перетяжеление конструкции
сказывается более резко, чем прн завышении Go при начальном его оп-
ределении (см. рис. 13.12 и 8.4). Это может быть объяснено с помощью
формулы (2.15'). Если в начале проектирования в результате неправиль-
ного определения было завышено Go, то потребное для данного Lmax зна-
чение GT будет определено соответственно для этого Gq, и дальность по
* Нагрузка р0 увеличивается потому, что на том этапе проектирования, когда
можно обнаружить перетяжеление конструкции, площадь крыла S уже окончательно
выбрана.
247
сравнению с дальностью, возможной прн правильном определении 60,
уменьшится вследствие уменьшения тяговооружениости Ро н незначи-
тельного изменения ]/$/•?• Прн завышении Go в результате перетяжеле-
ния конструкции дальность уменьшается в результате уменьшения GT, в
значительной степени влияющего на величину Дтах.
Малый вес конструкции агрегата самолета зависит от следующих
условий:
1) тщательности разработки конструктивно-силовой схемы агре-
гата;
2) рационального выбора материала для элементов конструкции
агрегата.
Кроме того, малый вес конструкции может быть обеспечен путем:
1) рационального подбора прн конструировании сечений и формы
детален агрегата;
2) правильного конструирования узлов агрегата.
Предварительно вес конструкции агрегата самолета определяется
прн проектировании с помощью так называемых весовых формул. Эти
приближенные формулы вводятся обычно на основании теоретических
зависимостей между нагрузкой, основными геометрическими параметра-
ми агрегата н его весом с использованием эмпирических коэффициентов,
получаемых из статистических значений веса данного агрегата.
Совершенно ясно, что определение веса по любым приближенным
формулам может производиться лишь в начале проектирования. Уточ-
няют же вес конструкции частей самолета в конце проектирования пу-
тем расчета веса по рабочим чертежам.
§ 4. РАЗРАБОТКА КОНСТРУКТИВНО-СИЛОВОЙ СХЕМЫ АГРЕГАТА
Под конструктивно-силовой схемой понимают схему взаимного рас-
положения основных силовых элементов конструкции самолета.
Разработка конструктивно-силовой схемы — сложный процесс, в ко-
тором конструктору необходимо учитывать самые разнообразные фак-
торы: рациональное размещение стыков обшивкн н ее раскрой, особен-
ности распределения температур при нагреве конструкции, расположение
герметических отсеков и т. д.
Основные особенности конструктивно-силовой схемы выявляются в
процессе компоновки самолета, при проектировании же агрегата конст-
руктивно-силовая схема уточняется.
Прн разработке конструктивно-силовой схемы необходимо соблю-
дать следующие важнейшие условия:
1) полный вес самолета для заданных условий должен быть наи-
меньшим, что достигается рациональной передачей енл по элементам
конструкции прн требуемой жесткости;
2) конструкция должна быть технологичной, т. е. такой, чтобы для
ее изготовления могла быть применена наиболее простая н рациональная
технология;
3) конструкция должна обладать высокой степенью живучести, т. е.
способностью выдерживать эксплуатационные нагрузки прн частичных
разрушениях отдельных ее элементов, и надежностью в отношении уста-
лостной прочности;
4) конструкция должна обеспечивать наибольшие удобства в экс-
плуатации самолета благодаря рациональному размещению люков и
эксплуатационных разъемов в агрегатах для подхода к силовой уста-
новке, оборудованию, вооружению н т. д.
Какому нз этих условий следует уделить прн проектировании наи-
большее внимание, необходимо решать, учитывая иазначенне, летные
характеристики и количество выпускаемых в серийном производстве са-
молетов.
248
Если выбранная конструктивно-силовая схема обеспечивает наи-
меньший вес конструкции, то обычно такая схема приводит и к наимень-
шему полному весу самолета. Одиако в некоторых случаях выгоды, по-
лучаемые при применении данной конструктивно-силовой схемы агрега-
та, могут существенно уменьшиться вследствие перетяжеления,
вызываемого данной схемой в других агрегатах, стыкующихся с рассмат-
риваемым.
Для решения задачи получения наименьшего для заданных условий
веса конструкции агрегата при разработке конструктивно-силовой схе-
мы необходимо учитывать следующие положения:
1) передача сил и моментов от одного элемента схемы к другому
должна осуществляться по кратчайшему расстоянию (при условии, что
величина сил н моментов при этом ие изменяется);
Рис. 13.13. Схема панели крыла с обшивкой, подкрепленной
стрингерами, и с вырезом (пример невыгодной конструкции с
малым напряжением материала)
2) необходимо использовать элементы конструктнвно-снловой схемы
с наибольшими возможностями для данного материала напряжениями;
3) следует стремиться к более рациональному распределению на-
пряжений по сечению элемента.
В тех случаях, когда величина действующего усилия илн момента
зависит от направления элемента, минимальная длина элемента, оче-
видно, не может служить критерием иаивыгоднейшего веса конструкции
и оптимум может быть, определен более сложным путем.
Не всегда элементы конструктивно-силовой схемы используются с
наибольшими допустимыми для данного материала расчетными напряже-
ниями. При этом возможны два случая.
1. Низкие напряжения в элементе могут обуславливаться особенно-
стями Нерациональной конструктивно-силовой схемы, примененной в
данном случае.
2. Низкие напряжения в элементе приходится допускать из-за явле-
ний потери устойчивости (местной и общей), возникающих в элементах
конструкции.
Примером невыгодной конструкции с низкими напряжениями мате-
риала может служить панель моноблочного крыла или фюзеляжа
(рис. 13.13), состоящая из дуралюминовой обшивки и приклепанных к
ней стрингеров. Панель имеет вырез и находится под действием нормаль-
ных растягивающих усилий.
Экспериментальным путем установлено, что и обшивка, и стрингеры
полностью включаются в работу лишь в сечении аа, расположенном от
249
края выреза на расстоянии В, равном приблизительно ширине выреза А.
По мере приближения сечений к краю выреза напряжения в обшнвке и
стрингерах падают и у самого края выреза становятся нулевыми. Для
сохранения прочности панелей в области выреза крайние стрингеры (от
сечения аа) приходится соответственно усиливать. Таким образом, на
довольно значительном участке панели — от сечения аа н до края выре-
за — стрингеры и обшивка, за исключением крайних стрингеров и при-
легающей к ним обшивки, будут работать с весьма пониженными напря-
жениями, вес же конструкции будет намного больше того веса, который
бы имела панель без выреза.
Примером второго случая может служить длинный раскос фермы,
нагруженный сжимающим усилием. При его проектировании потребуется
большое поперечное сечение, так как критические напряжения сжатия
из-за потери устойчивости будут довольно низкими. Если же переменить
положение раскоса и сделать его работающим на растяжение, то сече-
ние можно значительно уменьшить и тем самым уменьшить вес конст-
рукции.
Распределение напряжений, близкое к равномерному, возможно при
чистом растяжении или сжатии (для коротких элементов). При изгибе и
кручении распределение напряжений, близкое к равномерному, иногда
может быть достигнуто за счет применения некоторых форм сечеиия
элемента.
Наиболее ярким примером такого сечения является сечение двухпо-
ясной балки с тонкой стенкой, подкрепленной вертикальными стойками,
где в поясах по сечению сравнительно равномерно распределены нор-
мальные напряжения, а по стенке — касательные напряжения.
Требование технологичности конструкции приобретает особенно важ-
ное значение при проектировании самолета, предназначаемого для круп-
носерийного выпуска. Экономический эффект, получаемый от технологич-
ности конструкции, в этом случае чрезвычайно ощутим. Иногда для
улучшения технологичности идут даже на некоторое утяжеление
конструкции.
Технологичность конструкции зависит от конструктивно-силовой
схемы. Примером влияния конструктивно-силовой схемы на технологич-
ность конструкции может служить двухлонжеронное крыло. Совершен-
но ясно, что наличие четырех лонжеронных поясов усложняет изготовле-
ние такого крыла по сравнению с однолонжеронным, имеющим только
два пояса.
Для обеспечения наибольшей технологичности конструкции конст-
руктивно-силовая схема должна удовлетворять следующим требованиям:
— допускать удобное рациональное членение агрегата;
— обеспечивать возможность применения крупноблочной конструк-
ции агрегатов, допускающей высокопроизводительные технологические
методы (штамповка, литье и т. д.);
— обеспечивать такую конструкцию элементов агрегата, которая
могла бы быть изготовлена с помощью высокопроизводительных процес-
сов (групповая механическая клепка на прессах, автоматическая сварка,
точное литье и т. д.).
Этим требованиям наиболее удовлетворяет, например, кессонная
схема крыла и чисто моноблочный фюзеляж.
Живучесть конструкции имеет большое значение для военных само-
летов. Характерным примером конструктивно-силовой схемы, обеспечи-
вающей высокую степень живучести конструкции, является моноблочная'
или кессонная схема, так как небольшие пробоины в сечении агрегата
(крыле, фюзеляже) выводят из строя лишь незначительную часть работа-
ющего материала.
Примером конструктнвно-силовой схемы, имеющей малую степень
живучести конструкции, может служить ферменный фюзеляж, легко раз-
250
рушаемый при разрушении хотя бы одного стержня статически определи-
мой формы.
Примером конструктивно-сило1вой схемы, обеспечивающей эксплуа-
тационные удобства, может служить моноблочио-лонжеронная схема
хвостовой части фюзеляжа легкого самолета с расположением ТРД в
фюзеляже и с эксплуатационным разъемом по одному из шпангоутов,
осуществляемым четырьмя стыковыми узлами, сконструированными у
лонжеронов. Понятно, что чисто моноблочная (безлонжеронная) схема
фюзеляжа при наличии разъема в экплуатационном отношении менее
выгодна, так как требует большого количества стыковочных узлов, соот-
ветствующего числу стрингеров.
§ 5. ВЫБОР МАТЕРИАЛА ДЛЯ ЭЛЕМЕНТОВ КОНСТРУКЦИИ САМОЛЕТА
В современном самолетостроении находят применение разнообраз-
ные материалы: специальные легированные стали, легкие сплавы, цвет-
ные металлы, различные виды пластмасс, резины разных сортов, дерево,
фанера, ткани, различные лаки и клеи, краски н т. д.
Основными конструкционными материалами, применяемыми для из-
готовления агрегатов самолета, являются легкие сплавы (главным обра-
зом алюминиевые и титановые), специальные стали высокой прочности
и так называемые легкие наполнители. Правильный выбор материалов
для элементов конструкции самолета может существенно улучшить лет-
но-тактическне характеристики самолета и экономичность при его про-
изводстве и эксплуатации.
Материалы для элементов самолетных конструкций должны удов-
летворять следующим основным требованиям:
— материал должен обладать такими механическими и физически-
ми свойствами, которые могли бы обеспечить в условиях полета данного
самолета при заданных прочности и жесткости наименьший возможный
вес конструкции;
— материал должен обладать такими свойствами, которые обеспечи-
вали бы возможность применения прн изготовлении элементов конструк-
ции наиболее целесообразной для данного самолета технологии;
- —стоимость материала должна быть такова, чтобы его применение
в конструкции самолета экономически оправдывалось;
— производство материала должно обеспечиваться отечественным
сырьем.
Рассмотрим каждое из этих требований.
При выборе материала не всегда легко определить его весовую вы-
годность для данной конструкции, тем более невозможно установить ка-
кой-то единый критерий весовой выгодности материала, применяемый
для любого случая, который может встретиться при проектировании.
Совершенно очевидно, что, например, критерий весовой выгодности
для элементов конструкции, сильно нагруженных, н элементов, слабо
нагруженных, не может быть одним и тем же. Различными будут крите-
рии весовой выгодности при различных случаях нагружения элемента —
на растяжение, сжатие, нзгнб, кручение и т. д. Наиболее просто решает-
ся вопрос о весовой выгодности материала для сильно нагруженных эле-
ментов в случае работы элемента на растяжение или чистое сжатие (без
явлений общей и местной потерн устойчивости). Предположим, что неко-
торый элемент конструкции нагружен на растяжение или сжатие; тре-
буется провести сравнение двух материалов по весовой выгодности. Вес
элемента в случае применения первого материала будет
G^FJ-ц,
где Fi —площадь поперечного сечения элемента;
251
I — длина элемента;
Yi — удельный вес материала.
Вес элемента в случае применения второго материала будет
G2 = F2l^.
Длина I, определяемая конструктивными соображениями, остается
в обоих случаях одинаковой.
Второй материал будет выгоднее, чем первый, если Gi>C?2 или
Тогда, очевидно, если материалы эквиваленты по весовой выгодно-
сти, то
F\V\ /?2°2
5^71 F^
где oi и 02 — допускаемые расчетные напряжения для первого и второго
материалов.
Из последнего равенства можно получить условие эквивалентности
по весовой выгодности для двух материалов
а1 °2
71 72
Сравнение материалов по весовой выгодности с помощью критерия
6/у будет справедливо для любых по форме сечений элементов, работаю-
щих на растяжение или сжатие (без потери устойчивости), и ограничи-
вается одним лишь условием постоянства длины элемента I. Заметим,
что указанный выше критерий о/у иногда может применяться для растя-
нутых и сжатых поясов двухпоясной балки.
Путем несложных рассуждений можно получить условие эквивалент-
ности по весовой выгодности для случая нагружения элементов на по-
перечный изгиб
„2 3 „2/3
°1 °2
71 72
Однако это равенство является условием эквивалентности весовой
выгодности двух материалов лишь при условии сохранения длины элемен-
та и подобия поперечных сечений (в случае перехода к другому материа-
лу). Кроме того, в элементе ие должна возникать потеря устойчивости.
Условие эквивалентности весовой выгодности двух материалов при
продольном изгибе будет
71 72
которое справедливо при сохранении длины элемента, при подобии по-
перечных сечений и при отсутствии явлений местной потери устойчи-
вости.
Числовые значения полученных выше соотношений называют коэф-
фициентами удельной прочности материалов.
Для тонкостенных элементов конструкции, в которых разрушение
происходит вследствие потери устойчивости стенки (местной потери ус-
тойчивости), можно также найти критерий весовой выгодности.
Если тонкостенная труба нагружена сжимающей силой, при которой
стейка трубы теряет устойчивость, то для двух материалов, эквивалент-
ных по весовой выгодности, можно написать
Е} _ Е2
°i/5i7i ^2/8372
где D — диаметр трубы;
б — толщина стенки трубы.
252
Если принять условие геометрического подобия поперечных сече*
ний, то
£i ___
71 72
При работе тонкой плоской стеики иа сдвиг при равенстве ширины
b\ = b2 и длины — получим следующий критерий весовой выгодности.
71
72
При выборе материала с помощью коэффициентов удельной прочно-
сти необходимо убедиться в том, что условия, при которых справедлив
данный критерий весовой выгодности, имеют место в действительности.
Примером того, как неосмотритель-
ное применение критерия весовой выгод-
ности может привести к неверному ре-
зультату, может служить двухпоясная
балка с достаточно мощными сечениями
поясов, в которой расстояния между
центрами тяжести сечений поясов при
разных материалах будут значительно
отличаться друг от друга (рис. 13.14),
вследствие чего критерий o'/у для данного
случая ие может 'быть применен.
Выбор материала по коэффициенту
удельной прочности во многих случаях не
может быть использован. Так, например,
Рис. 13.14. Пример непримени-
мости критерия весовой вы-
годности о/у при сравнении
двух материалов, значительно
отличающихся по прочности на
разрыв
применение этого коэффициента при выборе материала для сжатых эле-
ментов, работающих иа устойчивость, может приводить в ряде случаев
к неверным выводам. Иногда для сравнительной оценки веса применяют
критерий, названный «коэффициентом напряженности» [27].
Коэффициент напряженности — мера интенсивности нагрузки, дей-
ствующей на элемент. Если известна нагрузка Р, действующая на эле-
мент, то «коэффициент напряженности» будет где а и b —
характерные размеры элемента.
Для стойки длиною I
kn=P\P.
Для цилиндрической оболочки с круговым поперечным сечением при
ее изгибе моментом М kn=M\D2, где D — диаметр оболочки.
Коэффициент k& для шарнирной стойки, работающей на общую потерю
устойчивости, можно выразить в виде
Р _ д2
Z2 ~ Л20ЗД ’
где 9=-^ ;
Е
—касательный модуль (производная напряжения по дефор-
мации) ;
ki=——коэффициент формы сечения;
г
Е—нормальный модуль упругости;
F— площадь сечения стойки;
I— радиус инерции стойки.
253
Если Р/l2 разделить на а и помножить на у, то получим величину
Fl G
—=— ’ которая характеризует вес стоики.
Графики, построенные для различных вариантов в координатах
G Р
~ и — (рис. 13.15), дадут возможность выбрать иаилучший вариант.
Для широких стоек с защемленными краями (типа панель) коэф-
фициент напряженности будет
Р g _ а8'2
в'° 1»
с — коэффициент заделки;
q — нагрузка иа единицу ширины. _
Если qjlfj разделить иа сг, то получим б//о, где 6 — площадь сечения иа
единицу ширины. Это выражение дает представление о весе широкой
стойки (панели). График в координатах д//о и g/Zo дает возможность
судить о иаивыгоднейшем варианте (рис. 13.16).
-%- кгскм
L0 ‘
Рис. 13.15. Зависимость весовой
характеристики защемленной
стойки GciP от коэффициента
напряженности (с — коэффи-
циент заделки):
/ — нержавеющая сталь: 2 —дур-
алюмин
Рис. 13.16. Зависимость ве-
совой характеристики 6/7о
для широкой стойки (типа
панели) от коэффициента
напряженности:
1 — нержавеющая сталь; 2 —
дуралюмин; 3 — магниевый
, сплав
При выборе материалов для современных самолетов задача опреде-
ления иаивыгоднейшего по весу материала значительно усложняется в
связи с необходимостью учета кинетического нагрева конструкции и тре-
бования ее долговечности.
Конструкция самолетов, летающих с большими сверхзвуковыми ско-
ростями (М>2), подвергается значительному нагреву вследствие выде-
ления большого количества тепла в результате торможения потока и
трения в пограничном слое.
При полете в течение достаточно продолжительного времени нагрев
распространяется на конструкцию и неблагоприятно влияет на материа-
лы элементов конструкции, приводя к более тяжелым условиям их рабо-
ты при больших нагрузках.
Нагрев вызывает следующие явления:
— уменьшение временного сопротивления материала ов и предела
текучести отек;
— уменьшение модулей упругости Е и G;
254
— усиление явлений ползучести — появление ползучести при очень
низких значениях о*.
Уменьшение при нагреве значений ов, £ и G должно сказываться на
величине критериев удельной прочности и жесткости, которые, очевидно,
должны уменьшаться по мере увеличения температуры иагрева.
Так как характер изменения предела текучести материалов оТек с
'увеличением температуры нагрева отличается от характера изменения
временного сопротивления ов, а допускать заметные остаточные дефор-
мации в конструкции самолета нельзя, то выбирать материалы для кон-
струкций, работающих в условиях сильного нагрева, нужно ие по крите-
рию ов/у, а по критерию оТек/у.
На рис. 13.17 приведены кривые изменения критерия <ттек/у при уве-
личении температуры нагрева для нескольких конструкционных мате-
Рис. 13.17. Влияние тем-
пературы нагрева на
критерий Сттек/у удель-
ной прочности для раз-
личных материалов при
выдержке в течение
30 мин:
/ — титановый сплав; 2 —
алюминиевый сплав; 3 —
нержавеющая сталь; 4 —
магниевый сплав
Рис. 13.18. Влияние тем-
пературы нагрева на кри-
терий Е/у удельной же-
сткости при растяжении
для различных материа-
лов при выдержке в те-
чение 30 мин:
/ — титановый сплав: 2—
алюминиевый сплав; 3 —
нержавеющая сталь; 4 —
. магниевый сплав
риалов. Испытания производились при действии нагрузки и нагрева в те-
чение получаса. На рис. 13.18 даны кривые для критерия удельной жест-
кости Е/у в зависимости от иагрева для тех же материалов. На рис. 13.19
даны кривые для критерия]/Е/у в зависимости от иагрева для плоских
листов, работающих иа сдвиг.
При нагреве конструкции самолета ие только изменяются физико-
механические характеристики материалов, ио в элементах конструкции
возникают дополнительные термические напряжения, обусловленные раз-
личиями в величинах коэффициентов теплового расширения материалов
н наличием температурных градиентов между отдельными элементами
конструкции. Термические напряжения вызывают коробление и искаже-
ния формы конструкции. Напряжения, связанные с наличием темпера-
турных градиентов, после полного прогрева конструкции, очевидно, ис-
чезают и остаются только напряжения вследствие различия в коэффи-
циентах расширения.
Снижение прочности конструкции самолета из-за кинетического на-
грева нередко приводит к необходимости ограничивать максимальную
* Явление ползучести состоит в том, что при длительном воздействии нагрузки,
значительно меньшей нагрузки предела текучести кратковременного нагружения, эле-
мент начинает пластически деформироваться. При высоких температурах напряжения,
соответствующие началу пластических деформаций при длительном воздействии нагруз-
ки, резко уменьшаются.
255
скорость (число М) полета. В этих случаях значение Vmax, соответствую-
щее Мпред, определяется уже температурой кинетического иагрева кон-
струкции самолета из условий ее прочности.
Для того чтобы конструкция сверхзвукового самолета имела доста-
точную прочность при высокой температуре иагрева его поверхности,
можно рекомендовать:
— увеличение плошали сечений силовых элементов, подвергающих-
ся сильному нагреву (обшивка, стрингеры, пояса лонжеронов и т. д.);
— применение д я силовых элементов сплавов, обеспечивающих не-
обходимые механические характеристики при высоких температурах;
— применение тепловой изоляции, преграждающей путь тепловому
потоку с поверхности к силовым элементам конструкции;
Рис. 13.19. Влияние темпе-
ратуры нагрева на критерий
Ely удельной жесткости
при сдвиге листов из сплава
титана (кривая /) и алюми-
ниевого сплава (кривая 2)
при кратковременном на-
гружении
Рис. 13.20. Зависимость потребной стартовой тяго-
вооруженности Ро и температуры Т° С на поверх-
ности самолета от числа М полета. Влияние чис-
ла М_на величину относительного веса конструк-
ции Ок, определяемого прочностью при высоких
температурах:
I — конструкция из дуралюминоного сплава, действие
нагрева и нагрузки 0,5 ч; 2 — конструкция из дуралюми-
нового сплава, действие нагрева и нагрузки кратковре-
менное; 3 — конструкция из титанового сплава, действие
нагрева и нагрузки 0,5 ч; 4 — конструкция из нержавею-
щей стали, действие нагрева и нагрузки 0,5 ч
— применение любой комбинации из приведенных выше мероприя-
тий;
— применение охлаждения конструкции.
Легко видеть, что все эти меры неизбежно влекут за собой увеличе-
ние веса конструкции и, следовательно, увеличение относительного веса
конструкции ёк.
На рис. 13.20, наряду с кривыми температуры поверхности самоле-
та для Я=12 км (с учетом радиации) и стартовой тяговооруженности
Ро, необходимой для получения данной скорости, даны кривые относи-
тельного веса конструкции Gk, соответствующего такому увеличению се-
чений ее силовых элементов, которое необходимо для сохранения их
прочности при нагреве. Кривые 1, 3 ъ 4 построены с учетом явлений пол-
зучести материала при нагрузке, действующей при заданной температу-
ре в течение получаса.
График построен в предположении, что высокая температура иагре-
ва сказывается только на элементах, составляющих 50% веса конструк-
ции самолета, и что тепловая изоляция на поверхности самолета отсут-
ствует.
Температурные напряжения в конструкции вследствие различия в
коэффициентах теплового расширения материалов, из которых она изго-
товлена, могут быть велики. Для подтверждения этого приведем коэф-
256
фициенты теплового расширения а наиболее употребительных в самолет-
ных конструкциях материалов: f
сталь ЗОХГСА........................ ос—11,0• 10~в_
алюминиевые сплавы.................. а=20—23,9-10 6
Рис. 13.21. Зависимость усталост-
ной прочности от числа циклов'
/ — гладкий образец; 2 —верхний пре-
дел. 3 — нижний предел усталостной
прочности конструкции
переменной нагрузке; ов — на-
При выборе материалов для конструкции, очевидно, с этими данны-
ми необходимо считаться, чтобы избежать значительных деформаций и
напряжений в конструкции.
Температурные напряжения в конструкции, возникающие вследствие
наличия градиентов температуры, менее доступны воздействию кон-
структора.
Вопрос о долговечности при проектировании конструкции самолета
вообще, и в частности при выборе материала, возникает в связи с уста-
лостной прочностью конструкционных материалов. При воздействии на
конструкцию переменных (по величи-
не или по величине и знаку) нагрузок*
разрушение таковой наступает при на-
пряжениях, существенно меньших, чем
разрушающие напряжения при одно-
кратном нагружении. При этом, если
количество изменений нагрузки (цик-
лов) в единицу времени уменьшается,
то разрушение конструкции наступает
быстрее. Чем меньшую долю составля-
ет от кратковременной (одноразовой)
разрушающей нагрузки действующая
переменная нагрузка, тем большее ко-
личество циклов выдерживает конст-
рукция. Зависимость количества цик-
лов N от отношения оу/ов, где а? — на-
пряжение усталостного разрушения при
пряжение временного сопротивления при статической одноразовой на-
грузке может быть изображена кривой 1 (рис. 13.21). Эта зависимость,
изменяясь в количественном отношении, для разных материалов сохра-
няет свой общий характер. Очевидно, при проектировании конструкции
с учетом усталости материалу, хотя и с меньшим значением удельной
прочности, но с лучшим протеканием правой ветви кривой, должно быть
отдано предпочтение. Необходимо отметить, что на усталостную проч-
ность материалов сильно влияет концентрация напряжений в конструк-
ции, поэтому кривые оу/ов по N для конструкции всегда лежат ниже
кривой для стандартн го образца. Все это, конечно, необходимо учиты-
вать при выборе материала для конструкции самолета.
В конструкции самолета даже при рационально разработанной сило-
вой схеме могут быть элементы настолько слабо нагруженные, что, если
придать им размеры, при которых получались бы обычные для данного
материала расчетные напряжения, то эти размеры были бы слишком
малыми, ие допустимыми с технологической точки зрения, а также при
возможных в процессе производства и эксплуатации самолета случайных
нагрузок и ударов. Так, например, в крыльевых ферменных нервюрах
легких самолетов некоторые раскосы несут часто очень незначительные
нагрузки. Размеры такого раскоса обычно определяются конструктивны-
ми условиями. Если принять для работающего на растяжение раскоса
такой материал как дуралюмин и определить толщину его стенки, исхо-
дя из действующей силы, расчетного напряжения для данного материала
* Переменные нагрузки действуют на самолет, например, при полете в неспокой-
ном воздухе.
9-1062 257
и определенных по конструктивным условиям размеров, то толщина стен-
ки может получиться настолько малой, что в процессе изготовления и
эксплуатации самолета заданная форма и даже целостность раскоса
могут быть легко нарушены. В таких случаях следует, придавая раскосу
практически приемлемую толщину, применять материал с возможно
меньшим удельным весом, например магниевый сплав, считаясь, однако,
с особенностями материала, влияющими на технологию изготовления
элемента н сборки.
Целесообразность той или иной технологии для данного самолета
определяется обычно следующими условиями;
•—размерами программы выпуска;
— возможностями данного производства.
Если намечается выпуск самолета в больших количествах, то для
его изготовления следует применить такую технологию, которая, хотя и
потребовала бы в большом количестве дорогостоящей оснастки (при-
способления, штампы, кокили), но позволила бы изготовлять части и
детали самолета в больших количествах с наименьшей затратой време-
ни. Для такой технологии требуется, чтобы материал обладал хорошими
литейными качествами, легко штамповался. Этим требованием вполне
удовлетворяют легкие алюминиевые сплавы.
Совершенно очевидно, что дорогостоящий материал может оказать-
ся целесообразным при производстве как гражданских, так и военных
самолетов, если в результате уменьшения удельного веса или значитель-
ного повышения прочности при прежнем удельном весе значительно
улучшаются летно-технические характеристики самолета (см. гл. XIV).
В заключение необходимо подчеркнуть, что принимаемое при проек-
тировании конструкции частей самолета решение в значительной степени
определяет технологию изготовления. С самого начала проектирования
конструктор должен стремиться к максимальному упрощению и удешев-
лению технологических процессов, введению механизации.
Глава XIV
ВЕСОВАЯ И ЭКОНОМИЧЕСКАЯ ОЦЕНКА
КОНСТРУКТИВНО-ПРОЕКТИРОВОЧНЫХ РЕШЕНИЙ
Для оценки конструктивно-проектировочного решения в процессе
проектирования самолета может быть использован метод градиентов
взлетного веса (см. гл. V).
Принимаем в качестве основного условия, что при разработке раз-
личных вариантов решений величины полезной нагрузки, скорость и
дальность полета остаются неизменными. Это условие не только суще-
ственно упрощает решение (так как в качестве критерия оценки во
многих задачах можно использовать вес самолета), но дает также воз-
можность рассмотреть большой круг задач, представляющих практиче-
ский интерес.
§ I. ВЕСОВЫЕ ЭКВИВАЛЕНТЫ РАЗЛИЧНЫХ ХАРАКТЕРИСТИК САМОЛЕТА
И УСЛОВИЯ ВЫГОДНОСТИ
КОНСТРУКТИВНО-ПРОЕКТИРОВОЧНЫХ РЕШЕНИИ
Как известно, улучшение одних характеристик проектируемого са-
молета (например, аэродинамического качества, удельного часового рас-
хода топлива, ресурса и т. п.) нередко достигается лишь ценою ухудше-
ния других (например, весовых характеристик, стоимости и т. п.). В этом
случае в процессе проектирования требуется найти границу целесообраз-
ности улучшения одних параметров за счет ухудшения других.
258
Для решения задач этого типа используется метод весовых и стои-
мостных эквивалентов, поскольку большинство параметров самолета
связано с весом и стоимостью.
Две величины считаются эквивалентными, если одновременное их
изменение приводит к равному по величине, ио противоположному по
знаку изменению критерия оценки самолета (т. е. ие приводит к изме-
нению критерия оценки). Аналитически эквивалентность величин мож-
но выразить так:
2^=0, (14.1)
1>2
где а — критерий оценки самолета;
i — количество параметров.
Рассмотрим весовые эквиваленты* следующих, наиболее характер-
ных параметров самолета:
— аэродинамического качества;
— силы вредного аэродинамического сопротивления;
— коэффициента сопротивления сХо;
— стоимости самолета;
— ресурса самолета.
Условия получения перечисленных весовых эквивалентов, вытекаю-
щие из формулы "(14.1), следующие (в том же порядке):
—0; (14.2)
Да0Ц- ДаХо = 0; (14.3)
Дао4-Дас.^ = 0; (14.4)
дао + Дасс-0; (14.5)
Да0 + Д«Гс = 0. (14.6)
Очевидно, что конструктивно-проектировочное решение будет выгод-
ным, если оно приводит к улучшению критерия оценки самолета.
Ради простоты будем считать, что для осуществления того или иного
конструкторского решения ие требуются или требуются весьма малые
затраты в виде дополнительных капиталовложений.
Рассмотрим, как определяются приведенные выше весовые эквива-
ленты основных характеристик самолета.
§ 2. ВЕСОВЫЕ ЭКВИВАЛЕНТЫ АЭРОДИНАМИЧЕСКОГО КАЧЕСТВА
Противоречия между весом и аэродинамическим качеством, весом и
сопротивлением воздуха не новы. Они возникли вместе с первыми само-
летами. Сущность противоречий состоит в том, что уменьшение сопро-
тивления агрегатов и деталей самолета, находящихся в потоке, может
быть достигнуто, как правило, лишь за счет увеличения веса. Поэтому
логичным является вопрос: иа какое увеличение веса выгодно идти для
определенного увеличения аэродинамического качества или уменьшения
сопротивления?
В 20—30 годах актуальными были такие задачи:
— насколько можно увеличить вес крыла и самолета при переходе
от биплана к моноплану, или при переходе от подкосного крыла к сво-
боднонесущему?
* Возможно обращение термина «весовой эквивалент». Например, когда это удоб-
но, можно говорить не «весовой эквивалент стоимости», а наоборот — «стоимостный
эквивалент веса».
9* 259
— насколько можно увеличить вес убирающегося шасси по сравне-
нию с неубирающимся?
—насколько можно увеличить вес силовой установки за счет капо-
тирования двигателя?
— выгодно ли вместо двигателя жидкостного охлаждения устанав-
ливать более легкий двигатель воздушного охлаждения той же мощ-
ности, если ои создает большее аэродинамическое сопротивление?
— где граница целесообразности увеличения веса деталей самолета,
находящихся в потоке, при переходе от менее обтекаемого сечеиия их
(например, круглого) к более обтекаемому?
К таким же типам задач относятся задачи о переходе от гофриро-
ванной обшивки частей самолета (в потоке) к гладкой, задачи о целесо-
образности герметизации частей самолета с целью уменьшения сопро-
тивления и т. д.
В последнее время появились новые задачи, например:
— найти целесообразное увеличение веса оборудования и конструк-
ции крыла, снабженного устройством для отсоса пограничного слоя на
крейсерском режиме полета, или увеличение веса проектируемой от-
клоняющейся носовой части фюзеляжа сверхзвукового пассажирского
самолета;
— какое увеличение веса конструкции сверхзвукового самолета мож-
но допустить ради увеличения среднего аэродинамического качества, ес-
ли самолет имеет крыло с изменяемым в полете углом стреловидности;
— насколько можно увеличить сопротивление рулей и элеронов для
уменьшения веса бустеров системы управления, если увеличить плечо
кронштейна привода, вывести кронштейны в поток и закрыть их обтека-
телями? Особое значение этот вопрос приобретает для сверхзвуковых
самолетов, у которых рули и элероны в местах крепления к кронштейнам
подвески имеют небольшие толщины.
Перечень аналогичных задач можно, разумеется, продолжить.
Все эти задачи можно решать:
либо «прямым» методом, предусматривающим полный проектиро-
вочный расчет каждого из вариантов самолета и сравнение результатов
с помощью критерия оценки;
либо методом весовых эквивалентов или другими подобными мето-
дами, с помощью которых находится лишь граница, отделяющая выгод-
ные варианты от невыгодных. Для этих методов в отличие от прямого
требуется значительно меньше вычислительных работ и меньше вре-
мени.
Следует заметить, что изысканию рациональных методов решения
подобных задач посвящено немало работ. Еще в 1917 году советский
ученый В. П. Ветчинкин, рассматривая задачу об улучшении аэродина-
мики самолета ценою увеличения веса конструкции, впервые ввел тер-
мин «авиационный вес». Под этим термином В. П. Ветчинкин понимал
некоторый условный вес. которым надо догрузить самолет вместо дета-
ли, убранной нз потока воздуха. Этот вес равен реальному весу детали
плюс некоторую добавку, зависящему от аэродинамических характе-
ристик детали и всего самолета.
Развитию идеи В. П. Ветчинкина об «авиационном весе» посвяще-
ны работы Г. Г. Ростовцева (1925 г.), Н. Н. Фадеева (1932 г., 1940 г.),
В. С. Пышнова (1934 г.), О. Н. Розанова (1938 г.). Из работ иностран-
ных авторов можно отметить работы А. Баумана (1924 г.), К- Д- Вуда
(1932 г.) и др.
Н. Н. Фадеев [27], обобщая и развивая работы различных авторов
по «авиационному вес}», еще в 1940 г. пришел к выводу о необходимо-
сти введения понятия среднего «авиационного веса» самолета, являюще-
гося эквивалентом ие только какой-либо одной летной характеристики,
ио и всего их комплекса. Эта идея, однако, не получила дальнейшего
260
развития в проектировании самолета из-за сложности определения
«удельного веса» или «цены» различных летиых характеристик самоле-
та, ие связанных между собой единым критерием.
Кроме того, Н. Н. Фадеев отмечал и другую слабую сторону работ
по «авиационному весу» — отсутствие связей, позволяющих определять
изменение веса самолета (с целью сохранения заданной прочности) при
изменении веса какого-либо агрегата или узла.
Приращение взлетного веса самолета Дбо принималось равным
приращению (изменению) веса х-го агрегата Дб,, т. е. задача сводилась
к модификации построенного самолета при условии, что Дбо/Дб,=
=xg = 1- В действительности, как уже говорилось в гл. V, при проекти-
ровании самолета значение xG^2—5.
В отличие от авиационного веса весовые эквиваленты различных
характеристик могут служить ие только для разрешения противоречий
между весом и аэродинамическими характеристиками, ио и для реше-
ния других задач-противоречий, так называемых задач-антиномий.
Применение уравнения весового баланса при выводе производных
взлетиого веса (см. гл. V) дает возможность иайти весовые эквивален-
ты иа любой стадии проектирования. Для этого достаточно зиать, ка-
кие величины должны остаться неизменными при изменении веса, аэро-
динамических или других характеристик самолета и его частей, а также
зиать зависимость веса частей самолета от взлетиого веса и других па-
раметров. Ииыми словами, функции, связывающие частные и общие
изменения веса самолета, могут быть иайдеиы при любых наперед за-
данных ограничениях, зависящих от стадии проектирования, и эти функ-
ции могут быть использованы при расчете весовых эквивалентов.
Задача нахождения весового эквивалента аэродинамического каче-
ства самолета формулируется следующим образом.
Допустим, что для увеличения аэродинамического качества самоле-
та требуется увеличить вес детали, узла или агрегата. Найти рациональ-
ный предел увеличения веса частей самолета для увеличения аэродина-
мического качества*, при котором величина критерия оценки самолета
остается неизменной.
Если считать, для простоты, что изменения веса и аэродинамиче-
ских характеристик не влияют иа стоимость и ресурс какого-либо узла
или агрегата, то при (L, V, бп.н) = const критерием оценки конструктив-
ного решения будет величина изменения взлетиого веса.
В этом случае весовой эквивалент аэродинамического качества вы-
ражается так:
(Дб0)о = 0. (14.7)
Здесь (Дб0)о — прирост взлетного веса самолета в связи с изменением
веса узла или детали;
(ДОо)я— прирост взлетиого веса в связи с изменением аэродина-
мического качества самолета.
Если учесть, что
(Дб0)о=хо. дб’
и (АОф)*=*к ‘ Д*с₽>
то нз (14.7) получим, что весовой эквивалент среднего за время полета
аэродинамического качества самолета равен
Д0’=--^-.д7Сср. (14.8)
_________ XG
* Здесь имеется в виду среднее за полет аэродинамическое качество самолета Кер.
Заметим, что возможна и обратная формулировка: с помощью какого уменьшения веса
детали, узла или агрегата можно компенсировать уменьшение аэродинамического каче-
ства самолета?
261
Когда требуется получить прирост среднего аэродинамического ка-
чества ( + ДКср), то по формуле (14.8) получаем + AG*, так как произ-
водная хк всегда отрицательна.
При решении обратной задачи, когда требуется найти, насколько
следует снизить вес детали, узла или агрегата для компенсации умень-
шения качества (—АКср), формула (14.8) дает рациональный минимум
снижения веса со знаком минус (—AG*).
Если формулу (14.8) записать в виде неравенства
AG*^---—-А^ср>
(14.9)
то получим условие выгодности конструктивно-проектировочного реше-
ния. Знак «меньше» соответствует прямой задаче (+Д/Сср), а знак
«больше» — обратной задаче (—ДКср). Из иеравенстна (14.9) следует,
Рис. 14.1. К оценке целесообразности применения носовой части фюзеляжа из-
меняемой геометрии:
а —схемы изменения геометрии носовой части фюзеляжа (/ — при М<1; 2 — при М>1);
б — зависимость наибольших допустимых потерь веса фюзеляжа, связанных с изменени-
ем геометрии носовой части фюзеляжа (Мрасч=2,2; Оком =13,5 тс; Д/ГСр=0,64)
что если увеличение среднего аэродинамического качества связано с
увеличением веса детали, узла или агрегата, то величина AG * должна
быть меньше, чем(/хА-|/х0)-дЛ’ср. Аналогичное рассуждение можно про-
вести и в отношении обратной задачи.
При сравнении нескольких вариантов конструктивно-проектировоч-
ных решений критерием их выгодности будет величина снижения взлет-
ного веса самолета
дО0=хс ДО* + *к • (14.10)
Здесь AG* и АКср— фактические приращения веса агрегата и сред-
него аэродинамического качества самолета.
Сумма (14.10) является отрицательной, так как производная Хк
всегда отрицательна, а | *к-A7Ccp j > | *G • aG* | (в прямой задаче + АКср;
+ AG*). В обратной задаче сумма (14.10) также отрицательна, потому
что AG* и Д/Сср имеют знак минус, а | vG• AG’ I > i v A^cp I-
Конструктивно-проектировочное решение будет иаивыгодиейшим при
(“ A Go) щах-
Для иллюстрации формул данного параграфа, по которым можно
найти весовые эквиваленты среднего аэродинамического качества само-
262
лета и определить выгодность конструктивно-проектировочных реше-
ний, рассмотрим следующий пример.
Продувками установлено, что аэродинамическое качество сверхзву-
кового пассажирского самолета (СПС) прн конфигурации носовой части
фюзеляжа 2 (рис. 14.1) на 0,64 единицы выше в крейсерском полете, чем
при конфигурации 1, соответствующей взлету — посадке. Устройство
специальной рампы, закрывающей фонарь прн М>1, или механизмов для
отклонения носовой части фюзеляжа (для улучшения обзора) требует
определенных весовых затрат.
Необходимо определить максимально допустимый дополнительный
вес фюзеляжа, компенсируемый увеличением аэродинамического качест-
ва СПС. Иначе говоря, требуется определить весовой эквивалент увели-
чения аэродинамического качества СПС на 0,64 единицы.
Будем считать, что средний за полет прирост качества также равен
0,64 единицы.
Решим пример, касающийся СПС с Мрасч = 2,2.
Чтобы получить весовой эквивалент прироста качества на 0,64 еди-
ницы, воспользуемся формулой (14.8) н данными табл. 5.1 и 5.2. В ре-
зультате получим максимально допустимый прирост веса фюзеляжа
ДОф = Дбагр=Дб* при устройстве рампы или системы поворота носовой
части фюзеляжа. Относительный вес (Дбф/б0)тахдоп составляет около
3%. По приближенной оценке потребное увеличение веса фюзеляжа СПС
не превысит 0,5—0,7%' от взлетного веса СПС.
Поэтому уже на стадии эскизного проектирования, не производя
сложных вычислений, можно сделать вывод о целесообразности рас-
смотренного конструктивно-проектировочного решения.
§ 3. ВЕСОВЫЕ ЭКВИВАЛЕНТЫ ВРЕДНОГО АЭРОДИНАМИЧЕСКОГО
СОПРОТИВЛЕНИЯ И КОЭФФИЦИЕНТА Сх0 САМОЛЕТА
Определим весовые эквиваленты вредного аэродинамического сопро-
тивления и коэффициента схо- Задача формулируется так:
— насколько можно увеличить вес агрегата, узла нли детали для
уменьшения силы вредного аэродинамического сопротивления самолета
илн коэффициента схо с тем, чтобы величина критерия оценки самолета
не изменилась?
В этой формулировке задачу условно назовем прямой, в отличие от
обратной, которая формулируется иначе:
— насколько надо уменьшить вес агрегата, узла нли детали, чтобы
компенсировать увеличение силы вредного аэродинамического сопротив-
ления самолета нли ее коэффициента схо?
Здесь средние за полет значения силы вредного аэродинамического
сопротивления Хо и ее коэффициента сх0 можно найтн по следующим
формулам:
(14.11)
ьрасч J
= \c,,dl. (14.12)
^•расч J
Эти формулы применяются в основном для сверхзвуковых самоле:
тов, у которых Xq и Схо существенно отличаются при М<1 и М>1. Что
касается дозвуковых неманевренных самолетов, то без ущерба для точ-
ности определения весовых эквивалентов можно принимать (схо)ср=
= (схо)крейс> а также (^о)ср== (^о)крейс, так как полет этих самолетов от
взлета до посадки ведется практически на режиме q —const. В дальней-
шем, ради краткости записи, индексы «ср» и «крейс» опускаются.
263
Как и прежде будем считать, что (L, V, GQH) =const. Тогда условия
(14.3) и (14.4) для получения весовых эквивалентов силы Хо и коэффи-
циента схо имеют вид
(AG0)0 + (AG0)Xo--0; (14.13)
(AGolo + fAGoV^O (14.14)
или, по аналогии с предыдущим параграфом,
xG-iG’ + xYo-дУ0 = О; (14.15)
х0-де*-нс .д<?Хо=о. (14.16)
Ло
Из уравнений (14.15) и (14.16) получим искомые весовые эквива-
ленты:
— весовой эквивалент силы Ха:
ЬО' =—^-ДХ»; (14.17)
*0
— весовой эквивалент коэффициента сха‘
(14.18)
*о
При решении прямой задачи ДЛо и Дсхо берутся со знаком минус, а
AG* по формулам (14.17) и (14.18) получается со знаком плюс, так как
*х0» и хо всегда положительны. При решении обратной задачи
(уменьшение веса при увеличении сопротивления) имеем (4-ДЛо),
(4-дс х01 и соответственно ( —4G*).
Если (14.17) и (14.18) записать в виде неравенств, то получим усло-
вия выгодности конструктивно-проектировочных решений.
AG‘=e-----^.дХ0; (14.19)
XG
ДО*>--^-.Дс,Го. (14.20)
*G
Знак «меньше» соответствует прямой задаче (—ДХо), а знак «боль-
ше» — обратной задаче (+ ДАо) •
Приращение ДЛо равно [(Acxo)5J(7, где 5Х— характерная площадь,
к которой отнесено приращение Д£х-о. Так как (Acxo)S; = const и g = const,
то численное значение ДХо не изменится от того, отнесено ДХо к агре-
гату, узлу, детали или к самолету в целом (т. е. к площади крыла).
В формуле (14.20) принято
ДСх. = ± (c^SJS,
где (cxo)i — добавочный коэффициент вредного аэродинамического со-
противления агрегата, узла или детали, отнесенный к характерной пло-
щади S,;
5 — площадь крыла.
Прн сравнении нескольких вариантов решений наилучшим будет ва-
риант, который дает наибольшее снижение взлетного веса:
AGo—(х^-дО • ДА^)тах- (14.21)
ЗДесь сумма xg-AG*+xxo* Д^о всегда отрицательна при выгодных
вариантах и положительна — при невыгодных.
264
В табл. 14.1 даны значения весовых эквивалентов силы вредного
аэродинамического сопротивления некоторых типов самолетов.
Таблица 14.1
Основные исходные данные
Go в кгс Мкрейс В КМ/ч Драсч В КМ 12 500 ’ 750 800 25 000 800 1200 50 000 850 2 000 140 000 900 5 000 160 000 2 300 6 500
Весовые эквиваленты силы вредного аэродинамического сопротивления
(РО, РоУ = const Д G * в кгс ций допустимый шением силы Хо 1,03 1,20 5,25 6,3 2,6
(S, Ро) = const (AG* — наиболы] оправдываемый умень 0,97 прирост на 1 кгс) 1,06 еса агрег 4,60 ата, узла 4,8 или детс ли в кгс.
Из табл. 14.1 видно, что только на легком самолете изменение веса
узла или детали на 1 кгс влияет на взлетный вес самолета примерно так
же, как изменение на 1 кгс вредного аэродинамического сопротивления
(AGarp/AA’o«l). На тяжелых дозвуковых самолетах изменение на 1 кгс
вредного аэродинамического сопротивления эквивалентно изменению ве-
са агрегата, узла или детали на 4—6 кгс, т. е. ЛСаГр/ДХ0=4—6.
Рассмотрим пример определения целесообразности конструктивно-
проектировочного решения методом весового эквивалента силы Хо— за-
дачу об условии выгодности неубирающегося шасси на легких са-
молетах.
Несмотря на то, что задача об убирающемся шасси существует не-
сколько десятков лет *, условия выгодности применения такого шасси
не были получены в общем виде с учетом уравнения весового баланса
самолета. Междувтем эта задача возникает каждый раз прн проектиро-
вании сравнительно тихоходных самолетов — для народного хозяйства,
туристских, учебных и т. п.
Применительно к рассматриваемой задаче весовой эквивалент аэро-
динамического сопротивления записывается так:
ДС0 = х0-дСщ-7.Хо-ДХ0= 0, (14.22)
где Дб0—изменение взлетного веса;
дбш—изменение веса при переходе к убирающемуся шасси;
'/.Q—dG^dG*—производная взлетного веса .в связи с появлением допол-
нительного веса агрегата (шасси);
^XQ=XUI—изменение пассивного сопротивления самолета (численно
равного аэродинамическому сопротивлению шасси) при
переходе к убирающемуся шасси;
xYo = <5G0/(?Xo— производная взлетного веса в связи с появлением пассив-
ного аэродинамического сопротивления.
Решение задачи состоят, следовательно, в определении величин, вхо-
дящих в уравнение (14.22).
У легких самолетов_производные xG и х^о имеют весьма стабильные
значения. Так, при (ро, Ро) =const можно принимать: х<?=1,7—1,8; х_хо =
= 1,40—1,6. Эти цифры говорят о том, что при изменении веса шасси, на-
пример на 1 кгс, взлетный вес самолета должен измениться на 1,7—
* Первые самолеты с убирающимися шасси появились в начале 30-х годов.
265
1,8 кгс, а при изменении аэродинамического сопротивления шасси на
1 кгс прирост взлетного веса должен составить 1,4—1,6 кгс, чтобы летные
данные (скорость, длина разбега, время полета) и прочность самолета
не изменились при появлении и AX0-
Выразим аэродинамическое сопротивление шасси через параметры
колес:
где Хш — аэродинамическое сопротивление неубирающегося шасси
(колес и стоек);
Хк — аэродинамическое сопротивление колес;
п=1,5 — если используются обтекатели*;
п=2,0— для шасси без обтекателей.
Запишем формулу для Хш в обычной форме
V 7 Ч с pV2
(^х)к^к.лоб g »
где (сж)к=0,242 — коэффициент аэродинамического сопротивления колес
малого давления (полубаллонных) *;
Зк.лоб — лобовая площадь всех колес в м2.
Из элементарных геометрических построений следует, что
Sk.„6=2(SxO«-°,214S«2),
1
где DK — диаметр колеса;
Вк — ширина колеса.
Следовательно (при полете у земли р= 1/8):
Хш=0,0151га^22(ВА“0’214В«)- (14.23)
1
Подставим (14.23) в условие эквивалентности (14.22) и решим урав-
нение относительно скорости полета. Тогда получим
----------. (14.24)
0,0ШхХал 2(^-0.2145^)
Здесь Укрит — критическая скорость, начиная с которой выгоднее приме-
нять убирающееся шасси, м/с.
Конструктивная проработка показывает, что 0,01 Go (ДОш
увеличение веса убирающегося шасси по сравнению с неубнрающимся).
Учитывая эту величину, получим
Для легких самолетов можно принимать xg=1,75; х^в = 1,5; п—2.
Тогда
♦Щербаков К. С Аэродинамические исследования шасси самолетов и изо-
лированных колес, ЦАГИ, 1935.
266
Если, например, самолет имеет шасси с носовым колесом и все три
колеса — равного размера (из условия проходимости по грунту), то при
£)к = 0,6 м; 5к=0,2 м и Go = 22OO кгс получим 1Лфит = 181 км/ч.
На рис. 14.2 приведен график для определения К<рит в функции ло-
бовой площади всех колес шасси.
Рис. 14.2. Скорость полета, до которой выгодно применять
пеубнрающееся шасси (25к.Лоб—суммарная лобовая пло-
щадь колес; п=2)
§ 4. ВЕСОВЫЕ ЭКВИВАЛЕНТЫ РЕСУРСА КОНСТРУКЦИИ САМОЛЕТА
Определим наибольшее допустимое (по соображениям экономичнос-
ти перевозок) увеличение ресурса конструкции гражданского самолета,
когда оно связано с приростом веса*’, т. е. найдем весовой эквивалент
ресурса конструкции.
Для упрощения решения полагаем, что исходная удельная стоимость
самолета Сс не зависит от исходного ресурса самолета Тс, т. е.
дСс/дТс = 0.
Из условия (14.6) имеем
-~ДСк-(--~д7’с = 0, (14.27)
о! с
где а — себестоимость тонно-километра.
Производная da!dGK=dajdG * определяется следующим образом.
На раиией стадии проектирования, когда для_сохранения заданных
значений скорости в дальности принимается (ро, Ро) = const,
[/ + А(1_Ст) + т&,рая], (14.28)
оиК «ком
*> Например, в результате создания резервных силовых элементов, ограничителей
распространения трещин, местных усилений, снижения действующих напряжений для
увеличения усталостной прочности и т. п.
267
- Сдв^О I + £р.д [(Тдв^дв) Ц .. - /14 «ХИ
где f^r----------'---------------- коп/(тс)2 км; (14.29)
^ком^рейс 7ДВ
С. 1 + ka с [(T’c/Zc) — 11
h = —-------------Р'сЦт --------- коп/(тс)2 км; (14.30)
^ком^рейс ‘с
т ——---------- коп/(тс)2 км. (14.31)
^ком^-расч
Значения коэффициентов, входящих в формулы (14.29) — (14.31),
указаны в гл. I.
На более поздней стадии проектирования, когда (S, Pq)= const,
да — —
-_ = 1,4 [Л (I - Ог) + тО,.м„]. (14.32)
оик "КОМ
Производную да1дТс, входящую в (14.27), можно определить по
формуле
^=-^-2С--СТ [1+^р.с —1 )1 С1433)
дТ<; йком ^ком^рейс L tc /J
Здесь Сс В коп/тс; Тс в ч; Сцуст н Оком в тс.
Подставляя значения datdGK и да!дТс в (14.27), после преобразова-
ний получим весовые эквиваленты ресурса конструкции самолета
— при (ро, Ро) =const:
Сс[1 + *р.с(Г£-1)а7’с
д О,, =---------------------Lis---4__------------; (14.34)
XG (^ком/^nj ст) ^рейс [/ + Л (1 — GT) + т^т-расх]
— при (S, Ро) = const;
СсГ1+йр.с(4£-1')1дГс
ДОК = —--------1=---------------У--------=. (14.35)
(^ком/^пуст) ^рейс (1 — GT) + wGT.pacx]
В (14.29) СдВ и в (14.30) Сс — стоимость двигателей, отнесенная к взлет-
ной тяге в коп/тс, и стоимость самолета без двигателей, отнесенная к ве-
су пустого самолета без двигателей в коп/тс, Ст = 5200 коп/тс — удель-
ная стоимость топлива; Тс,— исходный ресурс конструкции самолета в ч.
Сравнив фактические затраты веса для увеличения ресурса на за-
данную величину ДГС (в часах) с наибольшими допустимыми затрата-
ми, определяемыми по формулам (14.34) или (14.35), можно сделать вы-
вод о целесообразности данного конструктивно-проектировочного ре-
шения.
Таблица 14.2
Основные исходные данные
Gq в кгс 12 500 25 000 50 000 140 000
Vкрейс В КМ/ч 750 800 850 900
Г'расч В КМ 800 1 200 2 000 5 000
Наибольший прирост веса конструкции самолета,
оправдываемый увеличением ее ресурса на 1000 ч (Гс)исх=40 000 ч
(?0. Ро) = (-'onsl Д G,, В кгс 10,3 24,5 42,5 135
(S, Pq) == const 20,3 44,5 75,0 250
268
В табл. 14.2 даны весовые эквиваленты увеличения ресурса граж-
данских самолетов на 1000 ч при исходном ресурсе 40 000 ч. Из таблицы
видно, что наибольший допустимый прирост веса конструкции с целью
увеличения ее ресурса при (S, Pq) =const примерно вдвое больше, чем
при (ро, Ро) = const. Это объясняется меньшим влиянием веса конструк-
ции самолета на себестоимость т-км при (S, Ро) =const.
§ 5. ВЕСОВЫЕ ЭКВИВАЛЕНТЫ СТОИМОСТИ КОНСТРУКЦИИ САМОЛЕТА
При проектировании самолетов нередко приходится решать во-
прос— при каких условиях выгодно применить более легкую, но более
дорогую конструкцию агрегата, узла или детали Ч
Известно, например, что монолитные фрезерованные конструкции,
конструкции из титана или стеклопластиков в настоящее время значи-
тельно дороже, чем аналогичные сборные узлы, узлы из алюминиевых
сплавов или стали. Однако монолитные детали, детали из дорогостоящих
материалов могут дать и значительную экономию веса. Это противоречие
веса и стоимости приводит к необходимости определить весовой эквива-
лент стоимости, иайти границу, разделяющую выгодные варианты кон-
структивно-проектировочных решений от невыгодных.
При решении данной задачи принимаем, как и раньше, что
(£. И, G„.B)=const
Считаем также, что изменение стоимости самолета не приводит к
изменению ресурса его конструкции, т. е. считаем rc = const.
Из условия (14.5) имеем
ДС„р+-^-.ДСс=0, (14.36)
dGarp дСс
где Дбагр—изменение веса агрегата, узла или детали;
ДСс—изменение удельной стоимости самолета.
Производная daldG^^dajdG* применительно к_граждаиским са-
молетам определяется по формуле (14.28) при (ро, Ро) =const или по
формуле (14.32) при (S, Pq) =const. Производная да]дСс равна
.. 1,4 .
дСс ^ком Л GKOUVpeftC
Подставим значения производных в (14.5). Тогда получим абсолют-
ное значение отношения |ДСс/ДОагр| в руб/кгс при условии, что
ДСс= ДСс-Опуст.
Полагая (ро, Ро) =const, получим
1^1 Г№с [/ + А(1_ёт) + т5т.;а„] руб/кгс. (14.37)
|л°агр| 105[1+4р.с(2к-1^
При (S, Pq) =const получим
1-^-1= -[A(l-GT) + mGT.p,a] руб/кгс. (14.33)
I40’-1 10з[1+Ар.с(^-1)
♦) Возможна и обратная задача, которая ставится следующим образом: при каких
условиях выгодно применить более тяжелую, но более дешевую конструкцию?
269
В формулах (14.37) и (14.38) О|ЮМ в тс, а многочлен в квадратных
скобках имеет размерность коп/(тс)2км.
Стоимость конструкции самолета составляет по статистике (65—
75) % от стоимости пустого самолета с оборудованием (Сс). Поэтому
при определении дополнительной стоимости конструкции самолета, оп-
равдываемой уменьшением ее веса на 1 кгс, значения | ДСс/дОагр |, оп-
ределяемые по формулам (14.37) и (14.38), надо умножить на коэффи-
циент р:
= -^-=0,65 — 0,75.
Сс
В примерах расчета будем принимать р=0,7.
Обозначим
Сагр—стоимость 1 кгс исходного агрегата, узла или детали;
Garp—вес исходного агрегата, узла или детали;
CarPiH,,B, ^агр.н(в—стоимость 1 кгс и вес нового агрегата, узла нли детали
(взамен исходных).
Рассмотрим для определенности случай, когда Оагр.нов<Оагр, а
Сагр.нов>Сагр. Стоимость исходной конструкции агрегата, узла или де-
тали
Сагр = СагрОагр руб. (14.40)
Стоимость новой конструкции с меньшим на ДСагр весом
Сагр.н<>в СаГр (Оягр-дОагр)+дС;дОагр руб, (14.41)
где дСс—цена (стоимость) экономии 1 кгс веса конструкции, определяе-
мая по формулам (14.39), (14.37), (14.38). _
Разделим левую и правую части (14.41) на произведение СагрСагр =
= Сагр!
Сагр.нов СаГ|/^агр CarpAGarp 4- ДСсДСагр CarpGarp4-AGarp (АСс Сагр)
Carp CarpGarp Но ДОагр— Сагр—Оагр.нов- Сагр,нов J . Сагр [ 1 / 1 _ Оагр.нов \ / А( \ Garp X С; Откуда Garp ^агр.нов CarpGarp AGgrp / ДСс 1 \ Garp \ Сагр / Тогда ^агр— ^агр.нов / АСс \ ^агр ' Сагр >с 1 \ АСс Garp,H(IH / ДСс \ irp Сагр ^агр \ Сагр - = —-12 (14.42) АСс Сагр.нов СаГр СагР
270
Формула (14.42) определяет весовой эквивалент стоимости конст-
рукции агрегатов, узлов или деталей самолета. Из этой формулы следу-
ет, что
, . Сагр. нов ^Сс
1) если ------, то снижением веса уже невозможно ком-
Сагр Сагр
пенсировать увеличение стоимости агрегата, узла или детали (рис. 14.3);
Рис. 14.3. Зоны выгодности примене-
ния более дорогой, но более легкой
конструкции (агрегата, детали)
2) могут быть два случая, когда для компенсации относительного
увеличения стоимости новой конструкции требуется такое же по величи-
на гр Сагр .нон
не относительное снижение ее веса, т. е. когда ----------=—----------•
^агр.нов Сагр
Кроме тривиального случая, когда
С?агр Са(р нГ> j
^агр.нов Сагр
возможен еще такой, когда
= Саг!’ »» _ АСс _ 1 (14.43)
^агрлюв Сагр Сагр
Если известны не абсолютные СТОИМОСТИ Сагр и Сагр нов, а относи-
— Сагр Сагр.нов ,
тельные: Сагр=-—и Сагр.НОв = —-------------, то формула (14.42) при-
С/агр С/агр,нов
иимает вид
Сагр.нов
1 +—. (14.44)
^агр.нов ДСс
Сагр
271
Записывая формулу (14.42) в виде неравенства
ДС1
— 1
^аги Сагр
^агр.нов ДСс Сагр.нов
Сагр ^гр
(14.45)
получим условие выгодности конструктивно-проектировочного реше-
ния. В формуле (44.45) Сагр/6ац>.нов— отношение фактических значений
веса новой и исходной конструкции. Зоны выгодных решений видны из
рис. 14.3.
В заключение рассмотрим три примера, иллюстрирующие метод ве-
совых эквивалентов стоимости конструкции.
1. Выгодно ли детали из алюминиевого сплава Д16-Т, работающие
в основном на растяжение, заменять деталями из стеклопластиков
АГ-4С или ВФТ-2СТ, если последние легче на (17—25)%, но в 2,4—6,4
раза дороже?
Предполагается, что по жесткостным, усталостным п другим харак-
теристикам указанные стеклопластики удовлетворяют требованиям,
предъявляемым к конструкции.
Основные данные сравниваемых материалов приведены в табл. 14.3»
где
у — удельный вес;
Е — модуль упругости;
ов— временное сопротивление разрыву;
по,2 — нормальное напряжение при относительном удлинении 0,2%.
Таблица 14.3
Характеристики материалов Д16-Т АГ-4С ВФТ-2СТ
' в кгс/см3 2,8 1.8 1,9
• £ в кгс/см2 7,2-10> 1.2 103 4 105
оп в ьгс/мм2 45 40 60
По 2 В КГС/ММ2 27 21 32
O0.2/V • Ю-Б 9,65 11.7 16.9
Стоимость материала в руб/кгс 1,0 4,5 8
Средняя себестоимость деталей в руб/кгс 2.2 5,24 14
Относительная себестоимость деталей в % 100 238 636
Относительный вес в % 100 82,5 704-75
Рассмотрим задачу применительно к четырем типам дозвуковых
пассажирских самолетов, основные данные которых даны в табл. 14.4.
Исходную величину ДСс = р[ДСс/ДСагр|, необходимую для решения, рас-
считаем по формулам (14.38) и (14.39) при условии (S, Ро) =const.
В данном случае исходная удельная стоимость агрегата, узла или
детали СаГр=2,2 руб/кгс (себестоимость изготовления из Д16-Т). Най-
дем по формуле (14.44) относительный весовой эквивалент стоимости.
Например, для материала АГ-4С применительно к самолету № 1 имеем
Сагр.нов
—1Г_ _ J + _с^---------------= J + 2,38-J_ = J1O4 L
^агр нов ДСс "СаГ|; 74,1,2,2
Фактическое отношение
Оа'Р . = 100%/82,5% = 1,21.
^7агр нов ' Факт
272
Таблица 14.4
Основные пехотные данные № самолета
1 2 3 4
<7() в кгс Vrpeftc В км/ч £расч В КМ 12 500 750 800 25 000 800 1200 50 000 850 2 000 140 000 900 5 000
Стоимость экономии 1 кгс веса агрегата, узла или детали
на дозвуковых пассажирских самолетах
(S, Ро) ~ const д с; pv6jKic 74,0 72,0 79,5 102,5
(Ро. Ро) = const 150,0 138,5 150,5 200,0
Результаты расчетов даны в табл. 14.5.
Из табл. 14.5 следует, что во всех рассмотренных случаях замена
сплава Д16-Т стеклопластиками АГ-4С и ВФТ-2СТ выгодна.
Если узлы или детали из стеклопластика АГ-4С будут дороже не в
2,38 раза (как в табл. 14.3), а в 8—10 раз, но легче иа 17,5% по сравне-
нию с узлами из Д16-Т, то и в этом случае переход на стеклопластик
будет оправдан.
2. Выгодно ли заменять болты из высокопрочной стали ЗОХГСНА
болтами из высокопрочного титана ВТ-14, если стоимость болтов возрас-
тет с 2 руб/кгс до 25 руб/кгс, а вес их уменьшится иа 26% ?
Основные характеристики рассматриваемых материалов при нор-
мальной температуре даны в табл. 14.6.
Таблица 14.5
№ самолетов 1 2 3 4
Материал и 1 ВФТ-2СТ' 1 АГ-4С j 1 ВФТ-2СТ1 АГ-4С ем S СП АГ-4С 1 ВФТ-2СТ
Относительный весовой эквива- лент (14.44) 1,041 1,159 1,042 1,163 1,038 1,149 1,03 1,15
\ ^агр. нов факт 1 ,21 1 33— 1,43 1,21 1,33— 1,43 1,21 1,33— 1,43 1,21 1,33— 1,43
Таблица 14.6 Таблица 14.7
Характеристики материалов ЗОХГСНА ВТ-14 № самолета 1 2 3 4
X в гс,см3 7,85 4,52 1 Чтал. бо 1 г 1,311 1,318 1,290 1,225
Е в кге/см2 [а в кге/мм? в кгс,'мм2 21-10' 180 95 22,9 12,1 11-105 140 130 31 28,8 \ Г X и1итан. 6<i пт Г;,,
773
Предполагается, что удельная усталостная прочность титановых
болтов не хуже, чем стальных.
Возьмем для примера те же типы дозвуковых самолетов, что и в
предыдущем примере (табл. 14.4). Тогда
Сагр=2 руб/кгс; Сагр.„0,=25 руб/кгс; °-‘гр -=1,35.
Оагр.нов
Определим далее по формуле (14.44) минимально допустимое отно-
шение веса стальных н титановых болтов (—стал-болт )
\ £/титан. болт /т/п*
Результаты расчета даны в табл. 14.7.
Так как фактическое отношение весов в 1,35 раза больше, чем ми-
нимально допустимое для всех рассматриваемых типов самолетов, то
можно сделать вывод о целесообразности применения титановых болтов,
исходя из рассмотрения противоречия «вес — стоимость».
Следует подчеркнуть, что полезный эффект будет тем больше, чем
раньше реализуется его внедрение в процессе проектирования.
Применение нелегированного титана (например, ОТ-4-1) в качестве
жаропрочного материала вместо стали в несиловых конструкциях (вы-
хлопные трубы, противопожарные перегородки, трубопроводы обогрева
и т. п.) еще более оправдано, чем применение силовых титановых конст-
рукций, так как несиловые титановые конструкции получаются пример-
но вдвое легче стальных, хотя и значительно дороже.
3. Выгодно ли применять монолитные панели в конструкции крыла
пассажирских самолетов, если по сравнению с клепаными они на 8—
10% легче (с учетом герметизации топливных отсеков) и в 2,5—4,6 ра-
за дороже?
Рассмотрим фрезерованные и горячештампованиые монолитные па-
нели. Материал панелей во всех случаях один и тот же — Д16.
Цена экономии 1 кгс веса ДСс для четырех, рассмотренных ранее
типов самолетов при (S, Ро) —const и (ро, Ро) = const указана в
табл. 14.4. Основные характеристики панелей приведены в табл. 14.8.
Таблица 14.8
№ панели Эскиз панели Вес % 6'1 ^2; 3 Стоимость в руб/кгс панели
клепаная фрезеро- ванная горячештам- пованная
1 100 1,00 3,67 -
2 92 1,088 - 9,20 12,65
3 90 1,111 - 12,30 16,90*
* Прессованная панель.
274
Расчеты по формуле (14.44) сведены в табл. 14.9.
Таблица 14.9
Усло- вие № панели Самолет № 1 2 3 4
1SUOJ = (Orf \) 2 Минимально допустимое отно- шение / Gi \ \^2,3/т1п Фрезерованная Штампованная 1,075 1,121 1,077 1,124 1,070 1,113 1,054 1,088
3 Фрезерованная Штампов,ч иная 1,116 1,178 1,119 1,182 1,088 1,167 1,084 1,129
(^О- Pq) = const 2 Фрезерованная Штампованная 1,037 1,060 1,040 1,065 1,037 1,060 1,028 1,045
3 Фрезерованная Штамповапи я 1,058 1,088 1,062 1,095 1,057 1,088 1,043 1,066
Из сравнения фактических и минимально допустимых отношений ве-
сов клепаных и монолитных панелей видно, что при (S, Ро) =const (и
прочих заданных условиях) выгодно применять лишь фрезерованные па-
нели (за исключением панели № 3 на самолетах № 1 и № 2).
В случае, когда_панели выбирают на более ранней стадии проекти-
рования— при (ро, Ро) = const (т. е. когда производная xg значительно
больше, чем при (S, Po)=const), применение монолитных панелей крыла
во всех рассмотренных случаях целесообразно *.
Глава XV
ПРОЕКТИРОВАНИЕ КРЫЛА САМОЛЕТА
Крыло вместе с силовой установкой составляют главный рабочий
орган самолета. Размеры, форма в плане, набор профилей, тип механи-
зации передней и задней кромок, а также конструктивно-силовая схема
крыла определяются при проектировании самолета в целом в соответст-
вии с его назначением и принятой аэродинамической схемой. Проектиро-
вание крыла — основного агрегата самолета (как, впрочем, и других аг-
регатов)— должно вестись с учетом научных достижений в области
аэромеханики, с учетом освоения новых конструкционных материалов и
передовых технологических процессов.
Крыло должно обеспечивать наивысшую эффективность самолета в
заданных условиях эксплуатации.
Несущая способность и другие свойства крыла определяются его
аэромеханическими характеристиками.
§ I. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ КРЫЛА
Летио-технические и производственно-эксплуатационные данные са-
молета в большой мере зависят от следующих основных характеристик
крыла.
* При (ро, Po)=const экономия иа весе панелей приведет к значительно большему
снижению взлетного веса самолета и себестоимости т-км, чем при (S, P0)=const
(см. гл. V).
275
Аэродинамические характеристики: величина аэродинамической
подъемной силы и ее максимальное значение на всех допустимых режи-
мах полета;
величина аэродинамической силы лобового сопротивления и ее ми-
нимальное значение;
отношение подъемной силы к силе лобового сопротивления—аэро-
динамическое качество крыла и его максимальное значение;
положение центра давления и аэродинамического фокуса;
смещение фокуса от влияния сжимаемости воздуха при переходе от
дозвуковых к сверхзвуковым скоростям полета;
характер обтекания на больших и закритических углах атаки и свя-
занные с этим изменения сил и моментов,
влияние угла скольжения на аэродинамические характеристики
и т. д.
Весовые характеристики: вес конструкции крыла;
удельный вес крыла (вес крыла на единицу его площади);
относительный вес крыла (вес крыла, отнесенный к взлетному весу
самолета);
веса основных элементов, составляющих вес конструкции крыла
(вес продольного набора, стенок, иервюр, носков, механизации,элеронов,
крепежа и т. п.);
относительный вес силовых и удельный вес несиловых элементов
крыла.
Прочностные характеристики: максимальная расчетная перегрузка,
соответствующая основному расчетному случаю иагружения крыла;
расчетная нагрузка на крыло;
допускаемые расчетные напряжения по статической, динамической
и усталостной прочности;
общий запас прочности крыла и т. д.
Аэроупругие характеристики или характеристики статической и ди-
намической аэроупругости, определяющие соответственно статическую и
динамическую устойчивость конструкции крыла в зависимости от рас-
пределения материала или жесткостей и масс по крылу.
Этн характеристики показывают, насколько изменяются аэродина-
мические силы и моменты или запас продольной статической устойчи-
вости самолета от деформаций крыла при работе его на изгиб и кручение;
оии определяют возможные скорости дивергенции крыла или реверса
элеронов, а также частоты и формы упругих колебаний конструкции
крыла в аэроупругой системе самолета и критическую скорость флат-
тера.
Технологические характеристики: возможность использования пере-
довых технологических процессов при изготовлении основных деталей
и узлов крыла (широкое применение литья, штамповки, программного
механического фрезерования, химического фрезерования, склейки ме-
таллов и т. п.); рациональная схема технологических разъемов, допуска-
ющая широкую механизацию и автоматизацию сборочно-монтажных
работ, уменьшающая трудоемкость сборки и повышающая производи-
тельность труда.
Эксплуатационные характеристики: возможность доступа к узлам
крыла и другим агрегатам в крыле для профилактического осмотра или
их замены;
высокая ремонтоспособность (удобство демонтажа и монтажа);
антикоррозионная стойкость;
высокая живучесть, надежность и долговечность, заданный ре-
сурс и т. д.
Наиболее важные характеристики крыла будут рассмотрены ниже.
Все указанные характеристики крыла определенным образом зави-
сят от его геометрических параметров.
276
§ 2. ГЕОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ КРЫЛА
Под геометрическими параметрами крыла понимают его абсолют-
ные н относительные размеры, характеризующие форму крыла при ви-
де в плане, спереди и в отдельных сечениях.
Теоретический контур или форма крыла в плане образуется перед-
ней и задней кромками крыла (рис. 15.1). Передняя и задняя кромки
крыла в общем случае могут быть заданы уравнениями:
•^Я.к^^пЛ^п.к)»
Расстояния между передней и задней кромками называются хорда-
ми сечений крыла:
+ хорда
произвольного сечения; прн za.K=ZsM—z 6 = x3.K(z)—xn.K(z)—хорда сече-
ния по потоку. Могут быть и другие сечення, например, по перпендику-
ляру к передней кромке нлн к линиям, соединяющим точки, лежащие на
заданном расстоянии от передней кромки крыла (по постоянным про-
центам хорд, например, по 1/4 хорд).
Рис. 15.1. Геометрические характеристики крыла в плане
Основой построения крыла является крыльевой аэродинамический
профиль (рис. 15.2). Профиль крыла может быть симметричным и во-
гнутым (рис. 15.2, а и 15.2, б). Он определяется уравнением верхней и
нижией поверхностей ув(х) и г/и(х) и характеризуется такими геометри-
ческими параметрами: максимальной толщиной с = тах Q/B(x)—г/и(х)];
положением максимальной толщины по хорде хс; вогнутостью
, </в(*/) + ун(х/)
/(х)=------------------,’положением максимальной вогнутости (max по
хорде X/; радиусом носнка профиля гвос; углом схода (хвостика) профи-
ля о; толщиной хвостика t.
Для удобства сравнения профилей в различных сечениях крыла или
вообще для сравнеиия разных крыльевых профилей указанные линей-
ные геометрические параметры берутся в безразмерной форме, т. е. от-
несенными к_хорде профиля: с = стах/^; хс = хс/д; / = /тах//>; х^ = х^Ь\
Гнос = гнос/^; t — tlb-, абсцисса профиля также берется в безразмерной
форме: х=х[Ь — безразмерная запись уравнений верхней н нижней по-
верхностей контура профиля (рнс. 15.2, в) принимается в виде: ув =
= ув(х) н ун=£и(х), где ^B = yn = z/(x)/c; /=/(х)/с.
Основными нли наиболее общими абсолютными геометрическими
параметрами или геометрическими размерами крыла являются:
I — размах крыла в м;
277
6ср— средняя геометрическая хорда в м;
сСр — средняя толщина крыла в м;
S — площадь крыла в плане в м2;
SM.b-p — площадь миделя крыла при виде спереди в м2.
Линейные размеры связаны с указанными площадями крыла соот-
ношениями:
S = lbcp и SM.Kp~lcc-p.
Рис. 15.2. Геометрия профиля крыла (а — угол схода профиля):
а — симметричный профиль; б — несимметричный профиль; s —зависи-
мость у~(х) для симметричного (—) и fix) для несимметричного
(—•—) профилей
Основными безразмерными геометрическими параметрами крыла
являются:
л— геометрическое удлинение крыла;
Сер — средняя относительная толщина крыла.
Они связаны с предыдущими геометрическими параметрами соотноше-
ниями:
х=^=^- S bcp (15.1)
— Сер ^м.кр Сср==Т7="«—= ^М.ЬР. (15.2)
Из (15.1) следует, что
z=Kxs и йср=у= V т- (15.3)
278
Геометрической характеристикой крыла является также форма его
средиииой поверхности. Она определяется как полусумма ординат верх-
ней и нижней поверхностей крыла, образованных верхними и нижними
обводами профилей:
ycf(.x- z)=y[y,(x; z) + y„(x; z)].
Для некоторых крыльев срединная поверхность характеризуется на-
бором вогнутых профилей, повернутых на угол ф(г) относительно корне-
вого сечения (z=0). В соответствии с этим различают аэродинами-
ческую крутку, характеризуемую распределением вогнутостей про-
филей по размаху/(г) и геометрическую крутку, определяемую
законом углов поворота сечений по размаху крыла ср (г). Средними па-
раметрами, характеризующими аэродинамическую и геометрическую
крутки крыла, могут служить:
В качестве обобщенного параметра крутки можио принять величи-
ну <Рср = фср + 4/Ср.
В общем случае, для крыла, произвольного по форме в плане, обоб-
щенным параметром крутки, характеризующим искривленность средин-
ной поверхности, может быть принята величина
z)dxdz\’
дуср(*', 2)
где ----------угол между касательной к средиииой по-
дл
верхиости крыла и координатной плоскостью хОг.
Характеристическими размерами самолета являют-
ся: S — площадь крыла; I — размах крыла и 6а— средняя аэродинами-
ческая хорда крыла (сокращенно — САХ крыла). Величина САХ для
произвольного по форме в плайе крыла определяется выражением
(15.4)
Положение САХ по размаху определяется координатой
b(z\zdz
(15.5)
Координата иоска САХ по оси Ох определяется выражением
*(^)-3:n.K(z)</z
(15.6)
279
Все крылья условно можно раделнть на крылья больших удлине-
ний (А>3,5) и крылья малых удлинений (А<3,5).
По форме в плане крылья можно классифицировать так: прямые а,
стреловидные б, треугольные в, ромбовидные г, составные с изломами
по передней и задней кромкам, или с плавными криволинейными кром-
ками, так называемые «серповидные» д, е, оживальные ж, з и «готиче-
ские» и, к крылья (рис. 15.3).
Крылья,.образованные отрезками прямых линий, можно разделить
еще на группы по числу образуемых этими отрезками углов, например:
треугольные в, четырехугольные г, шестиугольные б, семиугольные ж
и т. д.
# 2) е) з) k к)
Рис. 15.3. Формы крыльев в плане'
Далее, все крылья с прямыми образующими по передней и задней
кромкам и с коицевой хордой, параллельной оси Ох, могут быть объе-
динены в одну группу, так как их форма в плане описывается одинако-
выми для них уравнениями (рис. 15.3, а, б, в, г).
Так, уравнение хорд этих крыльев будет иметь вид
где б0 — корневая хорда крыла (при z=0\;
by — концевая хорда крыла (при z—112).
Используя безразмерную координату по размаху крыла z=2zfl, а
также безразмерный параметр т|=до/£) — сужение крыла, предыдущее
уравнение для правого полукрыла можно записать в виде
b(z) = b0[ 1-^1 г). (15.7)
Используя (15.7), можно получить
s=ib0^, (15-8>
а сопоставляя (15.8) с (15.3), будем иметь
= (15.9)
На основании (15.4) можно вычислить САХ крыла
Л =— й 1)2 + 1 + 1 а з’1 ^(ч + l) ’ (15.10)
или b = — Ь 1'2 + ’1 +— . " 3 tp (1 + ip (15.11)
280
Относительная координата САХ по размаху крыла определяется со-
отношением
- __ 1 , + 2 а 3 т] 4-1 ’ Используя уравнения передней и задней кромок •*n.K=2tgx...K; *з.к = *о + 2 tgХз.к. (15.12) (15.13) (15.14)
где %п.к и Хзк — углы стреловидности крыла по передней и задней кром-
кам соответственно, можно получить, например, координату носка САХ
по оси Ох
(15.15)
6 rj + 1
а также — соотношение между углами стреловидности по передней и зад-
ней кромкам
tgX3.K=tgx„.l[—7-— (15.16)
Л Т) + 1
нли между передней кромкой и любой другой прямой, проходящей по
постоянным долям п (или процентам) хорд,
tgXn.K = tgXn + « ’ (15.17)
Л т] 4-
где 0<п<1.
Вообще, углы стреловидности двух любых прямых, проходящих по
разным постоянным долям («1 и п2) хорд, будут связаны соотношением
tgX", + «i 4-1T7=tgz"! + '12T1Z^1 (15.18)
A т] + 1 А т] 4- 1
Относительные омываемые (илн смачиваемые) площади для крыль-
ев с линейными кромками (5ом = 5ом/5) могут быть определены по фор-
мулам;
S0M =------- ( 1 + т]-Для среднепланов; (15.19)
^ + 1 V 1+Лф'
[ 1 + -——— f 1-J-^——=r-Y| — Для высокопланов н (15.20)
2 L 1 + 1 \ 1 ч-£>ф /J низкопланов,
где D$=D$!l — относительный диаметр фюзеляжа.
Очень важной геометрической характеристикой крыла является его
объем, который может быть использован главным образом под топливо.
Для крыльев с прямолинейными образующими по передней и задней
кромкам максимальный теоретический объем можно вычислить по фор-
муле
7
(15.21)
где kw — коэффициент объема, вычисляемый по формуле
4 2г)Т]е 4- т} 4- 4- 2
9 (Т)с 4- 1) С1} 4- 1)
(15.22)
281
Здесь t|c = cq/Ci — сужение крыла при виде спереди. Из (15.22) следует,
что наибольший объем таких крыльев получается:
при т(->оо и т1с~>со;
при Tks=:l #^ = 2/3, т. е. не зависит от т|с;
При V|-»QO kw =
4 2-^1
9 Vc + 1
откуда при т)с-*оо
, 8 ,
k — шах
Как правило, под топливо отводится только часть объема крыла.
В остальной части, занятой носками н хвостиками крыла, размещается
механизация, шасси, управление. По размаху крыло также не полностью
используется под топливо: например, законцовки крыла, нли корневая
часть, занятая фюзеляжем (у некоторых пассажирских самолетов).
Рис. 15 4 Расчетные схемы топливных объемов в крыле:
а —форма баков, характеризуемая образующими крыла, б — форма баков,
определяемая прямыми, удаленными на одинаковое расстояние от передней
н задней кромок
Чаще всего топливо размещают в силовом кессоне крыла, который
называется кессон-баком. Весь кессон может быть разбит на отдельные
кессон-баки. Передние и задние стенкн кессон-баков могут быть распо-
ложены либо на постоянном проценте хорд крыла, либо на постоянном
расстоянии от его кромок (рис. 15.4, а н б).
В обоих случаях объем топливных кессон-баков определится форму-
лой, аналогичной (15.21), только коэффициент объема в первом нз ннх
будет = а во втором—kw=kw- В первом случае для п
кессон-баков:
(15.23)
где —коэффициент заполнения площади профиля крыла t-м кес-
сон-баком;
—коэффициент заполнения крыла по размаху t-м кессон-ба-
ком.
Эти коэффициенты могут быть вычислены по формулам:
h'F, = \ (1 - 2»и< - у »К1) + 2\ (1 - )]; (15.24)
282
kh=[1 - 2гЛс+1+;с+2 (/к,+/„,) +
I 2rjrlC ‘
+-г 4^" ° +V-.+z»p1 (15-25>
«W ‘ * J
где bKl = bKJbl—относительная хорда f-го кессон-бака;
bK. = bKill—относительное расстояние в долях хорд крыла от нос-
_ ка крыла до передней стенки г-го кессон-бака;
lK^=lnjl—относительная координата начала t-ro кессон-бака по
размаху крыла;
4 =1К,[1—то же для конца Лго кессон-бака.
Во втором случае для п кессон-баков коэффициент объема можно
определить по упрощенной, формуле
k'w ---------------V kf. • k], (15.26)
Ol + W + l) Л ‘ ‘ 1 ’
где
4 = T [1 - (7k,+4) +
' L ^t\c 1 1
+ +i)fc + D g + 7 +g jl_ +g); (15.27)
3v1C 1 ‘ 1 1 J 2^ 1 1
(15.28)
В_формуле (15.27) обозначено:
^Hz = ^H./^cp — постоянное расстояние от передней кромки крыла до пе-
редней стенки t-ro кессон-бака, отнесенное к средней гео-
_ метрической хорде крыла;
bx ^bx jbq—то же для постоянного расстояния между задней кром-
кой крыла и задней стенкой t-ro кессон-бака.
Зная объем топлива в крыле, можно подсчитать его вес:
з
Ог.кр = 11М/1.«Р=*Др 4", (15.29)
где илн Ат = утЙ1г;
Ут — удельный вес топлива (для авиакеросина ут=800 кгс/м3).
Формулы для расчета объема (или веса) топлива в крыле (15.21)—
(15.29) являются достаточно общими: они охватывают практически все
возможные комбинации размещения кессон-баков в крыльях с прямоли-
нейными передними и задними кромками. Для случая одного кессон^ба-
ка (п=1) можно положить ZH = 0 и /к=1 — /З.кр,_или /н=Йф и 7К=1 — /З.кр
(для некоторых пассажирских самолетов), где Z3.Kp— доля размаха, при-
ходящаяся на законцовку крыла и не занятая топливом.
Законцовка крыла округляется по передней кромке, как показано
на рис. 15.5 (площадь крыла остается прн этом неизменной, а размах
считается до теоретической концевой хорды Ь\).
Как уже было сказано выше, для увеличения объема крыла выгод-
ны большие сужения (г]^>1 и r]cil). Поскольку наибольший вклад в
полезный объем вносят корневые сечения крыла, то может оказаться,
что выгодно иметь т]с>г]. Это следует, например, из анализа распределе-
283
ния относительных толщин по размаху для данного типа крыльев, кото-
рое описывается уравнением
»U) 1
1г — 1 -
-----Z
1-1- ’
•----Z
1
(15.30)
откуда видно, что для выполнения условия со=с(О)>с(1) необходимо
иметь
Наибольший объем можно получить для кессон-баков с постоянны-
ми расстояниями между их
стенками и кромками крыла.
Крылья больших удлине-
ний (у самолетов с дозвуковой
скоростью полета) сопрягают-
ся с фюзеляжем с помощью
так называемых «зализов» по
Рис. 15.5. Законцовка
крыла
Рис. 15.6. Зализы и наплывы иа крыле:
а— схема зализов: /— передний зализ: 2 — зад-
ний зализ; б — схема наплывов
передней и задней кромкам (рис. 15.6, а). Иногда полезными оказы-
ваются корневые «наплывы» (задние и передние, рис. 15.6, б).
Относительное увеличение площади крыла эа счет наплывов может
быть подсчитано по формулам
— для наплыва по передней кромке
Sn.,.,„ = S„.K.H/S=3.K.»-j-(tg /».«.,-tgXn.«) (15.31)
— для наплыва по задней кромке
S3.B,, = ^-=3.K.HA.(tgZ3.K-tgZ3.K.H), (15.32)
где гп.к.н и 2з.к.н — относительные размахн наплывов;
Хп.к.н и Хз.к.н —углы 'стреловидностей наплывов по передней и
задней кромкам.
Большое значение имеют передние наплывы для треугольных и ром-
бовидных крыльев, которые вместе образуют составные крылья, приме-
няемые на сверхзвуковых самолетах. По геометрическим характеристи-
кам и по ряду других характеристик к составным крыльям можно отне-
сти и оживальиые крылья, которые получаются из составных путем
скругления изломов по передней кромке. Объемы таких крыльев и со-
ответствующий им вес топлива могут быть определены по предыдущим
формулам (15.21) — (15.29), если в них принять:
площадь крыла
s=s6(l + Sn.K.s);
284
среднюю геометрическую хорду
^Р = ^;.б(1 + ^п.к.н); '
> Хо
удлинение крыла л=——±;
1 + •J’n.K.M
сужение крыла 'Л = 'Пб(1 + 5и>кЛ-5я.1(<н,
где 5б, #ср.б, fa и 1]б — геометрические параметры базового крыла (без
учета переднего наплыва).
Другой важной геометрической характеристикой составных и ожи-
вальиых крыльев является положение центра тяжести их площади отно-
сительно носка САХ базового крыла. По сравнению с положением цент-
ра тяжести площади крыльев с прямыми передними кромками, которое
равно ’/г в долях САХ, положение центра тяжести составных или ожи-
вальных крыльев относительно носка и в долях САХ базового крыла
можно определить по формуле
—> (15.33)
1 + Sji.K.H
где
tgXn.J-
8 L Цб +1 ! J
положение центра тяжести площади переднего иаплыва в долях САХ
базового крыла относительно иоска САХ базового крыла.
Для увеличения диапазона высот и скоростей полета за последние
годы большое внимание уделяется крыльям изменяемой геометрии и, в
частности, крыльям с изменяемой стреловидностью.
Такие крылья обладают тем положительным свойством, что при из-
менении стреловидности от х~^° до х~90° и более у них в широком
диапазоне изменяются и все другие геометрические параметры, что вы-
зывает желаемое изменение основных аэродинамических характеристик
крыла и самолета в целом.
За характеристические размеры крыла изменяемой стреловидности
могут быть приняты: общая теоретическая площадь S, САХ (Ьа) и раз-
мах I крыла одной из возможных его конфигураций (например, при наи-
меньшем х = Х/яйХт1п или наибольшем — Xmav угле стреловидности
поворотной консоли). Аналитические зависимости для геометрических
параметров такого крыла от угла стреловидности поворотной консоли х
в общем случае получить трудно.
Учитывая важность этих зависимостей для проектирования самоле-
та, можно получить их приближенно, исходя из расчетной схемы, пред-
ставленной на рис. 15.7. Из этой схемы следует, что хорды консоли будут
изменяться по закону
6M(z)=A. = j;5St, (15.34)
cos х cos X
где —хорда консоли при x=X/ = Xmin;
ЬОк— хорда консоли при х=0.
Учитывая, также, что строительная высота консоли не зависит от ее
поворота, относительная толщина профилей консоли будет изменяться
по закону
Mz)=-^^ = Co.e°s/.=<:« > (15.35)
Ьк (X) COS у/
где ск — относительная толщина консоли при х=Х, = Хтш;
с0.{ — относительная толщина при х=0.
285
Аналогично будет изменяться и относительная вогнутость профилей.
Если за характеристические размеры принять размеры крыла в развер-
нутой конфигурации, т. е. прн %=х,=Хтт» то можно записать следующие
постоянные соотношения:
S' = 5^ + 5’;
z' = Ан+ 4.с cos /;
Ь=у($Л..+йыМ,,
(15.36)
(15.37)
(15.38)
где 5Ц—площадь центроплана;
5к—площадь КОНСОЛИ при % = X, = Xmln;
S'— общая площадь крыла при х=х/=хт1л;
— размах между шарнирами;
/к<с—строительный размах консолей;
да*ц— САХ центроплана;
Ьл.к—САХ консоли при х=х';
Г— общий размах крыла при х=Х,=Хпнп-
%т . ^Дгщ/2
Рис. 15.7. Расчетная схема крыла изменяемой стрело-
видности
Соотношения (15.36) — (15.38) удобно записать в -безразмерной форме
5ц+&=1; (15.39)
?Ш-Н.ссозх'=1; (15.40)
ЗД,.Ц^Ж.К=1, (15.41)
где
"о ____ Зц . ‘с'_’4. ~ . 7 ___1к.с, Г _^a.u . Т' _ ^а.к
*^ц— с, ’ ‘-’к— с, ’ — ,, ’ ^к.с— » °а.ц . ’ .
S Ъ 1 I оа о&
В общем случае площадь н размах крыла и поворотной консоли в
зависимости от х будут определяться соотношениями:
(15.42)
^’Z) = 2u,+/K.ccosz; (15.43)
<(Z)=/(Z)~/U- (15-44)
286
Переходя к безразмерным величинам
S(Z)=^L; 7(х)=^;
'-’к
7k(z)=ACO; 7:=^ft),
I' I co
используя соотношение (15.39) —(15.41), (15.42) —(15.43) и полагая
s;=-^(i-a (15.45)
cos x
можно получить
7к(х) = гш-7ц + (1-г1П)-^г; (15.46)
LUb £
_ _ — cos х'
1 — гш — (/ц — гш)
S, (7,) =------z-----; (15.47)
1 - 'и
^(Z)=zm4- (1 - гш) cos x/cos (15.48)
S(z) = Sk(7) + [1 - 3К(Х)]3Ц; (15.49)
Л’(х) = 41а. (15-50)
Чх)
Тогда удлинение крыла в зависимости от х будет определяться соотно-
шением
k = k,k(Z),
(15.51)
где Х—-^-—удлинение крыла в развернутой конфигурации
^2(Х)
Л(Х) — _---—относительное изменение удлинения прн изменении х-
5 (X) _ _ _
Легко заметить, что при x=Xz 5’ = /=5к=Х = 1, а прн увеличении х
эти величины уменьшаются. По сравнению с исходной величиной (при
у=х') средняя относительная толщина крыла при увеличении х консоли
изменяется по закону
сср (X)
Ссп = —,------
(15.52)
Зависимости S(x); Цх); Мх); 5к(х); Сср(х) и 1К (х) представлены
на графике рис. 15.8. Следует отметить, что если закоицовка центропла-
на ие параллельна потоку, а наклонена иа угол Хзп (см._рис. 15.7 жирная
штрих-пунктирная линия), изменение площадей 5К и S будет происхо-
дить несколько иначе. Чтобы учесть это обстоятельство, в формуле
(15.47) для SK необходимо вместо отношения cosx'/cosx взять отношение
cos (х' — Хз .1)
cos (X — Хз.ц)
Очень важными дополнительными геометрическими параметрами
крыла, определяющими кинематику движения коисоли и ее сопряжение
с центропланом, являются координаты центра шарнира или оси узла
287
поворота консоли. Исходя из условий, что передняя кромка консол при
минимальной (х = хЭ и при максимальной (х=х") стреловидности долж-
на проходить через одну и ту же точку цеитроплаиа (в частности, через
точку на передней кромке центроплана, определяющей точку излома
передней кромки всего крыла), а также на основании схемы рис. 15.7 и
соотношения 115.45) можно получить
(15.53)
I ) 1 — /ц cos (х —х')'2
И
= ~~ = cig, (15-54)
где хщк=Хшк/^ок — относительное положение оси шариира по хорде
консоли, проходящей через ось шарнира перпенди-
кулярно передней кромке.
Другой важной геометрической характеристикой крыла является
величина смещения его центра тяжести при повороте консоли. Это сме-
щение в долях САХ крыла исходной конфигурации можно определить
по простой приближенной формуле
\ Z>a / cos х
(15.55)
где = 1 —5ц—вес поворотной коисоли, отнесенный к ве-
^кр
су всего крыла;
2Ц.Т.К=——расстояние от центра тяжести консоли до
х оси шариира, отнесенное к строительной
длине консоли; .
/ b ср ч
— —отношение средней геометрической хорды
\ /
к средней аэродинамической хорде крыла
в исходной конфигурации (при х=х')-
Рис. 15.8. Относительное измене-
ние геометрических параметров
при изменении стреловидности по-
воротной консоли
Рис 15 9 Одношарнирнсе крыло изменяе-
мой стреловидности
Наряду с рассмотренным двухшариирным крылом изменяемой стре-
ловидности можно рассмотреть гипотетическую схему одиошариирного
крыла изменяемой стреловидности (рис. 15.9). Из-за простоты определе-
ние геометрических характеристик одношарнирного крыла в зависимо-
сти от изменения его стреловидности здесь не рассматривается. Такое
288
крыло может быть применено как взлетно-посадочная механизация для
самолета с очень малой площадью основного крыла (например, у низко-
летящего самолета н т. п.).
Полезный объем крыла изменяемой стреловидности состоит из по-
лезных объемов центроплана и поворотной консоли. Эти объемы можно
вычислить по формулам (15.21) — (15.29), рассматривая центроплан н
консоль как отдельные крылья со своими геометрическими параметрами
и своим характером распределения кессон-баков вдоль хорд и размахов
с учетом расположения реальной конструкции узлов поворота консоли.
В заключение следует отметить, что геометрические характеристики
крыльев играют решающую роль при выборе оптимальных параметров
самолета, так как именно они в основном определяют аэродинамические
и конструктивно-весовые показатели самолета.
Основными, или строительными, геометрическими параметрами кры-
ла можно считать площадь S, удлинение сужение rj, относительную
толщину с и стреловидность %, так как от них зависит одновременно
аэродинамические и конструктивно-весовые характеристики крыла. Дру-
гие геометрические параметры, характеризующие аэродинамическую и
геометрическую крутку крыла, такие как /(2); <p(z); xc(z); Xf(z) и т. п.,
сравнительно слабо влияют на весовые характеристики крыла; поэтому
можно считать, что они всегда принимаются опитамальными в аэродина-
мическом отношении.
§ 3. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЫЛА
Крылья самолетов в аэродинамическом отношении характеризуются
силами и моментами, возникающими при движении в воздухе.
Подъемная сила крыла Укр определяет его несущую способность и
является главной аэродинамической характеристикой крыла.
Другой столь же важной аэродинамической характеристикой являет-
ся сила лобового сопротивления Лкр. Сочетание этих двух аэродинами-
ческих характеристик в виде отношения Укр/Хкр определяет аэродина-
мическое качество крыла К. Максимальное значение аэродинамического
качества крыла ^тах= (Укр/Х<р)тах является мерой его аэродинамиче-
ского совершенства.
Наиболее существенной аэродинамической характеристикой являет-
ся продольный момент крыла MZKP или положение центра давления хдкр
и фокуса крыла %гКр. Указанные аэродинамические характеристики ис-
пользуются чаще всего п^и условиях симметричного и безотрывного
обтекания. При несимметричном обтекании, т. е. при полете со скольже-
нием, эти аэродинамические характеристики несколько изменяются и на
крыле возникают другие силы и моменты: боковая сила ZKp, момент кре-
на Мхкр н момент рысканья А4укр. Наиболее важной характеристикой
из этих последних для проектирования самолета является момент крена.
Прн проектировании самолета необходимо знать зависимости аэро-
динамических характеристик крыла от его геометрических параметров.
С этой точки зрения целесообразно рассматривать безразмерные аэро-
динамические коэффициенты сил и моментов, используемые обычно в
аэродинамике, т. е. коэффициенты: подъемной силы — су, силы лобового
сопротивления — сх, продольного момента — mz, момента крена — тх
и т. п.
Аэродинамические характеристики крыла в виде безразмерных аэро-
динамических коэффициентов являются наиболее общими в них доста-
точно полно и хорошо отражается влияние геометрических параметров
крыла. Это влияние часто бывает трудно обнаружить особенно при срыв-
ных режимах обтекания. Однако дело несколько упрощается в связи с
тем, что основные расчетные случаи полета происходят при безотрывном
обтекании. Во всяком случае, конструктор проектируемого самолета дол-
10—1062 289
жен обеспечить такое обтекание на всех режимах полета всеми имею-
щимися средствами (набор профилей, механизация, УПС и т. п.), иначе
придется вводить ряд ограничений в эксплуатацию самолета и сущест-
венно ухудшать его летные данные.
Несущая способность крыльев умеренных и больших
удлинений (А>3) на малых дозвуковых скоростях полета при безотрыв-
ном обтекании характеризуется зависимостью коэффициента подъемкой
силы от угла атаки или его производной по углу атаки
^=4(а —а0), (15.56)
где ао — угол атаки при су = 0, зависящий от аэродинамической компо-
новки крыла;
da р>. -Ь 2
(15.57)
Здесь р— отношение лолупериметра крыла к его размаху.
Для крыльев с прямолинейными передними и задними кромками и
с концевыми хордами, параллельными потоку, это отношение равно
Р
2 \ cos 7.П.К cos Хэл- / A (rj -ь 1)
(15.58)
где %п.к и Хз.к связаны соотношением (15.16) или (15.17). Формулы
(15.56) и (15.57) применимы практически для крыльев любой формы в
плайе. Для крыльев малого удлинения эти формулы требуют некоторого
Рис. 15.10 Схемы обтекания крыльев малого
удлинения
дополнения, следующего
из особенностей их про-
странственного обтека-
ния. Обтекание крыльев
малых удлинений (7<^3),
различных по форме в
плане, является сущест-
венно пространственным
даже при небольших уг-
лах атаки. Оно характе-
ризуется интенсивным пе-
ретеканием воздуха с
нижней поверхности кры-
ла на верхнюю через бо-
ковые или передние кром-
ки при большой стрело-
видности (рис. 15.10). 06-
разующаяся на этих
кромках пространствен-
ная вихревая пелена (вер-
тикальная или наклонен-
ная внутрь крыла) сворачивается в мощные вихревые жгуты над крылом
по его концам вдоль потока. Далее по потоку они соединяются с конце-
выми вихрями, образующимися от основной вихревой пелены крыла
(рис. 15.11). Такая пространственная вихревая система индуцирует на
верхней поверхности крыла вдоль хорд дополнительную скорость. Это
согласуется с вышесказанным положением о перетекании воздуха с ниж-
ней поверхности крыла на верхнюю, в результате которого увеличивает-
ся расход воздуха над верхней поверхностью и скорость потока над ней
возрастает. В соответствии с законами гидродинамики на верхней по-
верхности крыла возрастает разрежение. Это дополнительное разреже-
ние создает дополнительную подъемную силу, которая с избытком ком-
пенсирует потери от местных срывов потока вдоль боковых или передних
стреловидных кромок.
290
Такой аэродинамический эффект у крыла малого удлинения усили-
вается с увеличением угла атаки. Он затягивает полный срыв потока до
больших углов, которые практически даже не всегда могут быть исполь-
зованы. Общая теория крыла малого удлинения в силу своей сложности
до настоящего времени окончательно еще ие разработана. Наибольший
вклад в ее разработку был внесен В. В. Голубевым [7].
Если использовать известный результат теории несущей линии для
крыла конечного размаха или формулу (15.56) в качестве решения пер-
вого приближения и дополнить его положениями, сформулированными
В. В. Голубевым для крыла малого удлинения, то можно получить при-
ближенную зависимость коэффициента подъемной силы такого крыла по
угл\ атаки су — су(о.) и его производную с* = с“(а).
Одним из основных таких положений является представление обте-
кания верхней поверхности крыла как обтекания твердой стенки, моде-
Рис. 15.11. Схема вихревых жгу-
тов на крыле малого удлинения
Рис. 15.12. Схема для опреде-
ления дополнительной скоро-
сти на верхней поверхности
крыла малого удлинения от
концевых вихрей
лируемое с помощью фиктивной системы вихрей, получаемой зеркальным
отражением основной системы (упрощенной, П-образиой) относительно
плоскости крыла (рис. 15.12).
Тогда, пренебрегая величиной опускания свободных вихрей или вих-
ревой пелены крыла, видим, что дополнительная скорость потока вдоль
хорд &V от действительных и фиктивных свободных вихрей с циркуляци-
ей Го будет связана с индуцируемой или нормальной скоростью и в об-
ласти присоединенного внхря соотношением Ay=2wsina. Но так как
и-2Г0/л/, а У]-pV/Го, то
и = и ДУ = 4У1 sin a/pl/nZ2.
Дополнительное разрежение иа верхней поверхности крыла в сред-
нем будет равно Др~—рУАУ, а приращение подъемной силы ДУ=
= —Др£ = рУДУ£; подставляя выражение для ДУ, получим
, v v 4S . 4aS v
дг =Г,-----sin --------У,.
1 Л/2 Л/2
Суммарная подъемная сила крыла будет равна У= У1 + ДУ= У1 (1 +•
’г4а/лЛ); переходя к безразмерному коэффициенту, будем иметь
+4а/лХ),
где Су, (или У]) соответствует значению первого приближения, опреде-
ляемого выражением (15.57).
10* 291
В последнюю формулу можно ввести поправку, учитывающую рас-
пределение подъемной силы по размаху, которое близко к эллиптическо-
му для крыльев малого удлинения. Обобщая, окончательно можно на-
писать
с„=2лХ 714-2^8). (15.59)
рХ +2 \ рХ /
Эту зависимость можно применять для крыльев умеренно малых
удлинений (1<%<3). Для крыльев очень малых удлинений (Л< 1) зави-
симость (а) иа малых углах атаки, как известно, имеет вид
с„ = у Х(а —а0). (15.60)
Нелинейность по углам атаки для таких крыльев можно учесть_с по-
мощью поправки в (15.59), если иметь в виду, что при 7,->0 р->1/А;
тогда
с^ = 7-Х(а —а0)[1-J-2(a —а0)]. (15.61)
Зависимость (15.59) действительна и для крыльев больших удлине-
ний, у которых нелинейность су(а) еще не успевает проявиться, так как
прирост подъемной силы от конечности размаха компенсируется паде-
Рис. 15.13. Зависимость cv (a)
для крыльев различных удлине-
ний:
Рис. 15.14. Зависимость с? крыла
от чисел М полета:
— •—•линейная теория,
------эксперимент
•— — - — линейная теория.
--------нелинейная теория;
--------с учетом срывов
нием ее за счет развивающихся турбулентных срывов потока с верхней
поверхности. Поэтому для крыльев с ^>3 следует использовать зависи-
мость (15.57), а для крыльев с 1 <Х<3 — зависимость (15.59).
Необходимо все же отметить, что влияние срывов потока иа умень-
шение нелинейного прироста су будет происходить иа одних и тех же ис-
тинных углах атаки с учетом скоса потока, т. е. для профилей иа одних
и тех же значениях су независимо от удлинений крыльев. При одинако-
вых профилях максимальные значения сушах крыльев будут примерно
равны при любых удлинениях (рис. 15.13).
Влияние сжимаемости воздуха при дозвуковых скоростях полета
иа подъемную силу крыла может быть учтено с помощью дозвукового
закона подобия, если вместо величины су, К, tg%j в формулах для су(а)
подставить величины c^V^l—М2; X V^l —М2; tg/z/V^l —М2. Следует
заметить, что характеристика су(а) для крыльев очень малых удлине-
ний Х<1 (15 60) при этом ие изменится.
Влияние сжимаемости на су(а) для крыльев малых и больших удли-
нений может быть учтено в формулах (15.57) и (15.50) только через без-
292
размерный параметр р: для крыльев с прямолинейными кромками сле-
дует вместо р принять
А» = -ИV l-M2 + tgZn.K + V l-M2+tg2z,K) + г-2— •
2 \ / л (Л I)
В приведенных выше зависимостях су(а), характеризующих несу-
щую способность крыльев конечного размаха в дозвуковом потоке, хоро-
шо отражено влияние геометрических параметров (Л; %; г]), определяю-
щих различные формы в плане. Однако они неприменимы для расчетов
в околозвуковом (так называемом «трансзвуковом») диапазоне скорос-
тей (М^0,85—1,15). При таких скоростях полета обтекание крыла яв-
ляется смешанным, т. е. на его поверхности имеются зоны местных до-
звуковых и сверхзвуковых скоростей. Вызываемые крылом возмущения
поля скоростей потока соизмеримы со скоростью полета. Эти возмущения
значительно больше, чем при полете с дозвуковыми или сверхзвуковыми
скоростями. В результате больших возмущений поля скоростей и давле-
ний резко возрастают силы, действующие на крыло. В околозвуковом
диапазоне скоростей они достигают максимального значения. Это под-
тверждается экспериментом (рис. 15.14).
Общего метода расчета несущих свойств крыльев в этом диапазоне
скоростей и при М=1 не существует. Получить расчетом скорость дву-
мерного потока в плоскости годографа можно только для специальных
профилей простой формы. Поэтому они практически не пригодны для
проектирования самолета, где требуются интегральные или суммарные
аэродинамические характеристики крыла. Для расчетов их в трехмерном
потоке существуют различные методы, основанные на приближенной не-
линейной теории обтекания крыла. Обоснованием первого приближения
является только требование конечности удлинения крыла, которому до-
статочно хорошо соответствуют реальные крылья умеренных и малых
удлинений.
Наиболее ценным результатом этой теории является правило подо-
бия в околозвуковой зоне скоростей и при М = 1. Эти правила подобия поз-
воляют установить некоторые зависимости, с помощью которых можно
правильно обрабатывать и обобщать экспериментальные материалы. На
основании правила подобия общая зависимость характеристики несущей
способности крыла Су в околозвуковом диапазоне имеет вид
- (с)
При М^1 эта зависимость может быть представлена в виде одной
кривой cj(c)3 =/[х(с)3 ], которая приХ(с)3<1 сводится к извест-
ному соотношению для крыльев малых удлинений = .Обоб-
щая имеющиеся результаты [2; 7], с достаточной для практики точностью
можно определить величину с’крыла при М = 1 по формуле
с* =----, (15.62)
Л (Г)т + 2
Где /г=Д>.(с)3; Z; 7]
В частности, для крыльев с прямыми передними и задними кромка-
ми и концевой хордой, параллельной потоку (для стерловидных крыльев
293
Анализируя указанные результаты, можно получить число М, при
котором Ср будет иметь максимальное значение
и отношение Ср1йзк при Мэ1
21^_=1+(7)тГ2----------1—I2. (15.64)
с“'м=* L к У -I
Несущие свойства крыльев, различных по форме в плане, на сверх-
звуковых скоростях не могут быть описаны какой-нибудь одной зависи-
мостью, так как границы крыла определяют характер взаимного влияния
отдельных его участков. Например, в зависимости от того, являются ли
кромки крыла (передние и задние) дозвуковыми (fg/, > УМ2—1) или
сверхзвуковыми (tg у, < УМ2 — 1), могут быть получены те или иные
формулы для зависимости Су(М). Для прямого крыла при
X]Zm2 — 1^>1 имеем
4 = — -Л-------------------Y (15.65)
у М2— 1 \ 2Х/м2 — 1/
При X У М2 — 1 < 1 получается более сложная и громоздкая зависи-
мость [2; 7]. Для прямого крыла с наклонными боковыми кромками в
случае, если они дозвуковые (И§/б.к17>УМ2— 1), при хУм2—1>1
с’ = - 4 -(1 - (15.66)
]/М2 — 1 к 2> /
В случае, если они сверхзвуковые,
с“=——-------- (15.67)
/М2 — 1
т. е. как у крыла бесконечного размаха или при двумерном обтекании
плоской пластинки.
Для треугольных крыльев со сверхзвуковой передней кромкой вели-
чина вычисляется также по формуле (15.67). При дозвуковых перед-
них кромках (ig Ч < "УМ2 — 1) для треугольных крыльев имеет место
зависимость
2л
£ tg 7.1
(15.68)
где Е(К) — полный эллиптический интеграл второго рода с модулем
k=Vr 1 — m2; т =
•gXn.K a
В качестве универсальной зависимости для треугольных крыльев
можно принять простую полузмирическую формулу
, (15.69)
м2—1 + 0,3
которая достаточно хорошо совпадает с экспериментом.
Для крыльев более общей формы в плане, например, для четырех-
угольных (типа «ласточкин хвост» или «ромбовидных») при дозвуковой
передней кромке (т<1):
‘т/л V I 1 С
?£(*) [Г+5 (1-52)3'2
При сверхзвуковой передней кромке
8m
W + s)
--- 1 — arccos ( —Ц -(---6 arccos —
]/m2_S2 \ m I /m2_l m
(15.70)
(15.71)
где = /M2 — 1, a .
tg Т.П к
Большой интерес для проектирования представляют характеристики
стреловидных крыльев на сверхзвуковых скоростях полета. Однако
теоретическое определение их несущей способности очень сложно: зави-
симости су (М) получаются весьма громоздкими. Приближенно зависи-
мость от геометрических параметров и числа М можно получить на
основании формул (15.70) и (15.71). Тогда, для случая дозвуковых перед-
них кромок,
(15.72)
। 1
4 j rt г 2arccos ( — g) 1 1 + я I 2
£(6)И?Т.п.к| 1+е I? (2-6) (1 + 6)1'2 J
а для случая сверхзвуковых
Приведенные выше зависимости С^(М) охватывают широкий класс
крыльев по форме в плане, наиболее часто применяемых на практике.
Для этих крыльев зависимости Су (М) могут быть построены во всем
летном диапазоне скоростей от дозвуковых до сверхзвуковых, включая и
трансзвуковую зону. Кривая С^(М) в околозвуковом диапазоне чисел М
ДОЛЖНа ПрОЙТИ через ТОЧКИ ^у (Мкрит) при М<С1, ^у ^утах (МЭ1) и
(с? при М = 1, ‘Плавно сопрягаясь с кривыми с“(М) для дозвуковых
и сверхзвуковых скоростей.
Зависимость (М) для крыльев очень малых удлинений остается
примерно постоянной: с?=лХ./2. Следует заметить, что. нелинейность
^(а) у крыльев малых удлинений на сверхзвуковых скоростях практиче-
ски исчезает.
Зависимость Су (М) необходима для проектирования крыла при оп-
ределении максимальной эксплуатационной и расчетной перегрузок в
295
случае вертикального порыва ветра (если эти перегрузки становятся
больше маневренных, как, например, для тяжелых и большинства пасса-
жирских самолетов). Снижение эксплуатационных перегрузок за счет
уменьшения с* при полете на малых высотах и околозвуковых скоро-
стях может быть достигнуто применением крыльев изменяемой стрело-
видности. Для таких крыльев с относительно небольшим центропланом
(^0,3) величина с у может быть определена по формулам для стре-
ловидных крыльев, если использовать кинематические зависимости
Л = Л(х); с = с(х) и т, п. (см. § 2).
Для крыльев более сложных форм в плане несущая способность в
виде Су может быть определена численными методами с использовани-
ем ЭВМ. Однако при общем или эскизном проектировании самолета
применение этих методов нерационально из-за больших затрат времени.
Поэтому для большинства практически используемых крыльев их инте-
гральные характеристики су могут быть определены с помощью приве-
денных выше аналитических выражений для крыльев по форме в плане,
аппроксимирующих заданное (например: оживальное крыло может быть
аппроксимировано треугольным при одинаковых Лиг. п.). При оценке
несущей способности крыла в общей схеме самолета необходимо учиты-
вать его интерференцию с другими агрегатами (фюзеляжем, мотогондо-
лами, оперением и т. п.).
Максимальная несущая способность к р ы л а характе-
ризуется величиной Сушах, которая зависит от набора профилей по раз-
маху, крутки и формы крыла в плане, т. е. от его аэродинамической ком-
поновки. У плоского крыла произвольной формы в плане индуктивные
скосы потока по размаху могут быть распределены так, что эффектив-
ные местные углы атаки профилей в отдельных сечениях крыла будут
неодинаковы. При увеличении общего угла атаки крыла в каком-то из
сечений местный угол атаки превысит критический и в этом сечеиии
будет развиваться срыв потока с верхней поверхности. По мере увеличе-
ния угла атаки крыла местные срывы будут возникать в других сечениях
крыла и при дальнейшем увеличении угла атаки срывы могут охватить
все крыло. Однако развитие срывов вдоль хорд может носить разный ха-
рактер в зависимости от относительных толщин профилей, из которых
составлено крыло. На толстых и умеренно толстых профилях (ё>12%)
с большим радиусом носков срыв будет развиваться от хвостика про-
филя к носку (так называемый турбулентный отрыв потока). На тонких
профилях с малыми радиусами носков отрыв потока может происходить
в районе носка (так называемый ламинарный отрыв) с последующим
«прилипанием» и переходом пограничного слоя в турбулентное состоя-
ние. При увеличении угла атаки ламинарный отрыв может распростра-
няться все дальше вниз по потоку, но при достижении некоторого угла
атаки может произойти встречный отрыв с хвостика профиля.
Такое развитие, по сравнению со срывом первого типа, приводит к
резкому падению су после достижения суШах, в то время как в первом
случае падение су от срывов после достижения сушах может происходить
сравнительно плавно (рис. 15.15). Увеличить сушах профиля можно за
счет придания ему вогнутости, что особенно эффективно для тонких про-
филей (с<8%).
Наиболее часто применяются стреловидные крылья с сужением.
У этих крыльев местные углы атаки иа концах больше, чем в корне,
поэтому срыв потока начинается с концов. Для того чтобы затянуть кон-
цевой срыв, необходимо выровнять индуктивные скосы или местные углы
атаки установкой менее несущих профилей в корне и более несущих иа
концах. У стреловидных крыльев с сужением аэродинамическая компо-
новка может быть такой, что в корне необходимо установить более тол-
стые профили даже с отрицательной вогнутостью, а на концах крыла —
296
более тонкие с положительной вогнутостью. Такая аэродинамическая
крутка может быть применена в комбинации с геометрической круткой,
когда сечение крыла поворачиваются относительно корневого по опреде-
ленному закону ф(z). Затянуть срыв потока на крыльевом профиле мож-
но либо с помощью его модификации, либо за счет утолщения нижней
части носков (для самолетов с малыми дозвуковыми скоростями), либо
за счет отгиба носков вниз
(для самолетов больших до-
звуковых и сверхзвуковых
скоростей полета).
Указанные меры по уве-
личению Сушах проводятся С
учетом интерференции кры-
ла с другими агрегатами
или частями самолета, а так-
же с учетом обеспечения тре-
бований минимального ин-
дуктивного сопротивления
крыла на основном крейсер-
ском режиме полета при за-
данном Су и условии балан-
сировки самолета. Особен-
Рис. 15.15. Отрыв потока на профиле крыла:
а — отрыв турбулентного слоя на толстом профиле;
б — отрыв ламинарного слоя на тонком профиле
ность стреловидных крыльев
заключается в том, что при достаточно большой стреловидности
(Хп.к>30°) ие удается сохранить значения Сушах составляющих их про-
филей: даже для профиля скользящего крыла (или стреловидного крыла
бесконечного размаха) справедливо соотношение
Су max lx>0 ~ Су max |z-0 C0S К’
Другой особенностью стреловидных крыльев является перетекание
пограничного слоя от корня к концам, что тоже приводит к преждевре-
менному срыву потока в коицевых
сечениях крыла вследствие накопле-
ния заторможенного пограничного
слоя. Для устранения этого нежела-
тельного явления, кроме указанных
мер по аэродинамической компонов-
ке крыла, могут применяться также
средства как установка аэродинами-
ческих перегородок в одном-двух
сечениях на верхней поверхности
крыла, «запилы» на носке, скачко-
образное увеличение хорд при их
изменении от кория к концам кры-
ла. В некоторых случаях могут быть
использованы турбулизаторы, пере-
мешивающие пограничный слой со
свежим потоком, увеличивающие
его кинетическую энергию и предот-
вращающие преждевременный срыв
потока.
Для повышения cymax крыла на
Рис. 15.16. Сравнение границ отделе-
ния потока для различных профилей
по числам М свободного потока
режимах взлета и посадки приме-
няются принципы изменения геометрии профиля с помощью щитков,
закрылков, предкрылков, носовых щитков, средств УПС и т. п. (см. § 8).
Большое влияние на сутах оказывает сжимаемость воздуха. Для
современных умеренно толстых профилей (с« 10—13%), которые имеют
турбулентный тип отрыва, влияние сжимаемости начинает сказываться
297
уже при числах М«0,2—0,3. Углы атаки, при которых еще только начи-
нается отрыв иа хвостике профиля (т. е. когда на профиле появляется
зона сверхзвуковых скоростей при су = 0, заканчивающаяся скачком
уплотнения), почти монотонно убывают с увеличением чисел М до нуля
при М=Мкрит- У тонких профилей с ламинарным отрывом углы атаки
начала отрыва значительно меньше, чем у толстых профилей при малых
числах М; с увеличением числа М углы атаки начала отрыва у тонких
профилей изменяются мало (см. рис. 15.16). Изменения сутах в зависи-
мости от числа М для профилей различного типа показано на рис. 15.17.
Видно, что тонкие профили при больших дозвуковых числах (М«0,65)
сохраняют более высокое значение су max- чем толстые профили.
Влияние вогнутости на зависимость Сутах от чисел М показано на
рис. 15.18.
Рис. 15.17. Зависимость между
числом М свободного потока и
Сушах для двух профилей с боль-
шими радиусами носка и для
двух с малыми радиусами:
/—NASA 00(5 । с большим радиу-
2 — NASA 23015 ) сом носка;
3 — NASA 66,2—215 1 с малым ра-
4 — NASA 65,2—215 1 диусом носка
Рис. 15.18. Влияние кривизны (во-
гнутости) на Сушах сходных про-
филей (Re-1-10е—2-10е):
/—NASA 65.1-0(0 без кривизны. 2 —
NASA 65.1 210 средней кривизны, 3 —
NASA 65,1 410 большой кривизны
При переходе к сверхзвуковым скоростям cvmax снова возрастает
примерно до 1, а затем монотонно убывает. Крылья с высокой макси-
мальной несущей способностью сутах имеют большое значение для по-
вышения маневренных характеристик самолета или характеристик безо-
пасности полета иа малых дозвуковых скоростях, а также в условиях
сильных вертикальных порывов ветра.
Выполнению совместного требования высоких значений Сушах для
малых скоростей и низких значений с“ для околозвуковых скоростей при
полете на малых высотах могут отвечать только крылья с изменяемой
геометрией и, в частности, — крылья с изменяемой в полете стреловидно-
стью.
Сила лобового сопротивления, действующая на крыло в
набегающем потоке, может быть разделена иа две основные составляю-
щие: на силу вредного лобового сопротивления и силу индуктивного
лобового сопротивления.
Первая из них связана с профильным сопротивлением и включает
в себя силы трения и силы давления, возникающие при обтекании кры-
ла, без подъемной силы, вторая — связана с подъемной силой на крыле.
В общем случае суммарное сопротивление крыла в форме безраз-
мерных аэродинамических коэффициентов может быть представлено в
виде
= +
(15.74)
298
где сх—коэффициент лобового сопротивления крыла;
с\0— коэффициент вредного лобового сопротивления;
сх.— коэффициент индуктивного сопротивления.
Уравнение (15.74) называется полярой крыла. На режимах безот-
рывного обтекания зависимость сх(су) имеет вид квадратичной поляры,
т. е. уравнение (15.74) можно записать еще в виде
+ (15.75)
где Do — коэффициент отвала поляры.
Коэффициент вредного лобового сопротивления может быть пред-
ставлен в виде
—Сгр4"гхов’ (15.76)
где схр — коэффициент профильного сопротивления, учитывающий тре-
ние пограничного слоя о поверхность профиля; зависит от
режима обтекания, т. е. от числа Рейнольдса и числа М, а так-
же от распределения давления по профилю нли от формы
профиля;
Схов — коэффициент волнового сопротивления от снл давления, кото-
рые возникают на скоростях полета, превышающих критическое число
Мкрит, т. е. вследствие сжимаемости воздуха на режимах трансзвуковых
и сверхзвуковых скоростей.
Коэффициент профильного сопротивления может
быть вычислен по формуле
<\Р=‘^ (1 + 3F) (1 +?М) 8,„ 4-0,001 -7Щ, (15.77)
где 30М— относительная омываемая площадь крыла с учетом интер-
ференции
‘-'ом ~ 1 ^инт ’ ^пф-
Здесь Зпф— относительная площадь подфюзеляжной части крыла;
ЛИит— коэффициент интерференции, равный для:
высокоплана — 0,9;
среднеплана — 0,7;
низкоплана — 0,5;
__ <7 пл— коэффициент трення плоской пластины;
относительная суммарная длина (размах) щелей на крыле
(между крылом и элеронами; крылом и закрылками и т. д.).
Коэффициент трения плоской пластины может быть определен с уче-
том влияния сжимаемости прн смешанном (ламинарно-турбулентном)
обтекании по формуле
Cf Т .((Л
*7 пл 2
(1 + 0, 1М2)Т
(15.78)
.. д. 0,455
где по известной формуле суг пл =-----------------коэффициент
(lg Re)2-58
плоской пластинки при турбулентном обтекании;
V b ср
Re =--------число Рейнольдса;
трения
— относительная координата по хорде профиля точ-
ки перехода ламинарного пограничного слоя в
турбулентный.
299
Для профиля точка перехода может быть приближенно определена
следующим образом:
хп = ш1п
V^Xc-l-X/.
^пр
где хп>пл— точка перехода для плоской пластины с учетом размеров
шероховатости ее поверхности;
хс и Xf— относительные координаты местоположения максимальной
толщины и вогнутости профиля;
йпр—относительная хорда предкрылков.
Величина хп.пл может быть определена по следующей эмпирической
формуле:
_ 10я
Re
(15.79)
где «=5 +[1,3 f 0,6М (1 — 0,25М)2]
1g (У Re) —1
\ Яср /
~ 0?08М2
2 2 4----2------
. ’ 1 +0.312М2
— средняя высота бугорков шероховатости поверхности крыла.
В зависимости от отделки поверхности
Волновое сопротивление на околозвуковых скоростях можно опреде-
лить по формуле
х0в
(15.80)
м’ = 1 Г14- (fe + 1)43 оо43 i
cas 1С [ 2 cos23^r cosl'3Xe
с
где
Хс — стреловидность крыла по лниии максимальных толщин;
М'крит — критическое число М для крыла при су = 0;
й = 1,4—показатель адиабаты воздуха;
2лХ (с)2 со$2Хс
ГхОвтах=--------*--------------максимум сх ;
Ов 2 + X (с)1 3 cos5 3/.с Ов
— {1 + 0,4 [2 - X (7)13 cos2,3Zc] I
л0 cos Хс [ COS2 3/.С j
— ЧИСЛО М, соответствующее схОвтах.
Волновое сопротивление на сверхзвуковых скоростях (М>
>1,2) может быть определено по формуле
r l.K|)j±gg22J.I1+(fen-_1)cf], (1582)
у М2 л. 1
300
где коэффициент &пр зависит от формы профиля:
= I— для ромбовидного профиля;
4
k =----для профиля, образованного дугами окружности;
k=3-5-4—для дозвукового профиля;
? =
1 +0,16(k/M2— 1 — k tgyf)2
О
при ]/М2 — 1 < tg хс
Итак, коэффициент волнового сопротивления может быть определен
практически во всем диапазоне
чисел М.
Вредное лобовое сопротивле-
ние может быть определено по
формуле (15.76) с помощью фор-
мул (15.77), (15.80) или (15.81)
также во всем диапазоне чисел
М полета (рис. 15.19). Эти зави-
симости включают геометриче-
ские параметры крыла (с; X; %; J
и пр.)» что позволяет использо-
вать их лри оптимизации пара-
метров самолета.
Следует заметить, что в
трансзвуковой зоне
Рис. 15.19. Зависимость вредного лобо-
вого сопротивления от числа М
от числа М = max
1
MSo»max
11,2
до числа М —mini ._______
• l/i+tg2zc
зависимость схо(М) может быть построена графически, например, так,
как показано на рис. 15.19.
Индуктивное лобовое сопротивление крыла обуслов-
лено подъемной силой. Можно считать, что оно состоит из двух сопротив-
лений: вихревого и волнового. Первое имеет место на всех скоростях по-
лета, второе — на околозвуковых и сверхзвуковых скоростях.
На малых скоростях индуктивное сопротивление определяется выра-
жением
сх1 = ~, (15.83)
Я^-э.несж
где Хэнесж — эффективное удлинение крыла в несжимаемом потоке, кото-
рое связано с геометрическим удлинением крыла соотношением
X Х .
э.несж I,» ’
1 “Г Онесж
где
8»иж=0,02^-('з,1-^- + ^—А). (15.84)
COS уД Г) 1)3 /
В условиях закритического обтекания в околозвуковом диапазоне
скоростей полета, когда сказывается сжимаемость воздуха,
= (15.85)
301
где ^.сж=^=-; 1 + °сж
(Х^'^м-М^,)3 при М > Мкрит (15.86)
| о при М< Мкрит
При су > О
М^^М'рит-с^Й* 1'2, ' (15.87)
где Мкрит вычисляется по формуле (15.81).
Зависимости (15.83) — (15.87) могут быть использованы для крыльев уме-
ренных и больших удлинений (Х^>3). Для крыльев малых удлинений
(Х<ёсЗ) вихревое индуктивное сопротивление
2?
cxi=~!г- (15.88)
ЛХ
На сверхзвуковых скоростях полета индуктивное сопротивление
(вихревое и волновое) этих крыльев при оптимальном (эллиптическом)
распределении нагрузки по размаху и хордам
(15-89>
ЛХ k tg2Xn.K /
Для всех крыльев со сверхзвуковыми передними кромками индуктивное
сопротивление может быть определено по формуле
с2
(15.90)
где соответствующая производная с> определялась ранее. Для дозвуко-
вых передних кромок индуктивное сопротивление с учетом подсасываю-
щей силы может быть определено с помощью выражения
с2
—-----Еа, (15.91)
где ст — коэффициент подсасывающей силы; £т— коэффициент ее реали-
зации (для острых передних кромок £т = 0, для скругленных дт =
= 0,8—1,15-Су).
Коэффициент подсасывающей силы
С___лХ 1/1 — тп2 с2 *)
Г'г 8с“ £2(£) сау
Тогда коэффициент индуктивного сопротивления крыльев с дозвуковыми
передними кромками при полете на сверхзвуковых скоростях определит-
ся выражением
; лХ }/1 — т2
8с“ W)
(15.92)
*» Обратную величину £ (/г) можно аппроксимировать выражением
_1 2/2
Е 1 (£) = — — arccos k arcs in k).
л \ л
302
Следует заметить, что подсасывающая сила может быть частично полу-
чена и на профиле с острым носком, если он будет отогнут вниз на угол,
несколько превышающий угол атаки крыла на данном режиме полета.
С этой целью на стреловидных и треугольных крыльях применяют так
называемую «коническую крутку» крыла (рис. 15.20). Такая крутка эф-
фективна только на околозвуковых скоростях, так как иа больших
сверхзвуковых скоростях она может дать некоторое снижение макси-
мального аэродинамического качества. Для того чтобы обеспечить мини-
мальное индуктивное сопротивление, необходимо применять крылья с
неплоской срединной поверхностью. Закон изменения срединной поверх-
Рис. 15.20. Коническая крутка на треугольных и
стреловидных крыльях
ности у=у(х; г), или крутка крыла, определяется при решении вариаци-
онной или экстремальной задачи на минимум индуктивного сопротивле-
ния прн заданных изопериметрических условиях или условиях связи,
определяющих либо только заданную подъемную силу (min сХг при су=
—const), либо — силу и нулевой продольный момент при заданной сте-
пени продольной статической устойчивости
(minrx/ при cz/=const и тго = — тсУсу=const).
На рис. 15.21 представлена одна из возможных зависимостей крутки
для неплоской срединной поверхности, состоящей из аэродинамической
Рис. 15.21. Оптимальная форма срединной поверхности крыла с аэродина-
мической и геометрической круткой определенного класса
/(г) и геометрической <p(z) крутки крыла. В настоящее время разрабо-
таны надежные методы решения таких задач для крыльев с произволь-
ной формой в плане. Результаты этих решений могут быть уточнены с
помощью эксперимента в аэродинамической трубе. Экспериментальные
и расчетные методы должны дополнять друг друга, так как класс крутки
или деформаций срединной поверхности может быть определен только
теоретическим путем, а амплитуды деформаций в заданном классе мо-
гут быть уточнены экспериментально. Следует отметить, что выбор опти-
мальной крутки крыла является актуальной задачей не только при
проектировании крыльев сверхзвуковых тяжелых или пассажирских са-
молетов, но и при проектировании крыльев дозвуковых и околозвуковых
самолетов со стреловидными крыльями. Из выражения максимального
аэродинамического качества /Стах =----------- следует, что для его
2 V
повышения необходимо подбирать не только оптимальный отвал поляры
Do, т. е. удлинение, форму в плане и крутку крыла, но также тщательно
подбирать форму профилей и их распределение по крылу, так как за
счет этого можно значительно уменьшить схо (без этого немыслимо
освоение околозвуковой зоны скоростей, когда М=0,9—1,2).
На величину /Стах (через Do) оказывает влияние продольная балан-
сировка самолета особенно на сверхзвуковых скоростях полета.
Продольный момент к р ы л a mz зависит от аэродинамической
компановки крыла и от режима полета (су и М).
В первом приближении тг= тС/су, где нулевой момент mz0
зависит от аэродинамической и геометрической круток крыла, а также
от числа М полета; степень продольной статической устойчивости
шсу зависит от положения фокуса крыла хркр, который, в
свою очередь, зависит от формы крыла в плане и от числа М.
Для дозвуковых скоростей он может быть определен приближенно:
=х? ^.+°>033(и§^ + 1-7Г——>
кр гпроф \ *' 1)4-1/ 1)
1 —-2
где xF ——(1 — 2сСр) — фокус профиля со средней
гпроф 4
(15.93)
толщиной
крыла.
Изменение фокуса от сжимаемости воздуха в диапазоне чисел
Мкр<М<1,2 может быть определено тоже приближенно:
Д^(М)=ДхГп1ах ^р(М),
(15.94)
где ^тах = 7-(°’12 + 0’03
fg Zt/2 \ 4- О2
т. / i)2 4- 4 4- 1 ’
kF(M)=
О при М<м;рейе;
/ У-.Укри, \73_2 М-Мур,т \ при М’рит<м< 1>2;
у 1,2 — Мкр11т у \ 1,2-
1 прн М> 1,2.
Формулы (15.93) и (15.94) могут быть использованы для широкого
класса крыльев, в том числе и для крыльев изменяемой стреловидности,
если в них принять в виде зависимости Л(х) по (15.51), а
__________ ___ COS Х1Д
tgZl/2 = 5UtgX^« + 5KtgX12K И 7] = 71 ------—
C°S Х1/2
(индексы «ц» и «к» соответствуют «центроплану» и «консоли»).
Для составных или оживальных крыльев фокус на сверхзвуковых
скоростях полета можно определить по формуле (15.33) при условии,
что передние кромки наплыва становятся сверхзвуковыми:
tgxo«<KMJ=T
На дозвуковых скоростях фокус этих крыльев можно определить по
формуле (15.93), если в ней принять за основу геометрические парамет-
ры базового крыла.
304
Эти зависимости позволяют определить потребную площадь перед-
него наплыва (точнее хон при заданном Zoe или наоборот) нз условия
одинакового положения фокуса крыла на дозвуковых и сверхзвуковых
скоростях.
Последнее обстоятельство очень важно для самолетов бесхвостой
схемы, аэродинамическая компоновка крыльев которых определяется со-
отношением тг1)= — тс^Су для основного режима полета.
Следует заметить, что составные крылья (с передним наплывом) н
крылья ожнвальной формы на дозвуковых скоростях полета имеют нели-
нейную характеристику mz(cy) типа «ложка». У этой зависимости для
готических крыльев, наоборот, наблюдается некоторое возрастание сте-
пени продольной статической устойчивости по су. Промежуточное поло-
жение между этими крыльями занимают треугольные крылья, имеющие
практически линейную зависимость mz(cy).
На сверхзвуковых скоростях нелинейность mz(cy) практически от-
сутствует для всех крыльев.
Нелинейный характер зависимости т2(су) имеют стреловидные
крылья, что объясняется более ранними срывами потока с концевых
сеченнй. Для того чтобы сместить начало срывов в сторону больших
значений су, применяют те же средства, которые были указаны для по-
вышения максимальной несущей способности стреловидных крыльев (пе-
регородки, запилы и т. п.).
На поперечную устойчивость самолета лг/ в наибольшей
степени влияет крыло. Момент крена от крыла на единицу угла скольже-
„ дтх в „
ння характеризуется производной ——=тх. Величину этой производной
$
можно оценить по формуле
где
дадМ ’
(15.95)
Х*/2 — угол стреловидности крыла посередине хорд;
ф— угол поперечного V крыла (все углы в радианах).
Из (15.95) видно, что на сверхзвуковых скоростях (прн сау <0)
нли на закритнческнх углах атаки ( су <0) крыло может иметь обрат-
ную реакцию на скольжение.
Для самолета в целом моментные статические характеристики mz
и тх должны включать интерференцию крыла с фюзеляжем и другими
агрегатами самолета, а также учитывать работу хвостового оперения.
Необходимо иметь в виду, что на эти характеристики существенное
влияние оказывают упругие деформации крыла и других агрегатов са-
молета.
Выбор геометрических параметров крыла производится иа основа-
нии аэродинамических, весовых и объемных его характеристик в про-
цессе оптимизации всех параметров самолета прн условии выполнения
заданных тактико-технических нлн технико-экономических требований.
§ 4. ВЕСОВЫЕ ХАРАКТЕРИСТИКИ
Для определения влияния основных геометрических параметров на
вес конструкции крыла можно воспользоваться весовой формулой для
современного свободнонесущего крыла с жесткой металлической обшив-
кой, выведенной на основании предположения, что вес крыла
Gbp = <Zr + Отт "Г “Г Ош.вл + GItp04,
305
тле бп— вес полок лонжеронов и всех элементов, воспринимающих
продольные силы, т. е. вес полок так называемого условного
лонжерона;
(?ст — вес стенок н всех элементов, воспринимающих перерезыва-
ющие силы;
би— вес нервюр;
бщэл — вес щитков, закрылков и элеронов;
бПроч —вес прочего.
Вес каждого слагаемого рассчитывается теоретически и корректи-
руется статистическими коэффициентами
Gkp = (' М3'2 + m^'2Sal2+m3 ) + 5,55, (15.96)
\ Со х 1 /
где с?= I — ЕЛ4гр/О,1Со/— коэффициент разгрузки крыла грузами;
Ё7Мгр—сумма моментов грузов в крыле;
р—коэффициент, учитывающий утяжеление за
счет кинетического нагрева;
45,5(1 +1/^) — (т;+1)—коэффициент, учитывающий влияние суже-
ния крыла;
/Пр т2\ т3—статистические коэффициенты (см. стр.318);
Па~ расчетный коэффициент перегрузки;
со—относительная толщина профиля у корня
крыла.
Полагая S = const; nA=const; po = const, получим
Gkp = ^^A, + 5X12+C-L-LZ>, (15.97)
Cq X 1
где А, В, С и D — коэффициенты, не зависящие от А, со и т|.
Формула (15.97) дает возможность судить о влиянии А, с0 и г) на вес
крыла бкр.
Подставив в формулу (15.97) вместо А выражение A/cos2x, получим
формулу для веса стреловидного крыла
Окр = А 4м- -В — + С -с^ + D, (15.98)
cos3 у. Со cos у
которая дает возможность судить о влиянии угла стреловидности у
на вес.
Для треугольного крыла формула будет иметь вид
<?,.р = Л'4^ + да1,2+С^г + £>. (15.99)
СО *
Большое значение_ имеют относительные величины — —
удельный вес крыла и бкр=бир/б0.
Например,
4кР — W-nApo2Go2 । т1 йг)-\~т2^ ^ + тз —+5,5; (15.100)
\ с0 л /
m2X1/2 + /n3^jjj И~- (15.101)
306
Эти формулы могут быть записаны в •
хз/2
С
— X3-2
Окр = А"^ + В"л
С
Введенные коэффициенты А'; В'
образом.
Для прямого крыла
А^срцЛд/^Оо'2^,;
В'=<Я1пд^'2Оо2т2;
С‘
D' = 5,5;
Для стреловидного крыла
. , 1/2/-Л 2
А =^пАро1 Gq тх—---------;
cos3X1;2
в’=да«д₽;'2о52т2—y—;
cos Xl/2
U = <$341aPq Gq m3COSXi;2;
D'=5,5;
Для треугольного крыла
A’ = t^iiApa2Go2ml;
В' = <^.пАро2Оо2т2-,
C' = w-nApo Go m3;
O'=5,5;
гаком виде:
1/2 + С' — + O'; (15.102).
I12
124-C'— +D". (15.103)
и т. д. будут выражены следующим.
A’=w«x -L-mikr-
Po
ao2
Po
°o2
c"=w«A -тттз;
Ao
Po
G>'2 ko
A"=<^.n, —— m,----------;
p'o2 cos3Xi;2
°J2 1
B" = m2--------;
Ao 2 C0S Hl,2
Gl2
С" = ^пл —m3cos. x12;
Po
D"—5t5jpo‘
°o2
Po
°o2
B"=4V-nA
G*'2
С" = ^ПЛ
PQ
D" = 5,5lp0.
Однако влияние геометрических параметров крыла на его вес может
осуществляться и косвенным путем, например, через расчетную пере-
грузку и? (пА\ пв и т. д.)-»
Выбор максимальной расчетной перегрузки я? тах производится,
исходя из требований, предъявляемых к эксплуатации самолета.
307
Максимальная расчетная перегрузка связана с максимальной экс-
плуатационной перегрузкой соотношением
р / э
Лу max = J fty тах»
где f — коэффициент безопасности. Для крыла n,/max и f выбираются
для расчетного случая полета, предусмотренного «Нормами прочности»
[12] в соответствии с назначением самолета.
Так, например, для тяжелых и транспортных самолетов наибольшее
значение ^тахвыбирается либо для случая маневра, либо для случая
«болтанки», т. е. для случая вертикального порыва ветра
Пу max— Шах
1 +
р
п , . 11 000 .
2,1-1---------но ие <
1 Go+4500
где №уг — нормированная индикаторная скорость вертикального поры-
ва ветра;
рн—массовая плотность воздуха на расчетной высоте /7;
k — коэффициент, учитывающий постепенное нарастание верти-
кального порыва по расстоянию.
Для легких маневренных самолетов
,,9 _„ ?тах
•1'У max — max
Ро
Следует заметить, что в процессе проектирования самолета необхо-
димо непрерывно уточнять fty max или rtjmax методом последовательных
приближений.
Формулы (15.97) — (15.101) позволяют сделать следующие выводы:
1) увеличение % ведет к существенному увеличению GKp, ^кр и GKp;
2) увеличение со приводит к уменьшению GKP, Цкр и С7кр;
3) увеличение сужения г| приводит к уменьшению веса крыла GKP,
?кр и GxpJ
4) увеличение угла стреловидности % влечет за собой увеличение
Сьр, <?ьР и GKp; _
5) увеличение ро приводит к увеличению qKp и уменьшению GKp;
6) увеличение Go увеличивает и GKP.
§ 5. ХАРАКТЕРИСТИКИ АЭРОУПРУГОСТИ КРЫЛА
Работа конструкции самолета вообще, а крыла в частности, харак-
теризуется взаимодействием аэродинамических сил, сил упругости и мас-
совых сил. При проектировании крыла необходимо учитывать это важ-
нейшее обстоятельство. Такой учет предполагает соответствующий вы-
бор геометрических параметров крыла в сочетании с выбором его
конструктивно-силовой схемы и рационального размещения масс конст-
рукционного материала. Рассмотрение взаимодействия только аэродина-
мических сил и сил упругости связано с решением задач статической
аэроупругостн. К ним относятся вопросы дивергенции крыла, реверса
элеронов, потери запаса продольной статической устойчивости от упру-
гих деформаций крыла.
При добавлении к этим силам сил инерции от масс конструкции при-
ходится рассматривать динамическую аэроупругость.
При решении таких задач рассматриваются явления флаттера (ди-
намической устойчивости конструкции), бафтинга (динамического пове-
дения конструкции при срывном обтекании), динамических реакций в
конструкции на внешние возмущения (порывы ветра, посадки и т. п.).
308
На рис. 15.22 представлена схема различных явлений аэроупругости
и соответствующих нм задач, возникающих прн проектировании крыла.
Рис. 15.22. Схема различных явлений аэроупругости
Статическая аэроупругость
При современных скоростях полета жесткость крыла при изгибе и
«ручении часто определяет выбор основных параметров крыла. Покажем,
что величины X и со существенно отражаются иа значениях прогибов и
углов закручивания крыла. Для простоты рассмотрим однолонжеронное
«свободнонесущее крыло с лонжероном, расположенным в месте макси-
мальной толщины профиля.
Общее выражение для максимального прогиба такого свободнонесу-
щего крыла будет
где В — некий коэффициент, зависящий от закона распределения на-
грузки по длине Z/2 и от изменения моментов инерции сечений
лонжеронов по длине Z/2;
Р — нагрузка, распределенная по длине //2 (полуразмах);
Jo— момент инерции лонжерона у корня.
Можно приближенно принять, что
Ло^о,
где ko=boco — высота лонжерона у корня;
Fo — сеченне пояса лонжерона у корня.
Подставим в формулу
Р Mq Mq
г О 7— — Z
Л0а 60с0а
значение изгибающего момента у корня
Мо=у/'о»лй,о(1+ у) (0,455-О,ОЦ).
В результате получим, что
f1 + —'ко,455 — 0,ОЦ)
р__________\ , 'Q /__________
го _ -
309
РоПл'2ео*о (’ + —) (0.455 — 0,01,)
Тогда 4=----------------------------------------
10-3
Полагая
b0 = \p^-j-,
получим
2SI (1 + —) ч
—•
£е0*ер(°. 455-0,01,)
Но так как при изменении г| в практически используемых пределах
величину (0,455—0,01г|) можно считать 'приближенно постоянной, то
«о
, 2а .
где k ~-----------------— const,
£(0,455 —0,01т;)
откуда относительный прогиб будет
f $ (1 + У7)) &
1
Из этой формулы следует, что при увеличении X относительный
прогиб на конце крыла увеличивается, а при увеличении со прогиб умень-
шается. При увеличении т), как нетрудно убедиться, коэффициент В
уменьшается, следовательно, В (1+ —) и относительный прогиб умень-
1
шаются.
Общее выражение для угла закручивания контура (нагруженного
моментом на конце) имеет следующий вид:
Л1кр/ Р dS
?0-- Л/-Г9 ф * ’
4и£2 Ц S
где <р0 — угол закручивания на конце крыла;
Л1|(р — крутящий момент, приложенный к концу крыла;
G — модуль упругости 2-го рода;
F— площадь контура сечения (рнс. 15.23);
dS— элементарный отрезок контура;
б — толщина оболочки;
В—
Vis
«,4“2Ь2 ’
где k$ — коэффициент формы.
Следовательно, для крыла ст|=1, считая, что f dS/b ио размаху по-
стоянно, можно написать
m№\ii2s' 2
4GZ)472&2
где Вч — некоторый постоянный коэффициент.
310
Так как
то
?0=»ЛР-2=г-
Относительный угол закручивания на конце крыла при т) — 1 будет
ъ=в2мп—,
I кр S27
или же, считая S = const,
Итак, относительные углы закручивания растут при увеличении уд-
Рис. 15.23. К определению угла
закручивания крыла
линения X и уменьшаются при увеличении со.
Недостаточность жесткости крыла при изгибе и кручении сказывает-
ся в полете самым неблагоприятным образом. Большие изгибные и кру-
тильные деформации крыла приводят к
тому, что крыло вследствие изменения
углов атаки сечений крыла и угла попе-
речного V значительно меняет свои аэро-
динамические характеристики.
Очень большие крутильные дефор-
мации при малой жесткости кручения
приводят к явлению частичной и даже
полной потери эффективности элерона,
называемому реверсом элеронов.
Рассмотрим это явление для наглядности упрощенно для элемента
крыла длиной dz.
При отклонении элерона на абсолютно жестком крыле на угол бэ
коэффициент подъемной силы элемента крыла длиной dz может быть
выражен следующим образом:
1 deц / \ < .
си—~— («о 4-
а коэффициент момента относительно носка профиля
Д = <?„о-гА<’»>о + .
dcy
причем приращение су вследствие отклонения элерона
ЬСу = т{(т2 — е$3) S9,
а приращение сто вследствие отклонения элерона
Ас„о = ("г3-е289)8„
где mi — коэффициент, зависящий от Л;
т2; т3 — коэффициенты, зависящие от Ьэ/Ь (Ьэ— хорда элерона);
ei и е% —числовые постоянные коэффициенты;
дэ — угол отклонения элерона в градусах.
311
При отклонении элерона иа упругом крыле иа тот же угол 6Э коэф>-
фициеит подъемной силы элемента крыла длиной dz выразится так
(рис. 15.24):
de и , I \ I dew
~ «о + а + Дс» - —~ %
da da
где <р — угол, иа который элемент крыла повернется в результате дейст-
вия момента от элерона.
Рис. 15.24. Влияние закручивания нежесткого крыла на
угол ф при воздействии на него силы R, создаваемой эле-
роном, на величину cw (явление реверса элерона;
л iC^> 'l
Подъемная сила элемента крыла вследствие поворота его на угол ф
уменьшится, и эффективность элерона, следовательно, уменьшится, не-
смотря иа то, что он будет отклонен на угол 6Э.
Угол ф определится, очевидно, из условия равенства момента круче-
ния от действия элерона, отклоненного на угол 6Э, и момента от действия'
внутренних сил упругости крыла при повороте крыла иа угол ф.
Момент кручения от действия элерона может быть выражен следую-
щим образом:
м.=[т) - -^Yl
I \ da ) \dcu b J\
а момент от внутренних сил упругости
где Хц.ж — координата центра жесткости от носка профиля;
q — скоростной иапор;
б?/р — жесткость крыла при кручении (/р— полярный момент инер-
ции; G — модуль упругости на сдвиг).
Из уравнения Л4Э—Му = 0 можно определить величину угла поворо-
та элемента крыла длиной dz при отклонении элерона на дэ
^Лс„,о + ACj
и'р dcy tdcm ^ц,ж
zdz da \ dcy b
(15.104)
b^q
* dcm!dcv есть, как известно, расстояние от носка фокуса профиля. Следовательно.
—— — ц,‘ж — расстояние между фокусом и центром жесткости.
dcy b
312
Очевидно, что, если угол закручивания <р при некотором значении q
будет настолько велик, что
4^ ? == ДС» = ml (т2 — «Л) Ss.
da
то приращение подъемной силы элемента крыла от действия отклонен-
ного элерона будет погашено вследствие поворота элемента крыла на
угол ф в результате уменьшения подъемной силы (см. рис. 15.24); при
этом, следовательно, эффективность элерона будет равна нулю.
Аэродинамический момент относительно оси х самолета от силы, дей-
ствующей иа элемент крыла длиной dz иа плече z, возникающий при от-
клонении элерона, будет
Мх 9 = q тх (т2 — £$) b°3bzdz.
Аэродинамический момент относительно оси х от силы, действующей
ъа тот же элемент крыла при поворачивании элемента на угол ф,
Мх!/= q ybzdz.
Суммарный аэродинамический момент относительно оси самолета х
от сил, действующих иа элемент крыла длиной dz,
М s — qtn,(tn2 — e$) ^bzdz — q ----^-'ibzdz. (15.105)
da
Если в уравнение (15.105) подставить выражение для ф из (15.104)
и выражения для Асте0 и Дсу, то пЬлучим
Ms = qmi (m2 — е^э) ^Ibzdz —
[<дз - ег5°)5° - М] b"ziz
zdz da \ dCy b /
(15.106)
Очевидно, Ms будет характеризовать эффективность элеронов.
Воспользовавшись уравнением (15.106), можно построить график
•изменения Ms по скоростному напору q (рис. 15.25).
При некотором значении q~q$, как
видно из графика, Afs = O. Следовательно,
при q = q? будет иметь место явление ре-
верса элеронов — элероны полностью
утеряют свою эффективность.
Отсюда следует, что по мере увеличе-
ния максимальных скоростей необходимо
предъявлять все более высокие требова-
ния к жесткости иа кручение крыльев,
так как с ростом скорости увеличивается
0 ^опт ?
Рис. 15.25. Зависимость эф-
фективности элеронов от
скоростного напора для аб-
солютно жесткого 1 и упру-
гого 2 крыльев
опасность возникновения реверса элеро-
нов; при увеличении же G/p крыла, как
следует из формулы (15.106), значение
др все более и более увеличивается, т. е.
реверс появляется при больших зиаче-
ниях q.
На жесткости крыла при кручении сказывается величина сужения ц.
Нетрудно понять, что деформация крыла при увеличении сужения q
уменьшается, так как:
313
— величины bo и ho (хорда и высота лонжерона) в корневой части
при увеличении т] увеличиваются;
— центр давления при увеличении т| передвигается к корню
(рис. 15.26) и, следовательно, конструкция при одинаковой нагрузке даст
меньшие деформации благодаря более благоприятному ее распределе-
нию по размаху.
Рис. 15.26. Влияние су-
жения крыла ч на по'
ложение центра давления
/стр' стр
/пр ’ ?пр
П in 7Р ЗР ЧП VP -Xе
Рис. 15.27. Зависимость стрелы
прогиба fCtp и угла закручива-
ния фетр от величины угла стре-
ловидности X (/стр и фетр —
стрела прогиба и угол закру-
чивания стреловидного крыла:
/пр и фПр — то же соответст-
венно прямого крыла)
Стреловидность крыла весьма значительно влияет на изгибную и
крутильную жесткость крыла. Чем больше угол стреловидности х, тем
больше деформации при прочих равных условиях. На рис. 15.27 показа-
на зависимость прогибов fCTp на конце стрело-
Рис. 15.28. Зависимость
потребной относитель-
ной толщины профиля
крыла с0 для двух раз-
личных сверхзвуковых
профилей при заданном
угле закручивания ф=
=const от числа М
видных кессонных крыльев и углов закручива-
ния ерстр концевых сечений в зависимости от %•
Прогибы и углы закручивания здесь отнесены
к прогибам и углам закручивания прямых
крыльев со всеми прочими данными, равными
данным стреловидных крыльев.
Крутильная жесткость крыла зависит от
формы профиля. На рис. 15.28 представлен
график для двух призматических крыльев со
сверхзвуковыми профилями (ромбовидным и
шестиугольным), характеризующий разницу в
жесткости этих крыльев при кручении. График
дает величину потребной относительной тол-
щины профиля со в зависимости от скорости, со-
ответствующей числу М, при условии, что угол
закручивания обоих крыльев <р одинаков при
выбранном значении М.
Динамическая аэроупругость
Вибрационные свойства крыла характеризуются величиной крити-
ческой скорости флаттера ГЬрит. Общее представление о влиянии важ-
нейших параметров на Икрит изгибно-крутильного флаттера можно со-
ставить на основании следующей приближенной формулы для крыла с
сужением т) = 1 иг, G, Jp, , постоянными по размаху [12]
V
_____л
ьрит~ s
- dcy
r “7Г Рcos *
da
2GJP
(15.107)
314
где S —площадь крыла;
r—r/bcos х — относительное расстояние между фокусом и центром тяже-
сти сечения (Ь — хорда крыла, взятая по потоку).
Формула (15.107) дает очевидную зависимость Икрит флаттера от
крутильной жесткости крыла G/p, от относительного расстояния между
фокусом и центром тяжести г и от плотности воздуха иа высоте полета р.
Из формулы (15.107) видно также, что Укрит увеличивается при
уменьшении производной dcvlda и уменьшается при ее увеличении. Выше
приводились зависимости производной dcy/da от удлинения крыла X и от
угла стреловидности х- При увеличении X увеличивается dcy/da, а при
увеличения х уменьшается.
Рис. 15.29. Характер
влияния удлинения Л на
критическую скорость
флаттера У,;рлт
Рис. 15.30. Влияние угла
стреловидности % на кри-
тическую скорость флат-
тера УКрит при положе-
нии центра тяжести се-
чения крыла хц.т=0,45
и f]-4
Следовательно, УкрИт увеличивается при уменьшении X и при увели-
чении % и уменьшается при увеличении X и уменьшении %.
На рис. 15.29 приведена кривая Укрит = ?(^), полученная для трапе-
циевидного крыла расчетным путем при условии, что сужение Г| и сред-
няя геометрическая хорда &сгх по величине остаются неизменными, т. е.
изменение X происходит за счет изменения размаха при изменении пло-
щади крыла S.
На рис. 15.30 изображена кривая Vi(pnT = f(x)> построенная по экспе-
риментальным данным [30]. Эксперимент проводился на модели, иа кото-
рой угол стреловидности одного и того же крыла мог измениться в диа-
пазоне от 0 до 50° (т. е. аэродинамический размах крыла I по мере уве-
личения х уменьшался, а строительный размах был постоянен).
Представление о влиянии сужения крыла т| на VKpnT можно получить
с помощью следующей формулы *;
. 0,8ч+0,4 ]/ 0,Р
,<РИТ V
где л:ц х— относительное расстояние от передней кромки до оси центров
тяжести;
Ofp — осредненная крутильная жесткость крыла на участке между
корнем и сечением на 0,75 от полуразмаха;
I— размах крыла;
f (М)=(1 — М)1/2, если 0< М<0.8;
/(М)=1,67, если М2>0,8.
* Формула может быть получена из формулы для погребной жесткости крыла,
приведенной в указанном выше источнике.
315
Следует иметь в виду, что увеличение сужения q влечет за собой
также и увеличение крутильной жесткости ОЛрнт. Характер зависимо-
сти Укрит флаттера от т| представлен на графике рис. 15.31. *
Необходимо отметить, что величина У'крит в сильной степени зависит
от взаимного расположения оси фокусов и оси центров тяжести крыла,
а также от величины крутильной жесткости конструкции крыла (от из-
гибной жесткости УКрит зависит очень слабо). Смещение оси центров
тяжести по хорде относительно оси фокусов может резко изменить вели-
чину Укрит (рис. 15.32). Совмещение осей фокусов и центров тяжести
приводит к увеличению критической скорости флаттера до Укрит = оо.
Практически, однако, осуществить конструкцию с совмещением указан-
ных осей невозможно. В практике проектирования для смещения оси-
центра тяжести сечений в сторону оси фокусов (т. е. вперед) часто при-
меняются балансирующие грузы, закладываемые в носки крыла (ближе-
Рис. 15.31. Характер
влияния сужения q
на критическую ско-
рость флаттера Укрит
при X=const
Рис 15 32. Влияние
относительного поло-
жения центра тяже-
сти хц т на величину
Укрит флаттера при
заданном положении
фокуса крыла xf =
=0,25
к концам крыла) или размещаемые в специальных обтекаемых крон-
штейнах, закрепленных в носке по концам крыла. Однако существенное
увеличение ЙКрит благодаря применению балансирующих грузов может
быть получено лишь ценой довольно значительного прироста общего ве-
са крыла, достигающего 10% и более от веса его конструкции.
Имея в виду сказанное, можно сделать важный вывод о том, что-
суждение о влиянии того или иного параметра крыла на Укрит флаттера
может быть справедливо лишь при условии, что с изменением парамет-
ра крутильная жесткость крыла GJP, а также взаимное расположение
осей фокусов н центров тяжести сеченнй остаются без изменения.
Таким образом, изменение величины основных параметров Л;
•q; с и х приводит к изменению аэродинамических, весовых, жесткостиых
и аэроупругих характеристик крыла.
Из всего сказанного выше можно сделать выводы, которые удобно
представить в виде табл. 15.1
§ 6. ОПРЕДЕЛЕНИЕ ВЕСА КОНСТРУКЦИИ КРЫЛА
О значении веса конструкции для летных характеристик самолета*
было сказано выше. Причинами, вызывающими лишний вес конструк-
ции, т. е. перетяжеление конструкции, могут быть:
— неправильное (завышенное) определение расчетного полного веса
самолета;
— неправильно выбранные основные параметры, силовая и конст-
руктивная схема агрегатов.
316
Таблица 15.1
Влияние основных параметров крыла на его важнейшие характеристики
Характер изменения параметров Аэродинамические характеристики Вес крыла Жесткость Критическая скорость флаттера
Схр Сх1 СХВ су max Концевые срывы
При увеличении удли- нения % — Уменьшается Увеличива- ется — - Увеличива- ется значитель- но Уменьша- ется значитель- но Уменьша- ется
Прн увеличении отно- сительной толщины с Увеличи- вается - Увеличи- вается Увеличивается — Уменьша- ется Увеличива- ется -
При увеличении суже- ния Г) - Минимальное значение при т) = 2—2,5 — — Ухудша- ются Уменьша- ется Увеличива- ется Возра- стает
При увеличении стре- ловидности х — Увеличивается Уменьша- ется Уменьшается Ухудша- ются Увеличива- ется Уменьша- ется Возра- стает
Так как крыло по весу составляет довольно значительную часть от
полного веса самолета, а именно
б?кр=(0,09-<O,15)Go* *>,
т. е. вес крыла иногда может составлять почти половину веса конструк-
ции самолета (GK~0,3), то можно сделать заключение о том, что рабо-
та, направленная на создание возможно более легкой (но достаточно
жесткой) конструкции крыла, всегда приводит к ощутимому экономиче-
скому или тактическому эффекту как для гражданских, так н для воен-
ных самолетов.
Вес крыла при проектировании определяется обычно по весовым
формулам. Для крыла разработано довольно большое количество весо-
вых формул, простых и сложных. При этом нужно сказать, что слож-
ность формулы не всегда определяет степень ее точности.
В практике удобно путем расчета по формуле получить вес 1 м2 кры-
ла, т. е. величину <7kp=Gkp/S.
Выше были приведены формулы, пригодные для определения веса
1 м2 прямого, стреловидного и треугольного крыльев. Приводя формулы
к удобному для расчетов виду, получим:
для прямого крыла
Ч№ = f\MAP»Л, + т/2 + т3 4-5,5; (15.108)
\ со > '
для стреловидного крыла
?kp = Wo'2Go2 (—тА + т3—-----------1- m3-°s ''- )-|-5,5; 1,15.109)
\ cos3 X са cos 7. X1'2 /
для треугольного крыла
= т2).1,24-т’)4-5,5, (15.110)
где
<р =
5МСТ
O.IGqZ ’
ИЛИ ср = 1 — (2i£1Gt4-22E2Gc );
•/] + 2
2i — расстояние от оси самолета до центра тяжести топлива в
крыле в долях полуразмаха;
£j — доля топлива в крыле;
2г—расстояние от оси самолета до центра тяжести СУ в долях
полуразмаха;
®2— доля веса СУ на крыльях
|Л= 14-S (Л--1 )> m^l.410-7 Ч-1.5-10-7;
m2==2,0-10-4-=-2,1.10-4; m3 = 0,8-10-3;
S44CT—сумма статических моментов грузов в крыле относительно оси
самолета;
_ GKp <7кр
* ) Полезно вспомнить, что GKp = ——— —-----------.
G0 Ро
318
—отношение пределов текучести при нормальной температуре и
при кинетическом нагреве;
е— отношение веса конструкции всех силовых нагруженных эле-
ментов к весу всей конструкции крыла *.
Для стреловидного крыла с углом стреловидности %>45° (при боль-
шом сужении) % берется по 0,5 хорды. В формулах (15.108) и (15.109)
А, = 45,5( 1 +^) - (ч+ 1).
Эти формулы могут служить для практического расчета веса крыла.
Некоторые авторы предлагали формулы довольно простые, но спо-
собные давать удовлетворительную точность лишь для веса крыльев с оп-
ределенными значениями _некоторых параметров; такова, например,
формула Дриггса:
q =k 1 / (15.111)
*кр |/ 1000
где ро — нагрузка в кгс/м2;
I — размах крыла в м;
k— числовой коэффициент, получаемый из статистики.
Коэффициент k меняется в зависимости от конструкции крыла, X и
и со. Для свободнонесущих крыльев легких спортивных самолетов с
г| = 2—3 и со= 15% можно принять значение k = 4—4,5.
Для более точных расчетов можно также применять формулу [31]
?ч>=Цр + А/,01О-Ч-^^ + 4,4), (15.112)
где £>=7,25-lO-6poZ«5w/^-^—Н-------------)- is')
\ Со cos2 X cos к у
— при проектировании крыла из условия удовлетворения только-
прочности и
D= 157,5- 10-“Z3cos Zklh (=-----------------V
\ с0(1 —0,166М COS Хн к) /
— при проектировании крыла из условия удовлетворения жесткости
на кручение.
Здесь пэ — коэффициент эксплуатационной перегрузки;
X — угол стреловидности крыла по линии 25% хорд;
Хпк — угол стреловидности крыла по передней кромке;
Хк — угол стреловидности крыла по оси жесткости;
h = 0,68 — для неразрезного кессона;
Л = 0,91 —для конструкций с небольшими вырезами;
/i=l,13 — для конструкций с большими вырезами;
pi — отношение модуля сдвига при 15° С к модулю сдвига при тем-
пературе нагрева, соответствующей числу М полета;
1+ — скорость пикирования;
Vn = Мкрейс +113 км/ч — для гражданских самолетов;
// =--соэ Хп-К---для Х<;3; Н =cos3/2/n к — для ^>3;
0,9(1+ 0.8/Х) Лп-К
* В первом приближении можно брать £ = 0,5.
31>
SMCT—сумма статических моментов грузов и конструкции для полови-
ны крыла относительно оси самолета;
^ = 1,1 —для крыла с сужением т) = 1;
= 0,97 — для крыла с г| = 2,5;
^ = 0,93 — для крыла с т]=4,0;
^^ = 0,87 — для треугольного крыла.
В заключение отметим, что в однолонжерных крыльях вес отдель-
ных элементов конструкции распределяется примерно следующим обра-
зом (в % от веса крыла):
лонжероны и дополнительные стенки................. 30—40
стрингеры и обшивка . . ......................... 29—30
нервюры........................................... 12—14
узлы, закрылки, элероны.......................... 16—20
прочее..........................................» 8—12
Центр тяжести крыла любой формы в плане и любого сужения
лежит обычно на расстоянии
хц.т.кр = (0>4^“ 0,45) ^сах.
§ 7. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ КРЫЛА
Правильный выбор основных параметров крыла в значительной сте-
пени определяет наилучшие летные качества самолета. Влияние пара-
метров других частей самолета на его летные качества гораздо меньше.
Если величины летных характеристик, как это обычно бывает в
практике, заданы, то наивыгоднейшими величинами параметров можно
считать такие, при которых проектируемый самолет имеет наименьшую
возможную величину взлетного веса Gq. Разумеется, при этом должны
удовлетворяться также все предъявляемые к проектируемому самолету
основные требования *.
Наивыгоднейшие параметры могут быть определены и из условия
получения заданной величины какой-либо одной летной характеристики
(например, Ртах), и из условия получения заданных величин нескольких
характеристик.
Существование наивыгоднейших величин основных геометрических
параметров крыла обусловливается тем обстоятельством, что основные
геометрические параметры крыла влияют как на летные характеристики
самолета, так и на вес его конструкции. Поэтому при определении наи-
выгоднейших параметров крыла необходимо пользоваться зависимостя-
ми, связывающими летные характеристики самолета и вес конструкции
крыла с основными геометрическими параметрами крыла.
Определение наивыгоднейших параметров практически имеет смысл
лишь для тех из них, которые существенно влияют на величины летных
характеристик и вес конструкции крыла.
Значительное влияние иа летиые характеристики самолета и вес
конструкции крыла оказывают удлинение X и относительная толщина
профиля со, сужение же т| влияет на вес конструкции значительно сла-
бее, а на летные характеристики сужение оказывает лишь косвенное
влияние (через величину суПос). Поэтому здесь будет идти речь только
об определении наивыгоднейших величин X и относительной толщины
профиля ёо.
Определим в первом приближении** наивыгоднейшие л и со крыла
самолета с ТРД для условия получения заданной или наибольшей даль-
ности полета.
* В первом приближении (Go) mtn может служить критерием оптимальности и для
пассажирских самолетов.
** Не учитывая, например, влияние X на Ifo и, следовательно, на вес фюзеляжа.
320
Определить основные параметры X и со для условия наименьшего
веса околозвукового самолета с ТРД * при заданной Lmax можно сле-
дующим образом. Максимальная дальность Околозвукового самолета с
ТРД выражается формулой
Z„ax = /o]£L(0.r-«), (15.113)
сЛ0
где
0,021
Имея в виду, что 6T=1 — GX/GO —GKp/Go, где Gx=Gq — Gt — GKp, a GKp —
вес конструкции крыла, получим
Lmax = -^0 --(1 — Gx— GKp —
CjcO
Учитывая формулу (15.103), можно написать
L„а, = A0 — f 1 - и - G (- (а" -Г- X3'2 + УГХ1'2 + C" -i- +£>")],( 15.114)
cxo L X cq X1/2 /J
откуда легко получить выражение
Gx = 1 - и - А!' -2— X3'2 - В"Х1/2 - С" —--D" - . (15.115)
Со X1'2 Л У х
Можно предположить, что при изменении X значения u = const, D"—
= const и poPo==P/5 = const (считаем, что для околозвуковой скорости
|«1) и тогда, дифференцируя выражение (15.115) и приравнивая пер-
вую производную нулю, получим уравнение
зд•• 2L _|_ в"\—1с + 2"п”‘:-И) 1 = о,
со \ А) /
откуда найдем величину ЛИв, соответствующую максимуму Gx=Gx/Gq
или при заданном Gx=const — минимуму Gq,
— В" + 1 / (В")2 + 12Д"( С" + —
хнв =----------------------. (15.116)
6Л"
со
Воспользовавшись формулами для 6кр (15.97) и для схо— (15.77),
(15.76), (15.80), (15.82), нетрудно определить и снв.
Определим теперь Лнв и сонв, если заданы величины О0 и Gx = Gq —
-GKp— 6Т для условия получения наибольшей дальности Lmax, возмож-
ной при заданном соотношении
G. = OJO0.
Например, военно-транспортного самолета.
11-1062
321
Дальность околозвукового самолета (М<1), как уже было отме-
чено выще, может быть выражена формулой (15.114).
Считая, что при изменении X коэффициент разгрузки <р изменяется
очень мало, примем <р=const и продифференцируем это выражение по
X, первую производную приравняем нулю. Тогда получим
----4 Л"-—л—2/?" —— =0.
Так как До'/^хо^О, то, сокращая и упрощая выражение, получим
4Д" -^-Х3/2 + 2Д"Х1/2-(1-ц-ТГ-ёЛ) = 0, (15.117)
или
J_x32+/^.12_f=o, (15.118)
cq
где ^1=4m1<ftwj4S1/2&Jcos3 /;
Л2=2/п2<ррлл.$1/21/со5 х;
Л
Уравнение (15.117) относительно X можно решить графически. Для
этого следует определить Fi, F2 и Е для ряда значений X и построить
график (рис. 15.33) двух функций 01 = Л -X- Х3/2 и 02 = Е — .Е^2. Пе-
со
ресечеиие кривых 0/ и 02 дает величину ХНв-
Для самолета с данными, характерными для
околозвуковых самолетов с ТРД, величина иаи-
выгодиейшего удлинения, найденного для усло-
вия наибольшей Z,max при заданном соотношении
Gx, получится Хнв — 7,2.
Рассматривая уравнение (15.117) и рис. 15.33,
можно сделать следующие выводы.
1. Бел», со увеличивается, то Fi=^-уменьшает-
со
ся, а Е—F2 остается без изменения, следователь-
но, кривая 01 сдвинется вниз, а кривая 02 оста-
нется на месте, поэтому значение Хив увели-
Рис. 15.33. Графиче- чцтся
ское определение паи- о’ г? л
выгоднейшей велнчи- 2- Если сужение г) увеличивается, то, рас-
ны удлинения крыла суждая аналогично предыдущему, находим, что
Хп в с помощью кри- Хнв увеличится.
вых 0i и 02 3. Если пА или <р увеличивается, то значение
ХНв уменьшается.
4. Если Go — Gx = Gt 4- GKP увеличивается, то значение ХЯв увеличи-
вается.
5. Если ро увеличивается вследствие уменьшения S при Go — const,
то значение ХНв будет увеличиваться.
Таким образом, для тяжелых самолетов с большой дальностью
и большой нагрузкой на 1 м2 значения ХНв должны быть выше, чем для
самолетов с небольшими значениями ро, небольшой дальностью и боль-
шими значениями nA и <р.
Легко можно решить задачу и в том случае, если требуется опре-
делить для тех же условий иаивыгодиейшие величины удлинения X и
322
относительной толщины профиля со- Для этого можно использовать то
же равенство (15.117).
Решая уравнение (15.117) графически, как и в предыдущем случае,
получим на графике (рис. 15.34) кривую 02=£ — и несколько
кривых = -гт^32 для ряда значений относительной толщины со,
со
которыми следует задаться. Найдем ряд значений ^•нв , ^-ня , ^-нв для раз-
личных значений со, со, £о и т. д. Подставляя попарно величины ХИв
и со в формулу (15.114), получим ряд величии Lmax, после чего построим
Рис. 15.34. К графическо-
му определению наивы-
годнейтих ^величин Хнв
И Соив
^тпах
6 8 Ю 12 Со°/о
Рис. 15.35. Графиче-
ское определение ве-
личин Сонв
график Z-max по со (рис. 15.35), из которого можно найти сонв. Наивыгод-
нейшее удлинение Хнв, соответствующее сонв, легко может быть иайдеио
при помощи графика со по Хнв (рис. 15.36).
Рис. 15.36. Графиче-
ское определение ве-
личины Хнв При Сонв
Рис. 15.37. К определе-
нию % и Со для дальнего
сверхзвукового самолета
Для сверхзвукового самолета рассмотрим лишь качественное влия-
ние величин X и со на дальность Дщах, полагая, что Go == const и Gx = const.
Для этого используем формулы (15.76) и (15.103).
Коэффициент лобового сопротивления при cv=0 сверхзвуковых са-
молетов на скоростях, соответствующих М>1,3, может быть приближен-
но выражен так:
с Q 5 Лосо — 4-с'хф —— 4- е<,
хо 0 Т Хф Г /.
где
И*
Ло = )/М2-!;
323
Gol%SM — нагрузка на сумму площадей миделя фюзеляжа и гондол
двигателя самолета, равная в среднем 6000—8000 кгс/м2;
Cf — коэффициент трения, в среднем равный 0,004.
Задавшись рядом значений А', Л", А"' н т. д. и рядом значений со, со",
со" и т. д., можно для каждого значения со определить крейсерскую ско-
рость при полете на дальность
М.рейс=О,О121/
V
Определить Мкрейс можно графически путем построения кривой Мзад
н Мист и луча под 45° (см. гл. П, рис. 2.17).
Зная для каждого значения со величину Мкрейс, можно определить
значения ф и величины схо и Dq.
Для каждой комбинации значений со и А определяем по формуле
(15.101) величину GKp.
Затем,_имея в виду, что (<7T — u) — (1— и—Gx~&кр), задавшись
величиной Gx, определяем для различных со и А величины (GT —и) и под-
ставляем в формулу (15.113) значения величин ф и (Gt — u) для различ-
ных значений со и А. В результате можно построить график зависимости
£тах от А для нескольких значений с0 (рис. 15.37). График позволяет
сделать вывод о том, что для увеличения дальности 2,гаах сверхзвукового
самолета необходимо применять крылья малого удлинения с довольно
малой относительной толщиной профиля со.
Изложенная методика является весьма приближенной и получаемые
по ней результаты требуют дополнительной проверки для того, чтобы
удовлетворить физические, эксплуатационные и экономические ограни-
чения, накладываемые на проектируемый самолет.
Оптимизация параметров самолета является сложной многомерной
задачей, решить которую до конца даже современными методами с ис-
пользованием ЭВМ, не всегда представляет возможным. Коррект-
ная постановка задачи выбора оптимальных параметров самолета пред-
полагает наличие объективного критерия оптимальности и полного соста-
ва дисциплинирующих условий (связей и ограничений, см. гл. III).
С математической точки зрения постановка подобной задачи озна-
чает; найти такие параметры Xi=Xi*, чтобы имело место inf фо(х) или
х=х*
ьирфо(^) при (pj(x)^O и фл(х)^0, где х — многомерный вектор иско-
мых параметров; <ро(*)—критерий оптимальности; <pj(x) и фь(х) —
дисциплинирующие условия (связи н ограничения); г = 1, 2, 3, ..., п; } —
= 1, 2, 3, ..., т\ Л«1, 2, 3, ..., I при т^.п— I и n<l<n (inf, sup — нижняя
и верхняя грани).
Отсутствие одного из компонентов задачи (критерия оптимальности
или дисциплинирующих условий типа равенств или неравенств) делает
ее непоставленной, нереальной, т. е. она теряет смысл. Действительно, в
качестве критерия оптимальности может быть принята эффективность
самолета (боевая или технико-экономическая), а в качестве дисципли-
нирующих условий-тактико-технические требования, техническое за-
дание на разработку, технические условия на проектирование, изготов-
ление и эксплуатацию самолета, различного рода физические ограниче-
ния и т. п. В целом ряде случаев удовлетворить всем требованиям не
представляется возможным: отсутствует область допустимых парамет-
ров. Анализ такого положения всегда позволяет найти необходимый
компромисс для принятия рационального решения.
В общих чертах процесс оптимизации параметров самолета можно
представить следующим образом, (см. гл. III):
1. Задается диапазон искомых параметров.
324
2. Рассчитываются зависимости от искомых параметров:
а) взлетного веса и других необходимых весовых характеристик са-
молета;
б) аэродинамических характеристик (в основном — поляр) са-
молета;
в) летно-технических характеристик самолета.
3. Рассчитывается критерий оптимальности на основании дан-
ных п. 2.
4. На зависимостях 2 а), б) ив) устанавливаются необходимые свя-
зи и отмечаются заданные значения летно-технических характеристик
самолета по ТТТ в виде ориентированных связей, выражающих границы
допустимых значений летно-технических характеристик, равных задан-
ным (неравенства рассматриваются как равенства).
5. На критерии оптимальности отмечаются те параметры, которые
отвечают границам неравенств, и выявляется допустимая область пара-
метров.
6. По критерию оптимальности в допустимой области параметров,
если она существует, с учетом связей (равенств) находится экстремаль-
ное (наибольшее или наименьшее) значение критерия н отмечаются со-
ответствующие значения параметров.
Следует заметить, что optimum может лежать либо на одной из гра-
ниц неравенств, либо на пересечении двух и более таких границ. Ука-
занная задача может и не иметь решения, если допустимая область па-
раметров в выбранном диапазоне их значений будет отсутствовать.
Выходом из такого положения может 'быть расширение диапазона зна-
чений искомых параметров, а если это не дает результатов, то необхо-
димо пересмотреть ТТТ, т. е. сделать нх более реальными.
Из краткого рассмотрения ясно, что решение подобной задачи дале-
ко выходит за рамки классических математических методов нахождения
экстремума, тем более — аналитических.
В настоящее время неклассические методы решения задач оптими-
зации интенсивно развиваются как у нас в стране, так и за рубежом при
проектировании в самых различных областях машиностроения и тех-
ники вообще, а также при проектировании сложных систем и комплек-
сов. Необходимо отметить, что существующие методы нелинейного мате-
матического программирования (различные градиентные методы, методы
случайного поиска и т. п.) для решения задачи оптимизации в общей ее
постановке еще весьма несовершенны и громоздки даже для современ-
ных ЭВМ. По-видимому рациональное расчленение решения такой за-
дачи на отдельные этапы и использование соответствующей логики по-
иска позволит значительно сократить объем и время решения подобной
задачи на ЭВМ.
Другой путь облегчения решений задач оптимизации состоит в том,
чтобы модель проекта, процесса проектирования н критерия оптималь-
ности были достаточно просты, чтобы они учитывали только самое
главное и решающее.
Действительно, в самолетостроении часто в качестве критерия опти-
мальности как его эквивалент может служить взлетный вес самолета;
например, в случае поиска оптимальных параметров пассажирского са-
молета по минимуму себестоимости перевозок при заданных значениях
коммерческого груза, скорости и высоты -полета или — в случае наиболь-
шей маневренности сверхзвукового самолета, когда cymax мало зависит
от геометрических параметров крыла и т. п.
В качестве иллюстрации на рис. 15.38—15.41 показаны зависимости
взлетного веса, дальности, сбалансированной длины ВПП и расчетной
перегрузки самолета от двух параметров крыла X и с:
с); Lq=с);
'325
•£впп=^впп(М с) и —Пу(Х; с).
Следует заметить, что все взлетные веса рассчитаны при заданной рас-
четной перегрузке (п? = const), а по полученному весу определялись
расчетные перегрузки, которые следовало бы принять для данного веса
самолета с такими параметрами.
Таким образом имеются следующие дисциплинирующие условия:
Рис. 15.38. Параметрическая зависимость взлет-
ного веса самолета от удлинения и средней отно-
сительной толщины крыла Go (X, с) с линиями по-
стоянных значений дальности полета Дозад; дли-
ны ВПП — ЬВППзад и расчетной перегрузки
прузад, заданных по ТТТ и ТУ
ной перегрузки самолета от
удлинения и средней относи-
тельной толщины крыла —
Пу (X, с)
Рис. 15.40. Зависимость рас-
четной дальности полета от уд-
линения и средней относитель-
ной толщины крыла самоле-
та Lo (X; с)
326
В качестве критерия оптимальности принимается взлетный вес
1пЮ0(Х; с).
X; с
На зависимостях Z0(X; с) и ЛВПп(Х; с) горизонтальными прямы-
ми отмечены заданные значения дальности и длины ВПП по ТТТ так, что
заштрихованные стороны указывают на неприемлемые значения (не-
равенства) .
Значения X и с, соответствующие границам этих неравенств, отме-
чаются на зависимости G0(X; с). Прямые на графиках L0(X; с) и
£впл (X; с) преобразуются в кривые на графике Go (X; с). Допустимая
область параметров обозначена штриховкой.
Прямая nJ =const на графике
nJ (X; с) также преобразуется в кривую
на графике G0(X; с), проходящую через
допустимую область параметров.
Нетрудно видеть, что на зависимости
G0(X; с) определится точка с координа-
тами Х = Х* и с~с*, для которой G0(X*;
с*) =infj7o(X; с), где X* и с* будут опти-
мальными.
Если бы значения Go(X; с) и nJ (X;
с) рассчитывались совместно (например,
методом последовательных приближе-
ний), то зависимость nJ (X; с) была бы
исключена и inf G0(X; с) определился
бы только границами неравенств
Z-o^const и /.Bnn^const.
Следует заметить, что расчеты Go с
nJ—const значительно облегчаются и
упрощаются, тем более, что значения nJ =const могут быть нормирова-
ны для каждого класса самолета.
Проиллюстрировать графически пример расчета оптимальных па-
раметров при их числе более двух затруднительно. Подобные расчеты с
большим числом искомых параметров рационально проводить на ЭЦВМ.
Рис. 15.41. Зависимость расчет-
ной длины взлетно-посадочной
полосы от удлинения и средней
относительной толщины кры-
ла ДВпп (Х1 с)
§ 8. ВЫБОР КОНСТРУКТИВНО-СИЛОВОЙ СХЕМЫ КРЫЛА
Выбор конструктивно-силовой схемы крыла определяется рядом
условий, а именно:
— компоновкой самого крыла — наличием в обшивке люков для
обслуживания расположенных в крыле агрегатов оборудования, нали-
чием внутри крыла баков для топлива, ниш для убирания шасси и т. д.;
— компоновкой фюзеляжа — наличием достаточных объемов для
центральной части крыла в фюзеляже (при одиолонжеронном крыле
объемы в фюзеляже требуются минимальные);
— требованиями жесткости.
Наиболее употребительными являются следующие конструктивно-
силовые схемы свободнонесущих крыльев современных самолетов:
— однолоижеронная (к концу переходящая в моноблочную);
— моноблочная или кессонная;
— однолонжеронная с «внутренним подкосом» (для стреловидных
крыльев);
— многолонжеронная (для треугольных крыльев малого удлинения).
Однолонжеронная схема. Современное крыло однолонже-
ронной схемы по существу является обычно (при применении жесткой
обшивки) крылом смешанной схемы: у корня или вблизи вырезов в об-
327
шивке— однолонжероиной схемы, а на конце крыла — моноблочной.
Лонжерон расположен в этой схеме вблизи максимальной толщины про-
филя, и его пояса воспринимают (у корня) полную величину нормаль-
ных сил от изгибающего момента. Для восприятия (совместно со стенкой
лонжерона) перерезывающих сил и нормальных сил от момента, дейст-
вующего в плоскости хорд крыла, устанавливаются одна или две про-
дольные стенки (рис. 15.42, а, б, в). Если стенка расположена позади
лонжерона, расстояние до нее от носка крыла принимается ~ (0,65—
0,7) Ь, где b — хорда крыла, а расстояние до лонжерона составляет
- (0,4—0,5) 6.
Если стенка расположена впереди лонжерона, расстояние от носка
до стенки составляет —ОД 6, а до лонжерона — (0,45—0,55) 6.
Рис. 15.42. Сечения крыльев однолонжеронной конструктивно-силовой схемы:
а — с одной продольной стенкой сзади и шарнирной стыковой опорой на ней, б—с
двумя продольными стенками и шарнирной стыковой опорой на передней стенке,
в — с двумя продольными стенками и шарнирными стыковыми опорами на каждой
из них, г —с внутренним подкосом или поперечной балкой
При двух стенках (рис. 15.42, б) передняя располагается на 0,1 Ь,
задняя — на —0,7 6*, а лонжерон — на 0,46. Стенка стыкуется с соот-
ветствующим элементом центроплана или фюзеляжа посредством одного
шарнира, воспринимающего только перерезывающую силу, нормальную
силу от изгиба в плоскости хорд крыла и реакции от действия крутящего
момента. Если установлены две стенки, на каждой из них может быть
иногда по стыковому шарниру (рис. 15.42, в). Так как крутящий мо-
мент крыла уравновешивается сосредоточенными в стыковых шарнирах
силами, составляющими пару, то нервюра по разъему должна быть уси-
ленной (рис. 15.47, а, нервюра 3).
Однолонжеронная схема крыла весьма целесообразна для примене-
ния в легких спортивных самолетах и других самолетах с прямыми
крыльями и достаточно 'большой относительной толщиной профиля
(ёо>8°/о), у которых из-за ограниченности объемов фюзеляжа трудно
пропустить сквозь фюзеляж моноблок или кессон, а также во всех слу-
чаях, когда в обшивке крыла (ёо>8°/о) неизбежны вырезы (для шасси,
оборудования и т. д.).
Однолонжеронная схема во всех этих случаях по весу заметно легче
схемы двухлонжероиной или миоголонжерониой (в случае жесткой,
работающей на нормальные, силы обшивки). При небольших на-
грузках на крыло однолонжеронная схема также значительно легче схем
моноблочной н кессонной. В крыльях тонких (со<8%) однолонжеронной
схеме следует предпочесть схему многолонжеронную нли кессонную.
* Расположение стенки более чем на 0,7 & от носка не имеет смысла, так как при
дальнейшем отодвигании стенки назад жесткость на кручение почти не увеличивается;
кроме того, последние 30% хорды заняты обычно механизацией и элеронами.
328
Моноблочная и кессонная схемы. Разница между моно-
блочным и кессонным крылом состоит в том, что в моноблочном крыле
нормальные силы при изгибе воспринимаются обшивкой и подкрепляю-
щими ее стрингерами по всему контуру поперечного сечеиия крыла
(рис. 15.43, а, в), а в кессонном крыле нормальные силы воспринимаются
обшивкой и стрингерами лишь по части контура, например носком или,
как обычно, средней частью; остальная часть контура с более тонкой
обшивкой и слабее подкрепленная стрингерами в работе иа изгиб участ-
вует значительно меньше (рис. 15.43, б). В одной и другой схемах лои-
3)
Рис. 15.43. Сечения крыльев:
а — моноблочной конструктивно-силовой схемы, б — кессонной кон-
структивно-силовой схемы; в - моноблочной схемы из штампован-
ных панелей
жероиы с сильными поясами отсутствуют, а для восприятия перерезы-
вающих сил служат стенки, скрепленные с обшивкой слабыми по-
ясами.
При моноблочной схеме сквозь фюзеляж проходит крыло почти всем
контуром (за исключением хвостика). При кессонной схеме сквозь фю-
зеляж проходит лишь кессон, т. е. наиболее сильно работающая часть
контура.
30
60 5крит,
Рис. 15.44. Тонкостенные и толстостенные профили и
графики их работы при сжатии
Кессонная схема весьма целесообразна для получения большей
жесткости крыла иа кручение. При одинаковом весе крыло кессонной схе-
мы (рис. 15.43, б) будет обладать жесткостью иа кручение, примерно иа
10% большей, чем крыло однолонжероиное (см. рис. 15.42, а). Для само-
летов со стреловидным крылом с большим удлинением кессонное крыло
может быть применено с большой эффективностью, так как для подоб-
ных крыльев с большой нагрузкой жесткость имеет важное значение
ввиду возможности возникновения иа таких крыльях явления реверса
элеронов. При небольших нагрузках иа крыло кессонная схема
уступает по весовым качествам одиолонжерониои. Однако следует при-
нять во внимание то обстоятельство, что с ростом скорости, с увеличе-
нием нагрузки иа крыло кессонная схема делается все выгоднее по весу,
так как толщина обшивки и стрингеров с ростом нагрузки увеличивается
и критические напряжения потери местной устойчивости сгорит делаются
более высокими. Это видио на примере двух дюралюмииовых профилей
329
Рис. 15.45. Зависимость
критического напряжения
потери местной устойчи-
вости Охрит гладкого
алюминиевого листа, со-
гнутого по цилиндру с
радиусом R при толщи-
не б, от отношения б/Я
кроме того, при малых
разной толщины (рис. 15.44). При толщине стенкн 61 = 1 мм профиль
длиной / = 200 мм теряет местную устойчивость прн <тКрит=17 кгс/мм2,
а прн толщине стенкн 6 = 3 мм и той же длине профиль теряет местную
УСТОЙЧИВОСТЬ прн (Ткрит —33 кгс/мм2.
Обшнвка (согнутая по цилиндру с радиусом Я) прн увеличении
толщины 6 нли уменьшении Я работает на устойчивость прн сжатии
значительно лучше (рнс. 15.45).
Следует прн этом иметь в виду, что толстая обшнвка прн потере
устойчивости может заставить стрингеры потерять устойчивость, если их
стенки недостаточно толсты. Поэтому при толстой обшивке должны быть
и достаточно толстые стеики стрингеров.
Очень выгодной по технологичности и до-
статочно удовлетворительной по весу оказы-
вается кессонная схема для тонких крыльев
(со<8°/о) при применении конструкции с прес-
сованными нлн штампованными панелями (см.
рис. 15.43, в).
Таким образом, можно утверждать, что
кессонная схема крыльев весьма целесообраз-
на для больших самолетов со стреловидным
крылом значительного удлинения и с большой
нагрузкой на 1 м2 и для самолетов с малыми
удлинениями, малыми относительными толщи-
нами (со<8%) н большой нагрузкой на 1 м2.
Для легких самолетов кессонная схема неце-
лесообразна, так как она требует значитель-
ных объемов в фюзеляже, объемы же фюзеля-
жей легких самолетов весьма ограничены и,
удлинениях и удельных нагрузках на крыло н
больших относительных толщинах кессонная схема будет менее выгодна
по весовым данным, нежели одноложеронная схема. Следует особо
отметить одно технологическое свойство кессонной схемы — она очень
удобна для панелирования.
Однолонжеронная схема с внутренним подкосом.
Эта схема применима для стреловидных крыльев с углом % не менее 35°.
Внутренний подкос — опора лонжерона в виде конца защемленной бал-
ки, идущей обычно перпендикулярно оси самолета на расстоянии 0,3—0,5
(в зависимости от величин угла стреловидности и сужения крыла) полу-
размаха от осн симметрии самолета (рис. 15.46). Внутренний подкос
работает аналогично лонжерону подкосного крыла как консольная
балка.
Лонжерон, расположенный на (0,3—0,4) Ь, для увеличения базы,
воспринимающей -реакцию от крутящего момента (между точками 4 и 5
на рнс. 15.46), на месте соединения с поперечной балкой имеет перелом,
так что в бортовом сеченнй конец лонжерона отстоит от носка крыла на
(0,08—0,1) b (см. рнс. 15.42, а). В точке 5 лонжерон крепится к фюзеля-
жу одним шарниром, воспринимающим только перерезывающую силу,
реакцию от крутящего момента и нормальную реакцию от изгибающего
момента, действующего в плоскости хорд.
Поперечная поддерживающая лонжерон балка в бортовом сечении
отстоит от носка крыла примерно на 0,65 Ь.
Схема однолонжеронного крыла с внутренним подкосом выгоднее в
конструктивном отношении, чем обычная однолонжеронная схема (см.
рнс. 15.47) по следующим причинам.
1. Опорная база у корня (между точками 4 и 5) благодаря перело-
му лонжерона в крыле с внутренним подкосом прн расположении лонже-
рона иа 0,4 6 может быть больше, чем в крыле одиолонжеронном.
330
2. Стыковые узлы в крыле с внутренним подкосом в точках 4 и 5
(см. рис. 15.46) конструктивно проще и легче, чем узлы однолонжерон-
ного крыла (см. рис. 15.47). Действительно, в стыковом узле лонжерона
обычного однолонжеронного крыла силы, действующие на пояса, и ре-
акции, возникающие на опорах, расположены по отношению друг к другу,
под острым углом. Это обстоятельство вызывает необходимость соеди-
нения этого узла с усиленной нервюрой № 3 в месте разъема. В резуль-
тате получается трудный в конструктивном оформлении и тяжелый
узел 4.
Рис. 15.46. Схема стрело-
видного однолонжеронного
крыла с внутренним подко-
сом:
Рис. 15.47. Схемы стрело-
видного однолонжеронного
крыла:
а—нервюры расположены по
потоку; о —нервюры располо-
жены перпендикулярно перед-
ней кромке нлн лонжерону;
1, 2, 3~ усиленные нервюры;
4, 5 —стыковые узлы
а — нервюры расположены по
потоку; о — нервюры располо-
жены перпендикулярно перед-
ней кромке илн лонжерону;
1, 2, 3 —усиленные нервюры;
4. 5 — стыковые узлы
3. В крыле с внутренним подкосом центр давления полукрыла рас-
полагается очень близко от нормали к оси самолета, проведенной из
главной опоры полукрыла узла 4 (см. рис. 15.46, а) на плече hi. В одно-
лонжеронном крыле центр давления полукрыла расположен на большем
плече /г2 (см. рис. 15.47, а). Вследствие этого опорная реакция на узле 5
первой схемы (см. рис. 15.46) будет значительно меньше, чем на узле 4
второй схемы (см. рис. 15.47), и поэтому корневая нервюра № 1 крыла
с подкосом будет нагружена меньше, чем корневая нервюра № 1 одно-
лонжеронного крыла, так как изгибающий момент, действующий на
нервюру, в первом случае равен
Л/.=— GQn ,h}, J
а во втором случае -ч
^2= й2,
причем hx < й2.
Однако схема с внутренним подкосом технологически менее выгодна,
чем кессонная, так как она не так удобна для панелировання.
331
Расположение нервюр на стреловидных крыльях.
В стреловидных крыльях нервюры могут быть расположены двумя спосо-
бами:
1) параллельно оси симметрии самолета, или по потоку (см.
рис. 15.46, а; 15.47, а; 15.49, а);
Рис. 15.48. Схема расположения сил в стыко-
вом узле однолонжеронного стреловидного
крыла:
а —лонжерон крыла обычной однолонжеронной схе-
мы; 6 — внутренний подкос однолонжеронной схемы
2) перпендикулярно к передней кромке или к оси лонжерона (см.
рис. 15.46, б; 15.47, б; 15.49, б) *.
Расположение нервюр в первом случае имеет некоторые недостатки,
например, нервюры в стреловидных крыльях имеют большую длину, чем
во втором случае, н поэтому их сложнее изготовить. Если крылья кессон-
Рис. 15.49. Схема стреловидного кессонного
крыла:
а — с нервюрами по потоку; б — с нервюрами, распо-
ложенными перпендикулярно к передней кромке кры-
ла или передней стенке кессона; I, 2, 3~ усиленные
нервюры
-----------------------стенка,
----------------------- стрингер
ные, т. е. нервюры подходят к лонжеронам или к стейкам (см.
рис. 15.49, а) под очень острыми углами, что создает конструктивную и
технологическую сложность; раскрой обшивки при этом расположении
получается невыгодным (в виде 'параллелограммов), дающим большие
отходы. Вместе с тем есть некоторые основания предполагать, что жест-
кость при изгибе у крыльев с расположением нервюр «по потоку» не-
* Часто нервюры располагают перпендикулярно к прямой, соединяющей точ-
ки 0,25 хорд.
332
Рис. 15.50. Схема многолонже-
ронного треугольного крыла
малого удлинения:
а — стенка, б — лонжероны
сколько выше, чем при изгибе у крыльев с нервюрами, расположенными
перпендикулярно к лонжерону*. При расположении нервюр по потоку в
любой силовой схеме — однолонжероиной с внутренним подкосом (см.
рис. 15.46), однолонжеронной (см. рис. 15.42) или кессонной (см.
рис. 15.49) усиленной будет только одна нервюра — бортовая (нервюра
№ 1 на рис. 15.46, а; 15.47, а, 15.49, а). Эта нервюра будет нагружена,
во-первых, силами от крутящего момента, действующего в сечении по
бортовой нервюре, и, во-вторых, силами, направленными в плоскости
нервюры, получающимися вследствие разложения сил, действующих в на-
правлении поясов лонжеронов и стринге-
ров (при кессонной схеме) в месте пере-
лома лонжерона и стрингеров. Если нер-
вюры расположены перпендикулярно к
лонжерону, то приходится делать не-
сколько усиленных нервюр. В схеме с
внутренним подкосом (см. рис. 15.46, б)
установлены усиленные нервюры № 2
и 3, а для восприятия снл, получающихся
вследствие перелома стрингеров, пред-
назначается усиленная нервюра № 1.
Многолонжеронная схема.
Многолонжероиная схема для прямых и
стреловидных крыльев современных са-
молетов не употребляется. С конструк-
тивной точки зрения многолонжеронная
схема представляется целесообразной для
удлинения (рис. 15.50). Переднюю стенку а следует крепить к фюзеля-
жу шарнирно, а лонжероны б — с защемлением. Нервюры в такой схеме
выгодно располагать параллельно потоку, носки нервюр — перпендику-
лярно передней стенке.
Выбор расстояния между стрингерами и нервю-
рами
Вес всех нервюр в крыле будет
л
о„=
О
где qz — погонная нагрузка в сечении с координатой z;
а — расстояние между нервюрами;
bz — хорда в сечении z;
kH— статистический коэффициент.
Но, так как
треугольных крыльев малого
п
О
п
о
то о« = т3р0пл Sbcp= тзо„пл Ьср.
Следовательно, вес нервюр Gn не зависит от расстояния между нер-
вюрами а, т. е. от количества нервюр.
Так как при очень малом а из-за конструктивных соображений для
элементов нервюр приходится применять толщины большие, чем нужно,
* Теоретически, кроме того, доказано, что устойчивость обшивки крыла на сжатие
и сдвиг при расположении нервюр по потоку выше, чем при расположении перпендику-
лярно к лонжерону
333
то вес нервюр при очень малом расстоянии между ними начнет возра-
стать. Целесообразное расстояние а между нервюрами следует выбирать
из условий работы стрингеров и обшивки.
Очень малое расстояние а невыгодно из-за большого количества
заклепок, которое приводит к ухудшению поверхности крыла (даже при
потайных заклепках) и к усложнению производства крыльев.
В бесстриигерных крыльях в зависимости от толщины обшивки бОб
можно принимать а = 120—220 мм при бОб = 1>2—2,0 мм.
Соотношение а/д05 следует при этом выбирать так, чтобы расчет-
ное напряжение Орасч обшивки сжатой зоны не превышало
kE
°- (л/*об)2 ’
где k — практически лежит в пределах £^3,6—7,5 и определяется в за-
висимости от соотношения a2/bR(R — радиус кривизны обшивки [1]).
Бесстрингерные крылья из-за увеличенного веса конструкции крыла
не могут быть признаны целесообразными.
В крыльях со стрингерным набором расстояние между нервюрами а
от мощности стрингерного набора и обшивки.
В кессонных и лонжеронных крыльях со
стрингерным набором расстояние между нер-
вюрами следует выбирать таким образом, что-
бы стрингер и обшнвка в сжатой зоне при
длине а имели такое значение аКрИт, при кото-
ром наступали бы одновременно и местная и
общая потеря устойчивости (рнс. 15.51). Прн
этом условии материал будет наиболее эконо-
мично использован и вес будет наивыгодней-
шим. Понятно, что величина а=/стр зависит от
/стр/i и чем больше радиус инерции! (чем мощ-
ные стрингер), тем больше будет, следова-
тельно, /Стр = Ц-
При подборе стрингера (площади и свободной длины) нужно учиты-
вать не только сжатие, но и его изгиб под действием воздушной нагруз-
ки. Изгиб стрингера ’(наружу вследствие разрежения) улучшает его ус-
тойчивость, так как стрингер и обшивка при потере устойчивости всегда
прогибаются внутрь крыла, т. е. к центру кривизны верхней поверхности.
В современных кессонных крыльях с большой нагрузкой иа 1 м2 при
большой толщине обшивки и стеиок стрингеров элементы крыла (стрин-
геры плюс обшивка) до разрушения работают в зоне пластических
деформаций. В подобных крыльях при не особенно мощных сечениях
стрингеров и обшивки (6Об=1»5—2,0 мм) расстояние между нервюрами
а берется равным 280—350 мм; при мощной обшивке (бОб = 3—5 мм) и
таких же стрингерах значения а могут доходить до 700—900 мм (так
как /СТр=(-£1£-1 г, a i— у мощных стрингеров велико). Расстояние меж-
\ I /opt
ду стрингерами в лонжеронных крыльях (один лонжерон) 6стр = 250—
300 мм.
В кессонных крыльях расстояние между стрингерами необходимо
брать очень небольшим ЬСтр=120—180 мм по следующим соображениям-
а) часто подкрепленная обшивка работает лучше; б) конструкция при
малых &стр работает в зоне пластических деформаций без потери устой-
чивости.
Наивыгоднейшее расстояние между стрингерами
в зависимости
бкрит
(Z/t)opt V1
15 51. К выбору ра-
Рис.
ционального расстояния
между нервюрами крыла
где боб — толщина обшивки в мм;
334
Петр — напряжение потери стрингером местной устойчивости
_ 0,3£
где /? — радиус кривизны обшнвки.
Коэффициент k следует выбирать в зависимости от типа заделки
пластины равным 1,9—2,3.
§ 9. ВЫБОР МЕХАНИЗАЦИИ КРЫЛА
Механизация является неотъемлемой принадлежностью крыла поч-
ти каждого современного самолета. С помощью механизации различного
типа решаются следующие задачи.
1. Увеличение су крыла при посадке и взлете.
2. Предотвращение потери боковой устойчивости и управляемости и
улучшение эффективности элеронов на больших углах атаки при исполь-
зовании механизации, решающей задачу 1.
Рис. 15.52. Различные виды механизации крыла:
а — обыкновенные щитки; 6 — обыкновенный закрылок; а —щелевые закрылки;
г — выдвижные щитки; д — выдвижные закрылки; е —выдвижные многощелевые
закрылки
3. Кратковременное уменьшение подъемной силы крыла для увели-
чения крутизны снижения самолета и для повышения эффективности
торможения колес при пробеге.
Для решения первой задачи применяются разнообразные виды меха-
низаций по задней кромке крыла.
Наиболее употребительны из них следующие:
— обыкновенные щиткн (рис. 15.52, а);
— обыкновенные закрылки (рис. 15.52, б);
— щелевые закрылки с одной щелью (рис. 15.52, в);
— выдвижные щитки (рис. 15,52, г);
— выдвижные щелевые закрылки (рис. 15.52, д);
— выдвижные многощелевые закрылки (рис. 15.52, е).
Все эти устройства в рабочем положении вызывают увеличение
max и заметное уменьшение критического угла атаки (по сравнению с
крылом без механизации). Наиболее просты по конструкции и выгодны
по весу простые щиткн и закрылки, но они при прочих равных условиях
значительно слабее увеличивают cVmax, чем выдвижные щитки и закрыл-
ки. Наибольший прирост суmax создают выдвижные многоцелевые за-
крылки, но они сложны по конструкции и обладают большим весом. При
335
выборе механизации крыла необходимо учитывать величину удельной
нагрузки на крыло р0-
Для решения второй задачи применяются следующие устройства:
—автоматические предкрылки с профилированной щелью
(рис. 15.53, а);
— щитки Крюгера (рис. 15.53, б);
— отклоняемые носки (рис. 15.53, в);
— турбулизаторы (рис. 15.53, г).
Рис. 15.53. Различные виды механизации носка
крыла:
в — предкрылок; б —щиток Крюгера; « — отклоняемый
носок; г — турболизаторы
Наиболее сложные по конструкции и тяжелые по весу предкрылки с
профилированной щелью весьма эффективны и способствуют безотрыв-
ному обтеканию крыла до больших углов атаки с плавным течением кри-
вой на закритических углах атаки (рис. 15.54). Применение предкрылков
спрофилированной щелью совместно с закрылками и щитками повышают
Рис. 15.54. Характер зависимостей cv
от а для различных видов механи-
зации:
I — крыло без механизации; 2— крыло с
предкрылком; 3 — с щитком Крюгера; 4—
отклоняемый носок; 5 — крыло с щелевым
закрылком: б — крыло с щелевым за-
крылком и предкрылком
Рис. 15.55. Схема механиза-
ции современного стрело-
видного крыла:
I ~ предкрылок; 2 — щитки
Крюгера; 3—закрылки; 4—
спойлеры или интерцепторы, ис-
пользуемые в полете для управ-
ления; 5 —спойлеры или интер-
цепторы, используемые при
посадке; 6 — элероны
Су max, увеличивая критический угол атаки. Щитки Крюгера более про-
стые по конструкции, чем щелевые подкрылки и более легкие по весу,
эффективны, по на закритических углах атаки крыла вызывают быстро
нарастающий срыв потока с крыла и резкое падение су по а (см. поз. 3).
Поэтому применение шитков Крюгера целесообразно только в той
части размаха крыла, где имеется повышенное значение критического
угла атаки, например, в корневой части стреловидного крыла. Отклоняе-
мые носки сложнее по конструкции, чем щитки Крюгера и менее эффек-
336
тивны. Они имеют такой же срывной характер кривой су по а как и-
щитки Крюгера 4. Турбулизаторы представляют собой небольшие пла-
стинки, размещенные нормально к верхней поверхности крыла и откло-
ненные на небольшой угол к направлению потока. Эти устройства так
же, как и предыдущие, значительно увеличивают критический угол ата-
ки (угол атаки срыва) за счет чего и дают увеличение сутах. Примене-
ние механизации передней кромки нецелесообразно без использования
механизации задней кромки. В некоторых случаях для улучшения эффек-
тивности элеронов на больших углах атаки применяются щелевые пред-
крылки только в той части размаха, где расположены элероны.
Для решения третьей задачи применяются интерцепторы или спой-
леры, представляющие собой управляемые узкие пластины, располага-
емые на верхней поверхности вдоль размаха крыла (рис. 15.55)г
утопленные в крыло и отклоняемые в рабочем положении нормально к
потоку. Обычно в полете спойлеры применяются для увеличения эффек-
тивности поперечного управления. Смысл применения спойлеров при.
посадке состоит в том, чтобы уменьшить при приземлении несущую спо-
собность крыла для увеличения нагрузок на колеса шасси с целью увели-
чения тормозящей силы и уменьшения дистанции пробега.
В механизированном крыле прирост Дсутах, т. е. сутах, зависит от
следующих факторов:
— типа и размаха механизации;
— сужения крыла rj;
— удлинения крыла X;
— стреловидности крыла %;
— хорды щитка или закрылка Ь3;
— типа профиля крыла и его относительной толщины с;
— угла отклонения поверхности механизации;
— величины сдвига сдвижного закрылка;
— формы щели между крылом и закрылком.
Большие г и Л усиливают эффект механизации. Малые с дают мень-
ший прирост Су max. Стреловидность х уменьшает эффект механизации.
Значительно влияет на Дсутах относительная хорда закрылка Ьз/Ькр или
щитка и относительный размах Можно принимать при предвари-
тельных расчетах следующие значения Дсутах профиля крыла:
— обыкновенные щелевые закрылки Дсутах=0,8—1,0; а=13°—14°;
— выдвижные однощелевые закрылки ДсУтах = 1Л—1,5; а=12°;
— предкрылок Дсу max = 0,7—0,8; а = 30°;
— обыкновенные щелевые закрылки и предкрылок Дсутах=0,9;
а=20°;
— выдвижные однощелевые закрылки и предкрылок Дсутах =1,7—
1,9; а = 20°.
При расположении механизации не по всему размаху крыла мож-
но определить величину суmax крыла с механизацией по такой формуле:
' ^кр.м
Су max = ~ Су max,
где с1/П1ЭХ — коэффициент подъемной силы крыла с механизацией не по
всему размаху;
—площадь крыла, обслуживаемая механизацией (рис. 15.56);
Сушах — коэффициент подъемной силы крыла с механизацией по
всему размаху.
Обычно выбирают относительную величину хорды щитков или за-
крылков по следующим соотношениям:
— для щитков 6щ/%р~0,25;
— для закрылков M&Kp~0,30;
— для выдвижных закрылков Ь3/Ьир^0,3—0,4.
337
При очень больших хордах наблюдается существенное уменьшение
роста эффективности механизации (рнс. 15.57).
Максимальные углы отклонения назначают следующие:
— для щитков 6щ=55—60° (по потоку);
— для закрылков 63=40—50° (по потоку);
— для выдвижных закрылков б3=ЗО—40° (по потоку);
Рис. 15.56. К опре-
делению величины
с¥Шах крыла с меха
низацией не по всему
размаху
Рис. 15 57. Характер влияния относи-
тельной хорды закрылков Ьэ/Ькр и отно-
сительной хорды щитков Ьщ/&кр на ве-
личину ДсВтах
— для выдвижных закрылков тонких крыльев б3=25—35° (по
потоку);
— для отклоняемых носков б|Н~15—20° (перпендикулярно оси).
Большие углы отклонения 6 не следует применять ввиду заметного
замедления роста эффективности щитков н закрылков (рис. 15.58). Сле-
Рис. 15.58. Характер
влияния угла отклонения
закрылков 1 и щитков 2
на величину Дсвтах
Рис. 15.59. Влияние угла стре-
ловидности крыла на относи-
тельную величину Сишах
2—простые щитки, 2 — выдвижные
щитки
дует иметь в виду, что угол атаки acy тах, соответствующий Сушах, при
применении закрылков заметно уменьшается (^на 3—5°) по сравнению
с % max крыла без закрылков.
Протяженность механизации по размаху крыла обусловливается
протяженностью той части задней кромки крыла, которая не занята фю-
зеляжем, гондолами двигателей и элеронами,
Эффективность механизации значительно повышается, если закрыл-
ки или щетки идут по всей задней кромке между элеронами, по фюзеля-
жу и гондолам двигателей.
Стреловидность сильно снижает эффект механизации (рис. 15 59).
Чем больше угол стреловидности %, тем меньше будет отношение
Gtymax)/
(СИ тах)г»о
338
где (суmax) —максимальный коэффициент подъемной силы с механи-
зацией стреловидного крыла; (сутах)Л=о—коэффициенте механизацией
прямого крыла.
Нужно иметь в виду, что для простых щитков и закрылков сниже-
ние Сушах вследствие стреловидности гораздо ощутимее (/), чем для вы-
движных (2).
а) S) в} г)
Рис. 15.60. Стреловидные крылья с одинаковым уг-
лом стреловидности по передней кромке и с различ-
ными углами стреловидности по задней кромке
(Л=2.31):
в-Хз.к-°°; б-Хз.к-20’; в-Хз.к“450. г-Хз.к’бО0
15.61. Влия-
стреловидно-
по задней
Для эффекта механизации стреловидных крыльев большое значение
имеет величина угла Хз.к, образованного линией задней кромки крыла и
перпендикуляром к оси симметрии (рис. 15.60). Чем больше угол %зк,
тем больше отражается стреловидность на величине
рис. 15.61 представлена зависимость Сутах крыльев
с углом стреловидности по передней кромке Хл.к=
= 60° и с различными значениями углов стреловид-
ности по задней кромке от Хз.к = 0° до Хзк = 60° (см.
рис. 15.60).
Для иллюстрации невыгодности простых за-
крылков (или щитков) на стреловидных крыльях
по сравнению с выдвижными могут служить сле-
дующие данные.
Для х=35° при выдвижных закрылках с отно-
сительной хордой b3/bvp=G,3—0,35 и с относитель-
ным размахом /з//кр = 0,6-МОЖНО получить ДСутах~
«0,40—0,45.
Для того же самого крыла при тех же разме-
рах простых закрылков величина Дсутах получает-
ся значительно меньше, а именно ДСушах~0,25—
0,30.
В связи с этим на стреловидных крыльях при-
меняются исключительно выдвижные закрылки.
В последнее время на самолетах с ТРД нахо-
дят применение закрылки со сдуванием погранич-
ного слоя с верхней поверхности закрылка (воздух
подводится от компрессора двигателя). Воздух выдувается
ней кромке крыла таким образом, чтобы струя обдувала
верхность закрылка (см. гл. X).
Иногда в целях улучшения управляемости самолета
оси х в зоне расположения элеронов применяются так называемые ин-
терцепторы. Интерцептор представляет собой обычно узкую пластинку,
которая в рабочем положении стоит нормально к поверхности крыла и,
следовательно, перпендикулярно к потоку, способствуя срыву последне-
го, а в нерабочем состоянии — прижата к поверхности крыла (в специ-
альное углубление на поверхности крыла).
'утах- На графике
Рис.
ние
сти
кромке на cvmax
крыла:
---- без механи-
зации;
----— выдвижные
закрылки
в щель в зад-
верхнюю по-
относительно
339
Удельный вес конструкции щитков н закрылков составляет в сред-
нем
^ = (0,3 —0,4)?ьР,
где 7ьР — удельный вес конструкции крыла.
§ 10. ВЫБОР ПЛОЩАДИ И РАЗМЕРОВ ЭЛЕРОНОВ
И АЭРОДИНАМИЧЕСКОЙ КОМПЕНСАЦИИ
Площадь элеронов составляет от площади крыла
SJS^ 0,05 -0,08.
Для современных небольших самолетов со стреловидным или тре-
угольным крылом н большими Vmax(M>l) площадь элеронов берут
меньше. Для тяжелых самолетов площадь элеронов больше.
При эскизном проектировании величину площади элеронов можно
подбирать по приближенной формуле
-^ = 0,05 - 0,07,
•$кр/кр
где So — площадь заштрихованной части полукрыла (рнс. 15.62);
а — расстояние между центрами тяжести площади So;
SKp — площадь крыла;
/Кр — размах крыла.
Рис. 15.62. К опре-
делению прибли-
женной величины
площадей элеро-
нов Зал
Рис. 15 63. Влияние углов
отклонения элеронов оэл и
относительного размаха
элеронов /эл// на коэффи-
циент поперечного момен-
та тх
Коэффициент момента элеронов для обычных соотношений /эл// и
^эл/^ср может быть выражен приближенно
тх = Л-^1/ (15.119)
/ у
где /ал — размах элеронов;
6ЭЧ — хорда элеронов;
— коэффициент статического момента площади крыла, обслужи-
ваемой элероном, /1 = 50а/5Ьр/кр.
Если на основании статистики определить величину тх(А, то форму-
лой (15.119) можно пользоваться для подбора размеров элеронов. Для
современных реактивных самолетов
-^-^0,16-0,17.
А
340
Величина коэффициента момента тх при относительных хордах эле-
рона 6эл/6Нр>0,25 растет очень медленно, поэтому обычно берут
W6kp = 0,20—0,25.
При увеличении относительного размаха элеронов lanll до величин,
близких к ^//^0,50 рост коэффициента тх замедляется (рис. 15.63), а
так как протяженность механизации по размаху определяет величину
сУшах, то обычно принимают /Эл//=0,30—0,40.
При углах отклонения элерона, близких к 6ЭЛ=25°, тх растет очень
медленно, поэтому максимальные углы отклонения элеронов бэл целесо-
образно брать не более бЭл = 25—30°.
Для так называемых дифференциальных элеронов отклонения
вверх — 6в — 25°; отклонения вниз — 6Н=15°.
Аэродинамическая компенсация для элеронов применяется обычно
следующая:
осевая
— с профилированной щелью;
— с непрофилироваиной щелью;
внутренняя, с мягкой перепонкой.
При осевой компенсации принимают
^-<0,25-0,28,
«^ЭЛ
где SQ к — площадь осевой компенсации;
Зэл — площадь элеронов.
При внутренней компенсации принимают
= 0,30-0,31.
Внутренняя компенсация особенно желательна при больших скорос-
тях, однако осуществление ее при тонких профилях (какие нужны для
высоких 7щах) затруднено, так как очень ограничивает углы отклонения
элерона (6Эл=15—18° в одну сторону).
Если в управлении применяют обратимую схему с гидроусилителем,
то величина компенсации элеронов в целях предотвращения перекомпен-
сацни должна быть уменьшена (~ 15%).
Площадь триммеров 5тр элерона выбирают из соотношений
5Тр/$эл=0,04—0,06 — для одиодвигательных и двухдвигательных само-
летов; 5Тр/5ол = О,О7—0,08 — для четырехдвигательных самолетов.
Удельный вес конструкции элеронов составляет в среднем
(0,4 — 0,5)?кр,
где — удельный вес крыла.
В целях увеличения VKP флаттера элероны должны иметь полную
весовую компенсацию. При применении в управлении необратимых схем
с гидроусилителем весовая компенсация может быть частичной.
Иногда на сверхзвуковых самолетах при крыле малого удлинения
или изменяемой геометрии элероны отсутствуют и для поперечного уп-
равления используются дифференциально-отклоияемые половины стаби-
лизатора.
§ 11. ВЫБОР УГЛА ПОПЕРЕЧНОГО V И УГЛА ЗАКЛИНЕНИЯ КРЫЛА
Угол поперечного V крыла определяют при расчете боковой устой-
чивости самолета, задаваясь величиной отношения
341
где mJ — производная коэффициента тх по углу скольжения 0;
mJ— производная коэффициента ту по углу скольжения 0.
В начале проектирования обычно задаются величиной V приближен-
но. Для прямых крыльев (% — 0°) берут:
— для низкоплана V=+5+ + 7°;
— для среднеплана V = + 34- + 5°;
— для высокоплана V= +1+2,5°.
Для стреловидных крыльев с углом %= +354-4-45° угол лежит в пре-
делах V= —1,54—3° с учетом работы автоматики в системе управления,
можно принимать V~0+ — 3°.
Углом заклинения крыла называется угол между хордой крыла и
строительной горизонталью фюзеляжа (СГФ). Обычно этот угол прини-
мается равным углу атаки крыла акр при полете на основном режиме,
т. е. для истребителя — на Vmax, для бомбардировщика — на V, соответ-
ствующей Lmax н т. д. Однако иногда, например в случае шасси велоси-
педной схемы, величину акр берут несколько большей аКр главного ре-
жима.
Для малых самолетов и истребителей принимают в начале проекти-
рования акр=0—1,0°; для больших самолетов акр =1,0—2,0°; для транс-
портных самолетов с ПД и ТВД принимают акр =3°.
Глава XVI
ПРОЕКТИРОВАНИЕ ФЮЗЕЛЯЖА
Фюзеляж самолета предназначен для размещения экипажа самоле-
та, полезной нагрузки, оборудования, топлива, двигателей, вооружения
и т. д. Фюзеляж на некоторых самолетах вмещает до 80% всей нагрузки.
Кроме того, в силовом отношении фюзеляж связывает между собой
другие основные части самолета—крыло, оперение, шасси, силовую ус-
тановку.
Вес конструкции фюзеляжа составляет около 40% веса всей конст-
рукции самолета, а его аэродинамическое сопротивление — до 50% пол-
ного сопротивления самолета. Таким образом, фюзеляж является важ-
нейшей частью самолета.
Если исключить задачи, связанные с выбором схемы и компоновкой
самолета (рассмотренные в предыдущих главах), то при общем проекти-
ровании фюзеляжа решаются следующие вопросы:
— выбор основных параметров н размеров фюзеляжа;
— выбор формы обводов носовой н хвостовой частей, а также фор-
мы поперечного сечения;
— выбор конструктивно-силовой схемы фюзеляжа и увязка ее с дру-
гими агрегатами самолета;
— определение веса фюзеляжа.
Разбору этих вопросов и посвящена настоящая глава.
§ 1. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ, РАЗМЕРОВ
И ОБВОДОВ ФЮЗЕЛЯЖА
Основными размерами фюзеляжа являются его длина £ф, диаметр
Рф, площадь миделевого сечення $м, длина носовой части /л.ч и длина
хвостовой части /хв.ч (рис. 16.1).
Большое влияние на характеристики самолета, особенно на аэроди-
намические н весовые, оказывают параметры фюзеляжа:
Хф = £ф/Рф—удлинение фюзеляжа;
Хи.ч = 4.ч/Рф—удлинение носовой части;
Ххв.ч=/хв.ч/Рф — удлинение хвостовой части.
342
Если поперечное сечение фюзеляжа некруглое, то прн расчете
^н.ч, Ахв.ч вместо Оф берется эквивалентный диаметр
°ф.9=2]/ (16-1)
Известно, что размеры н форму фюзеляжа следует, строго говоря,
выбирать на основании решения комплексной задачи по оптимизации
всех частей самолета, исходя нз единого обобщенного критерия (см.
гл. I, Ш). Дело в том, что параметры н характеристики всех агрегатов
самолета связаны уравнением весового баланса. Поэтому выбор пара-
Рис. 16.1. Основные размеры фюзеляжа
метров фюзеляжа в отрыве от параметров крыла, оперения и шасси на
основе какого-либо частного критерия (по минимуму аэродинамиче-
ского сопротивления нлн по минимуму веса фюзеляжа) является прибли-
женным решением задачи. Строгая постановка задачи о параметрах
фюзеляжа имеет следующую формулировку:
— найтн такие параметры фюзеляжа (и других частей самолета),
которые при выполнении требований компоновки, срока службы и др.,
давали бы экстремальное значение общему критерию оценки самолета.
Общим критерием оценки самолета может быть, как известно, либо
его эффективность (экономическая или боевая), (гл. I, III), либо при
некоторых неизменных величинах (L, V, Сп.н, Сс, Тс) взлетный вес Go.
Решение общей задачи оптимизации всех частей самолета практиче-
ски возможно лишь с помощью ЭВМ. Если такой возможности не имеет-
ся, то приходится использовать ряд упрощений и допущений (например,
применять методику приближенного графо-аналитического определения
•оптимального удлинения фюзеляжа; определять диаметр фюзеляжа пас-
сажирских самолетов в зависимости от числа мест в поперечном ряду
и т. д.).
Ниже даются некоторые аналитические и графические зависимости,
а также практические рекомендации, которые могут быть полезны прн
эскизном и дипломном проектировании.
Рис. 16.2. Зависимость критического числа М полета от
удлинения фюзеляжа и его частей
Удлинение фюзеляжа. Величина удлинения фюзеляжа и его частей
(Хф, Лн.ч, Ахв.ч) выбирается в первую очередь из аэродинамических сооб-
ражений. Невыполнение требований аэродинамики может значительно
(на одну-две единицы) уменьшить аэродинамическое качество самолета
на основных режимах полета.
343
От удлинения фюзеляжа, а также от удлинения его носовой и хво-
стовой частей зависит наступление критического значения скорости
(М=МкРит) (Рис. 16.2). Чтобы избежать резкого возрастания аэродина-
мического сопротивления фюзеляжа при выборе параметров /,ф, Хн.ч>
/•хв.ч, необходимо учитывать зависимость Мири фюзеляжа от этих пара-
метров. Очевидно, что число М полета для дозвуковых самолетов не
должно превышать Мкрит фюзеляжа. Следует заметить, что данное усло-
вие обычно выполняется, так как критическая скорость крыла, как пра-
вило, меньше критической скорости фюзеляжа.
Для сверхзвуковых самолетов большое значение приобретает удли-
нение носовой части фюзеляжа, так как на волновое сопротивление глав-
ное влияние оказывает форма носовой части тела.
Выбрать удлинение носовой части фюзеляжа сверхзвукового само-
лета можно, построив зависимость сХвтах=/(?.н.ч) по уравнению:
^»тах = -^- + 0,01Хн.ч, (16.2)
Лн.ч
где 0,01Хн.ч~ сх тр (сХтр — коэффициент трения).
Оптимальное удлинение носовой части фюзеляжа сверхзвукового са-
молета зависит от числа М полета и размеров самолета (рнс. 16.3).
Рис. 16.3. Зависимость опти-
мального удлинения носо-
вой части фюзеляжа сверх-
звукового самолета от чис-
ла М полета:
/ — тяжелые самолеты; 2 —
легкие самолеты
Из аэродинамических соображений оптимальное значение удлинения
фюзеляжа и его частей (как для дозвуковых, так и для сверхзвуковых
самолетов) определяется минимумом полного аэродинамического сопро-
тивления. На дозвуковых скоростях это главным образом профильное
сопротивление (т. е. сопротивление трения и сопротивление давления),
на сверхзвуковых скоростях это сумма волнового сопротивления и сопро,-
тивления трения (рис. 16.4).
Рис. 16.4. Схема образования оптимального удлинения фюзеляжа и его частей
из условия минимума аэродинамического сопротивления:
а— дозвуковые самолеты: б — сверхзвуковые самолеты
Однако выбирать значение удлинения фюзеляжа и его частей сле-
дует, исходя не только из соображений аэродинамики, но учитывая н
такие важные факторы, как вес, компоновка и эксплуатация самолета.
Удлинения фюзеляжа современных самолетов по статистике имеют
следующие значения:
344
«а) дозвуковые самолеты (М^0,7)
<ч=1,2-1,5;
ХХВфЧ = 2,0 —2,5;
Хф = 6—7 — легкие самолеты;
Хф= 7 — 8 — пассажирские и транспортные самолеты для
местных авиалиний;
Хф= 8 — 9 — средние магистральные пассажирские и тяжелые
транспортные самолеты;
€) дозвуковые самолеты (М^0,9)
\,.ч=1,7-2,0;
Ххв „ = 3,0 -3,2;
Лф=10—13 —тяжелые пассажирские самолеты большой даль-
ности;
в) сверхзвуковые легкие самолеты (истребители)
X =4-5 ) й
н < } с боковыми воздухозаборниками;
^хв.ч ~ 2, |
Ххв „= 4 — 5, если двигатели вне фюзеляжа;
Хф = 7-10;
т) сверхзвуковые тяжелые самолеты (военные и пассажирские)
X, ., = 5-6;
= 5 - 7;
Аф = 16 - 20.
Длина фюзеляжа и площадь миделя. Длина фюзеляжа определяет-
ся из условия обеспечения потребных объемов для размещения экипажа,
пассажиров, оборудования,
вооружения, грузов. ______________________________Таблица 161
Кроме компоновочных соображений, длина фюзе- ляжа определяется еще и потребным плечом горизон- Форма крыла в плане 7° крыла крыла Хф/1
9 11 0,65—0 75
тального оперения Lr0- Для определения длины Прямое 0 6-8 0,75-0,85
фюзеляжа в первом прибли- жении можно воспользо- Стреловидное 35-55 6-9 3-3,5 0,8—0,95 0,95—1,25
ваться статистическими дан- ными таблицы 16.1. Треугольное 60—65 2—3 1,5—2,0
Из условия обеспечения
потребного объема для заданной нагрузки длина фюзеляжа может быть
найдена по следующей формуле:
r 4vT
Ф" ^Уф
илн
(16.3)
(16.4)
где Уф — необходимый объем фюзеляжа;
k$ — коэффициент формы фюзеляжа (по объему), 0,75—0,8 —до-
звуковые самолеты; 0,70—0,75 — сверхзвуковые самолеты.
Кроме того, для дозвуковых самолетов в первом приближении дли-
ну фюзеляжа можно определять, воспользовавшись связью параметров
фюзеляжа и крыла, которая выражается следующей приближенной за-
висимостью:
Z.* = (0,25 - 0 ЗО)-^.,
Ух
(15.5)
где ?чф — удлинение фюзеляжа;
345
I — размах крыла;
X — удлинение крыла.
Далее длину фюзеляжа уточняют в процессе компоновки самолета,
а также из условия выбора необходимой величины LT0.
Если выбрана длина фюзеляжа, то длина носовой и хвостовой част»
определится из соотношений:
I __ Т Ч . 1 __ т ^хв ч
‘н.Ч ’ Чв.Ч'—.
Аф Аф
(16.6)
Диаметр фюзеляжа н площадь миделевого сечения, как было пока-
зано выше, связаны между собой уравнением (16.1).
При проектировании самолета (особенно сверхзвукового) следует
помнить, что площадь миделевого сечения фюзеляжа должна быть ми-
Рис 16.5. Влияние относительной площа-
ди миделевого сечения фюзеляжа на
аэродинамическое качество сверхзвуко-
вых самолетов (М=2—3)
нимальной (при выполнении важ-
нейших требований, предъявляе-
мых к компоновке самолета). Ми-
нимальная величина площади
миделевого сечения отвечает тре-
бованиям аэродинамики — умень-
шаются силы аэродинамического
сопротивления фюзеляжа (Хф =
= сХф5м<7) и повышается аэроди-
намическое качество самолета.
Аэродинамическое качество само-
вых самолетов показано на рис.
Характер зависимости Агаах=
лета существенно зависит от от-
носительной площади миделевого-
сечения фюзеляжа 5M = SM|5.
Влияние величины 6’м на аэроди-
намическое качество сверхзвуко-
?5.
’м) является одной из причин того,
что для сверхзвуковых пассажирских самолетов приходится принимать
Аф=16—20. Чтобы получить заданный объем фюзеляжа, приходится уве-
личивать его длину, так как увеличивать диаметр нежелательно (чтобы
не увеличивать 5М).
Для легких самолетов (с ТРД, расположенными в фюзеляже) не
удается получить 5М<6%. Следствием этого является сравнительно не-
высокое значение аэродинамического качества на самолетах данного
класса. Например, пассажирский самолет «Конкорд» (Англия — Фран-
ция) при имеющемся значении 5М теряет ~7% аэродинамического ка-
чества по сравнению с чистым крылом (без фюзеляжа), а истребитель-
бомбардировщик «Фантом» (США) теряет ~37°/о.
В общем, можно сказать, что оптимальный диаметр фюзеляжа сле-
дует выбирать, исходя нз разумного компромисса между аэродинамиче-
скими и весовыми характеристиками фюзеляжа и самолета в целом.
При проектировании военных самолетов размеры поперечного сече-
ния фюзеляжа часто определяются площадью сечения кабины летчиков
с учетом площади воздухозаборников или площадью сечения двигателей
(многоцелевые истребители). На размеры поперечного сечения влияют
также габариты грузов (военно-транспортные самолеты). При проекти-
ровании бомбардировщиков и пассажирских самолетов у конструктора
несколько больше свободы в варьировании диаметром и длиной фю-
зеляжа.
Практика самолетостроения выработала следующие размеры миде-
левого сечения фюзеляжей:
а) легкие самолеты без герметической кабины
SM= 1,0—1,2 м2 — одноместный самолет;
$м=1,5—1,7 м2— летчик и пассажир рядом;
346
б) многоцелевые истребители с ТРД в фюзеляже
SM = 1,3—2,5 м2— самолет с одним ТРД;
SM=3,0—5,0 м2— самолет с двумя ТРД;
в) средние бомбардировщики
5« = 3—4 м2; 2)ф = 2,0—2,3 м;
г) тяжелые бомбардировщики
5Д1=6—12 м2; Рф —2,8—3,9 м;
д) военно-транспортные самолеты
5М = 6,5—7,5 м2; Рф=2,9—3,1 м — легкие самолеты;
SM=10—15 м2; £)ф = 3,6—4,4 м — средние самолеты:
— ширина грузовой кабины 3,4—3,5 м;
— высота грузовой кабины 3,2—3,4 м;
Su =28—50 м2; Рф=6—7 м — тяжелые самолеты:
— ширина грузовой кабины 4,5—5,9 м;
— высота грузовой кабины 3,7—4,5 м.
Определение диаметра фюзеляжа пассажирских самолетов дано в
гл. IX.
Форма и обводы фюзеляжа. Форма носовой и хвостовой части, фор-
ма поперечных сечений фюзеляжа, а также общий вид фюзеляжа вы-
бираются в период эскизного проектирования самолета.
Форма фюзеляжа современных самолетов по тем или иным причи-
нам часто отличается от формы, диктуемой аэродинамическими сообра-
жениями (цилиндр с обтекаемой симметричной носовой и хвостовой
частью).
Форма носовой и хвостовой части фюзеляжа подвержена сильному
влиянию условий компоновки и эксплуатации самолета. Так как в носо-
вой части фюзеляжа всегда размещается кабина пилотов, а по требо-
ваниям компоновки необходимо обеспечить хороший обзор из кабины,
го носовую часть фюзеляжа приходится выполнять несимметричной (вид
сбоку).
Если на дозвуковых скоростях такая форма существенно не влияет
на аэродинамические характеристики самолета, то при М>1 несиммет-
ричный нос фюзеляжа (а точнее, фонарь кабины пилотов) создает за-
метное увеличение лобового сопротивления.
Из условия минимального волнового сопротивления форма носовой
части фюзеляжа сверхзвукового самолета (при заданном Рф и Хн.ч)
должна удовлетворять следующему закону:
7=1------(7-2X„j2, (16.7)
г — текущий радиус сечения носовой части фюзеляжа;
х — расстояние от носка до данного сечения.
На тяжелых самолетах для уменьшения сопротивления на сверхзву-
ковых скоростях и улучшения обзора при взлете и посадке часто при-
меняется отклоняемая носовая часть фюзеляжа (рис. 16.6).
Пример решения задачи о целесообразности применения отклоняе-
мой носовой части фюзеляжа для уменьшения сопротивления при М>1
d улучшения обзора при взлете и посадке дан в гл. XIV. Из этого при-
мера следует, что на сверхзвуковых тяжелых самолетах большой даль-
ности применение изменяемой геометрии носа фюзеляжа безусловно
целесообразно.
На легких сверхзвуковых самолетах применяют неубирающийся
фонарь кабины. По требованиям компоновки для такого типа самолетов
Самолет фирмы Локхид С-5А (США) имеет SM = 50 м2.
347
(многоцелевые истребители) хороший обзор для летчика необходимо
обеспечить не только на взлете и посадке, но и в течение всего полета.
Чтобы снизить сопротивление, фонарь кабины выполняют с удлинением
не менее 5—6 (отношение длины фонаря к ширине или высоте). Угол
наклона лобового стекла р должен быть не менее 60—65° (рис. 16.7).
Лобовые стекла таких фонарей, как и
М>1
Рис. 16.6. Конфигурация носовой части
фюзеляжа самолета «Конкорд» (Фран-
ция — Англия)
на дозвуковых самолетах, долж-
ны быть 'плоскими (для улуч-
шения обзора), а поперечное
сечение средней части — круг-
лым (оптимальное сечение гер-
метизированных отсеков).
Угол р у фонарей дозвуко-
вых самолетов (М = 0,7—0,9)
делают не менее 50—55° для
улучшения аэродинамики са-
молета.
На обводы носовой части
фюзеляжа легких самолетов
существенное влияние оказы-
вает компоновка воздухозабор-
ников. Даже если на самолете
установлены боковые воздухо-
заборники, нх форма будет
определять форму носовой час-
ти фюзеляжа. Например, если
воздухозаборник имеет плос-
кую форму, то и фюзеляж
вблизи воздухозаборника дол-
равномерный поток на входе в воз-
жен быть плоским (чтобы обеспечить
духозаборник).
Носовая часть фюзеляжа тяжелых военно-транспортных самолетов
для удобства процесса погрузки — выгрузки иногда выполняется отки-
дывающейся (рнс. 16.8). Такое конструктивное решение накладывает
определенный отпечаток на обводы носовой части, особенно в районе
фонаря (см. также самолет Боинг-747, США).
Рис. 16.7. Параметры фонаря кабины сверхзвуко-
вого истребителя
Обводам носовой части фюзеляжа следует уделять внимание и с
точки зрения эстетики (следует избегать обводов, показанных на
рис. 16.9).
Не меньшее внимание надо уделять н обводам хвостовой части фю-
зеляжа. Решающая роль здесь принадлежит требованиям эксплуатации,
особенно у дозвуковых военно-транспортных и пассажирских самолетов.
Хвостовая часть фюзеляжа пассажирских самолетов несколько припод-
нята для обеспечения нужных углов атаки при взлете и 'Посадке. У воен-
но-транспортных самолетов (ВТС) хвостовая часть еще более поднята
вверх и часто имеет плоскую нижнюю часть для обеспечения погрузки —
выгрузки н воздушного десантирования через задний люк. Такая форма
348
хвостовой части фюзеляжа ВТС неблагоприятно сказывается на аэроди-
намических характеристиках фюзеляжа. Для уменьшения схф в районе
заднего люка ВТС иногда 'Применяются специальные ребра (сечение
/ — /, рис. 16.10), с помощью которых удается на 10—15% уменьшить
сопротивление фюзеляжа и примерно на единицу увеличить аэродинами-
ческое качество в крейсерском полете (указанные ребра применены, на-
пример, на английском ВТС «Белфаст»).
Рис. 16.8. Носовая часть фюзеляжа военно-транспортного
самолета С-5А «Гэлакси» (США)
По форме поперечное сечение фюзеляжа должно приближаться к
кругу. Круг является лучшей формой поперечного сечения герметизиро-
ванной части фюзеляжа, обеспечивающей наименьший вес конструкции.
Поэтому не удивительно, что многие
современные гражданские и военные s*-—7 s'----Э
самолеты имеют круглое (либо близ- г----- ) I
кое к кругу) сечение фюзеляжа. \---------i С__________$
Однако форма сечеиия фюзеляжа
часто диктуется КОМПОНОВОЧНЫМИ СО- Рис- 16-9- Примеры неудачных ва-
ображениями. Даже для пассажирских Риантов носовой части фюзеляжа
самолетов, где сечение в форме круга
наиболее рационально, часто приходится отступать от этой формы и ис-
пользовать, например, сечеиие, образованное двумя пересекающимися
окружностями. В этом случае фюзеляж имеет значительно увеличенный
объем багажного отсека.
Военно-транспортный самолет
Рис. 16.10. Коэффициент аэродинамического сопротивле-
ния фюзеляжа в зависимости от угла атаки (сХф отне-
сен к SM) •
1 — военно-транспортный самолет; 2 — пассажирский самолет
34»
iMoryT быть и другие причины отступления от круглого сечения фю-
зеляжа, вызванные, например, желанием получить аэродинамически
выгодную конфигурацию крыла с фюзеляжем и т. д.
Еще сильнее сказываются соображения компоновки на форме
поперечного сечения фюзеляжа транспортных и легких самолетов.
На рис. 16.11 показана форма сечения фюзеляжа тяжелого военно-транс-
портного самолета Локхид С-5А с убранным и с выпущенным шасси.
Фюзеляж легких самолетов в основном является не герметичным (гер-
метизируется только кабина пилота). Так как при равной площади фор-
ма сечения не оказывает заметного влияния на аэродинамическое сопро-
тивление фюзеляжа (при условии, конечно, что данная форма сечения
Рис. 16.11. Два сечения фюзеляжа по грузовой кабине самолета С-5А
«Гэлакси»
не увеличивает сопротивление интерференции с крылом), то форма не-
герметизированной части фюзеляжа может выбираться главным обра-
зом нз компоновочных н эксплуатационных соображений. При этом,
естественно, следует стремиться к получению минимально возможной
площади поперечного сечения (особенно миделевого сечения фюзеляжа).
Так, например, истребитель с одним двигателем в фюзеляже имеет,
как правило, круглую форму сечения, а с двумя — овальную. Боковые
плоские воздухозаборники создают вместе с фюзеляжем сечение, близ-
кое к прямоугольной форме и т. д.
Если форма поперечного сечения фюзеляжа не оказывает заметного
влияния на сх самолета, то распределение площадей поперечных сече-
ний фюзеляжа по его длине оказывает весьма сильное влияние на вели-
чину сх, особенно в зоне трансзвуковых скоростей полета. Как показы-
вают исследования, от распределения площадей поперечных сечений
фюзеляжа по его длине существенно зависит сопротивление интерфе-
ренции (взаимного влияния) крыла и фюзеляжа.
Правило площадей
Исследования взаимного влияния крыла н фюзеляжа позволили
сформулировать правило проектирования трансзвуковых и сверхзвуко-
вых самолетов, получившее название правила площадей. Это правило
вначале было сформулировано теоретически на базе линейной теории
сверхзвуковых течений. Согласно этому правилу волновое сопротивление
самолета зависит от характера распределения площадей сечений вдоль
оси фюзеляжа, и расчет волнового сопротивления самолета можно су-
щественно упростить, сведя его к расчету волнового сопротивления экви-
валентного тела вращения. Испытания моделей в аэродинамических тру-
бах подтвердили справедливость этого правила. Дальнейшую проверку
350
правило площадей получило на практике. В 1954 г. совершили первый
полет самолеты Грумман F11F-1 и Конвэр F-102A (США), на которых
было реализовано правило площадей. До модификации самолет F-102A
б горизонтальном полете не мог перейти через скорость звука. После
модификации этот самолет с тем же двигателем развил сверхзвуковую
скорость даже при наборе высоты.
Сущность правила площадей заключается в том, что волновое сопро-
тивление самолета (при М = 1) равно волновому сопротивлению тела
вращения с одинаковым распределением площадей поперечных сечений
вдоль продольной оси.
Если построить эпюру площадей поперечных сечений комбинации
«крыло — фюзеляж», а затем по этой эпюре построить эквивалентное
Рис. 16.12. Комбинация «крыло — фюзеляж», выполненная без учета
правила площадей (/) и с учетом этого правила (2):
а —комбинация «крыло — фюзеляж»; б — эквивалентное тело вращения; в —
распределение площадей поперечных сечений
тело вращения, то уже по внешнему виду тела вращения можно судить
о волновом сопротивлении комбинации «крыло — фюзеляж», И наобо-
рот, если исходить из сверхзвуковой обтекаемой формы тела вращения
и по его эпюре построить комбинацию «крыло — фюзеляж», то можно
значительно снизить волновое сопротивление для этой комбинации.
Другими словами, чтобы волновое сопротивление самолета было наи-
меньшим, эпюра площадей поперечных сечений самолета по его длине
должна 'быть возможно более плавной, без горбов и провалов.
Применение правила площадей приводит к необходимости сужения
средней части фюзеляжа (рис. 16.12).
Наибольший эффект правило площадей дает при су=0. По мере
роста су (с увеличением угла атаки самолета) эффект уменьшается. Это
объясняется тем, что с ростом су все большую долю в лобовом сопротив-
лении самолета занимает индуктивное сопротивление, а правило пло-
щадей распространяется только на волновое сопротивление. Выигрыш,
однако, получается существенным до су«0,3, в то время как на транс-
звуковых скоростях Су потреб = 0,05—0,25.
Эксперименты показывают, что при скорости полета, соответствую-
щей числу М = 0,95—1,05, поджатие фюзеляжа уменьшает прирост сопро-
тивления на 60—80%'. При дальнейшем увеличении скорости полета эф-
фект правила площадей уменьшается, и при числе М = 1,7—2,0 он уже
незначителен (рис. 16.13).
Фюзеляжи многих современных самолетов (сверхзвуковых и дозву-
ковых) построены с учетом правила площадей. Этот эффект особенно
следует учитывать при проектировании самолетов с невысокой тягово-
35)
юружс ностью (пассажирские самолеты, бомбардировщики и т. д.), так
как сильное возрастание сопротивления иа трансзвуковой скорости при
небольшом избытке тяги может привести к значительному перерасходу
топлива при наборе высоты.
Рис. 16.13. Влияние поджатия фюзеляжа на величину ко-
эффициента лобового сопротивления комбинации «фюзе-
ляж — крыло»
Следует обратить внимание на тот факт, что эффект правила пло-
щадей распростраиется не только иа комбинацию «крыло — фюзеляж».
Плавную эпюру распределения площадей поперечных сечений необхо-
Рис. 16.14. Диаграмма распределения площадей поперечных сечений по длине
самолета В-58 «Хаслер» (США).
/ — фюзеляж, 2 — крыло. 3 —внутренние гондолы двигателей. 4, б —пилоны, 5 — внеш-
ние гондолы двигателей, 7 —зализ, 8 —оперение
димо получить для всего самолета с учетом опереиия, двигательных гон-
дол и т. д. На рис. 16.14 показана эпюра площадей поперечных сечений
по длине сверхзвукового/бомбардировщика В-58 (США).
§ 2. ОСОБЕННОСТИ КОНСТРУКТИВНО-СИЛОВОЙ СХЕМЫ
ФЮЗЕЛЯЖА
Фюзеляжи современных самолетов в подавляющем большинстве
имеют полумонококовую конструкцию, состоящую из обшивки, стрин-
геров и шпангоутов. Ферменные конструкции применяются лишь для
легких самолетов (сельскохозяйственных, учебно-тренировочных и т. п.).
Расстояние между шпангоутами зависит от толщины обшивки моно-
блочного фюзеляжа, компоновки и веса. На практике шаг шпангоутов
принимается в пределах:
352
200—300 мм — для легких самолетов; h,
300—400 мм — для средних самолетов (15<€?0<30 тс);
450—500 мм — для тяжелых самолетов.
Расстояние между стрингерами в фюзеляже выбирают из тех же
соображений, что и в крыле, стремясь как можно полнее использовать
(для снижения веса) эффект подкрепления обшивки. В зависимости от
толщины обшивки расстояние между стрингерами принимают:
100—150 мм — для легких самолетов;
150—200 мм — для тяжелых самолетов.
В зоне больших вырезов (люков и т. п.) устанавливаются в виде
окантовок усиленные продольные силовые элементы (усиленные стрин-
1еры, балки).
При проектировании конструкции моноблочного фюзеляжа необхо-
димо учитывать следующие требования и рекомендации.
1. Сосредоточенные силы, приложенные к элементам каркаса, не-
обходимо как можно более плавно распределить по обшивке фюзеляжа,
где они уравновесятся потоком касательных сил и нормальных напря-
жений.
2. Большие сосредоточенные силы (от двигателей, оперения, крыла,
шасси) следует передавать на обшивку элементами каркаса, направлен-
ными параллельно силе. Силы вдоль фюзеляжа должны передаваться
на обшивку через стрингеры и продольные балки, а силы, действующие
поперек фюзеляжа, — через усиленные шпангоуты.
3. Сосредоточенные f 'ты, направленные под острым углом к оси
фюзеляжа, следует передавать на обшивку через стрингеры и шпан-
гоуты.
4. Конструкция фюзеляжа современных самолетов должна удовлет-
ворять требованиям долговечности (до 60 000 взлетов-посадок) и надеж-
ности; это особенно существенно для гражданских самолетов. Для вы-
полнения данного требования необходимо, чтобы:
— величина нормальных напряжений в обшивке от внутреннего
давления в герметической кабине не превышала 8—10 кгс/мм2;
— отсутствовала высокая концентрация напряжений, особенно вбли-
зи вырезов для дверей, окон и люков;
— были приняты меры к ограничению скорости распространения
трещин (принцип безопасно разрушающейся конструкции).
5. При конструировании герметизировании* отсеков фюзеляжа сле-
дует правильно назначать границы зоны герметизации (с учетом выре-
зов под шасси, крыло и т. п.); следует избегать применения плоских по-
верхностей для восприятия избыточного внутреннего вления * (до
7000 кгс/м2).
Поперечные сечения герметизированных отсеков должны, как пра-
вило, иметь форму круга.
6. Для уменьшения веса и повышения срока службы фюзеляжа сле-
дует шире применять монолитные конструкции, особенно при проекти-
ровании средних и тяжелых самолетов. Чем меньше в конструкции клеп-
ки и различных соединений, тем меньше вес и меньше источников кон-
центрации напряжений. Как правило, монолитные конструкции дают
возможность на 10—20% снизить вес, что вполне оправдывает увеличе-
ние стоимости конструкции.
Ниже приведены некоторые примеры выполнения указанных требо-
ваний и рекомендаций.
Передача сосредоточенных сил:
а) сила Р приложена на небольшом расстоянии от обшивки и на-
правлена параллельно стрингеру 3 (рис. 16.15). Она воспринимается
башмаком /, соединенным со стрингером. Далее усилие переходит через
* В некоторых случаях могут быть исключения (стр 358).
12-1062
353
заклепки на обшивку фюзеляжа. Если момент Р-Н будет значителен,
то нужно рассмотреть изгиб стрингера и в случае необходимости уси-
лить его в этом месте. Желательно, чтобы башмак 1 устанавливался
ближе к шпангоуту 2;
б) сосредоточенная сила Р приложена вблизи обшивки параллель-
но последней и направлена под острым углом к стрингеру (рис. 16.16).
я 1
Рис. 16.15. Схема конструктивного решения узла, вос-
принимающего силу, направленную параллельно стрин-
геру фюзеляжа вблизи обшивки:
/ — башмак; 2— шпангоут; 3 — стрингер
В этом случае кронштейн 1, воспринимающий силу, должен быть при-
креплен к шпангоуту 2 и к стрингеру 3 в месте их перекрещивания. При-
крепление кронштейна 1 только к стрингеру или только к шпангоуту при
значительных силах будет неправильным решением (возникает изгиб
стрингера нли шпангоута, что нежелательно);
Рис. 16.16. Схема конст-
руктивного решения уз-
ла, воспринимающего
силу, направленную под
острым углом к стринге-
ру и шпангоуту вблизи
обшивки:
/ — кронштейн; 2 — шпан-
гоут; 3 — стрингер
Рис. 16.17.
Схема дей-
ствия силы,
приложен-
ной в плос-
кости шпан-
гоута:
1 — шпангоут;
2 — кронштейн,
3 — стенка;
4 — обшив-
ка фюзеляжа
в) сосредоточенная сила Р действует в плоскости шпангоута так,
как показано на рис. 16.17. Сила воспринимается кронштейном 2, сое-
диненным со стенкой 3. В свою очередь стенка 3 соединена со шпангоу-
том 1 и обшивкой фюзеляжа 4\
г) значительная сосредоточенная сила Р (например от подкоса
шасси) действует под острым углом в вертикальной плоскости по оси
симметрии фюзеляжа.
В этом случае целесообразно передать силу Р на обшивку фюзеля-
жа с помощью стенок, работающих на сдвиг. Два варианта решения
этой задачи показаны на рис. 16.18;
354
д) примеры силовых шпангоутов фюзеляжа, предназначенных для
восприятия изгибающих моментов и перерезывающих сил крыла, пока-
заны на рнс. 16.19.
Вариант / (среднеплан) —двигатель расположен внутри фюзеляжа,
а крыло занимает среднее положение.
Вариант II (низкоплан) в весовом отношении значительно выгоднее
варианта I (легче в 1,7—2 раза), так
как вариант I — это по существу
фюзеляжная часть лонжерона кры-
ла (кривой брус), воспринимающая
изгибающий момент (от снл N) и
перерезывающую силу Q (следует
по возможности избегать примене-
ния варианта /).
Вариант III обычно применяет-
Рис. 16.18.
правленной
Схемы действия силы, на-
под острым углом к плоско-
сти шпангоута:
/ — вертикальная стенка; 2 — горизонтальная
стенка; 3 — продольная стент
ся в случае самолета-высокоплана.
Вариант IV применяется, когда
требуется передать на обшивку фю-
зеляжа значительную перерезываю-
щую силу Q или передать нормаль-
ную силу N;
е) пример стыкового узла вертикального оперения с фюзеляжем
показан на рис. 16.20.
Окантовка вырезов.
Все вырезы в обшивке фюзеляжа (как в крыле и оперении) окан-
товывают силовыми элементами для передачи нормальных -и касатель-
ных усилий, действующих на обшивку. Большие продольные вырезы
Рис. 16.19. Схемы конструктивных решений силовых
шпангоутов фюзеляжа, предназначенных для восприя-
тия сосредоточенных сил с крыла:
I — моментный стыковой узел на силовом шпангоуте средне-
плана; II — моментный стыковой узел иа низко расположенном
центроплане, позволяющем облегчить шпангоут; III —стыковка
крыла с фюзеляжем в схеме высокоплана; IV — безмоментный
стыковой узел
12*
355
окантовываются балками-бимсами (рис. 16.21), роль которых состоит
не только в передаче нормальных сил от общего изгиба фюзеляжа, но
н усилий, вызванных крутящим моментом.
Вырезы под фонарь кабины пилотов окантовываются усиленными
стрингерами (лонжеронами), а вырезы для двери — специальной замк-
нутой рамой.
Лонжерон верти-
кального опе-
ре ная
Продольная
Шпангоут дал ко
Рис. 16.20. Пример конструктивного решения узла, соединяющего вер-
* тикальное оперение с фюзеляжем
Рис. 16.21. Окантовка большого выреза в фюзеляже с помощью
балок-бимсов
Для компенсации вырезов под окна в пассажирской кабине на совре-
менных самолетах устанавливают монолитные оконные панели, с по-
мощью которых снижают также и уровень концентрации напряжений в
местах вырезов.
Рис. 16.22. Типы штангоутов фюзеляжа:
а — распределяющий шпангоут; б — подкрепляющий шпангоут; 1 — обшивка фюзе-
ляжа
Вообще, задача конструирования усиления в месте выреза заклю-
чается в таком распределении материала по контуру выреза, чтобы
коэффициент ср — G окаит/ Свырез находился в пределах 2,5—3,0. Здесь
Оокант — вес окантовки; СВырез — вес удаленного при вырезе материала.
Увеличение срока службы и надежности конструкции фюзеляжа:
а) для снижения концентрации напряжений, которая является по-
тенциальным источником разрушений, важно обеспечить возможно бо-
356
лее равномерное распределение всех нагрузок на обшивку фюзеляжа.
В этом отношении распределяющие шпангоуты имеют преимущество
перед подкрепляющими (рис. 16.22). Неудивительно, что почти на всех
пассажирских самолетах в конструкции герметических кабии установле-
ны распределяющие шпангоуты, хотя в технологическом и весовом от-
ношении более выгодны шпангоуты типа б.
Шпангоуты типа а, кроме того, являются примером осуществления
принципа безопасно разрушающейся конструкции, так как шпангоут
состоит из двух элементов. В случае возникновения трещины в одном из
них, второй осуществит свои функции в пределах эксплуатационных
нагрузок. Показанный на рис. 16 22 распределяющий шпангоут состоит,
таким образом, из двух дублирующих элементов;
Рис. 16.23. Крепление шпангоу-
та, стрингера и обшивки фюзе-
ляжа пассажирского самолета
Дуглас ДС-8 (США)
Рис. 16.24. Границы герметизации фюзеляжа
пассажирского самолета.
а — правильное решение, б — неправильное ре-
шение
б) если в конструкции герметической части фюзеляжа между шпан-
гоутом и обшивкой проложить тонкую титановую (или стальную) ленту
(рис. 16.23), то уровень цепных напряжений в этом месте значительно
уменьшится. Модуль упругости титана почти вдвое больше, чем дур-
алюмина, а если толщина титановой ленты в 3—4 раза меньше толщины
обшивки фюзеляжа, то уровень цепных напряжений уменьшится в 1,5—
2 раза.
Такое конструктивное решение способствует увеличению срока
службы фюзеляжа, так как снижение действующих в эксплуатации на-
пряжений является основным способом борьбы с возникновением и рас-
пространением трещин.
Границы зоны герметизации фюзеляжа (этот вопрос
касается главным образом пассажирских, грузовых и военно-транспорт-
ных самолетов):
а) на рис. 16.24, а показана типичная схема герметизации фюзеля-
жа самолета низкоплана. Количество плоских поверхностей сведено
здесь к минимуму (ниша для носовой стройки шасси и участок пола ка-
бины над крылом). Иногда герметизируют и колодец для носовой стой-
ки шасси (герметизация по створкам шасси).
Пример неправильного расположения границы герметизации фюзе-
ляжа показан на рис. 16.24, б. Здесь значительная часть пола кабины
воспринимает избыточное давление, равное 5700—6300 кгс/м2. Избыточ-
ное давление в кабине пассажирских самолетов составляет, напри-
мер [9].
357
Самолет Ту-104 ДС-8 Копвер 880 VC.10
рэ в кгс/см2 0,57 0,615 0,575 0,63
Однако плоские панели являются невыгодными для восприятия внут-
реннего давления, так как работают на изгиб. Плоский герметизирован-
ный пол, если его осуществить, получился бы слишком тяжелым, а са-
молет неэкономичным;
б) герметическое динще без выреза под дверь имеет, как известно,
минимальный вес, если ему придать специальную форму, практически
исключающую нзгнбные напряжения от внутреннего давления (за исклю-
чением локальных зон краевого эффекта). Такую форму и имеют гер-
метические днища большинства транспортных самолетов. Однако если
Рис. 16.25. Варианты заднего герметического днища с
дверью:
а — выпуклое днище; й — плоское днище
Вид А
большую часть площади герметического дннща занимает вырез под
дверь (рис. 16.25), то напряженное положение существенно меняется
Выпуклое герметическое днище в этом случае не только усложняет
конструкцию, но к требует по соображениям компоновки увеличения
длины фюзеляжа на Л£ф (рис. 16.25, а), что влечет за собой увеличение
веса. Кроме того, герметическое днище с дверью работает далеко не в
идеальных условиях равномерно-распределенного внутреннего давления
(как без двери), так как нагрузки от двери передаются в виде сосредо-
точенных сил в петлях и замках и вызывают местный изгиб днища. По-
этому герметическое днище с дверью предпочитают делать, как правило,
плоским в виде трехслойной конструкции, как схематично показано на
рис. 16.25, б. Впервые такое днище было осуществлено на французском
пассажирском самолете «Каравелла».
§ 3. ОПРЕДЕЛЕНИЕ ВЕСА ФЮЗЕЛЯЖА
Под весом фюзеляжа понимают вес конструкции с полом, перего-
родками, днищами, окнами, фонарем, узлами стыковки крыла, оперения
и т. д., но без оборудования, силовой установки и топливной системы.
358
Вес конструкции фюзеляжа составляет от 7%' до 14% взлетиого
веса
* Оф = бф/(70=0,07—0,14.
Непосредственно вес конструкции (обшивка, стрингеры, шпангоуты
и т. д.) составляет 85—90%, а пол, фонари, перегородки, двери и т. д. —
10—15%' от Оф. Вес обшивки составляет 37—40% от Оф; вес лонжеронов
и стрингеров — 30—33%; вес шпангоутов — 21—30%.
Для фюзеляжа, так же как и для крыла, часто рассматривается
удельный вес конструкции.
Удельный вес конструкции фюзеляжа равен
«ф=-г- КГСМ2’
Оф
где 5ф — площадь внешней поверхности фюзеляжа (5ф~2,5 0фЛф).
Для самолетов различных назначений удельный вес конструкции
фюзеляжа составляет:
^Ф= (0,374-0,49)gKP — для дозвуковых гражданских самолетов;
£ф= (0,54-0,6)gKp — для военно-транспортных самолетов;
£ф= (0,754-0,80)gKp — для тяжелых неманевренных сверхзвуковых
самолетов;
g$— (0,77-4-0,84)Яь-р — для маневренных сверхзвуковых самолетов,
где g«p — вес 1 м2 крыла (£Ifp = Giq>/S).
Для расчета относительного веса фюзеляжа при эскизном и диплом-
ном проектировании, а также при оптимизации параметров фюзеляжа и
других частей самолета могут быть использованы следующие зависи-
мости.
Дозвуковые пассажирские самолеты:
ОФ=$(1-#Д))
0,0126(31 + (АфОф)1’5] 1 + (1 + 0,2р-'!
______________________\ /Go '___________________
V cos X
+ *2-( А -М+ д°*-+6^ф . + 3- 10-s 1,7). (16.8)
‘ХВ ] °0
Здесь Go в кгс; в м; рэ в кгс/см2;
/дв н /хв — соответственно расстояние по осн х от центра тяжести са-
молета до центра тяжести двигателей и от центра тяжести самолета до
конца фюзеляжа. Например, у самолетов с ТРД на хвосте фюзеляжа
/дв//хв = 0,55—0,60;
#i = 2-10-6 — в случае установки ТРД на фюзеляже;
k\ = 0,6-10“6 — двигатели расположены под крылом;
# 2 = 0 — двигатели не крепятся к фюзеляжу;
# 2 = 0,4 —ТРД установлены на фюзеляже;
# з = 1 —двигатели установлены на крыле;
#з=2,5—3,5 — ТРД установлены на фюзеляже, а главные стоики шас-
си — на крыле, причем в фюзеляже имеются вырезы для
уборки колес основных стоек шасси (#3=3,5 — вырезы,
имеющие протяженность до оси симметрии самолета;
#з=2,5 — ограниченные вырезы);
#з=4,3 — главные стойки шасси установлены на фюзеляже и уби-
раются в обтекатели; двигатели установлены на крыле;
удв — удельный вес двигателей;
5= 1 — двигатели на крыле;
5 = 1 —двигатели на фюзеляже (Go^. 130000 кгс);
359
£=0,55+3,5-Ю-6Ор — двигатели на фюзеляже (0о>130000 кгс);
Ро—тяговооруженность самолета на старте (при
MCA);
X — стреловидность крыла по линии хорд.
В табл. 16.2 приводится сравнение фактического значения относи-
тельного веса конструкции фюзеляжа с величиной (7ф, определенной по
формуле (16.8) для некоторых пассажирских самолетов.
Таблица 16.2
Тип самолета Gq в кгс £)ф в м а* фактический °ф по (16.8)
Аэро Командэр 1121 6 340 8,53 1,7* 0,1013 0,1007
Каравелла-1 44 000 9,85 3,2 0,0956 0,0982
Трайдент-1Е 60 000 8,6 3,66 0,0933 0,0974
Комета-4В 71670 11,52 3,12 0,0697 0,0657
DC-8-10 120200 11,0 3,93“ 0,0742 0,0754
VC 10 141500 11,0 4,035* 0,0772 0,0750
* Эквивалентный диаметр.
Дозвуковые военно-транспортные самолеты:
Оф =--( 1 — 0,6- 10“sG0)
8Р3ф + ЮДфХ,],
Go
0,014 [31 +(Ч°*)1,5]
V а0cos х j
+ 0,018.
Тяжелые иеманевренные сверхзвуковые самолеты:
Сф = 0,0025Лф4—-(60фХф + 503ф+400М + 500) + 0,0125.
Go
(16.9)
(16.10)
Здесь М — расчетное число М полета.
Маневренные сверхзвуковые самолеты:
Оф = О.ООЗХф -[—!- (0,5£>фХф + 50Оф + 250М) - + 0,01. (16.11)
с» а-
Здесь М — расчетное число М полета.
Положение центра тяжести конструкции фюзеляжа при центровке
самолета может быть принято в следующих пределах:
Хф= (0,45—0,50)Ьф — неманевренные самолеты;
Хф=(0,50—0,60) £ф — маневренные самолеты; двигатели в хвостовой
части фюзеляжа;
Здесь %ф — расстояние от носа до центра тяжести фюзеляжа.
Глава XVII
ПРОЕКТИРОВАНИЕ ОПЕРЕНИЯ
§ I. ОСНОВНЫЕ понятия.
ВАЖНЕЙШИЕ ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ ОПЕРЕНИЯ.
ЗАДАЧИ ПРОЕКТИРОВАНИЯ
Аэродинамические поверхности, образующие оперение самолета, яв-
ляются органами обеспечения его устойчивости и управляемости.
Горизонтальное оперение обеспечивает продольную устойчи-
360
вость и управляемость (относительно поперечной оси самолета Ozi). На
дозвуковых самолетах горизонтальное оперение проектируется состоя-
щим нз двух частей: неподвижного (или переставляемого специальным
механизмом) стабилизатора и подвижного руля высоты (см. рис. 19.5).
На сверхзвуковых самолетах горизонтальное оперение обычно проекти-
руется в виде цельноповоротного стабилизатора без руля высоты, а про-
дольное управление самолета осуществляется поворотами этого стаби-
лизатора.
В ряде случаев, когда эффективность расположенных на крыле ор-
ганов поперечного управления (элеронов) оказывается недостаточной,
для управления положением самолета относительно его продольной
оси 6*^1 (создания и парирования моментов крена) может использоваться
дифференциальное (т. е. в разные стороны) отклонение правой н левой
половин управляемого стабилизатора (см. рис. 19.8).
Вертикальное оперение обеспечивает путевую (флюгерную) и
совместно с крылом поперечную устойчивость самолета. Вертикаль-
ное оперение, как правило, проектируется состоящим из двух частей: не-
подвижного киля и отклоняемого руля направления. На самолетах, пред-
назначенных для больших сверхзвуковых (а также гиперзвуковых) ско-
ростей, на которых эффективность руля направления оказывается
недостаточной, проектируется цельноповоротное вертикальное оперение
без руля направления (см. гл. XIX и рис. 19.8).
Проектирование оперения должно обеспечить получение необходи-
мых характеристик устойчивости и упрвляемости самолета на всех
возможных режимах полета, а также достаточную эффективность орга-
нов управления для вывода самолета в нормальный режим полета пос-
ле непроизвольного превышения критических значении углов атаки, сва-
ливания н попадания самолета в режим пикирования после сваливания
или штопора.
Эффективность оперения может быть оценена по величине момента,
который это оперение может создать относительно соответствующей оси
самолета:
^гг.о~ ^г.о^г.сп '^в,о = ^-гв 0 —-^в.о^/в.о’ П^Л)
где ув.о — расстояние от продольной оси самолета до точки приложения
равнодействующей боковых сил на вертикальном оперении.
Подставив Yr.o = Cyr.oSr.0qro и Zbo=cJBoSb.o<7bo в выражения для мо-
ментов оперения (17.1), получим
о =fX.o'SJ’-°^r-o(7r-0’ Сгв.о‘^в-1'^в. ?В.О’
Мхв 0= С?в 0‘^в.оУв.о^в.о-
Чтобы получить выражения для безразмерных коэффициентов мо-
ментов *, первое выражение нужно поделить на Sbaq, а второе и
третье — на Slq. Тогда получим
^гг О = ^УГ о^г.о^г.о^т.и» в 0 o^b.o^b.o^-b.oi ^хв 0 ^гв о^в.о^в.о^в.о*
(17.2)
где kr.o=qr.o/q н kD.o = qBo/q — коэффициенты торможения потока в обла-
сти горизонтального и вертикального оперений соответственно (в орнен-
(17.1')
* Использование безразмерных коэффициентов при проектировании более удобно
вследствие того, что они в отличие от размерных величин моментов не зависят от гео-
метрических размеров самолета или модели, а на дозвуковых скоростях — и от режима
полета Результаты всех продувок моделей поэтому выдаются именно в виде безраз-
мерных коэффициентов.
361
тировочных расчетах можно принимать для дозвуковых скоростей
^ = ^.0-0,85-0,95); £й = &сах
~ ^*г.о “ ^-r.o/^а’ ^в.о SB.o = Sb.d/S; У3.п== Ув.о№'
Коэффициент подъемной силы горизонтального оперения (суг.о)
есть функция углов атаки аг.о и отклонения руля высоты 6В:
еаг.о=^гг-.°оаг.»+^".„8а,
а коэффициент боковой силы вертикального оперения — функция углов
скольжения р и отклонения руля направления би:
Ci..o = rL? +-
Подставив эти зависимости в выражения (17.2) и взяв частные про-
изводные по углу атаки и углу отклонения руля высоты от первого урав-
нения и по углам скольжения и отклонения руля направления — от вто-
рого и третьего, получим выражения для определения изменения коэф-
фициентов моментов при единичном изменении углов атаки и отклонения
руля высоты для горизонтального оперения и углов скольжения руля на-
правления — для вертикального:
г.о -'г.О *г.о
ml А, „8. „L. „ = Л к, „А. 0;
О В.О В'” ”• ’ в,и В.о в- ? в>'>'
= С^о о^в.о^в.о^/в.о»
=сув
Vo Vo Vo
=r®-< £вАДл-^и йв.<Л.о;
• в.о в о в.о
V A=.»W-
НО в.о
(17.3)
(17.4)
Выражения (17.3) используются в практике для оценки эффектив-
ности оперения как органа обеспечения устойчивости, а выражения
(17.4) —для оценки эффективности расположенных на оперении рулей
высоты и направления. *
Как следует из выражений (17.3) и (17.4), эффективность оперения
определяется не только его относительной площадью S н плечом L, но
и аэродинамическими характеристиками сиВг.о' с?гя-° и сгв.о’ к0'
торые в значительной степени зависят от формы оперения, его удлине-
ния 2,, стреловидности %, сужения т], формы и относительной толщины
профилей с, площади и относительной хорды расположенных на опере-
нии рулей (5рВ, 5р.н и&рви 5рП). Величина максимальных моментов уп-
равления зависит также от величины максимально возможных углов от-
клонения рулей, например, (/пгг..,)у„р.ппХ—/пгв>08в.т;х.
Для самолетов с безбустерным управлением (см. гл. XIX) большое
значение для обеспечения необходимых характеристик управляемости
имеет также выбор степени осевой аэродинамической компенсации ру-
лей 5о.к и площади триммеров или серовокомпенсаторов 5Тр.
* Если при проектировании самолета принято решение о применении цельнопово-
ротных поверхностей оперения без рулей, то для оценки эффективности этих поверхно-
стей как органов управления используются производные соответствующих коэффици-
ентов моментов по углам поворота поверхностей: т2вГ10. ту*в.<^ тхн о-
362
Таким образом, задачей эскизного проектирования оперения само*
лета является выбор оптимальных значений перечисленных выше пара-
метров горизонтального и вертикального оперений и величин их плеч
Дг.о н LBOi обеспечивающих необходимую устойчивость и управляемость
самолета при наименьшем весе конструкции. Достаточно сложной зада-
чей проектирования оперения является выбор места размещения гори-
зонтального оперения по высоте Лг.о.
Наряду с выбором основных параметров и размещением оперения в
задачу эскизного проектирования входят также разработка конструк-
тивно-силовой схемы и схемы крепления оперения.
Выбор места размещения горизонтального оперения относительно
крыла в плане (т. е. выбор схемы самолета — нормальная, «бесхвостка»
или «утка») относится к вопросам общего проектирования самолета н
рассматривался-ранее (см. гл. VI). Напомним только, что для обеспече-
ния продольной статической устойчивости по перегрузке центр тяжести
самолета должен находиться впереди фокуса, и расстояние между эти-
ми точками, отнесенное к величине САХ крыла, определяет степень
устойчивости
^ = х^хр<0. (17.5)
Схема самолета определяет, в какую сторону сдвигается фокус ком-
бинации «крыло — фюзеляж» при установке горизонтального оперения.
В нормальной схеме (оперение позади крыла) этот сдвиг происходит
назад, в схеме «утка» (оперение впереди крыла) —вперед. Величина
этого сдвига оценивается выражением
с“г о
Д^г.о = Аг0Лг0-^^(1-б“), (17.6)
где — изменение скоса потока в зоне горизонтального оперения
при единичном изменении угла атаки крыла.
Таким образом, необходимая степень продольной статической устой-
чивости самолета тСуг, являющаяся важнейшим параметром, в значи-
тельной степени определяющим характеристики устойчивости и управ-
ляемости, при выбранном крыле в процессе проектирования самолета
может быть обеспечена путем соответствующего выбора положения
центра тяжести (центровки) и выбора положения и параметров гори-
зонтального оперения.
§ 2. ПРЕДВАРИТЕЛЬНЫЕ СООБРАЖЕНИЯ И РЕКОМЕНДАЦИИ
ПО ВЫБОРУ ПАРАМЕТРОВ ОПЕРЕНИЯ
Сложность выбора параметров оперения при проектировании само-
лета связана с тем, что, с одной стороны, необходимые параметры опе-
рения определяются положением центра тяжести самолета (центровкой
хт), а, с другой стороны, параметры (и, следовательно, размеры и вес)
оперения, в свою очередь, влияют на центровку. Например, при извест-
ной центровке хт и некоторой потребной степени продольной статической
устойчивости т^отр необходимый сдвиг фокуса комбинации «крыло —
фюзеляж» ff6.ro за счет горизонтального оперения можно было бы оп-
ределить из простого выражения
а затем, пользуясь выражением (17.6), подобрать необходимые парамет-
ры этого оперения (напомним, что знак «плюс» перед &xF относится
к нормальной схеме, а знак «минус» — к схеме «утка»).
363
Но пока не выбраны параметры оперения, невозможно (даже при-
ближенно) определить его вес и плечо и, следовательно, учесть влияние
оперения на центровку самолета.
Из выражения (17.5) видно, что прн передней центровке степень
продольной устойчивости самолета возрастает, а при задней центровке—
уменьшается. Слишком большая устойчивость делает самолет тяжелым
в управлении, требует больших расходов рулей прн балансировке н ма-
неврировании. Дальнейший рост продольной устойчивости может при-
вести к невозможности балансировки самолета вследствие конструктив-
ного ограничения отклонения руля высоты и его недостаточной эффек-
тивности.
Слишком малая устойчивость также затрудняет управление, так как
на малейшие отклонения руля самолет отвечает чрезмерно большими
изменениями параметров полета, а прн внешних возмущениях продол-
жительное время не возвращается к исходному режиму. Полет на таком
самолете без специальных средств автоматического повышения устойчи-
вости (см. гл. XIX) чрезвычайно утомителен для экипажа, а прн очень
малой степени устойчивости — практически невозможен.
Балансировка, необходимая степень устойчивости н достаточная
управляемость самолета при всех возможных положениях его центра
тяжести также обеспечивается соответствующим выбором параметров
горизонтального оперения. Чем более «мощное» оперение [т. е. чем боль-
ше Дг>а = -г^г-° и с“гг-0о в выражениях (17.3) н (17.6)], тем большие
пределы изменения центровки допустимы. Но увеличение оперения,
естественно, приводит к увеличению его веса я сопротявлення. Поэтому
прн компоновке самолета необходимо стремиться уменьшать возможный
«разбег» центровок с тем, чтобы иметь возможность использования не-
большого горизонтального оперения.
Напомним, что выбранные параметры горизонтального оперения
определяют допустимые пределы изменения центровки самолета от пре-
дельно передней хт.пп до предельно задней хт.пз. Предельно передняя
центровка ограничивается эффективностью органа продольного управ-
ления (руля высоты нлн управляемого стабилизатора), предельно зад-
няя— минимально допустимой степенью продольной статической устой-
чивости.
Выбор параметров вертикального оперения также зависит от поло-
жения центра тяжести н компоновки самолета.
В связи с вышеизложенным выбор параметров оперения в процессе
проектирования самолета производится методом последовательных при-
ближений.
После выбора параметров крыла •и предварительной компоновки
фюзеляжа и силовой установки необходимые площади горизонтального
н вертикального оперений определяются приближенно по формулам
Q -Лг 0^3 О. Q -Л^. р/ о
Лг.о“~ ^в.о j
Ь, о “в.о
Значения коэффициентов статических моментов горизонтального
Лг.о н вертикального ЛВо оперений принимают нз статистических данных
по самолетам аналогичных типов, величины плеч Lvo и LB.o— по пред-
варительной компоновке.
Для ориентировочных расчетов можно принимать следующие значе-
ния коэффициентов статических моментов я плеч оперений.
Для дозвуковых самолетов с прямыми крыльями Ьг.о~7-в.о=
= (2,0—3,5) Ьа (причем тяжелым неманевренным самолетам соответст-
вуют большие значения, легким — меньшне); Дг.о = 0,45—0,55; Лв.о =
= 0,04—0,055.
364
Для скоростных самолетов со стреловидными и треугольными
крыльями
Дг.о~Ьв.о= (1,0—2,0)6а— для легких маневренных самолетов;
Дг.о~ Дв.о= (2,5—3,5) 6а — Для тяжелых неманевренных самолетов;
^г.о = 0,4—0,6, причем большие значения соответствуют тяжелым
скоростным самолетам*;
Дво=0,06—0,12.
Обработка статистических данных для современных самолетов по-
казывает, что относительные значения площадей горизонтального и вер-
тикального оперений не выходят за пределы 5Го=5Го/5=0,15—0,30;
SB.a=5B.o/5 = 0,1—0,22.
Для самолетов с большими сверхзвуковыми скоростями, особенно
если они проектируются по схеме «утка», для которой характерно небла-
гоприятное влияние сбегающих с носового оперения вихрей на располо-
женное в хвостовой части фюзеляжа вертикальное оперение, достаточно
эффективным может оказаться применение разнесенного вертикального
оперения (двухкилевая схема). При этом вертикальные аэродинамиче-
ские поверхности, образующие вертикальное оперение, могут устанавли-
ваться как у бортов фюзеляжа (если фюзеляж достаточно широкий),
так и на крыле с довольно большим разнесением их от продольной осн
самолета (например, американские самолеты ХВ-70А и YF-12A). При
последнем способе установки поверхностей вертикального оперения
условия нх работы оказываются наиболее благоприятными, так как они
не затеняются фюзеляжем, имеющим, как правило, значительную длину.
Разнесенное вертикальное оперение, устанавливаемое у концов го-
ризонтального, находит применение также и на транспортных самолетах
(например, на отечественном самолете-гиганте Аи-22) для уменьшения
нагрузок (в основном крутящего момента) на фюзеляж, обеспечение
прочности и жесткбсти которого вследствие наличия в его задней части
большого выреза-люка является достаточно сложной конструктивной
проблемой.
При использовании разнесенного вертикального оперения с двумя
килями потребные значения коэффициента Ав.о, получеииые расчетом по
приводимой ниже методике, увеличивают на 25—30%, так как возможны
случаи полета (например, при больших углах скольжеиня), когда одна
из вертикальных поверхностей затеняется и ее эффективность сильно
падает. В этих условиях вторая вертикальная поверхность должна обе-
спечить приблизительно до 75% потребного момента путевой устойчи-
вости и управляемости.
Если разнесенное вертикальное оперение устанавливается у концов
горизонтального, то потребная по расчету величина Аг.о может быть
уменьшена на 20—25% вследствие увеличения эффективности горизон-
тального оперения за счет установки концевых шайб. По этой же при-
чине несколько увеличивается эффективность вертикального оперения
при верхнем расположении на нем горизонтального оперения (так на-
зываемое «Т-образное» оперение). В этом случае расчетное значение Лв.о
может быть также уменьшено на 15—20%.
Хотя с ростом плеча оперения Lon его эффективность при создании
моментов статической устойчивости, см. (17.3), и управления, см. (17.4),
пропорционально увеличивается, этот способ обеспечения необходимой
эффективности оперения (за счет увеличения его плеча) практически не
используется. Это объясняется тем, что увеличение плеча оперения может
* При проектировании пассажирских и транспортных самолетов, для которых
характерен достаточно большой разбег центровок при различных вариантах загрузки,
нередко приходится принимать еще большие значения Аг о- Так, например, значения
этого коэффициента у некоторых пассажирских самолетов с ТРД следующие:
ТУ-104 — 0,768; Боинг-707 (США)—0,764; Виккерс VC110 (Англия) — 0,7'10; Дуг-
лас DC-8 (США) — 0,667. Самолеты с ТВД имеют еще большие значения Аг.о=0,8—1J.
365
быть достигнуто только в результате увеличения длины фюзеляжа, а зто
всегда связано с большими весовыми затратами, чем увеличение пло-
щади оперения.
После выбора ориентировочных размеров горизонтального и верти-
кального оперений с использованием статистических данных для пред-
варительной компоновки н центровки проектируемого самолета не-
обходимо определить приближенный вес оперений н величину сдвига
фокуса комбинации «крыло — фюзеляж» прн установке горизонталь-
ного оперения.
Приближенно определить вес оперения можно по формуле Gon =
=gonSon, где gon — вес одного м2 оперения (принимается на основании
обработки статистических данных по весу одного м2 оперения современ-
ных самолетов). Для дозвуковых самолетов с нестреловидными крылья-
ми н оперением можно принимать gOn=(0,5—0,6) gKp. Для самолетов со
стреловидными и треугольными крыльями н оперением gon=
= (0,7 0,9) gKp.
Обработка статистических данных по современным сверхзвуковым
самолетам дает значение GT.0 = Gr.o/Go = 0,01— 0,014, а значение GB.o =
= Gb.o/Go = 0,006—0,018 (большие значения (?в.о, как правило, имеют
легкие маневренные самолеты, у которых горизонтальное оперение рас-
положено на верхней части киля, меньшие — 0,006-^0,009 — тяжелые не-
маневренные самолеты).
Положение центра тяжести аэродинамических поверхностей опере-
.ння приближенно можно принимать на 0,5 бсгх .
При более точном определении веса оперения в процессе дальней-
шего проектирования не следует забывать о необходимости весовой ба-
лансировки* органов управления, если для обеспечения потребных
флаттерных характеристик не используются другие средства (например
необратимые гидроусилители нлн специальные демпферы). Вес протнво-
флаттерных грузов органов управления современных самолетов может
достигать достаточно больших величин (до 40—45°/о' веса конструкции
руля).
Помимо предварительно выбранного значения Дг.о для оценки сдви-
га фокуса комбинации «крыло — фюзеляж» при установке горизонталь-
ного оперения, необходимо знать величины kr.o, ат.0= с’гг°0 н е®.
Важнейшей нз этих характеристик является производная аг.о =
==с^гг.,о’ которая зависит от формы и геометрических параметров опере-
ния (Л, т), %, с)оп, выбор которых рассматривается ниже.
Выбор формы в плане н профиля оперения в известной мере зависит
ст выбранной формы н толщины профиля крыла. В настоящее время
наиболее часто применяется трапециевидная (прямая и стреловидная)
форма оперения, иногда — треугольная (рис. 17.1). На нескоростных са-
молетах, как правило, применяются различные разновидности формы,
показанной на рнс. 17.1а. Довольно часто (особенно у вертикального
оперения) для получения прямой (т. е. нестреловндной) осн вращения
руля, при которой конструкция узлов его привода н навески получается
наиболее простой н создающей наименьшее сопротивление, применяется
трапециевидная форма с небольшой стреловидностью, показанная на
рнс. 17.1, б.
На околозвуковых н сверхзвуковых самолетах, проектируемых по
нормальной схеме, чаще всего применяют стреловидное оперение. Такая
форма оперения позволяет получить достаточно высокие значения Мирит
* Весовой балансировкой органов управления называют смещение их центров
тяжести вперед относительно оси вращения. Обычно это достигается остановкой спе-
циальных грузов (балансиров) в носовых частях этих органов с тем, чтобы весовой
момент носовой части относительно оси вращения превышал бы весовой момент хво-
стовой части на 2—3% (весовая перебалансировка).
366
при сравнительно небольшом приросте волнового сопротивления, высо-
кие значения коэффициента ®г.о=^гг'о (за счет относительно боль-
шого удлинения), а также позволяет несколько увеличить величину пле-
Рис. 17.1. Различные формы оперений (все виды оперений, кроме
оживалыюго, имеют одинаковую площадь):
а — трапециевидная для нескоростных самолетов; б —с небольшой стрело-
видностью, применяемой на нескоростных самолетах для получения прямой
(нестреловидной) оси вращения руля; в — стреловидная; а — треугольная;
д, е~ различные варианты трапециевидной формы малого удлинения
сверхзвуковых самолетов; ж — ожнвальная (вертикальная)
ча, расположенного сзади оперения, благодаря «сдвигу» назад конце-
вой части его поверхности (рис. 17.2, а).
В схеме «утка» последнее обстоятельство приводило бы к уменьше-
нию плеча Аг.о, расположенного впереди стреловидного горизонтального
W*r.O. пр
0,25 СМ? пр
0.25СДХ-,
^Г-О. стр
Рис. 17.2. К определению геометрических
параметров оперения:
а — изменение параметров горизонтального опере,
ния при увеличении его стреловидности (двойной
штриховкой показана фюзеляжная часть оперения
Sf ; поточная площадь оперения ||||Т -•
=Sr 0—$г б — параметры вертикального опе-
рения; в — зависимость эффективного удлинения
вертикального оперения Ав,0.э °т истинного
удлинения Хв,0
СГФ
ц.т.----------
0,25СДХ
Фвркаль
Рортовая
нервюра,
нрыла
НОСОК ОДЛ
3,0
2,0
1,5 2,0
в)
оперения, и следовательно, к снижению эффективности последнего. По-
этому при проектировании самолетов по схеме «утка» для горизонталь-
ного оперения стреловидная форма практически никогда ие применяется.
Для носового горизонтального оперения этих самолетов выбирается либо
трапециевидная форма с достаточно малым удлинением и нулевой или
367
очень небольшой стреловидностью (как, например, на американских
самолетах Норт-Америкен ХВ-70А, Грумман F-14A), либо треугольная
форма (как, например, иа самолете SAAB-37).
При выборе угла стреловидности оперения хоп, удлинения ХОп и от-
носительной толщины его профилей соа необходимо стремиться обеспе-
чить достаточную эффективность оперения прн всех возможных углах
атаки крыла, а также затянуть наступление кризисных явлений при око-
лозвуковых скоростях иа большие числа М. (т. е. обеспечить Мкрит.оп>
>МкРит.кр). Поэтому для олереиия, как правило, выбираются симмет-
ричные профили с относительной толщиной, несколько меньшей, чем
принятая для профилей крыла, небольшое удлинение и большая стрело-
видность.
Относительная толщина профилей оперения для нескоростиых само-
летов с нестреловидными крыльями и оперением принимается в преде-
лах Соп=Ю—12%. Для скоростных самолетов со стреловидным опере-
нием эта толщина принимается на 1—2% меньше, чем относительная
толщина профилей крыла, и составляет, как правило, соп=5—6% (хор-
ды замеряются по потоку). Если для сверхзвукового самолета прини-
мается решение о применении нестреловидиого оперения, то достаточно
высокие значения Мкрит обеспечиваются за счет небольшого удлинения
(Хоп=1—2) и очень малой относительной толщины профилей (соп=
= 3—4%). Приблизительно такая же относительная толщина профилей
(соп = 4—5%) принимается и для треугольных оперений.
Достаточно существенное влияние на повышение значений Мкрит
профилей и, следовательно, всего оперения оказывает положение макси-
мальной толщины профиля по длине его хорды (хс=хс/Ь). Наибольшее
значение MKpiIT имеют профили, у которых максимальная толщина при-
ходится приблизительно иа середину хорды (хс=40—50%). Именно та-
кие профили выбираются для оперения.
Для повышения эффективности оперения и расположенных у его
задних кромок органов управления особенно при около- и сверхзвуко-
вых скоростях довольно существенное значение имеет такая модифика-
ция профилей, при которой уменьшается угол схода линий, образующих
хвостовую часть профиля (рис. 17.3). С этой целью профили оперения
нередко модифицируются таким образом, чтобы дугообразные образую-
щие хвостовой части профиля были заменены прямыми (показано ввер-
ху на рис. 17.3).
Рнс. 17.3. Изменение эффективности руля в зависимости от
чисел М при различных углах схода профиля у задней
кромки Ф (вверху справа пунктиром показана модификация
профиля для уменьшения угла схода)
На самолетах с большими сверхзвуковыми и, особенно, гнперзвуко-
вымн скоростями для повышения эффективности оперения профили его
нередко делаются с тупыми задними кромками или клиновидными (как,
368
например, профили вертикального оперения на экспериментальном гн-
перзвуковом самолете Норт-Америкеи Х-15).
При выборе стреловидности оперения околозвуковых самолетов для
выполнения условия М1:рит.оп>Мкрит кр можно использовать следующие
эмпирические выражения для определения МкрИт оперения [14]:
2
Мкриг. оп ~ Мкриг, rrj,Оф ~ »
1 + cos у.оп
где Хоп — стреловидность оперения по линии фокусов (приближенно мож-
но считать по линии ’А хорд профилей), а Мкрит.прОф определяется по
формуле
М-крит. проф 1—0,7 сип — 3,2с0пСу’оп>
значения суОп в которой принимаются соответствующими тем режимам
полета, для которых определялись значения Мкрит для крыла.
Для сверхзвуковых самолетов обычно стараются получить «дозвуко-
вую переднюю кромку» оперения, т. е. кромку, лежащую внутри конуса
возмущений. Это условие выполняется прн /п>1( > arc sin—~ . Практн-
Мтах
ческн стреловидность оперения обычно превышает стреловидность крыла
на 3—5°.
Выбор удлинения X и сужения т] горизонтального и вертикального
оперений осуществляется с учетом влияния этих параметров на вес кон-
струкции и эффективность оперения.
Рис. 17.4. Влияние параметров опере-
ния на его эффективность:
в —зависимость производной аГ-0 — о
от удлинения оперения при докритических
числах М (йг.о.стр.“яг.0 cos X): б — умень-
шение относительной части площади опе-
рения. находящейся в заторможенном по-
токе, при увеличении удлинения (площади
оперения одинаковы); в ~~ происхождение
оптимального значения удлинения опере-
ния, при котором вес оперения получается
наименьшим (при заданной эффективно-
сти); 1 — зависимость, характеризующая
увеличение веса конструкции при увеличе-
нии удлинения, 2 — зависимость, характе-
ризующая уменьшение веса оперения за
счет уменьшения потребной площади
При увеличении удлинения эффективность оперения увеличивается
как за счет увеличения лг.о==^г’0 (рис. 17.4, а), так н за счет умень-
шення части площади опереиия, находящейся в спутной струе затормо-
женного потока (рис. 17.4, б). Вследствие этого при увеличении удлине-
ния оперения его площадь, потребную для создания определенных мо-
ментов устойчивости н управляемости, можно уменьшать [см. выражения
(17.3) и (17.4)]. При этом, естественно, можно ожидать уменьшения ве-
369
a)
Рис. 17.5. Изменение параметров потока за крылом:
са оперения. Однако при увеличении удлинения вес кон-
струкции оперения и узлов его крепления возрастает за
счет увеличения изгибающих и крутящих моментов (при
той же величине нагрузки на оперение). Кроме того, при
увеличении удлинения оперения существенно увеличива-
ется неблагоприятное влияние упругих деформаций опе-
рения на характеристики устойчивости и управляемости,
а также ухудшаются флаттерные характеристики (кри-
тическая скорость флаттера уменьшается).
Очевидно, что существует какое-то оптимальное зна-
чение (Aon)opt, при котором вес конструкции получается
наименьшим (рис. 17.4, в).
При увеличении сужения оперения его вес умень-
шается за счет уменьшения изгибающих моментов, но
уменьшается также и эффективность части оперения,
находящейся в заторможенном потоке. Последнее об-
стоятельство заставляет увеличивать площадь оперения,
что, естественно, приводит к увеличению его веса.
Таким образом, на основании вышеизложенного
можно сделать вывод о том, что правильный выбор па-
раметров оперения, при которых вес конструкции само-
лета получается наименьшим, аналогично выбору пара-
метров крыла может производиться только методом ре-
шения задачи оптимизации.
Обработка статистических данных по современным
самолетам дает следующие значения для удлинения и
сужения горизонтального и вертикального оперений:
АГО=3,5—4,5 — для нескоростных самолетов с боль-
шим удлинением крыла (А>4,5);
Аг о = 2—3 — для скоростных самолетов с малым уд-
линением крыла;
т|го = 2—3,5 (для самолетов с треугольной формой
оперения т]го = 0°);
Ав.о=0,8—1,2;
т]во=2—3,5 — для самолетов с горизонтальным опе-
рением, расположенным на фюзеляже или на нижней
части киля.
При расположении горизонтального оперения на \он-
це киля т]во~ 1, т. е. вертикальное оперение проектирует-
ся практически без сужения. Это делается для получения
достаточно большой строительной высоты профиля киля
у его конца с тем, чтобы обеспечить размещение узлов
крепления горизонтального оперения и механизмов уп-
равления.
§ 3. ВЫБОР ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ
ПО ВЫСОТЕ
Как известно, в полете за крылом образуется зона
заторможенного и скошенного потока. А так как у само-
лета нормальной схемы горизонтальнее оперение находит-
ся позади крыла, то скоростной напор и углы атаки опе-
рения определяются параметрами этого заторможенного
и скошенного потока: коэффициентом торможения k =
_Умести, и уГЛ0М скоса потока е. Следовательно, от этих
Я
параметров зависят действующие на оперение аэродина-
мические силы и характеристики устойчивости и управ-
ляемости.
371
Коэффициент торможения потока за крылом (потеря напора) и на-
правление потока (угол скоса е) в спутной струе зависят от расстояния
за крылом н расстояния по высоте от плоскости бортовой хорды крыла.
Кроме того, характер этого изменения параметров потока в спутной
струе зависит от формы и параметров крыла, а также от режима полета
(рис. 17.5).
При попадании горизонтального оперения в зону сильного торможе-
ния и неблагоприятного изменения скоса потока в спутной струе харак-
тер изменения аэродинамических сил на горизонтальном оперении прн
изменении угла атаки крыла может существенно измениться. Например,
в результате неблагоприятного скоса потока при увеличении угла атаки
крыла вместо обычной, направленной вверх дополнительной подъемной
силы, на неудачно расположенном оперении может появиться сила, на-
правленная вниз. В результате вместо обычного момента продольной
статической устойчивости по перегрузке, действующего на пикирование
при увеличении угла атаки, возникнет дополнительный момент на каб-
рирование, стремящийся еще больше увеличить угол атаки. Другими
словами, в этих условиях самолет с таким расположением горизонталь-
ного оперения теряет продольную статическую устойчивость по пере-
грузке. Это иллюстрируется рнс. 17.6 положительным наклоном кривых,
выражающих зависимость коэффициента продольного момента mz от
коэффициента подъемной силы крыла су (угла атаки).
У самолетов с крыльями малых удлинений и достаточно длинной
хвостовой частью фюзеляжа (сверхзвуковые самолеты) зона макси-
мальных скосов у хвостовой части фюзеляжа, где располагается опере-
ние, как правило, смещается вверх. Поэтому у таких самолетов горизон-
тальное оперение размещается на фюзеляже (рис. 17.7).
неустойчивость по
перегрузив (т^>0) '
Рис. 17.7. Характер изменения по
высот? величины скоса потока и
выбор места расположения гори-
зонтального оперения:
а—за стреловидным крылом среднего
удлинения самолета с коротким фюзе-
ляжем; б — за крылом малого удлине-
ния самолета со сравнительно длинным
фюзеляжем
Рис. 17.6. Влияние высоты распо-
ложения горизонтального опере-
ния на характер протекания зави-
симостей mz=f(cv)
Для сверхзвуковых самолетов всех типов можно располагать гори-
зонтальное оперение ниже линии продолжения бортовой хорды крыла
у иижней поверхности хвостовой части фюзеляжа.
Для дозвуковых самолетов с относительно небольшими скоростями
(V<800 км/ч) н сравнительно длинными хвостовыми частями фюзеляжа
(£ГО = 2,7—3,0) можно рекомендовать устанавливать горизонтальное
оперение с выносом вверх на величину/ir.0= (0,15—0,20)6борт, где бборт—
величина хорды крыла у борта фюзеляжа.
Особо следует остановиться на самолетах, у которых вследствие их
компоновочных особенностей (например, при расположении двигателей
372
в хвостовой части фюзеляжа) приходится предусматривать верхнее рас-
положение горизонтального оперения на киле (Т-образное оперение).
Для этих самолетов при превышении допустимых значений углов атаки
возможно попадание в режим «глубокого срыва», в результате которого
может произойти сваливание самолета, если на этом режиме эффектив-
ность горизонтального оперения окажется недостаточной для создания
необходимого продольного момента на пикирование для перевода само-
лета на меиьшие углы атаки.
Сущность явления заключается в том, что при случайном превыше-
нии допустимых значений угла атаки (например, при сильном верти-
кальном порыве) и наступлении срыва на крыле, спутная струя сорван-
ного и сильно заторможенного потока поднимается вверх и охватывает
горизонтальное оперение. При этом скос потока на оперении изменяется
таким образом, что появляется дополнительный момент на кабрирова-
ние, вызывающий дальнейшее увеличение угла атаки. Так как оперение
находится в сильно заторможенном потоке, то эффективность руля
высоты даже при полном отклонении его вниз может оказаться
недостаточной для преодоления возникающего момента на кабри-
рование.
Характер протекания зависимости m?=f(a) для самолета с Т-об-
разным оперением показан на рис. 17.8. На рисунке также показаны
различные положения (4, Б, В, Г) спутной струи сорванного с кр>тла и
мотогондол потока при различных углах атаки.
Положение А. а=15—17° — начало срыва у концов стреловидного
крыла. Падение подъемной силы концов крыла (АУкр<0), расположен-
ных за центром тяжести, приводит к появлению продольного момента на
кабрирование ( + АМ,кр) и потере продольной статической устойчивости
по перегрузке. Для затягивания начала срыва на концах крыла на боль-
шие углы атаки, а также для смещения зоны первоначального возник-
новения срывов в центральную часть крыла в настоящее время приме-
няют установку на крыле аэродинамических перегородок (гребней) и
генерирующих вихри пилонов («вортилонов»), «запилы» и «наплывы»
на передней кромке крыла, аэродинамическую и геометрическую крутку
крыла. Эти средства обеспечивают сохранение продольной устойчиво-
сти до значений углов атаки а» 18—20°.
Положение Б. а = 18—22°—распространение срыва по всему крылу
приводит к исчезновению момента на кабрирование и восстановлению
продольной статической устойчивости.
Положение В. а=22—35° — неустойчивый режим глубокого срыва.
Спутная струя от крыла и пилонов двигателей охватывает расположен-
ное наверху горизонтальное оперение. Неблагоприятный скос приводит
к появлению дополнительной подъемной силы оперения ДУГ.О, создающей
момент на кабрирование +АМ2Г0 и вызывающей потерю продольной
статической устойчивости (для самолета с низкорасположенным опере-
нием устойчивость восстанавливается за счет выхода оперения из спут-
ной струи скошенного и заторможенного потока).
Положение Г. а=40—45° — оперение выходит из спутной струи и
попадает в невозмущенный поток. Создается момент на пикирование
—ДЛ4гг.о, и самолет балансируется на устойчивом режиме глубокого
срыва.
У самолетов с низкорасположенным горизонтальным оперением
(пунктир на рис. 17.8) после возникновения срыва на крыле и ухода
вверх спутной струи скос потока в зоне горизонтального оперения
уменьшается. Это вызывает появление действующей вверх дополнитель-
ной подъемной силы, которая создает момент на пикирование, способ-
ствующий переводу самолета на меньшне углы атаки. Кроме того,
низкорасположенное горизонтальное оперение не находится в сильно за-
373
374
Рис. 17.8. Развитие срыва на стреловидном крыле у
самолета с верхним расположением горизонтального
оперения и характерное протекание зависимости mz —
— f(a) (цифровые величины на моментной диа-
грамме ориентировочно даны по результатам проду-
вок модели самолета Дуглас DC-9), Для сравнения
показан характер протекания зависимости mz=f(a) у
самолета с прямым крылом (-------—) и самолета со
стреловидным крылом и низко расположенным гори-
зонтальным оперением (--------)
торможенмом потоке спутной струи, благодаря чему руль высоты сохра-
няет свою эффективность, позволяющую перевести самолет на меньшие
углы атаки и вывести его из срыва.
Чтобы предупредить возможность попадания самолета с Т-образным
оперением в режим «глубокого срыва», в системах продольного управ-
ления обычно предусматриваются специальные автоматические устрой-
ства.
У самолета, спроектированного по схеме «утка», расположенное впе-
реди горизонтальное оперение находится практически в невозмущенном
потоке. Поэтому для такого оперения можно принимать /гг.0~1 и е~0°.
§ 4. ПРЕДВАРИТЕЛЬНАЯ КОМПОНОВКА И УТОЧНЕНИЕ ОСНОВНЫХ
ПАРАМЕТРОВ ОПЕРЕНИЯ. МЕТОД ГРАНИЧНЫХ ЛИНИИ
После предварительного выбора основных параметров оперения и
приближенного определения его веса можно закончить предварительную
компоновку проектируемого самолета, «соединив» скомпонованный фю-
зеляж и установленное на нем оперение с крылом.
Для этого по формуле (17.6) вычисляется сдвиг фокуса комбниацни
«крыло — фюзеляж» за счет установки горизонтального оперення. Вхо-
дящие в выражение (17.6) коэффициенты fer.o, лго = с“го и е® лучше
^г-о
брать по данным продувок, а при их отсутствии можно пользоваться
приближенными расчетными значениями* с обязательной последующей
проверкой по результатам продувок моделей проектируемого самолета.
Рис. 17.9. Приближенная зависи-
мость коэффициента торможения
потока в зоне горизонтального
оперения от относительной величи-
ны фюзеляжной части оперения
(при докритических значениях чи-
сел М)
Рис. 17.10. Изменение производной cvr*°
-уг.о
в зависимости от чисел М для некото-
рых видов тонких оперений малого уд-
линения
Коэффициент торможения потока для полетных случаев при докри-
тическнх значениях чисел М. приближенно может быть определен по
графику рнс. 17.9. Для самолетов с Т-образным оперением для этих
случаев можно принимать fer.o~0,95.
Скос потока в зоне горизонтального оперения е и его изменение при
I „ dt dt а \ g
изменении угла атаки крыла Is® = су I можно приближенно
определить по методике, изложенной в известных руководствах по аэро-
динамике.
* При курсовом и дипломном проектировании для определения с® и е“ можно
использовать приближенные методы, изложенные, например, в учебнике И. В. Остослав-
ского и И. В. Стражевой Динамика полета. Устойчивость и управляемость летательных
яппаоатов. М., Машиностроение, 1967.
375
Коэффициент аг>„ для прямых и стреловидных оперений с
относительной толщиной профилей с = 8—10% для докритических чисел
М полета может приближенно определяться по графикам, приведенным
на рис. 17.4, а, Изменение этого коэффициента для некоторых других ви-
дов оперений с тонкими профилями при различных числах М показано
иа рис. 17.10,
После определения сдвига фокуса за счет установки горизонтально-
го оперения определяется расчетное положение фокуса самолета кР =
± Дл> )&а и наносится на САХ предварительно скомпонован-
/б.г.о гг,о
ного крыла (рис. 17.11). Затем для различных вариантов загрузки под-
считывают вес предварительно скомпонованных фюзеляжа с оперением
Оф' и крыла GKf, а также положения центра тяжести этих агрегатов
хт,ф и хт.Кр. Задавшись определенной для данного типа самолета сте-
пенью продольной статической устойчивости /и^потр’ на ^Х крыла на-
носится желательное положение центра тяжести самолета
Обозначив искомое расстояние от носка фюзеляжа до носка САХ
через (рис. 17.11), можно получить равенство
С'фЛ.ф 4- Gk₽ (ха + хт.кр)—(6?ф + <АР) (*а 4- хт),
откуда
ц.т, кръ'ла.
Рис. 17.11. К нахождению положения крыла, обеспечивающего
заданную степень продольной статической устойчивости по пере-
грузке при компоновке самолета
После предварительной компоновки самолета параметры оперения
уточняются. Прн этом используется метод «граничных линий». Этот ме-
тод позволяет при проектировании сразу ответить иа вопрос, в каких пре-
делах можно выбирать параметры оперения для обеспечения выполне-
ния предъявляемых к самолету требований по характеристикам устой-
чивости и управляемости.
В продольной устойчивости и управляемости важнейшими из этих
требований являются:
— обеспечение минимально допустимой степени проводольной ста-
тической устойчивости по перегрузке (при предельно задней центров-
ке Хт.пз);
376
— обеспечение необходимой эффективности органа продольного уп-
равления для балансировки самолета на взлетно-посадочных режимах
на больших углах атаки и полностью отклоненной механизацией крыла
при максимально передней центровке.
После предварительного выбора геометрических параметров опере-
ния (Лг0, 'Пг.о, ёго, Хг.о) можно перейти к уточненному определению коэф-
фициента статического момента горизонтального оперения 4г.о =
= 5гоГго, а имея предварительное значение пл_еча оперения £г.о — к оп-
ределению относительной площади оперения 6’го=^г.о/-^го-
С учетом выражений (17.5) и (17.6) условие выполнения первого
требования — требования обеспечения минимально допустимой степени
продольной статической устойчивости по перегрузке * при задней
центровке хТПз — можно записать в виде
— хт.пз4“ ^г.о^г.0 “'Г“ (1 — S*X (17.8)
При составлении неравенства следует учесть, что ^min<C0.
Значение необходимой эффективности органа продольного управле-
ния для балансировки самолета на взлетно-посадочных режимах поле-
та (большие углы атаки) с полностью отклоненной механизацией кры-
ла при передней центровке ят.гш может быть получено из уравнения
продольных моментов иа этих режимах. Например, для случая балан-
сировки на взлете
mz = тг,й г.о 4- + Дтг „ 4- cj (хт.пп — хп г.о) аотр - kT „ar^Ar,a X
X (а0,р - % ми - ^ие,а01р- Де„„ - Дезеу + Хг'?„+«,,.8.) = 0. (17.9)
В этом уравнении индексом «мех» отмечены изменения аэродина-
мических параметров при отклоненной механизации крыла; индексами
«б.г.о» и «б.мех» — без горизонтального оперения и без механизации
соответственно; индексом «зем» — изменение параметров от влияния
близости земли; SCT = SCT/Sro — отношение площади стабилизатора, нахо-
дящейся в потоке (так называемой «поточной площади»), к общей пло-
щади горизонтального оперения; •Sp,B=l'/'Sp>B/Sr>0—коэффи-
циент эффективности руля высоты (в случае применения цельнопово-
ротного управляемого стабилизатора член првбв выпадает, а для угла
отклонения стабилизатора обычно принимают значение фв = 0,8фвтах;
если на самолете предполагается использовать переставной стабилиза-
тор, то для взлетно-посадочных режимов принимают фв==фвтах);
Дт:дв = - — коэффициент момента от тяги двигателей.
?этр5^а
Из неравенства (17.8) получим следующее условие для выбора ко-
эффициента статического момента горизонтального оперения:
. . min ~-^Л.б.г.о + ХТ из
г о '''* " .
1 - б“ ^Г.о^г.о
(17.10)
* Строго говоря, как это будет показано далее (см. гл. XIX), продольная стати-
ческая устойчивость по перегрузке определяется коэффициентом >зп = т2у + т zz fa
[см. выражения (19.1) и (19.4)]. На малых высотах член та2 z^ при естественном демп-
фировании самолета может увеличить степень устойчивости иа 0,02—0,03 (т. е. на
2-3% САХ).
377
а из уравнения (17.9) —условие
. \ тг0 б.г.0 + мех + &тг дв + с* (-^т.пп ~ хр б.го) а~тр - _
Аг_0 “ — • (1 / • 1 1)
^г.оаг.о (аотр £®б.мех еб.мехагтр — ^емсх — Дезем + ^ст?в + Лр.в^в)
Построенные по выражениям (17.10) и (17.11) в координатах хт—Лг.о
граничные линии образуют так называемый «крест», ограничивающий
область выбора значений Дг.о в зависимости от диапазона разбега цент-
ровок хт.пз—хт.пп (рис. 17.12). Как видно из рис. 17.12, с увеличением
разбега центровок потребные значения Лг.о увеличиваются. Наимень-
шее потребное значение Лг.отш, определяемое точкой пересечения двух
граничных линий, обеспечивает удовлетворение обоих условий при един-
ственном положении центра тяжести без разбега центровок.
Рис. 17.12. Характер граничных линий («крест»), ог-
раничивающих область выбора Лг.о и х? из условий
обеспечения минимально допустимой степени про-^
дольной статической устойчивости по перегрузке
Wzmfn (17.10) и балансировки самолета на
больших углах атаки — 2 (17.11) (пунктирными ли-
ниями показано расширение области выбора при уве-
личении производной ar.o=cvr-° ; штрих-пунктир-
ной— расширение области выбора при применении
стабилизатора с изменяемым углом установки <рп)
Если значения хт.пз и хт.пц уже определились при компоновке само-
лета, то по соответствующим граничным линиям определяют потребные
значения Лг.о для каждой из центровок и принимают наибольшее зна-
чение.
Если значения хт.пз и хт.пп еще не определены, то, задавшись неко-
торым значением Лг.0>Лг.о шт, получают допустимый при этом диапазон
разбега центровок, а затем соответствующей компоновкой стараются
его обеспечить.
Увеличения допустимого диапазона разбега центровок при выбран-
ном значении Дг.о можно достигнуть также с помощью увеличения ко-
эффициента аг.о (например, путем увеличения удлинения оперения, как
показано иа рис. 17.12 пунктиром). Однако не следует забывать, что
конечной целью проектирования является выбор таких параметров опе-
рения, при которых вес конструкции получился бы наименьшим (а при
увеличении удлинения вес растет). Поэтому всегда необходимо опреде-
лять, что является более выгодным для обеспечения минимального веса
конструкции — увеличение площади оперения или его удлинения.
Для тяжелых скоростных самолетов определяющим условием при
выборе Дг.о в случае передней центровки может оказаться условие обе-
спечения достаточной эффективности органа продольного управления
для отрыва передней стойки шасси от ВПП и увеличения угла атаки до
378
взлетного значения аотр при V=0,85VOTp в пределах ограниченной дли-
ны полосы.
Для маневренных сверхзвуковых самолетов определяющим услови-
ем при выборе Дг.о в случае передней центровки, как правило, оказы-
вается условие обеспечения заданной маневренности самолета, т. е.
достаточной эффективности органа продольного управления для балан-
сировки самолета на максимальной перегрузке, особенно при сверхзву-
ковых скоростях на больших высотах.
Для нескоростных самолетов с безбустерными системами управле-
ния область выбора коэффициента Дг.о определяется дополнительно це-
лым рядом граничных линий, построенных из условий:
1) получения необходимого декремента затухания собственных
продольных колебаний самолета;
2) допустимых пределов изменения усилий на рычаге продольного
управления;
3) допустимого предела изменения расхода усилий на перегрузку
(показателя управляемости РП(/) и ряда других.
На скоростных самолетах с необратимыми бустерными системами
управления задачи обеспечения потребных характеристик управляемо-
сти решаются, как правило, методами автоматизации системы управле-
ния н искусственного формирования этих характеристик (см. гл. XIX).
Для обеспечения необходимых характеристик боковой устойчивости
и управляемости самолета без применения средств автоматизации уп-
равления прн выбранных основных параметрах крыла у конструктора
остается возможность соответствующего выбора коэффициента статиче-
ского момента вертикального оперения ^ДвЛ> — ~в'^в 2^ и угла попе-
речного V крыла, так как изменение этих параметров оказывает наи-
более существенное влияние на изменение производных т*, и т^,
в наибольшей степени определяющих характеристики боковой устойчи-
вости и управляемости.
Для нескоростных самолетов с безбустерными и неавтоматизиро-
ванными системами управления выбор параметров вертикального опе-
рения, угла поперечного V крыла, а также эффективности органов пу-
тевого и поперечного управлений обусловливается следующими основ-
ными требованиями:
1) показатель -/.= -^-rmax t определяющий соотношение угловых
max
скоростей крена и рыскания в развитии сокового движения, должен ле-
жать в определенных пределах;
2) степень затухания боковых короткопериодических колебаний
должна быть достаточной;
3) запаздывание реакции самолета на отклонение рычагов управ-
ления не должно превышать допустимых пределов;
4) должны обеспечиваться возможность балансировки и достаточ-
ная боковая управляемость самолета при посадке с заданным боковым
ветром и при взлете с односторонним отказом двигателя (т. е. при не-
полной и несимметричной тяге у многодвигательного самолета);
5) эффективность органов поперечного и путевого управлений дол-
жна быть достаточной для выполнения заданных маневров на всех воз-
можных режимах полета и надежного вывода самолета из штопора;
6) спиральное движение самолета не должно иметь сильно выра-
женной неустойчивости (ограничивается допустимое время удвоения от-
клонения параметров от исходных значений в спиральном движении).
Для скоростных самолетов с бустерными системами управления
выполнение пунктов 1), 2) и 6), как правило, обеспечивается примене-
нием специальных автоматических систем, независимо от летчика воз-
379
действующих на органы управления (демпферов рыскания и автоматов
скольжения).
Выбор параметров вертикального оперения и эффективности орга-
нов путевого управления (руля направления) при проектировании са-
молета также осуществляется путем последовательных приближений с
применением метода граничных линий. Эти линии после завершения
предварительной компоновки и определения аэродинамических ха-
рактеристик (например, производной aB., — CzH.о ) и плеча LB,o верти-
кального оперения строятся в координатах 5ВО— V или пр,н— Ав.о
(где Пр>н/Sp.H/SB.o —коэффициент эффективности руля направле-
ния).
При определении производной лв>о = с|в.о можно использовать
экспериментальные и расчетные данные для производной сау крыльев и
оперений (например, показанные на рис. 17.4,а), однако вследствие не-
симметричного расположения вертикального оперения относительно фю-
зеляжа, как это по большей части имеет место у самолетов, действи-
тельное удлинение Хв.о необходимо заменять эффективным Хв.0.э, зна-
чения которого снимаются с графика на рис. 17.2, в. Для упрощения
замеров при ориентировочных расчетах координата приложения боковой
силы на вертикальном оперении г/в.о часто замеряется от оси 0х{ само-
лета до середины его высоты, а плечо оперения LB.o— от центра тяжести
самолета до оси вращения руля направления (осн вращения киля при
цельноповоротном вертикальном опереиии) на середине высоты верти-
кального оперения, как это показано на рис. 19.18, а не до САХ и до
0,25 САХ вертикального оперения соответственно, как принимается при
уточненных расчетах и как показано на рис. 17.2, б.
Применение метода граничных линий можно показать на примере
определения области выбора значений коэффициентов Ав.о и пр,н из ус-
ловий обеспечения балансировки самолета при одностороннем отказе
двигателей на взлете и при посадке с боковым ветром, а также из усло-
вия обеспечения приемлемой величины показателя х в боковом дви-
жении.
Посадка с боковым ветром выбирается как один из основных рас-
четных случаев для определения потребного статического момента вер-
тикального оперения и эффективности руля направления, так как на
этом режиме необходимо обеспечить прямолинейный полет со скольже-
нием (по оси ВПП) на наименьшей скорости (V~Vnoc)-
Этот режим является также одним из главнейших расчетных случа-
ев при выборе степени поперечной статической устойчивости самолета
т ₽. Угол скольжения в этих условиях определяется задаваемой в требо-
ваниях к самолету величиной максимальной скорости бокового ветра
^гоах, При котором ДОЛЖНЗ обеспечиваться посадка (₽max~№max/Vnoc)-
Из уравнений равновесия боковых сил и моментов в прямолинейном
полете со скольжением можно получить условие для построения линии,
ограничивающей область выбора Ав.о и пр.н:
ГДе 6н — 0,8 бн. тах-
ПрИ одностороннем отказе двигателя при взлете (иа самолете с не-
сколькими двигателями, разнесенными от осн симметрии) создается
разворачивающий момент от несимметричной тяги МуТ. Этот момент по-
лучается наибольшим, когда двигатели работают на взлетном режиме.
Поэтому этот режим также является определяющим для выбора геомет-
рических параметров вертикального оперения и эффективности руля на-
380
правления, поскольку эти органы должны обеспечить уравновешивание
момента несимметричной тяги при достаточно невысокой скорости
(обычно принимается И = Иотр=--У2(7/^ 0трр5). Из условия баланси-
ровки самолета в прямолинейном полете с несимметричной тягой урав-
нение линии, ограничивающей область выбора значений Лв0 и прн, име-
ет вид
^0/«ДВ
Соотношение максимальных угловых скоростей крена и рыскания
при боковых колебаниях самолета определяется показателем
х — v>x
^У шах
где т^х=тх1 r2x, tri** — т'°хх/г2, т^—т^/г2. Максимально допустимая
величина этого показателя хдоп обычно задается в требованиях к само-
лету.
Для ориентировочных расчетов приведенное выше выражение для
показателя х может быть упрощено:
так как 4/х/т/2 и Гу=А],.1тР.
Отсюда можно приближенно определить потребную степень путевой ста-
тической устойчивости, необходимую для выполнения требований х<
Одоп (напомним, что mJ<0)
Отношение моментов инерции lv!lx для каждого класса самолетов,
достаточно устойчиво и может быть принято либо по статистическим
данным, либо определено расчетом по предварительной компоновке.
Выражения для определения производных тх и mt, приводятся в
гл. XIX [см. формулы (19.8) и (19.9)]. В несколько преобразованном
виде их можно представить так:
= (т|)б.,9 +(»й., = (т^б.,,.0 - ^..рЯв.оЛ.с/
Если подставить выражения для тх и mJ в условие (17.14), то оно
примет вид
[(АИ..АЛ. -^-1—
L *-в.о 1
38)
Отсюда
(17.15'
Построенные по условиям (17.12), (17.13) и (17.15) граничные ли-
нии имеют вид, показанный на рнс. 17.13, а. Эти линии ограничивают
область выбора коэффициентов Лв.о и /гр.н.
Рис. 17.13. к выбору параметров вертикального оперения и угла поперечно-
го V крыла:
а — область выбора коэффициентов статического момента вертикального оперения и эф-
фективности руля направления нз условий: 1 обеспечения посадки с боковым ветром
Фтахсы- формулу (17.12)]; 2 — обеспечения балансировки самолета при взлете с несим-
метричной тягой [см. формулу (17.13)]; 3— обеспечения заданной степени гармоничности
колебаний по крену и рысканию [х<к/10И. см- формулу (17.15)]; б — выбор относительной
значений производных
области выбора отно-
поперечиого V крыла
для легкого дозвукового самолета со стреловидным крылом из условий: I — максималь-
но допустимого времени затухания, за которое амплитуда боковых короткопериодиче-
ских колебаний уменьшается в два раза; 2 — максимально допустимого значения пока-
зателя хгаах; 3 — предельно допустимого отклонения руля направления при посадке с
заданным боковым ветром; 4 — предельно допустимого отклонения элеронов при посадке
с боковым ветром; 5 —минимально допустимого значения показателя Xtniir —макси-
мально допустимой степени спиральной неустойчивости (минимально допустимое время
увеличения в два раза первоначальной амплитуды в спиральном движении)
Благодаря использованию электронной вычислительной техники
при проектировании современных самолетов и, в частности, использова-
нию электронных интеграторов для решения уравнений движения прн
исследованиях динамики движения проектируемого самолета на различ-
382
ных режимах полета, уже на стадии предварительного проектирования
могут быть получены такие значения производных tn* н trfy, которые
обеспечат оптимальные характеристики бокового движения. После это-
го параметры вертикального оперения и угла поперечного V крыла мо-
гут выбираться с помощью выражений (19.8) и (19.9).
В этом случае удобнее,__ приняв по предварительной компоновке
ориентировочные значения и других геометрических параметров
проектируемого самолета, входящих в выражения для производных
тх а т,у, строить зависимости этих производных от параметра 5Во>
как показано на рис. 17.13, б.
Имея ориентировочные значения геометрических параметров само-
лета, граничные линии для выбора площади вертикального опе_рения и
угла поперечного V крыла удобнее сразу строить в координатах SB о — V.
Пример построения таких граничных линий из условий выполнения ря-
да требований к характеристикам боковой устойчивости и управляемо-
сти для легкого дозвукового самолета со стреловидным крылом показан
на рис. 17.13, в.
Однако для обеспечения приемлемых характеристик бокового дви-
жения современных скоростных самолетов на некоторых режимах поле-
та могут понадобиться по расчету такие большие площади и плечи вер-
тикального оперения (см., например, рис. 19.19), что нх конструктивная
реализация окажется практически невозможной. В этом случае приме-
няются автоматические средства стабилизации, повышения устойчивости
и улучшения характеристик управляемости.
§ 5. ВЫБОР ПАРАМЕТРОВ ОРГАНОВ УПРАВЛЕНИЯ
Выбор параметров органов управления, расположенных на опере-
нии (рули высоты и направления) и крыле (элероны или элевоны),
осуществляется уже в начальной стадии проектирования, так как от
этого зависят многие другие этапы проработки проекта. В частности,
эффективность руля высоты, зависящая от его параметров, определяет
предельную переднюю центровку и выбор параметров горизонтального
оперения (см. рис. 17.12).
Выбор параметров органов управления на ранней стадии проекти-
рования необходим также для определения их шарнирных моментов и
потребных скоростей отклонения, которые являются важнейшими исход-
ными данными для проектирования системы управления^
При выборе параметров органов управления (5p=Sp/S0n; bp-~
= Ьр/Ьоц\ S0K=S0V/Sp) следует учитывать, что при увеличении относи-
тельных размеров руля шарнирный момент его возрастает быстрее, чем
эффективность.
Действительно, как мы уже отмечали в начале главы, эффективность
органов управления в практике оценивают производными, харак-
теризующими прирост коэффициентов управляющих моментов при еди-
ничном отклонении рулей [см. (17.4)]. Из сравнения этих выражений с
формулами для коэффициентов моментов, возникающих на горизонталь-
ном и вертикальном оперениях при единичном изменении углов атаки и
скольжения соответственно [см. (17.3)], видно, что они отличаются толь-
ко аэродинамическими производными. В первом случае [формулы
(17.4)] производные о и ггг«()отражают прирост коэффициентов подъ-
емной и боковой сил при единичном отклонении рулей высоты и направ-
ления соответственно. Во втором [формулы (17.3)] — аэродинамические
производные и с?в.о отражают прирост коэффициентов тех же
сил при единичном изменении угла атаки горизонтального и угла сколь-
жения вертикального оперений. Отношения w«rx/m*r.o”rXo/c*rro<> и
383
т** т!'’-п = сгво называют обычно коэффициентами эффектив-
ности руля высоты и руля направления и соответственно обозначают
ГСр.в и «р.н*.
Прн дозвуковых скоростях коэффициенты эффективности рулен оп-
. / в
ределяются приводившимися ранее выражениями: г/ -—
/
и -—.При сверхзвуковых скоростях эффективность рулей
F ^8.0
существенно снижается и выражения для этих коэффициентов приобре-
тают внд: /?р.в^ 5р-в и «р.н« р,н-
5г. О о
Шарнирный момент руля, как известно, определяется выражением
Мш = ("й“ + тш8)3р6р.ср?- (17.16)
Для определенных условий полета можно считать, что (/nt“ а-Н
+ mm?d)(7 = /4 = const. Тогда Мц^ЛЗр&р.ср. Если учесть, что при
Рис. 17.14. Характер из-
менения шарнирного мо-
мента и коэффициента
эффективности руля при
увеличении хорды руля
Son = const площадь руля может изменяться только за счет изменения
его хорды, а размах руля остается постоянным (Sp = /p6p.Cp), то МЦ| =
— A Ipb ,ср.
Таким образом, прн дозвуковых скоростях эффективность руля воз-
растает пропорционально /ftp.cp, а шарнирный момент пропорцио-
нально Ьр.ср (рнс. 17.14).
С ростом относительной площади руле
-х___sp ^р.ср -т-т за счет возра-
— Д — ~ ^р^р.ср
•^оп *опрои ср
стания на нем воздушной нагрузки и шарнир-
ного момента быстро растут усилия, переда-
ваемые с руля на неподвижную часть оперр
ння. Для восприятия этих возрастающих уси-
лий необходимо усиливать конструкцию не-
подвижных частей оперения (стабилизатора и
киля), а это приводит к быстрому увеличению
веса. Поэтому при выборе параметров опере-
ния и относительной площади рулей необходи-
мо сравнить, что выгоднее в весовом отноше-
нии: некоторое увеличение площади оперения
нли увеличение площади руля, т. е. необходи-
мо выбирать оптимальные значения £р.
При проектировании рулей стремятся выполнить условие постоян-
ства относительной хорды руля по размаху оперения = = const],
\ ₽оп 1
так как в противном случае, во-первых, заметно возрастает коэффн-
ент шарнирного момента [точнее его составляющая , см. выражение
(17.16)], а, во-вторых, полки заднего лонжерона неподвижной части опе-
рения (стабилизатора или киля), к которой крепится руль, получаются
с переменными (закрученными) малками, усложняющими производство.
Для нескоростиых самолетов оптимальные относительные площади
рулей обычно лежат в пределах
5рв=0,3-0,4; Sp „=0,35 —0,45.
* Для цельноповоротных управляющих поверхностей (стабилизатора или киля)
понятие «коэффициент эффективности» не теряет свой смысл, так как суг-° су*
и cz В.О CZ В.О. 1
384
Для современных скоростных (околозвуковых) самолетов оптималь-
ные значения относительных площадей рулей несколько меньше и лежат
в пределах 5р = 0,2—0,3 *.
Важным вопросом проектирование органов управления является
выбор степени их осевой компенсации (S0.K=S0.l</Sp).
На небольших нескоростных самолетах с безбустерными системами
управления 5О.К обычно выбирается в пределах £о.к = 0,2—0,25 из усло-
вий обеспечения необходимых характеристик маневренности и управляе-
мости по усилиям, а также с учетом того факта, что при на-
ступает перекомпенсация.
В продольном управлении, например, выбор степени осевой аэроди-
намической конпенсации руля высоты для этих самолетов определяется
допустимыми пределами изменения балансировочных усилий в горизон-
тальном полете Рв.бал и расхода усилий на единицу перегрузки
Эти показатели продольной управляемости определяются из выра-
жений
^в.бал ^^zcn П ’ ?/?бал)>
где —значение скоростного напора, при котором самолет сбаланси-
рован по усилию (Рв = 0) на режиме горизонтального полета с помощью
триммера.
> Индексом «св» помечены аэродинамические производные, значения
которых берутся при свободной (незажатой) ручке управления рулем
высоты.
Q
В этих выражениях коэффициент Р'1 = kr 0#ш5р в&р в— и про-
s
m“r,0 г
изводные — —^-(1/cJ— д^дсу) и = — X
тш“в
гпвгв° £
X —_-------зависят от степени осевой аэродинамической компенса-
тУ.в ^г.о _
ции руля высоты SVK/PB через производные т^гв° и тввв.
Необратимая бустерная система управления обеспечивает возмож-
ность применения очень малой степени осевой аэродинамической компен-
сации рулей (так называемой «конструктивной», рис. 17.15) и возмож-
ность устранения весовой балансировки рулей, что заметно снижает
?дротивление щели между неподвижной частью оперения и рулем и
ликвидирует сопротивление выступающей в поток при больших углах
отклонения передней части руля с 'большой степенью осевой ком-
пенсации.
Выбор максимальных углов отклонения рулевых поверхностей про-
изводится с учетом того, что прирост коэффициентов подъемной силы
горизонтального оперения при отклонении руля высоты и коэффициента
боковой силы вертикального оперения при отклонении руля направления
по мере увеличения углов отклонения постепенно замедляется, а затем
падает при появлении срывов потока. Одновременно сильно возрастают
шарнирный момент и сопротивление.
* На самолетах с длинными хвостовыми частями фюзеляжа (и следовательно, с
большими значениями плеч оперений) относительные площади рулей могут снижаться
до значений Sp = 0,1—0,15, как, например, на ’американском самолете Боинг В-52.
13— 0H2
385
Поэтому максимальные отклонения рулей ограничиваются. Так, для
руля направления эти углы не превышают обычно битах =±20—25°.
Определяющими режимами для выбора максимальных значений потреб-
ных углов отклонения руля направления являются взлет при односто-
роннем отказе двигателя и боковом ветре с той же стороны, а также при
посадке с несимметричной тя-
гой при боковом ветре (т. е. те
же, что и для выбора площади
вертикального оперения или
^в.о) •
Углы отклонения руля вы-
соты вверх (отрицательные по
правилу знаков, см. рис. 19.25)
и вниз (положительные), как
правило, делаются неодинако-
выми. Отрицательные углы от-
клонения (на кабрирование)
делаются существенно больше
положительных (на пикирова-
ние), так как для обеспечения
балансировки на больших уг-
лах атаки (при полете на ма-
лых скоростях или при созда-
нии положительной перегрузки
во время выполнения манев-
ров) руль высоты должен со-
здавать значительно большие
моменты на кабрирование, чем
на пикирование. Поэтому мак-
симальные углы отклонения
руля высоты вверх обычно лежат в пределах бвmax = —25 — 30°, а вниз —
в пределах dDmax= + 15---h20°.
Потребные углы отклонения руля высоты можно определять по за-
рис. 17.16). Как видно из рис. 17.16
ЛМш«.к
большая щель
а)
Минимальная щель
= гн,р (конструктивная _
осевая компенсация)
б)
Рис. 17.15. Возникновение шарнирного мо-
мента перекомпенсации ДЛТШО.К руля с
большой степенью осевой компенсации
вследствие выхода его носка в поток при
больших углах отклонения (о) и образова-
ние «конструктивной» осевой компенсации
рулей скоростных самолетов (б)
виснмости mz=f(a) самолета (см.
Минимальный запас по отклонению
Рис. 17.16. Характер изменения коэффициента продольного момента по углам
атаки самолета со стреловидным крылом при различных числах М (а) и соот-
ветствующие балансировочные кривые отклонений руля высоты для чисел
М=0,8ё и М>4 (б)
386
для современных самолетов со стреловидными и треугольными крылья-
ми на больших углах атаки (а=15—18°) характерно появление зоны
продольной статической неустойчивости по перегрузке, вызываемой воз-
никновением концевых срывов на крыле и неблагоприятным изменением
скоса потока на горизонтальном оперении.
Эти срывы и связанная с ними продольная статическая неустойчи-
вость, как правило, возникают при значениях углов атаки, меньших
критического акрит. Однако превышение значений углов атаки, прн кото-
рых наступает продольная статическая неустойчивость, приводит к тому,
что вследствие появляющегося прироста момента па кабрирование само-
лет начинает самопроизвольно стремиться еще больше увеличивать угол
атаки (так называемое явление «подхвата») и, если вовремя не вмешает-
ся летчик (или автоматическая система ограничения углов атаки), могут
быть превышены критические значения угла атаки с последующим сва-
ливанием.
Поэтому для современных скоростных самолетов приходится вво-
дить ограничения по допустимым углам атаки аДОп, обеспечивающие в
нормальных условиях эксплуатацию самолета с заданной степенью про-
дольной статической устойчивости. При этом вследствие того, что
адоп<«крит, несущие свойства крыльев современных самолетов исполь-
зовать полностью не удается.
Если же при попадании самолета в зону с сильной атмосферной
турбулентностью или вследствие ошибки летчика значения аДОп будут
превышены, то эффективность руля высоты должна обеспечивать воз-
можность создания необходимого момента на пикирование для вывода
самолета па безопасные углы атаки а<аДОп- Этот режим является опре-
деляющим для выбора максимального угла отклонения руля высо-
ты вниз.
Определяющими режимами для выбора максимальных углов откло-
нения руля высоты вверх являются взлет и посадка с предельно перед-
ней центровкой и полет на больших высотах со сверхзвуковыми ско-
ростями.
При решении уравнения продольных моментов самолета [типа (17.9)]
и определении максимального потребного балансировочного угла откло-
нения руля высоты вверх (бв.бал.тах) ие следует забывать об обеспече-
нии маневренного запаса по углам отклонения руля. Этот запас, необхо-
димый для обеспечения минимально допустимой маневренности самолета
прн корректировании траектории и парировании атмосферных возмуще-
ний, может быть определен из выражения
А8»за„ =
/в (rf<d7/rf^)3
т*в8Ъад
где — задаваемое техническими требованиями к самолету ми-
нимально допустимое угловое ускорение, которое должно обеспечивать-
ся эффективностью органа продольного управления. Таким образом
бв max = б в ба л. max 4* Абв зап-
Аналогичные «маневренные» запасы по углам отклонения должны
быть обеспечены при выборе максимальных углов отклонения руля на-
правления и элеронов.
Полет на больших высотах со сверхзвуковыми скоростями является
определяющим режимом для выбора максимальных углов отклонения
руля высоты вверх у маневренных самолетов.
Вопрос об обеспечении продольной маневренности, которая опре-
деляется диапазоном реализуемых значений коэффициента су, как из-
вестно, необходимо решать путем обеспечения достаточно высоких несу-
щих свойств крыла, с одной стороны, и «путем обеспечения достаточной
эффективности органа продольного управления для создания больших
13* 387
балансировочных моментов — с другой. Как известно, создаваемая прн
маневрах вертикальная перегрузка определяется соотношением
пу— Су[СУг.п'
(17.17)
где cJ/rn = 2 G/pSV2 — значение коэффициента су в горизонтальном уста-
новившемся полете.
Значения на которых самолет может быть сбалансирован мак-
симальным отклонением руля высоты, определяются из уравнения про-
дольных моментов, написанного для случая установившегося полета с
перегрузкой,
тг = + т°‘шг-|-ттах = О,
откуда
(17.18)
При переходе к сверхзвуковым скоростям степень продольной стати-
ческой устойчивости самолета возрастает, а производная пг^ =
= ^г.о/гр.вЛг.о-'4г.о> характеризующая эффективность руля высоты, убы-
вает за счет уменьшения коэффициентов лр.в и аг>о = с“гг-^. Поэтому
значения су, на которых самолет может быть сбалансирован при сверх-
звуковых скоростях, убывают (рис. 17.17, а). Как следует нз соотноше-
ния (17.17), уменьшение располагаемых значений су из-за невозможно*
Рис. 17.17. Изменение эффективности продольного управления при
переходе на цельноповоротный управляемый стабилизатор:
а — используемые значения коэффициента с у крыла при балансировке рулем
высоты и управляемым стабилизатором: Су лоп~ ограничение коэффициента су
несущими способностями крыла, началом тряски самолета или выходом в эону
продольной статической неустойчивости; —максимальные значе-
ния Су, на которых самолет может быть сбалансирован органом продольного
управления (при сверхзвуковых скоростях самолет может быть сбалансирован
на с у =Су только при применении управляемого стабилизатора); б — огра-
ничение высот, на которых самолет может быть сбалансирован иа заданной
перегрузке рулем высоты, и увеличение этих высот при сверхзвуковых ско-
ростях в случае перехода на продольное управление цельноповоротным стаби-
лизатором (расчет по приведенным слева максимальным допустимым и балан-
сировочным значениям с^):
------руль высоты;
—-----управляемый стабилизатор
388
сти сбалансировать самолет по продольному моменту с помощью руля
высоты приводит к уменьшению значений располагаемых перегрузок,
т. е. к ограничению маневренности самолета (рис. 17.17, б, сплошные
кривые).
Это ограничение и привело к необходимости перехода на продольное
управление с помощью цельноповоротного (управляемого) стабилиза-
тора, эффективность которого, оцениваемая производной mJ’, сущест-
венно выше особенно на сверхзвуковых скоростях. Как видно из рис.
17.17, а, при переходе на продольное управление с помощью цельнопо-
воротного стабилизатора несущие свойства крыла при сверхзвуковых
скоростях используются гораздо полнее, а маневренность самолета су-
щественно улучшается (рис. 17.17, б, пунктирные линии).
Для облегчения балансировки дозвуковых тяжелых самолетов на
больших углах атаки стабилизатор (при управлении рулем высоты)
проектируется, как правило, переставным, т. е. с переменным углом уста-
новки (<pB = var).
Изменение углов установки стабилизатора расширяет диапазон
центровок, сдвигая вперед предельно допустимую переднюю центровку
Хтпп при том же значении Аг.о (см. рис. 17.12, штрих-пунктирная линия).
На современных околозвуковых транспортных самолетах угол установ-
ки стабилизатора изменяют в пределах (+ 3°) — ( —12°).
Выбор площади триммеров рулей (аэродинамических сервокомпен-
саторов) осуществляется из условия полного снятия усилии (баланси-
ровки по усилиям) с рычагов управления на всех режимах длительного
полета, включая режимы полета с несимметричной тягой и при боковом
ветре. Это условие выполняется при
тш = тяша-{-^т'шх=0,
откуда
(#1шТ)110тр = — (^ш^бал “Ь
где производная т'ш = дтш!дх зависит от относительной площади
триммера 5тр=5тр/5р и расстояния его от оси вращения руля.
Площадь триммеров рулей обычно лежит в пределах Зтр=(0,0б—
0,12)Sp, причем большие значения характерны для тяжелых транс-
портных и военных самолетов с большим разносом двигателей и боль-
шим диапазоном центровок.
Углы отклонения триммеров обычно лежат в пределах ттах=
= ±(8—12)°.
§ 6. ПРОЕКТИРОВАНИЕ КОНСТРУКТИВНО-СИЛОВОЙ СХЕМЫ ОПЕРЕНИЯ
И СХЕМЫ СТЫКОВКИ ОПЕРЕНИЯ
Проектирование оперения иа стадии разработки эскизного (или
дипломного) проекта обычно заканчивается выбором конструктивно-си-
ловой схемы, органически связанной как с видом самого оперения и вы-
бранным типом органов управления, так и со схемой стыковки оперения
с фюзеляжем или горизонтальной и вертикальной поверхностей опере-
ния друг с другом.
Проектирование конструктивно-силовой схемы оперения и схемы
его стыковки должно проводиться уже на начальных стадиях разработ-
ки проекта самолета в связи с тем, что силовые элементы горизонталь-
ного и вертикального оперений должны быть увязаны друг с другом и с
силовыми элементами фюзеляжа, расположение которых зависит также
от компоновки хвостовой (или носовой при схеме «утка») части фюзеля-
жа, а именно: наличия в ней силовых элементов для крепления двига-
телей, днищ герметических кабин, окантовок люков н пр.
389
Достаточно часто применяемое в настоящее время расположение
турбореактивных двигателей в хвостовой части фюзеляжа выдвигает
новое требование по расположению основных силовых элементов фюзе-
ляжа и оперения, связанное с обеспечением безопасности полета в слу-
чае разрушения дисков турбин двигателей. На этот случай все основные
Рис. 17.18. Расположение двигателей и основных
силовых элементов хвостовой части английского
пассажирского самолета Де Хевилленд DH 121
«Трайдент», обеспечивающее минимальную веро-
ятность разрушения основных силовых элементов
конструкции разлетающимися осколками дисков
турбин двигателей:
1 — передний лонжерон киля, 2 — главный лонжерон ки-
ля, 3 — центральный двигатель, 4— днище герметической
кабины, 5 — боковые двигатели
силовые элементы фюзеляжа и оперения должны быть расположены та-
ким образом, чтобы при разрушении турбины двигателя они либо сов-
сем не могли быть повреждены разлетающимися с большой скоростью
осколками, либо вероятность этого повреждения была бы наименьшей.
Особенно трудно это требование выполняется при наличии в хвостовой
Вариант установки
наклонных шпангоутов
Рис 17.19. Коиструктивно-силовая схема стыковки оперения с силовыми шпан-
гоутами фюзеляжа, внутри которого установлен двигатель:
I — усиленные продольные элементы; 2 — стыковые узлы; 3 — двигатель, 4— кольцевой
силовой шпангоут
части фюзеляжа третьего (центрального) двигателя, устанавливаемого
в настоящее время на многих околозвуковых пассажирских самолетах
(Ту-154 Як-40 Боинг-727 (США), DH-121 «Трайдент» (Англия), рис.
17.18].
Рассмотрим основные конструктивно-силовые схемы н схемы сты-
ковки оперения, применяемые на современных самолетах. Остановимся
390
сначала на конструктивно-силовых схемах и схемах стыковки поверхно-
стей оперения, состоящих из неподвижных частей (стабилизатора и ки-
ля) и шарнирно навешенных на них рулей.
Прн таком оперении конструктивно-силовые схемы стабилизатора и
киля практически не отличаются от соответствующих схем крыльев, рас-
смотренных ранее.
В конструкции этих агрегатов на легких самолетах применяется, как
правило, двухлонжеронная схема, на тяжелых самолетах — кессонная
или многолонжеронная схема.
Рули, как правило, выполняются по однолонжеронной схеме с нер-
вюрами, расположенными перпендикулярно лонжерону. Очень часто в
хвостовой части рулей вместо нервюр используют клееные или сварные
конструкции с сотовым или пено-заполиителем.
полетное
Взлетно-посадочное
полон<ение
Рис. 17.20. Схема установки стабилизатора с изменяемым углом установки
в верхней части сечения фюзеляжа:
/ — передний лонжерон киля; 2 — продольные элементы (усиленные стрингеры, вос-
принимающие составляющую MKp UI, возникающую при передаче изгибающего мо-
мента со стреловидного киля на прямые шпангоуты фюзеляжа (см. рнс. 17.19}-, 3 —
гайка -с шарнирной подвеской; 4 — ходовой винт механизма перестановки стабилиза-
тора; 5 — привод механизма перестановки (гидро- или электродвигатель с редукто-
ром); б — передний усиленный шпангоут фюзеляжа (на поперечном сечении показан
условным контуром); 7— полушпангоуты (со срезанной верхней частью); 8—борто-
вые продольные элементы (усиленные стрингеры, окантовывающие вырез для кессона
стабилизатора); 9 — задний силовой шпангоут фюзеляжа; 10 — узлы крепления стаби-
лизатора к фюзеляжу; // — задний лонжерон киля; 12 — секторные пластины-обтека-
тели, закрывающие прорези в борту фюзеляжа (контур выреза обшивки в бортах
фюзеляжа для обеспечения возможности изменения угла установки кессона стабили-
затора показан пунктиром, кессон стабилизатора — заштрихован)
При расчленении рулей на секцнн с независимыми приводами, при-
меняемыми на тяжелых самолетах для повышения безопасности полета,
каждая из секций подвешивается иа двух опорах и не связывается с
соседними. Количество секций в этом случае выбирается, исходя из при-
нятой в проекте степени резервирования н допустимого числа отказов
бустеров.
Наиболее легкой получается конструкция в том случае, если удает-
ся пропустить через фюзеляж основные силовые элементы оперения,
работающие на изгиб (лонжероны или кессон). Однако такую конструк-
цию ие всегда удается выполнить на легких самолетах с двигателями,
расположенными в хвостовой части фюзеляжа.
Если горизонтальное оперение на таких самолетах нельзя перене-
сти в верхнюю или иижнюю часть сечения фюзеляжа, то лонжероны
стабилизатора, так же как и киля, крепятся стыковыми узлами к уси-
ленным шпангоутам фюзеляжа. Во избежание перетяжеления конструк-
ции необходимо стремиться к тому, чтобы стыковые узлы киля и стаби-
лизатора всегда располагались на одних и тех же усиленных шпангоутах
фюзеляжа (рис. 17.19). При такой схеме крепления стреловидного опе-
рения (так же как и крыла) изгибающий момент, воспринимаемый про-
391
дольным элементом оперения (изображен вектором Мизг.оп), у борта
фюзеляжа раскладывается на две составляющие, действующие вдоль
плоскости наибольшей жесткости шпангоута МКр.ш и перпендикулярно
ей ЛЛгзг.ш-
При установке стабилизатора с неразрезанными продольными эле-
ментами в верхней части сечения фюзеляжа средняя часть (кессон) ста-
билизатора пропускается между двумя силовыми шпангоутами фюзе-
ляжа (рис. 17.20). Задний лонжерон стабилизатора крепится к заднему
из этих шпангоутов, передний — к переднему. Если стабилизатор проек-
тируется переставным, то неподвижными узлами, относительно которых
происходит поворот стабилизатора, как правило, делают задние, а пе-
редние узлы крепления заменяют кронштейном крепления механизма
привода, как это показано на рис. 17.20.
Для более равномерного распределения нагрузок на передний н зад-
ний усиленные шпангоуты фюзеляжа при несимметричном нагружении
правой и левой половин горизонтального оперения узел крепления меха-
низма прив'ода переставного стабилизатора может выполняться с на-
правляющими рельсами нли с шлнц-шарнирнымн звеньями, восприни-
мающими часть 'Нагрузок от изгибающего момента.
Рис. 17.21. Различные варианты выполнения переднего узла привода стаби-
лизатора с изменяемым углом установки:
а — без дополнительных силовых элементов; б —с шлиц-шарнирным трехзвеннкком;
в — с шлиц-шарнирным трехзвенником с кинематическим замком: 1 — кессон стаби-
лизатора; 2 — гайка с шарнирной подвеской; 3 — ходовой винт; 4—привод механизма
перестановки: 5 —задние узлы крепления стабилизатора (к фюзеляжу или килю);
6~ кронштейн подвески гайки 2; 7 — звенья шлиц-шарнира; 8 — звенья кинематиче-
ского замка, выполненные в виде шлиц-шарнирного механизма; 9 — предохранитель-
ный упор кинематического замка
Примеры таких конструкций показаны на рнс. 17.21, б н в. Для
сравнения на рис. 17.21, а приведена схема, в которой изгибающий мо-
мент от несимметричной нагрузки иа правой и левой консолях горизон-
тального оперения воспринимается задними узлами крепления кессона
стабилизатора; балансировочная и маневренная нагрузка (Уг.о) воспри-
нимается задними узлами и ходовым винтом привода.
В схеме «б» благодаря установке у переднего узла шлиц-шарннр-
ного трехзвениика задний узел крепления кессона стабилизатора час-
392
тичио разгружается от изгибающего момента; сила Уг.о, как и в схеме
«а», воспринимается задними узлами и ходовым винтом привода.
Изменение угла установки стабилизатора, как правило, осуществ-
ляется с помощью винтового механизма (подъемника), приводимого во
вращение от гидро- или электромоторов, а иногда и вручную с помощью
аварийной механической системы, связывающей подъемник со специаль-
ным штурвальчиком в кабине. Винтовой подъемник может крепиться
непосредственно к кронштейну стабилизатора. Но в этом случае вся на-
грузка с горизонтального оперения (за исключением части, приходящей-
ся на задние узлы крепления стабилизатора) должна восприниматься
подъемником (рис. 17.21, а, б). Для разгрузки подъемника в полете иа
больших скоростях, когда стабилизатор отклонен носком вверх (положи-
тельные углы установки) и аэродинамические нагрузки максимальны,
может применяться специальный шпнц-шарнириый механизм с кинема-
тическим замком, воспринимающим эти нагрузки и разгружающим
подъемник. Звенья этого механизма также частично разгружают задние
узлы крепления стабилизатора от изгибающего момента (рис. 17.21, в).
Рис. 17.22. Схема стыковки элемен-
тов хвостового оперения легкого не-
скоростного самолета (стабилизатор
неразъемный, верхняя часть шпангоу-
тов фюзеляжа срезана для установки
средней части стабилизатора):
/—узлы стыковки киля по переднему и
заднему лонжеронам. 2— ось вращения
руля направления; 3 — кронштейн навески
руля высоты; 4 — передний и задний узлы
стыковки стабилизатора с фюзеляжем; 5 —
усиленный стрингер по борту среза фюзе-
ляжа; 6 — усиленные шпангоуты
Рис. 17.23. Схема размещения гори-
зонтального оперения на киле (Т-об-
разное оперение) и возникновение
дополнительного изгибающего момен-
та (Л/*изг.в.с)> действующего в плос-
кости киля
Разновидностью рассмотренного выше способа установки стабилиза-
тора в вырезе верхней части фюзеляжа является применяемая преиму-
щественно на легких иескоростных самолетах установка, показанная иа
рнс. 17.22.
Рассмотрим особенности проектирования Т-образного оперения.
При такой схеме оперения, наиболее часто применяемой в настоящее
время на околозвуковых транспортных самолетах, возникает ряд особых
конструктивных задач, отличных от задач размещения горизонтального
оперения иа фюзеляже.
Для уменьшения вредной интерференции 'потоков, обтекающих го-
ризонтальное и вертикальное опереиня, рекомендуется горизонтальное
393
оперение устанавливать таким образом, чтобы линия максимальных тол-
щин его профилей была сдвинута назад относительно этой линии верти-
кального оперения на величину (0,1—0,15) Ьъ 0.
Установка горизонтального оперения на вертикальном приводит к
существенно более высокой загрузке последнего, чем в рассмотренных
ранее схемах Эти дополнительные нагрузки на вертикальное оперение
возникают как при скольжении (вследствие неравномерного обтекания
правой и левой консолей горизонтального оперения на вертикальное опе-
рение действует изгибающий момент перпендикулярно его плоскости),
Рис 17 24 Различные варианты оформления внешних обводов при уста-
новке переставного стабилизатора на киле1
а — применение неподвижного обтекателя при небольших изменениях угла уста-
новки стабилизатора 1 — контур выреза обшивки по бокам обтекателя, 2 — кессон
стабилизатора, 3 — механизм перестановки стабилизатора, 4—передний лонже-
рон киля, 5 — силовая концевая нервюра киля, б — задний лонжерон киля, 7 —
шарнирный узел крепления стабилизатора к килю 8 — обтекатель, 9— подвиж-
ные скользящие пластины, перекрывающие прорези в боковых панелях обте-
кателя, б—обтекатель стыка горизонтального и вертикального оперений с непо-
движной передней и подвижной задней частью 1 — подвижная (связанная со ста-
билизатором) задняя часть обтекателя, 2— кессон стабилизатора, 3— линия со-
членения подвижной и неподвижной частей обтекателя, 4 — кронштейн привода
стабилизатора, 5 — механизм перестановки стабилизатора, б —передняя непо-
движная часть обтекателя, закрепленная иа киле 7 — шарнирный узел крепления
стабилизатора, в—подвижный обтекатель, связанный со стабилизатором (схема
позволяет максимально увеличить хорду неразрезной части стабилизатора-кессо-
на) / — подвижный обтекатель, связанный со стабилизатором, 2 — кессон стаби-
лизатора, 3 — механизм перестановки стабилизатора, 4— верхняя законцовка ки-
ля, охватываемая обтекателем при взлетно посадочном положении стабилизатора,
5 —линия перехода обвода киля в обвод охватываемой обтекателем верхней за-
копцовки, б — силовая концевая нервюра киля, 7 — шарнирный узел крепления
стабилизатора
так и в полете без скольжения (балансировочная и маневренная нагруз-
ки на горизонтальном оперенин создают для неподвижной части верти-
кального оперення дополнительный изгибающий момент в его плоскости,
рис. 17.23).
Для восприятия этих дополнительных нагрузок конструкция верти-
кального оперения должна выполняться более мощной, что заметно ска-
зывается на увеличении ее веса (на 50—70%) по сравнению с весом сво-
бодного вертикального оперения той же площади.
394
При выборе положения лонжеронов киля с расположенным иа нем
горизонтальным оперением приходится искать оптимальное расстояние
между лонжеронами киля, при котором вес конструкции получается
наименьшим. Обычно это достигается при расположении переднего лон*
жерона в пределах (0,15—0,2)дв.о, а заднего — в пределах (0,6—0,65)6в о.
Шарнирный узел поворота стабилизатора, как правило, устанавли-
вается на заднем лонжероне киля. Механизм привода стабилизатора кре-
пится к переднему лонжерону и усиленным нервюрам.
Рис. 17.25. Установка подшипников оси вращения стре-
ловидного стабилизатора:
а — подшипники установлены на силовых шпангоутах фюзеля-
жа, ось жестко связана с конструкцией стабилизатора; б —
подшипники установлены в стабилизаторе, ось жестко связана
с конструкцией фюзеляжа силовыми шпангоутами, в — разно-
видность второй схемы с отогнутым концом оси (рогом)
Место стыка горизонтального и вертикального оперений закрывает-
ся обтекателем, конструкции которого могут быть разделены на три типа
(рис. 17.24).
Если обтекатель достаточно большой (рис. 17.24, а), конструкция
стыка напоминает соединение подвижного стабилизатора с фюзеляжем.
В конструкции, показанной на рис. 17.24, б, хвостовая часть обтека-
теля подвижна, так как связана со стабилизатором.
На тяжелых самолетах, где из-за большой площади горизонтального
оперения нагрузки весьма велики и кессон стабилизатора вследствие
этого имеет значительные размеры, применяется схема стыка с подвиж-
395
Рис. 17.26. Различные вариан-
ты положения оси вращения
стреловидного стабилизатора
иым обтекателем, .передняя часть которого охватывает носок верхней
части киля (см. рис. 17.24, в).
Рассмотрим теперь конструктивно-силовые схемы, схемы стыковки
и привода управляемого стабилизатора.
В конструкциях цельиоповоротных поверхностей управления приме-
няются две схемы размещения подшипников оси вращения, которые во
многом определяют конструктивно-силовые схемы этих поверхностей.
В первой схеме (рис. 17.25, а) подшипники устанавливаются на силовых
шпангоутах фюзеляжа (или лонжеронах киля), ось неподвижно связана
с конструкцией стабилизатора. Во второй схеме (рис. 17.25, б) —ось не-
подвижно связана с конструкцией фюзеляжа, а подшипники устанавли-
ваются в самом стабилизаторе.
Конструктивные особенности первой
схемы связаны с тем, что все виды нагру-
зок (изгибающий и крутящий моменты,
перерезывающая и нормальная силы),
действующих на стабилизатор, передают-
ся на фюзеляж только через одну ось,
которая поэтому вне стабилизатора вы-
полняется трубчатого сечеиия. У борто-
вой нервюры (внутри стабилизатора)
трубчатое сечение оси переводится в
двутавровое сечение лонжерона стабили-
затора, которое лучше воспринимает из-
гиб, а крутящий момент воспринимается
контуром стабилизатора. Очевидно, что
для обеспечения наименьшего веса оси
при ее наибольшей жесткости необходимо проектировать ее максимально
большого диаметра. Для этого ось необходимо устанавливать в месте
наибольшей толщины профилей стабилизатора. Однако, как следует из
рис. 17.26, при таком положении прямой оси А расстояние от нее до
центра давления стреловидного стабилизатора, особенно на сверхзвуко-
вых скоростях, получается очень большим и, следовательно, большим
будет шарнирный момент стабилизатора. Если для уменьшения шарнир-
ного момента установить прямую ось стреловидного стабилизатора та-
ким образом, чтобы она проходила приблизительно посередине между
положениями центра давления при дозвуковых и сверхзвуковых ско-
ростях (Б), то шарнирные моменты стабилизатора существенно умень-
шатся, но обеспечить прочность (жесткость) оси вследствие малой строи-
тельной высоты в хвостовой части профиля практически невозможно.
Поэтому при проектировании управляемых стабилизаторов с боль-
шим углом стреловидности их ось часто устанавливают с некоторым уг-
лом стреловидности %Ос, как показано на рис. 17.26, положение В, а так-
же в схемах, приведенных на рис. 17.25. При таком положении оси обес-
печивается размещение ее приблизительно по линии максимальных
толщин профилей стабилизатора и при наименьших значениях шарнир-
ных моментов. Благодаря этому применение стреловидной оси вращения
стабилизатора получило широкое распространение на многих сверхзву-
ковых самолетах.
При описанном выше положении оси на дозвуковых скоростях ста-
билизатор всегда оказывается перекомпенсировамным, так как центр
давления смещается вперед. Это исключает возможность перехода на
аварийное ручное (безбустерное) управление стабилизатором и застав-
ляет изыскивать специальные меры для обеспечения безопасности полета
(см. гл. XIX).
Однако применение стреловидных осей вращения стабилизаторов,
позволяющее существенно уменьшить их шарнирные моменты, вызывает
ряд конструктивных трудностей, связанных с необходимостью разделе-
396
ння осей для правой и левой половин, а также с ростом потребных углов
поворота этих осей при увеличении их стреловидности.
Если ось общая, то изгибающие моменты с правой и левой половин
стабилизатора замыкаются на ней и на фюзеляж не передаются. Поэто-
му, если ось прямая, конструкция стыковых узлов и шпангоутов получа-
ется наиболее легкой. Кроме того, в этом случае легко осуществляется
компоновка привода стабилизатора, так как закрепленный на оси рычаг
качается в плоскости, параллельной оси самолета. Поэтому силовые при-
воды стабилизатора (гидроусилители) легко компонуются даже в доста-
Рис. 17.27. Различные варианты установки и привода цельноповоротного
стабилизатора с прямой осью на фюзеляже:
а —с общей прямой балкой-осыо для правой и левой половин стабилизатора:
1 — силовые шпангоуты фюзеляжа; 2—балка-ось с рычагом привода; 3 — лонжероны
киля; 4 — кронштейны-цапфы подшипников оси; 5 — гидроусилитель привода стаби-
лизатора; б —кронштейны крепления гидроусилителя к усиленным продольным эле-
ментам, связывающим два силовых шпангоута; б — с изогнутой балкой-осью, огибаю-
щей двигатель снизу: / — кронштейя-цапфы подшипников оси; 2 —изогнутая бал-
ка-ось с проушинами подсоединения гидроусилителя; 3 — гидроусилитель; 4 — крон-
штейн крепления гидроусилителя; в — независимая установка правой и левой половин
стабилизатора с заделкой полуосей на силовом шпангоуте и раздельными приводами:
1 — Кронштейны-цапфы подшипников полуосей: 2 — рычаги привода правой и левой
половин стабилизатора; 3 — гидроусилители; 4 — кронштейны крепления гидроусили-
теля к силовому шпангоуту и усиленным продольным элементам
точно узком пространстве между бортом фюзеляжа и расположенным
внутри двигателем, как наиболее часто бывает на легких сверхзвуковых
самолетах (см. рис. 17.27). В последнем случае приходится либо приме-
нять изогнутую балку-ось, огибающую двигатель (рис. 17.27, б), либо
резать прямую ось иа две части и заделывать их на шпангоутах у пра-
вого и левого бортов фюзеляжа с раздельными приводами правой и ле-
вой половин стабилизатора (рис. 17.27, в).
В случае применения стреловидных осей очевидно, что выполнение
их неразрезными невозможно. Поэтому конструкция стыковых узлов и
шпангоутов получается более тяжелой, чем с общей прямой осью за счет
передачи иа шпангоуты изгибающих моментов с каждой из двух половин
стабилизатора. При этом усложняется также компоновка приводов по-
ловин стабилизатора, так как рычаги, связанные со стреловидными ося-
ми, качаются в пересекающихся плоскостях, расположенных под углами
Хос к продольной оси самолета (см. рис. 17.25). Поэтому гидроусилители
могут устанавливаться горизонтально только либо выше, либо ниже ус-
397
тановленных в хвостовой части фюзеляжа двигателей (рнс. 17.28, а).
Если стабилизатор установлен в среднем положении, компоновка гидро-
усилителей в достаточно узком пространстве между бортами фюзеляжа
и двигателями весьма затруднительна и единственным практически воз-
можным их положением является вертикальное (см. рис. 17.28, б).
Применение стреловидных осей стабилизатора, в отличие от общей
прямой оси, делает достаточно невыгодным использование одного гидро-
усилителя для привода правой и левой половин стабилизатора, так как
при этом усложняется конструкция проводки от гидроусилителя до ста-
Рис. 17.28 Компоновка гидроусилителей привода управляемого стабилизатора'
при стреловидных осях:
а — размещение гидроусилителей выше двигателя с креплением их на общем кронштейне,
связанном с усиленными продольными элементами между силовыми шпангоутами фюзе-
ляжа: /—подшипники полуосей правой и левой половин стабилизатора: 2 — рычаг»
привода половин стабилизатора; 3 — гидроусилители; 4— кронштейн крепления гидро-
усилителей; б — вариант установки гидроусилителей в вертикальных плоскостях с креп-
лением на силовом шпангоуте / — силовые шпангоуты заделки подшипников полуосей
правой и левой половин стабилизатора, 2 —рычаги привода правой и левой половин;
3 — подшипники полуосей, 4 — кронштейн крепления гидроусилителей на силовом шпан-
гоуте, 5 — гидроусилители
билизатора, растет ее вес и, как правило, весьма ощутимо теряется жест-
кость. Последнеее неблагоприятно сказывается иа флаттерных характе-
ристиках стабилизатора и заставляет устанавливать на нем достаточна
тяжелые протнвофлаттерные грузы-балансиры.
Перечисленные выше недостатки схемы со стреловидной осью неред-
ко делают более выгодным применение прямой оси даже при стреловид-
ном стабилизаторе, несмотря на увеличение шарнирных моментов. При
нестреловидных или треугольных стабилизаторах, как правило, приме-
няются прямые оси.
Наиболее часто применяемые конструктивно-силовые схемы управ-
ляемых стабилизаторов с заделанной осью (подшипники в фюзеляже)
показаны на рис. 17.29.
В отличие от рассмотренной выше первой схемы, в которой ось жест-
ко связана со стабилизатором и работает на все виды нагрузок, во вто-
рой схеме, в которой ось заделывается неподвижно в фюзеляж, а под-
шипники устанавливаются в стабилизаторе (рис. 17.25, б, в), крутящий
(шарнирный момент стабилизатора на ось не 'передается. Этот момент
воспринимается гидроусилителем, подсоединяемым к рычагу, непосред-
ственно связанному с конструкцией стабилизатора.
Наиболее рациональна конструкция, в которой рычаг привода ста-
билизатора является продолжением силовой нервюры стабилизатора
(рнс. 17.30, а). Этот рычаг может быть также продолжением дополни-
тельного лонжерона (рис. 17.30, б, в).
398
Поскольку в этой схеме ось вращения стабилизатора на кручение не
работает, то она может иметь наиболее благоприятное для работы иа
изгиб двутавровое сечение. Стреловидная ось заделывается в фюзеляже,
как правило, на два шпангоута, чтобы обеспечить достаточно большую
базу заделки (а—на рис. 17.25).
Рис. 17.29. Конструктивно-силовые схемы, применяемые при про-
ектировании цельноповоротных поверхностей управления с заде-
ланной осью (подшипники в фюзеляже):
а — при стреловидной форме с большим углом стреловидности (внизу по-
казан вариант оформления закопцовки при недостаточной жесткости и
возникновении вибраций); б—при сравнительно небольшой стреловидно-
сти; в — при треугольном оперении; а и д — различные варианты силовых
схем оперения малого удлинения с небольшой стреловидностью (в схеме г
пунктиром показана применяемая иногда в подобных схемах косая нер-
вюра); е— нестреловидное оперение малого удлинения
Если заделке внутреннего конца оси мешает расположенный в фюзе-
ляже двигатель, то ось может быть отогнута внутри фюзеляжа вдоль его
борта, как показано иа рис. 17.25, в. При такой схеме заделки отогнутый
конец оси (между шпангоутами) работаст_на изгиб от составляющей
Д/крш изгибающего момента стабилизатора Мизгст, который раскладыва-
ется у борта фюзеляжа на два направления Мизг.ш И Мкр.ш-
Рис. 17.30. Конструктивно-силовые схемы цельно-
поворотных поверхностей управления с заделан-
ными подшипниками (ось заделана в фюзеляже):
а — при стреловидном оперении; б — при треугольном
оперении (условным контуром показана срезанная
часть поверхности треугольного опереция у бортовой
нервюры, имеющая недостаточную жесткость и склонная
к вибрации), в — при иестреловидном олереции малого
удлинения. Пунктиром показаны другие возможные ва-
рианты положения рычага привода поверхности
Составляющая МИзг.ш является изгибающим моментом для стыково-
го шпангоута и воспринимается им. Составляющая Мкрш при отсутствии
связывающего два шпангоута отогнутого конца оси — «рога» была бы
моментом кручения для стыкового шпангоута, иа который шпангоут
практически ие работает. С помощью отогнутого конца оси^—«рога»
неблагоприятный для стыкового шпангоута момент кручения Мкр.ш пре-
образуется в пару сил, действующих в плоскостях шпангоутов.
399
Прямая ось в рассматриваемой схеме, как правило, заделывается
иа один стыковой шпангоут. Прн этом в конструкции могут широко при-
меняться штамповка и сварка (рис. 17.31).
Из показанных на рис. 17.30 схем видно, что при расположении под-
шипников оси вращения внутри стабилизатора в обшивке фюзеляжа не-
обходимо сделать соответствующие прорези для ввода рычага привода
стабилизатора внутрь фюзеляжа, которые во избежание дополнитель-
пого сопротивления должны каким-
либо способом закрываться. Конст-
руктивная реализация этого требо-
вания оказывается достаточно слож-
ной. Из тех же схем видно, что един-
ственным практически возможным
положением гидроусилителей приво-
да стабилизатора при такой схеме
установки подшипников оси оказы-
вается вертикальное (аналогичное
показанному на рис. 17.28, б).
Рассмотрим особенно-
сти установки и привода
управляемого стабилиза-
тора иа киле. В схеме установ-
ки управляемого стабилизатора на
киле вследствие недостаточной стро-
стреловидных осей стабилизатора
Рис. 17.31. Сварная из трех поковок
из нержавеющей стали силовая рама-
шпаигоут с осями правой и левой по-
ловин стабилизатора и цельнопово-
ротного вертикального оперения са-
молета Норт-Америкен А-5А «Виджи-
лент» (США)
ительной высоты киля для заделки
применяются конструкции с прямой осью и неразрезанным лонжероном
стабилизатора. Чтобы не вызывать чрезмерного возрастания шарнирных
моментов при использовании прямой оси, стреловидная форма стабили-
затора с большим углом стреловидности при такой схеме не применяется.
Наиболее часто применяются различные варианты нестреловидион или
треугольной форм. Стреловидная форма может быть использована толь-
ко при достаточно малых углах стреловидности.
Рис. 17.32. Установка цельноповоротного управляемого стабилизатора на
киле (конструктивное оформление обводов):
а _ передняя часть стабилизатора (до лонжерона) разрезана и охватывает носовую
часть киля (хвостовое оперение самолета Локхид F-104. США): / — цапфы оси вра-
щения стабилизатора на заднем лонжероне киля; 2 — законцовка обтекателя, связан-
ная со стабилизатором: 3 — часть подвижного обтекателя, входящая в неподвижную
эаконцовху киля; 4 —законцовка киля — неподвижная часть обтекателя привода ста-
билизатора; 5 —рычаг привода стабилизатора; 6 — гидроусилитель привода стабили-
затора' о—передняя часть стабилизатора цельная, задняя часть разрезана (от лон-
жерона) и охватывает хвостовую часть киля (хвостовое оперение английского экспе-
риментального самолета Бристоль Т.188): / --верхняя часть носка киля с прорезью
для прохода подвижного обтекателя привода стабилизатора; 2 —связанный со стаби-
лизатором подвижный обтекатель привода; 3 — цапфа оси вращения стабилизатора
иа главном лонжероне-балке киля: 4 — гидроусилитель привода стабилизатора;
5 —трубчатая ось руля направления; б —рычаг привода руля; 7 — гидроусилитель
400
Управление стабилизатором при такой схеме оперения осуществля-
ется, как правило, гидроусилителем, подсоединенным непосредственно к
конструкции стабилизатора. Узлы навески стабилизатора с подшипни-
ками устанавливаются чаще на заднем лонжероне киля, а гидроусили-
тель привода стабилизатора — внутри киля. Некоторые из возможных
схем установки и привода управляемого стабилизатора на киле показа-
ны на рис. 17.32.
Глава XVIII
ПРОЕКТИРОВАНИЕ ШАССИ
Шасси необходимо самолету для выполнения взлета, и посадки (раз-
бега и пробега), а также для маневрирования по аэродрому. Иногда
шасси используют как устройство, облегчающее погрузку и разгрузку
транспортного самолета*, а также в качестве аэродинамического тормоза.
Шасси самолетов разделяется на колесное, лыжное и смешанное
(колесно-лыжное). Лыжное шасси на современных самолетах приме-
няется главным образом прн эксплуатации на снегу, колесио-лыжное
шасси применяется для улучшения проходимости самолета на слабых
грунтах.
При проектировании шасси необходимо обеспечить:
— возможно меньший вес при достаточной прочности, жесткости и
долговечности (20—30 тысяч посадок);
— необходимую устойчивость и управляемость самолета при разбе-
ге и пробеге;
— мягкую посадку и возможно большее поглощение и рассеивание
кинетической энергии самолета при посадке;
— необходимую проходимость по аэродрому;
— надежную фиксацию стоек шасси в выпущенном и убранном по-
ложениях;
— уборку (и выпуск) шасси за время не более 10—12 с;
— возможно меньшие габариты, особенно в убранном положении;
— простоту осмотра и замену элементов шасси.
§ 1. ВЫБОР СХЕМЫ ШАССИ
Под схемой (типом) шасси понимается количество опор и их осо-
бенности расположения относительно центра тяжести самолета.
В настоящее время известны три схемы шасси (рис. 18.1):
— трехопорное шасси с хвостовым колесом;
— трехопорное шасси с носовым колесом;
— двухопорное или велосипедное шасси.
Трехопорное шасси с хвостовым колесом имело широкое распро-
странение в авиации до 40-х годов. В этой схеме главные стойки распо-
ложены впереди центра тяжести самолета, а вспомогательная стойка да-
леко позади. Такое расположение опор шасси порождает ряд недостат-
ков, которые при больших посадочных скоростях современных самолетов
становятся весьма серьезными:
а) интенсивность торможения после посадки ограничивается опас-
ностью капотирования, т. е. опрокидывания самолета. Капотирование
„ О dv t,
возникает, когда опрокидывающий момент от силы инерции---------п
g dt
(где Н— высота центра тяжести самолета) будет больше восстанавли-
вающего момента от веса самолета Ge\
б) при посадке с большой вертикальной скоростью возможно пе-
риодическое взмывание и снижение самолета («козление»). Это явление
* За счет уменьшения высоты шасси.
401
возникает вследствие того, что прн посадке с небольшим углом атаки и
с большим значением Vy летчик не в состоянии с помощью рулей высоты
преодолеть момент от силы веса на увеличение угла атаки (относительно
точки касания колес земли). Прн некотором достаточно большом угле
атаки подъемная сила крыла становится больше веса самолета. Самолет
взмывает. Однако двигатель работает на малых оборотах н не может
удержать самолет в горизонтальном полете. Снижаясь, он снова ударяет-
ся колесами о землю. Явление 'Повторяется, напоминая прыжки козла;
Рис. 18.1. Схемы шасси:
a— шасси с хвостовым колесом; б— шасси с носовым колесом:
в — велосипедное шасси
в) самолет с хвостовой опорой не обладает путевой устойчивостью
при движении на двух основных или на всех трех колесах (с ориентирую-
щимся хвостовым колесом), что
Рис. 18.2. К выбору схемы шасси
видно на рнс. 18.2.
Моменты от составляющих си-
лы сопротивления движению на коле-
сах взаимно уравновешиваются отно-
сительно центра тяжести самолета,
тогда как момент от составляющих
стремится еще больше увеличить воз-
никший случайный разворот.
Прн посадке с боковым ветром
возможен переворот самолета через
крыло. В этом случае, приземляясь в
положении, указанном на рис. 18.2, при
боковом ветре №, самолет имеет тен-
денцию вращения от составляющей М
в горизонтальной плоскости. Тенден-
ция эта реализуется, если летчик не
сможет удержать самолет рулем пово-
рота нли застопоренным хвостовым ко-
лесом;
г) ухудшается обзор из кабины
пилота прн движении на трех опорах вследствие наклона фюзеляжа.
Наклон фюзеляжа создает также неудобство для пассажиров.
Перечисленные недостатки привели к тому, что трехопорное шассн с
хвостовым колесом на современных самолетах почти не применяется.
Трехопорное шассн с носовым колесом лишено всех указанных выше
недостатков, поскольку в этой схеме главные опоры расположены позади
центра тяжести самолета, а вспомогательная (носовая опора)—далеко
402
впереди. В самом деле, капотирование самолета исключено, так как это-
му препятствует носовая опора; «козленке» также невозможно, так как
от удара в момент касания земли самолет опускает нос, и угол атаки
крыла, следовательно, уменьшается; самолет с носовой опорой при раз-
беге и пробеге обладает устойчивостью пути (так как силы находятся
сзади центра тяжести самолета); обзор из кабины значительно лучше;
горизонтальное положение пола создает удобство пассажиров при дви-
жении по аэродрому.
Трехопорное шасси с носовым колесом применяется на большинстве
современных самолетов.
Возникает вопрос— почему шасси с хвостовой опорой, обладая су-
щественными недостатками, все же было наиболее распространенным до
появления скоростных самолетов с реактивными двигателями?
К.ак известно, самолеты с поршневыми двигателями имели относи-
тельно малые посадочные скорости, а при небольших скоростях отрыва и
посадки самолета недостатки шасси с хвостовым колесом проявляются
незначительно. Вместе с тем шасси с хвостовой опорой несколько легче,
чем с носовой.
Интересно отметить, что все три схемы шасси (см. рис. 18.1) были
известны еще на заре авиации. Например, на некоторых самолетах
В. М. Ольховского в 1916—1917 гг. устанавливалось шасси с носовым
колесом, как и на тяжелом самолете «Святогор» В. А. Слесарева
(1914—1916 гг.) [31].
Велосипедная схема шасси получила распространение в 50-х годах на
военных самолетах, особенно на тяжелых бомбардировщиках [Боинг
В-47, В-52 (США) и др.]. Эта схема явилась следствием решения слож-
ной компоновочной за дачи. В районе центра тяжести самолета необходи-
мо было создать вместительный бомбоотсек, что приводило к высокому
расположению крыла относительно фюзеляжа. Если, выполняя заданные
требования, присоединить основные стойки шасси к крылу, они получи-
лись бы слишком высокими (3—4 м) и тяжелыми, не говоря уже о проб-
леме уборки шасси в тонкое крыло. Разумным решением в то время было
применение велосипедного шасси, когда основные опоры разносились за
пределы бомбового отсека и убирались в фюзеляж. Статическая нагруз-
ка на переднюю опору обычно составляла (45±5)% веса самолета, на
заднюю соответственно (55±5)%'. Поперечная устойчивость самоле-
та с велосипедным шасси на земле обеспечивается легкими вспомога-
тельными опорами, имеющими мягкую амортизацию с большим ходом;
их колеса делаются самоориентирующимися в пределах ±90°. Для ма-
неврирования при движении по земле передняя опора велосипедного
шасси делается управляемой как и носовое колесо трехопорного шасси.
Несмотря на то, что с введением велосипедного шасси проблема
компоновки была удачно решена, появились новые проблемы: эксплуата-
ции, веса и другие:
1. Требуется более высокая техника пилотирования при посадке, чем
на самолете с трехопорным шасси (с носовой опорой). Необходимо весь-
ма точное приземление одновременно на обе основные опоры (во избе-
жание сильного удара носовой опорой).
2. Для взлета необходим дополнительный механизм «вздыбливания»
(увеличения высоты) на передней опоре или механизм «приседания» на
задней опоре для увеличения угла атаки крыла при разбеге (с целью сок-
ращения длины разбега). Дополнительный механизм — это не только до-
полнительный вес, но и источник уменьшения надежности самолета.
3. Торможение при пробеге колесами обоих опор может привести к
неустойчивости пути. Торможение же только колесами задней опоры
(для избежания неустойчивости) приводит к увеличению длины пробега.
4. Необходимость маневрирования на аэродроме требует значитель-
403
но более мощного и тяжелого механизма поворота передних колес, на
которые приходится (45±5) % веса самолета, чем для поворота носо-
вого колеса, на которое обычно приходится не более (10±2) °/о веса са-
молета (шасси трехопорное).
5. Вес фюзеляжа самолета с велосипедным шасси на 15—20% боль-
ше вследствие больших нагрузок от опор, необходимости установки мощ-
ных рам (шпангоутов) для крепления передней и задней опор, а также
вследствие больших вырезов для уборки шасси.
Вес велосипедного шасси, несмотря на небольшую высоту основных
стоек, не получается меньше веса трехопорного шасси за счет установки
подкрыльных стоек, мощного механизма поворота передней опоры, а
также механизма изменения высоты одной нз главных опор (обычно
задней).
Несмотря на указанные недостатки, для реактивных самолетов вер-
тикального взлета и посадки велосипедное шасси заслуживает внимания,
так как позволяет избежать воздействия горячих газов двигателей на
стойки и колеса \ Кроме этого, у самолетов вертикального взлета и по-
садки снимаются трудности обычного взлета и приземления, порождае-
мые велосипедным шасси.
Из изложенного выше следует, что наилучшей схемой шасси для са-
молетов с обычным взлетом и посадкой является трехопорное шасси с но-
совым колесом, которое наиболее удачно решает вопросы безопасности
эксплуатации и комфорта пассажиров.
§ 2. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ ШАССИ
Рассмотрим выбор параметров трехопорного шасси с носовым коле-
сом, а также велосипедного шасси.
Рис. 18.3. Основные параметры шасси с носовым колесом
Определению геометрических параметров шасси должен предшество-
вать весовой расчет самолета и выполнение чертежа общего вида само-
лета 'В трех проекциях, т. е. необходимо знать положение САХ крыла и
центра тяжести самолета (а также угол заклинения крыла аз, рис. 18.3).
Основными параметрами трехопорного шасси являются:
* По этой причине велосипедное шасси применено, например, на английском
истребителе «Харнер» и его предшественнике Р.Н27 «Кестрел».
404
— база шасси b, т. е. расстояние при виде сбоку между осями глав-
ной н носовой опор;
— колея шасси 6, т. е. расстояние при аиле спереди плоско-
стями симметрии главных колес (или тележек);
— вынос главных колес е, т. е. расстояние прн виде сбоку между
вертикалью, проходящей через центр тяжести самолета, н осью главного
колеса (илн средней линией тележкн);
— вынос переднего колеса а, т. е. расстояние при виде сбоку между
вертикалью, проходящей через центр тяжести самолета, н осью перед-
него колеса;
— высота шассн ft, т. е. расстояние от узлов крепления до поверх-
ности аэродрома прн стояночном обжатнн амортизаторов и пневматнков
(вес взлетный);
— высота центра тяжести самолета Н.
Производными от этих параметров являются:
— угол выноса главных колес у;
—угол касания хвостовой пяткой (хвостовой частью фюзеляжа) <р.
Параметры шассн выбираются обычно при стояночном обжатин
колес и амортизаторов, соответствующем взлетному весу. Положение
центра тяжести самолета — предельно заднее, возможное при взлете нлн
посадке.
Выбор параметров шасси удобно проводить в следующем порядке.
Вынос главных колес е. Существенно важным вопросом при проек-
тировании шассн самолета является выбор положения осей главных ко-
лес относительно центра тяжести самолета. Если величина е выбрана
слишком большой, то прн разбеге будет затруднен отрыв передней но-
ги шасси (для получения взлетного угла атаки). Отрыв будет происхо-
дить на большей скорости, следовательно, будет возрастать длина
разбега самолета. Из условия легкого отрыва передней ногн желатель-
но иметь величину е как можно меньше (тогда момент от горизонталь-
ного оперения обеспечит отрыв передней ноги при небольших скоростях).
Однако при слишком малом выносе главных колес возможно перевали-
вание самолета на хвост, так как прн посадке центр тяжести самолета
может зайти за точку опоры (прн больших посадочных углах, т. е. когда
угол (р«0). Переваливание самолета на хвост категорически запрещает-
ся. В первом приближении величину выноса можно принимать в % от
Ьсах- Для прямых н стреловидных крыльев прн нормальных полетных
центровках обычно
е —(0,15 —0,20)йСах- (18.1)
Величину е следует выбирать еще нз условия эксплуатации само-
лета во время стоянки: предельно заднее положение центра тяжести са-
молета не должно заходить за ось главного колеса (или тележкн), в
противном случае самолет опустится на хвост.
Если схема самолета такова, что прн эксплуатации иа земле его
центр тяжести все же лежит за линией опоры основных колес, то во из-
бежание опускания самолета на хвост необходимо предусмотреть чет-
вертую (хвостовую) опору. В качестве такой опоры применяют либо
погрузочный трап, либо специальную стойку шасси.
Угол выноса главных колес (необходим для того, чтобы прн посад-
ке не произошло переваливания самолета на хвост), очевидно, должен
быть больше угла касания хвостовой пяткой. Поэтому прн выборе пара-
метров шассн принимают
7==(р + (1^20). (18.2)
405
Угол касания хвостовой пяткой <р должен обеспечить использование
заданных посадочных углов атаки, поэтому
=Gnoc max Oj — б, ( 18.3)
где Иное шах — максимальный посадочный угол;
а3=0—4° — угол заклинения крыла (относительно продольной
оси фюзеляжа);
ф = (—2°) — (+2°) —стояночный угол.
Обычно ф~0, однако представляет интерес и отрицательный угол ф.
При этом высота, вес носовой стойки и длина пробега уменьшаются, а
длина разбега несколько увеличивается.
Для различных по назначению самолетов угол ср = 1О—18°.
Высота шасси h непосредственно влияет на угол касания хвосто-
вой пяткой, а также определяет расстояние от поверхности аэродрома до
конструкции самолета. Минимальное расстояние от земли до конструкции
(до фюзеляжа, лопасти винта, до конца крыла при посадке с креном 3—
4° и т. д.) при полном обжатии пневматиков и амортизаторов допускает-
ся 200—250 мм. Высота шасси зависит от места крепления шасси и от
схемы самолета (высокоплан,среднеплан, низкоплан).
Вынос переднего колеса а выбирается таким образом, чтобы при
стоянке самолета нагрузка на переднюю опору составляла 6—12% от
веса самолета.
Из этих условий следует, что
а — (0,94 — 0,88)6; е = (0,06- 0,12) Ь, (18.4)
где b — база шассн.
При слишком малой нагрузке на переднюю ногу ухудшается управ-
ляемость самолета прн рулежке по аэродрому. Прн очень большой на-
грузке увеличивается вес передней стойки шасси и носовой части фю-
зеляжа.
База шасси b должна выбираться нз условия обеспечения хороших
эксплуатационных качеств самолета при маневрировании по аэродрому.
Из этих условий база шасси должна согласовываться с выносом главных
колес
6 = (8—16)^. (18.5)
Если база будет небольшой (^£ф/4), то при рулежке самолет мо-
жет испытывать значительные колебания в вертикальной плоскости, вы-
зывая неприятные ощущения у летчиков и пассажиров.
Поэтому база шасси зависит еще и от длины фюзеляжа. При проек-
тировании современных самолетов (различных схем и назначений) обыч-
но принимают
й = (0,3-0,4)£ф, (18.6)
где £ф — длина фюзеляжа.
Ниже приводятся статистические данные по величине отношения
6/£ф для самолетов различных типов.
Самолет «Фантом» «Мираж» III F-111 Боинг-707 Ту-104 Ту-114 «Кон- корд» Боинг- 2707 (проект}
0,397 0,306 0,38 0,365 0,384 0,395 0,297 0,40
Колея шасси В должна обеспечивать устойчивость движения самоле-
та по аэродрому во время разбега и пробега, а также во время рулежки.
Колея шасси зависит главным образом от высоты центра тяжести са-
406
молета Н, которая, в свою очередь, определяется высотой шасси и схе-
мой самолета (низкоплан, высокоплан). Если величина В не соответст-
вует высоте центра тяжести самолета, то самолет во время пробега
или разбега может опрокинуться иа бок. Поэтому минимальная колея
шасси с носовым колесом выбирается из условия предотвращения опро-
кидывания относительно линии 1—2, соединяющей носовую и главную
опоры (рис. 18.4)..
Опрокидывание (боковое капотирование) будет, очевидно, невоз-
можно, если
о tg s > Г ,р
или
tge>/,p,
где FTp — сила трения при боковом скольжении самолета;
/тр — коэффициент бокового трения, принимаемый при определении
колеи равным 0,85.
Вид Л
Рис. 18.4. К определению минимальной колеи В
Расстояние между носовым и одним из главных колес (цо диаго-
нали 1—2) равняется У&2 LB2/4. Отрезок т определяется из подобия
треугольников /—4—5 и 1—3—2:
+ В2/4
Следовательно, условие, при котором не происходит опрокидыва-
ния, запишется так:
т аВ z
- “77 /тр’
п 2Н V />2 + В2/А
2Hb f™
— Р (18.7)
|/
Так как а«0,9Ь, то величина колеи шасси практически не зависит
от базы (можно 'пренебречь величиной /72/Тр по сравнению с а2).
Поэтому в первом приближении можно принимать В ^2 Н.
Следует иметь в виду, что малая колея ухудшает маневренность са-
молета при рулежке. Наибольшая колея определеятся шириной рулеж-
ных дорожек и не должна превышать 12 м.
При проектировании шасси следует стремиться к возможно меньшей
высоте Н.
Для шасси велосипедной схемы необходимо определить:
— угол ср (см. рис. 18.3);
— базу b и вынос передней опоры а, см. рис. 18.1, в;
— стояночный угол ф (см. рис. 18.3);
— расположение подкрыльных стоек.
407
Угол <р определяется так же, как и для шасси с носовой опорой по
формуле (18.3).
Стояночный угол ф принимают обычно в пределах 0°—( + 2°). В мо-
мент отрыва самолета стояночный угол увеличивается на 2°—3° из-за
«приседания» на заднюю опору (для укорочения длины разбега).
Наивыгоднейшая база шасси b получится при условии
ac = il, (18.8)
где а — вынос передней опоры;
с — вынос задней опоры (см. рис. 18.1, б);
iz — радиус инерции самолета относительно оси Oz (приближенно
1г = 0,165£ф).
Соотношение (18.8) можно получить из формул, определяющих
усилия на переднюю и заднюю опоры.
Известно, что полное ускорение любой точки движущегося тела рав-
но сумме поступательного ускорения центра тяжести тела и вращатель-
ного ускорения относительно центра тяжести. Следовательно, полное ус-
корение на передней опоре равно
| О _ _ * П I * п
4- и,а=----------
т
где /пост — поступательное ускорение передней опоры;
02 — угловое ускорение передней опоры относительио оси Oz-r
— —масса самолета;
/2— момент инерции самолета относительно оси Oz\
Ра— усилие на переднюю опору.
Ускорение /п можно выразить так:
где та — приведенная (редуцированная) масса для передней опоры.
Следовательио, можно записать
р р р
• П _ • II | • п
т„ т J?la2
откуда найдем значение приведенной массы на передней опоре
т
Так как Jz=?2m, то
Аналогично для задней опоры
/п3
Можно записать
P3 = nEgm„
где пе —перегрузка по вертикали при посадке;
Рп, Рз — усилия на передней и задней опорах.
408
Следовательно,
(18-9)
(18.10)
(18.11)
(18.12)
Из этих уравнений следует
4* Л«2 =
РМР^ = пЕО/г,
или Рва2=(л£О0-/’ц)/22;
Р3г2=(Go P,)’k-
При нанвыгоднейшем соотношении между Ра н Р3 имеет место равен-
ство
/)п+/)з=«А (18.13)
Подставляя из (18.13) в (18.11) н (18.12) значения Рп н Р3, будем
иметь
Перемножая почленно этн равенства, получим
откуда н следует формула (18.8).
Наименьшая база шассн велосипедной схемы &min = 2A; прн этом
a — c = i2.
Базу, меньшую чем 0,3 L$, выбирать не следует, так как самолет при
рулежке будет сильно раскачиваться в вертикальной плоскости.
Боковую опору при виде сбоку (рнс. 18.1, в) желательно распола-
гать так, чтобы По размаху боковые опоры размещают нз условия
компоновки. Для вертикально взлетающих самолетов выгодно, очевидно,
размещать боковые опоры на конце крыла (чтобы, как уже отмечалось,
избежать воздействия горячей струи газов от двигателей). Амортизаторы
боковых опор делают, как правило, «мягкими» со слабым нарастанием
силы в начале хода. Прн таких амортизаторах допускается касание земли
боковыми опорами при стояночном обжатин амортизаторов н колес ос-
новных опор.
Высота велосипедного шасси определяется углом ф и размером с.
§ 3. ВЛИЯНИЕ УСЛОВИИ ЭКСПЛУАТАЦИИ НА ХАРАКТЕРИСТИКИ ШАССИ
На выбор количества н тип опор (одно колесо, спаренные колеса,
тележка нз нескольких колес и т. п.), а также на параметры самих колес
большое влияние оказывает проходимость самолета по взлетно-посадоч-
ной полосе (ВПП).
Качество покрытия н размеры ВПП зависят от класса аэродрома.
Класс аэродрома указывается в требованиях к проектируемому самолету.
Бетонированные ВПП. Для выполнения требований по проходимо-
сти (возможности эксплуатации без повреждения ВПП) вводится поня-
тие эквивалентной одноколесной нагрузки.
409
Эквивалентная одноколесная нагрузка РЭьв представляет собой на-
грузку от одноколесной опоры самолета, равную по силовому эффекту
воздействия на покрытие нагрузке от реальной опоры самолет с учетом
параметров, количества и схемы расстановки колес на этой опоре.
Если стойка шасси имеет одно колесо, то РЭКв равна нагрузке от этого'
колеса. Если же стойка имеет несколько колес (рассредоточенных-побе-
тонной плите), то, очевидно, можно допустить несколько большую на-
грузку на стойку без опасности сломать плиту, чем в случае одноколесной
опоры. Понятие об эквивалентной одноколесной нагрузке необходимо,
следовательно, для того, чтобы определить, насколько можно увеличить
суммарную рассредоточенную нагрузку на бетонную плиту по сравнению
с нормируемой сосредоточенной нагрузкой.
Аэродромы с искусственным покрытием взлетно-посадочной полосы
разделяются на несколько классов в зависимости от длины, ширины и
толщины покрытия. Для каждого класса ВПП указывается наибольшее
значение РЭКв.
В табл. 18.1 в качестве примера приведены нормы эквивалентной
одноколесной нагрузки, разработанные международной организацией
гражданской авиации.
Проектные значения Рокв не должны выходить за пределы норми-
руемых величин для каждого класса аэродрома (табл. 18.1).
Таблица 18.1
Характеристики ВПП
Класс аэродрома Длина ВПП м Ширина ВПП м р„., тс Класс аэродрома Длина ВПП м Ширина ВПП м р ‘ ЭКВ тс
А >2550 >45 <45 Е 1280—1500 45 <13
В 2150—2550 >45 <35 Е 1080—1280 30 <7
С 1800—2150 45 <27 G 900—1080 30 <2
D 1500—1800 45 <20
Так, если опора шасси представляет собой четырехколесную илн восьми-
колесную тележку, то эквивалентная одноколесная нагрузка может быть
найдена в первом приближении по следующей формуле:
[1 + 0,04 (1 — 0,0294Рст) (рш - 4)°'81рш 11 ’75
1 + 0,0534 (рш—4>°’в75 )
где РСт— стояночная нагрузка на одно колесо четырехколесной или на
два колеса восьмиколесной тележки в тс;
Рш — давление в пневматике шасси в кгс/см2;
km— конструктивный коэффициент, зависящий от типа опоры и диа-
метра колеса (рнс. 18.5).
Для опоры со спаренными колесами
Р, = 1,29Р';165/ 11 +°'03д2(Л"-4)!Н I'1'5, (18.15)
I 1 + 0,0488 (Рш-4)2 3 )
где Рст— стояночная нагрузка на одно колесо в тс; остальные обозначе-
ния те же, что в формуле (18.14).
Формулы (18.14) и (18.15) применимы при рш^4 кгс/см2 и при усло-
вии, что на одну бетонную плиту ВПП попадает только одна опора само-
лета. Если на одной плите одновременно находятся две основные опоры
шасси, то проходимость самолета резко снижается. В этом случае вели-
чину Акв, рассчитанную по формулам (18.14), (18.15), следует увеличить
на 25—30%. Для того чтобы не снижать проходимость самолета, рас-
410
стояние между основными опорами шасси при РЭкв>25 тс должно превы-
шать ширину плиты.
Таким образом, при проектировании самолета для ВПП с бетони-
рованным покрытием следует стремиться к тому, чтобы расчетное значе-
ние РЭкв не превышало нормируемого.
Одним из средств повышения проходимости по бетону, правда не
очень эффективным, является снижение давления в пневматиках шасси.
При уменьшении рш эквивалентная одноколесная нагрузка несколько
снижается. Однако вместе с этим увеличиваются габариты и вес колес
прн заданной стояночной нагрузке. Давление при котором получается
наилучшее сочетание проходимости по бетону, веса и габаритов колес,
лежит в пределах 8—12 кгс/см2.
Рис. 18.5. Влияние диаметра колес и типа
опоры на коэффициент йш:
/—четырехколесная тележка; 2 — восьмнколесная
тележка; 3 — спаренные колеса; li—lt—0,6DK'
/3=l,09DK; ls^DK
Рис. 18.6. Изменение коэффи-
циента сопротивления качению
в зависимости от давления в
пневматике:
/ — в период распутицы; 2 — н пе-
риод просыхания: 3 — сухой и
плотный грунт
Наиболее эффективными средствами увеличения проходимости тя-
желых самолетов по бетонированным ВПП являются;
— установка трех-четырех основных опор вместо двух (на самоле-
тах весом более 200 тс);
— переход на четырех- и восьмнколесные тележки вместо спаренных
колес на одной стойке.
Грунтовые ВПП. Проходимость самолета по грунту, как и по бето-
ну, зависит от параметров шасси. Под проходимостью самолета по грун-
ту понимается способность его взлетать на тяге собственных двигателей
с переувлажненного грунта. При этом дистанция прерванного взлета
должна быть в заданных пределах, как и глубина колеи от колес. Основ-
ное условие проходимости по грунту записывается так:
Л) > /стр»
где Ро — стартовая тяговооруженность самолета;
/стр— коэффициент сопротивления качению при страгивании с места.
Можно принимать /стр = 1,4 /кач, где /кач — коэффициент сопротивле-
ния качению прн скорости 1 м/с. Примерные значения /кач в зависимости
от давления в пневматике приведены на рис. 18.6.
Если рш<2,5 кгс/см2, то сильно увеличиваются размеры н вес колес;
при рш>4—5 кгс/см2 растет коэффициент /Кач.
Поэтому рациональные величины давления в пневматиках шассн
для грунтовых ВПП лежат в пределах 3—5 кгс/см2 в зависимости от сос-
тояния грунта *.
* Современные пневматики для грунтовых ВПП позволяют регулировать давле-
ние pm из кабины пилотов.
411
Минимальную прочность грунта, при которой обеспечивается прохо-
димость, можно в первом приближении рассчитать по формуле
= КГС/СМ2, (18.16)
где Рст — стояночная нагрузка на одно колесо в кгс;
DK и Вк— диаметр и ширина колеса в см;
Нк— допустимая глубина колеи (^5 см).
Найденное по формуле (18.16) значение <Jmin сравнивается с задан-
ным значением в технических требованиях к самолету и делается вывод
о проходимости самолета по грунту. Необходимо, чтобы соблюдалось
условие
Зт!ц расч 3mln норм-
Если это условие не соблюдается, то предпринимаются меры по улучше-
нию проходимости;
— увеличивается количество колес (снижается Рст);
— увеличиваются размеры колес;
— уменьшается давление в пневматиках.
Глубина колеи, которая образуется на поверхности грунтовой ВПП
при движении с малой скоростью, подсчитывается по формуле
1
окък
Як
см,
(18.17)
где о — прочность грунта в кгс/см2;
дк — коэффициент, учитывающий
деформацию пневматика в зоне
контакта с грунтом (рис. 18.7). Желательно, чтобы глубина ко-
леи не превышала 4 см на дерновом покрове и 6—8 см на грун-
без дернового покрова.
видно, что наиболее сильными средствами
уменьшения глубины колеи являются
снижение стояночной нагрузки на одно
колесо и увеличение ширины колеса.
Зная потребные значения Ощт, мож-
но определить среднюю ожидаемую про-
должительность нелетного периода в ус-
ловиях данного аэродрома илн группы
аэродромов. Например, для суглинистых
' грунтов среднее нелетное время в меся-
цах равно
Рис. 18.7. Коэффициент 6К
• 1,25 emin 1
нелетн о
(18.18)
где Отт определяется по формуле (18.16).
Проходимость по грунту можно существенно улучшить, применив
лыжное илн колесно-лыжное шасси.
Если применяется только лыжное шасси для грунта, то возникают
следующие проблемы:
— для страгивания самолета с места требуется тяговооруженность
не менее 0,6;
— неудовлетворительная маневренность на земле (самолет, по су-
ществу, лишается автономности передвижения).
Эти проблемы в значительной мере преодолеваются, если лыжиое
шасси комбинировать с колесным. Такое шасси может иметь в общих
чертах следующее устройство.
412
Таблица 18.2
Характеристики авиационных колес
Диаметр X ширина .мм Индекс Стояночная нагрузка кгс Максималь- ная нагрузка кгс Давление в шине кгс/см2 Вес колеса кгс Работа шины кгс-м
Тормозные Kdheca (пневматики высокого давления)
570X140 КТ 51 1200 5250 7 41,1 190
600x155 КТ 78 1 800 6 800 8 50,6 275
600Х 155 КТ 44 2 100 5 800 6,8 50,8 245
660Х 160 КТ 28 2 850 8 300 8,7—9,2 53 315
660X160 КТ 28;3 3 500 10 000 12,5 42 400
660X200 КТ 37 3 840 12 000 11 55,4 550
800X200 КТ 71 4 450 16500 10,5 107,4 930
800X200 КТ 50 5 500 18 400 12,5 104,5 1 030
800x225 КТ 39 4 200 14 200 8-9 80,8 800
880x230 КТ 69 5 100 16 000 И 128,5 910
930x305 КТ 81/2 7 200 19000 8 121,5 1 450
950x 250 КТ 59/4 4 600 14 000 9 127 820
1000x280 КТ 72/2 6200 25 400 11—12 158 1 690
1050X300 КТ 77 6 300 19 000 6,5 144 1570
1100X330 КТ 88 10 500 34 000 10 225 3 000
1150X355 КТ 36/3 12 000 36 000 8,5 251,7 3 220
1160X290 КТ 76/4 11 000 36 000 14,5 272,5 2 600
1230x260 КТ 84 14 000 35 000 14 328,0 2200
1300X380 КТ 86 24 000 64 000 20 395,0 4 900
1500X500 КТ 85 20 000 68 000 9,2 446,3 8 900
1500X500 КТ 58 26 000 81500 И 339,8 10 900
1700X550 КТ 31 23 000 78 000 9,5 556,0 10 000
Тормозные колеса (пневматики арочного типа)
500x180 КТ 38 1350 4 700 6—7 31,0 150
700x 250 КТ 23 2970 6 500 4 36,0 360
840X300 КТ 57 3 3 800 11 000 5,2 84,0 680
865X280 КТ 97 3 800 12 000 5,5 121,0 745
950x350 КТ 54 4 800 15 300 5,2 118,0 1 200
1100x400 КТ 48 7 920 24 400 6,5 200,0 1 840
1325 X480 КТ 67 15000 39 000 6 211,5 4 370
Тормозные колеса (пневматики полубаллонного типа)
500Х 150 К141-Т 480 1 800 2,5 15,1 60
600X180 К142-Т 1 300 4 500 4,5 23,7 200
800x260 К163-Т 2 800 8 900 4,5 58,5 670
900X 300 К145-Т 3 830 12 300 4,7 84,5 1055
1200x 450 7755-774 6 000 20 800 3,8 132,0 2 600
Нетормозные колеса (пневматики высокого
давления)
600x155 К262 1 490 5 150 6 21,5 220
660X160 К257 2 250 6 100 7,5 29,0 227
660x200 К288 1500 6 500 6 26,4 275
660x200 К2-106 4 100 13 000 12 31,9 610
900 X275 К286 3 150 13 000 5,5 58,5 880
1100X330 К278 9500 31000 9 119,0 2 260
Нетормозные колеса (пневматики арочного типа)
480 x200 I К329 I 700 I 4150 I 1 4-5 1 И,7 1 190
700x250 К275 3 100 1 7 500 4,5 29,2 410
413
Между спаренными колесами или между колесами четырехколесной
тележки устанавливают небольшую лыжу, которую можно использовать
и для улучшения проходимости самолета и в качестве дополнительного
тормоза на грунтовом аэродроме. При желании летчик может либо под-
нять лыжу, либо ввести ее в контакт с грунтом. При эксплуатации само-
лета на сухих грунтах лыжу можно снять для увеличения полезной на-
грузки самолета.
В табл. 18.2 приведены характеристики авиаколес, которые могут
быть использованы прн проектировании шасси. Колеса выбираются по
стояночной нагрузке при взлете.
§ 4. СХЕМЫ УБОРКИ ШАССИ
а) б)
Рис. 18.8. Основные схемы убирания но-
совой стойки шасси;
а—против полета, б—по полету
На всех скоростных самолетах шассн в полете убирается, так как
при больших скоростях (К>250 км/ч) оно создает значительное сопро-
тивление, снижая летные характеристики самолета.
Существует большое разнообразие конструктивно-силовых схем шас-
си и схем их убнрання, зависящих от многих факторов: схемы самолета,
назначения самолета, расположе-
ния стоек шасси на самолете, ве-
личины нагрузки и т. д. Однако в
любом случае (учитывая особен-
ности конкретного самолета) схе-
ма убирания шасси должна обес-
печивать:
— наименьший вес шасси (с
механизмами убирания, гондола-
ми под шасси, створками люков
н т. д., а также с учетом усиления
вырезов под шасси в конструкции
планера);
— наименьший объем шасси в убранном положении;
— простоту кинематической схемы механизмов выпуска и убирания
шасси.
Кроме того, колеса и стойки при убирании не должны проходить
через пространство, отведенное для внешних подвесок.
Ниже рассмотрим основные схемы убирания шасси современных
самолетов.
Схемы убирания носовой стойки шассн сравнительно просты. На
большинстве самолетов носовые стойки убираются в переднюю часть
фюзеляжа движением вверх — вперед. Однако достаточно широко рас-
пространен и способ убирания вверх — назад. Другие схемы убирания
носовой стойки встречаются очень редко. Таким исключением является,
например, английский'пассажирский самолет ДН-121 «Трайдент», у ко-
торого носовая стойка смещена от плоскости симметрии фюзеляжа на
610 мм влево, убирается поворотом вверх — вправо.
В нормальных эксплуатационных условиях выпуск шасси осущест-
вляется гидравлической системой. В аварийных случаях определенные
преимущества имеет схема убирания вверх — вперед (рис. 18.8, а). Эта
схема обеспечивает выпуск носовой стойки под действием силы тяжести
и скоростного напора даже при отказе бортовых источников энергии.
У некоторых самолетов таким же образом выпускаются и главные стой-
ки шасси.
Схемы убирания главных стоек шасси подвержены гораздо больше-
му влиянию перечисленных выше факторов (назначения самолета, схемы
самолета н др.), поэтому они отличаются значительно большим разнооб-
разием. Тем не менее, все схемы убирания главных стоек шассн можно
разбить на три группы (рис. 18.9):
414
а) главные стойки крепятся к крылу, а убираются частично в крыло
(стойки), частично в фюзеляж (колеса или тележки);
б) главные стойки крепятся к крылу и убираются в крыло (либо в
гондолы, расположенные на крыле);
в) главные стойки крепятся к фюзеляжу и убираются в фюзеляж.
Все три схемы используются и на легких н на тяжелых самолетах.
Схема а) пригодна для легких самолетов с нижним и средним
расположением крыла. Для тяжелых самолетов схема а) целесообразна,
как правило, лишь в том случае, если самолет имеет нижнее расположе-
ние крыла (низкоплан). По такой схеме главные стойки шасси убирают-
ся на многих пассажирских самолетах.
.«)
Рис. 18.9. Основные схемы убирания главных стоек
шасси:
а — колеса убираются в фюзеляж, главные стойки крепятся к
крылу; б—шасси убираются в крыло; а —шасси убирается в
фюзеляж
Схема б) применяется в основном на самолетах с нижним н сред-
ним расположением крыла. Данная схема требует применения колес
сравнительно небольших размеров. В этом случае даже в тонкое крыло
сверхзвукового самолета можно убрать стойку с многоколесной тележ-
кой (например, сверхзвуковой бомбардировщик В-58 «Хаслер», США —
8-колесная тележка; сверхзвуковой пассажирский самолет
Боинг-2707-300 — 12-колесная тележка).
Схема в) применяется на-самолетах с высоким расположением
крыла. Однако существуют легкие самолеты и со средним расположением
крыла, на которых главные стойки шасси убираются по данной схеме
(например, истребитель F-104 «Старфайтер», США). Для тяжелых са-
молетов при такой схеме убирания главных стоек необходимы специаль-
ные гондолы по бокам фюзеляжа, в которые убираются шасси (чтобы
обеспечить необходимую колею шасси и ие занимать большой объем в
фюзеляже).
Схемы убирания главных стоек велосипедного шасси аналогичны
схемам убирания носовых стоек трехопорного шасси.
415
Возможные кинематические схемы механизмов убирания и выпуска
шассн показаны на рнс. 18.10. Колесо (илн тележка) прн убнранин мо-
жет поворачиваться относительно стойки так, чтобы в убранном поло-
жении шассн занимало наименьший объем.
Рекомендовать какое-либо конкретное конструктивное оформление
стойки шассн весьма трудно. По существу для каждого самопета (вы-
полняя требования, преъявленные к данному самолету) создается своя
Рис. 18 10. Возможные кинематические схемы механизмов убирания и выпус-
ка шасси
конструктивная и силовая схема шассн. Даже размеры стойки зависят
не только от взлетного веса самолета, но н от его схемы н назначения.
Например, сверхзвуковой пассажирский самолет, обеспечивая получение
необходимых взлетных и посадочных углов атаки при большой длине
фюзеляжа, имеет высокие стойки шассн. Военно-транспортный самолет,
напротив, должен иметь очень низкое шассн, чтобы обеспечить выполне-
ние требования по эксплуатации самолета на земле и т. д.
Рис. 18.11. Шасси сверхзвукового пассажирского самолета:
а —носовая стойка, б — основная стойка, / — пневматики, 2 — демпфер тангажа;
3 — вертикальная амортизационная стойка. 4 — силовой цилиндр, 5 —ось,
б — подкос
На рнс. 18.11 приводится типичное шассн сверхзвукового пассажир-
ского самолета. Следует заметить, что конструктнвно-снловая схема шас-
сн дозвукового пассажирского самолета (прн меньшей высоте стоек) не
имеет принципиальных отличий от приведенной схемы.
416
Рис 18 12 Геометрия носовой и
основной стоек шасси военно-
транспортного самолета (С-5А,
США) в выпущенном и убранном
положениях
Рис. 18 13 Шасси современного многоцелевого истребителя:
а — носовая стойка, б —г авная стойка
Шасси тяжелого военно-транспортного самолета показано на
рнс. 18.12. В данном случае шесть очень низких главных стоек шассн (по
три с каждой стороны) полностью убираются в боковые гондолы. Однако
у этих самолетов могут быть и другие схемы убирания главных стоек
(см. гл. XVI, рис. 16.11).
На рис. 18 13 приводится пример шасси современного многоцелевого
истребителя.
14-1062 417
Как уже было сказано, кинематика шасси должна быть рассчитана
таким образом, чтобы стойки и колеса при убирании не препятствовали
наружным подвескам (снаряды, бомбы, топливные баки и т д.) Выпол-
нение данного требования можно наблюдать, например, на французском
самолете «Супер Мираж» F-1 (рис. 18 14). Кинематика убирания основ-
ных стоек шасси на этом самолете позволила сохранить нижнюю поверх-
ность фюзеляжа свободной н не препятствует подвеске грузов как под
крылом, так и под фюзеляжем.
Рис. 1814. Движение главных колес
шасси многоцелевого французского
истребителя «Супер Мираж» F-1 при
убирании
Рис. 18.15 Главная стоика шасси
французского самолета Бреге-94Г
! — передаточно разделительная емкость,
2— корпус стойки с амортизатором 3—
Шток. 4 — шатун, 5 — рычаг подвески ко-
леса 6 — крепежный узел фюзеляжа
Стремление обеспечить нормальную эксплуатацию самолетов с эле-
ментарно подготовленных грунтовых ВПП отразилось на конструкции
главной стойки шасси (рис. 18.15), спроектированного французской фир-
мой «Мессье» (для истребителей, пассажирских и военно-транспортных
самолетов). Корпус стойки расположен горизонтально. При разбеге и
пробеге на грунтовой ВПП колеса, встречаясь с умеренными возвышен-
ностями и впадинами, качаются на рычагах подвески; прн этом самолет
движется поступательно без значительных колебаний.
§ 5. .ОПРЕДЕЛЕНИЕ ВЕСА ШАССИ
Вес шасси можно представить в виде
где Ош — суммарный вес шасси (вес главных стоек, носовой
стойки, колес);
Ош=Ош/Оо — относительный вес шасси.
Для современных самолетов относительный вес шасси составляет
3—5% от максимального взлетного веса 60. С увеличением взлетною
веса самолета относительный вес шасси несколько уменьшается:
418
Gq В 1С <20 20-100 100—150 >150
Бш 0,055—0,040 0,05—0,040 0,045—0,035 0,040—0,032
Главная доля веса шассн приходится на основные стойки с колеса-
ми. Вес носовой стойки с колесом 6Нш составляет примерно 10—20% от
полного веса шассн. С увеличением взлетного веса самолета относитель-
ный вес носовой стойки уменьшается:
Gq в тс <20 20—40 40-60 >60
С». и,/° и, 0,25—0,20 0,20—0,13 0,13—0,11 -0,10
Вес шассн проектируемого самолета можно определить по эмпири-
ческим зависимостям. Относительный вес шасси удобно представить в
виде суммы
Ош=°от+°к.
где Gxr = Gcr/G0— относительный вес стоек шассн;
Gk=GJGq—относительный вес колес шасси.
Для трехопорного шасси (с носовой опорой) можно рекомендовать, на-
пример, формулу В. М. Шейнина [32}
С„=(6,32Л 4- 7) G^c-10"3-0,3-1О~7Со+0,0047, (18.19)
где h — расстояние от поверхности ВПП до шарнира поворота
основной стойки (высота шассн) в м;
^лос=<7пос/^0— наибольший допустимый нз условий прочности относи-
тельный вес самолета прн посадке;
Gq — взлетный вес в кгс.
При Gr расХ = 0,15—0,20 Gni>c = 1,0-0,95;
OTiPaeX = 0,25 —0,35 Gni)c = 0,80 -0,90;
GT расх= 0,40 - 0,50 Gnuc = 0,70 - 0,75.
Относительный вес колес шассн по Д. Л. Привену равен
Ок = 0,0293 (2 —г) -&S- , (18.20)
1 + Рш
где рщ — давление в пневматнках основных колес в кгс/см2;
ё=0,06—0,12—доля взлетного веса самолета, приходящаяся на но-
совую стойку шасси прн стоянке.
Ниже приводится пример относительного веса шасси некоторых со-
временных самолетов:
Конвер-240
Каравелла-1
Боинг-727
ДС-8-50
Супер VC-10
G0=17,5 тс
Go=44 тс
G0=69 тс
G0=143 тс
Go==152 тс
Gw=0,043
Ош = 0,047
Ош = 0,0405
Сш = 0,035
G,„ = 0,0332.
14*
419
Вес колес составляет значительную долю от полного веса шасси, осо-
бенно колес, снабженных тормозным устройством. Вес колес может пре-
вышать суммарный вес силовых и конструктивных элементов шасси.
К силовым элементам шасси относятся: цилиндр и шток амортизато-
ра, подкосы, осн колес, коромысло тележки н т. д.
К конструктивным элементам шасси относятся: детали амортизатора,
узел штока у оси, узел подкосов на стойке, шлиц-шарнир (двухзвенник);
замки шасси и т. д.
Распределение веса (в процентах) м£жду элементами шасси имеет
примерно следующий характер:
Элементы шасси Главное шасси Носовое шасс
с 2 колесами с 4 колесами
Колеса 55—60 46—50 18—22
Силовые элементы 26—23 33—30 36—34
Конструктивные элементы 19—17 21—20 46—44
Глава XIX
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ САМОЛЕТОМ
Процесс изменения во времени действующих на самолет сил и мо-
ментов для получения необходимой траектории полета называется уп-
равлением, а совокупность устройств, обеспечивающих этот процесс,—
системой управления самолета. Эта система нередко называется также
главной или основной системой управления, так как помимо нее на са-
молете существуют системы вспомогательного управления, обеспечиваю-
щие управление различными другими устройствами: аэродинамическими
триммерами, переставным стабилизатором, выпуском и уборкой шасси,
тормозами колес шасси, разворотом передней стойки шасси при руле-
нии, механизацией крыла (закрылками и предкрылками), тормозными
щитками, створками люков и пр.
Настоящая глава посвящена проектированию основной системы уп-
равления.
Проектирование систем вспомогательного управления, как прави-
ло, не представляет самостоятельной задачи и осуществляется в про-
цессе проектирования электро- и гидросистем самолета.
§ 1. КОНТУР УПРАВЛЕНИЯ. ЕГО ОСНОВНЫЕ ЭЛЕМЕНТЫ
Управление самолетом может осуществляться либо летчиком, либо
автоматическими системами. Последние получили в настоящее время
широкое распространение и решают разнообразные задачи от простого
выдерживания заданного летчиком режима полета (простейшие авто-
пилоты) до перехвата воздушных целей, захода на посадку и пр.
При управлении летчиком изменение положения самолета в npoci
ранстве (по высоте, углам крена, тангажа и рыскания), а также измене
ние режима полета (по скорости, перегрузке, углам атаки и скольжс
ния) обычно определяется летчиком визуально по земным ориентирам
и линии горизонта,'а при отсутствии видимости — по пилотажно-навига-
ционным и специальным приборам (по указателям скорости, перегруз-
ки, углов атаки, крена и скольжения, высотомеру, вариометру и др.).
Большую роль в информации летчика об изменении режима полета
и о действии органов управления играют физические ощущения перегру-
420
зок и изменения усилий на рычагах управления. Сравнение текущих
значений параметров полета с потребными позволяет летчику на осно-
вании определенных навыков по пилотированию формировать управ-
ляющие сигналы в виде перемещений рычагов управления. Эти пере-
мещения рычагов преобразуются системой управления в соответствую-
щие отклонения органов управления (рулей) самолета. Отклонение
органов управления приводит к тому, что самолет начинает менять па-
раметры полета. С помощью органов чувств летчик контролирует ре-
зультаты своих воздействий на органы управления (т, е. изменение
параметров полета самолета), стремясь устранить рассогласование
между текущими и потребными их значениями, и прекращает воздей-
ствие на рычаги управления, если эти значения соответствуют друг
другу.
~~п 1Л* \~ Система I 5 ГТ |ИН,ш,п,а,у,...
а)
Вх
система
Вых
Кинестетическая
обратная связь По усилиям
По перемещениям]
Рис. 19.1. Схема замкнутого контура управления «летчик —
система управления — самолет» (а) и структурная схема опе-
ратора-летчика как звена контура управления (б):
е — рассогласование между текущими и потребными значениями пара-
метров полета; Р, х — усилия, прилагаемые к рычагам управления и
их перемещения; S — отклонения органов управления; V, Н, ш, п, а,
V —параметры полета; ах— входные восприятия (зрительные, слухо-
вые, ощущения ускорений); вых —выходные воздействия на рычаги
управления
Таким образом, в полете образуется замкнутый контур управления,
состоящий из трех основных связанных друг с другом элементов (звень-
ев): летчика, системы управления и самолета (рис. 19.1, а). Характе-
ристики этого контура и его устойчивость определяются характеристика-
ми основных входящих в него элементов (т. е, летчика, системы управ-
ления и самолета как объекта управления),взаимосвязью этихэлементов
н их взаимным соответствием. Поэтому успешность выполнения полет-
ного задания во многом зависит от того, насколько удачно подобраны
характеристики элементов контура управления.
Как элемент контура управления, летчик, в свою очередь, упрощен-
но может рассматриваться как система автоматического регулирования,
образующаяся тремя основными связанными между собой элементами
(рис. 19.1, б): органами чувств (воспринимающие органы — «датчики»);
центральной нервной системой, выполняющей функции обработки ин-
формации и выработки решения, и исполнительными органами (муску-
лами рук, ног, спины). Движения исполнительных органов летчика и
развиваемые ими усилия являются «выходными сигналами» («выхо-
дом») человека как звена контура управления. При этом информация о
действии исполнительных органов (мускулов) передается в централь-
ную нервную систему через кинестатические рецепторы, осуществляю-
щие обратные связи в организме, подобно обратным связям в системах
автоматического регулирования. Эти внутренние связи в организме че-
421
ловека-летчика называются кииестатическими обратными связями,
благодаря которым система «регулятор — летчик» получается замк-
нутой, и оказывается возможным дозирование движений исполнитель-
ных органов как по величине перемещений, так н по развиваемым прн
этом усилиям.
Возможность дозирования усилий и перемещений исполнительных
органов позволяет летчику, знакомому с характеристиками управляе-
мости данного самолета, осуществлять потребные изменения режима
полета путем соответствующего перемещения рычагов управления при
приложении к ним определенных усилий.
При этом следует отметить, что изменение усилий лучше ощущает-
ся летчиками, чем перемещения, и точность дозирования усилий сущест-
венно выше точности дозирования перемещений. Поэтому среди харак-
теристик управляемости большее значение имеют характеристики
управляемости по усилиям. Если летчик не ощущает изменений усилий
на рычагах управления при изменении режима полета (что может иметь
место, например, при необратимом бустерном управлении без соответ-
ствующих загрузочных устройств), то он лишается очень важной части
информации, а, система, «регулятор— летчик» оказывается разомкну-
той по одному из параметров обратной связи. Как правило, это приводит
к очень большим ошибкам в управлении, следствием которых может
быть потеря устойчивости всего контура управления, выражающаяся в
виде прогрессирующей «раскачки» самолета.
Как звено контура управления летчик обладает рядом свойств,
влияющих на процесс управления. Из этих свойств можно отметить:
1. Запаздывание ответной реакции на внешние сигналы. Эта вели-
чина сильно зависит от тренированности летчика и его психологического
н физического состояния. Для обычных условий можно принимать время
запаздывания реакции летчика средней квалификации 0,2—0,3 с.
2. Некоторую зону нечувствительности.
3. Способность к фильтрации внешних сигналов.
4. Способность к изменению собственной передаточной функции в
широких пределах, включая дифференцирование н интегрирование, т. е.
способность к реагированию не только на отклонения какого-либо па-
раметра полета от потребного значения, но и на первую и вторую
производные (скорость и ускорение) этого отклонения, а также и на
интеграл этого отклонения.
5. Способность к формированию выходных командных сигналов с
определенной ограниченной точностью, зависящей от величины этих сиг-
налов и их частоты.
6. Способность слежения за сигналами, поступающими с частотой
не свыше 2,5—3 Гц (наличие полосы пропускания).
Несмотря на способность к изменению собственной передаточной
функции в широких пределах, наиболее точно летчик работает в контуре
управления как одноканальный усилитель, последовательно устраняю-
щий рассогласование по какому-либо параметру. Учитывая это, необхо-
димо так проектировать остальные элементы контура управления, чтобы
на долю летчика приходилась именно эта простейшая функция — уси-
ление.
§ 2. САМОЛЕТ КАК ОБЪЕКТ УПРАВЛЕНИЯ
Рассматривая контур управления, нельзя не остановиться на осо-
бенностях характеристик объекта управления — самолета. *
Самолет в пространстве имеет шесть степеней свободы, н его дви-
жение описывается шестью дифференциальными уравнениями движения
* Эти характеристики достаточно подробно рассматриваются в других курсах
(«Динамика полета», «Устойчивость и управляемость самолетов»).
422
(Эйлера). Решение этих уравнений в общем случае позволило бы опре-
делять характер пространственного движения самолета в любой момент
времени и, в частности, после воздействия летчика на органы управле-
ния, а также позволило бы судить об устойчивости этого движения. Од-
нако непосредственное решение этих уравнений представляет известные
трудности даже при применении современных аналоговых (непрерыв-
ных) вычислительных машин (интеграторов). Если же за исходный
режим полета принять прямолинейный установившийся полет без сколь-
жения и считать отклонения параметров движения от исходных значений
достаточно небольшими (применить метод «малых возмущений»), то
благодаря симметрии самолета систему шести уравнений движения
можно разделить на две независимые системы уравнений, с известной
степенью точности описывающих движение самолета в плоскости сим-
метрии (так называемое «продольное» движение) и в двух других плос-
костях («боковое» движение).
Прн использовании уравнений кинематических связей каждое из
движений (продольное и боковое) описывается системой четырех диф-
ференциальных уравнений. Система четырех уравнений продольного
движения описывает два колебательных движения, развивающихся после
прекращения воздействия на самолет внешнего возмущения (атмосфер-
ного воздействия, отклонения органа управления, изменения тяги дви-
гателей и пр.). Одно из этих движений (называемое короткопериодичес-
ким) развивается быстро и имеет небольшой период (порядок 1—5 с),
другое — развивается сравнительно медленно и имеет существенно
больший период (порядка нескольких десятков секунд). Это движение
называют длиннопернодическим (рис. 19.2).
Возмущение угла атаки
;/2Тд
Сумма короткопериоди-
ческих и длиннопериоди-
ческих колебаний
Исходное значение —______________—
угла атаки (Да = 0)
''Длиннопериодические колеба-
ния Тл~ (20-SOT после зату-
хания короткопериодических
Рис. 19.2. Характер изменения угла атаки самолета в процессе
затухания возмущенного движения после действия внешнего воз-
мущения порыва ветра:
Т — период короткопериодических колебаний; Гд — период длиннопериоди-
ческих колебаний
Решение системы уравнений бокового движения показывает, что
боковое движение, как правило, представляет сумму двух апериодичес-
ких и одного колебательного движения.
Длиннопериодическое продольное движение легко парируется лет-
чиком и ие представляет особого интереса для исследования. Апериоди-
ческие боковые движения, из которых одно представляет быстро зату-
хающее движение крена, а другое — достаточно медленно развивающе-
еся «спиральное» движение, также не представляет особого интереса,
так как не оказывают серьезного влияния на оценку летчиками управ-
ляемости самолета.
Другое дело — короткопериодическое продольное н колебательное
боковое движения. Характер развития этих движений после действия
внешних возмущений или отклонения рулей в решающей степени явля-
ется критерием оценки летчиками устойчивости н управляемости само-
лета. Поэтому эти движения самым подробным образом исследуются в
процессе проектирования самолета с тем, чтобы заранее разработать
423
соответствующие мероприятия на случай, если параметры этих движе-
ний окажутся неудовлетворительными. На стадии проектирования само-
лета эти движения исследуются с помощью электронных аналоговых
машин.
Рассмотрим подробнее уравнения возмущенных продольного корот-
копериодического и бокового колебательного движений, так как харак-
тер последних полностью определяется коэффициентами при соответст-
вующих производных параметров движения, а эти коэффициенты в зна-
чительной степени могут изменяться проектировщиками самолета путем
выбора его форм, центровки и автоматизации системы управления.
Упрощенное уравнение, описывающее изменение угла атаки в про-
дольном возмущенном короткопериодическом движении, в безразмерной
форме имеет вид
тг
и™;
.L
Да = О.
Если это уравнение написано для случая, когда возмущение исходного
режима полета происходит вследствие отклонения руля высоты Ддв, то в
„ 8
правой части появляется выражение г—^/ДЗ . Заметим, что соотноше-
ние между изменениями вертикальной перегрузки &пу и углов атаки Да
имеет вид
(19-2)
__ дт?
да
инерции самолета отно-
скорость тангажа;
х=^-
pSV7
самолета;
ais cat.„
В уравнениях (19.1) и (192)
Да—изменение угла атаки в возмущенном движении от его значе-
ния в исходном режиме полета;
а дсу дтг
су=—т7г——т*
ба г
>г ,
гг =---- — безразмерный радиус
_ mba сительно ОСИ Ozf,
— — безразмерная угловая
~ да ba ,
а = —— — — безразмерная скорость изменения угла атаки
при вращении самолета;
i —----безразмерное время, где
т — масса самолета;
2m
р =-------относительная плотность
pS^a
дтг — —
тгу = —— = xT—xF— степень продольной статической устойчивости
дСу по перегрузке;
» дтг , ,
= ----эффективность руля высоты;
2G
гУг,п = —значение су в горизонтальном полете.
Известно, что в дифференциальном уравнении второго порядка, опи-
сывающем колебательный процесс, быстрота затухания этого процесса
(т. е. степень демпфирования) определяется величиной коэффициента
при первой производной (т. е. в данном случае при—— , а частота этих
d t
колебаний — величиной коэффициента при нулевой производной (т. е.
(19-1)
424
при Да). Условием устойчивости этого движения, т. е. условием
тухания, будет положительное значение этих коэффициентов:
его за-
(19.3)
(19.4)
Сумма тсгу-\-т^2/^—ап
называется коэффициентом продольной статической устойчивости по пе-
регрузке н играет весьма существенную роль в формировании важней-
ших характеристик продольной устойчивости. и управляемости. Так как
всегда с“>0, то из (19.3) следует, что для обеспечения устойчивости
самолета необходимо, чтобы оп<0.
Выражение (19.4) показывает, что даже при mczy=xT — xF > 0 у
проектировщиков самолета есть еще возможность обеспечить устойчи-
вость самолета за счет увеличения абсолютной величины производной
т'2г (так как всегда w^<^0). Последнее может быть достигнуто, в част-
ности, введением в систему управления демпфера продольных колеба-
ний (демпфера тангажа).
У современных сверхзвуковых самолетов по сравнению с дозвуко-
выми существенно изменились все аэродинамические и инерционные ко-
эффициенты, входящие в уравнение (19.1) продольного короткопериодн-
ческого движения.
Так, момент инерции самолетов относительно поперечной оси
сильно возрос за счет значительного удлинения фюзеляжей и разноса по
их длине достаточно больших масс (оборудование, двигатели, топливо).
Производные и т™г (и, следовательно демпфирование) существенно
уменьшились за счет применения тонких стреловидных крыльев н опере-
ния, а также за счет особенностей аэродинамики при сверхзвуковых ско-
ростях. Степень продольной статической устойчивости по перегрузке
прн М>1 значительно возрастает за счет сдвига фокуса назад.
Все это приводит к неблагоприятному изменению характеристик ди-
намической устойчивости и управляемости, под которыми понимаются
характеристики переходного процесса возвращения к исходному режиму
полета после действия на самолет внешнего возмущения или установле-
ния новых значений параметров полета после отклонения органа управ-
ления (рис. 19.3, б). На рис. 19.3, а показан примерный характер пере-
ходных процессов изменения нормальной перегрузки при отклонении
руля высоты на дозвуковых и сверхзвуковых скоростях полета (пункти-
ром показано изменение переходного процесса на сверхзвуковой скорос-
ти при введении демпфера продольных колебаний самолета).
Из рассмотрения рис. 19.3, а видно, что при сверхзвуковых скоростях
(на больших высотах) отклонение руля высоты приводит к интенсивно-
му начальному забросу и долго незатухающим колебаниям с большой
частотой регулируемого параметра [в рассматриваемом случае — угла
атаки и, следовательно, вертикальной перегрузки, связанных соотноше-
нием (19.2)]. Самолетом с такими характеристиками управлять чрезвы-
чайно трудно, а иногда и невозможно, так как летчик, имея свойствен-
ные ему характеристики (запаздывание и инерционность), пытаясь по-
гасить колебания, начинает «раскачивать» самолет.
Явление «раскачки» самолета летчиком, заключающееся в быстром
увеличении амплитуды колебаний самолета и свидетельствующее о по-
тере устойчивости контура управления, встречалось в летной практике
в начале освоения высоких скоростей полета, пока конструкторами
систем управления не были приняты специальные меры.
425
Правильно спроектированный самолет всегда обладает продольной
статической устойчивостью и продольным демпфированием [см. условия
(19.3)]. Поэтому на любых режимах полета возникшие в результате воз-
мущения короткопериодические колебания самолета, если их ие пытает-
ся гасить летчик, обязательно затухают (правда, на некоторых режимах
полета для этого может понадобиться довольно большое время!) н са-
молет возвращается к исходному режиму (если возмущение было вы-
звано внешней причиной) или балансируется на новом режиме (если
возмущение было вызвано отклонением органа продольного управ-
ления).
Рис. J9.3. Переходные процессы изменения перегрузки (Длу) в продольном
короткопериодическом движении самолета после отклонения руля высоты
(Дбв):
а — изменение характера продольного короткопериодического движения при дозвуковых
и сверхзвуковых скоростях полета, а также при включении демпфера тангажа (при
А5В = const); б — показатели, характеризующие динамическую устойчивость и управляе-
мость самолета: Т — период собственных короткопернодическнх колебаний; /Ср— время
срабатывания; Дл^3а^—начальный заброс регулируемого параметра (в данном случае —
перегрузки); Дп^,,ст—установившееся значение изменения регулируемого параметра;
\'-=Дп узаб'4лг/'уст— относительный начальный заброс — перерегулирование; *зат—время
затухания переходного процесса; лзат— число периодов колебаний до момента затухания
Устойчивость самолета как динамической системы наглядно ил-
люстрируется рис. 19.4, где приведены амплитудио-фазовые частотные
характеристики некоторых самолетов, на которых в процессе летных
испытаний были зафиксированы случаи «раскачки». Как следует ИЗ ри-
сунка, эти самолеты на всех режимах полета устойчивы. В зависимости
от режима полета меняются только коэффициенты усиления, демпфиро-
вание (декременты затухания), собственные частоты, частоты среза
и др.
Если же летчик пытается стабилизировать самолет и погасить его
колебания движениями рычагов управления, то, вмешиваясь в управле-
ние, он подключает к устойчивому колебательному звену (самолету как
объекту управления) еще два звена: систему управления (передающее
звено) и самого себя (управляющее или командное звено), замыкая,
тем самым, контур управления (см. рис. 19.1, а). В этом случае иа час-
тотные характеристики самолета (устойчивого самого по себе) накла-
дываются частотные характеристики системы управления и самого лет-
чика. От этого устойчивость контура управления ухудшается (напомним,
что, например, при частоте колебаний 1 Гц только собственное времен-
ное запаздывание реакции летчика 0,2 с создает запаздывание по фазе-
720, а при запаздывании 0,3 с —108°). В результате на некоторых режи-
мах полета (например, на режимах с повышенной эффективностью орга-
нов управления или с недостаточным демпфированием) контур управле-
ния может стать неустойчивым, наступает «раскачка». Первое и ради-
кальное средство борьбы с ней — «отключить» от устойчивого самолета
426
летчика и систему управления, т. е. зажать рычаг управления. В этом
случае самолет успокоится сам.
Рассмотрим теперь боковое колебательное движение на примере уп-
рощенного дифференциального уравнения изменения угла скольжения
в возмущенном движении (в безразмерной форме). Это уравнение име-
ет вид
—- (- 4- - 4 т№]13=°- (19-s>
Рис. 19.4. Амплитудно-фазовые частотные характеристики тяжелого и легкого
самолетов на различных режимах полета:
А—А/Ац (где А — амплитуда изменения угла атаки при периодических отклонениях орга-
на управления с изменяющейся частотой; Ло — изменение угла атаки в статических ус-
ловиях (v—0) при отклонении того же органа управления); Д<р — фазовое запаздывание
изменения угла атаки по отношению к изменению угла отклонения органа продольного
управления; v — частота знакопеременных отклонений органа продольного управления;
усоб — собственная частота самолета
Режимы полета
------большая высота, М>1 (vco6=0.57 Гц)
------большая высота. М<1 <5>соб -0,195 Гц>
— —малая высота, М<1, режим 1?тах(’’соб—
=0,29 Гц)
Легкий маневренный са- ( —• — •— малая высота, M<i, режим большого
молет | скоростного напора (<?) (vCQg—0,73 Гц)
Если возмущение вызывается отклонением руля направления дн» то
в правой части уравнения появляется член !*тМн. В этом уравнении:
р — угол скольжения;
7=tjX, Х = —— ;
—(1>„ дтц 1
производная, характеризующая демпфирование коле-
г* баний самолета относительно оси Оуг,
шу =безразмерная угловая скорость рыскания;
/-размах; г2у = ~^ —безразмерный радиус ииерцин от-
носительно оси Oi/i самолета (в квадрате);
427
,5_ дсг . „ _ . 2” .
С Z----- 5 Г*- - ,
pSZ
—s dm у 1
Шу=—---------производная, характеризующая степень путевой ста-
>'2у тнческой устойчивости;
/п®и=”^- ---производная, характеризующая эффективность орга-
на путевого управления.
В уравнении (19.5) аналогично уравнению (19.1) коэффициент при
первой производной характеризует демпфирование собственных колеба-
ний (декремент затухания).
Для современных самолетов, особенно’при полетах па больших вы-
сотах с большими сверхзвуковыми скоростями, характерно существен-
ное уменьшение демпфирования. Следствием этого аналогично продоль-
ному движению является сильная колебательность процессов бокового
возмущенного движения со слабым затуханием. Здесь следует напом-
нить, что рассмотренное выше уравнение (19.5), описывающее изолиро-
ванное движение рыскания, приведено нами лишь в качестве упрощен-
ного примера для выявления связей между аэродинамическими и инер-
ционными характеристиками самолета. На самом деле боковое движение
самолета представляет совокупность одновременно развивающихся
движений крена и рыскания, в котором возникновение скольжения вы-
зывает появление моментов крена, а накренение — моментов рыскания.
Математически связь движений крена и рыскания в боковом движении
иллюстрируется известными аэродинамическим^ производными: т$х,
т"*, wJh н др., а также показателем х=шхгпах/шу тах, При этом
вследствие свойственных современным самолетам аэродинамических и
инерционных особенностей (большая поперечная статическая устойчи-
вость тх на больших углах атаки и малые значения момента инерции
Jx по сравнению с Jy) колебательное движение крена развивается очень
интенсивно, так что показатель х достигает значений 10 и более, а пе-
риод колебаний становится достаточно небольшим. Поэтому на некото-
рых режимах полета аналогично продольному управлению собственные
характеристики летчика и в контуре бокового управления могут оказать-
ся неудовлетворительными для обеспечения стабилизации самолета.
Вследствие этого контур управления перестанет быть устойчивым, про-
явлением чего также оказывается «раскачка» самолета летчиком в бо-
ковом движении.
В настоящее время устойчивость контура управления обеспечивает-
ся введением в систему управления самолетов специальных корректи-
рующих устройств, работающих параллельно с летчиком независимо от
него (демпферов колебаний, автоматов изменения передаточных чисел,
автоматов загрузки и пр.). Эти устройства существенным образом изме-
няют динамические характеристики самолета (см., например,
рнс. 19.3, а), улучшают характеристики управляемости, повышают без-
опасность полета и делают пилотирование современных скоростных са-
молетов доступным для летчиков средней квалификации.
§ 3. ОРГАНЫ УПРАВЛЕНИЯ СОВРЕМЕННЫХ САМОЛЕТОВ
На дозвуковых самолетах для продольного, поперечного и путевого
управлений используются рули высоты, элероны и рули направления
(рис. 19.5). На сверхзвуковых самолетах применяется цельноповорот-
ный (или управляемый) стабилизатор, так как руль высоты не может
обеспечить необходимую маневренность при больших сверхзвуковых
скоростях вследствие потери эффективности (рис. 19.6), в то время как
продольная статическая устойчивость самолетов по перегрузке на этих
428
режимах существенно увеличивается в связи со смещением фокуса
назад.
Для поперечного управления наряду с обычными элеронами стали
применяться интерцепторы (или спойлеры), корневые элероны, конце-
вые элероны — поворотные концы крыльев и даже дифференциально от-
Рпс. 19,5. Органы управления и проводка управления легкого нескоростного
самолета:
I _ТЯГи проводки управления элеронами; 2 — педали управления рулем направления; 3 —
элерон (правый); 4 —триммер элерона; 5 — ручка управления рулем высоты и элеронами;
б —руль высоты; 7 — киль; в —руль направления; 9 — тримметр руля направления; 10 —
тримметр руля высоты; //—стабилизатор; /2 —тяги проводки управления рулем направле-
ния; 13— тяги управления рулем высоты; 14 — элерон (левый)
клоняемые правые и левые половины стабилизатора. Последнее средст-
во поперечного управления наиболее часто применяется у самолетов с
крылом изменяемой стреловидности.
Рис. 19.6. Пример изменения эффектив-
ности руля высоты (/к^в) 11 цельнопово-
ротного (управляемого) стабилизатора
в зависимости от висел М полета
Рис. 19,7. Один из возможных вари-
антов кинематического смесительного
механизма управления элевонами:
/ — тяга управления по крену; 2 — тяга
управления по тангажу; 3— качалка-води-
ло; 4 — двуплечая качалка паралле.ю-
граммного механизма управления по кре-
ну; 5 — тяга параллелограммного меха-
низма; 6 — трехплечая качалка; 7 — тяга
к правому элеио;;у; 8—тяга к левому зле-
вону: 9 — крепление качалки-водила смеси-
тельного механизма к конструкции само-
лета; 10 — ось вращения трехплечей ка-
чалки
429
Для сверхзвуковых самолетов характерно достаточно частое при-
менение схемы «бесхвостка», а иногда и схемы «утка». Продольное и
поперечное управления самолетов этих схем осуществляется установ-
ленными вдоль задней кромки крыла элевонами, которые отклоняются
на правом и левом крыльях в одну сторону для выполнения функций
рулей высоты или в разные стороны — для выполнения функций элеро-
нов. Для обеспечения этого в проводке управления к элевонам устана-
вливается специальный смесительный механизм (рис. 19.7), который
суммирует командные перемещения по управлению рулем высоты (тан-
гаж) и элеронами (крен) и выдает на элевоны в одно крыло сумму, а
в другое— разность этих перемещений.
Некоторые из перечисленных выше новых органов аэродинамичес-
кого управления показаны на рнс. 19.8 условно совмещенными на одном
гипотетическом самолете.
Остановимся теперь на
особенностях органов управ-
ления вертикально взлетаю-
щих (СВВП) и воздушно-
космических (ВКС) само-
летов.
В отличие от обычных
самолетов, которые в про-
цессе разбега для взлета на-
бирают скорость не только
для создания достаточной
аэродинамической подъем-
ной силы, но и для обеспе-
чения необходимой эффек-
тивности органов аэродина-
мического управления (ру-
лей), для СВВП и ВКС ха-
Рис 19.8. Новые органы управления само-
летов (органы поперечного управления ус-
ловно показаны в положении для создания
левого крена):
1 — носовое горизонтальное оперение (дестабили-
затор); 2 — закрылок носового оперения; 3—кон-
цевой элерон (правый); 4 — корневые элероны,
5 — интерцепторы (спойлеры); 6 — дифференци-
ально отклоняемые правая и левая половины ста-
билизатора (элевоны); 7 — цельноповоротный
киль; 8 — нижний (подфюзеляжный) киль
рактерны режимы полета, прн которых обычные аэродинамические орга-
ны управления не эффективны.
Для СВВП — это режимы вертикального взлета и посадки с прак-
тически нулевой горизонтальной скоростью, при которой обычные аэро-
динамические органы управления становятся бесполезными, хотя они
вполне эффективно используются на этих самолетах на других режимах
полета с достаточно большой скоростью.
Для ВКС — это режимы полета в разреженных слоях атмосферы,
где недостаток скоростного напора также не позволяет использовать
обычные аэродинамические органы управления, с успехом используемые
на режимах полета в более плотных слоях атмосферы.
Поэтому для этих самолетов наряду с обычными органами аэро-
динамического управления для обеспечения возможности изменения
положения самолета и стабилизации на режимах вертикального взлета
и посадки (для СВВП) или полета в разреженных слоях атмосферы
(для ВКС) приходится применять и другие способы создания управля-
ющих сил и моментов. Из этих способов наибольшее распространение
получили:
1) струйное управление;
2) дифференциальное изменение (модуляция) тягн подъемных дви-
гателей;
3) изменение направления векторов тягн двигателей.
При струйном управлении для создания управляющих сил и момен-
тов относительно всех трех осей самолета используются силы реакций
струн, выпускаемых из специальных сопел, располагаемых на макси-
мально возможном удалении от центра тяжести самолета.
Для струйного управления на СВВП обычно используется воздух,
430
Типовое устройство
механизмов переключения ( Н. 16*
От летчика^
РУ
От летчика.
Фигурные
прорези
\гц
Фиксатор мирты Р
ления по тангажу; 17 — гидроусилитель
цня); 21 — хвостовое сопло управления
^Вашетемуфт /рнс |g.g. Схема управ-
Фиксатор муфты А ления эксперименталь-
Лрулям ного вертикально взлета-
\включемие муфты P ющего самолета
Шорт SC-il (Англия):
/ — ручка управления по
тангажу и крену, 2 — педали
управления по рысканию,
3—тросовая проводка пово-
рота переднего
управления по
4 — механизм
клапаном
5 — носовое
ния но тангажу и рысканию,
6—во!дуп!ная ма1истраль к
носовому соплу, 7 — потен-
циометрические датчики по-
ложения ручки при управле-
нии по тангажу (для систе-
мы автостабнлизацни); 8 —
механизм загрузки ручки
при управлении но ташажу,
9— проводка управления
клапаном носового сопла;
10 — проводка управления по
тангажу (от ручки), /1 — ме-
ханизм переключения режи-
мов управления по крену,
12— воздушная магистраль к
правому соплу управления
по крену; 13—проводка уп-
равления клапаном правого
сопла, 14— правое сопло уп-
равления по крену, 15 — про-
водка управления правым
элероном; 16— механизм пе-
реключения режимов управ-
привода руля высоты; /8 —воздушная магистраль к хвостовому соплу; 19 — элерон (правый); 20— руль высоты (правая сек-
.............. .. ... _,..г...... потангажу и рысканию, 22— проводка управления клапаном хвостового сопла, 23— тросовая проводка поворота заднего
сопла для управления по рысканию, 24 — руль направления. 23 — проводка управления рулем направления; 26 — маршевый ТРД, 27 — проводка управления левым элероном,
28 — проводка управления клапаном левого сопла управления по крену. 29— левое сопло управления по крену, 30 — воздушная магистраль к левому соплу. 31 — подъ-
емные ТРД (4 шт), 32 — воздушный коллектор. 33—проводка управления по крену (от ручки), 34 — механизм загрузки ручки при управлении по крену, 35 — потенцио-
метрические датчики положения ;учки прн управлении по крепу (для системы автостабилизации), 36—приводы системы автостабилизации; I, II—механизмы пере-
ключения режимов управления по тангажу и крену соответственно
сопла для
рысканию,
управления
носового сопла;
сопло управле-
18 —
отбираемый от двигателей, создающих вертикальную тягу (подъемных
или подъемно-маршевых). Выпуск воздуха через то или другое сопло
осуществляется открыванием клапана, связанного проводкой с соответ-
ствующим рычагом управления самолетом в кабине (ручкой, штурвалом
или педалями) и обычной рулевой поверхностью. Таким образом, прн
движениях рычага управления одновременно происходит отклонение ру-
ля и открывание соответствующего клапана системы струйного управ-
ления.
На рис. 19.9 в качестве
примера такой системы показана система
струйного н аэродинамического управле-
ний английского экспериментального
СВВП Шорт SC-1. У этого самолета воз-
можны три режима управления:
1 — ручное управление (от летчика)
соплами и рулями (тяги в механизмах И
и 16 установлены в положение РУ или
Авт., включены муфты Р);
2 — ручное управление рулями, авто-
матическое управление соплами от систе-
мы автостабилизации (тяги в механизмах
установлены в положение РУ, включены
муфты Л);
3 — автоматическое управление ста-
билизацией с помощью рулей и сопел
(тяги в механизмах — в положении Авт.,
включены муфты Л).
Переключение муфт осуществляется
(ГЦ), а в аварийном случае (отказ гидрав-
уменьшение тяги подъемных
ТРД с увеличением отбора воз-
духа за компрессором (----)
или газов за Турбиной (---)
(Р—Р с. от б/Р без отб )
гидравлическим цилиндром (
лики) муфты Р включаются аварийным пневматическим цилиндром
(АПЦ), что обеспечивает возможность ручного управления рулями и
-2?
Рис. 19.11. К определению потребного расхода воздуха через сопло
струйного управления:
а — пример определения плеча реактивной силы сопла относительно оси
самолета (центра тяжести);-------------отбор газов за турбиной;
• — отбор воздуха за компрессором; б — зависимости удельных тяг уп-
равляющих сопел, работающих на сжатом воздухе от компрессоров и иа
выхлопных газах ТРД, от степени сжатия воздуха в компрессорах двига-
телей
соплами. Тяги в механизмах переключения режимов управления 11 и 16
устанавливаются в положения РУ или Авт. на земле перед полетом.
Отбор воздуха от двигателей для системы струйного управления
приводит к падению тяги этих двигателей, которое_ сильно зависит от
относительного количества отбираемого воздуха GOt6 =С0Тб/6дп. Как
видно из рис. 14.10, это падение тяги может составлять до 15—35% ис-
ходной тяги двигателя. Следует отметить, что падение тяги существенно
432
меньше, если осуществлять отбор не воздуха за компрессором, а газов
за турбиной. Но при последнем способе сильно усложняется вся система
струйного управления, которая должна работать на высокотемператур-
ной газовой смеси.
Потребные управляющие усилия от сопел реактивного (струйного)
управления при известных размерах самолета, его весовых и инерцион-
ных характеристиках могут быть определены из соотношения (рис.
19.11, а)
где Рпотр.с — потребное управляющее усилие сопла относительно рас-
сматриваемой оси самолета;
Z — момент инерции самолета относительно этой оси;
/с — расстояние от оси до сопла;
еПотр — потребное при управлении угловое ускорение самолета от-
носительно этой же оси.
Значение еПотр зависит от весовой категории самолета и его аэроди-
намических характеристик и выбирается либо путем обработки статисти-
ческих данных, либо по результатам моделирования процессов движения
СВВП на электронных моделях.
После подсчета Литре необходимый максимальный расход воздуха
через сопло 6В.С определяется нз выражения
С',.с = Л,»,р.с/Ру.д.с «rqc,
где Руд.с — удельная тяга сопла (кгс) при расходе воздуха через него в
1 кгс/с, снимается с графика рис. 19.11, б для каждой конкретной степе-
ни сжатия воздуха в компрессорах выбранного типа подъемных двига-
„ * _
телеи лк и относительного количества отбираемого воздуха или газов
Сотб. Потребный расход воздуха через двигатели при этом подсчитывает-
ся по выражению 0в.1в —-_"'с кгс/с.
тб
Для струйного управления на ВКС вместо воздуха используются
продукты разложения каких-либо химических веществ, например, пере-
киси водорода (рис. 19.12) *.
На СВВП с несколькими подъемными и подъемио-маршевыми дви-
гателями, разнесенными по длине фюзеляжа и по размаху крыла, для
управления положением самолета и стабилизации на режимах верти-
кального взлета и посадки может использоваться дифференциальное из-
менение тяги разнесенных двигателей или изменение направления век-
торов тяги путем поворота всего двигателя или его соплового аппарата.
Пример компоновки агрегатов управления такого самолета показан
на рис. 19.13. Здесь на малых скоростях полета управление по тангажу и
крену осуществляется дифференциальным изменением тяги разнесенных
вдоль фюзеляжа и по размаху крыла групп подъемных и подъемно-мар-
шевых двигателей, а управление по рысканию — поворотом векторов
тяги (поворотом крыльевых гондол подъемно-маршевых двигателей).
Для изменения направления векторов тяги подъемно-маршевых ТРД на
переходных режимах гондолы одновременно поворачиваются от ручки 3
на угол 90°, а для управления по рысканию гондолы поворачиваются от
педалей 1 на небольшие углы в разные стороны.
Управление с помощью изменения тяги подъемных ТРД вследствие
недостаточно высокой приемистости последних обладает несколько худ-
* Более подробно об использовании и расчете струпного управления см., например,
[19], откуда использованы приводимые выше расчетные характеристики.
433
шими, характеристиками быстродействия, а также требует уменьшения
общей вертикальной тяги при дифференциальном ее изменении у разне-
сенных двигателей для создания управляющего момента.
“Л
Рис. 19.12. Система управления экспериментального самолета-ракетоплана Норт-Амери-
кен Х-15 (США):
а — схема продольного аэродинамического управления: / — центральная (основная) ручка управле-
ния; 2 — боковая ручка (на правом пульте); 3 — вспомогательный гидроусилитель; 4 — исполнитель-
ный механизм демпфера продольных колебаний (тангажа); 5—гидроусилитель привода поверхности
продольного управления (цельноповоротного стабилизатора); 6 — тросовая проводка; 7 — механизм
нелинейной передачи; 8 — автомат загрузки: б — схема размещения агрегатов реактивной (струй-
ной) системы управления: / — дублированные клапаны управления по тангажу и рысканию; 2 —
ручка управления реактивной системой; 3. 4, 5 — управление ручкой по тангажу, крену и рысканию
соответственно' 6 — дублированные клапаны управления по крену; 7, 8 — баки с перекисью водо-
рода; 9 — дублированные сопла реактивной системы управления по крену; 10. 11, /2 —тросовая
проводка управления клапанами крена, тангажа и рыскания соответственно: 13 — сопла реактивной
системы управления по тангажу и рысканию в носовой части фюзеляжа: А — основные сопла с
питанием перекисью из бака 7; В — дублирующие сопла с питанием из бака 8; в — принципиальная
схема реактивной системы управления, работающей на перекиси водорода: / — клапан управления
(открывающий выход газам через сопло); 2 — сопло; 3 — бак с перекисью водорода; 4 — баллон с
азотом; 5 —регулятор давления; 6 — газогенератор; 7 — второе сопло системы; 8 — дренажные вы-
воды; 9~ предохранительный клапан
§ 4. УПРАВЛЯЕМОСТЬ САМОЛЕТА. ВАЖНЕЙШИЕ ХАРАКТЕРИСТИКИ
Коротко остановимся на управляемости самолета и ее характерис-
тиках *.
* Подробнее этот вопрос может быть изучен, например, по книге [11].
434
Под управляемостью самолета понимают его способность изменять
режим полета в результате действий летчика,'которые сводятся к пере-
мещениям рычагов управления при приложении к иим определенных
усилий. Поэтому управляемость характеризуется зависимостями между
отклонениями рычагов управления и прикладываемыми к ним усилиями,
с одной стороны, и изменениями параметров движения самолета — с
другой. В практике нередко характеристики управляемости делят на две
группы: статической и динамической управляемости. Хотя такое разде-
ление и достаточно условно, оно все же широко применяется.
Характеристики статической управляемости определяют усилия на
рычагах управления и их отклонения, необходимые для балансировки
самолета на различных установившихся режимах полета, а также из-
менение этих усилий и перемещений, необходимое для перехода с одно-
го установившегося режима на другой с единичным изменением пара-
метров движения. Важнейшими из этих характеристик в продольном
управлении являются:
1) балансировочные кривые И, пу)\ PB~h(^, пу) и в
частном случае балансировочные кривые горизонтального полета хВгп =
= Н, Хт) И PBr.iT=f2(M, Н, хт).
Здесь и далее используются общепринятые обозначения: 6 — откло-
нение руля; х— линейное перемещение рычага управления (обычно в
практике замеряется в мм); Р— усилие на рычаге управления. Индек-
сы «в», «э», «н» обозначают соответственно каналы управления рулем
высоты (тангаж), элеронами (крен) и рулем направления (рыскание);
2) расходы рычага продольного управления и усилий на нем для
единичного изменения перегрузки x^—dxjdfiy и Р^у—дР^дПу или ско-
рости хв — дхп1дУ и PvB=*dPjdV*,
3) расходы усилий иа рычаге продольного управления при выводу
самолета из горизонтального полета иа режимы полета с предельно до-
пустимыми значениями коэффициента судОп или предельными значения-
ми перегрузки (РА, и (Л,)Л„ соответственно.
‘ r J ' В' у дОП \ В' У доп
В качестве характеристик боковой статической управляемости рас-
сматриваются зависимости отклонении рычага поперечного управления
(ручки или штурвала) хэ и смещений педалей хп, а также возникающих
на них усилий Р3 и Рп соответственно от параметров бокового движения
самолета, в качестве которых рассматриваются угловые скорости сох и
Wy, углы скольжения i0 и крена у, а также боковая перегрузка п2. Для
оценки боковой статической управляемости также используются:
1) балансировочные кривые хэ = Л (Р или п2), P^ — fi (Р или пг), хн=
— fz (Р или п.) и Ptt = ft (Р или пг), определяемые из серии установив-
шихся прямолинейных полетов со скольжением, а также в установив-
шихся полетах с несимметричной тягой двигателей (для многомоторных
самолетов);
2) зависимости (0х = Л (хэ ИЛИ Рэ), включая coxmax = f2 (Ха.тах ИЛИ
-Рэшах) на различных режимах полета;
3) производные от перемещений и усилий на рычагах поперечного
и путевого управлений по какому-либо параметру бокового движения,
взятые на режиме исходного установившегося прямолинейного полета
без крена и скольжения = дхэ/дых, РА^дР3\д<»х, р^дР^ду, Рн—
=дР,1дъ xl=dx,ld?,Pf,=dP,/d? и др.
Для современных скоростных самолетов достаточно важными ока-
зываются также балансировочные кривые, характеризующие зависимо-
сти усилий на рычагах поперечного и путевого управлений и их переме-
щений от скорости (или числа М) прямолинейного полета при р = у = О.
435
1
Эти кривые на различных высотах характери-
зуют усилия на рычагах управления и их пе-
ремещения, необходимые для парирования мо-
ментов крена и рыскания, возникающих вслед-
ствие влияния сжимаемости воздуха, упругос-
ти конструкции самолета или его производст-
венной асимметрии.
Динамическая управляемость характери-
зует пилотирование самолета при выполнении
различных неустановившихся движений, част-
ным случаем которых может быть перевод са-
молета из одного установившегося режима
полета в другой. Мы уже упоминали, что вся-
кое отклонение какого-либо органа управле-
ния, вызывающее изменение действующих на
самолет сил и моментов, можно рассматривать
как возмущение, отклоняющее самолет от ис-
ходного режима полета. Поведение самолета
после этого отклонения описывается соответст-
вующими уравнениями движения, из которых,
как более важные, рассматриваются уравне-
ния продольного и бокового короткопериодиче-
ских движений [см. уравнения (19.1) и (19.5)
с правыми частями]. Процесс изменения пара-
метров самолета при переходе от одного уста-
новившегося режима полета к другому после
отклонения органа управления (или процесс
возвращения к исходному режиму полета пос-
ле действия внешнего возмущения) называют
переходным процессом, а за характеристики
динамической управляемости принимают ха-
рактеристики этого процесса (см. рис. 19.3, б).
Так как характеристики переходного про-
цесса целиком определяются коэффициентами
при соответствующих производных параметров
в уравнениях движения самолета, а его устой-
чивость— условиями типа (19.3), то можно
сделать вывод, что характеристики динамиче-
ской управляемости (впрочем, так же, как и
статической) целиком определяются характе-
ристиками устойчивости самолета. А эти ха-
рактеристики при проектировании самолета и
его системы управления могут изменяться
проектировщиками в достаточно широких пре-
делах.
Значения важнейших показателей управ-
ляемости для самолетов различных типов за-
даются на основании многолетней практики
эксплуатации самолетов. В практике проекти-
рования систем управления современных само-
летов в результате специальных исследований
эти показатели могут корректироваться для
получения их оптимальных значений (наибо-
лее удобных с точки зрения летчиков), а также
для обеспечения устойчивости контура управ-
ления «летчик — система управления — само-
лет» на всех возможных режимах полета. Эти
исследования с участием летчиков проводятся
437
на специальных стендах с использованием аналоговой вычислительной
техники (рис. 19.14). Иногда эти стенды для наибольшего приближения
к реальным условиям полета делают с подвижными кабинами, имитиру-
ющими угловые и даже линейные ускорения, действующие на самолет
Рис. 19.14. Типовой стенд для исследования динамики самолета (с непо-
движной кабиной):
/ — экран с подвижным изображением «местности»; 2— макет кабины самолета;
3 — приборная доска пилота: 4 — летчик-испытатель; 5—блок загрузки пычагов
управления и датчиков усилий и перемещений; б —сигналы перемещения рыча-
гов управления к вычислителю; 7 — сигналы усилий и перемещений на записы-
вающую аппаратуру; 8 — электронная модель системы управления самолета;
9 — сигналы отклонения органов управления (рулей) самолета; 10 — электронная
модель динамики самолета; // — сигналы изменения параметров полета на при-
боры летчика; /2 —сигналы изменения параметров полета на записывающую
аппаратуру, пульт оператора и управляющий блок системы перемещений прием-
ника «обзора местности»; 13 — записывающая аппаратура (осциллографы); 14—
пульт оператора стенда; /5 — управляющий блок системы перемещения прием-
ника «обзора местности»; 16 — сигналы изменения положения приемника; 17 —
подвижная телевизионная головка приемника «обзора местности» с шестью дви-
жениями (3 поступательных и 3 вращательных); /8 —макет местности (взлетно-
посадочная полоса аэродрома); 19 — сигналы изображения местности к проекто-
ру; 20 — проектор
в полете. Управление движениями такой кабины также осуществляется
электронными вычислительными машинами (ЭВМ), решающими урав-
нения движения самолета.
§ 5. ОБЩЕЕ ПРОЕКТИРОВАНИЕ САМОЛЕТА
И ХАРАКТЕРИСТИКИ УПРАВЛЯЕМОСТИ
Выше отмечалось, что характеристики устойчивости и управляемос-
ти самолета могут изменяться при его проектировании в достаточно ши-
роких пределах. Рассмотрев, например, выражения для коэффициентов
при производных в уравнении продольного короткопериодического дви-
жения (19.1), можно отметить, что такие производные как тсгу и mS
при проектировании самолета могут достаточно легко изменяться.
Производная тСу=хт — хр, характеризующая степень продольной
статической устойчивости по перегрузке, может изменяться за счет изме-
нения центровки х-т и положения фокуса самолета х*. Положение фоку-
са, как известно, определяется формой, размерами и характеристиками
крыла и горизонтального опереиия, а также их взаимным расположени-
ем. Производная m[n = dmz!d^n, характеризующая эффективность руля
высоты, зависит от формы и размеров горизонтального опереиия и руля
высоты и определяется характеристиками его профилей, плечом горизон-
тального оперения Lr.o- Все эти величины достаточно легко могут ме-
438
ияться в процессе проектирования. При недостаточной эффективности
руля высоты осуществляется переход на цельноповоротный управляемый
стабилизатор, эффективность которого существенно выше и оценивается
производной m^=dmzld^B (см. рис. 19.6).
Очень большое значение имеет правильный выбор величины т^.
В гл. VI уже указывалось, что увеличение этой производной приводит к
увеличению потерь качества на балансировку. Наряду с этим, увеличе-
ние степени устойчивости, особенно при уменьшении демпфирования
(именно такое изменение этих характеристик происходит при переходе
к сверхзвуковым скоростям), приводит к возрастанию начального забро-
са (перерегулирования, см. рис. 19.3, б) регулируемого параметра при
отклонениях руля высоты. С другой стороны, уменьшение степени про-
дольной статической устойчивости по перегрузке приводит к уменьшению
важнейших показателей продольной статической управляемости хве и
а чрезмерное их уменьшение может привести к потере устойчивос-
ти контура управления. Зависимость показателя хпау от степени про-
дольной статической устойчивости по перегрузке имеет следующий вид:
х">=------(19.6)
г
где кш = -^ — коэффициент кинематической передачи в проводке про-
dxB
дольного управления.
Это выражение легко может быть получено из уравнения (19.1) с
правой частью, написанного для установившегося приращения угла
I сРьа «/да ..
атаки —— = —— = 0) и преобразованного с помощью соотношения
\ 4/2 at J i
(19.2) для определения приращения перегрузки. При необратимом бу-
стерном управлении показатель управляемости Распределяется про-
стым выражением
(19.7)
где коэффициент Рв = dPJdx* — градиент характеристики загрузки
рычага продольного управления по его отклонению, создаваемый загру-
зочным устройством.
Из выражения (19.7) следует, что при постоянной характеристике
загрузки уменьшение показателя х** при уменьшении тСу приводит и
к соответствующему уменьшению Р^. Таким образом, при проектиро-
вании самолета приходится каким-то способом удовлетворять противо-
речивым требованиям: с одной стороны, стремится сделать mcv как
можно меньше для уменьшения потерь качества на балансировку для
дальнего самолета илн улучшения маневренности — для легкого, а с
другой стороны, обеспечивать приемлемые характеристики управляе-
мости.
Выражения (19.6) и (19.7) в известной мере подсказывают пути
для решения этой задачи. Как следует из (19.6), даже прн достаточно
малом значении тСу можно обеспечить приемлемые значения показате-
ля х”у тремя способами:
1) путем уменьшения коэффициента передачи от рычага продольно-
го управления к рулю высоты (или стабилизатору) /еш.в‘.
439
2) путем уменьшения эффективности органа продольного управле-
ния т’в;
3) путем увеличения продольного демпфирования т™г.
Значения показателя РПу, помимо перечисленных выше трех спосо-
бов, могут приводиться к приемлемому уровню путем увеличения гради-
ента загрузки Рв.
Все эти способы широко используются в современном самолетостро-
ении и находят свое техническое воплощение-
Рис. 19.15. К пояснению работы демпферов колебании самолета:
а —схема установки гироскопов датчиков угловых скоростей (ДУС) демп-
феров крена, тангажа и рыскания (Я —вектор кинетического .момента
ротора гироскопа); б — принципиальная схема демпфера- / — гироскоп
датчика угловой скорости; 2 —усилитель. 3 — силовое реле (PC), -/ — элект-
родвигатель; 5 — редуктор-преобразователь вращательного движения
электродвигателя в поступательное движение штока, 6 — выходной шток;
7 — потенциометр обратной связи (ОС); в —фильтр высоких частот-, 9 —
потенциометр датчика (пунктиром показаны основные блоки комплекта
демпфера)- / — датчик угловой скорости (ДУС); 77 — релейно-усилитель-
ный блок (РУБ), III — исполнительный механизм — раздвижная тяга
— в регулировании передаточных чисел £шв по режимам полета;
— в применении продольного управления комбинированного типа,
при котором в качестве органа продольного управления на одних режи-
мах (М<1) используется руль высоты, а на других (М>1) — управляе-
мый стабилизатор;
— в повышении демпфирования самолета т'"г за счет установки ав-
томатических устройств — демпферов тангажа;
440
— в применении регулирования градиента загрузки Р* по режимам
полета.
В каждом конкретном случае в зависимости от типа самолета, его
характеристик н предъявляемых требований применяется тот или другой
способ или их комбинации.
Практика показывает, что существенным образом изменить неблаго-
приятные динамические характеристики самолетов при больших сверх-
звуковых скоростях на больших высотах только методами аэродинами-
ческой компоновки не удается. Эта задача решается путем применения
автоматических средств
повышения демпфирова-
ния — демпферов колеба-
ний.
В зависимости от то-
го, относительно какой из
осей самолета демпфер
должен гасить колебания,
различают демпферы тан-
гажа, крена и рыскания.
Устройство их совершен-
но одинаково, а отлича-
ются они только установ-
кой своих чувствительных
элементов — гироскопов
(рис. 19.15, а). Чувстви-
тельный элемент демпфе-
ра (гироскоп) реагирует
на изменение угловой ско-
рости самолета и выдает
Рис. 19.16. Изменение по скорости полета прира-
щений показателя управляемости лВу при работе
демпфера тангажа с различными передаточными
числами (£ш.в=0,05 град/мм)
сигнал на исполнитель-
ный механизм — раздвижную тягу (рис. 19.15, б). Раздвижная тяга уста-
навливается последовательно в проводку управления. Поэтому при пере-
мещениях штока раздвижной тяги на величину Дхя вводится рассогла-
сование между положениями рычага в кабине и органа управления (ру-
ля или клапана струйной системы на СВВП). Благодаря этому орган
управления при неподвижном рычаге управления отклоняется в соот-
ветствующую сторону для парирования вращения самолета.
При проектировании системы управления выбирают (расчетным пу-
тем пли моделированием процессов на электронных моделях) оптималь-
ные законы работы и передаточные числа демпферов*, обеспечиваю-
щие необходимое затухание собственных колебаний самолета, необходи-
мое улучшение характеристик статической управляемости и устойчивость
контура «демпфер — система управления — самолет».
Если демпфер тангажа работает по закону (8в)(т = ^0 (переда-
точное число k^), то при его установке абсолютная величина произ-
водной т”* увеличивается на (Дгп“г)ъг=&«, —, а показатель
kat
иа (ДлЛ")[>т —----— —-57,3 (рис. 19.16). Как видно из уравнения
В в
(19.1), увеличение абсолютной величины производной тР2 приводит к
увеличению коэффициента при d№\dt (так как т"'г<(0), определяю-
* Передаточным числом демпфера (й1Ц ) называют число, показывающее, на
сколько градусов отклоняется демпфером руль для парирования единичной угловой
град
скорости вращения самолета; размерность —------=с.
град, с
441
щего степень демпфирования собственных колебаний самолета, и, сле-
довательно, приводит к более быстрому их затуханию.
Как показывает исследование уравнений бокового движения [типа
(19.5)], наибольшую роль в формировании характеристик боковой управ-
ляемости играют следующие аэродинамические производные:
1) т* — степень поперечной статической устойчивости (tn* < 0);
2) т?у — степень путевой статической устойчивости (mJ < 0);
3) —производная, характеризующая демпфирование колеба-
ний рыскания (относительно оси Of/i самолета).
Рис. 19.17. Влияние изменения поперечного V крыла на
статические и динамические характеристики самолета в
боковом движении:
в
а — характер изменения зависимости f(Cy) самолетов со
стреловидным крылом; б — изменение характеристик боковой
динамической устойчивости самолета Боинг В-47 (США) на ре-
жимах захода на посадку (Н=0, V=240 км/ч. закрылки откло-
нены) Т — период боковых короткопериодических колебаний;
— время уменьшения амплитуды колебаний вдвое
Величина производной mJ меняется при изменении форм и разме-
ров крыла и вертикального оперения, а также в значительной мере при
изменении угла поперечного V крыла. Это хорошо видно из прибли-
женного выражения, определяющего значение производной mJ;
mj= — у ^„Vcos2/ — Г z„c„ sin /. — ka^
(19.8)
где x — угол стреловидности крыла;
V — угол поперечного V крыла;
уво — координата точки приложения боковой силы на вертикаль-
ном оперении относительно оси Oxi самолета;
zct — расстояние от плоскости симметрии самолета до центра тяже-
сти площади полукрыла, отнесенное к полуразмаху; для тра-
1 I + 2 , >
пециевндного крыла гст =— -—- (q — сужение крыла);
I — размах крыла.
Как следует из выражения (19.8), на самолете, основные парамет-
ры которого (S, х, SB>U, cj) уже выбраны, для уменьшения абсолютных
значений mJ и улучшения тем самым динамики бокового движения на
больших углах атаки проще всего применить отрицательное попереч-
ное V крыла (V<0). При этом в выражении (19.8) второй член становит-
442
ся положительным и отрицательные значения производной т* умень-
шаются (рис. 19.17).
Однако, как видно, из рис. 19.17, а, при малых углах атаки (полег
на больших скоростях) эта мера приводит к чрезмерному уменьшению
производной ml, в результате чего может появиться обратная реакция
по крену на отклонение руля направления («дачу ноги»).
Наряду с этим, опущенные вниз концы консолей крыла при отрица-
тельном поперечном V приводят к целому ряду трудностей при компо-
новке шасси самолета (прихо-
дится увеличивать длину сто-
ек), а также при проектирова-
нии топливных систем с раз-
мещенными в крыле топливны-
ми баками, так как топливо не
может самотеком подаваться
из опущенных вниз консолей
крыла к расходным бакам.
Поэтому в настоящее вре-
мя проблема обеспечения при-
Рис. 19.18. Определение геометрических па-
емлемых динамических харак- раметров самолета, входящих в выражения
теристик самолета в боковом Для производных и т?, характеризую-
движении все чаще решается тих боковую статическую устойчивость
только за счет применения раз-
личных автоматических средств (автоматов скольжения и демпферов
рыскания), а поперечное V применяется положительное. Естественно, что
в этом случае к надежности автоматических систем предъявляются по-
вышенные требования.
Что касается производной т?, характеризующей путевую статиче-
скою устойчивость, то эта производная в основном зависит от соотноше-
ния площадей проекций на плоскость симметрии самолета носовой части
фюзеляжа и вертикального оперения:
~ - 0,06с= tg -/ - а И), р - Лав.<Л.0 + . (19.9)
где
kf ж0,32 (хф-0,25) хф = ^;
хф *ф *ф
Значения входящих в выражения (19.8)и (19.9) обозначений геометриче-
ских параметров самолета приведены на рис. 19.18.
Характерное увеличение длин фюзеляжей /ф и их носовых частей х$
у современных скоростных самолетов, связанное с особенностями их ком-
поновки и необходимостью максимального снижения волнового сопро-
тивления, приводит к возрастанию «дестабилизирующего» последнего
члена в выражении (19.9) и, следовательно, к уменьшению производной
Наряду с этим, выражение (19.9) показывает, что с ростом углов
атаки (заход на посадку или полет на больших высотах) путевая устой-
чивость также снижается как за счет неблагоприятного влияния
(тх)кр<С0, так и за счет увеличения затенения вертикального оперения
фюзеляжем, в результате которого уменьшается коэффициент торможе-
ния потока в зоне оперения k= У2В.О/У2< 1.
При больших числах М производная т.у уменьшается вследствие
снижения эффективности вертикального оперения (яв.о = д£2в о/др—
убывает).
Все это приводит к необходимости соответствующего увеличения
площади вертикального оперения для обеспечения путевой устойчиво-
443
сти, особенно в условиях сверхзвукового полета на больших высотах
(рис. 19.19, а).
Решение вопросов общего проектирования скоростных самолетов
невозможно также без обеспечения необходимой степени затухания бо-
ковых колебаний, определяемой в основном значениями производной
Из приближенного выражения для этой производной
Ч"~(т7итф=-2.4^«.» ~~ (19.10)
следует, что она достаточно быстро уменьшается при больших сверхзву-
ковых скоростях (вследствие уменьшения ав0) и при больших углах ата-
ки (вследствие торможения потока и уменьшения k), а наиболее эффек-
тивными способами ее увеличения при выбранных параметрах крыла яв-
ляются увеличение плеча вертикального оперения и его площади.
рис. 19.19. Влияние изменения площади вертикального опере-
ния на статические и динамические характеристики бокового
движения самолета:
а — изменение путевой статической устойчивости самолета на сверх-
звуковых скоростях: б — изменение характеризующей демпфирование
колебаний рыскания производной ту у при различных углах атаки
----- осредненные данные испытаний фирмы Бристоль; —- осред-
иенные данные испытаний RAE); в —изменение характеристик боковой
динамической устойчивости самолета Боинг В 47 на режимах захода на
посадку (//=0, У=24О км/ч, закрылки отклонены, начало осей коорди-
нат, так же как и па рис 19 17, б. соответствует исходному варианту
Однако, как показывают расчеты, для получения необходимых зна-
чений этой производной требуется либо весьма существенное увеличение
площади оперения (рис. 19.19, бие), приводящее к значительному уве-
личению веса конструкции самолета, либо достаточно большое увеличе-
ние длины хвостовой части фюзеляжа АВо, приводящее к существенным
компоновочным трудностям и опять-таки к значительному увеличению
веса конструкции.
Поэтому наиболее рациональным способом улучшения характерис-
тик боковой динамической устойчивости и управляемости современных
444
самолетов является установка в систему управления демпфера рыскания.
Если демпфер рыскания работает по закону (sH)i.p= то увеличение
производной при его установке может быть оценено с помощью
простого выражения
(Дт/)др=т/Ч—•
Из этого выражения следует, что при соответствующем увеличении
передаточного числа демпфера рыскания можно получить необхо-
димый прирост производной туу. Однако не следует забывать, что уве-
личение передаточного числа демпфера ограничено условиями устойчи-
вости контура «демпфер — система управления — самолет»*, а необхо-
димый прирост производной может быть обеспечен только при
обеспечении соответствующей эффективности руля направления т*и.
Последнее в связи с падением эффективности руля направления приво-
дит к необходимости перехода на целыюповоротиые управляемые кили
на самолетах, предназначенных летать с большими сверхзвуковыми ско-
ростями на больших высотах.
§ 6. СОСТАВ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАДАЧИ ЕЕ ПРОЕКТИРОВАНИЯ
На самолетах, летающих с небольшими дозвуковыми скоростями, за-
дачей системы управления является только обеспечение передачи уп-
равляющих сигналов от летчика (или автопилота) к органам управле-
ния. Эта задача выполняется посредством механической проводки от ры-
чагов управления в кабине к рулям самолета, подобной показанной на
рис. 19.5.
На скоростных самолетах задачи системы управления существенно
усложняются, а ее состав в связи с этим значительно расширяется. Сис-
темы управления иа этих самолетах решают следующие задачи:
1) передают управляющие сигналы от летчика к органам управле-
ния (режим пилотирования летчиком);
2) передают управляющие сигналы от исполнительных механизмов
систем автоматического управления к органам управления;
3) обеспечивают необходимую мощность для отклонения органов
управления;
4) обеспечивают статическую и динамическую устойчивость (стаби-
лизацию) ;
5) формируют необходимые характеристики управляемости;
6) формируют управляющие сигналы для автоматического траек-
торного управления;
7) формируют сигналы иа дпректорные приборы при режимах по-
луавтоматического пилотирования летчиком по директориым приборам;
8) обеспечивают повышение безопасности пилотирования летчиком
путем соответствующей сигнализации и ограничения отклонения органов
управления при подходе к предельно допустимым значениям параметров
полета (V, М, пу, а, у, |3 и др.).
Эти задачи решаются введением в систему управления целого ряда
новых механических, гидравлических и электрических устройств и авто-
* Практика показывает, что для современных тяжелых самолетов величина
(k wy)max ограничивается приблизительно значениями 1,5—2,5—, а для легких
маневренных самолетов эта величина еще меньше. Эта величина определяется, в основ-
ном, частотными! характеристиками системы самого демпфера и системы управления
самолета (в частности, бустера).
445
магических систем. Поэтому, помимо механической проводки, системы
управления современных скоростных самолетов включают (рис. 19.20, а}-.
1) гидравлические усилители мощности — силовые приводы рулей
(бустеры) и гидросистемы их питания;
2) системы загрузки рычагов управления (при необратимом бустер-
ном управлении);
3) системы обеспечения необходимых характеристик статической и
динамической устойчивости и управляемости (регуляторы передаточных
чисел в проводке от рычагов управления к рулям, демпферы колебаний,
автоматы устойчивости, автоматы скольжения, автоматы балансировки,
автоматы тяги и др.);
S)
Рис. 19.20. Примерный состав системы управления совре-
менного самолета (а) и новые связи в контуре управле-
ния (б):
/— днректорные приборы; 2-—рычаг управления; 3 — электриче-
ский сигнал триммирования усилий (балансировки по усилиям); 4 —
загрузочное устройство; 5 — механизм трнммерного эффекта (МТЭ);
6—исполнительный механизм систем улучшения характеристик
устойчивости и управляемости; 7 — двухкамерный гидроусилитель с
двумя гидросистемами питания камер: 8 — поверхность управления
(руль); 9 — исполнительный механизм системы траекторного управ-
ления; 10— механизм отключения механизма 9; // — элементы меха-
нической проводки; 12 — исполнительный механизм системы огра-
ничения предельных режимов (ОПР). Стрелками показаны электри-
ческие управляющие сигналы от вычислительных блоков автомати-
ческих систем к соответствующим исполнительным механизмам
4) систему директорных приборов с вычислителями командных сиг-
налов;
5) систему автоматического пилотирования (автопилот или другие
автоматические системы, выполняющие задачи автоматического поиска
и наведения, автоматической посадки и др.);
6) системы сигнализации и ограничения предельных режимов
(ОПР).
Конечно, на каждом конкретном самолете не обязательно наличие
всех перечисленных выше систем. Вопрос о необходимости применения
той или иной системы решается в процессе проектирования самолета и
его системы управления в зависимости от характеристик самолета и его
назначения. Пример размещения показан на рис. 19.21.
446
Проектирование автоматических систем управления самолетов
представляет достаточно сложную самостоятельную задачу, которая в
практике современного самолетостроения решается специализированны-
ми организациями по заданиям самолетостроительных ОКБ. Эта задача
является предметом рассмотрения специальных курсов.
В настоящем учебнике мы остановимся лишь на вопросах проекти-
рования элементов систем управления, участвующих в процессе пилоти-
рования самолетов летчиками. К этим элементам относятся:
1) механическая проводка;
2) гидроусилители с гидросистемами питания;
3) система загрузки рычагов управления;
4) подключенные к проводке исполнительные механизмы систем
обеспечения необходимых характеристик устойчивости и управляемости,
а также систем ограничения предельных режимов.
При проектировании рассматриваемой части системы управления
необходимо стремиться к достижению минимального веса конструкции
при условии выполнения требований по обеспечению заданной степени
надежности, технологичности конструкции и удобства эксплуатации.
§ 7. ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ СИСТЕМЫ
УПРАВЛЕНИЯ. ЭТАПЫ ПРОЕКТИРОВАНИЯ
Проектирование системы управления самолета начинается после
определения его основных весовых и аэродинамических параметров, а
также выбора органов управления и проверки (расчетным путем или
экспериментально — продувками) их эффективности на всех возможных
режимах полета. По получении этих данных на первом этапе проектиро-
вания проводятся расчеты потребных отклонений органов управления и
шарнирных моментов на них при различных режимах взлета, набора
высоты, горизонтального полета, маневрирования, снижения, захода на
посадку и посадки, включая случаи отказов двигателей. Определяются
максимальные необходимые отклонения органов управления и баланси-
ровочные отклонения этих органов на различных режимах горизонталь-
ного полета.
Параллельно с этими задачами на электронных аналоговых маши-
нах («моделях») проводится моделирование процессов движения проек-
тируемого самолета при отклонении органов управления и внешних воз-
мущениях. Результаты этого моделирования позволяют определить не-
обходимые средства автоматизации системы управления, подобрать
предварительные законы управления, установить допустимые пределы
изменения параметров элементов системы, при которых обеспечивается
устойчивость контура управления.
Полученные данные по отклонениям органов управления при различ-
ных маневрах, а также по условиям устойчивости контура управления
позволяют определить необходимые характеристики кинематической пе-
редачи от рычагов к органам управления и характеристики загрузки ры-
чагов управления, обеспечивающие выполнение ТТТ по характеристикам
управляемости. При расчетах потребных характеристик загрузки учи-
тываются также требования по ограничению максимальных углов от-
клонений органов управления иа некоторых режимах полета, наклады-
ваемые условиями прочности конструкции самолета.
Эти ограничения являются характерной чертой современного само-
летостроения, благодаря которым удается существенно снизить вес кон-
струкции самолета. В качестве примера можно привести наиболее часто
применяемое (особенно на тяжелых самолетах) ограничение отклонений
руля направления на больших скоростях (рис. 19.22), предохраняющее
вертикальное оперение от разрушения при ошибочных действиях лет-
чика и чрезмерном отклонении руля направления. Конечно, прочность
447
Рис. '19.21. Схема размещения основных элементов механической части необратимой бустерной системы уп-
равления рулями легкого скоростного самолета (I—центральный пост управления).
оперения можно было бы обеспечить н соответству-
ющим усилением его конструкции и конструкции
хвостовой части фюзеляжа, ио это потребовало бы
существенно большего увеличения веса, чем прн
введении ограничений.
Наряду с теоретическими проработками, про-
водимыми, как правило, совместно спецналнстамн
аэродннамнками, динамиками, управленцами и гид-
равликами, на первом этапе проектирования систе-
мы управления производится оборудование кабины
экипажа и размещение в ней рычагов основного уп-
равления, рычагов и тумблеров вспомогательного
управления, пультов управления, сигнализации и
контроля за работой гидросистемы и средств авто-
матизации. Эти работы, так же как и прокладка
трасс проводок основного и вспомогательного уп-
равлений, размещение и конструктивная увязка ос-
новных агрегатов системы управления и элементов
конструкции самолета, проводятся конструкторами
разных бригад в основном на натурном макете бу-
дущего самолета. •
Все перечисленные выше проработки составля-
ют основу эскизного проекта системы управления,
входящего как составная часть в эскизный проект
нового самолета. Эскизный проект, который завер-
шает первый этап проектирования системы управ-
ления, содержит:
1) краткое описание назначения н состава си-
стемы, ее элементов и их взаимодействия, органов
управления, рычагов н других элементов управле-
ния и сигнализации в кабине, описание принципов
повышения надежности и обеспечения безопас-
ности;
2) исходные данные для проектирования систе-
мы (балансировочные отклонения органов управле-
ния на различных режимах полета, включая отказ-
ные, потребные отклонения н скорости перекладки
органов управления прн маневрах н стабилизации,
изменение шарнирных моментов на органах управ-
ления при различных режимах полета, инерционные
характеристики органов управления, потребные ха-
рактеристики демпфирования органов управления
для обеспечения необходимых флаттерных характе-
ристик) ;
3) принципиальные схемы управления (по всем
каналам основного н вспомогательного управлений)
с включенными в них исполнительными механизма-
ми систем загрузки, автоматизации н гидроусили-
телями;
4) кинематические зависимости отклонений ор-
ганов управления от отклонения рычагов управ-
ления;
5) характеристики загрузки рычагов управле-
ния (включая н ограничения);
6) расчеты характеристик и выбор гидроусили-
телей привода поверхностей управления (серийных
или новых, заказанных специально для данного са-
молета) ;
14 -1062
449
7) принципиальную схему и расчеты мощностей гидросистемы пи-
тания гидроусилителей, включая различные случаи отказов;
8) принципиальные схемы и законы работы автоматических систем;
9) увязку размещения основных агрегатов системы управления с
элементами конструкции и других систем самолета;
10) компоновку рычагов и других элементов системы управления в
кабине.
Эскизный проект с учетом замечаний макетной комиссии ложится в
основу конструктивной разработки элементов системы управления.
Второй этап разработки проекта системы управления включает ра-
ря
ЮО
90
80
10
60
50
00
30
20
Ю
---------f*'-
.(ограничени.^)_
ОСЙ
-Ю
-25
крайнеии
положении, штока
МТЗ
___________~ , I Ход педали. хн
__________50_________100 Отклонение рул?
-Диапазон\ 5 15
'трймми.р^
винил
боты по трем направле-
ниям:
1) конструктивная
разработка и выпуск ра-
бочих чертежей на эле-
менты системы управ-
ления, разрабатываемые
в самолетостроительном
ОКБ (как правило, это
механическая проводка с
включенными в нее раз-
личными механизмами,
система загрузки и мон-
тажи гидросистемы);
2) теоретическая и
конструктивная проработ-
на в специализированных
организациях, заказан-
ных агрегатов и систем,
изготовление опытных об-
Рис. 19.22. Характеристика загрузки педалей уп-
равления рулем направления тяжелого самолета
с ограничением углов отклонения руля на боль-
ших скоростях (в проводке применена нелиней-
ная передача от педалей к рулю) разцов и ИХ испытания;
3) разработка и по-
стройка стендовых установок для комплексной отработки системы уп-
равления.
Последнее направление вследствие чрезвычайной сложности систем
управления н необходимости экспериментальной отработки многих кон-
структивных решений включает разработку целого комплекса стендовых
установок от натурного стенда, включающего все натурные элементы
системы управления н позволяющего отрабатывать вопросы их взаимо-
действия, до небольших стендовых установок, предназначенных для ре-
шения отдельных конструктивных задач.
Особое место среди работ этого этапа занимает создание стенда —
тренажера, предназначенного для окончательного решения вопросов вы-
бора оптимальных характеристик управляемости, подготовки экипажа
самолета к первому вылету, отработки методики пилотирования на раз-
личных режимах полета, включая отказные и другие.
Наконец, третий этап включает в основном экспериментальные от-
работки систем и комплексов на стендах, а затем иа построенном само-
лете, и выполнение соответствующих доработок. Среди этих работ важ-
ное место занимают работы по снятию частотных характеристик систем
и отдельных агрегатов, проверка устойчивости контуров и устранение
возможных автоколебаний, исследование работы системы управления
при различных отказах.
450
§ 8. РАЗМЕЩЕНИЕ РЫЧАГОВ И ДРУГИХ ЭЛЕМЕНТОВ
УПРАВЛЕНИЯ В КАБИНАХ ПИЛОТОВ
Рис. 19.23. Установка ручки управления
легкого маневренного самолета по тан-
гажу (поворот носом) и крену (поворот
крылом)
Управление самолетом при пилотировании летчиком осуществляет-
ся с помощью перемещения соответствующих рычагов управления. В ми-
ровой практике установилось, что продольное и поперечное управления
на легких маневренных самолетах осуществляются с помощью соответст-
венно продольных и поперечных
новленной между коленями
летчика (рис. 19.23, а также
19.5, 19.9 и 19.21), а па тяже-
лых и немаиевренных самоле-
тах— с помощью штурвала,
установленного на колонке, ка-
чающейся в продольной вер-
тикальной плоскости самолета
(см. рнс. 19.26, а, 19.27 и 19.31).
Иногда штурвал устанавлива-
ется на валу, проходящем че-
рез приборную доску и имею-
щем возможность поступа-
тельных перемещений в на-
правляющих вдоль продольной
осн самолета (рис. 19.24). Поперечное управление на неманевренных са-
молетах осуществляется поворотами штурвала.
Эти рычаги управления используются также и при изменениях на-
правления полета — разворотах.
Парирование или создание угла скольжения при разворотах, боко-
вом ветре или несимметричной тяге на самолетах всех типов осуществля-
ется смещением педалей.
Для облегчения процесса управления кинематика проводки всегда
проектируется таким образом, чтобы направление движения командных
перемещении ручки управления, уста-
14’
Рис. 19.24. Установка
штурвала на валу, про-
ходящем через прибор-
ную доску пилота:
а — общий вид установки:
б — конструкция установки
легкого самолета с тросовым
управлением- 1—кронштейн
с роликами. 2— тросы уп-
равления элеронами; 3 — центральный пульт (секторы газа условно не показаны); 4 —
штурвал. 5 — трубчатый вал штурвала; б —ролики, 7 — направляющая вала при управ-
лении по тангажу (установлена в подшипниках и одновременно служит для передачи
вращения штурвала при управлении по крену), 8 — педаль управления рулем направле-
ния, 9 — отверстия для регулировки установки педали; 10 — фиксатор; // — сектор; 12 —
параллелограммный механизм; 13 — тросы управления рулем направления, 14— тросы
управления рулем высоты
45Г
рычагов совпадало с необходимым направлением вращения самолета.
Так, например, при смещении ручки (или колонки штурвала) вперед «от
себя» нос самолета начинает опускаться вниз, перегрузка падает, ско-
рость растет. При смещении ручки «на себя» нос самолета начинает
подниматься вверх, перегрузка растет, скорость падает. При отклонении
ручки (повороте штурвала) вправо самолет также начинает крениться
вправо, а движение вперед правой педали вызывает движение носа са-
молета тоже вправо и т. д.
На рис. 19 25 изображены принятые правила знаков для отклонения
рулей, рычагов управления и усилии на рычагах управления.
Рис 19 25 Правила знаков для отклонения рулей,
рычагов управления и усилий на рычагах управле-
ния х—чиненное перемещение рычага управления,
Ри — Р и пр — Р к лев I Рн >0, еСЛИ Р н пр">Рц лев
На самолетах, для которых при полетах будет характерно длитель-
ное действие достаточно больших перегрузок, управление с помошью
обычных рычагов управления может оказаться неудобным. Поэтому для
управления на таких самолетах (например, гиперзвуковых или ВКС)
могут использоваться какие-то другие командные рычаги, например, бо-
ковая ручка, которая позволяет руке летчика лежать на подлокотнике
(см. рис. 19.12).
Для того чтобы управление было удобным и не вызывало утомления
летчика, командные рычаги управления должны быть расположены на
определенных, расстояниях от сидения, приборной доски и друг от дру-
га. Учитывая различный рост летчиков, сидения пилотов выполняют ре-
гулируемыми Также регулируемыми делаются и педали.
Установочные размеры рычагов основного управления выработаны
практикой и закрепляются соответствующими рекомендациями. Пример
таких рекомендаций для магистрального пассажирского самолета пока-
зан на рис. 19.28, а*, а для военных самолетов на рис. 19.28, б [5],
ст|). 208
Расстояние между педалями (по их центрам) для самолетов, у ко-
торых продольное и поперечное управления осуществляются ручкой,
принимается порядка 420—460 мм, чтобы ноги летчика не мешали откло-
нениям ручки. На самолетах со штурвальным управлением это расстоя-
ние можно принимать несколько меньше (порядка 320—350 мм). Шири-
на самой педали принимается равной 150 мм.
Пост ножного управления на легких самолетах, как правило, вы-
полняется с вертикальной осью вращения параллелограммного механиз-
ма, на котором устанавливаются педали (см., например, рис. 19.21 и
* В настоящем параграфе используются материалы исследований Нефедова В К.,
опхбликованные в статьях «Кабина экипажа самолета и комфорт» и «Эстетика и органы
управления самолета» (см. журнал «Техническая эстетика», № II, 1966 и № 10, 1968).
462
Рис 19 26 Основные способы обеспечения независимости продольного и поперечного
управлений при проектировании центральных постов управления
о и б — управление ручкой (легкие маневренные самолеты) / — ручка управления, 2 — тяга управ
ления по тангажу. 3 — шарнирное звено, обеспечивающее возможность лроворота наконечника тяги.
4 — тяга управления по крену, 5 — ось-кронштейн установки ручки (р п — радиальный подшипник,
р уп — радиально упорный подшипник), в, а и д — различные варианты вывода тяги или троса
управления по крену при управлении штурвалом /- штурвал 2 — ось вращения штурвала, 3 —
зубчатое колесо («звездочка»), 4 — цепь Галля 5 —.росы управления по крену, б —колонка.
7-рмик в —сектор, 9 —тяга с шарниром, 10 — тяга (или трос) управления по крену, // — тяга
управления по тангажу, /2 —связь со вторым штурвалом (лр м —тумблер управления триммер-
ным механизмом в канале тангажа)
Рис 19 27 Конструкции шарнирного элемента тяги
/ — проворачивающийся вильчатый наконечник 2 — радиально
упорные шарикоподшипники, 3 —труба т ira
15—1062
453
х. Положение глаза при во°г^\взлете и посадке ' ' | / ^^.^^^'^аксимальныи угол наклона. 20° /'-"•\ ^/w Dr,^ilxa- ~\ f Нормальный, угол наклона \ 7~~—_ \. спинки, сиоенья ,Со 7 \ I и <S^X / \ ю°~15°\ \ * Линия горизонтального визирЬбануя - /Г zz J/(И л/ Угол наклона приборной Ш ‘ \ Т -W—-7 5=> \JV L A/t^A AJ |i Ход педалей б<*--. . < LL к яяО 2£з^*-*г*~—/&г—" 220-210 Регулировка педа-^^^^^р^ 1 1 § лей под роспГ^--^Л^\^А;^0 I ри — 1 1 — .7— ...п Линия пола Ухг^^Ы 1,0 ’’° 1 • -1 ха 10а~130 \ж cs_- /Ж\ \Ород(льная рогули- Нейтральное положе- Х£н ._. \ЧЛ' ь ч Редка сиденья пае педали "f ij а) ч z ia Горизонтальная х линия зрения /1 S£u §з5 % irZ/V^ 1сЛгч /' i A \'v- Регулировка 1 |-i И , x по горизонтали t35мм, д // n \no вертикали ±85 мм ^/гварийная лодка 6) Рис. '19.28. Рекомендации по размещению ры- чагов основного управления в кабинах пилотов магистральных пассажирских самолетов (а) и самолетов с катапультируемыми сидениями (б)
f-. lasss
с? SSSg
й. gggg
t
о sssg
ч ggsg
sfiSS
8ggS
S;
gg"'
СП g-S’S
s-
SsKS
и. Ssis
КЗ gssg
sags
5
I
Г
19.24, б). На тяжелых самолетах педали выполня-
ются подвесными или рычажными с горизонтальны-
ми осями вращения (см. рис. 19.31).
Прн проектировании постов ручного управле-
ния необходимо обеспечить независимость продоль-
ного и поперечного управлений. Конструктивных
реализаций этого требования может быть множест-
во, однако, наиболее распространенными способами
прн установке ручки являются:
1) вывод тяги управления по одному из кана-
лов (тангажа илн крена) по теоретической оси вра-
щения ручки при управлении по другому каналу
(рис. 19.26, а);
2) вывод тяги управления по одному из кана-
лов по образующей конуса с осью, совпадающей с
осью вращения ручки при управлении по другому
каналу; ось вращения ручки и ось тяги прн этом
способе должны пересекаться в точке (вершина ко-
нуса), конструктивно совмещаемой с точкой креп-
ления тяги к следующей качалке (рис. 26, б, этим
способом обеспечивается независимость управлений
на схемах рис. 19.5 и 19.21).
Если на самолете установлено штурвальное уп-
равление, то, как правило, используется первый спо-
соб. Если при управлении ручкой различных кон-
струкций через соответствующую ось могли выво-
диться как тяга управления по крену, так и тяга
управления по тангажу, то при штурвальном уп-
равлении такой вывод осуществляется только тягой
илн тросом управления по крену через ось враще-
ния колонки (управление по тангажу) (см. рис.
19.26, в, г, д и рис. 19.31).
Следует заметить, что прн всех способах обес-
печения независимости управлений, тяга, относи-
тельно оси которой происходит вращение рычага уп-
равления, во избежание ее скручивания должна
иметь конструктивный элемент, допускающий про-
ворот одного из наконечников относительно другого
(рис. 19.27) -
Отклонения рычагов управления (так же как
и качалок в проводке) принято измерять по линей-
ным перемещениям (хордам) их расчетных точек.
Ход педалей обычно принимается в пределах ±90--
±135 мм, ход рычага продольного управления
280—480 мм, ход ручки прн управлении элеронами
100—150 мм (здесь большие значения ходов, как
правило, соответствуют более тяжелым самолетам).
Максимальный угол разворота штурвала (при рас-
четном радиусе 250—300 мм) на неманевренных са-
молетах в настоящее время выполняется в пределах
±70~±90°, в то время как на старых тяжелых ма-
шинах с безбустерным управлением для обеспече-
ния приемлемых усилий на штурвале приходилось
делать этот угол до ±180°. Это приводило к очень
неудобному перекрестному положению рук пилота
при необходимости большого отклонения элеронов.
Большое значение имеет также выбор поавиль-
ной формы и размеров штурвала, так как неудач-
15*
465
ная форма штурвала может привести к затруднениям в пилотировании
вследствие задевания за колено (рис. 19.29).
ЗОО-ЧООмм
Рис. 19.29. К выбору формы штурвала
Максимальные отклонения рычагов управления должны обязатель-
но ограничиваться смонтированными в постах управления регулируемы-
ми ограничителями ходов — упорами.
Необходимо помнить, что при наличии на самолете двух пилотов, их
посты управления кинематически объединяются для того, чтобы рычаги
управления левого и правого пилотов отклонялись синхронно (см., на-
пример, рис. 19.31).
При проектировании управления в кабине и, в частности, постов уп-
равления, помимо выполнения требований по прочности, жесткости и
минимальному весу, следует обращать внимание н иа технологичность
конструкции. Как показывает практика проектирования, управление в
кабине с загрузочными устройствами и многочисленными механизмами
(см., например, рис. 19.21 и 31) получается одним из самых сложных
узлов механической части системы управления, монтаж, регулировка и
снятие характеристик которого в стесненных условиях кабины самолета
представляет известные трудности.
Если же вопросы технологии продумываются на ранних стадиях
проектирования, то агрегаты управления в кабине могут быть скомпоно-
ваны таким образом, что их сборка, монтаж и снятие характеристик смо-
гут быть выполнены в открытых и удобных условиях вне кабины самоле-
Рис. 19.30. Рекомендации по размещению рычагов и других элементов управления в ка-
бине пилотов магистрального пассажирского самолета с учетом удобства досягаемости
о Органы управления Координаты органов управления
левое сиденье правое сиденье
2 X У Z X Z
1 Штурвал управления рулем высоты и элеро- нами (нейтраль) . , □05 3'0 Q 505 Зг0 0
2 Педали управления рулем направления (нейтраль) 890 980 1 7.5 890 980 167,5
3 Рычаг управления двигателем (РУД) . 395 550 500 390 550 500
4 Рычаг аварийного торможения колес . . 730 (00 310 730 690
5 Кнопка аварийного отключения автопилота Правая рдкоятка Левая рукоятка
штурвала ш гд'рвада
6 Рычаг выпуска и уборки шасси 530 —90 С80 с 30 -90 320
7 Рычаг выпуска, уборки закрылков и пред- крылков 540 —140 □00 540 -140
8 Рычаг аварийного выпуска шасси . . . , 120 640 —420
9 Орган управления передним колесом . . . Педали ножного Педали ножною
пульта пульта
10 Рычаг управления интерцепторами . . . 395 660 410 400 660 590
11 Щиток управления автопилотом , . . . 345 730 355 345 730 645
12 Тумблер триммера загр> .катсля руля высоты Левая рукоятка Правая р\ коятка
штурвала штурвала
13 Рычаг триммера загруи<ателя руля паправ-
ления . 650 140 400 650 140 600
14 Рычаг триммера загружателя элеронов 650 140 550 650 140 450
466.
457
Рис. 19.31. Компоновка носовой части фюзеляжа и кабины экипажа современного магистрального пассажирского самолета:
/—левый пульт пилота; 2— педали левого датчика (командира корабля); 3— левый пульт; 9 — элементы проводки управления под полом кабины; 10— тяги
штурвал левого летчика; 4 — приборная доска пилотов; 5 — центральный пульт связи рычагов управления правого и левого пилотов; 11—выход тяг к органам
пилотов с РУД; б —штурвал правого летчика; 7- педали правого летчика; 8 — управления; 12 — пульт бортового инженера с РУД
та, а затем весь узел в с оре можно будет установить на самолет с
помощью достаточно небольшого числа крепежных деталей. При хоро-
шей технологичности конструкции можно пойти даже на некоторое уве-
личение веса, которое окупится повышением качества при сборке, лег-
костью эксплуатации, и следовательно, повышением надежности.
На рис. 19.30 в качестве примера приводятся некоторые рекоменда-
ции по размещению рычагов и других элементов управления в кабине
пилотов современного магистрального пассажирского самолета, а на
рис. 19.31—компоновка носовой части такого самолета. Как видно из
рис. 19.31, элементы системы управления в районе кабины пилотов за-
нимают достаточно большой объем, который необходимо предусматри-
вать при компоновке современного самолета.
§ 9. ПРОЕКТИРОВАНИЕ МЕХАНИЧЕСКОЙ ПРОВОДКИ
На самолетах с безбустерным управлением механическая проводка
соединяет командные рычаги управления самолета с его органами уп-
равления— рулевыми поверхностями. На самолетах с бустерным управ-
лением механическая проводка условно может быть разделена на две
части:
1) несиловую — от командных рычагов управления до входных ка-
чалок гидроусилителей (бустеров), воспринимающую усилия только рук
(или ног) летчика или загрузочного устройства;
2) силовую — от выходного звена бустера до рулевой поверхности,
воспринимающую и передающую на гидроусилитель нагрузки от шар-
нирного момента на рулевой поверхности.
В настоящее время проводку стремятся проектировать так, чтобы
практически полностью исключить ее силовую часть, а выходное звено
бустера присоединить непосредственно к рычагу рулевой поверхности.
К механической проводке подсоединяются устройства загрузки ры-
чагов управления (при необратимой бустерной системе), исполнитель-
ные механизмы систем улучшения характеристик устойчивости и управ-
ляемости и автоматического управления (автопилота),
В зависимости от компоновочных условий, весовых, жесткостных и
некоторых других факторов механическая проводка на современных са-
молетах может проектироваться трех основных видов:
1) жесткой, при которой управляющие сигналы передаются к ру-
левым поверхностям при помощи возвратно-поступательных перемеще-
ний трубчатых тяг, работающих на сжатие и растяжение (рис. 19.32, а);
2) гибкой, при которой управляющие сигналы передаются при по-
мощи возвратно-поступательных перемещений тросов или стальных лент,
работающих только иа растяжение, в связи с чем гибкая проводка обя-
зательно должна состоять из двух ветвей (прямой и возвратной,
рис. 19.32, б);
3) вращательной, представляющей разновидность жесткой провод-
ки, в которой сигналы передаются реверсируемыми вращательными
движениями трубчатых тяг — валов, а отклонения рулевых поверхнос-
тей осуществляются с помощью винтовых шариковых преобразователей
вращательного движения в поступательное (рис. 19.32, в).
Часто применяются и комбинации различных видов проводок. Как
правило, это комбинации жесткой поступательной и тросовой или жест-
жой поступательной и вращательной проводок.
Основное назначение проводки — с наименьшими искажениями (по
фазе и амплитуде) передавать управляющие сигналы от летчика или ав-
томатической системы к рулевой поверхности.
Общая рекомендация по проектированию элементов проводки мо-
жет быть сформулирована следующим образом:
460
— необходимо стремиться заменить элементы, работающие на из-
гиб и кручение, элементами, воспринимающими только продольные силы
(рис. 19.33). Особенно следует избегать передачи движения с помощью
качалок (нлн секторов), соединенных длинными валами, работающими
на кручение (рис. 19.33, б). Кроме того, необходимо обращать особое
внимание иа обеспечение жесткости крепления проводки к конструкции
самолета, так как от жесткости этого крепления в значительной степени
зависит общая жесткость проводки.
-2
Рис. 19.32. Различные виды механической проводки:
а — жесткая с возвратно-поступательным движением тяг (пунк-
тиром показан вариант с включением в систему необратимого
гидроусилителя поступательного действия): 1—рычаг управле-
ния; 2— система загрузки; 3 — тяги управления; 4—необрати-
мый гидроусилитель: 5 — поверхность управления; б — гибкая
(вверху показан вариант использования гибкой проводки в не-
обратимой бустерной системе управления): 6 — ведущий сектор:
7 —ролики; 8 — тросы (или ленты); 9 — ведомый сектор: 10 —
сектор с рычагом (стрелкой показана прямая ветвь проводки,
передающая сигнал управления, при заданном движении ры-
чага управления); в — различные варианты вращательной про-
водки: внизу — гидромоторпый привод установлен в носовой ча-
сти фюзеляжа (у кабины пилотов), проводка вдоль фюзеляжа
и крыла — вращательная (трансмиссия); вверху — гидромотор-
ный привод установлен непосредственно у рулевой поверхности,
проводка вдоль фюзеляжа и крыла — поступательная; // — гид-
роусилитель вращательного действия — гпдромоторный привод;
/2 — вращательная проводка (трансмиссия); 13 — шариковые
преобразователи движения (подъемники)
Трение в проводке ухудшает ее частотные характеристики и харак-
теристики управляемости. При большом трении в проводке, вызывающем
необходимость приложения к рычагам управления достаточно больших
сил для их страгивания, управление самолетом вообще может стать не-
возможным. Поэтому в общих технических требованиях (ОТТ) к само-
летам в зависимости от их типа оговариваются максимальные допусти-
мые силы трения в проводке, приведенные к рычагам управления.
Наличие комбинированных видов проводки иа современных самоле-
тах объясняется стремлением конструкторов-проектировщиков макси-
мально использовать преимущества и по мере возможности избавиться
от недостатков проводок различных видов. Так, например, бесспорными
461
преимуществами жесткой проводки с поступательным движением тяг по
сравнению с тросовой проводкой является ее простота в эксплуатации и
меньшее треиие при многократных изменениях направления движения
на качалках. В то же время тросовая проводка на прямых участках по-
лучается легче и занимает меньше места, облегчая се компоновку; тро-
совая проводка проще дублируется, что особенно важно для самолетов
военного назначения. Поэтому для современных самолетов характерно
достаточно частое применение жесткой проводки в местах, где по усло-
виям обеспечения кинематических связей между элементами системы
управления и компоновки их иа самолете необходимы многочисленные
соединения и изменения направления трассы проводки (например, в ка-
бинах пилотов), а длинные прямые участки без изменения направления
часто выполняются при помощи тросовой проводки.
Рис. 19.33. Некоторые рекомендации по увеличению жесткости элементов провод-
ки при проектировании:
а — плоскостные качалки, б — пространственные качалки
Однако если условия компоновки это допускают, то применение
жесткой проводки кажется более предпочтительным, так как тросовая
проводка яри одинаковом количестве переходных элементов обладает
большим трением и требует постоянного внимания в эксплуатации.
При проектировании жесткой проводки следует стремиться макси-
мально сокращать число соединительных элементов, так как каждое
соединение увеличивает люфт в проводке и вес соединительных и под-
держивающих элементов. Одиако при излишне большой длине тяг их
придется делать очень толстыми из условия сохранения устойчивости
при сжатии *. Поэтому вес тяг будет быстро возрастать и, хотя при этом
вес соединительных и поддерживающих элементов уменьшается, общий
вес проводки будет тоже возрастать. Очевидно, что для каждой провод-
ки в зависимости от передаваемых усилий существует оптимальная
длина тяг на прямых участках, при которой вес проводки получается
наименьшим (обычно это длина порядка 1200—1500 мм).
В жесткой проводке в качестве поддерживающих элементов приме-
няются поводковые качалки или роликовые направляющие (рис. 19.34).
При применении поводковых качалок треиие в системе получается мень-
шим, ио зато трасса требует несколько больше места, так как тяги при
передаче управляющих сигналов смещаются не только вдоль своей оси,
но и параллельно ей.
Для предупреждения нежелательной дифференциальности и суще-
ственного изменения передаточных чисел в проводке при отклонениях от
нейтрального положения при проектировании проводки необходимо
стремиться к тому, чтобы в нейтральном положении углы между осями
* Критическая сила сжатия для тяги может быть определена по известной фор-
л2£г
муле Эйлера Ркрит = —(где для тяг р=1). В практике чаще используются рас-
четные и экспериментальные кривые критических напряжений и усилий для стержней
трубчатого сечения различной длины. См., например, [1], стр. 286—307.
462
рычагов качалок и подсоединяющихся к ним тяг были равны 90°, а ве-
личины плеч рычагов были выбраны таким образом, чтобы углы макси-
мальных отклонений этих рычагов не превышали ±30—35°. Только в
проводке управления рулем высоты или управляемым стабилизатором,
которая имеет неодинаковый ход в одну и другую стороны вследствие
большой разницы потребных углов отклонения руля высоты вверх и
вниз, оси рычагов качалок в нейтральном положении «сбиваются» от
нормали к оси тяг в сторону меньшего хода, соответствующего отклоне-
нию руля высоты вниз (рис. 19.35).
['.‘чангоут
Рис. 19 34. Поддерживающие элементы жесткой проводки с поступательным дви-
жением тяг:
а — соединение тяг на двойных проушинах поддерживающих качалок (поводков); б — соедине-
ние тяг на двойных наконечниках, поводки — с одинаковыми проушинами, в — роликовые на-
правляющие, справа покатано сечение по одной тяге и разрез верхнего ролика, обеспечиваю-
щего регулировку узла / — ролик. 2 — эксцентриковый валик-регулятор, 3—стопор, 4 — тяга.
5—нижние нерегулируемые ролики
При проектировании механической проводки современных самоле-
тов, особенно тяжелых с длинными фюзеляжами, необходимо предусмат-
ривать конструктивные меры для устранения влияния линейных дефор-
маций фюзеляжа и крыла. Эти деформации вызываются в основном тре-
мя причинами:
1) действующими на конструкцию внешними нагрузками;
2) изменением окружающей температуры (а это изменение для со-
временных сверхзвуковых самолетов может происходить в пределах
-60-4-+ 250° С);
3) действием избыточного давления в герметической кабине пасса-
жирского самолета.
Как показывают расчеты и практические замеры, изменение длины
фюзеляжа под действием этих факторов может достигать весьма боль-
ших величин (так, например, для самолета типа «Конкорд» — порядка
463
120 мм). Поэтому, если не принять специальные конструктивные меры
для компенсации линейных деформаций конструкции самолета, то это
может привести к ограничению возможных отклонений руля. Это про-
изойдет потому, что почти весь ход жесткой проводки управления будет
уже выбран только для сохранения нейтрального положения руля, а
рычаги управления будут при этом близки к крайним положениям, огра-
ниченным упорами, или даже станут на эти упоры. Так, например, на
одном ip пассажирских самолетов до введения специального компенса-
ционного механизма (рис. 19.36, б) в проводку управления рулем на-
Максимальный ход Максимальный код
Рис. 19.35 Установка тяг по отношению к осям рычагов качалок.
Справа показана «сбивка» нейтрали (Дх) рычагов в проводке управ-
ления рулем высоты (управляемыми стабилизатором) в сторону
меньшего хода
правления смещение педалей для сохранения нейтрального положения
руля при деформациях фюзеляжа в полете составляло порядка 100 мм.
Если применяется тросовая проводка, то из-за наличия двух ее вет-
вей деформация конструкции самолета не приводят к «ножницам» в
управлении (т. е. рассогласованию положения рулей и рычагов управ-
ления), ио тросы при этом могут или ослабляться и провисать, или силь-
но натягиваться. В первом случае в управлении появляется большой
люфт, во втором — сильно увеличивается трение. В обоих случаях управ-
ление может стать невозможным.
Для компенсации линейных деформаций конструкции самолета в
жесткой проводке применяются компенсационные качалки и механизмы
(см. рис. 19.36, а и б), а в тросовой — механизмы регулировки натяже-
ния тросов (см. рис. 19.36, в). Следует отметить, что при существующих
конструкциях механизмы натяжения тросов имеют диаметр порядка
300—400 мм, что необходимо учитывать при компоновке самолета, остав-
ляя для них соответствующие объемы.
Если применяется вращательная проводка, вопросы компенсации
деформаций конструкции самолета легко решаются применением шлице-
вых телескопических валов.
В заключение необходимо отметить, что конструктивные трудности
обеспечения необходимых характеристик механической проводки, слож-
ность ее компоновки и большой вес на современных самолетах, особенно
тяжелых, все чаще заставляют обращаться к рассмотрению вопросов
перехода на электродистаициоииое управление. Такая система в настоя-
щее время применяется, в частности, на французских самолетах «Ми-
раж» III и «Мираж» IV для управления рулями направления, а также
является основной (дублированной для повышения безопасности) систе-
464
мой управления на англо-французском СПС «Конкорд». Имеющаяся на
этом самолете механическая проводка является третьей (аварийной) си-
стемой управления.
Рис. 19.36. Конструктивные меры для компенсации линейных деформаций
конструкции самолета в проводке управления:
а — компенсационная качалка и ее установка на самолете; б — компенсационный ме-
ханизм: / — пол кабины (не деформируется от воздушных нагрузок и избыточного
давления); 2 —тяга управления (от летчика): 3 — днище пассажирской герметиче-
ской кабины: 4 — компенсационный механизм; 5—качалка; б — тяга к рулю: в —
механизм натяжения тросов: / — тросы: 2 — верхний подвижный сектор; 3 — пружи-
ны натяжения тросов; 4 — качалка выравнивания натяжений верхнего п нижнего
тросов; 5 — качалка: б— ось вращения механизма, к которой неподвижно крепятся
рычаг 7 и коромысло Sr 9 — нижний подвижный сектор; 10 — пружины натяжения
тросов при деформациях конструкции самолета; // — серьга с прорезью, 12— пол-
зушка; 13 — упор ползушки при максимальном удлинении фюзеляжа; 14 — упор пол-
зушкн прн максимальном сокращении длины фюзеляжа; /5 —палец
§ 10. ПОДКЛЮЧЕНИЕ К ПРОВОДКЕ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ
АВТОМАТИЧЕСКИХ СИСТЕМ
Различие назначений автоматических устройств, применяемых в си-
стемах управления современных самолетов, приводит и к различию спо-
собов подключения их исполнительных механизмов к механической про-
водке (см. рис. 19.20, а).
Быстродействующие исполнительные механизмы систем повышения
устойчивости и демпфирования подключаются к проводке последователь-
но с тем, чтобы их работа не отражалась на изменении положения ры-
чагов управления и усилий на них. Для обеспечения этого необходимо
устанавливать механизмы этих систем как можно ближе к входным уст-
ройствам гидроусилителей привода управляющих поверхностей с тем,
чтобы усилия, создаваемые этими механизмами в проводке и действую-
щие вдоль нее в обе стороны от их места установки (т. е. к рычагу уп-
равления у летчика и к входному звену гидроусилителя), со стороны
465
рычага управления гасились бы инерционностью элементов возможно
большего участка проводки.
Работа исполнительного механизма, установленного в проводку по-
следовательно, вносит рассогласование между положениями рычага и
органа управления, чем, собственно, и достигается возможность незави-
симой работы летчика и этого механизма. Вследствие этого, как пока-
зано иа рис. 19.37, б, зависимости отклонений органа управления б от от-
клонения рычага х при не нейтральных положениях выходного звена
механизма могут появиться ограничения отклонений рычага и органа
управления.
Ограничения диапазона углов отклонений органа управления при
яоздвижнан тяга (исполнительный механизм)
ит летчика
Ограничение отклонения
руля____________
входная
началка
выходная
качалка
а)
Ьтаж
7Г гидроусилителю
I г
| *rnai
—
\ Ограничение хода рычага
. 'Wraw ппчЙЯч! »Ав.
S)
'Шток раздвижной тяги удран
''Шток 8 нейтральном положении
Шток выдвинут
Рис. 19.37. Последовательное подключенье к проводке исполнительных механизмов авто-
матических систем:
а — раздвижная тяга; б— изменение кинематической зависимости отклонений руля при отклонениях
рычага управления при различных положениях штока, последовательно подключенного к проводке
исполнительного механизма (раздвижной тяги); е — два примера последовательной установки ис-
полнительных механизмов с помощью дифференциальной (суммирующей) качалки
возможных отказах автоматических систем в не нейтральных (а тем бо-
лее, в крайних) положениях выходных звеньев их исполнительных ме-
ханизмов может привести к затруднениям в балансировке самолета иа
некоторых режимах полета. Ограничение диапазона отклонений рычага
управления за счет преждевременного упора входного звена гидроуси-
лителя при не нейтральном положении выходного звена исполнительного
механизма может привести к возникновению на этом механизме нерас-
четных нагрузок от усилий летчика иа рычаге управления, который еще
ие дошел до своего упора.
Эти особенности кинематики проводки управления с последователь-
но включенными исполнительными механизмами автоматических систем
необходимо учитывать при выборе диапазонов отклонений рычагов уп-
466
равления (которые регулируются упорами у самих рычагов) и диапазо-
нов отклонения органов управления (которые регулируются упорами у
входных звеньев гидроусилителей).
Исполнительные механизмы (рулевые машины) систем траекторно-
го управления (СТУ) и, в частности, автопилотов, как это показано на
рис. 19.20, а, на большинстве современных самолетов подключаются к
проводке параллельно. Поэтому при работе этих систем рычаги управле-
ния в кабине летчика перемещаются соответственно отклонениям орга-
нов управления самолета, а возможность одновременной работы летчика
и автоматической системы исключается. Для обеспечения возможности
пилотирования летчиком при выключении системы автоматического
траекторного управления (автопилота) рулевые машины этих систем
имеют устройства отключения своих выходных звеньев, связанных с
проводкой, от остального механизма. У электрических рулевых машин
это специальные кулачковые или фрикционные муфты с электрическим
управлением, у гидравлических — электроуправляемые клапаны кольце-
вания полостей силового цилиндра. Включение и выключение этих уст-
ройств происходит одновременно с включением или выключением систе-
мы автоматического траекторного управления.
На самолетах с необратимым бустерным управлением такой способ
подключения к проводке исполнительных механизмов систем автомати-
ческого траекторного управления приводит к ряду новых проблем, свя-
занных с наличием загрузочных устройств. С одной стороны, мощность
этих механизмов должна быть достаточной, чтобы преодолевать усилия,
создаваемые загрузочными устройствами. С другой стороны, самолет и
летчик должны быть предохранены от быстрых отклонений рычагов и
связанных с ними органов управления при выключении (в частности,
аварийном) системы автоматического управления, при котором сраба-
тывают устройства отключения выходных звеньев рулевых машин от их
механизмов. В результате этого под действием усилий от загрузочных
устройств рычаги и связанные с ними органы управления будут стре-
миться быстро вернуться к исходному балансировочному положению, в
котором оии находились в момент включения автоматической системы
пилотирования.
Эти проблемы могут решаться, например, введением автоматическо-
го триммирования усилий от загрузочных устройств с помощью меха-
низма триммерного эффекта при автоматическом управлении полетом.
Однако это усложняет систему управления и в какой-то мере снижает ее
надежность. Поэтому в настоящее время появились и такие системы ав-
томатического траекторного управления, в которых исполнительные ме-
ханизмы устанавливаются в проводку последовательно и при их работе
рычаги управления в кабине летчика остаются неподвижными, как сде-
лано, например, на самолете В-58 «Хаслер» (США) и др.
Подобные системы также обладают рядом недостатков в частности,
невозможностью контроля летчиком работы системы по изменению по-
ложения рычагов управления. Отказы такой автоматической системы при
ие нейтральном положении выходного звена исполнительного механизма
приведут к описанным выше затруднениям, которые усугубляются суще-
ственно большими отклонениями органов управления, потребными для
системы автоматического траекторного управления, чем для систем по-
вышения устойчивости и демпфирования.
В связи с рассмотренными выше проблемами вопрос о выборе того
или иного способа подключения к проводке исполнительных механизмов
систем автоматического траекторного управления для каждого конкрет-
ного проектируемого самолета должен решаться особо, хотя можно за-
метить, что системы, в которых рычаги управления при работе автома-
тической системы управления полетом перемещаются, кажутся более ло-
гичными и соответствующими психологии летчиков.
467
Особую группу подключаемых к проводке исполнительных механиз-
мов автоматических систем составляют механизмы изменения передаточ-
ного числа от рычага к органу управления самолета. По назначению
эти механизмы при выполнении своей задачи, в отличие от рассмотрен-
ных ранее исполнительных механизмов систем стабилизации и СТУ, не
должны отклонять органы управления. Однако если рассмотреть приво-
димые на рис. 19.38 зависимости отклонения органа управления 6 от хода
рычага управления х при различных передаточных числах, устанавли-
ваемых исполнительным механизмом системы регулирования передаточ-
ного числа в проводке, то хорошо видно, что при изменении передаточно-
Рнс. 19.38. К явлению <>вода> руля (или рычага управления) при работе автомата
изменения передаточного числа в проводке управления (схема показана для случая
работы автомата при уменьшении передаточного числа, 5ув— увод руля при непо-
движном рычаге; хув—отклонение рычага, потребное для компенсации увода руля
(увода рычага); ku^dtydx
го числа при не нейтральном положении рычага управления (напри-
мер, %бал) неизбежно должно произойти и изменение положения
(«увод») органа управления на величину 6ув. Если при этом необходимо
сохранить исходное балансировочное положение органа управления ббал,
то при работе механизма изменения передаточного числа летчику придет-
ся изменить положение рычага управления на величину хуп для компен-
сации «увода» руля.
«Увод» органов управления при работе механизмов изменения пе-
редаточных чисел в проводке путевого и поперечного управлений не вы-
зывает особых затруднений, так эти органы управления и соответствую-
щие рычаги в течение большей части полета находятся в нейтральном
(или близком к нему) положении, когда, как это видно из рис. 19.38,
изменение передаточного числа не влечет за собой изменения положения
рулевой поверхности или рычага управления.
Иначе обстоит дело в проводке продольного управления. Здесь, как
известно, положения рулевой поверхности и соответствующего рычага
управления изменяются иа различных режимах полета в достаточно ши-
роких пределах для обеспечения балансировки самолета [в соответствии
с балансировочными кривыми Н, х-г)]. Поэтому в канале про-
дольного управления работа механизма изменения передаточного числа
будет приводить к заметному изменению одного из важнейших показа-
телей продольной управляемости — балансировочных кривых xa=f(M,
468
Н, хт). Можно существенно улучшить эти балансировочные кривые, ис-
пользуя явление «увода» для компенсации околозвуковой неустойчивости
самолета по скорости и уменьшения «ложек» иа балансировочных кри-
вых. В то же время неудачная установка механизма изменения переда-
точного числа может привести к существенному ухудшению балансиро-
вочных кривых.
Заметим, что влияние механизма изменения передаточного числа иа
изменение балансировочных кривых И, хт...), помимо задаииого
закона регулирования определяется выбором режима по-
лета и соответствующего ему балансировочного положения органа про-
дольного управления, при котором тяги проводки управления устанав-
ливаются под углом 90° к оси штока механизма. В этом положении меха-
низма движения штока, при которых происходит изменение передаточ-
ного числа в проводке, не приводят к изменению положения органа уп-
равления. *
При установке исполнительных механизмов систем стабилизации и
автоматического управления и подключении их к механической проводке
для обеспечения задаваемых передаточных чисел выполняются доста-
точно несложные кинематические расчеты, примеры которых мы рассмот-
рим ниже.
Как показано на рис. 19.37, последовательное подключение исполни-
тельных механизмов может осуществляться либо методом непосредствен-
ного включения их в проводку в качестве раздвижных тяг, либо с по-
мощью дифференциальных (суммирующих) качалок. Обычно проекти-
рование узлов подключения исполнительных механизмов автоматических
систем ведется уже после установки рычагов управления и гидроусили-
телей приводов рулевых поверхностей. Поэтому при проектировании
этих узлов должен быть задан:
I) полный ход тяги (или троса) от рычага управления летчика гл;
2) полный ход тяги (или троса) к гидроусилителю хгу> обеспечи-
вающий полный диапазон углов отклонения данной рулевой поверхности
бшах, причем достаточно часто задается хл = хг.у;
3) передаточное число исполнительного механизма ц, выражаемое
величиной хода его выходного звена в мм на единицу изменения того па-
раметра полета, который для данной системы является командным (на-
пример, угловая скорость вращения самолета для демпфера колебаний,
угол атаки для автомата устойчивости и т. д.);
4) потребное передаточное число k в градусах отклонения рулевой
поверхности на единицу изменения того же параметра.
Выбор способа последовательного подключения исполнительного ме-
ханизма определяется как видом самого механизма и предусмотренным
его конструкцией способом крепления, так и величиной и формой распо-
лагаемых свободных объемов при проектировании узла установки этого
механизма.
Установка исполнительных механизмов методом раздвижной тяги
При этом методе исполнительный механизм включается в проводку
как одна из тяг и шарнирно закрепляется за два конца между двумя
качалками (см. рис. 19.37, а). Для обеспечения потребного‘передаточного
числа длины плеч качалок подбираются из следующих соображений.
Выходное плечо /Вых выбирается таким образом, чтобы при задан-
ном ходе тяги к гидроусилителю Хгу общее отклонение качалки ие превы-
шало бы, как мы рекомендовали ранее, ±30—35°. Если принять меиьшее
* Подробнее вопрос о влиянии «увода» органа продольного управления на балан-
сировочные кривые и использовании этого явления для их улучшения см. [20],
стр. 242—248.
469
из этих значений (т. е. ±30°), то выходное плечо качалки определится:
/вых^*1у. Из простой пропорции определяем, какой ход тяги к гидроуси-
лителю обеспечивает отклонение рулевой поверхности на угол, числен-
но равный потребному передаточному числу k:
*г.у xk
&П1ЭХ
§kxry
а отсюда xk=---------, где = С помощью второй пропорции
&niax
определяем плечо /д подсоединения исполнительного механизма к вы-
^А ____________________ л™-,, TI о ! _<
ходнои качалке--------------, откуда /д-р------.
‘ВЫХ Xk xk
Если по условиям задачи было задано хл=Хгу, то входная качалка
будет иметь такие же плечи, т. е. /Вх=/вых и 1б=1а.
Если же лл=#хгуЧ то длины плеч входной качалки находятся из
соотношения: = или При 1А = 1Б /вХ—/вЫХ . Если в ре-
•Хту Ах Хгу
зультате расчета узел получается неконструктивным или плохо компо-
нуется, то расчеты следует повторить, задавшись другой величиной 1мы\-
Установка исполнительных механизмов с помощью дифференциальных
(суммирующих) качалок
Наряду с непосредственной установкой исполнительных механизмов
систем автоматической стабилизации и СТУ в проводку управления, по
компоновочным соображениям могут применяться различные варианты
установок этих механизмов с помощью дифференциальных (суммирую-
щих) качалок. Примеры таких установок показаны на рис, 19.37, в.
Плечи качалок, образующих дифференциальный (суммирующий) ме-
ханизм, подбираются в зависимости от соотношения трех величин: ко-
мандного перемещения (хода) тяги (или тросов), подходящей к месту
установки механизма от рычага управления в кабине пилота хл, хода
тяги от этого места к гидроусилителю привода рулевой поверхности хгу
и хода штока исполнительного механизма. Естественно, что тяга (или
трос) с наибольшим ходом -присоединяется к самому большому из имею-
щихся трех плеч качалок, образующих дифференциальный механизм.
Кинематический расчет такого механизма аналогично приведенному
выше сводится к решению ряда пропорций и нахождению длин плеч ка-
чалок, обеспечивающих потребное передаточное число автоматической
системы k и максимальный угол отклонения органа управления бтах-
Рассмотрим пример расчета механизма, показанного иа рис. 19.37, в,
слева. Такой вид дифференциального механизма удобно применять, если
по условиям задачи хл>*гу (если по условиям задачи задано хл<хгу, то
точки присоединения тяги от летчика и тяги к гидроусилителю следует
поменять местами).
Аналогично разобранному выше примеру расчета установки раз-
движной тяги сначала определим ход тяги проводки к гидроусилителю
Х/;, обеспечивающий отклонение органа управления на угол численно
равный потребному передаточному числу k:—“= —, откуда
&шах Ъь
xk=bk-^-t где |8ft|==|£[. После этого из конструктивных соображений
Smax
задаемся значением меньшего из трех плеч качалок механизма (а, b
или с иа рис. 19.37, в): пусть, например, Ь—В\. Тогда можем составить
пропорции: = и ——Ас—, из которых легко находятся не-
r а Ву а + с а В-^
известные плечи качалок дифференциального механизма а и с. Если в
470
результате первого кинематического расчета получаются такие значения
плеч качалок а, b и с, при которых механизм трудно реализуется кон-
структивно или плохо компонуется на самолете, то расчет следует повто-
рить, задавшись другим значением Ь = &2.
Аналогичные расчеты проводятся и при применении дифференциаль-
ных механизмов других видов.
Параллельное подключение к проводке исполнительных
механизмов (рулевых машин) систем траекторного управления (СТУ)
В зависимости от вида этих механизмов подключение их к провод-
ке осуществляется либо с помощью двуплечих качалок (если выходное
звено рулевой машины имеет поступательные перемещения, рис. 19.39,
а), либо с помощью качалки с сектором (если рулевая машина имеет
выходное звено, выполненное в виде барабана или звездочки, совершаю-
щих при работе машины реверсируемые вращательные движения, рнс.
19.39, б, в).
Заданные передаточные числа в этих установках определяются в
результате соответствующего кинематического расчета длин плеч дву-
плечих качалок и радиусов секторов секторных качалок. Этот расчет не
представляет трудностей и аналогично рассмотренным выше примерам
сводится к решению пропорций.
Однако прн параллельном подключении исполнительных механизмов
в отличне от последовательного приходится обеспечивать еще и соответ-
ствие максимальных ходов тяг или тросов проводки управления мак-
симально возможным ходам выходных звеньев этих механизмов с тем,
чтобы при выключении рулевой машины ограничения хода выходного
звена рулевой машины не приводили бы к ограничению хода проводки
управления.
Прн достаточно большом максимальном ходе тросов от выходного
звена (барабана) рулевой машины вращательного действия для подклю-
чения ее к проводке управления приходится применять двухступенчатую
передачу, как это показано на рис. 19.39, в, справа.
В заключение настоящего параграфа заметим, что для современного
самолетостроения характерна тенденция к использованию комбинирован-
ных необратимых гидроусилителей вместо специальных рулевых машин
систем траекторного управления (СТУ) и автопилотов. Комбинирован-
ные гидроусилители имеют две группы распределительных золотников,
из которых одной управляет летчик с помощью механической проводки,
а другой — вычислительные блоки автоматических систем стабилизации
и траекторного управления с помощью электрических сигналов.
§ 11. ВЫБОР И УСТАНОВКА ГИДРОУСИЛИТЕЛЕЙ ПРИВОДА
РУЛЕВЫХ ПОВЕРХНОСТЕЙ
Правильный выбор и установка гидроусилителей привода органов
управления является одной из важнейших задач проектирования всего
комплекса управления современного самолета.
Для современных скоростных (околозвуковых и сверхзвуковых) са-
молетов характерно все более широкое применение необратимых бустер-
ных систем управления без возможности перехода на аварийное ручное
управление с помощью только мускульной силы летчика. Применение
такого управления дает целый ряд преимуществ, из которых следует ука-
зать на следующие:
1) возможность применения органов управления без аэродинамиче-
ской компенсации, что позволяет уменьшить их площади за счет повы-
шения эффективности; наряду с этим такая установка благодаря умень-
шению сопротивления повышает качество самолета (на 0,5—0,8);
471
Рис. 19.39. Параллельное подключение к проводке исполнительных механизмов
систем траекторного управления (рулевых машин автопилотов):
а — подключение рулевой машины с поступательными движениями выходного звена (штока)
/ — кронштейн. 2 — съемный кронштейн-щека крепления цапфы рулевой машины 3 — руле-
вая машина, 4 — качалка; 5 — тяги проводки управления, б — пример установки рулевой ма
шины с вращательным движением выходного звена (звездочки) и узла управления элоро
нами на заднем лонжероне центроплана1 / — рулевая машина, 2 — звездочка. 3—вал при-
вода закрылков 4 — ролик, 5 —рычаг привода проводки управления элеронами в крыле
6 — трос, 7 —сектор подключения рулевой машины, 8 — вал передачи движения управления
элеронами, 9 — рычаг подсоединения тяги из кабины пилотов (от штчрвата) 10 — рычаг си
стемы стояночного стопорения элеронов, II — трос от рычага стопорения элеронов в каби
не (стрелкой показано направление движения троса при стопорении), /2 —цепь 13 —
сюпор, 14 — гнездо стопора в рычаг, 9, /5—опорный подшипник в — два примера подклю
чения к проводке рулевых машин с вращательным движением выходного звена — тросового
барабана (одноступенчатая передача слева и двухступенчатая — справа) / — трос 2 — руле
вая машина, 3 —тросовый барабан, 4 — сектор с качалкой. 5 —проводка управления. 6 — за-
делка троса на секторе, 7 — двухшкивный сектор второй ступени
472
2) возможность обеспечения необходимых флаттерных характерис-
тик рулевых поверхностей без нх весовой балансировки, а только за счет
использования жесткостных и демпфирующих характеристик гидроуси-
лителей (на самолете VC.10, например, это позволило снять около
450 кгс весовых балансиров рулей);
3) возможность упрощения конструкции гидроусилителей (а следо-
вательно, повышения их надежности) вследствие изъятия целого ряда
устройств, обеспечивавших переход на ручное (безбустериое) управ-
ление.
Однако применение необратимых бустерных систем управления без
перехода на аварийное ручное управление выдвигает достаточно серьез-
ные проблемы обеспечения безопасности полета и совершения посадки са-
молета в случае возможных отказов в такой системе. Некоторые мето-
ды решения этих проблем будут рассмотрены в следующем параграфе.
Для того чтобы современные гидроусилители могли успешно выпол-
нять задачу по обеспечению флаттерных характеристик рулевых поверх-
ностей, в их конструкции применяется ряд усовершенствований, повы-
шающих их динамическую жесткость (применение так называемой «пе-
ревернутой» кинематической схемы, при которой направления движения
входного и выходного звеньев гидроусилителя противоположны, введе-
ние дополнительных обратных связей). Наряду с этим особо серьезное
внимание необходимо обращать на обеспечение максимальной жестко-
сти узлов крепления гидроусилителей к конструкции самолета, а также
жесткости участка проводки от гидроусилителя до рулевой поверхности.
Выше отмечалось, что для современного самолетостроения харак-
терно стремление полностью устранить эту силовую часть проводки и
крепить выходное звено гидроусилителя непосредственно за рычаг при-
вода рулевой поверхности. Помимо улучшения флаттерных характерис-
тик за счет увеличения динамической жесткости привода рулевой по-
верхности (зависящей, в частности, от жесткости проводки от руля до
гидроусилителя), такой способ установки гидроусилителей обеспечивает
минимальное количество элементов проводки, находящихся под нагруз-
кой от шарнирного момента рулевой поверхности, н, следовательно,—
минимальный вес проводки.
Заметим, что при установке гидроусилителей непосредственно у ру-
левых поверхностей (особенно в крыле и оперении) не всегда следует
стремиться «спрятать» гидроусилитель и рычаг привода руля внутри тео-
ретического обвода. Стремление «спрятать» привод рулевой поверхности
в обвод, как правило, приводит к сложным и тяжелым конструкциям, об-
ладающим, кроме того, еще значительным трением и люфтами, ухуд-
шающими качество системы управления.
Значительно более простыми и легкими, а главное, более жесткими,
получаются конструкции, в которых ось гидроусилителя устанавливает-
ся перпендикулярно оси вращения рулевой поверхности. Неподвижную
часть гидроусилителя при этом крепят за достаточно. жесткую среднюю
часть крыла или оперения, а его выходное подвижное звено — непосред-
ственно за рычаг привода рулевой поверхности, длина которого в этом
случае может быть выбрана оптимальной, т. е. обеспечивающей мини-
мальный вес конструкции привода. Гидроусилитель и рычаг привода ру-
левой поверхности при таком способе установки закрывается выступаю-
щими в поток несиловыми обтекателями (рис. 19.40). Конструкции, ана-
логичные показанной на рис. 19.40, широко применяются на современных
самолетах как на дозвуковых, так и на сверхзвуковых, уменьшение тол-
щин профилей крыльев и оперения которых приводит к практической
невозможности «спрятать» привод руля внутрь обвода.
Естественно, что всякие выступы в теоретическом обводе обтекае-
мых потоком поверхностей самолета увеличивают его сопротивление. Од-
473
нако вследствие малости миделя обтекателей приводов рулей по срав-
нению с миделем самолета, этот рост сопротивления из-за выступающих
в поток обтекателей весьма незначителен и, безусловно, окупается зна-
чительным выигрышем в весе, жесткости и простоте конструкции при-
вода.
10 9 8 7 6
12 3 Ч 5
Рис. 19.40. Пример установки гидроусилителя привода рулевой
поверхности на тонком крыле сверхзвукового самолета:
/ — кронштейн крепления гидроусилителя; 2 — гидроусилитель; 3 — не-
подвижная часть обтекателя; 4 — подвижная часть обтекателя; 5 —
рычаг привода руля; 6 — руль; 7 — лонжерон руля с кронштейном на-
вески; 8—задний лонжерон (стенка) крыла; 9 — силовая нервюра
крыла; 10 — тяга управления гидроусилителем
При проектировании приводов цельноповоротных поверхностей уп-
равления (например, управляемого цельноповоротного стабилизатора
или киля) также необходимо стремиться устанавливать гидроусилители
таким образом, чтобы крепить их выходные звенья непосредственно за
рычаги привода этих поверхностей. Стремление улучшить флаттерные
характеристики.цельноповоротного управляемого стабилизатора прнво-
Рис. 19.41. Внешняя характеристика одномерного гидроусили-
теля (------) и изменение ее при двукратном резервировании
располагаемой мощности путем применения двухкамерного
гидроусилителя с питанием камер от двух независимых гидро-
систем (— •• — •• —). Точки с цифрами на сплошной
кривой соответствуют двум расчетным режимам полета, по ко-
торым определяется потребная характеристика гидроусили-
теля:
1 — малые нагрузки, большие скорости перекладки; 2— большие нагруз-
ки, малые скорости перекладки
дит к необходимости применения раздельных гидроусилителей для при-
вода его правой и левой половин. Только в случае применения общей
прямой оси, конструктивно связанной с обеими половинами стабилиза-
тора, возможно применение одного гидроусилителя, если удается обес-
печить достаточную жесткость сравнительно больших участков трубча-
той оси, работающих на кручение.
Выбор гидроусилителей для привода поверхностей управления са-
молета производится исходя из полученных значений потребных скоро-
стей перекладки (отклонения) этих поверхностей и их шарнирных мо-
474
ментов. При этом используется известная зависимость скорости движе-
ния выходного звена гидроусилителя от усилия, приложенного к его
выходному звену, т. е. его внешняя (механическая) характеристика (см.
рис. 19.41), описываемая уравнением
X^k^p^-P), (19.11)
где xrv =dxr[dt — скорость движения выходного звена гидроусилите-
ля в мм/с;
kx — коэффициент пропорциональности;
Р —-текущее значение усилия, приложенного к выход-
ному звену гидроусилителя;
Ртах — максимальное значение противодействующего уси-
лия, при котором скорость движения выходного зве-
на гидроусилителя становится нулевой.
Величина Ртах для гидроусилителя определяется площадью его
поршня F и максимально возможным перепадом давлений ДРтах в ра-
бочих ПОЛОСТЯХ Pma\ = PApmax.
Для удобства и упрощения расчетов выражение (19.11) для внеш-
ней характеристики гидроусилителя используется в несколько другой
форме, раскрывающей зависимость возможной угловой скорости пере-
кладки органа управления d ог шарнирного момента Л1Ш:
(Mul таХ-ЧЛ (19.12)
где ЛГштах — значение шарнирного момента, которое создает на выход-
ном звене гидроусилителя усилие Ртах.
Чтобы выбрать гидроусилитель, обеспечивающий необходимые скорости
перекладки органа управления на всех режимах полета, сначала исполь-
зуются данные о необходимых скоростях перекладки и соответствующих
шарнирных моментах на двух режимах полета:
1) режим полета, где необходимы максимальные скорости переклад-
ки б] при сравнительно небольших значениях шарнирных моментов Л1ш1
(обычно это взлетно-посадочные режимы);
2) режим полета, где иа органах управления возннкают наибольшие
шарнирные моменты Л1т2, но потребная скорость перекладки бг— срав-
нительно невелика.
Уравнение (19.12), написанное для этих двух режимов полета, дает
два равенства, где остаются неизвестными и 2Иштах:
= &а(А1штах — 1 )i ^2—^8 (^ш max — Мша)-
т-! (^1)^ шах —
Поделив эти равенства одно на другое, получим / -= *---,
(§2)2 '"шшах — -Лаш2
откуда легко определить значение Л4штах, а затем из любого равенства
н значение коэффициента Лз.
Полученные значения Мштах и kt позволяют построить потребную
внешнюю характеристику гидроусилителя, написанную в форме (19.12),
и проверить обеспечение неравенств МШ1ЮгР^.Мтрасп и бпотр^брасп на
всех режимах полета. Затем, используя соотношения 8 =——— и
R cos 5
Мш — PRcosd (гле R— длина рычага привода рулевой поверхности, а
б — угол его отклонения от нейтрального положения, рис. 19.42), можно
получить потребную внешнюю характеристику гидроусилителя в форме
(19.11), по которой лнбо подбирается готовый гидроусилитель, либо за-
казывается новый специализированному ОКБ.
Заметнм здесь, что потребная мощность гидроусилителя (Л/Гупотр)
не зависит от длины R рычага привода рулевой поверхности и опредс-
475
ляется выражением
V - = Krc.M/t
г).»..тр 57,3 I
(19.1з;
(Мш.тах выражен в кгс-м, а Стах —в град/с).
Подсчитанная по формуле (19.13) потребная мощность гидроусили-
теля при заданном расчетном давлении р в гидросистеме определяет
потребный расход жидкости через данный гидроусилитель при движении
его выходного звена Qry.noTpi = ^ry.noTp/0,167 р л/мин (Nгу.потр выражена
в кгс-м/с, ар — в кгс/см2), а суммарный потребный расход на всех п гид-
роусилителях системы управления определяется суммой Qr-.noTp~
1 =п
— ^Qry.noTp; • Эта сумма определяет потребную мощность гидросистемы
i=i
для питания гидроусилителей приводов рулевых поверхностей. Если в
эту гидросистему подключены еще и другие потребители, то общая по-
Рис. 19.42. Связь хода выходного звена гидроуси-
лителя Хгу с углом отклонения рулевой поверх-
ности 6 и длиной рычага ее привода R
требная производительность насосов этой гидросистемы определится
суммой расходов всех потребителей с учетом коэффициента одновре-
менности их работы *.
С появлением и развитием бустерных систем управления мощность
самолетных гидросистем стала чрезвычайно быстро возрастать, хотя
потребные мощности для обслуживания других потребителей (например,
уборка и выпуск шасси и механизации крыла, привод механизма разво-
рота передней стойки и др.) практически мало возрастали. Так, напри-
мер, по данным журнала Aircraft Engineering (№ 12, 1966) мощности
гидросистем магистральных пассажирских самолетов DC-7 (безбустер-
ное управление), VC.10 и «Конкорд» составляют соответственно 34, 160
и ч’ЗО л. с.
Независимость потребной мощности для отклонения рулевой по-
верхности от длины R рычага ее привода не означает, однако, что воз-
можен произвольный выбор этой длины. При слишком малых величинах
R качество механизма привода ухудшается тем, что люфты в шарнирных
сочленениях становятся достаточно заметными на фоне сравнительно
малых потребных командных перемещений, вследствие чего увеличи-
вается угол свободного отклонения рулевой поверхности. Наряду с этим
сильно возрастают усилия от шарнирного момента, действующие на гид-
роусилитель и шарниры его крепления к рычагу и конструкции, что по-
вышает вес этих элементов. И хотя при малых потребных командных хо-
* При определении потребно!? мощности гидросистемы питания гидроусилителей
(так называемой бустерной) коэффициент одновременности работы потребителей при-
нимается равным 1, так как все приводы рулевых поверхностей в отличие от других
потребителей гидроэнергии могут работать одновременно.
476
дах выходного звена бустера его размеры и, следовательно, вес умень-
шаются, общий вес узла может оказаться достаточно большим.
При слишком больших величинах вес конструкции самолета
вследствие уменьшения действующих усилий снижается; однако за счет
существенного возрастания веса самого гидроусилителя при большом по-
требном ходе его выходного звена общий вес узла также может увели-
чиваться. Заметим, что увеличение хода выходного звена гидроусилителя
(точнее — хода его поршня) гораздо существеннее сказывается на воз-
растании веса самого гидроусилителя, чем увеличение усилия, которое он
должен воспринимать. Это объясняется тем, что в первом случае, осо-
бенно если гидроусилитель двухкамерный, сильно возрастает его длина,
а увеличение воспринимаемого усилия достигается весьма небольшим
увеличением диаметра силового цилиндра. Кроме того, и при достаточно
больших значениях R диаметр этого цилиндра нередко приходится до-
полнительно увеличивать (по сравнению с потребным для восприятия
действующих усилий) для повышения демпфирующих свойств гидроуси-
лителя и обеспечения необходимых флаттериых характеристик рулевой
поверхности.
Очевидно, что для каждых конкретных условий существует какая-то
оптимальная длина рычага привода рулевой поверхности, при которой
общий вес элементов конструкции самолета и гидроусилителя получает-
ся наименьшим. Задача конструктора — найти эту длину.
При компоновке самолета и проектировании узлов привода рулевых
поверхностей необходимо учитывать, что современные многокамерные
гидроусилители имеют достаточно большую длину. Так, например, двух-
камерные гидроусилители с рабочим ходом штока 150—200 мм имеют
установочную длину порядка 1000—1200 мм.
При проектировании навески и привода рулевых поверхностей боль-
шое внимание следует обращать на выбор стреловидности их осей вра-
щения, так как от этого в значительной степени зависит потребная мощ-
ность привода. Особенно это относится к цельноповоротцым стреловид-
ным поверхностям, например, управляемому стабилизатору. С одной
стороны, увеличением стреловидности оси можно добиться уменьшения
шарнирного момента относительно этой оси. Но, с другой стороны, при
увеличении стреловидности оси вращения рулевой поверхности уменьша-
ются поточные (т. е. относительно набегающего потока) углы отклоне-
ния этой поверхности ср при повороте оси на одни и те же углы 6. Следо-
вательно, для обеспечения нужной эффективности рулевой поверхности
при увеличении угла стреловидности оси придется увеличивать углы по-
ворота оси 6, а значит, и скорости поворота этой оси 6. Как следует из
выражения (19.13), увеличение 6 приведет к увеличению потребной мощ-
ности привода и, следовательно, к увеличению мощности и веса питаю-
щей его гидросистемы.
Необходимо обратить внимание, что в выражениях (19.12) и (19.13)
символ 6 обозначает угловую скорость перекладки органа управления
относительно его оси вращения. Относительно этой оси определяется и
задается в конструкторские бригады также и шарнирный момент этого
органа. Связь поточных углов отклонения органа управления ср, которые
определяют его эффективность (например, для продольного управле-
ния— изменение коэффициента продольного момента при единичном уг-
ле отклонения управляемого стабилизатора mVa — дтг[д<?в), с углами по-
ворота его оси б описывается выражением
tg<p?K tg 8 cos хос, (19.14)
где Хос — стреловидность оси вращения.
477
Как следует из выражения (19.14), при увеличении стреловидности
осн вращения разница между осевыми 6 и поточными ф углами быстро
возрастает.
Таким образом, с ростом стреловидности осн Хос органа управления
потребная мощность привода за счет уменьшения шарнирного момента
Мш уменьшается, а за счет увеличения потребной угловой скорости по-
ворота осн 6 — увеличивается (рис. 19.43). На этом рисунке
— (^)у >0 — (Л4Ш), ->0 — (^потр)у >о
8^ .-Уос- ; тИщ = - —
О)7 =0 (^ш)у «о (Nnorp)z =0
'•ot и '-ос w г Лос
За расчетные значения шарнирных моментов принимались большие из
нх дозвуковых и сверхзвуковых значений. Очевидно, что существует ка-
кая.-то оптимальная стреловидность осн вращения (xoc)opt, при которой
Рис. 19.43. Характер изменения относительных ве-
личин потребной скорости перекладки 6, шарнир-
ного момента Л1ш и потребной мощности привода
^потр иельноповоротного оперения при изменении
стреловидности его оси вращения хос
потребная мощность привода и питающей его гидросистемы окажется
минимальной.
Так как потребные мощности приводов поверхностей управления и
гидросистем их питания у современных сверхзвуковых самолетов весьма
велнки, то применение оптимальной стреловидности оси (при которой
эта мощность оказывается наименьшей) позволяет снизить вес этих эле-
ментов, а значит, и взлетный вес самолета.
§ 12. МЕРОПРИЯТИЯ ПО ПОВЫШЕНИЮ БЕЗОПАСНОСТИ ПОЛЕТА
ПРИ ПРОЕКТИРОВАНИИ СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА
При проектировании безбустерных систем управления нескоростных
самолетов основными мерами по повышению надежности проводки было
проектирование ее с достаточно большим запасом прочности, а также
размещение проводки таким образом, чтобы вероятность попадания в
нее посторонних предметов была наименьшей*. Наряду с этими мерами
* Например, в летной практике известны трагические случаи, вызванные попада-
нием в проводку посторонних предметов, забытых в кабине после проведения каких-
либо работ (отверток, ключей и пр.). Чтобы исключить возможность таких случаев,
478
одним из методов повышения надежности системы управления является
прокладка проводки в местах, легко доступных для обзора, проверки и
проведения различных регламентных работ. Это позволяет легко обнару-
жить появившиеся дефекты и своевременно их устранить.
Перечисленные меры обеспечивают достаточную надежность про-
водки и в бустерных системах управления. Однако в этих системах сте-
пень их надежности определяется в основном степенью надежности
гидроусилителя и гидросистемы его питания. Поэтому в первых бустер-
ных системах управления, в которых гидроусилители были еще недоста-
точно надежны, предусматривалась возможность перехода на аварийное
ручное управление с помощью мускульной силы летчика. Однако такой
способ обеспечения безопасности вызывал необходимость сохранения
аэродинамической и весовой компенсаций рулевых поверхностей, аэро-
динамических триммеров, а также, как правило, ограничивал возмож-
ность полета на некоторых режимах. Наряду с этим, при применении
варианта перехода на аварийное ручное управление в самих гидроуси-
лителях должен быть предусмотрен ряд устройств (как, например, уст-
ройство стопорения золотника, устройства обеспечения безударного пе-
рехода и т. д.), в свою очередь, снижающих надежность самого гидро-
усилителя.
При использовании для продольного управления цельноповоротного
стабилизатора аварийный переход на ручное управление невозможен не
только вследствие весьма больших шарнирных моментов, но и главным
образом потому, что на дозвуковых скоростях стабилизатор, как прави-
ло, оказывается перекомпенсированиым (вследствие смещения центра
давления вперед от оси вращения).
При использовании необратимой бустерной системы управления без
возможности перехода в аварийном случае на ручное управление толь-
ко с помощью мускульной силы летчика безопасность полета, помимо
других мер по повышению надежности гидроусилителей и гидросистем
их питания, обеспечивается резервированием этих гидроусилителей и
гидросистем. В настоящее время принцип резервирования гидроусилите-
лей чаще всего осуществляется применением так называемых многока-
мерных (двух- и трехкамерных) гидроусилителей, имеющих две или три
изолированные камеры (цилиндра), в которых перемещаются поршни,
соединенные одним общим штоком. Каждая камера такого гидроусили-
теля питается независимой гидросистемой, а движение поршня в ней ре-
гулируется независимым распределительным золотником.
При нормальной работе многокамерного гидроусилителя силы дав-
ления жидкости на поршень в каждой камере складываются на общем
штоке, поэтому внешняя характеристика многокамерного гидроусилите-
ля по сравнению с однокамерным изменяется в сторону увеличения
преодолеваемой противодействующей силы при той же скорости движе-
ния выходного звена гидроусилителя.
На случай заклинения одного из распределительных золотников
многокамерного гидроусилителя они соединяются между собой через
развязывающие устройства (чаще всего пружинные тяги или торсион-
ные валы, работающие на кручение), которые обеспечивают возмож-
ность (при приложении некоторого дополнительного усилия) перемеще-
ния остальных золотников и, следовательно, возможность управления
гидроусилителем. Заметим, что подача давления в камеру с заклиненным
в настоящее время рекомендуется изолировать отсек, где проходит проводка, от осталь-
ной кабилы. Если по компоновочным соображениям проводка проходит над герметиче-
ским полом кабины, то от остальной кабины она должна быть отделена несиловым
(ложным) полом, отверстия в котором должны быть тщательно заделаны, а места
прохода через него рычагов управления — закрыты специальными мягкими чехлами.
479
золотником прн этом должна быть отключена по сигналу обжатия раз-
вязывающего устройства.
Прн отказе одной из независимых гидросистем питания многокамер-
ного гидроусилителя давление в соответствующей его камере падает и,
как это видно из рис. 19.41, усилия, которые может воспринять гидроуси-
литель, уменьшаются, и, следовательно, уменьшаются воспринимаемые
(располагаемые) шарнирные моменты. Это приводит к необходимости
увеличения мощности гидроусилителей при резервировании с тем, чтобы
даже при одной работающей камере (одной исправной гидросистеме пи-
тания) располагаемые шарнирные моменты превосходили бы потребные.
В противном случае, при отказе одной из гидросистем питания многока-
мерного гидроусилителя, рулевая поверхность будет самопроизвольно
отклоняться под действием шарнирного момента со всеми вытекающими
из этого последствиями.
Поэтому при применении многокамерных гидроусилителей расчет
потребных мощностей, рассматривавшийся в предыдущем параграфе,
производится для одной камеры гидроусилителя и одной гидросистемы,
а все остальные камеры и питающие их гидросистемы (число которых
равно принятому при проектировании допустимому числу отказов за по-
лет) создают избыточную мощность гидроусилителя. Величина этой из-
быточной (резервной) мощности и, следовательно, избыточного веса
системы определяется степенью резервирования и его схемой.
Поясним это на примере. Пусть необходимо обеспечить продолже-
ние полета самолета и совершение посадки после двух отказов. Эту за-
дачу можно решить двумя способами: либо для привода каждой рулевой
поверхности поставить один трехкамериый гидроусилитель с тремя неза-
висимыми гидросистемами питания, либо поставить два двухкамерных
гидроусилителя с четырьмя независимыми гидросистемами питания.
В первом случае суммарная мощность трех гидросистем будет раи-
на утроенной потребной, во втором — суммарная мощность двух гидро-
систем должна быть равна только удвоенной потребной, так как каждая
из четырех гидросистем может иметь только половину потребной мощ-
ности (после двух отказов останется как раз потребная мощность).
В каждом конкретном случае в зависимости от потребной мощности мо-
жет оказаться правильным то или другое решение, обеспечивающее
наименьшие затраты веса на конструкцию гидросистем и гидроусили-
телей.
На небольших самолетах военного назначения, как это следует из
сообщений зарубежной периодической печати, для привода поверхностей
управления, как правило, применяются двухкамерные гидроусилители с
питанием от двух независимых гидросистем. Также предусматривается
питание одной из камер от аварийной гидросистемы, насосы которой
приводятся не только от двигателей самолета, но и от какого-либо друго-
го независимого источника энергии. Такая схема предусматривается для
обеспечения возможности управления прн отказе двигателей.
В случае допущения ограничения маневренности самолета при отка-
зе одной гидросистемы (при условии обеспечения возможности соверше-
ния посадки) при резервировании гидросистем питания камер двухка-
мерного гидроусилителя можно не предусматривать описанного выше
резервирования мощности (т. е. увеличения ее по сравнению с потреб-
ной), если только конструкция гидроусилителей обеспечивает при отказе
сохранение располагаемых шарнирных моментов и уменьшение только
располагаемых скоростей перекладки органов управления.
Это условие достаточно легко выполняется при применении гидро-
усилителей вращательного действия, два гидромотора которых с пита-
нием от независимых гидросистем имеют выход через дифференциал иа
один общий вал. При отказе одной гидросистемы н возрастании нагрузки
на оставшийся гидромотор его регулятор поворачивает наклонную шай-
480
бу в положение, при котором скорость мотора уменьшается, а распола-
гаемый момент на валу увеличивается.
Такие характеристики двухкамерного гидроусилителя поступатель-
ного действия можно обеспечить, например, если давление от двух неза-
висимых гидросистем подвести через клапаны переключения к золотни-
ковым распределительным устройствам обеих камер. При этом одна
система должна быть основной для одной из камер и аварийной для
другой камеры; другая система — основной для второй камеры и ава-
рийной для первой (рис. 19.44). В этом случае при отказе одной из сис-
Рис. 19.44. Запитка камер двухкамерного гидроусилителя («перевер-
нутой» схемы) от двух гидросистем [(вверху справа показаны внеш-
ние характеристики гидроусилителя при нормальной работе двух
гидросистем (сплошная линия) и при отказе одной из гидросистем
(пунктирная линия). Там же для сравнения дана внешняя характе-
ристика одной камеры (штрих-пунктирная линия)]:
1 — входной рычаг, 2— развязывающие пружинные тяги; 3 — электрическая
сигнализация заклинения золотника; 4 — клапаны переключения гидросистем;
5 — золотниковые распределители; 6 — силовой цилиндр гидроусилителя; 7 —
шток с двумя поршнями (стрелкой показано направление движения штока
при заданном смещении входного рычага)
тем давление в обеих камерах будет создаваться оставшейся гидросисте-
мой и располагаемые шарнирные моменты при этом не изменятся.
Уменьшатся только располагаемые скорости перекладки органа управ-
ления, так как производительности насосов одной гидросистемы уже бу-
дет недостаточно для перемещения поршней в двух камерах с той же
скоростью.
Недостатками такой системы является снижение надежности самого
гидроусилителя из-за дополнительных клапанов переключения.
На современных тяжелых самолетах с необратимым бустерным уп-
равлением для повышения безопасности полета на случай возможных
отказов применяется разделение рулевых поверхностей на секции, каж-
дая из которых приводится независимыми гидроусилителями. Питание
этих гидроусилителей также осуществляется от независимых гидросис-
тем, число которых нз соображений повышения безопасности достигает
четырех (например, на самолетах Норт-Америкен ХВ-70А, Боинг-747) и
даже более *.
Необходимо обратить внимание на то, что в системах, где преду-
сматривается возможность выхода из строя части гидроусилителей при-
* На военно-транспортном самолете Локхид С-5А (США) используется шесть
независимых гидросистем.
481
Рис. >19 45
Компоновка агрегатов управления
на французском СВВП Дассо «Бальзак»:
1 — размещение агрегатов механической части системы продпль
кого управления в носовой части фюзеляжа / — ручка продоль-
ного н поперечного управления. 2—трехплечая качалка подклю-
чения системы загрузи, J — загруючный механизм, 4— элект
ромехантм триммерного эффекта, 5 — электрогидравтический
сервопривод управления клапаном струйных рулей продольного
управления от системы автоматической стабилизации, 6 —тяг?
управления клапаном. 7—клапан струйных рулей тангажа, 8 —
смесительный механизм команд продольного и поперечного уп-
равлений элевонами 9 — размыкающееся звено, обеспечивающее
возможность перехода е ручного на автоматическое управление
клапанои 7 от системы стабилизации, /0— вспомогательный
гидроусилитель продольного управления, 11—размещение агре
гатов струйного управления и механической части системы уп
равления рулем направления // — передние дублированные воз-
душные сопла струйного управления по тангажу. 12 — педали
управления рулем направления и клапаном струйного управле-
ния по рысканию, 13 — тросовая проводка от педалей; 14 — воз-
душным коллектор системы струйного управления; 15 — дублиро-
ванные воздушные сопла струйного управления по крену на
правом крыле. 16— фильтры отбираемого от двигателей возду-
ха, /7— подъемные ТРД (8 шт.); 18 — трехплечая секторная
качалка подключения системы загрузки педалей. 19— загруюч-
пый механизм педалей, 20— механизм триммерного эффекта,
21 — подсоединение механической проводки управления клапаном
струйных рулей рыскания 22 — руль направления, 23 — гидро-
усилитель. 24— рычаг с изменяемым плечом для регулирования
передаточного числа 25—тросовая проводка управления клапа-
ном струйных рулей рыскания, 26 — клапан струйных рулен
оыскания, 27—воздушное сопло (левое) струйного управления
по рысканию, 28—задние дублированные воздушные сопла
струйного управления по тангажу 29 — дублированные воздуш-
ные магистрали к соплам 28, 30—отбор воздуха к турбонасос
ному агрегату, 31— две секции элевонов (левого крыла), 32 —
гидроусилитель привода секции элевона. 33— дублированные
воздушные сопла струйного управления по крену на левом кры
ле. 34 — дублированные воздушные магистрали к соплам 33.
35 — воздухопроводы отбора воздуха от компрессоров подъемных
ТРД, 36— клапан струйных рулей крена, 37 — дублированнг.ге
воздушные магистрали к соплам 11 111— размещение агрегатов
механической части системы поперечного управления в носовон
части фюзеляжа, 38— механизм загрузки ручки при поперечном
управлении. 39—электромеханизм триммерного эффекта, 40—
тяга управления клапаном струйных рулей крена, 41— электро-
гидравлический сервопривод управления клапаном струйных ру-
лей крена от системы автоматической стабилизации, 42—раз-
мыкающееся звено. 43— вспомогательны,! гидроусилитель попе-
речного управления, 44— трехплечая качалка подсоединения си
стемы загрузки, 45—вывод тяги управления по крену через
ось вращения ручки при управлении по тангажу
вода одной поверхности управления (разделенной на секции), входные
звенья этих гидроусилителей должны подсоединяться к общей проводке
через «развязывающие» механизмы, допускающие возможность движе-
ния проводки и входных звеньев исправных гидроусилителей на полный
ход проводки при заклинении одного или нескольких гидроусилителей в
данном канале управления. Эти механизмы выполняются в виде так
называемых пружинных тяг с достаточно большим предварительным за-
тягом пружины или качалки с ограничительной пружинно-кулачковой
муфтой, рассчитанной на передачу определенного момента (рис. 1946).
Рнс 19 46 Конструкция «развязывающей» качалки с ограничи-
тельной моментной муфтой
/ — входной рычаг с осью 2 —стопорное кольцо с зубьями. 3 —пружина.
4 — гайка регулировки затяга пружины. 5 — втулка скольжения. 6 — ша-
риковый подшипник, 7 —распорная втулка, 8 —гайка, 9 — выходной ры-
чаг со стаканом
Современные скоростные, а особенно сверхзвуковые, самолеты час-
то обладают настолько неблагоприятными собственными характеристи-
ками устойчивости и управляемости, что отказ автоматических систем
улучшения этих характеристик даже при нормально работающих гидро-
усилителях может привести к невозможности управления. Поэтому на
таких самолетах эти автоматические системы также многократно резер-
вируются (известны системы с 3- и 4-кратным резервированием).
Более высокие требования по надежности системы управления
предъявляются к самолетам особых типов со струйным управлением
(СВВП, ВКС и др.). Так, для повышения безопасности на случай отказа
одного из подъемных двигателей, от которых воздух отбирается для
струйного управления, магистрали отбора воздуха от каждого двигателя
объединяются в общий коллектор, сжатый воздух от которого подводит-
ся к клапанам, управляющим его выпуском через сопла (струйники).
Магистрали подвода воздуха на СВВП пли паро-газовых смесей на
ВКС к соплам реактивного управления так же как и клапаны управле-
ния, как правило, дублируются (см. рис. 19.12 и 19.45). Интересно от-
метить, что на СВВП военного назначения клапаны управления выпус-
ком воздуха через сопла располагаются ближе к коллектору. Это не-
сколько уменьшает быстродействие такой системы реактивного
управления по сравнению с системой, где клапаны располагаются не-
посредственно у сопел (сравни с рис. 19.9), но зато существенно повы-
484
шает живучесть за счет уменьшения длины воздушных магистралей, по-
стоянно находящихся под давлением.
Большую опасность для СВВП представляет отказ одного из подъ-
емных двигателей на режимах вертикального взлета н посадки. Угловое
положение самолета при этом, как правило, должно стабилизироваться
автоматическими системами (подключение исполнительных механизмов
этих систем к проводке управ-
ления СВВП показано, напри-
мер, на рис. 19.9). Быстрая
компенсация вертикальной тя-
ги посредством увеличения тя-
ги оставшихся подъемных дви-
гателей для разгрузки летчика
в напряженной ситуации долж-
на осуществляться также авто-
матически, например, с по-
мощью так называемого груп-
пового компенсатора тяги, за-
меряющего давление выхлоп-
ных газов каждого из подъем-
ных двигателей данной группы
и независимо от летчика, пере-
мещающего рычаги управле-
ния тягой в сторону ее увеличе-
ния при падении давления в
выхлопном сопле одного из
двигателей (рис. 19.47).
Рис. 19.47. Установка автоматического группо-
вого компенсатора тяги группы подъемных
ТРД СВВП:
/ — рычаг управления дросселем двигателя; 2 — про-
водка управления к дроссельным рычагам; 3 —тяга
от рычага управления вертикальной тягой (у летчи-
ка); 4 — дифференциальная (суммирующая) качалка;
5 —групповой компенсатор тяги; 6 — подвод давле-
ния выхлопных газов ТРД к вычислителю компен-
сатора
* * *
В заключение отметим, что вследствие все большей механизации и
автоматизации систем управления современных самолетов, роста по-
требных мощностей гидросистем н резервирования с целью повышения
безопасности относительный вес управления С?уПр н гидросистем Gr.c на
современных самолетах заметно увеличился по сравнению с самолетами
с безбустерным управлением.
Так, обработка статистических данных для самолётов с безбустер-
ным управлением дает <?ynp —0,006—0,015; <?г.с = 0,01—0,015 (включая
систему управления механизацией крыла).
Для самолетов с необратимым бустерным управлением очень труд-
но провести грань между агрегатами системы управления и гидросисте-
мы. Поэтому для этих самолетов можно принимать £Упр+гс=0,025—0,045.
Вследствие необходимости использования ряда одинаковых агрегатов
для легких и тяжелых самолетов большие значения относительных ве-
сов, как правило, соответствуют самолетам с меньшим взлетным весом.
16—1062
ПРИЛОЖЕНИЯ
Приложение 1
ТИПОВАЯ ВЕСОВАЯ СВОДКА САМОЛЕТА
I. Конструкция самолета.
1. Крыло (включая герметизацию топливных отсеков).
2. Фюзеляж (включая герметизацию отсеков).
3. Оперение (включая форкилн и шайбы).
4. Шасси (включая створки и обтекатели).
5. Вес окраски.
II. Силовая установка.
1. Двигатели (основные и вспомогательные, с системами реверса
тяги н шумоглушителями).
2. Воздушные винты с кокамн и креплением (для самолетов с ПД
и ТВД).
3. Средства установки двигателей:
а) мотогондолы с воздушными каналами (если воздушный канал
конструктивно связан с фюзеляжем, то он относится к весу фюзеляжа);
б) пилоны;
в) капоты;
г) моторамы и узлы крепления;
д) механизмы поворота двигателей (для самолетов вертикального
взлета и посадки).
4. Системы двигателей:
а) система запуска;
б) маслосистема;
в) система регулирования воздухозаборников;
г) система охлаждения;
д) система выхлопа;
е) система огнетушения;
ж) система управления двигателями;
з) система контроля работы двигателей;
и) противообледенительная система силовой установки.
5. Топливная система:
а) топливные баки с протекторами;
б) установочная арматура баков;
в) система подачи топлива (топливопроводы и насосы);
г) система наддува (инертного газа);
д) система автоматического управления расходом топлива;
е) система заправки;
ж) система аварийного слива;
з) система заправки в полете.
III. Оборудование и управление.
1. Гидросистема:
а) источники энергии;
б) арматура, баки, коммуникации;
в) рабочая жидкость;
г) крепления и эксплуатационные устройства.
2. Пневмосистема:
486
а) источники энергии;
б) арматура, баллоны, коммуникации;
в) сжатый воздух;
г) крепления и эксплуатационные устройства.
3. Электрооборудование:
а) генераторы и аккумуляторы;
б) преобразователи энергии;
в) электропроводка, аппаратура, детали крепления и эксплуатаци-
онные устройства.
4. Управление самолетом:
а) управление рулями и элеронами;
б) управление закрылками, предкрылками, интерцепторами;
в) управление другими механизмами и агрегатами (кроме силовой
установки).
5. Радиооборудование:
а) аппаратура радиосвязи;
б) радионавигационное оборудование;
в) радиолокационное оборудование;
г) системы автоматического взлета и посадки.
Примечание. Радиооборудование включает коммуникации, антенны, аппара-
туру и устройства крепления.
6. Аэронавигационное оборудование:
а) аэронавигационные приборы;
б) приборы контроля работы систем и механизмов (кроме силовой
установки);
в) автопилот;
г) вычислительные устройства, пульты, приборные доски.
7. Противообледенительная система.
8. Система теплозвукоизоляции кабин н приборных отсеков.
9. Оборудование жизнеобеспечения и бытовое оборудование:
а) сидения экипажа;
б) сидения пассажиров;
в) система кондиционирования;
г) кислородная система;
д) туалеты;
е) кухни и буфеты (для пассажирских самолетов);
ж) гардеробы и багажники (для пассажирских самолетов);
з) противопожарное оборудование кабин;
и) система катапультирования экипажа.
10. Специальное оборудование, вооружение и бронирование:
а) система автоконтроля работы оборудования и конструкции са-
молета;
б) пушки, пулеметы с установкой (без боезапаса);
в) детали, установки и оборудование ракетного вооружения;
г) оборудование бомбардировочное, крепление устройств активной
и пассивной защиты;
д) бронирование экипажа и оборудования;
е) фотооборудоваиие, системы обнаружения и т. п.;
ж) швартовочное (несъемное) оборудование.
IV. Пустой самолет.
1. Конструкция самолета.
2. Силовая установка.
3. Оборудование и управление.
V. Снаряжение и служебная нагрузка.
1. Экипаж:
а) летно-подъемный состав с личными вещами;
б) вспомогательный состав (бортпроводники и т. п.).
16*
487
2. Вода в буфете и умывальниках (пассажирские самолеты).
3. Невырабатываемое топливо.
4. Масло.
5. Расходуемые в полете технические жидкости (например, проти-
вообледенительная жидкость).
6. Продукты в буфете пассажирского самолета (с контейнерами).
7. Литература для пассажиров, ковры, чехлы для сидений, аптечка
и т. п.
8. Спасательное оборудование (лодки, аварийные трапы и т. д.).
9. Запасные части, бортииструмеит, чехлы для агрегатов самолета,
сигнальные ракеты.
10. Подвесные баки (без топлива), комплекты съемных подвесок
для спецгрузов, съемное санитарное оборудование.
11. Контейнеры для багажа, грузов и почты.
VI. Снаряженный самолет.
1. Пустой самолет.
2. Снаряжение.
3. Служебная нагрузка.
VII. Топливо.
1. Расходуемое топливо.
2. Навигационный запас.
3. Топливо в дополнительных и подвесных баках.
VIII. Полезная нагрузка.
1. Бомбы, торпеды, ракеты.
2. Боезапас (патроны, снаряды).
3. Спецгрузы и сбрасываемые вещества.
4. Снаряжение для фоторазведки.
5. Десантники с вооружением и парашю-
тами.
6. Боевая техника, включая вытяжные и
основные парашюты, платформы.
7. Пассажиры. 1 Пассажирский
8. Багаж, грузы, почта. ) самолет
9. Химикаты (сельскохозяйственный самолет).
IX. Полная нагрузка.
1. Снаряжение и служебная нагрузка.
2. Топливо.
3. Полезная нагрузка.
X. Взлетный вес самолета.
1. Вес пустого самолета.
2. Вес полной нагрузки.
Истребители,
бомбардировщики
разведчики
Военно-
транспортные
самолеты
Приложение II
ПРИМЕРНЫЙ ПЕРЕЧЕНЬ РАДИОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ
САМОЛЕТОВ
Тяжелые неманевренные самолеты.
1. Связное оборудование:
а) коротковолновые приемно-передающие радиостанции (два комп-
лекта для дублирования);
б) ультракоротковолновые приемо-передающие радиостанции (два
комплекта);
в) радиотелефон;
г) аппаратура для приема служебных передач.
488
2. Навигационное оборудование:
а) система ближней навигации и автоматической посадки;
б) система автономной навигации (инерциальной, астронавигации);
в) радиокомпас;
г) радиовысотомер;
д) маркерный приемник;
е) счетно-решающее устройство для оптимизации режимов полета.
3. Радиолокационное оборудование:
а) система индикации и обнаружения препятствий (транспортные
самолеты);
б) система обнаружения и наведения;
в) система управления вооружением;
г) система помех и защиты от нападения.
4. Система опознавания (ответчик и запросчик).
5. Внутренняя (бортовая) радиосвязь:
а) громкоговорящее устройство в кабинах;
б) самолетное переговорное устройство.
6. Бортовое электронное оборудование автоматического контроля
систем, механизмов и конструкции самолета.
Маневренные военные самолеты.
1. Связное оборудование:
а) ультракоротковолновая и дециметровая командная радио-
станции;
б) коротковолновая связная радиостанция.
2. Навигационное оборудование:
а) система ближней навигации и посадки;
б) радиокомпас, радиовысотомер, маркерный радиоприемник.
3. Система наведения с наземного командного пункта (бортовая
система приема команд).
4. Радиолокационное оборудование:
а) радиолокационный прицел;
б) система индикации;
в) счетно-решающее устройство;
г) система управления оружием.
5. Система опознавания (ответчик и запросчик).
6. Система воздушных сигналов и система «Курсовертикаль».
Приложение III
ХАРАКТЕРИСТИКИ СОВРЕМЕННЫХ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Предлагаемые ниже характеристики современных газотурбинных
двигателей (таблица и рис. III.1—III.10) предназначены для выполне-
ния необходимых расчетов в период дипломного проектирования.
Высотно-скоростные характеристики ТРД и ТРДД
Не являясь характеристиками каких-либо конкретных двигателей,
данные характеристики, однако, с достаточной для их назначения сте-
пенью точности отражают влияние высоты и скорости полета на тягу и
удельный расход топлива современных авиационных двигателей (иа гра-
фиках приведены относительные значения величины Р и ср).
Как было показано в гл. VII, характеристики ТРД и ТРДД имеют
определенные отличительные особенности, обусловленные типом двига-
теля и максимальной скоростью полета, но при выполнении расчетов к
489
Назначение* Двигатели длт дозвуковых пассажирских самолетов Двигатели для сверхзвуковых самолетов Двигатели для СПС
многоцелевого назначения
Тип двигателя ТРДД ТРДД ТРДД ТРДД ТРД ТРДД ТРД ТРД
Фирма Пратт-Уитни Пратт-Уитни Пратт-Уитни Роллс-Роь'с Дженерал- Электрик Пратт-Уитни Брис !‘зл’- Сидлли Дженерал- Электрик
Обозначение (марка) Степень двухконтур- иости Взлетный режим (с полным форсированием): тяга в иге удельный расход топ лива в кге/кге-ч расход воздуха в кгс/с Взлетный режим (без форсирования): JT8D (США) т --= 1,1 JT3D (США) т — 1,4 JT9D (США) т = 5 RB. 172/Т260 (Англия) т — 1,25 3150 1,75 50 J79 (США) 7700 1,85 76,5 TF-30 (США) т= 1,3 9070 2,0 113 Олимп» 593 (Англия) 16 970 1,68 190 GE4J5 (США) 28 700 1,72 280
тяга в кге 6350 8165 19 750 2100 4950 5200 15 960 21 700
удельный расход топ- лива в кге/кге-ч 0,585 0,54 0,415 0,63 0,73 0,85 0,7 0,72
расход воздуха в кгс/с 143 204 685 50 76,5 113 190 280
Сухой вес в кге 1405 1890 3 575 580 1670 1590 2 860 4760
Длина в м 3,7 3,98 7,05 3,1 4,6 ~5 ~6 7,82
Диаметр (max) в м 1,08 1,35 2,43 0,81 1.1 1,2 1.4 1,88
Самолет (стартовый «Супер-Кара- Боинг-707 Боинг-747 «Ягуар» F-104 F-111 «Конкорт» Боинг-2707
вес, число двигателей) велла» (Gg = 141 тс; (см. рис. (Go = 10 тс, (Оо = (Gq — 31,8 тс; (Go == 170 тс; (Go = 27O тс;
(см. рис. Ш-1) (Go _ 50 тс; Лдв ~ 2), Боинг-727 (Go —77 тс, Д,1В == 3), Дуглас ДС-9 (Go = 41 тс; Лдв = 2). Боищ-737 45 тс; л1В=2) "д. = 4), Дуглас ДС-8 (Go-- 140,5 тс; «лв = 4) НТ-2) (Gq = 322 тс. «до =4) П и. = 2) — 10,2 тс, ^чв = 1). «Фантом»-!! (Go = 21 тс; тцв = 2) "ди = 2), «Корсар»-11 (см. рис. Ш. 3) (Gq = 14,8 тс; Лдв — О 'll, = Л "д. = 4)
* Данная таблица основных характеристик наиболее совершенных зарубежных ТРД и ТРДД составлена по материалам, опубликованным в
открытой иностранной литературе.
jo I — воздухозаборник с
Рис Ill 1 Компоновка ТРДД Пратт Уитни Л8Д на
противообледенительной системой 2—двигатель 3 — капот
тяги 7 _ задний узел крепления двигателя
фюзеляже французского самолета «Супер К<равелла»
4 _ подкос крепления двигателя 5 — главный узел крепления
8 —сопло, 9 — ВСУ, 10 — воздухозаборник ВСУ
двигателя
б — реверсер
/ — вал привода вспомогательных агрегатов; 2 —соосный привод постоянной ско-
рости; 3 — генератор мощностью 60 кВ • А; 4— насос и блок управления; 5 —
центрифуга; 6 —маслобак; 7 —привод реверсера тяги газогенератора; S — тросо-
вая проводка к реверсеру; 9 — пневмомотор привода реверсера тяги вентилятора;
10 — гибкий приводной вал; // — коробка передач и домкрат; 12 — перемещаю-
щееся кольцо; 13 — роликовые направляющие; 14 — узел подвески двигателя;
/5—звено, воспринимающее тягу; 16—перепуск воздуха; /7 — образный клапан
Рис. Ш.2. Компоновка ТРДД Пратт-Уитни Л9Д и схема работы реверсеров тяги и впускных створок (самолет Боинг-747):
- ---- --------- о —......х ----------------« .... отбора от 8-й ступени; 18 — отсечной клапан отбора от 15-й ступени;
ный теплообменник; 20— воздух от вентилятора к теплообменнику:
ной клапан воздуха от вентилятора; 22 — клапан сбрасывания давления: ......
регулирования температуры перепускаемого воздуха; 24 — отсечной и регулирую-
щий клапан; 25 — магистраль воздушной системы; 26 — пневмостартер; 27 — при-
водимый пцевмомотором гидронасос; 28— гидробак; 29 — статоры; 30—болты;
31—решетка реверсера; 32 — створки реверсера; 33— впускные створки; 34 — аку-
стические панели; 35 — вентилятор; 36— стаюры
19 — первич-
21 — выпуск»
т. 23 — блок
дипломному проекту этими особенностями в высотно-скоростных харак-
теристиках можно пренебречь. Поэтому приведенные ниже (см.
рис. III-6) характеристики сверхзвукового ГТД (рассчитанного на
Мгаах~3,5) можно в данном случае рассматривать как характеристики
ТРД (и ТРДФ), а также ТРДД с небольшой степенью двухконтурностн
(без форсажа и с форсажем во втором контуре), предназначенных для
современных многоцелевых самолетов и самолетов с крейсерской ско-
ростью, соответствующей МкРейс~2,0—3,0. Высотно-скоростные характе-
ристики подъемных двигателей для СВВП и СУВП можно отождествить
с характеристиками дозвукового ТРДД (рнс. Ш-4).
Рис. 111.3. Компоновка ТРДД Пратт-Уитни TF-30 на истребителе-бомбардировщике
«Корсар» 11 (США):
/ — воздушный канал, 2 — двигатель; 3 — стартер; 4 — генератор
Высотно-скоростные характеристики дозвуковых ТРДД с большой
степенью двухконтурностн (т=5—8) приводятся отдельно (рис. Ш-5).
Так как на графиках даны относительные значения тяги и удельно-
го расхода топлива (отнесенные к стартовым значениям указанных ве-
личин), следовательно, зависимости P=f(M, Н) и cp=f(M, Н) можно
получить для любой выбранной величины Ро н ср0.
Как известно, на высотах, больших 11 км (прн неизменном режиме
и M = const), удельный расход топлива остается постоянным, а тяга дви-
гателя изменяется пропорционально плотности или давлению атмосфер-
ного воздуха, поэтому она определяется простым пересчетом. Например,
для какого-либо значения числа М:
р ___р Р13 и 1И Р — р - Г ____________г- ___г — г
13 Ц или^о-^.-^ , Гр11_гр13-гр15-
493
Переход от режима набора высоты к режиму крейсерского полета
(значения ср.крейС приводятся ниже) осуществляется путем дросселиро-
вания двигателя (снижения оборотов). В крейсерском полете число
оборотов П = (0,8—0,9) Птах-
Для сверхзвукового крейсерского полета на больших высотах при-
меняется обычно режим частичного форсажа (как правило, малый фор-
саж). Число оборотов при этом также несколько снижается.
Рис. 111.4. Высотно-скоростные харак-
теристики ТРДД (т=0—2), рассчи-
танного на дозвуковой крейсерский
полет
Рис. 111.5. Высотно-скоростные ха-
рактеристики ТРДД (т=6), рассчи-
танного на дозвуковой крейсерский
полет
Ниже приводятся:
—• зависимость удельного расхода топлива (керосин) авиационных
ВРД от крейсерского числа М (рис. III.7). Для криогенного топлива
(жидкий водород) указанная зависимость будет такой же, только
„ gP (кер) .
сР(вод)~ 2 ,
— зависимость стартового секундного расхода воздуха ТРД и
ТРДД от максимальной стартовой тяги (рис. III-8). Резкое возрастание
расхода воздуха больших ТРДД объясняется высокой степенью двухкон-
турности этих двигателей (т=Ъ—8);
— зависимость приведенного расхода воздуха ТРД и ТРДД от тем-
пературы полного торможения (рис. Ш-9);
494
V/Pn У/Ро
Рис. III.6. Высотно-
скоростные характе-
ристики ГТД, рассчи-
танного па сверхзву-
ковой крейсерский по-
лет и максимальную
скорость, соответст-
вующую числу
М= 34-3,5:
А — с форсажем; Б —
максимальный режим
без форсажа
— зависимость диаметра ТРД и ТРДД от стартовой тяги
(рис. III.10). Резкое возрастание диаметра больших ТРДД объясняется
высокой степенью двухконтуриости этих двигателей (т = 5—8).
Рис. Ш.7. Зависимость удельного расхода
топлива (керосин) авиационных ВРД от
крейсерского числа М:
1 — ТРДД (т-1-8: лк =20-27): 2 —ТРД и ТРДД
(т-0,5—1,5: Лк-9—10); 3 — ТРД и ТРДД (т=
—0,5—1,5; «в=3—4); 4 — ПВРД с дозвуковым сго-
ранием
Рис. III.8. Зависимость стартового
секундного расхода воздуха ТРД и
ТРДД от максимальной стартовой
/7=7 ^в.пр \
тяги С/В.пр ~~—
\ “во /
Рис. Ш.9. Зависимость приведенного оасхода воздуха для раз-
личных ТРД и ТРДД от температуры полного торможения
(Сво — стартовый секундный расход воздуха)
496
Рис. 111.10. Зависимость диаметра ТРД и ТРДД
от стартовой тяги
Приложение IV
ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ САМОЛЕТОВ
Ниже приведены основные данные и общие виды в трех проекциях
многоцелевых самолетов, самолетов тактического назначения, военно-
транспортных, экспериментальных и пассажирских (рис. IV.1—IV.21).
Эти данные могут быть полезны прн дипломном проектировании.
Рис. IV. I. Истребитель «Мираж»
ШС (Франция)
Рис. IV.2. Истребитель-бомбардировщик
«Ягуар» (Англия — Франция)
497
Рис. 1V.3. Многоцелевой истребитель SAAB-37 «Вигген»
(Швеция)
Рис 1V.4. Многоцелевой истребитель F4H-1 «Фантом» 11
(США)
Рис. 1V.5. Сверхзвуковой бомбардировщик «Мираж» IVA (Фран-
ция)
498
Рис. IV.6. Многоцелевой самолет TSR-2 (Англия)
Рис. IV.7. Истребитель-перехватчик Локхид YF-I2A
(США)
Рис. IV.8 Многоцелевой самолет Дженерал-Дайнемикс F-111A (США)
499
Рис. IV.9. Экспериментальный самолет Норт-Амерлкен Х-15
(США)
Рис. IV.I0. Экспериментальный самолет Норт-Америкеи ХВ-70А (США)
Рис. IV.ll. Военно-транспортный самолет Локхид С-141 А
(США)
500
Рис. IV.12. Военно-транспортный самолет Локхид С-5А
(США)
Рис. IV.I4. Административный и пассажирский самолет HFB-320
«Ганза» (ФРГ)
501
Рис. IV. 15. Пассажирский самолет для авиалиний
малой протяженности Дассо «Меркурий» (Франция)
Рис. IV.16. Пассажирский самолет для авиалиний средней протяжен-
ности Ту-]54 (СССР)
502
Рис. IV.17. Пассажирский самолет для авиалиний большой
протяженности Ил-62 (СССР)
Рис. IV.18 Самолет большой пассажировместимости Лок-
хид L-1011 (США)
503
Рис. IV.19. Самолет большой пассажировместимости
Боинг-747 (США)
Рис. IV.20. Сверхзвуковой пассажирский самолет «Кон-
корд> (Франция — Англия)
504
Рис. IV.21. Сверхзвуковой пассажирский самолет Боинг-2707-300 (проект, США)
505
сл а Многоцелевые самолеты (истребители и бомбардировщики)
Параметры и характеристики «Мираж» 111 С (Франция) «Ягуар» (Англия—Франция) «Ви1 ген> (Швеция) «Фантом»-!! (США) F-106A Дельта Дарт (США) «Виджичент» A3J-I (США)
Взлетный вес в кге 8950 9980 16 000 24 800 16 000 27 000
Тяга двигателей на старте с 7500 6300 12 000 15000 11 000 15 400
форсажем (без форсажа) (4250) (4200) (7 000) (9 500) (7800) (9 900)
Число двигателей 1 дв. ТРДФ 4-ЖРД 2 дв. ТРДД 1 дв. ТРДД 2дв. ТРДФ 1 дв. ТРДФ 2 дв. ДРДФ
Тяговооруженность с форса- 0,84 0,632 0,75 0,604 0,69 0,57
жем (без форсажа) (0,475) (0,424) (0,44) (0,383) (0,49) (0,367)
Площадь крыла в м2 35 24,2 35 49,2 61,5 65
(есть УПС) (есть УПС)
Нагрузка при взлете в кге/м2 256 412 457 505 260 415
Ра з мак в м 8,2 8,5 10,61 Л ,7 11,62 16,15
Длина в м 13,3 15,5 16,31 17,76 21,56 22,25
Стреловидность крыла по пе- редней кромке 60° 4,5 45° 42°— 58° 50° 60° 45°
Относительная толщина кры- 5,1 4,5 3,5
ла у корня (на конце) в % (3,5) (средняя)
Вес пустого в кге (%) 6350 12 700 11 800 12 300
(71) (51,2) (73,7)
Вес топлива во внутренних 1700 6 200
баках в кге (%) (19) (25)
Максимально ’допустимый посадочный вес в кге 6600 17200
Максимальная скорость в км/ч
/7=0 ЛОО М= 1,1 М- 1,0
Н 11 км 2350 (М = 2,2) М = 1,7 М = 2,0 М = 2,4 М =г 2,1 М == 2,1
Практический потолок: — без ЖРД в км 18 21,6 >17 21
— с ЖРД в км 22
Дальность полета (топливо только во внутренних баках) 1300 1250 >2 400 2 300 4 000
Дальность перегоночная в км 3600 4500 3 700 4 350 >6 000
Взлетная дистанция в м 900 715 2 000 1 300
Посадочная дистанция в м 950 850 1500
Вооружение (П — пушки; П = 2х30; УРС; PC УРС; Б УРС УРС УРС; PC; 5
У PC—управляемые реактив- 2хУРС; Б = 6000 кге
ные снаряды; PC—реактивные PC = 72 шт.
снаряды; Б — бомбы) Б = 1350 кге
Самолеты тактического назначения, экспериментальные и военно-транспортныё
Параметры и характеристики Тактические самолеты Экспериментальные самолеты Военно-транспортные самолеты
<Мираж» 1VA (Франция) TSR-2 (Англия) YF-12A (США) F-111A (США) Х-15 (США) ХВ-70А (США) С-141А (США) С-5А (США)
Взлетный вес в тс 30 40 45 31,8 15,14 250 143,6 323
Тяга па старте
Р,,ф в тс 13,6 30 29 18 81,5
Ри в тс 9.8 18,2 26,1 54,2 38,1 74,4
Число двигателей 2ХТРДФ 2ХТРДФ 2ХТРДД 2ХТРДД 1ХЖРЛ 6ХТДРФ 4 X ТРДД 4ХТРДД
РОф 0,454 0,750 0,645 0,565 0,326 — —
Ро 0,327 0,455 1,72 0,265 0,23
S в м2 63 60,5 120 48,8-58,74 18,6 585 300 576
Ра в кгс/м2 477 660 375 542- 652 815 427 479 560
Размах в м 11,8 10,7 15 19,2- 9,74 6,7 32 48,8 67,8
Длина в м 23,5 27,4 28 22,4 15,24 56,4 44,2 75,0
Удлинение крыла X 2,21 1,91 1,90 7,56—1,34 2,42 1,75 7,91 7,98
X 25° 25°
Х°П.К 60 60 60 16—72,5 35 65
Со В % 4,5 ~4 3,5-12 5 ~з 13 12
Си в % 3,5 (средняя) (сре (няя) 10 11
Guy с т в тс 14,0 17,87 6,07 107,5 61,2 | 144,5 .
Параметры и характеристики Тактические самолеты
<Мираж> IVA (Франция) TSR-2 (Англия) YF-12A (США)
.
Сдует В % 46,6
Ст в тс 11,5
Ст в % 38,4
Максимальный СП1Н в тс 3
Сп.я в % 10
Максимальный
Спос. доп В ТС
V (или М) в км/ч, //=0 км 1220 М = 1,5
Н 11 км М — 2,2 М = 2,2 М = 3
Нпракт В КМ 18,3 -30
Z-расч В КМ -3000 3200
Лщах В КМ 6400
Ьразб В М -1000 550
Z-n р о б В М -700 600
Z-взл. диет В М
Z,пос. диет В М
Vnoc В КМ/Ч
Вооружение Б; PC УРС; PC; Б
Примечания УПС на
закрылках
Продолжение
Экспериментальные самолеты Военно-транспортные самолеты
F-111A Х-15 ХВ-70А С-141А С-5А
(США) (США) (США) (США) (США)
56,2 40 43 42,6 44,7
-6 8,33 136 48 76
18,9 55,0 55 33,5 23,5
0,68 10 32 99,8
4,5 4 22,3 30,9
6,6 117 288
М= 1,1 —
М = 2,5 Л1-6— 7 М = 3 815 815
— 18 >100 20—25 12,2
-3200 12000 6 700 5 600
6400 14 500 10 000 10 200
500 • 1200
600 1400 2 000 535
900 1 600 2 285
1 130 1220
200 370
П; УРС; Б — —
^впп,~ '800 м
Пассажирские реактивные самолеты
Параметры и характеристики PD-808 (Италия — .США) HFB-320 <Ганза> (ФРГ) Дассо «Меркурий» (Франция) Ту-154 (СССР) Ил-62 (СССР) Локхид L-1011 (США) Боинг-747В (США) «Конкорд» (Франция — Англия) Боинг-2707- 300 (проект, США)
О0 в тс 7,5 8,2 52,5 84 15-1,5 186 352 148 310,2
Ро в тс 2,38 2,58 14 29,5 42 53,8 86,5 63,6 121,5
Пдв 2ХТРД 2ХТРДД 2ХТРДД ЗХТРДД 4ХТРДД ЗХТРДД 4 X ТРДД 4ХТРДФ 4ХТРДФ
Двухконтурность ТРДД 0 0 1,05 5,0 5,0
Ро 0,317 0,315 0,268 0,339 0,272 0,29 0,245 0,43 0,357
S в м2 20,9 30,0 116 180 282 321 511 357 730
р0 в кгс/мг 359 272 452 467 548 575 630 415 465
Размах в м 11,42 14,42 30,55 37,55 43,3 47,0 59,8 43,2
Длина в м 12,0 16,61 34,0 47,9 53,12 53,34 70,5 58,3 85,34
X 6,25 6,90 8,06 7,0 6,63 6,88 7,0 2,55
X’ 0 —15 25 35 35 35 37,5 7„к = 65’ (средний) 'Лик = 50,5°
Со 0,09 0,13 0,127 0,120 0,124 0,0297 0,031
т 0,09 0,10 0,10 0,082 0,08 0,0215 (средняя)
Оф в М 1,8 2,06 3,9 3,8 3,93 (средний) 5,97 6,5 3,00 (средний) ~4
Аф 6,66 7,55 8,46 11,4 13 8,7. 10,6 19,4 21,4
Ппас 7 12 155 158 186 345 490 136 321
Шаг кресел в см 76 75 75 86,5 86
Параметры и характеристики PD-808 (Италия — США) HFB-320 «Ганза» (ФРГ) Дассо «Меркурий» (Франция)
Высота пассажирской каби- 1,5 1,55 2,19
мы в м
Длила пассажирской каби- 3,75 4,6 20,51
НЫ В м
Guyст в ТС 4,2 4,42 25,45
Gnycr В % 56 53,8 48,5
Gt расч В ТС 2,25 2,38 7,0
G-г.расч В % 30 29 14,2
Максимальный GKQM в тс 0,880 1,2 16
Максимальный GkOM в % 11,8 14,6 30,5
Максимальный Gnoc в тс 7,5 7,62 47,0
км/ч 650 700 830
V KllCHclH R км 10 6 6
Lpai-ч В КМ 2000 2000 900
Оком В ТС 0,88 1,2 15,2
Lmax В КМ 1715
3200 3200
Gkom В ТС 10,9
Ияах В КМ/Ч 206 180 232
^раоб В М 760 860 800
^•про б В М 590 435
Йпп в « 1450 1340 2180
Продолжение
Ту-154- (СССР) Ил-62 (СССР) Локхид L-1011 (США) Боинг-747В (США) «Конкорд» (Франция — Англия) Боинг-2707- 300 (проект, США)
2,59 2,54 1,96
41 57,9 30 53,8
44,0 —95 -147 — 70 131
52,4 51,2 45,7 47,3 38,5
105 184,6
32,5 54,2
16,0 23,0 40 65,4 13 22,2
19,1 14,9 21,5 20,3 8,8 6,53
158 256 195
900 850 960 935 М-2,1 М = 2,7
10 10 9 И 18—20 18-21
2900 6500 6200 6680
16 65,4 12 22,2
5600 5300 9250
5,8 17 34,5
230 240 240 270
900 1800
700 1000
1450 3000 3400 3000 3290
СПИСОК ЛИТЕРАТУРЫ
1. Астахов М. Ф. и др. Справочная книга по расчету самолета на проч-
ность. М., Оборонгиз, 1954.
2. Аэродинамика частей самолета при больших скоростях. Под ред. А. Ф. До-
новэна и Г. Р. Лоурена. М., ИЛ, 1959.
3. Бадягин А. А., Овруцкий Е. А. Проектирование пассажирских са-
молетов с учетом экономики эксплуатации. М., «Машиностроение», 1964.
4. Болховитинов В. Ф. Пути развития летательных аппаратов. М., «Ма-
шиностроение», 1962.
5. Вудсон У, и Коновер Д. Справочник по инженерной психологии для
инженеров и художников-конструкторов. М., «Мир», 1968, стр. 208.
6. Гиммельфарб А. Л. Обработка и использование статистики при проек-
тировании самолета. — «Труды МАИ», вып. 2, 1946. Проектировочный расчет потребного
запаса топлива и полного веса самолета. — «Труды МАИ», вып. 108, 1969.
7. Голубев В. В. Труды по аэродинамике, М. — Л., ГИТТЛ, 1957.
8. Горощенко В. Т. Аэродинамика скоростного самолета. М., Оборонгиз,
1948, стр. 330.
9. Егер С. М. Проектирование пассажирских реактивных самолетов. М., «Ма-
шиностроение», 1964.
10. Каган Б. М., Тэр-Микаэлян Т. М. Решение инженерных задач на
цифровых вычислительных машинах. М., «Энергия», 1964.
11. Калачев Г. С. Показатели маневренности, управляемости и устойчивости
самолетов. М., Оборонгиз, 1958.
12. Кан С. Н. и Свердлов А. И. Расчет самолетов на прочность. М., Обо-
ронгиз, 1958.
13. Крейсон П. М. Самолеты за 20 лет. ОНТИ, 1934. Весовые характеристики,
самолетов, 1935.
14. Лигу м Т. И. Аэродинамика и динамика полета турбореактивных самолетов.
М., «Транспорт», 1967.
15. Мартынов А. К. Экспериментальная аэродинамика. М., Оборонгиз, 1958.
16. Овруцкий Е. А. Экономическая оценка транспортного самолета, РИО
Аэрофлота, 1940.
17. Остославский И. В. Аэродинамика самолета. М., Оборонгиз, 1957.
18. Остославский И. В., Стражева И. В. Динамика полета. М., Обо-
ронгиз, 1963.
19. Павленко В. Ф. Самолеты вертикального взлета и посадки. М., Воен-
нздат, 1966, стр. 144—186.
20. П о л и к о в с к и й В. И., Бадягин А. А. О коэффициенте увеличения
стартового веса летательных аппаратов, ИВУЗ, 1966, № 1.
21. Пышнов В. С. Коэффициенты для оценки самолета. — «Техника воздуш-
ного флота», 1945, № 5.
22. Ра ст риг ин Л. А. Случайный поиск. Рига, «Зинатяе», 1965.
23. Самсонов П. Д. Проектирование и конструкции гидросамолетов, ОНТИ
НКТП, 1936.
24. Ск л янский Ф. И. Управление сверхзвукового самолета. М., «Машино-
строение», 1964, стр. 242—248.
25. Тома шеви ч Д. Л. Конструкция и экономика самолета. М., Оборон-
гиз, 1960.
26. Фадеев Н. Н. Теоретическая формула веса трапециевидного крыла.—
<Труды МАИ», вып. 138, Оборонгиз, 1961.
27. Фадеев Н. Н. Авиационный вес.—«Труды ЦАГИ», вып. 470, 1940.
28— 29. Фадеев Н. Н. Изыскание рациональных размеров самолета. — «Труды
ЦАГИ», вып. 461, 1939.
30. Фомин Н. А. Проектирование самолетов. М., Оборонгиз, 1961.
511
31. Шавров В. Б. История конструкций самолетов в СССР. М., «Машино-
строение», 1969.
32. Шейнин В. М. Весовая и транспортная эффективность пассажирских
самолетов, М, Оборонгиз, 1962.
33. Шейнин В. М. Центровка самолета. М., Оборонгиз, 1952.
34. Ш е н л и Ф. Р. Анализ веса и прочности самолетных конструкций, Обс-
ронгиз, 1957.
35. Эльсгольц Л. Э, Вариационное исчисление. М. — Л, Гостехтеорет-
кздаг, 1952.
36 Everling Е. Verglucks — grossen zur Flugzeugstatistick, ZFM, Nr. 10, 1926.
Second International Conferens, No. 4, 1950, pp. 556—576.
37. The college of Aeronautics Cranfield Note, No. 77, Sept. 1957.
3S Шунейко И. И Крылатые космические корабли, АЙ СССР, [966.
39. Скрипниченко С. Ю Изменяемая стреловидность М., Воеииздат, 1969.
40. Гаухман Я Н, Казанский Б. Н. Основы разработки гиперзвуковых
пассажирских самолетов Р., изд-во РКИИ ГА, 1972.
41. Jane's all the World's Aircraft, London, 11968—<19(71.
Стр
ОГЛАВЛЕНИЕ
Предисловие................................................................ 3
Основные обозначения и сокращения....................................... 5
Введение .................................................................. 8
Часть первая
Общее проектирование самолета
Раздел 1
Теоретические основы и методы общего проектирования самолетов..............15
Глава / Краткий исторический обзор развития методов общего проектирования
и критериев оценки самолетов ............................................. 15
Глава II. Основные и относительные параметры самолета, уравнение относитель-
ных весов. Влияние важнейших параметров самолета на его летные
характеристики ........................................................... 26
§ 1. Уравнение относительных весов самолетов...........................27
§ 2. Зависимость основных летных характеристик самолета от отдельных
Глава III Методика оптимального проектирования самолетов...................55
§ 1. Постановка задач............................................... 55
§ 2. Методы поиска оптимума..........................................57
§ 3. Конструктивные и эксплуатационные ограничения...................61
§ 4. Алгоритмы задач.................................................63
Глава IV. Приближенные методы оптимизации параметров самолета..............69
§ 1. Определение частных оптимумов параметров самолета................70
§ 2. Последовательная оптимизация нескольких параметров...............78
§ 3. Вариационные задачи. Оптимальное распределение относительных тол-
щин крыла по размаху...................................................78
Глава V. Метод градиентов взлетного веса и его применение при проектировании
самолетов.........................................................85
§ 1. Описание метода.....................................................85
§ 2. Определение производных взлетного веса по дополнительному весу ча-
стей самолета.....................................................88
§ 3. Определение производных взлетного веса по аэродинамическим харак-
теристикам самолета 92
§ 4. Определение производных взлетного веса по удельному часовому
расходу топлива ................................................. 95
Раздел И
Выбор схемы, силовой установки и основных параметров самолета...............97
Глава VI Схема самолета. Анализ и выбор схемы . ............................97
§ 1. Анализ и выбор схемы сверхзвуковых самолетов.....................100
§ 2. Анализ и выбор схемы дозвуковых самолетов........................108
§ 3. Схема самолета с крылом изменяемой в полете стреловидности ... .112
§ 4. Расположение двигателей на самолете..............................114
Глава VII. Основные вопросы проектирования силовой установки самолета . . . 119
§ 1. Выбор двигателя для силовой установки самолета...................119
§ 2. Воздухозаборники современных самолетов...........................126
§ 3. Размещение воздухозаборников на самолете.........................135
§ 4. Топливная система самолета.......................................139
Глава VIII. Определение основных параметров самолета.......................142
513
Стр.
§ 1. Определение величины удельной нагрузки на крыло.................143
§ 2. Определение потребной тяговооруженности самолета................1J5
§ 3. Определение полного (взлетного) веса самолета.....................146
Глава IX. Особенности проектирования пассажирских самолетов................149
§ 1. Компоновка пассажирской кабины..................................149
§ 2. Компоновка служебной кабины и обслуживающих помещений...........153
§ 3. Обеспечение аварийной эвакуации пассажиров. Двери и окна в пасса-
жирском помещении......................................................157
§ 4. Выбор основных размеров крыла дозвуковых пассажирских самолетов . 159
§ 5. Выбор тяговооруженности и числа двигателей для дозвуковых пассажир-
ских самолетов.........................................................163
Глава X. Особенности проектирования самолетов вертикального и укороченного
взлета и посадки....................................................... 164
§ 1. Самолеты укороченного взлета и посадки...........................165
§ 2. Самолеты вертикального взлета и посадки....................... . 174
Глава XI. Особенности проектирования воздушно-космического самолета .... 189
§ 1. Особенности полета воздушно-космического самолета...............189
§ 2. Выбор схемы воздушно-космического самолета......................203
§ 3. Определение основных параметров воздушно-космического летательного
аппарата...............................................................209
Раздел ]II
Компоновка и центровка самолета...................................... 226
Глава XII. Компоновка и центровка самолета, общие виды самолета........226
Часть вторая
Проектирование частей самолета
Глава XIII. Общие основы проектирования частей самолета.................. . 241
§ 1. Основные параметры частей самолета.................................241
§ 2. Определение и увязка формы и теоретические чертежи отдельных частей
самолета............................................................. 241
§ 3. Определение веса конструкции агрегата..............................246
§ 4. Разработка конструктивно-силовой схемы агрегата . .................248
§ 5. Выбор материала для элементов конструкции самолета.................251
Глава XIV. Весовая и экономическая оценка конструктивно-проектировочных
решений.................................................................258
§ 1. Весовые эквиваленты различных характеристик самолета и условия вы-
годности конструктивно-проектировочных решений...................258
§ 2. Весовые эквиваленты аэродинамического качества..................................................259
§ 3. Весовые эквиваленты вредного аэродинамического сопротивления и ко-
эффициента Сх0 самолета.............................................. 263
§ 4. Весовые эквиваленты ресурса конструкции самолета................................................267
§ 5. Весовые эквиваленты стоимости конструкции самолета...............................................269
Глава XV. Проектирование крыла самолета.....................................................................275
§ 1. Основные характеристики крыла....................275
§ 2. Геометрические параметры крыла......................................277
§ 3. Аэродинамические характеристики крыльев....................289
§ 4. Весовые характеристики..............................305
§ 5. Характеристики аэроупругости крыла..............................308
§ 6. Определение веса конструкции крыла....................316
§ 7. Выбор основных параметров крыла..............................320
§ 8. Выбор конструктивно-силовой схемы крыла....................327
§ 9. Выбор механизации крыла....................335
§ 10. Выбор площади и размеров элеронов и аэродинамической компенсации 340
§ 11. Выбор угла поперечного V и угла заклинения крыла.341
Глава XVI. Проектирование фюзеляжа..........................................342
§ 1. Выбор основных параметров, размеров и обводов фюзеляжа...........................................342
§ 2. Особенности конструктивно-силовой схемы фюзеляжа..................................................352
§ 3. Определение веса фюзеляжа.........................................................................358
Глава XVII. Проектирование оперения.........................................................................350
§ 1. Основные понятия. Важнейшие характеристики и параметры оперения.
Задачи проектирования ............................................... 350
§ 2. Предварительные соображения и рекомендации по выбору параметров
оперения...............................................................363
§ 3. Выбор положения горизонтального оперения по высоте...............371
§ 4. Предварительная компоновка и уточнение основных параметров опере-
ния. Метод граничных линий.............................................371
514
Стр.
§ 5. Выбор параметров органов управления.............................383
§ 6. Проектирование конструктивно-силовой схемы оперения и схемы сты-
ковки оперения........................................................389
Глава XVIH. Проектирование шасси..........................................401
§ 1. Выбор схемы шасси...............................................401
§ 2. Выбор основных параметров шасси.................................404
§ 3. Влияние условий эксплуатации на характеристики шасси............409
§ 4. Схемы уборки шасси..............................................414
§ 5. Определение веса шасси..........................................418
Глава XIX. Проектирование систем управления самолетом.....................420
§ 1. Контур управления. Его основные элементы.......................420
§ 2. Самолет как объект управления..................................422
§ 3. Органы управления современных самолетов........................428
§ 4. Управляемость самолета. Важнейшие характеристики...............434
§ 5 Общее проектирование самолета и характеристики управляемости . . . 438
§ 6. Состав системы управления и задачи ее проектирования...........445
§ 7. Исходные данные для проектирования системы управления. Этапы про-
ектирования ..........................................................447
§ 8. Размещение рычагов и других элементов управления в кабинах пилотов 451
§ 9. Проектирование механической проводки ......................... 460
§ 10. Подключение к проводке исполнительных механизмов автоматических
систем................................................................465
§ И. Выбор и установка гидроусилителей привода рулевых поверхностей . . 471
§ 12. Мероприятия по повышению безопасности полета при проектировании
системы управления самолета...........................................478
Приложения
f. Типовая весовая сводка самолета................................... . . 486
II. Примерный перечень радиотехнического оборудования самолетов . . . 488
III. Характеристики современных авиационных двигателей................489
IV. Основные параметры и характеристики самолетов....................498
Литература................................................................511
Александр Алексеевич Бадягин, Сергей Михайлович Егер,
Владимир Федорович Мишин, Феликс Иосифович Скяянский,
Николай Александрович Фомин
ПРОЕКТИРОВАНИЕ САМОЛЕТОВ
Редактор Е. В. Сербинавская Художник Е. В. Бекетов
Техн, редактор В. И Орешкина Корректор Е. П. Карнаух
Т-14337 Сдано в набор 10/V-1972 г. Подписано в печать 28/VIII-1972 г.
Формат 70Х108’/« Печ. л. 32.25 (Уел. печ. л. 45,15) Уч.-изд. л. 39.6
Бум. л. 16,13 Бумага № 1 Тираж 13 000 экз. Зак. № 2417.
Цена 1 р. 74 к. Тем. план 1972 г. № 180
Издательство «Машиностроение». Москва, Б-78, )-й Басманный пер., 3.
Московская типография № 8 Главполиграфпрома
Государственного комитета Совета Министров СССР по делам издательств,
полиграфии и книжной торговли. Хохловский пер , 7. Тип. зак. 1062.