/






























































































































































































































































Автор: Киселев В.И. Копылов А.И. Кузнецов Э.В.
Теги: электротехника электроника
ISBN: 978-5-904673-09-3
Год: 2010




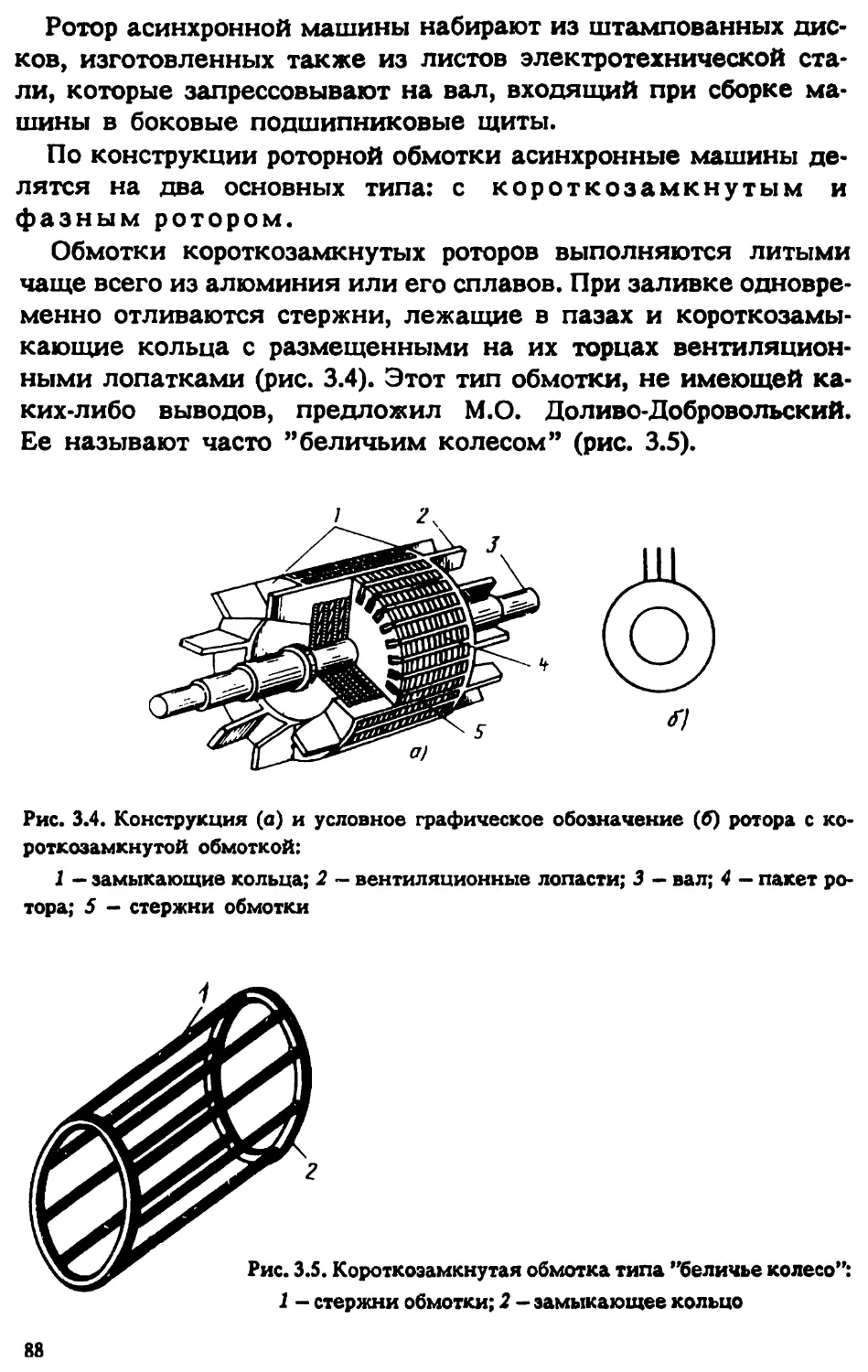
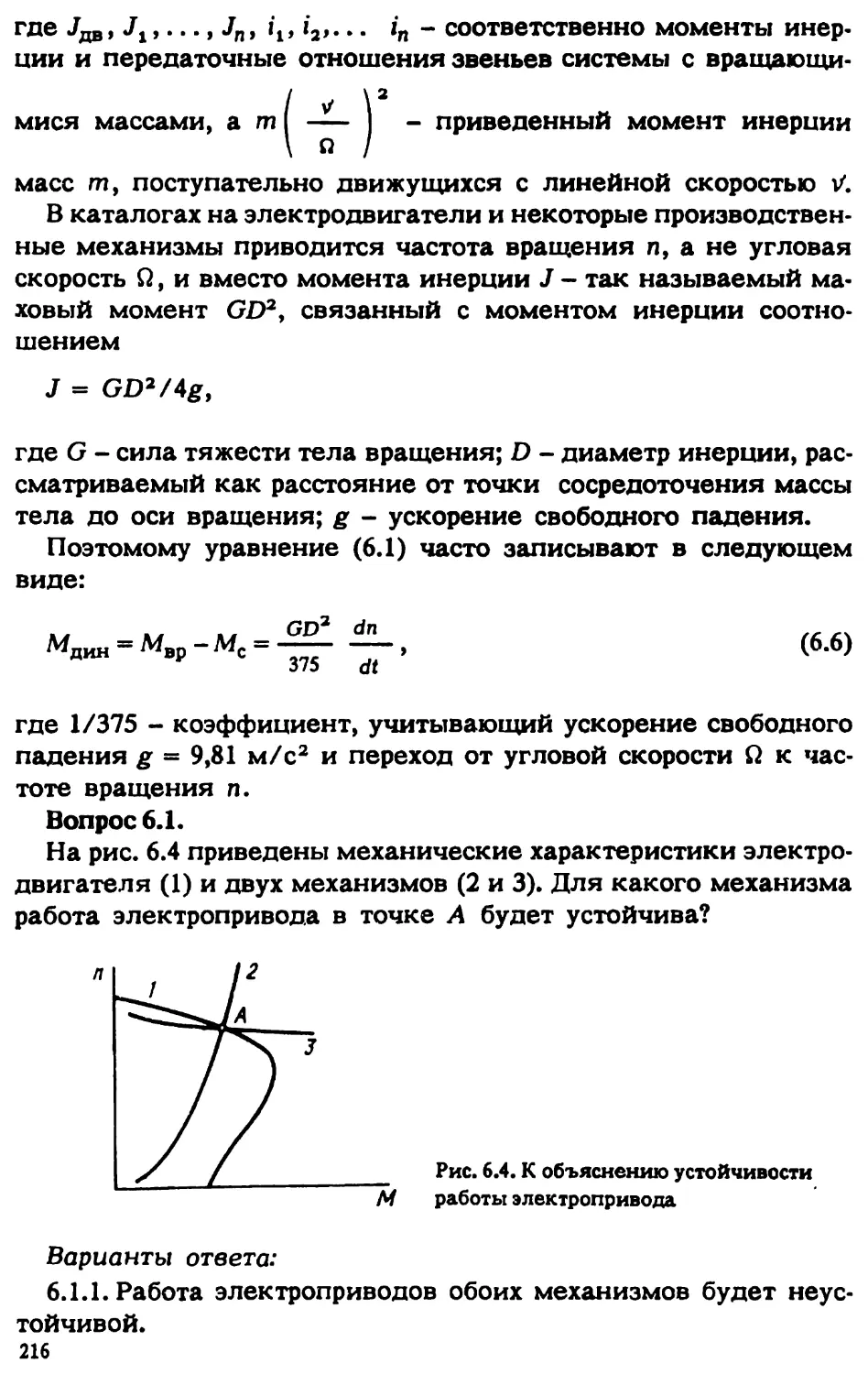
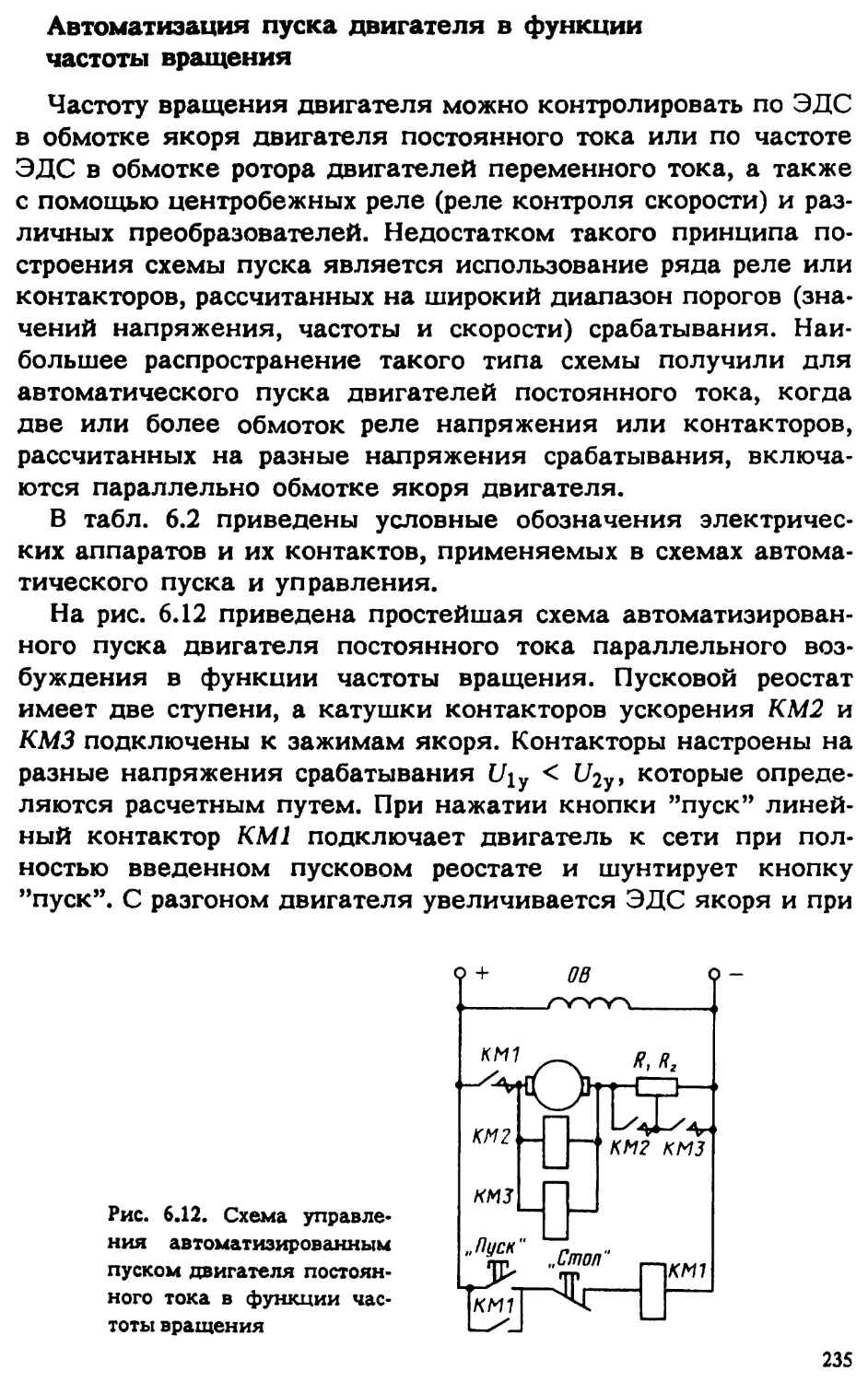
Текст
ЭЛЕКТРОТЕХНИКА
И ЭЛЕКТРОНИКА
Книга 2
ЭЛЕКТРОМАГНИТНЫЕ
УСТРОЙСТВА
И ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ
ЭЛЕКТРОТЕХНИКА
И ЭЛЕКТРОНИКА
ЭЛЕКТРОМАГНИТНЫЕ
УСТРОЙСТВА
И ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ
Для студентов вузов
S
УДК 621.3Ц075^
-ББК-еН-2я^--
Э45^Г~
Выпуск первого издания в свет осуществлен при финансо-
вой поддержке АЭК «Динамо» и Издательства МЭИ.
Рецензенты: кафедра «Электротехника» МИСиС (зав. кафедрой
проф. А. Е. Краснопольский) и проф. Б. П. Соколов
Авторы: Киселев В. И., Копылов А. И., Кузнецов Э. В., Морозов Д. Н..
Соколов В. Б.. Сильванский И. В.
Э 45 Электротехника и электроника. Учебник для вузов. - В 3-х
кн. Кн. 2. Электромагнитные устройства и электрические
машины / В. И. Киселев, А. И. Копылов, Э. В. Кузнецов и др.
Под ред. проф. В. Г. Герасимова. - 2-е издание, стереотип-
ное. - М.: ООО «Торгово-
272 с.: ил.
ISBN 978-5-904673-09-3 (кн. 2)
Книга является второй частью учебника «Электротехника и электро-
ника», предназначенного для электротехнической подготовки бакалавров
и инженеров неэлектротехнических направлений.
Рассмотрены трансформаторы, электрические машины постоянного
тока, трехфазные асинхронные и синхронные машины, микромашины,
основы электропривода и моделирование электромеханических устройств.
В каждой главе приводятся задачи и вопросы с альтернативными отве-
тами.
Для студентов вузов неэлекгротехнических специальностей.
ISBN 978-5-904673-09-3 (кн. 2) © Авторы, 1997
ISBN 978-5-904673-07-9 © ООО «Торгово-Издательский Дом «Арис», 2010
ПРЕДИСЛОВИЕ
Предлагаемая книга "Электромагнитные устройства и элек-
трические машины" является второй частью учебника "Элек-
тротехника и электроника”, предназначенного для электро-
технической подготовки бакалавров неэлектротехнических
направлений и инженеров неэлектротехнических специальнос-
тей. Содержание книги соответствует типовым учебным про-
граммам подготовки бакалавров по электротехническим дис-
циплинам указанных направлений и соответствующих спе-
циальностей подготовки инженеров.
Авторский коллектив кафедры электротехники и интроско-
пии МЭИ использовал при написании данной книги методичес-
кий опыт кафедры при изложении соответствующих вопросов
в предыдущих изданиях учебников и учебных пособий: "Элек-
тротехника" (1985 г.), "Электротехника. Программированное
учебное пособие” (1983 г.) и "Сборник задач по электротехнике
и основам электроники" (1987 г.), выпущенных издательством
"Высшая школа” под ред. проф. В.Г. Герасимова. Принципиаль-
ным отличием от предыдущих изданий является то, что в дан-
ной книге объединяется учебник и задачник с использова-
нием принципов программированного учебного пособия. Та-
кое построение книги должно способствовать более активному
усвоению и закреплению теоретического учебного материала
и получению навыков расчета и анализа электромагнитных
устройств и электрических машин.
Кроме того, в данной книге 2, также как и в книге 1 "Элек-
трические и магнитные цепи" и в книге 3 "Основы электрони-
ки и электрические измерения” в отличие от предыдущих из-
даний включены специальные главы, посвященные модели-
рованию и расчету с помощью ПЭВМ соответствующих цепей и
устройств. В данной книге этим вопросам посвящена гл. 7.
В конце каждого параграфа всех глав приведены или вопросы
с альтернативными ответами, или задачи по теме соответст-
з
вующего параграфа. Подбор задач осуществлен таким образом,
что вначале в большинстве случаев, приводится типовая задача
с решением, затем многовариантная задача с возможностью
использования ее для самостоятельного решения студентами
на практических занятиях, после этого приводятся остальные
задачи, которые могут решаться студентами на занятиях или
дома. Ответы по всем задачам приведены сразу же после фор-
мулировки этих задач. Комментарии к правильным ответам на
вопросы приведены в конце соответствующей главы книги.
Работа по написанию книги распределена между авторами
следующим образом: гл. 1 - В.Б. Соколов, гл. 2 - В.И. Киселев,
гл. 3 - А.И. Копылов, гл. 4 - В.И. Киселев, Д.Н. Морозов, гл. 5 -
Э.В. Кузнецов, И.В. Сильванский, гл. 6 - И.В. Сильванский,
гл. 7 - Э.В. Кузнецов, В.И. Киселев.
Авторы будут благодарны читателям, которые пришлют свои
замечания и пожелания по адресу: 113114, Москва, Шлюзовая
наб., д. 10, издательство "Энергоатомиздат”.
Авторы
Глава первая
ТРАНСФОРМАТОРЫ
1.1. НАЗНАЧЕНИЕ, ОБЛАСТИ ПРИМЕНЕНИЯ
И УСТРОЙСТВО ТРАНСФОРМАТОРОВ
Трансформатором называется электромагнитное устройство,
предназначенное для преобразования электрической энергии
переменного тока одного напряжения в электрическую энергию
переменного тока другого напряжения при неизменной час-
тоте.
Первые трансформаторы с разомкнутым магнитопроводом
предложил в 1876 г. П.Н. Яблочков, который применил их для
питания электрической ’’свечи”. В 1885 г. венгерские ученые
М. Дери, О. Блати, К. Циперновский разработали однофазные
промышленные трансформаторы с замкнутым магнитопрово-
дом. В 1889-1891 гг. М.О. Доливо-Добровольский предложил
трехфазный трансформатор.
Трансформаторы широко применяются в различных областях
электротехники, радиотехники, в устройствах измерения, авто-
матического регулирования и управления.
Наибольшее применение в народном хозяйстве получили
силовые трансформаторы, которые являются непременным эле-
ментом промышленной электрической сети. Электростанции,
располагаемые обычно вблизи природных запасов топлива и
воды, удалены от потребителей электроэнергии на сотни кило-
метров. Мощность одной современной электростанции может
составлять 2-5 млн. кВт и более. Если передавать ее энергию
при напряжении генераторов, которое в настоящее время не
превышает 24 кВ, то токи в трехфаэной линии электропередачи
(ЛЭП) превысили бы 48-120 кА. Такая передача была бы не-
экономична из-за огромных потерь энергии в линии и ее боль-
шой стоимости. Поэтому с помощью трансформаторов напряже-
5
ние в ЛЭП повышают до 500, 750 или 1150 кВ. В конце линии
напряжение понижают с помощью трансформаторов распреде-
лительных подстанций до 35, 10 или б кВ и, наконец, на под-
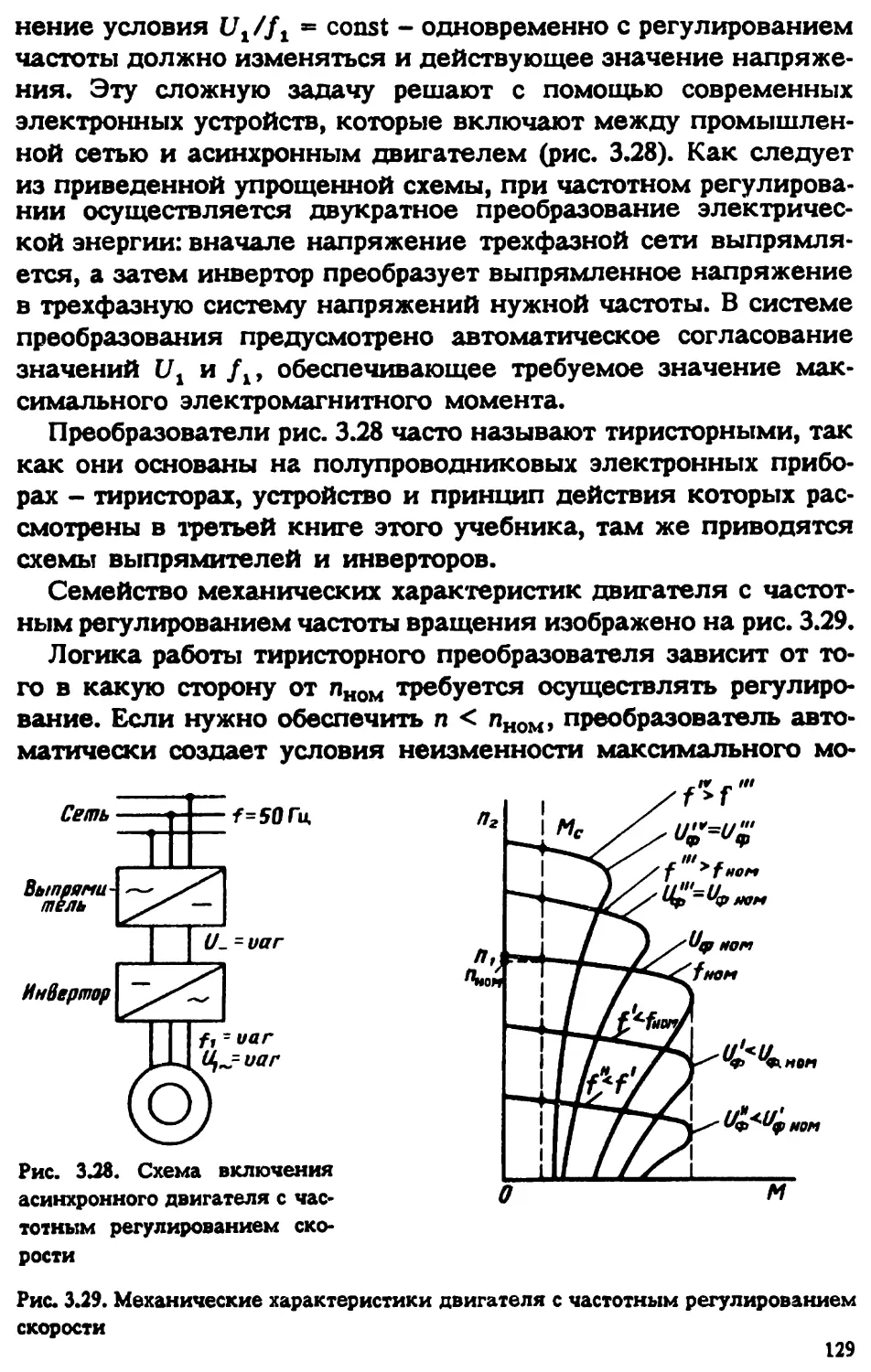
станциях цехов и жилых районов - до 380/220 В (рис. 1.1, а, б).
В процессе передачи электроэнергии от источника к потреби-
телю приходится многократно повышать и понижать напряже-
ние, что обеспечивается большим количеством трансформа-
торов. Трансформация напряжений и токов необходима прежде
всего для экономичной передачи и распределения энергии.
Трансформаторы являются одним из самых распространен-
ных видов электротехнического оборудования. Как всякое
электротехническое устройство, трансформатор рассчитан на
нормальную работу только при определенных значениях часто-
ты, мощности, токов и напряжений, называемых номиналь-
ными. Номинальные значения указывают на щитке трансфор-
матора и в его паспорте.
Номинальная мощность силовых трансформаторов различна.
В радиоэлектронных устройствах имеются трансформаторы,
мощность которых составляет десятки вольт-ампер. Мощность
же одного трехфазного трансформатора для ЛЭП достигает
1 млн. кВ-А.
Рис. 1.1. Условное графическое обозначение трансформатора (а) и однолиней-
ная схема передачи электрической энергии (б)
6
Большинство трансформаторов предназначено для работы
на промышленной частоте 50 Гц. В тех случаях, когда необхо-
димо снизить массу трансформаторов и электрооборудования
(на летательных аппаратах, судах) применяют повышенную час-
тоту 400 и 500 Гц.
Помимо силовых существуют и другие типы трансформаторов:
сварочные, печные, измерительные, испытательные, раздели-
тельные (или изолирующие). Они имеют особенности и неко-
торые отличия от силовых трансформаторов. Но все виды транс-
форматоров низкой частоты имеют замкнутый стальной магни-
топровод с двумя (или более) обмотками на нем (рис. 1.2). Маг-
нитопровод собирают из тонких пластин или лент электротех-
нической стали с высокой магнитной проницаемостью и не-
большими удельными потерями на гистерезис и вихревые токи.
Обмотку, включаемую на напряжение источника питания
(сети), называют первичной, обмотку, к которой подключают
приемник, - вторичной. Если вторичных обмоток несколько, то
такой трансформатор называют многообмоточным. Обмотки
различают также по значению напряжения: обмотка высшего
напряжения (ВН), обмотка низшего напряжения (НН). Обычно
первичную и вторичную обмотки размещают концентрически
на одном и том же стержне (вертикальной части магнитопро-
вода).
Конструкция трансформатора зависит от его габаритных раз-
меров, которые определяются, в основном, номинальной мощ-
ностью трансформатора. Под номинальной мощностью транс-
форматора SH0M понимают его полную мощность при номиналь-
ном напряжении и номиналь-
ном токе, т. е. 5Н0М = Цюманом*
Потерями в силовом трансфор-
маторе обычно пренебрегают и
считают, что полная мощность
во вторичной цепи равна пол-
ной мощности первичной цепи,
Т. в. ^2ном^2ном * ЦномАном ~
= SHOM. Для лучшего отвода теп-
Рис. 1.2. Устройство трансформатора
7
ла и улучшения изоляции магнитопровод с обмотками транс-
форматоров мощностью от 50 кВ • А и выше погружают в бак с
минеральным трансформаторным маслом (рис. 1.3), которое слу-
жит для отвода теплоты от нагревающихся обмоток и магнито-
провода. Одновременно масло является дополнительной элект-
рической изоляцией между обмотками и заземленными частя-
ми трансформатора.
В трансформаторе должна быть предусмотрена возможность
изменения объема масла, вызываемого колебаниями темпе-
ратуры его нагрева при различных нагрузках. В мощных транс-
форматорах маслом заполняется весь бак, который снабжает-
ся расширителем 2 - стальной бочкой, объем которой состав-
ляет около 10% объема масла; на торцовой части расширителя
установлен указатель уровня масла 1. В случае образования до-
полнительного источника теплоты (при коротких замыканиях
витков обмотки) масло разлагается и генерируемый газ быстро
повышает давление в баке, вследствие чего бак может дефор-
мироваться или даже разорваться. Поэтому на баке устанавли-
Рис. 1.3. Внешний вид масляного трансформатора (с баком и радиатором) мощ-
ностью 6000 кВ-А:
1 — указатель уровня масла; 2 — расширитель; 3 — выхлопная труба; 4 — вводы
обмотки НН; 5 - вводы обмотки ВН; 6 - трубчатый охладитель
8
вается выхлопная труба 3 с предохранительной мембраной, ко-
торая при необходимости обеспечивает свободный выход газов.
Масляные трансформаторы взрыво- и пожароопасны. На от-
крытых подстанциях их приходится устанавливать вдали от
помещений, где находится обслуживающий персонал. При ус-
тановке внутри зданий такие трансформаторы помещают в спе-
циальные бетонированные ячейки. Концы обмоток трансформа-
тора выводят из стального бака через фарфоровые проходные
изоляторы 4 и 5. В трансформаторе применена трубчатая си-
стема охлаждения 6.
Вопрос 1.1. При каком напряжении целесообразно:
а) передавать;
б) потреблять электрическую энергию?
Варианты ответа:
1.1.1. а) при высоком; б) при высоком;
1.1.2. а) при высоком; б) при низком;
1.1.3. а) при низком; б) при высоком.
1.2. РЕЖИМ ХОЛОСТОГО ХОДА ТРАНСФОРМАТОРА
Принцип работы трансформатора в режиме холостого хода
Режимом холостого хода (XX) называется такое состояние
трансформатора, когда его первичная обмотка включена на но-
минальное напряжение UiH0M, а вторичная обмотка разомкнута
(рис. 1.4). Процессы, происходящие в трансформаторе в режиме
XX, практически ничем не отличаются от процессов в индук-
тивной катушке (см. гл. б кн. 1).
При питании первичной обмотки от источника синусоидаль-
ного напряжения ut ток первичной обмотки ilx создает МДС
Ft = wtixx, которая вызывает в магнитопроводе основной маг-
<P(t)
Рис. 1.4. Электромагнитная схема трансфор-
матора
9
нитный поток Ф(1)> замыкающийся по магнитопроводу и про-
низывающий первичную и вторичную обмотки. Этот магнитный
поток наводит в обмотках ЭДС ех и еа, действующие значения
которых
Et = 4,44/wx Фт; Е2 = 4,44/»аФт, (1.1)
где и>х и w2 - числа витков первичной и вторичной обмоток.
Отношение этих ЭДС, т. е. Et/E2 = w1/w2 = п - называется
коэффициентом трансформации.
При XX ЭДС первичной обмотки £х приблизительно равна на-
пряжению С/1ном (£х * С/1ном) из-за малого падения напряжения
в первичной обмотке вследствие того, что Ijx «: 4НОМ, а Ег ~
= U2x> поэтому отношение ЭДС можно заменить отношением
напряжений на зажимах обмоток трансформатора
®1
П = ----- = ----- я> -------
Е2 W2 U2x
(1-2)
Из (1.2) следует, что для понижающего трансформатора n > 1,
а для повышающего - n < 1.
Помимо основного (рабочего) магнитного потока, небольшая
часть его замыкается вокруг первичной обмотки в основном по
воздуху. Эта часть магнитного потока создает потокосцепле-
ние рассеяния ¥ jpac первичной обмотки. Поля рассеяния наво-
дят в первичной обмотке ЭДС рассеяния eipac, которую можно
представить падением напряжения uipac на индуктивном со-
противлении рассеяния Х1рас = Llpacw, где £1рас » У1рас/|1х.
В комплексной форме
^Ipac = J-^lpac Лх •
Уравнение электрического состояния первичной
обмотки и векторная диаграмма трансформатора
На схеме рис. 1.4 показаны условно-положительные направ-
ления физических величин, характеризующих электромагнит-
ные процессы в трансформаторе. Первичная обмотка н>х транс-
форматора рассматривается как приемник электрической энер-
гии. Положительное направление магнитного потока Ф(()
связано с током i'ix правилом правоходового винта,
ю
По закону электромагнитной индукции et = -d'¥/dt, следо-
вательно, ЭДС ех отстает по фазе от магнитного потока на
90°. Уравнение электрического состояния, записанное для
контура первичной обмотки по второму закону Кирхгофа
ui = "ei + *'1х + ^1рас <*‘1х
или
= — *1х + ^1рас »
где Aji'ix - падение напряжения на активном сопротивлении
первичной обмотки; LipMdiiK/dt = ujpac = напряжение рассеяния
первичной обмотки.
В комплексной форме
= Ах + i -^Ipac Лх > (1-3)
где /Xipac ^1х ~ падение напряжения на индуктивном сопротив-
лении рассеяния Xipac первичной обмотки.
Векторная диаграмма трансформатора, работающего в режи-
ме XX (рис. 1.5), построена на основании уравнения (1.3). Она
аналогична векторной диаграмме индуктивной катушки с
ферромагнитным магнитопроводом (см. гл. 6 ки. 1). Построение
векторной диаграммы обычно начинают с вектора амплитуды
магнитного потока Фт, не входящего непосредственно в урав-
некие (1.3). Затем строят вектор то- ка Jlz, опережающий по фазе вектор магнитного потока Фт на угол маг- нитных потерь 6. Далее относитель- но вектора Фт с опережением на угол 90° построены векторы ЭДС -£t и -Ё2, так как в комплексной форме при выбранном направлении ЭДС магнитный поток Фт и ЭДС Рис. 1.5. Векторная диаграмма трансформа- тора при холостом ходе 1 hx
и
связаны соотношением £m =-/шн>Фт = (ом»Фте"^5®’. Вектор йх
на основании уравнения (13) равен сумме векторов -£t, £t4xH
j-Xjpac/ix, что и отражено на векторной диаграмме.
Ранее было отмечено, что ток XX трансформатора мал. Так,
например, в мощных трансформаторах ток Ijx обычно не превы-
шает (5-10)% номинального тока первичной обмотки. Поэтому
малы падения напряжений (J?x + /Xira<.)/p. которые составля-
ют доли процента от С/|мом (на рис. 1.5 они преувеличены).
Вопрос 1.2. Во вторичной обмотке трансформатора наводится
ЭДС Е2 = 100 В с частотой 50 Гц. Чему будет равна ЭДС £2, если
амплитуда напряжения на первичной обмотке не изменится,
а частота возрастет до 400 Гц?
Варианты ответа:
1.2.1. 800 В;
1.2.2. 100 В;
123. 12,5 В.
Вопрос 1.3. Что произойдет с обмоткой и магнитопроводом
трансформатора, если при разомкнутой вторичной обмотке его
первичную обмотку включить на напряжение 220 В вместо но-
минального 127 В?
Варианты ответа:
13.1. Ничего не произойдет.
13.2. Мощность потерь XX возрастет примерно в 3 раза.
1.33. Сгорит первичная обмотка трансформатора.
Задача 1.1. Однофазный трансформатор с номинальной мощ-
ностью <$ном = 3 кВ-А, подключенный к сети с напряжением
^1ном ~ 127 В, имеет число витков вторичной обмотки ю2 = 40,
а напряжение на зажимах вторичной обмотки при XX Ujx = 60 В.
Определить коэффициент трансформации л трансформатора,
число витков первичной обмотки, а также номинальные то-
ки Лном и /гном в обмотках трансформатора.
Ответ: л = 2,12; м>1 = 85; Лном = 23,6 А; /гном = 50 А.
Задача 1.2. * В табл. 1.1 трансформатор характеризуется сле-
дующими параметрами: частотой /, амплитудой магнитной ин-
дукции Вт, площадью поперечного сечения магнитопровода S,
числами витков первичной и вторичной обмоток и »2, ко-
эффициентом трансформации л, ЭДС первичной и вторичной
обмоток £х и £2. Пять из этих параметров известны. Определить
недостающие параметры.
12
Таблица 1.1
№ вар. А Гц S, см2 ^т» Тл *1 »а л Е1а В е2,в
1 100 4 1,0 250 1250 2 2 2
2 ? 5 1,2 200 ? ? 100 500
3 200 ? 0,8 200 ? 2 300 600
4 150 5 ? ? 500 2,0 400 2
Ответы:
1.2.1. п =0,2; Ед = 44,4 В; Е2 = 222 В.
1.2.2. /= 187,7 Гц; w2 = 1000; л = 0,2.
1.23. S = 21,11 см2; w2 = 400; п = 0,5.
1.2.4. Вт = 1,20 Тл; = 1000; Еа = 200 В.
1.3. РЕЖИМ НАГРУЗКИ ТРАНСФОРМАТОРА
Режим нагрузки или рабочий режим трансформатора соответ-
ствует случаю, когда первичная обмотка включена на номи-
нальное первичное напряжение, а ко вторичной подключены
приемники (нагрузочные устройства). К трансформатору под-
ключаются различного рода приемники: электрические двига-
тели, осветительные устройства и т.п.
Как видно из схемы нагруженного трансформатора (рис. 1.6),
основной магнитный поток Фт, согласно закону электромаг-
нитной индукции наводит ЭДС ех и еа, условно-положительные
направления которых показаны на схеме. Ток >а, возникающий
Рис. 1.6. Электромагнитная схема на-
груженного трансформатора
*Так обозначается многовариантная задача.
13
под действием наведенной ЭДС е2, создает МДС w2i2. Поэто-
му магнитный поток трансформатора обусловлен совместным
действием МДС первичной и вторичной обмоток. Исходя из
этого, запишем уравнение для мгновенных значений МДС:
wiG + w2*2 = Fi(0 + F2<0 = F(0.
Так как действительное (а не условно-положительное) на-
правление тока i2 противоположно направлению тока отно-
сительно одноименных выводов обмоток wl и wa, поэтому МДС
F2(t) - w2i2 оказывает размагничивающее действие, т.е. со-
здает магнитный поток Ф2(Г), направленный навстречу
При неизменном действующем значении напряжения ре-
зультирующий магнитный поток Фт практически также оста-
ется неизменным в режимах от холостого хода до номинального.
Это объясняется тем, что падения напряжения Xipa<Ji и
ХграсАг в несколько десятков раз меньше ЭДС £х из-за малости
потокосцеплений рассеяния обмоток, т. е. ¥ipac и ^2рас- Паде-
ние напряжения на активном сопротивлении обмоток также
много меньше £х. Поэтому £х * % const и, таким образом,
амплитуда магнитного потока Фт = £1/4,44/w1 почти посто-
янна и не зависит от токов обмоток. Тогда
«1 + w2 i2 = ilx
или в комплексной форме
+ w2 i3 = /и • (L4>
Разделив обе части (1.4) на н>а, получим:
А + —i2 = Ах-
Запишем для токов
. . *>2 •
Л = 4х------13-
Отсюда
Л = Лх + К»
14
• f u>2 •
где I2 ----12 - составляющая тока , компенсирующая Mar-
'll
нитное действие тока вторичной обмотки.
Как указывалось Zix 11нОм> и если в режиме нагрузки током
XX можно пренебречь, то из вышеприведенных уравнений вид-
но, что 1х/12 % w2/wx = 1/п, т*е* токи обмоток обратно пропор-
циональны числам витков.
Запишем уравнения электрического состояния обмоток при
нагрузке в соответствии со вторым законом Кирхгофа (рис. 1.7)
= А + /^lpac A 5 (1*6)
l/2 = Е2 — R2 12 ~/-^2рас А • (1*7)
Эти уравнения иллюстрируются векторной диаграммой
трансформатора для случая активно-индуктивного сопротив-
ления приемника (рис. 1.8). Построение ведется также, как и
для случая режима XX трансформатора (см. рис. 1.5), но здесь
добавляются векторы тока 12 и напряжения IJ2, затем строятся
векторы тока Ц и напряжения Ui.
Из (1.7) следует, что с увеличением тока активно-индуктив-
ного приемника вторичное напряжение несколько снижается.
Работа трансформатора при нагрузке сопровождается увеличе-
нием потерь энергии в нем по сравнению с режимом XX.
Рис. 1.7. Схема замещения обмоток
трансформатора
Рис. 1.8. Векторная диаграмма транс-
форматора при активно-индуктивном
сопротивлении приемника
15
1.4. СХЕМЫ ЗАМЕЩЕНИЯ ТРАНСФОРМАТОРА
Схема с магнитно-связанными контурами (см. рис. 1.7) для
расчета электрических величин трансформатора неудобна. Же-
лательно иметь простую схему замещения, пригодную для ана-
лиза любого режима работы трансформатора. Это можно сде-
лать, если для устранения магнитной связи между обмотками
составить эквивалентную электрическую схему. Для этого не-
обходимо объединить обе обмотки трансформатора в одну,
сделав равными ЭДС этих обмоток, т. е. Ех = Ё'2. Равенство бу-
дет выполнено, если новое число витков вторичной обмотки
и>2 сделать равным числу витков первичной обмотки w1( т. е.
Очевидно, что при таком преобразовании изменятся все ве-
личины, характеризующие вторичную цепь (12, 1/2, Е2, Л2,
Х2рас, zH), и их необходимо пересчитать на новое число витков.
Пересчет величин вторичной цепи на новое число витков назы-
вается приведением вторичной цепи к числу витков первичной
обмотки, а схема замещения трансформатора в этом случае на-
зывается ’’приведенной”.
Найдем приведенные значения, умножив уравнение (1.7)
на л:
U2 п = E2n-R2n2 i2— -]Х2ряс п212 — .
п п
Приведенными значениями напряжений, ЭДС, тока и сопро-
тивлений являются: tr2 = £/2л; Е2 = Е2п, Г2 = /2/л; J?2 = Я2л2;
-^2рас = -^2расп2» ~
Уравнение электрического состояния (1.7) вторичной цепи
трансформатора с приведенными значениями принимает вид
й2 = e2-r2 i2 -jx^ i'. (1.8)
Такое преобразование справедливо, так как МД С, относи-
тельные значения падения напряжения и мощность потерь в
обмотке остаются неизменными, т. е.
^1^2 = ^2^2> &2 ^2 / ^2 = ^2 ^2 ^2*
*2рас ^2 f ^2 = *2рас 12 / £2; Ф2 = *2 •
16
Приведенная схема замещения трансформатора математи-
чески описывается уравнениями электрического состояния
(1.6), (1.8) и уравнением токов (1.5). В соответствии с этими урав-
нениями построена Т-образная схема замещения трансформа-
тора (рис. 1.9).
На схеме Rt и Xipac соответственно - активное сопротивле-
ние и индуктивное сопротивление рассеяния первичной обмот-
ки; R'2 и %2рас “ приведенные активное сопротивление и индук-
тивное сопротивление рассеяния вторичной обмотки; Ro и
Хо - активное и реактивное сопротивления ветви XX, анало-
гичные сопротивлениям катушки с ферромагнитным магнито-
проводом. Мощность потерь в сопротивлении Ro при токе
эквивалентна мощности потерь в магнитопроводе, т. е. R0Iix =
~ АЛлагн ” ^х-
Падение напряжения в ветви XX с комплексным сопротивле-
нием Zo = Rq + jXQ при токе /1Х равно ЭДС и Ё'2 трансфор-
матора. Параметры Т-образной схемы замещения трансформа-
тора экспериментально найти трудно. Поэтому, если прене-
бречь током XX из-за его малого значения, то получим так на-
зываемую упрощенную схему замещения (рис. 1.10), где RK и
Хк называются сопротивлениями короткого замыкания (КЗ)
= Rx ** Хк = ^1рас + ^2рас • 0-9)
Упрощенная схема замещения не отражает параметров XX
трансформатора, но позволяет определить многие его эксплуа-
тационные характеристики.
Задача 1.3. Номинальное вторичное напряжение понижающе-
го трансформатора равно 400 В, коэффициент трансформации 10,
сопротивление нагрузочного устройства 20 Ом. Чему равны зна-
чения напряжения, сопротивления и тока нагрузочного устрой-
ства для приведенной схемы замещения трансформатора?
Ответ: U2 = 4000 В; R„ = 2000 Ом; 12 = 2 А.
Рис. 1.9. Т-образная схема замещения
тра нсформатора
Рис. 1.10. Упрощенная схема замещения
трансформатора
17
1.5. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ И ЭКСПЛУАТАЦИОННЫХ
ХАРАКТЕРИСТИК ТРАНСФОРМАТОРА ПО ПАСПОРТНЫМ ДАННЫМ
И ОПЫТАМ ХОЛОСТОГО ХОДА И КОРОТКОГО ЗАМЫКАНИЯ
Кроме номинальных значений мощности, напряжений, то-
ков, частоты в паспорте трансформатора записывают ряд опре-
деляемых опытным путем параметров, называемых парамет-
рами трансформатора в режимах XX и КЗ. Используя их, можно
определить все эксплуатационные характеристики трансфор-
матора: диапазон изменения напряжения на приемнике при
изменениях тока в нем, наибольший возможный ток при КЗ,
потери энергии в трансформаторе, распределение мощностей
между параллельно работающими трансформаторами и др.
Параметрами трансформатора в режиме XX являются относи-
тельное значение тока Цх в процентах от /1ном и мощность по-
терь в магнитопроводе Рх, измеренные при СЛН0М, параметрами
в режиме КЗ - напряжение ик в процентах от Й1НОм и мощность
потерь в обмотках Рк при /1ном, /2ном-
Опыт холостого хода
Все изготовленные трансформаторы испытывают в опыте XX
(рис. 1.11). При этом первичная обмотка включается на напря-
жение сети, а вторичная обмотка размыкается (12 = 0). Измери-
тельные приборы при этом регистрируют, что в первичной об-
мотке существует небольшой ток холостого хода 4Х, и транс-
форматор потребляет из сети электроэнергию, мощность кото-
рой (относительно небольшую)называют потерями XX Рх.
Эта мощность измеряется ваттметром и определяется в основ-
ном потерями в магнитопроводе АРмагн трансформатора. Поте-
ри в обмотках трансформатора (электрические ДРЭ) в опыте XX
незначительны из-за малого значения тока Г1х.
Из опыта XX можно найти полное сопротивление трансфор-
матора
^х = ^1ном^Лх> (1*10)
COS фх = Рх / (П1ном Лх)« (1-11)
Активное сопротивление схемы замещения трансформатора
в режиме XX
Рх = Р1+Ро = Рх/1?х. (1.12)
18
Рис. 1.12. Схема опыта короткого
замыкания трансформатора
Рис. 1.11. Схема опыта холостого хода
трансформатора
Индуктивное сопротивление схемы замещения трансформа-
тора в режиме XX
Хх = Х1рас + Хо = y/Z^-R^'.
(1.13)
Так как сопротивления Ro и Xipac « Хо, то значения
Ro и Хо определяются из формул:
Ro « Рх / 7fx, Хо * JZ}-R*~. (1.13а)
Опыт короткого замыкания
В этом опыте вторичную обмотку замыкают накоротко
(рис. 1.12), а к первичной обмотке подводится такое понижен-
ное напряжение 1/1к, при котором токи в обмотках равны номи-
нальным 7]ном и /гном * Относительное значение этого напряже-
ния, называемого напряжением КЗ составляет
1/1к
u к = ------ 100% = (5 - 10) % СГ1ном.
^1ном
Это напряжение является одним из паспортных параметров
трансформатора и используется для определения ряда экс-
плуатационных характеристик. В опыте КЗ активная мощность
Рк.ном» измеренная ваттметром, представляет собой мощность
электрических потерь ДРЭ в обмотках. В этом опыте потери в
магнитопроводе ДР^гм малы и составляют лишь (0,05 + 0,1)
потерь при номинальном режиме из-за пониженного напря-
жения и, следовательно, пренебрежимо малого основного
магнитного потока Фт. Мощность потерь при КЗ и номиналь-
19
ных токах
^1ном "* ^2 ном •
По данным опыта КЗ можно найти параметры упрощенной
схемы замещения (см. рис. 1.10).
Полное сопротивление
2К = 1Лк/-ЬнОМ> (1’14)
cos фк = Рк / U1K Л ном • (К15)
Суммарное активное сопротивление обмоток
RK = Rt + R2 = РК/Л2НОМ
и реактивное сопротивление, обусловленное магнитными поля-
ми рассеяния обмоток,
Хк = X, + Х2 = y/z*-R*\
Потокосцепления рассеяния возрастают с увеличением объ-
ема обмоток, поэтому в мощных силовых трансформаторах
обычно Хк > RK, а в маломощных - RK > Хк. Относительное
значение напряжения КЗ
и«-^-юо%. О-16)
и 1ном
Активная составляющая напряжения КЗ нахо-
дится по формуле
^кЛном Рк .. . _ч
ик а =------100% = -----100% = uK cos фк. (1.17)
У1НОМ S"0M
а реактивная составляющая напряжения КЗ
•^кЛном
ик.р =------100% = ик sin фк . (1-18)
^1ном
Процентные значения напряжений иК9 uKa, ик р связаны меж-
ду собой соотношением
“к = + U’.P. (1.19)
20
Задача 1.4. При испытании однофазного трансформатора с
номинальными данными: мощность SH0M = 6650 кВ-А, напряже-
ние U1HOM = 35 кВ в опыте КЗ получили результаты измерений:
= 2800 В, Ц = 190 А, Рк = 63 кВт. Определить напряжение и
сопротивление КЗ этого трансформатора.
Ответ. ик = 8%; Як = 1,75Ом; Хк = 1,46 Ом.
1.6. ВНЕШНЯЯ ХАРАКТЕРИСТИКА ТРАНСФОРМАТОРА
Известно (см. гл. 1 кн. 1), что напряжение на зажимах источ-
ника ЭДС при изменении тока приемника изменяется из-за
падения напряжения на внутреннем сопротивлении источника.
Трансформатор также является источником питания прием-
ников, подключенных к его вторичной обмотке. Поэтому важ-
но знать как изменяется напряжение на вторичной обмотке
трансформатора от тока приемника при неизменном первичном
напряжении. Например, как будет показано в гл. 3, если на-
пряжение питания трехфазных асинхронных двигателей сни-
зится на 10%, то вращающий момент двигателя уменьшится
примерно на 20% и такой момент может быть недостаточным
для рабочей машины, приводимой во вращение электродвига-
телем.
Из рассмотрения упрощенной схемы замещения трансфор-
матора (см. рис. 1.10) видно, что вторичное напряжение изме-
няется с изменением тока приемника вследствие падения на-
пряжения на сопротивлении КЗ ZK.
Изменение вторичного напряжения Д[/2 = [У2х - и2
определяют обычно в процентах
- и2 У1НОМ- и2
&U3% = ---------- 100 ---------- 100. (1.20)
^1ном
Если построить векторную диаграмму (рис. 1.13) для упрощен-
ной схемы замещения трансформатора (см. рис. 1.10), то практи-
чески с допустимой погрешностью можно считать, что
<71ном - U'2 = ту • АС, где ту - масштабный коэффициент напря-
жения. Отрезок АС можно выразить так:
АС = АВ 4- ВС = (RK cos ф2 4- Хк sin ф2)тц
или
^Лном “ U2 в cos ф2 4- Хк sin ф2 .
21
Введем понятие коэффициента нагрузки трансформа-
тора
о 11 12
р -------*-------.
Лном ^2ном
После подстановки значения р в (1.20) получим выражение для
Д1/а%:
jR 1 ном
Д U2 % = Р-------cos <р2 • 100 +
^1иом
^1ном
или с учетом (1.17) и (1.18)
Д U2 % - р (uK.aC0S Фз + ик.р sin Фз)- (1-21)
Если найдено Д С7а%, то вторичное напряжение U2 опреде-
ляется так:
и2 = U2X 1-
ди2%
100
(1.22)
Рис. 1.13. Векторная диаграмма для расчета измене-
ния напряжения на вторичной обмотке трансфор-
матора
Рис. 1.14. Внешние характеристики трансформатора
22
Для трансформатора очень важной является его внешняя
характеристика, т. е. зависимость вторичного напряжения
U2 от тока нагрузки 12 при фиксированном напряжении Ut.
Внешние характеристики при активной и активно-индуктив-
ной нагрузках трансформатора представлены на рис. 1.14. Чем
больше ток нагрузки при активном и активно-индуктивном
приемниках, тем меньше напряжение U2. Но в пределах от
12 = 0 до I2 = /гном (0 < ₽ < 1), напряжение U2 изменяется лишь
на несколько процентов. Чем больше ток нагрузки, тем больше
падение напряжения на сопротивлениях обмоток трансформа-
тора и, значит, тем меньше напряжение U2.
Вопрос 1.4. При одинаковом характере приемника наклон
внешней характеристики трансформатора зависит от расстоя-
ния I между первичной и вторичной обмотками (рис. 1.15, а).
Определите в каких соотношениях находятся расстояния меж-
ду катушками для характеристик 1, 2, 3 (см. рис. 1.15, б) по
упрощенной схеме замещения трансформатора (см. рис. 1.10).
Рис. 1.15. Пояснение к вопросу 1.4
Варианты ответа:
1.4.1. it < 12 < 13.
1.4.2. lt = 12 - 13.
1.4.3. > 12 > 13.
1.7. ПОТЕРИ ЭНЕРГИИ И КПД ТРАНСФОРМАТОРА
Преобразование напряжений и токов трансформатором со-
провождается потерями энергии: магнитными (потерями в
стали магнитопровода) ДРмагн и электрическими (в обмотках
трансформатора) ДРЭ.
Амплитуда магнитного потока Фт в магнитопроводе транс-
форматора при постоянстве амплитуды и частоты напряжения
23
сети остается практически неизменной независимо от токов в
обмотках. Поэтому магнитные потери также постоянны и равны
мощности потерь XX Рх при любых токах:
ДРМагн = -Рх*
Электрические потери в обмотках пропорциональны квадра-
ту тока; их можно выразить через мощность потерь КЗ Рк =
_ р т2
к 21ном *
т2
_ 21ном „
ДРЭ = RK1} = -----1} = Р2 Рк. • (1.23)
т2
11ном
Активная мощность приемников
Р2 = U2 J-2 COS V 2 = Р "-*НОМ COS ф 2 .
Хотя работа трансформатора состоит в передаче полной мощ-
ности, его КПД определяют по передаваемой активной мощ-
ности и потерям энергии:
Р2 ₽«номСО8ф2
П -------------------------------------------(1.24)
^2 + А^э+А^магн ₽^homcos Фз + Р 2^к +^х
Зависимость магнитных и электрических потерь от коэффи-
циента нагрузки и зависимость л(Р) показаны на рис. 1.16. Из
(1.24) можно определить значение коэффициента нагрузки Р,
при котором КПД максимален. Для этого приравняв нулю про-
изводную di,/dp, получим Рош Рк = Рх. Это значит, что п =
= птах при равенстве переменных электрических потерь по-
стоянным магнитным потерям. Таким образом, оптимальный
коэффициент нагрузки
₽опт= А/Лс- О-25)
Рис. 1.16. Зависимость КПД, магнитных и
электрических потерь от коэффициента
нагрузки
24
Обычно для трансформатора Рх / Рк •= 0,25 + 0,5 и, значит,
рОпт = * °,7- Следовательно, наибольшее значение КПД
трансформатора будет при токе нагрузки 50-70% номинально-
го. Максимальный КПД силовых трансформаторов доходит
до 99,5%.
Задача 1.5. Известны номинальные паспортные данные од-
нофазного трансформатора: мощность SH0M = 10 кВ • А, первич-
ное напряжение U1H0M = W кВ> напряжение СГ2х = 660 В, а также
ток XX, составляющий 7% номинального, мощность потерь
при XX Рх = 90 Вт и при КЗ Рк = 280 Вт, напряжение КЗ ик =
= 4,5%.
Определить ток XX /jx, коэффициент трансформации п, пара-
метры Т-образной схемы замещения, КПД трансформатора,
напряжение U2 и ток 12 приемника с параметрами ZH = 60 Ом,
cos<p2 = 0,8.
Допущения. 1. Принять, что при XX реактивное сопротив-
ление первичной обмотки Xipac мало по сравнению с реактив-
ным сопротивлением Хо. 2. Принять, что при КЗ мощность по-
терь делится поровну между первичной и вторичной обмот-
ками.
Решение. Номинальный ток трансформатора
Лном = Shom/СЛном - 10 • 103/10 • 103 = 1 А.
Ток холостого хода
Лх ~ 0,077iHOM = 0,07 А.
Коэффициент трансформации
л = ^Ihom / и2* = Ю ‘ Ю3 / 660 = 15,2.
Параметры схемы замещения:
Zo = СЛном /Лх “ 10 • Ю3/0,07 = 142,86 • 103 Ом;
Ro =рх/^1х = 90/0,072 = 18,37- 103 Ом;
Хо = Jz2-R20 = 7(142,86- 103)2 -(18,37- 103)2’= 141,7• 103 Ом.
Напряжение КЗ
Ценном 4.5 • 10-103
П1К------:-----------------= 450 В и /1к = 71ном = 1 А.
25
Из упрощенной схемы замещения (см. рис. 1.10) следует, что
сопротивления КЗ:
ZK = - 450/1 = 450 Ом;
RK = Рк / IfK = 280/1 = 280 Ом;
Хк = >!zk-Rk = а/4502 -2802'« 352 Ом.
С учетом допущения 2 получаем:
।
= R2 =---------- 140 Ом;
^Ipac ~ -^2рас= = ^7^ Ом;
2
Рк 280
ик.а=—— Ю0% = -----------100 = 2,8 %;
5иом 10*10э
“К.Р = № - “к.а = А52-2,82'= 3,52%.
Ток первичной обмотки
^1нсм
Л = ....................>
/(Лк+*н)2 + (Хк + Х'н)2
где
Rh - Z'n cos ф2 - n2 ZHcos <р2 = 15,22 • 60 • 0,8 = 11090 Ом;
= Z„ sin ф2 = n2 ZH sin ф2 = 15,22 • 60 • 0,6 = 8320 Ом.
Следовательно,
ю • ю3 I,
' = °-7 А; ₽ = —-— = 0,7.
У (280 + 11090) 2 + (352 + 8320) 2 Л ком
Изменение вторичного напряжения
Д V2 % = р (uK.a cos ф2 + ик р sin ф2) =
= 0,7 (2,8 • 0,8 + 3,52 • 0,6) = 3,05 %
U2x
или Д(Л = ^и2%—— = 0,0305-660 = 20,1В.
26 100
Напряжение и ток приемника
Д Ц-% 3,05 • 660
и, = Uix - ли2 = и2х-----------и1х = 660-------------- 639,9 В;
100 100
I2 = U2/ZH = 639,9/60 = 10,7 А.
КПД трансформатора
₽5НОМСО5Ф2
п --------------------------
Р^номсо® Фг + + ₽х
0,7 • 10 • 10э • 0,8
= ---------1---------:-------- = 0,96.
0,7 • 10 • 103 • 0,8 + 0,7 3 • 280 + 90
Задача 1.6.* В табл. 1.2 приведены номинальные параметры
однофазного трансформатора: мощность SH0M, первичное на-
пряжение 1/1Н0М, вторичное напряжение 1/2ном, потери мощ-
ности XX рх, потери мощности КЗ Рк, напряжение КЗ Цс,
коэффициент нагрузки ₽ и коэффициент мощности cos ф 2. Оп-
ределить для каждого варианта в соответствии с табл. 1.2 пара-
метры, помеченные знаком
Таблица 1.2
№ Дано
вариан- та $ном> кВ «А ^1ном» В У2х. В ^х» Вт Рк. Вт «к р С03ф2
1 20 6000 400 180 600 5,5 0,75 0,8
2 10 6000 230 105 335 5,5 0,6 0,6
3 20 6000 — — 600 5,5 0,75 0,8
4 10 6000 — — 335 5,5 0,6 0,6
№ Определить
вариан- та п Лном» ^2 ном» П utK, ^к» хк, ди2,в
А А в Ом Ом
1 ? 2 2 2
2 ? 2 2 — — — —
3 — — — ? 2 ?
4 — — — 2 ? 2
27
Ответы:
1.6.1. л = 15; Zihom = 3,33 А; 12ном = 50 А; Т] = 0,96.
1.6.2. и = 26,10; /1НОМ = 1,67 А; /зном = 43,48 А; Т) ® 0,96.
1.6.3. U1K = 330 В; RK = 54,1 Ом; Хк = 83,03 Ом; ДС/2« 15,48 В.
1.6.4. = 330 В; Як = 120,5 Ом; Хк = 157,10 Ом; ДLL = 7,59 В.
Л 14 * *4 * 9 14 9 ' 4 9
1.8. ОСОБЕННОСТИ ТРАНСФОРМАТОРОВ МАЛОЙ МОЩНОСТИ
Хотя принцип действия всех трансформаторов одинаков, од-
нако, в зависимости от назначения они имеют существенные
эксплуатационные и конструктивные особенности.
В устройствах автоматики и промышленной электроники ши-
роко применяют силовые трансформаторы мощностью в не-
сколько десятков и сотен вольт-ампер. Маломощные транс-
форматоры чаще выполняются однофазными. Они имеют
простейшую конструкцию: обмотки на магнитопроводе стерж-
невого и броневого типа. Стержневой магнитопровод имеет
форму закрытой буквы П или О (см. рис. 1.2), броневой - форму
закрытой буквы Ш. В трансформаторе с броневым магнитопро-
водом обмотки на каркасе помещают на средний стержень
(рис. 1.17).
Магнитопроводы маломощных трансформаторов собирают из
стандартизованных Ш-образных пластин, выштампованных из
листов электротехнической стали. В последнее время магни-
топроводы маломощных трансформаторов часто наматывают в
форме буквы О из тонкой ленты холоднокатаной стали, скреп-
Рис. 1.17. Трансформатор броневого типа
и его магнитопровод
Рис. 1.18. Схема замещения четы-
рехобмоточного трансформатора
28
ляют и разрезают для сборки с обмотками. Для уменьшения за-
зора места разреза шлифуют.
Относительное значение тока XX возрастает с уменьшением
номинальной мощности трансформатора. Кроме того, при отно-
сительной короткой длине магнитного пути по магнитопрово-
ду здесь заметнее сказывается влияние воздушных зазоров -
стыков магнитопроводов. В трансформаторах малой мощнос-
ти (десятки вольт-ампер) ток XX достигает (50-70)% /1ном.
В маломощных трансформаторах объемы обмоток и изоля-
ционные расстояния между ними очень малы. Поэтому в них
очень малы магнитные потоки рассеяния и сопротивление КЗ
представляет собой относительно большое активное сопротив-
ление.
Обычно трансформаторы малой мощности имеют несколько
вторичных обмоток с различным напряжением. Схема замеще-
ния многообмоточного (например, четырехобмоточного, рис. 1.18)
трансформатора сложнее, чем двухобмоточного.
Как видно из схемы замещения, напряжение на любой вто-
ричной обмотке зависит от токов остальных обмоток.
Вопрос 1.5. Выберите свойства, характерные только для транс-
форматоров малой мощности: 1) трехфаэные; 2) однофазные;
3) = 5% /1НОМ; 4) 11х - 50% Дном; 5) RK < Хк; 6) RK > Хк.
Варианты ответа:
1.5.1. Пункты 1,2,3.
1.5.2. Пункты 2,4,5.
1.53. Пункты 2,4, б.
1.9. ТРЕХФАЗНЫЕ ТРАНСФОРМАТОРЫ
Трансформирование энергии в трехфазной цепи можно осу-
ществлять тремя однофазными трансформаторами или спе-
циальным трехфазным трансформатором. В большинстве слу-
чаев применяют трехфазные трансформаторы, так как они де-
шевле и имеют меньшие габариты, чем группа однофазных.
Только при передаче энергии большой мощности используют
однофазные трансформаторы. Это объясняется главным об-
разом условиями технологического процесса изготовления
мощных трансформаторов на заводе и возможностью их пере-
возки.
29
Обмотки и магнитопровод трехфазного трансформатора изоб-
ражены на рис. 1.19. На каждый стержень магнитопровода на-
девают обмотки высшего и низшего напряжений одной фазы.
Л В С
Рис. 1.19. Элементы конструкции силового трехфазного трансформатора
Рис. 1.20. Векторная диаграмма фазных
напряжений и магнитных потоков трех-
фаэного трансформатора
У трансформатора, изображенного на рис. 1.19, снято верхнее
ярмо, удалены обе обмотки крайнего правого стержня и обмот-
ка высшего напряжения со среднего стержня.
Векторная диаграмма трехфазного трансформатора в режи-
ме XX приведена на рис. 1.20. Фазные напряжения питающей
сети и фазные ЭДС сдвинуты на угол 120е. Векторы магнитных
потоков в трех стержнях образуют симметричную звезду, и сум-
ма их равна нулю. Поэтому силовой трансформатор не имеет
четвертого замыкающего стержня (так же, как нет нейтраль-
ного провода у трехфазных линий передачи электроэнергии).
Обмотки трехфазных трансформаторов могут соединяться
звездой и треугольником с учетом разметки выводов всех фаз
обмоток, выполненной на заводе (рис. 1.21, а).
эо
Рис. 1.21. Схемы соединения обмоток (а) и векторные диаграммы напряже-
ний (б) двух групп соединений трехфазных трансформаторов
Группа соединения обмоток трехфазного трансформатора
определяется цифрой циферблата часов, на которую "указы-
вает” вектор линейного вторичного напряжения при условии,
что вектор линейного первичного напряжения "направлен на
ноль часов".
В зависимости от схемы соединения линейные напряжения
на выходных зажимах вторичной обмотки трехфаэного транс-
форматора могут совпадать по фазе с одноименными линейны-
ми напряжениями первичной обмотки (У/У-0) или быть сдви-
нуты по фазе на 30е (У/Д-11).
На рис. 1.21, б построены топографические векторные диа-
граммы, поясняющие это положение. Заметим, что одноимен-
ными называют напряжения, векторы которых имеют одина-
ковый буквенный индекс. При построении этих диаграмм учи-
тывалось, что векторы одноименных фазных напряжений пер-
вичной и вторичной обмоток совпадают по направлению: они
создаются общими фазными магнитными потоками в стержнях
магнитопровода.
Для расширения пределов измерения измерительных прибо-
ров переменного тока используют измерительные трансфор-
маторы тока и напряжения, которые рассмотрены в гл. 1 (кн. 3).
1.10. АВТОТРАНСФОРМАТОРЫ
В некоторых случаях из экономических соображений целе-
сообразно применять так называемые автотрансформаторы. От-
личие их от обычных трансформаторов заключается в том, что
обмотки имеют не только магнитную, но и электрическую
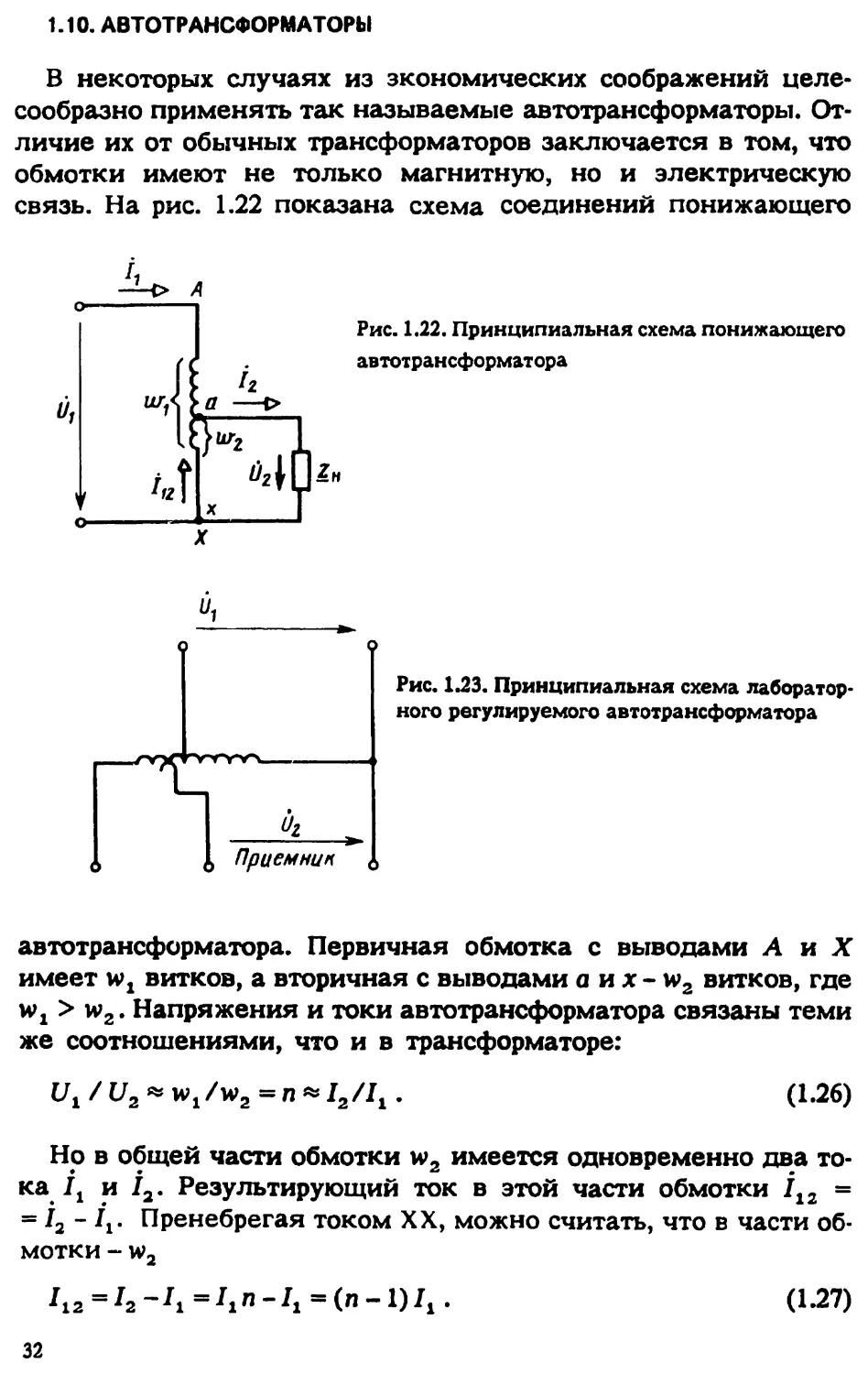
связь. На рис. 1.22 показана схема соединений понижающего
1.22. Принципиальная схема понижающего
Рис. 1J3. Принципиальная схема лаборатор-
ного регулируемого автотрансформатора
автотрансформатора. Первичная обмотка с выводами А и X
имеет и»! витков, а вторичная с выводами а и х - w2 витков, где
и»! > w2. Напряжения и токи автотрансформатора связаны теми
же соотношениями, что и в трансформаторе:
U1 / V» * /М»2 = П * I2/It .
(1.26)
Но в общей части обмотки w2 имеется одновременно два то-
ка Д и 12. Результирующий ток в этой части обмотки 112 =
= 12 - Л- Пренебрегая током XX, можно считать, что в части об-
мотки - w2
Л2 = I2= Л и - Л = (и -1) л . (1.27)
32
При близких значениях и*х и w2 ток 112 намного меньше то-
ка It. Это позволяет выполнить часть обмотки, т. е. и»2, из бо-
лее тонкой проволоки, что потребует меньше места для ее раз-
мещения и, таким образом, можно уменьшить окно магнито-
провода автотрансформатора и его размеры. Обычно автотран-
сформатор применяется при 1 < л < 3. Преимущества автотран-
сформатора уменьшаются с увеличением коэффициента транс-
формации л и, кроме того, приводят к удорожанию изоляции.
Для лабораторных работ разного рода широко применяют ла-
бораторные автотрансформаторы регулировочные (ЛАТРы).
В них регулирование вторичного напряжения достигается из-
менением положения точки а по отношению к обмотке. В соот-
ветствующих ЛАТРах одним из зажимов вторичной цепи служит
подвижный рычажный контакт (рис. 1.23).
Задача 1.7. Определите ток нагрузочного устройства авто-
трансформатора, включенного в сеть с напряжением 220 В, если
ток Ii - 5 А (см. рис. 1.22), а напряжение на нагрузочном уст-
ройстве НОВ?
Ответ. 10 А.
1.11. Комментарии к правильным ответам на вопросы гл. 1
1.1.2. Передавать электрическую энергию целесообразно при
высоком напряжении, так как при этом уменьшаются потери в
линии электропередачи, которые пропорциональны квадрату
тока и появляется возможность применять провода меньшего
сечения, а потреблять - при низком напряжении, так как при
этом снижаются требования к изоляции проводов и уменьша-
ется вероятность поражения людей электрическим током.
1.2.2. Связь между амплитудой магнитного потока, прило-
женным напряжением и частотой (Е2 = 4,44/»2Фт). При том же
первичном напряжении в трансформаторе будет та же уравно-
вешивающая его ЭДС Ei - даже при частоте в 8 раз большей. Од-
нако теперь для этого достаточно в 8 раз меньшего значения
Фт. Следовательно, ЭДС Е2 не изменится.
1.3.3. Так как напряжение на первичной обмотке возрастет
в УЗраз, то и магнитный поток также увеличится и из-за насы-
щения магнитопровода уменьшится индуктивность и индуктив-
ное сопротивление Хо, следовательно, ток XX станет во много
раз больше Лном и первичная может сгореть.
33
1.4.1. С увеличением расстояния между обмотками транс-
форматора, возрастают потокосцепления рассеяния первич-
ной и вторичной обмоток. При этом увеличиваются индуктив-
ные сопротивления рассеяния обмоток, т. е. Хк = Xlpac+Xjpac.
Поэтому из выражения (1.21) следует, что с ростом расстояния /
возрастает икр &U2% и, следовательно, уменьшается U2.
1.5.3. Вы правильно поняли особенности трансформаторов ма-
лой мощности (однофазные, 11х = (0,5 + 0,7) /1ном и RK > Хк).
Глава вторая
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
2.1. НАЗНАЧЕНИЕ И ОБЛАСТИ ПРИМЕНЕНИЯ МАШИН
ПОСТОЯННОГО ТОКА
Несмотря на преимущественное распространение электри-
ческой энергии переменного тока, электрические машины по-
стоянного тока широко применяются в качестве двигателей и
несколько меньше - в качестве генераторов. Широкое распро-
странение двигателей постоянного тока объясняется в первую
очередь простыми и надежными способами регулирования час-
тоты вращения в широких пределах, большими пусковыми мо-
ментами и перегрузочной способностью, чем у двигателей пе-
ременного тока. Поэтому их широко используют в электропри-
водах, требующих глубокого регулирования частоты вращения
(металлургическая промышленность, транспорт и т.п.).
Электродвигатели постоянного тока часто являются испол-
нительными звеньями систем автоматического регулирования,
а специальные генераторы используются как усилители элек-
трических сигналов управления и как тахогенераторы - датчи-
ки частоты вращения. Генераторы постоянного тока находят
широкое применение для питания электролитических ванн,
зарядки аккумуляторов, высококачественной сварки. Машины
постоянного тока входят в состав автомобильного, судового и
самолетного электрооборудования.
Диапазон мощностей машин постоянного тока достаточно
34
широк - от единиц ватт (микромашины) до десятков тысяч
киловатт (крупные двигатели для прокатных станов, гребных
винтов кораблей).
Наиболее распространены машины общепромышленного при-
менения серии 2П, выпускаемые как двигатели или как гене-
раторы, и двигатели серии 4П. Серия 2П машин постоянного то-
ка охватывает диапазон мощностей от 0,37 до 200 кВт. В основу
создания двигателей новой серии 4П положены требования
современного электропривода: расширение диапазона регули-
рования частоты вращения в 2-2,5 раза, а также существенное
улучшение динамических и виброакустических свойств двига-
теля. Для производства машин постоянного тока новой серии
используется высокопроизводительное технологическое обо-
рудование, созданное для асинхронных двигателей. Серия 4П
машин постоянного тока имеет диапазон мощностей от 0,126
до 800 кВт.
При целом ряде преимуществ машины постоянного тока
имеют существенный недостаток, связанный с работой так на-
зываемого щеточно-коллекторного узла. При определенных
неблагоприятных условиях щетки могут искрить (см. § 2.5), что
снижает надежность работы и требует надзора и ухода за маши-
ной. Такую машину нельзя использовать во взрывоопасных
средах. Коллектор усложняет и удорожает ее конструкцию и
эксплуатацию по сравнению с бесколлекторной машиной пере-
менного тока. Кроме того, для питания двигателей постоянного
тока требуется дополнительное оборудование - генераторы по-
стоянного тока или выпрямители, так как основной вид элек-
троснабжения промышленных предприятий - электроэнергия
переменного тока.
Вопрос 2.1. Чем объясняется широкое применение двигате-
лей постоянного тока?
Варианты ответа:
2.1.1. Простотой конструкции.
2.1.2. Электропитанием от источника постоянного тока.
2.1.3. Хорошими пусковыми и регулировочными свойствами.
2.1.4. Высокой надежностью.
2.2. УСТРОЙСТВО СОВРЕМЕННЫХ МАШИН ПОСТОЯННОГО ТОКА
Машина постоянного тока состоит из двух основных частей:
неподвижной части, называемой статором,предназначенной,
в основном, для создания магнитного потока и вращающейся
части, которая называется якорем.
Неподвижная и вращающаяся части отделены друг от дру-
га небольшим воздушным зазором.
На рис. 2.1 показан упрощенный поперечный разрез магнит*
ной цепи двухполюсной машины и силовые линии магнитного
поля.
Статор состоит из станины 1, представляющей полый ци-
линдр. К внутренней поверхности станины крепятся глав-
ные полюсы 2. Станина и полюсы выполняются из ферро-
магнитного материала. На главных полюсах располагаются ка-
тушки обмотки возбуждения 3, которые питаются либо
от постороннего источника постоянного тока, либо от зажимов
якорной обмотки. Постоянный ток в обмотке возбуждения со-
здает магнитное поле. Катушки обмотки возбуждения соеди-
няются последовательно так, чтобы полюсы N и S на статоре
чередовались. Главные полюсы имеют полюсные нако-
нечники 4 для более равномерного распределения магнит-
ной индукции в воздушном зазоре.
Якорь 5 представляет собой стальной цилиндр, закреплен-
ный на валу 6. На поверхности якоря расположены пазы
(на рис. 2.1 не показаны), в которых расположена якор-
ная обмотка 7 . Обмотка якоря состоит из витков, охваты-
вающих якорь вдоль оси. Витки объединяются в секции. Сек-
цией называется часть обмотки якоря, состоящая из одного
или нескольких последовательно соединенных витков, присо-
Рис. 2.1. Принципиальная схема машины
постоянного тока
36
Рис. 2.2. Одмовитковая секция обмотки
якоря
единенных своими концами к
коллекторным пластинам (рис. 2.2).
Секция состоит из двух активных
сторон ab и cd, которые распола*
гаются вдоль оси машины под по-
люсами разной полярности. Ин-
дуктируемая в секции ЭДС максимальна, если шаг обмотки у
равенполюсному делению
т = лОя/2р,
(2.1)
где £>я - диаметр якоря; р - число пар полюсов.
Из 2.1 следует, что полюсное деление - это часть окружности
якоря, принадлежащая одному полюсу.
На якоре располагается коллектор 8 (см. рис. 2.1), который
представляет собой цилиндрическое тело, состоящее из медных
коллекторных пластин. Пластины изолируются друг от друга
изоляционными прокладками. К каждой пластине коллектора
присоединяются два конца секций обмотки якоря. Поэтому ко-
личество пластин коллектора равно количеству секций обмот-
ки. Электрический контакт с вращающимся коллектором
осуществляется с помощью неподвижных электрографи-
тов ых щеток, помещенных в щеткодержатели. Коллектор
и щеточный аппарат являются весьма ответственными узлами
машины, от конструкции и качества изготовления которых в
большой степени зависит бесперебойная работа машины и на-
дежность электрического контакта между коллектором и щет-
ками.
Магнитное поле, созданное постоянным током возбужде-
ния, - неподвижное. Основная часть магнитного потока замы-
кается через сердечник северного полюса N, воздушный зазор,
якорь, сердечник южного полюса S и станину. На рис. 2.1 пока-
заны силовые линии 9 магнитного поля. Распределение нор-
мальной составляющей магнитной индукции Вп в воздушном
37
Рис. 23, Распределение нормальной
к поверхности якоря составляющей
магнитной индукции на разверну-
том полюсном делении
зазоре вдоль поверхности якоря показано на рис. 2.3. Под полю-
сом магнитная индукция наибольшая, посередине между полю-
сами Вп равна нулю. Воображаемая линия, проведенная через
середину межполюсного промежутка, называется геометричес-
кой нейтралью, а часть окружности якоря между геометричес-
кими нейтралями равна полюсному делению т. В машинах по-
стоянного тока щетки устанавливаются на геометрических
нейтралях. Поскольку число нейтралей равно числу полюсов,
то и число мест, где устанавливаются щетки, выбирается рав-
ным числу полюсов.
Выше была рассмотрена двухполюсная машина постоянного
тока. Современные машины обычно выполняются с большим
числом полюсов. На рис. 2.4 показаны основные элементы кон-
струкции четырехполюсной машины. К станине 6 крепятся
главные полюсы 5 с катушками обмотки возбуждения. Между
главными находятся узкие дополнительные полюсы 4 со свои-
ми катушками (их назначение рассмотрено в § 2.5). Сердечники
полюсов выполняются массивными, либо шихтованными - на-
Рис. 2.4. Конструкция четырехполюсной машины
постоянного тока (разрез)
38
бранными из тонких листов электротехнической стали. К тор-
цам станины прикреплены подшипниковые щиты 1 с подшип-
никами, в которых вращается вал якоря 3. Для уменьшения по-
терь от вихревых токов при перемагничивании якорь набирают
из листов электротехнической стали толщиной 0,5 мм. На щите
со стороны коллектора установлены щеткодержатели со щет-
ками 2.
На электрических схемах якорь машины постоянного тока
изображают условно в виде окружности с двумя диаметрально
расположенными щетками, а обмотку возбуждения - как ин-
дуктивный элемент (см. рис. 2.9).
Вопрос 2.2. Почему участки магнитопровода машины постоян-
ного тока выполняются из стали?
Варианты ответа:
2.2.1. Для повышения механической прочности.
2.2.2. С целью усиления магнитного поля.
2.2.3. Из экономических соображений.
2.3. ПРИНЦИП ДЕЙСТВИЯ МАШИНЫ ПОСТОЯННОГО ТОКА (МПТ)
В ГЕНЕРАТОРНОМ И ДВИГАТЕЛЬНОМ РЕЖИМАХ
Принцип действия генератора постоянного тока (ГПТ)
На рис. 2.5, а изображена упрощенная модель машины посто-
янного тока.
Допустим, что якорь машины приведен во вращение двигате-
лем в направлении движения часовой стрелки с постоянной
угловой скоростью Q, обмотка возбуждения подключена
Рис. 2.5 Простейшая модель машины постоянного тока (а) и ее схема (б)
39
к источнику постоянного напряжения, а внешняя цепь отклю-
чена от якоря. При вращении якорной обмотки ее проводники
будут пересекать магнитные линии поля статора и в них по за-
кону электромагнитной индукции наведется ЭДС е = BnW,
где Вп - нормальная составляющая магнитной индукции в воз-
душном зазоре; I - активная длина проводника; V - линейная
скорость. Направление ЭДС в проводниках может быть опреде-
лено по правилу правой руки. Применяя это правило в рассмат-
риваемом случае, можно убедиться, что направление ЭДС
е, - е3 во всех проводниках, движущихся в зоне северного полю-
са, будет одинаковым - от переднего торца якоря к заднему
(обозначено знаком креста). В проводниках, движущихся в зо-
не южного полюса, ЭДС будет направлена от заднего торца
якоря к переднему (е4-е6) (обозначено знаком точки) (см.
рис. 2.5, а). В момент перехода активных проводников через гео-
метрическую нейтраль (ГН на рис. 2.5, б) ЭДС в них наводиться
не будет, так как здесь нормальная составляющая магнитной
индукции равна нулю. Следовательно, при вращении якоря в
его проводниках, перемещающихся из зоны одного полюса в
зону другого полюса, наводятся переменные ЭДС.
Обмотка якоря представляет собой замкнутый контур. Од-
нако ток в контуре не возникает, так как алгебраическая сум-
ма мгновенных значений ЭДС всех последовательно соединен-
ных проводников обмотки равна нулю: обмотка выполняется
с равным количеством проводников под каждым полюсом,
магнитные потоки полюсов одинаковы, полярность полюсов
чередуется. Если установить неподвижные щетки для осуще-
ствления скользящего контакта с проводниками, проходящими
геометрические нейтрали, то между щетками всегда будут на-
ходиться проводники обмотки с одинаково направленными
ЭДС, сумма которых максимальна и постоянна.
В действительности, как уже было сказано, щетки касаются
не проводников на поверхности якоря, а соединенных с ними
соответствующих пластин коллектора. Прижатые к пластинам
коллектора щетки делят обмотку якоря на две части с одина-
ковым числом последовательно соединенных проводников.
Эти части обмотки называются параллельными вет-
вями. Направление ЭДС в проводниках, образующих парал-
лельную ветвь, сохраняется неизменным. Из схематически
изображенной на рис. 2.5, б обмотки якоря видно, что ЭДС яко-
ря Е равна ЭДС любой из параллельно соединенных ветвей.
40
Рис. 2.6. Схема замещения цепи
якоря генератора
Внутреннее сопротивление якоря /?я (рис. 2.6) - это эквива-
лентное сопротивление параллельно соединенных ветвей об-
мотки.
Если к зажимам якоря подключить приемник, то ЭДС якоря
вызовет в цепи ток, направленный так же, как и вызвавшая его
ЭДС. Проводники обмотки якоря, в которых возник ток, нахо-
дятся в магнитном поле, поэтому в соответствии с законом
Ампера возникают электромагнитные силы, приложенные к
якорю. По правилу левой руки найдем, что электромагнитные
силы создают момент, противодействующий вращению якоря
(см. рис. 2.5, а). При постоянной скорости якоря Q, вращающий
момент приводного двигателя равен противодействующему
электромагнитному моменту генератора: Мвр = Мэм. Таким об-
разом, для производства электрической энергии необходимо
затрачивать механическую энергию.
В соответствии со схемой замещения цепи якоря генератора
(рис. 2.6) запишем уравнение электрического состояния для
цепи якоря
Е = и + Ля1я. (2.2)
Умножив это выражение на 1я, получим уравнение баланса
мощностей цепи якоря
Е1Я = UIX + РЯ1Я. (2.3)
Мощность приемника Р = 1ЛЯ и мощность электрических по-
терь в обмотке якоря ДРЭЯ - Яя/я составляют электромаг-
нитную мощность Рзы = Е-1Я, развиваемую генератором и рав-
ную механической мощности приводного двигателя
Е1Я = = Рмех = MQ. (2.4)
Принцип действия двигателя постоянного тока (ДПТ)
Обмотки якоря и возбуждения ДПТ подключаются к источ-
нику постоянного напряжения. Допустим, что направление то-
41
О~
Рис. 2.7. К пояснению принципа действия двигателя (а), схема замещения цепи
якоря двигателя (6)
ка в проводниках обмотки якоря такое, как указано на рис. 2.7, а.
Проводники якоря с током будут находиться в неподвижном
магнитном поле, созданном постоянным током в обмотке воз-
буждения. Поэтому в соответствии с законом Ампера возника-
ют электромагнитные силы, приложенные к якорю. По прави-
лу левой руки определим направление электромагнитных сил
Гэми найдем, что они создают вращающий электромаг-
нитный момент. Под действием этого момента якорь дви-
гателя будет вращаться. Если скорость якоря Q постоянна, то
вращающий момент равен моменту сопротивления механизма
на валу: Мвр = Мс. Во вращающейся в магнитном поле обмот-
ке якоря наводится ЭДС. Определив направление ЭДС в про-
водниках якоря на рис. 2.7, а, найдем, что оно противоположно
направлению тока. Поэтому часто ЭДС якоря двигателя назы-
вают противо-ЭДС. Составив схему замещения цепи якоря
двигателя (рис. 2.7, б), найдем, что приложенное к зажимам
якоря двигателя напряжение равно сумме противо-ЭДС и паде-
ния напряжения на внутреннем сопротивлении обмотки якоря
U = Е + Яя /я.
Отсюда ток якоря двигателя
1Я = (и-Е)/Ля.
(2.5)
(2.5а)
Уравнение баланса мощностей цепи якоря двигателя имеет
вид
Шя = Е1Я + ЕЯ1Я.
(2.6)
42
Оно показывает, что электрическая мощность Рэ = Шя пре-
вращается в электромагнитную мощность Рэм = Е1Я и мощность
потерь в обмотке якоря. Электромагнитная мощность равна
механической мощности, развиваемой двигателем:
Е7Я = рэМ = MQ = Рмех. (2.6а)
Вопрос 2.3. Как изменится электромагнитный момент двига-
теля, если щетки сдвинуть с геометрических нейтралей?
Варианты ответа:
2.3.1. Не изменится.
2.3.2. Увеличится.
2.3.3. Уменьшится.
2.4. ЭДС ЯКОРЯ И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ
В § 23 было показано, что ЭДС Е якоря машины постоянного
тока равна сумме мгновенных ЭДС е; проводников одной из
параллельных ветвей обмотки якоря. Если общее количество
проводников якоря равно N, количество параллельных вет-
вей 2а, то ЭДС в одной ветви, содержащей N/2a проводников
N/2a N/2a
Е = Z е; = /V Z Вп;,
7=1 J=1
пя
где V -----Q - линейная скорость движения проводника; I ~
2
активная длина проводника.
На рис. 2.3 было показано распределение нормальной к по-
верхности якоря составляющей магнитной индукции Вп. Сум-
N/2a
му Z Bnj можно выразить через среднее значение магнитной
;= 1
индукции Вср на полюсном делении т:
N/2a
S Bnj « ^cp, (2.7а)
j-=l 2а
гдеВср = Фп/т/; Фп " магнитный поток полюса.
43
N/2a
Подставив выражения V, Z Bnj, приведенные выше, и т из
(2.1) в (2.7), получим: J-1
2па 60а
гдеп = 60П/2л-частота вращения якоря,об/мин.
Обозначим С£ = pN/60a, получим:
Е = с£пФп. (2.8а)
Таким образом, ЭДС якоря пропорциональна частоте его
вращения и магнитному потоку полюса машины.
Электромагнитный момент машины
Рэм Е1Я
wIVI Л
Мзм = = , (2.9)
Q Я
где Рэм = Е1Я - электромагнитная мощность.
Подставив выражение (2.8) для Е в (2.9), получим
pN
мэм-------Фп/Я. (2.10)
2ла
Обозначив См = pN/2na, получим
Мэм=смФп/я. (2.10а)
Таким образом, электромагнитный момент машины постоян-
ного тока пропорционален магнитному потоку полюса и току
якоря. Он является тормозящим в генераторе и вращающим в
двигателе.
Направление вращения якоря двигателя можно изменить
на обратное, изменив направление вращающего момента. Из
формулы (2.10а) следует, что его знак изменится, если изме-
нится направление тока в якоре или направление магнитных
потоков полюсов.
На паспортном щитке двигателя приводятся номинальная
мощность Рном (кВт) и номинальная частота вращения якоря
пном (об/мин). В этом случае номинальный момент (Н • м) мо-
44
жет быть подсчитан по формуле
Мном = 9,55 • 10 3-^-.
пном
(2.11)
Вопрос 2.4. Как изменится ЭДС на зажимах обмотки якоря
генератора, если уменьшить ток в обмотке возбуждения?
Варианты ответа:
2.4.1. Уменьшится.
2.4.2. Останется постоянной.
2.4.3. Увеличится.
2.5. ИСКРЕНИЕ В ЩЕТОЧНОМ КОНТАКТЕ НА КОЛЛЕКТОРЕ
При вращении якоря коллекторные пластины поочередно
входят в соприкосновение со щеткой. При этом секции, при-
соединенные к этим пластинам, замыкаются щеткой, а при
дальнейшем перемещении якоря переходят в другую парал-
лельную ветвь (рис. 2.8). При переходе секции из одной парал-
лельной ветви в другую ток в ней изменяет направление на
противоположное. Процесс переключения секций из одной па-
раллельной ветви в другую носит название коммутации. При
коммутации машины может наблюдаться искрение в щеточ-
ном контакте на коллекторе (причины возникновения объяс-
нены ниже). При интенсивном искрении поверхность коллек-
тора и щеток разрушается, увеличивается переходное сопро-
тивление скользящего контакта и нагрев коллектора. Искре-
ние снижает надежность машины постоянного тока, создает
радиопомехи, оно недопустимо при
средах.
Искрение щеток на коллекторе
может происходить по разным
причинам, которые можно под-
разделить на механические и
электромагнитные. Механичес-
кие причины искрения связа-
Рис. 2.8. Добавочный ток в коммутируемой
секции
работе во взрывоопасных
45
ны с некачественным изготовлением коллектора и щеточ-
ного аппарата: неровная поверхность коллектора, выступаю-
щие отдельные коллекторные пластины, заедание и вибра-
ция щеток в щеткодержателях и т. п. Электромагнитная
причина искрения является основной и связана с протеканием
электромагнитных процессов в коммутируемых секциях. Так
как секция имеет определенную индуктивность Ls, то при
коммутации в ней будут наводиться ЭДС самоиндукции, а
также ЭДС взаимной индукции от соседних коммутируемых
секций. Электродвижущая сила коммутируемой секции, рав-
ная сумме ЭДС самоиндукции и взаимной индукции, назы-
вается реактивной ЭДС ер. Кроме реактивной ЭДС в коммути-
руемых секциях наводится ЭДС от внешнего магнитного поля
якоря, которую называют ЭДС вращения евр. Таким образом,
при работе машины постоянного тока в коммутируемой сек-
ции действует результирующая ЭДС Ее = ep±ej,p, которая
создает добавочный ток коммутации в контуре, образован-
ном секцией и щеткой (см. рис. 2.8). Характер изменения тока
1д за период коммутации зависит от действующей в коммути-
руемой секции результирующей ЭДС и от ее знака. Если в мо-
мент, когда секция выходит из состояния короткого замыка-
ния щеткой, ток 1д не достигает нулевого значения, то проис-
ходит ’’разрыв” этого тока. При этом запасенная в контуре энер-
гия, равная Lsi„/2, ’’освобождается” и вызывает появление
искры между щеткой и коллектором. Интенсивность искре-
ния зависит от запасенной в контуре энергии магнитного поля.
Так как искрение щеток связано с ’’разрывом” добавочного
тока г'д коммутируемой секции, то меры по улучшению комму-
тации направлены в первую очередь на уменьшение его значе-
ния. Наилучшим способом улучшения коммутации в машинах
постоянного тока является установка дополнительных полю-
сов. Они располагаются между основными полюсами по ли-
ниям геометрических нейтралей. Катушки возбуждения до-
полнительных полюсов включают последовательно в цепь
якоря так, что с ростом тока якоря увеличиваются магнитный
поток якоря и противоположный ему магнитный поток допол-
нительных полюсов. Это позволяет скомпенсировать реактив-
ную ЭДС. Все современные машины постоянного тока мощно-
стью более 1 кВт имеют дополнительные полюсы. Безыскровая
работа машины постоянного тока обеспечивается лишь при па-
раметрах, не выходящих за номинальные. При чрезмерных то-
46
к ах якоря (более 3 1я.ном) дополнительные полюса насыща-
ются и компенсация магнитного поля нарушается. Поэтому
большие перегрузки, даже кратковременные, а также значи-
тельные превышения частоты вращения якоря могут вызвать
искрение, опасное для щеточно-коллекторного узла.
Для борьбы с искрением необходимо также следить за поверх-
ностью коллектора, качеством закрепления щеток в щеткодер-
жателеях, правильностью выбора пружин* прижимающих щет-
ки к коллектору.
Вопрос 2.5. С чем связаны электромагнитные причины искре-
ния щеток на коллекторе?
Варианты ответа:
2.5.1. ЭДС вращения в коммутируемой секции не равна нулю.
2.5.2. При завершении коммутации добавочный ток в комму-
тируемой секции не равен нулю.
2.5.3. Некачественное изготовление щеточно-коллекторного
аппарата.
2.6. СПОСОБЫ ВОЗБУЖДЕНИЯ МАШИН ПОСТОЯННОГО ТОКА
Обмотка возбуждения (рис. 2.9) и обмотка якоря в машинах
постоянного тока могут быть включены различными способа-
ми: независимо одна от другой, параллельно и последователь-
но. В зависимости от способа соединения этих обмоток разли-
чают четыре типа машин постоянного тока:
1) машины независимого возбуждения (см. рис. 2.9, а), в ко-
торых обмотка возбуждения подключается к постороннему
источнику;
Рис. 2.9. Схемы возбуждения машин постоянного тока:
независимого (а), параллельного (б), последовательного (в) и смешанного (г)
47
2) машины параллельного возбуждения (см. рис. 2.9, б), в ко-
торых обмотка возбуждения подсоединяется к щеткам парал-
лельно обмотке якоря.
Катушки машин с независимым и параллельным возбужде-
нием выполняются относительно тонким проводом с большим
количеством витков, поэтому ток возбуждения относительно
мал и для номинального режима составляет 1-5% номиналь-
ного тока якоря машины;
3) машины последовательного возбуждения (см. рис. 2.9, в),
в которых обмотка возбуждения включается последовательно
с обмоткой якоря. При этом ток возбуждения равен току яко-
ря и, следовательно, обмотка возбуждения выполняется тол-
стым проводом с малым количеством витков;
4) машины смешанного возбуждения, в которых на каждом
полюсе имеется две обмотки ОВХ и ОВ2 (см. рис. 2.9, г), кото-
рые могут быть включены согласно (МДС обмоток направлены
одинаково) и встречно (МДС направлены противоположно).
Способы возбуждения машин постоянного тока оказывают
сильное влияние на электрические свойства генераторов и ме-
ханические свойства двигателей.
Вопрос 2.6. При каком способе возбуждения машины посто-
янного тока с увеличением тока якоря и постоянном токе воз-
буждения магнитный поток уменьшается?
Варианты ответа:
2. 6.1. При независимом.
2. 6.2. При параллельном.
2. 6.3. При последовательном.
2. 6.4. При смешанном согласном.
. 2.6.5. При смешанном встречном.
2.7. ПОТЕРИ ЭНЕРГИИ И КПД МАШИН ПОСТОЯННОГО ТОКА
Работа электрической машины сопровождается различного
рода потерями энергии в ней, вызывающими нагрев частей ма-
шины. В машине постоянного тока электрические потери
ДРЭ,Я в обмотке якоря составляют примерно 50% всех потерь
при номинальном режиме. Электрические потери в обмотках,
зависящие от квадрата тока якоря, называют переменными.
Другими потерями, считающимися постоянными или поте-
рями холостого хода являются: - магнитные потери в
магнитопроводе якоря, возникающие вследствие его перемаг-
48
ничивания при вращении (1-3% Рном); Д^мех ~ механические
потери от трения в подшипниках и вентиляционные (менее
1-2% Рком); А^э.в ” электрические потери в обмотке возбужде-
ния (0,5-7 % Рном). Все эти потери практически не зависят от
тока якоря.
Диаграмма преобразования энергии в генераторе постоянного
тока приведена на рис. 2.10, а. К генератору подводится меха-
ническая мощность Рмех = Pt. Часть этой мощности расходу-
ется на механические ДРмех и магнитные ДРмагн потери, а ос-
тальная часть преобразуется в электрическую мощность, кото-
рая называется электромагнитной мощностью Рэм. Полезная
электрическая мощность генератора Рэ = Р2 меньше электро-
магнитной мощности на значение электрических потерь в об-
мотках якоря ДРэ.я и возбуждения ДРЭ.В. Диаграмма преобра-
зования энергии в двигателе постоянного тока приведена на
рис. 2.10, б. К двигателю подводится электрическая мощность
Рэ = Рх. Часть этой мощности расходуется на электрические
потери в обмотках возбуждения ДРЭ.В и якоря ДРЭ,Я. Остальная
часть преобразуется в механическую мощность, которая назы-
вается электромагнитной мощностью Рэм. Полезная механи-
ческая мощность на валу Рмех= Р2 меньше электромагнитной
мощности на величину механических ДР^у и магнитных
ДРмагн потерь.
Основной энергетический показатель машины - КПД (отно-
шение полезной мощности к затраченной), который изменяется
вместе с изменением тока якоря. Зависимость КПД от полез-
ной мощности ц(Р2) является рабочей характеристикой маши-
ны (рис. 2.11). Машина проектируется таким образом, чтобы
• р^Рмех
^.М=мяр4/’магн
|3=/»2р4Р,в
а)
Рис. 2.10. Диаграммы преобразования энергии
в машине постоянного тока:
а — в генераторе; б — в двигателе
Рис. 2.11. Рабочая характе-
ристика машины постоянного
тока п (Р2)
49
наибольший КПД примерно соответствовал номинальной мощ*
ности (когда переменные потери равны постоянным). Номи*
нальное значение КПД машины постоянного тока зависит от
ее номинальной мощности. При перегрузке электрические по-
тери растут быстрее, чем полезная мощность и КПД снижается.
Современные электрические машины имеют высокий КПД.
Так у машин постоянного тока мощностью 10 кВт КПД состав-
ляет 83-87%, мощностью 100 кВт - 88 - 93%. Лишь микромаши-
ны имеют относительно низкие КПД, например, у двигателя
постоянного тока мощностью 10 Вт КПД - 30-40%.
Задача 2.1. Двигатель постоянного тока независимого воз-
буждения имеет следующие номинальные данные: Р2н<(М =
= 3 кВт; Оном = 220 В, /ЯеНОМ = 15 А, КПД = 80%. Считая, что элек-
трические потери в обмотке якоря в номинальном режиме со-
ставляют половину всех потерь, определить сопротивление об-
мотки якоря.
Решение. Подводимая мощность
pi = Р2ном/П = 3 - 103/0,8 = 3750 Вт.
Потери
ZДР = Pt - Р2ном = 3750 - 3000 = 750 Вт.
Электрические потери
ДРЭ.Я = 2ДР/2 = 750/2 = 375 Вт.
Сопротивление обмотки якоря
Ря = ДЛя/П„ом- 375/153 = 1,66 Ом.
2.8. ОСНОВНЫЕ ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ
ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Характеристика холостого хода
Характеристика холостого хода (XX) представляет зависи-
мость ЭДС якоря от тока возбуждения при XX генератора
Е(1В) ПРИ 7 = 0, Р2 = 0. Поскольку при постоянной частоте враще-
ния (л = const) ЭДС якоря согласно (2.7) пропорциональна маг-
нитному потоку полюса, то характеристика XX подобна зави-
симости ФП(1В), называемой магнитной характеристикой ма-
50
шины. Она представляет собой узкую петлю гистерезиса, так
как магнитная цепь машины выполнена из электротехничес-
кой стали, являющейся магнитно-мягким материалом. При-
ближенно ее представляют в виде кривой намагничивания
(рис. 2.12).
Вначале магнитный поток Фп и ЭДС £ возрастают почти про-
порционально току возбуждения 1В. При дальнейшем увеличе-
нии 1в рост магнитного потока (и ЭДС) замедляется - насту-
пает магнитное насыщение.
Магнитная цепь машины рассчитана так, что ее состояние
при 7В * 4.ном соответствует точке Фном на середине "колена”
кривой Фп(4).
При отсутствии тока в обмотке возбуждения в якоре при его
вращении наводится небольшая ЭДС (1-3% 1/ном) эа счет оста-
точной намагниченности магнитной системы машины. Этот
малый остаточный магнитный поток Фост обеспечивает само-
возбуждение генераторов.
Рассмотрим условия и процесс самовозбуждения ге-
нератора параллельного возбуждения при холостом ходе.
Первым условием самовозбуждения является наличие хо-
тя бы очень слабого остаточного магнитного поля. Если при-
вести якорь во вращение, то в обмотке якоря остаточный маг-
нитный поток Фост наведет слабую (несколько вольт) ЭДС
£ост. Однако она достаточна для того, чтобы вызвать в цепи
обмотки возбуждения, подключенной к якорю, начальный ток.
Начальный ток возбуждения увеличивает магнитный поток
Рис. 2.12. Магнитная характе-
ристика машины Фп(^в) или
характеристика холостого хода
генератора Е(1В)
Рис. 2.13. Определение крити-
ческого сопротивления цепи
возбуждения
51
Фп, а вместе с ним увеличивается и ЭДС якорной обмотки.
Поэтому ток возбуждения продолжает увеличиваться, магнит-
ный поток и ЭДС снова возрастают и т. д. В этом и заключает-
ся процесс самовозбуждения, который заканчивается, когда
падение напряжения в обмотке возбуждения становится рав-
ным ЭДС якоря, т. е. £ = RB/Bi (рис. 2.13).
Вторым условием самовозбуждения является совпадение по
направлению возбуждаемого и остаточного магнитных пото-
ков. Если напряжения на зажимах вращающегося якоря не
возникает, то необходимо изменить направление вращения ма-
шины, или пересоединить концы обмотки возбуждения.
Третье условие самовозбуждения определяет значение со-
противления RB в цепи возбуждения, т. е. угол наклона а пря-
мой иЛ = RB1B к оси абсцисс. Если уменьшить 1в, например введя
реостат в цепь возбуждения, то точка пересечения А сместит-
ся влево. При достаточно большом сопротивлении цепи воз-
буждения, называемом критическим (RBjq>), напряжение
на зажимах генератора неустойчиво и практически не превы-
шает ЭДС £ост. Таким образом, по третьему условию самовоз-
буждения, сопротивление цепи возбуждения генератора по-
стоянного тока должно быть меньше критического.
Внешняя характеристика
Внешняя характеристика генератора постоянного тока пред-
ставляет зависимость напряжения на зажимах генератора от
тока нагрузки U(I) при n = const. Аналитически эта характерис-
тика описывается уравнением электрического состояния (2.2).
Внешние характеристики генераторов зависят от способа их
возбуждения.
Генератор независимого возбуждения
Схема генератора независимого возбуждения приведена на
рис. 2.14. Реостат возбуждения в этом случае включают по схе-
ме потенциометра с выводом средней точки, чтобы изменять
не только значение, но и направление тока возбуждения и тем
самым изменять направление ЭДС якоря и полярность напря-
жения на его зажимах.
Внешнюю характеристику этого генератора снимают при
1В.НОМ = const. Она представляет (рис. 2.15) слегка наклонную
прямую. Из уравнения для цепи якоря U = Е - R„I следует, что
напряжение нерегулируемого генератора (£ = const) с увеличе-
52
и
Рис. 2.14. Схемы генератора
независимого возбуждения
Рис. 2.15. Внешние характерис-
тики генератора независимого
возбуждения
нием тока нагрузки снижается из-за падения напряжения в
обмотке якоря. Снижение напряжения от XX Ux = Е до номи-
нального CJH0M составляет 6-12% Ux. При КЗ во внешней цепи
якоря ток превышает номинальный в десятки раз: U = 0,1К =
= E/RH = 10-5- 20ZHOM. Такой ток опасен для коллектора, щеток
и обмотки. Электрическую машину защищают от токов КЗ
быстродействующими реле и контакторами.
Перегрузка током I = (2-2,5) ZH0M допускается лишь кратко-
временно (несколько секунд), когда нагрев машины не успе-
вает достичь опасного состояния, а искрение неинтенсивно.
Если устанавливать различные постоянные значения 1В, на-
пример IB < ZB<H0M, то и значения ЭДС Е будут разные. При этом
получают семейство внешних характеристик для разных токов
возбуждения. Из рис. 2.15 видно, что в генераторе независимо-
го возбуждения можно плавно регулировать током возбужде-
ния напряжение от нуля до номинального. Постоянство напря-
жения генератора постоянного тока можно поддерживать так-
же регулированием тока возбуждения. Это делается с помощью
автоматических регуляторов.
Генератор параллельного возбуждения (рис. 2.16)
Внешняя характеристика генератора параллельного возбуж-
дения U(I) при RB = const и п = const (кривая 2 на рис. 2.17)
проходит ниже, чем при независимом возбуждении (прямая 1).
Это объясняется тем, что с увеличением тока нагрузки I умень-
шается напряжение U на зажимах генератора за счет падения
напряжения в обмотке якоря. Так как обмотка возбуждения
53
Рис. 2.17. Внешняя характе-
ристика генератора парал-
лельного возбуждения
Рис. 2.16. Схема генератора параллельного возбуждения
подключена к зажимам генератора (см. рис. 2.16), то ток возбуж-
дения IB = U/RB также уменьшается и, следовательно, умень-
шается магнитный поток полюсов Фп и ЭДС Е. Из уравнения
для цепи якоря U = Е - КЯ1Я следует, что напряжение генерато-
ра параллельного возбуждения с увеличением тока нагрузки
снижается не только из-за падения напряжения в обмотке яко-
ря (как в генераторе независимого возбуждения), но также
из-за уменьшения ЭДС Е. Снижение напряжения при номи-
нальной нагрузке составляет 10-20% (7Х.
У генератора параллельного возбуждения при уменьшении
сопротивления нагрузки ток I будет увеличиваться до опреде-
ленного значения, называемого критическим /кр = 1,5 +
2,5 /Ном- При дальнейшем уменьшении сопротивления нагруз-
ки ток I начинает уменьшаться, так как уменьшение тока
возбуждения приводит к размагничиванию генератора. При КЗ
машина практически будет размагничена и установившийся
ток КЗ /ку определяется лишь действием ЭДС якоря, созда-
ваемой потоком остаточного намагничивания. Вследствие
того, что эта ЭДС небольшая, ток 1ку в большинстве случаев
невелик и не превышает номинального значения. Однако в
переходном режиме при внезапном КЗ вследствие медленного
изменения магнитного потока и ЭДС ток КЗ может превысить
номинальное значение в несколько раз, что может вызвать
сильное искрение щеток. Поэтому эти генераторы снабжают
реле, которое отключает цепь якоря как только ток якоря до-
стигнет больших значений.
54
Генератор смешанного возбуждения
В генераторе смешанного возбуждения (рис. 2.18) путем
соответствующего подбора числа витков последовательной об-
мотки удается получить практически постоянное напряжение
при изменениях тока нагрузки (кривая 1 на рис. 2.19). С этой
иелыо последовательную и параллельную обмотки возбужде-
ния включают согласно, при этом их магнитные потоки склады-
ваются. В этом случае ЭДС от магнитного потока последова-
тельной обмотки компенсирует падение напряжения в обмот-
ке якоря и уменьшение ЭДС от снижения тока возбуждения.
При встречном включении обмоток напряжение генератора при
нагрузке резко падает (см. кривую 2 на рис. 2.19). Такая внеш-
няя характеристики необходима, например, при электродуго-
вой сварке для постоянства тока при колебаниях сопротивле-
ния цепи вследствие изменения длины дуги.
Рис. 2.18. Схема генератора
смешанного возбуждения
Рис. 2.19. Внешние характеристики генератора
смешанного возбуждения
Генераторы последовательного возбуждения
Эти генераторы имеют внешнюю характеристику, сходную с
характеристикой XX. Они не нашли широкого применения
из-за непостоянства выходного напряжения, поэтому их харак-
теристики не рассматриваются.
Регулировочная характеристика
Регулировочная характеристика генератора постоянного то-
ка представляет зависимость тока возбуждения от тока на-
грузки 1В(1) при U = UK0M = const. Из внешней характеристики
55
Рис. 2.20. Регулировочные характеристики генера-
тора при различных схемах включения его обмо-
ток возбуждения:
1 — независимое (параллельное) возбуждение;
2 - смешанное возбуждение при согласном вклю-
чении обмоток; 3 — смешанное возбуждение при
встречном включении обмоток
ГПТ видно, что с ростом тока нагрузки напряжение на зажимах
генератора падает. Его можно поддержать постоянным, изме-
няя ЭДС Е током возбуждения 1В. Регулировочная характе-
ристика генератора параллельного возбуждения имеет тот же
вид, что и для генератора независимого возбуждения (кри-
вая 1 на рис. 2.20). С увеличением тока нагрузки ток возбуж-
дения несколько увеличивают, чтобы скомпенсировать паде-
ние напряжения в обмотке якоря. Регулировочная характерис-
тика генератора смешанного возбуждения зависит от вида
внешней характеристики. При достаточной МДС последова-
тельной обмотки возбуждения, когда напряжение генератора
практически постоянно при изменениях тока нагрузки (см.
кривую 1 на рис. 2.19), регулировочная характеристика имеет
вид кривой 2 на рис. 2.20. У генераторов смешанного возбуж-
дения при встречном включении обмоток, имеющих наиболь-
шее изменение напряжения при изменениях тока нагрузки
(см. кривую 2 на рис. 2.19), регулировочная характеристика
имеет вид кривой 3 на рис. 2.20.
Задача 2.2. Генератор постоянного тока (ГПТ) параллельного
возбуждения имеет следующие данные: номинальная мощ-
ность РНом ~ 16,5 кВт, номинальное напряжение ^ном ~ 115 В,
номинальная частота вращения пном = 1460 об/мин, сопротив-
ление обмотки якоря в нагретом состоянии Ря = 0,0424 Ом, со-
противление цепи возбуждения R3 = 20,6 Ом, число полюсов
2р = 4.
Определить:
1. Относительное снижение напряжения ГПТ при переходе
от XX к номинальной нагрузке и построить рабочий участок
внешней характеристики;
2. КПД генератора;
3. Электромагнитный момент генератора в номинальном ре-
жиме.
56
Рис. 2.21. Схема замещения генератора
постоянного тока Д 5
Механическими и магнит- _____________.4—п
ними потерями пренебречь.
Решение 1. Схема замещения ГПТ параллельного возбуж-
дения изображена на рис. 2.21.
Из схемы замещения ток якоря
(я.ном = ^В.НОМ + ^НОМ e ^НОМ / + -Рном / ^ном =
= 115/20,6 + (16,5 • 103)/115 = 149,1 А.
ЭДС генератора
Е - 1/ном+1?я1яном = 115 + 0,0424 • 149,1 = 121,3 В.
При XX напряжение Ux будет равно ЭДС генератора, т. е.
Пх = Е.
Относительное снижение напряжения ГПТ при переходе
от XX к номинальной нагрузке
ди»(ах-[/ном)/1/ном- 100% = (121,3-115)/115- 100% = 5,5%.
Внешняя характеристика ГПТ построена по двум точкам, соот-
ветствующим XX и номинальному режиму (рис. 2.22).
При XX:
U* = Дюм = 0*
В номинальном режиме:
^ном = 115 В; 1НОМ = РНом / ^ном = 143,5 А.
У,8
1‘ис. 2Л2. Внешняя характеристика генератора
параллельного возбуждения
*3,5 1,А
2. К ГПТ от приводного двигателя подводится механическая
мощность:
= ^мех = ^эм + ДРмех + А^магн •
Так как
ДРмех = О и АРмагн =
ТО
Рмех = Рэм = = 121,3-149 = 18,1 кВт.
КПД генератора
П = Р2/Рх = 16,5/18,1 * 0,91.
3. Электромагнитный момент
“ 9,55 • Рэм / пном = 9,55 • (£ ^я.ном)^лном а
= 9,55- 18100/1460^ И Н-м.
Задача 2.3. * Характеристика XX генератора постоянного то-
ка независимого возбуждения задана в табл. 2.1. В табл. 2.2
приведены значения параметров генератора и нагрузки: ток
возбуждения 1В9 сопротивление обмотки якоря в нагретом со-
стоянии Ря, сопротивление нагрузочного устройства Рн, на-
пряжение на нагрузке (7Н. Определить для каждого варианта
в соответствии с табл. 2.2 неизвестный параметр.
Ответы: 1. UH = 97 В; 2. Ян = 9,5 Ом; 3. Яя = 0,4 Ом; 4. IB = 1 А.
Таблица 2.1
Е, В 10 100 160 200 240 250
/в, А 0 0,3 0,4 0,5 0,7 1
Таблица 2.2
№ варианта исходных данных
Параметры _________________:_____________________
1 2 3 4
1в, А 0,3 0,4 0,5 ?
Ея, Ом 0,3 0,5 7 0Л
Ra, Ом 9,7 7 19,6 12
Uh, В 7 152 196 240
58
Задача 2.4. Генератор постоянного тока параллельного воз-
буждения при напряжении U = 220 В имеет ток в нагрузке
1Н = 19,3 А. Сопротивление обмотки возбуждения RB = 314 Ом.
Характеристика XX генератора задана в табл. 2.1. Определить
сопротивление иепи якоря.
Ответ. Яя * 1,1 Ом.
Задача 2J5. Генератор независимого возбуждения имеет сле-
дующие номинальные данные: мощность Рном = 200 кВт, на-
пряжение (7Н0М = 2^0 В, частоту вращения лном = 2850 об/мин.
Сопротивление обмотки якоря в нагретом состоянии Ря =
= 0,02 Ом, сопротивление обмотки возбуждения RB = 180 Ом.
Определить момент, который развивает приводной двигатель
для обеспечения номинальной работы генератора, и КПД ге-
нератора (механическими и магнитными потерями пренебречь).
Ответ. Мном = 721 Нм, п = 0,93.
Задача 2.6. Генератор постоянного тока с параллельным воз-
буждением имеет следующие номинальные данные: мощность
РНом “ 5 кВт> напряжение [Уном « 230 В, частоту вращения лном =
® 1450 об/мин. Сопротивление обмотки якоря в нагретом со-
стоянии R* - 0,635 Ом, сопротивление обмотки возбуждения
R3 = 91 Ом, магнитные и механические потери ДРХ = 0,052РНОМ.
Определить ток якоря, ЭДС, механическую мощность и КПД
в номинальном режиме.
Ответ. 1Я = 24,2 А; Е = 245,4 В; Рх = 6215,9 Вт; п = 0,8.
2.9. ПУСК ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Пуском называют процесс разгона якоря двигателя от непод-
вижного состояния до установившегося значения частоты вра-
щения, когда Мвр = Мс. В процессе пуска вращающий момент
должен быть больше момента сопротивления Мвр > Мс. Пуск
характеризуется: 1) кратностью пускового тока 7п/^ном5 2) крат-
ностью пускового момента Мп/Мном; 3) временем пуска tn.
При пуске двигателя необходимо: обеспечить надлежащее зна-
чение пускового момента и предотвратить возникновение
чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя: 1) прямой, при кото-
ром обмотка якоря непосредственно подключается к сети;
2) реостатный с помощью пускового реостата, включаемого по-
следовательно в цепь якоря; 3) при пониженном напряжении,
подводимом к якорю.
59
При прямом пуске в первый момент при л « 0 в якоре не на-
водится противо-ЭДС (Е = 0) и согласно (2.5) начальный пус-
ковой ток ограничивается только малым внутренним сопро-
тивлением обмотки якоря.
/п = « (Ю*30)/ном.
«я
(2.12)
Такой большой ток вызывает опасное искрение на коллекторе
(см. § 25) и чрезмерно большой пусковой момент Мп = смФп/п, со-
здающий рывок или удар на валу, отрицательно воздействую-
щий на передачу и рабочий механизм, приводимый во враще-
ние двигателем. На рис. 2.23 приведены кривые изменения во
времени тока якоря, вращающего момента, ЭДС и частоты вра-
щения двигателя при прямом пуске и постоянном моменте со-
противления. В первый момент пуска возникает большой ток
якоря и вращающий момент, а затем по мере разгона якоря
двигателя возрастает его противо-ЭДС и, следовательно,
уменьшаются ток и момент, развиваемый двигателем. Когда
вращающий момент становится равным моменту сопротивле-
ния на валу, возрастание частоты вращения прекращается
(л = const). Прямой пуск применяется для двигателей малой
мощности (до 1 кВт), у которых сопротивление Rn относитель-
но велико, разгон происходит быстро (tn < 1 с) и обмотка якоря
не успевает нагреться, а толчок момента оказывается сравни-
тельно небольшим.
Наибольшее распространение получил реостатный пуск.
Для ограничения пускового тока в цепь якоря двигателя вклю-
чают специальный пусковой реостат, сопротивление которого
Rn выбирают с таким расчетом, чтобы пусковой ток не превы-
шал (2 - 2,5)/ном. Пусковой реостат предназначен для крат-
Рис. 2.23. Изменения |’я и M(t)t п и E(t) при пуске дви-
гателя постоянного тока
60
ковременной работы, поэтому по мере увеличения частоты вра-
щения двигателя пусковой реостат выводят, что вызывает рост
тока и вращающего момента, превышающего момент сопро-
тивления, и дальнейшее возрастание частоты вращения. Пус-
ковые качества двигателя тем выше, чем больше его пуско-
вой момент при пусковом токе, не превышающем допустимый.
Пуск происходит быстро и легко, если двигатель развивает пус-
ковой момент, существенно превышающий момент сопротив-
ления на валу. Поэтому пуск производят при максимальном
магнитном потоке, для чего перед пуском необходимо пол-
ностью вывести регулировочный реостат RB в цепи возбуж-
дения.
Количество ступеней пускового реостата и значения их со-
противлений рассчитываются таким образом, чтобы при над-
лежащих интервалах времени переключения ступеней мак-
симальные и минимальные значения 1я на всех ступенях полу-
чились одинаковыми. Верхний предел выбирается из условий
ограничения пускового тока и надежной коммутации, ниж-
ний - из условия создания на валу двигателя необходимого
вращающего момента. По условиям нагрева ступени реостата
рассчитываются на кратковременную работу. Пусковые реоста-
ты применяются с ручным или автоматическим управлением.
В двигателях большой мощности пусковой реостат стано-
вится громоздким и вызывает значительные потери энергии,
особенно при частых пусках. В этом случае можно использо-
вать безреостатный пуск при пониженном напряжении, подво-
димом к якорю двигателя от источника с регулируемым на-
пряжением, например, в системах генератор - двигатель (Г-Д).
Среди всех электродвигателей двигатели постоянного тока
имеют лучшие пусковые качества. При относительно неболь-
шом пусковом токе (2-2,5) 1ном они могут создавать достаточно
большой пусковой момент (2,5-4) Мном- Это обеспечивает
быстрый разгон приводимых ими механизмов.
Вопрос 2.7. Какое назначение имеет пусковой реостат?
Варианты ответа:
2.7.1. Ограничить пусковые ток и момент.
2.7.2. Уменьшить время пуска.
2.7.3. Увеличить пусковой момент.
2.10. СВОЙСТВО САМОРЕГУЛИРОВАНИЯ
Свойство саморегулирования заключается в том, что все
электродвигатели обладают способностью автоматически созда-
вать вращающий момент Мвр, равный моменту сопротивления на
валу и при этом частота вращения устанавливается постоянной.
Электромеханический процесс саморегулирования проте-
кает следующим образом. Пусть двигатель работал в устано-
вившемся режиме при равенстве вращающего момента и мо-
мента сопротивления с постоянной частотой вращения: MBpi =
= Мс1, п •= п1. При увеличении момента сопротивления МС2 >
> MBpi “ МС1 в соответствии с известным уравнением механи-
ки вращения
Мвр-Мс-J—, (2.13)
dt
где J - момент инерции вращающихся масс, появляется отри-
цательное ускорение dQ/dt < 0 и частота вращения якоря
n ” 60Q/2n начинает падать.
Но вместе с частотой вращения падает противо-ЭДС Е «
= С£лФп, а ток якоря 1Я « ([7-Е)/1?я и вращающий момент Мвр «
=Чм’:смФп^ возрастают. Когда вращающий момент станет
равным возросшему моменту сопротивления “ МС2,
dQ/dt станет равным нулю и установится новое установившееся
состояние, при котором п3<п1.
Вопрос 2.8. Как изменится частота вращения двигателя при
уменьшении момента сопротивления?
Варианты ответа".
2.8.1. Уменьшится.
2.8.2. Не изменится.
2.8.3. Увеличится.
2.11. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И РЕГУЛИРОВАНИЕ
ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели параллельного и независимого возбуждения
Схема двигателя параллельного возбуждения приведена на
рис. 2.24. В цепь якоря включены пусковой РП и регулировоч-
ный РЯ реостаты, в цепи возбуждения - реостат РВ для регули-
62
Рис. 2.24. Схема двигателя параллельного
возбуждения
рования тока возбуждения. Обмотка возбуждения этого двига-
теля может быть включена на напряжение другого источника.
Независимое возбуждение расширяет возможности регулиро-
вания частоты вращения двигателя.
Эксплуатационные свойства двигателей постоянного тока
определяются механическими характеристиками - зависимо-
стью частоты вращения л от вращающего момента Мвр Мэм =
= М двигателя, г. е. л(М) при U » const, Яр.в «= const, 7?р-я = const.
Выведем аналитическое выражение механической характе-
ристики двигателя и выясним возможности регулирования час-
тоты его вращения. Из выражения для ЭДС (2.8а) найдем, что
Е U I -®я^я
П = ------- » -------- = ----- 1-------
сЕфп сЕфп с£фп\ и
(2-14)
Заменив 1Я на М/(смФп) получим уравнение механической
характеристики:
и I яям \ / м \
л =------- 1-------) = п0 11-------, (2.15)
С£ФП ' UCM*nl \ Мп0 /
где
и
л0 ------
сЕфп
(2.16)
- частота вращения при ’’идеальном” XX (Мс « 0); Мпо =
= cM^*n4i = СмФпи/Кя - начальный пусковой момент при пус-
ковом токе 1П = 1//Ля.
Таким образом, механическая характеристика двигателя па-
раллельного возбуждения представляет наклонную прямую,
63
Ином Мп И
Рис. 2.25. Механические характерис-
тики двигателей параллельного и
независимого возбуждения
проходящую через точку XX (п0) на оси ординат (рис. 2.25) и
точку пускового момента Мпд (на рис. не показана) на оси
абсдисс.
Механическая характеристика двигателя при номинальных
напряжении и магнитном потоке (U = 1ГНОМ, *п = *ном) и от‘
сутствии пусковых и регулировочных реостатов (Rn « 0, £рЯ = О,
Ярв = 0) называется естественной. Поскольку при пуске без
реостата (Rn = 0) Мпо » Мп, точка Мпо выходит за пределы гра-
фика. Естественная характеристика проходит через точку но-
минального режима лном, Мном. При М - Мном снижение час-
тоты вращения пропорционально отношению R„ /яном^^ном
и составляет всего 3-7% от п0. Естественная механическая ха-
рактеристика двигателей параллельного и независимого воз-
буждения является ’’жесткой”.
При пуске двигателя с пусковым реостатом (J?n # 0, см.
рис. 2.25) пусковой момент ограничивается до допустимого зна-
чения Мп, а разбег происходит по пусковой (искусственной)
механической характеристике. Когда пусковой реостат выво-
дят (Rn = 0), двигатель переходит на естественную характе-
ристику.
Как указывалось, вследствие свойства саморегулирования,
частота вращения устанавливается постоянной тогда, когда
вращающий момент двигателя равен моменту сопротивления
рабочего механизма. Значение установившейся частоты вра-
щения легко определить по точке пересечения механической
характеристики двигателя с механической характеристикой
механизма Мс (см. рис. 2.25), которая может иметь различный
вид. Очевидно, что при изменении вида механической харак-
теристики двигателя будет изменяться частота вращения ис-
полнительного механизма.
Рассмотрим способы регулирования частоты враще-
ния двигателя постоянного тока при постоянном моменте со-
64
противления (см. рис. 2.25), который имеют, например, лебедки,
транспортеры, подъемники. Как следует из выражения (2.14)
частоту вращения можно регулировать тремя способами:
1) реостатным - изменением суммарного сопротивления це-
пи якоря (₽рл = var); 2) полюсным - изменением магнитно-
го потока полюсов (Яр,в = var); 3) якорным - изменением на-
пряжения, подводимого к якорю (LT = var).
Реостатное регулирование частоты вращения осуществляют
введением реостата РЯ в цепь якоря. Механическая характе-
ристика становится круто падающей (см. рис. 2.25, где вместо
Rn введено Ярл). При заданной зависимости Мс(п) частота
вращения падает тем значительнее, чем больше Яр>я и Мс. Оче-
видно, данный метод позволяет уменьшать частоту вращения
двигателя.
Проследим за электромеханическим переходным процессом
изменения частоты вращения. При введении реостата РЯ ток
якоря и вращающий момент падают, вращение двигателя на-
чинает замедляться. Но при этом уменьшается противо-ЭДС,
а ток и момент возрастают. Когда вращающий момент снова
сравняется с моментом сопротивления, переходный процесс
закончится и установится пониженная частота вращения.
При Мс = const ток якоря будет прежним, поэтому электричес-
кая мощность Рэ = UI не изменится, а механическая мощность
Рмвх s MQ уменьшится. КПД двигателя резко уменьшится.
Реостатное регулирование - не экономичное, его применяют
только для двигателей небольшой мощности.
Полюсное регулирование частоты вращения осуществляется
изменением магнитного потока за счет регулирования тока
возбуждения с помощью реостата РВ в цепи возбуждения. В со-
ответствии с формулой (2.16) частота вращения при XX обрат-
но пропорциональна магнитному потоку, который определя-
ется током возбуждения. При значительном уменьшении по-
тока возбуждения ток якоря 1Я и частота вращения ненагру-
женного двигателя резко увеличиваются, что может привести
к механическому повреждению двигателя. Поэтому двигатели
снабжают аппаратурой автоматической защиты, которая от-
ключает их от сети при чрезмерном уменьшении тока возбуж-
дения.
Механические характеристики двигателя при различных зна-
чениях магнитного потока показаны на рис. 2.26. Каждому
значению магнитного потока соответствуют свои значения п0
65
Рис. 2.26. Механические характеристики дви-
гателей параллельного и независимого воз-
буждения при различных значениях магнит-
ного потока возбуждения
и Мп. Если момент сопротивления на валу Мс(п) меньше номи-
нального, то при уменьшении магнитного потока частота вра-
щения возрастает.
Рассмотрим электромеханический переходный процесс уста-
новления нового значения частоты вращения. Вместе с не
большим уменьшением магнитного потока уменьшается и
противо-ЭДС Е якоря. Но при этом резко возрастает ток якоря
/я = (U- Е)/«я и вращающий момент становится больше проти-
водействующего. Частота вращения двигателя увеличивается,
ЭДС возрастает, ток и момент падают. При равенстве момен-
тов устанавливается повышенное значение частоты вращения
при большем токе якоря.
При нагрузке на валу, близкой к номинальной, полюсное ре-
гулирование применять нельзя, так как с уменьшением маг-
нитного потока ток якоря превысит номинальный. Поэтому
регулирование можно производить лишь в области, располо-
женной выше естественной характеристики, что позволяет
только повышать частоту вращения двигателя.
Полюсное регулирование является экономичным, так как
из-за относительно малой мощности обмотки возбуждения не-
большими оказываются и дополнительные потери мощности в
регулировочном реостате и, следовательно, КПД двигателя
практически не изменяется.
Якорное регулирование частоты вращения безреостатным
изменением напряжения на якоре осуществимо только при
независимом возбуждении, так как при параллельном возбуж-
дении одновременно изменялся бы и магнитный поток, что
привело бы к изменению тока якоря, но не частоты вращения.
От источника регулируемого напряжения (ИРН) на якорь дви-
гателя независимого возбуждения (ДНВ) (рис. 2.27) подается
напряжение, которое можно плавно изменять от нуля до номи-
66
Рис. 2.27. Схема двигателя независимого
возбуждения с якорным регулированием
Рис. 2.28. Механические харак-
теристики двигателя при
якорном регулировании
нального и обратно с переменной полярностью. При якорном
регулировании двигателя пусковой реостат не нужен, так как
пуск начинается с малого напряжения. Механические харак-
теристики двигателя при различных значениях напряжения
на якоре и /в = const представляются параллельными прямыми
(рис. 2.28).
Электромеханический переходный процесс при якорном регу-
лировании происходит следующим образом. Вследствие, на-
пример, уменьшения напряжения на якоре до 17*< UH0M умень-
шаются ток якоря и вращающий момент. Начинается замедле-
ние вращения, при котором противо-ЭДС уменьшается, а ток
и вращающий момент возрастают. При равенстве моментов
Мвр = Мс замедление прекращается. Если момент Мс не изме-
нился, то ток якоря будет прежним.
В качестве ИРН может быть использован генератор незави-
симого возбуждения. В этом случае собирают систему машин
Г-Д, в которую, кроме генератора Г и двигателя Д входит дви-
гатель привода генератора и возбудителя их магнитных си-
стем. В последнее время широкое применение получили си-
стемы, в которых генератор заменяется управляемым выпря-
мителем. По сравнению с системой Г-Д такие установки имеют
меньшую массу и больший КПД. Для регулирования напряже-
ния находят применение системы, в которых постоянное по
значению и направлению напряжение периодически подает-
ся на якорь в виде отдельных импульсов: широтно-импульсное
и частотно-импульсное регулирование.
67
Двигатели последовательного возбуждения
Схема двигателя последовательного возбуждения приведе-
на на рис. 2.29. В этом двигателе при разомкнутом выключате-
ле В ток якоря и ток возбуждения один и тот же. Поэтому с
изменением нагрузки в двигателе изменяются магнитный по-
ток полюсов и, следовательно, частота вращения.
Уравнение механической характеристики двигателя после-
довательного возбуждения можно получить из формулы (2.14),
если считать характеристику намагничивания линейной. Тогда
магнитный поток полюса пропорционален току Фп = к^1я, а
момент - квадрату тока:
М —
Подставив это выражение в (2.14) после несложных преобразо-
ваний, получим:
С£*Ф
(2.17)
Таким образом, механическая характеристика двигателя по-
следовательного возбуждения представляет кривую гипербо-
лического типа (кривая 1 на рис. 230) и является ’’мягкой”. При
пуске с реостатом 1?п, ограничивающим пусковой ток и момент
до допустимых значений 1П и Мп, пусковая характеристика (см.
кривую 2 на рис. 2.30) несколько опускается. При небольших
нагрузках частота вращения двигателя резко возрастает - дви-
гатель ’’идет вразнос”, что опасно с точки зрения механичес-
Рис. 2.30. Механические ха-
рактеристики двигателя пос-
ледовательного возбуждения
Рис. 2.29. Схема двигателя последо-
вательного возбуждения
68
кой прочности якоря. Поэтому нельзя допускать работу двига-
теля последовательного возбуждения при XX и при малых
нагрузках (меньше 25-30% номинальной).
Регулирование частоты вращения двигателей последова-
тельного возбуждения производится также тремя способами.
Реостатное регулирование в цепи рабочего тока реостатом
РЯ дает снижение частоты вращения (см. рис. 2.30, где вместо
Rn введено R^). Оно является не экономичным, как и в дви-
гателе параллельного возбуждения.
Полюсное регулирование осуществляется шунтированием
обмотки возбуждения реостатом РВ (см. рис. 2.29). При этом ток
и магнитный поток возбуждения уменьшаются, а частота вра-
щения при небольших нагрузках возрастает. Этот способ регу-
лирования широко применяется в электротяге.
Безреостатное изменение напряжения на якоре позволяет
регулировать частоту вращения вниз от номинального значе-
ния с сохранением высокого КПД, Этот способ широко приме-
няется в тяговых двигателях на электротранспорте, в подъем-
ных устройствах, а регулирование осуществляется путем пере-
ключения нескольких двигателей, работающих на один вал,
с параллельного на последовательное включение их в сеть.
Благодаря ’’мягким” механическим характеристикам двига-
тели последовательного возбуждения применяют в различных
электрических приводах, особенно там, где имеют место изме-
нение нагрузочного момента в широких пределах и тяжелые
условия пуска (крановые установки, тяговый привод и пр.).
Двигатели смешанного возбуждения
В двигателях смешанного возбуждения магнитный поток
создается действием двух обмоток возбуждения - параллель-
ной и последовательной. Обычно обмотки возбуждения вклю-
чают согласно. Магнитный поток двигателя смешанного воз-
буждения за счет последовательной обмотки будет увеличи-
ваться с ростом тока якоря. Увеличение магнитного потока бу-
дет тем больше, чем больше число витков имеет последова-
тельная обмотка. Поэтому двигатель смешанного возбуж-
дения имеет более мягкую механическую характеристику по
сравнению с двигателем параллельного возбуждения, но бо-
лее жесткую по сравнению с двигателем последовательного
возбуждения (рис. 2.31, кривая 3). При слабой последовательной
обмотке она будет приближаться к характеристике двигателя
69
Рис. 2.31. Механические характеристики двига-
телей параллельного (1), последовательного (2)
та смешанного возбуждения с согласным вклю-
чением обмоток (3)
параллельного возбуждения (кривая I), а при сильной - к ха*
рактеристике двигателя последовательного возбуждения
(кривая 2).
Частота вращения в двигателях смешанного возбуждения
обычно регулируеся так же, как и в двигателях параллельного
возбуждения. Достоинством этих двигателей является то, что
они имеют большой пусковой момент и могут работать при XX,
так как частота вращения имеет конечное значение.
Двигатели смешанного возбуждения применяются в усло-
виях, когда требуется большой пусковой момент, быстрое уско-
рение при пуске и допустимы значительные изменения час-
тоты вращения при изменении нагрузки (компрессоры, прокат-
ные станы, тяговый привод и пр.). В двигателях общепромыш-
ленного применения с независимым или параллельным воз-
буждением устанавливают небольшую стабилизирующую
последовательную обмотку для повышения устойчивости ра-
боты.
Задача 2.7. Двигатель постоянного тока (ДПТ) параллельно-
го возбуждения имеет следующие номинальные параметры:
^ном в 220 В, 1Ном = 21,71 А, пном = лх = 740 об/мин. Сопротивле-
ние обмотки якоря в нагретом состоянии Кя = 1,167 Ом, сопро-
тивление цепи возбуждения RB = 310 Ом.
Определить:
1. Сопротивление пускового реостата Rn, который надо вклю-
чить в цепь якоря, чтобы ток якоря при пуске был равен 1П =
= 2,5 /я.НОМ*
2. Добавочное сопротивление Ядоб, которое необходимо вклю-
чить в цепь якоря, чтобы двигатель при неизменном моменте
на валу понизил частоту вращения до п2 = 500 об/мин?
3. Как изменится КПД двигателя при включении Ядоб (меха-
нические и магнитные потери считать равными нулю).
70
4. Построить участки искусственной и естественной механи-
ческих характеристик.
Решение. 1. Схема замещения ДПТ параллельного возбуж-
дения изображена на рис. 2.32.
Ток параллельной обмотки возбуждения
4 = ^ном/^в = 220/310 = 0,71 А.
Номинальный ток якоря
1Я ном = /ном-4 = 21,71 -0,71 = 21 А.
Сопротивление Rn определяем из формулы пускового тока
якоря
= ^НОМ Л*П + «я>; = (^ном/2,5/я ном) “Яя =
= (220/2,5 • 21) - 1,167 = 3 Ом.
2. При включении реостата с добавочным сопротивлением
Ядоб в цепь якоря ток якоря не изменится, так как момент со-
противления, напряжение U и сопротивление RB остаются по-
стоянными. Следовательно
^ном = Ео + («я + ^доб ) ^я ном •
При п2 = 500 об/мин определим ЭДС Е2 якоря. Для этого за-
пишем выражения для Ех (пх = 740 об/мин) и Е2 (п2 =
= 500 об/мин).
Е1 = сЕФпп1- Е3 = с£Фпп2.
В этих выражениях Фп = const, так как U = const и Яв = const.
Разделим первое выражение на второе:
Е./Е, = п,/и,; Е, =Е. (п,/п.).
X А X А 9 X ' X X 9
Рис. 2.32. Схема замещения двигателя
параллельного возбуждения
71
ЭДС £t найдем из уравнения электрического состояния де-
ли якоря
Е. = ^ном - Яя 4 ном = 220 -1,167*21 = 195,5 В,
тогда ЭДС Е3
Е3=Е1 (na/nt) = (195,5 • 500)/740 = 132 В.
Добавочное сопротивление
Ядоб = (14ом -Ьа)/4 ном -«я = (220 -132)/21 -1,167 = 3,023 Ом.
3. Электрическая мощность
р, = Ц.ОМ 4ом = 220 • 21,71 = 4776 В.
Механическая мощность
Ра = Рэм “ Д Рмех “ Д Рмагн •
Так как ДРмагн = 0 и Д Рмех = 0, то Р3 = Рэм = Е1Я.
Механическая мощность при частоте вращения 740 об/мин.
P2(1) = Р,М1 = £14 НОМ = 195,5 • 21 = 4105 Вт.
КПД при частоте вращения 740 об/мин
П1 = Pjd/Pj =4105/4776 = 0,86.
Механическая мощность при частоте вращения 500 об/мин
Р2(2) = РЭМ2 = Z2 /я ном = 132 • 21 = 2772 Вт.
КПД при частоте вращения 500 об/мин
Л 3 = Р2(2)/Р1 = 2772/4776 = 0,58.
Таким образом КПД существенно уменьшился.
4. Механическую характеристику будем строить по двум точ-
кам:
1) идеальный XX;
2) номинальный режим.
В режиме идеального XX
*0 = ^ном = СЕ Фп по •
72
В режиме номинальной нагрузки = сЕФпп1. Отсюда час-
тота вращения при идеальном XX
л0 = Ео / • л t = 220/195,5 • 740 = 834 об/мин.
Номинальный момент
Мном = 9,55 • Р2(1)/ лном « 9,55 • 4105/740 = 53 Н • м.
На рис. 2.33 изображены естественная 1 и искусственная 2
механические характеристики.
Задача 2.8*. В табл. 23 приведены значения параметров дви-
гателя независимого возбуждения: номинальное напряжение
1УН0М, номинальный ток /ном, номинальная частота вращения
лном, сопротивление обмотки якоря в нагретом состоянии Яя,
сопротивление регулировочного реостата в цепи якоря Яр>я, час-
тота вращения якоря при реостатном регулировании лх.
Определить для каждого варианта в соответствии с табл. 2.3
неизвестный параметр, отмеченный знаком ?, при неизменном
моменте сопротивления на валу.
Таблица 23
№ варианта
Параметры ._________________________
1 2 3 4 5
Uhom» В 220 220 220 220 220
Л<ОМ» А 100 100 80 ? 100
пном> об/мин 600 600 ? 900 720
Яя, Ом 0,2 0,2 0,2 0,2 7
^р.я» 0,4 ? 03 1,2 1,2
Пр об/мин ? 420 360 300 240
Ответы: 1.^= 480 об/мин; 2. Яря = 0,6 Ом; 3, лном = 525 об/мин;
4. 4юм = ПО А; 5. Хя = 0,4 Ом. ’
Задача 2.9. ДПТ независимого возбуждения имеет следующие
номинальные данные: [/ном = 220 В, 1Н0М = 40 А, пном =
= 1000 об/мин. Сопротивление обмотки якоря R* = 0,5 Ом.
Как изменяется частота вращения п и ток якоря 1Я при не-
изменном моменте, если подведенное к обмотке якоря напря-
жение уменьшается до 180 В.
Ответ: п = 800 об/мин, 1Я = 40 А.
Задача 2.10. Двигатель постоянного тока имеет следующие
номинальные данные: напряжение t/H0M = 220 В, частота враще-
ния пном = 900 об/мин, ток /ном = 48 А, ток возбуждения /в.ном =
= 1,25 А. Для увеличения частоты вращения якоря в цепь парал-
лельной обмотки возбуждения двигателя введен регулировоч-
ный реостат, обеспечивающий уменьшение тока возбуждения
до 1В = 0,45 /в.ном и ослабление магнитного потока до значения
0,7ФНОМ. Сопротивление обмотки якоря Кя = 0,405 Ом.
Определить: 1) сопротивление регулировочного реостата, вве-
денного в цепь возбуждения; 2) частоту вращения при работе
двигателя с ослабленным магнитным потоком при XX и с мо-
ментом на валу Мс = 0,4Мном.
Ответ: jRp в = 215 Ом; п0 = 1407 об/мин; п = 1341 об/мин.
Задача 2.11. Двигатель постоянного тока независимого воз-
буждения имеет номинальные данные: Рном = 8,8 кВт, UH0M =
= ПО В, лном = 80%. Сопротивление обмотки якоря в нагретом
состоянии Яя = 0,1 Ом. Определить кратность пускового тока
к = (/п/*Ном) ПРИ прямом пуске и в случае, если сопротивление
пускового реостата Яп = 4Яя.
Ответ: к = 11; к' = 2,2.
2.12. ТОРМОЖЕНИЕ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
После отключения двигателя постоянного тока от источни-
ка электрической энергии якорь некоторое время продолжает
вращаться по инерции за счет запасенной кинетической энер-
гии. Для того чтобы быстро остановить вращающийся дви-
гатель, осуществляют торможение как с помощью механичес-
ких тормозов, так и электрически. Сущность электрических
способов торможения состоит в том, что электрическая машина
переводится из двигательного в генераторный режим и, следо-
вательно, создается электромагнитный момент, направленный
против вращения.
Различают три способа электрического торможения: динами-
ческое, рекуперативное и противовключением.
Динамическое торможение. Для того чтобы осуществить ди-
намическое торможение, якорь двигателя отключают от сети
и замыкают на резистор Ядт. Обмотка возбуждения остает-
ся включенной в сеть. Якорь по инерции будет продолжать
вращаться и в его обмотке наводится ЭДС того же направле-
ния. что и при двигательном режиме. После отключения яко-
ря от сети (U = 0), ток якоря изменит направление (/я =-E/(R* +
+ ЯДТ))> а следовательно, изменится направление электромаг-
нитного момента, который становится тормозным. Машина на-
чинает работать в режиме генератора независимого возбужде-
ния. Если двигатель работал, например, преодолевая момент
сопротивления Мс (точка С на рис. 2.34), а затем был переклю-
чен на динамическое торможение, то при изменении знака
электромагнитного момента произойдет переход в точку D и
торможение будет происходить по механической характеристи-
ке 2. Резистор Рдт включается для ограничения тока.
Рекуперативное торможение. Рекуперативное торможение
будет происходить в том случае, когда у машины, подключен-
ной к сети, частота вращения превысит частоту вращения при
идеальном холостом ходе. При этом ЭДС, наводимая в якоре,
окажется больше напряжения, ток якоря и момент изменяют
направление и будет создаваться тормозной момент. Машина
начинает работать генератором параллельно с сетью, в кото-
рую она отдает энергию, полученную в результате преобразо-
вания кинетической энергии вращающихся масс установки в
электрическую. Механическая характеристика режима реку-
перативного торможения - прямая 1' во втором квадранте (см.
рис. 2.34), которая является продолжением механической ха-
рактеристики двигателя (прямая I). Примером рекуператив-
ного торможения является работа подъемного устройства при
спуске груза, когда двигатель включен с направлением враще-
ния якоря в сторону спуска. Подобный режим возможен также
Рис. 2.34. Механические характерис-
тики двигателя в режиме динами-
ческого и рекуперативного тормо-
жения
75
при движении транспортного средства (троллейбус, трамвай)
под уклон. Рекуперативное торможение не приводит к оста-
новке якоря, а лишь ограничивает частоту вращения.
У двигателей последовательнрго возбуждения рекупера-
тивное торможение осуществить невозможно, так как у них
при увеличении частоты вращения уменьшается магнитный
поток и, следовательно, ЭДС не может быть больше прило-
женного напряжения.
Торможение противовключением. Торможение противовклю-
чением осуществляется в том случае, когда обмотки двигате-
ля включены для одного направления вращения, а якорь под
воздействием внешнего момента или сил инерции вращает-
ся в противоположном направлении. Торможение противо-
включением обычно осуществляется изменением полярнос-
ти подводимого к якорю напряжения. Так как после пере-
ключения полярность напряжения изменилась, то ток якоря
может приобрести недопустимо большое значение (1я =
= -(СЛ-Е)/Яя).
Для ограничения тока в цепь якоря включают резистор с от-
носительно большим сопротивлением, примерно в 2 раза пре-
вышающем максимальное сопротивление пускового реостата.
Энергия, отбираемая из сети и энергия вращающегося якоря
при противовключении преобразуется в теплоту, нагревающую
элементы цепи якоря. При противовключении машина из точ-
ки С механической характеристики 1 переходит на работу в
точку П механической характеристики 2 (рис. 235). Торможе-
ние будет происходить по механической характеристике 2, на-
клон которой зависит от величины сопротивления резистора
в цепи якоря. Точка А соответствует частоте вращения л = 0.
Если требуется только остановить двигатель, то в этот момент
машина должна быть отключена от сети, так как в противном
Рис. 2.35. Механические характеристики
двигателя в режиме торможения проти-
вовключением
76
случае якорь начнет вращаться в противоположную сторону.
Торможение противовключением обычно применяют для ре-
версивных приводов.
Вопрос 2.9. Каким образом можно осуществить динамичес-
кое торможение двигателя постоянного тока последователь-
ного возбуждения?
Варианты ответа:
2.9.1. Цепь якоря с последовательной обмоткой возбужде-
ния отключить от сети и замкнуть на резистор?
2.9.2. Цепь обмотки якоря замкнуть на резистор, а обмотку
возбуждения отключить от якоря и включить в сеть.
2.9.3. Изменить полярность напряжения, подводимого к
якорю.
2.13. ОСОБЕННОСТИ ПРИМЕНЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
С РАЗЛИЧНЫМИ СПОСОБАМИ ВОЗБУЖДЕНИЯ
Двигатели параллельного и независимого возбуждения
имеют ’’жесткую” естественную механическую характеристи-
ку: частота вращения почти не зависит от момента сопротив-
ления на валу. Поэтому они применяются в установках, где
необходимо иметь примерно постоянную частоту вращения.
К таким установкам относятся различного вида станки, про-
катные станы, вентиляторы и т.д. При необходимости глубо-
кого и плавного регулирования частоты вращения используют-
ся двигатели независимого возбуждения, в которых иепь воз-
буждения подключается на неизменное напряжение в то вре-
мя, как напряжение, подводимое к якорю, изменяется в ши-
роких пределах.
Двигатели последовательного возбуждения имеют ’’мягкую”
механическую характеристику. Эти двигатели применяются в
устройствах, где требуются большие моменты при пуске и
наблюдаются частые перегрузки по моменту. Связано это с
тем, что при одних и тех же толчках момента ток и электри-
ческая мощность двигателей последовательного возбуждения
изменяются в меньшей степени, чем двигателей параллель-
ного возбуждения. Двигатели последовательного возбужде-
ния находят применение на транспорте (трамваи, троллейбусы,
электровозы и т.д.) и в подъемных устройствах.
Двигатели смешанного возбуждения в зависимости от МДС
последовательной обмотки применяются или вместо двигате-
77
лей параллельного возбуждения, или вместо двигателей после-
довательного возбуждения. Тяговый двигатель с дополнитель-
ной параллельной обмоткой может работать при холостом хо-
де, ему не угрожает ” разнос”. Эта обмотка обеспечивает пере-
вод двигателя электропоезда в режим рекуперативного тормо-
жения при движении поезда под уклон.
Вопрос 2.10. В каком случае целесообразно использовать дви-
гатель последовательного возбуждения?
Варианты ответа:
2.10.1. При частой работе двигателя без нагрузки на валу.
2.10.2. С целью обеспечения постоянной частоты вращения
при изменении момента сопротивления на валу.
2.10.3. Для создания большого момента.
2.14. МАШИНЫ ПОСТОЯННОГО ТОКА МАЛОЙ МОЩНОСТИ
Двигатели постоянного тока с постоянными магнитами
Двигатели постоянного тока с возбуждением от постоянных
магнитов имеют различное конструктивное исполнение и нахо-
дят все более широкое применение. Многообразие конструк-
ций двигателей с постоянными магнитами объясняется раз-
личными требованиями к их стоимости, эксплуатационным
характеристикам и областью их применения. Важное место в
конструкции двигателей занимают системы возбуждения с по-
стоянными магнитами, выполненные из магнитотвердого ма-
териала. Для получения высокого значения магнитной ин-
дукции магниты предварительно намагничиваются. На рис. 2.36
приведены некоторые варианты конструктивного исполнения
двигателей и показаны силовые линии магнитного поля, со-
зданного постоянными магнитами.
На рис. 2.36, а, в изображены двухполюсные конструкции, на
рис. 2.36, б - четырехполюсная конструкция. Полюса I, ярмо 3
и полюсные башмаки 4 выполняются из магнитомягкого мате-
риала и служат для концентрации и формирования магнит-
ного поля в воздушном зазоре. Полюсные башмаки применяют
для предотвращения размагничивания постоянных магнитов
под действием магнитного поля якоря. Корпус 2 изготавлива-
ется из немагнитного материала, например, алюминия или его
сплавов. Якорь 5 имеет классическую конструкцию и набира-
ется из листов электротехнической стали.
78
Рис. 2.36. Варианты конструктивных схем двигателей с возбуждением от по-
стоянных магнитов:
1 — полюс; 2 — корпус; 3 — ярмо; 4 — полюсный башмак; 5 - якорь; 6 - посто-
янный магнит
При подведении к цепи якоря постоянного напряжения в об-
мотке якоря появляется ток, создающий в результате взаимо-
действия с магнитным потоком постоянного магнита вращаю-
щий момент, под действием которого якорь двигателя приво-
дится во вращение. Для регулирования частоты вращения та-
ких двигателей используется непрерывное или импульсное из-
менение напряжения, подводимого к якорю (см. §2.11).
Двигатели постоянного тока с возбуждением от постоянных
магнитов не требуют источника питания обмотки возбуждения,
имеют небольшие размеры и массу, высокий КПД, хорошие экс-
плуатационные свойства и используются в электроприводах
периферийных устройств ЭВМ, в робототехнике, в медицинском
оборудовании и в устройствах связи. В системах автоматическо-
го регулирования и управления зачастую используются дви-
гатели с постоянными магнитами, имеющие полый или дис-
ковый якорь. Такая конструкция якоря позволяет значитель-
но уменьшить механическую или электромагнитную инер-
ционность якоря. Основной недостаток двигателей с постоян-
ными магнитами - сложность конструкции и высокая стои-
мость постоянных магнитов.
Тахогенераторы постоянного тока
Тахогенератор постоянного тока по принципу действия и кон-
структивному исполнению представляет собой генератор по-
стоянного тока либо с независимым электромагнитным воз-
буждением, либо с возбуждением от постоянных магнитов.
Тахогенератор служит для преобразования частоты вращения
якоря в пропорциональное напряжение. Вал тахогенератора
79
соединяется с валом механизма, частоту вращения которого
нужно измерить. Выходной характеристикой тахогенератора
является зависимость напряжения на зажимах якоря от часто-
ты вращения при постоянном магнитном потоке и постоянном
сопротивлении нагрузочного устройства. Из (2.8 а) следует, что
эта зависимость будет иметь линейный характер, так как при
постоянном магнитном потоке ЭДС якоря прямо пропорцио-
нальна частоте его вращения.
Вентильные двигатели
Вентильные двигатели являются разновидностью двигате-
лей постоянного тока, у которых коллекторно-щеточный узел
заменен бесконтактным полупроводниковым коммутатором,
управляемым датчиком положения. При замене механичес-
кого коммутатора - коллектора со щетками полупроводнико-
вым двигатель постоянного тока становится более надежным
и долговечным, создает меньше радиопомех, может приме-
няться для работы в агрессивных и взрывоопасных средах.
Чтобы исключить скользящий контакт в цепи якоря, для вен-
тильных двигателей обычно применяют обращенную конструк-
цию машины постоянного тока. В этой конструкции обмотка
якоря размещается на неподвижном статоре, а на роторе раз-
мещаются постоянные магниты или полюса с обмотками, воз-
буждаемые постоянным током через контактные кольца. Пер-
вый вариант выполнения ротора является более предпочти-
тельным, так как двигатель будет полностью лишен сколь-
зящих электрических контактов (бесконтактный двигатель).
Для пояснения принципа действия вентильного двигателя
на рис. 2.37 изображена его принципиальная схема. В этом дви-
гателе применяется замкнутая обмотка якоря, как и у обыч-
ных машин постоянного тока. Секции обмотки якоря через
двойной управляемый полупроводниковый ключ присоеди-
няются к сети постоянного тока. В положении ротора, изобра-
женном на рис. 2.37, ток будет в цепи тиристоров I и 5', а ос-
тальные тиристоры в это время закрыты. Под действием вра-
щающего электромагнитного момента, создаваемого в ре-
зультате взаимодействия магнитного потока возбуждения
с током обмотки якоря, ротор будет поворачиваться. После
поворота ротора на 1/8 оборота отключаются тиристоры 1 и 5'и
включаются тиристоры 2 и б'и т. д. В результате для любых мо-
ментов времени распределение тока по обмотке якоря будет
80
Рис. 2.37. Схема вентильного двигателя с замкнутой обмоткой якоря
таким же, как у коллекторного двигателя. Для поочередного
включения тиристоров в зависимости от углового положения
ротора в двигателе предусматриваются специальные датчики
положения оси магнитного потока ротора по отношению к сек-
ции обмотки якоря, например, датчики Холла. Количество
секций обмотки якоря на статоре резко повышает сложность
электронной схемы управления. Поэтому в вентильных дви-
гателях обычно используется не более четырех секций с замк-
нутой или разомкнутой обмоткой якоря.
Таким образом, вентильный двигатель состоит из трех функ-
ционально связанных между собой частей: собственно электро-
двигателя, датчиков положения и полупроводникового ком-
мутатора. В полупроводниковых коммутаторах в качестве клю-
чей, включающих и отключающих секции обмотки якоря, ис-
пользуются тиристоры и транзисторы.
Рабочие характеристики вентильных двигателей практи-
чески совпадают с аналогичными характеристиками двигате-
лей постоянного тока с независимым возбуждением. Для регу-
лирования частоты вращения широкое применение получил
частотно-импульсный способ регулирования с помощью полу-
проводникового коммутатора.
Вентильные двигатели с электронным управлением широко
используются в высококачественных приборах и аппаратах, на-
пример, в электроприводах магнитофонов и видеомагнитофо-
нов, в устройствах обработки информации, в измерительной
технике.
81
Универсальные коллекторные двигатели
Коллекторный двигатель с последовательной обмоткой воз-
буждения, который может работать как от сети постоянного
тока, так и от однофазной сети переменного тока, называется
универсальным коллекторным двигателем. В двигателях па-
раллельного и независимого возбуждения индуктивность об-
мотки возбуждения много больше индуктивности якоря. По-
этому при питании от сети переменного тока магнитный поток
и ток якоря оказываются сдвинутыми по фазе почти на 90°.
Момент двигателя при этом практически равен нулю. В двига-
телях последовательного возбуждения при одновременном из-
менении магнитного потока и тока направление момента не из-
меняется. Поэтому он может работать и на переменном токе.
По конструкции универсальный коллекторный двигатель
подобен машине постоянного тока с последовательной обмот-
кой возбуждения. Отличие состоит лишь в том, что вся маг-
нитная система (статор и якорь) выполняется шихтованной и
обмотка возбуждения делается секционированной. Шихтован-
ная конструкция статора и якоря обусловлена тем, что при ра-
боте на переменном токе их пронизывают переменные магнит-
ные потоки, вызывая значительные магнитные потери.
Схема рассматриваемого двигателя приведена на рис. 2.38.
Обмотка возбуждения состоит из двух катушек, одна из кото-
рых соединяется со щеткой положительной полярности, а дру-
гая - со щеткой отрицательной полярности. Получается сим-
метричная электрическая цепь, обеспечивающая меньшие
радиопомехи. Как видно из схемы, при работе универсального
коллекторного двигателя на переменном токе напряжение
подается не на всю обмотку возбуждения, а только на часть ее.
Рис. 2.38. Схема универсального коллекторного дви-
гателя
82
Этим достигается сближение рабочих характеристик при ра-
боте двигателя от сетей постоянного и переменного тока. При
работе двигателя от сети переменного тока существенно ухуд-
шается коммутация и усиливается искрение под щетками.
Универсальные коллекторные двигатели находят широкое
применение благодаря следующему: могут работать от источ-
ников как постоянного, так и переменного тока; при работе
от любого из источников допускают возможность плавного и
широкого регулирования частоты вращения изменением под-
водимого к двигателю напряжения с помощью якорного или
полюсного регулирования; позволяют получить при промыш-
ленной частоте сети весьма высокую частоту вращения якоря
(30 000-40 000 об/мин), недостижимую при применении асин-
хронных и синхронных двигателей промышленной частоты без
повышающего редуктора.
Универсальные коллекторные двигатели используются во
многих бытовых машинах (пылесосах, швейных машинах, кофе-
молках, электродрелях), в медицинской технике, в автомати-
ческих системах и др.
Вопрос 2.11. Почему двигатели постоянного тока с возбужде-
нием от постоянных магнитов имеют более высокий КПД?
Варианты ответа:
2.11.1. Меньше магнитные потери.
2.11.2. Отсутствуют потери в обмотке возбуждения.
2.11.3. Меньше потери в обмотке якоря.
Вопрос 2.12. Зачем в универсальном коллекторном двигателе
обмотка возбуждения делается секционированной.
Варианты ответа:
2.12.1. Для уменьшения радиопомех.
2.12.2. С целью сближения рабочих характеристик двигателя
при питании его от сети постоянного и переменного тока.
2.12.3. Для улучшения коммутации.
2.15. Комментарии к правильным ответам на вопросы гл. 2
2.1.3 . Широкое применение двигателей постоянного тока объ-
ясняется в первую очередь простыми и надежными способами
регулирования частоты вращения в широких пределах и боль-
шими пусковыми моментами.
2.2.2 . Участки магнитопровода машины постоянного тока вы-
полняются из стали с целью усиления магнитного поля, так как
83
электротехническая сталь обладает высокой магнитной прони-
цаемостью.
233. Если щетки сдвинуть с геометрических нейтралей, то
витки, образующие параллельную ветвь обмотки якоря маши-
ны, будут расположены в зоне действия разных полюсов и, сле-
довательно, под каждым полюсом будут находиться проводни-
ки обмотки якоря, имеющие разное направление тока. В резуль-
тате возникают электромагнитные силы, действующие на
якорь в противоположные стороны. Поэтому электромагнитный
момент двигателя уменьшится.
2.4.1. При уменьшении тока в обмотке возбуждения уменьша-
ется магнитный поток и, согласно (2.8а), уменьшается ЭДС.
2.5.2. Электромагнитные причины искрения щеток на кол-
лекторе связаны с тем, что в коммутируемых секциях будет
наводиться ЭДС, которая создает добавочный ток коммутации.
Если при завершении коммутации добавочный ток в комму-
тируемой секции не равен нулю, то это приводит к появлению
искрения между щеткой и коллектором.
2.6.5. При смешанном возбуждении увеличение тока якоря
приводит к увеличению магнитного потока последовательной
обмотки. Если параллельная и последовательная обмотки
включены встречно, то результирующий магнитный поток бу-
дет уменьшаться.
2.7.1. Пусковой реостат применяют для ограничения пуско-
вого тока 1П = —и при этом согласно (2.10а) уменьшается
пусковой момент.
2.83. При уменьшении момента сопротивления на валу час-
тота вращения двигателя начинает возрастать, возрастает про-
тиво-ЭДС, а ток якоря и вращающий момент уменьшаются.
Когда вращающий момент станет равным моменту сопротив-
ления, установится новое установившееся состояние при боль-
шей частоте вращения двигателя.
2.93. Если цепь якоря отключить от сети и замкнуть на резис-
тор, а обмотку возбуждения включить в сеть, то машина начи-
нает работать в режиме генератора независимого возбуждения
и при этом возникает тормозной электромагнитный момент.
Если же цепь якоря замкнуть на резистор при самовозбужде-
нии, то в этом случае ток в цепи якоря и обмотки возбужде-
ния изменит направление. При этом магнитный поток обмот-
84
ки возбуждения и магнитный поток, созданный остаточной
намагниченностью, будут направлены встречно и самовозбуж-
дение машины не произойдет.
2.10.3. Двигатели последовательного возбуждения целесо-
образно использовать при тяжелых условиях пуска и при пере-
грузках, так как они развивают больший момент при меньшем
токе и мощности, чем, двигатели параллельного возбуждения.
2.11.2. Двигатели постоянного тока с возбуждением от по-
стоянных магнитов имеют более высокий КПД, так как у них
отсутствует обмотка возбуждения и, следовательно, нет элек-
трических потерь в этой обмотке.
2.12.2. При работе универсального коллекторного двигателя
от сети переменного тока напряжение подается на часть об-
мотки возбуждения. Этим достигается сближение рабочих ха-
рактеристик при работе двигателя от сетей постоянного и пере-
менного тока.
Глава третья
АСИНХРОННЫЕ МАШИНЫ
3.1. НАЗНАЧЕНИЕ И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ МАШИН
Асинхронные машины относятся к электрическим машинам
переменного тока, и как любой электромеханический преобра-
зователь, обладают свойствами обратимости, т. е. служат для
взаимного преобразования электрической энергии переменного
тока в механическую энергию или наоборот, механической
энергии в электрическую.
Магнитное поле асинхронной машины создается трехфазным,
двухфазным или однофазным источником переменного напря-
жения. В соответствии с этим различают трех-, двух- или одно-
фазные асинхронные машины.
Трехфазный асинхронный двигатель был разработан в 1889 г.
выдающимся изобретателем, инженером и ученым М.О. Доливо-
Добровольским. Благодаря простоте конструкции, а следова-
тельно, надежности и дешевизне, асинхронные машины полу-
чили самое широкое применение в современных силовых ус-
тановках. Их используют в качестве двигателей различных
85
насосно-компрессорных, кузнечно-прессовых, подъемно-транс-
портных систем, в устройствах электропривода станков и руч-
ного инструмента, в медицинском оборудовании и бытовых
приборах. Примерно 60% вырабатываемой электроэнергии
потребляется асинхронными двигателями, что характеризует
их огромное распространение.
Электротехническая промышленность выпускает асинхрон-
ные двигатели в большом диапазоне мощностей. Предель-
ная мощность специальных асинхронных двигателей - несколь-
ко десятков мегаватт. В индикаторных системах применяются
асинхронные двигатели мощностью от долей ватт. Электри-
ческие машины общего назначения выпускаются в виде серий,
охватывающих определенный диапазон мощностей, частот
вращения и напряжений. Машины одной серии обладают общ-
ностью конструктивных решений и технологии их изготовле-
ния, а также однотипностью применяемых материалов.
В настоящее время наиболее распространенной серией асин-
хронных двигателей является серия 4А, охватывающая ряд
машин мощностью от 0,06 до 400 кВт. Кроме основного исполне-
ния имеется ряд модификаций двигателей с повышенным пус-
ковым моментом, многоскоростные, малошумные и т. д. Выпус-
каются также асинхронные двигатели новой серии ЛИ, кото-
рые имеют улучшенные массогабаритные показатели и харак-
теристики, охватывая диапазон мощностей от 0,025 до 400 кВт.
3.2. УСТРОЙСТВО АСИНХРОННЫХ МАШИН
Асинхронные машины состоят из двух частей: неподвиж-
ной - статора и вращающейся - ротора.
Магнитопровод или сердечник статора представляет собой
полый цилиндр, собранный из отдельных колец (рис. 3.1), изго-
товленных из листов электротехнической стали толщиной
обычно 0,5 мм, причем эти кольца электрически изолируют
друг от друга оксидированием или лакировкой. При сборке
магнитопровода - пакетировании, кольца, полученные штам-
повкой, ориентируют так, чтобы выштампованные пазы обра-
зовывали каналы для укладки проводников обмотки. Собран-
ный пакет колец статора запрессован в корпус - станину, кото-
рый имеет соединительные элементы (лапы, торцовый фла-
нец и т. д.) для крепления к неподвижному жесткому основа-
нию. Обмотку статора выполняют в виде многовитковых кату-
86
Рис. 3.1. Пакет штампованных листов статора
шек, имеющих, как правило, одинаковые размеры. Каждая фа-
за статорной обмотки состоит из нескольких последователь-
но включенных катушек. В качестве примера на рис. 3.2 изобра-
жены катушки простейшей трехфазной обмотки, создающей
двухполюсное магнитное поле; каждая фаза образована тремя
катушками, находящимися в соседних пазах. Такая обмотка
статора с несколькими катушками в каждой фазе обеспечи-
вает распределение магнитной индукции, близкое к синусои-
дальному. Если бы форма торцовых (лобовых) частей катушек
была такой, как на рис. 3.2, то ротор машины нельзя было бы
вставить в статор. Поэтому лобовые части катушек отгибают
и они проходят вдоль торцовой поверхности пакета статорных
колец (рис. 3.3).
Рис. 3.2. Трехфазная обмотка
двухполюсного статора с тремя
катушками в каждой фазе
Рис. 3.3. Внешний вид статора со стороны лобовой части трехфаэной обмотки
87
Ротор асинхронной машины набирают из штампованных дис-
ков, изготовленных также из листов электротехнической ста-
ли, которые запрессовывают на вал, входящий при сборке ма-
шины в боковые подшипниковые щиты.
По конструкции роторной обмотки асинхронные машины де-
лятся на два основных типа: с короткозамкнутым и
фазным ротором.
Обмотки короткозамкнутых роторов выполняются литыми
чаще всего из алюминия или его сплавов. При заливке одновре-
менно отливаются стержни, лежащие в пазах и короткозамы-
кающие кольца с размещенными на их торцах вентиляцион-
ными лопатками (рис. 3.4). Этот тип обмотки, не имеющей ка-
ких-либо выводов, предложил М.О. Доливо-Добровольский.
Ее называют часто ’’беличьим колесом” (рис. 3.5).
Рис. 3.4. Конструкция (а) и условное графическое обозначение (б) ротора с ко*
роткозамкнутой обмоткой:
1 - замыкающие кольца; 2 — вентиляционные лопасти; 3 - вал; 4 — пакет ро-
тора; 5 - стержни обмотки
Рис. 3.5. Короткозамкнутая обмотка типа ’'беличье колесо":
1 - стержни обмотки; 2 - замыкающее кольцо
88
Короткозамкнутые роторы крупных машин и специальных
асинхронных машин с улучшенными пусковыми характерно*
тиками выполняются сварными. Стержни ротора из меди или
латуни привариваются к короткозамыкающим кольцам, имею*
щим отверстия, куда перед сваркой вставляются стержни об-
мотки.
Асинхронные машины с фазным ротором имеют на роторе
обмотку, которая выполняется так же, как и обмотка статора.
Трехфазная обмотка соединяется звездой, выводы ее присоеди-
нены к контактным кольцам (рис. 3.6), поэтому асинхронную
машину с фазным ротором также называют асинхронной маши-
нойс контактными кольцами.
Контактные кольца, опрессованные пластмассой, насажи-
ваются на вал двигателя, они выполняются чугунными или
медными. Выводные концы обмотки ротора подводятся к трем
кольцам через внутреннее отверстие вала ротора.
Токосъемное устройство состоит из щеток и щеткодер-
жателей. Щеткодержатели укреплены на изолированной час-
ти пальца, металлический конец которого ввинчен в прилив
подшипникового щита.
Кольца с помощью щеток подключают к трехфазному реоста-
ту для улучшения пусковых характеристик или для регулиро-
вания частоты вращения ротора. В некоторых сложных электри-
ческих приводах к кольцам ротора подводят регулируемое на-
пряжение от неподвижного источника питания, что также по-
зволяет изменять по желанию частоту вращения ротора асин-
хронной машины. Обычно в рабочем режиме асинхронного
двигателя кольца фазного ротора замыкают накоротко.
Рис. 3.6. Внешний вид ротора (а) и условное графическое обозначение (б) асин-
хронного двигателя с контактными кольцами:
1 - обмотка; 2 - контактные кольца; 3 — вал
89
Рис. 3.7. Общий вид асинхронного двигателя:
1 - вентилятор, закрытый кожухом; 2, 3 - ребра охлаждения, проходящие
вдоль наружной поверхности корпуса; 4 - вентиляционные лопатки, отводя-
щие тепло от торцевых частей обмотки
Наибольшее распространение получили двигатели с коротко-
замкнутым ротором, которые дешевле в изготовлении и надеж-
нее в эксплуатации.
В дальнейшем при рассмотрении свойств асинхронных ма-
шин не всегда будем различать два типа ротора, поскольку
многостержневая (многофазная) обмотка типа ’’беличье коле-
со” эквивалентна по электрическим свойствам трехфазной об-
мотке. Для доказательства эквивалентности нужно разбить все
стержни на три группы и заменить мысленно каждую группу
одним короткозамкнутым витком.
В конструкции асинхронных машин принимают специаль-
ные меры для отвода тепла, выделяемого как в магнитопро-
воде, так и в обмотках ротора и статора. На рис. 3.7 показана
асинхронная машина закрытого исполнения, внешняя поверх-
ность станины которой обдувается вентилятором 1. Вентиля-
тор закрыт кожухом 2, направляющим охлаждающий воздух
вдоль ребер 3 станины. Кроме того, вентиляционные лопатки 4,
отлитые заодно с обмоткой ротора, обеспечивают перемеши-
вание воздуха в закрытом объеме машины, увеличивая интен-
сивность отвода тепла.
Вопрос 1. При изготовлении асинхронных машин электричес-
кая изоляция листов стали друг от друга необходима:
Варианты ответа:
3.1.1. Для пакета статора и пакета ротора.
3.1.2. Только для пакета ротора.
3.1.3. Только для пакета статора.
90
3.3. ВРАЩАЮЩЕЕСЯ МАГНИТНОЕ ПОЛЕ
В основе работы электрических машин переменного тока, в
том числе и асинхронных машин, лежит использование вращаю-
щегося магнитного поля, создаваемого обмоткой статора.
Вращающееся магнитное поле трехфаэной обмотки
Рассмотрим создание вращающегося магнитного по-
ля на упрощенной модели статорной обмотки трехфазного
асинхронного двигателя (рис. 3.8, а). В пазах статора уложены
три катушки, каждая из которых является фазой трехфазной
обмотки и представлена одним витком. Катушки соединены
между собой по схеме звезды (или треугольника) и подключены
к трехфазной сети (рис. 3.8, б). Катушки совершенно идентич-
ны и расположены симметрично, поэтому векторная диаграм-
ма токов будет также симметрична (рис. 3.8, в).
На рис. 3.9, а показаны графики мгновенных значений токов
обмотки статора.
На рис. 3.9, б-г изображены поперечные сечения асинхрон-
ной машины для упрощенной модели трехфазной обмотки
рис. 3.8, а.
Эффект вращения магнитного поля трехфазной обмотки
можно наглядно показать на примере картин результирующе-
го магнитного поля этой обмотки для нескольких моментов
времени, например, при максимуме фазных токов (д, ig и i'c-
Условимся за положительное направление тока принимать ток,
направленный от начала обмотки к ее концу, таким образом в
момент времени t3 ток в катушке А-Х достигает положитель-
ного максимума (рис. 3.9, а) и направлен от зажима А к зажи-
му X (рис. 3.9, б). В тот же момент времени токи в двух других
катушках отрицательны, т. е. направлены от концов катушки
(У и Z) к их началам (В и С). Направления токов в проводни-
ках обмотки показаны на рис. 3.9, б-г знаками креста и точки.
Силовые линии магнитного поля охватывают проводники с
одинаковым направлением тока. В момент времени две маг-
нитные линии этого поля изображены на рис. 3.2, б пунктиром,
а ось симметрии результирующего магнитного поля совпада-
ет с осью симметрии катушки А-Х. Рассмотрим направления
токов в катушках в два последующих момента времени t2 и t3,
соответствующих максимумам токов в катушках B-Y и C-Z
91
Рис. 3.8. Упрощенная модель статорной обмотки (а), схема соединения катушек
(б) и векторная диаграмма токов (в)
Рис. 3.9. Вращающееся магнитное поле трехфазной обмотки:
а - мгновенные значения тока обмотки статора; б, в, г — положение оси
симметрии магнитного поля для моментов времени t х, t2, t3
92
(рис. 3.9, в, г). Выяснив направление токов, легко провести ось
симметрии результирующего магнитного поля катушек. Со-
поставление магнитных полей на рис. 3.9, б-г указывает на
вращение оси симметрии и всей картины магнитного поля. За
один период Т изменения токов магнитное поле делает пол-
ный оборот.
Реверсирование магнитного поля (изменение направления
вращения) осуществляется переключением на зажимах ис-
точника питания двух выводов трехфазной обмотки (например,
В и С). При этом фазы В и С обмотки как бы меняются местами,
т. е. изменяется направление вращения магнитного поля.
На рис. 3.9 ось симметрии магнитного поля вращается по ча-
совой стрелке, при переключении фаз В и С вращение будет
против часовой стрелки.
При проектировании обмотки асинхронных машин добива-
ются того, чтобы закон распределения магнитной индукции В
вдоль воздушного зазора между статором и ротором был бли-
зок к синусоидальному, поэтому вращающееся магнитное поле,
созданное статором, принято упрощенно изображать в виде
эпюры, показанной на рис. 3.10,а.*
Рассмотренное магнитное поле имеет одну пару полюсов
(Р - 1).
На рис. 3.10, б показана линейная развертка эпюры распре-
ИНДУКЦИИ» соответствующая рис. 3.10, а, по-
у енная мысленным рассечением торцовой поверхности по
линии 1-1 с последующим распрямлением поверхностей стато-
ра и ротора.
Вращающееся магнитное поле машины количественно харак-
теризуют потоком Ф вектора магнитной индукции В через
поверхность полюсного деления с площадью т/ (т - полюсное
деление, I - активная длина проводника). Этот магнитный по-
ток называют магнитным потоком полюса Фп.
реальной электрической машине распределение магнитной индукции
вдоль воздушного зазора отличается от идеального синусоидального. Кроме пер-
шие 0СН0ВН0Й) пространственной гармоники магнитного поля появляются выс-
гармонические составляющие. Высшие гармоники магнитного поля при-
Дят к Дополнительным потерям энергии в стальных листах статора, к появ-
допол ВЫСШИХ га₽моник ЭДС и тока в обмотках ротора и статора, что помимо
мепилсИТвЛЬНЫХ потврь эне₽«*и в проводниках обмотки, приводит к неравно-
мм к.™ в₽ащаю1цего момента. Специальными конструктивными приема-
биял “^«н-ной обмоткой с укороченным шагом, скосом пазов и т. д. до-
ются существенного уменьшения высших гармоник магнитного поля.
93
Рис. 3.10. Магнитное поле однофазной обмотки:
а - картина магнитного поля двухполюсной обмотки; б — эпюра распределе-
ния магнитного поля в воздушном зазоре на линейной развертке
Для определения магнитного потока полюса пользуются
средним значением магнитной индукции по площади по-
люсного деления:
Фп “ ®ср
При синусоидальном распределении магнитной индукции с
амплитудным значением Вт, когда ее среднее значение В^ =
- 2Вт/п, магнитный поток полюса определяют соотношением
Фп = - Втх1.
Л
(3.1)
Отметим, что в трехфазной асинхронной машине, включен-
ной в сеть с симметричной трехфазной системой напряжений,
магнитный поток полюса вращающегося магнитного поля
сохраняется неизменным при любом положении оси магнит*
ного поля.
Нетрудно определить частоту вращения магнитного поля:
полный оборот совершается за время, равное периоду измене-
ния токов статорной обмотки Т; за одну секунду число оборо-
тов равно 1/Т, с учетом того, что Т = 1//, (ft - частота токов ста-
тора), частота вращения магнитного поля л,, об/мин, опреде-
ляется формулой
лх = 60Д. (3.2)
Видоизменив обмотку статора, можно получить вращающееся
магнитное поле с несколькими парами полюсов. Схематичес-
ки устройство обмоток для случая р = 2 показано на рис. 3.11, а.
94
<9
Рис. 3.11. Эпюра вращающегося магнитного поля:
а — распределение тока по проводникам обмот-
ки статора; б — схема соединения катушек обмотки
статора; в — эпюра магнитного поля двухполюсной
машины
в)
Фаза трехфазной обмотки статора состоит из двух катушек
(АХ, А'Х'и т. д.), каждая из которых упрощенно, как и на
рис. 3.8, а, представлена одним витком. Катушки фазы соеди-
нены последовательно и полученная симметричная трехфаз-
ная обмотка подключена к трехфазной сети (рис. 3.11, б).
Картина магнитного поля на рис. 3.11, а соответствует момен-
ту времени, когда ток фазы А положителен и имеет максималь-
ное значение.
Внимательно изучив распределение проводников с одина-
ковым направлением тока (рис. 3.11, а), можно увидеть, что
магнитное поле имеет четыре полюса (р = 2). Если проследить
за изменением токов катушек во времени и соответствующим
им положениям осей симметрии результирующего магнитно-
го поля, то нетрудно убедиться, что за время Т магнитное поле
’’повернется” на половину оборота, т. е. в случае р = 2 частота
вращения магнитного поля в 2 раза меньше, чем для р - 1.
Эпюра магнитного поля двухполюсной машины показана на
рис. 3.11, в.
Число пар полюсов можно сделать любым, при этом формула
для частоты вращения магнитного поля будет иметь вид
95
60/x
nx ---------
р
(3.3)
Формула (3.3) не противоречит формуле (3.2), записанной для
случая р - 1.
Условимся, что в обозначениях величин индекс 1 относит*
ся к статору, а 2 - к ротору. Допустимо не ставить индекс для
величины, отношение к статору или ротору которой очевидно.
Например, частота сети /, частота вращения ротора п или угло-
вая скорость ротора Q.
В табл. 3.1 приведены значения частот вращения магнитного
поля статора асинхронного двигателя, включенного в сеть с
частотой / = 50 Гц.
Таблица 3.1. Частоты вращения магнитного поля статора АД
р 1 2 3 4 5
п х , об/мин 3000 1500 1000 750 600
Вопрос З.Х Соответствуют ли приведенные в табл. 3.1 частоты
вращения принятым в США?
Варианты ответа’.
3.2.1. Не соответствуют.
3.2.2. Соответствуют.
3.2.3. Данных для ответа недостаточно.
Вопрос 33. По эскизу торца статора с лобовыми частями об-
мотки (рис. 3.12) определите частоту вращения магнитного по-
ля, на которую рассчитана
машина.
Варианты ответа:
3.3.1. Данных для ответа недо-
статочно.
3.3.2. пх = 1500 об/мин.
3.3.3. пх = 3000 об/мин.
Рис. 3.12. К вопросу 3.2
96
Вращающееся магнитное поле двухфазной обмотки
Вращающееся магнитное поле может быть создано не только
трехфазной обмоткой. В § 3.14 будут рассматриваться асин-
хронные машины малой мощности, вращающееся магнитное
поле которых создается при подключении обмотки в однофаз-
ную или двухфазную сеть. Докажем возможность получения
вращающегося магнитного поля для этих случаев.
Рассмотрим магнитное поле однофазной обмотки, включен-
ной в сеть переменного тока, представленной на рис. 3.13, а од-
ним витком. Две магнитные линии этого двухполюсного маг-
нитного поля показаны для выбранного направления тока в
обмотке. На линейной развертке машины (рис. 3.13, б) сплош-
ной линией изображена эпюра распределения магнитной ин-
дукции в зазоре* для момента времени соответствующего мак-
симальному току в катушке
В(х) » Bmcos л——
(3-4)
Пунктирными линиями показаны эпюры распределения маг-
Статор
Ротор
Рис. 3.13. Магнитное поле однофазной обмотки (а) и эпюра распределения маг-
нитной индукции в зазоре (б) двухполюсной асинхронной машины
* Гармонический закон распределения магнитной индукции в реальной ма-
шине обеспечивается многовитковой распределенной обмоткой.
97
нитной индукции для различных моментов времени
В (х, t) = Вт cos (w t) cos л — .
(3.5)
Полученное уравнение, известное из курса физики, являет-
ся уравнением стоячей волны. Используя простое тригономет-
рическое преобразование
cos a cos ₽ = —cos (а-3) +-i-cos (а + р),
2 2
перепишем уравнение стоячей волны в виде
„ , „ I их \ &т I лх \
В (х, t) -у COS I СО t-I + у COS I Ы t + у I . (3.6)
Последнее выражение показывает, что стоячую волну можно
представить как результат наложения двух ’’бегущих” волн,
перемещающихся в двух противоположных направлениях с оди-
®7П / ЛХ \
наковой угловой скоростью - прямой волны--cos I со t-,
2 у Т I
максимум которой перемещается в сторону положительных зна-
/ лх \
чений х, и обратной — cos ы t +---- , перемещающейся в
2 \ т /
противоположную сторону. Прямая и обратная волны имеют
одинаковые амплитуды, вдвое меньшие амплитуды стоячей
волны.
Представление о стоячей волне, как результате наложения
двух бегущих волн, очень удобно для анализа многих процес-
сов в электрических машинах. Поскольку магнитные поля ’’бе-
гут” в противоположных направлениях, их называют соот-
ветственно прямым и обратным.
При использовании многофазных обмоток с соответствующей
многофазной системой токов создается возможность подавле-
ния одной из волн, а оставшаяся волна создает вращающееся
магнитное поле.
Рассмотрим это явление на примере простейшей двухфазной
обмотки, содержащей в каждой фазе по одной одновитковой
катушке. Оси катушек фаз смещены в пространстве на угол л/2,
98
токи катушек имеют фазовый сдвиг, также равный л/2. Ам-
плитуды токов одинаковы. Стоячие волны магнитной индук-
ции этих катушек описываются уравнениями
Вх (t, х) = Вт cos (ы t) cos л—j,
Ва (*>*)“ вт cos (ut-~ j cos I л —
Разложим обе стоячие волны на прямые и обратные волны
Bi (<> х) = -|— Bmcos^ ) + -^-Bm cos t + л -^-j,
B2(t»x) = ~_BmC0S|b)t“n~j +~ -®mcosl Wf + n—j-Л
Результирующее магнитное поле определяется наложением
этих полей. Можно заметить, что обратные волны находятся в
противофазе и взаимно компенсируются, а прямые волны сум-
мируются
В (г, х) = Bt (t, х) + В3 (t, х) = Вт cos I cot - л -i-
(3.7)
образуя круговое вращающееся магнитное поле.
Для изменения направления вращения магнитного поля
нужно изменить фазу одного из токов на 180°, т. е. переклю-
чить выводы одной из фаз обмоток на зажимах источника пи-
тания. При этом взаимно компенсируются прямые волны, а ре-
зультирующее магнитное поле будет вращаться в сторону об-
ратной волны.
В случае нарушения симметрии расположения катушек или
симметрии системы токов, обратные волны не будут компен-
сироваться полностью, результирующее магнитное поле будет
содержать прямую и обратную волны, амплитудные значения
которых отличаются. При этом вращающееся магнитное поле
создается, но оно будет не круговым, а эллиптическим.
99
Аналитически можно также доказать возможность создания
вращающегося магнитного поля с помощью m-фазной системы
токов. Не приводя доказательства, отметим лишь условия об-
разования кругового вращающегося магнитного поля т-фаз-
ной машины:
1) пространственное смещение осей катушек каждой фазы
симметричной обмотки на угол 360° /т (для двухполюсной ма-
шины) или 360°/рги (в общем случае);
2) углы сдвига фаз симметричной системы синусоидальных
токов этих катушек равны 360*7т.
3.4. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Принцип действия асинхронных двигателей основан на сило-
вом взаимодействии вращающегося магнитного поля с токами,
возникающими в обмотке ротора под действием наведенной
в ней ЭДС.
Наведение ЭДС в обмотке ротора
На рис. 3.14, о показан один из проводников обмотки ротора,
расположенный во вращающемся магнитном поле, созданном
токами статорной обмотки. Линии магнитной индукции пере-
секают проводник, индуцируя в нем ЭДС. Направление ЭДС
определено по правилу правой руки, при этом учтено, что от-
носительное движение проводника в магнитном поле направ-
лено против часовой стрелки.
Возникновение ЭДС в роторной обмотке возможно только в
случае, если ротор и магнитное поле статора вращаются с раз-
ными скоростями, т. е. относительная скорость движения про-
водника в магнитном поле отлична от нуля. Это обстоятель-
Ротир
Ротор
Рис. 3.14. Проводник ротора
[ во вращающемся магнитном
поле статора:
а - наведение ЭДС в про-
воднике ротора; б — воз-
никновение электромагнит-
ных сил
100
ство определяет название электрической машины - асинхрон-
ная (несинхронная), в отличие от синхронной, у которой ротор
вращается со скоростью магнитного поля, созданного статор-
ной обмоткой (гл. 4).
Мгновенная ЭДС прямо пропорциональна относительной
скорости проводника в магнитном поле, а также значению маг-
нитной индукции. Закон изменения магнитной индукции в
воздушном зазоре машины близок к синусоидальному, поэто-
му при дальнейшем рассмотрении процессов будем считать,
что ЭДС, наводимая в роторе, синусоидальна.
Силовое электромагнитное взаимодействие
В замкнутой обмотке ротора, один из проводников которой
показан на рис. 3.14, а, под действием синусоидальной индуциро-
ванной ЭДС возникает синусоидальный электрический ток.
Обмотка ротора обладает индуктивностью, поэтому ток будет
на некоторый угол, меньший л/2, отставать по фазе от ЭДС.
Проводник на рис. 3.14, б показан в момент времени, когда на-
водимая в нем ЭДС максимальна, при этом ток совпадает по
направлению с ЭДС.
На проводник с током, находящийся в магнитном поле ста-
торной обмотки, будет действовать электромагнитная сила
F3M, направление которой определено по правилу левой руки.
Под действием электромагнитных сил ротор будет вращаться
в направлении вращения магнитного поля, при этом умень-
шается относительная скорость движения проводника в поле,
следовательно, изменяются ЭДС, ток и электромагнитные
силы.
Установившийся режим наступит при такой постоянной час-
тоте вращения ротора п2 = const, когда электромагнитные си-
лы будут уравновешены механическими силами торможения
(сопротивления).
Скольжение
Из рассмотренного принципа действия асинхронной машины
очевидно обязательное неравенство частот вращения ротора и
магнитного поля статора. В теории асинхронных машин исполь-
зуется понятие скольжения
101
Скольжение - безразмерная величина, которую выражают и
в процентах
л 1 “
s --------- 100 %. (3.9)
"i
В режимах, близких к номинальному, разница в частотах
вращения ротора и магнитного поля статора невелика и колеб-
лется в пределах нескольких процентов.
Скольжение может выражаться и через угловую скорость ро-
тора и вращающего магнитного поля стАтора, измеряемую в
радианах в секунду
Q « 2л п/60,
Задача 3.1. Найти число пар полюсов обмотки асинхронного
двигателя, если в номинальном режиме частота вращения ро-
тора лном = 960 об/мин.
Решение. Скольжение в номинальном режиме составляет
несколько процентов, следовательно, скорость магнитного поля
незначительно превышает скорость ротора. По табл. 3.1 выби-
раем ближайшую частоту вращения, незначительно превышаю-
щую пном, т. е. nt = 1000 об/мин, следовательно, речь идет о
шестиполюсной машине (р = 3).
1000—960
Скольжение sH0M «----------100% = 4%.
1000
3.5. ЭЛЕКТРОДВИЖУЩИЕ СИЛЫ ОБМОТОК СТАТОРА И РОТОРА
В отличие от машин постоянного тока, в которых ЭДС наво-
дится только во вращающейся обмотке, в асинхронных маши-
нах ЭДС создается и во вращающейся и в неподвижной обмот-
ках. Мгновенное значение ЭДС, наводимой вращающимся маг-
нитным полем машины в каком-либо проводнике ее обмотки,
может быть определено по формуле, выражающей закон элек-
тромагнитной индукции
е(х) = lVomBx, (3.11)
102
где I - активная длина проводника, ^отн - относительная ско-
рость движения проводника в магнитном поле с магнитной ин-
дукцией Вх.
Индуцированная ЭДС любого проводника, расположенно-
го на статоре или роторе, при равномерной скорости вращения
будет изменяться по синусоидальному закону.
Определим частоты индуцируемых ЭДС: Д - для статорной
обмотки и Д Для роторной.
За время одного полного оборота вращающегося магнитного
поля закончится период изменения ЭДС в проводниках не-
подвижного статора, следовательно,
п.р 60/ р
Д = — --------------Л
60 р 60
Частота ЭДС обмотки статора равна частоте напряжения
сети, Частота вращения магнитного поля относительно вращаю-
щихся проводников ротора, называется частотой сколь-
жения ns, она определяется разностью частот вращения маг-
нитного поля и ротора
ns — П j — n2 — sn j
(3.12)
Следовательно, частота ЭДС обмотки ротора
nsP sn ! р
60 60
= Sfx .
(3.13)
Частота ЭДС обмотки ротора прямо пропорциональна час-
тоте сети и скольжению. Для неподвижного ротора s = 1, Д = Д.
Найдем выражения действующих значений ЭДС в фазах об-
моток статора и ротора.
Амплитудное значение ЭДС проводника
^пр m ~ -®т •
Амплитудное значение магнитной индукции Вт и магнит-
ный поток полюса Фп связаны пропорциональной зависимо-
стью (3.1). Относительная линейная скорость проводника ста-
тора ^отн во вращающемся магнитном поле прямо пропорцио-
нальна частоте вращения магнитного поля лх и, следователь-
юз
но, частоте сети (3.3), тогда для действующего значения ЭДС
фазы статора можно записать
- С£1/Фп, (3.14)
где C£i - постоянный коэффициент, зависящий от геометри-
ческих размеров машины, числа витков в фазе обмотки, рас-
положения катушек в пазах магнитопровода и учитывающий
константы, входящие в формулы (3.1), (3.3). Для неподвижного
ротора ЭДС будет выражаться аналогичной формулой
Е2 = СЕ2/Фл. . (3.15)
Для вращающегося ротора относительная скорость провод-
ника в магнитном поле будет определяться скольжением
(3.10) и, следовательно, ЭДС вращающегося ротора будет пря-
мо пропорциональна скольжению. Условимся далее все элект-
рические величины, характеризующие работу вращающегося
ротора и зависящие от скольжения, обозначать индексом
E2s^ sE2 = С£2/Фп$. (3.16)
Вопрос 3.4. С каким утверждением Вы согласны?
Варианты ответа:
3.4.1. ЭДС ротора, вращающегося синхронно с магнитным по-
лем статора, равна нулю.
3.4.2. В неподвижном роторе частота ЭДС равна частоте сети.
3.4.3. Оба утверждения справедливы.
Задача 3.2*. Определите частоту ЭДС ротора в номинальном
режиме для вариантов табл. 3.2.
Таблица 3.2
Номер варианта 1 2 3 4
Частота сети, Гц 50 60 50 60
Номинальная 2900 1700 980 860
частота вращения ротора, об/мин
Ответы приведены в табл. 3.3.
Таблица 3.3
Номер варианта 1 2 3 4
1,67 3,33 1 2,67
Помимо ЭДС, индуцированных вращающимся магнитным
полем, учитываются также ЭДС магнитного поля рассеяния,
которое в асинхронной машине имеет специфическую топо-
графию. По определению магнитные линии поля рассеяния
замыкаются вокруг проводников только одной обмотки - ста-
тора или ротора. Упрощенная картина магнитного поля рас-
сеяния одной из катушек обмотки статора изображена на
рис. 3.15.
Также, как в трансформаторе, действующее значение ЭДС
рассеяния прямо пропорционально действующему значению
тока в фазе статора и индуктивному сопротивлению рассеяния
обмотки статора Хх
= Lx шх,
(3.17)
где Lx - индуктивность рассеяния фазы статора.
При неизменной частоте сети о х = 2л/х значение Хх практи-
чески не зависит от режима работы машины и его принимают за
постоянную величину.
Аналогичная картина наблюдается в роторе, где ток, гармо-
нически изменяющийся с частотой (025 = 2л/2j, возбуждает маг-
нитное поле рассеяния, индуктирующее в каждой фазе ЭДС
рассеяния ротора, пропорциональную току и индуктивному со-
противлению рассеяния обмотки ротора
^25 = b25G)25. (3.18)
Индуктивное сопротивление X2S зависит от режима работы
машины, так как с изменением нагрузки двигателя изменяет-
ся скольжение $, частота f2s = sj\ и круговая частота (*)25 х
х 2л/25 = 2ла/х = $ых, X2S — sX2 .
Рис. 3.15. Картина магнитного
поля рассеяния катушки обмот-
ки статора
105
Рис. 3.16. К вопросу 3.5
Вопрос 3.5. Рассмотрите графики (рис. 3.16), построенные в
функции частоты вращения ротора п2. Проставьте буквы в сле-
дующей последовательности: на первом месте букву, соответ-
ствующую характеру изменения действующего значения ЭДС
ротора, на втором - букву, соответствующую характеру изме-
нения индуктивного сопротивления рассеяния ротора.
Варианты ответа:
3.5.1. б, а.
3.5.2. а, в.
3.53. а, а.
3.6. УРАВНЕНИЯ ЭЛЕКТРИЧЕСКОГО СОСТОЯНИЯ ОБМОТОК
Уравнение электрического состояния фазы обмотки статора
имеет вид
Ut “-E.+R, 4. (3.19)
Как и в трансформаторе, при токе в фазе обмотки статора,
не больше номинального, напряжение Ut этой фазы уравно-
вешено главным образом основной ЭДС Et, так как слагаемые
R1Z1 и XtIt малы по сравнению с основной ЭДС:
Ех * Ut. (3.20)
Обмотка ротора обычно замкнута накоротко (U2 = 0), и ЭДС
уравновешивается только падением напряжения на внутрен-
них сопротивлениях этой обмотки
^23 ~ ^23 + j Xzglzs • (3-21)
Уравнение (3.19) тождественно аналогичному уравнению
для первичной обмотки трансформатора. Уравнение (3.21) от-
личается от уравнения для вторичной обмотки трансформато-
106
ра тем, что в нем нет члена U2 - напряжения на вторичной об-
мотке трансформатора (обмотка ротора замкнута накоротко).
Но отличие этого уравнения значительно больше: амплитуда
и частота ЭДС Е2 зависят от скольжения $, т. е. от частоты вра-
щения ротора. Реактивное сопротивление рассеяния X2s =
= L2<a2s также является переменной величиной, так как зави-
сит от частоты тока ротора. ЭДС и ток в проводниках ротора
имеют фазовый сдвиг
*2
4=25 - arctg (Х2, / Я2); созф25= -- , (3.22)
/я^ + («Х2)2'
который также зависит от скольжения ротора.
Очевидна зависимость от скольжения и действующего зна-
чения тока
E2s _ tE2
(3.23)
Таким образом, вместе с изменением нагрузки, сопровожда-
ющимся изменением частоты вращения ротора, в его обмотке
происходит одновременно изменение амплитуд ЭДС и тока, их
частоты и угла сдвига фаз. Для двигательного режима работы
асинхронной машины перечисленные величины достигают наи-
большего значения при неподвижном роторе (л2 « 0), когда
s * 1 (в момент пуска).
Уравнения (3.19) и (3.21) можно иллюстрировать схемами за-
мещения обмоток фаз статора и ротора.
Вопрос 3.6. Из схем рис. 3.17 выбрать те, которые соответст-
вуют схемам замещения фазы статорной и роторной обмоток.
Обратите внимание, что на схемах указаны параметры, зави-
сящие от частоты вращения ротора.
Рис. 3.17. К вопросу 3.6
107
Варианты ответа:
3.6.1. Статор - схема а), ротор - схема г).
3.6.2. Статор - схема б), ротор - схема г).
3.6.3. Статор - схема б), ротор - схема в).
3.7. РАБОЧЕЕ МАГНИТНОЕ ПОЛЕ АСИНХРОННОЙ МАШИНЫ
До сих пор имелось в виду только вращающееся магнитное
поле, образованное токами в трехфазной обмотке статора. Но
при нагрузке асинхронного двигателя возникают токи в замкну-
той обмотке ротора. Следовательно, токи ротора создают свое
собственное вращающееся магнитное поле, накладывающееся
на магнитное поле статора. Скорость магнитного поля ротора
Я22 относительно создающей его обмотки определяется часто-
той (1)2« токов ротора. Но значение как было показано, за-
висит от скольжения ротора:
W2i = 5(0,.
Отсюда
Q22 = $(0, /р .
Скорость магнитного поля ротора в пространстве (относи-
тельно статора) Й21 складывается из двух составляющих: Я22
и Й2 = (l-s)Qj, т.е.
Я21 = ft2 + Q22 = (l-s)Q1+sQ1 =
Получен интересный результат: при любой нагрузке магнит-
ные поля ротора и статора вращаются с одинаковой скоростью,
т. е. неподвижны относительно друг друга. Можно подумать,
что интенсивность результирующего магнитного поля зависит
от нагрузки машины, так как магнитное поле ротора опреде-
ляется его токами, а токи зависят от нагрузки на валу машины.
Но практически это не так. В асинхронной машине происходит
изменение токов статора в соответствии с изменением токов
ротора, а магнитный поток, как и в трансформаторе, опреде-
ляется приложенным напряжением и частотой. С учетом (3.20)
и (3.14) найдем
и. иг
Фп *-----— = К— . (3.24)
СЕ1Л
108
Вопрос 3.7. С каким утверждением Вы согласны?
Варианты ответа:
3.7.1. В режиме пуска двигателя ток статорной обмотки имеет
максимальное значение.
3.7.2. В режиме пуска двигателя ток статорной обмотки имеет
минимальное значение.
3.8. ПРЕОБРАЗОВАНИЕ ЭНЕРГИИ В АСИНХРОННОМ ДВИГАТЕЛЕ
При работе асинхронного двигателя происходит процесс пре-
образования электрической энергии в механическую энергию
вращательного движения. Этот процесс сопровождается беспо-
лезным расходом части энергии источника питания на нагрев
машины, который характеризуют мощностями электрических,
магнитных и механических потерь.
Мощностью электрических потерь характеризуют нагрев об-
моток статора и ротора, обладающих активными сопротивле-
ниями Рх и Rz. По закону Джоуля-Ленна, она, как известно,
пропорциональна квадрату тока в обмотке.
Мощностью магнитных потерь характеризуют нагрев паке-
тов магнитопровода, вызванный гистерезисом и вихревыми
токами.
Механические потери слагаются из потерь механической
энергии на трение в подшипниках и контактных кольцах, а
также на вентиляцию машины.
Процесс преобразования электрической энергии в полезную
механическую энергию, развиваемую асинхронным двигателем,
может быть описан уравнением баланса активной мощности.
На основании закона сохранения и преобразования энергии
можно записать
Pj = ЗПхф 1Хф COS фх = 7Х COS фх = ДРХЭ + А^хмагн АР2э +
^^2магн + Д-^мех + Pz » (3.25)
где Pt - мощность потребления электрической энергии; ДР1Э -
мощность электрических потерь в обмотке статора; ДР1магн -
мощность магнитных потерь в пакете магнитопровода статора;
ДР2Э - мощность электрических потерь в обмотке ротора; ДР2Магн “
мощность магнитных потерь в пакете магнитопровода ротора;
ДРМлУ - мощность механических потерь; Р2 - полезная механи-
ческая мощность двигателя.
109
P.-'/Su.i.noser. ——P...= Q.H -~P~„. = Q.,M—*-P.——
Рис. 3.18. Диаграмма преобразования энергии в асинхронном двигателе
Уравнение (3.25) наглядно иллюстрируется диаграммой мощ-
ностей, представленной на рис. 3.18.
Она дополнена структурной схемой асинхронного двигателя,
которая указывает на характер связей, существующих между
источником питания, статором электрической машины, рото-
ром и рабочей машиной (станок, кран, насос и т. п.), приводи-
мой в движение асинхронным двигателем. Источник питания
и статор связаны между собой электрически, статор и ротор
имеют магнитную связь, а ротор и рабочий механизм - механи-
ческую связь.
Из диаграммы рис. 3.18 следует, что мощность Р9М передачи
энергии со статора на ротор, осуществляемой посредством вра-
щающегося магнитного поля, всегда меньше активной мощ-
ности двигателя на значение мощности электрических и маг-
нитных потерь в статоре:
^эм = ~ (A-^ia Д^гмагн)’
Мощность Рэм, называемую электромагнитной мощностью,
можно выразить также через механические величины - угло-
вую скорость Q j магнитного поля и электромагнитный момент
Мэм,создаваемый двигателем вследствие силового взаимодей-
ствия вращающегося магнитного поля с токами роторной об-
мотки. Возможность такого выражения электромагнитной мощ-
ности может быть обоснована при помощи рис. 3.19, на кото-
ром изображена магнитная муфта, являющаяся моделью
асинхронного двигателя.
Здесь взамен статора с трехфазной обмоткой, возбуждающей
основное вращающееся магнитное поле, применены эквива-
по
Рис. 3.19. Электромагнитная муфта
лентные постоянные магниты, вращаемые посторонним двига-
телем со скоростью Q j .
Как известно из курса теоретической механики, момент сил,
действующих на равномерно вращающийся ротор, равен мо-
менту сил, действующих на статор, или моменту сил, прило-
женных к полюсам вращаемого магнита. Отсюда мощность по-
стороннего двигателя, вращающего магнитную муфту со ско-
ростью Qt, численно равна электромагнитной мощности*:
Лм=П1М9м. (3.26)
Аналогично выражается механическая мощность Рмг ротора,
вращающегося со скоростью Й2:
^мех = ^2^эм* (3.27)
Разность электромагнитной и механической мощностей рав-
на мощности потерь в роторе машины. Поскольку мощность маг-
нитных потерь в роторе мала по сравнению с мощностью элек-
трических потерь (так как мала частота перемагничивания
пакета ротора), ею пренебрегают и считают
Лм-^мвх = ДР,.-
Последнее равенство позволяет получить из (3.26) и (3.27)
весьма важное для анализа работы асинхронных двигателей
* В инженерной практике большее применение имеет частота вращения п,
об/мин, использование в формулах (3.26) и (3.27) угловой скорости Q, рад/с,
предпочтительнее, так как позволяет связать Р и М в основной системе еди-
ниц СИ без дополнительных коэффициентов.
111
соотношение:
ДР2Э = Qj Мэм-Q2 Mjm = ftj Мэм ———-
или
ДР2э = *Рэм- (3^8)
Итак, мощность электрических потерь в роторе асинхронного
двигателя пропорциональна скольжению.
Для ограничения электрических потерь в роторе двигателя
его рассчитывают и конструируют таким образом, чтобы при
номинальной нагрузке частота вращения ротора незначительно
отличалась от частоты вращения магнитного поля и, как уже от-
мечалось выше, номинальное скольжение бывает равно не-
скольким процентам.
Полезная механическая мощность Р2 двигателя меньше ме-
ханической мощности Рмех ротора на значение мощности меха-
нических потерь:
^2 = ^мех “ Д^мех •
Поэтому полезный момент на валу двигателя немного мень-
ше электромагнитного момента, развиваемого ротором, т. е.
^эм = .
Для установившегося режима работы, как и для двигателя
постоянного тока, вращающий момент Мвр равен моменту на-
грузки, т.е. моменту сопротивления Мс и в этом случае воз-
можно обозначение момента без всякого индекса: М = Мэм = Мс.
Следует иметь в виду, что в паспорте асинхронного двигате-
ля, так же как и других электрических двигателей, в качест-
ве номинальной мощности всегда указывается его полезная
механическая мощность Ра, а не мощность потребления элек-
трической энергии Pt. Отношение этих мощностей определяет
коэффициент полезного действия (КПД) асинхронного дви-
гателя:
n=P2/Pt. (3.29)
Вопрос 3.8. Мощность магнитных потерь в пакете магнито-
провода статора
Варианты ответа’.
3.8.1. Максимальна в режиме пуска двигателя.
3.8.2. Не зависит от нагрузки на валу.
3.8.3. Максимальна в режиме холостого хода двигателя.
3.9. ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ И МЕХАНИЧЕСКАЯ
ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
Воспользовавшись соотношениями (3.26) и (3.28), можно по-
лучить выражение для электромагнитного момента
М = (330)
Выразим мощность электрических потерь в трех фазах рото-
ра ДР2Э через ЭДС и ток ротора
^^23 = ^2S COS Ф24 ’ (331)
В формуле (3.31) угол ф as является углом сдвига фаз между
£зз и ^24» следовательно, произведение i2scos<|)2s является ак-
тивной составляющей тока, тогда
^совфгз = J2sa.
Используя формулу (3.16) для ЭДС E2t, перепишем (331) в
виде
Д^2, = ЗС£2/Фп5/2,а. (332)
Подставим (3.32) в (3.30), учтя, что й, = 2nf/p, и перепишем
(3.30) в виде
М = (ЗС£2/Фп5/2мр)/5-2л/.
Введем константу См = ЗСЕ2р/2п и запишем выражение для
электромагнитного момента
М = СмФп/2и. (333)
Так как при постоянстве напряжения сети магнитный по-
ток полюса Фп не зависит от нагрузки на валу (3.24), получаем
важный вывод: электромагнитный момент, развиваемый на
валу двигателя, пропорционален активной составляющей тока
ротора.
Вопрос 3.9. На рис. 3.20, а, б показаны эпюры распределения
магнитной индукции В вращающегося магнитного поля в зазо-
ре асинхронной машины и расположение нескольких стерж-
ней ’’беличьего колеса” на роторе. Правильно ли показано
113
Рис. 3.20. К вопросу 3.9
направление действия электромагнитных сил Гэм на стержень
обмотки с током, если рис. 3.20,. а предполагает, что ток I2s со-
впадает по фазе с ЭДС E2s, т. е. I2s = J2sa, а рис. 3.20, б предпола-
гает, что активная составляющая тока пренебрежимо мала,
ток 12S имеет только реактивную (индуктивную) составляющую,
т. е. отстает от ЭДС E2S на л/2.
Варианты ответа:
3.9.1. Правильно направление F3M только на рис. 3.20, а.
3.9.2. Правильно направление F3M только на рис. 3.20, б.
3.9.3. Правильно направление F3M на обоих рисунках.
Выразим активную составляющую тока 125Л через скольжение
с учетом формул (3.22) и (3.23):
sE2
Ьзь = J2sC0S = - х
/j?2+(sX2)2’
R2 E2R2/s
X ------ = --------- .
v6?2+(SX2)2' (J?2/s)2+*2
После простейших преобразований, получим
Е2 1
/2sa « — --------------------- • (3.34)
*2 (sX2)/fl3 + J?2/(sX2)
Приравнивая нулю производную функции /2$а от скольже-
ния $ находим точку максимума тока I2s& и, следовательно, мо-
мента Ммакс:
sKp = R2 / Хг . (3.35)
114
форме
I
•Л 9
Значение скольжения, соответствующее Ммакс , называют кри-
тическим.
Теперь выражение (334) можно записать в более простой
1
^sKp + 5Кр / s
и подставить в исходную формулу (3.33)
Е2 1
м = См Фп — ---------i. (336)
^2 St$Кр + $Кр s
Выражение СмФпЕ2/Х2 является константой, если неизмен-
но напряжение сети и определяет максимальное значение мо-
мента Ммакс при s = $кр
^макс = См Фп &2 / • (3.37)
2
Максимальный электромагнитный момент зависит от напря-
жения на статорной обмотке; эта зависимость непосредствен-
но не видна из полученной формулы, но ее легко найти. Напря-
жение определяет значение магнитного потока полюса Фп.
В свою очередь, ЭДС Е2 также пропорциональна потоку Фп.
Тогда на основании формулы (3.37) легко установить, что
Ломакс " • (338)
Зависимость M(s) показана на рис. 3.21, а.
Рис. 3.21. Зависимость электромагнитного момента от скольжения (а) и меха-
ническая характеристика асинхронного двигателя (б)
115
Большинство асинхронных двигателей проектируют так, что
точка максимального момента соответствует sKp « 0,1. Зави-
симость M(s) удобна для анализа физических процессов, про-
исходящих в машине при пуске или при изменении нагрузки
на валу. При анализе электромеханических процессов, связан-
ных с эксплуатацией двигателя, удобнее пользоваться зави-
симостями частоты вращения ротора от момента на валу
л(М) - механическими характеристиками двигателя.
На основании характеристики M(s), показанной на рис. 3.21,а,
легко построить механическую характеристику, если вспом-
нить, что при s=l п2 = 0, а при $ = 0 иа = (рис. 3.21, б).
Рассмотрим вопрос устойчивости работы двигателя при на-
грузке на валу, не зависящей от частоты вращения Ме = const.
В точках а и б (рис. 3.21, б) двигатель развивает одинаковый
электромагнитный момент, но устойчивой работа двигателя
может быть только в точке а, где проявляется свойство само-
регулирования. Действительно, предположим, что при работе в
точке а нагрузочный момент на валу в силу каких-то обсто-
ятельств несколько возрос и двигатель начал замедляться, как
видно из механической характеристики это вызывает одно-
временное увеличение электромагнитного момента, двигатель
перейдет в новое устойчивое положение, когда при несколько
сниженной частоте вращения, будет существовать равенство
момента вращающего и момента сопротивления.
При работе в точке б ситуация иная. Любое малое положи-
тельное приращение тормозного момента опять, как и в точ-
ке а, приведет к замедлению вращения двигателя, однако это
замедление вызовет уменьшение вращающего момента, дви-
гатель продолжит торможение и остановится.
Частота вращения, соответствующая максимуму момента,
называется критической (лкр) - двигатель работает устойчи-
во при частоте вращения большей критической (п2 > пкр).
На рис. 3.21, б показано ориентировочное положение точки,
соответствующей номинальному режиму работы двигателя
(точка в). Отношение М^.^/Мыл^ всегда больше единицы, что
обеспечивает запас устойчивости и предотвращает внезапные
остановки двигателя при случайных колебаниях напряжения
сети или тормозного момента на валу.
Вопрос 3.10. Механические характеристики (рис. 3.22) соот-
ветствуют разным условиям работы двигателя с фазным ро-
тором:
116
Рис. 3.22. К вопросу 3.10
1) работа в номинальном режиме: U = 1/ном, обмотка ротора
закорочена.
2) U < иты, обмотка ротора закорочена.
3) U = Ц<ом> в Цепь ротора введено добавочное сопротивле-
ние Ядов.
Проставьте буквы, обозначающие характеристики на
рис. 3.22, в последовательности, соответствующей приведенно-
му выше перечислению режимов работы двигателя.
Варианты ответа:
3.10.1. б, в, а.
3.10.2. в, а, б.
3.10.3. б, а, в.
ЗЛО. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Рабочими характеристиками двигателя называют зависи-
мости угловой скорости Л3 или частоты вращения вала л2,
электромагнитного момента М, тока статора , коэффициента
мощности cos tp и КПД двигателя от мощности нагрузки Р2, при
неизменном напряжении на статорной обмотке. Примерный вид
рабочих характеристик показан на рис. 3.23, где зависимости
для коэффициента мощности и КПД приведены в абсолютных
значениях, а все остальные - в относительных единицах.
Частота вращения вала в но-
минальном режиме меньше час-
Рис. 3.23. Рабочие характеристики трех-
фаакого асинхронного двигателя
тоты вращения магнитного поля всего на несколько процен-
та
тов, характеристика -—(Р2) близка к линейной. В соответ-
ствии с соотношением Р2 = Q2M, при практически неизмен-
ной частоте вращения вала, электромагнитный момент воз-
растает с ростом мощности Р2 по закону также близкому к ли-
нейному.
Зависимость тока от мощности на валу аналогично зависи-
мости тока первичной обмотки трансформатора от мощности
нагрузки - с ростом мощности увеличивается ток ротора, при
этом возрастает также и ток статора, компенсируя размагни-
чивающее действие тока ротора, при этом обеспечивается не-
изменность магнитного потока вращающегося магнитного по-
ля. В отличие от трансформатора, у которого значение тока хо-
лостого хода составляет несколько процентов от значения но-
минального тока, в асинхронном двигателе ток холостого хо-
да может достигать 50% номинального значения. Объясняет-
ся это тем, что в магнитной цепи двигателя имеется воздуш-
ный зазор, существенно увеличивающий ее магнитное сопро-
тивление.
Как известно, коэффициент мощности оценивает соотно-
шение между активной Pt и реактивной мощностями дви-
гателя и численно равен косинусу угла <рх сдвига фазы тока в
обмотке статора по отношению к напряжению
Pi
COS ф, = ------ .
При изменении нагрузки двигателя от холостого хода до но-
минального режима реактивная мощность остается практи-
чески неизменной, так как ее значение определяется обрати-
мыми процессами периодического изменения запаса энергии
магнитного поля машины, магнитный поток которого поддер-
живается практически неизменным.
В режиме холостого хода, когда необратимые процессы пре-
образования энергии определяются только потерями на на-
грев, и, следовательно, активная мощность мала, значение ко-
эффициента мощности также мало и составляет 0,06-0,2. При
возрастании нагрузки на валу активная мощность увеличива-
ется, и при неизменном значении реактивной мощности воз-
растает коэффициент мощности, который в режиме, близ-
118
ком к номинальному, достигает своего наибольшего значе-
ния (0,7-0,95). Дальнейшее увеличение момента сопротивле-
ния на валу ведет к некоторому снижению коэффициента
мощности, так как рост токов в обмотках приводит к насыще-
нию машины*, к значительным полям рассеяния, а обменные
энергетические процессы в этих магнитных полях вызывают
соответствующее возрастание реактивной мощности и соот-
ветственно уменьшение коэффициента мощности.
Ввиду массового применения асинхронных двигателей в на-
родном хозяйстве рациональная эксплуатация их, исключаю-
щая работу машины с низким коэффициентом мощности, при-
обретает важное значение для экономичного электроснабже-
ния предприятий. В частности, избегают длительного враще-
ния роторов асинхронных двигателей без нагрузки, следя за
тем, чтобы мощность устройства, приводимого в действие
асинхронной машиной, незначительно отличалась от номи-
нальной мощности машины. Если при длительной работе
асинхронного двигателя его средняя полезная мощность не
превышает 45% номинальной, то такой электродвигатель за-
меняют соответствующим двигателем меньшей мощности.
В тех случаях, когда работа двигателя при полной нагруз-
ке сочетается с его работой со значительной недогрузкой, при
которой коэффициент мощности становится недопустимо
низким, применяют специальные меры, обеспечивающие по-
вышение коэффициента мощности. Так, во время работы асин-
хронного двигателя со значительной недогрузкой (например,
когда Р2 < 0,5Р2НОМ) снижают фазные напряжения на его ста-
торной обмотке. Тем самым магнитный поток полюса вращаю-
щегося магнитного поля, а следовательно, и реактивная мощ-
ность машины будут уменьшены, а коэффициент мощности
возрастает.
Пренебрегая трением, выражение (3.29) для коэффициента
полезного действия можно записать в виде
?2
П ---------------,
^2+ АЛ + Д^магн
* Магнитная индукция машины в зубцовой зоне в номинальном режиме близ-
ка к насыщению - так проектируют асинхронные машины общепромышлен-
ного применения.
119
где ДРЭ - потери в обмотке статора и ротора; ДРмагн " потери в
магнитопроводе машины.
При анализе зависимости КПД двигателя от мощности на ва-
лу нужно учитывать, что магнитные потери не зависят от на-
грузки на валу, так как при неизменном напряжении питания,
магнитный поток вращающегося магнитного поля постоянен,
а электрические потери пропорциональны квадрату тока.
В режиме холостого хода КПД равняется нулю (Р2 = О,
ДРмагн > 0), а с ростом нагрузки на валу (полезной мощности)
растет КПД двигателя. При нагрузках, близких к номиналь-
ной, КПД двигателя принимает максимальное значение и при
дальнейшем росте нагрузки начинает уменьшаться, что свя-
зано с быстрым ростом потерь в обмотках.
Зависимость КПД двигателя от мощности на валу аналогич-
на зависимости КПД трансформатора от полезной мощности -
Р2. Здесь также потери в обмотках пропорциональны квадрату
токов, а зависимость токов от мощности Р2 близка к линейной.
Большинство двигателей работают с переменной нагрузкой,
обычно их средняя нагрузка меньше номинальной. Это учи-
тывают при проектировании, обеспечивая максимум КПД
(равенство потерь энергии в обмотках и магнитопроводе) при
недогрузке машины (0,7-0,8)Р2ном.
Задача 33. На рис. 3.24 показан паспортный щиток трехфаз-
ного асинхронного двигателя.
Как следует соединить фазы обмотки статора двигателя при
включении ее в сеть с линейным напряжением 380 В? Опреде-
лить активную мощность двигателя Р1Н0М, ток /1НОМ и момент
на валу Мном при номинальной нагрузке.
Решение. Двигатели, которые предназначены для вклю-
чения в трехфазную сеть напряжением 220/380 В, имеют обмот-
ки статора, каждая фаза которых рассчитана на 220 В, т. е.
^Ф.ном = 220 В. Так как в фазе обмотки статора допустимо под-
вести напряжение, равное лишь 220 В, а линейное напряжение
120
сети составляет 380 В, то статорную обмотку следует включить
по схеме ’’звезда”.
Для симметричной трехфазной цепи активная мощность
Pj “ЗИф/фСОвфф, или Рх = Уз’1/л/лС08фф,
тогда ток обмотки статора
Л = Рх /( а/З Un cos фф), где Рх = Р2 / п .
Подставляя данные двигателя, находим
Рх = Р2 / П = 75/0,921 = 81,4 кВт
и при ил = 380 В, cos фХном = 0,85 вычисляем номинальное зна-
чение тока обмотки статора: 7Хном = 81400/(1,73-380-0,85) =
= 145 А.
ПР*< "ном = 735 об/мин, йном = (2я/60)ПнОМ = пном/9,55, тогда
Л^ном ~ 9,55 Р2н0м /"ном = 974 Н • м.
Задача 3.4. Как изменятся ток, мощность и cos ф двигателя
предыдущей задачи, если двигатель будет работать с момен-
том М я 0,5 ,
Решение. 1.Момент М' =487Н-м.
2. Частота вращения л'«= Оц+Пном)/7 = (Ю00 + 735)/2 =
= 867,5 об/мин.
3. Механическая мощность Р2 = М'п'/9,55 = 44 кВт.
4. Электрическая мощность с учетом малого изменения КПД
в диапазоне нагрузок (0,45-1,0) Рхном равна Рх = 44/0,921 =
= 48 кВт.
5. Реактивная мощность осталась неизменной (так как оста-
лось неизменным напряжение питания) и равной = QH0M =
= Лном *8 Ф = 50,5 квар. _____________
6. Полная мощность у(Р2)3 + (Qx )а = 69,7 кВ • А.
7. Коэффициент мощности cos Ф = P'/S'= 48/69,7 =0,69.
Задача 3.5*. В табл. 3.4 приведены некоторые данные по трех-
фазным асинхронным двигателям, работающим в номинальных
режимах. Найдите ответы на все вопросы, поставленные в таб-
лице для вашего варианта.
Ответы приведены в табл. 3.5.
Таблица 3.4
Номера варианта 1 2 3 4
Два линейных напряжения сети, 220/380 380/660 ? 380/660
на которые рассчитан двигатель при работе в номинальном режиме Номинальное напряжение сети, В 220 7 380 660
Схема соединения фаз обмотки ? Y Д 7
статора Линейный ток статора, А 36,5 7 45,8 ?
Электрическая мощность, кВт 7 41,1 7 7
КПД, % 88% ? ? 0,91
Коэффициент мощности 7 0,89 0,9 0,9
Механическая мощность, кВт 11 7 22 ?
Частота вращения вала, об/мин 2900 2945 7 1470
Момент на валу, Н * м ? 125 143 213
Таблица 3.5
Вариант 1 Схема соеди- нения Д = 12,5 кВт cos ф = 0,9 М = 36Н-м
Вариант 2 СУ =660 В /х = 40,5А П = 93,7% Р2 = 38,5 кВт
Вариант 3 Напряжения сети 380/660 В Рх =27,1 кВт П = 81% п2 = 1470 об/мин
Вариант 4 Схема соеди- нения Y = 35 А Рх = 36кВт Р2 = 32,8 кВт
3.11. ПУСК АСИНХРОННЫХ ДВИГАТЕЛЕЙ
В начале пуска ротор двигателя неподвижен (s = 1) и ЭДС
Е2 в его обмотке достигает наибольшего значения. Соотноше-
ние ЭДС Е3 в начале пуска и после разгона ротора может быть
равно 20-30. Пусковой ток ротора превышает ток при номи-
нальной нагрузке в меньшее число раз, так как реактивное со-
противление ротора X2s = sX2 также зависит от скольжения.
Соответственно пусковой ток статора также в несколько раз
превышает свое номинальное значение. По мере разгона рото-
ра токи 12 и J, уменьшаются и устанавливается нормальный ре-
жим работы, определяемый статической нагрузкой на валу.
В нормальных условиях длительность пуска двигателя не пре-
122
вышает нескольких десятков секунд. При этом не возникает
опасности перегрева двигателя, но в первоначальный момент
пуска броски тока приводят к значительным колебаниям
электромагнитного момента асинхронного двигателя, сущест-
венно превышающего значение Мном, способным привести к
поломкам механической части привода, поэтому двигатели со-
единяют с нагрузкой через демпфирующие устройства (упру-
гие муфты, ременные передачи и др.).
Не следует забывать, что двигатели подключены к распре-
делительной сети, питающейся от трансформатора ограни-
ченной мощности. Напряжение на зажимах вторичной обмот-
ки трансформатора уменьшается по мере роста нагрузки в се-
ти. При полной нагрузке трансформатора падение напряжения
в сети достигает 10-15% 1/ном. Если мощность одного двига-
теля много меньше мощности трансформатора, то при его пус-
ке напряжение в сети изменится незначительно. Но может
возникнуть ситуация, когда мощность одного-двух двигате-
лей намного превышает мощность всех остальных двигателей
и сравнима с номинальной мощностью трансформатора. Тогда
при пуске мощного двигателя токи в обмотках трансформато-
ра будут превышать номинальные значения, например, в
5-7 раз и напряжение на вторичной обмотке трансформатора
и на двигателе уменьшится до (0,6-0,7) U1H0M. Электромагнит-
ный момент двигателя снизится почти вдвое, а пуск двигателя
затянется или вообще окажется невозможным. Уменьшение
напряжения на вторичной обмотке трансформатора снизит
значение электромагнитного момента других двигателей и мо-
жет даже привести к их остановке.
Таким образом, в условиях эксплуатации может возникнуть
необходимость ограничения пусковых токов с одновременным
увеличением вращающего электромагнитного момента дви-
гателя.
Поставленную задачу решают путем искусственного увели-
чения активного сопротивления фазы обмотки ротора, что
осуществляется двумя способами:
1) для двигателя с контактными кольцами - включением в
цепь ротора пускового реостата;
2) для двигателей с короткозамкнутым ротором - специаль-
ной конструкцией обмотки ротора.
Пуск двигателя с контактными кольцами
В процессе пуска асинхронного двигателя с контактными
кольцами в его роторную цепь включают пусковой реостат.
На рис. 3.25, а показана принципиальная схема включения
асинхронного двигателя с двухступенчатым пусковым рео-
статом.
Характер изменения момента, развиваемого при пуске с по-
мощью реостата, иллюстрируют механические характеристи-
ки (рис. 3.25, б).
Первая и вторая характеристики - искусственные, соответ-
ствующие работе асинхронного двигателя с введенными в
цепь ротора секциями реостата, имеющего сопротивления
R„ и третья характеристика - естественная, которую имеет
двигатель при замкнутых накоротко щетках. Механические
характеристики рис. 3.25, б построены с учетом того, что час-
тота вращения магнитного поля и значение максимального
электрического момента Ммакс не зависят от активного сопро-
тивления роторной цепи, а значение критической частоты вра-
щения пкр обратно пропорционально этому сопротивлению.
Как видно из семейства механических характеристик, на-
чальный пусковой момент Мп асинхронного двигателя за-
висит от активного сопротивления фазы обмотки ротора: уве-
личение активного сопротивления приводит к увеличению
пускового момента. Он может быть даже равен максимально-
му, если общее сопротивление роторной цепи будет таким, при
котором критическое скольжение станет равно единице.
Дальнейшее увеличение активного сопротивления фазы об-
мотки ротора приводит вновь к ослаблению начального пус-
кового момента (характеристика 4 на рис. 3.25,6).
Рис. 3.25. Схема включения
асинхронного двигателя с кон-
тактными кольцами (а) и его
механические характеристики
при разных значениях сопротив-
ления реостата, включенного
в цепь ротора (5)
124
Рис. 3.26. Магнитное поле пазо-
вого рассеяния около стержне-
вой роторной обмотки (а); рас-
пределение тока в стержне в на-
чале (б) и конце (в) пуска дви-
гателя
Пуск двигателя происходит с момента включения обмотки
статора в сеть. При этом в ротор вводят все секции пускового
реостата, благодаря чему начальный пусковой момент значи-
тельно увеличивается (характеристика I), а пусковой ток
уменьшается. По мере разгона двигателя токи ротора и стато-
ра уменьшаются и часть пускового реостата R'n закорачивают.
Рабочая точка перемещается на новую характеристику 2, соот-
ветствующую сопротивлению (R2 + Яп)* Затем закорачивают
весь пусковой реостат и рабочая точка перемещается по естест-
венной механической характеристике до точки, в которой
электромагнитный момент двигателя не станет равным мо-
менту сопротивления (точка а на рис. 3.25,6).
Обычно реостат разбивают на 5-10 ступеней, которые авто-
матически закорачиваются по мере разгона ротора. Схема ав-
томатического выведения пускового реостата работает в
функции времени или тока ротора (см. гл. 6).
Применение двигателей с контактными кольцами обеспе-
чивает уменьшение времени пуска. Уравнение динамического
равновесия моментов на валу двигателя, как известно, имеет
вид
dQ2
Мс + J------Мвр, (3.39)
dt
где Мс - момент сопротивления приводимого механизма; J -
сумма моментов инерции двигателя и приводимого механизма.
Увеличение пускового момента приводит к росту ускорения
dQ2/dt, сокращая время разгона двигателя.
Пуск двигателя с короткозамкнутым ротором
Для улучшения пусковых свойств двигателей с короткозам-
кнутым ротором их выполняют специальной конструкции, на-
пример, алюминиевые стержни ’’беличьего колеса” заливают в
глубокие пазы (см. рис. 3.4). При низкой частоте тока ротора
12S
f2s = sfl9 соответствующей установившемуся режиму работы
О < s < 0,05, f2s < 2,5 Гц, ток равномерно распределяется по все-
му сечению стержней. В первый момент пуска, когда частота
f2 = Д = 50 Гц, на распределение тока в стержне доминирующее
влияние оказывает его магнитное поле рассеяния. На
рис. 3.26, а стержень условно разбит на несколько слоев, а маг-
нитное поле представлено несколькими линиями магнитной
индукции. Нижний слой А стержня сцеплен со всеми линиями,
а верхние слои имеют меньшее потокосцепление. В результа-
те при пуске индуктивные сопротивления отдельных слоев
резко различаются:
хл > ХБ > ... > хг.
При большой частоте (/2 = Д) ток распределяется в соответ-
ствии с индуктивными сопротивлениями слоев (рис. 3.26, б) так,
что в глубине паза плотность тока J практически равна нулю,
ток 12 вытесняется в верхнюю часть паза и активное сопротив-
ление стержня резко возрастает. По мере разгона ротора умень-
шается частота f2s и кривая изменения плотности тока по высо-
те стержня приближается к изображенной на рис. 3.26, в, при
этом можно сказать, что поперечное сечение стержня как бы
увеличивается, поэтому его активное сопротивление посте-
пенно уменьшается. Благодаря эффекту вытеснения тока дви-
гатель с глубоким пазом на роторе имеет условия пуска, ана-
логичные двигателю с фазным ротором, так как ’’автомати-
чески” плавно уменьшается активное сопротивление ротора
по мере его разгона. Такие двигатели имеют повышенный пус-
ковой момент, т. е. сокращенное время разгона (3.39).
При пуске асинхронной машины проявляет себя и эффект
силового взаимодействия вихревых токов в стали ротора с
вращающимся магнитным полем машины. Этот эффект также
способствует увеличению пускового момента, но дополнитель-
но приводит к появлению провала в механической характерис-
тике при больших скольжениях s = 0,75 + 0,85 до значения
0,8 Мп. Это значение момента называется минимальным мо-
ментом и задается обычно кратностью
Вопрос 3.11. Пусковые свойства двигателя можно улучшить,
осуществляя пуск при пониженном напряжении
Варианты ответа:
3.11.1 . Да.
3.11.2 . Нет.
3.11.3 . Данных для ответа недостаточно.
126
Задача 3.6. Определить пусковой ток 1п и пусковой момент Мп
для двигателя 4А1004УЗ единой серии 4А по следующим ката-
ложным данным: мощность на валу Рном = 4 кВт, частота вра-
щения пном = 1400 об/мин, Ином = cosq)HOM = 0,84, кратность
пускового момента Мп/Миом = 2,2, кратность пускового тока
VA.om = 6,5, напряжение сети U = 380 В.
Решение
Номинальный момент - Мном = ^ном/^ 2 НОМ или Мном =
= 9,55 Рном / пном = 27,3 Н м; пусковой момент - Мп = 2,2 Мном =
- 60 Н • м; электрическая номинальная мощность - Р1ном =
- -Рзном/П = *>76 кВт; Р1ном = УЗ WHOMcos ФноМ; следовательно,
номинальный ток статора -/1Н0М = Р1ном/ cos фном = 8,6 А;
пусковой ток статора - 1П = 6,5/1ном = 56 А.
Задача 3.7. Можно ли осуществить пуск асинхронного двига-
теля при номинальной нагрузке, если изменится подводимое
напряжение с 380 В на 220 В. Паспортные данные двигателя
4А1004УЗ приведены в задаче 3.6.
Решение.
Пусковой момент изменяется пропорционально квадрату
напряжения, т. е. пусковой момент при сниженном напряжении
Мп = 2,2Мном —= 0,73 Мном. При нагрузке, равной номиналь-
з
ной, пуск данного двигателя невозможен.
3.12. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
Полюсное регулирование
Этот способ регулирования основан на изменении числа пар
полюсов вращающегося магнитного поля статора, т. е. на изме-
нении частоты вращения магнитного поля nx = 60/j/p.
Регулирование скорости путем переключения числа полю-
сов р - ступенчатое.
Следует иметь в виду, что частоты вращения при частоте
сети 50 Гц и р = 1 и 2 соответственно 3000 и 1500 об/мин, а при
р = 5 и 6 - 600 и 500 об/мин. При большем числе полюсов раз-
ница между частотами вращения уменьшается.
Двигатели с изменением числа пар полюсов называются
многоскоростными. Промышленностью выпускаются двигатели
на две, три и четыре скорости.
127
Рис. 3.27. Изменение числа полюсов магнитного поля при включении катушек
фазы статорной обмотки последовательно (а) и параллельно (б)
Для изменения числа пар полюсов в одни и те же пазы ста-
тора можно уложить отдельные обмотки с разными числами
полюсов. В зависимости от необходимой частоты вращения
включается одна или другая обмотка. При этом обмотки рабо-
тают поочередно, что снижает использование материалов.
Поэтому желательно иметь одну обмотку и путем изменения
ее схемы соединения изменять число пар полюсов. Пример та-
кого переключения двух катушек одной фазы показан на
рис. 3.27, а, б. В первом случае катушки включены последова-
тельно, во втором - параллельно. В результате изменится на-
правление токов в проводниках, составляющих фазу обмотки,
и топография магнитного поля станет иной. При последова-
тельном соединении катушек образуются четыре полюса,
при параллельном - лишь два.
Частотное регулирование
В последние годы все большее распространение получает ре-
гулирование скорости двигателя посредством изменения час-
тоты напряжения на статорной обмотке. При регулировании
частоты скорость можно плавно изменять так, что ее макси-
мальное значение будет в десятки или сотни раз превышать
минимальное.
При осуществлении частотного регулирования учитывается,
что значение максимального электрического момента Ммакс
пропорционально квадрату магнитного потока полюса вращаю-
щегося поля [формула (337)]. Магнитный поток полюса Фп, в
свою очередь, определяется действующим значением и часто-
той фазного напряжения статора [формула (3.24)]. Поэтому,
если при регулировании частоты вращения ротора желатель-
но, например, сохранить неизменным значение максималь-
ного электромагнитного момента, то нужно обеспечить выпол-
128
нение условия Ut/ft const - одновременно с регулированием
частоты должно изменяться и действующее значение напряже-
ния. Эту сложную задачу решают с помощью современных
электронных устройств, которые включают между промышлен-
ной сетью и асинхронным двигателем (рис. 3.28). Как следует
из приведенной упрощенной схемы, при частотном регулирова-
нии осуществляется двукратное преобразование электричес-
кой энергии: вначале напряжение трехфазной сети выпрямля-
ется, а затем инвертор преобразует выпрямленное напряжение
в трехфазную систему напряжений нужной частоты. В системе
преобразования предусмотрено автоматическое согласование
значений Ut и Д, обеспечивающее требуемое значение мак-
симального электромагнитного момента.
Преобразователи рис. 3.28 часто называют тиристорными, так
как они основаны на полупроводниковых электронных прибо-
рах - тиристорах, устройство и принцип действия которых рас-
смотрены в третьей книге этого учебника, там же приводятся
схемы выпрямителей и инверторов.
Семейство механических характеристик двигателя с частот-
ным регулированием частоты вращения изображено на рис. 3.29.
Логика работы тиристорного преобразователя зависит от то-
го в какую сторону от лном требуется осуществлять регулиро-
вание. Если нужно обеспечить п < лном, преобразователь авто-
матически создает условия неизменности максимального мо-
Рис. 3.28. Схема включения
асинхронного двигателя с час-
тотным регулированием ско-
Рис. 3.29. Механические характеристики двигателя с частотным регулированием
скорости
рости
129
мента двигателя - одновременно с заданным снижением зна-
чения соответственно уменьшается и значение . Для слу-
чая п > пном соблюдение условия постоянства уже не
выполняется, так как требует регулирования напряжения
выше номинального, кроме того, во избежание перегрузки дви-
гателя по мощности, его длительная работа при частотах вра-
щения, превышающих номинальную, допустима только при
соответствующем снижении момента сопротивления на валу.
Частотное регулирование экономично, однако габариты
преобразователя частоты превышают габариты двигателя. Кро-
ме того, надежность работы преобразователей пока еще не-
достаточна.
Реостатное регулирование
Реостатное регулирование частоты вращения ротора трех-
фазных асинхронных двигателей с контактными кольцами
осуществляется при помощи трехфазного реостата, включаемо-
го в цепь обмотки ротора так же, как и пусковой реостат (см.
рис. 3.25, а). В отличие от пускового реостата его рассчитывают
на длительный режим работы и называют регулировочным рео-
статом. Семейство механических характеристик двигателя с
регулировочным реостатом ничем не отличается от характе-
ристик с пусковым реостатом (см. рис. 3.25, б). Они свидетель-
ствуют о том, что с увеличением сопротивления регулировоч-
ного реостата частота вращения ротора снижается.
Если момент сопротивления нагрузки неизменен, то ампли-
туды токов в обмотке ротора при реостатном регулировании
сохраняются почти неизменными. Это означает, что с увеличе-
нием сопротивления регулировочного реостата мощность по-
терь в нем возрастает. Номинальная мощность регулировочно-
го реостата обычно соизмерима с мощностью двигателя и, как
следствие этого, он имеет большие габариты. Поэтому реостат-
ный способ регулирования частоты вращения асинхронных
двигателей является неэкономичным. Однако он прост и обес-
печивает плавное изменение частоты вращения в широких
пределах. Его иногда применяют для регулирования частоты
вращения двигателей средней мощности.
Существует еще несколько возможных методов регулирова-
ния. При изменении напряжения, подводимого к статору маши-
ны, механические характеристики изменяются так, как пока-
зано на рис. 3.30: максимальный момент изменяется пропорнио-
130
Рис. 330. Регулирование частоты вращения
изменением напряжения питания
нально квадрату напряжения, а критическое скольжение ос-
тается неизменным. Критическое скольжение, как правило,
не превышает нескольких процентов, поэтому диапазон регу-
лирования частоты вращения узкий. Снижение максималь-
ного момента уменьшает запас по устойчивости работы дви-
гателя.
Иногда находит применение комбинированный способ регу-
лирования, когда изменяются подводимое к двигателю на-
пряжение и активное сопротивление ротора.
Возможно регулирование частоты введением ЭДС в цепь
ротора. Такие машины получили название асинхронных дви-
гателей двойного питания.
В заключение отметим, что по сравнению с двигателями по-
стоянного тока в настоящее время асинхронные двигатели
имеют меньшие возможности по экономичному, надежному и
плавному регулированию частоты вращения в широком диапа-
зоне, что является их основным недостатком.
Вопрос 3.12. Назовите способ, позволяющий регулировать
частоту вращения асинхронного двигателя в сторону повыше-
шения, добившись условия па = 3000 об/мин.
Варианты ответа'.
3.12.1. Полюсное регулирование.
3.12.2. Частотное регулирование.
3.12.3. Реостатное регулирование.
3.13. ГЕНЕРАТОРНЫЙ И ТОРМОЗНОЙ РЕЖИМЫ РАБОТЫ
АСИНХРОННОЙ МАШИНЫ
Режим генератора
В режиме двигателя механическая характеристика асинхрон-
ной машины М(п) располагается в первом квадранте (М > 0;
0 < s < 1; 0 < п2 < nt), при этом внешний механический момент,
т. е. момент сопротивления Мс, противодействует движению
ротора и в стационарном режиме уравновешивается электро-
магнитным моментом М. Работа двигателя в этом режиме мо-
жет характеризоваться точкой Д на рйс. 331. Если статор
асинхронной машины оставить подключенным к сети, а вал
ротора соединить с другим двигателем, например турбиной,
имеющей тоже направление вращения, то асинхронная маши-
на может работать в режиме генератора, отдавая в сеть актив-
ную мощность. Рассмотрим этот режим подробнее.
Внешний механический момент турбины М„ действующий в
направлении вращающегося магнитного поля статора, может
разогнать ротор до частоты вращения n2 > nt. При этом сколь-
жение $ = (лх -п2)/лм станет отрицательным, согласно форму-
ле (336), справедливой при любом значении $, электромагнит-
ный момент машины М станет также отрицательным, т. е. бу-
дет тормозить вращение ротора. При Mt = М установится ста-
ционарный режим, точка Г на рис. 331. Соответственно будет
отрицательной и электромагнитная мощность:
Р,м = Млх /9,55<0,
Рис. 3.31. Механическая характеристика
асинхронной машины в режимах дви-
гателя и генератора
132
что означает изменение направления электромагнитной энер-
гии; теперь механическая мощность турбины преобразуется в
электрическую энергию.
Эта энергия отдается машиной в промышленную сеть и мо-
жет быть использована в других приемниках энергии. Работе
асинхронной машины в генераторном режиме соответствует
механическая характеристика, лежащая в третьем квадранте
(М < 0; s < 0; п2 > пх).
Необходимо отметить, что в генераторном режиме работы,
так же как и в двигательном, асинхронной машине на возбуж-
дение магнитного поля требуется реактивная мощность. По-
этому асинхронные машины несмотря на свою конструктив-
ную простоту и надежность не находят широкого применения
как генераторы.
Режим электромагнитного тормоза
В режиме электромагнитного тормоза асинхронная машина
работает тогда, когда ее ротор и магнитное поле вращаются в
разных направлениях. Этот режим часто используется для рез-
кого торможения двигателя. Торможение осуществляется пу-
тем изменения порядка чередования фаз статорной обмотки,
при этом магнитное поле изменяет направление вращения,
а ротор по инерции вращается в сторону противоположную вра-
щению магнитного поля. Применив правила правой и левой ру-
ки, можно убедиться, что электромагнитный момент, возникаю-
щий от взаимодействия токов ротора с магнитным полем, вра-
щающимся против направления вращения ротора, будет ока-
зывать тормозящее действие на ротор. Такой режим называ-
ется торможением противовключением. В режиме противовклю-
чения $ > 1.
Особенности рассмотренных режимов работы асинхронной
машины наглядно иллюстрируются на рис. 332.
Рис. 3.32. Зависимость n(s) для гене-
раторного, двигательного и тормозного
режимов
-п
133
3.14. АСИНХРОННЫЕ МАШИНЫ МАЛОЙ МОЩНОСТИ
Электрическими машинами малой мощности, или микрома-
шинами, принято называть электромеханические преобразова-
тели энергии мощностью от долей ватт до 750 Вт.
Асинхронные машины составляют более половины всех
выпускаемых микромашин, они предназначены для работы от
однофазных и трехфазных сетей при частотах питания 50, 200,
400, 800, 1000 Гд.
Полная классификация асинхронных микродвигателей пока-
зана на рис. 333.
Асинхронные микродвигатели
Однофазные
Управляемые
। Конденсаторные] ] Двухфазные ] | Трехфаэмые
Неуправляемые
| Трехфазные | ГУниверсальные
кои0енеа,оР»ьш| । I Iе p,csr”IF дй|*,м|
Назначения™ 1 I Слециалнзироеанные | | Саповые |
Рис. ЗЛЗ. Классификация асинхронных микродвигателей
Несмотря на многообразие конструктивных решений, прин-
цип действия асинхронных микромашин тот же, что и у рас-
смотренных трехфазных.
Основное различие этих машин определяется конструкцией
статора и способом подключения его обмотки. Дополнитель-
ное разнообразие вносится конструктивными особенностями
короткозамкнутого ротора.
Рассмотрим основные типы асинхронных микромашин.
Однофазные асинхронные двигатели
Из электрической схемы, приведенной на рис. 3.34, а, видно,
что ротор однофазного двигателя расположен в пульсирующем
магнитном поле однофазной обмотки с числом витков ». Прин-
цип действия такого двигателя можно объяснить, если пуль-
сирующее магнитное поле разложить на два магнитных поля,
вращающиеся в прямом и обратном направлениях с одинако-
134
обратное вращающиеся магнитные поля (б), ме-
ханическая характеристика (в) однофазного
асинхронного двигателя
выми частотами вращения л1пр и л1обр (рис. 3.34,6).
При неподвижном роторе (s = 1) оба магнитных поля, вра-
щаясь относительно ротора с одинаковыми скоростями в раз-
ных направлениях, создают одинаковые вращающие моменты
(Мпр и Мобр), направленные встречно. На рис. 3.34, в пунктиром
показаны механические характеристики для прямого и об-
ратного магнитных полей, а сплошной линией - результирую-
щая механическая характеристика л(М) « п(Мпр) + л(Мобр)
двигателя. Результирующий момент, действующий на непод-
вижный ротор, будет равен нулю, т. е. двигатель не имеет пус-
кового момента.
Если ротору двигателя придать начальную скорость внеш-
ней силой, то он будет развивать вращающий момент, причем
направление вращения будет определяться тем, в какую сто-
рону была приложена превоначально внешняя сила. Двигате-
ли без пускового момента практически не находят применения.
Конденсаторные двигатели
Электрическая схема конденсаторного двигателя представ-
лена на рис. 3.35, а. Обмотка статора подключена к однофаз-
ной сети и состоит из двух катушек с числом витков и u>2,
оси которых смещены в пространстве на угол л/2. Токи этих
катушек, за счет фазосдвигающего элемента (конденсатор С),
сдвинуты по фазе (см. векторную диаграмму на рис. 3.35, б).
135
Рис. 3.35. Электрическая схема (а), векторная диаграмма токов (б), механичес-
кая характеристика (в) конденсаторного асинхронного двигателя
Смещение катушек в пространстве и временной сдвиг токов
обеспечивают условия образования вращающегося магнитно-
го поля, сформулированные в § 3.3. Механическая характерис-
тика такого двигателя будет соответствовать характеристике
трехфазного асинхронного двигателя (рис. 335, в).
Двигатели с расщепленными полюсами
Фрагмент конструкции асинхронного двигателя с расщеп-
ленными полюсами схематически изображен на рис. 3.36, а.
Обмотка статора состоит из двух катушек. Первая катушка с
числом витков расположенная на явно выраженных полю-
сах, подключена к однофазной сети и создает пульсирующее
магнитное поле. Полюс статора разделен продольным пазом
на две части, одну из которых охватывает вторая катушка с
числом витков н>2, замкнутых накоротко. Пульсирующий маг-
нитный поток Фх, созданный током первой катушки, наво-
дит ЭДС Е2 во второй короткозамкнутой катушке, вызывая
в ней ток 12, создающий свой магнитный поток Ф2, сдвинутый
по фазе относительно Фг на угол ф (рис. 336, 6). Таким образом,
результирующее магнитное поле статора образуется двумя ка-
тушками, оси которых сдвинуты в пространстве на угол а, а
токи сдвинуты по фазе на угол ф.
Следовательно, в двигателе с расщепленными полюсами реа-
лизуются условия образования вращающегося магнитного по-
ля, подобные условиям, создаваемым в конденсаторном дви-
гателе, но без подключения второй катушки к сети и исполь-
зования дополнительного фазосдвигающего устройства. Та-
кие двигатели являются наиболее дешевыми и, хотя их пус-
136
Рис. 336. Схематическое изоб-
ражение конструкции асин-
хронного двигателя с расщеплен-
ными полюсами (а) и его век-
торная диаграмма (б)
ковой момент составляет не более 10-40% номинального,
широко применяются в бытовых приборах - магнитофонах,
проигрывателях, вентиляторах и т. д.
Рассмотренные однофазные двигатели не позволяют регули-
ровать частоту вращения, т. е. являются неуправляемыми. В
качестве неуправляемых однофазных двигателей могут быть
использованы и трехфазные двигатели, которые подключают-
ся к однофазной сети с использованием фазосдвигающих кон-
денсаторов, включаемых по специальным схемам, примеры
которых показаны на рис. 3.37. За счет фазосдвигающих конден-
саторов С обеспечивается одно из условий образования вра-
щающегося магнитного поля - временной сдвиг токов. Вто-
рое условие - пространственный сдвиг катушек - уже обес-
печено конструкцией трехфаэной обмотки асинхронной ма-
шины.
Рис. 3.37. Примеры схем включения трехфазных асинхронных двигателей в од-
нофазную сеть
137
Управляемые двухфазные (исполнительные) двигатели
Управляемые двухфазные двигатели, называемые также
двухфазными исполнительными двигателями (ДИД), находят
широкое применение в системах автоматического регулирова-
ния, используются как элементы обратной связи вычислитель-
ной машины и как силовые исполнительные двигатели в робо-
тотехнических комплексах.
ДИД - это асинхронный двигатель малой мощности (0,1 *
300 Вт) с двухфазной обмоткой статора и короткозамкнутым ро-
тором (рис. 3.38). Одна из фаз статора называется обмоткой
возбуждения wB и постоянно находится под напряжением UB9
а вторая - называется обмоткой управления юу и питается на-
пряжением с7у, амплитуда (рис. 3.38, а) или фаза (рис. 3.38, б)
которого изменяются в зависимости от управляющего сигна-
ла. В первом случае управление называется амплитудным, а
во втором - фазовым. В обоих случаях выполняются условия
образования вращающегося магнитного поля: пространствен-
ный сдвиг обмоток шв и wy обеспечен конструкцией статора, а
временной сдвиг токов - конденсатором С (рис. 3.38, а) или фа-
зовращателем (рис. 3.38, б). Поэтому подобно рассмотренному
выше однофазному конденсаторному двигателю исполнитель-
ный двигатель способен создавать пусковой момент.
К электродвигателям, работающим в составе устройств авто-
матики и вычислительной техники, предъявляются специфи-
ческие требования. Сформулируем некоторые, наиболее важ-
ные из них:
1) отсутствие самохода - самоторможение при снятии элек-
трического сигнала управления;
Рис. 3.38. Схемы включения двухфазных исполнительных двигателей с ампли-
тудным управлением (а) и с фазовым управлением (б)
138
2) широкий диапазон регулирования частоты вращения;
3) возможность реверсирования;
4) малая инерционность ротора - высокое быстродействие.
Рассмотрим как сформулированные требования реализуют-
ся в конструкции двухфазного исполнительного двигателя для
случая амплитудного управления (рис. 3.38, а).
При снятии электрического сигнала управления (напряже-
ние и ток обмотки wy стали равны нулю) двухфазную асин-
хронную машину можно рассматривать как однофазную, меха-
ническая характеристика которой рассмотрена выше
(рис. 3.34) и представлена на рис. 3.39, а пунктиром. Такая меха-
ническая характеристика не обеспечивает самоторможения
двигателя, так как при любой частоте вращения, отличной от
нуля, двигатель развивает вращающий момент.
Механическая характеристика двигателя, обладающего свой-
ством самоторможения (отсутствие самохода) должна иметь
вид, показанный на рис. 3.39, а сплошной линией. При любой
частоте вращения двигатель развивает тормозной момент, так
как момент и частота вращения имеют противоположные зна-
ки, т. е. направлены навстречу друг другу.
Покажем, что для обеспечения нужного вида характеристи-
ки ротор двигателя должен обладать повышенным сопротив-
лением. На рис. 3.39, б пунктиром изображены механические
характеристики двигателя для прямого и обратного вращаю-
п
Рис. 3.39. Механические характеристики двигателя, обеспечивающего самотор-
можение (о) и полученная как результат суммирования моментов, вызванных
прямым и обратным вращающимися магнитными полями
139
щихся магнитных полей, в случае ротора с большим значе-
нием активного сопротивления (см. рис. 3.25,6).
Результирующая механическая характеристика двигателя
п(М) п(Мпр) - п(Мобр), изображенная на рис. 3.39, б сплошной
линией, обладает требуемыми свойствами. Итак, для устране-
ния самохода ротор исполнительного двигателя должен иметь
повышенное сопротивление.
Докажем возможность получения широкого диапазона регу-
лирования частоты вращения путем изменения амплитуды
напряжения на обмотке управления Uy. Для этого построим
механические характеристики двигателя при нескольких зна-
чениях напряжения. Построение начнем со случая равенства
амплитуд напряжений, подводимых к обмоткам возбуждения
и управления. При этом будут равны амплитуды токов 7В и 1у,
а также амплитуды пульсирующих магнитных потоков, созда-
ваемых каждой из этих обмоток. Фазосдвигающий конденса-
тор С обеспечивает сдвиг по фазе между токами 1у и!в, равный
л/2, в соответствии с (3.7), обратные волны бегущего поля бу-
дут полностью компенсироваться, а ротор будет находиться во
вращающемся магнитном поле. Механическая характеристика,
представленная на рис. 3.40, а, соответствует механической ха-
рактеристике трехфазного асинхронного двигателя для случая
Рис. 3.40. Механические характеристики двухфазного исполнительного двигате-
ля как сумма моментов прямого и обратного вращающихся магнитных полей
(а) и семейство характеристик при разном токе управления (6)
140
ротора с большим активным сопротивлением. При уменьшении
напряжения Uy амплитуда пульсирующего магнитного потока
обмотки управления уменьшится, соответственно уменьшится
его прямая и обратная составляющие. При этом отсутствует пол-
ная компенсация обратных полей и ротор находится в магнит-
ном поле, которое можно рассматривать как два поля, вращаю-
щиеся в разные стороны и имеющие разные амплитудные
значения Фшпр > Фтобр- Результирующую механическую харак-
теристику получим суммированием двух механических ха-
рактеристик, построенных на рис. 3.40, а пунктиром. На
рис. 3.40, б изображено семейство механических характерис-
тик для разных значений токов управления.
Полученные характеристики показывают, что плавным изме-
нением напряжения управления можно обеспечить плавное
регулирование частоты вращения двигателя.
Реверсирование двухфазного двигателя можно осуществить
(см. § 3.3) переключением выводов любой из обмоток статора,
что соответствует изменению фазы тока на 180°, следовательно,
двухфазный исполнительный двигатель соответствует и треть-
ему требованию, предъявляемому к двигателям систем авто-
матического управления.
Наконец, рассмотрим последнее требование - исполнитель-
ный двигатель должен обеспечивать высокое быстродействие,
т. е. обладать малым моментом инерции. Это требование наи-
более полно обеспечивается конструкцией двигателя с полым
немагнитным ротором (рис. 3.41). Двигатель состоит из внеш-
него статора 1 и внутреннего статора - сердечника 2. Статоры
набираются из листов электротехнической стали. В пазах внеш-
него статора располагаются обмотки управления и возбужде-
ния 3, сдвинутые в пространстве, а внутренний статор служит
Рис. 3.41. Схема устройства двухфаз-
ного исполнительного двигателя с
полым немагнитным ротором
141
для уменьшения воздушного зазора на пути магнитного пото-
ка и крепится на внутреннем выступе подшипникового щита 4.
Полый ротор 5, выполненный в виде стакана, обычно из алю-
миниевых сплавов, жестко укрепляется на валу 6. Толщина
стенок ротора составляет доли миллиметра. Момент инерции
тонкого и легкого стакана очень мал, что обеспечивает высо-
кое быстродействие двигателя. Кроме того, активное сопро-
тивление такого тонкостенного ротора велико и обеспечивает
нужный вид механических характеристик, устраняя самоход
двигателя.
Двухфазные исполнительные двигатели получили широ-
кое распространение, в основном, за счет малой инерционнос-
ти ротора, что в совокупности со значительным пусковым мо-
ментом обеспечивает высокое быстродействие. Такие двига-
тели имеют и недостатки, обусловленные большим воздуш-
ным зазором (двойной зазор) - низкий КПД и коэффициент
мощности и, следовательно, большие габариты и массу, чем
у асинхронных двигателей обычного исполнения.
Линейные асинхронные двигатели
Статор линейной асинхронной машины подобен развертке
в плоскость статора обычного трехфазного асинхронного дви-
гателя, разрезанного по осевой плоскости. Статор линейного
асинхронного двигателя принято называть индуктором. На
рис. 3.42, а, б схематично показаны статор трехфазного четырех-
полюсного асинхронного двигателя и его линейная разверт-
ка - четырехполюсный трехфазный индуктор. На рис. 3.42, а,
пунктиром показана линия разреза, стрелками - направление
развертки. Магнитопровод индуктора подобно магнитопрово-
ду статора асинхронной машины набран из отдельных плас-
тин электротехнической стали. Трехфаэная четырехполюсная
обмотка индуктора подобна обмотке четырехполюсного стато-
ра обычной конструкции (см. рис. 3.42, а, б) и создает четырех-
полюсную волну магнитного поля, перемещающегося вдоль
индуктора с линейной скоростью Д, которое называется бегу-
щим. Линейная скорость этой бегущей волны равна линейной
скорости перемещения вращающегося магнитного поля (в слу-
чае когда расточка статора лР равна длине индукторов /) и
определяется известным выражением
= лРД/р = /Д/р.
142
Рис. 3.42. Статор трехфаэного четырехполюс-
ного двигателя (о) и его линейная разверт-
ка — четырехполюсный трехфазный индук-
тор (б)
Выражение для определения линейной скорости бегущей
волны, учитывая, что полюсное деление
nD 1
т ------------,
2р 2р
удобнее представлять в виде:
Л = 2тД.
Принцип действия линейных асинхронных двигателей та-
кой же, как и у других типов асинхронных машин. Если в бегу-
щее магнитное поле индуктора поместить электропроводную
пластину, в ней будут наводиться вихревые токи. Взаимодей-
ствие бегущего магнитного поля с этими вихревыми токами
создает электромагнитные силы, заставляющие пластину
двигаться за магнитным полем, подобно тому, как это проис-
ходит в асинхронном двигателе с полым немагнитным ротором.
Линейные асинхронные двигатели, в отличие от рассмотрен-
ных выше типов асинхронных машин, не выпускаются серий*
но. Они проектируются и изготавливаются единичными эк-
143
земплярами обычно в составе специализированного техноло-
гического оборудования или под конкретные устройства, при-
менение в которых обычных двигателей невозможно или эко-
номически не оправдано.
Линейные асинхронные двигатели находят применение
как управляемые лотки или дозаторы для подачи расплав-
ленных металлов. Подвижным элементом в этом случае явля-
ется электропроводная жидкость. Перспективным является
применение линейных асинхронных двигателей в качестве тя-
говых на скоростном наземном транспорте. Такие двигатели
позволяют отказаться от традиционного привода на колесо и
избежать связанных с этим ограничений по скорости. Скорость
бегущего магнитного поля (v\ = 2тД) при т = 0,25 м,Д = 200 Гц
равна 100 м/с или 360 км/ч и при увеличении частоты питания
индуктора будет пропорционально расти.
Воздушный зазор линейного асинхронного двигателя - рас-
стояние от поверхности индуктора до подвижного элемента -
в 10-100 раз превышает воздушный зазор серийного асинхрон-
ного двигателя. Поэтому массогабаритные и энергетические
показатели линейных асинхронных двигателей значительно
уступают аналогичным показателям серийных двигателей.
Представленная на рис. 3.42,6 конструкция индуктора ли-
нейного асинхронного двигателя является упрощенной. В та-
кой конструкции индуктора возникают эффекты искажения
магнитного поля, особенно на его краях (краевые эффекты).
В реальных конструкциях индуктора с этими нежелательны-
ми эффектами успешно борются путем увеличения числа пар
полюсов и размещением на краях индуктора пазов полуза*
полненных обмоткой.
3.15. Комментарии к правильным ответам на вопросы гл.З
3.1.3. Листы пакетов электротехнической стали электри-
чески изолируют друг от друга для уменьшения вихревых то-
ков, т. е. уменьшения тепловых потерь и повышения КПД ма-
шины. Частота вращения магнитного поля относительно ста-
торного пакета равна п t, относительно роторного пакета в но-
минальном режиме работы она на порядок меньше. Поэтому
листы ротора можно не изолировать друг от друга.
3.2.1. Частота вращения зависит от частоты сети [формула
(3.3)]. Вы исходите из того, что в США частота fl = 60 Гц, Вы
правы.
144
33.2. Частота сети не задана и Вы строили свой ответ, счи-
тая, что Д = 50 Гц, обмотка, изображенная на рис. 3.12 имеет
две катушки на каждую фазу, аналогично рис. 3.11. Вы правы
при р = 2 и Д = 50 Гц пх = 1500 об/мин.
3.4.3. Проводники ротора, вращающегося с синхронной ско-
ростью, не пересекают линий магнитного поля, поэтому ЭДС
равна нулю. Для неподвижного ротора частота пересечения
проводников магнитным полем такая же, как и для провод-
ников статора, следовательно, частоты этих ЭДС равны между
собой и равны частоте сети.
3.53. Зависимости Е2(п2) и Х2(п2) действительно совпадают.
3.6.2. Вы учли, что постоянство амплитуды магнитного потока
обеспечивается при постоянстве МДС. Ток зависит от тока
/2, т. е. от частоты вращения вала, которая влияет так же и на
индуктивное сопротивление роторной обмотки. Примерное ра-
венство ЭДС вращения фазному напряжению статора (Ех
% С\) справедливо только при малых скольжениях.
3.7.1. В режиме пуска скольжение равно единице, при этом
ток ротора принимает максимальное значение (3.23). В соот-
ветствии с принципом Ленца индуктированные токи ротора
стремятся изменить магнитный поток вращающегося поля, а
токи статорной обмотки будут компенсировать размагничи-
вающее действие токов ротора, обеспечивая тем самым посто-
янство магнитного потока.
3.8.2. Значение магнитного потока и его частота вращения
относительно статора не зависит от нагрузки на валу, следова-
тельно, изменение нагрузки не влияет на интенсивность вих-
ревых токов и гистерезис, т. е. на мощность магнитных потерь.
3.93. На рис. 3.43 показаны направления ЭДС и токов про-
водников ротора. Направление ЭДС определено по правилу
правой руки. Направление токов на рис. 3.43, а совпадает с
Рис. 3.43. К ответу на вопрос 3.9
145
направлением ЭДС (сдвиг по фазе между Е2 и 12 отсутствует).
На рис. 3.43, б направление токов проставлено с учетом того,
что 12 отстает по фазе от Е2 на угол л/2. Направления электро-
магнитных сил определены по правилу левой руки. На
рис. 3.43, а направления всех сил совпадают и действуют в на-
правлении вращения магнитного поля, создавая вращающий
электромагнитный момент. На рис. 3.43, б равнодействующая
электромагнитных сил равна нулю, т. е. реактивная составляю-
щая тока электромагнитного момента не создает, что соответ-
ствует формуле (3.33), полученной для момента из энергети-
ческих соотношений. Следовательно, направления сил на обоих
рисунках даны верными.
3.10.1. В асинхронном двигателе снижение напряжения ста-
торной цепи уменьшает значение максимального момента,
не изменяя критического скольжения, введение реостата в
цепь ротора не влияет на значение максимального момента,
но увеличивает значение критического скольжения.
3.11.3. Безусловно, что при < С/1Н0М снизятся значения маг-
нитного потока Ф, следовательно, ЭДС Е2 и пусковые токи об-
мотки. Это хорошо. Но Вы правы, так как при этом снижается
и пусковой момент двигателя Мп, а в вопросе не оговорено в
режиме холостого хода или при нагрузке на валу запускают
двигатель. Если Мс будет больше Мп - запуск двигателя не
возможен.
3.12.2. Если регулировать частоту напряжения статорной це-
пи в сторону /> 50 Гц, то можно, в принципе, обеспечить зна-
чение частоты вращения поля гц существенно превышающее
3000 об/мин следовательно, выполнить условие п1>3000об/мин.
Вы правы, только помните, что Фп = /fx, а повышать напряже-
ние выше номинального недопустимо, поэтому можно полу-
чать гц > 3000 об/мин при условии недогруженного двигателя,
т.е. при М < Мном.
Г лава четвертая
СИНХРОННЫЕ МАШИНЫ
4.1. НАЗНАЧЕНИЕ И ОБЛАСТИ ПРИМЕНЕНИЯ СИНХРОННЫХ МАШИН
Название ’’синхронные” имеют электрические машины пере-
менного тока, в которых ротор и магнитное поле токов статора
вращаются синхронно, т. е. с одной и той же частотой вращения.
Если частота токов статора постоянна, то и ротор вращается со
строго постоянной частотой вращения.
Как все электрические машины, синхронные машины обра-
тимы: они могут работать в режимах генератора и двигателя.
В настоящее время основными источниками электроэнергии
остаются синхронные генераторы на тепловых, атомных и гид-
роэлектростанциях (ТЭС, АЭС, ГЭС).
Трехфазные синхронные генераторы - самые мощ-
ные электрические машины. Технический прогресс в энерге-
тике характеризуется концентрацией мощностей электростан-
ций и энергоагрегатов, их блочной компоновкой.
В энергоблок ТЭС кроме турбины и генератора входят также
парогенератор (со своим водяным и топливным оборудованием),
трансформатор, повышающий напряжение до уровня, соответ-
ствующего напряжению линии электропередачи (ЛЭП), вы-
ключатели и насосновентиляционное оборудование систем
охлаждения. С применением более мощных энергоблоков сни-
жается удельный расход топлива, металла, уменьшается стои-
мость оборудования, строительства и эксплуатации агрега-
тов. Повышение единичной мощности машины дает большой
экономический эффект. Но при этом быстро растут проблемы
надежности с одной стороны и экологии - с другой.
Единичная мощность синхронных генераторов, устанавли-
ваемых на ГЭС, достигла 640 МВт, а на ТЭС - 800 -1200 МВт
(рис. 4.1).
Синхронные двигатели также являются самыми мощ-
ными среди всех электродвигателей. Так, единичная мощность
синхронных двигателей для крупных насосов, компрессоров,
воздуходувок, угольных мельниц достигает нескольких десят-
ков мегаватт.
Особенностью синхронной машины, работающей в энергоси-
стеме, является возможность регулирования ее коэффициента
147
1
2 3
Рис. 4.1. Устройство мощного турбогенератора ТВВ-1200-2:
1 - корпус; 2 - камеры для сбора и распределения охлаждающего водорода;
3 - статор; 4 - обмотка статора; 5 - подшипник; 6 - вал; 7 - ротор
мощности по значению и характеру. Поэтому для улучшения
cos ф крупных электроустановок на электрических подстанциях
устанавливают специальные синхронные двигатели, работаю-
щие в режиме холостого хода с опережающим по фазе током.
Их называют компенсаторами реактивной мощ-
ности. Мощность крупных синхронных компенсаторов состав-
ляет 50, 100, 160 МВт.
Разумеется, выпускаются синхронные генераторы и двигате-
ли значительно меньших номинальных мощностей. Синхрон-
ные генераторы мощностью до десятков или сотен киловатт
(рис. 4.2) используют как автономные источники питания с при-
водом от двигателей внутреннего сгорания.
Синхронные двигатели мощностью выше 100 кВт имеют оп-
ределенные преимущества перед асинхронными, хотя они слож-
нее в эксплуатации и дороже, чем асинхронные. Синхронные
микродвигатели мощностью от долей ватта до сотен ватт имеют
упрощенную конструкцию. Строгое постоянство частоты враще-
ния обуславливает их широкое применение в регистрирующих
приборах, в системах звуко- и видеозаписи.
4.2. УСТРОЙСТВО ТРЕХФАЗНОЙ СИНХРОННОЙ МАШИНЫ
Статор синхронной машины устроен так же, как асинхронной.
В пазы пакета из листов электротехнической стали уложены
148
катушки трехфазной обмотки, токи которой создают вращаю-
щееся магнитное поле.
Ротор синхронной машины представляет собой электромаг-
нит. На рис. 4.3, а показана электрическая схема статора и ро-
тора, а на рис. 4.3, б - стандартное графическое обозначение
синхронной машины на схемах. Обмотку статора 1 (см. рис. 4.3, а)
обычно соединяют звездой. Обмотка ротора 2, которую называ-
ют обмоткой возбуждения, подключают через два кон-
тактных кольца 3 и щетки 4 к независимому источнику по-
стоянного напряжения ИНН 5.
Рис. 4.2. Устройство синхронной машины небольшой мощности:
1 — корпус; 2 — сердечник статора; 3 — обмотка статора; 4 — ротор; 5 — венти-
лятор; 6 - выводы обмотки статора; 7 - контактные кольца; 8 - щетки; 9 - воз-
будитель
Рис. 4.3. Электрическая схема син-
хронной машины (о) и ее условное
графическое обозначение на схе-
мах (б):
1 — обмотка статора; 2 — обмотка
ротора; 3 - контактные кольца;
4 — щетки; 5 - источник постоянного
напряжения
149
Рис. 4.4. Поперечное сечение явнополюсного (а) и неявнополюсного (б) роторов:
1 — полюс; 2 — обмотка возбуждения; 3 — полюсный наконечник
Роторы выполняются явнополюсными (рис. 4.4, а) или
неявнополюсными (рис. 4.4, 6). Явнополюсный ротор имеет
выступающие полюсы, на которые надеты катушки обмотки
возбуждения. Полюсы имеют полюсные наконечники (см.
рис. 4.4, а). Неявнополюсный ротор имеет распределенную об-
мотку возбуждения, которая укладывается в пазы, выфрезеро-
ванные в цельной стальной поковке (рис. 4.4, б). При этом обес-
печивается высокая механическая прочность ротора.
Синхронные машины проектируются таким образом, чтобы
количество полюсов на статоре было равно количеству полю-
сов на роторе. От количества полюсов зависит синхронная час-
тота вращения ротора
п2 = 60//р, (4.1)
где / - частота токов статора; р - число пар полюсов.
Неявнополюсные роторы применяются в синхронных
машинах большой мощности, имеющих одну или две пары по-
люсов и соответственно частоту вращения п = 3000 или
1500 об/мин. Изготовление синхронных машин большой мощ-
ности с такими частотами вращения при явнополюсной кон-
струкции ротора невозможно по условиям механической проч-
ности ротора. Неявнополюсные роторы (рис. 4.5, а) имеют син-
хронные генераторы, предназначенные для непосредственного
соединения с паровыми и газовыми турбинами на ТЭС и АЭС.
Такие машины называют турбогенераторами.По условиям
механической прочности диаметр ротора при частоте враще-
ния 3000 об/мин не должен превышать 1,2-1,3 м, а активная
длина ротора должна быть не более 6,5 м.
12 3 4 5 6
61 в)
Рис. 4.5. Конструкции неявнополюсного ротора (а) и явнополюсных роторов
(б, в) (масштабы разные):
1 — контактные кольца; 2 - кольцевые бандажи; 3 - ротор; 4 — металличес-
кие клинья; 5 — вентилятор; 6 — вал; 7 — катушка обомтки возбуждения; 8 — по-
люсы; 9 — пусковая асинхронная обмотка
Явнополюсные роторы применяются в синхронных ма-
шинах с большим числом полюсов и соответственно относи-
тельно низкой частотой вращения (см. рис. 4.5, б, в). Синхрон-
ные машины с явнополюсным ротором, и горизонтальным рас-
положением вала широко используются в качестве двигателей
и генераторов. Явнополюсные роторы с вертикальным распо-
ложением вала имеют синхронные генераторы, предназначен-
ные для непосредственного соединения с гидравлическими
турбинами на ГЭС. Такие генераторы называются гидроге-
нераторами. Самые мощные гидрогенераторы имеют диаметр
ротора около 12 м при относительно небольшой длине - около
2,5 м, число полюсов 2р = 42 и частоту вращения 143 об/мин.
Источниками постоянного напряжения для обмоток воз-
буждения являются специальные устройства, называемые воз-
будителями. Простейшим возбудителем является само-
возбуждающийся генератор постоянного тока, установленный
на валу синхронного генератора. Его мощность составляет
1-3% мощности синхронного генератора. С увеличением еди-
ничной мощности синхронного генератора возбудитель с кол-
лектором стал ненадежным (истираются щетки, возрастает
151
Рис. 4.6. Схема бесщеточного возбуждения мощного синхронного генератора
опасность искрения на коллекторе), поэтому в последнее вре-
мя все большее применение находят вентильные систе-
мы возбуждения с диодами и тиристорами. В вентильной
системе возбуждения используется специальный возбудитель,
выполненный в виде трехфазного синхронного генератора.
Его ротор укреплен на валу главного генератора. Переменное
напряжение возбудителя выпрямляется и подводится через
щетки и контактные кольца к обмотке возбуждения. Для наи-
более мощных синхронных генераторов применяется вентиль-
ная бесщеточная система возбуждения (рис. 4.6). На валу син-
хронного генератора размещается якорь возбудителя В, кото-
рый представляет из себя генератор переменного тока ’’обра-
щенной конструкции”. Полюсная система у такого возбудите-
ля расположена на статоре (как в машинах постоянного тока),
а трехфазная обмотка - на роторе. Переменное напряжение
этой обмотки с помощью выпрямителя, закрепленного на ва-
лу машины, преобразуется в постоянное и непосредственно
(без колец) подается на обмотку возбуждения главного гене-
ратора. Обмотка возбуждения возбудителя, расположенная
на статоре, получает питание от подвозбудителя ПВ - генера-
тора переменного тока меньшей мощности с постоянными маг-
нитами на роторе и выпрямителем на статоре. Ротор подвозбу-
дителя укреплен на валу главного генератора.
Вопрос 4.1. Как отразится на КПД и потерях синхронной ма-
шины, если ее ротор будет изготовлен не из массивной стали,
а набран из тонких стальных листов?
Варианты ответа:
4.1.1. Магнитные потери уменьшатся, а КПД увеличится.
152
4.1.2. КПД и магнитные потери в роторе не изменятся.
4.1.3. КПД не изменится, так как магнитных потерь в роторе
нет.
4.3. ПРИНЦИП ДЕЙСТВИЯ СИНХРОННОГО ГЕНЕРАТОРА
Ротор генератора приводится во вращение первичным двига-
телем (турбиной). Вместе с ротором с частотой вращения п2 вра-
щается магнитное поле ротора (поле возбуждения), которое
создается постоянным током в обмотке возбуждения ротора.
Силовые линии магнитного поля ротора, которое называется
основным, проходят через воздушный зазор и сцепляются с
трехфазной обмоткой статора. Распределение магнитной ин-
дукции Bq в воздушном зазоре вдоль окружности ротора ста-
раются сделать синусоидальным (рис. 4.7) за счет формы полю-
сов ротора (в тихоходных машинах) или размеров катушек воз-
буждения (в быстроходных машинах). Поэтому при вращении
ротора магнитный поток основного магнитного поля инду-
цирует в трех фазах обмотки статора синусоидальные ЭДС
еод> еов> еос (в дальнейшем индексы А, В, С опускаются) оди-
наковой амплитуды и частоты. Так как оси фаз трехфазной об-
мотки сдвинуты в пространстве на угол 2л/3, то ЭДС будут
сдвинуты по фазе на тот же угол 2л/3. Максимальная ЭДС на-
водится в тех проводниках, которые расположены напротив
середины полюсов ротора No и So, где магнитная индукция
максимальна. Направления ЭДС в фазах обмотки статора, по-
казанные на рис. 4.8, а, можно определить по правилу правой
руки (они обозначены знаками креста и точки).
Рис. 4.7. Диаграмма распределения магнитной
индукции двухполюсного ротора
‘Величины, относящиеся к магнитному полю ротора записываются с ин-
дексом ”0”.
153
Частоты ЭДС в обмотках статора зависят от числа пар полю-
сов р и частоты вращения ротора п2
рп2
60
(4.2)
Если к трехфазной обмотке статора синхронного генерато-
ра подсоединить активный симметричный приемник, то в фа-
зах обмотки возникнут токи i, совпадающие по направлению
с вызвавшими их ЭДС, и, следовательно, сдвинутые по фазе на
угол 2л/3. Эти токи создадут вращающееся магнитное поле
статора*. Частота вращения этого поля относительно статора
р
Заменяя в (4.3) частоту ее значением из (4.2), получаем, что
П1 = п2•
Следовательно, ротор и его магнитное поле вращается с той
же частотой, что и магнитное поле токов статора.
Направление силовых линий магнитного поля статора можно
определить по правилу правоходового винта (см. рис. 4.8, а).
На рис. 4.8, б показано распределение магнитной индукции
статора Ва вдоль зазора по окружности статора. Из рис. 4.8, 6 вид-
Рис. 4.8. Распределение ЭДС е0 и токов i в проводниках обмотки статора (а);
диаграмма распределения магнитной индукции двухполюсного поля токов
статора при совпадении фаз ЭДС е0 и тока i (б)
* Величины, относящиеся к магнитному полю статора записываются с ин-
дексом ”а”.
154
но, что под каждым полюсом статора (Na, Sa) будут находиться
проводники обмотки возбуждения, имеющие одинаковое
направление тока возбуждения ротора 1р. В результате взаимо-
действия магнитного поля статора и проводников с токами на
роторе возникают электромагнитные силы, действующие на
ротор в тангенциальных направлениях против направления
вращения, и создается электромагнитный момент, тормозящий
движение ротора. В установившемся режиме тормозной элект-
ромагнитный момент уравновешен вращающим моментом пер-
вичного двигателя (Мэм = Мвр).
Магнитные поля токов ротора и статора, неподвижные отно-
сительно друг друга, образуют результирующее маг-
нитное поле, которое зависит от взаимного расположения
этих полей в пространстве. Магнитное поле ротора всегда на-
правлено по оси полюсов и обусловливает ЭДС е0 в фазах об-
мотки статора. Ориентация магнитного поля токов статора в
пространстве определяется углом сдвига между индуцируемой
ЭДС Eq и током Z. В дальнейшем этот угол сдвига будем обо-
значать буквой ф. Угол ф может изменяться от л/2 до -л/2 и
зависит от характера нагрузки генератора. При чисто активной
нагрузке (ф = 0), как следует из рис. 4.7 и 4.8, оси магнитных по-
лей ротора и статора перпендикулярны. Сложение двух маг-
нитных полей с синусоидальным распределением магнитных
индукций Во и Ва можно произвести, используя принцип на-
ложения, при допущении, что магнитная цепь машины не на-
сыщена.
Распределение магнитной индукции результирующего маг-
нитного поля Врез вдоль воздушного зазора показано на
рис. 4.9. Из рис. 4.9, следует, что ось результирующего магнитно-
го поля смещена относительно оси магнитного поля ротора.
Пространственный угол 0 (см. рис. 4.9) между магнитными ося-
ми полюсов ротора и результирующего магнитного поля маши-
ны называют углом рассогласования (полюсов).
Рис. 4.9. Диаграмма распределения результи-
рующей магнитной индукции при совпадаю-
щих по фазе е0 и ।
155
Выше рассмотрена работа генератора при активной нагрузке,
когда токи I в фазах обмотки статора совпадают по фазе с соот-
ветствующими ЭДС Ео (см. рис. 4.8, а). При индуктивной или
емкостной нагрузке генератора токи будут соответственно от-
ставать или опережать ЭДС на угол ф = л/2 (если пренебречь от-
носительно малым активным сопротивлением обмотки стато-
ра). При этом ось магнитного поля токов статора повернется от-
носительно оси полюсов ротора также на угол л/2 и, следова-
тельно, их оси совпадут. В случае индуктивной нагрузки маг-
нитное поле токов статора будет направлено встречно магнит-
ному полю ротора и результирующее магнитное поле машины
будет ослабляться, а в случае емкостной нагрузки магнитные
поля будут направлены согласно и результирующее магнитное
поле машины будет усиливаться. В обоих случаях угол рассо-
гласования 0 будет равен нулю.
Таким образом, при наличии активной составляющей тока
статора, когда активная мощность генератора больше нуля, ось
результирующего магнитного поля смещается относительно
магнитной оси полюсов ротора на угол 0 в сторону отставания
тем больше, чем больше активная мощность. В генераторе по-
люсы ротора являются ведущими, ’’тянущими” за собой полю-
сы результирующего магнитного поля.
Образное представление о возникновении угла 0 может дать
механическая модель, состоящая из свободно вращающихся
соосных диска и кольца (рис. 4.10). Кольцо и диск связаны упру-
гой нитью (пружинкой). Уподобим диск ротору генератора, а
кольцо - магнитному полю токов статора. При вращении диска
кольцо также будет вращаться с той же скоростью. При этом ес-
ли на кольцо не действует момент сопротивления, то точки
закрепления пружинки на диске и кольце будут располагаться
на одной прямой (на радиусе, рис. 4.10, а).
Рис. 4.10. Модель синхронного вращения диска и кольца без торможения (а)
и с торможением (б)
156
Если увеличивать момент сопротивления (трение кольца),
то и диск надо вращать с большей силой. Кольцо продолжает
вращаться синхронно, хотя пружинка растянется и точки ее за-
крепления сместятся на некоторый угол а, передавая усилие
от диска кольцу (рис. 4.10, 6).
Вопрос 4.2. При каком характере нагрузки электромагнитный
момент синхронного генератора будет равен нулю? (магнит-
ные и механические потери считать равными нулю)
Варианты ответа:
4.2.1. При активно-индуктивной нагрузке.
4.2.2. При активно-емкостной нагрузке.
4.2.3. При емкостной или индуктивной нагрузке.
4.2.4. При активной нагрузке.
4.4. УРАВНЕНИЕ ЭЛЕКТРИЧЕСКОГО СОСТОЯНИЯ,
ВЕКТОРНАЯ ДИАГРАММА И СХЕМА ЗАМЕЩЕНИЯ ФАЗЫ
СИНХРОННОГО ГЕНЕРАТОРА
Из § 4.3 следует, что в синхронной машине существует магнит-
ное поле возбуждения и магнитное поле токов статора (полем
рассеяния статорной обмотки пренебрегаем). Каждое из этих
полей индуцирует во всех трех фазах обмотки статора ЭДС.
Так как фазы симметричны будем строить векторную диаграм-
му и схему замещения для одной фазы статора. Для качест-
венного рассмотрения процессов в синхронной машине при-
мем, что ее магнитная цепь не насыщена. Это дает возмож-
ность считать магнитные поля независимыми и использовать
принцип наложения.
Ток возбуждения создает основное магнитное поле. Сину-
соидально изменяющееся потокосцепление То(О основного
магнитного поля с фазой обмотки статора индуцирует в ней
ЭДС е0. Действующее значение ЭДС связано с амплитудой
потокосцепления соотношением
Ео = 4,44/¥от. (4.4)
Зависимость амплитуды потокосцепления ¥огп от тока воз-
буждения ротора приведена на рис. 4.11 и повторяет кривую
намагничивания В(Н) магнитной системы синхронной машины.
Важной характеристикой синхронной машины является ха-
рактеристика холостого хода, которая представляет собой
зависимость ЭДС Ео от тока возбуждения 1р. Эта характеристи-
157
Рис. 4.11. Характеристика холостого
хода синхронной машины
ка аналогична кривой намагничивания (см. рис. 4.11), так как
согласно (4.4) ЭДС Ео пропорциональна потокосцеплению ¥От.
Характеристика холостого хода может быть получена опытным
путем в режиме холостого хода синхронного генератора. Эта
характеристика позволяет оценить насыщение магнитной це-
пи машины.
Токи обмотки статора создают вращающееся магнитное поле.
Изменяющееся потокосцепление магнитного поля токов ста-
тора ¥а(0 с фазой обмотки статора наводит в ней ЭДС еа.
Результирующая ЭДС статорной обмотки
ерез = е0 + еа
или в комплексной форме
Ёрез = Ёо + Еа - (4.5)
Эта ЭДС определяется результирующим потокосцеплением
*рез“ *о + *о» <4 6)
которое создано магнитными полями токов статора и ротора.
Уравнения (4.5) и (4.6) использованы при построении вектор-
ной диаграммы рис. 4.12. Вектор потокосцепления опере-
жает вектор ЭДС Ёо на угол п/2. Вектор тока статора I имеет
направление, соответствующее активно-индуктивной нагруз-
ке. Потокосцепление Уа, создаваемое током I, совпадает по
фазе с этим током. Вектор ЭДС Ёа отстает по фазе от соответ-
ствующего вектора потокосцепления Та на угол л/2. Результи-
рующие векторы потокосцепления ¥рез и ЭДС Ерез определя-
ются согласно (4.5) и (4.6) геометрическим сложением векторов.
Направление вектора ¥0 относительно вектора ¥рез характе-
ризует пространственное смещение осей магнитного поля ро-
тора и результирующего магнитного поля. Поэтому угол меж-
ду этими векторами соответствует углу рассогласования 6. Из
158
Рис. 4.12. Векторная диаграмма потоко-
сцепления и ЭДС синхронного генера-
тора
построения следует, что сдвиг между вектором Ёо и Ёрез также
соответствует углу 0.
Согласно второму закону Кирхгофа сумма индуцируемых в
фазе обмотки статора ЭДС равна напряжению фазы обмотки
статора плюс падение напряжения в активном сопротивлении
этой обмотки
Ёо + Ёа = U + RI. (4.7)
Заменим ЭДС Еа падением напряжения на индуктивном
сопротивлении X обмотки
Ёа =-jXI. (4.8)
Величина X называется синхронным индуктивным
сопротивлением.
В синхронных машинах обычно Л « X. Пренебрегая членом
RI в уравнении (4.7), получим упрощенное уравнение электри-
ческого состояния фазы синхронного генератора
Ео = U+jXI. (4.9)
Из этого уравнения следует, что синхронный генератор -
это источник ЭДС EQ9 внутреннее сопротивление которого име-
ет индуктивный характер. Уравнению (4.9) соответствует схема
замещения фазы обмотки статора (рис. 4.13) и упрощенная век-
торная диаграмма (рис. 4.14) для активно-индуктивной на-
грузки.
Построение векторной диаграммы можно вести в следующей
последовательности. Считаем заданными векторы напряжения
U, тока I и характер нагрузки. Вектор £0 определяется геометри-
ческим сложением векторов й и jxt. Вектор jXI должен быть
направлен таким образом, чтобы он опережал ток 1 на угол л/2.
Так как U = £рез и Еа = - jXI, то из векторной диаграммы на
159
Рис. 4.13. Схема замещения фазы
синхронного генератора
Рис. 4.14. Упрощенная векторная
диаграмма синхронного генерато-
ра (при ф > 0)
рис. 4.12 следует, что в режиме генератора вектор ЭДС Ёо опе-
режает вектор напряжения U на угол 0.
Вопрос 4.3. С помощью векторной диаграммы для случая,
когда ток статора опережает по фазе напряжение на угол л/2,
определите, что больше - напряжение на зажимах статора или
ЭДСЕ0? Каков при этом угол рассогласования 0?
Варианты ответа:
4.3.1. Ео < U, 0 = 0.
4.3.2. Ео > U, 0 = 0.
4.3.3. Ео = U, 0 = 0.
4.3.4. Ео < U, 0 > 0.
4.3.5. Ео > I/, 0 > 0.
4.3.6. Ео = [/, 0 > 0.
4.5. СИНХРОНИЗАЦИЯ И ВКЛЮЧЕНИЕ ГЕНЕРАТОРА
НА ПАРАЛЛЕЛЬНУЮ РАБОТУ В МОЩНОЙ ЭНЕРГОСИСТЕМЕ
Понятие о мощной энергосистеме
Рассмотрим эксплуатационные свойства отдельного синхрон-
ного генератора, работающего параллельно с множеством дру-
гих генераторов на общую сеть с разнообразными потребителя-
ми электроэнергии.
Энергосистема представляет множество электростанций и
потребителей, объединенных общей электрической сетью. В
энергосистеме имеются специальные службы, которые заботят-
ся о поддержании постоянства частоты и напряжения в сети.
160
Рис. 4.15. Схема замещения синхронного ге-
нератора и энергосистемы
Диспетчер системы имеет суточно-почасовой график мощнос-
тей всех потребителей. Энергосистемы укрупняются, так как
это делает их более экономичными и гибкими.
В нашей стране создана самая крупная в мире Единая энер-
гетическая система (ЕЭС), ее мощность превысила 200 млн. кВт.
Создание ЕЭС повысило надежность электроснабжения,
позволило сократить на 3-4 млн. кВт необходимые резервы
мощности (за счет различия времени в часовых поясах), уве-
личило примерно на 6 млн. кВт пропускную способность линий
передач без строительства дополнительных ЛЭП.
Для рассмотрения работы отдельного синхронного генера-
тора в энергосистеме нужно заменить множество параллельно
включенных генераторов системы одним эквивалентным ге-
нератором. Внутреннее сопротивление такого эквивалентного
генератора очень мало, а мощность - велика. Эквивалентный
потребитель может быть изображен переменным активно-реак-
тивным сопротивлением. Анализ работы отдельного генерато-
ра в мощной энергосистеме будем вести, используя схему заме-
щения на рис. 4.15. При этом будем полагать, что изменение
рабочих режимов синхронного генератора не может влиять на
напряжение и частоту мощной сети, так как они поддержива-
ются в сети постоянными.
Включение генератора на параллельную работу с сетью
При включении генератора на параллельную работу с други-
ми генераторами необходимо избегать бросков тока в статор-
ной цепи и возникновения ударных электромагнитных момен-
тов на валу, способных вызвать повреждение генератора и дру-
гого оборудования, а также нарушить работу энергосистемы.
Чтобы этого не происходило необходимо определенным обра-
зом отрегулировать режим работы генератора на холостом ходу
и в определенный момент времени включить генератор в сеть.
Совокупность этих операций называется синхрониза-
цией генератора.
161
Чтобы синхронизировать генератор с сетью, необходимо обес-
печить:
1. Равенство ЭДС Ео генератора и напряжения сети U.
2. Равенство частот напряжений генератора /г и сети /с.
3. Совпадение по фазе напряжений генератора и сети.
4. Одинаковый порядок чередования фаз генератора и сети.
Равенства Ео = U добиваются путем регулирования тока воз-
буждения синхронного генератора (см. рис. 4.11). Изменение час-
тоты и фазы напряжения генератора достигается изменением
частоты вращения приводного двигателя (турбины).
Выполнение первого условия проверяют по вольтметрам, под-
ключенным к сети и выводам генератора. Остальные условия
проверяют с помощью специального прибора, называемого
синхроноскопом. Простейшим синхроноскопом является
ламповый. Три лампы прибора включены на разность потен-
циалов между одноименными линейными контактами трехфаз-
ного выключателя. При не вполне точном равенстве частот
генератора и сети разности потенциалов будут изменяться и
соответственно будет изменяться напряжение на лампах -
они будут то загораться, то гаснуть. Для выполнения второго
условия синхронизации необходимо добиться, чтобы измене-
ние свечения ламп было очень медленным. Включение генера-
тора в сеть надо производить в момент времени, когда все лам-
пы погаснут. В этом случае будет выполнено третье условие.
При выполнении четвертого условия синхронизации все три
лампы гаснут и зажигают одновременно. Если порядок чере-
дования фаз генератора и сети разный, то будет происходить
’’вращение” огня (одна лампа загорается, другая - гаснет).
Правильность чередования фаз необходимо проверять толь-
ко при первом включении генератора после монтажа или сбор-
ки схемы.
При точном выполнении условий синхронизации после
включения генератора в сеть он остается в режиме холостого
хода (I = 0). Векторная диаграмма генератора для этого режи-
ма приведена на рис. 4.16.
ДЯ//
в=о
-> *— Рис. 4.16. Векторная диаграмма одной фазы включенного в сеть
генератора в режиме холостого хода
162
Вопрос 4.4. Четырехполюсный синхроный генератор вклю-
чают на параллельную работу с трехфазной сетью, имеющей ли-
нейное напряжение Un - 380 В и частоту / = 50 Гц. Чему должны
быть равны ЭДС Ео и частота вращения ротора п2 для синхрониза-
ции генератора с сетью.
Варианты ответа:
4.4.1. £0 = 380 В; п2 = 3000 об/мин.
4.4.2. Ео - 220 В; п2 = 1500 об/мин.
4.43. Ео = 380 В; п2 = 1500 об/мин.
4.6. УГЛОВЫЕ ХАРАКТЕРИСТИКИ СИНХРОННОГО ГЕНЕРАТОРА
Регулирование активной мощности
Рассмотрим особенности работы синхронного генератора
параллельно с сетью бесконечной мощности (Uc = const, fc -
= const).
Активная мощность синхронного генератора определяется
известным соотношением
Р = 3Wcos Ф.
(4.10)
Электромагнитная мощность Рэм больше полезной актив-
ной мощности Р на относительно малую мощность электричес-
ких потерь в обмотке статора.
Пренебрегая этими потерями, получим
Р *• Рэм ш 3EaI cos ф .
(4-11)
Преобразуем (4.11), выразив мощность Р через угол рассогла-
сования 8. Для этого обратимся к векторной диаграмме син-
хронного генератора, работающего с активно-индуктивной на-
грузкой (рис. 4.17). Обозначим точками а и b концы векторов,
а точкой с пересечение перпендикуляра, опущенного из точ-
ки а на вектор Ео. Угол Ьас равен углу ф, а
, ас 17 sin 0
cos ф ---------------------.
ab XI
Подставив в (4.11) выражение созф, получим
Рис. 4.17. Векторная диаграм- Рис. 4.18. Угловые характеристики
ма синхронного генератора синхронного генератора
при активно-индуктивной на-
грузке
3Eou
Р ---------sin 9 = Рмакс sin в > (4.12)
х
где
^макс ~
3£ои
X
Электромагнитный момент, создаваемый синхронной ма-
шиной
Р 3£ои
Мэм М “ — sin 9 Аймаке s*n ® *
(4.13)
где Qj = 2л n t/60 - угловая скорость магнитного поля статора,
ЗЕ01/
^макс •
Так как Qx = const, то М ~ Р. Зависимости (4.12) или (4.13)
представляют собой аналитическое выражение угловой
характеристики синхронной машины (рис. 4.18).
Активная мощность и электромагнитный момент синхрон-
ной машины пропорциональны ЭДС и синусу угла рассогласо-
вания 0, так как остальные параметры, входящие в формулы
(4.12) и (4.13) - напряжение сети, угловая скорость, синхронное
сопротивление - практически постоянны.
164
Амплитуду электромагнитного момента Ммакс можно регули-
ровать, так как она пропорциональна ЭДС Ео, зависящей от то-
ка ротора (см. рис. 4.11).
Покажем на угловой характеристике синхронного генерато-
ра значение вращающего момента Мвр приводного двигателя
(турбины) в виде горизонтальной пунктирной прямой (момент
турбины не зависит от угла 0). В точке пересечения этой пря-
мой с угловой характеристикой (при угле рассогласования 0Х)
вращающий момент турбины равен электромагнитному мо-
менту сопротивления генератора Мвр = М; механическая мощ-
ность турбины равна электромагнитной (активной) мощности
генератора. При том же вращающем моменте турбины, но мены
шем токе ротора угол рассогласования будет больше (02 > 0t).
Чем больше момент турбины, тем больше активная мощность
отдаваемая генератором в сеть. Мощность синхронного генера-
тора максимальна (при заданных Ео и U) при 6 = 90°.
Таким образом, активная мощность генератора на электро-
станции регулируется моментом турбины или другого первич-
ного двигателя и не зависит от сопротивления электрических
приемников в сети. Диспетчер электростанции имеет суточно-
почасовой (с учетом времени года) график нагрузки всех потре-
бителей, где указана требуемая активная и реактивная мощ-
ность. По указанию диспетчера синхронные генераторы вклю-
чаются, нагружаются (или разгружаются и отключаются) так,
чтобы в любой момент обеспечивалась требуемая мощность
электроэнергии.
Об устойчивости в синхронизме
На рис. 4.10 была рассмотрена модель синхронного вращения
диска и кольца. Очевидно, что при определенном значении мо-
мента пружина может разорваться. Так же не беспределен
синхронизм генератора. Он существует, пока вращающий мо-
мент турбины уравновешивается электромагнитным моментом
сопротивления генератора.
При 0 < 0 < 90° (восходящий участок угловой характеристи-
ки, см. рис. 4.18) синхронный генератор сохраняет синхронизм
с сетью, т. е. имеет синхронную частоту вращения и работает
устойчиво. Например, при увеличении вращающего момента
турбины Мвр будут увеличиваться угол 0 и, следовательно,
электромагнитный момент сопротивления генератора М до
тех пор, пока не наступит новое равновесие моментов Мвр = М.
165
При этом увеличатся ток статора I, активная мощность Р, но
частота вращения ротора п2 останется постоянной.
При в - 90° электромагнитный момент генератора достигает
максимально возможного (при заданных £0 и U) значения и
при дальнейшем увеличении вращающего момента турбины
генератор не может создавать равного момента сопротив-
ления (Ммакс < Мвр). Полюсы ротора ’’отрываются” от полюсов
магнитного поля токов статора, частота вращения ротора начи-
нает возрастать сверх синхронной, т. е. он ’’выпадает” из син-
хронизма. Такой режим может возникнуть при постоянном
вращающем моменте и уменьшении тока ротора (и ЭДС £0)
или снижении напряжения на зажимах генератора (например,
при близком к генератору коротком замыкании в сети).
Амплитудное значение электромагнитного момента (или
мощности) называют пределом статической устойчивости син-
хронной машины в синхронизме.
Естественно, что на пределе статической устойчивости нор-
мальная эксплуатация генератора недопустима. Необходим
определенный "запас” по электромагнитному моменту, обес-
печивающий сохранение синхронизма при значительных изме-
нениях (динамике) момента первичного двигателя. Для обес-
печения динамической устойчивости допускается работа син-
хронной машины при угле рассогласования, не превышающем
30° при номинальной мощности.
Заметим, что прямая Мвр пересекается с угловой характе-
ристикой также при угле 0'= 180°-0Х (см. рис. 4.18). Однако
на этом участке характеристики (90° < 0 < 180°) синхронный ге-
нератор работает неустойчиво. Если, например, вращающий
момент турбины станет немного больше электромагнитного
момента сопротивления генератора, то угол рассогласования
начнет возрастать: 0 > 0'. Но при этом, как видно из рис. 4.18,
электромагнитный момент уменьшается, ротор получает до-
полнительное ускорение и угол 0 продолжает увеличиваться.
Происходит ’’выпадение” синхронного генератора из синхро-
низма.
’’Выпадению” из синхронизма генератора предшествует не-
устойчивое состояние: неравномерное возрастание угла 0
до 90°, 180°, 360° и т. д., т. е. ’’проворачивание” ротора относи-
тельно магнитного поля токов статора и чередование режимов
генератор-двигатель-генератор; броски тока статора достига-
ют значений, соответствующих при 0 = 180° двойному току КЗ:
166
и
Рис. 4.19. Векторная диаграмма синхронного генератора • . •
при 0= 180° <
J
I — 2U/X (рис. 4.19). Это состояние является аварийным. Из не*
го есть два выхода: отключить генератор от сети или стремить-
ся удержать его в синхронизме, ’’форсируя”, т. е. резко увели-
чивая ток возбуждения ротора. При этом усиливается магнитное
поле и возрастает максимальный электромагнитный момент
генератора.
Аварийное отключение мощного генератора (или несколь-
ких генераторов) может привести к необходимости либо отклю-
чения ряда потребителей соответствующей мощности, что свя-
зано с экономическим ущербом, либо перевода нагрузки на
оставшиеся генераторы. В последнем случае требуется опре-
деленное время для увеличения вращающих моментов тур-
бин (увеличение расхода топлива, воды, пара).
Вопрос 4.5. Синхронный генератор включен на параллельную
работу с энергосистемой и отдает электроэнергию в сеть. Что
произойдет, если случится обрыв в цепи возбуждения?
Варианты ответа:
4.5.1. Частота вращения ротора начнет возрастать и генера-
тор выйдет из синхронизма.
4.5.2. Частота вращения ротора начнет уменьшаться и гене-
ратор выйдет из синхронизма.
4.53. Генератор будет продолжать работать параллельно с
сетью в режиме холостого хода.
4.7. РЕГУЛИРОВАНИЕ РЕАКТИВНОЙ МОЩНОСТИ
СИНХРОННОГО ГЕНЕРАТОРА. V-ОБРАЗНЫЕ ХАРАКТЕРИСТИКИ
Рассмотрим влияние тока возбуждения ротора на работу
включенного в сеть синхронного генератора при постоянном
вращающем моменте первичного двигателя (Мвр = const).
Построим три векторные диаграммы генератора для различ-
ных токов возбуждения, совместив их на одном рисунке
167
(рис. 4.20). Первую диаграмму построим для случая, когда ЭДС
E0(i)> 1А Ток статора при этом отстает от напряжения U
на угол <рх .
Вторую диаграмму построим для такого тока возбуждения,
когда ток статора имеет только активную составляющую 1а. Так
как по условию Мвр = М = const и U = const, то на основании фор-
мул (4.13), (4.10) Ео sin 0 = const, I cos ф = Ia = const.
Это означает, что векторы Ео и I имеют годографы - прямые,
показанные пунктирными линиями на рис. 4.20. Поэтому на
второй диаграмме Е0(2) < ^o(i), а ток статора 1а - минимальный.
Наконец, легко построить диаграмму для малого тока воз-
буждения, когда Е0(3) < U- Из диаграммы видно, что при малом
токе возбуждения ток статора генератора опережает напря-
жение U на угол фэ.
На угловых характеристиках рис. 4.21 отмечены точки 1, 2, 3,
соответствующие векторным диаграммам рис. 4.20.
Таким образом, изменение тока возбуждения ротора син-
хронного генератора приводит к изменению характера реактив-
ной мощности: при большом токе ротора (при перевозбуждении)
реактивная мощность имеет индуктивный характер (Q > 0),
при недовозбуждении - емкостный характер (Q < 0).
Зависимость тока статора от тока возбуждения ротора син-
хронного генератора при постоянной активной мощности
Р представляется V-образными характеристиками, показываю-
щими возможность регулирования реактивной мощности
(рис. 4.22). Минимумы кривых соответствуют чисто активным
токам статора (cos ф = 1). Легко определить значение cos ф в
Рис. 4.20. Векторные диаграммы
синхронного генератора при ре-
гулировании реактивной мощно-
сти
Рис. 4.21. Угловые характеристики син-
хронного генератора при изменении
тока ротора
168
любой точке V-образной кривой
cos ф = 1а/1.
(4.14)
Зависимость cos Ф от тока ротора для одной из V-образных
кривых (Р = const) показана штрих-пунктирной кривой на
рис. 4.23. Левее пунктирной кривой, соответствующей cos ф = 1
(см. рис. 4.22), ток имеет емкостную реактивную составляющую,
правее - индуктивную реактивную составляющую.
В левой части графика (см. рис. 4.22) V-образные кривые не
доходят, до оси ординат, кроме нижней кривой при Р = 0. Это
означает, что при малом токе возбуждения мала амплитуда
электромагнитного момента и при увеличении активной мощ-
ности (или момента турбины) может произойти выпадение ге-
нератора из синхронизма. При больших значениях тока ротора
начинается насыщение магнитной цепи машины, в результате
чего нарушается линейная зависимость ЭДС Ео от тока рото-
ра /р (см. рис. 4.11). Поэтому правые ветви V-образных характе-
ристик становятся более пологими. На рис. 4.22 отмечены точки
1, 2, 3 угловых характеристик, показанных на рис. 4.21.
Влияние тока возбуждения на реактивную мощность син-
хронного генератора, работающего в сети, можно пояснить еще
и таким образом. При постоянном напряжении сети интенсив-
ность результирующего магнитного поля и потокосцепле-
ния ¥рез (см. рис. 4.9 и 4.12) должны оставаться неизменными.
Поэтому увеличение или уменьшение интенсивности магнит-
ного поля полюсов ротора вызывает такое изменение располо-
жения оси магнитного поля статора относительно ротора, при
котором сохраняется результирующее потокосцепление маши-
ны: магнитное поле токов статора размагничивает или подмаг-
Рис. 4.22. V-образные характеристики
синхронного генератора
ltcos<p
КО
Р- const
cos (р[емк) [ cos у (ин д)
Рис. 4.23. Зависимости I и cos ф
синхронного генератора от 1р
приР= const
169
ничивает ротор, что изменяет характер реактивной мощности
генератора. Нормально синхронный генератор работает с пере-
возбуждением.
Задача 4.1. Четырехполюсный синхронный генератор работает
в энергосистеме с активной мощностью Р = 68,25 МВт. Ток воз-
буждения установлен таким, что ЭДС Ео • 15 кВ. Номиналь-
ные данные генератора: Рном = 100 мВт, 1/ном = 15,75 кВ,
cos фном = 0,9 (инд), X = 3 Ом. Потерями энергии в генераторе
можно пренебречь.
Определить угол рассогласования, ток статора, коэффициент
мощности, реактивную мощность, момент, развиваемый тур-
биной, и максимальную активную мощность, соответствую-
щую пределу устойчивости генератора в синхронизме.
Решение. Угол рассогласования 9 определим из уравнения
угловой характеристики
РХ 68.25 • 106 • 3
sin 0 ------—---------------!------------------ 0,5; 0 = 30°.
31/ф.ном£о 3 ♦ 9,1 • 103 • 15-ю3
Фазное напряжение
Уфном = = 9Л кВ-
)/з 1.73
Ток статора определим из уравнения электрического состо-
яния
£0-17флом 15е130 -9,1 ;27»зо'
4ом ----------------------------- 2>8 е ~;2Г30 кА.
}Х j3
Угол 30° соответствует углу 0, на который ЭДС Ео опережает
напряжение й (см. рис. 4.14).
Коэффициент мощности
cos ф = cos (-27°30’) = 0,89 (инд).
Реактивная мощность
Q = ЗПф.Ном^ном sin ф = 3 • 9,1 • 2,8 • 0,46 = 35,16 Мвар.
Момент, развиваемый турбиной
170
МВр = ~= 9,55 — = 9,55 —д5'106 = 0,43 • 106 Н • м.
nj 1500
Максимальная активная мощность
р
Р -----------
* макс
sin 9
68,25
0,5
= 136,5 мВт.
Задача 4.2.* Для двухполюсного синхронного генератора,
работающего параллельно с сетью, на рис. 4.24 приведены уг-
ловые и V-образные характеристики. Определить для отмечен-
ных на характеристиках точек значения параметров, указан-
ные в табл. 4.1.
Таблица 4.1
№ варианта № рисунка Неизвестные параметры
1 4.25, а точка!: 0, М
2 4.25,6 точки 1 и 2х М
3 4.25, в точка 1: РМакс» ^макс
4 4.25, г точки 1 и 2: cos ф
Рис. 4.24. Угловые и V-образные характеристики синхронного генератора
171
Ответы:
1. 0t = 30°, Мх = 318 Н м.
2. = 0; М2 = 103 Н • м.
3. Рмакс. = 600 кВт; Мi = 1,9 кН • м.
4. cos фх = cos ф2 = 0,5.
Задача 4.3. Синхронный генератор имеет следующие номи-
нальные данные: SH0M = 500 кВ • А, Уном - 6,3 кВ, cos фном = 0,9,
Л ном - 92,4%, пном = 93,8 об/мин. Определить номинальную ак-
тивную мощность, мощность приводного двигателя, ток гене-
ратора при номинальной нагрузке и число пар полюсов.
Ответ: РНом = 450 кВт; Рдв = 487 кВт; I = 45,8 А; р = 32.
Задача 4.4. Найти максимальную активную мощность, соот-
ветствующую пределу статической устойчивости, трехфазного
синхронного генератора с номинальным напряжением UH0M =
400 В, ЭДС Ео = 1,2 • l/ф.ном- Синхронное сопротивление X =
= 0,38 Ом.
Ответ: Рмакс = 506 кВт.
4.8. РАБОТА СИНХРОННОГО ГЕНЕРАТОРА В АВТОНОМНОМ РЕЖИМЕ
Для обеспечения электроэнергией различных потребителей
в местах, удаленных от мощной электрической сети, исполь-
зуется автономно работающий синхронный генератор. Приме-
рами могут служить строительные площадки, удаленные от
промышленных районов, лесозаготовительные пункты, мор-
ские и речные суда и т.д. Обычно в этом случае синхронный
генератор приводится во вращение двигателем внутреннего
сгорания.
Работа генератора в энергосистеме большой мощности харак-
теризуется постоянством напряжения на зажимах машины и
частоты этого напряжения. При работе генератора в автоном-
ном режиме напряжение на его зажимах й = Ёо - jXI зависит
от тока и характера нагрузки. На рис. 4.25 построены внешние
характеристики синхронного генератора при различном коэф-
фициенте мощности и л2 = const. Изменение напряжения, ко-
торое может достигать нескольких десятков процентов, объяс-
няется большим внутренним индуктивным сопротивлением
синхронной машины. Для стабилизации напряжения U необ-
ходимо регулировать ЭДС Ео и, следовательно, ток возбуж-
172
Рис. 4.25. Внешние характеристики синхронного у
генератора при автономной работе Р
Cos ср-1
Cosш< 1*
(инд!
I
дения. С этой целью генераторы снабжают автоматическими
регуляторами возбуждения, реагирующими на значение U.
Изменение тока возбуждения генератора приводит к изме-
нению напряжения и тока статора, но не коэффициента мощ-
ности. Следовательно, автономный синхронный генератор не
обладает свойством регулирования реактивной мощности. Она
целиком определяется характером приемника.
Изменение сопротивления нагрузки влияет не только на зна-
чение напряжения, но и на частоту вращения ротора. При вне-
запном увеличении активной составляющей тока статора пос-
ле подключения дополнительной нагрузки возрастает электро-
магнитный момент сопротивления и ротор начинает тормо-
зиться. Если момент приводного двигателя остается неиз-
менным, то частота вращения ротора снижается, что вызыва-
ет уменьшение ЭДС Ео. При этом уменьшается ток статора, в
частности, его активная составляющая, до тех пор пока элек-
тромагнитный момент не снизится до значения момента пер-
вичного двигателя. Генератор автоматически ’’сбрасывает”
дополнительную активную нагрузку. В новом режиме значе-
ние напряжения на зажимах машины и его частота оказыва-
ются меньше, что неблагоприятно отражается на условиях ра-
боты нагрузочного устройства. Для поддержания частоты вра-
щения ротора и частоты напряжения постоянными привод-
ной двигатель снабжается автоматическим регулятором мо-
мента.
Задача 4.5. Синхронный генератор в автономном режиме пи-
тает резистивный приемник с сопротивлением фазы Rn = 10 Ом.
Его индуктивное синхронное сопротивление X = 10 Ом, а ЭДС
Ео ~ Ю2 В. Найти фазные ток, напряжение и активную
мощность приемника.
Ответ: I з= ю A, U = 100 В, Р = 3 кВт.
4.9. ПРИНЦИП ДЕЙСТВИЯ И ОСОБЕННОСТИ РАБОТЫ
СИНХРОННОЙ МАШИНЫ В РЕЖИМЕ ДВИГАТЕЛЯ
Предположим, что синхронный генератор включен в трех-
фазную сеть и работает без нагрузки в режиме XX. Если теперь
механически отключить приводной двигатель, то ротор будет
продолжать вращаться с синхронной частотой, а потери холос-
того хода будут покрываться электрической энергией, посту-
пающей от сети. При этом изменятся направления токов в
трехфазной обмотке статора. Так как фазы обмотки статора
смещены в пространстве, а токи в трехфазной сети сдвинуты
по фазе на угол 2л/3, то токи обмотки статора создадут вращаю-
60/
щееся с частотой л. ---магнитное поле. Ротор, вращающий-
р
ся с синхронной частотой л2, и его магнитное поле, созданное
постоянным током в обмотке возбуждения, будут неподвижны
относительно поля статора. В результате взаимодействия маг-
нитного поля статора и проводников с токами на роторе возни-
кают электромагнитные силы, действующие на ротор в танген-
циальных направлениях, и создается вращающий электро-
магнитный момент. Синхронная машины стала работать в ре-
жиме двигателя.
Магнитные поля токов ротора и статора, неподвижные от-
носительно друг друга, образуют результирующее маг-
нитное поле. При идеальном XX (Мс = 0) ось результирую-
щего магнитного поля будет совпадать с магнитной осью ро-
тора (0 = 0). Если к валу двигателя приложить момент сопро-
тивления (Мс > 0), то ось магнитного поля ротора сместится
относительно оси результирующего магнитного поля на
угол 0 в сторону отставания (рис. 4.26). В установившемся ре-
жиме момент сопротивления будет уравновешен вращающим
электромагнитным моментом (Мс = Мэм). Относительно гене-
раторного режима изменяются знаки электромагнитного мо-
Рис. 4.26. Результирующее магнитное поле
машины и положение ротора относительно
него в режиме двигателя с нагрузкой на валу
174
мента и угла рассогласования полюсов. В двигательном режи-
ме ведущим звеном являются полюсы результирующего маг-
нитного поля, а ведомым - полюсы ротора.
Если увеличивать механический момент сопротивления, то
будет возрастать угол рассогласования, механическая мощ-
ность двигателя и электроэнергия, потребляемая им из сети.
При этом частота вращения ротора будет оставаться постоян-
ной и равной синхронной частоте вращения магнитного поля
статора.
Для иллюстрации режима синхронного двигателя вновь об-
ратимся к модели диска и кольца, соединенных пружинкой
(рис. 4.27). Будем вращать кольцо, возложив на него роль анало-
га вращающегося магнитного поля машины. Диск - аналог ро-
тора. Если тормозить ось диска, то он будет продолжать вра-
щаться синхронно с кольцом, но возникнет угол расхождения
точек закрепления пружинки.
Очевидно, схема замещения синхронного двигателя
(рис. 4.28) имеет те же элементы, что и схема замещения син-
хронного генератора (см. рис. 4.13). Но теперь она должна вы-
ражать иной смысл: синхронный двигатель - это активный
приемник, имеющий противо-ЭДС Ео и внутреннее индуктив-
ное синхронное сопротивление X. На основании схемы замеще-
ния по второму закону Кирхгофа можно записать уравнение
электрического состояния фазы статора двигателя
U = Ёо + jXI. (4.15)
Уравнению (4.15) соответствует векторная диаграмма син-
хронного двигателя, изображенная на рис. 4.29. Вектор ЭДС
Рис. 4.27. Модель диск-
кольцо — аналог син-
хронного двигателя
Рис. 4.28. Схема замеще-
ния фазы синхронного
двигателя
Рис. 4.29. Векторная диа-
грамма нагруженного
перевозбужденного син-
хронного двигателя
175
Ео, который связывают с положением полюсов ротора, при на-
личии нагрузки на валу двигателя отстает на угол 0 от векто-
ра напряжения U сети, с которым связано положение полюсов
результирующего магнитного поля машины.
Вопрос 4.6. Синхронный двигатель работает без нагрузки на
валу при идеальном XX. Его ротор возбужден так, что Ео > U.
С помощью векторной диаграммы определите угол сдвига ф
между током и напряжением статора.
Варианты ответа:
4.6.1. ф =-90°.
4.6.2. ф = +90°.
4.6.3. ф = 0°.
4.10. УГЛОВЫЕ ХАРАКТЕРИСТИКИ СИНХРОННОГО ДВИГАТЕЛЯ
Угловая характеристика синхронного двигателя, также как
и для генератора, - это зависимость электромагнитной мощ-
ности Р или электромагнитного момента М от угла рассогласо-
вания 0 (см. рис. 4.18), которая аналитически описывается вы-
ражением (4.12) или (4.13). Следует учитывать, что при перехо-
де из генераторного в двигательный режим работы, как было
отмечено в § 4.9, изменяется знак угла 0, что приводит к изме-
нению знака мощности и момента. Однако оперирование с от-
рицательными мощностями и моментами неудобно и поэто-
му они условно принимаются положительными.
Амплитуда угловой характеристики (Ммакс или Рмакс) ха'
рактеризует перегрузочную способность синхронного
двигателя или предел его статической устойчи-
вости в синхронизме
1 _ ^макс _ 1
А — —— — в
^ном s*n ®
Перегрузочная способность зависит от напряжения сети и
ЭДС Ео, т. е. от тока возбуждения ротора. Таким образом, пере-
грузочную способность двигателя легко регулировать током
возбуждения. Номинальный момент двигателя соответствует
углу рассогласования не более 30°. Поэтому перегрузочная
способность синхронных двигателей всегда больше двух. У дви-
гателей с резко переменным моментом сопротивления (для
привода дробилок, поршневых насосов) она достигает 3,5.
176
Как все электродвигатели, синхронный двигатель обладает
свойством саморегулирования: при изменении момента сопро-
тивления на валу изменяется угол рассогласования 6 и элек-
тромагнитный вращающий момент становится равным момен-
ту сопротивления. При этом изменяются активная мощность
и ток статора двигателя. Но частота вращения остается неиз-
менной: механическая характеристика синхронного двигате-
ля - зависимость п2 (М) - представляет собой горизонтальный
отрезок прямой.
На угловых характеристиках (рис. 4.30) значение момента
сопротивления на валу показано горизонтальной линией.
Ее пересечение с восходящими ветвями характеристик, где
возможна устойчивая работа синхронного двигателя, дают зна-
чения рабочих углов рассогласования 0. На нисходящих вет-
вях характеристик, так же как и для генератора, устойчивая
работа двигателя невозможна.
При большом токе ротора его магнитное поле становится
сильнее, угол рассогласования полюсов уменьшается. Если
уменьшить ток ротора, то момент сопротивления на валу мо-
жет оказаться больше максимального электромагнитного мо-
мента двигателя и ротор остановится. При этом ЭДС EQ « 0 и
ток статора резко увеличивается, так как J = (U-EQ)/jX.
Вопрос 4.7. При номинальном моменте сопротивления и недо-
возбуждении синхронный двигатель работает с углом рассогла-
сования 30°; при перевозбуждении 17,5°. Преодолеет ли дви-
гатель кратковременную трехкратную перегрузку по моменту
в первом и во втором случаях?
Варианты ответа:
4.7.1. Преодолеет и в первом и во втором случаях.
4.7.2. В первом случае преодолеет, во втором - не преодолеет.
4.7.3. В первом случае не преодолеет, во втором - преодолеет.
4.7.4. Не преодолеет ни в первом, ни во втором случаях.
Рис. 4.30. Угловые характеристики синхронного
двигателя
177
4.11. РЕГУЛИРОВАНИЕ КОЭФФИЦИЕНТА МОЩНОСТИ
СИНХРОННОГО ДВИГАТЕЛЯ
Постоянство напряжения сети, от которой работает синхрон-
ный двигатель, обусловливает постоянство в нем результирую-
щего потокосцепления. Поэтому регулирование тока возбуж-
дения ротора при М = const приводит к изменению значения
тока статора двигателя и его фазы (см. § 4.7). Таким образом,
коэффициент мощности синхронных двигателей можно регу-
лировать, что является их важной особенностью.
Изменение тока статора и его фазы при изменении тока воз-
буждения двигателя можно показать, построив векторные
диаграммы (рис. 4.31), так же как это было сделано для гене-
ратора. Зависимость тока статора от тока ротора при заданном
моменте на валу синхронного двигателя представляют V-об-
разными характеристиками (рис. 4.32).
Перевозбужденный двигатель работает с опережающей реак-
тивной составляющей тока (см. рис. 4.31), недовозбужденный -
с отстающей. На V-образных характеристиках рис. 432 отмече-
ны точки 1, 2, 3, соответствующие тем же точкам на угловых
характеристиках рис. 4.30 и векторных диаграммах рис. 431.
Обычно синхронные двигатели работают с перевозбуждением
при cos V = 0,8. При этом емкостные составляющие токов стато-
ра компенсируют в линии индуктивные составляющие токов
асинхронных двигателей, трансформаторов и других индук-
тивных приемников, уменьшая токи и потери энергии в ли-
ниях.
Рис. 432. V-образные харак-
теристики синхронного дви-
гателя
'о sin 9= const
Рис. 4.31. Векторные диаграммы син-
хронного двигателя при регулиро-
вании тока возбуждения
17в
Рис. 4.33. Векторная диаграмма синхронного
компенсатора
jxi
Перевозбужденный синхронный двигатель, работающий без
нагрузки на валу, называется синхронным компенсатором -
потребителем емкостного тока. Векторная диаграмма компен-
сатора дана на рис. 4.33. Синхронные компенсаторы используют
для улучшения коэффициента мощности и стабилизации на-
пряжения промышленных сетей. Мощности синхронных ком-
пенсаторов достигают 100 - 160 Мвар.
Задача 4.6. В цехе установлено несколько трехфазных асин-
хронных двигателей. Их общие параметры: cos ф = 0,6 (инд),
^ном = 124 кВт, 1/ном = 380 В. Предполагается увеличить актив-
ную мощность приводов в 1,8 раза, но так, чтобы ток в линии
увеличился не более, чем на 20%. Для этого установлен син-
хронный двигатель с номинальными данными: Рном =100 кВт,
Ином = 380 В, cos <р = 0,8 (емк.).
Определить коэффициент мощности и ток в линии до и пос-
ле установки синхронного двигателя.
Решение. 1. Мощности всех асинхронных двигателей и ток
до установки синхронного двигателя.
Реактивная мощность
Qxd ~ Pad tg Ф ~ 124 • 1,33 = 165 квар.
Полная мощность
SAD = —— = — = 207 кВ • А.
cos ф 0,6
Ток
т SAD 207 • 103
IaD -------- = ------- “ 315 А.
1.73-380
179
Коэффициент мощности cos ф = 0,6.
2. Реактивная мощность синхронного двигателя
Qcd = PCD tg ф = 100 • 0,75 = 75 квар.
3. После установки синхронного двигателя.
Общая активная мощность
РОб = Pad + Pcd = 124 + Ю0 = 224 кВт.
Общая реактивная мощность
<?об = Qad - Qcd = 165 - 75 = 90 квар.
Общая полная мощность
Яоб = VP’6 + Qo26 = >/224’ + 90’ =242кВ- А.
Общий ток
-$об 242 • 10э
1фб - тг-2- - —------- 368 А.
V3 Uhom V3 • 380
Ток увеличился всего на 17%.
Коэффициент мощности
cos ф = °6 = 224 = 0,926.
$об 242
Установка синхронного двигателя привела к улучшению
коэффициента мощности.
4.12. ПУСК СИНХРОННЫХ ДВИГАТЕЛЕЙ
До сих пор говорилось о работающем синхронном двигателе.
Пуск этого двигателя имеет некоторые особенности. При под-
ключении статора к сети быстровращающееся магнитное поле
токов статора действует на неподвижный, возбужденный по-
стоянным током ротор со знакопеременной силой, не создаю-
щей среднего момента, и ротор остается неподвижным. Так же
180
ведет себя стрелка магнитоэлектрического прибора, если по его
катушке пропускать переменный ток частотой 50 Гц. Но если
частота тока очень мала (например, 0,5 Гц, как в цепи ротора
работающего асинхронного двигателя), то стрелка будет совер-
шать медленные колебания в такт с изменением тока.
Электромагнитный момент может заставить ротор преодолеть
инерцию и следовать за магнитным полем статора - втянуться
в синхронизм, если полюсы магнитного поля токов статора бу-
дут достаточно медленно перемещаться относительно полю-
сов ротора. Это состояние возникнет, если предварительно
разогнать ротор до частоты вращения близкой к синхронной.
Для разгона современных синхронных двигателей их роторы
снабжают специальной пусковой короткозамкнутой обмот-
кой 1, подобной ’’беличьему колесу” асинхронных двигате-
лей (рис. 4.34). Стержни этой обмотки укладывают в специаль-
ные пазы полюсов 2 и соединяют по торцам ротора.
При пуске обмотку возбуждения отключают от источника
питания и замыкают на резистор, сопротивление которого в
10-15 раз превышает сопротивление самой обмотки. Если об-
мотку оставить разомкнутой, то в начале пуска в ней вращаю-
щимся магнитным полем будет индуцироваться большая ЭДС,
опасная для изоляции. Под действием асинхронного момента
ротор разгоняется до частоты вращения близкой к синхронной
(п2 * 0,95 п х), а затем обмотку возбуждения подключают к
источнику постоянного напряжения. Возникает синхронный
электромагнитный момент и двигатель втягивается в синхро-
низм. Переход двигателя в процессе пуска с асинхронной на
синхронную механические характеристики иллюстрируется
на рис. 4.35.
Для мощных синхронных двигателей, асинхронный пуск ко-
торых потребовал бы мер по ограничению пусковых токов,
Рис. 4.34. Часть ротора синхронного дви- Рис. 4.35. Пусковая механическая ха-
гателя с пусковой обмоткой: рактеристика синхронного двига-
1 — стержни пусковой обмотки; 2 — теля
полюсы
181
иногда применяют небольшой асинхронный разгонный дви-
гатель.
Обычно пуск синхронных двигателей автоматизирован, что
удорожает их, однако при мощностях свыше 100 кВт синхрон-
ные двигатели оказываются экономически выгоднее асин-
хронных в основном благодаря способности работать с емкост-
ной мощностью при перевозбуждении.
Задача 4.7. Построить угловую характеристику и векторную
диаграмму шестиполюсного синхронного двигателя при номи-
нальной нагрузке и номинальном возбуждении. Отметить на
угловой характеристике точку, соответствующую этому режиму.
Номинальные данные двигателя: Рном = 990 кВт, U»ntJ, = 6 кВ,
X = 42 Ом, Ммакс/Мном = 2,2.
Решение. Номинальная частота вращения
60/ _ 60'50
пиом - :
Р 3
= 1000 об/мин.
Угловая скорость
Qj = й2 =
Зяпном 2 • J.14 • 1000
60 60
= 105 ра д/с.
Номинальный момент
Мном “ 9,55 = 9,55 10 = 9,45 • 103 Н • м.
1000
Максимальный момент
Ммаис = 2,2 Мном = 2,2 • 9,*5 • 10э = 20,8 • 10э Н • м.
Угол рассогласования полюсов
sin 0 =
= 0 =27»,
^макс
На угловой характеристике двигателя (рис. 4.36, а) отмечена
точка номинального режима. Значение ЭДС Ео найдем из урав-
нения угловой характеристики
„ Ммаксп1х 20,8-10’-105 - 42
Ео -------------=------------—
3«/ з-б-ю3/уз
= 8,8 • 103 В.
182
Рис. 4.36. Угловая характеристика (а) и векторная диаграмма (б) синхронного
двигателя
Для построения векторной диаграммы (рис. 4.36, б) отклады-
ваем вектор фазного напряжения й и под углом 0 к нему в сто-
рону отставания вектор ЭДС Ёо. Затем находим вектор паде-
ния напряжения на синхронном сопротивлении
jXI = 1У-Ё0 =-”-8,8е~>27° = 5,7е>137° кВ
уз
и его модуль XI = 5,7 кВ.
Ток статора найдем из соотношения
_ XI 5,7-103 .
I ------ —— 136 А.
X 42
Вектор тока I должен быть направлен перпендикулярно век-
тору jxi в сторону отставания.
Задача 4.8. В табл. 4.2 приведены номинальные данные син-
хронных двигателей напряжением UH0M ~ 380 В (Р± - электри-
ческая мощность синхронного двигателя). Определить неиз-
вестные параметры, помеченные знаком ?
Таблица 4.2
№ вар. пном» об/мин х s • г 2 К О ^ном» Н • М cos ф ном 0, град р ном» кВт Л. кВт Лном» % ^ном» А ^а» А
1 1000 600 300 7 7 7 7 7 74,7 59,8
2 7 900 300 0,83 7 47,1 55,4 7 7 7
3 1500 7 7 7 25 40 7 80 95,1 ?
4 7 7 532,9 1 20 7 7 85 100 7
Ответы:
1- cos Фном = 0.8; 0 = 30°; рном = 31,4 кВт; Pt = 39,3 кВт; цном =
= 80%.
2. пном = 1500 об/мин; 0 = 19°30'; пном = 85%; /ном - 101,5 А;
4 = 84,3 А.
3- Ммакс = 602,4 Н • м; Мном = 254,8 Н • м; cos фном = 0,8; =
= 50 кВт; 4 = 76,1 А.
4. пном = 1000 об/мин; Ммкс - 1567 Н • м; Рном - 55,8 кВт; Pt -
= 65,7 кВт; 4 = 100 А.
Задача 4.9. Как изменится режим работы (угол В, частота вра-
щения п2; ток статора I) шестиполюсного синхронного двигате-
ля мощностью Рном = 2700 кВт, если напряжение сети снизит-
ся на 25% по отношению к номинальному напряжению 17ном =
= 6 кВ. Двигатель при номинальном возбуждении нагружен
номинальным моментом сопротивления. Максимальный мо-
мент в 2,2 раза больше номинального. Синхронное сопротив-
ление двигателя X = 16 Ом, номинальные КПД т]ном = 0,96, ко-
эффициент мощности cos Фном = 0,8.
Ответ:
При 17 = 6 кВ: 0 = 33°, п2 = 1000 об/мин; I = 338 А.
При U = 4,5 кВ: 0 = 46°; п2 = 1000 об/мин; I = 406 А.
Задача 4.10. Определить частоту вращения, номинальный мо-
мент, ток статора, активную и реактивную мощности шестипо-
люсного синхронного двигателя со следующими номинальны-
ми данными: Рном = 285 кВт; UH0M = 3 кВ; cos Фном = 0,8; пном =
= 0,94.
Ответ:
п2 = 1000 об/мин; Мном = 2,7 • 10э Н • м; 1 - 73 А; Р = 303 кВт;
Q = 227 квар.
184
Задача 4.11. Синхронный двигатель на напряжение UH0M =
= 6 кВ имеет синхронное сопротивление X = 10 Ом и работает
с углом рассогласования 0 = 45°. Определить значение ЭДС
Ео и электрическую мощность Рх, если он работает с cos <р = 1.
Ответ:
Ео = 4,9 кВ; Рх = 3606 кВт.
4.13. СИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ
В автоматических устройствах для привода механизмов с
постоянной частотой вращения, например, лентопротяжных,
применяют синхронные микродвигатели мощностью от долей
до сотен ватт. Они отличаются от обычных синхронных двига-
телей тем, что не имеют обмотки возбуждения на роторе. При
этом исключается необходимость в источнике питания и нали-
чие скользящих контактов.
Микродвигатели выпускаются в трех- и двухфазном испол-
нении. В двигателях, предназначенных для работы от одно-
фазных источников питания, в пазах статора размещено две
обмотки, одну из которых включают через фазосдвигающий эле-
мент для получения вращающегося магнитного поля (ВМП).
В зависимости от типа ротора различают синхронные микро-
двигатели с постоянными магнитами, гистерезисные и реак-
тивные.
Синхронный микродвигатель с постоянными магнитами
на роторе (СД с ПМ)
На рис. 4.37 схематически показана конструкция ротора это-
го двигателя. Для создания магнитного поля возбуждения на
роторе размещаются постоянные магниты I, выполненные из
магнитотвердого материала с большой коэрцитивной силой
(Нс > 50 кА/м). Вращающий момент в двигателе возникает как
результат взаимодействия полюсов ВМП токов статора с полю-
сами намагниченного ротора.
Свойства и рабочие характеристики двигателя с постоянны-
ми магнитами практически не отличаются от двигателя с
электромагнитным возбуждением. Но в СД с ПМ нельзя регу-
лировать максимальный вращающий момент и коэффициент
мощности. СД с ПМ не имеет собственного пускового момента.
Разгон ротора осуществляется под действием асинхронного
185
Рис. 4.37. Устройство ротора синхронного
микродвигателя с постоянными магнитами:
1 - магниты; 2 - стержни пусковой об-
мотки; 3 - полюсы; 4 — пластмассовая за-
ливка
момента, который создается в результате взаимодействия ВМП
и токов в стержнях 2 пусковой короткозамкнутой обмотки, за-
крепленной в полюсах 3 (см. §4.12).
Основным недостатком СД с ПМ является высокая стоимость
постоянных магнитов.
Гистерезисный микродвигатель
Это синхронный микродвигатель, вращающий момент кото-
рого возникает за счет явления гистерезиса при перемагни-
чивании ротора. Его ротор, как и у СД с ПМ, выполняется из
магнитотвердого материала с меньшей коэрцитивной силой
(Нс < 50 кА/м). Однако если ротор СД с ПМ предварительно
намагничен, то магнитотвердый материал ротора гистерезис-
ного двигателя намагничивается и перемагничивается ВМП
токов статора.
Для рассмотрения принципа образования вращающего мо-
мента на рис. 4.38 изобразим условно один полюс N ВМП токов
статора и элементарную площадку ’’область” на роторе, намаг-
ничиваемую ВМП (см. рис. 4.38, а). Силы взаимодействия полю-
сов в рассматриваемом случае направлены по радиусу, поэто-
му момент не создается. В следующее мгновение полюс N не-
много повернется (вправо), а ротор вследствие гистерезисного
запаздывания еще сохраняет предыдущее намагничивание
(см. рис. 4.38, б). Теперь между полюсом ВМП и отстающей ’’об-
ластью” ротора возникает тангенциальная составляющая си-
лы F, которая создает гистерезисный вращающий момент Мг.
Гистерезисный микродвигатель может работать как в син-
хронном, так и в асинхронном режиме. В синхронном режиме,
когда момент сопротивления Мс < Мг, перемагничивания
материала ротора не происходит и гистерезисный микро-
двигатель работает как С Л с ПМ. Отличие только в том,
что угол 0 не может превысить угла гистерезисного запаз-
186
Рис. 4.38. К возникновению гистерезисного момента:
а-Мг = 0; б-Мг>0
дывания 6Г, так как в противном случае начинается перемаг-
ничивание ротора. Угол 0Г и гистерезисный момент Мг опреде-
ляются магнитными свойствами материала ротора. Угол 0Г
обычно не превышает 20-25°.
Если момент сопротивления на валу Мс > Мг, то двигатель
переходит в асинхронный режим работы. При этом ротор пере-
магничивается, а Мг остается неизменным при любом сколь-
жении. Асинхронный режим работы не экономичен из-за боль-
ших потерь энергии на перемагничивание.
При пуске и в асинхронном режиме результирующий момент
Мреэ определяется суммарным действием гистерезисного мо-
мента Мг и асинхронного момента Масин, вызванного вихревы-
ми токами. Механическая характеристика гистерезисного дви-
гателя приведена на рис. 4.39.
Ценные свойства гистерезисного микродвигателя: он имеет
большой пусковой момент и момент входа в синхронизм, ток
мало изменяется от пуска до холостого хода. Его отличитель-
ной особенностью является полисинхронизм - способность со-
Рис. 4.39. Механическая характеристика
гистерезисного микродвигателя
187
хранить пусковые и рабочие свойства при изменении частоты
вращения поля статора, т. е. этот микродвигатель позволяет
регулировать частоту вращения ротора изменением частоты
напряжения питания микродвигателя.
Энергетические показатели гистерезисного двигателя не
очень высокие: КПД = 50-5-60%, cos ср - 0,4 -5- 0,6.
Реактивный микродвигатель
Это синхронный микродвигатель, вращающий момент кото-
рого возникает при отсутствии магнитного поля ротора, имею-
щего неодинаковую магнитную проводимость в радиальных
направлениях. Роторы выполняют из магнитомягкого материа-
ла либо явнополюсными, либо неявнополюсными. На
рис. 4.40 изображены поперечные разрезы неявнополюсных рото-
ров с одной и двумя парами полюсов. Они выполнены из не-
скольких пакетов 1 листовой электротехнической стали, зали-
тых алюминием 2. Применение двух разнородных по магнит-
ным свойствам материалов обеспечивает разное магнитное
сопротивление ротора в радиальных направлениях.
Вращающий момент возникает за счет стремления ротора за-
нять положение, при котором магнитный поток полюсов ста-
тора проходит по оси полюсов ротора с наименьшим магнитным
сопротивлением.
В синхронном режиме и отсутствии момента сопротивления
(Мс = 0) угол рассогласования 0 = 0. Если на ротор действует
момент сопротивления (Мс > 0), то угол рассогласования воз-
растает и возникают тангенциальные силы, вызывающие
синхронный реактивный момент. Вращающий реактивный мо-
мент зависит от относительного смещения осей полюсов ро-
тора и поля статора и пропорционален синусу двойного угла
рассогласования, т. е. М = MMaKcsin 20.
Рис. 4.40. Конструкция двухпо-
люсного (а) и четырехполюсного
(б) роторов реактивного двига-
теля:
1 — электротехническая сталь;
2 — алюминий
188
Реактивный синхронный двигатель имеет простую конструк-
цию, низкую стоимость, но наличие пассивного ротора, не имею-
щего собственного магнитного потока, вызывает снижение
вращающего момента и cos ср двигателя. По этой же причине
при одинаковых габаритных размерах КПД и развиваемая мощ-
ность реактивных микродвигателей меньше, чем у СД с ПМ.
Шаговый микродвигатель
Так называют микродвигатель, в котором поворот ротора на
фиксированный угол происходит после подачи на статорные
обмотки управляющих импульсов напряжения прямоуголь-
ной формы, которые формируются коммутатором (рис. 4.41, а).
Статор шаговых двигателей обычно имеет явно выраженные
полюсы с катушками возбуждения и ю2 (см. рис. 4.41, б). Ро-
тор явнополюсный с постоянными магнитами.
Рассмотрим принцип работы шагового микродвигателя. По-
ложение ротора относительно полюсов статора зависит от токов
в катушках. Например, при появлении токов в катушках на по-
люсах 1 и 3 ротор займет положение, показанное на рис. 4.42, а.
Рис. 4.41. Схема включения (а) и
конструкция (б) синхронного ша-
гового двигателя
Рис. 4.42. Врашение ротора синхронного шагового двигателя (а—а) и временные
диаграммы токов в катушках (г)
189
При подключении к источнику питания катушек на полюсах
1, 2, 3 и 4 (см. рис. 4.42, б), ось симметрии поля статора повер-
нется на 45°. Включение только катушек на полюсах 2 и 4 (см.
рис. 4.42, в) обеспечит поворот еще на 45°. Временные диаграм-
мы тока в катушках на полюсах 1, 3 и тока i2 в катушках на
полюсах 2, 4 приведены на рис. 4.42, г. Изменяя направление
токов и i2 в катушках, можно поворачивать ротор далее ша-
гами в 45°. При увеличении числа полюсов 2р на статоре шаг
углаповоротауроторауменьшаетсяв”р”раз у = 360°/2р.
Вопрос 43. Какой синхронный микродвигатель может рабо-
тать в асинхронном режиме?
Варианты ответа:
4.8.1. Двигатель с постоянными магнитами.
4.8.2. Гистерезисный двигатель.
4.8.3. Реактивный двигатель.
4.8.4. Шаговый двигатель.
4.14. Комментарии к правильным ответам на вопросы гл. 4
4.1.3. Как известно, магнитные потери возникают при пере-
магничивании магнитопровода. В синхронной машине ротор
вращается с той же частотой, что и магнитное поле статора и,
следовательно, не перемагничивается. Поэтому в роторе нет
магнитных потерь. Изготовление ротора из тонких листов стали
приведет к уменьшению его механической прочности, а КПД
при этом не изменится.
4.2.3. При емкостной или индуктивной нагрузке под каждым
полюсом статора (Na, Sa) будут находиться проводники обмот-
ки возбуждения, имеющие разное направление тока ротора
1р. В результате взаимодействия магнитного поля статора и
проводников с токами на роторе возникают электромагнитные
силы, действующие на ротор в тангенциальных направлениях
в разные стороны, и результирующий электромагнитный момент
будет равен нулю.
43.1. Если ток статора опережает напряжение на угол л/2,
то режим работы синхронного генератора характеризуется ре-
активным емкостным током и при этом активная мощность
равна нулю. Следовательно, угол рассогласования 6 = 0. При
построении векторной диаграммы вектор jxi следует направить
от конца вектора U в противоположную ему сторону, так как
190
й
Рис. 4.43. Векторная диаграмма синхронного генератора
при ф = — п/2
jxi
to
он должен опережать вектор тока I на угол л/2. Поэтому век-
тор Ёо будет короче вектора U на длину вектора jxi (рис. 4.43).
4.4.2. ЭДС Ео индуцируется в фазе обмотки статора генера-
тора, которая соединяется ’’звездой”. Для равенства напряже-
ний сети и генератора Ео = 380/^3 = 220 В. С целью выполнения
второго условия синхронизации частота вращения ротора ге-
нератора, имеющего две пары полюсов, согласно (4.1) должна
быть 1500 об/мин.
4.5.1. В этом случае ток возбуждения, создающий основное
магнитное поле, будет равен нулю. Следовательно, в обмотках
статора не будет индуцироваться ЭДС Ео и согласно (4.13) элек-
тромагнитный момент сопротивления будет отсутствовать. Ро-
тор за счет вращающегося момента турбины получает ускоре-
ние, его частота вращения начинает увеличиваться и генера-
тор выходит из синхронизма.
4.6.1. Из векторной диаграммы следует, что ток опережает
напряжение на 90°. При построении диаграммы векторы U и Ёо
следует изобразить совпадающими, так как двигатель рабо-
тает без нагрузки на валу и, следовательно, 0 = 0. Согласно
(4.15) вектор jxi следует направить от конца вектора Е в про-
тивоположную ему сторону. Ток статора i отстает от напряже-
ния на индуктивном сопротивлении на 90° и по отношению к
напряжению сети оказывается опережающим, чисто емко-
стным.
4.7.3. Перегрузочная способность синхронного двигателя при
недовозбуждении 1/sin 30° = 2, а при перевозбуждении -
1/sin 17,5° = 3,3. Поэтому при перевозбуждении двигатель пре-
одолеет трехкратную перегрузку, а при недовозбуждении - не
преодолеет.
4.8.2. Гистерезисный двигатель может работать в асинхрон-
ном режиме, когда момент сопротивления больше гистерезис-
ного момента.
191
Г лава пятая
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ УПРАВЛЕНИЯ
5.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ
АППАРАТОВ
Для управления режимом работы электрического оборудова-
ния необходимо осуществлять подсоединения (включения),
переключения или выключения различных устройств.
Например, для включения бытового электроприбора (осве-
тительной лампы, пылесоса) часто достаточно нажать кнопку
выключателя. При этом происходит механическое соединение
пары электрических контактов. Для включения двигателя по-
стоянного тока мощностью около 1 кВт необходимо обеспе-
чить определенную последовательность ряда коммутаций. Все
электротехнические устройства, как правило, подключаются к
общей сети через специальные автоматические выключатели
или предохранители, которые защищают сеть от повреж-
дения в случае короткого замыкания приемника электричес-
кой энергии. В системах автоматического управления исполь-
зуются разнообразные устройства - первичные преобразователи
различных механических, тепловых, химических и других ве-
личин в электрические, устройства обработки электрических
сигналов, устройства дистанционного управления. Для пере-
ключения устройств высокого напряжения приходится ис-
пользовать специальные сложные аппараты, в которых прини-
маются меры против образования электрической дуги, для ее
гашения, а также предусматривается защита от поражения
электрическим током.
В этих и многих других случаях используются электри-
ческие аппараты - устройства для включения, переклю-
чения и выключения электрических и механических цепей,
а также для плавного управления режимами работы электри-
ческих приемников.
По назначению электрические аппараты управления делят-
ся на:
а) аппараты управления режимом работы электрооборудо-
вания (контакторы, пускатели, реле, электромагнитные муф-
ты, командоаппараты и переключатели);
б) аппараты распределительных устройств (автоматические
выключатели и предохранители);
192
в) аппараты регулирования и контроля (стабилизаторы и дат*
чики).
Важнейшей частью электрического аппарата является ком-
мутирующий узел, который характеризуется переходным со-
противлением. В состоянии "замкнуто” оно должно иметь зна-
чение, много меньше, чем сопротивление управляемого при-
емника. Это обеспечивает небольшие потери энергии и не-
значительное влияние на режим работы приемника. В состо-
янии ’’разомкнуто” переходное сопротивление должно быть
много больше сопротивления приемника.
Процессы коммутации сопровождаются образованием им-
пульсов тока и напряжения, которые могут вызвать импульсы
электромагнитного поля, опасные для здоровья человека и
мешающие работе многих электронных устройств. Поэтому для
решения проблем электромагнитной совместимости электри-
ческие аппараты включают в цепь с электрическими фильт-
рами и помещают в электромагнитные экраны.
По типу коммутирующего узла различают контактные, бес-
контактные и гибридные электрические аппараты управления.
В контактном аппарате имеются электрические кон-
такты, которые замыкаются или размыкаются под действием
механических сил, создаваемых приводом. Привод может быть
электромагнитный, тепловой, механический, магнитный и др.
В контактных аппаратах достигаются малое переходное
сопротивление после замыкания и весьма большое - после
размыкания контактов, высокая надежность, большая пере-
грузочная способность (сохранение работоспособности при
токах и напряжениях, превышающих номинальные), большие
номинальные значения токов и напряжений в коммутируемой
цепи. К недостаткам контактных аппаратов относят износ кон-
тактных поверхностей, невысокую частоту коммутаций, неста-
бильность переходного сопротивления в момент коммутации
из-за механических колебаний подвижной части контакта
(’’дребезг контактов”).
В бесконтактном электрическом аппарате коммутация
достигается изменением сопротивления нелинейного элемен-
та - транзистора, тиристора и др. Такие аппараты отличаются
отсутствием подвижных частей и "дребезга” контактов, малы-
ми габаритами, большим сроком службы, малым уровнем мощ-
ности управляющего сигнала. Недостатками бесконтактных
аппаратов являются сравнительно высокое переход-
193
ное сопротивление в состоянии ’’замкнуто” и сравни-
тельно невысокое - в состоянии ’’разомкнуто”, низкая
перегрузочная способность.
В зависимости от напряжения в коммутируемой цепи при-
меняются аппараты высокого (свыше 1000 В) или низкого на-
пряжения. В зависимости от значения коммутируемого тока
используются аппараты различных конструктивных исполне-
ний.
Часто для управления используется несколько аппаратов
различных типов, образующих электрические цепи автомати-
ческого управления.
По характеру управляющей величины аппараты управления
подразделяются на множество типов, среди которых наиболее
употребительны:
электрические, реагирующие на превышение или дости-
жение ниже определенного значения тока или напряжения
в определенном участке цепи;
тепловые, реагирующие на температуру;
механические, реагирующие на перемещение, давление,
частоту вращения и др.;
магнитные, реагирующие на значение магнитных величин;
оптические, реагирующие на световые величины;
акустические, реагирующие на силу звука.
В данной главе рассматриваются контактные коммутацион-
ные аппараты управления.
Вопрос 5.1. Укажите группу достоинств, характерных для
контактных коммутационных электрических аппаратов по
сравнению с бесконтактными. Группы составлены из следую-
щих качеств:
А - большое быстродействие, Б - малые габариты, В - боль-
шая перегрузочная способность, Г - малая мощность электри-
ческих потерь в контакте, Д - большие значения токов в комму-
тируемых цепях, Е - большие значения напряжений в комму-
тируемых цепях, Ж - малая мощность управляющего сигнала,
3 - большой срок службы.
Варианты ответа:
5.1.1. А, Б, Ж, 3.
5.1.2. Б, Г, Ж.
5.1.3. В, Г,Д, Е.
5.1.4. А, В, Д, Е, 3.
194
5.2. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ КОММУТАЦИОННЫХ
КОНТАКТНЫХ АППАРАТОВ
Контактный аппарат содержит две главные части - электри-
ческие контакты и привод для управления контактами.
Форма, размеры, материал, тип покрытия контактов выбира-
ются в зависимости от значений напряжения и тока в управ-
ляемой электрической цепи. Основные свойства контактов за-
висят от площади контактной поверхности, удельной электри-
ческой проводимости материала контактов и поверхностного
покрытия, силы сжатия контактов, скорости размыкания кон-
тактов.
На рис. 5.1 приведены примеры с различным характером
участка электрического контакта: пары точечных контактов
(рис. 5.1, а - г, к), рассчитанных на коммутации цепей с неболь-
шими токами и напряжениями, пары линейных контактов
(рис. 5.1, д, е, з, и) и пара плоских контактов (рис. 5.1, ж), рас-
Рис. 5.1. Варианты устройства электрических контактов:
а — г — точечные; д, е, з, и — линейные; ж — плоские;
к — мостиковая пара точечных контактов
195
считанных на большие токи. Мостиковые пары контактов
(рис. 5.1, к) обеспечивают двукратный разрыв цепи. Контакты
изготавливаются из материалов, обладающих небольшим
удельным электричесеим сопротивлением (медь, многокомпо-
нентные сплавы с никелем, иридием, металлокерамические
соединения). В ряде случаев контакт покрывается серебром,
золотом для уменьшения влияния окислов, вольфрамом или
металлокерамическими соединениями для повышения изно-
соустойчивости.
Контакт укрепляется на плоском рычаге, изготовленном
из упругого токопроводящего материала. Это обеспечивает
плотное смыкание пары контактов. Если используется неупру-
гий материал, то плотное соединение обеспечивается специаль-
ными пружинами.
Наиболее сильному воздействию контакт подвергается при
размыкании. После уменьшения сжимающих сил переходное
сопротивление контактной пары увеличивается, температура
контактирующих поверхностей может сильно повыситься
вплоть до температуры плавления. Для предотвращения разо-
грева и повреждения контактов ускоряют процесс размыкания
и используют тугоплавкие материалы.
После размыкания контактов в образующемся малом зазо-
ре резко возрастает напряженность электрического поля. Она
может достигнуть величины, достаточной для возникновения
дугового газового разряда, разрушающего поверхностный слой
контактов. Предотвращение разряда достигается увеличе-
нием скорости размыкания и расстояния между контактами
в разомкнутом состоянии, использованием сдвоенных мости-
ковых пар контактов (рис. 5.1, к), двух пар контактов, включен-
ных последовательно. Для ликвидации дугового разряда при-
меняют также специальные активные и пассивные дугога-
сительные устройства (см. § 5.3).
Перемещение контактов производится с помощью привода.
Наиболее просто устроены приводы командоаппаратов, в ко-
торых электрические контакты замыкаются под действием
механической силы, создаваемой движением руки (нажатие
кнопки, поворот ручки или рычага) или при движении частей
какого-либо механизма (концевые и путевые выключатели).
В контакторах, магнитных пускателях, реле используется
электромагнитный привод контактов с помощью электромаг-
нитов постоянного или переменного тока.
196
Рис. 5.2. Варианты устройства электромагнитных приводов электрических ап*
паратов:
а — с внешним несимметричным якорем (аппарат клапанного типа); б — с
внешним притягивающимся симметричным якорем; в — с внутренним симмет-
ричным якорем; г - с внешним втягивающимся якорем; д — с поворотным якорем
На рис. 5.2 изображены некоторые примеры устройства
электромагнитного привода. Подвижная часть привода -
якорь I, перемещается под действием силы, создаваемой
электромагнитом с сердечником 2 (катушки на рисунках
не изображены). В устройстве на рис. 5.2, в используется внеш-
ний электромагнит, который не изображен.
Ярмо 3 - часть магнитопровода, обеспечивающего замыка-
ние магнитного потока. Полюсный наконечник 4 со-
здает необходимое распределение магнитного поля в области
якоря.
В зависимости от расположения якоря, характера его движе-
ния различаются следующие электромагнитные системы при-
вода:
с внешним несимметричным якорем (аппарат клапанного
типа - см. рис. 5.2, а);
с внешним притягивающимся симметричным якорем (аппа-
рат поворотного типа - см. рис. 5.2, б);
с внутренним симметричным якорем (см. рис. 5.2, в);
с внешним втягивающимся якорем (аппарат соленоидного
типа - см. рис. 5.2, г);
с поворотным якорем (см. рис. 5.2, д).
Все элементы, формирующие магнитное поле, изготавливают-
ся из ферромагнитного материала. В аппаратах переменного
тока они изготавливаются шихтованными для уменьшения по-
терь энергии на вихревые токи.
Якорь может находиться в одном из двух устойчивых поло-
жений. При отсутствии тока в катушке якорь удерживается в
начальном положении специальной пружиной, называемой ра-
бочей (или возвратной). При наличии в катушке тока, превы-
шающего определенное значение (ток срабатывания)в маг-
197
нитной системе возникает магнитное поле, достаточное для
перемещения якоря в другое устойчивое положение. При этом
преодолевается сопротивление рабочей пружины и с помощью
механических связей замыкаются или размыкаются электри-
ческие контакты.
Вопрос 5.2. Запишите последовательность рис. 5.1 в порядке
возрастания номинального тока контактов, если они отлича-
ются только формой.
Варианты ответа:
5.2.1. ”а”, ”б”, ”в”, ”г”, ”д”, ”е”, ”ж”, ”з” ”и”;
5.2.2. ”и”, ”з”, ”ж”, ”е”, ”д”, ”г”, ”в”, ”б”, ”а”;
”и”: ”ж”;
5.2.4. ”ж”; ”д” или ”е” или ”з” или ”и”; ”а” или ”б” или ”в”
или ”г”,
5.3. КОММУТАЦИОННЫЕ АППАРАТЫ ДЛЯ УПРАВЛЕНИЯ
ЭЛЕКТРОТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ НИЗКОГО НАПРЯЖЕНИЯ
Для управления электрическими двигателями и другими
электротехническими устройствами необходимо производить
ряд коммутаций, которые обеспечивают пуск в ход (включе-
ние), останов (выключение), защиту от перегрузок и отклю-
чение в аварийных режимах. На рис. 5.3 для примера изображе-
на схема электрической цепи для управления режимом при-
емника П. Коммутации производят с помощью магнитного
пускателя Q-устройства, содержащего несколько коммутацион-
ных аппаратов: двухкнопочный пульт (SI, S2, контактор КМ и
защитные тепловые реле КК1, КК2).
Сеть о
Пуск 51
Стоп S2
Рис. 5.3. Схема включения приемника
с помощью магнитного пускателя
198
Двухкнопочный пульт имеет две кнопки - кнопку ’’Пуск”, с
помощью которой (нажатием рукой) замыкаются контакты S1,
и кнопку ’’Стоп”, при нажатии которой контакты S2 размыка-
ются. Контакты этих кнопок соединены последовательно. С по-
мощью кнопок подключается к сети и выключается катушка
электромагнита КМ, служащего приводом в контакторе.
Привод контактора замыкает основные контакты КМ1 и КМ2,
которые соединены последовательно с приемником П. Таким
образом, приемник подключается к сети. Одновременно замы-
каются вспомогательные контакты КМЗ, которые шунтируют
участок с контактами S1. Теперь при отпускании кнопки ’’Пуск”
ветвь катушки контактора КМ не будет размыкаться.
Для защиты от перегрузок сети и приемника в магнитном
пускателе устанавливаются тепловые реле. Их обмотки управ-
ления КК1 и КК2 включены последовательно с приемником,
а нормально замкнутые контакты КК1 и КК2 включены после-
довательно с обмоткой контактора КМ. Если ток приемника в
течение некоторого времени превышает определенное значе-
ние, то контакты КК1 и (или) КК2 разомкнутся, катушка кон-
тактора КМ отсоединится от сети, контакты КМ 1 и КМ2 разом-
кнутся и приемник отключится от сети. Устройство теплового
реле рассмотрено в § 5.4.
Магнитный пускатель Q обладает самоблокировкой от про-
извольного включения. Например, если после отключения
приемника и катушек КМ контакты КК1 и КК2 замкнутся, цепь
катушки контактора останется разомкнутой, так как контакты
КМ разомкнуты. Аналогично при уменьшении напряжения се-
ти и отключении приемника повторное его включение воз-
можно после восстановления напряжения только путем нажа-
тия кнопки ’’Пуск”.
Схематически устройство одного из типов контакторов по-
казано на рис. 5.4. Контактный узел состоит из неподвижного 1
и подвижного 3 контактов, помещенных в дугогасительную ка-
меру 2. Контакт 3 закреплен на рычаге 4, связанном с помощью
пружины 5 с якорем 6, и соединен с управляемой электричес-
кой цепью гибкой медной лентой 10. Электромагнитный при-
вод контактора имеет возвратную пружину 7, сердечник 8
и обмотку 9.
Обычно в контакторе имеется несколько пар основных
и вспомогательных контактов, управляемых одним рычагом
привода. Так, контактор в схеме на рис. 5.3 имеет две пары ос-
199
Рис. 5.4. Конструктивная схема устрой-
ства контактора постоянного тока:
1 — неподвижный контакт; 2 — дуго-
гасительная камера с решеткой;
3 — подвижный контакт; 4 — рычаг;
5 — нажимная пружина; 6 — якорь элек-
тромагнита; 7 - возвратная (рабочая)
пружина; 8 — сердечник; 9 — обмотка;
10 — гибкий токопровод
Рис. 5.5. Дугогасительное устройство
с магнитным дутьем:
1 - катушка; 2 - сердечник;
3 - ферромагнитные пластины; 4 -
пластины
новных - КМ1, КМ2 - и одну пару вспомогательных - КМЗ-кон-
тактов.
Важным элементом контактора является дугогасительное
устройство. На рис. 5.5 схематически изображена конструкция
дугогасительной камеры с узкой щелью и магнитным дутьем.
При размыкании между контактами в результате дугового
разряда образуется ионизированная газовая область с движу-
щимися зарядами. Ток в витках катушки 1 намагничивает
ферромагнитный сердечник 2 и создает магнитное поле между
ферромагнитными пластинами 3. Магнитное поле создает си-
лы F, которые перемещают ионизированную область в узкую
щель между двумя пластинами 4, изготовленными из изоля-
ционного материала. Пластины отбирают тепловую энергию и
дуга гаснет. Аналогично действует дугогасительное устрой-
ство в контакторе на рис. 5.4. Отличие состоит в использовании
дугогасительной решетки 2, которая отбирает тепловую энер-
гию из области дугового разряда.
200
Электротехническая промышленность выпускает большой
ассортимент контакторов постоянного и переменного тока
для различных целей.
Для коммутации ряда устройств с защитой от аварийных ре-
жимов применяется аппарат, который называется автомати-
ческим воздушным выключателем (сокращенно - ав-
томат). Изготавливают автоматы универсальные (для уста-
новки только в закрытых шкафах распределительных устройств)
и установочные, имеющие пластмассовый защитный корпус для
установки вне шкафов. Универсальные автоматы могут иметь
ручной или электромагнитный привод для дистанционного
управления. Установочные автоматы выполняют с ручным при-
водом.
На рис. 5.6 приведена конструктивная схема установочного
автомата. Включение и отключение производится рукояткой 11,
которая находится в пазу изоляционной крышки корпуса 9.
Для включения рукоятку поднимают вверх. При этом фигур-
ная пластина 10 свободным концом зацепляется за зуб 13 рас-
цепителя 14 и фиксируется, пружина 12 тянет шарнир рыча-
гов 4 и 5 наверх, рычаг 6 с подвижным контактом поворачива-
ется влево вплоть до неподвижно-
го контакта 7, контакты замы-
каются. Цепь автомата замыкает-
ся через гибкую токоведущую ши-
ну 3. Выключение рукояткой про-
исходит в обратном порядке. В ав-
томате установлена дугогаси-
тельная решетка 8.
В автомате имеются два за-
щитных устройства - тепловой и
электромагнитный расцепители.
Оба расцепителя освобож-
Рис. 5.6. Схема устройства воздушного ав-
томатического выключателя:
1 - биметаллическая пластина;
2 — якорь; 3 — токоведущая шина; 4, 5, 6 —
рычаги; 7 — неподвижный контакт; 8 - ду-
гогасительная решетка; 9 — крышка кор-
пуса; 10 — фигурная пластина; 11 — руко-
ятка; 12 — пружина; 13 - зуб расцепителя;
14 — расцепитель
201
дают (или не позволяют зафиксировать) пластину 10 и расце-
питель 14.
Тепловой расцепитель - биметаллическая пластина 1 кото-
рая деформируется при нагревании и опускается вниз. При
этом поворачивается рычаг 14, освобождается пластина 10 и
размыкаются контакты автомата. Таким образом, приемник за-
щищается от длительного превышения номинального значе-
ния тока.
Электромагнитный расцепитель имеет катушку, которая со-
единена последовательно с управляемыми контактами. При
кратковременном превышении определенного значения тока
якорь в виде ферромагнитной шайбы 2 притянется к сердечни-
ку катушки (влево), рычаг 14 расцепителя повернется и в ито-
ге управляемые контакты разомкнутся.
Защитные расцепители не только отключают, то также не
позволяют включить автомат пока не будут устранены причи-
ны защитного отключения - чрезмерный нагрев элемента теп-
ловой защиты или недопустимо большой ток приемника.
Вопрос 53. Укажите типы электрического контакта (точеч-
ный, линейный, плоский) и тип привода (клапанный, поворот-
ный, соленоидальный) в контакторе на рис. 5.4.
Варианты ответа:
5.3.1. Плоский, клапанный.
5.3.2. Точечный, поворотный.
5.3.3. Линейный, соленоидальный.
5.4. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ И ЗАЩИТЫ
Электромагнитное реле - электрический контактный аппа-
рат, имеющий два или более устойчивых состояний в зависи-
мости от управляющих токов и напряжений. Состояния отли-
чаются замкнутыми, разомкнутыми или переключенными кон-
тактами. Промышленность выпускает большой ассортимент
коммутационных и защитных реле постоянного и пере-
менного токов различных типов. Здесь рассмотрены отдель-
ные примеры.
Простейшее коммутационное промежуточное реле
с приводом клапанного типа (рис. 5.7) имеет устройство, анало-
гичное контактору. Управляющий ток катушки 1 намагничи-
вает якорь 3, который притягивается к сердечнику 2 и замыка-
202
ет контакты 4. В этом реле процессы не зависят от направления
тока. Срабатывание реле произойдет и при переменном токе.
Такое реле называют нейтральным.
Срабатывание реле происходит, если ток катушки превы-
шает ”ток срабатывания”. Эта величина указывается в техни-
ческом паспорте токового реле, имеющего небольшое сопротив-
ление катушки. Токовое реле используется для управления в
зависимости от значения тока в управляющей цепи.
Реле напряжения имеет большое сопротивление катушки.
В техническом паспорте реле напряжения указывается ’’номи-
нальное напряжение” на катушке. Реле напряжения срабаты-
вает при превышении напряжения в управляющей цепи номи-
нального значения.
При уменьшении тока (напряжения) катушки до значения,
называемого током (напряжением) отпускания происходит
возвращение контактов в исходное положение.
Электромагнитные реле могут иметь от 2 до 20 контактов,
рассчитанных на допустимый ток от 5 мА до 5 А, и более, а
напряжение (в разомкнутом положении) от 5 до 400 В. Время
срабатывания (интервал от момента появления управляющего
воздействия определенного значения до момента коммутации
контактов) составляет от 0,1 до сотен миллисекунд. Износо-
стойкость контактов - не менее 106 срабатываний.
Если необходимо осуществить коммутации в зависимости от
направления управляющего тока (напряжения), то используют
поляризованные реле.
Пример устройства такого реле приведен на рис. 5.8. Магнит-
Рис. 5.7. Общий вид коммутационно-
го электромагнитного реле:
1 - катушка; 2 - сердечник;
3 - якорь; 4 — контакты
Рис. 5.8. Схема устройства поляризован-
ного реле:
1 - постоянный магнит; 2 - якорь;
3 - контакты; 4 - сердечник; 5-катушка
ная система реле имеет две катушки 5, соединенные последо-
вательно, сердечник 4, постоянный магнит 1 и якорь 2, находя-
щийся в воздушном зазоре сердечника, и контакты 3. При отсут-
ствии тока в катушках постоянный магнит намагничивает
сердечник и якорь таким образом, что магнитные силовые ли-
нии из северного полюса N магнита входят в якорь снизу, про-
низывают его, выходят из верхней части якоря слева и справа
и входят в торцы сердечника. Далее они замыкаются через
сердечник и южный полюс постоянного магнита S. Верхняя
часть якоря и торцы сердечника взаимно притягиваются с си-
лами и F3, так как они имеют противоположные магнитные
полюсы. Эти силы обратно пропорциональны зазору между яко-
рем и сердечником. Поэтому всегда одна из сил больше и якорь
занимает одно из крайних устойчивых положений.
Ток управляющих катушек создает дополнительное магнит-
ное поле, магнитные силовые линии которого пронизывают
якорь и замыкаются в сердечнике, как это указано пунктир-
ной линией. При этом создается дополнительное намагничи-
вание торцов сердечника и образуются новые магнитные полю-
сы. Их полярность зависит от направления тока управления.
Если направление магнитных силовых линий, создаваемых то-
ком управления, соответствует рисунку, то на левом торце
сердечника образуется полюс N, а на правом - S и возникнет
сила, перемещающая якорь и рычаг 2 с подвижным контактом
вправо. В итоге левая пара контактов разомкнется, а правая -
замкнется.
Описанное поляризованное реле называется двухпозицион-
ным. Состояние реле зависит от полярности управляющего то-
ка. При уменьшении управляющего тока до нуля состояние
реле не изменяется. Поляризованные реле рассчитаны на
весьма небольшие токи и напряжения срабатывания.
Для задержки коммутаций во времени используются реле
времени.
На рис. 5.9 приведена схема устройства реле времени с часо-
вым механизмом. Пружина механизма поддерживается во
взведенном состоянии электромагнитом 1, когда в катушке
есть ток. При отключении тока пружина освобождается и под
управлением часового механизма 3 раскручивается. Рычаг с
подвижным контактом 4 поворачивается вплоть до неподвиж-
ного контакта 5. Интервал времени задается перестановкой
контакта 5 в плате крепления 6. Заводка пружины механизма
происходит после включения тока катушки 1 с помощью чер-
204
вячной передачи 2. Реле с часовым механизмом используется
для получения задержки времени в пределах от ОД до 20 с.
Другой тип реле времени - с электромагнитным замедле-
нием. Это реле отличается от простого реле на рис. 5.7 допол-
нительной короткозамкнутой обмоткой на сердечнике управ-
ляющего электромагнита. При изменении управляющего тока
магнитный поток изменяется и в дополнительной обмотке
возбуждается ток, который создает магнитное поле, умень-
шающее изменение магнитного потока в якоре и задерживаю-
щее перемещение якоря. Время задержки в таких реле по-
стоянное.
Защитные реле применяются для защиты электродвига-
телей и других устройств.
Для защиты от превышения недопустимой температуры ис-
пользуются тепловые реле. Схематически устройство тепло-
вого реле показано на рис. 5.10. Управляющей величиной явля-
Рис. 5.9. Схема реле времени с часовым
механизмом
1 — электромагнит; 2 — червячная
передача! 3 — часовой механизм;
4 - подвижный контакт; 5 — неподвиж-
ный контакт; 6 - плата крепления под-
вижного контакта
Рис. 5.10. Схема устройства защитного
теплового реле
205
ется ток /н защищаемого приемника электрической энергии.
Поэтому последовательно с приемником включается нагрева-
тельный элемент 1, который нагревает термочувствительный
элемент 2 - биметаллическую пластину. При достаточно дли-
тельном превышении определенного значения тока (тока сра-
батывания) пластина нагревается и деформируется, опус-
каясь вниз. Рычаг 4 освобождается и под действием пружины 5
поворачивается против часовой стрелки. При этом подвижный
управляемый контакт 3 поднимается и контактная пара ра-
зомкнется, разрывая ток 1у цепи управления. Управляемые
контакты включены последовательно с приемником, поэтому
при их размыкании ток приемника уменьшится до нуля. По-
следующее охлаждение биметаллической пластины не при-
ведет к ее выпрямлению, так как этому препятствует рычаг 4.
Для восстановления замкнутого состояния управляемых кон-
тактов необходимо нажать на кнопку возврата 6, которая со-
жмет пружину 5 и отведет рычаг 4.
Момент времени срабатывания теплового реле зависит от
скорости нагрева термочувствительного элемента, которая оп-
ределяется значением тока нагревательного элемента и тепло-
вой постоянной. Нагреватель и приемник имеют одинаковые
значения тока, поэтому тепловые постоянные реле и защища-
емого приемника подбираются одинаковыми.
Для защиты электрической сети и приемника от импульсно-
го изменения тока (напряжения) до недопустимых значений
применяются защитные реле тока (напряжения). Они
отличаются наличием специального регулирующего элемента,
который позволяет установить с высокой точностью ток (на-
пряжение) срабатывания или отпускания.
Например реле максимального тока устроено (рис. 5.11) та-
ким образом, чтобы обеспечить коммутацию контактов при
превышении значения тока нагрузки 1Н установленного значе-
ния ’’тока срабатывания” 1сраб* Реле имеет токовую обмотку I,
винт 4 для регулировки воздушного зазора между якорем 3
и сердечником 2, гайку 5 для регулировки натяжения возврат-
ной пружины 12, пластмассовые колодки 9 для крепления двух
пар подвижных контактов 7 и 10, две пары неподвижных кон-
тактов 6 и 11, контактные пружины 8 для сжатия пар коммути-
руемых контактов. Ток срабатывания реле 1^$ регулируется
в широком диапазоне изменением положения винта 4 и гай-
ки 5. Время срабатывания реле при импульсном повышении
тока до 1,31^6 не более 0,1 с.
206
Рис. 5.11. Схема устройства реле максимального тока:
1 — обмотка; 2 — полюсный наконечник сердечника; 3 — якорь; 4 — винт;
5 — гайка; 6, 11 — неподвижные контакты; 7, 10 — подвижные контакты; 8 — кон-
тактные пружины; 9 — пластмассовые колодки; 12 — возвратная пружина
Вопрос 5.4. Укажите, при выполнении каких условий произой-
дет срабатывание защитного электромагнитного реле макси-
мального тока.
Варианты ответа:
5.4.1. Шсраб>1.
542 t > t
1реле ' iприемник*
5.4.3. U/Ucp&6> 1.
5.5. КОММУТАЦИОННЫЕ ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ
С МАГНИТОУПРАВЛЯЕМЫМИ КОНТАКТАМИ
Магнитоуправляемый контакт - устройство, имею-
щее контакты из упругого ферромагнитного материала, кото-
рые управляются внешним магнитным полем. Контакты выпол-
няют одновременно несколько функций. Они являются управ-
ляемым элементом, частью магнитного привода и рабочей пру-
жиной.
В настоящее время выпускаются и широко используются
герконы - магнитоуправляемые контакты, котдрые помеще-
ны в стеклянную герметизированную колбу.
Вследствие малой массы подвижных частей герконы обла-
дают большим быстродействием, высокой чувствительностью
к управляющему воздействию. Благодаря герметичности кон-
такта и простоте устройства механической части достигается
207
большой срок службы - до 107 включений. Контактные пары на-
ходятся в защищенной инертной среде. Поэтому удается
достигнуть и сохранить улучшенные свойства контактной пары
по переходному сопротивлению. Эти достоинства привели к
широкому распространению герконов в электрических аппа-
ратах.
Устройство герконов некоторых типов приведено на рис. 5.12.
На рис. 5.12, а пластины J из пермаллоя (ферромагнитный ма-
териал с высокой магнитной проницаемостью) с контактны-
ми площадками 2, покрытыми золотом, родием или серебром,
помещены в стеклянной герметизированной колбе 3, напол-
ненной инертным газом. Колба помещается в катушку 4 -
устройство, создающее управляющее магнитное поле. При на-
личии в катушке тока, превышающего ток срабатывания,
пластины намагнитятся и взаимно притянутся до соприкосно-
вения - замыкания контактов. Таким образом устроен геркон с
контактами замыкающего типа.
На рис. 5.12, б приведена схема устройства геркона пере-
ключающего типа. Изменяя соотношение токов в катуш-
ках, можно замкнуть правую или левую пару контактов. На
рис. 5.12, в представлен многоконтактный геркон замыкаю-
щего типа.
Недостатком герконов является повышенная чувствитель-
ность к внешним магнитным полям. Для уменьшения их влия-
ния геркон помещают в экранирующий корпус из магнито-
мягкого материала.
Один из типов магнитоуправляемого контакта - феррид -
имеет важное свойство сохранять свое состояние после умень-
шения до нуля управляющего тока. На рис. 5.13 представлена
конструктивная схема такого реле. В стеклянной герметизи-
рованной колбе 1 укреплены гибкие ферромагнитные пласти-
ны 2. Управляющая магнитная система содержит сердечник 3
из феррита, обладающего заметной остаточной намагничен-
ностью, и катушку 4. Для замыкания контактов и намагничи-
вания сердечника необходимо создать импульс тока в катушке,
определенных амплитуды и длительности. После уменьшения
тока до нуля магнитное поле, создаваемое намагниченным
сердечником удерживает контакты в замкнутом состоянии.
Для размыкания контактов необходимо создать отрицатель-
ный импульс тока достаточный для размагничивания сердеч-
208
2
Рис. 5.12. Конструктивные схемы герконовых реле:
а — замыкающее; б - переключающее; в — многоконтактное
Рис. 5.13. Схема устройства
феррида—герконового реле
с памятью состояния:
1 — колба; 2 - контактные
пластины; 3 - сердечник;
4 — обмотка
Рис. 5.14. Схема устройства герсикона — сильнотокового реле:
1 - катушка; 2 - сердечник; 3 - подвижный контакт; 4 - неподвижный кон-
такт; 5 — токопроводящая шина; 6 — якорь; 7 — полюс; 8 — корпус; 9 — крышка
ника. Описанные герконы называют слаботочными, так как
они рассчитаны на коммутацию цепей с токами до 1 А.
В цепях с большими токами используются, так называе-
мые силовые герконы - герсиконы. Устройство герсико-
на схематически показано на рис. 5.14. Управляющая катуш-
ка 1 помещена на ферромагнитном сердечнике 2. При токе
катушки, превышающем ток срабатывания, якорь 6 - упругая
ферромагнитная пластина, - притянется к торцевой поверх-
ности полюса 7 сердечника, подвижный контакт 3 соединится
с неподвижным контактом 4. Керамический корпус 8 с неферро-
магнитной металлической крышкой 9 создает герметичную
область с инертными газами, в которой находятся контакты.
Электрическое соединение управляемой цепи с подвижным
контактом происходит с помощью гибкой токопроводящей
шины 5 и крышки 9. Проблема повышения допустимых токов
209
и напряжений контактов для герконов решается труднее, чем
для обычных реле, из-за технических трудностей и большой
стоимости герметизации больших объемов.
Вопрос 53. Укажите группу достоинств, характерных для
реле с герметизированными магнитоуправляемыми контак-
тами по сравнению с обычными электромагнитными реле.
Группы составлены из следующих качеств:
А - большое быстродействие, Б - малые габариты, В - боль-
шая перегрузочная способность, Г - малая мощность электри-
ческих потерь в контакте, Д - большие значения токов в комму-
тируемых цепях, Е - большие значения напряжений в комму-
тируемых цепях, Ж - малая мощность управляющего сигнала,
3 - большой срок службы, И - малая стоимость.
Варианты ответа'.
5.5.1. А, В, Д, Е, 3.
5.5.2. А, Б, Г, Ж, 3.
533. Б, Г, Ж, 3, И.
5.6. Комментарии к правильным ответам на вопросы гл. 5
5.1.3. Основными достоинствами контактных электрических
аппаратов являются: большая перегрузочная способность, ма-
лая мощность потерь энергии из-за малого переходного сопро-
тивления в состоянии ’’замкнуто” и большого переходного со-
противления в состоянии ’’разомкнуто”, большие значения то-
ков и напряжений в коммутируемых цепях.
5.2.3. Наименьший номинальный ток имеют точечные кон-
такты (”а” - ”г”), большее значение у контактов линейных
(”д”, ”е”, ”з”, ”и”) и наибольшее значение у плоского контак-
та (”ж”).
5.3.1. В контакторе на рис. 5.4 использованы плоские контак-
ты и электромагнитный привод клапанного типа (см.
рис. 5.2, а).
5.4.1. Для срабатывания реле максимального тока ток ка-
тушки электромагнитного привода реле должен быть больше
тока уставки реле 1сраб- Надежность и время срабатывания в
некоторой степени зависят от соотношения 1/1^6.
5.5.2. Реле с герметизированными магнитоуправляемыми
контактами имеют следующие преимущества по сравнению с
обычными электромагнитными реле: большее быстродействие,
меньшие габариты, меньшую мощность потерь, более высокую
чувствительность, больший срок службы.
210
Глава шестая
ОСНОВЫ ЭЛЕКТРОПРИВОДА
6.1. НАЗНАЧЕНИЕ И ОБЛАСТИ ПРИМЕНЕНИЯ ЭЛЕКТРОПРИВОДА
Электроприводом называется электромеханическая си-
стема для приведения в движение исполнительных механиз-
мов рабочих машин и управления этим движением в целях
осуществления технологического процесса. Современный элек-
тропривод представляет собой комплекс электрических машин,
аппаратов и систем управления ими. С энергетической точки
зрения электропривод является основным потребителем элек-
троэнергии (до 60%) и главным источником механической
энергии во всех отраслях промышленности.
Электроприводы разделяют на:
нерегулируемые, простейшие, предназначенные только
для пуска и остановки электродвигателя, работающего в одно-
скоростном режиме;
регулируемые, неавтоматизированные и автоматизиро-
ванные, предназначенные для регулирования частоты враще-
ния и управления пуском и торможением электродвигателей
в соответствии с требованиями технологических процессов.
Современный электропривод является, в основном, авто-
матизированным, так как все процессы в нем, связан-
ные с пуском, остановкой и регулированием частоты враще-
ния, обеспечиваются средствами автоматики и, часто, вычис-
лительной техники и микропроцессорами.
Техническое совершенство производственных механизмов
и эффективность технологических процессов в промышлен-
ности определяются совершенством и уровнем автоматизации
электропривода. Электродвигатели современных приводов
получают питание от индивидуальных транзисторных или
тиристорных преобразователей. Они позволяют по необходи-
мому закону регулировать частоту и напряжения питания
электродвигателей. Управление режимами работы двигателей
осуществляется непосредственным воздействием на преоб-
разователи напряжения средств автоматики ц вычислитель-
ной техники.
Такие электроприводы обладают оптимальными техничес-
кими и экономическими характеристиками и включают в се-
бя две основные части: силовую и информационную. Первая,
211
включающая в себя электродвигатель, преобразователь и меха-
ническую передачу, осуществляет непосредственное преоб-
разование энергии, а вторая - управление преобразованием
энергии и работой привода, сбор и анализ информации о функ-
ционировании всех частей электропривода и связь с техноло-
гическим процессом.
6.2. ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДОВ
Электродвигатель и механизм образуют механическую си-
стему, в которой двигатель приводит во вращение механизм,
преодолевая сопротивление последнего. Характер движения
определяется действием моментов, приложенных к валу, и мо-
ментом инерции системы J. Следует выделить два момента -
вращающий момент Мвр, развиваемый двигателем, и момент
сопротивления Мс, учитывающий момент сил сопротивления
производственного механизма и моменты сил трения, которые
действуют в механической системе. Совместное действие мо-
ментов Мвр и Мс определяет динамический момент
dQ
системы Мдин = J------и ее ускорение. Уравнение движения
dt
электропривода имеет вид
MBp-Mc = J—. (6.1)
dt
Если Мвр = Мс, то Мдин = 0 и привод работает в установившем-
ся режиме при Q = const. При Мвр > Мс динамический момент
положителен и направлен на увеличение частоты вращения,
а при Мвр < Мс электропривод тормозится под действием дина-
мического момента.
Электропривод работает в установившемся режиме устой-
чиво только тогда, когда после любого внешнего воздействия
на систему она возвращается в исходное состояние. Статичес-
кая устойчивость определяется видом механической характе-
ристики производственного механизма и двигателя.
В установившемся режиме работы частота вращения привода
определяется из условия Мвр = Мс, т. е. точкой пересечения
механических характеристик л =/1 (Мвр) и л =/2 (Мс).
Момент сопротивления механизма Мс часто не является по-
стоянной величиной и зависит от ряда факторов, которыми
212
могут быть угловая скорость, время, путь, угол поворота ва-
ла и т.д.
На рис. 6.1 показаны характеристики Мс(п) наиболее распро-
страненных производственных механизмов. У некоторых ме-
ханизмов момент Мс не зависит от частоты вращения (пря-
мая 2). К ним относится большинство грузоподъемных и
транспортных механизмов (лифты, транспортеры, механизмы
подъемных кранов). Линейно возрастающую зависимость
Мс(л) (прямая 2) имеет привод генератора постоянного тока
независимого возбуждения, работающего на постоянную на-
грузку (RH = const), а механическая характеристика механиз-
ма, работающего при постоянной мощности Р = const, соответ-
ствует кривой 3.
Широко распространенные механизмы собственных нужд ТЭЦ
(центробежные насосы, компрессоры, вентиляторы и воздухо-
дувки) имеют механическую характеристику ’’вентиляторного”
типа (кривая 4), выражаемую соотношением
Мс = кпт, при т > 1.
На рис. 6.2 приведены изученные ранее естественные меха-
нические характеристики электродвигателей: 1 - синхронно-
го; 2 - асинхронного; 3 - постоянного тока независимого (па-
раллельного); 4 - последовательного возбуждения.
Представленные на рис. 6.1 и 6.2 механические характерис-
тики отличаются характером изменения момента Мвр и Мс с
изменением частоты вращения. Величину, характеризующую
это изменение, принято называть жесткостью меха-
Рис. 6.1. Механические характеристики производственных механизмов
Рис. 6.2. Механические ха-
рактеристики электродви-
гателей
213
нической характеристики р. Жесткость характерис-
тики или отдельного ее участка оценивают отношением прира-
щений момента и угловой скорости:
₽ = ДМ/ДЙ.
Характеристики с большим значением р называют жесткими,
им свойственно малое изменение частоты вращения при из-
менениях момента. Так, синхронный двигатель обладает
’’абсолютно” жесткой механической характеристикой (Р = °°).
Жесткость искусственных механических характеристик дви-
гателей постоянного и переменного токов отличается от жест-
кости естественных характеристик и зависит от способа регу-
лирования частоты вращения. Это существенно влияет на
стабильность частоты вращения при работе привода с пере-
менной нагрузкой.
Работа привода в установившемся режиме может быть ус-
тойчивой и неустойчивой; это выясняется из совместного рас-
смотрения механических характеристик двигателя и производ-
ственного механизма. Если механические характеристики дви-
гателя и механизма имеют вид, представленный на рис. 6.3, а,
то при изменении частоты вращения от лх (Мвр = Мс) до п2
(Мвр > Мс) возникает динамический момент Мтн - Мвр - Мс =
= ДМ, который будет положительным. Действие этого момен-
та увеличивает частоту вращения до лх, электропривод возвра-
щается в исходное положение. В случае механических харак-
теристик, соответствующих рис. 63, б, при изменении часто-
ты вращения от их (Мвр = Мс) до п2 < Мс) разность ДМ »
=₽ Мвр-Мс становится отрицательной. Момент Мдин увеличи-
вает отклонение частоты вращения от установившегося зна-
чения и двигатель будет тормозиться до л = 0.
Используя понятие жесткости механической характеристи-
ки р, можно в общем виде сформулировать условие устойчи-
вости работы электропривода: в установившемся режиме при-
Рис. 6.3. К вопросу об устойчивости
работы электропривода
214
вод будет работать устойчиво, если Р - 0С < 0, где Р, рс - жест-
кость механических характеристик соответственно электродви-
гателя и производственного механизма.
Поскольку отдельные элементы системы передачи механи-
ческой энергии от двигателя к рабочему органу производствен-
ного механизма имеют различные угловые скорости и могут
совершать как поступательное, так и вращательное движение,
непосредственный расчет систем электропривода оказыва-
ется сложным и громоздким. Поэтому анализ режимов работы
электропривода и выбор мощности электродвигателя прово-
дят для эквивалентной системы двигатель - механизм. Все
моменты статических сил сопротивления и моменты инерции
должны быть приведены к валу электродвигателя, относитель-
но которого составляют и решают уравнение движения.
Приведение моментов сопротивления основано на равенст-
ве работ (мощностей) в эквивалентной и действительной си-
стемах, т. е.
= Мс Q, (6*2)
где Мсм, QM - момент сопротивления и угловая скорость ме-
ханизма; Мс и й - момент сопротивления, приведенный к ва-
лу двигателя, и его угловая скорость; л - КПД редуктора.
Заменив отношение Q/QM передаточным отношением меха-
нической передачи i, получим:
Мс = Мс.м/(in), (6*3)
если энергия поступает от двигателя к механизму;
Мс — Мс м л / i»
(6*4)
если энергия поступает от механизма к двигателю, например,
при спуске груза, когда двигатель развивает тормозной момент.
Приведение моментов инерции вращающихся масс основано
на равенстве запасов кинетической энергии в эквивалентной
и действительной системах. Так как приведенный момент
инерции Jnp эквивалентной системы является результирую-
щим, то 4
J. J2
^пр ~ /цв + + — +
2 1 1 2
ГП ' \
\ П /
(6*5)
215
где /дв, Jt,..., Jn, il9 i2,... in - соответственно моменты инер-
ции и передаточные отношения звеньев системы с вращающи-
I v \2
мися массами, а т ----- - приведенный момент инерции
\ я /
масс т, поступательно движущихся с линейной скоростью V.
В каталогах на электродвигатели и некоторые производствен-
ные механизмы приводится частота вращения п, а не угловая
скорость Q, и вместо момента инерции J - так называемый ма-
ховый момент GD2, связанный с моментом инерции соотно-
шением
J = GD2/4g,
где G - сила тяжести тела вращения; D - диаметр инерции, рас-
сматриваемый как расстояние от точки сосредоточения массы
тела до оси вращения; g - ускорение свободного падения.
Поэтомому уравнение (6.1) часто записывают в следующем
виде:
Мдин = Мвр-Мс = -^ (6.6)
о/э at
где 1/375 - коэффициент, учитывающий ускорение свободного
падения g = 9,81 м/с2 и переход от угловой скорости Q к час-
тоте вращения п.
Вопрос 6.1.
На рис. 6.4 приведены механические характеристики электро-
двигателя (1) и двух механизмов (2 и 3). Для какого механизма
работа электропривода в точке А будет устойчива?
Рис. 6.4. К объяснению устойчивости
работы электропривода
Варианты ответа:
6.1.1. Работа электроприводов обоих механизмов будет неус-
тойчивой.
216
6.1.2. Механизм с характеристикой 2 будет работать устой-
чиво.
6.1.3. Механизм с характеристикой 3 будет работать устой-
чиво.
Задача 6.1. Определить приведенный к валу двигателя Д мо-
мент инерции Jnp производственного механизма ПМ для кине-
матической схемы рис. 6.5, если момент инерции механизма
J = 8 кг • м2, а моментом инерции редуктора можно прене-
бречь, a Zlt Z2, Z3, Z4 - число зубцов шестерен механической
передачи.
Z340
Рис. 6.5. Кинематическая схема электропривода
производственного механизма
Z,=20
Ответ:
Jnp = °>5 кг • м2.
6.3. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ УСКОРЕНИЯ
И ЗАМЕДЛЕНИЯ ЭЛЕКТРОПРИВОДА
Обеспечение заданного времени переходных режимов элек-
троприводов (пуск, торможение и т.д.) имеет большое значение
для выбора мощности и структуры схем управления пуском и
торможением электродвигателя. Расчет времени переходных
режимов проводится интегрированием уравнения (6.1) движе-
ния электропривода
JdQ
dt --------
мвр-мс
(6.7)
Определим время изменения угловой скорости привода от
значения до значения Q2
q2
{JdQ
Мър-Мс
«1
(6.8)
217
В простейшем случае при Мвр = const, Мс = const и J = const
получим:
(1-2 = ----
Мвр -Мс
ИЛИ
GD3(n3-n1)
G—2 ~ ————— •
375 (Мвр —Мс)
(6.9)
Из этой формулы можно определить время торможения дви-
гателя до значения Q - 0 после его отключения, если Мвр =
= 0 и Мс = const
tTOp = JQ/Mc. (6.10)
Эта формула позволяет по измеренному времени и извест-
ному моменту Ме (например, при холостом ходе) определить
приведенный к валу двигателя момент инерции Jnp электро-
привода.
Однако часто ни вращающий момент двигателя, ни момент
сопротивления не остаются неизменными. Тогда пользуются
приближенными графоаналитическими методами интегри-
рования уравнения (6.8), например ’’методом площадей”.
Пусть нужно определить время пуска вентилятора, приводи-
мого асинхронным двигателем. Начертим на одном графике
механическую характеристику двигателя и вентилятора
(рис. 6.6). Вместо малых приращений dQ и dt в уравнение (6.7)
подставим конечные интервалы ДО,- (или Ап,) и At, в пределах
которых динамические моменты Мдин » Мвр - Мс можно счи-
тать постоянными (средними). Эти моменты определяем по
механическим характеристикам. Тогда время At, изменения
скорости АЛ, на каждом интервале будет равно:
/ДО. /Дп,- GD’An;
At, = ---— = ---------- = --------- . (6.11)
Мдин( 9,55Мдин i 375Мдин i
Общее время пуска суммируется:
т
tn = S A t j.
i = l
218
Значения AQ (Ап) можно выбирать одинаковыми или разны-
ми в зависимости от характера изменения момента. Точность
конечных результатов тем больше, чем больше число интерва-
лов AQ (Ап).
Задача 6.2. Определить время пуска вентилятора, приводимо-
го во вращение асинхронным двигателем типа 4А-72-2, имею-
щим следующие номинальные данные: Рном = 15 кВт; пном =
= 1450 об/мин; GD2 = 40 Н • м2; Мп/Мном = 1,6; Ммакс/Мном =
= 23; Мном = 99 Н • м. Механическая характеристика двигате-
ля приведена на рис. 6.6.
Рис. 6.6. К определению времени
переходного процесса методом пло-
щадей
Решение. Разделим диапазон пуска 0-1450 об/мин на
шесть интервалов: четыре по Ап = 300 об/мин и два по 150 и
100 об/мин. Проведем расчеты по формуле (6.11). Результаты
расчета сведены в табл. 6.1.
Таблица 6.1
Параметры Номер интервала
1 2 3 4 5 6
л 0-300 600 900 1200 1350 1450
Дл{* 300 300 300 зро 150 100
Мдин / МНОм 1,60 1,60 1,58 1,57 1,40 1,10
Д , с 0,20 0,20 0,203 0,204 0,115 0,097
Г, с 0,2 0,40 0,603 0,807 0,922 1,02
Ответ. Время пуска приближенно равно 1 с.
Задача 6.3. Определить время пуска двигателя подъемника,
если пусковой момент Мп = 1,8-Мном, а Мс = Мном = 100 Н • м,
J = 0,935 кг • м2, пном = 960 об/мин, а механическая характери-
стика двигателя приведена на рис. 6.6.
Ответ: t= 0,96 с.
6.4. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ЭЛЕКТРОПРИВОДА
Выбор типа электродвигателя, схемы его включения и сте-
пени автоматизации привода диктуются условиями его рабо-
ты, требованиями технологического процесса и условиями ок-
ружающей среды, а также требованиями экологии, техники
безопасности и обеспечения минимальных капиталовложе-
ний и издержек эксплуатации. Это определило широкий ассор-
тимент выпускаемых двигателей как по назначению, так и по
условиям эксплуатации.
Выбранный двигатель по своему исполнению должен отве-
чать всем требованиям технологического процесса и условиям
эксплуатации, что является гарантией долговременной и на-
дежной работы всего электропривода.
Большое практическое значение имеет правильный выбор
конструктивного исполнения двигателя с учетом условий ок-
ружающей среды. Так, например, химостойкие двигатели
предназначены для работы в условиях химически активной
среды; влагостойкие -в сырых и особо сырых помещениях
и т. д. Многие двигатели выпускаются в закрытом обду-
ваемом исполнении, т. е. снабжены боковыми крышками,
предохраняющими от проникновения пыли извне. Двигатели
защищенного исполнения имеют приспособления,
предохраняющие от случайного прикосновения к вращающим-
ся и токоведущим частям, а также от попадания внутрь по-
сторонних предметов.
Для защиты окружающей среды от возможного взрыва при
искрообразованиях внутри двигателя выпускаются взрыво-
защищенные двигатели, снабженные специальными кожу-
хами, которые выдерживают давление при взрыве газов или
паров в корпусе двигателя и не пропускают пламя наружу.
Необоснованное использование двигателя специального
исполнения удорожает установку. Поэтому во всех сухих не-
пыльных помещениях с нормальной средой рекомендуется
устанавливать открытые двигатели, а в производственных по-
мещениях - защищенные двигатели.
Двигатели переменного и постоянного токов выпускаются в
различных модификациях в зависимости от способа монтажа:
двигатели с горизонтальным расположением вала, имеющие
для крепления лапы, фланцевые двигатели с левым или пра-
вым расположением вводного устройства (клеммная панель)
и т. д. Эти данные приводятся в каталогах и позволяют выбрать
220
двигатель по способу монтажа с таким расчетом, чтобы исклю-
чить применение специальных устройств.
С точки зрения надежности и экономичности целесообраз-
но в первую очередь рассмотреть возможности применения
асинхронных двигателей с короткозамкнутым ротором. Это
наиболее простой в эксплуатации надежный двигатель, имею-
щий наименьшие массу, габариты и стоимость, а также высо-
кие энергетические показатели.
Асинхронные двигатели нашли широкое распространение
во всех отраслях народного хозяйства для привода различных
механизмов. Если асинхронный двигатель обычного испол-
нения не обеспечивает допустимого уменьшения частоты
вращения при увеличении момента сопротивления, частоты
повторных включений, возможности быстрого и надежного
пуска и т. д., необходимо исследовать возможность использо-
вания асинхронных двигателей с улучшенными пусковыми
свойствами.
В напряженных режимах работы механизмов с большой час-
тотой включений и изменением направления вращения, а
также при регулировании частоты вращения в узких пределах
применяются асинхронные двигатели с контактными коль-
цами.
Использование статических транзисторных и тиристорных пре-
образователей частоты для регулирования частоты вращения п
расширило области применения короткозамкнутых асинхрон-
ных двигателей и сделало их конкурентоспособными с двига-
телями постоянного тока в электроприводах малой и средней
мощности (до сотен киловатт), где требуются высокая жест-
кость механической характеристики, цлавное и глубокое ре-
гулирование частоты вращения.
Для нерегулируемых приводов средней и большой мощности
(до 20 000 кВт), работающих с редкими пусками в длительном
режиме (компрессоры, мощные центробежные насосы, воздухо-
дувки на тепловых электростанциях и др.), используют син-
хронные электродвигатели, имеющие более высокий КПД и
обладающие способностью компенсировать (при необходи-
мости) реактивную мощность в сети или работать с коэффици-
ентом мощности, близким к единице (cosip ~ 1). Использовать
синхронные двигатели малой мощности в приводах, не требу-
ющих постоянства частоты вращения вала, нецелесообразно,
так как эксплуатационные преимущества не окупают капиталь-
ных затрат.
221
Двигатели постоянного тока независимого возбуждения
применяют главным образом в электроприводах, требующих
глубокого и плавного регулирования частоты вращения, а так-
же при работе с низкими частотами вращения.
Двигатели постоянного тока последовательного возбужде-
ния широко распространены на транспорте и подъемно-тран-
спортных механизмах.
Для правильного выбора мощности и конструктивного ис-
полнения двигателей необходимо прежде всего рассмотреть
особенности их нагрева и охлаждения, обусловленные режима-
ми работы электропривода в целом.
При работе двигателя часть подводимой электрической
энергии преобразуется в теплоту, которая определяется поте-
рями энергии и зависит от нагрузки двигателя. Частично эта
теплота рассеивается в окружающую среду, а остальная часть
накапливается в двигателе, вызывая его нагрев. Наиболее
чувствительной с точки зрения нагрева является изоляция
обмоток.
По ГОСТу температура окружающей среды принята равной
£ос = 40 °C, а температура двигателя (его изоляции) (дв с ростом
развиваемой на валу мощности будет возрастать и может
достигнуть недопустимых значений. Допустимое значение
температуры перегрева изоляции над температурой среды за-
висит от класса изоляции, т. е. от нагревостойкости применен-
ных материалов. Для изоляции класса А этот перегрев состав-
ляет 65 °C и достигает 115 °C у машин с улучшенной изоля-
цией (класс F), а для некоторых термостойких изоляционных
материалов на основе кремнийорганических смол, керамик и
слюды может достигать 140-180 °C и больше.
Тепловые процессы в двигателе характеризуются неравно-
мерным распределением источников теплоты и неодинаковой
температурой отдельных его частей. Для упрощения расчета
полагают, что двигатель является однородным сплошным те-
лом, а его теплоемкость и теплоотдача пропорциональны тем-
пературе перегрева т = (да-*0.с- Тогда изменение темпе-
ратуры перегрева т в зависимости от начальной tM4 и устано-
вившейся (конечной) туст выражается соотношением т =
~~ "^уст U "в ) 4й если = 0, ТО Т ** *^уст (1 ив )> где
Тн - тепловая постоянная времени нагрева; тует - установив-
шаяся температура перегрева.
Из графика нагрева двигателя рис. 6.7 видно, что двигатель
может долгое время работать без перегрева, если развиваемая
Рис. 6.7. График нагрева двигателя
при различных механических мощ-
ностях на валу
им мощность меньше или равна номинальной. Бели мощность
выше номинальной (Р3 > Ра > Рном), то время работы следует
уменьшить (t3 < t2 < Тн) с таким расчетом, чтобы температура
перегрева т не превышала допустимого перегрева изоляции.
Исходя из особенностей процессов нагревания и охлажде-
ния двигателя, различают три режима его работы:
продолжительный режим tp > ЗТН (рис. 6.8, а);
кратковременный режим tp < ЗТН, t0 > ЗТ0 (рис. 6.8,6);
повторно-кратковременный режим tp •« Тн, t0 « То
(рис. 6.8, в), где То - тепловая постоянная времени охлаждения,
tp - время работы двигателя; t0 - длительность паузы в работе.
В продолжительном режиме температура перегрева
достигает установившегося значения за время работы tp; дли-
тельность пауз в работе не играет роли.
Особенностью работы двигателя в кратковременном ре-
жиме является то, что за время tp двигатель не успевает на-
греваться до температуры туст, а за время паузы t0 остывает
до темпуратуры окружающей среды.
Повторно-кратковременный режим работы электро-
привода характеризуется циклическим повторением периодов
работы tp и пауз t0 при общей длительности цикла tu
t4 = tf + t0 < 10 мин.
За время работы tp температура перегрева двигателя не до-
стигает установившегося значения, за время паузы t0 двига-
тель не успевает охладиться до температуры окружающей сре-
ды, а при многократном повторении рабочих циклов процесс
устанавливается, температуры в начале и конце цикла стано-
вятся равными, их колебания происходят около среднего зна-
чения температуры перегрева тср. 223
Рис. 6.8. Нагрузочные диаграммы и графики нагрева двигателя при различных
режимах работы:
а — продолжительный режим; б — кратковременный режим; в — повторно*
кратковременный режим; г - к вопросу об определении режима работы двига-
теля
Поэтому промышленностью помимо обычных двигателей,
рассчитанных на длительный режим работы, выпускаются спе-
циальные двигатели для кратковременного и повторно-крат-
ковременного режимов работы, с нормированной продолжи-
тельностью включения (ПВ): 15, 25, 40 и 60%. Если на щитке
двигателя указано Рном = 11 кВт при ПВ = 25%, то это означает,
что данный электродвигатель в течение 2,5 мин может работать
с нагрузкой 11 кВт, а последующие 7,5 мин должен быть от-
ключей от сети, так как ПВ -----— • 100%.
*р + *о
Вопрос 6.2. Из какого условия следует выбирать двигатель
электропривода, нагрузочная диаграмма которого приведена на
рис. 6.8, г.
Варианты ответа:
6.2.1. Из условия длительного режима работы.
6.2.2. Из условия кратковременного режима работы.
6.2.3. Из условия повторно-кратковременного режима работы.
6.5. НАГРУЗОЧНЫЕ ДИАГРАММЫ И ПРЕДВАРИТЕЛЬНЫЙ
ВЫБОР МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПРИВОДА
Определяющими факторами для выбора мощности электро-
двигателя являются моменты сопротивления на валу, угло-
вая скорость, ускорение производственного механизма и его
момент инерции.
224
Все эти данные задаются требованиями технологического
процесса и представляются нагрузочными диаграммами -
временными зависимостями момента сопротивления Mc(t) или
мощности Рс(0, а также тахограммами - зависимостями
dQ
угловой скорости Q(t) и ускорения--(t) от времени.
dt
Нагрузочные диаграммы механизма Mc(t) и Pc(t) совпадают с
нагрузочными диаграммами электропривода только в стати-
ческом режиме работы и могут быть использованы для выбора
мощности электродвигателя, если привод работает преимуще-
ственно в длительных установившихся режимах (Мвр = Мс) и не
имеет дополнительных условий (ограничений) в переходных
режимах.
Во всех остальных случаях расчет мощности электродвига-
теля проводят по нагрузочным диаграммам электропривода,
учитывающим нагрузку электродвигателя в динамических
режимах, так как ток, нагревающий обмотки двигателя, бу*
dQ
дет определяться развиваемым им моментом Мвр = Мс + J----,
dt
значение которого в отдельных случаях может значительно
превышать момент статической нагрузки.
При выборе мощности двигателей приводов с большим мо-
ментом инерции (например, для угольных мельниц и дробилок
ТЭЦ) определяющим может являться не момент сопротивле-
ния, а требуемый динамический момент. Поэтому, когда дина-
мические режимы в работе привода играют существенную роль,
задачу выбора мощности двигателя решают в два этапа: 1) пред-
варительный выбор мощности двигателя по среднему за цикл
моменту сопротивления МСаСр; 2) последующая его проверка по
перегрузочной способности и нагреву с использованием нагру-
зочных диаграмм электропривода.
Ход построения нагрузочной диаграммы электропривода
проследим на примере механизма, тахограмма Q(t) и нагру-
зочная диаграмма Mc(t) которого приведены на рис. 6.9, а, б.
При построении учитывается, что момент Мс и суммарный мо-
мент инерции механизма J приведены к валу двигателя.
Длительность одного цикла работы складывается из: -
времени пуска двигателя под нагрузкой от Q = 0 до Q = QyCT ;
t2 - времени работы с установившейся угловой скоростью
йуст! t3 ~ времени торможения и t0 - времени паузы в работе
225
Рис. 6.9. Нагрузочные диаграммы электропри-
вода
механизма. По диаграмме рис. 6.9. б
определяют средний статический мо-
мент:
п
2 мск*к
1
Мс.ср = --------- ,
п
2 а
1
где Мск - момент сопротивления на k-м интервале; t* - продол-
жительность k-го интервала; п - число интервалов с Мск.
Номинальный момент двигателя предварительно находят с
учетом динамических режимов:
Л^НОМ ~ ^ДИН^с.ср»
где
-Кдин = + 1,3.
По найденным значениям Мном и QH0M из каталогов выби-
рают ближайший по мощности двигатель, определяют его мо-
мент инерции и строят механические характеристики. После
того как двигатель предварительно выбран, построение на-
грузочной диаграммы электропривода (двигателя) Af(t) сводит-
ся к решению уравнения движения
_. т dQ
МВр *“ Мс + J — •
dt
По тахограмме определяют ускорения dQ/dt в динамичес-
ких режимах (рис. 6.9, в), рассчитывают и строят диаграмму ди-
226 /
намических моментов Мднл = J— (рис. 6.9, г). На основании
dt
проведенных расчетов строят нагрузочные диаграммы электро-
привода M(t) и P(t) (рис. 6.9, д,е).
Зависимость M(t) строится суммированием значений момен-
тов сопротивления Mc(t) и динамического Мдин(0, a P(t) -
на основе использования известного соотношения P=QM.
Предварительно выбранный двигатель /проверяют по перегру-
зочной способности и нагреву. При проверке по перегрузочной
способности проверяют выполнение условия
^макс ^доп»
где Ммакс - максимальное значение момента; Мдоп - допусти-
мый по перегрузке момент двигателя, равный: (2 2,5)Мном -
для двигателя постоянного тока; 0.8М„а„л - для асинхронного
двигателя с учетом снижения напряжения на 10%; (2 +
+ 2,5)Мном - для синхронных двигателей нормального испол-
нения.
Для асинхронных короткозамкнутых двигателей дополни-
тельно должно выполняться условие превышения пускового
момента над максимальным моментом М„ЯЖ1. < Мп.
При длительном режиме работы электропривода с
постоянной нагрузкой (Р = const) мощность электродвигателя
выбирается из условия Р < Рном, где Л»ом ~ номинальная мощ-
ность ближайшего к заданной нагрузке двигателя по каталогу.
В кратковременном режиме работы двигатель за
время работы не успевает нагреться до температуры установив-
шегося значения. Следовательно, двигатель для этого режима
работы привода может быть нагружен больше, чем для дли-
тельного. Мощность двигателя выбирают не по условиям на-
грева, а по условиям допустимых перегрузочного момента и
тока. Для таких электроприводов выпускают специальные дви-
гатели, имеющие большую перегрузочную способность и рас-
считанные на работу в течение 15,30 и 60 мин. Эти двигатели
выбираются по каталогу серий двигателей для кратковремен-
ного режима работы.
Для приводов, работающих в повторно-кратковре-
менном режиме, типичными примерами которого являют-
ся электроприводы подъемно-транспортных механизмов и
большинства металлорежущих станков, следует применять
227
специальные электродвигатели для повторно-кратковремен-
ного режима работы с гостированной продолжительностью
включения.
6.6. ПРОВЕРКА ВЫБОРА МОЩНОСТИ ДВИГАТЕЛЕЙ ПО НАГРЕВУ
Проверку правильности предварительного выбора мощности
электродвигателя для всех режимов работы производят по его
нагрузочным диаграммам.
Если температура окружающей среды не отличается от при-
нятой по ГОСТу, то выбор мощности двигателя, работающего в
продолжительном режиме при постоянной нагрузке, сводится
к выбору его по каталогу, при этом номинальная мощность дви-
гателя РНом > т. е. механической мощности нагрузки. Ес-
ли двигатель работает в продолжительном режиме с перемен-
ной нагрузкой, то, пользуясь нагрузочной диаграммой и урав-
нениями нагревания и охлаждения двигателя, следует опре-
делить температуру максимального перегрева тма1СС и сравнить
ее с допустимой. Этот метод требует сложных вычислений
и в практических расчетах почти не применяется. Более удоб-
ным и достаточно точным методом проверки выбора мощнос-
ти двигателя является метод средних потерь, основан-
ный на том, что мощность потерь ДРд, за цикл работы не долж-
на превышать мощности номинальных потерь, т. е. ДРср <
АРном- Если средняя мощность потерь ДРср не превышает
мощности номинальных, то средняя температура перегрева
не будет превышать допустимой величины: < *ДОттак как
средняя температура пропорциональна мощности потерь за
цикл. В соответствии с этим можно записать, что
ДРХЦ + APata +... + АРл^л
ДРср =1-------------------, (6.12)
‘ц
где ДР* и t* - мощность потерь и продолжительность k-го участ-
ка нагрузочной диаграммы.
Для определения ДР* и соответственно ДРд, необходимо най-
ти зависимость коэффициента полезного действия от момента
на валу п(МВр) и> вычислив мощность на каждом участке (Р* =
228
= определить мощность потерь
^(1-Пк)
др^------------
Лк
(6.13)
и среднюю мощность потерь за никл.
Если ДРср ДРном, то двигатель выбран правильно. При
ДРср > ДРном двигатель будет перегреваться, что недопустимо.
В этом случае выбирают по каталогу двигатель большей мощ-
ности. Этот метод является наиболее точным и применяется
для выбора мощности двигателей постоянного и переменного
токов.
Если в результате построения нагрузочной даиаграммы по-
лучены зависимости тока 1(0 или мощности Р(0 в функции
времени, то проверку выбора двигателя по нагреву можно
осуществить без вычисления потерь, используя метод эквива-
лентных величин: тока, мощности или момента.
Метод эквивалентных величин основан на методе
средних потерь с учетом допущения, что потери ДРП (в ста-
ли и механические) постоянны, т. е. не зависят от нагрузки.
Тогда можно записать:
ДРср - ЛРП + RI23K =
(ДРП + RI*)t! + (ДРП + RI2)t2 +... + (ДРП + Я/’) t„
« .................................... - , (6.14)
Ч +t2 +
где RI2 - потери в проводах двигателя.
Из этого уравнения можно определить эквивалентный ток:
(6.15)
Если соблюдается условие 1ЗК < /ном для предварительно
выбранного двигателя, то двигатели удовлетворяют требова-
ниям нагрева и выбраны правильно.
Метод эквивалентного тока для проверки выбранного дви-
гателя по нагреву можно применять практически во всех слу-
чаях, когда можно не учитывать изменение мощности потерь
(например, в стали и на трение). Этот метод неприменим в
случае асинхронных двигателей, работающих при регулируе-
229
мом напряжении статорной обмотки, а также для двигателей с
глубоким пазом или с обмоткой типа ’’двойное беличье ко*
лесо”, так как их сопротивление ротора сильно изменяется в
пусковых и тормозных режимах. В этом случае надо приме-
нять метод проверки, основанный на непосредственном опре-
делении мощности потерь.
Производными от метода эквивалентного тока являются
методы эквивалентного момента и мощности:
+ ...
Ц+«3 + ... + «п
(6.16)
(6.17)
Определенные эквивалентные значения Мэк и Рэк представ-
ляют собой среднеквадратичные значения момента и мощности
нагрузочных диаграмм.
Бели полученные эквивалентные величины не превышают
соответствующие номинальные (Мэк Мном и Рэк Рном), т0
двигатель удовлетворяет требованиям нагрева.
Метод эквивалентного момента применим для проверки по
нагреву синхронных и асинхронных двигателей нормального
исполнения и двигателей постоянного тока независимого воз-
буждения при работе с номинальным магнитным потоком
возбуждения.
Метод эквивалентной мощности применяется для проверки
по нагреву тех же самых двигателей, но работающих при неиз-
менной частоте вращения и номинальном магнитном потоке
возбуждения для двигателей независимого возбуждения.
Проверку по нагреву двигателя для повторно-кратковремен-
ного режима работы проводят так же, как и для продолжитель-
ного режима работы, однако следует учитывать ухудшение ус-
ловий охлаждения при разгоне, торможении и остановке элек-
тродвигателя. Если ПВ работы данного привода не соответ-
ствует стандартным ПВ, то можно применять специализиро-
ванные электродвигатели с другим ПВ или даже двигатели
для длительного режима работы (ПВ = 100%).
При пересчете мощности выбранного двигателя с одной ПВ
на другую допустимая мощность рассчитывается по формуле
230
Р2 = рх /пв, / пв2,
(6.18)
где Рх и ПВ1 - номинальная мощность и продолжительность
включения по каталогу, а Р2 - допустимая мощность электро-
двигателя при „нестандартной” продолжительности включе-
ния ПВ2.
Вопрос 63. Каким из методов (эквивалентного момента или
мощности) следует воспользоваться для проверки по нагреву
выбранного двигателя постоянного тока параллельного воз-
буждения, работающего с переменной нагрузкой и реостатным
регулированием частоты вращения?
Варианты ответа:
6.3.1. Оба метода равноценны.
6.3.2. Методом эквивалентного момента.
6.3.3. Методом эквивалентной мощности.
6.7. АВТОМАТИЗАЦИЯ ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
Задачи и способы автоматизации
В предыдущих главах книги рассмотрены пусковые и тор-
мозные режимы работы электродвигателей. Показана необхо-
димость использования специальных пусковых реостатов для
пуска двигателей постоянного тока и асинхронных двигателей
с фазным ротором. В электроприводах малой и средней мощ-
ности пуск этих двигателей обычно производится ’’вручную”,
плавным выведением пускового реостата по мере разгона дви-
гателя, а пуск асинхронных двигателей с короткозамкнутым
ротором осуществляется непосредственным подключением к
сети статорной обмотки двигателя.
Во всех остальных случаях (большая мощность и частота
включения, дистанционное управление и т. д.) для пуска при-
меняются автоматизированные схемы пуска и защиты электро-
двигателей, а для быстрой остановки и изменения направле-
ния вращения - схемы принудительного торможения. Одно-
временнно с использованием схем автоматизированного пуска
решается задача дистанционного управления электродви-
гателем.
При пуске двигателей постоянного тока решается задача
ограничения пускового тока и момента, а асинхронных дви-
гателей с фазным ротором - увеличение пускового момента
и уменьшение пускового тока. В обоих случаях это решается
231
введением в цепь якоря (ротора) пускового реостата. Быстрый
разгон двигателя возможен лишь при значительном превыше-
нии пускового момента над моментом сопротивления механиз-
ма. Для уменьшения пускового тока одновременно с разгоном
двигателя необходимо автоматически уменьшать сопротивле-
ние пускового реостата, который состоит из нескольких секций.
Реостатный пуск двигателя постоянного тока независимого
или параллельного возбуждения подобен пуску асинхронного
двигателя с пусковым реостатом в цепи ротора. Число ступе-
ней пускового реостата обычно равно 2-3, каждой ступени рео-
стата соответствует своя механическая характеристика, а их
семейство, называмое пусковой диаграммой (рис. 6.10), отобра-
жает процесс разгона двигателя.
Для определения числа ступеней реостата при пуске дви-
гателя необходимо задаться пусковыми моментами переклю-
чения. Пусть Мп1 = 2,ЗМном, МП2 = 1,ЗМном, а момент сопротив-
ления равен номинальному Мс - Мном. Сначала строим есте-
ственную механическую характеристику (1 - Ъ-2) и первую
искусственную механическую характеристику (J-e-З), задаю-
щую при Мп1 = 2,ЗМном допустимые пусковые ток и момент. Ее
пересечение с вертикалью Mnj в 1»ЗМном определяет точку 4,
соответствующую nt, когда необходимо уменьшить сопротив-
ление пускового реостата, т. е. отключить первую ступень, что-
бы момент возрос вновь до Мп1. Двигатель переходит на вто-
рую механическую характеристику (l-d-5) практически при
прежнем значении частоты вращения nt.
Далее с разгоном двигателя до частоты вращения п2, когда
момент снова уменьшается до 1,ЗМном (точка 6) выводится
вторая ступень реостата и двигатель разгоняется в соответ-
ствии с третьей механической характеристикой (1-с-7), и при
достижении точки 8 выводится третья ступень реостата и двига-
0 Мсч п„-^Н/Нно„
Рис. 6.10. Пусковая диаграмма двигате-
ля постоянного тока параллельного воз-
буждения
232
тель разгоняется до номинальной частоты вращения лном в
соответствии с естественной механической характеристикой.
Значения сопротивлений пусковых реостатов легко можно
определить по пусковой диаграмме, так как относительное
уменьшение частоты вращения двигателя от холостого хода
до номинального режима равно относительному падению на
напряжения на всех сопротивлениях якорной цепи Яя£
Дл ^яЕ^яном
-----------------------, (6.19)
п 0 ^ном ^ном
^ном
где 2?ном = —------номинальное сопротивление двигателя,
^яном
Тогда R* = ^у • Яном » ЯпХ= jy ’ ЯНОм»
Яп2 = ^у * ЯНом > Япз = jy * Яном .
Частота вращения холостого хода п0 определяется по номиналь-
ной лном из соотношения
^ном
по= пном • (6.20)
^ном “^я£ ^ном
Если сопротивление якоря Яя неизвестно, то его можно с
достаточной для практических расчетов точностью определить,
приняв допущение, что мощность электрических потерь в
якорной цепи при номинальном токе составляют половину
мощности потерь двигателя, т. е.
Яя^яном* 0,5ДРНОМ = 0,5 (1 —Пном )Яном (6.21)
или
Яя * 0,5 (1 - Пном) ЯНОМ>
где
^НОМ
Яном = " •
т2
ля ном
На рис. 6.11 приведена диаграмма изменения вращающего
момента во времени при ступенчатом выведении пусковых
233
Рис. 6.11. Изменение вращающего момента (тока)
двигателя во времени при ступенчатом выведе-
нии пусковых резисторов
реостатов, она же в другом масштабе соответствует диаграмме
изменения пускового тока двигателя.
При всех переключениях пусковых реостатов ток якоря и
пусковой момент не должны превышать допустимых значе-
ний, лежащих в пределах (2,3-3)Мном (/ном) Для двигателей
постоянного тока разных типов. Это достигается выбором ре-
зисторов при графо-аналитическом расчете момента переклю-
чения МЛ2 и числа ступеней пуска. Увеличение числа ступе-
ней пускового реостата приводит к ускорению и плавности
пуска двигателя.
Аналогичным образом определяются сопротивления ступе-
ней пускового реостата для асинхронного двигателя с фазным
ротором. Для упрощения процесса построения пусковой диа-
граммы начальные участки механических характеристик дви-
гателя можно линеаризовать, так как при изменении момента
от 0 до Мном механические характеристики асинхронного дви-
гателя практически линейны.
Задача автоматизации реостатного пуска двигателей состоит
в выведении ступеней пускового реостата таким образом, чтобы
при изменении сопротивления реостата значения пускового
тока и момента оставались бы в заданных пределах.
Автоматизация пуска выполняется в функции частоты вра-
щения якоря (ротора) двигателей постоянного и переменного
тока, а также тока и времени, т. е. определяющим фактором,
вызывающим переключение ступеней реостата, является из-
менение частоты вращения двигателя, его тока или расчетное
время разгона на каждой ступени.
Рассмотрим некоторые пути построения схем автоматичес-
кого пуска.
Автоматизация пуска двигателя в функции
частоты вращения
Частоту вращения двигателя можно контролировать по ЭДС
в обмотке якоря двигателя постоянного тока или по частоте
ЭДС в обмотке ротора двигателей переменного тока, а также
с помощью центробежных реле (реле контроля скорости) и раз-
личных преобразователей. Недостатком такого принципа по-
строения схемы пуска является использование ряда реле или
контакторов, рассчитанных на широкий диапазон порогов (зна-
чений напряжения, частоты и скорости) срабатывания. Наи-
большее распространение такого типа схемы получили для
автоматического пуска двигателей постоянного тока, когда
две или более обмоток реле напряжения или контакторов,
рассчитанных на разные напряжения срабатывания, включа-
ются параллельно обмотке якоря двигателя.
В табл. 6.2 приведены условные обозначения электричес-
ких аппаратов и их контактов, применяемых в схемах автома-
тического пуска и управления.
На рис. 6.12 приведена простейшая схема автоматизирован-
ного пуска двигателя постоянного тока параллельного воз-
буждения в функции частоты вращения. Пусковой реостат
имеет две ступени, а катушки контакторов ускорения КМ2 и
КМЗ подключены к зажимам якоря. Контакторы настроены на
разные напряжения срабатывания С/1у < и2у, которые опреде-
ляются расчетным путем. При нажатии кнопки ’’пуск” линей-
ный контактор КМ1 подключает двигатель к сети при пол-
ностью введенном пусковом реостате и шунтирует кнопку
’’пуск”. С разгоном двигателя увеличивается ЭДС якоря и при
Рис. 6.12. Схема управле-
ния автоматизированным
пуском двигателя постоян-
ного тока в функции час-
тоты вращения
235
Таблица 6.2
Наименование Обозначение
буквенное графическое
А втома тический выключатель с расцепителем максимального тока Выключатель кнопочный с замыкающим контактом с размыкающим контактом Реле, контактор, пускатель; контактор реле токовое реле времени реле напряжения реле тепловое Контакты силовые и блокировочные • без дуеогасиения силовой с дугогашением с выдержкой времени на замыкание с выдержкой времени на размыкание SB к км КА КТ ки кк 4 НИ *
определенной частоте вращения срабатывает контактор КМ2,
шунтирующий первую ступень реостата. При дальнейшем уве-
личении частоты вращения срабатывает контактор КМЗ, за-
мыкающий вторую ступень пускового реостата, и двигатель
достигает установившейся частоты вращения.
236
Автоматизация пуска двигателя в функции тока
На рис. 6.13 показана схема реостатного пуска асинхронного
двигателя с фазным ротором в функции тока. При нажатии на
кнопку ’’пуск” контактор КМ1 подключает обмотку статора к
сети, одновременно шунтируя кнопку ’’пуск”. Пусковой ток ро-
тора двигателя вызывает срабатывание токовых реле ускоре-
ния КА1 и КА2, которые размыкают свои контакты в цепи кон-
такторов ускорения КМ2 и КМЗ до их включения. При разгоне
двигателя ток в цепи ротора уменьшается и при снижении его
до заданного значения реле КА2 отпускает якорь и своим кон-
тактом включает контактор КМЗ, который замыкает своими
контактами первую ступень пускового реостата и цепь с реле
КА2.
Рис. 6.13. Схема управления автома
тизированным пуском асинхронного
двигателя с фазным ротором
Двигатель продолжает разгон в соответствии со второй ис-
кусственно механической характеристикой, а после второго
броска ток снова начинает уменьшаться. При снижении тока
до заданного значения реле КА1 отпускает свой якорь и вклю-
чает контактор КМ2, который закорачивает вторую ступень
реостата, а пуск двигателя до установившейся частоты враще-
ния продолжается в соответствии с естественной механичес-
кой характеристикой. На этом пуск двигателя заканчивается.
Заданные значения тока переключения определяются на-
стройкой реле КА 1 и КА2 на ток отпускания.
237
Автоматизация пуска двигателя в функции времени
Схемы пуска данного типа находят самое широкое распро-
странение, это объясняется очень широким ассортиментом раз-
личных типов реле времени, их надежностью и простотой ус-
тановки требуемых выдержек времени, которые определяются
по результатам расчета времени переключения по построен-
ной ранее пусковой диаграмме. Упрощенная схема пуска
асинхронного двигателя в функции времени приведена на
рис. 6.14.
Расчетные выдержки времени, соответствующие времени
работы двигателя при полностью и частично введенном пус-
ковом реостате задаются регулированием времени задержки
(замедления) на срабатывание реле времени КТ1 и КТ2. При
нажатии кнопки ’’пуск” контактор КМ1 подключает статорную
обмотку двигателя к сети и замыкает цепь реле КТ1. Двига-
тель пускается при полностью введенном пусковом реостате.
По истечении заданной выдержки времени срабатывает реле
КТ1 и своими контактами включает контактор КМ2. Контактор
КМ2 шунтирует первую ступень пускового реостата и вклю-
чает реле КТ2. Пуск двигателя продолжается при уменьшенном
сопротивлении в роторной цепи. После соответствующей вы-
Рис. 6.14. Схема управления автоматизированным пуском двигателя в функ-
ции времени
238
держки времени срабатывает реле КТ2 и включает контактор
КМЗ, который полностью закорачивает пусковой реостат. Дви-
гатель достигает установившейся частоты вращения, работая
в соответствии с естественной механической характеристикой.
Для быстрой и точной остановки двигателя электроприводов
используют динамическое торможение и торможение противо-
включением.
Автоматизация торможения двигателей постоянного и пе-
ременного тока может быть выполнена в функции времени или
частоты вращения.
Управление в функции частоты вращения при торможении
противовключением более предпочтительно как технически,
так и экономически, и, в основном, осуществляется с помощью
центробежных реле контроля скорости (РКС), размыкающих
свои контакты при п * 0. При динамическом торможении
двигателей применение РКС и других устройств контроля час-
тоты вращения не обязательно, так как оно осуществляется в
основном в функции времени.
Задача 6.4. Определить число ступеней пускового реостата
и значение сопротивлений его отдельных секций для автома-
тического пуска двигателя постоянного тока параллельного
возбуждения, чтобы при пуске вращающий момент изменялся
в пределах Mni = = 2Мном до Л/П2 = ^мин = (1 “ 1,2)Мном.
Номинальные данные двигателя: Рном = 14 кВт, ^ном " 220 В,
пНом = 750 об/мин, Яя = 0,23 Ом, /ЯЛОм = 63,8 А.
Решение. Вначале строим естественную механическую ха-
рактеристику. Для этого по паспортным данным определяем
номинальный момент:
9,55 9,55
Мном = -Рном---= 14 • 103---- 178 Н • м.
пим пим пгл
"ном 750
Частота вращения якоря двигателя при идеальном холостом
ходе
ином 220
п0-------------лном --------------750 = 805 об/мин.
^ном ~^я^я.ном 220 —0,23 • 63,8
Естественная механическая характеристика представляет
собой прямую, проведенную через две точки (рис. 6.15): точку
О, (и0 = 805 об/мин, М = 0) и точку N (пном = 750 об/мин, Мном =
= 178 Н • м). Затем строим искусственные (пусковые) характе-
239
Рис. 6.15. Пусковая диаграмма к за-
даче 6.4
ристики, для которых точка О1( соответствующая идеальному
холостому ходу, является общей.
Первую пусковую характеристику, соответствующую полному
пусковому сопротивлению Rn + Rn в главной иепи, строим по
точкам и а (п = О, М = MMIUi = 356 Н • м).
Необходимое для построения расчетной пусковой диаграм-
мы значение МП2 находим в результате построения ряда про-
межуточных пусковых диаграмм, чтобы для выбранного Мп2
при отключении секций пускового реостата максимальный
момент не превышал заданных условий задачи.
Найденный таким образом момент равен Мп2 = 1,055 Мном =
- 188 Н * м, а число ступеней (секций) пускового реостата рав-
но трем.
Проводим через точки а и b принятые границы пускового мо-
мента, т. е. прямые ас и bd, параллельные оси ординат, до пере-
сечения с горизонтальной прямой Охе.
Вторую и последующие пусковые характеристики строим
на основе следующих рассуждений. После включения двига-
теля в сеть увеличение частоты вращения его якоря, в цепь
которого введены все секции пускового реостата, и изменение
вращающего момента происходят по закону, характеризуемо-
му прямой Ota. Когда вращающий пусковой момент умень-
шится до значения Ммн, а частота вращения якоря достигнет
значения лд, характеризуемого ординатой точки пересечения
прямых Оха и bd (точка А), первая секция пускового реостата
должна быть выключена. Ее выключение приведет к повтор-
ному возрастанию тока в якоре, а вместе с ним и вращающего
момента. Оставшиеся секции пускового реостата должны ог-
раничивать ток до значения, определяемого вращающим мо-
ментом Ммакс при частоте вращения пд.
Дальнейшее увеличение частоты вращения якоря и умень-
шение вращающего момента происходит по закону, характери-
зуемому второй пусковой характеристикой, которую следует
240
провести через точки С\и к. Когда частота вращения якоря и
развиваемый им вращающий момент достигнут значений, ха-
рактеризуемых ординатой точки пересечения прямой Otk с
прямой bd (точка К), должна быть выключена вторая секция
реостата и т.д.
После выключения последней секции реостата работа дви-
гателя будет определяться его естественной механической
характеристикой (прямая Ох/)>
По построенным пусковым характеристикам определяем со-
противления ступеней реостата из следующих соображений.
Зависимость между частотой вращения якоря и сопротивле-
нием якорной цепи можно выразить, пользуясь уравнением
механической характеристики двигателя:
МВр(*я + *п)
п - п0------------- = п0 - Дп.
СЕСМФ2
М вр(Яя + Яп)
В момент пуска и = 0, а Дп = по = ----=------ к(Яя + R„) или
СЕСМФ
Дп = п0 = k(Rx + Яп). Отсюда следует, что изменение частоты
вращения Дп (при Мс - const) пропорционально полному сопро-
тивлению цепи якоря, состоящему из сопротивления якоря в хо-
лодном состоянии Rn и сопротивления Rn всех секций пускового
реостата, т. е. Яя + Rn, которое в некотором масштабе определя-
ется отрезком ас. При заданных значениях Ммакс = 2Мном.
^ном 220 „ „ , „ л
J?n “ " “ ~ Rx = “ 0,23 “1,5 Ом.
Ня ном 2 • 63,8
Тогда масштаб сопротивления
®я+^п
= „;••• •
ас
Отрезки ак, kl, If определяют сопротивления трех секций
пускового реостата
1?! = ак тя;
Ra“ klmR ;
R3 e If mR-
241
В результате расчетов получены следующие значения: =
= 0,8 Ом; R2 = 0,45 Ом; Яэ - 0,25 Ом.
Отрезок /с в том же масштабе определяет значение сопро-
тивления якоря Ля = 0,23 Ом.
6.8. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОПРИВОДОВ
Достижения электронной техники и широкий выбор различ-
ных силовых полупроводниковых приборов изменили подхо-
ды к построению систем электропривода и способам регули-
рования частоты вращения. Высокий КПД, надежность, малая
мощность управления тиристоров и транзисторов вытеснили
из систем управления и регулирования различные электро-
механические преобразователи энергии (электромашинные
преобразователи напряжения и частоты), а использование об-
ратных связей открыло новые возможности применения элек-
трических двигателей.
На рис. 6.16 приведена упрощенная структурная схема элек-
тропривода, представляющая собой систему автоматического
регулирования, например, частоты вращения электродвигате-
ля л. Основные узлы электропривода - блок управления,
преобразователь энергии, электродвигатель и рабочий орган с
механической передачей образуют цепь прямой связи, когда
воздействие с выхода предыдущего блока (узла) подается на
вход последующего, а электропривод может рассматриваться
как разомкнутая система автоматического регулирования, вы-
Сеть
Рис. 6.16. Упрощенная структурная схема электропривода производственного
механизма
242
ходное воздействие которой и пропорционально входному на-
напряжению управления Uy, формируемого блоком управления
или другими внешними источниками сигналов. Разомкнутая
система превращается в замкнутую введением отрицательных
обратных связей (ООС), передающих с помощью блока датчиков
и различных преобразователей выходное воздействие системы,
например, частоту вращения, вращающий момент двигателя и
т. д. на вход блока управления. Обратная связь будет отрица-
тельной, если ее сигнал (напряжение, ток) вычитается из сиг-
нала управляющего воздействия. Если ООС охватывает один
или несколько блоков системы, то такие обратные связи назы-
ваются местными и корректируют характеристики блоков, а
если охватывают всю систему, то - главными.
На рис. б. 16 пунктирными линиями показаны цепи обратных
связей, которые превращают разомкнутую систему электро-
привода в замкнутую, например, систему регулирования и ста-
билизации частоты вращения, получения специальных меха-
нических характеристик. Сочетание управляемого преобразо-
вателя энергии с отрицательной обратной связью по частоте
вращения позволяет резко увеличить жесткость механичес-
ких характеристик двигателей постоянного и переменного то-
ка, использовать для управления частотой вращения асин-
хронного двигателя регулирование напряжения на статоре и
разработать целый класс преобразователей для частотного
управления асинхронными двигателями. Общие принципы
построения и работы транзисторных и тиристорных преобразо-
вателей рассматриваются в кн. 3. В преобразователях тиристор
выполняет роль управляемого выпрямителя или бесконтакт-
ного ключа, открываемого импульсом тока в епи управления.
Преобразователи на тиристорах стали главными для систем
преобразователь-двигатель постоянного тока (П-Д). Способ
регулирования частоты вращения двигателей независимого
возбуждения, основанный на изменении напряжения ия(ия <
< СГЯ<НОМ), позволяет получить широкий диапазон регулирова-
ния, а также отказаться от пусковых реостатов.
Реализация данного способа управления построена на ис-
пользовании управляемого выпрямителя (тиристорный выпря-
митель, см. в кн. 3), от которого питается якорная цепь двигате-
ля (рис. 6.17, а). Ранее подобный привод выполнялся по си-
стеме генератор - двигатель (Г-Д). На рис. 6.17, а представлена
243
Рис. 6.17. Схема тиристорного управления частотой вращения двигателя по-
стоянного тока (а) и механические характеристики (б)
схема тиристорного устройства управления электроприводом
с отрицательной обратной связью по частоте вращения. Регу-
лирование частоты вращения производится однофазным ти-
ристорным преобразователем, состоящим из трансформатора
Тр с выводом средней точки вторичной обмотки и тиристоров
VS1, VS2, управляемых блоком управления БУ. Якорная обмот-
ка двигателя подключается через дроссель Др к общей точке
тиристоров и средней точке трансформатора. Регулирование
частоты вращения двигателя производится изменением угла
управления тиристорами а, пропорционального разности уп-
равляющего напряжения Uy и напряжения обратной связи по
частоте вращения (Un). Напряжение обратной связи выраба-
тывается тахогенератором постоянного тока ТГ. Частота вра-
щения регулируется изменением управляющего напряжения
на входе регулятора - Uy.
На рис. 6.17, б представлены механические характеристики
двигателя при различных значениях угла управления а. Меха-
ническая характеристика двигателя при отсутствии отрица-
тельной обратной связи а = 0 (без ООС) имеет меньшую жест-
кость, чем естественная (Ест). Введение ООС по частоте вра-
щения двигателя позволяет осуществлять регулирование
в широком диапазоне частот вращения с более высокой жест-
костью (характеристики на рис. 6.17, б при ООС и а = 0), посто-
янной во всем диапазоне регулирования.
Использование тиристорного управляемого выпрямителя
для якорного регулирования частоты вращения двигателя по-
стоянного тока в сочетании с отрицательными обратными свя-
зями позволили получить диапазон регулирования скоростей
Д - пмакс/пмин = 1 + ЮО. Подобного типа системы могут быть
использованы и при полюсном регулировании частоты враще-
ния. В специализированных высокоточных приводах при со-
244
вместном якорном и полюсном регулировании достигается
диапазон до Д = 1:1000, а нестабильность частоты вращения
не более десятых и сотых долей процента. Это достигается
введением специальных обратных связей по частоте вращения,
току, моменту и их производным.
Тиристорные преобразователи переменного напряжения в
регулируемое постоянное напряжение практически полностью
заменили в системах автоматизированного привода системы
генератор - двигатель (Г - Д).
В электроприводах переменного тока тиристоры применяют
в качестве бесконтактного ключа для регулирования частоты
вращения и управляемого пуска асинхронных двигателей
(рис. 6.18). Изменяя угол а управления тиристорами в пределах
от нуля до 150°, практически можно регулировать напряжение
на статорной обмотке двигателя 17, от напряжения сети Uc «
“^номДОиуля.
Для регулирования частоты вращения двигателя с фазным
ротором в электроприводах применяют бесконтактное изме-
нение сопротивления добавочного резистора КДОб’ который
включается в обмотку ротора через мостовую цепь и сглажи-
вающий дроссель Др (рис. 6.19). Тиристорный ключ ТК изобра-
жен на схеме в виде переключателя с последовательно вклю-
ченным диодом. Сопротивление добавочного резистора при
достаточно высокой частоте f0 коммутации ТК плавно регули-
Рис. 6.18. Схема тиристорного регу-
лятора среднего значения напря-
жения (ТРН) трехфаэного асинхрон-
ного двигателя
Рис. 6.19. Схема тиристорного ком-
мутатора для бесконтактного регу-
лирования частоты вращения
асинхронного двигателя реостат-
ным способом
245
руется от нуля до Вдоб при изменении скважности управляю-
щих импульсов v • То / tH, где То = 1//0.
Тиристорный ключ (ТК), так же как и тиристорный регулятор
напряжения (ТРН), при анализе работы двигателя в электро-
приводе можно считать практически безынерционным.
Цепи отрицательных обратных связей на схемах рис. 6.18
и 6.19 для упрощения не приводятся.
Для регулируемых электроприводов переменного тока при-
меняют тиристорные преобразователи частоты (ТПЧ), по-
строенные обычно по схеме с промежуточным эвеном постоян-
ного тока (см. кн. 3). Основными преимуществами таких ТПЧ
являются возможность получения широкого диапазона ча-
стот выходного напряжения независимо от частоты питающей
сети, высокие КПД (л = 0,87 + 0,9) и коэффициент мощности
(cos<p * 0,9). Мощность серийно выпускаемых ТПЧ достигает
450 кВ • А и непрерывно повышается.
Вопрос 6.4. Укажите преимущества применения тиристорных
преобразователей напряжения и частоты в схемах регулиро-
вания частоты вращения двигателей постоянного и перемен-
ного тока.
Варианты ответа:
6.4.1. Повышение КПД привода.
6.4.2. Уменьшение капитальных затрат и эксплуатационных
расходов электроприводов.
6.4.3. Расширение диапазона регулирования частоты враще-
ния и повышение жесткости механических характеристик
электродвигателей.
6.9. Комментарии к правильным ответам на вопросы гл. 6
6.1.2 . Если двигатель нагружен механизмом с механической
характеристикой 2, то работа в точке А будет устойчивой. Воз-
никающий динамический момент при уменьшении частоты
вращения вызывает появление ускорения, возвращающего
привод в точку установившегося режима работы.
6.2.1. Из условия длительного режима работы, так как дли-
тельность цикла более 10 мин, а за время паузы двигатель не
успеет охладиться до температуры окружающей среды.
6.3.2. Метод эквивалентного момента. При реостатном регу-
лировании и Мс = const ток якоря остается постоянным и соот-
246
ветственно практически постоянными остаются условия на-
грева и охлаждения двигателя.
6.43. Использование тиристорных преобразователей с различ-
ными обратными связями позволяет создавать замкнутые си-
стемы электропривода, которые расширяют диапазон регули-
рования частоты вращения и повышает жесткость механиче-
ских характеристик используемых электродвигателей.
Глава седьмая
МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ УСТРОЙСТВ
7.1. ЗАДАЧИ И СРЕДСТВА МОДЕЛИРОВАНИЯ
Бурное развитие вычислительных средств дает новые воз-
можности для математического моделирования электромеха-
нических устройств (ЭМУ).
Моделирование состоит в расчете состояния ЭМУ при раз-
ных значениях параметров его элементов и при различных ус-
ловиях работы. Моделирование применяется в целях исследо-
вания свойств ЭМУ на стадиях проектирования и эксплуата-
ции, а так же при обучении правилам эксплуатации. Это мощ-
ный и универсальный способ, позволяющий экономично и оп-
тимально разрабатывать и эксплуатировать ЭМУ.
Задачи моделирования могут быть различными.
Так например, на стадии проектирования трансформатора
приходится искать оптимальные соотношения поперечных
размеров магнитопровода и его длины при разных значениях
параметров обмоток. От этого существенно зависят стоимость
изготовления и значения необратимых потерь энергии при
эксплуатации.
При эксплуатации электрического двигателя необходимо
выдерживать определенные условия пуска или изменения час-
тоты вращения в целях экономичной и безаварийной работы.
При моделировании могут использоваться программы расче-
та электромагнитного, механического и теплового состояний
ЭМУ в зависимости от:
247
режима цепи, в которую включено устройство;
электромагнитного, механического и теплового воздействий
со стороны внешней среды;
параметров и свойств отдельных элементов ЭМУ;
влияния ЭМУ на состояние окружающей среды.
Например, при моделировании асинхронного электрического
двигателя с фазным ротором необходимо учитывать, что при
заданных напряжении и частоте сети ток зависит от конструк-
тивных параметров двигателя, механического момента сопро-
тивления на валу двигателя, электрического сопротивления
в цепи обмотки ротора, температуры отдельных частей дви-
гателя.
Важным свойством ЭМУ является стоимость его изготовле-
ния и эксплуатации. Поэтому математическая модель ЭМУ,
используемая для проектирования, должна включать расчет
технико-экономических показателей ЭМУ.
Приведенное описание задач моделирования показывает ее
большую сложность, во-первых, из-за комплексной связи раз-
личных явлений и, во-вторых, из-за сложности самих явлений.
Так, точный расчет магнитных полей в ЭМУ усложняется та-
кими обстоятельствами:
магнитопровод ЭМУ имеет несколько разных участков, из-
готовленных из различных ферромагнитных материалов, по-
этому электромагнитное поле описывается системой диффе-
ренциальных уравнений с частными производными (или си-
стемой интегральных уравнений), магнитная цепь описывает-
ся системой алгебраических уравнений;
магнитные характеристики ферромагнитных материалов,
из которых изготовлены элементы ЭМУ, нелинейны и имеют
гистеризисный характер, поэтому магнитные поля и цепи опи-
сываются системами нелинейных уравнений;
в современных ЭМУ широко используются текстурированные
в результате прокатки и анизотропные магнитные материалы,
т. е. материалы с анизотропией (зависимостью магнитных
свойств от направления векторов магнитной индукции и на-
пряженности магнитного поля), поэтому коэффициенты урав-
нений имеют тензорный характер;
изменения магнитного поля, вызываемые переменными то-
ками и напряжениями источников электрической энергии,
перемещением или вращением частей ЭМУ приводят к воз-
никновению электромагнитной индукции и вихревых токов,
248
поэтому система уравнений имеет не только производные по
пространственным координатам, но и частные производные по
времени.
По этим причинам математически строгий расчет электро-
магнитного состояния ЭМУ сложной конфигурации является
пока непосильной задачей даже для самых мощных современ-
ных ЭВМ, поэтому применяются приближенные методы, ос-
нованные на ряде упрощений: ЭМУ моделируется в виде маг-
нитной цепи, магнитные свойства материалов которой линеа-
ризуются, упрощаются формы границ участков ЭМУ, пренебре-
гают зависимостью параметров от одной из пространственных
координат и учитывают пространственную симметрию кон-
струкции, используют индивидуальные свойства ЭМУ, обна-
руженные с помощью других математических или физичес-
ких моделей.
Выбор ЭВМ зависит от сложности модели. В последние годы
все чаще используются персональные ЭВМ (ПЭВМ) с универ-
сальным или специальным программным обеспечением. В ка-
честве универсальных программных средств используются
языки высокого уровня, специальные программы для мате-
матических вычислений (см. гл. 7. кн. 1).
На языке высокого уровня удобно готовить специализиро-
ванные моделирующие программы для различных целей.
В § 7.3 описана программа, моделирующая свойства электри-
ческих машин в различных режимах.
7Л. МОДЕЛИРОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ УСТРОЙСТВ
С ПОМОЩЬЮ ПРОГРАММЫ MATHCAD
Программа позволяет рассчитать магнитное и электричес-
кое состояние ЭМУ (реле, контактора, дросселя и др.) с ферро-
магнитным сердечником, имеющим воздушный зазор, при
заданных конструктивных параметрах катушки и напряжении
синусоидального источника. Магнитные свойства электротех-
нической стали вводятся путем чтения данных в файлах с рас-
ширением dat. Эти файлы содержат списки десяти значений
удельных активной и реактивной мощностей и соответствую-
щие им значения амплитуды магнитной индукции. Для лю-
бого материала эти файлы могут быть созданы в любом тексто-
вом редакторе.
Ниже приводится распечатка текста программы.
249
Программа моделирования электромагнитного устройства.
1. Задание исходных данных
U *= 50 напряжение источника> В . Внимание' 0.25 < Вп < 1.8
Г := 50 частота тока, Гц
U - 1000 число витков
dp'= 0.5 диаметр провода, мм
г : = 0.0172 10“^ удельное электрическое
сопротивление провода, Ом.м (медь)
а : = 0.02 ширина стержня сердечника, и
t : = 0.01 толщина сердечника, п
s •= at площадь сечения сердечника, мА2
1с 0.304 длина средней линии сердечника, м
1о : = 0.0000108 длина немагнитного зазора в сердечнике, и
Pi := у число пи= 3.141593
g : = 7800 удельная плотность сердечника , кг/щА3 ,-сталь
! Исходные данные можно изменить. Для этого установите
! курсор на изменяемое число и наберите новое значение.
! Для получения результатов перейдите в конец текста
! одновременным нажатием клавиш <Ctrl> и <End>.
! После этого подождите завершения расчетов !
Значения р(Вм) и q(Bm) для кусочно-линейной аппроксимации*.
i := 1 ..10
Р := READ Грс340430
i dat
q := READ [qc340430
i DAT
Значения амплитуды магнитной индукции:
b := READ ГЕНЕ
i DAT
b := 0
0
1МТЕРИАЛ СЕРДЕЧНИКА -листовая электротехническая сталь:
3404.30
। ♦ и
марка стали-------------! ?
толщина листа,*. 1/100 мм-----!
-9
dd := 10 вспомогательная малая постоянная
250
Функции кусочко-линейной аппроксимации:
i := 0 ..9
Вм - Ml
Вм - dd
-7
Пи := 4 Pi 10
магнитная постоянная! Гн/м
2. Предварительные вычисления (ВСЕ ВЫЧИСЛЕНИЯ НАЧИНАЮТСЯ
АВТОМАТИЧЕСКИ !)
U := sic объем сердечника, мА3 -5
U = 6.08 10
И := g V масса сердечника, иг П = 0.474
и : = 2 Pi £ круговая частота, рад^с- и = 314.159
1р •= (2 а * 2D U длина провода » м 1р = 60
2
dp -6
sp := Pi — 10 -7
4 площадь сечения провода,мА2 sp = 1.963 10
1Р
R г— сопротивление провода R - 5.256
sp
Приближенные вычисления начальных значений 8 искомых параметров
для последующих расчетов методом последовательных приближений.
2 2 ____________
Jpc + (Qc ♦ Чо) 2 2
I ---------------------- Ul := )|U - (В I)
U
Здесь
251
в расчетах Рс и Qc
приняты линейные
Qc * Qo Pi : = atan Pc аппроксимации U1 р(Вм)=1»Вм Z1 := - q(Bn)=l*Bn I
Задаются следующие начальные приближения8 искомых параметров:
I = 0.021 1. ток, А
Bn = 1.125 Pc = 0.534 2. амплитуда магнитной индукции в сердечнике, Тл 3. мощность потерь в сердечнике. Вг
Qc = 0.534 4. мощность магнитного поля в сердечнике! вар Qo = 0.342 5. мощность магнитного поля в зазоре, вар 3 (реактивные мощности) Z1 = 2.438 10 Ь. полное сопротивление без учета сопрот. провода! Ом U1 = 50 7. напряжение без учета падения напряжения на сопрот. проводар 0 Fi = 1.023 8. сдвиг фаз напряжения U1 и тока L рад
к := 1 . 3. Система нелинейных уравнений. ..10 целая переменная
Given -команда ввода данных** системы уравнений Интервалы допустимых значений: ?• ПРОСИМ ПОДОЖДАТЬ ЗДВЕРШЕНИЯ РАСЧЕТОВ ?•
Рс > 8 Qc > 0 Qo > 0 |U1[ > 0 I > 0 Bn > 0 Bn < 1.8
НРДВНЕНИЯ: ИСХОДНЫЕ СООТНОШЕНИЯ: для уравнений 1. BptUm/(u*U»S) 2. Рс=И»Руд(Вп) Qc=№QyA(Bn) Qo=B«lo*Ul/(U«Hu)
Bn U u s - 42 U1 = 0 Рс = Н рс(Вп) Qc = Н чс(Вм) Qo Jz U Nu - Bn lo Ul г 0 3. 4.
2 2 I U1 - >|Pc ♦ (Qc ♦ Qo) = 8 5. I=sqr(PcA24Qc*Q)A2)/Ul
252
6. U=sqr(UaA2+Up*2)
4 . Решение системы уравнений.
Ival
Bnval
Pcval
Qcval
Qoval
Ulval
:= Fini(LBni,Pc,Qc,Qo,Ul)
РЕЗУЛЬТАТЫ:
lual = 0.017 Bmval = 1.125 A Tn действующий ток амплитуда магнитной индукции в сердечнике
Pcval = 0.358 Вт мощность магнитных потерь
Qcval = 8.422 вар реактивная мощность поля
Qoval - 0.341 вар в сердечнике реактивная мощность поля
Ulval = 49.952 В в зазоре напряжение на Z1
2 P := Pcval ♦ Я Ival Р = 0.359 мощность потерь,Вт
Q := Qcval ♦ Qoval Q = 0.763 реактивная мощность, вар
CO II *TJ KSJ * S = 0.843 полная мощность, ВА
№ 180 Fi := atan - Fi = 64.795 сдвиг фаз напряжения
Pj Pi P км := - S км и тока, град = 0.426 коэффициент мощности
253
ПЛРДМЕТРЫ ПОСЛЕДОВАТЕЛЬНОЙ СХЕМЫ ЗАИЕЦЕНИЯ:
Q 3 Xek
Хек := Хек = 2.682 10 Lek := — Lek = 8.539
2 и
Ival
Р 3 S 3
Rek := Rek = 1.263 10 Zek := Zek = 2.965 10
2 2
Ival Ival
2
Ulval 3
HI := R1 = 6.98 10
Pcval
HD : = Lek Rek U Ival Bmval U s 1c 1° Запись pe UR1TEPRM зультатм LXS DAT . i в файл: := fID
3 u = lie f = 5t сводка результатов s = 1 R = 5.256 -4 2 18 1c = 8.384 U = 50
-5 lo = 1.08 10 Ival = 0.817 Rmval = 1.125
P = 8.359 Xek = 2.682 3 18 Q = 0.763 3 Rek = 1.263 10 S = 0.843 Lek = 8.539
! нажмите <Ctrl> и <Нотв> !
! ДЛЯ ИЗМЕНЕНИЯ ИСХОДНЫХ ДАННЫХ И ПОВТОРНЫХ ВЫЧИСЛЕНИЙ !
• или <Ctrl> и <Ч> ♦
• ДЛЯ ЗАВЕРШЕНИЯ РАБОТЫ В MathCad »
КОНЕЦ ПРОГРАММЫ
254
7.3. ИСПОЛЬЗОВАНИЕ МОДЕЛИРУЮЩИХ ПРОГРАММ ДЛЯ ИЗУЧЕНИЯ
И ИССЛЕДОВАНИЯ ЭКСПЛУАТАЦИОННЫХ СВОЙСТВ
ЭЛЕКТРИЧЕСКИХ МАШИН
Математические модели электрических машин (ЭМ), реали-
зованные в программах для современных вычислительных
средств, широко используются в различных исследованиях, а
так же могут с успехом применяться в учебном процессе. При-
менение моделирующих программ позволяет выполнять лабо-
раторные работы, в которых сочетаются экспериментальные
исследования на лабораторном стенде и моделирование на
ПЭВМ. Это повышает эффективность обучения, так как дает
возможности:
1. Ускорить приобретение навыков управления ЭМ.
2. Расширить круг исследовательских задач.
3. Провести эксперименты, которые невозможны на реальной
ЭМ (например, в режимах перегрузки или в аварийных режимах).
4. Провести опыты, которые невозможны в лаборатории из-за
отсутствия требуемых специальных измерительных приборов
(например, быстрые динамические процессы и неустойчивые
режимы, опыты с изменением частоты питающих напряжений).
5. Автоматизировать обработку экспериментальной инфор-
мации, что позволяет ускорить эксперимент и повысить его точ-
ность.
б. Получить и вывести на экран ПЭВМ в наглядной форме
значительно более полную информацию о параметрах, свойст-
вах и режимах ЭМ, чем удается получить по измерительным
приборам на лабораторном стенде.
7. Активизировать самостоятельную работу студента, пре-
доставив ему свободу выбора программ исследования.
Ниже описываются моделирующие программы - тренажеры
для различных типов электродвигателей, разработанные на
кафедре Электротехники и интроскопии МЭИ. Во всех програм-
мах используются математические модели, включающие диф-
ференциальное уравнение механического состояния (уравне-
ние равновесия моментов), уравнения электрического состо-
яния цепей статора и ротора и формулы для определения
электромагнитных параметров статора и ротора. Тренажеры
всех типов ЭМ построены по единым правилам работы на ПЭВМ
и являются универсальными, так как позволяют моделиро-
вать практически любой электромеханический режим рабо-
ты ЭМ.
255
Моделирующая программа "Тренажер ДПТ"
Программа предназначена для моделирования двигателя
постоянного тока (ДПТ). Работа на тренажере ДПТ начинает-
ся с ввода по запросам ПЭВМ номинальных данных и парамет-
ров двигателя: мощности, напряжения, частоты вращения,
КПД, момента инерции привода, способа возбуждения.
После этого на экране ПЭВМ формируется таблица с основ-
ными параметрами двигателя, которые задают режим работы
или рассчитываются в процессе моделирования. Справа от
этой таблицы приводятся параметры ДПТ в номинальном ре-
жиме, часть из которых рассчитывается программой (рис. 7.1).
Это позволяет в процессе работы на тренажере сопоставлять
параметры исследуемого режима, которые приводятся в таб-
лице, с номинальными параметрами ДПТ.
Режим работы ДПТ задается режимными параметрами, к
которым относятся: напряжение источника, сопротивление
добавочных резисторов в цепях якоря и возбуждения, механи-
ческий момент сопротивления на валу. Добавочный резистор
в цепи якоря используется и в качестве пускового и для регу-
лирования частоты вращения.
Режимные параметры вводятся в ПЭВМ в диалоговом режи-
ме после нажатия "горячей клавиши", имя которой приведе-
но в таблице. После ввода осуществляется пуск циклическо-
го вычислительного процесса в программе - тренажере ("пуск
ДПТ”).
В процессе моделирования в верхней части экрана ПЭВМ
строятся три графика: траектория рабочей точки на механичес-
кой характеристике ДПТ, зависимости тока якоря и частоты
вращения от времени (см. рис. 7.1). Численные значения этих
параметров указываются в таблице.
В любой момент времени работы на тренажере можно из-
менять значения режимных параметров. На время ввода новых
значений процесс моделирования останавливается с запоми-
нанием последнего состояния ДПТ. Последующие состояния
ДПТ рассчитываются с учетом электромеханических переход-
ных процессов.
Таким образом, можно моделировать следующие режимы
работы ДПТ:
1. Пуск:
путем прямого включения в электрическую сеть;
256
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
<с> Яв:<Р> С Ом) Мс:<м> < Нм) I в < А) Вдоб:< R> С Ом) Е < В) Р= 2000 Вт п=1500обХм
2.96 0.00 12.70 220.00 2.00 10.00 128.77 0=220 В _г-яаах
СХЕМА ВОЗБН ЖДЕНИЯ НЕЗАВИСИМАЯ
Частота вр, п (об/мин/ Темп ТСТ«>С) Мвр < Нм) 1я (А) Рмех < Вт) Рэп С Вт) Кпд Х<Х> 1в=’2.0 А _ т — о л А
905.16 23.26 8.50 1203.80 2309.21 52.1<: _М= 12.7 Нм
Рис. 7.1. Распечатка экрана ПЭВМ при работе с программой ’’Тренажер ДПТ ”
при пониженном напряжении якорной цепи;
с помощью пускового реостата.
2. Изменение момента сопротивления на валу.
3. Регулирование частоты вращения:
включением добавочного резистора в цепь якоря;
включением добавочного резистора в цепь возбуждения;
изменением напряжения цепи якоря.
Программа - тренажер позволяют изменить способ возбуж-
дения и значения номинальных параметров двигателя.
На рис. 7.1 в качестве примера приведена распечатка экрана
ПЭВМ, полученная после моделирования некоторых режимов
работы ДПТ. Прокомментируем зависимости п(М), 7Я(Г) и n(t).
В интервале t - 0... t3 моделировался пуск двигателя без на-
грузки на валу с помощью пускового реостата. Для реализации
этого режима задавались напряжение U цепи якоря и сопро-
тивление добавочного резистора в цепи якоря Удоб-
на участке t = 0... tx этого интервала производился пуск ДПТ
при полностью включенном пусковом реостате (максимальное
сопротивление). В момент пуска при п - 0 ток якоря резко воз-
растает (импульс тока) 1п = 1//(Ля + Лдоб), так как ЭДС Е в це-
пи якоря равна нулю и возникает большой пусковой момент
(Мп = см7пФп). При пуске ДПТ импульсы тока якоря 1Я и вра-
щающего момента Мвр обычно превышают номинальные зна-
чения этих величин. (В нижней части экрана, под таблицей
при этом печатается сообщение ” 1Я > /я.ном ” и ” ^вр > Мном ”•)
Якорь начинает разгоняться, частота вращения увеличивается.
При этом возрастает ЭДС Е (Е = С£лФп), а ток якоря 1Я =
= (U-Е)/(Ея + 2?ДОб) постепенно уменьшается. Одновременно
уменьшается вращающий момент (участок 1 характеристи-
ки п(М)).
На участке t = tx... t а моделировался процесс, связанный с
уменьшением (в момент tx) сопротивления пускового реостата
(вывод одной ступени пускового реостата). Это привело к по-
вторному импульсу тока, возрастанию вращающего момента и
частоты вращения ДПТ (участок 2 характеристики п(М)). Пере-
ходный электромеханический процесс протекал таким же об-
разом, как на участке t = 0... tx.
На участке t - t2... t3 зафиксирован переходный процесс,
наступивший после полного вывода пускового реостата (ЯДОб =
- 0). Установившийся режим наступил, когда вращающий мо-
мент стал равным моменту сопротивления. Так как ДПТ залу-
258
щен без нагрузки на валу, то момент сопротивления Мс опре-
деляется только механическими потерями ДПТ и поэтому мал.
Следовательно Мвр и 1Я уменьшатся почти до нуля (участок 3
характеристики n (М)).
На интервале t t3.. .t4 имел место переходный процесс
после увеличения момента сопротивления на валу до номи-
нального значения в момент времени t3. Вращающий момент
стал меньше момента сопротивления и частота вращения на-
чала уменьшаться. Это привело к уменьшению ЭДС Е, увели-
чению тока в цепи якоря. Новое установившееся состояние
(Мвр = Мс) достигнуто при меньшей частоте вращения (учас-
ток 3 характеристики л(М)). Таким образом реализуется свой-
ство саморегулирования ДПТ.
На интервале t > t4 осуществлялось реостатное регулирова-
ние частоты вращения ДПТ. В момент времени t4 было увели-
чено значение сопротивления ЛДОб. Это привело к резкому
уменьшению тока якоря и вращающего момента. Частота вра-
щения ДПТ начала уменьшаться, что привело к уменьшению
ЭДС и увеличению тока в цепи якоря. Вращающий момент на-
чал возрастать. В итоге переходного процесса новое установив-
шееся состояние ДПТ (Мвр =• Мс) достигнуто при меньшем, чем
исходное, значении частоты вращения (участок 4 характери-
стики п(М)).
Моделирующая программа "Тренажер АД”
Программа предназначена для моделирования трехфазного
асинхронного двигателя (АД).
В качестве исходных данных по запросу ПЭВМ задаются схе-
ма соединения обмоток статора (звезда или треугольник) и тип
ротора (фазный или короткозамкнутый), вводятся номиналь-
ные данные и парамеры исследуемого АД: мощность, частота
вращения, напряжение и частота сети, КПД, коэффициент мощ-
ности, момент инерции ротора, кратности максимального и
пускового моментов.
Для моделирования работы АД задаются значения следую-
щих режимных параметров: напряжение и частота сети, момент
сопротивления на валу, сопротивление добавочного резисто-
ра в цепи фазного ротора.
259
После ’’пуска двигателя” моделирующая программа выпол-
няет циклические вычисления параметров состояния АД. На
экране ПЭВМ строятся зависимости частоты вращения от вра-
щающего момента п(М), тока обмотки статора I(t) и частоты
вращения л(0 от времени. Численные значения этих парамет-
ров указываются на экране ПЭВМ в таблице.
На тренажере АД, изменяя различные параметры, можно мо-
делировать следующие режимы работы:
1. Пуск:
прямым включением в электрическую сеть;
при пониженном напряжении питания;
переключением обмоток статора с треугольника на звезду;
с помощью пускового реостата в цепи фазного ротора.
2. Изменение момента сопротивления на валу.
3. Регулирование частоты вращения:
изменением напряжения питания;
изменением частоты напряжения;
изменением числа пар полюсов;
включением добавочного резистора в цепь фазного ротора.
В процессе моделирования по команде, производимой нажа-
тием на ’’горячую клавишу”, имя которой записано в таблице,
можно останавливать процесс моделирования и задавать но-
вые значения режимных параметров.
Программа-тренажер позволяет в диалоговом режиме изме-
нять схему соединения обмоток статора, тип ротора и номи-
нальные данные двигателя.
На рис. 7.2 приведены распечатки экранов ПЭВМ, получен-
ные после моделирования процессов пуска АД с короткозамк-
нутым (рис. 7.2, а) и фазным (рис. 7.2, б) роторами.
Рассмотрим зависимости n(M), 7(t) и n(t) на рис. 7.2, а.
В интервале t = 0... tt моделировался пуск АД без нагрузки
на валу при прямом включении на номинальное напряжение.
Перед включением АД задавались два параметра - напряже-
ние U и частота f сети. Сразу после пуска скольжение s = 1,
токи в обмотках ротора и статора максимальные. При этом
возник большой пусковой вращающий момент, под действием
которого ротор АД начал разгоняться. Это привело к умень-
шению скольжения s, токов обмоток ротора и статора. Таким
образом частота вращения продолжала увеличиваться вплоть
до установившегося состояния, при котором Мвр = Мс. Этим
процессам соответствует кривая 1 на механической характе-
ристике п(М).
260
С КОРОТКОЗАМКНУТЫМ
РОТОРОМ
АСИНХРОННЫЙ ДВИГАТЕЛЬ
Cos Ф
с н. м>
0,4.7.
0.63
0
0.78
♦ 1488
Рэл
скильж
Рмёх
220
587
35
♦0.008
98
276
Мпуск=
••s”
< ВА>
Ммех:<М>
СН.М)
Частота вр.
fob/мин)
Ra об:< я>
(Ом) I
СВ)
Нм In«fCK=
11
НОМИНАЛ.
Рн= 2000 Вт
п=1400 об/м
11 =380 В
КПД=0.80
J= 0.100 кГг
ПРЕРЫВАНИЕ РЕЖИМА -<3>
2
А
___ I = 4.7
£= 50 Ги
Cos=0.80
СОЕД.ОБМОТКИ-ЗВЕЗДЛ
С ФАЗНЫМ РОТОРОМ
АСИНХРОННЫЙ ДВИГАТЕЛЬ
3
0.30
♦ 0.35
(Вт)
380
1498
449
12
♦0.0013
55
Рмех
СВт)
Mbs»
СН.М)
Ммех:<М>
СН.М)
•сГм2
Нм
А
Частота вр.
об/мин
Ядоб:<R)
С Ом) I
+1498.;;;
жож-*-
Мп^ск= 33.5 Нм
2.28
СВ)
0.30
С ВЛ)
номинал,
Рн= 2000 Вт
п=1400 обХм
11 =380 В
КПП=0.85
J= 0.100
М= 13.6
I = 4.5
ПРЕРЫВАНИЕ РЕЖИМА -<S>
6)
Cos=0.80
СОЕД.ОБМОТКИ-ЗВЕЗДА
Рис. 7.2. Распечатки экранов ПЭВМ при работе с программой "Тренажер АД", полученные после моделирования процессов
£ пуска АД с короткозамкнутым (а) и с фазным (б) роторами
В интервале t = t2 ... t3 моделировался пуск АД без нагруз-
ки на валу при пониженном напряжении. Характер процессов
аналогичен процессам в предыдущем случае (пуск при номи-
нальном напряжении). Значения частоты вращения п в уста-
новившемся состоянии почти одинаковые, так как они близки
к частоте вращения магнитного поля АД, которое зависит
только от частоты сети и числа пар полюсов. Однако при по-
ниженном напряжении пусковой момент и ток статора меньше.
Значения пусковых моментов и тока обмотки статора выво-
дятся на экране ПЭВМ под таблицей параметров. На рис. 7.2, а
эти значения соответствуют моменту времени t2.
На рис. 7.2, б приведены зависимости n(M), I(t) и n(t), полу-
ченные при моделировании процесса пуска АД с фазным рото-
ром без нагрузки на валу. Для моделирования этого режима
вводились значения трех режимных параметров: напряжение U
и частота f, сопротивление добавочного резистора Ядов в цепи
ротора.
В интервале t = 0... tt моделировался пуск АД при полно-
стью включенном пусковом реостате. После включения АД
скольжение s = 1, поэтому возникли импульсы токов обмоток
ротора и статора, зависящие от сопротивления пускового рео-
стата. Под действием большого пускового момента ротор дви-
гателя начал разгоняться, что привело к уменьшению сколь-
жения, токов и вращающего момента. Этому режиму соответ-
ствует участок 1 кривой л(М).
Сравнение зависимостей п(М) и I(t) на рис. 7.2, а и б, которые
имеют одинаковые масштабы по осям, показывает, что у дви-
гателя с фазным ротором пусковой вращающий момент боль-
ше, а пусковой ток меньше.
В момент времени t = tt была выведена первая ступень пус-
кового реостата (в модели сопротивление йДОб уменьшено).
Возник импульс тока, увеличился вращающий момент и нача-
ла расти частота вращения. Последовавший переходный про-
цесс на интервале t = ...t2 протекал аналогично, как на
предыдущем интервале. Этому режиму на характеристике
п(М) соответствует участок 2.
В момент времени t = t2 пусковой реостат был полностью вы-
веден (АДОб = 0)- Вновь возник переходный процесс на интерва-
ле t = t2 ... t3, который завершается установившимся режимом
АД при Мвр - Мс (участок 3 характеристики п(М)).
262
Моделирующая программа "Тренажер СД”
Программа предназначена для моделирования трехфазного
синхронного двигателя (СД). В качестве исходных данных вво-
дятся номинальные данные и параметры исследуемого двигате-
ля: мощность, напряжение и частота сети, напряжение и ток
возбуждения, КПД, коэффициент мощности, число пар полюсов,
момент инерции, кратности максимального и пускового мо-
ментов. В качестве режимных параметров задаются: напряже-
ние и частота сети, момент сопротивления на валу и напряже-
ние на обмотке возбуждения.
После ’’пуска СД” на экране ПЭВМ по результатам цикли-
ческих вычислений, производимых автоматически, строятся
участки характеристик: механической п(М), У-образной
7(7В) и угловой М(9) и печатаются числовые значения пара-
метров. С помощью ’’горячих клавиш” можно прервать процесс
моделирования и задать новые значения режимных парамет-
ров.
На тренажере можно моделировать следующие режимы:
1. Асинхронный пуск.
2. Изменение момента сопротивления навалу.
3. Регулирование коэффициента мощности.
На рис. 73, а и б приведены распечатки экрана ПЭВМ, полу-
ченные после моделирования ряда режимов СД.
На рис. 7.3, а представлены результаты моделирования асин-
хронного пуска СД при моменте сопротивления на валу Мс = О
и последующего увеличения момента сопротивления.
Перед ’’пуском” СД вводились два режимных параметра: на-
пряжение U и частота f сети. После ’’включения СД” его состо-
яние изменялось от точки а (п = 0, Мвр - Мп) до точки Ь по
участку 1 зависимости п(М) (эта кривая похожа на участок меха-
нической характеристики асинхронного двигателя). В момент
времени, соответствующий точке Ь, обмотка возбуждения СД
была ’’подключена” к источнику постоянного напряжения
(задавалось напряжение на обмотке возбуждения (7В). После
этого СД перешел в синхронный режим. Его состояние стало
характеризоваться сначала точкой с, а потом - точкой d на
участке 2 зависимости п(М), где n = const. На этом процесс
’’пуска СД” завершился.
После пуска СД момент сопротивления Мс на валу был уве-
личен до значения М". При этом ток возбуждения 7В был по-
стоянным и равным 1в'. На зависимости п(М) при этом была
263
достигнута точка е. На У-образной характеристике /(/в) и на
угловой характеристиках М(в) соответствующий переходный
процесс описан участком 1. Ток обмотки статора I (от точки а
до точки Ь), вращающий момент Мвр, угол 6 увеличивались
вплоть до достижения установившегося состояния Мвр = М".
Ток возбуждения был большим (’’перевозбужденный СД”) и
СД имел отрицательную реактивную мощность. Поэтому СД
для сети был приемником с емкостным характером реактив-
ной составляющей эквивалентного сопротивления.
Затем момент сопротивления на валу был уменьшен до ну-
ля. На зависимости л(М) произошло возвращение в точку d, на
У-образной характеристике Z(ZB) - в точку а и на угловой харак-
теристике М(9) - в точку 0.
Далее был постепенно уменьшен ток возбуждения до зна-
чения /в. Частота вращения, вращающий момент и угол 0 в
отсутствии момента сопротивления на валу при этом не изме-
нились. Поэтому на зависимостях п(М) и М(0) состояние СД
осталось прежним. На У-образной характеристике произошел
переход по участку 2 в точку с.
На заключительном этапе момент сопротивления на валу СД
был вновь увеличен до значения М'(М'< М”). В результате на
характеристике п(М) была достигнута точка/, на зависимости
Ц1В) - точка d на участке 3 и на зависимости М(0) - значе-
ние М'на кривой 2. В этом режиме (’’недовозбужденный СД”)
реактивная мощность СД положительная. Комплексное экви-
валентное сопротивление СД для сети стало иметь активно-
индуктивный характер.
В том случае, когда вращающий момент и ток обмотки ста-
тора превышают номинальные на экране ПЭВМ (внизу) выво-
дятся соответствующие комментарии, как на рис. 73, а.
На рис. 7.3, б представлены результаты моделирования
асинхронного пуска при Мс = 0 и последующего регулирования
коэффициента мощности СЛ. Коэффициенты мощности
циклически записываются в таблице данных на экране
ПЭВМ.
Процесс пуска описан участком 1 зависимости п(М) и был
аналогичен предыдущему случаю. Напряжение на обмотке
возбуждения было установлено пониженным (режим недовоз-
буждения), поэтому реактивная мощность СД была положи-
тельной (индуктивный характер входного сопротивления).
Затем ток возбуждения постепенно изменяли от значения
/в до Состояние СД изменялось от точки а до точки b на
264
п d 2 f с е
В b Х1 а/ М
СИНХРОННЫЙ
I
ДВИГАТЕЛЬ
b
М
м"
М*
lb
О
о
t сек Частота вр (об/мин) Ммех:<М > (Н.М) Мвр (Н.М) 1Ь ( А ) I (А) Cos Ф
0.10 +1500 20.13 20.13 1.18 7.07 0.80
Г :<F> (Гц) УГОЛ 0 Рмех (Вт) (вар) кпд (X) U: <U> (В) (В)
50 +57-9 3162 2807 85 380 65
О
НОМИНАЛ.
Рн= 2000 Вт
п=1500 об/м
U =380 В
КПД=0.85
J= 0.100 :
М= 13.4 I
I = 4.7 I
Г= 50 Гц
Cos=0.80
1в= 2.0 А
8=19°
кГм
Нп
А
2
Мпуск= 26.8 Нп 1пуск= 19.4 А
1>1ном М>Мном а)
ПРЕРЫВАНИЕ РЕЖИМА -<S>
Рис. 7.3. Распечатки экранов ПЭВМ при работе с программой ’’Тренажер СД”, полученные после моделирования процессов:
асинхронный пуск СД и изменение момента сопротивления на валу (а), асинхронный пуск СД и регулирование коэффици-
ента мощности (б)
п в СИНХРОННЫЙ 2 а I —— 1 / 11 ДВИГАТЕЛЬ а с d Ч \ 2 ; > \ J——— Н л О* 0
и •ь *ь ’ь и НОМИНАЛ. Рн= 2888 Вт п=1508 об/м U =388 В КПД=8.85 J= 8.188 хГм2 М= 13.4 Ни > I = 4.7 А Г= 58 Гц Cos=8.88 1в= 2.8 А
t сех частота вр (об/мин) Пиех:<М> СН.М) Ивр (Н.М) 1Ь ( А ) I (А) Cos Ф
........ 48 . .. ♦158 В 13.13 13.13 8.73 7.81 8.53
(Гц) :УГОЛ’!8':1': Рмех (Вт) '""сГ (вар) кпд (X) (В) Ub : <V (В)
50 ♦63.4 2863 3926 85 388 48
8=19"
Ипуск= 26.8 Нн 1пуск= 19.4 А
I>1ном
ПРЕРЫВАНИЕ РЕЖИМА -<S>
<5)
Рис. 7.3, б
участке 1 зависимости 1(1в). Ток статора сначала уменьшал
ся до нуля, а потом увеличивался. При этом коэффициент
мощности увеличивался до 1 и затем уменьшался. В итоге (Л
стал работать в перевозбужденном режиме. Характер его экви-
валентного сопротивления стал емкостным.
Другой опыт с изменением коэффициента мощности прово-
дился после увеличения момента сопротивления на валу СД.
После повышения Мс состояние СД на зависимости 1(/в) стало
характеризоваться точкой d на участке 2. На характеристиках
п(М) и М (0) произошел переход в точку а.
Потом ток возбуждения был постепенно уменьшен до 1в\
Состояние СД изменилось на зависимости 1(1в) по кривой 2
до точки с и на зависимости М(9) по участку 2 до точки Ь.
Каждая из рассмотренных программ - тренажеров имеет ин-
формационно-обучающий режим, в котором даются отдельные
задания и способы их выполнения.
Все программы - тренажеры оснащены базами данных, в ко-
торых хранятся номинальные параметры серийных электри-
ческих двигателей общепромышленного применения. Данные
могут быть автоматически введены в качестве исходных в мо-
делирующие программы.
Программы подготовлены на алгоритмическом языке высо-
кого уровня Quick Basic 4.5 фирмы Microsoft для персональных
IBM - совместимых ЭВМ и реализуются в виде исполняемых
”ехе”-файлов.
СПИСОК ЛИТЕРАТУРЫ
1. Ильинский Н.Ф., Казаченко В.Ф. Общий курс электропривода. Учебник
для вузов. - М.: Энергоатомиздат, 1992.
2. Копылов И.П. Электрические машины. Учебник для вузов. - М.: Энерго-
атомиэдат, 1986.
3. Сборник задач по электротехнике и основам электроники / Под ред.
В.Г. Герасимова: Учеб, пособие для вузов. - Высшая школа, 1987.
4. Справочник по электрическим машинам: В двух томах / Под ред. И.П. Ко-
пылова, Б.К. Клокова. М.: Энергоатомиздат, 1989.
5. Токарев В.Ф. Электрические машины: Учеб, пособие для вузов. — М.: Энер-
гоатомиздат, 1990.
6. Электротехника / Под ред. В.Г. Герасимова: Учебник для вузов. М.: Выс-
шая школа, 1985.
7. Электротехника: Программирование учеб, пособие / Под ред. В.Г. Гераси-
мова. М.: Высшая школа, 1983.
8. Электротехнический справочник: В трех томах., т. 2 / Под общ. ред. профес-
соров МЭИ (гл. ред. И.Н. Орлов) М.: Энергоатомиздат, 1986.
9. Электротехника и основы электроники / Учебник для вузов. Под ред.
О.П. Глудкика, Б.П. Соколова. М.: Высшая школа, 1993.
ОГЛАВЛЕНИЕ
Предисловие......................................................... 3
Глава первая.Трансформаторы......................................... 5
1.1. Назначение, области применения и устройство трансформаторов. 5
1.2. Режим холостого хода трансформатора. Принцип работы транс-
форматора в режиме холостого хода............................... 9
Уравнение электрического состояния первичной обмотки и вектор-
ная диаграмма трансформатора................................. 10
1.3. Режим нагрузки трансформатора............................... 13
1.4. Схемы замещения трансформатора.............................. 16
1.5. Определение параметров и эксплуатационных характеристик транс-
форматора по паспортным данным и опытам холостого хода и ко-
роткого замыкания.............................................. 18
Опыт холостого хода.......................................... 18
Опыт короткого замыкания..................................... 19
1.6. Внешняя характеристика трансформатора....................... 21
1.7. Потери энергии и КПД трансформатора ........................ 23
1.8. Особенности трансформаторов малой мощности.................. 28
1.9. Трехфазные трансформаторы................................... 29
1.10. Автотрансформаторы......................................... 32
1.11. Комментарии к правильным ответам на вопросы гл. 1.......... 33
Глава вторая. Электрические машины постоянного тока................ 34
2.1. Назначение и области применения машин постоянного тока....... 34
2.2. Устройство современных машин постоянного тока............... 36
2.3. Принцип действия машины постоянного тока (МПТ) в генератор-
ном и двигательном режимах..................................... 39
Принцип действия генератора постоянного тока (ГПТ)........... 39
Принцип действия двигателя постоянного тока (ДПТ)............ 41
2.4. ЭДС якоря и электромагнитный момент........................ 43
2.5. Искрение в щеточном контакте на коллекторе................. 45
2.6. Способы возбуждения машин постоянного тока................. 47
2.7. Потери энергии и КПД машин постоянного тока................ 48
2.8. Основные эксплуатационные характеристики генераторов постоян-
ного тока...................................................... 50
Характеристика холостого хода................................ 50
Внешняя характеристика....................................... 52
Регулировочная характеристика .............................. 55
2.9. Пуск двигателя постоянного тока............................. 59
2.10 Свойство саморегулирования...........-...................... 62
2.11. Механические характеристики и регулирование частоты вращения
двигателей постоянного тока................................... 62
268
Двигатели параллельного и независимого возбуждения............... 62
Двигатели последовательного возбуждения.......................... 68
Двигатели смешанного возбуждения................................. 69
2.12. Торможение двигателей постоянного тока........................ 74
2.13. Особенности применения двигателей постоянного тока с различ-
ными способами возбуждения..................................... 77
2.14. Машины постоянного тока малой мощности........................ 78
Двигатели постоянного тока с постоянными магнитами............... 78
Тахогенераторы постоянного тока.................................. 79
Вентильные двигатели............................................. 80
Универсальные коллекторные двигатели............................. 82
2.15. Комментарии к правильным ответам на вопросы гл. 2............. 83
Глава третья. Асинхронные машины...................................... 85
3.1. Назначение и области применения асинхронных машин............. 85
3.2. Устройство асинхронных машин.................................. 86
3.3. Вращающееся магнитное поле..............................
Вращающееся магнитное поле трехфазной обмотки.................... 91
Вращающееся магнитное поле двухфазной обмотки.................... 97
3.4. Принцип действия асинхронных двигателей...................... 100
Наведение ЭДС в обмотке ротора.................................. 100
Силовое электромагнитное взаимодействие......................... 101
Скольжение ..................................................... 101
3.5. Электродвижущие силы обмоток статора и ротора................ 102
3.6. Уравнения электрического состояния обмоток................... 106
3.7. Рабочее магнитное поле асинхронной машины.................... 108
3.8. Преобразование энергии в асинхронном двигателе............... 109
3.9. Электромагнитный момент и механическая характеристика асин-
хронного двигателя............................................ ИЗ
3.10. Рабочие характеристики асинхронного двигателя................. И7
3.11. Пуск асинхронных двигателей.................................... Ш
Пуск двигателя с контактными кольцами........................... 124
Пуск двигателя с короткозамкнутым ротором....................... 125
3.12. Регулирование частоты вращения............................... 127
Полюсное регулирование.......................................... 127
Частотное регулирование......................................... 128
Реостатное регулирование........................................ 130
3.13. Генераторный и тормозной режимы работы асинхронной машины.... 132
Режим генератора................................................ 132
Режим электромагнитного тормоза................................. 133
3.14. Асинхронные машины малой мощности............................ 134
Однофазные асинхронные двигатели................................ I34
Конденсаторные двигатели........................................ 135
Двигатели с расщепленными полюсами.............................. 136
Управляемые двухфазные (исполнительные) двигатели............... 138
Линейные асинхронные двигатели.................................... Ш
3.15. Комментарии к правйльйыкгбт^бтам на вопросы гл. 3........... 144
Глава четвертая. Синхронные машины................................... I47
4.1. Назначение и области применения синхронных машин............. I47
4.2. Устройство трехфазной синхронной машины...................... 148
4.3. Принцип действия синхронного генератора...................... 133
4.4. Уравнение электрического состояния, векторная диаграмма и схема
замещения фазы синхронного генератора........................ 137
269
4.5. Синхронизация и включение генератора на параллельную работу
в мощной энергосистеме....................................... 160
Понятие о мощной энергосистеме............................ 160
Включение генератора на параллельную работу с сетью....... 161
4.6. Угловые характеристики синхронного генератора............ 163
Регулирование активной мощности........................... 163
Об устойчивости в синхронизме............................. 165
4.7. Регулирование реактивной мощности синхронного генератора.
V-образные характеристики.................................... 167
4.8. Работа синхронного генератора в автономном режиме........ 172
4.9. Принцип действия и особенности работы синхронной машины в
режиме двигателя............................................. 174
4.10. Угловые характеристики синхронного двигателя............ 176
4.11. Регулирование коэффициента мощности синхронного двигателя. 178
4.12. Пуск синхронных двигателей............................ 180
4.13. Синхронные двигатели малой мощности................... 185
Синхронный микродвигатель с постоянными магнитами на роторе 185
Гистерезисный микродвигатель.............................. 186
Реактивный микродвигатель................................. 188
Шаговый микродвигатель.................................... 189
4.14. Комментарии к правильным ответам на вопросы гл. 4....... 190
Глава пятая.Электрические аппараты управления................... 192
5.1. Назначение и классификация электрических аппаратов....... 192
5.2. Устройство и принцип действия коммутационных контактных ап-
паратов ..................................................... 195
5.3. Коммутационные аппараты для управления электротехническими
устройствами низкого напряжения.............................. 198
5.4. Электромагнитные реле систем автоматического управления и за-
щиты ........................................................ 202
53. Коммутационные электрические аппараты с магнитоуправляемыми
контактами................................................. 207
5.6. Комментарии к правильным ответам на вопросы гл. 5 -...... 210
Глава шестая. Основы электропривода............................. 211
6.1. Назначение и области применения электропривода.......... 211
6.2. Основы механики электроприводов......................... 212
63. Определение времени ускорения и замедления электропривода. 217
6.4. Выбор электродвигателя электропривода................... 220
63. Нагрузочные диаграммы и предварительный выбор мощности
электродвигателя привода..................................... 224
6.6. Проверка выбора мощности двигателей по нагреву.......... 228
6.7. Автоматизация пуска и торможения электродвигателей...... 231
Задачи и способы автоматизации.......~~................... 231
Автоматизация пуска двигателя в функции частоты вращения... 235
Автоматизация пуска двигателя в функции тока............. 237
Автоматизация пуска двигателя в функции времени.......... 238
6.8. Регулирование частоты вращения электроприводов.......... 242
6.9. Комментарии к правильным ответам на вопросы гл. 6....... 246
270
Глава седьмая. Моделирование электромеханических устройств 247
7.1. Задачи и средства моделирования..................... 247
7.2. Моделирование электромагнитных устройств с помощью программы
Mathcad.................................................... 249
7.3. Исследование моделирующих программ для изучения и исследова-
ния эксплуатационных свойств электрических машин........... 255
Моделирующая программа ’’Тренажер ДПТ”................. 256
Моделирующая программа ”Тренажер АД”................... 259
Моделирующая программа ”Тренажер СД”................... 263
Список литературы............................................. 267