
































































Автор: Головенков С.Н.
Теги: формообразование со снятием стружки молоты и прессы разделительные операции без образования стружки, дробление и измельчение, обработка листового материала, изготовление резьбы отдельные машиностроительные и металлообрабатывающие процессы и производства машиностроение автоматика
Год: 1980




chipmaker.ru
С.Н.ГОАОВЕНКОВ
С. В. СИРОТКИН
АВТО
ОСНОВЫ
АТИКИ
УПРАВЛЕНИЕМ
И АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
СТАНКОВ
С ПРОГРАММНЫМ
Chiimaker.ru
chipmaker.ru
С. Н. ГОЛОВЕНКОВ, С. В. СИРОТКИН
Chipmaker.ru
ОСНОВЫ АВТОМАТИКИ
И АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ СТАНКОВ
С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
Допущено Министерством станкостроительной
и инструментальной промышленности в качестве
учебного пособия для машиностроительных техникумов
МОСКВА «МАШИНОСТРОЕНИЕ» 1980
chipmaker.ru
ББК 34.63-5
Г61
УДК 621.9.06-529.075)
Редактор канд. техн, наук В. И. Телешевский.
Рецензенты ннж. Ю. Ф. Булаев, канд техн, наук Ю. В. Н ай дин
Головенков С. Н., Сироткин С. В.
Г61 Основы автоматики и автоматического регулирова-
ния станков с программным управлением:Учебн. пособие
для машиностроительных техникумов. — М.: Машино-
строение, 1980. — 142 с., ил.
30 к.
„ 31304-149
С 038(01).80 149-80. 2703000000
ББК 34.63-5
6П4.6.08
© Издательство «Машиносторение», 4980 г.
Chipmaker.ru
Введение
Идея создания машин, которые работали бы без участия человека,
возникла еще в глубокой древности. Однако практического значения
первые автоматические устройства наших предков не имели. Автома-
тические устройства использовали исключительно для развлекатель-
ных целей. В языке древней Греции появилось специальное слово
аутоматос (самодействующий), которое принято ныне за основу наи-
менования области науки и техники об автоматических (самодейству-
ющих) устройствах.
История развития автоматических устройств промышленного на-
значения начинается с XVII—XVIII вв. Первые промышленные авто-
матические устройства появились в связи с изобретением и развитием
техники паровых машин и турбин. Чтобы широко использовать па-
ровые машины в промышленности необходимо было оснастить их та-
кими автоматическими устройствами, как автоматический парораспре-
делительный механизм, регулятор уровня воды в котле, регулятор
частоты вращения вала машины и т. д.
В 1765 г. наш соотечественник И. И. Ползунов сконструировал
и изготовил первый в мире автоматический регулятор для поддержа-
ния уровня воды в паровом котле. Через 20 лет Джеймс Уатт создает
автоматический регулятор частоты вращения вала паровой машины.
Использование электроэнергии в промышленности, начиная со
второй половины XIX в., чрезвычайно расширило возможности по-
строения и применения сложных автоматических устройств. Электри-
ческие автоматические устройства начинают проникать в различные об-
ласти техники. Одним из первых электрических автоматических уст-
ройств был электромагнитный регулятор частоты вращения вала па-
ровой машины, разработанный в 1854 г. русским механиком и элек-
триком К. И. Константиновым.
Однако проектирование первых автоматических устройств велось
при отсутствии научной теории. Основы научного подхода к проекти-
рованию автоматических регуляторов были заложены профессором
Петербургского технологического института И. А. Вышнеградским,
научная работа которого «Об общей теории регуляторов», изданная
3
chipmaker.ru
в 1876 г., положила начало теории автоматического управления и ре-
гулирования. В этот же период словацкий профессор А. Стодола ис-
следовал устойчивость регулирования гидравлических и паровых тур-
бин, а немецкий математик А. Гурвиц решил общую задачу о критерии
устойчивости линейных систем автоматического регулирования.
Однако четкое понимание того обстоятельства, что работа любых
автоматических устройств, независимо от их физической природы, ос-
нована на общих принципах, а следовательно может быть рассмотрена
с единых позиций, пришло значительно позже — в 40-е годы XX в.
К этому же времени относится и окончательное формирование автома-
тики в самостоятельную научную дисциплину.
Значительный вклад в развитие автоматики как науки внесли рус-
ские ученые И. Л- Чебышев, А. М. Ляпунов, Н. Е. Жуковский. В раз-
витии автоматики особенно велики заслуги советских ученых А. А. Ан-
дронова, И. Н. Вознесенского, А. Н. Колмогорова, Б. Б. Булгакова,
Н. М. Крылова, Н. Н. Боголюбова, А. В. Михайлова. Большой вклад
в развитие автоматического регулирования внесли крупные советские
ученые В. С. Кулебякин, В. А. Трапезников, Б. Н. Петров, В. В. Со-
лодовников, Я. 3. Цыпкин, А. М. Летов и многие другие.
За последние десятилетия в автоматическом управлении широко
применяют средства вычислительной техники. Числовое программное
управление позволяет нести большой объем информации о программе
действия объекта управления, сделать программу более гибкой, обра-
батывать ее как в математическом, так и в логическом плане. Создание
систем адаптивного управления (самоприспосабляющихся систем
управления) позволило совместить функции автоматического управле-
ния и автоматического регулирования.
Автоматическое управление — совокупность действий, направлен-
ных на поддержание и улучшение функционирования управляемого
объекта, без непосредственного участия человека в соответствии с за-
данной целью управления.
Автоматика — отрасль науки и техники, охватывающая теорию
и принципы построения систем автоматического управления. Прин-
цип построения систем управления не зависит от физической природы
устройств, входящих в системы.
Автоматизация есть процесс внедрения средств автоматики в си-
стемы управления. Таким образом, под автоматизацией технологиче-
ских процессов следует понимать придание станку или другому техно-
логическому оборудованию посредством систем управления свойств
автоматического выполнения тех или иных операций или всего про-
цесса в целом.
Степень автоматизации станков и технологического оборудования
определяет, в какой мере управление технологическим объектом осу-
ществляется без участия оператора и обслуживающего персонала.
Автоматическое отключение двигателя при перегрузке с помощью теп-
лового защитного реле — пример частичной автоматизации. Копиро-
вал ьно-следяща я система, осуществляющая автоматическое управление
движением режущего инструмента, в которой вспомогательными дви-
жениями управляет человек, :— пример комплексной автоматизации.
4
Экономическую эффективность автоматизации технологических про-
цессов обусловливают следующие факторы: возможность^одновремен-
ного управления группой станков и вследствие этого освобождение ра-
бочего от функции управления; обеспечение больших скоростей управ-
ления, что повышает производительность и качество; возможность
обеспечения большего количества управляющих команд и возможность
дистанционного управления, что позволяет управлять сложными
объектами и комплексом оборудования; использование в управлении
быстродействующих электронных вычислительных машин (ЭВМ).
Например, система с числовым программным управлением (СЧПУ)
представляет собой систему автоматического управления, в которой
используется вычислительная машина технологического назначения,
являющаяся звеном этой системы.
В машиностроении механизация и автоматизация развиваются в
следующих направлениях.
1. Создание универсальных систем управления с применением ми-
ни-ЭВМ, ЭВМ на микропроцессорах и быстропереналаживаемого тех-
нологического оборудования, чем обеспечивается технологическая
мобильность производства, т. е. способность технологического обору-
дования и систем управления быстро переналаживаться на изготов-
ление новых изделий, что особенно важно для машиностроения.
2. Создание и более широкое внедрение автоматизированных само-
приспосабливающихся (адаптивных) систем, обеспечивающих опти-
мизацию управления технологическими процессами.
3. Создание различных систем с числовым программным управле-
нием не только отдельными станками, но и группой станков (автома-
тическая линия, участок) с применением современных средств электро-
ники и вычислительной техники.
4. Создание и широкое внедрение автоматизированных приводов
с большим диапазоном бесступенчатого регулирования частоты враще-
ния двигателей с обеспечением необходимой жесткости механических
характеристик и применением в приводах более современных преобра-
зователей тока и двигателей.
Для создания предпосылок успешного внедрения автоматизации
технологических процессов в ^машиностроении развитие средств об-
работки, подготовки и организации производства, конструкций тех-
нологического оборудования должно сопровождаться:
1) более высокой концентрацией технологических операций, т. е.
созданием большего числа агрегатных и многооперационных металло-
режущих станков и т. д.;
2) специализацией и концентрацией производства, унификацией из-
делий, позволяющих привести мелкосерийное и серийное производство
к массовому, что облегчает решение вопросов, связанных с внедрением
механизации и автоматизации;
3) внедрение на станках и другом технологическом оборудовании
быстропереналаживаемых приспособлений, всевозможных автомати-
зированных устройств, осуществляющих быструю смену режущего
инструмента, его настройку на размер, смену позиции заготовки и т. д.;
5
chipmaker.ru
4) широким внедрением всевозможных устройств, осуществляю-
щих автоматизацию загрузки, выгрузки деталей, их складирование
и транспортировку, контроль изделий;
5) более полной автоматизацией технологической подготовки про-
изводства на основе стандартизации и режущего инструмента, оснаст-
ки, технологической документации и ее обработки на основе единой
системы технологической подготовки производства (ЕСТПП); внедре-
нием автоматизированных систем проектирования с широким исполь-
зованием ЭВМ;
6) обеспечением автоматизированного управления производством
путем создания и широкого внедрения автоматизированных систем
управления предприятием (АСУП), которые позволяют получать боль-
шее количество сведений об управляемом производстве, быстро их
обрабатывать, дают возможность человеку, управляющему производст-
вом и имеющему большое количество сведений и проработанных ва-
риантов, принять более правильное и оптимальное решение, связанное
с управлением производством.
Машиностроительная промышленность является основой для ус-
пешного развития всех отраслей народного хозяйства, поэтому разви-
тию машиностроения партия и правительство уделяют большое вни-
мание.
Основным направлением развития техники является широкое внед-
рение во все отрасли машиностроения механизации и автоматизации
технологических процессов и в особенности комплексной механизации
и автоматизации, наиболее успешно решающей задачу повышения
эффективности производства и улучшения качества изделий.
Механизация — это замена ручных средств труда машинами и ме-
ханизмами с применением для их действия различных видов энергии.
Экономическая эффективность применения механизации заключается
в том, что в рабочих и вспомогательных движениях развиваются боль-
шие мощности и тем самым большие силы и скорости. Вследствие это-
го возможно значительное сокращение времени на производство опе-
раций и вспомогательных движений.
Содержание учебного пособия соответствует утвержденной програм-
ме курса «Основы автоматики и автоматического регулирования» по
специальности 05116 «Эксплуатация и наладка станков с числовым
программным управлением».
Первый раздел написан С. В. Сироткиным, второй и третий —
С. Н. Головенковым.
РАЗДЕЛ 1
Основы автоматики
Глава 1
Основные понятия о системах автоматизации
производственных процессов
§ 1. Автоматизированные системы
Автоматизированная система управления — человеко-машинная
система, обеспечивающая автоматизированный сбор и обработку ин-
формации, необходимой для оптимизации управления в различных
сферах человеческой деятельности. При автоматическом управлении
различными объектами необходимо получать от управляемого объекта
сведения, чтобы на основании их осуществлять управляющие воздей-
ствия; поддерживать какой-то параметр в заданных пределах или из-
менять его по заданному закону; обеспечивать необходимые управляю-
щие воздействия на объект в определенной последовательности (по
заданной программе) и т. д. По виду решаемых задач, связанных с уп-
равлением объектами, системы управления подразделяют на системы
автоматического контроля, автоматического регулирования, следящие
системы, системы автоматической защиты, автоматического управле-
ния," адаптивного управления, системы обработки данных, системы ав-
томатического управления предприятием (АСУП), и т. д., причем функ-
циональное назначение системы может быть совместным. Например,
система автоматического регулирования представляет собой совокуп-
ность систем автоматического контроля и управления. Кроме того,
автоматизированные системы могут быть комбинированными, т. е. пред-
ставлять собой совокупность" нескольких вышеперечисленных систем.
Системы могут также отличаться видами применяемых в них устройств,
параметрами, конструктивными решениями и т. д. Рассмотрим на-
значение, структуру систем, основные устройства, узлы и элементы,
которые входят систему, и их функциональное назначение.
§ 2. Система автоматического контроля
Система~автоматического контроля (САК) обеспечивает измерение
различных физических величин (параметров), сведения о которых
необходимо’при управлении” объектом. Всякая система состоит из
элементов, узлов и устройств, выполняющих ту или иную функцию;
Следовательно, систему автоматического контроля можно предоставить
7
chipmaker.ru
Рис. 1. Блок-схемы систем:
а — автоматического контроля; б — автоматического регулирования; У О — управляемый
объект; Д — датчик; ПУ — преобразующее устройство; У—усилитель; У У—указывающее
устройство; СУ—сигнализирующее устройство; РУ — регистрирующее устройство; ОУ—
отключающее устройство; ИО — исполнительный орган; 3 — задающее устройство; СУ —
сравнивающее устройство; ДОС — Датчик обратной связи; В В — возмущающее воздействие
в виде блок-схемы (рис. I, а). Управляемым объектом может быть ста-
нок, машина, установка. Датчик обеспечивает измерение физической
величины и получение от этой величины сигнала. Преобразующее
устройство служит для преобразования сигнала к виду, удобному для
использования в системе. Усилитель обеспечивает усиление сигнала
до необходимой величины (уровня). Исполнительный орган (испол-
нительное устройство) предназначен для исполнения команд управ-
ления.
В системе автоматического контроля в качестве исполнительных
органов, как правило, применяют указывающие устройства. Это все-
возможные приборы, с помощью которых получают индикацию изме-
ряемой величины; сигнализирующие устройства, обеспечивающие вы-
дачу сигнала от какого-то предельного или заданного значения вели-
чины; регистрирующие устройства, осуществляющие регистрацию изме-
ряемой величины, как правило, в функции времени. Кроме того, в ка-
честве исполнительных органов можно применять отключающие уст-
ройства (защитные исполнительные органы), которые защищают управ-
ляемый объект от аварийных режимов работы.
§ 3. Система автоматического регулирования
Система автоматического регулирования (САР) обеспечивает под-
держание регулируемой величины (параметра) в заданных пределах
или по заданному закону (рис. 1, б). Задающее устройство обеспечи-
вает воспроизведение задающего воздействия, определяющего закон из-
менения регулируемой величины. Как правило, эта величина задается
в условном виде. Например, температура задается величиной напряже-
ния;’давление—'натягом пружины”и т. п. Сравнивающее устройство
служит”для’сравнения задающего воздействия с действительным'зна-
чением* регулируемой’величины в’объекте. Оно'может’быть выполнено
по мостовой’или дифференциальной схеме, при этом в’процессе срав-
ненияТзаданной ’величины х3 с действительным’значением величины хд
вычисляют’через их разность. Следовательно, сигнал со сравнивающего
устройства есть функция от разности сравниваемых величин, т, е.
Ах = f (х3 — хд).
8
Исполнительный орган обеспечивает воздействие на объект таким
образом, чтобы восстановить отклонившуюся величину от заданного
значения. Датчик обратной связи служит для измерения действитель-
ного значения величины хд и для подачи от этой величины сигнала на
сравнивающее устройство.
§ 4. Следящая система
Следящая система — автоматическая система, в которой выходная
величина воспроизводит с определенной точностью входную величину,
характер изменения которой заранее неизвестен.
Входящие в блок-схему следящей системы (рис. 2, а) узлы и устрой-
ства выполняют следующие функции.
Задающий рабочий орган является ведущим, он задает закон изме-
нения регулируемой величины. Задающий датчик измеряет положение
задающего рабочего органа и связан с ним механически. Приемный
датчик измеряет положение исполнительного органа и имеет с ним ме-
ханическую связь. Исполнительный рабочий орган является ведомым,
т. е. действия этого органа согласуются с действиями задающего ра-
бочего органа. В некоторых датчиках сравнивающее устройство явля-
ется их составной частью.
§ 5. Система автоматического управления
Система автоматического управления обеспечивает автоматиче-
ское управление объектом. В зависимости от способа решаемых задач
связанных с управлением объектами, способа задания программы уп-
равления ит. д., могут быть следующие системы управления:'кулач-
Рис. 2. Блок-схемы следящей системы (а), разомкнутой (б) и замкнутой (в)
систем автоматического управления:
ЗРО — задающий рабочий орган; ЗД — задающий датчик; ПД — принимающий датчик;
ПРО — исполнительный рабочий орган; СУ — сравнивающее устройство; СУл — система уп-
равления исполнительным органом; ЗУ — задающее устройство; ПУ — преобразующее уст-
ройство; У — усилитель; ИО — исполнительный орган; УО — управляемый объект; СУ —
сравнивающее устройство; ДЗ — датчик защиты; ДОС — Датчик обратной связи
е
chipmaker.ru
новая, командная (циклическая), путевая, с числовым программным
управлением и адаптивная. Системы могут быть замкнутыми или ра-
зомкнутыми.
Входящие в блок-схемы систем автоматического ^управления
(рис. 2, б, в) узлы и устройства выполняют следующие функции.
Задающее устройство служит для хранения и выдачи команд управле-
ния объектом. В зависимости от способа задания программы управле-
ния система автоматического управления может быть, например, ко-
мандной (циклической), где задающее устройство представляет собой
штекерную панель или кулачковый командоаппарат, которые обеспе-
чивают выдачу команд на управляемый объект в определенной последо-
вательности и по определенному алгоритму (порядку). Преобразующее
устройство служит для преобразования сигналов управления к виду,
удобному для использования в системе. Например, в системах с ЧПУ
при считывании программы с перфоленты осуществляется преобразо-
вание светового сигнала в электрический.
Датчик защиты является элементом системы автоматической защи-
ты. Он обеспечивает измерение параметров в управляемом объекте,
отклонение которых или достижение определенного значения вызы-
вают аварийную обстановку. Как правило, сигнал датчика формирует
команду на останов управляемого объекта.
В замкнутых системах автоматического управления датчик обрат-
ной связи контролирует правильность исполнения команд, задавае.-
мых задающим устройством, и обеспечивает выдачу сигналов на срав-
нивающее устройство. Сравнивающее устройство вырабатывает сиг-
нал ошибки (рассогласование) на основании сравнения значения регу-
лируемой величины с ее заданным значением.
§ 6. Самоприспосабливающаяся (адаптивная) система
автоматического управления
Самоприспосабливающаяся т (адаптивная)! система — система ав-
томатического управления, у которой автоматически изменяется способ
функционирования (алгоритм) управляющей части для осуществле-
ния в каком-либо смысле наилучшего управления. В зависимости от
поставленной задачи и методов ее решения возможны различные законы
управления, поэтому системы адаптивного управления разделяют на
следующие виды.
1. Адаптивные системы функционального регулирования (рис. 3, а)-
где управляющее воздействие является функцией какого-либо парамет»
ра. Например, подача естьтфункция от одной из составляющих силы
резания, т. е. sn = f (Pz), скорость резания есть функция мощности,
т. е. Dp = f (NJ, и т. д.
2. Адаптивные системы предельного (экстремального) регулиро-
вания, которые обеспечивают поддержание предельного значения одно-
го или нескольких параметров в объекте.
3. Адаптивные системы оптимального регулирования (рис. 3, б),
в которых учитывается совокупность многих факторов с помощью ком-
плексного критерия оптимальности. В соответствии с этим критерием
10
а) fi)
Рис. 3. Блок-схемы адаптивной системы функционального (л) и экстремального
и оптимального (6) регулирования:
СЛУ —система автоматического управления; ИО — исполнительный орган; ДП — датчик
измеряемых параметров; ВПУ — вычислительио-преобразующее устройство- ПСУ — преоб-
разующее сравнивающее устройство; ЗУ —задающее устройство; БВК— блок ввода коэф-
фициентов; УОЭ — устройство определения экстремума; УО — управляющий объект- УОЭ —
устройство определения экстремума; ДП1 и ДП2 — датчики измерения параметров
осуществляется изменение регулируемых параметров и величин. На-
пример, поддержание в станке режима обработки, обеспечивающего
гаксимальную производительность и наименьшую себестоимость обра-
ботки, определяется заданием оптимальных значений параметров (ско-
ростей сил резания, температуры и т. д.), от которых зависят произво-
дительность и себестоимость процесса обработки.
В системы могут входить следующие элементы, узлы и устройст-
ва. Вычислительно-преобразующее устройство, входящее в блок схему,
предназначено для вычисления и преобразования сигналов от измеряе-
мых параметров. Преобразующе-сравнивающее устройство служит для
сравнения действительного значения регулируемой величины (или
величин), функционально от нее зависящей. Задающее устройство уста-
новлено для задания предельных значений параметров в экстремаль-
ных системах или величин, от них зависящих. Например, максималь-
ное значение производительности может быть задано значением темпе-
ратуры режущего инструмента. В оптимальных адаптивных системах
задающее устройство предназначено для задания функционально
зависящих величин от регулируемых параметров. В оптимальных
системах • заданные параметры составляют комплексный критерий
оптимальности.
Блок ввода коэффициентов служит для введения и изменения по-
стоянных величин как исходных (начальных) данных и поправочных
коэффициентов. Устройство"определения экстремума необходимо для
измерения регулируемого параметра по экстремуму и для определения
и формирования знака сигнала регулирования.
chipmaker.ru
Глава 2
Элементы и устройства систем автоматизации
производственных процессов
§ 1. Измерительные преобразователи (датчики)
Автоматизация производственных процессов может успешно осу-
ществляться только при наличии современных технических средств,
создание которых должно базироваться на новейших достижениях на-
уки и техники. К этим средствам автоматики можно отнести датчики,
преобразователи, усилители, задающие устройства, исполнительные
органы и т. д. Все эти устройства в системах автоматики выполняют
ту или иную функцию, связанную с управлением объектом. В зависи-
мости от характера управления, способа решения задач, связанных с
управлением, требований, предъявляемых к устройствам, и т. д. они мо-
гут различаться по исполнению и принципу действия.
Рассмотрим некоторые разновидности более распространенных
5 стройств.
Метрологические характеристики датчиков определяют следующие
основные параметры.
1. Статическая характеристика датчика представляет собой зави-
симость изменения выходной величины от изменения входной величины,
т. е. ых = f (хБХ).
2. Чувствительность датчика есть отношение приращения выход-
ной величины к приращению входной величины, т. е. S = dxBlAXfdxBX.
Следовательно, чувствительность датчика есть не что иное, как ко-
эффициент передачи датчика.
3. Порог чувствительности датчика — наименьшее значение вход-
ной величины, которое вызывает появление сигнала на выходе. Этот
параметр связывают с зоной нечувствительности, т. е. с зоной, в пре-
делах которой при наличии входного сигнала на выходе датчика сиг-
нал отсутствует.
4. Инерционность датчика — это время, в течение которого вы-
ходная величина принимает значение, соответствующее входной вели-
чине.
Датчики по характеру получения сигнала от измеряемой величины
разделяют на параметрические, в которых изменение измеряемой ве-
личины вызывает изменение какого-либо параметра, например изме-
нение сопротивления, давления, индуктивности и т. д.; и генератор-
ные, у которых изменение измеряемой величины вызывает генерацию
сигнала (появление термо-ЭДС, фототока и т. д.). Генераторные дат-
чики не требуют постороннего источника энергии.
По характеру зависимости выходного сигнала от входного дат-
чика могут быть пропорциональные, у которых сигнал на выходе про-
порционален измеряемой величине; нелинейные, у которых сигнал на
выходе нелинейно зависит от сигнала на входе; релейные, в которых
сигнал на выходе изменяется скачкообразно; циклические, у которых
сигнал на выходе пропорционален измеряемой величине или нелиней-
но зависит и повторяется циклически; импульсные, у которых измене-
ние входной величины вызывает появление сигналов (импульсов),
число которых пропорционально измеряемой величине. Схемы вклю-
чения измерительных и преобразовательных элементов датчика могут
быть дифференциальные, компенсационные, мостовые и т. д.
По виду преобразования сигналов датчики делят на электроконтакт-
ные, где механическое усилие преобразуется в электрический сигнал;
индуктивные, у которых изменение магнитной проницаемости вызывает
изменение индуктивности; фотоэлектрические, в которых световой сиг-
нал преобразуется в электрический; тензометрические, в которых ме-
ханическое усилие вызывает изменение сопротивления; гидравличе-
ские, в которых механические усилия преобразуются в гидравлический
сигнал, и т. д.
По назначению в системах автоматического управления датчики
можно разбить на датчики пути и положения, скорости, силовые, уг-
ловые положения или угла рассогласования и т. д. Так как датчики
можно рассматривать как составные элементы систем управления, удоб-
нее их классифицировать по назначению.
§ 2. Датчики пути и положения
Датчики пути и положения обеспечивают создание управляющих
сигналов в зависимости от пройденного пути или положения рабочих
органов управляемого объекта.
Электроконтактные датчики пути и положения представляют собой
конечные, путевые включатели, микропереключатели (рис. 4, а—в).
У датчиков имеются штоки "или рычаги 2, которые воздействуют через
механизм передачи на контакты 1. Принцип действия датчиков
(рис. 5, а—в) основан на том, что датчики 1 устанавливаются на непод-
вижных частях рабочих органов в определенном положении, а движущие-
ся рабочие органы 3, на которых укреплены кулачки 2, достигнув
заданного положения, воздействуют на датчики, вызывая их срабаты-
вание.
Имеются также электроконтактные размерные датчики (предельные
или амплитудные),’которые, как и путевые, являются датчиками пе-
ремещений. Применяют одно- и многопредельные датчики. Двух-
предельный датчик рычажного типа (рис. 4, а) состоит из корпуса 2,
в котооом расположен измерительный’шток 1 в цилиндрических втул-
ках. На штоке установлен наконечник"'/,? для контактирования с из-
меряемой деталью. Сверху в корпусе имеется отверстие, в которое уста-
навливают отсчетную головку 9. Положение стрелки отсчетной голов-
ки регулируют регулировочной гайкой 12 с микропередачей. На штоке
установлен хомутик 10 с пружиной 11, создающей силу измерения. На
колодке 5 с помощью крестообразной пружины 4 укреплен рычаг 6
с подвижными^контактами 8. Настроечные контакты, запрессованные
12
13
-Hl
Рис. 4. Электр оконтактные датчики:
а — путевой выключатель; б — конечный
г — размерный преобразователь
выключатель; в — микропереключатель;
в концы микрометрических’винтов 3„.^регулируют с помощью7'бараба-
нов 7 с нанесенными на них делениями. Предел измерения датчиков
составляет 1 мм, предельная погрешность ± 1 мкм.
Известны электроконтактные размерные датчики для измерения
больших перемещений с высокой точностью. Электроконтактный раз-
мерный датчик КП-3 (кодовый преобразователь, см. рис. 5, г) состоит
из шести контактных пластин, по которым перемещаются контактные
щетки, выполненные в виде стальных шариков, свободно вращающихся
в стальных втулках с прижимными пружинами. Щетки смонтированы
на валах, соединенных между собой зубчатой передачей с передаточ-
ным отношением 1 : 10. Для предотвращения износа щеток и контакт-
ных пластин имеется электромагнит, который отводит щетки при боль-
14
г)
Рис. 5. Электроконтактные датчики:
а, б, в — схемы, поясняющие принцип действия датчиков; г — размерный датчик КП-3
шой частоте вращения входного вала (во время перемещения на боль-
шие расстояния).
Для младшего разряда (рис. 5, г, справа) применено 10 щеток,
соединенных друг с другом и расположенных по нониусной шкале,
что позволяет делить окружность при наличии 10 щеток и контактных
пластин на 100 делений (разрешающая способность младшего разря-
да). Подвод тока к щеткам младшего разряда производится через сег-
мент TH, имеющий длину, которая обеспечивает постоянный контакт
щетки с сегментом. Следовательно, первый и второй разряд имеют за-
мыкание цепей на доли оборота, третий — на целые обороты, а четвер-
тый—шестой — соответственно на десятки, сотни и тысячи оборотов.
Погрешность датчика составляет 0,05 мм.
Индуктивные датчики. Принцип действия основан на изменении
индуктивности катушки с подвижным якорем за счет изменения маг-
нитной проницаемости. Индуктивные датчики, как и электроконтакт-
ные, можно использовать как датчики пути или положения и как раз-
мерные (рис. 6, а). Если перемещать якорь 1 датчика, воздушный зазор
б будет изменяться, что вызовет изменение индуктивности обмотки wn.
Ток в цепи обмотки датчика
Z = ^n/Z=f/nZ/^+Xl,
где Ua — напряжение питания датчика; Z — полное сопротивление
цепи; R — активное сопротивление цепи; Xz = 2nfL — индуктивное
сопротивление обмотки.
Если Un, Rt f постоянны, то ток / в катушке, а следовательно,
и напряжение U будут пропорциональны воздушному зазору б,
15
cliipmaker.ru
т. e. U s= I гз k8. Датчики работают при частотах питающей сети от
50 до 5900 Гц.
Индуктивный дифференциальный размерный датчик (рис. 6, б)
состоит из двух катушек 2, 4, на которых расположены обмотки, под-
ключаемые по дифференциальной схеме или в плечи измерительного
моста. В катушках расположен сердечник 3, соединенный с измери-
тельным штоком 1, который контактирует с измеряемой поверхностью.
При среднем положении сердечника, т. е. при бх = 62, параметры ка-
тушек одинаковы, тогда Д = /2. Так как_обмотки соединены по диф-
ференциальной схеме, сигнал на выходе датчика равен нулю, т. е.
U = Ul — U2 = 0. При изменении положения сердечника, когда
6х=#б2, происходит изменение индуктивности обмоток, тогда 2 X
Х(Д>/2 или /х</2). Величина сигнала будет пропорциональна ве-
личине перемещения сердечника, а знак будет определять направление
перемещения.
В индуктивных дифференциальных датчиках трансформаторного
типа при изменении положения сердечника (плунжера) меняется ве-
личина взаимоиндукции между первичной и вторичной обмотками, что
вызывает во вторичных обмотках изменение величины индуктируемой
ЭДС.
Бесконтактный щелевой индуктивный датчик типа БВК (рис. 6, в,
г) является датчиком пути или положения. Он имеет два ферритовых
сердечника с расположенными на них обмотками. Сердечники и все
16
элементы схемы датчика, кроме реле Р, размещены й капронойом кор*
пусе. На одном сердечнике расположены контурная обмотка шк и
обмотка положительной обратной связи иуп.с» на другом сердечнике —
обмотка отрицательной обратной связи ьуо.с. Такой магнитопровод ис-
ключает влияние посторонних магнитных полей. Обмотки обратной
связи включены последовательно и навстречу друг другу. Значение
коэффициента связи такова, что колебания в контуре wK — СЗ не
возникают.
При введении в зазор алюминиевого экрана, который несет на себе
движущийся рабочий орган, связь между обмотками шк и ау0-с осла-
бевает, и возникает генерация. В контуре юк — СЗ появляется пере-
менный ток, который индуктирует ЭДС в катушке вуп.с. В цепи базы
транзистора Т происходит детектирование переменной составляющей
тока базы. Транзистор открывается, вызывая срабатывание реле Р.
Для стабилизации работы транзистора при колебаниях температуры
и напряжения применен нелинейный делитель напряжения, состоя-
щий из линейного элемента резистора R1, полупроводникового термо-
резистора R2 и диода D2. Погрешность срабатывания составляет 1—
1,3 мм. В промышленности применяют также другие бесконтактные
переключатели, которые отличаются конструктивным решением или
схемой преобразования сигнала.
Индуктивные импульсные размерные датчики (рис. 7) получили до-
вольно широкое распространение для измерения линейных перемеще-
ний. Датчик (рис. 7, а) состоит из стальной зубчатой шкалы 1 с шагом
рубцов 4 и двух съемников А и В, каждый из которых состоит из двух
П-образных сердечников с зубцами на торцах (шаг t2). Зубцы одного
сердечника каждого съемника смещены по отношению к зубцам дру-
гого сердечника на половину шага 4- В каждом .съемнике имеется об-
щая первичная обмотка 3 и две разделенные вторичные обмотки 4,
которые включены так, что постоянные составляющие токов вычитают-
ся друг из друга. Для того чтобы получить электрический сигнал мень-
ший и кратный шагу 4» зубцы на съемниках нанесены с шагом /2, ко-
торый меньше шага 4 и кратен ему. Для определения направления
движения зубцы съемника В смещены по отношению к зубцам съем-
ника А на четверть исходного шага 4- Благодаря такому смещению
удается также получить цену импульса, равную четверти шага 4-
Датчик питается током с частотой 20—25 кГц, что обеспечивает нор-
мальную работу на любых скоростях. Датчики изготовляют с ценой им-
пульса 0,05 и 0,02 мм. Имеются также индуктивные датчики такого
типа, где вместо зубчатой шкалы применен стальной винт 2 (рис. 7, б),
а сердечники съемников выполнены в виде полугаек 1. При поступа-
тельном движении полугаек относительно винта или при вращении вин-
та периодически меняется магнитное сопротивление зазора, что при-
водит к изменению ЭДС в обмотках 3 датчика.
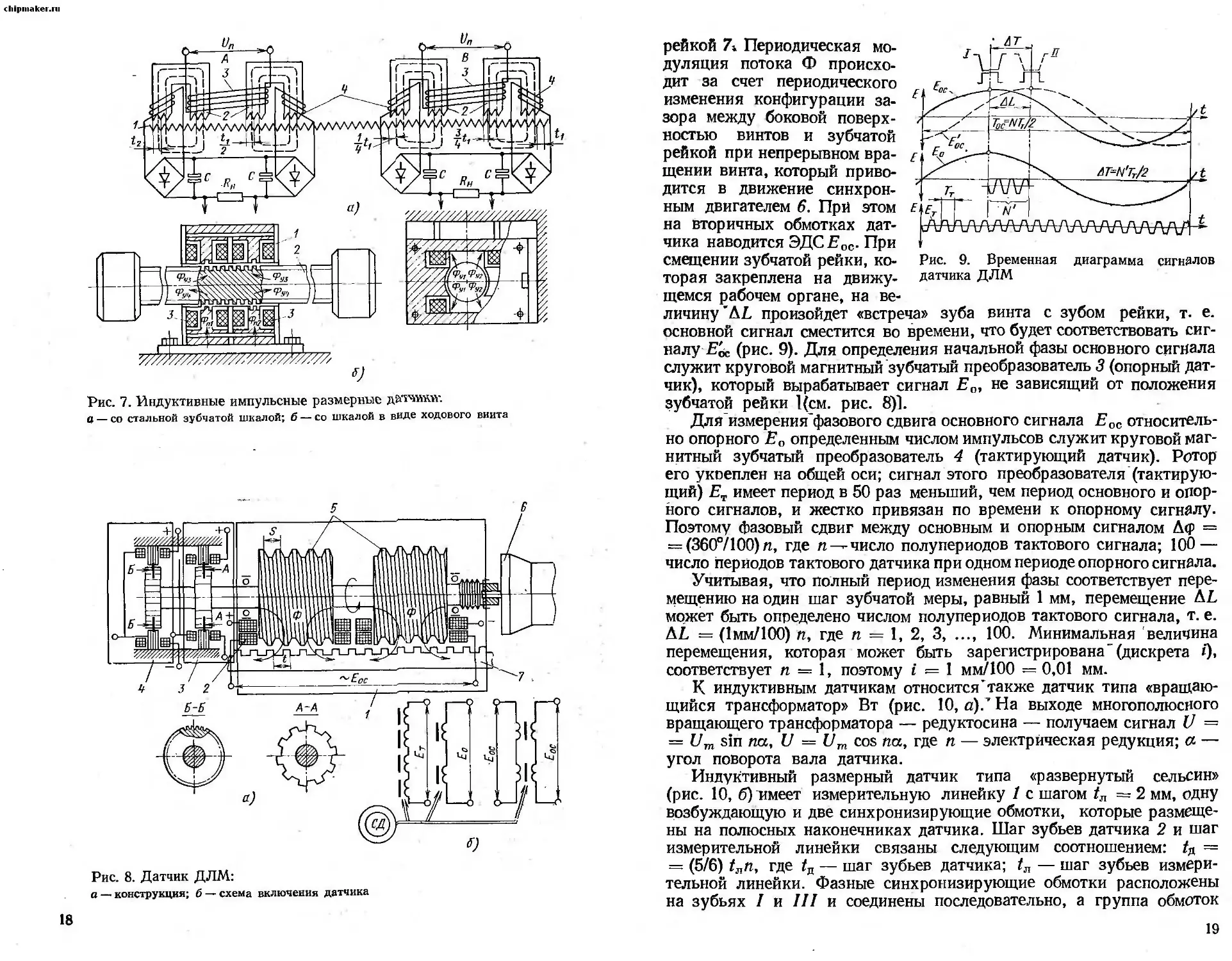
Фазо-импульсный индуктивный размерный датчик типа ДЛМ
(рис. 8, а) состоит из основного /, опорного 3 и тактирующего 4 дат-
чиков. Основной сигнал £ос датчика вырабатывается за счет периоди-
ческой модуляции магнитного тока Ф, созддайёмрго намагничивающими
катушками 2 в магнитной системе, о^й^Аннбй^я^тами 5 и зубчатой
17
chipmaker.ru
Рис. 7. Индуктивные импульсные размерные дйтэджй-.
а — со стальной зубчатой шкалой; б — со шкалой в виде ходового впита
Рис. 8. Датчик ДЛМ:
а — конструкция; б — схема включения датчика
18
Рис. 9. Временная диаграмма сигналов
датчика ДЛМ
рейкой 74 Периодическая мо-
дуляция потока Ф происхо-
дит за счет периодического
изменения конфигурации за-
зора между боковой поверх-
ностью винтов и зубчатой
рейкой при непрерывном вра-
щении винта, который приво-
дится в движение синхрон-
ным двигателем 6. При этом
на вторичных обмотках дат-
чика наводится ЭДСЕос- При
смещении зубчатой рейки, ко-
торая закреплена на движу-
щемся рабочем органе, на ве-
личину'AL произойдет «встреча» зуба винта с зубом рейки, т. е.
основной сигнал сместится во времени, что будет соответствовать сиг-
налу Ебс (рис. 9). Для определения начальной фазы основного сигнала
служит круговой магнитный зубчатый преобразователь 5 (опорный дат-
чик), который вырабатывает сигнал Ео, не зависящий от положения
зубчатой рейки 1(см. рис. 8)1.
Для измерения’фазового сдвига основного сигнала Еос относитель-
но опорного Ео определенным числом импульсов служит круговой маг-
нитный зубчатый преобразователь 4 (тактирующий датчик). Ротор
его укоеплен на общей оси; сигнал этого преобразователя (тактирую-
щий) Ет имеет период в 50 раз меньший, чем период основного и опор-
ного сигналов, и жестко привязан по времени к опорному сигналу.
Поэтому фазовый сдвиг между основным и опорным сигналом А<р =
= (3607100) п, где п— число полупериодов тактового сигнала; 100 —
число периодов тактового датчика при одном периоде опорного сигнала.
Учитывая, что полный период изменения фазы соответствует пере-
мещению на один шаг зубчатой меры, равный 1 мм, перемещение AL
может быть определено числом полупериодов тактового сигнала, т. е.
AL = (1мм/100) п, где п = 1, 2, 3, ..., 100. Минимальная величина
перемещения, которая может быть зарегистрирована "(дискрета *)•
соответствует п = 1, поэтому i — 1 мм/100 = 0,01 мм.
К индуктивным датчикам относится’также датчик типа «вращаю-
щийся трансформатор» Вт (рис. 10, с).' На выходе многополюспого
вращающего трансформатора — редуктосина — получаем сигнал U =
= Um sin па, U = Um cos па, где п — электрическая редукция; а —
угол поворота вала датчика.
Индуктивный размерный датчик типа «развернутый сельсин»
(рис. 10, б) имеет измерительную линейку 1 с шагом /л ~ 2 мм, одну
возбуждающую и две синхронизирующие обмотки, которые размеще-
ны на полюсных наконечниках датчика. Шаг зубьев датчика 2 и шаг
измерительной линейки связаны следующим соотношением: /д =
= (5/6) /лп, где /д — шаг зубьев датчика; /л — шаг зубьев измери-
тельной линейки. Фазные синхронизирующие обмотки расположены
на зубьях I и III и соединены последовательно, а группа обмоток
19
chipmaker.ru
А, В, С — в звезду. Обмотки возбуждения расположены на зубьях II
и включены таким образом, чтобы направления магнитных потоков
в зубьях датчиков чередовались (N, S, N, S, N).
Индуктивный датчик — линейный индуктосин (рис. 10, в) — со-
стоит из набора измерительных шкал 2 и ползуна 1, монтируемых на
рабочих органах. Измерительная шкала индуктосина укреплена на не-
подвижной части и представляет собой стальную линейку, на которой
на соответствующую^изолирующую подложку печатным способом на-
несена'зигзагообразная обмотка с шагом 2 мм. Ползун 1, укрепленный
по подвижной части, является якорем и состоит из^двух таких же, но
более коротких’обмоток,’'сдвинутых на 1/4 шага относительно друг
друга. На выходе обмоток якоря индуктируется циклический сигнал.
Число циклов определяется числом пройденных шагов. В^промышлен-
ности применяют также круговые индуктосины.
5)
Рис. 11. Фотоэлектрические датчики:
а — пути и положения; б — размерный
20
Фотоэлектрические датчики. Фотоэлектрические датчики пути и
положения (рис. 11, а) представляют собой обычное фотореле, установ-
ленное на рабочих органах в определенном положении. Движущийся
рабочий орган ДРО, переместившись в установленное положение, эк-
раном 1 прерывает поток света Ф, вызывая срабатывание фотореле ФР.
В промышленности применяют также размерные фотоэлектрические
датчики. Размерный датчик (рис. 11,6) состоит из диска 1, который со-
единен с движущимся рабочим органом ДРО. На диске нанесены штри-
хи или прорези с определенным шагом t. При движении рабочего ор-
гана штрихи на диске будут прерывать световой поток Ф, вызывая
срабатывание фотореле. Величина измеренного перемещения AL=
= nt, где п — число срабатывания фотореле, t — цена деления шага.
Имеются датчики, у которых в качестве измерительных шкал при-
меняют линейки с нанесенными штрихами.
Гидравлические датчики. Гидравлические датчики пути и положе-
ния представляют собой обычный управляющий гидрораспределитель
поршневого или кранового типа (рис. 12, а). Принцип действия основан
на том, что движущиеся рабочие органы, на которых размещены ку-
лачки или упоры 1, достигнув этого положения, где установлен датчик,
воздействует на него, вызывая срабатывание. Управляющий гидро-
распределитель обеспечивает сигнал исполнительному органу (гидро-
двигателю).
Пневматические датчики. Пневматические датчики пути или по-
ложения аналогично гидравлическим выполнены в виде пневмораспре-
делителей кранового типа (рис. 12, 6), дросселей или клапанов. Ши-
рокое распространение получили размерные пневматические дифферен-
циальные, датчики мембранного и сильфонного типа с электроконтакт-
ным выходом.
§ 3. Силовые датчики
Силовые датчики обеспечивают создание управляющих сигналов
в зависимости от сил, создаваемых в рабочих органах.
Электромеханические датчики. Один из видов электромеханиче-
ского силового датчика (рис. 13, а) представляет собой кулачковую муф-
21
cliipmaker.ru :-- - ------
ту 2 со скошенными зубьями, замыкающуюся под действием пружины
3. Одна из полумуфт сидит на валу со скользящей шпонкой. Полумуф-
та через рычаг 4 воздействует на микропереключатель /. При возник-
новении на валу заданных сил сдвинутая полумуфта, воздействуя че-
рез рычаг на микровыключатель, вызывает его срабатывание.
Силовой датчик (токовое реле) (рис. 13, б) состоит из токовой ка-
тушки /, рычага 2 и контактов KI, К2. Токовая катушка включена
в цепь электродвигателя, приводящего в движение рабочий орган, ко-
торый измеряет силу. Принцип действия токового реле состоит в сле-
дующем. При увеличении силы Fp-0 в рабочем органе увеличивается
сила тока двигателя, который приводит в движение рабочий орган, это
в свою очередь вызывает увеличение силы тока в токовой катушке реле,
и электромагнитная сила FBM токовой катушки станет больше, чем
усилие пружины 3 /7пр(усилие пружины устанавливают с помощью ре-
гулировочного винта). Произойдет опрокидывание рычага, который,
воздействуя на контакты, вызовет их срабатывание. Принцип действия
токового реле можно описать следующим динамическим уравнением:
Fp.o t ^дв t ^дв t ^ам t =* ^пр
=> срабатывание контактов XI, К2, где f — величина растет; | —
величина уменьшается; ->-------величина не изменяется; => — отсюда
следует.
Силовой тензометрический датчик. Чувствительным элементом дат-
чика является тонкая проволока (из никеля, копеля, константана) диа-
метром 0,015 ... 0,05 мм (рис. 13,в), которая’жестко закреплена’или на-
клеена на изолирующей подложке на^рабочий орган,*где измеряется
Рис. 13. Силовые датчики:
a электромеханический; б — токовое реле; в — чувствительный элемент датчи-
ка; г — схема включения тензометрического датчика
22
Рис. .4. Реле давления
сила. Чувствительный элемент включается в цепь датчика по мостовой
(рис. 13, г) или потенциометрической схеме. Принцип действия датчи-
ка основан на использовании тензометрического эффекта, который за-
ключается в следующем явлении: при деформации металлов происходит
деформация кристаллической решетки, что вызывает изменение их
электрического сопротивления. Таким образом, принцип действия тен-
зометрического силового датчика можно описать динамическим урав-
нением
^р.о t => д t => f •
Реле давления (рис. 14, а). Изменение нагрузки в рабочих органах
вызывает изменение давления в гидросистеме ГС, а следовательно, из-
менение давления в полости А датчика, которая подсоединена к гидро-
системе. Происходит прогибание мембраны /; при этом рычаг 2, сжимая
пружину 3, поворачивается и воздействует на микропереключатель 5,
зызывая его срабатывание. Регулировка силы срабатывания реле осу-
ществляется с помощью регулировочного винта 4. Применяют также за-
щитные реле давления в виде сливного клапана (рис. 14, б).
§ 4. Датчики скорости
Датчики скорости создают управляющие сигналы в зависимости
от скорости. Более широкое распространение в машиностроении
получили следующие разновидности.
Тахогенератор служит для измерения частоты вращения. По роду
тока их делят на тахогенераторы постоянного и переменного тока.
Тахогенераторы постоянного тока разделяют по способу возбуждения
на тахогенераторы с возбуждением от постоянных магнитов (рис. 15, а)
23
chipmaker.ru
Рис. 15. Датчики скорости:
а — тахогенератор с возбуждением от постоянных магнитов; б — асинхронный тахоге-
нератор; в — реле контроля скорости
и с электромагнитным возбуждением. И те и другие представляют собой
малогабаритную машину постоянного тока. Напряжение на зажимах
якоря пропорционально частоте вращения вала якоря, т. е. Е =
= ия = ЛеФсо, где Е — ЭДС, индуктируемая в обмотке якоря; ke —
конструктивный^коэффициент машины; Ф — поток возбуждения. Учи-
тывая, что поток возбуждения постоянный, можно записать £/я —
= /гтгсо, где /гтг = /геФ.
Тахогенераторы переменного тока по принципу действия делят на
синхронные и асинхронные. Более широкое распространение получили
асинхронные тахогенераторы. .Конструкция асинхронного тахогенера-
тора подобна конструкции - двухфазного асинхронного двигателя
(рис. 15, б). Тахогенератор имеет две обмотки: обмотку возбуждения
ОВ и выходную обмотку. При вращении ротора в выходной обмотке
наводится ЭДС, пропорциональная частоте вращения, т. е. £ = Л£/Всо,
где kw — конструктивный коэффициент тахогенератора; UB — на-
пряжение обмотки возбуждения; со — частота вращения ротора.
Реле контроля скорости РКС (рис. 15, в) состоит из постоянного
магнита 3, который находится на валу (сигнал на входе), кольца
4, в котором расположена обмотка типа «беличье колесо». 'На другой
валу, соединенным с кольцом, расположен толкатель 1, который воз
действует на группу контактов £7, К2, которые возвращаются в ис-
ходное положение под действием пружин 2 и 5. При вращении вала РКС
вращающийся магнит наводит в обмотке, расположенной в кольце,
ЭДС. Ток, проходящий по обмотке, взаимодействуя с магнитным пото-
ком вращающегося магнита, создает вращающий момент, который, по
ворачивая кольцо с толкателем, воздействует на контакты и вызывае?
их срабатывание.
§ 5. Датчики угла рассогласования
Датчики угла рассогласования обеспечивают создание управляю-
щего сигнала в зависимости от углового положения или угла рассогла-
сования между рабочими органами.
24
Потенциометрический датчик углового положения (рис. 16, а) со-
стоит из потенциометров П1 и П2, которые подключены параллельно
к общему источнику питания’[7П.Подвижные контакты потенциометров
KI, К2 соответственно соединены механически с задающим (ЗРО) и
исполнительным (ПРО) рабочими‘органами. Напряжение, снимаемое
с подвижных контактов потенциометров, является напряжением сиг-
нала Uc. При согласованном положении*рабочих органов (подвижные
контакты находятся в’одинаковом положении), когда а — 0/ напря-
жение сигнала'равно нулю. При рассогласованном положении, когда
а Р, сигнал на выходе датчика будет не равен нулю,’т. е. а Ф р =>
=>J7C #= О- Причем величина сигнала будет пропорциональна углу рас-
согласования,’т. е.’ Uc == а — р, а’знак сигнала определяет направле-
ние рассогласования (Uc =f= 0 можно рассматривать как [7С > 0,
Uc < 0, т. е. как сигнал положительный или отрицательный).
Датчики угла рассогласования типа «сельсинная пара» (рис. 16, б)
состоят из двух датчиков, которые представляют собой индукционную
электрическую'машину переменного тока. В зависимости от способа
подключения обмоток возбуждения они могут работать в индикатор-
ном и трансформаторном режимах. Сельсинная пара, работающая в
трансформаторном режиме, где выходным сигналом является напряже-
ние на обмотке С77,*нашла более широкое применение.* Трехфазные
обмотки сельсина-датчика СД и сельсина-приемника СП соединены
между собой последовательно. На обмотку возбуждения ОВСп подает-
ся питающее напряжение, а с обмотки возбуждения ОВСП снимается сиг-
нал.’ Валы СД и СП соединены с рабочими органами, угловое положе-
ние или угол рассогласования’между "которыми можно’измерить, т. е.
СД соединен с ЗРО или с неподвижным рабочим”органом,*’а СП со-
единен с ПРО,Гкоторый является согласуемым рабочим органом или
положение которого можно измерить. При согласованном положении
рабочих’органов, когда угол а = 0,'сигнал на обмотке СП равен нулю.
При рассогласованном положении рабочих органов, когда а Ф 0, на-
пряжение сигнала не равно нулю и будет определять знак (направле-
ние) рассогласования, так как напряжение, снимаемое с обмотки СП,
изменяется по закону
UС = Umax sin (а—0) = t/max sin 6.
Рис. 16. Датчики углового положения или угла рассогласования:
а — потенциометрический; б — сельсинная пара
25
chipmaker.ru
§ 6. Преобразующие устройства
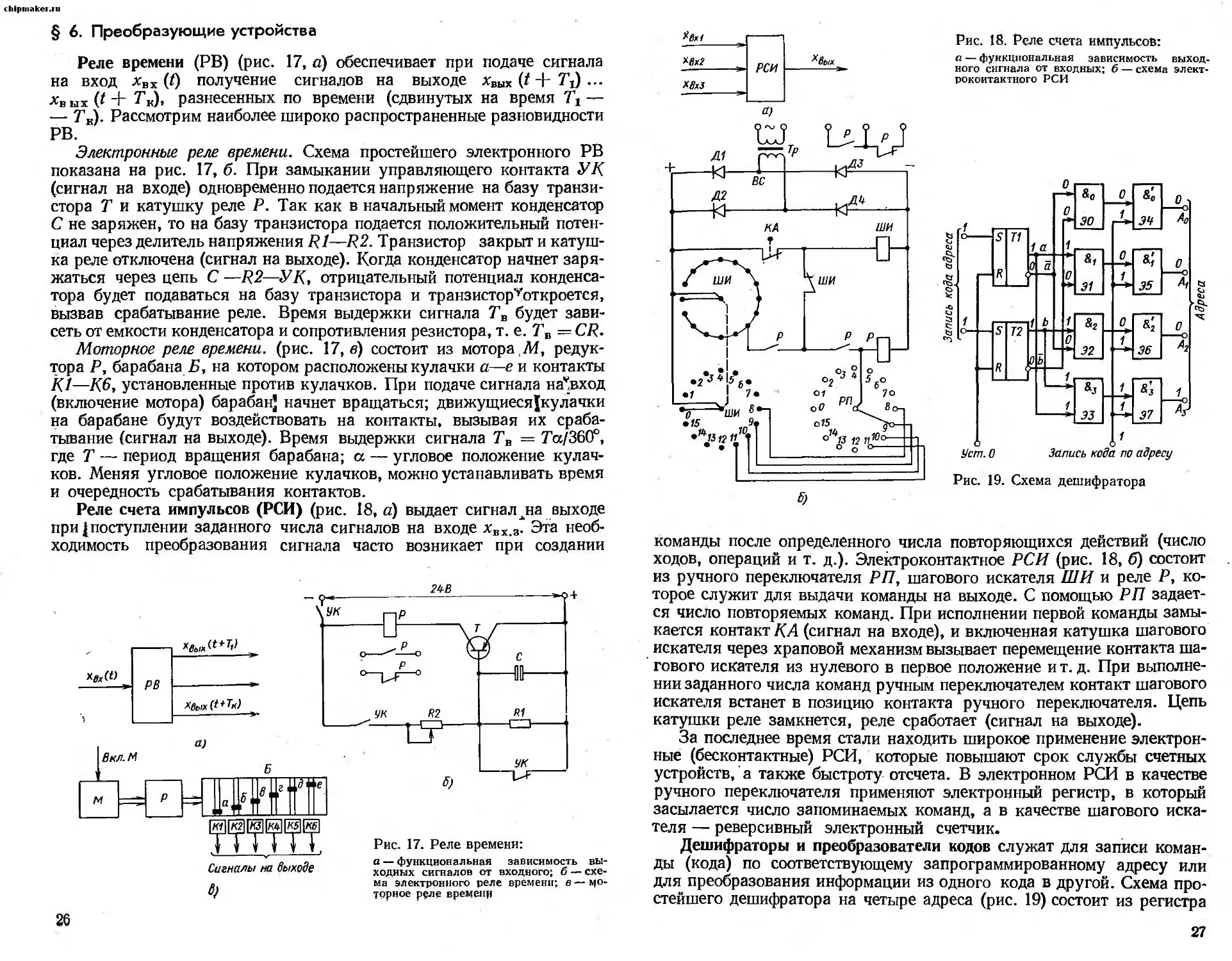
Реле времени (РВ) (рис. 17, а) обеспечивает при подаче сигнала
на вход хВх (О получение сигналов на выходе хвых (f + Tt) ...
хВЫх(^ + Тк), разнесенных по времени (сдвинутых на время Tj—
— Тк). Рассмотрим наиболее широко распространенные разновидности
FB.
Электронные реле времени. Схема простейшего электронного РВ
показана на рис. 17, б. При замыкании управляющего контакта УК
(сигнал на входе) одновременно подается напряжение на базу транзи-
стора Т и катушку реле Р. Так как в начальный момент конденсатор
С не заряжен, то на базу транзистора подается положительный потен-
циал через делитель напряжения R1—R2. Транзистор закрыт и катуш-
ка реле отключена (сигнал на выходе). Когда конденсатор начнет заря-
жаться через цепь С —R2—УК, отрицательный потенциал конденса-
тора будет подаваться на базу транзистора и транзистор¥откроется,
вызвав срабатывание реле. Время выдержки сигнала Тв будет зави-
сеть от емкости конденсатора и сопротивления резистора, т. е. Тв = CR.
Моторное реле времени, (рис. 17, в) состоит из мотора Л4, редук-
тора Р, барабана Б, на котором расположены кулачки а—е и контакты
К1—Кб, установленные против кулачков. При подаче сигнала на*вход
(включение мотора) барабан’ начнет вращаться; движущиеся|кулачки
на барабане будут воздействовать на контакты, вызывая их сраба-
тывание (сигнал на выходе). Время выдержки сигнала Тв = Та/360°,
где Т — период вращения барабана; а — угловое положение кулач-
ков. Меняя угловое положение кулачков, можно устанавливать время
и очередность срабатывания контактов.
Реле счета импульсов (РСИ) (рис. 18, а) выдает сигналена выходе
при |поступлении заданного числа сигналов на входе хвх.3. Эта необ-
ходимость преобразования сигнала часто возникает при создании
[м]га|ю|га[ю][ад]
Ji II I I,
Сигналь! на выходе
Рис. 17. Реле времени:
а — функциональная зависимость вы-
ходных сигналов от входного; б — схе-
ма электронного реле времени; в — мо-
торное реле временц
6)
26
Рис. 18. Реле счета импульсов:
а — функциональная зависимость выход-
ного сигнала от входных; б — схема элект-
рокоитактного РСИ
команды после определенного числа повторяющихся действий (число
ходов, операций и т. д.). Электроконтактное РСИ (рис. 18, б) состоит
из ручного переключателя РП, шагового искателя ШИ и реле Р, ко-
торое служит для выдачи команды на выходе. С помощью РП задает-
ся число повторяемых команд. При исполнении первой команды замы-
кается контакт КА (сигнал на входе), и включенная катушка шагового
искателя через храповой механизм вызывает перемещение контакта ша-
гового искателя из нулевого в первое положение и т. д. При выполне-
нии заданного числа команд ручным переключателем контакт шагового
искателя встанет в позицию контакта ручного переключателя. Цепь
катушки реле замкнется, реле сработает (сигнал на выходе).
За последнее время стали находить широкое применение электрон-
ные (бесконтактные) РСИ, которые повышают срок службы счетных
устройств, а также быстроту отсчета. В электронном РСИ в качестве
ручного переключателя применяют электронный регистр, в который
засылается число запоминаемых команд, а в качестве шагового иска-
теля — реверсивный электронный счетчик.
Дешифраторы и преобразователи кодов служат для записи коман-
ды (кода) по соответствующему запрограммированному адресу или
для преобразования информации из одного кода в другой. Схема про-
стейшего дешифратора на четыре адреса (рис. 19) состоит из регистра
27
chipmaker.ru
«3
7
Рис. 20. Схема преобразователя кодов
адреса, который имеет тригге-
ры первого (Т1) ювторого^ТР)
разрядов; диодные матрицы,
состоящие из логических эле-
ментов И (ЭО) — И ^ЭЗ) и И'
(Э4)—И' (Э7),(а — единичный
выход Tl, fl — нулевой выход
Tl, b — единичный выход Т2,
b — нулевой выход Т2, А 0 —
Аз — адреса команд (кодов).
Запись или выдача команд
произойдет по адресу, запи-
санному в регистре. Напри-
мер, если в регистре записан
адрес А—3(10) или А = 11 (2),
где 10,2 — десятичная и дво-
ичная системы счисления, раз-
решен выход И (Э7), т. е. за-
пись команды (кода) идет по
третьему адресу.
Преобразователь 'двоично-
го кода в десятичный (рис. 20)
состоит из логических элемен-
тов И (Э1)—И(Э7), выходы
которых подключены к реги-
стру, где хранится двоичный
код (abed — единичные выходы триггеров регистра; abed — нуле-
вые выходы), логических элементов И (ЭО)—И (Э9), выходы кото-
рых выдают десятичный код. Например, если из регистра на вход
подается 1112, будет разрешен элемент И (Э7), т. е. код преобра-
зован в число 7.
Преобразователи типа «геркон» (магнитоуправляемые контакты)
представляют собой взаимодействующую с внешним магнитным полем
контактную систему. Магнитоуправляемые контакты заключены в ва-
куумный или газонаполненный стеклянный баллон, внутри которого
находятся упругие ферромагнитные пластины (контакты). Для того
чтобы повысить надежность контактирования, место соприкосновения
пластин обрабатывают, т. е. покрывают серебром, золотом или родием.
Замыкание контактов производится внешним магнитным полем. Пре-
имущества герконов — длительность срока службы, высокое быстро-
действие, стабильность контактного сопротивления.
Оптоэлектронный прибор (преобразователь) — оптрон — представ-
ляет собой пару из светодиода и кремниевого фотоприемника — фото-
диода.
Оптрон предназначен для гальванической развязки интеграль-
ных схем. Им заменяют импульсные трансформаторы, повышая со-
противление развязки электрических цепей, он увеличивает помехо-
устойчивость от внешних магнитных полей.
§ 7. Усилители
В промышленности широко применяют электронные, электрома-
шинные, магнитные, гидравлические и пневматические усилители.
Электронными усилителями являются устройства, в которых уси-
ление электрических сигналов осуществляется с помощью ламп или
полупроводниковых приборов, поэтому по типу применяемых прибо-
ров усилители делят на электронные и полупроводниковые (транзистор-
ные, тиристорные и т. д.). В зависимости от рода сигнала и режима ра-
боты усилительных элементов усилители могут быть пропорциональ-
ными, импульсными, фазочувствительными. По назначению усилители
подразделяют на три группы: усилители напряжения, мощности и тока,
решающие усилители. Транзисторные и электронные усилители имеют
малые выходные мощности и в машиностроении их чаще используют как
промежуточные усилители. На больших выходных мощностях приме-
няют тиристорные усилители, которые одновременно служат и преобра-
зователями рода тока, так как они имеют более высокий КПД.
Электромашинные усилители ЭМУ получили широкое распростра-
нение в системах автоматизированного электропривода. Их можно
изготовлять на большие выходные мощности. ЭМУ в зависимости от
способа возбуждения бывают с продольным и поперечным полем. Бо-
лее широкое распространение получили ЭМУ с поперечным полем
(рис. 21, а), которые представляют собой обычную машину постоян-
ного тока, у которой кроме основных щеток 1—1 имеется дополнитель-
ная пара щеток 2—2, замкнутых накоротко. Имеется одна или не-
сколько управляющих обмоток ОУ. Наличие нескольких управляю-
28
29
chipmaker.ru
щих обмоток, дает возможность суммирования на данном усилителе
сигналов, зависящих от многих параметров. ЭМУ является также пре-
образователем .рода_тока. Недостаток ЭМУ—наличие вращающихся
машин, ^многократное преобразование энергии, что усложняет усили-
тель, уменьшает его КПД. За последнее время более широкое приме-
нение находят тиристорные усилители-преобразователи, которые не
имеют перечисленных недостатков.
Магнитные усилители (МУ) — магнитное статическое устройство,
усиливающее электрические сигналы. Простейший МУ (рис. 21, б) со-
стоит из двух рабочих обмоток wp, включенных встречно; такое вклю-
чение необходимо для устранения наводимой ЭДС в обмотке управле-
нияАза счет переменного тока управляющей обмотки w7. В цепь
рабочих обмоток включают нагрузку Ru (сигнал на выходе). Рабочие
обмотки питаются от сети переменного тока UB. Достоинства МУ:
неограниченный срок службы, высокая надежность, высокий КПД,
способность суммирования, дифференцирования и сравнения сигналов
при наличии нескольких обмоток управления. МУ допускают значи-
тельные перегрузки и могут обеспечивать большие выходные мощности.
Наиболее существенный недостаток — значительная инерционность
(малое быстродействие). Магнитные усилители можно включать по
различным схемам, например, по однофазной мостовой, трехфазной мо-
стовой и т. д.
Гидравлические усилители (ГУ) нашли широкое применение там,
где применяют гидросистемы. ГУ в зависимости от принципа действия
бывают струйные, золотникового типа, дроссельные. ГУ золотниково-
го типа (рис. 21, в) представляют собой устройство, состоящее из уп-
равляющего золотника УЗ и гидроцилиндра ГЦ. Входным сигналом
усилителя является сила f, действующая на шток управляющего зо-
лотника, а выходным сигналом — сила F, действующая на шток гидро-
цилиндра. Широкое применение получили гидроусилители момента,
в которых золотник кранового типа совмещен с гидродвигателем акси-
ально-плунжерного типа и управляет им.
Дифференциальный струйный усилитель (рис. 21, г) состоит из
струйной трубки 3, в которую подается масло под давлением р0, рас-
пределительного сопла 2 и гидроцилиндра 1.
Пневматические усилители могут быть золотникового типа, где зо-
лотник управляет пневмоцилиндром или диафрагменным пневмодви-
гателем. Применяют дроссельные пневмоусилители там, где пневмо-
цилиндром управляет дроссель.
§ 8. Исполнительные органы
Исполнительными органами называют устройства, преобразующие
сигнал управления в механическое перемещение, благодаря которому
осуществляются воздействия на управляемые объекты или получение
от них сведений. В качестве исполнительных органов в автоматизиро-
ванных системах более широко используют следующие разновидности.
Указывающие, регистрирующие, сигнализирующие и отключаю-
щие устройства. Это всевозможные механизмы электрического, электро-
магнитного, гидравлического, пневматического типа и г. п., переме-
щающие стрелки, указатели, перья самописцев; устройства, дающие
сигнализацию; ' устройства Л воздействующие на контакты, t отключая
их, и т. д.
Двигатели постоянного тока. К ним относятся двигатели нормаль-
ного исполнения серии П, серии4ПБС,’ обеспечивающие постоянство
предельно допустимого момента за счет одинаковых условий охлажде-
ния на всех скоростях с большим быстродействием (станочная серия),
серии ПЬСТ со встроенным тахогенератором, серии МИ, серии 2П
с улучшенными качествами с применением новых материалов и др.
Двигатели постоянного тока в зависимости от способов возбуждения
могут быть с параллельным, последовательным, смешанным и незави-
симым возбуждением. Находят применение высокомоментные двигатели
с ьозоуждением от постоянных магнитов, двигатели с гладким якорем,
двигатели с печатным ротором и т. д. Их изготовляют на различные вы-
ходные мощности. Двигатели постоянного тока имеют следующие до-
стоинства: широкий и бесступенчатый диапазон регулирования частоты
вращения, который может быть обеспечен в пределах D = coraax/®min=
= 15 4- 5000; простоту регулирования частоты вращения; жесткие
механические характеристики, удовлетворяющие требованиям к при-
водам станков, в частности, у двигателей с независимым параллельным
возбуждением; большую перегрузочную способность с коэффициентом
перегрузки в пределах kB = Ми1Мп = 2,5 4- 10, где 7ИП—пуско-
вой момент, 7ИН — номинальный момент; сравнительно малую инер-
ционность (достаточное быстродействие).
Однако двигатели постоянного тока имеют некоторые существен-
ные недостатки: сложность конструкции, сравнительно низкую на-
дежность, значительные габаритные размеры на единицу мощности,
требуется’преобразователь переменного токаТвТпостоянный.
Электродвигатели переменного тока. По принципу действия их
делят на синхронные и асинхронные. Более широкое распространение
в автоматизированных системах получили асинхронные двигатели, ко-
торые делят на три класса: трехфазные с короткозамкнутой’обмоткой ро-
тора, с полым ферромагнитным ротором, с полым'немагнитным ротором.
Б машиностроении более широкое распространение получили трех-
фазные асинхронные двигатели, которые имеют следующие достоинст-
ва: малые габаритные размеры, простоту конструкции, высокую надеж-
ность (отсутствие подвижных контактов), жесткие механические ха-
рактеристики (для двигателей с короткозамкнутым ротором). К не-
достаткам асинхронных трехфазных двигателей'следует отнести малую
перегрузочную способность (kB — 1,5 4- 2,5) для двигателей нормаль-
ного исполнения; узкий и ступенчатый диапазон регулирования ча-
стоты вращения (изменением числа пар полюсов). Однако за последнее
время разработаны частотные полупроводниковые преобразователи, поз-
воляющие осуществлять регулирование угловой скорости изменением
частоты тока питающего напряжения.
Электромагниты широко применяют в автоматизированных уст-
ройствах и системах для обеспечения1 быстрых перемещений на огра-
ниченные расстояния и с ограниченными силами. Их используют для
31
30
chipmaker.ru
управления гидравлическими и пневматическими вентилями, пневмо-
распределителями, включения и выключения кулачковых и функцион-
ных муфт,' перемещения тормозных колодок и т. д. Достоинством элек-
тромагнитных'муфт является простота конструкции (отсутствие меха-
низмов преобразования движений).
[ Электромагнитные муфты (ЭМ) нашли широкое применение в ав-
томатизированных системах и устройствах для переключения кинема-
тических цепей без прерывания движения,'плавного пуска и торможе-
ния механизмов, регулирования скорости'и как ограничительные (за-
щитные) муфты. В зависимости от конструктивного исполнения ЭМ
бывают дисковые типа ЭТМ; бесконтактные дисковые типа МЭС,
МЭТ; порошковые; муфты скольжения. Существуют также фрикцион-
ные дисковые гидравлические муфты.’Достоинства электромагнитных
муфтг’возможность получения плавного пуска’и’торможения, переклю-
чения кинематических цепей на ходу и т. д. Недостатки: малое бы-
стродействие и механический износ.
|Г, Шаговые двигатели. Для обеспечения малых дискретных переме-
щений широко применяют электрические шаговые двигатели различ-
ных конструкций. В приводах станков с ЧПУ применяют синхронные
реактивные шаговые двигатели (рис. 22, а) типа ШД-5 и др. Статор 2
двигателя~имеет три пары полюсов: А, В, С, на которых расположены
управляющие обмотки А, В, С. Зубцы одних полюсных наконечников
сдвинуты относительно зубцов других полюсных наконечников на 1/3
полюсного шага. Шаг зубцов ротора 1 равен шагу зубцов полюсных
наконечников'статора. При подаче на обмотку А тока (рис. 22, б) по-
люсные зубцы ротора совмещаются с полюсными”зубцами'’секции А
(такт Л). Если затем подать ток на обмотку В, то полюсные зубцы
ротора совмещаются с полюсными зубцами секции В (такт В), т. е.
при последовательной подаче тока в управляющие обмотки в очеред-
ности А—В—С—А—В—С ит. д., ротор шагового двигателя будет пе-
а)
Рис. 22. Шаговый двигатель:
a — схема; б — диаграмма работы
Такт А Такт В Такт С Такт А Такт В
6)
32
ремещаться (поворачиваться) на величину 1/3 полюсного шага. Не-
трудно заметить, что если очередность включения обмоток осущест-
влять в последовательности А—С—В—А—С—В и т. д., ротор шагово-
го двигателя будет двигаться в противоположную сторону. Для ШД-4
максимальная частота отработки с места составляет 800 Гц и при плав-
ном разгоне до 4000 Гц; для ШД-5 — соответственно 2000 и 8000 Гц.
Момент на валу двигателя Ми = 0,85 Н-м. Угол поворота шагового
двигателя ср = 3607тг, где т — число тактов управления; z — число
зубцов ротора.
Гидравлические двигатели (ГД) в зависимости от видов движения
делят на двигатели поступательного и вращательного движения.
Двигатели поступательного движения в зависимости от конструкции
делят на поршневые, диафрагменные (мембранные) одностороннего
и двустороннего действия; двигатели вращательного движения —
шестеренчатые, лопастные, аксиально-плунжерные и радиально-плун-
жерные.
Достоинства гидродвигателей: простота конструкции, присущая
поршневым лопастным и шестеренчатым двигателям, возможность
получения больших сил и мощностей, плавных движений; жесткие
механические характеристики; возможность получения прямолиней-
ных и вращательных движений; широкий диапазон регулирования ско-
рости. Применяют два способа регулирования: объемное (изменение
производительности насоса) и дроссельное (регулирование изменением
давления). Однако гидравлические двигатели имеют существенные не-
достатки: утечки масла, необходимость применения автономной гидро-
системы, зависимость характеристик гидросистемы и i идродвигателя
от температуры и вязкости масла и т. д.
Пневматические двигатели. По принципу действия пневмодвига-
тели можно разделить на поршневые и диафрагменные (мембранные)
одностороннего и двустороннего действия. Регулирование скорости
осуществляется аналогично гидродвигателям. Достоинства пневмодви-
гателей: простота конструкции, возможность использования централи-
зованного сжатого воздуха. Недостатки: малые развиваемые силы,
необходимость очистки воздуха, недостаточная жесткость механиче-
ских характеристик.
Глава 3
Системы, обеспечивающие автоматизацию
технологических процессов на металлорежущих станках
и другом технологическом оборудовании
§ 1. Системы автоматического контроля
Для ^обеспечения требуемого качества деталей и изделий (точно-
сти, геометрической формы, чистоты поверхности и т. д.) применяют
комплексный контроль, включающий в себя контроль готовых деталей,
изделий, заготовок; контроль вспомогательных средств производства
33
chipmaker.ru
(режущего инструмента, измерительного инструмента иприспособле-
ний); контроль основных средств производства (технологического обо-
рудования). В зависимости от вида деталей, их стоимости и требований,
предъявляемых к точности, применяют полный и выборочный контроль.
По принципу действия, назначению средства автоматизированного конт-
роля (САК) можно подразделить на средства пассивного и активного
контроля. Выбор средств и вида контроля зависит от степени автома-
тизации технологического оборудования, условий производства, фор-
мы и стоимости деталей, эксплуатационных требований к ним, видов
применяемого оборудования для обработки и т. д.
Автоматизированные средства пассивного контроля в машинострое-
нии представляют собой САК, которые включают в себя датчик разме-
ров, преобразователь, усилитель, атакже исполнительные органы. Типы
применяемых датчиков (электроконтактные, индуктивные и т. д.),
наличие и разновидности усилителей и преобразователей будут зави-
сеть от требований к точности измерений, видов измеряемых поверх-
ностей и многих других факторов.
В качестве исполнительных органов можно применять указываю-
щие, сигнализирующие, регистрирующие или отключающие устройства.
САК могут отличаться также способами отсчета измеряемой величины,
т. е. их можно использовать для измерения размеров или величины
отклонения от заданных размеров. Кроме того, различают САК с пря-
мым измерением, когда дат-
чик размеров непосредственно
контактирует с измеряемой
• поверхностью, и с косвенным
измерением, когда датчик кон-
тактирует с рабочими органа-
ми, положение которых опре-
деляет размер. Измеритель-
ные механизмы датчиков мо-
гут быть одноконтактные и
многоконтактные, измерение
осуществляется в отдельной
измеряемой позиции или в
позиции обработки.
Система пассивного конт-
роля (рис. 23) состоит из диф-
ференциального индуктивно-
го размерного датчика /; элек-
тронного блока ЭБ, имеюще-
го электронный усилитель,
сигнализирующее и отключа-
ющее устройства; указываю-
щего прибора УП (гальвано-
метра). Датчик имеет два
Ш-образных сердечника, за-
крепленных с помощью плос-
ких пружин на корпусе дат-
Рис. 23. Система пассивного контроля
34
чика. На сердечниках 5, 7 расположены обмотки w3\ кото-
рые с обмотками трансформатора w2, представляют собой урав-
новешенный измерительный мост; в диагональ моста подается питающее
напряжение от сети переменного тока U„. Измерительный шток 2
датчика подвешен с помощью плоских пружин 3 к корпусу. На штоке
закреплен якорь 6 сердечников. На корпусе датчика устанавливают
сменную скобу 9 с боковым и нижним наконечниками, которые контак-
тируют с измеряемой поверхностью, что дает возможность при смене
скобы измерять другие виды деталей.
При настройке датчика на размер скобу устанавливают на эталон-
ную деталь или калибр. Вращением микрометрического винта S Ш-об-
разные сердечники перемещаются относительно якоря до тех пор, пока
не наступит баланс моста (сопротивление плеч равны г± = z2 = zs =
— z4), и стрелка гальванометра установится в нулевое положение.
Если размеры детали до обработки за пределами измерения датчика,
то ограничительная гайка 4, установленная на штоке с помощью уголь-
ника 10, отодвинет сердечники от микрометрического винта.
По мере съема припуска, когда размеры детали войдут в установ-
ленные пределы измерения датчика, шток, отпустившись, даст возмож-
ность сердечнику коснуться микрометрического винта, что зафикси-
рует их относительно подвижного якоря. Принцип действия устройст-
ва состоит в следующем. При контактировании измерительного штока
с измеряемой поверхностью происходит отклонение якоря сердечников
от среднего положения и наступает разбаланс моста вследствие нера-
венства зазоров между якорем и сердечниками. Напряжение разба:
ланса, приложенное через электронный усилитель к гальванометру,
вызовет поворот стрелки, которая будет показывать отклонение раз-
меров от заданного значения.
При достижении заданного размера во время обработки положение
якоря будет таково, что измерительный мост будет сбалансирован,
сигнал на выходе датчика будет равен нулю и стрелка гальванометра
установится в нулевое положение. Кроме того, при балансе моста элек-
тронное устройство сформирует сигнал на окончание обработки. Та-
кие системы применяют также в активных средствах контроля, где сиг-
нал разбаланса используют для подналадки станка.
В массовом производстве в качестве пассивных средств контроля
применяют автосортировщики. Автоматический сортировщик (рис. 24)
состоит из бункера-накопителя /, механизма для подачи деталей в из-
меряемую позицию 10, электроконтактного двухпозиционного размер-
ного датчика 2, сигнализирующего устройства в виде ламп 5, испол-
нительных механизмов-электромагнитов 8, 9, приводящих в действие
распределительные заслонки 6, 7.
Принцип действия автосортировщиков состоит в следующем. Де-
тали из бункера-накопителя с помощью механизма для подачи деталей
устанавливаются в измеряемую позицию, одновременно происходит
включение цепи питания датчика и исполнительного органа. Отклю-
чение датчика и исполнительного органа производится для исключе-
ния ложных срабатываний датчика, когда измерительный шток 11 не
контактирует с измеряемой поверхностью детали. При наличии разме-
35
chipmaker.ru
Рис. 24. Автосортировщик
ров детали в пределах зоны нечувствительности (деталь без отклонения
размеров в заданных пределах) контакты датчика разомкнуты (см. прин-
цип действия электроконтактного датчика, схема которого приведена
на рис. 4) и деталь при закрытых заслонках направляется в позицию
В. Если отклонение размера положительное, замыкается контакт 4,
включающий цепь электромагнита 8. Электромагнит действует на за-
слонку 7, которая закрывает позицию В и открывает позицию А.
При отрицательном отклонении детали от размеров замыкается кон-
такт 3, который включает электромагнит 9. Электромагнит, воздейст-
вуя на заслонку, закрывает позицию В и открывает позицию В (откло-
нение размеров с минусом). Применяют автосортировщики с индуктив-
ными, пневмоконтактными и другими датчиками. Измерение и сорти-
ровку можно осуществлять по многим параметра и по большому числу
позиций.
Средства активного контроля осуществляют контроль замеров
деталей в процессе их изготовления. При отклонении размеров дета-
ли происходит автоматическая подналадка станка: изменение положе-
ния режущего инструмента относительно заготовки или изменение по-
ложения заготовки относительно режущего инструмента. Следова-
тельно, устройства активного контроля представляют собой системы
авторегулирования, где регулируемой величиной являются размеры
детали или параметры, от которых зависят размеры. Такие системы
получили название автоподналадчиков. Разновидности устройств,
входящих в автоподналадчик, а именно типы датчиков, преобразова-
телей, усилителей и исполнительных органов будут зависеть от тре-
бований к точности, вида оборудования и обработки и т. д.
Автоподналадчик (рис. 25), установленный на расточном станке
для расточки колец 3 резцом 2 по внутреннему диаметру, состоит из
пневмоэлектрического дифференциального сильфонного датчика, в ко-
36
тором в качестве чувствительного элемента используют пробку 7
(калибр), вставляемую в деталь в измеряемой позиции 6 с помощью
гидроцилиндра 8; преобразователей-усилителей, в качестве которых
используют электромагниты ЭМ1, ЭМ2 и управляющие гидрораспре-
делители У31, У32' исполнительных органов, в которые входят гидро-
цилиндры ГЦ1, ГЦ2, храповые механизмы 5 прямого и обратного хода
и ходовой винт 4 с гайкой 18. Кроме того, имеется ручной привод П
для установки оправки на заданный размер. Датчик питается от пнев-
мосистемы. Для стабилизации работы датчика имеются устройства под-
готовки и очистки воздуха: фильтр 16, регулятор давления 14 с мано-
метром.
Настойка автоналадчика на размер осуществляется следующим об-
разом. Годную деталь или калибр устанавливают в измеряемую пози-
цию — вставляют калибр и включают питание датчика. С помощью
игольчатого клапана 15 (дросселя) регулировочным винтом устанавли-
вают расход воздуха через клапан так, чтобы он был равен расходу воз-
духа через зазор между деталью и калибром, т. е. Г1=Г2, где V2—
расход воздуха через игольчатый клапан; Vj — расход воздуха через
зазор между деталью и калибром; в этом случае контакты 10, 13
датчика должны быть разомкнуты, а стрелка указывающего прибора
устанавливается в нулевое положение.
Принцип действия автоподналадчика состоит в следующем. При
отклонении размеров детали производится подналадка станка изме-
нением положения оправки с режущим инструментом относительно
детали в обрабатываемой позиции. Допустим, что под воздействием
каких-то факторов диаметр обрабатываемой детали уменьшится, тогда
на позиции измерения расход воздуха через зазор между деталью и
калибром уменьшится и станет меньше, чем в игольчатом клапане, т. е.
Рис. 25. Автоподналадчик
37
chipmaker.ru
Vi < V2. При этом давление в правом сильфоне 9 будет больше, чем
в левом 11 за счет меньшего перепада давления в правом дросселирую-
щем отверстии (отверстия а, б). Поэтому правый сильфон расширится,
а левый сожмется, и рамка 12, подвешенная на плоских пружинах, пере-
местится влево, замкнув контакты цепи питания электромагнита ЭМ1.
ЭМ1 воздействует'на управляющий золотник У31, а тот, в свою оче-
редь, включит гидроцилиндр ГЦ1. Включившийся с помощью хра-
пового механизма гидроцилиндр повернет ходовой винт, который сдви-
нется вправо, а оправка с режущим инструментом в результате дейст-
вия гидроцилиндра 1 развернется на обрабатываемую деталь 3, вос-
становив отклонившийся размер.
При отклонении размера в большую сторону работа автоподналад-
чика аналогична, только подналадка будет осуществляться через хра-
повой механизм обратного хода. Для нормальной работы автоподна-
ладчика чувствительность датчика и шаг подналадки должны состав-
лять 0,2—0,3 от размёров поля допусков.
§ 2. Системы автоматического управления
Кулачковая система автоматического управления. Под термином
«кулачковая» понимается система упраьления, в которой движение
исполнительных механизмов осуществляется от кулачков, закреплен-
ных на распределительном валу. В системе, кроме действий управле-
ния, кулачки осуществляют и непосредственный привод исполнитель-
ных механизмов. Кулачковые механизмы состоят из кулачка и толкате-
ля, получающих прямолинейное или вращательное движение. Про-
филь кулачка строится соответственно закону движения рабочих орга-
нов. Недостаток — трудность переналадки на новый вид управления.
Путевая система управления. Для управления рабочими органа-
ми станка широко применяют путевые системы управления, в которых
используют упоры и кулачки, а также датчики пути или положения,
которые являются задающими органами. Путевая система управления
удобна тем, что она одновременно с обеспечением управления контро-
лирует выполнение команд. Это означает, что если команда по каким-то
причинам не выполнится или задержится ее выполнение, то рабочий
орган не займет новую позицию и не обеспечит выдачу последующей не-
совместимой команды. Эти системы легко переналадить перестановкой
упоров и кулачков.
Одна из схем путевого управления дана на рис. 26, а, а расположе-
ние управляемого органа (головка горизонтально-сверлильного агре-
гатного станка) и циклограмма работы — на рис. 26, б. В исходном по-
ложении конечные выключатели BKJ, ВК2 нажаты. Для включения
станка в работу нажимают на кнопку КУ2 «пуск», при этом вклю-
чается двигатель шпинделя и гидронасоса. При нажатии на кнопку
КУ4 «цикл» включают промежуточное реле РП1, пускатель дви-
гателя охлаждения ПО и, так как нажат ВК1, электромагнит
гидропанели ЭВ. Начинается быстрый подвод головки к детали: ВК1,
ВК2 освобождается. Второй своим размыкающим контактом подго--
тавливает цепь питания электромагнита движения назад ЭН.
38
Приблизительно в 2—3 мм
от детали происходит автома-
тическое переключение (с по-
мощью гидропанели) с быст-
рого хода на рабочую по-
дачу. Окончание первого про-
хода осуществляется с помо-
щью ВКЗ, на который нажи-
мает упор А и включает
РП2. РП2 шунтирует кон-
такты ВКЗ и включает ЭН,
который переключает гидро-
панель. Происходит быстрый
отвод головки в исходное по-
ложение. Так как контакты
ВКЗ оказались зашунтиро-
ванными, то РП2 не отклю-
чается. В момент нажатия
упором В на ВК2 реле РПЗ
включается через контакты
РП2, становится на самоп.и-
тание и размыкающим кон-
тактом отключает РП2. Вновь
при нажатии упора В на ВК1
включается - ЭВ, осущест-
вляется быстрый подвод к де-
тали и начинается второй
проход. На ВКЗ нажимает
упор А, однако РП2 вклю-
Рис. 26. Путевая система управления:
а — принципиальная схема; б — расположение уз-
лов органов управления и циклограмма работы
читьея не может, так как раз-
мыкающий контакт РПЗ еще разомкнут. Головка, проходя дальше,
нажимает упором А на ВК4, который размыкающим контактом отклю-
чает РПЗ, а замыкающим контактом включает РП4. Размыкающим кон-
тактом РПЗ подготавливает цепь питания РП2. При нажатии упора Б
на ВКЗ включается РП2 и включает ЭН. Головка быстро отводится
назад. Упор В сначала нажимает на ВК2, который отключает ЭН,
а затем на ВК1, который включает ЭВ. Начинается подвод головки для
выполнения третьего прохода.
В конце третьего прохода упор А нажимает на ВКЗ, ВК4 и затем
упор Б — на ВКЗ; однако никаких переключений в схеме не происхо-
дит, так как контакты ВКЗ, ВК4 зашунтированы контактами РП2,
РП4. После окончания третьего прохода упор Г, укрепленный на
станке, нажимает на рычаг ВК5, размыкающий контакт которого от-
ключает ЭВ и РП2, РПЗ, РП4, а замыкающий контакт включает ЭН.
Головка возвращается в исходное положение и при нажатии упора В
на ВК2 отключает ЭН. Цикл можно повторить нажатием на КУ4.
За последнее время вместо электроконтактных конечных выклю-
чателей для путевого управления применяют бесконтактные щелевые
индуктивные датчики типа БВК и другие, которые более надежны,
39
chipmaker.ru
а схемы управления выполняют на бесконтактных логических элемен-
тах. Построение схем осуществляется на тех же принципах, что
и контактных. Переключающие логические элементы выполняют
функции, соответствующие логическим операциям И, ИЛИ, НЕ,
ПАМЯТЬ (И — соответствует последовательному соединению контак-
тов; ИЛИ — параллельному, НЕ — цепь с размыкающим контактом
или цепь блокировки; ПАМЯТЬ — цепь самопитания или выдержки
времени). Достоинства бесконтактных схем управления —отсутствие
подвижных контактов.
Бесконтактная схема управления реверсивным двигателем с огра-
ничением хода в крайних положениях рабочих органов приведена на
рис. 27. При нажатии на кнопку В «вперед» на вход 2 элемента ИЛИ
(3/) поступит напряжение, и на его выходе возникнет сигнал, посту-
пающий на вход 2 элемента И (Э5) через схему запрета И (ЭЗ). На вы-
ходе схемы И (Э5) сигнал будет в том случае, когда схема запрета раз-
решена [отсутствует сигнал на входе 2 схемы И (35)] и когда на другие
входы 1, 3 поступает напряжение. В данном случае сигнал на вход 1
поступает через замкнутые контакты — кнопки Н «назад», а на вход
3 — через кнопку С «стоп». На выходе И (Э5) появится напряжение,
которое является входным для элемента И (Э7).
Второй сигнал на элемент И (Э7) поступает от теплового реле, а
третий — от размыкающего контакта конечного выключателя ВК1
(ограничение хода вперед). На выходе И (Э7) появится напряжение,
которое поступает на вход усилителя; усиленный сигнал включает ка-
тушку реле Р1. Реле Р1 остается включенным сигналом обратной свя-
зи между выходом элемента И (Э5) и. входом / элемента И (Э1). Од-
новременно с выхода И (35) сигнал подается на схему запрета И (Э4),
осуществляя тем самым блокировку включения реле Р2. Реле Р1
отключается нажатием на кнопку «стоп», размыканием контактов
В 1(1 при достижении рабочим органом крайнего положения от срабаты-
вания контактов теплового реле. Аналогично работает схема при нажа-
тии на кнопку Н «назад».
Командная система уп-
равления. В командной си-
стеме управление осущест-
вляется с помощью коман-
дой ппарата. Командоаппа-
рат (рис. 28) имеет бара-
бан У с 26 рядами отвер-
стий, который приводится
в движение двигателем 2;
первый ряд отверстий соот-
ветствует исходному поло-
жению; в 24 рядах задает-
ся программа (переходы);
последний ряд дает комап-
-А- вк2 ду об окончании цикла.
Рис. 27. Бесконтактная схема путевого ® каждом ряду имеются
управления 17 отверстий (возможное
40
число команд в переходе) для установки в них штекеров (кулачков).
Над барабаном в один ряд установлены 17 микропереключателей 3 та-
ким^образом, что вставленные в отверстия штекеры воздействуют
на соответствующие микропереключатели, осуществляя выдачу той
или иной команды, заданной в переходе.
После окончания обработки перехода барабан автоматически пово-
рачивается на один шаг распределительной шайбой 4. После обработки
всей программы барабан устанавливается в 26-й позиции, и штекер
воздействуя на микропереключатель, дает команду на возврат бараба-
на в исходное состояние. Для отработки размерных' перемещений
величина отработки задается настройкой путевых выключателей, т. е.
используется совмещенная путевая система управления. В качестве
поэтапного ввода программ (циклов) применяют шаговые искатели,
которые при отработке первого цикла подают питание на цепи для об-
работки второго цикла и т. д.
§ 3. Система автоматического регулирования частоты
вращения двигателя
Система- (рис. 29, а) состоит из тиристорного усилителя-преобра-
зователя (TIT) (источник питания), собранного по трехфазной мостовой
схеме, блоков управления БУ, блоков пилообразного напряжения
БПН, промежуточного полупроводникового усилителя ПУ, задатчи-
ка скорости PC, тахогенератора Г Г (датчик обратной связи по ско-
рости), двигатели постоянного тока Д (исполнительный орган), бло-
ка токоограничения БТО. Данная система предназначена для полу-
чения широкого диапазона регулирования частоты вращения двигателя
с обеспечением на всем диапазоне необходимой жесткости механиче-
ских характеристик двигателя. В данном случае применена замкнутая
система авторегулирования (рис. 29, б), управляющая напряжением
источника питания, в которой на сравнивающем устройстве сравни-
вается задающее напряжение Ua, определяющее частоту вращения дви-
41
chipmaker.ru
Рис. 29. Система авторегулирования:
а — принципиальная схема; б — блок-схема системы
гателя, с напряжением тахогенератора (7ТГ, который измеряет действи-
тельную угловую скорость двигателя.
Необходимость авторегулирования обусловлена тем, что в разом-
кнутой системе с расширением диапазона регулирования уменьшается
жесткость механических характеристик. Приложенная к валу двига-
теля нагрузка увеличивает ток, что приводит к уменьшению ЭДС
на нем в связи с увеличением падения напряжения на якорной цепи,
так как Uo = /я7?я, где Uo — падение напряжения на якорной цепи;
1п—ток якоря; 7?я—сопротивление якорной цепи. Падение напряже-
ния на якорной цепи приводит, в свою очередь, к изменению угло-
вой скорости двигателя.
Так как сопротивление якорной цепи постоянно, падение напряже-
ния с изменением нагрузки на всех скоростях будет одинаково, и на-
клон статических характеристик на всем диапазоне регулирования не
меняется. Отсюда следует, что абсолютная потеря угловой скорости
для любой ступени одинакова, т. е. = aoh — юнЬ = const, где
(ooh — угловая скорость холостого хода /г-й ступени; — номиналь-
ная скорость /г-й ступени. Тогда относительная потеря угловой ско-
рости, характеризующая жесткость механических характеристик,
Дш% = Awh/o)Hh 100%. Из данного соотношения видно, что умень-
шение частоты вращения двигателя, обусловленное регулированием
скорости, ведет к увеличению относительной потери угловой скорости,
т. е. к уменьшению жесткости механических характеристик. Авторе-
гулирование устраняет этот недостаток.
42
Принцип действия системы можно описать динамическим уравне-
нием
Мдв f => /я t ^дв I адв I I ^вх t Un t (одв t =’>
<=> компенсация потери скорости.
При уменьшении нагрузки процесс регулирования частоты враще-
ния двигателя будет осуществляться аналогично, только в обратном
порядке.
§ 4. Адаптивная система управления
Адаптивная система стабилизации мощности резания (система функ-
ционального регулирования) (рис. 30) осуществляет регулирование
подачи в зависимости от мощности резания sn — f (Np) и состоит из
системы ЧПУ контурного типа, которая обеспечивает управление при-
водом подач по трем координатам. Скорость подачи в программе зада-
ется плотностью записи управляющих импульсов.
Рис. 30. Адаптивная система управления:
« — блок-схема; б — принципиальная схема
43
chipmaker.ru
Система с ЧПУ включает в себя САР мощностью резания, которая
изменяет скорость протягивания магнитной ленты и тем самым изме-
няет скорость подачи в связи с изменением мощности резания. САР
состоит из датчика нагрузки Дн (рис 30, а), выпрямителя, нелинейного
элемента НЭ, магнитного усилителя МУ, двигателя Д лентопротяж-
ного механизма. Датчик нагрузки выполнен в виде трансформатора
тока ТрТ и трансформатора напряжения ТрН (рис. 30, б), включенных
в цепь двигателя шпинделя Дшп. Сигнал, снимаемый с трансформаторов
тока и напряжения, равен векторной сумме двух слагаемых, одно из
которых пропорционально фазному току, а другое — напряжению на
двигателе, т. е. £7Д п == IU = Np.
Сигнал датчика мощности уравновешивается на холостом ходу сиг-
налом компенсации; на выпрямителе происходит суммирование и вы-
прямление сигналов датчика. Нелинейный элемент ДЭ (резистор R6)
воспроизводит функциональную зависимость сигнала датчика от ве-
1
личины скорости подачи, т. е. sn = cPza, где sn — подача; Pz —
сила резания при фрезеровании; с и а—коэффициенты, зависящие от
материала детали, инструмента и режима обработки (устанавливают
резисторами R1 и R2).
Сигнал с нелинейного элемента подается на управляющую обмотку
ws магнитного усилителя. Кроме того, на обмотке смещения w2 с по-
мощью резистора R3 устанавливается ток смещения, соответствующий
холостому ходу станка и максимальной скорости протягивания маг-
нитной ленты.
Для стабилизации работы двигателя лентопротяжного механизма
применена отрицательная обратная связь по току с помощью управ-
ляющей обмотки Wi магнитного усилителя, которая включена парал-
лельно якорной цепи двигателя Д. Стабилитрон СТ, установленный
на входе магнитного усилителя, ограничивает нижний предел скорости
лентопротяжного механизма. Система работает следующим образом.
При изменении мощности резания N v сигнал датчика мощности, подан-
ный через нелинейный элемент на вход магнитного усилителя, приво-
дит к изменению напряжения на якоре двигателя лентопротяжного
механизма, вызывая изменение частоты вращения двигателя, а следо-
вательно, и изменение подачи.
§ 5. Копировально-следящие системы
Наиболее широкое применение на станках получили следующие ко-
пировально-следящие системы: гидравлические, электромеханические,
электрогидравлические, пневмогидравлические. По числу следящих
движений применяют системы однокоординатные с независимой ско-
ростью ведущего движения; однокоординатные с зависимой скоростью
ведущего движения; многокоординатные. Причем ведущее и следя-
щее движения могут осуществлять как режущий инструмент, так и
заготовка. В копировально-следящих системах применяют механиче-
ский привод с электромагнитными муфтами, регулируемые электро-
и гидроприводы. В зависимости от вида привода и ряда других тре-
44
Рис. 31. Копировально-следящая система:
а — гидравлическая; б — электромеханическая; в — диаграммы движений
бований датчики могут быть электроконтактными, индуктивными, гид-
равлическими в виде управляющих гидрораспределителей и т. д. Для
получения траектории движения вершины режущей кромки инстру-
мента в виде плавной кривой необходимо обеспечить соответствующую
функциональную связь между подачами: sp = f (s3, sc), где sp —
результирующая подача, s3 — задающая подача, sc — следящая
подача.
На рис. 31, а представлена гидрокопировальная однокоординат-
ная система состоящая из гидроцилиндра 2 (исполнительный орган
следящей подачи), гидроцилиндра задающей подачи, который осущест-
вляет продольное движение суппорта (не показан на рисунке), управ-
ляющего однокромочного золотника 5, шаблона-задатчика программы
3. Принцип действия системы состоит в следующем. При движении
щупа 4 управляющего золотника за счет задающей подачи по восхо-
дящей линии контура шаблона поршень управляющего золотника
сдвинется вправо (рис. 31, а). Управляющая кромка золотника откроет
доступ масла на слив. Вследствие дросселирования масла, проходяще-
го из правой полости гидроцилиндра в левую, давление рх р2,
а так как площадь торца правой полости цилиндра меньше площади
торца левой на величину площади штока, то Fx > F2, гДе Pi> Pi —
давления в правой и левой полостях гидроцилиндра; Flt F2 — силы,
действующие на торцовые поверхности гидроцилиндра.
Под действием большого усилия F\ гидроцилиндр будет двигаться
вправо. Суппорт, а следовательно, и вершина режущей кромки рез-
ца, совершая результирующее движение подачи $р, будет двигаться по
восходящей линии контура заготовки 1, повторяя траекторию движения
щупа. При движении щупа по нисходящей линии контура шаблона зо-
45
chipmaker.ru
лотник за счет опускания щупа закроет доступ масла на слив, тогда
Pi = Р?', следовательно, < Г2, и гидроцилиндр будет двигаться
влево.
Суппорт, а следовательно, и вершина режущей кромки резца, со-
вершая результирующее движение sp, будет двигаться по нисходящей
линии контура заготовки. При движении щупа по линии шаблона,
параллельной оси заготовки, золотник располагается так, что часть
масла уходит на слив, тогда рг > р2, Ft = F2, и величина следящей
подачи равна нулю. Суппорт движется только за счет рабочей подачи,
следовательно, вершина режущей кромки резца совершает движение
по липии контура заготовки, параллельной ее оси вращения. На
рис. 31, б представлена схема электромеханической копировальной
системы, которая состоит из электроконтактного датчика 2, управляю-
щего следящей подачей; двигателя следящей подачи Дс.п; двигателя
задающей подачи Д3. п; шаблона-задатчика программы III. Щуп элек-
троконтактного датчика, двигаясь по контуру шаблона за счет задаю-
щей подачи и воздействуя на контакты, будет включать Дс, п при дви-
жении щупа по линии шаблона.
§ 6. Системы и устройства автоматизации загрузки станков.
Автооператоры
В зависимости от вида заготовок загрузочные устройства делят на
два класса: для сортового материала (прутков, труб, ленты, проволо-
ки), для штучных заготовок (поковок, штамповок, отливок, отрезных
заготовок и т. д.). Загрузочные устройства для штучных заготовок в
зависимости от степени автоматизации делят на механизированные за-
грузочные устройства (подъемно-транспортное оборудование); полу-
автоматические (магазинные загрузочные устройства); автоматические
(бункерные загрузочные устройства, роботы-манипуляторы). Каждую
группу, в свою очередь, можно разделить на подгруппы, отличающиеся
между собой принципом действия, конструктивным исполнением, про-
изводительностью и другими особенностями. Применение на станке или
другом технологическом оборудовании того или иного вида загрузоч-
ных устройств обусловливается назначением, степенью автоматизации,
темпом загрузки, формой и видом загружаемых заготовок и т. д.
Подъемно-транспортное оборудование — различные устройства и
приспособления для механизации загрузки-съема, транспортировки
и складирования заготовок. Оно может быть следующих разновидно-
стей: мостовые краны— загрузочные устройства общего назначения;
кран-балки, тельферы и т. д. — загрузочные устройства группового
назначения; консольные краны, механические руки и т. д. — индиви-
дуальные загрузочные устройства. При более высоких темпах загрузки
заготовками большой массы и габаритных размеров применяют сле-
дующие разновидности загрузочных и транспортных устройств: цеп-
ные, траковые транспортеры, рольганги (роликовые транспортеры),
подвесные цепные конвейеры, шаговые транспортеры и т. д. Для транс-
портных операций и складирования применяют электрокары, электро-
тележки, штабелеры. В последнее время стали применять штабелеры
46
Рис. 32. Загрузочные устройства:
а — блок-схема магазинного загрузочного устройства; б, в — лотковые магазины;
г — секционные; д — шахтные; е — блок-схема автоматического загрузочного устрой-
ства; ж — внбробункер
с программным управлением, работающие в автоматизированных скла-
дах заготовок и готовых изделий и деталей.
Полуавтоматические (магазинные) загрузочные устройства приме-
няют для загрузки станков при высоких темпах загрузки заготовка-
ми незначительной массы. Магазинное загрузочное устройство
(рис. 32, а) состоит из магазина М, отсекателя ОТС и питателя 77,
можно применять и промежуточные бункера. Магазин в загрузочном
устройстве необходим для создания запаса заготовок. В зависимости от
формы заготовок, темпа загрузки и других факторов магазины могут
быть выполнены в виде лотковых, трубчатых, цепных, секционных,
шахтных и т. д.
Отсекатели (рис. 33) отделяют одну или несколько заготовок от
общего потока. Управление отсекателями осуществляется от станка.
Их конструкции также разнообразны и в основном зависят от форм за-
готовок. Более широкое распространение получили штифтовые, движ-
ковые, дисковые, качающиеся и кулачковые, отсекатели. Питатели
служат для подачи заготовок в рабочую зону. Они бывают шибер-
ного, маятникового, револьверного и других типов.
Автоматизированные (бункерные) загрузочные устройства при-
меняют для загрузки станков и другого технологического оборудо-
вания при высоком темпе загрузки. Бункерное загрузочное устрой-
ство (см. рис. 32, е) состоит из бункера Б, привода бункера ПБ, от-
секателя ОТС, ориентирующего устройства ОУ и питателя П. Бун-
кер служит для создания запаса заготовок, которые загружаются в
навал. Применяют бункеры различных конструкций, особенно широко
распространены вибрационные бункеры. Вибробункер (см. рис. 32, ж)
47
chipmaker.ru
Рис. 33. Отсекатели, питате-
ли и ориентирующие уст-
ройства:
а — качающиеся; б, в — движ-
ковые; г — дисковые; д — ку-
лачковые; е — питатель шибер-
ный; ж — ориентирующее уст-
ройство
состоит из чаши 4, по винтовому глотку [5 которой движутся заго-
товки; привода (виброротора), выполненного в виде электромагнита,
который питается выпрямленнымj.пульсирующим током; основания
2, установленного на виброопорах; 1. ^Чаша] вибробункера установ-
лена на основании на пружинных опорах 3, расположенных под
углом 20°. Сердечник электромагнита 7 с расположенной на нем ка-
тушкой крепится к основанию, а якорь 6 — к чаше.
Ориентирующие устройства служат для ориентации заготовок при
подаче их в рабочую зону (см. рис. 33, ж). Принцип действия ориен-
тирующих устройств основан на различных явлениях асимметрии
(смещения центра тяжести относительно оси и т. д.). При правильной
ориентации 2 заготовка движется к питателю, при неправильной ори-
ентации 1 заготовка, опрокидываясь, направляется снова в бункер.
За последнее время в качестве ориентирующих устройств использу-
ют фасонные электромагниты. При прохождении через магнитное по-
ле ориентирующего устройства заготовка меняет положение (ори-
ентируется), если она движется неправильно, и не меняет положения,
если движется правильно.
Одним из важных элементов автоматизированных транспортных
систем являются промышленные роботы-манипуляторы, которые мо-
гут выполнять у станка некоторые функции рабочего. Их используют
для погрузочно-разгрузочных работ, межстаночного транспортиро-
вания, установки-снятия заготовок (деталей) в условиях массового,
крупносерийного и серийного производств и для выполнения различ-
ных вспомогательных операций при многостаночном обслуживании.
На рис. 34 представлена кинематическая схема промышленного ро-
бота-манипулятора с цикловым программным управлением, который
работает с применением специальной тары, являющейся магазинами
заготовок и деталей. Этот робот-манипулятор имеет четыре степени
свободы (движение руки с захватом вдоль оси X, поворот вокруг оси
48
X, вертикальное движение
вдоль оси Z, поворот вок-
руг оси Z, не ^считая .дви-
жения губок захватываю-
щего устройства, переме-
щения стола и самого ро-
бота).
Робот-манипулятор со-
стоит из основания 1, на
котором установлена ко-
лонна 15 и тактовый стол
2, перемещаемый гидроци-
линдром 14. На столе ус-
танавливается тара с заго-
товками (деталями). На ко-
лонне закреплена рука 4
робота, на которой крепят-
ся быстросменные захваты-
вающие устройства 3. Дви-
жение рабочих органов ро-
бота обеспечивается следу-
ющими гидродвигателями:
гидроцилиндром 7 — движе-
Рис. 34. Кинематическая схема робота-манипу-
лятора
ние руки робота вдоль оси Z; гидроцилиндром 8 — поворот руки во-
круг оси X; гидроцилиндром 5 — движение губок захватывающего
устройства; гидроцилиндром 6 — вращение захватывающего устрой-
ства вокруг оси Z; гидроцилиндром 9 — перемещение руки робота
вдоль оси X.
Робот-манипулятор управляется цикловым программным устрой-
ством от командоаппаратов 10 и 11, которые после отработки оче-
редного перехода поворачиваются на программу нового перехода гид-
роцилиндрами 12 и 13. Находят применение работы с ЧПУ, которые
входят в комплекс полностью автоматизированного технологического
оборудования.
§ 7. Автоматизированные устройства зажима
и разжима заготовок
Всякое автоматизированное зажимное устройство состоит из ме-
ханизма зажима, осуществляющего установку (базировку), фиксацию
и зажим заготовки (зажим осуществляется одним элементарным дви-
жением), привода зажимного механизма, устройства управления при-
водом, которое может быть составной частью системы управления
станком. Автоматизированные зажимные устройства и приспособле-
ния на металлорежущих станках и другом технологическом оборудо-
вании классифицируют по типу применяемых приводов: механические,
электромеханические, электромагнитные, пневматические, гидравли-
ческие, пневмогидравлические.
49
chipmaker.ru
Механические зажимные устройства применяют на сверлильных,
токарных, фрезерных станках и станках-автоматах. Сила зажима обес-
печивается за счет основных движений станка — главного движения и
движения подачи, причем механизмы главного движения или движения
подачи воздействуют на^зажимные механизмы с помощью кулачков, упо-
ров, деформирующих пружин и т. д. Зажимные механизмы чаще выпол-
нены в виде тисков, прихватов, цанговых и кулачковых патронов.
В электромеханических зажимных устройствах зажимные силы
создают электродвигатели. К устройствам этого типа относятся элект-
ромеханические тиски, электромеханические зажимные ключи (гай-
коверты), прихваты, имеющие распространение в тех случаях, когда
.заготовки совершают только движение подачи.
Электромагнитные зажимные устройства представляют собой
электромагнитную плиту, на которой устанавливаются обрабатыва-
емые заготовки. Сила зажима обеспечивается электромагнитными си-
лами, создаваемыми катушками, установленными в плите и питаемы-
ми постоянным током. Для создания равномерной силы зажима по
всей площади плиты зеркало (установочная поверхность) плиты рас-
членяется немагнитными прослойками. Магнитные плиты позволяют
закрепить одновременно несколько заготовок. Сила зажима незна-
чительна, поэтому эти устройства применяют в основном на шлифо-
вальных станках.
В пневматических зажимных устройствах зажимные механизмы
приводятся в движение пневмоприводом. В пневмоприводах применя-
ют диафрагменные (мембранные) двигатели или двигатели в виде
пневмоцилиндра одностороннего и двустороннего действия. Такие за-
жимные устройства нашли широкое применение ввиду простоты кон-
струкции (непосредственное получение возвратно-поступательного
движения), быстродействия, возможности подключения пневмоприво-
да к централизованной пневмосистеме. Однако пневматические зажим-
ные устройства имеют существенный недостаток — ограниченные си-
лы зажима.
В гидравлических устройствах зажимные механизмы приводятся
в движение гидроприводом. Применяют двигатели в виде гидроци-
линдра и диафрагменные. Гидравлические зажимные устройства поз-
воляют создавать большие силы зажима, обеспечить плавность хода
зажимного механизма и быстродействие. Однако устройства этого ти-
па требуют применения автономной гидросистемы, если на станке гид-
ропривод не применяют для других целей.
В пневмогидравлических зажимных устройствах привод имеет
двигатель, выполненный в виде пневмогидроусилителя редукционного
типа, в котором используется энергия сжатого воздуха, что дает воз-
можность исключить применение гидронасоса. Недостатком является
ограниченность хода зажимных элементов.
РАЗДЕЛ 2
Элементарные основы теории
автоматического регулирования
Глава 4
Основные понятия и определения систем
автоматического регулирования
§ 1. Принцип построения и структура
С целью пояснения основного принципа построения систем авто-
матического регулирования рассмотрим следующую техническую за-
дачу. Пусть требуется обеспечить постоянство частоты вращения дви-
гателя постоянного тока с независимым возбуждением. Частота вра-
щения двигателя
= ия 1Се Ф—гя М/се См Ф2,
где U„ — напряжение в цепи якоря двигателя; се, см — конструктив-
ные постоянные; г„ — сопротивление цепи якоря двигателя; Ф — маг-
нитный поток, создаваемый обмоткой возбуждения двигателя 0Вм;
М — момент на валу двигателя.
Изменения момента нагрузки на валу двигателя вызывают изме-
нения частоты его вращения. Для поддержания постоянной частоты
вращения, при изменении момента нагрузки на валу двигателя необ-
ходимо изменить либо сопротивление гя, либо величину магнитного
потока Ф, либо напряжение U„ в цепи якоря. Условимся, что будем
изменять напряжение в цепи якоря путем перемещения ползунка по-
тенциометра П (рис. 35, а).
Ручное регулирование осуществляется в такой последовательности:
1) измеряется фактическая частота вращения двигателя Q с помощью,
например, тахометра; 2) сравнивается ее текущее значение с заданной
частотой вращения й3, т. е. определяется отклонение частоты враще-
ния; 3) перемещается ползунок потенциометра таким образом, что-
бы фактическая частота вращения совпала с заданной.
Можно исключить человека из процесса регулирования путем при-
менения автоматической системы (рис. 35, б).
1. Тахогенератором постоянного тока Тг измеряют фактическую
частоту вращения двигателя.
2. На входном сопротивлении усилителя У задающее напряжение
U3, которое является функцией заданной частоты вращения, сравни-
вается с напряжением тахогенератора (7ТГ, пропорциональным фак-
тической частоте вращения двигателя М. При отклонении частоты вра-
51
chipmaker.ru
Рис. 35. Схемы ручного (а) и автоматического (б) регули-
рования частоты вращения двигателя
щения двигателя разность At/ = U3 — U,[r, поступающая на усили-
тель, изменяется по величине.
3. Напряжение /гуА(7 с выхода усилителя поступает на обмотку
управления ОУэму электромашинного усилителя ЭМУ, усиливается
в Кэму раз и подается на обмотку якоря двигателя М. Следователь-
но, частота вращения двигателя будет изменяться в сторону ум?нь-
шения отклонения от заданного значения.
Например, при увеличении момента нагрузки М частота вращения
двигателя Q уменьшается, следовательно, напряжение тахогенера-
тора t/Tr понизится, что, в свою очередь, приведет к увеличению
разности At/. Возросшее отклонение усилится усилителями У, ЭМУ,
напряжение в цепи якоря Un также возрастет, благодаря чему час-
тота вращения двигателя Q увеличится. Следовательно, частота вра-
щения двигателя не изменится при увеличении, а также при умень-
шении момента нагрузки на его валу.
Автоматическим регулированием называется поддержание физи-
ческих величин на определенном уровне или изменение их по требу-
емому закону без непосредственного участия человека.
Технические устройства, в которых процессы подлежат автомати-
ческому регулированию, называют объектами регулирования.
Физические величины, подлежащие регулированию, называют ре-
гулируемыми величинами.
Внешние воздействия, вызывающие отклонение регулируемой ве-
личины от его заданного значения, называют возмущающими воздей-
ствиями.
Технические устройства, предназначенные для автоматического
регулирования различных величин в объектах, называют автомати-
ческими регуляторами. Система автоматического регулирования сос-
тоит из двух основных частей: объекта регулирования, автоматичес-
кого регулятора.
52
В соответствии с функциональными преобразованиями в состав ав-
томатического регулятора входят следующие основные элементы. Из-
мерительный элемент — устройство, предназначенное для измере-
ния значения регулируемой величины. В качестве измерительных эле-
ментов используют разнообразные датчики.
Элемент сравнения — устройство, предназначенное для сравне-
ния фактического значения регулируемой величины с его заданным
значением. Подобно измерительному элементу элемент сравнения
иногда и преобразует отклонение в физическую величину, более удоб-
ную для использования в автоматическом регуляторе. В качестве эле-
ментов сравнения используют входные цепи различных усилителей,
потенциометры, сельсины и пр.
Исполнительный элемент — устройство, посредством которого ав-
томатический регулятор оказывает воздействие на объект регулиро-
вания. В качестве исполнительных элементов используют двигате-
ли, электромагнитные муфты и пр.
Кроме указанных основных элементов, в состав автоматического
регулятора могут входить следующие элементы.
Задатчик — устройство, предназначенное для ввода в автомати-
ческий регулятор заданного значения регулируемой величины.
Усилитель — устройство, предназначенное для усиления мало-
мощного сигнала с выхода элемента сравнения в более мощный
с целью воздействия на исполнительный элемент.
Корректирующие элементы — устройства, предназначенные для
улучшения динамических свойств системы автоматического регулиро-
вания.
Преобразующий элемент — устройство, предназначенное для. пре-
образования сигналов в более удобную форму для использования
в автоматическом регуляторе.
В рассмотренном выше примере объектом регупирования явля-
ется двигатель постоянного тока; регулируемой величиной — часто-
та вращения двигателя; возмущающим воздействием — момент на-
грузки на валу двигателя; измерительным элементом — тахогенера-
тор; элементом сравнения — входное сопротивление усилителя; испол-
нительным элементом — электромашинный усилитель.
§ 2. Функциональные схемы
Система автоматического регулирования представляет собой слож-
ные комплексы взаимодействующих технических средств, узлов и эле-
ментов, работа которых основана на различных физических принци-
пах (электрических, механических, гидравлических и др.). Они раз-
нообразны по конструктивному исполнению и техническим характе-
ристикам. Однако в теории автоматического регулирования основное
внимание уделяется не техническим свойствам отдельных элементов,
а их функциональным преобразованиям и характеру связей между
ними. Наглядное представление об этом дают функциональные схемы
систем автоматического регулирования.
Функциональные 'схемы отражают взаимодействие устройств, уз-
лов, элементов систем автоматического регулирования в процессе их
53
chipmaker.ru
Рис. 36. Функциональные схе-
мы систем автоматического ре-
гулирования:
а — обобщенная схема: б — схема
системы автоматического регулиро-
вания частоты вращения двигателя
постоянного тока
работы. Графически отдельные устройства систем автоматического ре-
гулирования изображают в виде прямоугольников, а существующие
между ними связи — стрелками, соответствующими направлению
прохождения сигнала. Внутреннее содержание каждого устройства
не конкретизируется, а функциональное назначение шифруется бук-
венными символами.
Большое разнообразие элементов, входящих в различные системы,
автоматического регулирования, может быть сведено к нескольким ос-
новным типам, различающимся по их назначению и взаимодействию
в системе автоматического регулирования. Следовательно, можно го-
ворить о типовой (или обобщенной) функциональной схеме системы
автоматического регулирования (рис. 36, а).
На объект регулирования ОР, находящийся под влиянием внеш-
него возмущающего воздействия F, поступает управляющее воздей-
ствие хр, которое является выходной величиной автоматического ре-
гулятора АР, представляющего собой совокупность элементов. В ав-
томатический регулятор по цепи главной обратной связи ОСГ посту-
пает регулируемая величина хвых. Входная величина хвх с задатчика
3 поступает на элемент сравнения ЭС. Сигнал ошибки, представля-
ющий собой разность входной величины хвх и сигнала главной обратной
связи хо с (Дх = хвх—хос), поступает на усилитель У, где усиливает-
ся в k раз и воздействует на исполнительный элемент ИЭ, выходной сиг-
нал хр которого является регулирующим воздействием автоматичес-
кого регулятора. Элемент местной обратной связи ОСМ вводится в
систему автоматического регулирования для придания ей лучших ди-
намических свойств.
Функциональная схема системы автоматического регулирования час-
тоты вращения двигателя постоянного тока изображена на рис. 36, б.
§ 3. Классификация систем
Вследствие большого разнообразия используемых в технике сис-
тем автоматического регулирования, различающихся функциональ-
ными возможностями, принципами построения и формой конструктив-
ной реализации, невозможно дать единую классификацию систем ав-
54
Рис. 37. Функциональные схемы систем
автоматического регулирования:
а — разомкнутая; б — замкнутая
тематического регулирования,
поэтому рассмотрим наиболее
характерные классификацион-
ные признаки.
Первый признак — наличие в
системах явно выраженной цепи
главной обратной связи. По это-
му признаку системы разделяют
на разомкнутые и замкнутые
(рис. 37). Системы, работающие
по разомкнутому циклу, исполь-
зуют только в качестве состав-
ной части более сложных си-
стем автоматического регулиро-
вания. Под главной обратной связью понимается подача части энер-
гии с выхода системы на ее вход. Главная обратная связь ОСГ слу-
жит для сравнения действительного закона изменения регулируемо-
го параметра с требуемым.
Помимо главной обратной связи в системе имеются различные мест-
ные обратные связи, предназначенные для улучшения динамических
свойств системы. Местная обратная связь охватывает один или не-
сколько элементов основной цепи. Обратную связь называют положи-
тельной, если ее выходной сигнал суммируется с основным сигналом,
и отрицательной, если этот сигнал вычитается из основного сигнала.
Второй признак — закон изменения регулируемой величины в
них. По этому признаку системы принято делить на системы стабили-
зации, программного регулирования и следящие.
Системы стабилизации предназначены для поддержания постоян-
ного значения регулируемой величины. В этих системах задающее
воздействие не изменяется во времени.
Системы программного регулирования предназначены для изме-
нения регулируемой величины по известному закону в функции вре-
мени или какой-либо другой величины. Задающее воздействие на-
зывают программой регулирования.
Следящие системы предназначены для изменения регулируемой
величины по заранее неизвестному закону. Задающее воздействие пред-
ставляет собой случайную функцию времени.
Третий признак — способность системы автоматического регули-
рования поддерживать с определенной степенью точности значения"
регулируемой величины. По этому признаку системы разделяются на
статические и астатические.
Статической системой автоматического регулирования называют
такую систему, в которой принципиально невозможно поддерживать
одно и то же значение регулируемого параметра при условии, что за-
дающее воздействие системы остается неизменным. Остаточную ошиб-
ку в такой системе называют статизмом.
Астатической системой автоматического регулирования называют
такую систему, в которой в установившемся режиме регулируемый
параметр принимает всегда одно и то же значение и не зависит от ве-
55
chipmaker.ru
личины возмущающего воздействия на объект регулирования. Ста-
тизм в астатической системе всегда равен нулю.
Четвертый, признак — функциональная связь между входными
и выходными величинами элементов, входящих в состав системы авто-
матического регулирования. По этому признаку системы подразделя-
ют на непрерывные и дискретные.
Непрерывной системой автоматического регулирования называ-
ют систему, в которой непрерывному изменению входных величин эле-
ментов соответствует непрерывное изменение выходных величин этих
элементов.
Дискретной системой автоматического регулирования называют
систему, в которой непрерывному изменению входной величины хотя
бы одного элемента, входящего в состав системы, соответствует дис-
кретное изменение выходной величины этого элемента.
Глава 5
Характеристики звеньев
автоматического регулирования
§ 1. Типовое динамическое звено
Системы автоматического регулирования различного назначения
имеют в своем составе разнообразные по конструкции и принципу дей-
ствия элементы. Представление системы автоматического регулиро-
вания в виде элементов позволяет разобраться в принципе их действия.
При изучении динамических свойств систем целесообразно рас-
сматривать отдельные ее элементы только с точки зрения их динами-
ческих свойств независимо от функциональных преобразований и кон-
структивных форм исполнения. Одинаковыми динамическими свой-
ствами могут обладать различные элементы независимо от их физичес-
кой природы. По этому признаку в цепях регулирования принято вы-
делять отдельные элементы или группы элементов, которые называ-
ют динамическими звеньями.
Например, центробежный регулятор частоты вращения и последо-
вательный колебательный контур устроены различно, но обладают
одинаковыми динамическими свойствами, и процессы, протекающие
в них в переходном режиме, описываются одними и теми же дифферен-
циальными уравнениями второго порядка. Коэффициенты этих урав-
нений будут зависеть от массы и свойств пружины в центробежном ре-
гуляторе и от индуктивности, емкости и сопротивления в колебатель-
ном контуре. Следовательно, эти элементы будут представляться од-
ним и тем же динамическим звеном.
Динамическим звеном называют часть системы автоматического ре-
гулирования, переходный процесс которой описывается дифференци-
альным уравнением определенного вида. Динамическим звеном можно
представить элемент, совокупность элементов и всю систему автома-
56
тического регулирования в целом. В отличие от элемента системы ди-
намическое звено не обязательно является конструктивно или схемно
оформленным устройством. Например, обмотки возбуждения, цепь
якоря электродвигателей и т. п. часто рассматриваются как динами-
ческие звенья. В отдельных случаях динамические звенья могут вооб-
ще не иметь физического смысла, характеризуя лишь математические
зависимости между некоторыми величинами системы автоматического
регулирования.
Графически динамическое звено изображается в виде прямоуголь-
ника, внутри которого вписывается выражение передаточной функции
W (р), а направление прохождения информации изображается стрел-
ками. Входной и выходной сигналы в динамическом звене могут иметь
различную физическую природу.
В теории автоматического регулирования можно выделить следую-
щие типовые динамические звенья: безынерционное (пропорциональ-
ное), апериодическое (инерционное), дифференцирующее, интегрирую-
щее, колебательное.
§ 2. Статические и динамические
характеристики звеньев
Зависимость выходной величины звена от входной в установив-
шемся режиме называется статической характеристикой. Устано-
вившийся режим—это такой режим, при котором входная и выходная
величины остаются постоянными во времени. Статическую характерис-
тику обычно изображают графически в плоскости XY. Ее значения
можно снять экспериментально или получить расчетным путем.
Экспериментально статическую характеристику снимают следу-
ющим образом. Входной величине придают определенное значение
х = х, (рис. 38, а). Выждав время, необходимое для затухания пере-
ходного процесса (время изменения выходной величины), определяют
соответствующим измерительным прибором установившееся значение
выходной величины у = уг. Таким образом получают первую точку
статической характеристики с координатами xlt уг. Повторив измерения
для различных значений входной величины х и соединив полученные
точки плавной линией, получают статическую характеристику звена.
Рис. 38. Статические характеристики динамических звеньев:
а — экспериментальная характеристика; б — семейство характеристик; в — разно-
видность характеристик
57
chipmaker.ru
В том случае, когда выходная величина звена зависит еще и от не-
которой величины 2, кроме входной величины звено характеризуется
семейством статических характеристик, построенных для различных
постоянных значений г (рис. 38, б).
Для аналитического выражения статической характеристики не-
обходимо составить уравнения, описывающие работу звена в устано-
вившемся режиме. Затем следует разрешить эти уравнения относи-
тельно х и у. Получим уравнения статической характеристики в яв-
ном у = f (х), неявном F = (х, у) — 0 или параметрическом виде
х = х (г), у = у (z). В уравнении параметрического вида z обознача-
ет некоторый параметр.
Статические характеристики звеньев системы могут быть линей-
ными /, нелинейными 2 и с зоной нечувствительности 3 (рис. 38, в).
Система автоматического регулирования называется линейной, если
все звенья, входящие в ее состав, являются линейными, и нелиней-
ной, если она содержит хотя бы одно нелинейное звено.
Системы автоматического регулирования, как правило, работают
в неустановившемся, переходном режиме. Такой режим работы явля-
ется следствием воздействия на систему непрерывно и случайно изме-
няющихся внешних возмущающих факторов, приводящих к непре-
рывному изменению входной и выходной величины во всех ее звеньях.
Поэтому одной из важных задач является изучение поведения
динамических звеньев в переходных режимах.
Динамической, характеристикой звена называется зависимость
выходной величины от входной в переходном процессе. Физическая
задача определения выходной величины звена при изменяющемся
входном сигнале сводится к решению дифференциального уравнения
того или иного вида, описывающего протекание переходных процес-
сов в звене.
§ 3. Операторная форма записи дифференциальных
уравнений
В линейных системах автоматического регулирования протекаю-
щие процессы описываются линейными дифференциальными уравне-
ниями, решение которых значительно упрощается с использованием
методов операционного исчисления. Для этой цели с каждой функци-
ей вещественного переменного времени /, входящей в дифференциаль-
ное уравнение, с помощью некоторого преобразования сопоставляется
функция комплексного переменного р = о -И /®. Первую называют
оригиналом, а вторую изображением. Чтобы подчеркнуть соответствие
изображения F (р) своему оригиналу f (t), для их изображения обыч-
но выбирают одинаковые буквы (для изображения — заглавные, а
также применяют знак в виде стрелки): f (I) F (р).
Преобразование оригинала в изображение позволяет свести опе-
рации дифференцирования и интегрирования над оригиналами к бо-
лее простым алгебраическим операциям над их изображениями.
Решение дифференциального уравнения методом операционного
исчисления осуществляется в следующие три этапа:
58
1) переход от оригиналов к изображениям, т. е. переход от диффе-
ренциального уравнения к алгебраическому;
’ отыскание из полученного алгебраического уравнения неизвест-
ной функции Y (р), т. е. решение алгебраического уравнения;
3) переход от найденного изображения Y (/?) к оригиналу неизвест-
ной функции у (0.
Изображение суммы функции равно сумме изображений этих функ-
ций:
/(0=Л (0-Ш0Ф-+М0;
F (р) = Ri (р) + F2 (р) +... + Fn (р).
Умножение оригинала на постоянный коэффициент влечет за со-
бой умножение изображения на тот же коэффициент:
Л/(0^ЛК(р).
При нулевых начальных условиях оригинала и его производных
«-кратное дифференцирование оригинала соответствует умножению
изображения на рп:
dn f (t) Idtn-у рп F (р).
Интегрирование оригинала влечет за собой деление изображении
на р:
о
На практике переход оригиналов к изображениям и обратно к
оригиналам осуществляется по таблицам изображений типовых функ-
ций, которые вычислены по
формуле Карсона — Хевисай-
да (табл. I).
Пример 1. На рис. 39, а изо-
бражена электрическаи цепь, со-
стоящая из резистора Р= 100 кОм
и конденсатора С — 1 мкФ. На
вход РС-цепп при замыкании
включателя 5 подается постоян-
ное напряжение Овх = —12 В.
Необходимо найти закон измене-
ния напряжения на конденсато-
ре Uc=f (t).
Решение. На основании
второго закона Кирхгофа соста-
вим дифференциальное уравнение
контура:
Ri+Uc = Uvx.
Ток, протекающий в контуре,
£ == CdUcldt.
Подставив значение тока в уравнение контура, получим дифференциальное
уравнение Контура:
RCdVcldt + Uc^UB*-
Таблица 1
Простейшие преобразования Лапласа
и Карсона—Хевисайда
Оригинал Изображение Лапласа Изображение Карсона—Хеви - сайда
А А/p А
e~at Р/(р+а)
(l~e-at)/a 1/(Р+а)
i 1/P2 Up
tn n! pn+x пЦрп
sin Hit aKp'+uF) ир/(р2+к>г)
cosat p/(p4<»2] д-7(р2+шг)
chipmaker.ru
3)
теристика
Первый этап решения дифференциального уравнения методом операционно-
го исчисления — переход от оригиналов к изображениям:
RCpUc (p) + Uc (р) = t7BX (р).
Второй этап — разрешение алгебраического уравнения относительно не-
известной функции:
i/c(p) = t/BX(p)/(7?Cp + l).
Приведем полученное изображение к одному из типовых изображений функ-
ций. Для этого числитель и знаменатель правой части уравнения умножим на
а = \!Т = 1/RC, тогда получим
^c(p) = t/BX(p)«/(P+a)-
Третий этап — переход от найденного изображения к оригиналу неизвест-
ной функции:
i/c(0 = i7BX(0(l-e-a<)-
Подставив числовые значения параметров цепи, получим зависимость —
изменения напряжения на конденсаторе от времени:
Временная диаграмма Uc = f (/) изображена на рис. 39, б.
§ 4. Передаточная функция
Передаточной функцией звена называется отношение изображения
выходной величины звена к изображению входной величины при ну-
левых начальных условиях. Обозначим через W (р) передаточную
функцию, а через X (р) и Y (р) — соответственно изображения
входной и выходной величин, тогда
W (р) = Y (р)/Х (р).
Предположим, что динамическое звено описывается дифференци-
альным уравнением, полученным в примере 1,
Т dUcldt ф- Uc = £7ВХ.
60
В операторной форме имеем
Uc(Tp+\) = UBX,
а передаточная функция описывается выражением
W (р) = 1/ (Тр + 1).
§ 5. Переходная характеристика
Переходной характеристикой (переходным процессом) динамичес-
кого звена называется зависимость выходной величины от времени при
подаче на вход звена ступенчатого сигнала единичной амплитуды.
Следовательно, переходная характеристика отображает реакцию
звена на единичный ступенчатый сигнал.
§ 6. Частотные характеристики звеньев
Если на вход динамического звена поступает сигнал синусоидаль-
ной формы определенной частоты, то выходной сигнал также имеет си-
нусоидальную форму и ту же частоту, но другие амплитуду и фазу.
В связи с этим различают амплитудно-частотные и фазово-частотные
характеристики звеньев.
Амплитудно-частотная характеристика выражает отношение ам-
плитуды колебаний на выходе звена к амплитуде колебаний на его
входе в зависимости от частоты входного сигнала (рис. 40, а):
А(ю) = АВыХМвх = /(ю),
гдеАвых — амплитуда выходного сигнала; Авк — амплитуда входного
сигнала; <о — угловая частота.
Фазово-частотная характеристика выражает зависимость раз-
ности фаз между входными и выходными колебаниями звена от час-
тоты входного сигнала (рис. 40, б):
<Р = f («),
где <р — фазовый угол.
Опережению фазы соответствует <р > 0, а отставанию — tp <? 0-
В теории автоматического регулирования используют комплекс-
сную амплитудно-фазовую характеристику, в которой дают соотно-
Рис. 40. Частотные характеристики звеньев:
а — амплитудно-частотная; б — фазово-частотная; в — амплитудно-фазовая
61
chipmaker.ru
шения между амплитудами выходного и входного сигналов и сдвигом:
фаз при изменении частоты колебаний входного сигнала от 0 до со
W (/<->) = 4ыкМвХ = ЛЕЫХ е/ «>'+<₽>/Двх е/^ = Авых ей₽/Авх = А (ш)^ «-»,
где АВЬ1Х ^Ле'<«х+ч», Авх = A DyeJat — соответственно выходной и вход-
ной сигналы в символической форме записи.
Амплитудно-фазовую характеристику W (]а>) можно рассматри-
вать как одну из форм записи передаточных функций для случая синусо-
идального воздействия на вход звена. Для получения №(/®)из переда-
точной функции W (р) необходимо р заменить на /со:
Г(/со)==[Г(р)]р=/ш.
Выражение для амплитудно-фазовой характеристики можно
представить в алгебраической форме записи:
W (ja) = U (со) + jV (со),
где U (со) и' V (со) —вещественная и мнимая частотные характеристи-
ки системы.
Существует также показательная форма записи:
JF (/со) = А (со) <ш).
В полярных координатах откладывают модуль А (со) и аргумент
Ф (®).
где А (со) = | W (ja>) | = УU2(со) -f-V2(со); ср (co) = arctg U (co)/V (со).
Величина А (со) определяет изменение отношения амплитуд вы-
ходного сигнала к входному, а ср (со) — изменение фазы колебаний на
выходе звена относительно колебаний на входе, происходящими с
изменением частоты входного сигнала.
Для построения амплитудно-фазовой характеристики по оси ор-
динат откладывают мнимую, а по оси абсцисс — вещественную части
(рис. 40, в). Представим W (/со) как вектор, характеризующий пове-
дение звена при периодическом возмущении с частотой со. При изме-
нении со от 0 до со конец этого вектора прочертит на комплексной плос-
кости кривую, называемую амплитудно-фазовой частотной харак-
теристикой. Ввиду симметричности функции W (ja) относительно ве-
щественной оси ветвь характеристики в диапазоне частоты от —оо до
0 можно получить как зеркальное отображение относительно вещест-
венной оси ветви, полученной при изменении частоты от 0 до Ч--оо.
Пример 2. Рассмотрим на примере построение амплитудно-частотной, фа-
зово-частотной и амплитудно-фазовой характеристик RC-цепи (см. рис. 39, а).
На вход цепи поступает сигнал синусоидальной формы R = 100 кОм, С =
= 1 мкФ.
Решение. Запишем выражение передаточной функции цепи:
w (д) = 1/ (тР + 1).
Получим выражение амплитудно-фазовой характеристики путем замены
в передаточной функции р на /со.
W (/со) = 1/(77со 4- 1).
62
Выделим вещественную и мнимую части W (/со), умножая числитель и зна-
менатель на сопряженное число 1 — Т/ю:
W (/со) =----!---=-------L~r/(0_____=_______1_______/____2“____
Z/co + l (1+77<в)(1—77со) l+T^co2 ' l-J-T^co2 ’
где Т = RC = 10® . 10—в = 0,1 с,
тогда U (со) = 1/(1 + 0,01 со2); ' (со) = 0,1со/ (1 + 0,01 со2).
Получим выражения модуля
1 Т2со2 1
(1 + Г2со2)2 + (1+Т2со2)2 ~~ /1+7\со2
Л(со) = 1/J/1 + 0,01 со2
и аргумента
Гео
ф(со) = arctgarctg --!+.^м2 = —arctg Тео.
V (со/ 1
1 +Т2 со2
Подставив числовые значе-
ния частоты, сделаем вычисле-
ния, результаты которых сведем
в табл. 2.
Частотные характеристики
/?С-цепи изображены на рис.
39, в — д.
Для построения частотных
характеристик используют
очень широкий диапазон ча-
стот, поэтому амплитудно-ча-
стотную и фазово-частотную
характеристики целесообраз-
но строить в логарифмическом
масштабе, при этом характе-
Таблица 2
Расчетные данные для построения
частотных характеристик
to. 1/с Л(ш) <p(to) 1/(0) Им)
0 1 0 1 0
1 0,99 —5°40' 0,99 —0,1
5 0,89 —26°30' 0,8 —9,48
10 0,71 —45° 0,5 —0,5
20 0,5 —63*30' 0,2 —0,4
40 0,25 —769 0,06 —0,23
100 0,1 —84° 10' 0,01 —0,1
1000 0,01 —89°20' 0,0001 —0,01
СО 0 —90° 0 0
ристики называют логарифмическими частотными характеристиками.
Логарифмической амплитудно-частотной характеристикой (ЛАЧХ)
L (со) называют зависимость модуля частотной характеристики от час-
тоты, представленную в логарифмическом масштабе.
Логарифмической фазово-частотной характеристикой (ЛФЧХ)
называется зависимость аргумента частотной характеристики от ло-
гарифма частоты.
Для построения ЛАЧХ от выражения амплитудно-фазовой ха-
рактеристики вида
W (/со) = А (со)
переходят к выражению
L (со) = 20 1g | W (/со) | = 20 1g А (со),
где L (со) измеряют в децибелах.
В натуральном масштабе 1 дБ соответствует усилению в 1,12 раза,
т. е. 20 1g 1,12 « 1.
63
cliipmaker.ru
При построении ЛАЧХ по оси ординат откладывают величину
L (со) = 20 1g А (со) в децибелах, а по оси абсцисс в логарифмическом
масштабе частоту в декадах. Декадой называют отрезок между час-
тотами, отличающимися друг от друга в 10 раз. На логарифмической
шкале декаду изображают отрезком единичной длины 1g 1 Осо— 1g со = 1,
поэтому относительно величины 1g со логарифмическая шкала яв-
ляется равномерной, а относительно частоты со — неравномерной.
При построении ЛФЧХ по оси ординат откладывают непосредст-
венно углы в градусах или радианах, по оси абсцисс используют так-
же логарифмический масштаб частоты со в декадах.
Пример 3. Рассмотрим на примере построение логарифмических частотных
характеристик RC-цепи (см. рис. 39, а). На вход цепи поступает сигнал синусои-
дальной формы, R = 100 кОм, С = 1 мкФ.
Решение. Запишем выражение модуля, полученного в примере 2,
А (со) = 1... .
/ 1 Д-Т^со2
Получим выражение ЛАЧХ
L (со) = 201g А (со) = 20 lg-^__L_^- = 201g 1 -201gЮ+'^со2,
где 20 1g 1 = 0 дБ, тогда
L (со) - —201g /1 + Г2 ю2.
Для низких частот со < l/Т произведение Т^со2 < 1, следовательно, им по
сравнению с единицей можно пренебречь, т. е. можно считать, что L (со) =
= —20 1g 1/1 + TW ® —20 1g 1 = 0 дБ.
Для высоких частот со 1/Т3со2 > 1, следовательно, можно пренебречь
единицей по сравнению с произведением Т^со2, т. е. можно считать, что L (со) =
= —20 1g 1/1 + Г2со2 « —20 1g Тео.
Для низких частот со < 1/Т представляет собой прямую линию, совпадаю-
щую с осью абсцисс, для высоких частот со > \/Т с некоторым приближением
представляет собой прямую, проходящую под отрицательным углом к оси абс-
цисс, значение угла можно определить, найдя значение L (со) для частот, отстаю-
64
щих друг от друга на одну декаду. Например; для вц= 10 и <в2 = 100, получим
-20 1g 1007 — (—20 1g 107) = —20 1g 1007 + 20 1g 107 = —20 1g 10 =
= —20 дБ.
Итак, наклон прямой, представляющей L (со) = —20 1g 7со; составляет
20 дБ/дек. Точка перелома характеристики соответствует значению сопрягаю-
щей частоты сосоп, которую находят из условия 20 1g 7шС0П = 0, тогда 7сосоп =
= 1, следовательно, шсоп = 1/7, где 7 = RC = 10® , 10® = 0,1 с, тогда
СОсоп = Ю 1/с.
Для построения ЛФЧХ следует использовать данные, приведенные в табл. 2.
Логарифмические частотные характеристики PC-цепи построены на рис. 41.
Глава 6
Типовые динамические звенья систем
автоматического регулирования
§ 1. Безынерционное звено
Безынерционным (пропорциональным) называют звено, у которого
выходная величина в каждый момент времени пропорциональна вход-
ной величине. Уравнение безынерционного звена
У = kx,
где k — коэффициент передачи звена (в общем случае размерная вели-
чина).
Передаточная функция безынерционного звена
W (р) = Y (р)/Х (р) = k.
Рис. 42. Безынерционное звено:
« — переходная характеристика; б — амплитудно-фазовая характеристика; а —лога-
рифмические частотные характеристики; г — е — примеры, безынерционного звена.
65
Логарифмические частотные характеристики
L (cd) = 20 1g А (со) = 20 1g k,
<р (cd) = arctg -^М = 0.
(У (co)
Характеристики и примеры безынерционного звена изображены
на рис. 42. Примером такого звена могут служить потенциометриче-
ский датчик, преобразующий величину перемещения ползунка I
в напряжение U, пропорциональное этому перемещению; рычаг, где
входной и выходной величинами являются перемещения его плеч /х и
/2; электронный или полупроводниковый усилитель без реактивных
элементов; безлюфтовая зубчатая передача и пр.
§ 2. Апериодическое звено
Апериодическим (инерционным) называют звено, в котором при
подаче на вход ступенчатого сигнала выходная величина апериоди-
чески (по экспоненте) стремится к новому установившемуся значению.
Уравнение апериодического звена
Tdyldt + у — kx,
где Т — постоянная времени звена, характеризующая инерционность
звена, с.
В операторной форме
TpY (р) + Y (р) = k X (р).
Передаточная функция
W (р) = Y (р)/Х (р) = k/(Tp + 1).
Уравнение амплитудно-фазовой характеристик
W (ja) = [W (p)]p=/fi)= U (cd) -J- jV (со) =—- —
k . kaT
l+<o27’2 1+(»2'П '
Модуль
A (CD)=/t/2(CD) + V2(CD) =
k
V1 + 'ш2 Л
Логарифмические частотные характеристики
L (CD) = 201g A (CD) = 201g-,-Д—_ = 201g £-20 IgV 1 +(«П2;
У 1 + (D2 T2,
cp (CD) = arctg = —arctg cdT.
4/(ш)
Характеристики и примеры апериодического звена приведены на
рис. 43. Апериодическое звено образуется из элемента, накапливаю-
щего энергию, и элемента, рассеивающего эту энергию. Например, в
ад
Рис. 43. Апериодическое звено:
а — переходная характеристика; б — амплитудно-фазовая характеристика; в — логарифмиче-
ские частотные характеристики; г, д — примеры апериодического звена
ДС-цепи, LC-цепи, электронном или полупроводниковом усилителе
с учетом наличия реактивных элементов, магнитном усилителе вход-
ной величиной является напряжение t/BX, выходной — напряжение
Uвых-
§ 3. Дифференцирующее звено
Дифференцирующим называют звено, в котором выходная вели-
чина пропорциональна производной во времени от входной величины.
В дифференцирующем звене выходная величина пропорциональна
скорости изменения входной величины. Различают идеальное и ре-
альное дифференцирующие звенья.
Уравнение идеального дифференцирующего звена
у = kdx/dt.
При подаче на вход звена ступенчатого сигнала на выходе получа-
ется мгновенный выходной импульс, теоретически имеющий бесконеч-
но большую амплитуду, соответствующую бесконечно большой ско-
рости входного сигнала в момент подачи.
Уравнение реального дифференцирующего звена
Tdy/dt у ~ kTdx/dt,
или в операторной форме,
TpY (р) + Y (р) = kTp X (р).
Передаточная функция звена
W (р) = Y (р)/Х (р) = kTp/ (Тр + 1).
67
рейдирующее звено:
а — переходная характери-
стика; б — амплитудно-фазо-
вая характеристика; в — ло-
гарифмические частотные ха-
рактеристики; г — диффе-
ренцирующая 7?С-цепь: д —
i^x
переходная характеристика
ЯС-цепи
Уравнение амплитудно-фазовой характеристики
w &>)=IW (р)]Р=/е = и (<»)+jV И=+/ .
Модуль
Логарифмические частотные характеристики
L (о) = 201g А (<о) = 201g —= 201g kTa - 201g /Ц-72(о2 ;
У 1 -\-Т2 со2
(р (и) = arctg — = arctg 1/Ты = 90°—arctg юГ.
Характеристики и пример реального дифференцирующего звена
приведены на рис. 44. Примером реального дифференцирующего зве-
на может служить цепочка RC, которая нашла широкое применение
в промышленной электронике для преобразования прямоугольного
импульса в импульсы более короткой длительности, предназначенные,
например, для переброса триггера.
§ 4. Интегрирующее звено
Интегрирующим называют звено, в котором выходная величина
пропорциональна интегралу во времени от входной величины.
Уравнение интегрирующего звена
t
У — k^ xdt.
b
68
При ступенчатом входном сигнале выходная величина линейно за-
висит от времени:
у = kxt = Kt,
где t — время, К = kx — постоянная величина.
В интегрирующем звене скорость изменения выходной величины
пропорциональна входной величине.
Уравнение звена в операторной форме
У(р) =/гХ (р)/р.
Передаточная функция
w (р) = У (р)/Х (р) = k/p.
Уравнение амплитудно-фазовой характеристики
W (/со) = [ W (р)]Р^а = U (со) + /V (со) = -*_ = ~/ — -
/(0 (О
Модуль
А (со)=|-У2(<о) = — •
(О
Логарифмические частотные характеристики
L (со) = 20 1g А (со) = 20 1g k/ы = 20 1g k — 20 1g co;
ср (co) = arctg = arctg = — л/2.
Характеристики и пример интегрирующего звена приведены на
рис. 45. Примером интегрирующего звена может служить электриче-
ский двигатель, имеющий незначительные электромеханическую и
электромагнитную постоянные времени, у которого угловая скорость
вращения вала является выходной величиной, а напряжение, прило-
Цы),8Б
Рис. 45. Интегрирующее
звено:
а — переходная характеристи-
ка; б — амплитудно-фазовая ха-
рактеристика; в — логарифмиче-
ские частотные характеристики;
г, д — примеры интегрирующе-
го звена
69
r.ru
женное к цепи якоря, Un входной величиной. Инерционное звено
можно приближенно считать интегрирующим при условии, что режим
в инерционном звене далек от установившегося. Это происходит, ког-
да сигналы на входе изменяются достаточно быстро по сравнению с
величиной \/Т. Следовательно, КС-цепь, изображенная на рис. 39, а,
может также служить примером интегрирующего звена.
§ 5. Колебательное звено
Колебательным называют звено, у которого при ступенчатом из-
менении входной величины выходная величина стремится к новому
установившемуся значению, совершая при этом колебания.
Уравнение колебательного звена
T^Py/dt2 4- Tydyldt + у = kx,
в операторной форме
T*P2Y (р) + TlPY (p) + Y (р) = kX (р).
Передаточная функция
W (р) = Y (Р)/Х (р) = /?/(Пр2 + Лр + 1).
Уравнение амплитудно-фазовой характеристики
Г (М=IW (₽)!,-,« = U и +lv (Ш) = ”
__ . kTiCO
1 (1—7’2со2)24-Г2со2 '
Модуль
А (со) = )/L'2(w)+l/2(w) = й/У(1 —П<о2)2 + TloY.
Логарифмические частотные характеристики
L (и) = 201g А (со) = 201g k—201g /(1—Л со2)2 ф-Л со2,
Ф (со) = arctg -У = —arctg Тг со/( 1 —Л со2).
Характеристики и примеры колебательного звена приведены на
рис. 46. Колебательное звено образуется из двух элементов, способных
запасать энергию и взаимно обмениваться этими запасами. Примером
колебательного звена может служить электрическая цепь, состоящая
из последовательно соединенных резистора R, конденсатора С и ка-
тушки L, где L/BX, Пвых — соответственно входная и выходная вели-
чины. Конденсатор способен запасать энергию электрического поля,
индуктивность — магнитного поля. При колебаниях происходит об-
мен энергией, запасенной в этих элементах, с потерей на резисторе.
Другой пример колебательного звена — масса т, подвешенная
на пружине. Если приложить к массе некоторую импульсную силу
в вертикальном направлении, то она будет совершать колебания от-
носительно нового установившегося значения. Входная величина в
70
Рис. 46. Колебательное звено:
а — переходная характеристика;
б — а мплнту дно-фазовая характе-
ристика; в— логарифмические ча-
стотные характеристики; г, д —
примеры колебательного звена
данном случае сила F, выходная — перемещение h. Масса здесь за-
пасает потенциальную энергию, пружина — кинетическую.
При наличии возмущающих факторов, нарушающих равновесие
звена, возникают колебания. Причем, если в результате колебаний
происходит потеря энергии в звене, то колебания затухают и звено в
этом случае является устойчивым. Если в колебательном звене отсут-
ствует потеря энергии, то такое звено называют консервативным.
Уравнение консервативного звена
Tzd^y/dt2 + у — kx.
Глава 7
Соединение динамических звеньев систем
автоматического регулирования
§ 1. Структурные схемы систем
Систему автоматического регулирования можно представить ти-
повыми динамическими звеньями и изобразить на схеме. Схема систе-
мы автоматического регулирования, в которой все элементы или их
составные части представлены типовыми динамическими звеньями, на-
зывают структурной схемой системы. Графически на структурной
схеме каждое типовое динамическое звено системы изображают пря-
моугольником, а существующие связи между ними — стрелками, со-
ответствующими направлению прохождения сигнала. Над стрелками
надписывают символы, обозначающие операторные изображения сиг-
налов.
Структурные схемы, как и функциональные, отражают процесс
передачи и преобразования информации. Однако функциональные
71
iker.ru
схемы, как известно, характеризуют систему по составу входящих в
нее элементов, рассматриваемых с точки зрения их значения, тогда
как структурные схемы определяют динамические свойства системы.
Структурные схемы систем автоматического регулирования состав-
ляют путем выделения динамических звеньев таким образом, чтобы
для них можно было наиболее просто определить передаточные функ-
ции. В качестве примера составим структурную схему системы автома-
тического регулирования частоты вращения двигателя постоянного
тока (см. рис. 35, б), функциональная схема которой изображена
на рис. 36, б. Система состоит из задающего элемента — потенцио-
метра П, полупроводникового усилителя У, электромашинного уси-
лителя ЭМУ, двигателя постоянного тока М, являющегося объек-
том регулирования, тахогенератора Тг — элемента главной обрат-
ной связи.
Запишем выражения передаточных функций звеньев структурной
схемы:
усилителя
_ fey At/ (р)
MJ (р) '
где fey — коэффициент усиления усилителя; по своим динамическим
свойствам полупроводниковый усилитель является безынерционным
звеном;
электромашинного усилителя
^эму (р) = У я (P)lky № (р) ~ fe3My/(7’y р +1),
где fe3My — коэффициент усиления ЭМУ; Ту — постоянная времени
обмотки управления ЭМУ; по своим динамическим свойствам ЭМУ
является инерционным звеном;
двигатели постоянного тока
^дв (Р) = й (Р)/^Я (Р) = Р + 1) р.
где feM — коэффициент пропорциональности частоты вращения дви-
гателя величине напряжения на якоре; Тм — электромеханическая
постоянная времени двигателя с учетом инерции нагрузки; по своим
динамическим характеристикам двигатель представляет собой пере-
V^y(P)
«2
Рис. 47. Структурные схемы системы автоматического регулирования частоты
вращения двигателя:
а — исходная схема; б, в — преобразованные схемы
72
даточную функцию последовательно соединенных инерционных и ин-
тегрирующего звеньев;
тахогенератора
u/Tr(p) = t/Tr(p)/Q(p) = ^,
где /гтг — коэффициент пропорциональности между напряжением на
якоре и частотой вращения тахогенератора; тахогенератор является
безынерционным звеном.
На рис. 47 изображена структурная схема системы автоматического
регулирования частоты вращения двигателя.
§ 2. Соединение динамических звеньев
и их передаточные функции
Систему автоматического регулирования можно представить в ви-
де отдельных динамических звеньев на структурной схеме. Зная пе-
редаточные функции звеньев, можно найти выражение передаточной
функции системы, что является важным фактором при исследовании
ее динамических свойств. Звенья, входящие в состав структурной схе-
мы системы, могут быть соединены между собой последовательно, па-
раллельно и встречно-параллельно.
Последовательным называют такое соединение звеньев, при кото-
ром выходная величина предшествующего звена является входной
величиной для последующего (рис. 48, а). При последовательном сое-
динении звеньев передаточная функция системы равна произведению
передаточных функций этих звеньев:
Г (р) = (р)^2 (p)...Wn(p).
Параллельным называют такое соединение звеньев, при котором
входная величина у всех звеньев общая, а выходные величины сум-
мируются (рис. 48, б). При параллельном соединении звеньев пере-
даточная функция системы
равна сумме передаточных
функций звеньев:
№ (р) = (р) + Г2 (р) +
+ - + Wn (р).
Встречно-параллельным на-
зывают такое соединение двух
звеньев, при котором выход-
ная величина первого звена
подается, на вход второго, вы-
ходная величина которого
суммируется с общей входной
величиной и подается на вход
первого звена. В этом случае
образуется замкнутая систе-
Рис. 48. Соединение звеньев:
а — последовательное; б — параллельное; в —
встречно-параллельное
73
chipmaker.ru
Ма автоматического регулирования (рис. 48, в). Выражение переда-
точной функции имеет следующий вид:
W{p)=Wl (р)/(1 ± W. (p)W2 (р)),
где положительный знак в знаменателе соответствует отрицательной
обратной связи, а отрицательный знак — положительной обратной
связи.
В качестве примера определим передаточную функцию системы
автоматического регулирования частоты вращения двигателя посто-
янного тока (см. рис. 35, в), структурная схема которой изображена
на рис. 47, а. Звенья, охваченные обратной связью с передаточными
функциями IV7у (р), 1ГЭму (р). И7ДВ (р), соединены последовательно.
В этом случае передаточная функция разомкнутой системы имеет вид
(Р) = (р) И7ЭМУ (р) Г дв (р) = ky^™ k” =
7ур-|-1 (Тмр + 1)р
__
(ГурН-1) (Тмр+Ор
где Д = йуРэму&дв — коэффициент усиления системы.
Разомкнутая система с передаточной функцией (р), охваченная
отрицательной обратной связью, и звеном с передаточной функцией
№тг (р) соединены встречно-параллельно, следовательно, передаточ-
ная функция замкнутой системы
w (р) = w, (р)/(1 - W^p) U7Tr (р)) = ky Рэму kM/((Ty р + 1) (Тм р + 1)р+
+ Ру Рэму Рм &гг)-
На рис. 47, б, в изображены преобразованные структурные схемы
системы.
Глава 8
Устойчивость систем
автоматического регулирования
§ 1. Понятие об устойчивости системы
Необходимым условием работоспособности системы автоматичес-
кого регулирования является ее устойчивость. Под устойчивостью по-
нимается свойство системы восстанавливать состояние равновесия,
из которого она была выведена под влиянием возмущающих факторов,
после прекращения действия этих факторов. Если система не способна
возвращаться в состояние равновесия, которое было нарушено в про-
цессе работы, то для практического использования она непригодна.
На практике для определения устойчивости системы автоматичес-
кого регулирования используют критерии устойчивости, т. е. прави-
ла, с помощью которых можно определить, устойчива ли система, не
прибегая к решению дифференциальных уравнений.
74
§ 2. Критерии устойчивости
Алгебраический критерий (Рауса—Гурвица) позволяет судить об
устойчивости замкнутой системы по коэффициентам ее характеристи-
ческого уравнения, которым является знаменатель передаточной функ-
ции. Необходимые и достаточные условия устойчивости системы опре-
деляются различными соотношениями коэффициентов в зависимости
от порядка системы. Для системы, имеющей характеристическое урав-
нение первого порядка,
аор + ох = О,
необходимо и достаточно, чтобы все коэффициенты характеристичес-
кого уравнения были положительными, т. е. а0 >0; аг > 0.
Для системы, имеющей характеристическое уравнение второго
порядка,
а0р2 + агр + а2 = 0,
требуется, чтобы все коэффициенты характеристического уравнения
были положительными, т. е. а0 >0; аг > 0; а2 > 0.
Для системы, имеющей характеристическое уравнение третьего
порядка,
а0р3 + atp2 ]- а2р + аз =0,
все коэффициенты характеристического уравнения, а также опреде-
литель второго порядка Д2 должны быть положительными, т. е.
аи >0; > 0; а2 >0; а3> 0;
Д2 —
О1
«о
«з
а2
== аг а.г — а0 а.л> 0.
Для системы, имеющей характеристическое уравнение четвертого
порядка,
о0р4 + й!р3 4- а2р2 + а3р + =0,
все коэффициенты характеристического уравнения и определители Д2
и Дз должны быть положительны:
Д2 —
О1 «з
Оо О2
Д3 —
а0
0
°з 0
О2 О4
О1 ал
~ах а2 Os—a2 a,t— al a0>0.
В общем случае условие устойчивости заключается в требовании
положительности всех диагональных определителей (миноров) — оп-
ределителя Гурвица:
Ап =
oi ая а5 ....... 0
Оо о2 а3 ....... 0
0 at Од ....... 0
>0.
0............cn_j 0
0...........оп_2 ап
Chipmaker.ru
75
chipmaker.ru
Условия устойчивости, полученные из критерия Рауса—Гурвица,
значительно усложняются с ростом порядка характеристического
уравнения. Начиная с пятого порядка, применять критерий становит-
ся затруднительно.
Пример 4. Используя критерий Рауса—Гурвица, определить устойчи-
вость системы автоматического регулирования частоты вращения двигателя по-
стоянного тока (см. рис. 35, б). Структурная схема системы изображена на
рис. 47. Передаточная функция системы имеет следующее выражение:
W (р) = К/[(Гу р 4-1) (Тм р 4-1) р + Kkn],
где
К = ky кэму kM-, ^у = 5; 6эму = 4; &м = 5 град/(В-с);
Агг = 0,01 В/град-с; Ту = 0,01с; 7^ —0,1с.
Решение. Подставим численные значения в выражение передаточной
функции:
W (р) =5.4- 5/(( 0,01р+ 1) (0, \р + 1)р+ 5-4.5- 0,01) = 100/(0,001 р34-
+ 0,11р2+ р+ В-
Характеристическое уравнение замкнутой системы получим, приравняв ну-
лю знаменатель полученного выражения:
0,001р3+ 0, Пр24- р+ 1 = 0.
Из уравнения видно, что коэффициенты а0 = 0,001; а± = 0,11; а2 = 1; с3 =
= 1 характеристического уравнения положительны.
Проверим выполнение второго условия а±а2 — аоаа > 0; 0,11 • 1 — 0,001 X
X 1 > 0; 0,11 —0,001 > 0.
Следовательно, рассматриваемая система устойчива.
Критерий устойчивости Михайлова основан на связи характера
переходного процесса системы с амплитудой и фазой вынужденных
колебаний, устанавливающихся в системе при синусоидальном воз-
действии. Анализ устойчивости системы этим методом сводится к по-
строению по характеристическому многочлену замкнутой системы
знаменатель передаточной функции) комплексной частотной функции
(F (/со) = R (со) 4- /5 (со),
где R (со) и S (со) — соответственно реальная и мнимая части знаме-
нателя передаточной функции, по виду которой можно судить об ус-
тойчивости системы.
Критерий устойчивости Михайлова может быть сформулирован
следующим образом: замкнутая система автоматического регулирова-
ния устойчива, если комплексная частотная функция F (/со) (функция
Михайлова), начинаясь на действительной положительной оси, при
изменении со от 0 до оо огибает против часовой стрелки начало коор-
динат, проходя последовательно п квадратов, где п — порядок харак-
теристического уравнения (рис. 49).
Пример 5. Используя критерий Михайлова, определить устойчивость сис-
темы автоматического регулирования частоты вращения двигателя постоянного
тока (см. рис. 35, б). Структурная схема системы изображена на рис. 47. Пере-
76
Рис. 49. Амплитудно-фазовые характеристики критерия Михай-
лова:
а — устойчивой системы; б — неустойчивой системы; в — системы на гра-
нице устойчивости
даточная функция системы имеет следующее выражение:
W (Р) = К/[(Ту Р +1) (TM Р + 1)р 4-W1.
где
K = ky &эму = 100 град/В-с; /г.гг = 0,01 В/(град-с); Ту ~ 0,01 с;
Тм = 0,1 с.
Решение. Запишем характеристический многочлен замкнутой системы
F (/со), заменив р на /со.:
F (/со) = (Ту /со + 1) (Тм /со + 1) /со + 1.
Подставим численные значения, выделим вещественную и мнимую части:
F (/со) = Я (со) 4- jS (со) = 1 — 0, Нсо2 4- / (со — О,О1со3).
Задаваясь значениями частоты со от 0 до оо, подсчитаем соответствующие
значения R (со) и jS (со), результаты вычислений запишем в табл. 3.
Таблица 3
Расчетные данные для построения амплитудно-фазовой
характеристики Михайлова
СО, I/с 0 0,5 1 5 10 30 50 100 ОО
R (й) . I 0,97 0 —1,75 — 10 —98 —274 —1099 — оо
/S (со) 0 0,5 1 4,9 9 3 —75 —900 ОО
По данным табл. 3 на рис. 50 построена функция Михайлова, которая, на-
чинаясь на действительной полуоси, огибает навстречу направлению вращения
часовой стрелки начало координат, проходя непоследовательно три квадранта,
что соответствует порядку характеристического уравнения. Следовательно, сис-
тема устойчива.
Критерий устойчивости Найквиста позволяет судить об устойчи-
вости замкнутой системы автоматического регулирования по ампли-
тудно-фазовой характеристике разомкнутой системы.
77
Рис. 50. Амплитудно-фазовая характеристика критерия Михайлова
Критерий устойчивости применим, в частности, для систем устой-
чивых в разомкнутом состоянии. Замкнутая система будет устойчива
в том случае, если устойчива разомкнутая система и ее амплитудно-
фазовая характеристика не охватывает точку с координатами (—1,/0),
называемую критической (рис. 51). При отсутствии местных обратных
связей разомкнутая система всегда устойчива, если состоит из устой-
чивых звеньев. При наличии местных обратных связей система может
оказаться неустойчивой в разомкнутом состоянии.
Пример 6. Используя критерий Найквиста, определить устойчивость сис-
темы автоматического регулирования частоты вращения двигателя постоянного
тока (см. рис. 35, б). Структурная схема системы изображена на рис. 47. Пере-
даточная функция разомкнутой системы имеет следующее выражение:
^(р) = К/[(Тур + 1)(Тмр + 1)р].
где К — ^у^-зму^м = 100 град/(В • с);
Рис. 51. Амплитудно-фазовые ха-
рактеристики разомкнутых систем:
1 — система устойчива; 2 — система на
границе устойчивости; 3 — система не-
устойчива
Ту = 0,01 с; Ту = 0,1 с.
Решение. Местных обратных свя-
зей в системе нет, следовательно, разом-
кнутая система устойчива.
Запишем выражение амплитудно-фа-
зовой характеристики разомкнутой си-
стемы:
№ (/*>) = IW (р)]р=/и = К/(Ту /<о +
+ 1)(Тм/<о + 1)/со.
Выделим вещественную и мнимую
части:
Г(/ш)=-К(Ту + Тм)/[И2(Ту +
+ Тм)2 + (1-<о‘ТуТм)2] +
+/ [ - К (1 -<->2 Ту Тм)]/[«я (Ту +
+ТМ)2+ <о(1— со2ТуТм)2],
78
£ учетом ЧислейнЫх Значений параметров будем иметь следующие выражения:
U (со) = —11 [О,О12со2 + (1 — O.OOlco*)2];
V (со) = —100 (1 — 0,001 со2)/ [0,0012со’+ со2 (1 — O.OOlco2)2].
Задаваясь значениями частоты со it 0 до оо, подсчитаем соответствующие
значения U (со) и V (со). Результаты зычислений сведем в табл. 4.
Таблица 4
Расчетные данные для построения амплитудно-фазовой
характеристики разомкнутой системы
со, 1/с 0 10 20 30 31,7 40 100 оо
£/ (со) -11 —5,4 т-2,1 -1.01 —0,92 —0,56 —0,06 0
V (со) —100 —4 —0,35 —0,031 0 0,08 0,05 0
По данным табл. 4 на рис. 52 построена амплитудно-фазовая характеристи-
ка разомкнутой системы, которая не охватывает критическую точку, следова-
тельно, система устойчива.
Устойчивость по логарифмическим частотным характеристикам
определяют с использованием критерия устойчивости Найквиста. Кри-
тической точке, где модуль амплитудно-фазовой характеристики ра-
вен единице, соответствует точка пересечения ЛАЧХ с осью абсцисс
на частоте среза соср, а точке, в которой фазовый сдвиг равен 180°, со-
ответствует пересечение ЛФЧХ — л.
Замкнутая система устойчива, если на частоте со, для которой <р=
— —л, ордината ЛАЧХ разомкнутой системы отрицательна L (а>) <
< 0 (рис. 53, а). Если разомкнутая система устойчива, а ЛАЧХ пере-
79
chipmaker.ru
секает линию —л в нескольких точках, то замкнутая система будет ус-
тойчивой, когда £ ((») < 0 при <р = —л, для самой правой из точек
пересечения (рис. 53, б).
Чтобы оценить, насколько система автоматического регулирова-
ния далека от неустойчивого состояния, используют понятия запаса
устойчивости по амплитуде и фазе. Запас устойчивости по ампли-
туде AL есть число децибел, на которое нужно увеличить коэффици-
ент усиления на частоте, соответствующей фазовому сдвигу <р = —л,
чтобы система потеряла устойчивость. На ЛАЧХ AL представляет
собой отрезок, заключенный между осью абсцисс и ординатой ЛАЧХ
при частоте, соответствующей фазовому сдвигу —л.
Запас устойчивости по фазе есть угол Дф = 180°— |ф(соср)|.
На ЛФЧХ это угол превышения фазовой характеристики над ли-
нией ф = —л при частоте среза cdcp- Для удовлетворительного ка-
чества регулирования должны выполняться следующие условия
ДБ > (104-15) дБ; Дф > (30ч-60)°.
Обычно для определения устойчивости системы используют при-
ближенную ЛАЧХ, представляющую собой ломаную линию, отдель-
ные участки которой имеют определенный наклон, а точки изломов
определяются сопрягающими частотами (оСоц, значения которых нахо-
дят из постоянных времени отдельных звеньев разомкнутой системы.
При построении ЛАЧХ удобно воспользоваться следующими ука-
заниями.
1. Необходимо определить значения сопрягающих частот wconi,
в которых ЛАЧХ имеет изломы. По оси абсцисс в логарифмическом
масштабе откладывают значения сопрягающих частот, полученных
из выражения
®СОП1 = l/Т i,
где Тi — постоянная времени соответствующего звена.
2. Построить низкочастотную прямую ЛАЧХ для значений
<d < <ocoui с наклоном —20р. дБ/дек, где р. — число интегрирующих
звеньев в главной цепи системы. Эта прямая при ы — 1 должна иметь
ординату, равную 20 1g k, где k — передаточный коэффициент сис-
Рис. 53. Использование логарифмических частотных характеристик
для определения устойчивости систем:
а, б — системы устойчивы; в — система неустойчива
80
3. Для каждой из сопрягающих частот coCOIji изменить наклон
ЛАЧХ по отношению к предшествующему участку, причем наклон
характеристики^зависит от вида звена для данной сопрягающей часто-
ты. Для дифференцирующего звена наклон изменяется на +20 дБ/дек,
для апериодического и интегрирующего — на —20 дБ/дек и для коле-
бательного — на —40 дБ/дек.
Для построения ЛФЧХ следует помнить, что каждое звено дает
сдвиг по фазе выходных сигналов по отношению к входным: аперио-
дическое (—arctg со/); идеальное дифференцирующее л/2; реальное
дифференцирующее (л/2 — arctg со/); интегрирующее (—л/2); коле-
бательное (—arctg 7\со/ (1 — 7’2со2).
Пример 7. По логарифмическим частотным характеристикам определить
устойчивость и запасы устойчивости по амплитуде и фазе системы автоматичес-
кого регулирования частоты вращения двигателя постоянного тока (см.
рис. 35 б). Структурная схема системы приведена на рис. 47. Передаточная
функция разомкнутой системы имеет следующее выражение:
W)=Wyp+n(TMp + i)p,
где
К = ky Рэму = 100 град/(В с); Ту = 0,01 с; Тм = 0,1 с.
Решение. Определим значения сопрягающих частот:
®conl t/T'jj ®conL t/T'y, ®conl= 1 1/с, <йсоп2= 100 1/С-
ЛАЧХ представляет собой ломаную линию, состоящую из трех прямых
участков с наклонами —20; —40; —60 дБ. Для построения первой прямой опре-
делим значение L (со) при частоте со = 1 1/с;
L (со) = 20 1g К = 20 1g 100 = 40 дБ.
Рис. 54. Логарифмические частотные характеристики системы (к примеру 7)
81
chipmaker.ru
Прямая с ЯакЛоном —60 дБ/дек начинается отточий с частотой сосопг— 160 1/с.
Находим выражение для построения ЛФЧХ:
ф (о>) = arctg ыТу — arctg (о7ы — л/2 = arctg 0,01 а> — arctg 0,1ш — п/2.
Задаваясь значениями частоты ш от 1 до 100, найдем соответствующие зна-
чения для ф:
(0, 1/с ... 1 10 20 32 100
Ф°((о) ... — 96°40' —140° 40' —164° 50' —180° —219° 18'
На рис. 54 построены логарифмические частотные характеристики рассмат-
риваемой системы. Система устойчива. Запас устойчивости по амплитуде ДЦ =
= 1 дБ, по фазе Дф = 1,5°.
Глава 9
Качественные показатели
переходного процесса
§ 1. Основные показатели качества
автоматического регулирования
У
Устойчивость системы автоматического регулирования является
необходимым, но далеко не достаточным условием ее практической
пригодности. Понятие устойчивости отражает наличие или отсутствие
затухания переходного процесса в системе. Однако характер затуха-
ния переходного процесса может быть самым разнообразным, кроме
того, регулируемый параметр может иметь различные отклонения от
заданного значения в установившемся режиме. Следовательно, воз-
никает необходимость в оценке качества процессов в системе автома-
тического регулирования.
Под качеством процесса регулирования понимается свойство сис-
темы автоматического регулирования поддерживать с достаточными
точностью и быстродействием заданный закон изменения регулируемо-
го параметра. Требования к качеству
процесса регулирования в частном
случае могут быть самыми разнооб-
разными, однако из всех качественных
показателей можно выделить несколь-
ко наиболее существенных, которые в
достаточной мере характеризуют ра-
боту большинства систем автоматиче-
ского регулирования.
На рис. 55 изображена кривая пе-
реходного процесса в системе авто-
матического регулирования при сту-
пенчатом изменении входного сигна-
ла. Существуют следующие показа-
тели, характеризующие качество ре-
гулирования.
'////////////////
г///////
Уз
0
Рис. 55. Кривая переходного про-
цесса системы автоматического ре-
гулирования
82
1. Длительность переходного процесса /р — интервал времени с
момента подачи ступенчатого входного сигнала до момента окончания
переходного процесса. Обычно считают переходной процесс закончен-
ным, если величина регулируемого параметра отличается от задан-
ного не более чем на 5%. Время переходного процесса характеризу-
ет быстродействие системы и зависит от динамических свойств и числа
входящих в ее состав звеньев. С увеличением числа звеньев быстродей-
ствие обычно уменьшается.
2. Перерегулирование о представляет собой отношение максималь-
ного отклонения регулируемого параметра к установившемуся зна-
чению z/yCT, выраженное в процентах:
® = (f^max //уст) Ю0///уСт.
Большое перерегулирование (выброс) вызывает чрезмерные силы
в механических и перенапряжения в электрических узлах систем ав-
томатического регулирования. Для большинства систем перерегули-
рование ограничено и составляет о (10-е-30)%, однако в некоторых
системах допускается до 70%, а в ряде случаев вообще может отсут-
ствовать.
3. Статическая ошибка представляет собой отношение разности
между заданным у3 и установившимся (фактическим) t/yCT значения-
ми регулируемого параметра к установившемуся значению, выражен-
ное в процентах:
^СТ = (Уз УуСт) 100/t/yCT"
Статическая ошибка характеризует точность регулирования в ус-
тановившемся режиме. В астатических системах 6 = 0, в статичес-
ких не должна превышать 3—5%.
4. Частота колебаний в переходном процессе определяется числом
колебаний v регулируемого параметра за время переходного процес-
са. Частота колебаний обычно составляет v = 1,54-2.
Требования, предъявляемые к показателям качества переходного
процесса системы автоматического регулирования, наглядно можно
изобразить на графике в виде определенной области, за пределы ко-
торой не должен выходить регулируемый параметр, удовлетворяющий
этим требованиям.
§ 2. Методы исследования качества процесса регулирования
Качество процесса регулирования определяют прямыми и косвен-
ными методами. Применение прямых методов влечет за собой решение
дифференциального уравнения и графического изображения его ре-
шения, т. е. кривой переходного процесса системы. Прямые методы
наиболее точны, однако с ростом порядка дифференциальных урав-
нений их решения усложняются.
Косвенные методы позволяют обойти сложные вычислительные
операции. Одним из косвенных методов является метод интегральных
83
chipmaker.ru
Рис. 56. Метод интегральных оценок
оценок, основанный на вычис-
лении определенных интегра-
лов вида
[(Az/)2 + P(A/)2]df,
О
где Ау — отклонение регулируемого параметра от заданного значе-
ния; Т — постоянная времени.
Интеграл 10 определяет значение площади над кривой переходно-
го процесса, ограниченной установившимся значением регулируемой
величины (рис. 56, а). Уменьшение интеграла 10 характеризует уско-
рение процесса регулирования. По значению этого интеграла оцени-
вают быстродействие системы, имеющей характеристику переходного
процесса без перерегулирования.
Интеграл определяет качество регулирования по квадратичной
сумме площадей, заключенных между кривой переходного процесса
и прямой заданного значения регулируемого параметра (рис. 56, б).
Чем меньше интеграл /lf тем ближе кривая переходного процесса ОВС
к идеальной ломаной линии. По значению интеграла оценивается
быстродействие системы, которая имеет характеристику переходного
процесса с перерегулированием.
Интегралом /2 оценивается колебательность процесса регулиро-
вания, причем идеализированным переходным процессом является
£
экспонента A# = куоът, к которой должен стремиться реальный пе-
реходной процесс.
К косвенному методу относится также частотный метод. Частотный
метод допускает совместное исследование качества и устойчивости
систем. Этот метод, основанный на общих свойствах частотных харак-
теристик, был разработан проф. В. В. Солодовниковым. Используя
вещественную частотную характеристику замкнутой системы, можно
построить приближенную кривую переходного процесса без решения
дифференциального уравнения.
Глава 10
Методы улучшения качества
переходного процесса
§ 1. Включение корректирующих устройств
в главную цепь систем
Если качество процесса регулирования для заданных параметров
не удовлетворяет поставленным техническим требованиям (например,
велико t, а, 6СТ, недостаточный запас устойчивости и т. п.), то в сис-
TfR1C
K=Rl/(R1*R2)i 1
T2=KTt
* T,~(^RP)C
TZ~R2C
W(pH(TtP^){Tzp4))l
1((Т,р^)(ТчР^Г)
T,-R1C1
TZ-R2C2
Tj^Ttf-T^TzlHRl/RP)
Рис. 57. Корректирующие цепи:
a — электрические схемы; б — ЛАЧХ; е — параметры
e)
тему вводят дополнительные корректирующие устройства (электри-
ческие цепи) и выбирают их характеристики так, чтобы удовлетворить
этим требованиям.
Параметры корректирующих цепей подбирают по ЛАЧХ и ЛФЧХ
разомкнутой системы (рис. 57). При подборе корректирующих цепей
строят желаемую ЛАЧХ системы, т. е. такую ЛАЧХ, для которой кри-
вая переходного процесса имеет оптимальную форму. Затем путем
вычитания желаемой ЛАЧХ из действительной находят ЛАЧХ кор-
ректирующей цепи, по которой определяют ее вид и параметры.
Решающее влияние на характер переходного процесса оказывает
поведение ЛАЧХ на средних частотах вблизи частоты ыср. Переход-
ный процесс протекает благоприятно, если ЛАЧХ вблизи частоты ыср
имеет наклон —20 дБ/дек, причем длина этого участка должна состав-
лять примерно одну декаду.
Низкочастотный участок ЛАЧХ определяет поведение системы в
установившемся режиме. В астатической системе наклон ЛАЧХ на
этих участках составляет—20 К дБ/дек; в статической системе наклон
составляет 0 дБ/дек (К = 0). Высокочастотный участок (при и соср)
существенного влияния на характер переходного процесса не оказы-
вает.
Для выбора корректирующего звена, последовательно включен-
ного в контур системы автоматического регулирования, удобно вос-
пользоваться следующими рекомендациями:
84
85
chipmaker.ru
1. По заданным требованиям к качеству переходного процесса или
к запасу устойчивости в проектируемой системе построить ЛАЧХ же-
лаемой (скорректированной) разомкнутой системы.
2. Путем вычитания ЛАЧХ исходной системы из ЛАЧХ жела-
емой системы получим ЛАЧХ корректирующей цепи.
3. По полученной ЛАЧХ корректирующей цепи подобрать наи-
более простую по техническому исполнению корректирующую цепь.
4. С учетом однозначной связи между ЛАЧХ и ЛФЧХ по постро-
енным ЛАЧХ построить ЛФЧХ исходной и желаемой системы, по ко-
торым определить запас устойчивости по амплитуде ДА и по фазе Д<р.
5. Если ЛАЧХ выбранной корректирующей цепи будет несколь-
ко отличаться от расчетной, то следует построить окончательную
ЛАЧХ скорректированной системы и по ней проверить качественные
показатели переходного процесса.
Пример 8. Система автоматического регулирования частоты вращения дви-
гателя постоянного тока (см. рис. 35, б) имеет недостаточный запас устойчивости
по амплитуде AL = 1 дБ и по фазе Д<р = 1,5° (см. пример 7). Передаточная
функция главной цепи исходной системы имеет следующее выражение:
W (р) = К / (Тур + 1) (Тмр + 1)р,
где К = kykbMykM = 100 град/ (В . с), Ту = 0,01 с; Тм = 0,1 с.
Необходимо ввести в главную цепь системы корректирующее устройство
при этом коэффициент усиления системы должен оставаться неизменным, час-
тота среза должна быть не менее 40 1/с, запас устойчивости по фазе Дфск = 30°
(Дфск — запас устойчивости по фазе скорректированной системы); наклон ЛАЧХ
вблизи частоты соСр должен иметь — 20 дБ/дек.
Решение 1. Построим логарифмические частотные характеристики ис-
ходной системы (рис. 58).
86
Рис. 59. Система автоматического регулирова-
ния частоты вращения двигателя с корректиру-
ющим звеном
2. На этом же рисунке
построим ЛАЧХ желаемой си-
стемы таким образом, чтобы
она в области низких частот
совпала с ЛАЧХ исходной си-
стемы, в области средних ча-
стот прошла через частоту
среза соср = 40 1/с и имела
наклон —20 дБ/дек, в области
высоких частот была парал-
лельна ЛАЧХ исходной сис-
темы.
Так как наклон скоррек-
тированной ЛАЧХ (L (со)си) в
области частоты среза уменьшается до —20 дБ/дек, то корректирующей цепью
является реальное дифференцирующее звено (см. рис. 57) с передаточной
функцией
W (р) = К(Лр+ 1) / (Т2р+ 1).
Коэффициент передачи дифференцирующего звена k < 1, а по условию за-
дачи общий коэффициент системы должен оставаться без изменения, следова-
тельно, необходимо увеличить коэффициент усиления усилителя до Лу.ск =
= £у1/К, где ^у.ск — коэффициент усиления усилителя скорректированной
системы.
Передаточная функция главной цепи скорректированной системы будет
иметь следующее выражение:
W (р)ск = к (Л р + 1)/(Ту р + 1) (Ти р +1) (Тг р + 1) р.
Первая скорректированная частота сопряжения равна a>Coni = 24 1/с, вто-
рая частота соСоП2 определяется из выражения фазово-частотной характеристи-
ки скорректированной системы:
Ф (“)= —90°—arctg соср Ту—arctg ыср Тм—arctg соср Т2+ arctg(ocP7\ =
= —90°arctg 40-0,01 —arctg 40-0,1 —arctg 40/ысоп2 + arctg 40/24.
По условию задачи Дфск = 30°, следовательно,
30° — 18QP == —90° — arctg 40 . 0,01 — arctg 40 . 0,1 — arctg 40/сосопа -4-
arctg 40/24.
Из уравнения находим соСОп2 = 100 1/с.
3. Путем вычитания ЛАЧХ исходной системы из ЛАЧХ скорректирован-
ной системы строим ЛАЧХ корректирующей цепи.
4. По построенной ЛАЧХ определим параметры реального дифференци-
рующего звена:
Tr=Ri Ci = l/«coni = 1/24 = 0,042 с.
Tz—Ri Ci = Vwcon2 — 1/100 = 0,01 с;
Ti/T2=(Ri + R2VR2 = «сопг/ь'сош = 100/24 = 4,2;
201g 4,2= 12,4 дБ.
5. Запишем выражение для построения ЛФЧХ скорректированной систе-
мы:
<р (со)Ск — —90° — arctg 0,01 со — arctg 0,1 со — arctg 0,01 со-|-arctg О,О42со.
87
chipmaker.iu
Задаваясь значениями частоты to от 1 до 100, найдем соответствующие зна
чення <р (<о)ск: о, 1/с ... 1 Ю 40 <р(<о)ск... -93° 86' -123°37' 150° 100 — 187° 71'
Построим ЛФЧХ скорректированной системы.
Запас устойчивости скорректированной системы по амплитуде Д7. = 7 дБ,
по фазе Дфск = 30°.
Схема скорректированной системы изображена на рис. 59.
§ 2. Параллельные корректирующие устройства
Параллельные корректирующие цепи включают в виде элементов
отрицательной обратной связи, охватывающих наиболее инерцион-
ные звенья системы. В качестве параллельных стабилизирующих це-
пей чаще всего используют дифференцирующее звено для улучшения
динамических свойств или интегрирующее звено для уменьшения
статической погрешности.
РАЗДЕЛ 3
Системы числового программного
управления
Chipmaker.ru
Глава 11
Основные сведения о системах
числового программного управления
§ 1. Общая структура систем числового
программного управления
Система числового программного управления (СЧПУ) является
специализированным вычислительным устройством и предназначе-
на для решения определенного ряда задач. При решении этих задач
СЧПУ выполняет определенную последовательность арифметических
и логических операций (алгоритма работы СЧПУ). В большинстве сис-
тем алгоритм работы осуществляется специальным построением полу-
проводниковых схем — функциональных узлов и блоков. Однако име-
ются СЧПУ (например, Н55) с изменяемым алгоритмом работы, ко-
торый содержится в памяти системы и может быть изменен, причем
структура системы остается неизменной.
Функции, выполняемые СЧПУ, можно разделить на основные и
дополнительные. Основной функцией СЧПУ является управление
приводами подач в соответствии с заданной программой. Дополни-
тельные функции предусматривают изменение по программе скоростей
шпинделя, вида инструмента и т. п.
Обобщенная структурная схема СЧПУ представлена на рис. 60. Уст-
ройство ввода УВП считывает программу, т. е. преобразует в электри-
ческие сигналы и направляет в устройст-
во отработки программы УОП, которое
через устройство управления приводом
УУП воздействует на объект регулиро-
вания — привод подач ПП. Величину
перемещения подвижного узла станка,
связанного с приводом подач, контроли-
рует датчик Д, включенный в цепь глав-
ной обратной связи. Информация с дат-
чика через устройство обратной связи
УОС поступает в УОП, где происходит
сравнение фактического перемещения
узла подачи с заданным по программе, Рис. 60. Обобщенная структур-
для внесения корректив в произведен- ная схема СЧПУ
89
chipmaker.ru
ные перемещения. Для исполнения дополнительных функций с УВП
электрические сигналы поступают в устройство технологических ко-
манд УТК, которое воздействует на исполнительные элементы техно-
логических команд НЭТ К. Происходит включение (или выключение)
различных двигателей, электромагнитов, электромагнитных муфт и
др. СЧПУ, построенные по разомкнутой схеме, датчика обратной свя-
зи и УОС не имеют.
Обозначение СЧПУ состоит из четырех элементов:
1) буква, обозначающая тип системы: П — позиционная; Н —
непрерывная или контурная; У — универсальная или контурно-по-
зиционная;
2) цифра обозначающая общее число управляемых по программе
координат;
3) цифра, обозначающая число одновременно управляемых коор-
динат;
4) цифра, обозначающая тип привода подачи: 1 — шаговый, 2 —
следящий.
В конце четырехэлементного обозначения может стоять буква «М»,
которая означает, что данная СЧПУ выполнена на микроэлектронных
или интегральных микросхемах.
§ 2. Классификация систем числового программного управления
СЧПУ можно классифицировать по различным признакам.
1. По виду управления движения: позиционные; прямоугольные;
непрерывные (контурные).
2. По принципу работы: сравнения (только для позиционирова-
ния и прямоугольной обработки), с интерполяторами прямоугольны-
ми (только для позиционирования и прямоугольной обработки), ли-
нейными, линейно-круговыми и специального вида., с обработкой де-
кодированной программы (только с заданием программы на магнит-
ной ленте).
3. По принципу задания программы и типу программоносителя:
с заданием декодированной программы на магнитной ленте (с фазовой,
частотной и импульсной записью), с заданием кодированной програм-
мы на перфоленте (в абсолютных координатах и в приращениях).
4. По типу привода: со ступенчатым и бесступенчато-регулируе-
мым (только для позиционирования и прямоугольной обработки),
с шаговым, со следящим.
5. По типу датчика измерительного устройства: с абсолютным,
с циклическим, с импульсным, без датчика положения (только в СЧПУ
с шаговым приводом).
6. По числу одновременно управляемых координат: по одной
(только для позиционирования и прямоугольной обработки), по двум,
по трем, по четырем и более координатам.
7. По возможности коррекции программы: без коррекции, с кор-
рекцией длины и положения инструмента, с коррекцией радиуса фре-
зы на один или несколько инструментов или с автоматическим расче-
том эквидистанты.
90
Позиционные СЧПУ применяют для работы со станками сверлиль-
но-расточной группы. При позиционировании рабочий узел станка
(например, координатный стол с деталью) перемещается в новую точ-
ку обработки, причем перемещение должно быть произведено по про-
извольной траектории за кратчайшее время. Число управляемых ко-
ординат доходит до пяти, одновременно управляемых координат не
более двух, рабочая подача производится по одной координате.
При одновременном управлении по одной координате траектория
движения инструмента представлена на рис. 61, а, при одновременном
управлении по двум координатам — на рис. 61, б. Примером пози-
ционной системы может служить СЧПУ «Координата С-70».
Прямоугольные СЧПУ предназначены для обработки деталей с
прямоугольными контурами (например, ступенчатых валиков) на
станках токарной и фрезерной группы. Траектория движения инстру-
мента, прямоугольных систем представлена на рис. 61, в. Рабочие по-
дачи в этих системах в отличие от позици онных осуществляются по
всем координатам. При этом управление производится по одной коор-
динате при общем числе управляемых координат до пяти. Классифи-
кация позиционных СЧПУ приведена на рис. 62, а.
Непрерывные СЧПУ применяют для работы с фрезерными, токар-
ными и другими станками, где требуется перемещать рабочий орган
станка по строго заданной траектории одновременно по одной, двум
или большему числу координат. Непрерывные СЧПУ подразделяют
на системы управления от магнитной ленты, которые не содержат ин-
терполятор, и от перфоленты, где имеется интерполятор того или ино-
го вида.
СЧПУ с линейным интерполятором являются наиболее простыми.
Их используют в тех случаях, когда контур обрабатываемой детали
образован отрезками прямых, расположенных под различными угла-
Рис. 61. Траектория движения инструмента, задаваемая СЧПУ раз-
личного типа
91
chipmaker.ru
Рис. 62. Классификация СЧПУ:
а — позиционных; б — непрерывных
ми к осям координат (см. рис. 61, г). Если же контур обрабатываемой
детали более сложный (криволинейный), его аппроксимируют (с за-
данной точностью) ломаной линией (см. рис. 61, д). Двухкоординат-
ные СЧПУ с линейным интерполятором используют на токарных
станках, например СЧПУ «Контур 2ПТ». Трехкоординатные и с боль-
шим числом координат — на фрезерных станках, например СЧПУ
«Контур ЗП-68».
Системы с линейно-круговым интерполятором упрощают расчет
программ, улучшают чистоту обработки. Линейно-круговые интер-
поляторы отрабатывают задаваемые программой участки прямых и
дуг окружностей, причем дуга окружности может задаваться одним
кадром программ (см. рис. 61, е), если она не проходит через коорди-
натную ось. Примерами систем с линейно-круговым интерполятором
могут служить Н22-1М, предназначенная для управления токарными
станками; НЗЗ-1М — фрезерными станками; Н55-1 (Н55-2)—слож-
ными много координатными станками.
СЧПУ с интерполяторами специальных видов применяют для об-
работки деталей сложной формы (гребные винты, лопатки турбин
и т. п.). Классификация систем непрерывного управления приведена
на рис. 62, б.
§ 3. Блок-схема СЧПУ, управляемой
от магнитной ленты
Система программного управления фрезерными станками может
управлять по трем координатам. Одновременно можно управлять по
трем координатам. Система формирует от программы три технологи-
ческие команды. Программоносителем является девятидорожковая
магнитная лента, на которой записывается декодированная информа-
ция. Система преобразует эту информацию в электрические импульсы
и распределяет по обмоткам шаговых двигателей (основная функция),
а также воздействует на электромагнитные муфты, электромагниты
и пр. (дополнительные функции). Система может работать в двух ре-
жимах (рис. 63): автоматическом — от программоносителя и ручном —
от органов управления, расположенных на пульте. В автоматическом
режиме работы для считывания информации с магнитной ленты ис-
пользуется устройство считывающее магнитное У СМ, в котором с по-
мощью магнитной головки, состоящей из девяти катушек, программа
обработки детали преобразуется в определенную последовательность
электрических импульсов. Информация для перемещения по одной
координате считывается с двух дорожек (прямой и обратный ход). На
девяти дорожках магнитной ленты программа распределяется следую-
щим образом: первая и вторая координата X; третья и четвертая —
координата Y; пятая и шестая — координата Z; седьмая и восьмая —
технологические команды TKJ и ТК2\ девятая — сигнал «Конец про-
граммы» (технологическая команда ТКЗ). Счет дорожек ведут сверху
вниз. Начало каждой программы маркируется полоской из мягкой
алюминиевой фольги, которую наклеивают на тыльную сторону лен-
ты. Марки считываются фотодатчиком ФД, который формирует сиг-
нал «Начало программы». Электрические сигналы с катушек магнит-
ной головки поступают на девять усилителей считывания УС1—УС9,
усиливаются и направляются в блоки электронных коммутаторов БЭК
и блок технологических команд БТД.
В блоке электронного коммутатора происходит формирование им-
пульсов в прямоугольные; вырабатывается признак направления пере-
мещения (прямой и обратный ход); последовательно поступающие
импульсы распределяются по трем
фазам шеститактной схемы ком-
мутации.
С выхода электронного комму-
татора импульсы поступают для
усиления на усилители мощности
БУМ, нагрузкой которых являют-
ся обмотки шагового двигателя.
Информация о соответствующих
технологических командах (в виде
импульсов) поступает в блок техно-
логических команд, где преобразу-
ется в постоянные напряжения,
включающие электромагнитные ре-
ле, контактами которых замыкают-
ся цепи исполнительных элементов
технологических команд (ИЭТК).
Первая и вторая технологические
команды (ТК1\ ТД2) предназначены
для использования на станке. Тре-
тья технологическая команда ТК.З
«Конец программы» поступает в
блок автоматического управления
БАУ.
Станок
Рис. 63. Блок-схема СЧПУ, управляе-
мой от магнитной ленты
93
92
Блок автоматического управления предназначен для автомати-
ческого управления лентопротяжным механизмом магнитного считы-
вающего устройства, также содержит генератор ручного управления
ГРУ для работы системы в ручном режиме. Блок регулирования БР
предназначен для изменения скорости протяжки магнитной ленты, а
следовательно, частоты вращения шаговых двигателей.
В ручном режиме работы от генератора ручного управления из
БАУ импульсы с различной частотой следования (по заданию с пе-
реключателей, расположенных на пульте управления) или одиночные
импульсы поступают на вход выбранного блока электронного комму-
татора. Далее преобразование информации происходит аналогично
автоматическому режиму работы.
§ 4. Блок-схема контурной СЧПУ
с линейным интерполятором
Система предназначена для программного управления приводами
подач фрезерных станков по трем координатам. Число одновременно
управляемых координат три. Система под зет от программы на испол-
нительные элементы станка три группы (двумя десятичными разря-
дами) технологических команд. Программоносителем является пяти-
дорожковая телеграфная лен-
та, на которую наносится ин-
формация в коде БЦК-5. Си-
Рис. 64. Блок-схема контурной СЧПУ с ли-
нейным интерполятором
стема преобразует кодирован-
ную информацию с перфолен-
ты в унитарный код, т. е. в
серию последовательных им-
пульсов, число и частота сле-
дования которых соответст-
вуют величине и скорости пе-
ремещения узла подачи.
Система может быть также
использована в комплекте с
пультом записи и контроля
для перезаписи кодированной
программы с перфоленты в де-
кодированную программу на
магнитную ленту. Система мо-
жет работать в двух режимах
(рис. 64): автоматическом от
перфоленты и ручном, где
возможен ввод информации
с пульта управления, а так-
же непосредственно от гене-
ратора ручного управления
или генератора одиночных
импульсов.
В автоматическом режиме работы считывание кодированной ин-
формации с перфоленты производится фотосчитывающим устройством
ФСУ, которое преобразует отверстия, пробитые на перфоленте, в
электрические импульсы и направляет их в блок ввода БВ. Блок вво-
да преобразует, формирует и направляет импульсы в блок контроля
БК, дешифратор адресов первый ДА, память скоростей ПС, память
перемещений ПП, память технологических команд ПТК-
Блок контроля предназначен для контроля вводимой информации
по модулю 10. В кадре программы сумма числовой информации и чис-
ловых эквивалентов должна быть кратна десяти. В этом случае бло-
ком контроля дается разрешение на отработку введенной информа-
ции и на ввод информации последующего кадра программы. Если ин-
формация в кадре программы не кратна 10, формируется запрет на
отработку введенной информации и на ввод информации последующе-
го кадра.
Кодированная адресная информация из блока ввода поступает в
дешифратор адресов ДА1 для расшифровки очередного адреса. Сфор-
мированный адрес направляется во второй дешифратор адресов ДА2,
где он запоминается и коммутирует соответствующий адресу блок па-
мяти для записи в него кодированной числовой информации.
В системе имеются три блока памяти: ППХ, ППУ, ППг — переме-
щений по осям X, Y, Z; ПС — скоростей; ПТК — технологических
команд. Кодированная числовая информация, следующая в програм-
ме за кодом адреса, из блока ввода заносится в выбранный дешиф-
ратором ДА2 блок памяти. Из блока памяти технологических команд
кодированная числовая информация поступает на исполнительные
элементы технологических команд ИЭТК- Из блоков ППХ, ППУ,
ППг — в блок декад БД, из ПС — в блок генераторов БГ и блок за-
дания скорости БЗС.
Формирование частоты следования импульсов начинается в блоке
генераторов, где в соответствии с кодом подачи, хранящимся в блоке
памяти скоростей, выбирается один из генераторов. Импульсы с бло-
ка генераторов поступают в блок задания скорости, где происходит де-
ление частоты их следования в соответствии с кодом подачи. Для обес-
чения постоянства контурной скорости при работе различного числа
координат, а также прохода по прямым различной длины предназна-
чен блок поддержания контурной скорости БПКС, где происходит
также деление частоты следования импульсов. Из блока поддержания
контурной скорости импульсы с частотой следования, соответствую-
щей коду подачи, поступают в блок декад.
Блок декад пропускает в блоки отбора и тактирования выходных
импульсов БОТИ по каждой оси число импульсов, соответствующих
кодам, хранящимся в блоках памяти перемещений. Следовательно,
на выход блока декад проходит серия импульсов, число которых со-
ответствует величине запрограммированного перемещения узла стан-
ка, а частота их следования — скорости этого перемещения. Блоки
памяти перемещений и блок декад представляют собой линейный ин-
терполятор.
95
94
chipmaker.ru
С блоков отбора и тактирования выходных импульсов импульсы
поступают на соответствующие блоки электронных коммутаторов
БЭК для распределения по трем фазам шеститактной схемы коммута-
ции. Усиленные по мощности в блоках усилителей мощности БУМ
импульсы поступают на обмотки шаговых двигателей.
В ручном режиме работы информация вводится в память с пульта
управления через блок ручного ввода БРВ. Кроме того, ручной ре-
жим работы предусматривает подачу импульсов от генератора ручно-
го управления блока генераторов, а также одиночных импульсов не-
посредственно на входы соответствующих блоков электронных комму-
таторов.
Если система используется в комплекте с пультом записи и контро-
ля ПЗК, то импульсы непосредственно с блоков отбора и тактирова-
ния выходных импульсов поступают в ПЗК для записи декодирован-
ной программы на магнитную ленту по трем координатам.
§ 5. Блок-схема СЧПУ с линейно-круговым
интерполятором
Система предназначена для управления по программе привода-
ми подач токарных станков по двум координатам. Одновременно мож-
но управлять по двум координатам. Система производит по програм-
ме разгон и торможение приводов по линейному закону, обеспечивает
подачу на исполнительные элементы три группы технологических
команд (двумя десятичными разрядами). В системе предусмотрен ввод
коррекций по раздельным и парным координатам. Программоносите-
лем является восьмидорожковая перф мента, на которую наносится
информация по ГОСТ 13052—74 и рекомендациям кода ИСО. Система
преобразует кодированную информацию с перфоленты в серию после-
довательных импульсов (унитарный код), число и частота следования
которых соответствуют величине и скорости перемещения узла по-
дачи станка. Система содержит линейно-круговой интерполятор.
Система может работать в следующих режимах.
1. Автоматический — автоматическое выполнение рабочей прог-
раммы от перфоленты (чтение и отработка программы). Автоматичес-
кий режим предусматривает работу в двух подрежимах:
а) программа — автоматическое считывание всех кадров програм-
мы с их отработкой до получения команды «Конец кадра»;
б) программа по кадрам — автоматическое покадровое считыва-
ние (с остановкой в конце каждого кадра) и отработка информации.
2. Поиск кадра — автоматический поиск кадра.
3. Ускоренная отработка — режим аналогичен автоматическому,
с той лишь разницей, что отработка программы производится на макси-
мальной скорости рабочей подачи.
4. Проверка ленты — контрольный ре^им проверки ленты перед
работой.
5. Ручной ввод — ручное занесение информации с пульта.
6. Ручное управление — используется при безразмерном пере-
мещении инструмента.
96
7. Возврат и «О» — ручной режим установки подвижных органов
станка в нулевую точку.
Устройство (рис. 65) ввода предназначено для ввода информации
с перфоленты с предварительной отработкой и долговременного хра-
нения ее для использования как внутри вводного устройства, так и
на станке.
Считывание кодированной информации с перфоленты производит-
ся фотосчитывающим устройством ФСУ, с выхода которого электри-
ческие импульсы усиливаются, преобразуются в прямоугольные уси-
лителями считывания УС и направляются в блок входного регистра
ВР. Работой фотосчитывающего устройства управляет блок управ-
ления вводом УВ. Входной регистр предназначен для хранения ин-
формации, проверки ее на четность схемой контроля по паритету. Ад-
ресная информация из входного регистра переписывается в регистр
адресов РА, где адрес запоминается на время прохождения кодиро-
ванной числовой информации, следующей за ним. Расшифровку по-
ступившего адреса производит дешифратор адресов ДА. Кодирован-
ная числовая информация из входного регистра построчно записыва-
ется в регистр числа РЧ для хранения. Кодированная числовая инфор-
мация номера кадра, номера скорости шпинделя, номера вспомогатель-
ной команды и номера инструмента записываются в соответствую-
щие регистры памяти ПД, IIS, ПМ, ПТ для хранения.
Устройство управления и преобразования предназначено для фор-
мирования сигналов управления в различных режимах работы, сиг-
налов пуска и останова системы, а также для преобразования содер-
жимого регистра числа в двоичной код. Кроме того, устройство управ-
ления и преобразования обеспечивает цифровую индикацию коорди-
натных перемещений и состояний регистров в десятичной системе счис-
ления.
Устройство ввода
Устройство задания скорости j
ФСУ
УС
ВР
УРП
| Станок
иэтк |
Устройство интерполяции '^шаывы^
Устройство
управления и преобразования
Рис. 65. Блок-схема СЧПУ с линейно-круговым интерполятором
Устройство управлений
] и
] ® I
97
chipmaker.ru
Признаки адреса, знака, числа управляют прохождением и преоб-
разованием двоично-десятичной числовой информации в двоичный
код. Кодированная числовая информация подачи, координат х, у ко-
нечной точки, координат начальной точки дуги по х, у относительно
центра, шаг резьбы поступают из регистра числа на схемы считчиков
цифр СЦ и строк СС для контроля вводимой информации на длину сло-
ва, а также в узел режимов преобразования УРП для преобразова-
ния двоично-десятичного кода в двоичный.
Пульт коррекции ПК служит для набора с помощью переключа-
телей коррекции на установку инструмента и индикации выбранной
коррекции, введения «Смещение 0» станка, ручного ввода данных по
соответствующему адресу. Ввод коррекции начинается после прихода
от программы информации «Конец кадра». По этой команде в узле уп-
равления коррекции УК вырабатывается цикл коррекции, во время
которого считывается информация с заданного переключателя кор-
рекций и передается во входной регистр вводного устройства, затем
в регистр числа. Из. регистра числа вводного устройства информация
поступает в узел режимов преобразования, где преобразуется в дво-
ичный код. «Смещение 0» станка, ручной ввод по осям X или ¥ преоб-
разуется в двоичный код аналогично выполнению механизма коррек-
ции. Блок режимов управления РУ предназначен для управления
системой в различных режимах работы. Пульт управления ПУ слу-
жит для задания режимов работы системы, управления, сигнализа-
ции, индикации. Схема индикации СИ предназначена для обеспечения
цифровой индикации координатных перемещений в десятичной сис-
теме счисления.
Устройство задания скорости предназначено для выдачи в устрой-
ство интерполяции импульсов заданной частоты следования, опреде-
ляющих скорость отработки (подачи). При этом устройство обеспечи-
вает поддержание постоянства контурной скорости обработки, про-
изводит разгон и торможение с автоматическим определением участка
пути торможения.
Кодированная числовая информация о подаче и режимах скорости
в двоичном коде из узла режимов преобразования устройства управ-
ления и преобразования поступает в узел приема информации У ПИ.
Перезапись информации в память скоростей ПС производится в на-
чале обработки нового кадра. Величина скорости, записанная в интег-
ратор И, является определяющей величиной для формирования пере-
полнения регистра, т. е. управляющей выходной частотой, и находит-
ся в пропорциональной зависимости от величины скорости подачи. Сиг-
налы переполнения интегратора, команда «Быстрый ход» из узла при-
ема информации, режимов генератора разгона, торможения ГРТ по-
ступают в блок формирования выходных импульсов ФВИ, где проис-
ходит окончательное формирование частоты следования импульсов.
Автоматические разгон-торможение, задаваемые программой при пе-
реходе от рабочих подач к скорости быстрого хода и обратно, обеспе-
чиваются совместной работой узла разгона, торможения УРТ и ге-
нератора разгона-торможения. Блок поддержания постоянства кон-
турной скорости БПКС обеспечивает поддержание постоянства кон-
98
турной скорости, меняющейся в зависимости от угла наклона обраба-
тываемой прямой.
Устройство интерполяции предназначено для обработки геометри-
ческой информации, ее хранения на время отработки предшествую-
щих кадров и выдачи в соответствии с кодированной числовой инфор-
мацией определенного числа импульсов на привод.
Служебная информация, определяемая G-функцией, поступает в
приемный регистр узла G-функции УФБ из регистра числа устройства
вводного в виде двоично-десятичного кода, где происходит ее дешиф-
рация. Эта информация определяет режимы работы устройства ин-
терполяции (линейная и круговая), возврат в «О» и др. Кодированная
числовая информация о координатах х, у конечной точки, координа-
тах начальной точки дуги по X, Y относительно центра, шаге резьбы
поступает из узла режимов преобразования устройств управления и
преобразования в двоичном коде в регистры памяти интерполятора
ЛХИ.
Из блока формирования выходных импульсов устройства зада-
ния скорости поступают на интерполятор импульсы с частотой следо-
вания, соответствующей коду подачи. На выходе интерполятора фор-
мируются импульсы, число которых соответствует коду запрограмми-
рованного перемещения по осям X, Y, а частота их следования—ско-
рости этого перемещения. Импульсы с выхода интерполятора посту-
пают в устройство управления шаговым приводом.
Устройство управления шаговым приводом предназначено для
преобразования унитарного кода, полученного от интерполятора^ в
команды для последовательного включения фаз шагового двигателя.
Импульсы ±Х, ±Z, поступающие с интерполятора устройства
интерполяции, подаются на вход соответствующих блоков электрон-
ных коммутаторов БЭХ- Блок электронного коммутатора распреде-
ляет последовательно поступающие импульсы по шести фазам двенад-
цатитактной схемы коммутации, которые усиливаются усилителями
мощности БУМ и поступают на обмотки шаговых двигателей.
Блок реле БР предназначен для связи исполнительных элементов
технологических команд НЭТ К с системой,
§ 6. Блок-схема позиционной СЧПУ
Система -предназначена для программного управления ступенча-
тыми приводами подач сверлильных станков по двум координатам.
Число одновременно управляемых координат две. Система подает, на
исполнительные элементы три группы технологических команд (дву-
мя десятичными разрядами) — номер инструмента, скорость подачи,
скорость шпинделя. Программоносителем является восьмидорожко-
вая перфолента, на которую наносится информация по ГОСТ 13052—74
и рекомендациям кода ИСО.
Система с помощью датчиков обратной связи определяет координа-
ты подвижного органа станка, сравнивает их с заданными (определяет
величину и знак рассогласования), выдает команды на приводы до
момента устранения рассогласования.
Система может работать в следующих режимах.
99
chipmaker.ru
1. Автоматическом — ввод програм-
мы с перфоленты и отработка ее проис-
ходит автоматически кадр за кадром
до прихода команды «Конец кадра»;
2. Полуавтоматическом — ввод про-
граммы производится с перфоленты, но
циклы ввода программы и отработка ее
разделены.
3. Преднабор — программа задается
вручную .набором ее на переключате-
лях пульта управления;
4. Ручное управление — безразмер-
ное перемещение рабочих органов стан-
ка от органов управления, расположен-
ных на пульте управления.
Считывание кодированной информа-
ции (рис. 66) с перфоленты произво-
дится контактным считывающим устрой-
ством К.СУ, которое преобразует отвер-
стия на перфоленте в электрические им-
пульсы и направляет их в устройство
ввода УВ. Работой контактного счи-
Рис. 66. Блок-схема позицион-
ной СЧПУ
тывающего устройства управляет устройство управления УУ.
Устройство ввода предназначено для усиления, формирования счи-
танной информации, расшифровки адреса, контроля вводимой инфор-
мации на четность и на длину слова, хранения в памяти кодированной
числовой информации. Распределенная во времени информация о
координатах заданной точки, фактических координатах, плавающем
нуле, величине ступеней поступает в блок сбора информации БСИ
соответственно с устройства ввода, датчиков обратной связи Дх, Ду,
пульта управления ПУ, блока управления приводом БУП.
Из блока сбора информации информация поступает в устройство
арифметическое У А для вычисления величины и знака рассогласова-
ния. Блок управления приводом в соответствии с полученной инфор-
мацией из арифметического устройства формирует команды управле-
ния приводами подач /7Х, Пу. Распределитель импульсов РИ обес-
печивает синхронность в работе блоков системы. Устройство управле-
ния обеспечивает работу системы в различных режимах. Пульт уп-
равления служит для задания различных режимов работы системы.
Схема индикации СИ предназначена для обеспечения цифровой инди-
кации необходимой информации.
§ 7. Программоносители управляющих программ
Управляющие программы для работы СЧПУ записываются на пер-
фолентах и магнитных лентах. Перфоленты для записи управляющих
программ используются пятидорожковая шириной 17,5 мм (рис. 67, а)
и восьмидорожковая шириной 25,4 мм (рис. 67, б).
100
. a) f)
Рис. 67. Перфолента для записи управляющих программ:
а — пятидорожковая; б — восьмидорожковая
Пятидорожковая лента имеет шесть дорожек, из них пять кодовых
и одна синхронизирующая (транспортная Т). Восьмидорожковая лен-
та имеет девять дорожек — восемь кодовых и одну синхронизирующую.
Пока для записи программ управления СЧПУ используются пяти-
и восьмидорожковые перфоленты, но постепенно будет осуществлен пе-
реход к повсеместному использованию восьмидорожковой перфоленты.
На кодовых дорожках построчно в соответствии с программой про-
биваются отверстия большего диаметра (на месте каждого знака «1»
пробивается отверстие в ленте, на месте знака «О» ленту не пробивают),
на синхронйзирующей дорожке обязательно в каждой строке проби-
вается отверстие меньшего диаметра.
Для перфоленты используют бумажную или майларовую (плас-
тиковую ленту). Майларовая лента во много раз прочнее бумажной и
выдерживает многократное (порядка нескольких тысяч) число прого-
нов через считывающее устройство.
Магнитная лента представляет собой ленту из ацетилцеллюлозы
шириной 35 мм, покрытую тонким слоем (порядка 1 мкм) ферромагнит-
ной эмульсии. Магнитная лента разделена по ширине на девять доро-
жек и на каждую из них записывается информация в соответствии с
управляющей программой. Одним из главных технико-экономичес-
ких достоинств применения магнитной ленты является возможность
на одном отрезке ленты многократно воспроизводить, стирать и запи-
сывать вновь управляющие программы. К недостаткам следует отнести
влияние на магнитную ленту внешней среды (температуры, влажности,
магнитных полей); довольно быстрый износ магнитного слоя, абра-
зивное воздействие магнитного слоя на элементы лентопротяжного
механизма необходимость специальной аппаратуры для записи про-
грамм на ленту.
§ 8. Запись управляющих программ на перфоленту
Управляющая программа записывается на перфоленту в виде по-
следовательности фраз. Фраза содержит информацию о геометричес-
ких и технологических данных, необходимых для обработки опреде-
ленного участка детали или выполнения вспомогательных функций
101
chipmaker.ru
(начало программы, ускоренный подвод инструмента и т. п.). Последо-
вательность фраз в программе определяет последовательность обработ-
ки детали. Фраза состоит из нескольких строк, в которых записывают-
ся кодовые обозначения символов программы. Слово представляет
собой часть фразы, т. е. несколько строк, определяющих одно понятие.
В практике программного управления программы в основном за-
писываются фразами с переменным числом слов. Реже используются
запись программы фразами с постоянным числом слов. Такие фразы
называются кадрами. При записи программы кадрами в каждую фразу
записываются все слова независимо от их повторяемости и числовых
значений. В этом случае длина слов в программе остается постоянной,
следовательно, длина фраз также будет постоянной, т. е. для каждой
фразы отводится постоянное число строк на перфоленте (рис. 68, а).
При записи программы фразами используют только необходимые
слова для данной программы обработки детали. Запись программы
фразами на перфоленту выполняется различными способами, но в ос-
новном используется адресная система, в которой кодированной чис-
ловой информации предшествует буквенный адрес (рис. 68, б). Иногда
для замены пропускаемых слов используется специальный табуля-
ционный знак TAB (рис. 68, в).
Кроме рассмотренных способов записи программы на перфоленту
иногда употребляют универсальную систему, предусматривающую
буквенный адрес и табуляционный знак (рис. 68, г). В рассмотренных
примерах в качестве разделения TAB использован символ «Я».
Использование буквенных обозначений адресов обеспечивает чет-
кое разделение слов. Кроме того, отпадает необходимость устанав-
ливать последовательность слов во фразах, так как наличие буквен-
ных адресов позволяет производить запись слов в любой последова-
тельности и появляется возможность использовать единый способ ко-
дирования для станков различного технологического назначения и
различного уровня автоматизации. Для этого достаточно принять еди-
ный код и закрепить соответствующие символы кода (адреса) за опре-
деленными командами управления.
«7 г)
Рис. 68. Запись информации на перфоленте:
а —кадровая; б — адресная; в — табуляция; г — универсальная
102
§ 9. Запись управляющих программ
на магнитную ленту
Если станок управляется от СЧПУ, для которой программоносите-
лем является магнитная лента, то кодированная информация програм-
мы вначале наносится на перфоленту, а затем с помощью специальной
аппаратуры перезаписи записывается на магнитную ленту в унитар-
ном коде.
При записи управляющих программ на магнитную ленту, как пра-
вило, одновременно записывается несколько управляющих сигналов,
поэтому она разделена по ширине на несколько дорожек (в большин-
стве случаев на девять), и на каждой из них записывается информация.
В настоящее время применяют три типа СЧПУ с различным видом
записи программы на магнитную ленту: фазовые, частотные и импульс-
ные. При фазовой записи программы на одной из дорожек записывает-
ся опорный сигнал синусоидальной формы с частотой следования
250 Гц, а на других дорожках — сигналы программы той же частоты,
но сдвинутые по фазе относительно опорного сигнала в соответствии с
задаваемым перемещением. Фазовую систему записи применяют в
СЧПУ со следящим приводом.
При частотной записи программы на дорожках магнитной ленты
записываются импульсы, промодулированные с высокой частотой.
СЧПУ с частотной записью программы предназначены для работы с
шаговыми приводами. Для каждого шагового двигателя отводятся три
дорожки магнитной ленты.
При импульсной записи программы на дорожках магнитной ленты
записываются импульсы, число которых соответствует величине пере-
мещения рабочего органа станка, а частота их следования — времени
этого перемещения. СЧПУ с импульсной записью программы пред-
назначены также для работы с шаговыми приводами, причем для каж-
дого двигателя отводятся две дорожки магнитной ленты (прямой и об-
ратный ход).
СЧПУ с заданием программы на магнитной ленте имеют следующие
недостатки, ограничивающие область их применения:
1) отсутствует возможность введения коррекций на размеры и по-
ложение .инструмента;
2) ограниченное число технологических команд;
3) ограниченная скорость подач холостых перемещений;
4) отсутствует возможность задания постоянных циклов обработ-
ки;
5) относительно большой расход магнитной ленты вследствие ее бы-
строго износа.
В связи с повышением степени автоматизации станков с числовым
программным управлением, внедрением быстродействующих приводов
и необходимостью производства деталей с длительным временем обра-
ботки все большее значение приобретают СЧПУ с заданием програм-
мы на восьмидорожковой перфоленте.
103
chipmaker.ru
Глава 12
Основы работы блоков СЧПУ
§ 1. Устройства ввода и считывания программ
В СЧПУ применяют магнитные, контактные и фотосчитывающие
устройства. Магнитное считывающее устройство предназначено для
преобразования информации, записанной на магнитной ленте в виде
магнитного поля, в электрические импульсы. Магнитное считываю-
щее устройство состоит из двух основных узлов: считывателя програм-
мы, лентопротяжного механизма.
Считывателем программы являются магнитные головки, которые,
находясь в магнитной связи с лентой, осуществляют воспроизведение
записанной на ней информации. Основной частью магнитной головки
является сердечник, состоящий из двух полуколец, набранных из лис-
тов пермаллоя (рис. 69, а). В рабочей части головки, обращенной к
ленте, между половинками сердечника имеется зазор размером 0,01—
0,02 мм, заполненный немагнитным материалом. На полукольцах
сердечника размещены две катушки с обмоткой.
Записанная информация на магнитной ленте представляет собой
определенное направление магнитных силовых линий. При переме-
щении магнитной ленты мимо рабочего зазора головки магнитные ли-
нии участков ленты будут замыкаться по сердечнику, возбуждая элект-
родвижущую силу Е в обмотке катушек. - Нагрузкой магнитных голо-
вок являются входные цепи усилителей считывания. '
Лентопротяжный механизм (рис. 69, б) предназначен для переме-
щения магнитной ленты относительно магнитных головок. Он может
работать в режимах считывания программы, обратной перемотки маг-
нитной ленты и ускоренной перемотки магнитной ленты вперед.
При работе лентопротяжного механизма в режиме «Считывания
программы» магнитная лента непрерывно, с постоянной скоростью пере-
мещается относительно магнитной головки. Лента перемещается от
ведущего вала ВВ двигателя постоянного тока, к которому ее прижи-
мает прижимной ролик ПР. Для уменьшения воздушного зазора лен-
Рис. 69. Магнитное считывающее устройство:
а — считыватель программы; б — лентопротяжный механизм
104
эм
Рис. 70. Контактное считывающее
устройство
та прижимается к магнитным го-
ловкам МГ прижимной колодкой
/(. В процессе считывания магнит-
ная лента сматывается с левой ка-
тушки ЛК и наматывается на пра-
вую катушку ПК, которые уста-
новлены на валах синхронных дви-
гателей, причем левый двигатель
работает в тормозном режиме (про-
изводит натяжение ленты), пра-
вый — в качестве подмотчика (на-
матывает ленту на правую катуш-
ку. Номинальная скорость переме-
щения ленты составляет 0,2 м/с.
Обратная перемотка магнитной
ленты предусмотрена для ускорен-
ной перемотки ленты с правой ка-
тушки на левую. Левый двигатель
работает с повышенной частотой вращения, правый двигатель — с по-
ниженной (натягивает ленту), при этом ведущий двигатель отключен,
прижимной ролик и прижимная колодка отводится от ленты, рычаг Р
колодки отводит ленту от соприкосновения с магнитной головкой.
Ускоренная перемотка ленты вперед предусмотрена для перемотки
ленты с левой катушки на правую. Режим работы аналогичен обрат-
ной перемотке магнитной ленты, с той лишь разницей, что в рассмат-
риваемом режиме работы правый двигатель вращается с повышенной
частотой, левый — с пониженной.
Контактное считывающее устройство предназначено для преоб-
разования программы, записанной в виде комбинации отверстий на
перфоленте, в электрические импульсы. В состав контактного считы-
вающего устройства входят считыватель программы и лентопротяж-
ный механизм.
Считыватель программы (рис. 70) предназначен для преобразова-
ния отверстий, пробитых на перфоленте, в электрические импульсы.
Считыватель программы состоит из контактной колодки КК и головки
Г со щетками, между которыми расположена перфолента ПЛ. Кон-
тактная колодка и головка выполнены из изоляционного материала.
В колодке запрессованы металлические пластины (контакты), в голов-
ке — металлические пластины в виде щеток. Щетки головки и контак-
ты колодки соединены с источником питания, нагрузкой которого (по
дорожкам перфоленты) служат входные цепи усилителей считывания.
При считывании информации щетки головки прижимаются к контак-
там колодки. Если между щеткой и соответствующим контактом колод-
ки нет отверстия на перфоленте, то электрическая цепь останется
разомкнутой, что будет соответствовать наличию «0». При наличии от-
верстия на дорожке перфоленты щетка замкнется с контактом колодки,
т. е. электрическая цепь будет замкнута, что соответствует наличию «1».
Лентопротяжный механизм предназначен для перемещения пер-
фоленты относительно контактной колодки и головки, со щетками.
105
chipmaker.ru
Основными элементами лентопротяжного механизма являются асин-
хронный конденсаторный двигатель, редуктор и электромагнит про-
тяжки. Электродвигатель работает непрерывно с момента включения
считывающего устройства и вращает через редуктор ведущий вал ВВ.
Из блока управления считывающим устройством приходит команда на
протяжку перфоленты, при этом включается электромагнит протяжки
ЭМ, который через рычаг Р прижимает прижимной ролик ПР, а сле-
довательно, и перфоленту к ведущему валу. Перфолента начинает
перемещаться относительно считывателя программы. При обесточива-
нии электромагнита протяжки прижимной ролик отводится от ведуще-
го вала, и протяжка перфоленты прекращается.
Скорость считывания программ с помощью контактных считываю-
щих устройств невелика (10—30 строк/с).
Фотосчитывающее устройство предназначено для преобразования,
отверстий, пробитых на перфоленте, в последовательность электричес-
ких импульсов. Оно состоит из фотосчитывателя и лентопротяженного
механизма. Фотосчитыватель (рис. 71) имеет осветительную лампу Л,
фокусирующую линзу ФЛ, диафрагму столика ДС и фотоэлектричес-
кие преобразователи ФЭ. Перфолента ПЛ расположена на столе, в ко-
тором имеются сквозные отверстия (диафрагма столика). Под каждым
отверстием стола размещены фотоэлектрические преобразователи. Све-
товой поток от лампы фокусируется линзой в узкую полоску, направ-
ленную на строку перфоленты. При наличии отверстий на одной или
нескольких дорожках освещенной строки перфоленты световой поток,
пройдя через них, осветит соответствующие фотоэлектрические преоб-
разователи, на выходе которых появятся электрические сигналы,
что будет соответствовать наличию «1». При отсутствии пробивок на
каких-то дорожках освещенной строки перфоленты соответствующие
фотопреобразователи освещены не будут, следовательно, разность
потенциалов на их выходах будет отсутствовать, что соответствует на-
личию «0». Фотоэлектрические преобразователи нагружены на вход-
ные цепи усилителей считывания.
Лентопротяжный механизм состоит из асинхронного конденсатор-
ного двигателя, электромагнитов протяжки ЭМП и тормоза ЭМТ.
Электродвигатель работает непрерывно с момента включения фотосчи-
тывающего устройства, вращая ведущий вал ВВ. Перфолента распола-
гается между ведущим валом и прижимным роликом ПР. Если из
блока управления фотосчитывающим устройством поступит команда
на протяжку перфоленты, то
выключается электромагнит тор-
моза и включается электромаг-
нит протяжки, прижимая ры-
чагом Р прижимной ролик, а
следовательно, и перфоленту к
ведущему валу. Перфолента нач-
нет перемещаться относительно
фотосчитывателя. При поступле-
нии команды на останов перфо-
Рис. 71. Фотосчитывающее устройство
Ю6
ленты, электромагнит протяжки
Рис. 72. Принципиальная схема усилителя считывания с магнитной ленты
выключится, прижимной ролик отойдет от ведущего вала; а электро-
магнит тормоза включится и прижмет перфоленту к столу. Ско-
рость считывания фотосчитывающих устройств составляет 300—
—1500 строк/с.
Усилители считывания предназначены для усиления и формирова-
ния электрических импульсов, считанных с программоносителя счи-
тывающим устройством. На рис. 72 приведена принципиальная схема
усилителя считывания информации с магнитной ленты для одной до-
рожки. Усилитель считывания состоит из трех каскадов усилителей,
построенных на транзисторах Tl, Т2, ТЗ; эмиттерного повторителя
на транзисторе Т4 и усилителя-ограничителя на транзисторе Т5.
Импульсы с магнитной головки поступают на вход первого каскада
усилителя. Первый каскад усилителя для уменьшения уровня соб-
ственных шумог поставлен в режим работы с малым коллекторным
током, его коэффициент усиления невысок. Второй и третий каскады
усилителя обеспечивают дальнейшее усиление электрических импуль-
сов. С выхода третьего каскада усилителя импульсы поступают на эмит-
терный повторитель, согласующий большое выходное сопротивление
третьего каскада усилителя с малым входным сопротивлением усили-
импульсы положительной
теля-ограничителя. Диод Д1 шунтирует
полярности, благодаря чему с выхода
усилителя-ограничителя снимаются пря-
моугольные импульсы только отрица-
тельной полярности.
На рис. 73 приведена принципиаль-
ная схема усилителя считывания инфор-
мации с перфоленты для одной дорожки.
На вход усилителя считывания при осве-
щении фотоэлектрического преобразова-
теля поступает ^сформированный элек-
трический импульс отрицательной поляр-
ности. Благодаря оптимальному подбору
на входе усилителя цепочек ДС с раз-
личной постоянной времени с выхода уси-
лителя снимается прямоугольный им-
пульс положительной полярности.
Рис. 73. Принципиальная схе-
ма усилителя считывания кодо-
вых дорожек перфоленты
107
chipmaker.ru
§ 2. Контроль вводимой информации
Для качественной обработки деталей на станках, управляемых
системами числового программного управления, необходима безо-
шибочная работа всех звеньев, начиная с процесса подготовки управ-
ляющих программ и кончая работой станка. Необходимо исключить
прохождения команд на станок, приводящих к браку детали, поломке
инструментов и станка. Источники ошибок в управляющей программе,
поступающие в СЧПУ, можно разделить на ошибки, допущенные тех-
нологом при программировании, допущенные при записи программы
на программоноситель, (сбой) считывающего устройства СЧПУ.
Ошибки, допущенные технологом при программировании, можно
разделить на геометрические и технологические. Геометрические ошиб-
ки являются причиной неправильных перемещений рабочих органов
станка и приводят к получению ошибочных размеров или поломке ин-
струмента, а возможно и станка. Для выявления геометрических оши-
бок используют различные графические устройства.
Технологические ошибки главным образом связаны с неправильно
выбранными режимами резания, что приводит к недогрузке станка,
т. е. к снижению производительности станка, или к перегрузке —
преждевременному выходу из строя инструмента и станка.
Ошибки, внесенные при записи программы на программоноситель
или допущенные считывающим устройством, могут распознаваться
блоками контроля СЧПУ. Информация, введенная в СЧПУ считываю-
щим устройством, контролируется блоком контроля для подачи коман-
ды в блок управления на запрет отработки ошибочной (ложной) ин-
формации и на ввод последующей информации программы.
Наибольшее распространение в СЧПУ получил контроль по моду-
лю десять, по модулю девять, на четность и длину слова.
При контроле по модулю десять числовая информация во фразе
(кадре) программы должна быть кратна десяти, т. е. делиться на десять
без остатка. Поэтому перед нанесением программы на программоно-
ситель необходимо числовую информацию каждой фразы дополнить
таким контрольным числом, чтобы сумма чисел и числовых эквива-
лентов была бы кратна десяти. Например, фраза программы содержит
следующую информацию: Е50982Д13045Т24471П06Н. Сумма чисел
равна 72, следовательно, необходимо дополнить фразу контрольным
числом 8. Тогда фраза программы будет записана следующим обра-
зом: 8Е50982Д13045Т24471П06Н.
Введенная в СЧПУ числовая информация фразы поступит в блок
контроля на контроль по модулю десять. Блок контроля подсчитает
числовую информацию и по приходу адреса «Конец кадра» сформиру-
ет команду разрешения на отработку введенной информации и на ввод
информации последующей фразы программы. Если при записи про-
граммы на программоноситель была допущена ошибка, т. е. перепута-
но какое-то число, или считывающее устройство допустило сбой, то
числовая информация во фразе уже не будет кратна десяти. Тогда
блок контроля, обнаружив ошибку, сформирует команду запрета на
108
отработку введенной ложной информации и на ввод последующей час-
ти программы.
При контроле по модулю девять числовая информация фразы до-
полняется таким контрольным числом, чтобы сумма чисел и числовых
эквивалентов была бы кратна девяти.
При контроле на четность и длину слова требуется прежде всего,
чтобы число отверстий в строке перфоленты было четным. Для контро-
ля на четность отведена восьмая дорожка перфоленты, на которой про-
бивается отверстие, если число отверстий на семи дорожках нечет-
ное. Если во введенной информации блок контроля зафиксирует нечет-
ное число импульсов, то он сформирует команду запрета на ввод по-
следующей информации программы.
Контроль на длину слова предусматривает наличие полного соста-
ва слова, т. е. адреса, знака и числового значения. Причем под каж-
дым адресом должно быть записано всегда постоянное число строк,
определяемое данным адресом. Если в середине слова появится новый
адрес, то блок контроля на длину слова сформирует команду запрета
на ввод последующей информации программы.
Блок контроля на четность (рис. 74) состоит из семи идентичных
схем. В состав каждой схемы входят два логических элемента ИЛИ
(Э2, Э4), два инвертора НЕ (ЭЗ, Э5) и логический элемент И (Э1).
Схема имеет два входа и один выход. На два входа схемы могут посту-
пать по первой и второй дорожкам нули; по первой дорожке нуль, по
второй — единица; по первой дорожке единица, по второй — нуль;
по первой и второй дорожкам единицы.
При поступлении по двум входам схемы нулей на входе элемента
ИЛИ (Э2) формируется нуль, который преобразуется в единицу ин-
вертором НЕ (ЭЗ). Единица с инвертора НЕ (ЭЗ) поступает на один
из входов элемента ИЛИ (54). Кроме того, два нуля поступят на вход
элемента И (Э1), с выхода которого нуль поступит на второй вход
Рис. 74. Функциональная схема блока контроля на четность
109
chipmaker.ru
элемента ИЛИ (Э4). На два входа элемента ИЛИ (Э4) поступают еди-
ница и нуль. Единица с выхода элемента ИЛИ (Э4) преобразуется в
нуль инвертором НЕ (Э5). На выходе схемы будет сформирован
нуль.
Если по первому входу (первая дорожка перфоленты) схемы посту-
пит нуль, а по второму (вторая дорожка) входу — единица, то на вы-
ходе элемента ИЛИ (Э2) формируется единица, которая преобразует-
ся в нуль инвертором НЕ (ЭЗ) и поступит на один из входов элемента
ИЛИ (Э4). На второй вход этого элемента поступит нуль с выхода
элемента и (Э1). Нуль с выхода элемента ИЛИ (Э4) преобразуется в
единицу инвертором НЕ (35) .Следовательно, на выходе схемы будет
сформирована единица.
При поступлении по первому входу схемы единицы, а по второму
входу — нуля преобразование информации на логических элементах
будет аналогично случаю, когда по первому входу схемы поступал
нуль, а по второму входу — единица. На выходе схемы будет сформи-
рован нуль.
Если по двум входам схемы поступают единицы, то единица с вы-
хода элемента ИЛИ (32) преобразуется в нуль инвертором НЕ (ЭЗ)
и поступит на один из входов элемента ИЛИ (34). На второй вход это-
го элемента поступит единица с выхода элемента И (Э1). Единица с вы-
хода элемента ИЛИ (Э4) преобразуется в нуль инвертором НЕ (Э5).
Следовательно, на выходе схемы будет сформирован нуль.
На вход блока контроля на четность информация поступает (схе-
мы Сх.1 — Сх.4) с восьми дорожек считанной строки перфоленты.
Выходная информация схем Сх.1 и Сх.2 является входной информаци-
ей по соответствующим входам схемы Сх. 5, а выходная информация
схем Сх.З и Сх.4 — схемы Сх.6. Выходная информация схем Сх.5 и
Сх.6 является входной информацией по соответствующим входам
схемы Сх.7, выход которой является выходом блока контроля на чет-
ность. Если число пробивок в считанной строке перфоленты четное,
то на выходе блока формируется нуль, т. е. команда, разрешающая
дальнейший ввод информации. При нечетном числе пробивок в считан-
ной строке перфоленты на выходе блока формируется единица — ко-
манда на запрет считывания последующих строк программы.
При вводе четной записи информации, например, числа 4 —
— 10110100 на выходах схем блока контроля будут следующие состоя-
ния:
Сх.1 — нуль
Сх.5 — единица
Сх.2 — единица
Сх.7 — нуль
Сх.З — нуль
Сх.6 — единица
Сх.4 — единица
т. е. на выходе блока будет сформирован нуль.
При вводе нечетной записи информации, например, числа 4 —
00110100 на выходах схем блока контроля будут следующие состоя-
ния:
ПО
Сх.1 — единица
Сх.5 — нуль
Сх.2 — единица
Сх.7 — единица
Сх.З — нуль
Сх.6 — единица
Сх.4 — единица
т. е. на выходе блока контроля будет сформирована единица.
§ 3. Дешифраторы адресов
В общем случае дешифраторы (избирательные схемы) позволяют
выделить из серии сигналов отдельные сигналы или же распределить
сигналы в определенные цепи в заданном порядке в зависимости от
комбинации сигналов на входе. Дешифраторы в СЧПУ предназначе-
ны для расшифровки адресной информации управляющей программы.
Сформированный тот или иной адрес с выхода дешифратора запомина-
ется в регистре адресов и коммутирует определенные блоки памяти,
в которые записывается геометрическая, технологическая п служеб-
ная информация, следующая под этим адресом. Адресная информация
может вначале запоминаться в регистре адреса, а уже затем подлежит
расшифровке дешифратором адресов. В обоих случаях адрес запоми-
нается до прихода очередного адреса.
Регистр адресов предназначен для запоминания адресной информа-
ции на время прохождения информации, записанной под ним, до мо-
мента поступления очередной адресной информации. Считанная с пер-
фоленты, усиленная и сформированная адресная информация посту-
пает в регистр адресов по шести дорожкам на логические элементы
И — НЕ (31 — 35) (рис. 75). На один вход каждого элемента И — НЕ
поступают сигналы с одной из пяти дорожек. На вторые входы этих
элементов сигнал поступает с седьмой дорожки, так как при наличии
любого адреса на седьмой дорожке перфоленты имеется отверстие.
При поступлении со считывающего устройства адресной информа-
ции формируется сигнал «Сброс адреса», который поступает на нуле-
вые входы триггеров Т1 — Т5 и установит их в единичное (исходное)
состояние, т. е. подготовит регистр адресов для приема адресной ин-
формации. Адресная информация на время «очистки» регистра будет
задержана, после чего поступит в виде единиц и нулей по соответст-
вующим адресной информации дорожкам. Единицы преобразуются
в нули элементами И — НЕ и установят соответствующие триггеры в
нулевое состояние, которое не изменится до прихода сигнала «Сброс
адреса». Записанная адресная информация будет сохранена до при-
хода очередной адресной информации.
Например, поступит в систему информация адреса X. Прежде всего
будет произведена «очистка» регистра адресов путем переброса и еди-
ничное состояние триггеров Т1 — Т5 сигналом «Сброс адреса». Ад-
рес X задается наличием отверстий на четвертой, пятой и седьмой до-
рожках перфоленты. Следовательно, единицы поступят по двум вхо-
дам только на элементы И — НЕ (34, 35), которые сформируют нули
и установят триггеры Т4 и Т5 в нулевое состояние.
Ш
Рис. 75. Функциональная схема регистра и дешифратора
адресов
Адресная информация с единичных и нулевых выходов тригге-
ров регистра адресов поступает в дешифратор адресов для расшифровки.
Дешифратор адресов предназначен для расшифровки адресной
информации с целью управления записью числовой информации в бло-
ки системы. Записанная в регистре адресов (в триггерах Т1 — Т5)
адресная информация по цепям 1—10 поступит в дешифратор адресов
на входы логических элементов И — НЕ (36—3/7). На выходе одного из
этих элементов сформируется нуль, который Преобразуется в единицу
соответствующим элементом НЕ (Э18—Э26) ИЛи элементом И — НЕ
(Э17 — Э29). Таким образом, будет сформирован поступивший адрес.
На остальных выходах элементов НЕ и И —- НЕ будут сохраняться
нули.
Например, при записи очередной адресной информации в регистр
адресов триггеры будут находиться в следующих состояниях: Т1,
Т2, ТЗ — в единичном, Т4, Т5 — в нулевом. Единицы по цепям 1, 3, 5,
Зв 10 поступят в дешифратор адресов на входы элементов И — НЕ (Э6—
— Э17), и только на элемент И — НЕ (37) По всем четырем входам
(/, 3, 8, 10) поступят единицы. Следовательно, На его выходе сфор-
мируется нуль, который преобразуется в единицу элементом НЕ (3/9).
Таким образом, будет сформирован адрес X.
112
Адреса технологических команд Т, М, S формируются при наличии
сигнала «Сброс логики», который производит «очистку» регистров па-
мяти Т, М, S.
С выхода дешифратора адресов сформированный адрес направля-
ется для выбора необходимых блоков, в которые запишется числовая
информация. Сформированный адрес будет сохраняться в дешифрауо-
ре адресов до прихода очередного адреса.
§ 4. Устройство памяти
Устройства памяти служат для хранения числовой информации —
геометрической, технологической и служебной. Технологическая и
служебная информация может сохраняться в памяти как на время
отработки информации, записанной во фразе, так и программы в це-
лом. Геометрическая информация фразы программы сохраняется в па-
мяти только на время ее отработки. Блок памяти состоит из буферной
и рабочей памяти.
Буферная память предназначена для преобразования информации
во время приема с перфоленты, хранения ее на время отработки ин-
формации предыдущей фразы и преобразования перед выдачей в ра-
бочую память. Буферная память обеспечивает непрерывность процесса
обработки, которая необходима для работы токарных и фрезерных
станков, где нежелательна даже кратковременная остановка режуще-
го инструмента при переходе с одного участка интерполирования к
другому. Ввод информации в буферную память с перфоленты произ-
водится последовательно строка за строкой во время отработки инфор-
мации предшествующего кадра.
Рабочая память предназначена для хранения информации на вре^я
ее отработки. Рабочая память геометрической информации является
составной частью интерполятора, рабочая память скорости подачи —
устройства задания скорости.
В ряде СЧПУ числовая информация перед записью в память пре-
образуется из двоично-десятичного кода в двоичный. СЧПУ, работаю-
щие в двоично-десятичном коде, как правило, не требуют преобразо-
вания вводимой информации. Так, в СЧПУ с линейными интерполято-
рами, работающими по методу отбора импульсов, геометрическая и
технологическая информация, находящаяся в памяти, полностью сов-
падает с информацией, записанной на перфоленте.
Блок памяти перемещений содержит буферную и рабочую память
для записи знаковой и числовой информации в двоично-десятичном
коде (рис. 76). В один блок записывается знаковая и числовая инфор-
мация фразы- с одной дорожки перфоленты, а так как числовая Ин-
формация записывается на четырех дорожках перфоленты, то для За-
писи числовой информации фразы по одной координате используются
четыре аналогичных блока памяти.
Буферная память представляет собой регистр сдвига, построенной
на триггерах Т1 — Т5. В триггерах в качестве вентилей используются
внутренние потенциально-импульсные схемы. Потенциал каждого
предыдущего триггера управляет потенциально-импульсной схемой
’13
Рис. 76. Функциональная схема блока памяти перемещений
последующего триггера, а первый триггер Т1 управляется блоком де-
шифратора адресов (ДА). Тактовый импульс ТИ поступает на счет-
ные входы триггеров Т2 —Т5 одновременно и при этом каждый по-
следующий триггер установится в такое состояние, в котором находил-
ся предыдущий триггер. Первый триггер Т1 устанавливается тактовым
импульсом всегда в нулевое состояние. Перед приемом информации
триггеры буферной памяти устанавливаются также в нулевое состоя-
ние.
Дешифратор адресов, расшифровав адресную информацию, пода-
ет разрешающий сигнал (единицу) в соответствующие адресу блоки
буферной памяти на запись числовой информации. Единица разреше-
ния записи с дешифратора адресов поступит на один из входов эле-
мента И — НЕ (Э7), на другой вход которого последовательно будут
поступать единицы знаковой и числовой информации с вводимой до-
рожки перфоленты (на схеме это первая дорожка перфоленты) при на-
личии на ее строках отверстий. Информация о знаке с первой строки
перфоленты, следующая за адресом, поступит на единичный вход триг-
гера Т1 и запомнится им. Тактовый импульс перепишет информацию о
знаке из триггера Т1 в триггер Т2. Затем на единичный вход триггера
Т1 поступит числовая информация разряда'тысяч, следующая за ин-
формацией о знаке. Тактовый импульс перепишет информацию о зна-
ке из триггера Т2 в триггер ТЗ, а информацию разряда тысяч из триг-
гера Т1 в триггер Т2.
Аналогично, последовательно запишется и передвинется числовая
информация разрядов сотен, десятков и единиц. Таким образом, к кон-
цу записи информация, записанная на дорожке перфоленты, будет раз-
мещена в триггерах буферной памяти следующим образом: в триггере
114
Т5 — о знаке, в триггере Т4 — о разряде тысяч, в триггере ТЗ — о раз-
ряде сотен, в триггере Т2 — о разряде десятков, в триггере Т1 — о
разряде единиц.
Единичный выход каждого триггера буферной памяти соединен с
соответствующим ему триггеромj. (76 — Т10) рабочей памяти через
элементы Н—НЕ (Э9—Э13). Рабочая память является составной
частью линейного интерполятора и управляет работой блоков декад
ДД, блоком электронного коммутатора, блоком поддержания контур-
ной скорости в схеме определения декад ОД.
Запись информации из буферной памяти в рабочую производится
параллельно, что практически не вызывает остановки режущего ин-
струмента за это время. Таким образом, последовательный ввод инфор-
мации в буферную память и параллельный из буферной в рабочую па-
мять позволяет избежать остановки режущего инструмента при пере-
ходе от одного участка интерполирования к другому на время ввода ин-
формации последующей фразы программы.
Запись информации в рабочую память начинается с момента при-
хода из блока управления циклами БУЦ сигнала «Запись в рабочую
память» на вход элемента НЕ (Э14). Сформированный нуль на выходе
этого элемента преобразуется в единицу элементом НЕ (Э15) и задер-
живается элементом временной задержки Э8 на время «очистки» рабо-
чей памяти для приема информации. Триггеры рабочей памяти уста-
навливаются в нулевое состояние импульсом, поступившим с элемента
НЕ (Э14) на их нулевые входы. После этого единица с выхода эле-
мента временной задержки (Э8) поступит по одному из входов на эле-
менты И-НЕ (Э/ — Э5), а также на элементы временной задержки Э6
для задержки сигнала ЗРП на время перезаписи информации из бу-
ферной в рабочую память. На вторые входы элементов И — НЕ (Э1—
Э5) поступит единица из блока питания БП при наличии номиналь-
ных величин напряжений. На выходах элементов И — НЕ (Э1—Э5)
формируются нули, в результате триггеры буферной памяти устано-
вятся в нулевое состояние.
Если триггер буферной памяти находился в единичном состоянии,
то с его единичного выхода единица поступит на соответствующий ему
элемент И — НЕ (Э9 — Э13) по одному из входов. На вторые входы
этих элементов поступят единицы с выхода элемента временной за-
держки (Э8). Таким образом, нули сформируются только на выходах
тех элементов И — НЕ (Э9—Э13), на вход которых поступят единицы
с триггеров буферной памяти. Нули с выходов элементов И — НЕ
(Э9—Э13) поступят на единичные входы соответствующих им тригге-
ров рабочей памяти, которые будут установлены в единичное состоя-
ние.
Итак, после поступления из блока управления циклами импульса
записи в рабочую память, который определяется концом обработки
фразы программы, информация из буферной памяти переписывается
в рабочую, а все триггеры буферной памяти устанавливаются в нуле-
вое (исходное) состояние. После этого из буферной памяти с выхода
элемента временной задержки (Э6) в блок управления циклами по-
ступает ответный сигнал об окончании записи в рабочую память.
11 5
chipmaker.ru
§ 5. Линейный интерполятор
Получение абсолютно точного очертания криволинейной поверхно-
сти детали является сложной технической задачей. Поэтому действи-
тельное очертание обработанной поверхности детали представляет со-
бой лишь более или менее точное приближение к заданному профилю.
Такая замена профиля детали называется его аппроксимацией. При
линейной интерполяции заданный чертежом профиль детали аппрокси-
мируется линейными участками различной крутизны, т. е. составля-
ется из небольших линейных отрезков (рис. 77, а). Чем меньше эти
отрезки прямых, тем ближе действительный профиль детали к задан-
ному чертежом.
При составлении программы на обрабатываемом профиле детали
намечают несколько опорных точек (alt я2> • ••)» для каждой из кото-
рых устанавливают значения х и у. По этим значениям вычисляют ко-
ординаты промежуточных точек для каждого интервала. Зная цену
импульса СЧПУ (угол поворота ротора шагового двигателя при пода-
че на его обмотки одного импульса), расстояние между опорными точ-
ками заменяют числом импульсов по координатам х и у (рис. 77, б).
Импульсы поступают на обмотки шаговых двигателей, которые пере-
мещают инструмент или заготовку на необходимое расстояние, при-
чем величина перемещения между двумя опорными точками опреде-
ляется числом импульсов по каждой из координат, а частота их следо-
вания — подачей.
В СЧПУ большое распространение получили интерполяторы, по-
строенные по схеме импульсных умножителей (рис. 78). В счетчик им-
пульсов от генератора поступают импульсы с частотой следования,
соответствующей подаче. Счетчик построен таким образом, что на
каждые десять входящих импульсов с его первого выхода поступают
восемь импульсов на один из’входов элемента И (52); со второго вы-
хода — четыре импульса на элемент И (53); с третьего выхода — два
импульса на элемент И (Э4); с четвертого выхода — один импульс на
Рис. 77. Линейное интерполирование криволинейного контура:
а линейная аппроксимация: б — представление отрезков прямых соответствующей
частотой следования импульсов
116
элемент И (Э5). В четырех-
разрядном регистре памяти
записана кодированная циф-
ровая информация о величи-
не перемещения (в каждом
разряде может быть записан
нуль или единица). Следова-
тельно, на вторые входы эле-
ментов И с соответствующих
разрядов регистра памяти бу-
дут поступать нули или еди-
ницы. С выходов элементов
И, на вход которых поступят
единицы из регистра памяти,
импульсы пройдут через эле-
мент ИЛИ (Э6), где произой-
дет их суммирование. Итак,
Рис. 78. Функциональная схема линейного
инверполятора
на выходе линейного интерполятора формируется число импульсов,
соответствующих коду, записанному в регистре памяти. Следова-
тельно, интерполятор представляет собой преобразователь кода в чис-
ло импульсов.
Например, в регистре памяти записано число семь в двоично-деся-
тичном коде 0111. Восемь импульсов с выхода 1 счетчика не пройдут
через элемент И (Э2), так как на второй его вход из регистра памяти
поступает нуль. На входы элементов И (ЭЗ, Э4, Э5) из регистра памяти
поступают единицы, следовательно, с выходов 2, 3 и 4 счетчика прой-
дут через элемент ИЛИ
(Э6), соответственно четы-
ре, два и один импульс.
В результате на выходе ин-
терполятора будет сформи-
ровано семь импульсов, что
соответствует коду, храня-
щемуся в регистре памяти.
Линейный интерполя-
тор в СЧПУ состоит из че-
тырех блоков декад, пост-
роенных на основе двоич-
но-десятичных импульсных
умножителей. Двоично-де-
сятичный счетчик представ-
ляет собой последователь-
ное соединение четырех де-
кад: тысяч, сотен, десятков
и единиц. Импульсы пере-
полнения старших декад
служат входными импуль-
сами для последующих,
Рис. 79. Функциональная схема блока декад
младших.
117
chipmaker.ru
Рис. 80. Временная диаграмма работы счетчика
Декада представляет собой счетчик до'десяти, построенный на
элементах И — НЕ (Э1), триггерах Т1 — Т4 (рис. 79). На каждые
десять поступивших импульсов на один из входов элемента И — НЕ
(Э1) проходит восемь импульсов с выхода элемента И—НЕ (5/), че-
тыре импульса с нулевого выхода триггера Т1, два импульса с нулево-
го выхода триггера Т2 и один импульс с нулевого выхода триггера Т4.
Временная диаграмма работы счетчика представлена на рис. 80.
Выходы счетчика по одной координате во всех декадах объедине-
ны и представляют одну шину отбора (X, У или Z), на которую посту-
пает столько импульсов, сколько закодировано в программе и записа-
но в память по данной координате. Импульсы переполнения старшей
декады служат входными импульсами более младшей декады. Импульс
переполнения всего двоично-десятичного умножителя означает ко-
нец отработки фразы и направляется в блок управления циклами для
формирования сигнала на перезапись информации из буферной в ра-
бочую память.
§ 6. Узел задания скорости
Узел задания скорости предназначен для выдачи в интерполятор
импульсов заданной частоты следования, определяющих скорость по-
дачи. Узел задания скорости обеспечивает поддержание запрограмми-
рованного постоянства контурной скорости отработки, а также раз-
гон и торможение с автоматическим определением участка пути тормо-
жения.
В СЧПУ, предназначенных для работы с низкоскоростным шаго-
вым приводом, воспринимающим частоту управляющих импульсов
до 800 Гц, как правило, не требуется плавных разгонов и торможений
при переходе с одной подачи на другую. Узел задания скорости таких
СЧПУ упрощен и состоит из блока генераторов, частота следования
импульсов которых определяется задаваемым от программы кодом по-
дачи; блока задания скорости, в котором происходит деление частоты
следования импульсов на различные коэффициенты, выбираемые ко-
118
дом подачи; схемы поддержания постоянства контурной скорости, в
которой происходит деление частоты следования импульсов на различ-
ные коэффициенты в зависимости от числа одновременно управляемых
координат.
Блок генераторов предназначен для генерации прямоугольных им-
пульсов с частотой следования, близкой к коду подачи. Он состоит из
пяти мультивибраторов G1—G5 (рис. 81). Мультивибратор G1 предназ-
начен для работы в ручном режиме, а мультивибраторы G2 — G4 для
работы в автоматическом режиме. Частота колебаний мультивибрато-
ров G2 — G4 отличается в 1,19 раза друг от друга. В зависимости от
кода подачи, хранящимся в блоках памяти скоростей ПС, один из че-
тырех элементов И (Э1 — Э4) пропускает импульсы от подключенного
к одному из его входов мультивибратора на элемент ИЛИ (35). С вы-
хода этого элемента импульсы поступят на один из входов элемента
ИД36). Если закончена перезапись информации из буферной в рабочую
память перемещений, то блок управления циклами БУД выдаст еди-
ницу на один из входов элемента И (Э6). На два других входа этого
элемента поступят единицы из дешифратора адресов ДА, если в де-
шифратор адресов не посту пил "адрес «Смена инструмента», и со стан-
ка С, если на'станке не выполняется команда «Смена инструмента».
В этом случае элемент И (Э6) пропустит импульсы от мультивибрато-
ра на выход блока генераторов.
Импульсы с выхода блока генераторов поступают в блок задания
скорости БЗС для’дальнейшсго формирования частоты, в ручном ре-
жиме работы — в блок электронного коммутатора БЭК.
Блок задания скорости предназначен для деления частоты следова-
ния импульсов, поступающих с блока генератора БГ в соответствии с
кодом подачи (рис. 82). Блок за-
дания скорости представляет со-
бой делитель с коэффициентами
деления 2; 4; 8; 16; 32; 64; 128.
Импульсы с выхода блока зада-
ния скорости поступают в" блок
поддержания постоянства кон-
турной скорости БПКС. £
При делении частоты следова-
ния импульсов на два из блоков
памяти скоростей ПС поступают
единицы на элементы И (5/),
И (Э5), И (Э8). В этом случае
импульсы, поступающие на вход
блока задания скорости, подают-
ся на счетный вход триггера Т1,
который произведет деление ча-
стоты на два. С единичного вы-
хода триггера Т1 импульсы
пройдут через элементы И (Э1),
ИЛИ (33), И (55), ИЛИ (36),
И (38), ИЛИ(35) на выход блока.
119
chipmaker.ru
Рис. 82. Функциональная схема блока задания скорости
При делении частоты следования импульсов на четыре, единицы
из блоков памяти скоростей поступают на элементы И (Э2), И (Э4),
И (Э8). В этом случае импульсы, поступающие на вход блока задания
скорости, пройдут через элементы И (Э2), ИЛИ (ЭЗ) и будут пода-
ваться на счетный вход триггера Т2. Триггер Т2 произведет деление
частоты на два, и импульсы с его единичного выхода будут поступать
на счетный вход триггера ТЗ, который также произведет деление час-
тоты на два. Следовательно, два триггера (Т2 и ТЗ) произведут деле-
ние частоты входных импульсов на четыре. Импульсы с единичного
выхода триггера ТЗ пройдут через элементы И (Э4), ИЛИ (Э6),
И (Э8), ИЛИ (Э9) на выход блока.
При делении частоты следования импульсов на восемь будут ра-
ботать триггеры Т1 — ТЗ; на 16 — триггеры Т4 — Т7, на 32 — триг-
геры Tl, Т4—Т7; на 64—триггеры Т2—Т7; на'128—триггеры Т1—Т7.
Итак, четыре различные частоты следования импульсов сформиру-
ются в блоке генераторов, поделят на один из восьми коэффициентов
в блоке записи скорости, благодаря чему эти два блока позволяют по-
лучать 32 различные частоты следования импульсов, определяющих
подачу.
Блок поддержания постоянства контурной скорости предназна-
чен для поддержания постоянства контурной скорости при работе
разного числа координат. Деление частоты следования импульсов обес-
печивает счетчик на семь. Счетчик пропускает все семь импульсов,
если работает одна координата: пять из каждых семи входных импуль-
сов, если работают две координаты, и четыре из каждых семи входных
импульсов, если работают три координаты. Импульсы с выхода блока
поддержания постоянства контурной скорости, сформированные по
частоте в соответствии с кодом подачи, поступают в блоки декад.
Более сложные узлы задания скорости обеспечивают автоматичес-
ки плавный разгон и торможение при переходе от рабочих подач
к скорости быстрого хода и обратно. В таких узлах задания скорости
используют более сложные генераторы, обеспечивающие плавное из-
менение частоты следования выходных импульсов.
Структурная схема генератора разгона-торможения приведена на
рис. 83. Формирователь линейно изменяющегося напряжения ФЛИН
предназначен для формирования линейно нарастающего напряжения
до + 24В в режиме «Разгон» или линейно убывающего до +ЗВ в ре-
120
Рис. 83. Структурная схема генератора разгона-
торможения
жиме «Торможение». Режимы «Разгон» или «Торможение» задаются
уровнем входного сигнала. Линейно изменяющееся напряжение по-
ступает на вход буферного устройства БУ, согласующего высокое вы-
ходное сопротивление ФЛИН с низким входным сопротивлением дели-
телей напряжения на входе формирователя запуска ФЗ ждущего муль-
тивибратора. С выхода ждущего мультивибратора ЖМ импульсы с
плавно изменяющейся частотой следования поступают на вход фор-
мирователя Ф импульсов, уровень которых согласован с другими бло-
ками системы. Кроме того, с выхода буферного устройства линейно из-
меняющееся напряжение поступает на схему формирования сигнала
конца торможения СФСКТ для выработки команды «Конец торможе-
ния» КТ.
Принципиальная схема генератора разгона-торможения изобра-
жена на рис. 84. При подаче на вход схемы ФЛИН сигнала низкого
уровня (нуля) происходит запирание транзистора Т1, напряжение на
конденсаторе С1 начинает увеличиваться. Заряд конденсатора С1
происходит по цепи R6, Т2. При подаче на вход сигнала высокого уров-
ня (единицы) транзистор Т1 открывается, напряжение на конденса-
торе С1 уменьшается. Конденсатор разряжается по цепи R5, ТЗ. Ли-
Рис. 84. Принципиальная схема генератора разгона-торможения
121
chipmaker.ru
нейность изменяющегося напряжения обусловлена jeM, что токи тран-
зисторов Т2 и ТЗ стабилизированы с помощью стабилитронов Д1 и Д2.
В режиме «Разгон» на рабочих подачах конденсатор С1 отключает-
ся от общей шины ОВ контактами реле Р, что обеспечивает изменение
выходной частоты генератора от 400 до 8000 Гц.
В режиме «Торможение» на рабочих подачах конденсатор С1 под-
ключается к общей шине. Так как он заряжен, то выходная частота ге-
нератора изменяется от 8000 до 400 Гц.
При разгоне и торможении в одной фразе на рабочих^подачах, а
также в режиме «Быстрый ход» в начале фразы конденсатор С1 под-
ключается к общей шине — выходная частота генератора изменяется
скачком от 8000 до 400 Гц (если в предыдущей фразе был признак ре-
жима «Разгон»). Затем частота плавно изменяется от 400 до 8000 Гц,
с момента начала торможения частота генератора плавно изменяется
от 8000 до 400 Гц.
Буферное устройство собрано на составном эмиттерном повторите-
ле (транзисторы Т4, Т5) и делителях напряжения, расположенных на
пульте управления. Резисторы R12— R18 делителя напряжения
предназначены для установки верхнего предела частоты, а резисторы
R19 — R25 — для установки нижнего. Ступенчатое изменение вели-
чины сопротивления позволяет установить с пульта управления час-
тоты 20; 40; 50; 60; 70; 80; 90 и 100% от номинальных.
Формирователь запуска ждущего мультивибратора собран на
транзисторе ТЗ; на транзисторе Т8 собран эмиттерный повторитель.
Ждущий мультивибратор с формирователем запуска работает сле-
дующим образом. Если в исходном состоянии транзистор T9 форми-
рователя запуска открыт, то транзистор Т10 ждущего мультивибра-
тора закрыт, а транзистор Т11 — открыт. Пусть на вход поступает уве-
личивающееся напряжение. В этом случае происходит заряд емкости
С2 через резистор R33. С некоторого момента напряжение на конден-
саторе С2 становится достаточным для отпирания транзистора Т10.
При этом транзистор Т11 закрывается, а T9 открывается. Открывание
транзистора T9 через резистор R34 приводит к запиранию транзистора
Т10. Таким образом, процесс периодически повторяется.
Формирователь собран на транзисторе Т12. Для большей стабиль-
ности частоты выходных импульсов напряжение питания формирова-
теля и ждущего мультивибратора стабилизировано стабилитроном Д5.
Схема формирования сигнала «Конец торможения» выполнена
нй транзисторах Т7, Т8. Ее работа происходит следующим образом.
В режиме «Торможение» транзисторы Т7 и Т8 закрыты и на выходе
сформирована единица (напряжение +4,5 В). Во время выхода гене-
ратора из зоны торможения открываются транзисторы Т7 и Т8 и на
выходе формируется нуль (напряжение + 0,2 В).
§ 7. Кольцевой электронный коммутатор
Кольцевой электронный коммутатор предназначен для преобра-
зования последовательности входных импульсов в команды для по-
следовательного включения фаз шагового двигателя.
122
Электронные коммутаторы строятся по трехтактной, шеститакт-
ной, двенадцатитактной и более сложным схемам коммутации. На
станках с ЧПУ применяют в основном шеститактные и двенадцати-
тактные схемы коммутации для управления шаговыми двигателями.
Трехтактную схему коммутации применяют для управления ша-
говыми двигателями с тремя выводами обмоток (типа ШД-4). При по-
даче на вход электронного коммутатора первого импульса напряже-
ние поступит на фазу 1 (рис. 85); при подаче второго импульса — на-
пряжение поступит на фазу 2; при подаче третьего импульса — напря-
жение поступит на фазу <3. При подаче на вход электронного коммута-
тора четвертого импульса напряжение поступит на фазу 1, т. е. цикл
будет заканчиваться по приходу трех импульсов (тактов), поэтому
схема коммутации называется трехтактной.
Электронный коммутатор может изменять порядок распределения
импульсов по фазам, т. е. вначале напряжение подается на фазу 3,
затем на фазу 2 и, наконец, на фазу 1. В первом случае порядок рас-
пределения импульсов называют прямым, во втором случае — об-
ратным. Прямое и обратное распределения импульсов обеспечивает
вращение ротора шагового двигателя в различном направлении.
Шеститактную схему коммутации применяют также для управле-
ния шаговыми двигателями типа ШД-4. Цикл работы электронного
коммутатора заканчивается по приходу шести импульсов. Порядок
распределения импульсов представлен в табл. 5.
Двенадцатитактную схему коммутации применяют для управле-
ния шаговыми двигателями с шестью выводами обмоток (типа ШД-
5Д1). Цикл работы таких схем заканчивается по приходу двенадцати
импульсов. Порядок распределения импульсов на выходе электрон-
ного коммутатора представлен в табл. 6.
Импульсы на вход блока электронного коммутатора поступают либо
по шине положительного (+ Пр), либо по шине отрицательного
Рис. 85. Функциональная схема блока электронного коммутатора
123
chipmaker.nl
Таблица
Распределение
импульсов по
Таблица 6
двеиадцатитактной схеме коммутации
Такт
13
4 | S
6
8
9
Выход ком-
мутатора
Фаза 1 1 1 1 1 0 0 0 0 0 0 0 1 1
Фаза 2 1 1 0 0 0 0 0 0 0 1 1 1 1
Фаза 3 0 0 0 0 0 0 0 1 1 1 1 1 о
Фаза 4 0 0 0 0 0 1 1 1 1 1 0 о о
Фаза 5 0 0 0 1 1 1 1 1 0 0 0 0 0
Фаза 6 0 1 1 1 1 1 0 0 1 0 0 0 0
(— Пр) направления. В первом случае получается прямое распреде-
ление импульсов, во втором — обратное распределение импульсов.
При прямом распределении импульсы последовательно поступают
на вход формирователя Э1, с выхода которого сформированные по дли-
тельности и амплитуде импульсы поступают на единичный вход триг-
гера Т1 признака направления. Первый импульс устанавливает триг-
гер признака направления в единичное состояние. Кроме того, импуль-
сы поступают на вход элемента временной задержки ЭЗ для задержки
импульсов на время переброса триггера Т1 от первого импульса. Еди-
124
ница с единичного выхода триггера признака направления поступает
на входы элементов И (Э6, Э9). Единица с выхода элемента времен-
ной задержки ЭЗ преобразуется в нуль элементом ИЛИ — НЕ (Э5)
и поступает на счетный триггер ТЗ, а также на один из входов элемен-
та И (Э8). Триггеры ТЗ — Т5 и элементы И (Э6 — ЭЮ) образуют ре-
версивный счетчик, который благодаря наличию обратной связи (эле-
мента Э8) имеет цикл работы, равный шести.
Итак, первым импульсом триггер ТЗ устанавливается в единичное
состояние, триггеры Т4, Т5 находятся в нулевом состоянии. С при-
ходом второго импульса на счетный вход триггера ТЗ он установится
в нулевое состояние, а с его единичного выхода импульс, пройдя эле-
мент И (Э6), поступит на счетный вход триггера Т4 и установит его
в единичное состояние. Третий импульс, поступивший на вход триг-
гера ТЗ, установит его в единичное состояние. Четвертый импульс ус-
тановит триггер ТЗ в нулевое состояние, импульс с его единичного вы-
хода, пройдя через элемент И (Э6), установит триггер Т4 также в ну-
левое состояние. С единичного выхода триггера Т4 импульс, пройдя
через элемент И (Э9), поступит на счетный вход триггера Т5 и устано-
вит его в единичное состояние. Единица с единичного выхода триггера
Т5 поступит на один из входов элемента И (Э8). Пятый импульс уста-
новит ТЗ в единичное состояние. Кроме того, импульс через элемент
И (Э8) поступит на вход триггера Т2 и установит его в единичное со-
стояние. Шестой импульс установит триггеры реверсивного счетчика
в нулевое состояние (рис. 86).
При обратном распределении импульсы последовательно поступа-
ют на вход формирователя Э2 (см. рис. 85). Первый импульс с выхода
формирователя установит триггер признака направления в нулевое
состояние. Единицы с нулевого выхода триггера Т1 поступят на вхо-
ды элементов И (Э7, ЭЮ).
Импульсы с выходов триггеров счетчика поступают на дешифратор
блока электронного коммутатора, состоящий из элементов И (Э11—
Э16), ИЛИ (Э17—Э19). С выходов блока электронного коммутатора
импульсы, распределенные по трем фазам, поступают для усиления в
блок усилителей мощности.
Рис. 86. Временная диаграмма работы блока электронного коммутатора
Обратное распределение •
f 2 3 Ч 5 6 7 8 9 10 '11 12
UUUUUUDUUULTU
125
chipmaker.ru
В ручном режиме работы импульсы поступают в блок электронного
коммутатора с блока генераторов БГ. Управление элементами И (Э6,
Э9 или Э7, ЭЮ) на рисунке не показано. Триггер Т2 предназначен
для формирования одиночных импульсов путем последовательного
нажатия и отпускания кнопки, расположенной на пульте управления
ПУ.
Импульсы с выходов блока электронного коммутатора усиливают-
ся по мощности и через узел форсировочных резисторов для повыше-
ния быстродействия шагового двигателя поступают на его обмотки.
§ 8. Устройство управления циклами
Устройство управления предназначено для формирования’сигна-
лов управления в различных режимах работы СЧПУ, сигналов пуска
и останова, преобразования информации из двоично-десятичного в
двоичный код, а также преобразования информации из двоичного в
двоично-десятичный код.
Устройство управления циклами предназначено для синхрониза-
ции работы отдельных блоков системы в автоматическом режиме.
Блок управления циклами согласует работу лентопротяжного меха-
низма фотосчитывающего устройства и блока генераторов с записью
информации из буферной в рабочую память. Устройство управления
циклами также формирует команду «Конец программы».
Формирование сигнала перезаписи информации из буферной в ра-
бочую память происходит в следующем порядке. Если информации
предшествующей фразы программы отработана, то импульс перепол-
нения декады единиц с блока декад БД поступит на единичный вход
триггера ТЗ и установит его в единичное состояние (рис. 87). С единич-
ного выхода триггера ТЗ единица преобразуется в нуль элемента НЕ
(Э4), поступит на единый вход триггера Т4 и установит его в единичное
состояние. С единичного выхода триггера Т4 единица поступит на один
из входов элемента И (Э7). Если на вход элемента И (Э7) из блока конт-
роля БК поступила единица
(в случае правильного считы-
вания информации фразы) и
по входу «Конец кадра» имеет-
ся единица (если запись ин-
формации в буферную память
закончена), поступившая из
дешифратора адресов ДА на
единичный вход триггера Тб,
то на выходе элемента И (37)
сформируется единица. Эта
единица поступит на усили-
тель Э8 и с его выхода на-
правится в блоки памяти П
перемещений, скоростей и тех-
нологических команд, где
произведет стирание отрабо-
танной информации фразы в
Рис. 87. Функциональная схема блока уп-
равления цикламн
126
рабочей памяти и перезапишет информацию из буферной памяти в
рабочую. После перезаписи информации из буферной в рабочую па-
мять этот же импульс из блоков памяти перемещения (ППХ, ППу,
ППг) возвратится в блок управления циклами и через элемент
ИЛИ — НЕ (35) поступит на нулевые входы триггеров ТЗ, Т4. Триг-
геры ТЗ и Т4 установятся в нулевое (исходное) состояние, а затем
триггер Т4 установит в нулевые состояния триггеры Т5 и Тб.
С момента установки триггера Т4 в единичное состояние с его нуле-
вого выхода в блок генераторов БГ поступит сигнал запрета выдачи
импульсов на время перезаписи информации из буферной в рабочую
память. После установки триггера Т4 в нулевое состояние, а следова-
тельно, и триггера Т5 в нулевое состояние, запрет на прохождене
импульсов с блока генераторов снимается.
Лентопротяжным механизмом фотосчитывающего устройства уп-
равляет триггер Т5. При установке триггера Т4 в нулевое состояние
триггер Т5 также устанавливается в нулевое состояние, и с его нуле-
вого выхода поступает сигнал на выключение электромагнита тормо-
за и включение электромагнита протяжки фотосчитывающего устрой-
ства. Начнет вводиться информация последующей фразы программы.
Сигналом «Конец кадра», поступающим из дешифратора адресов, триг-
гер Т5 устанавливается в единичное состояние, происходит выключе-
ние .электромагнита протяжки и включение электромагнита тормоза
фотосчитывающего устройства. Ввод программы прекращается.
Устройство управления циклами формирует команду «Конец про-
граммы», которая при работе СЧПУ в комплекте с пультом записи
и контроля ПЗК записывается на девятую дорожку магнитной ленты,
а также производит включение сигнальной лампы СЛ «Конец програм-
мы», расположенной на пульте управления. При считывании послед-
ней фразы программы из дешифратора адресов поступит сигнал «Ко-
нец программы» на единичный вход триггера Т1 и установит его в еди-
ничное состояние.
Как только отработается информация последней фразы, импульс
переполнения декады единиц установит триггер ТЗ в единичное состоя-
ние. Тогда по двум входам элемента И (3/) поступят единицы, следо-
вательно, на его выходе сформируется нуль, триггер Т2 установится
в единичное состояние. С единичного выхода триггера Т2 единица по-
ступит на пульт записи и контроля, а нуль с нулевого выхода преоб-
разуется в единицу элементом НЕ (32), поступит на усилитель (35).
Напряжение с выхода усилителя будет подано на сигнальную лампу.
§ 9. Линейно-круговой интерполятор
Линейная аппроксимация затрудняет использование линейных ин-
терполяторов при обработке деталей с фасонным контуром, включаю-
щим криволинейные участки (в частности, дуги окружности). Аппрок-
симация таких участков отрезками прямых значительно усложняет
процесс подготовки программ и приводит к большому расходу пер-
фоленты за счет наличия большого числа фраз. Кроме того, замена кри-
волинейных участков отрезками прямых ухудшает чистоту обработки
127
chipmaker.ru
деталей. В связи с указанными недостатками СЧПУ с линейными ин-
терполяторами заменяют СЧПУ с линейно-круговыми интерполято-
рами.
При построении СЧПУ используют два метода круговой интер-
поляции. Один из них основан на решении дифференциальных урав-
нений окружности, другой — алгебраических уравнений окружности,
который называется методом оценочной функции. Наибольшее рас-
пространение в настоящее время получил метод оценочной функции.
Оценочная функция F рассчитывается в процессе интерполяции, и по
ее знаку определяется направление очередного шага.
Интерполируемая прямая делит плоскость XY на две области: об-
ласть, где F > 0, находится над прямой, область, где F < 0, распо-
ложена под прямой и F = 0 для точек, расположенных на прямой ли-
нии (рис. 88). Траектория интерполяции представляет определенную
последовательность элементарных перемещений — шагов по осям ко-
ординат X, Y. Интерполяция методом оценочной функции заключает-
ся в том, что если промежуточная функция траектории находится в об-
ласти F^O, то следующий шаг производится по оси X, если же в об-
ласти F < 0, то по оси Y. Значения оценочной функции для промежу-
точных точек траектории можно определить по формуле
Fr.i = yjXk—xtyh,
где xh, yh — координаты конечной точки обработки (координаты на-
чальной точки прямой совпадают с началом координат); хг, г/г — коор-
динаты текущих точек обработки (I = 0,1, 2, 3, ...; / = 0,1, 2, 3...).
Если координаты xh, yh, Xt, у} задаются числом шагов, то текущие
координаты точки обработки при шаге по осям координат увеличивают-
ся на единицу: xf+1 = хл + 1; yJ+i = у} + 1.
Текущее значение оценочной функции с каждым шагом по любой
из осей координат изменяется следующим образом:
при шаге по оси х
Л+1;; = Fi-.i — Uk'
Рис. 88. Круговая и линейная интерполяция прямой (о) и дуги (б) ме-
тодом оценочной функции
128
при шаге по оси у
Fi;i+1 = F i-'j + xh.
Начальное значение вели-
чины оценочной функции
Foo = 0-
При круговой интерполя-
ции методом оценочной функ-
ции плоскость XY делится
дугой окружности также на
две области. Область, где
F < 0, находится внутри ду-
ги, область, где F > 0, вне
ее и F = 0 для точек, распо-
ложенных на дуге.
При отработке дуги ок-
ружности, расположенной в
Рис. 89. Функциональная схема линейно-
кругового интерполятора
первом квадранте, и враще-
нии против часовой стрелки, траекторию отработки строят сле-
дующим образом: если промежуточная точка траектории находит-
ся в области F 0, то следующий шаг производится в направлении
оси X, если же в области F<Z 0, то в направлении оси Y. Значение оце-
ночной функции для промежуточных точек траектории можно опреде-
лить по формуле
Ег,1=Я+У* — R2,
где xit ч/у —текущие значения точки обработки относительно центра
интерполируемой дуги с радиусом R.
Текущие координаты точки обработки при шаге по осям координат
изменяются на единицу:
•*«+1=Xi — 1; уi+i = У1 4-1 •
Текущее значение оценочной функции с каждым шагом по осям ко-
ординат изменяется следующим образом:
при шаге по оси X
Fi+I;y ~Fi;j — 2-Vj + 1,
при шаге по оси Y
Fi-.j+i = Fi-j-\- 2у} 4-1.
Функциональная схема линейно-кругового интерполятора приве-
дена на рис. 89. Программа работы считывается, преобразуется уст-
ройством ввода программы УВП, откуда в интерполятор поступает ин-
формация о координатах начальной и конечной точек.
Интерполятор содержит пять регистров сдвига, в четыре из кото-
рых вводятся координаты начальной и конечной точек обработки
хн, (/н, хк, ук. Если интерполируется прямая, то хн = 0, ун = 0, а при
интерполяции дуги окружности хи, ун, хк, ук — координаты началь-
ной и конечной точек обработки относительно центра дуги. В регист-
рах Р/ и Р2 хранятся значения текущих координат, перед началом
129
chipmaker.ru
работы они составляют хв, ув. В регистрах РЗ и Р4/хранятся значения
конечных координат хк, ук. Регистр Р5 предназначен^для хранения
промежуточных значений/щеночной функции, причем перед началом
работы Foo = 0.
2При отработке прямой, если Fi;J = 0, в сумматоре С1 содержимое
регистра^РА будет складываться с единицей, и^сумма Xt+i,= *i + 1
запишется в'регистр Р/. ^Вместо) вычитания в сумматоре С2 из содер-
жимого регистра Р5 содержимое регистра Р4 производится сложение
с обратным кодом инверсии ук с выхода элемента НЕ1 и прибавлением
единицы = Fi;l + ~ук + 1.
Текущее значение оценочной функции возвращается на хранение
в регистр Р5, а также в^узел^определения знака 03 для формирования
сигнала направления перемещения, который ^поступает в блок управ-
ления приводом/Блок сравнения^СР,формирует сигнал «Конец отра-
ботки кадра» К, если текущие значения координат совпали с заданны-
ми.
При отработке прямой, если Fit} < 0, в сумматоре С1 к содержи-
мому регистра Р2 прибавляется единица, и сумма yJ+1 = у} + 1
записывается в регистр Р2. В сумматоре С2 производится сложение
содержимого регистров Р5 и РЗ, полученная сумма Fii]+1 = Ft.} +
+ х„ записывается в регистр Р5 и направляется в узел определения
знака.
При отработке окружности триггера режима работы ТокР изме-
нит свое состояние. Если Ецу 0, то в сумматоре С1 производится
вычитание (сложение с дополнительным кодом) единицы из содержи-
мого регистра Pl: xt+1 = xt — 1. Результат вычитания записывается
в регистр Р1. В сумматоре С2 из содержимого регистра Р5 вычитается
удвоенное содержимое регистра Р1 с прибавлением к разности едини-
цы. Вычисление текущего значения оценочной функции производится
по формуле Fi+liJ = Fta 4-2 (х, — 1). Результат вычисления ^зано-
сится в регистр Р5 и направляется в узел определения знака. Величи-
на с выхода сумматора С1 удваива'ется путем задержки на один раз-
ряд и через элемент НЕ2 направляется в сумматор С2.
Если Fi;J<Z0, тп содержимое регистра Р2 суммируется с едини-
цей в сумматоре С1, и сумма yJ+1 = yj + 1 возвращается в регистр
Р1. В сумматоре С2 содержимое регистра Р5 суммируется с единицей
и удвоенным значением содержимого регистра Р2. Сумма Fi; ]+1 =
= Fi;] + 2 у} + 1 заносится в регистр Р5 и направляется в узел опре-
деления знака.
Блок задания скорости БЗС обеспечивает необходимую скорость
работы интерполятора, а следовательно, скорость подачи.
§ 10. Обратные связи в СЧПУ
СЧПУ строятся по разомкнутой или замкнутой схеме. Разомкну-
тые СЧПУ проще, следовательно, дешевле, но по точностным показа-
телям уступают замкнутым СЧПУ. Замкнутые СЧПУ содержат узел
контроля, который автоматически контролирует работу приводов по-
дач станка (рис. 90). При этом контролируются либо размеры детали
130
б)
Рис. 90 Блок-схема СЧПУ:
а —разомкнутая; б—замкнутая
в процессе ее обработки, либо перемещения рабочих органов станка, от
положения которых зависят размеры обрабатываемой детали (обрат-
ная связь по положению рабочих органов).
В узле контроля результаты измерений преобразуются в электри
ческие сигналы и направляются в узел управления, где сравниваются
с программой, т.е. заданная программа обработки детали сопоставляет-
ся с фактической программой, выполняемой станком.
В процессе обработки детали постоянно возникает рассогласова-
ние между заданной и фактической программой. Размеры обрабаты-
ваемой детали получаются отличными от заданных на некоторую вели-
чину, зависящую от зазоров в системе привода, упругих деформаций
технологической системы, износа инструмента и ряда других причин.
Узел управления в течение всего периода работы замкнутой СЧПУ
стремится устранить возникающие рассогласования.
Узел контроля состоит из датчика, устройства связи датчика с ра-
бочим органом, схемы усиления и преобразования сигнала датчика
(рис. 91).
£ Датчики по виду зависимости выходного сигнала от длины пере-
мещения (или угла поворота) могут быть абсолютными и цикличес-
кими. Сигнал абсолютного датчика определяет его положение по всей
длине перемещения, т. е. каждому положению датчика в пределах
всей длины хода соответствует вполне определенное значение парамет-
ров выходного сигнала датчика. У циклических датчиков длина пере-
мещения, соответствующая однозначному сигналу (зона однозначно-
Рис. 91 Блок-схема узла контроля
131
chipmaker.ru
сти), всегда меньше длины хода.
Примером циклического датчика
может служить фотодатчик с
дифракционной решеткой, вра-
щающиеся трансформаторы и др.
Деление датчиков на абсо-
лютные и циклические условно
связано с отношением зоны од-
нозначности к величине переме-
щения: если перемещение мень-
ше зоны, датчик можно рассмат-
ривать как абсолютный, если
больше — как циклический. Соз-
дать абсолютный датчик для
большой длины перемещения до-
вольно сложно, так как класс
точности такого датчика должен
быть высоким. При создании аб-
солютных датчиков обычно идут
по пути сочетания нескольких циклических датчиков с различной зо-
ной неоднозначности; у самого грубого датчика зона равна длине из-
мерения или несколько превышает ее, у следующего — соответственно
в п раз меньше и т. д. (рис. 92). Зону для точного канала выбирают из
условий потребной точности и дискретности измерения. В такой си-
стеме точность измерения зависит только от погрешности точного ка-
нала. Примером абсолютного датчика может служить преобразова-
тель угол-код КП-З.
Одним из основных параметров узла контроля является его точ-
ность, определяемая разностью запрограммированного и фактического
расстояний между двумя любыми положениями подачи команд.
Погрешность узла контроля складывается из погрешностей собст-
венно датчика, устройства связи датчика с рабочим органом, схемы уси-
ления и преобразования сигнала датчика.
Помимо обратной связи по положению рабочих органов в некото-
рых приводах на станках с числовым программным управлением при-
меняют обратную связь по скорости, предназначенную для увеличе-
ния быстродействия и улучшения динамических свойств привода.
Глава 13
Устройства контроля и подготовки
управляющих программ
§ 1. Ручная подготовка программ
Большое разнообразие систем числового программного управле-
ния привело к значительному числу отличных друг от друга устройств
подготовки и контроля управляющих программ, разграничение кото-
132
рых может быть произведено прежде всего по типу носителей программ:
для перфолент и для магнитных лент.
Запись управляющих программ на пятидорожковую перфоленту в
основном производят на телеграфном аппарате СТА-2МФ. Запись уп-
равляющих программ на восьмидорожковую ленту производят на
устройстве подготовки данных УПДЛ «Брест-1Т».
УПДЛ «Брест-1Т» предназначено для:
1) нанесения алфавитно-цифровой информации в виде отверстий
на перфоленту с помощью клавиатуры пишущей машины с печатью
наносимой информации «Режим подготовки данных»;
2) репродукции перфоленты — «режим реперфорации»;
3) сравнения двух перфолент — «режим сравнения»
4) контроля информации на перфоленте путем ее сравнения с инфор-
мацией, набираемой на клавиатуре пишущей машины — «режим срав-
нения с клавиатурой»;
5) сравнения двух перфолент с реперфорацией третьей перфоленты
— «режим сравнения с реперфорацией»;
6) распечатки информации с перфоленты на бланк — «режим рас-
печатки»;
7) сравнения двух перфолент с реперфорацией третьей и распе-
чаткой информации с перфоленты на бланк — «режим сравнения с
распечаткой».
Блок-схема УПДЛ «Брест-1Т» представлена на рис. 93.
Рис. 93. Блок-схема УПДЛ «Брест-1Т»
133
Режим подготовки данных. При нажатии клавиши пишущей маши-
ны комбинатор выдает код, соответствующий символу нажатой клави
ши. Одновременно сигнальный контакт комбинатора выдаёт сигнал,
по которому производится сброс регистра-счетчика пишущей машины
и занесение кода с комбинатора в регистр-счетчик пишущей машины по
сигналу со схемы управления печатью. По окончании записи сигнал со
схемы управления печатью поступает на схему управления перфора-
тором, и производится перфорация предыдущего кода регистра симво-
ла. С регистра-счетчика через дешифратор управляющих потенциалов
код поступает на блок кодовых электромагнитов. Производится пе-
чать символа при поступлении стробирующего сигнала со схемы управ-
ления печатью. Одновременно с регистра-счетчика код через дешифра-
тор поступает в блок кодопреобразователя, который преобразует ин-
формацию, представленную в коде пишущей машины «Консул-254» в
код ГОСТ 13052—74. После окончания перфорации предыдущего кода
производится опрос кодопреобразователя и в регистр символа зано-
сится новый код.
Режим реперфорации. При продвижении перфолент в механизме
считывания в регистр символа поступает информация только с первой
перфоленты. С регистра символа по команде «Прием кода», поступаю-
щей с перфоратора, информация через схему управления перфорато-
ром поступает на кодовые электромагниты и электромагнит синхрони-
зирующей дорожки перфоратора. Происходит перфорация одной стро-
ки. По окончании перфорации производятся продвижение ленты в
перфораторе и сброс регистра символа.
Режим сравнения. При нажатии клавиши «Пуск» срабатывает схе-
ма управления пуском и остановом и начинается продвижение перфо-
лент в механизме считывания. Информация, нанесенная на первой
перфоленте, через схему формирования фотодиодных сигналов посту-
паёт в регистр символа, куда затем поступает информация со второй
перфоленты. Если информация на двух лентах совпадает, то схема вы-
работки признака совпадения формирует сигнал, который не может воз-
действовать на схему управления пуском и остановом. При несовпа-
дении информации по каким-либо дорожкам из регистра символа по-
ступает сигнал в схему выработки признака совпадения, по которому
формируется команда, воздействующая на схему управления пуском и
остановом, при этом производится останов механизма считывания,
включается световая и звуковая индикация. Индикация производится
для тех дорожек, по которым произошло несовпадение.
Режим сравнения с клавиатурой. При нажатии клавиши на пишу-
щей машине «Консул-254» производится занесение информации в ре-
гистр-счетчик пишущей машины. Через дешифратор управляющих по-
тенциалов код поступает на блок кодовых электромагнитов, и произ-
водится печатание соответствующего символа. Одновременно запуска-
ется механизм считывания, перфолента продвигается на одну строку,
и происходит занесение информации, содержащейся на перфоленте,
в регистр символа. По окончании записи схема управления регистром
символа выдает сигнал, по которому производится опрос кодопреобра-
зователя, и информация с кодопреобразователя поступает в регистр
134
символа. При совпадении информации схема выработки признака сов-
падения выдает сигнал, по которому производятся повторная запись
информации с перфоленты в регистр символа и ее перфорация. При
несовпадении схема выработки признака совпадения выдает сигнал, по
которому клавиатура блокируется. При этом реперфорация не произ-
водится.
Режим сравнения с реперфорацией. Информация, поступающая с
двух перфолент, сравнивается в регистре символа. При совпадении
информации на двух перфолентах схема выработки признака совпаде-
ния формирует сигнал, который через^схему управления регистром
символа производит повторный опрос первой перфоленты, и произво-
дится перфорация строки на ленте.
Режим распечатки. С нажатием клавиши «Пуск» начинается про-
движение перфоленты в механизме считывания, и информация зано-
сится. в регистр символа. Сигнал со схемы управления распечаткой
производит опрос кодопреобразователя. Информация с регистра-счет-
чика пишущей машины через дешифратор управляющих потенциалов
и блок кодопреобразователя поступает в регистр символа с перфоленты.
Если информация не совпадает, то в регистр-счетчик пишущей
машины будет добавляться единица и происходить опрос схемы кодо-
преобразователя до тех пор, пока информация, поступившая в регистр
символа с перфоленты, совпадет с информацией, поступившей с бло-
ка кодопреобразователя. При совпадении информации код с регистра-
счетчика пишущей машины через дешифратор управляющих потен-
циалов поступит на блок кодовых электромагнитов, на бланке отпеча-
тается соответствующий символ, а информация с перфоленты повтор-
но записывается в регистр символа и перфорируется.
Режим сравнения с распечаткой. В данном режиме УПДЛ
«Брест-1Т» работает аналогично режиму распечатки, только предва-
рительно производится сравнение информации, нанесенной на двух
перфолентах, и если произойдет совпадение, производится повторный
опрос первой перфоленты, запускается схема управления распечат-
кой и начинается подбор информации в регистре-счетчике пишущей
машины. Схема подсчета предназначена для подсчета числа кодовых
комбинаций.
Типичным представителем устройства записи информации на маг-
нитную ленту является линейный интерполятор «Программа Л-68».
Линейный интерполятор «Программа Л-68» предназначен для подго-
товки и записи на магнитную ленту шириной 35 мм программ для
станков, управляемых от СЧПУ «Контур МИ-68».
В комплект линейного интерполятора «Программа Л-68» вхо-
дят СЧПУ «Контур ЗП-68», пульт записи на магнитную ленту и конт-
роль записи, устройство контроля записи информации на перфоленту,
телеграфный аппарат СТА-2МФ и координатограф.
Пробивка перфоленты производится на телеграфном аппарате, к
которому подключено устройство контроля записи информации на
перфоленту. Это устройство отключает телеграфный аппарат в слу-
чае сбоя его работы или ошибки оператора, при этом на лицевой пане-
ли устройства загорается сигнальная лампа «Ошибка».
135
chipmaker.ru
Контроль качества управляющих программ производится коорди-
натографом, который подключен к СЧПУ «Контур ЗП-68». При этом
импульсы, формируемые линейным интерполятором СЧПУ «Контур
ЗП-68», поступают через усилители записи пульта записи и контроля
на магнитную головку. Информация, записанная на ленту, считыва-
ется магнитной головкой воспроизведения и через усилители подается
в блоки электронных коммутаторов СЧПУ «Контур ЗП-68». С выхода
СЧПУ «Контур ЗП-68» импульсы поступают на обмотки шаговых дви-
гателей, расположенных на координатографе. Таким образом, на ко-
ординатографе воспроизводится контур, программа которого записы-
вается на магнитную ленту.
§ 2. Машинная подготовка программ
При подготовке программ электронная вычислительная машина
(ЭВМ) по введенным в нее данным производит все необходимые расче-
ты и выдает на перфоленту управляющую программу. В ЭВМ вводится
комплекс вычислительных программ, способных выполнить все рабо-
ты, переданные вычислительной машине. Такой комплекс вычисли-
тельных программ называется системой автоматизации подготовки уп-
равляющих программм с помощью электронной вычислительной ма-
шины (САП).
Состав систем автоматизации подготовки управляющих программ
определяется теми функциями, которые должны выполнить системы
машинной подготовки.
Прежде всего система должна предусматривать «язык» записи ис-
ходных данных. Под «языком» понимается набор знаков, которыми мож-
но описать форму обрабатываемой детали и все необходимые техноло-
гические требования. Этот набор знаков алгоритм системы умеет рас-
шифровать, т. е. понять описание и указания и после необходимых вы-
числений сформировать набор фраз с учетом конкретных условий кон-
кретного станка, для которого готовится управляющая программа.
Для определенной группы станков с числовым программным управ-
лением (токарные, фрезерные и т. д.). необходимые расчеты можно раз-
делить на две группы: расчеты, которые нужно выполнить независимо
от возможностей конкретного станка, и расчеты, которые связаны с
учетом возможностей и особенностей каждого конкретного станка.
Поэтому системы обычно строят так: все программы, связанные с об-
щими для данной группы станков расчетами, выделяют в подсистему,
которую называют процессором, а расчеты, связанные с учетом конк-
ретного станка, в подсистему, которую называют постпроцессором.
Таким образом, для всех видов станков данной технологической груп-
пы достаточен один процессор и столько постпроцессоров, сколько
комбинаций систем управления — станков (рис. 94).
Кроме перфоленты управляющей программы выдается, как прави-
ло, распечатка этой программы (по распечатке легче прочесть каждую
фразу) и, самое главное, распечатка указаний наладчику о настрой-
ке станка (набор инструментов, номера корректоров, режимы реза-
ния и т. д.). Кроме того, для проверки качества программы на коорди-
136
Рис. 94. Схема построения систем подготовки управляющей программы с помо-
щью электронной вычислительной машины
натографе или дисплее прочеркивается траектория движения инстру-
ментов.
Дисплей, как и координатограф, предназначен для воспроизведе-
ния контура, программа которого записывается на перфоленту. Дис-
плеи представляют собой графические устройства на электронно-лу-
чевых трубках, следовательно, они обладают более высоким быстро-
действием. С их помощью изображение может быть высвечено за доли
секунды. Дисплеи позволяют не только высвечивать изображение дви-
жения инструмента, но и упрощают введение исправления в програм-
му. Для этого используется «электронный карандаш», представ-
ляющий собой чаще всего фотодиод, на который попадает луч и замы-
кает электрическую цепь. Зафиксированное положение луча в момент
замыкания позволяет автоматически выяснить, какой элемент заме-
няется. Если нужно изменить радиус элемента, контур которого вы-
свечен на дисплее, то для исправления достаточно электронным каран-
дашом прочеркнуть изображение этого радиуса и набрать на клавиа-
туре его новую величину.
Глава 14
Управление станками от ЭВМ
Для повышения эффективности эксплуатации станков с ЧПУ оп-
ределенный интерес представляет объединить их в участки и управлять
непосредственно от электронных вычислительных машин (ЭВМ).
137
chipmaker.ru
На ЭВМ решаются задачи планирования производства. На основе дан-
ныхТ’по числу обработанных деталей, наличию заготовок, оператив-
ных плановых заданий и необходимом объеме переналадок при пере-
ходе с детали на деталь ЭВМ выдаст «советы» плановому отделу и бюро
программного управления.
С помощью систем непосредственного программного управления
станками от ЭВМ (системы, в которой информация от ЭВМ к станку
передается по каналам связи) можно автоматизировать значительную
часть работ по передаче, хранению и обработке информации.
По структуре система непосредственного программного управле-
ния (НПУ) подразделяется на две подгруппы.
1. Система НПУ с центральной'ЭВМ управляет группой станков
с ЧПУ от средней или большой ЭВМ, которая кроме управления стан-
ками может выполнять также другие функции (планирование, авто-
матическое программирование и т. д.).
2. Система НПУ с периферийной ЭВМ управляет станком от инди-
видуальной мини-ЭВМ, причем в зависимости от типа примененной в
системе ЭВМ можно создать промежуточные структуры, в которых
функции мини-ЭВМ расширяются (например, мини-ЭВМ управля-
ет несколькими двух- или трехкоординатными станками).
Одним из основных преимуществ системы НПУ является общее
улучшение организации производства за счет введения эффективного
диспетчирования работы и передачи информации по каналам связи.
Хранение в памяти ЭВМ постоянных циклов обработки, однократ-
но вводимых от программы, значительно упрощает процесс программи-
рования, уменьшает длину записанной на перфоленте программы для
ЭВМ. Кроме того, представляется возможность редактирования
управляющих программ, упрощается и ускоряется процесс их отлад-
ки, который может производиться у станка.
Системе НПУ по силам задачи компенсации погрешностей кинема-
тических цепей станка, что приводит к повышению точности и позво-
ляет в ряде случаев отказаться от дорогостоящих и сложных датчи-
ков перемещений.
Одной из важных задач системы НПУ является адаптивное управ-
ление процессом обработки с решением задач оптимизации режимов
резания и коррекциями траектории движения инструмента для ком-
пенсации погрешностей, связанных с нежесткостью системы СПИД.
Система НПУ позволяет повысить степень автоматизации станков
без существенного увеличения управляющего оборудования, Одно-
временно с управлением процессом обработки система управляет ав-
томатизированным оборудованием, обслуживающим станки и обеспе-
чивающим смену заготовок и инструмента.
Система НПУ создает принципиально новые возможности увеличе-
ния производительности, основанные на|улучшении организации про-
изводственного процесса и'ускорении передачи’информации между от-
дельными подразделениями. Это направление в автоматизации металло-
обработки развивается в последние годы и тесно связано с общим’про-
грессом вычислительной техники.
СПИСОК ЛИТЕРАТУРЫ
1. Владзиевский А. П., Белоусов А. П. Основы автоматизации производст-
ва в машиностроении. М.; Высшая школа, 1974, 351 с.
2. Гордин Е. М., Стародуб К. Я. Автоматическое регулирование. М., Выс-
шая школа, 1976. 351 с.
3. Комаров А. Ф. Наладка и эксплуатация электрооборудования металло-
режущих станков. М.: Машиностроение, 1974, 382 с.
4. Кувшииский В. В. Автоматизация технологических процессов в машино-
строении М.; Машиностроение, 1972, 271 с.
5. Киселев В. М. Фазовые системы числового программного управления
станками. М.; Машиностроение, 1976, 352 с.
6. Корытин А. М., Шапарев Н. К. Оптимизация управления металлорежу-
щими станками. М.: Машиностроение, 1974, 198 с.
7. Либерман Б. С., Тергаи В. С., Андреев И. Б. Автоматизация технологи-
ческих процессов механической обработки. М.: Машиностроение, 1969. 247 с.
8. Мельников В. И., Сурков А. Н. Теория атоматического регулирования и
системы автоматики. М.: Машиностроение, 1972. 351 с.
9. Мясковский Н. Г. Основы автоматизации производства. М.: Высшая
школа, 1968. 369 с.
10. Саидлер А. С. Электропривод и автоматизация металлорежущих стан-
ков, М.: Высшая школа, 1972. 439 с.
11. Стрыгии В. В. Автоматика и вычислительная техника, М.: Высшая шко-
ла, 1977. 295 с.
12. Харизоменов И. В. Электрооборудование и электроавтоматика метал-
лорежущих станков. М.: Машиностроение, 1975. 263 с.
13. Числовое программное управление металлорежущими станками. М.:
НИИМАШ, 1970. 150 с.
14. Чекваскин А. Н., Семии В. Н., Стародуб К. Я. Основы автоматики,
М.: Энергия, 1977. 448 с.
Chlpmaker.ru
chipmaker.ru
Раздел 2
ЭЛЕМЕНТАРНЫЕ ОСНОВЫ ТЕОРИИ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Chipmaker.ru
ОГЛАВЛЕНИЕ
Введение
3
Раздел 1
ОСНОВЫ АВТОМАТИКИ
Глава 1. Основные понвтия о системах автоматизации производствен-
ных процессов........................................ 7
§ 1. Автоматизированные системы........................ 7
§ 2. Система автоматического контроля.................. 7
§ 3. Система автоматического регулирования............. 8
§ 4. Следящая система.................................. 9
§ 5. Система автоматического управления................ 9
§ 6. Самоприспосабливающаяся (адаптивная) система ав-
томатического управления...............................10
Глава 2. Элементы и устройства систем автоматизации производствен-
ных процессов .... .............................12
§ 1. Измерительные преобразователи (датчики)...........12
§ 2. Датчики пути и положения..........................13
§ 3. Силовые датчики...................................21
§ 4. Датчики скорости..................................23
§ 5. Датчики угла рассогласования......................24
§ 6. Преобразующие устройства..........................26
§ 7. Усилители.........................................29
§ 8. Исполнительные органы.............................30
Глава 3. Системы, обеспечивающие автоматизацию технологических
процессов на металлорежущих станках н другом технологи-
ческом оборудовании...............................................33
§ 1. Системы автоматического контроля..................33
§ 2. Системы автоматического управления................38
§ 3. Система автоматического регулирования частоты вра-
щения двигателя .......................................41
§ 4. Адаптивная система управления.....................43
§ 5. Копировально-следящие системы.....................44
§ 6. Системы и устройства автоматизации загрузки станков.
Автооператоры..........................................46
§ 7. Автоматизированные устройства зажима и разжима
заготовок..............................................49
Глава 4. Основные понятия и определения систем автоматического
регулирования.....................................................51
§ 1. Принцип построения и структура....................51
§ 2. Функциональные схемы..............................53
§ 3. Классификация системы.............................54
Глава 5. Характеристики звеньев автоматического регулирования 56
§ 1. Типовое динамическое звено........................56
§ 2. Статические и динамические характеристики звеньев 57
§ 3. Операторная форма записи дифференциальных урав-
нений ................................................58
§ 4. Передаточная функция.............................60
§ 5. Переходная характеристика........................61
§ 6. Частотные характеристики звеньев..................61
Глава 6. Типовые динамические звенья систем автоматического регу-
лирования ........................................................65
§ 1. Безынерционное йвено..............................65
§ 2. Апериодическое звено..............................66
§ 3. Дифферейцирующее звено............................67
§ 4. Интегрирующее звено...............................68
§ 5. Колебательное звено...............................70
Глава 7. Соединение динамических звеньев систем автоматическо-
го регулирования..................................................71
§ 1. Структурные схемы систем..........................71
§ 2. Соединение динамических звеньев и их передаточные
функции..............................................73
Глава 8. Устойчивость систем автоматического регулирования . . 74
§ 1. Понятие об устойчивости системы......74
§ 2. Критерии устойчивости............................75
Глава 9. Качественные показатели переходного процесса.........82
§ 1. Основные показатели качества автоматического регу-
лирования ...........................................82
§ 2. Методы исследования качества процесса регулирова-
ния .................................................83
Глава 10. Методы улучшения качества переходного процесса ... 84
§ 1. Включение корректирующих устройств в главную цепь
систем...............................................84
§ 2. Параллельные корректирующие устройства...........88
Раздел 3
СИСТЕМЫ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ
Глава 11. Основные сведения о системах числового программного уп-
равления .......................................................89
§ 1. Общая структура систем числового программного уп-
равления .... ............................89
§ 2. Классификация систем числового программного уп-
равления ............................................до
§ 3. Блок-схема СЧПУ, управляемой от магнитной ленты 92
§ 4. Блок-схема контурной СЧПУ с линейным интерполя-
тором..................................................
§ 5. Блок-схема СЧПУ с линейно-круговым интерполятором 96
§ 6 Блок-схема позиционной СЧПУ......................99
§ 7. Программоносители управляющих программ . . . .110
§ 8. Запись управляющих программ на перфоленту . . 101
§ 9. Запись управляющих программ на магнитную ленту 103
140
141
chipmaker.ru
Глава 12. Основы работы блоков СЧПУ.............................104
§ 1. Устройства ввода и считывания программ. .... 104
§ 2. Контроль вводимой информации...................108
§ 3. Дешифраторы адресов............................111
§4. Устройство памяти............................. 113
§5. Линейный интерполятор..........................116
§6. Узел задания скорости..........................118
§ 7. Кольцевой электронный коммутатор...............122
§ 8. Устройство управления циклами........... . . 126
§ 9. Линейно-круговой интерполятор..................127
§ 10. Обратные связи в СЧПУ.........................130
Глава 13. Устройства контроля и подготовки управляющих программ
§ 1. Ручная подготовка программ.....................132
§ 2. Машинная подготовка программ ......... 136
Глава 14. Управление станками от ЭВМ '..........................137
Список литературы.............................................. 139
Chipmaker.ru
ИБ № 1628
Серафим Николаевич Головенков, Сергей Владимирович Сироткин
ОСНОВЫ АВТОМАТИКИ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
СТАНКОВ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
Редактор Н. П. Гурвич
Художественный редактор И. К- Капралова
Технический редактор Н. В. Тш офеенко
Корректор А. А. Снастина
Обложка художника И. Богачева
Сдано в набор 23.01.80. Подписано в печать 07.05.80. Т-09915
Формат 60X90716- Бумага типографская № 2. Гарнитура литературная. Печать
высокая Усл. печ. л. 9,0 Уч.-изд. л. 9,15
Тираж 25000 экз. Заказ 1577 Цена 30 к.
Издательство «Машиностроение», 107076, Москва, Стромынский пе_р., 4
Московская типография № 4 Союзполнграфпрома
Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
129041, Москва, Б. Переяславская ул., д. 46
chipmaker.ru
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
НОВЫЕ КНИГИ
ПО СТАНКОСТРОЕНИЮ И ИНСТРУМЕНТАЛЬНОМУ ПРОИЗВОДСТВУ
Выпуск 1980 года
Автоматизация производства и повышение качества концевого режущего ин-
струмента I Ю. А. Ю д к о в с к н й, Г. Н. К н б е р е в, А. П. Ще'ве ль и др.
11 л., ил.
Б о б р о в В. П„ Чеканов Л. И. Транспортные и загрузочные устройства
автоматических линий: Учебник для техникумов. 7 л., ил Глаговский Б. А.,
Ройтштейн Г. Ш., Яшин В. А. Контрольно-измерительные приборы и осно-
вы автоматизации производства абразивных инструментов: Учеб, пособие для
техникумов. 16 л., ил.
Костюков К. М., М и х е л ь к е в и ч В. Н. Автоматические врезные устрой-
ства. 10 л., ил.
Кучер А. М. Механизмы и кинематические схемы металлорежущих станков:
Учеб, пособие для техникумов. Плакаты в 5 сериях.
Л а ш н е в С. И., Юликов М. И. Проектирование режущей части инстру-
ментов с применением ЭВМ. 12 л., ил.
Л е п и х о в В. Г. Самоустанавливающиеся приспособления. 3 л., ил.
Мовчнн В. Н., Михайлов Г. М. Технология производства измеритель-
ных инструментов и приборов: Учебник для техникумов. 2-е изд., перераб. и доп.
20 л., ил.
Надежность электрооборудования станков / 3. В. Тевлнн, М. А. Б о с и н-
зон, Б. П. Брейтер и др. 12 л., ил. (Электроавтоматика станков).
Опоры скольжения с газовой смазкой / С. А. Ш е й н б е р г, В. П. Ж е д ь,
Н. Д. 3 а б л о ц к и й и др. 2-е изд., перераб. и доп. 22 л., нл.
Ракович А. Г. Автоматизация проектирования приспособлений для метал-
лорежущих станков. 8 л., ил.
Сидоренко А. К. Червячные фрезы: Опыт применения иа НКМЗ. 9 л., ил.
Смирнов Ю. А., Волков А. В. Неисправности гидроприводов станков:
Альбом. 23 л., ил.
Срнбнер Л. А. Цикловое программное управление оборудованием. 11 л. ил.
Трофимов А. М. Металлорежущие станки: Альбом. Учеб, пособие для
техникумов. 2-е изд., перераб. и доп. 50 л., ил.
Тамбулатов Б. Я- Доводочные станки. 12 л., ил. (Б-чка станочника).
Тарзиманов Г. А. Проектирование металлорежущих станков. 3-е пзд.
перераб. и доп. 19 л., ил.
Филонов И. П., Петров С. Г., Шевандо Я. Г. Наладка металло-
обрабатывающих станков и автоматических линий: Учебник для техникумов.
10 л., ил.
Числовое программное управление круглошлифовальными станками
В. И. Та рт а ко век ий, М. Л. К о г а н, А. А. Э тк и н и др. 12 л., нл.
Своевременно заказывайте и приобретайте новые книги изда-
тельства «Машиностроение» в магазинах, распространяющих тех-
ническую литературу!
Chipmaker.ru