


























































































































Автор: Солонина А.И. Улахович Д.А. Арбузов С.М. Соловьева Е.Б.
Теги: компьютерные технологии учебники и учебные пособия цифровая обработка сигналов информатика дискретная математика
ISBN: 5-94157-604-8
Год: 2005




А. И. Солонина
Д. А. Улахович
С. М. Арбузов
Е. Б. Соловьева
III t ) r ке
X(eJl{ }
Основы цифровой
обрдботки СИГНАЛОВ
2-е издание
Математический аппарат ЦОС
Синтез цифровых фильтров
Адаптивная фильтрация
Многоскоростные цифровые системы
Нелинейные цифровые системы
Моделирование обработки
сигналов в MATLAB
_ z ч| Q
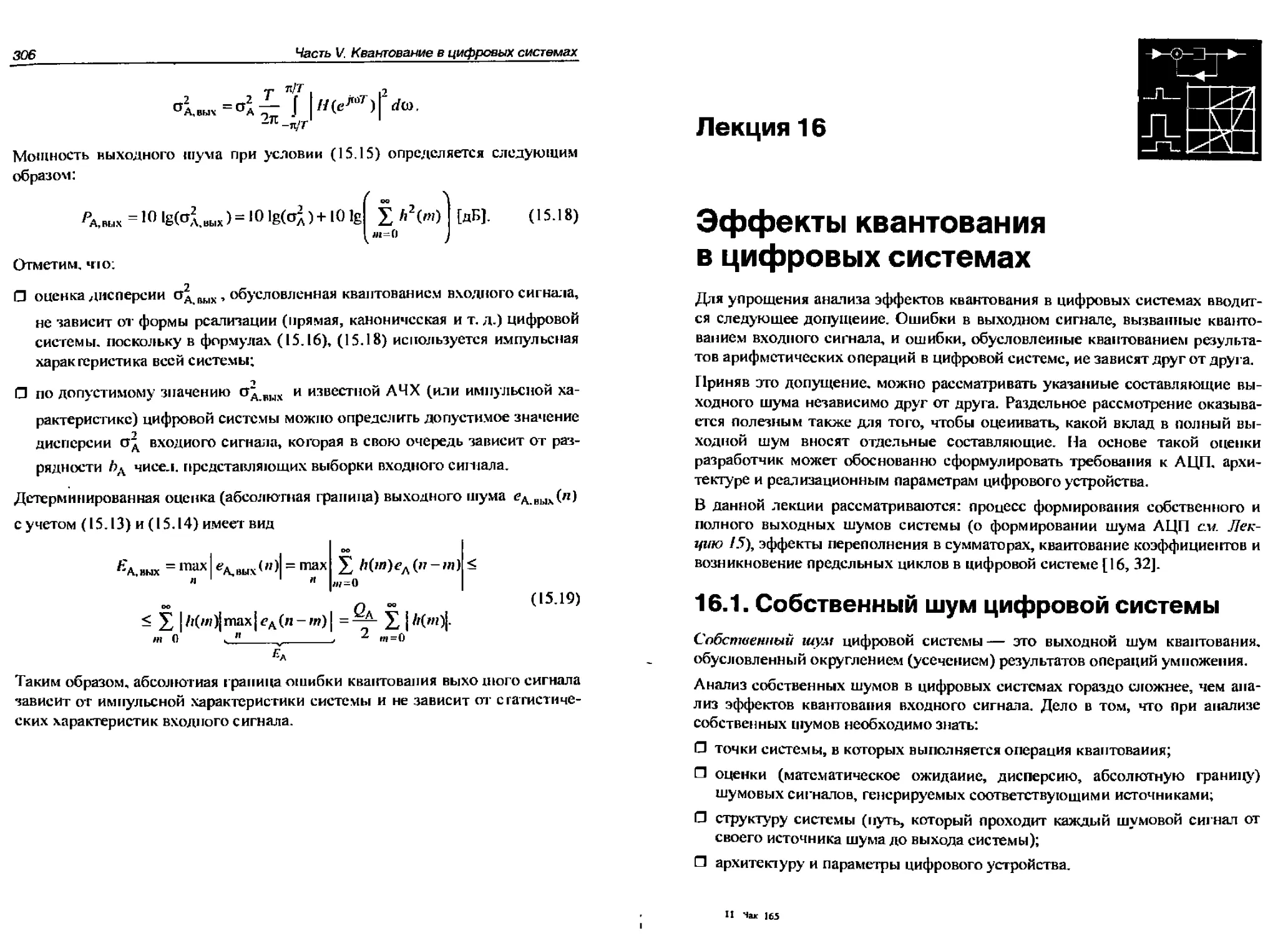
max е(п)\ = =2
п 2
УЧЕБНОЕ ПОСОБИЕ
Авторы - преподаватели Санкт-Петербургского государствен-
ного университета телекоммуникаций им. проф. М. А. Бонч-
Бруевича с многолетним научно-методическим и педагоги-
ческим стажем, кандидаты и доктора технических наук, авторы
книг и многочисленных публикаций по цифровой обработке
сигналов.
Основы цифровой
обрдботки СИГНАЛОВ
2-е издание
Учебное пособие построено в виде курса лекций по дисциплине
ЦОС с многочисленными примерами и иллюстрациями. В книге
системно изложены математические основы и алгоритмы ци-
фровой обработки сигналов, рассмотрены приемы математи-
ческого моделирования в программной среде MATLAB. На
основе данного материала могут формироваться различные
учебные курсы и методики. Работа содержит ряд новых, а также
малоизвестных сведений. Второе издание дополнено несколь-
кими новыми разделами. Книга предназначена для студентов
и преподавателей вузов и может представлять интерес для спе-
циалистов.
i(z) = Z h(n)\= h(n)z~n
БХВ-Петербург
194354, Санкт-Петербург,
ул. Есенина, 5Б
E-mail: mail btiv.ru
Internet www.bhv.ru
Телефакс: (812) 591-6243
ClOZON
4619050
www.ozon.ru
А. И. Солонина
Д. А. Улахович
С. М. Арбузов
Е. Б. Соловьева
Основы цифровой
обрдботки СИГНАЛОВ
2-е издание
Рекомендовано УМО по образованию в области телекоммуникаций в качестве
учебного пособия для студентов, обучающихся по направлению подготовки
дипломированных специалистов 654400 — Телекоммуникации
Санкт-Петербург
<БХВ-Петербург»
2005
УДК 681.3.06(075.8)
ББК 32.973я73 .
0-75
0-75 Основы цифровой обработки сш налов: Курс лекции / Авторы:
А. И. Солонина. Д. А. Улнхович, С. М. Арбузов. Е. Б. Соловьева /
Изл. 2-е испр. и перераб. — СПб.: БХВ-Петербург, 2005. — 768 с.: ил.
ISBN 5-94157-604-8
В книге, написанной на базе курса лекций, читаемых студентам ГУТ нм. проф.
М. А. Бонч-Бруевича, изложены теоретические основы цифровой обработки сигна-
лов: способы описании дискретных и цифровых сигналов и систем во временной,
Z- и частотной областях, включая дискретное и быецхте преобразования Фурье,
л также систем в пространстве состояний; основные методы и особенное!!! синтеза
цифровых линейных и адапшвных фильтров; понятия о многоскоростных системах
ЦОС. Отдельные главы иосвяншны введению в проблемы передачи параметров ли-
нейного предсказания и принципам нелинейной обработки сигналов. Книга содер-
жит большое количество ил t кастраций и примеров*, рассмотрены основы математиче-
ского моделирования дискретных сш патов и систем в программной среде MATLAB
Второе издание дополнено рядом новых разделов и лекций: дискретизация относи-
тельно узкополосных сигналов. фазовые звенья и др.
Для студентов вузов
и специалистов в области цифровой обработки сигналов
УДК 681.3.06(075.8)
ББК 32.973я73
Группа подготовки издания:
Глинный редактор
Зам. гл. редактора
Зав. редакцией
Редактор
Компьютерная верстка
Корректор
Дизайн обложки
Зап. производством
Екатерина Кондукова
Людмила Еремеевская
Григорий Добин
Нина Седых
Натальи Караваевой
Виктория Пиотровская
Игоря Цырулъникова
Николай Тверских
Лицензия МД No 02429 от 24.07.00. Подписано в печать 29.04.05.
Формат 70хЮ0У|б. Печать офсетная. Усл. леч. л. 61.92.
Тираж 5000 экэ. Заказ N» 165
"БХВ-Летербург", 194354, Санкт-Петербург, ул. Есенина, 5Б.'
Санитарно-эпидемиологическое заключение на продукцию
№ 77.99.02.953.Д.006421.11.04 от 11.11.2004 г. выдано Федеральной службой
по надзору в сфере защиты прав потребителей и благополучия человека.
Отпечатано с готовых диапозитивов
в ОАО ’Техническая книга"
190005, Санкт-Петербург. Измайловский пр.. 29.
ISBN 5-94157-604-8
© "БХВ-Ппербург'’. 2005
Оглавление
Принятые сокращения..................................................1
Предисловие ко второму изданию.......................................3
ЧАСТЬ I. ВВЕДЕНИЕ....................................................5
Лекция 1. Введение в ЦОС .......................................;....7
1.1. Обобщенная схема цифровой обработки сигналов...................7
1.2. Основные типы сигналов и их математическое описание.
Нормирование времени...............................................12
1.3. Типовые дискретные сигналы....................................14
1.4. Основная полоса частот. Нормирование частоты..................17
Лекции 2. МатемЯ1ический аппарат описания сигналов
и линейных систем...................................................20
2.1. Математическое описание аналоговых сигналов и линейных систем
в р -области и в частотной области..................................21
2.1.1. Преобразование Лапласа......................................21
2.1.2. Преобразование Фурье........................................23
2.1.3. Связь преобразования Фурье с преобразованием Лапласа........23
2.1.4. Ряд Фурье...................................................24
2.2. Математическое описание дискретных сигналов и линейных систем
в г -области и в частотной области..................................25
2.2.1. Дискретное преобразование Лапласа...........................25
2.2.2. /-преобразование............................................26
2.2.3. Связь Z-преобразования с дискретным преобразованием Лапласа... 27
2.2.4. Преобразование Фурье........................................27
2.2.5. Связь преобразования Фурье с /-преобразованием..............29
IV
Оглавление
Лекпия 3. /-преобразование........................................ 30
3.1. /-преобразование..............................................30
3.2. Соотношение между р- и г-плоскостями..........................33
3.3. Отображение /^-плоскости иа z-плоскость.......................34
3.4. Основные свойства /-преобразования............................39
3.5. /-преобразование типовых дискретных сигналов..................42
3.6. Обратное /-преобразование............,........................49
3.6.1. Использование таблицы соответствий...........................49
3.6.2. Прямое вычисление интеграла на основе теоремы Коши
о вычетах...........................................................51
3.6.3. Разложение z-изображения па простые дроби....................54
ЧАСТЬ II. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ЛИНЕЙНЫХ ДИСКРЕТНЫХ СИСТЕМ----------------------------------------- S7
Лекции 4. Описание линейных дискретных систем
во временной области.................................................59
4.1. Импульсная характеристика.....................................61
4.2. Соотношение вход/выход........................................62
4.2.1. Формула свертки..............................................63
4.2.2. Разностное уравнение.........................................69
4.3. Рекурсивные и нерекурсивные линейные дискретные системы.......71
4.4. Системы с конечной и бесконечной импульсной характеристикой...72
4.5. Свойства линейных дискретных систем...........................74
4.5.1. Свойство памяти линейных дискретных систем...................74
4.5.2. Устойчивость линейных дискретных систем......................75
4.5.3. Оценка устойчивости по импульсной характеристике:
критерий устойчивости...............................................76
Лекция 5. Описание линейных дискретных систем в z-области.............. 78
5.1. Передаточная функция. Соотношение вход/выход..................78
5.2. Взаимосвязь между передаточной функцией
и разностным уравнением............................................83
5.3. Разновидности передаточных функций............................84
5.4. Передаточные функции и импульсные характеристики
звеньев 1-го и 2-го порядков.......................................88
5.5. Оценка устойчивости по передаточной функции:
критерий устойчивости..............................................92
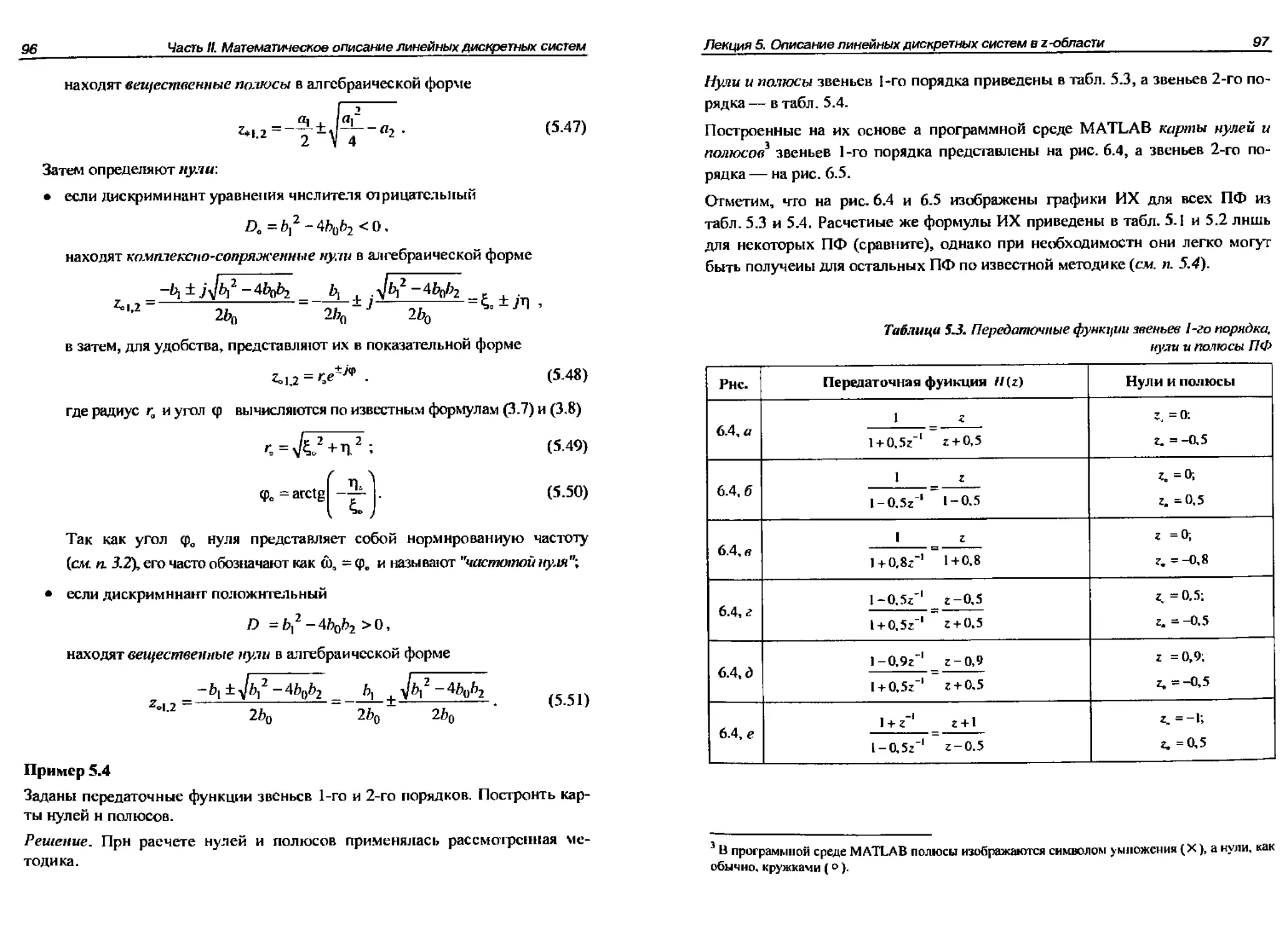
5.6. Карты пулей и полюсов звеньев 1-го и 2-го порядков............94
Оглавление
V
Лекция 6. Описание линейных дискретных систем
в частотной области................................................99
6.1. Частотная характеристика......................................99
6.1.1. Связь частотной характеристики с передаточной функцией.....102
6.1.2. Соотношение вход/выход.....................................103
6.2. Свойства частотных характеристик............................ 104
6.2.1. Основная полоса частот.................................... 106
6.3. Расчет АЧХ и ФЧХ............................................ 106
6.3.1. Расчет АЧХ и ФЧХ звена 1-го порядка....................... 107
6.3.2. Расчет АЧХ и ФЧХ звена 2-го порядка........................108
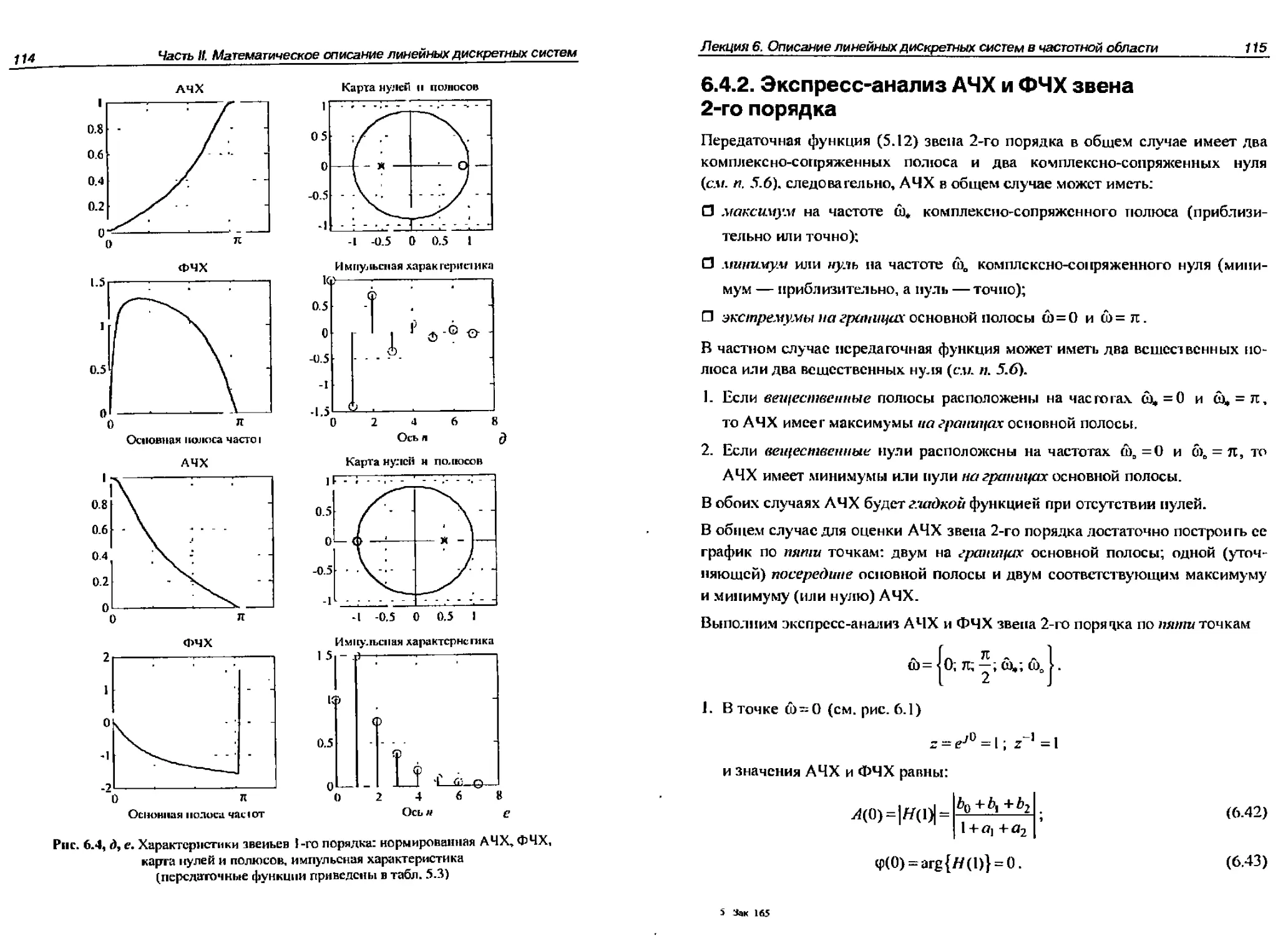
6.4. Экспресс-аиализ АЧХ и ФЧХ................................... 109
6.4.1. Экспресс-анализ АЧХ и ФЧХ звена 1-го порядка...............109
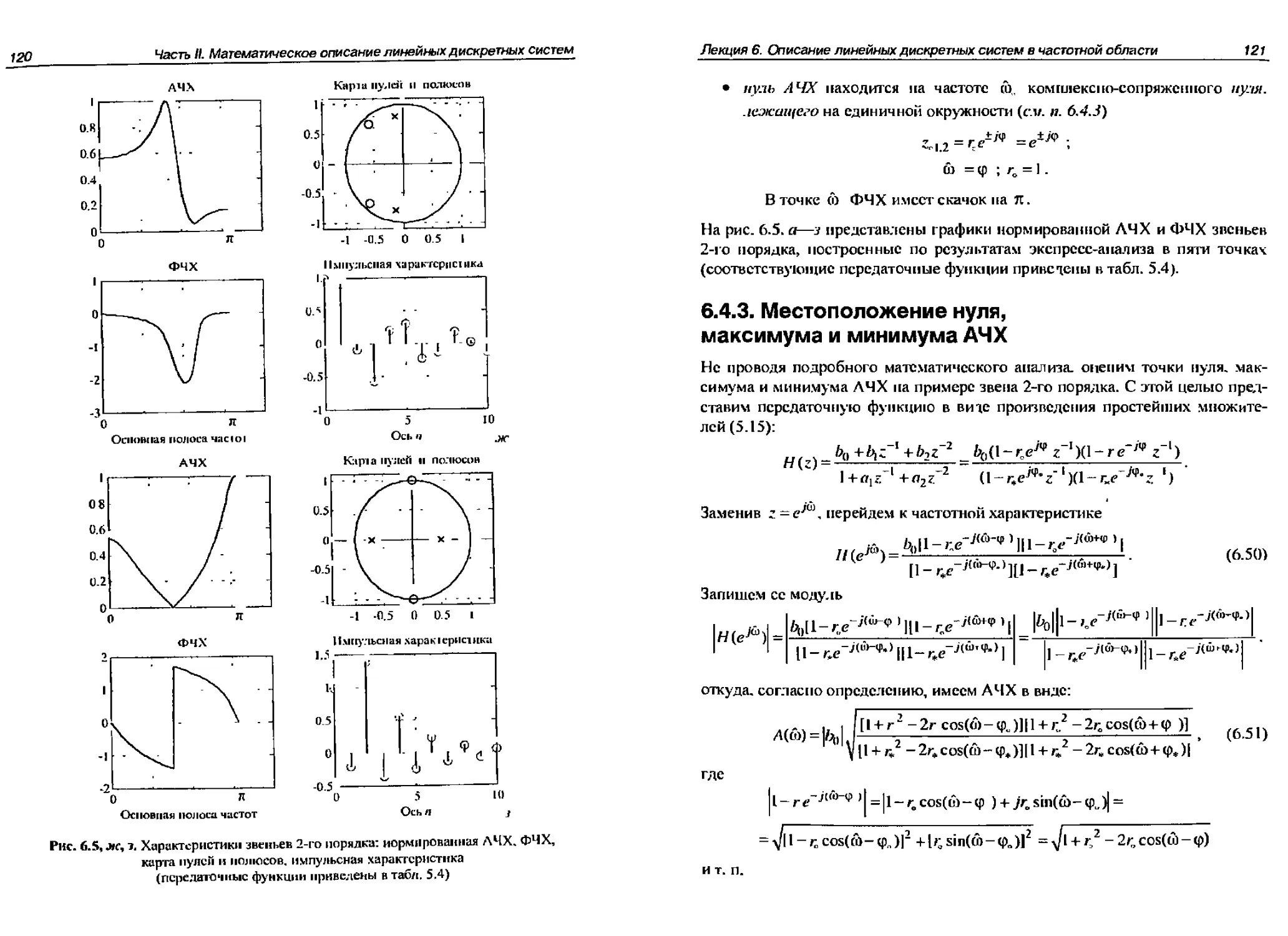
6.4.2. Экспресс-анализ АЧХ и ФЧХ звена 2-го порядка...............115
6.4.3. Местоположение нуля, максимума и минимума АЧХ..............121
6.5. Анализ АЧХ по карте нулей и полюсов..........................124
6.6. Минимально-фазовые и неминимально-фазовые ЛДС................126
6.7. Фазовые звенья...............................................130
6.7.1. Определение и свойства фазовых звеньев.....................132
6.7.2. Фазовое звено 1-го порядка.................................135
6.7.3. Фазовое звено 2-го порядка.................................138
Лекция 7. Структурные схемы линейных дискретных систем—............144
7.1. Структуры рекурсивных ЛДС....................................145
7.1.1. Прямая струю ура...........................................146
7.1.2. Прямая каноническая структура 1............................147
7.1.3. Каноническая структура2....................................148
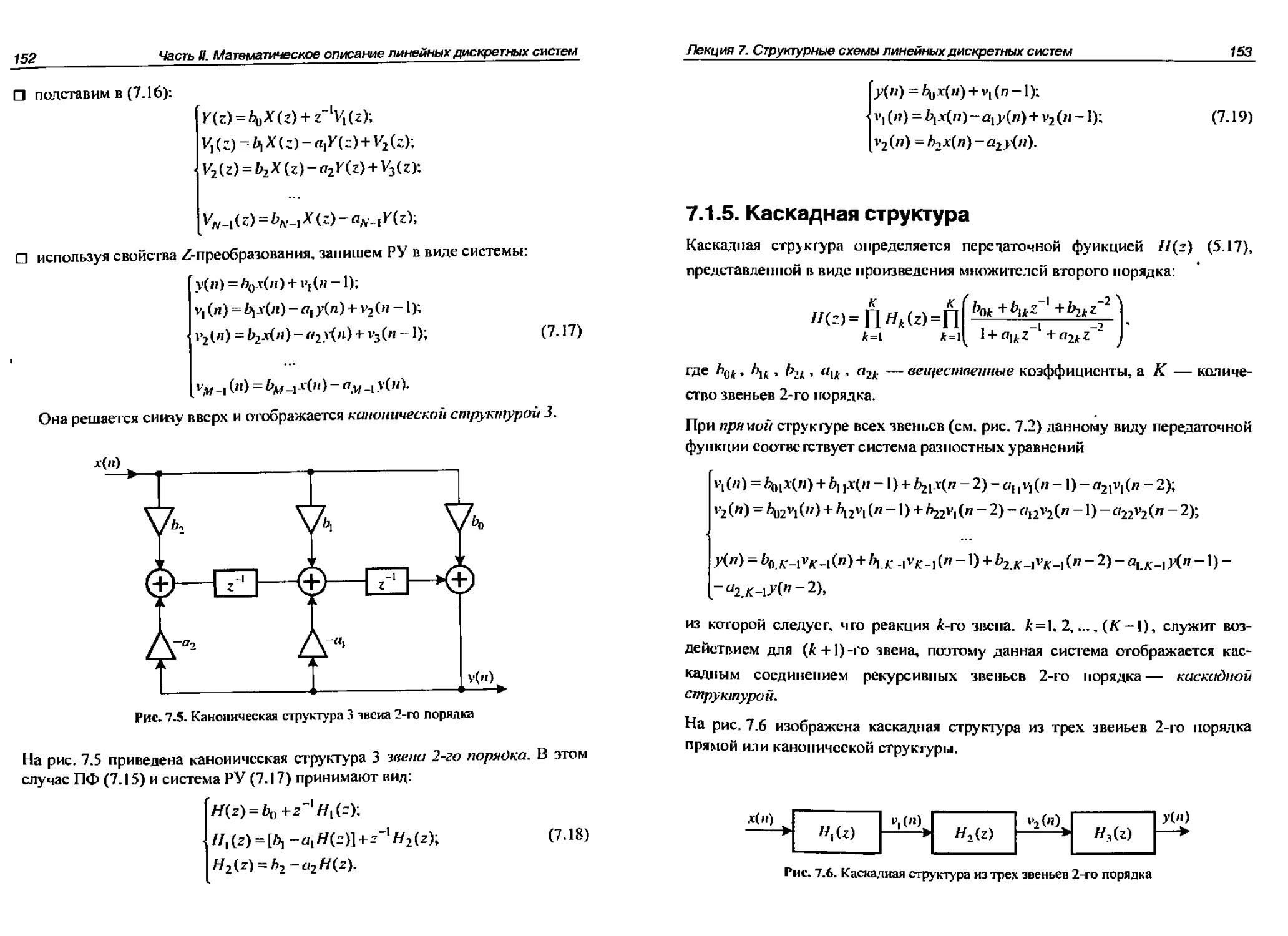
7.1.4. Каноническая структура 3...................................150
7.1.5. Каскадная структура........................................153
7.1.6. Параллельная структура.....................................154
7.2. Структуры нерекурсивных ЛДС..................................155
7.2.1. Прямая структура...........................................156
7.2.2. Каскадная структура........................................156
7.3. Выбор структуры..............................................157
Лекции 8. Описание линейных дискретных систем
в пространстве состояний..........................................158
8.1. Понятие состояния............................................1 59
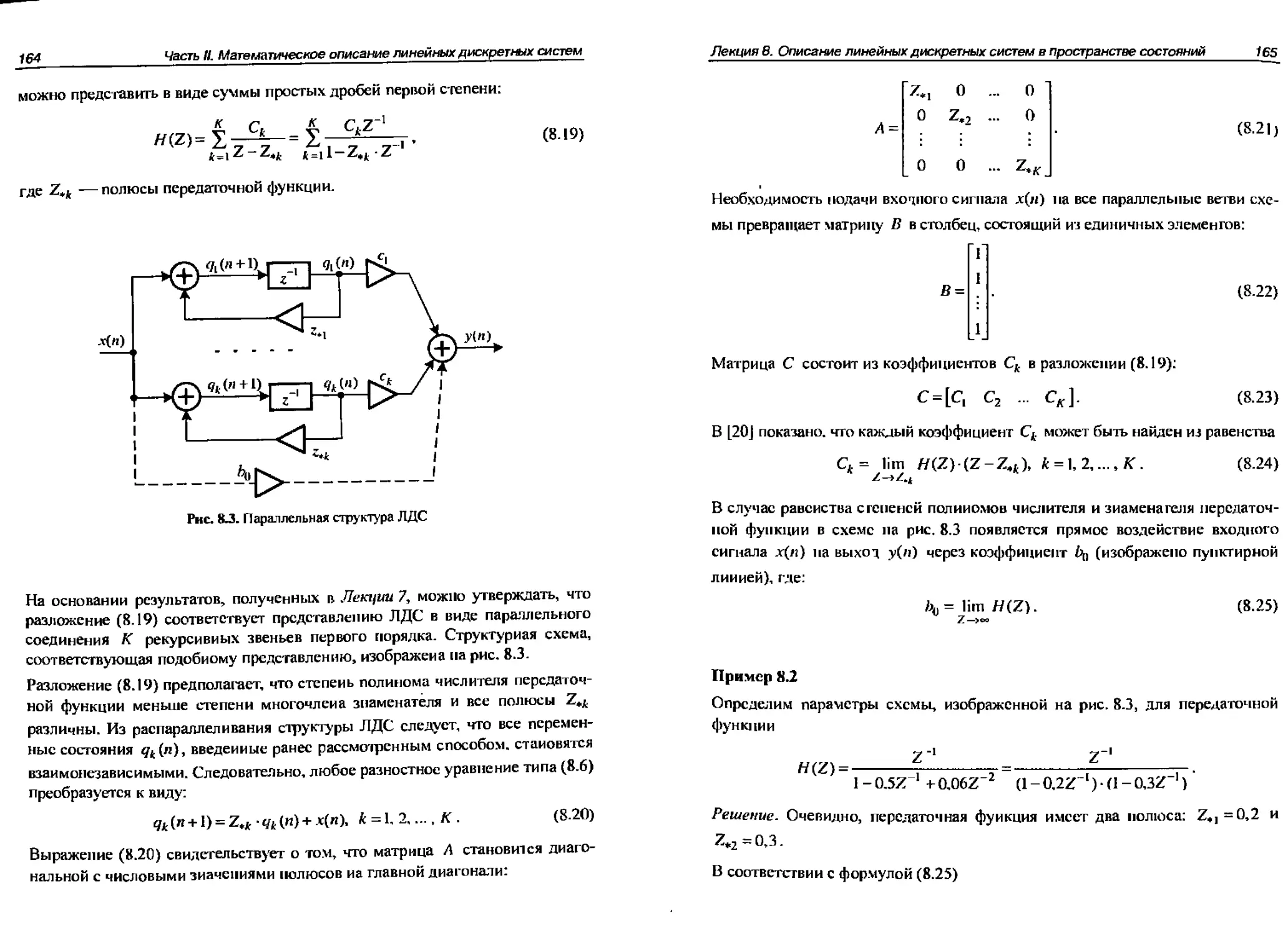
8.2. Описание ЛДС на основе структурных схем......................160
8.3. Определение уравнений состояния н выхода
по передаточной функции...........................................163
и
Оглавление
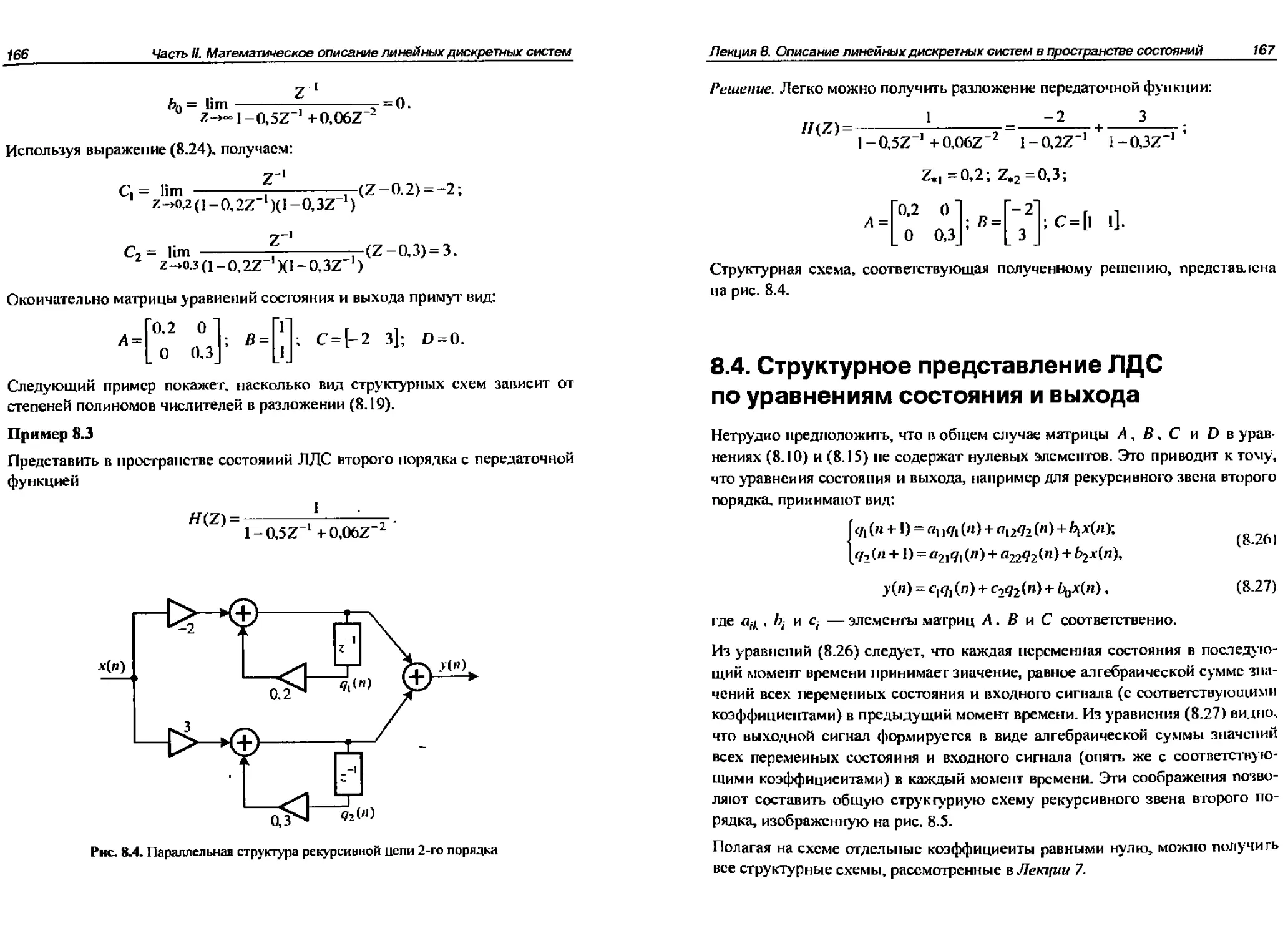
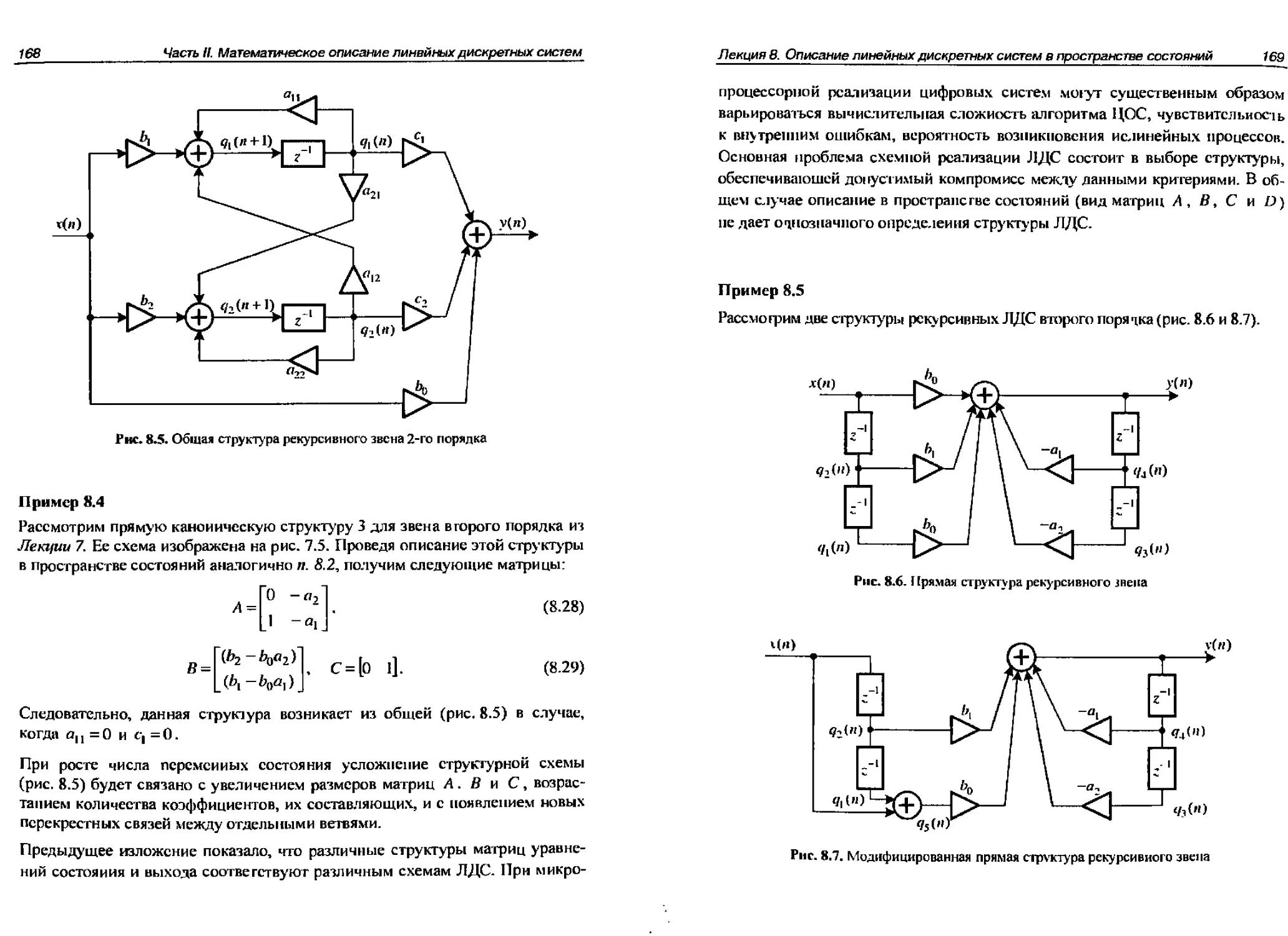
8.4. Структурное представление ЛДС по уравнениям
состояния и выхода..........................................................167
Лекции 9. Анализ линейных дискретных систем
в пространстве состояний.................................................... 171
9.1. Временной анализ......................................................171
9.2. Анализ в z-области....................................................174
9.3. Линейные преобразования в пространстве состояний..................177
ЧАСТЬ 1П. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ДИСКРЕТНЫХ СИГНАЛОВ 181
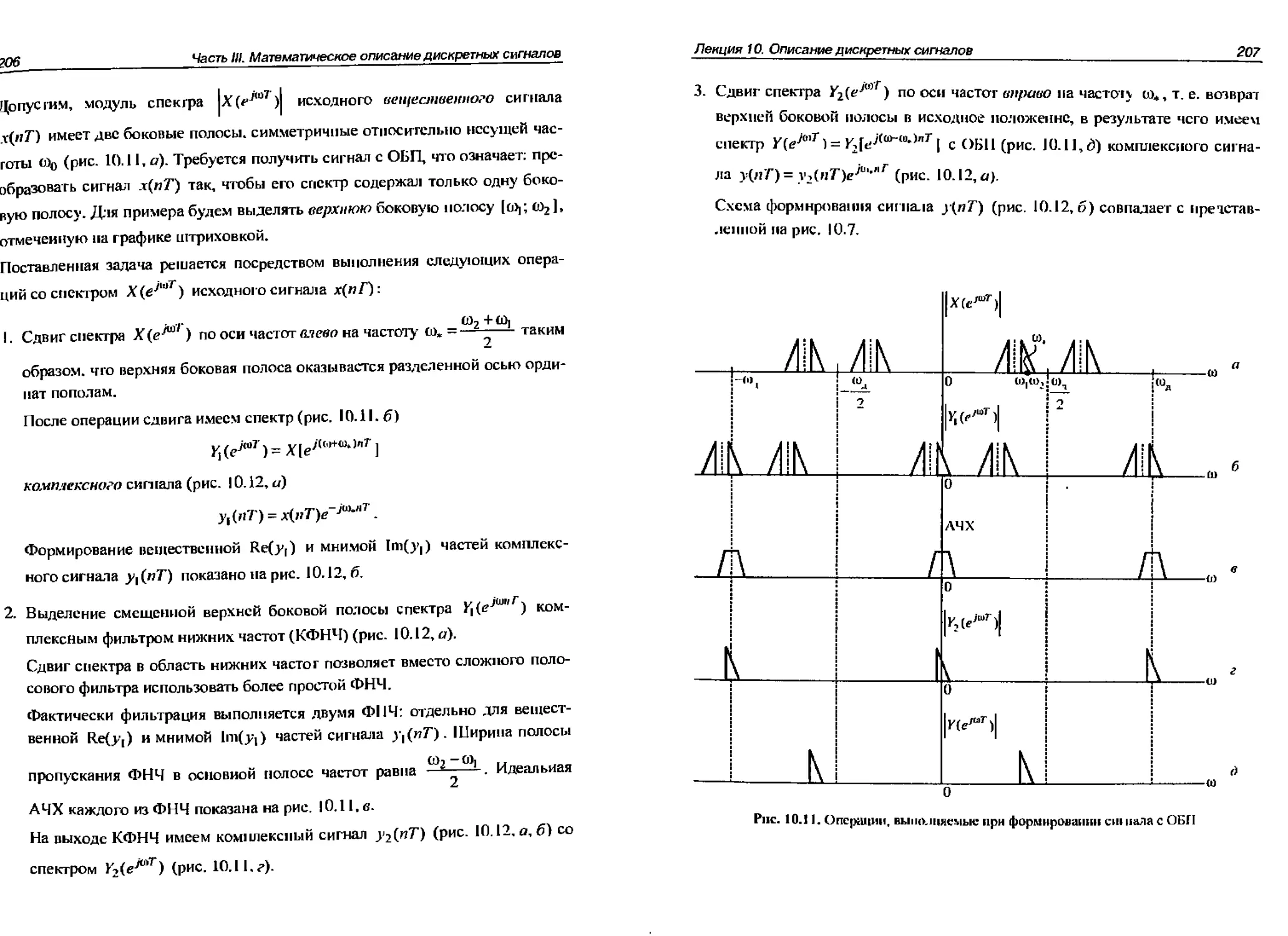
Лекцин 10. Описание дискретных снгналов.......мм..м..^..........................м 183
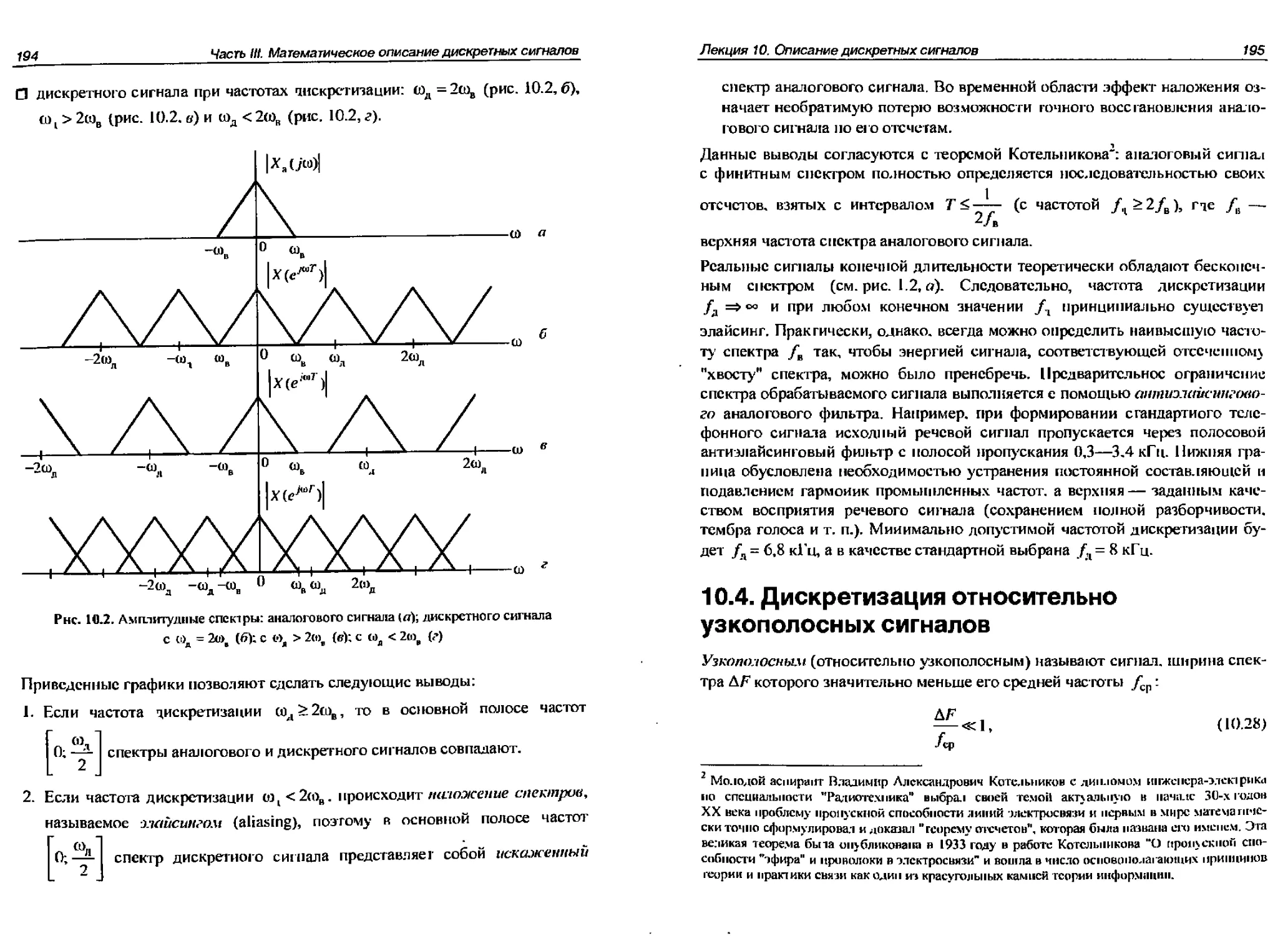
10.1. Описание дискретных сигналов в частотной области.....................184
10.2. Свойства спектров дискретных сигналов................................186
10.3. Связь между спектрами аналогового и дискретного сигналов.............191
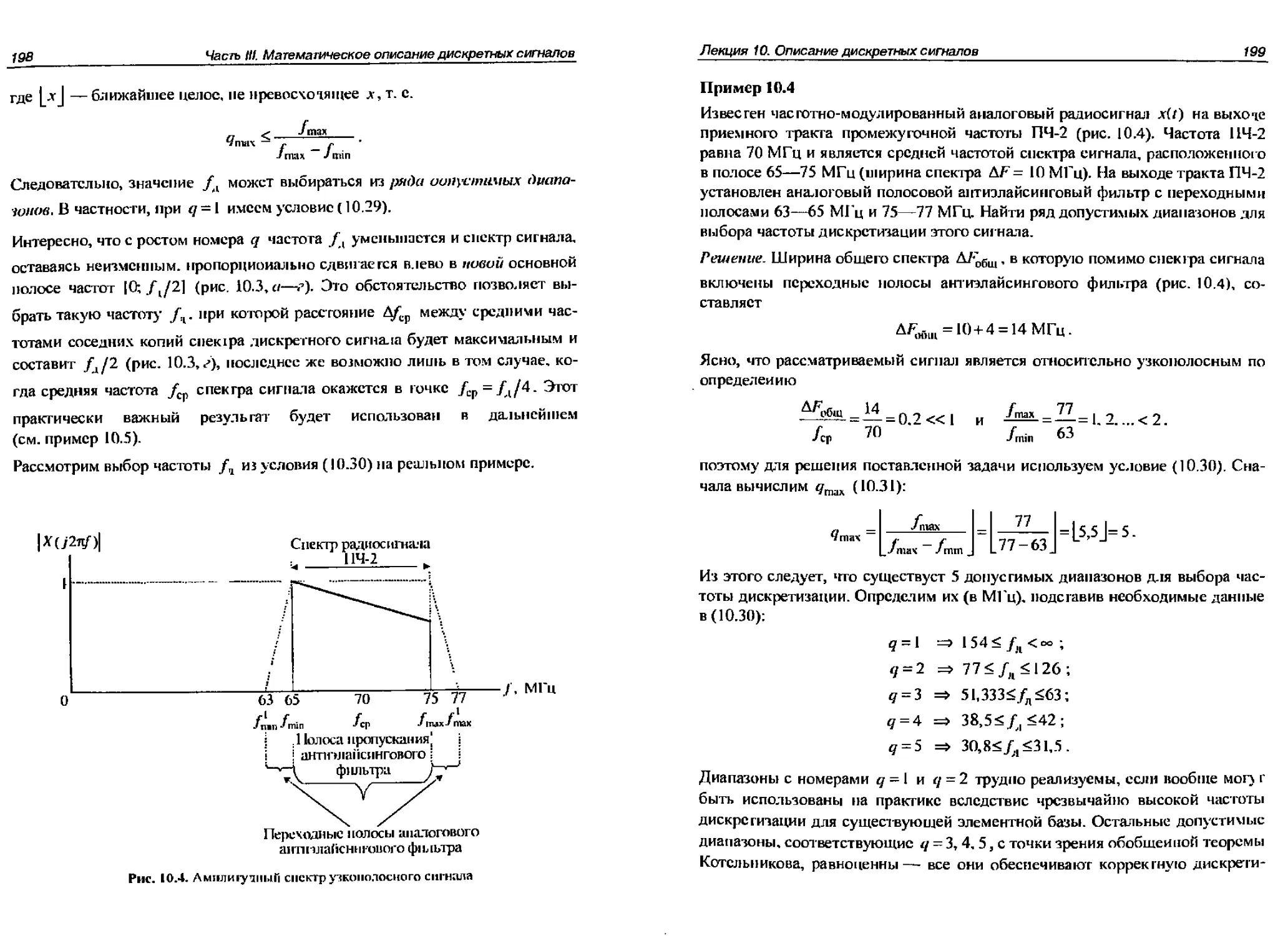
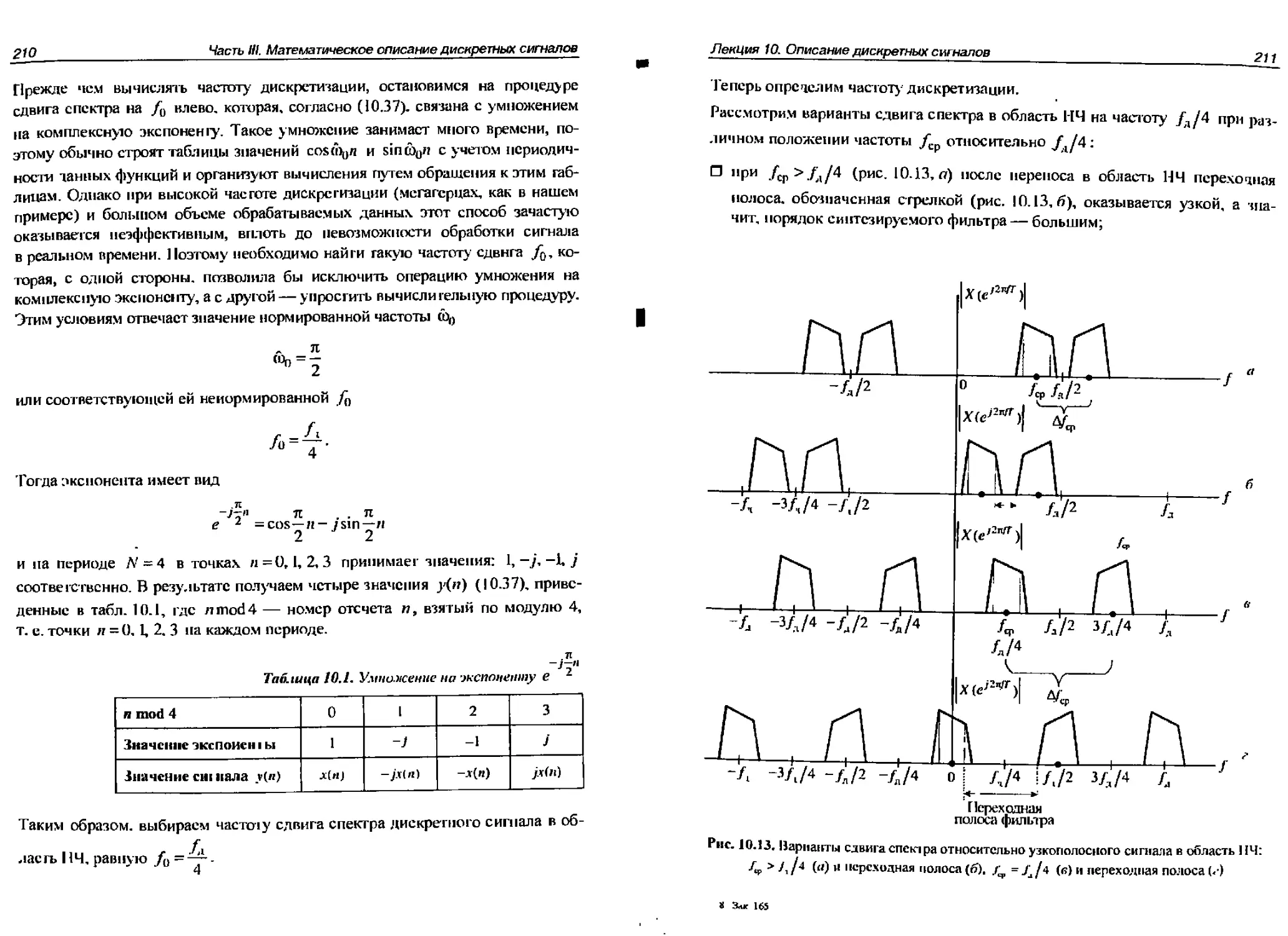
10.4. Дискретизация относительно узкополосных сигналов.....................195
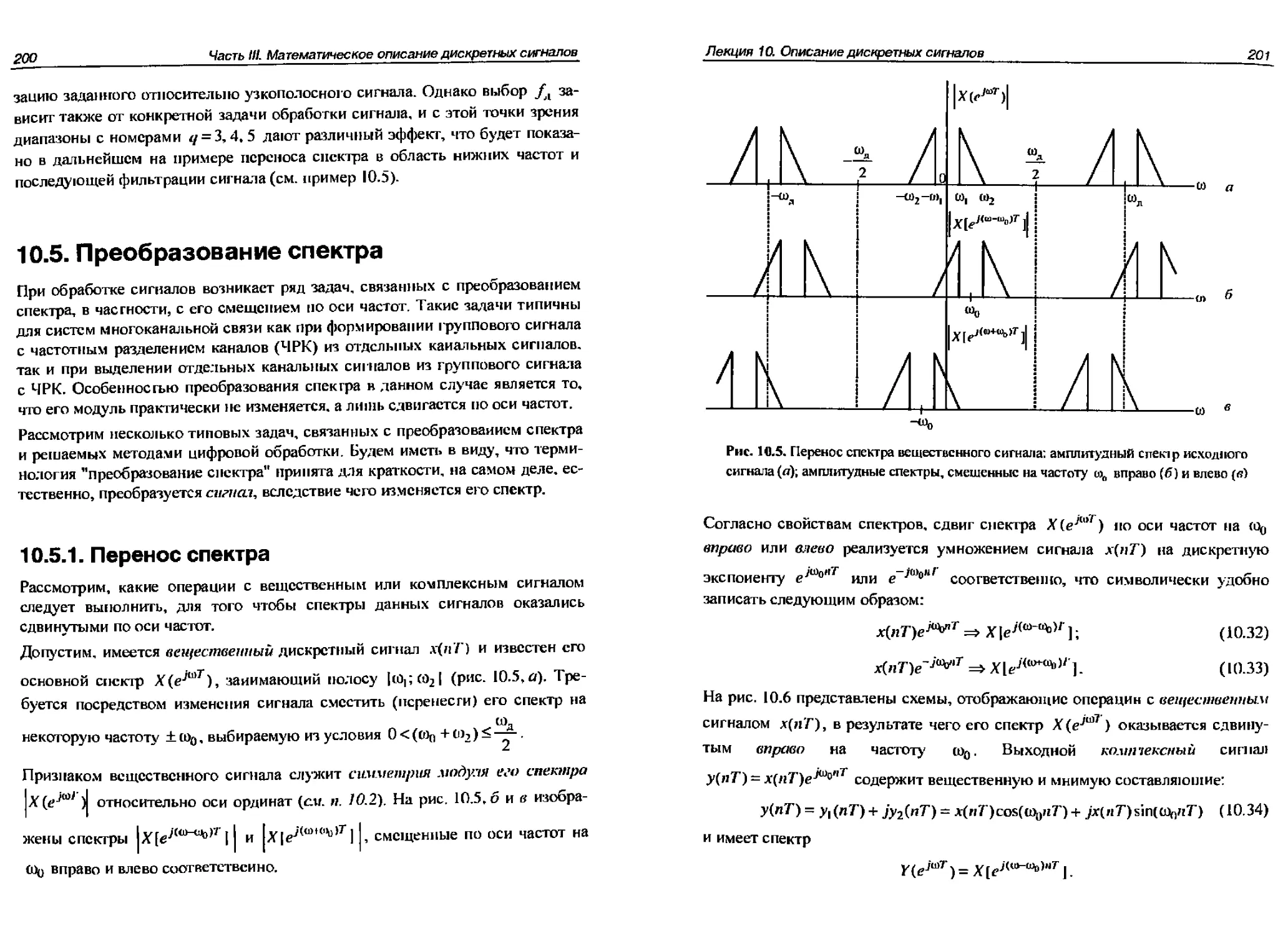
10.5. Преобразование спектра...............................................200
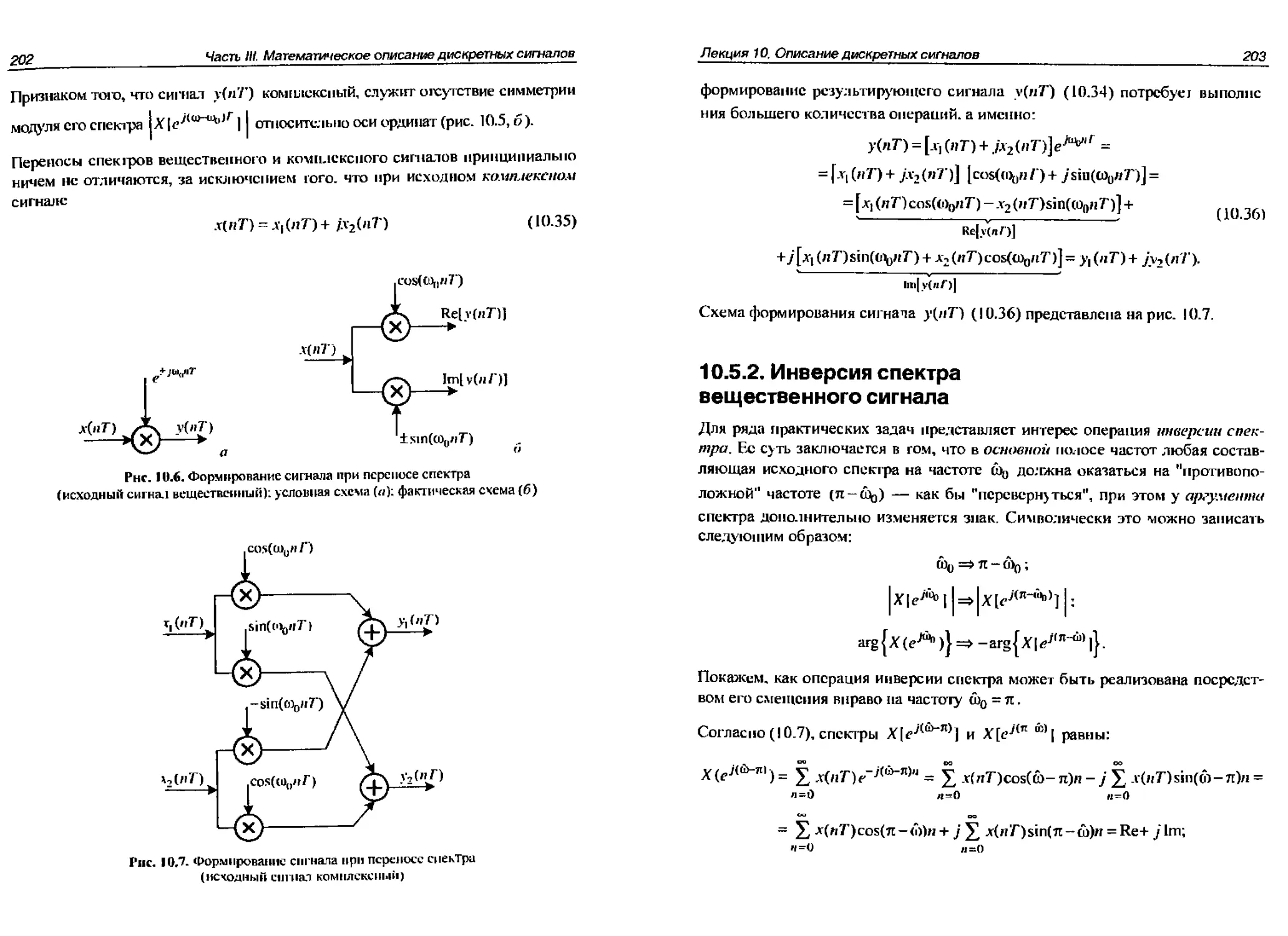
10.5.1. Перенос спектра.................................................200
10.5.2. Инверсия спектра вещественного сигнала..........................203
10.5.3. Формирование сигнала с одной боковой полосой....................205
10.5.4. Перенос спектра узкополосного ВЧ-снгнала
в область нижних частот..................................................208
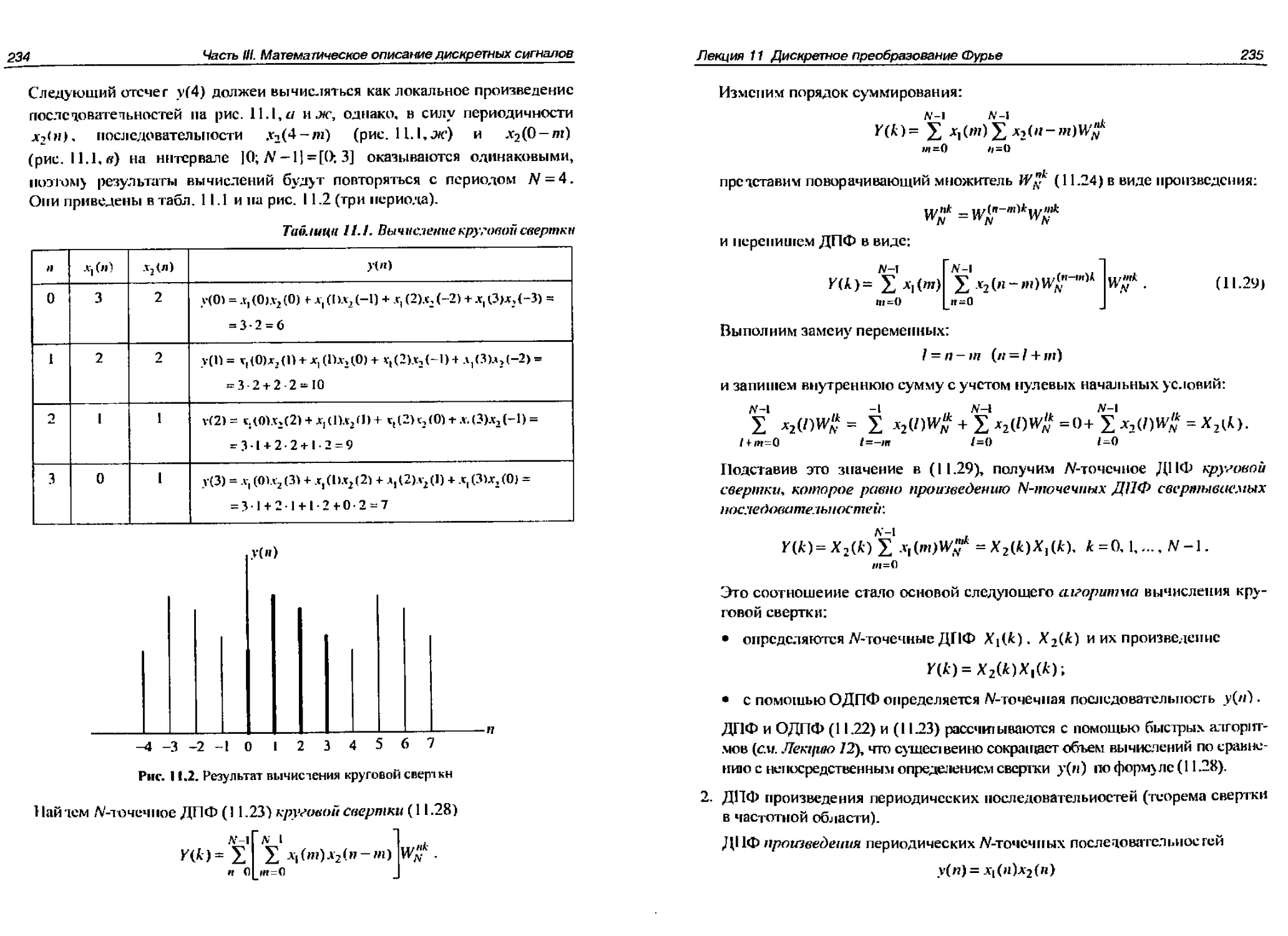
Лекция 11. Дискретное преобразование Фурье.......................................... 215
11.1. Дискретное преобразование Фурье периодической
последовательности..........................................................216
11.2. Дискретное преобразование Фурье конечной последовательности..........225
11.3. Свойства ДПФ.........................................................229
Лекция 12. Быстрое преобразование Фурье................................................ 243
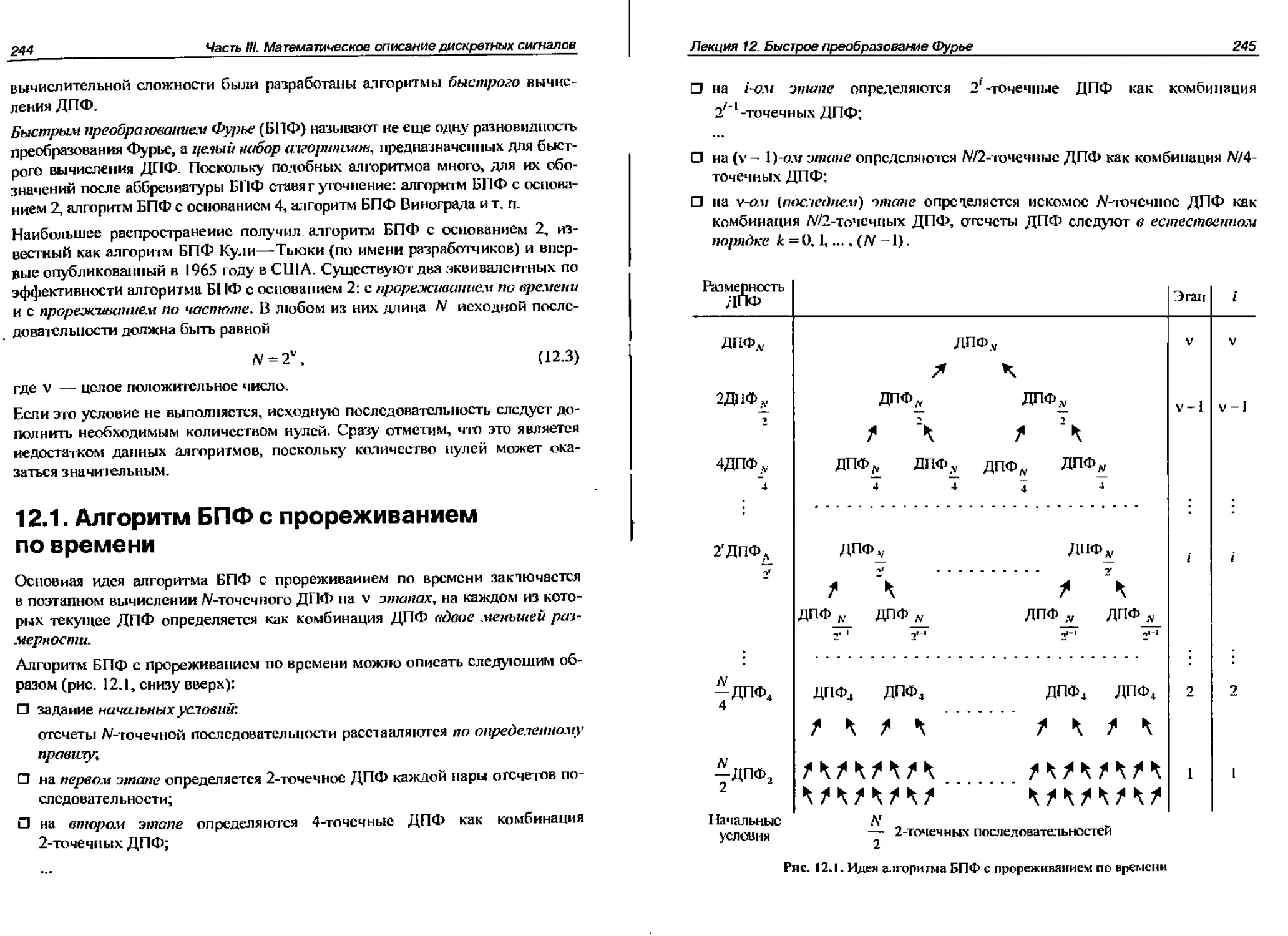
12.1. Алгоритм БПФ с прореживанием по времени..............................244
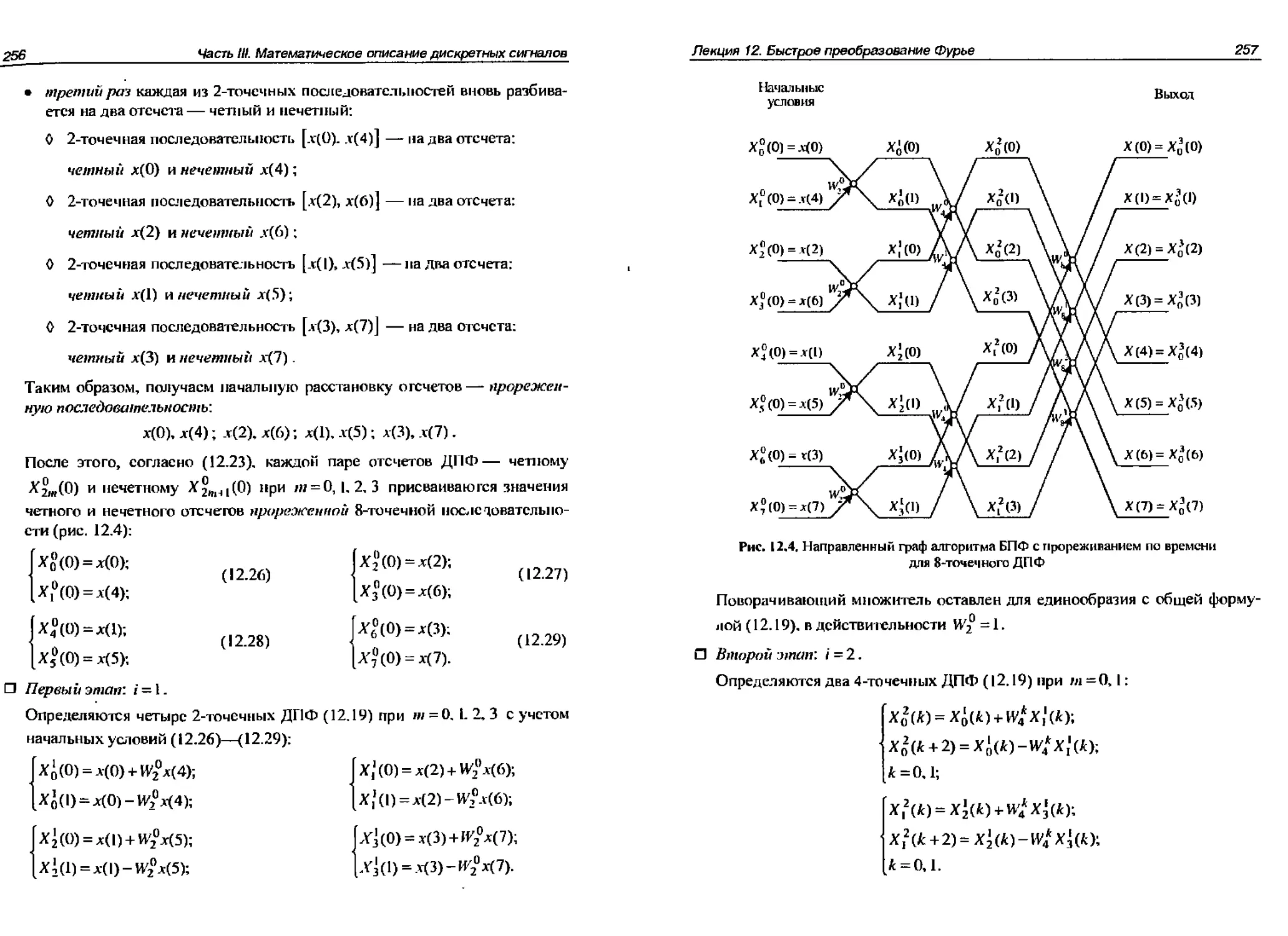
12.2. Пример вычисления 8-точечного ДПФ с помощью алгоритма БПФ
с прореживанием по времени..................................................255
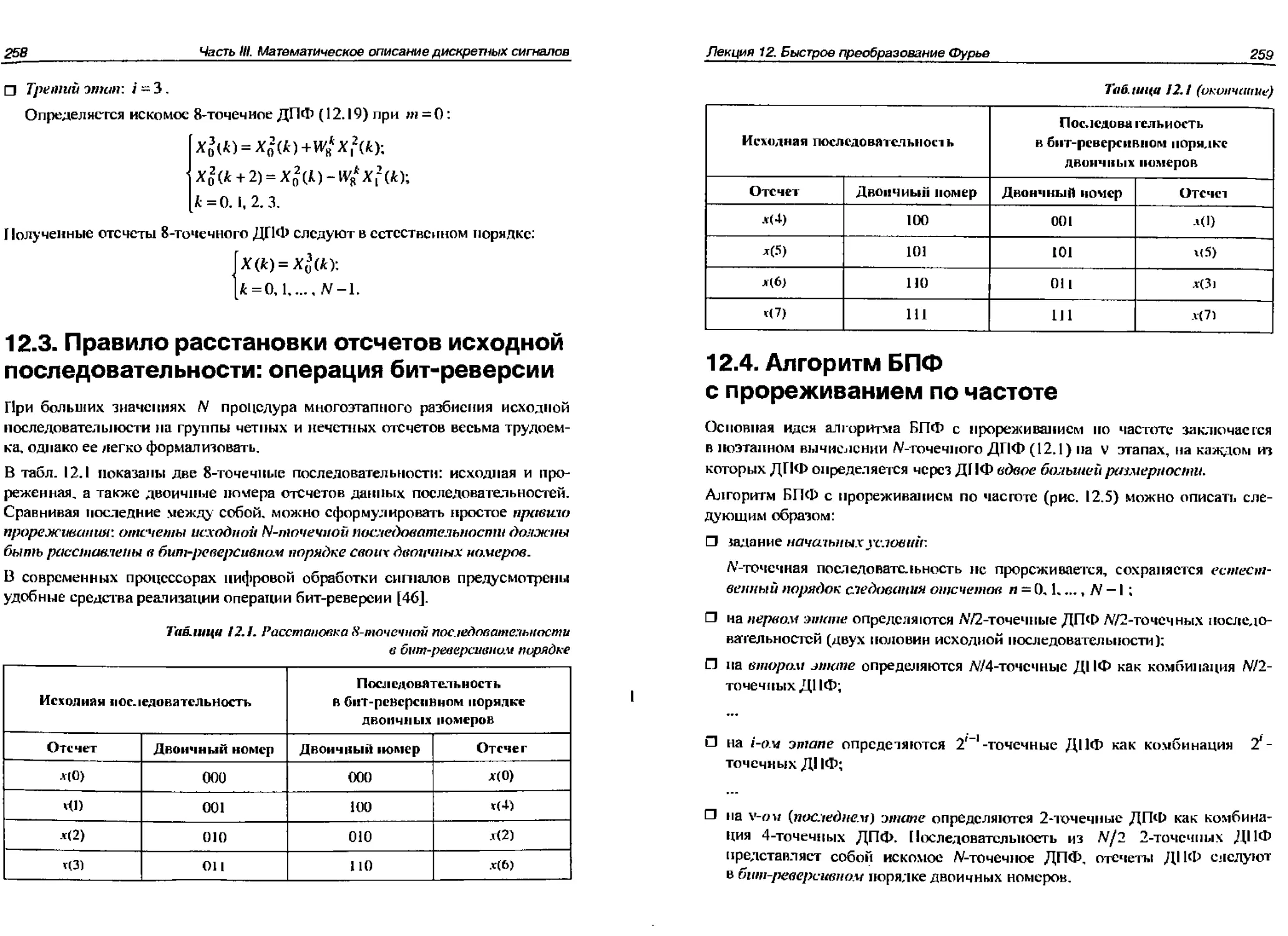
12.3. Правило расстановки отсчетов исходной последовательности:
операция бит-реверсии.......................................................258
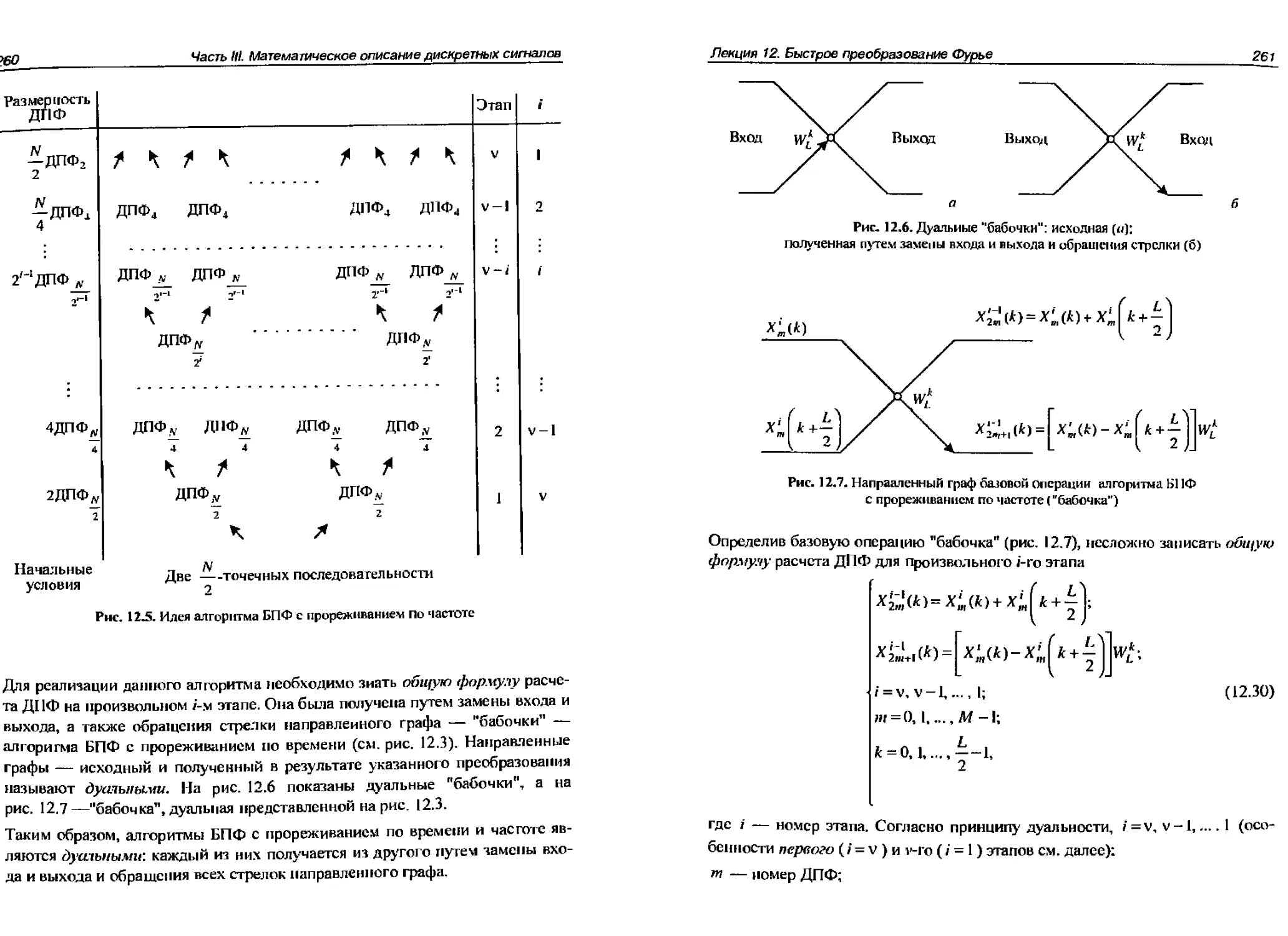
12.4. Алгоритм БПФ с прореживанием по частоте..............................259
Оглавление УМ
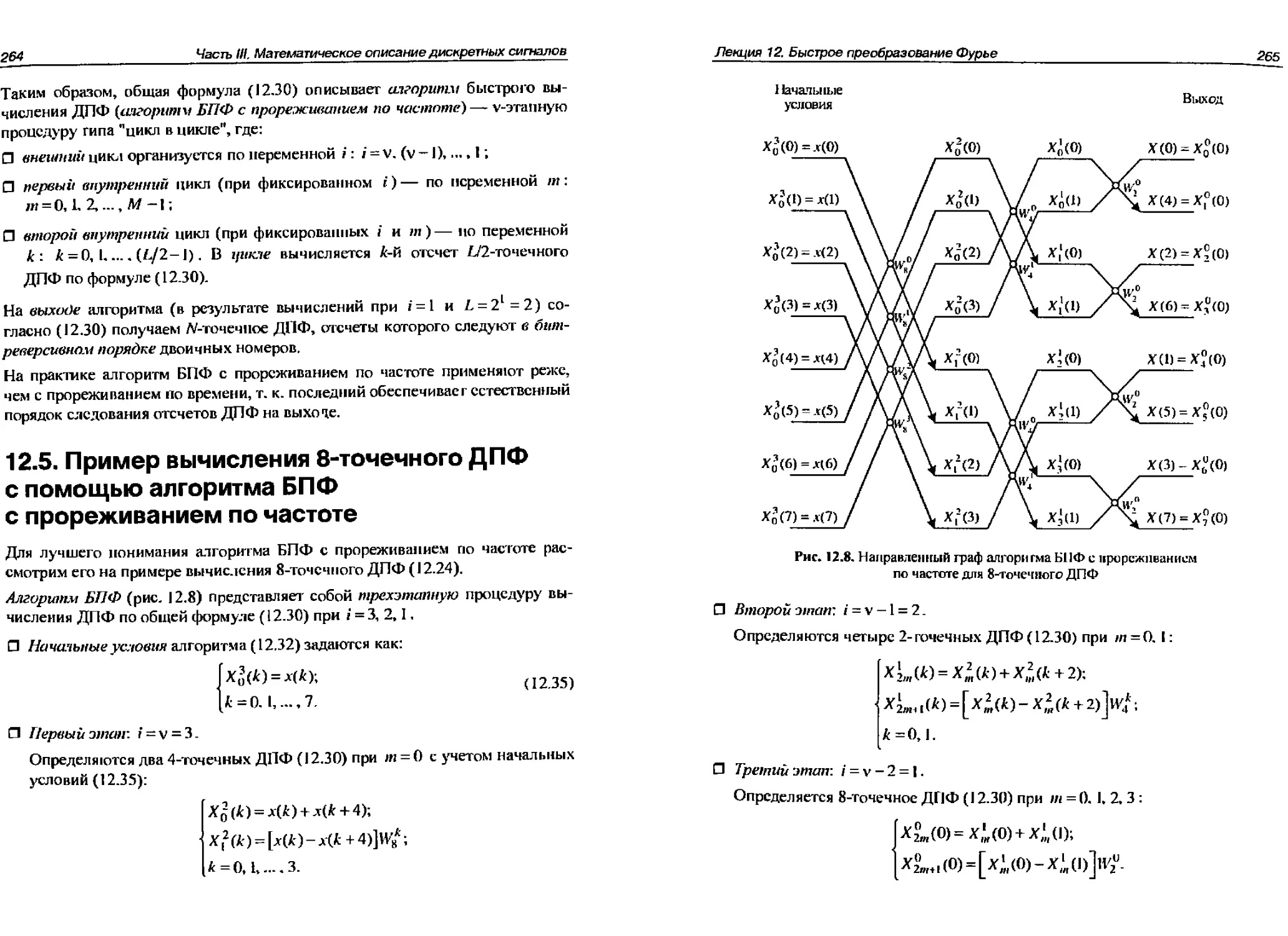
12.5. Пример вычисления 8-точечного ДПФ с помощью алгоритма БПФ
с прореживанием по частоте.....................................264
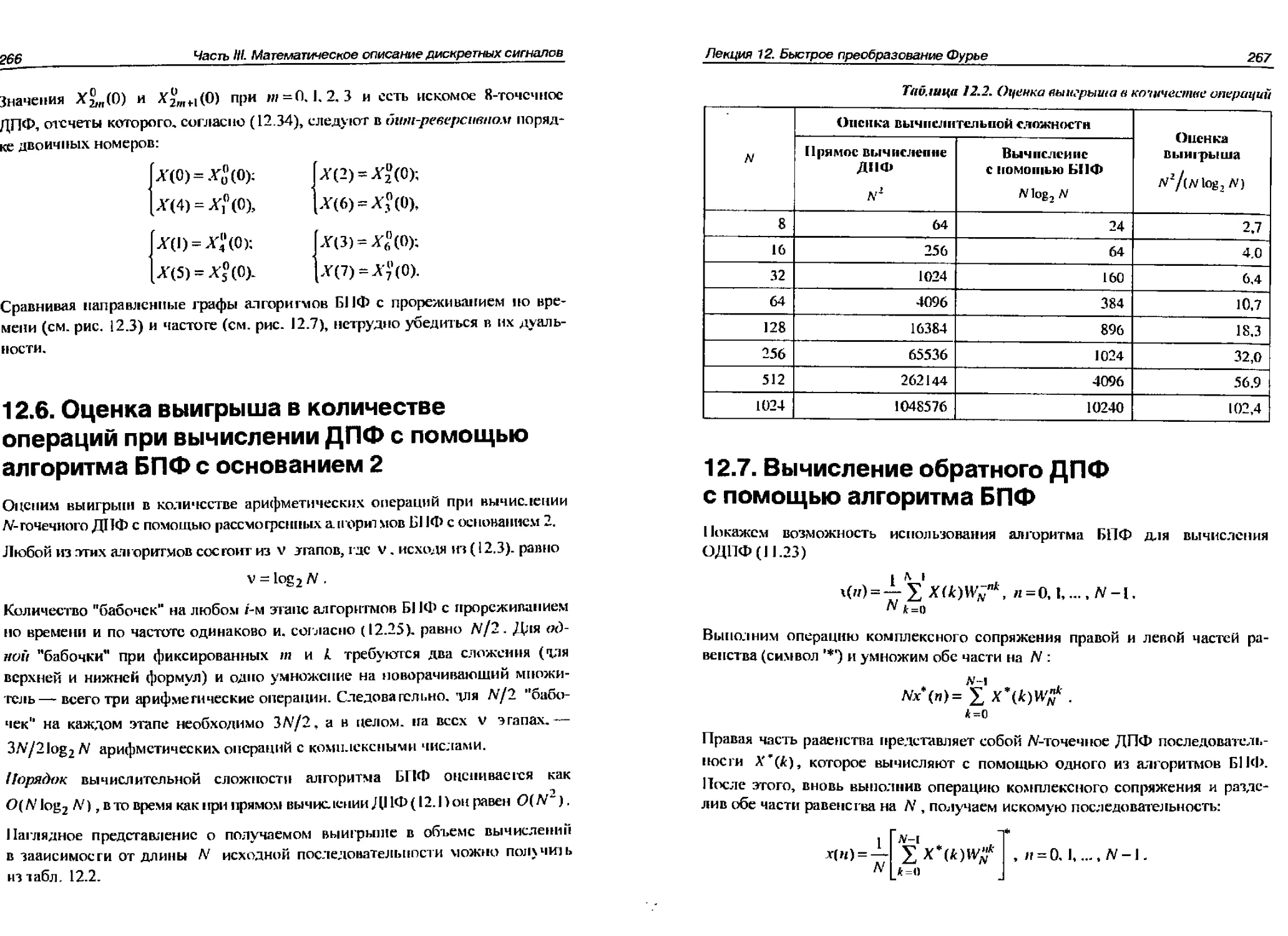
12.6. Оценка выигрыша в количестве операций при вычислении ДПФ
с помошью алгоритма БПФ с основанием 2.....................266
12.7. Вычисление обратного ДПФ с помощью алгоритма БПФ.........267
ЧАСТЬ IV. ПРОХОЖДЕНИЕ СЛУЧАЙНЫХ СИГНАЛОВ ЧЕРЕЗ
ЛИНЕЙНЫЕ ДИСКРЕТНЫЕ СИСТЕМЫ--------------------------269
Лекция 13. Лнпейнан дискретная система как генератор
случайных сигналов............................................. 271
13.1. Основные понятия вероятностного анализа дискретных сигналов.271
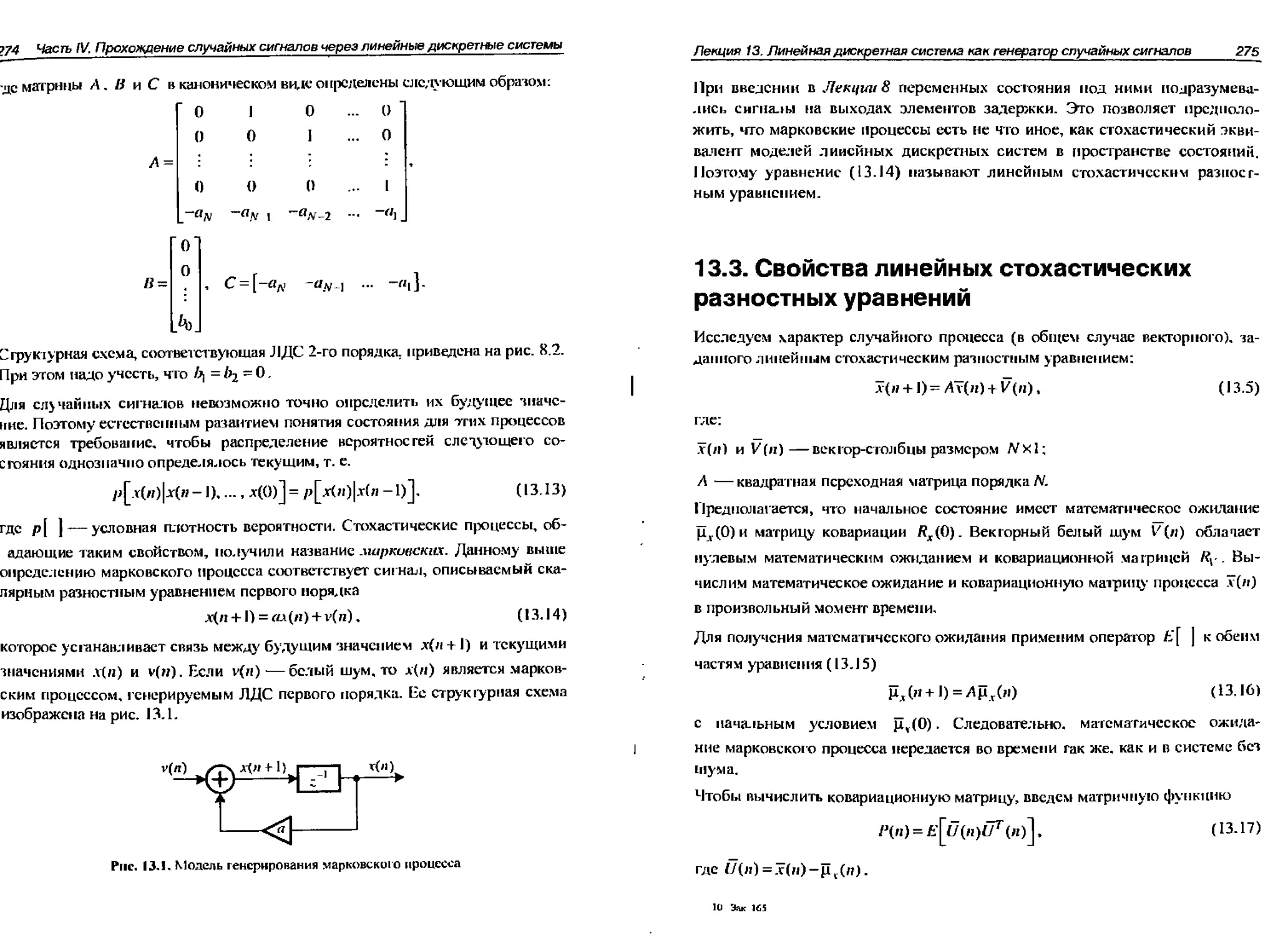
13.2. Генерирование ЛДС случайных сигналов.....................273
13.3. Свойства линейных стохастических разностных уравнений....275
Лекция 14. Прохождение случайных сигналов через линейные
дискретн ые систем ы...........................................279
14.1. Анализ во временной области..............................279
14.2. Анализ в частотной области...............................281
14.3. Спектральная факторизация................................283
ЧАСТЬ V. КВАНТОВАНИЕ В ЦИФРОВЫХ СИСТЕМАХ.......................287
Лекпня 15. Квантование сигналов в цифровых системах ...........289
15.1. Представление и кодирование чисел........................289
15.1.1. Формы представления чисел...........................290
15.1.2. Кодирование чисел...................................292
15.1.3. Арифметические операции над числами
с фиксированной запятой......................................294
15.2. Квантование чисел и сигналов.............................296
15.2.1. Способы квантования чисел...........................297
15.2.2. Модели процесса квантования. Предположения
о свойствах ошибок квантования...............................300
15.3. Шум аналого-цифрового преобразования.....................301
15.3.1. Линейная модель процесса квантования входного сигнала.
Оценки шума АЦП..............................................301
15.3.2. Шум АЦП, приведенный к выходу цифровой системы......304
Оглавление
УШ
Лекция 16. Эффекты квантования в цифровых системах-------........._307
16.1. Собственный шум цифровой системы..........................307
16.1.1. Линейная модель цифровой системы......................308
16.1.2. Определение составляющих собственного шума............310
16.1.3. Вычисление собственного шума...........................311
16.2. Полный выходной Шум системы...............................313
16.3. Эффекты переполнения в сумматорах.........................315
16.3.1. Динамический диапазон цифровой системы.............. 315
16.3.2. Масштабирующие коэффициенты...........................316
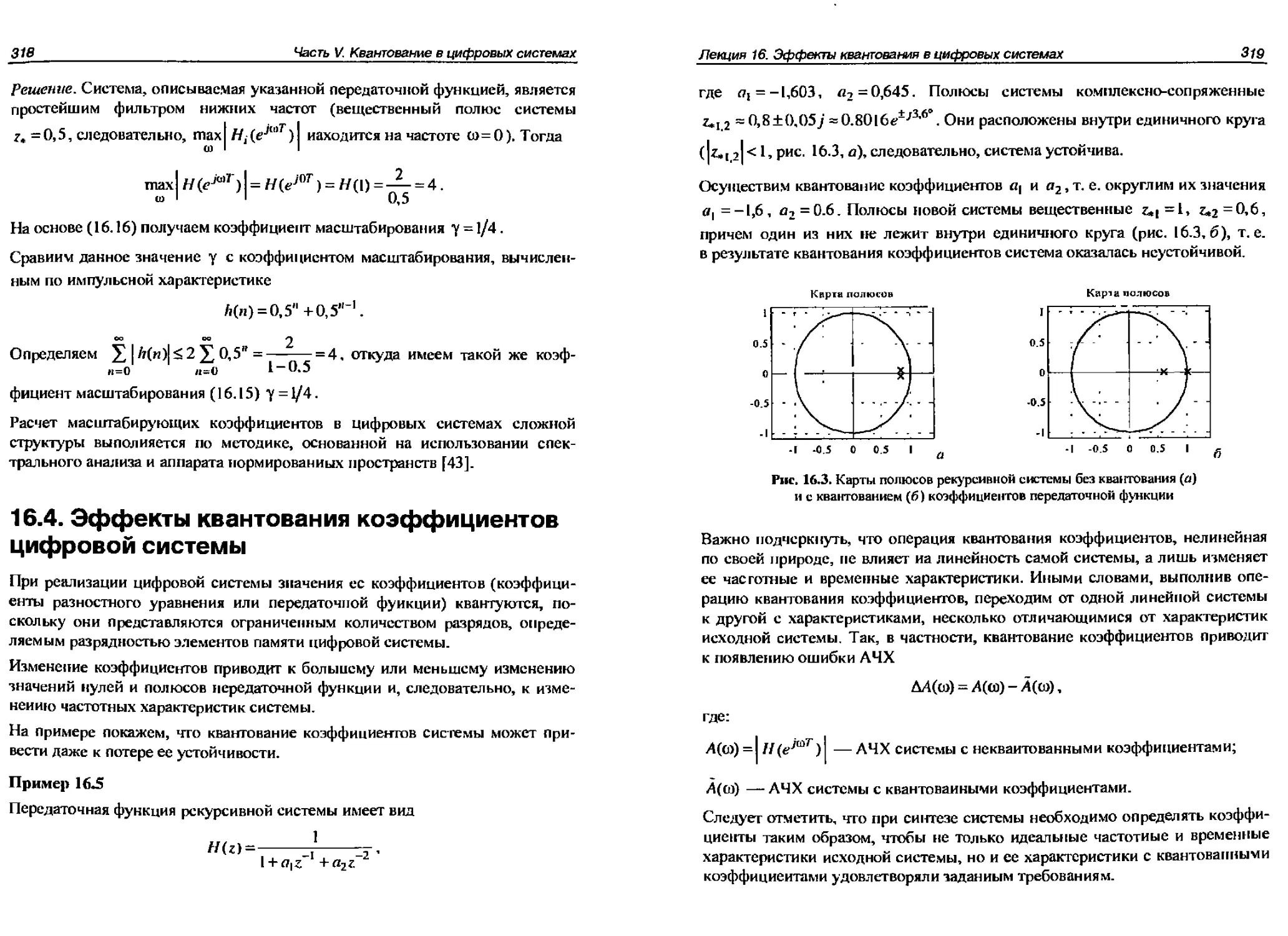
16.4. Эффекты квантования коэффициентов цифровой системы........318
16.5. Понятие о предельных циклах...............................320
ЧАСТЬ VI. ЦИФРОВЫЕ ФИЛЬТРЫ......................................323
Лекции 17. Введение в цифровые фильтры......................... 325
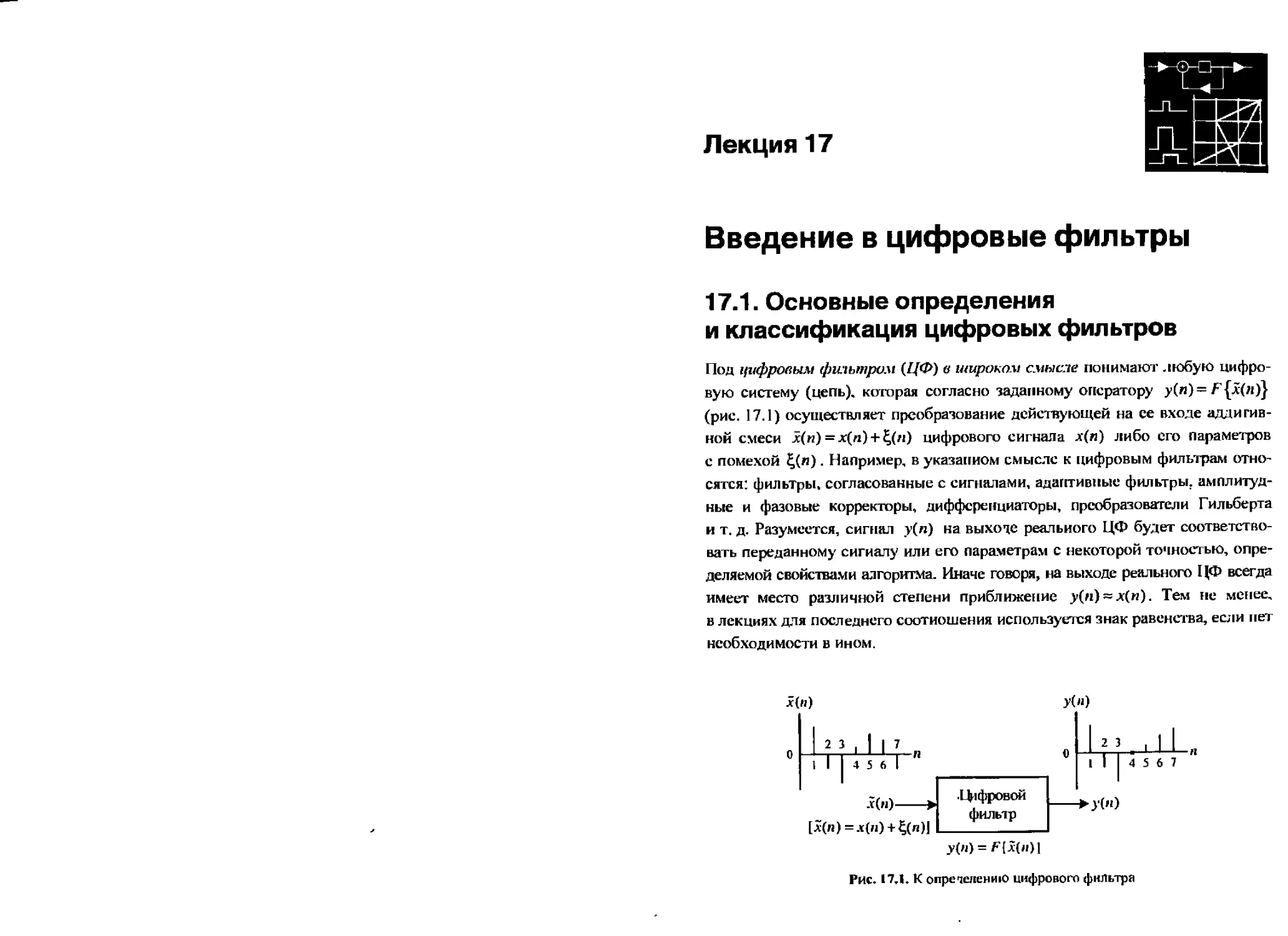
17.1. Основные определения и классификация цифровых фильтров.....325
17.2. Синтез цифровых фильтров..................................328
17.2.1. Требования к цифровым фильтрам........................328
17.2.2. Типы избирательных фильтров н задание требований к ним.331
17.2.3. Характеристика задачи оптимального синтеза............336
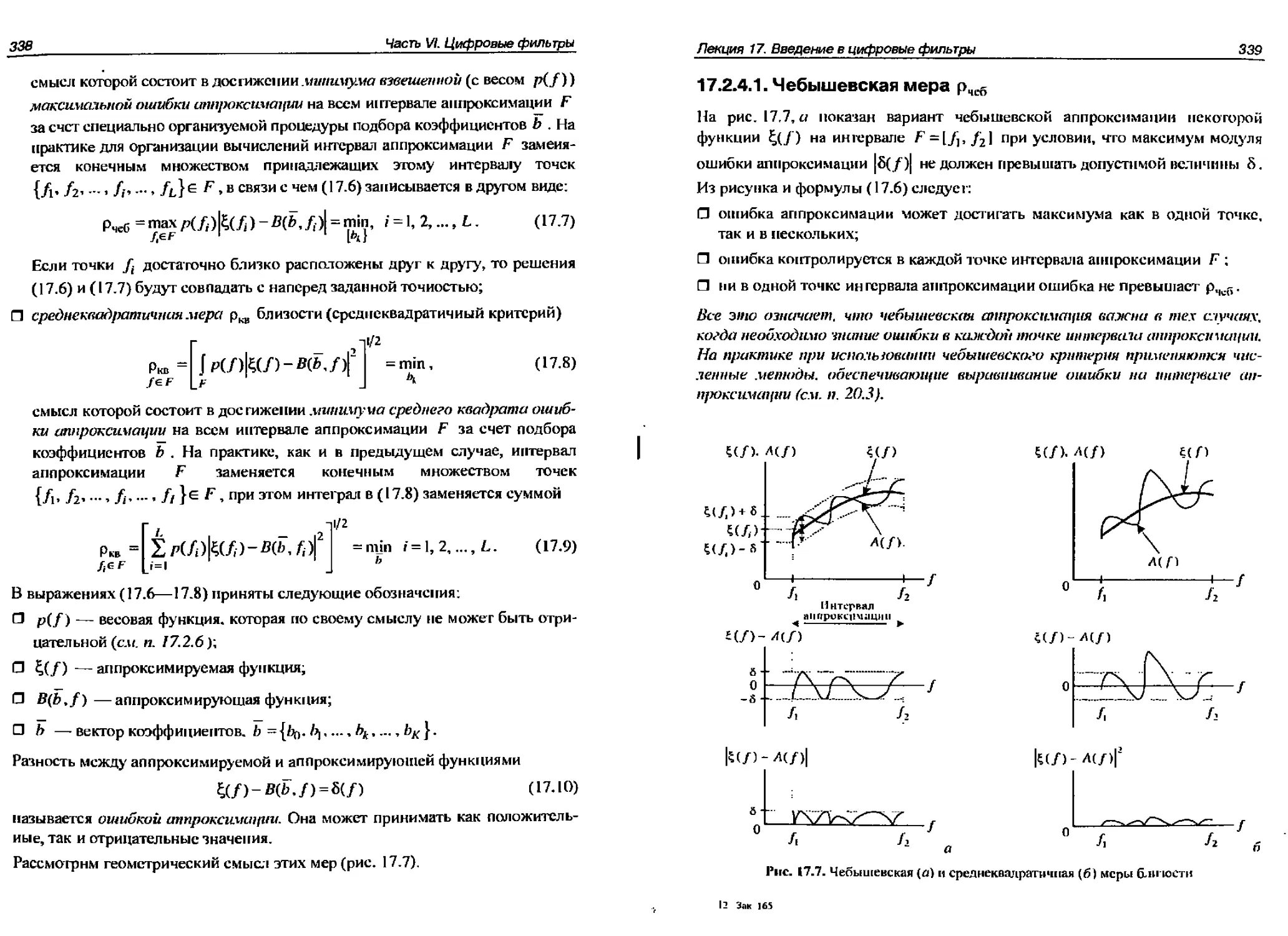
17.2.4. Меры близости в задачах аппроксимации ЦОС.............337
17.2.5. Постановка задачи оптимального синтеза................340
17.2.6. Весовая функция.......................................342
17.3. Конструирование функциональной схемы цифрового фильтра.....344
Лекцнн 18. КИХ-фильтры с линейной ФЧХ............................................... 345
18.1. Условия безыскаженной передачи сигналов..................345
18.2. Теорема о КИХ-фильтрах с линейной ФЧХ.....................348
18.3. Структурные схемы КИХ-фильтров с линейной ФЧХ.............358
18.4. Частотные характеристики КИХ-фильтров с линейной ФЧХ.......361
18.4.1. КИХ-фильтрытипа 1 иЗ..................................363
18.4.2. КИХ-фильтры типа 2 и 4................................366
18.5. Свойства КИХ-фильтров с линейной ФЧХ......................369
18.5.1. Свойства КИХ-фнльтровтипа 1............................370
18.5.2. Свойства КИХ-фильтров типа 2...........................371
18.5.3. Свойства КИХ-фильтров типа 3..........................372
18.5.4. Свойства КИХ-фильтров типа 4..........................373
Оглавление
IX
Лекция 19. Синтез КИХ-фильтров методом окон.....................376
19.1. Постановка задачи. Определение метода....................376
19.1.1. Общая характеристика задачи...........................376
19.1.2. Явление Гиббса........................................379
19.2. Окна и их основные параметры.............................383
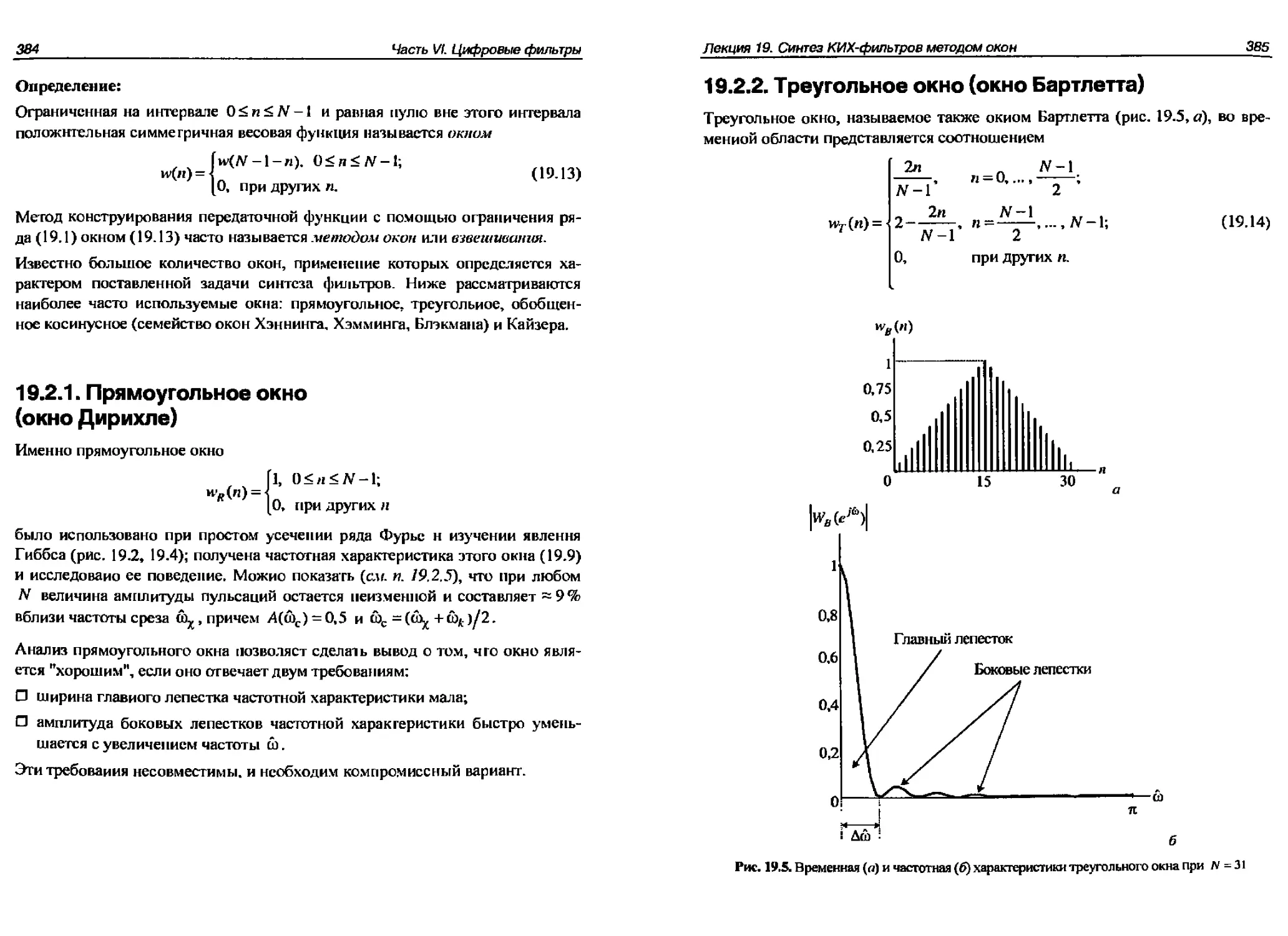
19.2.1. Прямоугольное окно (окио Дирихле).....................384
19.2.2. Треугольноеокно(окио Бартлетта).......................385
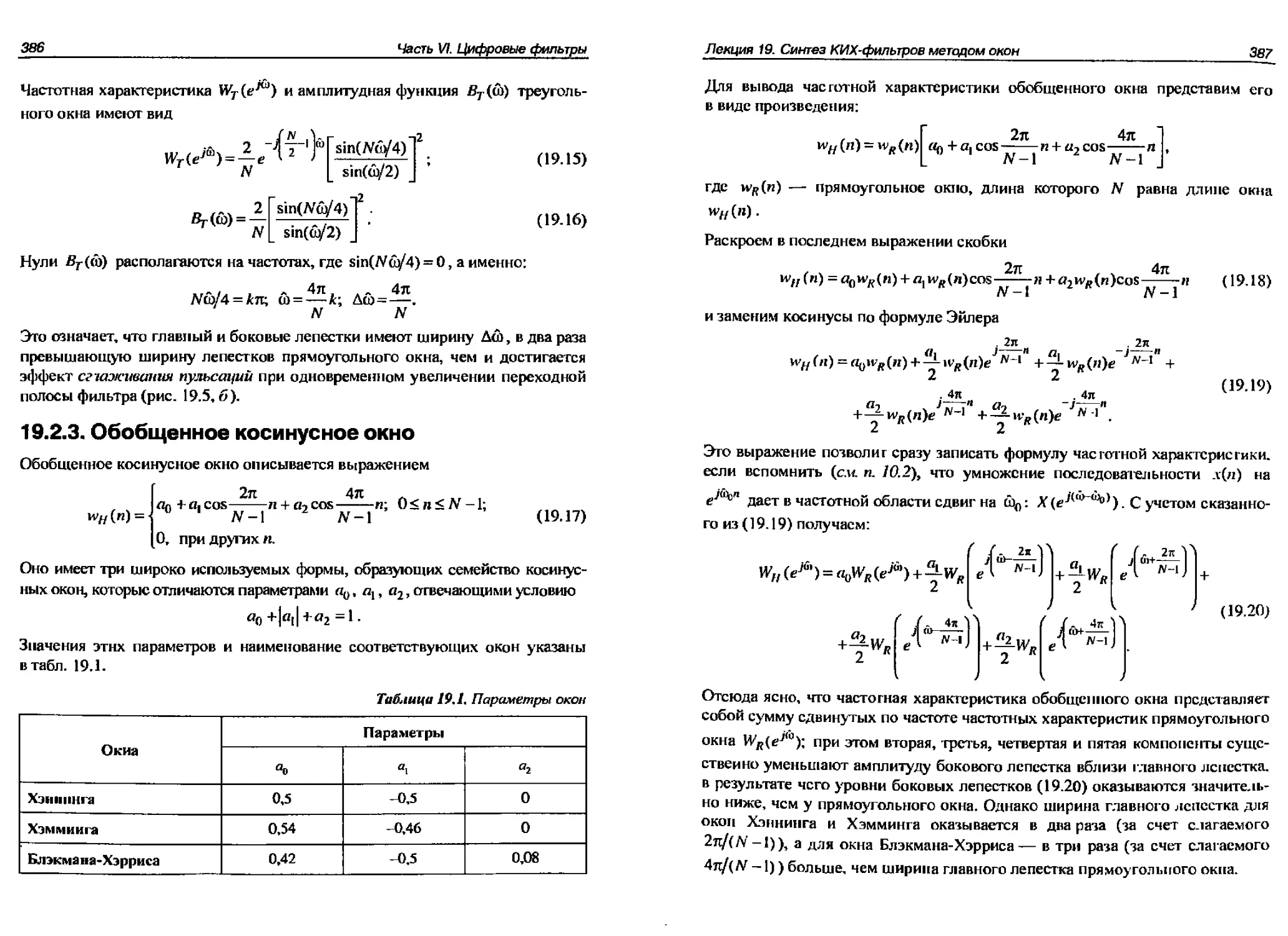
19.2.3. Обобщенное косинусное окно............................386
19.2.4. Окно Кайзера..........................................390
19.2.5. Определение величины пульсаций Гиббса.................393
19.3. Методика синтеза КИХ-филыров на основе окон...............397
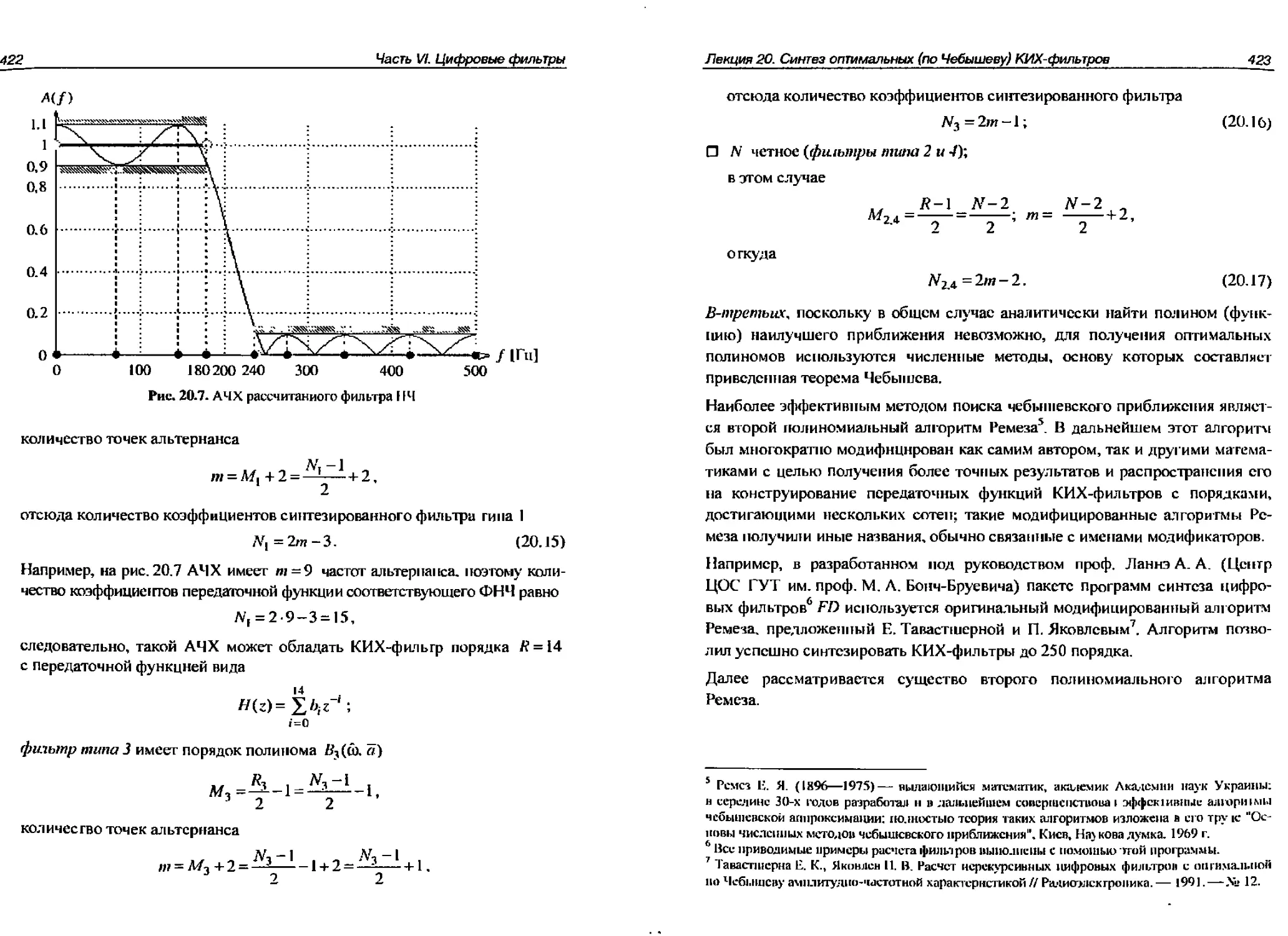
Лекции 20. Синтез оптимальных (но Чебышеву) КИХ-фильтров......... 404
20.1. Понятие об оптимальном (по Чебышеву) синтезе фильтров....404
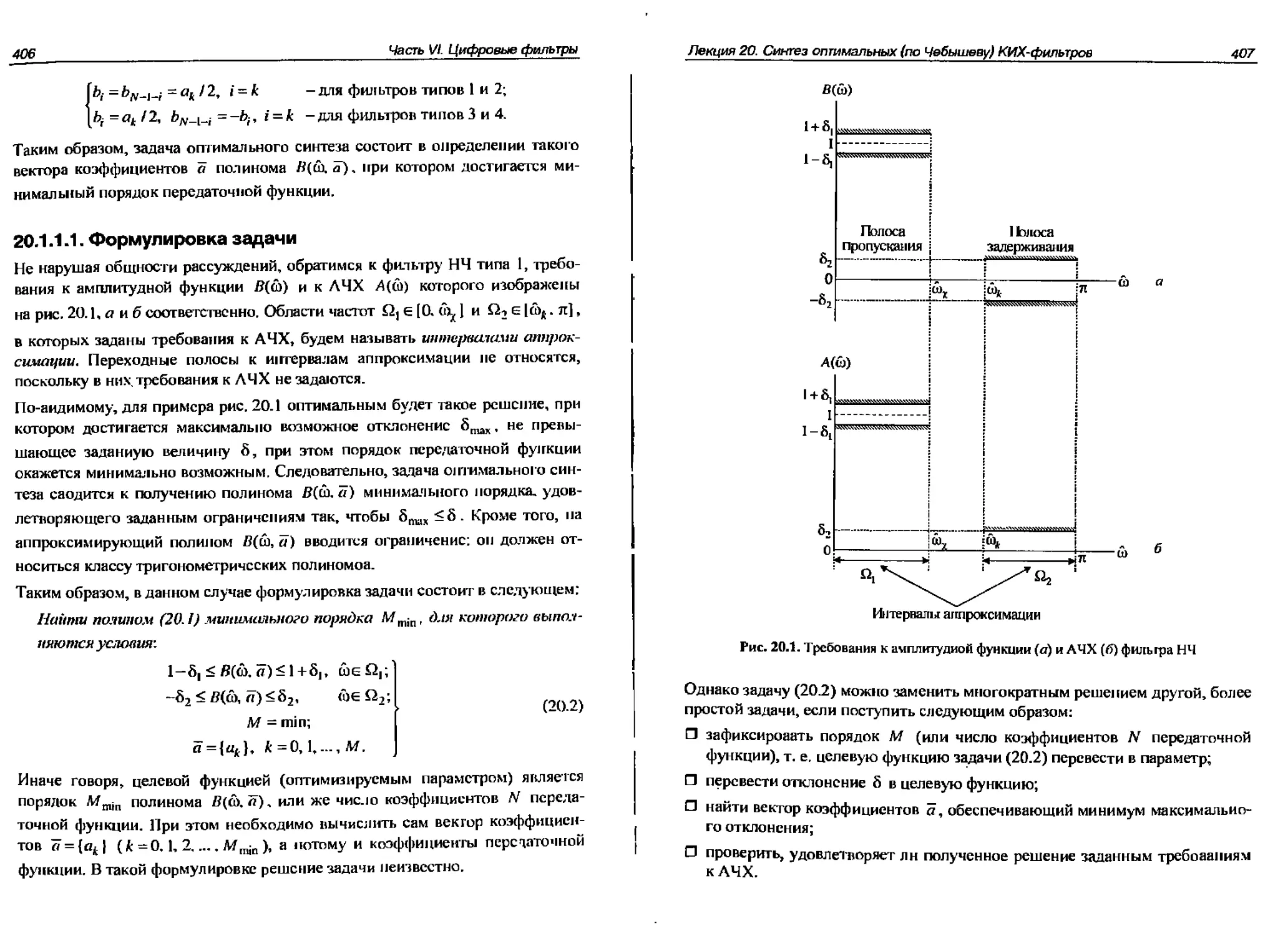
20.1.1. Постановка задачи оптимального синтеза................405
20.1.2. Понятие о полиномах Чебышева..........................412
20.2. Теорема Чебышева.........................................415
20.3. Полиномиальный алгоритм Ремеза...........................424
20.3.1. Понятие об алгоритме Ремеза...........................424
20.3.2. Пример использования обменного алгоритма Ремеза.......426
Лекция 21. Цифровые преобразователи Гильберта
и дифференциаторы................................................431
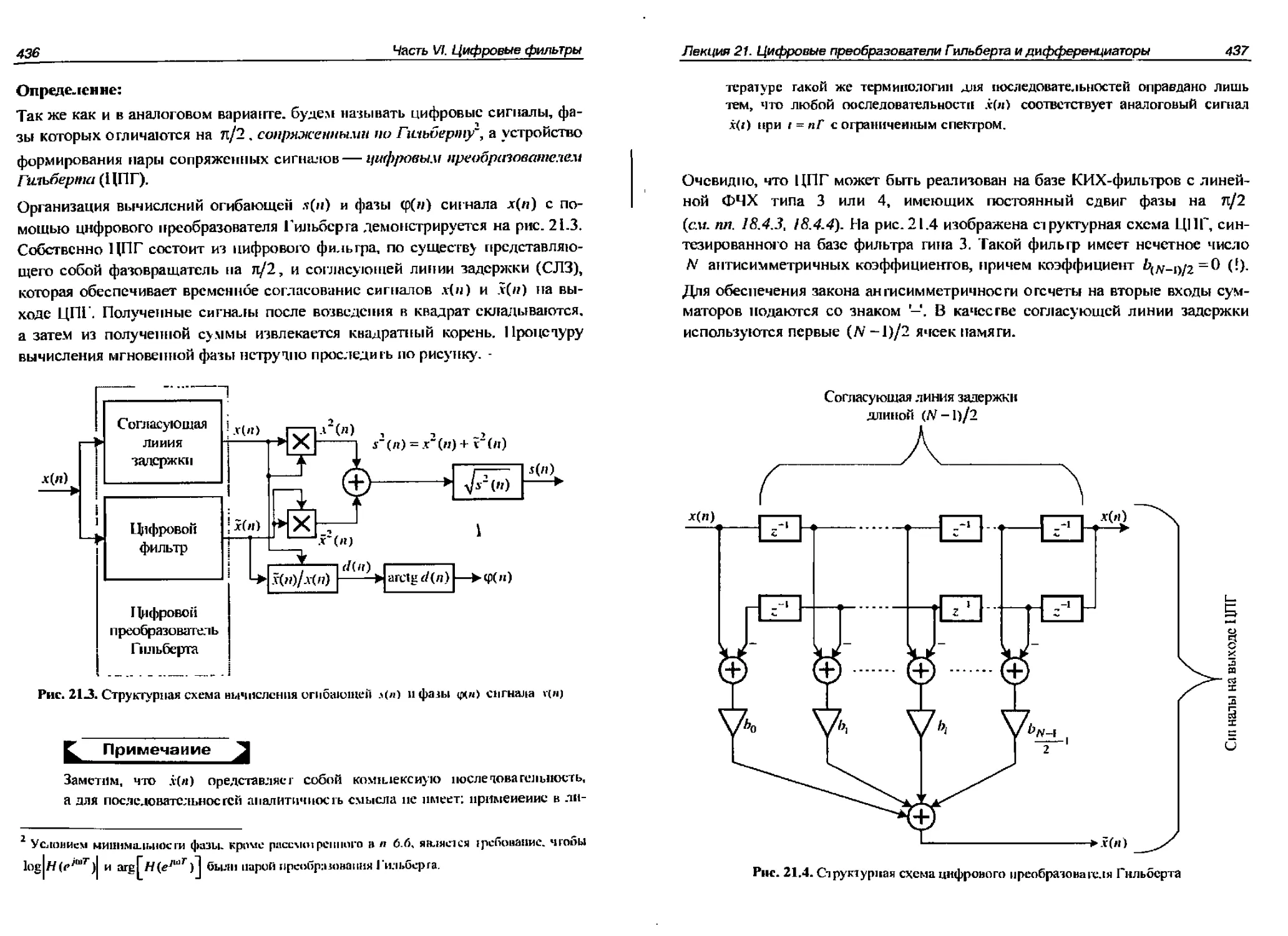
21.1.1 Цифровой преобразователь Гильберта.......................431
21.1,1. Понятие о преобразовании Гильберта...................431
21.1.2. Дискретное преобразование Гильберта..................434
21.1.3. Частотные характеристики цифровых
преобразователей Гильберта....................................438
21.1.4. Импульсная характеристика ЦПГ.........................440
21.1.5. Задание требований к цифровым преобразователям Гильберта.... 444
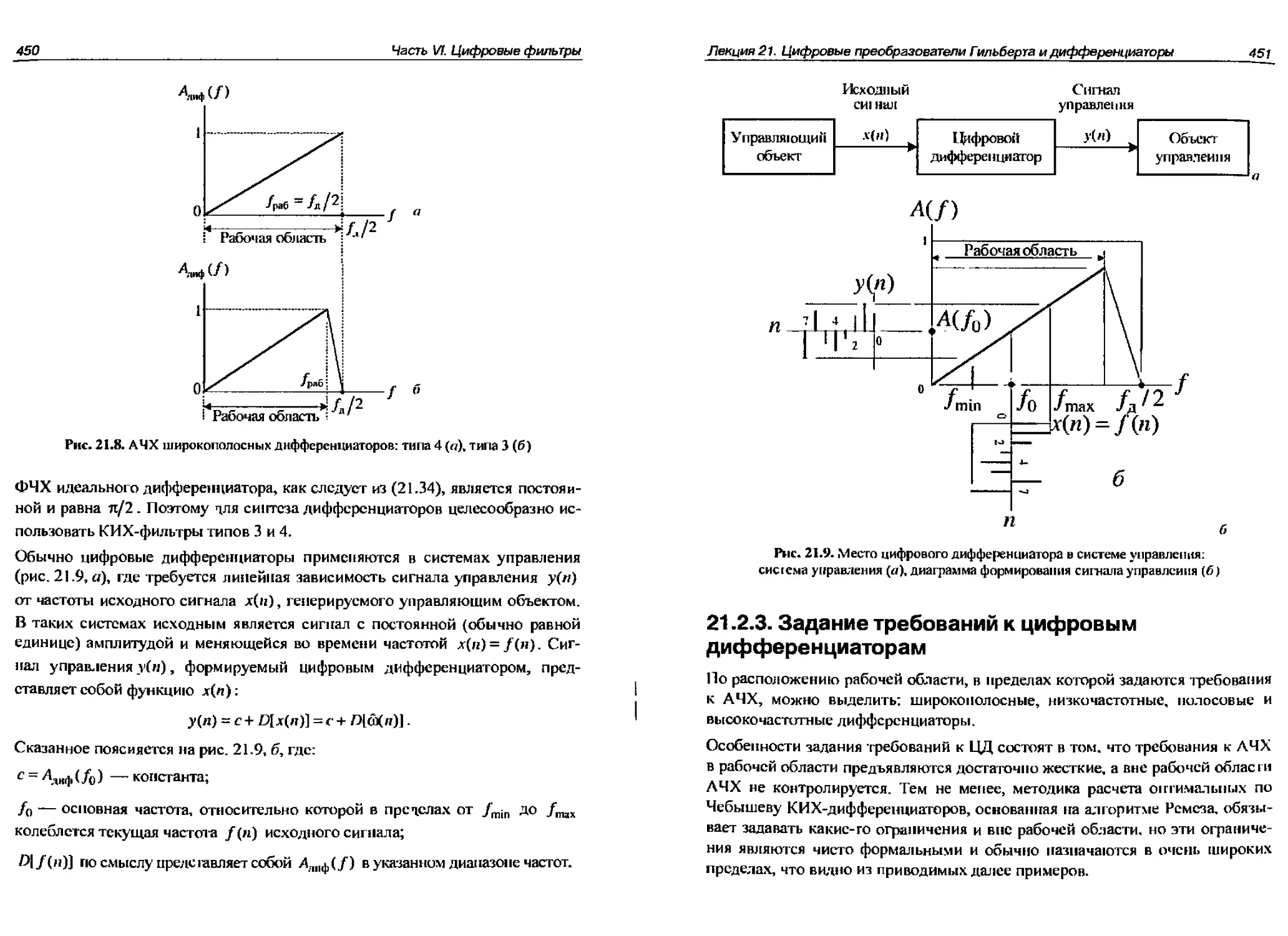
21.2. Цифровые дифференциаторы..................................447
21.2.1. Понятие о дифференциаторе.............................447
21.2.2. Частотные характеристики цифровых дифференциаторов.....448
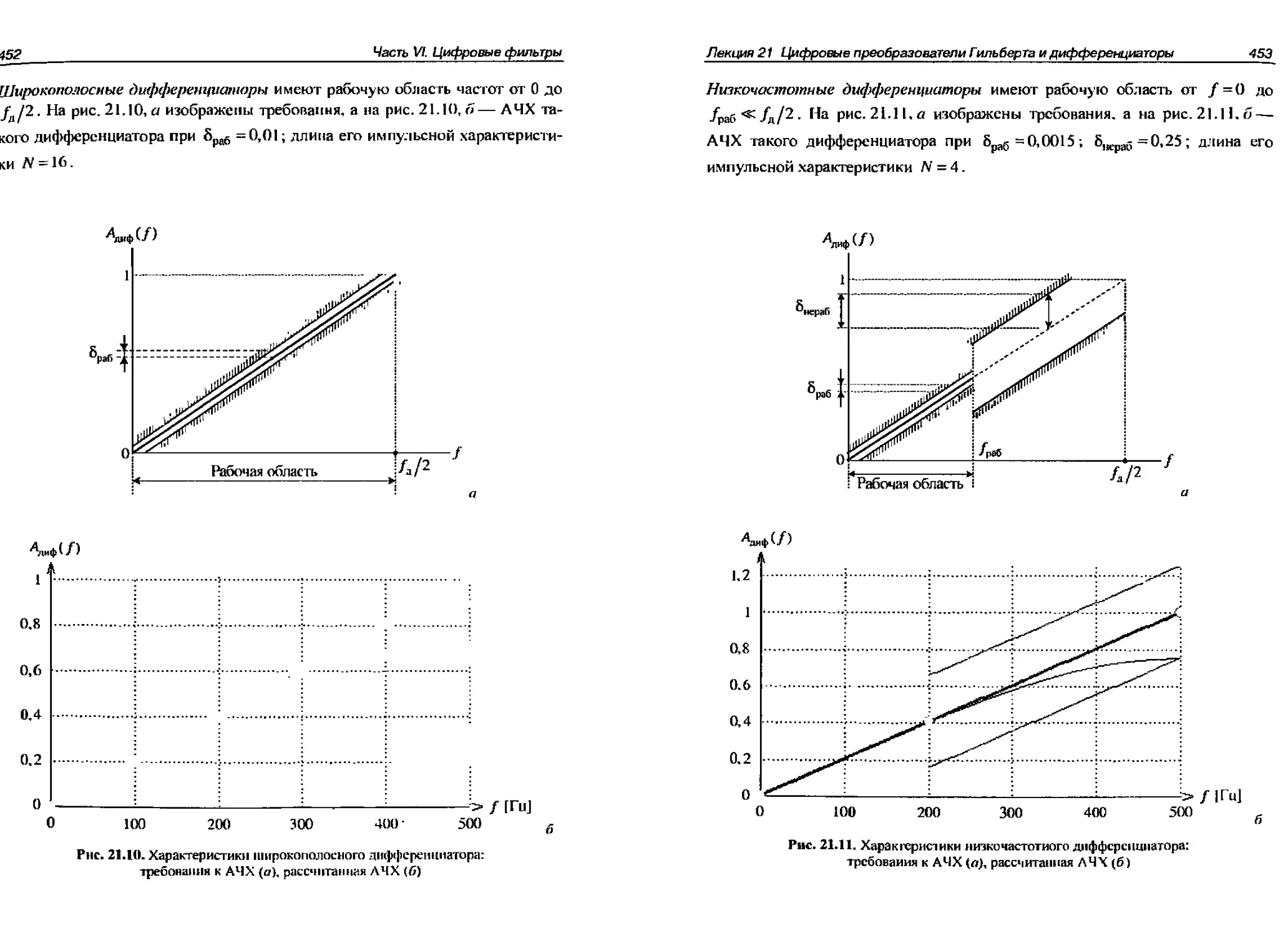
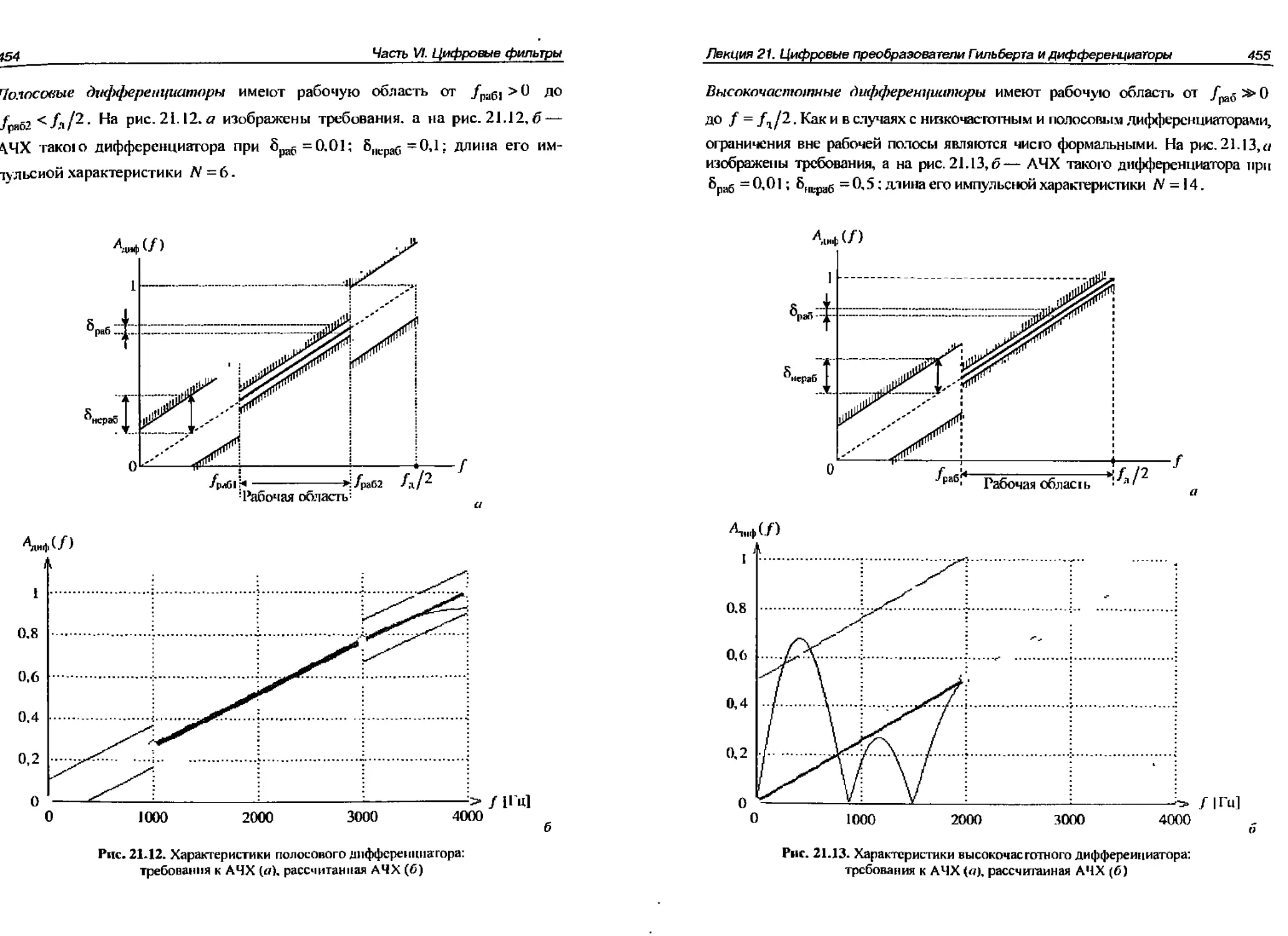
21.2.3. Задание требований к цифровым дифференциаторам........451
Лекция 22. Специальные КИХ-фильтры..............................456
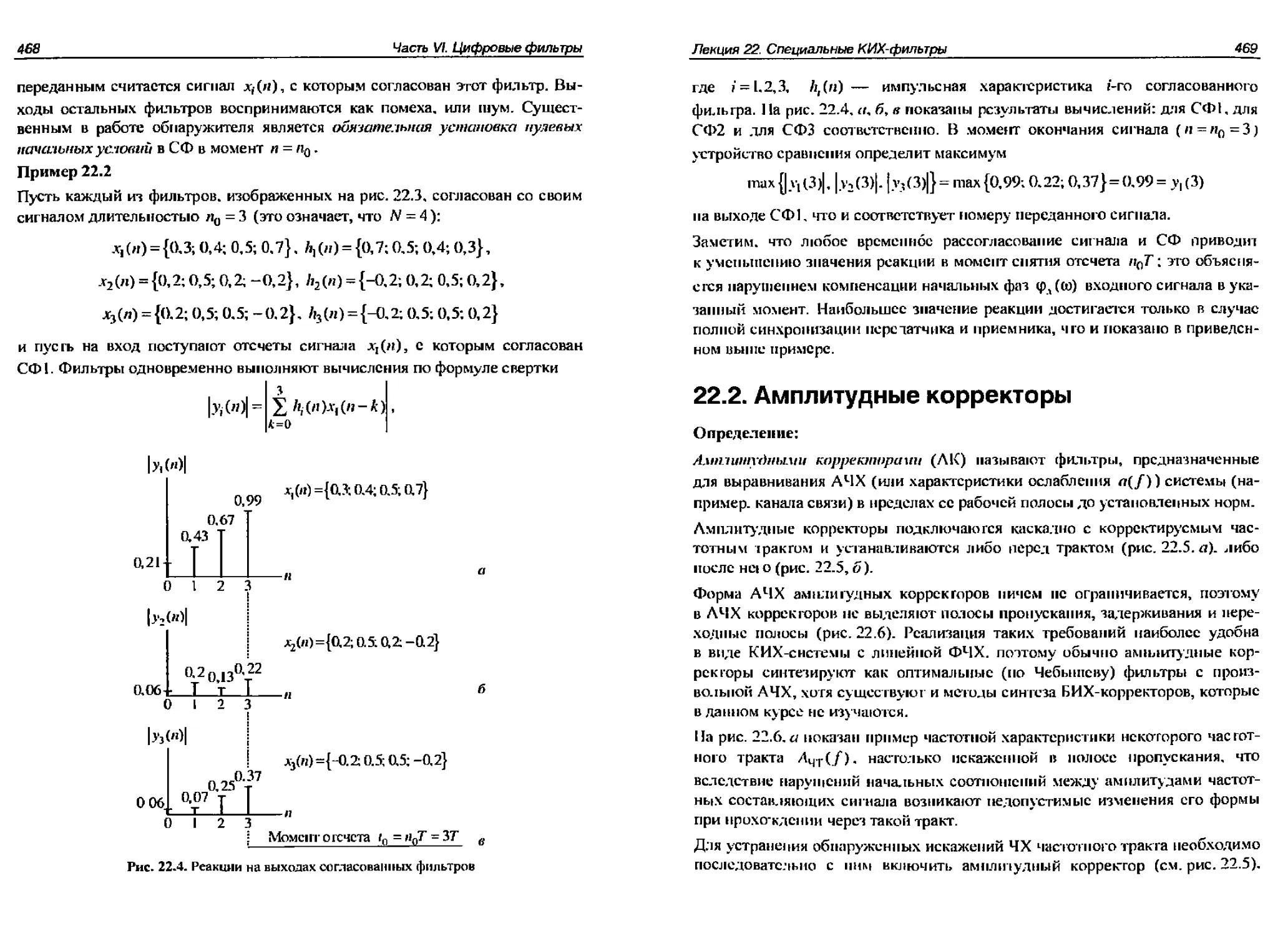
22.1. Цифровые согласованные КИХ-фильтры.......................456
22.1.1. Связь между характеристиками сигнала и согласованного
с ним фильтра.................................................457
X
Оглавление
22.1.2. Свойства согласованного фильтра...........................463
22.1.3. Решающая схема обнаружителя сигналов......................467
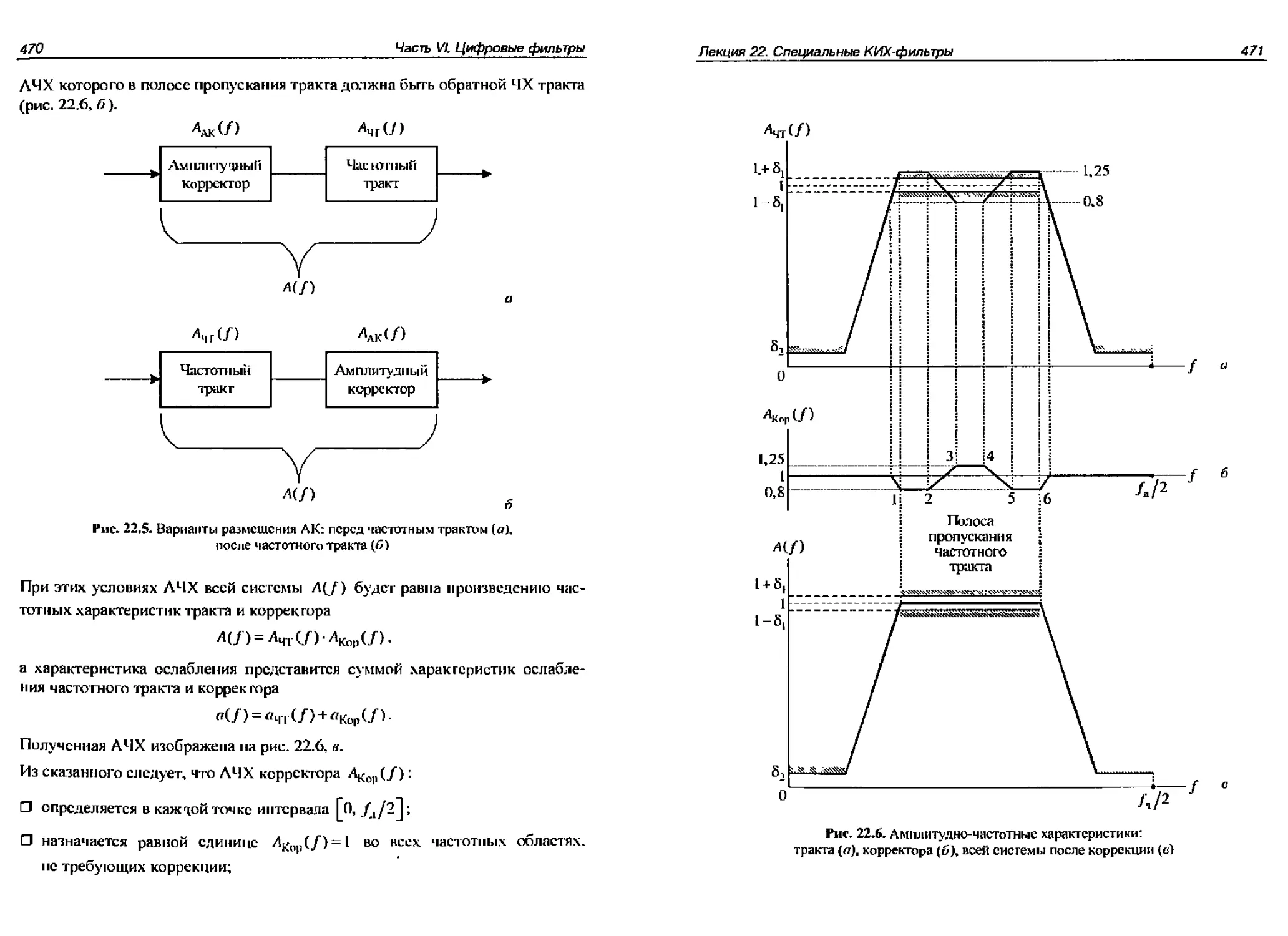
22.2. Амплитудные корректоры.....................................469
Лекции 23. Синтез БИХ-фильтров....................................473
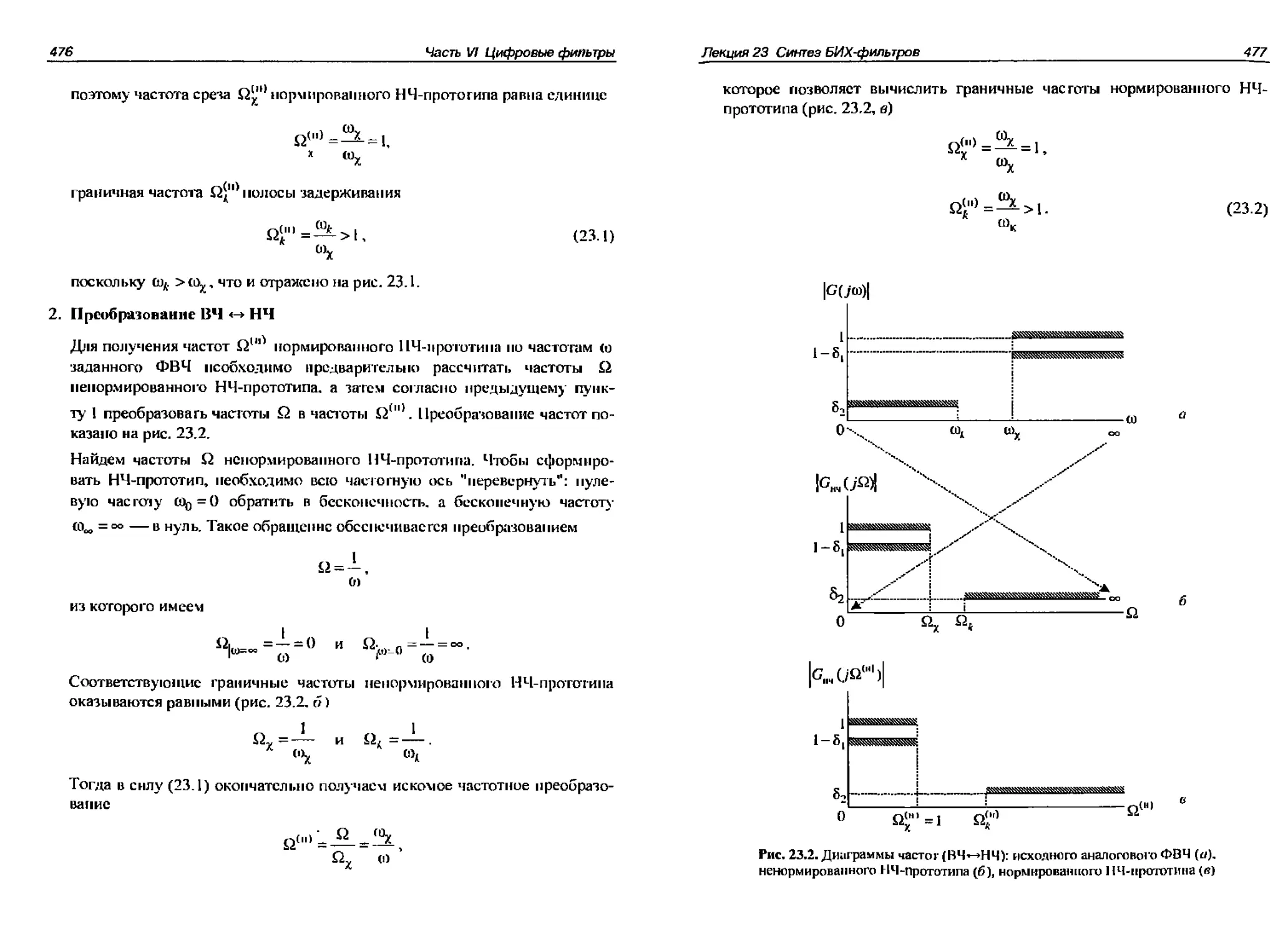
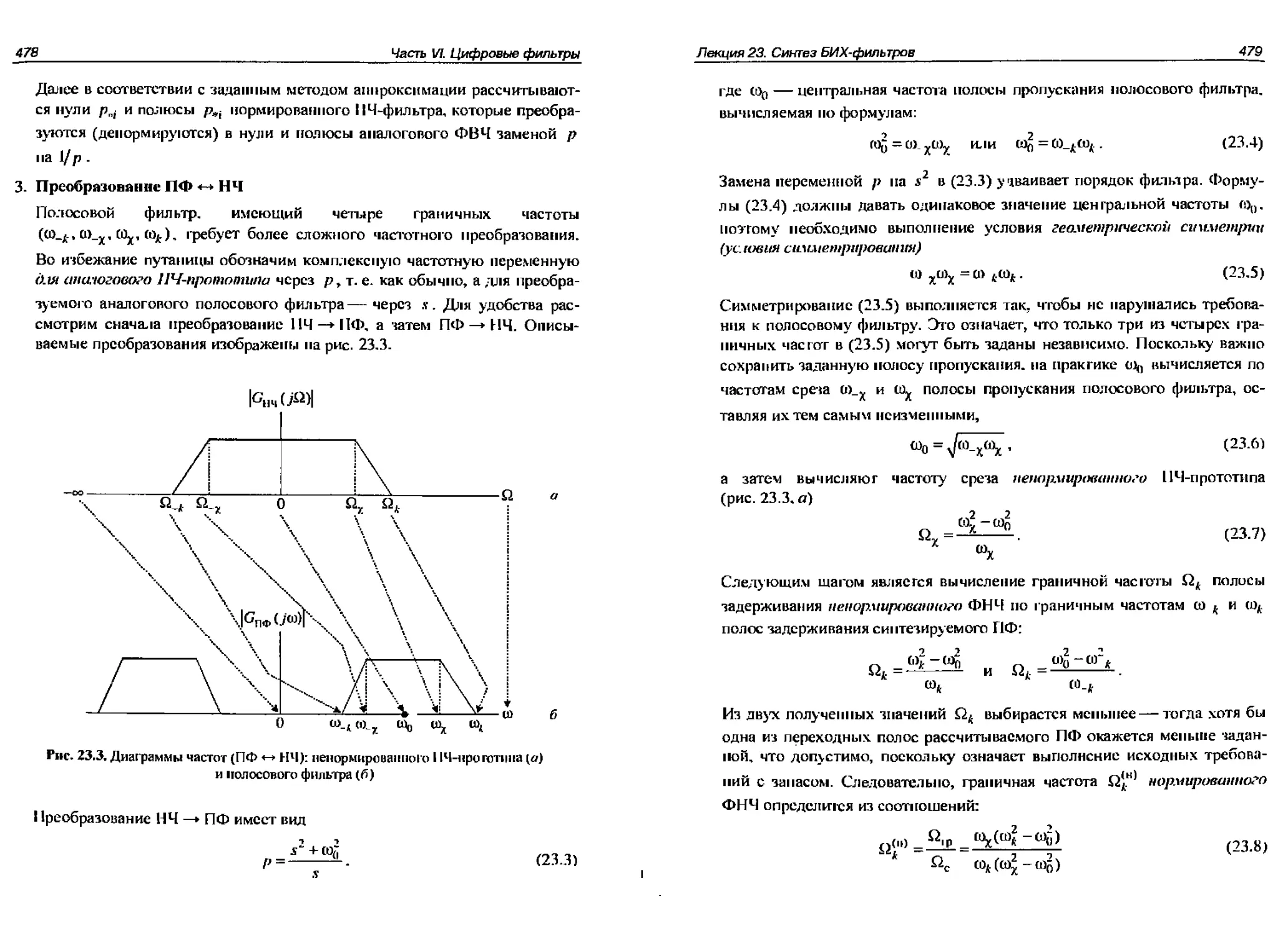
23.1. Обзор методов синтеза аналоговых фильтров-прототипов........474
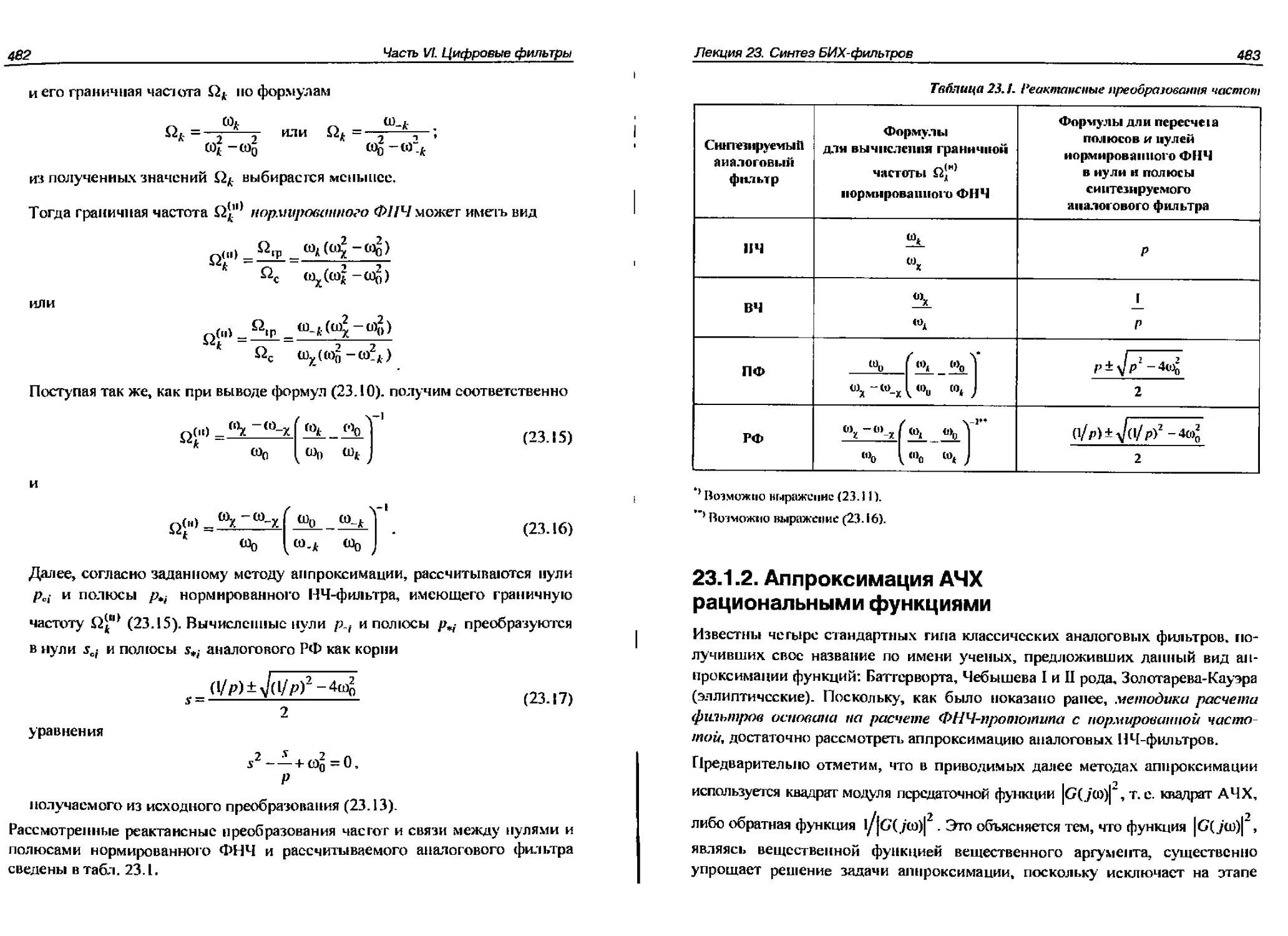
23.1.1. Реактансные преобразования частоты........................475
23.1.2. Аппроксимация АЧХ рациональными функциями.................483
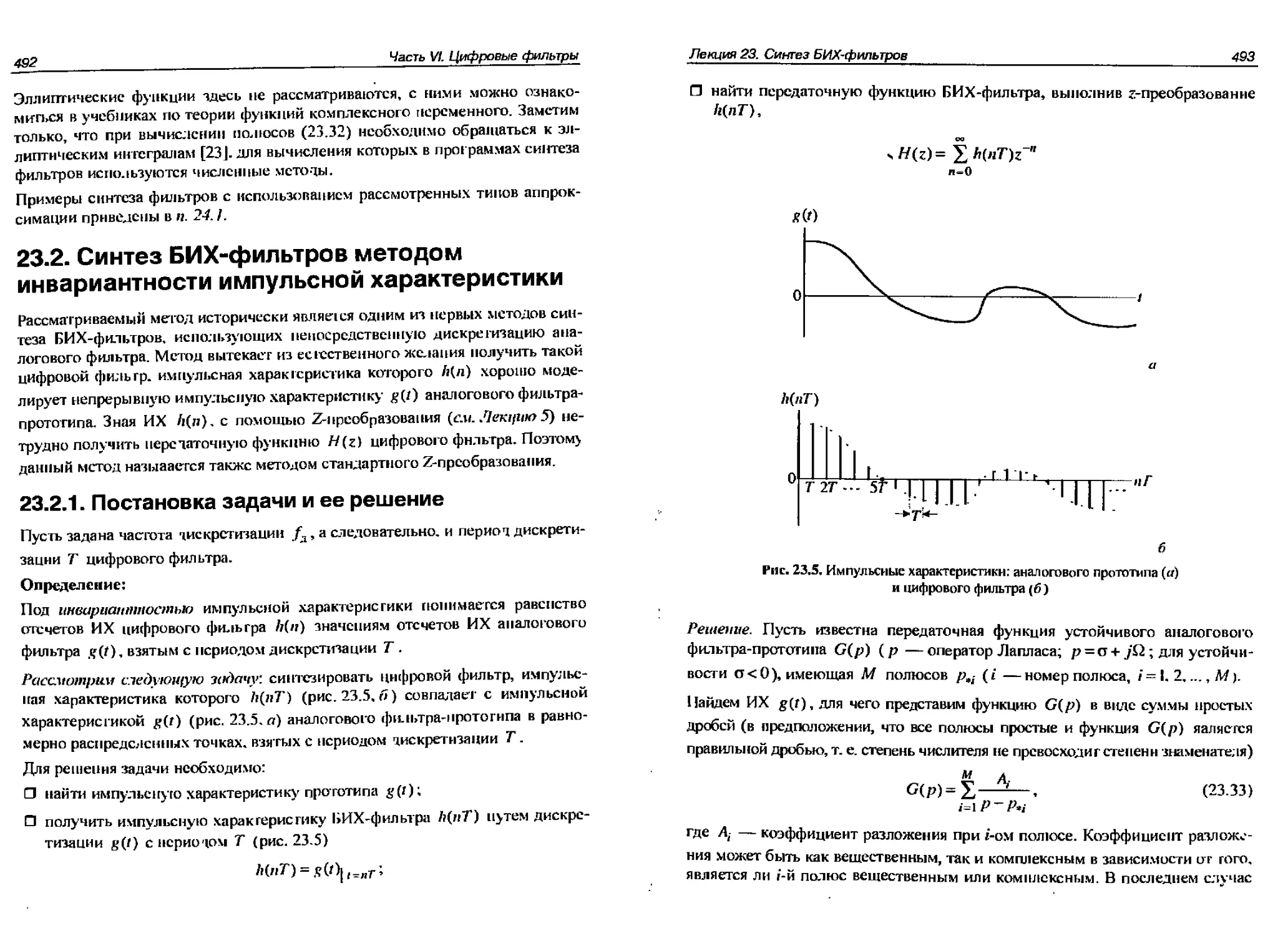
23.2. Синтез БИХ-фильтров методом инвариантности
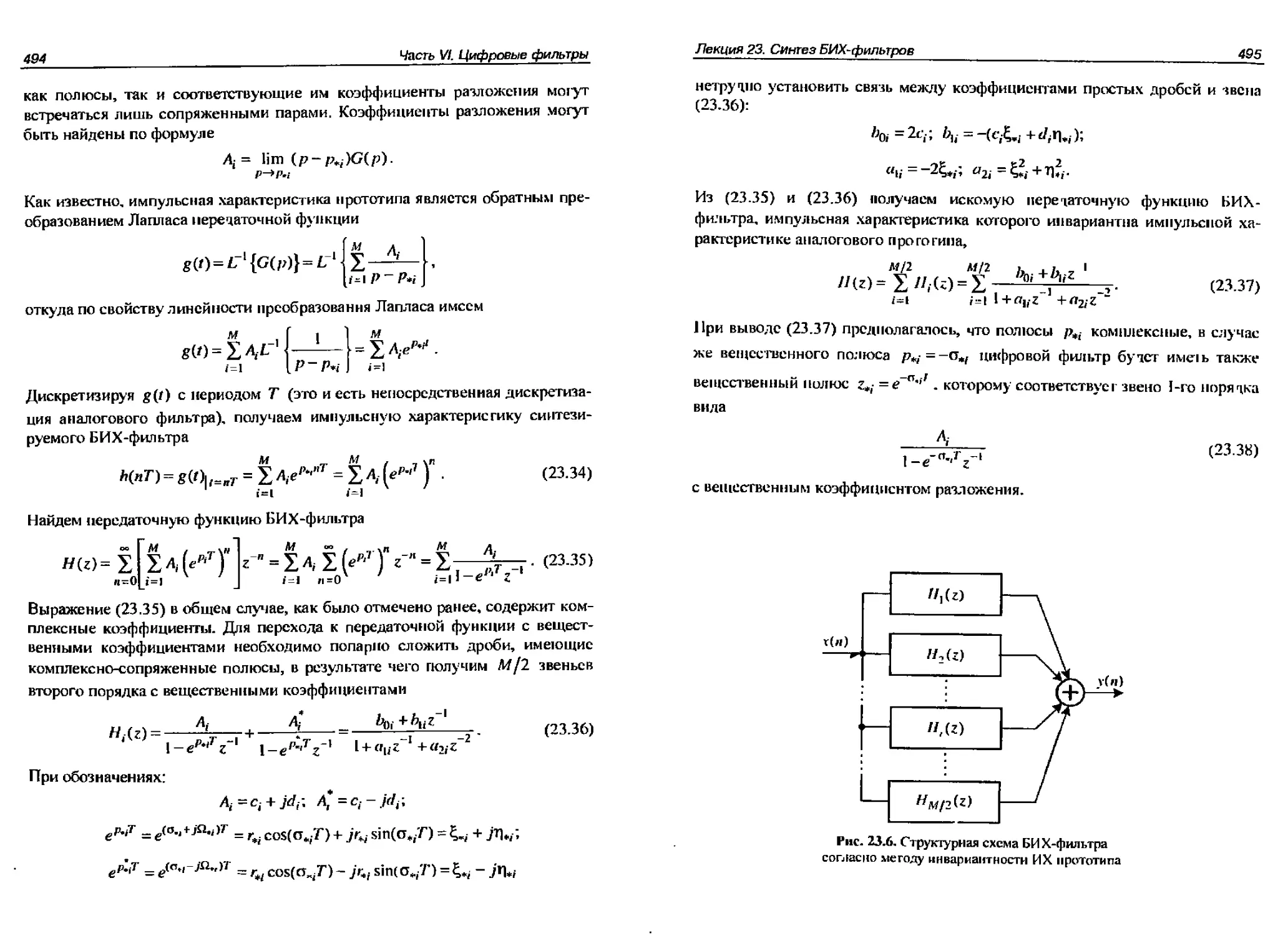
импульсной характеристики........................................492
23.2.1. Постановка задачи и ее решение............................492
23.2.2. Свойства БИХ-фильтров, синтезируемых методом
инвариантности импульсной характеристики..........................496
23.2.3. Процедура синтеза БИХ-фильтров методом
инвариантности ИХ.................................................498
Лекция 24. Синтез БИХ-фяльтров методом билинейного
Z-прсобразовання..................................................499
24.1. Билинейное Z-преобразование................................499
24.1.1. Определение билинейного /-преобразования..................499
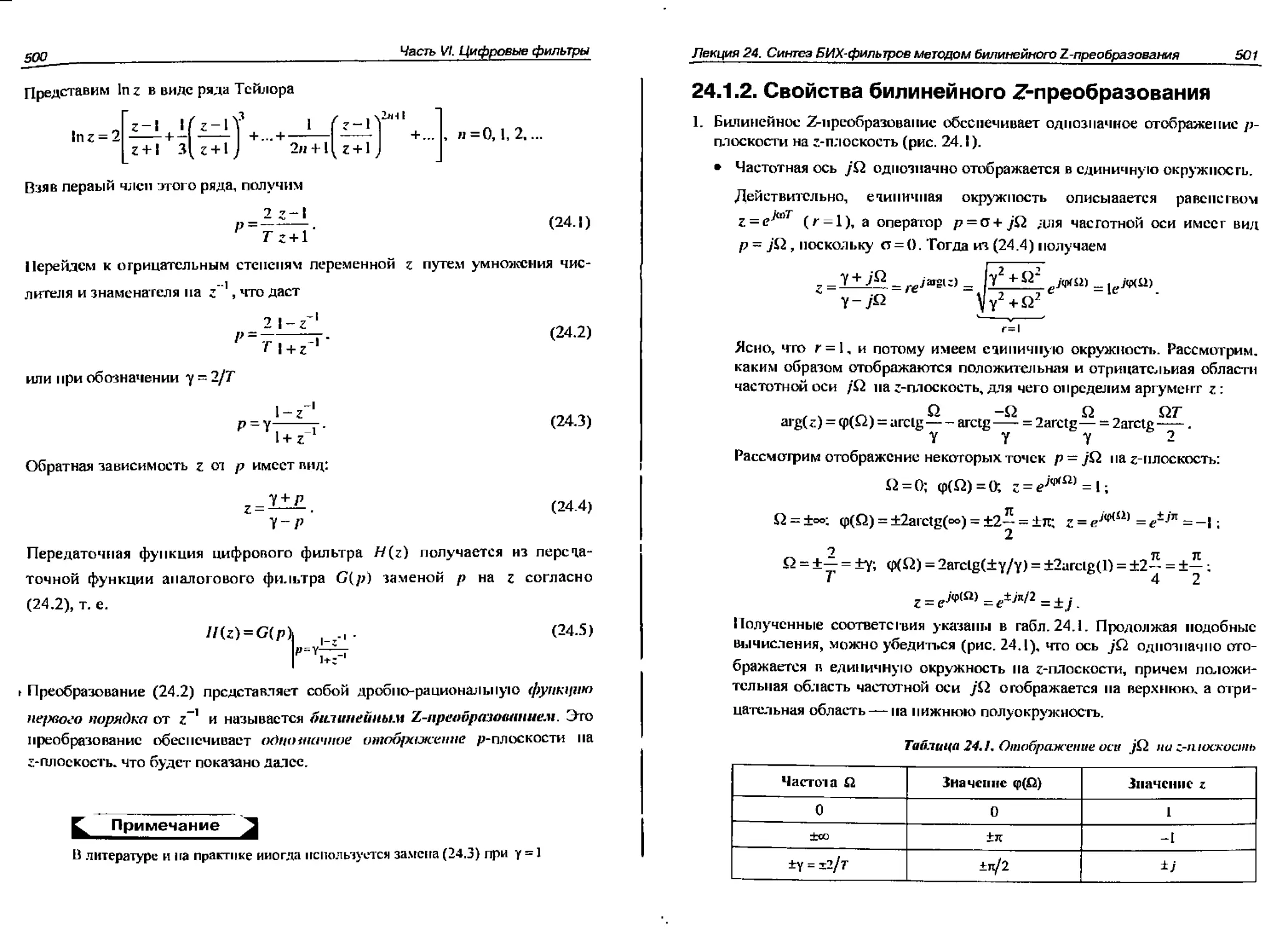
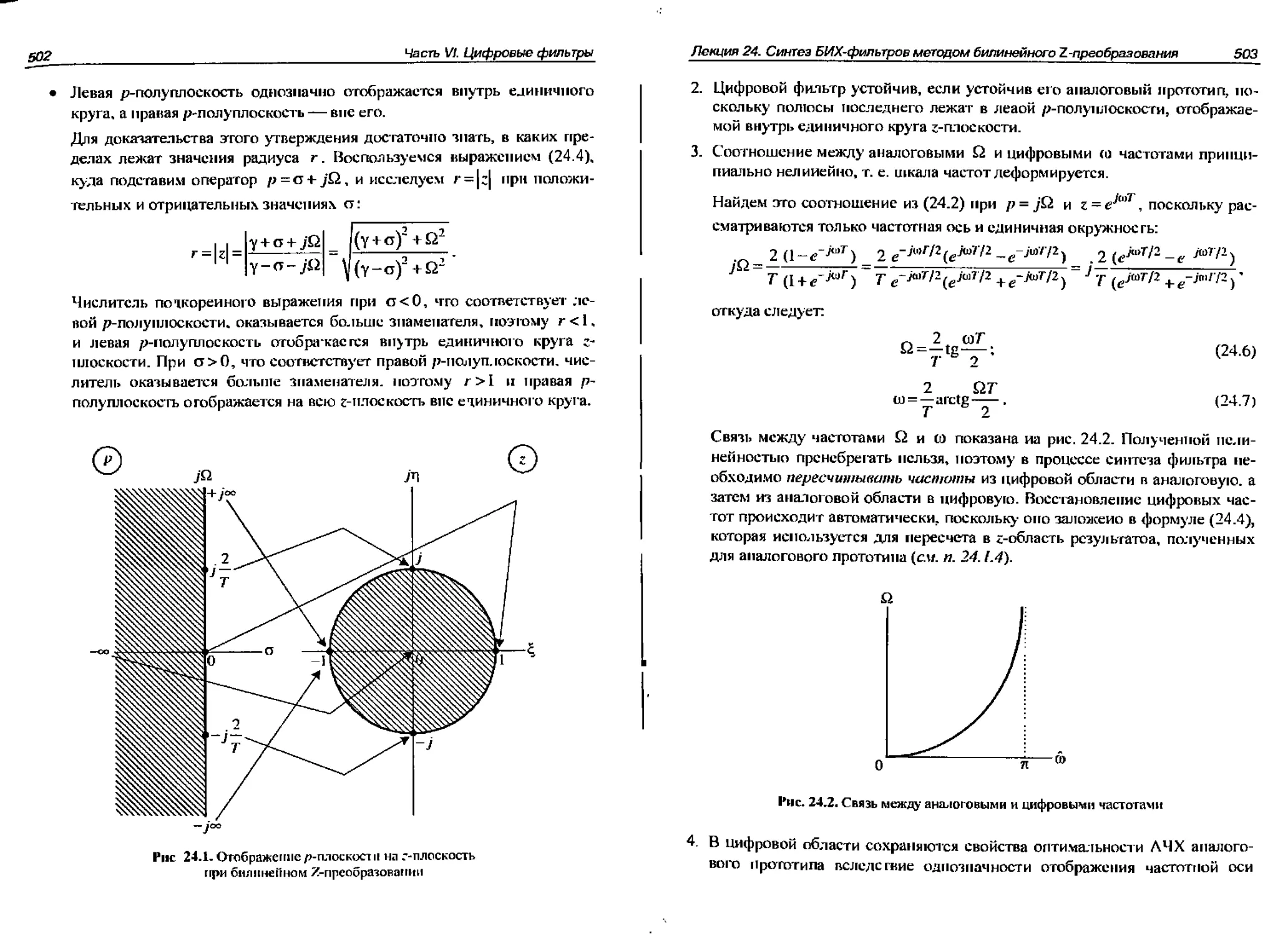
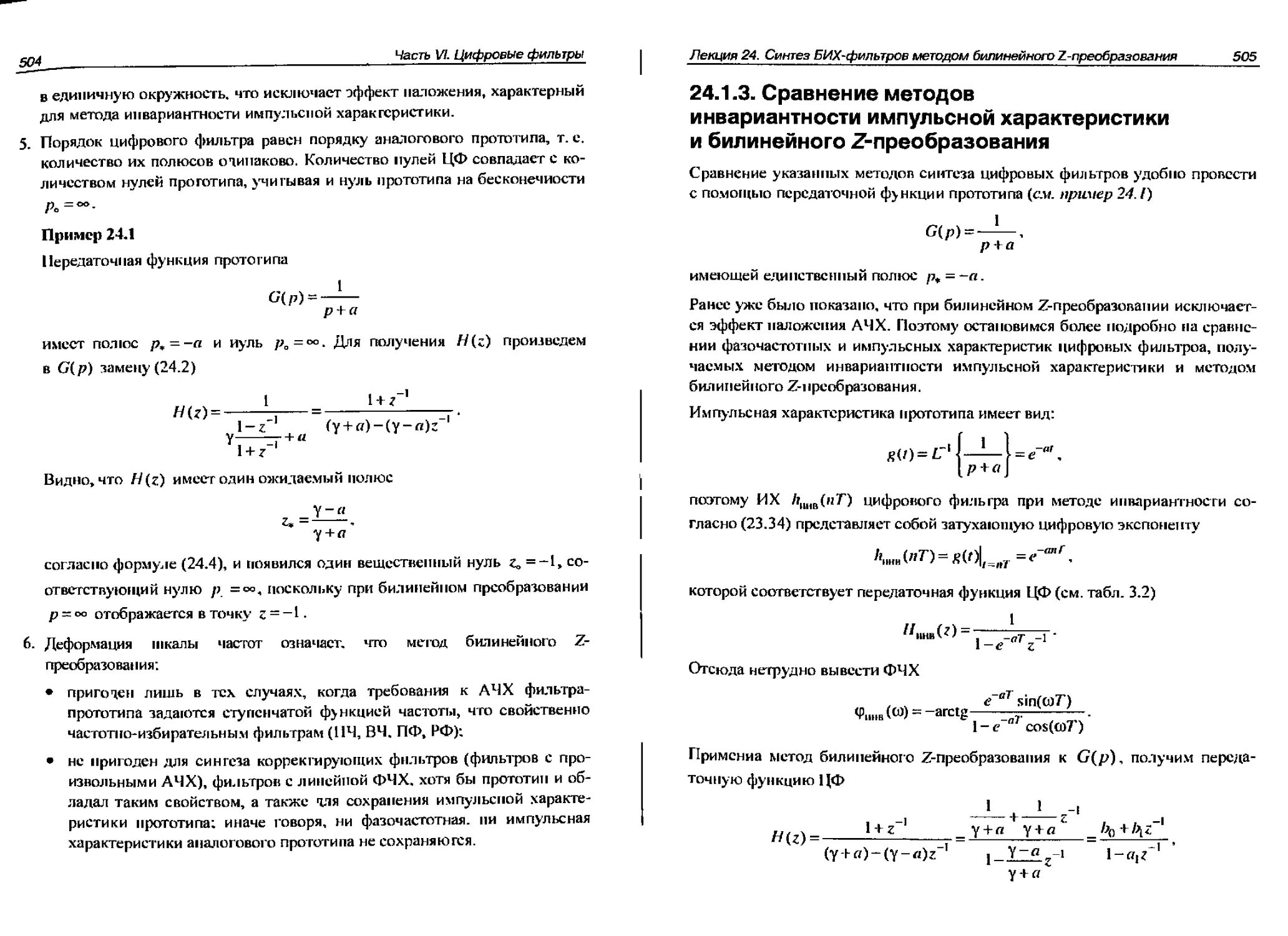
24.1.2. Свойства билинейного Z-цреобразоваиия.....................501
24.1.3. Сравнение методов инвариантности импульсной
характеристики и билинейного /-преобразования.....................505
24.1.4. Процедура синтеза цифрового фильтра при билинейном
Z-преобразовании..................................................507
24.2. Синтез БИХ-фильтров методом частотных преобразований
БИХ-фильтров нижних частот.......................................517
ЧАСТЬ УП. АДАПТИВНАЯ ФИЛЬТРАЦИЯ___________________________________525
Лекция 25. Введение в линейное предсказание.......................................... 527
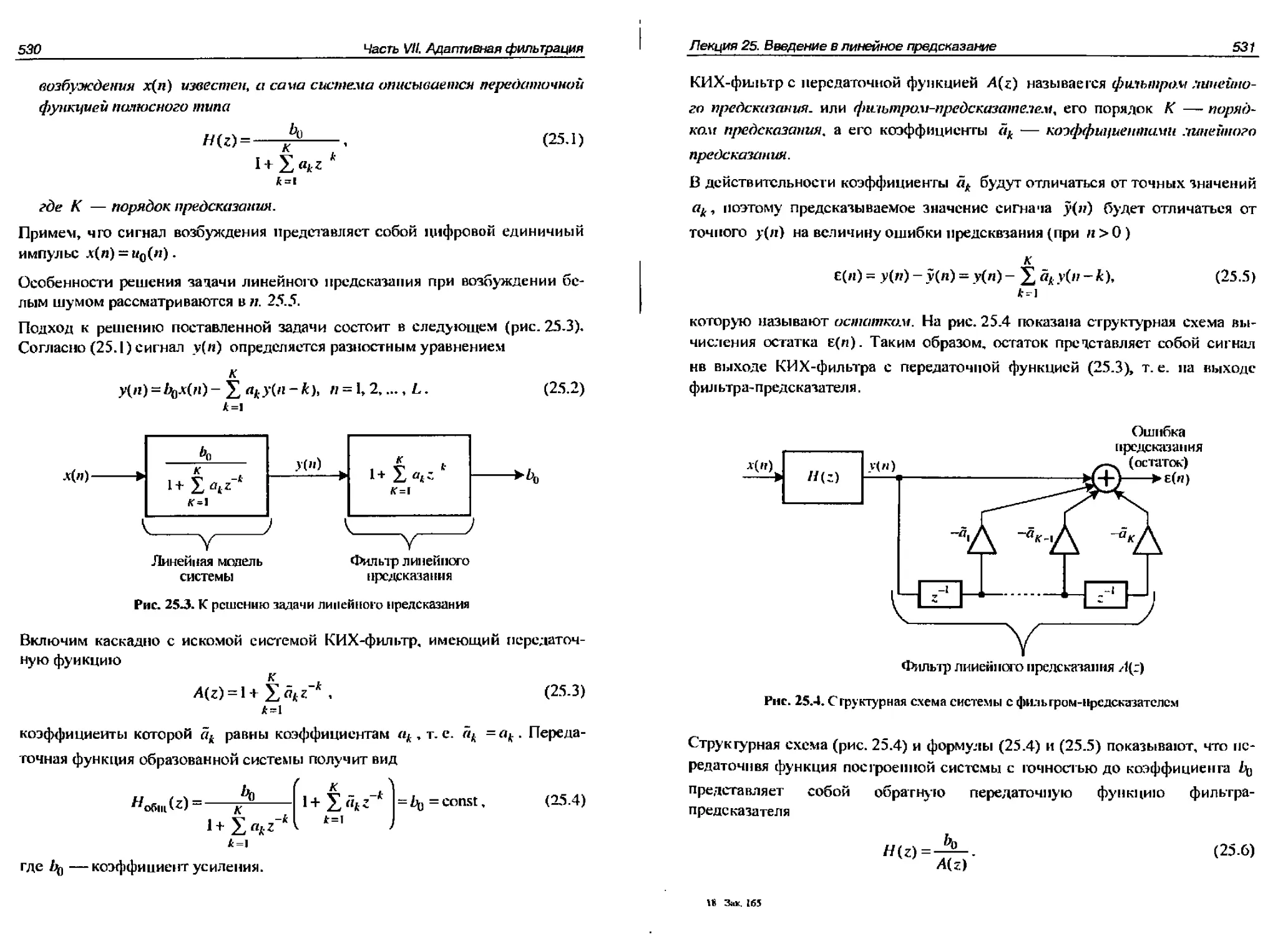
25.1. Постановка задачи линейного предсказания...................528
25.2. Решение задачи линейного предсказания во временной области..532
25.3. Вычисление коэффициентов линейного предсказания............536
25.3.1. Алгоритм Левинсона—Дарбина................................539
25.3.2. Устойчивость фильтра-предсказателя........................542
25.4. Решение задачи линейного предсказания в частотной области..543
25.5. Линейное предсказание при возбуждении белым шумом..........546
Оглавление
XI
25,5.1. Реакция линейной модели на случайный процесс.............546
25.5.2. Особенности линейного предсказания при возбуждении
белым шумом......................................................549
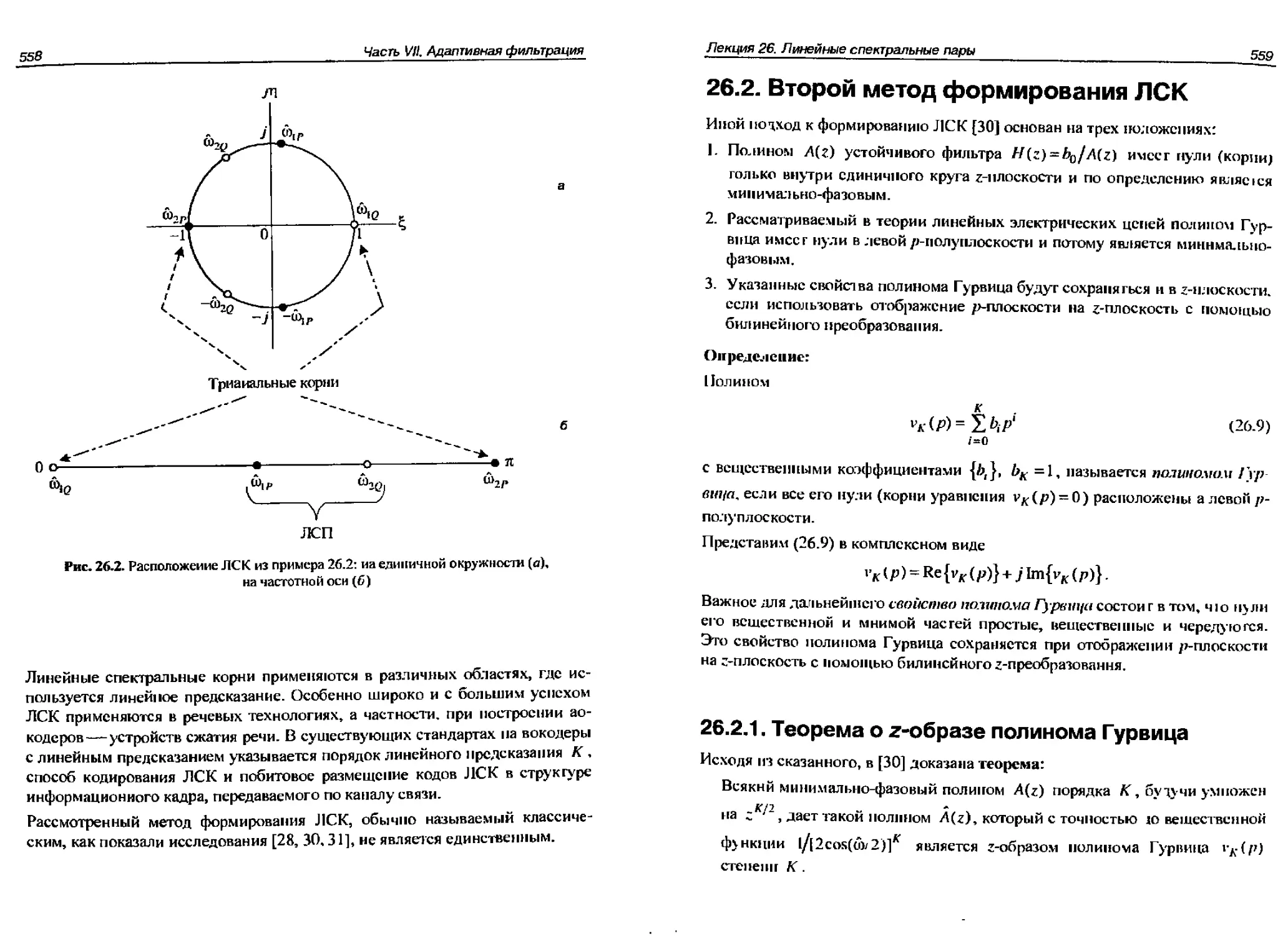
Лекцнн 26. Линейные спектральные пары................................ 551
26.1. Метод Итакуры.............................................553
26.2. Второй метод формирования ЛСК............•.. 559
26.2.1. Теорема о г-образе полинома Гурвица.....................559
26.2.2. Вторая процедура вычисления ЛСК.........................560
26.3. Обобщение теории ЛСК......................................562
26.4. Поиск спектральных корней.................................564
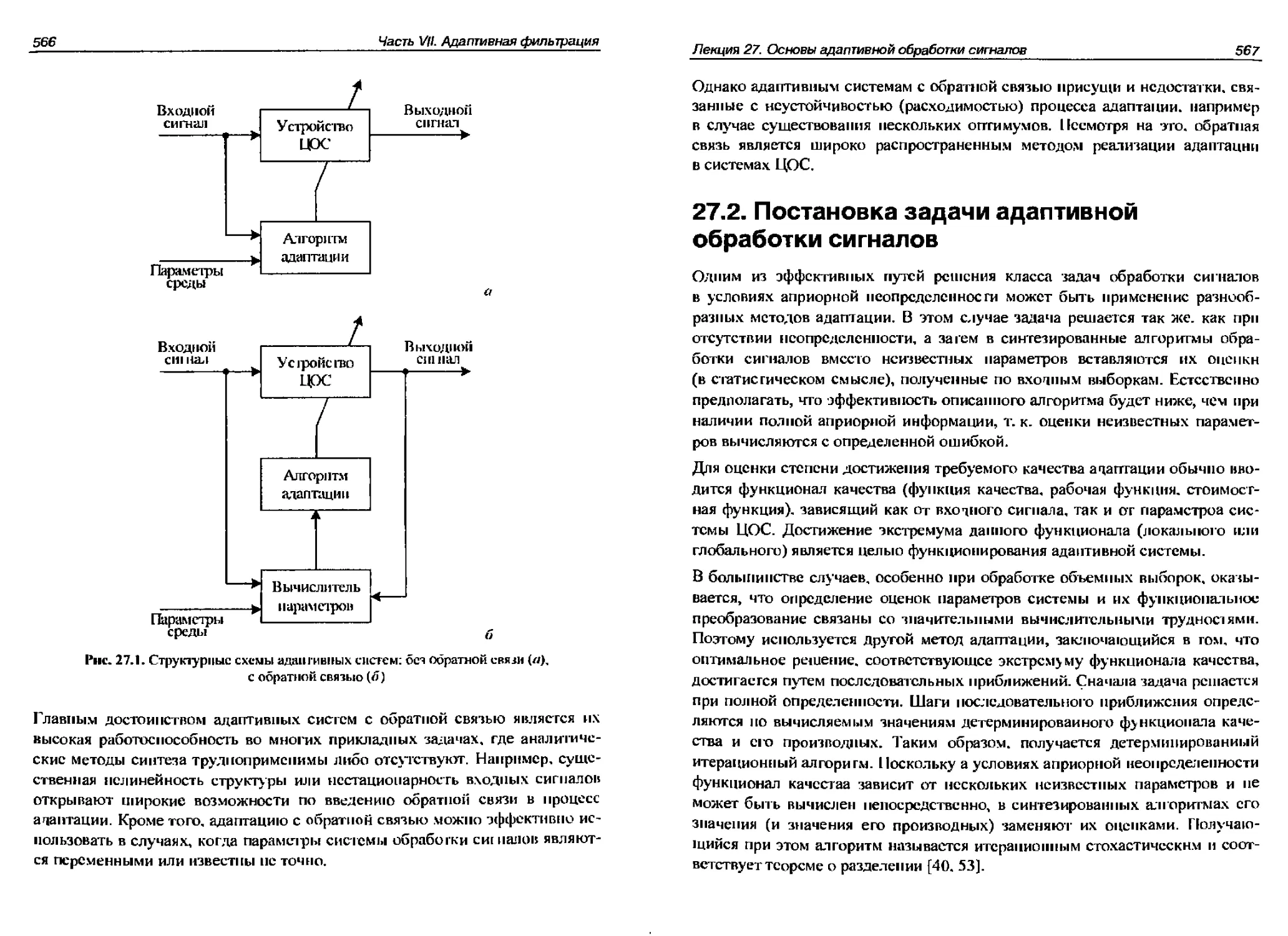
Лекция 27. Основы адаптивной обработки сигналов..................565
27.1. Классификация адаптивных систем обработки сигналов........565
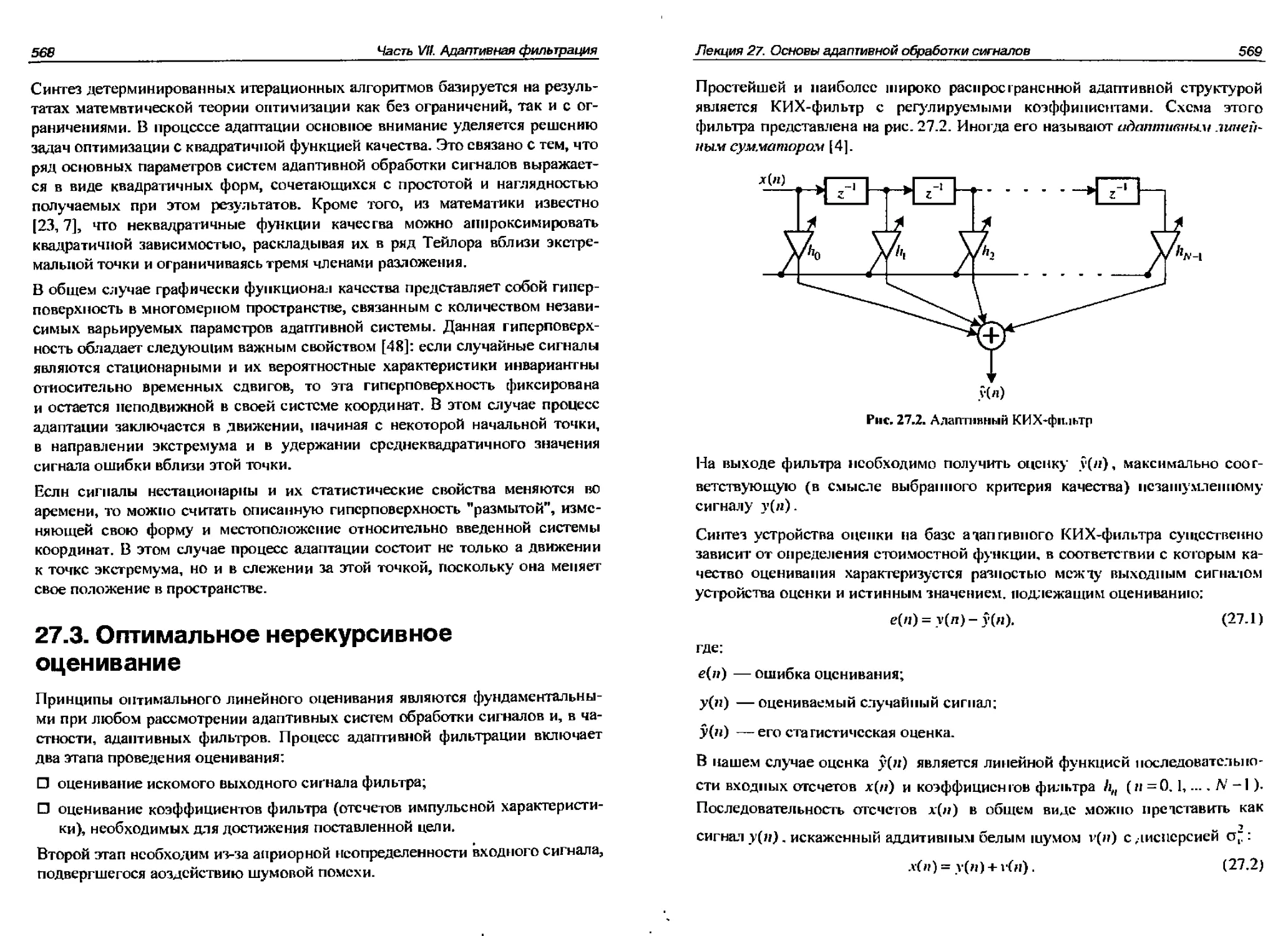
27.2. Постановка задачи адаптивной обработки сигналов...........567
27.3. Оптимальное нерекурсивное оценивание......................568
Лекция 28. Рекуррентные алгоритмы адаптапнн .....................575
28.1. Калмановское оценивание случайного сигнала................575
28.2. Характеристика итерационных алгоритмов адаптации..........580
28.3. Градиентные методы адаптации..............................582
ЧАСТЬ VIII. МНОГОСКОРОСТНЫЕ СИСТЕМЫ ЦОС..........................587
Лекция 29. Многоскоростные системы ЦОС............................... 589
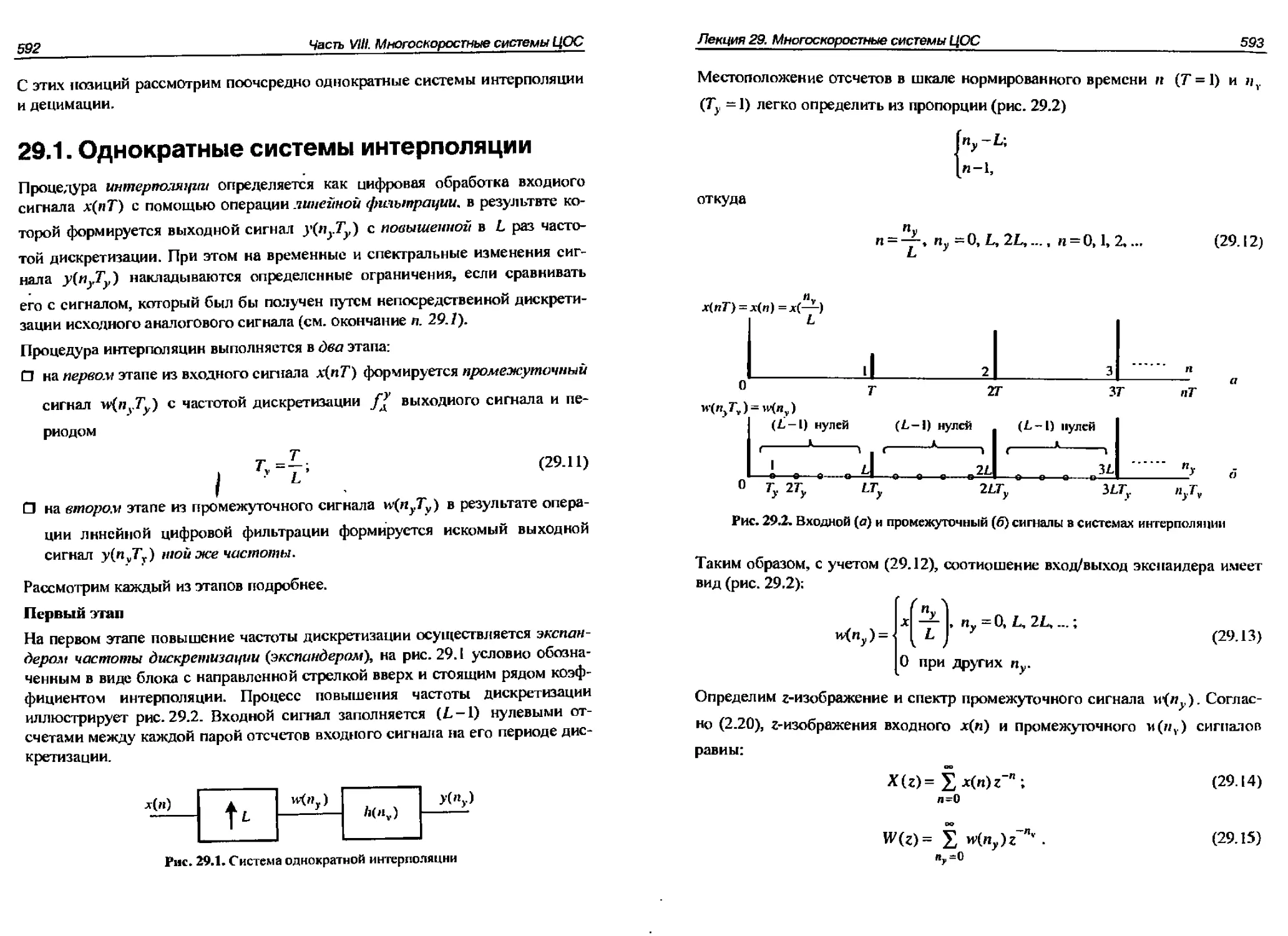
29.1. Однократные системы интерполяции..........................592
29.2. Однократные системы децимации.............................600
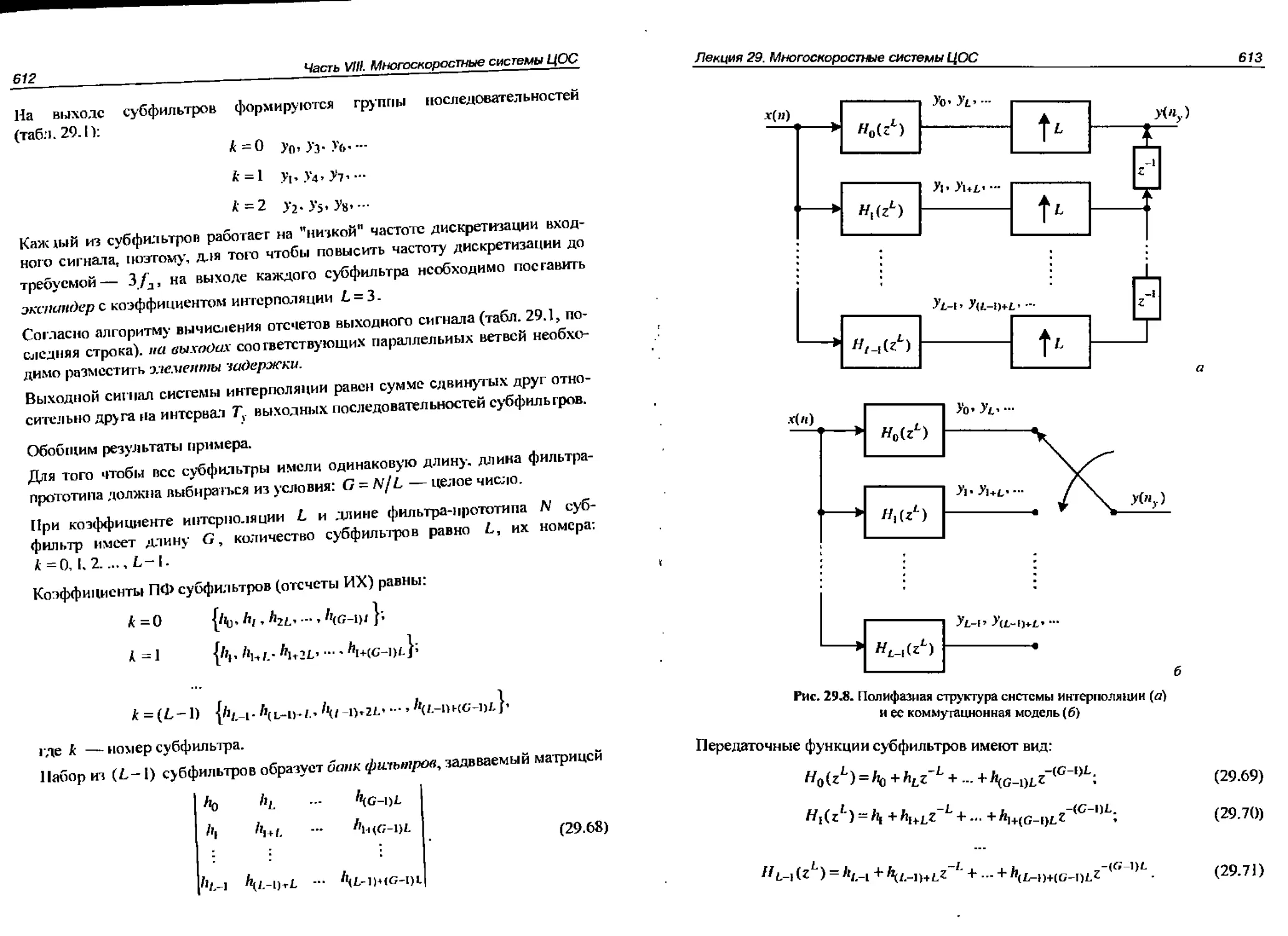
29.3. Полифазная структура систем интерполяции..................608
29.4. Полифазная структура систем децимации.....................615
ЧАСТЬ IX. ПРИМЕНЕНИЕ ВЕЙВЛЕТ-АНАЛИЗА В ЦОС.......................621
Лекция 30. Основы дискретного вейвлет -анализа»...................623
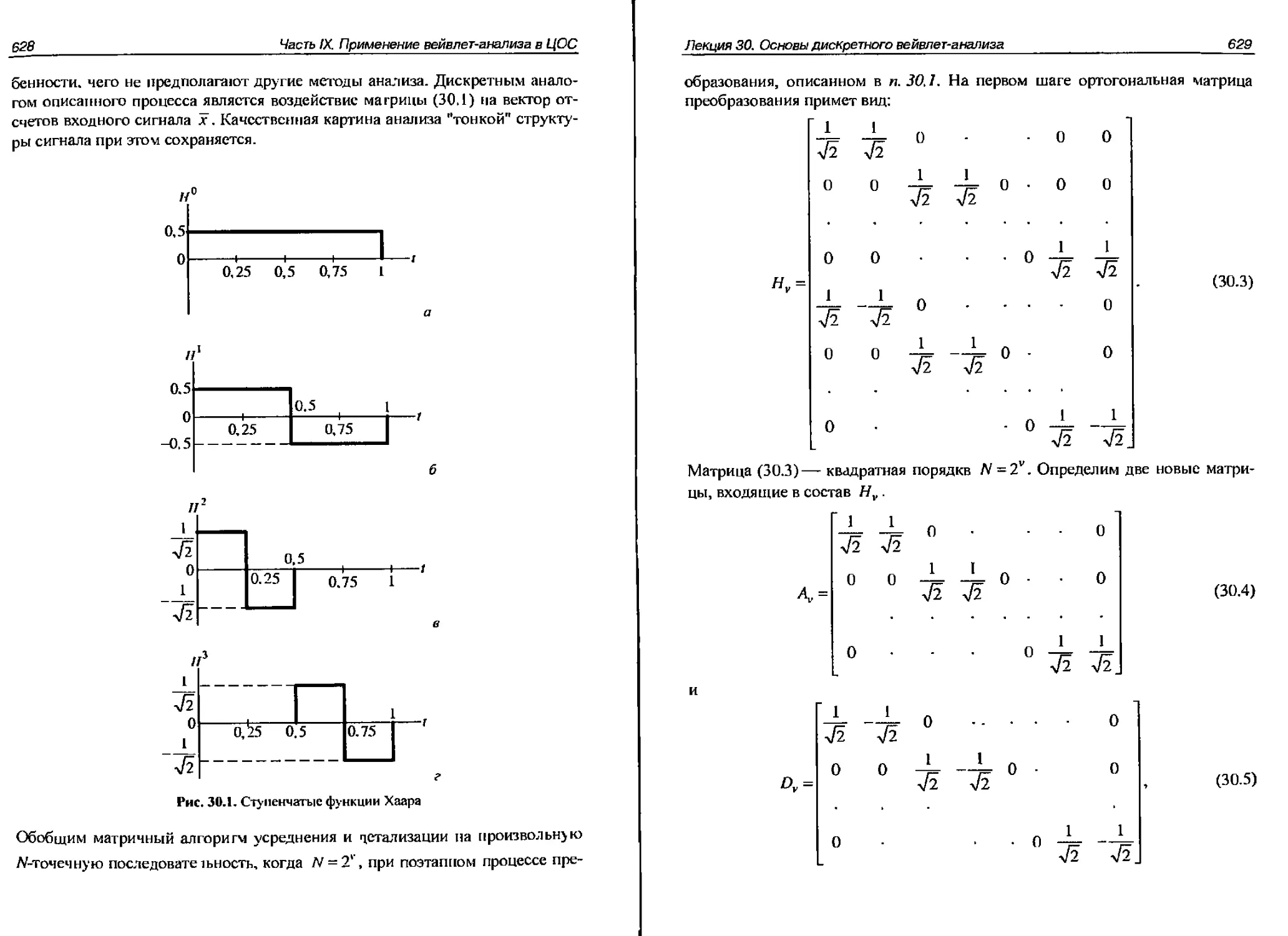
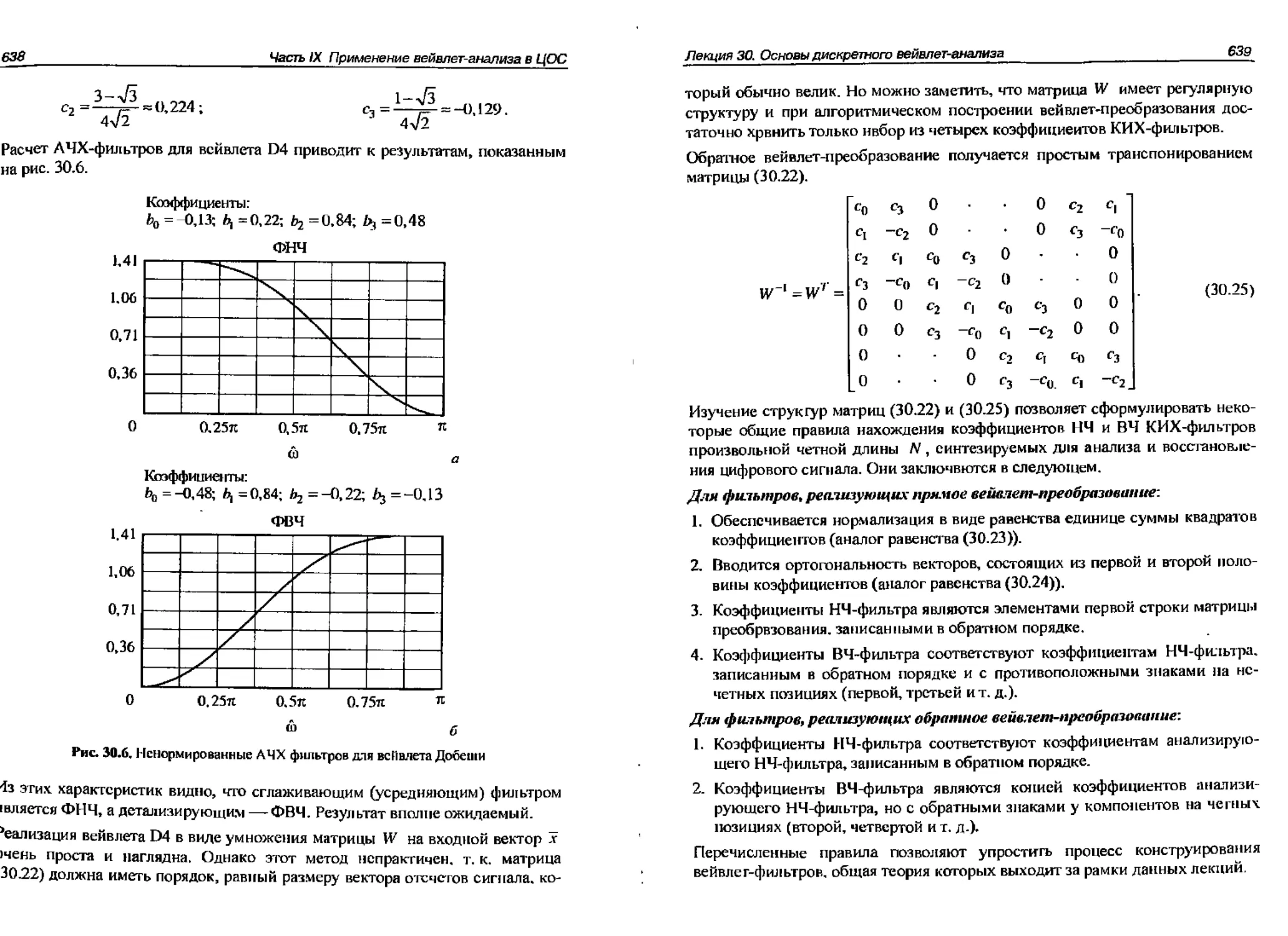
30.1. Усреднение и детализация..................................623
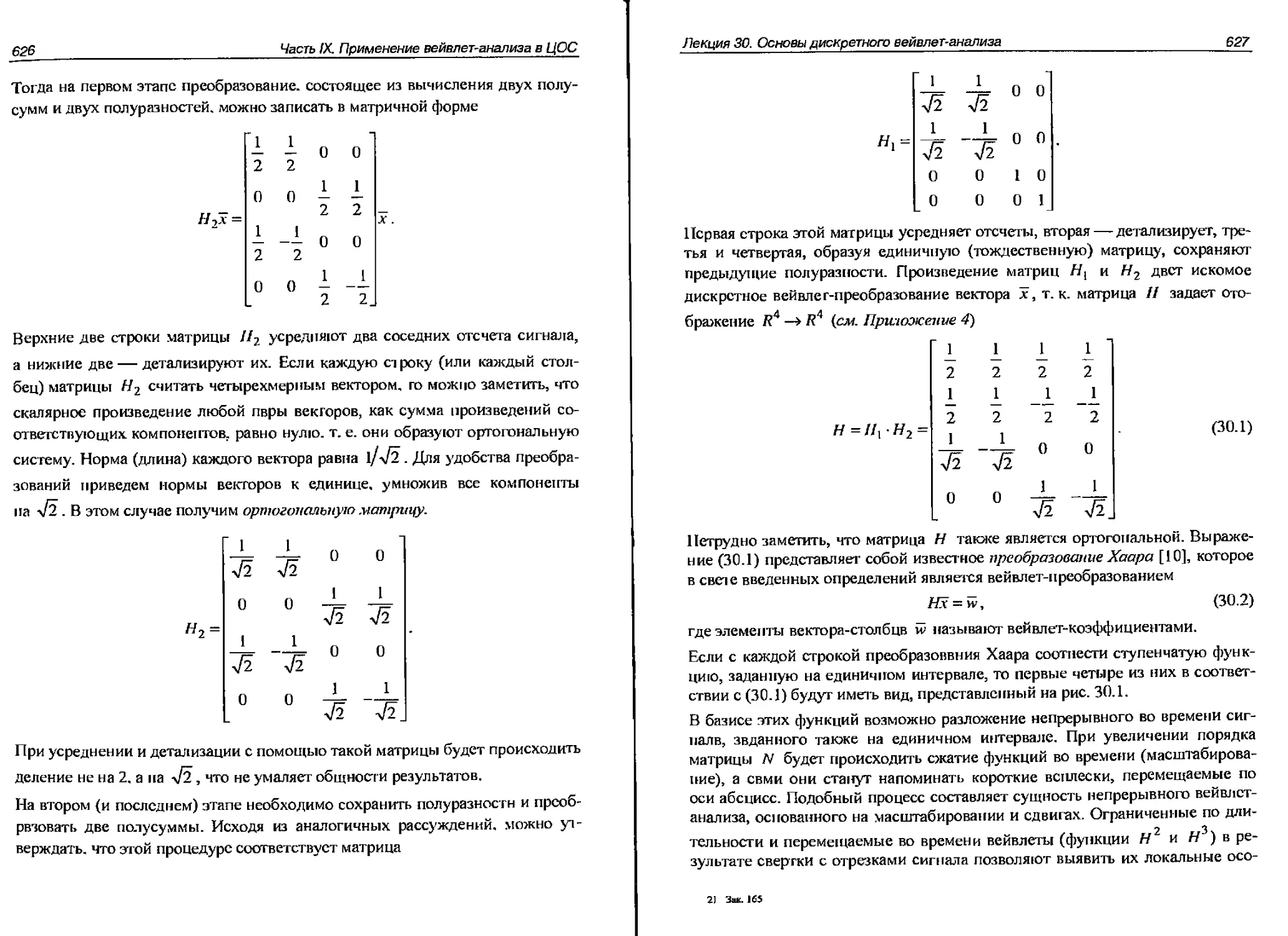
30.2. Матричные представления.................................. 625
30.3. Обратное вейвлет-преобразование...........................631
30.4. Фильтровая реализация вейвлет-преобразования..............633
30.5. Дискретные вейвлет-преобразования.........................636
XII
Оглавление
ЧАСТЬ X. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ НЕЛИНЕЙНЫХ
ДИСКРЕТНЫХ СИСТЕМ------------------------------------641
Лекция 31. Математическое описание нелинейных дискретных
систем на основе функциональных ридон
и полиномов Вольтерры.........................................643
31.1. Операторное уравнение системы н его использование в задачах
идентификации, моделирования и синтеза нелинейных систем.....644
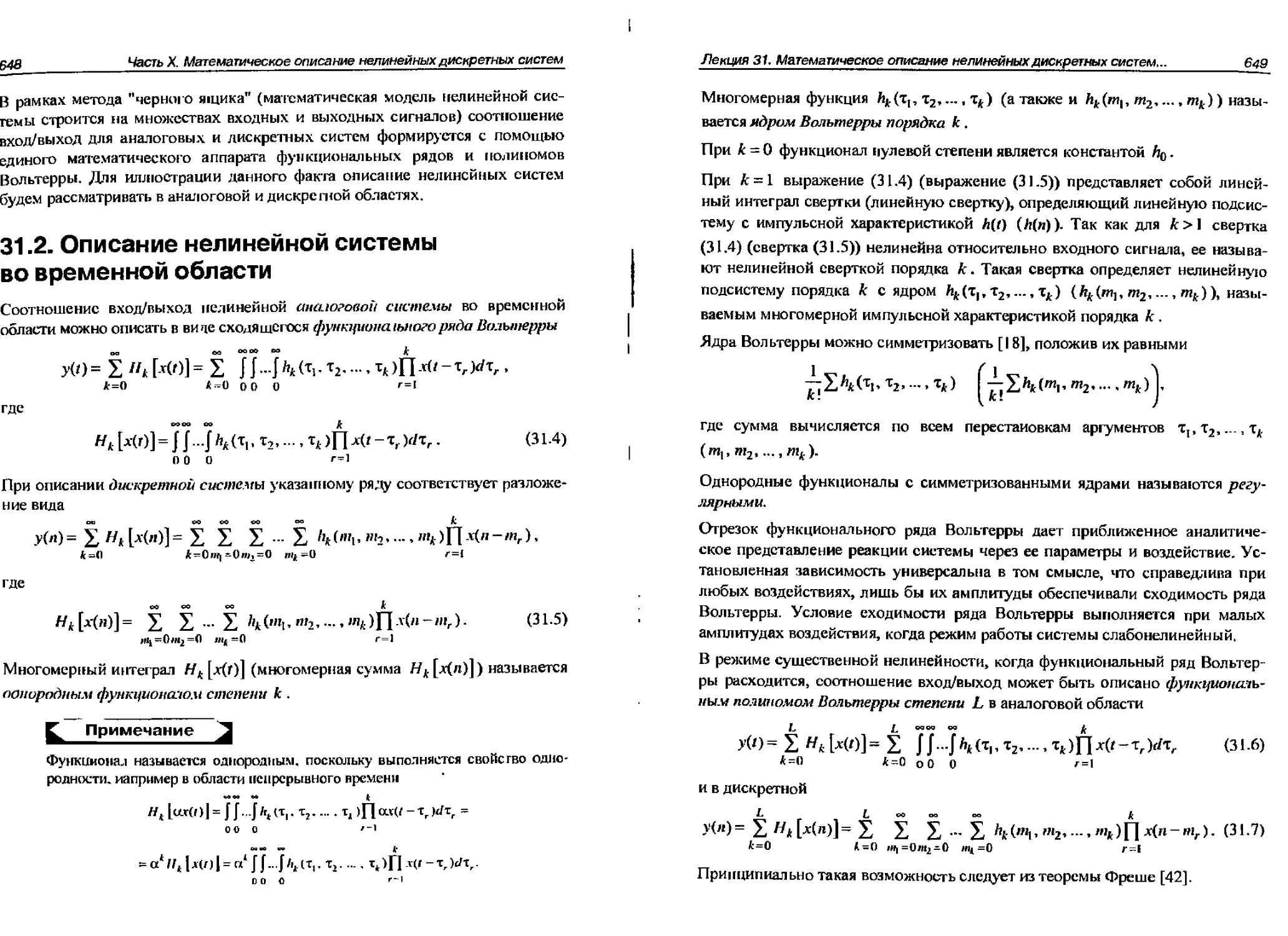
31.2. Описание нелинейной системы во временной области..........648
31.3. Описание нелинейной системы в р- и г-областях.............650
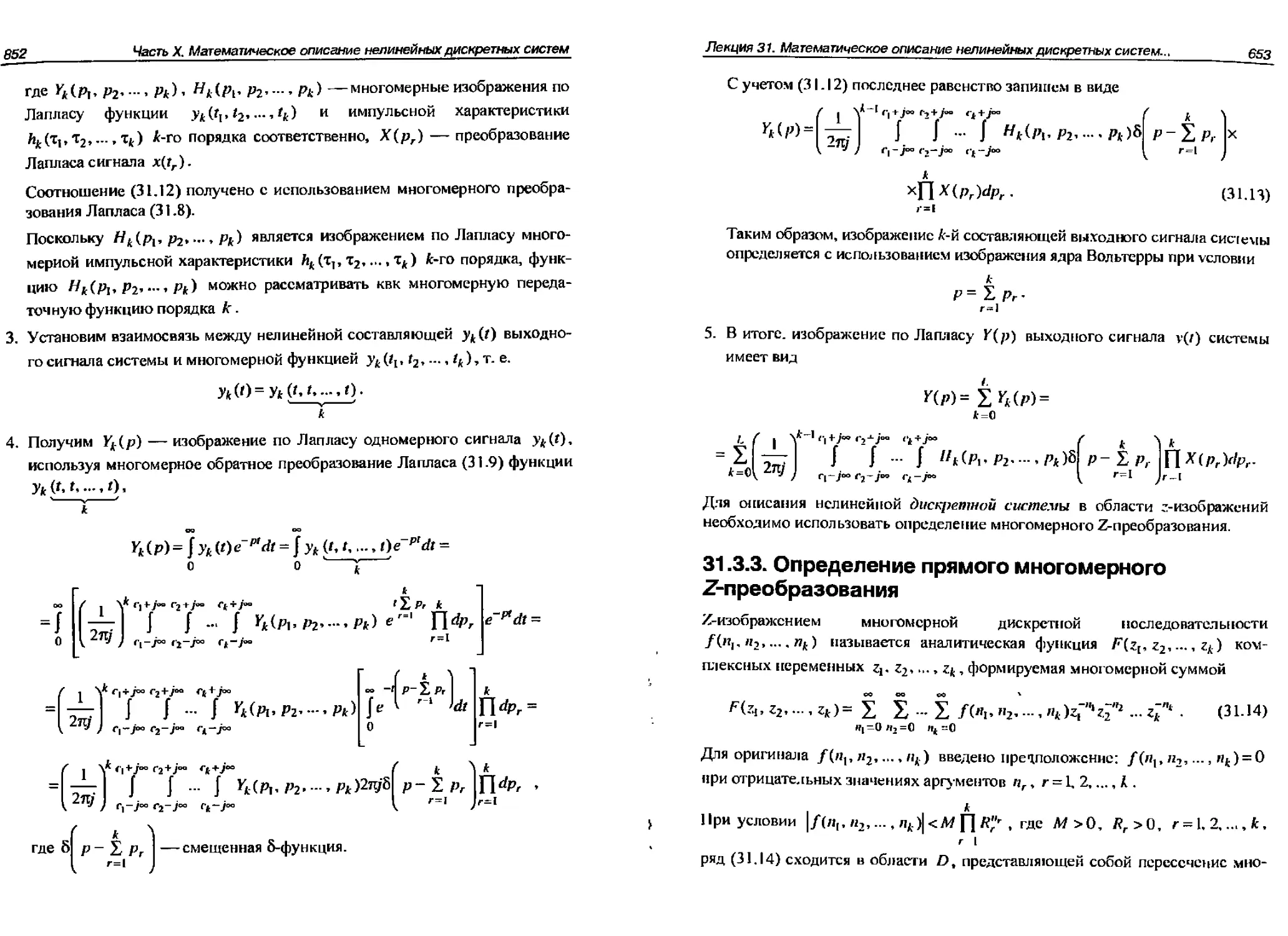
31.3.1. Определение прямого многомерного преобразования Лапласа.650
31.3.2. Определение обратного многомерного преобразования Лапласа.... 651
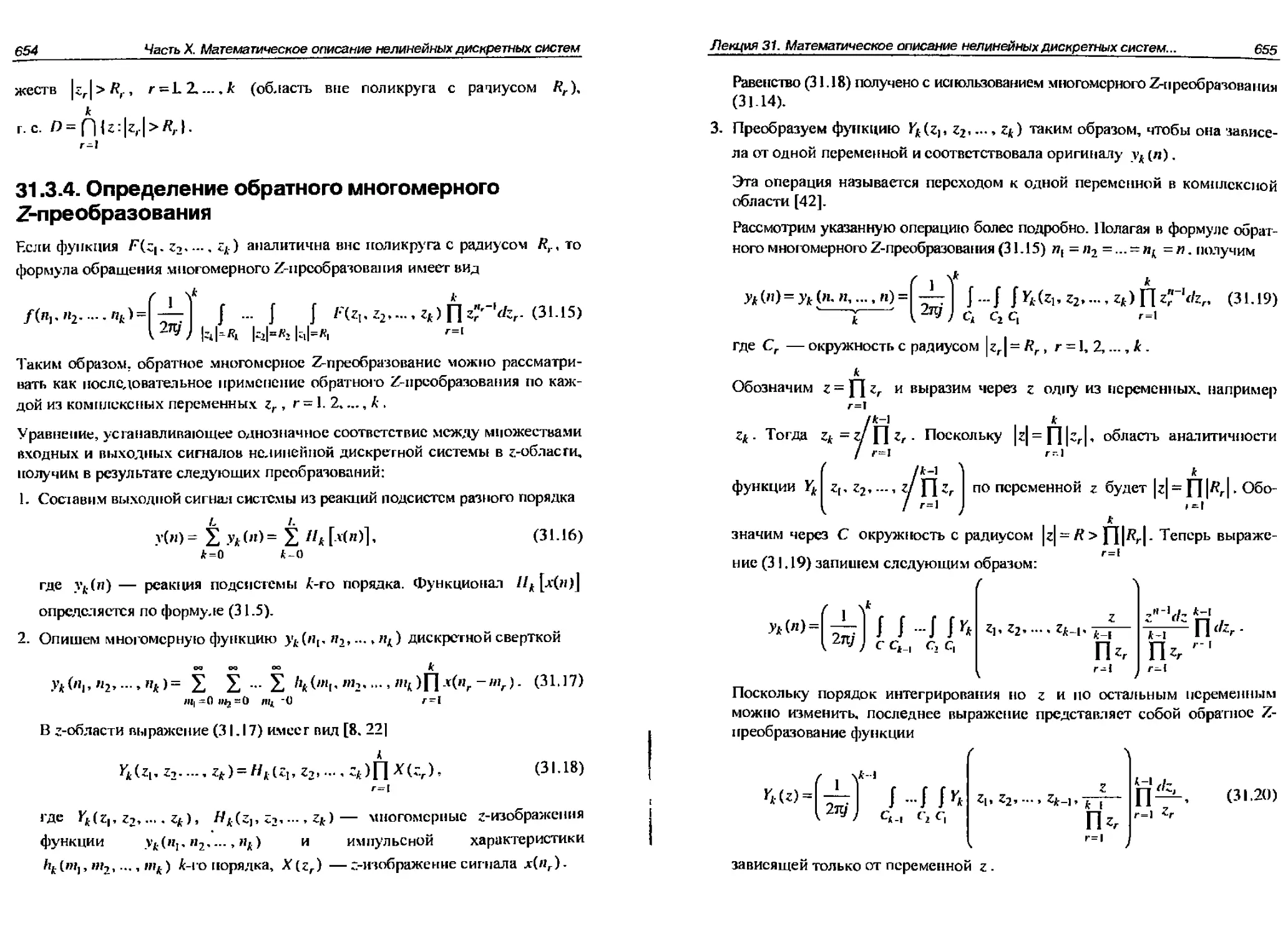
31.3.3. Определение прямого многомерного Z-преобразовапня.......653
31.3.4. Определение обратного многомерного Z-преобразования.....654
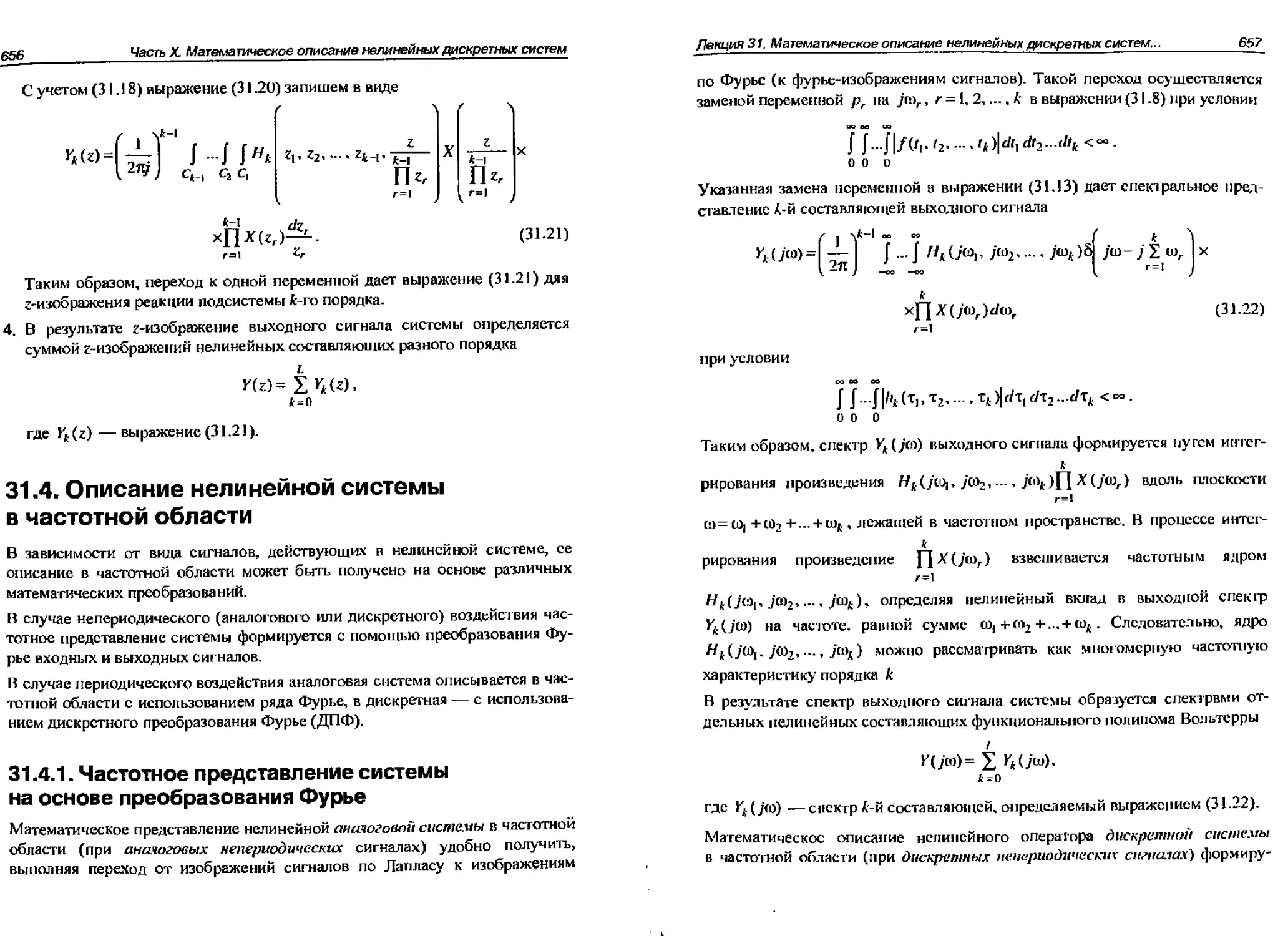
31.4. Описание нелинейной системы в частотной области.............656
31.4.1. Частотное представление системы на основе
преобразования Фурье........................................656
31.4.2. Частотное представление системы иа основе дискретного
преобразования Фурье........................................664
31.5. Определение параметров нелинейного оператора дискретной
системы по средпеквадратическому критерию....................666
31.5.1. Построение нелинейного оператора во временной области.666
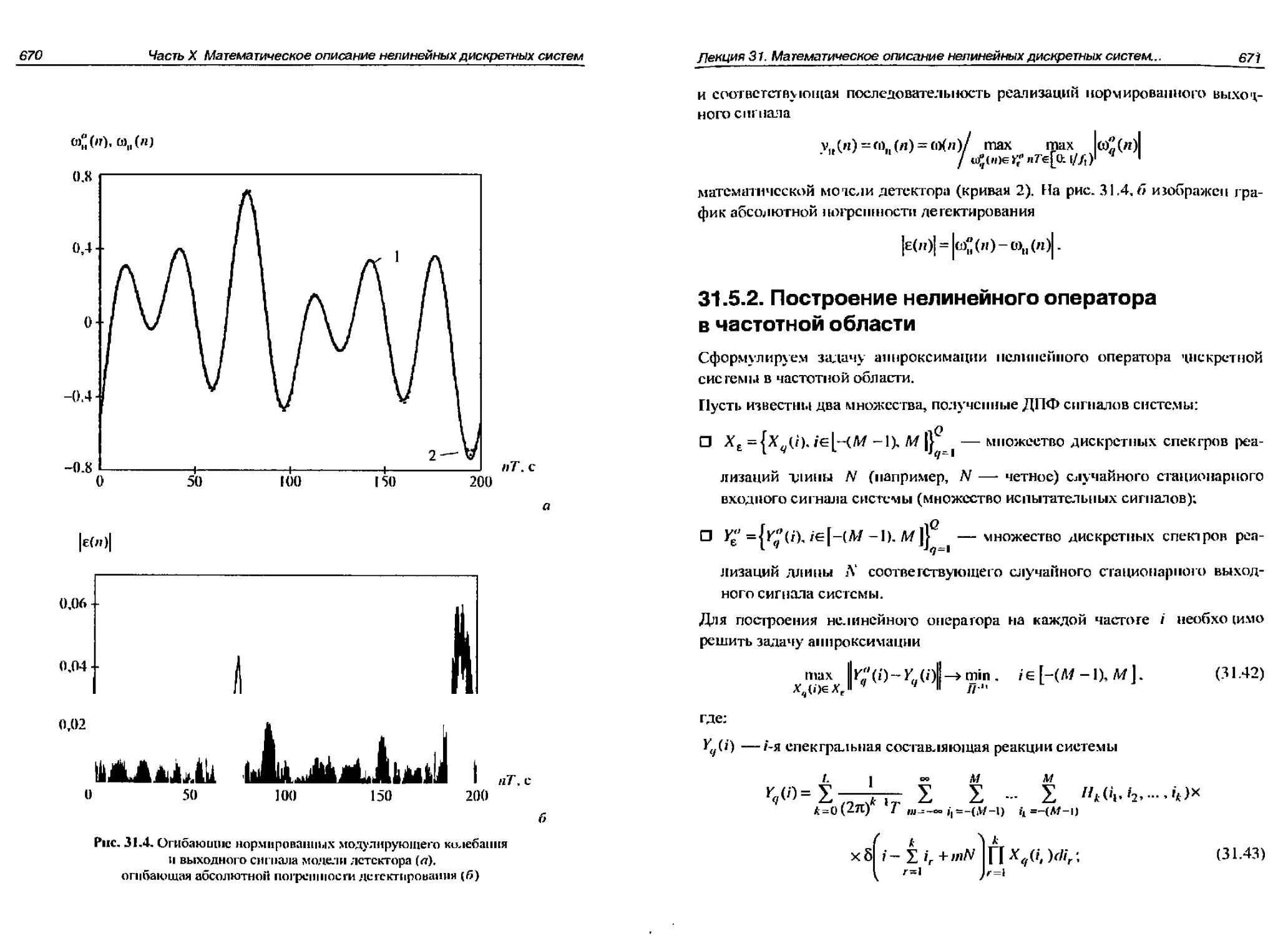
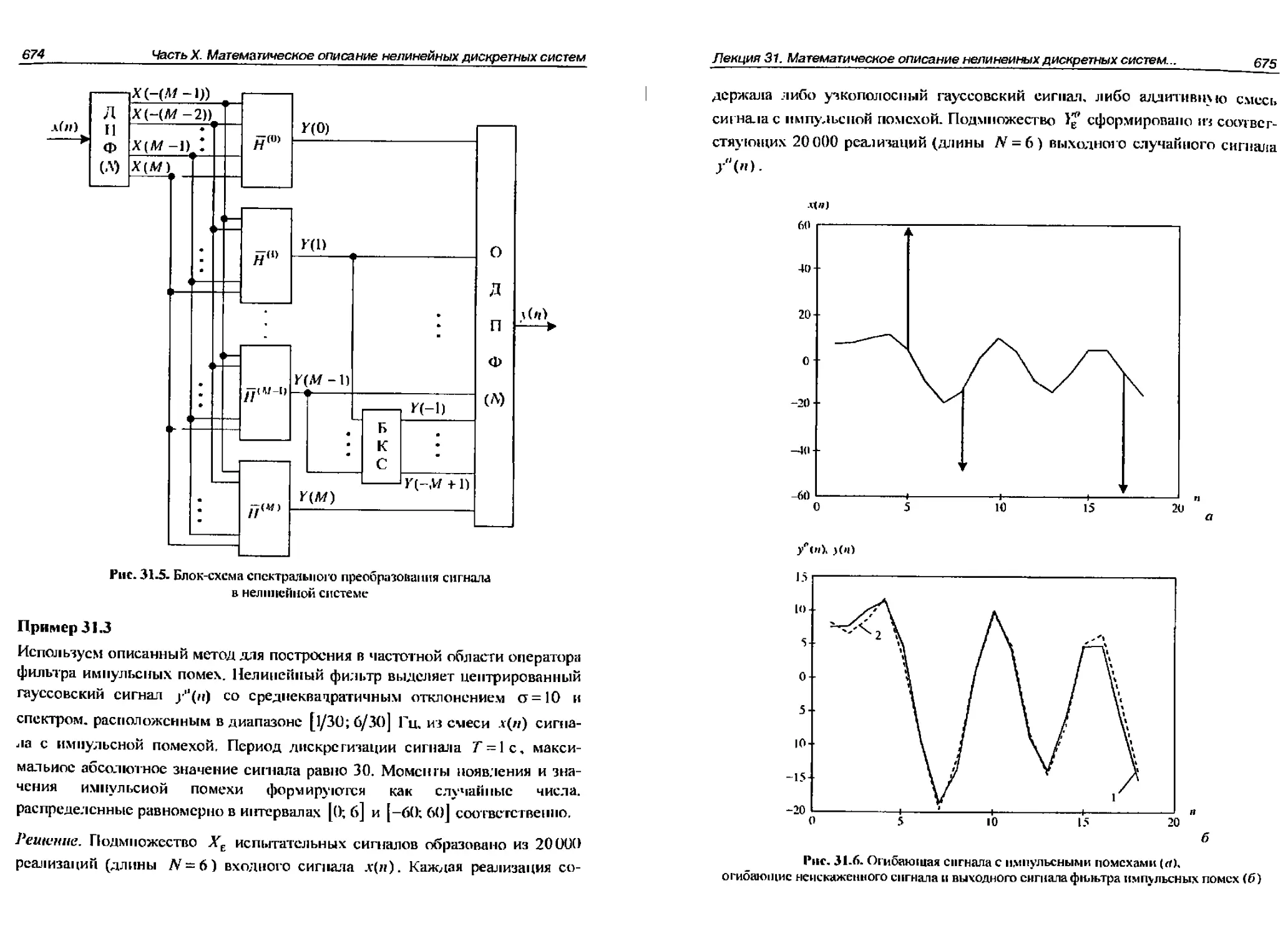
31.5.2. Построение нелинейного оператора в частотной области..671
ПРИЛОЖЕНИЯ____________________________________________________ 677
Приложение 1. Математическое моделирование обработки
сигналов линейной дискрет мой системой
в программной среде MATLAB...................................679
П1.1. Моделирование работы ЛДС во временной области...............681
П1.1.1. Моделирование работы ЛДС иа основе разностного
уравнения: функция filter.............................681
III.1.2. Расчет импульсной характеристики по разностному
уравнению: функция filter.............................683
П1.1.3. Расчет импульсной характеристики по коэффицис! ггам
разностного уравнения: функция htipz..................685
П1.1.4. Моделирование работы ЛДС на основе уравнения свертки:
функция coiiv.........................................686
Оглавление X///
1П. 1.5. Вычисление импульсной характеристики БИХ-фнльтра
по известным реакции и воздействию: функция decanv....................689
111 .1.6. Формирование модели переменных состояний:
функции tf2ss, zp2ss. ss2lf, ss2zp....................................690
П1.2. Моделирование работы ЛДС в z-обласги...............................691
П1.2.1. Передаточная функция в общем виде................................692
П 1.2.2. Передаточная функция в виде произведения простейших
множителей: функции iflzp. zp2tf-.................................................... 693
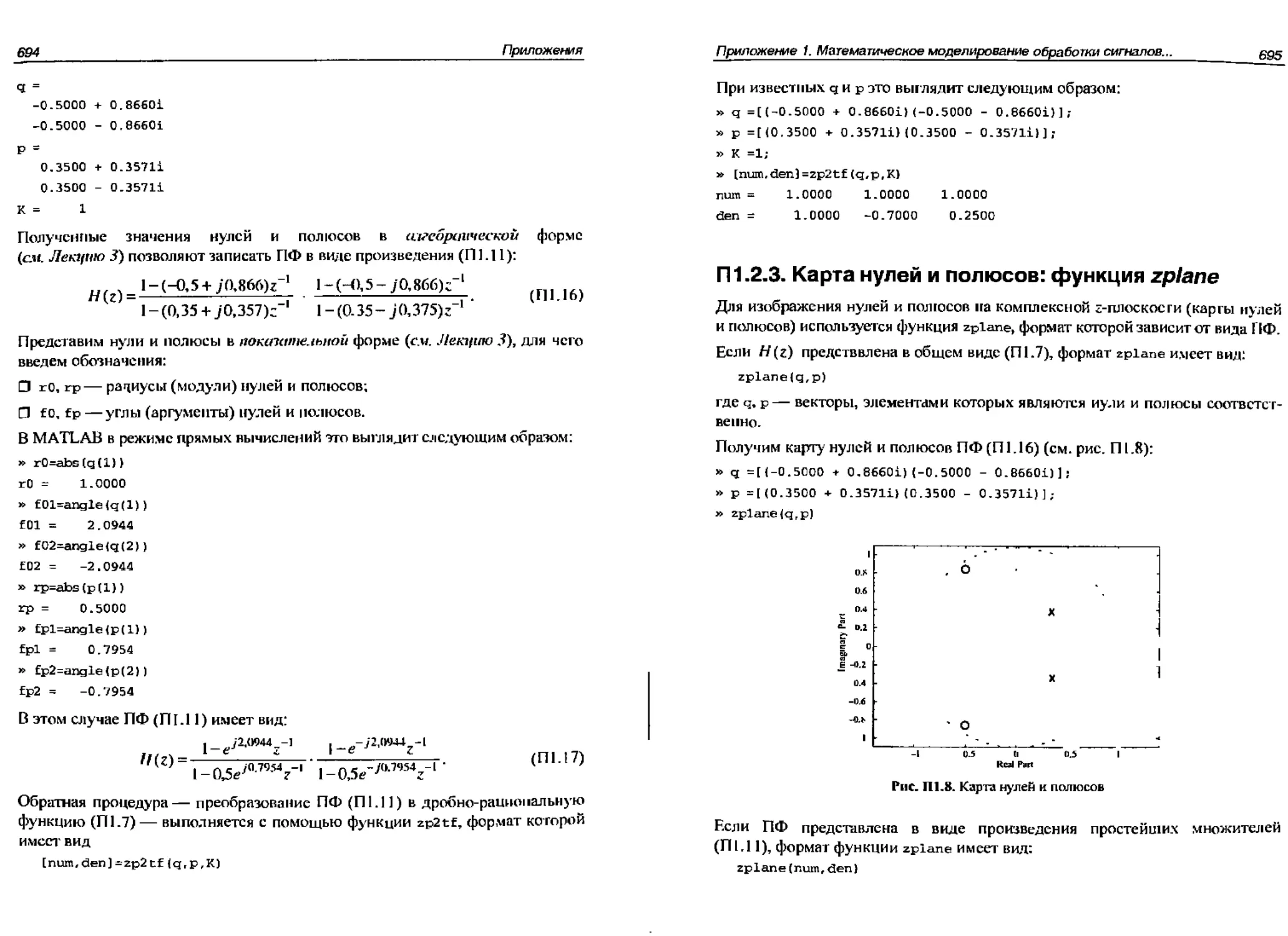
П1.2.3. Карта нулей и полюсов: функция zplane......................................... 695
П1.2.4. Передаточная функция в виде произведения множителей
второй степени: функции tf2sost zp2sos, sos2tf, sos2zp................696
111.2.5. Передаточная функция в виде суммы простых дробей:
функция residwz..................................................698
П1.3. Моделирование работы ЛДС в частотной области.......................699
111.3.1. Расчет частотной характеристики по коэффициентам
передаточной функции: функция freqz..............................700
П1.3.2. Расчет АЧХ н ФЧХ: функции/rayz, «М angle, dbode.................... 701
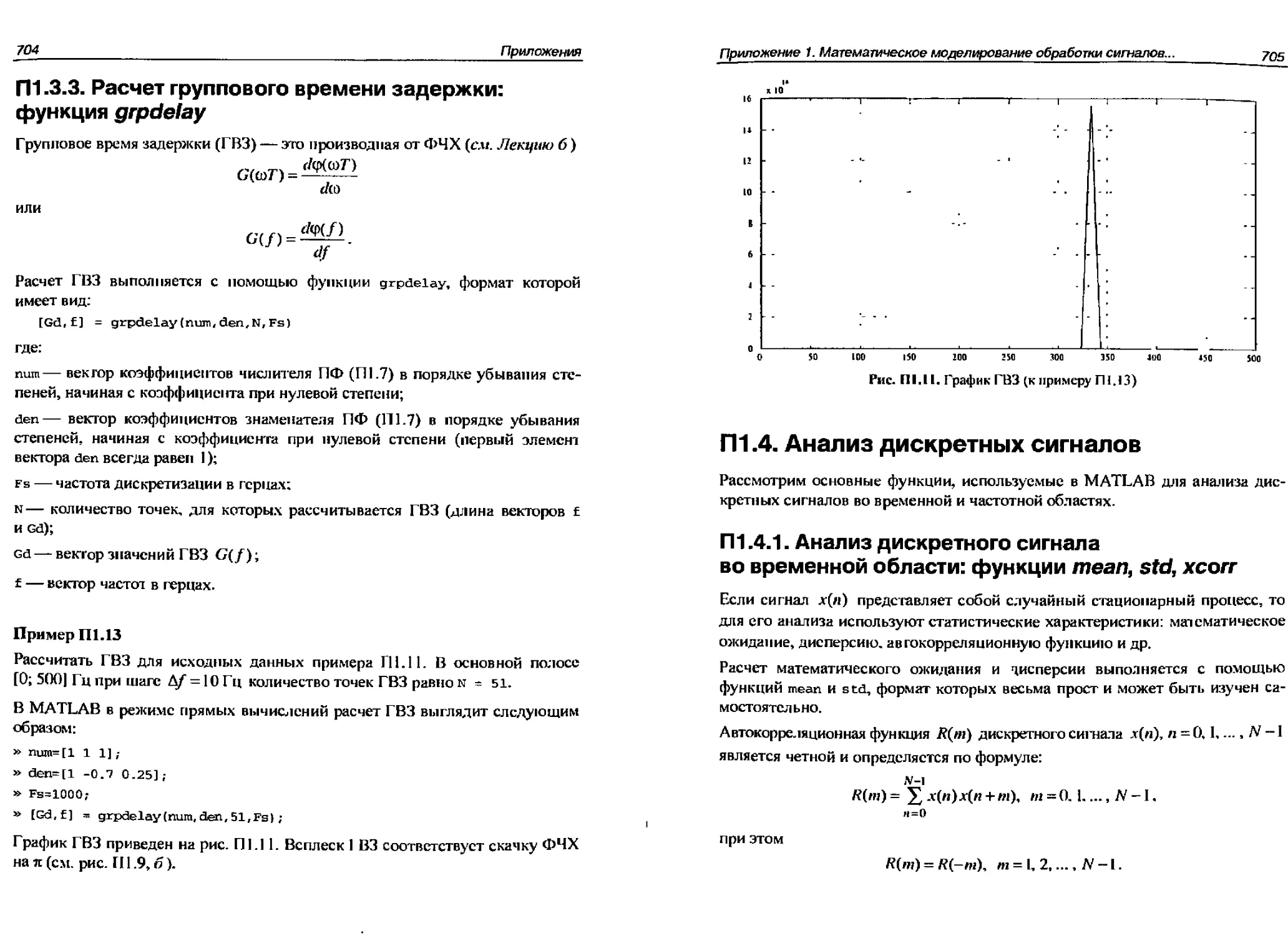
П1.3.3. Расчет группового времени задержки: функция gtpdelay.............704
П1.4. Анализ дискретных сигналов.........................................705
Ш.4.1. Анализ дискретного сигнала во временной области:
функции mean, std.xcorr..........................................705
111.4.2. Анализ дискретного сигнала в частотной области:
функции fft, ifft................................................707
Приложение 2. Моделирование цифровой фильтрации
с помощью GVT SPTool в программной
среде MATLAB-------------------------....................................712
П2.1. Последовательность действий при работе
в SPTool-программе.................................................712
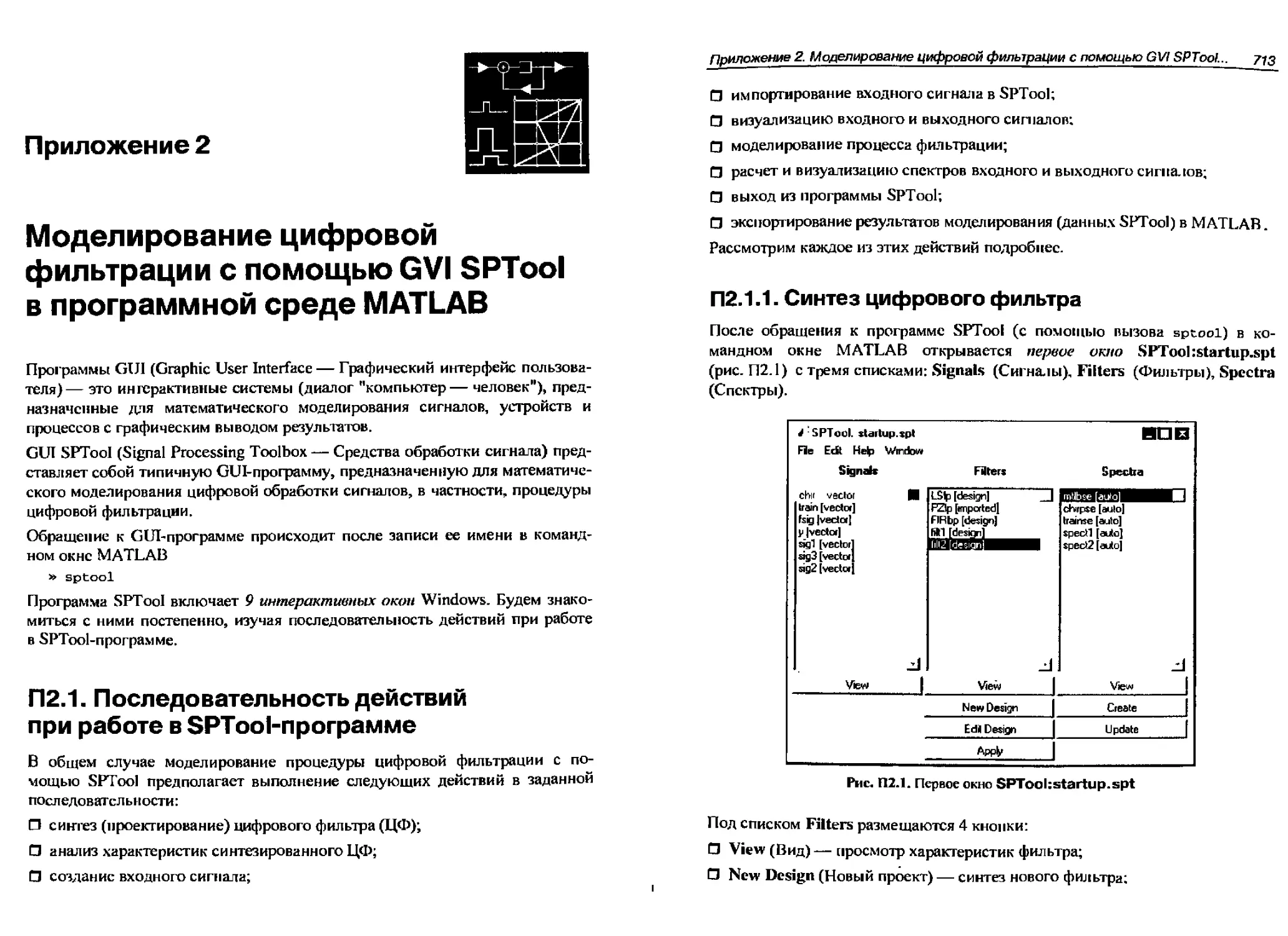
П2.1.1. Синтез цифрового фильтра.........................................713
П2.1.2. Анализ характеристик синтезированного фильтра....................717
П2.1.3. Создание входного сигнала........................................719
П2.1.4. Импортирование входного сигнала в SPTool.........................719
TI2.I.5. Визуализация входного и выходного сигналов......................721
П2.1.6. Моделирование процесса фильтрации................................722
П2.1.7. Расчет и визуализация спектров входного
и выходного сигналов.............................................723
П2.2. Выход из программы SPTool..........................................724
112.3. Экспортироваинс результатов моделирования в MATLAB................725
Xiv Оглавление
Приложение 3. Массивы записей
в программной среде MATLAB..........................................728
Приложение 4. Необходимые сведения из теории матриц...........735
Список литературы...................................................741
Дополнительная литература...........................................745
Предметный указатель............................................ 747
I
Принятые сокращения
АЦП — аналого-цифровой преобразователь:
АЧХ —амплитудно-частотная характеристика;
БИХ — бесконечная импульсная характеристика (тип фильтра);
БПФ — быстрое преобразование Фурье;
ГВЗ — групповое время задержки;
ДПФ — дискретное преобразование Фурье;
ИХ — импульсная характеристика;
КИХ — конечная импульсная характеристика (тип фильтра);
KHII — карта нулей и полюсов;
КФНЧ — комплексный фильтр иижннх частот;
КЧХ — комплексная частотная характеристика;
ЛДС — линейная дискретная система;
ЛП — линейное предсказание;
ЛСК — линейные спектральные корни;
ЛСП — линейные спектральные пары;
МНК — метод наименьших квадратов;
НУН — начальные условия нулевые;
ОБП — одна боковая полоса (спектра сигнала);
ОДПФ — обратное дискретное преобразование Фурье;
ПСС — позиционная система счисления;
ПФ — передаточная функция;
ПФ — полосовой фильтр;
Принятые сокращения
ру — разностное уравнение;
рф— режскторный фильтр;
СС — система счисления;
СФНЧ —сглаживающий фильтр нижних частот;
ФВЧ — фильтр верхних частот;
ф[|Ч — фильтр нижних частот;
ФЧХ — фазочастотная характеристика;
ЦАП— цифро-аналоговый преобразователь;
ЦОС — цифровая обработка сигналов:
ЦПГ — цифровой преобразователь Гильберта;
I [ПОС — цифровой процессор обработки сигналов:
ЦСП —г цифровой сигнальный процессор;
ЦФ — цифровой фильтр:
ЧРК — частотное разделение каналов;
ЧХ — частотная характеристика.
Предисловие
ко второму изданию
В последние годы дисциплина "Цифровая обработка сигналов" (ЦОС) и ее
модификации включены в общеобразовательные стандарты российских вузов
(к сожалению, с большим опозданием). Одиако данная тематика недостаточ-
но поддерживается русскоязычной литературой, особенно учебниками и
учебными пособиями. Вместе с тем, учитывая тенденции развития техники
связи, отставание в области ЦОС для современного специалиста недопусти-
мо, а потому и актуальность соответствующих книг бесспорна. Подобных
книг, отечественных и переводных, должно быть много, т. к. обширность ге-
мы практически не позволяет се охватить в одной работе.
Учебное пособие может быть полезно для всех, желающих самостоятельно
изучать ЦОС. однако, в первую очередь, оио ориентировано на студентов и
преподавателей вузов и может быть рекомендовано, в частности, для сле-
дующих стандартных дисциплин:
□ "Микропроцессоры и цифровая обработка сигналов" (специальность
201100);
□ "Цифровая обработка сигналов и сигнальные процессоры в системах под-
вижной связи" (специальность 201200);
□ "Цифровая обработка аудио-видеосигналов" (специальность 201400).
Содержание книги тематически разделено на 10 частей и включает 31 лекцию.
По существу, это расширенный курс по теории ЦОС, причем название "лек-
ция" условно и лишь отражает изучаемую тему. На основе данного курса
в зависимости от объема часов и направленности дисциплины могут форми-
роваться более сжатые курсы, которые желательно поддерживать лаборатор-
ными и практическими занятиями. В этом смысле весьма перспективно мо-
делирование цифровых сигналов и систем в программной среде MATLAB,
основы которой изложены в данном пособии.
4
Предисловие ко второму изданию
Второе издание пособия существенно переработано и дополнено: добавлена
новая лекция но методам ЦОС в базисе вейвлет-функций (Лекция 30), а также
ряд новых разделов, в частности, по дискретизации относительно узкополос-
ных сигналов, фазовым звеньям и др. Исправлены досадные опечатки
и ошибки, допущенные в первом издании.
Предполагается, что читатели знакомы с основами теории аналоговых ли-
нейных цепей и вычислительной техники.
Над книгой работало четверо авторов лекций и приложений:
П Алла Ивановна Солонина — Лекции!—7.10—12, 29, Приз. 1—3.
П Дмитрий Андреевич Улахович— Лекции 17—26, пп. 6.6, 6.7, 10.3.1,
10.4.4.
□ Сергей Михайлович Арбузов —Лекции 8. 9. 13. 14, 27, 28, 30, Приз. 4.
П Елена Борисовна Соловьева — Лекции 15. 16. 31.
Все авторы являются преподавателями кафедры "Цифровая обработка сигна-
лов" Государственного университета телекоммуникаций им. нроф. М. А. Боич-
Бруевича, возглавляемой профессором Артуром Абрамовичем Ланпэ, кото-
рому авторы очень признательны за помощь в подготовке книги.
При написании учебного пособия учтен опыт авторов в чтении лекций и про-
ведении лабораторных и практических занятий. Широко использовались ра-
боты наших коллег, к сожалению, уже ушедших из жизни: профессоров
Гольдеиберга Льва Моисеевича и Матюшкина Бориса Дмитриевича.
Все предложения и замечания, которые будут приняты с благодарностью,
просим присылать по электронным адресам:
Солониной А. И. — alla_solonina@e-mail.ru:
П Улаховичу Д. А. — dau-spb@yandex.ru,
П Соловьевой Е. Б. — selenab@hotbox.ru.
ЧАСТЬ 1
ВВЕДЕНИЕ
Лекция 1. Введение в ЦОС
Лекция 2. Математический аппарат описания
сигналов и линейных систем
Лекция 3. Z-преобразование
Лекция 1
Введение в ЦОС
Цифровая обработка сигналов (ЦОС)— это область науки и техники, в ко-
торой изучаются общие для различных технических приложений принципы,
методы и алгоритмы обработки сигналов средствами цифровой вычисли-
тельной техники,
1.1. Обобщенная схема
цифровой обработки сигналов
Обобщенная схема ЦОС (рис. L1) отображает последовательность процедур,
необходимых для преобразования исходного аналогового сигнала _v(/) в дру-
гой аналоговый сигнал у (О по заданному алгоритму средствами цифровой
вычислительной техники.
В цифровой обработке сигнала можно выделить три основных этапа:
П формирование цифрового сигнала х^(пТ) из исходного аналогового сиг-
нала х{1);
□ лреобразованне цифрового сигнала хц(лГ) в цифровой сигнал у^пТ) по
заданному алгоритму;
П формирование результирующего аналогового сигнала у(/) из цифрового
сигнала уц(нГ).
В обобщенной схеме ЦОС этим этапам соответствуют три функциональных
устройства:
П кодер;
П устройство ЦОС;
П декодер.
8
Часть f. Введение
Декодер I I Кодер
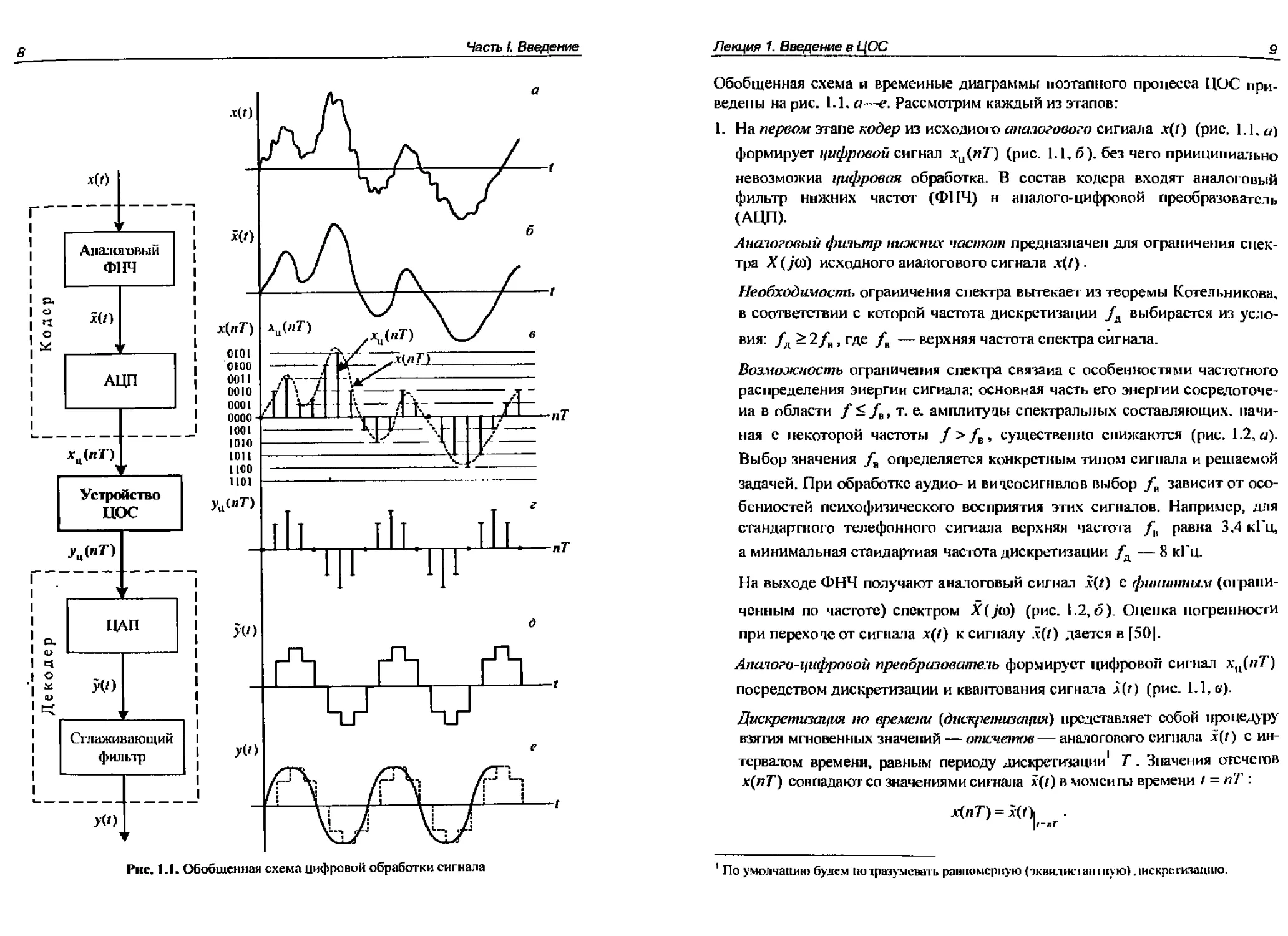
Рис. 1.1. Обобщенная схема цифровой обработки сигнала
Лекция 1. Введение в ЦОС g
Обобщенная схема и временные диаграммы поэтапного процесса ЦОС при-
ведены на рис. 1.1. а—е. Рассмотрим каждый из этапов:
1. На первом этапе кодер из исходного аналогового сигнала х(1) (рис. 1.1. «)
формирует цифровой сигнал хи(пТ) (рис. 1.1. б), без чего принципиально
невозможна цифровая обработка. В состав кодера входят аналоговый
фильтр ннжних частот (ФПЧ) н аналого-цифровой преобразователь
(АЦП).
Аналоговый фильтр нижних частот предназначен для ограничения спек-
тра Х(у<0) исходного аналогового сигнала л(/).
Необходимость ограничения спектра вытекает из теоремы Котельникова,
в соответствии с которой частота дискретизации /л выбирается из усло-
вия: /д > 2/в, где /в — верхняя частота спектра сигнала.
Возможность ограничения спектра связана с особенностями частотного
распределения энергии сигнала: основная часть его энергии сосредоточе-
на в области /</в, т. е. амплитуды спектральных составляющих, начи-
ная с некоторой частоты />/в, существенно снижаются (рис. 1.2, а).
Выбор значения /н определяется конкретным типом сигнала и решаемой
задачей. При обработке аудио-и вицсосигнвлов выбор /в зависит от осо-
бенностей психофизического восприятия этих сигналов. Например, для
стандартного телефонного сигнала верхняя частота Д равна 3.4 кГц,
а минимальная стандартная частота дискретизации /д — 8 кГц.
На выходе ФНЧ получают аналоговый сигнал .?(/) с финитным (ограни-
ченным по частоте) спектром Х(усо) (рис. 1.2,6). Оценка погрешности
при переходе от сигнала х(/) к сигналу л(0 дается в [501.
Аналого-цифровой преобразователь формирует цифровой сигнал хп(нТ)
посредством дискретизации и квантования сигнала л(г) (рис. 1.1, в).
Дискретизация но времени (дискретизация) представляет собой процедуру
взятия мгновенных значений — отсчетов— аналогового сигнала л(г) с ин-
тервалом времени, равным периоду' дискретизации1 Г. Значения агсчегов
х(пТ) совпадают со значениями сигнала i(/) в момсигы времени t = пТ :
х(пТ) = A’(f)|, .
1 По умолчанию будем (ютразуменачь ранномерную (-жвилисч ан шую). (искре гизанию.
10
Часть I. Введение
Рис. 1.2. Сигналы и их амплитудные спектры на входе (а) и выходе (б) Ф114
Совокупность отсчетов х(нТ), и = 0,1,... называю г дискретным сигналом.
Квантование по уровню (квантование) производится с целью представле-
ния точных значений отсчетов х(пТ) в виде двоичных чисел конечной
разрядности— квантованных отсчетов хи(пТ). Для этого динамиче-
ский диапазон дискретного сигнала х(п’Г) разбивается на конечное число
дискретных уровней — уровней квантования — и каждому отсчету по
определенному правилу присваивается значение одного из ближайших
уровней, между которыми он оказывается. Уровни квантования кодиру-
ются двоичными числами разрядности Ь, зависящей от числа уровней
квантования R:
К<2Ь.
откуда b = int(log2 R). На временной диаграмме (рис. 1..1, в) ,щя примера
выбрано 5 уровней квантования (без учета знака), поэтому b — 3 и отсче-
ты хп(пТ) кодируются четырехразрядными двоичными числами: один
разряд знаковый, три значащих.
Совокупность квантованных отсчетов .гц(иГ). « = 0. I.... называют циф-
ровым сигналом.
Лекция 1. Введение в ЦОС
11
Детерминированные и вероятностные оценки ошибки квантования екп(и)
за счет АЦП
будут изучаться в Лекции 15.
2. На втором этапе устройство ЦОС преобразует цифровой сигнал хп(п1‘)
(рис. 1.1, <?) в цифровой сигнал уц(//7’) (рис. 1.1, г) по заданному алгоритм).
Устройство ЦОС может быть реализовано аппаратно или программно.
В первом случае — в виде специализированного цифрового устройства, во
втором — в виде программы на компьютере или цифровом процессоре
обработки сигналов (ЦПОС). Программная реализация преобладает.
Устройства ЦОС могут работать в реальном или нереальном времени.
В реальном времени обработка сигналов должна выполняться в темне по-
ступления отсчетов входного сигнала хн(кГ), « = 0,1,... и отвечать сле-
дующим требованиям:
• время цикла Д/н при вычислении отсчета _уц(яГ) не должно превы-
шать интервала между двумя соседними отсчетами хц(иГ). т. е. пе-
риода дискретизации Т
ми<т-,
• тактовая частота /т процессора должна быть много выше частоты дне-
кретизацни /д сигнала хц(иГ)
А» А-
Последнее вызвано гем, что в алгоритмах ЦОС количество операций
в цикле, необходимое для вычисления одного отсчета уц(иГ), весьма ве-
лико. Например, для стандартного телефонного сигнала с частотой дис-
кретизации 8 кГц тактовая частота должна быть нс менее 6 мГц.
В реальном времени выполняется обработка сигналов, связанная с их пе-
редачей по каналам связи, в том числе, по сети Internet. К типовым зада-
чам ЦОС в реальном времени относятся: обнаружение, фильтрация, сжа-
тие, распознавание сигналов и др.
В нереальном времени выполняется обработка сигналов, связанная, преж-
де всего, с их исследованием. К типовым задачам ЦОС в нереальном вре-
мени относятся: студийная обработка аудио- и видеосигналов; обработка
данных различной физической природы, полученная отдатчиков, и др.
12
Часть I. Введение
3. На третьем этапе декодер формируег результирующий аналоговый сиг-
нал Я О из цифрового сигнала уц(нГ). В состав декодера входят цифро-
аналоговый преобразователь (ЦАП) и сглаживающий фильтр.
Цифро-аналоговый преобразователь формирует из цифрового сигнала
yu(irT) (рис. 1.1, г) ступенчатый аналоговый сигнал у(г) (рис. 1.1. д).
Сглаживающий фильтр (низкочастотный) устраняет ступенчатый эффект
(скачки) в выходном сигнале ЦАП у(О- На выходе сглаживающего
фильтра получаем аналоговый сигнал у(г) (рис. 1.1, е)— результат пре-
образования исходного сигнала х(/).
Предметами изучения в настоящем курсе лекций являются (ла рис. 1.1 выде-
лено полужирным шрифтом):
О дискретные и цифровые сигналы;
□ устройства ЦОС: линейные и нелинейные дискретные системы, методы и
алгоритмы цифровой обработки сигналов.
1.2. Основные типы сигналов
и их математическое описание.
Нормирование времени
Сигналом называют физический процесс, несущий в себе информацию [17].
Математически сигналы описываются функциями времени, тип которых за-
висит от типа сигнала. К основным типам сигналов относят: аналоговый,
дискретный и цифровой.
Аналоговым называют сигнал, непрерывный по времени и состоянию
(рис. 1.3, а). Такой сигнал описывается непрерывной или кусочно-непрерывной
функцией *(/), при этом и аргумент, и функция могут принимать любые зна-
чения из некоторых интервалов tt </ </2 , х} <х<,х2 соответственно.
Дискретным называют сигнал, дискретный по времени и непрерывный по
состоянию (рис. 1.3, о). Такой сигнал описывается решетчатой функцией
[последовательностью) х(пТ), п = 0,1, 2,..., которая определена только в
дискретные* моменты времени пТ и может принимать любые значения из
некоторого интервала л, < т £ х2 .
Интервал Т называют периодом дискретизации, а обратную величину —
частотой дискретизации
Л=у-
(io
Лекция 1. Введение в ЦОС
13
Значения последовательности в моменты времени пТ называют отсчетами.
Дискретный сигнал может быть как вещественным, так и комплексным.
В последнем случае его вещественная и мнимая части описываются вещест-
венными последовательностями
x{nT) = xl(nT) + jx2(nT).
Цифровым называют сигнал, дискретный по времени и квантованный по со-
стоянию (рис. 1.3, в). Такой сигнал описывается квантованной решетчатой
функцией (квантованной последовательностью) х^пТ), отсчеты которой
в каждый момент времени пТ принимают дискретные значения уровней
квантования из некоторого интервала JCj <х £л*2 .
в
Рис. 13. Основные типы сигналов: аналоговый (л),
дискретный (б) и цифровой (в)
14
Часть /. Введение
При описании дискретных и цифровых сигналов удобно пользоваться норми-
рованный временем i
- t
t =—,
т
которое при 1 = пТ имеет смысл номера отсчета и
i=^==^-=« (1-2)
т т
и означает, что отсчет взят в момент пТ . Это позволяет описывать дискрет-
ный сигнал функцией целочисленной переменной х(п) и считать тождест-
венными обозначения дискретного сигнала х(и) и х(пТ):
= х(и).
1.3. Типовые дискретные сигналы
В ЦОС ряд дискретных сигналов используют в качестве испытательных воз-
действий и называют типовыми. К ним относятся:
1. Цифровой единичный импульс, описываемый последовательностью
fl. Л=(Х
ио(л)=|о,и*а (13)
т. е. этот сигнал равен единице прн и = 0 и нулю при всех остальных зна-
чениях п (рис. 1.4, а).
Задержанный цифровой единичный импульс описывается последователь-
ностью
(I, n = nv,
л <1-4>
0, п * т,
т. е. этот сигнал, в отличие от незадержанного, равен единице при и = т и
нулю при всех остальных значениях п (рис. 1.4.6).
Из определения задержанного цифрового единичного импульса (1.4) вы-
текает важное соотношение
х(н) = У х(т)и0(п-т). (1.5)
Лекция f. Введение в ЦОС
«о(«)
-I 0 1 2 3 " а -1 0 1 2 3 " б
Рис. 1.4. Цифровой единичный (а)
и задержанный цифровой единичный (б) импульсы
По определению (1.4) последовательность и0(и-т) равна нулю во всех точ-
ках и, кроме п = т (где она равна единице), поэтому слагаемые в (1.5) при
всех значениях т, кроме т = п, равны нулю, а значит, сумма равна х(п):
У л(ш)мо(и-т) = х(0)и00?) + л-(1)«о(я-1)+...+.г(л)и0(п-л) +
w»=0
+ л1и + 1)мо|и-(н + 1)]+... = О+О+...+л(и)мо(0) + 0+... = х(и).
11аиример. подставляя в (1.5) и = 2, имеем
т(2) = л(0)ип(2)+ л'(1)л0(1) + л(2)ы0(0) + л(3)м0(-1)+ ...-
= 0 + 0 + х( 2) «о (0)+0+... = х( 2).
По аналогии со свойством дельта-функцин [17] соотношение (1.5) назы-
вают фильтрующим свойствам или свойством селективности цифрового
единичного импульса.
2. Цифровой единичный скачок, описываемый последовательностью
f 1, и > 0:
"1(п)4о’«<о, (L6)
г. с. этот сигнал равен единице при всех неотрицательных значениях п
(рис. 1.5, а).
Задержанный цифровой е типичный скачок (рис. 1.5.6) описывается по-
следовательностью
(1» п2т; .. _
(1.7)
О, п<т.
г. е. этот сигнал, в отличие от незадержанного, равен единице при всех
значениях п > т и нулю при остальных значениях п.
16
Часгъ I. Введение
рис 1.5. Цифровой единичный (а) и задержанный цифровой единичный (о) скачки
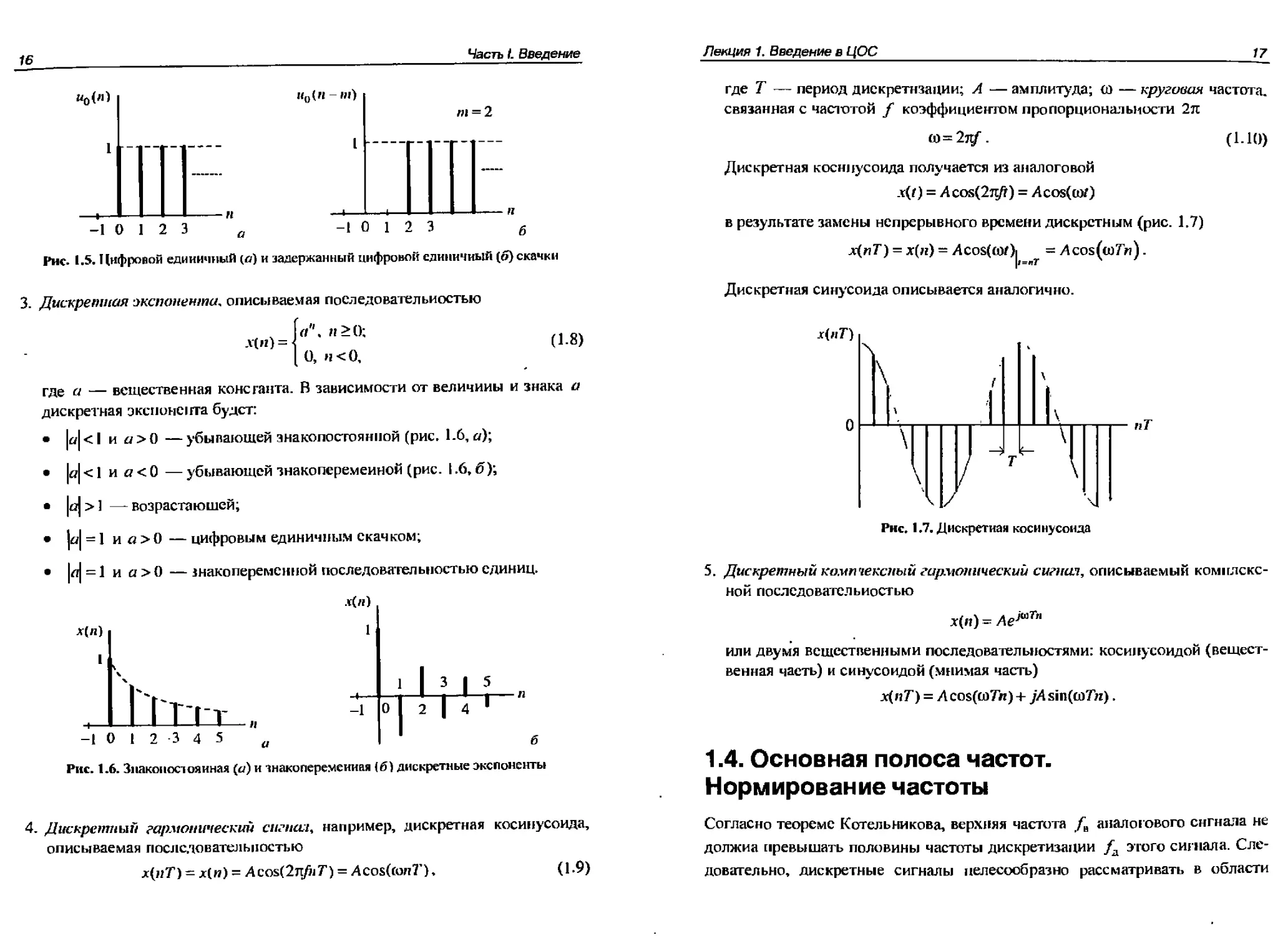
3. Дискретная экспонента, описываемая последовательностью
. [я"» н>(к о.
л(и) = ^ (1.8)
[О, н<0,
где а — вещественная константа. В зависимости от величины и знака а
дискретная экспонента будет:
• |с/|<1 и а>0 —убывающей знакопостоянной (рис. 1.6, а)',
• |я|<1 и а<0 —убывающей знакопеременной (рис. 1.6,6);
• |а|>] —возрастающей;
• ру| = 1 и а>0 —цифровым единичным скачком;
• |л| = 1 и а>0 —знакопеременной последовательностью единиц.
Рис. 1.6. Знакопостоянная (а) и знакопеременная (б) дискретные экспоненты
4. Дискретный гармонический сигнал, например, дискретная косинусоида,
описываемая последовательностью
х(мТ) = х(и) = Асо5(2л/лГ) = Acos(ton7’), (1.9)
Лекция 1. Введение в ЦОС__________________________________________ 17
где Т — период дискретизации; А — амплитуда; <о — круговая частота,
связанная с частотой f коэффициентом пропорциональности 2л
ы = 2л/. (1.10)
Дискретная косинусоида получается из аналоговой
x(t) = 4cos(27£ft) = Zcos(coz)
в результате замены непрерывного времени дискретным (рис. 1.7)
ДпТ) = х(н) = Xcos(wf)| =Mcos(co7n).
Дискретная синусоида описывается аналогично.
5. Дискретный компчекспый гармонический сигнал, описываемый комплекс-
ной последовательностью
х(») - Ле7”7'"
или двумя вещественными последовательностями: косинусоидой (вещест-
венная часть) и синусоидой (мнимая часть)
x(nr) = 4cos(co7>t) + /4sin(ci)7>z).
1.4. Основная полоса частот.
Нормирование частоты
Согласно теореме Котельникова, верхняя частота /в аналогового сигнала не
должна превышать половины частоты дискретизации fa этого сигнала. Сле-
довательно, дискретные сигналы пелесообразно рассматривать в области
18
Часть I. Введение
Г Л1
0; ~ I, которая называется основной полосой частот или основным диапа-
зоном частот.
Это позволяет ввести понятие нормированных частот:
□ / — отношение текущей частоты f к частоте дискретизации fA
i=--=fT-. (i.ii)
Лч
П О) — отношение текущей частоты со к частоте дискретизации Д
& = — =ш7\. (1.12)
А
Нормированные частоты f и со связаны соотношением, подобным (1.10):
со 2яУ _ *
со=— =—— = 2nf .
Л h
В зависимости от выбранной шкалы частот основная полоса соответствует
областям:
Обычно предпочтение отдастся абсолютной частоте f н нормированной
частоте СО.
Например, дискретная косинусоида (1.9) в области нормированных частот
имеет вид:
х(п) = Xcos(2n/5i) = Acos(wn).
Введение нормированной частоты указывает на то, что в ЦОС важны не аб-
солютные значения частот сигнала и дискретизации, а их отношение. Пока-
жем это на простейшем примере двух дискретных косинусоид:
Х] (w) = cos( 2nfiTt п) = cos
2л—н
ври у = 2 Гц. /д| = 16 Гц ;
Лекция 1. Введение в ЦОС
19
x2(K) = cos(27t/27'2H) = cos 2л-&-п при /2 =5 кГц, //l2 =40 кГц.
[ Zi2 J
Подставив значения f и /д, получим в области нормированных частот оди-
наковые дискретные сигналы
/ ч fn 2 ’l \
X’1(n) = cos 2л—и =cos —и ;
I 16 J I4 J
, ч (_ 5000 > (jt’l
л2(»)=со$| 2л-----п =cos — и,
2 ( 40000 J 4 J
т. к. они имеют равные значения нормированных частот
. со. 2л/. 2л - 2 л
/д| А. 16 4
. _ со3 _ 2itf2 _ 2л-5000 _ л
“2-А7-7^ 40000 ~4’
2 Зяк. 165
Лекция 2
Математический аппарат
описания сигналов
и линейных систем
В этой лекции обсуждается математическое описание аналоговых и дискрет-
ных сигналов и линейных систем в различных областях.
Во временной области:
П сигналы (аналоговые и дискретные) описываются функциями времени',
О линейные системы (аналоговые и дискретные) описываются:
• характеристиками. Характеристика линейной системы определяется
как ее реакция на некоторый тестовый сигнал, т. с. характеристика —
это сигнал, описываемый функцией времени',
• соотношением вход/выход. Соотношение вход/выход линейной систе-
мы описывается линейным уравнением, устанавливающим связь между
входным и выходным сигналами— функциями времени. По умолча-
нию будем считать, что системы имеют один вход и один выход.
Тип функции времени определяется типом сигнала. а именно (см. Лекцию /):
О непрерывная функция х(г) описывает аналоговый сигнал;
О последовательность (решетчатая функция) х(пТ) описывает дискретный
сигнал.
Помимо временной, сигналы и линейные системы могут описываться и
в других областях (в областях иных независимых переменных), при этом со-
ответствующие функции времени преобразуются в функции другой пере-
менной.
Такое преобразование не следует путать с преобразованием функций одной
переменной, например с преобразованием входного сигнала в выходной.
Смысл термина '’преобразование" всегда ясен из контекста.
Лекция 2. Математический аппарат описания сигналов и линейных систем 21
Данная лекция содержит краткие сведения о математическом аппарате, тра-
диционно используемом для преобразования функций времени при описании
сигналов и линейных систем в следующих областях:
О в области комплексной переменной (р-области— для непрерывных
функций х(/). z-области— для последовательностей .г(иГ));
□ в частотной области.
При чтении лекции рекомендуется обратить особое внимание на взаимосвязи:
□ однотипных преобразований непрерывной функции л(/) и последова-
тельности х(нТ);
□ между различными преобразованиями каждой из этих функций.
2.1. Математическое описание
аналоговых сигналов и линейных систем
в p-области и в частотной области
Математическое описание аналоговых сигналов и линейных систем в р-
области (па комплексной p-плоскости) и в частотной области основано соот-
ветственно на преобразованиях Лапласа и Фурье функции времени х(/)> для
которой выполняется условие
л(?)|/<0=0. (2.1)
2.1.1. Преобразование Лапласа
Преобразованием Лапласа1 функции л(/) (2.1) называется следующая пара
взаимно однозначных преобразований:
□ прямое" преобразование
Х(р) = = f x(r)e-^dr; (2.2)
О
О обратное преобразование
х(О = Г,{Х(р)}=ут fx(p)e'"dp. (23)
У <*0 ~J°°
1 Односторонним.
~ Обычно во всех преобразованиях, cc.ni речь идет о прямом преобразовании, при.огательнос
"прямое" опускают.
22
Часть f. Введение
где:
Z.{r(/)}, Г'{Х(Р)} — символические обозначения прямого и обратного пре-
образований Лапласа;
х(/) — оригинал — вещественная или комплексная функция (2.1), непрерыв-
ная или кусочно-непрерывная, однозначная на любом конечном интервале
в области определения, имеющая экспоненциальный порядок3 О(е^) и огра-
ниченную возможность возрастания
|jr(/)|dS Ае*1 (ЛиХ не равны бесконечности);
р — оператор Лапласа
p = G+y(o; (2.4)
Х(р) — ^изображение (L-образ) функции л(/), результат преобразования
Лапласа;
Go — абсцисса абсолютной сходимости интеграла (2.2).
Преобразование Лапласа справедливо только в области абсолютной сходи-
мости интеграла (2.2)
]|х(ОС-'“|л = ;|.г(Ое-,я+-"“>'|л =
о о
= J|x(O||>T'“' |е'п'А = J|.v(/)|e“rf( < ~, (2.5)
О о
определяемой абсциссой абсолютной сходимости с0. Па комплексной р-
плоскости это область, где Rc(p)=o > о().
Как известно [37], в области сходимости интеграла (2.5) обеспечивается
и сходимость интеграла (2.2), однако обратное не всегда справедливо.
Может случиться, что интеграл (2.2) сходится за счет сбалансированности
площадей с положительными и отрицательными знаками, а интеграл (2.5)
расходится.
3 Для оценки поря цса обычно используется символика <?(•). Примером функции, имеющей
1кспонс1Щиа.!|Ы1ЫЙ характер, является х(/) = £ аке **
Лекция 2. Математический аппарат описания сигналов и линейных систем 23
2.1.2. Преобразование Фурье
Преобразованием Фурье4 функции х(/) (2.1) называется следующая пара
взаимно однозначных преобразований:
□ прямое преобразование
Х(» = |л(/)с'даЛ; (2.6)
О
□ обратное преобразование
-Ф)=т- J (2.7)
2л Д
где:
х(/) — оригинал— вещественная или комплексная функция (2.1), удовле-
творяющая условиям Дирихле: на любом конечном интервале в области за-
дания определена, однозначна, непрерывна или кусочно-непрерывна, имеет
конечное число экстремумов и разрывов первого рода;
X (— фурье-изобралсепие (фурье-образ) функции х(/), результат преоб-
разования Фурье.
Преобразование Фурье справедливо только в области абсолютной сходимо-
сти интеграла (2.6)
||л(0<Г*“р( = {|х(0|Л <~. (2.8)
О о
Условия сходимости преобразований Лапласа (2.5) и Фурье (2.8) позволяют
утверждать, что преобразование Фурье справедливо для более узкого класса
сигналов, чем преобразование Лапласа [9].
2.1.3. Связь преобразования Фурье
с преобразованием Лапласа
Сравнивая преобразования Лапласа (2.2) и Фурье (2.6), легко видеть их взаи-
мосвязь: при условии абсолютной сходимости соответствующих инте) ралов
фурье-изображение X(Jo>) функции х(/) совпадает с ее /--изображением
Односторонним.
24
Часть t. Введение
Х(р), если область значений переменной р на комплексной p-плоскости ог-
раничена точками иа оси частот усо:
XO<0) = X(p))p=J,Q. (2.9)
2.1.4. Ряд Фурье
Непрерывная периодическая функция времени х(Г) с периодом Ts, удовле-
творяющая в пределах периода условиям Дирихле, может быть представлена
в виде ряда Фурье
л(г)= X (2.10)
к 00
где:
Д(0 — период дискретизации по частоте:
Д<0 = — [т,=—1 (2.11)
Т, ( Де))
Х(к) — коэффициенты Фурье (комплексные числа):
L.
Х(к) = — j ; (2.12)
К -L.
2
Л —иомер коэффициента Фурье, соответствующего частоте АД со.
Аналогично, непрерывная периодическая функция чистоты X ((d) с перио-
дом соЛ, удовлетворяющая в пределах периода условиям Дирихле, может
быть представлена в виде ряда Фурье, симметричного (2.10),
Х((0)= X х(л)е"^дпо, (2.13)
где:
А/ — период дискретизации по времени:
2тг ( 2п 2л1
1 <□, = — *— ;
д' L J
(2.14)
Лекция 2. Математический аппарат описаний сигналов и линейных систем 25
x(w) — коэффициенты Фурье (комплексные числа):
(J),
x(n)=— j Х«1))<-'',Л'шАо; (2.15)
чА
2
п — номер коэффициента Фурье, соответствующего времени п& .
На основании (2.11) и (2.14) можно записать соотношение для периодов
функций и периодов дискретизации во временной и частотной областях
Т;Дш = ш1.Д/.
Сравнивая ряды (2.10) и (2.13). легко заметить взаимозаменяемость незави-
симых переменных время-частота.
2.2. Математическое описание
дискретных сигналов и линейных систем
в z-области и в частотной области
Математическое описание дискретных сигналов и линейных систем в z-
области (на комплексной z-плоскостн) и в частотной области основано соот-
ветственно на Z-преобразовании и преобразовании Фурье последовательно-
сти х(иТ), для которой выполняется условие
<216)
2.2.1. Дискретное преобразование Лапласа
Дискретное преобразование Лапласа (D-прсобразованис) последовательности
х(пТ) (2.16) имеет прямую аналогию с преобразованием Лапласа (2.2)
непрерывной функции.
В результате перехода от непрерывного времени к дискретному
1 => пТ
и замены непрерывной функции последовательностью
х(/)=>Х»П
интеграл в (2.2) заменяется суммой.
26
Часть I. Введение
Соответственно, дискретным преобразованием Лапласа называется следую-
щий ряд
X ) = О{л(»Г)} = X Х(ИГ)С-',”Г . (2.17)
л-0
где:
£){х(иГ)} — символическое обозначение дискретного преобразования Лапласа;
х(пТ) —оригинал— вещественная или комплексная последовательность (2.16);
Х(ерТ) — D-изображемие (D-образ) последовательности х(пТ), результат
дискретного преобразования Лапласа.
Дискретное преобразование Лапласа однозначно связывает последователь-
ность х(/?Г) с ее D-изображенисм Х(ерТ) и справедливо только в области
абсолютной сходимости ряда (2.17)
х |х(л/)| = X I х(пТ) ||с= £ | х(пТ) | е-тт < „ (2 |g)
определяемой абсциссой сходимости о0. На комплексной p-плоскости это
область, где Re(p)=o > с0.
2.2.2. Z-преобразование
При исследовании дискретных сигналов и линейных систем, как правило,
вместо дискретного преобразования Лапласа используют Z-преобразование,
которое получается из дискретного преобразования Лапласа (2.17) в резуль-
тате замены переменных
г = ерТ. (2.19)
Z-преобразоваиием5 последовательности х{пТ) (2.16) называется следующий
ряд:
Х(г) = /{л(«П}= X 4»Пг”, (2 20)
л=0
где:
Zfanr)} — символическое обозначение Z-преобразования;
х(иГ) —оригинал— вещественная или комплексная последовательность (2.16);
Прямым по умолчанию.
Лекция 2. Математический аппарат описания сигналов и линейных систем 27
X(z)— z-изображение (z-образ) последовательности х(пТ), результаз
Z-преобразования.
Z-преобразование однозначно связывает последовательность х(пТ) с ее
z-изображением A’(z) и справедливо только в области абсолютной сходимо-
сти ряда (2.20)
Х|х(лГ)г""|<~. (2.21)
л=0
Как известно (37], в области сходимости ряда (2.21) обеспечивается и сходи-
мость ряда (2.20), однако обратное не всегда справедливо. Может случиться,
что ряд (2.20) сходится за счет сбалансированности слагаемых с положи-
тельными и отрицательными знаками, а ряд (2.21) расходится.
2.2.3. Связь Z-преобразования
с дискретным преобразованием Лапласа
Сравнивая дискретное преобразование Лапласа (2.17) и Z-преобразование
(2.20), легко видеть их взаимосвязь
~Х(ерТ').
Может возникнуть вопрос, почему при исследовании дискретных сигналов и
линейных систем используют Z-, а не D-преобразование. Дело в том, что по-
добно преобразованию Лапласа непрерывных функций, Z-преобразование
последовательности позволяет получить алгебраические соотношения (пока
не будем вникать, какие именно), в то время как D-преобразование приводит
к весьма неудобным для анализа трансцендентным соотношениям.
Подробно Z-преобразование будет рассматриваться в Лекции
2.2.4. Преобразование Фурье
Преобразованием Фурье6 последовательности х(нТ) (2.16) называется сле-
дующий ряд:
X(eJt*r} = ^Х(пТ)е~^Тя , (2-22)
я=0
где:
х(яГ) — оригинал— вещественная или комплексная последовательность (2.16);
Прямым по уми.1чапиго.
28
Часть I. Введение
Х(е^т) — фурье-изображение (фурье-образ) последовательности х(пТ),
результат преобразования Фурье.
Преобразование Фурье однозначно связывает последовательность х{пГ) с ее
фурье-изображением Х{е^°т) н справедливо только в области абсолютной
сходимости ряда (2.22)
Е|л(яТ)е-Л“Л|= Х1-Ф1П|<~. (2.23)
л=0 1 п-о
Условия сходимости /-преобразования (2.21) и преобразования Фурье (2.23)
позволяют утверждать, что преобразование Фурье справедливо для более уз-
кого класса дискретных сигналов.
Из (2.22) видно, что фурье-изображение Х(е*'а1) последовательности х(пТ)
является периодической функцией, поскольку аргумент данной функции
е^°т (который, в свою очередь, тоже является функцией) периодичен с пе-
2л
риодом по частоте О), равным частоте дискретизации (о, - —:
е^г = X"** т = е'"'7 <?±>2ni = eimT. (2.24)
Значит, непрерывная периодическая функция частоты X(eJuil) может быть
представлена рядом Фурье (2.13) при сод =сол и Д? = Т
Х(ю)=Х(е}шТ) = X x(n)e~j,l&™= £ x(n)e~Su"T, (2.25)
Я = -<Ю H — -OQ
где коэффициенты Фурье .v(m) вычисляются по формуле (2.15)
л
х(„) = — I X («>'“’ )eJM7,,da>. (2.26)
2 л
7’
Действительно, подставляя х(п) = х(пТ) в (2.25) и учитывая условие (2.16),
получаем преобразование Фурье (2.22)
Х(г>7’)= у .r(«R->"7’ = Ё х(ПТ)е-^т.
Я=-со л-0
Поэтому формула (2.26) презставляет собой не что иное, как обратное пре-
образование Фурье.
Лекция 2. Математический аппарат списания сигналов и линейных систем 29
Таким образом, преобразованием Фурье последовательности х(нТ') называ-
ется пара взаимно однозначных преобразований (2.22)—(2.26):
□ прямое преобразование
Х(е’шГ ) = £ x(nT')e-JaT" ; (2.27)
п=0
□ обратное преобразование
л
х(пГ) = — \ Х(е1"'т)е1,‘т"г1ы. (2.28)
2л л
"7
2.2.5. Связь преобразования Фурье
с Z-преобразованием
Сравнивая преобразование Фурье (2.22) с /-преобразованием (2.20), легко
видегь их взаимосвязь: прн условии абсолютной сходимости соответствую-
щих рядов фурье-нзображенис Х(е^ ) последовательности х(пТ) совпада-
ет с ее ^-изображением Л'(с), если область значений переменной z на ком-
„ ~ j(uT
плекснои s-плоскости ограничена точками на единичном окружности eJ :
X(e*T) = X(z), (2.29)
Лекция 3
Z-преобразование
Как известно, анализ и синтез линейных аналоговых систем существенно уп-
рощается при переходе из временной области в /^-область [9]. В частности,
преобразование Лапласа позволило ввести фундаментальное понятие переда-
точной функции в удобном для анализа дробно-рациональном виде и описать
соотношение вход-выход в виде алгебраических, а не дифференциальных
(интегрально-дифференциальных) уравнений.
Аналогично, анализ и синтез линейных дискретных систем существенно
упрощается при переходе из временной области в ^-область. В частности,
Z-преобразование позволяет ввести понятие передаточной функции в дробно-
рациональном виде и описать соотношение вход-выход в виде алгебраиче-
ских, а нс разностных уравнений (см. Лекцию 5).
3.1. Z-преобразование
Z-преобразованисм1 последовательности х(пТ) называется следующий ряд
(си. Лекцию 2):
X(z) = Z{x(„n}= Ё , (3.1)
>1=0
где:
Z{x(nT)} — символическое обозначение Z-прсобразования;
х(пТ) — оригинал — последовательность (вещественная или комплексная),
для которой выполняется условие
(32)
111рямым по умолчанию.
Лекция 3. 7.-преобразование 31
X(z) — z-мзоброжение (z-образ) последовательности х(иТ’), результат
/-преобразования.
Напомним, что Z-преобразование получено на основе дискретного преобра-
зования Лапласа (2.17) в результате замены переменных
z = epT, (3.3)
где р — оператор Лапласа (2.4)
р = о+Jco. (3.4)
Комплексная переменная z может быть представлена в двух формах:
□ в алгебраической форме
z=^+jn; (3.5)
О в показагелыюй форме
z~re^^ (3.6)
где радиус г является модулем, а угол ср — аргументом переменной z
(3-5):
r=|z|=^2+n2; (3-7)
Соответственно, положение произвольной точки на комплексной z-плоскосги
может задаваться:
□ координатами (£; п) —в декартовой системе координат;
□ полярными координатами (г; ср) —в полярной системе координат.
Z-преобразование однозначно связывает последовательность х(пТ) с се z-
изображением A^z) и справедливо только в области абсолютной сходимости
ряда (3.1)
У, 1х(л7')г“"| <°°, (3.9)
л-0
которую называют областью сходимости z-изображемия.
Напомним, что в области сходимости ряда (3.9) обеспечивается и сходимость
ряда (3.1) (см. Лекцию 2).
32
Часть I. Введение
Для того чтобы найти область сходимости z-нзображения, выполним сле-
дующие преобразования:
□ в (3.9) заменим модуль произведения произведением модулей
Х|л-(НГ)г-"|=Х |л-(н7’)||г-“|;
О вынесем нулевое слагаемое за знак суммы
Х |x(»D||z""| = .r(0)+ ;
О представим сумму в виде
||-v(»O||Z-"|= Ё(|х(НГ)|'/''|г-|)":
П обозначим верхний предел последовательности |х(иГ)|^"
/?=тах|л(н7')|1/й. н = 1, 2, ...
Поскольку значение любого отсчета, в том числе и х(0), всегда конечно, ус-
ловие (3.9) выполняется, если
£к|г'|<~,
л=)
что возможно только при
r|z*'|<1,
откуда получаем область сходимости ^-изображения
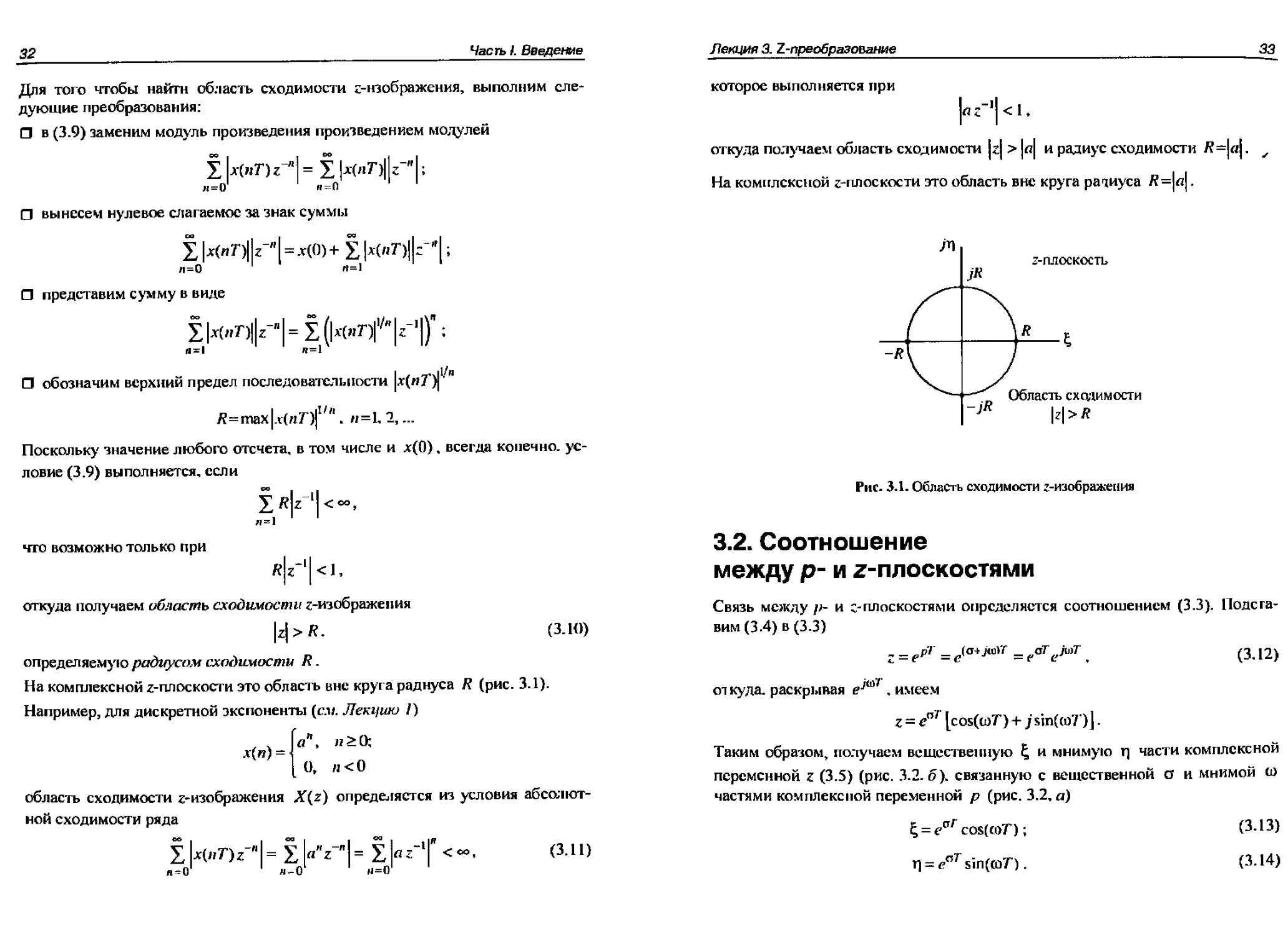
|z|>R. (З.Ю)
определяемую радиусом сходимости Л.
На комплексной z-плоскости это область вне круга радиуса R (рис. 3.1).
Например, для дискретной экспоненты (см. Лекцию 1}
область сходимости z-изображения X(z) определяется из условия абсолют-
ной сходимости ряда
f L(»r)Z-"|= (зло
я=0 л-0 м=0
Лекция 3. Z-преобразование
33
которое выполняется при
откуда получаем область сходимости |z| > |л| и радиус сходимости z
На комплексной z-плоскости это область вне круга рачиуса 7?=jnj.
Рис. 3.1. Область сходимости z-изображения
3.2. Соотношение
между р- и z-плоскостями
Связь между />- и с-плоскостями определяется соотношением (3.3). Подста-
вим (3.4) в (3.3)
z = ерТ = eia^jwYr - еаТе^)Т (3.12)
откуда, раскрывая . имеем
z = e”7 [cos(coT) + jsin((i)7 )j.
Таким образом, получаем вещественную £ и мнимую Г] части комплексной
переменной z (3.5) (рис. 3.2.6). связанную с вещественной о и мнимой со
частями комплексной переменной р (рис. 3.2, а)
= cos(coT); (3.13)
I] = соГ51'л(0)Г). (3.14)
34
Часть /. Введение
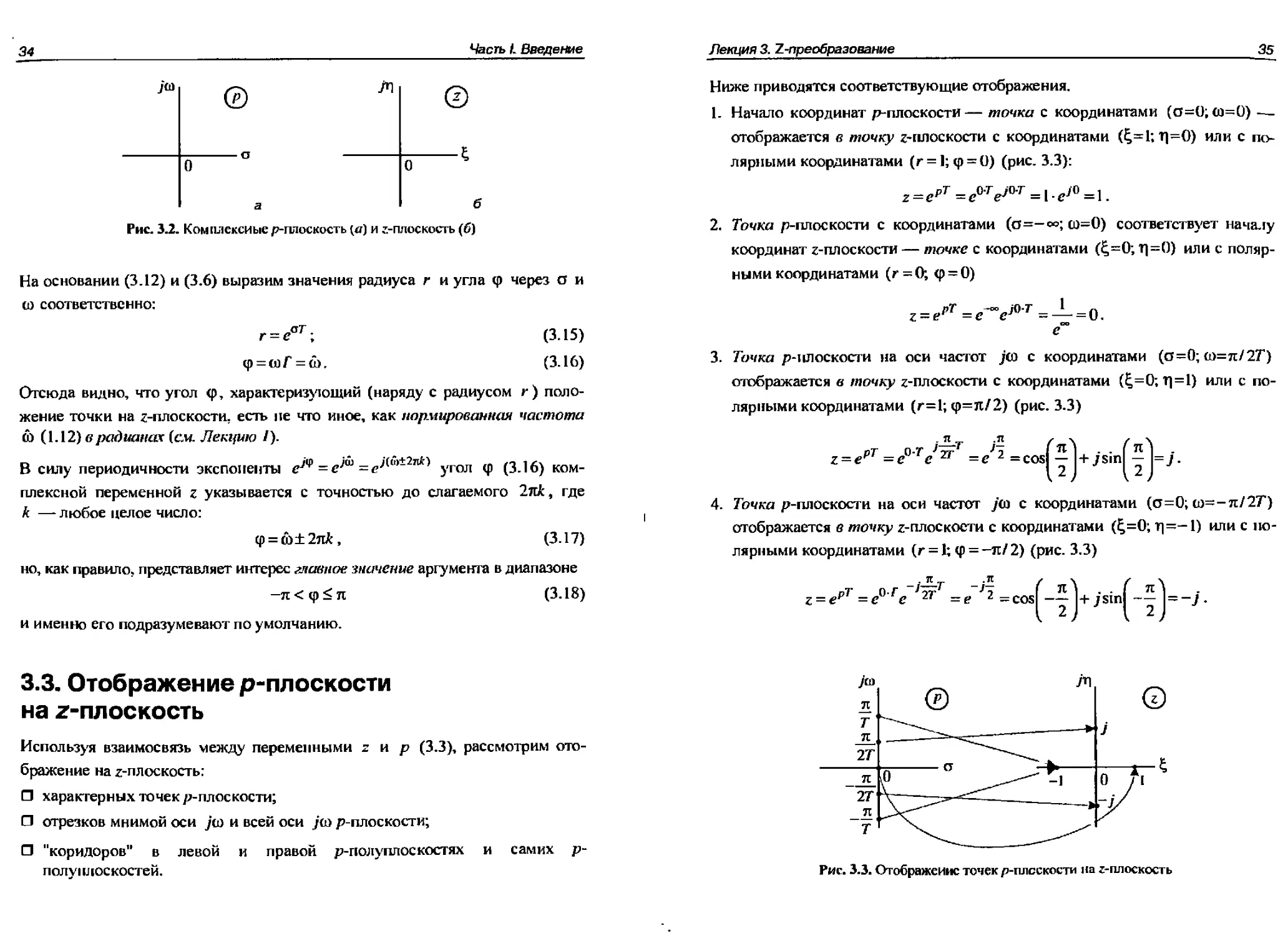
Рис. 3.2. Комплексные p-плоскость (а) и г-пяоскость (б)
На основании (3.12) и (3.6) выразим значения радиуса г и угла ср через 0 и
со соответственно:
г = еат; (3.15)
ф = (о Г = (Ь, (3.16)
Отсюда видно, что угол ср, характеризующий (наряду с радиусом г) поло-
жение точки на 4-плоскости, есть не что иное, как нормированная частота
со (1.12) в радианах (си. Лекцию /).
В силу периодичности экспоненты е& = е^ш = е№>±2пк) угол ср (3.16) ком-
плексной переменной z указывается с точностью до слагаемого 2пк, где
к — любое целое число:
ф = 6±2лЛ, (3.17)
но, как правило, представляет интерес главное значение аргумента в диапазоне
-Ж ср (3.18)
и именно его подразумевают по умолчанию.
3.3. Отображение р-плоскости
на z-плоскость
Используя взаимосвязь между переменными z и р (3.3), рассмотрим ото-
бражение на z-плоскость:
□ характерных точек р-плоскости;
О отрезков мнимой оси усо и всей оси у<о р-плоскости;
□ "коридоров" в левой и правой р-полуплос костях и самих р-
полунлоскостей.
Лекция 3. Z-преобразование
35
Ниже приводятся соответствующие отображения.
1. Начало координат р-плоскости— точка с координатами (0=0; со=О) —
отображается в точку z-плоскости с координатами (Е,=1;Т]-0) или с по-
лярными координатами (г = 1;ф = 0) (рис. 3.3):
2. Точка р-плоскости с координатами (о=-оо;со=0) соответствует началу
координат z-плоскости — точке с координатами (£=0; Т|=0) или с поляр-
ными координатами (г = 0; ф = 0)
7 = РрТ ^c “cjnT = — = 0.
3. Точка р-плоскости на оси частот усо с координатами (0=0; (л=л/2Г)
отображается в точку z-плоскости с координатами (£=0;Г| = 1) или с по-
лярными координатами (г=1;ф=л/2) (рис. 3.3)
4. Точка р-плоскости на оси частот /со с координатами (0=0; со=-л/27’)
отображается в точку z-плоскости с координатами (£=0; Т]=— 1) или с по-
лярными координатами (г = 1; ф = —л/2) (рис. 3.3)
Рис. 3.3. Отображение точек р-плсскости на z-плоскость
36
Часть I. Введение
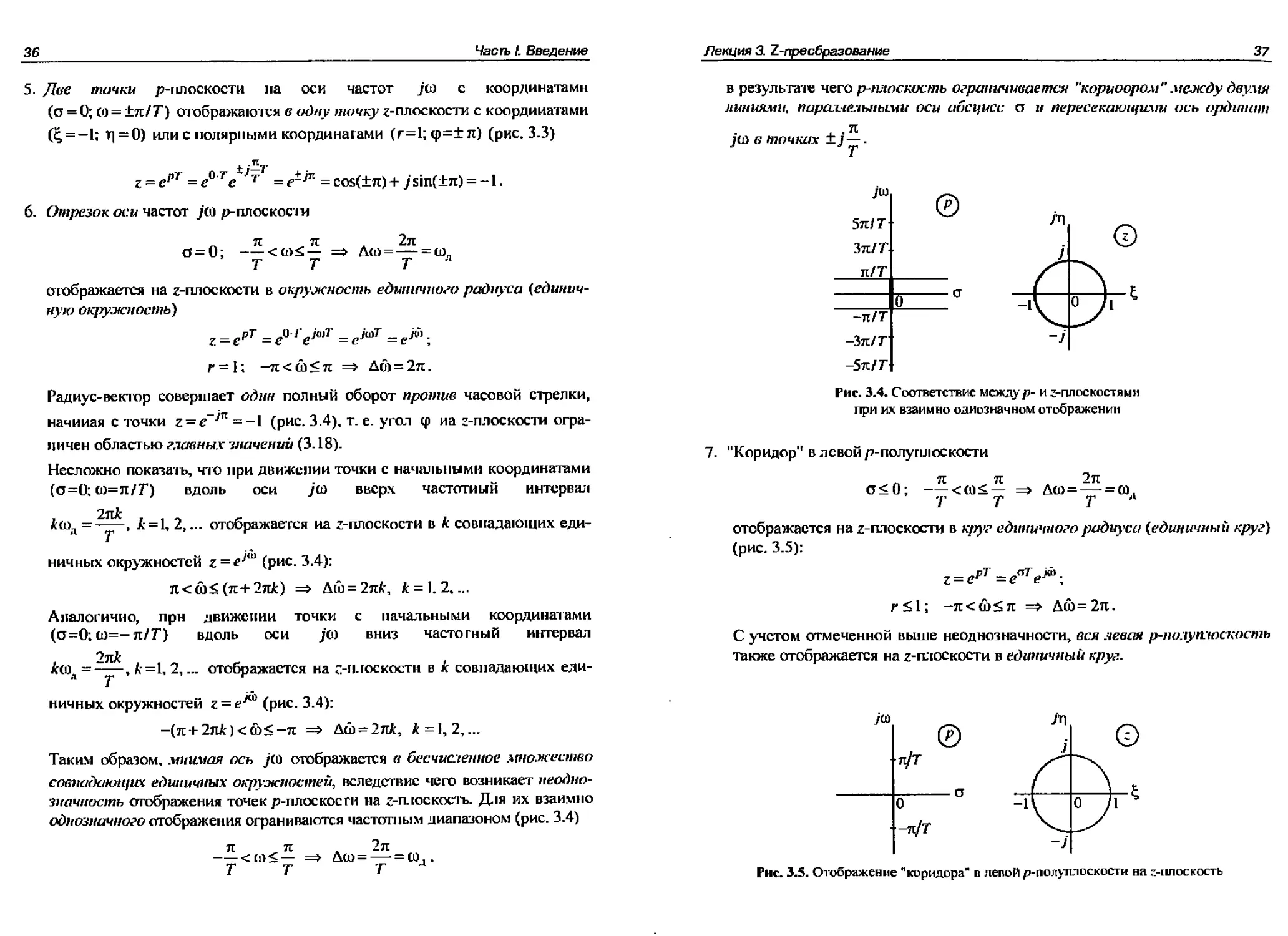
5. Дее точки р-плоскости на оси частот у’со с координатами
(о = 0; GJ = ±п/Г) отображаются в одну точку z-плоскости с координатами
(£ =—1; Т] — 0) или с полярными координагами (г=1;ф=±л) (рис. 3.3)
z = epT=e°'Te Jt =е~^ = cos(±n) + ysin(±n) = -l.
6. Отрезок оси частот Jw р-плоскости
„л л ж 2л
0 = 0; —<(D<— => Дш =— = соп
’ у у у .1
отображается на z-плоскости в окружность единичного радиуса (единич-
ную окружность)
г = ерТ = eol'ej"‘r = е>шГ = ;
г = 1; -л<со<л => Дб) = 2л.
Радиус-вектор совершает один полный оборот против часовой стрелки,
начиная с точки z = e~jr' =-1 (рис. 3.4), т. е. угол ф иа z-плоскости огра-
ничен областью главных значений (3.18).
Несложно показать, что при движении точки с начальными координатами
(а=О;со=л/Г) вдоль оси у'со вверх частотный интервал
, 2лЛ _ . „ .
к<пд = ——, А = 1, 2,... отображается иа z-плоскости в к совпадающих еди-
ничных окружностей z = ера (рис. 3.4):
л<ш<(л + 2лА) => Д(Ь = 2лАг, Jt = l. 2,...
Аналогично, прн движении точки с начальными координатами
(а=О;со=-л/Г) вдоль оси /со вниз частотный интервал
^лЛ
Л(0я =-у-, к = 1, 2,... отображается на z-плоскости в к совпадающих еди-
ничных окружностей z = (рис. 3.4):
-(л + 2лА)<сЬ<-л => Дш = 2лА, к = 1,2,...
Таким образом, мнимая ось j(O отображается в бесчисленное множество
совпадающих единичных окружностей, вследствие чего возникает неодно-
значность отображения точек р-плоскосги на z-плоскость. Д|я их взаимно
однозначного отображения ограниваются частотным диапазоном (рис. 3.4)
л л . 2л
— <со<— => До)= — = со..
Т т т J
Лекция 3. Z-пресбразование 37
в результате чего р-плоскостъ ограничивается "кориоором”между двумя
линиями, параллельными оси абсцисс о и пересекающими ось ординат
, •71
усо в точках ± j—.
5л/7
Зп/Т
rJT
-п/Т
-Зп/7
-5ШТ
Рис. 3.4. Соответствие между р- и ’-плоскостями
при их взаимно однозначном отображении
7. "Коридор" в левой p-полуплоскости
_ л л 2л
О<0;------<(□<— => Дю = — = й).
7’ т т *
отображается на z-плоскости в круг единичного радиуса (единичный круг)
(рис. 3.5):
z = epT^enTejA.
г<1; -л<со<л => Дбэ=2п.
С учетом отмеченной выше неоднозначности, вся левая рчюлуплоскость
также отображается на z-плоскости в единичный круг.
-п/Т
—
Рис. 3.5. Отображение "коридора" в левой р-полуплоскости на г-плоскость
38
Часть I. Введение
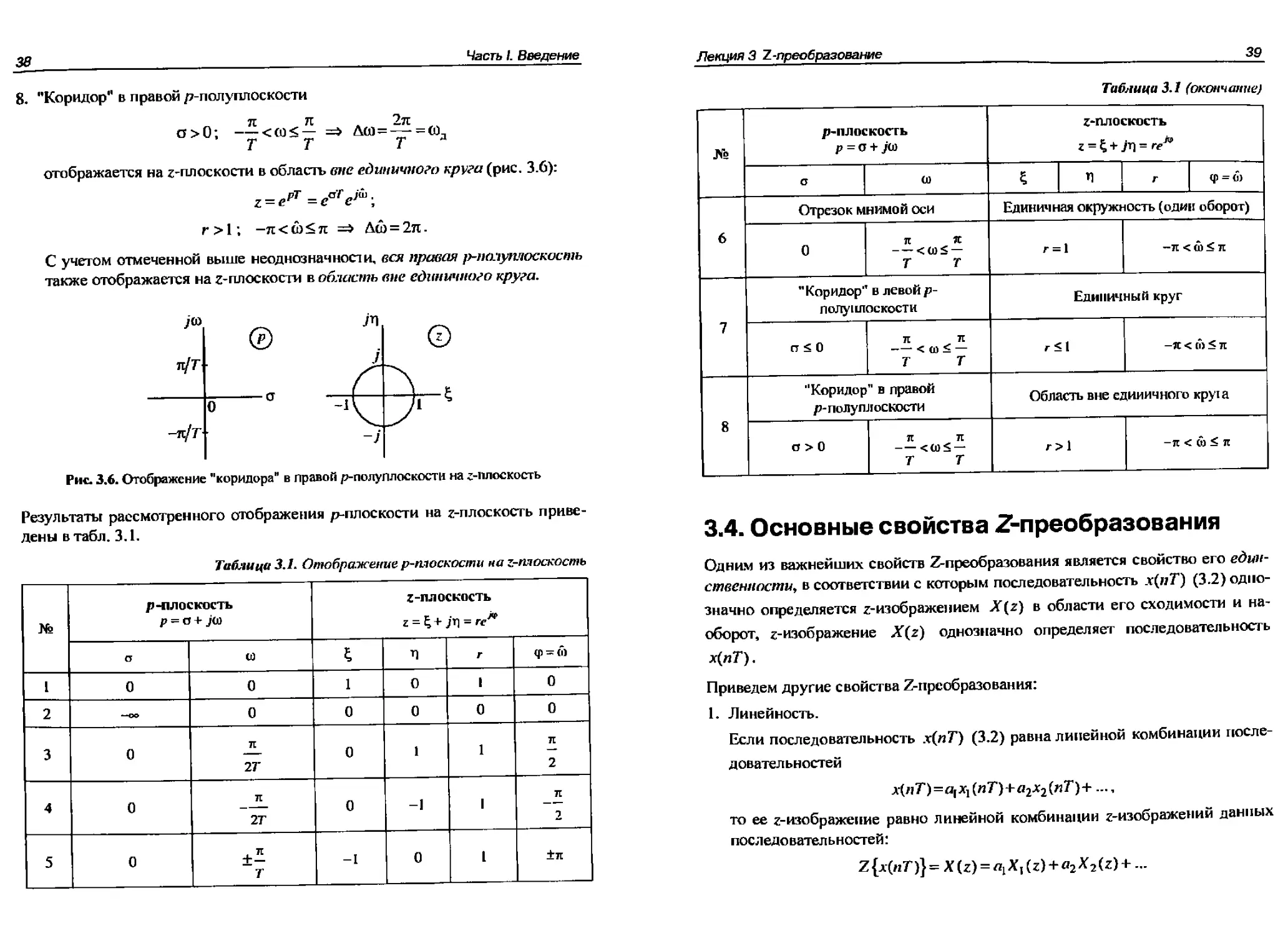
8. "Коридор" в правой р-полуплоскости
отображается на z-плоскости в область вне единичного круга (рис. 3.6):
z = <? = е е' ;
г>1; -л<со<л => Д(Ь = 2д.
С учетом отмеченной выше неоднозначности, вся правая р-молуплоскостъ
также отображается на z-плоскости в область вне единичного круга.
Рис. 3.6. Отображение "коридора" в правой р-пояуплоскости на z-плоскость
Результаты рассмотренного отображения p-плоскости на z-плоскость приве-
дены в табл. 3.1.
Таблица 3.1. Отображение p-плоскости на z-плоскость
№ р-плоскость р = О + j(O z-плоскость z = C+J4 =геЯ
а со с п г Ср = 6)
1 0 0 1 0 1 0
2 -оо 0 0 0 0 0
3 0 п 2Т 0 1 1 п 2
4 0 п 2Т 0 -1 1 п 2
5 0 1+ S 1* -I 0 1 ±л
Лекция 3 Z-преобразование
39
Таблица 3.1 (окончание)
№ р-плоскость р = о + jto + о г> i в<
° со 5 1 г | ф = &
6 Отрезок мнимой оси Единичная окружность (один оборот)
0 п я <(!)< — т т Г = 1 -л<ш<л
7 "Коридор” в левой р- полуплоскости Единичный круг
п < 0 л л < О) < — т т Г<1 -Я < (!) < Л
8 'Коридор’' в правой р- полуплоскости Область вне единичного круш
о > 0 п л <С0< — т т г > 1 -и < и
3.4. Основные свойства Z-преобразования
Одним из важнейших свойств Z-преобразования является свойство его един-
ственности, в соответствии с которым последовательность х(нТ) (3.2) одно-
значно определяется z-изображением X(z) в области его сходимости и на-
оборот, z-изображение X(z) однозначно определяет последовательность
х(лГ).
Приведем другие свойства Z-прсобразования:
1. Линейность.
Если последовательность х(пТ) (3.2) равна линейной комбинации после-
довательностей
х(пТ)=а1х1(пТ)+а2Х2(кТ)+...,
то ее z-изображепие равно линейной комбинации z-изображений данных
последовательностей:
Z {х(иТ)} = X (z) = X, (z) + а2 Х2 (z) +...
40
Часть I. Введение
Доказательство. Подставив х(пТ) в (3.1), получим
Х(г) = Ё " = Ё [a1xl(H7’) + o2A-2(H'/')+ .. Jz'" =О| Ё " +
н»0 л=0 м=0
+«2 Ё л-2(пПг"'' + - = «1Х1(г) + «2^2(г)+ -
п=0
2. Z-преобразование задержанном последовательности (теорема о задержке).
Z-изображение последовательности х|(п-ш)Г], задержанной на т
(ш>0) отсчетов, равно z-изображеиию незадержанной последовательно-
сти х(пТ) (3.2), умноженному на z~m:
Z{v(«7)}= A'(z):
Z{x[(n-»or]}=X(c)z“"'.
Доказательство. Подставим x[(n-m)T] в (3.1):
Z{x[(«-m)T]}= £ v[(ji-m)r]z "
я-0
и выполним замену переменных к = п-т (п — к + т):
Z{x[(n-«)?]}= Ё Jr(A)z-(t+m)=z m Ё
Л+ж-0 к=-т
Разобьем сумму на две:
Z{x[(n-m)7']}= z
£ v(*)z * + £ a(A)z“*
к=-т к=0
и с учетом (3.2) получим:
2{л[(й-т)Г]} = 0 + г-"' Ё = X(z)z"“ •
А=0
Е2 Примечание
Иногда требуется знать с-мзображение опережающей последовательности
х((л + ш)7*] при »|>0 (см. Лекцию 8). В тгом случае оно будет равно
X(z) = z"p(O-S
Лекция 3. 2-преобразование
41
Доказательство. Подставим х[(и + т)Т| в (3.1)
Z{r|(n +л1)?|}= £ л [(я +га)/’]с“"
п=0
и выполним замену переменных к-п+т (п=к-т)
Z{.v|(n+„,)7 |}= £ t «к)г ‘ .
к-гл -О к = т
Разобьем сумму на две и с учетом (3.2) получим:
z{x[(„ + m)r]}=<" Ё 4‘к’* ' X(z)-£x(«z’*
L*=o t=o J L *=°
3. ^преобразование свертки последовательностей {теорема о свертке).
Сверткой последовательностей хх{пТ) и х2{пТ) называется последова-
тельность x{nT)t определяемая соотношением
<>/?) = Ё ^(тПлгКп-нОП.
wi=O
Z-изображение свертки равно произведению ^-изображений свертываемых
последовательностей
Z{x(nT)}= *(г) = A', (z)X2(z) .
Доказательство. Подставим х{пТ) в (3.1)
Х(г)=Ё
>1=0
Ё х,(шГ)х2[(п- т)Г]
ш=0
Z
и изменим порядок суммирования
Х(г)= Ё-М«>П
ш=0
/1=0
В квадратных скобках имеем z-изображенис задержанной последователь-
ности х2|(п-?и)Г], поэтому на основании теоремы о задержке запишем
Х(г)= Ё г1(тПХ2(г)г"" = Х2(г)Ё
m = 0 «1-0
где сумма представляет собой z-изображение последовательности хДлГ).
следовательно.
A'(*) = A'|(z)A'2(z).
42
Часть I. Введение
3.5. Z-преобразование
типовых дискретных сигналов
Типовые дискретные сигналы и описывающие их последовательности рас-
сматривались в Лекции 1. При определении z-нзображений данных последо-
вательностей будем пользоваться нормированным временем и формулой
Z-преобразования (3.1) в виде
X(z) = Z{x(H)} = (3.19)
и=0
Ниже приводятся z-изображения последовательностей, описывающих типо-
вые дискретные сигналы.
1. Z-изображение цифрового единичного импульса ии(п) (1.3)
[1, н = 0;
И°(") = 1о.^о.
Выполнив Z-преобразование (3.19) последовательности , получим
Z{«b(«)} = l/0(z) = X »0(h)z"” = «о(О)г"° = 1.
/1=0
2. Z-изображение задержанного цифрового единичного импульса и0(п- т) (1.4)
{1, п = т:
О, w * т.
На основании теоремы о задержке имеем
Z(w0(n-m)) = £/0(z)z""=z"'".
3. Z-изображение цифрового единичного скачка а, (и) (1.6)
[1, „>0;
“‘(п) = (о. Н<0.
Подставив М|(и) в (3.19), получаем ряд
Z{«l(a)) = (/,(z)= Ea,(n)z= Х1г'"= £ г"" .
н-0 »=0 н=<У
Лекция 3. Z-преобразование 43
представляющий собой сумму бесконечной геометрической прогрессии
f , (3.20)
л=0
при q = z~l.
В области абсолютной сходимости этого ряда"
ЕИ"<~.
я=0
соответс гвующей
И<1. (3.21)
сумма ряда (сумма бесконечно убывающей геометрической прогрессии)
имеет конечный предел, равный
Ё?"=Г!- (3.22)
л=0 1-9
Подставляя ? = 2-1 в (3.22), находим z-изображение
^(г) = ^
и область его сходимости (3.21)
определяемую радиусом сходимости К = 1.
4. Z-изображение задержанного цифрового единичного скачка иДп-т)
(1-7)
[1, w>m;
«)(«-»!) = (
[О, п<т.
На основании теоремы о задержке имеем
Z{B1(n-m)} = J/1(z)z m =-
1-z
Где обеспечивается сводимость ряда (3.20>.
44
Часть I. Введение
5. Z-изображение убывающей дискретной экспоненты (1.8)
х(п) =
(±«)", » >0, |а| < 1;
О, п<0.
Подставив а(и) = (±а)” в (3.19), получаем ряд типа (3.20):
Z{x(>.)) = X (z) = X (±o)"z " = X
и = О п - 0
Подставляя ^ = ±лг-1 в (3.22), находим искомое 7-изображение
Х(;) = —!— (3.23)
1 + ог
и область его сходимости (3.21)
laz''l<1=* ы<1=’|г|>|"1’ (3-24)
|г|
определяемую радиусом сходимости Я = .
6. Z-изображение последовательности
xW = r."Sinl(,1 + 1)4
smep*
Подставим х(п) в (3.19)
X(z)=x-."sinff”+')tp-^
„=О «'ПФ.
-Д- X r" sin[(n + l)q>.]z~"
sinep. ,1=о
и раскроем sin [(w 4- 1)фф ] по формуле Эйлера
х (г) = -Д- х г." ---------------4-----------Z
sintp. „=о
2Jsin ф(
у г-« _ у л
2 j sin фц
X -е-^ X (гХ^г1)'
иМ» >1=0
Лекция 3. Z-преобразование
45
Каждая из сумм представляет собой ряд типа (3.20). Подставляя
q = i^e^z~l и q = r^e~^z~l в (3.22), находим --изображение
Х(г)= —------
2 jsm(p4
.Ж
и область его сходимости (3.21)
определяемую радиусом сходимости R = г* .
X(z) =
2y'sin<p. (1->•.<?
11риведем к общему знаменателю дроби в квадратных скобках
I г g^-r.z-'-e-^+r.z-' '
?Jw,z’l)(l-r.e
e№_g-M
2 J sin ф. [ (1 - г.с^-Г1 )(1 - т.е"-'ф-z"‘)
и, сворачивая экспоненты, получим z-изображеиис
1 sin ср»
sinq>„[(l-r.g."*z ‘Xl-v’^z’1)
(3.25)
(l-r.e^z_1Xl-r.e '"г"')
в виде дробно-рациональной функции 2-го порядка с разложением знаме-
нателя на простейшие множители.
Полюсами такой функции называют значения z, при которых се знамена-
тель обращается в нуль. Умножив числитель и знаменатель (3.25) на z2:
X(z) =-----
(z-v^Xz-r.^)
найдем два комтексно-сопряженных полюса — два корня знаменателя*
7. . . = Г
(3.26)
Для обозначения полюса принято использовать символ звездочка.
46
Часть I. Введение
После умножения простейших множителей знаменателя:
' l-r.C-^z-'-r.e^Z-‘+r.2z-2 l-(r.c-* +е*кГ‘ к,2г-2 ’
свернув экспоненты:
Л W . ~Zi2-Т
1 —z^coscp^z + ГФ Z
и обозначив коэффициенты многочлена знаменателя:
«I = _2г* cos (р*;
получаем z-изображение в виде дробно-рациональной функции с вещест-
венными коэффициентами
, -1 -2 *
1 + atz + a2z
Таблица 3.2, называемая таблицей соответствий, содержит рассмотренные
ранее последовательности и их z-изображения. Z-преобразование двух по-
следних последовательностей предлагается выполнить самостоятельно с по-
мощью аналогичного приема.
Таблица 3.2. Таблица соответствий
№ Последовательность z-нзображение
1 Мл> = , к = 0; ), п *0 Ц,Ы = 1
2 ы0(л-И1) = р ' . а а % II 3 9 х-В.М»:-
3 «1(л)« I, п > 0; 0. л<0 ци)=—Ц- 1 - Z
4 «,(Л-Л|) = 1. п > т; 0, л < т Ц(г)Гй,=^— 1-z
5 Л(И) = (±а)" |о|<1 1 X(z) = - 1 + az
Лекция 3. Z-преобразование
47
Таблица 3.2 (окончание)
№ Последовал елыюс гь Z-июбражеиие
6 ,, »sin|(n+l)g>.J х(м) = г„ sin<p„ 1 X(z> l + t^z +a2z~2 где a, = -2r, cos<p., a, ~ r,2
7 х(я) = г" sin(<p,n) b.z 1 X(z) = 4 27- 1 + z +a2z где = -2r. cos<p., a-, = r2, = r. sin cp.
8 х(«) = rj cos(<p.w) 1 +hz-1 l+fljZ +a2z гле at = -2r, coscp., a2 = r2 , b{ = r, costp.
Покажем, как пользоваться таблицей соответствий на примерах.
Пример 3.1
Найти г-изображение последовательности
x(n) = fcl)(-‘'|)"+M-«l)"“'- (3.27)
Решение. Согласно свойству линейности
X (г) = fcoz{(-«,)" }ч- Ь, Z )"“] }•
На основании теоремы о задержке
х (г) = />„/{(-«,)" }+ fc, J-‘Z )" }.
Используя результаты таблицы соответствий (см. табл. 3.2, строку 5):
х(и) = (-а,)“ =» Х(г) =--
1 + iTjZ
имеем
48
Часть L Введение
откуда после приведения к общему знаменателю получаем z-изображение
Х(_-) = h° +blZ ' . (3.28)
1+П|Х ’
Пример 3.2
Найти z-изображенис последовательности
, . L „ sin[(n + l)q>.] sinGxp.,) t „_,sin[(n-l)q>.]
л'ОО'-Ц)**---------------•*A|* —:-------;------------------
Sint/),. Япф, S1DQV
Решение. Согласно свойству линейности
, A7J „51п[(л + 1)ч>.]1 „ [„-1 sin(H<p.)l f „_2 sin[(«-l)<p.]
x(z) = d0Z^/i ---------------J + f + ----------
I sincp* j [ sincp* J [ sincp*
На основании теоремы о задержке
у. . /,.Л „5>П[(« + ')Ф.]1 i f „sin[Oi + l)q>.]l
Л {z)-°o'-'\:-----------i',’hz ; i +
[ sincp* j [ sincp„ j
j> .-2J-Lx,sin[('! + 1)4>-])
+t?2< Z</; ----;------f-
I Sin Ф* I
Используя результаты таблицы соответствий (см. табл. 3.2, строку 6)
Х(г)=-------->-----
Sincp* 1+fljz +a2z
имеем
fro , ,, ly~2
14-fl|Z4+o>£-2 1+c/jZ ,+a2Z~2 1+ajZ 1+a2z~2
откуда после приведения к общему знаменателю получаем z-изображение
A-(z) = fc«+<’12,1 —2\2 (3.30)
1+(7]Г 4-«2^ 2
где a, =-2rwcoscp»; а2 =г^‘
Лекция 3. Z-преобразование 4g
3.6. Обратное Z-преобразование
Последовательноеib (оригинал) х(м) по известному z-изображению Л(г)
находится с помощью обратного /-преобразования
Z“1 {X(z)} = л(и) = -Цф X (z)z"-'zfe , (3.31)
2л/с
где:
Z4{X(.-)} — символическое обозначение обратного /-преобразования;
С — любой замкнутый контур в области сходимости подынтегральной
функции, охватывающий все ее особые точки (полюсы) и начало координат
комплексной z-плоскости.
Вычислить оригинал непосредственно по формуле (3.31) достаточно сложно
и в большинстве случаев невозможно. Существуют более простые способы
определения обратного /-преобразования на основе:
□ таблицы соответствий;
□ теоремы Коши о вычетах;
П разложения z-изображения на простые дроби.
3.6.1. Использование таблицы соответствий
Это наиболее простой и удобный способ в случае, когда z-изображение имеет
вид дробно-рациональной функции. Но существу, таблица соответствий
(табл. 3.2) уже применялась в примерах 3.1 и 3.2 для прямого /-преобразования.
Покажем, как ею пользоваться прн обратном /-преобразовании.
Пример 3.3
Найти последовательность (оригинал) x(w) по известному z-изображснию
Х(:)=Ь°+Ь'г' . (3.32)
Решение. Числитель Х(г) (3.32)— многочлен ненулевой степени, поэтому
его следует представить в виде суммы дробей
X(Z)=_^+^rL.
I -ttj Г 1 -«I Z
50
Часть I. Введение
В таблице соответствий (см. табл. 3.2) находится z-изображение с таким же
знаменателем (для данного примера это строка 5) и записывается соответствие
X(z)=---—г => л(») = о''- (3.33)
Согласно свойству линейности
х(п) = Z"‘ I—L Z"1г' =
[1-цг J [ 1 - а,г 1
=baZ~' !rJ—rbfc|Z1 (т-5—=rl-
|1-й;г l-rtjz J
На основании теоремы о задержке и соответствия (3.33) получаем последова-
тельность
л(л) = +^ав 1 •
Пример 3.4
Найти последовательность (оригинал) х(п) по известному z-изображению
X(z) = Z’o+*1Z' (334)
1 +flj Z 1 +й22
Решение. Числитель X(z) (3.34)— многочлен не нулевой степени, поэтому
его следует представить в виде суммы дробей
^)=—
l + a{z +a2z l+njZ +л22 l + O|2 + «2z
В таблице соответствий (см. табл. 3.2) находится z-изображение с таким же
знаменателем (в данном примере это строка 6) и записывается соответствие
1 „ sinГ(л + 1)Ф*|
X (г) =---_!------ х(и) = г/ —. (3.35)
l+njZ 1 +д2г 2 sincp*
Согласно свойству линейности
X (z) = Z-' |----------Д + 7. ' I---------Д +
[1+Ц1 +<y j [1 + а1< +агг ~
Лекция 3. Z-преобразование
51
+—Д+м-11—~—2
[1 + ^z +«2^"J [l + ^iZ +a2z
На основании теоремы о задержке и соответствия (3.35) получаем последова-
тельность
, >_>. »sinl(" + 1)4,.l л-1 sin(K<p.) „_2 sin[(n-1)Ф.]
Х\К)— Т Т /?2^к
siB(p+ sin ф* sin ф4
3.6.2. Прямое вычисление интеграла
на основе теоремы Коши о вычетах
Этот способ основан на использовании теоремы Коши о вычетах, в соответ-
ствии с которой вычисление интеграла (3.31) саодится к вычислению суммы
Х(Л)=Е Rcsai[x(z)z" (3.36)
где Resaj ^(zjz"-1 ] называется вычетам* подынтегральной функции в осо-
бой точке — k-м полюсе aA = z#A. .
Если дробно-рациональная функция A'(z) имеет простые (не кратные, т. е. не
равные между собой) полюсы, то вычет в простом k-м полюсе равен
Resaji [x(z)z""1 J= lim |\z-ak)X(z)zH-1 J. (3.37)
Пример 3.5
Найти последовательность (оригинал) x(w) по известному ^-изображению
4 Res — начальные буквы фраш^скоп) слова icsidtt — остаток.
3 Зяк ]65
52
Часть L Введение
Решение, /-изображение X(z) представляет собой дробно-рациональную
функцию первого порядка, имеющую только один полюс ctj. Умножив чис-
литель и знаменатель Л(з) на z :
находим этот полюс (корень знаменателя):
«1 = -ах.
Следовательно, в сумме (3.36) имеем одно слагаемое— один вычет (3.37) и
последовательность имеет вид
jt(;i) = ResU|
[х(г)г" ’] = lim (г+n,/jz"~‘
= lim fb(lz" +ft,z" +bl(-a,)“ *.
Это совпадает с результатом, полученным другим способом в примере 3.3.
Пример 3.6
Найти последовательность (оригинал) х(н) но известному z-изображению
Решение. Z-изображение Л(2) представляет собой дробно-рациональную
функцию второго порядка, имеющую два простых вещественных полюса
Ct। = 0,2 и а2 = 0,3, которые легко находятся по теореме Виета.
Следовательно, в сумме (3.36) имеем два слагаемых — два выче1а (3.37).
Вычет в полюсе ОС] =0,2 равен
Res Гхи)г,,-,'|= lim (z-0,2)
1L J г-»0.2
lim
c-»o.2
Лекция 3. Z-преобразование
53
Вычет в полюсе а2 =0.3 равен
Согласно (3.36) послецовательность равна сумме
г(и) = -2-0,2" + 3-0,3".
При наличии у дробно-рациональной функции X(z) кратных полюсов вычет
в полюсе аЛ. кратности /А в (3.36) определяется по формуле
Res L- lim Х(г)г" '].
(Jk -ir z-^kclz4
Пример 3.7
11айти последовательность (оригинал) по известному г-изображенню
А^') l-z-1+0,25z"2 (1-0,5z-1)2 ’
Решение. Z-изображенне ,¥(г) представляет собой дробно-рациональную
функцию второго порядка, имеющую вещественный полюс сц =-0,5 кратно-
сти Zj=2 (т. е. два одинаковых полюса). Поэтому сумма (3.36) содержит
один вычет и последовательность имеет вид:
jrt«) = Re5nirX(zk"-|l=--l— lim <z,)' X(zR" '1 =
L J ~ I). v-»ctj dz1 L J
=----!— lim Г(г-0.5)2Х(с).’"-11 =
(2-l)!z-»0.5rfr2-,L J
= lim — (c-0.5)2-------, г"-1 =
• >0.5rf;[ (I-0.5c-1)2
= lim — (z-0.5)2--------—T<"~' =
(*—0.5r J
= lim —1>1= lim Ггцп1 = л0,5я.
= -*o.5 dzL -1 =->o.5L J
54
Часть / Введение
3.6.3. Разложение z-изображения на простые дроби
Этот способ основан на представлении z-изображения в виде суммы простых
дробей.
Если X(z} —дробно-рациональная функция, числитель и знаменатель кото-
рой являются многочленами относительно z 1, порядок многочлена числи-
теля меньше порядка многочлена знаменателя, а полюсы — простые
(не кратные), то ее можно представить в виде суммы простых дробей
м-if а А
Х(г)= £ -----г , (3.39)
где:
= •г** — простой Л-й полюс (вещественное или комплексное число);
Ак — коэффициент разложения при к-м полюсе (константа Лк — всегда
число того же типа, что и полюс ак):
{М -1) — количество полюсов сс* (н констант Ак ).
Найдем оригинал х(л) z-изображения (3.39). Согласно свойству линейноегн
откуда, на основании (3.33), получаем оригинал
Л(н)=£\а/. (3.40)
Пример 3.8
Найти последовательность (оригинал) л(н) по известному z-изображению
-------Г--------у. (3.41)
l-0,5z" 4-0,06= ~
Решение. При известных простых полюсах иц =0.2 и а2 = 0,3 (см. при-
мер 3.6) представление Х(г) в виде суммы простых дробей (3.39) имеет виц
где А2 — коэффициенты разложения при полюсах (вещественные числа).
Лекция 3. Z-преобразование 55
Из условия равенства левых частей (3.41) и (3.42) следует равенство правых
частей
--------Р 2 = —~~г+— (3-43)
1—0,5^ +0,06-------------------------------------1-0,2z~ 1-0,3’"1
Разложив на простейшие множители знаменатель дроби в левой части равен-
ства (3.43) и сложив дроби в правой часл и равенства, получим:
1 (^|+A)-(0,3J|+0,2^)z~'
(l-O.K’xi-O.Jz-1) (l-0.2z-l)(l- 0,3="')
Дробно-рациональные функции с одинаковыми знаменателями равны, если
они имеют одинаковые числители, что обеспечивается равенством коэффи-
циентов при одинаковых степенях z :
f Л1 +Л2=1;
[0,3x1, + 0,2Л2 =0.
Решив данную систему уравнений, находим коэффициенты разложения:
р«|=-2;
Нг=3
и «-изображение в виде суммы простых дробей (3.39):
-2 3
X (z) =----г +--------г.
1-0,2z 1-0,Зг"1
Согласно (3.40). последовательность равна сумме
,г(и) =-2-0,2"+3-0,3".
Эго совпадает с результатом, полученным другим способом в примере 3.6.
Если порядки многочленов числителя и знаменателя равны
(/V-1) = (M-1),
то дробно-рациональную функцию >V(z) с простыми полюсами можно пред-
ставить в виде:
м if д А
XU)=A>+Z —• <3-44>
J.ll 1-ttj.Z I
где А{) — вещественная конста1ла.
56 Часть I. Введение
Тогда, с учетом результатов таблицы соответствий (см. табл. 3.2, строку 1) и
соотношения (3.40), получаем оригинал
М -1
лХя) = Ло"о(">+ X Акак"
(3.45)
При кратных полюсах также применимо разложение дробно-рациональной
функции X(z) на простые дроби, однако определение оригинала в данном
случае существенно усложняется. Необходимые формулы можно найти, на-
пример. в [9].
ЧАСТЬ II
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ЛИНЕЙНЫХ ДИСКРЕТНЫХ СИСТЕМ
Лекция 4. Описание линейных дискретных систем
во временной области
Лекция 5. Описание линейных дискретных систем
в z-области
Лекция 6. Описание линейных дискретных систем
в частотной области
Лекция 7. Структурные схемы линейных
дискретных систем
Лекция 8. Описание линейных дискретных систем
в пространстве состояний
Лекция 9. Анализ линейных дискретных систем
в пространстве состояний
Лекция 4
Описание
линейных дискретных систем
во временной области
Системой обработки сигналов (системой) называется объект, выполняющий
требуемое преобразование входного сигнала в выходной.
Входной сигнал системы называется воздействием. выходной —реакцией.
В общем случае взаимосвязь между входными и выходными сигналами сис-
темы с несколькими входами и выходами— соотношение вход/выход—
описывается уравнением в операторной форме
Y = F(X), (4.1)
где:
X, У — векторы, элементами которых являются воздействия и реакции
(функции времени) соответственно;
F — оператор, определяющий математическое преобразование1 (линейное
или нелинейное алгебраическое, дифференциальное и т. д.).
Для систем с одним входом и одним выходом, уравнение (4.1) принимает вид:
_y = F(x), (4.2)
где х, у —воздействие и реакция (функции времени) соответственно.
По умолчанию будем рассматривать системы с одним входом и одним выходом.
В соответствии с определением, системой можно назвать как физическое
устройство, так и оператор F (математическое преобразование).
По .ггой причине в математике оператор F иначе называли преобразование» F 123, 37].
60
Часть И. Математическое описание линейных дискретных систем
Приведем необходимые определения:
1. Система называется линейной. если она отвечает двум условиям:
• реакция на сумму воздействий равна сумме реакций на каждое из воз-
действий {свойство аддитивности или принцип суперпозиции):
Г(Л1 + .т2+ ...)= Г(х1) + Нл2)+ - ; (4.3)
• умножению воздействия на весовой коэффициент соответствует реак-
ция, умноженная па тот же коэффициет (свойство однородности):
F(ax) = cfF(A) . (4.4)
Соотношение вход/выход лш/доюй системы описывается уравнением (4.2)
с линейным оператором F, т. с. линейным уравнением.
2. Система называется дискретной, если она преобразует входной дискрет-
ный сч/гнал .т(/|Г) в выходной дискретный сигнал у(нТ) (рис. 4.1). Эти
сигналы могут быть вещественными или комплексными (см. Лекцию I).
г(п7) = л[л(пГ)].
Рис. 4.1. К определению линейной дискретной системы
3. Дискретная система называется стационарной, если ее реакция инвари-
антна но отношению к начал) отсчета времени (свойство инвариантно-
сти во времени), г. с. цдя реакций у(нТ) и у|(м7’) = у[(м-ш)7'] при лю-
бом целом т справедливо равенство
у(пТ) = у, [(» + т)Г].
Параметры стационарной системы неизменны во времени. По умолчанию
будем рассматривать стационарные системы.
В стационарной системе задержка воздействия па время тТ (m > 0 ) при-
водит к задержке реакции на то же время
Л [(и - ш)Т I => у [(л - 1И)Г]
4. Начальные условия в дискретной сис теме могу г быть нулевыми или нену-
левыми.
Признаком нулевых начальных условий является озсутствие реакции
ДмГ) = 0 при отсутствии воздействия л(г/7) = 0.
Лекция 4. Описание линейных дискретных систем во временной области 61
Обозначив момент начала воздействия и = 0, нулевые начальные условия
можно записать в следующем общем виде
... =0;
(4.5)
что означает: вес значения воздействия и реакции, которые может пом-
нить дискретная система, в моменты времени, предшествующие началь-
ному, равны нулю.
Признаком ненулевых начальных условий является наличие ненулевых
значений реакции (свободных колебаний) при отсутствии воздействия.
5. Дискретная система называется физически реализуемой, если для нее вы-
полняются условия физической реализуемости: при пулевых начальных
условиях реакция не может возникнуть раньше воздействия; значения
реакции у(пТ) в каждый момент времени п зависят от текущего х(пТ) и
предшествующих значений воздействия х[(л-ля)Г]. m >0, но нс зависят
от его последующих значений л[(н + m)7'], m £ 1.
Условия физической реализуемости отображают причинно-следственную
связь реакции с воздействием (принцип причинности).
Рассмотрим описание линейной дискретной системы (ЛДС) во временной
области', основную характеристику и соотношение вход/выход.
4.1. Импульсная характеристика
Во временной области основной характеристикой линейной дискрснюй сис-
темы, так же как и линейной аналоговой системы, является импульсная ха-
рактеристика (ИХ).
Импульсной характеристикой h(nT) линейкой дискретной системы назы-
вается ее реакция на цифровой единичный иипулъс Hq(hT) при нулевых на-
чальных условиях (рис. 4.2).
ЛДС
Рис. 4.2. К определению импульсной характеристики
Импульсную характеристику й(»Г) считают основной характеристикой ли-
нейной системы, потому что, зная ее, можно определить реакцию на любое
(произвольное) воздействие.
62
Часть /А Математическое описание линейных дискретных систем
Во временной области ЛДС может также описываться переходной характе-
ристикой. Переходной характеристикой g(nT) линейной дискретной сис-
темы называется ее реакция на цифровой единичный скачок и{(пТ) при ну-
левых начальных условиях (рис. 4.3).
Рис. 4.3. К определению переходной характеристики
Как известно [9], переходная характеристика линейной аналоговой системы
связана с ее импульсной характеристикой соотношением
g(z) = p?(/k/z.
О
Аналогично, переходная характеристика линейной дискретной системы свя-
зана с ее импульсной характеристикой соотношением
g(.nT) = X МтТ).
tn-d
Например, если импульсная характеристика имеет вид убывающей дискрет-
ной экспоненты
Л(н) = а", |а|<1,
то переходная характеристика определяется как сумма конечной убывающей
геометрической прогрессии и имеет следующий вид:
Н И 1-п"
«(«Г)= £й(»>Т)=
т=0 т О 1 О.
Зная переходную характеристику g(rt7"), также можно определить реакцию
на произвольное воздействие.
4.2. Соотношение вход/выход
Соотношение вход/выход отображает взаимосвязь между входным х(лГ) и
выходным у(пТ) сигналами ЛДС. т. е. реакцию ЛДС па произвольное воз-
действие.
Лекция 4. Описание линейных дискретных систем во временной области 63
Ви временной области соотношение вход/выход ЛДС описывается чиненны-
ми уравнениями:
□ формулой свертки (сверткой), если используется импульсная характеристика;
□ разностным уравнением, если используются параметры ЛДС.
4.2.1. Формула свертки
Получим уравнение взаимосвязи между входным х(пТ) и выходным у(пТ)
сигналами для ЛДС» заданной своей импульсной характеристикой h(nT).
Воспользуемся определением ИХ и свойствами ЛДС. Будем последовательно
записывать соотвегствия, указываемые стрелкой, между воздействием и ре-
акцией:
О по определению, воздействию в виде цифрового единичного импульса со-
ответствует реакция, называемая импульсной характеристикой,
и0(пТ)=ь h(nT)',
□ на основании свойства инвариантности во времени для стационарных чи-
ненных систем воздействию, задержанному на время тТ, соответствует
реакция, задержанная на то же время,
«о [(п - ш)И =>А [(« - '"Уг ];
□ на основании свойства однородности (4.4) линейных систем, умножению
воздействия на константу х(тТ) соответствует реакция, умноженная на
ту же константу,
w0 [(л => Л[(я-ш)Г].т(тГ);
□ на основании свойства аддитивности (4.3) линейных систем реакция на
сумму воздействий равна сумме реакций на каждое из воздействий
х И|)[(л-И1)т]л(т7')=> X Л[(л-"')7’]л(»17’);
;Н = -м щ = ~оо
□ для физически реализуемых систем
х и0 [(л - ш)Т]х(ш7’) => X й [(п - in>T]х[тТ);
wi=O hi=O
□ слева имеем воздействие в виде (1.5)
х(нТ) = £ и01(н-»1)7*].т(т'Г),
т=0
64
Часть U. Математическое описание линейных дискретных систем
справа — реакцию
у(пТ) = £ Ь[(п-т)Т]х(тГ), (4.6)
in=O
где й[(я-/л)Т]— импульсная характеристика, задержанная на m перио-
дов дискретизации.
Линейное уравнение (4.6) называют формулой свертки (сверткой): реакция
у(л7*) вычисляется как дискретная свертка воздействия х(пТ) и импульс-
ной характеристики h(nT).
Выполнив в (4.6) замену переменных, можно получить другой вариант запи-
си формулы свертки
у(пТ) = £ /|(л17).т[(п-т)Г]. (4.7)
я1«0
Для нормированного времени (ель Лекцию I) формулы (4.6) и (4.7) принима-
ют вид соответственно
у(л) = У h(n-m)x(m). (4.8)
ш=0
>’(«) = У. h(m)x(n~m). (4.9)
»| = 0
При стандартном обозначении операции саертки, формулы (4.8) и (4.9) запи-
сываются в компактном виде
у(л) = г(») */,(;/).
Линейная дискретная система, соотношение вход/аыход которой описывает-
ся в виде формулы свертки, отвечает условиям физической реализуемости:
при нулевых начальных условиях
л(и-'»)|,1_„1<о=О;
=•>
реакция не может возникнуть раньше воздействия. Значения реакции у(пТ)
в каждый момент времени и зависят от текущего и предшествующих значе-
ний воздействия, но не зависят от его последующих значений.
Линейные уравнения (4.8) и (4.9) решаются методом прямой подстановки
при нулевых начальных условиях. поэтому формула свертки непосредственно
Лекция 4. Описание Линейных дискретных систем во временной области 65
описывает алгоритм вычисления реакции по известному воздействию и им-
пульсной характеристике ЛДС.
Отметим, что для вычисления реакции линейной аналоговой системы по
формуле свертки в виде интеграла необходимо выбрать метод (алгоритм)
численного интегрирования, однако все подобные методы являются прибли-
женными и принципиально вносят методическую погрешность.
Покажем тождественность результатов прн вычислении по формуле свертки
в двух вариантах ее записи (4.8) и (4.9) при нулевых начальных условиях.
Определим реакцию в точке н = 3:
□ по формуле свертки (4.8) имеем:
у(3) = Л(3)л(0) + Л(2)а(1) + й(1)а-(2) + й(0)х(3) ;
□ по формуле (4.9) получаем тот же результат:
у(3) - /1(0) л(3) + й(1) д(2) + й(2) х(1) + Л(3) л(0).
Выбор варианта формулы определяется удобством применения в конкретном
случае.
Пример 4.1
Вычислить реакцию ЛДС по формуле свертки при нулевых начальных ус-
ловиях. Импульсная характеристика и воздействие заданы графически
на рис. 4.4. Требуется определить 8 отсчетов реакции.
Рис. 4.4. Импульсная характеристика (а) и воздействие (б)
Решение. Вычисление реакции приведено в табл. 4.1, а график полученной
реакции — на рис. 4.5.
66 Часть II. Математическое описание линейных дискретных систем
Таблица 4.1. Вычисление реакции но формуле свертки
л Реакция
0 >(0) = Л СО) л(0) + Л(1) Jt(-l) + ЛС2) Л(2) +... = ВД .г(0) = 12 = 2
1 у(|) = Л(О)д(|) + й(|)х(О) + Л(2)х(-1) +... = й(О)х(|) + й(1)х(0) = 11+22=5
2 у(2) = Л(0) х(2) + Л (1) л(1) + й(2) л(0) + Л(3) х(-1) +... = - Л(0) л(2) + Л(1) х(1) + й(2) х(0) = 10 + 21 + 2- 2 = 6
3 у(3) = Л(0)л(3) + й(1)х(2) + Л(2)х(1) + й(3)х(0) + й(4)х(-1) + ... = = Л(0) г(3) + й(1) х(2) + й(2)л(1)+ й(3)х(0) = 10 + 2-0 + 21 +1-2 = 4
4 у(4) = Л(0) х(4) + Л(Пл(3) + Й(2)х(2) + й(3)х(1) + й(4)х(0) + й(5)х(-1) + ... = = Л(0)л(4) + й(1)х(3) + й(2)х(2) + Л(3)х(1)+й(4).с(0) = = 1-0 + 2 0 + 2 0 + 11+0-2 = 1
5 у(5) = Л(0) х(5) + Л(1) л(4) + Л<2) х(3) + Л(3) г(2) + й(4) х( 1) + Л(5)х(0) + + й(6)л(-1) + ... = Л(0)л(5) + й(1)х(4) + /Я2)х(3) + Л(3) л(2) + + Л(4) х(1) + й(5) х(0) = 1-0+20 + 2-0 + 10 + 0-1 + 0-1 = 0
6 У(6) = 0
7 у(7)=0
Механизм вычисления отсчсгоа реакции у(»)« н = 0.1, 2,... по формуле
свертки можно представить как вычисление сумм локальных произведений
двух последовательностей— импульсной характеристики и воздействия.
Лекция 4. Описание линейных дискретных систем во временной области
67
При этом одна из последовательностей фиксирована, а другая зеркально ото-
бражается относительно оси ординат и затем скользит слева направо по оси
времени. При использовании формулы свертки (4.9) фиксированной будет
импульсная характеристика, а скользящим — воздействие.
Механизм вычисления свертки (4.9) для примера 4.1 приведсн па рис. 4.6.
Фиксированная импульсная характеристика показана на рис. 4.6, а, воздейст-
вие — на рис. 4.6, б, зеркально отображенное воздействие— на рис. 4.6. с,
а результат его последовательного скольжения — па рис. 4.6, г—з.
Рис. 4.6. Вычисление реакции по формуле свертки
68 Часть II. Математическое описание линейных дискретных систем
Первый отсчет реакции у(0) вычисляется как сумма локальных произведе-
ний последовательностей на рис. 4.6,айв, второй отсчет реакции у(1) — как
сумма локальных произведений последовательностей на рис. 4.6, а н г, и т. д.
Очевидно, что вычисление следует прекратить, как только все локальные
произведения окажутся равными нулю. Это произойдет, когда последова-
тельности "разойдутся”, т. е. у двух умножаемых последовательностей не бу-
дет ни одного совпадения отсчетов ни в один из моментов времени п. В рас-
сматриваемом примере последовательности "расходятся" при сдвиге
скользящего воздействия по оси времени на m = 5 (рис. 4.6, з).
Рассмотренный механизм вычисления реакции по формуле свертки позволя-
ет сделать следующие выводы:
□ если длительность воздействия и/или импульсной характеристики беско-
нечна, то длительность реакции также бесконечна;
□ если длительности воздействия л(л7*) и импульсной характеристики
h(nT) конечны и равны NT и МТ соответственно, то длительность реак-
ции у(пТ) также конечна и равна LT, где
L=N + M-1. (4.10)
При n>L последовательности (импульсная характеристика и зеркально
отображенное скользящее воздействие) "расходятся" и =0 .
Если воздействие и импульсная характеристика конечны, формулы (4.8) и
(4.9) приобретают вид:
Z.-1
у(п) = X (4.11)
«1=0
L-I
Я»)= X (4.12)
«1=0
В примере 4.1 имеем длину воздействия N =2 и длину импульсной ха-
рактеристики М = 4, поэтому длина L реакции равна (см. рис. 4.5)
L=4+2-l=5.
Операцию дискретной свертки в формулах (4.8) и (4.9) называют линейной
(апериодической) сверткой, в отличие от другой ее разновидности — круговой
(периодической) свертки (сн. Лекцию //).
Лекция 4. Описание линейных дискретных систем во временной области 69
4.2.2. Разностное уравнение
Наряду с формулой сверчки взаимосвязь между воздействием г(лГ) и реак-
цией у(нТ) — соотношение вход/выход— можег описываться линейным
разностным уравнением (РУ)
N-1 М-1
Я«Г)= s V[0j-/)T]- X «Лу[(л-А)Т], (4.13)
i = 0 k = l
где;
bf, ak —коэффициенты (вещественные константы);
х(пТ).у(мТ) — воздействие и реакция (вещественные или комплексные);
i.k —значения задержек д.чя воздействия и реакции соответственно;
Лг, Л/ — константы;
х[(и- nr],A«-wJ — воздействие и реакция, задержанные на i и к пе-
риодов дискретизации соответственно.
Коэффициенты bf, ак называют внутренними параметрами (параметрами)
ЛДС.
Для нормированного времени разностное уравнение (4.13) принимает вид
N-l М-1
у(п) = £ aky(n-k). (4.14)
/-О
Линейная дискретная система, соотношение вход/выход которой описывает-
ся в виде разностного уравнения (4.14). отвечает условиям физической реали-
зуемости: при нулевых начальных условиях (4.5) реакция не может возник-
нуть раньше воздействия.
Значения реакции у(пТ) в каждый момент времени п зависят от текущего и
предшествующих значений воздействия, но нс зависят от его последующих
значений.
Разностное уравнение имеет прямую аналогию с линейным дифференциаль-
ным уравнением, описывающим соотношение вход/выход аналоговой линей-
ной системы [15],
>(0= X(4-15>
,-о Л <=i dr
70
Часть II. Математическое описание линейных дискретных систем
где:
b;, ak — коэффициенты (вещественные константы), определяемые значе-
ниями резисторов, емкостей и индуктивностей:
х(0, У(.г) —аналоговые воздействие и реакция (токи или напряжения).
Переход от дифференциальных уравнений к разностным обусловлен разли-
чием функций, описывающих входной и выходной сигналы аналоговых и
дискретных линейных систем. Аналоговые сигналы описываются непрерыв-
ными, а дискретные—решетчатыми функциями времени, поэтому вычисле-
ние производных в (4.15) заменяется вычислением разделенных разностей
в (4.14) (см., например, [37]).
Дифференциальное уравнение (4.15) решается с помощью одного из методов
(алгоритмов) численного интегрирования. Выбор метода— достаточно
сложная проблема, однако любой из этих методов яалястся приближенным,
т. е. принципиально вносит методическую погрешность. При неудачно вы-
бранном методе погрешность вычисления функции времени у(/) может ока-
заться нарастающей, что приведет к непредсказуемому результату.
Разностное уравнение (14.14) решается методом прямой подстановки при
нулевых начальных условиях, не вносящим методической погрешности, по-
этому оно непосредственно описывает алгоритм вычисления реакции по из-
вестному воздействию и параметрам ЛДС.
Пример 4.2
Решить разностное уравнение:
у(п) = х(п) - 0,5у(н -1)
методом прямой подстановки при заданном воздействии:
х(п) = О.Г
и нулевых начальных условиях. Вычислить 5 отсчетов реакции.
Решение. Вычисление реакции приведено в табл. 4.2.
Таблица 4.2, Вычисление реакции методом прямой подстановки
п Воздействие Реакция
0 х(0) = 1 у(0) =л(0) - 0.5 v(-1) = 1 - 0.5 0 = 1
1 х(1) = 0.1 у(1) =л(1) - 0.5.г(0) = 0.1 - 0.5 1 = -0.4
Лекция 4. Описание линейных дискретных систем во временной области
71
Таблица 4.2 (окончание^
л Воздействие Реакция
2 л(2) = 0.01 у(2)=л(2)-0.5у(1) = 0.01 -0.5 -(-0.4) = 0.21
3 х(3) = 0,001 у (3) = л(3) - 0.5у(2) = 0.001 - 0.5 • 0,21 = -0.104
4 л(4) = 0.0001 у(4) = х(4) - 0,5у(3) = 0,0001 - 0,5 (-0,104) = 0,0521
4.3. Рекурсивные и нерекурсивные
линейные дискретные системы
Линейная дискретная система называется рекурсивной, если хотя бы один из ко*
эффициентов ак , А=1, 2,..., М -1 разностного уравнения (4.14) неравен ну. но.
Порядок рекурсивной ЛДС равен порядку РУ (4.14), т. е.
max{(M-1), (N-1)}. (4.16)
Согласно (4.14), реакция у(п) рекурсивной ЛДС в каждый момент времени и
определяется:
□ текущим отсчетом воздействия х(л);
□ предысторией воздействия .v(n-i), i=l, 2,..., 7V-1;
□ предысторией реакции у(п - к), к=1. 2,, М -1.
Приведем примеры разностных уравнений простейших рекурсивных ЛДС:
□ первого порядка
г(и) = й[)Х(п) + &1л‘(л-1)-«1г(и-1); (4.17)
□ второго порядка
у(п) = 6пл(н) + -1) + Ь2х(п - 2)- fl,y(« -1)- а2у(н - 2). (4.18)
Линейная дискретная система называется нерекурсивной, если все коэффици-
енты ак разностного уравнения (4.14) равны нулю
ак =0, 6 = 1, 2,...,М-1. (4.19)
Для нерекурсивной ЛДС разностные уравнения (4,13) и (4.14) принимают вид:
7V-I
у(«Т) = X b,JA(H-!)TJ; (4.20)
1=0
72 Часть II. Математическое описание линейных дискретных систем
,V‘l
у(п) = X bix(п ~ 0 • (4.21)
i=O
Порядок нерекурсивной ЛДС равен порядку РУ (4.21), т. е. (W -1).
Согласно (4.21 X реакция у(п) нерекурсивной ЛДС в каждый момент времени
п определяется:
О текущим отсчетом воздействия х(п);
□ предысторией воздействия х(п — I), /=1, 2,..., У-1.
Приведем пример разностного уравнения простейшей нерекурсивной ЛДС
второго порядка:
У(w) = bQx(n) + b|х(п -1) + - 2). (4.22)
4.4. Системы с конечной и бесконечной
импульсной характеристикой
Оцепим особенности импульсных характеристик рекурсивных и нерекур-
сивных ЛДС, описываемых разностными уравнениями (4.14) и (4.21) соот-
ветственно.
Рассмотрим процедуру расчета ИХ непосредственно по РУ и сравним ре-
зультаты на примерах простейших рекурсивной и нерекурсивной систем.
Пример 4.3
Вычислить импульсную характеристику нерекурсивной ЛДС второго поряд-
ка, соотношение вход/выход которой описывается РУ (4.22)
у(л) = ^)Х(п) + /?|Л(п -1) + h2x(n - 2).
Решение. Согласно определению, ИХ — это реакция на цифровой единичный
импульс (см. рис. 4.2), поэтому, выполнив замену
(4 23)
(X»)=» *(»).
перепишем РУ а виде
М») = ^wo(n) + £>]и0(н -1) + Ь2и0(» -2)
и решим его методом прямой подстановки при нулевых начальных условиях:
Л(0) = IjqUq (0) + £>]М0(-1) + = bQ 1 + fa • 0 + /ъ - 0 = hQ;
Лекция 4. Описание линейных дискретных систем во временной области 73
Л(1) = 60u0(l) + fyw0(0) + 62w0(-1) = fyj О 1 + Ь2 О=й,;
Л(2) = Zty'o(2) + Л]w0(l) +й2но(О) = ло ‘0+А1' о+л2 1 =Ь2;
й(3) = +Z?]I/q(2) + /^^(l) = й(> 0 + Л, О + />? О = О;
h(n) = О при п > 3.
Распространяя напученные результаты па нерекурсивную ЛДС произвольною
порядка, приходим к следующим выводам:
□ импульсная характеристика нерекурсивной НДС имеет конечную длитель-
ность;
□ значения отсчетов ИХ равны коэффициентам разностного уравнения
h{n) = b„ n=i=Q.\...Л/-1. (4.24)
Поэтому нерекурсивные ЛДС называют системами с конечной импульсной
характеристикой (КИХ-системами)".
Пример 4.4
Вычислить импульсную характеристику рекурсивной ЛДС первого порядка.
соотношение вход/выход которой описывается РУ (4.17) при й, =0
у(н) = I)
Решение Выполним замену (4.23), перепишем РУ в виде
Л(и) = йог/о(н)- «[А(« -1)
и решим его методом прямой подстановки при нулевых начальных условиях:
Л(0) = йомо (0) - axh(-1) = bf,;
Л(П=Vo(0-"A0>;
Л(2) = /Л)П0(2) = -о, (-«|/^) = «/Ad •
Л(3) = Z)qMq(3) — «,й(2) = —«|(«[ й[)) = —°i
Вычисление ИХ можно продолжать бесконечно по формуле
h(n) = (-!)"«/%. п = 4, 5,...
2 Имеется ряд исключений. копа КИХ-снстеча может быть нрстсмиясиа как в нерекурсивной.
так и н рекурсивной форме. Примером может служить о шпро ишй фильтр [|6|.
74
Часть II. Математическое описание линейных дискретных систем
Распространяя полученные результаты на рекурсивную ЛДС произвольного
порядка, приходим к выводу, что импульсная характеристика рекурсивной
ЛДС имеет бесконечную длительность.
Поэтому рекурсивные ЛДС называют системами с бесконечной импульсной
характеристикой (БИХ-систв-мами).
4.5. Свойства
линейных дискретных систем
Ранее было отмечено, что все стационарные линейные системы (аналоговые
и дискретные) обладают общими свойствами:
□ аддитивности;
О однородности;
П инвариантности во времени.
Рассмотрим еще два важнейших свойства линейных дискретных систем:
□ свойство памяти;
□ устойчивость.
4.5.1. Свойство памяти
линейных дискретных систем
Свойство памяти системы подразумевает сс способность "помнить предыс-
торию" (предшествующие отсчеты воздействия) при вычислении реакции
в текущий момент времени. Длительность предыстории (количество предше-
ствующих отсчетов воздействия) определяет длительность памяти.
Рассмотрим свойство памяти нерекурсивных и рекурсивных ЛДС.
Согласно разностному уравнению нерекурсивной ЛДС (4.21), при вычисле-
нии реакции у(и) в текущий и-й момент времени система "помнит" (N-\)
предшествующих отсчетов воздействия. Следовательно, нерекурсивная ЛДС
обладает свойством памяти, ее длительность конечна и раана (N — 1).
Согласно разностному уравнению рекурсивной ЛДС (4.14), каждый текущий
огечет реакции у(л) можно выразить через предшествующие отсчеты воз-
действия:
j-(0) = M(°);
У (1) = МО) + MW - fljXO) = V(I) + й,л(0) - а, [/>оа-(0>] ;
Лекция 4. Описание линейных дискретных систем во временной области 75
у(2) = b0x(2) + + /jj.y(O) - а, у(1) - £72у(О) = 60л-(2) + fyxfl) + 6,х(0) -
- «| {*V(1) + М°) “ ai I V(0)J I “ a2
Таким образом:
□ отсчет реакции у(0) зависит от текущего отсчета воздействия х(0) ;
□ отсчет у(1) зааисит от текущего и предшествующего отсчетов воздейст-
вия х(1 -/), i = 0,!;
□ отсчет у(2) зависит от текущего и двух предшествующих отсчетов воз-
действия x(2-i). / = 0.1.2.
Аналогичным образом, несложно показать, что отсчет у(3) зависит от отсче-
тов воздействия х(3 - У), i = 0.1. 2. 3 и т. д.
Следовательно, при вычислении отсчета реакции в текущий н-й момент вре-
мени система "помнит” всю предысторию воздействия, а значит, рекурсивная
ЛДС обладает свойством памяти и се длительность в общем случае бесконеч-
на. Это свойство памяти рекурсивных ЛДС объясняется наличием обратной
связи (c.v. формулу (4.14)), благодаря чему любой ненулевой отсчет воздей-
ствия циркулирует в системе бесконечно. С течением времени он затухает, но
присутствует, по крайней мере, теоретически.
4.5.2. Устойчивость
линейных дискретных систем
ЛДС называется устойчивой, если при ограниченном воздействии
тах|л(л)|</\,
п
где Rx — любое сколь угодно большое положительное число, не равное бес-
конечности, и произвольных, но ограниченных начальных условиях реакция
будет также ограниченной
тах|у(л)|<Лу,
где Ry — любое сколь угодно большое положительное число, не равное бес-
конечности.
Существуют два критерия устойчивости ЛДС. Один из них позволяет оце-
нить устойчивость ЛДС по ее характеристике во временной области
(ат/, п. 4.5.3), другой — по z-изображению этой характеристики в z-области
(см. Лекцию 5).
76
Часть II. Математическое описание линейных дискретных систем
4.5.3. Оценка устойчивости по импульсной
характеристике: критерий устойчивости
В данной лекции, посвященной описанию ЛДС во временной области, рас-
смотрим критерий, позволяющий оценить устойчивость ЛДС по ее импульс-
ной характеристике.
Если ни один из коэффициентов разложения импульсной характеристики
в виде (3.45)
JH-1
Л(п) = А)|<о(")+ X 4“*"
А=1
не равен нулю:
#0. Z =h 2...К,
критерий устойчивости формулируется следующим образом: т)./я того чтобы
линейная дискретная система была устойчива, необходимо и достаточно,
чтобы выполнялось условие абсолютной сходимости ряда
у |*(»)| < 00 • (4.25)
и=0
Доказательство. При известной импульсной характеристике Л(п) реакция
может бьпъ вычислена по формуле свертки (4.9)
у(л) = S h(m)v[л-т).
wi=0
Для модуля реакции справедливы соотношения:
|>(»)| =
У. Л(»1)Дп-н1)
м»=0 «-=0
Оценим максимальное значение |у(л)|. подставив вместо отсчетов воздейст-
вия |лг(н-т)| их максимально допустимую величину ЯЛ:
max |у(л)|<ЛЛ Х|Мж)|.
" т=0
(4.26)
Если реакция ограничена значением R :
max|y(n)| < Rx £ Rr-
” т»0
необходимо, чтобы выполнялось условие (4.25).
Лекция 4. Описание линейных дискретных систем во временной области 77
С другой стороны, для того чтобы реакция в (4.26) была ограниченной, дос-
таточно выполнения условия (4.25), что и требовалось доказать.
Если хотя бы один из коэффициентов разложения Ак равен нулю, возможна
ситуация, когда условие (4.25) выполняется, а ЛДС— неустойчива. Пример
подобной ЛДС рассматривается в Лекции 5, где приводится критерий устой-
чивости в z-области.
Критерий (4.25) позволяет утверждать, что нерекурсивные ЛДС (КИХ-
системы) принципиально устойчивы, поскольку их импульсная характери-
стика конечна.
Прежде чем делать выводы об устойчивости рекурсивных ЛДС, рассмотрим
простой пример.
Пример 4.5
Определить, устойчива ли рекурсивная ЛДС, импульсная характеристика ко-
торой имеет вид дискретной экспоненты (си. Лекцию /)
. (а", л>О,
Л(и) = {
[О, н<0.
Решение. Подставив данную ИХ в (4.25), получим ряд типа (3.20)
ii*(«)i= хи <4-27’
/|=о п=0
при д -и область его сходимости |а| < 1 -
В этой области импульсная характеристика имеет вид затухающей экспонен-
ты (см. рис. 1.6), а ЛДС, согласно критерию (4.25), является устойчивой.
Вне области сходимости, при |о| > 1, ряд (4.27) оказывается расходящимся
Х1«П~.
п=0
а ЛДС, согласно критерию (4.25), неустойчивой.
Обобщая данный результат, можно сделать следующие выводы:
□ рекурсивные ЛДС (БИХ-системы) требуют проверки на устойчивость;
□ импульсная характеристика устойчивой рекурсивной ЛДС имеет характер
затухающей функции времени (примеры см. в Лекции 5).
Лекция 5
Описание линейных
дискретных систем в z-области
В Лекции 4 рассматривалось описание ЛДС во временной области: импульс-
ная характеристика и соотношение вход/выход. В этой лекции изучается их
отображение в z-об.части.
Описание ЛДС в z-области позволяет:
□ ввести фундаментальное для теории линейных систем понятно передаточ-
ной функции;
□ перейти от разностных уравнений к алгебраическим;
□ упростить анализ устойчивости;
П обеспечить автоматический переход к частотным характеристикам
(ел/. Лекцию 6) и многое другое.
5.1. Передаточная функция.
Соотношение вход/выход
В z-области основной характеристикой ЛДС являегся z-изображение
импульсной характеристики /?(»)> которое определяется с помощью
/-преобразования (3.1)
tf(z) = Z{ft(n)}= £Л(л)г " (5.1)
/I- о
и называется передаточной функцией (ПФ). Это математическое определе-
ние ПФ.
По известному z-изображению импульсная характеристика А(и) находится
с помощью обратного /-преобразования (см. Лекцию 3)
= (5.2)
Лекция 5. Описание линейных дискретных систем в z-области
79
Соотношение вход1выход ЛДС во временной области описывается с помо-
щью свертки либо разностного уравнения. Рассмотрим их отображение в г-
области поочередно.
Формуле свертки (4.8) и (4.9) (двум вариантам записи)
X Л(п-нг)л(»0;
, > ю=0
у(") =
X х(п-т)Л(ш)
,и = 0
в z-области, согласно теореме о свертке (с.н. Лекцию 3), при нулевых началь-
ных условиях соответствует уравнение
r(z) = //(z)X(z). (5.3)
где X(z) и E(z) —z-изображения воздействия и реакции соответственно.
Это позволяет представить передаточную функцию как отношение
Щ;) = — (5.4)
X(z)
н определить сс подобно передаточной функции линейных аналоговых систем.
Передаточной функцией H(z) линейкой дискретной системы называется
отношение z-изображения реакции к {.-изображению воздействия при нуле-
вых начальных условиях.
Данное определение не противоречит математическому: поскольку импульсная
характеристика Л(п) представляет собой реакцию на воздействие в виде цифро-
вого единичного импульса мо(н). то, подставив z-изображення данных сигналов
в H(z) (5.4) и учитывая, что 2{»о(и)} = 1 (см. п. 3.5), получим H(z) (5.1):
A(z) Z{w0(w)}
Разностному уравнению (4.14)
N~l M-i
у(п) = X bi - о - X ak y<n ~ *)
i=0 *=l
в z-области при нулевых начальных условиях соответствует уравнение, которое
легко можно получить, выполнив Z-преобразованне левой и правой час гей РУ.
{N-I м-\ 1
X х ak У(»-*)р
1=0 *=i J
80 Часть It. Математическое описание линейных дискретных систем
Воспользуемся свойством линейности Z-преобразовапия и теоремой о за-
держке:
.'V J Af-J
r(z) = XU)S«-,z '-rU)S«»z'*,
is-0 *=l
приведем подобные члены и получим соотношение вход/выход а z-области
в виде алгебраического уравнения:
Л’-1
Hz)=—------------Х<‘>' <5-5’
1+ X akz~k
A-I
Разделив обе части (5.5) на X(z), получим, согласно определению (5.4), пе-
редаточную функцию, не зависанию ни от воздействия, пи от реакции и вы-
раженную явно через внутренние параметры ЛДС (коэффициенты разностно-
го уравнения),
А'-1
----- <5’6>
1+ Ё «*г ‘
1=1
ПФ общего вида (5.6) представляет собой дробно-рещмона/ьную функцию,
числитель и знаменатель которой являются многочленами относительно z 1
порядков (/V-1) и (Af — 1) с вещественными коэффициентами fy и а/. соот-
ветственно.
Порядок передаточной функции (5.6) равен
max {(Л/ -1), (Д' -1)}.
Здесь и далее будем полагать, что порядок многочлена чгюлигнеля не превос-
ходит порядка многочлена знаменателя
(N-|)<(M-1).
Как любая дробно-рациональная функция, ПФ (5.6) характеризуется своими
особы ми точками {полюсами) и нулями.
Нулями называют значения z, при которых ПФ (5.6) равна нулю.
Лекция 5. Описание линейных дискретных систем в z-области
Особыми точками (полюсами) называют значения z, прн которых знамена-
тель ПФ (5.6) равен нулю.
Особые точки и нули ПФ линейных дискретных систем находятся аналогич-
но тому, как это делается для ПФ линейных аналоговых цепей. Предвари-
тельно необходимо записать H(z) (5.6) как дробно-рациональную функцию
относительно положительных степеней z, для чего числитель и знаменатель
H(z) следует умножить на zM~1'
,, ЛМ Лг~[
J =_______1=0__________ 1=0_____________
M-lfl.'v' М-! +/у' (М-П-t
z 1 + /, z I + 2^ z
( л—i j *=i
Далее целесообразно выделить два случая:
1. Передаточная функция H(z) представляет собой неправильную дробно-
рациональную функцию: порядок многочлена числителя равен порядку
многочлена знаменателя
(W-1) = (M-1).
Тогда в результате умножения числителя н знаменателя H(z) (5.6) на
Af-l
z имеем:
М-1
H(z) =--------------------
_w-i v
z + 2- akz
(5.7)
Нулями данной передаточной функции являются корни уравнения числи-
теля (корни числителя):
'Уб./"'11--=о, (5.8)
» = 0
а поносами— корни уравнения знаменателя (корни знаменателя):
гЛ/“'+УоА/Л,“,’^=0. (5.9)
*=1 •
Если среди полюсов или нулей встречаются одинаковые, их называю!
кратны ми.
62 Часть //. Математическое описание линейных дискретных систем
2. Передаточная функция H(z) представляет собой правильную дробно-
рациональную функцию: порядок многочлена числителя (£-1) меньше
порядка многочлена знаменателя (М -1)
(Л-1)<(Л/-1),
где (L — 1) может принимать значения
(L-1)-0.1....(М-2).
Полюсы передаточной функции H(z) определяются так же. как в первом
случае. Что касается нулей, то помимо (£-1) корней числителя добавля-
ются нули z = CK3, крвтность которых равна разности порядков многочле-
нов знаменателя и числителя
Как правило, эти нули не считаются информативными, поэтому часто их
опускают.
Например, имеем ПФ второго порядка
' • -I -2 '
I + <7]Z +cht;
После умножения числителя и знаменателя иа zM 1 = г2 получим 11Ф
z +a}z+a2
представляющую собой правильную дробь, у которой порядок числителя
(£-1) = 1 на единицу меньше порядка знаменателя (Л/-1) = 2:
Следовательно, такая ПФ имеет два нуля: один — корень числителя
bjZ+l^ =0=>го1 = —f-
Ц
и второй — неинформативный z„2 = 00 •
Нули и полюсы передаточной функции удобно изображать в виде точек на
комплексной z-плоскости. Положение точек определяется их координатами,
чаще всего полярными. Пули изображаются кружками (о), а полюсы — звез-
точками (*). Совокупность нулей (о) и полюсов (*) на z-плоскости называ-
ют картой нулей и полюсов. В дальнейшем станет ясно, что такая карта —
одна из важнейших графических характеристик ЛДС.
Лекция 5. Описание линейных дискретных систем в z-области ВЗ
5.2. Взаимосвязь между передаточной
функцией и разностным уравнением
Из сопоставления передаточной функции общего вида (5.6) и разностного
уравнения (4.14) понятна их взаимосвязь при нулевых начальных условиях:
□ числитель ПФ связан с отсчетами воздействия b,x(n-i) РУ:
• задержка отсчета лг(и “ 0 отображается в 11Ф степенью z-';
• коэффициент Ь{ сохраняется.
Символически это можно записать следующим образом:
h-x(n-i) <=> bi=~':
□ знаменатель ПФ связан с отсчетами реакт/ш/ у (я) и а^у(п-к) РУ:
• свободный член знаменателя всегда равен I (я0 = 1), в РУ он соответ-
ствует реакции у(и);
• задержка отсчета у(н-к) отображается в ПФ степенью z *;
• у коэффициента лд. изменяется знак.
Символически это можно записать следующим образом:
Простейшие ЛДС, описываемые передаточными функциями 1-ю н 2-го по-
рядков. называют звеньями 1-го и 2-го порядков.
Пример 5.1
Даны передаточные функции звеньев 1-го и 2-го порядков. Записать соответ-
ствующие разностные уравнения.
Решение. Запишем РУ, используя взаимосвязь между ПФ и РУ:
□ ПФ звена 1-го порядка
Н(г) = !*.±Ь\ (5.Ю)
соответствует Ру
у(п) = bQX(n) + -1) - «^(/7 -1); (5. И)
4 Зак 165
64
Часть П. Математическое описание линейных дискретных систем
□ ПФ звена 2-го порядка
1 + a}z +a2z
(5.12)
соответствует РУ
Хи) = Zfy*(w) + bpc(n -1)+/?2X(W - 2) - ц y(n -1) - в?Х« “ 2). (5.13)
5.3. Разновидности передаточных функций
Разные виды передаточных функций обусловлены возможностью нх различ-
ного математического представления, а также типом ЛДС — рекурсивная
(БИХ) или нерекурсивная (КИХ).
Рассмотрим разновидности передаточной функции общего вида (5.6) —
дробно-рациональной функции
K-i
... . 1=0
обусловленные ее различным математическим представлением:
П в виде произведения простейших множителей
ЬьПа-Р.г'1)
------------• (514>
*=1
где Р, = zDi и ak = z*A — i-й нуль и k-и полюс ПФ (5.6). В общем случае,
как нули, так и полюсы — попарно комплексно-сопряженные числа.
Если N = М , то передаточная функция (5.14) принимает вид
Н(г) = ^ П тг Ь <515>
*=i *=i^l-a*z J
□ в виде произведения множителей второго порядка с вещественными ко-
эффициентами.
Для перехода к передаточной функции с вещественными коэффициента-
ми в (5.14) попарно умножают простейшие множители с комплексно-
Лекция 5. Описание линейных дискретных систем в z-области
В5
сопряженными нулями (в числителе) и комплексно-сопряженными полю-
сами (в знаменателе). Покажем, как это делается на примере множителей
знаменателя
(l-atz_,Xl-«t+lz-1).
где осА, осд-q — комплексно-сопряженные полюсы. Представим их в ал-
гебраической форме
«к = Ь +Л-
и выполним умножение
{i-(^ + 7n*)z',lli-fc-;mk’']=i+№)z“l+(5i2+n/)z’2 =
= l + «uz"'+a2tz“2.
Получаем множитель второго порядка с вещественными коэффициентами
°IJt и a2k ~(^k2 +TU2)
В результате попарного умножения простейших множителей числителя и
знаменателя (5.14), имеем передаточную функцию в виде произведения
множителей второго порядка с вещественными коэффициентами (с точ-
ностью до постоянного вещественного множителя [9]):
/У-1
П (Ль,.+*,,<'+*2,Z"2)
//(Z) = ^f----------------, (5.16)
П (1 + «цг‘‘ +«2tz"2)
J--d
где:
» ^2/ » а2к — вещественные числа;
{N -1), (Л/ -1) — четные числа1.
Здесь и далее. сели (N-1) или [М -1) — нечетные числа. верхний индекс произведения
будет ранен N/2 или Л7/2. а соответствующие коэффициент.)— И',|И а2.м/2~^'
т. е. один из нулей или полюсов оказывается вещественным. а множитель— простейшим.
86 Часть II. Математическое описание линейных дискретных систем
Если N = М , передаточная функция (5.16) принимает вид
//(:)= П +b|tZ,' I <5.17)
*=l k =1( l + «iJtZ + a2kz )
где К = (Л/ - 0/2 — количество звеньев 2-го порядка;
□ в виде суммы простых дробей.
Если у ПФ общего вида (5.6) порядок многочлена числителя меньше по-
рядка многочлена знаменателя и все полюсы простые (не кратные), она
может быть представлена в виде суммы простых дробей (3.39)
М-1 М-\( д А
W(z)= S//t(z)=E --------Чг , (5.18)
*=1 }
где:
ak - z*k — простой k-й полюс ПФ (5.6). В общем случае полюсы — по-
парно комплексно-сопряженные числа;
Ак — коэффициент разложения при k-м полюсе. Константа Ак — всегда
число того же типа (вещественное или комплексное), чю и полюс Ckk , по-
этому в общем случае константы, так же как и полюсы, попарно комплексно-
сопряженные числа;
(М -1) —количество полюсов осА (и констант Ак);
□ в виде суммы дробей второго порядка с вещественными коэффициентами.
Для перехода к передаточной функции с вещественными коэффициента-
ми в (5.18) попарно складывают простые дроби с комплексно-
сопряженными полюсами d.k (и комплексно-сопряженными константами
Ак), в результате чего получают передаточную функцию в виде суммы
дробей второго порядка с вещественными коэффициентами
= Ьм^<г~' _Д (5.19)
* = 1 * = +«2*г )
где:
• ^ц- • fliA-» а2к — вещественные числа:
К = (Л/ -1)/2 — количество заеньев 2-го порядка;
(Л/ -1) — четное число.
Лекция 5. Описание линейных дискретных систем в z-области 87
Рассмотрим разновидности передаточных функций. обусловленные типом ЛДС.
1. Рекурсивные ЛДС описываются ПФ общего вида (5.6) и могут иметь лю-
бое математическое представление (см. ранее).
Среди ПФ (5.6) выделяют ПФ полюсного вида, у которой числитель —
многочлен нулевой степени
н<г> = ~дГ7------• (5.20,
А = 1
ПФ (5.20) имеет (М —1) полюсов и (А/ —1) кратных нулей, равных 0. Она
может иметь математическое представление:
• в виде произведения простейших множителей
’ <5-2])
Л=1
• в виде произведения множителей второго порядка с вещественными
коэффициентами
"(<’) = йч------------------• <5.221
П о + alkz 1 + a2kz 2)
А=1
• в виде сумм простых дробей (5.18) и дробей второго порядка (5.19)
с вещественными коэффициентами.
Звено нвзывают базовым, если числитель его передаточной функции
H(z) равен 1.
Пример 5.2
Передаточные функции базовых звеньев 1-го н 2-го порядков имеют вид
соответственно
H(z) =----!—г; (5-23)
1 + 0,2
8в Часть II. Математическое описание линейных дискретных систем
2. Нерекурсивные ЛДС описываются ПФ, которая может рассматриваться
как частный случай H(z) общего вида (5.6) при ak =0, к =1, 2,..., М -1.
При этом знаменатель H(z) оказывается равным единице, и ПФ имеет
вид рациональной функции
H(z) = (5-25)
/=0
или, с учетом (4,24),
W(z) = £й(и)Г". (5.26)
л=0
Передаточная функция (5.25) может быть представлена:
• в виде произведения простейших множителей
"(г) = Ь„ П HtМ=П (1 - р,г-'); (5.27)
1=1 i=l
• в виде произведения множителей второго порядка с вещественными
коэффи циента ми
/У-l /У-1
H(z) = fl «;(г) = fl№o-+V '+А2,Г2), (5.28)
1=1 1=1
где (W — J) — четное число.
5.4. Передаточные функции и импульсные
характеристики звеньев 1-го и 2-го порядков
Математическое представление передаточных функций в виде произведений
(5.14) н (5.16) или сумм (5.18) и (5.19) основано на звеньях 1-го и 2-го поряд-
ков, поэтому анализу данных звеньев уделяют особое внимание.
Определим импульсные характеристики звеньев 1-го и 2-го порядков по за-
данной передаточной функции, полагая, что соответствие между ПФ и ИХ
базовых звеньев известно:
□ для базового звена 1-го порядка (см. табл. 3.2, строку 5)
Я(2) = —Ь-г =, й(„) = (-О,)"; (5.29)
1 +а.г
Лекция 5. Описание линейных дискретных систем в z-области
89
□ для базового звена 2-го порядка (см. табл. 3.2. строку 6)
I , sin[(n + 1)0*1
=--------q-----7 => '»(«) = г." —А----— • (5-30)
1 +ti|Z 1 + a2z ~ stnqj*
где г* и (р* — радиус и угол комплексно-сопряженных полюсов в показа-
тельной форме:
г.,,2 (5.31)
Значения г*, ф* и cq. п2 связаны между собой соотношениями (см.
табл. 3.2, строку 6)
=-2r*cos((p*). (5.32)
а2 = цг. (5.33)
Для того чтобы определить ИХ не базового звена, достаточно воспользовать-
ся свойством линейности Z-преобразования н теоремой о задержке, на осно-
вании чего легко получается соответствие между ПФ и ИХ не базовых
звеньев (см. Лекцию 3)\
□ для не базового звена 1-го порядка
Н(г) = Ь"+Ь|7-1 => й(„) = bo (-о,)” + 6, (-«, f (5.34)
1 +G|Z
или с учетом нулевых начальных условий
/Л) (-<»])". и = 0; _ _ _
й(л) = Р' ' , (5.35)
bot-rt,)"-'. п >1;
П для не базового звена 2-го порядка
H(z) = *°+fclZ''+^-~~2^
1 +ajZ + a2z i
+ (5.36)
sin0* sin0*
+ l (.-2) sin[(»-l)<p.]
* sinep*
90
Часть II. Математическое описание линейных дискретных систем
нли с умелом нулевых начальных условий
Л(л) =
sin[(„ + 1><pj п = 0;
sin ср*
„ sin[(H + l)<p.J („-I) sin(»<P.)
» м — 1,
sin ср*-----------------------sinip*
„ sin [(л + 1)ф.] („ ,) sin(n<p.) („-2) sin[(»- 1)ф.]
-------- +Л|Г* —; +1)2Г* :-
sin ср*-------------------------------------------------------smcp,-sincp*
(5.37)
n>2.
Пример 5,3
Задана передаточная функция H(z). Получи<ь импульсную характеристику h(n).
Решение. При определении ИХ применялась рассмотренная методика.
Примеры передаточных функций и полученных иа их основе импульсных
характеристик звеньев 1-го порядка приведены в табл. 5.1, а звеньев 2-го
порядка — в табл. 5.2.
Построенные в программной среде MATLAB графики ИХ звеньев 1-го по-
рядка представлены на рис. 6.4, а звеньев 2-го порядка — на рис. 6.5.
Графики ИХ, а также карты нулей и полюсов (см. пример 5.4) приводятся
совместно с графиками частотных характеристик, изучаемых в Лекции б, для
того чтобы иметь в едином комплекте вес основные характеристики звена,
описываемого соответствующей передаточной функцией.
Таблица 5.1. Передаточные функции и импульсные характеристики
звеньев 1-го порядка
Рис. Передаточная функции H(z) Импульсная характеристика А(л)
6*4, а 1 1 + 0,5г”1 (-0,5)". н>0
6.4,6 1 1 -0,5х”' 0.5". н>0
6.4, в ) 1 + 0,8г“‘ (-0.8)", н>0
Лекция 5. Описание линейных дискретных систем в z-области
91
Таблицы 5.1 (окончание)
Рис. Передаточная функция //(*-) Импульсная характеристика h(n)
6.4,^ 1-0,5г~‘ 1+0,5г"‘ (-0,5)", »i = 0; (-0,5)" -O.5(-O,5)"-1, я>1
6.4, д l-0.9z-' 1 +0,5z-1 (-0,5)'. «=(к (-0,5)" -0,9(-0.5)вЧ. «>1
6.4, е 1 + С 1-0,5с-1 0,5", н = 0; О.5'+О.5"_|, я>1
Таблица 5.2. Передаточные функции и импульсные характеристики
звеньев 2-го парника
Рис. Передаточная функция //(;) Г., ф. Импульсная характеристика Л(л)
6.5. а 1 г. =0.7; л Ф. =- 3 Sin 0.7"
1-0.7.<‘ + 0.49с'2
6.5.6 1 i; =0.7; 2л Ф* ~ — 3 sin 0.7" — 2л 01 + 1)— 3 2х sin — 3
l + 0.7z-1 +0.49Г2
6.5, г 1 + г'1 i; =0,7; л Ф. =- 3 sir 0.7я — sir 0.7я — о> + |)л- 3 и мп — 3 Н’1 sin — 3 + © г '-J н г ° а J1 3 IV
1-0.7;-' + 0.49г“г
92
Часть fl Математическое описание линейных дискретных систем
Табиица 5.2 (окончание)
Рис. Передаточная функция //(г) ф. Импульсная характеристика h(n)
6.5, д I-;’2 г. =0.7; л Ф. =- 3 sin Gi +D- 3 о a '-j и ? .© S' Л i °V Iя, bJ „ —
1-0.7Г’ +0,49<<2
л sin — 3 sin (и + 1)- 0.7"—L 3j sin — 3
5.5. Оценка устойчивости
по передаточной функции:
критерий устойчивости
В Лекции 4, посвященной описанию ЛДС во временной области» был получен
критерий (4.25), позволяющий оценить устойчивость ЛДС по импульсной
характеристике. Логично предположить, что в г-области. где основной ха-
рактеристикой ЛДС является передаточная функция — z-изображение им-
пульсной характеристики, должен существовать критерий, позволяющий
оценить устойчивость ЛДС по передаточной функции. Получим его на осно-
вании критерия (4.25)
X |й(л)| < “ .
п-0
Представим ПФ общего вида (5.6) прн /V = М в виде (3.44)
н запишем ИХ в виде (3.45)
Л(п) = Л0и0(и)+ X Atat"
Лекция 5. Описание линейных дискретных систем в 2-области
93
В соответствии с критерием (4.25), устойчивость определяется вторым сла-
гаемым, обозначив который
М-1
*(«)= X А“*"
4 = 1
и подставив h(n) в (4.25), имеем:
(5.38)
оо М-1
О» М—1.
» । । М-1 °® М—! I °° М-1
Е k«) =х Е W Е W = X X МЫ •
н=0 /1 = 0 4=1 и=04=! л=04=1
Изменим порядок суммирования:
£|л(»)|< е'ЫЕНГ- (5.39)
п=0 4=1 н=0
Отсюда следует, что для Л(п) критерий (4.25) будет справедлив в области
абсолютной сходимости ряда
Х|а*|" * = 1.2..М-1,
л=0
которая соответствует следующему ограничению для полюсов а*
|а(|<1, * = (5.40)
Это позволяет сформулировать критерий устойчивости в z-области: для того
чтобы ЛДС была устойчива, необходимо и достаточно, чтобы все полюсы
ее передаточной функции находились внутри круга единичного радиуса (еди-
ничного круга) комплексной z-плоскости.
Как правило, устойчивость ЛДС проверяют по критерию (5.40). Во-первых,
он более удобен для практического использования, а во-вторых, критерий
(4.25) имеет ограничение (см. п. 4.5.3)'. если хотя бы одни из коэффициентов
разложения в (5.38) равен нулю, условие (4.25) может выполняться и для
неустойчивой ЛДС.
Например, передаточная функция
(1-1,к’1)
Н(г) =-------q--------q-
(l-0.8z )(1-1,к ')
(5.41)
может быть представлена в виде суммы простых дробей (5.18)
4, А
-0,8г-1 1-l.lz"1
94 Часть II. Математическое описание линейных дискретных систем
Коэффициенты разложения Л|, А, определяемые в результате решения сис-
темы уравнений (см. пример 3.8)
{ Л1+А2 = 1:
(1,1 А, + 0,8А2 =1,1,
равны
|А,=1;
(Л2=0.
Следовательно, импульсная характеристика, соответствующая (5.41), имеет
вид:
/1(л) = 0,8".
Получается, что по критерию (4.25) ЛДС устойчива, а по критерию (5.40) —
не устойчива.
Вывод: критерий (4.25) справедлив, если ПФ (5.14) не содержит сокращаю-
щихся множителей', в противном случае необходимо обратить внимание на
сокращающиеся множители: если полюсы (и равные им нули) расположены
внутри единичного круга, ЛДС будет устойчива, иначе — не устойчива [33 ].
5.6. Карты нулей и полюсов звеньев
1-го и 2-го порядков
В общем случае для вычисления нулей и полюсов ПФ (5.6) следует числи-
тель и знаменатель H{z) умножить на zM~} {см. п. 5./), после чего необхо-
димо найти нули и полюсы, исходя из их определения.
Рассмотрим вычисление нулей и полюсов для звеньев 1-го и 2-го порядков,
□ Звено /-го порядка в общем случае описывается передаточной функцией
(5.10). Умножим числитель н знаменатель на z:
ад^.
г + о,
после чего из уравнения
Z + а, = О
" Когда нуль равен полюсу. О, = ах. •
Лекция 5. Описание линейных дискретных систем в z-области
95
найдем корень знаменателя — вещественный полюс
z*=-flP (5.42)
а из уравнения
b^z + by =0
получим корень числителя — вещественный нуль
Z. =-?*-. (5.43)
Ьо
□ Звено 2-го порядка в общем случае описывается передаточной функцией
(5.12). Умножим числитель н знаменатель на г2:
//(z) = io£M£tk.
z +utz+a2
Сначала определяют полюсы:
• если дискриминант уравнения знаменателя отрицательный
2
А = — < 0 =Ф 4<72 > °|2 •
находят комплексно-сопряженные полюсы в показательной форме
= (5.44)
{•де радиус г* и угол ф* определяются по известным коэффициентам
А) н «2 с помощью (5.32) и (5.33):
(5.45)
ф* “ arccos] —— ]. (5.46)
] 2r* I
Так как угол ф* полюса представляет собой нормированную чается у
(см. п. 3.2), его часто обозначают как со* =ф* и называют "частотой
полюса"’,
• если дискриминант положительный
2
А =-^—а2 >0^ 4а2 <а£2 .
96
Часть И. Математическое описание линейных дискретных систем
находят вещественные полюсы в алгебраической форме
г.1.2 = -у±М-«2- (5-47)
2 V 4
Затем определяют нули:
• если дискриминант уравнения числителя отрицательный
= Ь] — < о,
находят комплексно-сопряженные нули в алгебраической форме
-fei±jjfei2-4fcllbz _
^o|,2 -J. Л. “ J пт ^Э= — 7Л ’
2*ь 2/т0 2Ьо
в затем, для удобства, представляют их в показательной форме
г.и = г.е±л. (5-48)
где радиус г0 и угол ср вычисляются по известным формулам (3.7) и (3.8)
г.=7С+п2; (5.49)
Так как угол ф0 нуля представляет собой нормированную частоту
(см. п 3.2\ его часто обозначают как со, = фо и называют "частотой нуля*
• если дискриминант положительный
D =b*-4ЬаЬг >0,
находят вещественные нули в алгебраической форме
_ "^1 ±V^12 ”4^2 _ “4V2 rssn
Z I ? —----------------------I----------. I J. J1)
2Ь0 2Ь0 2f„,
Пример 5.4
Заданы передаточные функции звеньев 1-го и 2-го порядков. Построить кар-
ты нулей и полюсов.
Решение. При расчете нулей и полюсов применялась рассмотренная ме-
тодика.
Лекция 5. Описание линейных дискретных систем в 2-области 97
Нули и полюсы звеньев 1-го порядка приведены в табл. 5.3, а звеньев 2-го по-
рядка — в табл. 5.4.
Построенные на их основе а программной среде MATLAB карты нулей и
полюсов звеньев 1-го порядка представлены на рис. 6.4, а звеньев 2-го по-
рядка — на рис. 6.5.
Отметим, что на рис. 6.4 и 6.5 изображены графики ИХ для всех ПФ из
табл. 5.3 и 5.4. Расчетные же формулы ИХ приведены в табл. 5.1 и 5.2 лишь
для некоторых ПФ (сравните), однако при необходимости они легко могут
быть получены для остальных ПФ по известной методике {см. п. 5.4).
Таблица 5.3. Передаточные функции звеньев 1-го порядка,
нули и полюсы ПФ
Рис. Передаточная функция //(г) Нули и полюсы
6.4, а 1 Z 1 + O.Sz"1 г + 0,5 г, =0: z. =-0.5
6А,б 1 z l-O.Sz ‘ 1-0.5 Z„ =0; Z. =0,5
6.4, в 1 z 1+0,8.-’' 1+0.8 z =0, z. =-0,8
6.4, г 1-0,5z‘ z-0.5 l + O.Sz"1 г + 0.5 <=0,5; z. = -0.5
6.4, д l-0.9z4 z-0,9 1 + O.Sz"1 г+ 0.5 z =0,9;
6.4, е 1 + z~‘ z + 1 1-O.Sz"1 г-0.5 z„ =-l; z,=0,5
В программной среде MATLAB полюсы изображаются символом умножения (X), а нули, как
обычно, кружками (°).
98
Часть II. Математическое описание линейных дискретных систем
Таблица 5.4, Передаточные функции увеньев 2-го порядка,
нули и полюсы ПФ
Рис. Передаточная функция ll(z) Нули н полюсы
6.5, а 1 z2 1-0.7:"' + 0.49 г’2 г2-0.7г+0.49 •”>4=0; ;.,2 =0.7/J’
6.5,6 । г 1 + 0.7.- '+0.49;’2 г2+0.7.-+0.49 " 1.2 = °- 2n ±1— z,u=0.7<? 3
6.5, а 1 г 1+0.9.-’’ +0.81.-"2 ;2+0.9;+0.81 ;,.,=0; lit z,u =0,9e" 1
6.5. г 1-0.7;”' + 0.49 г’2 г2-0.7; + 0.49 z j = 0; 2 = -1; =0.?Л
6.5, д I-;’2 г2-1 1-0,7,’.'' + 0.49z-2 г2 -0.7- +0.49 -1.2 =±h z,12 =0.7/^
6.5, е 1 + z”2 -2 +1 1-0.7- '+0.49.-’2 г2-0.7;+0.49 г>.2=±Г- bu=0.7/J’
6.5, ж l + l.2z~X + 0,8k'2 _ z2 +1.2,-+0,81 1+0,28z-1 + 0,64г”2 z2 + 0.28c+ 0.64 г1.,=0.9?яи"; ;.,г =0.8г1',ЛИ4
6.5,з l + z~2 z2 4-1 1 + 0.2;”' - 0.35;”2 ;2 + 0.2. - 0.35 г.1.г =±j- с., =0.5;
Лекция 6
Описание
линейных дискретных систем
в частотной области
В Лекции 4 рассматривалось описание ЛДС во временной области: импульс-
ная характеристика и соотношение вход/выход. В этой лекции приводится их
отображение в частотной области.
Описание ЛДС в частотной области позволяет:
□ ввести фундаментальное для теории линейных систем понятие частотной
характеристики. Прн проектировании большинства систем ЦОС именно
к частотным характеристикам предъявляются и выдерживаются требова-
ния (см. ч. VI);
□ определять реакцию ЛДС в установившемся режиме ие только на гармо-
ническое воздействие, но и на любое воздействие, которое можно прст-
ставить как линейную комбинацию гармонических воздействий.
6.1. Частотная характеристика
В частотной области основной характеристикой ЛДС является фурье-
изображение импульсной характеристики Л(лГ), которое определяется с по-
мощью преобразования Фурье (2.27)
Н(е^Т)= £ hinTfe-^" (6.1)
н=0
или для нормированных времени и частоты
Н(^й,)= (6.2)
п=0
и называется комплексной частотной характеристикой (КЧХ) или
частотной характеристикой (ЧХ). Это математическое определение ЧХ.
100 Часть И. Математическое описание линейных дискретных систем
По известному фурье-изображснию Н(е*°г) импульсная характеристика
h(nT) находится с помощью обратного преобразования Фурье (2.28)
л
h(nT) = — ) H(e*“')e'wJ>'rf<0. (6.3)
2л л
г
Из теории линейных аналоговых систем известно [9], чго в установившемся
режиме гармоническое воздействие вызывает гармоническую реакцию той
же частоты, но (в общем случае) другой амплитуды и начальной фазы.
Рассмотрим реакцию ЛДС иа дискретное комплексное гармоническое воз-
действие
х(п) = CxeJ&n = Схе^'<&), < н <~, (6.4)
с амплитудой и фазой соответственно
Сх = const;
фд ((b) = ebn.
Для вычисления реакции воспользуемся формулой свертки (4.9)
>’(»)= X h(m)x(n-m) = X ^(mJQe^"-”’=
" „ (6.5)
= Схе^!я X й(/,,)е-'*еи1 ‘х(п) X,
»w = 0 ni=O
откуда, с учетом определения ЧХ (6.2),
у(п) = х(н)Н(е&). (6.6)
Комплексную функцию Н(е^а) можно выразить через ее модуль и аргумент:
W(c>) = = А({Ь)е'*<!Л. (6.7)
Модуль частотной характеристики Н(е*м) называют амплитудно-
частотной характеристикой (АЧХ):
А(&) = |н(е7,Ь)|. (6.8)
а аргумент — фазочастотной характеристикой (ФЧХ) ЛДС:
<р(й) = arg {//(<>-'“’)}. (6.9)
Лекция 6. Описание линейных дискретных систем в частотной области 101
Перепишем выражение для реакции (6.6). подставив в него воздействие (6.4)
и ЧХ (6.7),
у(и) = л(я) Н (е*“) = Сх еЛ>'<й‘ Л(й)е=
= СЛ А(й»е7,ф'кф(6)| = С,, е»'(<М. (б'' °’
из чего следует, что реакция на комплексный гармонический сигнал есть
комплексный гармонический сигнал той же частоты, что н возчействие, но
с частотио-завнсимымн амплитудой
Су = Сх Л(6)
и фазой
фу(ю) = фЛ((Ь) + (р(6)).
На основании (6.6) частотную характеристику можно представить как oi но-
шение гармонических сигналов — воздействия и реакции
/у _ Я") _ /ф» («)-<₽, <&>]
Я'0[ф1)=Г1Ггй" Сх
и определить следующим образом.
Частотной характеристикой линейной дискретной системы назы-
вается частотная зависимость отношения реакции к дискретному гармо-
ническому воздействию в установившемся режиме.
Существенно, что для линейных систем (аналоговых и дискретных) отноше-
ние двух функций времени— гармонических реакции н воздействия — дает
функцию, не зависящую от времени.
Поясним, почему введено ограничение "в установившемся режиме”. Теоре-
тически, гармонические сигналы— воздействие и реакция— существуют
в области нормированного времени -«><«<«>. Однако на практике имеют
дело с условно гармоническим воздействием в области 0<п<*>, где время
и = О соответствует началу воздействия. Как известно [9], в течение некото-
рого времени О<н<по после возникновения воздействия ЛДС работает
в режиме переходных колебаний., когда реакция не является периодическим
сигналом. Спустя время процесс устанавливается и реакция становится
периодическим сигналом: у(н)= у(л + А'), где N — число отсчетов на пе-
риоде. Поэтому в данном случае имеет смысл говорить о реакции как о гар-
моническом сигнале в установившемся режиме. При расчете реакции по
формуле свертки (6.5) в диапазоне О<п<ио на выходе ЛДС будем имен»
значения реакции в режиме переходных колебаний— непериодический сигнал.
102
Часть И. Математическое описание линейных дискретных систем
а начиная с момента — значения реакции в установившемся режцме—
гармонической сигнал. Пример расчета реакции на гармоническое воздейст-
вие по формуле свертки в программной среде MATLAB рассматривается
в П.П1.4, где приводятся графики воздействия и реакции (см. рис. П 1.6),
из которых видно, что спустя некоторое время после возникновения воздействия
реакцию можно считаз ь гармоническим сигналом в установившемся режиме.
Сопоставив выражения для реакции (6.10) и воздействия (6.4), ладим опреде-
ления АЧХ и ФЧХ, подобные тем, которые существуют для линейных анало-
говых систем.
Амплитудно-частотной характеристикой А(6з) линейной дискретной
системы называется частотная зависимость отношения амплитуды реак-
ции к амплитуде дискретного гармонического воздействия в установивше м-
ся режиме:
Фазочастотной характеристикой линейной дискретной системы
называется частотная зависимость разности фаз реакции и дискретного
гармонического воздействия в установившемся режиме:
Ч> (ш) - q>х (к>) = [фд. (Ш)+ч>(6>)] - q>, (ш) = .
6.1.1. Связь частотной характеристики
с передаточной функцией
Сравним передаточную функцию (3.1) с частотной характеристикой (6.1).
Очевидна их взаимосвязь: ЧХ H(eJ<ti) совпадает с Г1Ф //(*). если область
значений переменной z на комплексной z-нлоскости ограничена точками на
единичной окружности eJ<ti:
щЛ)=Щг)^. (6.11)
Это позволяет при известной передаточной функции (5.6) путем подстановки
г = еуш автоматически получить частотную характеристику в виде
Л'-1
—ТП---------• <612)
i+l к*
*=1
Лекция 6. Описание линейных дискретных систем в частотной области 103
6.1.2. Соотношение вход/выход
Взаимосвязь (6.11) позволяет также от известных соотношений вход/выход
(5.3) и (5.5) в г-области:
K(z)-H(z)X(z),
Л'-|
-----Х(г)
1+ £ akz
t=i
автоматически перейти к соответствующим соотношениям в частотной
области:
Y(ej6>)= (6.13)
/V-!
ПеЪ=-^,-----------
1+ X wJb'°
t=l
где
Х(е7й) = Х(е>Г),
Г(в*Ъ) = Г(<?*'г)
представляют собой фурьс-изображения воздействия и реакции соответст-
венно.
На основании (6.13) частотную характеристику ЛДС можно определить
как отношение фуръе-изображений реакции и воздействия при нулевых на-
чал ъных условиях
Подчеркнем, что частотная характеристика (6.12), так же как и передаточная
функция (5.6), зависит исключительно от внутренних параметров ЛДС и не
зависит ни от воздействия, ии от реакции.
104
Часть V. Математическое описание линейных дискретных систем
6.2. Свойства частотных характеристик
Перечислим основные свойства частотных характеристик:
1. Непрерывность.
ЧХ, АЧХ и ФЧХ — непрерывные (или кусочно-непрерывные) функции
частоты по определению.
2. Периодичность.
ЧХ, АЧХ и ФЧХ — периодические функции частоты с периодом, равным
2л
частоте дискретизации <0, = —.
Доказательство. Периодичность функций следует из периодичности ар-
2л
гумента е^Т с периодом по частоте со, равным сод = —,
= e1'",e'i^ =eiml , *=0,1, ...
Соответственно, период ЧХ, АЧХ и ФЧХ в зависимости от используемой
шкалы частот будет равен:
(6.14) (6.15)
<о=»о>д; (6.16)
0)=>2л. (6.17)
3 Четность A ЧХ и нечетность Ф ЧХ.
Если коэффициенты ПФ— вещественные числа (а другие случаи мы не
рассматриваем), то модуль частотной характеристики (АЧХ) является
четной, а аргумент (ФЧХ) — нечетной функцией частоты:
|w(eJ“7 )|=|н(е~7ШГ)|;
arg (н (е>г )} = - arg {Н )}.
Напомним, что четной называется функция, которая нс изменяется при
изменении знака аргумента. Если же при изменении знака аргумента из-
меняется знак функции, но ее абсолютное значение сохраняется неизмен-
ным, функция называется нечетной.
Лекция 6. Описание линейных дискретных систем в частотной облает
105
Доказательство. Запишем частотную характеристику (6.1)в виде
Н(е]юГ1= X = £ Л(лТ)соя«Ви/ )- j X h(nT) sin(WiTl
л-0 л-0 п=0
или коротко
//(t>o7) = Rt -jIm,
где вещественная часть — четная
Re = у, А(лТ)соь(о)п7').
л=0
а мнимая — нечетная функция частоты
Im= У Л(лГ)&1п((0лТ),
п = 0
т. к. в первом случае имеем сумму косинусов (четных функций), а во вто-
ром— синусов (нечетных функций).
Изменив знак аргумента со = —си. получим:
H(e~J‘“T) = Re +;lm.
Для модуля частотной характеристики справедливо равенство
|н(е>г)| = |«(е ^"г)| = >/Ке2+1т2 ,
следовательно, АЧХ — четная функция частоты.
Для аргумента частотной .характеристики, принимая во внимание, что
арктангенс — нечетная функция, справедливы равенства:
arg{H(ej“’r)} = arctg^-!^|
aig{«(c->r)} = arctg^^^ = -arcig^j;
arg{//(eJ“T)} = -arg{H(e-J“')},
следовательно, ФЧХ —нечетная функция частоты.
106
Часть fl. Математическое описание линейных дискретных систем
6.2.1. Основная полоса частот
Наименование "основная полоса частот” возникло в результате того, чго при
дискретизации аналогового сигнала его спектр по условию теоремы Котель-
никова ограничивается верхней частотой (с.и. Лекцию /)
вследствие чего спектры дискретных сигналов, а также частотные характе-
ристики ЛДС имеет смысл рассматривать только в диапазоне ^0; кото-
рый и назвали основным диапазоном или основной полосой частот.
Напомним, что в зависимости от используемой шкалы частот основная поло-
са соответствует областям:
/=3^0;^; (6.18)
/=»[0; 0,5]; (6.19)
Н°:т]=Н]; (б-2о)
d)=>[0; д]. (6.21)
АЧХ и ФЧХ рассчитывают и изображают па графике в основной полосе час-
тот; при необходимости их легко продолжить на любом интервале частот,
учитывая свойства периодичности, а также чстности АЧХ и нечетности ФЧХ.
6.3. Расчет АЧХ и ФЧХ
Расчет АЧХ и ФЧХ линейной дискретной системы выполняется по известной
передаточной функции H(z) (5.6).
Получим необходимые расчетные формулы для АЧХ и ФЧХ. выполнив сле-
дующие преобразования:
П в H(z) (5.6) заменим г = в результате чего автоматически перейдем
к частотной характеристике
= ; «5.221
i+ X
А = 1
Лекция 6. Описание линейных дискретных систем в частотной области
107
П
□
разложим экспоненты:
e'j*™ ~ cosfXtr)) - jsiii(&(u);
= cos(/<0) —ysin(roj); (6.24)
выделим вещественные и мнимые части в числителе (с индексом *ч‘) и
знаменателе (с индексом *з’) ЧХ (6.22):
N-l N-I
Ь, cosfreo) - ) У bj sin(i&)
(6.23)
Rc, + 7lm,
М-1
Л/-1 ... .
1 + У ak cosUcb) - j У a* sin(£co)
(6.25)
запишем АЧХ и ФЧХ, исходя из их определений (6.8) н (6.9)
венно:
соответст
Re,,2 + Im42
Re?+ Im 2
(6.26)
<р(Л) = arg{//(г>г )J = arclg
M-I Л'-l
У ak sin(£(b) £ b-t sin(/c6)
= arctS-^q---------------arctg—----------------
1 + У ak cos(A(b) bo + У bj cos(ho)
(6.27)
Применим тот же прием для звеньев l-го и 2-го порядков.
6.3.1. Расчет АЧХ и ФЧХ звена 1-го порядка
Получим расчетные формулы для АЧХ и ФЧХ на основе передаточной
функции //(z) (5. Ю) звена 1-го порядка
/7(s)=*01V
1 +£J.Z
Часть fl. Математическое описание линейных дискретных систем
108
Выполним следующие преобразования (см. п. 6.3):
□ в Z/(z) заменим z = eJl>' и перейдем к частотной характеристике
Н ; (6.28)
О разложим экспоненты и выделим вещественные и мнимые части в числи-
теле и знаменателе:
н= U\i+V°s(&)l~ ^У''П(Й). (6 29)
ll+«jCos(djH- ja{sin(to)
□ запишем АЧХ и ФЧХ, исходя из их определений:
А(Л) = k,COSt^l2 ±jfc,s7^; (6 30)
У U + «I COS(CO)r + [<7j sin(co)]“
„ Ь| sin(w)
ф(со) = arctg—!---— - arctg—!------—. (631)
14- Л( cos(co) bft +1\ cos(w)
6.3.2. Расчет АЧХ и ФЧХ звена 2-го порядка
Получим расчетные формулы для АЧХ и ФЧХ на основе передаточной
функции H(z) (5.12) звена 2-го порядка
ит~\- ho+b\z 1 2
Выполним следующие преобразования (см. п. 6.3):
□ заменим z = e^ и перейдем к частотной характеристике
□ разложим экспоненты:
w [cos(fo) - j sin(fo)]+ b2[cos(2&) - j sin(2&)]
l + rtj[cos((b)-ysin(6))]+n2[cos(2&)-jsin(2&)] ’
□ выделим вещественные и мнимые части в числителе и знаменателе:
//(е7“)=
[/)(, + b, cos(&) +1>2 cos(26))]- j[b, sin(oi) + fc2 sin(2&)]
^1 + at cos(&) + o2 cos(2tb)]- sin((b) + «, sin(2&)]
(6.33)
Лекция 6. Описание линейных дискретных систем в частотной области
109
□ запишем АЧХ и ФЧХ, исходя из их определений:
rtb + *icoS(w) + 62cos(2d})]3+[^sin(co)+A«2sin(26)J
V [l + flj cos(6>) + а2 cos(2cb) J sin(w) + ct2 sin(2(b) J
(6.34)
(₽(&) = arctg °' sin(&) + »2sin(2&) fe, sin(&) + fr, sin(2cb)
1 + (j, cos(fi))+(i2 cos(2cb) + 6, cos(cb) + b2 cos(2(0)
. (6.35)
6.4. Экспресс-анализ АЧХ и ФЧХ
На практике часто требуется оценить ЛЧХ и ФЧХ при минимуме расчетов.
Для этого строят приближенные графики данных характеристик по их значе-
ниям в нескольких точках, количество которых должно быть минимально
достаточным. Такой быстрый способ оценки частотных характеристик назы-
вается экспресс-амализом.
Экспресс-анализ предполагает заранее известным характер функции: ее глад-
кость, точки экстремумов и нулевых значений.
К особенностям АЧХ общего вида (6.26) в основной полосе частот tb = [O; зт|
относится следующее:
□ на точки максимумов АЧХ доминирующее влияние оказывают полюсы ПФ:
О на точки минимумов АЧХ доминирующее влияние оказывают нули ПФ, не
лежащие на единичной окружности;
□ точки нулей (нулевых значений) АЧХ определяются нулями ПФ, лежащи-
ми на единичной окружности; нулю АЧХ соответствует скачок ФЧХ на п;
АЧХ будет гладкой функцией при отсутствии нулей.
Справедливость двух последних утверждений следует из анализа амплитуд-
ной характеристики (слг. Лекцию 18).
Нули и минимумы АЧХ необходимо различать: нуль АЧХ является ее наи-
меньшим значением, но не минимумом.
6.4.1. Экспресс-анализ АЧХ и ФЧХ
звена 1-го порядка
Передаточная функция (5.10) звена 1-го порядка имеет один всшественш
полюс и один вещественный нуль (см. п. 5.6). Следовательно. АЧХ является
монотонной (возрастающей или убывающей) функцией, которая имеет экс-
110
Часть II. Математическое описание линейных дискретных систем
тремум или нуль на границах основной полосы Л = 0 и <Ь= л: максимуму
АЧХ на одной границе соответствует минимум либо нуль на противополож-
ной границе. Поэтому для оценки АЧХ звена l-го порядка достаточно по-
строить се график по трем точкам: двум на границах основной полосы и од-
ной (уточняющей) посередине основной полосы.
Выполним экспресс-анализ АЧХ и ФЧХ звена 1-го порядка по трем точкам
1. В точке й>=0 (рис. 6.1)
г = ^0=1; '=]
и значения АЧХ и ФЧХ равны:
Л(О)=|Н(1)|=^!А
1 +а.
(6.36)
q>(0) = arg{/7(l)} = 0.
(6.37)
/1т
Re
Рис. 6.1. Соответствие между значениями со = 0 и г = 1
2. В точке о) = л (рис. 6.2)
г = е.7" = _j. z-'=-J
и значения АЧХ и ФЧХ равны:
А(Я)=|Н(-1)|=^-^>-
(6.38)
ф(л) = arg{7/(-1)} = О.
(6.39)
Лекция 6. Описание линейных дискретных систем в частотной области
111
Рис. 6.2. Соответствие между значениями и z=-l
„ я
3. В точке <0 = у (рис. 6.3)
г = еУ2 = ;; z-1 --}
и значения АЧХ и ФЧХ равны:
(6.40)
q>f = arg {Н (у)} = arg j I = arctg(n, ) - arctg[ 1. (6.41)
l2J U“A'i J l*o I
Рис. 6.3. Соответствие между значениями Л = — и z~ j
На рис. 6.4, a—е представлены графики нормированной ЛЧХ и ФЧХ звеньев
1-го порядка, построенные по результатам экспресс-анализа в трех ючках
(соответствующие передаточные функции приведены в табл. 5.3).
112
Часть II Математическое описание линейных дискретных систем
Оспенная полоса частот
Kapia iiy.icM и полюсов
Остижцая по юса чается
Карта пулен и полюсов
Рис. 6.4. а. б. Характеристики лгенъев 1-го порядка: нормированная АЧХ, ФЧХ,
карга нулей и полюсов, импульсная характеристика
(перспаточные функции приведены в табл. 5.3)
Лекция 6. Описание линейных дискретных систем в частотной области
113
ФЧХ
Кар! и нулей н полюсов
Основная полоса часто!
ФЧХ
Карта нулей и полюсон
Основная полоса частот
Рис. 6.4, в, г. Характеристики звеньев 1-го порядка: нормированная АЧХ, ФЧХ,
карта нулей и полюсов, импульсная характеристика
(передаточные функции приведены в габл. 5.3)
114
Часть It. Математическое описание линейных дискретных систем
Основная полоса частоi
Основная полоса час I от
Карта нулей п полюсов
Импульсная харакгериешка
Рис. 6.4, д, е. Характеристики звеньев 1-го порядка: нормированная АЧХ, ФЧХ,
карга нулей и полюсов, импульсная характеристика
(передаточные функции приведены в табл. 5.3)
Лекция 6. Описание линейных дискретных систем в частотной области 115
6.4.2. Экспресс-анализ АЧХ и ФЧХ звена
2-го порядка
Передаточная функция (5.12) звена 2-го порядка в общем случае имеет два
комплексно-сопряженных полюса и два комплексно-сопряженных нуля
(см. п. 5.6). следовательно, АЧХ в общем случае может иметь:
□ максимум на частоте ш» комплексно-сопряженного полюса (приблизи-
тельно или точно):
□ минимум или нуль на частоте Ло комплексно-сопряженного нуля (мини-
мум — приблизительно, а нуль — точно);
□ экстремумы на границах основной полосы б)=0 и со=д.
В частном случае передаточная функция может иметь два всшсственных по-
люса или два вещественных нуля (сла п. 5.6).
1. Если вещественные полюсы расположены на частотах й, =0 и й, = л,
то АЧХ имеет максимумы иа границах основной полосы.
2. Если вещественные нули расположены на частотах Лэ=0 и б)е = л, то
АЧХ имеет минимумы или пули на границах основной полосы.
В обоих случаях АЧХ будет гладкой функцией при отсутствии пулей.
В общем случае для оценки АЧХ звена 2-го порядка достаточно построй гь се
график по пяти точкам: двум на границах основной полосы; одной (уточ-
няющей) посередине основной полосы и двум соответствующим максимуму
и минимуму (или нулю) АЧХ.
Выполним экспресс-анализ АЧХ и ФЧХ звена 2-го поряцка по пяти точкам
Л L п . Л 1
<0= 40; л; —; щ»; юо к
1. В точке d) = 0 (см. рис. 6.1)
z = ^0 = l; z' —I
и значения АЧХ и ФЧХ равны:
AO) = |H(l)| = |to + + *2|; (6.42)
11 + а, +а2 |
q>(0) = arg{W(l)} = 0. (6.43)
5 Зак 165
116
Часть II. Математическое описание линейных дискретных систем
2. В точке Л = п (см. рис. 6.2)
и значения АЧХ и ФЧХ равны:
А(л) = 1/7 (-1)1 = Ь1"6' +/S.|. (6.44)
|1-Я|+«2|
<p(rc) = arg{//(~l)} = 0. (6.45)
3. В точке (см. рис. 6.3)
.п
п • -1
z = e 1 \ z =-j
и значения АЧХ и ФЧХ равны:
лМ=|//(>)| &)2+±j; (6.46)
1.2 ) I I \ (1-л2)ч-ст,-
4>pfl=arg{//(;)} = arg AI = aretgf]-arctgf . (6.47)
l2J [ (1-«2>-7"l ] ^“«2 J (.^“*2 J
4. Точка (n = (b. соответствует максимуму АЧХ. который находится (прибли-
зительно или точно) на частоте со* комплексно-сопряженного полюса
(см. п. 6.4.3)
zM.2 = ^±^;
со* = <р*. (6.48)
Значение АЧХ в этой точке вычисляется по общей формуле (6.34).
5. Точка 0) = 0)о соответствует.инлл/ину)’или wy.w АЧХ:
• минимум ЛЧХ находится (приблизительно) на частоте о># комплексно-
сопряженного нуля, не лежащего па единичной окружности
(сн. п. 6.4.3)
(Ъ. : г0 Ф1. (6.49)
Значение ЛЧХ в этой точке вычисляется по общей формуле (6.34);
Лекция 6 Описание линейных дискретных систем в частотной области
117
Основная паюса частот
Карга ну icit и 1т.ткк*он
Оспопная полоса частот
Импульсная хараюеристкка
Импульсная хиракгеристнка
'о 5 10
Ось м б
Рис. 6.5, я, б. Характеристики звеньев 2-го порядка: нормированная АЧХ, ФЧХ,
карта нулей и полюсов, импульсная характеристика
(передаточные функции приведены в табл. 5.4)
11В
Часть И. Математическое описание линейных дискретных систем
Основная полоса частот
Основная полоса частот
Карта нулей и полюсов
-I -0.5 0 0.5 I
Импульсная характеристика
Рис. 6.5, в, г. Характеристики звеньев 2-го порядка: нормированная ЛЧХ, ФЧХ,
карта нулей и полюсов, импульсная характеристика
(передаточные функции приведены в табл. 5.4)
Лекция 6. Описание линейных дискретных систем в частотной области
119
Основная полоса частот
Основная полоса частот
Карта нуяеп и полюсов
Рис. 6.5, д, е. Характеристики звеньев 2-го порядка: нормированная АЧХ, ФЧХ,
карта нулей и полюсов, импульсная характеристика
(передаточные функции приведены в табл. 5.4)
120
Часть II. Математическое описание линейных дискретных систем
Основная полоса часю!
Карта нулем п полюсов
Импульсная характерце!нка
О 5 10
Ось п
Основная полоса частот
Карта нулей и полюсов
Импульсная характеристика
Ось п
Рис. 6.5, ле, т. Характеристики звеньев 2-го порядка: нормированная АЧХ. ФЧХ,
карта нулей и полюсов, импульсная характеристика
(передаточные функции приведены в табл, 5.4)
Лекция 6. Описание линейных дискретных систем в частотной области 121
• нуль АЧХ находится на частоте со., комплексно-сопряженного нуля,
лежащего на единичной окружности (c.v. и. 6.4.3)
^2 = ^ = e±jts> ;
6j =(₽ ; ro = l.
В точке (b ФЧХ имеет скачок на я.
На рис. 6.5. а—з представлены графики нормированной АЧХ и ФЧХ звеньев
2-IO порядка, построенные по результатам экспрссс-анализа в пяти точках
(соответствующие передаточные функции привечены в табл. 5.4).
6.4.3. Местоположение нуля,
максимума и минимума АЧХ
Нс проводя подробного математического анализа, оцепим точки нуля, мак-
симума и минимума АЧХ на примере звена 2-го порядка. С этой целью пред-
ставим передаточную функцию в визе произведения простейших множите-
лей (5.15):
н Ьа+Ь^'+b2z~2 =
!+«!.<'+л2< 2 (1-г,ел,г’1)(1-г.<>'л,г ')
Заменив z. = перейдем к частотной характеристике
,, =
(6.50)
Запишем се модуль
А)11 г.е-Л^'И,г.е-^ФЧ
|н(<>)| =
откуда, согласно определению, имеем АЧХ в виде:
. |. 1 l[l + r2 -2r cos(6)-(pj]|l + i;2 -2r0cos(6)+(p )1 ,
А(со) = йв .----=---------------------5-----------------» (6 -
V11 + Г* - 2r+ cos(m “ )111 + г* - 2ги cost со + ср*) |
где
)|=|i-.reCOS(&_(p ) + yrosin(cb-(p„)| =
= 7l1 - ГЕ cos(to- (рп )]2 +1?; sin(O)- (pQ)|2 = Jl + r2 - 2r„ cos(to - (p)
и т. n.
122 Часть Н. Математическое описание линейных дискретных систем
Проанализируем АЧХ (6.51), полагая, что как полюсы, так и нули ПФ
H(z) —комплексно-сопряженные числа.
Точка нуляЛЧХочевидна: А(й)) = О, если оба сомножителя в числителе (6.51)
равны нулю (т. к. нули ПФ — комплексно-сопряженные числа)
1 + г2 - 2r„ cos(fo-фо) = 0;
1 + г2 -2глcos(co+ (pj = 0,
что выполняется при
[СО = ±(р0,
следовательно, пуль АЧХ находится точно на частоте й)о =<ро комплексно-
сопряженного ну:т, лежащего на единичной окружности
г...2=е±Л’ .
При оценке точек максимума и минимума АЧХ ограничимся двумя предель-
ными случаями:
1. Рассмотрим ПФ H(z), содержащую только рекурсивную часть (полюсно-
го айда), когда комплексно-сопряженные нули равны 0:
Л<“)=1М.
ЧХ (6.50) и АЧХ (6.51) принимают вид:
(ej&) =’
1 ~~
[1 +л2 -2r*cos(cb-(p*)]ll + г2 -2г* cos(co + (₽*)]
В этом случае внутри основной полосы 0<©<я АЧХ имеет максимум и
не имеет минимума. Точка максимума определяется только знаменателем
А(со) (6.51). На границах основной полосы АЧХ имеет минимумы.
Максимум АЧХ достигается при минимальном значении знаменателя
А(ш) (6.51)
1 + г2 - 2г* cos(d>- <р*) = min * О;
1 + г*2 -2r*cos(cb+(p*) = min *0
Лекция 6. Описание линейных дискретных систем в частотной области 123
в точке й) = +(р* (при фиксированном г*). Следовательно, максимум АЧХ
находится точно на частоте = (р* комплексно-сопряженного полюса
2. Рассмотрим ПФ H(z), содержащую только нерекурсивную часть, когда
комплексно-сопряженные полюсы равны 0:
^,.2=^=0.
ЧХ (6.50) и АЧХ (6.51) принимают вид:
W(e'“) = Ml - 1 )(1 - ;
A(tb) ~ |fy)| х/ll + г.2 - 2r= cos(m-q>, )][1 + r/ - 2r„ cos(d> + q>J].
В этом случае внутри основной полосы 0<(Д<л АЧХ имеет минимум и
нс имеет максимума. Точка минимума определяется только числителем
А(со) (6.51). На границах основной полосы АЧХ имеет максимумы.
Минимум АЧХ достигается при минимальном значении числителя А (Л) (6.51)
1 + г2 - 2r cos(tt) -(₽,.) = min #= О;
1 + /;2 - 2z; cos(tb + (Д,) = min #=0
в точке со = ±(р„ (при фиксированном ro 1 ). Следовательно, минимум
АЧХнаходится точно на частоте 6)„ = (ро комплексно-сопряженного ну-
ля, не лежащего на единичной окружности
41,2 “
В общем случае передаточная функция звена 2-го порядка содержит как
рекурсивную, так и нерекурсивную часта. Поэтому точки максимума 6). и
минимума Ле (при фиксированных г, и зависят как от частоты (0 = Ф*
комплексно-сопряженного полюса (знаменателя (6.51)), так и от частоты
й>= (р комплексно-сопряженного нуля (числителя (6.51)):
6* =5](Ф^ чО;
Ч=^2(Ф*’Фо)-
Методами математического анализа можно показать, что на точку максимума
т* доминирующее влияние оказывает частота комплексно-сопряженного
полюса (р# (или знаменатель (6.51)), а на точку минимума б)в — частота
124 Часть II. Математическое описание линейных дискретных систем
комплексно-сопряженного нуля (pQ (или числитель (6.51)), что и отражается
симаолом приблизительного равенства в (6.48) и (6.49).
6.5. Анализ АЧХ по карте нулей и полюсов
Как уже говорилось (c,w. Лекцию 5), карта нулей и полюсов является одной из
важнейших графических характеристик ЛДС. Помимо оценки устойчивости,
она позволяет по расположению пулей и полюсов составить представление
о характере АЧХ и сделать ряд заключений о ФЧХ (например, о линейности
или о скачках па я )
Общие закономерности качественного анализа АЧХ по карте пулей и полю-
сов сформулированы в н. 6.4, здесь они иллюстрируются на конкретных при-
мерах для звеньев 1-го и 2-го порядков.
Рассмотрим соответствие между каргой нулей и полюсов и характером АЧХ
для звена l-го порядка.
□ Максимум АЧХ находится на частоте 6)* вещественного полюса:
• вещественному полюсу на частоте со*=О соответствует максимум
АЧХ па левой границе основной полосы (см. рис. 6.4, о, е);
• вещественному полюсу па частоте со* = п соответствует максимум
АЧХ па правой границе основной полосы (см. рис. 6.4, а, в—с)).
□ Минимум АЧХ находится па частоте (о, вещественного нуля, не лежаще-
го на единичной окружности:
♦ вещественному нулю на частоте (Ь =0, не лежащему на единичной
окружности, соответствует минимум АЧХ на левой границе основной
полосы (см. рис. 6.4, ?);
• вещественный пуль в начале координат z9 - 0 гак же. как и нуль zo = 03.
не считается информативным. В подобных случаях АЧХ звеньев 1-го по-
рядка имеет характср гладкой монотонной функции с экстремумами на
границах основной полосы. Максимуму на одной границе соответствует
минимум иа противоположной границе (см. рис. 6.4, а—в).
□ Нуль АЧХ (и соответствующий ему скачок иа л ФЧХ) находится на час-
тоте юв вещественного нуля, лежащего на единичной окружности:
• вещественному нулю на частоте 6>в =п. лежащему на единичной ок-
ружности, соответствует нуль АЧХ и скачок на п ФЧХ на правой гра-
нице основной полосы (см. рис. 6.4, £»).
Отметим, что нуль АЧХ — се наименьшее значение, но не минимум.
Лекция 6. Описание линейных дискретных систем в частотной области 125
О Соотношение полюсов и нулей определяет избирательность звена 1-го
порядка:
• низкочастотную (НЧ). если максимум ЛЧХ находится па частоте
со* - 0, а .минимум или нуль АЧХ — на частите соо - п (см. рис. 6.4, б, е);
• высокочастотную (ВЧ), если максимум АЧХ находится па частоте
С0о=я, а минимум или нуль АЧХ— на частоте й* =0
(см. рис. 6.4, а, в—д).
□ Абсолютная величина полюса определяет крутизну ЛЧХ: с увеличением
абсолютной величины полюса крутизна АЧХ возрастает. Например, при
£*=<?]= 0,5 АЧХ имеет меньшую крутизну (см. рис. 6.4. а), чем прн
j* = aj = 0,8 (см. рис. 6.4. в).
Рассмотрим соответствие между картой пулей и полюсов и характером ЛЧХ
для звена 2-го порядка.
□ Максимум АЧХ находится (приблизительно или точно) па частоте по-
люса'.
• комтексно-сопряженным полюсам соответствует максимум АЧХ
внутри основной полосы частот (см. рис. 6.5, а—ле);
• вещественным полюсам соответствует максимум ЛЧХ па границах ос-
новной полосы частот (см. рис. 6.5, з).
□ Минимум АЧХ находится (приблизительно) па частоте со нуля, не лежа-
щего па единичной окружности:
• комплексно-сопряженным нулям соответствует минимум ЛЧХ внутри
основной полосы (см. рис. 6.5. ж);
• вещественным нулям соответствует минимум ЛЧХ на границах основ-
ной полосы частот,
• вещественные нули в начале координат z17=0 так же, как и нули
zo=©o, не считаются информативными. В подобных случаях ЛЧХ
звеньев 2-го порядка имеет максимум внутри и минимумы иа границах
основной полосы (см. рис. 6.5, а—в).
□ Нуль АЧХ (и соответствующий ему скачок на я ФЧХ) находится на час-
тоте <о„ нуля. лежащего на единичной окружност и:
• комплексио-сопря.ясенным пулям соответствует нуль АЧХ и скачок на л
ФЧХ внутри основной полосы (см. рис. 6.5. е—з)’.
126 Часть II. Математическое описание линейных дискретных систем
• вещественным нулям соответствуют нули АЧХ и скачки на л ФЧХ па
границах основной полосы частот (см. рис. 6.5. ?. t)).
Отметим, что нуль АЧХ — ее наименьшее значение, но не минимум.
О Соотношение полюсов и нулей определяет избирательность звена 2-го
порядка:
• полосовую (П) (см. рис. 6.5, в);
• режекторную (Р) (см. рис. 6.5. е);
• низкочастотную (НЧ) (с.м. рис. 6.5, а);
• высокочастотную (ВЧ) (см. рис. 6.5, б).
Тип избирательности не имеет ярко выраженного характера.
□ Абсолютная величина полюса определяет крутизну АЧХ: с увеличением
абсолютной величины полюса крутизна АЧХ возрастает. Например, при
гф = 0,7 АЧХ имеет меньшую крутизну (см. рис. 6.5, б), чем при г* = 0.9
(см. рис. 6.5, &).
6.6. Минимально-фазовые
и неминимально-фазовые ЛДС
В Лекции 5 было показано, что полюсы передаточной функции устойчи-
вой ЛДС должны располагаться внутри единичного круга комплексной z-
плоскости. при этом па положение нулей жестких ограничений не наклады-
вается: они могут находиться как внутри, так и вне единичного круга. Сово-
купность нулей и полюсов полностью определяет вид частотных характери-
стик ЛДС.
Вместе с тем, подобно линейным аналоговым системам [9]. целесообразно
выделить два класса передаточных функций по признаку полного или час-
тичного расположения нулей внутри единичного круга и рассмотреть осо-
бенности частотных характеристик соответствующих ЛДС.
. Определим эти два класса ПФ:
О Передаточная функция и соответствующая ей линейная дискретная систе-
ма называются минимально-фазовыми, если все нули этой передаточной
функции расположены в пределах единичного крута z-плоскости.
□ Передаточная функция и соответствующая ей линейная дискретная систе-
ма называются неминимально-фазовыми, если хотя бы один нуль этой
передаточной функции расположен вне единичного крут z-плоскости.
Лекция 6. Описание линейных дискретных систем в частотной облает 127
Поясним смысл данных определений на примере. Рассмотрим даа заена 1-го
порядка:
О минимально-фазовое звено с передаточной функцией Н](г)
H|(z)=' при 0<iH <1,
l + a,z
имеющей один вещественный нуль внутри единичного круга
Pi 1 = 1 ’
О неминииально-фазовое звено с передаточной функцией W2(z)
W,(z) = ^—Ц- при 0<Ь,, <1,
l + «,z
имеющей один вещественный пуль вне единичного круга
Р|2 = 1/^1 > 1 •
Коэффициенты знаменателей передаточных функций H,(z) и а сле-
довательно, и полюсы, одинаковые |я]|<1), коэффициенты числи-
телей — зеркальные
*02 “~*1Н
*12 = -*01 =“!
Найдем АЧХ и ФЧХ данных звеньев. Подставляя г = еуш и раскрывая экспо-
ненты, запишем частотные характеристики:
// (еjA) = *"*1^ = 1-^ic0S^ + J*nsin(‘Q.
1 + 1 +flj cosco-Jusino
н feli-cosM+jsina)
l + 1 + (ilcosco-/n1 sin co
откуда получим одинаковые АЧХ минимально-фазоаого и неминимально-
фазового звеньев:
AI(a»=|Hl(e^)|= (-^1cosa>)4(^,sin&)2
у (l + tf|Cosd>) +(^$>1161))
l-2^|costo+fefi .
У 1 + 2fl| costo+H]2
128
Часть II. Математическое описание линейных дискретных систем
Л2(Й) = |н2(<>)| =
(Лц - costo)2 + (sin <?))“ _ Il - 2/jj [ costo+fc2]
(1 +a, costo)2 +(fl|Sin6))2 у l + 2rtj costo + f/]2
и различные ФЧХ:
A b. । sin 0) -л. sin 6) fen sin 6) «.sin to
(Pi (to) = arctg —-------arctg----!-------- = arctg-------- + arcig---------;
l-/?ucosto 1 + tfj cos to l-/?|jcosto l + n,costo
A sino) -n.sinto sin co a,sinto
(p2 (to) = arctg-------arctg---1------- ~ arcig ------- + arctg---------.
£»n-costo l + fl|COsto 6} ।-cos co 1 + 4 costo
Срааним полученные ФЧХ; они отличаются только первыми слагаемыми.
Обозначим их:
А bi. sin to
V,(“) = arctg—I-----
l~D||COSto
a. sin to
\g,(to) = arctg-----—.
I — COS to
Разделим числитель и знаменатель ^i(to) на 6ц
. sin to
Vi (to) = arctg—--------
Iib{j -costo
и, подставив 0)2 = 1/йц, запишем V|(to) в виде
sin to
V i (“) = arctg-------------------------------.
p12 -costo
Сравним V](to) и Vz(to)- Поскольку при 0<Ли <1
Pl2 =V^IL > fyl*
в основной полосе частот to = |0; л] справедливо соотношение
Isin to sin to
0i2-costo| |i»|। -costo|
а потому
|vi(*)| <|vz(<0)|
Это означает, что прирашение фазы — набег фазы — по абсолютной вели-
чине для минимачьно-еразового звена оказывается меньшим.
Лекция 6. Описание линейных дискретных систем в частотной области
129
Следствие: из даух линейных дискретных систем — минимально-фазовой и
неминимально-фазовой с одинаковыми АЧХ— набег фаз по абсолютной ве-
личине, а следовательно, и групповое время задержки у минимально-фазовой
будет меньшим.
Рис. 6.6. Характеристики минимально-фазовой к немннлмалыю-фазовой систем:
карта пулей и полюсов («), АЧХ (б) и ФЧХ (я)
130
Часть ft Математическое описание линейных дискретных систем
и H2(z) =
Пример 6.1
Определить, какая из двух передаточных функций
является минимально-фазовой. Изобразить карты нулей и полюсоа, получить
АЧХ и ФЧХ, построить их графики.
Решение. Поскольку нуль ПФ //|(z) находится внутри единичного круга
рп =-/>!,=(),8<1.
а нуль ПФ H2(z) — вне единично!-© круга (рис. 6.6, д)
012 = 1/6п = 1/0,8 = 1,25>1,
передаточная функция Н|(г) — минимально-фазовая, а //2(z) — немини-
мально-фазовая.
АЧХ рассматриваемых звеньев одинаковые (рис. 6.6, 6)
„ „ /1 — 1,6coscb +0,64
АДсо) = А2(со) = —--———- ,
V l + cosco+0,25
а ФЧХ различные (рис. 6.6.«):
Л sinco O,5sin(b
(pi(co) = arctg-------4-arete-----------;
61,25-cosco 1 +0,5 cosco
Л sintb 0,5sinw
Ф2 (co) = arctg — ---7 + arctg —— -----,
0,8-cosco l + 0.5cosco
при этом набег фазы у минимально-фазового звена— меньший.
6.7. Фазовые звенья
Известно, что одним из условий безыскаженной передачи сигналов является
линейность ФЧХ капала связи (с.м. п. 18.1). Известно также, что на практике
фазочастотпые характеристики каналов связи принципиально нелинейны
вследствие нелинейности ФЧХ болылинсгаа фильгров, ограничивающих
частотную полосу капала, особенно на его краях. Искажения формы сигнала
вследствие нелинейности ФЧХ канала называют фазовыми искажениями.
Фазовые искажения, превышающие определенные нормы, приводят к су-
щественным ошибкам на нрисме, особенно в случае сигналов с частотной
модуляцией.
Лекция 6. Описание линейных дискретных систем в частотной области 131
Компенсация фазовых искажений осуществляется в том сечении канала
связи, где ФЧХ канала <рка1В(ш) имеет недопустимые отклонения (рис. 6.7).
В этом сечении "вразрез" и каскадно с каналом связи включается фазовыГ.
корректор, снижающий фазовые искажения до установленных норм.
Сечение Общая ФЧХ
канала связи Фо6щ (а» = Ф10ш (ш) + Ф1> (а»
Рис. 6.7. Включение фазового корректора в канал связи
Каскадное включение фазового корректора с каналом связи означает, что
общая передаточная функция равна произведению передаточной функции
канала до выбранного сечения Яка||(г) и передаточной функции //фк(г) фа-
зоаого корректора
^общ(г)=^кан(2)^фк(г),
поэтому общая частотная характеристика имеет вид
= |«ка„(е^)||нфк(е>й)|?[ф-(й,+ф*-,й)1.
132 Часть II. Математическое описание линейных дискретных систем
Конечно же, фазовый корректор не должен искажать АЧХ канала
[f/KlUi (<?Jfil)| * значит, АЧХ корректора должна быть частотно независимой
|Яфк<еУ'”)|=СОПЯ-
Общая ФЧХ равна сумме ФЧХ канала и фазового корректора
Фазовые корректоры, как правило, строят на основе рекурсивных фазовых
звеньев.
6.7.1. Определение и свойства
фазовых звеньев
Фазовым называется звено, АЧХ которого в основной полосе частот
&=[0;п] не зависит от частоты
А(й>)= К = const.
Поскольку фазоаые звенья, а потому и фазовые корректоры, не обладают
частотной избирательностью, часто, особенно в иностранной литературе, их
называют ecenponycKatottfituu.
Следующее утверждение устанавливает условие существования фазоаого
звена.
Утверждение: заено является фазовым, если для всех пар нулей и полюсов
его передаточной функции выдерживается соотношение
рЛхаЛ=1. (6.52)
Доказательство. Передаточная функция (5.6) рекурсивной ЛДС
М-1
1+ s
А=1
для фазового звена, согласно (6.52), должна иметь одинаковое количество
нулей и полюсов, и, следовательно, равные порядки многочленов числителя
и знаменателя. Обозначим порядок передаточной функции
K = A/-1 = .V-1
Лекция 6. Описание линейных дискретных систем в частотной области
133
и представим ее в виде произведения простсйл1их множителей (5.I5)
Из условия существования фазового звена (6.52) получим соотношение меж-
ду' нулями и полюсами
0* “ '
в результате чего передаточная функция примет вид:
где R — множитель, не зависящий от z
R - — = const. (6.54)
п«*
*=1
Рассмотрим произведение в (6.53)
Вынесем z 1 за скобки каждого fc-ro простейшего множителя в числителе,
азатем х-Л —за знак произведения:
*=i^l-at.z
Заменим z = eJ0' н запишем Н(е^) в виде:
//(г'"1) = e~j№ П| И*е"’ |= (6.55)
1-a^e JU> ) k=l
где
_-1 +aA cos (О+ya* since _
k l-a^cosm + A s'nW (6 56)
_ ~(1 - ик cos (b) + jtif. sin fo
(l-a* cos6)) + jak sin d)
134
Часть //. Математическое описание линейных дискретных систем
Модуль Hk(eJ(£>) равен
I/7 ( 'й)|—l-^- cos^ + ^a* sbi d>| _ (I-a* cos to)2 +(aA. sin to)2
I * I I (1-atcostb)+ 7014 sin Л I \(l-at cosra)2+(at sinw)2
и не зависит от частоты и значений полюсов аА. поэтому и АЧХ всего звена
с ПФ (6.53) является час/nomuo независимой
A(d>) = |w(e;“)| = |fi| = const. (6.57)
Аргумент Нк(е^) равен
г.. , #йк1 a*since atsinto
arg{ Hk (е л°)1=фд (to) = arctg—--— - arctg-—---— =
1 J -(l-aAcosco) (1-a* cosco) (658)
Л a>. since
= -2arctg---------.
(l-afc costo)
Теперь несложно определить ФЧХ всего звена с передаточной функцией
(6.53), имея в виду следующее:
□ аргументы комплексных функций (6.55) и (6.53), с учетом (6.54), оказы-
ваются равными
arg{w(t>)} = aig{w(£>’)},
□ аргумент произведения комплексных функций равен сумме аргументов
функций-сомножителей
arg|w (е7“)}= arg|e'A“n Ht(e'w)| = -ЛГй> + £ q>t (<o).
Отсюда, после подстановки фЛ(со) (6.58), получаем ФЧХ звена
arg{w(e;“)} = (p(to) = -Kto- 2 У arctg—aAs'n(^ (6.59)
1 J £=i ({-a* costo)
с частотно независимой АЧХ (6.54), что и требовалось доказать.
Следствия:
1. Соотношение (6.52) показывает, что фазовые звенья не являются мини-
мально-фазовыми. Действительно, для устойчивости звена полюсы его
передаточной функции должны лежать внутри единичного круга, при
этом нули, согласно (6.52), всегда будут располага ться за его пределами.
Лекция 6. Описание линейных дискретных систем в частотной области 135
2. Фазочастотная характеристика фазоаого звена является гладкой монотон-
ной функцией, принципиально не имеющей скачков, а том числе и на л
(напомним, что скачки ФЧХ на ±2л/п не являются информативными).
3. Частотно независимая АЧХ, согласно (6.54), определяется только коэф-
фициентом и полюсами ak.
Поскольку фазовые корректоры обычно представляют собой каскадное со-
единение фазовых звеньев 1-го и 2-го порядков, рассмотрим их передаточные
функции, АЧХ, ФЧХ и групповое время задержки (ГВЗ).
6.7.2. Фазовое звено 1-го порядка
Передаточная функция фазового звена 1-го порядка (ФЗ-1) имеет вид
И-а.Г'
где для удобства принято -1.
Передаточная функция ФЗ-l имеет один нуль Pj и один полюс ctj, по опре-
делению равные
Pi = -*>1; “1 = -“1 •
что отвечает условию (6.52)
“1Р1 =1
и для ФЗ-1 равносильно условию
я,*| =1,
откуда имеем соотношения между нулем и полюсом
Pl =1/C£[
и коэффициентами числителя и знаменателя передаточной функции
Следоаательно, нуль передаточной функции ФЗ-1 оказывается больше едини-
цы, т. е. лежит за пределами единичного круга (звено неминимально-фазовое).
На основании полеченных соотношений имеем частотно независимую АЧХ (6.54):
Афз-1(<0) = |я| = НЧ = —— = — =1^1 = const > 1. (6.60)
136
Часть И. Математическое описание линейных дискретных систем
При К = I ФЧХ (6.59) имеет вид:
. А „ tf.SinCD
<Pd>3 i (w) = -co + 2arcig —5-~
1 +tf| COSCO
Найдем групповое время задержки тгиз.1(со), для чего перепишем ФЧХ
(6.61), подставив сЬ=соГ,
(6.61)
ч ~ ~ a.sincoT
Ффч-1 (Ь>) = -ГОГ + 2arctg—I------
1 + с?! COSCOT
(6.62)
По определению
т,та(а>) =------— = -<p(<o),
Jco
откуда, подставляя Ффз_|(со) (6.62), получаем
.( „ a.ivad^T |
J -соТ + 2arclg—1----------
I____________ {+ Д| coscoT ]
J co
Взяв производную, после несложных тождественных преобразований (пред-
лагаем выполнить самостоятельно), получим
1_Л2
Tnn-i(w)”
ТгВЗ-1(«) = 7—-------
1 + 2Д| COSCO? + rtj
(6.63)
или для нормированных времени и частоты
тГВЗ-1 (И) - ——-------4-------г
1 + 2«| coscd + о.
(6.64)
Пример 6.2
Фазовое звено 1-го порядка имеет полюс а( =0,8. Записать передаточную
функцию, изобразить карту нулей и полюсов, получить АЧХ, ФЧХ, ГВЗ и
построить графики частотных характеристик.
Решение. Передаточная функция ФЗ-1 имеет один полюс О], по определению
равный
И,
откуда имеем коэффициент знаменателя передаточной функции
=-ct| =-0,8.
Лекция 6. Описание линейных дискретных систем в частотной области
137
1.260
1,255
1,250
1,245
1,240
1,000
о
б
100 200 300
400 500
Рис.6.8.ХарактеристикиФЗ-1 при а, =0.8 н /, =1000 Гц:
карта нулей и полюсов (а), АЧХ (б>. ФЧХ (в) и ГВЗ
138
Часть II. Математическое описание линейных дискретных систем
На осноае соотношения между нулем и полюсом находим нуль
Р, =1/П1 =1/0,8 = 1.25,
по определению равный
₽, =-ь.
откуда имеем коэффициент числителя передаточной функции
fc, =-Pj =-1.25.
Запишем передаточную функцию
H(-)=1“l>25z 1
1-0.8? '
и комплексную частотную характеристику
1 — t,25e~J1I>
1-0.8е
1-О.8сл“
1-0,8<Г-'“
= -l,25e"J,'“
на основании которой получим:
□ АЧХ (6.60)
Аф3_|((0)=|//(е>шГ)| = |1/(-0,8)| = 1,25 = const:
П ФЧХ (6.61)
А ч -0.8 sin со
ФфЗ-i (Ш) = -<!>+ 2arctg———----;
l-().8cosco
□ ГВЗ(б.бЗ)
, 1-0,64
T™3-i(“) 1 - li6cos(il7'+ 0,64
Карта нулей и полюсов ФЗ-1, а также графики частотных характеристик
представлены на рис. 6.8. a—г.
6.7.3. Фазовое звено 2-го порядка
Передаточная функция фазового звена 2-го порядка (ФЗ-2) имеет вид
ад=44^4-
I +atz +a2z ~
где для удобства принято 60 = 1. Найдем соотношение между ее коэффи-
циентами.
Лекция 6. Описание линейных дискретных систем в частотной области у 3g
В общем с«учае передаточная функция имеет два комплексно-сопряженных
нуля и полюса, поэтому, согласно (6.52), условием существования фазового
звена будет
“|₽1=1: и2р2=1.
Представив комплексно-сопряженные полюсы а( 2 в алгебраическом виде
“i=5+m “2=5-Л.
запишем соотношение между нулями и полюсами передаточной функ-
ции ФЗ-2
В - ' - 1 Ч
1 “i 5+Л1 52+п2 52+ir’
в = 1 - 1 - 5 , . ч
2 «2 5-Л1 52+ч2 52 +п2
Выразим коэффициенты числителя и знаменателя передаточной функции
через вещественную и мнимую части полюсов £ и т], для чего представим
знаменатель в виде произведения простейших множителей (си. Лекцию 5):
(1 - а, Г1 )(1 - а2Г') = 1 - 2^"' + (52 + Л2 К“2.
о гкуда
п,=-2^, n2=V + n2- (665)
Подобным образом для числи геля имеем
(1 - P1Z"1 XI -₽<*) = 1 -тДуг'1 +72^-2 Z"2.
5 +п 5 +л
откуда
6|=А (606)
5 +Т12 5-+ТГ
Сравнивая (6.65) и (6.66), получим коэффициенты числителя
/>1=—;б2 = — (6.67)
“2 “2
и запишем передаточную функцию ФЗ-2 в виде:
l+^Lz-'+J-z’2
H(z)= °2 , °2 з-. (6.68)
I +OjZ 1 + n2z
/40
Часть iJ. Математическое описание линейных дискретных систем
Если нули и полюсы представить в показательной форме, на основании вы-
шеприведенных соотношений для пулей и полюсов получим пары
a,=r.e^, -—е
Г* (6.69)
а, = г.е ₽2 = ^ф =-!-<>,
причем радиус нулей, как и в случае ФЗ-I. оказывается больше единицы
г =—>1.
т. е. нули лежат за пределами единичного круга (звено неминимально-
фазовое).
Используя взаимосвязи:
□ между коэффициентами знамена/пеля ПФ и комплексно-сопряженными
полюсами (5.32) и (5.33):
(«I =-2/;cos(p*;
□ между коэффициентами чис.тгине:1я ПФ и комплексно-сопряженными ну-
лями (при b$ = 1 она такая же, как для полюсов):
[Л, --2r cosep ;
□ между коэффициентами числителя и знаменателя (6.67) и пулями и по-
люсами (6.69),
запишем коэффициенты числителя передаточной функции в виде:
--2r cosip., = «>2 = >-.2=-!7 r* и передаточную функцию ФЗ-2 Н(’)- l~2r°cos<P* г"1 + г?е 2 1-2r,cosip,,г ‘+г2г“2 -2г costp* cos(p+; 1 -(2/r4,)cos<p« ". l+(l/r,2)z 1 - 2г„ cos<pH z'1 + rfz"2
Лекция 6. Описание линейных дискретных систем в частотной области
141
Получим АЧХ, ФЧХ и ГВЗ фазоаого звена 2-го порядка, применив тот же
прием, что и при доказательстве (6.52). В числителе передаточной функции
(6.68) вынесем за скобки ~z~2
°2
rr. 1 a->z2 + a,z +1
77(z) =—z - 1---(6.71)
a? 1 + atz + a2z "
тогда комплексная частотная характеристика примет вид
Н (eja) =—с-2я °2e2jM + aieJM + 1 = у (672
«2 1+ «,?“'“+«2<Г2'“ а2
Запишем
fjj _ «2g2^n +fl1g^U „ 0 + fli coso + <?2 cos 2(b) + j(a1sincb + <72 sin2&)
1 + a}e~^ + a2e~2J& (1 + tfj costb+a2 cos 2(b) - j(a} sindo + a2 sin 2d))
и найдем ее .модуль и аргумент.
Поскольку числитель и знаменатель — комплексно-сопряженные
функции, ее модуль равен единице:
|н(^й)| = 1,
а аргумент — удвоенному аргументу числителя:
Г А, лк! т . a, sin&+a-,sin2fi)
arg I // (е^’Н = 2arctg-1-.
1 1 l + fl|COSCO+«2COS2tO
На основании (6.72) имеем:
□ АЧХ
Лрз-2 (й) = | Н (0^)1 = Л = = const (6.73)
□ ФЧХ
z-ч friz /бк! « ft sin(b + Ojsin2(b
Ффз-2(ш) = ar81 ) J=-2(0+ 2anctg—1--------=----------; (6.74)
1 J l + fl|COS(0 +tf2cos2(D
О ГВЗ
Т,та.2(ф) =-----------(1-п2)(1 + а,со5(йТ + а,)-------- (675)
(1 + <7| COSCOT + а2 cosier)?)^ sintoT + л2 sin2coT)
142
Часть If. Математическое описание линейных дискретных систем
Пример 6.3
Фазовое звено 2-го порядка имеет комплексно-сопряженные полюсы
а12=0,8е . Записать передаточную функцию, изобразить карту нулей и
полюсов, получить АЧХ, ФЧХ, ГВЗ и построить графики частотных характе-
ристик.
Решение. Из условия существования фазового звена (соотношения между
нулями и полюсами) найдем нули
PU =---------1,25с
“1.2
Коэффициенты знаменателя передаточной функции равны
= -2гф coscp* - —l,6cos(it/3) = -0,8:
a2 = r2 = 0,82 =0,64,
а коэффициенты числителя, согласно (6.67), равны
fej =ai/a2=-l,25; 6, = l/c/2 = 1,5625.
Это позволяет записать передаточную функцию ФЗ-2 (6.68)
„ , , 1 - 1,25г1 + 1,5625г-2
#Ф1-гг =-----------i------ZJ—
1-0,8- + 0,64г 2
□
и получить:
АЧХ (6.73)
ЛИ2(Ы) = 1,5625;
□
ФЧХ (6.74)
/-ч -a -O,8sin<i)4- O,64sm2co
Ф<1Я-2 (w) = ”2(0 +-----------------------7-:
1 - 0.8 cos co+0,64 cos 2co
□
ГВЗ (6.75)
тГВЗ-2(т)-
______________0,36(1,64-0,8cos 0)7)______________
(1 - 0.8 cos cor + 0,64cos ЗсоГМ-О.в sin соГ + 0,64sin 2соГ)
Карта нулей и полюсов ФЗ-2, а также графики частотных характеристик
представлены на рис. 6.9, a—г. Скачок фазы на 2л в точке f0 не является ин-
формативным, он обусловлен удобством построения графика ФЧХ.
Лекция 6. Описание линейных дискретных систем в частотной облает
143
1,575
1.570
1,565
1,5625
1,560
1,555
1,550
О
300
100 200
400 500
Рис. 6.9. Характеристики ФЗ-2 при и, 2 = 0,8**^* и £ = 1000 J ц :
карта пулей и полюсов (о), АЧХ (б). ФЧХ (в) и ГВЗ (?)
Лекция 7
Структурные схемы
линейных дискретных систем
Структурная схема (структура) ЛДС отображает алгоритм вычисления ре-
акции. Напомним (с.и. Лекцию 4). чю во временной области соотношение
вход/выход при известных параметрах ЛДС описывается разностным урав-
нением (4.14), которое решается .методом прямой подстановки при нулевых
начальных условиях. Таким образом, алгоритм вычисления реакции задастся
непосредственно разностным уравнением, и в этом смысле структура ЛДС
отображает разностное уравнение.
Алгоритм вычисления реакции но РУ (4.14) основан на выполнении трех
типов операций с отсчетами сигнала:
□ задержки иа период дискретизации Т ;
□ умножения на константу;
□ алгебраического сложения.
На структурной схеме им ставится в соответствие три вила элементов:
□ элемент задержки (рис. 7.1, а)',
□ умножитель (рис. 7.1, б);
□ сумматор (рис. 7.1, в).
Рис. 7.1. Элементы сфукгурноП схемы ЛДС: элемент затержки (о),
умножитель (б), сумматор (в)
Лекция 7. Структурные схемы линейных дискретных систем 145
Условное изображение элемента задержки связано с тем, что задержка сиг-
нала на период дискретизации Т отображается в г-области умножением z-
изображения данного сигнала на z'1 (см. Лекцию 3)'.
х(пТ)^> X(z)\
х(пТ-Т)=ь X(z)z~'.
Физически элемент задержки представляет собой регистр, хранящий один
предшествующий (задержанный) отсчет сигнала.
Структура ЛДС может быть реализована аппаратно или программно.
В первом случае— в виде специализированного цифрового устройства
на интегральных логических элементах, во втором — в виде программы
на компьютере или цифровом процессоре обработки сигналов (Ц11ОС).
Развитие технологии ЦПОС сделало программную реализацию преобла-
дающей [45].
Разностному уравнению (4.14) соответствует передаточная функция (5.6).
Однако передаточная функция может иметь и другие, эквивалентные виды
математического представления (см. Лекцию 5), и, следовательно, разност-
ные уравнения могут иметь различные виды, отображаемые различными
структурами ЛДС. Вот почему структура ЛДС определяется видом переда-
точной функции.
С этих позиций рассмотрим структуры рекурсивных и нерекурсивных ЛДС.
7.1. Структуры рекурсивных ЛДС
Рекурсивным ЛДС соответствуют три основных вида математического пред-
ставления 11Ф Pl(z):
□ дробно-рациональный (5.6);
□ произведение множителей второго порядка (5.17);
□ сумма дробей второго порядка (5.19),
которые определяют три основные структуры:
□ прямую;
□ каскадиуЕо;
□ параллельную.
146
Часть IL Математическое описание линейных дискретных систем
7.1.1. Прямая структура
Прямая структура определяется передаточной функцией //(c) (5.6), пред-
ставленной в дробно-рациональном виде (в общем виде):
Л'-1
ч 1=0
и отображает разностное уравнение (4.14)
Л'-] Л/-1
>’(«)= y,bjX<.n-i)- J aty(ii-k).
i=0 k=l
На рис. 7.2 приведена прямая структура звена 2-го порядка, описываемого
передаточной функцией (5.12) и разностным уравнением (5.13).
Рис. 7.2. Прямая структура звена 2-го порячка
В общем случае прямая структура содержит [(/V-1) + (A/-1)] элементов за-
держки, из них: (Лг-1) — для предшествующих отсчетов воздействия и
(Л/-1) — для предшествующих отсчетов реакции. Рассмотрим канониче-
ские структуры, позволяющие свести число элементов задержки к минимуму.
Структуру называют канонической, если число элементов задержки в пей ми-
нимально и равно порядку передаточной функции— тах{(Л7-1), (/V-1)}.
1 (редставим три разновидности таких ст руктур.
Лекция 7. Структурные схемы линейных дискретных систем
147
7.1.2. Прямая каноническая структура 1
Прямая каноническая структура 1 определяется эквивалентным представле-
нием передаточной функции H(z) (5.6) в виде произведения двух псредагоч-
иых функций
я(г) = Л£)=_J-------^\г-.=Уа).>Чг) = (7Л)
X(Z> 14. V „ V(Z>
I + 2- ak г
одна из которых описывает рекурсивную часть ЛДС
1+ X акг
а вторая — нерекурсивную
Перечаточным функциям Hfa), согласно их определению, соответ-
ствуют разностные уравнения
Af-l
v(«) = л(п) - X «*>’(" - *) ; (7.2)
А = 1
У(Н)= Ш-П, (7.3)
»=о
отображаемые прямыми структурами.
На рис. 7.3, а показана прямая структура звена 2-го порядка в виде последо-
вательного соединения рекурсивной (7.2) и нерекурсивной (7.3) частей.
В этом случае ПФ (7.1) и РУ (7.2) и (7.3) принимают вид
W(3) = H,(z)ff2(z) =------J------(^+61z',+b2z V. (7.4)
l+6f|Z -bt/jZ
т(л) = x{n)~atv(n- 1)“А2Ия'*2) ; (7.5)
У’(л) = bnv(ri)+bfv(n -1) + b2v(n - 2). (7.6)
Объединение двух линий задержки в одну (на основании равенства входного
и выхочного сигналов в точке Д) приводит к прямой канонической структуре /
(рис. 7.3. 6).
6 ч.к 165
148
Часть //. Математическое описание линейных дискретных систем
Рис. 73. Прямая каноническая структура 1 звена 2-го порядка:
пос/гедовательное соединение рекурсивной и нерекурсивной частей (а);
объединение авухлиний задержки водку (б)
7.1.3. Каноническая структура 2
Каноническая структура 2 определяется другим эквивалентным представ-
лением передаточной функции H(z) (5-6). которое можно получить путем
деления числителя иа знаменатель по правилу деления многочленов при
N = M :
H(z) =
И»
*(z)
M 1
I=o
M-l
1+ X atz'
=/% +
X V’t -IVi )Z ‘
4=1____________
M-l ,
(7.7)
= /7,lp(z) + //p(z) =
Y Y
*np , * up
X(z) X(z)’
Лекция 7. Структурные схемы линейных дискретных систем
149
в результате чего H(z) представляется в виде суммы двух передаточных
функций, описывающих нерекурсивную (с индексом ’нр’)
*нр(")
“ Оп
Х(з) °
(7.8)
и рекурсивную (с индексом 'р')
w-i
X (^ -M*)z
K(z)
"p(z>=^-~
1+ X"<z
(7.9)
части ЛДС.
Передаточной функции/7нр(г) (7.8) соответствует разностное уравнение
J1.P(") = M(n)- (710)
Для того чтобы получить РУ, соответствующее Z/p(z), представим ее, по-
добно (7.1). в виде произведения двух передаточных функций
К, (г) V(z) ^(z)
= -—=—-— = Wpl(z)Wp2(z) =
X(z) X(z) V(z) p p2
I M-l
=—STi-------X №
1+ X
и запишем разностные уравнения в виде (7.2) и (7.3):
м-1
г(м) = л(к)- у akv(n~k)'.
М-1
Ур(н)= X -l>oat)v(n-k).
совокупность которых отображается прямой канонической структурой I.
В итоге передаточной функции Z/(z) (7.7)
1 M 1 ,
«(z) = //llp(z) + A/p,(z)//p2(z) = ^ +—iTT----------2 -Wz'* (7-1 О
I I V Л *=l
|+ L akZ
150
Часть II. Математическое описание линейных дискретных систем
соответствует система разностных уравнений
М-1
у(п) = У,ф ('0 + .Гр («) = bi>x<.n'1 +'5Льк~ hi>ak>*'(" ~
v(n)=x(n)~ X a*v(n-i),
*=l
отображаемая канонической структурой 2.
На рис. 7.4 приведена каноническая струкп'ра 2 звена 2-го порядка. В этом
случае НФ (7.11) и система РУ (7.12) принимают вид:
Н(г) = Ье ч------р-----Дл +(*2 -1ьЪ>г~2]; (7-13)
1 + «1Z +O2i
fx») = /,b-r(«) + (*i ~*<А)’’(»-О+ (*2-b0a2jv{n-2);
| v(n) = х(и) - at v(n -1) - а2т(л - 2).
Рис. 7.4. Каноническая структура 2 звена 2-го порядка
7.1.4. Каноническая структура 3
Каноническая структура 3 определяется еще одним эквивалентным представ-
лением передаточной функции H{z) (5.6). которое получается следующим
образом:
Г м_| -И
□ полагая W = Л/, умножим. «свую и правую части (5.6) на I 1 + £ п* z I:
Лекция 7. Структурные схемы линейных дискретных систем 151
М-1
( W-1 ,1 -п ( М-[
"(г) 1+ X к 1+ X
I J l+X«fcz-4 *='
jt=i
□ сократим общие множители в числителе и знаменателе справа:
М-1 М-1
//(г)= 5>,г“'-//(г)Х^г *;
i=0 Jt = l
□ представим передаточную функцию в виде разложения (в лестничной
форме 16]):
W(z) = ^ + z“177,(z);
//|(z)=|fe,-o,//(z)l + z“'//2(z);
//2(z) = [fc2-o2W(z)| + r‘w3(z); (7.15)
«и -i(z) = *m-i
таким образом, что ]](:) опречслястся последовательной подстановкой
снизу вверх.
Получим систему разностных уравнении, соответствую111у1о данной 1 |Ф. для чсто:
П умножим левую и правую части всех равенств (7.15) на А’(д):
//(z)X(;) = fe„X(Z) + z '//|(z)X(z);
W1(z)X(z) = fc1X(z)-fll//(z)X(z) + z’,W2(z)X(z);
772U)X(z) = fc2X(z)-a2W(z) + z-1 W3(z)X(z); (7.16)
A/M_1(z)X(z) = fcM_,X(z)-«W-l7/(z)X(z);
П обозначим:
Hz)=//(z)X(z);
Ц(г)=//|(г)ХСг);
V2(z) = //2(z)X(z);
Ум-М = Нм ,X(z);
152 Часть И. Математическое описание линейных дискретных систем
□ подставим в (7.16):
nz)=Mw+z’'im
V, (z) = b|X(z) -«/(.7) + V2(z);
V2(z) = b2X(z)-«2r(’) + V3(z);
V„-i(z)=bw_, X(z)-a^y(z);
П используя свойства Z-преобразования, запишем РУ в виде системы:
y(n) = b0.v(/i) + v,(n-l);
V, (и) = ^л(л) - a,yM + v2(n -1):
i’2(.n) = b2.r(H)-"2.'('i) + v3(n-l); (7.17)
v,w-i (») = ЬА,_;.г(н) - a w у(и).
Она решается снизу вверх и отображается канонической структурой 3.
Рис. 7.5. Каноническая структура 3 звсиа 2-го порядка
На рис. 7.5 приведена каноническая структура 3 звени 2-го порядка. В этом
случае ПФ (7.15) и система РУ (7.17) принимают вид:
Я(г) = ьо+г
H,(z) = [ftl-u,W(z)] + -’-1/72(z); (7.18)
W2(z) = />2-a2//(z).
Лекция 7. Структурные схемы линейных дискретных систем
153
y(n) = btix(n) + vl (n-l);
v, (и) = VO') - (и) + v2 (п -1); (7.19)
>’2(») = Л2х(п) - a2><«).
7.1.5. Каскадная структура
Каскадная структура определяется передаточной функцией 7/(з) (5.17),
представленной в виде произведения множителей второго порядка:
"(7) = П "л(г)=ПР’1№ +h2tZf
X = l t = l^ 1 + «hZ + "2]fZ
где V, bik, V , a^k , н22. — eeufecinaeiiHue коэффициенты, a К — количе-
ство звеньев 2-го порядка.
При пряной структуре всех звеньев (см. рис. 7.2) данному виду передаточной
функции соотвс гствует система разностных уравнений
vi («)=М”)+bi 1*(" -1)+*214" -2) - «11 vi (« - о - a2ivi (« -2);
v2(n) = *B2V1(") + *12vl(" - 1) + *22vl(" - 2) - «12v2(n “ О “ «22v2<" “ 2)i
И") = *O.K--1VK-1(") + *1.K -ivri (" - D + *2.K-1’’K-1 (" - 2) - <Ч.к-\У(п - 0 -
-"2Х-1Я"-2),
из которой следует, что реакция Л-го звена. к = \, 2,(К-1), служит воз-
действием для (А + 1)-го звена, поэтому данная система отображается кас-
кадным соединением рекурсивных звеньев 2-ко порядка— каскадной
структурой.
На рис. 7.6 изображена каскадная структура из трех звеньев 2-го порядка
прямой или канонической структуры.
Рис. 7.6. Каскадная структура из трех звеньев 2-го порядка
154 Часть II. Математическое описание линейных дискретных систем
7.1.6. Параллельная структура
Параллельная структура определяется передаточной функцией H(z) (5.19),
представленной в виде суммы дробей второго порядка:
«u)= i Htu)=£f-
(=i t=ip + «u.z +«21^")
где Ьщ., Ьц., alk, «2* — вещественные коэффициенты, а К — количество
звеньев 2-го порядка.
Получим разностное уравнение, соответствующее данному виду ПФ. для чего:
□ умножим левую и правую части (5.19) на X(z):
к к ( к + ь у-1 А
Г(г) = //(г)Х(г)=1ВДХ(:) = £ - ! ~_г *(:);
fc=l IJ
П обозначим:
vk(-) = »,№(--)- 1 X(z),
в результате чего имеем соотношение вход/выход в виде (5.5):
□ представим реакцию F(z) в виде суммы реакций:
X(z)=f V*(z);
Jc = l
О выполним обратное /-преобразование левой и правой частей и запишем
искомое разностное уравнение
уОО=5>>(л). (7.20)
где
гЛ(н) = ^Ал-(л)-|-Л1Лл-(п-1)-«цРА.(п-1)-п2АгЛ(л-2). (7.21)
Из РУ (7.20) следует, что воздействие для всех звеньев одинаковое, а реакция
равна сумме реакций отдельных звеньев, поэтому данное РУ отображается
параяя&яъным соединением рекурсивных звеньев 2-го порядка — паралле./ь-
ной структурой.
Парис. 7.7 изображена параллельная структура из грех звеньев 2-го порядка
прямой или канонической структуры.
Лекция 7. Структурные схемы линейных дискретных систем
Рис. 7.7. Параллельная структура из трех звеньев 2-го порядка
Рис. 7.8. Прямая структура звена 2-го порядка при параллельной структуре
На рис. 7.8 приведен пример прямой структуры звена 2-го порядка, описы-
ваемого ПФ (5.12)иРУ (5.13)при 62 =0-
7.2. Структуры нерекурсивных ЛДС
Напомним (си. Лекцию 5), что передаточная функция нерекурсивных ЛДС
может рассматриваться как частный случай Щг) общего вида (5.6) при
=0. Л=1, 2,..., М -1. В этом случае знаменатель //(з) оказывается рав-
ным 1, а дробно-рациональная функция — рациональной.
Нерекурсивным ЛДС соответствуют два основных вида математического
представления Пф H(z):
□ рациональный (5.25);
□ произведение множителей второго порядка (5.28),
156
Часть II. Математическое описание линейных дискретных систем
которые определяют det* основные структуры:
П прямую;
□ каскадную.
7.2.1. Прямая структура
Прямая структура (рис. 7.9) определяется передаточной функцией f/(z)
(5.25), представленной в вице рациональной функции
v-t
W(z) = £ V"',
i=0
и отображает разностное уравнение (4.21)
N-1
у(>|)= £М»-0-
1 = 0
Рис. 7.9. Прямая структура нерекурсивной ЛДС
В Лекции 18 приводится разновидность прямой структуры— прямая приве-
денная структура для нерекурсивных ЛДС с линейной фазочастотной харак-
теристикой.
7.2.2. Каскадная структура
Каскадная сгруктура определяется передаточной функцией Я(з) (5.28).
представленной в вице произведения множителей второго порядка:
Н(г) = П".(г) = П<^ + V' +Ь2,’2'), (7-22)
Лекция 7. Структурные схемы линейных дискретных систем 157
где Ьщ, Ьц, b2j — вещественные коэффициенты, а К — количество звеньев
2-го порядка.
ПФ (7.22) соответствует система разностных уравнений нерекурсивных
звеньев 2-го порядка (с.м. и. 7.1.3):
V] (я) =/^)| >(//) 4- Ь, tx(ll - 1) 4- “ 2);
14(я) -fy2Vj(и) 4-/д2vi(« -1) + ZhjV,(и- 2);
уОО = fy) к-р'к-i (я) 4- (« “ 1) 4- b^K-iVx .] (л - 2).
отображаемая каскадной структурой (с.м. рис. 7.6), где каждое звено имеет
прямую сгруюуру (рис. 7.10).
у(«)
Рис. 7.10. Прямая структура звена 2-го порячка нерекурсивной ЛДС
7.3. Выбор структуры
Поскольку одна и та же передаточная функция может быть представлена
в разных видах, возникает вопрос о неоднозначности структуры ЛДС и се
выборе. Подробно это обсуждается в лекциях по синтезу цифровых фильт-
ров, здесь же ограничимся двумя общими положениями:
□ для цифровых фильтров вид передаточной функции определяется методом
синтеза, тем самым структура по существу оказывается автоматически
выбранной; для рекурсивных фильтров обычно она каскадная или парал-
лельная (с.м. Лекции 23—24), а для нерекурсивных — прямая приведенная
(с.=и. Лекцию /8):
О при выборе структуры отдельных звеньев 2-го порядка и последователь-
ности их расположения в каскадном соединении необходимо иметь в ви-
ду, что от этого зависит погрешность вычислений— собственные шумы
системы.
Лекция 8
Описание
линейных дискретных систем
в пространстве состояний
Как следует из предыдущих лекций, анализ ЛДС осуществляется во времен-
ной области или нат. комплексной Z-плоскостыо. включая частотные методы.
В настоящее время методы пространства состояний отождествляют с совре-
менной теорией управления, частью которой можно считать цифровую обра-
ботку сигналов. В широком смысле метод пространства состояний, по край-
ней мере при изучении дискретных систем, имеет ряд положительных
аспектов:
□ описание в пространстве состояний является естественным и удобным для
решения задач на компьютере с учетом развитости матричных алгоритмов;
П унифицируется описание цифровых систем с различными типами кванто-
вания;
□ унифицируется описание одномерных и многомерных дискретных систем;
□ возможно применение к некоторым типам нелинейных и нестационарных
систем.
В пространстве состояний непрерывная во времени структура описывается
системой дифференциальных уравнений первого порядка, называемых урав-
нениями состояния. Для дискретных систем уравнения состояния — это раз-
ностные уравнения первого порядка. Некоторые дискретные системы могут
содержать аналоговые и цифровые элементы, и, следовательно, уравнения
состояния в общем случае будут одновременно состоять из дифференциаль-
ных и разностных уравнений первого порядка. Однако нс должно склады-
ваться впечатление, что использование метода пространства состояний все-
гда имеет очевидные преимущества. Достоинство хорошо разработанных
частотных методов состоит в их компактности. Поэтому большое число задач
анализа и синтеза систем ЦОС но-нрежнему решается с использованием пе-
редаточных функций.
Лекция 8. Описание линейных дискретных систем в пространстве состояний 159
8.1. Понятие состояния
Понятие состояния является в значительной мере интуитивным и, следова-
тельно, нс можея быть определено более полно, чем, например, термин
’'множество'’ в математике. Наибольшее, что можно предпринять в этом пла-
не.— это сформулировать свойства, какими должна обладать система (в па-
шем случае дискретная), поведение которой отвечает понятию состояния.
Детерминированная (неслучайная) [цифровая сис'1'ема может быть определена
следующим образом:
1. Существует класс функций времени {х(«Г)}, называемых допустимыми
входными сигналами.
2. Для каждого момента времени пТ определено множество Q(hT\ эле-
менты которого д(нТ) являются возможными состояниями.
3. Каждой паре х(нТ) и q(nT') отвечает, по крайней мере, одна функция
времени у(пТ)к называемая выходным сигналом.
Из этого определения следует, что состояние системы в каждый момент вре-
мени можно описал ь с помощью конечного набора изменяющихся величин
4/i, </2.Чк» называемых переменными состояния. Совокупность этих вели-
чин образует вектор состояния q дискретной системы, если с их помощью
по известному входном) сигналу х(пТ) можно определить как выходной
сигнал системы у(пТ). так и будущие значения вектора состояния. Таким
образом, для того чтобы К-мерный вектор €/ = [t?f *7л] был вектором со-
стояния, необходимо существование такой однозначной векторной функции
F и такой однозначной скалярной функции векторного аргумента G. что
имеют место равенства (для нормированного времени):
ч(и + 1)= F[<7(n), .<«)]; (81)
у(л) = G[</(«), л(и)]- (8-2)
Совокупность всех возможных значении вектора состояний образует простран-
ство состоянии данной системы. Разумеется, оно также будет /С-мерным.
Пример 8.1
Пусть дискретная система описывается двумя переменными и <у2, каждая
из которых принимает четыре целочисленных значения 0, 1, 2, 3. В этом слу-
чае пространством состояний является множество узлов двумерной решетки
размером 4x4, изображенной на рис. 8.1.
160
Часть II. Математическое описание линейных дискретных систем
Рис. 8.1. Пространство состояний двумерной дискретной системы
Эволюцию системы во времени можно представить в виде ломаной линии,
соединяющей узлы решетки. Переходы из одного состояния в другое проис-
ходят в дискретные моменты времени.
При описании систем в пространстве состояний вводятся понятия управляе-
мости и наблюдаемости, позволяющие в ряде случаев охарактеризовать
внутренние свойства системы.
Динамическую систему называют управляемой^ если существует реализуемая
последовательность входных сигналов х(нТ), позволяющая перевести объ-
ект из произвольного начального состояния д(0) в любое конечное состоя-
ние q(NT) за ограниченное время, равное N периодам дискретизации.
Дискретную систему с выходным сигналом у(пТ) называют наблюдаемой,
если произвольное состояние q(nT) можно определить, имея конечное число
отсчетов выходного сигнала у(пТ), у [(и + 1)Т].у[(н + JV -1)7’].
8.2. Описание ЛДС
на основе структурных схем
Из соотношения (4.13) следует, что во временной области ЛДС можно опи-
сать линейным разностным уравнением порядка /V. Одной из целей введе-
ния пространства состояиий является понижение порядка исходного разно-
стного уравнения путем перехода к системе из N линейных разностных
уравнений первого порядка.
Лекция 8. Описание линейных дискретных систем в пространстве состояний 161
Рассмотрим прямую каноническую структуру 1 ЛДС второго порядка, изо-
браженную на рис. 7.3, б. Считается целесообразным вводить переменные
состояния как сигналы на выходах элементов задержки. Такое введение пе-
ременных состояния является не единственным, но обладает хорошей на-
глядностью, т. к. позволяет отождествить каждую переменную с содержи-
мым регистра или ячейки памяти микропроцессора, входящих в состав линии
задержки. Разумеется, число переменных состояния будет не меньше порядка
цифровой цепи.
На основании вышеизложенного будем считать, что на рис. 7.3, б сигнал
v(«-2) совпадаете переменной ^(и), а сигнал v(« —2) — с переменной
^2(«)- После этого прямая каноническая структура 1 примет вид, изобра-
женный на рис. 8.2.
Рис. 8.2. Прямая каноническая структура I с переменными состояния
Из рисунка видно, что переменная опережает на один период
дискретизации Т. Аналогично промежуточная переменная v(n) опережает
<7г(л). Математически в нормированном времени это можно записать сле-
дующим образом:
^1(л + 1) = у2(л); (8-3)
V2(w + 0 = l'(n)- (8-4)
Структурная схема показывает, что промежуточная переменная v(n) есть
алгебраическая сумма грех сигналов:
v(n) = -л2<7| (и) - «!б/2 («) + а(л) . (8-5)
162
Часть И. Математическое описание линейных дискретных сметем
Подставляя уравнение (8.5) в (8.4) и незначительно модифицируя запись
уравнения (83), получим систему двух линейных разностных уравнений,
описывающих временную динамик}' переменных состояния:
[<7|(н+1)=Ог/1(п)+1‘72(',)+О-'('О;
1 (о.О)
[q2(» + 0 = (”)“ "K/2(w) + 1 ‘ ФО-
Переходя к матричным обозначениям, можно ввести вектор-столбец состоя-
ния размером 2x1:
(8.7)
квадратную матрицу коэффициентов размером 2x2:
Л=Г ° ' 1 (8.8)
[“«I -"ij
и матрицу-столбец размером 2x1:
В=ЭД. (8.9)
С учетом введенных обозначений (8.7) и (8.9) систему (8.6) запишем в сле-
дующем виде:
9(л +1) = Ац (и) + Ял(л). (8.10)
Уравнение (8.10) называется матричным уравнением состояния ЛДС второ-
го порядка. Оно, естественно, тоже будет линейным.
Получим для той же схемы уравнение выходного сигнала у(п). Прежде все-
го заметим, что у(н) является алгебраической суммой трех переменных:
у(п) = 1’(я) + Л, <72 («) + /лс/] (л). (8.11)
С учетом (8.5) уравнение (8.11) примет вид:
у(н) = [Ь2 - /^а2 ) сц (л) + (Z>, - btftj) q2 (») + ^Ь-Ф1) (8.12)
Введем матрицу-строку размером 1x2:
С = [(Л2-^)«2) (8.13)
и для единообразия — матрицу D. состоящую из одного элемента b{i:
D^.
(8.14)
Лекция в. Описание линейных дискретных систем в пространстве состояний
163
С учетом (8.13), (8.14) и (8.7) уравнение (8.12) может быть записано в сле-
дующем виде:
у(л) = С ^(и) + О-л(п). (8.15)
Уравнение (8.15) называют уравнением выхода ЛДС. Несмотря на то. чго а
уравнении фигурируют векторы и матрицы, оно позволяет найти скалярный
выходной сигнал у(н).
Нетрудно показать, что ЛДС с канонической структурой 1 произвольного
порядка N описывается уравнениями (8.10) и (8.15). Матрицы Д, В, С и
вектор q(n) будуг иметь размеры /Vx/V. ^x1. IxN и Nxl соответственно.
При этом матрицы обладают следующими структурами:
О 1 0 ... 0
0 0 1 ... о
...... Пэ ~Д1
о'
fi=°,
1
(8.16)
(8.17)
С ~ [(^v — “ ^aaN-i) — (^]—^Ьд|)]* (8.18)
Матрица D соответствует скаляру 6^.
В случае нерекурсивных линейных цифровых систем в равенствах (8.16) и
(8.18) следует положить все коэффициенты ......aN равными нулю. При
этом описание ЛДС в пространстве состояний становится тривиальным.
8.3. Определение уравнений состояния
и выхода по передаточной функции
Уравнения состояния и выхода ЛДС с одним входом и одним выходом могут
быть получены с помощью разложения передаточной функции системы
на элементарные дроби. Предположим, что передаточную функцию Н(г)
164
Часть И. Математическое описание линейных дискретах систем
можно представить в виде суммы простых дробей первой степени:
H(Z)= f
4 = 1
Q
z-z.t
Л- с. 7-1
4,11-Z.j Z"' ’
(8.19)
где — полюсы передаточной функции.
На основании результатов, полученных в Лекции 7, можно утверждать, что
разложение (8.19) соответствует представлению ЛДС в виде параллельного
соединения К рекурсивных звеньев первого порядка. Структурная схема,
соответствующая подобному представлению, изображена на рис. 8.3.
Разложение (8.19) предполагает, что степень полинома числителя передаточ-
ной функции меньше степени многочлена знаменателя и все полюсы Z»*
различны. Из распараллеливания структуры ЛДС следует, что все перемен-
ные состояния ?д(л), введенные ранее рассмотренным способом, становятся
взаимонезависимыми. Следовательно, любое разностное уравнение типа (8.6)
преобразуется к виду:
9jt (и +1) = Z*k (н) + х(л), к = 1,2.К. (8.20)
Выражение (8.20) свидетельствует о том, что матрица Л становится диаго-
нальной с числовыми значениями полюсов иа главной диагонали:
Лекция 8. Описание линейных дискретных систем в пространстве состояний
165
(8.21)
О О ... Z*k
Необходимость подачи входного сигнала х(п) па все параллельные ветви схе-
мы превращает матрицу В в столбец, состоящий из единичных элементов:
(8-22)
Матрица С состоит из коэффициентов Ск в разложении (8.19):
С = [С, С2 ... Q], (8.23)
В [20] показано, что каждый коэффициент Ск может быть найден из равенства
Ск= lim //(Z)-(Z-Z^), к = I, 2.....К. (8.24)
В случае равенства степеней полиномов числителя и знаменателя передаточ-
ной функции в схеме на рис. 8.3 появляется прямое воздействие входного
сигнала х(п) па выход у(п) через коэффициент (изображено пунктирной
линией), где:
Zty = _Hm H(Z). (8.25)
Пример 8.2
Определим параметры схемы, изображенной на рис. 8.3, для передаточной
функции
Z4 7-1
W(Z) --------у------г --------------------j-.
I-0.5Z'1 4-0.06Z-2 (I-O^Z^MI-OJZ"’)
Решение. Очевидно, передаточная фуикция имеет два полюса: Z4I =0,2 и
Z*2=o,3.
В соответствии с формулой (8.25)
166
Часть П. Математическое описание линейных дискретных систем
4» = lim--------------------
z->“l-0,5Z_' + 0,062"“
= 0.
Используя выражение (8.24). получаем:
Z1
lim ----------------—(Z-O.2) = -2;
z->o.2(i-O,2Z’lXl-O,3Z ’)
7~l
C2= lim --------;---------r(Z -0,3) = 3.
Z—*o.3 (1 - 0,2Z“ )(1 - 0.3Z” )
Окончательно матрицы уравнений состояния и выхода примут вид:
o°J: в=[:]; с^2 з]; d=°-
Следующий пример покажет, насколько вид структурных схем зависит от
степеней полиномов числителей в разложении (8.19).
Пример 8.3
Представить в пространстве состояний ЛДС второго порядка с передаточной
функцией
tf(Z)=----------г----~г
l-0,5Z-1 4-0,06Z 2
Рис. 8.4. Параллельная структура рекурсивной цепи 2-го порядка
Лекция в. Описание линейных дискретных систем в пространстве состояний 167
Решение. Легко можно получить разложение передаточной функции:
11(7) =------г-------2 = ~~~Т +-------”~Т;
I-0.5Z-' +0.06Z"2 1-0,2Z 1-0.3Z 1
Z*| = 0,2; Z„2=0,3;
< а "=[>=" '>
Структурная схема, соответствующая полученному решению, представлена
на рис. 8.4.
(8.26)
(8.27)
8.4. Структурное представление ЛДС
по уравнениям состояния и выхода
Нетрудно предположить, что в общем случае матрицы A, fi, С и D в урав-
нениях (8.10) и (8.15) не содержат нулевых элементов. Это приводит к тому,
что уравнения состояния и выхода, например для рекурсивного звена второго
порядка, принимают вид:
*71 (п 4-1) = «I]</[ (н) 4- П12*71(«) + Ла(п);
*71<« + 1) = «21 Ч\ (Я) + «22^2('О +
у(н) = зд (л) 4- C2q2 («) 4- ЬаХ(н),
где , bj ис, — элементы матриц А. В и С соответственно.
Из уравнений (8.26) следует, что каждая переменная состояния в последую-
щий момент времени принимает значение, равное алгебраической сумме зна-
чений всех переменных состояния и входного сигнала (с соответствующими
коэффициентами) в предыдущий момент времени. Из уравнения (8.27) видно,
что выходной сигнал формируется в виде алгебраической суммы значений
всех переменных состояния и входного сигнала (опять же с соответствую-
щими коэффициентами) в каждый момент времени. Эти соображения позво-
ляют составить общую структурную схему рекурсивного звена второго по-
рядка, изображенную на рис. 8.5.
Полагая на схеме отдельные коэффициенты равными нулю, можно получить
все структурные схемы, рассмотренные в Лекции 7.
168
Часть И. Математическое описание линвиных дискретных систем
Рис. 8.5. Общая структура рекурсивного звена 2-го порядка
Пример 8.4
Рассмотрим прямую каноническую структуру 3 для звена второго порядка из
Лекции 7. Ее схема изображена на рис. 7.5. Проведя описание этой структуры
в пространстве состояний аналогично п. 8.2, получим следующие матрицы:
-[! .;] <828>
’-[S-К]- с''°<мм
Следовательно, данная структура возникает из общей (рис. 8.5) в случае,
когда <3| j = 0 и с-| = 0.
При росте числа переменных состояния усложнение структурной схемы
(рис. 8.5) будет связано с увеличением размеров матриц А. В и С, возрас-
танием количества коэффициентов, их составляющих, и с появлением новых
перекрестных связей между отдельными ветвями.
Предыдущее изложение показало, что различные структуры матриц уравне-
ний состояния и выхода соответствуют различным схемам ЛДС. При микро-
Лекция в. Описание линейных дискретных систем в пространстве состояний 169
процессорной реализации цифровых систем .могут существенным образом
варьироваться вычислительная сложность алгоритма ЦОС, чувствительность
к внутренним ошибкам, вероятность возникновения нелинейных процессов.
Основная проблема схемной реализации ЛДС состоит в выборе структуры,
обеспечивающей допустимый компромисс между данными критериями. В об-
щем случае описание в пространстве состояний (вид матриц Д, В, С и D)
не дает однозначного определения структуры ЛДС.
Пример 8.5
Рассмотрим две структуры рекурсивных ЛДС второго порятка (рис. 8.6 и 8.7).
Рис. 8.6. Прямая структура рекурсивного звена
Рис. 8.7. Модифицированная прямая структура рекурсивного звена
170
Часть //. Математическое описание линейных дискретных систем
Переменные состояния определим как выходы элементов задержки. Приме-
няя способ, описанный в n. 8.2, можно установить, что матрицы уравнений
состояния и выхода для обеих схем одинаковы и имеют вид:
л = 0 10 0 ООО 0 ООО 1 ро ~ (,2 - °|. 0 1 0 А). ; C = [fc0 bt -a2 -a,]; D = ^>
Однако приведенные схемы имеют разное число сумматоров и умножителей,
что скажется на их алгоритмической реализации.
Для отражения в пространстве состояний более "тонкой" структуры схемы
приходится вводить дополнительные переменные. Считается рациональным
(но не единственно возможным!) их введение через сигналы па выходах
сумматоров и в точках ветвления схемы. К примеру, введение дополнитель-
ной переменной q$(n) на выходе второго сумматора в схеме, изображенной
на рис. 8.7, даст следующие уравнения состояния и выхода:
q(n 4- I) = Aq(n) 4- Вх(п) 4- В'х(п 4-1);
y(n) = Cg(n),
где 0 1 0 0 o' 0 ()
0 0 0 0 0 1 0 9z(")
0 0 0 1 0 ; в = 0 ; В' = 0 ; </(») = <7з(«)
0 *1 ~п2 -«1 ^0 0 0 <74<«)
0 1 0 0 0 0 1
с= [о -“2 -«1 *«]•
Таким образом, особенности структурных схем ЛДС могут быть отражены
в пространстве состояний путем введения дополнительных переменных, чго,
несомненно, приводит к увеличению размерности матриц в уравнениях со-
стояния и выхода. Это, в свою очередь, ведет к росту объема вычислений,
проводимых в процессе анализа и синтеза ЛДС высокого порядка.
Лекция 9
Анализ
линейных дискретных систем
в пространстве состояний
Описание систем методами просгранства состояний, проведенное в Лекции 8,
предполагало независимость коэффициентов разностных уравнений и пере-
даточных функций (а следовательно, и введенных матриц) от времени. По-
добное предположение характеризует стационарные системы, что снижает
общность полученных результатов. Однако это соответствует материалу, из-
ложенному во всех предыдущих лекциях. Дискретные системы с параметра-
ми, являющимися функциями времени, будут рассмотрены в дальнейшем при
переходе к адаптивным методам обработки сигналов.
В данной лекции будут получены основные характеристики ЛДС в предпо-
ложении, что их описание проведено методами пространства состояний. При
этом предполагается достаточно широкое привлечение результатов матрич-
ной алгебры, необходимые сведения из которой приведены в Приложении 4.
9.1. Временной анализ
Пусть ЛДС описывается уравнениями состояния и выхода в нормированном
времени:
tj(n 4-1) = Aq(n) + Вх(п) ; (9.1)
у(/|)-Сд(л)+Ол(н). (9.2)
Временной анализ основывается на построении рекуррентной процедуры
решения разностного уравнения (9.1) для заданной последовательности
172 Часть II. Математическое описание линейных дискретных систем
1ходных сигналов х(и) при известном начальном состоянии ^(0). Эта про-
цедура описывается соотношениями:
п = 0: 9(1) = Л<у(О) + Сл(0);
и = 1: (2) = 49(1) + Вл(1) = Л 2?/(0) + Л£>(0) + Вл(1);
и = 2: 9(3) = Л39(О)+ Л2Вл(0) + ЛВл(1) + Вл(2).
Полученная последовательность легко обобщается на произвольный момент
времени п:
q(.n) = Л"9(0) + £ ВлЦ), (9.3)
*=0
где А° = I —единичная матрица,
Ак = Л-А Л.
К pal
С помощью уравнения (9.3) можно вычислить компоненты вектора состоя-
ния q(n) в любой момент времени л. зная начальное состояние </(0) и вход-
ной сигнал х(л). С алгебраической точки зрения первое слагаемое в (9.3)
есть решение однородного разностного уравнения (9.1) при В = 0. Вторая
сумма в (9.3) есть частное решение (9.1), представляющее собой линейную
дискретную свертку.
В случае отсутствия входного сигнала (В = 0 или jt(/i) = O) матрица А пол-
ностью описывает внутреннюю динамику линейной системы. Поэтому А
называют переходной матрицей состояния. По аналогии назовем В матри-
цей входа, а С — матрицей выхода.
Подставим выражение (9.3) в уравнение выхода (9.2):
л-1
у(н) = САп7(0) + сХ '~kBx(k) + Dx(n). (9.4)
*=о
Уравнение (9.4) служит основой для получения импульсной и переходной
характеристик ЛДС. На основании определений, приведенных в п. 4.1, можно
утверждать, что импульсной характеристике соответствует выходной сигнал
при единичном цифровом импульсе на входе и нулевых начальных
условиях. Аналогично, переходной харакзсристике соответствует выходной
сигнал, получаемый под воздействием единичного цифрового скачка их{п)
при нулевых начальных условиях. Аналитическое выражение для импульс-
Лекция 9. Анализ линейных дискретных систем в пространстве состояний
173
ной характеристики получается из уравнения (9.4) при условиях ^(0) = 0 и
х(и) = 1<о(п):
П-1
Л(л) = С£ A,J*'1’*fi«0(A) + Dw0(n). (9.5)
*==о
При п = 0 й(0) = Duo(O) = , а при п > 0 сумма в правой части (9.5) вырож-
дается в единственное слагаемое при к = 0:
h(n) = CA"'B. (9.6)
Объединяя (9.5) и (9.6), окончательно получаем:
Пример 9.1
Вычислить три первых отсчета импульсной характеристики рекурсивной це-
пи второго порядка, имеющей прямую каноническую структуру 1.
Решение. На основании выражений (8.8), (8.9) и (8.13) имеем:
А-
о
“й2
С = [(*2
В соответствии с (9.7) получим:
и = 0: Л(О>=Л»о;
л = 1: Л(1) = СЛ°В = С/Я = С-В = [(*2-6Ь«2) (*i “V1)] [^] = й1
л = 2: A(2) = C/tfi = [(fc2-fct)a2) (^6o«1)Jl ° 1 • К =
l~«2 LlJ
= Ь2-ПЛ + -<12fc(1.
Полученный результат совпадает с решением разностного уравнения (5.13)
при х(п) = и0(п).
Переходная характеристика получается из выражения (9,4) при условиях
<7(0) = б и х(л) = «1(и):
g(n) = cy An~l~kBui(k) + Dul(n} = c''£ A"~l~k-B + D. (9.8)
4=0
174 Часть И. Математическое описание линейных дискретных систем
Несложный анализ выражений (9.7) и (9.8) показывает, что для получения
временных характеристик ЛДС необходимо вычисление больших степеней
квадратной переходной матрицы состояния Д . Для этого существует эффек-
тивная процедура, основанная на теореме Гамильтона—Кэли, которая будет
рассмотрена в дальнейшем.
9.2. Анализ в z-области
Свяжем уравнения состояния и выхода с передаточной функцией вве-
денной в п. 5.1. Для этого применим z-преобразование к обеим частям ра-
венств (9.1) и (9.2):
г ]С(г) - 9(0)] = А • (?(.-) + ЙХ(г). (9.9)
Г(г) = С(2(<) + ОХ(г), (9.10)
где:
X(z) —z-образ входного сигнала х(п)\
Y(?) —z-образ выходного сигнала у(п):
Q(z) —z-образ последовательности векторов состояния <у(й).
При нулевых начальных условиях (д(0) = 0) разрешим уравнение (9.9) отно-
сительно Q(z)‘
Q(z)=[zI-AY1BX(z), (9.11)
где:
/ —единичная матрица порядка, совпадающего с порядком матрицы Д;
операция [ ] 1 означает обращение матрицы, находящейся в квадратных
скобках.
Подставляя (9.11) в (9.10) и учитывая, что передаточная функция
нт х
и U) =----, получаем:
X(z)
//(г) = С[г/-дГ1В + О. (9.12)
Выражение (9 12) связывает передаточную функцию ЛДС с матрицами урав-
нений состояния и выхода.
Лекция 9. Анализ линейных дискретных систем в пространстве состояний/75
Существует несколько способов вычисления матрицы, обратной к заданной.
Воспользуемся тем, который описан в Приложении 4.
(9-В)
где:
[Ду]г —транспонированная матрица алгебраических дополнений у-х Э ш-
ментов матрицы [:7-Д]. = 2,... ,7/.
|z/ — А| —определитель матрицы [г/ -Д].
После подстановки (9.13) в (9.12) получим:
Гд-.у
H(z) = C-.L <Jj ,-B + D. (9.14)
|z/-A|
В знаменателе выражения (9.14) находится определитель. Следовательно, он
должен совпадать с полиномом знаменателя передаточной функции рекур-
сивной цифровой цепи. Покажем это на примере.
Пример 9.2
Найти из матричного уравнения (9.14) знаменатель передаточной функции
рекурсивного звена второго порядка, которая имеет вид:
//(;) = (9.15)
Z2 4-Л|2 + «2
Решение. Для канонической структуры 1 в соответствии с (8.8) имеем:
г/_л=р °1_Г ° ‘W
[о zj [-«, -oj [о2 (z + a,)J
|г/ — Л| = z - (z + а,)+ «2 = z2 + «|Z + a2,
ч го совпадает со знаменателем (9.15).
Нахождение полюсов передаточной функции связано с решением уравнения
|z/-Л|=0, (9.16)
которое называют характеристическим уравнением системы. Корпи харак-
теристического уравнения называются собственными значениями матрицы Л
176
Часть Н. Математическое описание линейных дискретных систем
и обозначаются Лн Л2, ..., Л/у . Они обладают следующими важными свойст-
вами.*
□ если коэффициенты характеристического уравнения сеть скалярные ве-
личины, то собственные значения либо действительны, либо образуют
комплексно-сопряженные пары и совпадают с полюсами передаточной
функции;
□ след матрицы А опрецеляется как сумма элементов на главной диагонали,
т. е.
/г(Д) = Л] +12 + ... 4-Хд,;
□ определитель матрицы Д связан с собственными значениями соотноше-
нием
|д| = А] -A2 ... -A_v;
□ если А — действительная симметрическая матрица, то все ее собствен-
ные значения действительны.
В соответствии с этими свойствами можно переформулировать критерий ус-
тойчивости (5.40): для того чтобы ЛДС была устойчива, необходимо и дос-
таточно, чтобы все собственные значения переходной матрицы системы не
превышали по модулю единицы.
Введение понятия характеристического уравнения позволяет применить тео-
рему Гамильтона—Кэли для вычисления больших степеней переходной
матрицы Д. Теорема утверждает, что каждая квадратная матрица должна
удовлетворять своему характеристическому уравнению. Для иллюстрации
применения теоремы Гамильтона—Кэли рассмотрим пример.
Пример 9.3
Получить простой способ вычисления любой степени переходной матрицы.
Решение. 11усть матрица Д может быть записана в виде:
Характеристическое уравнение для матрицы Д соответствует выражению
(9.16):
"Н” №
мН’1-
Лекция 9. Анализ линейных дискретных систем в пространстве состояний 177
Применяя теорему Гамильтона—Кэли, получаем матричное уравнение
А2-2А-1 = 0,
из которого имеем:
А2 = 2А + /.
Таким образом, матриц}2 А2 можно выразить через матрицу А . Суть теоремы
состоит в том, что матрицу Ам можно выразить как алгебраическую сумму
матриц Ам-1, AW2,..., А . В результате последовательного применения тео-
ремы матрица Ам в конечном счете выражается через матрицу А . Поэтому
А3 = АА2=А(2А+1) = 2А2 + А = 2(2А + 1) + А = 5А + 21-,
А4 = АА3 = А(5А + 2Г) = 5А2 + 2А = 5(2А + П + 2А = 12А + 51.
Продолжая подобный итерационный процесс, можно вычислить матрицу
Ам для сколь угодно большого М .
9.3. Линейные преобразования
в пространстве состояний
Из матричной алгебры известно [20], что квадратная невырожденная матри-
ца, порядок которой совпадает с размерностью вектора состояния, осуществ-
ляет линейное преобразование последнего. При этом претерпевают измене-
ния как переходная матрица, так и матрицы входа и выхода. В результате
проведенного преобразования новые переменные состояния могут не иметь
наглядной физической интерпретации. С практической точки зрения инте-
ресны такие линейные преобразования, которые упрощают анализ ЛДС.
В частности, как было показано в н. 8.5, диагонализация переходной матрицы
Л приводит к разложению исходной системы на независимые параллельные
ветви, состоящие из цифровых звеньев 1-го порядка.
Преобразуем вектор состояния q(n) с помощью невырожденной квадратной
матрицы W в новый вектор р(п), т. е.
q (и) = W ~р(п). (9.17)
Если ЛДС описывается уравнениями (9.1) и (9.2), то, подставляя в них равен-
ство (9.17), получим
W р(п +1) = АIV р(п) + Вх(п);
у(л) = CW р(п) + £)х(п).
(9.18)
(9.19)
178
Часть II. Математическое описание линейных дискретных систем
Умножая слева обе части равенства (9.17) на W 1, приходим к соотношению:
p(n +1) = И'~‘Л IV p(n) + W~lBx(n). (9.20)
При распараллеливании исходной ЛДС предполагаем, что существует такая
невырожденная матрица W , что
X, 0 0 ... О' 0 X, 0 ... 0
VV = л = ООО ... Хл. (9.21)
где Аь..., Адг —собственные значения матрицы А .
Введя обозначения:
W'A1V=A;
УГ'В = В„-, (9.22)
CIV=C„.
получим так называемую нормальную форму векторных уравнений состоя-
ния и выхода:
p(n +1) = А^(«) + В„х(п); (9.23)
у(и) = С„р(л) + Da(m) . (9.24)
Структурная схема ЛДС, соответствующая порученным уравнениям, была
изображена на рис. 8.3 с учетом того, что полюсы совпадают с собствен-
ными значениями Af, i = I, 2,..., N.
Существует несколько методов определения матрицы VV при заданной wai-
рице Д и известных ее собственных значениях. Самый простой заключается
в том, что если матрица А записана в канонической форме для структуры I
(8.16), то матрица И' есть матрица Вандермонда:
1 1 1
х2 Ад;
V х,2 Адг (9.25)
х," 1 х2л'-‘ •• Ал/
Лекция 9. Анализ линейных дискретных систем в пространстве состояний 17g
Введение линейных преобразований в пространстве состояний позволяет
сформулировать две важные теоремы, указывающие на независимость ос-
новных характеристик ЛДС от выбора системы координат.
Теорема 9.1
Импульсная характеристика (9.7) инвариантна относительно линейною не-
вырожденного преобразования координат пространства состояний.
Доказательство. Введя новые координаты в соответствии с (9.17), па осно-
вании (9.7) с учетом (9.22) будем иметь:
/?(«) = С„А"-1В„ = C'WfW'1 ЛIV)"‘ 1В = СИ'И'-1А"“1И'1У“| в =
= СА"-'В = /Цп).
Теорема 9.2
Передаточная функция ЛДС для модели в пространстве состояний нс зависит
от выбора этого пространства.
Доказательство. В соответствии с (9.12) с учетом (9.21) передаточная функ-
ция в преобразованных координатах имеет вид
/7(c) = C„[c/-A]“1B„ + D. (9.26)
С учетом введенной матрицы преобразований VV выражение (9.26) преобра-
зуется следующим способом:
/7(z) = Clv[z/-ir‘Alv] ‘и/ 'B + D = CH’[z(V ‘aiv] 'iv1b + d =
= Cw[w 1(.т/-А)И'] '|V_1B + D = CW'W'“,[:/-A]“,IWiB + D =
= C[z/-A] ‘b + D = (/(z).
Теоремы (9.1) и (9.2) позволяют утверждать, что независимо от способа опи-
сания ЛДС, ее основные характеристики остаются неизменными, что чает
возможность исследователю использовать весь набор предлагаемых методов
для анализа и синтеза систем цифровой обработки сигналов.
Следует отметить, что преобразование (матрица) IV нс изменяет размера мат-
риц Л, В и С , т. к. является преобразованием подобия. Следовательно, раз-
личные структурные схемы ЛДС можно получить с помощью преобразования
IV только в рамках пространства состояний фиксированной размерности. Dior
факт позволяет сделать вывод о неприменимости чанного преобразования для
детализации и установления ’’топкой” структуры ЛДС. требующих увеличения
размерности за счет роста числа переменных состояния.
7 Зак 165
ЧАСТЬ III
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ДИСКРЕТНЫХ СИГНАЛОВ
Лекция 10. Описание дискретных сигналов
Лекция 11. Дискретное преобразование Фурье
Лекция 12. Быстрое преобразование Фурье
г
Лекция 10
Описание
дискретных сигналов
Подобно описанию линейных дискретных систем, дискретные сигналы опи-
сываются в трех областях: временной, частотной иг-области.
Во временной области дискретный сигнал описывается последовательно-
стью (решетчатой функцией) х(пТ) — х(п) (см. Лекцию /).
В z-области дискретный сигнал онисывае»ся своим z-изображепием X(z),
которое определяется с помощью /-преобразования (3.1)
X(z) = 2>(и)Г" (10.1)
»=о
По известному z-изображению сигнал х(п) находится с помощью обратного
Z-преобразования (си. Лекцию 3)
x(n) = Z ~'{Х(г)}. (10-2)
Пример 10.1
Определить z-изображение сигнала
Решение. Подставив х(нГ) в формулу /-преобразования (10.1), имеем ряд
типа (3.20)
X(z) = f X(n7-)z” = Ё (eaTz-')“ . (10.4)
if=0 .1=0
где q = er,:t z~‘, откуда, на основании (3.22), получаем ^-изображение
X(z) = -
FTz~'
(10.5)
184
Часть III. Математическое описание дискретных сигналов
и область его сходимости (3.21)
(10.6)
сг7
определяемую радиусом сходимости л = е
10.1. Описание дискретных сигналов
в частотной области
В частотной области дискретный сигнал х{пТ) описывается своим фурье-
изображением Х(е-^’7). которое определяется с помощью преобразования
Фурье (2.27) (ель Лекцию 2)
Х(е*"г) = X xfnTye-i"'1" . (10.7)
w=0
или для нормированных времени и частоты
Х(с>) = X-v(«)e-jdw. (Ю.8)
л-0
Фурье-изображение Х(е7‘оГ) дискретного сигнала называют его комплекс-
ным спектром (спектром).
Преобразование Фурье однозначно связывает дискретный сигнал х(пТ) с его
спектром Х(е^т) и справедливо только в области абсолютной сходимости
ряда (10.7)
S МлТ)|<«, (10.9)
л=0 и-0
которую называют областью сходимости фурье-изображения.
По известному спектру сигнал х(пТ) находится с помощью обратного пре-
образования Фурье (2.28)
л
л(пП = —\ X (eJ‘“T) е*“г"<1(й.
2л п
(10.10)
Лекция 10. Описание дискретных сигналов
185
Комплексную функцию Х(е^>т) можно выразить через ес модуль и ар-
гумент
(10.11)
Х(е>г) = |Х(ем')|е>аГЕ^<''',”Г)\
Модуль |х(е^“т)| называют амплитудным спектром, а аргумент
arg{%(е^"1 )| — фазовым спектром дискретного сигнала.
Пример 10.2
Определить амплитудный и фазовый спектры дискретного сигнала х(пТ) (10.3).
Решение, Подставив х(пТ) в формулу преобразования Фурье (10.7), имеем
ряд типа (3.20)
Х(е^,т) = £ e™Te jta,,/' = £ e(a-j(v),lT , (10.12)
л=0 и=0
где g = e(ct , откуда, на основании (3.22), получаем фурье-изображение
(спектр)
X(eJ,oT) =----,' . (10.13)
и область его сходимости (3.21)
|е(а“7ш)г|<1 => enT|eJ‘“’ |< 1 => саГ <1 => а>0. (10.14)
Из сравнения условий сходимости /-преобразования (10.6) и преобразования
Фурье (10.14) ясно, что преобразование Фурье справедливо для более узкого
класса дискретных сигналов, чем /-преобразование.
Согласно определению, амплитудный и фазовый спектры равны:
|х(е-'мГ)| = , 1 ..............;
fv, Л>7,1 . еаТsin(0)D
I 1 l-e“Tcos(wT)
Сравнивая Z-преобразование (10.1) с преобразованием Фурье (10.7), легко
видеть их взаимосвязь, из которой следует, что при условии абсолютной схо-
186
Часть III. Математическое описание дискретных сигналов
димости соответствующих рядов спек гр X (е^г) дискретного сигнала х(пТ)
совпадает с его z-изображенисм Л(х), если область значений переменной z
на комплексной z-плоскости ограничена точками па единичной окружно-
сти е*°Г:
X(eJ"'')=X(<)|;=fJwr. (10.15)
Это позволяет при известном z-изображении сигнала путем подстановки
z = автоматически получать его спектр.
Пример 10.3
Известно z-изображение А"(") (10.5) дискретного сигнала х(пГ) (10.3). Оп-
ределить его спектр.
Решение. Выполнив подстановку z = e^1 в (10.5). автоматически получаем
спектр сигнала (10.13).
10.2. Свойства спектров дискретных сигналов
Перечислим основные свойства спектров дискретных сигналов:
1. Непрерывность.
Спектр X(e^°r). а также его модуль и аргумент— непрерывные (или
кусочно-непрерывные) функции частоты по определению.
2. Периодичность.
Спектр Х(еуй>г), а также его модуль и аргумент — периодические функ-
2л
Т '
ции частоты с периодом, равным частоте дискретизации юЛ =
Доказательство. Периодичность указанных функций следует из перио-
дичности их аргументов е^г с периодом по со, равным сод (см. п. 6.2).
В зависимости от используемой шкалы частот период спектра ранен
со => <оЛ:
ш=>2л.
Лекция 10. Описание дискретных сигналов
167
Часть спектра, расположенная в основной поносе частот, называется ос-
новным спектром.
3. Спектр вещественного сигнала.
Если х(пТ} — вещественный сигнал, то модуль его спекгра— четная
функция частоты, а аргумент — нечетная’.
|Х(НшГ)|=|х(е.^” )|;
arg{x(eJ“r)} = -arg{X(e->r)}.
Доказательство. Представим преобразование Фурье (10.7) в виде
X (е;шГ) = £ х(п7")е~'тГ“ = X x(/i7’)cos(01n7’) - j £ r(n7-)sin(con7), (К). 16)
л=0 н=0 л О
или коротко
X(t>') = Rc-;im, (10.17)
где Re — четная функция частоты, a Im — нечетная, поскольку в нервом
случае имеем сумму косинусов (четных функций), а во втором— сумму
синусов (нечетных функций).
Изменим знак переменной ш=-со в (10.16)
X(e"*’r) = Rc + ./lm. (10.18)
Запишем модули и аргументы спектров (10.17) и (10.18):
IX(eJ‘"r )| =| X {е~‘шТ )| = jRc2+Im2 ; (10.19)
arg {х (eJ“r)} = arctg^ j:
arg{x(<?‘-'“>' )} = arctg^-j“~ j= -arclg^ ^; (10.20)
arg {x (e'“'’)} = - arg { X^ )}.
Отсюда видно, чго при изменении знака переменной люфпь спеюра не
меняется, следовательно, он является четной функцией частоты, a tf/vr-
мент. сохранившись неизменным по абсолютной величине. изменился по
знаку, следовательно, он является нечеткой функцией частоты.
186
Часть III. Математическое описание дискретных сигналов
4. Линейность.
Если дискретный сигнал х{пТ) равен линейной комбинации сигналов
л(иГ) = GjA’i (лТ) + д2л2(н'Г) + ...,
то его спектр Х(еуиТ) на основании (Ю.7) равен линейной комбинации
спектров данных сигналов
х(е^г) = «, X, (<>' ) + Я,Х (?иГ) + ...
5. Сдвиг (перенос, смещение) спектра.
Умножение дискретного сигнала х(пТ) на комплексную экспоненту
eitao,lT приводит к сдвигу его спектра по оси частот со вправо на величи-
ну C0q , чго символически удобно записать следующим образом:
л(л7 )=> X(e'“,J');
х(пТУе1ш^Т => Х[еу,""“'>”']. (10.21)
Доказательство. Подставив в правую часть преобразования Фурье (10.7)
сигнал х(пТ)е^ш°пТ, имеем:
X х(пТ)е^,те-^п = X х(пТ)е = Х[еЛш-щ")’’].
л=0 и=0
Аналогично, умножение дискретного сигнала х(пТ) на комплексную экс-
поненту е~^,т приводит к сдвигу его спектра по оси частот со влево на
величину со0, что символически можно записать следующим образом:
х(пТ) => X(eJa'r);
х(пТ)е~J"V'T => X [еЛ“*"*)’г |. (10.22)
В обоих случаях и модуль, и аргумент спектра комплексного сигнала утра-
тили свойства четности и нечетности соответственно.
Действительно, выполним преобразование Фурье (10.7) комплексного
сигнала .v(H7’)eyta°"7 :
£ х{пТ)е~']ы,1Ге^Г = X л(л7)е'Л<,ь<ц,>"Г =
»=0 н~0
= У v(«7')cos(co-cO())h7' - j У .v(H7’)sin(co-(flt))/i7'
»i=0 м=0
Лекция 10. Описание дискретных сигналов
189
и запишем модуль и аргумент снекгра:
-|2
lx(₽j«o-4)''
ОО I2
l| = J J]-r(«7')cos(o>-fi\j>7’ + У л(«7’)51П(й>-ц1)л7’
1 V 11=0 «=°
“X т(н7’)5*1п(СО-Ц))нТ
arg { X [ ел^,"“,т |}=arctg ------------------------
X Л’(«Т)СО5(0>-Ц1)л7’
11=0
Изменив знак переменной со = -со. получим следующие выражения для
модуля и аргумента:
-12
£ л(?/Г)СО5(С0+(О0)пГ +
у л(лГ)5Ш(0)+Шо)н/’
11=0
X .t(«7’)sin((o+ а>())л7'
arg{%|<? |} = arctg-!^2-----------------.
X Х(//Г)СО8(0Л-С!^)лГ
и=0
Поскольку и модуль, и аргумент спектра при изменении знака переменной
со изменили свое значение, эти функции нс являются нн четными, ни не-
четными (сравните с (10.19) и (10.20)).
6. Сдвиг сигнала х(пТ) на/и отсчетов вправо (задержка сигнала).
Задержка сигнала ApiT) на /л отсчетов приводит к умножению его спек-
тра Х(е^т) на комплексную экспоненту е-^117, что символически
удобно записать следующим образом:
л(лТ)=» X(eJ<“')-,
4(п-п,УП=> X(eJaT)e~JmT. (10.23)
Доказательство. Это свойство вытекает из теоремы о задержке
(си. Лекцию 3) и связи z-изображсния со спектром дискретного сигнала (10.15):
Z { г[(л - >я)Г]} = X (z)z-,"| ,01Г = X (е*°Т )е->“"г =
190
Часть III. Математическое описание дискретных сигналов
Отметим, что задержка сигнала приводит к изменению только фазового
спектра (аргумента). который получает линейное приращение
aig|x(eJ“r)|~ci>m7’.
7. Равенство (теорема) Иарсеваля.
Равенство Парссваля устанавливает связь между энергией дискретного
сигнала. вычисленной во временной и частотной областях:
л
£ |х(»Г)|2 =^~ f |x(e'wr)|2do>, (10.24)
н=0 2л-л
Т
где:
°° 2
£ |а(нТ)| —энергия сигнала, вычисленная во временной области;
и «О
л
— [ |х(е>г)| </со — та же энергия, вычисленная в частотной области.
2я-п ।
г
Если обработка сигнала производится в частотной области, равенство
I Тарсеваля позволяет вычислять энергию сигнала непосредственно по его
амплитудному спектру, нс прибегая к обратному преобразованию Фурье.
Доказательство. Умножим правую и левую части преобразования Фурье
(10.7) на комплексно-сопряженные функции (обозначенные символом
= | X .r(n7-)e~J“n,]| £ х'(пТ)е^Тя|.
л-0 л=0
С учетом свойств комплексных функций
lx(eJ“r)|2 = £|.v(n7')|2 + X Л(п7-)л'(и7')е“>7(,'"").
1 w=0 «=0
iitm
Умножим обе части равенства на Т/2л и проиигег рируем в пределах периода:
71 77
у- У|х(е*’г)|2Ло= Ё|л(„П|2^- J +
т т
Лекция 10. Описание дискретных сигналов
191
+ X х(.пГ>х"(тГ)— f e->Mr(“-">rfai
л=о _я
л т m
Вычислив простейшие интегралы в правой части:
п л
— ’[</«= I И — Ь->Г(’-",,Ло=0.
2лД 2яД
I г
получаем равенство Парсеналя (10.24).
10.3. Связь между спектрами аналогового
и дискретного сигналов
Пусть имеются аналоговый сигнал хл(1) и сигнал х(пТ). полученный в ре-
зультате его дискретизации. Определим связь между их спектрами.
Аналоговый сигнал хй(1) и его спектр (фурье-изображение)1 Xa(jco) при
ха (/)i =0 связаны преобразованием Фурье (2.6) и (2.7):
|г<0
Ха(;<о) = /ла(/)<?“',“'Л: (10.25)
о
л,,(o = ^-f XJj^e^du. (10.26)
2л_оо
Заменим в (10.26) непрерывное время дискретным / => пТ :
а вычисление интеграла па интервале °°] —тождественным вычислени-
ем бесконечной суммы У, интегралов па равных интервалах
л 2п
Дсо=со,1 = —•
д т
1 Строго говоря, фурье-изображение в (10.11) представляет собой комплексную спектрапьпую
плотность 19].
192
Часть ffl Математическое описание дискретных сигналов
х(иГ) = — X J Ха(>)е;ш"Ао.
—7С„1 = -оо,_ ТС
(2м-1)
где m — номер интервала (0д =— (рис. 10.1).
(2и1-1)л (2m + 1)л Зп п л Зл (2т-1)л (2m+i)n
т т т т т т т т
Рис. 10.1. Бесконечная последовательность интервалов
Интеграл | с переменными пределами, ио независимой от m подынте-
тральной функцией Xa(J<n), можно заменить интегралом с фиксированными
п
пределами J , но зависимой от m подынтегральной функцией
-л
т
+ которая представляет собой спектр аналогового сигнала,
сдвинутый по оси частот на = m^, где m=0. +1. + 2,... (см. рис. 10.1).
При замене
2л
со=^ (1) + m —
Т
последнее равенство примет вид
Лекция 10. Описание дискретных сигналов
193
откуда, с учетом
J 2л 1
ан-м— bi7 _
Д Т)
получаем
Х(,,Т)=^ £ *'
Изменим порядок суммирования и интегрирования
п
А("7')=2^ ^a[>[“ + '"y]]eJ“Wrrf<0
~т
и сравним полученное выражение с обратным преобразованием Фурье
(10.10). На основании равенства левых и, соответственно, правых частей на-
ходим искомую связь между сисю рами аналогового и дискретного сигналов:
Х(е>Г) = у £ (10.27)
из которой следует, что спектр дискретного сигнала равен (с точностью до
постоянного множителя 1/Г) сумме спектров аналогового сигнала, сдвину-
тых по оси частот на все возможные частоты, кратные частоте дискретизации
2л
оно. = m—, где w = 0, ± 1, ± 2, ...
д т
Другими словами, спектр дискретного сигнала есть бесконечная сумма ко-
пий спектров аналогового сигнала, сдвинутых друг относительно друга пи
частоту дискретизации ю1.
Исследуем влияние частоты дискретизации соч на соотношение межцу спек-
трами (10.27), полагая, что спектр Xa(jto) аналогового сигнала ограничен
верхней частотой сов = 2т^в.
На рис. 10.2, а—г приведены условные графики амплитудных спектров:
□ аналогового сигнала с финитным спектром (рис. 10.2. а):
194
Часть III. Математическое описание дискретных сигналов
О дискретного сигнала при частотах чискретизации: (од=2со^ (рис. 10.2,6),
O)i>2ioB (рис. 10.2. в) и сод<2(ов (рис. 10.2,г).
Рнс. 10.2. Амплитудные спектры: аналогового сигнала (а); дискретного сигнала
с о)д = 2о>в (6): с > 2<t)e (в); с < 2«в (?)
Приведенные графики позволяют сделать следующие выводы:
1. Если частота цискретизации соЛ > 2шв, то в основной полосе частот
Г GJ, 1
0; спектры аналогового и дискретного сигналов совпадают.
2. Если частота дискретизации оз1 <2<ов. происходит наложение спектров,
называемое элайсингом (aliasing), поэтому в основной полосе частей'
Г со "I
0;-у- спектр дискретного сигнала представляет собой искаженный
Лекция 10. Описание дискретных сигналов
19S
спектр аналогового сигнала. Во временной области эффект наложения оз-
начает необратимую потерю возможности ночного восстановления анало-
гового сигнала ио его отсчетам.
Данные выводы согласуются с теоремой Котельникова": аналоговый сигнал
с финитным спектром полностью определяется последовательностью своих
отсчетов. взятых с интервалом Т<—— (с частотой / >2/вХ не /в —-
2 А
верхняя частота спектра аналогового сигнала.
Реальные сигналы конечной длительности теоретически обладают бесконеч-
ным спектром (см. рис. 1.2,«). Следовательно, частота дискретизации
/д => ®° и при любом конечном значении принципиально существует
элайсинг. Практически, однако, всегда можно определить наивысшую часто-
ту спектра /в так, чтобы энергией сигнала, соответствующей отсеченном}
"хвосту" спектра, можно было пренебречь. Предварительное ограничение
спектра обрабатываемого сигнала выполняется е помощью анмиэлаисингово-
го аналогового фильтра. Например, при формировании стандартного теле-
фонного сигнала исходный речевой сигнал пропускается через полосовой
антиэлайсинговый фильтре полосой пропускания 0,3—3,4 кГц. Нижняя гра-
ница обусловлена необходимостью устранения постоянной составляющей и
подавлением гармоник промышленных частот, а верхняя— заданным каче-
ством восприятия речевого сигнала (сохранением полной разборчивости,
тембра голоса и т. п.). Минимально допустимой частотой дискретизации бу-
дет Д = 6,8 кГц, а в качестве стандартной выбрана Д = 8 кГц.
10.4. Дискретизация относительно
узкополосных сигналов
Узкополосным (относительно узкополосным) называют сигнал, ширина спек-
тра ДГ которого значительно меньше его средней час тоты fCf}:
---<К1, (10.28)
/ср
2 Молодой аспирант Владимир Александрович Котельников с дипломом И1гжснсра-э.тск1рнк<1
но специальности "Радиотехника" выбрал своей темой актуальную в начале 30-х годов
XX века проблему пропускной способности линий электросвязи и первым в мире математиче-
ски точно сформулировал и доказал "теорему отсчетов", которая была названа ею именем. Эта
великая теорема была опубликована в 1933 году в работе Котельникова “О пропускной спо-
собности "эфира" и проволоки в электросвязи" и вошла в число основополагающих принципов
теории и практики связи как один из краеугольных камней теории информации.
196
Часть IH. Математическое описание дискретных сигналов
что практически всегда имеет место в радиоканалах и в многоканальных сис-
темах с частотным разделением.
Например, тот же стандартный телефонный сигнал можно трактовать как
узкополосный при его передаче на несущей частоте I28 кГц с использовани-
ем амплитудной модуляции, поскольку его спектр (допустим, верхняя боко-
вая полоса) сосредоточен в области
от /mjn =128 +0,3 = 128,3 кГц до =128 + 3,4 = 131,4 кГц
и, соответственно, имеет ширину
= - /ran = 3-1 k[U
и среднюю частоту
f = /max +_Z™ = 131,4 + 128.3 = п9 g5
JCP 9 9
Следовательно,
3 1
——« 0,024 <к1,
129.85
и по определению (10.28) сигнал является узкополосным.
Примечание
Иногда сигнал называют узкополосным, если отношение максимальной часто-
ты спектра к минимальной нс больше двух: £^-<2. Такое определение не
противоречит (10.28).
В подобных случаях частота дискретизации, выбираемая непосрсцственно из
условия
А^2А,ах, (10.29)
будет избыточно высокой, особенно для радиосигналов, когда она может со-
ставить сотни мегагерц, в результате чего обработка в реальном времени
окажется сомнительной либо по причине сложности алгоритма, либо вслед-
ствие ограниченности технических возможностей существующей элементной
базы. Кроме того, очевидна и нецелесообразность такого подхода к дискре-
тизации, поскольку информация о сигнале содержится не в частоте ,
а в огибающей или фазе <р(0 (при угловой модуляции), которые изменяются
во времени медленно при относительно низких частотах модуляции [17].
Лекция 10. Описание дискретных сигналов
197
Обобщенная теорема Котельникова приводит к другому условию выбора
частоты дискретизации [50]:
(10.30)
где q имеет смысл камера диапазона частот и может принимать только
целые значения
Рис. 10.3. Амплитудные спектры; узкополосного вещественного аналогового сигнала (л):
дискретного сигнала при <j, = I (б); при q2 > I (в); при >9, и ж 4/4
198
Часть III. Математическое описание дискретных сигналов
где |_.vj — ближайшее целое, не превосходящее л, т. с.
<• Утах
Чтях — f f. •
/max ” J min
Следовательно, значение fA может выбираться из оонустнмых диапа-
зонов. В частности, при q -1 имеем условие (10.29).
Интересно, что с ростом номера q частота /, уменьшается и спектр сигнала,
оставаясь неизменным, пропорционально сдвигается влево в нивой основной
полосе частот [0;/t/2] (рис. 10.3, и—г). Это обстоятельство позволяет вы-
брать такую частоту /ч. при которой расстояние zy"cp между средними час-
тотами соседних копий спекзра дискретного сигнала будет максимальным и
составит /д/2 (рис. 10.3,г), последнее же возможно лишь в том случае, ко-
гда средняя частота /ср спектра сигнала окажется в кочке /ер = /д/4. Этот
практически важный результат будет использован в дальнейшем
(см. пример 10.5).
Рассмотрим выбор частоты Д из условия (J 0.30) на реальном примере.
Переходные полосы аналогового
ант1плайснн1-'ового фильтра
Рис. 10.4. Ампли1узныГ| спектр узкополосного сигнала
Лекция 10. Описание дискретных сигналов
199
Пример 10.4
Известен часготно-модулированный аналоговый радиосигнал х(0 на выходе
приемного тракта промежуточной частоты ПЧ-2 (рис. 10.4). Частота 114-2
равна 70 МГц и является средней частотой спектра сигнала, расположенного
в полосе 65—75 МГц (ширина спектра AF = 10 МГц). На выходе тракта ПЧ-2
установлен аналоговый полосовой аптиэлайсинговый фильтр с переходными
полосами 63—65 МГц и 75—77 МГц. Найти ряд допустимых диапазонов для
выбора частоты дискретизации этого сигнала.
Решение. Ширина общего спектра Д^бш * в которую помимо спектра сигнала
включены переходные полосы антиэлайсингового фильтра (рис. 10.4), со-
ставляет
Д/\16щ = 10+4 = 14МГц.
Ясно, что рассматриваемый сигнал является относительно узкополосным по
определению
ЛГ-'и-- = -4- = 0.2« I и -^- = — =1.2....<2.
/ср ТО /min 63
поэтому для решения поставленной задачи используем условие (10.30). Сна-
чала вычислим qmiK (10.31):
Из этого следует, что существует 5 допустимых диапазонов для выбора час-
тоты дискретизации. Определим их (в МГц), подставив необходимые данные
в (10.30):
9 = 1 154</л<оф ;
9 = 2 => 77</д<126;
9 = 3 => 51,333</л £63;
9 = 4 =э 38,5</?|<42;
9 = 5 => 30,8</., <31,5.
Диапазоны с номерами 9 = 1 и 9 = 2 трудно реализуемы, если вообще моп г
быть использованы на практике вследствие чрезвычайно высокой частоты
дискретизации для существующей элементной базы. Остальные допустимые
диапазоны, соответствующие 9 = 3, 4, 5, с точки зрения обобщенной теоремы
Котельникова, равноценны — все они обеспечивают корректную дискрети-
200 Часть Ш. Математическое описание дискретных сигналов
зашло заданного относительно узкополосного сигнала. Однако выбор /д за-
висит также от конкретной задачи обработки сигнала, и с этой точки зрения
диапазоны с номерами z/ = 3. 4, 5 дают различный эффект, что будет показа-
но в дальнейшем на примере переноса спектра в область нижних частот и
последующей фильтрации сигнала (см. пример 10.5).
10.5. Преобразование спектра
При обработке сигналов возникает ряд задач, связанных с преобразованием
спектра, в частности, с его смещением по оси частот. Такие задачи типичны
для систем многоканальной связи как при формировании группового сигнала
с частотным разделением каналов (ЧРК) из отдельных канальных сигналов,
так и при выделении отдельных канальных сигналов из группового сигнала
с ЧРК. Особенностью преобразования спектра к данном случае является то,
что его модуль практически не изменяется, а лишь сдвигается по оси частот.
Рассмотрим несколько типовых задач, связанных с преобразованием спектра
и решаемых методами цифровой обработки. Будем иметь в виду, что терми-
нология ’’преобразование спектра” принята для краткости, на самом деле, ес-
тественно, преобразуется сигнал, вследствие чего изменяется его спектр.
10.5.1. Перенос спектра
Рассмотрим, какие операции с вещественным или комплексным сигналом
следует выполнить, для того чтобы спектры данных сигналов оказались
сдвинутыми по оси частот.
Допустим, имеется вещественный дискретный сигнал х(пГ) и известен его
основной спектр Х(е7шГ), занимающий полосу |tOj; (д21 (рис. 10.5,а). Тре-
буется посредством изменения сигнала сместить (перенести) его спектр на
сод
некоторую частоту + (Оц, выбираемую из условия 0 < (ojq + оэ2) —
Признаком вещественного сигнала служит симметрия модуля его спектра
)| относительно оси ординат (см. н. /0.2). На рис. 10.5,6 и в изобра-
жены спектры 11 и |х|е-/(“к”й,г 11, смещенные по оси частот на
0)0 вправо и влево соответственно.
Лекция 10, Описание дискретных сигналов
201
Рис. 10.5. Перенос спектра вещественного сигнала; амплитудный спектр исходного
сигнала (о)-, амплитудные спектры, смешенные на частоту сяп вправо (б) и влево (л)
Согласно свойствам спектров, сдвиг спектра Х(е;(‘>г) по оси частот на (Qg
вправо или влево реализуется умножением сигнала х(пТ) на дискретную
экспоненту или е-7а)°м/ соогветственно, что символически удобно
записать следующим образом:
х(пТ)е^т => ; (10.32)
xtnT')e~j°*‘r =i Х1еЛ“па',)' ]. (10.33)
На рис. 10.6 представлены схемы, отображающие операции с вещественным
сигналом х(н'Г), в результате чего его спектр Х(е7ш7 ) оказывается сдвину-
тым вправо на частоту соц. Выходной ко.шпексный сигнал
У(пТ) ~ х(пТ)е^°опТ содержит вещественную и мнимую составляющие:
у(л7’) = У|(л7’) + jy2(nT) = х(нГ)со5(щ|)н7) + jx(«7’)sin(cunn7') (10.34)
и имеет спектр
Г((?>7‘) = j.
202
Часть III. Математическое описание дискретных сигналов
Признаком того, что сигнал y(n’i') комплексный, служит отсутствие симметрии
модуля его спектра |X] | относительно оси ординат (рис. 10.5, б).
Переносы спекгров вещественного и комплексного сигналов принципиально
ничем нс отличаются, за исключением того, что при исходном комплексном
сигнале
л(нП = Л|(лТ)+ Zv2(h7’)
(10.35)
Рнс. 10.6. Формирование сигнала при переносе спектра
(исходный сигнал вещественный): условная схема (а): фактическая схема (б)
Рис. 10.7. Формирование сигнала при переносе спектра
(исходный сигнал комплексный)
Лекция 10. Описание дискретных сигналов 203
формирование результирующего сигнала у(л7*) (10.34) потребуй! выполне
ния большего количества операций, а именно:
у(пТ) = [_Г| (»Т) + jx2(nT)]e^ir =
= [.V|(h7') + Д2(и7)] [cos(<Ht)H/')+ 7Sin(0\)«r)] =
= [x,(nr)cos(<l>„n7')-.r2(»7’)sin(e>„H7')]+ 36)
Re|y(«T)]
+j [*1 (лТ')8т(Ц)иГ) + A2(n7’)cos(co0«7’)] = y, (nT) + yv,(n7).
lm[ >•(«/)]
Схема формирования сигнала у(лТ) (10.36) представлена на рис. 10.7.
10.5.2. Инверсия спектра
вещественного сигнала
Для ряда практических задач представляет интерес операция инверсии спек-
тра. Ес суть заключается в гом, что в основной паюсе частот любая состав-
ляющая исходного спектра на частоте tby должна оказаться на "противопо-
ложной” частоте (п-ц>) — как бы "перевернуться", при этом у аргумента
спектра дополнительно изменяется знак. Символически это можно записать
следующим образом:
;iIg{x(Z“")}=>-arg{xkJ",';,,|).
Покажем, как операция инверсии спектра может быть реализована посредст-
вом его смещения вправо па частоту о)0 - я.
Согласно (10.7), спектры Х[елбья)] и Х^” &)| равны:
Х(е^(бьл,) = У - у -фтТЭсозСб-п)п - j У, .vOiDsinfoi- л)л =
>1=0 «=0 «=0
~ X x(nT)cos(n-Ci))n + j У xG?r)sin(7t-ti))n = Re+ /Im;
'1=0 71=0
204 Часть Ш. Математическое описание дискретных сигналов
£ Х[пТ)е~л,1№" = X л(п'Г)со5(п-й)н-
ti=O п=0
- J £ x(nT)sin(n-&)« = Re- Jim.
л=0
Следовательно, для модулей и аргументов этих спектров справедливы соот-
ношения:
arg(x[e>^’ ]} = -arg{x| ™>]}.
Это означает, что смещение спектра вправо на частоту w^=7i приводит
к инверсии спектра. На рис. 10.8 показаны .модули спектров: исходный и ин-
версный соответственно.
Рассмотрим, какие операции с сигналом необходимо выполнить, для того
чтобы инвертировать его спекгр. Подставляя в (10.21) со = л, получим соот-
ветствие
х(пТ)е*' => xH(Sw,'T].
где
х(пТ)е^т = х(пТ)сс$(т1п) = x(nT)(-Y)n.
Таким образом, для инверсии спектра достаточно изменить знак каждого не-
четного отсчета исходного сигнала х(пТ) (рис. 10.9). Схема формирования
сигнала с инверсным спектром представлена на рис. 10.10.
Рнс. 10.8. Исходный (п) и инверсный (6) модули спектров
Лекция 10. Описание дискретных сигналов
205
Рнс. Ю.9. Сигналы: исходный (а) и с инверсным спектром (б)
Рис. 10.10, Схема формирования сигнала с инверсным спектром
10.5.3. Формирование сигнала
с одной боковой полосой
Как известно, при обычной амплитудной модуляции получается спектр
с двумя боковыми полосами относительно некоторой несущей частоты [ 17j.
Для техники связи представляют большой интерес сигналы, спектр которых
содержит только одну боковую полосу (ОБИ), — си! налы с ОБП. Такая зада-
ча возникает, например, в многоканальной связи с ЧРК при формировании
группового сигнала, когда в заданной полосе частот требуется передать мак-
симальное число отдельных канальных сигналов.
Напомним, что в аналоговой области простейший способ получения сигнала
с ОБП состоит в смешении спектра посредством балансной модуляции несу-
щей частоты с последующим выделением одной из требуемых полос (пнж
ней или верхней) полосовым фильтром.
Рассмотрим процедуру получения сигнала с ОБП методами цифровой обра-
ботки.
Часть ill. Математическое описание дискретных сигналов
206
Допустим, модуль спекгра |х(>^о7)| исходного вещественного сигнала
х(нГ) имеет две боковые полосы, симметричные относительно несущей час-
тоты с\) (рис. 10.11, а). Требуется получить сигнал с ОЬП, что означает; пре-
образовать сигнал .т(мГ) так, чтобы его спектр содержал только одну боко-
вую полосу. Дчя примера будем выделять верхнюю боковую полосу (o)j; о2],
отмеченную па графике штриховкой.
Поставленная задача решается посредством выполнения следующих опера-
ций со спектром Х(е^шГ) исходного сигнала х(пГ)-.
I. Сдвиг спектра X(е^1) по оси частот влево на частоту ы. = таким
образом, чго верхняя боковая полоса оказывается разделенной осью орди-
нат пополам.
После операции сдвига имеем спектр (рис. 10.11.6)
комплексного сигнала (рис. 10.12, а)
у|(п7) = л(я7-К>-''7-
Формирование вещественной Re(yr) и мнимой Im(y|) частей комплекс-
ного сигнала yi(nT) показано на рис. 10.12, б.
2. Выделение смещенной верхней боковой полосы спектра Е|(е*и,'г) ком-
плексным фильтром нижних частот (КФНЧ) (рис. 10.12, а).
Сдвиг спектра в область нижних частот позволяет вместо сложного поло-
сового фильтра использовать более простой ФНЧ.
Фактически фильтрация выполняется двумя ФНЧ: отдельно для вещест-
венной Ке(у[) и мнимой 1т(У|) частей сигнала У|(иГ). Ширина полосы
О?-0)1 ,.
пропускания ФНЧ в основной полосе частот равна —-—. Идеальная
АЧХ каждого из ФНЧ показана на рис. 10.11. в.
На выходе КФНЧ имеем комплексный сигнал у2(пТ) (рис. 10.12, а, б) со
спектром К2(е^г) (рис. 10.11. г).
Лекция 10. Описание дискретных сигналов
207
3. Сдвиг спектра У^{е^г) по оси частот вправо па частоту со+, т. е. возврат
верхней боковой полосы в исходное положение, в результате чего имеем
спектр У(е^”7'^У2[е^а>'<а*>л7'| с ОБИ (рис. К). 11, д) комплексного сигна-
ла у(ц7')= у^пТ)е^',пГ (рис. 10.12, а).
Схема формирования сигнала у{пТ) (рис. 10.12,6) совпадает с представ-
ленной па рис. 10-7.
208
Часть Ш. Математическое описание дискретных сигналов
10.5.4. Перенос спектра узкополосного ВЧ-сигнала
в область нижних частот
Перенос спектра узкополосного ВЧ-сигнала в область нижних частот (НЧ)
рассмотрим на конкретном примере.
Пример 10.5
Имеется относительно узкополосный высокочастотный сигнал (см. рис. 10.4)
с шириной спектра 14 МГц и средней частотой /ср= 70 МГц. Средняя часто-
та совпадает с промежу точной (см. пример 10.4).
Лекция 10. Описание дискретных сигналов
209
Требуется перенести спектр сигнала в область НЧ с целью его последующей
фильтрации цифровым КФНЧ (см. п. 10.5.3). При этом также необходимо:
1. Исключить операцию умножения на комплексную экспоненту (10.33)
y(») = -v(»)e‘-'fi’0" = x(»)coswi)n-jA(n)sin6\j«, (10.37)
где
«1(1=2я/07- = 2я^-. (10.38)
2. Обеспечить условия, при которых может быть получен КФНЧ наимень-
шей сложности.
Решение. Дэя решения поставленной задачи необходимо:
□ выбрать частоту дискретизации /л ;
□ перенести спекгр дискретного сигнала в область 114 на некоторую частоту'
/0, такую, чтобы это не сопровождалось умножением сигнала на ком-
плексную экспоненту (10.37):
□ сформулировать требования к цифровому КФНЧ;
□ синтезировать КФНЧ.
Формулировка требований к КФНЧ и его синтез рассматриваются в Лекци-
ях 19 и 20, здесь же определим частоту дискретизации fA и частоту' переноса
/о при заданных ограничениях.
В примере 10.4 были найдены пять допустимых диапазонов для выбора из
них практически важными оказались только три с номерами q = 3, 4. 5 . Выбор
частоты дискретизации определяется, исходя из следующих соображений:
□ чем выше частота дискретизации, тем более высокой вычислительной
мощностью должно обладать устройство последующей обработки. С этой
точки зрения, казалось бы, естественно выбрать минимально возможную
частоту /л из диапазона 30,8 </,<31,5 МГц с номером 7 = 5
(см. н. 10.4), но этому препятствует дополнительное требование — исклю-
чить умножение сигнала на комплексную экспоненту при переносе спек-
тра в область НЧ;
□ комплексный сигнал, получаемый в результате переноса спектра в область
НЧ, необходимо отфильтровать КФНЧ (по существу— двумя ФНЧ,
см. рис. 10.12, б), сложность которого зависит, в том числе, и от ширины
переходной полосы: чем опа уже, тем сложнее КФНЧ.
210
Часть HI. Математическое описание дискретных сигналов
Прежде чем вычислять частот} дискретизации, остановимся на процедуре
сдвига спектра на /0 влево, которая, согласно (10.37). связана с умножением
на комплексную экспоненту. Такое умножение занимает много времени, по-
этому обычно строят таблицы значений cos од л и sin одп с учетом периодич-
ности данных функций и организуют вычисления путем обращения к этим таб-
лицам. Однако при высокой час готе дискретизации (мегагерцах, как в нашем
примере) и большом объеме обрабатываемых данных этот способ зачастую
оказывается неэффективным, вплоть до невозможности обработки сигнала
в реальном времени. Поэтому необходимо найти такую частоту сдвига fa, ко-
торая, с одной стороны, позволила бы исключить операцию умножения на
комплексную экспоненту, а с другой — упростить вычисли тельную процедуру.
Этим условиям отвечает значение нормированной частоты од
или соответствующей ей ненормированной /о
Тогда экспонента имеет вид
-Jr'1 л . . я
е 2 =cos—n —/sin— it
2 2
и па периоде Л'-4 в точках п =0,1, 2,3 принимает значения: 1, -у, -1, j
соответственно. В результате получаем четыре значения у(п) (10.37), приве-
денные в табл. 10.1, где л mod 4 — номер отсчета п, взятый по модулю 4,
т. е. точки п = 0,1, 2. 3 па каждом периоде.
71
-J-»
Таблица 10.1. Умножение на экспоненту е -
п mod 4 0 1 2 3
Значение экспоиены 1 -J -1 J
Значение chi нала у(п) jM
Таким образом, выбираем часто!у сдвига спектра дискретного сигнала в об-
f.
лаегь 114, равную /O=-Lj-.
Лекция 10. Описание дискретных сигналов
211
Теперь определим частот)- дискретизации.
Рассмотрим варианты сдвига спектра в область НЧ на частоту Д/4 при раз-
личном положении частоты /ср относительно Уд/4:
□ НРИ /ср>-Л/^ (рис. 10.13» п) после переноси в область НЧ переходная
полоса, обозначенная стрелкой (рис. 10.13,6), оказывается узкой, а зна-
чит, порядок синтезируемого фильтра — большим;
|х-(С'2"/г)|
Переходная
полоса фильзра
Рис. 10.13. Варианты сдвига спскп ра относительно узкополосного сигнала е область НЧ:
7ф>д/4 (<») я переходная полоса (6). (<?) и переходная полоса (<•)
8 Злк 165
712 Часть HI. Математическое описание дискретных сигналов
□ при /ср = Д/4 (рис. 10.13. в) после переноса в область 114 переходная
полоса (рис, 10.13, г) оказываемся не просто широкой, а максимально воз-
можной. а значит, порядок синтезируемого фильтра — наименьшим (при
прочих равных условиях). Основной спектр и его копии в точках
Вывод: для исключения операции умножения на комплексную экспоненту и
достижения максимальной переходной полосы фильтра НЧ частота сдвига
и средняя частота сдвигаемого спектра должны совпадать и равняться
четверти частоты дискретизации':
Л=Ар=Л/4-
Это означает, что в нашем примере при использовании первого диапазона
(<7 = 1) частота сдвига и средняя частота (назовем их исходными) должны
быть одинаковыми и равными 70 МГц:
./оВс,=Ар„в=7ОМГц,
а частота дискретизации (исходная) — 280 МГц:
=4/о.,ех =4Аржх =4X 70 = 280 МГц.
Ранее было показано (см. п. 10.4), что при выборе частоты дискретизации
в других допустимых диапазонах с номерами с/= 2, 3, 4, 5 происходит про-
порциональное смещение спектра по оси частот влево. При этом всякий раз
необходимо выдерживать два условия:
1. Отношение S исходной частоты сдвига /0 |КХ (или равной ей исходной
срочней частоты /ср |1СХ ) к частоте сдвига /0</ (или равной ей средней час-
тоте fcv q ) должно быть целым числом:
„ ft) 1ICX fen цех Л - . с
S --------- —1---, /? = 2,3, 4,5.
ftty ./ср (/
2. Значение частоты сдвига /q(/ (и равной ей fcpt)) не должно выражаться
иррациональным числом.
Рассчитанные значения и
f.-m
приведены в табл. 10.2.
3 Данный ре (ульют получен cobmcciiki доцентом Д, Л. Улаховичсм и инженером Д С. Мальцевым.
Лекция 10. Описание дискретных сигналов
213
Таблица 10.2. Соотношения частот
Отношение S /«А (МГц) Лч (МГц) Номер юпустимого диапазона q Связь метолу S н q
J /о, = 70 4, = 280 1 (исходные данные) ! = 2 • 1 - 1 = 2q - 1
2 35 140 Вне допустимых диапазонов
3 23.33... 9333... 2 (иррациональное число не используется) 3 = 2-2 - 1 = 2с/- 1
4 17,5 70 Вне допустимых зиапаюнов
5 14 56 3 5 = 2-3 -1 = 2с/-1
7 10 40 4 7 = 2 4 - 1 = 2q - 1
10 7 28 Вне допустимых диапазонов
Как следует из табл. 10.2, при произвольном целом значении S некоторые
частоты дискретизации оказываются вне допустимых шапазопов
(см. п. 10.4).
Получена простая формула, связывающая S' и ц
S' = 2^-l,
которая позволяет для каждого номера q по известному значению /о1(сх
рассчитать частоту сдвига
_ fo iicx
“2^7
и частоту' дискретизации
— A f — НСХ
/л«г “4/о<7 ~ 24/ — 1
Например, для q = 2 имеем иррациональные числа (см. табл. 10.2):
/о2= —= 23,33... и /, = 4-23,33... = — = 93,33...
12 4-1 42 4-1
Заметим, что пятый допустимый диапазон 30,8 £ У’, ^31.5 МГц оказался во-
обще исключенным из рассмотрения.
214
Часть ///. Математическое описание дискретных сигналов
Таким образом, получены две допустимые частоты дискретизации: 56 и
40 МГц. Выбор межту ними определяется только удобством дальнейшей об-
работки. в частности, в нашем примере частота fa =56 МГц кратна общей
ширине спектра ДГодщ = 14 МГц, что позволяет упростить вычисления.
На рис. 10.14 показан сдвиг спектра в область НЧ С/ов/\/4) ПРИ
/. =56 МГц с учетом переходных полос антиэлайсипгового фильтра.
Рис, 10.14. Амплитудные спектры; аналогового сигнала 1«),
дискретного сигнала при /д = 56 МГц (б); -шскретного сигнала y(w) (я)
Лекция 11
Дискретное
преобразование Фурье
В Лекции 10 было введено понятие спектра дискретного сигнала х(»Г). вы-
числяемого с помощью преобразования Фурье (10.7)
X (</“'’) = X х(пТ)е ^г" . (11.1)
л=0
где:
х(пТ) —дискретный сигнал бесконечной длительности:
— спектр дискретного сигнала — непрерывная нериооическая
х 2л
функция частоты « с периодом, равным частоте дискретизации = —.
Для дискретных сигналов конечной длительности N7 (конечной длины N )
преобразование Фурье (11.1) принимает вид:
Х(е>шГ) = Х^(пГ)е ial" (11.2)
11-0
При расчете спектра (И.2) средствами цифровой вычислительной техники
(например, с помощью компьютера) он, как и любая непрерывная функция,
может быть определен только в дискретных точках.
Алгоритм вычисления непрерывного спектра X(e^i1) (II.2) конечной по-
следовательности х(пТ) на периоде Н)л в дискретных точках называется
дискретным преобразованием Фурье (Д11Ф).
Поскольку речь пойдет о математическом аппарате, принято говорить не
о дискретном сигнале, а о последовательности (см. Лекцию ]).
Понятие ДПФ первоначально было введено для периодических последова-
тельностей, поэтому с них и начнем.
Часть Hl, Математическое описание дискретных сигналов
11.1. Дискретное преобразование Фурье
периодической последовательности
Как известно, непрерывная периодическая функция времени (аналоговый пе-
риодический сигнал) хр(1) с периодом ТЛ., удовлетворяющая в пределах пе-
риода условиям Дирихле, может быть представлена в виде ряда Фурье (2.10)
(см. Лекцию 2):
Лр(0= i X(t)e>‘“', (11.3)
где:
Дю — период дискретизации по частоте (2.11):
Х(к) — коэффициенты Фурье (2.12):
Zk
Х{к) = — j л/г)е-^Л = Л/^(')е-^Л;
Л г, L о
2
к —номер коэффициента Фурье, соответствующий частоте Л.'Дю,т. с.
Х(Л) = Х(*Дю). (11.4)
Множество коэффициентов Фурье Х(к) ряда (11.3) называют спектром не-
прерывной периодической функции xp(f) (периодического аналогового сиг-
нала), а сами коэффициенты— комплексными гармониками на частотах
2л
к Дю = к —. - ею < к < «о.
т;
Как следует из (11.3), в общем случае спектр .¥(к) — это бесконечная непе-
риодическая последовательность в частотной области.
Периодическую последовательность х (пТ) с периодом NT
хр(нГ) = хр(нТ + т№Г), п = 0,1.(N -1). m ~..., -1. 0.1,...
можно представить в виде ряда, аналогичного (11.3), если заменить:
□ непрерывное время — декретным
1=>пТ;
Лекция 11. Дискретное преобразование Фурье
217
□ период по времени t—периодом по времени иТ
Ts=* NT.
В результате, период дискретизации по частоте Дсо (11.4) будет равен
* 2л
До,= ет <1L5>
и представление х (пТ) в виде ряда примет вид:
xp(nT) = Z Х(4)еЛйш"г,
или в нормированном времени:
2л
°° j— nk
лр(и) = X Х(4)е * , (И.<>)
где:
%(£) = Х(ЛДсо) — коэффициенты Фурье, равные
| ~1~як
Ni «=Q
или в нормированном времени
I *V—1 - j~itk
; (11.7)
к — номер коэффициента Фурье, соответствующий частоте ААо>
, 2л
к&ф - к-----.
NT
Выполним в (11.6) следующие математические преобразования. Представим:
□ последовательность хр(п) в виде бесконечной суммы одного ее nepuoou.
сдвинутого по оси и на wN, где л?=....-1,0.1,...;
□ бесконечную сумму в виде бесконечного числа конечных сумм из /V сла-
гаемых, сдвинутых по оси к на mN, где ш = .... —1,0.1,...
Используй свойство периодичности экспоненты по переменной » (при фик-
сированном к) с периодом N:
j—klin-iiiN) J^-kn f , j—нк
e н =e н e^21din, = e N
218
Часть III. Математическое описание дискретных сигналов
и но переменной к (при фиксированном я) с тем же периодом N :
,2л .2л , .2п ,
j—n(kvinN) j—нк . j—nk
e N =e N ej2*h,'=e N ,
запишем ряд (11.6) в следующем тождественном виде:
» •*> Л/-1 j2^nk
х лр(„ + я^) = У £X(* + wW)e N , л = 0.1,..., (/V-1), (11.8)
/ц = -ое> lfl=-ooks()
где периодической последовательности по переменной и c.ieea соответствует
периодическая сумма по переменной к справа, причем их периоды одинако-
вы и равны N.
Периодичность суммы (справа) следует из периодичности се слагаемых, обу-
словленной периодичностью экспоненты по переменной к и однозначно-
стью пространственного представления вектора Х(к}:
.2л .. .. ,2л
j—n(k+mN) j—пк
X(k + mN)e * = Х(к)е * . к = 0, 1.. (Д'-I), ///=..., -1, О, 1, ...
Введем обозначение:
Хр(к) = £ X(k + mNI, (J 1.9)
/л=—со
где Хр(к), -е»<к<°о — периодическая последовательность <у Частотной
области с периодом N , которая может рассматриваться как результат огра-
ничения (но протяженности) бесконечного спектра Х(к) функции xp(t) и
сдвига ограниченного спектра Х(к), к = 0,1,..., (N -1). по оси к на mN,
где т =... , -1,0,1,... Следовательно,
£ Xp(k+mN) = £ X(k + mN'i, к =0. I,..., (N -1),
fft = ~Oo /Н—~00
откуда имеем соотношение для периодов
Х(к +mN)— X р(к +niN), fc=0,l.....(W —1), т = ..., —1, 0,1, ...
Соответствующая замена в (11.8) позволит записать (11.6) в окончательном
виде:
У, xp(n + niN)= У J xp{k +м<Л/)е Л' , я = 0,1,.... (/V-1)-
Л1 = -оо -0
Лекция 11. Дискретное преобразование Фурье 219
Теперь понятен смысл представления .гр(я) в виде бесконечного ряда (11.6).
а именно: бесконечная сумма 51 является периодической и каждые .V се
* = -ео
слагаемых формируют одни и-й отсчет последовательности х (п). Количест-
во периодов суммы бесконечно, поэтому и количество одинаковых (периоди-
чески повторяющихся) огечетов хр(л) также бесконечно. Очевидно, что та-
кое представление последовательности хр(п) избыточно.
Так как в последнем равенстве периоды последовательности по н (слева) и
суммы но к (справа) одинаковы, для расчетов достаточно знать соотношение
между периодами
N 1 J^,,k
х„(ч)='£Х1,(к')е N , л = 0,1,...,(ЛГ-|). (11.10)
*=0
которое получило название дискретного ряда Фурье для последовательности
во временной области.
Коэффициенты Хр(к), во избежание путаницы с коэффициентами Фурье
Х(к) ряда (11.3), называют диекретнылш коэффициентами Фуръе. Сово-
купность этих коэффициентов представляет собой один период спектра пе-
риодической последовательности хр(н) (дискретного периодического сигна-
ла), а сами коэффициенты Хр(к) — комплексные гармоники на частотах
2л
АД(О = А--, А -0.1....(N-I).
NT
Рассмотрим соотношение (11.9) сточки зрения теоремы Котельникова.
Период спектра Хр(к) равен N отсчетам ограниченного спектра Х(к):
Х/А) = Х(А), А'=0,1....(N-1).
В шкале частот ш при Дсо (11.5) период N соответствует частоте ыд (час-
тоте дискретизации последовательности хр(п)):
ж,д 2л 2л
= N------- — = to..
NT Т 4
220
Часть ill. Математическое описание дискретных сигналов
Значит, последовательность *р(п) есть результат дискретизации функции
Хр(/) с ограниченным спектром1, верхняя частота которого равна <од/2,
а ширина — (0л:
оу, со,
---~<(П<— => Д(П = СО„.
2 2 4
2п
Заменив в (I J.9) к на АД(о и ТУ на /УД(О = — . получим взаимосвязь между
спектрами периодических аналоговых и дискретных сигналов
( 2п
Хр(£Д(О) = У X А'Дю+т—
точно такую же (с точностью до постоянного множителя), как (10.27) для
спектров непериодических сигналов. Отсюда следует, что дискретизация сиг-
нала хр(1) (11.3), имеющего бесконечный спек гр, с частотой <Д( приведет
~ со. л
к наложению спектров (элаисингу) в области частот о>= —
№
(см. н. 10.3). Согласно (11.9). это соответствует значениям , где
ш = 1,0,1,...
Выражение для дискретных коэффициентов Фурье Хр(к) в (II. 10) можно
получить по-разному. Так как это периодическая последовательность в час-
тотной области, логично ее представить в виде дискретного ряда Фурье для
последовательности в частотной области (симметричного ряду (11.10)) и
получить на основе ряда Фурье для непрерывной периодической функции
частоты (симметричного ряду (11.3)).
Как известно, непрерывная периодическая функция частоты Xp(ta) с пе-
риодом (о5.. удовлетворяющая в пределах периода условиям Дирихле, может
быть представлена в виде ряда Фурье (2.13) (см. Лекцию 2):
Х/(О) = X х\п)е~№ы, _оо<Сй<оо, (11.11)
1 Функция л’рО) с ограниченным спсюром отлнчаегся от исходной функции хр(г) (11.3)
с бесконечным сисюром Х(к) -
Лекция 11. Дискретное преобразование Фурье 221
где:
Д/ — период дискретизации но времени (2.! 4)
2л
Дг =—;
0)д
л(и) =x(hAz) — коэффициенты Фурье (2.15)
I 2 I Ч
л(н) =— Г ¥ (Ю)<>л""Л0= — f
о>, " со, Jo
~ 2
п — номер коэффициента Фурье, соответствующий времени иД/.
Периодическую последовательность в частотной области X/}(АД(|)) с перио-
дом N&to
Х/?(АДю) = X^kMo+mNbO)), £ = 0,1,..., - 1), /п = 1, 0.1....
можно представить в виде ряда, аналогичного (11.11), если заменить:
□ непрерывную частоту' со—дискретной £Дсо
(й=>£Дсо,
а следовательно,
О период но частоте о) — периодом по частоте £Дсо
со¥ => Д'Дел.
В результате период дискретизации по времени Д/ будет равным
л 2л 2л
<0j N&(j)
и представление периодической последовательности Хр(£До») в виде ряда
примет вид:
2п . . .2л ,
” - ы--АА<1> ” - j—iik
X1,(к^) = У х(н)е = У х(п)е N , -«><А-<о®,
„=-ео Н=-оэ
или с учетом обозначения (11.4):
°° ‘2я ut
Xp(.k)~ У x(w> 7 , — «><£<с>о, (11.12)
122
Часть III. Математическое описание дискретных сигналов
де:
х(н) = х(яД/) — коэффициенты Фурье, при Дсо (11.5) равные
Г<'’) = Т7 Ё х ckye N ;
|» t-o
п — номер коэффициента Фурье, соответствующий с учетом (11.5) времени
иД/ = п7':
. 2л 2л 2л
Д/ -------- —:----= Т.
АД(О /V ЛТ
выполним магматические преобразования, симметричные привеченным
занес для ряда (11.6). Представим:
□ последовательность Хр(к) в вице бесконечной суммы оОиого ее периода,
сдвинутого по оси к на ± mN, где ш = 1.0,1....;
□ бесконечную сумму в виде бесконечного числа конечных сумм из N сла-
гаемых, сдвинутых по оси и на + mN, где m = ...,-1.0.1....
Используя свойство периодичности экспоненты но переменным п и к
г одинаковым периодом N, перепишем ряд (11.12) в следующем тождест-
венном виде:
ее ~ /V I i^nk
X Х/,(Л+мЛ,)= X ^x(n + mN)e N ,*=0,1...............(W — 1). (11.13)
т ее itt=~оо л-0
Аналогично (11.9), обозначим
*,,(") = Ё л(я + тН).
щ = —ее
где Хр(н). -со<н<со — периодическая последовательность во вре.иенной
области, следовательно,
X xp(n+mN) = J r(H + m/V), л = 0.1.......(N-1),
№ = -«*> Ш = — <*>
откуда имеем соотношение между периодами
xp(n + mN) = x(n + mN), л = 0.1...(A-l). т = ..., -1. 0.1,...
Соответствующая замена в (11.13) позволит записать (11.12) в окончатель-
ном виде:
х XP(4+»|/V)= £ + £=().!.....(W-D,
Ш = -ое in--v?n-0
Лекция 11. Дискретное преобразование Фурье
223
откуда получаем соотношение между периодами последовательности (слева)
и суммы (справа):
W-! -j—
Хр(к}^^хр(п)е " .*=0.1.........(W-D. (11.14)
п=0
получившее название дискретного ряда Фурье для последовательности
в частотной области. Дискретные коэффициенты Фурье хр(п) этого ряда
равны отсчетам последовательности иа периоде.
Сравнивая дискретные ряды (11.10) и (11.14), легко убедиться в их симмет-
ричности.
Как известно, ряды Фурье (113) и (11.11) непрерывных функций xp(t) и
Xp(fx>) будут взаимно однозначныуш, если в один из них добавить коэффи-
циент пропорциональности 1/Л’. Это справедливо и для дискретных рядов
Ф\рье (11.10) и (11.14). Как правило, коэффициент 1/Л7 добавляют в (11.10):
1 )?Ппк
-v„(n)=—X N , и = 0.1............(V-l. (11.15)
Покажем, что при подстановке Xp(k) (11.14) в (11.15) равенство обращается
в тождество. При подстановке, во избежание путаницы, в (11.14) заменим
индекс и па /:
I л/-1 лм
'Д«)=-Е "
” к О 1=0
Изменим порядок суммирования
I Л--1 Л'-l
N (“16)
IV /=0 *=0
и вычислим внутреннюю сумму. Очевидно, что при I = п она равна /V :
w-i Л
£ej0 = /V.
л=о
а при I * п. согласно формуле для суммы конечной геометрической прогрессии
224
Часть HI. Математическое описание дискретных сигналов
она равна нулю, поскольку числитель дроби равен нулю (при 1 = п^ раскрыв
неопределенность 0/0, получим значение суммы, равное N ).
Так как внешняя сумма в (11.16) содержит только одно отличное от пуля сла-
гаемое при I = п> равенство (11.16) обращается в тождество:
Аналогично можно показать, что при подстановке хр(п) (11.15) в (11.14) это
равенство также обращается в тождество.
Сравнивая дискретные коэффициенты Фурье Хр(к) (11.14) с коэффициен-
тами Фурье Х(к) (11.7) бесконечного ряда (11.3). легко убедиться, что они
совпадают с точностью до множителя" N при к =0,1...., (N-\)
Xp(k) = NX(k\ к =0,1...(дг-1).
Дискретным преобразованием Фурье (ДПФ) периодической последователь-
ности хр(п) называется пара взаимно однозначных дискретных рядов Фурье
для последовательностей во временной и частотной областях:
□ прямое преобразование
* I
Хр(к)^хр(п)е » , А =0,1.....................(11.17)
и=0
□ обратное преобразование (ОДПФ)
I j—"k
,л = 0.1...(/V-l), (11.18)
Wit=o
где:
жр(н). п = 0,1» — , (/V -1) — один период последовательности во временной
области (вещественной или комплексной);
Хр(к). £=0, I,... ,(/V —1) — дискретные коэффициенты Фурье (веществен-
ные или комплексные) — один период последовательности в частотной об-
ласти (один период спектра).
" Они бы полностью совпала ih- если бы коэффициент 1/ V . обеспечивающим взаимную одно-
значное! >• дискретных рядов Ф\рье. был добавлен в (11.14), однако п большинстве источников
его уплывают в <11.10).
Лекция 11. Дискретное преобразование Фурье
225
11.2. Дискретное преобразование Фурье
конечной последовательности
Перейдем к вычислению непрерывного спектра Х(е^{1) (11.2) конечной по-
, 2л
с.тедоватсльности x{ni) на периоде (01 = — в дискретных точках.
Возникает вопрос о количестве данных точек, ибо их недостаточное число
может привести к пропуску важной информации, а избыточное— к неоправ-
данному возрастанию объема вычислений.
Ответ на вопрос о минимально достаточном количестве дискретных точек
непрерывного спектра на периоде даст теорема Котельникова в частотной
области, симметричная теореме во временной области и сформулированная
на основе взаимозаменяемости независимых переменных время-частота во
всех преобразованиях Фурье [17].
Напомним суть теоремы Котельникова во временной области; аналоговый
сигнал {непрерывная функция) с конечным (ограниченным по протяжспно-
с । и) спектром полностью определяется послсдоватсльносзъто своих отсчетов.
I
взятых с интервалом Т <--, где /н — верхняя частота конечного спектра.
По этим отсчетам гарантируется возможность точного восстановления ана-
логового сигнала {непрерывной функции).
Произведем симметричную замену переменных:
□ время заменим на частоту
П ширину конечного спектра 2сов па интервале [-o^coj — на длитель-
ность конечного сигнала Те
соответственно, с учетом соотношения между частотами о) и f .
(11.19)
In
□ период дискретизации по времени Т — иа период дискретизации по час-
тоте Д(о
2п
-=> Дш = —
7с
26 Часть III. Математическое описание дискретных сигналов
епсрь сформулируем суть теоремы Котельникова в частотной ofaactmr.
(.•прерывный спектр Х{е^1) конечного сигнала полностью определяется
:ос.1едовательностыо своих отсчетов в частотной области, взятых с иитерва-
ом Д<о, где
Ды< —. (11.20)
{а основании (11.20) для дискретного сигнала длительности Тс = ХТ полу-
тем минимально достаточное количество равноотстоящих отсчетов спек-
пра на периоде :
<J\ _ 2п _ 2л _ 2п 2л _
ТС"Т'nt"
Следовательно, па периоде <0, непрерывный спектр (11.2) конечной
тоследователыюсти длины N полностью определяется последовательно-
стью своих N равноотстоящих отсчетов к-0,1N-1. По
этим отсчетам гарантируется возможность точного восстановления непре-
рывного спектра.
Это позволяет заменить в преобразовании Фурье (11-2) вычисление непре-
рывного спектра Х(е^"Г) на интервале ©о<(0<оо его вычислением в N
дискретных точках па периоде cot:
Д'-! Л'-l fit 'V-1 -]~ик
Х[е}к^! ) = X х(пТ)е~*к{лаТп = £ х{пТ)е *'г = X <(лГ)е *' ,
л=0 »1«0 /1-0
к = 0,1..jV-1.
или в нормированном времени:
Х(е1*атГ)= t=0.1......Л-1. (11.21)
лтО
Сравним формулы (11.21) и (11.17). Они совпадают при слечующих предпо-
ложениях:
□ последовательность х{п) длины N представляет собой один период пе-
риодической последовательности хр(н) с периодом
Лекция 11. Дискретное преобразование Фурье 227
□ отсчеты непрерывного спектра X(ejk£Mil) на периоде (О., равны шскрет-
пым коэффициентам Фурье Хр(к)
Х(е/кл*'}Г) = XpW, к =0, 1..... N -1.
С учетом этих предположений ДПФ (11.17) и (11.18) может использоваться
как для периодических последовательностей с периодом N , так и для после-
довательностей конечной длины /V, поэтому индекс принято опускать.
Дискретным преобразованием Фурье (ДПФ) называется пара взаимно одно-
значных преобразований:
□ прямое преобразование
Л'-1 ,
Х(*)=£.ф1)Иу , £=().!,...,А-1; (11.22;
и=0
□ обратное преобразование (ОДПФ)
.ф,) = — л=0.1...../V-1, (11.23;
Н А=0
где:
д-(л). л = 0.1.А'— 1 — последовательность во временной области (веще-
ственная или комплексная):
Х(А), k=(). I..N~ I —дискретные коэффициенты Фурье (вещественные
или комплексные) — один период последовательности в частотной области;
к — помер отсчета последовательности Х(к). соответствующий частоте
А*Доз;
Иу* — поворачивающий множитель
W^=e " , (11-24)
,2я
- J-ПК
получивший свое название потому, что аргумент экспоненты е л ото-
бражает угол поворота на единичной окружности комплексной г-плоскости.
Последовательности х(п) и AZ(A) в (11.22) и (11.23) называют П-точечными.
Отсчеты последовательности Х(к) называют отсчетами ДПФ 1381’.
В рязс источников их называю г коэффиинсшамп ДПФ или лаже просто Д1 [Ф.
228
Часть Ш. Математическое описание дискретных сигналов
ДГ1Ф (11.22) описывает дегорилш вычисления /V-точечиой последовательно-
сти А’(Л) в частотной области, а ОДПФ (11.23)— алгоритм вычисления
N-точсчпой последовательности х(и) во временной области.
Д| |Ф (11.22) и (11.23) справедливо как для периодической, так и для конечной
последовательности, причем результат вычислений в обоих случаях будет
одинаковым, однако его трактовка — различной, а именно:
□ в случае периодической последовательности:
• /V-гочсчная последовательность х(п) — это один период данной по-
следовательности;
• /V-точсчная последовательность Л'(А-) — это jV комплексных гармо-
ник периодического спектра на периоде:
О в случае конечной последовательности:
• /V-точсчпая последовательность т(и) — конечная последовательность
длины N (формально это один период периодической последователь-
ности):
• N-точечная последовательность Х(к) — N равноотстоящих отсчетов
непрерывного периодического спектра Х(е^0/) на периоде сод.
Пример 11.1
Найти ДПФ /V-точсчпой последовательности v(n) = а".
Решение. Подставив х(п) = «" в формулу ДПФ (11.23), получаем сумму ко-
нечной геометрической прогрессии:
W-I ,д- AM X(Л) = X *(")<? л‘ = X а"е ,v It=o равную z , \N -j—k 1 1 — ае N i -) -к J—L 1-ае N 1 — ае * и представляющую собой N-точечиое Д11Ф. 5 1 * 1 3# ^-г ,о^ О н II II
Лекция 11. Дискретное преобразование Фурье 229
Необходимо иметь в виду, что точно такой же результат будем иметь для пе-
риодической последовательности л<п) = дг| с периодом /V.
11.3. Свойства ДПФ
Перечислим свойства ДПФ, которые являются прямым следствием свойств
спектров дискретных сигналов (см. п. 10.2). Доказательства данных свойств
аналогичны приводимым в н. 10.2 и мо1*ут быть выполнены самостоятельно.
I. Периодичность:
/V-точечное ДПФ является периодической последовательностью по опре-
делению.
2. Линейность:
• если /V-точечная последовательность равна линейной комбинации TV-
точечных последовательностей
х(п) - а,х}(п) + а2х2(л) +..., (И .25)
то ее ^точечное ДПФ равно линейной комбинации /V-точсчных ДПФ
данных последовательностей
X (Л) = 4- «2Х(Л) + ...; (11.26)
• если в линейной комбинации (11.25) у последовательностей разные
длины /V|, N2, N3,..., то перед вычислением /V-точечного ДПФ исход-
ные последовательности необходимо привести к одинаковой длине N.
дополнив нулями, где N = max{/V|, ... }.
3. Сдвиг (смещение) N-точечного ДПФ:
умножение /V-точечной последовательности на поворачивающий множи-
.2л.
}--ityl
тель IVv N приводит к сдвигу /V-точечного ДПФ по оси к
вправо на величину к§, что символически удобно записать следующим
образом:
х(п)=$Х(кУ,
х(П)И^°"=>Х(к-к0).
Аналогично, умножение /V-точечной последовательности на поворачи-
вающий множитель =е N приводит к сдвигу /V-точсчного ДПФ
230 Часть til. Математическое описание дискретных сигналов
по оси К влево на величину что символически можно записать еле*
дующим образом:
*(„)=> Х(к)-.
x{nW^" =»X(k + k0).
4. Сдвиг (задержка) N-точечной последовательности:
сдвиг /V-точечной последовательности вправо па т (т>0) отсчетов (за-
держка последовательности) соответствует умножению /У-точечнот Д11Ф
2г. .
на поворачивающий множитель WNm = е N , что символически удоб-
но записать следующим образом:
л(н) =>.¥(*);
л(п-т)=» X(kW^
5. Равенство (теорема) Парсевам:
равенство Парсеваля (10.24) для периодических и конечных последова-
тельностей принимает вид:
W-1 , 1 W-I ,
2=-^1М'.
л--П /V А-=0
где:
ЛМ 2
У |л(н)| — энергия сигнала, вычисленная во временной области;
л «О
1 ЛГ-1 2
— та же энергия, вычисленная в частотной области.
N л=о
Если анализ сигнала производится в частотной области, равенство Персе-
валя позволяет вычислять энергию сигнала непосредственно по отсчетам
ДПФ. не прибегая к процедуре ОД ПФ.
6. Свойство симметрии:
• если /V-точечная последовательность _v(n) — вещественная, модуль ес
Л'-точсчного ДПФ будет четной функцией переменной к:
|У(*)|=|У(-«:)|;
Лекция 11. Дискретное преобразование Фурье
231
а аргумент— нечетной:
arg{A' (k)}= -arg{A" (-*)};
arg{A'(i)}= -arg{A"(A' -i)}.
Это означает, что для модуля и аргумента будут соблюдаться соответ-
ственно условия симметрии и антисимметрии.
Доказательство. Эти соотношения очевидно вытекают из сравнения
ДПФ Х(к) и X(N-k):
.V-l -j~nk W-l (1-к А
Х(1) = У х(н)е N - у .фг)СО5 —пк -
м=0 п=0 \ ^ )
AXn)sin| —лЛ | = Re-/hn;
н=о I N )
,V-J /V-l -j~h/V j—nk
X(N-k)= У л(и)С N = У Л* е N
»г=0 я=0
v 1 j~nk
= У х(н)е N =Re + Jim;
/1-0
• если ^точечная последовательность .r(n) вещественная и для нее вы-
полняется условие симметрии
x(h) = a(/V-«), (11.27)
то ее /V-точсчцое ДПФ будет также вещественным.
Докакнпе.1ьсп1во. Допустим, что N — четное. Найдем ДПФ с учетом
симметрии (11.27):
Л'-| _ _ -?Л-4 _ —Ik
Х(Л) = 'у х&)е Jh” =хф) + х(\)е J n +.<(!)<’ +...+
и -о
(7
x(0)-x(-y |+2^ x(«)cosI^hA
232
Часть HI. Математическое описание дискретных сигналов
Аналогично, для N нечеткого
у. ।
N-l -j^nk 1
X(k)=Y !(„)< " = .Г(())+ £ X(«)
н=0 я=1
=x(0) + 2£ x(n)cos| — nk
Л = 1 I N
В обоих случаях /V-точечное ДПФ вещественное.
Дополним эти свойства теми, которые присущи исключительно ДПФ.
I. Круговая (периодическая, циклическая) свертка: вычисление с помощью
дпф
Понятие круговой свертки используется только для периодических после-
довательностей. Круговой сверткой двух периодических /V-точсчпых по-
следовательностей д-| (п), л-2(«) называется периодическая /V-точечная по-
следовательность
N-l N-I
у(п) = У Л|(ш)л20,-1н)= У Х1(п-Н1)х2(т). (11.28)
«1=0 т=0
Пример 11.2
Вычислить круговую свертку 4-точсчных периодических последователь-
ностей Aj(h), х2(н):
а1(л) = [3.2, 1.0]; л2(л) = [2.211.1].
Рисунок 11.1 иллюстрирует механизм вычисления круговой свертки
3
у(н)= У A|(»i)a2(h-wi),
т=0
который подобен рассмотренному ранее механизму вычисления линейной
(апериодической) свертки конечных последовательностей (aw. Лекцию 4).
’’Фиксированная” последовательность Л|(н) (три периода) показана
на рис. 11.1. о. а "скользящая" последовательность л2(л) (три периода) —
па рис. 11.1,6. Отсчеты последовательностей па периоде 10; /V-l] = [0; 31
выделены жирными линиями. Зеркально отображенная последователь-
ность х2(») представлена на рис. 11.1. в, а результат ее последовательно-
го скольжения— на рис. П.1.?—лс.
Лекция 11. Дискретное преобразование Фурье
233
Рассмотрим вычисление круговой свертки на периоде: первый otchci
у(0) вычисляется как сумма локальных произведений последовательно-
стей на рис. И.1. а и в: второй отсчет у(1) — как сумма локальных произ-
ведений последовательностей на рис. 11.1. а и г; а далее аналогично:
у(2) — на рис. 11.1, а и д. у(3) — на рис. 11.1. а и е.
Рис. 11.1. Вычисление круговой свертки
234
Часть Hi. Математическое описание дискретных сигналов
Следующий отсчет у(4) должен вычисляться как локальное произведение
послсцоватепьностей па рис. 11.1, а и ж, однако, в силу периодичности
последовательности л2(4-/н) (рис. 11.1, ж) и лг2(О —ш)
(рис. 11.1, в) на интервале ]0; 7V-1J®[(>. 3] оказываются одинаковыми,
поэтому результаты вычислений будут повторяться с периодом N = 4.
Они приведены в табл. 11.1 и па рис. 11.2 (три периода).
Таб./ицн 11.1. Вычисление круговой свертки
II л/л) л2(л) У(п>
0 3 2 у(0) = л, (0)л-2 (0) + л, (I >л2 (-1) + х, (2)л, (-2) + л, l3M ,(-3) = = 3-2 = 6
1 2 2 у(П = г1(0иг(П + л1(Пх210)+ г,(2)л2Ы)+ л,(3).ч(-2) = = 3-2 + 2-2 = 10
2 1 1 г(2) = с.(0)л2(2) + л|(1)ж/1)+ te(2)r3(0) +л.(3)лг(-1) = = 3-1 + 2-2 + 1 • 2 = 9
3 0 1 у(3) = л, (0)д2 (31 + х,(1)л2(2) + л, (2).г2 (1) + л,(3)лг(0) = = 3-1 + 2 • 1 + 1 • 2+0-2 = 7
11ай тем /V-точечиое ДПФ (11.23) круговой свертки (11.28)
VI
п О
Л’ I
У Л|(»1)Л2(и-»1)
»г=0
Wn
Лекция 11 Дискретное преобразование Фурье
235
Изменим порядок суммирования:
/V-l Л'-I
К(А) = У. Х](ш) У x2(n-m)W^
»1=0 0=0
представим поворачивающий множитель W^' (11.24) в виде произведения:
wtf =и#-"’*и^
и перепишем ДПФ в виде:
N-Т
Ш)= X х,(и)
т=0
W"? .
|г=0
(11.29)
Выполним замену переменных:
I = п - in (// = 1 + ш)
и запишем внутреннюю сумму с учетом нулевых начальных условий:
Х‘ a2(Z)W^= X a-2(/)W“ + X^2(')W/!,‘=O+ \х2(1^ = Х2(к).
/ + »г=0 l=-m /=() /—О
Подставив это значение в (11.29), получим /V-точсчное ДПФ круговой
свертки., которое равно произведению N-точечных ДПФ свертываемых
последовательностей'.
Л-1
Y(k} = X2(k) X л,(т)И<7 =X2(4)Xl(i). k=0, 1.....N-l.
tn=Q
Это соотношение стало основой следующего алгоритма вычисления кру-
говой свертки:
• определяются ^точечные ДПФ Xi(fc). Х2(^) и их произведение
щ-) = х2(*)х,(*);
• с помощью ОДПФ определяется /V-точечная последовательность у(н).
ДПФ и ОДПФ (11.22) и (11.23) рассиживаются с помощью быстрых алгорит-
мов (см. Лекцию 12у что существенно сокращает объем вычислений по сравне-
нию с непосредственным определением свертки у(н) по формуле (11.28).
2. ДПФ произведения периодических последовательностей (теорема свертки
в частотной области).
ДПФ произведения периодических /V-точечпых последовательностей
у(и) = Л|(н)л2(л)
236
Часть III. Математическое описание дискретных сигналов
равно круговой свертке /V-точечных ДПФ данных последовательностей
YW = “ Е X, (»0Х2(* - л>) = — Х' X, (4 - m)X,(m).
N ».=о N „г=0
Доказательство. Подставим Y(k) в ОДПФ (11.23):
I N-1 I Л/-1 I Л/-1
>(«) = - Е YWW^ =- Е - Е Х,(л1)Х2(*-т)
Nj=o Nj=o w »,<)
и изменим порядок суммирования:
Используя свойство о сдвиге /V-точсчного Д11Ф, получаем:
I N-1 I Л-1
Я«)=- Е х,(»о — Е х2(.к)
w »=о W л-=о
= 4-Е Xl(m)WNm" ^Х21к)Г/
N «.-о Wt=0
= X|(n)x2(il).
3. Линейная (апериодическая) свертка: вычисление с помощью ДПФ.
Линейной сверткой конечных последовательностей х((и) и л*2(л) с дли-
нами N] и W2 соответственно называется L-точечная последовательность
L-l L-1
>(»)= Е х2[т')хг{п-т') = X Л|(я-ш)л:2(»|), (11.30)
гл=О ш=0
где L= Nx + N2 -1, причем последовательности Л|(л), л2(а?) и у(и) рав-
ны нулю вне этого интервала.
Пример вычисления линейной свертки был приведен я Лекции 4.
Из определения ДПФ (11.22) следует, что конечные последовательности
условно считаются периодическими, поэтому для линейной свертки мо-
жет использоваться алгоритм расчета круговой свертки с помощью ДПФ,
а именно:
• последовательности Х|(п), д'2(л) дополняют нулями до олины L , пере-
ходят к ^точечным последовательностям д-|(н), л2(и), тогда линейная
Лекция 11. Дискретное преобразование Фурье
237
свертка последоввтсльностей Л1(н), л2(м) будет равна /.-точечной кру-
говой свертке последовательностей Х\(п), л2(и):
Z.-I Z--I
У(п)= У А,(и|)л'2(«-"') = X Л|(п-т)л-2(»1); (11.31)
ж=(1 ш=0
• определяются L-точечныс ДПФ ХД&), X2(fc) и их произведение
т) = Х((А)Х2(А); (11.32)
• с помощью ОДПФ определяется L-точечная последовательность у(п)
Рассмотренный алгоритм применяют для расчеши реакции но формуле
свертки
/.-I /-1
у(п) = У Л(т)Х« — ш) = У h(n - ш)л(ш),
ш=0 ш=0
где:
/V], N2 — длины импульсной характеристики и воздействия;
L — длина реакции, равная L ~ ZVj + /V2 — 1.
Алгоритм расчета реакции по формуле свертки с помощью ДПФ заклю-
чается в следующем:
• импульсная характеристика Л(и) и воздействие х(н) дополняются ну-
лями до длины L, переходят к L-точечным последовательностям Л(н).
£(»). Тогда линейная свертка последовательностей Л(л). x(ii) будет
равна L-точсчпой круговой свертке последовательностей h(n). л(л):
/-1 . /-1 „
у(и)= У /|(и1).г(и-т)= У Zi("-'«).»('»);
ш=0 гм = О
• определяются L-точсчные ДПФ H(k). Х(к) и их произветение:
• с помощью ОДПФ определяется L-точечная реакция у(п).
ДПФ и ОДПФ рассчитываются с помощью быстрых алгорит-
мов (см Лекцию 12), что существенно сокращает объем вычислений
по сравнению с непосредственным определением реакции у(п) по фор-
муле (1 1.30).
238
Часть III. Математическое описание дискретных сигналов
4. Секционированные свертки.
Линейная свертка (11.30) в случае, если длина одной из последовательно-
стей существенно превышает длину другой, вычисляется путем разбиения
длинной последовательности на короткие части — секции— и определе-
ния частичных секционированных сверток, из которых формируется ис-
комая линейная свертка.
Именно этот случай особо важен для практических задач I(ОС при вычис-
лении реакции по формуле свертки
у(н)= X й(ш)х(п-ш) = £ Л(я-т).фн),
т-0 т=0
когда отсчеты сигнала воздействия л(л) поступают в реальном времени.
Количество отсчетов (длина последовательности) весьма велико и заранее
неизвестно, поэтому условно можно говорить о "бесконечной" последова-
тельности.
Пусть длина импульсной характеристики h(n) ограничена Nj отсчетами,
а длина последовательности х(п) не ограничена. Требуется вычислить их
свертку.
Существуют два метода вычисления свертки с секционированием:
• перекрытие с суммированием:
• перекрытие с накоплением.
Метод перекрытия с суммированием состоит в последовательном вычис-
лении линейных секционированных сверток с их последующим суммиро-
ванием.
Для этого последовательность х(п) (рис. 11.3.6) делится па смежные
секции хк(п) длиной N2 (рис. 11.3, б, в. г). при этом рекомендуется вы-
бирать длину N2> близкую по величине к /V] (рис. 11.3.с/). Исходная по-
следовательность л(л) представляется в виде суммы секций:
л(я) = X С1 L33)
к =0
и формула свертки принимает вид:
У(я) = X Л('"> X I" -
т - 0 к = О
Лекция 11. Дискретное преобразование Фурье
239
Изменим порядок суммирования
у(п) = Ё X Л(<я)л4(И-»И)
4=0ш^0
и с учетом конечных длин .V, и /V2 носледовагсльпосзсн /км) и л\(н)
заменим во вну греннсй сумме бесконечный предел конечным:
L-I
>'(«) = X х h(m)xk(n-m),
Jc=0w=0
в результате чего получим /.-точечную секционированную шлейную
свертку )7 00 типа (11.30):
t-i
УА(п) = У. Ь(ж)лк(п-ш),
ш = 0
гае £ = /V| + Л'2 -1.
Искомая свертка равна сумме секционированных линейных сверток
у(л) = Ё уд„). (11.34)
к-0
На рис. 11.3. <), е показаны смежные L-точечные секционированные сверт-
ки. перекрывающиеся па участке длиной (/V, -1):
(^ + /V2-1)-/V2 = ^-1.
при этом, согласно (11.34), на участке перекрытия соответствующие от-
счеты суммируются (рис. 11.3, эк).
Метод перекрытия с накоплением состоит в последовательном вычислении
круговых секционированных сверток с их последующим накапливанием.
Для‘этого последовательность х(н) (рис. 11.4, б) делится па секции Лд.(л),
л\г|(и), k~{>. 1..каждая длиной L = /Vj + /V2-I с участками перекрытий
длиной (/Vi“l) отсчетов (рис. 11.4. в.г). Последовательность Л(н) ioiio.i-
пяют (Лг2 “ 1) нулями до длины L, переходя, таким образом, к / -точечной
последовательности h(n) (рис. 11.4. а). После этого вычис илотся секцио-
нированные круговые свертки №(/»)' У*-п(«) (II.28)(рис. 11.4.
Z.-1 .
Ут-ОО = У (ft ~,п); 135)
т~0
240
Часть III. Математическое описание дискретных сигналов
У*цО') = X /l(m)At+|("-w) .
№0
(11.36)
Рис. 11.3.1 1оследовательное вычисление свертки
методом перекрытия с суммированием
Лекция 11. Дискретное преобразование Фурье
241
Рис. 11.4. Последовательное вычисление свертки
методом перекрытия с накоплением
242
Часть III. Математическое описание дискретных сигналов
При формировании искомой свертки необходимо иметь в виду, что в дан-
ном случае секции хк(н), .г*+|(н) перекрываются, поэтому условие
(11.33) не выполняется:
х(л)* £ хк(н),
*=0
и соотношение (11.34) нс справедливо:
Ил)* У У*(н).
Л=(1
Представим последовательности хк{ц), в виде сумм:
^(п) = л{(и) + Пл(н):
где Пл и Лл+i— последовательности длины (АГ( — 1) на участках пере-
крытия. Тогда круговые свертки (11.35), (11.36) можно записать в виде:
/-1 _ / ।
У*(и) = X Л(ш)л>(и-ш)+ У ук(п) + ^к(н);
ш О ж = 11
Л-1 - /.-I
Л.|(«)= £*(и)лЬ|(л-и) + х /i(«i)Tin.,('i-'«) = yiu('i) + 5t.l(H).
m=0 m-0
где £j-_ и — "лишние” (/Vj — 1)-точечные свертки, обусловленные
вкладом отсчетов гц и тц+i 1,а участках перекрытия, необходимых для
вычисления круговой свертки.
Поэтому при формировании искомой свертки (11.34) последние, "лишние"
(/V|-l) отсчетов каждой секционированной свертки yk(n) на участке пе-
рекрытия отбрасываются. Таким образом, отсчеты vA(/i) как бы "накап-
ливаются" (рме. 11.4, ж).
В обоих рассмотренных методах секционированные свертки могут рас-
считываться с помощью ДПФ и ОДПФ с использованием быстрых алго-
ритмов.
Быстрые алгоритмы расчета ДПФ и ОДПФ будут предметом изучения в сле-
дующей лекции.
Лекция 12
Быстрое преобразование
Фурье
Обработка сигналов, связанная с анализом их спектров, называется спек-
тральным анализом. Спектральный анализ используется во многих алгорит-
мах ЦОС. в частности, при распознавании, обнаружении и сжатии сигналов.
Математической основой спектрального анализа является ДПФ (11.22)
Х(4) = x'xGOlV*, 4=0,1.../V —I. (12.1;
и~0
где:
N — длина исходной последовательности и размерность ДПФ; для кратко-
сти последовательность и Д11Ф называют N-пючечкыми (см. Лекцию I /);
W/f — поворачивающий множитель (11.24):
и,й,‘ =е '*” . (12.2)
Оценим вычислительную сложность алгоритма ДПФ (12.1): при фиксиро-
ванном значении к и п = 0,1...., (N-1) требуется выполнить N операций
умножения и (/V-l)*=/V операций сложения, всего 2N операций; в целом
же, при к = 0, 1,..., (N-1) необходимо выполнить A'x2A-=2/V2 арифмети-
ческих операций с комплексными числами.
Как правило, представляет интерес оценка порядка вычислительной сложно-
сти алгоритма относительно длины N , для чего используют символику <?(•)•
Порядок вычислительной сложности алгоритма ДПФ (12.1) оценивается как
О(№), что при больших N весьма существенно.
В реальном времени обработка исходных последовательностей выполняет-
ся по частям (сегментам) длины N. Численное значение Л’ зависит от
физической природы сигнала и решаемой задачи. Для снижения порядка
9 Зил. 165
244
Часть til. Математическое описание дискретных сигналов
вычислительной сложности были разработаны алгоритмы быстрого вычис-
ления ДПФ.
Быстрым преобразованием Фурье (БПФ) называют не еще одну разновидность
преобразования Фурье, а целый набор алгоритмов, предназначенных для быст-
рого вычисления ДПФ. Поскольку подобных алгоритмов много, для их обо-
значений после аббревиатуры БПФ ставят уточнение: алгоритм БПФ с основа-
нием 2, алгоритм БПФ с основанием 4, алгоритм БПФ Винограда и т. п.
Наибольшее распространение получил алгоритм БПФ с основанием 2, из-
вестный как алгоритм БПФ Кули—Тьюки (по имени разработчиков) и впер-
вые опубликованный в 1965 году в США. Существуют два эквивалентных по
эффективности алгоритма БПФ с основанием 2: с прореживанием по времени
и с прореживанием по частоте. В любом из них длина N исходной после-
довательности должна быть равной
/V = 2v, (12.3)
где v — целое положительное число.
Если это условие не выполняется, исходную последовательность следует до-
полнить необходимым количеством нулей. Сразу отметим, что это является
недостатком данных алгоритмов, поскольку количество нулей может ока-
заться значительным.
12.1. Алгоритм БПФ с прореживанием
по времени
Основная идея алгоритма БПФ с прореживанием по времени закзючастся
в поэтапном вычислении /V-точсчного ДПФ на v этапах, на каждом из кото-
рых текущее ДПФ определяется как комбинация ДПФ вдвое меньшей раз-
мерности.
Алгоритм БПФ с прореживанием по времени можно описать следующим об-
разом (рис. 12. Ц снизу вверх):
□ задание начальных условий:
отсчеты /V-точечной последовательности расстааляются по определенному
правилу,
□ на первом этапе определяется 2-точечное ДПФ каждой нары огечетов по-
следовател ьности;
О на втором этапе определяются 4-точечныс ДПФ как комбинация
2-точечных ДПФ;
Лекция 12. Быстрое преобразование Фурье
245
□ на i-ом этапе определяются 2'-точечные ДПФ как комбинация
2z~l-точечных ДПФ;
□ на (v- l)-aw этане определяются /V/2-точечныс ДПФ как комбинация /V/4-
точечных ДПФ;
□ па v-rzif (последнем) этане определяется искомое /V-точечное ДПФ как
комбинация Л72-точсчных ДПФ, отсчеты ДПФ следуют в естественном
порядке к =0,1,..., (N -1).
Размерность
ДПФ
Этап
ДПФЛ,
2ДПФЛ,
4ДПФЛ.
ДПФ5
л к
ДПФ« ДПФ,,
t \ t ч
ДПФ* ДИФд. ДПФ* ДПФ*
2'ДПФ*
ДПФ*
t \
ДПФ * ДПФ N
ДПФ*
" t \
ДПФ * ДПФ *
—дпф4 дпф4 дпф4 дпф4 дпф4
t \ t \ .................... t \ t \
—-дпф2 ММММ
2
Начальные Л'
условия — 2-точечных последовательностей
Рис. 12Л. Идея алгоритма БПФ с прореживанием по времени
246 Часть ML Математическое описание дискретных сигналов
Для реализации данного алгоритма необходимо знать:
I. Правило начальнойрасстановки отсчетов ^точечной последовательности.
2. Общую формулу расчета ДПФ для произвольного /-го этапа.
Получим их, используя следующий прием;
□ предположим, что алгоритм БПФ состоит из одного, v-ro этапа. Рассмот-
рим начальную расстановку отсчетов последовательности и формулу
/V-точечного ДПФ как комбинацию Л72-точечных:
□ предположим, что алгоритм БПФ состоит из двух, v-ro и (у- 1)-го этапов.
Рассмотрим начальную расстановку отсчетов последовательности и фор-
мулы /V/2-точсчных ДПФ как комбинацию JV/4-точсчных;
□ найдем закономерность в начальной расстановке огечегов последователь-
ности и определении ДПФ как комбинации ДПФ вдвое меньшей размер-
ности. Распространим ее па v-этаппый алгоритм.
Итак, предположим, что алгоритм БПФ состоит из одного, v-ro этапа.
Начальные условия одноэтанного алгоршма БПФ формируются в результате
однократного разбиения исходной /V-точсчпой последовательности на две
/V/2-точеч.ныс (рис. 12.2):
четных [л(0), х(2),..., .<( N - 2) | о тсчетов; (12.4)
нечетных [х(1), л(3).х(ЛГ —1)| отсчетов. (12.5)
Начальная расстановка отсчетов производится но правилу:
Л//2 четных отсчетов; N/2 нечетных отсчетов:
х(0), л(2)..л(Л/ - 2); л(1), л(3)...r(N -1).
Это позволяет разбить сумму в ДПФ (12.1) на две:
Х(*) = X л(2„ + 1)И^2л+,)‘ =
11 = 0 и=()
N f Л/_,
= Y л(2,1)И'л'1 л(2» + 1)И’“, *=0.1......(/V-D. (12.6)
н=0 л=0
где л(2п) и л(2п + 1) — .V/2-гочечные последовательности четных и нечет-
ных отсчетов соответственно.
Лекция 12 Быстрое преобразование Фурье
247
Крат нос । ь
разбиения
Длины последовательностей
.V
—чет
2
Z X
N N
—чет —нем
4 4
N
—иеч
Z X
N N
— чет —нем
4 4
чет неч чет иеч чет иеч чет иеч
Начальные
условия
— 2-точечных последовательностей
2
Рис. 12.2. Разбиение ^точечной последовательности
Представим поворачивающий множитель И^и* в виде
7 ь -i-ink
W™ — е N -е Л/2 = wff/2 112.7)
и перепишем Д11Ф (12.6)
* 1 Ш
Х(*)= х(2и)И$2 + И^ 42» + I)1V$2, I =0,1.....Л’-1. (12.8)
о=0 л=0
Каждая из сумм представляет собой /V/2-точсчнос ДПФ; первая сумма —
ДПФ последовательности четных отсчетов, а вторая — нечетных. Причем
каждое из /V/2-точечных ДПФ определяется при к =0.1...../V-1. Введем
обозначения;
XOV(A) = X(A); (12.9)
ХГ(к)=^,л(2н))УЙ/2-. (12'0)
248
Часть Hi. Математическое описание дискретных сигналов
Л*
*г'(*)= $>(2« + W£,,
л = 0
(12.11)
где верхний индекс указывает номер этапа алгоритма БПФ, а нижний— но-
мер ДПФ, четный и нечетный. Для краткости будем говорить "четное ДПФ"
и "нечетное ДПФ".
С учетом введенных обозначений перепишем ДПФ (12.8): N-точсчное ДПФ
определяется как комбинация двух Л72-точечных ДПФ— четного Xq (£) и
нечетного X|V~1(£);
Xv(jt) = Xj",(Jt) + Wjix^-,(Jt), Л = 0.1......N-1. (12.12)
Принимая во внимание, что /V/2-точечныс ДПФ Хо'ЧЛ) и Xi~l(k) — пе-
риодические функции переменной к с периодом 7V/2 (см. Лекцию 77), нет
необходимости определять их при к = 0.1....N - I, достаточно только опре-
N
делить их при к = 0.1,...,----------1, а затем повторить при
Xov'lm = Xov-,^ + y^, * = 0.1.у-1:
Xlv’,(t) = X1v-,ft+y| * = 0.1 у-1.
(12.13)
(12.14)
Поворачивающий множитель при к = —, — + I,..., /у — 1 равен
к-^- N
WN 2 =Vff,W^2 =W^e N 2 =~w^, *=0.1.........——1,(12.15)
следовательно, и его достаточно определить при £ = 0,1................. 1, а затем,
изменив знак, повторить при к =
N N .
—, — + 1.
2 2
N -1.
Лекция 12 Быстрое преобразование Фурье
249
Свойства (12.13)—(12.15) позволяют представить ДПФ (12.12) в виде:
(*) = *<Г‘ (*) + Н'^Г' (к);
(12.16)
Из сопостааления ДПФ (12.12) и (12.16) ясно, что в (12.16) расчет упрощает-
N
ся за счет распаратзеливания вычислений при к=0,1,...,-----------1 и
2
N N
А = —, — +1....TV -1 по верхней и нижней формулам соответственно.
Вывод: если алгоритм Ы1Ф состоит из одного, v-ro этапа:
□ начальные условия формируются в результате однократного разбиения
исходной /V-точечной последовательности:
□ /V-точсчнос ДПФ определяется по формуле (12.16).
Предположим, что алгоритм БПФ состоит из двух, v-ro и (v — 1 )-го этапов.
Начальные условия алгоритма формируются в результате последовательного
двукратного разбиения /V-точечной последовательности (рис. 12.2):
О сначала /V-точсчная последовательность разбивается на две W/2-точечные
(12.4) и (12.5);
□ каждая из этих последовательностей вновь разбивается на две /V/4-
гочечные— четных и нечетных отсчетов по порядку их следования, счи-
тая от нуля, а именно:
• /V/2-точечная последовательность четных отсчетов (12.4) разбивается
на две /V/4-точечные:
четных [л(0), л(4),..., д(Л—4)] отсчетов;
нечетных [л(2), л(6),..., х(Н - 2)] отсче гов;
• /V/2-точсчная последовательность нечетных отсчетов (12.5)— на две
/V/4-точечные:
четных [л(1), jt(5), ..., x(N -3)] отсчетов;
нечетных [л(3), л-(7)....г(Л1-1)] отсчетов;
250
Часть Ш. Математическое описание дискретных сигналов
□ начальная расстановка отсчетов производится по правилу:
Л//4 четных отсчетов; /V/4 нечетных спсчеюв - результат разбиения (12.4):
N/4 четных отсчетов; N/4 нечетных отсчетов—результат разбиения (12.5),
а именно:
л*(0), л(4).л(/У - 4); л(2), л(б).л(N - 2);
л(1), а-(5).x(/V -3); л(3). л(7),.v( Л' - I).
На (v- 1)-м этапе определяются два TV/2-гочечпых ДПФ. причем кажюе из
них — как комбинация двух /V/4-точсчных ДПФ:
□ N/2-точечное ДПФ Xq1 (к) — как комбинация Л74-точечных ДПФ: чет-
ного Хъ~2(к) и нечетного X|V"^(<);
□ /V/2-точечное ДПФ X^fk) — как комбинация /V/4-точсчных ДПФ: чет-
ного Х2~2(к) и нечетного Хз"2(А).
/V/2-точечные ДПФ Х%'1(к) и определяются но формуле (12.16),
в которой индекс v уменьшается на единицу
v=>v-l,
а размерности ДПФ и поворачивающего множителя понижаются вдвое
в результате чего имеем два /V/2-точечных ДПФ Xq 1(к) и X* ’(Л):
ХГ‘ (*) = Х^2 «) + Htf/2 X ,v-2 (t);
Xj-'k+^kX^W^xr2^);
(12.17)
k=0, I,
4
Xi~'W=xv,-\k)+w^2xy 2(ky,
2(k)-W^xr2(ky
(12.18)
Лекция 12. Быстрое преобразование Фурье
251
11а v-м этапе /V-точечное ДПФ Хц(к.) определяется как комбинация /V/2-
точечных ДПФ по формуле (12.16).
Вывод: если алгоритм Ы1Ф состоит из двух, v-го и (v - I )-го этапов, то:
□ начальные условия формируются в результате двукратного разбиения ис-
ходной /V-точечной последовательности;
□ на (v-l)-M этапе каждое из двух /V/2-точечных ДПФ определяется по
формуле (12.16). в которой индекс V уменьшается на единицу, а размер-
ности Д11Ф и поворачивающего множителя понижаются вдвое:
□ на v-м этапе №-точечное ДПФ определяется согласно рассмотренному
ранее одиоэшапиому алгоритму.
Если алгоритм Б ПФ состоит из трех, v-го, (v- 1)-го и (v-2)-ro этапов, го
с помощью аналогичных рассуждений приходим к выводу, что:
□ начальные условия формируются а результате трехкратного разбиения
/V-точечной последовательности:
□ на (v- 1)-м этапе каждое из четырех /V/4-точсчных ДПФ определяется но
формуле (12.16). в которой индекс v уменьшается на два
v=>v-2,
а размерности ДПФ и поворачивающего множителя понижаются
в 4 раза
4
О на (у - I >-м и v-м лапах два /V/2-точечпых и /V-точечное ДПФ определя-
ются согласно рассмотренному выше двухнпапному алгоритму.
Замеченную закономерность несложно распространить на v-этапный алго-
ритм БПФ с прореживанием но времени.
Начальные условия формируются в результате v-кратного разбиения N-
точечиой последовательности (см. рис. 12.2). сформированная последова-
тельность называется разреженной.
Общая формула расчета ДПФ на произвольном i-м этапе, полученная на ос-
нове (12.16), имеет вид:
252
Часть III. Математическое описание дискретных сигналов
, = 1.2..v; (|219’
m = О. I.М -1 ;
к = 0,1,
2
где:
i — номер этана (особенности первого (i = 1) этапа см. ниже);
m — номер ДПФ:
к — номер отсчета ДПФ:
М —количество L-точечных ДПФ:
N 2V t ;
М =-т = — = 2Ч ; (12.20)
2' 2'
L — размерность Д11Ф:
£^2'; (12.21)
Х}„(к) —L-точечное ДПФ:
» Xim+iW — четное и нечетное L/2-точсчиое ДПФ соответственно.
Согласно (12.19), L-точечное Д| 1Ф определяется параллельно:
О первая половина отсче тов /^точечного Д11Ф — по верхней формуле;
□ вторая половина отсчетов L-точечного ДПФ — по нижней формуле.
Обратимся к особенностям первого этапа алгоритма (/ = 1). По формуле
(12.21) определим размерность L ДПФ:
Л = 2*=2,
а по формуле (12.20) — количество 2-точечных ДПФ:
A/=2V"'=2V"'=—.
2
С учетом этого перепишем общую формулу ДПФ (12.19) в виде:
*1,(0) = *2°,,.(0)+W2“X?„tl(0); (1, ,2)
^0) = Л-2о,„(0)-»'"Л2п„„,(0),
Лекция 12. Быстрое преобразование Фурье 253
где поворачивающий множитель W2° = I сохранен для единообразия с общей
формулой (I2.19).
В правой части (I2.22) формально, т. е. согласно принятым обозначениям.
Л'^ДО) и Х?„г+1(0) — отсчеты ДПФ нулевого этапа (/ = 0), однако такого
этапа ист, поэтому для вычисления 2-точечных ДПФ по общей формуле
(12.19) перед выполнением первого этапа задаются начальные условия: каж-
дой паре отсчетов ДПФ — четному Х^,ДО) и нечетному Х^,н1(0).
ш = 0,1,..., (/V/2 — I) — присваивают значения пары отсчетов прореженной
последовательности — четного и нечетного:
2т (1223)
^2,„+1(0)=а-2,п+„
где х2м| и *hn+i — условные обозначения четного и нечетного отсчетов
2-точечной последовательности, полученные в результате v-кратного разбие-
ния исходной /V-точечной последовательности (см. рис. 12.1 и 12.2).
Подставляя (12.23) в (12.22) при m = 0, l,...,(/V/2-l), получим /V/2 формул
типа
Х^(О) = ло + лр
_Л’
X,1 (0) — х2 +л3;
X' (1) == х2 —
Таким образом, общая формула (12.19) описывает алгоритм быстрого вы-
числения ДПФ (алгоритм БПФ с прореживанием по времени) — v-этапную
процедуру типа "цикл в цикле", где:
О внешний цикл организуется по переменной i: i = I. 2.v;
□ первый внутренний цикл (при фиксированном i)— по переменной т:
Н1=О. 1.....М-к
□ второй внутренний цикл (при фиксированных i и т)— по переменной
к : к = 0,1,..., (L/2 -1). В цикле вычисляется к-и отсчет L-точсчного ДПФ
по формуле (12.19).
254
Часть III. Математическое описание дискретных сигналов
На выходе алгоритма (в результате вычислений при i = v и L=2v = /V) со-
гласно (12.19) получаем /V-точечное ДПФ, отсчеты которого следуют в есте-
ственном порядке: к = 0. 1,..., (/V - 1).
Основной операцией алгоритма Ы1Ф, называемой базовой, является одно-
временное (параллельное) вычисление двух отсчетов ДПФ — k-го и (к + Z72)-ro
по двум верхним формулам (12.19). 11а рис. 12.3 приведен направленный
граф базовой операции. получивший название "бабочка” по ассоциации
с изображением графа. Кружок обозначает арифметическую операцию сло-
женмя/вычитания, верхний выход соответствует сумме, а нижний— разно-
сти; стрелка обозначает операцию умножения на поворачивающий множи-
тель. стоящий над ней.
Алгоритм Б11Ф (12.19) обычно представляют в виде направленного графа —
совокупности "бабочек".
Рис. 12.3. Направленный граф базовой операции алгоритма Ы1Ф
с прореживанием ио времени (“бабочка")
Важно отметить, что качичество "бабочек”, т. е. базовых операций алгорит-
ма, на любом t-м этапе одинаково: согласно (12.19), на i-м этапе при фикси-
рованном значении т и к = 0, 1...., L/2 требуется L/2 "бабочек", следова-
тельно. при т = 0.1,..., (М — I) будем иметь ML/2 "бабочек". Подставляя
значения М (12.20) и L (12.21), получим одинаковое количество "бабочек”
иа любом r-м этапе
£ = 2V'-' —= —
2 2 ’
(12.24^
Лекция 12. Быстрое преобразование Фурье 255
12.2. Пример вычисления 8-точечного ДПФ
с помощью алгоритма БПФ
с прореживанием по времени
Для лучшего понимания алгоритма БПФ с прореживанием по времени рас-
смотрим его на примере вычисления 8-гочсчного ДПФ (12.I)
Х(*)=£х(„)И'^. (12.25)
и=0
где /V = 2v = 23=8, v = 3.
Алгоритм НПФ (рис. 12.4) представляет собой трехэтапную процедуру оп-
ределения ДПФ по общей формуле (12.19) при i = L 2, 3.
□ Пачазьные условия алгоритма формируются в результате трехкратного
разбиения исходной 8-точечной последовательности на четные и нечет-
ные отсчеты, а именно:
• первый раз 8-гочечиая последовательность разбивается на две 4-точечные:
О четных [л(0), л(2), л(4), л(6)] отсчетов:
О нечетных [л(1), л(3), л(5), х(7)] отсчетов;
• второй раз каждая из 4-точечных последовательностей вновь разбива-
ется на две 2-точечные: четных и нечетных отсчетов но порядку’ их сле-
дования. считая от нуля:
О 4-точечная последовательность [л(0). л(2). л‘(4). .г(6)] разбивается
на две 2-точечные:
Д четных [jrtO). л(4)] отсчетов;
и нечетных [л(2). л(6)] отсчетов;
О 4-точсчная последовательность [.г(1). .v(3), х(5), л(7)] разбивается па
две 2-точсчные:
и четных [v(D. -Г(5)] отсчетов;
и нечетных Р(3), л-(7)] отсчетов;
256
Часть til. Математическое описание дискретных сигналов
• третий раз каждая из 2-точсчных последовательностей вновь разбива-
ется на два отсчета — четный и нечетный:
О 2-точечная последовательность f.v(O). л(4)] — на два отсчета:
четный х(0) и нечетный д(4);
О 2-точечная последовательность [х(2), х(б)] — на два отсчета:
четный л(2) и нечетный х(6);
О 2-точечная последовательность [л(1), х(5)] —на два отсчета:
четный х(1) и нечетный х(5);
О 2-точсчная последовательность [л(3), л(7)] — на два отсчета:
четный д(3) и нечетный х(7).
Таким образом, получаем начальную расстановку огечетов — прорежен-
ную последовательность:
х(0), х(4); х(2), х(6); х(1), л(5); л(3), х(7).
После этого, согласно (12.23). каждом паре отсчетов ДПФ— четному
Х2»»(0) и нечетному при ш = 0,1. 2, 3 присваиваются значения
четного и нечетного отсчетов прореженной 8-точечной последовательно-
сти (рис. 12.4):
Х0°(О) = х(О);
Х1“(0) = х(4);
Х°(0) = Л(1);
Х5о(О) = х(5);
(12.26)
(12.28)
|х2"(0)=х(2);
Х?(0) = л-(6);
Х°(0) = х(3);
Х,°(0) = х(7).
(12.27)
(12.29)
□ Первый этап'. г = 1.
Определяются четыре 2-точечных ДПФ (12.19) при т = 0. 1. 2. 3 с учетом
начальных условий (12.26)—(12.29):
Х^(0) = л(0) + И/2°х(4);
Xj(l) = X0)-W°x(4);
X2(O) = x(l) + W2°x(5);
Xi(l) = x(l)-W20X5);
x;(0) = x(2) + lVfx(6);
Х|'(|)=л(2)-И'20.г(6);
%](O) = x(3) + JF2°x(7);
Л’з(1) = .v(3) - H'2°x(7).
Лекция 12. Быстрое преобразование Фурье
257
Выход
Начальные
условия
х^о) Х„2(0) Х(О)=Х„'(О)
Рис. 12.4. Направленный граф алгоритма БПФ с прореживанием по времени
для 8-точечного ДПФ
Поворачивающий множитель оставлен для единообразия с общей форму-
лой (12.19). в действительности VV2° = 1.
О Второй этап", i = 2.
Определяются два 4-точечпых ДПФ (12.19) при м =0,1:
X02(4) = Xi(4) + lV4*X,l(4);
X2(4 + 2) = xi(4)-lV‘XIl(4);
4=0,1;
Xl2(4) = xj(4) + W'‘x](4);
Х,2(4 + 2) = X^(4)-1V4‘ Х](4);
4 = 0,1.
258
Часть III. Математическое описание дискретных сигналов
□ Третий зтип'. i - 3.
Определяется искомое 8-точечное ДПФ (12.19) при т = 0:
X03(t) = XQ2(A-)+W8‘x2(fc);
Xg(k + 2) = Xjfaj-W's* X2(k);
it =0.1, 2.3.
Полученные отсчеты 8-точечного ДПФ следуют в естественном порядке:
Х(к)=Х$(к>.
fc=0,1..N-l.
12.3. Правило расстановки отсчетов исходной
последовательности: операция бит-реверсии
При больших значениях N процедура многоэтапного разбиения исходной
последовательности на группы четных и нечетных отсчетов весьма трудоем-
ка. однако ее легко формализовать.
В табл. 12.1 показаны две 8-точечные последовательности: исходная и про-
реженная. а также двоичные номера отсчетов данных последовательностей.
Сравнивая последние между собой, можно сформулировать простое правило
прореживания', отсчеты исходной N-точечмой последовательности должны
быть расставлены в бит-реверсивном порядке своих двоичных номеров.
В современных процессорах цифровой обработки сигналов предусмотрены
удобные средства реализации операции бит-ревереии [46].
Тавлмца 12.1. Расстановка 8-точечной последовательности
в бит-реверсивчо.м порядке
Исходная последовательность Последовательность в бит-ревсрсивном порядке двоичных номеров
Отсчет Двоичный номер Двоичный номер Отсчет
-Ч<>> ООО 000 х(0)
Ц1) 001 100 г<4)
х(2) 010 010 т(2)
г(3) 011 110 л(6)
Лекция 12. Быстрое преобразование Фурье
259
Таблица J2./ (окончание)
Исходная последовательное! ь Поспелова ельиость в бнт-рсверсивном порядке двоичных номеров
Отсчет Двоичный помер Двоичный номер Отсчсл
л(4) 100 001 .1(1)
л(5) 101 101 «5>
Л(6) ПО он х(3)
М7) 111 111 а(7)
12.4. Алгоритм БПФ
с прореживанием по частоте
Основная идея алгоритма БПФ с прореживанием по частоте заключается
в поэтапном вычислении /V-точечпого ДПФ (12.1) па V этапах, на каждом из
которых ДПФ определяется через ДПФ вдвое большей размерности.
Алгоритм БПФ с прореживанием по час готе (рис. I2.5) можно описать сле-
дующим образом:
□ задание начальных условий:
Л’-точсчная последовательность нс прореживается, сохраняется естест-
венный порядок следования отсчетов п - 0, к.... /V -1;
□ на первом этапе определяются /V/2-точечные ДПФ Л72-точечных последо-
вательностей (двух половин исходной последовательности):
П па вторам этапе определяются N/4-точсчныс ДПФ как комбинация /V/2-
точечных ДПФ;
О на i-ом этапе определяются 2' ’-точечные ДПФ как комбинация 2*-
точечных Д11Ф;
□ на v-ом (последнем) этапе определяются 2-точечныс ДПФ как комбина-
ция 4-точечных ДПФ. Последовательность из N/2 2-точсчпых ДПФ
представляет собой искомое /V-точечное ДПФ, отсчеты ДПФ следуют
в бит-реверсивном порядке двоичных номеров.
>60
Часть III. Математическое описание дискретных сигналов
Размерность
ДПФ
Этап
-ДПФ,
2
—ДПФ4 ДПФ„ ДПФ4 ДПФ4 Д11Ф4
2'-'ДПФ „
ДПФ^ ДПФ_*
< t
ДПФ„
ДПФ_^ дпф_*
\ t
ДПФ*
2‘
4 ДПФ*
4
2 ДПФ*
ДПФ,. ДПФ*
4 4
ДПФ л.
ДПФ* ДПФ*
4 4
* /
ДПФ*
Л
Начальные
условия
Две —точечных последовательности
Рис. 12Л. Идея алгоритма БПФ с прореживанием по частоте
Для реализации данного алгоритма необходимо знать общую формую расче-
та ДПФ на произвольном z-м этапе. Она была получена путем замены входа и
выхода, а также обращения стрелки направленного графа — “бабочки” —
алгоритма БПФ с прореживанием по времени (см. рис. 12.3). Направленные
графы — исходный и полученный в результате указанного преобразования
называют дуальными. На рис. 12.6 показаны дуальные "бабочки", а на
рис. 12.7—"бабочка", дуальная представленной на рис. 12.3.
Таким образом, алгоритмы БПФ с прореживанием по времени и частоте яв-
ляются дуальными". каждый из них получается из другого путем замены вхо-
да и выхода и обращения всех стрелок направленного графа.
Лекция 12. Быстрое преобразование Фурье
261
Рис. 12.6. Дуальные "бабочки”: исходная (</);
полученная путем замены входа и выхода и обращения стрелки (б)
Рис. 12.7. Направленный граф базовой операции алгоритма Ы1Ф
с прореживанием по частоте ("бабочка”)
Определив базовую операцию "бабочка” (рис. 12.7), несложно записать общую
формулу расчета ДПФ для произвольного i-ro этапа
*£(*>=
=p:„w - ••
< = v,v-l,..., I; (12.30)
иг = 0,1.М-1;
it = 0,1.--1,
2
где i — номер этапа. Согласно принципу дуальности, i =v. v-i,.... 1 (осо-
бенности первого (/ = v) и v-ro (/ = 1) этапов см. далее):
w — номер ДПФ;
262
Часть HI. Математическое списание дискретных сигналов
к — номер отсчета ДПФ;
Л/ —количество ДПФ, определяемое по формуле (12.20):
М = 2V~‘;
L — размерное гъ ДПФ, определяемая по формуле (12.21):
L = 2'\
X'm(k) —L-точечное Д11Ф;
Х^ОО * ^2«i+i(*) — четное и нечетное /72-точечнос ДПФ соответственно.
Согласно (12.30), L-точсчное ДПФ определяется параллельно:
□ отсчеты четного £/2-точечного ДПФ — но верхней формуле;
□ отсчеты нечетного L/2-точсчпого ДПФ — по нижней формуле.
Сравнивая (12.30) с (12.19), видим. чго в соответствии с принципом дуально-
сти вход и выход поменялись местами.
Рассмотрим особенности первого этапа (z = v) алгоритма. Определим раз-
мерность L (12.21)
L = 2V = N
и количество Л/ (12.20) /V-точечных ДПФ
М = 2V-V = 1.
С учетом этого перепишем общую формулу ДПФ (12.30) в виде:
ХоЛ*) = ХоЧ*)+хф+^|;
xr'(*)=[x№-*o^+4]]w*: <|2-31)
* = 0,1.—-1.
2
В правой части (12.31) формально, т. е. согласно принятым обозначениям,
v ( ft Л
Хо (fr) и Xq I к + — — отсчеты /V-почечного ДПФ в естественном порядке
следования, однако они неизвестны и будут определены по завершении алго-
ритма (на последнем этапе при г = 1), поэтому для расчета /V/2-точсчных
ДПФ Х^Ч(Л) и Х/Л*) по общей формуле (12.31) перед выполнением пер-
Лекцию 12. быстрое преобразование Фурье
263
вого этана задают начальные условия: отсчетам ДПФ Xq(A) присваивают
значения отсче гов /V-точечной послсдоаателъности;
|а- = 0. 1.(N -1).
Рассмотрим последний v-й этап (i = I) алгоритма. Определим размерность L
(12.21)
L = 2‘ = 2
и количество М (12.20) 2-гочечных ДПФ
С учетом этого перепишем общую формулу (1230) в виде:
1 о Г I (12.33)
При m = 0,1,..., (/V/2 -1) по формуле (12.33) вычисляются два отсчета ДПФ:
четный Х^нДО) и нечетный X?w+i(0). Формально это отсчеты ДПФ (v+ 1)-
го (/ = 0) этапа, однако такого этапа нет, поэтому полученные значения
в действительности являются отсчетами искомого N-точечного ДПФ Х(к).
которые, в соответствии с принципом дуальности, следуют в бигн-
реверсивгюч порядке двоичных номеров:
х2и = х£,(0); (|2 34)
^2л|+1 ~ ^2Hr+l(^)’
где Х2ш и X2wn — условные обозначения четного и нечетного отсчетов
ДПФ (сравните с (12.23)).
Подставляя (12,34) в (12.33) при m = 0,1,.... (W/2-I), получим N/2 "бабо-
чек" типа;
Хо = х'п([)) + х'о(1)-,
х,=%;(()) -xja),
x, = x;(o)+x;(i),
Х3 = Х1,(0)-Х|,(1).
264 Часть (Н. Математическое описание дискретных сигналов
Таким образом, общая формула (1230) описывает алгоритм быстрого вы-
числения ДПФ (алгоритм БПФ с прореживанием по частоте) — v-этапную
процедуру типа "цикл в цикле", где:
□ внешний цикл организуется по переменной i: i = v. (v -1),...»1;
□ первый внутренний цикл (при фиксированном i) — по переменной т:
ш = 0, L 2,..., М -1;
□ второй внутренний цикл (при фиксированных i и т)— по переменной
Л: к = 0,1....(L/2-1). В цикле вычисляется Л-й отсчет L/2-точечного
ДПФ по формуле (1230).
На выходе алгоритма (в результате вычислений при / = 1 и L = 2l =2) со-
гласно (1230) получаем /V-точечпое ДПФ, отсчеты которого следуют в бит-
реверсивном порядке двоичных номеров.
На практике алгоритм БПФ с прореживанием по частоте применяют реже,
чем с прореживанием по времени, т. к. последний обеспечивает естественный
порядок следования отсчетов ДПФ на выхо 'je.
12.5. Пример вычисления 8-точечного ДПФ
с помощью алгоритма БПФ
с прореживанием по частоте
Для лучшего понимания алгоритма БПФ с прореживанием по частоте рас-
смотрим его на примере вычисления 8-точсчного ДПФ (12.24).
Алгоритм БПФ (рис. 12.8) представляет собой трехэтапную процедуру вы-
числения ДПФ по общей формуле (1230) при i = 3, 2,1.
□ Начальные условгтя алгоритма (12.32) задаются как:
|х’(4) = х(4); (12.35)
[4=0. I.... ,7.
□ Первый этан: f = v = 3.
Определяются два 4-точечных ДПФ (12.30) при т = 0 с учетом начальных
условий (1235):
Х£(*)==л(Л) + л(* + 4);
Х|2(А) = [л(А)-л(4 +4)]IV8a;
4=0,1,....3.
Лекция 12. Быстрое преобразование Фурье
265
11ачальные
условия
Выход
Х3(О)=л(О)
Хо(П=х(П
Уо\2) = лЧ2)
У3(3)=л(3)
X’(4) = xt4)
Л-„(5) -л<5)
X’ (6)=А(6)
Хо\7) = л(7)
Х(5)= х"(0)
Х(0) = xg(O>
Х(4) = Х°(0)
Х(2) = Х$(0)
Х(6)=Х?(0)
Х(3)-Х"(0)
\Хт = Х?(0)
Рис. 12.8. Направленный граф алгоритма БПФ с прореживанием
по частоте для 8-точечного ДПФ
□ Второй этап: i = v -1 = 2.
Определяются четыре 2-точечных ДПФ (1230) при ш = 0. I:
x'2,„(k) = X^,(k) + x;,(k + 2)-.
|(*) =[*»(*) - + 2)]^*;
Jt=O, 1.
О Третий этап: / = v - 2 = 1.
Определяется 8-точечное ДПФ (1230) при т = 0. I, 2, 3 :
^2°,„(О)=Х,,„(О) + Х',(1);
^2„„,(0) = [x',(0)-X'(I)]1V2u.
266
Часть HI. Математическое описание дискретных сигналов
Значения Х^„(0) и xJ»n-i(O) пРи w/=0.1.2. 3 и есть искомое 8-точсчное
ДПФ, отсчеты которого, согласно (12.34), следуют в бит-реверсшшом поряд-
ке двоичных номеров:
Х(0) = Хо°(0); |х(2) = Х?(0);
Х(4) = ХГ(0), 1-¥(6) = Л?(0),
Х(1) = А'"(0): |Х(3) = Х6"(0);
A'(5) = X5°(0). |х(7) = А"(0).
Сравнивая направленные графы алгоритмов БПФ с прореживанием по вре-
мени (см. рис. 12.3) и частоте (см. рис. 12.7), нетрудно убедиться в их дуаль-
ности.
12.6. Оценка выигрыша в количестве
операций при вычислении ДПФ с помощью
алгоритма БПФ с основанием 2
Оценим выигрыш в количестве арифметических операций при вычислении
N-точечного ДПФ с помощью рассмотренных алгоритмов Ы !Ф с основанием 2.
Любой из этих алгоритмов состоит из v этапов, где v. исходя из (12.3). равно
v = Iog2 N
Количество "бабочек" на любом ;-м этапе алгоритмов Б! !Ф с прореживанием
но времени и по частоте одинаково и. согласно (12.25). равно N/2. Для <«)-
нон "бабочки" при фиксированных т и А требуются два сложения (тля
верхней и нижней формул) и одно умножение на поворачивающий множи-
тель—- всего три арифметические операции. Следовательно, тля Л//2 "бабо-
чек" на каждом этапе необходимо 3/V/2, а в целом, на всех v этапах.—
3/V/2log2 N арифметических операций с комплексными числами.
Порядок вычислительной сложности алгоритма БПФ оценивается как
O(/Vlog2 /V), вто время как при прямом вычислении ДПФ (12.1) он равен
Наглядное представление о получаемом выигрыше в объеме вычислении
в зависимое ги от длины /V исходной последовательности можно полупи ь
из табл. 12.2.
Лекция 12. Быстрое преобразование Фурье
267
Тай.шца 12.2. Оценка выигрыша в кочичеснше операций
N Оценка вычислительной сложности Оценка выи|рыша A^/lWlog, Л>)
Прямое вычисление ДПФ Л'’ Вычисление с помощью БПФ /Vlog, W
8 64 24 2,7
16 256 64 4,0
32 1024 160 6,4
64 4096 384 10,7
128 16384 896 18.3
256 65536 1024 32,0
512 262144 4096 56.9
1024 1048576 10240 102,4
12.7. Вычисление обратного ДПФ
с помощью алгоритма БПФ
Покажем возможность использования алгоритма БПФ для вычисления
ОДПФ (И.23)
i * |
з(и) = — у X(k)Wxnk, п = 0,
N k=n
Выполним операцию комплексного сопряжения правой и левой частей ра-
венства (символ '*') и умножим обе части на N :
Nx\n)=2 X'tkywtf .
*=0
Правая часть равенства представляет собой /V-точечное ДПФ последователь-
ное ги Л'’(£), которое вычисляют с помощью одного из алгоритмов БПФ.
После этого, вновь выполнив операцию комплексного сопряжения и разде-
лив обе части равенства на N, получаем искомую последовательность:
J,",=V
, » = 0,1,
N-l.
ЧАСТЬ IV
ПРОХОЖДЕНИЕ СЛУЧАЙНЫХ СИГНАЛОВ
ЧЕРЕЗ ЛИНЕЙНЫЕ ДИСКРЕТНЫЕ СИСТЕМЫ
Лекция 13. Линейная дискретная система
как генератор случайных сигналов
Лекция 14. Прохождение случайных сигналов
через линейные дискретные системы
Лекция 13
Линейная дискретная система
как генератор случайных сигналов
На практике часто встречаются за чачи, в которых воздействие на дискретную
систему носит случайный (стохастический) характер, связанный как с веро-
ятностной природой самого сигнала, так и с различного рода шумами, В этом
случае к содержа гельным результатам привозят методы оценки усредненных
параметров. учитывающие статистические характеристики воздействий.
Изложение материала данной лекции предполагает у читателя наличие зна-
ний но основам теории вероятностей и случайных процессов. Гем не менее,
сначала будут определены тс понятия, которые лягут в основу этой и не-
скольких последующих лекций.
13.1. Основные понятия вероятностного
анализа дискретных сигналов
Форма !ьно дискретный с.'П'чайный процесс в нормированном времени явля-
ется индексированным семейством случайных величин {т(м)}. Такое семей-
ство характеризуется совокупностью функций распределения вероятности,
которые в общем случае могут зависеть от времени пТ. Дискретный случай-
ный процесс является математической моделью сгохасшчсского сигнала.
Если функции всевозможных совместных распределений зааисят от времени,
случайный сигнал называют нестационарным. Если указанные функции ин-
вариантны к сдвшу во времени, сигнал называют стационарным (в узком
смысле). Стационарный случайный процесс является эргодическим, если ус-
реднение но множеству для него может быть заменено усреднением по вре-
мени. 9pi одический сигнал можно описать его математическим ожиданием
(средним значением)
ц, =t'{.r(n)} = lim —X 4'0 <I3 I)
72 Часть IV, Прохождение случайных сигналов через линейные дискретные системы
автокорреляционной функцией
1 N
Rx(m) = Е{л(я)'л(л + /л)}= Jim -----л(л)л(л + лг),
Д/ —fVO /V + 1 /|=.Q
(13,2)
де:
имволом Е{ } обозначено усреднение и по ансамблю, и по времени;
W + I) —количество отсчегов дискретного сигнала.
Автокорреляционная функция является мерой взаимозависимости отдельных
значений случайного сигнала. Из ее определения следует, что она зависит от
датематического ожидания сигнала. Если же анализируются только отклоие-
1ия от среднего, функция (13.2) переходит в авпюковариационную функцию
гх (т) = Е {[л(«) - Ц, J [л( п + т) - цл]} = RK(»i) - (X,2. (13.3)
При т = 0 формула (13.3) дает дисперсию сигнала
a2=r,(O) = lim -L £[Дл)-ц ] (13.4)
«-»» N +1 „=0
Если амплитуда сигнала распределена по нормальному закону, он полностью
эписывается математическим ожиданием и автоковариациопной функцией.
Стохастический сигнал называют стационарным в широком смысле, если его
характеристики и не зависят от времени.
Степень линейной связности двух различных случайных сигналов определя-
ется взаимной корреляционной функцией
или взаимной ковариационной функцией
r„(III) = Е|[л(и) - цt][у(и + ш) - ]}= R„ (HI) - (1,1s • (1 з.б)
Два случайных сигнала называются некоррелированными, если
г„(и1) = 0.
Белый шум отличается от случайных сигналов других типов тем, что его те-
кущее значение не зависит от всех предшествующих. Поскольку внутренняя
взаимосвязь между значениями белого шума отсутствует, то последовагель-
ность его отсчетов {р(л)} состоит из независимых, одинаково распределен-
ных случайных величин. В случае распределения по нормальному закону бе-
Лекция 13. Линейная дискретная система как генератор случайных сигналов 27з
лый шум полностью описывается математическим ожиданием и ковариа-
ционной функцией
= . (13.7)
где 6(/н) —символ Кронексра, определяемый равенством
(I при w = 0;
о А 03.8)
О при ш^О.
Векторный случайный сигнал (процесс) порядка М представляет собой со-
вокупность М скалярных сигналов. Взаимосвязь отдельных скалярных со-
ставляющих описывается ковариационной мазрицей, состоящей из всевоз-
можных функций вида (13.6).
13.2. Генерирование ЛДС случайных сигналов
Белый шум играет важную роль в вероятностном анализе— большинство
случайных процессов генерируются его фильтрацией. Пусть v(n) — дис-
кретный белый шум в нормированном времени. Процесс, вырабатываемый
системой, которая описывается разностным уравнением
x(n)-b(iv(n) + blv(n-].)+ ... + bNv(n-N)t (13,9)
называется скользящим средним. В соответствии с Лекцией 4, уравнение
(13.9) отображает во временную область нерекурсивную ЛДС порядка /V.
Выходной сигнал такой системы х(п) рассматривается как взвешенная сум-
ма N отсчетов входного белого шума.
Если сигнал, вырабатываемый системой, описывается разностным уравне-
нием
д(н) = A>ov(n)-«(A(n-1)-я2 г(л - 2) - ... - aNx(n -N), (13.10)
то процесс называется авторегрессионным. Уравнение (13.10) соответствует
выходу рекурсивной цепи порядка /V, возбуждаемой белым шумом v(h).
Авторегрессионные процессы играют важную роль в линейном предсказании
и будут подробнее рассмотрены в Лекции 25.
Разностное уравнение (13.10) порядка N методами пространства состояний,
описанными в Лекции 8, легко свести к системе /V линейных уравнений.
В матричной записи уравнения состояния и выхода будут иметь вид:
q(n+l)= Aq(n)+Bv(n) (13.11)
х(л + 1) = С7?(п) + Лйз<л), (13.12)
774 Часть IV. Прохождение случайных сигналов через линейные дискретные системы
-де матрицы А. Я и С в каноническом виде определены следующим образом:
0 0 1 0 0 I 0 ' 0
А = 0 0 0 1
~aN 1 ~Он-2 • -r7l
О
А>
Структурная схема, соответствующая ЛДС 2-го порядка, приведена на рис. 8.2.
При этом надо учесть, что Л| = Ь2 ~ 0.
Для случайных сигналов невозможно точно определить их будущее значе-
ние. Поэтому ес тественным развитием понятия состояния для этих процессов
является требование, чтобы распределение вероятностей следующего со-
стояния однозначно определялось текущим, т. е.
p[.t(w)|a(w -1),..., л(0)] = р[л(н)|.т(п -1)], (13.13)
где р[ ] — условная плотность вероятности. Стохастические процессы, об-
адающие таким свойством, получили название марковских. Данному выше
определению марковского процесса соответствует сигнал, описываемый ска-
лярным разностным уравнением первого порядка
л(« + П = ОА(п} + v(n), (13.14)
которое устанавливает связь между будущим значением х(п +1) и текущими
значениями д(л) и v(h). Если v(h)—белый шум, то л(и) является .марков-
ским процессом, генерируемым ЛДС первого порядка. Ес структурная схема
изображена на рис. 13.1.
Рис, 13.1. Модель генерирования марковскою процесса
Лекция 13. Линейная дискретная система как генератор случайных сигналов 275
При введении в Лекции 8 переменных состояния под ними подразумева-
лись сигналы на выходах элементов задержки. Это позволяет предполо-
жить, что марковские процессы есть не что иное, как стохастический экви-
валент моделей линейных дискретных систем в пространстве состояний.
Поэтому уравнение (13.14) называют линейным стохастическим разност-
ным уравнением.
13.3. Свойства линейных стохастических
разностных уравнений
Исследуем характер случайного процесса (в общем случае векторного), за-
данного линейным стохастическим разностным уравнением:
л(и + !) = Av(h) + V(n), (13.5)
где:
х(я) и V(h)—век rop-с голбцы размером WX1;
А — квадратная переходная матрица порядка N.
Предполагается, что начальное состояние имеет математическое ожидание
Цч.(0)и матрицу ковариации Ях(0). Векторный белый шум V(л) облачает
нулевым математическим ожиданием и ковариационной матрицей /?г, Вы-
числим математическое ожидание и ковариационную мазрицу процесса х(н)
в произвольный момент времени.
Для получения математического ожидания применим оператор £"[ | к обеим
частям уравнения (13.15)
Цл(н +1) = Apv(n) (13.16)
с начальным условием pv(0). Следовательно, математическое ожида-
ние марковского процесса передается во времени гак же. как и в системе без
шума.
Чтобы вычислить ковариационную матрицу, введем матричную функцию
/’(и) = . (13.17)
где (7(л) = .Т(п)-Ц1(П).
10 Зак 1С5
276 Часть IV. Прохождение случайных сигналов через линейные дискретные системы
Из уравнений (13.15) и (13.16) следует, что U(n) удовлетворяет уравнению
(13.15) с нулевым начальным математическим ожиданием. Для вычисления
ковариационной матрицы построим выражение
17(п+1)-17т(я+1)=[л17(л)+Г(п)][л17(я)+Йн)]' = (|3 |8
= AU(ii)Ur(ii') Ат + + Vtn'iU1' (п)Ат + V(>i)v‘(ii).
Определяя математические ожидания правой и левой частей (13.18) и учиты-
вая независимость |/(н) и U(n), получаем
Р(п +1) = АР(п)Аг + Rv (13.19)
с начальным условием Р(0) = Ял(0). Рекуррентное уравнение (13.19) опреде-
ляет передачу во времени ковариации процесса х(п).
Чтобы вычислить ковариационную матрицу состояния, заметим, что
и (я +1) • иг (я) = [л U(n) + V (л)] U1' (и).
Так как V(«) и U(n) независимы и математическое ожидание белого шума
1/(л) равно нулю, то ковариационная матрица процесса х(п) в момент вре-
мени п + 1 равна
Rx(n+ \) = АР(п). (13.20)
Для прогнозирования эволюции ковариационной матрицы на nt временных
интервалов повторяем приведенные рассуждения и получаем
R'(n + nt) = AwP(H). (13.2J)
Если случайный процесс является нормальным, то он однозначно определя-
ется своими математическим ожиданием и ковариационной матрицей. Раз-
личные члены в уравнении (13.19) имеют определенную физическую интер-
претацию. Ковариационная матрица Р(п) есть неопределенность состояния
в момент времени п. Произведение АР(п)Ат показывает, как передастся
неопределенность в соответствии с динамикой системы. Матрица Rv описы-
вает увеличение неопределенности вследствие наличия возмущения V(л).
Проиллюстрируем проведенный анализ простейшим примером.
Пример 13.1
Рассмотрим ЛДС первого порядка со скалярным состоянием х(и) и скаляр-
ным белым шумом ?(л) с нулевым математическим ожиданием и коаариа-
Лекция 13. Линейная дискретная система как генератор случайных сигналов 277
ционной функцией rv(m). Пусть состояние в момент времени и = 0 имеет
математическое ожидание цт(0) и ковариационную функцию rv(0). Дина-
мика данной системы будет описываться разностным уравнением
х(п +1) = йл(д) + v(n) . (13.22)
Из (13.16) следует, что математическое ожидание процесса в соответствии
с (13.22) изменяется следующим образом:
цд(и + 1) = ацд(л) (13.23)
при известном начальном условии ЦЛ (0). Решая (13.23) для произвольною
момента времени, получим
цх(л) = а"ц,г(О). (13.24)
Уравнение (13.19) для ковариационной функции дает
P(n + t) = a2P(n) + r„, (13.25)
где Р(0) = ^(0).
Итерационная процедура решения (13.25) приводит к следующему ре-
зультату
F(H) = n2"r.(0) + l~“, г„. (13.26)
1-а2
Если |ц|< 1, то из (13.24) и (13.26) следует при л —»«>
щ(л)-»О,
Р(п)->-Ц.
|-<72
В этом случае процесс становится стационарным, т. к. математическое ожи-
дание есть константа, а ковариационная функция не зависит от времени.
Приводящее к стационарности условие |п| <1 соответствует тому, что полюс
передаточной функции ЛДС
Z+ = d
лежит внутри единичного круга на Z-плоскости. Следовательно, устойчивая
ЛДС 1-го порядка, описываемая уравнением (13.22), порождает на выходе
стационарный случайный процесс при «—><».
278 Часть IV, Прохождение случайных сигналов через линейные дискретные системы
Наиболее общий вид линейные стохастические разностные уравнения при-
нимают в случае объединения выражений (13.9) и (13.10) в единое целое:
х(я) = Ь0\'(н) + 6,v(n -1) +... + bvv(>i -N)- щх(.п -1) - 113 27)
-л2*( л ~ 2) - -aNx(n -N).
Уравнение (13.27) описывает скалярный смешанный авторегрессионный
процесс со скользящий средним. Выходная случайная последовательность
л*(л) является функцией независимого возбуждающею шума у(и) и линей-
ной комбинацией Л/ предыдущих своих отсчетов. В этом случае говорят, что
линейная дискретная система порождает марковский случайный сигнал по-
рядка N , т. к. каждый его отсчет зависит от /V предыдущих. С точки зрения
общей теории НДС. изложенной в Лекции 5, сигнал х(п) можно рассматри-
вать как выход цифровой цепи, имеющей передаточную функцию
= (|32g)
1+«]Z +... + flwE
и возбуждаемой белым шумом г(н) с нулевым средним и единичной зиспер-
сией. Структурные схемы подобных рекурсивных цепей произвольного по-
рядка подробно рассматривались в Лекции 7.
С помощью методов пространства состояний можно получить эквивалент
стохастического разностного уравнения (13.27), сведя его к системе N ли-
нейных уравнений, имеющих, например, вид (13.11) и (13.12). С точки зрения
теории случайных функций, происходит декомпозиция марковского процесса
/V-го порядка, и он превращается в векторный (размерности /V) марковский
процесс первого порядка. В случае рационального выбора переменных со-
стояния каждый компонент векторного процесса может иметь физически на-
глядную интерпретацию как выход своего элемента задержки в структурной
схеме рекурсивной ЛДС.
Таким образом, широкий класс случайных зискрегных сигналов может опи-
сываться параметрическими моделями, представляющими собой марковские
процессы, что в значительной мерс облегчает их теоретический анализ.
Лекция 14
Прохождение случайных сигналов
через линейные дискретные системы
В данной лекции будут рассмотрены различные способы анализа процессов
прохождения случайных последовательностей через ЛДС с постоянными па-
раметрами.
14.1. Анализ во временной области
Рассмотрим ЛДС с импульсной характеристикой h(n) (время нормирован-
ное). Пусть на се вход воздействует скалярная случайная последовательность
х(н) с математическим ожиданием и автоковариационной функцией
rv(/z). На выходе системы возникает случайная последовательность у(и),
обладающая своими вероятностными характеристиками. Определим их.
Во временной области связь вход-выход в соответствии с (4.8) и (4.9) описы-
вается формулой свертки
у(л) = У, й(н-т)л(т) = £ Л(ш)х(п-»0- (14.1)
»i-0 т=0
Определив математические ожидания левой и правой частей равенства (14.1),
получим
(14.2)
Таким образом, математическое ожидание (как функция времени) выходного
процесса получается при подаче на вход системы математического ожидания
исходного сигнала х(п).
280 Часть IV Прохождение случайных сигналов через линейные дискретные системы
Определим и сразу вычислим среднюю мощность выходной последователь-
ности
Л = еГ/(»)! = lim -Ц X >’(") =
L J W->oo /V + 1 /1=0
= lim —!—У У У h(k}h(m)x(n-k)x{n-m) -
N~^BO N + 1 „_о[_Л=Ом=О
= Ё Ё Л(*)Л(»О lim 77—7 E x(n—k) r(H-m)
l'=Orf L'V-»« N + 1 ,,_0
Выражение в квадратных скобках есть по определению средняя мощность
входной последовательности Рх и, следовательно.
Py=Ps^h2(n). (14.3)
я-=0
Если входной сигнал имеет нулевое среднее значение, то в соответствии
с (13.4) и (14.3)
Оу = °,Ёл2('<). (14.4)
л=0
Прежде чем определить ковариационную функцию выходного процесса
(иг), заметим, что вычитание (14.2) из (14.1) дает
у(п)-Цу(п)= У Л(т)[.ф>-т)-Мл-"")]•
1л = 0
Следовательно, разность между входным сигналом и его математическим
ожиданием передается через ЛДС так же, как и сам входной сигнал. Поэтому
при вычислении ковариационных функций можно допустить, что математи-
ческие ожидания равны нулю, а это существенно упрощает выклатки. Опре-
деление автоковариационной функции приводит к следующему результату:
гу (иг) = Е [у(п + /и) - у(и)] = Е У h(k)х(и + т - А) У /г(/)л(« “ 0 [ =
[*=° /.о J (]45)
= Е Ё Л(4)Л(0^[х(п + т-/:)л(п-0]= Е ^,li(k)h{l)rX'»+l-к).
Л=0/ = 0 i = 0l-~0
Лекция 14. Прохождение случайных сигналов через линейные дискретные системы
281
Аналогично можно получить формулу для взаимной ковариационной функ-
ции входной и выходной последовательностей, воспользовавшись выраже-
нием (13.6);
гта(лО = Е[у(п + ш)х(н)] = Е
У, h(l)x(n + m-l)x(n)
/=о
= X /1(0 £[л(н + m - /)л(л)] = £ 11(1) rt(m -1).
/=о /=о
(14.6)
Выражение (14.6) представляет собой свертку автоковариационной функции
входного процесса с импульсной характеристикой ЛДС. Вычисления в фор-
мулах (14.5) и (14.6) основывались на предположении о существовании бес-
конечных сумм и на свободном изменении порядка суммирования и опера-
ции взятия математического ожидания. Справедливость подобных действий
можно доказать [40], если предположить, что четвертый момент входного
сигнала конечен, а сходимость понимается в среднеквадратичном смысле.
14.2. Анализ в частотной области
Связи, выражаемые уравнениями (14.5) и (14.6), можно описать в более про-
стой форме, если ввести понятие спектральной плотности мощности слу-
чайного процесса. Согласно теореме Хинчина—Винера, она является фурье-
образом автоковариационной функции. Па основании соотношений, полу-
ченных в п. 6. /, спектральную плотность мощности определяем как
S, (й>) = 4- X rv(„)e’yd“'. (14.7)
Подставляя в (14.7) выражение тля tv(h) из (14.5), получаем
= X е’^'Х X/ia)A(/)rl(n + /-i) =
2л,=_ t=0(=0
= —X X ^е-^к)е-Лп+1-кЛгх(.П + 1-к-)е]й1Н(1)= (14.8)
2^а:=ол=-ро/=о
1
2л
*₽0 w=-~ t=0
282 Часть IV. Прохождение случайных сигналов через линейные дискретные системы
Вспоминая определение для частотной характеристики //(eJ<n), введенное
в л. 6.Z, уравнение для спектральной плотности мощности (14.8) можно запи-
сать в виде
S} (й) = W(e;“)5,(0))H(e^). (14.9)
На основании уравнения (14.6) для взаимной спектральной плотности мощ-
ности имеем:
5уЛ(Й) = ^- f е ^га.(п) = ^- £ е-^^1,(к)г,(п-к) =
2пямв • *=0
(14,10)
= — '£h(k')e-itS‘ £ е’^гДи) = //(<>). S,(w).
27Г4=о л=-~
Проведенный анализ позволяет сделать следующие выводы:
□ если входной сигнал ЛДС есть стационарный случайный процесс с мате-
матическим ожиданием и спектральной плотностью мощности 5,(со),
то для устойчивой системы выходной сигнал является также стационар-
ным процессом с математическим ожиданием
Иу=//(1)-цд.(со = О); (14.11)
□ выходная и взаимная спектральные плотности мощности определяются
соотношениями (14.9) и (14.10). Результат (14.9) имеет простую физиче-
скую интерпретацию. Спектральная плотность мощности выходного сиг-
нала есть произведение квадрата АЧХ системы на спешральную плот-
ность мощности входа, т. к.
= Д2(6)); (14.12)
□ из уравнения (14.10) следует, что взаимная спектральная плотность мощ-
ности равна частотной характеристике системы, если па входе действует
белый шум с единичной спектральной плотностью мощности. Это свойст-
во можно использовать для определения частотной характеристики
W(e^) ЛДС.
Пример 14.1
Рассмотрим процесс л(п). описанный в примере 13.1. С точки зрения соот-
ношения вход-выход, можно считать, что он порождается системой с переда-
точной функцией
= — г = ——, (14.13)
J-tiZ Z-a
Лекция 14 Прохождение случайных сигналов через линейные дискретные системы 283
на вход которой поступает белый шум. Так как спектральная плотность
мощности процесса v(/z) постоянна и равна
5Лй) = ^.
то из уравнения (14.9) следует, что спектральная плотность мощности гене-
рируемого процесса л(л) будет равна
5,(й) = И (с1'"}- W(^7“)— = —--------5-^-----=
1 2 л 2 л (е^-оХе'^-о)
2л(1+«2 -2tfcoscb)
При выводе использовался известный из (6.11) факт, что
W(ey‘") = W(z)|;=^.
14.3. Спектральная факторизация
Рассмотрим задачу нахождения такой линейной дискретной системы (ее пе-
редаточной функции), выходной случайный сигнал которой имеет заданную
спектральную плотность мощности, если на ее вход поступаег белый шум.
Решение згой задачи имеет важное значение, т. к. оно показывает, как, пре-
образуя белый шум, можно генерировать случайный сигнал с требуемыми
характеристиками. Кроме того, решение позволяет определить, насколько
универсальна модель (13.I5). Из л. 14.2 следует, что случайный процесс, вы-
рабатываемый ЛДС, на вход которой поступает белый шум, имеет спек-
тральную плотность мощности, задаваемую соотношением (14.9). Если сис-
тема конечномерная, то частотная характеристика и спектральная
плотность мощности S(w) — рациональные функции от ejUl. С небольшим
допущением закую спектральную плотность мощности называют просто ра-
циональной. Учитывая, что при переходе на z-плоскость
Z = ej'\
для правой части (14.9) можно ввести новую функцию
= (14.14)
Еслиг(| — корень функции //(z), то z~' — корень W(z“’)« Таким образом,
нули функции F(-.) симметричны относительно действительной оси ком-
284 Часть IV. Прохождение случайных сигналов через линейные дискретные системы
плексной z-плоскости и инверсны относительно единичной окружности в
предположении, что коэффициенты рациональной функции F(z) — дейст-
вительные числа. Это рассуждение имеет силу и для полюсов функции F(z).
На рис. 14.1 показан один из возможных вариантов симметрии нулей и по-
люсов.
2-ПЛОСКОСТЬ
Рис. 14.1. Симметрия нулей и полюсов искомой системы
Пусть для простоты на входе ЛДС действует белый шум с единичной спек-
тральной плотностью мощности Sr(tb) = l. Из (14.9) следует, что требуемая
спектральная плотность мощности выходного процесса Sv(w) будет опреде-
ляться нулями и полюсами функции F(z) (а следовательно, и H(z)).
Сначала определим полюсы z*j и нули z.f- функции F(z). Из установленной
симметрии полюсов и нулей следует, что они всегда появляются парами при
соблюдении условий
4ГЧ =1:
Z*j Z« j ~ 1
В каждой парс выбираем полюс или нуль, модуль которого не превышает
единицу, а затем строим из них требуемую передаточную функцию вида:
(14.15)
Лекция 14. Прохождение случайных сигналов через линейные дискретные системы 285
Выбор полюсов внутри единичного круга на Z-плоскости обеспечит устойчи-
вость ЛДС н асимптотическую стационарность генерируемого случайного
процесса.
Приведенные рассуждения позволяют сформулировать результат. Если зада-
на спектральная плотность мощности 5(<Ь), являющаяся рациональной
функцией оз* cos б), то существует такая линейная дискретная система с пе-
редаточной функцией
A(z)
что выходной процесс после подачи па вход белого шума будет стационар-
ным случайным процессом со спектральной плотностью мощности 5(б>).
Многочлен Д(<) будет иметь корни внутри единичного круга на г-плоскости.
a R(z) — внутри или на границе единичного круга.
Из этого результата вытекают важные следствия:
□ вес стационарные случайные последовательности можно представлять как
выходы устойчивых линейных систем, на вход которых подастся белый
шум. Схемная реализация таких систем ограничивается рекурсивными це-
пями требуемого порядка. В этом случае достаточно понимать поведение
системы при ее возбуждении белым шумом и иметь возможность модели-
ровать его. Все другие стационарные процессы с рациональными спек-
тральными плотностями мощности могут быть получены фильтрацией бе-
лого шума;
□ так как непрерывную функцию на небольшом интервале можно скань
угодно близко аппроксимировать рациональной функцией (7], модели
(13.15) и (14.1) могут описывать сигналы, спектры которых близки любой
непрерывной функции;
□ появляется возможность представления для скалярных систем совместно-
го воздействия нескольких случайных сигналов одним эквивалентным
воздействием, которое определяется посредством вычисления общей
спектральной плотности мощности выходного сигнала и применения рас-
смотренной выше процедуры.
Пример 14,2
11усть спектральная плотность мощности случайного процесса имеет вид
S(w) =
l,04 + 0,4coso)
1,25 +cos со
286 Часть IV. Прохождение случайных сигналов через линейные дискретные системы
Необходимо найги передаточную функцию ЛДС, генерирующей подобный
процесс из белого шума.
Решение. Рассмотрим разложение 5(6)):
„ 1.04 + 0,4cos& <?'“+0,2 е'/й+0,2
5 (<о) =-------= -------------.
l,25 + cos<o ejm +0,5 <г"-'<” + 0,5
Ему удовлетворяют следующие передаточные функции
",(;) = Z+0,2;
1 Z + 0,5
„ , , 1 + 0.2Z „„ Z + 5
"2(г)=Т7БУ=°'2^:
„^,= 2+02^^
1 + 0.5Z Z + 2
,/jU) = 1±^ = 0.4I±5.
1 + 0,5Z Z + 2
Заметим, что только нс имеет нулей и полюсов вис единичного круга
па z-плоскости. Это означает, что устойчивая система, генерирующая слу-
чайную последовательность с рассматриваемой спектральной пютпостыо
мощности, будет реализована схемой, показанной на рис. 14.2.
Рнс. 14.2. Схема генератора случайной последовагечьности
Спектральная факторизация даст мощный и конструктивный способ синтеза
линейных дискретных систем, возбуждаемых белым шумом, для генерирова-
ния случайных последовательностей с заданными характеристиками.
ЧАСТЬ V
КВАНТОВАНИЕ В ЦИФРОВЫХ СИСТЕМАХ
Лекция 15. Квантование сигналов
в цифровых системах
Лекция 16. Эффекты квантования
в цифровых системах
Лекция 15
Квантование сигналов
в цифровых системах
Цифровая система обработки сигналов— это дискретная система, описы-
ваемая разностным уравнением и реализованная программным путем на
[(ПОС или аппаратным путем в виде специализированного цифрового вы-
числителя.
Для представления коэффициентов системы (коэффициентов разностного
уравнения или передаточной функции) и отсчетов обрабатываемого сигнала
в цифровой системе используются элементы памяти (регистры, ячейки памяти),
разрядность которых конечна. Операционные устройства (сумматоры, умно-
жители) также имеют ограниченную разрядность. Следовательно, коэффици-
енты системы (коэффициенты разностного уравнения или передаточной
функции) и отсчеты обрабатываемого сигнала представляются с ограничен-
ной точностью. Ограничение разрядности элементов памяти и операционных
устройств системы приводит к операции квантования.
Квантование — это нелинейная операция. Ее введение в алгоритм обработки
сигнала, описываемый линейным дискретным уравнением, вызывает появле-
ние ошибок в реализации алгоритма. Эти ошибки называются ошибками
квантования.
В данной лекции описываются формы представления и способы кодирования
чисел, эффекты, связанные с выполнением арифметических операций нал
числами, способы квантования чисел, источники ошибок квантования и
предположения о свойствах ошибок квантования, а также приводятся оценки
шума квантования входного сигнала и оценки соответствующего шума кван-
тования на выходе системы [16, 321.
15.1. Представление и кодирование чисел
Дискретный сигнал представляет собой последовательность отсчетов (чисел),
принимающих произвольные значения в некотором диапазоне.
290 Часть УС Квантование в цифровых системах
Цифровой сигнал — это квантованный по уровню дискретный сигнал, т. е.
квантованная последовательность отсчетов (чисел), которые могут прини-
мать лишь конечный ряд дискретных по величине значений — уровней кван-
тования. Значения отсчетов цифрового сигнала представляются числами
в выбранной системе счисления (СС). Как правило, в устройствах ЦОС числа
представляются в двоичной СС. что обьясняется удобством запоминания и
обработки двоичной информации.
Далее рассмотрим формы представления и способы кодирования чисел,
а также эффекты, связанные с выполнением арифметических операций над
числами.
15Л .1. Формы представления чисел
В системах ЦОС используются две формы представления чисел: с фиксиро-
ванной и плавающей запятой (точкой).
Представление чисел в форгме с фиксированной занятой (ФЗ) означает, что
в рамках заданного формата для всех чисел логически фиксируется одинако-
вое местоположение запятой, разделяющей целую и дробные части числа.
Старший разряд числа используется как знаковый, остальные разряды счи-
таются значащими. После старшего, знакового, разряда логически фиксиру-
ется запятая.
Символическое обозначение формата, в котором представляется двоичное
число Д, имеет вид 2ft, где b— количество значащих разрядов числа Л.
На рис. I5.I приведен пример представления двоичного числа в форме с ФЗ
(его десятичный эквивалент 0.2890625).
7 6 5 4 3 2 1 0
0 0 1 0 0 1 0 1
Знак 2-1 2'2 2'3 г-4 2 5 2'6 2'7
Рис. 15.1. Пример представзения двоичного числа в форме с ФЗ
Диапазон абсолютных значений чисел А в форме с ФЗ составляег
0<|Л|< I -2'ь. (15.1)
При арифметических операциях (сложении и вычитании чисел) может про-
исходить переполнение, г. е. результат операции может выйти за верхний
Лекция 15. Квантование сигналов в цифровых системах 291
предел диапазона (15.1) (|Л|> 1) и, тем самым, исказиться. Для устранения
переполнения в системах ЦОС с ФЗ вводится масштабирование обрабаты-
ваемых данных, при этом все арифметические операции выполняются с чис-
лами А, по абсолютному значению меньшими единицы:
0<|А|<1. (15.2)
Представление числа А в форме с плавающей занятой (ПЗ) основано па
записи
д = (15.3)
где:
s — основание системы счисления;
р. — мантисса, вещественное число со знаком, представленное в форме с ФЗ;
Y — порядок, целое число со знаком.
Для устранения неоднозначности и упрощения арифметики чисел с ПЗ из
всех возможных вариантов представления числа А выбирают один, назы-
ваемый нормализованной формой, Нормализованная форма соответствует
такому представлению числа, когда целая часть мантиссы равна нулю, а пер-
вая значащая цифра дробной части отлична от пуля.
Пример 15.1
Представим двоичное число Д2) = +101.001 и соответствующее ему деся-
тичное число Aiю) =+5.125 в нормализованной форме (15.3):
Л(2| = 40.101001-2*", где 5 = 2, М(2) =0,101001. Yrzi=l1-
Л(1О)=4О,512510ч,где 5 = 10, ц(]0) =0,5125 , Y(]0) = I.
Отмерим, что в Ц11ОС описанный способ нормализации чисел в форме с 113
не является единственным [46].
Далее будем рассматривать системы ЦОС, использующие представление чи-
сел в форме с фиксированной запятой. Вопросы, связанные с эффектами
квантования в системах с ПЗ, изложены в [43].
292
Часть И Квантование в цифровых системах
15.1.2. Кодирование чисел
Для кодирования чисел с ФЗ применяют два основных способа; прямой и до-
полнительный.
Рассмотрим особенности способов кодирования, выполняя операции с удов-
летворяющими условию (15.2) положительными и отрицательными двоич-
ными числами А.
Д =±0,й] 02—ab »
где Oj, j~ I, 2,... ,b — значащие разряды числа.
Примечание
Для наглядности записи условная запятая в представляемых числах отделяет
знаковый разряд от значащих.
Прямой код числа А формируется по следующему правилу. В знаковый раз-
ряд записывается 0 (для положительных чисел) или 1 (для отрицательных
чисел), значащие разряды соответствуют дробной части числа. После стар-
шего. знакового, разряда логически фиксируется запятая, отделяющая целую
часть (равную нулю) от дробной (см. рис. 15.1). Указанное правило обозна-
чается следующим образом:
(0,«| a7при Л>0;
1 2 6 F (15.4)
l,at a2—(ib пРи
Пример 15.2
Представим в прямом коде положительное число А и отрицательное число В,
модуль которых равен 0,10111. В соответствии с (15.4)
[4ф= 0.10111 и [В]11р = 1,101 II.
Отметим, что нуль в прямом коде имеет две формы (представляется неодно-
значно): 0.00...О (г.е. +0)и L00...0 (т. е. -0).
До/ю.чшипелъпый код наиболее широко используется в системах ЦОС, по-
скольку арифметические действия над числами со знаком, представленными
в дополнительном коде, выполняются как над беззнаковыми (беззнаковыми
называются числа, имеющие положительный знак по умолчанию).
Дополнительный код числа А формируется по следующему правилу. Если
число положительное, то дополнительный код совпадает с прямым кодом,
т.е. . Для отрицательных чисел в знаковый разряд записывается 1,
Лекция 15. Квантование сигналов в цифровых системах 29з
значащие разряды исхочпого числа инвертируются (0 заменяется I и наобо-
рот) и к младшему значащему разряду полученного числа прибавляется I
с соблюдением правил сложения двоичных чисел, т. е.
)0,П|«2 —аь ПРИ Л>0;
l,ala2...al> + 2~b при Л<0. (Ь'5)
При этом предполагается, что число А удовлетворяет условию (15.2).
Пример 15.3
Представим отрицательное двоичное число А = -0,10111, соответствующее
десятичному числу Дц» =-0,7188, в дополнительном коде. Согласно (15.5)
запишем
[лЦ = 1.10111-> 1.01000
+1
1,(11001
W =1.01001.
yjpfl
Для перевода дополнительного кода отрицательного числа в прямой код не-
обходимо инвертировать значащие разряды дополнительного кода и доба-
вить 1 к младшему разряду.
Пример 154
Осуществим обратный перевод дополнительного кода числа Л = 1,01001 (из
примера 15.3) в прямой код:
М] = 1,01001-> 1,10110
1 -*ДОП
+ 1
1.10111
[V°l,L
Код называется дополнительным, поскольку отрицательное число можно
представить как разность между числом 2 и модулем рассматриваемого чис-
ла, т. е. как дополнение к 2. Так как двоичное число с ФЗ по модулю всегда
294
Часть V. Квантование в цифровых системах
меньше 1, его дополнение к 2 всегда больше I и меньше 2. Именно этот ре-
зультат и является дополнительным кодом отрицательного числа, где едини-
ца в целой части соответствует отрицательному знаку, а дробная часть —
значащим разрядам отрицательного числа в дополнительном коде.
Пример 15.5
Получим дополнение к 2 отрицательного числа =-0.71875. Модуль
этого числа в двоичной системе счисления А = 0.10111. Вычтем указанный
модуль из двоичного числа 10.00000. соответствующего числу =2 :
в двоичной СС; 10,00000 в десятичной СС: 2,00000
-00,10111 -0.71875
01,01001 1,28125
Полученный результат совпадает с [dj =1.01001 из примера 15.3.
В дополнительном коде исключается неоднозначность представления нуля
(4(10) =0 соответствует [а] =0,00...0), а число А,10)=-1 представляется
в виде Га| = 1,00.,,0.
L Ьюн
Диапазон чисел, представленных в дополни тельном коде, составляет
-1<А<1-2Ь.
Старший разряд числа в дополнительном коде всегда остается знаковым.
Основными арифметическими операциями над числами в системах ЦОС яв-
ляются сложение и умножение. Алгоритмы выполнения операций над чис-
лами подробно описаны в (46, 51]. Нас же будут интересовать вопросы, свя-
занные с рассмотрением эффектов квантования в системах ЦОС при
выполнении указанных операций.
Далее рассмотрим арифметические операции над числами с фиксированной
запятой. представленными в дополнительном коде.
15.1.3. Арифметические операции над числами
с фиксированной запятой
При сложении двух чисел с одинаковыми знаками, удовлетворяющих усло-
вию (15.2), результат может оказаться по модулю больше 1. Поскольку числа
в дополнительном коде суммируются как беззнаковые, произойдет перепое
из старшего значащего разряда в знаковый разряд, что соответствует пере-
Лекция 15. Квантование сигналов в цифровых системах 295
полнснию. Переполнение приведет к неверному результату и к ошибкам
в последующих вычислениях. Покажем это на примере.
Пример 15.6
Выполним операцию У = А + В, где Д|0| = 0,625 , В(10) = 0,5, т. с. суммируем
двоичные числа А<2) =0,101 и Л<2) =0,100 в дополнительном коде. При этом
слагаемые и результат будем представлять с помощью четырех двоичных
разрядов:
[/И =0,101
L JJOII
+
[я| =0,100
*- Люи
= 1,001.
лои
Итак, при сложении двух положительных чисел получен отрицательный ре-
зультат (знаковый разряд содержит 1). Преобразуем результат в прямой код
(см. пример 15.4); = LI 11. Таким образом, У = -0.825 вместо истинно-
го значения =+1,125. Появление неверного результата естественно, 1. к.
для представления целой части числа в разрядной сетке разрядов нс преду-
смотрено.
Переполнение легко обнаруживается. Действительно, в приведенном приме-
ре суммируются положительные числа, а полученный результат воспринима-
ется как отрицательный; и наоборот, при сложении отрицательных чисел
в случае переполнения результат окажется положительным. Следовательно,
чтобы обнаружить переполнение в дополнительном коде, достаточно прове-
рить знаки слагаемых и сравнил» их со знаком суммы.
На рис. 15.2, а показана нелинейная характеристика сумматора при сложении
чисел в дополнительном коде. При переполнении происходит искажение резуль-
тата. Для уменьшения ошибок при возможных переполнениях часто используют
сумматор с насыщением, характеристика которого показана рис. 15.2. б.
Для устранения переполнения разрядной сетки в системах ЦОС вводится
масштабирование данных согласно неравенству (15.2).
Вместе с тем, легко видеть, что в отсутствие переполнения операция сложе-
ния чисел с ФЗ выполняется точно.
Рассмотрим операцию умножения двух чисел в форме с ФЗ. Д1я представле-
ния произведения требуется 2Ъ значащих разрядов плюс 1 знаковый.
296
Часть у Квантование в цифровых системах
Рис. 15.2. Нелинейные характеристики: сумматора (а)
и сумматора с насыщением (о)
Пример 15.7
Выполним операцию Y = AB, где Д(|0)=0,625 и В(1(1} =0,375, т. с. пере-
множим двоичные числа Лц) =0,101 и В(2) — 0,011. Результат произведения
чисел
Y= Л-В = 0,234375(|О) = 0,001111(2).
Исходные сомножители содержали b = 3, а произведение — 2Ь = 6 значащих
разрядов.
В случае, если число разрядов в регистре умножителя меньше указанного, то
результат операции умножения формируется с искажением.
Отмстим, что операция умножения выполняется без переполнения, посколь-
ку модуль произведения чисел, абсолютные значения которых меньше 1.
также меньше 1.
15.2. Квантование чисел и сигналов
Принципиальным отличием дискретной системы ог цифровой является вве-
дение в алгоритм обработки цифровой системы операций квантования отсче-
тов сигнала и коэффициентов системы.
Рассмотрим способы квантования чисел, источники ошибок квантования и
предположения о свойствах ошибок квантования.
Лекция 15. Квантование сигналов в цифровых системах 297
15.2.1. Способы квантования чисел
Квантование числа— это его представление с помощью конечного количе-
ства (/>) значащих разрядов. Операция квантования является нелинейной и
вносит в представление квантуемого числа А ошибку
e=F{A)-A> (15.6)
где:
А — число до квантования;
F(A) — число после квантования (после выполнения нелинейной операции F ).
Шагом квантования Q называется расстояние между двумя соседними
уровнями квантования. Будем рассматривать операцию квантования с посто-
янным шагом, в этом случае Q = const. Шаг квантования определяется весом
младшего значащего разряда: Q = 2'11.
Наглядно процесс квантования нескольких чисел (отсчетов дискретной по-
следовательности) показан на рис, 15.3. На рис. 15.3, а пунктирной линией
указан аналоговый сигнал, из которого получены отсчеты дискретной после-
довательности. Дискретные значения отсчетов отмечены точками на анало-
говом сигнале. На рис. 15.3,6 изображен квантованный сигнал, значения ко-
торого расположены на уровнях квантования.
Квантование выполняется двумя способами: с помощью округления и усечения.
При округлении числа до b значащих разрядов исходное Д-разрячиюе число
(k>b) заменяется на ближайшее ^-разрядное (что соответствует выборх
ближайшего уровня квантования).
Детерминированная оценка (абсолютная |раница) ошибки квантования (15.6)
при округлении равна
шах|е(и)| = у = 2"ь"1. (15-7)
Характеристика нелинейности, соответствующая операции квантования, по-
казана на рис. 15.4, а. Числам А. модули которых меньше, чем Q/2. соот-
ветствуют квантованные числа /4^=0. Числам, лежащим в интервале
(Q/2; 3Q/2) , соответствуют квантованные числа = Q нт. л.
Обычно прн анализе делается допущение, что все возможные значения
ошибки в пределах диапазона (15.7) равновероятны, т. е. ошибка квантования
представляет собой случайную величину с равномерной плотностью вероят-
ности. График плотности вероятности ошибки квантования при округлении
приведен на рис. 15.4, б.
298
Часть У. Квантование в цифровых системах
ошибки квантования при округлении числа
Лекция 15. Квантование сигналов в цифровых системах
299
Отменам, что при округлении до ближайшего значения все числа, попадаю-
щие точно на границу между двумя ближайшими значениями всегда округ-
ляются в сторону увеличения (с избытком). В алгоритмах ЦОС при обработке
огромного количества данных это приводит к возникновению односторонне-
го смещения. Для устранения подобной систематической ошибки в ЦПОС
используется процедура округления до ближайшего четного (округленное
число будет всегда четным). Данная процедура приводит к равновероятному
округлению с избытком и с недостатком и, как следствие, к получению пра-
вильного результата. Часто процедуру округления до ближайшего четного
называют сходящейся или конвергентной [46, 47].
При усечении ^.-разрядного числа до b значащих разрядов (к >Ь ) младшие
(А. -Ь) разрядов исходного числа отбрасываются. Ошибка квантования (15.6)
при усечении удовлетворяет следующим неравенствам:
□ для положительных чисел при любом способе кодирования и для отрица-
тельных чисел в дополнительном коде
-2~Ь<е<0'. (15.8)
□ для отрицательных чисел в прямом коде
0<е<2~ь. (15.9)
Характеристика нелинейности, соответствующая операции усечения для до-
полнительного кода, показана на рис. 15.5, а. Соответствующая плотность
вероятности ошибки квантования изображена на рис. 15.5, б.
Рис. 15.5. Характеристика нелинейности (д) и плотность вероятностн (б)
ошибки квантования при усечении числа
300
Часть V. Квантование в цифровых системах
15.2.2. Модели процесса квантования.
Предположения о свойствах ошибок квантования
Источниками ошибок квантования в цифровых системах являются:
□ аналого-цифровое преобразование (ЛЦП), при котором квантуются дис-
кретные сигналы;
□ умножение цифровых сигналов. результат которого округляется или усе-
кается;
□ квантование коэффициентов цифровой системы (коэффициентов разност-
ного уравнения или передаточной функции).
Нелинейная модель процесса квантования показана на рис. 15.6, а, где d(n) —
квантуемый сигнал (дискретный или ^-разрядный цифровой), р(п) — кван-
тованный сигнал (/^разрядный цифровой. b<k ), характеристика нелинейно-
сти квантователя F при округлении изображена на рис. 15.4, а, при усече-
нии— на рис. 15.5, а.
Линейная модель процесса квантования представлена на рис. 15.6,6, где
е(п) — шум квантования (ошибка квантования)— аддитивный дискретный
сигнал:
е(п) = — .
Рис. 15.6. Модели процесса квантования:
нелинейная (а) и линейная (6)
Для сигнала ошибки квантования е(п) вводятся следующие предположения:
□ последовательность е(л) является стационарным и эргодическим дис-
кретным случайным процессом (стационарный процесс обладает свойством
Лекция 15. Квантование сигналов в цифровых системах 30/
эргодичности, если среднее по времени случайного процесса совпадает со
средним по множеству реализаций случайного процесса);
□ распределение вероятности ошибок является равномерным по диапазону
ошибок квантования (см. рис. 15.4, б, рис. 15.5, б):
□ любые два отсчета последовательности е(п) не коррелированы, т. е. по-
следовательность е(п) является случайным процессом типа "белый шум”;
□ последовательность е(п) не коррелировала с квантуемой последователь-
ностью d’Qi).
Введение указанных допущений позволяет упростить анализ эффектов кван-
тования сигналов в цифровых системах.
15.3. Шум аналого-цифрового
преобразования
На практике входной сигнал цифровой системы формируется в аналого-
цифровом преобразователе (АЦП). Данное устройство выполняет дискрети-
зацию и квантование до ЬА значащих разрядов входного аналогового сигна-
ла. Появившуюся при этом ошибку квантования (шум квантования) ел(п)
входного сигнала называют шумом АЦП. Предположения о свойствах шума
АЦП такие же, как и о свойствах шума квантования (см. п. I5.2.2).
Получим оценки шума АЦП и выходною шума цифровой системы, обуслов-
ленного квантованием входного сигнала (шума АЦП. приведенного к выходу
системы).
15.3.1. Линейная модель процесса квантования
входного сигнала. Оценки шума АЦП
Для приближенного описания нелинейной операции квантования входного
сигнала при анализе цифровых систем используется линейная модель процес-
са квантования входного сигнала^ изображенная на рис. 15,7. Дискретизатор
Д преобразует аналоговый сигнал x(t) в дискретную последовательность
х(п) = —неограниченное число разрядов). К этой последовательности
добавляется шум АЦП, учитывающий ошибку квантования ел(») при фор
мировании значащих разрядов цифровой последовательности. Чем боль-
ше разрядность АЦП, тем меньше шум АЦП, тем сложнее н дороже оказьг i
стся это устройство. Современные АЦП имеют разрядность от 8 до 20.
Выходной сигнал линейной модели — квантованный (цифровой) сигнал а(л) .
302
Часть У. Квантование в цифровых системах
д
Рис. 15.7. Линейная модель процесса квантования входного сигнала
цифровой системы
Получим вероятностные оценки (математическое ожидание, дисперсию)
и детерминированную оценку (абсолютную границу) шума АЦП при опе-
рациях округления и усечения чисел. Математическое ожидание цА и
дисперсия Од ошибки квантования еА(л) определяются по следующим
формулам [16]:
М-л = £[«Ч('')]= f eA(n')pA(e)deA(n)-,
аА =^[(еА(")-ЦА)2]= J «А(«)РА<е)'/еА(',) = £'[4('")]-ц1.
где:
РА(е) — плотность вероятности шума квантования;
Сд(п), £,'[ ] —оператор математического ожидания.
Далее будем считать, что квантованию подвергаются числа, представленные
в форме с ФЗ в дополнительном коде.
С учетом этого предположения по указанным формулам вычислим матема-
тическое ожидание и дисперсию шума АЦП при округлении чисел (график
плотности вероятности р&(е} шума квантования показан на рис. 15.4,6):
- Сд/2 ।
На = J eA(n)pA(e)deA(n) = J еА(и)—-</ед(п) =
- -Сд/2 Са
<2л/2
Лекция 15. Квантование сигналов в цифровых системах
303
в® 2д /2 I
= f <'д(я)рА(е)с/еА(п)= J «аОО—deA(n) =
-&Р La
Сл/2
_ бл
12 '
-QJ2
(15.11)
1
еА з
где:
Qa - 2-*' — шаг квантования;
Ьл — количество значащих разрядов АЦП.
Выполняя аналогичные преобразования при операции усечения чисел (гра-
фик плотности вероятности рА(е?) шума квантования показан на рис. 15.5. о),
получим значения:
На=-Сл/2. о! =01/12-
Мощность ш)ма квантования при условии (15.10) равна дисперсии шума
АЦП в логарифмическом масштабе
Ра =10lg(^/12) = l0lg(2"2"'/12) = -[20fcA lg(2) + 10lg(12)] = р)
= -(6.()22>Л +10,79) [дБ].
Детерминированная оценка (абсолютная граница) шума АЦП с учетом выра-
жений (15.7)— (15.9) имеет вид
ИА =max|eA(/i)|<
п
QfJ‘2 = 2bf' 1 при округлении:
С?А = 2~Ьа при усечении.
(15.13)
Пример 15.8
Получим вероятностные оценки шума АЦП при ЬА =8 и Ьл =12. Квантова-
ние входного сигнала выполняется с помощью округления. Тогда оценки
шума сЛ(») согласно формулам (15.10), (15.12), (15.13) составляют
|1А = 0, F\- -58,8 дБ. Еа = 2“7 при ЬА ~ 8,
НА=0. Рд=-82^дБ, £д=2 11 приЬд=12.
304
Часть V. Квантование в цифровых системах
15.3.2. Шум АЦП, приведенный
к выходу цифровой системы
Рассмотрим цифровую систему с передаточной функцией H(z) и импульс-
ной характеристикой /?(п), н = 1. 2.... Будем считать, что коэффициенты сис-
темы и арифметические операции, выполняемые в ней. реализуются точно.
Линейная модель оценки шума АЦП, приведенного к выходу цифровой сис-
темы, показана на рис. 15.8. На рис. 15.8 блок ЦС— цифровая система,
л(п) — отсчеты дискретного (представленного точно) входного сигнала,
еА(л)— шум АЦП, л(п) — квантованный сигнал, у(п) — составляющая
выходного сигнала (результат обработки дискретного сигнала л(я)),
е?д выч(л) — выходной шум, обусловленный квантованием входного сигнала
(шум АЦП, приведенный к выходу цифровой системы).
Рис. 15.8. Модель оценки шума АЦП. приведенного к выходу цифровой системы
Для цифровой системы, описываемой сверткой
у(и)= £ A(«i).v(«-w),
ш=0
согласно свойству линейности системы, шум АЦП на выходе системы равен
еА.них(")= X Л(т)еЛ(я-»О. (15.14)
»г=0
Примечание
В последующих преобразованиях используются вероятностные и детермини-
рованные оценки шума квантования еА(л) при округлении чисел в дополни-
тельном коде. Эгм оценки содержатся в (15.10) —(15.13).
Приведем вероятностные оценки (математическое ожидание, дисперсию) и
детерминированную оценку (абсолютную границу) выходного шума, обу-
словленного квантованием входного сигнала. Используя равенство (15.14),
Лекция 15. Квантование сигналов в цифровых системах
305
математическое ожидание ЦА=0 и дисперсию оА ~Q\/\2 входного шума
квантования, получим математическое ожидание и дисперсию выходного
шума еА.КЬ1Х(н):
М-д.вых =£[ч«ь«] = Е S Л(т)ед(п->я) =
Од вых = Е
= Л(т)Е[еА(и-т)] =0;
’
(15.15)
^А.®ых(и) На, вых
о
^А-вых
(г V
Ё й(т)ел(я-т)
Н| = 0 I
= £.' 2L Л2(и1)4(«-«')+ X Ё l>(”>)l'(k')eA(n-»i)eA(>i~k) =
Hj = O m=(ik~i)
m*k
= Е х ft2(m)ej(n-m) +Х X Л(«ОЛ(А')£[еА(и-т)еА(н-Л)] =
ш=0
ш =0* =0 ---
J **,ю »p>trM»‘»Hvcni
= Ё /г2(И.)ф2(П-т)1 = ^ J Л2(»,).
hi=0 ^-=-------V-----1 12ш=0
0А
(15.16)
(15.17)
Дисперсию 0А вих можно определить, не только используя значения ИХ сис-
темы (формула (15.16)), но и по известным значениям АЧХ. Для этого ис-
пользуем равенство Парсеваля
со Т । I?
X А2(и) = ^ J da,
m=o
где — амплитудно-частотная характеристика цифровой сисюмы.
Подставляя (15.17) в (15.16), имеем
306
Часть У, Квантование в цифровых системах
т । р
о1..ь,ч =аА— I
“*С -п/Г
Мощность выходного шума при условии (15.15) определяется следующим
образом:
PA,Bux=>0lg(fA.BUx) = l0lg(fA) + l01g Ё h\m-) [дБ]. (15.18)
М1=О )
Отметим, tio:
О оценка дисперсии Од nwx , обусловленная квантованием входного сигнала,
не зависит от формы реализации (прямая, каноническая и т. д.) цифровой
системы, поскольку в формулах (15.16), (15.18) используется импульсная
характеристика всей системы;
О по допустимому значению о^вых и известной АЧХ (или импульсной ха-
рактеристике) цифровой системы можно определить допустимое значение
дисперсии Од входного сигнала, которая в свою очередь зависит от раз-
рядности ЛЛ чисел, представляющих выборки входного сигнала.
Детерминированная оценка (абсолютная граница) выходного шума <?А вых (л)
с учетом (15.13) и (15.14) имеет вид
р
*'А, вых
= max|eA_llux(n)| =
max
£ Л(<я)еЛ(»-»1)
ш=0
< £ |Л(»,)|max|ел(п-,„)| = ^- Ё |*<«П|
m 0 . " _______. 2 О
(15.19)
Таким образом, абсолютная граница ошибки квантования выхо того сигнала
зависит от импульсной характеристики системы и не зависит от статистиче-
ских характеристик входного сигнала.
Лекция 16
Эффекты квантования
в цифровых системах
Для упрощения анализа эффектов квантования в цифровых системах вводит-
ся следующее допущение. Ошибки в выходном сигнале, вызванные кванто-
ванием входного сигнала, и ошибки, обусловленные квантованием результа-
тов арифметических операций в цифровой системе, ие зависят друг от друга.
Приняв это допущение, можно рассматривать указанные составляющие вы-
ходного шума независимо друг от друга. Раздельное рассмотрение оказыва-
ется полезным также для того, чтобы оценивать, какой вклад в полный вы-
ходной шум вносят отдельные составляющие. На основе такой оценки
разработчик может обоснованно сформулировать требования к АЦП. архи-
тектуре и реализационным параметрам цифрового устройства.
В данной лекции рассматриваются: процесс формирования собственного и
полного выходных шумов системы (о формировании шума АЦП см. Лек-
цию 15), эффекты переполнения в сумматорах, квантование коэффициентов и
возникновение предельных циклов в цифровой системе [16, 32].
16.1. Собственный шум цифровой системы
Собственный шум цифровой системы— это выходной шум квантования,
обусловленный округлением (усечением) результатов операций умножения.
Анализ собственных шумов в цифровых системах гораздо сложнее, чем ана-
лиз эффектов квантования входного сигнала. Дело в том, что при анализе
собственных шумов необходимо знать:
О точки системы, в которых выполняется операция квантования;
П оценки (математическое ожидание, дисперсию, абсолютную границу)
шумовых сигналов, генерируемых соответствующими источниками;
О структуру системы (путь, который проходит каждый шумовой сигнал от
своего источника шума до выхода системы);
□ архитектуру и параметры цифрового устройства.
И Чах 165
ЗОв Часть У. Квантование в цифровых системах
Собственный шум и его оценки определяются в три этапа;
1. Составляется линейная модель цифровой системы, учитывающая шумы
квантования в тех точках системы, в которых выполняется операция кван-
тования.
2. Вычисляются реакции системы на каждый шумовой сигнал (составляю-
щие собственного шума).
3. На основе полученных составляющих формируется собственный шум
цифровой системы, находятся его вероятностные и детерминированная
оценки.
Рассмотрим подробно каждый из указанных этапов.
16.1.1. Линейная модель цифровой системы
Источниками шума квантования сигналов в цифровой системе являются ум-
ножители.
Действительно, умножение значений с by значащими разрядами (без учета
знакового разряда) последовательности х(п) па коэффициент а дает произ-
ведение ах(п), содержащее точные значения с 2Ьу значащими разрядами.
Одиако вычисленное произведение должно быть представлено последова-
тельностью значений с by значащими разрядами. При формировании
результата появляется ошибка квантования, вызванная сокращением числа
разрядов.
Линейная модель умножителя (источника ошибки квантования) показана
на рис. 16.1. Модель умножителя с конечным числом разрядов представляет-
ся в виде последовательного соединения идеального умножителя (с неогра-
ниченным числом разрядов) и сумматора, на вход которого наряду с точным
значением произведения поступает ошибка квантования е?у(п). На выходе
модели формируется последовательность квантованных значений произведе-
ния с by значащими разрядами.
еу(л)|
Л(Г)
дл(к) + е (л)
Рис. I6.I. Линейная модель умножителя
Лекция 16. Эффекты квантования в цифровых системах 309
Считается, что предположения о свойствах ошибок квантования, введенные
в п. 15.2.2., действуют в случае шумового сигнала е?у (п). Тогда при использо-
вании округления на основе (15.10), (15.11), (15.13) имеем следующие веро-
ятностные оценки (математическое ожидание, дисперсию) и детерминиро-
ванную оценку (абсолютную границу) шума квантования на выходе
умножителя:
□ математическое ожидание
|1у — 0; (16.1)
□ дисперсия
aJ=C?J/12, (16.2)
где Qy = 2 — шаг квантования;
□ абсолютная граница
£у = max I ev (п) I < Qy /2 = 2“^“'. (16.3)
II
Линейная цифровая система произвольной структуры .может быть описана
с помощью линейной модели, представляющей собой дискретную систему
с аддитивными воздействиями, учитывающими эффекты квантования сигна-
лов и подаваемыми на соответствующие точки дискретной системы.
Пример 16.1
Составим линейную модель цифровой системы с указанием источников шу-
ма кван тования. В качестве цифровой системы рассмотрим рекурсивную сис-
тему первого порядка, описываемую передаточной функцией
1 + «]Z
и импульсной характеристикой
й (н) = Ьо (-«,)" + fej (-6?!) "-|. (16.4)
Система устойчива при условии | | < I.
Решение. Структурная схема реализации рекурсивной системы в прямой
форме показана иа рис. 16.2, и. Для анализа эффектов квантования в качестве
входного сигнала используем шум АЦП
Линейная модель системы с указанием шумовых сигналов £У1(л)» еУ2(«)»
еуз00 на выходах умножителей показана на рис. 16.2,6.
310
Часть V Квантование в цифровых системах
Рис. 16.2. Прямая форма схемы (а), линейная модель с шумами квантования (Л)
и ее эквивалентное преобразование (в) для рекурсивной системы первого порядка
16.1.2. Определение составляющих
собственного шума
Составляющие собственного шума — это реакции цифровой системы на шу-
мовые сигналы от каждого источника шума.
Используем модель умножителя (см, рис. I6.1) для описания каждого источ-
ника шума (узла умножения).
На основе свойства линейности цифровой системы ошибка квантования на
выходе системы (собственный шум) определяется как суперпозиция ошибок
«у£эвых(и)’ i = L2.L, обусловленных всеми L источниками шума кван-
тования, т. е.
L
('•) = 2>у„их («) (16-5)
Лекция 16. Эффекты квантования в цифровых системах
311
При этом i-я составляющая выходного сигнала ошибки (собственного шума)
eVi вых(«), вызванная i-м источником шума, находится с помощью импульс-
ной характеристики Л, (/л) части системы от точки приложения i-го источни-
ка шума до выхода системы по формуле свертки
eViBU«(n>= £ А ("О «у, («-'«) (16.6)
»|=1
Выполняя преобразования, аналогичные (15.15), (15.16) и (15.19), с учетом
(16.6) получим оценки j-й составляющей собственного шума:
□ математическое ожидание (среднее значение)
Цу(,вык = Ё ^(»и)Е[еу,(л-т)1 = Ё /%(т)цу( =0. (16.7)
»н=0 wj=O
где |лу ,• = 0 согласно (16.1);
□ дисперсия
°у,..ых = 4, Ё Ё Л,2('«). (16.8)
т=0 *“ ж=0
где (Ту, =Су/12 согласно (16.2);
□ абсолютная граница
£У(.вь.х =max|fy<.BB.x(n)k£yi Ё Ё (16.9)
л т=0 - ж=0
где Еу/ = Су/2 согласно (16.3).
16.1.3. Вычисление собственного шума
В соответствии с выражением (16.5) собственный шум системы определяется
суммой всех шумовых составляющих, полученных в результате анализа про-
хождения шумов квантования от точек их появления (с выходов L умножи-
телей) до выхода цифровой системы.
Вероятностные (математическое ожидание, дисперсия) и детерминированная
(абсолютная граница) оценки собственного шума системы находятся сле-
дующим образом:
□ математическое ожидание
L
Ну,вых = X Нужных
i=l
с учетом (16.7) для всех i = I. 2.L:
312
Часть У, Квантование в цифровых системах
□ дисперсия
°У.Вых = 2с1У1.вих =7^2 Ё
i = I i=lni = O
с учетом (16.8) для всех / = 1, 2,..., L;
□ абсолютная граница
Еу.вых = Е£У1. вых Ё |АДЯ‘)|
1 = 1 Z f = lwr=O
с учетом (16.9) для всех i = 1, 2,..., L.
Следует отметить: чем больше умножителей содержит цифровая система,
тем больше ее собственный шум. Таким образом, собственный шум системы
зависит от формы реализации (прямая, каноническая и т. д.) системы. На
практике целесообразно использовать такую форму реализации, которая бы
генерировала меньший собственный шум, т. е. содержала меньше умножите-
лей. Например, для КИХ-фильтров с линейной ФЧХ целесообразно исполь-
зовать прямую приведенную структуру (см. Лекцию 18).
Пример 16.2
Получим вероятностные оценки собственного шума рекурсивной системы
первого порядка. Линейная модель системы показана на рис. 16.2, б, где шу-
мовые сигналы еУ1-(п), 1 = 1,2» 3 с математическим ожиданием цу,=0 и
дисперсией Оуг = 0?/12. i = L2,3 описывают эффекты квантования на вы-
ходах умножителей.
Решение. Используя свойство линейности системы, заменим три источника
шума одним, генерирующим эквивалентный сигнал
*уэ(л)= *У|(и) + «’у2(«) +суз(п) •
Его математическое ожидание равно цуэ=0, а дисперсия —
°УЭ = Х°у| =3Qy/\2. Соответствующая эквивалентная линейная модель
i=I
показана на рис. 16.2, в.
Из рис. 16.2, в видно, что сигнал е?уэ(п) обрабатывается только рекурсивной
частью. Следовательно, эквивалентный шумовой сигнал воздействует на эк-
вивалентную систему с передаточной функцией
цэы=—Ц-
l + «,z
Лекция 16. Эффекты квантования в цифровых системах 313
и импульсной характеристикой
Л3(я) = (-я1)".
Реакцией системы на сигнал вуэ(л) является собственный шум <?уэвых(")
с математическим ожиданием
Ну Э. вых = 0
и дисперсией
2 _ V—2 _ Х?у . 2, х _ 3Qy у . 2л _ Збу_________1
®УЭ,вых — Х®У(,вых .л Х^э(м)“ .л Zrf ( al) — io । / \2 ’
i = l 12 »| = о 12 «1=0 12
16.2. Полный выходной шум системы
Напомним, что ошибки в выходном сигнале, вызванные квантованием вход-
ного сигнала, и ошибки, обусловленные квантованием результатов арифме-
тических операций в цифровой системе, не зависят друг от друга (с.м. Лек-
цию 15 о введенном допущении). Па основе этого допущения полный
выходной шум системы, обусловленный квантованием входного сигнала и
квантованием результатов арифметических операций умножения, определя-
ется суммой соответс гвующих ошибок, т. е.
‘’„их («) = + СУ.»..,х 00 . С16-10)
где:
* ВЬ|Х(л) —полный выходной шум системы;
^Авых(н) — шум квантования входного сигнала (шум АЦП), приведенный
к выходу системы;
е?у вых(и) — собственный шум системы.
Шумовые сигналы, обусловленные квантованием в произвольной точке сис-
темы, являются стационарными случайными процессами типа "белый шум",
они не коррелированы с квантуемым сигналом, а любые два источника шума
создают некоррелированные шумы (см. и. 15.2.2).
Тогда с учетом линейности модели системы и равенства (16.10) получим
оценки полного выходного шума системы:
□ математическое ожидание цвых
Нвых =МА.ВЫХ "* Ну.вых »
(16.11)
314
Часть V. Квантование в цифровых системах
где:
На,вых — математическое ожидание шума АЦП;
цу вых — математическое ожидание собственного шума системы;
2
□ дисперсия овЫх
= °Л.вых + ^У.вых , (16-12)
где:
Од вых — дисперсия шума АЦП;
Оу ВЬ|Х —дисперсия собственного шума системы;
□ абсолютная граница
^вых — тах I ^ВЫХ (И) 1 — ^Л.вых ^У ВЫХ
м
Пример 163
Получим вероятностные оценки полного выходного шума рекурсивной сис-
темы первого порядка с учетом результатов примера 16.2.
Решение. На основе выражений (15.15), (15.16) и импульсной характеристики
(16.4) системы запишем вероятностные оценки шума АЦП, приведенного
к выходу системы:
математическое ожидание
На, вых ~ 0 >
дисперсия
=^- Ё Л2('«)=~*- Ё Гйь(-«!>" ]2•
ш=0 12 т=О
В результате имеем математическое ожидание полного выходного шума
(16.11)
Нвых = 0
и дисперсию полного выходного шума (16.12)
12 OT=0L J 12 !-(-«,)
Лекция 16. Эффекты квантования в цифровых системах 315
16.3. Эффекты переполнения в сумматорах
Ранее были рассмотрены эффекты квантования сигналов в цифровых систе-
мах и получены оценки дисперсии (мощности) овых полного выходного шу-
ма и ее составляющих: сГдр|}Ь|Х —дисперсии составляющей выходного шума,
обусловленной квантованием входного сигнала (шума АЦП), и Оу вых —
дисперсии собственного шума системы. Таким образом, полезный сигнал на
выходе системы присутствует на фойе шумов.
Опишем шумовые характеристики системы, а также методы масштабирова-
ния сигналов, позволяющие улучшить указанные характеристики и предот-
вратить появление эффекта переполнения в сумматорах системы.
16.3.1. Динамический диапазон цифровой системы
Важной характеристикой цифровой системы является отношение сигнал/шум.
Отношением сигшп/шум R называется отношение мощности Рс вых выход-
ного сигнала системы к мощности ^вых шума на выходе системы
К = 1016(.^й[дБ].
1 *111. ВЫХ J
Пороговым отношением сигнал/шум называется отношение минимальной
мощности Рст,|1>вых выходного сигнала системы к мощности вых Шумана
выходе системы
(Р
п । л i I С 11Ш1. ВЫХ Ip г*1
к» = 10 1g —---- [дБ].
1 ии.вых I
Минимальная мощность выходного сигнала имеет место при минимальном
уровне e7min входного сигнала.
Динамическим диапазоном D цифровой системы называется отношение
максимальной амплитуды oD>max к минимальной амплитуде aD min входного
сигнала, при которой обеспечивается определенное отношение R& сиг-
нал/шум на выходе системы
D = 20 lg ---- [дБ]
D. min
316
Часть У. Квантование в цифровых системах
при
где Рс d min вых — мощность выходного сигнала на нижней границе динами-
ческого диапазона (при амплитуде входного сигнала, равной «p>mjn).
Динамический диапазон следует контролировать введением коэффициентов
масштабирован ия.
16.3.2. Масштабирующие коэффициенты
При суммировании чисел с фиксированной запятой ошибки квантования не
возникает, если аккумулятор имеет разрядность не меньше разрядности сла-
гаемых.
Однако при суммировании чисел возможно переполнение, означающее, что
результат арифметической операции выходит за границы допустимого диа-
пазона представления чисел (c,w. п. 15.1.3). В этом случае результат суммиро-
вания существенно искажается.
Во избежание переполнения в сумматорах вводится масштабирование сигна-
лов с использованием коэффициентов масштабирования. Масштабирование
сигналов можно выполнить разными способами.
16.3.2.1. Масштабирование сигналов с использованием
импульсной характеристики
Если импульсная характеристика системы (или ее части) равна ЛДн), то вы-
ходной сигнал системы (или ее части) можно определить по формуле свертки
У,(л) = X
/м=0
Для модуля выходного сигнала и его максимума можно записать, что
|у,(п)| s X |л,(т)||А(и-ш)|,
/11=0
max|yt(n)|<тах|х(«)| У |/7|-(т)|. (16.13)
п 11 м=0
Лекция 16 Эффекты квантования в цифровых системах 317
Согласно (16.13) при max |х(л) | < 1 (что справедливо при ФЗ) необходимым
условием отсутствия переполнения (тах|уДл)|< I) является
н
X I й,(ш)|< I. (16.14)
»i=0
Условие (16.14) будет выполняться, если ввести коэффициент масштабиро-
вания следующим образом:
/z/m) = Y|h/(m).
Тогда (16.14) примет вид
Yi S I Л, (ш)| < 1 .
ш=0
следовательно, коэффициент масштабирования должен выбираться из условия
¥,<^7—!------. (16.15)
Ё | М"')|
»1=о
Масштабирующие умножители включают на входах системы.
16.3.2.2. Масштабирование сигналов по максимуму
Данный способ применяется для системы (или ее частей) невысокого (не выше
четвертого-пятого) порядка. Максимальное значение амплитудно-частотной
характеристики системы (или ее части) должно удовлетворять условию
тах| Н,(е^т)| > 1. Масштабированию подвергается входной сигнал системы
(или ее части). При этом коэффициент масштабирования рассчитывается но
формуле
У, =—, 1 . т-г (1616)
max Н1(ел“г)
(О I '
Пример 16.4
Получим коэффициент масштабирования входного сигнала системы первого
порядка с передаточной функцией
l-0,5z '
Часть У. Квантование в цифровых системах
318
Решение. Система, описываемая указанной передаточной функцией, является
простейшим фильтром нижних частот (вещественный полюс системы
z„ =0,5, следовательно, max| находится на частоте со=0).Тогда
maxi H(eJulT) I = H(e)ttT) = W(l) = — = 4.
и ' ' 0,5
На основе (16.16) получаем коэффициент масштабирования у = 1/4.
Сравним данное значение у с коэффициентом масштабирования, вычислен-
ным по импульсной характеристике
Л(л) = 0,5,|+0,5"’'.
Определяем У. | й(и)|< 2 X 0,5" =—-— = 4, откуда имеем такой же коэф-
п=о п=о 1-0.5
фициент масштабирования (16.15) у = 1/4.
Расчет масштабирующих коэффициентов в цифровых системах сложной
структуры выполняется по методике, основанной на использовании спек-
трального анализа и аппарата нормированных пространств [43].
16.4. Эффекты квантования коэффициентов
цифровой системы
При реализации цифровой системы значения ес коэффициентов (коэффици-
енты разностного уравнения или передаточной функции) квантуются, по-
скольку они представляются ограниченным количеством разрядов, опреде-
ляемым разрядностью элементов памяти цифровой системы.
Изменение коэффициентов приводит к большему или меньшему изменению
значений нулей и полюсов передаточной функции и, следовательно, к изме-
нению частотных характеристик системы.
На примере покажем, что квантование коэффициентов системы может при-
вести даже к потере ее устойчивости.
Пример 16Л
Передаточная функция рекурсивной системы имеет вид
H(z) =-----Z7----ZT-
l + <7|Z +а2г
Лекция 16. Эффекты квантования в цифровых системах
319
где Я| = -1,603, л2 = 0,645. Полюсы системы комплексно-сопряженные
z*! 2 == 0,8 ±0,05 j = 0.8016е±;3,6 . Они расположены внутри единичного круга
ф„, Ь рис. 16.3, о), следовательно, система устойчива.
Осуществим квантование коэффициентов q и а2, т. е. округлим их значения
=-1,6, й2 = 0.6. Полюсы новой системы вещественные z«|=l, z«2=0’6,
причем один из них не лежит внутри единичного круга (рис. 16.3, б), т. е.
Рис. 16.3. Карты полюсов рекурсивной системы без квантования (а)
и с квантованием (б) коэффициентов передаточной функции
Важно подчеркнуть, что операция квантования коэффициентов, нелинейная
по своей природе, не влияет иа линейность самой системы, а лишь изменяет
ее частотные и временные характеристики. Иными словами, выполнив опе-
рацию квантования коэффициентов, переходим от одной линейной системы
к другой с характеристиками, несколько отличающимися от характеристик
исходной системы. Так, в частности, квантование коэффициентов приводит
к появлению ошибки АЧХ
ДА(со) = А(со) - А(со),
где:
А(ш) =| //(е^т) | — АЧХ системы с некваитованными коэффициентами;
А(со) — АЧХ системы с квантованными коэффициентами.
Следует отметить, что при синтезе системы необходимо определять коэффи-
циенты таким образом, чтобы не только идеальные частотные и временные
характеристики исходной системы, но и ее характеристики с квантованными
коэффициентами удовлетворяли заданным требованиям.
320
Часть V. Квантование в цифровых системах
Для оценки влияния операций квантования коэффициентов на параметры
системы используются функции чувствительности. Функция чувствительно-
сти является коэффициентом пропорциональности в соотношении, связы-
вающем относительное изменение величины к-го коэффициента с относи-
тельным изменеинем определенного параметра системы (положения полюса
или нуля наг-ппоскости, частотной характеристики и др.) [32].
Эффекты квантования коэффициентов существенным образом зависят от
свойств передаточной функции, типа фильтра, структуры и т. д.
16.5. Понятие о предельных циклах
Ранее, при рассмотрении эффектов квантования, были сделаны определен-
ные допущения относительно ошибок, вносимых в обрабатываемый сигнал.
Во-первых, было принято, что отсчеты шума квантования не коррелированны
как друг с другом, так и с отсчетами входного сигнала. Во-вторых, считалось,
что при обработке сигнала в цифровой системе не происходит переполнения
аккумулятора. Вместе с тем. и те и другие предположения могут нарушаться.
Это приводит в рекурсивных системах к возникновению специфических эф-
фектов, которые получили название предельных циклов.
Различают два вида предельных циклов:
П предельные циклы низкого уровня, связанные с квантованием отсчетов об-
рабатываемого сигнала (наличием в структуре цифровой системы нели-
нейностей, характеристики которых приведены на рис. 15.4, л,
рис. 15.5, а);
□ предельные циклы высокого уровня, связанные с переполнениями регист-
ров сумматоров (наличием в структуре цифровой системы нелинейностей
с характеристиками, показанными на рис. 15.2, б).
Существует несколько подходов к анализу предельных циклов. Первый под-
ход основан на анализе положения полюсов системы при квантовании сигна-
лов [43], второй подход — на анализе устойчивости цифровой системы [ 15].
Предельными циклами низкого уровня называют постоянные или периоди-
ческие сигналы, которые могут возникать в рекурсивных системах при от-
сутствии (или малом уровне) воздействия и ненулевых начальных условиях
в системе. Появление этих сигналов обусловлено ошибками округления при
квантовании сигналов на выходах умножителей.
Рассмотрим простой пример, иллюстрирующий эффект предельного цикла.
Лекция 16. Эффекты квантования в цифровых системах 321
Пример 16.6
Исследуем появление предельного цикла в рекурсивной системе первого по-
рядка, описываемой разностным уравнением
у(п) = х(м) + 0,95у(п-1); х(п) = О; у(-1) = 13.
Решение. В табл. 16.1 сопоставляются точные значения у(п), рассчитанные
по указанному разностному уравнению, а также результат их округления до
ближайшего целого.
Таблица 16.1. Значения выходного сигнала системы первого порядка
п -1 0 1 2 3 4
у(п} 13,0 12,35 11.7325 11,145875 10,58858125 10.05915219
у(«) с круглеиием 13 12 11 10 10 10
Из табл. 16.1 видно, что, начиная с и = 2, округленные значения у(м) сохра-
няются на уровне 10 и далее не меняются.
Отметим, что чем больше значащих разрядов в представлении чисел, тем
меньше вероятность появления предельных циклов низкого уровня.
Предельные циклы высокого уровня могут возникать в рекурсивных систе-
мах, если при сложении отсчетов сигналов в аккумуляторе происходит пере-
полнение (см. п. 16.3). В этом случае система становится существенно нели-
нейной, в выходном сигнале появляются значительные ошибки, т. е. система
фактически неработоспособна.
В ряде случаев, после переполнения аккумулятора выходной сигнал системы
принимает вид периодического колебания с предельным значением амплиту-
ды, равным единице. Поэтому предельные циклы высокого уровня часто на-
зывают "колебаниями переполнения".
В связи с возможностью возникновения колебаний переполнения в рекур-
сивных системах необходимо принимать меры для предотвращения перепол-
нений регистров сумматоров, т. е. выполнять масштабирование сигналов
(см. п. 16.3).
ЧАСТЬ VI
ЦИФРОВЫЕ ФИЛЬТРЫ
Лекция 17. Введение в цифровые фильтры
Лекция 18. КИХ-фильтры с линейной ФЧХ
Лекция 19. Синтез КИХ-фильтров методом окон
Лекция 20. Синтез оптимальных (по Чебышеву)
КИХ-фильтров
Лекция 21. Цифровые преобразователи Гильберта
и дифференциаторы
Лекция 22. Специальные КИХ-фильтры
Лекция 23. Синтез БИХ-фильтров
Лекция 24. Синтез БИХ-фильтров
методом билинейного Z-преобразования
Лекция 17
Введение в цифровые фильтры
17.1. Основные определения
и классификация цифровых фильтров
Под цифровым фильтром (ЦФ) в широком смысле понимают любую цифро-
вую систему (цепь), которая согласно заданному оператору у(и) = Г{л(л)}
(рис. 17.1) осуществляет преобразование действующей на се входе аддитив-
ной смеси х(п) = х(п) + £(л) цифрового сигнала х(я) либо его параметров
с помехой ^(л). Например, в указанном смысле к цифровым фильтрам отно-
сятся: фильтры, согласованные с сигналами, адаптивные фильтры, амплитуд-
ные и фазовые корректоры, дифференциаторы, преобразователи Гильберта
и т. д. Разумеется, сигнал у(п) на выходе реального ЦФ будет соответство-
вать переданному сигналу или его параметрам с некоторой точностью, опре-
деляемой свойствами алгоритма. Иначе говоря, на выходе реального ЦФ всегда
имеет место различной степени приближение у(и)»л(и). Тем не менее,
в лекциях для последнего соотношения используется знак равенства, если пет
необходимости в ином.
Цифровой
фильтр
—►>•(«)
Х(м)
-Г(н)----->
[Л(п) =*(«) + £(«)!
у(д) =/=*{*(«) I
Рис. 17,1. К onpeqeneHHiO цифрового фильтра
326 Часть VI. Цифровые фильтры
Цифровой фичътр в узком смысле — это частотно-избирательная цепь, кото-
рая обеспечивает селекцию цифровых сигналов по частоте. К таким фильт-
рам относятся: фильтры нижних частот (ФНЧ), фильтры верхних частот
(ФВЧ), полосовые фильтры (ПФ), режекторные фильтры (РФ).
В данном разделе рассматривается синтез частотно-избирательных фильтров,
амплитудных корректоров, дифференциаторов, преобразователей Гильберта
и согласованных фильтров.
Как и все цифровые системы, цифровые фильтры делятся на два обширных
класса: нерекурсивные (КИХ) и рекурсивные (БИХ). В свою очередь, в каж-
дом из этих классов выделяют линейные и нелинейные фильтры. Рассматри-
ваемые здесь фильтры являются линейными, т. е. оператор Г{л(и)} отвечает
свойству линейности (слл Лекцию 4):
F {а,*, (л) + а2х2 (л)} = л, F {л, (л)} + a2F {х2 (л)}.
Формой представления линейного оператора F, в частности, является разно-
стное уравнение.
Будем также полагать, что изучаемые фильтры:
□ физически возможны. Это означает, что:
• выполняется условие причинности (ом. Лекцию 4): при нулевых на-
чальных условиях реакция у(и) не зависит от будущих значений воз-
действия л(гг). Иначе говоря, реакция не может возникнуть раньше
воздействия. Например, если начало воздействия приходится на мо-
мент «о, то реакция у(л)|д<|^ =0;
• фильтр реализуем на заданной элементной базе;
□ стационарны. Это означает, что:
• реакция у(и) не зависит от момеита подачи воздействия л(и), т. е. задер-
жанному на По воздействию x(n — nG) соответствует реакция у(я-Но);
• коэффициенты передаточной функции (разностного уравнения) явля-
ются постоянными, не зависящими от времени, а потому н все характе-
ристики фильтра также не зависят от времени.
Таким образом, в курсе лекций изучаются стационарные, линейные, физиче-
ски возможные избирательные цифровые фильтры.
Примечание
КИХ-фильтры могут быть построены на базе рекурсивных звеньев (например,
при использовании метода частотной выборки (39, 43]). Такие варианты здесь
Лекция 17. Введение в цифровые фильтры
327
не рассматриваются, поэтому в дальнейшем термины "нерекурсивные фильт-
ры" и "КИХ-фильтры" используются как синонимы.
Цифровые фильтры, как и любая цифровая система, могут быть реализованы
аппаратно, программно илн аппаратно-программно, что определяется целью,
назначением и местом ЦФ в предполагаемой системе.
Аппаратная реализация подразумевает использование разнообразных функ-
циональных блоков (регистров, сумматоров, умножителей, устройств памяти,
логических элементов и т. п.), объединяемых в единое устройство.
Программная реализация означает, что фильтр представлен в виде програм-
мы, написанной на языке программирования, соответствующем конкретному
операционному блоку. Так. для персонального компьютера это будет любой
из языков высокого уровня, а для микропроцессорного комплекта или циф-
рового процессора — язык соответствующего ассемблера.
Аппаратно-программная реализация говорит о том, что часть функций
фильтра выполняется аппаратно (аналого-цифровое и цифро-аналоговое Пре-
образования, умножение, синхронизация, прием/передача данных и т. д.),
а другая часть функций выполняется программно.
Под проектированием ЦФ понимают процесс, в результате которого
предъявляется программа или цифровое устройство, отвечающее заданный
требованиям и ограничениям.
Процесс проектирования ЦФ включает в себя следующие этапы:
I. Синтез, результатом которого является функциональная схема фильтра
с коэффициентами. Собственно процедуры синтеза КИХ- и БИХ-фильтров
существенно различаются, однако имеют одинаковую последовательность
действий:
• задание требований к фильтрам;
• решение задачи аппроксимации характеристик фильтра, в результате
которой рассчитываются коэффициенты передаточной функции (раз-
ностного уравнения);
• конструирование функциональной схемы ЦФ.
2. Выбор или разработка эффективных алгоритмов вычислений с учетом
арифметики, используемой при заданном методе реализации: плавающая
или фиксированная запятая. Алгоритм зависит от разрядности регистров
процессора, количества аккумуляторов, возможности распараллеливания
операций, наличия устройств, выполняющих операцию умножения с на-
коплением и других особенностей процессора. Конечной целью этого эта-
па является обеспечение функционирования фильтра в реальном времени
при минимальных потерях качества обработки сигналов.
328
Часть VI. Цифровые фильтры
3. Проверка моделированием проектируемого фильтра в нереальном времени
по стандартным сигналам с использованием программных средств отладки:
• симуляторов системы команд (симуляторов), имитирующих работу
конкретного процессора на уровне его команд;
• отладчиков— буферных программ, которые предоставляют разработ-
чику необходимый интерфейс и обеспечивают функциональные воз-
можности симуляторов.
Задача проверки моделированием состоит в обнаружении и устранении
возможных логических и иных скрытых ошибок, испытании иа соответст-
вие сконструированного фильтра заданным характеристикам, включая
частотные, временные и шумовые.
4. Практическая реализация и отладка в реальном времени с помощью ап-
паратных средств отладки: эмуляторов и проверочных модулей.
Результаты проверки моделированием и отладки могут оказать влияние иа
изменение ряда решений от выбора структурной схемы ЦФ вплоть до зада-
ния новых требований.
Для изучения этапов 2—4 можно обратиться к [46], где они изложены под-
робно, здесь же рассматриваются действия только на этапе синтеза ЦФ, при-
чем основное внимание уделяется частотно-избирательным КИХ- и БИХ-
фильтрам. Особенностям синтеза других цифровых фильтров посвящены
Лекции 21 и 22.
17.2. Синтез цифровых фильтров
Каждый из классов ЦФ (БИХ и КИХ) имеет свои, принципиально отличные,
методы синтеза, которые изучаются отдельно для каждого класса. При этом
выделяются фильтры, в которых реализованы принципы оптимального син-
теза, и фильтры, при синтезе которых принципы оптимальности не прини-
маются во внимание.
17.2.1. Требования к цифровым фильтрам
Требования к фильтрам могут формулироваться как во временной
(рис. 17.2, а), так и в частотной областях (рис. 17.2, б), что определяется на-
значением фильтра и областью его описания.
Во временной области (рис. 17.2, а) требования могут задаваться к импульс-
ной ft(n) или переходной g(n) характеристике при широких допусках к час-
тотным свойствам фильтра. Так, согласованные с сигналами фильтры цели-
Лекция 17. Введение в цифровые фильтры
329
ком определяются импульсной характеристикой (си. и. 22. Z), в то время как
фильтры, входящие в состав высокоскоростных систем, весьма критичны
к длительности переходных процессов, поэтому такие фильтры удобнее опи-
сывать переходными характеристиками.
Рис. 17.2. Описание фильтра во временной (а) и в частотной (б) областях
В частотной области (рис. 17.2,6) обычно синтезируются избирательные
фильтры. При этом требования могут предъявляться:
□ только к АЧХ или к характеристике ослабления (затухания) без каких-
либо ограничений на ФЧХ;
□ только к ФЧХ, когда важно сохранение фазовых, а потому и временных
соотношений между гармоническими составляющими принимаемого сиг-
нала. Это фазовые корректоры, у которых АЧХ нс зависит от частоты, т. е.
A(d)) = const навеем интервале частот О<со<я;
□ одновременно н к АЧХ, и к ФЧХ. Например, как будет показано в даль-
нейшем. возможен синтез КИХ-фильтров с заданной АЧХ и линейной
ФЧХ (си. Лекцию 18), которая в общем виде представляется формулой
ф(со) = -СыТ + ф0,
где:
Т — период дискретизации;
С — константа;
0J = 27if ;
Фо — начальная фаза.
При этом групповое время задержки1 (ГВЗ) оказывается постоянным
б/ф(СО)
Тгнч =-----— = С7 = const.
Синонимом этого термина является "групповое время прохождения" (СНП).
330
Часть VI. Цифровые фильтры
При задании требований в частотной области и в процессе сннгеза сами час-
тоты могут задаваться как действительными (/ [Гц], со [рад/с]), так и нор-
мированными со [рад], что определяется удобством и традициями. Посколь-
ку связи между перечисленными представлениями частот известны,
читателю будет не трудно переходить от одной частоты к другой.
Рассмотрим требования к частотно-избирательиым ЦФ. На рис. 17.3—17.6, a
представлены идеальные АЧХ фильтров: НЧ, ВЧ, полосового и режекторио-
го соответственно, которые, вследствие их физической невозможности, не-
обходимо аппроксимировать при заранее определяемых допусках, зависящих
от ряда практических ограничений. Эти ограничения связаны, прежде всего,
с назначением синтезируемого фильтра. Все ограничения и допуски состав-
ляют требования, предъявляемые к фильтру.
Требования к фильтрам включают в себя:
□ задание частоты дискретизации /л [Гц] и типа избирательности (НЧ, ВЧ
и т. д.);
О задание требований к АЧХ А(/) или к характеристике ослабления (зату-
хания) a(f), представляющей собой логарифмическую АЧХ. При этом
необходимо помнить, что:
• задание требований начинается с установки всех граничных частот
фильтра только в основной полосе частот 0 < f < ;
• требования в переходных полосах избирательных фильтров не зада-
ются;
• требования формулируются в виде допустимых отклонений от норми-
рованной АЧХ А(/) [или от «(/)] в полосах пропускания и задержи-
вания и отображаются на диаграмме допусков;
• АЧХ А(/) является безразмерной величиной и выражается в абсолют-
ных единицах;
• характеристики ослабления и затухания обозначаются одинаково
a(f)2, размерность п(/) выражается в децибелах, связь между А(/) и
характеристикой ослабления a(f) определяется формулой
«(/) = 2OlgA(/), (17.1)
2 Традиционно в радиосистемах используется характеристика ослабления, а в системах про-
водной связи — характеристика затухания.
Лекция 17. Введение в цифровые фильтры
331
а при отображении требований в виде характеристики затухания
a(/) = -201gX(/); (17.2)
□ выбор метода аппроксимации АЧХ А(/) (или «(/))•
17.2.2. Типы избирательных фильтров
и задание требований к ним
В данном пункте изучаются требования, предъявляемые к АЧХ и характери-
стикам ослабления (затухания) избирательных фильтров. Все требования
отображаются на диаграммах. При постановке задач оптимального синтеза
идеальную АЧХ обычно обозначают £(/). Наиболее подробно излагаются
требования к ФПЧ. которые нетрудно перенести и на другие фильтры.
1. Фильтр нижних частот (ФНЧ) имеет три частотных полосы
(рис. 17.3,6): полосу пропускания (ПП), полосу задерживания (ПЗ), или
ослабления (рис. 17.3, в) и затухания (рис. 17.3, г), и переходную полосу.
Полоса пропускания (ПП) ограничивается частотой среза3 ;
ширина полосы пропускания A/jin = ;
— максимально допустимое отклонение от 1 (рис. 17.3, 6);
«niax — максимально допустимое ослабление (рис. 17.3, в) в полосе про-
пускания
=20 lg(l-6i). (17.3)
Соответственно максимально допустимое затухание в полосе пропускания
(рис. 17.3, г) имеет вид
=-20 Ig(l-81).
Важным является то обстоятельство, что в соответствии с методом синте-
за КИХ-фильтров отклонение АЧХ от I (соответственно л(/) от 0) зада-
ется симметрично 1-5j < А(/)£ 1 + 5], а для БИХ-фильтров отклонение
задается только в одну сторону так, чтобы АЧХ не превышала единицы
(1-5] < А(/)< 1) и характеристика ослабления, соответственно, не пре-
вышала нуля («(/)< 0), что отображено на рис. 17.3, б, в вынесенными
диаграммами. Это означает, что для БИХ-фильтра, синтезируемого с теми же
Используемый в курсе лекций термин "частота среза1* и встречающийся в литературе термин
1раничная частота полосы пропускания" являются синонимами.
332
Часть VI. Цифровые фильтры
1(f)
Рис. 17.3. Диаграммы требований к ФНЧ: идеальная АЧХ (а),
требования к АЧХ (б), требования к характеристике ослабления (в),
гребования к характеристике затухания (г)
Лекция 17. Введение в дисковые фильтры 333
допусками, что и КИХ-фильтр, необходимо задавать в полосе пропуска-
ния допустимое отклонение АЧХ
8|бих = 28ц<их»
допустимое отклонение характеристики ослабления
яшахБИХ =2лтахКИХ [дБ]»
допустимое отклонение характеристики затухания
^тахБИХ ~~~^^тахКИХ [дЩ*
Причина, по которой нормированная АЧХ БИХ-фильтров в полосе про-
пускания не превышает единицы, объясняется методикой синтеза БИХ-
фильтров по аналоговым фильтрам-прототипам (см. Лекции 23 и 24).
Полоса задерживания (ослабления) (ПЗ) лежит в пределах от граничной
частоты fk до половины частоты дискретизации /д/2;
ее ширина Д/пз = ;
52 — максимально допустимое отклонение АЧХ от 0;
е?0 — максимально допустимое ослабление в полосе задерживания
а0 =20 lgfi2 <0, (17.4)
а в терминах характеристики затухания «q — минимально допустимое за-
тухание в полосе задерживания
«о =«mm =-201g82 >0. (17.5)
Переходная полоса располагается между полосами пропускания и задер-
живания, ее ширина Д/ = fk~ Поскольку в этой полосе требования не
задаются, удовлетворительным окажется любое решение, если оно соот-
ветствует требованиям в полосах пропускания и задерживания.
2. Фильтр верхних частот (ФВЧ) имеет, как и ФНЧ, три частотных по-
лосы, которые расположены в обратном, относительно ФНЧ, порядке
(рис. 17.4):
полоса задерживания в пределах от 0 до fk , Д/*пз = fk;
переходная паюса в пределах от fk до /х, Д/ = Д - fk;
полоса пропускания в пределах от /% до /д /2, Д/пп = /д /2 - /х.
Остальные параметры определяются так же, как и для ФНЧ.
334
Часть VI. Цифровые фильтры
$(/)
Рис. 17.4. Диаграммы требований к ФВЧ:
идеальная АЧХ (д), требования к АЧХ (б)
3. Полосовой фильтр (ПФ) характеризуется пятью частотными полосами
(рис. 17.5), из которых центральная— полоса пропускания, две полосы
задерживания и две переходных полосы. Отрицательный индекс частоты
означает, что частота расположена слева от середины полосы пропуска-
ния. На рис. 17.5» б обозначены:
f-k — граничная частота первой полосы задерживания П31, ширина ко-
торой д/п31 = f_t;
— левая частота среза полосы пропускания:
fx —- правая частота среза полосы пропускания, ширина полосы пропус-
кания Д/'пп=Л~/-х;
Л — граничная частота второй полосы задерживания П32, ширина кото-
рой А/пз2 = /д/2 “ Л •
Переходные полосы I и 2 имеют ширину Д/i - и = J\
соответ стве» мо.
Лекция 17. Введение в цифровые фильтры
335
Примечание
При задании требований к ПФ следует иметь в виду» что в общем случае
ДГ1Н, * Д/"ПЭ2, Д/j * Д/г и допустимые отклонения от нуля в полосах задержива-
ния не обязаны быть одинаковыми.
П32
Рис. 17.5. Диаграммы требований к ПФ;
идеальная АЧХ (а), требования к АЧХ (б)
4. Режекпюрный физътр (РФ), иногда называемый полосно-заграждающим,
подобно ПФ характеризуется пятью полосами (рис. 17.6), из которых две
полосы пропускания, одна полоса задерживания и две переходных поло-
сы. Отрицательный индекс частоты означает, что частота расположена
слева отсереднны полосы задерживания. На рис. 17.6, б обозначены:
/_у — частота среза первой полосы пропускания, ширина которой
4/11ГП = f х •
f_k и fk — нижняя и верхняя граничные частоты полосы задерживания,
д/пз = A ~f~k;
/х — частота среза второй полосы пропускания, ширина которой
Д/11П2 =/д/2-/х-
336
Часть VI. Цифровые фильтры
£(/)
Рис. 17.6. Диаграммы требований к РФ; идеальная АЧХ (а), требования к АЧХ (б)
Переходные полосы 1 и 2 имеют ширину A/"t = f_k -и ДГ2 = fк
соответстве hi ю.
Примечание
При задании требований к РФ следует иметь в виду, что в общем случае
Afnni *4/пп” А/i * Аб и допустимые отклонения от единицы в полосах про-
пускания не обязаны быть одинаковыми.
17.2.3. Характеристика задачи
оптимального синтеза
Цель оптимального синтеза в самом общем смысле состоит в том, чтобы при
заданных условиях и ограничениях получить фильтр, который имел бы иаи-
лучшис параметры: минимальный порядок, минимум максимального откло-
нения реальной частотной или временной характерисгики от желаемой, ма-
лый собственный шум, желаемые особенности структуры н т. д.
Типовой, весьма распространенной задачей оптимального синтеза является
получение цифрового фильтра минимального порядка при условии достиже-
ния наилучшего воспроизведения (наичучшей аппроксимации) требуемой А ЧХ
при заданных ограничениях.
Лекция 17. Введение в цифровые фильтры 337
Преследуемая цель формально может быть выражена как функция одною
или нескольких аргументов (частоты f и вектора коэффициентов
£» = {b0,fy.ЬЛ}), которую требуется минимизировать (или максимизиро-
вать). Минимизируемая функция называется целевой: ею определяется каче-
ство достижения поставленной цели; степень же приближения оценивается
одним числом. К примеру, степень полученного воспроизведения АЧХ оце-
нивается допустимым отклонением в полосе пропускания фильтра.
Одиако достижение определенной цели может иметь разный смысл, опреде-
ляемый мерой близости, или критерием оптимальности.
Любое решение, удовлетворяющее заданным ограничениям, называется до-
пустимым. Оптимальное решение является лучшим допустимым решением
в смысле выбранного критерия, т. е. меры близости.
Критерием оптимальности называют показатель, который характеризует об-
щую ценность решений таким образом, что решение признается тем лучшим,
чем меньше (или больше) значение показателя при заданных условиях и ог-
раничениях задачи. Это означает, что любая оценка решения в виде некото-
рого числа является оценкой по определенному критерию. Критерий опти-
мальности включается в постановку задачи.
Задача приближения реальной АЧХ А(/) к желаемой £(/') решается на со-
вокупности F ограниченных областей частот Ft G (Оч- /л/2), которые назы-
ваются интервалами аппроксимации. В эту область входят только полосы
пропускания и задерживания фильтра. Так, фильтры иижних и верхних час-
тот имеют по два интервала аппроксимации, а полосовые и режекторпые
фильтры имеют по три интервала аппроксимации (см. рис. 17.3).
Чаще всего при конструировании передаточной функции в качестве
критерия оптимальности используется мера близости р реальной А ЧХ A(f)
или амплитудной функции B(f) (см. Лекцию 18) к желаемой £(/). Выбран-
ная мера близости р определяет характер задачи оптимизации, смысл кото-
рой состоит в достижении минимума (или максимума) целевой функции.
17.2.4. Меры близости
в задачах аппроксимации ЦОС
В теории и практике ЦОС, как правило, используются две меры близости:
О чебышевская мера р[(Сб близости (чебышевский критерий)
Рчеб = max р( f )|^(/) - В(Ь, л| = пип , (17.6)
338
Часть VI. Цифровые фильтры
смысл которой состоит в достижении минимума взвешенной (с весом р(/))
максимальной ошибки апп1юксимсп(ии на всем интервале аппроксимации F
за счет специально организуемой процедуры подбора коэффициентов Ь . На
практике для организации вычислений интервал аппроксимации F заменя-
ется конечным множеством принадлежащих этому интервалу точек
{/1* fl' —' ft' — » /l}g F»в св«и с чем (17.6) записывается в другом виде:
рчгб=тах/)(//)|^)-Д(6,Л)| = тт, i = I, 2,..., L. (17.7)
Если точки f достаточно близко расположены друг к другу, то решения
(17.6) и (17.7) будут совпадать с наперед заданной точностью;
□ среднеквадратичная мера ph15 близости (среднеквадратичный критерий)
л1/2
Ркв = 1₽(/)|«Л-В(й./)|:! =min, (17.8)
feF 1 J
смысл которой состоит в достижении минимума среднего квадрата ошиб-
ки аппроксимации на всем интервале аппроксимации F за счет подбора
коэффициентов b . На практике, как и в предыдущем случае, интервал
аппроксимации F заменяется конечным множеством точек
{/1» fl' ••• > fi- — « У/ }е Г > при этом интеграл в (17.8) заменяется суммой
Ркв
ЕхЛ)|ад)--о(ь,/;)|2
= nun
г = 1, 2,
L.
(17.9)
В выражениях (17.6—17.8) приняты следующие обозначения:
О p(f) — весовая функция, которая по своему смыслу не можег быть отри-
цательной (см. п. 17.2.6);
О %>(f) — аппроксимируемая функция;
О B(btf) —аппроксимирующая функция;
□ b — вектор коэффициентов, b - Ь)....bk,..., Ь^}.
Разность между аппроксимируемой и аппроксимирующей функциями
B(b,f) = 6(D (17.10)
называется ошибкой аппроксимации. Она может принимать как положитель-
ные, так и отрицательные значения.
Рассмотрим геометрический смысл этих мер (рис. 17.7).
Лекция 17. Введение в цифровые фильтры
339
17.2.4.1 . Чебышевская мера рчсб
На рис. 17,7, с/ показан вариант чебышевской аппроксимации некоторой
функции £(/) на ингервале Г = [yj, /^1 ПРИ условии, что максимум модуля
ошибки аппроксимации |5(/)| не должен превышал» допустимой величины 8.
Из рисунка и формулы (17.6) следует:
О ошибка аппроксимации может достигать максимума как в одной точке,
так и в нескольких;
□ ошибка контролируется в каждой точке интервала аппроксимации F ;
□ ни в одной точке интервала аппроксимации ошибка не превышает рЧиб.
Все это означает, что чебышевская аппроксимация важна в тех случаях,
когда необходимо знание ошибки в каждой точке интервала аппроксимации.
На практике при использовании чебышевского критерия применяются чис-
ленные методы, обеспечивающие выравнивание ошибки на интервале ап-
проксимации (см. п. 20.3).
|4(/) - А(/)|
Рис. 17.7. Чебышевская (а) и среднеквадратичная (б) меры близости
12 Зак 165
340
Часть VI. Цифровые фильтры
17-2.4.2. Среднеквадратичная мера ркв
На рис. 17.7,6 показан вариант среднеквадратичной аппроксимации той же
функции £(/), что и на рис. 17.4,«. Из рисунка и формулы (17.8) следует прин-
ципиальное отличие среднеквадратичной аппроксимации от чебышевской.
Ошибки рет не контролируется в каждой точке интервала аппроксимации,
поэтому вполне возможно, что в отдельных местах интервата аппроксима-
ции абсолютное значение ошибки окажется недопустимо большим, в связи
с чем не исключено получение физически невозможной передаточной функ-
ции (если, например, в результате указанной ошибки полюс расположится на
единичной окружности, то в цифровой цепи появятся незатухающие свобод-
ные колебания, характерные для генераторов).
Последним объясняется широкое использование чебышевской меры близо-
сти в разнообразных задачах аппроксимации. Более того, именно чебышев-
ский Критерий наиболее соответствует задачам синтеза цифровых фильтров.
Среднеквадратичная мера близости обычно применяется вместо более слож-
ной равномерной чебышевской, а также в задачах линейного предсказания
(см. Лекцию 25) и в тех случаях, когда аппроксимируемая функция задаегся
в виде графика или таблицы.
В связи со сказанным, интересен следующий установленный эксперимен-
тальным путем факт [29]: решение задачи чебышевского приближения всегда
дает примерно ту же среднеквадратичную погрешность, что и решение зада-
чи наилучшего среднеквадратичного приближения. Обратное же утвержде-
ние неверно: наилучшее среднеквадратичное приближение, как правило, дает
максимальную абсолютную погрешность, значительно превышающую по-
грешность чебышевского решения.
17.2.5. Постановка задачи оптимального синтеза
После того как мера близости р ЛЧХ и аппроксимируемой функции E>(f)
определена, сформулированная ранее задача оптимального синтеза КИХ-
фильтра может быть поставлена следующим образом: при ограничениях,
диктуемых условиями задачи. найти такие коэффициенты b = {/»/.}. чтобы
мера близости была минимальной р => min.
Формально это записывается так:
ограничения;
р => min;
ь
b={b[,....bk....Ьк}.
(17.ll)
Лекция 17. Введение в цифровые фильтры
341
Если р = рчсб, задача (I7.l I) с учетом (17.6) при замене f на со и F на П
принимает вид:
ограничения;
max В(/мо)| = min;
*=0.1....к.
Подобно этому при р = ркв имеем:
ограничения:
J />(й)|уй)-В(Ь,ш)|"
S1
ь ={/>*}. * = о. 1.к.
(17.12)
(17.13)
Таким образом, в задачах оптимального синтеза можно выделить четыре ос-
новных этана;
I. Определение цели задачи и оценка возможности ее решения. Например,
задача синтеза частотно-избирательного фильтра минимального порядка
с абсолютно линейной ФЧХ, как будет показано в дальнейшем, может
быть решена только в классе КИХ-фильтров.
2. Выбор критерия близости и соответствующего метода решения задачи
(метода оптимизации).
3. Математическое описание оптимизируемой функции, которую называю!
целевой функцией.
4. Установление ограничений, определяющих условия решения задачи, и их
математическое описание.
Подобные задачи, за редкими исключениями, аналитически не решаются,
поэтому прн оптимальном синтезе используются эффективные численные
методы (см. п. 20.3).
Попутно заметим, что неоптимальные методы синтеза, которые также рас-
сматриваются в данном курсе, не предполагают минимизации какой-либо
целевой функции или нормы. Тем не менее, возможны постановки задач ап-
проксимации, когда такие методы дают необходимые решения. В подобных
случаях выбранные методы синтеза могут рассматриваться как оптимальные
в определенном смысле. Например, полиномиальные БИХ-фильтры Баттер-
ворта могут рассматриваться как оптимальные в смысле максимально пло-
ской аппроксимации ампличудно-частотных характеристик (с.п. п. 23.1.2).
342
Часть VI. Цифровые фильтры
17.2.6. Весовая функция
Решение задач аппроксимации требует введения весовой функции р(ю), за-
висящей от частоты. Такая функция позволяет перераспределять ошибки по
интервалам аппроксимации.
Покажем, как это можно выполнить.
Если р(ц>) -1, модуль ошибки аппроксимации (17.10) имеет вид:
|5(й)-В(Л,Л)| = |8(Л)|.
Если р((Ь) * 1, имеем взвешенную ошибку аппроксимации:
р((о)|^(о>)- В(Ь,й>)| = |8(й)|.
Рассмотрим влияние весовой функции на решение задачи. Пусть задача ре-
шена, т. е. получено некоторое отклонение 5ор1, являющееся минимальным
из всех максимальных отклонений на интервале аппроксимации Q
min max|8(cb)| = 80rt.
b £2 1
Это означает, что на всем интервале аппроксимации модуль взвешенной
ошибки не превосходит 8opt
р(ш)|^(«>) - В(В.&)| S 8ор[, Vtoe Q.
Поделив неравенство на р(со), получим абсолютную погрешность аппрок-
симации
|6(а>)| =
И-в(М5^8ор1.
P(w)>k
|£(й)-В(Ь,о>)|>-у^->8
J 1 Р(0)) ’
р(Л) < I.
Отсюда ясно, как влияет весовая функция на погрешность аппроксимации; па
тех частотах, где p(ib) > 1, погрешность аппроксимации |8(й))| нс превышает
8ор| ’ а »’Де Р((Ь) < 1, погрешность аппроксимации может превышать б()р(.
Пример 17.1
Рассмотрим Ф11Ч (рис. 17,8), имеющий полосу пропускания =10:0.25л!.
полосу задерживания £22=[0,4л;л] и, следовательно, переходную полосу
Лекция 17. Введение в цифровые фильтры 343
в пределах (0»25тс; 0,4л). Поскольку в переходной полосе погрешность нс
контролируется, полосы пропускания Q, и задерживания Q2 являются ин-
тервалами аппроксимации. Пусть для этого фильтра известны: оптимальное
решение 8opt =0,05 и весовая функция
И. шей,;
[0,25го, toe Q2.
Поставим задачу: найти влияние весовой функции на погрешность аппрокси-
мации.
Решение. На интервале = [0; 0,25л], где p(cb) = 1, погрешность аппрокси-
мации не превосходит 8^
8| (“)=- В(Ь, ь>)| < 8ор1 = 0,05.
На интервале аппроксимации Q2 = (0,4л; л], где р(ш) = 0,25(0, погрешность
может превосходить 8ор1
62 (го) = |£<го) “ Жго-«)| *
1 р(ю) 0,25ш
поскольку 0,25Л< 1, (be Q2 =10.4л; л].
Например, на частоте (b,N = 0,432л погрешность достигает максимальной
величины 82(cjh1)=0.1471, после чего оиа убывает.
л/4«*-^0,4т
Переходная
полоса
Рис. 17.8. Зависимость погрешности от весовой функции
344 Часть VI. Цифровые фильтры
17.3. Конструирование функциональной
схемы цифрового фильтра
функциональная схема ЦФ определяется, вообще говоря, двумя обстоятель-
ствами: принадлежностью фильтра к КИХ- или БИХ-системам и методом
синтеза. Например, в зависимости от метода синтеза БИХ-фильтры могут
иметь как параллельную, так и каскадную структуру из звеньев первого и
второго порядка.
С другой стороны, каждое звено может быть представлено в прямой, канони-
ческой или иной форме для выполнения дополнительных ограничений: сни-
жения собственного шума фильтра, экономии памяти, повышения скорости
вычислений и т. п.
КИХ-фильтры также обладают разнообразием структур, пусть и меньшим по
сравнению с БИХ-фильтрами. При реализации КИХ-фильтров с линейной
ФЧХ вследствие особых свойств их импульсных характеристик, как будет
показано в м. /8.2, обычно используют структуру, содержащую минимальное
число умножителей, что позволяет существенно уменьшить собственный
шум фильтра,
Таким образом, синтез цифровых фильтров представляет собой достаточно
сложную многопараметрическую задачу, в которой учитываются не только
частотные или временные характеристики фильтра, ио и его технические и
реализационные возможности.
Лекция 18
КИХ-фильтры с линейной ФЧХ
18.1. Условия безыскаженной передачи
сигналов
При пост роении систем связи всегда стремятся к тому, чтобы сигнал переда-
вался без искажения его формы. Рассмотрим условия безыскаженной пере-
дачи сигналов во временной и частотной областях.
1. Во временной области безыскажснная передача сигнала означает, что ре-
акция системы у(пТ) представляет собой копию воздействия х(пТ). От-
сюда очевидно требование: значения у{пТ) должны быть пропорцио-
нальны значениям х(пТ) с точностью до вещественной постоянной к.
чему соответствует свойство линейности системы. Однако выполнение
одного этого требования еще не гарантирует отсутствие искажения. Дей-
ствительно, реакция всегда появляется с задержкой на некоторое время
тт относительно воздействия. При выполнении первого условия форма
сигнала не будет нарушаться, если все его составляющие получат одина-
ковую задержку, т. е. задержка является постоянной тгвз = н0Т .
Из сказанного следуют два условия безыскаженной передачи сигнала во
временной области:
• значения реакции системы должны быть пропорциональны значениям
воздействия у(пТ)-кх(нТ),
• время задержки сигнала должно быть постоянным тГ1П = п$Т .
Па этих основаниях формальное выражение условий безыскаженной пе-
редачи сигнала х(пТ) во временной области определяется соотношением
у(нТ)~ к л[(н— нп)Т], (18.1)
где к —коэффициент пропорциональности.
346
Часть VI, Цифровые фильтры
2. Условия безыскаженной передачи в частотной области нетрудно полу-
чить из (18.1), если воспользоваться свойствами задержки и линейности
преобразования Фурье дискретного сигнала (слт. п. 10.2):
Пе^Т)=ке-^Х(е^Т).
Следовательно, комплексная частотная характеристика цепи, обладающей
свойством безыскаженной передачи, должна выражаться формулой
Ще'шТ) = ^Ц-- = ке~^т. (18.2)
Х(еу,“г)
Это означает, что АЧХ такой цепи должна быть частотно-независимой
(т. е. оставаться постоянной) в пределах заданной области частот, зани-
маемой спектром сигнала,
A(o) = |w(e>'’)| = i=const. (18.3)
ее ФЧХ в этой же области должна быть линейной функцией частоты, по-
скольку
<р(W) = arg И (г>7) - -ninQT, (18.4)
а групповое время задержки
Tr>i=_^=„„r (18.5)
г/со
оказывается постоянным, т. е. начальные фазы всех частотных состав-
ляющих сигнала получают пропорциональный частоте сдвиг, поэтому не
нарушаются их фазовые соотношения: это приводит лишь к смещению
начала отсчета времени на тгвз.
В общем случае условия безыскаженной передачи (18.3) и (18.4) могут
быть выполнены лишь приближенно, поскольку передаточные функции
фильтров являются рациональными. Тем не менее, в классе КИХ-
фильтров можно синтезировать фильтры, обладающие заданной АЧХ и
строго линейной ФЧХ (18.4), а потому и постоянным ГВЗ (18.5). Покажем
существование таких фильтров на простом примере.
Пример 18.1
Найти фазочастотную характеристику КИХ-фильтра, описываемого переда-
точной функцией
H(z) = 0,5 + z '+0,5z"2.
Лекция 18. КИХ-фильтры с линейной ФЧХ 347
Решение. Получим из передаточной функции комплексную частотную харак-
теристику, для чего подставим z = :
I! ) = 0,5 + cos(wT) - j sin(CoT') + 0,5cos(2(t>T) - j0,5 sin(2o)T).
Отсюда вещественная часть
Re{tf(<>" )} = 0,5 + cos(co7’)+О, 5со5(2йГ) = 0,5[1 + 2cos(cor) + cos(2ft>r)J,
а мнимая часть
11П {// (е1'"7 >} = Hsin(o>'f)+O.5sin(2<or)] = -O.5[2sin((i>D + sin(2<oD].
По определению ФЧХ, имеем
Re{//(fy“/')} 2sin(co7’) + sin(2co7’)
Ф(о>) = arctg—?----. -~г = -arctg-----------------------.
)} 1 + 2cos(uT) + cos(2toT)
Рассмотрим аргумент арктангенса.
2sin(co7') + sin(2<j)7') _ 2sin(toT) + 2sin(coT)cos(co7') _
1 + 2cos(cnT) + 005(20)7') 2cos(oT) + (1 + cos(2cd7'))
_ 2sin((i)T)|l+cos(co7’)] _ 2sin(co7')[l + cos(tt)7')[ _((07’)
2cos(it>7’) + 2cos2(o>7') 2cos(<o7’)[l + cos(<i>7’)]
откуда следует
<p(o) = -arctg[tg(o7‘)] = -coT,
ф(Ш)
Рис, 18.1. Пример АЧХ (а) и ФЧХ (б) КИХ-фильтра 2-го порядка с линейно!) ФЧХ
348
Часть VI. Цифровые фильтры
т. е. ФЧХ рассмотренного фильтра строго линейна, а групповое время за-
держки
Т|ИЗ (со) = -<р'(о>) ~Т = const
постоянно. АЧХ и ФЧХ рассмотренного КИХ-фияьтра второго порядка пока-
заны на рис. 18.1, а и б соответственно.
Заметим также, что рассмотренная в примере передаточная функция фильт-
ра, имеющего строго линейную ФЧХ. обладает особой структурой: ее коэф-
фициенты симметричны: Ьо =Ь2 =0,5.
18.2. Теорема о КИХ-фильтрах
с линейной ФЧХ
Рассмотренный ранее пример показывает, что
□ существуют КИХ-фильтры. обла чающие строго линейной ФЧХ;
□ коэффициенты передаточных функций (а потому и отсчеты импульсной
характеристики) таких фильтров должны обладать определенной симмет-
рией.
Приводимая ниже теорема1 и следствия из псе устанавливают условия, при
которых КИХ-фильтр обладает линейной ФЧХ.
Теорема:
Пусть имеются два многочлена
D(z)= S 4Г' и 0(7"')= X d,^ ,
i=O i = 0
где:
Ф— вещественные коэффициенты;
D(z)— минимально-фазовый многочлен, т. с. его нули лежат в пределах
единичного круга z-плоскости (см. п. б.б).
Тогда цифровой фильтр с передаточной функцией
//(?) = £6,<' = D(;)±z "D(z"‘) (18.6)
i О
при условии, что
K>/VD-1. (18.7)
1 Теорема 'юкннша совместно ироф. Ланн*) Л. А. и доп. Улаховичсм Л. А.
Лекция 18. КИХ-фильтры с линейной ФЧХ 349
имеет строго линейную ФЧХ вида
ф(со) = - + (-[/'л + , А = 1,2... ш = {0,1}
во всем диапазоне частот 0Sto^co;i/2 с точностью до скачков фазы на л
радиан на тех частотах со*. где АЧХ принимает нулевое значение.
Доказательство. Исследуем частотную характеристику (ЧХ), соответст-
вующую (18.6):
H(eJmr') = D(ejtor)±eJi”ntD(e->tor) =
= |D(e-'“r)|£-'<₽'1<й» +е >“пг|р(е-7ш7 )|е-Л’о<«|>
Функции Dfe7^) и О(е~7"‘Г) являются комплексно-сопряженными, вслед-
ствие чего их модули равны
|о(е7а1Г)| = |о(е-7Ш/)|,
и тогда при обозначении фо = фр(со) ЧХ принимает вид
г I ttiT I -j— /фо<ш)+^“П
//(4?;шГ) = |о(4?Л0Г)|е 2 4?' 2 J±e? I 2 J . (18.8)
Рассмотрим (18.8) отдельно при знаках (+) и (-), стоящих в квадратных скоб-
ках перед правой экспонентой.
1. Если стоит злак (+)>т0 ЧХ имеет вид
( х _ _ .coTft
Фо(<1>) + ^ |е 1 2 = В, (<?''"’ )<? ‘ 2 , (18.9)
где
В+ (е'иГ ) = 2| D(c>’r )| cos ( фо (<о) + (18.10)
представляет собой амплитудную функцию,, которая может принимать как
положительные, так и отрицательные значения, что зависит только от зна-
ка косинуса.
Амплитудно-частотная характеристика запишется как мотуль амплитуд-
ной функции
А(в») = |нДеуш7' )| = |й+ (е>Г )| •
(18.11)
350
Часть VI. Цифровые фильтры
Отсюда ясно, что АЧХ принимает нулевые значения на тех же частотах,
на которых B+(ejwT) = 0. Это будет только в тех случаях, когда
cos(vD(cot) + ^-^ = 0, 4 = 1.2......................
т. е. на частотах сох., удовлетворяющих равенству
Фо(»л) + ^ = (2А-')^, 4 = 1,2,...
На этих частотах происходит смена знака косинуса, вызываемая последо-
вательным приращением сто аргумента на -л или на +тс радиан. Смена
знака косинуса тождественна умножению )| ,,а = п, по-
этому ФЧХ в исследуемом случае получает вид
<М“) = -^~ + (-1)‘л, 4 = 1.2......... ,и = о.
2. Если стоит знак (-), го в этом случае ЧХ имеет вид
WJ^“r) = 2j|D(t>,'’)|sin^<pD(Q) + ^yy 2 =
= в+(^)Л 2 ч
где приращение ФЧХ на п/2 следует из равенства j = е^2.
Здесь знак амплитудной функции
В_(е^г) = 2|D(eJ<"r)|sinf ф„(о) + -™'|
(18.12)
(18.13)
(18.14)
определяется знаком синуса. Амплитудно-частотная характеристика
Л(с») = |//_ (е>г )| = |й_ (е'1,,г )| (18.15)
принимает нулевые значения на тех же частотах, на которых
^JidT ) - 0, что возможно только в тех случаях, копа
. ( , х «’Т'Н Л
Sin cpD(to) + —— = 0,
т. е. па частотах ц>., удовлетворяющих равенству
ф„(п^) + ^^ = 24л, 4 = 1.2,...
Лекция 18. КИХ-фильтры с линейной ФЧХ 351
На этих частотах происходит смена знака синуса, вызываемая последова-
тельным приращением его аргумента па -л или на +л радиан. Смена
знака синуса тождественна умножению |/? на -1 = е^ л, поэто-
му, как и в предыдущем случае, ФЧХ можно записать в виде
(р_ (to) = - + (-1/ л + . k = 1, 2. ш = 1. (18.16)
Объединение (18.12) и (18.16) окончательно дасглинейную ФЧХ
ф(€0) = -Мга +(-1)*я + от-^. к = 1,2. яг = {0.1}, (18.17)
где m =0 для случая I и m -1 для случая 2, что и требовалось доказать.
Покажем, что введенное в теореме ограничение R>ND-1 справедливо,
для чего обратим внимание на второе слагаемое в (18.6). Многочлен
£)('“*). будучи рациональной функцией от z, физически невозможен (не-
реалнзуем) в силу невыполнения условия причинности. Для того чтобы
передаточная функция //(г) была физически возможной, необходимо,
чгобы физически возможной была и функция z RD(z ’), что достижимо
лишь в том случае, когда z‘RD(z~f) станет функцией от г"’. Следова-
тельно, если порядок D(z~l) равен ND-1, то значение R должно быть,
во-первых, не менее ND-l и, во-взорых. целым, поскольку являет-
ся рациональной функцией от г-1- Таким образом, показана справедли-
вость введенного в теореме ограничения (18.7)
R>Nd-\.
Примечание
Можно покачать, что рассмотренные условия являются не только необходи-
мыми. но и достаточными, а теорема справедлива и для неминимально-
фазового многочлена D(z).
Доказанная теорема позволяет вывести ряд практически важных следствий.
Следствие 1:
Соотношение (18.17) порождает два типа качественно различных ФЧХ:
1. ф+(т7’) = -^^ + (-1)лл; 2. ф_(шГ) = -^у-Я + (->)*’1 + ^.
352
Часть VL Цифровые фильтр1
Первый тип фазочастотных характеристик, исходящих из начала координат,
тс
соответствует знаку (+) в (18.16): второй тип ФЧХ. исходящих из точки —,
2
соответствует знаку (—) в этом же выражении (рис. 18.2).
Следствие 2:
Скачки ФЧХ па л радиан возможны только в полосах задерживания и пере-
ходных, где АЧХ может принимать нулевые значения. На рис. 18.2 показаны
варианты линейной ФЧХ фильтра нижних частот при N = 11 для (+)
(рис. 18.2, <г) и полосового фильтра при W = 16 для (-) (рис. 18.2, б) в (18.8).
Точками обозначены частоты со*, на которых А(с\) = О, и потому имеется
скачок фазы на ±л. Па рис, 18.2.б видно, что одна из таких частот (cb4)
принадлежит переходной полосе, а на первой частоте ц -0 имеются два
скачка; на -л (поскольку к = 1) и на л/2 (вариант ФЧХ тина (p_(o)T)). по-
этому общий скачок на cbj составляет -л/2.
Рис. 18.2. Варианты линейной ФЧХ
Лекция 18. КИХ-фильтры с линейной ФЧХ 353
Следствие 3:
Групповое время задержки фильтра с линейной ФЧХ постоянно и равно
, N-~\
Т1 вз (°>) = -Ф (°) = —— Т = consl’
причем в зависимости от значения N (нечетное или четное) выделяются две
группы фильтров: одна из них обладает задержкой на целое число периодов
дискретизации Т (N нечетно), другая — на целое число периодов дискрети-
зации Т плюс полпериода дискретизации ( N четно).
Прежде чем формулировать следствие 4, рассмотрим несколько примеров
конструирования передаточных функций КИХ-фильтров с линейной ФЧХ.
Пример 18.2
В качестве исходного возьмем многочлен первого порядка
D(z) = 0,5 + 0.5z"’.
Соответствующий ему многочлен по положительным степеням г имеет вид
£>(z“') = 0,5 + 0,5z.
Запишем согласно теореме переда точную функцию фильтра с линейной ФЧХ
H(z) = D(z) + z RD(z“1). (18.18)
По поскольку R должно удовлетворять условию (18.7)
где Nd - 2, выберем R = 2. Тогда получим
tf(z) = O.5 + O.5z"'+z“2 (0.5 +0,5г),
откуда
H(z) = 0,5+z~'+0.5z~2,
что совпадает с передаточной функцией из примера 18.1, в котором показано,
что ФЧХ такого фильтра строго линейна.
Если в (18.18) вместо знака (+) взять знак (-), то при /? = 2 получим (предла-
гается проверить это самостоятельно):
tf_(z) = O.5-O,5z2,
гзе ФЧХ также линейна.
354
Часть VI. Цифровые фильтры
Пример 18.3
Теперь в качестве исходного возьмем многочлен второго дорячка общего
вида
D(z) = dt, + dl2,+dlZ-2.
у которого /? = /Vd-i = 2. Рассмотрим различные варианты передаточной
функции, которые можно отсюда получить при /?>2 и противоположных
знаках в (18.6).
Решение.
1. К = 2.знак(+):
Z ^0(2“') = Z 2(d0 +£/,£ +r/2-2) = 4)Z 2 1 +
отсюда получаем возможную передаточную функцию
H(z) = D(z)+z~2D(zl) = dlt + d1Z~l + d2z~2+d(lz~2+dlz~1 + d2 =
~(.dQ + (l2) + 2dlz 1 + (dG + d2)z 2 -fy) + Z>|Z 1 + ^z 2
c симметричными коэффициентами относительно £>| (как и в приме-
ре 18.2). на который приходится центр симметрии.
2. R = 2, знак (-):
в этом случае передаточная функция
Н(г) = dm + г"2D(Z*1) = d0 + dtz 1 + d2z'2 - d0z~2 - d, г 1 - d2 =
= (d0 -d2) + Oz“' -(rf0 -d2)z~2 = (d(t-d2)-(d0-d2)z~2=b0-b0z~2
имеет антисимметричные коэффициенты относительно bt. т, е, отли-
чающиеся только знаком: причем средний коэффициент при
N-]
•> -1
z * =z по условию антисимметрии равен нулю.
3. /? = 4,знак(+):
z RD(z~X) = + +d2z2) = d{)z~A+d}z * + d2z~2\
передаточная функция
W(z) = О(г) + г’4О(г“!) = с70 +J|Z~’ + d2z‘2 + </0z-4 +d{z~* + d2z~2 =
= +^z~2 +61z"3 + ^)z“4
обладает такой же симметрией коэффициентов, как и в первом случае, что
легко проверить, если найти связи между коэффициентами dt и bk .
Лекция 1в. КИХ-фильтры с линейной ФЧХ 355
4. R = 7. знак (-):
; лО(г",) = Г7+rf,z' +rf2z2) = rf„z-7 + + rf2z"5;
передаточная функция в этом случае имеет вид (проверьте саыостсм гелыю)
H(z} = bn + blz~t +&2Z-2 -b2z"5 -l^z 6 -b^z'1,
т, е. ее коэффициенты характеризуются тем же свойством ан гисиммс грин,
как и в случае 2.
Рассмотренные примеры подтверждают существование двух подклассов
КИХ-фильтров с линейной ФЧХ, которые отличаю тся характером симметрии
коэффициентов передаточной функции, Именно симметрия коэффициентов
(или отсчетов импульсной характеристики, что одно и го же) КИХ-фильтра
является признакомлинейности ФЧХ, вытекающим из доказательства теоремы.
Следствие 4:
Цифровой КИХ-фильтр облачает линейной ФЧХ, если коэффициенты его
передаточной функции симметричны
bk =>>»-,-к (18.19)
или антисимметричны
(18.20)
Учитывая, чэо коэффициенты передаточной функции КИХ-фильгра пред-
ставляют собой отсчеты его импульсной характеристики, записанное правило
обычно формулируют иначе: цифровой КИХ-филынр обладс/ет линейной
ФЧХ с точностью до скачков па к рад па частотах, где A Ч¥равна нулю,
если его импульсная характеристика симметрична
l,k=llN-i-k (18.211
u'iu антисимметрична
hk=-l',V-tk-
Покажем общую справедливость этого правила, для чего запишем выраже-
ние (18.6) в развернутом виде.
H(z) = d„ +£/,.<' +d2z-2 +... + </A,(i..,z4w“” + г"|</0 + d,z + d2z2 +
+-+<у„-.г1Л'я'”1 =
= </„ + rf]Z 1 + d2z~2 +... + rfv„.1z''A’D4> ±
±W,Z" +d2<(R-2’ +... + dND_,z.-,R-N'>^ I.
356
Часть Vi. Цифровые фильтры
При выполнении неравенства R>ND -1 все показатели степени комплексной
переменной г отрицательны; нетрудно также видеть, что общее количество
слагаемых, включая и нулевые (!), равно R +1; другими словами, длина N
импульсной характеристики (или число коэффициентов) фильтра равна R +1:
N = R +1,
как и должно быть.
Для получения коэффициентов Ьк, или отсчетов импульсной характеристики
hk -Ь/., приведем в //(г) подобные члены. Тогда при обозначениях
i-R- Nd + V или R = 1
имеем:
□ для t-го члена
d,z" =d,z" ±rfWl,-|Z“' = (rf, ±dNn_l)z l
□ для (i +1 )-го члена
j -<<+l> Л..1 ~~(Я_Л^+2> _j -I + J -1 —(si +sl
flj-Z ±«(ArD_|)_[Z -UjZ ±aNi}_}Z -(«/+[ Tf,ND-2fz
ИТ. Д.
Из полученных соотношений следует, что
bt = hj- (ф ± dND_]);
^г+i =ht+} =(^i+i
и для произвольного к-го члена
=fyt = *=0,1....................(18.23)
причем если k>ND-l и/или к-i<0 (т. е. k<i = R-ND +1), то
dk =0 и/или
поскольку все коэффициенты с такими индексами в передаточной функции
N-\ ,
"(z) =
к=0
равны нулю.
Найдем значения коэффициентов (или отсчетов импульсной характеристи-
ки), равноостоящих от центрального коэффициента, для чего рассмотрим вы-
ражение (18.23) для суммы и разности при индексах к=0 и k = R, к = 1 и
к = R-l, k = i и к = R-i:
Лекция 18. КИХ-фильтры с линейной ФЧХ
357
1. При суммировании для соответствующих индексов получаем:
fyj =Ло =rf0 +^лГд-|+| =^0 +(^R' ]
. -ь -я 4-л J.h =>/1о=А« и bo=bR’
bR~llR~dR + о ,vD~i- ( r-о - Ов + Ц) J
- /?1 - + ^;vD-i+/.-i -dt+ dR_t;
bR-i ~bR-i =dg-i +df/D^l =^b-i + <A
=>Л1=Ав-1 и *i=*b-i;
i>=A,=rf(+rfWD-i:
bR-i =bR-i =^R-i + d ND-l~iR-2i> =dN0-l +th
2. При вычитании, с учетом рассмотренного в первом пункте, получаем:
dR;
bR =bR = dR ~d0
=> I’o ~ bR
и *%=-*«;
fc, =ft = d,-dR_,-. 1
Г=>А1=-Л1
bR-l = I'R-l = r‘R~l ~ J
И b|
6/=ft. =rf.
, . =Лк-1 и b,=-bR4.
bR-^dNu-i+di J
Все вышеизложенное подтверждает справедливость приведенного рапсе ут-
верждения о двух типах симметрии импульсной характеристики в КИХ-
цепях, обладающих линейной ФЧХ:
Л1=±Лкч=±^и-
При этих условиях передаточная функция может быть записана в виде
R . R
H(Z)= X [rft ±dN ,_(М|г^ = X Ллг-*, (18.24)
k^O t=D
где i = /?-JVp + l, dk — коэффициенты исходной передаточной функции.
Если в правой части (18.24) перейти к принятым для передаточной функции
обозначениям, окончательно получаем:
N-1 Л-1
ад=Хй1г-' = У^-/ (18.25)
1=0 /=о
при условиях
Лп=±А^кн=±^-1-я.
где знаки (+) и (-) соответствуют знакам в (18.6).
358
Часть VI. Цифровые фильтры
Следствие 5:
J5 зависимости от четности ши нечетности порядка R (соответственно
нечетности и четности длины импульсной характеристики N), а также
от симметричности ши антисимметричности коэффициентов передаточ-
ной функции (отсчетов импульсной характеристики) существуют четыре
типа КИХ-фильтров с линейными ФЧХ. что показано в табл. 18.1.
Таблица 1S.1. Тины КИХ-фильтров с линейной ФЧХ
Длина импульсной характеристики (число коэффициентов) Л' Порядок фильтра R-N-1 Импульсная характеристика
Симметричная Антнсимме гричная
Нечетная Четный Тип 1, т = 0 Тип 3. т = 1
Четная Нечетный П ни 2, HI = 0 Тип 4, т = 1
Частотные характеристики этих фильтров изучаются в п. 18.4. а их свойст-
ва— в п. 18.5.
18.3. Структурные схемы КИХ-фильтров
с линейной ФЧХ
Свойства симметричности коэффициентов (импульсной характеристики)
позволяют построить структурную схему КИХ-фильтра с линейной ФЧХ,
имеющую практически в два раза меньше умножителей, чем структурная
схема КИХ-фильтра с произвольной ФЧХ.
Уменьшение числа умножителей приводит, во-первых, к увеличению быст-
родействия и, во-вторых, к существенному уменьшению собственного шума
фильтра, а потому и к увеличению его динамического диапазона.
Покажем пос 1 роение таких схем на двух простых примерах.
Пример 18.4
Построим структурную схему фильтра при N = 9 (/? = 8) с симметричной
импульсной характеристикой (симметричными коэффициентами)
h( = , или bg = .
Лекция 18. КИХ-фильтры с линейной ФЧХ
359
Решение. Таким условиям соответствует фильтр типа 1 (см. табл. 18.1). пере-
даточная функция которого имеет вид
H(.z) = bB + l>lz~'-b2z~2+b4z~i-b4z 4 + fe3z"5-ft2z"6+*lz’7 + ibz'8.
Объединим члены передаточной функции, имеющие одинаковые коэффициенты:
Щг) = ^(1 + г 8) + ^(г '+z"7)-/>2(z"2 + z“6) + ft3(z“:' + z'5)-64z_4.
Полученную передаточную функцию и соответствующую ей схему будем
называть приведенными.
Приведенная передаточная функция имеет 8 сложений, как и в исходной, и
только 5 умножений, в то время как в исходной было 9, т, е. число умножи-
телей в структурной схеме (рис. 18.3) сократилось практически в два раза.
Для приведенных структур КИХ-фильтров типа I число умножителей окаты-
вается равным (N +1)/2.
Примечание
Приведенная структура КИХ-фильтра типа 3. имеющего нечетное Л п атн-
ciiMMeipH’Hiyio ИХ. будет иметь умножителей, поскольку централь-
ный коэффициент ^(iV+|j/2
360
Часть VI. Цифровые фильтры
Пример 18.5
Построим приведенную структурную схему фильтра при N =8 (Я = 7).
с симметричной импульсной характеристикой (симметричными коэффициен-
тами)
= /? 7_. или Ь{ - Ь-]_(.
Решение. Таким условиям соответствует фильтр типа 2 (см. табл. 18.1), пере-
даточная функция которого имеет вид
Н (z) = Ah + г-1 - b2z~2 + l%z~3 + Ajz-4 - + fyjZ-7 -
Поступим так же, как в предыдущем примере; тогда получим приведенную
передаточную функцию
M(z) = fc0(l + z"7) + fc1(z’1 + z’<i)-62(z“2 + z“5) + ^(z"3 + z"').
у которой число умножений ровно в 2 раза меньше по сравнению с обычной
прямой структурой; поэтому количество умножителей в приведенной струк-
турной схеме (рис. 18.4) также сократилось вдвое.
Рис. 18.4. Приведенная структурная схема КИХ-фильтра типа 2
Лекция 18. КИХ-фильтры с линейной ФЧХ
361
Примечание
Приведенные структуры КИХ-фильтров типов 2 и 4. имеющих четное N,
всегда будут иметь N/2 умножителей, поскольку fc(Jvy2bl = ±^Л/2 (знак (т) со-
ответствует типу 2; (-) — типу 4).
18.4. Частотные характеристики
КИХ-фильтров с линейной ФЧХ
Согласно теореме из п. 18.2, существует четыре типа КИХ-фильтров с линей-
ной ФЧХ (с.м, габл. 18.1). Понятно, что различие в характере симметрии ИХ
и четности/псчстности значения N должно приводить и к различию свойств
соответствующих фильтроа. Например, одно из различий, указанное ранее,
касается ФЧХ; фильтры с антисимметричными ИХ имеют начальную фаз)
-л/2, что видно из (18.17). Действительно, АЧХ таких фильтров па частоте
6= 0 всегда равна нулю и, следоаатсльно, ФЧХ имеет первый скачок иа -л.
к которому добавляется л/2 .
Поставим задачу найти явные выражения для частотных КИХ-фильтров
с линейной ФЧХ. С этой целью, исходя из (18.9) и (18.13), запишем ком-
плексную частотную характеристику в общем виде
(N-1. я) /А-1. л)
-л----tii-wi— - Л--ы-т—
Н(е^ = В(е^е ' 2 2J = Z?(w)e V 2 2\ (18.26)
где. как и ранее, т = {0,1}.
Заметим, что из (18.26) следует важное соотношение между АЧХ и ампли-
тудной функцией:
Л(6) = |//(<>)| =|В(&)|,
которое говорит о следующем (рис. 18.5):
□ на частотах, где/?(сЬ)>0, АЧХ в точности равна амплитудной функции,
что возможно только в полосе пропускания:
□ на частотах, где Z?(cb) < 0, АЧХ раана модулю амати |удной функции; зна-
чения В((Ь) < 0 возможны только вне полосы пропускания (т. е. в полосах
задерживания, в первую очередь, а также в переходных полосах, посколь-
ку для последних, как известно, требования не задаются), где амплитудная
функция может неоднократно менять знак, а каждая смена знака приводит
к скачку ФЧХ на ±л (рис. 18.5).
362
Часть VI. Цифровые фильтры
Рис. 18.5. Графики: амплитудной функции (л), АЧХ (о), ФЧХ (г*)
Сказанное ранее можно компактно записать в виде соответствия
„ I л- । ffl(cb). в полосе пропускания;
Л(й)=/7(е"")= 1 ' (18.27)
1 1 (|В(<»)|. вне полосы пропускания,
Для решения поставленной задачи представим передаточную функцию W(z)
в развернутом виде
//(;) = й() + й,г ,+...±A1z“l^l>±it<'i
Лекция 18. КИХ-филыры с линейной ФЧХ
363
и перейдем к комплексной частотной характеристике
Н (е*) = l>u +bie~Ji‘ +... + ± (18.28'
где знак (+) соответствует симметрии, а знак (-) — антисимметрии коэффи
циентов {/?,}, Рассмотрим талое выражение (18.28) при четном и нечетном
порядке R.
С целью удобства анализа преобразуем (18.28) к более наглядной форме, для
чего вынесем за скобки
и после объединения слагаемых с одинаковыми коэффициентами fy имеем
В дальнейших преобразованиях будем пользоваться известными формулами
Эйлера:
□ для случая симметрии
+ е~*к1Л = 2cos(A6));
□ для случая антисимметрии
елй= 2ysin(Ao>).
Проанализируем выражение (18,29) отдельно для симметричного и антисим-
метричного соотношения коэффициентов.
18.4.1. КИХ-фильтры типа 1 и 3
Комплексные передаточные функции КИХ-фильтров типа 1 и 3 имеют не-
четную длину Л1’ (чешый порядок /?), но разную симметрию импульсной
характеристики (см. maai. 18.1):
П фильтры типа 1 обладают симметричной ИХ (симметричными коэффици-
ентами b, = bN_l4):
П фильтры типа 3 обладают антисимметричной ИХ (антисимметричными
коэффициентами fy
364
Часть VI, Цифровые фильтры
18.4.1-1- КИХ-фильтры типа 1
В этом случае (18.29) запишется в виде
R. Г / ч
' ( R
2/^ cos! —со
Н}(е&) = е
или
Н}(е^ = е~'^
(18.30)
Обозначим 2Ьк = ,2.11к = ак и ащз =Ьк/2 =^r/2'-> тогда ЧХ фильтра типа 1 при-
мет окончательный вит
//i(eJ“) = e ‘г £ ax.cos|jK-^<a
(18,31)
откуда имеем:
амплитудную функцию
В
(18.32)
амплитудно-частотную характеристику
(18.33)
фазочастотную характеристику"
ф1(и)) = — ytb (18.34)
и группоаос время задержки
TlrM=-rflP'(“- = -7~- (18-35)
1гю 6/0) 2
равное цело чу числу периодов дискретизации.
2 Здесь и далее формулы ФЧХ танисыяакггсм с точностью до скачка фазы па Л на тех часто-
тах. где АЧХ равна нулю.
Лекция 18. КИХ-фильтры с линейной ФЧХ
365
18.4.1.2. КИХ-фильтры типа 3
При антисимметричной ИХ (антисимметричных коэффициентах) выражение
(18.28) примет вид:
-J—ш
Н^) = е г j
2Ь0 sin
+ 2bK sincb
J”1
где коэффициент Ьк =0 (см, пункт 2 списка из примера 18.3).
2~*
Учитывая равенство j = eJ1^2, имеем:
частотную характеристику КИХ-фильтров типа 3
, „ \R 1
Й3(<?;“) = И
• “* = 2bk •
(18.36)
амплитудную функцию
B3(ct))= ak sin
амплитудно-частотную характеристику
А,(й» = |
(18.37)
(18.38)
фазочастотную характеристику
ф3(б)) = —+ у (18.39)
и групповое время задержки
4())
Зпв do 2
равное целому числу периодов дискретизации.
Пример 18.6
Получить формулу ЧХ фильтра типа 3 при N = 5.
Выражение (18.28) при заданной длине ИХ (количестве коэффициентов)
принимает вид:
Н(е&) = + bie~J& - - Лье“-'4(Ь,
366
Часть VI. Цифровые фильтры
поскольку порядок /? = 4 и коэффициент /72=0. Вынесем за скобки
e-j{Rl2)»3 =e-J2(b
= e--'2'a(b0ej2": + lv-~ & - bp* - Ь^е^}
и приведем подобные члены
И(е^) = e~i2io[\(£'-"’ -е~12Л) + *,(е1Си -Jfc)].
После применения формулы Эйлера получаем
Н(е^) = je~j2& [2^ sin(2<b) + 27,, (sin Л)] =
= je j2G1 2Z>osin^ — 0^6)4-2^ sin^-l'jd)^
= ie i2ta 2/^sin^-^-0^d) + 2ftjSm^-y-l^(j)J.
Отсюда при обозначениях cif. =2bk и пределах изменения к от 0 до
(/?/2) -1 = 1 имеем искомую формулу
//3(eJ“) = <-l2 оЛ sin [(2 - А )6>].
Л=0
18.4.2. КИХ-фильтры типа 2 и 4
Комплексные передаточные функции КИХ-фильтров типа 2 и 4 имеют чет-
ную длину N (четный порядок R), но разную симметрию импульсной ха-
рактеристики (см. табл. 18.1):
П филыры типа 2 обладают симметричной ИХ (симметричными коэффици-
ентами =bA._t_f);
□ фильтры типа 4 обладают антисимметричной ИХ (антисимметричными
коэффициентами £>. =-бЛМЧ).
Вновь обратимся к выражению (18.28) и запишем его с учетом соответст-
вующей симметрии двух центральных слагаемых:
К-I. .Я-t.
//(?6)=^+&,е->й + ... + Ьк_/' 2 '‘±bK-le ' 2 ' ±-±lbe i{R "{'l±^~i,!t’-
~2 2~
Лекция 18. КИХ-фильтры с линейной ФЧХ
367
Как и ранее, вынесем за скобки е 2 , но в данном случае величина R/2 не
является целой:
R N-1N 1
2 ~ 2 ~ 2 2*
что приводит к существенном}- изменению свойств фильтров. Для единооб-
разия записи частотных характеристик КИХ-фильтров воспользуемся тожде-
ством
R /?-1 1
Тогда выносимый за скобки множитель примет вид е v 2 2' , а комплекс-
ная частотная характеристика преобразуется в форму:
откута после объединения cnaiae\twx с одинаковыми коэффициентами получим
Как и ранее, проанализируем последнее выра'кение отдельно для симметрич-
ного и антисимметричного соотношения коэффициентов.
18.4.2.1. КИХ-фильтры типа 2
В этом случае из (18.39) при знаке (+) получаем:
//2(cJ”) = e 2 2^г £ fetcos[p^+|-^o>
118.42)
368
Часть VI. Цифровые фильтры
или Н2(е^) = е~}^12 ^cos^-^wj. (18.43)
Вновь обозначив = 21%, приходим к выражению для ЧХ фильтра типа 2
Н2(е^") = е*2' £0|tcos|J-y-4p)
подобное выражению (18.31), откуда имеем:
амплитудную функцию
R
В2(со) = У cos | — -к |6)
л-о Ц 2 )
(18.44)
(18.45)
амплитудно-частотную характеристику
А2(6) = |в2(й)| =
(18.46)
фазочастотную характеристику
ф2(Л) =-^-^-5-+^й = —(18.47)
и групповое время задержки
2|"' Ло 2 2 2 2
равное целому числу периодов дискретизации плюс половина периода: на-
пример, при N=6
т2пн = (3 - 0,5)Т = 2,5Т = 2Т + 0,5Г .
18.4.2.2. КИХ-фильтры типа 4
В этом случае из (18.41) при знаке (-), подобно примеру 18.Э, нетрудно получить
W4(£>J&) = e 'I 2 2> /|2/A)sin^^-i + ^wj+
+2i) sinff + | - И* I+- + 2*кч sin(
Лекция 18. КИХ-фильтры с линейной ФЧХ
369
или при ak =2bk и пределах изменения к от 0 до (/?-1)/2
(18.49)
что после перестановки слагаемых в показателе степени и упрощения выра-
жения в скобках даст
(18.50)
откуда имеем:
амплитудную функцию
К-1
(18.51)
амплитудно-частотную характеристику
(18.52)
фазочастотную характеристику, подобную ФЧХ фильтра типаЗ вследствие
антисимметричности ИХ,
z л к /? А 71 Z 1 Г "1 V
Ф4(со) = -—со+— (18.53)
и группоаое время задержки, аналогично ГВЗ фильтра типа 2,
гп Ао 2 2 2 2
18.5. Свойства КИХ-фильтров
с линейной ФЧХ
Рассмотренные выше четыре типа КИХ-фильтров с линейной ФЧХ обладают
разными комплексными частотными характеристиками и потому неодинако-
выми свойствами. Различие указанных фильтров состоит, прежде всего,
в принципиальных возможностях аппроксимации конкретной АЧХ. Оказы-
вается, что не любой из них годится для реализации произвольной избира-
370
Часть VI. Цифровые фильтры
тельное ги. Аппроксимационные возможности, заключенные в конкретном
типе фильтров, определяются теми значениями амплитудной функции (или
АЧХ). какие опа приобретает на границах основного частотного диапазона,
т. е. на час гагах С') = 0 (/ = 0)и со-л (/-), независимо от значений
коэффициентов ак , а нагому и аг значений коэффшгпептов Ьк (отсчетов
импульсной характеристики).
18.5.1. Свойства КИХ-фильтров типа 1
Запишем АЧХ (18.33)
н
Л,«о) = |в|(£>)|
где а^/2 = Л^-2 ’ и при обозначении 0(Acb) = cos^ — -lc jroj проанализируем ее
значения па частотах со-О и (Ь = л:
П на частоте <Ь = 0 функция ф(Л<Ь)|й =1, поэтому значение А|(0) =
полностью определяется коэффициентами ак, т. е. коэффициентами Ьк
фильтра (ак = 2Ьк );
□ на частоте о> = л функция 9(Дй)|(.)=я =±1, а именно: если — чет-
ное. го ф(Аб))^_п = 1; если -Jtj— нечетное, го 6(Л(Ь)||Ь_и =-1. Это
означает, что при б)=п значение АЧХ также определятся только коэффи-
циентами ак или Ьк , т. е. отсчетами импульсной характеристики фильтра.
Проанализируем фазочастотную характеристику. Из формул ФЧХ (18.12) и
(18.34)след\ет:
□ начальная фаза ф|(0) = 0;
□ пабег фазы (с учетом ее скачков на ±л) в основной полосе час гот состав-
ляет целое число л и равно
W-1
Ф1(Я)=----уя.
Лекция 18 КИХ-фильтры с линейной ФЧХ 371
если количество скачков черное, и
Z х ^-1
ф,(Л) =—~л-л,
если количество скачков нечетное.
Из вышесказанного вытекают свойства КИХ-фильтров типа Г.
1. Возможна реализация фильтров произвольной избирательности (низко-
частотной, высокочастотной, полосовой, режскторной, многочастотной), а
также цифровых амплитудных корректоров.
2. Задержка сигнала на выходе фильтра относительно сигнала на его входе
равна целому числу периодов дискретизации
18.5.2. Свойства КИХ-фильтров типа 2
Воспользуемся выражением (18.46) и запишем аргумент косинуса с учсгом
равенства R = N -1
Вновь произведем анализ АЧХ на частотах (й=0 и б) = л. При <Ь = 0, как и
для фильтров типа 1, значение А2(0) полностью определяется коэффициен-
тами ак, т. е. отсчетами импульсной характеристики фильтра, поскольку
cos(O) = 1. А вот на частоте со = л независимо от коэффициентов А(л) = 0.
Действительно, аргумент косинуса содержит разность целого числа
N , _ ,
—* и дроои 1/2, поэтому при со = л аргумент приобретает значение
( л') ( л А
I l> а cos = 0, что говоРит ° невозможности конструиро-
вания высокочастотных и режекторных фильтров на базе фильтров
тина 2.
13 Заж. 165
372
Часть VI. Цифровые фильтры
Из формул ФЧХ (18.12) и (18.47) следует:
П начальная фаза ф2(0) = 0;
□ набег фазы (с учетом ее скачкоа на ±л) в основной полосе частот состав-
ляет целое число л плюс л/2
, ч W-l N 1
Фг(л) =--^~п"~^л+2Л‘
если количество скачкоа четное, и целое число л минус л/2
ч 7V-1 N 1
ф2(7Г) =-—7Г-Л = -—ТС—Л,
если количество скачков нечетное.
Из вышесказанного вытекают свойства КИХ-фильтров типа 2:
1. Возможна реализация только низкочастотных и полосовых фильтров.
2. Задержка сигнала на выходе фильтра относительно сигнала на его входе
(18.48) равна целому числу с половиной периодов дискретизации Т
_N~lT_N_T Т
Т2гв’ 2 2 2 ’
18.5.3. Свойства КИХ-фильтров типа 3
Формула АЧХ (18.38) КИХ-фильтров типа 3
содержит функцию sin(a), аргумент которой а представляет собой произве-
дение целого числа (— -к | на со. Это означает, что на частотах со=О и
'2 >
й) = тс sin(a) = 0. Следовательно, АЧХ КИХ-фильтров типа 3 на указанных
частотах всегда равна нулю независимо от значений ак, т. е. независимо от
значений отсчетов импульсной характеристики
Aj(0)= А3 (тг) — О,
Лекция 18. КИХ-фильтры с линейной ФЧХ
373
что говорит о невозможности конструирования низкочастотных, высо-
кочастотных и режекторных фильтров на базе фильтров типа 3.
Поэтому рассматриваемые фильтры могут быть только полосовыми.
Из формулы ФЧХ (18.39) с учетом скачков фазы на ±л следует:
□ начальная фаза Фз(О) = ~л/2; действительно, на частоте ci) = 0 А3(0)~0,
поэтому имеет место скачок фазы на -л и
.—ч /? Л Л
ф3(0) = --0 + у-л = --;
□ набег фазы (относительно начальной фазы) в основной полосе частот со-
ставляет целое число л и равно
W-1
Ф3(л) =--— л,
если количество скачков (включая скачки на частотах со = О и со-л)
нечетное, и
ч W-l W + 1
ф3(л) = —-—л + л - —-—л,
если количество скачков четное.
Из вышесказанного вытекают свойства КИХ-фильтров типа 3:
1. Возможна реализация только полосовой избирательности. Однако по-
скольку ФЧХ (18.39) на всех частотах сохраняет сдвиг на л/2, фильтры
типа 3 обычно применяются для синтеза преобразователей Гильберта и
дифференциаторов (aw. Лекцию 21).
2. Задержка сигнала на выходе фильтра относительно сигнала на его входе
равна целому числу периодов дискретизации
^Згвз 2 ‘ '
18.5.4. Свойства КИХ-фильтров типа 4
Запишем в выражении (18.52) аргумент синуса так, как это сделано в (18.49):
374
Часть И. Цифровые фильтры
Видно, что
sin!
= 0
lfo=o
sin I
поэтому Л4 (0) = 0 независимо от значений коэффициентов а^, а следова-
тельно, и от значений отсчетов ИХ. С другой стороны, Д4(л) полностью
определяется коэффициентами ak (отсчетами ИХ), что говорите невозмож-
ности конструирования низкочастотных и режекторных фильтров на
базе фильтров типа 4.
Из формулы ФЧХ (18.53) с учетом скачков фазы на ±л следуег:
□ начальная фаза Ф4(0) = -л/2 (объяснение этого факта см. в п. 18.5.3)-,
□ набег фазы (относительно начальной фазы) в основной полосе частот со-
ставляет
tf-1 N 1
<р4(л>=——
если количество скачков (включая скачок па частоте w=0) нечетное, и
7V-1 N-2 1
<M*) = —— * + *=—
если количество скачков четное.
Из сказанного вытекают свойства КИХ-филыпров типа 4:
1. Возможна реализация фильтров только высокочастотной и полосовой из-
бирательности. Однако, поскольку ФЧХ на всех частотах сохраняет сдвиг
на л/2, фильтры типа 4 обычно применяются для синтеза цифровых диф-
ференциаторов и преобразователей Гильберта (ем. Лекцию 21).
2. Задержка сигнала на выходе фильтра относительно сигнала на его вхоце
равна целому числу периодов дискретизации Т плюс Т/2
= Л/-1 N_T_7L
4,ю 2 2 2 ’
Основные свойства КИХ-филыров с линейной ФЧХ отражены в табл. 18.2.
Лекция 18. КИХ-фильтры с линейной ФЧХ
375
Таблица 18.2. Основные параметры КИХ-фильтров с линейной ФЧХ (hk = bk )
ИХ Тип Длина N Порядок R Амплитудная функция Я(Й) ФЧХ <р(ш) Приме- нение
Симметричная I Нечетная Четный й II о * £ II ' S ' s О* *• N) | 55 £• * 1 S> | Ъ 5 Е> <3 ас | е-1 Без ограни- чений, кроме ЦП Г и цд
2 Четная Нечетный "v'/2 Л1 >. a. cos к со *=о 1Д 2 ) J = ^к </?-! 1А - +- со \ 2 2) ФНЧ, ПФ
Антисимметричная 3 Нечетная Четный «3 / ' * И Й* t=f " Е <Г я* л R „ <|) 2 2 ЦПГ. цд
4 Четная Нечетный &м| £ Я? й' 11 1 = J S> " > я? N | >5 ' £> л f R-\ lY -- + - со 2^2 2) ЦД, ЦПГ
Лекция 19
Синтез КИХ-фильтров
методом окон
Среди достаточного разнообразия методов синтеза КИХ-фильтров с линей-
ной ФЧХ наибольшее применение в различных приложениях получили два
"классических”: метод окон и метод оптимального (по Чебышеву) синтеза.
В данной лекции изучается первый метод, а оптимальному (по Чебышеву)
синтезу посвящена Лекция 20.
Обратим внимаиие на тот факт, что поскольку коэффициенты hf передаточ-
ной функции (отсчеты hf- импульсной характеристики) КИХ-фильтров с ли-
нейной ФЧХ обладают определенной симметрией, установленной в Лек-
ции 18, достаточно знать лишь половину требуемых коэффициентов
синтезируемого фильтра. Это свойство позволяет существенно упростить
процедуру расчета коэффициентов и потому сократить время их вычисления.
19.1. Постановка задачи.
Определение метода
В основе обсуждаемого в лекции метода лежит простая идея: поскольку час-
тотная характеристика цифровых фильтров является периодической
функцией, естественно воспользоваться ее представлением в виде ряда Фурье
с тем, чтобы вычислить отсчеты импульсной характеристики фильтра с по-
мощью обратного преобразования Фурье.
19.1.1. Общая характеристика задачи
Без потери общности зададимся целью рассчитать коэффициенты (импульсную
характеристику) фильтра НЧ. Идеальная АЧХ такого фильтра (рис. 19.1) явля-
ется кусочно-постоянной периодической функцией с разрывом на граничной
Лекция 19. Синтез КИХ-фильтров методом окон 377
частоте (Ьс; при этих условиях в основной области частот идеальная АЧХ
описывается функцией
Л ft 0<Л<Лг;
д,(И) = //„(<>>)= с’ .
(О, при других со,
а периодическая функция Ha(eJlii) может быть представлена рядом Фурье
(с.и. Лекцию 2)
«,(г>7')= £ Л1,(я)е“Л”''’. (19.1)
Л = -ео
в котором коэффициенты Фурье равны отсчетам идеальной импульсной ха-
рактеристики:
т л/г
\,(л) = — f Н^е1ЮТ)е1шТ“<На. (19.2)
2п-^г
Ясно, что идеальная передаточная функция (19.1) описывает физически не-
возможный БИХ-фильтр, поскольку его импульсная характеристика начина-
ется в (-со), т. е. реакция предшествует воздействию. Простейший путь кон-
струирования физически возможной передаточной функции состоит в исклю-
чении всех членов ряда (19.1), имеющих отрицательный индекс м<0, Одна-
ко такая операция даст бесконечную импульсную характеристику, соответст-
вующую БИХ-фильтру. Для получения импульсной характеристики КИХ-
фильтра длины N необходимо ограничить ряд (19.1) еще и сверху до А/-1
членов, т. е. усечь его в пределах Процедура усечения ряда
(19.1) по сути представляет собой операцию умножения идеальной ИХ (19.2)
на последовательность wR(n) вида
fl, 0<n<N-k
[0. при других п.
(19.3)
378
Часть VI Цифровые фильтры
В результате умножения образуется реальная импульсная характеристика
h(n) КИХ-фильтра
h(n) = wR(n)h„(n), (19.4)
частотная характеристика которого согласно (19.1) приобретает вид:
Н(е1шТ) = X h(»)e~J,“T" . (19.5)
л=0
2
Рис. 19.2. Процедура усечения ИХ: отрезок "идеальной" ИХ (а).
последовательность (19.3) (б), реальная ИХ (результат умножения на и*^(и)) (в)
Лекция 19. Синтез КИХ-фильтров методом окон 379
Производя в (19.5) замену е-^г = г, получаем передаточную функцию
фильтра
//(г)= £ft(n)z'n. (19-6)
н=0
Пример формирования ИХ фильтра НЧ типа 1 при N = 39 (см. табл. 18.1,
п. 18.4.!) с помошью (19.3) показан на рис. 19.2, где нулевой отсчет идеаль-
ной ИХ, имеющий максимальное значение, равное единице, для удобства
сдвинут вправо на 19 отсчетов (рис. 19.2, а); отсчеты реальной ИХ
(рис. 19.2, (?), имеющие нулевые значения, не отмечены.
Казалось бы, решение найдено. Действительно, подбирая значения N и кон-
тролируя поведение АЧХ. за несколько итераций можно найти такое N , при
котором требования к заданному фильтру будут выполнены. Однако усече-
ние ряда Фурье приводит к существенным искажениям, которые обсуждают-
ся далее.
19.1.2. Явление Гиббса
Искажения обусловлены характером сходимости ряда Фурье в точке разрыва
первого рода, каковой и является точка 6)с (см. рис. 19.1, 19.3, б):
□ во-первых, а точке разрыва Лс первого рода ряд Фурье сходится к сред-
нему предельных значений функции слева и справа; в нашем случае это оз-
начает, что
где Я(ц. -0) = 1 — предел слева, Z?(tbc +0) = 0 — предел справа; поэтому
в точке О)с независимо от величины N всегда будет
Я(Лс) = А(сЬс) = 0,5;
□ во-вторых, в точке разрыва сходимость ряда Фурье не является равно-
мерной и носит особый характер, который выражается в появлении пуль-
саций вблизи точки разрыва, максимум которых слева и справа составляет
~ 9 % от АЧХ и остается таковым вне зависимости от N. Этот феномен,
объяснение которому дается в п. !9.2.5> получил название явления Гиббса .
1 Гиббс Дж. Виллард (1КЭ9—1903) — один из крупнейших математиков; он первый сообши.ч
об этом эффекгс.
380
Часть VI. Цифровые фильтры
На рис. 19.3, б показана амплитудная функция ФНЧ, импульсная характери-
стика которого (рис. 19.3. а) имеет длину Л/ =31. Видно, что в результате
усечения формируются пульсации как в полосе задерживания, так и в полосе
пропускания фильтра; кроме того, образуется переходная полоса (заштрихо-
ванная область на рис. 19.3, б), ширина которой Дб)=соЛ -со* тем меньше,
чем больше значение N , причем середина переходной полосы приходится на
частоту wc.
Рис. 19.3. Явление Гиббса: импульсная характеристика ФНЧ, N = 3L (л),
амплитудная функция (б)
Лекция 19. Синтез КИХ-фильтров методом окон
381
Изучим явление Гиббса более подробно, для чего обратимся к формуле
(19.4). Здесь и далее будем рассматривать только фильтры типа 1, т. е. огра-
ничимся N нечетными, поскольку именно такие фильтры наиболее часто
используются на практике.
Импульсная характеристика (19.4) представлена произведением двух функ-
ций во временной области: идеальной ИХ (19.2) н некоторой весовой функ-
цией (19.3), чему в частотной области соответствует свертка фурье-
изображсний этих функций. Фурье-изображение h(ri) (19.2) представляет
собой частотную характеристику фильтра, а фурье-изображение ве-
совой функции wK(n) является ее спектром WR(eJ(i)), который принято назы-
вать частотной характеристикой функции h»a(h).
Найдем частотную характеристику функции (19.3), для чего выполним пре-
образование Фурье
N-I .. W-I
ИМ^“)= I ".W = X е~1Ш" (19.7)
и=0 я=0
Видно, что W^fe^) представляет собой сумму N членов убывающей гео-
метрической прогрессии
~ i-У
$n -«о-:----»
1-9
первый член которой flo=e~jOw = l, а знаменатель д = е~^. Поэтому (19.7)
можно записать в виде:
_______-______-
R1 f j _ е~№ е~№2 (ejG^2 - е~^2)
или
. ((hN 'j
sin ---
I?, Л (19.8)
. ( CD ]
Sln[ 2 J
Функция (19.8) известна под названием ядра Дирихле, причем M^eOi&eO ~ N •
Если не учитывать множитель, характеризующий линейный фазовый сдвиг,
то график нормированного вещественного сомножителя ядра Дирихле
382
Часть VI. Цифровые фильтры
будет иметь форму, показанную на рис. 19.4. а при W = 31; модуль ее изо-
бражен на рис. 19.4, б. Эта функция имеет характер быстро затухающих ко-
лебаний с максимальным значением N на частоте cb=O (читателю пред-
лагается этот факт доказать самостоятельно, раскрыв неопределенность
в (19.9)). Заштрихованная область с максимальной амплитудой называется
главным лепестком, а остальные области — боковыми лепестками.
Рис. 19.4. График функции (19.9) при N - 31 (я) и ее модуль (б)
Функция (19.9) равна нулю, если равен нулю ее числитель
sin(ib/V/2) = 0 (d)*0),
т. е. при
&N/2 = knt к =1.2...N.
Следовательно, функция ^(е-^0) (19.8) равна нулю на частотах
Л = , Л=1,2.....N,
N
а ширина всех ее лепестков, включая главный, одинакова и составляет
дЛ 2л
причем с увеличением N ширина лепестков уменьшается и увеличивается
число пульсаций. На рис. 19.4, а ширина каждого лепестка составляет
2л
Дш =—,
31
а главный лепссгок занимает область 0<6)< 2я/31.
Лекция 19. Синтез КИХ-фильтров методом окон 383
Известно [39], что умножению функций во временной области соответствует
комплексная свертка в частотной области на периоде [-л, л], поэтому (19.5)
можно записать в виде:
= —J «в(?’)»я(елам”)</ф- (19.10)
Но поскольку
fl, 0<cb<(bf;
[0. при Других (0,
то усечение ряда Фурье (19.1) до Лг членов (19.5) означает, что H(eJM)
представляет собой круговую свертку частотной характеристики идеального
фильтра НЧ H„(eJiti) (см. рис. 19.1) с ядром Дирихле. Следовательно, час-
тотная характеристика идеального фильтра //H(eJ<D) окажется размытой.
В результате получаем амплитудную характеристику (см. рис. 19.3, б, N = 39),
у которой вблизи точки разрыва наблюдаются два эффекта:
□ возникают ошибки аппроксимации в виде пульсаций, которые обусловле-
ны боковыми лепестками функции WR(eJta);
□ образуется сглаживающая разрыв переходная полоса, ширина которой
зависит от ширины главиого лепестка функции ^(е7*0) и фактически
равна ей: чем больше N, тем уже главный лепесток.
19.2. Окна и их основные параметры
Явление Гнббса объясняется, как отмечалось ранее, неравномерной сходимо-
стью ряда Фурье в точке разрыва. Управлять сходимостью ряда Фурье (19.1)
можно с помощью весовой последовательности конечной длины w(n) (w —
первая буква английского слова window— окно), называемой окном или ве-
совой функцией. Метод состоит в том, что коэффициенты ряда Фурье (т. е.
импульсная характеристика йДл) идеального фильтра) умножаются на
и>(л). В результате, подобно (19.4), получается импульсная характеристика
A(n) = /iH(n)w(/i) (19.И)
и соответствующая ей передаточная функция реального фильтра
//(;)= У. Л(п) г-" = У. h(n) w(n) z~" , (19.12)
и=0 л=0
где /V —длина функции w(n).
384
Часть VI. Цифровые фильтры
Определение:
Ограниченная на интервале 0<н<Лг-1 и равная нулю вне этого интервала
положительная симметричная весовая функция называется окном
|w(/V-l-n). 0<л<ЛГ-1;
[О, при других п.
(19.13)
Метод конструирования передаточной функции с помощью ограничения ря-
да (19.1) окном (19.13) часто называется методом окон или взвешивания.
Известно большое количество окон, применение которых определяется ха-
рактером поставленной задачи синтеза фильтров. Ниже рассматриваются
наиболее часто используемые окна: прямоугольное, треугольное, обобщен-
ное косинусное (семейство окон Хэннинга, Хэмминга, Блэкмана) и Кайзера.
19.2.1. Прямоугольное окно
(окно Дирихле)
Именно прямоугольное окно
[1, ()<,1<ЛГ-1;
[О, при других н
было использовано при простом усечении ряда Фурье н изучении явления
Гиббса (рис. 19.2, 19.4); получена частотная характеристика этого окна (19.9)
и исследовано ее поведение. Можио показать (aw. и. 19.2.5), что при любом
W величина амплитуды пульсаций остается неизменной и составляет «9%
вблизи частоты среза , причем А(шс) = 0,5 и сос = («Ь^ + с\. )/2.
Анализ прямоугольного окна позволяет сделать вывод о том, чго окно явля-
ется ’’хорошим", если оно отвечает двум требованиям:
□ ширина главного лепестка частотной характеристики мала;
□ амплитуда боковых лепестков частотной характеристики быстро умень-
шается с увеличением частоты ш.
Эти требования несовместимы, и необходим компромиссный вариант.
Лекция 19. Синтез КИХ-фильтров методом окон
385
19.2.2. Треугольное окно (окно Бартлетта)
Треугольное окно, называемое также окном Бартлетта (рис. 19.5, а), во вре-
менной области представляется соотношением
иу(и) =
(19.14)
О, при других и.
Рис. 19.5. Временная (я) и частотная (б) характеристики треугольного окна при N = 31
386
Часть VI. Цифровые фильтры
Частотная характеристика и амплитудная функция Вг(&) треуголь-
ного окна имеют вид
И/Г(Л) = — Дт“']юГ5Н1(М^)1 . (19.15)
N [ sin(uy2) J
мй) = 2Г^МТ; (19.16)
/v|_ sin(6y2) J
Нули Вг(&) располагаются на частотах, где sin(/Vo/4) = 0, аименно:
4л 4л
N(b/4 = kTV, cb =—к\ Дсо=—.
N N
Это означает, что главный и боковые лепестки имеют ширину Дш, в два раза
превышающую ширину лепестков прямоугольного окна, чем и достигается
эффект сгтаживания пульсаций при одновременном увеличении переходной
полосы фильтра (рис. 19.5, б).
19.2.3. Обобщенное косинусное окно
Обобщенное косинусное окно описывается выражением
и7/(и) =
2л 4л . .
Лл -Г л. cos-п + a-) cos--и; О < п < N -1;
Ю 1 N-1 2 JV-1
0, при других п.
(19.17)
Оно имеет три широко используемых формы, образующих семейство косинус-
ных окон, которые отличаются параметрами Яу, отвечающими условию
я0+|О||<-я2=1.
Значения этнх параметров и наименование соответствующих окон указаны
в табл. 19.1.
Таблица 19.1. Параметры окон
Окна Параметры
«0 а\ а2
Хэннинга 0,5 -0,5 0
Хэмминга 0,54 -0,46 0
Блэкмана-Хэрриса 0,42 -0,5 0,08
Лекция 19. Синтез КИХ-фильтров методом окон
387
Для вывода частотной характеристики обобщенного окна представим его
в виде произведения:
, . , J .L 2п 4л I
lV//(n) = TV»(n) «q+G|COS--m + u2cos-----п ,
L N-l JV-l J
где wR(n) — прямоугольное окно, длина которого равна длине окна
и7/(н).
Раскроем в последнем выражении скобки
/х . к , х 2л , ч 4л
wlf («) = a^wR(n) + ^jivff(n)cos-я + a2wff(n)cos-п
N-t /V-l
и заменим косинусы по формуле Эйлера
, 2л _ . 2л
= + +%s(n)e +
. 4л _ . 4л
+^»ц(п)е +уи>(п)е
(19.18)
(19.19)
Это выражение позволит сразу записать формулу частотной характеристики,
если вспомнить (си. п. 10.2), что умножение последовательности л(л) на
дает в частотной области сдвиг на : X . с учетом сказанно-
го из (19.19) получаем:
(19.20)
+*w„
2 R
Отсюда ясно, что частотная характеристика обобщенного окна представляет
собой сумму сдвинутых по частоте частотных характеристик прямоугольного
окна IVr(£?j‘o); при этом вторая, третья, четвертая и пятая компоненты суще-
ственно уменьшают амплитуду бокового лепестка вблизи главного лепестка,
в результате чего уровни боковых лепестков (19.20) оказываются значитель-
но ниже, чем у прямоугольного окна. Однако ширина главного лепестка для
окоп Хэннинга и Хэмминга оказывается в два раза (за счет слагаемого
2n/(/V-l))s а для окна Блэкмана-Хэрриса — в три раза (за счет слагаемого
•4л/(Лг — 1)) больше, чем ширина главного лепестка прямоугольного окна.
388
Часть VI, Цифровые фильтры
Степень подавления боковых лепестков характеризуют коэффициентом
пульсации кп:
Амплитуда первого бокового лепестка
Амплитуда главного лепестка
100%.
Для окон Блэкмана-Хэрриса (рис. 19.6) и Хэмминга (рис. 19.7) коэффи-
циент оказывается значительно меньше, чем для прямоугольного
окна, поскольку максимальный уровень боковых лепестков существенно сни-
жается.
Рис. 19.6. Временная (а) и частотная (б) характеристики
окна Блэкмана-Хэрриса при N ~ 31
Лекция 19. Синтез КИХ-фильтров методом окон
389
Рис. 19.7. Временная (а) и частотная (б)
характеристики окна Хэмминга при и = 31
Значения основных параметров рассмотренного семейства окон сведены
в табл. 19,2. Указанные величины могут изменяться в незначительных преде-
лах в зависимости от длнны Лг и частоты среза фильтра.
390
Часть VI Цифровые фильтры
Таблица 19.2. Значения основных параметров окон
Тип окна Ширина главного лепестка Максималь- ный уровень бок. лепест- ков, дБ Коэффициент пульсаций An(/V), %
W = ll N = 21 N =31
Прямоугольное 2n/w -13 22,34 21,89 21,80
Хэннинга 4n/N -35 2,62 2.67 2,67
Хэмминга 4n/N -43 1,47 0,93 0,82
Блэкмана- Хэррнса 6k/n -67 0,08 0.12 0,12
19.2.4. Окно Кайзера
Внимательное рассмотрение табл. 19.2 приводит к выводу, что между ши-
риной главного лепестка (т. е. шириной переходной полосы АЧХ фильтра)
и коэффициентом пульсаций существует явная зависимость: уменьшение
коэффициента пульсации для рассмотренных окон сопровождается увели-
чением ширины главного лепестка, которая может регулироваться только
изменением длины окна Лг. С другой стороны, коэффициент пульсации для
конкретного окна мало зависит от N, изменяясь в небольших пределах.
Это обстоятельство позволяет при синтезе фильтра сначала подобрать окно
с подходящими коэффициентами пульсации, а затем подобрать длину Лг
окна, при которой обеспечивается требуемая переходная полоса. Однако
при этом всегда получается либо слишком большая длина Лг, что зачастую
может привести к трудностям реализации, либо чрезмерная ширина пере-
ходной полосы.
Описанное противоречие в значительной степени может быть преодолено (но
не решено окончательно) компромиссом, который достигается с помощью
окна Кайзера, определяемого формулой
(19.21)
Лекция 19. Синтез КИХ-фильтров методом окон
391
гае: = (19.22)
— модифицированная функция Бесселя первого рода нулевого порядка;
N — длина КИХ-фильтра (нечетная);
а — параметр, определяющий величину пульсаций.
Значения а и N вычисляются по приводимым ниже эмпирическим форму-
лам Кайзера [Д9], в которые входят затухание в полосе задерживания
«min =-201g8
н нормированная ширина переходной полосы
AF = Л - /х = (“4 - Лц )/2л,
причем параметр а зависит от требований к
а =
0,1102(anlin-8,7), "min >50;
0,5842(flmin-21)0'4 + 0.07886(«mjll-21). 21<а,1й„<50; (19.23)
0. «mi.. <21.
Окна Кайзера обладают одним замечательным свойством: для фиксирован-
ного отклонения б произведение (/V — 1) на нормированную ширину пере-
ходной полосы ДЕ является практически постоянной величиной.. которая
называется D-фактором
D-(JV-l)-A/js=nx, (19.24)
откуда
(19.25)
где [.vj —ближайшее целое, не превосходящее х.
D-фактор можно вычислить по формуле
D =
Г «mm-7,95
14,36
flmin ^21,
(19.26)
0.9222, «lnin<21.
Из соотношений (19.24)—(19.26) следует:
□ с одной стороны, длина фильтра Лг обратно пропорциональна ширине
нормированной переходной полосы ДЕ;
392
Часть VL Цифровые фильтры
□ с другой стороны, Лг прямо пропорционально зависит от , что позво-
ляет добиваться компромиссного значения Лг за счет снижения пульсаций
и расширения переходной полосы.
Рассмотренные параметры показаны в табл. 19.3. По соотношениям (19.23)—
(19.26) и значениям параметров табл. 19.3 нетрудно определить длину Лг.
Таблица 19.3. Параметры окна Кайзера
Затухаине в полосе задерживания а , дБ mm ♦ Параметр а D-фактор D = (/V-1)AF Затухание в полосе пропускания °™. ДБ
30 2,117 1,536 0,27
40 3,395 1,884 0,0864
50 4,551 2,928 0,0274
60 5,653 3,625 0,00868
70 6,755 4,321 0,00275
80 7,857 5,017 0,000868
90 8,959 5,714 0,000275
100 10,061 6,410 0,000087
Частотная характеристика окна Кайзера вычисляется с помощью выражения
ИЪ(7)=
о
(Л-D-sh . 1
(19.27)
где sh(x) — гиперболический синус
е — е
sh(x) =-—
Примечание
•1. Вычисление функпии /0(а) удобно производить через представленный
выше степенной ряд (19.22), который сходится весьма быстро и для а> 19
уже при 25 членах разложения дает очень хороший результат; если же
Лекция 19. Синтез КИХ-фильтров методом окон
393
а < 19, число членов разложения существенно снижается и для а = 0,5 ока-
зывается равным 5.
2. Оценить длину рассчитываемого фильтра Л' илн по заданной длине шири-
ну полосы ДГ можно но табл. 19.3.
19.2.5. Определение величины пульсаций Гиббса
Ранее было сказано, что слева и справа от точки разрыва, т. е. вблизи частоты
при усечении ряда (19.1) до N членов возникают пульсации, всегда со-
ставляющие ~ 9 % от значения АЧХ. Покажем это, для чего запишем ряд
(19.1) в эквивалентной форме:
Яи(со) = X (л* cosAtb + fy sinAcb). (19.28)
Произведем усечение ряда до Лг членов, что означает получение новой
функции как частичной суммы (19.28):
«V-l R
IlN(d))= J (ak cosAw + bk sin Аш) = j (ak cosAcb + fysinAdi),
< = 0 A=0
где, как и ранее, принято R = N — 1. Полученная функция периодична с пе-
риодом 2л, представляет собой частотную характеристику, и для нее спра-
ведливы следующие соотношения:
а R
HN (й) = —- + ^ («* cos Acb+ bk siп A;to); (19.29)
2 л=.о
। л । л
=- f H(Q)cosAQt/Q; bk =- f H(Q)sin Wt/Q , (19.30)
n-n 71Л
где частота Q введена во избежание путаницы в обозначении частот в по-
следующих формулах. Получим //yV((b) подстановкой (19.30) в (19.29):
1 я 1 1 Л R
HN((6) = —j J/(Q)—dQ + — J H(Q) J (cosAQcosAtb+sinAQsinAib)r/Q =
2 n-n * = i
I * । к 1
= — J H(Q.) —+ У, (cosAQcosA(b+sinAQsinAa))h/Q.
[2*1 J
Применение известного соотношения
cos Ай cos Acb + sin АЙ sin Atb = cos А(Й - to)
394
Часть VI. Цифровые фильтры
дает
j 5 1 R
Ww(cb) = — J /7(Q)' —+ У cosA(Q-w) dQ.
2 >.=1
(19.31)
Найдем сумму 5^, стоящую в фигурных скобках, для упрощения записи
приняв Q-tb=a:
1 R
SN =— + У cosfca.
2 fr=i
Умножим последнее равенство на sin(a/2):
a I a R a
Sm sin — = —sin—+ У sin—cos Ла.
N 2 2 2 ± 2
(19.32)
Произведем замену произведения, стоящего под знаком суммы в (19.32), по
известному соотношению
• а
sin—cos Ла-
2
запишем (19.31) в виде развернутой суммы
. За
sin------sm
2
. 5а . За 1
sin---sin— +
2 2 I
SN sin —
N 2
Г . 2R +1 . 2К-1
+...+ sin----a-sm---------a
2 2
и после сокращения слагаемых получим
„ .a 1 . 2R-F1
Ski sin —=—sin--a,
N 2 2 2
откуда следует
_ sin(2/? + l)a/2
w 2sina/2
Подставляя полученное для суммы выражение в (19.31) и учитывая, что
Q = со+a, получаем:
„ 1 г sin(2/? + l)a/2 . 2?sin(2/? + l)a/2 .
Нк/((й) = ~ Н(ш+а)— ----------—— da = — I—
it_n 2sina/2 Пр 2sina/2
Лекция 19. Синтез КИХ-фмльтров методом окон
395
где пределы интегрирования приведены к основной полосе частот ше [0. л].
Кроме того, согласно условию задачи, //(со) = 1 при (см. рис. 19.1),
что позволяет записать функционал
(&х) = —2:g +,1-)Ct/2 da. (19.33)
А nJ sinoy2
Для определения местоположения экстремумов необходимо взять производ-
ную от (19.33) по ос и результат приравнять нулю. Согласно определению
интеграла
ах
достаточно приравнять нулю подынтегральное выражение (19.33)
sin (27?-И)а/2
sina/2
Последнее равенство выполняется при условии
. (2Я + 1)а п
sin------— = 0,
2
откуда для А-го экстремума справедливо
27? I 1
-------а=*л, * = 1,2,...
2
Первый, ближайший слева к точке разрыва АЧХ, экстремум находится на
частоте а, соответствующей k = 1,
2Я + 1 2л
а = л; а =-,
2-------------------2Я + 1
поэтому верхний предел интегрирования в (19.33) будет равен этой же частоте
( 3 I 2tf(2«+l) sin (2 д + [)а/2
sinot/2
Для удобства вычисления произведем замену переменной
27?+ 1
v =-------------------------------------а,
2
(19.34)
HN\
тогда
a v , 2
— =----- и da =--------dv,
2 2Л + 1 2Я + 1
396
Часть Vf. Цифровые фильтры
и верхний предел инте1рировапия по новой переменной v окажется равным л,
поскольку
2гс
всрх 2Я + 1 2Я + 1 ’ Г’е' Vk'“ П'
Воспользуемся этой заменой и в подынтегральном выражении (19.34) умно-
жим числитель и знаменатель на v :
1 jsinv 2v/(2fl + l) f/v = (19.35)
7Г0 v sin(v/(2fl-H)) nJ0 v sin(v/(2/? + l))
При /V—»°° (t. e. /?—><») вторая дробь в подынтегральном выражении
(19.35) оказываегся равной единице
|im v/(2K + l) =ь
sin( v/(2/? + l))
в чем можно убедиться, раскрыв неопределенность. Поэтому имеем
W(n) = — = — Si( л),
по V
где интеграл
Si(A‘) = f —-лРу
о v
представляет собой интегральный синус, значение которого при х = л можно
взять из справочника:
Si(n) = 1,8516.
Умножая Si(7C) на 2/л,получаем Н(л) = 1,17876.
Искомая величина первой пульсации Гиббса 5П вблизи точки разрыва на
частоте
Л _ 2л _ 2л
" 2(W-I)+I ~ 2N-1 <“*
слева составит половину разности между значением полученного функцио-
нала и единицей (значением нормированной АЧХ слева отточки разрыва)
Лекция 19. Синтез КИХ-фильтров методом окон 397
Следовательно, независимо от N слева от точки разрыва d)x имеет место
приблизительно 9 %-ый выброс А ЧХ
(1,17876-1)/2 = 0,08949-» = 9 %.
Аналогично показывается, что на частоте
Л 4л 4л
со2 =--------=-------> ок,,
2(JV-1) + 1 2/V — 1
ближайшей справа к точке разрыва, также имеет место выброс ~ 9% отно-
сительно нуля.
Сказанное позволяет сделать три важных вывода:
□ пульсации, которые наблюдаются в полосах пропускания и задерживания,
являются следствием медленной сходимости ряда Фурье, что обусловлено
наличием разрыва АЧХ на частоте 0)с (справа от частоты среза cbt, поло-
сы пропускания);
□ с увеличением Лг частота пульсаций растет при уменьшении их амплиту-
ды как на нижних, так и на верхних частотах; однако амплитуды пульса-
ций вблизи частоты <ЬС (первая пульсация слева и первая пульсация спра-
ва) остаются неизменными и составляют 9 %;
□ рассмотренные пульсации обеспечивают просачивание нежелательных
спектральных составляющих обрабатываемого сигнала, и потому при
проектировании КИХ-фильтров исключают простое усечение ряда Фурье;
этот метод требует такого преобразования, при котором отмеченные пуль-
сации подавлялись бы до заданной величины. В частности, пульсации
в полосе пропускания могут дать значительную ошибку при каскадной
реализации КИХ-фильтров: если число каскадов равно М , то при пульса-
ции (1 + 5), присущей одному каскаду, общая пульсация фильтра оказыва-
ется равной (1 + 5)м и может вызвать переполнение.
19.3. Методика синтеза КИХ-фильтров
на основе окон
Напомним, что отсчеты импульсной характеристики КИХ-фильтров одно-
временно являются и коэффициентами его передаточной функции (разност-
ного уравнения), поэтому задача синтеза в данном случае сводится к получе-
нию импульсной характеристики.
398
Часть VI. Цифровые фильтры
Методика синтеза включает в себя:
1. Задание требований к фильтру (см. и. 17.2.1).
2. Вычисление импульсной характеристики /^(п) "идеального" фильтра.
Остановимся иа этом пункте более подробно.
Ранее было показано, что при усечении идеальной импульсной характери-
стики (т. с. при умножении ее на прямоугольное окно) на частоте разрыва
АЧХ /с (или сос) всегда будем иметь значение 0,5 (или я = 6 дБ), т. е. эта
частота находится в пределах переходной полосы ДГ = Д -
(см. рис, 19.1). Однако именно е этой частотой связано вычисление й^(и) •
Определим частоту /с такой, чтобы Д и Д располагались симметрично
относительно fc \ иначе говоря, будем полагать, что
Л+Л
2
Выражения для импульсных характеристик избирательных фильтров при
усечении до N членов (/V нечетное) приведены в табл. 19.4.
Таблица 19.4. Формулы для импульсных характеристик фильтров
Tun фильтра Импульсная характеристика Примечание
Л(л) A(0)
ФНЧ sin /17Е 2/.
ФВЧ sin 2п/сл нп 1-2/.
ПФ sih2nn/c -sin2mi/c П7С 2<Z, -7.,) -f ' C' 2/„ •• 7 11 2/.
РФ sin2nn£ -sin2n/i4 nn
Конечно же определение импульсной характеристики зависит от длины /V;
в свою очередь, выбор N связан с типом используемого окна.
Лекция 19. Синтез КИХ-фильтров методом окон
399
3. Выбор окна и длины фильтра (илн порядка R-N -1).
Как отмечалось ранее, ширина переходной полосы фильтра равна ширине
главного лепестка окна, величина которого может быть определена для
некоторых типов окон из табл. 19.2. Это означает, что:
• во-первых, чем более узкую переходною полосу требуется получить,
тем больше должна быть длина окна, а потому и длина фильтра;
• во-вторых, чем большее подавление требуется в полосе задерживания,
тем более гладкое окно необходимо использовать.
Последнее приводит к увеличению ширины переходной полосы и, как
следствие, к увеличению длины фильтра с тем, чтобы добиться выполне-
ния заданных требований. Здесь налицо противоречие требований, кото-
рое побуждает к поиску разумного компромисса. Если окно выбрано, то
N оценивается по второму столбцу табл. 19.2, а именно:
AF
где к = 2, 4, 4, 6; AF — нормированная ширина переходной полосы.
В случае аыбора окна Кайзера длина N определяется по формулам
(19.25) и (19.26).
После того как получено значение N, вычисляются отсчеты выбранной
функции окна и<л).
4. Расчет импульсной характеристики реального фильтра.
Расчет ИХ осуществляется по формуле
А(п) = ^, (n)w(n),
где й„(л) берется из табл. 19.4.
Поскольку импульсная характеристика найдена, го, казалось бы, процеду-
ра на этом должна быть завершена. К сожалению, вследствие приближен-
ной оценки параметра N , от которого полностью зависит импульсная ха-
рактеристика, а потому и частотные свойства фильтра, крайне редко
полученный фильтр удовлетворяет заданным требованиям, что вызывает
необходимость проверить их выполнение.
5. Проверка выполнения заданных требований.
Для проверки выполнения заданных требований рассчитывается АЧХ: ес-
ли требования выполняются, то на этом процедуру конструирования пере-
даточной функции можно завершить; если требования не удовлетворяют-
ся, необходимо при выбранном окне увеличить N и повторить шаги 2—5.
400
Часть И. Цифровые фильтры
Может случиться так, что требования выполняются с большим запасом —
тогда следует проверить, нельзя ли уменьшить N . Иначе говоря, за неко-
торое количество итераций (проб) обязательно найдется наименьшее зна-
чение N, при котором требования выполняются.
Может случиться и так, что при выбранном окне длина фильтра оказывается
слишком большой, а фильтр но каким-либо соображениям (большие собст-
венные шумы, обеспечение работы а реальном масштабе времени, элемент-
ная база и т. п.) не может быть реализован. Тогда выбирается другое окно и
процедура повторяется.
Наконец, требования к фильтру могут оказаться такими, что при выбранном
окне они в принципе пи при каких N не удовлетворяются; в этом случае не-
обходимо перейти к другому окну и повторить процедуру.
Пример 19.1
Рассчитать КИХ-фильтр, обеспечивающий выполнение задачи из при-
мера 10.5.
Решение. Рассчитываемый фильтр должен обрабатывать комплексный НЧ-
сигнал, что следуез из результатов переноса вещественного сигнала в об-
ласть НЧ; поэтому фильтр должен быть низкочастотным и комплексным, т. е.
состоять из двух самостоятельных и одинаковых блоков, обеспечивающих
независимую обработку вещественной и мнимой составляющей НЧ-сигнала.
Поскольку по условию задачи обрабатывается фазомодулированный сигнал,
во избежание неустранимых фазовых искажений фильтр должен обладать
линейной ФЧХ.
Выбранная в примере 10.5 частота дискретизации равна 56 МГц. Спектр
комплексного НЧ-сигнала имеет полосу Af = 14 МГц в пределах от -7 до
7 МГц. но в этой полосе диапазоны частот [-5; -7] МГц и [5; 7] МГц пред-
ставляют собой переходные полосы аптиэлайсингового фильтра, установ-
ленного на выходе тракта ПЧ-2 приемника, поэтому полосу пропускания
комплексного ЦФ выбираем Afiui МГц (т. е. для обработки каждой со-
ставляющей комплексного сигнала требуется полоса 5 МГц). Сигнал в ука-
занных переходных полосах сильно искажен скатами частотной характери-
стики антиэлайсингового фильтра и непригоден для последующей
обработки, поэтому диапазоны ±|5-*-7] МГц отнесены к переходным поло-
сам синтезируемого комплексного ФНЧ.
Установленный перед АЦП аналоговый антиэлайсипгоаый фильтр имеет не-
равномерность АЧХ «пих =3 дБ. Кроме того, в полосе 5 МГц начинают ска-
зываться потери на рассогласование высокочастотных цепей: соединителей,
кабелей, согласование фильтра с кабелем и др. Поэтому нет необходимости
Лекция 19. Синтез КИХ-фильтров методом окон
401
предъявлять высокие требования к АЧХ в полосе пропускания и достаточно
определить для нее = 3 дБ. С другой стороны, фильтр должен обеспе-
чить хорошее подавление копии спектра в полосе 21 -г 28 МГц. Это следует
из необходимости обработки радиосигналов, поступающих от приемника,
имеющего динамический диапазон по интермодуляции третьего порядка не
менее 100 дБ.
На основании сказанного, требования к цифровому фильтру НЧ формулиру-
ются следующим образом:
□ частота дискретизации /д=56МГц;
□ частота среза полосы пропускания Д=5МГи;
□ граничная частота полосы задерживания Д - 21 МГц;
□ максимальное ослабление в полосе пропускания = (Ддтак )/2 = 1,5 дБ;
П максимальное ослабление в полосе задерживания <2q = -100 дБ.
Требования к частотной характеристике ослабления цифрового фильтра
представлены на рис. 19.8.
Рис. 19.8. Требования к характеристике ослабления ФНЧ
По приведенным в п. 19.2.4 формулам вычислим параметры окна Кайзера для
синтеза заданного КИХ-фильтра:
л - А - Л 21 — 5
ДГ = Д - Д = -<*. У* = ±L_Z = 0,28571;
Jk J* f ЧА
402
Часть VI. Цифровые фильтры
а = 0,1102(100 - 8,7) = 10.061;
Р=10°77-95= 6.4102,
14,36
что соответствует табл. 19.3
ЯпЛ1=100дБ.
Определим длину фильтра
^ =
при затухании в полосе задерживания
6,4102
0,28571
23.
Коэффициенты рассчитываемого НЧ-фильтра (отсчеты импульсной характе-
ристики) определяются как произведение Лг отсчетов идеальной ИХ, вычис-
ленных по формуле из табл, 19.4, и N отсчетов окна Кайзера (19.21). Резуль-
таты вычислений в программной среде MATLAB представлены в табл. 19.5
и на рис. 19.9.
Таблица 19.5. Коэффициенты ФНЧ Кайзера
«<) Значения коэффициентов b(N-i-l)
*(0Э IJ554031269223E-OO6 «22)
Л(1) -4.80654108947Е-005 М21)
«2) -4,560362193842Е-004 «20)
«3) -1,718848443811Е-003 «19)
«4) —3.757703Ю7786Е-003 «18)
ад -4.494828623649Е-003 «17)
ЫЬ) I.O1893384O652E-OO3 Ь(16)
«7) 1,91525739О973Е-ОО2 «15)
«8) 5.345285876081Е-002 «14)
М9) 9,991658888042Е-002 «13)
*(Ю) I.458397474149E-001 «12)
«11) 1,74655079I697E-001 МП)
Лекция 19. Синтез КИХ-фильтров методом окон
403
М Зак. 165
Рис. 19.9. Характеристика ослабления НЧ-фильтра Кайзера
Лекция 20
Синтез оптимальных (по Чебышеву)
КИХ-фильтров
Как было отмечено а предыдущей лекции, простота расчета коэффициентов
передаточной функции методом окон сопряжена с получением фильтроа вы-
соких порядков даже при умеренных требонаниях к АЧХ с размыванием пе-
реходной массы, ширина которой полностью зависит от выбранного окна.
На практике чаше всего требуется не только жестко фиксировать все гранич-
ные частоты при обеспечении небольших допустимых отклонений 5] и б2
АЧХ от 1 и от 0 соответственно, но и получить фильтр (передаточную функ-
цию) наименьшего порядка., удовлетворяющий заданным требованиям и ог-
раничениям. Такие фильтры относят к классу оптимальных, а получающиеся
при этом решения называют оптимальными. В данной лекции рассматрива-
ется методика синтеза подобных фильтроа.
20.1. Понятие об оптимальном (по Чебышеву)
синтезе фильтров
Конструирование передаточной функции минимального порядка, при кото-
ром обеспечивается выполнение всех заданных требований и ограничений
означает, что в результате решения поставленной задачи достигается:
□ необходимая точность аппроксимации заданной характеристики в соот-
ветствии с предъявленными к характеристике требованиями согласно вы-
бранному критерию близости; в случае избирательных фильтров такой ха-
рактеристикой обычно является АЧХ (или характеристика ослабления);
□ выполнение установленных ограничений, таких кик:
• вида ФЧХ (в данной лекции рассматриваются КИХ-фильтры с линей-
ной ФЧХ);
• соотношения между коэффициентами передаточной функции (симмет-
рии изи антисимметрии);
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров
405
• структуры фильтра:
• физической реализуемости и т. д.
Задачу, решение которой при заданных условиях дает минимальный порядок
передаточной функции, называют задачей оптимального синтеза.
20.1.1. Постановка задачи оптимального синтеза
Как и в двух предыдущих лекциях, будем исходить из представления частот-
ной характеристики в виде:
где амплитудная функция В(&) всегда положительна в полосе пропускания,
но может принимать как положительные, так и отрицательные значения
а полосе задерживания; при этом для АЧХ, по определению амплитудной
функции (18.27), справедливы соотношения
Л(О» = |Н(1>)| = |В(6»|.
и поэтому можно записать
{Л(ш) в полосе пропускания;
. „ «
|«(w)| а полосе задерживания.
Амплитудную функцию частоты (см. п. 18.1) удобно представить в форме
тригонометрического полинома Я(ш. а). Например, для фильтра типа 1
(А’Ч)/2 Г/н_| VI л/
Я|(<1>)= У, 2ЛА. Cos ---------k = У ак cos (рЛ (Л) = Z?j(c»x а), (20.1)
4=о L I 2 JJ 4=0
где:
а— вектор коэффициентов, связывающий амплитудную и передаточную
функции соотношением
«1 = 2*1 = 2Л* ;
N~>
М =—2-------порядок полинома В((о, а).
Если известны коэффициенты . нетрудно записать передаточную функцию
Л'-)
W(z) =
/а-0
406
Часть Vi. Цифровые фильтры
(fy - bf^-i -ак!2, i-k — для фильтров типов 1 и 2;
bi=ak! 2, bN_\_t = -bt, i-k - для фильтров типов 3 и 4.
Таким образом, задача оптимального синтеза состоит в определении такого
вектора коэффициентов а полинома Й(ш. а), при котором достигается ми-
нимальный порядок передаточной функции.
20.1.1.1. Формулировка задачи
Не нарушая общности рассуждений, обратимся к фильтру НЧ типа I, требо-
вания к амплитудной функции /?(<о) и к АЧХ А(6) которого изображены
на рис. 20.1, а и б соответственно. Области частот Qj е [0. u)-z J и [о)А. л],
в которых заданы требования к АЧХ, будем называть uiimepeaiaMu аппрок-
симации. Переходные полосы к интервалам аппроксимации не относятся,
поскольку в них. требования к ЛЧХ не задаются.
По-аидимому, для примера рис. 20.1 оптимальным будет такое решение, при
котором достигается максимально возможное отклонение 5^, не превы-
шающее заданную величину 5, при этом порядок передаточной функции
окажется минимально возможным. Следовательно, задача оптимального син-
теза сводится к получению полинома Я(ш. ti) минимального порядка, удов-
летворяющего заданным ограничениям так, чтобы 5П1ах <5 . Кроме того, на
аппроксимирующий полином В(ш, а) вводится ограничение: он должен от-
носиться классу тригонометрических полиномов.
Таким образом, в данном случае формулировка задачи состоит в следующем:
Найти полином (20.1) минимального порядка для которого выпол-
няются условия:
1—6| < н)< 1+6], шеЙр
-62 </?(&,«)<62, Ле £2,;
М - min;
а ={«*}. к =0,1,..., М.
Иначе говоря, целевой функцией (оптимизируемым параметром) является
порядок Mmtn полинома л), или же число коэффициентов N переда-
точной функции. При этом необходимо вычислить сам вектор коэффициен-
тов 77 = {а*| (к-о. 1, 2 Мmjn), а потому и коэффициенты передаточной
функции. В такой формулировке решение задачи неизвестно.
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров
407
Рис. 20.1. Требования к амплитудной функции (а) и АЧХ (б) филъгра НЧ
Однако задачу (20.2) можно заменить многократным решением другой, более
простой задачи, если поступить следующим образом:
П зафиксировать порядок М (или число коэффициентов передаточной
функции), т. е. целевую функцию задачи (20.2) перевести в параметр;
П перевести отклонение 5 в целевую функцию;
□ найти вектор коэффициентов а, обеспечивающий минимум максимально-
го отклонения;
□ проверить, удовлетворяет лн полученное решение заданным требованиям
к АЧХ.
408
Часть VI. Цифровые фильтры
За некоторое число решений (этапов) при последовательном уменьшении или
увеличении параметра М (или /V ) обязательно найдется такой вектор коэф-
фициентов а, при котором максимальное значение отклонения 6 на сово-
купности интервалов аппроксимации Q окажется минимальным и удовле-
творит заданным требованиям к АЧХ.
Полученные при этом порядок полинома Л(со. а) и. следовательно. число
коэффициентов передаточной функции H(z) будут оптимальными; и
/Vopt соответственно.
В дальнейшем будет показано, что поскольку полином В(&. а) является ли-
нейной функцией коэффициентов, на каждом этапе потребуется решать
систему из некоторого числа т (си. п. 20.2) линейных уравнений на сово-
купности частот {&/}, /=0,1.2...ж, принадлежащих интервалам аппрок-
симации: только на этих частотах будет достигаться максимально допусти-
мое отклонение.
В соответствии с этими соображениями поставленная задача на одном этапе
приобретает формулировку:
При фиксированном М найти коэффициенты «={«0.........ам }, при ко-
торых достигается минимум максимальной ошибки 5 па совокупности
интервалов аппроксимации Q = [Qr Q2J:
1-а5< Л(б). «)^1 + аб, cbeQp
-5<Л(со, д)<б. (be О,2:
а = const;
max 6 = min;
Q a
a = {ak |, k =0, I,..., M,
(20.3)
где постоянная а, определяющая соотношение между 8, и 82, называ-
ется весовым коэффшщентом и имеет следующий смысл: 82=5,
5( =а-82 = аб.
Весовой коэффициент ос позволяет регулировать требования к АЧХ в интер-
валах аппроксимации:
□ если а = 1, то отклонение АЧХ от единицы в полосе пропускания и от ну-
ля в полосе задерживания одинаковы б| = б2 = б;
□ если а<1, то отклонение АЧХ от единицы в полосе пропускания б]
меньше отклонения от нуля 52=5 в полосе задерживания б]=а6<6;
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров 409
например, при а = 0,5 отклонение от единицы а полосе пропускания в два
раза меньше отклонения от пуля в полосе задерживания;
□ если а>1, то отклонение АЧХ от единицы в полосе пропускания 81
больше отклонения от пуля б2=б в полосе задерживания 5|=а5>6;прн
а = 2 отклонение аг единицы в полосе пропускания в два раза больше от-
клонения от нуля в полосе задерживания.
Целевой функцией в (20.3) является отклонение б:
шах 5 = min.
Q «
причем эта функция связана с коэффициентами а = {л0, ..., ом }, меняющими
свои значения в процессе решения (20.3). По этой причине коэффициенты
называют также варьируемыми параметрами.
20.1.1.2. Процедура решения задачи
оптимального синтеза
Рассмотрим, каким образом с помощью задачи (20.3) можно решить исход-
ную задачу. Как уже было отмечено, решение задачи (20.2) сводится к мно-
гократному решению задачи (20.3), т. с. к постепенному приближению полу-
чаемой величины б к заданной.
Процедура сводится к следующему:
1. Из практических соображений или по эмпирическим формулам задается
начальное значение М = М।, имеющее смысл первого приближения.
2. При назначенном порядке выполняется первая итерация (первый этап),
результатом вычислений которой является величина ininmax6 = 6(,\
и Q
3. Полученное значение 8(|) сравнивается попарно с допустимыми значе-
ниями отклонений в полосах пропускания и задерживания: (a-6f1) с б|) и
(6fl> с б2). Возможны два результата сравнения и в соответствии с ними
дальнейшие действия:
• требования к АЧХ удовлетворены; тогда можно попытаться умень-
шить ; при новом М2<м1 выполнить вторую итерацию задачи
(20.3) и получить новое значение minmax6 = 6(2), которое будет боль-
fl п
ше предыдущего, т. е. б(2) проверить выполнение заданных тре-
бований. Известно, что за конечное число подобных итераций обя-
410
Часть VI. Цифровые фильтры
зательно найдется такое минимальное значение Мт]п = УИор1, при ко-
тором еще выполняются условия задачи и достигается минимум мак-
симального отклонения такой, ч го min max 5 - 6^ < 52 и <x8opt <5|; на
этом процедура заканчивается;
• требования к АЧХ не удовлетворены; тогда необходимо увеличить
и при новом М2>М} решить задачу (20.3); получив <5<1\ вноаь
проверить выполнение заданных требований и, если они не выполня-
ются, увеличить М2. Как и в предыдущем случае, за конечное число
подобных итераций обязательно найдется такое минимальное значение
Мmin = , при котором еще выполняются условия задачи и достига-
ется минимум максимального отклонения такой, что
min max 5 = 5™* < б2 и на этом процедура заканчивается.
а £1 4 н
Определение:
Соответствующее порядку минимальное число /V коэффициентов {fy},
при котором еще выполняются условия задачи, называется оптимальным и
обозначается .
Примечание
При решении задачи необходимо следить за тем, к какому из четырех типов
фильтроа принадлежит синтезируемый фильтр, н согласно этому типу выби-
рать импульсную характеристику (симметричную или антисимметричную) и
значение N (четное или нечетное).
Пример синтеза фильтра НЧ типа 1 с использованием рассмотренной про-
цедуры показан на рис. 20.2, где =0,1 и б2 =0,05, т. е. а = 2. При нер-
вом приближении (рис. 20.2» д) выбрано N = 27 и получены отклонения:
=0,0284 и а5<]> =0,0568. Из графика видно, что требования выполне-
ны с большим запасом, а значение Лг = 27 является избыточным, поэтому
можно уменьшить количество коэффициентов. Такое последовательное
уменьшение приводит к N = 21, при котором достигается минимум макси-
мальной ошибки аппроксимации, равный заданным допускам (рис. 20.2, б).
Дальнейшее уменьшение N невозможно, поэтому W = 21 является опти-
мальным решением.
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров
411
A(f)
A(f)
Рис. 20.2.1 loiioc оптимального решения для фильтра 114: АЧХ при избыточном («)
п оптимальном (б) значениях N
412
Часть VI. Цифровые фильтры
20.1.2. Понятие о полиномах Чебышева1
Результатом решения сформулированной ранее задачи аппроксимации в час-
тотной области является некоторый тригонометрический полином порядка
М =Afopl вида (20.1)
_ м
Z?((0. «) = у ak cos<pA (со),
*=о
т. е. в конечном счете задача сводится к поиску коэффициентов полинома
В((Ь. о). Иначе говоря, в рассмотренной задаче осуществляется аппроксима-
ция заданной функции £(Л) (cur. н. 17.2.2) полиномом Й(й, а). Такая ап-
проксимация называется naiuHo.\ma:ibnou.
Тригонометрический полином #(<Ь. а) можно выразить в более удобной
форме, если использовать замену переменной
х = cos(2n/"T) = cos со, -1 < л < 1,
откуда
л „ arccosCv) „
(0= arccos(x); /---------/Л.
При такой замене переменной аппроксимирующий полином
Я(сЬ, я) = У a* cos(fcto)
A = U
представляется а виде
м м
Z?(d). д)= У cos(fccb) = У cos(fcarccos(v)). (20.4)
Х=0 *-0
Стоящая под знаком суммы функция
cos(fc arccos(x)) (20.5)
также является полиномом fc-ro порядка, получившим название полинома
Чебышева.
Полиномы Чебышева (20.5) занимают одно из важнейших мест в теории ап-
проксимации.
Рассматриваемые полиномы были введены И- Л. Чебышевым в сс1чииац(и 11 Теория механиз-
мов. известных под названием параллелограммов" (1854 г.).
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров 413
Полином Чебышева /V-го порядка по определению имеет вид'
C;v(x) = cos(Warccos(.v)). (20.6)
Убедимся, что (20.6) действительно представляет собой полином по л
(~1<д<1) степени /V с вещественными коэффициентами:
N = 0 С0(х) = 1;
N = 1 Cj (л) = cos(arccos( г)) = х\
N = 2 C2(a) = cos2 arccos(.v) - 2cos2(arccos(x)) -1 = 2л‘2 -1.
Зная полиномы 1-го и 2-го порядков, получим рекуррентную формулу для
представления полиномов степени N >3. В целях удобства обозначим
0 = arccos(.v).
Тогда из (20.6) следует:
СЛ._| =cos((A; - l)0) = cos(M))cos(0) + sin(/V0)sin(0),
Cv^j = cos((tf + 1)0) ~ cost /V6)cos(6)-sin(H0)sin(G),
Суммируя эти два равенства, имеем
С\_,(л) + Cw+I(.v) = 2cos(W0)cos(O). (20.7)
Учитывая соотношения
cos(/V0) = C,v(a) и cos(0) = cos arc cos(.v) = .v,
из (20.7) окончательно получаем рекуррентную формулу для конструирова-
ния полиномов Чебышева
Сд;^)(.т) = 2.гСн (.г) — Cjy-jGv).
На основании равенств
С[(х) = х и С,(х) = 2л2-1
нетрудно получить следующий ряц полиномов:
Cj(x) = 4x3 -Зх:
С4(х) = 8х4 -8л2 +1;
С5(л) = 16х5-20.?+5х;
м т. д
“ Более точно такие полиномы называются полиномами Чебышева 1 рода.
(20.8)
(20.9)
414
Часть VI Цифровые фильтры
Непосредственно из определения полинома Чебышева, а также из формул
(20.8) и (20.9) следует:
1. Коэффициент полинома CN(x) при старшей степени л* равен 2N
2. Для всех ле 1-1.1] и любого W выполняется неравенство |CW(*)|<1.
3. Любой полином степени N представляет собой разность между функцией
£/v(x) = 2w“l xN и полиномом Р(л) меньшей степени
причем максимальное значение этой разности, не превосходящее I на ин-
тервале —1 <х< 1:
naxl^W-PWl^l,
является минимально возможным. На этом основании доказывается, что
из всех полиномов степени N с коэффициентом при старшем члене
2N~X полином Чебышева CN(x) наименее уклоняется от нуля.
Рассмотрим характер этого уклонения при произвольном /V, для чего обра-
тимся к определению полинома Чебышева (20.6)
CN(x) = cos(Ararccos(x)).
Пусть переменная л возрастает от-1 до 1; тогда угол <p = arccos(x) возраста-
ет от ф = -л до ф = 0 соответственно. В то же время угол Лгф возрастает
от -Nit до 0. Последнее означает, что в указанных пределах функция
со&(пф) ровно N раз переходит через нуль (т. е. принимает значения, рав-
ные нулю) и N +1 раз достигает значений-1 или +1, причем знаки этих ве-
личин чередуются.
С5(л)
Рис. 203. График полинома С5(л)
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров 415
На рис. 20.3 показан график полинома С5(х), который на интервале аппрок-
симации - 1<х<1 имеет пять нулей (пересечений с осью х) и шесть раз дос-
тигает максимальных по абсолютной величине значений, из которых два на-
хоцятся па границах интервала.
Примечание
1. Вне интервала -I < х < 1 значения полиномов Чебышева возрастают: их вы-
числяют с помощью эквивалентного представления полиномов в виде
(20.9).
2. Если по условиям задачи максимальные отклонения полинома СЛ.(х)
должны отличаться от±1 в е раз, необходимо записать
eCv (х) = scosf/V arccos(x)) ,
и тогда на интервале -1 < х < 1 будет соблюдаться неравенство
-£ < eCv (х) < е.
3. Если по условиям задачи полином CN(x) должен наименее уклоняться от
нуля на интервале Ix.^xJ, отличающемся от интервала доста-
точно а решении (20.6) или (20.9) произвести линейное преобразование пе-
ременной л но формуле
2х-х, -х,
Таким образом, тригонометрический полином £?(&, о) можег быть представ-
лен а виде суммы (20.4) полиномов Чебышева Ск(х) с весом
ak. =0. 1..../И.
м м м
B(C^a)= у akcos(k&i) = У ak cos(fcarccos(jr))= У akCk(x),
k=Ci *=0
и поставленная задача должна решаться на классе полиномов Чебышева
Ск{х).
20.2. Теорема Чебышева
Рассматриваемая задача оптимального синтеза (20.2) и (20.3) а общем виде
является задачей аппроксимации (приближения) идеальной (аппроксимируе-
мой) функции £(&) полиномом а). Для выбранного в качестве примера
фильтра НЧ аппроксимируемая функция имеет вид (рис. 20.4)
416
Чвсть VI. Цифровые фильтры
1, ©еЦ, O<cb<(.oz;
О, 6)eQ2, <W<7L
(20.10)
Рис. 20.4. Аппроксимируемая функция
Аппроксимирующая функция согласно (20.3)
1 — аб< Л(6). а)< 1 +аб,
-8<Я(ца)<6, сое Q2 j
в результате поэтапного решения задачи должна попасть в заданные допуски,
т. е. результирующая ошибка аппроксимации б (максимальное отклонение)
не должна превышать б2; иначе гоаоря. максимальное отклонение должно
быть минимальным.
В этом смысле поставленная задача для одного этана принимает вид: на
классе полиномов (.г) найти такой вектор коэффициентов а тригоно-
метрического полинома В(&,а) порядка М = М^пкс, при котором макси-
мум модуля взвешенной ошибки аппроксимации на совокупности интервалов
аппроксимации Q был бы минимальным
max p(cb)|£(cb)- Л(со. <7)|=> ннв, (20.11)
шей о
где:
я ={^0, Др ..., ам } —искомый вектор коэффициентов:
Q—совокупность интервалов аппроксимации (и Q2 в нашем примере);
р(со) — весовая функция;
|&й)-В(я. Л)| = 8 — модуль ошибки аппроксимации. ,
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров
417
Это означает, что изучаемая задача относится к к-taccy минимаксных и не чя-
ется итеративной.
Поясним сказанное еще раз, обратившись к вссоаой функции р(й). Весовую
функцию определяют по-разному (см н. 17.2.6У, в частности, во многих важ-
ных приложениях се записывают так;
р(со) =
1 ~
—, coeQ.;
а
1, weQ2.
Пусть в результате решения (20.11) получено
тал р(й)|^(й) - В(ш, о)| < 5lnin .
Тогда для интервала аппроксимации Qj = IHcOg]
max—1£(6) - В(й. «)| < 8, lnill
u>=il| а 1
нли
шах |£,(&>) - Жб), п)| a5tnjn ,
а для интервала аппроксимации Q, = [б)А. nJ
тах|^(ш)-В(й. a)|<Smi„.
(ijeQ,
(20.12)
(20.13)
что совпадает с требованиями и ограничениями (20.3). Отсюда следует, что
качество решения, т. е. критерий близости, полностью определяется дости-
жением минимума максимального отклонения mi птах 5. Это означает,
в свою очередь, что относительно аппроксимируемой функции аппроксими-
рующая функция колеблется с амплитудой 5min в интервале частот Q2 11
с амплитудой a8tnin в интервале Qj. Такое колебание называется равномер-
ным или равноволновым, а сам критерий приближения — равномерным (че-
бышевским).
Вывод: забочу (20.3) можно решать как задачу (20.13) наилучшего равно-
мерного приближения функции £(Сй) полиномам Жох а) с весам р(со) на
совокупности интервалов аппроксимации Q.
Это означает, что при вычислении коэффициентов полинома В(б}.а) на
каждом этапе необходимо решать задачу иаилучшего приближения. Основа-
41В
Часть VI. Цифровые фипьтры
нием для решения такой задачи служит обобщенная теорема об альтернансе
(теорема Чебышева3):
Для того чтобы тригонометрический полином
м
В(й>, «)= X atЧ>*(“)
к-0
был единственным полиномом4 панлучшего равномерного приближения не-
прерывной функции £(d>) на совокупности интервалов аппроксимации £2,
необходимо и достаточно, чтобы абсолютный максимум взвешенной разности
max р(й)|£(й) - /?(ш, а)| = 8^
tusQ
достигался не менее чем в (М + 2) точках < ш2 < — < < — < ®м+2 > в ко"
торых знаки разности
Г м
8(й>)=р(й) ^(й))- X <№(“)
*=°
последовательно противоположны, т. с.
Определения:
1. Совокупность точек {ц}, в которых разность 8(d)) принимает равные по
абсолютной величине и чередующиеся по знаку значения (рис. 20.5, а, б),
называется чебышевским альтернансом или просто альтернатом, а сами
частоты ц называются частотами аштернанса.
2. Искомые коэффициенты ак, изменяемые (варьируемые) в процессе реше-
ния задачи, называются варьируемыми параметрами полинома 0(d), а).
Примеры различных вариантов чебышевского альтернанса приведены на
рис. 20.5, где точками обозначены частоты альтернанса. Из этого рисунка
видно, что:
□ частоты альтернанса могут располагаться произвольно: как эквидистантно
(рис. 20.5, о), т. е. на равном расстоянии относительно друг друга, так и не
эквидистантно (рис. 20.5, б);
□ на граничных частотах отклонение может нс быть равным 8^^
(рис. 20.5, в), поэтому частоты (о = 0 и со=л могут нс относиться к частотам
3 Чебышев Пафлутий Львович (1821—1894)— великий русский математик, член Император-
ской академии наук (1853). Парижской академии наук (1860). Данная теорема относится
к разработанной им в конце 80-х годов теории функций. наименее уклоняющихся от нуля.
Теорема Чебышева об альтернансе соответствует теореме Киира о единственности наилучше-
го приближения.
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров
419
альтернанса (например, КИХ-фильтры типа 3 на указанных частотах асе
гда имеют нуль АЧХ).
Рис. 20.5. Примеры вариантов чебышевского альтернанса
Таким образом, из теоремы об альтернансе (или обобщенной теореме Чебы-
шева) следует»:
□ существует единственный полнном В(6. «) наилучшего приближения по-
рядка М ; такой полином обеспечивает минимум максимальной ошибки
аппроксимации 6max = min ;
□ существует единственный полином паилучшего приближения при задан-
ной ошибке аппроксимации б; такой полином имеет наименьший порядок
w=Mmin;
□ взвешенная ошибка аппроксимации 8(6) имеет раановолноиый характер:
□ количество частот альтернанса тн нс менее чем на два превышает порядок
полинома д) или не менее чем на единицу число варьируемых
L-M +1 параметров (коэффициентов) ик , т. е. m> М + 2.
Примечание
В задачах синтеза избирательных фильтров неравенство m > М + 2 превраща-
ется в равенство in = М + 2.
420
Часть Vi. Цифровые фильтры
Пример 20.1
Рассчитаем НЧ-фильтр Чебышева по требованиям, сформулированным
в примере 19.1, с помощью пакета программ синтеза цифровых фильтров
FD3. Результаты расчета показаны в габ.т. 20.1 и на рис. 20.6.
Таблица 20.1. Коэффициенты НЧ-фюыпра Чебышева
МО Значения коэффициентов b(N -! -1)
Ь(0) -1.05916900Е-003 МЮ)
ми 9.806179000Е-004 ьы
6(2) 3,240292220Е-002 б(&)
Ю) J.262916000E-001 Ю)
Ь(4) 2.551977915Е-001 Ь(6)
Ь(5) 3,185478691Е-001 Ь(5)
Рис. 20.6. АЧХ НЧ-фильтра Чебышева, рассчитанного
по требованиям примера 19.1 (4), АЧХ в полосе задерживания (б)
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фипьтров 421
Число коэффициентов фильтра Чебышева оказалось равно 11 против 23 ко-
эффициентов фильтра Кайзера, т. е. в два раза меньше!» Таким образом, рас-
считанный фильтр является оптимальным.
Приведенная теорема Чебышева важна по трем обстоятельствам, которые
рассмотрим подробно.
Во-первых, теорема позволяет проверять оптимальность полученного решения.
Пример 20.2
Пусть в результате синтеза НЧ-фильтра Чебышева по требованиям:
□ частота дискретизации /д = 1000 Гц;
□ частота среза = 180 Гц:
□ граничная частота Д = 240 Гц;
О отклонение в полосе пропускания 5] =0.1;
□ отклонение в полосе задерживания й? =0.1
получен полином
7
/?(со) = ak cos(Hb) (20.14)
*=о
порядка М =7 (т. е. найдены 8 коэффициентов ak = 2Ьк). ЛЧХ синтезиро-
ванного фильтра изображена на рис. 20.7, где, как и на рис. 20.5, точками по-
казаны частоты альтернанса. Проверим, является ли это решение оптималь-
ным при условии, что m = М + 2 .
Решение. На рисунке количество частот альтернанса /и = 9, а число варьи-
руемых параметров (коэффициентов) L в (20.14) равно 8, т. е. количество
частот альтернанса на единицу больше количества варьируемых параметров пк .
Поэтому можно утверждать, что полученное решение оптимально.
Во-вторых, по числу т>М +2 частот альтернанса можно определить поря-
док синтезированного фильтра и наоборот: по порядку оптимального фильт-
ра можно определить число точек альтернанса. Покажем это для нечетных и
четных N (см. табл. 18.2):
□ N нечетное (фильтры типа 1 и 3);
фильтр типи I имеет количество коэффициентов передаточной функции
Nj и порядок полинома Bj(cb, a)
422
Часть VI. Цифровые фильтры
количество точек альтернанса
т = М1 + 2 = ^—-+2,
1 2
отсюда количество коэффициентов синтезированного фильтра типа 1
У| =2т-3. (20.15)
Например, на рис. 20.7 АЧХ имеет ш = 9 частот альтернанса. поэтому коли-
чество коэффициентов передаточной функции соответствующего ФНЧ равно
/V, = 2-9 —3 -15,
следовательно, такой АЧХ может обладать КИХ-фильгр порядка Я = 14
с передаточной функцией вида
1=0
фильтр типа 3 имеет порядок полинома Ву (ох а)
Wl=2k_1=^_1,
3 2 2
количество точек альтернанса
1Л ^3-' . Т АН
III = М3 + 2 = — -1 + 2 = — -
3 2 2
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров 423
отсюда количество коэффициентов синтезированного фильтра
N3=2m-l-t (20.16)
□ /V четное (фшъшры типа 2 и -/);
в этом случае
7?-1 N-2 N-2.
^2.*=—=—^—; т= ——+2-
о гкуда
N2A= 2т- 2. (20.17)
В-третьих, поскольку в общем случае аналитически найти полином (функ-
цию) наилучшего приближения невозможно, для получения оптимальных
полиномов используются численные методы, основу которых составляет
приведенная теорема Чебышева.
Наиболее эффективным методом поиска чебышевского приближения являет-
ся второй полиномиальный алгоритм Ремеза5 В дальнейшем этот алгоритм
был многократно модифицирован как самим автором, так и другими матема-
тиками с целью получения более точных результатов и распространения его
на конструирование передаточных функций КИХ-фильтров с порядками,
достигающими нескольких сотен; такие модифицированные алгоритмы Ре-
меза получили иные названия, обычно связанные с именами модификаторов.
Например, в разработанном под руководством проф. Ланнэ А. А. (Центр
ЦОС ГУТ им. проф. М. Л. Бонч-Бруевича) пакете программ синтеза цифро-
вых фильтров6 FD используется оригинальный модифицированный алгоритм
Ремеза, предложенный Е. Тавастшерной и П. Яковлевым7. Алгоритм позво-
лил успешно синтезировать КИХ-фильтры до 250 порядка.
Далее рассматривается существо второго полиномиального алгоритма
Ремеза.
5 Ремез Е. Я. (1896—1975)— выдающийся математик, аюыемик Академии наук Украины:
н середине 30-х голов разработал и в дальнейшем сопершенепмша» эффективные алгоршмы
чебышевской аппроксимации: полностью теория таких алгоритмов изложена а его тру ю "Ос-
новы численных методов чебышевского приближения". Киев, Нп\ нова думка. 1969 г.
Все приводимые примеры расчета фильтров выполнены е помощью пой программы.
Тавастшерна Е. К., Яковлев II. В. Расчет нерекурсивных цифровых фильтров с оптимальной
по Чебышеву амплитудно-частотной характеристикой // Ралисгмтскгроттика. — 1991.—№ 12.
424
Часть VI. Цифровые фильтры
20.3. Полиномиальный алгоритм Ремеза
20.3.1. Понятие об алгоритме Ремеза
Идея алгоритма основана на том, что всегда можно получить функцию
ошибки
м
E(w) = ^((0)- У ak cos((o£). (20.18)
k-Q
принимающую значения ±8 на некоторой заданной сетке (М +2) частот сц-,
i = 1,2,..., М +2. В (20.18) для простоты весовая функция принята равной
единице р(О)) = 1. Иначе говоря, получаемая из (20.18) система М + 2 ли-
нейных уравнений с (М +2) неизвестными коэффициентами ак и 8
м
^(о)4.) = у ак costf)^) + (-1У 8. i = 1, 2.М+ 2 (20.19)
имеет единственное решение для коэффициентов {«*.} и максимум отклоне-
ния 8 на заданных частотах {со,-} из интервала аппроксимации Q. Отсюда
коэффициенты {«*}. полученные при расчете, оказываются коэффициен-
тами наилучшей аппроксимации, а максимум ошибки аппроксимации 8 явля-
ется минимальным. Этот вывод следует непосредственно из обобщенной
теоремы Чебышева, согласно которой частоты {«)•} являются частотами аль-
тернанса, а 8 есть амплитуда ошибки на всех частотах {(О^}; более того, если
на совокупности интервалов аппроксимации Q содержится только (Л/ + 2)
частоты, то
м
max £(б))- У ak cos(ibA) = 8 . (20.20)
0 л*
В большинстве практических случаев Q содержит более чем (М + 2) часто-
ты; задача состоит в гом, чтобы найги из них только те (М + 2) частоты, ко-
торые являются экстремальными (частотами альтернанса).
Алгоритм Ремеза итерационный, т. е. его результат представляет собой итог
многократногоТфименения серии одних и тех же шагов. Алгоритм начинает-
ся с пробной сетки частот при заданном порядке Л/ и в ходе решения изме-
няет частоты до тех пор, пока не будет найдена сетка экстремальных частот.
Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтров 425
В очередной итерации используются новые (М +2) частоты, на которых
взвешенная ошибка е(со), во-первых, имеет значение, нс меньшее, чем в пре-
дыдущей итерации, и, во-вторых, на соседних частотах знаки е(Л) противо-
положны. Если, тем не менее, требования нс выполняются (величина М недос-
таточна) или выполняются с запасом (Л/ выбрано больше необходимого),
назначается новый порядок М и алгоритм повторяется. Окончательным (оп-
тимальным) решением является такое значение М, уменьшение которого на
единицу приводит к неудовлетворению заданных требований. Поскольку на
каждой итерации алгоритма происходит обмен порядка па величину взве-
шенной ошибки, алгоритм был назван обменным.
Полиномиальный обменный алгоритм Ремеза включает в себя слеоующие
шаги:
1. Задание начального (нулевого) приближения пробной сетки экстремаль-
ных частот
S<°> ={(ь'вд.й'1”...6>™2}; й'%й.
Выбор начального (нулевого) приближения представляет особую задачу,
состоящую в поиске такого расположения экстремальных частот (частот
альтернанса), которое приводит к улучшению сходимости алгоритма, т. с.
к более быстрому достижению результата за счет сокращения количества
дальнейших итераций. Простейшим, недалеко нс лучшим, решением этой
задачи является равномерное расположение частот па интераале аппрок-
симации Q.
2. Решение системы линейных уравнений (20.19)
и
£(ц) = E^cos(«,.*)+(-l)'8, 1 = 1,2..М + 2.
к=0
в результате которого вычисляются вектор коэффициентов «<0) ={«*} и
ошибка 8(0), где верхний индекс указывает номер ичерации (этапа).
3. При коэффициентах на густой сетке частот {«J/}
(/ = 1,2....,/,; ) вычисляются значения bt аппроксимирующей
функции
и
bi = Е Ojcos(a>,).
Л=0
426
Часть VI. Цифровые фильтры
4. На полученном массиве (£у| определяется максимальная ошибка аппрок-
симации
max |e(w()| = |^(<;>,)- Ь,|.
5. Определяется необходимость очередной итерации:
• если 8 = тах|е(о)/)|, процесс закапчивается; полученное значение М
(а потому и число коэффициснюв N передаточной функции) является
оптимальным;
• если 5< тах|е(Ц)|, назначается новая сетка частот
Sfl> С>+2}; ц">еп,
среди которых обязательно должны быть частоты с max |e<G)/ )| f а также
все частоты, где
|е(Ш/ )| > 5;
/ если таких частот больше, чем М +2, выбираются М +2 частоты
с наибольшими ошибками и чередованием знаков; процесс повторяется
с шага 2.
В приводимом далее численном примере используется полиномиальный ва-
риант задачи чебышевской аппроксимации (20.19).
20.3.2. Пример использования
обменного алгоритма Ремеза
Поставим задачу аппроксимации парабаты
= Л ле[0,1]
прямой линией
Р(л) = п0 + п[х. (20.21)
Тогда задача Чебышевской аппроксимации примет вид: найти коэффици-
енты и а,, минимизирующие ошибку аппроксимации в смысле критерия
Чебышева
е(х)= max Lr2 -(«0 + п,х) => min .
ле[0,|}1 I «0'п1
. Лекция 20. Синтез оптимальных (по Чебышеву) КИХ-фильтры
427
Решение. В данном примере аппроксимирующий полином имеет вид
м 1
P(x) = o0 + alx = 2>4х = lv <
k*0 k=0
поэтому функция ошибки аппроксимации е(а) , согласно обобщенной теоре-
ме Чебышева, должна иметь т = М +2=1+2=3 экстремальные точки (ина-
че говоря, необходимо найги два коэффициента полинома, поэтому функция
ошибки должна иметь число точек альтернанса на единицу больше, т. е. три).
Решение задачи поясняется рис. 20.8.
Обозначим, как и ранее, через S' сетку точек
5={Лр х2, Лз}.
Шаг 1. Выбор начального приближения.
В качестве начального приближения выберем в области [0,1] произвольную
сетку (рис. 20.8, а)
S<0> ={0,25; 0,5; 1}.
Шаг 2. Решение системы из трех линейных уравнений на сетке
х2 =а0 +«|л-, +(-|)'8о, i = 0.1,2, (20.22)
где (-1)' обеспечивает колебательный характер поведения ошибки Е(х).Для
принятой се гки система имеет вид
Решением этой системы являются: а0 =-0.3125; я, =1.25; So = 0.0625
(см. рис. 20.8, б).
Шаг 3. Вычисление ошибки е0(а) на густой сетке AG [0; 1] (например, через
0,0001)
е0(х) = х - («0 + л,х)
428
Часть Vi. Цифровые фильтры
с тем, чтобы определить, существуют ли точки, где ошибка е0(х)>|80|.
Оказалось, что таких точек две: при л = 0 она максимальна и равна
Ео(О) = 0.3125; в точке * = 0.625 ошибка ео(О.625) = -О, 78125 и в точке
х = 1 ошибка составляет ео(1) = О,78125. Видно, что нулевое приближе-
ние не дало желаемого результата, т. с. сетка S(0>
нс является набором
точек альтернанса. поэтому необходимо назначить новую сетку и перейти
к шагу 2.
Повторяемый шаг 2. Назначение повой пробной сетки максимумов и
решение на этой сетке системы из трех линейных уравнений.
Из рис. 20.8. б следует, что чередование знаков ошибки аппроксимации про-
исходит в точках: х, = 0, х2 = 0.625 и = 1. Эти точки и составляют новую
сетку
5(1> = {0; 0.625;!},
Решением этой системы являются: а0 =0.1328125; 8] =0,1171875
(рис. 20.8, в). Необходимо проверить полученное решение на оптимальность,
для чего требуется повторить шаг 3.
Повторяемый шаг 3. Вычисление ошибки Ej(x) на густой сетке хе[0; 1]
е,(л) = х2-(а0 +а,-г)
с тем. чтобы определить точки, где ошибка . Таких точек три:
в двух из них х = 0 и х=1 ошибка равна б] =0,1171875 = 0,117 , а третья
ошибка в точке х = 0.5 максимальна по абсолютной величине и равна
е,(0.5) = -0,1328125 . Видно, что и новое приближение не дало желаемого
результата, т. е. сетка S(t) не содержит альтернанса, поэтому необходимо
назначить очередную сетку и повторить итерацию, начиная с шага 2.
Повторяемый шаг 2. Назначение очередной сетки и решение на этой
сетке системы из трех линейных уравнений.
Лекция 20. Синтез оптимальных (по Чебышеву)КИХ-фильтров
429
Р(х)
Рис. 20-8. Демонстрация полиномиального алгоритма Ремеза
430
Часть VI. Цифровые фильтры
Из рис. 20.8, в следует, что чередование знаков ошибки аппроксимации про-
исходит в точках: Л] =0, х2 =0,5 и лэ =1. Эти точки и составляют очеред-
ную сетку
S(2) =(0; 0.5; 1}.
для которой система уравнений имеет вид
io Г "0 0
1 0.5 - 1 1 1 1 °. А. = 0,25 1
Решением этой системы являются: я0 =-0,125; а(=1; б2 =0,125 и макси-
мум ошибки max |е2(х)| = 0,125 (рис. 20.8, г).
Вследствие равенства тах|Е2(А')| = 5г ошибок на заданной сетке и чередова-
ния их знаков
е2(0,5) = -е2(0), е2(1) = -е2(0.5)
можно утверждать, что полученное решение является оптимальным и ап-
проксимирующий полином имеет вид
Р(х) = -0,125+ л.
Соответствующая полиному прямая показана на рис. 20.8, а.
Лекция 21
Цифровые
преобразователи Гильберта
и дифференциаторы
21.1. Цифровой
преобразователь Гильберта
Среди задач цифровой обработки сигналов важное место принадлежит моду-
ляции и демодуляции узкополосных сигналов с нулевой постоянной состав-
ляющей. а также задача сдвига спектра (например, в модемах в режиме под-
стройки). Самым простым и в то же время общим примером подобных зачач
является демодуляция однополосного сигнала, который получается путем
выделения одной из боковых полос амплитудно-модулированного сигнала.
При этом сам амплитудно-модулированнын сигнал является вещественным,
в то время как однополосный сигнал — комплексным (слг. Лекцию 10).
Как известно, в результате демодуляции формируется низкочастотное коле-
бание— огибающая исходного сигнала, которая представляет собой одну из
трех временных характеристик сигнала, включающих, помимо самой оги-
бающей, мгновенные фазу и частоту.
Прежде чем рассматривать процедуру вычисления указанных характеристик
сигнала в цифровой области, обратимся к преобразованию Гильберта в его
аналоговом варианте.
21.1.1. Понятие о преобразовании Гильберта
Пусть известен стационарный сигнал x(t) длительности /0; запишем для пе-
го обобщенный ряд Фурье
*(0 = S К costco*./) + hk sin(c>v)l. (21.1)
k 0
432
Часть VI. Цифровые фильтры
где:
, ' 2л
(0А =л(оп = к—;
10
2
с1к = — J лг(Осоя(сол/)г/г;
?о о
2'9
Ьк = — J x(/)sin(toAf)f/r.
ГО о
Запишем комплексный сигнал
i(O= X (21.2)
*=о
вещественная часть которого представляет собой исходный сигнал x(f):
Re{.i(/)} = x(z) = Re f . (21.3)
[л=° J
а мнимая часть отличается аг вещественной лишь фазовым сдвигом на л/2,
т. е. имеет ви к
°= л 71
1ш{л(0} = Х(«А.со5(С1^/+—)+fysin(tiV+—)|= £ [aA.sm(0V)~^cos(°V)b (21.4)
*=о 2 2 А=о
Можно показать, что требования (21.3) выполняю тся только при условии
=«*-А-
Тогда для комплексного сигнала (21.2) получаем
лг(О = У. k<tcos(a\./) + ЛА.sin(coA./)} + j У [tysin(coAO“fycos((dA./)}, (21.5)
v(o *U)
откуда при указанных а (21.5) обозначениях имеем
.<(/) = л(/) + ji(f). (21.6)
Таким образом, вещественная лг(Г) и мнимая л(г) части (21.5) находятся
в квадратуре относительно друг друга, т. е. их фазы отличаются на л/2 , что
объясняется связью тригонометрических функций
cos((oA/) = sin| соА, + -^ j и sinfcDjt/) = — cosj coAr + — . (21.7)
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы
433
Доказано, что x(t) и л(г) в (21.5) связаны нарой преобразований
(21.8)
получившей название преобразования Гшьберига; при этом сигналы ,г(/) и л(/)
называются сопряженными по Гильберту1; следовательно. cos(w/) и sin(cor)
являются сопряженными по Гильберту.
Выражения (21.5) и (21.7) позволяют схематически (рис. 21.1) представить
физический процесс получения одного из пары сопряженных по Гильберту
сигналов с помощью фазовращателя на 90°.
Рис. 21.1. Получение пары сопряженных по Гильберлу сигналов:
при исходном Ф) (а) и при исходном i(/j (б)
Для определения огибающей и мгновенной фазы представим (21.6) в показа-
тельной форме
x(0 = x(0 + = -5-(f)cos<p(0)f)+ jA(/)sin(p(titf),
Ф) .t(O
где:
л(г)—огибающая сигнала v(/)
j(/)=7r(0+i’(f); (21-9)
ф(г) —его мгновенная фаза
(р(/) = arctg--. (21.10)
л(/)
I ильберт Дани*: (1862—1943) — нс 1икий немецкий математик.
434
Часть VL Цифровые фильтры
Смысл принятого для функции s(t) названия огибающей сигнала x(f) объ-
ясняется просто. Из (21.9) следует:
□ j(f) >|.т(/)|, т. е. функция s(0 нигде нс пересекает функцию x(t) ;
□ имеет место равенство 5*(г) = /(г); действительно, найдем производную
огибающей
2L J s(t)
из которой имеем
s(f) s'(0 = x(f)x'(f) + x(f)x (f) -
Последнее выражение доказывает, что в точках, где $(f) = x(f) (т. е. х(/) = 0
согласно (21.6)), имеет место равенство производных s(t) = x'(t). а пото-
му функции х(/) и s(t) в точках соприкосновения имеют общие каса-
тельные.
Примечание
Сигнал, определенный в виде (21.5), где вещественная и мнимая части сопря-
жены по Гильберту, называется аналитическим. Введение аналитического
сигнала оказывается весьма полезным для анализа сложных сигналов благода-
ря следующим его свойствам:
1. Соектр X (го) аналитического сигнала содержит только положительные
частоты
{2Х (ай. (1)>0:
0. ш<0.
2. Произведение аналитического сигнала л(т) на сопряженный ему сигнал
х (?) = хи) - /?(/) равно квадрату огибающей исходного сигнала х(0. Это оз-
начает, что модуль аналитического сигнала равен огибающей сигнала х(т).
3. Энергия аналитического сигнала равна удвоенной энергии исходного сигнала.
21.1.2. Дискретное преобразование Гильберта
Дискретное преобразование Гильберта (ДПГ) можно получить в результате
дискретизации сигнала (2I.5), т. е. заменой непрерывного времени / на дис-
кретное нТ —¥п . Тогда из (21.6) получим:
х(и) = х(») + /х(м) = л(п)е‘,ф(',>: (21.11)
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы
435
x(ji) = j(h)COs<p(«) ;
A</l) = s(/f)sin <р(н).
(21.12)
(21.13)
где:
х(н) и л(и)—сопряженные по Гильберту вещественные сигналы;
5(л) —огибающая сигнала л(/г), вычисляемая, как следует из приведенных
равенств, по формуле
jW = 7*2(") +*2('О; (21.14)
<р(и) —мгновенная фаза сигнала
<X») = arctg-A—. (21.15)
-<(«)
Из (21.12) и (21.13) видно, что л(и) и л(л) подобно соответствующим анало-
говым сигналам находятся в квадратуре относительно друг друга, т. е. их фа-
зы отличаются на тс/2. Следовательно, для получения д(н) но х(н) (и на-
оборот) необходимо пропустить сигнал x(w) через фазовращатель па л/2
(рис. 21.2). Это означает, что фаза каждого компонента спектра входного
сигнала меняется на 7i/2.
Рнс. 21.2. 11олучение пары сопряженных по Гильберту сигналов
с помощью фазовращателя на и/2: ори исходном л(«> (о) и при исходном л(л) (б)
15 Зак. 165
436
Часть VI. Цифровые фильтры
Определение:
Так же как и в аналоговом варианте, будем называть цифровые сигналы, фа-
зы которых отличаются на л/2 . сопряженными но Гильберту", а устройство
формирования нары сопряженных сигналов—цифровым преобразователем
Гильберта (ЦПГ).
Организация вычислений огибающей я(п) и фазы (р(н) сигнала х(п) с по-
мощью цифрового преобразователя Гильберта демонстрируется на рис. 21.3.
Собственно ЦПГ состоит из цифрового фильтра, по существу представляю-
щего собой фазовращатель на л/2, и согласующей линии задержки (СЛЗ),
которая обеспечивает временное согласование сигналов л(н) и х(п) на вы-
ходе ЦПГ. Полученные сигналы после возведения в квадрат складываются,
а затем из полученной суммы извлекается квадратный корень. Процсзуру
вычисления мгновенной фазы нетруню проследить по рисунку. -
Рис. 213. Структурная схема вычисления огибающей и фазы <р(н) сигнала \(н)
Примечание
Заметим, что л-(л) представляет собой комплексную последовательность,
а для последовательное гей аналитичность смысла не имеет; применение в ли-
2 Условием минимальности фазы, кроме риссмтрепного а п 6.6, являсзся требование. чтобы
log|w(r'“7')| и arE^H(eJwr )J были парой преобразования Гильберта.
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы
437
тературс такой же терминологии для последовательностей оправдано лишь
тем, что любой последовательности л(д) соответствует аналоговый сигнал
х(г) при t = пГ с ограниченным спектром.
Очевидно, что ЦПГ может быть реализован на базе КИХ-фильтров с линей-
ной ФЧХ типа 3 или 4, имеющих постоянный сдвиг фазы на л/2
(aw. nn. 18.4.3, 18.4.4). На рис.21.4 изображена структурная схема ЦПГ, син-
тезированною на базе фильтра типа 3. Такой фильгр имеет нечетное число
N антисимметричных коэффициентов, причем коэффициент fyw-I)/2 С)-
Для обеспечения закона антисимметричности отсчеты на вторые входы сум-
маторов подаются со знаком —. В качестве согласующей линии задержки
используются первые (/V-1)/2 ячеек памяти.
Согласующая линия задержки
Рис. 21.4. Структурная схема цифрового преобразователя Гильберта
438
Часть VI. Цифровые фильтры
Таким образом. основным элементом ЦПГ является цифровой фильтр., опре-
деляющий все свойства самого преобразователя. По этой причине, следуя
традиции, в дальнейшем под характеристиками ЦПГ будем иметь в виду ха-
рактеристики фильтра цифрового преобразователя Гильберта.
21.1.3. Частотные характеристики цифровых
преобразователей Гильберта
Поставим задачу: найти передаточную функцию (z), комплексную час-
тотную характеристику Н|Ц1|(е><0) и АЧХ Дш11 (<п) идеального преобразова-
теля Гильберта.
Ранение. Поскольку вещественная часть функции (21.11) представляет собой
воздействие л(«) на ЦПГ, то мнимая часть х(п) той же функции, сопряжен-
ная с л(л) по Гильберту, представляет собой реакцию ЦПГ и потому опреде-
ляется с помощью свертки
«(«)= X /^Ц|Г(»»ох«—«о.
»я=0
z-изображение которой (c.w. п. 5.2)равно произведению
Z{.v(h)}=X(z)-//uiii.(c)X(z),
откуда, подставляя г = с-"/ш, получаем ЧХ цифрового преобразователя ['иль-
берта
как отношение фурье-изображений мнимой и вещественной частей (21.11).
С другой стороны, из (21.11) по свойству линейности преобразования Фурье
имеем:
Х(е'й) = Х(е'й) + 7Х(^Й). (21.17)
Найдем связь между спектрами Х(е^3) и Х(е^”). Учитывая, что спектр
Х(е}Ш) комплексного сигнала на частотах -л<й)<0 равен нулю, из (21.17)
получаем:
X (ejS))~ — jX (е^), -Л<(О<0,
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы 439
или после умножения на j обеих частей равенства и перестановки их отно-
сительно знака равенства
X(^) = jX(A -n<d)<0. (21.18)
Остается определить соотношение между спектрами Х(еуш) и X(eJlsi) веще-
ственных сигналов л(л) и л(н) в основной полосе частот 0 < 0)< п. Для это-
го покажем, что спектр вещественного сигнала л(и) является четно-
сопряженной функцией
X(eJ'S,) = X*(e~J&).
Запишем преобразование Фурье (10.4) сигнала л(н):
X (e^“) = У х(н)е = У x(h)cos(0)h) - j У -v(H)sin(ovi),
н=0 м=0 11=0
поменяем знак частоты (функция cos четная)
Х(ё~^) = У л(л)е'“" = У jc(«)cos(wh) + j У л(н)5Ш(б)н)
и=0 »1 = 0 и = 0
и возьмем комплексно-сопряженную функцию
Х*(е~'"1) = У л(и)со5(йл)-> X *(H)sin(tbn)-
tt=0 я=0
Видно, что первое и третье выражения равны друг другу, что подтверждает
высказанное утверждение.
Аналогично можно показать, что спектр вещественного сигнала л(«), сопря-
женного по Гильберту с исходным, является нечстно-сопряженной функцией
Х(е^) = -Х*(е~&).
поэтому из (21.18) при изменении знака частоты на положительный получаем:
X(e7fi) = -jX(e/fi’), 0<&<л. (21.19)
Из (21.16), (21.18) и (21.19) следует, что комплексная частотная характера-
стика цифрового преобразователя Гильберта описывается соотношением
",,„гИ') =
Х(е&)
X(eJ“)
.71
-j = e 2, 0<(Ь<л;
.я
j = e г, -л<&<0.
(21.20)
440
Часть VI. Цифровые фильтры
На практике необходимо обеспечивать полученные соотношения только
в некоторой рабочей полосе частот &)раб1 <6)<(bpa-l2» подобной полосе про-
пускания (aw. п. 21.1.5), поэтому (21.20) записывают в визе
,п
-J- - ж .
-J = е -, сопяд| < со < со^дт;
(*'М) = „ (21-21)
j = е 2. - гораб2 < й < -юраб|.
Выражения (21.20) и (21.21) позволяют сделать следующие выводы:
□ сигнал л(п) может быть получен из ,г(л) с помощью КИХ-фильтра с час-
тотной характеристикой (21.20);
□ АЧХ преобразовагсля Гильберта во всей области частот от -я до я равна
единице
А„, (*)=|//,ull.(ejd,)| = l: (21.22)
□ ФЧХ преобразователя Гильберта равна
0<О)<ГС
«Риш («) =
(21.23)
Следовательно, комплексная частотная характеристика цифрового преобра-
зователя Гильберта представляет собой частотную характеристику фазовра-
щателя на л/2, и ЦПГ может быть реализован с использованием КИХ-
фильтров типа 3 и 4, о чем уже говорилось ранее. При синтезе преобразова-
телей Гильберта обычно используется методика расчета оптимальных по Че-
бышеву КИХ-фильтров, основанная на алгоритме Ремеза.
21.1.4. Импульсная характеристика ЦПГ
Найдем импульсную характеристику Л11П|.(н), соответствующую ЧХ (21.20).
для чего выполним обратное преобразование Фурье частотной характеристи-
ки, воспользовавшись его свойством линейности:
I’., 2«o
Лекции 21. Цифровые преобразователи Гильберта и дифференциаторы
441
Отсюда
-it 0
^('0 = ^-
= —(l-e“2n"-e-'n"+l);
271
ио поскольку е JJVl =eJJVl = cos(7l/r), получаем
, , ч l-cos(nn) 2sin2(тги/2)
(Я) =-----------=----------------
TUI ЯЛ
Последняя функция при n = 0 равна нулю, что легко проверить.
Теперь можно записать выражение для ИХ преобразователя Гильберта:
2 sin2(rt7l/2)
--------—л* О;
п п
0, « = ().
(21.24)
Заметим, что при четных н sin(/m/2) = 0, поэтому каждый второй отсчет им-
пульсной характеристики идеального преобразователя 1 'ильберта равен пулю
^.r('>)|„.2t=0. (21-25)
Далее показывается, что при некоторых условиях соотношение (21.25) вы-
полняется и для реальных преобразователей.
Получим для дискретных вещественных сигналов л(и) и л(н) пару преобразо-
ваний Гильберта, подобную (21.6). Воспользуемся формулой свертки и выраже-
нием (21.24) и учтем, что при формировании сигнала х(п) воздействием являет-
ся х(и), и наоборот. В результате имеем дискретное преобразование Гильберта:
. . 2 £ sin2(mit/2)
Jqn) = — >. д-(л-т)---------'—, пришли;
, . 2 “ sin2(«in/2)
х(п) = — У х(п-т)----------------, пришел.
7С П1
Возникает вопрос: какому из двух типов КИХ-фильтров— 3 или 4— необ-
ходимо отдавать предпочтение при синтезе ЦПГ? Ответ на него следует ис-
кать, учитывая два обстоятельства;
□ фильтры обоих типов на частоте ео = О имеют нуль АЧХ, поэтому при за-
дании требований всегда должно быть to^ = й)_х > 0;
442
Часть VI. Цифровые фильтры
□ фильтр типа 3 к тому же имеет нуль ЛЧХ на частоте ю = л, поэтому для
него всегда должно быть (bp^ = <71 •
Понягно также, что если спектр обрабатываемого сигнала сосредоточен в об-
ласти верхних частот, то для синтеза соответствующего ЦП Г верхних час гаг
необходим фильтр типа 4. Во всех остальных случаях, т. е. при синтезе полосо-
вых преобразователей, желателен фильтр типа 3. поскольку он обладает одним
полезным свойством, формулируемым в следующем утверждении.
Утверждение: каждый второй отсчет импульсной характеристики цифрово-
го преобразователя Гильберта вида 3 в точности равен нулю, если граничные
частоты его АЧХ определяются соотношениями:
=я-о\;
d)-x = л-еЬх,
(21.26)
и допустимые отклонения в полосах задерживания одинаковы, т. е. если АЧХ
преобразователя симметрична относительно частоты cb = л/2.
Доказательство. Симметричность АЧХ относительно частоты (0 = л/2 озна-
чает равенство
Д(6)) = А(п-й),
которое, согласно связи АЧХ с амплитудной характеристикой (сл/. п. 18.3),
позволяет записать
Для фильтров типа 3 полученное соотношение согласно выражению (18.37)
принимает вид
Л_|
#3(с/ш) = £ «4 sin = J rttsin[|-£-Ал-й) . (21.27)
1д 2 J J ьо L\ 2 ) J
Поскольку в данном случае К — четная величина, разность
(K/2)-Jt=m (21.28)
является целым числом. Найдем, чему равен синус, стоящий в правой части
(21.27):
б))] = 81в[т(Я“Ш)]=81п(шл— шб))-
= sin(mft)cos(mc))-cos(mrc)sin(m(b).
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы
443
В этом выражении уменьшаемое sin(m7l)cos(mw) = 0, поэтому достаточно
рассмотреть вычитаемое
-cos(mn)sin(m<b) = (-I)"*1 sin(md)).
С учетом введенного обозначения (21.28) запишем для степени (-1)'"+| тождества
(-1)"'*1 =(-1)2 M-I)J С-1)'*.
Поскольку [(Я/2) +1} является величиной нечетной, из последнего тождества
я
—+ С г
имеем (-I)2 = -1, ктому же (-1) -(-I) : поэтому можно записать
в результате чего из выражения (21.27) получаем равенство:
2L,
X ak sin[f—1= У a*(-l)t+lsinИ — -к
к-о Ц. 2 ) J к=о LI 2
откупа
В последней сумме учтено соотношение между отсчетами hk импульсной
характеристики (коэффициентами передаточной функции Ьк ) и коэффициен-
тами ак амплитудной функции (см. табл. 18.2):
«к =2bk= 2hk.
Следовательно,
2Л, =яЛ[1 —(—I)**1 J,
откуда ИХ преобразователя Гильберта при заданных в утверждении условиях
имеет вид
. акГ x-4.i1 (0. если к - четное;
hk =— l-(-l)
2 L J [произвольное, если к - нечетное,
что и требовалось (оказать.
444
Часть VI. Цифровые фильтры
21.1.5. Задание требований
к цифровым преобразователям Гильберта
Требования к цифровым преобразователям Гильберта в общем задаются так же,
как и для полосовых фильтров или фильтров верхних частот (aw. Лекцию 17).
Но поскольку ЦПГ являются элементами низкочастотного тракта приемника,
а частотная фильтрация обрабатываемого сигнала выполняется в предыду-
щих трактах, требования к ЦПГ имеют следующие особенности:
П в полосах задерживания нет необходимости задавать слишком жесткие
ограничения 82 к отклонению ог нуля:
П полосу пропускания обычно называют рабочей полосой или рабочей об-
ластью; ширина рабочей полосы не должна превышать ширину по-
лосы пропускания Д/цц фильтра, предшествующего преобразователю,
т е. Д/ра6<Д/'1111;
□ в рабочей полосе допустимое отклонение 81; как правило, устанавливает-
ся не жестче, чем отклонение в полосе пропускания филыра. предшест-
вующего преобразователю;
□ требования к АЧХ полосовых ЦПГ (рис. 21.5) чаще всего задают симмет-
ричными согласно доказанному в п. 21.1.4 утверждению: в этом случае
для синтеза ЦПГ используются КИХ-фильтры типа 3.
1 + 6,
1
1-6,
82 smssmsmss
; Рабочая
: полоса
j (область)
-
f-k /рйб1 /рабЗ Л Xi/2
Piic. 21.5. Требования к полосовому ЦПГ
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы 445
Пример 21.1
Синтезируем оптимальный полосовой ЦПГ при симметричных требованиях
к АЧХ (см. рис. 21.6,6/), когда Д/П3| = Д/|132. Д/i =4/2- допустимые отклоне-
ния в полосах задерживания 82 одинаковы:
□ частота дискретизации Д = 1000 Гц;
□ f_k =50 Гц — граничная частота левой полосы задерживания:
□ f у — /рПб1 = 100 Гц — левая частота среза рабочей полосы:
□ /_х = Граб2 “ 400 Го — правая частота среза рабочей полосы:
□ fk =450 Гц — граничная частота правой полосы задерживания;
□ 8j =0,05 — максимально допуст имое отклонение в рабочей полосе;
□ 62 =0,1 — отклонения в полосах задерживания.
Расчеты, проведенные с номотыо программы FD3, показали, что минималь-
ное значение N . при котором удовлетворяются затапные требования, равно
22, т. е. получается преобразователь Гильберта типа 4. Согласно чебышев-
скому критерию этот резу.тыа! является оптимальным.
Однако наилучшим решением с точки зрения многокритериального выбора
оказывается N = 23, т. е. преобразователь Гильберта типа 3, характеристики
которого представлены на рис. 21.6. Это объясняется гем, что при /V = 23,
как видно из графика ИХ (рис. 21.6, р) и списка коэффициентов (табл. 21.1),
каждый второй отсчет ИХ равен нулю (числа, имеющие -8 и -9 степени, пред-
ставляют собой шум вычислений). Поэтому преобразователь Гильберта тина
3 по объему вычислений в 2 раза эффективнее преобразователя Гильберта
типа 4.
Таблица 21.1. Коэффициенты ЦПГ
Коэффициенты Значения коэффициентов Коэффициенты Значения коэффициентов
/>„ = 1.34005478Е-002 '>6 - -''ш -7-86072346Е-002
*! = -2.60000000F.-009 *7 = -*IS -Е25000000Е-008
”1 = -4.04389803Е-002 ^=-*14 3.78450995Е-002
*3 = -8.50000000Е-009 А ” *4з 7.40000000Е-009
Л4 = -*11 -7.90I60764E-002 Ь,о = 5,67819180E-O01
1.32000000Е-008 *11 = “*| 1 0
446
Часть VI. Цифровые фильтры
Рис. 21.6. Характеристики синтезированного ЦПГ:
АЧХ согласно заданным требованиям (а), импульсная характеристика (б)
Действительно, при N = 22 для приведенной струкгурной схемы
(см. рис. 18.4) на вычисление каждого отсчета реакции потребуется
N/2 = 22/2 = 11 умножений, а при N = 23. с учетом равенства нулю каждого
L _1 I /V-l 1 I ,
второго коэффициента, требуется —-—— =6 умножении. Кроме гого.
уменьшение количества умножений приводит к существенному уменьшению
собственного шума преобразователя.
Благодаря этим преимуществам используют преобразователь Гильберта типа 3
с АЧХ, симметричной относительно/^/4 .
Таким образом, выбираем =23.
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы 447
21.2. Цифровые дифференциаторы
Перед тем как изучать основы синтеза цифровых дифференциаторов, рас-
смотрим содержание вопроса в аналоговой области, затем перейдем в цифро-
вую область.
21.2.1. Понятие о дифференциаторе
Определение:
Дифференциатором называют устройство, выполняющее операцию диффе-
ренцирования в заданной области частот.
Это означает, что входному сигналу л(0), I) соответствует выходной сигнал
<7л(си, I)
y(u,t) = k \
dl
причем частота <0 = 27^ ограничена интервалом , Wpa621, называемым
рабочей областью дифференциатора. Сигналы л(со, I) н у(со. 0 описывают-
ся непрерывными функциями частоты и времени, поэтому любому входному
гармоническому сигналу а^со, г) = sin(uw) в рабочей области дифференциатор
ставит в соответствие выходной сигнал
, х , rfsin(col) . , .
v(co, f) - k--—- = A:<ocos(to/),
dt
где k —коэффициент пропорциональности.
Переход из аналоговой области в цифровую (т. е. дискретизация времени
t=nT и нормирование частоты to —СОТ) дает
л(ю, /)| Т = sin(conT) = sin(oin);
ft . (21.29)
у(са. 0|г=/1Г = Acocos(coTn) = &—cos(coh).
Таким образом, цифровой дифференциатор (ЦД) обеспечивает соотношение
вход/выход (рис. 21.7) вида (21.29).
х(и) = sin(w«)
Цифровой
дифференциатор
О)
y(n) = k—cos(w0
Рис. 21.7. К определению цифрового дифференциатора
448
Часть VI. Цифровые фильтры
21.2.2. Частотные характеристики цифровых
дифференциаторов
Найдем передаточную функцию /7д|1ф(г), частотную характеристику
и АЧХ (0 <co<<i)t/2) дифференциатора. Воспользуем-
ся z-изображениями функций sin((i)7n) и со8((оГл) (см. габл. 3.2) при г = 1 и
получим z-изображения воздействия и реакции (21.29):
Zlsin((o7-„)1=---
1 - 2cos(co7’)z 1 + z 2
ZUmcos(o>7»)} =A<o--l~CQs(to7')~—
l-2cOS(0)7)£- + 2
Тогда по определению передаточной функции имеем:
.. < Л г(г> . 1-««(сот-);'1
X(z) sinfCDDz
(21.30)
Для вывода формулы частотной характеристики произведем
замены:
известные
е^т +
cos(a)T) =--------------
2
eJH,r _е_-А°г
sin(OjT) =--------;-----
(21.31)
После несложных преобразований из (21.30) получим
Ид»ф(^*"7 ) = ^(О=кше^2, <ое IcOpafli, <ор>62].
т. е. частотная характеристика дифференциатора является линейной и
чисто мнимой.
Определим коэффициент пропорциональности к в формуле (21.31). Естест-
венно связать его с максимальным значением частоты со|Пах, которое равно
половине частоты дискретизации: со1|1ах =(0д/2. Положим
k 1 _ Т Г
Ид/2 оцТ/2 л‘
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы
449
Тогда ЧХ (21.31) принимает вид:
И-Шф^' )=J—= ]-
ТС 71
откуда для АЧХ имеем
Лц1ф(«) G — А]Иф(Ф) — 1 ’
(21.32)
или в области ненормированных частот
Л..ф(Л=7^- А,в,=/д/2-
-'1/ А
Выражение (21.32) описывает широкополосный дифференциатор, рабочая
область которого составляет всю основную полосу частот [0, те}, и си
[О,/д/2]. Такой дифференциатор легко реализуется на базе КИХ-филыров
типа 4 (рис. 21.8. а) и невозможен на базе КИХ-филыров типа 3, АЧХ кото-
рых равна пулю как на частоте f =0 (тл = О). так и на частоте / = /,/2
(6) = л). При синтезе 1(Д на базе фильтров типа 3 АЧХ обязательно будет
иметь спал от точки ^1Иф(/рао) ло нуля (рис. 21.8,6), т. с. рабочая область
должна находиться в пределах [0, /рай </ч/2].
Спад характеристики вне рабочей области (рис. 21.8,6), как следует из
(21.32), можно описать формулой
= = (21.33)
Объединение (21.32) и (21.33) дает окончательное общее выражение для час-
тотной характеристики дифференциатора:
(21.34)
и для АЧХ дифференциатора в области ненормированных частот:
Аи.Ф(Л =
(21.35)
450
Часть VI. Цифровые фильтры
Рис. 21.8. АЧХ широкополосных дифференциаторов: типа 4 (а), типа 3 (б)
ФЧХ идеального дифференциатора, как следует из (21.34), является постоян-
ной и равна л/2. Поэтому для синтеза дифференциаторов целесообразно ис-
пользовать КИХ-фильтры типов 3 и 4.
Обычно цифровые дифференциаторы применяются в системах управления
(рис. 21.9, а), где требуется линейная зависимость сигнала управления у(п)
от частоты исходного сигнала х(н), генерируемого управляющим объектом.
В таких системах исходным является сигнал с постоянной (обычно равной
единице) амплитудой и меняющейся во времени частотой л(н) = /00 • Сиг-
нал управления у (и), формируемый цифровым дифференциатором, пред-
ставляет собой функцию л(л):
у(л) = с + Ш(")] = < + П1<ад].
Сказанное поясняется на рис. 21.9, б, где:
с = АжфС/о) —константа;
/о — основная частота, относительно которой в пределах от /min до
колеблется текущая частота f (п) исходного сигнала;
/9|/(»)] по смыслу ирелс«являет собой ДЛцф(/) в указанном диапазоне частот.
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы
451
Исходный Сигнал
сшнал управления
А(/)
Рис. 21.9. Место цифрового дифференциатора в системе управления:
сисгема управления (а), диаграмма формирования сигнала управления (б)
21.2.3. Задание требований к цифровым
дифференциаторам
По расположению рабочей области, в пределах которой задаются требования
к АЧХ, можно выделить: широкополосные, низкочастотные, полосовые и
высокочастотные дифференциаторы.
Особенности задания требований к ЦД состоят в том. что требования к ЛЧХ
в рабочей области предъявляются достаточно жесткие, а вне рабочей области
ЛЧХ не контролируется. Тем не менее, методика расчета оптимальных по
Чебышеву КИХ-дифференциаторов, основанная на алгоритме Ремеза, обязы-
вает задавать какие-то ограничения и вне рабочей области, но эти ограниче-
ния являются чисто формальными и обычно назначаются в очень широких
пределах, что видно из приводимых далее примеров.
452
Часть VI. Цифровые фильтры
Широкополосные дифференциаторы имеют рабочую область частот от 0 до
д/2. На рис. 21.10, а изображены требования, а на рис. 21.10, б — АЧХ та-
кого дифференциатора при 8ра6 =0,01; длина его импульсной характеристи-
ки N = 16.
АЛиф(/)
1
0.8
0,6
0,4
0.2
0
------------!------------:-----------:------------:------------f rruj
О 100 200 300 400 - 500
Рис. 21.10. Характеристики широкополосного дифференциатора:
требования к АЧХ (а), рассчитанная ЛЧХ (б)
Лекция 21 Цифровые преобразователи Гильберта и дифференциаторы 453
Низкочастотные дифференциаторы имеют рабочую область от f = 0 до
/раб<?:А/2. На рис. 21.11. а изображены требования, а на рис.21.11.б —
АЧХ такого дифференциатора при браб = 0,0015; б!Краб =0,25; длина его
импульсной характеристики N = 4.
А,Иф(Л
Рис. 21.11. Харакгерисзики низкочастотного дифференциатора:
требования к АЧХ (п), рассчитанная АЧХ (б)
*54 Часть VI. Цифровые фильтры
Чолосоеые дифференциаторы имеют рабочую область от /pag| >0 до
/pa62<Xi/2. На рис.21.12.0 изображены требования, а на рис. 21.12,6—
\ЧХ такою дифференциатора при 5раб =0,01; б||сраб =0,1; длина его им-
зульсиой характеристики N = 6.
Рис. 21.12. Характеристики полосового дифференциатора:
требования к АЧХ («). рассчитанная АЧХ (б)
Лекция 21. Цифровые преобразователи Гильберта и дифференциаторы 455
Высокочастотные дифференциаторы имеют рабочую область от f $ »О
до f = f'J-. Как и в случаях с низкочастотным и полосовым дифференциаторами,
ограничения вне рабочей полосы являются чисго формальными. На рис. 21.13,»
изображены требования, а на рис. 21.13,6— ЛЧХ такого дифференциатора при
6pa6=0,0l; Бнсраб-0,5: дтина его импульсной характеристики Л = 14.
ЛифСП
Рис. 21.13. Характеристики высокочастотного дифференциатора:
требования к АЧХ («). рассчитанная АЧХ (б)
Лекция 22
ЯШ
IBMI
Специальные КИХ-фильтры
22.1. Цифровые согласованные КИХ-фильтры
Основным назначением любого приемника является выделение (обнаруже-
ние) полезного сигнала х(пТ) или его параметров из действующей на входе
приемника аддитивной смеси х(пТ) сигнала и помехи (шума) c>(iiT)
x(nT) = x(nT) + ^,iT). (22.1)
В этой связи среди прочих задач можно выделить следующие:
1. Обнаружение полезного сигнала. Содержание этой задачи состоит в том,
чтобы определить, имеется ли в действующем на входе приемника коле-
бании полезный сигнал или оно образовано только помехой (шумом).
Приемник в результате решения этой задачи должен дать ответ типа "да"
или "пет".
2. Воспроизведение формы (параметров) передаваемого сигнала. По сути,
это идентификация сигнала, форма (или структура) которого приемнику
известна. Идентификация означает восстановление переданного сигнала
по принятому сигналу. В силу не идеальности канала связи прием полез-
ных сигналов происходит при априорной недостаточности сведений о
свойствах помех, форма принимаемого сигнала оказывается искаженной,
поэтому ее воспроизведение осуществляется с некоторой ошибкой. Вос-
произведение формы (параметров) сигнала оправдано в тех случаях, когда
имеет значение вид функциональной зависимости сигнала от времени (на-
пример, различные радиоимпульсы, группа видеоимпульсов и проч.).
В результате решения этой задачи приемник выдает сигнал определенной
формы или наиболее вероятные значения параметров сигнала.
3. Установление наличия сигнала известной формы среди одновременно
действующих на входе приемника сигналов при условии, что относитель-
но каждого из них известны некоторые априорные сведения. Такие задачи
характерны для систем подвижной радиосвязи, передачи широкополосных
Лекция 22. Специальные КИХ-фильтры
457
сигналов н в радиолокации, когда важно лишь установить наличие или от-
сутствие сигнала определенной формы. В этом случае достаточно полу-
чить лишь признак того, сигнал какой формы был передан, и по этом\
признаку извлечь соответствующий ему сигнал из памяти приемника.
Иначе говоря, приемник даст ответ типа "да/нет" по каждому из сигналов.
которые могут действовать на входе приемника.
Для решения указанных задач строят оптимальные приемники, в состав ко-
торых входят линейные фильтры. Выбор критерия оптимальности определя-
ется решаемой задачей. Из многочисленного списка критериев (среднего
риска, идеального наблюдателя, максимального правдоподобия и проч.) наи-
большее распространение получил энергетический критерий максимума от-
ношения мощностей сигнала Р(со) и помехи (шума) И', (со) на выходе линей-
ного фильтра. Это отношение сокращенно называют енгнал/шум (С/Л/) и
обозначают
С /’(со) , „
— = 4 ' . (22.2)
Ш И'/со)
Отношение (22.2) имеет разное содержание, зависящее от решаемой задачи.
Поэтому всегда следует определять не только то, что понимается под сигна-
лом, но и какими свойствами обладает шум.
22.1.1. Связь между характеристиками сигнала и
согласованного с ним фильтра
Отношение сигнал/шум (22.2) определяется в известный момент времени
,о = ло7’ возможного максимума (пика) сигнала у(пТ)
тах|у(иТ)|=|у(и0Т)|
как отношение этого максимума к среднеквадратичному (эффективному)
значению шума
= (22.3)
ш Jn
где Т —период дискретизации.
Определение:
Оптимальный по критерию максимума отношения ОШ (22.3) /инейный
филыпр называется согласованным (СФ) с сигналом.
Часть VI. Цифровые фильтры
158
22.1.1.1. Постановка задачи
Определение СФ и выражение (223) говорят о том, что согласованный с сиг-
налом фильтр позволяет получить в момент /0 = п$Т наибольшее отношение
мгновенного значения сигнала |у(поТ)| на выходе фильтра к среднему квад-
жгичному значению шума (помехи), т. е. согласованный филыпр максимизи-
jyem отношение С/Ш.
Тоставим задачу определить связь между характеристиками фильтра и сиг-
1ала, с которым фильтр согласован. Решение будем искать при следующих
ксловиях:
□ на входе фильтра действует аддитивная смесь сигнала и помехи (22.1):
□ фильтр является линейным с постоянными параметрами;
□ сигнал полностью известен и является детерминированной (или квазидс-
терминированной) функцией времени:
□ шум представляет собой стационарный случайный процесс с заданными
характеристиками: законом распределения плотности вероятности и энер-
гетическим спектром И'Дсо): в лекции рассматривается наиболее простой
случай, когда иа входе фильтра действует белый шум, имеющий равно-
мерный энер1етичсскин спектр W4(co) = Wo и обладающий нулевым сред-
ним; получаемые результаты могут быть распространены и на случай не-
белого шума [17, Д1, Д2, 713]-
^огласованный фильтр, являясь линейным, полностью описывается им-
пульсной ^фСиГ) и частотной //сф(е7шГ) характеристиками, которые связа-
ны между собой преобразованием Фурье (с.и. п. 6. /):
•р д/т-
Лсф<"г) = 7- f (22.4)
-л/т
Таким образом, задача сводится к получению импульсной и частотной харак-
теристик согласованною фильтра, для чего необходимо:
□ вычислить по формуле свертки реакцию у(нТ’) па входной сигнал х(нТ)
и записать результат для я = ;
□ вычислить среднеквадратичное значение шума \[n на выходе фильтра и
записать отношение (223);
□ найти частотную характеристику /7Сф(^7Ш/);
□ определить ИХ йсф(л’г) подстановкой в (22.4) ЧХ //^(e7W/ ).
Лекция 22. Специальные КИХ-фильтры 459
22.1.1.2. Реакция согласованного фильтра
Реакция у(пТ) произвольного линейного фильтра, в том числе и согласован-
ного, на входной сигнал л(пТ’) в соответствии с п. 4.2.1 имеет вид
у\пТ)= J л(тГ)^ф[(л-н1)Т1. (22.5)
С другой стороны, если известно фурье-изображение У(е^,,г) реакции
у(л'Г), она сможет быть получена с помощью обратного преобразования Ф\ рье
у(пТ) =— [ Г(е'ш7 )е'ш"7’А1>. (22.6)
Для определения Y(elmT) воспользуемся преобразованием Фурье свертки (22.5)
Г(е>г) = Х(е7“г)Н<;ф(е*”').
Следовательно, сигнал на выходе фильтра можно записать как
'г я/Т
У(пГ)=^~ f Х(е7“г)Нсф(<>Ло7')е>ш'7</со. (22.7)
1П -n/T
Представим спектр входного сигнала х(пТ) через его спектр эмплитуц
|x(eyto7 )| и спектр фаз <pjto):
X (т>7) = |х (eJ^ei^x,e'°‘T) = |х (e'w )| ,
а частотную характеристику фильтра — через АЧХ А(со) и ФЧХ (рсф (со):
«еф(^>Т) = |»сф(«УюТ)^аГе"е*"""’Г’ = А*(а>И‘ф<“’’.
Тогда (22.7) примет вид
У(«Г) = —7 Х(е7Ш')1еЛ<“)4,ь(<»)ем*<'’”А1"'7’г/о>. (22.8)
2п-„/т 1
Предположим, что реакция у(пТ) достигает своего максимума в некоторый,
пока еще не известный, момент Для этого момента времени из
(22.8) получаем
v(n0T)= — f 1х(е>г)144((1>)еЛ<,,''",)+ф'*(ю)^(22.9)
2П -nil' 1
460
Часть VI. Цифровые фильтры
22.1.1.3. Отношение сигнал/шум на выходе СФ
Энергия шума N на выходе произвольного линейного фильтра согласно ра-
венству Персеваля (c.w. п. 10.2) имеет вид
'Г я/т
N =— Г W„(to)42(co)<to.
где:
1УЯ(СО) — энергетический спектр шума, действующего на входе фильтра;
Д((й) —АЧХ произвольного линейного фильтра, в том числе и согласованного.
Поскольку по условиям задачи предполагается белый шум, имеющий равно-
мерный энергетический спектр ^((0) = % = const. энергия шума определит-
ся из выражения
Т
N =—% J Д2(со)Ло,
2п -л'г
а среднеквадратичное (эффективное) значение шума равно корню квадрат-
ному из N
п!Т
Зная V/V и |у(/107’)|, получаем отношение С/Ш на выходе согласованного
фильтра:
_„гт ’
(22.10)
22.1.1.4. Частотные характеристики согласованного фильтра
Прежде всего, определим условия, при которых выражение (22.10) достигает
максимума. С этой целью воспользуемся неравенством Шварца [23] и приме-
ним его к интегралу в (22.7):
Лекция 22. Специальные КИХ-фильтры
461
которое, в силу равенства
можно записать в тождественной форме
я/7- 2 п/т 2 п/т
f Х{е'“'1 )Нсф(е'ш' Ми < J Х(е;иГ) rfw J 4ф(о^/Ю.
-л/7’ nft' -я/Г
Теперь из отношения (22.10) получаем неравенство
~ л/г
— f Х(е>’-)кф«оН’'‘<”,+,Л*(“,+ия"7'1</ш
“Л ..J I
(22.11)
и после сокращения сомножителей, содержащих (со), имеем
(22.12)
Из полученных выражений следует, что отношение сигнал/шум на выходе
фильтра достигает максимума, когда неравенство обращается в равенство
причем исследуемое отношение, с одной стороны, не зависит от Дф((О).
а с другой — полностью определяется модулем |х(е^°т)|.
Однако согласованный фильтр как линейная система характеризуется свои-
ми частотными характеристиками Дф((О> и (рсф(ю), которые необходимо
462
Часть VI. Цифровые фильтры
найти. Для этого определим условия, при которых (22.10) достигает макси-
мума:
□ первое условие следует из числителей (22.10) и (22.11) — сумма аргумен-
тов должна равняться нулю
<Рл (“) + <Рсф (ГО) + (иИцГ = 0 ,
а потому ФЧХ согласованного фильтра должна иметь вид
Фсф(го) = -[(Рл(го) + сопог]; (22.14)
это говорит о том, что ФЧХ согласованного фшыпра равна взятой с об-
ратным знаком сумме спектра фаз входного сигнала и линейно зависимо-
го от частоты слагаемого-,
□ второе условие следует из (22.13) — /1г2¥ согласованного фильтра долж-
на быть пропорциональна спектру амплитуд сигнала
Лсф(ш) = ^Х(е7"'г)|. (22.15)
где k = const —коэффициент пропорциональности.
Теперь на основании условий (22.14) и (22.15) можно записать частотную
характеристику согласованного фильтра:
//сф(б>7) = Лсф(со)е;ф‘*<,“) =^|х(е>г)|£-^(“’£-^.
Но поскольку функция
|х(^,о7)|е"^(ш) = Х(е->",г) =
является комплексно-сопряженной по отношению к функции X (е^°7 ), полу-
чаем окончательное выражение для частотной характеристики фильтра, со-
насованного с сигналом х(пТ), имеющим спектр Х(е^т),
Нсф(е'шГ') = кХ’^7 )е^г. (22.16)
или в нормированных частотах
Н^е*) = кХ*(е&)е~^. (22.17)
Лекция 22. Специальные КИХ-фильтры 463
22.1.1.5. Импульсная характеристика
согласованного фильтра
По известной частотной характеристике (22.16) нетрудно найти импульсною
характеристику СФ (22.4)
у 'Г
Исф(пТ-) = — J //сф(р'ш’)е'™'Ап = 4- — f "“}Td<n. (22.18)
271-и> г 2п г.;т
Учитывая соотношение
Х\е^г) = Х(е~'мГ)
и ввоця новую переменную 1|/ = -со, приведем равенство (22.18) к более
удобному для анализа виду:
у —л/? у vjT
h^tnry = -k— X(eJ'>r-)e-J'>t"-'^r(tV = k~ Г X(eJvr)eM"“-">T<lV.
2jl Л 2пЛ.;г
Но поскольку подынтегральное выражение содержит преобразование Фчрье
кХ(е^г )е№,к'г последовательности (функции)
Н(м0 - п)Т],
то импульсная характеристика согласованного с сигналом х(п) фильтра рав-
на этой последовательности:
ЛСф(»Г) = Л.4(н0-»)7'Ь <22.19)
или в нормированном времени
/ц:ф(и) = Ь(/1о-н). (22.20)
Поставленная задача решена.
22.1.2. Свойства согласованного фильтра
Рассмотрим свойства согласованного с сигналом х(пГ) фильтра и физиче-
ский смысл полученных соотношений во временной и частотной областях.
22.1.2.1. Свойства импульсной характеристики СФ
Из определения импульсной характеристики (си. Лекцию 4) следует, что при
п< 0 она должна быть равна нулю
Лсф^|«>=0-
464
Часть VI. Цифровые фильтры
Это требование помогает выяснить смысл задержки в (22.19), а именно: если
длительность сигнала (или его отрезка) равна псТ, то:
П во-первых, ИХ (22.19) должна отвечать условию
Лсф(лП = ^[(^ =°
и потому представлять собою отсчеты сигната (или его отрезка), взятые
в обратном порядке',
□ во-вторых, лишь при п^ >пс вся энергия сигнала может быть использова-
на для формирования его максимума;
□ в-третьих, максимум формируется в момент л0Т;
О в-четвергых, увеличение л0 свыше пс не влияет на значение максимума,
но только сдвигает его вправо.
Все сказанное означает, что и длительность нс сигнала х(п), и длительность
п0 ИХ согласованного с сигналом фильтра должны быть конечными и рав-
ными друг другу:
»о = «с-
Отсюда следует второе, наиболее часто используемое определение согласо-
ванного фильтра: фильтром. согласованным с сигналом х(пТ) длительно-
стью п^Т, называется фильтр с конечной импульсной характеристикой
h^nT) вида
hc^(nT) = kx](n(J -л)Г],
отсчеты которой равны отсчетам сигнала, взятым в обратном порядке.
Запишем передаточную функцию согласованного фильтра с точностью до
коэффициента к, приняв его равным единице. По определению передаточ-
ной функции (см. Лекцию 5) имеем
нсф(г)= Леф(«)г " = £ Л<"о
//=0 >1 = 0
произведя замену переменных: w0 - п - т . п = -т, получим
Нсф(г)= £ *(»!)№' =;-"« £ XmXz ‘Г”,
т=0 >»=0
ИЛИ
//t4(z) = z ”“X(z"’).
Лекция 22. Специальные КИХ-фильтры
465
Пример 22.1
Известен сигнал а(л) = {0.3; 0.4: 0.5:0.7}: записать ИХ, разностное уравне-
ние и передаточную функцию согласованного с ним фильтра.
Решение. Согласно изложенному имеем:
О импульсную характеристику
Лсф(я) = {о,7; 0.5; 0.4; 0,3} (рис. 22.1);
□ разностное уравнение
у(н) - 0.7.г(н) + 0,5.v(n -1) + 0,4х(л - 2) + 0.3х(и - 3);
□ передаточную функцию
77Сф(:) = Е ЛСф(и)г“'' = Ё *(3-n)z" -
п и л=и
Рис. 22.1. Отсчеты сигнала (</) и ИХ согласованного с ним фильтра (б)
22.1.2.2. Свойства ФЧХ согласованного фильтра
Обратимся к выражению (22.14)
arg wc<|» ) = Фсф (to) = “ [фv (ы) + ]= —Фt (to) — соп0Г.
11ервое слагаемое, равное -ipv(co), компенсирует спектр фаз <р4(со) сигнала,
поэтому при отсутствии второго слагаемого -tonft7’ все составляющие вы-
ходного сигнала имели бы нулевые начальные фазы в момент л0 = 0 и мак-
симум сигнала пришелся бы именно на момент л0 =0, что физически не реа-
лизуемо; линейная же часть ФЧХ обеспечивает сдвиг момента образования
максимума сигнала нз точки п'Г = 0 (м =0) в точку НуТ, и такой филыр фи-
зически возможен.
466
Часть VI. Цифровые фильтры
22.1.2.3. Свойства АЧХ согласованного фильтра
Выражение (22.15) устанавливает, что АЧХ согласованного фильтра должна
по своей форме совпадать со спектром амплитуд сигнала, т. с.
Л^ф(СО) = *|х(е'ю7')| = * |х )|.
физически это означает, что фильтр пропускает спектральные составляющие
сигнала и шума неравномерно: в частотных областях, где значения ЛЧХ ма-
лы (^(со) с I), составляющие получают большее ослабление. Однако в си-
лу того, что АЧХ но форме совпадает со спектром амплитуд сигнала
(рис. 22.2), ослабление сигнала выражено в меньшей степени, поскольку
в указанных областях расположены спектральные составляющие сигнала,
вклад которых в величину максимума незначителен; .мощность же белого
шума в этих областях WBbIX(0)) = A^j(O))Wo снижается весьма существенно.
Это приводит к ослаблению шума относительно сигнала, вследствие чего
максимизируется отношение С/Ш на выходе фильтра.
снижения мощности шума
Рис. 22.2. Спектр амплитуд сигнала и АЧХ согласованного фильтра
Лекция 22. Специальные КИХ-фильтры 467
22.1.3. Решающая схема обнаружителя сигналов
Изученные выше свойства СФ позволяют на основе согласованных фильтров
построить обнаружитель одного in группы возможных сигналов, поступаю-
щего на вход приемника вместе с помехой (шумом).
Установка нулевых начальных условии
Рис. 223. Решающая схема обиаружигечя сигналов с согласованными фильтрами
Структурная схема обнаружителя сигналов, построенная на базе согласован-
ных фильтров, изображена па рис. 22.3. Входной сигнал л(я) поступает од-
новременно на три параллельно соединенных фильтра, каждый из которых
согласован с формой своего сигнала. Выходы фильтров подключены к yci-
ройству сравнения, параметром которого является порог rfliopor — мини-
мально допустимая величина сигнала у(и), при которой сигнал считается
принятым (в противном случае предполагается, что па входе фильтра дейст-
вует помеха). Мгновенные значения сигналов |уДн0)| на выходах фильтров
сравниваются в момент л = я0 окончания сигнала г(н). Если реакция /-го
согласованного фильтра максимальна
|у,(я0)| = тах{|Л()|(|)|. I V2(7IO)|, |v3(»(,)|}
и соответствует услоиию
|у,("о)| =const,
I6 Зак. 165
468
Часть VI. Цифровые фильтры
переданным считается сигнал л, (л), с которым согласован этот фильтр. Вы-
ходы остальных фильтров воспринимаются как помеха, или шум. Сущест-
венным в работе обнаружителя является обязательная установка нулевых
начальных условий в СФ в момент п = .
Пример 22.2
Пусть каждый из фильтров, изображенных на рис. 22.3. согласован со своим
сигналом длительностью л0 = 3 (это означает, что N = 4 ):
-Г,(и) = {0.3; 0,4; 0,5; 0,7}, /1](л) = {0,7;0.5; 0,4; 0,3},
,г2(л) = {0,2; 0,5; 0,2; -0,2}, Л2(л) = {-0,2; 0,2; 0,5; 0,2},
jr3 (л) = {(). 2; 0,5; 0,5; - 0.2}, Л3 (л) = {-0,2; 0,5; 0,5; 0,2}
и пусть на вход поступают отсчеты сигнала л, (и), с которым согласован
СФ1. Фильтры одновременно выполняют вычисления по формуле свертки
|у,(«)| =
3
у ЛДл)*, (»>-*)
4=0
0
г,01) ={0,3:0,4; 0,5; 0.7}
л2(л)={0,2; 0.5:0.2 - 02}
б
0
3(л)={-0.2 0.5;0.5;-0.2}
Момент отсчета iQ =чпТ = 37~
Рис. 22.4. Реакции на выходах согласованных фильтров
Лекция 22. Специальные КИХ-фильтры 469
где i = 1.2,3, ЛДн)— импульсная характеристика 1-го согласованного
фильтра. 11а рис. 22.4, сц б, в показаны результаты вычислений: для СФ1, для
СФ2 и для СФЗ соответственно. В момент окончания сигнала (и = п0=3)
устройство сравнения определит максимум
max{|.v1(3)|,|v,(3)|.|.v!(3)|} = max{0,99;0.22;0,37} = 0.99 = у,(3)
на выходе СФ1. что и соответствует номеру переданного сигнала.
Заметим, что любое временное рассогласование сигнала и СФ приводит
к уменьшению значения реакции в момент снятия отсчета : это объясня-
ется нарушением компенсации начальных фаз фч (to) входного сигнала в ука-
занный момент. Наибольшее значение реакции достигается только в случае
полной синхронизации передатчика и приемника, что и показано в приведен-
ном выше примере.
22.2. Амплитудные корректоры
Определение:
Амплитудными корректорами (ЛК) называют фильтры, предназначенные
для выравнивания АЧХ (или характеристики ослабления п(/)) системы (на-
пример. канала связи) в пределах се рабочей полосы до установленных норм.
Амплитудные корректоры подключаются каскално с корректируемым час-
тотным трактом и устанавливаются либо перед трактом (рис. 22.5. а), либо
после не» о (рис. 22.5, б).
Форма АЧХ амплитудных корректоров ничем не ограничивается, поэтому
в ЛЧХ корректоров нс выделяют полосы пропускания, задерживания и пере-
ходные полосы (рис. 22.6). Реализация таких требований наиболее удобна
в виде КИХ-снстемы с линейной ФЧХ. поэтому обычно амплитудные кор-
ректоры синтезируют как оптимальные (по Чебышеву) фильтры с произ-
вольной АЧХ, хотя существуют и методы синтеза БИХ-корректоров, которые
в .чанном курсе не изучаются.
На рис. 22.6.47 показан пример частотной характеристики некоторого частот-
ного тракта Ац|-(/)- настолько искаженной в полосе пропускания, что
вследствие нарушений начальных соотношений между амплитудами частот-
ных составляющих сигнала возникают недопустимые изменения его формы
при прохождении через такой тракт.
Для устранения обнаруженных искажений ЧХ частотного тракта необходимо
последовательно с ннм включить амплитудный корректор (см. рис. 22.5).
470
Часть VI. Цифровые фильтры
АЧХ которого в полосе пропускания тракта должна быть обратной ЧХ тракта
(рис. 22.6, б).
A(f)
Л(П
Рис. 22,5. Варианты размещения АК: перед частотным трактом (а),
после частотного тракта (б)
При этих условиях АЧХ всей системы Л(/) будет равна произведению час-
тотных характеристик тракта и корректора
Л(Л) = ЛЧ| (У) -АКо|,(У).
а характеристика ослабления представится суммой характеристик ослабле-
ния частотного тракта и корректора
п(./) = Лчт(/) + лКор(/^
Полученная АЧХ изображена на рис. 22.6, в.
Из сказанного следует, что АЧХ корректора Акор(/):
□ определяется в каждой точке интервала [(), /д/2];
□ назначается равной единице = 1 во всех частотных областях,
не требующих коррекции;
Лекция 22. Специальные КИХ-фильтры
471
Рис. 22.6. Амплитудно-частотные характеристики:
тракта (а), корректора (б), всей сисгемы после коррекции (с)
472 Часть VI. Цифровые фильтры
□ задается ломаной линией в частотных областях, требующих коррекции,
причем в характерных i-х точках должна иметь значение, обратное значе-
нию ЧХ тракта
А Кор =|/АчТ
На рис. 22.6, б это точки с номерами i = 1, 2.6: например, в точках 1 и 4
Акор =1/1.25 = 0.8;
Л4Кор = 1/0.8= 1,25.
Нетрудно распространить изложенное на характеристику ослабления коррек-
тора:
О в частотных областях, где не требуется коррекции,
"коР(Л=°;
о в точках частотной области, где коррекция необходима,
Л»Кор =“АЧТ •
Лекция 23
Синтез БИХ-фильтров
Методика синтеза частотно-избирательных БИХ-фильтров (НЧ, ВЧ, ПФ, РФ)
базируется на хороню развитом аппарате расиста аналоговых фильтров и
преобразовании передаточной функции аналогового фильтра в передаточную
функцию цифрового фильтра. Характер преобразования определяется мето-
дом отображения p-области в ^-область.
Процедура синтеза БИХ-фильтров включает в себя:
□ задание требований к цифровому фильтру;
□ выбор метода отображения p-области в z-область:
□ формирование требований к аналоговому фильтру согласно методу ото-
бражения плоскостей;
□ расчет аналогового фильтра;
□ применение к аналоговому фильтру выбранного метода отображения
/^-области в z-область.
Определение:
Аналоговый фильтр. рассчитываемый по требованиям, заданным к цифрово-
му фильтру, называется фшьтром-прототшюм, или просто "прототипом”.
Основными ограничениями для методов синтеза цифровых фильтров по про-
точинам являются;
□ сохранение существенных свойств ЛЧХ прототипа в АЧХ соответст-
вующего ему цифрового фичыпра, чю означает необходимость отображе-
ния мнимой оси /Q p-области в единичную окружность z-области;
□ обеспечение преобразования устойчивого прототипа в устойчивый циф-
ровой фичьтр, что означает необходимость отображения полюсов прото-
типа из левой р-пол\плоскости внутрь единичного круга z-плоскости.
474
Часть VI. Цифровые фильтры
Из ряда известных методов преобразования аналоговых фильтров в цифро-
вые наиболее широкое распространение получили рассматриваемые в курсе
лекций два метода:
1. Инвариантность импульсной характеристики прототипа (стандартное
Z-прсобразованис).
2. Билинейное ^-преобразование.
Примечание
Другие методы преобразования аналоговых фильтров в цифровые (отображе-
ния дифференциалов, согласованного z-преобразования, Боксера-Тапера)
можно найти в {1,22,43].
Прежде чем изучать теорию конструирования БИХ-фильтров, рассмотрим
методы синтеза аналоговых фильтров-прототипов.
23.1. Обзор методов синтеза
аналоговых фильтров-прототипов
Материал данного пункта имеет целью достижение более глубокого понима-
ния принципов конструирования БИХ-фильтров на основе аналоговых
фильтров. Пункт может быть опущен, если читателю известны принципы
синтеза аналоговых фильтров.
БИХ-фильтры рассчитываются на основе аналоговых ПЧ-прототинов по сле-
дующей методике:
1> Согласно методу синтеза БИХ-фильтра формулируются требования к со-
ответствующему аналоговому фильгру-прототипу.
2. Для аналогового фильтра-прототипа определяется нормированный аналого-
вый НЧ-прототип, т. е. такой, частота среза которого £2^ = I (рис. 23.1). При
условии сохранения допустимых отклонений 5], 52 и метода аппроксимации
АЧХ рассчитываются полюсы и нули нормированного НЧ-прототипа по
квадралу его АЧХ |g(jQ<iiJ )| (за исключением филыра Бесселя).
3. С помощью формул преобразования частот нормированный НЧ-прототип
преобразуется в аналоговый прототип (НЧ, ВЧ, ПФ, РФ), соответствую-
щий исходному цифровому фильтру. При этом осуществляется денорми-
ровапие нулей и полюсов аналогового прототипа.
4. Производится пересчет депормированных пулей и полюсов из аналоговой
области в цифровую.
Лекция 23. Синтез БИХ-фильтров
475
Рис. 23.1. Диаграмма гребовапип к нормированному аналоговому ИЧ-ирототииу
Прежде чем обсуждать особенности расчета аналоговых фильтров, остано-
вимся на определении нормированного аналогового НЧ-прототипа и его пре-
образованиях.
23.1.1. Реактансные преобразования частоты
Расчет аналоговых фильтров любого типа осуществляется на основе соответ-
ствующего ему нормированного НЧ-прототипа. Для этого предварительно
необходимо преобразовать граничные частоты со_А., 0>_х, рассчитывае-
мого аналогового фильтра в частоты его аналогового НЧ-прототипа
(т. е. произвести нормирование частот), а затем (после расчета НЧ-прототипа)
выполнить обратную процедуру— ценор.мировапие. Обычно такие преобра-
зования частоты осуществляют с помощью реакшансных функций'. поэтом)
сами преобразования называются реактанспы.ми. Рассматриваемые далее
преобразования имеют смысл, поскольку привозят к физически возможной
цепи.
1. Преобразование НЧ НЧ
Рассматриваемое преобразование имеет виз
£2<">=-^-
Реактанспыми пшыпакн рациональные функции, которые с точностью до вещественного
положительного множители представляют собой отношение четной и нечетной частей поли-
нома I уряина или их обратное отношение.
476
Часть VI Цифровые фипьтры
поэтому частота среза йх° нормированного НЧ-протогипа равна единице
й<|,}=^
х (о.
граничная частота й*'* полосы задерживания
(23.1)
«V1’ =—>' •
0)х
поскольку (ок что и отражено на рис. 23.1.
2. Преобразование ВЧ «-> НЧ
Для получения частот й’11' нормированного ПЧ-мроготина по частотам (о
заданного ФВЧ необходимо предварительно рассчитать частоты й
ненормированного НЧ-прототипа. а затем согласно предыдущему пунк-
ту 1 преобразовать частоты Й в частоты й(11). Преобразование частот по-
казано на рис. 23.2.
Найдем частоты й ненормированного НЧ-прототипа. Чтобы сформиро-
вать НЧ-прототип, необходимо всю частотную ось "перевернуть": нуле-
вую часгозу (0^=0 обратить в бесконечность, а бесконечную частоту
(0^ =о° —в нуль. Такое обращение обеспечивается преобразованием
й = —
0)
из которого имеем
%=.
и
1 = 0
0)
Соответствующие граничные частоты
оказываются равными (рис. 23.2. о)
Q^=«=“'
ненормированного НЧ-протогипа
ЙА= —
й¥ =— и
Тогда в силу (23.1) окончательно получаем искомое частотное преобразо-
вание
О(ц) ‘- _fQX
Йу (!)
Лекция 23 Синтез БИХ-фильтров
которое позволяет вычислить граничные частоты нормированного НЧ-
прототипа (рис. 23.2, е)
Рис. 23.2. Диаграммы частот (ВЧ^НЧ): исходного аналогового ФВЧ (а).
ненормированного НЧ-прототипа (б), нормированного НЧ-нрототина (в)
478
Часть VL Цифровые фильтры
Далее в соответствии с заданным методом аппроксимации рассчитывают-
ся нули и полюсы нормированного 114-фильтра, которые преобра-
зуются (депормируются) в нули и полюсы аналогового ФВЧ заменой р
на 1/ р.
3. Преобразование ПФ «-* НЧ
Полосовой фильтр, имеющий четыре граничных частоты
(со_£, о>_х, С0х, (оА.), требует более сложного частотного преобразования.
Во избежание путаницы обозначим комплексную частотную переменную
д.ш аналогового ИЧ-npomomuna через р, т. е. как обычно, а для преобра-
зуемого аналогового полосового фильтра— через х. Для удобства рас-
смотрим сначала преобразование 114—> ПФ, а затем ПФ —* НЧ. Описы-
ваемые преобразования изображены па рис. 23.3.
Рис. 23.3. Диаграммы частот (ПФ «-* НЧ): ненормированною 11Ч-нроготнна (о)
и полосового фильтра (б)
11реобразование НЧ —* ПФ имеет вид
Лекция 23. Синтез БИХ-фильтров
479
где — центральная частот полосы пропускания полосового фильтра,
вычисляемая но формулам:
rojj — их *сп* или (Оо = СО_дСоА.. (23.4)
Замена переменной р па s2 в (23.3) удваивает порядок филыра. Форму-
лы (23.4) должны давать одинаковое значение центральной частоты со0.
поэтому необходимо выполнение условия геометрической симметрии
(условия симметрирования)
to хсох =0) t.cofc. (23.5)
Симметрирование (23.5) выполняется так, чтобы не нарушались требова-
ния к полосовому фильтру. Это означает, что только три из четырех гра-
ничных частот в (23.5) могут быть заданы независимо. Поскольку важно
сохранить заданную полосу пропускания, на практике вычисляется по
частотам среза со.* и со* полосы пропускания полосового фильтра, ос-
тавляя их тем самым неизменными,
<00 = , (23.6)
а затем вычисляют частоту среза ненормированного НЧ-прототипа
(рис. 23.3. а)
Следующим шагом является вычисление граничной частоты полосы
задерживания ненормированного ФНЧ по граничным частотам со * и (ОА.
полос задерживания синтезируемого ПФ:
Q.
<>» (0_t
Из двух полученных значений Q.k выбирается меньшее — тогда хотя бы
одна из переходных полос рассчитываемого ПФ окажется меньше задан-
ной. что допустимо, поскольку означает выполнение исходных требова-
ний с запасом. Следовательно, граничная частота нормированного
ФНЧ определится из соотношений:
о<||> _ Qip _ (23.8)
‘ £2С iot(ci£-<og)
4В0
Часть VI Цифровые фильтры
или
г.л Qin (Оу((|)» -СГ,.)
q(h) = = _JL2_JL---*1. (23.9)
£2с <O-fc(«x _(IV))
где также выбирается меньшее значение О*0, Тогда после подстановки
в знаменатели (23.8) и (23.9) выражения
0)^ = со
и умножения числителей и знаменателей па cOq получаем соответственно
»<"> = 0111 (23.10)
CQy -C0_z I IDj) СО* I
Q<„) =_(23.li)
(0x-W_z[<lLj Ц> J
Из полученных значений Q*1^ вновь выбирается меньшее.
Далее, согласно заданному методу аппроксимации, рассчшываются r-с пули
pai и полюсы рч нормированного НЧ-фильтра, имеющего граничную час-
тоту Q*"\ после чего нули р^ н полюсы pti пересчитываются в нули sai и
полюсы х^ синтезируемого аналогового ПФ следующим образом:
• записывается уравнение
S2 - рх + tog = 0 ,
получаемое из (23.3);
• вычисляются корни этого уравнения
д=Р±^-4< (23i2)
• нули ла,- и полюсы 5в| ПФ формируются подстановкой в (23.12) нулей
и полюсов рч нормированного ФНЧ.
4. Преобразование РФ <-* НЧ
Процедура преобразования РФ *->114 (рис. 23.4) подобна процедуре
преобразования ПФ «-> НЧ, но в этом случае преобразование НЧ —* РФ
имеет вид
р= ,S . . (23.13)
s“+(06
Лекция 23. Синтез БИХ-фильтров
481
|С11ч(Д2>|
Рис. 23.4. Диаграммы частот (РФ ** НЧ): ненормированного НЧ-прототипа (а),
режекторного фильтра (б)
где а>о — центральная частота полосы зачсрживапия режекторного
фильтра (рис. 23.4, б), вычисляемая по формулам:
СОо - С0~ХШХ И = •
Так же. как и в предыдущем случае, должно обеспечиваться условие гео-
метрической сим метрии
w_xioz =(0 д.со^.
Подобно полосовому фильтру, обычно tog определяется по частотам среза
полос пропускания режекторного фильтра
“о = 7Ш-Л • (23.14)
после чего вычисляется частота среза ненормированного НЧ-прототипа
(0~
«х ~~2 Т
462
Часть VI. Цифровые фильтры
и его граничная часюта Q* но формулам
0). С0_/.
Qt- = к , или Q* = —=-----------—;
со?-соб
из полученных значений выбирается меньшее.
Тогда граничная частота нормированного ФНЧ может иметь вид
q(u) _ _ С°А (fa)x ~ °*о)
* (^(coJ-Wj2))
или
o(-> . .QT _(U-ttU)Z~‘11<2>)
‘ шх((0й-со?*)
Поступая так же, как при выводе формул (23.10). получим соответственно
(23.15)
Шо Ш|) O)t )
и
Далее, согласно заданному методу аппроксимации, рассчитываются пули
pei и полюсы p*j нормированного НЧ-фильтра, имеющего граничную
частоту (23.15). Вычисленные нули p.t и полюсы р^ преобразуются
в нули sef и полюсы s*; аналогового РФ как корни
(1/р)±7(1/р)2-4^
2
уравнения
s2~—+<0q = 0,
Р
получаемого из исходного преобразования (23.13).
Рассмотренные реактансные преобразования частот и связи между нулями и
полюсами нормированного ФНЧ и рассчитываемого аналогового фильтра
сведены в табл. 23.1.
Лекция 23. Синтез БИХ-фильтров
463
Таблица 23.!. Реактансные преобразования частот
Синтезируемы!! аналоговый фильтр Формулы дли вычисления граничной .-Цн) частоты *2/ нормированного ФНЧ Формулы дли перссчыа полюсов и нулей нормированного ФНЧ в нули и полюсы синтезируемого аналогового фильтра
ич Р
ВЧ <0А р
ПФ р + ^р1-!^ 2
РФ % Ч J (l/p) + >/(l/p)2 ~4И* 2
} Возможно выражение (23.11).
’ Возможно выражение (23.16).
23.1.2. Аппроксимация АЧХ
рациональными функциями
Известны четыре стандартных типа классических аналоговых фильтров, по-
лучивших свое название по имени ученых, предложивших данный вид ап-
проксимации функций: Баттерворта, Чебышева I и II рода, Золотарева-Кауэра
(эллиптические). Поскольку, как было показано ранее, .методика расчета
фильтров основана на расчете ФНЧ-прототипа с нормированной часто-
той, достаточно рассмотреть аппроксимацию аналоговых ИЧ-фильтров.
Предварительно отметим, что в приводимых далее методах аппроксимации
используется квадрат модуля передаточной функции |G(Jco)|'’, т. с. квадрат АЧХ,
либо обратная функция l/|G(_/co)|2 . Это объясняется тем, что функция |G(_/со)|~,
являясь вещественной функцией вещественного аргумента, существенно
упрощает решение задачи аппроксимации, поскольку исключает на этапе
464
Часть V/. Цифровые фильтры
аппроксимации чрезвычайно сложные, а порой и невыполнимые операции
над функциями комплексного переменного.
Найдем взаимообратную связь между передаточной функцией G(p) и квад-
ратом Л ЧХ |G(jco)|", для чего введем вспомогательную функцию F(p) вида
F(p) = G(p)G(~p) (23.18)
и рассмотрим ее при р = До, как и следует для АЧХ. Тогда
G( jio) = Re(co) + и G(-jco) = Re(-co) + j Im(-d)).
Поскольку вещественная часть является четной функцией частоты, а мни-
мая — нечетной, справедливы соотношения:
Re(co) = Re(-ro);
G(-jco) = Re(co) - j Im(co);
F( jw) = [Re(io) + j Im(w)] |Re(co) - jlm(co)] = Re2 (co) + Im2(co),
или
F(jW) = |G(jco)|2 = Re2 (co) + Im2(co).
Таким образом, введенная вспомогательная функция F(p) при р = Jco дей-
ствительно является вещественной функцией вещественного аргумента со и
представляет собой квадрат АЧХ. Кроме того, функция F(p) содержит в ка-
честве множителя передаточную функцию G(p). Причем функции G(p) и
G(-p) являются комплексно-сопряженными, а потому их взаимно соответ-
ствующие нули и полюсы также являются комплексно-сопряженными.
23.1.2.1. Фильтры Баттерворта
Функция квадрата АЧХ Мго порядка фильтра НЧ имеет вид
|G(jW)|2=^—co = Q/Qc. (23.19)
где £2С — частота среза. Это означает, что за единицу частоты принято такое
ее значение, которое равно частоте среза, причем на этой частоте
|(7(О.)| = 1/-J2 = 0,707 для любых 7V.На частоте £1=0 всегда |G(0)| = I.
Фильтр Баттерворта оптимален но критерию максимальной плоскости в точ-
ках £2 = 0 и £! = «> (для цифровых фильтров d) = 0 и б) = л). Смысл опти-
мальности состоит в том, что АЧХ фильтра НЧ порядка /V па частотах £1 = 0
Лекция 23. Синтез БИХ-фильтров 485
и Q = oo имеет равные нулю первые А производных (т. е. максимальное их
число). Это означает, что фильтр первого порядка имеет одну производную,
второго порядка—две (первую и вторую) и т. д. Указанные производные
равны нулю. АЧХ фильтра Баттерворта является монотонной как в полосе
пропускания, так и в полосе задерживания. Благодаря этим качествам фильт-
ры Ба ттерворта называют фи (ьтрамн с максимально плоскими A ЧХ.
При увеличении N переходная полоса уменьшается, т. е. возрастает коэф-
фициент прямоугольности К||р (крутизна в переходной полосе). Коэффици-
ентом црямоуголыюсти называют отношение
полоса мешания
“пр •
полоса пропускания
где полоса мешания включает в себя полосу пропускания и перехочныс по-
лосы; например, для ФНЧ согласно данному определению
Достоинством фильтроа Баттерворта является близость их Ф1!Х к .пшенной
в полосе пропускания. С этой точки зрения они имеют существенное преиму-
щество перед другими классическими фильтрами, рассматриваемыми далее.
Основное свойство фильтра Баттерворта состоит в том, что его ЛЧХ в полосе
пропускания является максимально плоской, а во всей остальной области
частот— монотонной, при этом процедура аппроксимации сосредотачивает-
ся на двух частотах: £2 = 0 и £2 = <». Единственным параметром фильтра яв-
ляется его порядок Л', определяющий степень плоскости на указанных
крайних частотах: чем выше порядок, тем более плоской оказывается АЧХ и
тем более близкой становится она к желаемой характеристике как в полосе
пропускания, так и в полосе задерживания.
Процедура аппроксимации состоит в следующем.
Прежде всего вычисляется наименьшее целое N . удовлетворяющее соотно-
шению
где — нормированная граничная частота > I (см. рис. 23.1),
486
Часть VI. Цифровые фильтры
Из (23.18) и (23.19) при аналитическом продолжении (23.19) на всю
p-плоскость следует
G(/>)G(-p) =----(23.20)
1 + (-р2)Л
Ясно, что 2N нулей (23.20) находятся на бесконечности Q,|9=±oo (соответ-
ственно на z-плоскосги в точке z = -l). a 2N полюсов равномерно распре-
делены па единичной окружности p-плоскости на расстоянии it/N друг от
друга, причем центр окружности находится на мнимой оси; полюсы, являю-
щиеся в общем случае комплексно-сопряженными, располагаются симмет-
рично относительно мнимой оси, не попадая на псе. Полюс может находит-
ся на действительной оси только для нечетных /V. г. е. только в том случае,
когда полюс является вещественным.
Для формирования передаточной функции G(p) в целях достижения устой-
чивости фильтра используются N полюсов, расположенных в левой р-
полуплоскости (при переходе в цифровую область они будут находишься
внутри единичной окружности z-плоскосги). Тогда передаточная функция,
выраженная через полюсы, получает вид
где — константа, р»л. — fc-ый полюс. Найдем выражения для полюсов,
приравняв знаменатель (23.20) к нулю
l + (-p2)AA = l + (-l)Np2'V=0.
Отсюда для четных /V получаем
Р=2^П,
для нечетных N
р = 2l>ll
Но поскольку -1 = е-'"=е-'<2‘т1*п и l = r'j2<" (к = 0,1. 2,..., N -1), то для чер-
ных значений W
A* =cos
(2к + 1)п
2N
+ J sin
(2к + 1)л
2N
Лекция 23. Синтез БИХ-фильтров
487
для нечетных
кп . кп
/К/. =cos—+ /sin —.
А N J N
Если воспользоваться известными тригонометрическими равенствами
z , 7L
COS(0t + — ) = -SinOt и Sin(0t + y) = COS0t.
легко получить общую формулу для вычисления полюсов фильтра Баттер-
ворта как для четных, так и для нечетных N
. (2* + 1)п . (2* + 1)л
p*t =-sin-------1- JCOS------.
2N J 2N
Полюсы с отрицательными вещественными частями и составят требуемый
набор полюсов, которые пересчитываются в полюсы исходного аналогового
прототипа, а последние затем преобразуются а z-обласгь. Поскольку коэф-
фициенты передаточной функции G(p) вещественные, полюсы должны об-
разовывать комплексно-сопряженные пары.
Сказанное позволяет сделать следующие выводы:
□
фильтры Баттерворта обладают максимально плоской АЧХ в полосе
пропускания и монотонной в полосе задерживания}
в полосе пропускания ФЧХблизка к линейной}
фильтры Баттерворта наиболее полно соответствуют условиям безы-
скаженной передачи сигналов, поэтому применяются при необходимости
сохранения соотношений составляющих сигнала по амплитуде и фазе.
□
□
23.1.2.2. Фильтры Чебышева
Удовлетворение требований к фильтру может быть обеспечено при меньших
порядках, если ошибку аппроксимации равномерно распределить по полосе
пропускания или по полосе задерживания; еще лучше, если ошибка распре-
делена по обеим указанным полосам. Тогда получаем раановолновую ап-
проксимацию (см. п. 20.1.2) и порядок фильтра, существенно .меньший по-
рядка фильтра Баттерворта. Такими свойствами обладают фильтры
Чебышева. В зависимости от полосы частот, в которой минимизируется
ошибка аппроксимации, различают фильтры Чебышева I рода и II рода":
П АЧХ фильтров Чебышева I рода в полосе пропускания имеет равноволно-
вый характер, а в полосе задерживания монотонно убывает;
В литературе также используются следующие обозначения пих фильтров: 1-го типа и 2-го
типа, тип Т и run / соотиегсгнспио.
486
Часть VI. Цифровые фильтры
□ АЧХ фильтров Чебышева И рода в полосе пропускания является макси-
мально плоской (подобно фильтрам Баттерворта), а в полосе задержива-
ния имеет равноволновый характер; т. е. вид АЧХ фильтров Чебышева II
обратен виду АЧХ фильтров Чебышева I, поэтому фильтры Чебышева II
часто называют инверсными.
Фильтры Чебышева I рода
Фильтры Чебышева I рода обладают равноволновой АЧХ в полосе пропуска-
ния и монотонной в полосе задерживания. Функция квадрата АЧХ /V-го по-
рядка фильтра НЧ имеет вид
|G(»|2 =------Лз----; w=Q<")/fi!"’, (23.21)
I + Е~Сд. ((О)
где C,v(a) — полином Чебышева TV-го порядка, е — параметр, управляю-
щий величиной пульсаций. Корни полиномов С#(х) вычисляются по форму-
ле |9. 29]
(2к- 1)л
х>. = cos-----, к = 1, 2,..., /V .
*• 2N
Параметр е определяется из максимально допустимого затухания «^>0
в полосе пропускания
е = 71О''”“‘/,о-|, (23.22)
откуда нетрудно получить связь между е и Sj:
Исходя из требований к отклонениям АЧХ как в полосе пропускания Sj
(flmax), так и в полосе задерживания Si («о)> определяется порядок фильтра
как наименьшее целое, удовлетворяющее условию3
Arch((i\.)
3 В формулах (23.23) и (23.24) через Arch(x) и Arsh(x) обозначены обратный гиперболиче-
ский косинус (арсакосинус) и синус (арсасинус) соотиегствспно.
Лекция 23. Синтез БИХ-фильтров 489
Полюсы (23.21) для четных и нечетных N вычисляются но формуле
uz . ((2k + \)n\ f(2A + l)n')
p,t=-sh(v0)sml 2/v— l+jch(vn)cosl -~n . (23.24)
где
Arsh(l/E)
V°” N '
Расчет фильтра Чебышева включает в себя следующие шаги:
1. Задаются требования к допустимым отклонениям ЛЧХ в полосах пропус-
кания и задерживания.
2. Вычисляется параметр е согласно (23.22).
3. Определяется порядок Л' с учетом максимально допустимого откюнення
(минимально допустимого затухания п0) в полосе задерживания, г. е.
па частотах го > (i)fc.
4. Вычисляются полюсы р<* по формуле (23.24).
5. Полученные полюсы пересчитываются в полюсы соответствующего ана-
логового прототипа согласно табл. 23.1.
6. Полюсы аналогового прототипа отображаются на z-илоскоегь согласно
выбритому методу синтеза цифрового фильтра.
Фильтры Чебышева наиболее широко применяются в радиосистсмах для по-
давления помех от соседних радиостанций.
Фильтры Чебышева II рода
Фильтры Чебышева 11 рола (инверсные) обладают монотонной ЛЧХ в полосе
пропускания и равноволновой в полосе задерживания. Функция квадрата
АЧХ /V-го порядка фильтра НЧ имеет вид
|G(»I2 = . m = Q<")/u«'>. (23.25)
l + e“Q (!/<»)
откуда следует, что передаточные функции фильтров Чебышева И рода обла-
дают не только полюсами, но и нулями.
Параметр е. контролирующий пульсации r полосе задерживания, определя-
ется из соотношения
Е= ...!— . (23.26)
V10"»/"’ -1
490
Часть VI. Цифровые фипьтры
откуда нетрудно получить связь между е и 62:
'-а2.
По заданным 5j и б2» как и ЛЛЯ фильтров Чебышева I рода, определяется по-
рядок фильтра как наименьшее целое, удовлетворяющее неравенству
Arch —Д1 - -
N>------
Arch(l/(OC)
Пули инверсного фильтра, рассчитываемые по формуле
Я* =----(23'27)
(2.К + 1m
cos-------
27V
не являются функциями от Е и потому независимы от величины пульсаций
в паюсе задерживания.
Полюсы инверсного фильтра рассчш ываются на основе полюсов р^ прямо-
го фильтра. Для большей ясности процедуры воспользуемся традиционной
записью оператора р в виде комплексного числа
p = O + jS2. (23.28)
Процедура вычисления полюса состоит в следующем:
1. Вычисляются вещественная и мнимая части полюса фильтра Чебышева по
формуле (23.24). где
c = -sh(v0)sin^^~^^-^ Q = ch(v0)cos^^^——(23.29)
2. Рассчитываются вещественная и мнимая части полюса инверсного фильт-
ра по формулам
3. Полученные по (23.3) величины подставляются в (23.28). что и даег иско-
мый результат
Р*к - a»k + •
(23.31)
Лекция 23. Синтез БИХ-филътрое 491
Алгоритм расчета инверсного фильтра ничем не отличается от алгоритма
расчета чебышевских фильтров I рода.
Инверсные фильтры применяются значительно реже, чем фильтры I рода,
поскольку они требуют реализации нулей. Эго не только усложняет про
граммную и аппаратную реализации, но и увеличивает собственный шум
фильтра за счет введения умножений в числителе передаточной функции.
Тем не менее, инверсные фильтры обладают и важным положительным
свойством: их АЧХ, подобно АЧХ фильтров Баттерворта, является монотон-
ной в полосе пропускания.
23.1.2.3. Фильтры Золотарева-Кауэра
Фильтры Золотарева-Кауэра (эллиптические) характеризуются равноволно-
вой АЧХ как в полосе пропускания, так и в полосе задерживания. Они опти-
мальны в том смысле, что среди всех других фильтров заданного порядка N
и заданной неравномерности отклонения в полосе пропускания 5, эти
фильтры в полосе задерживания обладают минимально возможным значени-
ем максимального отклонения max б2((о), т. е.
max б2 (О) = min .
<^><0^ N.S|
Это означает, что фильтры Золотарева-Кауэра при заданных /V , б( и 52 об-
ладают наименьшей переходной полосой и наименьшим коэффициентом
прямоугольное™ Поэтому такие фильтры применяют а задачах, тре-
бующих высокой избирательности и не критичных к виду фазочастотной ха-
рактеристики, о линейности которой хотя бы в первом приближении в дан-
ном случае говорить не приходится.
Функция квадрата АЧХ фильтра НЧ Золотарева-Кауэра порядка А имеет вид
|G(»|2=—5-4----------; CO=Q/QX, (23.32)
' ' l + e2t/^(o, k,-) 1 *
где:
параметр е имеет тот же смысл, что и для фильтров Чебышева, и определя-
ется формулой
8?
параметр Л, связан с допустимыми отклонениями 5, и б2;
UN — эллиптическая функция Якоби.
492
Часть VI. Цифровые фильтры
Эллиптические функции здесь не рассматриваются, с ними можно ознако-
миться в учебниках по теории функций комплексного переменного. Заметим
только, что при вычислении наносов (23.32) необходимо обращаться к эл-
липтическим интегралам [23]. для вычисления которых в программах синтеза
фильтров используются численные методы.
Примеры синтеза фильтров с использованием рассмотренных типов аппрок-
симации приведены в п. 24. /.
23.2. Синтез БИХ-фильтров методом
инвариантности импульсной характеристики
Рассматриваемый метод исторически является одним из первых методов син-
теза БИХ-фильтров. использующих непосредственную дискретизацию ана-
логового фильтра. Метод вытекает из естественного желания получить такой
цифровой фильтр, импульсная характеристика которого Л(л) хороню моде-
лирует непрерывную импульсную характеристику g(/) аналогового фильтра-
прототипа. Зная ИХ Л(п). с помощью Z-нреобразования (см. Лекцию 5) не-
трудно получить передаточную функцию H(z) цифрового фильтра. Поэтому
данный метод называется также методом стандартного Z-преобразования.
23.2.1. Постановка задачи и ее решение
Пусть задана частота дискретизации Д, а следовательно, и периоц дискрети-
зации Т цифрового фильтра.
Определение:
Под инвариантностью импульсной характеристики понимается равенство
отсчетов ИХ цифрового фильтра h(n) значениям отсчетов ИХ аналогового
фильтра g(t), взятым с периодом дискретизации Г.
Рассмотрим следующую задачу: синтезировать цифровой фильтр, импульс-
ная характеристика которого h(»T) (рис. 23.5, б) совпадает с импульсной
характеристикой g(t) (рис. 23.5. а) аналогового фильтра-прототипа в равно-
мерно распределенных точках, взятых с периодом цискретнзации Т.
Для решения задачи необходимо:
О найти импульсную характеристику прототипа ^(/);
□ получить импульсную характеристику БИХ-фильтра h(nT) путем дискре-
тизации g(/> с периодом Т (рис. 23.5)
Л(иТ) =.?(/)[,=„г;
Лекция 23. Синтез БИХ-фильтров
493
□ найти передаточную функцию БИХ-фильтра, выполнив ^-преобразование
Л(лГ).
п=0
Л(«Т)
б
Рис. 23.5. Импульсные характеристики: аналогового прототипа (а)
и цифрового фильтра (б)
Решение. Пусть известна передаточная функция устойчивого аналогового
фильтра-прототипа G(p) (р —оператор Лапласа; р = о + j'Q ; для устойчи-
вости о<0), имеющая М полюсов р^ (I —номер полюса, / = I. 2,..., М).
Найдем ИХ g(t), для чего представим функцию G(p) в виде суммы простых
дробей (в предположении, что все полюсы простые и функция G(p) яалясгся
правильной дробью, т. с. степень числителя не превосходит степени знаменателя)
М А
G(p)=^-------(23.33)
i=iP~P»i
где Ai — коэффициент разложения при i-ом полюсе. Коэффициент разложе-
ния может быть как вещественным, так и комплексным в зависимости от того,
является ли i-й полюс вещественным или комплексным. В последнем случае
494
Часть VI. Цифровые фильтры
как полюсы, так и соответствующие им коэффициенты разложения могут
встречаться лишь сопряженными парами. Коэффициенты разложения могут
быть найдены по формуле
Д = lim (p-p4)G(p).
p-*p-i
Как известно, импульсная характеристика прототипа является обратным пре-
образованием Лапласа передаточной функции
g(/) = /?'{G(p)} = L 1
м
J^l
р ~ p*i
откуда по свойству линейности преобразования Лапласа имеем
М [ I 1 м
g(4) = £ ДГ1 -------- = X Дел" .
/=i lP”p*d 4=1
Дискретизируя §(/) с периодом Т (это и есть непосредственная дискретиза-
ция аналогового фильтра), получаем импульсную характеристику синтези-
руемого БИХ-фильтра
м м , \П
ЦпТ) = g(t)\l=:ilT = X Л^пТ = X А [е^7 ) . (23.34)
1 = 1 4=1
Найдем передаточную функцию БИХ-фильтра
°° М / тМ
Н(г)=У ЕДр')
н=0 i=| Х 1
М » , _хл М Д
вмя
Выражение (23.35) в общем случае, как было отмечено ранее, содержит ком-
плексные коэффициенты. Для перехода к передаточной функции с вещест-
венными коэффициентами необходимо попарно сложить дроби, имеющие
комплексно-сопряженные полюсы, в результате чего получим М/2 звеньев
второго порядка с вещественными коэффициентами
А , А* ... 1
\-ер‘^г' l + оцг 1+«2,г-2
(23.36)
При обозначениях:
Ai-Cj + jdj-, A^Cj- Jd^
е’’"' - = COS^4T) + jr4 sinCa./C) = + jt]tl;
ер-<г = jn")7 =rwcos(a_/)-,/r,/sin(a./n = £.i-Mi
Лекция 23. Синтез БИХ-фильтров
495
нетрудно установить связь между коэффициентами простых дробей и звена
(23.36):
Ьа = 2с,; fc), = -(С;4„ +
"2(=Й + П?,-
Из (23.35) и (23.36) получаем искомую передаточную функцию БИХ-
фильтра., импульсная характеристика которого инвариантна импульсной ха-
рактеристике аналогового про го типа,
Л*/2 «/2 ?»„ + Л 7 1
// (z) = X им=X —_ (2337)
HI +n2;Z “
При выводе (23.37) предполагалось, что полюсы комплексные, в случае
же вещественного полюса цифровой фильтр бу тег имечь также
вещественный полюс z*,- = e~n,'f. которому соответствует звено I-го норячка
вида
с вещественным коэффициентом разложения.
Рис. 23.6. Структурная схема БИ Х-фильтра
согласно методу инвариантности ИХ прототипа
496
Часть VI. Цифровые фильтры
Примечание
Нечетное количество полюсов М означает, что имеется хотя бы один i-Й ве-
щественный полюс; тогда соответствующее ему r-е звено 1-го порядка (23.38)
надо вынести за знак суммы, после чего верхний предел суммирования опре-
делить как (М -1)/2 •
Передаточной функции (23.37) соответствует параллельная структура фильтра
(рис. 23.6).
23.2.2. Свойства БИХ-фильтров,
синтезируемых методом инвариантности
импульсной характеристики
Для изучения свойств синтезированных фильтров сопоставим функции
(23.35) и (23.36) и установим связь между аналоговой и цифровой областями.
1. Соотношение между комплексными переменными р и ; имеет вид
г = с''т. (23.39)
что полностью соответствует стандартному Z-иреобразованию
(aw. Лекцию 3), чем и объясняется название мегода: это соотношение
нетрудно получить из знаменателя (23.35), если приравнять его к нулю и
опустить индекс I:
2. Аналоговые £2 и цифровые (i) частоты r пределах от -((0^2) до <0j/2
равны друг другу. Действительно.
- = ге№ = = e^rejQT e rejUT. (23.40)
откуда вытекает равенство частот Q =(0 в пределах от -(со ,/2) до сОд/2
и линейность их соотношения за пределами этой области.
3. Как и в стандартном Z-прсобразовапин, соотношение между z- и р-
плоскостями носит периодический характер, г. е. каждая из горизонталь-
ных полос шириной 2п/Т р-нлоскости отображается па всю z-плоскость
(си. н. 3.1), т. е. метод инвариантности ИХ нс обеспечивает однозначное
отображение р-нлоскостн на z-плоскость.
4. Из предыдущего пункта следует, что комплексная частотная характери-
стика цифрового филыра периодична с периодом, равным частоте дис-
кретизации Со,*. и связана с частотной характеристикой дискретизируемо-
го аналогового фильтра соотношением, подобным соотношению между
Лекция 23. Синтез БИХ-фильтров 497
спектрами аналоговых и дискретных сигналов (aw. Лекцию 10), поскольку
частотную характеристику можно рассматривать как спектр импульсной
характеристики
W(e;“T) = yti фао+taoj].
Отсюда ясно, что при дискретизации ИХ реального аналогового фильтра-
прототипа неизбежно возникает наложение частотных характеристик
цифрового фильтра вследствие неограниченности частотной характери-
стики прототипа по полосе частот; причем наложение в принципе не уст-
ранимо при любом Т . Тем не менее форма частотной характерис тики про-
тотипа сохраняется, за исключением тех частотных областей, где имеет
место эффект наложения.
5. При высоких частотах дискретизации вследствие малости величины Т
цифровой фильтр может иметь слишком большое усиление. Чтобы этого
избежать, обычно в передаточную функцию (23.35), а потому и в (23.37).
вводится коэффициент Т:
М д
1-еЯф* z
тогда импульсная характеристика записывается в вице
КнТ)^Т^А\еР^\ .
f = I
6- Если устойчив аналоговый фильтр-прототип, устойчив и соответствую-
щий ему цифровой фильтр. Это объясняется тем, что полюс р^, лежащий
в левой р-полуплоскости— области устойчивости прототипа, преобразу-
ется согласно (23.39) в полюс z*,-, лежащий внутри единичного круга —
области устойчивости цифрового фильтра.
7. Нули передаточной функции в общем случае отображаются иначе, нежели
полюсы, поскольку они зависят от полюсов и коэффициентов разложения.
8. Свойство оптимальности прототипа не сохраняется, поскольку форма его
АЧХ сильно искажается на участках наложения, имеющих место в облас-
ти верхних частот (т. е. близких к л).
9. В большинстве случаев не целесообразно синтезировать фильтры верхних
частот и режекторные вследствие присущего методу эффекта наложения.
496 Часть VI. Цифровые фильтры
23.2.3. Процедура синтеза БИХ-фильтров
методом инвариантности ИХ
Процедура синтеза БИХ-фильтров методом инвариантности ИХ аналогового
прототипа следует из результатов, полученных в пп. 23.2.1 и 23.2.2. Для син-
теза БИХ-фильтра необходимо выполнить следующие шаги:
I. Задать требования к АЧХ или характеристике ослабления (затухания)
цифрового фильтра.
2. Рассчитать нули и полюсы аналоговою фнльгра-прототина, воспользо-
вавшись любой из известных методик.
3. Построить передаточную функцию аналогового фильтра-прототипа G(p).
4. Разложить G(p) на простые дроби.
5. Записать передаточную функцию цифрового фнльгра H(z) на основе со-
отношений (23.36) и (23.37).
6. Выбрать структуры биквадратных звеньев с учетом пополнительных тре-
бований, например: снизить эффекты квантования (см. Лекцию 16) или
уменьшить необходимую память (см. Лекцию 7).
Лекция 24
Синтез БИХ-фильтров методом
билинейного Z-преобразования
Как было указано ранее, основным недостатком метода инвариантности им-
пульсной характеристики прототипа является искажение АЧХ соответст-
вующего цифрового фильтра вследствие наложения АЧХ. что объясняется
периодичностью, а потому и неоднозначностью отображения /7-плоскости на
z-плоскость. Причем эти искажения оказываются столь велики, что метод
инвариантности накладывает ограничения на синтез цифровых фильтров
верхних частот, режекторных и широкополосных фильтров. От этого недос-
татка свободен другой метод синтеза БИХ-фильтров по аналоговом)
прототипу, который основан па представлении комплексного оператора />
как функции комплексной переменной z. Такое представление оператора р
имеет вид дробно-рациональной функции от z"1 первого порядка и названо
билинейным /-преобразованием; именно ему и уделяется основное внимание
в данной лекции.
Возможен также синтез БИХ-фильтров непосредственно в z-области с помо-
щью отображений цифрового ФПЧ. синтезированного по аналоговому прото-
типу, r другой цифровой фильгр. Суть таких отображений излагается в и. 24.2.
24.1. Билинейное Z-преобразование
24.1.1. Определение билинейного Z-преобразования
Воспользуемся полученным в л. 23.2.2 соотношением (23.39)
г=ерТ
и выразим комплексный оператор р через комплексную переменную г
1 ,
p = ylnz.
17 Чые. 165
500
Часть VI. Цифровые фильтры
Представим In z в виде ряда Тейлора
Взяв пераый член этого ряда, получим
(24|)
Перейдем к отрицательным степеням переменной z путем умножения чис-
лителя и знаменателя па , что даст
(242)
или при обозначении у = 2/Г
P = Y-^-r- (24.3)
1+ Z
Обратная зависимость z от р имеет вид:
г = ^. (ЫА)
ч-р
Передаточная функция цифрового фильтра H(z) получается из персча-
точной функции аналогового фильтра G(p) заменой р на г согласно
(24.2), т. е.
//U) = G(p)| ( (24.5)
► Преобразование (24.2) представляет собой дробно-рациональную функцию
первого порядка от и называется билинейным Z-преобразованием. Это
преобразование обеспечивает одпошачпое ишоб/хгжемие p-плоскости па
г-плоекость. что будет показано далее.
Примечание
В литературе и 1 га практике иногда используется замена (24.3) при у = 1
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования 501
24.1.2. Свойства билинейного Z-преобразования
1. Билинейное 2-преобразовапис обеспечивает однозначное отображение р-
плоскости на ^.-плоскость (рис. 24.1).
• Частотная ось j'Q однозначно отображается в единичную окружность.
Действительно, е типичная окружность описыаается равенством
z = <?Jt,>T (г = 1), а оператор р = о + /Q для частотной оси имеет вид
р-Д2, поскольку ст = О. Тогда из (24.4) получаем
т = Ч + № - rejn&z) = и2 + ^,
у-;£2 \Y2+Q2
Ясно, что г = 1, и потому имеем единичную окружность. Рассмотрим,
каким образом отображаются положительная и отрицательная области
частотной оси /Q па z-плоскость, для чего определим аргумент z :
, ч О. -Q „ Q QT
arg(z) = <p(s2) = arctg-arctg-= 2arctg— = 2arctg--.
у у 7 2
Рассмотрим отображение некоторых точек p = jQ на z-плоскость:
£2 = 0; <р(£2)=(Х г = еЛ<п, = 1;
£2 = ±оо; (р(£2) = ±2arctg(oo) - +2-^ - ±п; z = = e±-fn = -I;
£2 = ±— = ±y; <p(£2) = 2arclg(±Y/Y) = +2arclg(l) = ±2— = ±— ;
7’ 4 2
г = еЛХП)=£,±Л/2=±у.
Полученные соответствия указаны в габл. 24.1. Продолжая подобные
вычисления, можно убедиться (рис. 24.1), что ось JD однозначно ото-
бражается в единичную окружность па z-плоскости, причем положи*
тельная область частотной оси jQ отображается па верхнюю, а отри-
цательная область — на нижнюю полуокружность.
Таблица 24.1, Отображение оси jQ ма z-шоскость
Часто! а £2 Значение ф(£2) Значение z
0 0 1
±со -1
+Y = й/т ±п/2 ±7
502
Часть V!. Цифровые фильтры
• Левая р-полуплоскость однозначно отображается внутрь единичного
крута, а правая р-полуплоскость — вне его.
Для доказательства этого утверждения достаточно знать, в каких пре-
делах лежат значения радиуса г. Воспользуемся выражением (24.4),
куда подставим оператор р = а+- уЙ, и исследуем г = |с| при положи-
тельных и отрицательных значениях а:
I |_|у + о + уй|_ kv*0)" * &
2 ^(у-о)Э+й2
Числитель подкоренною выражения при а<0, что соответствует ле-
вой р-полуплоскости. оказывается больше знаменателя, поэтому г<1,
и левая р-полуплоскость отображается внутрь единичного круга г-
плоскости. При о>0, что соответствует правой р-полуплоскости. чис-
литель оказывается больше знаменателя, поэтому г>1 п правая р-
полуплоскость отображается на всю г-плоскость вне единичного круга.
Рис 24.1. Отображение р-плоскосгн на г-плоскость
при билинейном /-преобразовании
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования 503
2. Цифровой фильтр устойчив, если устойчив его аналоговый прототип, по-
скольку полюсы последнего лежат в леаой р-полуплоскости, отображае-
мой внутрь единичного круга z-плоскости.
3. Соотношение между аналоговыми £2 и цифровыми О) частотами принци-
пиально нелинейно, т. е. шкала частот деформируется.
Найдем это соотношение из (24.2) при p = j& и г = е^,)Т, поскольку рас-
сматриваются только частотная ось и единичная окружность:
2 2е"м/2(еМ/2-е’да) . 2 -е ушГ/2)
т + Т +е-]ыГ/2} ~ J т (с^/2 ’
откуда следует:
= (24.6)
2 Q.T
ш =—arctg----. (24.7)
Т 2
Связь между частотами Q и 0) показана иа рис. 24.2. Полученной нели-
нейностью пренебрегать нельзя, поэтому в процессе синтеза фильтра не-
обходимо пересчитывать частоты из цифровой области в аналоговую. а
затем из аналоговой области в цифровую. Восстановление цифровых час-
тот происходит автоматически, поскольку оно заложено в формуле (24.4),
которая используется для пересчета в z-область результатов, полученных
для аналогового прототипа (сл/. п. 24.1.4).
Рис. 24.2. Связь между аналоговыми и цифровыми частотами
4. В цифровой области сохраняются свойства оптимальности АЧХ аналого-
вого прототипа вследствие однозначности отображения частотной оси
504
Часть VI. Цифровые фильтры
в единичную окружность, что исключает эффект наложения, характерный
для метода инвариантности импульсной характеристики.
5. Порядок цифрового фильтра равен порядку аналогового прототипа, т. е.
количество их полюсов одинаково. Количество пулей ЦФ совпадает с ко-
личеством нулей прототипа, учитывая и нуль прототипа на бесконечности
ро =«>.
Пример 24.1
Передаточная функция прототипа
G(p) = —
p + a
имеет полюс р* = -а и нуль р0=°°. Для получения произведем
в G(p) замену (24.2)
"К* 2— Г ZT •
1 —г (у + я)-(у-п)г
YTTF+"
Видно, что H(z) имеет один ожидаемый полюс
г.=^.
у+ п
согласно формуле (24.4), и появился один вещественный нуль £<> = -1, со-
ответствующий нулю р =со, поскольку при билинейном преобразовании
р = 00 отображается в точку z = -1.
6. Деформация шкалы частот означает, что метод билинейного Z-
преобразова t1 и я:
• пригоден лишь в тех случаях, когда требования к АЧХ фильтра-
прототипа задаются ступенчатой функцией частоты, что свойственно
частотно-избирательным фильтрам (114, ВЧ. ПФ, РФ):
• не пригоден для синтеза корректирующих фильтров (фильтров с про-
извольными АЧХ), фильтров с линейной ФЧХ. хотя бы прототип и об-
ладал таким свойством, а также чля сохранения импульсной характе-
ристики прототипа; иначе говоря, ни фазочастотная, пи импульсная
характеристики аналогового прототипа не сохраняются.
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования
505
24.1.3. Сравнение методов
инвариантности импульсной характеристики
и билинейного Z-преобразования
Сравнение указанных методов синтеза цифровых фильтров удобно провести
с помощью передаточной функции прототипа пример 24./)
G(p) = — ,
p+a
имеющей единственный полюс р* - -а.
Ранее уже было показано, что при билинейном Z-преобразовапии исключает-
ся эффект наложения АЧХ. Поэтому остановимся более подробно на сравне-
нии фазочастотпых и импульсных характеристик цифровых фильтроа, полу-
чаемых методом инвариантности импульсной характеристики и методом
билинейного Z-нреобразования.
Импульсная характеристика прототипа имеет вид:
й(/) = г'|—| = е-".
поэтому ИХ Л,||Ш(»7') цифрового фильтра при методе инвариантности со-
гласно (23.34) представляет собой затухающую цифровую экспоненту
Л,„.н("П = я(О|,=„/
которой соответствует передаточная функция ЦФ (см. табл. 3.2)
^ннв(?) . -ат -1 '
1-€ Z
Отсюда нетрудно вывести ФЧХ
<Ршж (w) = -arctg
е a1 sin(cor)
1 - е~аГ cos(C07’)
Применив метод билинейного Z-преобразования к G(p), получим переда-
точную функцию ЦФ
Н(г)= 1 + г ' = Y + n Y+o4 _'
(Y 4-«)-(Y-«)z-1 ] Y-o.-i 1-«|Г'
y + rz*’
506
Часть У! Цифровые фильтры
откуда имеем импульсную характеристику
Л(п) = Ь0«]" +^«|Я
и фазочастотную характеристику
, 4 -/> sin(<joT) -a. sin(ci)T)
(p(co) = arctg--J----------arctg----1---------=
/^+^cos((i>r) l + tfrcos((i)r)
--—-* sin(ti>T)
. Y + rt
— -arctg—t—---------------
----cos(coT) 1 + ———cosfeor)
.... Y + «
-(y-«)sin(ti)7’)
(Y + a) + (Y-f/)cos(tor)
= arctg
———sin(ci)T’)
Y + fl
-sin(co'r)
= arctg ------ - arctg
I +cos(coD
Рис. 243. Импульсные характеристики цифровых фильтров:
при мегоде инвариантности ИХ (а), при методе билинейного Х-прсобразовапия (б)
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования
507
<p(f) IpauJ
На рис. 24.3 и 24.4 показаны импульсные и фазочастотные характе-
ристики цифровых фильтров, полученные для рассмотренного примера
при Т = 2 (у = 1) метолом инвариантности ИХ и методом билинейного
Z-преобразования. Из полученных формул и рисунков ясно, что пи импульс-
ная, пи фазочасто'1ная характеристики прототипа не сохранились. Но в мето-
де билинейного Z-преобразования такая затача не ставилась.
24.1.4. Процедура синтеза цифрового фильтра
при билинейном Z-преобразовании
Заметим, что свойства билинейного Z-преобразоваиия требуют учета нели-
нейной связи между цифровыми и аналоговыми частотами (24.6), а реализа-
ция передаточной функции фильтра в виде каскадного соединения звеньев
вызывает необходимость введения коэффициентов масштабирования с целые
уменьшения шумов квантования (см. Лекцию 16). В связи с этим процедура
синтеза ЦФ состоит в следующем:
1. Задаются требования к цифровому фильтру (рис. 24.5, а) с указанием тина
аппроксимации АЧХ.
508
Часть VI. Цифровые фильтры
Рис. 24.5. Задание требовании к цифровому фпльгру и аналоговому прототипу:
требования к ЦФ (а), преобразование цифровых частот в аналоговые (б),
требования к аналоговому прототипу («)
2. Формулируются требования к аналоговому прототипу (рис. 24.5, б, в):
• пересчитываются граничные частоты ц цифрового фильтра в гранич-
ные частоты Й/ прототипа по формуле (24.6)
• оставляются без изменения допустимые отклонения 8| от единицы
(в полосе пропускания) и 52 от ИУЛЯ (в полосе задерживания);
• сохраняется заданный тип аппроксимации ЛЧХ.
3. Рассчитываются по справочнику или аналитически (но формулам) нули
и полюсы р*к прототипа, Л = 1,2..........К (К —количесгао полюсов
прототипа).
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования 509
4. Нули и полюсы прототипа пересчитываются в z-область по формуле (24.4)
у-р ’
при этом восстанавливаются цифровые частоты.
5. По комплексно-сопряженным нулям = и комплексно-сопряженным
полюсам = z*k формируются полиномы второй степени с вещест-
венными коэффициентами, которые затем используются в качестве числи-
телей и знаменателей биквадратных звеньев соответственно. Например,
для комплексно-сопряженной пары полюсов имеем:
=> (l + z.tz'l)(l + zrt+1z'l) = l+flltz' +л,Лг'2.
где alt = -2E.J., a2Jt = c2t + .
Такой способ компоновки звеньев является рациональным, поскольку
обеепечиааег малый уровень собственного шума звена.
6. Формируются К/2 биквадратных звеньев вида
Нк (г) = +\г~' (24.8)
1 + + a2kz
по правилу близости добротностей нуля и полюса. Добротность Q пуля
или полюса определяется по формуле
Qk (24.9)
|-Г*
где Г(. — радиус полюса (нуля), — нормированная частота (угол) по-
люса (нуля).
Примечание
Если коэффициенты и равны пулю, имеем звено перво! о порядка, нуль
и полюс которого расположены на вещественной оси с-плоскости. Fenn paanvc
нуля равен единице (нуль лежит на единичной окружности), то в пару нуль-
полюс войдет нуль, ближайший к полюсу по частоте (углу).
510
Часть VI. Цифровые фильтры
На рис. 24.6 показан принцип объединения пулей и полюсов при форми-
ровании биквадратных звеньев; согласно (24.9) пары нуль-полюс состав-
ляют:
• нуль z<,| и полюс z*|. имеющие практически одинаковые радиусы и
являющиеся ближайшими относительно друг друга по частоте:
• нуль находящийся на единичной окружности, и ближайший к нему
полюс z*2 J
• вещественные нуль и полюс
Рис. 24.6. Принцип объединения нулей п полюсов в биквадратные звенья
Получаемая передаточная функция представляет собой произведение К/2
биквадратных звеньев вида (24.8)
К/2
//(£)= П
k = \
чему соответствует каскадная структура фильтра.
7. Для биквадратных звеньев выбирается одна из известных струюур (не ка-
ноническая или каноническая), а звенья в каскадной структуре фильтра
размещаются в порядке возрастания добротности полюсов с целью
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования 511
уменьшения уровня собственного шума фильтра. Вычислим добротности
полюсов па рис. 24.6 по формуле (24.9):
^0^/6
1-Л 1-0.64
А = 0,85-0.4л
" 1-г,2 0.2775
_ r3&j _ 0.21-0
СА —---—-------------и.
1-г? 1-0,0441
Согласно полученному соотношению добротностей £?з<ф<£?2 звенья
необходимо разместить в порядке
//(z) = //3(z)W,(z)W2(<:)-
8. Для каждого звена, во избежание переполнения его сумматора, рассчиты-
вается коэффициент масштабирования но следующему правилу, учи-
тывающему характеристики предыдущих звеньев:
• для первого звена на частоте резонанса <оа вычисляется значение его
ненормированной АЧХ
| Н, (<?7‘"'г )| = max | Нх (eios'‘ )|;
величина, обратная полученной, является коэффициентом масштабиро-
вания , включаемым на входе первого звена, а потому и на вхоте
всего фильтра
и, =/|„1(е7а|7’)|;
• для второго звена:
О на час tone резонанса (02 вычисляется значение его ненормирован-
ной ЛЧХ
|7/2(С^,')| = тах|7/2(£^')|;
О в предположении, что на входе фильтра действует гармонический
сигнал с частотой, равной резонансной частоте со2, вычисляется
значение АЧХ первого звена |/7, (е^1 )| на этой частоте и умножа-
ется на Ц]; эта операция необходима, чтобы учесть влияние уже
512
Часть VI. Цифровые фильтры
рассчитанного коэффициента масштабирования первого звена, ко-
торый ослабляет сигнал, поступающий на вход второго звена; если
этого не предусмотреть, коэффициент масштабирования р2 может
оказаться избыточным;
О рассчитывается коэффициент масштабирования второго звена по
формуле
1 I
• д.чя всех последующих А'-ых (к-3. 4,.... К/2) звеньев алгоритм повто-
ряется в предположении подачи па вход фильтра гармонического сиг-
нала с частотой, равной резонансной частоте Cty £-го звена;
• Оля последнего М-го звена (М = tf/2) коэффициент масштабирования
рассчитывается по формуле
______________1_____________.
11 + л , -_/2шиГ|
+ а2.Ме |
• с целью уменьшения количества умножителей (которые, по идее,
должны устанавливаться перед каждым звеном), а следовательно,
и снижения собственного шума фильтра, коэффициент масштабирова-
ния А-го звена вносится в предыдущее (к -1 )-е звено, а связи с чем пе-
ресчитываются коэффициенты числителей звеньев, составляющих
фильтр; коэффициенты масштабирования первого и второго звеньев
учитываются в числителе первого звена.
Пример 24.2
Рассчитать фильтры нижних частот, используя аппроксимации Баттерворта.
Чебышева I и 11 рода. Золотарева-Кауэра. при следующих требованиях:
П частота дискретизации /д = 1000 Гц;
П частота среза Д = 160 Гц;
□ граничная час гота Д. =240 Гц;
□ допустимые отклонения в полосах пропускания и задерживания
fiI=fi2=0,l.
Решение. На рис. 24.7—24.10 изображены частотные характеристики и карты
нулей и полюсов фильтра нижних частот, рассчитанного с помощью пакета
программ FD-3 при различных типах аппроксимации.
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования
513
Рис. 24.7. Характеристики фильтра Баттерворта:
АЧХ la). ФЧХ 16) и карта нулей и полюсов (с)
Из сравнения характеристик видны те особенности АЧХ и ФЧХ, которые
присущи данному типу аппроксимации и были указаны в п. 23.1.2 при изуче-
нии свойств соответствующих аналоговых фильтров. Поскольку при били-
нейном /-преобразовании оптимальность сохраняется, приводимые здесь
примеры наглядно демонстрируют особенности применяемых типов аппрок-
симации. При этом не только меняется вид АЧХ и ФЧХ, по изменяется и по-
рядок синтезированного фильтра: фильтр Баттерворта (рис. 24.7) имеет поря-
док 6 (для реализации требуется три биквадратных звена), фильтры
514
Часть VI. Цифровые фильтры
---------7
Чебышева I (рис. 24.8) и II (рис. 24.9) рода имеют одинаковые порядки 4 (для
реализации каждого из них требуется два биквадратных звена), а фильтр
Золотарева-Кауэра (рис. 24.10) оказывается наименее сложным, поскольку
его порядок равен 3 (для его реализации требуется одно звено первого и одно
звено второго порядка).
Рис. 24.8. Характеристики фильтра Чебышева I ро [а:
АЧХ (а}, ФЧХ (б) и карта нулей и полюсов (с)
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования
515
A(f)
б
Рис. 24.9. Характеристики фильтра Чебышева II рода:
АЧХ (г/), ФЧХ (б) и карта нулей и полюсов («)
Для большей наглядности поведения АЧХ фильтра Золотарева-Кауэра уча-
сток АЧХ, соответствующий полосе задерживания, изображен отдельно
(рис. 24.10,6), из чего видна равноволновость АЧХ как в полосе пропуска-
ния. так и в полосе задерживания.
Что касается ФЧХ. то по этой характеристике явным преимуществом облада-
ет фильтр Баттерворта, у которого ФЧХ в полосе пропускания близка к ли-
нейной. а наихудшим является фильтр Золотарева-Кауэра. Следует также за-
метить, что ФЧХ фильтров Чебышева II рода и Золотарева-Кауэра имеют
скачки на л в полосах задерживания па тех частотах, где АЧХ равна нулю.
516
Часть VI. Цифровые фильтры
Вне. 24.10. Характеристики фильтра Золотарева-Кауэра:
АЧХ («). ЛЧХ в полосе залержнвалня [6), ФЧХ (о) и карта нулей и полюсов (г)
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования 5/7
24.2. Синтез БИХ-фильтров
методом частотных преобразований
БИХ-фильтров нижних частот
Рассмотренные ранее методы синтеза БИХ-фильтроа основаны па предвари-
тельном расчете соответствующего аналогового прототипа с последующим
преобразованием его в цифровой. При этом, во-первых, на всех этапах синте-
за осуществляются преобразования частот, и. во-вторых, сама процедура
синтеза основана на расчете нормированного аналогового 114-прототипа. Как
было показано, такая мегодика имеет ряд недостатков, а именно:
□ при использовании метода инвариантности импульсной характеристики
аналогового прототипа возникает эффект наложения. вследствие чего не-
возможен синтез фильтров верхних частот и режекторных, а также за-
труднен синтез широкополосных фильтров Т14 и полосовых;
П при использовании метода билинейного Z-преобразования существенно
искажается импульсная и фазочастотная характеристики прототипа.
Or этих недостатков свободен другой метод, предложенный Константинидн-
сом [22]. Идея метода состоит в получении частотно-избирательных фильт-
ров (НЧ, В4, Пф. РФ) по известному цифровому фильтру нижинх частот,
называемому цифровым ИЧ-нрототипом, путем рациональных преобразова-
ний комплексной переменной z~l в передаточной функции Я1!Ч(с) цифрово-
го НЧ-прототипа. подобных билинейному преобразованию.
Суть таких преобразований состоит в следующем. Свяжем комплексную пе-
ременную z с известной передаточной функцией //||Ч(<). а комплексную
переменную z —с искомой передаточной функцией //(=). Определим ото-
бражение из z-плоскости на с-плоскость как функцию
z“' = /?(?“'), (24.10)
а обратное отображение
Г1 =Я“'(г-1). (24.11)
Подставив (24.10) в Wll4(z), получаем искомую передаточную функцию
»(:) = W„.,|(2(z"')]. (24.12)
518
Часть V!. Цифровые фильтры
Попятно, что отображения (24.10) и (24.11) должны соответствовать сле-
дующим требованиям:
□ отображение (24.10) должно быть рациона плюй функцией z”’ (или z.
что отпо и то же); именно в этом случае рациональная функция /7||Ч(г)
будет преобразована в рациональную же функцию Н(z);
□ единичный круг z-плоскости должен однозначно отображаться в единич-
ный круг z-плоскости. что обеспечит устойчивость синтезируемого
фильтра;
□ синтезируемый фильтр должен быть физически возможным.
Обозначим частоты в z-плоскости как м и /, а в z-плоскости— как Q
и F: тогда соответствующие комплексные переменные примут вид
- _ и s _ tJ2nFT _
Найдем соотношения между нормированными частотами, чля чего восполь-
зуемся определением (24.10):
Последнее равенство справедливо, если
|/?(<? >Й)| = I.
ra = -aigp?(eTyi2)}. (24.13)
Выражение (24.13) связывает частоты z-плоскости с частотами z-плоскости.
Константинидисом было показано, что удовлетворяющая указанным выше
требованиям рациональная функция K(z-1) имеет вил
я(г‘)=±П '' (24.14)
*=1 l-aAz
где |<Хд|<1 чля устойчивости.
Из функции (24.14) нетрудно получить множество отображений, зависящих
только от констант К и a . Простейшее отображение получается при К = 1
г-‘=«(Г,) = ^—(24.15)
1-az
которое обеспечивает отображение одного Ф114 в другой Ф114.
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования
519
Поставим задачу найти соотношение между частотами (Ьи Q, а также выра-
зить коэффициент а через эти частоты. Подставляя в (24.15) z = eJ<n и
z = ejSi, получаем
- е~&~а
е1ш=--------(24.16)
1-ае
откуда после несложных преобразований имеем соотношение между часто-
тами
А (l-a2)sin6 ,
Q = arctg-------------- (24.17)
2а + (1 + а )cosu>
и выражение для коэффициента а при известных частотах среза и Ц,
sin[(dk
а =-------1—2£2__. (24.18)
sin[(d)x + П3()/2|
Знание частот среза позволяет вычислить коэффициент Ct, подстановка ко-
торого в (24.15) дает необходимое преобразование НЧ —* НЧ. Таким образом,
для получения передаточной функции //(f) ФНЧ с частотой среза П* из
имеющейся передаточной функции //tl4(z) ФНЧ с частотой среза га* необ-
ходимо:
□ рассчитать коэффициент Ct;
□ подставить коэффициент а в формулу (24.15) для получения необходи-
мого преобразования НЧ —* НЧ;
□ воспользоваться заменой (24.15)
"(?) = А/„.,(г)| г-,_и
|l-(1Г’
В табл. 24.2 представлены полученные Константинидисом рациональные
преобразования комплексной переменной z~l (24.10), применяемые к пере-
даточной функции //„„(z) цифровогоНЧ-прототипа.
520
Часть VI Цифровые фильтры
Таблица 24.2. Преобразования цифрового ФНЧ-nponiomuna
к другим фичьтрам
Тип фплыра Преобразование z Расчетные формулы (<й —частота среза ФНЧ-прототипа)
Низках час- тот Г’ -а 1 - аГ’ f_ tinIA-S)/2] sin[«\ +Ях)/2] Йх —заданная частота среза
Верхних частот Г1 + а 1 +CCZ ' 1ЧА+1\>/2] “{А -йх)/2] Йх —заданная частота среза
Полосовой —2 2ау Л - 1 *-rl‘ +*+1 ц Ч«У»-*)/2] еоь[<Ях-Йх)/2]’ MAA’/W2)- где Й* и Й_х —заданные верхняя и ниж- няя частоты среза полосы пропускания
*-1 _2 2а 1 = +1 k+1 1+А
Рсжекторный _2 2(л 1-Л ~ Z + \+к \+к ЧА+А>/2] ЧА-Й.р/2]’ к = igQ йх - й.х )/2]ig( ах /г >. где Пх и Й_х —заданные верхняя и ниж- няя частоты среза верхней и нижней полос пропускания
1+Л | + <
Процедура синтеза цифровых фильтров с помощью преобразования
Конспшнтшшдиса:
1. За щются требования к синтезируемому цифровому фильтру с указвиием
типа аппроксимации АЧХ.
2. По заданным требованиям к цифровому фильтру по известным методикам
рассчитывается аналоговый ФНЧ-прототип.
Лекция 24. Синтез БИХ-фильтров методом билинейного Z-преобразования 521
3. По аналоговому Ф114-прототипу рассчитывается передаточная функция
//„(z) цифрового ФНЧ-прототипа (например, с помощью билинейною
преобразования).
4. В передаточной функции //n(z) цифрового ФНЧ-прбтотипа произвести
замену переменной z~l из табл. 24.2 согласно синтезируемому фильтру.
В тех звеньях, где «0 * 1, числитель и знаменатель разделить на г/0 для
формирования звеньев стандартного вида.
5. При получении каскадной структуры выполнить шаги 7 и 8 процедуры
синтеза для билинейного Z-преобразования (e.w. п. 24.1.4). •
Пример 24.3
Рассчитать филыр верхних частот методом преобразования Копстшггиниди*
са, используя аппроксимацию Золотарева-Качэра. при следующих требова-
ниях:
□ частота дискретизации fA = IOCX) Гц;
П граничная частота Fk =240 Гц;
□ частота среза F* = 3(H) Гц;
О допустимые отклонения в полосах пропускания и задерживания
fil=52=0.1.
Решение. Прежде всего необходимо рассчитать цифровой Ф114-прототип.
В данном примере этого можно не делать. а воспользоваться в качестве про-
тотипа уже рассчитанным в примере 24.2 ФПЧ Золотарева-Кауэра. Это
фильтр 3-го порядка с передаточной функцией
„ t ч 0.304578 + 0,304578?“’ 0,304578+0,034343г"1+О.304578;“2
1-0.513313?“ 1-0,892143?“ +0.700834
Для получения фильтра верхних частот необходимо рассчитать коэффициент
cos
а =-----
cos
и произвести замену
z1 =
А+й/.)/2.
(Йх -йх)/2’
Г1 +а
I + ей 1
522
Часть VI. Цифровые фильтры
Рис. 24.11. АЧХ (al и карта нулей и полюсов (Ш ФВЧ.
рассчитанного методом Копсгантинидиеа
Для расчета коэффициента а найдем нормированные частоты
&х = Wx/A = 2л-160/1000 - 0.32л
и =2л^х//,1 = 2л-300/1000 = 0.6л.
При этих данных имеем: « = -0.138516 и преобразование
Г1 -0,138516
1 -0.138516Г'
Подставляя последнюю формулу в передаточную функцию //нч(с) цифрово-
го НЧ-нрототппа, получаем передаточную функцию искомого фильтра верх-
них частот
(-) _ 0.3346767 - 0,3346767;"' 0,3315179-0,203756’"' + 0,33151797 2
0,92862 + 0,376797;"' 0,88987+ 0,438075;“'+ 0.596444;"2
Лекция 24. Синтез БИХ-фильтров методам билинейного Z-преобразования 523
Оба звена передаточной функции содержат п() Ф 1; для формирования звень-
ев сгвндартпого вида числитель и знаменатель первого звена разделим на
0,92862, а второго звена— на 0,88987. Тогда, переобозначив комплексную
переменную z как г. окончательно получим
„ 0.373422 - 0.373422;"’ 0,354185 -0,228973г"1 + 0.354185г":
//(;) =-----------------:----------------------:------------5---
1 + 0.405759г" 1 + 0,492291г"1 + 0,670259г"2
Амплитудно-частотная характеристика и карта нулей п полюсов рассчитан-
ного фильтра представлены на рис. 24.11; из рисунка видно, что заданные
требования удовлетворены полностью. Следует обратить внимание на рввеп-
ство граничных частот ФНЧ-прототина и рассчитанного ФВЧ (240 I ц).
ЧАСТЬ VII
АДАПТИВНАЯ ФИЛЬТРАЦИЯ
Лекция 25. Введение в линейное предсказание
Лекция 26. Линейные спектральные пары
Лекция 27. Основы адаптивной обработки
сигналов
Лекция 28. Рекуррентные алгоритмы адаптации
Лекция 25
Введение
в линейное предсказание
Основной проблемой, возникающей при анализе недетерминированных сиг-
налов разнообразной природы (речевых, медицинских, сейсмических. !софи-
знческих при поиске и разработке месторождений полезных ископаемых) и
динамических систем, является определение их временных и частотных ха-
рактеристик. поскольку любой недетерминированный сигнал и динамическая
система, как правило, являются нестационарными объектами, что чрезвы-
чайно усложняет их анализ.
Однако всегда можно выделить некоторый временной интервал &i = LT
(Т —период дискретизации), па котором параметры объекта изменяются не
слишком сильно. Такой интервал нвзывают шипервачом квсиистацчоиарло-
епш, а параметры объекта на этом интервале считаются пос тоянными.
От резок сигнала х(пТ) па интервале А/ называется кадрам.
Если построить достаточно точную параметрическую модель объекта (сигна-
ла или системы) для интервала квазиствционарности, то ее можно использо-
вать в самых различных случаях, например в системах управления и сжатия
данных.
Самыми простыми являются линейные модели, которые легко описываются
в виде разностных уравнений и в терминах Z-преобразования (перс тючных
функций). Наиболее полной в указанном смысле моделью является рекур-
сивная система порядка .V - 1, представляемая пере заточной функцией
JV-I
... х /=0
528
Часть VII. Адаптивная фильтрация
или соответствующим разностным уравнением
Л'-l М-1
у(я) = X bix(n X “кУ<п-к)
j=0 Л=1
Наиболее широко в настоящее время применяется полюсная модель, числи-
тель передаточной функции (леввя сумма в разностном уравнении) которой
содержит только один коэффициент /;0
М-1
1+ X "J Z *
к = 1
а разностное уравнение имеет вид
Л/-1
у(и) = ^-Ч«) - X «I v(" - *) •
4=1
25.1. Постановка задачи
линейного предсказания
Пусть на некоторую линейную модель системы с передаточной функцией
Я(г) (рис. 25.1) воздействует сигнал возбуждения .v(/i), а на ее выходе фор-
мируется сигнал у(н). Параметры системы, т. е. коэффициенты передаточ-
ной функции, не известны.
возоуждеимя
сигнал
Рис. 25.1. Линейная модель системы
Требуется найти коэффициенты [ак} такие, чтобы на интервале квазиста-
ционарпости выполнялось равенство
м-1
У(И) = ^А’ОО- у aky(n-k)
*=1
при условии, что сигнал возбуждения а(/|) известен. Сигнал возбуждения
может быть либо импульсным, либо белым шумом, что характерно, напри-
мер, для модели речсобразования.
Лекция 25. Введение в линейное предсказание
529
Фактически необходимо предсказать значение сигнала у(и) но его износi-
ным предыдущим или последующим отсчетам1. В первом случае говорят, чю
предсказание осуществляется вперед, а во втором — назад (рис. 25.2). Далее
в лекции будет рассматриваться предсказание вперед.
Предсказание назад 11рсдсказапнс вперед
4---------------------------------------
L отсчетов предсказания,
выделяемые окном Хэмминга
(кадр)
Рис. 25.2. Предсказание назад и вперед
(соответствующие предсказываемые отсчеты обведены штриховыми линиями)
Линейное предсказание (ЛП) — это вычислительная процедура, позволяю-
щая по некоторой линейной комбинации L предшествующих у(н-/).
I = 1, 2,..., L, взвешенных отсчетов недетерминированного сигнала предска-
зать (с некоторой точностью) будущее значение отсчета. Отрезок сшиала из
L отсчетов (рис. 25.2) выделяется окном длины I, (обычно окном Хэмминга).
Практическая важность линейного предсказания состоит:
□ во временной области — в оценке будущего значения сигнала но его пре-
дыдущим L отсчетам;
П в частотной области— в получении оценки спектра исследуемого сиг-
нала на его отрезке (кадре) длиной в L отсчетов.
Итогом решения задачи ЛП является получение коэффициентов адаптивного
линейного цифрового фильтра, АЧХ которого с хорошей степенью прибли-
жения совпадает с формой спектра сигнала на кадре.
Задача линейного предсказании может быть сформулирована следующим
образом:
найти коэффициенты } некоторой линейной системы, на выходе ко-
торой наблюдается сигнал у(п). н = 1, 2....L, при условии, что сигни?
Подобные работы относятся к задачам анализа временных рядов. Оли ста hi интенсивно раз-
виваться с 1933 гола после выхода в спет классической моио1'раф|Ц1 A. II. Колмогорова "Ос-
новные понятия теории вероятностей”. изданной па Немецком языке и ю.иггс.тьсгве 11 [принтера.
530
Часть VII. Адаптивная фильтрация
возбуждения х(п) известен, а сама система описывается передаточной
функцией полюсного типа
H(z) =----Р, (25.1)
1+ X«*z *
к=|
где К — порядок предсказания.
Примем, чго сигнал возбуждения представляет собой цифровой единичный
импульс л(л) = м0(и).
Особенности решения задачи линейного предсказания при возбуждении бе-
лым шумом рассматриваются вл. 25.5.
Подход к решению поставленной задачи состоит в следующем (рис. 25.3).
Согласно (25.1) сигнал у(п) определяется разностным уравнением
х«) = Ао-'С'*)— X «*>(«-<:). п = 1,2,..., L. (25.2)
к=1
Х(«)
Фильтр линейного
предсказания
Линейная модель
системы
Рис. 25-3. К решению задачи линейного предсказания
Включим каскадно с искомой системой КИХ-фильтр, имеющий передаточ-
ную функцию
A(z) = l+f (25.3)
А = 1
коэффициенты которой ак равны коэффициентам ак, т. е. ак =ак. Переда-
точная функция образованной системы получит вид
«об,ц(г) =-ir-----[1+E«Jz’‘] = A>=‘»nst, (15.4)
1+2>л.<Ч *=' )
к=1
где —коэффициент усиления.
Лекция 25. Введение в линейное предсказание 531
КИХ-фильтрс передаточной функцией Л(<) называется фильтром линейно-
го предсказания, или фильтром-предсказателел!^ его порядок К — поряд-
кам предсказания, а его коэффициенты ак — коэффициентами линейного
предсказания.
В действительности коэффициенты ак будут отличаться от точных значений
ак, поэтому предсказываемое значение сигнача у(„) будет отличаться от
точного у(м) на величину ошибки предсквзания (при п>0)
к
е(н) = >(«)-v(«) = у(«)- ^aky[n-k), (25.5)
А-н
которую называют остатком. На рис. 25.4 показана структурная схема вы-
числения остатка е(и). Таким образом, остаток представляет собой сигнал
нв выходе КИХ-фильтра с передаточной функцией (253), т. е. па выходе
фильтра-предсказателя.
Рис. 25.4. Структурная схема системы с фильтром-предсказателем
Структурная схема (рис. 25.4) и формулы (25.4) и (25.5) показывают, что пс-
редаточнвя функция построенной системы с гочноегью до коэффициента
представляет собой обратную передаточную функцию фильтра-
предсказателя
Н(г)=-^-. (25.6)
4(z)
U Зак 165
532
Часть VII Адаптивная фильтрация
В дальнейшем будет показано, что .чиненное предсказание — это способ
оценки спектра сигнала на выходе линейной системы с неизвестными пара-
метрами.
25.2. Решение задачи линейного
предсказания во временной области
Основное внимание в лекции уделяется детерминированному случаю, когда
на входе КИХ-фильтра (см. рис. 25.4) ЯП порядка К ~М —1 действует из-
вестный сигнал у(п), а на выходе фильтра имеем остаток (ошибку предска-
зания) е(я) .
При этих условиях для одного кадра сигнала у(«) из L отсчетов, с учетом
формулы (25.2), запишем разностное уравнение
с(л) = у(н)“ й|У(«-1) -...-«*>(« -2) -...-аку(п - К); л = 0,1, 2,..., L.
Желательно, чтобы для всех н = 1, 2,..., L (исключая л=0) остаток был ра-
вен нулю
е0?) = 0,
т. е. чтобы
y(«)-«jу(л-1)-...-aky(n-2)-...-aKy(n -Л')-0 . (25.7)
Ф|ыыр линейного предсказания
(;iintciiin>t<i нрелск.гмзель)
Поскольку все отсчеты сигнале у(м) известны, составим по (^5.7) систему
линейных уравнений при нулевых начальных условиях для одного кадра из
L отсчетов, причем L» К. Учтем также, что при возбуждении сигналом
и$(п) имеем
« = 0; Д[У(-1) + аку(-2) +... + аку(-К) = у(0) =
и = 1; й]у(О) +—+<7*у(~ 1) +...+- К) = _>(!);
(25.8)
п = 1-, ci^yU -1)+... + аку(1 — 2) +... + аку(1 ~К) = у(1);
и = £; й1у(£-1) + ... + «лу(£-2) +... + aKy(L - К) = y(L').
Лекция 25. Введение в линейное предсказание 533
Провнализируем систему (25.8). в которой число неизвестных коэффициен-
тов равно К, все правые част и известны, количество уравнений равно коли-
честву отсчетов L на анализируемом кадре. Реально L существенно превы-
шает порядок предсказания; например, стандарт LPC“-10 имеет К = 10,
£=120.
Линейные системы, у которых число уравнений превышает число независи-
мых коэффициентов, называют переопределенными. Точного решения пере-
определенных систем нс существует. Обычно для них используют метод
наименьших квадратов Гаусса, когда коэффициенты ak находятся из систе-
мы линейных у равнений, составленных но ошибкам во всех уравнениях
(/ = 1, 2,..., L). Ошибку называют невязкой l-го уравнения. Запишем сис-
тему линейных уравнений по невязкам
Si =?•(!)-
К=1
?/ = >'(/)- 1Лу(1 -*); (25.9)
*=|
=у(£)- УйаИ£-А).
*=1
Получим из (25.9) квадрат средней невязки (средней ошибки предсказания)
(25Ю)
Lt=l
Коэффициенты линейного предсказания (ik должны быть такими, чтобы дос-
тигался минимум (25.10)
q? => min
но всем коэффициентам , т. е. чтобы
, i /. г к т
fcp =-£.'(()-Y,akyV-h =>min. (25.11)
£/ = ||_ A=l J ak
LPC (Linear Prediction Coder)— aoKotcp с линейным предсказанием (вокодер - устройство
сжатия речи).
534
Часть VII. Адаптивная фильтрация
откудв следует, что квадрат средней невязки являегся функцией коэффици-
ентов С^(йА)-
Условием существования минимума функции является равенство
нулю всех ее честных производных по коэффициентам ak . к = 1. 2.К, чго
приводит к следующей системе линейных уравнений относительно коэффи-
циентов ак:
ЛГ* । i Г К
da, Z;;] t=1
у (/-!)=№
Эй,
(25.12;
да%
у(/-У) = О.
Уравнения данной системы легко преобразуются к более удобному виду, что
покажем па примере первого уравнения, где не влияющие на результат кон-
станты 2 и -1/L можно опустить. Рассмотрим уравнение
L
X
Ml
К
у(Г>-£«„>•(/-*)
y(J-l) = O.
Умножим вырвжение, стоящее в квадратных скобках, почленно на v(/-l),
раскроем первую сумму, оставим слева полученную двойную сумму
L К I
X X э,у(/ - «у(/ -1)=£ - о
/=1А=1 / = 1
и поменяем порядок суммирования
К L I
X^X.v(/-^)y(/-l)=X.v(/)v(/-l).
*=1 /=1 J=1
Приведем к такому же виду все К уравнений и раскроем суммы ио к . В ре-
зультате образуется новая система уравнений
Лекция 25. Введение в линейное предсказание
535
л, £у(! -1)>(/ -1) +52 Х.г(/ - Ъу(1 -1) + £>•(/ - -1) =£у(,)у(/ -1);
1=1 1=1 1=1 1=1
Ч 2>(/ -1)у(/ -2)+й2 ХМ' -2)у(/ -2)+...-HI/f £у(,-Л')у(/ -2) =5>(/)у(/ -2);
/=1 /=Е 1=1 1=1
"j X yu - Ъуи - о +-+«а X y(i -fyyv - о+- X уи ~~ KWf - о =Х yU)y(i - 'У-
/=1 f=i i=i /=i
лХ v(z-i)y(/-^)+52f j(/-2)x/-/o+---^XM^^W’^)=X>Vb-(/-^),
/=i /=i i=i i=i
где * = 1,2,...,К, / = 1, 2.К.
Поскольку изучается детерминированный случай, все отсчеты сигнала у(/),
1 = 1. 2, ...,£, и все содержащиеся в системе суммы также известны. Поэтому
имеем систему линейных уравнений относительно неизвестных сц. в кото-
рой коэффициенты при неизвестных выражены суммами.
Обратим внимание на вид этих сумм и рассмотрим их, для чего введем обо-
значения:
£у(/-*)у(/-г) ==/?*;
i=i
Ху(Оу(/-0 = /?,,
i=i
(25.13)
где k — номер столбца, i — номер строки. Ясно, что все эти суммы пред-
ставляют собой коэффициенты автокорреляции с различными относитель-
ными сдвигами. Известно, что коэффициенты автокорреляции являются чет-
ными функциями времени, т. е. их значения зависят только от модуля
разности во времени |г-*|, поэтому имеет место равенство
Rtk ~ Rki»
на основании которого полученную систему уравнений (Кх К) можно запи-
сать в компактном виде
536
Часть VI! Адаптивная фильтрация
+Я]2^1 +...+ = Л»
Я[2^| + ^22^2 + —+ ^2К^К ~
Z^CFj + К,2&2 + —+ + ... + Я1А-£/л- = R,',
RiKat + ... + Як x-i“tf-i + КккЗк = RK.
(25.14)
Система уравнений (25.14), называемая нормальной, легко решается извест-
или
Ra = r, (25.16)
где:
R —симметричная матрица коэффициентов;
а — вектор параметров линейного предсказания;
г — вектор свободных членов.
В силу единственности коэффициентов линейного предсказания ив иссле-
дуемом кадре знак тильды (") для удобства исключен и в дальнейшем ис-
пользоваться ие будет.
25.3. Вычисление коэффициентов
линейного предсказания
Прямые методы решения нормальной системы уравнений вызывают значи-
тельный расход временного и материального ресурсов. Так, метод исключе-
ния Гаусса имеет вычислительную сложность (количество операций сложе-
ния и умножения), пропорциональную К' , и требует К2 ячеек памяти.
Кроме того, для вычисления коэффициентов автокорреляции необходимо
Лекция 25. Введение в линейное предсказание 537
выполнить LK^ (L — длина анализируемого кадра сигнала) операций. Время,
отводимое на вычисление коэффициентов ЛИ, ис должно превосходить пе-
риода дискретизации Т (времени перехода от одного квдра к другому), по-
этому при указанной сложности вычислений обработка сигналов в реальном
времени может оказаться затруднительной и даже невозможной.
Пример 25.1
Оценим возможность работы в реальном времени системы, включающей
линейный предсказатель порядка К = 10. при следующих параметрах:
П длина анализируемого кадра L = 120;
□ частота дискретизации Д = 8000 Гц;
□ время выполнения цифровым процессором одной операции т=50пс (со-
временный среднескоростной процессор ADSP-2105).
Решение. Определим период дискретизации и оценим время глп вычисления
коэффициентов ЛП.
Период дискретизации Т = 1/8000 = 0,125 Ю-3 с.
Оценка времени /Л11, требуемого для вычисления коэффициентов ЛП при за-
данных параметрах, дает величину
=(Л,3 + /.Л'2)т = (1000 + 12000)-50 Ю"’=0,65 10“3 с.
Видно, что время /Н|! в 5.2 раза превышает допустимое (период дискретиза-
ции Г), поэтому необходимо либо уменьшать параметры L и К — тогда мо-
жет потеряться смысл введения линейного предсказания, либо ускорять про-
цесс вычисления с помощью особых процедур.
Рассмотренный пример демонстрирует важность применения быстрых алго-
ритмов вычисления коэффициентов ЛП. Изучению одного из таких алгорит-
мов, используемого во .многих приложениях и ставшего .международным
стандартом, и посвящен данный пункт.
Еще раз обратимся к структуре матрицы R в (25.15). Из определения коэф-
фициентов автокорреляции следует, что:
□ главная дивгональ матрицы состоит только из коэффициентов /^>0, по-
скольку
к* = = X f I v(/ —г)|3 = «о- (25.17)
1=1 /=| /=|
538
Часть VII. Адаптивная фильтрация
Лекция 25. Введение в линейное предсказание
539
откуда имеем также очевидное равенство
яь = Е/(П;
(25.18)
□ любая диагональ, параллельная главной, состоит из одинаковых коэффи-
циентов Rj, поскольку разность во времени j = k-i на диагонали остает-
ся неизменной;
□ матрица является симметричной вследствие рввенства коэффициентов ав-
токорреляции Rjj. = Rfr; -
Матрицы, обладающие перечисленными свойствами, называют теплицевыми
(по имени немецкого математика О. Теплина). Теплицевы матрицы R (25.15)
записывают в более удобной форме
/?□ Я, К2
/?! /?□ ... RK_2
/?2 Rq ... /?к_3
.Rr-1 ^К-2 КК-3 — ^0
25.3.1. Алгоритм Левинсона—Дарбина
Обсуждаемый алгоритм является рекуррентным: коэффициенты ак линейно-
го предсказателя порядка К рскуррентно вычисляются через решения разно-
стных уравнений вида (25.14)
R, = £ at Rj_t, г = 1. 2,..., К, (25.20)
А = 1
когда решение уравнения /-го порядка осуществляется через решение урав-
нения порядка (/ — 1). Это означает, что на Аом шаге вычисляется предсказа-
тель /-го порядка, т. е. система уравнений (25.14) решается последовательно
для i = 1, 2,..., К.
На основании (25.10) и (25.11), опуская несущественный для вычислений ко-
эффициент 1/L, квадрат погрешности предсказания в предсказателе i-ro по-
рядка можно записать в ните
откуда следует, чго теплицева матрица полностью определяется элементами
первой строки (первого столбца). Теперь систему уравнений (25.15) можно
записать в виде
(25.19)
где вектор свободных членов г сформирован из элементов матрицы.
Особая структура системы уравнений (25.19) позволяет организовывать вы-
числения параметров линейного предсказания с помощью быстрых алгорит-
мов, из которых наибольшее распространение получил рекуррентный алго-
ритм Левинсона—Дврбина.
Подставляя в (25.22) определения (25.13) и (25.17), получаем для Е, иную
форму представления
Е,. = R„ - X . i = 1. 2,.... К. (25.23)
*=!
откуда следует, что общая погрешность предсказания имеет два слагаемых,
из которых одно является постоянным, а другое зависит от коэффициентов
предсказания. Ясно также, что. во-первых,
£[) = /?()
И, во-вторых, от шага к шагу, т. е. от предсказателя (r-l)-ro к предсказателю
<-го порядка, полная ошибка предсказания уменьшается
О < Е( < ЕЬ1.
540
Часть VII. Адаптивная фильтрация
В алгоритме Левинсона—Дарвина на каждом i-om шаге вычисляются два
рабочих параметра:
□ полная ошибка Е,- предсказания для предсказателя г-го порядка (25.23);
□ вспомогательный параметр . связанный с ошибкой предсказания.
В стандартных обозначениях рекуррентный ал гори гм Левинсона—Дарбина
состоит в следующем.
Задаются начальные условия
£0 = ЯЬ- (25.24)
Последовательно на /-ом (/ = 1, 2. ....К) шаге итерации производятся вычис-
ления по рекуррентным формулам (25.25)—(25.28):
Jt = l (25.25)
г' Ei-\
«Р-гц (25.26)
(25.27)
(25.28)
С каждым шагом порядок предсказания увеличивается на единицу до тех
пор, пока он не достигнет величины К. Окончательное решение определяется
на /С-ом шаге соо тношением
«А. =«[к>, 1<£<Л'. (25.29)
В теории линейного предсказания вспомогательные параметры г, принято
называть коэффициентами отражения3.
Пример 25.2
Пусть задана система уравнений предсказателя 2-го порядка
к «nJL'bJ Ы'
элементы Л, матрицы R известны. Найти коэффициенты линейного пред-
сказания «I и и-,, используя алгоритм Левинсона—Дарбина.
В литералу ре по статистике тги параметры иазынаютсн ко)ффнцисп1ами частной корреляции.
Лекция 25. Введение в линейное предсказание
541
Решение. Для вычисления коэффициентов ЛП щ и «2 предсказателя 2-го
порядка потребуется только два шага итерации.
Начальным условием является равенство полной ошибки предсказания
(25.24) коэффициенту /?0
~ *() -
На первом шаге итерации согласно (25.25) вычисляется коэффициент отра-
жения
- А-А
Г' " Ео ” «в ’
значение которого присваивается коэффициенту (25.26) в качестве перво-
го приближения
полная ошибка па 1 -ом шаге итерации будет определяться как
На втором шаге итерации получаем:
г->------------------------------------ —п---ч—;
значение коэффициента г, присваивается коэффициенту «2
,/2) _ г .
"2 _ гг •
затем вычисляется повое значение коэффициента а,
(21 _ CD (D _ Ri (. Е»к2 ~КГ )_ .
С<1 —*Г1 /?«1 — 1 z ч I — > ’
/ц /?„-/?, j яг-«г
Е2=(1-г22)Е1.
На этом алгоритм завершается.
Окончательным решением являются значения коэффициентов линейного
предсказания» полученные на втором шаге:
й,=«,(2);
«2=«Р.
542
Часть VII. Адаптивная фильтрация
Примечание
Осталась невыясненной процедура вычисления коэффициента Ьо. Этот коэф-
фициент вычисляют после того, как определены все коэффициенты линейного
предсказания. Можно показать, что справедливо равенство
VVEMi •
* = 1
25.3.2. Устойчивость фильтра-предсказателя
Как известно, для устойчивости полюсного фильтра с передаточной
функцией
W(z) = -^-
A(z)
необходимо и достаточно, чтобы корни полинома A(z) (г. е. полюсы H(z))
лежали внутри круга единичного радиуса. Теплицевы матрицы, с помощью
которых вычисляются коэффициенты ЛП, обладают очень важным свойст-
вом: для полюсных передаточных функций при отсутствии ошибок вычисле-
ния они дают устойчивое решение.
Однако это саойетво может нарушаться вследствие квантования коэффици-
ентов. Проверка принадлежности корней A(z) единичному кругу является
весьма трудоемкой задачей. Однако рассмотренная выше процедура показы-
вает, что необходимым и достаточным условием устойчивости является
выполнение неравенства
Е,>0,
а потому и неравенства
h|<l. (25.30)
что следует из (25.28). Этим обеспечивается простота проверки устойчивости
при вычислениях согласно рекуррентной процедуре (25.24)—(25.29).
Существует также необходимость проверять устойчивость фильтра //(z) по
известным коэффициентам ак, например, при восстановлении его по пере-
данным по каналу связи параметрам. Один из методов такой проверки осно-
ван на вычислении коэффициентов отражения / по коэффициентам линей-
ного предсказания сц с помощью обратной рекуррентной процедуры и
последующей проверки устойчивости по условию (25.30).
Лекция 25, Введение в линейное предсказание
543
Обратная рекуррентная процедура записывается следующим образом:
(25.31)
где:
i принимает значения в убывающем порядке от К до I;
= (if. — начальные значения, 1 < k < К .
25.4. Решение задачи линейного
предсказания в частотной области
Линейное предсказание во временной области, как было показано в преды-
дущих разделах, представляет собой оценку сигнала у{п) по его предыду-
щим L отсчетам; в этом смысле оно несколько напоминает экстраполяцию.
Принципиальное отличие ЯП от экстраполяции состоит в получении коэф-
фициентов ЛП, которые являются коэффициентами полюсной передаточной
функции (25.1). представляющей собой математическую модель линейной
системы (см. рис. 25.2) формирования сигнала у(«). Но если имеется моде-
лирующая систему перецаточная функция
H(z) =-------
к
1+
то нетрудно записать частотную характеристику системы
Н <ei&) =-------------------------.
которая, в свою очередь, представляет собой фурье-изображение импульсной
характеристики Л(н) (c.w. п. 6.1).
Импульсную характеристику можно найти как с помощью обратного
ТгПреобразоваиия передаточной функции, так и с помощью разностного
уравнения (см. Лекцию 4) при условии, что воздействием является цифровой
единичный импульс х(п) - и0(п)
К
Л(и) = *Ь«о(п)-
544
Часть УН. Адаптивная фильтрация
С помощью методов, рассмотренных в н. 25.2, можно показать, что коэффи-
циенты автокорреляции для Л(н) имеют вид
*=0
причем первые (tf + 1) коэффициентов точно совпадают с коэффициентами
автокорреляции R, сигнала у(н)
Rfl(i) = R,, / = 0.1.К. (25.32)
Это дает возможность оцепить спектр сигнала |У(с^9)| на отрезке длительно-
стью LT через ЛЧХ фильтра |//(eJ"9)|. Покажем это.
Во временной области ошибка линейного предсказания определяется разно-
стью (25.5)
Л'
£(п) = >’(«) - JGO = >(«) ~ У «k У(п ~к), 0 < и < t -1.
* = i
где сигнал у(л) отличен от нуля только на ин гервале 0 < n < L -1, а порядок
предсказания равен К. Тогда энергия кратковременной ошибки предсказа-
ния (25.21) примет вид
L-I
и 0
В частотной области на основании теоремы Парссваля (ел/. н. 10.2) имеем
Е = X е2(н) = f |1ЛО-"")]2 А» (25.33)
Подставляя в (25.33) соотношение
получаем окончательное выражение для энергии ошибки предсказания в час-
тотной обзасти
г КШ)|2 .
_U_ J------!—^Ц).
2’1-ф/(<>’)|
Е =
(25.34)
Лекция 25. Введение в линейное предсказание 545
Из выражений (25.32) и (25.34) следует, что:
О минимизация энергии ошибки предсказания Е эквивалентна минимизации
отношения энергетического спектра сигнала к квадрату АЧХ
)| полюсного фильтра (линейного предсказателя);
О при К—> для всех / соответствующие коэффициенты автокорреляции
сигнала и импульсной характеристики совпадают, вследствие чего в пре-
дельном случае
^im =|к(е'ш)|2;
при ограниченном К имеет место приближенное равенство
|//(г'й)|=|г(е'й)|, «•<=»,
причем чем больше К, тем точнее аппроксимация сиекгра сигнала.
Из сказанного можно сделать важные выводы:
□ линейное предсказание аппроксимирует спектр сигнала на кадре (отрезке
его квазистационарносги), имеющем длительность LT, согласно крите-
рию наименьших квадратоа;
□ чем больше порядок предсказания К, гем точнее аппроксимация; причем
во всех случаях более высокая точность обеспечивается вблизи максиму-
мов спектра, а более низкая— в области минимумов; требуемая степень
аппроксимации определяется выбором порядка предсказания К ;
□ порядок К предопределяет количество максимумов спектра, которое ап-
проксимирует линейное предсказание, и это количество равно К/2. Дей-
ствительно, цепь второго порядка может иметь только один максимум
ЛЧХ, соответствующий частоте полюса в основной полосе частот
(gw. Лекцию б), поэтому цепь порядка К = 2т может иметь не более т
максимумов;
О линейное предсказание может рассматриваться как метод кратковремен-
ной оценки спектра сигнала.
Линейное предсказание играет важнейшую роль в системах передачи и обра-
ботки речевых сигналов. где оно используется для построения вокодеров —
устройств сжатия речи.
Сжатие речи означает, что вместо передачи или хранения каждого отсчета
речевого сигнала передается группа параметров, соответствующих кадру.
546
Часть VII. Адаптивная фильтрация
на котором сигнал может считаться стационарным. Так, в простейшем
стандарте LPC-10 (tf = 10) текущий кадр из 120 отсчетов речевого сигнала
представляется десятью коэффициентами предсказания (т. е. коэффициента-
ми модели речевого тракта), а также параметрами возбуждения, чем достига-
ется существенное снижение скорости в канале связи, по которому передает-
ся эга группа параметров. На приеме по полученным параметрам
осуществляется восстановление (синтез) речевого сигнала. Применение ли-
нейного предсказания позволяет снизить скорость передачи в канале
с 96000 бит/с до 1200 бит/с, т. е. сократить се в 80 раз, а потому и сократить
необходимую полосу пропускания канала с 48 кГц до 0,6 кГц, что означает
частотное сжатие сигнала. На этом кадре частотная характеристика мини-
мально-фазового полюсного фильтра 10-го порядка HlQ(eJW) аппроксимиру-
ет спектр речевого сигнала, причем в спектре будет не более 5 максимумов.
25.5. Линейное предсказание
при возбуждении белым шумом
Ранее было рассмотрено линейное предсказание при возбуждении линейной
модели цифровым единичным импульсом. Но для ряда практически важных
применений сигнал возбуждения х(л), как уже отмечалось (cw. п. 25.1), мо-
жет представлять собой случайный стационарный процесс типа белого
шума. Рассмотрим особенности линейного предсказания при таком возбу-
ждении.
25.5.1. Реакция линейной модели
на случайный процесс
Дня дальнейшего (п. 25.5.2) необходимо знание реакции линейной модели на
случайный процесс типа белого шума. В связи с этим поставим задачу:
определить спектр мощности случайного процесса у(п) на выходе ли-
нейной модели при возбуждении ее процессом типа белого шума.
Решение. Выходной процесс у(п) устойчивой линейной модели с импульс-
ной характеристикой 1?(п) при возбуждении случайным стационарным про-
цессом определится по формуле свертки
y(n) = Z lt(k)x(n-k)
с бесконечными пределами суммирования.
Лекция 25. Введение елинейное предсказание
547
Входной х(п) и выходной у(п) процессы могут быть охарактеризованы
своими статистическими средними соответственно;
□ математическим ожиданием (ц, и цу);
О дисперсией (ст* и а*);
□ автокорреляционной функцией ((pvr и <Pyv )-
Найдем математическое ожидание и автокорреляционную функцию <pvv
выходного процесса при условии, что цЛ, gJ и фЛГ известны.
Математическое ожидание по определению и Свойству линейности имеет
вид:
gv=M[y(W)] = M X адл(я-л) = 2 адлнх(н-*)]=щ X Ш).
Поскольку па участке квазистационарности модель устойчива, правая сумма
является константой
X Л(£)== const.
следовательно, математическое ожидание выходного процесса у(л) пред-
ставляет собой постоянную величину
= const,
т. е. не зависит от времени.
Вычислим автокорреляционную функцию (р)Т выходного процесса. По оп-
ределению имеем
Фу>,(п,н + ш) = М{у(н)у(н + /я)) = Л'М X X h(k)h(r)x(n~k)x(H + m-r)[ =
[jt = -oor=-«o J
= У h(k) у A(r)M(x(n-t)x(n + m-r)J.
k = -oo r = —СО
В силу стационарности процесса возбуждения х(п) его функция автокорре-
ляции
M(x(.n-k)x(n + m-r)} + k - г)
548
Часть VII. Адаптивная фильтрация
зависит только от разности во времени; действительно,
п + m - г - (л — к) = m + к - г.
Поэтому функция автокорреляции выходного процесса
<р„(и.п + Н!)= £ Л(А) X Л(г)<Р„('" + к-') = <Р™("0 (25.35)
Д- = ~ОО г = -оо
также зависит только от разности во времени.
Слсчовательно, на выходе линейной модели имеет место стационарный
процесс, что позволяет перейти к вычислению его спектра мощности как
преобразования Фурье автокорреляционной функции.
Найдем z-изображение Ф¥у(г) функции автокорреляции (pwG«), для чего
в (25.35) обозначим 1 = г-к и поменяем порядок суммирования
ipvv(m)= У ф„.(ш-/) У h(k)h(l + k)= У ФХ¥('н-/)!</), (25.36)
/ = ~м> к=-ьь 1=—сл
где последовательность
v(/)= f h(k)h(l+k)
называется корреляционной последовательностью импульсной характери-
стики //(л), или сверткой h(n) и h(-n)
v(T) = h(n)*h(-n). (25.37)
Нетрудно показать, что
= (25.38)
Используя соотношение (25.38), получим z-нзображение свертки (25.37)
Z{v(/))=V(z) = W(z)//(z-1). (25.39)
Теперь обратимся к выражению (25.36), представляющему собой также
свертку последовательностей, поэтому его z-изображспие с учетом (25.39)
имеет вид:
Х«р„(«.)} = Ф„(г) = Флг(г)//(.’:)«(г-1). (25.40)
Лекция 25. Введение в линейное предсказание 549
Отсюда можно получить значение мощности стационарного процесса у(п),
если в (25.40) выполнить подстановку z = ex'1. Предварительно отметим два
обстоятельства:
П в силу четности модуля и нечетности аргумента частотной характеристики
произведение
представляет собой квадра т АЧХ линейной модели;
□ воздействие х(н) типа белого шума имеет математическое ожидание
ЦЛ =0. дисперсию Oj=const и функцию автокорреляции
фм(т) = о^и„(»1)-
где М()(ж) —цифровой единичный импульс, причем Z{h0(«i)) = 1, поэтому
фхг(г)|.=гл =“;=/’«(“)
можно рассматривать как мощность входного процесса.
Подстановка полученных выражений в (25.40) дает спектр мощности процес-
са, наблюдаемого на выходе линейной модели
Ф„ (е П = (Й>) = а* 111 (е )|2. (25.41)
Таким образом, спектр мощности случайного процесса на выходе линейной
модели равен спектру мощности процесса на входе, умноженному на квад-
рат модуля передаточной функции модели.
25.5.2. Особенности линейного предсказания
при возбуждении белым шумом
Полученный в п. 25.5.1 результат говорит о том, что в случае, когда линейной
моделью некоторой системы (например, тракта формирования речевого сиг-
нала) на интервале квазистациопарности выступает полюсный фильтр
'"•-у- ?’ •
1+ ‘
Г I
550
Часть И/. Адаптивная фильтрация
на который воздействует белый шум, оценка спектра сигнала, как и в случае
импульсного возбуждения, сводится к оценке коэффициентов ак, поэтому
общая методика линейного предсказания остается неизменной.
Однако в данном случае следует минимизировать не квадрат ошибки (невязки)
у(1)- £й*у(/-4)
как это поставлено в задаче (25.11), а математическое ожидание квадрата
ошибки
М у(О-£й*Х<-*)
min,
°4
поскольку все у(/) представляют собой случайные процессы.
Проведя ряд преобразований, подобных преобразованиям в п. 25.2, получим
системы, аналогичные системам в л. 25.2, но перед каждой суммой Е теперь
будет стоять знак математического ожидания М . В свою очередь, это озна-
чает, что для построения системы уравнений
S,M £y(/-l)y(l-i) +... + akM tyd-k'fyd-i)
+аКМ ^y(l-KMl-i) =M ’Evibytl-i)
i = l, 2, ...,N; к = I, 2,..., N;
требуется вычислить корреляционные функции
М £ yU-k')y(.l-i) ; 1 = 1.2......N; к = 1,2....N.
(25.42)
Таким образом, процедура линейного предсказания при возбуждении белым
шумом сводится к следующему:
1. Вычисляются корреляционные функции (25.42).
2. Составляется система уравнений (25.15), где вместо коэффициентов авто-
корреляции подставляются значения корреляционных функций.
3. К полученной системе уравнений применяется алгоритм Левинсона—
Дарбина.
Лекция 26
Линейные спектральные пары
Для восстановления фильтра-предсказателя на приемной стороне канала свя-
зи необходимо передавать какие-либо параметры линейного предсказания.
К таким параметрам, кроме коэффициентов ак, относятся коэффициенты
отражения г{ и корни полинома A(z). Поскольку любой из параметров, ао-
первых, должен быть квантован и, во-вторых, подвергается воздействию по-
мех. необходимо выбрать такие параметры, которые допускали бы эконо-
мичное кодирование и обладали хорошей помехоустойчивостью, с тем чтобы
восстановление фильтра-предсказателя осуществлялось с наименьшими по-
терями. Оценим перечисленные параметры с этих позиций.
Коэффициенты ак являются наиболее удобными параметрами, поскольку их
непосредственная подстановка в передаточную функцию (25.1) БИХ-фильтра
приема (восстанавливающего фильтра), порядок которой иа приеме известен,
напрямую решает задачу восстановления. Однако, как доказывается в теории
чувствительности и подтверждается практикой (см. п. 16.4), любой БИХ-
фнльтр чрезвычайно чувствителен к квантованию коэффициентов, что может
выразиться в потере устойчивости фильтра, контроль которой оказывается
непростой задачей. Причем чувствительность тем выше, чем выше порядок
фильтра. Это отрицательное свойство коэффициентов ЛП вынуждает увели-
чивать точность их квантования, вводить помехоустойчивое кодирование и,
как следствие, использовать более высокие скорости передачи, повышать
требования к качеству канала связи. Кроме того, АЧХ восстанавливающего
фильтра очень чувствительна к ак, особенно при высокой добротности по-
люсов H(z) (нулей A(z)). По этим причинам сами коэффициенты ак по
калачу связи не передаются.
552
Часть УН. Адаптивная фильтрация
Коэффициенты отражения г,, будучи связаны с ак рекуррентными соотно-
шениями (25.19) и (25.21), оказываются более предпочтительными для пере-
дачи по каналам связи благодаря трем особенностям:
О они позволяют легко контролировать устойчивость фильтра па приеме, по-
скольку условием устойчивости является выполнение неравенства |/j | < 1;
О диапазон их значений не изменяется с ростом порядка предсказателя К;
□ чувствительность АЧХ к изменению #;• существенно ниже, чем к измене-
нию ак .
Тем нс менее, напрямую коэффициенты отражения обычно также не переда-
ются. Многочисленные зарубежные и отечественные исследования показали,
что равномерное квантование (Q = const ) коэффициентов отражения не явля-
ется наилучшим, поскольку они могут принимать значения от очень малень-
ких до близких к единице, что вызывает необходимость перехода к неравно-
мерному квантованию. В связи с этим коэффициенты отражения
преобразуют в другой параметр g.t который является нелинейной функцией
от /J, и уже к этому параметру применяют равномерное квантование. Удоб-
ным оказалось преобразование
1 * + /i
Я, =lg-—L.
I-'?
из которого на приеме нетрудно получить коэффициенты отражения, а затем,
воспользовавшись обратной рекуррентной процедурой (25.21), вычислить
коэффициенты линейного предсказания.
Как показано во многих исследованиях, рациональными параметрами для
передачи по каналу связи являются корни полинома А(г), поскольку их
квантование оказывает наименьшее влияние па параметры фильтра-
предсказателя. условия устойчивости тривиальны и контролируются элемен-
тарно (корпи, т. е. пули полинома, должны находиться внутри единичного
круга). Тем не менее, корни полинома A(z) не передаются по причине высо-
кой сложности их вычисления.
Перечисленные выше трудности в значительной мере преодолеваются заме-
ной коэффициентов фильтра-предсказателя другими эквивалентными пара-
метрами. представляющими собой корни особых уравнений, получаемых из
полинома A(z). Эти корни впервые были введены Итакурой [2] в 1975 году и
названы линешгы.мн спектрачьпыдш корнями (ЛСК). Оказалось, что они
сравнительно легко вычисляются, обеспечивают гарантированный контроль
Лекция 26. Линейные спектральные пары 553
за устойчивостью при квантовании, а фильтр-предсказатель обладает низкой
чувствительностью к их возмущениям.
26.1. Метод Итакуры
Линейные спектральные корни согласно Итакуре определяются следующим
образом.
Пусть известен минимально-фазовый полином порядка К
A(z> = l+ * .
А-1
где, как и а и. 25.3, вычисленные коэффициенты линейного предсказания ak
записываются без знака
Поскольку на практике в линейном предсказании полином A(z) обычно имееп
четный порядок, в дальнейшем будем полагать К четным. Получаемые при этом
результаты нетрудно распространить и на полиномы А(г) нечетного порядка.
Образуем из А(;) два полинома одинаковых порядков (К +1)
Р(г) = Ак (г) + г"1**11 Ак (г-1), (26.1)
С(г) = Ак (г) - г’(А' (Г1), (26.2)
где полипом Р(г) имеет симметричные коэффициенты, а полином Q(z) —
антисимметричные (с.и. и. 18.2). Можно показать, что полиномы /’(г) и Q(<.)
имеют тривиальные корни го/> = -1 и ге^ = 1 соответственно. Исключим ука-
занные тривиальные корни этих полиномов, для чего разделим P{z) на
1 + г-1 н Q(z) на 1-г-1. В результате получим два новых полинома:
Р(г)=-^Ц- и ё(г) = -^Ц-. (2&-3)
1 + г"1 1-г"1
порядки которых оказываются четными и равными порядку К исходного
полинома A(z), а сами эти полиномы имеют симметричные коэффициенты.
Пример 26.1
Получим полиномы Р(г) и P(z), (?(z) и Q(z) при К = 2.
554
Часть VII. Адаптивная фильтрация
Решение. В данном случае исходные полиномы имеют вил:
A(z) = l + flIz 1 + a2z~2',
A(z~i) = \ + aiz + a2z2
Умножив AU-1) на z (K+n = г~\ получим два полинома третьего порядка:
□ с симметричными коэффициентами согласно (26 J)
P(z) = Aa-(z) + z_<K+,,A/c(z_i) = l + a[z‘’1 +a2z~2 + z-3 + «(z~2 =
= 1+Л<' +^г"2 + г"3.
где
= G| + a2;
□ с антисимметричными коэффициентами согласно (26.2)
Q(z) = AK(z)-z~iK+l)AK(z~l) = 1+ fl(z-1 +«2Z~2 “ z 1 -«|Z~2 -^z"1 =
= 1+4;-’
где
- «2 .
Полином третьего порядка P(z) имеет тривиальный вещественный корень
zop = -1, которому соответствует множитель (1+ Z*1).
Разделим полином P(z) на этот множитель, тогда получим полином второго
порядка
Az) = P = l + (*1-l)z^+z“2.
Аналогично полином третьего порядка Q(z) имеет тривиальный веществен-
ный корень zeiQ—l, которому соответствует множитель (1 —zj. Разделив
Q(z) на этот множитель, также получим полином второго порядка
d(z) = G = l + (</| + l)z"'+z'2.
Оба полинома имеют симметричные коэффициенты.
Заметим, что тривиальные корни полиномов (26.1) и (26.2) вещественны и
лежат на единичной окружности на частотах й)в^ = л (z°p =-1 = ejn) и
й)ер ~ 0 ( = 1 = ) соответственно.
Лекция 26. Линейные спектральные пары 555
Для дальнейшего потребуется понятие чередуемое™ (перемежаемости) кор-
ней двух полиномов. Говорят, что корни полиномов с вещественными коэф-
фициентами перемежаются (чередуются), если:
□ оба полинома имеют только вещественные и простые корни;
□ между любыми двумя соседними корнями одного полинома содержится
один и только один корень другого полинома.
Степени таких полиномов либо равны, либо отличаются на единицу.
Поставим задачу:
iiaitmu частоты <biP и которые соответствуют нетривиальным
корням полиномов P(z) и Q(z), равные корням полиномов P(z) и Q(z) из
(26.3).
Решение. Подставим z = eJtA a P(z) и Q(z), после чего перейдем к алгебраи-
ческим полиномам заменой
х = z + f1 = + e"yd) = 2cos6j . (26-4)
В результате чего получим новые полиномы порядка К/2 с вещественными
коэффициента м и
К/2
(26.5)
п = 0
К/2
Dq(x)= £ Vrt. (26.6)
м=0
Общее число корней xjPt полиномов (26.5) и (26.6) равно К .
Итакурой было доказано, что все эти корни различны, вещественны, лежат
в интервале [-2. 2] и чередуются в этом интервале. В свою очередь, это оз-
начает, что корни полиномов P(z) и Q(z) также разтчны, вещественны и
чередуются.
Согласно (26.4) нетрудно вычислить искомые частоты
tbir =arccos(xlT/2), ц-q =arccos(x/e/2), (26.7)
где Р и (J означают принадлежность корня соответствующему полиному
при 7 = 1.2.К/2.
556
Часть УН. Адаптивная фильтрация
Выражения (26.7) и (26.4) означают, что корни zlP. z^ полиномов P(z) и
Q(z) имеют вид
и че=?'Ч
т. е. корни лежат на единичной окружности г-илоскостн (их радиусы г = 1) и
соответственно отображаются на частотную ось.
Итакурой были доказаны важнейшие свойства корней полиномов (26.1) и
(26.2):
□ все корни й/г и Ц-q полиномов простые и лежат па единичной окружности.
□ корни полиномов чередуются, т. е. за корнем одного полинома следует
корень другого.
Частоты <й(7> и MjQ (26.7) называются линейными спектральными корнями
(ЛСК).
Расположение линейных спектральных корней на частотной оси показано
на рис. 26.1, где видна их чередуемое™.
Линейные спектральные корни
(ЛСП)
Рис. 26.1. Расположение ЛСК на частотной оси
Два соседних корня, принадлежащих разным полиномам, образуют.атейную
спектральную пару (ЛСП).
Таким образом, линейные спектральные корни являются вещественными н
различными, что нс только облегчает их кодирование, но и упрощает кон-
троль над устойчивостью: чередование ЛСК является признаком устойчиво-
сти полученного фильтра [14, 49. 31].
Лекция 26. Линейные спектральные пары
557
Зная ЛСК ц-. нетрудно восстановить полиномы P(z) и Q(z), от которых
потом перейти к полиномам P(z) и Q(z). Восстановление передаточной
функции фильтра-предсказателя осуществляется по формуле
йи)=£м±Ж (2М)
что следует из выражений (26.1) и (26.2).
Пример 26.2
Известен минималыю-фазовый полином
A(z) = l+O.5z"‘ +0,25z"2;
требуется найти линейные спектральные корни.
Решение. По формулам, полученным в примере 26.1 для полиномов второго
порядка, запишем полиномы Р(<) и Q(z) и найдем их корни:
1. P(z) = 1 + 0,75; 1 + 0.75z~2+ г~3;
освобождаясь от тривиального корня z = —1 (&2р = л )> получаем полипом
Р(г) = 1-0,25г '+г 2,
спек1ральные корни которого +0,46п лежат на единичной окружное!и.
Поскольку ЛСК рассматриваются в основной полосе часпют, ни частот-
ной оси имеем
(Цр =0,46л.
2. е(г) = 1 + 0.25г"'-0,25г’2-г"3;
освобождаясь от тривиального корня z = I (ftJjg =0), получаем полипом
(2(г) = । + 1,25г"' + г’2,
спектральные корни которого ±0.715л также лежат па счипнчной окруж-
ности, а в основной полосе частот имеем
G)2q =0,7 15л.
Расположение линейных спектральных корней на единичной окружное tn и
па частотной оси показано на рис. 26.2, а и б соответственно. где точка ли
отображены корпи полинома P(z), а кружочками—корни полинома (2(г)
Гам же для наглядности указаны и тривиальные корни.
558
Часть VII. Адаптивная фильтрация
ДСП
Рис. 26.2. Расположение ЛСК из примера 26.2: иа единичной окружности (а),
на частотной оси (б)
Линейные спектральные корни применяются в различных областях, где ис-
пользуется линейное предсказание. Особенно широко и с большим успехом
ЛСК применяются в речевых технологиях, а частности, при построении ао-
кодеров — устройств сжатия речи. В существующих стандартах па вокодеры
с линейным предсказанием указывается порядок линейного предсказания К ,
способ кодирования ЛСК и побитовое размещение кодов ЛСК в струкгуре
информационного кадра, передаваемого по каналу связи.
Рассмотренный метод формирования ЛСК, обычно называемый классиче-
ским, как показали исследования [28, 30.31], не является единственным.
Лекция 26. Линейные спектральные лары
559
26.2. Второй метод формирования ЛСК
Иной подход к формированию ЛСК [30] основан на трех положениях:
1. Полином A(z) устойчивого фильтра Я(г) = ^/Л(г) имеет нули (корпи)
только внутри единичного круга z-плоскости и по определению являс>ся
минимально-фазовым.
2. Рассматриваемый в теории линейных электрических цепей полипом Гур-
вица имеет нули в левой ^-полуплоскости и потому является минимально-
фазовым.
3. Указанные свойства полинома Гурвица будут сохраняться и в z-нлоскости.
если использовать отображение /^-плоскости на z-плоскость с помощью
билинейного преобразования.
Определение:
Полином
АГ
>’*-(₽) = EV <26-9)
;=0
с вещественными коэффициентами {bf}, =1, называется полиномом Гур-
вица, если все его нули (корни уравнения (р) = 0 ) расположены а левой р-
полуплоскости.
Представим (26.9) в комплексном виде
'к (Р) = Re {vf. О)} + j Im{vK (р)}.
Важное для дальнейшего свойство полинома Гурвица состои г в том, чю нули
его вещественной и мнимой частей простые, вещественные и чередуются.
Это свойство полинома Гурвица сохраняется при отображении /^плоскости
на z-плоскость с помощью билинейного z-преобразовання.
26.2.1. Теорема о z-образе полинома Гурвица
Исходя из сказанного, в [30] доказана теорема:
Всякий минимально-фазовый полином A(z) порядка К, бу тучи умножен
на zK'2, дает такой полином A(z), который с точностью ю вещественной
функции l/[2cos(o)/2)]Ar является z-образом полинома Гурвица гА-(р)
степени К.
560
Часть VII. Адаптивная фильтрация
Иначе говоря.
V(z) = v(p)| ]
Л(г)гл/г _ Л(г)
[2cos(w/2)]A I2cos(ei/2)]K ’
(26.10)
где полином Л(с) также является минимально-фазовым.
Из теоремы и свойств билинейного ^-преобразования вытекают даа важных
следствия:
1. Нули полинома А(г) = А(г)г*^2, где A(z) — минимально-фазовый поли-
ном, лежат внутри единичного круга z-нлоскости.
2. Нули вещественной Rc|a(z)| и мнимой частей минимально-
фазового полинома А(<) (при z = eJW) простые, вещественные и череду-
ются, причем один из нулей мнимой части лежит в точке <Ь=0.
Как и ранее, нули вещественной и мнимой частей названы линейными спек-
тральными корнями. Пара ближайших нулей, один из которых принадлежит
вещественной, а другой — мнимой части полинома A(z), называется линей-
ной спектральной парой (JIC11).
26.2.2. Вторая процедура вычисления ЛСК
Новые линейные спектральные корни, вычисляемые согласно приведенной
выше теореме, отличаются от ЛСК, получаемым по методу Итакуры. Про-
цедура их вычисления состоит в следующем:
I. Минимально-фазовый полином
i=0
умножается на zK^, в результате чего получается новый полином А(г),
нули которого совпадают с нулями исходного. Множитель z -е 1
вносит только линейное приращение фазы, в результате чего полином
A(z) обладает монотонно возрастающей фазочастотной характеристикой.
2. Полученный полином А(г) после замены
г = е*° =cosw + jsinco
Лекция 26. Линейные спектральные пары
561
представляется в виде суммы вещественной и мнимой частей
А(е'й) = 0(6)4- J£>(6). (26.1
3. Используя формулы кратных дуг, формируются тригонометрические по-
линомы
АГ/2
G(6)= £ £( cos'6 ; (26.I2)
i=0
<ад-|
D(&i) = sin6) У cos'6, (26.13)
1=0
из которых видно, что один нуль находится в точке 6 = 0.
4. Из полиномов (26.12) и (26.13) после замены
л = cos 6
образуются алгебраические полиномы
к/2
GW= ;
I--
1 = 0
после решения которых вычисляются ЛСК (сравншпе с методом Итикуры)
6; = arccos х{.
По известным ЛСК нетрудно получить полиномы (26.12) и (26.13), а загсы
и A(z). Можно также непосредственно связать ЛСК и коэффициенты ли-
нейного предсказания. Такие соотношения для фильтра-предсказателя
10-го порядка были установлены в [30] и сведены в таблицы
Примечание
Приведенные выше рассуждения строились при четном К : в случае нечетного
К ничего принципиально нового не вносится — необходимо только Л(г) ум-
ножить на хк+'^2.
Пример 26.3
Известен полином
А(г) ^l + l.er1 +0.6z2 +О.8-3ьО.7г4.
562
Часть VII. Адаптивная фильтрация
Умножив его на г2, образуем новый полином
Л(г) = г2 + l.8z + 0.6 + 0.8г-1 + 0.7г‘2,
вещественная часть которого имеет вид
(7(d)) = 1,7 cos2cb + 2.6 cos d)+0.6,
а мнимая
D(<b) = 0.3 sin2d>+si n co.
Графики (рис. 26.3) показывают, как чередуются корни G(cb) и D(d)). Такое
чередование свидетельствует об устойчивости исходного полинома.
Рис. 263. Характеристики вещественной и мнимой частей полинома
из примера 26.3
Рассмотренный метод, базирующийся на полиномах Гурвица, также является
частным случаем формирования ЛСК. Линейные спектральные пары можно
получать и другими способами [28].
26.3. Обобщение теории ЛСК
Принципиальным во всей теории ЛСК является формирование полинома
A(z) с монотонно возрастающей ФЧХ из исходного устойчивого полинома
A(z) путем умножения последнего на гл, основанием чему служит доказы-
ваемое а теории устойчивости утверждение: если корни вещественной и
мнимой части полинома A(z) чередуются, то его фазовая характеристика
либо монотонно возрастает, либо монотонно убывает.
Лекция 26. Линейные спектральные пары 563
Утверждение: вещественная часть полинома Aa-(z>| _ & имеет пули па
частотах , при которых arg|e7RwA/c(e-/*”)| принимает значения
(2k + 1)—. к =0, 1,..., d =р?-— а мнимая часть этого же полинома имеет
нули на частотах ш[т,, при которых arg{e*Jft0AK(e-*D)} равен
Л=0,1,..., d =[/?]. где [.vj означает ближайшее целое, не превосходящее .г,
Содержание этого утверждения состоит в том, что вещественная
КсрЛ,..(г)|гж^|= £ njscos[(«-«<o]
и мнимая
(1 Л
> г = X «< sinfC/?—к )й|
г * J А=0
части полинома zKAK(z) имеют на интервале [0, л] только вещественные
корни. Эти корни простые, различные и чередующиеся.
Доказательство утверждения, приведенное в [28], основано на свойствах по-
линомов Re|’SAK(z)| и Im{z*AK(z)| в зависимости от соотношения между
значениями R и К.
Возможны четыре варианта получения ЛСК в зависимости от показателя R :
К
I. Л = —. Степени полиномов Re и 1m будут равны соответственно R и
(Л-1), если R — целое, и /?—-у, если R —дробное. Общее число опре-
деляемых корней равно (К — 1), и для полной информации о полиноме
А(г) необходимо передават ь значение еще одною параметра (например,
масштабного множителя при мнимой части). Это случай, описанный
в и. 26.2.
К । 1
2- R ——-—. Имеем соотношение Итакуры, когда число корней оказывается
равным К.
19 Так 165
564
Часть VW. Адаптивная фильтрация
3. /?>—-—. Общее число корней становится больше К и потому избыточно.
4. R-К. Число корней вещественной части равно К, а мнимой части —
(АГ-1). Следовательно, для полной информации о полиноме 4(7) доста-
точно передать N корней вещественной части или (N -1) корней мнимой
части и масштабный множитель.
Таким образом, изменяя параметр R. можно генерировать разнообразные
варианты ЛСК, причем выбор варианта определяется конкретной задачей.
26.4. Поиск спектральных корней
Вычисление ЛСК непосредственно по коэффициентам линейного предсказа-
ния занимает очень много времени, поэтому для их определения используют
специальные алгоритмы, которые построены на поиске той частоты, на кото-
рой вещественный (мнимый) полином обращается а нуль. Наиболее простым
и в то же время достаточно точным является метод дихотомии. Суть его со-
стоит в следующем.
Поиск спектральных корней осуществляется в два этапа.
На первом этапе определяются корни вещественного полинома по принципу
от корня к корню с выбранным шагом Дб). При обнаружении на некотором
интераале 6) + Дб) изменения знака полинома дальнейшее уточнение поло-
жения корня осуществляется половинным делением частотного интервала,
которому принадлежит изменение знака, пока этот интервал не станет рав-
ным или меньшим заданной точности 56). После определения всех корней
вещественного полинома осуществляется переход ко второму этапу.
На втором этапе определяются корни мнимого полинома, которые должны
чередоваться с корнями вещественного полинома. Па интервалах между со-
седними корнями вещественного полинома путем дихотомического поиска
с точностью до 56) вычисляются корни мнимого полинома.
Следует отметить, что задача построения быстрых алгоритмов вычисления
ЛСК является актуальной.
Лекция 27
Основы
адаптивной обработки сигналов
Под термином адаптация применительно к системам ЦОС будем понимать
изменение их параметров и, возможно, структуры с целью достижения задан-
ного эффекта в результате приспособления к неизвестным заранее внешним
условиям. К последним можно отнести всевозможные случайные помехи, ха-
рактеристики каналов распространения сигналов, принципиально неустрани-
мые шумы квантования. Главным свойством адаптивной системы можно счи-
тать изменяющееся во времени функционирование с саморегуляцией.
Если используется неизменяемая система обработки сигналов, го предпола-
гается, что условия на ее входе известны, хотя бы в статистическом смысле.
Однако в большинстве реальных условий диапазон входных воздействий из-
вестен приблизительно и меняется сложным образом во времени. Тогда
адап тивная система ЦОС имеет преимущества по сравнению с неизменяемой.
Эти преимущества реализуются за счет введения регулярного процесса поис-
ка оптимума в пре тел ах допустимого класса возможностей.
27.1. Классификация адаптивных систем
обработки сигналов
В соответствии со сложившейся традицией [48] адаптивные системы можно
классифицировать по наличию или отсутствию обратной связи.
Процесс адаптации без обратной связи состоит из измерений характеристик
входных воздействий (сигналов и ш\мов), введения этой информации в алго-
ритм ЦОС и использования результатов для целенаправленного регулирова-
ния. При адаптации с обратной связью, кроме того, автоматически оценива-
ется влияние параметров регулирования па выходной сигнал.
Структурные схемы двух типов адаптивных систем представлены
на рис. 27.1.
566
Часть VII. Адаптивная фильтрация
Выходной
сигнал
-------►
среды
Рис. 27.1. Структурные схемы адаптивных систем: бея обратной связи (//),
с обратной связью (о)
Главным достоинством адаптивных систем с обратной связью является их
высокая работоспособность во многих прикладных задачах, где аналитиче-
ские методы синтеза труднопримснимы либо отсутствуют. Например, суще-
ственная нелинейность структуры или нсстационарность входных сигналов
открывают широкие возможности по введению обратной связи в процесс
ачаптации. Кроме того, адаптацию с обратной связью можно эффективно ис-
пользовать в случаях, когда параметры системы обработки сигналов являют-
ся переменными или известны не точно.
Лекция 27. Основы адаптивной обработки сигналов 567
Однако адаптивным системам с обратной связью присущи и недостатки, свя-
занные с неустойчивостью (расходимостью) процесса адаптации, например
в случае существования нескольких оптимумов. Несмотря на это. обратная
связь является широко распространенным методом реализации адаптации
в системах ЦОС.
27.2. Постановка задачи адаптивной
обработки сигналов
Одним из эффективных путей решения класса задач обработки сигналов
в условиях априорной неопределенное ги может быть применение разнооб-
разных методов адаптации. В этом случае задача решается так же. как при
отсутствии неопределенности, а затем в синтезированные алгоритмы обра-
ботки сигналов вместо неизвестных параметров вставляются их оценки
(в статистическом смысле), полученные по входным выборкам. Естественно
предполагать, что эффективность описанного алгоритма будет ниже, чем при
наличии полной априорной информации, т. к. оценки неизвестных парамет-
ров вычисляются с определенной ошибкой.
Для оценки степени достижения требуемого качества адаптации обычно вво-
дится функционал качества (функция качества, рабочая функция, стоимост-
ная функция), зависящий как от входного сигнала, так и ог параметров сис-
темы ЦОС. Достижение экстремума данного функционала (локального или
глобального) является целью функционирования адаптивной системы.
В большинстве случаев, особенно при обработке объемных выборок, оказы-
вается, что определение оценок параметров системы и их функциональное
преобразование связаны со значительными вычислительными трудностями.
Поэтому используется другой метод адаптации, заключающийся в гом, что
оптимальное решение. соответствующее экстремуму функционала качества,
достигается путем последовательных приближений. Сначала задача решается
при полной определенности. Шаги последовательного приближения опреде-
ляются но вычисляемым значениям детерминированного функционала каче-
ства и ci-o производных. Таким образом, получается детерминированный
итерационный алгоритм. Поскольку а условиях априорной неопределенности
функционал качества зависит от нескольких неизвестных параметров и не
может быть вычислен непосредственно, в синтезированных алгоритмах его
значения (и значения его производных) заменяют их оценками. Получаю-
щийся при этом алгоритм называется итерационным стохастическим н соот-
ветствует теореме о разделении [40. 53).
568
Часть VII. Адаптивная фильтрация
Синтез детерминированных итерационных алгоритмов базируется на резуль-
татах математической теории оптимизации как без ограничений, так и с ог-
раничениями. В процессе адаптации основное внимание уделяется решению
задач оптимизации с квадратичной функцией качества. Это связано с тем, что
ряд основных параметров систем адаптивной обработки сигналов выражает-
ся в виде квадратичных форм, сочетающихся с простотой и наглядностью
получаемых при этом результатов. Кроме того, из математики известно
(23,7], что неквадратичные функции качества можно аппроксимировать
квадратичной зависимостью, раскладывая их в ряд Тейлора вблизи экстре-
мальной точки и ограничиваясь тремя членами разложения.
В общем случае графически функционал качества представляет собой гипер-
поверхность в многомерном пространстве, связанным с количеством незави-
симых варьируемых параметров адаптивной системы. Данная гиперповерх-
ность обладает следующим важным свойством [48]: если случайные сигналы
являются стационарными и их вероятностные характеристики инвариантны
относительно временных сдвигов, то эта гиперповерхность фиксирована
и остается неподвижной в своей системе координат. В этом случае процесс
адаптации заключается в движении, начиная с некоторой начальной точки,
в направлении экстремума и в удержании среднеквадратичного значения
сигнала ошибки вблизи этой точки.
Если сигналы нестационарны и их статистические свойства меняются во
аремени, то можно считать описанную гиперповерхность "размытой”, изме-
няющей свою форму и местоположение относительно введенной системы
координат. В этом случае процесс адаптации состоит не только а движении
к точке экстремума, но и в слежении за этой точкой, поскольку она меняет
свое положение в пространстве.
27.3. Оптимальное нерекурсивное
оценивание
Принципы оптимального линейного оценивания являются фундаментальны-
ми при любом рассмотрении адаптивных систем обработки сигналов и, в ча-
стности, адаптивных фильтров. Процесс адаптивной фильтрации включает
два этапа проведения оценивания:
□ оценивание искомого выходного сигнала фильтра;
□ оценивание коэффициентов фильтра (отсчетов импульсной характеристи-
ки), необходимых для достижения поставленной цели.
Второй этап необходим из-за априорной неопределенности входного сигнала,
подвергшегося аоздсйствию шумовой помехи.
Лекция 27. Основы адаптивной обработки сигналов 56©
Простейшей и наиболее широко распространенной адаптивной структурой
является КИХ-фильтр с регулируемыми коэффициентами. Схема этого
фильтра представлена на рис. 27.2. Иногда его называют адаптивным линей-
ным сумматорам [4].
Рис. 27.2. Адаптивный КИХ-фпдьтр
На выходе фильтра необходимо получить оценку у(п), максимально соот-
ветствующую (в смысле выбранного критерия качества) iiC3aiiiy.\ineniiOMy
сигналу у(«).
Синтез устройства оценки на базе адаптивного КИХ-фильтра существенно
зависит от определения стоимостной функции, в соответствии с которым ка-
чество оценивания характеризуется разностью между выходным сигналом
устройства оценки и истинным значением, подлежащим оцениванию:
е(/1) = у(л)-у(м). (27.1)
где:
е(н) —ошибка оценивания;
у(п) —оцениваемый случайный сигнал:
у(н) —его статистическая оценка.
В нашем случае оценка у(и) является линейной функцией последовательно-
сти входных отсчетов х(п) и коэффициентов фильтра htl (п = 0.1,.... N -1).
Последовательность отсчетов х(п) в общем виде можно претставить как
сигнал у(п). искаженный аддитивным белым шумом г(н) с дисперсией и“ :
лОО = у(н) + т(н), (27.2)
570
Часть VII. Адаптивная фильтрация
Наиболее часто используемым при проведении оптимального оценивания
у(л) является уже упоминавшийся метод наименьших кватратов (МИК).
При этом среднеквадратичная ошибка определяется как
E[e2(n)] = £{|..v(«)-y(n)]2}- (27.3)
где Е[ ] —оператор математического ожидания (с.и. н. 13.1).
Среднеквадратичная ошибка минимизируетоя относительно весовых коэффициен-
тов КИХ-фильтра для получения оптимального оценивания но критерию МИК.
В нерекурсивном фильтре в соответствии с его разностным уравнением вы-
ходная оценка yin) является конечным линейным полиномом
А'-1
у(л) = У hkx(n-k). (27.4)
*=о
Выражение (27.4) можно переписать в векторно-матричной системе обозначений
;>(л) = X '(и) II = 1/тХ(и). (27.5)
где:
Х(») =
— вектор-столбец входного сигнала;
— вектор-столбец коэффициентов фильтра.
Тогда функция среднеквадратичной ошибки (27.3) принимает вид:
Е[е2(п)] = £[>•(»)- И' Х(н)]2 . (27.6)
Это выражение описывает стандартную поверхность гипсриараболежда
в (/V+1)-мерном пространстве с единственным минимумом. Дифференциро-
вание (27.6) по Н1 даст
Э£Ге2(п)1 fr , 1
—J = -2e{[v(„)- Н' X (h)JX7 (и)}. (27.7)
Лекция 27. Основы адаптивной обработки сигналов 571
Допуская, что (27.7) равно нулю, получаем
е£у(„)-//гХ(и)]хГ(»)} = 0 (27.8)
или, что го же самое,
е[я»)Х ' («)] = е[н ГХ(н)Х г (и)] . (27.9)
Полагая, что вектор коэффициентов Н и вектор входного сигнала Х(м) не-
коррелированы, получаем
e[v(»)Xг(я)] = Hl .е[х(л)Хг(п)]. (27.10)
где //о — вектор оптимальных коэффициентов КИХ-фильтра, обеспечи-
вающий минимум выражению (27.6).
Чтсны математических ожиданий в выражении (27.10) можно определить
следующим образом:
□ Е = е[х(л)Хг(л)] — автокорреляционная квадратная матрица порядка
N входных отсчетов сигнала;
□ Р = /?[ т(н)- Х(н)]— вектор взаимной корреляции между оцениваемым
сигналом и отсчетами входной последовательности размером /Vх 1.
С \ четом введенных обозначений (27.10) можно переписать в виде:
₽'=//„« (27.11)
Уравнение (27.11) является известным матричным уравнением Випера—
Хонфа, которое даст оптимальное (по критерию МИК) решение для
коэффициентов КИХ-фильгра
Но = к'р. (27.12)
Выражение (27.12) получено из (27.11) с учетом симметричности корреляци-
онном ма(рицы А?, для которой
[Е-'р/Г1.
Винсровская оценка (27.12) по существу является одношаговым блочным
процессом, который подходи!’для конечной выборки (блока) данных. В слу-
чае нсстационарности входного сигнала обновление матриц В и В должно
происходить на каждом временном шаге.
572
Часть VII. Адаптивная фильтрация
Получим остаточную среднеквадратичную ошибку оценивания [4], используя
оптимальный вектор коэффициентов Н$. Из соотношения (27.8) можно по-
лучить выражение
Е[Кп)Х(н)] = 0. (27.13)
Преобразуем формулу для среднеквадратичной ошибки с учетом (27.13) и
вычисленного вектора :
Е |\'2(яу(п) - ll0‘ X (/>)]} =
= Е [<(«) У(»)] - Е £r( n) - llar X (и)] • у(и)} = (27.14)
= Е[у2(М)]-//0'Е[у(И)- Х(п)] = е[.у2(л)]-НотР.
Формула (27.14) позволяет вычислять остаточную среднеквадратичную
ошибку при известном полезном сигнале у(м) и найденных векторах Hq и Р.
Пример 27.1
Получим оптимальный вектор коэффициентов адаптивного линейного сум-
матора исраого порядка, имеющего в своей структуре два коэффициента
и Л|. Пусть входной сигнал является суммой дискретной синусоиды и ста-
ционарного белого шума с нулевым средним и дисперсией . т. е.
Таким образом, оцениваемый сигнал у(п) имеет восемь отсчетов на один
период синусоиды.
Получим автокорреляционную матрицу К:
л2(„) >(,,«„-!)] (271б)
л(н)л(м-1) X (л-1)
Г х(п} , .1
iL-v(«-i)J I
С учетом стационарности процессов и некоррелированности сигнала у(п) и
шума г(н) получить значения элементов матрицы (27.16) особенно просто,
поскольку шумовая составляющая влияет лишь на ее диагональные элемен-
ты. Все остальные элементы можно найти из детерминированного компонен-
та сигнала
. Г я
V(rt)=Sin — И
I 4
Лекция 27. Основы адаптивной обработки сигналов
573
путем бесконечного усреднения в результате применения оператора матема-
тического ожидания После этих соображений нетрудно записать матрицу
(27.16) в явном виде:
(27.17)
Обращение матрицы (27.17) в соответствии с процедурой, описанной в При-
ложении 4, дает
2 75
1 г
Вектор взаимной корреляции Р находится из аналогичных соображений и
принимает вид
Применение формулы (27.12) дает вектор оптимальных коэффициентов
КИХ-фильтра первого порядка
hq = r-'p =
(27.20)
Адаптация линейного сумматора заключается а том, что его коэффициенты
(а следовательно, и частотные характеристики) зависят от мощности (дис-
персии) аддитивного белого шума. Анализ выражения (27.20) показывает,
что при отсутствии шума (о“ = 0) фильтр передает входную синусоиду пря-
574
Часть УН. Адаптивная фильтрация
мо на выход (-1, А] =0). Если мощность шума равна мощности сигнала
(= 0,5 ), го вектор оптимальных коэффициентов имеет элементы
Ненормированная АЧХ такого фильтра для частоты дискретизации 1000 Гц
представлена на рис. 273.
Рис. 273. АЧХ линейного сумматора при равенстве мощностей сигпапа
н шумовой помехи
Из характеристики следует, что а результате синтезирован Ф11Ч, удовлетво-
рительно пропускающий синусоиду на частоте 125 Гц (/(/8).
Дальнейшее увеличение мощности шума приводит к резкому уменьшению
значений коэффициентов линейного сумматора, и фильтр практически пере-
стает передавать входной сигнал на выход.
Увеличение порядка КИХ-фильтра позволяет получить лучшие оценки.
В частности, снижается величина остаточной среднеквадратичной ошибки
(27.14), однако для этого требуется гораздо больший объем вычислений.
Лекция 28
Рекуррентные алгоритмы
адаптации
Рассмотренная в п. 27.3 винеровская оценка коэффициентов КИХ-фильтра
требует полного пересчета всех членов авто- и взаимокорреляционных мат-
риц для каждой новой выборки, что с вычислительной точки зрения нера-
ционально. Если иметь дело с продолжительным (теоретически бесконеч-
ным) рядом отсчетов входного сигнала, значительно более удобными
являются рекуррентные алгоритмы получения оценок, вносящие коррекцию
на каждом шаге итерационного процесса.
28.1. Калмановское оценивание
случайного сигнала
По существу, кашановское оценивание реализует рекурсивную процедуру
адаптации, основанную на авторегрессионной модели процесса генерирования
сигнала (см. н. 13.2). Если входной сигнал л(м) является случайным и марков-
ским, го его можно представить в виде выхода ЛДС первого порядка, возбуж-
даемой белым шумом 1г(и) с нулевым средним и дисперсией о^.. Модель ге-
нерирования сигнала описывается разностным уравнением 1-го порядка
х(л) = тЩл-1) + и<л-1). (28.1)
Струюурная схема устройства, соответствующая уравнению (28.1), пред-
ставлена на рис. 28.1.
Предполагается, что после прохождения капала связи сигнал х(п) претерпел
амплитудные изменения, описываемые постоянным коэффициентом с. и на него
воздействовал аддитивный белый шум v(/i) с нулевым средним и дисперсией
Ор. Модель воздействия канала на сигнал описывается простым уравнением
у(л) = ск(л) + v(fi). (28.2)
Cooi вез-ствуюшая ей структурная схема представлена на рис. 28.2.
576
Часть VII. Адаптивная фильтрация
Рис. 28.1. Устройство генерирования случайного сш нала
Рис. 28.2. Модель прохождения сигнала по каналу связи
Зашумленный сигнал у(л) поступает па вход синтезируемого адаптивного
калмановского фильтра. На его выходе необходимо получить рекуррентную
оценку л(п), максимально близкую к сигналу л(н) по критерию МПК.
Рекурсивная формула оценки первого порядка имеет вид:
лОг) = Ь(н).х(н -1) + £(и) - у(«). (28.3)
Следует отметить, что в общем случае коэффициенты b(if) и к(п) зависят от
нормированного времени. Обобщенная структурная схема адаптивного оце-
нивателя, реализующего алгоритм (28.3), представлена па рис. 28.3.
Рис. 28.3. Обобщенная струю ура рекурсивного оненивателя первого порядка
Введем обозначения:
е(и) = л(л)-л(н).
р{п) = Е[.х(и) -л(н)]“.
(28.4)
(28.5)
Лекция 28. Рекуррентные алгоритмы адаптации 577
Выражение (28.4) называется ошибкой оценки, а (28.5)—среднеквадратич-
ной ошибкой. Подставляя (28.3) в (28.5), получим
р(я) = £[б(н)x(n -1) + k(n)y(n) - л(л)]" (28.6)
Для получения оптимального с точки зрения МНК оцеиивателя выражение
(28.6) дифференцируется по Ь(н) и Л(н) с последующим приравниванием
результатов нулю:
= 2Е{[б(п)л(л -1) + Л(п) у(И) - x(„)]i(« -1)} = 0; (28.7)
ощд)
= 2 0 (л) х(л -1) + ВД у(п) - л(п)] >(»)} = о. (28.8)
ок(л)
Преобразуем уравнение (28.7):
E{[fe(/i) i(n -1)].?(« - !)} = Е{-[ад у(»)-л(п)]л(« -1)}. (28.9)
После несложных арифметических преобразований из (28.9) получаем ра-
венство
6(м) Е{[х(л -1) - v(п - 1) + л(« - 1)]л (л -1)} =
= Е{[л(н) - к (л) у(«)]х(л -1)}.
Подставиа в (28.10) значение у(н) из (28.2) с учетом обозначения (28.4), по-
лучим
b(n)E[e(n -1)х(н -1) + .г(л -1)т(л -1)] =
гг г 1 ъ 1 <28Л,)
= е{[ х( п ) [1 - С*(л)]“ А'(л)т(л)]л(л -1)}.
Принцип ортогональности, который минимизирует ошибку [40], требует не-
коррелированности ошибки е(и) и оценки х(л — 1). а также независимости
шума v(h) и х(л-1), что выполняется в рамках сделанных предположений.
Это означает выполнение равенств
Е [<?(«) х(л-1)] = О (28.12)
и
E[v(w)jc(n-l)] = 0. (28.13)
Тогда уравнение (28.11) с учетом (28.12) и (28.13) примет вид
Ь(м)Е[х(п - 1)х(л-1)] = [1-сА(д)] Е[х(л)л(л-1)]. (28.14)
578
Часть VII. Адаптивная фильтрация
Подставляя модель i оперирования сигнала (28.1) в (28.14), получим
Л(и)Е|л(и- 1)л(н -1)] =
= [1-£Л(л)]Е[ат(л-1)л(л-|)+н'(л-1).г(л-1)]. ’
Последовательная подстановка (28.1) в (28.2), а татем в (28.3) даст
х(и-1)=Ь(л-1)х(я-2)+ас4(л-1)л(п-2)+
+ск(н — 1)и-(я — 2) + к(п - 1)г(л — 1).
Умножим обе части равенства (28.16) иа и-(» -1) и возьмем маге магическое
ожи тание
/:[.)(»- 1)и<л-1)] = 0, (28.17)
т. к. шум и(н — I) некоррслировап со всеми членами в правой части (28.16).
Воспользовавшись соотношением (28.17), преобразуем (28.15):
/>(д)Е[л(л _1)л-(м - 1)] = «[|-гА-(м)]е[.г(и — !)•-£(л -1)],
что приводит к соотношению между коэффициентами Ь(п) и к(п):
Ь(п) =о|1-гА(л)]. (28.18)
Подставив (28.18) в (28.3), после несложных преобразований получим
x(/j) = ax(n -1) + А'(«)|у(«)- псх(н -1)]. (28.19)
Уравнение (28.19) является искомым решением для построения адаптивного
рекурсивного оценивателя первого порядка, называемого скалярным фильт-
ром Катана. Его структурная схема изображена на рис. 28.4.
Рис. 28.4. Скалярный филыр Налмана
Адаптация в этом уст ройстве оценки происходит следующим образом. Пре-
дыдущая оценка £(»-1) после умножения на коэффициенты а и с предска-
зывает очередной отсчет зашумленЕЮго сигнала у(н). Последний сравнива-
Лекция 28. Рекуррентные алгоритмы адаптации 579
ется с текущим отсчетом у(л). Разница .между ними с коэффициентом ’'до-
верия1' 6(и) суммируется с предсказанной оценкой лх(и-1), в результате
чего получается текущая оценка х(п).
Нетрудно предположить, что изменяющийся во времени коэффициент "дове-
рия’’ к(н) должен зависеть от шумовых параметров модели и текущего зна-
чения среднеквадратичной ошибки р(н). В [4] получено явное выражение
для к(п): *(и> = , L , ,—5-5—*—. а; +с-« />(»-!) (28.20)
где p(n) = -a2k(n). С (28.21)
Анализ выражений (28.20) и (28.21) указывает на гибкое (адаптивное) изме-
нение коэффициента k(n) в зависимости от дисперсий действующих шумов
Оу и а также величины текущей среднеквадратичной ошибки р(н).
Для перехода к векторному фильтру Кал мана необходимо, как это было от-
мечено в и. 13.2, перейти к авторегрессионной модели генерирования сигнала
более высокого порядка с последующей редукцией к многомерному про-
странству состояний.
В заключение данного раздела рассмотрим пример, иллюстрирующий адап-
тацию коэффициента к(н) к изменяющейся помеховой обстановке.
Пример 28.1
В рамках описанной модели для определенности положим a = 0,5; с = 1:
aj. = 1. Пусть дисперсия аддитивного шума 0^(„) в четные моменты време-
ни равна 1. а в нечетные — 2. Необходимо проследить изменения коэффици-
ента к(п), определяющего адаптивные свойства фильтра Калмана.
После сделанных допущений формулы (28.20) и (28.21) примут упрощенный
вид:
ц,,)=±^МП-0 ;
1 + 0,25/Х«-1) + о,.(»)
р(л) = с£(л)-*(п).
580
Часть УН. Адаптивная фильтрация
Полагая для определенности р(-1) = 0, получим расчетную табл. 28.1.
Таблица 28.1. Адаптивное изменение параметров фильтра Каймана
л -1 0 1 2 3 4 5
— 1 2 1 2 1 2
р(л) 0 0.5 0.36 0,52 0,72 0,54 0,72
А(л) — 0.5 0.72 0,52 0,36 0,54 0,36
Анализ таблицы показывает наличие в фильтре Калмана вплоть до момента
времени п = 2 переходного процесса адаптации, связанного с достаточно
произвольным начальным заданием среднеквадратичной ошибки р(-1) = 0.
Начиная с л = 3, наблюдается установившийся режим, причем степень "до-
верия" к зашумленным отсчетам (нечетные моменты времени) значительно
ниже, чем к "чистым”.
28.2. Характеристика итерационных
алгоритмов адаптации
Как было отмечено в п. 27.2, синтез итерационных алгоритмов адаптации
основывается на результатах математической теории оптимизации как без
ограничений, так и с ограничениями. Последние могут быть связаны с час-
тичным заданием структуры схемы ЦОС, с необходимостью фиксации неко-
торых ее параметров и т. п. В задачах оптимизации с ограничениями выбор
промежуточных и конечных решений не может быть произвольным и прово-
дится из некоторого подмножества, задаваемого системой дополнительных
уравнений и неравенств.
Методы оптимизации приводят к детерминированным рекуррентным алго-
ритмам оптимизации, т. е. решение задачи отыскивается в результате ко-
нечного числа итераций путем последовательного приближения к опти-
мальному,. причем иа каждом шаге используются новые выборочные
значения обрабатываемых сигналов и параметров. Алгоритмы данного
класса должны сходиться за конечное время к точке оптимума либо попа-
дать в ее окрестность.
Следовательно, в результате использования итерационных алгоритмов полу-
чают последовательность значений искомого вектора Н(п) (например, век-
Лекция 28. Рекуррентные алгоритмы адаптации 581
тора коэффициентов цифрового фильтра), для которой значения функциона-
ла качества F отвечают соотношениям
f[H(O)]>F[//(l)]>...>F[H(n)]>...
в случае минимизации (спуска) и
F[H(0)]< F[tf(l)]<...< F[H(n)]<-
в случае максимизации (подъема).
Точка W(0) определяет начальные условия процесса оптимизации.
Основными характеристиками итерационных алгоритмов являются сходи-
мость (в математическом смысле) и скорость сходимости к оптимальному
решению. Желательно, чтобы за меньшее время (количество итераций) вы-
бранный алгоритм сходился к точке экстремума.
Процесс адаптации весового вектора Н при использовании любого итераци-
онного алгоритма может быть приведен к виду
H(n + 1) = Я(п) + Ц(л)й (л), (28.22)
где:
Ц(«) —величина шага итерации;
Л (л) —вектор, определяющий направление этого шага.
Варьируя процедуры выбора Ц(и) и Л(п), можно изменять методы поиска
экстремума. Направление последующего шага логично выбирать гак, чтобы
осуществлялось приближение к оптимальному решению.
В зависимости от способа определения ц(и) и Л (л) методы адаптации сис-
тем обработки сигналов можно разделить на три категории:
1. Методы прямого поиска, использующие только чистые значения функ-
ционала качества.
2. Методы, использующие, кроме того, первые производные функционала
качества.
3. Методы, дополнительно использующие вторые производные функционала
качества.
Методы прямого поиска применимы в случаях, когда функционал качества
не задан в явном виде и определение производных затруднено, имеются точ-
ки разрыва рабочей функции, наблюдается несколько локальных экстрему-
мов. Эти методы достаточно просты, но не всегда обеспечивают сходимость
за конечное число шагов.
582
Часть УН. Адаптивная фильтрация
Методы третьей категории обычно приводят к оптимальным решениям за
более короткое время по сравнению с другими. однако они сложнее в алго-
ритмической реализации и не всегда обеспечивают ее устойчивость при не-
точном определении оцениваемых параметров.
Наибольшее применение в адаптивной обработке сигналов нашли методы
второй категории, основу которой в силу относительной простоты реализа-
ции составляют градиентные методы поиска экстремума.
28.3. Градиентные методы адаптации
Градиентным называется метод, при котором каждый последующий вскгор
//(л + 1) выбирается в направлении —V/''[//(w)J. где VF|7/(h)J— вектор-
столбец частных производных функционала качества, называемый градиентом;
VF [//(»)] =
dF
‘Чч>
<IF
dhx
(28.23)
dF
//Л/v-l
Таким образом, математическое выражение алгоритма адаптации принимает вид
//(п + 1) = W(H}-pVF[W(/i)].
(28.24)
Положительная константа р. определяется из условий устойчивости и требуе-
мого времени сходимости алгоритма. Ее значение может быть переменным
в зависимости от степени приближения текущего решения к оптимальному.
Рассмотрим свойства градиентного метода, определив квадратичным функ-
ционал качества в виде
F(H ] = H ‘RH.
(28.25)
где R — положительно определенная симметричная матрица. В некоторых
алгоритмах она может иметь смысл автокорреляционной матрицы конечной
выборки отсчетов входною сигнала. Следовательно, F(H)>() при любых Н
и достигает минимума при // = 0.11одобпое тривиальное решение неприем-
лемо в задачах обработки сигналов, т. к. вырождает любой адаптивный циф-
ровой фильтр.
Лекция 28. Рекуррентные алгоритмы адаптации 583
Градиент функционала качества (28.25) равен
dF(H) - кп
----— — Kit ,
</н'
гогда в соответствии с (28.24)
//(л +1) = //(л) - уЛН(н). (28.26)
Расписывая равенство (28.26) по итерационным шагам при любом начальном
век горе Н (0) * 0, получаем:
Щ1) = Я(0)-рЯ/7(0) = (/-ц/?)//((», (28.27)
//(2)=А/(1)-цЯ//(1) = (А-цЛ)И(1) = (/-ц«)2Н(0)
//(п) = (/-ЦЯ)"//(0).
Из формулы (28.27) следует, что при условии
/-цЯ = 0
оптимальное значение /70 =0 может быть достигнуто за один шаг в направ-
лении -VF[//(0)]. Дтя выполнения этого условия необходимо, чтобы
/ = цК или R~\a.~1I,
т. е. матрица R должна быть диагональной с элементами на главной диаю-
нали, равными р1. В противном случае для достижения оптимального ре-
шения потребуется большее число итераций.
Если начальную точку //(()) выбирать не произвольно, а определенным об-
разом, го возможен другой способ достижения оптимального решения за
один шаг. Для этого первое равенство в (28.27) перепишем в виде
//(!)=//(О)-р/?//(0).
Если оптимальное значение На =0 достигается за одни шаг, т. е.
Н(1) = //о = 0,
то Н(0) = рК//(0).
Это возможно, если вектор /7(0) является собственным вектором матрицы
R, соответствующим собственному числу Х = р“*. В этом случае соблюдает-
ся равенство
//(1) = //(0)-рр"’н(0) = 0,
доказывающее очношаговую сходимость.
584
Часть УН. Адаптивная фильтрация
Таким образом, из условия
№(0) = ц-1//(0) (28.28)
следует, что оптимальное решение возможно иайти за один шаг адаптации.
Для этого необходимо значение шага ц выбрать обратным одному из собст-
венных чисел матрицы R, а 7/(0) —равным соответствующему собствен-
ному вектору. При этом матрица R может не быть диагональной.
В [48] показано, что сходимость градиентных методов адаптации обеспечи-
вается, если линии уровня функционала качества, соответствующие условию
F = const,
замкнуты вокруг точки экстремума при положительной определенности мат-
рицы R. В противном случае последовательность точек итеративных реше-
ний не всегда сходится. Проиллюстрируем применение градиентного метода
адаптации на примере.
Пример 28.2
Рассмотрим простой случай, когда вектор весовых коэффициентов Н состо-
ит из одного элемента Л. Квадратичный функционал качества имеет вид па-
раболы. описываемой соотношением
F = F^„+k(h-hBf, (28.29)
где Fmin — минимальное значение, соответствующее оптимальному значе-
нию Йд .
Градиент функционала качества превращается в простую производную
VF[/i] = — = 2Л(Л-Л„). (28.30)
dh
В соответствии с (28.24) итерационный алгоритм адаптации примет вид
h(ii + 1) = й(п)-2цХ[й(п)-йо]. (2831)
Меняя местами члены уравнения (2831), получаем
й(п + !) = (!- 2цХ)й(п) + 2цХ^. (2832)
Решая это уравнение иа основе метода математической индукции по не-
скольким первым итерациям, приходим к обобщению:
Л(п) = Ло+(1-2цХ)"[Л(О)-Ло], (28.33)
Лекция 28. Рекуррентные алгоритмы адаптации
585
которое дает в явном виде значение весового коэффициента h(n) в любой
момент времени. Сходимость алгоритма (28.33) зависит от величины
у=|1-2цХ|. (28.34)
Из (28.33) очевидным условием сходимости адаптивного алгоритма является
у<1. Чем ближе у к 1, тем скорость сходимости ниже. Случай у = 0 соот-
ветствует сходимости за один шаг. Отметим, что величина у зависит от па-
раметра функционала качества X и шага итерации ц. которыми можно
варьировать.
ЧАСТЬ VIII
МНОГОСКОРОСТНЫЕ СИСТЕМЫ ЦОС
Лекция 29. Многоскоростные системы ЦОС
Лекция 29
Многоскоростные системы ЦОС
До сих пор мы имели дело с линейными дискретными системами (ЛДС), ос-
новные характеристики и соотношения вход/выход которых были определены
в предположении фиксированной (неизменной) частоты дискретизации
Напомним, что соотношение вход/выход таких систем описывалось:
□ во временной области при известной импульсной характеристике
Л(пГ) — формулой свертки (см. Лекцию 4 )
у(лТ) =
J h(mT)x(nT - тТ)-
т=0
У h(nT-mT)x(mT)
т=0
(29.1)
или в нормированном времени
Х") =
У Л(т)л(и-т);
т=0
(29.2)
т=0
О в z-области при известной передаточной функции H(z) — уравнением
(суи. Лекцию 5)
>4z) = H(z)X(z); (29.3)
□ в частотной области при известной частотной характеристике
W(е^г) — уравнением (см. Лекцию 6)
У (eJ<iiT) = Н (е^т ) X (е^т )
(29.4)
590
Часть V/fl. Многоскоростные системы ЦОС
или, при представлении ЧХ через модуль и аргумент, уравнением
^Х(е^г) = А(о>)еМ'‘лХ(е1шГ). (29.5)
где А(ш) и <р(ю) — АЧХ и ФЧХ ЛДС.
В нормированной шкале частот формулы (29.4) и (29.5) принимают вил
i'(eJ‘") = H(eib) X (<'"'). (29.6)
r(?d,) = |//(^,)|/’ar^"<‘''°’^(e-"'“) = А(&)еЛ‘й”Х(е>Ь). (29.7)
Вместе с тем, в реальных системах телекоммуникаций, как правило, различ-
ные этапы обработки данных удобно выполнять на разных частотах дискре-
тизации, что в ряде случаев оказывается более эффективным. С этим связана
необходимость разработки систем с.миогочастотной дискретизацией, белее
известных, как многоскиростные системы ЦОС,
Напомним, что частота /Л и период дискретизации Т связаны соот ношением;
T = jr- (29.8)
В многоскоростных системах для сопряжения различных этапов обработки
данных необходимо решать задачу преобразования частоты дискретизации:
□ от меньшей к большей — повышение часто™ дискретизации в целое чис-
ло раз, называемое интерполяцией',
О от большей к меньшей — понижение частоты дискретизации в целое чис-
ло раз, называемое децимацией.
Соответствующие преобразования частот реализуются системами интерпо-
ляции или децимации.
В системе интерполяции отношение частоты дискретизации сигнала на вы-
ходе к частоте дискретизации сигнала на входе, равное
1 = — , (29.9)
Zi
называют коэффициентом интерполяции (целочисленным).
В системе децимации отношение частоты дискретизации сигнала на входе
к частоте дискретизации сигнала на выходе, равное
= (29.10)
/?’
называют коэффициентом децимации (целочисленным).
Лекция 29. Многоскоросгные системы ЦОС 591
Здесь и в тальнейшсм принята следующая система обозначений:
О / j. Т — частота и период дискретизации входного сигнала системы ин-
терполяции (децимации):
П х(пТ}, л(м) —входной сигнат системы интерполяции (децимации) в ре-
альном и нормированном (Г = 1) времени;
О f* , Т — частота и период дискретизации выходного сигнала системы
интерполяции ( децимации);
□ у(пу7\). y(nv) — выходной сигнал системы интерполяции (децимации)
к реальном и нормированном (Tv =1) времени.
В данной системе обозначений индекс ’у' всегда соответствует выдтИу систс
мы интерполяции (децимации).
Системы, в которых увеличение (уменьшение) частоты дискретизации реа »и-
зуется в очин прием (однократно), называют однократными.
Многократными называют системы, образованные последовательным со-
единением о (некратных систем.
Помимо сне (см интерполяции и децимации с целочисленными коэффициен-
тами Л/ и L. существуют системы преобразования частоты с рациональным
коэффициентом изменения частоты L/M . Они строятся но принципу после-
довательного выполнения интерполяции и децимации. Например, повышение
частоты дискретизации в 1,5 раза может быть реализовано последовательным
соединением системы интерполяции с коэффициентом L = 3 и системы ю
цимакии с коэффициентом М =2.
В теории ЦОС смысл термина "интерполяция" нс тождественен общеприня
тому математическому: восстановление (L-1) отсчетов между каждой нарой
отсчетов исходного сигнала на периоде Т; так же, как и смысл термина '’де-
цимация" не заключается в отбрасывании (Л/—1) отсчетов mcmuv каждой
парой крайних отсчетов на периоде Т .
Эти термины в ЦОС используются несколько в ином, более общем смысле,
а именно: преобразование частоты определяется как цифровая обработка
входного сигнала с помощью операции линейной фильтрации. в результате
которой формируется выходной сигнал с новой частотой дискретизации. При
этом па временные и спектральные изменения выходного сигнала наклады
ваюгся определенные ограничения, если сравнивать его с сигналом, который
был бы получен путем непосредственной дискретизации исходного аналого-
вого сигнала.
592
Часть VIII. Ммогоскоростные системы ЦОС
С этих позиций рассмотрим поочередно однократные системы интерполяции
и децимации.
29.1. Однократные системы интерполяции
Проце,тура интерполяции определяется как цифровая обработка входного
сигнала х(пТ) с помощью операции линейной фильтрации. в результате ко-
торой формируется выходной сигнал У(ПуТ.,) с повышенной в L раз часто-
той дискретизации. При этом на временные и спектральные изменения сиг-
нала у(пуТу) накладываются определенные ограничения, если сравнивать
его с сигналом, который был бы получен путем непосредственной дискрети-
зации исходного аналогового сигнала (см. окончание п. 29.1).
Процедура интерполяции выполняется в два этапа:
□ на первом этапе из входного сигнала х(пТ) формируется промежуточный
сигнал ~w{nvTy) с частотой дискретизации выходного сигнала и пе-
риодом
Г, =—; (29.11)
I ’ L •
О на втором этапе из промежуточного сигнала w(nyTy) в результате опера-
ции линейной цифровой фильтрации формируется искомый выходной
сигнал y(nvTx) той же частоты.
Рассмотрим каждый из этапов подробнее.
Первый этап
На первом этапе повышение частоты дискретизации осуществляется экспан-
дером частоты дискретизации (экспандерам), на рис. 29.1 условно обозна-
ченным в виде блока с направленной стрелкой вверх и стоящим рядом коэф-
фициентом интерполяции. Процесс повышения частоты дискретизации
иллюстрирует рис. 29.2. Входной сигнал заполняется (L-1) нулевыми от-
счетами между каждой парой отсчетов входного сигнала на его периоде дис-
кретизации.
Рис. 29.1. Система однократной интерполяции
Лекция 29. Многоскоростные системы ЦОС
593
Местоположение отсчетов в шкале нормированного времени п (Т = 1) и
(Ту = 1) легко определить из пропорции (рис. 29.2)
откуда
n = Y> n,=0,L,2L,„., n = 0,l,2,... (29.12)
х(пТ) = л(п) = *(—)
_______________J_______________J_______________3 "
0 Г 27 37 пТ
w(nyTv) = w(ny)
(£-1) нулей (L-I) нулей (L-l) нулей I
г-------*------» <--------*-------> <--------*-------.
| с ?_______с J „ с , _2L| ? „ „31| .......... пу
0 Ту 2Ту LTy 2LTy ’ 3LTV fIyTv
Рис. 29.2. Входной (а) и промежуточный (б) сигналы в системах интерполяции
Таким образом, с учетом (29.12), соотношение вход/выход экспандера имеет
вид (рис. 29.2);
и<п,)=
(29.13)
О при других пу.
Определим z-изображение и спектр промежуточного сигнала и<л). Соглас-
но (2.20), z-изображения входного х(п) и промежуточного м(н,) сигналов
равны:
X(z)= X x(n)z“" ;
л=0
(29.14)
W(z)= X w(n,)z'
=0
(29.15)
594
Часть УШ. Многоскоростные системы ЦОС
Рис. 293. Частотная интерпретация процедуры интерполяции:
амплитудные спектры входного (о), промежуточного (о), аналогового (?)
и лнекрегного (d) сигналов; идеальная АЧХ (л)
Перепишем г-изображение промежуточного сигнала w*(»v) (29.15). подста-
вив и'(нг) (29.13):
w(z)= f
/», =0. 2L.
(29.16)
Лекция 29. Многоскоростные системы ЦОС 595
и еще раз, учитывая зависимость (29.12) между переменными л и
W(z) = X л(л)(г')'"=Ё4п)г"1". (29.17;
/л=0. L. 21. п=0
Следовательно, взаимосвязь z-изображений входного (29.14) и промежуточ-
ного (29.17) сигналов имеет вид:
1Г(;) = Л’(г'). (29.18)
Выполним замену
z = eJ v =eJ v
и автоматически получим взаимосвязь между спектрами входного и проме-
жуточного сигналов:
)=Х(?'"> ). (29.19)
На основании соотношения между периодами дискретизации (29.11) запи-
шем соотношение меж чу нормированными частотами ш и tov:
&=(ОТ = coLTv = Ltov. (29.20)
с учетом которой при подстановке (29.20) в (29.19) констатируем равенство
спектров входного и про.межу точного сигналов (рис. 29.3, а, б):
»'(«.'“’) = .¥(«>). (29.21)
Второй ЭТЙП
На втором этане процедуры интерполяции из промежуточного сигнала
w(jiyTy) формируется выходной сигнал у(п}Ту).
На рис. 29.3. г. с) представлены модули спектров |ХЯ(ДО)| и |к(е^ш7-‘ )| соот-
ветственно исходного аналогового сигнала хс,(/) и дискретного сигнала
y(nvTv). который был бы получен в результате непосредственной дискрети-
зации аналогового сигнала ха(г) с частотой . Соотношение меж чу спек-
трами данных сигналов. согласно (10.27), имело бы вид:
Г(е>,;) = -!- X Ха[у(Ш + ,ят>;)1.
* у щ=~оа
или в основной полосе частот |0; coj/2J для т =0:
f(Z'r‘) = ^Xa(>). (29.22)
20 Чак 165
596
Часть УШ. Многоскоростные системы ЦОС
При решении задачи интерполяции средствами цифровой фильтрации ста-
вится условие (накладывается ограничение): в результате операции линейной
фильтрации должен быть сформирован сигнал y(«v7\), модуль спектра
|к(еумТ*)| которого должен совпадать с модулем спектра |y(eJ(,>r' )| сигнала
у(иуТг) (рис. 29.3, с)).
Сопоставив равные модули спектров |lV(e7W> )| = |x(e'a>jr )| входного и проме-
жуточного сигналов и требуемый модуль спектра )| выходного сиг-
нала системы интерполяции (рис. 29.3. б. Э). легко видеть, что операция ли-
нейной фильтрации должна заключаться в подавлении (L-I) "лишних"
составляющих спектра W(eJb3) ) с помощью фильтра пижппх частот (ФНЧ).
На рис. 29.1 ФНЧ был обозначен блоком с импульсной характеристикой
которой в ^-области соответствует передаточная функция //(z),
а в частотной области— частотная характеристика Идеальная
АЧХ А(о) ФНЧ в основной полосе частот должна удовлетворять требовани-
ям (рис. 29.3, в):
(L в полосе пропускания 0<0)<сотя¥;
н j max (29.23)
О при других значениях.
или в шкале нормированных частот со :
A(cbv)= L в полосе пропускания 0<(ov <
(29.24)
О при других значениях.
Почему усиление в полосе пропускания должно равняться L, станет понят-
ным из дальнейших рассуждений.
Уравнение, описывающее соотношение вхоц/выход ФНЧ в z-области, с уче-
том равенства (29.18), имеет вид:
r(z) = //(z)lV(z) = //(z)X(z').
(29.25)
Выполнил подстановку z = eJInT,'? получим соответствующее уравнение для
частотной области:
Г(е>';) = //(Z’7' )W(eJ“r') = Н(е’шГ’ }X(ei,MT') (29.26)
Лекция 29 Многоскоростные системы ЦОС 59?
или при замене частот в (29,26) на основании (29.20)
Г(<-7шТ' ) = //(£'“’' )Х(е>г). (29.27)
В шкале нормированных частот это уравнение имеет вид:
l'(eJ“') = Н (е^’) X (<?"’’). (29.28)
Соотношение вход/выход (29.27) в частотной области устанавливает связь
между спектрами входного и выходного сигналов.
Выразим частотную характеристику H(eJUi>;) через ее модуль и аргумент
y(eJ*"’') = |w(Z’v)pJJ^"<t >^Х(е-'й) (29.29)
и перепишем (29.29) с учетом обозначений АЧХ и ФЧХ (си. Лекцию 6)
Г(?“’) = А(С0,)еЛКй>',Х(е>й). (29.30)
При идеальной АЧХ (29.24) в основной полосе частот получим следующее
соотношение между спектрами входного и выходного сигналов (соотноше-
ние вход/выход системы интерполяции в частотной области):
Y(ei">>) = LXfe&ye*1^. (29.31)
Как известно, соотношение (10.27) между спектрами входного х(пТ) и ис-
ходного аналогового xa(r) сигналов имеет вид:
№г)=7 Z xjxw+mtoj]
* HI = -09
или в основной полосе частот [0; сол/2] для т = О
X(f>r) = lxa(7io). (29.32)
Подставив (29.32) в (29.31), получим выражение для спек фа выходного cni-
нала в основной полосе частог[0; coj/2]:
или, с учетом соотношения между периодами дискретизации (29.11),
Г (?“'’) = у- ХаО<0)еЛ(иТ'). (29.33)
598
Часть VIII. Многоскоростные системы ЦОС
Из сопоставления спектров У(е^м7у) (29.22) и K(eJ0’r*) (29.33), принимая во
внимание необходимое условие равенства модулей спектров, становится по-
нятным, почему коэффициент усиления ФНЧ в полосе пропускания должен
быть равен L.
Отсюда же получаем взаимосвязь между У(е ) и У(е ):
Y(ejmT’) = r(eJ'“7'' )e*"’T'), (29.34)
из которой следует, что при идеальной ЛЧХ модули спектров (амплитудные
спектры) сигнала на выходе системы интерполяции и сигнала, полученного
путем непосредственной дискретизации исходного аналогового сигнала
хл(1) с частотой /д’, совпадают. При этом аргумент спектра (фазовый
спектр) сигнала на выходе системы интерполяции оказывается измененным
в соответствии с ФЧХ фильтра.
В действительности АЧХ фильтра не является идеальной, поэтому не только ар-
гументы, но и модули спектров сигналов y(iivTv) и y(nvTv) будут отличаться.
Если кроме ограничений на снскгральные изменения сигнала требуется со-
хранить форму исходного сигнала, рекомендуется проектировать ФНЧ па
базе КИХ-фильтра с линейной ФЧХ.
Получим соотношение вход/выход системы интерполяции во временной области.
Запишем формулу свертки (29.2) для Ф114:
ХМ = X Л(,1у ”. (29.35)
/л=0
где /?(«,.) —импульсная характеристика Ф114.
Формуле (29.35) в z-области соответствует уравнение (29.25)
r(z) = //(z)W(z),
а в частотной области — уравнение (29.27)
)=//(?“' )(У(с>'ч.
На основании (29.13) выразим отсчеты промежуточного сигнала Мп)
в (29.35) через отсчеты входного сигнала, в результате чего получим соотно-
шение вход/выхоц системы интерполяции в виде:
y(nv)= f AG.,,-»>)-vW. Р9.36)
т^О. L. 21,. ... \ )
Лекция 29. Многоскоростные системы ЦОС
599
При прямом вычислении по этой формуле будем иметь
у(0) = А(О)лХО):
v(l) = Л(1) ДО);
y(L -1) = ft(L-l).r(O);
y(L)= Л(7.)л-(0) + /1(0)Д1);
y(L +1) = h(L + 1)Л(О) + /г(1)Д1);
(29.37)
(29.38)
v(2L — 1) = /i(2L -l)jr(O) + h(L- 1)л(1);
y(2L) = /1(2£)Д0) + /1(Л)Д I) + Л(О)л(2);
y(2L +1) = h(2L + l).v(0) + /i(L + l)x(l) + A(1)a(2);
(29.39)
y(3Z,-1) = h(2L - l).v(O) + /i(2L - l)x(l) + /1(/. - 1)л(2);
Данный алгоритм вычислений может быть описан в виде следующего соот-
ношения вход/выход системы интерполяции:
y(nv) = X Л(Ь1 + л?-©М-Ч — L (29.40)
л=О ([_ Ч J
где:
«д., л — номера отсчетов входного и выходного сигналов соответственно,
взаимосвязь между которыми устанавливается в (29.12);
ну® L — значение пу, взятое по модулю L\
FHvl nv
— целая часть числа ——.
|>J L
Рекомендуем убедиться самостоятельно, что результаты вычисления отсче-
тов выходного сигнала но формулам (29.36) и (29.40) совпадают.
600
Часть VIII. Многоскоростные системы ЦОС
29.2. Однократные системы децимации
Процедура децимации определяется как цифровая обработка входного сигна-
ла х(пТ) с помощью Операции линейной фильтрации, в результате которой
формируется выходной сигнал у(луГ¥) с пониженной в М раз частотой
дискретизации. При этом на временные и спектральные изменения сигнала
y(«j,7\) накладываются определенные ограничения, если сравнивать его
с сигналом, получаемым путем непосредственной дискретизации аналогово-
го сигнала (см. окончание п. 29.2).
Процедура децимации выполняется в два этапа:
О на первом этапе из входного сигнала х(пТ) в результате операции линей-
ной цифровой фильтрации формируется промежуточный сигнал w(nT)
той же частоты*
О на втором этапе из промежуточного сигнала ю(пГ) формируется иско-
мый выходной сигнал y(nv7\,). период которого, согласно (29.10), связан
с периодом входного и промежуточного сигналов соотношением:
Ту = МТ (29.41)
Рассмотрим каждый из этапов подробнее.
Первый этап
На первом этапе процедуры децимации выполняется операция линейной
фильтрации с помощью ФНЧ. обозначенного на рис. 29.4 блоком с импульс-
ной характеристикой Л(и).
Рис. 29.4. Система однократной децимации
Па рис. 29.5, а представлен модуль спектра |х(е-/ш/)| входного сигнала
х(пТ), в общем случае занимающий всю основную полосу частот. Поэтому,
согласно теореме Котельникова, при понижении частоты дискретизации
в М раз произойдет наложение спектров (с.п. Лекцию 10). Чтобы этого из-
бежать, спектр сигнала х(пТ) с верхней частотой /д/2 следует дополни-
тельно ограничить 'io верхней частоты // /2 = Д/2Л/ .
Лекция 29. Многоскоростные системы ЦОС
601
Рнс. 29.5. Частотная интерпретация процедуры децимации:
амплитудные спектры входного («), промежуточного (в) и выходного (е) сигналов;
идеальная АЧХ (б); амплитудные спектры входного сигнала при * = 1 (г) и к = 2 (d)
602
Часть Vffl. Многоскоростные системы ЦОС
Идеальная ЛЧХ А(со) ФНЧ в основной полосе частот должна удовлетворять
следующим требованиям (рис. 29.5, б):
Л(со) =
(0..
1 в полосе пропускания 0<со<——;
2М
О при других значениях
или в шкале нормированных частот to
А(со) =
в полосе пропускания 0<(и<—;
М
(29.42)
(29.43)
О
При других значениях.
модуль спектра |w(eJ0>r)| промежуточного сигнала
На рис. 29.5, в показан
ю(«Т) на выходе ФНЧ.
Соотношение вход/выход ФНЧ описывается формулой свертки
и<«7’)= J h(mT)x(nT-mT) (29.44)
/»=0
или в шкале нормированного времени
и<«) = £ Л(т)л(н - tn). (29.45)
/л-0
Второй этан
На втором этапе процедуры децимации из промежуточного сигнала ю(»Г)
(рис. 29.6,о) формируется выходной сигнал y(/?v7\) (рис. 29.6,6) путем про-
реживания отсчетов промежуточного сигнала: из последовательности отсчетов
w(nT), n = 0,1, 2,... берется каждый М-n отсчет, п = 0, М, 2М,... Понижение
частоты дискретизации осуществляется компрессорам частоты дискретиза-
ции (компрессором) (см. рис. 29.4), условно обозначенным в виде блока с на-
правленной стрелкой вниз и стоящим рядом коэффициентом децимации.
Местоположение отсчетов в шкале нормированного времени н (Т = I) и wv
(7^. = 1) легко определить из пропорции
nv-l;
п-М.
откуда n-Mny, щ.=0, I, 2... п-О, М, 2М,... (29.46)
Лекция 29. Многоскоростные системы ЦОС
603
Рис. 29.6. Формирование выходного сигнала в системе децимации:
промежуточный (а), выходной (б) н вспомогательный (г) сигналы;
периодическая последовательность единиц и нулем (в)
Соотношение вход/выход компрессора имеет вид:
y(HvTv) = wOiT), л = О,М, 2Л/,... (29.47)
или. с учетом (29.46),
у(Лу) = к? - 0.1, 2,... (29.48)
Объединяя (29.48) и (29.45), получим соотношение вход/выход системы де-
цимации-.
у(л¥) = X Л(»«)а(Шу-м). (29.49)
т=О
При прямом вычислении по этой формуле будем иметь:
у(О) = Л(О);
у(1) = адх(М) + й(1)л(М -1) + ... + h(M)л(0);
у(2) = й(0)л(2М) + й(1)х(2М -1) + ... + b(M )х(М) + ... 4- h(2М )л(0);
604
Часть УШ. Многоскоростные системы ЦОС
(29.50)
(29.51)
(29.52)
Получим соотношение вход/выход системы децимации в z-области и в час-
тотной области. С этой целью определим следующий абстрактный вспомога-
тельный сигнал (рис. 29.6, г):
, к = 0, М,2М
(О при других п.
Так как этот сигнал и>'(п) совпадает с сигналом vv(n) в моменты взятия от-
счетов выходного сигнала, для данных моментов времени, с учетом соотно-
шений (29.45) и (29.46), можно записать:
у(л v7\,) = w'(h7"), и = О, М, 2М,.
y(ny) = w(Mny\ пу = 0,1, 2,...
Представим сигнал »/(«) как произведение сигнала м(и) и периодической
последовательности единичных отсчетов, между которыми расположено
- (М -1) нулей на периоде, равном М (рис. 29.6, в). Такая последователь-
ность может быть описана суммой (см. формулу (11.16))
1 V Лт"* f1 П= рМ. р = 0.1. 2,...;
— 2. е м =•<
М *=о [0 при других н.
поскольку при п = рМ. р = 0,1,...
-2л
?м"“=|
а при других значениях и сумма конечной геометрической прогрессии равна
,2к ..
j—пМ
, М
И-> j—h.
^ = 0.
1—и
1-е -м
1-е "
т. к. равен нулю ее числитель.
Таким образом, сигнал ш(п) можно представить как произведение
j М-1 j™,*
w(n) = w(n) — 2- е м
М *=0
(29.53)
Получим z-изображение выходного сигнала y(rtv). Согласно определению,
l'(z) = X X"v)z
н, =0
Лекция 29. Многоскоростные системы ЦОС
605
или, с учетом (29.52),
Y(z) = £ w'(Mny)z~“y
Используя взаимосвязь (29.46) между переменными луи п и представление
w'(n) в виде (29.53), запишем:
Пг)= Ё H-'(Mnv)z
>ц - О
«* “ I Г-'Ч-Д1 i—nk
Ё w\h)z м = £ и»)—i X е м
11=0 иг-0 М к=0
Изменим порядок суммирования:
j м-1 « Ад -Л.
Т(г) = тг L Ё vv^e М z М
М Jt = O >i=0
1 М-1 <»
м к=О я=0
—к
w(rt)e w ziV
Так квк сумма в фигурных скобках представляет собой z-изображсние
функции в квадратных скобках, запишем:
, л/ч ( ±
Г(г) =— JiyL м гм
м I
На основании соотношения вход/выход ФНЧ в z-области (см. рис. 29.4)
lV(z) = //(z)X(z)
получим соотношение вход/выход системы децимации в z-ofaacmu:
1 м-i | L 1 _,г.\ Л_
У(г) = —J // е л1 zM XЬ м zM
Мм I
(29.54)
а подставив z = e3<1'T)l =e7t°’r, автоматически имеем соогношепие вхоч/выход
системы децимации в частотной области:
м-t ( А»-2"*
r(eA) = _L'y н е1~и~~
м *=о
(29.55)
Используя взаимосвязь (29.41) между' периодами дискретизации, получаем
взаимосвязь между нормированными частотами 6) и (bv :
со., =оГГ. =шШ' = Мю.
(29.56)
Z м
606
Часть VIII. Многоскоростные системы ЦОС
Подставляя о\. из (29.56) в правую часть (29.55), запишем:
Выразим данную частотную характеристику через ее модуль и аргумент:
и перепишем (29.57) с учетом обозначений АЧХ и ФЧХ:
м <-<i ।
(29.58)
При идеальной АЧХ (29.43) в основной полосе частот входного сигнала
[0; 0)я/2| получим следующее соотношение между спектрами входного и
выходного сигналов (соотношение вход/выход системы децимации в частот-
ной области):
(29.59)
из которого следует, что спскгр выходного сигнала равен (с точностью до
постоянного множителя \/М ) сумме спектров входного сигнала, сдвинутых
по оси частот друг относительно друга на величину й)=2п/М . При этом
сдвиг спектра входного сигнала сопровождается изменением его аргумента
в соответствии с ФЧХ фильтра.
В основной полосе частот [О, со^/21 выходного сигнала при подстановке
в (29.57) Л = 0 соотношение между' спек|рами входного и выходного сигна-
лов имеет вид:
) = — X . (29.60)
м
На рис. 29.5.Д, г, д показаны модули спектров входного сигнала при
к =0,1. 2, а на рис. 29.5. е — модуль спектра выходного сигнала, совпадаю-
щий. согласно (29.60), в основной полосе частот [0; со^/1| с модулем спектра
Лекция 29. Многоскоростные системы ЦОС
607
входного сигнала при к -О и повторяющийся с периодом <о£. Необходимо
иметь в виду, что модуль спектра выходного сигнала не равен сумме модулей
спектров входного сигнала, сдвинутых на G)=2itk/M (модуль суммы не ра-
вен сумме модулей в (29.59)).
Рассмотрим, каким был бы спектр при непосредственной дискретизации ис-
ходного аналогового сигнала с частотой выходного сигнала . Аналоговый
сигнал имеет финитный спектр с верхней частотой /д/2, а дискретизировать
этот сигнал необходимо с большей частотой // -М/л. Поэтому во избежа-
ние элайсинга (наложения спектров) необходимо дополнительно ограничить
спектр до верхней частоты /д/2 в соответствии с теоремой Котельникова.
На рис. 29.7, а, б представлены модули спектров исходного аналогового сиг-
нала ха(/) и сигнала ла(/), полученного в результате дополнительного огра-
ничения спектра сигнала ла(/). Па рис. 29.7, в приведен модуль спектра
сигнала y(nvTv), полученного в результате дискретизации сигнала ха(0
с частотой '. Соотношение между спею рами аналогового и дискретною
сигналов, согласно (10.27). имеет вид:
Г(е*”;) = 7- f Ха1Л<1>+»ю>>)|
•у щ=-ао
или в основной полосе частот [1):сод/2| для /и = 0
) = ±Ха(уШ).
*У
Подставив Ту (29.41), получим
) = — Ха (yen). (29.61)
МТ
Сравнивая снск|ры (29.60) и (29.61) (Т = 1), можно утверждать, что при иде-
альной АЧХ модули спектров (амплигудные спектры) сигнала на выходе
системы децимации и сигнала, полученного путем непосредственной дискре-
тизации исходного аналогового сигнала хъ{Г) с частотой f* , совпадают.
Такое условие (ограничение) ставится при решении задачи децимации срсц-
сгвами цифровой филырации. Аргумент снекгра (фазовый спектр) сигнала
на выходе системы децимации оказывается измененным в соответствии
с ФЧХ фильтра.
Часть УШ. Многоскоростные системы ЦОС
Рис. 29.7. Непосредственная дискретизация аналогового сигнала:
амплитудные спектры исходного аналогового (л),
с дополнительным ограничением спектра (б) н дискретного (в) сигналов
В действительности ЛЧХ фильтра нс является идеальной, поэтому не только
аргументы, но и модули спектров сигналов y(nvTv) и y(nvTy) будут отли-
чаться.
29.3. Полифазная структура систем
интерполяции
Структура системы интерполяции, представленная па рис. 29.1, содержит
ФНЧ. соотношение вход/выход которого описывается формулой свертки
(29.35):
у(пг)= X А('Ч-"')«('")= У А(т)»<лу
/н=0 иг=О
На выхоце ФНЧ формируется сигнал y(«v) с ’’высокой" частотой дискрети-
зации из промежуточного сигнала u>(wv) той же частоты. Однако промежу-
точный сигнал »v(nv) содержит (L- I) нулевых отсчетов между каждой па-
рой отсчетов входного сигнала ’’низкой" частоты дискретизации. Это
Лекция 29. Многоскоростные системы ЦОС
609
обстоятельство стало основой разработки на базе КИХ-фильтров эффектив-
ных структур с ФНЧ, работающими на "низкой" частоте дискретизации вход-
ного сигнала. Такие структуры получили название "пашфспиые".
Полифазная структура основана на замещении системы интерполяции
(см. рис. 29.1) с одним ФНЧ, работающим на "высокой" частоте дискретиза-
ции выходного сигнала, эквивалентной системой с L ФНЧ, работающими на
"низкой" частоте дискретизации выходного сигнала.
Рассмотрим полифазную структуру системы интерполяции.
КИХ-фильтр длиной /V. называемый фи.чы1цюм-прототипам. описывается
передаточной функцией
//(г)=Х'й(/)г''. (29.62)
/=0
где, как известно, отсчеты импульсной характеристики равны коэффициен-
там передаточной функции.
В этом случае соотношение вход/выход системы интерполяции (29.40) при-
нимает вид:
y(«v) = X + Ф£)л — -м
*|=о I [ J
(29.63)
Изучение иолифазной структуры начнем с простого примера.
Пример 29.1
Длина фильтра-прототипа N =9. коэффициент интерполяции L~3. Требу-
ется определить выходной сигнал системы интерполяции при ее полифазной
структуре.
Решение. Запишем соотношение (29.63)
Я ГГл,"1
ylny)= j Л(Зл + луФЗ)х — -п (29.64)
n=0 IL 3 J I
и определим отсчеты выходного сигнала прямым вычислением по формуле
(29.64). Результаты расчетов при нулевых начальных условиях представлены
в табл. 29.1, где для краткости номера отсчетов ИХ и входного сигнала запи-
саны не в скобках, а нижними индексами, например Л(0) заменено иа й()
и т. д. Слагаемые, содержащие отсчеты ИХ, начиная с л = 9. отбрасывались
(см. верхний предел суммы в (29.64)).
610
Часть VIII. Многоскоростные системы ЦОС
Taii./ици 29.1. Пример расчета выходного сигнала системы интерполяции
"у '<0 Л, lt2 h. /|4 h(l b1 Л, Вычисление v(»?j ио формуле (29.63)
0 "о ^oxo
1 ЛгЧ1
2 ft2 Mo
3 '4 V, + Л,^
4 /(| Й4 ЛЛ! +^4Л0
5 1'2 '•s л,.г, + hsxa
6 /r3 ^*0Л2 + ^-г| + bf,xQ
7 Л, *4 Ь\Х1 +^4Л’| +^7ЛЬ
8 h2 ft5 'n Л2.г2 + AS.V| + Ii^Xq
9 '<0 /|э ЪА + Л3Г2 + Ml
10 Л) *4 /f7 Л,.г3 +h4xy +^?-vl
11 h2 '>2 Лк ftj.tj + /ls.r2 +
12 *0 *3 b. Mj + 'Ь-'} + '!»л2
«г v(/iv + 2) = hQx{n) + hKx(n - 1) + +/i6.v(n-2)
л, +1 y(nv + 1) « AjA(H) + lt4.r(fi ~ 1) + + hjXin -2)
Лекция 29. Многоскоростные системы ЦОС
611
Таблица 29.1 (окончание)
Й| Л, йх ''4 Л5 'б Вычисление у(я¥) по формуле (29.63)
л¥ +2 у(яг) = Л2х(«) -1) + + V(«"2)- где nf - 0. 1....; [яР/з] — целая часть от деления
Приведенные расчеты позволяют сформулировать алгоритм вычисления вы-
ходного сигнала системы интерполяции.
Фильтр-прототип длиной N =9 заменяется эквивалентной структурой из
/„ = 3 параллельно соединенных субфильтров длиной G = N/L = 3 каждый.
Передаточную функцию А-го субфильтра можно записать следующим обра-
зом (табл. 29.1):
f Ч+*(«)г"3р.
р=0
откуда прн к =0, 1. 2:
Но(г3) = '"о+'>зг’3+М4’; (29.65)
Н1(г3) = Л| + Л4г<’ + Л7г"6; (29.66)
7/2< Z3 > = *2 + Лзг”3 + Лвг"6. (29.67)
Коэффициенты ПФ субфильгров равны:
4 = 0 {Л,, ftj.M;
А -1 {йр й4, Л? };
А = 2 {й2, й5, /fc}.
Входной сигнал системы интерполяции равен сумме входных сигналов суб-
фильтров.
612
Часть VIII. Многоскоростные системы ЦОС
На выходе субфильтров формируются группы последовательностей
(табл. 29.1):
*=° Л>.й-Уб-
к =1 Уь >4’ >7’ -
* = 2 у2. у5, у8,...
Каждый из субфильтров работает на "низкой” частоте дискретизации вход-
ного сигнала, поэтому, для того чтобы повысить частоту дискретизации до
требуемой— 3/д, на выходе каждого субфильтра необходимо поставить
экспандере коэффициентом интерполяции L = 3.
Согласно алгоритму вычисления отсчетов выходного сигнала (табл. 29.1, по-
следняя строка), на выходах соответствующих параллельных ветвей необхо-
димо размес тить элементы задержки.
Выходной сигнал системы интерполяции равен сумме сдвинутых друг отно-
сительно друга на интервал Tv выходных последовательностей субфильгров.
Обобщим результаты примера.
Для того чтобы вес субфильтры имели одинаковую длину, длина фильтра-
прототипа должна выбираться из условия: G = NfL — целое число.
При коэффициенте интерполяции L и длине фильтра-прототипа N суб-
фильтр имеет длину G, количество субфильтров равно L, их номера:
k = 0, I. 2.L-I.
Коэффициенты ПФ субфильтров (отсчеты ИХ) равны:
к=0 {/^.Л,,Л2л.Л(С-1>1};
* = 1 Л,,,.. hhiL..... Л1+(с-))Л};
* = {Л/,-1- Л(г-1>-/.' \i-n.2L- — • Л(1-ПКС-1)/.}>
где к — номер субфильтра.
Набор из (L-1) субфильтров образует банк фильтров, задеваемый матрицей
Л(С-1)£
Л| ^1+£ (29.68)
Л/.-1 ^L-l)-r£ A(£-)H(G-I)1.
Лекция 29. Многоскоростные системы ЦОС
613
Рис. 29.8. Поли фазная структура системы интерполяции (а}
и ее коммутационная модель (6)
Передаточные функции субфильтров имеют вид:
Ha(zL} = Йо + (29-69)
W.(z') = *i +A,^-l + ... +Л1+(е_,)£.г-(с-,)1-; (29.70)
+ Чх-1)+лг '+ — + Й|£-1)+(О-Г)г.г <G 1)1 (29.7))
614
Часть VIII. Многоскоростные системы ЦОС
Входной сигнал системы интерполяции равен сумме входных сигналов суб-
фильгров.
На выходе субфильтров формируются следующие группы последовательностей:
>0- У2/_, ...
^ -1 >! + /-• У11-2Л*
Л==(£~1) Ул-1' У(Л-Н+Л' У(Л1)к2/---
Каждый из субфилыров работает па ’’низкой" частоте дискретизации вход-
ного сигнала, поэтому на выходе каждого субфильтра ставят экспандер, по-
вышающий частоту дискретизации в L раз. Согласно алгоритму вычисления
отсчетов выходного сигнала, на выходах соответствующих параллельных
ветвей необходимо разместить элементы задержки.
Выходной сигнал системы интерполяции равен сумме сдвинутых друг отно-
сительно друга на интервал Tv выходных последовательностей субфильтров.
Рис. 29.9. Система интерполяции: пехотная (а), полифагнои С1руктуры (6)
Лекция 29. Многоскоростные системы ЦОС 615
Полифазная структура системы интерполяции представлена на рис. 29.8. а.
С практической точки зрения часто удобно использовать коммутационную
модель полифазной структуры (рис. 29.8, б), где переключение ветвей ведет-
ся в направлении против часовой стрелки.
На рис. 29.9 для сравнения приведены исходная и полифазная структуры сис-
темы интерполяции.
29.4. Полифазная структура
систем децимации
Структура системы децимации, представленная на рис. 29.4, содержит ФНЧ,
соотношение вхоз/выход которого описывается формулой свертки (29.45):
и-(/1)= £ /г(ш)х(л-ш).
м -О
На выходе ФНЧ формируется промежуточный сигнал iv(/r) с "высокой” час-
тотой дискретизации из входного сигнала х(п) той же частоты. Однако при
формировании выходного сигнала системы децимации из промежуточного
сигнала и<н) выбирается только каждый М-и отсчет, а остальные игнориру-
ются. Эго обстоятельство стало основой разработки на базе КИХ-фильтров
эффективных структур с Ф11Ч, работающими на "низкой'* частоте дискрети-
зации выходного сигнала. Такие струкзуры получили название "па'шфегшые".
Полифазная структура основана на замещении системы децимации с одним
ФНЧ (см. рис. 29.4). работающим на "высокой" частоте дискретизации вход-
ного сигнала, эквивалентной системой с М ФНЧ, работающими на ’’низкой"
частоте дискретизации выходного сигнала.
Рассмотрим полифазную струю уру системы децимации.
Подобно системе интерполяции, фильтр-прототип имеет длину N и описы-
вается передаточной функцией (29.62).
В эком случае соотношение вход/выход системы децимации (29.49) прини-
мает вид:
у(и„) = У h(m)x(Mny-m). (29.72)
Изучение полифазной структуры начнем с простого примера.
616
Часть УШ. Многоскоростные системы ЦОС
Пример 29.2
Длина фильтра-прототипа /V = 9, коэффициент децимации М = 3. Требуется
определить выходной сигнал системы децимации при ее полифазной структуре.
Решение. Запишем соотношение (29.72)
8
.у(л,) = X A('"b(3;iv -tn) (29.73)
«1=0
и определим отсчеты выходного сигнала прямым вычислением по формуле (29.73).
Результаты расчетов при нулевых начальных условиях представлены в табл. 29.2.
Гвблици 29.2. Пример расчета выходного сигнала системы децимации
ь, hx '9 ", ", ". ", ", Вычисление y(n ) по формуле (29.65)
0 *o*o
1 "о Й| Л2 ", Vs + *1*2 + *2*1 + *1*0
2 "о "l *2 ", ". ", ". + Ms + *2*4 + {ЬХ3 + h4X2 + + Л5л( + h6x0
3 "о Л, Л, ", Л, ", ". ", ", *ОЛЧ + *1лй + hl*! ^*6 + *4*5 + + Aj.y4 + h^Xj + fijX2 + h$xi
4 *0 Л, Л, й3 Ь4 ", ". ", Л0х,2 + й,Л| ( + AjJCjq + /ijX9 + ftjAg + + + Л6л6 + A7.vs +
5 ь, Al /1, Л3 It, ". It, ". 'Vis +"Л. +"Лз+"Л1 +Mii + + /is.l|0 +Л6л,
6 "о ", Л’ ". ", ". It, It, Al-Stf +btX(7 +*ZAf6 +^*3Xf5 +Ь4Л14 + + *SAI J + *6*12 + *7*lt * *8*10
7 ", ", Л2 л3 ", ", It. It, "s
Aox(3nr} + A|X(3/tv -l) + ... + figx(3nv -8) = = |/ioX(3«v) + -3) +hbx(3tiv - 6)1 + +[Arv(3fi,. -I)+A4x(3n, -4)+Л7х(Злу -7)1 + +[ft,.v(3/J-2) + ft$x(3n¥ -5) + ftgX(3/iy -8)1
Лекция 29. Многоскоростные системы ЦОС 617
Приведенные расчеты позволяют сформулировать алгоритм вычисления вы-
ходного сигнала системы децимации.
Фильтр-прототип длиной W =9 заменяется эквивалентной структурой из
М = 3 параллельно соединенных субфильтров длиной G = N/M - 3 каждый.
Передаточные функции субфильтров имеют такой же вид, как в системе ин-
терполяции: (29.65)—(29.67). Коэффициенты ПФ субфильтров равны:
к=0 {/!„,/г,.Л6};
k-\ {Л,. Л,, Л7};
к = 2 {Л2,Л5.Л8}_
где к — номер субфильтра.
Согласно алгоритму вычисления отсчетов выходного сигнала (габл. 29.2, по-
следняя строка), на входах соответствующих параллельных ветвей необхо-
димо разместить элементы задержки.
Таким образом, входной сигнал системы децимации равен сумме сдвинутых
друг относительно друга на интервал Т входных последовательностей суб-
фильтров:
Л = 0 х0, х3,х6,ль,,...
к = \ 0, xz'X^x^...
к = 2 О, Л], х4, л7,...
Каждый из субфильтров работает на ’’низкой" частоте дискретизации выход-
ного сигнала, поэтому, для того чтобы понизить частоту дискретизации по
требуемой — На входе каждого субфильтра необходимо поставить
компрессор с коэффициентом децимации М = 3.
Выходной сигнал системы децимации равен сумме выходных сигналов суб-
фильтров (табл. 29.2, последняя строка).
Обобщим результаты примера.
Для того чтобы все субфильтры имели одинаковую длину, длина фильтра-
прозотипа должна выбираться из условия: G = N/M —целое число.
При коэффициенте децимации М и длине фильтра-прототипа W субфильтр
имеет длину G, количество субфильтров равно М, их номера:
к = 0.1, 2,..., М -1.
618
Часть УШ. Многоскоростные системы ЦОС
Л0’ хм ’ Х2М ’ —
Рис. 29.10. Полифазная структура системы децимации (п)
и се коммутационная модель (б)
Передаточные функции субфильтров имеют такой же вид, как в системе ин-
терполяции: (29.65)—(29.67). Коэффициенты ПФ субфильтров равны:
fc=0 Р;О*^'И’А2Л/.....}’
* =1 {^I» ^1+Л/ , ^1+2Л/.^+(G-I)M }’
А: — (/И -1) [hM_|, 1цм-})+м > h(M-i>+2M..
Лекция 29. Многоскоростные системы ЦОС
619
Набор из (М — 1) субфилы ров образует банк фшыпров, задаваемый матрицей
ЛС! hM
Л| К+м fy+«7-])M
Ьм-1 \м-\)+м •
Согласно алгоритму вычисления отсчетов выходного сигнала, на входах со-
ответствующих параллельных ветвей размещаются элементы задержки.
Входной сигнал системы децимации равен сумме сдвинутых друг относи-
тельно друга иа интервал Т входных последовательностей субфильтров:
А-0 х$,хм, х2м,...
А = 1 О, x2jW„i,...
А-(М 1) О, Хм_2, *2М-2’ •••
Рис. 29.11. Система децимации: исходная (а), полифазной структуры (б)
620 Часть VIII. Многоскоростные системы ЦОС
Каждый из субфильтров системы децимации работает на ’’низкой” частоте дис-
кретизации выходного сигнала, поэтому на входе каждого субфильтра необхо-
димо поставить компрессор, понижающий частоту дискретизации в М раз.
Выходной сигнал системы децимации равен сумме выходных сигналов суб-
фильтров.
Полифазная структура системы децимации представлена на рис. 29.10, а, а ее
коммутационная модель — на рис. 29.10, б, где переключение ветвей ведется
в направлении против часовой стрелки.
На рис. 29.11 для сравнения приведены исходная и полифвзная структуры
системы децимации.
ЧАСТЬ IX
ПРИМЕНЕНИЕ ВЕЙВЛЕТ-АНАЛИЗА
В ЦОС
Лекция 30. Основы дискретного
вейвлет-анализа
Лекция 30
Основы дискретного
вейвлет-анализа
Термин "вейвлет" (wavelet) дословно можно перевести как "маленькая волна"
или "всплеск". За последнее десятилетие функции с графиком типа всплеска
стали все чаще применяться для разложения сигналов вместо гармонических
волн. Теория вейвлетов является мощным дополнением фурье-анализу и
обеспечивает более гибкую технику обработки сигналов. Главное преимуще-
ство вейвлет-анализа заключается в том, что он позволяет обнаружить сильно
локализованные изменения сигналов, тогдв квк дискретное преобрвзование
Фурье этого не дасг. Дело в том, что в коэффициентах ДПФ (ом. Лекцию //)
отражается поведение сигнале на всем временном отрезке его наблюдения.
Особенно важна принципиальная возможность вейвлетов представлять
нестационарные сигналы, состоящие, например, из различных компонентов,
действующих на непересекающихся временных интервалах, модулирован-
ные сигналы и т. д. Подобные сигналы являются более адекватными моде-
лями процессов, происходящих в квналах связи и устройстввх их обработки.
Вейвлет-спектрограммы значительно информативнее обычных спектро-
грамм, что делает их незаменимыми при "тонком" анализе структуры сигна-
лов в различных прикладных задачах, например при идентификации пара-
метров цифровых систем или в биомедицинской кибернетике.
Данная лекция затрагивает понятия только дискретного вейвлет-анализа. по-
зволяющего легко реализовать рассматриваемые далее методы с помощью
систем ЦОС. Для более подробного ознакомления с этой предметной обла-
стью предлагается обратиться к специальной литературе [Д2, ДЗ, Д7].
30.1. Усреднение и детализация
Рассмотрим Л'-точсчную последовательность отсчетов цифрового сигнала.
Для простоты можно предположить, что число /V является степенью двойки.
В этом нет ограничения общности, т. к. в конце последовательности всегда
можно добавить пулевые отсчеты, увеличивающие N до ближайшей степени
624
Часть IX. Применение вейвлет-анализа в ЦОС
двойки (ел/. Лекцию 12). В качестве примера возьмем 8-точечную последова-
тельность
{16,14,12,10, 8, 6, 4, 2}.
Сначала для каждой пары рядом стоящих отсчетов вычислим четыре средние
величины:
(1б+14)/2 = 15; (12 + 10)/2 = 11; (8 + 6)/2 = 7; (4+2)/2 = 3.
Вполне очевидно, что знания этих четырех полусумм недостаточно для об-
ратного восстановления всего сигнала. Поэтому можно подобным образом
вычислить четыре лолуразности
(16-14)/2 = 1; (12-10)/2 = 1; (8-б)/2 = 1; (4-2)/2 = 1,
которые называют коэффициентами деталей (деталями). Средние величины
представляют крупномасштабный '’слепок” исходного сигнала, а детали не-
обходимы для восстановления его ''тонкой” структуры. В случве сильной
коррелированное™ отсчетов сигнала вполне достаточно крупномасштабного
анализа, т. к. детали будут малы.
Полученную последовательность, состоящую из четырех полусумм и четы-
рех полуразностей
{15,11,7, 3.1,1,1.1},
легко использовать для восстановления отсчетов исходного сигнала. Повто-
рим описанную процедуру применительно к четырем первым (крупным)
элементам новой последовательности:
(15+10/2 = 23; (7+3)/2 = 5; (15 -11)/2 ~ 2; (7 - 3)/2 = 2.
Они преобразовались в два средних и две полуразности. Остальные элементы
оставим без изменения. Получилась последовательность следующего вида:
{13, 5, 2, 2,1,1,1,1}-
Последияя итерация описываемого процесса преобразует первые два элемен-
та в одно среднее и одну полуразность:
(13+5)/2 = 9; (13-5)/2 = 4.
Можно отметить, что последняя полусумма является средним знвчением всех
восьми отсчетов исходного цифрового сигнала. В итоге получилась преобра-
зованная 8-точсчиая последовательность
{9, 4, 2, 2,1,1,1,1},
которая является альтернативным представлением исходного сигнала и со-
стоит из общего среднего и семи полуразностей, выражающих различные
Лекция 30. Основы дискретного вейвлет-анализа 625
уровни детализации. Рассмотренная процедура представляет собой eeiauem-
преобразование, а результирующая последовательность является вейвлет-
образом исходного сигнала.
Оценим порядок вычислительной сложности алгоритма вейвлег-
преобразовапия, т. е. число арифметических операций сложения, вычитания
и деления как функцию количества отсчетов N в сигнале (см. Лекцию 72).
В проведенных ранее вычислениях требуется выполнить 8 + 4 + 2 = 14 опера-
ций, которые можно представить в виде произведения: 14 = 2(8-1). Если
в общем случае имеется N = 21‘ отсчетов сигнала, го на первом шаге потре-
буется 2V операций, на втором— 2|’“1 операций и так далее до последнего
шага, на котором будет 21 операции. Общее число операций находится про-
стым суммированием членов геометрической прогрессии:
Е 2'=2(2l'-l)/(2-l) = 2(«-l).
1=1
Таким образом, для реализации вейвлет-преобразования требуется произве-
сти 2(N —1) арифметических операций, т. е. сложность алгоритма имеет по-
рядок O(N).
На каждом из трех шагов описанного процесса исходный сигнал рассматри-
вался с различной степенью детализации. Поэтому удобно с каждой итераци-
ей процесса связать величину, называемую разрешением, которая равна чис-
лу оставшихся средних в конце данного шага, В проведенном анализе
разрешение последовательно принимало значения 4 = 2v-ls 2 = 2,_2, 1 = 2V-3
для v=3. Понятие разрешения является принципиально важным в дискрет-
ном вейвлет-анализе.
30.2. Матричные представления
Описанный в предыдущем разделе процесс усреднения и детализации не-
трудно представить с помощью матричных преобразований. Для простоты
изложения примем 7V = 22=4 и введем следующие обозначения. Исходную
4-точечную последовательность отсчетов цифрового сигнала представим
в виде вектора-столбца:
ра/
_ = А(2)
х(3) ’
_х(4)
626
Часть IX. Применение вейвлет-анализа в ЦОС
Тогда на первом этапе преобразование, состоящее из вычисления двух полу-
сумм и двух полуразностей, можно записать в матричной форме
н2?= - - 0 0 2 2 0 0 - 1 2 2 ---00 2 2 0 0 - -- L 2 2J X
Верхние две строки матрицы //2 усредняют два соседних отсчета сигнала,
а нижние две — детализируют их. Если каждую строку (или каждый стол-
бец) матрицы Н2 считать четырехмерным вектором, го можно заметить, что
скалярное произведение любой пвры векгоров, как сумма произведений со-
ответствующих компонентов, равно нулю. т. е. они образуют ортогональную
систему. Норма (длина) каждого вектора равна 1Д/2 . Для удобства преобра-
зований приведем нормы векторов к единице, умножив все компоненты
па 5/2 . В этом случае получим ортогональную .матрицу.
При усреднении и детализации с помощью такой матрицы будет происходить
деление не на 2. а на -72 , что не умаляет общности результатов.
На втором (и последнем) этапе необходимо сохранить полуразностн и прсоб-
рвзовать две полусуммы. Исходя из аналогичных рассуждений, можно ут-
верждать. что этой процедуре соответствует матрица
Лекция 30. Основы дискретного вейвлет-анализа
627
Первая строка этой матрицы усредняет отсчеты, вторая — детализирует, тре-
тья и четвертая, образуя единичную (тождественную) матрицу, сохраняют
предыдущие полуразности. Произведение матриц и Н2 двст искомое
дискретное вейвлег-преобразование вектора 7, т. к. матрица II задает ото-
бражение R* —> R^ (см. Приложение 4)
Нетрудно заметить, что матрица Н также является ортогональной. Выраже-
ние (30.1) представляет собой известное преобразование Хаара [10], которое
в свете введенных определений является вейвлет-преобразованием
Hx = w, (30.2)
где элементы вектора-столбцв называют вейвлет-коэффициентами.
Если с каждой строкой преобразоввния Хаара соотнести ступенчатую функ-
цию, заданную на единичном интервале, то первые четыре из них в соответ-
ствии с (30.1) будут иметь вид, представленный на рис. 30.1.
В базисе этих функций возможно разложение непрерывного во времени сиг-
нале, звданного также на единичном интервале. При увеличении порядка
матрицы N будет происходить сжатие функций во времени (масштабирова-
ние), а евми они станут напоминать короткие всплески, перемещаемые по
оси абсцисс. Подобный процесс составляет сущность непрерывного вейвлет-
анализа, основанного на масштабировании и сдвигах. Ограниченные по дли-
тельности и перемещаемые во времени вейвлеты (функции Н2 и //3) в ре-
зультате свергки с отрезками сигнала позволяют выявить их локальные осо-
2) Зак. 165
628
Часть IX. Применение вейвлет-анализа в ЦОС
бенности. чего не предполагают другие методы анализа. Дискретным анало-
гом описанного процесса является воздействие матрицы (30.1) на вектор от-
счетов входного сигнала 7. Качественная картина анализа "тонкой" структу-
ры сигнала при этом сохраняется.
Рис. 30.1. Ступенчатые функции Хаара
Обобщим матричный алгоритм усреднения и детализации на произвольную
^точечную последовате тьность, когда N = 2', при поэтапном процессе пре-
Лекция 30. Основы дискретного вейвлет-анализа
629
образования, описанном в п. 30,1. На первом шаге ортогональная матрица
преобразования примет вид:
Матрица (30.3)— квадратная порядке /V = 2v. Определим две новые матри-
цы, входящие в состав Hv.
630
Часть IX. Применение вейвлет-анализа в ЦОС
что позволяет считать Hv блочной матрицей, состоящей из двух подматриц
Д, и Dv, размером 2'4 х2‘‘ каждая, т. е. записать Н,, в виде
(30.6)
Подматрицу можно назвать преобразованием усреднения, a Dv —- преоб-
разованием детализации. Введем векторы-столбцы результатов поэтапного
преобразования
(30.7)
которые содержат 2 элементов и соответственно являются векторами ко-
эффициентов усреднения и детализации. С учетом принятых обозначений
преобразование (30.2) на первом этапе примет вид:
(зо-8)
I (1 .
Матрица в правой части (30.8) является также блочной и состоит из двух
векторов-столбцов (30.7).
На каждом шаге вейвлет-преобразования сохраняются детализирующие ко-
эффициенты d и обрабатываются результаты усреднения а . Очередной шаг
вейвлет-преобразования состоит в применении к вектору av_t операций ус-
реднения и детализации на следующем, более низком, уровне разрешения:
(30.9)
Здесь и £\_| —матрицы вида (30.4) и (30.5) размером 2Р 2х2г-,> a av~2
и d^2 — векторы-столбцы, содержащие 2‘”2 элементов. Чтобы построить
часть вейвлет-преобразования, вектор dv_2 сохраняется вместе с . Этот
процесс продолжается до заключительного шага, на котором получаются
Лекция 30. Основы дискретного вейвлет-анвлиза
631
скалярные величины «0 и с/0. Итоговый результат вейвлет-преобразования
можно представить вектором-столбцом, содержащим N = 2И элементов:
(30.10)
30.3. Обратное вейвлет-преобразование
В првктических приложениях выдвигается традиционное требование обрв-
тимости вейвлет-преобразования, как и любого другого преобразования. То
есть по изображению (вектору) iv необходимо восстановить оригинал (/V-
точечную последовательность 7). Исходя из выражения (30.2), входной век-
тор отсчегов может быть получен в результате умножения слева обеих частей
этого равенства на обратную матрицу Н"1:
Н'1Нх = 1Г»,
откуда
x = H~1w, (30.11)
т. к. произведение Н образует единичную матрицу / , являющуюся тож-
дественным преобразованием. Следствием ортогональности матрицы Н яв-
ляется простота ее обращения, заключающаяся в обычном транспонирова-
нии. Поэтому выражение (30.11) для обратного вейвлет-преобразования
принимаег вид:
x = HTw
(30.12)
Если рассмвтривать многошаговый процесс, описанный в п. 30.2, то можно
убедигься в использовании па каждой итерации ортогональной матрицы Хввра
Нк соответствующего порядкв (к = 1, 2,..., у). Поэтому восстановление век-
торов коэффициентов усреднения Лд на А-ом этапе будет происходигь анало-
гично (30.11) на основании обращения матрицы в выражении (30.9):
(30.13)
632
Часть IX. Применение вейвлет-аналиав в ЦОС
С учетом того, что
выражение (30.13) можно переписать в следующем виде:
~ Ак (lk-\ + &к d.
(30.14)
Соотношение (30.14) дает практическую формулу для восстановления из
ojt-i и dk„i. В скалярном случае (30.14) приводит к парс равенств
о _ а”-1
(30.15)
ЙА'^/Г“
Распишем равенство (30.9) для произвольного к-го этапа в вице пары мат-
ричных соотношений
А"* ="4-Р
я*«(. = d*_,.
(30.16)
Подставив (30.16) в (30.14), получим равенство
(lk ~ Ак Акак + ®как '
(30.17)
из которого следует, что
аГЛл + Di Dk
(30.18)
где 1к —единичная матрица порядка 2*. Следовательно, выполняется пара
соотношений
AkAl -h-i*
0^ = 1^.
(30.19)
В следующем разделе равенства (30.18) и (30.19) будут играть существенную
роль при доказательстве возможности реализвции прямого и обратного
вейвлет-преобразований с помощью низкочастотных и высокочастотных
цифровых фильтров.
Лекция 30. Основы дискретного вейвлет-анализа
633
30.4. Фильтровая реализация
вейвлет-преобразования
Матричные представления преобразования Хаара (30.3)—(30.5) позволяют
применить методы цифровой фильтрации в дискретном вейвлет-анализе. По-
скольку умножение матрицы на вектор происходит по правилу "строка на
столбец", то элементы любой строки матрицы (30.3) можно рассматриввть
как коэффициенты КИХ-фильтра 1~го порядка, которые являются отсчетами
его импульсной характеристики (см. Лекции 4, 7). В результате свертки (ум-
ножения с накоплением) импульсной характеристики и входного сигнала по-
лучаются выходные отсчеты фильтра, как раз являющиеся коэффициентами
усреднения и детализации. Однако в любом цифровом фильтре после вычис-
ления очередного выходного отсчета входной сигнал сдвигается нв одну
временную позицию. Но элементы строк матрицы (30.3) сдвинуты друг отно-
сительно друга сразу на две позиции вправо. Это означает, что в выходном
сигнале фильтра по сравнению с преобразованием (30.3) появляется каждый
второй "лишний" отсчет, который необходимо убрать. Изъятие квждого
второго отсчета выполняется посредством децимации с коэффициентом 2
(см. Лекцию 29). Структурная схема КИХ-фильтра, соответствующего стро-
кам матрицы (30.3), представлена на рис. 30.2.
Рис. 30.2. КИХ-фильтр, реализующий преобразование Хаара
Для подматрицы (30.4) коэффициенты фильтра должны иметь значения
bQ = 1Д/2 , b\ ~ Для подматрицы (30.5) = -1/л/2, = 1/л/2. Переста-
новка элементов строк матриц для получения коэффициентов фильтра обу-
словлена структурой вектора-столбца отсчетов входного сигнала х. В этой
структуре более поздние по времени отсчеты находятся ниже предыдущих,
что заставляет менять местами коэффициенты фильтра ради сохранения тра-
диционных способов описания цифровых цепей. На основании предыдущих
634
Часть IX. Применение вейвлет-внализа в ЦОС
результатов (см Лекцию 18) можно утверждать, что первый фильтр (фильтр А )
является ФНЧ, а второй (фильтр £>)— ФВЧ. Их ненормированные АЧХ изо-
бражены на рис. 30.3.
Коэффициенты: b0 = 1; Ь, = 1
Рис. 303. АЧХ фильтров для преобразования Хаара
Таким образом, многошаговый процесс вейвлет-преобразования Хаара, опи-
санный в w. 30.2, можно изобразить в виде структурной схемы, приведенной
на рис. 30.4 и использующей цепочку низкочастотных и высокочастотных
КИХ-фильтров с системой децимации на выходе каждого из них.
Лекция 30. Основы дискретного вейвлет-анализа
635
Рис. 30.4. Фильтровая реализация вейвлет-преобразования
Для вектора входного сигнала, содержащего четыре отсчета, операция циф-
ровой фильтрации с учетом вида матриц (30.4) и (30.5) будет иметь следую-
щий вид:
x->(D2)^D2x
>L—>(Л2)"> А2х —» (А) ~* DtA2x
J--»(A|)-> Л,Л2л .
Данная схема дает представление о том, как с помощью цифровых фильтров
можно восстановить исходный сигнал из его вейвлет-коэффициентов. Для
этого воспользуемся выражением (30.14) и составим схему обратного
вейвлет-преобразования, связанную с предыдущей.
а,а,х -i^а,г) ф _»j
>Т.
Операция © обозначает поэлементное сложение компонентов-векторов.
На обоих этапах преобразования использовались соотношения, основанные
на равенствах (30.18) и (30.19):
А|ГА,А27 + Р,,Р|А27 = (а|'а| + D[D,)a2x = I,A2x = A2x, (30.20)
А[ А2 х + dId2x=(a2A2 + dID2\x = 12x = x . (30.21)
Формулы (30.20) и (30.21) дают ключ к фильтровому восстановлению исход-
ного сигнала из вейвлет-коэффициентов: схема будет обратной, к изображен-
ной на рис. 30.4, только децимация заменяется интерполяцией с коэффициен-
том 2, осуществляемой путем добавления нулевых компонентов вперемежку
с имеющимися. Коэффициенты НЧ- и ВЧ-фильтров восстановления сигнала
соответствуют элементам строк транспонированных матриц А7 иО . Струк-
636
Часть IX. Применение вейвлет-анализа в ЦОС
турная схема процесса восстановления исходного сигнала по его вейвлст-
коэффициентам показана на рис. 30.5.
Рис. 30.5. Фильтровое восстановление цифрового сигнала
Преобразование Хаара, как простейший вейвлет, позволяет перейти к обоб-
щениям, раскрывающим принципы конструирования более сложных структур.
30.5. Дискретные
вейвлет-преобразования
Из предыдущих разделов данной лекции следует, что качество вейвлет-
преобразований может сильно зависеть от масштабирования базисных функ-
ций, временных сдвигов и от типа вейвлета. На практике масштвбирующие
множители, сжимающие базисные функции (см. рис. 30.1), принимаются
равными отрицательным степеням двойки. Соответственно временные сдви-
ги выбираются рввными положительным степеням двойки. Основное на-
правление в исследовании типов вейвлетов состоит в поисках таких се-
мейств, которые образуют ортогональный базис (ортогональную матрицу
преобразования). Среди этих вейвлетов предпочтение отдается тем, которые
основываются на КИХ-фильтрации, т. е. имеют компактный (конечный во
времени) носитель.
Самый простой способ описания вейвлет-преобразоввний использует произ-
ведение матриц (см. п. 30.2). Усложнение конструкции вейвлетов основано
на построении взвешенных средних
сох(1) + c,jr(2) +... + cN_tx(N)
и взвешенных разностей
Cjjtfl) - сох(2) + с3х(3) - с2х(4)+...
для /V-точечных последовательностей отсчетов входного сигнала (N>2) и
некоторого множества коэффициентов с0, q, с2’ — « cjv-i Нетрудно заметить,
Лекция 30. Основы дискретного еейвлет-анализа
637
что подобный выбор приводит к следующему свойству ортогональности век-
торов, состоящих из коэффициентов
ЭД ~Wl + ~С2С3 + - = 0.
По такому принципу построен один из самых популярных вейвлетов, а имен-
но вейвлет Добеши [ДЗ]. который принято обозначать D4, т. к. он основан на
четырех коэффициентах с0, q. с2 и
ет вид
со q с2
q -с0
0 0 с0 q
W = 0 0 q “с2
(1 0
0 0
q 0
-Со 0
. Матрица этого преобразования име-
0 0
0 0
с2 t‘3 0 0
q -qj 0 0 (30.22)
с0 с[ с2 С3
<3 ~С2 с, -с0
0 Со С|
0 сз ~с2_
Если эту матрицу умножить на вектор-столбец отсчетов входного сигнала, то
ее первая строка дает взвешенную сумму первых четырех отсчетов. Третья
строка определит такую же сумму, но сдвинутую па две временные позиции.
Вес строки с нечетными номерами зададут аналогичные взвешенные суммы
(усреднения). Таким образом коэффициенты сэ, с2, ct и с0 определяют
КИХ-фильтр 3-го порядка, выходной сигнал которого подлежит децимации
с коэффициентом 2. Аналогично четные строки матрицы (30.22) порождают
взвешенные разности (детализации). При этом задается другой КИХ-фильтр
3-го порядке с коэффициентами -с0, q, -с2. с3 и децимацией выходного
сигнала.
Требование ортогональности матрицы (30.22) для ее легкого обращения
(транспонирования) приводит к соотношениям
Сд+q2 +с2+с2 =1; (30.23)
с0 - с2 + q с3 = 0. (30.24)
Одним из возможных решений, удовлетворяющих уравнениям (30.23) и
(30.24), является следующий набор коэффициентов
с0=1±Д- 0.483; с. =-^Д = 0.837;
4л/2 1 4^/2
638
Часть IX Применение вейвлет-анализа в ЦОС
с2=^-^-= 0.224; с1=—Д = Ч),129.
4>f2 4у/2
Расчет АЧХ-фильтров для вейвлета D4 приводит к результатам, показанным
на рис. 30.6.
Коэффициенты:
feo = -O,13; ^=0,22; ^=0,84; />,=0,48
Коэффициенты:
Ьо =-0,48; =0,84; = -0,22; 1% =-0,13
Рис. 30.6. Ненормированные АЧХ фильтров для вейвлета Добеши
4з этих характеристик видно, что сглаживающим (усредняющим) фильтром
1вляетсяФНЧ, а детализирующим — ФВЧ. Результат вполне ожидаемый.
Реализация вейвлета D4 в виде умножения матрицы И’ на входной вектор х
)чень проста и наглядна. Однако этот метод непрактичен, т. к. матрица
30.22) должна иметь порядок, равный размеру вектора отсчетов сигнала, ко-
Лекция 30. Основы дискретного вейвлет-анализа
639
торый обычно велик. Но можно заметить, что матрица W имеет регулярную
структуру и при алгоритмическом построении вейвлет-преобразования дос-
таточно хрвнить только нвбор из четырех коэффициентов КИХ-фильтров.
Обратное вейвлет-преобразование получается простым транспонированием
матрицы (30.22).
-о с2 Сз -сг q 0 0 со с3 0 0 0 <?2 Сз С| -Со 0
с3 -Со С| -С1 0 0 (30.25)
0 0 с2 q со с3 0 0
0 0 с3 -Со С| -с2 0 0
0 0 с2 q с2
0 0 С3 -Со. q ”С2.
Изучение струкгур матриц (30.22) и (30.25) позволяет сформулировать неко-
торые общие правила нахождения коэффициентов НЧ и ВЧ КИХ-фильтров
произвольной четной длины N, синтезируемых для анализа и восстановле-
ния цифрового сигнала. Они заключвются в следующем.
Для фильтров, реализующих прямое вейвлет-преобразование:
1. Обеспечивается нормализация в виде равенства единице суммы квадратов
коэффициентов (аналог равенства (30.23)).
2. Вводится ортогональность векторов, состоящих из первой и второй поло-
вины коэффициентов (аналог равенства (30.24)).
3. Коэффициенты НЧ-фильтра являются элементами первой строки матрицы
преобрвзования. записанными в обратном порядке.
4. Коэффициенты ВЧ-фильтра соответствуют коэффициентам НЧ-фильтра.
записанным в обратном порядке и с противоположными знаками на не-
четных позициях (первой, третьей ит. д.).
Для фильтров, реализующих обратное вейвлет-преобразование:
1. Коэффициенты НЧ-фильтра соответствуют коэффициентам анализирую-
щего НЧ-фильтра, записанным в обратном порядке.
2. Коэффициенты ВЧ-фильтра являются копией коэффициентов анализи-
рующего НЧ-фильтра, но с обратными знаками у компонентов на четных
позициях (второй, четвертой и т. д.).
Перечисленные правила позволяют упростить процесс конструирования
вейвлег-фильтров, общая теория которых выходит за рамки данных лекций.
ЧАСТЬ X
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
НЕЛИНЕЙНЫХ ДИСКРЕТНЫХ СИСТЕМ
Лекция 31. Математическое описание
нелинейных дискретных систем
на основе функциональных рядов
и полиномов Вольтерры
Лекция 31
Математическое описание
нелинейных дискретных систем
на основе функциональных рядов
и полиномов Вольтерры
Одним из направлений развития ЦОС является разработка метопов нелиней-
ной цифровой обработки сигналов (детектирования, фильтрации, компенса-
ции, синтеза преобразователей частоты, сшпсза генераторов нт. д.).
Реализация этих методов на практике стала возможной в результате развития
цифровых сигнальных процессоров и вычислительной техники.
Многие методы нелинейной обработки сигналов применяются для иденти-
фикации. моделирования и синтеза нелинейных дискретных систем, описы-
ваемых нелинейным операторным уравнением.
Система является:
□ нелинейной, г. к. опа не обладает свойствами аддитивности и однородно-
сти (ам, Лекцию 4)\
□ дискретной, т. к. в пей действуют дискретные сигналы (система называет-
ся аналоговой. если в ней преобразовываются аналоговые сигналы).
Операторное уравнение устанавливает однозначное соответствие меж-ту
множествами входных и выходных сигналов.
В данной лекции рассматриваются временная, частотная и с-формы описа-
ния нелинейного операторного уравнения на основе функциональных рядов
и полиномов Вольтерры. а также методы построения математических мо-
делей нелинейных дискретных систем во временной и частотной областях,
приводятся примеры моделирования частотного детектора и фильтра им-
пульсных помех.
j44 Часть X. Математическое описание нелинейных дискретных систем
31.1. Операторное уравнение системы
л его использование в задачах
идентификации, моделирования
л синтеза нелинейных систем
Полагаем, что на нелинейную дискретную систему воздействуют сигналы
множества X (рис. 31-1, а). Выходные сигналы системы образуют множест-
зо Y0 . Однозначное соотношение между указанными множествами (соотно-
шение вход/выход) системы описывает оператор .
У(и) = ^Ын)|.
где Fv каждому воздействию Ди) из множества X ставит в соответствие
только одну реакцию у°(и) из множества У”.
Для построения нелинейного оператора системы введем следующие предпо-
ложения:
□ из множества воздействий X сформировано подмножество испытатель-
ных сигналов ХЕ cz У, а из множества реакций Y11—со-
ответствующее подмножество • 1? с У” измеренных или
вычисленных выходных сигналов системы;
□ нелинейная дискретнвя система обладает свойством непрерывности, т. е.
реакции системы на сигналы, отличные ог испытательных, но принадле-
жащие заданному клвссу воздействий (a(h)g X ). мало отличаются от ре-
акций нв соответствующие испытательные сигналы.
Тогда нелинейный оператор Ее, описывающий с точностью 6t однозначное
соответствие между подмножествами У£ и (рис. 31.1,6)
|^(л)-?(,(»)|58е для всех л,(л)е 3’J('Oe
где у9(л)-^^(п)^, устанавливает соотношение между множествами X и
У°, т. е.
||J‘Oo||^6e л™ всех X«)e X, у"(л)е У”, (31.1)
где у(н) = ГЕ |л(н)] — реакция системы на входной сигнал л(л).
Лекция 31 Математическое описание нелинейных дискретных систем...645
Рис. 31.1. Схематическое отображение действий операторов F (а) и F (б)
646 Часть X. Математическое описание нелинейных дискретных систем
Неравенство (31.1) означает, что нелинейная дискретная система (с операто-
ром ?’) описана нелинейным оператором Fz на заданном классе входных
сигналов с точностью 6Г, а оператор Fz аппроксимирует оператор Fs.
Параметры нелинейного оператора Fg находятся в результате решения зада-
чи аппроксимации
max ||у"(и)-ГеГл (n)l-»tnin, (31.2)
хч(к)е Xf'i u -hi
где с — вектор параметров оператора Fz.
По свойству непрерывности системы решение задачи (31.2) (вектор с ) явля-
ется оптимальным решением более общей задачи аппроксимации
max J у" («) - Fe —> min.
Для описания нормы погрешности аппроксимации на практике используют
П равномерную метрику (С )
|/(и)- Fc [x(n)]| = maxjy"()i) - Fc [?ф0]|:
□ среднеквадратическую метрику
Математическое представление нелинейного оператора Ге называется
математической моделью системы, а соотношение
у(и)=/;[х(/1)] (31.3)
— операторным уравнением системы.
Существует несколько универсальных математических форм представления
нелинейного оператора Fz. К ним относятся:
О фунциональные ряды и полиномы Вольтерры [8. 18, 19. 42];
□ ряды и полиномы Вольтерры—Пикара [18];
□ полиномы расщепленных сигналов [27];
□ нелинейные авторегрессионные разностные уравнения [8, 52];
П нейронные цепи [52].
Лекция 31. Математическое описание нелинейных дискретных систем...647
Указанные математические модели системы (кроме нейронных ценен) со-
держат линейно-входящие параметры, поэтому задача аппроксимации (31.2)
имеет единственное оптимальное решение по критерию выбрвнной метрики.
Описание нелинейного оператора в вице нейронной цепи в общем случае со-
держит нелинейно-входящие параметры. В этом случае решение задачи ап-
проксимации (31.2) существенно усложняется. поскольку помимо глобально-
го минимума (оптимального решения) появляются локальные минимумы.
В результате, получив решение задачи (31.2). трудно оценить, достигнут гло-
бальный минимум (получено оптимальное решение) или процесс поиска ре-
шения остановился па локальном минимуме.
На основе математического описания системы в виде операторного уравне-
ния (31.3) можно характеризовать процессы идентификации, моделирования
и синтеза нелинейных систем следующим образом.
П Идентификация системы — это процесс построения нелинейного операто-
ра (определение параметров математической модели системы в резуль-
тате решения задачи (31.2)) по известным множествам входных и выходных
сигналов. В качестве испытательных входных сигналов системы могут быть
использованы как детерминированные, так и случайные сигналы.
П Математическое моделирование системы — это использование получен-
ной в процессе идентификации математической модели для определения
выходных сигналов системы.
П Синтез системы — это создание физически или программно-
реализуемого объекта, выполняющего заданное функциональное назначе-
ние, например фильтрацию, детектирование, компенсацию и т. д.
В данной лекции рассматриваются вопросы, посвященные представлению
математической модели нелинейной дискретной системы в виде функцио-
нального ряда и полинома Вольтерры. а также методы определения парамет-
ров модели (методы идентификации системы) на классе стационарных слу-
чайных сигналов в срсднсквадрагической метрике.
При дальнейших преобразованиях математической модели системы учиты-
ваются следующие условия:
□ нелинейная дискретная система стационарнв. т. е. се выходной сигнал ин-
вариантен к моменту* появления воздействия:
□ входной сигнал системы действуете нулевого момента времени (.v(h) = O
при. н<0), поэтому используются односторонние преобразования Лапла-
са. Фурье и Z-преобразование:
□ для математической модели системы выполняется принцип причинности.
048 Часть X. Математическое описание нелинейных дискретных систем
В рамках метода "черного ящика" (математическая модель нелинейной сис-
темы строится на множествах входных и выходных сигналов) соотношение
вход/выход для аналоговых и дискретных систем формируется с помощью
единого математического аппарата функциональных рядов и полиномов
Вольтерры. Для иллюстрации данного факта описание нелинейных систем
будем рассматривать в аналоговой и дискретной областях.
31.2. Описание нелинейной системы
во временной области
Соотношение вход/выход нелинейной аналоговой системы во временной
области можно описать в ви ле сходящегося функциона 1ьного ряда Волыперры
у(0 = Ё [хо] = Ё И •• J(Ti • т2.......)П - т к'т •
*=0 А-О 00 о г=1
где
ОООО ОО
Wt[*(r)]=П...JА*(т,. г2,..., . (31.4)
ООО Г=1
При описании дискретной системы указанному ряду соответствует разложе-
ние вида
ос оо оо ОО ОО А
У(л)= XHi[i(")]= Е I X £ Л,(т1,»12,...,т*)ПХя-'пг).
Л=0 А=Онг| =O«ij=O mi —0 г=(
где
нДл(п)] = х Ё ••• Ё ^(.пц, т2,... .тДП-Ф’-'",)- (31.5)
m^-O/Kj=O w«4 =0 r=l
Многомерный интеграл [ХО] (многомерная сумма #*[х(л)]) называется
оонородным функционалом степени к .
Примечание
Функционал называется однородным, поскольку* выполняется свойство одно*
родности. например в области непрерывного времени
Ик |аг(п] = Jf ...J/rt(Tr т2.тд )ПолЦ -Tr)jTr =
00 О /-1
- a* llk IА(П I = a J f...JЛд. (Т|. т2 rt )П Ч'_ т,
00 О Г-1
Лекция 31. Математическое описание нелинейных дискретных систем,..
649
Многомерная функция й*(тр т2, —, тА) (а также и Ьк(пц, т2.т*)) назы-
вается ядром Вольтерры порядка к .
При к =0 функционал нулевой степени является константой й0.
При к~\ выражение (31.4) (выражение (31.5)) представляет собой линей-
ный интеграл свертки (линейную свертку), определяющий линейную подсис-
тему с импульсной характеристикой Л(0 (Л(и)). Так как для Л>1 свертка
(31.4) (свертка (31.5)) нелинейна относительно входного сигнала, ее называ-
ют нелинейной сверткой порядка к. Такая свертка определяет нелинейную
подсистему порядка к с ядром й*(тр т2,..., тк) (hk(mj, т2, тк)), назы-
ваемым многомерной импульсной характеристикой порядка к .
Ядра Вольтерры можно симметризовать [18], положив их равными
Т7ХМт1.Т2....1*) [ 7]XMml-......тк
к* (kl
где сумма вычисляется по всем перестановкам аргументов трт2,...,т*
(«I» т2,..., т*).
Однородные функционалы с симметризованными ядрами называются регу-
лярными.
Отрезок функционального ряда Вольтерры дает приближенное аналитиче-
ское представление реакции системы через ее параметры и воздействие. Ус-
тановленная зависимость универсальна в том смысле, что справедлива при
любых воздействиях, лишь бы их амплитуды обеспечивали сходимость ряда
Вольтерры. Условие сходимости ряда Вольтерры выполняется при малых
амплитудах воздействия, когда режим работы системы слабонелинейный.
В режиме существенной нелинейности, когда функциональный ряд Вольтер-
ры расходится, соотношение вход/выход может быть описано функциональ-
ным полиномом Вольтерры степени L в аналоговой области
Я')= X [•»<»)]= X //•••/Лц(т|,т2,...,т)1)Пх(«-тг)Лг (31.6)
А=0 А=0 о0 0 ' = 1
и в дискретной
>(«)= X н*Нп)]= X X X - X Мт1-'и2-ГН'1-"'<•)• (31-7)
£=0 А=0 №|=0/Н2 = 0 /н4=0 г=1
Принципиально такая возможность следует из теоремы Фреше [42].
650 Часть X. Математическое описание нелинейных дискретных систем
Отметим, что полином и отрезок ряда Вольтерры имеют одинаковую математи-
ческую форму записи, однако их параметры— ядра Вольтерры— различны.
Ситуация здесь аналогична проблеме аппроксимации функций степенными ря-
дами и полиномами. Пусть f(x) — аналитическая в окрестности л = .\) функ-
ция (функция называется аналитической, если ее молено представить равномерно
сходящимся рядом из однородных составляющих [42]). Тогда она может быть
разложена в окрестности згой точки в сходящийся ряд Тейлора. Если радиус
сходимости конечен, то любой отрезок ряда есть полином, аппроксимирующий
fix') при значениях л, удовлетворяющих условию |л-xq|< R, где R—радиус
сходимости ряда. Однако существуют полиномы, не являющиеся отрезками ука-
занного ряда и аппроксимирующие функцию f(x) с заданной точностью на
любом конечном интервале изменения переменной х. Существование таких по-
линомов обосновано теоремой Вейерштрасса.
Дальнейшие преобразования будем выполнять с функциональными полино-
мами Вольтерры.
31.3. Описание нелинейной системы
в р- и z-областях
Математическое представление оператора нелинейной аналоговой системы
в р-области изображений формируется с использованием прямого многомер-
ного преобразования Лапласа и формулы обращения.
31.3.1. Определение прямого многомерного
преобразования Лапласа
Изображением по Лапласу многомерной функции /(/p/j,называется
функция F(pp р2, •••, Рд.) к комплексных переменных Рд.
а
С4Ю СО “У prlr £
FI.P1-P2.a) = ...'*)£"' п^. (31.8)
ООО Г = 1
Функция Е(ри р2,..., Pf.) существует в подпространстве Re{p,.}>oJ!,
г = 1, 2,..., к и является аналитической функцией к переменных при выпол-
нении условий:
□ функция .......h) определена и не имеет других разрывов кроме
разрывов первого рода на конечном числе гладких кривых в Л-мерном
евклидовом пространстве переменных tJt t2.t*;
Лекция 31. Математическое описание нелинейных дискретных систем... 651
□ функция t2,...»Q.) = 0. если хотя бы одна из переменных fr<0.
г = 1, 2..к\
□ существуют такие числа М>0 и ctJ, г = 1.2,..., к, что
|/0|, ?2’ •••' Ч-)|< М?' 1 при любом значении lr > 0, г = 1, 2,..., к.
31.3.2. Определение обратного многомерного
преобразования Лапласа
Пусть /(ГрЬэ — Л*)—оригинал, а Г(р\, р2, •••» Рк)— его изображение,
тогда во всех точках непрерывности функции /(/,, 12.) имеет место ра-
венство
/ . X* q+j“>r24;« J p,ir к
....'‘Hyj I f - I F(P1’P2........Pt)e'" П<>Pr• <31 -9>
\ * •' / q — J°° Г, — Cl — J°°.......Г= ।
где A-мерный интеграл вычисляется вдоль прямых (с,. - j°°, сг + /»).
г -1, 2,..., к, удовлетворяющих условиям Ке{рг} = сг > ст®, г = 1, 2,..., к . и
А-кратный интеграл (31.9) сводится к А-повторпым интегралам, которые бе-
рутся в любой последовательности.
Описание нелинейной аналоговой системы в p-области получим в результате
следующих преобразований:
1. Представим выходной сигнал системы в виде суммы реакций подсистем
разного порядка (с разной степенью нелинейности)
y(')=En(O=fwt[4n]. (31.101
к-0 к=0
где У*(0 — составляющая А’-го порядка реакции системы. Функционал
[.ф)] описывается выражением (31.4).
2. Рассмотрим многомерную функцию А’ переменных
ооао CQ к
л('|- <2..'«) = f J -JMV Т2..Tjflx(rr -тг)г/тг. (31.1 11
00 0 r-f
Равенство (31.11) в области изображений Лапласа имеет вид [18. 42]
М₽1- Pl....Pt^HdPt. Ррп (31.12)
852 Часть X. Математическое описание нелинейных дискретных систем
где Ул(рр Pi..Pk)' Н k(Pv Р2'— * Pk)—многомерные изображения по
Лапласу функции у*(ГР ... ,?*) и импульсной характеристики
й*(трт2,...,£-го порядка соответственно, Х(рг) — преобразование
Лапласа сигнала x(tr).
Соотношение (31.12) получено с использованием многомерного преобра-
зования Лапласа (31.8).
Поскольку Р2* — » Pk) является изображением по Лапласу много-
мерной импульсной характеристики hk (тр т2,..., тА) fc-го порядка, функ-
цию Нк(р^ p2,‘„i Pt) можно рассматривать квк многомерную переда-
точную функцию порядка к.
3. Установим взаимосвязь между нелинейной составляющей у*(?) выходно-
го сигнала системы и многомерной функцией ук , г2, — , 1к), т. е.
к
4. Получим Yk(p) — изображение по Лапласу одномерного сигнала у*(0,
используя многомерное обратное преобразование Лапласа (31.9) функции
Л(г. ‘......О.
к
li (р) = f (') е" = f й (''.1)е~'й& =
о о ' V ’
Лекция 31. Математическое описание нелинейных дискретных систем.., 653
С учетом (31.12) последнее равенство запишем в виде
[. \*-l q + j~ <ч+р= <•* + >> < к \
— J J ••• J НЛ/’|. Р2.............Р*)6 Р-ЁРг X
к
'TlxtPrPJp, (31.В)
Г = 1
Таким образом, изображение А-й составляющей выходного сигнала системы
определяется с использованием изображения ядра Вольтерры при условии
Р = £ Рг •
г-1
5. В итоге, изображение по Лапласу У(р) выходного сигнала у(/) системы
имеет вид
Г(р)=Ь(р)=
*=0
L ( I V4 ''|+Jee <’*+> ( к У к
= £ к-; f f - f (/j(a-P2---p*)6 p-Sp, Пх(Рг>'рг-
к= 0\ J J ("j — joo — joe q — joo Г — I J f _ [
Для описания нелинейной дискретной системы в области з-изображений
необходимо использовать определение многомерного Z-преобразования.
31.3.3. Определение прямого многомерного
Z-преобразования
Z-изображением многомерной дискретной последовательности
/(и,, «2» ••••”*) называется аналитическая функция /•'(Zp z2, — , z^.) ком-
плексных переменных г2, •••» > формируемая многомерной суммой
Р<Л. Ч....г<-)= Ё Ё - Ё /("• п2......- г*'11 • (31.14)
«1=0 я2=0 »1*=0
Для оригинала /(«р л2,..., »д.) введено предположение: /(«р н2.я4)®0
при отрицательных значениях аргументов пг, г = 1, 2,..., к .
к
При условии |/(«р п2,..., Лд.)| <М П » гДе М >0, Яг>0, r = l,2,...,fc,
г I
ряд (31.14) сходится в области D, представляющей собой пересечение мио-
654 Часть X. Математическое описание нелинейных дискретных систем
жеств |<r|>/?r, r = LZ...J' (область вне поликруга с рачиусом
г.с. О=Пк:|г,.|>Я,.|.
Г —1
31.3.4. Определение обратного многомерного
Z-преобразования
Если функция F(q.<2....ч-) аналитична вне поликруга с радиусом /?,.,то
формула обращения .многомерного /-преобразования имеет вид
/(««•«2..I I I .............................г()Пг"'-'Аг. (31.15)
Таким образом, обратное многомерное Z-преобразование можно рассматри-
вать как последовательное применение обратного Z-преобразования по каж-
дой из комплексных переменных. zr, г = 1. 2...., k .
Уравнение, устанавливающее однозначное соответствие между множествами
входных и выходных сигналов нелинейной дискретной системы в «.-области,
получим в результате следующих преобразований:
1. Составим выходной сигнал системы из реакций подсистем разного порядка
у(„) = £ у*(н)= £ //*Гл(п)]. (31.16)
*=0 Л-0
где yfc(n) — реакция подсистемы А-го порядка. Функционал //* [л'(и)]
определяется по формуле (31.5).
2. Опишем многомерную функцию yfc(«p и2,...»л*) дискретной сверткой
у*(«|.«2.-•"*>= X Ё Z ЛЛ'«1-т2-••• •"'ЛПл("г-"М- (31.17)
/Н| =0 ihj =0 nil ‘0 r~i
В ’-области выражение (31.17) имеет вид [8. 22]
-2...= ....-ЛП (3!. 18)
Г=1
где , z*.), • •• * z*)— многомерные 2-изображения
функции м2...., ?iA) и импульсной характеристики
hk (»jj, ш2,..., ) А-го порядка, X(zr) —2-изображение сигнала х(пг).
Лекция 31. Математическое описание нелинейных дискретных систем... 655
Равенство (31.18) получено с использованием многомерного Z-преобразования
(31.14).
3. Преобразуем функцию Yk (Zj, z2.<*) таким образом, чтобы она зависе-
ла от одной переменной и соответствовала оригиналу у* (л).
Эта операция называется переходом к одной переменной в комплексной
области [42].
Рассмотрим указанную операцию более подробно. Полагая в формуле обрат-
ного многомерного Z-преобразования (31.15) = Л2 = — = 1Ц =И.получим
, 1 Y
?<(»)=?*("•»...")=| — I f-f
' I ' I ' 4 C2 c.
k
(3119)
r=l
где Cr — окружность с радиусом |zr| = Rr, r = 1, 2,..., к .
к
Обозначим z = J”[zr и выразим через z одну из переменных, например
Г = 1
/*-1 к
f] zr. Поскольку |г| = П|’г|' область аналитичности
(/А-1 А к
z(. z2, — , г/ П’г по переменной z будет |z| = П|^г| • Обо-
значим через С окружность с радиусом |z| = /? > ПК1- Теперь выраже-
ние (3 1.19) запишем следующим образом:
1 Т I1* г,,г2..........
I J сс,_, с, с, П гг
Поскольку порядок интегрирования но z и по остальным переменным
можно изменить, последнее выражение представляет собой обратное Z-
креобразование функции
(31.20)
зависящей только от переменной z .
656
Часть X. Математическое описание нелинейных дискретных систем
С учетом (31.18) выражение (31.20) запишем в виде
k J fjv
*П *(?,)— (31-21)
г=1 Zr
Таким образом, переход к одной переменной дает выражение (31.21) дяя
z-изображения реакции подсистемы k-ro порядка.
4. В результате z-изображение выходного сигнала системы определяется
суммой z-изображенин нелинейных составляющих разного порядка
r(z)= f гА(<),
k^O
где ty(z) —выражение (31.21).
31.4. Описание нелинейной системы
в частотной области
В зависимости от вида сигналов, действующих в нелинейной системе, ее
описание в частотной области может быть получено на основе различных
математических преобразований.
В случае непериодического (аналогового или дискретного) воздействия час-
тотное представление системы формируется с помощью преобразования Фу-
рье входных и выходных сигналов.
В случае периодического воздействия аналоговая система описывается в час-
тотной области с использованием ряда Фурье, в дискретная — с использова-
нием дискретного преобразования Фурье (ДПФ).
31.4.1. Частотное представление системы
на основе преобразования Фурье
Математическое представление нелинейной аналоговой системы в частотной
области (при аналоговых непериодических сигналах) удобно получить,
выполняя переход от изображений сигналов по Лапласу к изображениям
Лекция 31. Математическое описание нелинейных дискретных систем,..
657
по Фурье (к фурьс-изображениям сигналов)- Такой переход осуществляется
заменой переменной рг на j(ur, г = 1, 2,..., к в выражении (31.8) при условии
I J-JI/U1- '2....dt2...dtt <«..
О о о
Указанная замена переменной в выражении (31.13) дает спектральное пред-
ставление А-й составляющей выходного сигнала
[| ее ее
— 1 f ... f ]в>2,
к
ХП X(j<&r)du>r
;wA.)q jw-j £ со,
(31.22)
при условии
J J...J|Л* (Т,, Т2.Tt )|r/T, ...dxt < ~.
ООО
Таким образом, спектр Yk(j(ri) выходного сигнала формируется путем интег-
*
рирования произведения Нк(/top jcd2, — - ».)Г1 вдоль плоскости
(0= Ю| + cOj +... + CD* , лежащей в частотном пространстве. В процессе интег-
к
рирования произведение J"|X(;(or) взвешивается частотным ядром
Г = 1
, ,/iOfc), определяя нелинейный вклад в выходкой спек гр
КА(;со) на частоте, равной сумме CDj +0)2 +... + соЛ. Следовательно, ядро
j(£h,..., jcty) можно рассматривать как многомерную частотную
характеристику порядка к
В результате спектр выходного сигнала системы образуется спектрвми от-
дельных нелинейных составляющих функционального полинома Вольтерры
И(»= £ КД»,
где КА(;Чо) —спектр А-й составляющей, определяемый выражением (31.22).
Математическое описание нелинейного оператора дискретной системы
в частотной области (при дискретных непериодических сигналах) формиру-
658 Часть X. Математическое описание нелинейных дискретных систем
ется на основе спектрального прстставления сигналов дискретной системы
с учетом соотношения между спектрами аналоговых и дискретных сигналов.
Рассмотрим процесс получения соотношения вход/выход нелинейной дис-
кретной системы в частотной области.
1. Установим взаимосвязь между спектрами аналоговых и дискретных сиг-
налов. Известно, что дискретизация сигнала во временной области приво-
дит в частотной области к суммированию спектров соответствующих ана-
логовых сигналов, сдвинутых на величины wiCDp кратные
частоте дискретизации (д^ = 2п/Т, rqe Т — период дискретизации [43].
Соответственно, спектры входного х(н) и выходного у(л) сигналов дис-
кретной системы представляют собой периодические функции
Х(Р"',;Г)= - £ X(ja + j„KOA), (31.23)
Т щ - -°=
= £ К,.(;о>+рп<о.,). (31.24)
* к=Ош=-°°
где Х(усо) — финитный спектр входного сигнала. расположенный в диа-
пазоне [-С0д/2.<ид/2^, Kfc(jci)), k = 0, —спектры нелинейных со-
ставляющих выходного сигнала аналоговой системы.
2. Получим спектр нелинейной составляющей fc-й степени выход-
ного сигнала дискретной системы, используя определение многомерного
фурьс-преобразования дискретного сигнала. Для упрощения магемвтиче-
ских выражений введем нормированную частоту’ 6)= &Т.
Изображением по Фурье многомерной дискретной функции
/(iq, л2,.... ) называется функция F(e^, е^2......е/а*), представлен-
ная в виде
) -
« «> « . - . . (3125)
= X X ... X /(«г. «2......
Hi=.0//j=0 «4=0
Обратное многомерное преобразование Фурье описывается соотношением
...{ М Г(е«.^,..../“‘)х
\ 27Ч -гс-п -л
т/ц . (31.26)
Лекция 31. Математическое описание нелинейных дискретных систем... 65g
Псрсхот в частотную область осуществим с помощью следующих преоб-
разований:
• выполним многомерное преобразование Фурье (31.25) функции
yt.(«t. и2,.... и*) (31.17). В результате получим ]42]
(em еЛч......е А) = Ht (еА. е А,..., f А > f] х(еА), (3| _27)
гче:
, е^’...е^-,..., е^1) — многомерные фурье-
изобрвжения функции /*2’ •••' llk) и импульсной характерно гики
йЛ (»ij. m2 mk У порядка соответственно;
Х(е7°г) —фурье-изображение дискретного сигнала л(иг);
• представим реакцию подсистемы А-го порядка у^(и) в вню многомер-
ной функции Vfc(»i. «2* ••• » лл) ПРИ И|=«2= —= /,А =П»Т.е.
у*(л) = yk(nt и,... ,л);
• получим спектральное представление сигнала у*(и), используя преоб-
разования Фурье (31.25) и (31.26)
)21
б\. Ir/fOjf/OTj.of/cljp
660
Часть X. Математическое описание нелинейных дискретных систем
С учетом (31.27) последнее равенство запишем в виде
к
хПХ(еЛ)Лог. (31.28)
Г»|
Таким образом, спектр А-н составляющей выходного сигнала системы оп-
ределяется интегрированием произведения
Нк(е^.е™.......^)ПХ(^)
г-1
вдоль плоскости о) = 6] +6>2 +-. + (\ , лежащей в частотном пространстве.
Переходя от нормированной частоты б) к частоте (О, прсдстввим (31.28)
в виде
Z U-! сод/2 сод/2 (It, 12
Kt(e>7‘)= — J J ... J
\ 2л ) -w,/2 -шл/2
хб^ pjo>- V 4 jjn (31.29)
3. Подставим (31.23) в (31.29)
. w,/2 (jJ4/2 <од/2
Yt(e*>T) =-----f f ... ] ...<>‘’)x
(2л)‘ T ^/2^/2 -<»3/2
xs| ;7j w- £ <u,. 11 X - X п 2((;ш, + jm,.<o,)de),. (31.30)
Используя подстановку Л(. =tor +wrfco4, r = l, 2, ...,k и учитывая перио-
дичность (с периодом (оч) характеристики Нк(е^''г, е^'1Г..ej7'*r), пре-
образуем (31.30) к виду
I « « W./2 ПК/2 ш,/2
’i('>’')=v4=F7 S - X / / - J Н^т,е^.........................
(2Л) /,«,=-« шцв-ов -^/2-ша/2 -(iij/2
( ( к * Й *
хб JT\ «-£/.,.+ £ >пгш,, П X(Ar)d?.f.
Лекция 31. Математическое описание нелинейных дискретных систем...
661
Знамения спектра ) нс изменятся, если А-кратное суммирование
к
заменить су ммой по m = £ mr:
Yt(ei'"T') =
- 1 У
(2п)к~'Т,„ГЦ
~(^/2 -ши/2
Ч/2
Л*г)х
х 6 j1'\ 0)- £ Лг +/wcj)j PJ X(jXr )dkr.
(3131)
Поскольку снек гр аналогового входного сигнала расположен в диапазоне
(0д/2], из выражения (3131) при подстановке Л,г = ш, получим
1 « ЧУ2 Ч/2
}H-ZUf) = —bz S J J ... f
(.-Л) / = -<rta/2-шд/2 (Яд/2
f ( к VM
x 5 jT\ <o- £ <o, .
(31.32)
4. Спектр выходного сигнала дискретной сисгемы согласно (31.24) равен
сумме спектров нелинейных составляющих КА(<?у<и/). А = 0, I.Л. опи-
сываемых (31.32). Эти нелинейные составляющие равны сумме спектров
нелинейных составляющих соответствующего аналогово! о выходного
к
сигнала, смещенных на £ - uiio (, ш ~ -©о.+ °°,
Шд/2 а>д/2 шг/2
Гд(Л0+>(0а) = —Ly f / ... J
(2я) -w,/2 И,/2 -Шд/2
х 6 jT\ w- £ +мо)д Т] X(j(j)r)dwr.
Спектральная составляющая выходного сигнала дискретной системы на
частоте и) сформирована слагаемыми, содержащими спектральную со-
ставляющую во действия на iiacrove w и произведения спектральных со-
ставляющих входного сигнала на частотах
к
0) - £ О),. — «КО 4. Ш = -©О.......Т-оо.
(3133)
662
Часть X. Математическое описание нелинейных дискретных систем
Из выражения (31.33) видно, что свойство периодичности спектров дискрет-
ных сигналов приводит к эффекту наложения спектров, обусловленных не-
линейными составляющими различного порядка. Данный эффект называется
элайсингом {см. Лекцию 10).
Эффект наложения спектров иллюстрирует следующий пример.
Рис. 31.2. Формирование амплитудного спскгра реакции подсистемы 2-го порядка
Лекция 31. Математическое описание нелинейных дискретных систем...
663
Пример 31Л
Рассмо'грим подсистему 2-го порядка, на выходе которой согласно выраже-
нию (3132) спектр реакции представлен в виде
. ~ ид/2 w,/2
£ J / Нг(е'шТ,ет‘т-)х
хб(7Т«о - о), -со2 +»koj))X(j(0|)X(i/(i)2)J(D|€/(02, (31.34)
где подынтегральное выражение является периодической функцией по каж-
дой из частот <0j, (Оу с периодом (ол.
Решение. Формирование амплитудного спектра реакции подсистемы 2-го по-
рядка показано на рис. 31.2, Модуль спектра |У2(е^ш/ )| —результат интегри-
рования вдоль прямых, расположенных внутри области AOPCQR при усло-
вии СО - + со2 (в выражении (31.34) /н = 0), а также вдоль прямых,
расположенных в треугольнике ОВР при условии со=Ш[+со2-0)( (ш = 1).
В силу периодичности ДПФ треугольник ОВР отображается в треугольник
О'В'Р', расположенный внутри области AOPCQR. что порождает элайсинг.
Рис. 31.3. Результат наложения спектров реакции потсистемы 2-го порядка
664
Часть X. Математическое описание нелинейных дискретных систем
Результат наложения спектров показан на рис. 313. Здесь периодичность по-
дынтегрального выражения (31.34) приводит к тому, что на величину выход-
ного спектра К2(е-^°7). например, на частоте (О^од, получаемой путем ин-
тегрирования вдоль прямой 01)4-0)2=010 на отрезке 1, накладывается
значение, определяемое интегрированием по отрезку 2, которое соответст-
вует величине спектра па частоте (Oq -со^ ,
Отметим, что рассмотренный эффект наложения спектров, связанный с рас-
ширением спектра входного сигнала, присущ лить нелинейным системам и
отсутствует в линейных системах.
31.4.2. Частотное представление системы
на основе дискретного преобразования Фурье
Математическое описание нелинейной дискретной системы в частотной об-
ласти (в случае дискретных периодических сиенитов) формируется при пере-
ходе от области непрерывных частот в (31.24) с учетом (3I.32) к дискретным
частотам
О)—н’До, (Dr->ггДсо. г = 1, 2, ...Д,
где:
а 2л
Дсо = -^; —период дискретизации по всем частотам со,.
(31.35)
кг
NT — период дискретных сигналов системы ( N — количество отсчетов на
периоде);
i —номер спектральной составляющей (гармоники).
Дискретным частотам в (31.35) соответствуют дискретные нормированные
частоты
|Дсо . „ Л
|Д0)—»----->», г. До —»—------>/., г= 1, 2,..., к .
Д(г) ДСО
В дальнейших преобразованиях используем нормированные частоты и сле-
дующие обозначения:
rt(eJ“7) = n
2л
eW.......)8 /Г\ <о- £ о, ц-иха,
Лекция 31. Математическое описание нелинейных дискретных систем...
665
) = Х jir— |=Х(/Г); А = 1.2.....L; r = 1. 2,..., к .
I N )
Известно, что на частотном интервале <ол/2^ располагается N
спектральных составляющих псриотического сигнала [43]. Когда. например
при Л' четном (Л/=Л//2), выражение реакции полсистсмы Л-го порядка
имеет вид
1 •» м м м
1 £ X ••• X ........................<.)х
(2П) / ш=-« = ь= (M-l) J*=-(M I)
х 5р- £ г, +И1Л^П X{ir)dir, 1 = -(W - I)....М . (31.36)
Из выражения (31.36) видно, что каждая г-я спектральная составляющая вы-
ходного сигнала подсистемы порядка к образована слагаемыми, содержа-
щими спектральную составляющую воздействия па частоте i и произведения
спектральных составляющих воздейс твия, удовлетворяющих условию
к
ш = -о=...+°°. (31.37)
Согласно (31.37) для периодических сигналов (так же, как и тя непериоди-
ческих) в дискретной системе наблюдается эффект наложения спектров, обу-
словленный расширением спектра реакции при нелинейной обработке воз-
действия.
В результате спектр периодического выходного сигнала дискретной системы
определяется выражением
I.
Y(i) = j Г* (г); i = -(M г1), -(Л/ -2)....,-1,0, 1.М -1, М ,
<=о
где Yk(i)—спектр выходного сигнала подсистемы порядка к па частоте
полученный согласно (31.36).
666 Часть X. Математическое описание нелинейных дискретных систем
31.5. Определение параметров
нелинейного оператора дискретной системы
по среднеквадратическому критерию
Конструирование нелинейного оператора системы в форме функционального
полинома Вольтерры (или отрезка ряда Вольтерры) состоит в нахождении пара-
метров полинома (ядер Вольтерры) в результате решения задачи аппроксимации.
Для полиномиальной аппроксимации нелинейного оператора использчсм ме-
тод наилучшего среднеквадратичного приближения.
Построение оператора выполним на классе стационарных случайных сигналов.
Опишем постановку задачи аппроксимации нелинейного оператора и методы ес
решения во временной и в частотной областях (в тех областях, i де наиболее час-
то выполняются иде1П-ификация, моделирование и синтез нелинейных систем).
31.5.1. Построение нелинейного оператора
во временной области
Задачу полиномиальной аппроксимации нелинейного оператора дискретной
системы во временной области сформулируем следующим образом.
Пусть известны два множества сигналов:
— множество реализаций длины
(не [О, N -1]) c.iy-
N
чайного стационарного входного сигнала системы (множество испыта-
тельных сигналов);
□ У" = {?£(«)} —- множество реализаций длины /V (ле [0( N-1]) соот-
ветствующего случайного стационарного выходного сигнала системы.
Для построения нелинейного оператора необходимо решить задачу аппрок-
симации
(я) -к (н)1 т - (3L3S)
где оператор Fp^xr/(»i)J представляется в виде функционального полинома
Вольтерры
г / AM N-l W-l JJ
(")J = Уц («) =Х£ X - X f,k (»h * ’ ,l,k ) П Л</ (п ~ l,tr М31 -39)
Л=0 tiij -0 м*=0 / -1
Лекция 31. Математическое описание нелинейных дискретных систем...667
вектор h содержит многомерные имп}льсные характеристики системы, вхо-
дящие в выражение (31.39).
В полиноме Вольтерры (31.39) переменные ..........»г* меняются в диапа-
зоне [0; N -1] в силу конечного размера памяти системы.
На основе свойства непрерывности системы решение задачи (31.38) (век-
гор Л ) является оптимальным решением более обшей задачи аппрокси-
мации
max ||y'J(/i)-FP[x(/0i|—»min , (31.40)
vpijeXH “ Л
где:
Хс—подмножество множества воздействий X (ХесУ);
yrt(w)—реакция системы на входной сигнал v(n) (/(и)еГ);
оператор Гс[.т(н)| имеет форму полинома Вольтерры
L V-I Д'-l N-l к
/Дг(н)]= v(n)= X X L - £ М"'|-'"2...........7Н*)Пл(л-»!,). (31.41)
А-0 ад.-() ад, =П г-1
Согласно (31.40) необходимо построить такой функциональный полином,
чтобы процессы ур(н) и у(п) оказались близкими ио какому-либо крите-
рию. В качестве такого критерия выберем минимум среднскватратичсского
отклонения сигнала у(н) от ytf(w)
е[е2(и)]—> min.
где:
ошибка е(п) = у"(п)-у(н);
Л‘£к2(л)^ = ^ £ ( vj(n)- у? («)) —оператор математического ожидания.
Д|я определения параметров полинома Вольтерры (31.41) используем орто-
гональный метод Эйкхоффа [8].
Согласно этому методу условия ортогональности ошибки е(п), входного
сигнала и возможных его произведений дают следующею систему линейных
алгебраический \ равнений:
668 Часть X. Математическое описание нелинейных дискретных систем
Е { у"(и)“.у(п)} ] = 0;
Е {/(«}-)’(»)} л(п-т,) л(н-ш2) ]-();
^[ { *(n“H*i) Д’(и-ш2) ... Jv(/i-mt)j = O
для всех wq е [0; N - 1[, 1н2Е [0: N - 1J.mt£ [0; Л'-1|.
Уравнения системы линейны относительно элементов вектора h .
При использовании нелинейного оператора (31.39) указанная система урав-
нений имеет вид
L Л'-l Н 1
А=0 =-0 «ь =0 ш*=0
А
I. K-l N-I Л-1
ЕЕ Е - Е M"»i. '«г>-
А=0ш|=0»«2=0 »it~C
I. Л’-l W-I Л-1
ЕЕ Е ••• Е л*(ш|.ш2,
I I г(и-ш, )Йл(п-а,)
для всех о, 6 [0; /V -1).
Решением этой системы являются ядра Вольтерры (элсмс1пы вектора Л )>
оптимальные по среднеквадратическому критерию.
Пример 31.2
Используем метод Эйкхоффа для построения нелинейного оператора частот-
ного детектора, который выделяет узкополосный центрированный гауссов-
Лекция 31. Математическое описание нелинейных дискретных систем... 669
ский сигнал со среднеквадратичным отклонением су = 0,32, описываемый
суммой
6
у°(п) = (Л°(ll) = X лк COS(2nA/|«7' + aA),
*=i
где:
/=0,005;
Т = 1/7 — период дискретизации, из частотно-мо тулнрованнО! о колебания
Л(н) = cos[27wT + (р(н)],
в котором начальная фаза ф(л)б [—200; 200] связана с мгновенной частотой
со°(н) оператором интегрирования.
Решение. Подмножество Хе испытательных сигналов образовано из 40 000
реализаций (длины N = 5) входного случайного сигнала л(и) при движении
вдоль частотно-модулированного колебания с шагом в один такт. Подмноже-
ство сформировано из соответствующих 40 000 реализаций (длины
N-5) выходного (модулирующего) случайного сигнала т1,(н) детектора
при движении вдоль данного сигнала с шагом в один такт.
Математическая модель детектора, построенная на основе мето та Эйкхоффа.
имеет вид полинома Вольтерры 2-й степени
4 4
(|)(л) = ^+ X X Л-»(/«|.m2)x(n-mi)x(n-m2)>
№| = 0 W>=№,
где:
До =-0,8123, /ь(0,0) = -0,0386, А2(0,1) = 0,1444, А: (0,2) = 0,1544.
Л2(0,3) = -0.0419. Л2(0,4) = -0,3732, Л2(1,1) = -0,4756 , Л2(1,2) = 0.5327,
/ь(1,3) = -0,2067. Л2(1.4) =0.8852. /ь(2.2) = 0.0138. /н(2.3) = -0.3926,
А2(2,4) =-2,0827, А,(3.3) = 1,7594. А,(3.4) = 0.1454 . Л2(4,4) =-0,0388,
Результат детектирования показан рис. 31.4. где вместо дискретных отсчетов
изображены огибающие сигналов.
На рис, 31.4, ст представлена последовательность реализаций нормированного
модулирующего колебания (кривая 1)
у;;(п) = (|)ц(») = С1/'('')/ max max |о)’;(и)|
/ 14'(«)е);"м7с[о, i/л)1 ।
670
Часть X Математическое описание нелинейных дискретных систем
50 100 150 200
пТ. с
|е(«)|
0,02
UiJUUjkJLk
U 50
Рис. 31.4. Огибающие нормированных модулирующего колебания
и выходного сигнала модели детектора (п).
огибающая абсолютной погрет пос ги детектирования (б)
Лекция 31. Математическое описание нелинейных дискретных систем...
671
и соответствующая последовательность реализаций нормированного выход-
ного сигнала
Ч,(н) =<!).,('О = (|Х'’)/ птах max ко"(«)
математической мотели детектора (кривая 2). На рис. 31,4,6 изображен гра-
фик абсолютной погрешности детектирования
|е(»)| = |ю"('')
31.5.2. Построение нелинейного оператора
в частотной области
Сформулируем задачу аппроксимации нелинейного оператора тнекретной
системы в частотной области.
Пусть известны два множества, полученные ДПФ сигналов системы:
Xt ={x4(i). ie[-(W-I). М |}^(
— множество дискретных спектров (реа-
лизаций длины N (например, N — четное) случайного стационарного
входного сигнала системы (множество испытательных сигналов);
□ У" ={y"(j),-1)./и]} — множество дискретных спею ров реа-
лизаций длины Л* соответствующего случайного стационарного выход-
ного сигнала системы.
Для построения нелинейного оператора на каждой частоте / необхо 1имо
решить задачу аппроксимации
max ||у;(г)-У(/(О|Ц min . ie [-(Л7 -1), М J. (31.42)
Хч(0еХе11 4 4 и П"
где:
1^(0 — /-я спектральная составляющая реакции системы
во Д/
х х - х "^->2
*=0(2Я) I ||=-(И-1) ,(=-(*/-!)
X в[ г - z ir + mN IП )<Hr
'ЦХ
(31.43)
672
Часть X. Математическое описание нелинейных дискретных систем
вектор — вектор-столбец, содержащий фурьс-изображеция ядер Воль-
герры (многомерные частотные характеристики системы) в (31.43).
В силу непрерывности системы тля каждой спектральной составляющей /.
/е [-(Л/ “1), Л*] решение аппроксимационной задачи (31.42) является опти-
мальным решением более общей задачи аппроксимации
max II Г"(г)-Г(г) Я—»min, ie |-(М -1), М ]. (31.44)
Х<О€ХИ 11 j/1"
где X — множество спектров сигналов заданного класса воздействий, со-
держащее подмножество испытательных сигналов ( Xg с X ). f-я спектраль-
ная составляющая выходного сигнала системы описывается выражением
/.1 во If ,\f
Г(-)=Х—fZi- S I - I ...............й)х
A-=O(Z7l) /
Г * 1 A
x5l i-X ir +m/V I P| X(ir)dir, (31,45)
Равенство (31.45) можно записать в векторной форме
Y(i)=X,Hii\ (31.46)
где:
X — вектор-столбец, содержащий спектральные составляющие воздействия
и их произведения в выражении (31.45);
t —знак транспонирования.
Поскольку действующие в системе сигналы вещественные. их дискретные
спектры обладают свойством симметрии [43]. например /(-/) = К*(/) для
fe[l. М-1]. где (*) — знак комплексного сопряжения. Следовательно, при
построении нелинейного оператора системы количество решаемых задач ап-
проксимации (31.44) можно сократить, т. е. яместо числа задач /V
(ie [-(/И -1). Л/]) можно решать Л/+1 задачу (/е|0. Л/]). При этом ос-
тальные параметры Н(,) находятся по соотношению Н = //(,)* при
»е[1. М-1].
Опишем решение задачи (31.44) в срсднсквадратнческой метрике. Согласно вы-
бранному критерию задача (31.44) для каждой составляющей спектра имеет вид
я[е“(г)]-> Ф{п » /6 [О. Л/], (31.47)
Лекция 31, Математическое описание нелинейных дискретных систем...673
где:
ошибка е(0=Г*(0-К(0;
Ь'Ге2(г')1 = — £ (/"(i)- — оператор математического ожидания.
g =i
С учетом (31.46) запишем функцию среднеквадратнчсской ошибки
ф; («)] = е[(г(,) - X' Н<'>)1 ] . (31.48)
Решение задачи (31.47) находится в рсзулыагс дифференцирования обеих
частей выражения (31.48) по и приравнивания полученной производной
нулю:
Э£Ге2(г}1 г_ , _ _ г,
_kU5J=2E[x-(r(0-x'/7‘'>)]=0.
При не коррелированное™ векторов X и последнее равенство преобра-
зуется
е[х‘Г(>)] = е[х*Х'Я"')]: е[х*Г(о] = е[х*Х']/7<0;
/7(,) =(е[х*Х'] )”е[х*Г(0]. (31.49)
где E^X*Xfj —эрмитова матрица [13], состоящая из спектральных момси-
тов различных порядков.
Таким образом, многомерные частотные характеристики Нм, /е[0. Л/] оп-
ределяются по формуле (31.49). Остальные частотные характеристики систе-
мы формируются согласно равенству при /е[1, .W-l|.
Согласно (31.46) с использованием многомерной частотной характеристики
[-(/И-1), М | вычисляется спектр выходного сигнала системы,
а затем выполняется ОДПФ. Блок-схема спектрального преобразования
входного сигнала в нелинейной системе показана на рис. 31.5. Здесь БКС —
блок комплексного сопряжения.
674
Часть X. Математическое описание нелинейных дискретных систем
Рис. 31.5. Блок-схема спектрального преобразования сигнала
в нелинейной системе
Пример 31.3
Используем описанный метод для построения в частотной области оператора
фильтра импульсных помех. Нелинейный фильтр выделяет центрированный
гауссовский сигнал /*(н) со среднеквацратичным отклонением ст = 10 и
спектром, расположенным в диапазоне [1/30; 6/30] Гц. из смеси х(к) сигна-
ла с импульсной помехой. Период дискретизации сигнала Г = 1с, макси-
мальное абсолютное значение сигнала равно 30. Моменты появления и зна-
чения импульсной помехи формируются как случайные числа,
распределенные равномерно в интервалах [(X б] и [-60.60] соответственно.
Решение. Подмножество УЕ испытательных сигналов образовано из 20000
реализаций (длины N-6) входного сигнала х(н). Каждая реализация со-
Лекция 31. Математическое описание нелинейных дискретных систем...
675
держала либо узкополосный гауссовский сигнал, либо аддитивною смесь
сигнала с импульсной помехой. Подмножество сформировано из соотвег-
стяующих 20000 реализаций (длины N = 6) выходного случайного сигнала
У».
/(»). 3(ч)
Рис. 31.6. Огибающая сигнала с импульсными помехами (<г).
огибающие неискаженного сигнала и выходного сигнала фильтра импульсных помех (б)
б
676 Часть X. Математическое описание нелинейных дискретных систем
При hoci роении нелинейного оператора каждая спектральная составляющая
выходного сигнала описывалась полиномом (31.43) пятой степени (£-5).
Результат фильтрации показан на рис. 31.6. Для наглядности изображения
выполнено соединение отсчетов дискретных сигналов.
Па рис. 31.6. а представлена последовательность реализаций смеси сигнала
с импульсной помехой (импульсные помехи указаны стрелками). На рис. 31.6, б
показаны соответстяующая последовательность реализаций сигнала /*(«) из
подмножества ^’(кривая 1) и последовательность реализаций сигнала >•(«),
полученного фильтрацией импульсных помех согласно схеме на рис. 31.5.
ПРИЛОЖЕНИЯ
Приложение 1. Математическое моделирование
обработки сигналов линейной
дискретной системой в программной
среде MATLAB
Приложение 2. Моделирование цифровой фильтрации
с помощью GVI SPTool в программной
среде MATLAB
Приложение 3. Массивы записей
в программной среде MATLAB
Приложение 4. Необходимые сведения
из теории матриц
Приложение 1
Математическое моделирование
обработки сигналов линейной
дискретной системой
в программной среде MATLAB
Математическое моделирование обработки сигналов линейной дискретной
системой (ЛДС) в частности включает:
□ расчет* реакции ЛДС по соотношению вход/выход;
□ расчет характеристик ЛДС во временной области, z-области и частотной
области:
□ анализ воздействия и реакции во временной и частотных областях.
Приведем в соответствие терминологию и обозначения, используемые ранее,
с общепринятыми в MATLAB,
В MATLAB математической моделью ЛДС называют соотношение
вход/выхот в виде уравнения или системы уравнений, которые позволяют
вычислить реакцию на заданное воздействие.
Во временной области основной харакгеристикой ЛДС является импульсная
характеристика Ь(п). а моделирование работы ЛДС (расчет реакции) вы-
полняется на основе одного из следующих соотношений вход'выход
(см. Лекцию 4):
□ разностного уравнения (РУ):
у(н) = b(tx(u) + /?[А'(н -1) +... + bpfyi - i) +...+Лдг_|л[п - (N -1)] -
-Л|У(п -1) - а2у(п - 2) -... -ak у(п у[п - (М -1)],
которое задастся век Гором коэффициентов воздействия b
* = [*0 *1 - * *«-1|
и вектором коэффициентов реакции а
« = [«0 и, ... „J. ...
(111.1)
(111.2)
(П1.3)
680
Приложений
Первый элемент вектора а всегда равен 1
= 1; (П1-4)
П формулы свертки: У. Л(/«).<(«-и); /яЛ1
у(») = £ л(/и)Л(и-ш), 1П-0 (П1.5)
где импульсная характеристика и воздействие задаются в виде конечных
последовательностей (векторов);
О системы уравнений переменных состояний (си. Лекции 8, 9):
f.s(» + l) = As(n) + Bx(ny,
< (111.6)
[ у(п) = Сщ.н)+ Dx(n),
где:
s(/i) —переменные состояния;
x(ti) —входной сигнал;
А — тля систем с одним входом и одним выходом квадратная матрица
размером тхт. где т —порядок ЛДС;
Н — векгор-столбещ
С — вектор-строка;
D — скаляр.
В z-oo.iacmu основной характеристикой ЛДС является передаточная функ-
ция ЛДС
(П1,>
1+«jZ +... + ЛА< +... + rtM_|4
которая, подобно разностному уравнению, задастся векторами коэффициен-
тов b (111.2) и а (ГИЗ) и может иметь различные виды математического
представления (ем. Лекцию 5).
В частотной области основной характеристикой ЛДС является частотная
характеристика. а также ее модуль (АЧХ) и аргумент (ФЧХ) (см. Лекцию б):
Ще”1) = |н(см' . (111,8)
Приложение 1, Математическое моделирование обработки сигналов... ggy
В дальнейшем наименования "ЛДС” и "цифровой фильтр" (ЦФ) будем счи-
тать тождественными.
ГИЛ. Моделирование работы ЛДС
во временной области
Моделирование работы ЛДС во временной области выполняется на основе
одной из ее математических моделей, приведенных ранее.
П1.1.1. Моделирование работы ЛДС
на основе разностного уравнения: функция filter
Моделирование работы ЛДС на основе разностного уравнения (I I].1)— вы-
числение реакции на входное воздействие при пулевых начальных услови-
ях — выполняется с помощью функции filter, формат которой имеет вид:
f liter (b, а, х)
где:
ь— вектор котффициен гов (П1.2) в поряткс их следования;
а— вектор коэффициентов (П1.3) в порядке их следования (первый элемент
всегда равен 1);
х — вектор отсчетов воздейеч вия .ц«).
Рассмотрим два примера ЛДС — КИХ- и БИХ-филыры.
Пример 111.1
Рассчитать реакцию КИХ-фильгра 2-го порядка, заданного разностным урав-
нением
у(») = 0.1л(л) + ().5л'(п -1) + О.7.Г01 - 2), (П1.9)
где: н=0, 1..32; cn7’ = O,5pai; .v(u) = sin(o)7»).
В MATLAB в режиме прямых вычислений это выглядит следующим обра-
зом:
» Ь=[0.1 0.5 0.7];
» а-[ 1] ;
» п=О:32;
» x=sin(0.5.*n)i
» y=filter(b,a,x);
» plot(п,х,п,у,'—’),grid
» hold on
662
Приложения
» stem(n,x)
» stem(n,y)
» gtext(’Выходной сигнал’)
» gtext(’Входной сигнал1)
Результаты расчета представлены на рис. П1.1, где кроме дискретных сигна-
лов изображены их огибающие.
10
25 30 35
Рис. II1.1. Входной и выхотной сигналы (к примеру П1.1)
Пример 111.2
Рассчитать реакцию БИХ-фильтра 2-го порядка, заданного разностным урав-
нением
у(л) = л(л) + х(п -1) + х(п - 2) +0,7у(м - 1)-0,25у(л -2), (111.10)
где: w = 0. 1.32; соТ =0,5 рад; x(n) = sin(toTw).
В MATLAB в режиме прямых вычислений это выглядит следующим обра-
зом:
» Ь=[1 1 1] ;
» а=[1 0.7 -0.25};
» п=0:32;
» x=sin(0.5,*n);
Приложение 1. Математическое моделирование обработки сигналов. .
663
» y=filter(Ь,а,х);
» plot(n,x,n,y,).grid
» hold on
» stem(n.x)
» stem(n.y)
» gtext(’Выходной сигнал’)
» gtext(’Входной сигнал*)
Результаты расчета представлены на рис. П1.2, где кроме дискретных сигна-
лов изображены их огибающие.
Рис. Г! 1.2. Входной и выходной сигналы (к примеру 111.2)
П1.1.2. Расчет импульсной характеристики
по разностному уравнению: функция filter
Для того чтобы вычислить импульсную характеристику БИХ-фильтра по
разностному уравнению (П1.1). необходимо в качестве воздействия выбрать
цифровой единичный импульс — вектор [1 0 0 ...], где количество нулей
соответствует длине ИХ (в действительности, ИХ бесконечна).
684
Приложения
Пример 1113
Вычислить импульсную характерист ику БИХ-фильтра. заданного РУ (П1.10),
Введем обозначения:
□ h — импульсная характеристика;
□ delta — цифровой единичный импульс длиной 51 отсчет (одна единица и
50 нулей).
В MATLAB в. режиме прямых вычислений расчет ИХ выглядит следующим
образом:
» b=[l 1 1];
» а=[1 0.7 -0.25];
» delta=[l;zeros<50,1) ] ';
» h=filter(b,a,delta);
» stem(O:length(delta)-l,h)
» grid
График импульсной Характеристики представлен на рис. 111.3.
Рис. 111.3. Импульсная харамериешка, рассчитанная по РУ
Приложение 1, Математическое моделирование обработки сигналов..._ 685
П1.1.3. Расчет импульсной характеристики
по коэффициентам разностного уравнения:
функция impz
Импульсная характеристика может быть рассчитана непосредственно по ко-
эффициентам разностного уравнения с помощью функции impz, формат ко-
торой имеет вид:
[h,nT]=impz(b,a.N,Fs)
где:
ь— вектор коэффициентов (П1.2) в порядке их следования:
а— вектор коэффициентов (П 1.3) в порядке их следования (первый алеман
всегда равен 1);
N— рассчитываемое количество отсчетов импульсной характеристики (т. к.
она бесконечна);
Fs — частота дискретизации в герцах:
h— вектор-столбец отсчетов импульсной характеристики;
пт — вектор-столбец значений дискретного времени.
Определим импульсную характеристику БИХ-фильтра по данным пре (иду-
щего примера при N = 50 и Fs = 2000:
» b=[l 1 1]
» а-[1 0.7 -0.25];
» №50;
» Fs=2000;
» [h,nT]=impz(b,a,N,Fs);
» stem(nT,h)rgrid
График импульсной характеристики (рис. П1.4) имеет такой же вид. как
в примере П1.3 (при вычислении с помощью функции filter), за исключи
иием того, что вместо оси нормированного времени п имеем ось ненормиро-
ванного времени пт.
Если необходимо нормированное время и. удобнее использовать другой
формат функции impz:
h=impz(b,a,N)
Для рассматриваемого примера потребуются следующие изменения:
» h=inipz(b,a, 50) ;
» п=1:50;
» stem(n,h),grid
График импульсной характеристики представлен иа рис. 111.5.
686
Приложения
Рис. П1.4. Импульсная характеристика, рассчжапиая по коэффициентам РУ (ось пТ)
0.8
Об
од
0.2
о
-0.2
-0.4
-0.6
-0.8
0 5 10 IS 20 25 30 35 40 4) ’О
Рис. П1.5. Импульсная характеристика, рассчитанная по коэффициентам РУ (ось п)
П1.1.4. Моделирование работы ЛДС
на основе уравнения свертки: функция сот
Моделирование работы ЛДС нв основе уравнения свертки (П1.5) с пулевыми
начальными условиями выполняется с помощью функции conv, формат ко-
торой имеет вид:
conv(x,h)
Приложение 1. Математическое моделирование обработки сигналов.,. gg/
или
conv(h,x)
где:
х — вектор отсчетов воздействия длиной k = length(x);
И — вектор отсчетов импульсной характеристики длиной i = length (h) .
В результате вычисления функция conv возвращвет вектор реакции длиной
k + i - 1.
1.5
1.5
О
30
Рис. П1.6. Входной и выходной сигнал, вычисленный с помощью формулы свертки
Пример 111.4
Вычислить реакцию КИХ-фильтра, заданного РУ (111.9). Импульсная харак-
теристика равна вектору коэффициентов РУ.
В MATLAB в режиме прямых вычислений расчет реакции выгляди i сле-
дующим образом:
* Ъ=[0.1 0.5 0.7];
» h=b;
> п=0:32/
» x=sin(0.5.* *n);
S88 Приложения
» y=conv(h,x)
» k=length(y)
к = 35
» stem(n.x)
» hold on
» plot(n,x).grid
» nc=0:<k-l);
» stem(nc.y)
» plotinc,y,'—')
» gtext(’Входной сигнал')
» gtext(1Выходной сигнал’)
Результаты расчета привечены на рис. П1.6 (сравнитсс примером П1.1).
Пример Л 1.5
Вычислить реакцию БИХ-филыра, заданного РУ (111.10). Импульсная харак-
теристика рассчитана в примере 111.3.
Рис. 111.7. Импульсная характерно шка (к примеру П1.5)
В MATLAB в режиме прямых вычислений это выглядит следующим образом:
» Ь=[1 1 1] ;
» а=[1 0.7 -0.25];
» delta=[1;zeros(50,1) ] ;
» h=filter(b,a,delta)
» n=O:32;
Приложение 1. Математическое моделирование обработки сигналов..689
» x=sin(0.5.*n);
» y=conv(x,h);
» kxlength(y)
к = 83
» stem(0:82,y).grid
График импульсной характеристики привечен иа рис. LI1.7.
П1.1.5. Вычисление импульсной характеристики
БИХ-фильтра по известным реакции
и воздействию: функция deconv
Функция deconv выполняет операцию, обратною свертке. Поэтому, сели из-
вестна реакция (вектор у) н воздействие (вектор х), но неизвестны векторы
коэффициентов а, ь, импульсную характеристику можно найти с помощью
функции deconv, имеющей формат:
h=deconv(y,x)
где у, х, h— векторы отсчетов реакции, воздействия и имн>льсноГ| характе-
ристики соответственно.
Необходимо помнить, что вычисление импульсной характеристики с помо-
щью функции deconv возможно только в том случае, если первый элемент
векторов х, у не ровен О!
Пример П1.6
Вычислить импульсную характеристику при известном воздействии и реак-
ции (см. пример 111.3).
Попробуем использовать функцию deconv:
» h=deconv(y,x)
??? Error using ==> deconv
First coefficient of A must be non-zero-
В данном случае вычисление импульсной харак1еристики с помощью функ-
ции deconv невозможно.
Пример П1.7
Вычислить импульсную характеристику при воздействии
x(«) = cos(0,5w).
Определим реакцию:
» Ь=[0-1 0.5 0.71 г
» h=b;
690
Приложения
» n=0:32;
» x=cos(0.5.*n};
» y=conv(hzx);
Выполним обратную процедуру— по известным векторам х, у вычислим
импульсную характеристику— вектор h:
» h=deconv(yzx)
h - 0.1000 0.5000 0.7000
Полученные значения импульсной характеристики совпадают с вектором ь
коэффициентов разностного уравнения в примере II 1.4 (ан. Лекцию 4).
П1.1.6. Формирование модели переменных
состояний: функции tf2ss, zp2ss, ss2tf, ss2zp
Формирование математической модели в виде уравнений переменных со-
стояний (Il 1.6) может бы i ь выполнено:
□ по известным векторам коэффициентов b и а разностного уравнения
(П l.l) с помощью функции t£2ss, которая имеет формат:
[А, В, С, D] =tf 2ss (Ь, а)
где:
а, в, с, о определены в (Ш.6);
Ь— вектор коэффициентов (П1.2) в порядке их следования:
а— вектор коэффициентов (ПI.3) в порядке их следования (первый эле-
мент всегда равен I).
При известных векторах Ь и а формирование модели в виде уравнений пе-
ременных состояний выглядит следующим образом:
» Ь=[1.0000 1.0000 1.0000];
» а=[1.0000 -0.7000 0.2500];
» [А,В,С,D]=t£2ss(b.a)
А =
0.7000 -0.2500
1.0000 0
В “
1
0
С = 1.7000 0.7500
1
Приложение 1. Математическое моделирование обработки сигналов,.. 691
Система уравнений переменных состояний (П1.6) имеет вид:
-V] (n +1) = 0.75.Т, (и) - о, 25д’2 (») + -ФО:
^2(н + 1)-5|(н);
у(«) = 1,7jj (л)+0,75j2(ji) + л(и).
Обратная процедура выполняется с помощью функции ss2tf:
» А=[0.7 -0.25.-1 0] ;
» В=[1 0]
» С=[1.7 0-75};
» D=l;
» [b,a]=ss2tf(A,B,C,D)
Ь =
1.0000 1.0000 1.0000
a =
1.0000 -0.7000 0.2500
□ по нулям и полюсам передаточной функции H(z) (векторам р, q) с по-
мощью функции zp2ss (вычисление нулей и полюсов си в Н1.2.2). Обрат-
ная процедура выполняется с помощью функции ss2zp. Форматы этих
функций аналогичны рассмотренным, поэтому рекомендуем изучить их са-
мостоятельно.
П1.2. Моделирование работы ЛДС
в z-области
Рвссмотрим передаточную функцию, представленную в одном из следующих
видов (см. Лекцию 5):
□ общий — дробно-рациональная функция (111.7);
□ произведение простейших множителей
H(Z) = K (г-<7|)(г-7г) • (?-<?,) -(z-<?w,) =
(г - ftXz - рг)... (z - pt)... (г- )
, . . . (П1.11)
_к )(!-?,; ) (!-<?,z~ )„. (l-q,y_|Z~ )
П- PiZ~')(l - PiZ-1) ••• (1- Pkz"‘) ••• (I - Рл/iZ1)
где:
К —коэффициент усиления;
q, — вещественный или комплексный пуль (корень числителя);
2) Зак [65
692
Приложения
pk — вещественный или комплексный полюс (корень знаменателя);
(/V -1), (Л7 -1) — количество нулей и полюсов;
П произведение множителей второго порядка
= дФн+^1г '+^1~ ‘"Фок+Ь{к^ 1 +^2Аг " > — (А»,+ fyf/ +^2/.~ ) ((П1.12)
(1 +flllz-1 +rt2]Z~Z) ...(l + a^z-1 +a2kz"2)... (l+flILz-1 +o2[z~2)
где:
к — номер комплексно-сопряженной пары нулей либо полюсов;
G —коэффициент усиления;
L— количество комплексио-сопряжсппых пар нулей и полюсов
L = max{(/V-l)/2. (М-1)12};
П сумма простых дробей
W(z) = —'L-+—й-+...+—+ ... + —,И'(г) (П1.13)
г-Pi г-рг г- Pk г-Рм-i
или через отрицательные степени г
//(;) =--5—Г +---5—Г + ...+--5—-----------!л^!__ + И/(г)1 (П1.14)
J-P|Z 1-/ъг 1-PfcZ 1-Pm-iZ
где:
rk —коэффициент разложения;
W(z) —целая часть
Покажем возможность взаимного преобразования данных видов ПФ с помо-
щью функций MATLAB.
П1.2.1. Передаточная функция в общем виде
Общий вид передаточной функции — дробно-рациональная функция
(П1.7) — задается векторами коэффициентов числителя и знаменателя в по-
рядке убывания отрицательных степеней, начиная с коэффициента при нуле-
вой степени.
Обозначим:
□ вектор коэффициентов числителя длиной n:
num = b = [ЬО bl ... bN-2 bN-1]
(num — от слова numerator (числитель));
Приложение 1, Математическое моделирование обработки сигналов...
693
П вектор коэффициентов знаменателя длиной м:
den = а = [1 al а2 ... аМ-2 аМ-1)
(den — от слова denominator (знаменатель)}.
П1.2.2. Передаточная функция
в виде произведения простейших множителей:
функции tf2zp, zp2tf
Если передаточная функция //(г) задана в общем виде (П1.7). то для ее
представления в виде произведения простейших множителей (П1.11) необхо-
димо определить корни числителя (нули) и корпи знаменателя (полюсы), т. е.
корни многочленов, заданных векторами num = Ь и den = а соответственно.
Корни многочленов числителя и знаменателя можно вычислять поочередно
с помощью функции roots, однвко в MATLAB имеется специальная функция
tf2zp, обеспечивающая одновременное вычисление нулей и полюсов. Фор-
мат функции tf2zp имеет вид:
[q, р, К]=tf2zp(num,den)
где для ЛДС с одним входом и выходом:
q— вектор нулей:
р — вектор полюсов;
к — коэффициент усиления;
num— вектор коэффициентов числителя ПФ (111.7) в порядке убывания сте-
пеней, начиная с коэффициента при нулевой степени;
den— вектор коэффициентов знаменателя ПФ (111.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени (первый элемент
вектора den всегда равен 1).
Пример Ш.8
Определить нули и полюсы БИХ-фильтра 2-го порядка (см, пример 111 Л),
имеющего передаточную функцию
l + г-'+Г2
*• (*-./ । j •
1-0.1 г 1 + 0.25г 2
(П1.15)
В MATLAB в режиме прямых вычислений это выглядит следующим образом:
» num=[1 1 1 ] ;
» den=[l -0.7 0.25];
» [q,p.K]=tf2zp(num,deni
694
Приложения
q =
-0.5000 + 0.86601
-0.5000 - 0.86601
Р =
0.3500 + 0.35711
0.3500 - 0.35711
К = 1
Полученные значения нулей и полюсов в алгебраической форме
(см. Лекцию 3) позволяют записать ПФ в виде произведения (П1.11):
} 1-(-0.5 +уо,866)г~' 1—(—О,5-/0,866);"' (Г]] ]6)
’ 1 —(0,35 +J0,357)c-1 1-(0.35-J0,375);-1 '
Представим нули и полюсы в показательной форме (см. Лекцию 3), для чего
введем обозначения:
□ го, гр— рациусы (модули) нулей и полюсов;
О fo, fp — углы (аргументы) нулей и наносов.
В MATLAB в режиме прямых вычислений это выглядит следующим образом:
» r0=abs(q(1))
r0 = 1.0000
» f01=angle(q(l))
fOl = 2.0944
» f02=angle<q(2))
£02 = -2.0944
» rp=abs(p(l))
rp = 0.5000
» £pl=angle<p(l))
fpl = 0.7954
» £p2=angle(p(2))
fp2 = -0.7954
В этом случае ПФ (ПГ.11) имеет вид:
j_p2.OM4.-l 1_е-;2,<»44г-|
(П1.17)
Обратная процедура— преобразование ПФ (П1.11) в дробно-рациональную
функцию (П1.7) — выполняется с помощью функции zp2tf, формат которой
имеет вид
[num,den]=zp2tf(q,p,K)
Приложение 1. Математическое моделирование обработки сигналов...
При известных ди р это выглядит следующим образом:
»q =[(-0.5000 + 0.86601)(-0.5000 - 0.86601)];
» р =[(0.3500 + 0.35711)(0.3500 - 0.35711)];
» К =1;
» [num,den]=zp2tf (q,p,K)
num = 1.0000 1.0000 1.0000
den = 1.0000 -0.7000 0.2500
П 1.2.3. Карта нулей и полюсов: функция zplane
Для изображения нулей и полюсов па комплексной z-плоскосги (карты нулей
и полюсов) используется функция zplane, формат которой зависит от вида ПФ.
Если H(z) представлена в общем виде (П 1.7), формат zplane имеет вид:
zplane(q,p)
где q, р— векторы, элементами которых являются нули и полюсы соответст-
венно.
Получим карту' нулей и полюсов ПФ (П1.16) (см. рис. П 1.8):
» q =[(-0.5000 + 0.86601)(-0.5000 - 0.86601)];
» р =[(0.3500 + 0.35711)(0.3500 - 0.35711)];
» zplane(qrp)
, О
’ О
Real Part
Рис. П1.8. Карта нулей и полюсов
Если ПФ представлена в виде произведения простейших множителей
(П1.11), формат функции zplane имеет вид:
zplane (num, den)
696
Приложений
где:
num — вектор коэффициентов числителя ПФ (П 1.7) в порядке убывания сте-
пеней, начиная с коэффициента при нулевой степени;
den— вектор коэффициентов знаменателя ПФ (П1.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени (первый элемент
вектора den всегда рввен 1).
Для примера П 1,8 в результате выполнения следующих операций:
» num=[l 1 1];
» den=(l -0.7 0.25];
» zplane(num,den)
получим ту же карту пулей и полюсов.
П1.2.4. Передаточная функция
в виде произведения множителей второго порядка:
функции ff2sos, zp2sos, sos2tf, sos2zp
Если передаточная функция задана в общем виде (П1.7), то для ее представ-
ления в виде произведения миожителей второго порядка (П1.12) использует-
ся функция f t2sos, имеющая формат:
[sos,G]=tf2sos(num,den)
где:
num— вектор коэффициентов числителя ПФ (П 1.7) в порядке убывания сте-
пеней, начиная с коэффициента при пулевой степени;
den— вектор коэффициентов знаменателя ПФ (П1.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени (первый элемент
векторв den всегда равен 1);
G — коэффициент усиления в (П1.12);
sos — вектор коэффициентов в (П 1.12), равный
[fyjl ^2] й0| «и a2i -.bQk (7ц «2к --^0L ^2L alL
Представим ПФ (П1.15) (см. пример П1.8) в виде произведения множителей
второго порядка:
» num=[l 1 1];
» den=[l -0.7 0.25];
sos = 1.0000 1.0000 1.0000 1.0000 -0.7000 0.2500
1
Приложение 1, Математическое моделирование обработки сигналов... 697
Запишем векторы коэффициентов ь и а:
Аз1 ~ I’ ^21 = 1-
Aqi — lj Л[। = — 0,7: «2i =0,25.
По полученным коэффициентам найдем нули и полюсы. Это можно сделать,
решая квадратные уравнения для числителя и знаменателя:
» num=[1 1 1 ];
» 2=roots(num)
z -
-0.5000 + 0.86601
-0.5000 - 0.86601
» den=[l -0.7 0.25];
» p=roots(den)
P =
0.3500 + 0.35711
0.3500 - 0.35711
Представление полюсов в показательной форме (через радиус и угол) на ос-
нове известных формул (сл/. ЛетараоЗ)
f-л| А
ф*1-> =arccos ---
12r* J
выполняется следующим образом:
» rp=sqrt(sos(6) |
гр = 0.5000
» fpl=acos(-den(2)/(2*rp))
fpl = 0.7954
» Ep2=-fpl
fp2 = -0.7954
Если передаточная функция H(z) представлена в виде произведения про-
стейших множителей (П1.11). то для сс представления в виде произведения
множителей второго порядка (III. 12) используется функция zp2sos, имею-
щая формат:
[sos,G]=zp2sos(q,р,К)
где:
q, р— векторы нулей и полюсов в (П1.11);
к — коэффициент усиления в (П 1.11);
698
Приложения
G — коэффицисн г усиления в (П 1.12);
sos — вектор коэффициентов в (111.12), равный
IA)I /?|| ь21 й01 Д]| Д21 ... Ь^. bjk Ьц. ДоА Яц. ... bQL blL bbl' аЫ. all fl2/J •
При известных q и р(см. пример П1.8) это выглядит следующим образом:
» q=[(-0.5000+0.86601) (-0.5000-0.B660i)]j
» р=[(0.3500+0.35711) (0.3500-0.3571D];
р = 0.3500 + 0.35711 0.3500 - 0.357И
» K=l;
» [sos,G] =zp2sos (q, p, K)
SOS = 1.0000 1.0000 1.0000 1.0000 -0.7000 0.2500
G = 1
Коэффициенты ПФ(П1.12) равны:
^3i = h Л|]=1; ^2i = I» "01 = ^ йи=“0»7; д2|=0,25.
Для обратной операции — представления ПФ. заданной в виде произведения
множителей второго пордяка, в общем виде или в виде произведения про-
стейших множителей— необходимо воспользоваться соответственно функ-
циями sos2tf и sos2zp, форматы которых имеют вид:
[num,den]=sos2tf(sos,G)
[q,p,K]=sos2zp(sos,G)
П 1.2.5. Передаточная функция
в виде суммы простых дробей:
функция residuez
Для представления передаточной функции (П1.7) в виде суммы простых дро-
бей (П1.14) используется функция residuez следующего формата:
[г, р,с]=residuez(num,den)
где num— вектор коэффициентов ПФ (П1.7) в порядке убывания степеней,
начиная с коэффициента при нулевой степени;
den — вектор коэффициентов ПФ (П1.7) в порядке убывания степеней, начи-
ная с коэффициента при нулевой степени (первый элемент вектора den всегда
равен 1);
г — вектор коэффициентов числителя в (П1.14):
Приложение 1. Математическое моделирование обработки сигналов...699
р — век гор полюсов;
с — вектор коэффициентов целой части IV(z) в (П1.14).
В MATLAB в режиме прямых вычислений при известных num и den (см при-
мер П1.8) это выглядит следующим образом:
» num=[1.0000 1.0000 1.0000];
» den=[1.0000 -0.7000 0.2500);
» [r.p.c]=residuez(num,den)
r =
-1.5000 - 3.8508i
-1.5000 + 3.85081
P =
0.3500 + 0.357ii
0.3500 - 0.35711
c = 4
Получили ПФ в виде суммы простых дробей:
п .) = -1.5-/3.8508 + -1.5 + J0.8508 + д
1-(0.35 + /0.3571)Г' 1-(0,35-/0,3571)г'
Образная процедура выполняется также е помощью функции residuez с оче-
видным форматом:
(num,den)=residuez(г,р,с)
Для заданных значений г, ри с это выглядит следующим образом:
» г=[(-1.5000-3.85081) (-1.5000+3.85081)];
» р=[(0.3500+0.35711) (0.3500-0.3571Ц];
» с=4;
» [num,den]=residuez(r,p,c)
num = 1.0000 1.0002 1.0001
den = 1.0000 -0.7000 0.2500
П1.3. Моделирование работы ЛДС
в частотной области
Моделирование работы ЛДС в частотной области в первую очередь включает
в себя вычисление ее частотных характеристик (слг. Лекцию 6),
700
Приложения
П1.3.1. Расчет частотной характеристики
по коэффициентам передаточной функции:
функция freqz
Для вычисления частотной характеристики //(eju7 ) (П1.8) по коэффициен-
там передаточной функции — векторам b и а в (П1.7), используется функция
freqz. формат которой может выглядеть следующим образом:
□ [H,w]=freqz(num, den,N) (П1.18)
где:
num— вектор коэффициентов числителя ПФ (П1.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени;
den— вектор коэффициентов знаменателя ПФ (П1.7) в иорядке убывания
степеней, начиная с коэффициента при нулевой степени (первый элемент
вектора den всегда равен 1):
N— количество точек, в которых должна быть рассчитана частотная ха-
рактеристика;
н — значения частотной характеристики:
w — вектор частот о) (в радианах в секунду):
СЗ H=freqz (num, den, w) (П1.19)
[H, f ] =freqz (num, den, N, Fs) (111.20)
где:
f — вектор частот в герцах:
Fs — частота дискретизации;
3 H=freqz (num,den, f, Fs) (П1.21)
Пример П1.9
Вычислить частотную характеристику БИХ-фильтра. передаточная функция
которого задана в примере П1.8, с помощью функции freqz (111.19). Частота
дискретизации Fs = 1000.
В MATLAB в режиме прямых вычислений это выглядит следующим образом:
» num=[1 1 1];
» den=[L -0.7 0.251»
» w=0:pi/10:pi;
» Н=freqz (num, den,w)
Приложение 1. Математическое моделирование обработки сигналов...70/
Н =
Columns 1 through 4
5.4545 4.8473 - 2.2982i 2.7982 - 3.96301 0.2046 - 3.57381
Columns 5 through 8
-0.8360 - 1.90071 -0.6651 - 0.71261 -0.2457 - 0.16131 0.1038 ♦ 0.04391
Columns 9 through 11
0.3387 + 0.08721 0.4705 + 0.05771 0.5128 + 0.00001
Получили 11 комплексных значений частотной характеристики.
Пример П1.10
Получим те же значения, вычисляя частотную характеристику с помощью
функции freqz (П1.21):
» num= [1 1 1] ;
» den=[l -0.7 0.25];
» Fs=1000;
» £=0:50:500;
» H=freqz(num,den,f,Fs)
H =
Columns 1 through 4
5.4545 4.8473 - 2.29821 2.7982 - 3.96301 0.2046 - 3.57381
Columns 5 through 8
-0.8360 - 1.90071 -0.6651 - 0.71261 -0.2457 - 0.16131 0.1038 + 0.04391
Columns 9 through 11
0.3387 + 0.08721 0-4705 + 0.05771 0.5128 + 0,00001
П1.3.2. Расчет АЧХ и ФЧХ:
функции freqz, abs, angle, dbode
Расчет АЧХ и ФЧХ может производиться:
□ по вычисленной с помощью функции freqz частотной характеристике
с помощью функций abs и angle.
Пример ПЕП
Вычислим АЧХ и ФЧХ по частотной характеристике, полученной в при-
мереПМО:
» num= [1 1 1] ;
» den=[l -0.7 0.25];
» £=0:10:500;
» Fs=1000;
702
Приложения
» H=freqz(num,den,f, Fg);
» A=abs (H) ;
» FI=angle(H);
» plot(f,A),grid
» gtext(’A’lX’)
» hold o£f
» plot(f,FI).grid
» gtextf’CMX')
На рис. П1.9 представлены графики АЧХ и ФЧХ соответственно;
Рис. 111.9. Графики АЧХ (<?) и ФЧХ (б) (к примеру 111.11)
Приложение 1. Математическое моделирование обработки сигналов...
703
□ с помощью функции dbode, формат которой имеет вид:
[MAG,PHASE,w] = dbode(num.den.T)
где:
num— вектор коэффициентов числителя ПФ (II 1.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени;
den— вектор коэффициентов знаменателя ПФ (П1.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени (первый элемент
вектора den всегда равен 1):
т — период дискретизации:
w — вектор частот w (в радианах в секунду) в интервале от 0 до л/Т;
mag — вектор значений АЧХ;
phase — вектор значений ФЧХ.
Пример П1.12
Вычислим АЧХ и ФЧХ БИХ-фильтра, передаточная функция которого за-
1ана в примере 111.8, а период дискретизации равен Т = 1/1 000 с :
» num= [1 1 1 ] ;
» den=[l -0.7 0.25];
» T=l/1000;
» [MAG, PHASE,w] = dbode(num, den,T);
» plot (w, MAG), grid
На рис. П1.10 представлен график АЧХ (сравните с графиком АЧХ в при-
мере 111.11).
704
Приложения
П1.3.3. Расчет группового времени задержки:
функция grpdelay
Групповое время задержки (ГВЗ) — это производная от ФЧХ (ел/. Лекцию б )
cZco
или
df
Расчет ГВЗ выполняется с помощью функции grpdelay, формат которой
имеет вид:
[Gd,f] = grpdelay(num,den,N,Fs)
где:
num— век гор коэффициентов числителя ПФ (П1.7) в порядке убывания сте-
пеней, начиная с коэффициента при нулевой степени;
den— вектор коэффициентов знаменателя ПФ (П1.7) в порядке убывания
степеней, начиная с коэффициента при нулевой степени (первый элемент
вектора den всегда равен 1);
Fs — частота дискретизации в герцах;
n— количество точек, для которых рассчитывается ГВЗ (длина векторов f
и Gd);
Gd — вектор значений ГВЗ G(/);
f — вектор частот в герцах.
Пример П1.13
Рассчитать ГВЗ для исходных данных примера ГН. 11. В основной полосе
[0; 500] Гц при шаге Д/ = 10 Гц количество точек ГВЗ равно n = 51.
В MATLAB в режиме прямых вычислений расчет ГВЗ выглядит следующим
образом:
» ПШП=[1 1 1] ;
» den=[l -0.7 0.25];
» Fs=1000;
» [Gd, f ] = grpdelay (num, den, 51,Fs);
График ГВЗ приведен на рис. П1.11. Всплеск 1 ВЗ соответствует скачку ФЧХ
на л (см. рис. П1.9, б).
Приложение 1. Математическое моделирование обработки сигналов... 705
П1.4. Анализ дискретных сигналов
Рассмотрим основные функции, используемые в MATLAB для анализа дис-
кретных сигналов во временной и частотной областях.
П1.4.1. Анализ дискретного сигнала
во временной области: функции mean, std, xcorr
Если сигнал х(л) представляет собой случайный стационарный процесс, то
для его анализа используют статистические характеристики: математическое
ожидание, дисперсию, автокорреляционную функцию и др.
Расчет математического ожидания и дисперсии выполняется с помощью
функций mean и std, формат которых весьма прост и может быть изучен са-
мостоятельно.
Автокорреляционная функция Л(м) дискретного сишала лс(м), п = О, I,.... N -1
является четной и определяется по формуле:
N-I
R(m) = х(н)х(п + т), tn = 0. I...., N -I.
н=0
при этом
R(m) = /?(—m), т = 1, 2,..., N — I.
706 Приложения
Oictoqa следует, что значения автокорреляционной функции центрированы
(симметричны) относительно /?(0).
В MATLAB нижний индекс любого массива равен единице и индексы могут
иметь только положительные значения, поэтому автокорреляционная функ-
ция вычисляется по следующей модифицированной формуле:
N
R(m) = X л<«)х(п + т -N), m = N,N +1...W + (JV - I), (П 1.22)
Л = 1
при ЭТОМ
tf(W + m) = R(tf-m), /w = 1, 2,, JV-]. (П1.23)
Соответственно, значения автокорреляционной функции центрированы отно-
сительно R(Af).
Пример П1.14
Вычислить автокорреляционную функцию сигнала д* = [1 1 1] непосредст-
венно по формулам (П1.22) и (П1.23).
В данном случае A' = 3; п- 1, 2. 3; т = 3, 4, 5, поэтому значения автокорре-
ляционной функции равны:
(т = 3; №1, 2, 3) Л(3) = jc(1)jv(1) + x(2)jc(2) + х(3)х(3) - 3;
(m = 4; 2, 3) /?(4) = т(1)а(2) + .т(2).г(3) = 2;
(ш = 5; л = 1, 2, 3) Я(5) = л(1)л-(3) = 1;
(w = l); Л(4) =/?(2) = 2;
(»> = 2); Й(5) = Я(1) = 1
и центрированы относительно R(N) = fi(3).
Пример П1Л5
Вычислить автокорреляционную функцию сигнала т = [1 0 0 1] непо-
средственно по формулам (II1.22) и (П1.23).
В дампом случае N = 4; н = 1,2. 3, 4; т = 4, 5, 6, 7, поэтому значения авто-
корреляционной функции равны:
(,н = 4; л = |, 2, 3, 4) R(4) = л(1)т(1) + л(2)т(2) + х(3)х(3) + х(4)л(4) = 2;
(т = 5; 11 = 1.2,3,4) К(5) = л(1)х(2) + л(2)х(3) + .т(3)х(4) = 0;
(т = 6; и = 1, 2, 3, 4) Я(6) = л(1)л(3) + х(2)л(4) = 0;
(т = 7; и = |, 2, 3, 4) R(7) = л(1)х(4) = 1;
рпиложение Л Математическое моделирование обработки сигналов...707
(„1 = 1) R(3) = R(5) = U;
(,n = 2) R(2) = R(6) = 0;
(m = 3) /?(1) = /?(7) = 1
и центрированы относительно ft(iV) = /?(4).
В MATLAB расчет автокорреляционной функции сигнала л(м) производится
с помощью функции хсогг, формат которой имеет вид:
К=ХСОГГ(х)
где:
х — вектор отсчетов сигнала х(л);
R — вектор значений автокорреляционной функции R(m).
Длина вектора R равна удвоенной длине вектора х минус 1.
Пример П1.16
Вычислить автокорреляционную функцию при исходных данных приме-
ра П1.14 с помощью функции хсогг:
» х=[1 1 1];
» R=xcorr(x)
R = 1 2 3 2 1
Результаты совпадают с полученными в примере 111.14.
Пример П1.17
Вычислить автокорреляционную функцию при исходных данных приме-
ра П1.15 с помощью функции хсогг:
» х=[1 0 0 1];
» R=xcorr(x)
R = 1.0000 -0.0000 0.0000 2.0000 0.0000 -0.0000 1.0000
Результаты совпадают с полученными в примере П 1.15.
П1.4.2. Анализ дискретного сигнала
в частотной области: функции fft, ifft
Анализ дискретного сигнала в частотной области осуществляется с помощью
дискретного преобразования Фурье (ДПФ) (см. Лекцию //)•
О прямого:
«-] -j—ak _
Х(^)=£х(и)е N , *=0,1......../V-1; (П1.24)
,1=0
708
Приложения
□ обратного:
I j—nk
х(п) = — Т,Х(к)е N , и = 0,1,..., Д'-1, (П1.25)
N *=o
где Д — количество отсчетов входного сигнала и отсчетов ДПФ X(к) на
периоде.
Для повышения быстродействия коэффициенты ДПФ Х(к) рассчитываются
с помощью алгоритма БПФ Кули — Тьюки с использованием функции Eft,
формат которой имеет вид:
X=fft(x)
или t
X=f f t (x.mj
где:
x — вектор отсчетов входного сигнала х(и);
х—вектор отсчетов Д11Ф Х(к) -,
m— количество отсчетов сигнала х(и), по которым вычисляется ДПФ. Если
m < N, к вектору х добавляются нулевые элементы, если m > N, элементы
вектора х, начиная с п > га, при вычислении ДПФ не учитываются.
Отсчеты ДПФ Х(к) в общем случае— комплексные числа, поэтому также
определяют их модуль и аргумент.
Модуль отсчетов ДПФ определяется как <2/N)abs(X), а аргумент— как
angle(X).
Пример П1.18
Вычислить отсчеты ДПФ сигнала
х(п) = 0,781п(2лДяГ) + 0t5sm(2nf2nT),
где:
я = 1,2..1024 (tf = 1024);
частота /] = 500 Гц;
частота /2 = 750Гц;
частота дискретизации — 2000 Гц и, соответственно, период Т = 1/2000 с.
Запишем сигнал, подставив исходные данные:
х(и) = 0,7 sin + 0.5 sin = 0,7sin(0,5n«) + O,5sin(O,75iw)
2000 2000
Приложение 1. Математическое моделирование обработки сигналов.../од
Рассчитаем значения Х(к) и построим график модуля |г¥(Л)|, используя со-
ответствующие функции MATLAB:
» п=1:1024;
» x=0.7*sin(0.5*pi.*n)+0.5*sin(0.75*pi.*п);
» X=fft(х);
» MOD=(2/1024)*abs(X);
» stem(n,MOD).grid
» gtext(’Коэффициенты ДПФ')
» xlabel('Ось k’)
Коэффициенты ДПФ
Рис. П1.12. Коэффициенты ДПФ
Полученный график (рис. П1.12) симметричен относительно точки
k = Njl — середины основной полосы частот. Для того чтобы определить
значения и к2, соответствующие частотам /( и f2 гармоник, необходимо
составить пропорцию
/ - ft-.
k - N.
откуда
k=JN/fi.
710
Приложения
В пашем примере
kt =500-1024/2000 = 1024/4 = 256,
к2 = 750-1024/2000 = 384.
Отсчеты сигнала х(п) вычисляются на основе ОДПФ (П1.25) с использова-
нием функции ifft, формат которой имеет вид:
x=ifft(X)
ИЛИ
x=ifft(X,m)
где:
x — вектор отсчетов входного сигнала д(м) ;
х — вектор отсчетов ДПФ X (к);
ш — количество отсчетов ДПФ X (к). Если m < n, к вектору х добавляются
пулевые элементы, если m > n, элементы вектора х, начиная с п > га. при вы-
числении х(п) не учитываются.
Пример П1.19
Вычислить отсчеты ДПФ-сигнала
х(н) = 0,7sin(27i/jwr),
где:
п = 1, 2,, 8 (W=8);
частота /( = 500 Гц;
частота дискретизации /л = 2000 Гц и. соответственно, период Т -1/2000 с .
Выполнить обратную операцию: по вычисленным значениям Х{к) опреде-
лить значения сигнала х(и).
Запишем сигнал, подставив исходные данные:
х(и) = 0,7 sin _ q ?sjn(Q 5^)
2000
В MATLAB вычисление ДПФ и ОДПФ выполняется следующим образом:
» П=1:8;
» х=0.7*sin(0.5*pi.*п)
х =
Columns 1 through 7
Приложение 1. Математическое моделирование обработки сигналов... /у/
0.7000 0.0000 -0.7000 -0.0000 0.7000 0.0000 -0.7000
Column 8 -0.0000 » X=fft(x) X = Columns 1 -0.0000 through 4 -0.0000 - O.OOOOi 2.8000 - O.OOOOi 0.0000 - O.OOOOi
Columns 5 0.0000 through 8 0.0000 + O.OOOOi 2.8000 + O.OOOOi -0.0000
+ O.OOOOi » x=ifft(X) x = Columns 1 0.7000 through 4 0.0000 + O.OOOOi -0.7000 -0.0000 - O.OOOOi
Columns 5 0.7000 through 8 0.0000 + O.OOOOi -0.7000 -0.0000 - O.OOOOi
Очевидно, что значения сигнала совпадают е исходными.
Приложение 2
Моделирование цифровой
фильтрации с помощью GVI SPTool
в программной среде MATLAB
Программы GUI (Graphic User Interface — Графический интерфейс пользова-
теля)— это интерактивные системы (диалог "компьютер— человек"), пред-
назначенные для математического моделирования сигналов, устройств и
процессов с графическим выводом результатов.
GUI SPTool (Signal Processing Toolbox — Средства обработки сигнала) пред-
ставляет собой типичную GUI-программу, предназначенную для математиче-
ского моделирования цифровой обработки сигналов, в частности, процедуры
цифровой фильтрации.
Обращение к GUI-программе происходит после записи ее имени в команд-
ном окне MATLAB
» sptool
Программа SPTool включает 9 интерактивных окон Windows. Будем знако-
миться с ними постепенно, изучая последовательность действий при работе
в SPTool-программе.
П2.1. Последовательность действий
при работе в SPTool-программе
В общем случае моделирование процедуры цифровой фильтрации с по-
мощью SPTool предполагает выполнение следующих действий в заданной
последовательности:
□ синтез (проектирование) цифрового фильтра (ЦФ);
□ анализ характеристик синтезированного ЦФ;
□ создание входного сигнала;
Приложение 2. Моделирование цифровой фильтрации с помощью GVI SPTool... 773
О импортирование входного сигнала в SPTool;
О визуализацию входного и выходного сигналов;
Q моделирование процесса фильтрации;
О расчет и визуализацию спектров входного и выходного сигналов;
О выход из программы SPTool;
О экспортирование результатов моделирования (данных SPTool) в MATLAB.
Рассмотрим каждое из этих действий подробнее.
П2.1.1. Синтез цифрового фильтра
После обращения к программе SPTool (с помощью вызова sptool) в ко-
мандном окне MATLAB открывается первое окно SPTool:startup.spt
(рис. П2.1) с тремя списками: Signals (Сигналы), Filters (Фильтры), Spectra
(Спектры).
4 SPTool. startup.«pt
Fie Edt Hefc Window
BOB
Signal*
Filters
Spectra
chit vector
train [vector]
fsig |vectu]
у [vector]
sigl [vector]
s»g3 [vector]
sig2 [vector]
ntfJbse (auto!
View
LSIp [design]
FZIp [imputed]
ARbp [design]
chrpse [auto]
Iranse [auto]
spectl [auto]
$pecl2 [auto]
I View_________I View________|
New Design_| Create___j
Edit Design|Update |
АррУ
Рис. П2.1. Первое окно SPTookstartup.spt
Под списком Filters размещаются 4 кнопки:
□ View (Вид) — просмотр характеристик фильтра;
О New Design (Новый проект) — синтез нового фильтра;
714
Приложения
О Edit Design (Редактирование проекта)-— изменение требований к фильтру
и его синтез без изменения имени фильтра;
□ Apply (Применить)— моделирование процесса фильтрации сигнала, имя
которого выделено в списке Signals, фильтром, имя которого вы зелено
в списке Filters.
В списке Filters содержатся имена синтезированных ранее и сохраненных
фильтров: если они отсутствуют, активна только кнопка New Design.
Терминология "сохраненный фильтр" означает, что в файле с указанным
именем сохранены все данные о синтезированном фильтре в виде массива
записей (структуры) — struct array (cv. Приложение 3).
Для синтеза нового ЦФ необходимо нажать кнопку New Design, после чего
открывается второе окно Filter Designer (Синтез филыра) (рис. 112.2),
в котором выполняются следующие действия:
О задаются требования к синтезируемому ЦФ:
• в поле ввода Sampling Frequency (Частота дискретизации)— частота
дискретизации в герцак, например 2000 Гц;
• в группе Specifications (Параметры) в раскрывающемся списке Туре
(Тип)—тип избирательности фильтра, например lowpass (низкочастоп1Ый);
• в раскрывающемся списке Algorithm (Алгоритм) — тип ЦФ (КИХ или
БИХ) и одновременно метод синтеза.
Для синтеза КИХ-фтътров может быть выбран один из следующих
методов:
0 Equiripple FIR — оптимальной фильтрации Чебышева:
0 Least Square FIR — наименьших квадратов;
0 Kaizer Window FIR — окон Кайзера.
При синтезе БИХ-фильтров используется метод билинейного Z-
преобразовапия со следующими типами аппроксимации:
0 Butterwhorth I1R— Баттерворта;
0 Chebyshev Туре 1 IIR — Чебышева I рода;
0 Chebyshev Туре 2 1IR — Чебышева II рода;
0 Elliptic I1R — Золотарева— Кауэра:
• в группе Specifications —требования к характеристике ослабления:
0 в подгруппе Passband (Полоса пропускания) указываются:
н в поле ввода Fp— граничная частота полосы пропускания в гер-
цах, например 200 Гц;
Приложение 2. Моделирование цифровой фильтрации с помощью GVI SPTooL 715
к в папе ввода Rp— максимально допустимое ослабление в деци-
белах, например 3 дБ;
О в подгруппе Stopband (Полоса задерживания) указываются:
и в поле ввода Fp—- граничная частота полосы задерживания
в герцах, например 300 Гц;
и в поле ввода Rp- минимально допустимое ослабление в деци-
белах. например 60 дБ;
О синтезируется ЦФ по введенным требованиям после нажатия кнопки
Apply,
□ выводятся следующие данные о синтезируемом филыре:
• в поле Frequency Response (Частотная характеристика)— график ха-
рактеристики ослабления;
• в группе Measurements (Значения):
О в текстовом поле Order (Порядок)—- порядок ЦФ. в примере 32;
О в подгруппе Passband:
и Rp — действительное ослабление в полосе пропускания, в при-
мере 3,45 дБ;
п Weight (Вес)— вес в полосе пропускания (для подробной ин-
формации необходимо нажать правую верхнюю кнопку Help
данного окна);
О в подгруппе Stopband:
и Rp — действительное ослабление в полосе задерживания, в при-
мере 58.75 дБ;
и Weight— вес в полосе задерживания;
О в раскрывающемся списке Filter— имя синтезированного фнлыра.
Имена фильтров задаются автоматически: filtl. filt2 и т. д.
В примере синтезируемый фильтр имеет имя ЛИЗ.
Строка меню второго окна Filter Designer состоит из следующих пунктов:
□ File (Файл), меню которого содержит команду Close (Закрыть) — закрыть
окно;
П Window (Окно), меню которого содержит команды:
• 0 MATLAB Command Window — выход в окно MATLAB;
• 1 Filter Designer (Синтез фильтра) — выход в окно Filter Designer,
• 2 SPTool:startup«spt — выход в окно SPTool:startup^pt.
716
Приложения
Рис. П2.2. Второе окно Filter Designer
После синтеза фильтра окно Filter Designer закрывается, и пользователь
вновь оказывается в первом окне SPTool:startup.spt. Если никаких других
действий не предполагается, это окно можно закрыть, при этом автоматиче-
ски запрашивается необходимость сохранения результатов сессии (в общем
случае синтезированных фильтров, импортированных входных и вычислен-
ных выходных сигналов, вычисленных спектров).
Информация о синтезированном фильтре хранится в файле filtN в ви-
де массива записей, в нашем примере — в файле ПИЗ (см. примеры П3.5).
После выхода из окна Filter Designer имя файла ПИЗ синтезированного
фильтра отображается в окне SPTool:startup.spt в поле Filters.
Если после выхода из окна Filter Designer необходимо изменить требова-
ния к сохраненному фильтру (по существу, заново синтезировать филыр)
и сохранить новый фильтр под старым именем, следует в окне
SPTool:startup4»pt в поле Filters выделить имя фильтра, нажать кнопку Edit
Design и внести требуемые изменения.
Приложете 2. Моделирование цифровой фильтрации с помощью GVI SPTool... 717
П2.1.2. Анализ характеристик
синтезированного фильтра
Для анализа характеристик синтезированного фильтра необходимо выпол-
нить следующие действия:
1. В списке Filters окна SPTool:startup.spt выделить имя фильтра.
2. Нажать кнопку View, в результате чего открывается третье окно Filter
Viewer (Просмотр фильтра) (рнс. П2.3) и приводятся следующие данные
о синтезированном фильтре:
• в текстовом поле Filter (наверху слева) — имя анализируемого фильтра
filtl (как следует из рис. П2.1, это фильтр, синтезированный ранее);
• Fs = 2000 — частота дискретизации в герцах;
• в группе Plots (Графики) — список возможных графиков:
0 Magnitude (АЧХ);
0 Phase (ФЧХ);
0 Group Delay (ГВЗ);
О Zeros and Poles (Нули и полюсы) — карта нулей и полюсов;
О Impulse Response (Импульсная характеристика);
0 Step Response (Переходная характеристика).
Для вывода графиков необходимо установить соответствующие флажки.
Кроме того, в окне Filter Viewer можно выполнять следующие действия:
П в раскрывающемся списке Magnitude выбрать масштаб графика АЧХ (на-
пример, линейный);
□ в раскрывающемся списке Phase выбрать единицы измерения ФЧХ (на-
пример, в радианах);
П в группе Frequency Axis (Оси частот) выбрать:
• в раскрывающемся списке Scale (Масштаб) — масштаб по оси частот;
• в раскрывающемся списке Range (Диапазон) — диапазон частот;
О в группе Selection (Выбор) выбрать тип и цвет линий на графиках (всех
одновременно) с помощью кнопки Color (Цвет);
П в группе Rulers (Метки) в раскрывающемся списке выбрать один из 6
графиков, а затем, отметив требуемый график (двойной щелчок левой
кнопки мыши на поле графика), можно:
• с помощью кнопки Vertical (Вертикальный) перемещать сплошную и
пунктирную прямые вертикальные линии; при этом автоматически
716
Приложения
фиксируются значения соответствующих аргументов xl. х2 и разности
dx между ними;
• с помощью кнопки Horizontal (Горизонтальный) перемещать сплош-
ную и пунктирную прямые горизонтальные линии; при этом автомати-
чески фиксируются значения соответствующих функций yl. у2 и раз-
ности dy между ними;
• с помощью кнопки Track (Траектория) перемещать сплошную и пунк-
тирную вертикальные линии для отмеченных па графике точек; при
этом автоматически фиксируются значения соотвегствующик аргумен-
тов х!» х2, функций yl, у2 и разностей dx, dy между ними;
• с помощью кнопки Slope (Наклон) перемещать дополнительную ли-
нию, соединяющую отмеченные на графике точки; при этом автомати-
чески фиксируется значение ш тангенса угла наклона этой линии к оси
абсцисс;
• с помощью кнопки Peaks (Пики) отмечать максимумы;
• с помощью кнопки Valley (Впадины) отмечать минимумы:
□ с помощью кнопки Mouse Zoom (Масштаб мыши) выделить с помощью
левой кнопки мыши интересующую часть любого графика в увеличенном
масштабе.
Рис. П2_5. Третье окно Filler Viewer
Приложение 2. Моделироваюю цифровой фильтрами с помощью GVI SPTool... ?ig
П2.1.3. Создание входного сигнала
Источником сигнала для SPTool может являться:
□ рабочее пространство памяти Workspace, если сигнал соз'хается непо-
средственно в командном окне MATLAB. Например, создадим дискрет-
ный сигнал. представляющий собой смесь (сумму) двух гармоник с час го-
рами 500 Гц и 750 Гц с белым шумом:
» n=lsl000;
» х=0.7*sin(0.5*pi. *п)-*0 -5*sin(0.75*pi, *n) ;
» y=rand(l,length(x));
» sum=y+x;
О диск Disk, если сигнал создается как m-файл.
П2.1.4. Импортирование входного сигнала в SPTool
Для импортирования входного сигнала необходимо в первом окне
SPToolistartup.spt в меню File выбрать команду Import (Импорт).
После этого открывается четвертое окно Import to SPTool (Импорт в SPTool)
(рис. П2.4). в котором в группе Source (Источник) выбрать переключатель:
From Workspace (Из рабочего пространства памяти) или From Disk (С диска).
При этом:
□ если сигнал импортируется From Workspace, необходимо:
• в группе Workspace Content (Перечень имен переменных в рабочем
пространстве памяти) выделить имя сигнала, например, для приведен-
ного выше примера это имя сигнала sum;
• нажать кнопку, обозначенную стрелкой "—>”, после чего имя сигнала
будет отображено в поле ввода Data (Данные), это указание рассмат-
ривать сигнал sum как данные, т. е. как массив чисел;
• в раскрывающемся списке Import As (Импортировать как) выбрать
пункт Signal (Сигнал) и задать:
О в поле ввода Sampling Frequency — частоту дискретизации сигнала
в герцах, например 2000 Гц;
О в поле ввода Name (Имя) — имя сигнала (в SPFool), например sig3:
• нажать кнопку ОК;
□ если сигнал импортируется From Disk, необходимо:
• в группе Source нажать активизированную кнопку Browse (Просмотр),
в результате чего откроется пятое окно Select File to Open (Выбор от-
720
Приложения
крываемого файла) (рис. П2.5); дальнейшие действия выполнять
в этом окис:
• выделить имя m-файла, например sig2;
• нажать кнопку Open (Открыть), после чего автоматически происходит
возврат в окно Import to SPTool;
• в окне Import to SPTool в поле File Contents (Перечень файлов) выде-
лить имя сигнала (имя переменной, соответствующее сигналу в т-файле,
например s) и нажать кнопку со стрелкой ”—>”, после чего имя сигна-
ла будет отображено в поле ввода Data (Данные), это указание рас-
сматривать сигнал sum как данные, т. е. как массив чисел;
• в раскрывающемся списке Import As выбрать Signal и задать для сиг-
нала;
О в поле ввода Sampling Frequency — частоту дискретизации в гер-
цах, например 2000 Гц;
О в поле ввода Name — имя сигнала (в SPTool), например sig2 (в прин-
ципе, можно задать другое имя, не совпадающее с именем файла);
• нажать кнопку ОК.
Рис. П2Л. Четвертое окно Import to SPTool
Приложение 2. Моделирование цифровой фильтрации с помощью GVI SPTool... 721
Select File to Open EIQ
Палка: |j«k 3 jg] g| [ЙЭ|
111 Slap J
export ,
^№1
ЯЕЗ
sig3
£Ё! sig*
Имя файла: [sig2 _ „ _ " ___ ___| Скрыть |
Тип файлов: | MAT-files (".mat) Отмена |
Рис. П2.5. Пятое окно Select File to Open
П2.1.5. Визуализация
входного и выходного сигналов
Для визуализации сигнала необходимо:
□ в группе Signals окна SPToolistartiip.spt выделить имя сигнала, например
sig3;
□ нажать кнопку View, в результвте чего открывается шестое окно Signal
Browser (Просмотр сигнала) (рис. П2.6), содержащее:
• в группе Selection — имя сигнала, например sig3;
• в поле sig3— количество точек сигнала N, частоту дискретизации Fs
и график дискретного сигнала, представленный непрерывной линией,
на интервале времени [б; ЛТ]= [О; /V/Fs]c; дискретное время определя-
ется как пТ, где я = 1,2,..., N; на рис. П2.6 Fs = 2000 Гц, Д' = 1000
(см. надпись над графиком), соответственно, интервал времени равен
[0; 0,5]с.
В окне Signal Browser имеется набор средств для работы с графиками, такой
же, как в окне Filter Viewer (aw. п. П2.1.2).
722
Приложения
Рис. П2.6. Шестое окно Signal Browser
П2.1.6. Моделирование процесса фильтрации
После синтеза фильтра и импортирования сигнала можно моделировать про-
цесс фильтрации. Для этого необходимо:
□ в группе Signals окна SPTookstartup.spt выделить имя сигнала, например
sig3;
О в группе Filters окна SPTookstartup-spt выделить имя фильтра, например
КПЗ;
□ нажать кнопку Apply, после чего появляется седьмое окна Apply Filter
(Применить к фильтру) (рис. П2.7) с именами:
• входного сигнала (sig3);
• фильтра (ПИЗ);
• выходного сигнала (например, sig4); если имя выходного сигнала из-
менять не нужно, нажать кнопку ОК (в противном случае сначала из-
менить имя); после этого происходит автоматический возврат в окно
SPTool:startup.spt.
В поле Signals окна SPTool:startup.spt можно выделить одновременно вход-
ной и выходной сигналы (удерживая клавишу <Clrl>), например sig3 и sig4,
Приложение 2. Моделирование цифровой фильтрации с помощью GVI SPTool... 723
и. нажав кнопку View, в окис Signal Browser по очереди просмотреть сщ на-
лы, указывая в группе Selection в раскрывающемся списке их имена.
i ;Apply Fikes В1
Input Signal | sig3
Рйег|й5
^9pf^in|DiiectFotrnll Transposed(flte) Я
Output Signal р^д
Cancel | OK [
Phc. 112.7. Седьмое окно Apply Filler
П2.1.7. Расчет и визуализация спектров
входного и выходного сигналов
Для расчета и визуализации спектра сигнала в окне SPTool:startup.spt необ-
ходимо’.
□ в группе Signal выделить имя сигнала, например входного — sig3:
П в поле Spectra нажать кнопку Create (Создать), после чего появляется
восьмое окно Spectrum Viewer (Просмотр спектра) (рис. П2.8) с именем
спектра spectN: имена спектров задаются автомат ически (подобно именам
фильтров) последовательно spectl. spect2 и т. д., в примере spect3;
□ в окне Spectrum Viewer следует:
• в группе Parameters (Параметры) в раскрывающемся списке Method
(Метод) указать метод расчета спектра, например FFT — БПФ с осно-
ванием 2 (ем. Приложение /);
• задать количество точек, но которым рассчитывается спектр (для мето-
да FFT равное ближайшему к степени двойки Л' = 2Л );
• нажать кнопку Apply, после чего появляется график амплитудного
спектра (при расчете по методу FFT — модуль ДПФ).
Спектр выходного сигнала с именем sig4 рассчитывается и просматривается
аналогично. В примере обе гармоники должны быть подавленными, т. к. они
находятся в полосе задерживания синтезированного фильтра filt3.
24 Зак. 165
724
Приложений
Рис. П2.8. Восьмое окно SjMJttruru Viewer
В окне Spectrum Viewer имеется набор средств для работы с графиками,
такой же как в окне Filter Viewer (сн. и. П2.1.2).
П2.2. Выход из программы SPTool
При выходе из программы SPFoo) автоматически появляется запрос, надо ли
сохранять данные (сигналы, фильтры, спектры). В случае положительного
ответа данные сохраняются в файлах со своими именами и расширением spt
на диске в папке work\startup.spt.
Проверить соаержимое папки work можно с помощью программы Explorer
(Проводник).
Сохраненные файлы могут использоваться для последующей работы
в SPTool.
Для использования в MATLAB данных, сохраненных при выходе из SPTool,
необходимо осуществить их экспортирование в MATLAB.
Положение ? Моделирование цифровой фильтрации с помощью GVJ SPTool.., 725
П2.3. Экспортирование результатов
моделирования в MATLAB
Если результаты моделирования (данные SPTool) предполагается в дальней-
шем использовать в MATLAB, необходимо осуществить их экспортирование
из SPTool в MATLAB. Дгя этого следует в окне $PTool:startup.spt войти
в меню File и выбрать команду Export (Экспорт), после чего откроется девя-
тое окно Export from SPTool (Экспорт из SPTool) (рис. П2.9), в котором на-
до указать:
П в группе Export List (Список имен экспортируемых данных)— имя экс-
портируемых данных (сслн их несколько, то с помощью клавиши <Ctrl>),
например, имена: входного сигнала sig3, выходного сигнала sig4 и синте-
зированного фильтра filt3;
П с помощью соответствующих кнопок — куда сигнал экспортируется
(в Workspace или на Disk).
В обоих случаях данные сохраняются с таким же именем, как в SPTool.
Если данные экспортируются на диск, онн представляют собой m-файлы и
размещаются в папке work, проверить содержимое которой можно с помо-
щью программы Explorer.
Рис. 112.9. Девятое окно Export from SPTool
726
Приложения
Экспортированные данные представляют собой массивы записей (структу-
ры) — struct array (cw. Приложение 3).
Пример П2.1
Требуется:
О экспортировать в Workspace из SPTool следующие данные (см. 112.3):
• о входном сигнале в файле sig3 (struct array);
• о выходном сигнале в файле sig4 (struct array);
• о синтезированном фильтре в файле filt3 (struct array);
П раскрыть содержимое этих файлов.
Решение.
|. Экспортируем указанные файлы из SPTool в Workspace.
2. Выведем содержимое Workspace.
» whos
Name Size Bytes Class
Filt3 1x1 53600 struct array
sig3 1x1 9444 struct array
sig4 1X1 9444 struct array
Grand total is 6281 elements using 72488
3. Определим содержимое каждого из файлов.
» sig3
sig3 =
data: [1000x1 double]
Fs: 2000
type: 'vector*
lineinfo: [1x1 struct]
SPTIdentifier: [1x1 struct]
label: *sig3‘
» sig4
sig4 =
data: [1000x1 double]
Fs: 2000
type: 'vector*
lineinfo: [1x1 struct]
SPTIdentifier: [1x1 struct]
Приложение 2. Моделирование цифровой фильтрации с помощью GVI SPTool... 727
label: ’sig2*
» filt3
filt3=
tf: [lxl Struct]
SS; []
zpk: [] •
sos: []
imp: []
step: []
t: []
H: [1x2048 double]
G: []
f: [1x2048 double]
specs: [lxl struct]
Fs: 2000
type: ’design*
lineinfo: [lxl struct]
SPTIdentifier: [lxl struct]
label: 'filtl*
Каждый из этих файлов представляет собой массив записей (см. Приложе-
ние 3).
Для того чтобы работать с данными SPTool. сохраненными на лиске, необхо-
димо сначала их загрузить с диска в Workspace с помощью команды load,
например:
» load sig3 sig4 filt3
Извлечение необходимых данных, хранящихся в файлах с именами sig3, sig4
и filt3, рассматривается в Приложение 3.
Приложение 3
Массивы записей
в программной среде MATLAB
Массивы записей ИЛИ структуры (struct array ИЛИ string array) — это раз-
новидность нечисловых массивов, элементами которых являются значения
записей. Массивы записей необходимы при работе с GUI SPTool
(ом. Приложение 2), т. к. результаты моделирования процедуры фильтрации
сохраняются на диске исключительно в виде массивов записей.
Запись— это сложный тип данных, представляющий собой совокупность
полей.
Паче — это имя параметра, описывающего объект, в частности полем может
быть имя некоторого массива.
Значение пазя— это значение соответствующего параметра, в частности
значениями поля могут быть значения элементов соответствующею массива.
Значение записи — это совокупность нолей и присвоенных им значений.
Массив записей (struct array) целесообразно использовать для организации
банка данных об М объектах, когда каждый из них характеризуется JV зна-
чениями разнородных параметров. Терминология в этом случае согласуется
следующим образом (знак равенства означает тождественные понятия):
П х-й объект = z-му элементу массива записей = i-й записи (/ = 1.2.М ):
П количество объектов М = количеству М элементов массива = количест-
ву М записей;
П /-я запись = совокупности из /V полей;
□ количество полей N = количеству параметров N , характеризующих объ-
ект;
□ n-е поле = л-му параметру (п = 1, 2./V );
□ значение л-го поля = значению л-го параметра:
П значение i-й записи - совокупности из N нолей н присвоенных им значений.
Приложение 3. Массивы записей в программной среде MATLAB 729
Значения каждой i-й записи (м о элемента массива записей) формируются
отдельно по каждом) л-му полю следующим образом:
<имя массива(<индекс 1>)>.<имя п поля>=<значение для i-ro элемента»
где <имя массива (<индеке i>)> — /-я запись.
Подобное формирование следует выполнить для всех записей /,
/ = 1,2...., N (всех элементов массива) цля каждого из полей и.
п = 1, 2..N, всего MxN раз.
Часто удобно зарезервировать поле под какой-либо параметр, но значений
этому параметру до времени нс присваивать. В этом случае указывают
<имя массива(<индекс 1>)>.<имя п поля>-[]
Пример П3.1
Рассмотрим формирование массива записей из 5 элементов (5 записей,
М =5 ) для организации банка цаипых о 5 членах кафедры. Одна запись со-
держит 4 поля плюс одно зарезервированное поле (W = 5).
Имена полей:
□ surname (фамилия);
□ аде (возраст);
□ pd (ученая степень);
П position (должность);
□ vocation (отпуск) — зарезервированное поле.
Выберем имя массива записей — personal.
Сформированный массив записей имеет вид:
» personal (1) . sumame-'Ланнз';
» personal(2).surname-'Гольденберг';
» personal(3).surname»'Солонина';
» personal(4).surname»'Улахович';
» personal(5).surname»'Родина';
» personal(1).age=64;
» personal(2).age=80;
» personal(3).age=52;
» personal(4).age=62;
» personal(5).age=62;
personal(1).рс^’д.т.н.';
730
Приложения
» personal(2).рб='д.т.н.1;
» personal(3).рб=’к.т.н.
» personal(4).pd='K.T.h.';
» personal(5}.pd='-’;
» personal(1).pos i Lion-’профессор’;
» personal(2).position=’npc^eccop*;
» personal(3).роз1Г1оп=’профессор*;
» personal(4).position®’доцент’;
» personal(5) ,position=’3aB.Jia6. *;
» personal(l).vocation=[];
» personal(2).vocation=[];
» personal(3).vocation=[];
» personal(4).vocation=[];
» personal(5),vocation=[];
Другим примером массива записей являются экспортируемые из GUI SPTool
чанные о сигнале, спектре сигнала или фильтре (елл Приложение 2).
Рассмотрим возможные действия с массивом записей:
i. Вывод перечня имен полей, составляющих каждую запись массива, вы-
полняется по имени массива записей.
Пример П3.2
Вывести перечень имен полей массива записей personal.
» personal
personal =
1x5 struct array with fields:
surname
age
pd
position
vocation
2. Вывод значения z-й записи (значения i-ro элемента) массива записей осу-
ществляется следующим образом:
<имя массива(<индекс i>)>
Пример ПЗ.З
Вывести значения 1-й записи (1-го элемента) массива записей personal.
» personal(1)
Приложение 3. Массивы записей в программной среде MATLAB* 73/
ans =
surname: 'Ланнэ'
age: 64
pd: ’д.т.н.•
position: ’профессор’
vocation: []
3. Вывоз значения н-го поля в r-й записи массива записей выполняется сле-
дующим образом:
<имя массива(синдекс 1>)>.<имя п поля>
Пример 113.4
Вывести значения поля surname 1-й записи (1-го элемента) массива запи-
сей personal.
» personal(1).surname
ans = Ланнэ
Пример П3.5
Построить график выходного сигнала по данным экспортированного
из SPTool массива записей для выходного сигнала с именем sig4
{см. Приложение 2).
Решение. Выведем имена полей массива записей sig4, после чего присво-
им переменной s значения поля data, представляющего собой массив от-
счетов выходного сигнала.
» sig4
sig4 =
data: [1000x1 double]
Fs: 2000
type: ‘vector1
lineinfo: [lxl struct]
SPTIdentifier: [lxl struct]
label: ’sig4‘
» s=sig4.data;
» №1:1000;
» plot(n,s),grid
1 рафик выходного сигнала приведен па рис. ПЗ. 1.
732
Приложения
Рис. П3.1. Выходной сигнал
Пример П3.6
Вывести коэффициенты ь и а передаточной функции синтезированного
фильтра по данным экспо|ггированного из SPTool массива записей filt3
(см. Приложение 2).
Решение. Выведем имена полей массива записей f iit3:
» filt3
filt3 =
tf: [1x1 struct]
SS: []
zpk: []
sos: []
irtp: []
step: []
H: [1x2048 double]
G: []
f: [1x2048 double]
specs: [1x1 struct]
Fs: 2000
type: 1 design•
lineinfo: [lxl struct)
Приложение 3. Массивы записей в программной среде MATLAB 733
SPTIdentifier: [1x1 struct]
label: ‘filta*
Коэффициенты хранятся в поле tf, раскроем его структуру, которая,
в свою очередь, оказывается массивом записей. Так как синтезировался
КИХ-филыр, массив а содержит только один коэффициент, равный 1.
» fi.lt3.tf
ans =
num: [1x33 double]
den: 1
Массивы num и den— коэффициенты числителя и знаменателя передаточ-
ной функции. Присвоим их значения массивам Ъ н а соответственно.
» b=filt3.tf.num
b =
Columns 1 through 7 0.0236 0.0318 0.0339 0.0257
0.0013 0.0063 0.0137
Columns 8 0.0065 through 14 -0.0189 -0.0405 -0.0463 -0.0267 0.0204 0.0870
Columns 15 0.1566 through 21 0.2092 0.2288 0.2092 0.1566 0.0870 0.0204
Columns 22 -0.0267 through 28 -0.0463 -0.0405 -0.0189 0.0065 0.0257 0.0339
Columns 29 0.0318 through 33 0.0236 0.0137 0.0063 0.0013
» a-filt3.If.den
a = 1
4. Проверка того, является ли некоторый массив массивом записей, произво-
дится С ПОМОЩЬЮ функции isf ield.
Пример П3.7
Проверить, является ли массив sig4 массивом записей.
» isstruct(sig4)
ans = 1
5. Вывот значений /i-го поля сразу во всех записях выполняется следующим
образом:
<имя массива >.<имя п псля>
734
Приложения
Пример 113.8
Вывести фамилии всех членов кафедры (все значения поля surname).
» personal.surname
ans -
Ланнэ
ans -
Гольденберг
ans =
Солонина
ans =
Улахович
ans =
Родина
6. Удаление л-го поля выполняется с помощью функции rmfield. формат
которой имеет вид:
rmfield(<MMfl массива>,'<имя п поля>*)
Пример П3.9
Из массива personal удалить иоле vocation.
» rmfield(personal,’vocation*)
ans =
1x5 struct array with fields:
surname
age
pd
position
Для определения типа массива служит функция class.
Пример П3.1И
Определить тип массивов; personal (из примера П3.1) и s (из приме-
ра П3.5).
» class(personal)
ans = struct
» class(s)
ans = double
Массив s — это массив чисел с двойной точностью.
Приложение 4
Необходимые сведения
из теории матриц
Приведенные в данном приложении сведения в основном базируются на ма-
териалах. собранных в справочном пособии [13].
1. Матрицей Л называется совокупность вещественных или комплексных
чисел расположенных в виде прямоугольной таблицы:
ЛИ й12 — rtlwi
Л21 а22 а2т
,ап1 ан2 — ашн
где п —число строк, а т —число столбцов.
Числа Ujj называются элементами матрицы. Индексы /. j означают, что
элемент расположен на пересечении /-й строки и у-го столбца матрицы.
Если матрица имеет и строк и т столбцов, то опа называется матрицей
размером ttXni. Maipnua называется квадратной порядка н, если н = т.
Прямоугольная матрица размером nxl называется аектор-стачдиам,
’а размером 1 хт —векпюр-сшрокой.
Матрица Аг размером пхш называется транспонированной но отноше-
нию к матрице Д размером шхл.ссли
ац ~~ ан
тля всех г, j, т. е. матрица Лг получается в результате замены столбцов
матрицы Л на се строки.
Совокупность элементов а# матрицы, для которых i = j, называется г.шв-
noil диагона /ьк>, а соответствующие элементы — диагональными. Все
736
Приложения
остальные элементы называются внедиагональными. Сумма диагональ-
ных элементов матрицы Л называется следом матрицы и обозначается
как tr(A).
Матрица, все элементы которой равны пулю, называется нулевой и обо-
значается символом 0.
Матрица А называется диагональной. если все ес внедиагональные эле-
менты равны нулю. Диагональная квадратная матрица с диагональными
элементами, равными единице, называется единичной или матрицей тож-
дественного преобразования и обозначается /.
2. Суммой матриц А и В размером тхп называется матрица С размером
тхп, если
для всех Л j. Эта операция обозначается как
С = А + В.
Аналогично определяется разность матриц А н В. Операция сложения
матриц коммутативна и ассоциативна, т. е.
А + В = В + А, (Л + 0) + С = А + (В + С).
Произведением матрицы А размером тхп па число а называется мат-
рица С размером шхн,ссли
для всех Л j.
Эта операция обозначается как
С = аА.
Произведением матрицы А размером тхп и матрицы В размером
пхрназывается матрица С размером тхр, если
С,7 = X
для всех it j.
Эта операция обозначается как
С = АВ.
Произведение матриц нс является в общем случае коммутативным, т. е.
АВ * ВА.
Приложение 4. Необходимые сведения из теории матриц 737
Если операция произведения матриц выполнима, то она ассоциативна и
дистрибутивна но отношению к сложению, т. с.
(АЯ)С = Л(ЯС), (Л + В)С = ЛС + ВС, D(A + B) = DA + DB.
Для операции транспонирования имеют место соотношения:
(<М)'=«а', (Л + С)7' = Ат + Вг. (АВ)т = ВгЛт. {Лг)г = Л..
Для любой матрицы А и нулевой матрицы соответствующих размеров
справедливы равенства:
А + 0 = 0+А = А, ()А = А-О = О.
3. Если А — квадратная матрица порядка л, то ее определитель обознача-
ется как |Д| или del {А) и находился с помощью разложения
И1=Х«<,А>
при любом i . где Д,у — алгебраическое дополнение элемент Оц. В свою
очередь алгебраическое дополнение элемента ау определяется как
л,у=(-1)'+л^.
где Мц — .минор элемента т. с. определитель квадратной матрицы,
полученной из А вычеркиванием r-й строки и j-io столбца.
Матрица называется невырожденной (неособенной), если ее определитель
нс равен нулю, и вырожденной (особенной) в противном случае. Для лю-
бой невырожденной матрицы А существует единственная матрица А 1.
такая, что
АА'1 =АЧА = /.
Матрица А"1 называется обратной к матрице А. В явном виде обратная
матрица вычисляемся следующим способ
дп д12
д-1=± Д21 Д22
И : :
_Д«1 Дн2
Имеют место следующие соотношения:
(Ат) 1 = (А'1)7, (АВ)' =В'а', |а-1|=|А|
738
Приложения
4. Любую прямоугольную матрицу А горизонтальными и вертикальными
линиями можно рассечь на прямоугольные клетки (блоки):
Ai Д|2 Л|/
Ап •••
А = . ,
.4< Лч2 " .
причем г<м и Каждый из блоков (позматриц) Ац представляет
собой прямоугольную матрицу, которая в частности может быть вектором-
строкой, вектором-столбцом или числом. Такая матрица называется блоч-
ной. Операции сложения, вычитания, умножения и транспонирования нал
блоками производя гея гак же, как и над числами обычных матриц при ус-
ловии согласованности размеров подматриц. 2
5 Матрица А называется ортогпнепьной* если транспонированная матрица
совпадает с обратной, т. с.
А-АТ = АГ-А = 1.
Матрица А является ортогональной в гом’и только в том случае, когда
выполняется хотя бы одно из следующих условий:
• столбцы матрицы А, рассматриваемые как векторы евклидова про-
странства, образуют ортонормировапную систему;
• строки матрицы А. рассматриваемые как векторы евклидова простран-
ства. образуют ортопормированную систему;
• матрица А является матрицей преобразования координат при переходе
от оргонормировапного базиса к ортонормировасшому;
• матрица Аг является матрицей преобразования координат при перехо-
де от ортонормированного базиса к ортонормированпому.
6. Преобразованием W называется оператор, отображающий //-мерное про-
странство Е'1 в /н-мерное пространство Е"':
IV : Еп Е'",
т. е. преобразование сопоставляет каждому л-векгору QG Еп только один
ш-вектор pG Е,н, что записывается в виде:
р - W .
Приложение 4. Необходимые сведения из теории матриц
739
Преобразование VV называется линейным, если
W (ар + =* а 1У р+0 )У (j
для любых (в общем случае комплексных) чисел аир.
Квадратная .матрица порядка п полностью определяет линейное преобра-
зование пространства Е" в себя. С каждым таким преобразованием мож-
но связать некоторые числовые значения, являющиеся инвариантами это-
го преобразования и однозначно его определяющие. Для существования
ознозиачности преобразования, заданного квадратной матрицей А. необ-
ходимо выполнение условия
|м-д|=о.
которое называется характеристическим уравнением, т. к. в левой части
содержит характеристический полином относительно к. Корни характе-
ристического уравнения называются собственными значениями (или ха-
рактеристическими числами) матрицы А. Из основной теоремы алгебры
следует, что характеристическое уравнение имеет п корней, некоторые из
которых могут быть кратными, а некоторые— комплексными. Каждому
собственному значению \ соответствует собственный вектор q,, являю-
щийся решением матричного уравнения
f — 1, 2,, И .
Рах-шчны.м собственным значениям соответствуют линейно независимые
собственные векторы.
Список литературы
1. Ifeachor Е. С., Jervis В. W. Digital Signal Processing / Prentice Hall, 2001.
2. Ilakura F. Line spectrum representation of linear prediction coefficients of
speech signals //J. Ac. Soc. Am. — 1975. — V. 57. — № 1.
3. Vaidyanathan P. P, Multiratc Systems and Filter Banks/Prentice Hall/
Englewood Cliffs. — NY, 1993.
4. Адаптивные фильтры / Нод рец. К. Ф. Н. Коуэна и П. М. Гранта. — Мл
Мир, 1988.
5. Анохин В. В., Ланнэ A. A. MATLAB для DSP. Цикл статей / ChipNews,
2000.— №2—4, 7, 9; 2001.— №2; Цифровая обработка сигналов.
2000. — № 2.
6. Антонью А. Цифровые фильтры: анализ и проектирование. — М.: Радио
и связь, 1983.
7. Аоки М. Введение в методы оптимизации. — М.: 11аука, 1977.
Я. Башарин С. А.. Соловьева Е. Б. Моделирование и анализ нелинейных
элекфических пепси: Учеб, пособие. — СПб.: СНбГЭТУ, 1999.
9. Белецкий А. Ф. Теория линейных электрических цепей: Учеб, для вузов. —
Мл Радио и связь.
10. Блсйхут Р. Быстрые алгоритмы цифровой обработки сигналов. — Мл
Мир. 1989.
11. Вайдьнатхан П. П. Цифровые фильтры, блоки фильтров и полифазныс
цепи с многочастотной дискретизацией: Метод, обзор // ТИИЭР, 1990. —
Т. 78. — № 3. — С. 77—120.
12. Витязев В. В. Цифровая частотная селекция сигналов.— М.: Радио и
связь, 1993.
13. Воеводин В. В.. Кузнецов 1О. А. Матрицы и вычисления. — М., 1984.
742
Список литературы
14. Воробьев В. И.. Иванов В. Н., Улахович Д. А. Спектральные нары в ли-
нейном предсказании//Радиоэлектроника.— 1991. — Т. 34.—№ 12.
15. Гольдеиберг Л. М.. Матюшкин Б. Д.. Поляк М. Н. Цифровая обработка
сигналов: Справочник. — М.: Радио и связь, 1985.
16. Гольдеиберг Л. М., Матюшкин Б. Д., Поляк М. И. Цифровая обработка
сигналов: Учеб, пособие для вузов. — М.: Радио и связь. 1990.
17. Гомеровский И. С. Радиотехнические цепи и сигналы: Учеб, для вузов.—
М.: Радио и связь, 1994.
18. Данилов Л. В. Ряды Вольтерры — Пикара в теории нелинейных электри-
ческих цепей. — М.: Радио и связь, 1987.
19. Данилов Л. В., Матханов П. Н.. Филиппов Е. С. Теория нелинейных элек-
трических цепей. — Л.: Энергоатомиздат, 1990.
20. Дсруссо П., Рой Р., Клоуз Ч. Пространство состояний в теории управле-
ния.— М.: Паука, 1970.
21. Домрачев В. В., Лапнэ А. А., Шередин В. И. Комплекс алгоритмов и про-
грамм машинного проектирования цифровых фильтров // Цифровая об-
работка сигналов / Науч.-тсхн. сб. № 13. — Л.: ВАС, 1979.
22. Капиелиии В., Константинизис А. Дж., Эмилиани П. Цифровые фильтры
и их применение. — М.: Энергоатомиздат, 1983.
23. Корн Г.. Корн Т. Справочник по математике. — М.: Наука, 1984.
24. Крошьер Р. Е., Рабинер Л. Р. Интерполяция и децимация цифровых сиг-
налов: Метод, обзор //ТИИЭР. — 1981. — Т. 69. — № 3. — С. 14—40.
25. Куо В. Теория и проектирование цифровых систем управления.— М.:
Машиностроение, 1986.
26. Куприянов М. С., Матюшкин Б. Д. Цифровая обработка сигналов. —
СПб.: Политехника, 1998.
27. Лапнэ А. А. Нелинейные динамические системы: синтез, оптимизация,
идентификация.—Л.: ВАС, 1985.
28. Ланнэ А. А. Новая теория линейных спектральных корней // Цифровая об-
работка сигналов и ее применение / Докл. 3-й Междунар. конф. — М.
29. Ланиэ А. А. Оптимальный синтез линейных электронных схем.—
2-е изд., персраб. и доп. — М.: Связь, 1978.
30. Ланнэ А. А., Улахович Д. А. Передача информации о состоянии фильтра-
предсказателя с помощью спектральных пар// Радиоэлектроника и связь. —
1991. —№ 1.
Список литературы у43
31. Ланнэ А. А., Улахович Д. А. Теория линейных спектральных пар // Семи-
нар "Цифровые цепи, сигналы и системы" // Тр. академии. — СПб.: ВАС
1996.
32. Ланнэ А. А., Матюшкин Б. Д., Улахович Д. А. Основы цифровой обра-
ботки сигналов: Учеб, пособие. — Ч. 3. — СПб.: ГУТ. 1998.
33. Ланнэ А. А., Матюшкин Б. Д., Улахович Д. А. Основы цифровой обра-
ботки сигналов: Учеб, пособие. — Ч. I. — СПб.: ВАС, 1995.
34. Макхол. Линейное предсказание: Обзор // ТИИЭР. — 1975. — Т. 63. № 4.
*35. Маркел Дж. Д.. Грей A. X. Линейное предсказание речи.— М.: Связь,
1980.
36. Марпл С. Л. (мл.). Цифровой спектральный анализ и его приложения/
Пер. с англ. — М.: Мир, 1990.
37. Мышкис А. Д. Лекции по высшей математике. — М.: Наука. 1973.
38. Нуссбаумср Г. Быс трое преобразование Фурье и алгоритмы вычисления
сверток. — М.: Радио и связь. 1985.
39. Оппенгейм А., Шафер Р. Цифровая обработка сигналов.— М.: Связь,
1979.
40. Острей К. Введение в стохастическую теорию управления.— М.: Мир,
1973.
41. Применение цифровой обработки сигналов / Под ред. Э. Оппенгейма. —
М.: Мир, 1980.
42. Пупков К. А., Капал ин В. И., Ющенко А. С. Функциональные ряды в тео-
рии нелинейных систем. — М.: Наука, 1976.
43. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигна-
лов. — М.: Мир, 1978.
44. Сергиенко А. Б. Цифровая обработка сигналов: Учеб, пособие.— М.:
Питер. 2002.
45. Смирнов В. И. Курс высшей математики. — М.: Гостехтсоретиздат. 1951.
46. Солонина А. И., Улахович Д. А.. Яковлев Л. А. Алгоритмы и процессоры
обработки сигналов. — СПб.: БХВ-Пегербург, 2001.
47. Солонина А. И.. Улахович Д. А., Яковлев Л. А. Цифровые процессоры
обработки сигналов фирмы Motorola. — СПб.: БХВ-Пегербург, 2000.
48. Уидроу В., Стирнз С. Адаптивная обработка сигналов.— М.: Ра^ио и
связь, 1989.
744 Список литературы
49- Улахович Д. А., Симонина О. А,, Макарова М. Ю. Чувствительность
спектральных корней предельного случая ЯП-преобразования // Тр. учеб,
заведений связи. — СПб.; С116ГУТ, 1998. —№ 164.
50. Цикин И. Л. Дискретно-аналоговая обработка сигналов.— М: Радио и
связь. 1982.
51. Цифровая и вычислительная техника: Учеб, для вузов/Под ред.
Э. В. Евреинова. — М.: Радио и связь, 1991.
52. Цыпкин Я. 3. Информационная теория идентификации.— М.: Паука.
1995.
53. Цыпкин Я. 3. Основы геории обучающих систем. — М.: Наука, 1970.
Дополнительная литература
Д1. Parks Т. W., Burrus С. S. Digital Filler Design.— New York: John
Wiley & Sons, Inc., 1987.
Д2. Дьяконов В. 11. Вейвлеты: or теории к практике. — M.: СОЛОП-Р, 2002.
ДЗ. Добеши И. Десять лекций по вейвлетам.— М.: Регулярная и хаотиче-
ская динамика. 2001.
Д4. Левин Б. Р. Теоретические основы статистической радиотехники. Книга
первая. — М.: Советское радио. 1966.
Д5. Левин Б. Р. Теоретические основы статистической радиотехники. Книга
вторая. — VI.: Советское радио, 1968.
Д6. Финк Л. М. Теория передачи дискретных сообщений. Изд. 2-е, перераб.,
дон. — М.: Советское радио. 1970.
Д7. Чуи К. Введение в вейвлеты. — М.: Мир, 2001.
Предметный указатель
D
D-факгор 391
Z
^-преобразование 30
обратное 49
типовых
последовательностей 42
А
Адаптация систем ЦОС 565
Алгоритм:
БПФ:
с прореживанием
по времени 244
с прореживанием
по частоте 259
Левинсона—Дарбина 539
линейный 326
Ремеза 425
Амплитудный корректор 469
Аналитический сигнал 434
Аналого-цифровой
преобразователь (АЦП) 9
Аппроксимация
полиномиальная 412
Б
Билинейное преобразование 474
В
Вейвлет:
Добсши 637
преобразование 625
Вектор:
состояния 159
столбец 735
строка 735
Вокодер 545
Время
нереальное 11
нормированное 14
реальное 11
г
Градиент 582
Групповое время задержки 135,
141,346
д
Диапазон:
динамический 315
допустимый 198
частот основной 18, 106
74в
Предметный указатель
Дискретизация 9
Дискретная экспонента 16
Дисперсия случайного сигнала 272
Дифференциатор 447
высокочастотный 455
низкочастотный 453
полосовой 454
цифровой 447
широкополосным 449, 452
Добротность 509
Е
Единичная окружность 36
Единичный круг 37, 38
3
Звено:
базовое 1-го порядка 87
базовое 2-го порядка 87
биквадратное 509
и
Идентификация 647
Импульс:
цифровой единичный 14
задержанный 14
Импульсная характеристика:
антисимметричная 355
преобразователя Гильберта 440
симметричная 355
Инваринтность импульсной
характеристики 474
Интервал:
аппроксимации 406
квазистационарности 527
Искажения фазовые 130
К
Кадр 527
Калмановское оценивание 575
Карта нулей и полюсов 82
Квантование 10
равномерное 552
Код:
дополнительный 292
прямой 292
Кодер 9
Компрессор 602
Корни тривиальные 553
Корректоры фазовые 131
Коэффициент
децимации 590
ин терполяции 590
линейного предсказания 531
масштабирования 511
ирямоуголыюсти 485
пульсации 388
Коэффициенты!
автокорреляции 535
антисимметричные 354
линейного предсказания 551
отражения 540. 551
симметричные 354
Критерий:
оптимальности 337
среднеквадратическнй 338
устойчивости 75, 93
чебышевский 337
л
Линейное предсказание 529
обратная процедура 543
Линейное преобразование 739
Линейные спек тральные
корни 552, 556
Линейные спектральные
пары 556. 560
Предметный указатель
749
м
Максимум АЧХ 116
Масштабирование 316
Математическое ожидание
случайной
последовательности 271
Матрица 735
блочная 630, 738
главная диагональ 735
диагональная 736
единичная 736
квадратная 735
невырожденная 737
нулевая 736
обратная 73 7
определитель 737
ортогональная 626, 738
след 736
состояния переходная 172
теплицева 538
транспонированная 735
Мгновенная фаза 433, 435
Мера близости 337
Метод:
билинейного
Z-преобразования 499
дихотомии 564
инвариантности ИХ 492
Итакуры 553
перекрытия с накоплением 239
перекрытия
с суммированием 238
прямой подстановки 64, 70
Минимум АЧХ 116
Множитель поворачивающий 227
Моделирование 647
Модель:
линейная 527
математическая 646
полюсная 528
н
Невязка 533
Норма 646
11ормировапный НЧ-проготин 474
Пуль АЧХ 121
о
Обнаружитель сигналов 467
Огибающая 433, 435
Окно;
Блэкмана-Хэрриса 387
Кайзера 390
обобщенное косинусное 386
прямоугольное 384
треугольное 385
Хэмминга 387
Хэннинга 387
Округление 297
Оператор нелинейный 644
Операция:
бабочка 254
бит-ревсрсии 258
Определитель матрицы 737
Остаток 531
Отношение сигнал/шум 315. 457
Отсчет 13
Ошибка:
аппроксимации 338
предсказания 531
п
Параметры ЛДС 69
Передаточная функция:
в виде произвечеипя 84
в визе суммы 86
минималыю-фазоная 126
нсминималыю-фазовая 126
нерекурсивных ЛДС 88
(окончание рубрики см. па стр. 7э0)
750
Предметный указатель
Передаточная
функция (окончание):
нули 80, 96
общего вида 80
особые точки 81
полюсы 81,95
рекурсивных ЛДС 87
Перемежаемость корней 556
Переменные состояния 159
Период дискретизации 12
Полином:
Вольтерры 649
Гурвица 559
минимально-фазовый 348
Чебышева 412
Полиномы Чебышева 488
Полоса:
мешания 485
частот основная 18, 106
Порог 467
Последовательность 12
квантованная 13
Преобразование:
Z- 26, 30
билинейное Z-499
Гильберта 431
, дискретное 434
Константинидиса 517
Лапласа 22
дискретное 25
Фурье 23, 27
быстрое 244
дискретное 215, 227
обратное 28
Хаара 627
Преобразователь Гильберта 436
Принцип суперпозиции 60
Пространство состояний 159
Прототип:
аналоговый 499
цифровой 517
Процесс:
авторегрессионный 273
со скользящим средним 278
случайный
дискретный 271
марковский 274
эргодический 271
р
Радиус сходимости 32
Разрешение 625
Реактансные преобразования 475
Режим установившийся 101, 102
Ряд:
Вольтерры 648
Фурье 24, 431
с
Свертка:
комплексная 383
круговая 232
линейная 68, 236
секционированная 238
Свойства:
Z-преобразования 39
билинейного
Z-преобразования 501
дискретного преобразования
Фурье 229
согласованного филыра 463
спектров 186
частотных характеристик 104
Свойство:
аддитивное ги 60
однородности 60
памяти 74
Сжатие:
данных 527
речи 545
Предметный указатель
751
Сигнал 12
аналоговый 12
дискретный 10. 12
гармонический 16
комплексный
гармонический 17
типовой 14
случайный:
векторный случайный 273
марковский порядка N 278
нестационарный 271
стационарный 271
узкополосный 195
цифровой 10. 13
Синтез 647
КИХ-фильтров методом
окоп 376
Система:
НИХ 74
децимации 590, 600
дискретная 60
интерполяции 590. 592
КИХ 73
линейная 60
мипималыю-фазовая 126
многократная 591
многоскоростная 590
нелинейная 643
неминимально-фазовая 126
нерекурсивная 71
обработки сигналов 59
однократная 591
рекурсивная 71
стационарная 60
Скачок цифровой единичный 15
Скользящее среднее 273
Собственные значения
матрицы 175
Спектр:
амплитудный 185
дискретного сигнала 184
инверсия 203
основной 187
перенос 200
преобразование 200
сигнала с ОБИ 205
фазовый 185
Спектральная плотность мощности
случайного процесса 281
Спектральный анализ 243
Средняя мощность случайной
последовательности 280
Стандарт LPC-I0. 533, 546
Стационарность 326
Структура:
каноническая 146
каскадная 153
нерекурсивной ЛДС 155
параллельная 154
полифазная 609, 615
прямая 146
рекурсивной ЛДС 145
Субфильтр 611
Сумматор адаптивный
линейный 569
Схема структурная
приведенная 359
т
Таблица соответствий 46
Теорема:
Гамильтона—Кзли 176
Котельникова в частотной
области 226
о задержке 40
о свертке 41
обощениая Котельникова 197
Иарсеваля 190, 230
Типы:
сигналов 12
функции времени 20
752
Предметный указатель
У
Уравнение:
Винера—Хопфа 571
выхода ЛДС 163
операторное 646
разностное 69
системы характеристическое 175
состояния ЛДС матричное 162
Усечение 299
Условия:
безыскажешюй
передачи 130, 345
достижения максимума 462
начальные нулевые 60, 61,468
физической реализуемости 61
Устойчивость 75
фильтра-нрстсказателя 542
ф
Фазовое звено:
второго порядка 138. 142
первого порядка 135, 136
Фазовращатель 435
Физическая возможность 326
Фильтр:
антиэлайеинговый J 95
верхних частот 333
линейного предсказания 531
нижних частот 331
нижних частот 9
полосовой 334
-предсказатель 531
-прототип 473
режекторный 335
сглаживающий 12
скалярный Калмана 578
согласованный 457
Фильтры:
Баттерворта 484
Золотарева-Кауэра
(э.1Л1ИТП1Чсские) 491
КИХ:
с линейной ФЧХ 348
тина I 364
типа 2 367, 371
типа 3 365, 372
типа 4 368,373
цифровые 325
Чебышева:
I рода 488
II рода 489
Формула свертки 64
Функция:
Д-изображенис 22
автоковарианиониая 272
автокорреляционная 272
амплитудная 349
взаимная ковариационная 272
взаимная корреляционная 272
квантованная решетчатая 13
нечетная 104
передаточная 78
приведенная 359
решетчатая 12
фурье-изображспне 23
целевая 337
четная 104
X
Характеристика:
амплитудно-частотная 100
амилитудно-частотная СФ 466
импульсная 61
согласованного
фильтра 463
переходная 62
фазочастотная 100
фазочасготная СФ 465
частотная 99
Предметный указатель
ц <
Цепь:
всепропуекающая 132
фазовая 130
Цикл предельный 320
1 (ифро-аналоговый
преобразователь 12
Цифровая обработка сигналов 7
ч
Частота:
дискретизации 12
нормированная 18,34
Частотная характеристика
преобразователя Гильберта 439
цифрового дифференциатора 448
Чебышевский альтернанс 418
Число:
с плавающей запятой 291
с фиксированной запятой 290
753
ш
Шум:
АЦП 301
белый 272, 458, 546
полный 313
собственный 307
среднеквадратичное
значение 460
э
Экспандер 592
Экспресс-анализ 109
Элайсинг 194. 662
Эффект переполнения 315
я
Явление 1 иббса 379
Ядро Дирихле 381
Авторы - преподаватели Санкт-Петербургского государствен -
ного университета телекоммуникаций им проф. М. А Бони-
Бруевича с многолетним научно-методическим и педагоги
ческим стажем, кандидаты и доктора технических наук, авторы
книг и многочисленных публикации по цифровой обработке
сигналов.
Основы цифровой
обрдботки СИГНАЛОВ
2-е издание
Учебное пособие построено в виде курса лекций по дисциплине
ЦОС с многочисленными примерами и иллюстрациями. В книге
системно изложены математические основы и алгоритмы ци-
фровой обработки сигналов, рассмотрены приемы математи-
ческого моделирования в программной среде MATLAB На
основе данного материала могут формироваться различные
учебные курсы и методики. Работа содержит ряд новых, а также
малоизвестных сведений Второе издание дополнено несколь-
кими новыми разделами. Книга предназначена для студентов
и преподавателей вузов и может представлять интерес для спе-
циалистов.
CjOZON
БХВ-Петербург
194354 Санкт Петербург
ул Есенина. 5Б
Е mail таДОО.ги
Internet www hhv u
тел факс (812) 591 6?43
4619050
WWW ozon.ru