/



























































































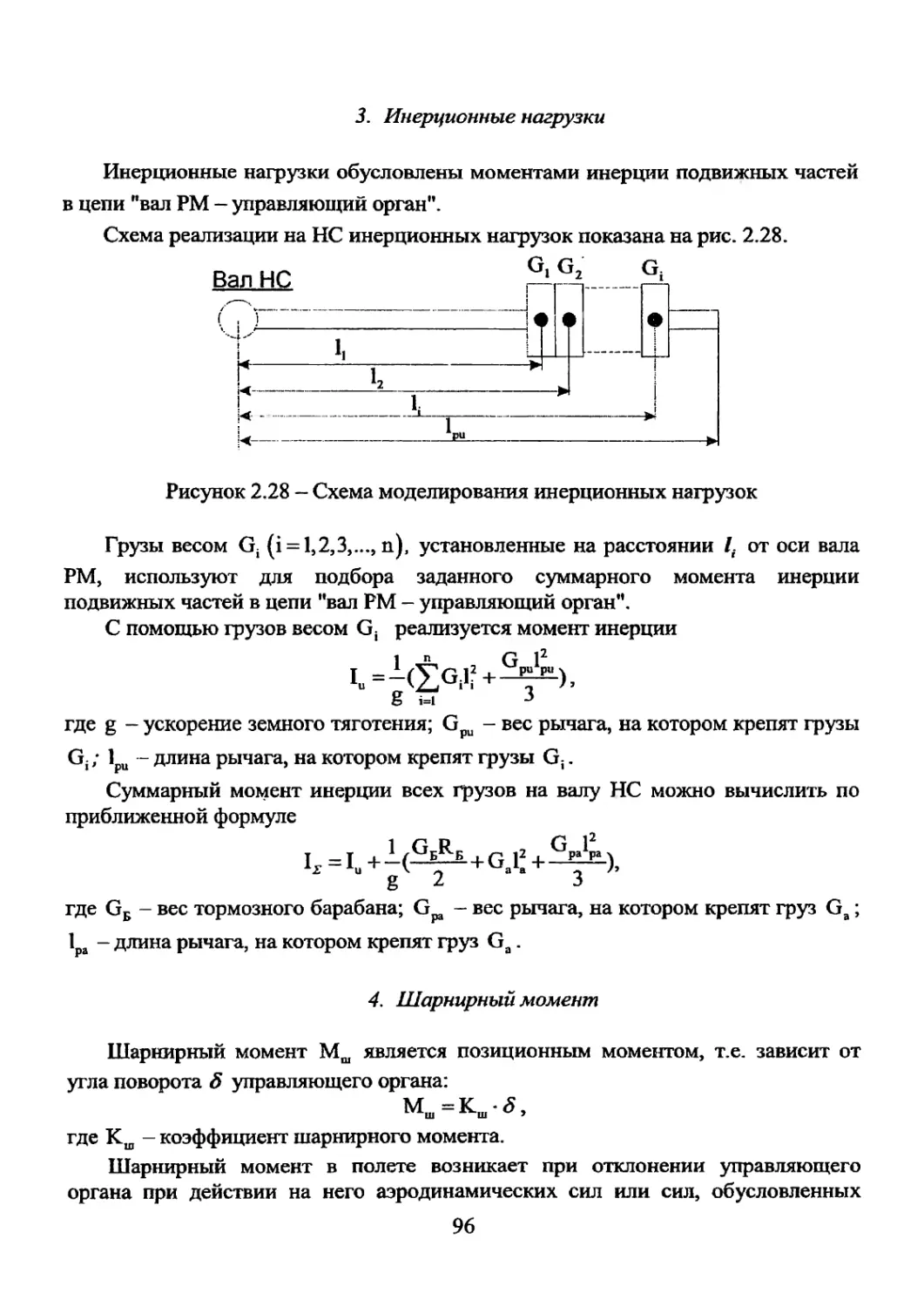





























































































































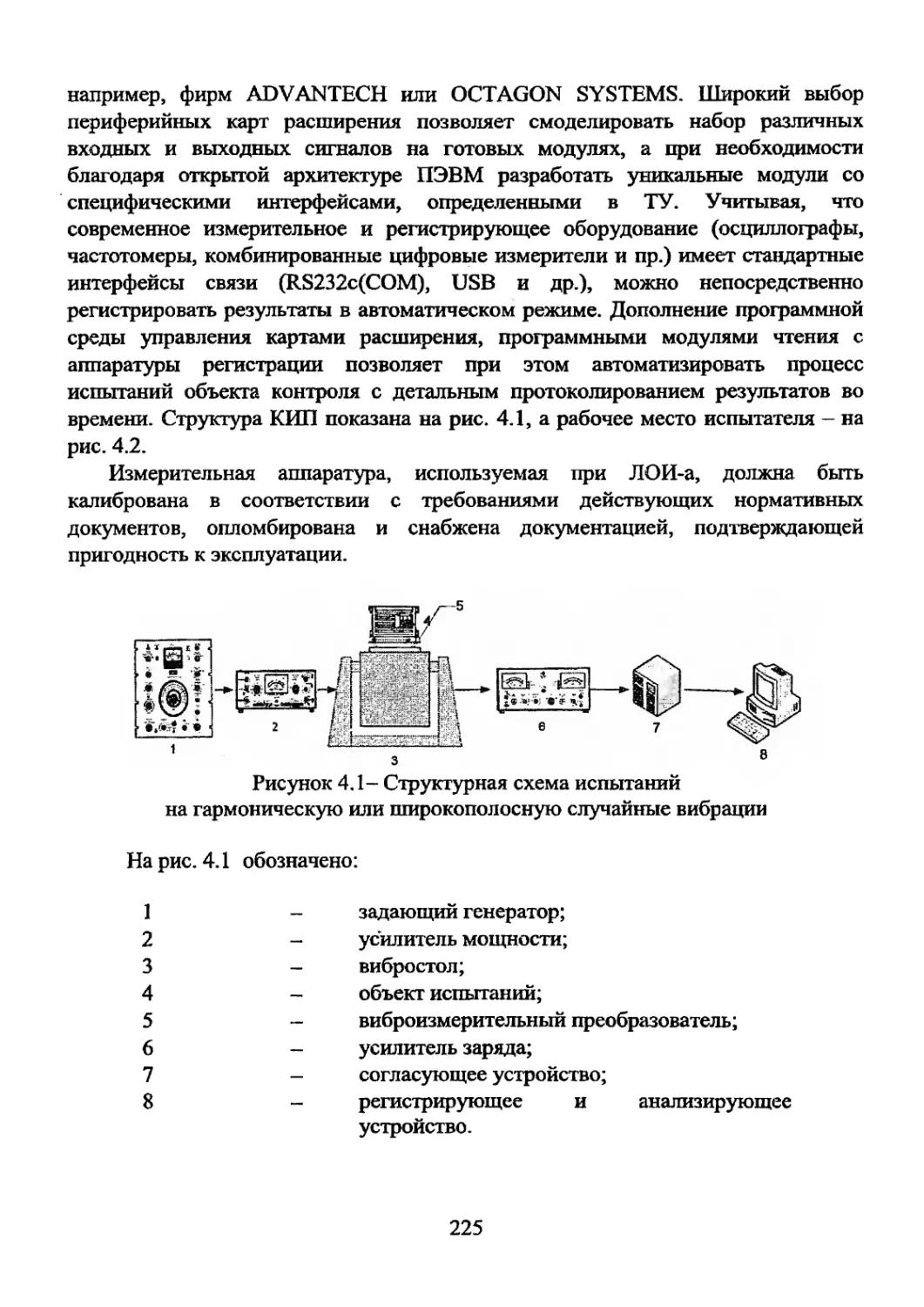
















































































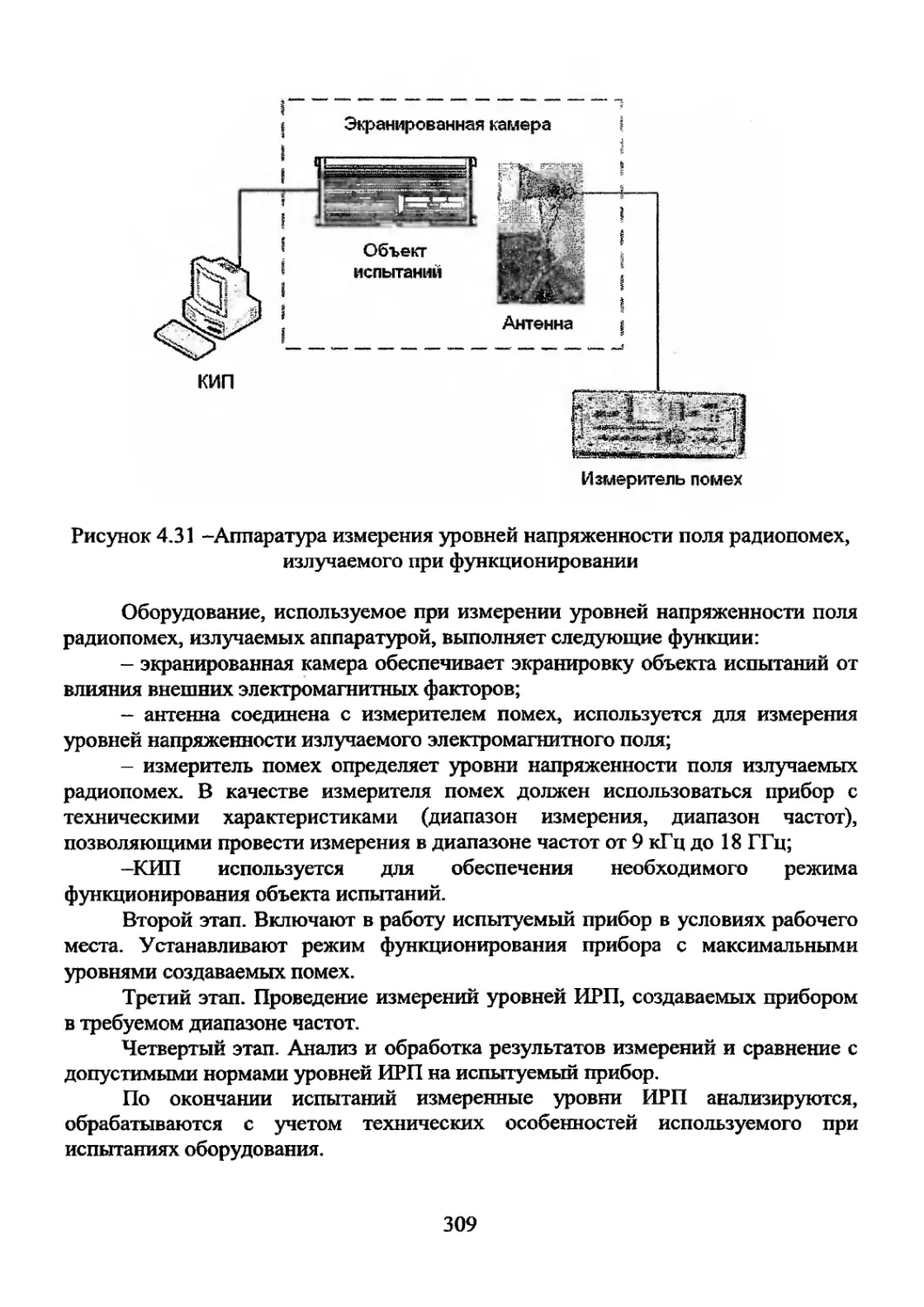
















































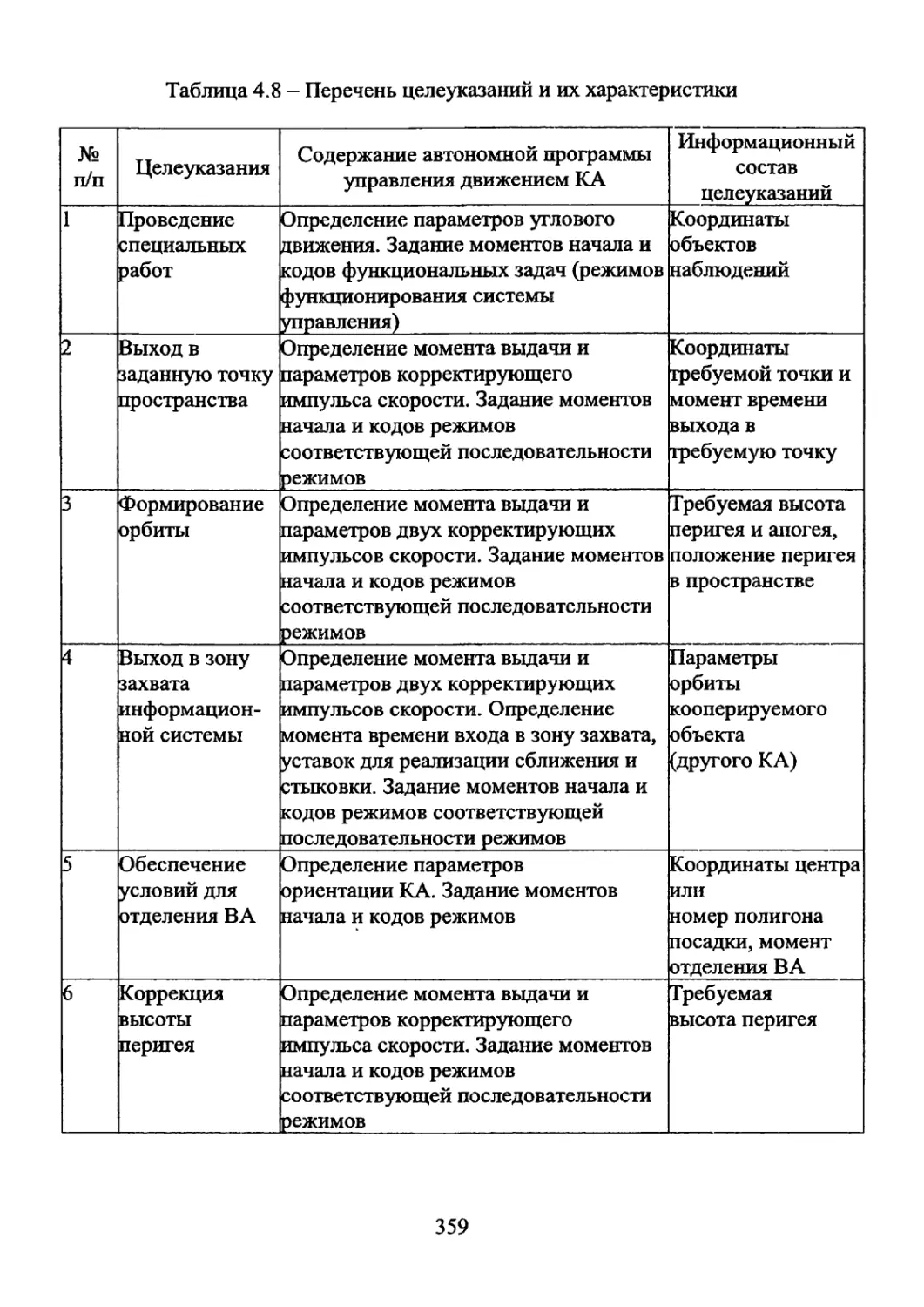











































































































Текст
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ,
МОЛОДЕЖИ И СПОРТА УКРАИНЫ
Институт инновационных технологий и содержания образования
Национальный аэрокосмический университет им. Н.Е. Жуковского
«Харьковский авиационный институт»
Научно-производственное предприятие «Хартрон-Аркос»
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
ОБЪЕКТОВ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
Том 3
ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА
СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТОВ
РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
Издание второе, переработанное и дополненное
Учебник
Утверждено Министерством образования и науки,
молодежи и спорта Украины в качестве учебника
для студентов высших учебных заведении,
обучающихся по направлению «Авионика»
Харьков «ХАИ» 2012
УДК 629.7.05.01:004.9(075.8)
П79
Наведено узагальнення багатор1чного досвщу експериментального вщпрацювання
унпсальних систем управлшня. Описано технолопю налагодження математичного
забезпечення. Викладено особливост! верифжаци та валщаци програмного забезпечення .
Розглянуто методы й засоби експериментального опрацювання апаратури. Подано загалып
вщомосп щодо перспективных вщмовостшких систем управлшня та специфжи 1‘хнього
експериментального вцщрацювання.
Для докторант!в, асшратгйв, мапстр!в i студенттв, що навчаються за напрямом
«Авюника».
Авторский коллектив: Ю.С. Алексеев, А.И. Батырев, Б.И. Батырев, Е.Е. Белова,
Е.А. Блошенко, В.И. Богданов, Г.К. Бондарец, А.М. Быков, К.Ю. Дергачев, В.Г. Джулгаков,
С.Г. Дручинина, Л.М. Еремина, Ю.М. Златкин, О.Ю. Златкин, Н.С. Завада, В.К. Зрайченко,
В.И. Иванов, В.П. Каменев, В.Ю. Квасневский, А.Ф. Кириченко, С.А. Ковалев, С.С. Корума,
В.И. Котович, В.С. Кривцов, Ю.А. Кузнецов, А.С. Кулик, Г.Я. Лобанов, А.Е. Лукьянович,
О.А.Лученко, А.А. Лысенко, М.З. Марголин, Н.Ф. Меховской, К.В. Немов, Е.А. Новиков,
С.В. Олейник, В.М. Остапенко, В.Н. Павленко, И.Т. Постолов, В.П. Ржемовский, К.И.
Руденко, В.И. Стиран, В.Г. Сухорсбрый, А.Н. Таран, С.Н. Фирсов, В.И. Чумаченко,
А.В. Чумаченко, А.Г. Чухрай, В.И. Щербина, Ю.Б. Юрченко, Е.М. Яковлев
Под общей редакцией Ю.С. Алексеева, Ю.М. Златкина, В.С. Кривцова, А.С. Кулика,
В.И. Чумаченко
Рецензенты:д-р техн, наук, проф. В.М. Свищ,
д-р техн, наук, проф. А.В. Збруцкий,
д-р техн, наук, проф. А.Н. Петренко.
П 79 Проектирование систем управления объектов ракетно-космической техники:
в 3 т. Т. 3. Экспериментальная отработка систем управления объектов ракетно-
космической техники [Текст]: учебник / Ю.С. Алексеев, А.И. Батырев, Б.И. Батырев и др.;
под общ. ред. Ю.С. Алексеева, Ю.М. Златкина, В.С. Кривцова, А.С. Кулика, В.И. Чумаченко.
- X.: Нац. аэрокосм, ун-т «Харьк. авиац. ин-т», НПП «Хартрон-Аркос», 2012. -472 с.
ISBN 978-966-662-269-6
Представлены обобщения многолетнего опыта экспериментальной отработки
уникальных систем управления. Описана технология отладки математического обеспечения.
Изложены особенности верификации и валидации программного обеспечения. Рассмотрены
методы и средства экспериментальной отработки аппаратуры. Приведены общие сведения о
перспективных отказоустойчивых системах управления и специфике их экспериментальной
отработки.
Для докторантов, аспирантов, магистров и студентов, обучающихся по направлению
«Авионика».
Ил. 153. Табл. 16. Библиогр.ИЗЗ назв.
УДК 629.7.05.01:004.9(075.8)
Гриф присвоен Министерством образования и науки, молодежи и спорта Украины
(письмо № 1/11 - 18660 от 03.12.12 г.)
ISBN 978-966-662-269-6
©Авторский коллектив, 2012
© Национальный аэрокосмический университет
им. Н.Е. Жуковского «Харьковский авиационный институт»,
НПП «Хартрон-Аркос», 2012.
ОГЛАВЛЕНИЕ
СПИСОК СОКРАЩЕНИЙ........................................... 5
ПРЕДИСЛОВИЕ............................................ 14
1 ЦЕЛИ, ЗАДАЧИ И ЭТАПЫ ЭКСПЕРИМЕНТАЛЬНОЙ ОТРАБОТКИ
СУ ОБЪЕКТОВ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ..................................................... 18
1.1 Основные положения об испытаниях........................ 18
1.2 Этапы жизненного цикла проектирования и экспериментальной
отработки СУ объектов ракетно-космической техники........... 22
1.3 Роль экспериментальной отработки СУ в процессе её
проектирования.............................................. 30
1.4 Задачи и содержание этапов отработки программно-математического
обеспечения................................................. 36
1.5 Задачи и содержание наземной экспериментальной отработки
аппаратуры и ПМО СУ......................................... 37
1.6 Задачи и содержание лётно-конструкторских испытаний СУ.. 43
Библиографический список.................................... 47
2 ТЕХНОЛОГИЯ ОТРАБОТКИ МАТЕМАТИЧЕСКОГО
ОБЕСПЕЧЕНИЯ СУ.............................................. 48
2.1 Общие сведения об объектах и системах управления........ 48
2.2 Моделирование на ЭВМ как основной инструмент отработки
математического обеспечения СУ динамических объектов........ 76
Библиографический список............................... 154
3 МЕТОДИКА И ТЕХНИЧЕСКИЕ СРЕДСТВА ВЕРИФИКАЦИИ И
ВАЛИДАЦИИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ БЦВМ
И ЦВМ СК................................................... 156
3.1 Программно-математическое обеспечение БЦВМ СУ и ЦВМ СК как
объект экспериментальной отработки......................... 156
3.2 Этапы верификации и валидации ПМО БЦВМ и ЦВМ СК. Задачи и
содержание этапов верификации и валидации ПМО. Планы верификации
и валидации ПМО............................................ 173
3.3 Верификация ПМО по формальным критериям в разомкнутой схеме
исследовательского стенда (РИС-технология)................. 176
3.4 Верификация и валидация ПМО по физическим критериям с
математическими моделями объектов управления в замкнутой схеме
исследовательского стенда (ЗИС-технология)................. 179
3.5 Верификация и валидация ПМО с реальной
аппаратурой СУ и СК........................................ 183
3.6 Программно-аппаратные комплексы для верификации и валидации
ПМО. Структура и задачи программно-аппаратных
комплексов................................................. 183
3.7 Система автоматизированного контроля и анализа результатов
испытаний в технологическом процессе отработки............. 194
3
3.8 Особенности технических требовании и этапы сопровождения при
натурных испытаниях и эксплуатации ПМО БЦВМ КА................ 206
3.9 Технология подготовки и контроля полетных заданий СУ...... 211
Библиографический список...................................... 216
4 ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА АППАРАТУРЫ
СИСТЕМ УПРАВЛЕНИЯ............................................. 217
4.1 Цели и задачи экспериментальной отработки аппаратуры СУ... 217
4.2 Автономные лабораторно-отработочные испытания (ЛОИ-а)..... 221
4.3 Совместные отработочные автономные испытания...... 227
4.4 Лабораторно-отработочные испытания системы управления и её
аппаратуры в составе комплексного стенда (ЛОИ-к).............. 254
4.5 Совместные испытания аппаратуры и ПМО СУ в составе
комплексного стенда........................................... 267
4.6 Приёмосдаточные испытания аппаратуры СУ................... 277
4.7 Испытания на контрольно-испытательных станциях............ 282
4.8 Испытания на ТК и СК...................................... 295
4.9 Специспытания аппаратуры СУ РКТ........................... 296
4.10 Летные испытания......................................... 324
4.11 Принципы организации телеметрического контроля процесса
испытаний подсистем КА........................................ 363
Библиографический список...................................... 369
5ЭКСПЕРИМЕНТАЛБНАЯ ОТРАБОТКА КОНЦЕПЦИИ
ОТКАЗОУСТОЙЧИВЫХ СИСТЕМ УПРАВЛЕНИЯ............................ 370
5.1 Основные понятия и положения отказоустойчивости........... 370
5.2 Методология обеспечения отказоустойчивости систем
управления.................................................... 376
5.3 Диагностические модели систем управления.................. 379
5.4 Критерии диагностируемое™.....-........................... 384
5.5 Критерии функциональной отказоустойчивости................ 387
5.6 Обобщенная функциональная схема первого уровня отказоустойчивой
системы стабилизации КА....................................... 389
5.7 Диагностическое обеспечение фрагмента БОДа................ 392
5.8 Восстановление сигналов датчиков.......................... 411
5.9 Лабораторные учебно-исследовательские стенды.............. 412
5.10 Конфигурация контроллера для отказоустойчивой системы
управления.................................................... 433
5.11 Интеллектуальные компьютерные обучающие системы.......... 439
Библиографический список...................................... 461
Послесловие................................................... 464
Приложение.................................................... 465
4
СПИСОК СОКРАЩЕНИЙ
GPS UTC АВК АВК ABM АИ АИК АИС АО АОБИ АП АПСНС АЛЛ АПС АРМ-П - спутниковая навигационная система; - всемирное декодированное время; - аналоговый вычислительный комплекс; - аппаратура входного контроля (по тексту); - аналоговая вычислительная машина; - автономные испытания; - автоматизированный измерительный комплекс; - астроизмерительная система; - алгоритмическое обеспечение; - алгоритм обработки бортовой информации; - архитектурное проектирование; - аппаратура потребителя спутниковой навигационной системы; - аварийное прекращение пуска; - система элемента автоматики и пиросредств; - автоматизированное рабочее место программиста (исследовательский стенд);
АС АСВХД АСКП АФЧХ АЦК АЦП АЧХ БА БД БДР БИМ БИНС БК БК БКРП БКС БКЭ-М БНО БОД БОС БС БСТК - адаптер связи; - автоматизированная система ввода и хранения данных; - автоматическая система генерации контрольных тестов; - амплитудно-фазочастотная характеристика; - аналого-цифровой комплекс; - аналого-цифровой преобразователь; - амплитудно-частотная характеристика; - блок акселерометров; - база данных; - блок дежурного режима; - бортовой источник мощности; - бесплатформенная инерциальная навигационная система; - бортовой комплекс (по тексту); - бортовой компьютер (по тексту); - блок коммутации и распределения питания; - бортовая кабельная сеть; - блок коэффициентов электронный модифицированный; - баллистико-навигационное обеспечение; - блок отказоустойчивых датчиков; - блок отказоустойчивых сервоприводов; ~ боковая скорость; - блок согласования телеметрического кадра (по тексту);
5
БСТК
БУК
БУМ
БЦВК
БЦВМ
БШВ
ВА
ВК
ВОГ
ВПобр
ВПпр
ВР
вти
Вх
ВхИ
вэд
ГА
ГБ
ГВК
ГВО
ГИ
ГИВУС
ГЛОНАСС
го
го
ГОГУ
ГС
ГСК
ГСП
д
дзз
дк
ДМ
дм
дм-о
днг
док
дп
ДПЗ
ДПр
- бортовая система телеконтроля (по тексту);
- блок управления конфигурацией;
- блок усилителей мощности;
- бортовой цифровой вычислительный комплекс;
- бортовая цифровая вычислительная машина;
- бортовая шкала времени;
- возвращаемый аппарат;
- вычислительный комплекс;
- волоконно-оптический гироскоп;
- воспроизведение обратное;
- воспроизведение прямое;
- восстановление работоспособности;
- внешнетраекторные измерения;
- входы;
- входная информация;
- ведомость эксплуатационной документации;
- гидроаккумулятор;
- гироблок;
- гибридные вычислительные комплексы;
- генератор видов отказов;
- гироинтегратор;
- гироскопический измеритель вектора угловой скорости;
- глобальная навигационная спутниковая система;
- головной обтекатель (по тексту);
- Головная организация (по тексту);
- Главная оперативная группа управления;
- гиростабилизатор;
- Гринвичская система координат;
- гиростабилизированная платформа;
- датчики;
- дистанционное зондирование Земли;
- двигатели коррекции;
- двигатели-маховики (по тексту);
- диагностические модели (по тексту);
- двигатель - маховик основной;
- динамически настраиваемый гироскоп;
- датчик ориентации комбинированный;
- детальное проектирование;
- датчик положения звезды;
- дистанционные проверки;
6
ДП-фаза ДС — фаза детального проектирования ПМО БЦВМ (ЦВМ СК); двигатели стабилизации (по тексту);
ДС — динамическая спецификация (по тексту);
ДУ — двигательная установка (по тексту);
ДУ — датчик угла (по тексту);
ДУС — датчик угловой скорости;
ЕРПЗ — естественный радиационный пояс Земли;
ЖРД — жидкостный ракетный двигатель;
ЗИП - запасные инструменты и приборы;
зис замкнутая схема исследовательского стенда;
ЗУ - запоминающее устройство;
ИА — измерительная аппаратура;
ивк — измерительно-вычислительный комплекс;
ИВО — имитация видов отказов;
ид - исходные данные (по тексту);
ид, — имитатор движения (по тексту);
ИИ — ионизирующее излучение;
ик - имитатор инфракрасного излучения Земли;
ИК-РКУ — испытательный комплекс релейно-коммутационных устройств;
им — имитационная модель;
ИНС - инерциальная навигационная система;
ио — исполнительные органы;
ипо — исследовательское программное обеспечение;
ИРП — индустриальные радиопомехи;
ИС — имитатор солнечного излучения (по тексту);
ИС - исследовательский стенд (по тексту);
исз - искусственный спутник Земли;
иск — инерциальная система координат;
исп — исполнитель;
ИУС — измеритель угловой скорости;
ицм - информационно-цифровая машина;
иэ — исполнительный элемент;
КА - космический аппарат;
кд - конструкторская документация;
КДУ — корректирующая двигательная установка;
ки - корректирующий импульс (по тексту);
ки — комплексные испытания (по тексту);
ки - командная информация (по тексту);
кип — контрольно-измерительный пульт;
кис — контрольно-испытательная станция;
7
кк ккип ккп КЛА клс кмо ко КП КП КПА кпэо КРК КРЛ КРШ КС ЛА ЛВС лг ли лки ЛОИ-а - космический корабль; - комплекс командно-измерительных приборов; - комплекс командных приборов; - космический летательный аппарат; — кабельные линии связи; - канал мультиплексного обмена по протоколу магистрали 1553В; - кооперируемый объект; - контрольный пример (тест); - космическое пространство (по тексту); - контрольно - проверочная аппаратура; - комплексный план экспериментальной отработки; - космический ракетный комплекс; - командная радиолиния; - контроль разобщённости шин; - комплексный стенд; — летательный аппарат; - локальная вычислительная сеть; - лазерный гироскоп; — летные испытания; - летно-конструкторские испытания; - лабораторно-отработочные испытания аппаратуры СУ (автономные);
ЛОИ-ис - лабораторно-отработочные испытания ПМО на исследовательском стенде;
ЛОИ-к - лабораторно-отработочные испытания ПМО на комплексном стенде;
ЛПД МБР МВИ МВК МД МДМ МИК мип мк МКР мкс мм МО МОУ - локальная поглощенная доза; - межконтинентальная баллистическая ракета; — межведомственные испытания; — межведомственная комиссия; - маршевый двигатель; - машинные диагностические модели; - монтажно-испытательный корпус; - массив изменений программ; - модуль команд; - малогабаритные контрольные разъединители; - международная космическая станция; - математическая модель; - математическое обеспечение; - модель объекта управления;
8
МРК МРУ мт МУ МУ МЭМС НАП НД ни НИЛ НКА НКУ НОЗУ нп НППА ПУП - (СК) нппи НС НС НС нстк нтд ОАС ог ог ОГУ ОЗУ ОК опт - массив разовых кадров; - модель режима управления; - модуль телеметрии; - магистральный усилитель; - моделирующие установки; - микроэлектронная механическая система; - навигационная аппаратура потребителя; - научная документация; - натурные испытания; - наземный измерительный пункт; - навигационный космический аппарат; - наземный комплекс управления; - наладочное оперативное запоминающее устройство; - непосредственная передача; - наземная проверочно-пусковая аппаратура пункта управления пуском (стартового комплекса); - наземный пункт приема информации; - нагрузочный стенд (по тексту); - нерасчетные ситуации (по тексту); - нормальная скорость (по тексту); - наземная система телеконтроля; - нормативная техническая документация; - объект автоматической стабилизации; - оперативная группировка (по тексту); - орбитальная группировка (по тексту); - оперативная группа управления; - оперативное запоминающее устройство; - основной канал связи НППА ПУП с НППА СК по оптоволоконному кабелю;
омк ОНА ОР OPKT ОрУ ОС оск отк ОТУ ОУ 04 - оборудование обмена между каналами БЦВМ (ЦВМ СК); - остронаправленная антенна; - основная работа; - объект ракетно-космической техники; - органы управления; - операционная система; - орбитальная система координат; - отдел технического контроля; - общие технические условия; - объект управления; - оси чувствительности (по тексту);
9
04 ОШ — отделяемая часть PH (по тексту); образование шин;
оэ — опытная эксплуатация;
ПАИС - прецизионная астроизмерительная система;
ПАК — программно - аппаратный комплекс;
ПАК - программно-алгоритмический комплекс (по тексту);
ПАО - программно-алгоритмическое обеспечение;
ПВ — приемовычислитель;
ПВВ - процессор ввода-вывода;
ПГ — полезный груз;
ПГЗ - представительство Генерального заказчика;
пз - полетное задание (по тексту);
пз - представительство заказчика (по тексту);
ПЗУ - постоянное запоминающее устройство;
пи - периодические испытания;
пи - программа испытаний (по тексту);
пик - полигонный измерительный комплекс;
ПК - персональный компьютер;
ПКУ — пульт контроля и управления;
пм — программный модуль;
ПМО - программно-математическое обеспечение;
пн — полезная нагрузка;
по - программное обеспечение;
поз - прибор ориентации на Землю;
ПОН — программа обеспечения надежности;
ПОР - программа отработки режимов;
ПОС — прибор ориентации на Солнце;
плз - прибор ориентации на Полярную звезду;
пев - простая случайная выборка;
пси — приемосдаточные испытания;
ПСУ - подсистема СУ;
ПУСМ - пульт управления стендом моделирования;
ПЭ — пироэлемент;
ПЭВМ — персональная электронная вычислительная машина;
ПЭ-фаза - фаза передачи ПМО БЦВМ (ЦВМ СК) в эксплуатацию;
РБ - разгонный блок;
РВ — радиовысотомер;
Рг — регистры;
РДТТ — ракетный двигатель твердого топлива;
РЗЦ - регистр запуска ЦВМ;
10
РИС РК РК опт - разомкнутая схема исследовательского стенда; - релейный коммутатор; - резервный канал связи НППА ПУП с НППА СК по оптоволоконному кабелю;
РКС РКТ РЛС РМ РМО РМРУ PH РП РРУ РСУ РТС РУ РУК САКАРИ - система регулирования кажущейся скорости; - ракетно-космическая техника; - радиолокационная станция; - рулевая машина; - рабочее место оператора; - результаты "электронного пуска” МРУ; - ракета-носитель; - район падения; - результаты "электронного пуска" РУ; - рабочая станция управления; - радиотелеметрическая станция; - режим управления; - регистр управления коммутатором; - система автоматизированного контроля и анализа результатов испытаний;
САН САПР СБ СВ СВТ СГК СГП сдкп СЕВ сзпо СИ синод СК СК скдо - система автономной навигации; - система автоматизированного проектирования; - солнечные батареи; - служба времени; - средство вычислительной техники; - силовой гироскопический комплекс; - станция гидропитания; - система динамической коррекции программ БЦВМ (ЦВМ СК); - система единого времени; - система замены программного обеспечения; - средства измерения; - система измерения параметров относительного движения; - система координат (по тексту); - стартовый комплекс (по тексту); - система комплексной динамической отработки ПМО БЦВМ (ЦВМ СК);
скк СЛДУ см сн снн - служба контроля качества; - система линейных дифференциальных уравнений; - стенд моделирования; - система наведения; - система навигации и наведения;
11
снс сои СОИ-а СОИ-ис - спутниковая навигационная система; - совместные отработочные испытания; - совместные отработочные испытания аппаратуры (автономные); - совместные с заказчиком (пользователем) испытания ПМО на исследовательском стенде;
СОИ-к - совместные с заказчиком (пользователем) испытания ПМО на комплексном стенде;
СОН СП спд спз СПО сс сск сскм стк СУ СУ СУБД СУД СУОД СУОС СУРМ СУРТ СФМ сэ сэп СЭС сям тз ти тк ТЛФ тм тми ТНА тп тпз ТПО-фаза тс - сообщение о неисправности; - стартовая позиция; - система поддержания давления в ДУ; - стартовое полетное задание; - специальное программное обеспечение; - система стабилизации; - связанная система координат; - система сброса кинетического момента; - система телеметрического контроля; - система управления; - согласующее устройство СУРМ; - система управления базой данных; - система управления движением; - система управления относительным движением; - система управления ориентацией и стабилизации; - согласующее устройство РМ; - система управления расходом топлива; - стенд физического моделирования; - сопровождение при эксплуатации; - система электропитания; - система электроснабжения; - специализированные языки моделирования; - техническое задание; - типовые испытания; - технический комплекс; - телефонная линия связи; - телеметрия; — телеметрическая информация; - турбонасосный агрегат; - техническая позиция; - технологическое полетное задание; - фаза определения требований к ПМО БЦВМ (ЦВМ СК); - технические средства;
12
тт
ттз
ттх
ТУ
УАС
УВВ
УИВК
УК
УМКР
УОБР
Файл ВхИ
Файл РМРУ
Файл РРУ
ФГБ
ЦАП
ЦВК
ЦВМ
ЦМК
ЦУП
ЧПППАС
ЧЭ
ШД
шлс
ЭБ
ЭВМ
ЭД
ЭлП
ЭМ
эмо
эмп
эмп
ЭМС
эпк
ЭРИ
ЭРТИ
эск
ЭСР
ЭТТ
технические требования;
тактико-техническое задание;
тактико-технические характеристики;
технические условия;
устройство автоматической стабилизации;
устройство ввода-вывода БЦВМ (ЦВМ СК);
управляющий информационно-вычислительный комплекс;
управляющий кадр МОУ;
универсальный малогабаритный кабельный разъединитель;
устройство обработки сообщений, передаваемых по магистрали
протокола 1553В;
файл входной информации РУ и МРУ;
файл результатов "электронного пуска" МРУ;
файл результатов "электронного пуска" РУ;
функционально-грузовой блок;
цифро-аналоговый преобразователь;
цифровой вычислительный комплекс;
цифровая вычислительная машина;
цифровой моделирующий комплекс;
центр управления полетами;
частная программа проверки полярностей автомата стабилизации
и СУОС;
чувствительный элемент;
шаговый двигатель;
широкополосные линии связи;
электробезопасность;
электронная вычислительная машина;
эксплуатационная документация;
электронный пуск;
электромагниты;
электромагнитная обстановка;
электромагнитный преобразователь;
электромагнитные помехи (по тексту);
электронно-магнитная совместимость;
электропневмоклапан;
электрорадиоизделия;
электро- и радиотепловые испытания;
экваториальная система координат;
электронно-радиационная стойкость;
электротренировка;
13
ПРЕДИСЛОВИЕ
Развитие ракетно-космической техники (РКТ) свидетельствует о невиданных
ранее темпах и уникальном прогрессе в области освоения человечеством
аэрокосмического пространства с помощью беспилотных и пилотируемых
летательных аппаратов. Современные ракетные и космические летательные
аппараты по сложности и многообразию выполняемых функций приближаются к
природным объектам и явлениям. Такие впечатляющие результаты научно-
технической деятельности были обусловлены разумной стратегией освоения
совершенно новых принципов, способов и средств перемещения в
аэрокосмическом пространстве. Эта стратегия формировалась посредством
кристаллизации многовекового мирового научного опыта открытий и познания
природных явлений и использования его в создании техносферы человеческого
обитания. Самым значительным достижением в построении научной картины
Мира представляется открытие путей, способов и средств, другими словами,
технологии проектирования наукоемких принципиально новых технических
объектов и процессов. И в этой технологии существенная, значительная роль
отводится опытам, экспериментам, испытаниям как единственным, самым
эффективным, универсальным инструментам получения достоверных
представлений о качестве проектных решений.
С древнейших времен формирование человеком научной картины Мира, т.е.
научное познание окружающего Мира - Природы шло с помощью как
наблюдений - пассивного эксперимента, так и опытов - активного
эксперимента. Научная картина Мира формировалась всегда с помощью
научного метода познания. Один из творцов научного метода познания
английский философ Фрэнсис Бэкон (1561-1626) является автором знаменитого,
мудрого изречения: «Scientia est potentia», что в переводе с латинского означает
«Знание - сила», отражающего истинную суть научного познания и его
непреходящего значения для прогресса общества. Свою лепту в создание
научного метода внес и Рене Декарт (1596-1650) - французский философ и
математик. С момента применения к устойчивым повторяющимся явлениям
природы научного метода стали появляться научные знания - это такие знания,
которые можно проверить, сохранить и передать другому. Установить
научность факта, заключения, знания невозможно без проверки посредством
опыта. Английский философ и естествоиспытатель, родоначальник
экспериментального метода - Роджер Бэкон (1214-1292) еще на раннем этапе
формирования научной картины Мира отмечал: «Выше всех умозрительных
знаний и искусств стоит умение проводить опыты, и эта наука есть царица наук».
И еще: «Без опыта ничто не может быть узнано достаточным образом» [1,2, 3].
14
Усилиями и трудами гениальных исследователей Природы Древней Греции:
ученого Архимеда (ок. 287-212 гг. до н.э.), мыслителя Пифагора (ок. 570-ок. 500 гг.
до н.э.), древнегреческого философа Платона (428-347 гг. до н.э.),
древнегреческого философа и ученого Аристотеля (384-322 гг. до н.э.), в нашу эру
итальянского физика и астронома Галилео Галилея (1564-1642) и целого ряда
других ученых в естествознание были внедрены количественные оценки,
позволившие перейти от наблюдений к измерениям, а далее- к расчетам. Эти
новые революционные для того времени технологии научного метода познания
дали возможность «сжимать» и упорядочивать огромные накопившиеся массивы
научных фактов с помощью математических средств. Существенному прогрессу в
деле сохранения и передачи полученных научных знаний способствовало развитие
мифологии, живописи, письменности и книгопечатания.
О плодотворной связи опыта и теории свидетельствуют многие научные
открытия. Один из талантливых исследователей, сделавших много оригинальных
открытий в различных областях физики, англичанин Уильям Томсон (Кельвин)
(1824-1907) сравнивал теорию с жерновами, а опытные данные - с зерном,
которое засыпается в эти жернова. Ясно, что сами по себе вращающиеся жернова
без зерна ничего полезного дать не смогут и что качество муки определяется
качеством зерна. Следовательно, качественный эксперимент является основой
для построения эффективной теории. Вот что утверждал выдающийся
экспериментатор Капица П. Л. (1894-1984): «Работа крупных ученых-
естествоиспытателей, внесших большой вклад в развитие современного
естествознания, неизменно проходила в тесной связи теории и опыта. Поэтому
для развития естественных наук на здоровой материалистической основе всякое
теоретическое обобщение должно непременно проверяться на опыте.
Гармоническое развитие теории и практики является абсолютно необходимым во
всех областях естествознания» (4].
Наблюдения-теория-эксперимент - таковы составляющие современной
базы научного познания Мира, таковы особенности познавательной стратегии
современной научно-практической деятельности.
Период становления и развития РКТ характеризуется устойчивой
тенденцией возрастающих требований к качеству летательных аппаратов и
производимых ими услуг. В области разработки РКТ это привело к
необходимости проектировать весь жизненный цикл летательного аппарата от
замысла до утилизации. Использование новых конструкций летательных
аппаратов, более энерговооруженных силовых установок, совершенного
многофункционального бортового оборудования существенно опережает
разработку адекватного математического и программного обеспечения процесса
проектирования изделий РКТ. Поэтому при создании новых образцов аппаратов
значительная роль отводится различным видам полунатурных, гибридных и
15
натурных испытаний, позволяющим эффективно разрешать примерно до 40%
проблем, возникающих в процессе проектирования, и при этом расходуется
около 70% средств от затрат на всю разработку.
Качество выполнения возложенных функций любого изделия РКТ
определяется качеством конструкции, энергетических установок и в
значительной степени качеством системы управления, которая в конечном итоге
должна обеспечить выполнение всех тактико-технических требований как в
штатных, так и в нештатных ситуациях. По глубокому убеждению
разработчиков, «... система управления - это мозг и нервы ракеты». Степень ее
совершенства определяет такие важные тактико-технические характеристики PH,
как полная автоматизация предпусковых и пусковых операций, надежность и
точность решения конечной задачи, реализация энергетически оптимальных
траекторий выведения, и ряд других.
Система управления космических аппаратов полностью определяет качество
маневров на орбите (сближения, стыковки, межорбитальных переходов),
ориентации и переориентации, живучесть и длительность активного
существования.
Вдохновляющий прогресс в области информационных технологий вызвал
необходимость модернизации классической парадигмы обучения студентов
основам проектирования систем управления летательными аппаратами.
Модернизация радикально протекает по многим направлениям, отличающимся
масштабами внедрения таких программных платформ, как MS DOS, WINDOWS, а
также универсальных оболочек типа Компас, Auto CAD, Trace Mode, Lab View,
MATLAB, SIMULINK и отдельных проблемно-ориентированных пакетов для
решения отраслевых задач. При таком радикальном подходе наметилась опасная
тенденция интенсивного отрыва, абстрагирования образовательного процесса от
реального процесса проектирования, что приводит к лжезнаниям и
псевдоумениям, не пользующимся популярностью на рынках инженерного труда
аэрокосмических держав. В области проектирования РКТ полный переход на
информационные технологии проектирования невозможен. При создании новых
образцов ракет и космических аппаратов существенную роль играют
полунатурные и натурные испытания.
Анализ опыта работы высших учебных заведений и ряда ведущих проектных
организаций при подготовке кадров в области систем автоматического управления
летательными аппаратами в течение последних 30 лет привел нас к глубокому
убеждению о необходимости нахождения нового компромисса между
использованием при обучении классических технологий экспериментальных
исследований и современных информационных технологий проектирования.
16
В то же время в обширной опубликованной литературе по ракетно-
космической тематике вопросы технологии экспериментальной отработки систем
управления объектов РКТ на этапах их проектирования освещены весьма слабо.
В настоящем издании делается попытка восполнить этот пробел, опираясь на
многолетний опыт предприятия «Хартрон-Аркос» в части проектирования систем
управления (СУ) многих типов ракет-носителей и космических аппаратов, а
также плодотворный опыт подготовки кадров для ракетно-космической отрасли в
Национальном аэрокосмическом университете им. Н.Е. Жуковского
«Харьковский авиационный институт».
В первом разделе книги излагаются цели, задачи и основные этапы
экспериментальной отработки систем управления объектов РКТ.
Второй раздел посвящен описанию технологии отработки математического
обеспечения СУ.
Методика верификации и валидации программного обеспечения БЦВМ СУ
объектов РКТ описана в третьем разделе.
Многоэтапный процесс и методика экспериментальной отработки аппаратуры
и СУ в целом, включая летные испытания, описаны в четвертом разделе.
Принципы и средства экспериментальной отработки СУ со свойствами
активной отказоустойчивости изложены в пятом разделе.
Книга предназначена для студентов, магистров, аспирантов, докторантов, а
также инженеров соответствующих специальностей.
Библиографический список
1. Кузнецов, Б.Г. Развитие научной картины мира в физике ХУП - XVIII вв.
[Текст] / Б.Г. Кузнецов. - М.: Изд-во АН СССР, 1955. - 344 с.
2. Лауэ, М. История физики: пер. с нем. [Текст] / Т.Н. Горштейн. - М.:
Гос. изд-во техн.-теор. лит-ры, 1965. - 229 с.
3. Таранов, П.С. Анатомия мудрости: 120 философов: в 2 т. [Текст] /
П.С. Таранов - Симферополь: Реноме, 1997. - Т.2. - 624 с.
4. Капица, П.Л. Эксперимент. Теория. Практика: Статьи и выступления
[Текст] / П.Л. Капица. - 4-е изд., испр. и доп. - М.: Наука, 1987. - 496 с.
17
1 ЦЕЛИ ЗАДАЧИ И ЭТАПЫ ЭКСПЕРИМЕНТАЛЬНОЙ ОТРАБОТКИ
СУ ОБЪЕКТОВ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
1.1 Основные положения об испытаниях
Испытания как вид научно-технической деятельности преследуют цель -
получить ответы на вопрос о пригодности объекта испытаний к штатной
эксплуатации путем проведения цикла экспериментов на всех этапах
проектирования.
Выдающиеся естествоиспытатели всех времен понимали сущность
эксперимента и его роль в построении адекватной картины Мира.
«Эксперимент - это вопрос. Точный ответ редко можно получить, если вопрос
не точен; действительно, глупые ответы - т.е. непоследовательные,
несовместимые, несоответствующие или не имеющие отношения к
экспериментам результатам - обычно свидетельствуют о глупом вопросе» [1] -
такому убеждению следовали А. Розенблют и Н. Винер в своих научных
исследованиях. И более позднее суждение И. Пригожина и И. Стенгере:
«Экспериментальный метод есть искусство постановки интересного вопроса и
перебора всех следствий, вытекающих из лежащего в основе его теоретической
схемы, всех ответов, которые могла бы дать природа на выбранном
экспериментатором теоретическом языке» [2]. Теоретическая схема, лежащая в
основе эксперимента, есть не что иное, как модель материальная или идеальная.
Построение модели - это представление объекта-оригинала с помощью
объекта-заместителя, обеспечивающего информационное отражение свойств,
существенных для решаемой задачи. _
Модель (лат. modus - мера, масштаб, способ действия) - это объект-
заместитель объекта-оригинала, обеспечивающий информационное
отражение свойств и характеристик, существенных для задачи, решаемой
субъектом [3]. Построение модели и эксперимент находятся в циклическом
взаимодействии. По образному сравнению это взаимодействие похоже на
отношение между курицей и яйцом, в котором невозможно определить, что
было «в самом начале». По сути, эксперимент с объектом испытаний
проводится для того, чтобы уточнить, конкретизировать имеющиеся
представления, как правило, выраженные в форме той или иной модели, чаще в
форме математической модели, а постановка эксперимента определяется
необходимостью усовершенствования имеющейся модели.
Итак, под экспериментом будем понимать совокупность
взаимосвязанных действий исследователя, осуществляемых посредством
аппаратно-программных средств, в целях получения новой информации об
объекте испытаний. Для рационального и эффективного проведения
эксперимента его нужно планировать. Планирование эксперимента - это
18
процедура выбора числа и условий проведения опытов, необходимых и
достаточных для решения поставленной задачи с требуемой точностью.
Очевидно, что цель любого научно-исследовательского познавательного
эксперимента состоит в снятии неопределенности понимания свойств объекта
испытаний. Неопределенность понимания обусловлена множеством факторов,
дестабилизирующих работоспособность объекта испытаний. Это используемые
в объекте новые физические явления, принципы работы, материалы, условия,
аппаратура, программное обеспечение, неизбежно появляющиеся при
испытаниях сбои, отказы, дефекты, неисправности и ряд других объективных
причин, существенно влияющих на адекватное понимание и отражение
функциональных свойств испытуемого объекта.
Испытания - это сложный, многоэтапный и ответственный вид
интеллектуальной и организационно-технической деятельности, направленный на
выдачу заключения о пригодности объекта испытаний к штатной эксплуатации,
основными атрибутами которого являются:
- техническое задание и план экспериментальной отработки;
- объект испытаний или его модель, включающая в себя
имитаторы возмущающих и управляющих воздействий;
- технические средства, обеспечивающие проведение
испытаний на всех этапах проектирования, в состав которых входят
стенды математического, полунатурного моделирования, различные
устройства, воспроизводящие воздействия эксплуатационных факторов;
- различные виды лабораторно-отработочных испытаний;
— летно-конструкторские испытания;
- программно-аппаратные устройства обработки результатов
испытаний и автоматизации принятия решений.
Конечная задача любых испытаний - это получение наиболее полного
понимания объекта испытаний, его свойств и поведения. Высшим достижением
такого понимания является построение адекватных математических моделей,
позволяющих в последующем перейти к разработке современных
информационных технологий проектирования, однако ни в коей мере не
замещающих экспериментальные исследования и испытания натурных объектов.
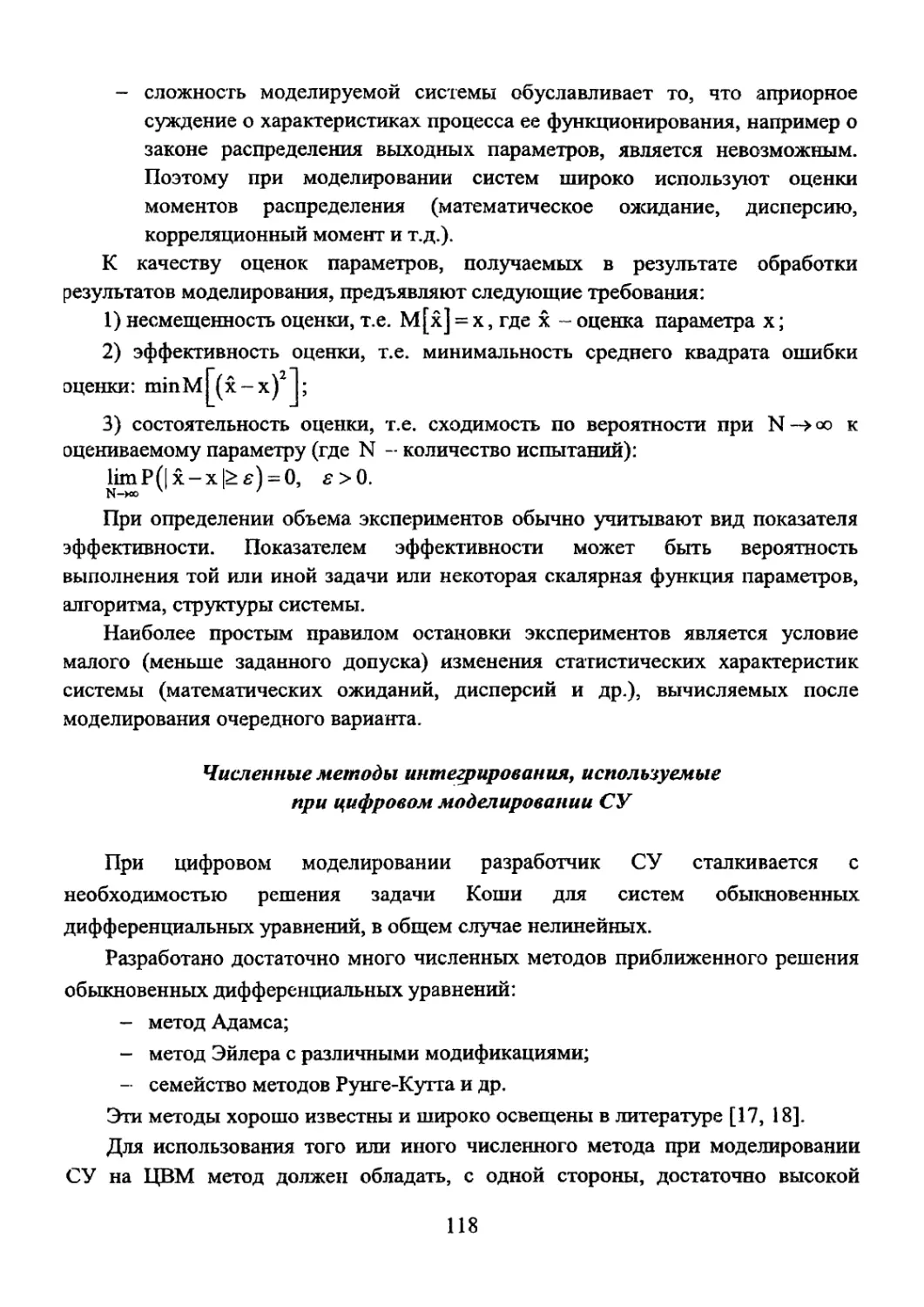
Рассмотрим взаимосвязь основных понятий в области испытаний на примере
обобщенной функциональной схемы (рис. 1.1).
Как следует из рассмотрения функциональной схемы, показанной на рис. 1.1,
начальным этапом испытаний является составление комплексного плана
экспериментальной отработки, включающего в себя:
- место проведения испытаний;
— техническое обеспечение;
- сроки завершения этапов испытаний;
19
- объект испытаний;
- задачи испытаний;
- план проведения испытаний;
- инструктивно-нормативное обеспечение испытаний;
- способ фиксирования результатов испытаний;
- документирование и отчетность;
- ряд других положений.
После составления комплексного плана отработки приступают к созданию
экспериментальной базы, представляющей собой совокупность технических и
инженерных средств, которые включают в свой состав стенды математического и
полунатурного моделирования, различное оборудование, воспроизводящее
воздействие на объект испытания, по возможности, всех эксплуатационных
факторов, а также регистрирующую аппаратуру.
Если испытательная база создана и проведены все испытания,
предусмотренные планом экспериментальной отработки, результаты опытов над
объектом испытаний регистрируются и фиксируются для дальнейшего анализа.
Процесс измерения - это алгоритмическая операция, которая данному
наблюдаемому состоянию объекта испытания ставит в соответствие определенное
обозначение: число, номер или символ. Правильно выбранное соответствие
обеспечивает полный объем информации об объекте, в результате обработки
которой получаются требуемые характеристики и признаки исследуемых свойств.
Следующий этап экспериментальной обработки заключается в обнаружении
отклонений вычисленных признаков от требуемых значений и представляет собой
завершающую стадию контроля - проверки соответствия объекта испытаний
установленным техническим требованиям. Отрицательные результаты контроля
обуславливают необходимость перехода к следующему этапу -
диагностированию, заключающемуся в поиске места, установлении класса и
определении вида отказа, вызвавшего отклонения признаков работоспособности
от требуемых значений. Все описанные этапы в совокупности составляют
сущность термина «испытание», состоящего в экспериментальном определении
качественных и количественных характеристик, свойств объекта в процессе его
функционирования в определенных условиях испытаний.
Заключительный этап экспериментальной обработки состоит в устранении
аномалий, отказов и других причин, вызвавших неработоспособное состояние и
приведших к появлению отклонений признаков, характеризующих
функциональное состояние испытуемого объекта. Восстановление
работоспособности осуществляется посредством настройки, наладки, замены
отказавших компонентов, соответствующих изменений в аппаратных и
20
программных средствах и в целом комплексе традиционных ремонтных
мероприятий по устранению факторов, дестабилизирующих работоспособность
объекта испытаний.
Имитация внешних
воздействий
Имитация управляющих 1___К
воздействий_________*
Комплексный план
экспериментальной
отработки
U- — 4
ОБЪЕКТ ИСПЫТАНИЙ
Технические средства,
обеспечивающие испытания
Рисунок 1.1- Обобщенная функциональная схема процесса
экспериментальной отработки
э
к
с
п
Е
Р
И
м
Е
н
т
А
Л
ь
н
А
Я
О
т
р
А
Б
О
Т
К
А
21
Таким образом, следуя изложенному выше, можно дать следующее
определение: экспериментальная отработка - это опытная проверка заданной
разработчиком совокупности функциональных свойств, представленных
соответствующими признаками, и доработка принципов, аппаратуры,
математического и программного обеспечения, технологии изготовления объекта
в целях обеспечения его заданных функциональных свойств.
1.2 Этапы жизненного цикла проектирования и экспериментальной
отработки СУ объектов ракетно-космической техники
Проектирование систем управления объектов ракетно-космической техники,
а именно: космических летательных аппаратов и ракет-носителей, является
сложным итерационным процессом, включающим в себя новейшие достижения
науки и техники и осуществляющимся по определенным этапам. Этапы
проектирования СУ ОРКТ регламентируются ГОСТами, ОСТами, нормативными
указаниями Национального космического агентства Украины. В то же время
каждое предприятие имеет свои отличительные особенности проектирования,
обусловленные спецификой производства, которая отражена в стандарте
предприятия.
Обычно этапы проектирования СУ ОРКТ укрупненно делят на следующие:
замысел СУ ОРКТ, формирование технического задания (ТЗ), формирование
технического предложения (ТП), эскизный проект, рабочий проект, производство,
испытания, сдача в эксплуатацию.
Время жизни системы - от замысладо снятия с эксплуатации и утилизации -
называется “жизненным циклом”. Продолжительность жизненного цикла систем
управления зависит от типа ракетно-космической техники и ее технического
потенциала.
В табл. 1.1 приведена общая схема этапов жизненного цикла СУ объектов
РКТ, их содержание и техническое оснащение, поддерживающее работы на
этапах их создания. Рассмотрим каждый этап более подробно.
Жизненный цикл системы управления объектов РКТ начинается с замысла
системы (формирования концепции). Зарождение замысла начинается с осознания
организацией-заказчиком потребностей в создании принципиально новых,
усовершенствовании или замене существующих систем в связи с расширением и
изменением характера решаемых системой управления задач.
Формализация замысла сопровождается рядом действий организации-
заказчика, основными из которых являются:
22
— проведение исследований для анализа множества новых возникших задач,
их классификация и формализация;
- формирование первоначальных тактико-технических требований к
разрабатываемой системе управления;
- анализ последних достижений научных и промышленных организаций
аэрокосмической отрасли в целях поиска новых научных и технических
принципов и путей;
- анализ (диагностирование) возможностей и технической оснащенности
предприятий аэрокосмической отрасли, необходимых ресурсов (материальных,
временных, человеческих);
- выбор предприятия-проектировщика.
Конечным результатом этапа формализации замысла является техническое
задание (13), которое включает в себя содержание замысла в виде характеристик
системы, объема и источников ресурсов, потребных на ее создание и
функционирование, а также оценку сроков разработки и производства.
Этап согласования ТЗ обычно реализуется во взаимодействии организации-
«заказчика» и предприятия-«проектировщика». При этом к требованиям
организации-заказчика предприятие-проектировщик относится как к
целеуказанию о направлениях поиска. Предприятие-проектировщик, основываясь
на своих возможностях и ресурсах, а также на опыте создания аналогичных
систем, предлагает свое виденье решения поставленной задачи, которое согласует
с «заказчиком» по каждому пункту. В процессе конструктивного диалога
предприятие-проектировщик и организация-заказчик приходят к компромиссу,
удовлетворяющему заказчика, учитывающему реальные возможности
проектировщика и регламентирующему выбранный способ проектирования
системы управления: по аналогии (модификация разрабатываемых до этого
прототипов) или проектирование принципиально новой СУ.
В результате согласования появляется окончательное ТЗ на разработку СУ
как официальный документ, который утверждается заказчиком и
проектировщиком.
ТЗ на разработку СУ декомпозируется на множество отдельных технических
заданий на разработку элементов и устройств СУ. Согласование этих технических
заданий происходит уже не с заказчиком, а внутри предприятия-проектировщика.
Технические предложения разрабатывают в целях выявления
дополнительных или уточненных требований к СУ (технических характеристик,
показателей качества и др.), которые не могли быть указаны в техническом
задании, и это целесообразно сделать на основе предварительной
конструкторской проработки и анализа различных вариантов СУ.
23
Таблица LI - Основные этапы процесса проектирования и
Этап Пред- эскизное проектиро- вание Эскизное проектиро- вание Рабочее
Разработка КД Исследовательские испытания Предва-
ЛОИ-ис ЛОИ-а ЛОИ-к СОИ-ис
Содер жание этапа Проработ- ка техническо го задания. Выбор и обоснован ие структуры и приборное о состава СУ. Оценка основных характерис тик Исследовани е принципов построения систем и приборов СУ. Оценка основных характеристи к. Комплексное проектирова ние СУ Разработка схемно-конст- рукторской документации для изготовления опытного образца. Разработка программно- ал горитмическог о обеспечения Отработка программно- алгоритмичес кого обеспечения Автономные лабораторно- отработочные испытания аппаратуры СУ Комплексны е испытания аппаратуры и ПАО СУ Совместные отработочные испытания ПАО
Экспе- римен- тальны е работы на этапе Электронн ое моделиров ание различных вариантов построени я СУ и её систем Электрон- ное и ими- тационное моделирован ие Макетирование Имитационн ое моделирован ие в схемах РИС, ЗИС. Верификаци я ПАО Отработка аппаратуры СУ на соответствие требованиям ТЗ Проверка работоспосо бности аппаратуры и ПАО при взаимодейст вии со смежными системами. Проверка полярности трактов ККП -ИО. Отработка конструктор ской и эксплуатаци онной документаци и Подтвержден ия соответствия ПАО в схема: РИС, ЗИС Валидация ПАО
Гехнич еское оснаще ние ПЭВМ Стенды электронног 0 моделирован ия на базе АВМ или ЭЦВМ, аналогово- вычислитель ные комплексы. Нагрузочные стенды ПЭВМ, АРМ Исследовате льские стенды, стенды полунатурно го моделирован ия КИПы, стандартные измерительные приборы, климатические камеры, вибростенды и т.п. Комплексны й стенд СУ Исследовател ьские стенды стенды полунатурног о моделироваш я
Цоку- менти- ровани е Аван- проект Эскизный проект Схемно-кон- структорская документация Алгоритмическо е и программное обеспечение СУ Отчеты по испытаниям. Акты, заключения Отчеты по испытаниям. Акты, заключения Отчеты по результатам испытаний аппаратуры и ПАО СУ на КС Отчеты п< испытаниям. Акты, заключения
24
экспериментальной отработки современных СУ PH и КА
различного назначения
проектирование
рительные испытания Приёмо- сдаточные испытания (ПСИ) Испытания на контрольно- испыта- тельной станции (КИС) Испытания на технической и стартовой позициях Проверка полетного задания Лётные испытания СУ
СОИ-а СОИ-к
Автономные совместные лабораторно- отработочны е испытания аппаратуры СУ Совместные отработанны е испытания аппаратуры и ПАОСУ 1 .Испытания на заводе- изготовителе. 2 . Проверка функционирова НИЯ аппаратуры СУ в схеме комплексного стенда Испытания СУ в составе PH, КА Электроиспытан ия в составе PH, КА 1. Контроль правильности расчета и составления таблиц полетного задания. 2. Контроль работы штатной программы БЦВМ с данным ПЗ в режиме «электронного пуска» Испытания СУ в составе PH, КА в реальных условиях полёта
Подтвержден ие соответствия аппаратуры СУ требованиям ТЗ Подтвержден ие работоспособ ности аппаратуры и ПАОпри взаимодейсгв ИИ со смежными системами. Подтвержден ие правильност и работы трактов ККП -ИО Подтверждение соответствия технических и эксплуатацион ных характеристик аппаратуры требованиям ТЗ.ТУ Автономные испытания приборов и БКС с помощью аппаратуры входного контроля. Автономные испытания СУ. Комплексные испытания PH, КА. Проверка полярностей трактов ККП - ИО Проверка СУ на работоспособное ть в составе PH, КА 1. Цифровое моделирование в целях проверки правильности работы алгоритмов системы наведения и стабилизации с данным ПЗ в режиме АСКП. 2.Полунатурное моделирование в режиме «электронного пуска» Всестароння я проверка и подтвержден ие характеристи к СУ в реальных условиях функциониро вания и эксплуатации
КИПы, стандартные измерительн ые приборы, климатическ ие камеры, вибростенды и т.п. Комплексны й стенд СУ КИПы (завод- изготовитель), комплексный стенд Аппаратура КИС Аппаратура ТП и СП Исследовательск ий стенд Полигонный измерительн ый комплекс
Отчеты по испытаниям. Акты, заключения Отчеты по испытаниям. Акты, заключения Заключения о годности аппаратуры к дальнейшим испытаниям Отчеты по испытаниям. Акты, заключения Отчеты по испытаниям. Акты, заключения Заключение Отчеты Государствен ной комиссии
25
При разработке технических предложений СУ предприятие-проектировщик
обычно выполняет следующий спектр работ:
-выявление вариантов возможных реализаций СУ, установление особенностей
вариантов (принципов действия, размещения функциональных составных частей и
т.п.), их конструкторскую проработку. Глубина проработки вариантов СУ в
техническом предложении определяется требованиями, сформированными в ТЗ, и
должна быть достаточной для сравнительной оценки рассматриваемых вариантов;
-сравнительную оценку рассматриваемых вариантов СУ.
Сравнение проводят по наиболее важным показателям качества СУ,
например, уровню отказоустойчивости, живучести, безопасности, точности
решения конечной задачи, качеству управления, массе, габаритным размерам и др.
Варианты могут сопоставляться также по показателям технологичности,
стандартизации и унификации. При этом следует уштывать конструктивные и
эксплуатационные особенности разрабатываемой СУ и существующих аналогов.
Если для сравнительной оценки необходимо проверить принцип работы
различных вариантов СУ, а также сравнить их по разным функциональным
показателям, то могут быть изготовлены макеты, произведен выбор оптимального
варианта СУ и обоснование выбора и уточнение требований к СУ (к техническим
характеристикам, показателям качества и др.) и к последующим стадиям
разработки.
В результате работы над техническим предложением появляется новый
документ - аванпроект как официальный документ, который утверждается
заказчиком и проектировщиком. Этот документ в отличие от ТЗ содержит не
только задание, условия и ограничения, но и предварительные данные о будущей
СУ - варианты структурных и функциональных схем всей системы и ее
устройств, расчеты динамики и точности, массы и габаритных размеров,
предложения по конструкторским и технологическим решениям.
Эскизное проектирование начинается с результатов предыдущего этапа и
выполняется в целях определения принципиальных (конструктивных, схемных и
др.) решений СУ, дающих общее представление о принципе работы и устройстве
СУ.
Перечень необходимых работ на этом этапе определяется предприятием-
проектировщиком в зависимости от характера и назначения СУ и согласовывается
с заказчиком, если это необходимо.
На этапе эскизного проектирования к основным можно отнести следующие
виды работ:
-реализация вариантов СУ, установление их особенностей и конструкторская
проработка;
-изготовление и испытания макетов СУ для проверки принципов ее работы и
составных частей;
26
- разработку и обоснование технических решений, направленных на
обеспечение показателей надежности, отказоустойчивости СУ, установленных
техническим заданием и техническим предложением;
- оценку изделия на технологичность и правильность выбора средств и
методов контроля (испытаний, анализа, измерений);
- подтверждение (или уточнение) предъявляемых к СУ требований
(технических характеристик, показателей качества и др.), установленных
техническим заданием и техническим предложением;
- выявление на основе принятых принципиальных решений новых изделий и
материалов, которые должны быть разработаны другими предприятиями
(организациями), составление технических требований к этим изделиям и
материалам;
- составление перечня работ, которые необходимо провести на последующей
стадии разработки, в дополнение или уточнение работ, предусмотренных
техническим заданием и техническим предложением;
-проработку основных вопросов технологии изготовления (при
необходимости).
На этапе эскизного проектирования осуществляется декомпозиция
разрабатываемой СУ на подсистемы, а подсистем - на элементы. Проводится
разработка, системная взаимная увязка и согласование параметров подсистем и
элементов разрабатываемой СУ.
Документация, выпускаемая на этом этапе, за исключением принципиальных
схем, называется эскизной и служит для изготовления отдельных
экспериментальных макетов и образцов устройств СУ и контрольно-измерительной
аппаратуры. Такая документация содержит' эскизы конструкций, технологических
карт, монтажных схем, условий технической эксплуатации, предварительное
программное обеспечение, программы проведения испытаний. По этой эскизной
документации в опытном производстве изготовляют макеты СУ, ее подсистем,
элементов и контрольно-измерительная аппаратура. Макеты подсистем и
элементов СУ объединяют в комплексные стенды, на которых начинается
реализация наиболее трудоемких и сложных проектных процедур разработки СУ -
объединение отдельных ее подсистем и элементов в систему и проведение
различных видов стендовых испытаний и физического моделирования.
Одновременно проводится цифровое и полунатурное математическое
моделирование на ЭВМ, в процессе которого решаются задачи синтеза и анализа
законов управления, оптимизации их параметров и оценка ожидаемой точности
решения конечной задачи, устойчивости и ряд других характеристик.
Для обеспечения этого этапа исследований разрабатывают математические
модели объектов управления и всех компонентов СУ - командных приборов,
управляющих органов, преобразовательных, вычислительных средств и т.п.
27
В дальнейшем проводят конструкторские расчеты подсистем и элементов СУ,
отлаживают программное обеспечение СУ; проводят детальное технико-
экономическое обоснование проекта. По результатам анализа эскизного проекта
вносят коррективы в 13, проводят оценку заказчиком качества процесса
проектирования, соответствия принятых проектировщиком технических решений и
принципов цели проекта.
Этап рабочего проектирования предназначен для разработки полного
комплекта технической документации (ТД) на всю СУ, ее подсистемы и
элементы, технологию изготовления необходимых и достаточных для ее
серийного производства. В процессе рабочего проектирования по
конструкторской и технологической документации изготовляют опытные образцы
СУ и ее подсистем. Завершается этап рабочего проектирования изготовлением
опытных образцов и их испытаниями. Этап испытаний является неотъемлемой
частью процесса проектирования. Испытания прототипов, макетов начинаются
уже на первых этапах проектирования, а испытаниями опытных образцов
завершается процесс рабочего проектирования. В табл. 1.1 приведено место
испытаний в жизненном цикле СУ и взаимосвязь их с этапами проектирования
СУ.
Проведение испытаний на любом этапе проектирования требует выполнения
следующего объема работ:
- составление программы испытаний с указанием цели проведения каждого
эксперимента;
- разработка методики проведения каждого испытания с указанием
последовательности выполнения операций и порядка использования проверочной
аппаратуры;
- подготовка объекта испытаний, сборка схем испытаний;
- проведение испытаний по программе в соответствии с методикой и
нормативной документацией;
- анализ результатов испытаний;
- принятие решений по полученным результатам;
- оформление отчета испытаний.
Первые испытания начинаются уже на этапе технического предложения.
Основной их объем заключается в отработке математического обеспечения путем
цифрового моделирования, анализа и обоснования правильности выбора
конфигурации разрабатываемой СУ.
Различное испытательное оборудование и стенды для испытаний СУ и ее
элементов, как правило, разрабатываются параллельно с СУ и сохраняются затем
в течение всего процесса проектирования. По результатам испытаний оформляют
28
протоколы, которые включают в отчеты по техническому предложению,
эскизному и рабочему проекту, в техническую документацию проекта в целом.
Заводские испытания проводят после получения опытных образцов. Эти
испытания, осуществляемые на заводе, предназначены для проверки
функционирования СУ и всех ее характеристик после сборки и стыковки элементов
системы в заводских условиях. Системы управления объектов РКТ нуждаются в
совместных испытаниях входящих в них элементов и подсистем, так как эти
устройства проектируют и изготовляют обычно на разных предприятиях. Такие
испытания, называемые также межведомственными служат для выявления
работоспособности СУ в целом, установления соответствия ТЗ стыковочным
характеристикам элементов и подсистем СУ, локализации мест неисправностей и
Т.Д.
Завершают этот этап испытания на технической и стартовой позициях и
летные испытания СУ. На технической и стартовой позициях осуществляют
заключительную проверку исправности функционирования всех элементов СУ.
Если при всех перечисленных ранее видах испытаний не удается воспроизвести
реальную обстановку эксплуатации СУ, то во время летных испытаний,
проводимых специальной комиссией с участием заказчика и государственной
приемки, СУ работает в тех же условиях и на тех же объектах, для которых ее
проектируют. Отчеты и заключения о результатах летньгх испытаний являются
одними из основных документов проекта.
По результатам испытаний выявляют и анализируют также причины
неблагоприятных исходов испытаний. Задача анализа результатов испытаний
представляет собой по сути задачу диагностирования. Результаты
диагностирования позволяют принять правильное обоснованное решение о путях
и средствах повышения качества СУ. В процессе диагностирования решают
следующие задачи:
- выявление причин недостаточного качества СУ;
- получение информации о причинах неудовлетворительного качества;
- организация эффективных обратных связей на предыдущие этапы
проектирования, в результате чего исправляют и корректируют техническую
документацию, отбрасывают неверные проектные решения;
- организация мероприятий по предупреждению аварийных ситуаций;
- прогнозирование тенденций изменения качества СУ в процессе
проектирования;
- формирование условии эксплуатации.
Обобщенно говоря, диагностирование представляет собой информацию о
текущем состоянии СУ в процессе ее проектирования и эксплуатации в целях
29
управления процессом повышения ее качества путем эффективной организации
местных и глобальных обратных связей.
Этап эксплуатации начинается с момента завершения полного цикла
испытании и признания заказчиком достижения поставленной цели.
К сожалению, в существующей литературе по проектированию СУ мало
внимания уделяется таким этапам жизненного цикла, как завершение
эксплуатации и утилизация. Считается, что работа проектировщика заканчивается
с передачей СУ заказчику и дальнейшие этапы не представляют для него
интереса. Это в методологическом плане не совсем верно. Проектировщик обязан
сопровождать свое “детище” до конца жизненного цикла, фиксируя и
контролируя причины и условия снятия с эксплуатации: аварийные ли они или
связаны с выработкой СУ ресурса. Это необходимо, прежде всего, для
организации эффективных обратных связей в решении общей проблемы
повышения качества СУ. Кроме того, вопросы утилизации необходимо решать на
ранних стадиях проектирования, не откладывая и не перекладывая
ответственность на заказчика.
1.3 Роль экспериментальной отработки СУ в процессе
её проектирования
Рассмотрим основные причины аварий объектов РКТ на примере
ракетоносителей и космических летательных аппаратов, запущенных в СССР и в
России за период с 1961 по 2000 гг. За это время было произведено 2625 успешных
запусков ракет-носителей, закончившихся выводом полезной нагрузки на орбиту.
При этом за указанный период при запусках ракет-носителей произошло 120
аварий и 62 аварии космических летательных аппаратов. Примерно такая же
ситуация с отказами, если не хуже, сложилась в других ведущих космических
государствах. Так, США за тот же календарный период осуществили 1186
успешных запусков ракетоносителей, при этом произошло 100 аварий
ракетоносителей и 38 КЛА.
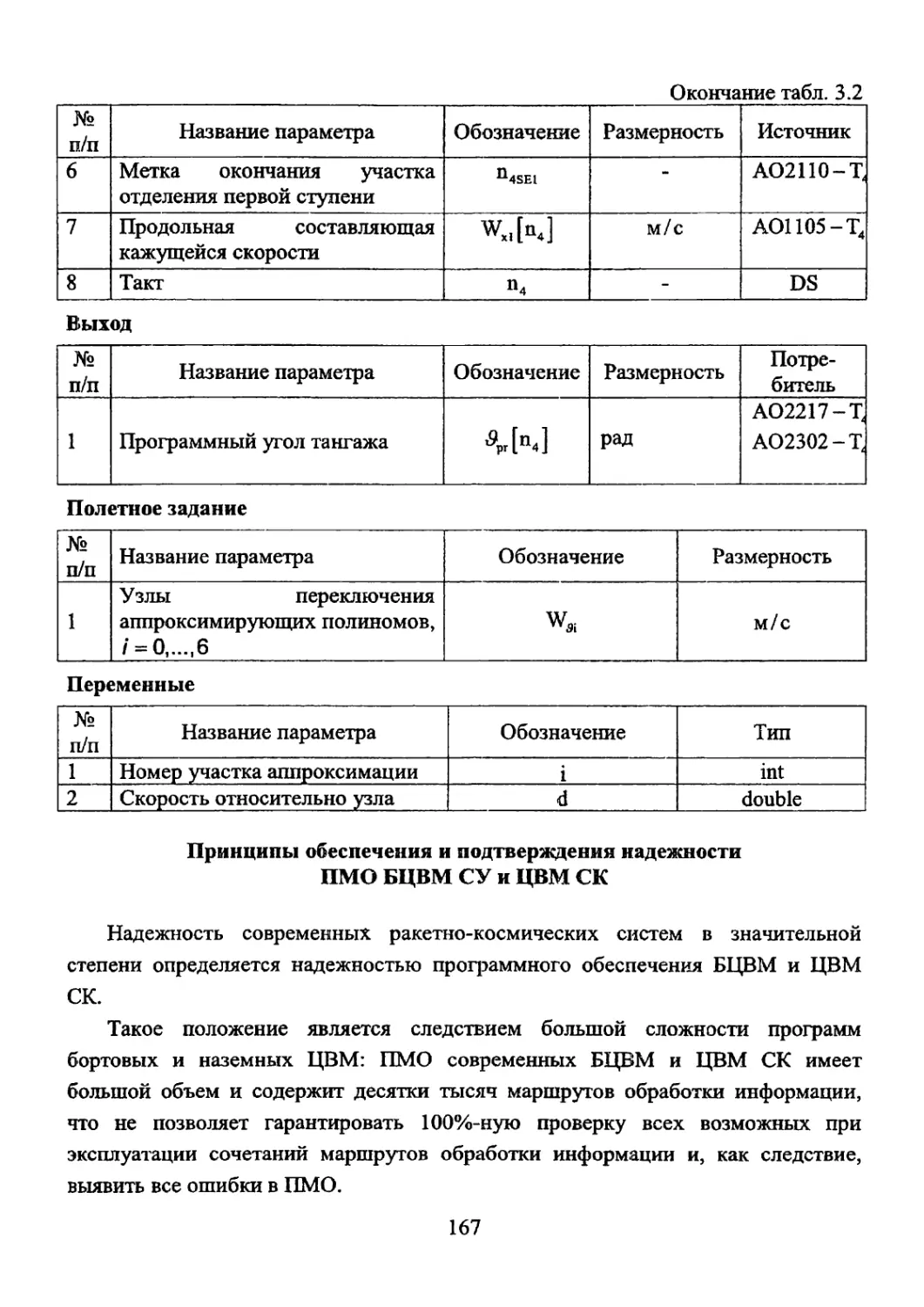
По результатам анализа причин аварий ракетоносителей и КЛА [4]
распределение причин отказов в 90-е годы выглядит так как показано на рис. 1.2.
Тщательное исследование и анализ причин аварий [5] позволяют выделить
основные их причины и сгруппировать в следующие пять категорий:
1. Проектирование. К этой категории относятся все аномальные
поведения, связанные с ошибками разработчиков, нерасчетной чувствительностью
к помехам, непредвиденным износом или нерасчетной деградацией с течением
времени или под действием неизвестных окружающих условий. Аномальное
30
поведение может носить электрический, механический, тепловой или системный
характер. Из всех проанализированных случаев снижения качества СУ объектов
РКТ более 60% приходится на этап проектирования.
Двигательные
Ракетоно-сигели
Рисунок 1.2 - Распределение причин отказов
2. Производство. Эта категория включает в себя такие причины, как
дефектные компоненты или материалы, загрязнения, дефекты сборки, недостатки
системы диагностики, системы обеспечения качества производства и др. Дефекты
производства составляют примерно 20% всех выявленных аномалии.
3. Эксплуатация. В эту категорию входят аномалии, являющиеся
результатом ошибок человека при подаче команд, выполнения функций
управления, составления программ работы или калибровке аппаратуры. К этой
категории относится примерно 10% дефектов.
4. Нерасчетное функционирование, обусловленное нештатными,
аварийными ситуациями.
5. Действие случайных внешних факторов. Эта категория включает в себя
случаи, являющиеся следствием действия непредвиденных нерасчетных внешних
факторов, например, воздействие метеоритов и т.п.
Обобщая приведенные сведения, можно сделать вывод, что четыре основные
причины, а именно: несовершенство технологии проектирования, несовершенство
технологии производства, несовершенство технологии эксплуатации и ошибки
человека (рис. 1.3) на различных этапах жизненного цикла изделия - являются
основными причинами недостаточного качества объектов РКТ и, как следствие,
предпосылками возникновения большинства аварий.
Из всего количества ошибок человека 48,8% вызваны упущениями. Такие
ошибки часто связаны с оплошностями и ошибками, допущенными в
эксплуатационных документах, или ошибочным исполнением каких-либо
31
действий, вызванных невнимательностью при выполнении работ и упущении
деталей. По видам деятельности распределение упущений показано на рис. 1.4.
Технические
специалисты 24%
Операторы 19%
ных руководств
18%
Рисунок 1.3- Распределение человеческих ошибок по категориям работников
Влияние всех рассмотренных причин на качество функционирования
объектов РКТ может быть существенно уменьшено путем внедрения
современных технологий экспериментальной отработки. Именно
экспериментальная отработка позволяет «дотянуть» спроектированную систему
до требуемых показателей качества, сгладить все неточности, устранить на ранних
стадиях ошибки проектирования.
Нормальная
работа
60%
Рисунок 1.4 - Распределение человеческих ошибок по видам
деятельности
В ходе экспериментальной отработки СУ объектов РКТ решают следующие
основные задачи:
- оценка совершенства конструктивно-схемных решений в целях определения
оптимального по весовым, энергетическим, экономическим и другим
32
эксплуатационно-техническим показателям варианта системы, обеспечивающего
выполнение заданных требований;
- выявление ошибок, допущенных при проектировании системы,
производственных дефектов и конструктивных отказов и доработка в соответствии
с этим аппаратуры в целях доведения ее эксплуатационно-технических показателей
до заданных значений;
- оценка истинных значений показателей, достигнутых к определенному
моменту отработки, и прогнозирование изменения этих показателей в процессе
эксплуатации для принятия решения о возможности допуска системы к
использованию по назначению;
- уточнение характеристик отдельных устройств и агрегатов как объектов
регулирования и внешних воздействий в целях корректировки исходных данных,
проектной документации, а также технического задания на разработку системы;
- выработка рекомендации по эксплуатации системы.
Таким образом, экспериментальная отработка представляет собой
взаимоувязанный комплекс проектно-конструкторских, технологических, планово-
организационных мероприятий, задачей которых является подтверждение
соответствия эксплуатационно-технических характеристик системы управления
заданным требованиям в процессе наземной отработки.
Обычно в основу экспериментальной отработки закладывают следующие
основные принципы:
- максимальное использование опыта предыдущих разработок;
- соответствие создаваемой системы новейшим достижениям отечественной и
зарубежной техники;
- выбор оптимального объема отработки, который позволил бы подтвердить
реализованные требования на разработку и провести испытания в заданные сроки с
наименьшими затратами;
- обеспечение безопасности при проведении всех работ;
- проверка работоспособности системы при имитации наиболее вероятных
нештатных ситуаций.
Для решения перечисленных задач экспериментальной отработки проводят
серию взаимосвязанных разнообразных испытаний как отдельных приборов,
устройств и агрегатов, так и всей системы в комплексе.
В ходе проведения всех испытаний осуществляют отработку СУ объектов РКТ
и накапливают большой объем информации, по которой оценивают качество и
эксплуатационно-технические свойства разработанной системы. Качество системы
определяется совокупностью ее свойств применительно к основному назначению.
С развитием техники удельный вес и значение экспериментальных
исследований и испытаний непрерывно растут. Это подтверждается
опубликованными данными. Увеличение объема и значимости испытаний
33
объясняется тем, что постоянно возрастает сложность и ответственность СУ
объектов РКТ, ужесточаются допуски на оценки их качества, возрастает количество
вновь осваиваемых систем, растет объем мелкосерийного производства.
Процесс испытании должен осуществляться на основе системного подхода,
позволяющего обеспечить возможную эффективность испытании. Сформулируем
ряд принципов, рекомендуемых при испытаниях СУ объектов РКТ.
1. Воспроизводимость результатов. Средства испытаний и методики их
применения должны обеспечивать повторяемость результатов испытаний с
заданной степенью точности.
2. Системность оценки. По результатам испытаний следует определить
пригодность системы управления к применению в конкретных условиях и качество
РКТ, содержащей данную СУ.
3. Дуальность управления процессом испытаний: на основании анализа
информации, полученной в ходе испытаний, выявляется состояние СУ и по
результатам этого анализа вырабатываются последующие управляющие
воздействия на СУ.
4. Своевременность определения характеристик. Характеристики СУ и
РКТ должны определяться на тех этапах разработки или технологического
процесса, на которых они впервые проявляются.
5. Замена части подсистем или процессов моделями.
6. Безналадочная сопрягаемостъ подсистем СУ РКТ.
7. Унификация средств и методов.
8. Возможность развития системы испытаний (адаптивность и
адаптируемость средств испытаний, последовательное увеличение функций
средств испытаний, замкнутая схема испытаний).
9. Экономичность средств и методов.
Рассмотрим эффективность и возможности реализации системных принципов
испытаний.
Воспроизводимость результатов является необходимой предпосылкой
проведения экспериментальных исследований вообще и испытаний в частности.
Она может быть достигнута единством или согласованностью технических средств
испытаний, методов их применения и оценок объекта испытаний.
Системность оценки дает возможность определить качество
функционирования РКТ с конкретной СУ в предполагаемых условиях
эксплуатации. Реализация этого принципа позволяет по результатам стендовых
испытаний СУ получить достаточные сведения о результатах натурных испытаний.
Этот принцип может быть реализован только на моделирующих стендах (с
применением различных имитаторов, в том числе и программных).
Двойственность управления обеспечивает реализацию обоснованной и
экономичной стратегии и тактики испытаний, позволяет выбирать минимальное
34
количество испытательных режимов, обладающих заданным уровнем
достоверности и точности. Принцип можег быть осуществлен соответствующим
построением математического обеспечения системы испытаний.
Своевременность определения характеристик позволяет: а) отказаться от
неперспективных вариантов на возможно ранних этапах разработки СУ РКТ и б)
выявить причины брака при производстве РКТ. Принцип может быть осуществлен
соответствующим планированием объемов и методик испытаний.
Замена объекта или процесса моделями позволяет создавать универсальные
средства, воспроизводящие различные виды взаимодействий объекта испытаний.
Реализация этого принципа осуществляется в моделирующих испытательных
стендах с помощью специально организованных программных имитаторов.
Эффективность применения безналадочной сопрягаемости подсистем
проявляется при производстве СУ РКТ, поскольку позволяет существенно
сократить затраты труда и времени на взаимное согласование подсистем в системе.
Безналадочная сопрягаемость может быть обеспечена благодаря точному
соответствию технических средств и испытательных режимов взаимодействующих
подсистем при общей методике испытаний.
Реализация принципа унификации позволит осуществить разработку
технических средств и математического обеспечения систем испытаний в
специализированных организациях, что может обеспечить высокую эффективность
систем испытаний и одновременное уменьшение их стоимости. Унификация
средств и методов может быть реализована путем: 1) создания семейств
универсальных устройств, предназначенных для исследований и испытаний
объектов одного класса; 2) выбора модульных блоков испытательных устройств из
числа унифицированных изделий, выпускаемых промышленностью; 3) разработки
универсальных методов синтеза испытательных устройств; 4) общей системы
математического обеспечения функционирования системы испытаний.
Реализация принципа развития системы испытаний позволяет начать
эффективную эксплуатацию отдельных подсистем системы испытаний до
завершения системы в целом, при этом принципиальные технические решения
должны учитывать принятую' идеологию создания системы. Развитие системы
испытаний обеспечивается прогнозированием развития ее структуры. Уже сейчас
понятно, что сложные дорогие системы испытаний, как и любые дорогостоящие
сооружения и машины, должны иметь длительный жизненный цикл, а
следовательно, быть способными изменяться и приспосабливаться к переменам в
задачах и объектах испытаний. Кроме того, они должны способствовать экономии
человеческих ресурсов, а это качество обеспечивается способностью к
саморегулированию. Иначе говоря, необходимо, чтобы системы испытаний были
адаптируемыми и адаптивными, замкнутыми.
35
Адаптивность - способность системы автоматически приспосабливаться к
изменяющимся условиям при сохранении состава и структуры системы испытании
путем изменения алгоритмов функционирования.
Различают параметрическую, алгоритмическую и ресурсную адаптацию.
Параметрическая адаптация предполагает изменение во времени алгоритма
функционирования. Алгоритмическая адаптация основывается на переключении с
одного алгоритма на другой. Ресурсная адаптация сводится к более эффективному
использованию имеющихся в системе испытаний ресурсов.
Адаптируемость - способность системы приспосабливаться к изменяющимся
условиям путем изменения состава и структуры системы испытаний.
Кроме того, в системе испытаний должен быть заложен принцип
последовательного увеличения функций системы испытаний.
Экономичность средств и методов обеспечивается применением
соответствующих методов использования технических средств испытаний,
разработкой методик ускоренных испытаний и переносом основного объема
испытаний с натурных полигонов на лабораторные и заводские испытательные
стенды, сокращением общей трудоемкости, затрачиваемой на испытания и наладку
РКТ, а также автоматизацией процесса испытаний.
Указанные системные принципы построения и применения систем испытаний
вполне осуществимы, а их реализация позволит обеспечить высокую
эффективность проведения процесса испытаний и, соответственно,
экспериментальной отработки.
1.4 Задачи и содержание этапов отработки
программно-математического обеспечения
К середине 60-х годов XX столетия стало ясно, что существующий подход к
построению СУ PH и КА на основе аналоговых вычислительных устройств,
берущий начало еще от ракет ФАУ-2 времен Второй мировой войны как
направление развития техники управления, практически полностью исчерпан.
Для дальнейшего улучшения тактико-технических характеристик PH и КА,
значительного расширения круга задач, решаемых СУ, повышения точности
выведения, снижения габаритно-массовых и энергетических характеристик
бортовой аппаратуры СУ настоятельно требовалось использовать существенно
более сложные алгоритмы, резко увеличить объем и точность обработки
информации на борту PH или КА в реальном масштабе времени полета и, как
следствие, перейти к применению бортовых цифровых вычислительных машин.
Описание математического обеспечения современных СУ очень объемно по
сути. Сложность динамических процессов, реализуемых в СУ, можно
охарактеризовать на примере системы стабилизации PH «Энергия», динамическая
36
схема которой включает в себя колебания жидкости в 12 баках, 45 тонов упругих
колебаний и описывается системой дифференциальных уравнений 350-го порядка.
Алгоритмы системы управления такого класса объектов занимают большое
количество печатных томов.
Очевидно, что для всесторонней проверки и отработки такого
математического обеспечения требуется привлечение самых мощных
вычислительных средств.
Соответственно программное обеспечение, реализующее этот математический
аппарат в БЦВМ, для своей разработки и отработки требует промышленного
подхода, обеспечивающего получение программного продукта с гарантированными
показателями качества.
Таким образом, экспериментальную отработку программно-математического
обеспечения СУ можно разделить на два больших этапа:
- отработку математического обеспечения;
- отработку программного обеспечения БЦВМ.
Основными инструментами отработки математического обеспечения является
цифровое и полунатурное моделирование. В некоторых случаях используют также
метод физического моделирования.
Для проектирования и отработки программного обеспечения БЦВМ создаются
специальные исследовательские стенды, включающие в свой состав мощные
вычислительные комплексы.
Ниже в разд. 2, 3 подробно описана технология экспериментальной отработки
ИМО PH и КА на всех этапах жизненного цикла.
1.5 Задачи и содержание наземной экспериментальной
отработки аппаратуры и ИМО СУ
Задачами экспериментальной отработки аппаратуры являются:
- оценка соответствия эксплуатационно-технических характеристик
аппаратуры требованиям ТТЗ и ТЗ;
— отработка программно-алгоритмического обеспечения СУ во всех режимах
эксплуатации, в том числе оценка правильности взаимодействия программных и
аппаратных средств;
- проверка взаимного функционирования СУ и смежных систем в условиях,
близких к реальным, в том числе проверка стыковочных параметров;
- проверка реакции СУ на имитацию возможных схемных неисправностей;
- отработка диагностики неисправностей;
— подтверждение безопасности эксплуатации аппаратуры;
37
- проверка отработанности технологии изготовления, достаточности и
эффективности контроля качества аппаратуры;
- проверка правильности выбора испытательного оборудования и контрольно-
измерительных средств;
- проверка полноты и степени отработки конструкторской документации,
отработка эксплуатационной документации;
- определение технической готовности аппаратуры к проведению приемочных
испытаний.
Задачи экспериментальной отработки реализуют поэтапно с обязательной
оценкой и учетом результатов испытаний предшествующих этапов.
В процессе создания и отработки аппаратуры проводят:
- исследовательские испытания;
- предварительные испытания;
- приемосдаточные испытания;
- приемочные испытания (межведомственные испытания и летные
испытания).
Экспериментальной отработке подвергается бортовая и наземная аппаратура
(приборы, КЛС), а также ПМО, разрабатываемые по ТЗ на СУ.
Исследовательские испытания проводят в целях проверки соответствия
аппаратуры и ПМО требованиям ТЗ и КД.
На данном этапе предусматривается проведение следующих автономных и
комплексных испытаний:
- отработка алгоритмов и ПМО наведения, навигации, стабилизации на
автоматизированных рабочих местах инженера-исследователя и программиста;
- лабораторно-отработочные испытания (автономные) аппаратуры СУ (ЛОИ-
а);
- лабораторно-отработочные испытания аппаратуры и ПМО в схеме
комплексного стенда (ЛОИ-к) при взаимодействии со смежными системами или их
эквивалентами.
Исследовательские испытания проводят на аппаратуре, принятой ОТК.
ЛОИ-к осуществляют после завершения с положительными результатами
автономных испытаний аппаратуры на этапе ЛОИ-а.
Виды и методы проведения испытаний в процессе ЛОИ-а, ЛОИ-к оговаривают
в соответствующих программах и методиках испытаний.
По результатам ЛОИ-а, ЛОИ-к выпускают отчеты.
Состояние и результаты ЛОИ-а, ЛОИ-к контролирует представительство
Генерального заказчика.
Предварительные испытания проводят в целях подтверждения соответствия
аппаратуры и ПМО требованиям ТЗ и возможности предъявления их на
приемочные испытания.
38
В процессе предварительных испытаний предусматривается проведение
следующих автономных и комплексных испытаний:
- совместные автономные отработочные испытания аппаратуры;
- специспытания (автономные):
- испытания на ЭМС и ЭСР;
- испытания на сохранность информации;
- испытания на воздействие электронного и протонного излучений (при
необходимости);
- совместные отработочные испытания аппаратуры в схеме комплексного
стенда:
- СОИ-к аппаратуры и ПМО СУ;
— проведение ЧП проверки полярностей системы стабилизации;
- проведение ЧП проверки полярностей СЦД или РКС;
- проведение ЧП проверки полярностей СУРТ;
- испытания на ЭМС и ЭСР;
- испытания на воздействие электромагнитных полей молнии;
- предварительные испытания аппаратуры в составе изделия на КИС.
Предварительные испытания проводят на аппаратуре, принятой ОТК и ПЗ
(ПГЗ).
СОИ-к выполняют после завершения с положительными результатами ЛОИ-к,
СОИ-а.
Виды и методы проведения испытаний в процессе СОИ-а, СОИ-к оговаривают
в соответствующих программах и методиках испытаний.
По результатам СОИ-а, СОИ-к выпускают отчеты.
Предварительные испытания аппаратуры СУ на КИС проводят в целях
подтверждения ее работоспособности в составе изделия при взаимодействии с
реальными системами и агрегатами.
К испытаниям в составе изделия допускается аппаратура, изготовленная
(доработанная) по КД с литерой ”О”, откорректированной по результатам ранее
проведенных испытаний. Испытания осуществляют на аппаратуре, прошедшей
ПСИ, принятой ОТК и ПЗ (ПГЗ) с заключением о допуске аппаратуры и ПМО к
испытаниям. Перед испытанйями на КИС приборы должны пройти входной
контроль в объеме инструкции по входному контролю.
По результатам предварительных испытаний на КИС выпускают отчеты,
согласованные с ПГЗ.
По завершении предварительных испытаний, предусмотренных КПЭО,
выпускают согласованный с ПГЗ итоговый отчет о выполнении требований ТЗ и
готовности СУ к приемочным испытаниям.
Приемосдаточные испытания проводят для проверки качества изготовления
аппаратуры и ПМО, а также соответствия их требованиям ТЗ и ТУ.
Приемосдаточные испытания включают в себя:
39
- приемосдаточные испытания аппаратуры на предприятии-изготовителе;
- приемосдаточные испытания аппаратуры в схеме комплексного стенда.
Приемосдаточные испытания осуществляют по документации главного
конструктора в соответствии с требованиями ТУ:
- проверка комплектующих деталей, ЭРИ, качества сборки и наличия
маркировки;
— проверка электромонтажа;
- проверка габаритных и установочных размеров;
- проверка электрического сопротивления изоляции;
- проверка параметров и работоспособности в нормальных условиях при
минимальном напряжении питания;
- испытание на воздействие вибрации на фиксированной частоте;
- испытание на воздействие пониженной температуры среды;
- испытание на воздействие повышенной температуры среды;
- испытание на герметичность;
- проверка массы;
- внешний осмотр;
- проверка на отсутствие инородных тел;
- проверка на функционирование в схеме КС;
- проверка комплекта поставки.
К приемосдаточным испытаниям в схеме КС допускается аппаратура,
прошедшая полный цикл испытаний в цехе-изготовителе и принятая ОТК и ПГЗ.
Приемочные испытания проводят для проверки соответствия технических
характеристик аппаратуры и ПМО СУ требованиям ТЗ и определения возможности
принятия СУ в эксплуатацию.
На данном этапе осуществляют:
- межведомственные испытания;
- летные испытания.
Межведомственные испытания проводят в целях проверки:
- соответствия характеристик аппаратуры и ПМО СУ требованиям ТТЗ, ТЗ;
- полноты и степени отработки комплекта конструкторской (в том числе
эксплуатационной) и технологической документации;
- технической готовности аппаратуры и ПМО СУ для испытаний ее в составе
комплекса в соответствии с программой летных испытаний.
Межведомственные испытания осуществляют по программе МВИ под
руководством МВК.
К МВИ допускается аппаратура СУ, изготовленная по КД с литерой "О” по
отработанным технологическим процессам и соответствующей ТД, прошедшая
испытания в объеме, предусмотренном ТУ, и принятая ОТК и ПГЗ.
Летные испытания проводят в целях всесторонней проверки и подтверждения
характеристик аппаратуры СУ, заданных в ТЗ, в условиях, максимально
40
приближенных к условиям применения и эксплуатации, и в реальных условиях
функционирования, а также для определения возможности принятия КРК в
эксплуатацию.
Испытания осуществляют по программе летных испытаний под общим
руководством Государственной комиссии. По окончании летных испытаний
выпускают акт и отчет.
Отработка взаимного функционирования сопряженных приборов, входящих в
СУ, а также СУ и смежных систем проводится в схеме комплексного стенда, на
КИС , на стартовой позиции полигона (при необходимости) и предусматривает:
- отработку эксплуатационных режимов работы аппаратуры и ПМО в
процессе исследовательских, предварительных и приемочных испытаний;
- проведение стыковочных испытаний аппаратуры СУ и смежных систем в
схеме КС в процессе ЛОИ-к, СОИ-к, а также при испытаниях в составе PH на КИС;
- осуществление испытаний аппаратуры СУ по частным программам.
Место проведения стыковочных испытаний СУ с аппаратурой смежных
систем уточняют на этапе создания рабочей КД в процессе разработки
соответствующих программ.
Совместные испытания по проверке стыковочных параметров проводят по
отдельным программам, согласованным с заинтересованными организациями и ПЗ
(ПГЗ) при них.
Испытания по подтверждению основных эксплуатационных характеристик
аппаратуры СУ, заданных в ТЗ, осуществляют в процессе экспериментальной
отработки в объеме программ.
Работоспособность аппаратуры при воздействии на нее внешних
дестабилизирующих факторов (температура, влажность, акустика, давление,
вибрации и т.д.) проверяют в процессе проведения ЛОИ-а и СОИ-а.
Возможность автономной транспортировки в штатной таре или в составе
изделия различными видами транспорта подтверждается соответствующими
транспортировочными испытаниями в процессе СОИ-а.
Работоспособность в течение гарантийного срока, оговоренного в ТЗ,
проверяют при автономных ресурсных испытаниях в процессе проведения СОИ-а.
Оценку ЭМС бортовой аппаратуры СУ, защищенности ее от воздействия ЭСР
и электромагнитных полей молнии выполняют в ходе предварительных испытаний.
По результатам анализа данных о работоспособности аппаратуры СУ,
полученных при СОИ-к и электроиспытаниях в составе PH на КИС, ТК, СК, дается
предварительная оценка выполнения заданных характеристик системы
диагностики. Окончательная оценка выполнения требований ТЗ в части системы
диагностики проводится при летной эксплуатации СУ.
Контроль выполнения требований надежности проводят в соответствии с
требованиями программы надежности.
41
Количественные значения показателей надежности, заданных в ТЗ,
контролируют расчетным методом по действующей ,гЧастной методике расчета
надежности аппаратуры СУ”.
Отчеты о выполнении работ направляют в заинтересованные организации в
соответствии с действующими НТД и руководящими документами.
Обеспечение реальных условий функционирования аппаратуры СУ
достигается:
1. При автономной отработке аппаратуры - путем имитации различных
видов внешних воздействующих факторов на аппаратуру.
2. При отработке в схеме комплексного стенда аппаратуры - путем
создания на комплексном стенде всех схем электроиспытаний PH и КА и их
составных частей и проверки в этих схемах:
- функционирования аппаратуры СУ в режимах работы СУ;
- энергетических показателей СУ;
- эффективности и достаточности принятых мер по безопасности
эксплуатации аппаратуры;
- обеспечения электромагнитной совместимости;
- полярностей трактов систем стабилизации, РКС, СУРТ, СПД.
Отработку конструкторской и технологической документации проводят
в процессе изготовления и отработки аппаратуры СУ.
В процессе отработки КД проверяют ее соответствие требованиям ТЗ, в том
числе:
- соответствие параметров и режимов работы аппаратуры требованиям КД;
- правильность и полнота методов испытаний, указанных в документации;
- полнота коррекции документации по результатам изготовления и
проведенных испытаний;
- правильность и достаточность проведенных проверок и испытаний,
подтверждающих необходимость внесения в документацию изменений при их
наличии;
- соответствие документации проводимому этапу испытаний.
В процессе отработки ТД наряду с перечисленными выше работами
проверяют:
- технологичность конструкции аппаратуры;
- возможность сборки аппаратуры по установленному технологическому
процессу;
- степень технологической оснащенности производства;
- степень унификации технологических процессов, оснастки и инструмента.
После коррекции КД по результатам отработки комплекту КД присваивают
литеру "О” и проводят соответствующую корректировку ТД.
42
Эргономическую и метрологическую экспертизы КД проводят на этапе ее
разработки.
Перечень средств измерений, применяемых при эксплуатации (при их
необходимости), приводят в заключении по метрологической экспертизе.
Отработку эксплуатационной документации проводят поэтапно, а именно:
- при автономных и комплексных испытаниях (конструкторская отработка);
- при испытаниях в составе изделия на КИС, ТК, СК.
В процессе отработки ЭД проверяют:
- достаточность и необходимость разработанной ЭД;
- полноту и правильность приведенных в ней материалов и указаний по работе
с аппаратурой в процессе эксплуатации;
- удобство работы с ЭД;
- возможность практического выполнения работ в объеме и
последовательности, определяемой ЭД, с применением инструментов,
измерительных приборов, приспособлений и т.д.;
- достаточность принятых конструктивных и организационно-технических
мероприятий, изложенных в ЭД, обеспечивающих безопасность эксплуатации
аппаратуры и работы обслуживающего персонала. При этом в процессе отработки
особое внимание уделяется достаточности принятых мер и указаний по
предотвращению опасных или аварийных ситуаций при отказах, ошибочных
действиях оператора, прекращении энергоснабжения и т.д.;
- правильность приведенных значений контролируемых параметров;
- рациональность последовательности выполнения работ;
- полноту коррекции документации по результатам проведения
предшествующих испытаний и соответствие документации проводимому этапу
испытаний.
Конструкторскую отработку документации разработчик ведет совместно с
представителями заказчика по контрольным экземплярам, хранящимся в архивах
предприятия-разработчика. Этап завершается оформлением заключения главного
конструктора совместно с представительством заказчика о пригодности
документации к отработке на КИС, ТК, СК.
На этапе отработки ЭД при испытаниях в составе изделия на КИС, ТК, СК
проверяют полноту представленной документации и выполняют ее практическую
проверку на комплектах аппаратуры, поставленных в места эксплуатации.
Практическая отработка документации завершается оформлением акта.
43
1.6 Задачи и содержание лётно-конструкторских
испытаний СУ
Лётные испытания СУ ракет-носителей и космических аппаратов являются
завершающей стадией процесса отработки и испытаний аппаратуры и ПМО, по
результатам которых принимают решение о начале серийного производства и
эксплуатации СУ. Их проводят в специальных организациях (полигонах) в
натурных условиях.
Лётные испытания СУ и объектов ракетно-космической техники (ОРКТ)
состоят из двух этапов:
- лётно-конструкторских испытаний (ЛКИ);
- зачётных испытаний.
Для каждого конкретного объекта РКТ порядок проведения лётных испытаний
определяет Генеральный заказчик и Головное предприятие-разработчик ОРКТ
совместным решением, согласованным с заинтересованными организациями.
Поэтапное проведение лётных испытаний (ЛКИ, зачётные испытания) или их
совмещение оговаривают в программе лётных испытаний.
Цель лётно-конструкторских испытаний:
- всесторонняя проверка и подтверждение работоспособности СУ в условиях,
максимально приближённых к реальным условиям применения и эксплуатации;
- подтверждение характеристик СУ, которые в ходе наземной отработки
невозможно определить (точность и т. д.);
- отработка эксплуатационной документации в реальных условиях
применения;
- определение возможности принятия СУ для решения (выполнения)
возложенных на неё целевых задач в составе ОРКТ народнохозяйственного и
научного назначения.
Основные задачи лётно-конструкторских испытаний СУ:
- проверка достаточности и эффективности экспериментальной отработки СУ
в наземных условиях;
- проведение той части отработки аппаратуры СУ, которую нельзя было
осуществить в наземных условиях;
- проверка и отработка эксплуатационной документации СУ в условиях
эксплуатации и в реальных условиях функционирования;
- определение возможности принятия СУ в составе ОРКТ для решения
целевых задач народнохозяйственного и научного назначения.
Общее руководство лётно-конструкторскими испытаниями осуществляет
Государственная (межведомственная) комиссия, назначаемая компетентным
органом по согласованию с Правительством Украины и состоящая из
представителей заинтересованных организаций, в том числе и по системе
управления.
44
Государственная комиссия своим решением назначает из своего состава лиц,
ответственных за испытания отдельных систем и агрегатов, оценку
технологических и эксплуатационных характеристик (включая надежность) систем,
агрегатов и объекта РКТ в целом и за отработку эксплуатационной документации.
Объем испытании и порядок их проведения определяются программой лётных
испытаний, которую разрабатывает головное предприятие - разработчик объекта
РКТ совместно с организациями-разработчиками составных систем и агрегатов, в
том числе и СУ. Программу ЯКИ рассматривает Совет Главных конструкторов и
Госкомиссия и утверждает Генеральный заказчик ОРКТ.
Программа лётно-конструкторских испытаний, как правило, должна
содержать:
- цели и задачи испытании, требования к испытаниям и порядок их
выполнения;
- перечень, состав и назначение объектов испытаний;
- порядок и последовательность подтверждения выполнения требований ТТЗ
(ТЗ), включая пуски для проверки предельных значений этих требований и
характеристик ОРКТ, заданных в ТТЗ (ТЗ), в том числе при неблагоприятных
сочетаниях внешних воздействующих факторов;
- перечень программ и методик определения и оценки характеристик ОРКТ и
его составных частей, в том числе и СУ, а также программ и методик подготовки и
проведения этих испытаний;
- порядок обработки телеметрической информации и внешнетраекторных
измерений;
- виды испытаний (лётно-конструкторские и зачётные), их задачи и
содержание, распределение объектов по видам испытаний, включая количество и
порядок пусков;
- порядок проверки и отработки систем эксплуатации, эксплуатационных
характеристик и эксплуатационной документации;
- форму и порядок отчетности с учётом требовании нормативной
документации, а также другие мероприятия в зависимости от специфики РКТ.
До начала лётно-конструкторских испытаний должны быть:
- завершена наземная отработка аппаратуры в запланированном объёме; по
результатам отработки выпущен итоговый отчёт о готовности СУ к лётно-
конструкторским испытаниям;
- устранены недостатки, выявленные в ходе наземной отработки,
конструкторской документации присвоена литера “О”;
— поставлена на полигон необходимая конструкторская и эксплуатационная
документация, в том числе документация по баллистическому, математическому,
метрологическому обеспечению лётных испытаний системы управления;
- поставлено, смонтировано и отлажено оборудование для проведения
автономных, комплексных и пусковых операций на техническом и стартовом
комплексах.
45
Перед отправкой на полигон ракеты-носителя или космического аппарата их
СУ должна быть проверена на соответствие параметров и характеристик, которые
заложены и используются в программах и алгоритмах бортовых вычислительных
машин. В формулярах и паспортах дано заключение о соответствии фактических
значений этих параметров и характеристик значениям, заложенным в программах
(алгоритмах).
Решение о начале лётных испытаний, а также о проведении каждого запуска
космического аппарата принимает Государственная комиссия на основании
рассмотрения результатов экспериментальной отработки, итогов подготовки к
лётным испытаниям СУ на технической и стартовой позициях, представленного в
письменной форме доклада (заключения) Генерального конструктора ОРКТ (к
которому прилагаются заключения на изделия ОРКТ), устных докладов на
заседании Госкомиссии представителей промышленности, заказчика, начальника
полигона о технической готовности ОРКТ к лётным испытаниям.
Для анализа функционирования и оценки основных характеристик системы
управления при ЛКИ используются система телеметрического контроля (СТК) и
система внешнетраекторных измерений (ВТИ). Основная задача СТК и ВТИ -
предоставление информации для оценки работоспособности СУ и её тактико-
технических характеристик.
Прием и регистрация телеметрической информации в полёте ракет-носителей
осуществляются аппаратурой ПРА-МК, а космических аппаратов - МА9-КТ.
По способу формирования телеметрическую информацию (ТМИ) системы
управления условно можно разделить на приборную ТМИ и цифровую ТМИ.
Приборная ТМИ формируется встроенными в аппаратуру СУ согласующими
устройствами. Аналоговые параметры приводятся к диапазону О...6,2 В,
сигнальные параметры формируются или замыканием (размыканием) сухих
контактов реле, или высоким (низким) уровнем напряжения.
Цифровая ТМИ формируется алгоритмами основной работы СУ и выдается в
радиотелеметрическую станцию кадрами по 64 шестнадцатиразрядных слова через
блок согласования телеметрического кадра (БСТК).
Текущая телеметрическая информация формируется в каждом такте работы
БЦВМ в виде кадров, содержащих 64 шестнадцатиразрядных слова. В кадрах
выдаются вся входная информация БЦВМ (информация, формируемая
командными приборами СУ и смежными системами) и вся выходная информация
БЦВМ (управляющие сигналы на исполнительные органы, информация в смежные
системы). Кроме того, в кадре выдаются признаки, характеризующие состояние
приборов СУ, и информация, позволяющая идентифицировать текущее состояние
СУ.
Для проведения оперативного анализа ТМИ в темпе её поступления
разрабатывается программно-математическое обеспечение, работающее в реальном
масштабе времени и формирующее на рабочем месте оператора логические
суждения, позволяющие оценить работу системы управления.
46
Система внешнетраекторных измерений осуществляет измерение
кинематических параметров реальной траектории полета ракет-носителей и
космических аппаратов в целях определения точностных параметров СУ.
Параметры движения PH вычисляются аппаратурой типа “Вега”, “Кама”,
оптоэлектронными и оптическими средствами.
По каждому пуску службы полигона совместно с предприятиями
промышленности в срок, установленный Госкомиссией, но не позже трёх дней
после пуска, докладывают Госкомиссии результаты пуска и составляют в течение
месяца отчёт о них.
Решение о завершении летно-конструкторских испытаний ОРКТ и его
основных систем и о принятии их в эксплуатацию принимает Госкомиссия на
основании оценки соответствия характеристик ОРКТ и СУ требованиям ТТЗ (ТЗ)
Государственного заказчика, полноты выполнения программы лётных испытаний, а
также проверки полноты, достаточности и качества ЭД и степени её пригодности
для дальнейшей эксплуатации ОРКТ.
- Оценку соответствия характеристик ОРКТ и СУ требованиям ТТЗ (ТЗ)
проводят по результатам расчётно-теоретических оценок, выполненных по
специальным методикам.
По окончании лётных испытаний ОРКТ и СУ Госкомиссия составляет отчёт
(акт) о результатах этих испытаний с оценкой выполнения программы лётных
испытаний, соответствия характеристик ОРКТ и СУ заданным в ТТЗ (ТЗ) и с
заключением о возможности принятия ОРКТ в эксплуатацию для решения целевых
народнохозяйственных и научных задач.
Библиографический список
1. Rosenblueth, Arturo. The Rose of Models in Science [Text] / Arturo
Rosenblueth, Norbert Winer // Philosophy of Science. - 1945 - Vol. 12, № 4. - P.
316-321.
2. Пригожин, И. Порядок из хаоса [Текст] / И. Пригожин, И. Стенгере. -
М.: Прогресс, 1986. - 340 с.
3. Кулик, А.С. Основы моделирования систем: учеб, пособие [Текст] /
А.С. Кулик. - X.: Харьк. авиац. ин-т, 1998. - 95 с.
4. Харченко, В.С. Анализ рисков аварий для ракетно-космической
техники: эволюция причин и тенденций [Текст] / В.С. Харченко, В.В. Скляр,
О.М. Тарасюк // Компьютерные системы и информационные технологии. -
2003.-№3.-С.135-149.
5. Кулик, А.С. Автоматизация диагностирования систем управления
летательных аппаратов [Текст]: учеб, пособие / А.С. Кулик. - X.: Харьк. авиац.
ин-т, 1994. - 61 с.
47
2 ТЕХНОЛОГИЯ ОТРАБОТКИ МАТЕМАТИЧЕСКОГО
ОБЕСПЕЧЕНИЯ СУ
2Л Общие сведения об объектах и системах управления
Различные типы объектов ракетно-космической техники можно разделить на
две основные группы:
- средства доставки полезного груза (ракеты-носители);
- полезный груз, обеспечивающий решение целевой задачи
(космические аппараты).
Далее под ракетами-носителями будем понимать как непосредственно
ракеты-носители, так и разгонные блоки.
Объекты ракетной техники
Одним из основных объектов ракетной техники являются ракеты-носители
различных типов и назначения [1, 2, 3].
PH - это беспилотный, управляемый ЛА, предназначенный для доставки
полезного груза в космическое пространство или на поверхность Земли, при
движении как в плотных и разреженных слоях атмосферы, так и в безвоздушном
пространстве, со скоростями, соответствующими М = 0 ... 23, на основе
использования реактивного принципа полета.
Как объект управления PH имеет следующие специфические особенности:
- старт PH чаще всего осуществляется с поверхности Земли из
вертикального положения;
- траектория полета представляет собой совокупность (сочетание) двух
типов участков:
- активный участок - полет осуществляется под действием тяги
ДУ,
- пассивный участок - полет происходит под действием только
гравитационной силы при отсутствии тяги ДУ;
- по мере выработки топлива отработанные разгонные ступени
отделяются;
— для управления движением используют автономную инерциальную
СУ, зачастую с помощью дополнительных средств коррекции.
Из всего многообразия классификаций PH приведем на рис.2.1-2.6 лишь
наиболее часто встречающиеся.
48
Рисунок 2.1 - Классификация PH по компоновке
Рисунок 2.2 - Классификация PH по типу двигателей
Рисунок 2.3 - Классификация PH по типу старта
49
Рисунок 2.4 - Классификация PH по типу органов управления
Рисунок 2.5 - Классификация PH по типу баков ДУ
Рисунок 2.6 - Классификация PH по массе
50
Типовые схемы полета PH
Как правило, типовая схема полета включает в свой состав следующие
участки:
- старт;
- полет в плотных слоях атмосферы;
- полет вне атмосферы;
- орбитальный полет.
На каждом из участков система управления решает конкретные задачи,
которые будут рассмотрены в следующих разделах.
Полезный груз может включать в свой состав как один, так и группу
космических аппаратов. При этом формируется специальная циклограмма
отделения КА и логика группового выведения, которая предусматривает наличие
и последовательность угловых маневров орбитальной ступени. Эти маневры
необходимы для безопасного отделения группы КА.
Типовая схема выведения полезного груза на орбиту ИСЗ показана на
рис.2.7.
Задачи, решаемые СУ PH на различных участках полета, и типовая
структура СУ
Современный комплекс систем управления типовой ракеты-носителя (СУ
PH) - это совокупность наземных и бортовых устройств, решающих следующие
основные задачи:
- управление выведением полезной нагрузки на орбиту ИСЗ или
в заданную точку на земной поверхности по энергетически оптимальным
(квазиоптимальным) траекториям;
- управление выведением нескольких полезных нагрузок по
разветвленным траекториям;
- управление точкой падения отделяющихся элементов PH
(первой ступени, обтекателя и др.);
- обеспечение высокой точности приведения полезной нагрузки в
заданную точку на земной поверхности или на расчетную орбиту ИСЗ;
- организация специальных режимов пространственного
движения в целях снижения поперечных нагрузок на корпус от
скоростного напора, что дает возможность снизить массу конструкции
PH;
- дистанционный оперативный контроль и управление
безлюдным ракетным комплексом с командного пункта средствами
системы управления на всех фазах ее жизненного цикла;
51
Старт
Полет в плотных
слоях атмосферы
Полет вне
атмосферы
Орбитальный
полет
Сбросj*0
Разделение II,
I I I . ступ е н е й
Требуемая
орбита
Точка
выхода на
орбиту
РПОЧ1
Рисунок 2.7 - Типовая схема выведения полезного груза на орбиту ИСЗ
Разделение I, II
ступеней
РП го
РП ОЧ II
- дистанционное автоматическое прицеливание и переприцеливание в
широком диапазоне азимутов (до ±180°);
- автоматический контроль и поддержание температурно-влажностного
режима пусковой установки (для PH шахтного базирования);
- энергетически оптимальное управление режимом расхода компонентов
топлива и двигательной установки.
Этот перечень не исчерпывает в полной мере всех задач, решаемых СУ PH. Типовая
структура комплекса СУ, решающего перечисленные выше задачи, показана на
рис. 2.8. В качестве примера взята двухступенчатая PH.
На рис. 2.8 изображено:
I. Бортовая аппаратура системы управления
ракеты-носителя
1.1. Чувствительные элементы (датчики информации) СУ:
— ГСП — гиростабилизированная платформа с установленными на
стабиплате гироинтеграторами (акселерометрами);
- СПрЦ - чувствительные элементы системы прицеливания;
- ДОС — датчики обратной связи рулевых приводов системы
стабилизации;
- ДУ «О» - датчик уровня окислителя СУРТ;
- ДУ «Г» - датчик уровня горючего СУРТ;
- ДД - датчик давления в камере сгорания системы РКС.
1.2. БЦВК — бортовой цифровой вычислительный комплекс.
1.3. Усилительно-преобразовательные устройства:
- АПС - прибор управления автоматикой пиросредств;
- АДУ - прибор управления автоматикой двигательной установки;
- ПСК - прибор силовых коммутаций;
- СУРМ - согласующие устройства рулевых машин;
- АПГ - адаптер полезной нагрузки;
- БСТК - блок согласующих устройств системы телеметрического
контроля.
53
Отсек системы Отсек полезной
I ступень । II ступень [ управления I нагрузки
Рисунок 2.8 - Типовая структура комплекса СУ PH
54
1.4. Исполнительные органы СУ:
— РП - рулевые приводы;
- ПРС - привод системы регулирования кажущейся скорости;
- ПР - привод системы управления расходом топлива;
- ПБ, ПС - пироэлементы;
- ЭПК - электропневмоклапаны ДУ.
7.5. Система бортового электроснабжения:
- ББ - первичный источник тока - аккумуляторная батарея;
- ВИП - вторичные источники электропитания бортовой аппаратуры
переменным током.
2. Наземное проверочное пусковое электрооборудование
(НППЭО) в составе:
- НЦВК - наземный цифровой вычислительный комплекс;
- ПССК - устройство сопряжения и силовых коммутаций;
- СНЭС - система наземного автономного электроснабжения;
- СПрЦ - система прицеливания.
3. Система дистанционного управления
командного пункта, включающая в себя:
- НЦВК КП - наземный цифровой вычислительный комплекс командного
пункта;
- пульт управления;
- блок коммутаций;
- блок питания.
Решение перечисленных выше задач обеспечивается системами:
- наземно-пускового проверочного оборудования;
- комплексного управления;
- навигации;
- наведения;
- стабилизации;
- бортовой электроавтоматики;
- бортового электроснабжения;
- рядом других систем.
Система комплексного управления обеспечивает реализацию циклограммы
полета, управление работой ДУ, предпусковые и пусковые операции и др.
55
Задачи, решаемые системой навигации, сводятся к измерению параметров
движения PH и вычислению координат, скорости и другой навигационной
информации, необходимой для управления PH.
Система навигации обычно строится на базе использования
гиростабилизированной платформы или бесплатформенной инерциальной
навигационной системы. Точность системы навигации в основном определяется
инструментальными погрешностями комплекса командных приборов. Для
повышения точности расчета навигационных параметров могут быть
использованы дополнительные средства коррекции, такие, как, например,
спутниковая навигационная система или система астрокоррекции.
Входной информацией для системы навигации являются навигационные
параметры измерительно-вычислительного комплекса, а выходной - результаты
решения навигационной задачи, характеризующие движение PH в опорной СК.
Это, например, координаты и составляющие вектора скорости в опорной СК,
углы ориентации связанной с корпусом PH СК относительно опорной. Перечень
параметров выходной информации существенным образом зависит от типа ИВК
и определяется для каждого объекта отдельно.
Задачи, решаемые системой наведения ракеты (управления движением
центра масс), сводятся к управлению тремя составляющими скорости центра масс
(продольной, нормальной и боковой) и формированию циклограммы базовых
событий (включение и выключение двигателей, команды на отделение ступеней
и полезной нагрузки) таким образом, чтобы параметры движения центра масс
ракеты в момент отделения полезной нагрузки обеспечивали требуемую точность
выведения.
В общем случае система наведения состоит из трех каналов для управления
боковой, нормальной и продольной составляющими скорости, которые работают
с использованием обратной связи и образуют вместе с ракетой трехканальную
замкнутую динамическую систему. Так как управляющие силы создаются путем
изменения углового положения ракеты относительно ее вектора скорости, т.е.
путем изменения углов атаки и скольжения, то для управления этими силами
используют три канала системы угловой стабилизации — тангажа, рыскания и
крена. В ряде случаев для управления полетом PH может применяться
регулирование тяги маршевых ДУ.
Входной информацией для системы наведения является выходная
информация, поступающая от системы навигации.
На основании информации о параметрах движения ракеты система
наведения формирует:
-функциональные команды и метки, определяющие циклограмму полета
PH;
56
-программные углы тангажа, рыскания и крена или программный
кватернион [4], определяющие требуемую ориентацию PH относительно
начальной стартовой СК;
-управляющие сигналы, которые включают в свой состав угловые
рассогласования в каждом канале и сигналы регулирования движения центра
масс.
На участке функционального наведения (атмосферный участок полета)
угловые программы рассчитываются через коэффициенты, задаваемые ПЗ. На
внеатмосферном участке угловые программы тангажа и рыскания вычисляются с
использованием текущих координат и скорости PH, а также параметров
требуемой орбиты, задаваемых ПЗ.
Рассчитанные управляющие сигналы являются выходной информацией
системы наведения.
Задача угловой стабилизации ракеты, а точнее, управления движением
вокруг центра масс, сводится к управлению ориентацией осей ракеты в
пространстве и выдерживанию требуемой ориентации. Благодаря обратным
связям ракета и система стабилизации образуют единую замкнутую
динамическую систему, в которой ракета является одним из звеньев. Обычно
ракета стабилизируется (ориентируется) относительно всех трех связанных с нею
осей координат. Соответственно система стабилизации состоит из трех каналов:
тангажа, рыскания и крена.
Входной информацией для системы стабилизации является выходная
информация, поступающая от систем навигации и наведения.
В общем случае система стабилизации должна обеспечивать:
- устойчивый полет PH при действии возмущений с учетом заданных
ограничений;
- ограничение величины, рассчитываемой как произведение скоростного
напора на пространственный угол атаки при движении PH в зоне
максимальных скоростных напоров;
- ограничение амплитуд изгибных колебаний ступеней и поверхности
жидкости в баках ДУ;
- ограничение угла атаки (скольжения) при разделении;
- формирование управляющих сигналов на исполнительные органы в
соответствии с принятыми законами управления.
Выходной информацией системы стабилизации являются управляющие
сигналы на исполнительные органы.
57
Объекты космической техники
Объекты космической техники, предназначенные для выполнения целевых
задач в космосе, принято называть космическими аппаратами (КА). Иногда
используют термин «космический летательный аппарат» (КЛА).
В соответствии с международной терминологией КА называется спутником,
если он совершил не менее одного оборота вокруг Земли только под действием
силы притяжения Земли. Последние ступени PH, головные обтекатели и
некоторые другие детали, отделяемые от КА при выводе на орбиту, представляют
собой вторичные орбитальные объекты; их обычно не называют спутниками,
хотя они обращаются по околоземным орбитам и могут служить объектами
наблюдений для научных целей [5].
КА делят на две основные группы:
- околоземные орбитальные КА, движущиеся по геоцентрическим
орбитам, не выходя за пределы сферы действия гравитационного поля
Земли, и называемые искусственными спутниками Земли;
- межпланетные КА, совершающие полеты к другим планетам.
При этом различают:
- автоматические КА (ИСЗ, искусственные спутники Луны, Марса,
Венеры и т.п., автоматические транспортные КА, космические
телескопы, автоматические межпланетные станции);
- пилотируемые космические корабли (КК) (обитаемые орбитальные
станции, КК для доставки космонавтов и грузов с Земли на орбитальную
станцию и обратно, межпланетные КК).
Особенностью большинства КА является способность к самостоятельному
длительному функционированию в условиях космического пространства.
В основном КА рассчитываются на одноразовое действие. Однако созданы
и транспортные системы многократного использования для доставки
космонавтов и грузов с Земли на низкие геоцентрические орбиты (например, для
связи с долговременной орбитальной станцией, обслуживания ИСЗ, проведения в
космосе монтажных работ) и обратно на Землю. Транспортировка полезной
нагрузки с низкой орбиты на более высокую осуществляется с помощью
межорбитальных буксиров.
В зависимости от задач, решаемых с помощью КА, их подразделяют на
научно-исследовательские и прикладные [5].
Научно-исследовательские КА предназначаются для исследований Земли и
других небесных тел, межпланетного космического пространства, медико-
биологических и других исследований.
58
Прикладные КА предназначаются для проведения различного рода
экспериментов в космическом пространстве прикладного значения, для
отработки конструкции отдельных систем, узлов и новой аппаратуры, для
обеспечения связи, нужд навигации и др.
На многоцелевых орбитальных станциях могут решаться задачи как научно-
исследовательского, так и прикладного характера.
Классификация околоземных КА по назначению показана на рис. 2.9.
В соответствии с разнообразием научных и прикладных задач, решаемых с
помощью ИСЗ, спутники могут иметь различные размеры, массу,
конструктивные схемы, состав бортового оборудования, различные типы систем
Рисунок 2.9 - Классификация околоземных КА по назначению
59
Рисунок 2.10 - Спутник АУОС-СМ-КФ «Фотон» (масса около 1500 кг)
По массе КА принято подразделять на следующие:
— пикоспутники
- наноспутники
- микроспутники
- спутники
- средние КА
- тяжелые КА
менее 1 кг;
от 1 до 10 кг;
от 10 до 150 кг;
от 150 до 5000 кг;
от 5 до 15 т;
более 15 т.
КА можно классифицировать также (рис.2.11-2.13) по таким параметрам:
- способу создания конструкции КА (типу конструкции);
- типу динамической схемы;
Рисунок 2.11 - Классификация КА по типу конструкции
Рисунок 2.12 - Классификация КА по динамической схеме
60
Рисунок 2.13 - Классификация КА по герметичности корпуса
На рис. 2.14 в качестве примера объекта со сложной динамической схемой
показана Международная космическая станция (МКС) "Альфа” [6].
Рисунок 2.14 - Международная космическая станция «Альфа»
Космический аппарат - это сложная конструкция, в состав которой входит
много разнообразных агрегатов, приборов и систем. Основными составляющими
элементами КА являются:
61
- собственно конструкция;
- системы, обеспечивающие функционирование КА;
— аппаратура, обеспечивающая решение целевой задачи.
Одной из основных систем, обеспечивающих функционирование КА,
является система управления движением КА. К вспомогательным относят
системы:
- терморегулирования,
- электроснабжения,
- телеметрии,
- обеспечения жизнедеятельности космонавтов (в пилотируемых КА) и др.
Классификация систем управления движением КА
Систему управления движением (СУД) КА обычно разделяют:
- на систему навигации и наведения (СНН), обеспечивающую управление
движением центра масс КА;
- систему управления ориентацией и стабилизации (СУОС),
обеспечивающую управление угловым положением КА вокруг центра
масс.
СНН и СУОС по способу управления подразделяют на следующие системы:
- автоматические,
- ручного управления,
- полуавтоматического управления.
По типу прибора, реализующего логику управления, СНН и СУОС,
подразделяют на такие:
- аналоговые,
- цифровые,
- гибридные.
По составу комплекса командно-измерительных приборов (ККИП) и способу
определения ориентации различают системы:
- платформенные, содержащие в составе ККИП гиростабилизированную
платформу;
- бесплатформенные инерциальные навигационные системы (БИНС),
корректируемые по оптико-электронным приборам внешних
ориентиров;
- интегрированные, строящиеся на основе БИНС с возможностью
коррекции по информации спутниковых навигационных систем.
СНН можно классифицировать по типу решаемых задач (приведено выше).
По способу взаимодействия с центром управления СНН подразделяют на
такие системы:
- автономные,
- полуавтономные.
62
В зависимости от применяемого метода космической навигации в СЫН
можно выделить системы, использующие:
- астрономические методы навигации;
- астроинерциальные методы навигации;
- методы, основанные на использовании навигационных спутников;
- комбинированные методы.
Существует множество классификаций СУОС. Наиболее часто СУОС
классифицируют по способу управления (рис. 2.15).
СУОС
Активные
реактивными.
%. двигателями^
1 С инерционными
исполнительными j
органами
Г равитационные
_ моментным-%,
^магнитоприводом^
Гравитационные
с маховиками
-Hv Аэродинамические
Стабилизация *
давлением
солнечных лучей,
С реактивными
двигателями и
маховиками .
/^двигателями?
'iL маховиками^
; С силовыми^
^гироскопами^
// ’ С маховиками и
V магнитоприводом
Стабилизация
вращением
С реактивными
двигателями и
стабилизацией
вращением...
С постоянными
магнитами
Рисунок 2.15 - Классификация СУОС КА по способу создания
управляющих моментов
К пассивным системам относятся системы, не требующие в процессе своего
функционирования энергозатрат от бортовых источников энергии любых видов.
Ориентация и стабилизация таких систем осуществляется с помощью внешних
моментов, создаваемых окружающей средой, а также придания КА
гироскопических свойств путем раскрутки его вокруг одной из связанных осей.
63
Активные системы создают управляющий момент с помощью устройств,
потребляющих в том или ином виде энергию от бортовых источников.
Следовательно, для их функционирования необходимо создать на борту КА
определенные запасы энергии. По своей структуре активные системы являются
замкнутыми системами автоматического или ручного управления с обратной
связью.
Строгое ограничение запасов энергии и рабочего тела на борту космического
аппарата и повышение требования к точности приводят к тому, что ни пассивные,
ни активные системы в отдельности не отвечают всем предъявляемым к ним
требованиям. В этом случае целесообразно применять комбинированные
системы, которые состоят из элементов активных и пассивных систем так, чтобы
избежать недостатков, свойственных этим системам, и использовать присущие
им достоинства [9]. Иногда под комбинированными системами понимают
активные системы управления, в которых применяют комбинации различных
типов исполнительных органов.
Приборный состав и структура типовых
систем управления движением КА
Современная СУД КА чаще всего является автономной комбинированной
цифровой бесплатформенной или интегрированной системой автоматического
управления. В состав такой СУД входят:
- комплекс командно-измерительных приборов, в который могут
входить:
• измеритель угловой скорости (ИУС),
• измеритель линейного ускорения (блок акселерометров - БА);
• приборы измерения углового положения КА (солнечный, земной,
звездный приборы, магнитометр);
- радиотехнические приборы - радиовысотомер (РВ), система
измерения параметров относительного движения (СИПОД);
- исполнительные органы (ИО), которые могут включать в себя:
• двигатели ориентации и стабилизации (ДС);
• силовой гироскопический комплекс (СГК, гиродины);
• двигатели-маховики (ДМ);
• электромагниты (ЭМ);
- бортовой цифровой вычислительный комплекс (БЦВК), составными
частями которого являются следующие:
• бортовая цифровая вычислительная машина (БЦВМ);
• устройство ввода-вывода (УВВ);
64
• блок управления конфигурацией (БУК) (для двухканальной схемы
БЦВМ);
• модуль команд (МК);
• блок коммутации и распределения питания (БКРП);
• бортовая кабельная сеть (БКС).
К смежным подсистемам СУД КА могут относиться:
- аппаратура потребителя спутниковой навигационной системы (АП
СНС);
- система электроснабжения (СЭС);
- модуль телеметрии (МТ);
- система разгрузки инерционных исполнительных органов и др.
На рис.2.16 показана структурная схема типовой СУД КА, где приняты
следующие обозначения:
ПОС - прибор ориентации на Солнце;
ПОЗ - прибор ориентации на Землю;
ГИВУС - гироскопический измеритель угловой скорости;
ПАИС - прецизионная астроизмерительная система;
БА — блок акселерометров;
СГК - силовой гироскопический комплекс;
ДМ - двигатель-маховик;
УВВ - устройство ввода-вывода;
ДПЗ - датчик положения звезды;
УИВК - управляющий информационно-вычислительный комплекс;
ДС - двигатели стабилизации;
ДК - двигатели коррекции;
ССКМ - система сброса кинетического момента;
БП(И, БВО i, MiCO, COiM (i=l,...) - массивы обмена.
Задачи, решаемые системой навигации и наведения КА
на различных участках полета
Система навигации и наведения КА предназначена для определения и
изменения кинематических параметров движения центра масс КА.
В зависимости от назначения КА и степени автономности его
функционирования СНН КА может состоять из следующих подсистем: системы
автономной навигации (САН); системы наведения; системы управления
относительным движением (СУОД).
65
Система автономной навигации
Система автономной навигации определяет кинематические параметры
движения центра масс КА, включая вектор ускорения КА.
В зависимости от состава целевых задач КА и точностных требований к ним
на борту КА может быть реализована как ограниченная (без использования
измерительных средств), так и полная задача навигации.
В ограниченной задаче навигации осуществляется прогноз параметров
движения центра масс КА по начальным условиям, переданным с Земли. В этом
случае погрешность формирования параметров движения КА определяется:
- длительностью интервалов прогноза (частотой обновления начальных
условий, передаваемых с Земли);
- погрешностью задания начальных условий, переданных с Земли;
- методической погрешностью модели движения КА;
- погрешностью метода решения задачи прогноза параметров движения
центра масс КА;
- методической погрешностью учёта управляющих воздействий
(корректирующих импульсов скорости);
- погрешностью знания времени на борту КА;
- погрешностью, обусловленной ограниченностью разрядной сетки БЦВМ.
Полная задача навигации решается с использованием измерительных
средств. В качестве таковых могут применяться астроизмерительные системы,
приборы ориентации на Солнце, спутниковые навигационные системы и др.
В состав полной задачи навигации входят задачи:
- прогноза параметров движения КА;
- планирования измерений;
- уточнения параметров движения КА по результатам измерений.
В этом случае погрешность формирования параметров движения КА
определяется (наряду с перечисленными выше) следующими факторами:
- длительностью интервалов между последовательными измерениями;
- погрешностью измерительных приборов;
- погрешностью используемых методов обработки измерительной
информации.
В настоящее время для КА на околоземных орбитах наиболее рациональным
являются системы навигации, основывающие на использовании спутниковых
навигационных систем (GPS, ГЛОНАСС), которые обеспечивают точность
определения координат от 15 до 45 м, а в перспективе (после модернизации
систем GPS, ГЛОНАСС) - не хуже 5 м. При необходимости для повышения
автоносмности и живучести такие КА могут дополнительно комплектоваться
резервными навигационными системами, использующими измерительные
приборы, непосредственно установленные на борту КА.
66
Рисунок 2.16 - Структурная схема СУД маневрирующего спутника ДЗЗ,
построенного на основе БИНС с астрокоррекцией и
комбинированным управлением
67
Системы автономной навигации КА, использующие информацию глобальных
навигационных спутниковых систем
В настоящее время интенсивно развиваются глобальные оперативные
спутниковые навигационные системы (СНС) ГЛОНАСС (Россия) и GPS (США)
[10]. Термин “глобальная оперативная навигация” означает, что подвижный
объект, оснащенный навигационной аппаратурой потребителя (НАЛ), может в
любом месте околоземного пространства в любой момент времени определить
(уточнить) кинематические параметры своего движения - три координаты и три
составляющие вектора скорости. Обе системы продемонстрировали высокие
точностные характеристики определения координат и скорости различных
подвижных средств, включая космические. Регулярно происходящие и
намечающиеся изменения в области спутниковых навигационных систем
позволяют обеспечить повышение непрерывности, точности и надежности
навигационных и временных определений.
Характеристики глобальных навигационных
снутниковых систем
Полная орбитальная группировка (ОГ) в системе ГЛОНАСС содержит 24
штатных навигационных космических аппарата (НКА) на круговых орбитах с
наклонением 1 = 64,8° в трех орбитальных плоскостях по восемь НКА в каждой и
равномерно разнесенных в каждой орбитальной плоскости по аргументу широты
на 45°.
ОГ в системе GPS содержит 24 штатных НКА на шести круговых орбитах с
наклонением 55° и равномерно разнесенных по долготе через 60°.
Каждый штатный НКА постоянно излучает непрерывные навигационные
радиосигналы в двух диапазонах частот L1 и L2:
- в системе ГЛОНАСС 1600 МГц (L1) и 1250 МГц (L2);
- в системе GPS 1575,42 МГц (L1) и 1227,6 МГц (L2).
В навигационной аппаратуре потребителя проведение навигационных
измерений в двух диапазонах частот позволяет исключить ионосферные
погрешности измерений.
В системе ГЛОНАСС навигационный L1 радиосигнал 1600 МГц -
двухкомпонентный. На заданной несущей частоте в радиопередатчике
формируются два радиосигнала: узкополосный (пониженной точности - ПТ) и
широкополосный (высокой точности - ВТ). Навигационный L2 радиосигнал -
однокомпонентный широкополосный.
Узкополосный навигационный радиосигнал в системе ГЛОНАСС является
открытым и предназначен для гражданских потребителей. Широкополосные
навигационные радиосигналы предназначены для использования
санкционированными потребителями и имеют защиту от несанкционированного
68
использования. В перспективе при восполнении ОГ предполагается применять
двухкомпонентный радиосигнал (узкополосный и широкополосный) в обоих
диапазонах частот 1600 и 1250 МГц.
В настоящее время в ОГ ГЛОНАСС размещен неполный состав НК А, что не
позволяет пользователям непрерывно получать навигационную информацию.
При полной ОГ ГЛОНАСС (24 штатных НКА) радионавигационное поле на
высотах h<2000 км непрерывно в пространстве, т.е. потребитель в любой точке
этого пространства “освещается” радиолучами не менее чем от четырех НКА,
образующих по отношению к нему удовлетворительное по геометрическому
фактору созвездие для оперативного автономного определения координат и
вектора скорости.
Передатчики НКА GPS излучают два непрерывных сигнала на частотах Пи
L2. Несущая частота L1 состоит из двух компонентов. Первый - модулируется
дальномерным псевдослучайным P-кодом, второй - С/А-кодом. Несущая частота
L2 имеет один компонент и моделируется дальномерным псевдослучайным
P-кодом или С/А-кодом. Основным дальномерным кодом является точный Р-код.
В распоряжении мирового сообщества находится открытый
псевдослучайный код С/A (Clear (Coarse)/Acguisition). В целях преднамеренного
снижения точности определения координат для С/А-кода введен специальный
режим селективного доступа S/A (Selective Availability).
В перспективе предполагается обеспечение передачи НКА второго
открытого сигнала с С/А-кодом на частоте L2 1227,6 МГц. Этот сигнал может
использоваться в гражданских применениях, не критических с точки зрения
безопасности. Решено также начать работы по обеспечению излучения третьего
гражданского сигнала на частоте 1176,5 МГц для применений, критических с
точки зрения обеспечения безопасности (например, в авиации).
Схожесть алгоритмов работы систем ГЛОНАСС и GPS позволяет
использовать совместно системы двух группировок для навигационных
измерений. В настоящее время существуют навигационные приемники,
способные обрабатывать одновременно сигналы этих систем.
Навигационная аппаратура потребителя
Навигационная аппаратура потребителя (НАЛ) предназначена для
определения параметров движения PH и КА посредством приема и обработки
радиосигналов с НКА систем СНС ГЛОНАСС (Россия) и (или) GPS (США).
НАЛ включает в себя бортовой приемовычислитель (ПВ) и антенно-
фидерную систему, состоящую из антенных устройств, размещаемых на внешней
поверхности КА. НАЛ является многоканальной аппаратурой и в зависимости от
предъявляемых к ней требований может выпускаться различных типов,
69
обеспечивающих прием и обработку сигналов только от одной из СНС
(ГЛОНАСС или GPS ) либо от двух СНС одновременно.
НАЛ формирует и выдает в СУ объекта управления следующую
навигационную информацию:
- три координаты;
- три составляющие скорости;
- текущее системное время ГЛОНАСС и (или) GPS, к которому относятся
параметры движения объекта управления;
- временную метку для привязки бортовой шкалы времени СУ к
системному времени ГЛОНАСС и (или) GPS;
- признак достоверности информации.
Параметры движения определяются НАП в Гринвичской вращающейся
системе координат (ГСК). Системное время ГЛОНАСС соответствует шкале
Государственной Системы Единого Времени (СЕВ). Системное время GPS
соответствует Международной шкале атомного времени ТАГ
Для штатной работы НАП может использоваться следующая априорная
информация:
- дата и текущий момент времени (СЕВ) на начало навигационного сеанса;
- параметры движения объекта управления (ГСК) и момент времени (СЕВ),
к которому они относятся;
- альманахи параметров орбит НКА ГЛОНАСС и (или) GPS.
Текущий момент времени и параметры движения поступают в НАП от САН
КА.
Альманах системы содержит: время, к которому относится альманах;
параметры орбиты; номер пары несущих частот и поправку к бортовой шкале
времени для каждого НКА в ОГ (24 НКА), а также поправку к шкале времени
системы относительно шкалы времени страны (погрешность поправки не более 1
мкс).
Альманах системы необходим в НАП для планирования сеанса
навигационных измерений (выбор оптимального созвездия НКА) и для приема
навигационных радиосигналов в системе (прогноз сдвига доплеровской частоты).
Обновление альманаха осуществляется аппаратными средствами НАП путем
их сбора от видимых НКА. Время, необходимое для полного обновления
альманаха для ГЛОНАСС, составляет 3-4 мин, а для КНС GPS - до 14 мин.
Период обновления альманахов <30 дней. Загрузка альманахов проводится в
энергонезависимую память НАП.
70
Определение параметров движения КА системой автономной навигации,
оснащенной навигационной аппаратурой потребителя
В рассматриваемом варианте комплектации бортовой навигационной
измерительной аппаратурой САН является НАЛ.
Для обеспечения штатного функционирования САН необходима следующая
априорная информация:
- начальные значения радиуса-вектора и вектора скорости КА;
- момент времени (СЕВ), к которому относятся эти векторы;
- баллистический коэффициент КА;
- база отсчета бортового времени, позволяющая в любой момент
определять дату (число, месяц, год) и текущий момент времени (СЕВ) на
борту КА;
- параметры движения кооперируемого КА в случае выполнения
операций сближения, причаливания и стыковки.
При необходимости для обеспечения штатной работы НАП в САН может
формироваться следующая априорная навигационная информация:
- дата и текущий момент времени (СЕВ) на начало навигационного сеанса
НАП;
- параметры движения КА (в ГСК) и момент времени (СЕВ), к которому
они относятся (начало навигационного сеанса НАП).
Обработка информации, поступающей от НАП, проводится непрерывно по
такой схеме:
- на интервалах времени, соответствующих интервалу обновления
навигационной информации САН, осуществляется фильтрация и
предварительная отбраковка измерений;
- в моменты времени обновления навигационной информации САН
контролируется достоверность информации, формируемой НАП, путем
сравнения текущих отфильтрованных параметров движения КА с
прогнозируемыми параметрами движения КА.
Система наведения КА
Система наведения КА различного назначения обеспечивает решение
следующих задач орбитального маневрирования:
- перевод КА с орбиты выведения на рабочую орбиту (на околоземных
орбитах);
- перевод КА со стартовой орбиты на орбиту межпланетного перелета;
- коррекцию орбиты в целях поддержания её параметров;
71
- дальнее фазирование (сближение) в задаче стыковки с другими КА;
- спуск КА с орбиты.
Структурно полная задача наведения при орбитальных манёврах КА
включает в себя две составляющие:
- определение требуемых параметров управляющего воздействия
(параметров корректирующего импульса скорости);
— реализацию управляющих воздействий.
В зависимости от используемого способа управления движением центра масс
КА и степени автономности КА расчет оптимальных управляющих воздействий и
формирование программной информации проводят непосредственно на борту КА
либо наземным комплексом управления. Система наведения реализует заданную
программу полёта автоматически в соответствии со сформированной
протраммной информацией.
Исходной информацией для системы наведения при этом являются:
- величина требуемого приращения кажущейся скорости;
- программные углы, характеризующие необходимое направление вектора
тяги;
- момент включения ДУ;
- расчётное время работы ДУ.
Момент выключения ДУ определяется одним из двух способов:
- по информации от акселерометра (при его наличии), положение оси
чувствительности которого относительно вектора тяги ДУ известно;
- по времени работы ДУ.
Для обеспечения решения возложенных на систему наведения задач должны
быть выполнены следующие динамические операции:
- пространственный разворот КА относительно базовой системы
координат в требуемое для выдачи корректирующего импульса (КИ)
положение;
- полёт КА с неизменной ориентацией относительно базовой системы
координат до момента включения ДУ;
- включение ДУ в заданное время;
- полёт КА в процессе выдачи корректирующего импульса с неизменной
ориентацией в базовой системе координат или с программным
разворотом по тангажу, начиная с момента начала отсчёта системой
управления времени работы ДУ;
- выключение ДУ по достижении заданного значения кажущейся скорости
или времени работы ДУ.
Под базовой системой координат здесь понимают инерциальную систему
координат, начало которой расположено в центре масс КА, а направления осей
72
совпадают с направлениями осей орбитальной системы координат (ОСК),
зафиксированной на момент начала пространственного разворота в требуемое
для выдачи КИ положение.
Требования к точности выдачи импульсов по направлению обеспечиваются
путем наложения ограничений на суммарную погрешность ориентации КА на
участках выдачи корректирующих импульсов.
Основной точностной характеристикой системы наведения является
погрешность реализации приращения кажущейся скорости по величине.
Результирующая погрешность реализации корректирующего импульса по
величине в случае выключения ДУ по достижении заданной величины
кажущейся скорости, т.е. с использованием информации от акселерометра,
обусловлена влиянием следующих наборов погрешностей:
- связанных с применённым акселерометром и со способами обработки
поступающей с него информации;
- вызванных разбросом времени формирования команды на выключение
ДУ и разбросом импульса последействия ДУ,
Результирующая погрешность реализации корректирующего импульса по
величине в случае выключения ДУ по расчётному времени её работы
обусловлена разбросами характеристик применённой ДУ и разбросом массы КА.
Задачи, решаемые СУОС КА на различных
участках полета
СУОС является основной системой КА, которая обеспечивает выполнение
поставленной целевой задачи КА.
Классификация задач, решаемых СУОС КА, показана на рис. 2.17.
Задачи построения требуемой ориентации и задачи стабилизации присущи
для СУОС практически всех КА. Работа любой СУОС заключается в выполнении
последовательности определенных режимов.
Под режимом СУОС понимают решение конкретной функционально
завершенной задачи. Каждый режим представляет собой замкнутую задачу
управления КА с индивидуальной конфигурацией программно-алгоритмического
обеспечения БЦВМ и составом используемых приборов СУОС.
В основном режимы работы СУОС можно подразделить на три группы (рис.
2.18):
- построительные;
- коррекции орбиты;
— специальные.
73
Построительные режимы используют для определения и поддержания
ориентации КА в пространстве и в некоторых случаях - как дежурные (режимы
длительного функционирования).
(Задачи СУОС КА
Построение
требуемой
Обеспечен не-
функционального
назначения КА
Коррекция
орбиты
i Стабилизация Ч
’ Парирование
(d неисправностей =1,
^.элементов СУОСОВ
Рисунок 2.17 - Классификация задач СУОС КА
Рисунок 2.18 - Классификация режимов СУОС КА
74
Практически все построительные режимы (за исключением пассивной
стабилизации) требуют применения астроизмерительных приборов: приборов
ориентации на Солнце, Землю, звезды. Приборный состав определяется заданным
требуемым типом ориентации.
Режимы выдачи корректирующего импульса применяют для изменения
высоты и (или) наклонения орбиты КА. Коррекции предшествует режим
пространственной ориентации КА и ее поддержание на участке работы двигателя
коррекции.
Специальные режимы определяются спецификой применения КА
(сближение и причаливание, калибровка приборов, тест динамической схемы КА
и др.).
Работу СУОС любого КА разделяют на два различных этапа: выводного
витка и штатного функционирования в соответствии с поставленной целевой
задачей.
Выводной виток (или несколько витков) характеризуется следующим:
- значительными угловыми скоростями КА после отделения от PH;
- использованием внутренних источников электропитания ограниченной
емкости в силу неполноценного притока энергии от солнечных батарей;
- возможным отсутствием полетного задания;
- неполным составом включенной аппаратуры СУОС.
Поэтому этап выводного витка является весьма напряженным и
ответственным для работы СУОС. Функционирование СУОС, как правило,
происходит следующим образом:
- включение и тестирование БЦВК;
- включение и тестирование необходимых командных приборов и
исполнительных органов;
- гашение остаточных после отделения от PH угловых скоростей КА;
- проведение одного из построите л ьных режимов в целях обеспечения
нормального притока электроэнергии.
Этап штатного (долгосрочного) функционирования состоит из
повторяющихся связок дежурного и специального (определяемого целевой
задачей КА) режимов.
При возникновении нештатной ситуации, которая не устраняется
автоматически в текущем режиме, СУОС может быть автономно или по команде
ЦУП переведена в режим проверки функционирования или выключена.
75
2.2 Моделирование на ЭВМ как основной инструмент отработки
математического обеспечения СУ динамических объектов
Классификация видов моделирования
Виды моделирования можно классифицировать по характеру изучаемых
процессов, протекающих в объекте:
а) детерминированное,
- стохастическое;
б) статическое,
- динамическое;
в) дискретное,
- непрерывное;
- дискретно-непрерывное.
В зависимости от формы представления объекта виды моделирования могут
быть классифицированы так, как это показано на рис. 2.19 [11].
Рисунок 2.19- Классификация видов моделирования в зависимости
от формы представления объекта
76
Задачи и основные принципы моделирования на ЭВМ
Моделирование на ЭВМ - метод решения задачи анализа или синтеза
сложной системы на основе использования ее компьютерной модели.
Задача компьютерного моделирования состоит в получении количественных
и качественных результатов по имеющейся модели. Качественные выводы,
получаемые по результатам анализа, позволяют исследовать неизвестные ранее
свойства сложной системы: динамику, устойчивость и др. Количественные
выводы в основном носят характер прогноза некоторых будущих или объяснения
прошлых значений переменных, характеризирующих систему [11].
Модель сложной системы должна по возможности отображать все основные
факторы и взаимосвязи, характеризующие реальные ситуации, критерии и
ограничения. Необходимо, чтобы модель была достаточно универсальной, по
возможности описывала близкие по назначению объекты и в то же время была
достаточно простой для выполнения необходимых исследований с разумными
затратами.
Можно выделить следующие основные этапы моделирования:
1) построение концептуальной модели системы и ее формализация;
2) алгоритмизация модели системы и ее машинная реализация;
3) получение результатов моделирования и их интерпретация.
Процесс формирования реальной математической задачи и последующего ее
решения достаточно сложен, его можно более детально представить в виде
следующих этапов:
1. Изучение объекта. Анализ особенностей функционирования объекта;
определение факторов, оказывающих влияние на его функционирование;
получение характеристик объекта в различных условиях; выбор
оптимизируемого критерия.
2. Описательное моделирование. Установление и фиксация основных связей
и зависимостей между характеристиками процесса или явления с точки зрения
оптимизируемого критерия.
3. Математическое моделирование. Перевод описательной модели на
формальный математический язык. Все условия записывают в виде
соответствующей системы равенств и неравенств, а критерий оптимизации ~ в
виде функции.
4. Выбор или создание метода решения. Исходя из полученной
математической записи задачи выбирают или известный метод решения, или
некоторую модификацию известного метода, либо разрабатывают новый метод
решения. Решением задачи будет то решение из множества допустимых решений,
при котором целевая функция достигает своего наибольшего (наименьшего)
значения.
5. Выбор или написание программы, реализующей выбранный метод для
решения задачи на ЭВМ. Задачи, содержащие целевую функцию и условия-
77
ограничения и описывающие поведение реальных объектов, как правило, имеют
большое число переменных и большое число зависимостей (уравнений связи)
между ними. Поэтому такие задачи могут быть решены только с помощью ЭВМ.
6. Решение задачи на ЭВМ. В соответствии с программой ЭВМ обрабатывает
введенную числовую информацию, получает решение и выдает его пользователю
в заданной им форме.
7. Анализ полученного решения. Анализ решения бывает формальным и
содержательным. При формальном анализе проверяют соответствие полученного
решения построенной математической модели, т.е. проверяют, правильно ли
введены исходные данные, правильно ли функционирует программа, ЭВМ и т.д.
При содержательном анализе проверяют соответствие полученного решения тому
реальному объекту, который моделировали. В результате содержательного
анализа в модель могут’ быть внесены изменения, затем описанный процесс
повторяют.
Если результаты моделирования подтверждаются путем проведения
специально организованных экспериментов, то модель является адекватной
объекту и может служить основой для прогнозирования процессов в объекте.
Фазы жизненного цикла математических моделей
Этапы разработки математических моделей (ММ) стандартизированы. В
стандартах предприятия их называют фазами жизненного цикла.
В соответствии со стандартами математические модели объектов и системы
управления являются продуктом, используемым при проведении разработки на
всех этапах жизненного цикла от момента начала разработки до момента
завершения ее эксплуатации [12, 13].
Жизненный цикл ММ должен состоять из следующих фаз:
- определение технических требований к ММ (фаза ТТ);
- архитектурное проектирование ММ (фаза АП);
- детальное проектирование, программирование, автономная и
комплексная отработка ММ (фаза ДП);
- опытная эксплуатация ММ (фаза ОЭ);
- сопровождение при эксплуатации ММ (фаза СЭ).
При разработке и эксплуатации ММ должна обеспечиваться возможность
реализации следующих вариантов жизненного цикла:
- "каскад”;
- "итерация";
- "модернизация".
Порядок выполнения фаз жизненного цикла ММ для варианта "каскад"
показан на рис. 2.20.
Данный вариант предусматривает последовательное одноразовое
выполнение каждой фазы жизненного цикла. Повторное выполнение фаз
78
допускается только для исправления ошибок, выявляемых в процессе
верификации и валидации программного обеспечения (ПО).
Передача в эксплуатацию ММ для варианта "каскад” происходит однократно.
При этом обеспечивается выполнение всех требуемых функций ММ.
Рисунок 2.20 - Вариант жизненного цикла "Каскад”
Порядок выполнения фаз жизненного цикла ММ для варианта "итерация”
показан на рис. 2.21.
Передача ММ в эксплуатацию в варианте "итерация" происходит
многократно с наращиванием ее возможностей в рамках первоначально заданных
требований.
Данный вариант характеризуется расщеплением фаз ДП, ОЭ и СЭ.
Вариант "итерация” обеспечивает поэтапную разработку ММ с постепенным
доведением ее характеристик до требуемых.
Рисунок 2.21 - Вариант жизненного цикла «Итерация»
Порядок выполнения фаз жизненного цикла ММ для варианта
"модернизация” показан на рис. 2.22.
Повторное выполнение блоков КСК1, - 2, — 3 в варианте "модернизация"
начинается с фазы ТТ.
79
Передача ММ в эксплуатацию в варианте ’’Модернизация” происходит
многократно. При этом передается полностью завершенная ММ,
обеспечивающая выполнение всех предъявляемых к ней требовании.
Рисунок 2.22 - Вариант жизненного цикла ’’Модернизация" (блоки
КСК1, 2, 3 эквивалентны совокупности фаз ТТ, АП, ДП и ОЭ)
Каждый последующий выпуск ММ включает в себя предыдущие как
подмножества и обеспечивает реализацию новых требований к ММ,
На каждой фазе жизненного цикла выполняют определенные работы,
выпускаются соответствующие документы.
На фазе "Определение требований к ММ” проводят такие основные работы:
- анализ технических заданий и исходных данных (ИД) Головной
организации (ГО) на разработку СУ;
- выпуск технических заданий на разработку командных приборов и
исполнительных органов СУ, согласование их с ГО;
- получение от разработчиков, командных приборов и исполнительных
органов исходных данных на разработку математических моделей,
технических условий и технических описаний приборов;
- определение состава ММ;
- составление перечня режимов функционирования ММ и перечня
алгоритмов;
- анализ ММ-аналогов, определение компонент ММ, которые можно взять из
БД проектов ранее разработанных систем;
- разработка и согласование технического задания на ММ, выбор
разрабатываемых вариантов ММ (минимальная, текущая, полная и др.);
- разработка основных положений по созданию ММ;
- создание словесно-формульного описания функционирования ММ;
- разработка формализованного (допускающего автоматизацию
программирования) описания функциональных алгоритмов
(информационно-логические схемы, структурно-функциональные схемы,
80
математические зависимости) с отражением перечня используемых
переменных, констант, настраиваемых параметров;
- разработка логической модели ПО ММ и структуры функциональных
алгоритмов ММ;
- разработка состава и технических требований к программным модулям
функциональных алгоритмов, определение информационных связей между
модулями ПО ММ;
- разработка технических требований к программам-генераторам тестов
(контрольных примеров) для автономного тестирования модулей
функциональных алгоритмов, интеграционного и системного тестирования
ПО ММ;
- выбор языка программирования.
Каждая работа, выполняемая на фазе ’’Определение требований к ММ” (как и
на остальных фазах), сопровождается выпуском соответствующих документов.
Так, на данной фазе выпускаются следующие документы:
- техническое задание на ММ;
- основные положения по созданию ММ;
- техническое описание и алгоритмы ММ (начальная редакция);
- описания логической и физической моделей ПО ММ;
- план верификации и валидации ММ, определяющий объем и порядок
проверки правильности выполнения работ (начальная редакция);
- план (программа) обеспечения качества разработки (начальная редакция) и
другие документы.
На фазе ”Архитектурное проектирование ММ” должны выполняться работы:
— уточнение физической модели и алгоритмов ММ;
- выбор идентификаторов переменных алгоритмов;
- программирование (кодирование) алгоритмов ММ и контрольной задачи;
— разработка программ-генераторов тестов (контрольных примеров) для
автономного тестирования модулей функциональных алгоритмов,
интеграционного и системного тестирования ПО ММ;
- тестирование (входной контроль) ПО системы комплексной динамической
отладки (СКДО) на контрольной задаче;
- определение полного перечня (словаря) контролируемых параметров
алгоритмов;
- уточнение программы верификации, валидации и плана обеспечения
качества;
81
- проверка правильности выполнения всех работ фазы в соответствии с
программами верификации, валидации и планом обеспечения качества.
На этой фазе должны выпускаться документы:
- техническое описание и алгоритмы ММ;
- уточненные логические схемы структурированных функциональных
алгоритмов ММ;
- программа-генератор настроек функциональных алгоритмов и тестов для
автономного тестирования модулей функциональных алгоритмов
(компонентов ПО), интеграционного и системного тестирования ПО;
- полный словарь параметров, контролируемых при автономном
тестировании модулей функциональных алгоритмов, интеграционном и
системном тестировании ПО;
- программа верификации и валидации (уточненная редакция),
определяющая объем и порядок проверки правильности выполнения всех
работ, а также объем и порядок автономного, интеграционного и
системного тестирования ПО ММ;
- план обеспечения качества (уточненная редакция)
и другие, соответствующие указанным выше работам документы.
На фазе ’’Детальное проектирование и производство ММ" должны
выполняться перечисленные ниже работы:
- программирование функциональных алгоритмов ММ;
- формирование библиотеки ПО компонентов ММ;
- выделение компонентов ММ, которые могут быть рекомендованы для
использования в последующих проектах;
- определение объема и генерация тестов (контрольных примеров) для
автономного тестирования модели алгоритмов СУ;
- сквозная верификация ПО ММ в соответствии с планом верификации и
валидации данной фазы.
На фазе "Детальное проектирование и производство ММ" должны
выпускаться перечисленные ниже документы:
- программы функциональных алгоритмов ММ и режимов;
- перечень и описание (таблица) глобальных переменных;
- спецификация программ, входящих в конкретную конфигурацию ПО при
необходимости;
- сквозная верификация ПО ММ в соответствии с планом верификации и
валидации данной фазы;
82
- файлы с результатами автоматизированной обработки параметров,
контролируемых при тестировании ПО;
- руководство пользователя ММ;
- программа и методика верификации и валидации в процессе опытной
эксплуатации, определяющие объем и порядок проверки правильности
функционирования ММ.
На фазе "Опытная эксплуатация ММ" должны выполняться работы:
- валидация всех конфигураций ММ, передаваемых пользователю, на тестах
приемки, состав и характеристики параметров которых определены в
документе "Программа и методика верификации и валидации ММ при
опытной эксплуатации";
- выпуск решения о коррекции ММ по результатам ее валидации или по
требованию пользователя.
Документы, выпускаемые на фазе "Опытная эксплуатация ММ":
- отчет о результатах валидации ММ;
- акт передачи ММ в эксплуатацию;
- решение о коррекции ММ по результатам ее валидации или по требованию
пользователя (при необходимости);
- техническое описание и алгоритмы ММ в виде документа абонентского
учета;
- инструкция пользователя ММ в виде документа абонентского учета.
Если заказчиком (пользователем) является внутреннее подразделение, то на
фазе "Сопровождение при эксплуатации ММ" должны выполняться следующие
работы:
- анализ сбоев при функционировавши ММ (с выпуском справки) и
выработка рекомендаций по их устранению;
- выпуск решения о коррекции ММ в местах его эксплуатации по
результатам эксплуатации, по требованию заказчика (пользователя) или в
связи с изменившимися условиями эксплуатации;
- коррекция ММ согласно рекомендациям и решениям;
- коррекция документации (при необходимости).
На фазе "Сопровождение при эксплуатации ММ", если заказчик
(пользователь) ММ представляет внешнюю организацию и ММ поставляется
ему, то должен быть заключен договор с заказчиком на выполнение работ по
сопровождению при эксплуатации ММ. Дальнейшие работы в этом случае
выполняют согласно договору.
83
Аналоговые, цифровые и гибридные (аналого-цифровые)
моделирующие комплексы
При машинном моделировании систем используют вычислительную технику
трех типов: аналоговые вычислительные машины (АВМ), цифровые
вычислительные машины (ЦВМ) и гибридные вычислительные комплексы (ГВК)
или аналого-цифровые комплексы (АЦК). Преимущества каждого типа
вычислительных средств, в первую очередь, определяются спецификой основных
свойств цифровых и аналоговых ЭВМ, используемых для моделирования
конкретной системы [11].
Для АВМ характерно то, что переменные параметры модели системы
представляют в непрерывном виде, а технология программирования состоит в
основном в замещении элементами АВМ (такими, как операционные усилители,
блоки переменных коэффициентов и т.п.) соответствующих элементов
моделируемой системы.
К достоинствам АВМ можно отнести:
- возможность одновременного выполнения параллельных вычислительных
операций, что особенно важно при моделировании сложных систем;
- возможность выполнения операций в реальном или ускоренном масштабе
времени (скорость вычислений ограничена главным образом частотными
характеристиками элементов АВМ, а не сложностью решаемой задачи
моделирования системы).
При этом вычислительные операции выполняют весьма эффективно, но
имеются ограниченные возможности выполнения логических действий,
накопления цифровых данных, обеспечения длительных задержек, обработки
информации, которые весьма характерны для моделирования систем. Кроме того,
точность результатов моделирования на АВМ ограничена и определяется
качеством компонентов АВМ.
Характерными чертами ЦВМ является то, что вся обработка промежуточной
и результирующей информации в процессе моделирования системы реализуется
в дискретном виде и все операции по работе с машинной моделью выполняются
последовательно.
К важным достоинствам ЦВМ можно отнести:
- высокую точность результатов моделирования системы, которая
определяется главным образом выбранными численными методами
решения задачи и длиной разрядной сетки;
- простоту реализации логических операций и принятия решений в процессе
моделирования.
Вместе с тем следует отметить, что время решения определяется сложностью
задачи моделирования системы, т.е. числом и длительностью операций,
необходимых для получения результатов моделирования, поэтому обычно идут
84
на компромисс между временем решения и точностью результатов
моделирования системы.
Для моделирования сложных динамических объектов мощным средством
является АЦК, которые реализуют преимущества цифрового и аналогового
моделирования и позволяют наиболее эффективно использовать ресурсы ЦВМ и
АВМ в составе единого комплекса. При использовании АЦК существенно
упрощаются вопросы взаимодействия с датчиками, установленными на реальных
объектах, что позволяет, в свою очередь, проводить комбинированное
моделирование с применением аналого-цифровой части модели и натурной части
объекта. Такие гибридные моделирующие комплексы обычно включают в состав
многомашинного информационно-вычислительного комплекса коллективного
пользования, что еще больше расширяет его возможности с точки зрения
моделируемых классов больших систем.
В зависимости от специфики исследуемых объектов в ряде случаев
эффективной оказывается ориентация при моделировании систем на
универсальные ЦВМ. В общем случае с любой задачей, которую решает АВМ,
может справиться и достаточно мощная универсальная ЦВМ.
Следует отметить, что, учитывая стоимость и сложность создания АЦК, а
также постоянно улучшаемые характеристики ЦВМ, в последнее время все чаще
при моделировании сложных систем управления динамических объектов
используют цифровое моделирование.
Так, на этапе 60-80-х годов в практике предприятий ракетно-космической
отрасли при разработке СУ PH и КА широко использовали АВМ и АЦК. В
настоящее время в целях экономии средств и времени разработки практически
основным способом отработки математического обеспечения СУ стало цифровое
моделирование.
Ниже описаны различные методы и технические средства моделирования
динамических процессов в СУ PH и КА.
Технология моделирования на АВМ
Дифференциальные уравнения, решаемые на АВМ, * являются
математической моделью физических процессов. Поэтому решению задачи на
АВМ предшествует ряд этапов, которые представляют собой операции перехода
от физической системы к ее модели на АВМ. Основные из них следующие:
1. Анализ исходной физической системы уравнений и приведение их к
виду, удобному для моделирования.
2. Масштабирование исходных дифференциальных уравнений, т.е.
операция перехода к машинным уравнениям.
85
3. Выбор оптимального (или близкого к оптимальному) варианта наборной
схемы решения задачи с учетом конструктивных особенностей АВМ и ее
решающих блоков.
4. Набор задачи на АВМ.
5. Проведение статических и динамических проверок по набранной схеме.
6. Пробное решение задачи и уточнение (при необходимости) масштабов и
параметров машинных уравнений.
7. Выполнение программы исследований.
При предварительном анализе исходной системы необходимо найти ответ на
существенный вопрос: «Устойчива эта система или нет?». Для систем высокого
порядка вопрос устойчивости может быть решен аналитически или с помощью
критериев устойчивости.
Так как при полунатурном моделировании замкнутая система "PH + система
стабилизации" должна, по определению, всегда быть устойчивой, объект
регулирования, реализуемый на АВМ, может быть и неустойчивым.
Рассмотрим масштабирование линейной системы дифференциальных
уравнений.
При решении на АВМ система линейных дифференциальных уравнений
может быть представлена в виде системы линейных дифференциальных
уравнений первого порядка
-^=Хап1Уп + ^0)«
dt J
Переменные уп физической системы могут меняться в широких пределах, а
напряжения, представляющие эти переменные в АВМ, меняются в пределах от
-U до +U (обычно напряжение U равно 10 или 100 В). Таким образом,
возникает необходимость масштабирования исходной физической системы
уравнений. Масштабы переменных должны быть выбраны такими, чтобы ни одна
переменная уравнений в машинном представлении не выходила за пределы ±U в
процессе решения задачи на АВМ.
Рассмотрим основные принципы масштабирования.
Обозначим через уп машинные переменные, соответствующие физическим
переменным уп. Операция масштабирования осуществляется введением
масштабных множителей, которые определяются следующими соотношениями:
у
У“=7Г-’ у"=Му.Уп’
МУ.
где М„ - масштабные множители.
Уп
86
Учитывая, что ни одна из переменных в исследуемой на АВМ системе не
должна выходить за пределы ±U, величины масштабных множителей можно
оценить следующим образом:
если
|Уптах| |МупУптах
ТО
Выбрав масштабы переменных АВМ, проводят масштабирование линейной
системы дифференциальных уравнений, приведенных выше.
Очевидно, что
dy. _ 1 dy„. f(t)=U0
dt Mv dt ’ n M '
Уп In
Полагая, что масштабы производных равны масштабам функций, а решение
задачи идет в натуральном масштабе времени, получаем машинную систему
уравнений
dy, _ Му _ М.
-^^а.-у. + а17----у7 + ••• + а|п
dt 1171 12 Mv 72 10
У2
= a.
dy2 _
—— = a71-----^y. + a77y7 + --- + a.
dt 21 Mv 2272
Mv ____
—-i-f/t);
Mf,
Mv ____
——f2(t);
Mf 2
*2
Mv n
2 П
My
Mv
J n
dy Mv _ Mv __ _ Mv -------
= — У | +an2 —У2+-” + а„пУп + — fn(t).
dt Mv Mv ML
yl y2 Tn
Новые численные значения принимают и начальные значения:
у„(0)=уп(0)мУп.
Хотя точные величины максимальных значений переменных физической
системы неизвестны перед решением задачи, их можно с какой-то степенью
точности оценить исходя из физической природы исследуемого процесса. В
нашем случае задача облегчается, так как рассматривают PH, о динамических
характеристиках полета которых накоплен большой объем данных.
Для "сглаживания” порядка коэффициентов в машинной системе вводят
отдельные масштабы по производным:
87
Ун “
и
£aDjyn+fn(t)
Введение отдельного масштаба по производным дает следующий результат:
dYi Myi_ Му,_ М Myj_
— = an——у, +ai7——y7+“- + ain—— yn +——£(t),
dt n My/1 *2 My/2 My/n Mf.
i = 1,2,3,...,n.
Начальные значения по функциям по-прежнему определяют, как это указано
выше.
Если заданы и начальные условия по производным
— =ф(,
к dt Л
то машинные значения производных получают следующим образом:
о
=Ф2М,
. dt JB
M-М =ФпМ4п.
ldtje
Рассмотрим численный пример приведения физической системы уравнений к
машинному виду, пригодному для решения на АВМ.
Возьмем упрощенное уравнение, описывающее возмущенное движение PH в
виде
z = aIV,+a2i+Fz; aZ(Z =-25м-с"2; aZ(S =-1,2м-с’2; Fz = 0,15м •с~2;
У=а„+а^ + М,; а^=1,7с'2; а^ =-0,22с”2; М„ =0,05с~2.
Приведем эту систему уравнений к системе уравнений первого порядка в
форме Коши:
z=y,;
У1=a^+a*s+F*;
^=у2;
У2 = а^+а^+0>05-
Известны ожидаемые максимальные значения переменных:
z = ±1000m; z = ±50m/c; z = ±100m/c2;
у/ = ±20 град (±0.349рад); у? = ±50град/с (±0.8726рад/с);
= ±100град/с2(±1.7452рад/с2); 8 = ±20град(±0.349рад).
88
Начальные условия:
z(0) = -2м / с; z(0) = 1 Ом;
у>(0) = 1.5град (0.0262рад); у<(0) = 1град (0.01745рад).
При использовании АВМ, в которой диапазон переменных равен ±100 В,
выбираем масштабные множители из условий:
М <-^- = 0.1В/м; М.< —= 2В/м с*';
2 1000 2 50
М.2 —= 1В/мс-2; М„<;-^- = 286.5В/рад;
г 100 ’ v 0349
М„ < 100 =114.6В/рад с~'; <±^- = 57.3В/рад’2;
* 0.8726 v 1.7452 F
М. < = 286.5В/рад.
s 0.349
С учетом масштабов получаем машинные уравнения в виде
Z = ^2- fy,dt =0.02 |y,dt;
о о
ММ- -
у, =-25--^-^-1.2^5 + 0.15Мг =-0.08726^-0.00418855 +0.015;
м„ Мг
о о
М- М . _
у2 =1.7—-1/7-0.22—^8 + 0.05М„ =0.34/7-0.044(5 +2.865.
М5
При начальных условиях:
у1(0) = Мгу1(0) = -4;
У2(0) = М^.у2(0) = 3.0025;
z(0) = Mz • z(0) = 1;
y7(0) = MF-y<(0) = 4.999.
Изложенные выше принципы масштабирования применяют и при решении
на АВМ системы нелинейных дифференциальных уравнений.
В случае, если коэффициенты физической системы уравнений являются
функциями времени, при масштабировании надо исходить из их максимальных
значений.
Приведенные уравнения пригодны для набора на АВМ. При выборе
структуры наборной схемы желательно выполнять следующие основные
требования:
89
1. Наборная схема должна состоять из минимального числа операционных
усилителей (в целях уменьшения суммарной погрешности дрейфа нулей
усилителей).
2. Следует избегать операции дифференцирования.
3. Наборная схема должна быть гибкой в эксплуатации.
Экспериментальная отработка математического
обеспечения СУ на основе полунатурного моделирования
Задачи, решаемые при полунатурном моделировании
Алгоритмы такой сложной системы, как система управления PH, обычно
разрабатываются на этапе, когда ее приборный состав, да и сама ракета находятся
только на начальной стадии проектирования. И если аппаратура СУ в конце
концов появляется на испытательных стендах и может участвовать в отработке
проектируемой системы, то ракета как объект совместных исследований с СУ
появляется только на заключительном этапе - этапе летно-конструкторских
испытаний.
Наиболее сложной среди математических моделей звеньев системы является
математическая модель PH, движение которой с учетом колебаний топлива в
баках и упругих колебаний корпуса описывается нелинейными
дифференциальными уравнениями высокого порядка.
Такова действительность, и в связи с этой ситуацией при проектировании и
отработке алгоритмов СУ применяют метод полунатурного моделирования.
Сущность метода полунатурного моделирования заключается в том, что в
моделирующий комплекс наряду с математическими моделями некоторых
звеньев системы включаются элементы аппаратуры СУ. При этом на реальную
систему с помощью специальных стендов действуют внешние возмущения
(например, нагрузки на исполнительные органы PH), которые существуют в
полете.
Применение полунатурного моделирования позволяет существенно
сократить удельный вес и объем ЛКИ PH, значительно снизить степень риска при
ЛКИ, а также сократить общее время и стоимость проектирования СУ.
Полунатурное моделирование позволяет решать следующие основные задачи
исследований:
90
- динамики и синтеза СУ PH, а также оптимизации параметров
исследуемой системы;
- СУ в различных эксплуатационных режимах полета;
- критических и аварийных режимов работы СУ с имитацией отказов
различной бортовой аппаратуры.
В данном разделе рассмотрены основные типы стендов полунатурного
моделирования, использовавшиеся по мере развития ракетной техники для
отработки систем управления PH.
Структурная схема и приборный состав стенда моделирования
Назначение основных аппаратных составляющих аналогового СМ,
показанных на рис. 2.23, следующее:
1. Аналоговая вычислительная машина (АВМ) используется для набора
динамической схемы PH и реализации коэффициентов ее
дифференциальных уравнений.
2. Аналого-цифровой комплекс (АЦК) предназначен для отработки
алгоритмов системы управления и выбора значений параметров ПЗ. В
состав АЦК входят универсальная электронная вычислительная машина
и преобразователи ЦАП и АЦП (стойка УП-6).
Рисунок 2.23 - Структурная схема стенда моделирования
3. Согласующее устройство рулевых машин (СУРМ) служит для
согласования электрических и временных характеристик, управляющих
сигналов, выдаваемых БЦВМ на РМ.
91
4. Согласующее устройство (СУ) СУРМ (используется только в схеме СМ)
является каналом связи, позволяющим преобразовывать управляющие
сигналы на РМ, поступающие от универсальной ЭВМ в формате
штатной БЦВМ.
5. Пульт управления стендом моделирования (ПУСМ) предназначен для
управления всеми составляющими элементами СМ, организации
дискретизации по времени, приема и пересылки параметров и команд.
6. Нагрузочный стенд (НС) предназначен для обеспечения
работоспособности установленных на них РМ и реализации нагрузок,
действующих на управляющие органы PH в полете.
7. Станция гидропитания (СГП) предназначена для подачи рабочей
жидкости на вход РМ, гидропитание которых на борту PH
осуществляется централизованно (от БИМ или от насоса ТНА).
8. Гидроаккумулятор (ГА) обеспечивает сглаживание пульсаций давления
рабочей жидкости РМ, подаваемой на ее вход.
По мере развития отечественной электронной техники на стендах
моделирования использовали все более современные АВМ: ИПТ-5, МПТ-9,
"Электрон” (50-60-е годы), МН-18 (70-80-е годы).
При этом в качестве универсальных ЭВМ применяли и более
производительные, которые могут быть представлены следующим рядом:
"Радон”, М-220, М-222 (70-е годы), М-6000, СМ-2, СМ-4 (80-90-е годы).
Для иллюстрации на рис. 2.24 показана часть СМ (ПУСМ и одна стойка АВМ
МН-18), предназначенного для полунатурного моделирования системы
управления одной из PH разработки ГКБ "Южное".
Рисунок 2.24 - ПУ СМ и стойка АВМ МН-18
92
Основные технические характеристики АЦК
АВМ и ЭВМ вместе с технологической аппаратурой образуют аналого-
цифровой вычислительный комплекс (АЦК). В 90-е годы широкое
распространение получил АЦК, построенный на базе АВМ АВК-32 и
ЭВМ СМ-2М. Ниже приведены основные технические характеристики данного
АЦК.
1. Диапазон изменения аналоговых величин - 2. Максимальный порядок дифференциальных уравнений, ±10 В
решаемых одной стойкой АВК-32 20
3. Максимальное время интегрирования - 1000 с
4. Минимальное время интегрирования - 5. Максимальная приведенная погрешность инвертирования 10 мкс
напряжения постоянного тока - ±0,02%
6. Максимальная погрешность установки постоянных
коэффициентов с использованием подпрограммы ввода и контроля на машине СМ-2М - ±0,03%
7. Предусмотренное аналого-цифровое преобразование
методом непосредственного считывания входного напряжения Диапазон преобразуемых величин - ±10,24В
8. Максимальная погрешность преобразования - ±0,05%
9. Максимальное время преобразования не превышает - 10. Количество каналов при работе на одной стойке АВК-32: 32 мкс
-АЦП -ЦАП 60
Возможное увеличение числа каналов в четыре раза при - увеличении количества стоек АВК-32 20
11. Количество разрядов - 12. Возможно изменение динамической схемы с помощью 14
блоков автоматической коммутации в реальном времени и
вне его
13. Переменные коэффициенты ДС, которые реализуются с
помощью блока БКЭ-М, позволяющего воспроизвести 16 коэффициентов. Количество точек аппроксимации каждого коэффициента - 512
14. Стыковка АВК-32 с ЭВМ СМ-2М осуществляемая через
канал связи типа 2К.
15. Программы пользователя, которые пишутся на мнемокоде
с использованием разработанной операционной системы.
93
Нагрузочные стенды
Как указывалось ранее, НС реализуют нагрузки, действующие на
управляющие органы PH в полете. На НС эти нагрузки реализуются в виде сил и
моментов, приложенных к выходящему валу РМ.
К основным нагрузкам относятся:
— момент трения;
- момент асимметрии;
- инерционные нагрузки;
- позиционный (шарнирный момент).
На НС эти нагрузки обычно реализуются на одном валу (рис. 2.25), жестко
связанном с выходным валом РМ.
На рис. 2.31 приняты следующие обозначения: М1р - момент трения; I -
момент инерции; Ма - момент асимметрии; Мш - шарнирный момент.
Мя
Рисунок 2.25 - Схема нагрузочного стенда
Рассмотрим реализацию отдельных нагрузок на НС.
1. Момент трения
Момент трения обусловлен трением в узлах сочленения подвижных частей в
цепи "вал РМ - управляющий орган".
На НС момент трения реализуется тормозными колодками (рис. 2.26).
Рисунок 2.26 - Схема моделирования момента трения
94
На рис. 2.26 приняты следующие обозначения: ВНС - вал НС; ТБ -
тормозной барабан (жестко скреплен с валом РМ); ТК - тормозные колодки.
Тормозные колодки создают момент трения
Мто
М =2P-f -Re, Р =--------
Я. Ч> Б’ 2fTpRj
где Р - сила прижатия тормозной колодки; - коэффициент трения; RB -
радиус тормозного барабана; GB - вес ТБ (используется при расчете
инерционных нагрузок).
Заданный момент трения обеспечивается приложением силы Р,
вычисленной по приведенной формуле, что может быть выполнено различными
путями: например, с помощью пружин сжатия пневмоцилиндров или другими
способами.
2. Момент асимметрии
Момент асимметрии при полете PH может создаваться постоянной силой
благодаря асимметрии тяги управляющего двигателя (несовпадения оси сопла
двигателя и вектора тяги) или несовпадения координат центра масс
управляющего двигателя и координат его узла качания в поперечном к
продольной оси PH направлении.
Момент асимметрии на НС реализуется с помощью груза весом Ga,
устанавливаемого на рычаге длиной 1ра (рис. 2.27) на расстоянии 1а от оси вала
РМ.
Вал НС
Ga
Рисунок 2.27 - Схема моделирования момента асимметрии
Вес груза Ga определяют из равенства
Изменение момента асимметрии на НС достигается изменением веса груза
Ga либо изменением места его установки на рычаге крепления (изменением
плеча 1а).
95
3. Инерционные нагрузки
Инерционные нагрузки обусловлены моментами инерции подвижных частей
в цепи "вал РМ - управляющий орган".
Схема реализации на НС инерционных нагрузок показана на рис. 2.28.
Рисунок 2.28 - Схема моделирования инерционных нагрузок
Грузы весом G1 (i = 1,2,3,..., п), установленные на расстоянии /г. от оси вала
РМ, используют для подбора заданного суммарного момента инерции
подвижных частей в цепи "вал РМ - управляющий орган".
С помощью грузов весом Gj реализуется момент инерции
1 n G I2
1„ =- (Ёв,1?+-Вй),
gw 3
где g - ускорение земного тяготения; Gpu - вес рычага, на котором крепят грузы
Gp 1 - длина рычага, на котором крепят грузы Gj.
Суммарный момент инерции всех грузов на валу НС можно вычислить по
приближенной формуле
g 2 3
где GB - вес тормозного барабана; G^ - вес рычага, на котором крепят груз Ga;
1 - длина рычага, на котором крепят груз Ga.
4. Шарнирный момент
Шарнирный момент Мш является позиционным моментом, т.е. зависит от
ут ла поворота 5 управляющего органа:
мш=кш-г>,
где Кш - коэффициент шарнирного момента.
Шарнирный момент в полете возникает при отклонении управляющего
органа при действии на него аэродинамических сил или сил, обусловленных
96
упругими свойствами подводящих к управляющему органу элементов
(трубопроводов, шлангов и т. д.).
Шарнирный момент на НС реализуется с помощью пластинчатой пружины
(рис. 2.29) переменной ширины, жестко соединенной с валом НС.
Рис. 2.29. Схема моделирования шарнирного момента
Если свободный конец пружины закрепить в сечении А - А, то при повороте
вала НС на угол 8 возникает упругий момент, пропорциональный этому углу.
Величина упругого момента зависит от жесткости части 1п пружины (эта часть
пружины реализует коэффициент Кш ).
Изменение жесткости пружины осуществляется путем изменения длины 1п
части пружины с помощью зажимного устройства 1. Для примера на рис. 2.30
изображен график тарировки пружины на СМ, на котором показана зависимость
реализуемого коэффициента шарнирного момента от длины части пружины 1п.
кгсм
Рисунок 2.30 - Зависимость реализуемого коэффициента шарнирного момента от
длины пружины
Общий вид нагрузочного стенда для одного из рулевых приводов PH
"Энергия” изображен на рис. 2.31, а на рис. 2.32 - комплект нагрузочных стендов
для рулевых приводов одной из PH разработки ГКБ "Южное".
97
Особенности отработки математического
обеспечения СУ на АЦК
Особенностью математического обеспечения аналого-цифрового комплекса
является то, что в своем составе оно должно содержать как программы штатных
алгоритмов СУ, так и сервисные программы, обеспечивающие доступ оператора
АЦК для коррекции любого параметра алгоритмов стабилизации, а также
интерфейс аналоговой и цифровой частей АЦК.
Как указывалось ранее, динамика PH описывается системой линейных
дифференциальных уравнений (СЛДУ) с переменными во времени
коэффициентами.
Для исследования и определения запасов устойчивости в любой точке
траектории PH необходимо интегрировать СЛДУ с постоянными
коэффициентами. Для этого исследования проводят при "замороженных"
коэффициентах СЛДУ и соответствующей этой "замороженной секунде" фазе
алгоритмов БЦВМ.
Рисунок 2.31 - Общий вид нагрузочного стенда для рулевого
привода PH "Энергия"
98
Рисунок 2.32 - Комплект нагрузочных стендов для рулевых приводов одной из
PH разработки ГКБ "Южное"
Такое допущение можно считать оправданным, так как скорость протекания
переходных процессов стабилизации намного выше, чем скорость изменения
коэффициентов. Значит, сервисная часть программы должна давать возможность
перестраивать программу из полетного режима движения PH по траектории в
режим определения областей устойчивости на "замороженной секунде" и
наоборот.
Алгоритмы системы стабилизации реализуются в виде программы БЦВМ и
решаются с тактом То. Входными величинами являются результаты
интегрирования на АВМ углового и бокового движения PH и подаваемые в ЭВМ
через аналого-цифровой преобразователь в дискретные моменты времени
kTo(k = O,l,2...), а выходными величинами - командные сигналы, подаваемые
через цифро-аналоговый преобразователь на исполнительные органы СУ. При
этом необходимо имитировать квантование по уровню входных и выходных
величин, соответствующее реальной дискретности датчиков приборов,
установленных на PH.
Например, пусть уровень квантования в угловом датчике равен Ду/. Тогда
значение угла у/*, снимаемого с датчика:
I Av7 J
Операция Е{ } означает определение ближайшего целого числа.
Проведя аналогичное преобразование над управляющим сигналом, можем
получить имитацию эффекта квантования выходного сигнала БЦВМ.
99
Кроме того, необходимо учесть, что в целях оптимизации по
быстродействию БЦВМ чаще всего является машиной с фиксированной запятой
и все результаты вычислений не должны превосходить единицу по модулю. В
противном случае происходит переполнение разрядной сетки БЦВМ. При этом
единица переполнения обычно пропадает, и на сумматоре остается дробная часть
результата вычислений.
Для исследования таких эффектов необходимо моделировать алгоритмы,
реализованные в БЦВМ. Моделирование процессов стабилизации проводится,
как правило, на ЭВМ общего назначения (компьютерах), которые представляют
собой машины с плавающей запятой и с существенно большей разрядностью, чем
БЦВМ.
Поэтому исходные данные для алгоритмов (константы) должны быть
округлены в соответствии с разрядностью БЦВМ. Результаты операций, при
которых образуются числа с большим числом разрядов, чем исходные (операции
умножения, деления, сдвига вправо), должны быть также округлены. Кроме того,
после каждой операции, которая может вызвать переполнение БЦВМ,
необходимо проверить, не стал ли модуль результата больше единицы, и если
стал, то увеличить масштаб представления переменных. Чрезмерное увеличение
масштаба может привести к потере точности вычислений.
Эти дополнения усложняют программирование алгоритмов СУ, но зато дают
возможность исследовать реализацию алгоритмов БЦВМ на ЦВМ общего
назначения.
Кроме того, в состав математического обеспечения АЦК включаются
программные модули, обеспечивающие расчет частотных характеристик
реальных звеньев, входящих в состав аппаратуры системы управления. К таким
звеньям относятся, например, датчики угла и угловой скорости с согласующими
устройствами, сервопривод с обратной связью, RLC-фильтры различного
назначения.
Программные модули определения амплитудно-фазочастотных
характеристик базируются, как правило, на применении математического
аппарата преобразования Фурье или быстрого преобразования Фурье, которые
позволяют определять как АФЧХ линейных звеньев, так и эквивалентные АФЧХ
для звеньев, имеющих в своем составе нелинейные элементы. Эти
характеристики необходимы для частотного анализа на начальном этапе
проектирования.
АЦК обеспечивает также снятие областей устойчивости объекта управления
на ’’замороженных” секундах и моделирование движения ракеты в соответствии с
заданной траекторией.
100
Цифровое моделирование как современный способ отработки
математического обеспечения СУ
В настоящее время основным способом отработки МО является цифровое
моделирование, что обусловлено стремительным развитием вычислительной
техники и средств разработки программного обеспечения. Благодаря
использованию современных компьютеров появилась возможность создания
достаточно точной модели любого физического процесса, при этом степень
достоверности модели ограничивается только производительностью
вычислительной техники.
Собственно цифровое моделирование включает в свой состав следующие этапы:
- определение задач моделирования по результатам анализа ТЗ и его
приложения - ИД;
- разработка исследовательского программного обеспечения (ИПО);
- проведение исследований (моделирование).
Анализ ТЗ и постановка задачи моделирования
На данном этапе проводят анализ требований ТЗ на СУ в целом,
структурирование требований по подсистемам и выбирают внешний облик
разрабатываемой системы. Исходя из имеющихся средств (характеристики
объекта управления, тип навигационной системы, вычислительные возможности
БЦВМ и др.) и требований ТЗ синтезируются законы управления. Проводят
эмпирический анализ реализуемости предлагаемых подходов на основе
существующих аналогов или существенно упрощенных математических моделей.
Данная фаза является определяющей для всего дальнейшего функционирования
как ИПО, так и ПМО СУ в целом. Впоследствии по результатам моделирования
некоторые решения могут быть скорректированы или заменены на более
оптимальные.
Следующим шагом является реализация синтезированных законов
управления в виде формульных схем моделей алгоритмов СУ и разработка
алгоритмов для стенда моделирования. При этом обязательно осуществляется
структурирование алгоритмов по подсистемам в соответствии с требованиями
конкретных отраслевых стандартов.
После разработки формульных схем необходимо разработать архитектуру
ИПО. Это осуществляется посредством разработки ТЗ на ИПО, представляющего
собой полную спецификацию требований к ПО.
Результатом проделанной работы является набор документов, описывающий
в полном объеме как модели алгоритмов СУ и стенда моделирования, так и
порядок их взаимодействия. Примерный набор включает в свой состав как
минимум следующие документы:
- анализ основных законов управления;
101
математическая модель объекта управления и приборов СУ;
математическая модель алгоритмов СУ;
ТЗ на ИПО.
Разработка ИПО
Одной из важнейших задач, решаемых при цифровом моделировании,
является процесс создания ИПО. Основное назначение ИПО - моделирование
совместной работы модели алгоритмов СУ и модели ОУ в целях подтверждения
правильности выбранных подходов и законов управления, оценки методических
и инструментальных погрешностей СУ, а также проверка соответствия
разработанных алгоритмов СУ требованиям ТЗ.
ИПО включает в свой состав:
- модель алгоритмов СУ;
- модель стенда моделирования.
ИПО разрабатывают на основании и в строгом соответствии с документами,
приведенными в предыдущем разделе. Разработку ИПО можно разделить на
следующие основные стадии:
- анализ ТЗ на ИПО;
- разработка программных модулей;
- сборка ПМ в рамках подсистем;
— сборка ИПО как системы в целом;
- тестирование ИПО (верификация и валидация);
- документирование.
На рис. 2.33 показана модель разработки ИПО [28].
/^Спецификаций4^
Ч^требований^^к
Тест-план
валидации
Тест-план
системного
тестирования
Тест-план
интеграционного^
тестирования -i
Разработка ПМ
и автономное
тестирование
Программнь1Й
Валидация ИПОэ
Системное"
t тестирование
Интеграционное
тестирование./
Рисунок 2.33 — Модель разработки ИПО
Остановимся на каждой стадии подробнее. В данном случае имеет смысл
начать с тестирования ИПО, поскольку, как видно из рис.2.39, верификация и
валидация охватывают полный жизненный цикл ПО - они начинаются на этапе
анализа требований и завершаются проверкой программного кода на этапе
готового ПО.
102
Тестирование ИПО (верификация и валидация).
Общие определения
Верификацией и валидацией называют процессы тестирования и анализа, в
ходе которых проверяют соответствие ПО своей спецификации и требованиям
ТЗ. Верификация и валидация не одно и то же, хотя их легко перепутать.
Приведем краткие определения этих понятий.
Верификация - поэтапная проверка выходных продуктов каждой фазы
жизненного цикла ПО на соответствие требованиям, содержащимся в планах
тестирования. Верификация должна отвечать на вопрос: «Правильно ли создана
система?» и выполняется разработчиком ПО. От того, насколько качественно
будет проведено тестирование, зависит способность ПО выполнять возложенные
на него функции. Поэтому имеет смысл начать планирование верификации на
возможно более ранней стадии разработки.
Валидация - поэтапная проверка выходных продуктов каждой фазы
жизненного цикла ПО на соответствие требованиям, содержащимся в планах
тестирования. Верификация должна отвечать на вопрос: «Правильно ли работает
система?». На этапе валидации ПМО проводят моделирование работы системы в
целом для подтверждения выполнения требований ТЗ в системе. Валидация
эквивалентна сквозной верификации.
В процессах верификации и валидации используют две основные методики:
- инспектирование ПО;
- тестирование ПО.
Инспектирование - это просмотр и проверка программ для обнаружения в
них ошибок, при этом не анализируют общие проблемы ПМО. Под такими
ошибками понимают несоответствие формульной схеме, несоответствие кода
организационным проектным или семантическим стандартам. Инспектирование
программ не требует их исполнения, поэтому данный метод используют до
завершения полной реализации ПО. Инспектирование - это статический метод
верификации. К методам инспектирования относятся:
- инспектирование программ;
- автоматический анализ исходного кода;
- формальная верификация.
Однако статическими методами невозможно проверить правильность
функционирования системы. Поэтому для оценки соответствия системы
требованиям ТЗ необходимо применять тестирование
Тестирование - запуск исполняемого кода с тестовыми данными и
исследование выходных данных ИМ для проверки правильности его
функционирования. Тестирование ПМ - это динамический метод верификации и
103
аттестации, поскольку его применяют к исполняемой системе. В зависимости от
стадии разработки различают тестирование:
- автономное;
- интеграционное;
- системное.
При тестировании на каждой стадии используют те или иные методы
тестирования. Сейчас нашли широкое применение следующие методы
тестирования:
- тестирование дефектов;
- тестирование с помощью контрольного примера;
- контрольный расчет;
- статистическое тестирование.
Тестирование дефектов проводят для обнаружения несоответствий между
программой и ее спецификацией, которые обусловлены ошибками или дефектами
в программах. Такие тесты разрабатывают для выявления ошибок в системе, а не
имитации ее работы.
Тестирование с помощью контрольного примера имеет противоположное
значение. Его проводят для проверки правильности функционирования системы
на этапе автономного и интеграционного тестирования. Контрольный пример
представляет собой заранее рассчитанный набор входной и выходной
информации для разового расчета.
Контрольный расчет проводят для системного анализа правильности
функционирования системы на этапах системного тестирования и проверки
выполнения требований ТЗ на систему и ПО.
Статистическое тестирование проводят для имитации реальной работы
системы с реальными входными данными. Надежность работы системы
оценивают по количеству сбоев, отмеченных в работе системы. Под сбоями
понимают также нарушение требований ТЗ на систему и ПО.
На рис. 2.34 показано место инспектирования и тестирования в процессе
разработки ПО. Стрелки указывают на те этапы процесса разработки, где можно
применять данные методы. Согласно этой схеме инспектирование можно
выполнять на всех этапах разработки ПО, а тестирование - только тогда, когда
создан исполняемый модуль.
Таким образом, главной целью верификации и валидации является
подтверждение того, что система соответствует своему назначению. Далее при
рассмотрении отдельных стадий разработки ПО покажем конкретное место
верификации и валидации на каждой фазе жизненного цикла.
104
| Сборка ПМО как
£ системы
---------
Спецификация |
требований |
________i_______
—J
j Исполняемый -J
модуль |
I.. J
Рисунок 2.34 - Тестирование разрабатываемого ПО
Анализ ТЗ на ИПО
На данном этапе проводят анализ требований ТЗ на ИПО, разрабатывают
архитектуру ИПО на всех уровнях, выбирают язык программирования и
соответствующие ему методы и средства разработки ПО.
При выборе языка программирования следует обратить внимание на такие
аспекты:
1. Язык программирования должен быть широко распространен в данной
отрасли. Этим обеспечивается принципиальная реализуемость
средствами языка всех особенностей математического обеспечения СУ.
Это должен быть язык программирования высокого уровня (например,
C/C++ или Ада). * Допускается использование других языков
программирования при обосновании необходимости их применения.
2. Выбор технологии и стиля программирования определяется
возможностями языка программирования, а также требованиями ТЗ на
ИПО.
3. Язык программирования должен обеспечивать простоту чтения и
изменения кода. В качестве «языка программирования» могут быть
использованы современные системы моделирования, такие, как MatLab
или MatrixX. Особенности применения таких систем будут описаны
ниже.
105
Основным требованием к архитектуре ИЛО является соблюдение принципа
модульности. Действительно, в связи с ростом сложности моделей
представляется удобным разрабатывать ИПО не в одиночку, а коллективом
разработчиков, каждый из которых разрабатывает отдельную подсистему, блок
или алгоритм. Такой подход широко используют как в отечественной, так и
мировой практике создания ПО. В этом случае создание ПО представляет собой
как бы постройку дома из отдельных блоков. Каждый блок, представляющий
собой систему, подсистему или алгоритм, проходит полный цикл верификации.
При этом модификация программного продукта происходит с минимальными
затратами.
Однако при таком подходе важнейшее значение для корректного
функционирования ИПО имеет вопрос согласования интерфейса как между
отдельными ПМ, так и в рамках всего программного продукта как системы. Для
решения этого вопроса разработчики должны составить соглашение об
интерфейсе. Данный документ учитывает особенности архитектуры ИПО и
является обязательным к использованию всеми разработчиками.
Под верификацией на данном этапе понимают анализ требований к
реализуемости в рамках выбранной технологии программирования
(инспектирование).
После окончательного согласования всех технологических вопросов должна
быть сформирована группа разработчиков и составлен план-график разработки и
сдачи ИПО.
Разработка программных модулей
Данный этап включает в свой состав следующие фазы:
- анализ формульной схемы;
- кодирование программного модуля;
- автономное тестирование ПМ.
При анализе формульной схемы принимают решение об использовании тех
или иных программных средств в рамках принятой технологии, обеспечивающих
оптимальную реализуемость исходного математического обеспечения.
Кодирование ПМ осуществляют строго в соответствии с ТЗ на ИПО. После
его завершения рекомендуется провести инспектирование исходного кода - это
значительно сэкономит время в процессе дальнейшей отладки.
Процесс автономного тестирования представляет собой сравнение
(автоматически или вручную) результатов работы ПМ и результатов, полученных
на контрольном примере по одним и тем же исходным данным. Целью
тестирования является выявление в программном модуле ошибок. В процессе
тестирования должны быть проверены все логические ветви алгоритма. В общем
случае одного контрольного примера может быть недостаточно. Количество
контрольных примеров определяется сложностью логики, заложенной в ПМ.
106
Тестирование может осуществляться с использованием различных подходов:
- аттестации;
- тестирования дефектов.
В процессе аттестации проверяется соответствие ПМ своей спецификации,
т.е. система должна корректно работать со всеми заданными тестовыми данными.
При тестировании дефектов запускается такой тест, который вызывает
некорректную работу программы и, следовательно, выявляет дефект. Выбор того
или иного метода тестирования основывается на требованиях ТЗ.
Как уже отмечалось, обычно ИПО создается коллективом разработчиков,
поэтому в такой ситуации на первый план выходит вопрос документирования.
Каждый ПМ должен включать в свой поставочный комплект следующие файлы:
- файл с текстом программы и ПО для тестирования;
- файл описания переменных;
- файл данных;
- файл описания ПМ, включающий в свой состав:
- перечень входных данных,
— перечень выходных данных,
~ перечень исходных данных,
- описание алгоритма,
- описание контрольного примера и ПО для тестирования.
Выдача протестированного ПМ должна осуществляться строго в срок,
оговоренный планом-графиком, так как это существенно влияет на разработку
всего ИПО.
Сборка ПМ в рамках подсистем
Сборку ПМ в рамках подсистемы проводят в соответствии с такими
регламентирующими документами, как ТЗ на ИПО, соглашение об интерфейсе и
описание взаимодействия ПМ в рамках подсистемы. Инспектирование исходного
кода сборки является такой же необходимой операцией, как и при автономном
тестировании.
Верификация собранной подсистемы осуществляют путем интеграционного
тестирования. На данном этапе считается, что ПМ протестированы и
функционируют правильно, поэтому основным назначением данного типа
верификации является выявление ошибок системного характера. Контрольные
примеры подбирают таким образом, чтобы продемонстрировать корректность
функционирования подсистемы для всех возможных режимов.
В целях обеспечения формализации процесса верификации составляют
специальный документ «Тест-план интеграционного тестирования» для каждой
подсистемы. Такой документ в общем случае содержит следующую
информацию:
107
- технические требования к подсистеме;
- описание и конфигурация ПО стенда тестирования;
- структура входной и выходной информации подсистемы;
- детальное описание тестов (контрольных примеров).
Выдача протестированной подсистемы должна осзчцествляться строго в срок,
оговоренный планом-графиком, так как это существенно влияет на разработку
всего ИПО.
Сборка ИПО как системы в целом
Сборку ИПО проводят в соответствии с такими регламентирующими
документами, как ТЗ на ИПО, соглашение об интерфейсе и описание
взаимодействия подсистем в рамках системы. Инспектирование исходного кода
сборки является такой же необходимой операцией, как и при автономном и
интеграционном тестировании.
Верификацию собранной системы осуществляют путем системного
тестирования. На данном этапе считается, что подсистемы протестированы и
функционируют правильно, поэтому основным назначением данного типа
верификации является выявление ошибок общесистемного характера.
Контрольные примеры подбирают таким образом, чтобы продемонстрировать
корректность функционирования системы для всех возможных режимов.
Для обеспечения формализации процессов верификации и валидации
составляют специальный документ «Тест-план системного тестирования». Такой
документ в общем случае содержит следующую информацию:
- технические требования к системе в целом;
- описание и конфигурация ПО стенда тестирования;
- структура входной и выходной информации системы;
- детальное описание тестов (контрольных примеров).
Сдача протестированной системы должна осуществляться строго в срок,
оговоренный планом-графиком, так как это существенно влияет на разработку в
целом.
Документирование
По завершении процесса разработки ИПО должен быть выпущен документ,
содержащий всю информацию, необходимую для его использования. В общем
случае такой документ включает в свой состав:
- технические требования к системе в целом;
- описание ИПО как системы, включая перечень и описание ПМ и
подсистем;
108
— описание и конфигурация ПО стенда моделирования;
- структура входной и выходной информации системы;
- детальное описание тестов (контрольных примеров) на всех этапах.
Примерная структура ИПО
Разработанное и протестированное ИПО используют в дальнейшем для
моделирования физических процессов и оценки технических характеристик
разработанного математического обеспечения. В качестве примера на рис. 2.35
показана структура ИПО, используемого для моделирования совместной работы
алгоритмов СУ PH.
Структурно ИПО можно разделить на два блока:
- модель алгоритмов СУ;
- модель стенда моделирования.
Модель алгоритмов СУ включает в свой состав:
- модель алгоритмов навигации;
- модель алгоритмов наведения;
- модель алгоритмов стабилизации;
— модель алгоритмов управления полетом в части обеспечения
диспетчерских функций и формирования меток и команд.
Модель стенда моделирования состоит из следующих основных частей:
- модель ОУ;
- модель окружающей среды;
- блоки обработки результатов.
В состав модели PH входят следующие компоненты, описывающие
состояние и характеристики PH на всех этапах полета:
- модуль конфигурации PH;
- модуль массово-инерционных и центровочных характеристик PH;
- модуль расчета аэродинамических сил и моментов;
- модуль расчета тяги и секундного расхода двигателей PH;
- модель приводов и исполнительных органов;
- модель навигационной системы;
- модель возмущений.
109
ИД J-------
—...—.....►
Углы
ориентации PH
..........-> ивк
Вектор
кажущегося
ускорения^
X
=Гз
2с
; осев
Н mi
Модель СУ -,
Betep
5 Начальные
условия
Потенциал
.
Команды
конфигурация. Й.Н1
АэкюдияаМйчёскиё
: характеристики^:
Силы; И мрменты
| тяга ДУ..Силы и-моменты
|. .Возму1цения.;6т разделения |
Силы и моменты
...-"Т ""т'"
Окружающая среда
I
Возмущенная a- • :осоеоа
ит->гР.ар’’,пая атмосфера
Массойо-ичерииснные
характеристики
£ё?
S.Hj;
О.>й
O.&j!
Рисунок 2.35 - Структурная схема ИПО моделирования совместной работы алгоритмов
наведения, навигации и стабилизации
Модель окружающей среды включает в себя следующие программные
модули:
- ветра;
- стандартной атмосферы;
- возмущенной атмосферы;
— гравитации.
Кроме того, в состав ПО стенда моделирования входят блоки:
- преобразования кинематических параметров;
- интегрирования системы дифференциальных уравнений;
- генерации возмущений;
— представления результатов тестирования.
Цифровое моделирование
Задачи, решаемые при цифровом моделировании, в принципе эквивалентны
валидации ИПО, но только применительно к математическому обеспечению СУ.
В общем случае их можно сформулировать следующим образом:
- проверка реализуемости синтезированных законов управления для
конкретной аппаратуры СУ (например, БЦВМ, ИНС/БИНС и др.);
- проверка соответствия характеристик СУ на базе разработанного
математического обеспечения требованиям ТЗ на СУ, в том числе:
- оценка точностных характеристик СУ;
- оценка методической и инструментальной погрешностей СУ;
— проверка правильности функционирования алгоритмического
обеспечения СУ в условиях действия различного рода возмущений;
- проверка правильности функционирования алгоритмического
обеспечения СУ в аварийных ситуациях;
- для отработки новых решений при модификации МО СУ.
На этапе цифрового моделирования разработчику необходимо решить такие
основные вопросы:
- планирование экспериментов;
- организация статистического моделирования;
- выбор численных методов интегрирования дифференциальных
уравнений математических моделей;
- способы обработки и отображения результатов моделирования;
- выбор программных средств моделирования и др.
111
Методы планирования экспериментов
Планирование эксперимента - это комплексная процедура выбора числа
опытов и условий их проведения, необходимых и достаточных для решения
поставленной задачи с требуемой точностью.
Основная задача планирования экспериментов заключается в получении всей
необходимой информации об объекте моделирования при минимальных или
ограниченных затратах машинных ресурсов на реализацию процесса
моделирования. Эту задачу решают на основе теории планирования
экспериментов [14].
Математический аппарат теории планирования экспериментов включает в
себя теорию вероятности, математическую статистику, а также некоторые
разделы прикладной математики, связанные с численными методами и
математическим программированием. Мощным импульсом теории и практики
планирования эксперимента явились успехи вычислительной техники и
появление автоматизированных систем обработки результатов эксперимента.
Если целью эксперимента является изучение влияния переменной х на
переменную у, то х называется фактором, а у - реакцией. Каждый фактор в
процессе эксперимента может принимать различные значения, которые называют
уровнями.
Факторы могут быть управляемыми и неуправляемыми, наблюдаемыми и
ненаблюдаемыми, количественными и качественными, детерминированными и
случайными.
При планировании эксперимента обычно одновременно изменяют несколько
факторов. Основными требованиями к такой совокупности факторов являются их
совместность и независимость. Совместность означает, что все комбинации
факторов осуществимы, а независимость соответствует возможности
установления фактора на любом уровне независимо от уровня других.
Эксперимент называется воспроизводимым, если разброс результатов опыта
контролируется и не превышает заранее заданного значения. Объект является
управляемым, если на нем возможен активный эксперимент. Если
экспериментатор не может влиять на ход опыта, находится в роли пассивного
наблюдателя, то речь идет о пассивном эксперименте. Планировать можно
только активный эксперимент [29].
Различают стратегическое и тактическое планирование эксперимента. Цель
методов стратегического планирования экспериментов - получение
максимального объема информации об исследуемой системе в каждом
эксперименте. Другими словами, стратегическое планирование позволяет
ответить на вопрос, при каком сочетании уровней внешних и внутренних
факторов может быть получена наиболее полная и достоверная информация о
поведении системы.
При стратегическом планировании эксперимента должны быть решены две
основные задачи:
1. Идентификация факторов.
112
2. Выбор уровней факторов.
Под идентификацией факторов понимают их ранжирование по степени
влияния на значение наблюдаемой переменной (показателя эффективности).
Уровни факторов выбирают с учетом двух противоречивых требований:
- уровни фактора должны перекрывать весь возможный диапазон его
изменения;
- общее количество уровней по всем факторам не должно приводить к
чрезмерному объему моделирования.
Отыскание компромиссного решения, удовлетворяющего этим требованиям,
и является задачей стратегического планирования эксперимента.
Совокупность методов установления необходимого объема испытаний
относят к тактическому планированию экспериментов.
В общем виде эксперимент представляет собой единство следующих
основных звеньев:
1. Разработки первоначальной идеи или рабочей гипотезы.
2. Подготовки модели эксперимента.
3. Интерпретации результатов эксперимента.
4. Разработки мероприятия по перенесению приобретенного знания и
опыта на весь объект (или другие объекты).
Практически это сводится к осуществлению таких операций:
- определению целей эксперимента с учетом теоретических знаний по этому
вопросу;
- теоретическому обоснованию условий эксперимента, способствующих
наиболее полному и всестороннему проявлению заданных свойств и связей
изучаемого объекта;
- разработке методики эксперимента, представляющей собой совокупность
конкретных способов и приемов исследования в соответствии со спецификой
объекта;
- разработке экспериментальных средств исследования (приборов, установок,
стендов);
- наблюдению и измерению изучаемых характеристик объекта;
- статистической обработке результатов эксперимента, выводу математических
формул, построению диахрамм, графиков, схем;
- анализу экспериментальных результатов, их теоретическому обобщению.
В теории планирования эксперимента одним из основных понятий является
план эксперимента, который представляет собой множество точек х„,
отражающих численные значения факторов и условия проведения опыта. План
эксперимента представляют в виде матрицы
ИЗ
хнх12...х1Г..х1п
_XNlXN2*'*XNj*“XNn _
в которой строки соответствуют номерам опытов i = l,2,...,N, а столбцы -
номерам факторов j = l,2,...,n .
Точки Xij составляют факторное пространство. Область возможных значений
факторов называют областью планирования эксперимента.
Эксперимент, в котором реализуется все возможное сочетание уровней
факторов, называют полным факторным экспериментом.
Для оптимизации плана эксперимента используют симплексный метод
планирования экспериментов. Этот метод требует минимального количества
вычислений и опытов [15; 30].
Поскольку цифровое моделирование представляет собой статистический
эксперимент, то при его проведении необходимо не только получить
достоверный результат, но и обеспечить его «измерение» с заданной точностью.
Точность оценок наблюдаемой переменной характеризуется ее дисперсией.
В общем случае объем испытаний (величина выборки), необходимый для
получения оценок наблюдаемой переменной с заданной точностью, зависит от
следующих факторов:
- вида закона распределения наблюдаемой переменной у, при
статистическом эксперименте являющейся случайной величиной;
— коррелированности между собой элементов выборки;
- наличия и длительности переходного режима функционирования
моделируемой системы.
Если исследователь не обладает перечисленной информацией, то у него
имеется единственный способ повышения точности оценок истинного значения
наблюдаемой переменной - многократное повторение прогонов модели для
каждого сочетания уровней факторов, выбранного на этапе стратегического
планирования эксперимента. Такой подход получил название «формирование
простой случайной выборки» (сокращенно - ПСВ). Другими словами, при
использовании ПСВ каждый «пункт» стратегического плана выполняют
повторно определенное число раз. При таком подходе общее число прогонов
модели, необходимое для достижения цели моделирования, равно произведению
Nc х NT (Nc - число сочетаний уровней факторов по стратегическому плану; NT
- число прогонов модели для каждого сочетания, вычисленное при тактическом
планировании) [30].
Даже при использовании ПСВ до начала испытаний необходимо определить
тот минимальный объем выборки, который обеспечит требуемую точность
результатов.
114
Если случайные значения наблюдаемой переменной не коррелируются и их
распределение не изменяется от прогона к прогону, то выборочное среднее
можно считать нормально распределенным. В этом случае число прогонов NT,
необходимое для того, чтобы истинное среднее наблюдаемой переменной лежало
в интервале у±Ъ с вероятностью (1-а), определяется следующим образом:
где Z - коэффициент доверия, определяемый принятой вероятностью а; Dy -
дисперсия; Ь-допустимая ошибка.
Если требуемое значение дисперсии Dy до начала эксперимента неизвестно,
целесообразно выполнить пробную серию из L прогонов и вычислить на ее
основе выборочную дисперсию, по которой получают предварительную оценку
числа прогонов NT. Затем выполняют оставшиеся NT - L прогонов,
периодически уточняя оценку и число прогонов NT.
Основной недостаток методов планирования, основанных на использовании
простой случайной выборки, - медленная сходимость выборочных средних к
истинным средним с ростом объема выборки NT (пропорционально значению
квадратного корня из NT). Это приводит к необходимости использования
методов уменьшения ошибок, не требующих увеличения NT. Такие методы
называют методами понижения дисперсии. Существует достаточно много
методов понижения дисперсии. Выбор конкретного метода определяется, как
правило, спецификой модели и целями эксперимента [15].
Таким образом, эксперимент, как и любой научный метод исследования,
включает в себя три основные фазы [31]:
- постановка задачи;
- экспериментальная фаза;
- анализ результатов.
Перед началом эксперимента необходимо максимально ясно представлять,
какого рода результаты должны получиться и каким способом этого можно
достичь. Именно с такой целью перед каждым экспериментом необходимо
выпускать документ, регламентирующий проведение эксперимента, — «Тест-план
эксперимента».
В зависимости от цели и сложности эксперимента содержание документа
может существенно изменяться, однако в любом случае в нем должны
присутствовать следующие разделы:
- постановка задачи (цель эксперимента);
- структура входной и выходной информации (информационное
обеспечение);
- методы решения (перечень контрольных примеров);
115
- описание ожидаемых результатов.
Выбор методов исследования в полной мере определяется целью
эксперимента.
Составление такого документа позволит исследователю четко представлять
цель эксперимента и облегчит идентификацию результатов.
Подходы, используемые при цифровом моделировании СУ
Методы решения включают в свой состав два основных подхода:
- контрольный расчет;
- статистическое моделирование.
Принципиальное отличие этих подходов заключается в следующем: при
контрольном расчете анализ результатов проводят на основании одного прогона
ИПО, а в случае статистического моделирования результаты анализируют по
нескольким прогонам ИПО (чем больше, тем лучше) с применением аппарата
математической статистики и теории вероятности.
Как правило, статистическое моделирование используют для оценки
характеристик точности выведения, степени надежности СУ и устойчивости при
воздействии различного рода возмущений.
Организация статистического моделирования на ЦВМ
Метод статистического моделирования называют также методом
статистических испытаний, или методом Монте-Карло.
Только с появлением ЦВМ метод статистических испытаний смог найти
широкое применение, поскольку построение множества искусственных
реализаций случайных процессов - очень трудоемкая работа.
Сущность метода статистического моделирования заключается в
построении некоторого алгоритма, имитирующего поведение изучаемого объекта
с учетом случайных входных воздействий, случайных разбросов параметров
объекта среды и элементов системы управления [16].
В результате статистического моделирования получается серия частных
значений искомых величин или функций, статистическая обработка которых
позволяет получить сведения о процессах в исследуемом объекте. На основе
предельных теорем теории вероятностей (теории Бернулли, Пуассона, Чебышева
и других) можно утверждать, что с увеличением числа испытаний результаты
моделирования приобретают статистическую устойчивость и с достаточной
точностью могут быть приняты в качестве оценок искомых характеристик
процессов функционирования объекта.
Чтобы решить задачи методом Монте-Карло, нужно иметь источник
получения чисел, соответствующих случайным величинам с различными
законами распределения. С помощью случайных чисел можно моделировать
116
результаты испытаний в схеме случайных событий, получать значения
случайных величин с заданным законом распределения, формировать случайные
функции.
Существуют три способа получения случайных чисел [11]:
- аппаратный (физический);
— табличный (файловый);
- алгоритмический (программный), или метод псевдослучайных чисел.
При цифровом моделировании используют алгоритмический способ,
основанный на формировании случайных чисел в ЦВМ с помощью специальных
алгоритмов и реализующих их программ.
На ЦВМ можно получить последовательность случайных величин,
подчиняющихся любым законам распределения. Это возможно на основе
функционального преобразования базовых последовательностей случайных
величин. В качестве базовой обычно рассматривают последовательность
псевдослучайных величин, равномерно распределенных на интервале (0, 1).
Обычно предполагают, что фигурирующие в задаче случайные параметры в
основном подчиняются нормальному закону распределения.
Достоверность и точность результатов статистического моделирования
существенно зависят от количества полученных в результате машинного
эксперимента реализаций функционирования исследуемой системы. Если
длительность моделируемого процесса достаточно большая, а требуемая
точность результатов высокая, т.е. количество реализаций необходимо брать
очень большим, то вычислительная система метода статистических испытаний
становится чрезвычайно громоздкой и возникает вопрос об автоматизации
процесса моделирования.
Для автоматизации процесса моделирования необходимо:
а) после окончания моделирования очередного процесса автоматически по
сгенерированным псевдослучайным числам формировать исходные данные для
моделирования последующего варианта;
б) после окончания моделирования очередного процесса вычислить
статистические характеристики контролируемых параметров;
в) по заданному правилу остановки принять решение о продолжении или
прекращении испытаний.
При выборе методов обработки результатов статистического моделирования
существенную роль играют следующие особенности:
- моделирование позволяет получать большие выборки для качественной
оценки характеристик процесса функционирования системы, при этом
возникает проблема хранения промежуточных результатов. Эту
проблему необходимо решать на основе разработки рекуррентных
алгоритмов обработки, в которых уточнение значений оценок
происходит по их предыдущим значениям и результатам моделирования
очередного процесса;
117
- сложность моделируемой системы обуславливает то, что априорное
суждение о характеристиках процесса ее функционирования, например о
законе распределения выходных параметров, является невозможным.
Поэтому при моделировании систем широко используют оценки
моментов распределения (математическое ожидание, дисперсию,
корреляционный момент и т.д.).
К качеству оценок параметров, получаемых в результате обработки
результатов моделирования, предъявляют следующие требования:
1) несмещенность оценки, т.е. М[х] = х, где х - оценка параметра х;
2) эффективность оценки, т.е. минимальность среднего квадрата ошибки
оценки: тшм£(х-х)2 j;
3) состоятельность оценки, т.е. сходимость по вероятности при N оо к
оцениваемому параметру (где N - количество испытаний):
limP(| x-xl> s) = 0, г >0.
N-ию v 7
При определении объема экспериментов обычно учитывают вид показателя
эффективности. Показателем эффективности может быть вероятность
выполнения той или иной задачи или некоторая скалярная функция параметров,
алгоритма, структуры системы.
Наиболее простым правилом остановки экспериментов является условие
малого (меньше заданного допуска) изменения статистических характеристик
системы (математических ожиданий, дисперсий и др.), вычисляемых после
моделирования очередного варианта.
Численные методы интегрирования, используемые
при цифровом моделировании СУ
При цифровом моделировании разработчик СУ сталкивается с
необходимостью решения задачи Коши для систем обыкновенных
дифференциальных уравнений, в общем случае нелинейных.
Разработано достаточно много численных методов приближенного решения
обыкновенных дифференциальных уравнений:
- метод Адамса;
- метод Эйлера с различными модификациями;
- семейство методов Рунге-Кутта и др.
Эти методы хорошо известны и широко освещены в литературе [17, 18].
Для использования того или иного численного метода при моделировании
СУ на ЦВМ метод должен обладать, с одной стороны, достаточно высокой
118
точностью, а с другой - быть удобно реализуемым на ЦВМ, например, с точки
зрения требований к ее ресурсам.
До недавнего времени на практике чаще использовали метод Рунге-Кутта.
Этот метод позволяет строить схемы различного порядка точности. Схемы Рунге-
Кутта очень удобны как для расчетов на ЦВМ, так и для «ручных» расчетов. В
настоящее время наряду с методом Рунге-Кутта широко применяют численный
метод интегрирования, основанный на вычислении фундаментальной
(переходной) матрицы системы [19].
Особенности имитационного моделирования
Компьютерный эксперимент проводят с применением ЦВМ для
интегрирования математических моделей объектов исследования. В настоящее
время сложилось два вида компьютерных экспериментов:
- численный,
- имитационный.
Объединяющим фактором для этих двух разновидностей компьютерного
моделирования является использование математических моделей как
«заменителей» реального объекта исследования.
Особенности этих двух видов экспериментов состоят в следующем.
Математическую модель, используемую при численном эксперименте, строят
исходя из теории объекта исследований в виде уравнений (дифференциальных,
алгебраических и др.), решение которых аналитически получить не удается. При
этом применяют численные методы и комплексы эффективных вычислительных
алгоритмов.
В отличие от этого модели в имитационных экспериментах описывают
поведение реального объекта, известное по эмпирическим данным, и
реализуются в виде набора алгоритмов, отображающих ситуации, возникающие в
моделируемом объекте. Результатами имитационного эксперимента являются не
численные решения каких-либо уравнений модели, а реализация созданных с
помощью ЦВМ процессов, имитирующих поведение реального объекта [20].
Имитационная модель (ИМ) - это формальное (т.е. выполненное на
некотором формальном языке) описание логики функционирования исследуемой
системы (объекта) и взаимодействия отдельных ее элементов во времени,
учитывающее наиболее существенные причинно-следственные связи, присущие
системе, и обеспечивающее проведение компьютерного моделирования, в том
числе статистических экспериментов [11].
119
При разработке ИМ остаются справедливыми основные принципы
разработки математических моделей. При этом необходимо отметить следующие
обстоятельства:
- взаимосвязь отдельных элементов системы, описанных в модели, а также
некоторых величин (параметров) может быть представлена в виде
аналитических зависимостей (например, при моделировании полета
ракеты отработка поступающих на борт команд может быть описана на
уровне логики, а возникающие перегрузки рассчитывают аналитически);
- модель можно считать реализуемой и имеющей практическую ценность
только в случае, если в ней отражены лишь те свойства реальной
системы, которые влияют на значение выбранного показателя
эффективности.
Для ИМ практически отсутствуют ограничения на область их применения
(по типу моделируемой системы), и речь может идти только о целесообразности
использования ИМ в данной предметной области и об объеме трудозатрат на ее
разработку.
Поскольку основой имитационного моделирования является метод
статистических испытаний, наибольший эффект от его применения достигается
при исследовании сложных систем, на функционирование которых существенное
влияние оказывают случайные факторы.
Применение имитационного моделирования целесообразно в следующих
случаях:
- если не существует законченной постановки задачи на исследование и
идет процесс познания объекта 'моделирования;
- характер протекающих в системе процессов не позволяет описать эти
процессы в аналитической форме;
- необходимо наблюдать за поведением системы (или отдельных ее
компонентов) в течение определенного периода, в том числе с
изменением скорости протекания процессов;
- проводят изучение новых ситуаций в системе либо при оценке
функционирования ее в новых условиях;
- исследуемая система является элементом более сложной системы,
другие элементы которой имеют реальное воплощение;
- необходимо исследовать поведение системы при введении в нее новых
компонентов;
— проводят подготовку специалистов и освоение новой техники (в качестве
тренажеров).
120
Но имитационные модели имеют и целый ряд недостатков. Первый
заключается в том, что разработка ИМ, как правило, требует больших затрат
времени и сил. Кроме того, любая имитационная модель сложной системы
значительно менее «объективна», чем аналитическая модель, поскольку она,
прежде всего, отражает субъективные представления разработчика о
моделируемой системе. Причем бывает достаточно сложно как опровергнуть, так
и обосновать адекватность созданной ИМ, особенно, если речь идет о
проектируемой системе. Результаты имитационного моделирования, как и при
любом численном методе, всегда носят частный характер. Для получения
обоснованных выводов необходимо провести серию модельных экспериментов, а
обработка результатов требует применения специальных статистических
процедур.
Однако указанные недостатки с успехом преодолеваются благодаря
современной вычислительной технике и программному обеспечению, которые
представляют собой мощные инструментальные средства моделирования. То же
самое можно сказать о средствах статистического анализа и визуализации
полученных результатов.
В большинстве случаев конечной целью моделирования является
оптимизация тех или иных параметров системы, при этом потенциальные
возможности имитационного моделирования достаточно широки.
В зависимости от этапа и назначения проводимых исследований применяют
один из трех наиболее распространенных видов имитационных экспериментов:
- исследование относительного влияния различных факторов на значения
выходных характеристик системы;
- нахождение аналитической зависимости между интересующими
исследователя выходными характеристиками и факторами;
- отыскание оптимальных значений параметров системы.
С точки зрения организации взаимодействия исследователя с моделью в ходе
эксперимента ИМ делят на автоматические и диалоговые.
Автоматическими называют ИМ, взаимодействие пользователя с которыми
сводится только к вводу исходной информации и управлению началом и
окончанием работы моделей.
Диалоговыми называют ИМ, позволяющие исследователю активно управлять
ходом моделирования: приостанавливать сеанс моделирования, изменять
значения параметров модели, корректировать перечень регистрируемых данных и
т.д.
121
Автоматизация цифрового моделирования
Автоматизация процедур, охватывающих построение и реализацию моделей,
является радикальным способом снижения трудоемкости при увеличении
сложности моделируемого объекта.
Такая цель в настоящее время реализуется путем разработки
специализированных языков моделирования. Однако эти языки позволяют
преодолеть только некоторую часть трудностей, так как, во-первых, высока
трудоемкость подготовительных работ, направленных на представление
моделируемого процесса в требуемой для того или иного языка форме, и, во-
вторых, в рамках известных языков моделирования формализация объектов
основывается на математических схемах определенного класса.
Все это подчеркивает необходимость дальнейшего совершенствования
средств автоматизации имитационного моделирования, которое, помимо
основной цели - уменьшение трудоемкости ручных работ и охвата систем,
представляющих собой сложные структуры из разнородных элементов, должно
быть нацелено также на снижение требований к подготовке пользователя по
программированию, формализации и методам решения задач на ЦВМ.
Каковы же принципы построения и основные части универсальной
имитационной модели, которая отвечала бы требованиям автоматизации [11]?
Во-первых, программа имитации должна быть построена по модульному
принципу, при котором все элементы системы описываются единообразно в виде
некоторой стандартной математической схемы-модуля. При этом в качестве
такого модуля следует выбрать динамическую систему достаточно общего вида,
охватывающую как детерминистические, так и стохастические объекты,
функционирующие в непрерывном и дискретном времени. Необходимо
предусмотреть возможность автоматического преобразования математических
моделей реальных элементов к стандартному виду, определяемому выбранным
модулем, т.е. речь идет о преобразовании различных математических схем к
схеме, описывающей динамическую систему.
Во-вторых, схема сопряжения, содержащая множество входных и выходных
контактов всех элементов системы и внешней среды, а также операторы
сопряжения на всех уровнях иерархии должны быть приведены к заранее
определенному стандартному виду, который должен быть реализован
программно. Здесь также необходимо предусмотреть выполняемые
автоматически действия настройки или приведения реальной схемы сопряжения
к ее стандартному виду.
В-третьих, в целях получения всей необходимой информации о
характеристиках функционирования объекта необходимо разработать
математическое обеспечение для проведения экспериментов с имитацией
122
исследуемого объекта. Такое математическое обеспечение должно реализовывать
как стратегическое, так и тактическое планирование, решать задачи анализа и
синтеза, давать возможность строить различные планы экспериментов.
В-четвертых, следует разработать обобщенные схемы обработки и анализа
результатов моделирования, основанных на методах статистического анализа.
Такие разработки возможны на основе создания достаточно развитой библиотеки,
включающей в себя программные модули, реализующие соответствующие
методы статистической обработки и анализа. Библиотека должна постоянно
пополняться, что соответствует принципу открытости. Кроме того, в указанную
библиотеку необходимо включить программные модули, позволяющие оценить
количественные, качественные и структурные показатели.
В-пятых, следует разработать блок управления моделью (своеобразную
систему управления базой данных - СУБД), который координировал бы
функционирование всех составных частей такой модели, формировал бы
необходимые запросы к пользователю и предоставлял ему всю необходимую
информацию о результатах моделирования.
Особенности обработки, анализа и отображения
результатов моделирования СУ на ЦВМ
После того, как эксперимент спланирован, необходимо организовать
адекватную обработку и представление его результатов.
Возможность фиксации параметров и их статистическая обработка
позволяют провести анализ связей между этими величинами. Для этого
используют методы корреляционного, регрессионного и дисперсионного анализа.
С помощью корреляционного анализа определяют, насколько тесна связь
между двумя или более случайными величинами.
Регрессионный анализ позволяет построить модель, наилучшим образом
соответствующую набору данных, полученных в ходе эксперимента с
имитатором. Для этого выдвигается гипотеза о структуре модели и подбираются
параметры модели, которые минимизировали бы ошибку между данными,
получаемыми на основе модели, и данными эксперимента. Чаще всего при этом
используют метод наименьших квадратов.
Еще одна задача, возникающая при обработке и анализе результатов
моделирования, - это сравнение средних выборок. Если в результате такой
проверки окажется, что математическое ожидание совокупностей случайных
переменных |у^|, {у^}>—>{у^} отличается незначительно, то статистический
материал можно считать однородным. Это дает возможность объединить все
123
совокупности в одну, что увеличивает информацию о свойствах имитатора, а
значит, и модели.
Проверку гипотезы о равенстве математических ожиданий осуществляют на
основе дисперсионного анализа. Он позволяет вместо проверки гипотезы о
равенстве средних значений выборок с помощью одного из критериев согласия
(чаще Стьюдента) проводить проверку гипотезы о тождественности выборочной
и генеральной дисперсии. Дело в том, что критерий Стьюдента предусматривает
попарное сравнение средних значений выборки. При достаточно большом числе
выборок число таких попарных сравнений будет велико. Это и обуславливает
необходимость использования дисперсионного анализа [11].
Автоматизация обработки результатов моделирования
В результате цифрового моделирования обычно накапливается огромный
объем численных данных. Обработка такого количества информации
традиционным (неавтоматизированным) способом неэффективна и может
привести к значительным затратам времени.
В настоящее время почти всегда используют специализированное
программное обеспечение, предназначенное для анализа значительных объемов
информации. Такое ПО может быть двух видов:
- узкоспециализированное, созданное самим разработчиком;
- стандартное, разработанное специализированной компанией.
Каждый из указанных видов имеет свои преимущества и недостатки. Кратко
остановимся на них.
Стандартное ПО имеет ясный интуитивно понятный интерфейс и является
достаточно универсальным средством обработки числовых данных. Такие
программы обычно включают в свой состав модули различного назначения:
построение графиков и диаграмм, обработка численной информации с помощью
математического аппарата, статическая обработка данных и др. В то же время из-
за универсальности некоторые методы обработки могут быть недоступными.
Хотя такое встречается очень редко и обычно ПО полностью удовлетворяет всем
требованиям как разработчиков, так и исследователей. Кроме того,
использование стандартного ПО позволяет исследователям обмениваться
результатами, зафиксированными в одинаковой форме (стандарт).
Узкоспециализированное ПО создается разработчиком для выполнения
конкретных действий, например построения графиков в определенных
масштабах и т.п. Такое ПО редко может быть использовано другим
исследователем как по объективным, так и субъективным причинам.
124
В любом случае предпочтительно использование стандартного ПО. В
качестве примера данного ПО можно привести MS Excel. Из опыта авторов
данный пакет способен решить практически любую задачу, связанную с
анализом результатов.
Отображение результатов моделирования
Для сокращения затрат времени на анализ и понимание результатов
моделирования важно правильно выбрать способ отображения результатов.
Из способов отображения результатов цифрового моделирования отметим
следующие:
- отображение в виде числовых данных:
а) колонки численных значений переменных, наиболее информативно
характеризующих исследуемый процесс (в основном компонент вектора
состояния объекта и информативных переменных алгоритмов);
б) таблицы автоматизированной обработки результатов, содержащих
обобщенные параметры, вычисляемые по текущим переменным,
характеризующих процесс;
- графическое отображение:
а) графики изменения во времени характерных переменных
моделируемого процесса;
б) фазовые портреты вектора состояния моделируемой системы;
в) трехмерная визуализация моделируемого процесса на экране
компьютера (например, полет PH или ориентация КА).
Отображение результатов в той или иной форме (кроме трехмерной
визуализации процесса) может осуществляться либо на экране компьютера, либо
путем печати на бумаге. При этом возможно отображение как в темпе получения
результатов моделирования, так и после его завершения.
База данных задачи моделирования
В связи со значительным ростом прикладных возможностей персональных
компьютеров появилась возможность существенно формализовать хранение
исходных данных и результатов моделирования. Одним из таких средств
упорядоченного хранения данных является база данных задачи моделирования.
База данных предназначена для хранения массивов данных и должна
выполнять следующие функции:
- упорядоченное хранение параметров;
- хранение полной информации о каждом параметре;
- обеспечение доступа к параметрам для их записи, считывания или
ручной коррекции (при необходимости);
125
- регламентации (санкционирования) доступа пользователей, регистрации
обращений, контроля, защиты и восстановления данных при
эксплуатации БД;
- возможность импорта или экспорта отдельных таблиц БД для
обеспечения обмена между отдельными разработчиками.
В качестве СУБД может использоваться любой программный пакет,
удовлетворяющий изложенным выше требованиям (например, широко
распространенный MS Access).
Программные средства моделирования СУ на ЦВМ.
Библиотека ПО
Перед началом моделирования необходимо выбрать программные средства,
что имеет большое значение для всего дальнейшего исследования. Вообще
говоря, известно множество подходов, которые могут быть использованы при
моделировании СУ на ПК. Из всего многообразия можно выделить следующие:
- создание собственного ИПО;
- применение прикладных программных продуктов.
В существующей практике при разработке СУ принято использовать ИПО,
разработанное на языке программирования высокого уровня. Данный подход
имеет следующие преимущества:
- ИПО создается строго в соответствии с ТЗ на СУ и реализует его
функции в полном объеме;
- производительность ЦВМ не оказывает существенного влияния на время
вычислений;
- имеется возможность реализовать интерфейс в любом, удобном для
исследователя виде.
В качестве недостатков можно отметить:
- разработанное ИПО не является универсальным и не может быть без
существенных доработок использовано для другой модели СУ;
- изучение и модификация достаточно сложны;
- требуется квалификация исследователя как программиста.
Данный подход был основан на имеющихся возможностях вычислительных
средств. Для создания ИПО исследователь должен был обладать хорошей
квалификацией как программист. Однако чаще всего с помощью разработанных
программ решали очень узкие проблемы. Программы были трудными для
изучения другими специалистами и несовершенными. Поэтому наряду с
развитием компьютерной техники начинают появляться специализированные
программные продукты, решающие задачи синтеза программ, моделирующих
работу различных систем и процессов. К такому ПО можно отнести как САПР,
разрабатываемые в различных научных коллективах, так и мощные
коммерческие интегрированные системы, такие, как Eureka, Mercury, MatrixX,
Mathematica, и др.
126
Особое место в их ряду занимает мощная интегрированная система
автоматизации математических и научно-технических расчетов MATLAB [21].
Другими словами, ее кратко можно охарактеризовать как математико-
ориентированный язык программирования высокого уровня. Огромное внимание
в данной системе уделяется визуализации результатов вычислений, что
достигается применением обширных средств графики, в том числе
анимационной.
Казалось бы, использование таких систем позволит решить все проблемы,
однако истина, как обычно, находится где-то посередине. По опыту можно
заключить, что выбор программных средств разработки определяется
следующими факторами:
- сложность задачи/модели;
- функциональные возможности ПО;
- производительность ЦВМ;
- критерий цена/целесообразность;
- квалификация исследователя.
При разработке собственного ИПО рекомендуется применять библиотеки
стандартного ПО, существующие в данной компании, а также максимально
использовать системы типа MATLAB.
Ниже рассмотрены структура и характеристики конкретного ЦМК на
примере моделирующего комплекса, использованного при проектировании и
отработке математического обеспечения СУ PH «Энергия».
Цифровой моделирующий комплекс
Синтез и отработку систем управления сложных объектов, таких, как PH
"Энергия”, описываемых системой дифференциальных уравнений высокого
порядка, невозможно реализовать на технологии АЦК из-за большого количества
необходимых элементов и блоков, что приводит к низкой отказоустойчивости
моделирующего комплекса в целом.
Эти проблемы исчезают при использовании цифровых моделирующих
комплексов.
ЦМК применяют для моделирования в реальном масштабе времени
физических процессов и объектов, требующих высокопроизводительной
обработки больших массивов информации с помощью регулярных
(повторяющихся) алгоритмов.
Рассмотрим пример реализации ЦМК на базе вычислительного комплекса
ПС-2000.
Основные достоинства ВК ПС-2000:
127
1. Обработку больших объемов информации в ВК ПС-200 проводят со
скоростью до 400 млн операций типа сложения в секунду, при этом
обеспечивается возможность одновременной обработки до 128
однотипных независимых наборов данных.
2. ВК имеет разветвленную систему каналов обмена данными между
процессорными элементами.
3. На решающем поле ВК, состоящего из 128 процессорных элементов,
выполняется быстрое преобразование Фурье на 1024 комплексные
точки, при этом время вычислений составляет:
- с фиксированной запятой..........1,0 мс;
- с плавающей запятой...............1,4 мс;
- умножение матрицы 64x64..........0,45 мс.
4. ВК ПС-2000 реализован на микросхемах средней и большой степени
интеграции, а его память - на базе динамических МОП ЗУ.
Все это позволяет проводить моделирование на ЦМК сложных систем в
реальном масштабе времени.
Состав ВК ПС-2000
1. Мультипроцессор ПС-2000 осуществляет высокопроизводительную
обработку больших массивов информации по регулярным алгоритмам.
2. Мониторная подсистема ВК СМ-2М с подключенными к нему
периферийными устройствами выполняет:
- общее управление работой всего комплекса и входящих в него
устройств;
- решение фоновых задач и задач, не требующих высокой
производительности;
- функции инженерного пульта мультипроцессора.
3. Подсистема внешней памяти - микропрограммируемый контроллер с
подключенными к нему НСМД, НМЛ, CD, обеспечивающий:
- прием информации из мультипроцессора и мониторной подсистемы, а
также ее хранение;
- ввод исходных данных магнитных носителей в мультипроцессор и
мониторную подсистему;
- запись с носителя на носитель.
Ядро подсистемы составляют микропрограммируемый контроллер, ПЗУ и
ОЗУ.
Микропрограммируемый контроллер проводит прием управляющих
128
последовательностей из СМ-2М и обеспечивает обработку указанных операций,
выдавая команды и задания составным частям подсистемы.
В ПЗУ хранится часть тестовых микропрограмм и все рабочие
микропрограммы подсистемы.
ОЗУ используют как для размещения массивов данных, буферирования
управляющих последовательностей, так и в качестве управляющей памяти для
хранения тестовой системы.
Для осуществления связи подсистемы внешней памяти с центральным
процессором СМ-2М и с ПС-2000 применяют согласователь интерфейсов ИУС-2К.
В состав микропрограммного обеспечения подсистемы внешней памяти
входят тестовые микропрограммы, которые позволяют проверить
работоспособность подсистемы и его составных частей в автономном режиме.
Для запуска тестовых микропрограмм и индикации результатов тестирования
используют пульт управления микропрограммным комплексом.
Функциональный состав ВК ПС-2000
Функционально ВК ПС-2000 содержит следующие блоки:
1) мониторная подсистема (МПС), основу которой составляет
вычислительный базовый комплекс СМ-2М в составе:
- процессор с каналом прямого доступа в память - устройство оперативной памяти (64 Кб) - согласователь ввода-вывода - устройство внешней памяти на магнитных дисках 2) мультипроцессор ПС-2000: - процессорные элементы - емкость памяти решающего поля 3) подсистема внешней памяти: - общая ёмкость памяти на сменных магнитных дисках - общая ёмкость памяти на магнитных лентах - общая ёмкость памяти полупроводниковой 4) подсистема ввода-вывода: - устройство ввода с перфоленты - 2 шт.; - 4 шт.; - 3 шт.; - 20 Мб; - 2x64 шт., - 2x3072 Кб; - 1905 Мб; - 160 Мб; - 24 Мб; 1 шт.;
129
- устройство подготовки и ввода
информации с гибких магнитных дисков - 3 шт.;
- устройство алфавитно-цифровое печатающее — 3 шт.,
5) видеотерминалы:
- видеотерминал алфавитно-цифровой — 5 шт.;
- устройство вывода графической информации — 2 шт.;
- рабочее место оператора - 2 шт.
Мультипроцессор ПС-2000
Данный мультипроцессор предназначен для высокопроизводительной
обработки больших массивов информации по регулярным алгоритмам,
обеспечивает однозначный режим работы с одним потоком команд и многими
потоками данных.
Высокая производительность достигается благодаря оригинальной
архитектуре мультипроцессора, его проблемной ориентации на задачи,
алгоритмы решения которых допускают параллельную обработку многих
потоков данных по одной и той же программе.
В числе таких алгоритмов:
- одномерное и двумерное прямое и обратное быстрое преобразование Фурье;
- цифровая фильтрация;
- сложение, умножение и другие операции над векторами и матрицами;
- определение математических ожиданий, дисперсий, моментов высших
порядков;
- вычисление корреляционных и автокорреляционных функций;
- решение систем дифференциальных уравнений в частных производных и т.п.
Состав мультипроцессора ПС-2000 показан на рис. 2.36.
Решающее поле мультипроцессора состоит из процессорных элементов (ПЭ),
каждый из которых имеет собственную оперативную память.
ПЭ - функциональный конструктивно не выделенный узел, обеспечивающий
хранение и обработку данных.
Восемь ПЭ объединяют в устройство обработки. Решающее поле может
содержать 1,2,4 либо 8 устройств обработки.
Управление всеми ПЭ осуществляет общее устройство управления.
Обмен данными между составными частями мультипроцессора
обеспечивается системой информационных каналов.
130
ПЭ 64
Шины управления
Рисунок 2.36 - Мультипроцессор ПС-2000
Решающее поле мультипроцессора может динамически (программно)
сегментироваться. Посредством регулярного канала из ПЭ формируют несколько
не связанных между собой одинаковых “колец”.
Допустимые конфигурации:
- 8 колец по 8 ПЭ;
- 4 кольца по 16 ПЭ;
- 2 кольца по 32 ПЭ;
- сплошное решающее поле - 64 ПЭ.
Загрузку данных в ПЭ выполняют по программе из устройства управления
(УУ) через магистральный канал либо через канал прямого доступа в память. Для
прямого доступа в память в каждом ПЭ реализованы буферные регистры ввода и
вывода, а также счетчики адресов для ввода и вывода.
Форматы обрабатываемых данных: 12-, 16-, 24-разрядные числа с
фиксированной запятой и 24-разрядные числа с плавающей запятой (4 разряда -
шестнадцатеричный порядок и 20 разрядов - мантисса).
Оперативная память процессорного элемента содержит от 4096 (цикл
обращения - 0,64 мкс) либо 16384 (цикл обращения - 0,96 мкс) 24-разрядные
ячейки.
Устройство управления обеспечивает хранение программы обработки
информации, генерацию команд управления решающим полем, синхронизацию
процессов обработки и ввода-вывода, связь с мониторной подсистемой,
тестирование решающего поля мультипроцессора (состав устройства управления
показан на рис. 2.42).
Арифметико-логическое устройство (АЛУ) УУ ориентировано на обработку
24-разрядных операндов с фиксированной запятой и имеет следующие
характеристики:
- объём памяти G — 16348 64-разрядных слова;
- цикл обращения к запоминающей среде - 0,64 мкс;
- время выдачи микрокоманды - 0,32 мкс.
В памяти Н хранятся 24-разрядные данные, цикл обращения составляет:
- для памяти 4096 слов - 0,64 мкс;
- для памяти 16384 слова - 0,96 мкс.
Обмен информацией между устройством управления и мониторной
подсистемой следующий:
Мониторная подсистема выполняет загрузку и чтение микропрограмм,
управление и опрос состояния УУ командами интерфейса.
132
Загрузку и чтение микропрограмм, а также передачу управляющей и
диагностической информации осуществляют через стандартный интерфейс 2К.
Сигналы, передаваемые по информационным шинам интерфейса 2К,
сопровождаются контрольными разрядами на каждый байт передаваемой
информации.
Максимальная скорость обмена информацией между устройством
управления и мониторной подсистемой - 0,2 Мслов/с.
Микропрограммы загружаются из мониторной подсистемы в память G.
Программы и данные хранятся в памяти Н.
Для адресации памяти имеется адресная арифметика.
Управление мультипроцессором
Программирование мультипроцессора ПС-2000 осуществляется на
микроуровне.
В систему микрокоманд входят:
- микрокоманды обработки информации в решающем поле;
- микрокоманды обращения к запоминающим устройствам;
— микрокоманды управления.
В качестве микропрограммной памяти микроуровня используется
оперативное запоминающее устройство-память G.
Загрузка программ и микропрограмм, запуск и останов, опрос состояния
процессора выполняются мониторной подсистемой посредством команд
интерфейса.
В табл. 2.1 приведено время выполнения в одном мультипроцессоре ПС-
2000 некоторых типичных процедур.
Структура вычислительных процессов в ВК НС-2000
Вычислительный процесс в ВК ПС-2000 представляет собой совокупность
трех параллельно происходящих взаимосвязанных процессов:
- вычислительного процесса в мониторной подсистеме;
- выполнения микропрограмм в мультипроцессорах;
- ввода данных в память мультипроцессора и вывода из нее.
Вычислительный процесс в мониторной подсистеме является основным, он
порождает остальные процессы и управляет их ходом. Параллельно выполняется
несколько задач под управлением операционной системы. Мультипроцессор по
отношению к этим задачам выступает как периферийный программируемый
спецпроцессор с последовательным доступом.
133
Таблица 2.1- Время выполнения в мультипроцессоре ПС-2000 типичных
процедур
№ п/п Параметры Характеристика одного ПС-2000
1 Суммарная производительность, млн оп./с: - сложение с фиксированной запятой (регистр-регистр) - сложение с плавающей запятой - умножение (в зависимости от формата) 200 66,4 28,5...50
2 Время выполнения быстрого преобразования Фурье на 1024 комплексные точки (в среднем на один массив), мс: - все ПЭ обрабатывают один массив: - с фиксированной запятой - с плавающей запятой - каждый ПЭ обрабатывает отдель- ный массив: - с фиксированной запятой - с плавающей запятой 2,5 2,8 1,0 1,4
3 Время выполнения умножения матриц 64x64 элемента, мс: - с фиксированной запятой - с плавающей запятой 23,0 32,0
4 Время транспонирования матриц 64x64 элемента, мс 0,45
Процесс выполнения микропрограмм в мультипроцессоре организуется
следующим образом:
1. В начале работы системы проводится загрузка одной или нескольких
взаимосвязанных и выполняющихся последовательно микропрограмм, а
затем их запуск. В дальнейшем этот процесс протекает непрерывно,
синхронизируясь с вычислительным процессом в МПС и вводом-выводом
данных.
2. Набор процедур, выполняемых в мультипроцессоре по запросам со
стороны МПС, определяются заранее. Микропрограммы, реализующие
этот набор процедур, загружают в память мультипроцессора в начале
134
работы. Если в ходе вычислительного процесса в МПС возникает
необходимость выполнить какую-либо процедуру из этого набора, то
задача запускает соответствующую микропрограмму и передает ей
необходимые данные.
3. Предусматривается динамическая замена микропрограмм в памяти
мультипроцессора. Замена возможна непосредственно перед запуском
соответствующей процедуры или заранее. В последнем случае
обеспечивается более рациональное использование вычислительных
мощностей мультипроцессора.
Мультипроцессор ПС-2000 обменивается данными с подсистемой внешней
памяти и (или) с мониторной подсистемой. Инициализацию обмена
осуществляют задачи, выполняемые в МПС, для чего в них имеются специальные
вызовы. Предусмотрены средства синхронизации процессов ввода-вывода и
выполнения микропрограмм. Обмен данными проводится через специальный
канал ввода-вывода, причем ввод данных в память ПЭ и вывод из неё могут
выполняться параллельно.
Задачи моделирования в реальном масштабе времени решаются
следующим образом:
- в мониторной подсистеме решается задача управления объектом;
- в мультипроцессорах размещена математическая модель объекта
регулирования;
- формирование алгоритма обмена, выдача управляющих кодов
исполнительным механизмам и прием информации об их реализации
осуществляет ТВСО;
- запись телеметрии в реальном масштабе времени возложена на
подсистему внешней памяти на магнитных дисках;
- вывод результатов моделирования осуществляется:
- в реальном масштабе времени - на мониторы;
- АЧХ и ФЧХ - покадрово на устройства вывода графической
информации;
- печать результатов исследований - на устройства печати;
- подготовка и выпуск отчетных документов ~ на рабочих местах
операторов.
В процессе анализа результатов возможен многократный проход
интересующего фрагмента из общего процесса моделирования.
135
Структурная схема ЦМК
Структурная схема ЦМК показана на рис. 2.37, на котором с учетом рис. 2.23
приняты следующие обозначения:
МПС
МП
ПВИ
ПВВИ
ПВП
МД и
МЛ
ПВП CD
ТВСО
м
РМО
УП
УВГИ
эк
ЭЭРМ
мониторная подсистема;
мультипроцессор;
подсистема вывода информации (печать);
подсистема ввода информации;
подсистема внешней памяти
на магнитных дисках
и магнитных лентах;
подсистема внешней памяти на компакт-дисках;
терминал вычислительный связи с объектом;
монитор;
рабочее место оператора;
устройство печати;
устройство вывода графической информации;
электронный коммутатор;
электронный эквивалент РМ.
Назначение СУРМ, СУ СУРМ, НС, РМ, СГП и ГА описано в подразделе
"Структурная схема и приборный состав стенда моделирования". Роль ПУ СМ в
ЦМК выполняет ТВСО.
В целях экономии энергетических ресурсов РМ, НС, СГП И ГА в ЦМК
предусмотрен режим моделирования с электронным эквивалентом, подключение
которого обеспечивается с помощью электронного коммутатора.
Особенности отработки математического обеспечения СУ на ЦМК
аналогичны особенностям отработки на АЦК. Как и АЦК, цифровой
моделирующий комплекс должен обеспечивать решение следующих основных
задач:
- моделирование движения PH в реальном масштабе времени;
- реализация штатных алгоритмов СУ, реализованных в БЦВМ;
- снятие областей устойчивости;
- расчет частотных характеристик реальных звеньев СУ: аналоговых
фильтров, рулевых приводов, датчиков угла и угловой скорости,
согласующих устройств и т.д.
136
Технология отработки математического обеспечения СУОС КА
на стенде физического моделирования
В целях подтверждения работоспособности СУ в условиях, приближенных к
реальному полету КА, в технологию разработки СУ НПП «Хартрон-Аркос»
введены динамические испытания ПАО с физическими воздействиями на
приборы ориентации системы управления при их угловом перемещении в
пространстве относительно имитаторов светил-ориентиров. Данные испытания
реализуются на стенде физического моделирования (СФМ).
Рисунок 2.37 - Структурная схема ЦМК
137
Отработка СУ на СФМ позволяет решать следующие задачи:
- подтвердить адекватность математических моделей реальным приборам,
используемым в СУ;
- проверить работоспособность СУ во фрагментах динамических режимов
функционирования;
- сопровождать натурные испытания.
В состав СФМ входят следующие основные элементы:
- бортовой компьютер;
- командные приборы и исполнительные органы;
- имитаторы движения, на которые устанавливают командные приборы;
- имитаторы астроориентиров;
- инструментальный компьютер;
- блок согласующих устройств;
- терминал связи с БЦВМ;
- пульт управления имитаторами углового движения и имитаторами
астроориентиров.
Основные принципы испытаний СУОС КА на СФМ
Термин ’’физическое моделирование" возник в силу того, что при данном
типе испытаний некоторые элементы СУ функционируют при конкретных
механических и световых воздействиях, приближающихся к условиям реального
полета. Проверке и испытаниям, как правило, в этом случае подвергаются
построительные режимы СУ: режим построения солнечной ориентации,
трехосной базовой ориентации, инерциальной ориентации и др.
Основным принципом физического моделирования является
воспроизведение функционирования СУ при следующих действиях:
- создании угловых перемещений штатных командных приборов СУ с
угловыми скоростями и ускорениями, соответствующими движению КА;
- имитации излучения астроориентиров для оптико-электронных
приборов;
- имитации поведения реальных исполнительных органов СУ.
Чувствительными элементами СУ могут быть: измерители угловой скорости,
приборы ориентации на Солнце, Землю, звезды. Исполнительные органы также
могут быть различного типа: силовые гироскопы, двигатели-маховики,
электроклапаны двигателей стабилизации.
На рис. 2.38 показана функциональная схема испытаний на СФМ [22].
Основным элементом, определяющим специфику испытаний в данной схеме,
является поворотное устройство или имитатор движения (ИД), на котором
размещают реальные датчики СУ. Поворотное устройство осуществляет
138
вращение с угловыми скоростями, соответствующими угловым скоростям КА.
При этом установленные на нем датчики позволяют получить с них позиционные
сигналы и использовать эту информацию в работе остальных элементов СУ.
На поворотном устройстве обычно размещают астроприборы, а в некоторых
случаях — измеритель угловой скорости. Датчики могут размещаться как на
одном поворотном устройстве, так и на разных, в зависимости от их массы и
габаритных размеров.
При установке на поворотное устройство измерителя угловой скорости
необходимо учитывать, что при штатном его функционировании на Земле в
измерениях осуществляется систематическая ошибка, связанная с угловой
скоростью вращения Земли и прецессией гироскопических чувствительных
элементов, возникающей из-за наличия силы тяжести.
Испытания на СФМ представляют собой проверку функционирования
исследуемой СУ в замкнутом контуре и проводятся следующим образом.
С пультов ручного управления имитаторы «движения устанавливаются в
угловое положение, соответствующие начальному положению КА относительно
ориентиров (Солнца, Земли, звезды). После прохождения команды ’’Пуск” для
запуска бортовой программы БЦВМ включается режим ’’Включение ЦВМ”, тест
включения, а затем СУ переходит в первый режим (например, в режим
построения солнечной ориентации) с тактированным обменом информацией
между системами СФМ.
На рис. 2.38 показаны: 1 - информация об угловой скорости; 2 - сигналы
управления моделью измерителя угловой скорости; 3 - сигналы управления
исполнительными органами; 4 - информация о состоянии исполнительных
органов; 5 - сигналы управления ИД; 6 - углы поворота ИД; 7, 11 - управление
ИД1, ИД2; 8, 12 - коды углов поворота ИД1, ИД2; 9, 10, 13 - информация и
сигналы управления командных приборов.
Установленные на поворотном устройстве приборы ориентации на Солнце
(ПОС), Землю (ПОЗ), Полярную звезду (ППЗ) или астроизмерительная система
(АИС), воспринимая излучение от имитаторов, определяют координаты
ориентиров и передают информацию об измерениях в БЦВМ, которая формирует
сигналы управления КА, соответствующие выполнению целевой задачи данного
режима работы СУ. Сигналы управления КА поступают на исполнительные
органы или их математическую модель в инструментальный компьютер, где
проводится расчет управляющих моментов, используемых в математической
модели КА для определения его угловых скоростей, соответствующих данным
сигналам управления. Сигналы, пропорциональные угловым скоростям КА, через
вращение поворотного устройства или имитационные входы поступают в
139
измеритель угловой скорости или в его математическую модель. Угловые
скорости, преобразованные инструментальным компьютером в сигналы
управления имитатором движения, приводят его во вращение, соответствующее
движению КА.
Рисунок 2.38 - Функциональная схема испытаний на СФМ
Установленные на поворотном устройстве приборы ориентации, вращаясь с
угловыми скоростями КА, измеряют координаты ориентиров относительно
связанной системы координат КА и передают информацию по штатным связям в
БЦВМ. Тем самым достигается замыкание физического процесса моделирования.
Циклограмма типового процесса испытаний на СФМ показана на рис. 2.39.
140
Рисунок 2.39 - Циклограмма типового процесса испытаний на СФМ:
Tm - время начала процесса; - время конца процесса;
Т - текущее время
Технические характеристики СФМ
Моделирование углового движения КА вокруг его центра масс реализуется
на двухстепенных и трехстепенных поворотных устройствах.
Трехстепенной имитатор углового движения представляет собой карданов
подвес, конструктивно выполненный в виде трех вложенных последовательно
друг в друга рам. Рамы приводятся в движение тремя независимыми приводами,
которые управляются сигналами, поступающими из инструментального
компьютера, где реализована математическая модель КА.
Внутренняя рама представляет собой круглый стол (платформу) с
вертикальными и горизонтальными пазами для установки приборов СУ.
Внешний вид трехстепенного имитатора углового движения показан на рис.
2.40.
141
Рисунок 2.40 - Внешний вид трехстепенного имитатора
углового движения
Для обеспечения максимальной помехозащищенности приборов СУ,
установленных на платформе, от внешних механических воздействий (вибраций,
толчков) поворотное устройство монтируется на развязанном от внешнего грунта
фундаменте.
На рис. 2.41 изображена конструктивная схема трехстепенного имитатора
углового движения и его фундамента.
Рисунок 2.41 - Конструктивная схема трехстепенного имитатора углового
движения и его фундамента
142
Кинематическая схема имитатора углового движения показана на рис. 2.42.
Подвижная платформа
Рисунок 2.42 - Кинематическая схема трехстепенного
имитатора углового движения
На рис. 2.43 показаны:
OXbYbZb - базовая неподвижная система координат, связанная с основанием
стенда;
OXYZ - система координат, связанная с подвижной платформой;
a, fl, у - углы поворота платформы.
Зал управления стендом показан на рис. 2.43.
Рисунок 2.43 - Зал управления стендом физического моделирования
143
Основные технические характеристики трехстепенного ИД
- Масса полезной нагрузки не более 50 кг;
- углы прокачки рамок вокруг осей: -ОХ +1080 град;
-OY (-61...+57) град;
-OZ +1080 град;
— диапазон воспроизведения угловых скоростей платформы относительно осей OX, OY, OZ подвеса +(0,001 ... 1,0) град/с;
- полоса пропускания частот по каждой из осей подвеса не более 2,5 Гц;
- точность измерения углов поворота рамок: - при использовании 15-разрядных датчиков 39,5 угл. с;
- при использовании 19-разрядных датчиков 2,47 угл. с.
Двухстепенной имитатор углового движения представляет собой
двухстепенной карданов подвес, конструктивно оформленный в виде двух
вложенных последовательно друг в друга рам. Рамы приводятся в движение
двумя независимыми цифровыми приводами, управляемыми сигналами,
поступающими из инструментального компьютера.
Внешний вид двухстепенного имитатора углового движения показан на рис.
2.44.
Основные технические характеристики двухстепенного ИД
- Масса полезной нагрузки - диапазон воспроизведения угловых скоростей рамок - углы прокачки рамок вокруг осей: не более 40 кг; +(0,00001.. .5) град/с;
- внутренней -внешней +360 град; +180 град;
- динамическая точность слежения по углу - полоса пропускания частот 5 угл.с; не более 5 Гц.
144
Рисунок 2.44 - Внешний вид двухстепенного имитатора движения
На двухстепенном ИД устанавливают, как правило, звездные датчики,
например, ППЗ или АИС, а на трехстепенном - приборы ориентации на Солнце и
приборы ориентации на Землю.
Для каждого типа прибора применяют специальный имитатор внешнего
излучения.
Для обеспечения работы инфракрасных построителей местной вертикали
СФМ содержит имитатор инфракрасного (ИК) излучения Земли. ИК-имитатор
предназначен для моделирования заданного теплового потока Земли,
воздействующего на инфракрасные построители местной вертикали.
Имитатор представляет собой источник излучения в требуемом диапазоне
частот. Основным элементом имитатора является нагреватель, предназначенный
для создания теплового потока с температурой и равномерностью,
удовлетворяющими требованиям технического задания на разработку ИК-
имитатора, воспроизводящего тепловое излучение Земли.
Конструктивно нагреватель представляет собой алюминиевый диск. Внутри
него уложена константановая лента, являющаяся нагревательным элементом.
Параллельно поверхности нагревателя установлен радиатор кольцевой формы, по
которому циркулирует вода. Экран совместно с нагревателем создают требуемый
тепловой контраст в ИК-области. На поверхности экрана, обращенной к
нагревателю, укреплено полированное кольцо со степенью черноты 0,05 для
145
уменьшения влияния теплового потока нагревателя на экран. Конструкция экрана
позволяет с помощью съемных диафрагм изменять его внутренний диаметр для
обеспечения различных угловых размеров имитатора в поле зрения ПОЗ.
При отработке СУОС КА, функционирующих на эллиптических орбитах с
большим эксцентриситетом, возможно применение ИК-имитатора с
автоматически изменяемым угловым диаметром излучающей поверхности [23].
Для поддержания заданной температуры экрана служит система охлаждения.
Термостабилизация воды осуществляется с помощью термореле, чувствительный
элемент которого устанавливают на выходе системы охлаждения. Температура
нагревателя регулируется уровнем напряжения питания схемы нагревателя.
Основные технические характеристики имитатора ИК
- Температура излучающей поверхности нагревателя не более 150° С;
- неравномерность температуры излучающей поверхности не более 1° С;
- внешний диаметр экрана 1000 мм;
- несовпадение центра экрана с центром нагревателя не более 1 угл.мин.
Внешний вид ИК-имитатора показан на рис. 2.45.
Рисунок 2.45 - ИК-имитатор
Для обеспечения работы ПОС используют имитатор солнечного излучения
ИС-160. Имитатор ИС-160 представляет собой проекционную установку,
предназначенную для облучения различных объектов излучением со
спектральным составом, близким к спектральному составу Солнца в диапазоне
длин волн от 0,25 до 1,8 мкм (рис. 2.46).
146
Энергия излучения
Рисунок 2.46 - Спектральная характеристика имитатора солнечного излучения
ИС-160:
- - - • - излучение ИС-160;
- спектральное излучение Солнца
Основные технические характеристики имитатора ИС-160
- Угловой размер диафрагмы 32 угл.мин;
- диаметр облучаемой имитатором площади (100... 105) мм;
- освещенность центральной части облучаемой
площади при диафрагме 4 мм (140000... 145000) лк.
Внешний вид имитатора ИС-160 показан на рис. 2.47.
Рисунок 2.47 - Имитатор Солнца ИС-160
147
Для обеспечения работы приборов ориентации по одиночным звездам
используют имитатор точки И-2 - имитатор звездных приборов. Имитатор И-2
воспроизводит излучение точечных источников определенного спектрального
класса и заданного диапазона эквивалентных светимостей.
Внешний вид имитатора И-2 изображен на рис. 2.48.
Рисунок 2.48 - Имитатор звезд И-2
Основные технические характеристики имитатора И-2
- Световой диаметр объектива
- угловой размер точки
- диапазон воспроизведения звездной величины
- рабочий спектральный диапазон
100 мм;
не более 5 угл.с;
-2,00...+ 6,0;
0,28 .. .0,70 мкм;
- характеристики имитатора, которые сохраняются
п ри удалении от объектива имитатора до 3 м;
- предельная погрешность имитации излучения не более 15%.
При использовании в составе СУ астроизмерительных систем, работающих
по фрагментам звездного неба, на СФМ применяют специальный имитатор,
позволяющий воспроизводить участок неба, содержащий до шести звезд.
Внешний вид подобного имитатора показан на рис. 2.49.
148
Рисунок 2.49 - Имитатор участка звездного неба
Примеры практических результатов испытаний СУОС КА
на СФМ
Отработке и испытаниям на СФМ подвергались многие СУ,
разрабатываемые в НИИ «Хартрон-Аркос». Особую практическую ценность и
интерес имели испытания СУ, которые в своем составе содержали новые, еще не
применявшиеся ранее типы астроприборов.
Хронология испытаний на СФМ, разрабатываемых в НИЛ «Хартрон-Аркос»
СУОС КА, началась в 1987-1989 гг. с отработки системы управления транспортных
модулей серии 77КС орбитального комплекса «Мир» (ГКНПЦ им. М.В. Хруничева,
КБ «Салют», Россия). Модули серии 77КС («Квант-2» - 1989 г., «Кристалл» - 1990
г., «Спектр» - 1995 г., «Природа» - 1996 г.) предназначались для доставки на
орбитальный комплекс «Мир» научной аппаратуры, а также использовались для
управления орбитальным комплексом [24].
На СФМ проводили испытания СУ модуля 77КСД - «Квант-2».
Была подтверждена работоспособность СУ в режиме построения базовой
ориентации. При этом была выявлена аномальная работа прибора ориентации на
Землю типа 256К (НИИ «Геофизика-Космос»), заключающаяся в обнулении на
выходе прибора информационных импульсов при его определенной ориентации
относительно диска Земли в процессе построения местной вертикали.
Разработанный массив изменения программного обеспечения (МИЛ) позволил
парировать данную ситуацию в полете.
В 1989-1991 гг. на СФМ проходила испытания система управления
космического аппарата 71X6 (НПО им. С. А. Лавочкина, Россия). КА
функционирует на геостационарной орбите и предназначен для дистанционного
зондирования поверхности Земли.
Летные испытания КА начались в 1991 г., а эксплуатация - в 1994 г. и
продолжается по настоящее время.
На СФМ проводили испытания СУ изделия № 7120. Подтверждены:
149
- работоспособность СУ в режимах построения солнечной одноосной
ориентации, построения базовой ориентации и подержания
прецизионной ориентации;
- точность астрокоррекции СУ с использованием прибора Полярной
звезды - 5 утл. мин.
В 1995-1997 гт. на СФМ была испытана система управления космического
аппарата «Аркон» (НПО им. С.А. Лавочкина, Россия). КА предназначен для
Рисунок 2.50 - Орбитальный комплекс «Мир»
Рисунок 2.51 - Космический аппарат 71X6
150
Рисунок 2.52 - Космический аппарат «Аркой»
На СФМ проводили испытания СУ изделия № 6420. Подтверждены:
- работоспособность СУ в режимах построения солнечной одноосной
ориентации, построения солнечно-земной базовой ориентации;
- точность астрокоррекции СУ с использованием прецизионной
астроизмерительной системы (ПАИС) - 1 угл.мин.
Проведены автономные испытания ПАИС в целях исследования
информационного взаимодействия с БЦВМ СУ, а также для уточнения
математической модели ПАИС. Выполнены автономные испытания СГК в целях
уточнения его математической модели.
Так как снова была зафиксирована аномальная работа ПОЗ 256К, натурные
испытания КА проводили с введенным в бортовое ПАО МИП.
В 1997-1998 гг. на СФМ проходила испытания система управления
функционально-грузового блока (ФГБ) «Заря» - первого сегмента
Международной космической станции «Альфа» (Boeing, США, ГКНПЦ им. М.В.
Хруничева, КБ «Салют», Россия), полет которого начался в 1998 г. [25].
Рисунок 2.53 - Функционально-грузовой блок «Заря»
151
Главным результатом этих испытаний явилось выявление причины
аномальной работы ПОЗ типа 256К, которую не удалось установить на стенде
предприятия-разработчика прибора.
На СФМ была восстановлена близкая к реальной обстановка возникновения
нештатной ситуации в полете. В результате исследований выявился
конструктивный дефект электрической схемы прибора. Ни при каком другом
методе испытаний данную ситуацию нельзя было спрогнозировать и
смоделировать, поскольку эффект проявлялся только при угловом движении КА.
Испытания на СФМ позволили выработать рекомендации по конкретной
доработке электрической схемы ПОЗ 256К. После проведенной доработки ПОЗ его
разработчиком аномальная работа прибора была исключена, что было
подтверждено повторными испытаниями на СФМ и в условиях реального полета.
Дополнительно на СФМ была проанализирована динамика построения
базовой системы координат станции при наличии в поле зрения ПОЗ панели
солнечной батареи КА «Прогресс».
В 2007-2010 гг. для СУ украинского спутника дистанционного зондирования
Земли (ДЗЗ) МС-2-8 системы «С1ч-2» - запущен 17 августа 2011 г. - (рис. 2.60) был
разработан солнечный датчик нового типа (ГП НИ ГИ11, Украина) [26].
Рисунок 2.54 - Спутник ДЗЗ МС-2-8
Дополнительно к солнечному каналу датчик снабжен миниатюрными
измерителями угловой скорости — МЭМС, поэтому назван датчиком ориентации
комбинированным (ДОК).
152
Испытания ДОК на СФМ (рис. 2.61) позволили подтвердить работоспособность
заложенных в прибор технических решений, отработать его программно-
математическое обеспечение, оценить основные технические характеристики,
проверить адекватность математической модели. Причем сделать это с учетом
углового движения основания, в том числе при затенении Солнца [27].
Рисунок 2.55 - Испытания ДОК на СФМ
Приведенные примеры показывают, что технология испытаний систем
управления и отдельных их приборов на стенде физического моделирования
позволяет:
- подтвердить правильность заложенных в разработку СУ технических
решений и проверить их реализацию в программах бортового
компьютера;
- проверить совместное функционирование программно-
алгоритмического обеспечения и бортовой аппаратуры системы
управления в условиях, близких к реальному полету;
— уточнить математические модели приборов СУ;
- сопровождать летные испытания или штатную эксплуатацию КА и при
необходимости воспроизвести требуемую полетную ситуацию, в
которой оказалась СУ.
Таким образом, испытания на стенде физического моделирования обладают
гибкостью, большим разнообразием и широкими функциональными
возможностями для отработки и исследования систем управления КА различного
назначения.
153
Библиографический список
1. Боднер, В.А. Системы управления летательными аппаратами [Текст] /
В.А. Боднер. - М.: Машиностроение, 1973. - 504 с.
2. Лебедев, А.А. Баллистика ракет [Текст] / А.А. Лебедев, Н.Ф. Герасюта. -
М.: Машиностроение, 1970. - 244 с.
3. Сихарулидзе, Ю.Г. Баллистика летательных аппаратов [Текст] /
Ю.Г. Сихарулидзе. - М.: Наука, Гл. ред„ физ.-мат. лит-ры, 1982. - 351 с.
4. Бранец, В.Н. Применение кватернионов в задачах ориентации твердого
тела [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука, 1973. - 320 с.
5. Космонавтика: Энциклопедия [Текст] / под. ред. В.П. Глушко - М.: Сов.
энциклопедия, 1985. - 528 с.
6. Истомин, В. Хроника полета экипажа МКС-8 [Текст] / В. Истомин,
И. Афанасьев // Новости космонавтики. - 2004. - Т. 14, № 5 (256). - С. 2 - 8.
7. Алексеев, К.Б. Управление космическими летательными аппаратами [Текст] /
К.Б. Алексеев, Г.Г. Бебенин. - М.: Машиностроение, 1974. - 340 с.
8. Инженерный справочник. Механика полёта (Общие сведения. Уравнения
движения) [Текст] / С.А. Горбатенко, Э.М. Макашов, Ю.Ф. Полушкин и др.
- М.: Машиностроение. 1969. -420 с.
9. Попов, В.И. Системы ориентации и стабилизации космических аппаратов /
В.И. Попов. - 2-е изд. - М.: Машиностроение, 1986. - 184 с.
10. Соловьев, Ю. А. Системы спутниковой навигации [Текст] / Ю.А. Соловьев.
- М.: Эко-трендз, 2000. - 267 с.
11. Советов, Б.Я. Моделирование систем: учеб, для вузов / Б.Я. Советов,
С.А. Яковлев. - М.: Высш, шк., 1985. - 271 с.
12. СТП 523.2-444-2004. Стандарт предприятия. Математическая модель
космического аппарата как объекта управления (включая командные
приборы и исполнительные органы). Порядок разработки и использования.
- X.: НПП «Хартрон-Аркос», 2004. - 23 с.
13. СТП 523.2-509-2004. Стандарт предприятия. Система управления
качеством. Математическая модель регулятора системы управления
космического аппарата. Порядок разработки и использование. - X.: ШН1
«Хартрон-Аркос», 2004. -17 с.
14. Бородюк, В.П. Статистические методы в инженерных исследованиях
(лабораторный практикум): учеб, пособие [Текст] / В.П. Бородюк; под ред.
Г.К. Круга. - М.: Высш, шк., 1983. — 216 с.
15. Плескунин, В.И. Теоретические основы организации и анализа выборочных
данных в эксперименте [Текст] / В.И. Плескунин, Е.Д. Воронина. - Л.: Изд-
во Ленингр. ун-та, 1979. - 232 с.
16. Бусленко, Н.П. Метод статистических испытаний (Метод Монте-Карло)
[Текст] / Н.П. Бусленко. -М.: Гос. изд-во физ.-мат. лит., 1962. -332 с.
17. Бахвалов, Н.С. Численные методы [Текст] / Н.С. Бахвалов. — М.: Наука,
1975.-631 с.
18. Корн, Г. Справочник по математике для научных сотрудников и инженеров
[Текст] / Г. Корн, Т. Корн. - М.: Наука, 1970. - 720 с.
154
19. Кузовков, Н.Т. Непрерывные и дискретные системы управления и методы
идентификации [Текст] / Н.Т. Кузовков, С.В. Карабанов, О.С. Салычев. -
М.: Машиностроение, 1978. - 222 с.
20. Шеннон, Р. Имитационное моделирование систем - искусство и наука
[Текст]: пер. с англ. / Р. Шеннон. - М.: Мир, 1978. - 418 с.
21. Дьяконов, В.П. MATLAB 5.0/5.3. Система символьной математики [Текст] /
В.П. Дьяконов, И.В. Абраменкова. - М.: Нолидж, 1999. - 640 с.
22. Технология отработки систем управления космических аппаратов на
стенде, физически моделирующем угловое движение [Текст] /
Ю.М. Златкин, В.П. Ржемовский, Ю.А. Кузнецов и др. И Сб. докл. V
Междунар. научно-техн. конф. «Гиротехнология, навигация и управление
движением». - К.: НТУУ КПП, 2005. - С. 361 - 364.
23. А.с. 233406 СССР, MKH2B64G 1/20. Устройство для имитации излучения
Земли / С.А. Ковалев, Б.Н.Березин, Б.Б. Мальцев и др. - № 3111093; заявл.
02.04.85.
24. Хроника дат и событий. 1959 - 2005 гг. [Текст] / автор-составитель
В.И. Котович. - X.: НПП «Хартрон-Аркос», 2006. - 212 с.
25. Златкш, Ю.М. Особливост1 керування М1жнародною косм!чною станщсю
’’Альфа” на початковому еташ польоту [Текст] / Ю.М. Златкш,
В.П. Ржемовський, Ю.О. Кузнецов // Космшна наука i технолога. - 2006. -
Т. 12, №2/3.-С. 3-7.
26. Кузнецов, Ю.А. Разработка математической модели малогабаритного
солнечного датчика для системы управления микроспутника [Текст] /
Ю.А. Кузнецов, Ю.В. Белоцерковец, В.А. Лебедь // Вюник Дшпропетровського
ун!верситету. - 2008. - Т. 16. - № 4. Сертя Ракетно-косм1чна технжа. - Т. 2. -
Вил. 12. -Дншропетровськ: вид-во ДНУ. - С. 9-16.
27. Белоцерковец, Ю.В. Исследование работы малогабаритного солнечного
датчика на стенде физического моделирования [Текст] /
Ю.В. Белоцерковец, Ю.А. Кузнецов, СА. Ковалев и др. // X М1жнародна
молод1жна науково-практична конференц!я ’’Людина i Космос”: зб. тез. -
Дншропетровськ, 2008. - С. 210.
28. Соммервил, И. Инженерия программного обеспечения [Текст] /
И. Соммервил. - М.: Изд. дом ’’Вильямс", 2002. - 624 с.
29. Сухоребрый, В.Г. Применение стохастического подхода при анализе
работоспособности системы стабилизации летательного аппарата. [Текст] /
В.Г. Сухоребрый, А.В. Чумаченко // Открытые информационные и
компьютерные интегрированные технологии: сб. науч. тр. Нац. аэрокосм,
ун-та им. М.Е. Жуковского ”ХАИ”. - Вып. 19 - X., 2003. - С. 8-16.
30. Сухоребрый, В.Г. Оценка вероятности работоспособности системы
стабилизации ракеты-носителя с использованием различных моделей
линеаризации максимумов фазовых координат [Текст] / В.Г. Сухоребрый,
А.В. Чумаченко // Открытые информационные и компьютерные
интегрированные технологии: сб. науч. тр. Нац. аэрокосм, ун-та
им. Н.Е. Жуковского ”ХАИ”.- Вып. 19 - X., 2003. - С. 205-215.
31. Калнагуз, А.Н. Особенности оценки работоспособности систем
стабилизации ракет различного назначения [Текст] / А.Н. Калнагуз //
Мсхашка та машинобудування. - X., 2004. - №3. - С. 36-45.
155
3 МЕТОДИКА И ТЕХНИЧЕСКИЕ СРЕДСТВА ВЕРИФИКАЦИИ И
ВАЛИДАЦИИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ БЦВМ И ЦВМ СК
3.1 Программно-математическое обеспечение БЦВМ СУ и ЦВМ СК как
объект экспериментальной отработки
Программное обеспечение БЦВМ СУ ракет-носителей, космических
аппаратов и ЦВМ, входящих в состав проверочно-пускового оборудования
стартового комплекса (ЦВМ СК), является одним из главных компонентов,
характеристики которого в значительной степени определяют способность СУ и
СК выполнять стоящие перед ними требования, надежность СУ и СК в целом, а
также трудоемкость и стоимость их разработки.
Основные требования к ПМО БЦВМ и ЦВМ СК:
- необходимость выполнения программ в "жестком" реальном времени
(минимальный цикл решения задач может достигать величины 5 мс);
- недопустимость потери заявок на решение задач (невыполнение БЦВМ
или ЦВМ СК какой-либо задачи как минимум приводит к потере качества
управления либо к катастрофическим последствиям для объекта
управления);
- повышенные требования к надежности программ БЦВМ и ЦВМ СК и, как
следствие, необходимость минимизации числа ошибок в программах на
момент ее сдачи в эксплуатацию, обеспечение устойчивости к сбоям
аппаратуры и высокого уровня автоматизации работ при проектировании
ПМО, его верификации и валидации.
Для выполнения данных требований разработка ПМО БЦВМ и ЦВМ СК
должна проводиться на базе эффективной промышленной технологии.
Основные признаки промышленной технологии:
- стандартизованный жизненный цикл разработки ПМО, передача его в
эксплуатацию и эксплуатация с четко определенным составом фаз
(этапов) проектирования, составом работ и документации для каждой
фазы;
- высокий уровень автоматизации работ на каждой фазе жизненного цикла
ПМО;
- модульная (блочная) структура ПМО;
- высокий уровень стандартизации и унификации отдельных модулей,
блоков ПМО и наличие базы данных унифицированных и
стандартизованных программных блоков;
- эффективная организация вычислений в реальном масштабе времени;
- структуризация функциональных алгоритмов;
- поддержка сборочной технологии проектирования ПМО;
156
- возможность автоматической инсталляции конфигурации
технологической системы, необходимой для конкретного проекта;
- удобство работы и обучения.
Основным директивным документом, определяющим идеологию и порядок
разработки ПМО БЦВМ СУ ракет-носителей, космических аппаратов и ЦВМ СК,
является стандарт СТП523.2-382-99, разработанный на базе стандарта ESA PSS-
05-0, Европейского космического агентства [1].
Состав ПМО БЦВМ и ЦВМ СК. Архитектура и основные
технические характеристики ПМО
Программное обеспечение БЦВМ СУ PH (КА) и ЦВМ СК состоит из трех
компонентов:
- системного программного обеспечения;
- прикладного ПМО конкретного проекта СУ PH (КА) и СК;
- технологических систем поддержки проектирования прикладного ПМО.
В состав системного ПМО входят:
- операционная система БЦВМ (ЦВМ СК);
- библиотека стандартных подпрограмм;
- драйверы обмена с абонентами БЦВМ и ЦВМ СК.
- В состав прикладного ПМО входят:
- алгоритмы и программы управления полетом PH (КА);
- алгоритмы и программы предстартовой подготовки PH (КА);
- алгоритмы и программы электроиспытаний оборудования PH (КА) и
оборудования стартового комплекса;
- алгоритмы и программы расчета, а также ввода данных на пуск (полетное
задание, систематические составляющие погрешностей датчиков и
исполнительных органов СУ PH (КА)).
В состав технологических систем поддержки проектирования прикладного
ПМО входят:
- интегрированные системы программирования, включая языки и
библиотеку ПО;
- трансляторы с языков программирования системного и прикладного
ПМО;
- система комплексной динамической отработки (СКДО) прикладного ПМО;
- процедуры автоматизированной обработки результатов исполнения
тестируемых программных модулей прикладного ПМО;
- система автоматизированного анализа результатов ’’электронных пусков”
прикладных программ.
157
Прикладное программное обеспечение БЦВМ СУ и ЦВМ СК
Прикладное программное обеспечение СУ PH (КА) и СК имеет модульную,
иерархическую архитектуру и проектируется на базе следующих типов модулей:
- функциональные алгоритмы;
- процессы;
- подрежимы (типовые участки);
- режимы;
- пакеты режимов.
Функциональный алгоритм - это функционально завершенный блок
обработки информации, имеющий строго определенный цикл (такт) решения или
выполняемый однократно.
Процесс - это совокупность информационно связанных функциональных
алгоритмов, выполняемых в реальном масштабе времени, имеющих одинаковый
цикл решения, одинаковый приоритет по отношению к другим процессам.
Процесс реализует функционально завершенные задачи СУ (например,
совокупность алгоритмов обмена с датчиками и исполнительными органами СУ,
алгоритмов наведения, алгоритмов стабилизации, алгоритмов формирования и
выдачи информации в систему телеметрии).
Подрежим (типовой участок) - совокупность информационно связанных
процессов, выполняемых в реальном масштабе времени, обеспечивающая
реализацию частных целевых функций СУ (например, подрежим управления
полетом первой ступени ракеты-носителя, подрежим отделения полезной
нагрузки, подрежимы аварийного прекращения предстартовой подготовки PH).
Режим - совокупность информационно связанных подрежимов,
выполняемых в реальном масштабе времени, обеспечивающая реализацию
функционально завершенных эксплуатационных требований СУ (например,
режим предстартовой подготовки, режим управления полетом в целом, режим
построения солнечной ориентации, режимы электроиспытаний).
Пакет режимов - совокупность режимов, выполняемых последовательно в
соответствии с требуемым графом (матрицей) переходов. Объединение режимов
в пакеты и их автоматическое выполнение в составе сформированного пакета
позволяют повысить уровень автоматизации работ при подготовке PH к запуску,
сократить количество ручных операций и, как следствие, увеличить
защищенность от несанкционированных действий оператора [1].
Иерархия модулей ПМО показана на рис. 3.1.
Сборку (объединение) функциональных алгоритмов в процессы, процессов в
подрежимы и подрежимов в режимы осуществляет система автоматизации
программирования.
158
Рисунок 3.1 - Иерархия модулей ПМО
При выполнении программ в реальном масштабе времени управление
функциональными алгоритмами внутри процессов, процессами внутри
подрежимов, подрежимами внутри режимов и режимами внутри пакетов
режимов (включение и выключение пакетов режимов, процессов и
функциональных алгоритмов, выполнение процессов и функциональных
алгоритмов в процессах с заданным циклом и приоритетностью) обеспечивает
операционная система БЦВМ и ЦВМ СК.
Оператор взаимодействует с системой в условиях эксплуатации либо на
уровне режимов, либо на уровне совокупностей режимов (пакетов режимов).
Типы переменных, используемые для описания
процесса решения задач в реальном масштабе
времени
Для описания процесса решения задач в реальном масштабе времени
используют следующие типы переменных:
- тактовая метка - моменты изменения значения дискретного времени;
- такт (цикл) - интервал времени между соседними тактовыми метками;
- базовый такт (цикл) — минимальное значение длительности такта решения
функциональных алгоритмов;
- события (заявки) - значения тактовых меток, по которым происходит
коммутация (включение или выключение) подрежимов, процессов или
функциональных алгоритмов.
159
Следует различать следующие типы событий: стационарные и случайные.
Стационарные события - это события, которые для выбранных настроек
алгоритмов (полетного задания) обязательно появляются на циклограмме режима
(подрежима) в моменты времени, вычисляемые по функционалам, или в
детерминированные, заранее определенные моменты времени. Стационарные
события могут быть базовыми. Базовые стационарные события - это события, к
которым могут быть по времени ’’привязаны" другие стационарные события.
Случайные события - это события, которые могут появляться на
циклограмме в случайные моменты времени или вообще не появляться.
Случайные события всегда являются базовыми, и как следствие все события,
"привязанные" к ним, также являются случайными.
Длительность цикла решения функциональных алгоритмов в пределах
процессов постоянна и равна либо кратна длительности базового цикла.
При проектировании ПМО БЦВМ и ЦВМ СК выделяют следующие типы
глобальных переменных:
- переменные режимов;
- переменные подрежимов;
- переменные процессов;
- переменные функциональных алгоритмов [1].
Типы функциональных алгоритмов
По способу организации вычислений в реальном масштабе времени следует
различать следующие типы функциональных алгоритмов:
I тип - циклические, решаемые в заданном интервале времени с периодом,
равным базовому такту. Работа функциональных алгоритмов данного типа
начинается и завершается в каждом базовом такте;
II тип - циклические, решаемые в заданном интервале времени с периодом,
кратным базовому такту. Работа модулей данного типа также начинается и
завершается в том базовом такте, в котором они включаются;
III тип - циклические, решаемые в заданном интервале с периодом, кратным
базовому такту, работа которых может прерываться на время решения
функциональных алгоритмов I и II типов с последующим продолжением их
решения в каждом базовом такте после завершения выполнения функциональных
алгоритмов I и II типов (фоновые функциональные алгоритмы);
IV тип - апериодические или разовые;
V тип - дежурные - функциональные алгоритмы, включаемые ОС в каждом
базовом такте в случае завершения выполнения всех перечисленных выше типов
функциональных алгоритмов [1].
160
Варианты размещения программ и данных на пуск
(полетного задания)
В исходном состоянии системные и прикладные программы БЦВМ и ЦВМ
СК и систематические составляющие погрешностей датчиков СУ могут
размещаться либо в энергонезависимом ПЗУ БЦВМ и ЦВМ СК, либо в базе
данных проекта СУ на сервере ЛВС наземной станции (НППА ПУП). Данные на
пуск (полетное задание) в исходном состоянии размещаются в БД наземной
станции. Запись программ и данных на пуск в БД НППА ПУП и их коррекция, в
том числе и в условиях эксплуатации СУ, обеспечивается с носителей,
устанавливаемых на управляющую рабочую станцию ЛВС. Загрузка программ и
данных на пуск из БД НППА ПУП в ПЗУ БЦВМ и ЦВМ СК выполняется в
специальных режимах, предшествующих режиму предстартовой подготовки.
База данных проекта - база данных, содержащая информацию, необходимую
для поддержки работ, связанных с разработкой и эксплуатацией ПМО СУ PH
(КА) и НИНА ПУП (все конфигурации и версии штатного ПМО СУ PH (КА) и
НППА ПУП, программные средства АРМ-П, результаты электронных пусков
отрабатываемых программ и т.д.).
При поставке ПМО в места эксплуатации из базы данных проекта выделяют
эксплуатационную БД, содержащую поставочную версию ПМО в рамках
конфигурации ПМО, необходимой для конкретного места эксплуатации (фирма-
разработчик PH или КА, техническая позиция, стартовая позиция).
Резидентные части ПМО БЦВМ и ЦВМ СК (тесты БЦВМ и ЦВМ СК,
программа-загрузчик, библиотека стандартных подпрограмм и т.п.) в любом
варианте размещаются в энергонезависимом ПЗУ БЦВМ и ЦВМ СК.
Размещение программ и данных в ПЗУ обеспечивает их защиту от
возможных искажений программ при сбоях БЦВМ и ЦВМ СК.
Для выполнения программы могут загружаться в ОЗУ или выполняться
непосредственно из ПЗУ.
В первом случае при сбоях БЦВМ и ЦВМ СК необходимо повторить
загрузку программ из ПЗУ в ОЗУ, что увеличивает время восстановления
вычислительного процесса после сбоя.
Во втором случае перезагрузка программы не требуется, однако
производительность процессора при ее выполнении уменьшается.
Выбор варианта исполнения программ зависит от производительности
процессора и модели сбоев.
Типы алгоритмов, входящих в состав режимов
(подрежимов) БЦВМ и ЦВМ СК
Комплект алгоритмов, необходимый для разработки любого режима
(подрежима) БЦВМ и ЦВМ СК, состоит из алгоритмов следующих типов:
- алгоритмы системного ПМО БЦВМ и ЦВМ СК;
161
- алгоритм, обеспечивающий формальное описание вычислительного
процесса, выполняемого БЦВМ и ЦВМ СК в реальном времени, -
динамическая спецификация режима (подрежима);
- алгоритм, обеспечивающий формальное описание информационных
потоков (интерфейсов), циркулирующих между функциональными
алгоритмами в любой точке динамической спецификации, - динамическая
схема информационных потоков;
- функциональные алгоритмы режима (подрежима) [2, 3].
Технические требования к динамическим спецификациям
и форма их представления
Динамические спецификации (ДС) - это формальное описание
последовательности, приоритетности выполнения структурированных
функциональных алгоритмов, условий их коммутации и циклов (тактов) решения.
ДС, разрабатываемые для режимов и подрежимов (типовых участков),
представляют собой алгоритм организации вычислений в реальном масштабе
времени в координатах "события*1 - "процессы" - "функциональные алгоритмы".
Вычислительный процесс БЦВМ (ЦВМ СК) описывают в графической
форме, удобной для восприятия человеком, что сокращает количество ошибок,
вносимых в программы БЦВМ и ЦВМ СК на этапах их проектирования и
программирования.
ДС имеют иерархическую структуру, содержащую следующие оси (уровни):
- источников событий;
- стационарных событий;
- случайных событий;
- процессов.
В состав ДС любого режима (подрежима) входит библиотека
структурированных функциональных алгоритмов данного режима (подрежима).
ДС имеют в своем составе одну ось источников событий, одну ось
стационарных событий, одну ось случайных событий и несколько осей
процессов.
Количество осей (уровней) процессов зависит от сложности режима
(подрежима).
Минимальное число осей (уровней) процессов - две: ось (уровень), на
которой располагаются алгоритмы обмена в реальном времени (РВ) с датчиками
и исполнительными органами, и ось (уровень), на которой располагаются
функциональные алгоритмы режима (подрежима).
Оси (уровни) процессов на ДС нумеруют сверху вниз в порядке понижения
приоритетности их выполнения.
В каждый момент времени любая ось (уровень) процессов может быть занята
только одним процессом.
162
Любая ось (уровень) процессов может последовательно заниматься
различными процессами.
Процесс, включаемый на любом уровне, приобретает приорите!' данного
уровня.
Вверху ДС (над осью источников событий) и внизу ДС (ниже уровня
процесса с наименьшим приоритетом) размещаются комментарии.
Любое событие представляется на осях стационарных и случайных событий
тремя параметрами:
- имя события (FCi, stabi, ACSi и т.д.);
- расчетное время осуществления события (n4FCi, n4stabi, n4ACSi и т.д.);
- условие возникновения события.
Условием возникновения события является совпадение текущего времени
режима с расчетным временем осуществления события, отсчитываемым от
начала режима с дискретностью базового такта.
При выполнении данного условия вырабатывается заявка операционной
системе БЦВМ (ЦВМ СК) на выполнение необходимых коммутаций (включения
или выключения) процессов и функциональных алгоритмов в процессах
Так, запись n4 = n4FCl на оси стационарных событий означает, что событие с
именем FC1, имеющее расчетное время осуществления n4FCl, возникнет при
совпадении текущего времени п4, отсчитываемого от начала режима, с
расчетным временем события FC1. Здесь п4 - порядковый номер базового такта,
отсчитываемый от начала режима.
Стационарные и случайные события, которые могут формироваться
функциональными алгоритмами любого процесса или аппаратными средствами,
фиксируются на оси источников, где показываются имена функциональных
алгоритмов, вырабатывающих данные события, или имена сигналов (команд),
поступающих из аппаратуры.
На осях процессов размещаются функциональные алгоритмы. Порядок
записи алгоритмов на осях процессов соответствует приоритетности их
исполнения (слева - направо).
В верхнем комментарии приводят формульные схемы, по которым
вычисляют расчетные времена осуществления событий, в нижнем комментарии -
пояснения физического смысла стационарных и случайных событий.
Пример фрагмента ДС показан в томе 1 на рис. 4.13.1.
Инструментальным средством проектирования ДС является графический
редактор ДС, обеспечивающий одновременно с ее набором и редактированием
автоматическое формирование настроек операционной системы БЦВМ (ЦВМ
СК) для каждого события, показанного на осях стационарных и случайных
событий. При таком подходе графический язык публикации ДС одновременно
является языком их программирования, что значительно облегчает и упрощает
программирование алгоритма организации вычислительного процесса в РВ.
163
Технические требования к динамическим схемам
информационных потоков и форма их представления
Динамические схемы информационных потоков - это формальное описание
потоков данных, которыми обмениваются структурированные функциональные
алгоритмы, представленные на динамических спецификациях режимов
(подрежимов), в координатах ’’события1’ - ’’процессы” - "потоки”.
Динамические схемы информационных потоков - это
продифференцированные по времени информационные потоки между
функциональными алгоритмами режимов (подрежимов), отображающие
динамику коммутации информационных потоков каждого функционального
алгоритма на циклограмме режима (подрежима).
Динамические схемы информационных потоков определяют интерфейс
между функциональными алгоритмами в любой точке циклограмм режимов
(подрежимов).
Динамические схемы информационных потоков разрабатывают для режимов
и подрежимов (типовых участков).
Динамические схемы информационных потоков выполняют в графической
форме, удобной для восприятия человеком, что сокращает количество ошибок,
вносимых в программы БЦВМ и ЦВМ СК на этапах их проектирования и
программирования.
По аналогии с динамическими спецификациями динамические схемы
информационных потоков имеют иерархическую структуру, содержащую
следующие оси (уровни):
- источников событий;
- стационарных событий;
- случайных событий;
- процессов.
Информация оси источников событий, осей стационарных и случайных
событий и обоих комментариев динамической схемы информационных потоков
аналогична информации соответствующих осей и комментариев ДС.
На каждой оси процесса динамической схемы информационных потоков
размещают таблицы интерфейсных параметров для всех функциональных
алгоритмов, включаемых на данной оси процесса ДС.
Динамическая спецификация участка полета первой, второй ступеней и
первого включения МДЗ (DS0) изображена в томе 1 на рис. 4.13.1.
Идентификатор имени таблицы интерфейсных параметров образуется из
буквы Т, номера соответствующего функционального алгоритма и порядкового
номера таблицы, который совпадает с порядковым номером участка
циклограммы режима. Например, таблица интерфейсных параметров алгоритма
АО2110 для i-ro участка циклограммы режима имеет имя Т02110 - i.
В состав таблиц интерфейсных параметров любого функционального
алгоритма входит следующая информация:
- имя таблицы интерфейсных параметров алгоритма;
164
- диапазон между событиями динамической спецификации режима
(подрежима), которому соответствует данная таблица интерфейсных
параметров алгоритма;
- имена параметров, поступающих на вход функционального алгоритма в
диапазоне действия таблицы;
- имена выходных параметров функционального алгоритма в диапазоне
таблицы;
- имена источников каждого параметра, поступающего на вход
функционального алгоритма в диапазоне таблицы;
- имена потребителей каждого выходного параметра алгоритма в диапазоне
таблицы.
Ниже показан пример таблицы на участке №8 циклограммы режима между
событиями FC7 и FC9.
Таблица 3.1 - Интерфейсные параметры алгоритма А02110
Входы Выходы
Обозначение параметра Источник Обозначени е параметра Потребитель
«4 ОС П4к31...П4кЗЗ А04001
n4FC7 А02105 П4АС51 DS
S АО2Ю5 n4Stab4 DS, АОЗЮ1, АОЗЮЗ, АОЗЮ4, АОЗЮ9, АОЗПО, AO3112
^n4Stab4 ПЗ
/^Il4ACSl ПЗ
^П4К31 ПЗ
Динамические схемы информационных потоков используют при разработке
планов верификации и валидации ПМО.
Язык публикации функциональных алгоритмов
БЦВМ и ЦВМ СК
Для обеспечения эффективной организации работ на этапе
программирования функциональные алгоритмы должны быть опубликованы на
языке, понятном и достаточно легко воспринимаемом человеком-программистом
и минимизирующем возможность их неоднозначного толкования.
Язык публикации должен обеспечивать представление следующих
характеристик функциональных алгоритмов:
- имя алгоритма;
- назначение алгоритма;
- цикл решения алгоритма;
165
- события, по которым включается и выключается функциональный
алгоритм (диапазон работы алгоритма);
- параметры, поступающие на вход алгоритма, их функциональное
назначение (название), обозначения (идентификаторы), размерность и
источники;
- выходные параметры алгоритма, их функциональное назначение
(название), обозначения (идентификаторы), размерность и потребители;
- данные на пуск (полетное задание), необходимые для работы алгоритма,
их функциональное назначение (название), обозначения
(идентификаторы) и размерность;
- диапазоны входных и выходных переменных;
- переменные и константы алгоритма, их функциональное назначение
(название), обозначения (идентификаторы) и размерность;
- блок-схема функционального алгоритма и формульные схемы.
Ниже показан пример публикации ’ функционального алгоритма при
П4 = n4SBl V П4 ~ n4SB2
Таблица 3.2 - Функциональный алгоритм
№ п/п Имя алгоритма Название
1 АО2203-Т4 Программа тангажа на участке функционального наведения
2 Цикл решения Диапазон работы алгоритма
3 т, П4|90 — П4 < n4SBI V П48Е1 ~ П4 < П4БВ2
Вход
№ п/п Название параметра Обозначение Размерность Источник
1 Коэффициенты аппроксимирующего полинома i = 0,...,5 аят[п4]] рад АО2202-Р
2 а5И [П4] рад с/м
3 a52i [^4] рад с3 /м3
4 аЭЗ,[П4] рад с2 /м2
5 Кажущаяся скорость в момент окончания вертикального участка Wxi$q [п4 ] м/с АО2202-Р
166
Окончание табл. 3.2
№ п/п Название параметра Обозначение Размерность Источник
6 Метка окончания участка отделения первой ступени П4БЕ1 - АО21Ю-Т,
7 Продольная составляющая кажущейся скорости WXI[n4] м/с АО1Ю5-Т4
8 Такт »4 - DS
Выход
№ п/п Название параметра Обозначение Размерность Потре- битель
1 Программный угол тангажа рад АО2217-Т, АО2302-Х
Полетное задание
№ п/п Название параметра Обозначение Размерность
1 Узлы переключения аппроксимирующих полиномов, /=0 6 м/с
Переменные
№ п/п Название параметра Обозначение Тип
1 Номер участка аппроксимации i int
2 Скорость относительно узла d double
Принципы обеспечения и подтверждения надежности
ПМО БЦВМ СУ и ЦВМ СК
Надежность современных ракетно-космических систем в значительной
степени определяется надежностью программного обеспечения БЦВМ и ЦВМ
СК.
Такое положение является следствием большой сложности программ
бортовых и наземных ЦВМ: ПМО современных БЦВМ и ЦВМ СК имеет
большой объем и содержит десятки тысяч маршрутов обработки информации,
что не позволяет гарантировать 100%-ную проверку всех возможных при
эксплуатации сочетании маршрутов обработки информации и, как следствие,
выявить все ошибки в ПМО.
167
Степень влияния ошибок в ПМО, не выявленных в процессе его
верификации и валидации, на эксплуатационные характеристики ПМО
определяется их количеством и вероятностью возникновения в условиях
ситуаций эксплуатации, в которых данные ошибки проявляются.
Таким образом, под "глобальной” надежностью программного обеспечения
следует понимать вероятность проявления в условиях реальной эксплуатации СУ
ошибок в ПМО, не выявленных в процессе его верификации и валидации.
В соответствии с данным определением количественная оценка надежности
ПМО требует создания инженерной методики, базирующейся на расчете
вероятности наличия ошибок в ПМО при его сдаче в эксплуатацию и расчете
вероятности возникновения в условиях эксплуатации таких ситуаций, при
которых данные ошибки оказывают негативное влияние на работу СУ.
Источниками таких ситуаций могут быть параметры полетного задания, входная
информация с датчиков СУ и т.д.
Решение указанной задачи является сложной научной проблемой, которая не
решена до настоящего времени, что не позволяет проводить количественную
оценку надежности ПМО при его сдаче в эксплуатацию.
В этих условиях задачу достижения максимальной надежности ПМО при его
сдаче в эксплуатацию решают путем внедрения в практику проектирования ПМО
двух комплексов технологических мероприятий. Задачей первого комплекса
технологических мероприятий является минимизация количества ошибок в ПМО
на момент его сдачи в эксплуатацию, а задачей второго комплекса -
подтверждение так называемой "локальной" надежности программ
предстартовой подготовки и управления полетом, т.е. их надежности в рамках
конкретного запуска PH.
В состав первого комплекса технологических мероприятий входят:
- разработка динамических спецификаций и динамических схем
информационных потоков;
- структуризация функциональных алгоритмов бортовых и наземных ЦВМ;
- использование унифицированных функциональных алгоритмов,
отработанных и апробированных в других проектах;
- автономная верификация программных модулей с использованием РИС-
технологии;
168
- комплексная верификация и валидация ПМО в условиях, максимально
приближенных к условиям его реальной эксплуатации, с использованием
ЗИС-технологии;
- применение сборочной технологии программирования;
- верификация и валидация ПМО с реальной аппаратурой СУ;
- максимальная автоматизация работ на всех этапах жизненного цикла
ПМО.
П4 < П48Е1
i<2 vwx1[n4]>WSM
i<2 vwx1[n4]>Wsl+1
d = wx1[n4]-Wsl-Wx1<,0[n4]
Spr [n« ]= a83. [n4 ] d3 + a32i KK + аэи [n4 ]d + a80l [n4 ]
Рисунок 3.2 - Блок-схема алгоритма A02203-T4
Структуризация - это декомпозиция алгоритмов на простейшие структуры
(блоки), обладающие однородными признаками, из которых могут быть
построены более сложные алгоритмические конструкции.
Главной задачей структуризации является упрощение внутренней логической
структуры функциональных алгоритмов, стандартизация интерфейса между
отдельными функциональными алгоритмами и, как следствие, обеспечение
169
возможности проверки всех маршрутов структурированных функциональных
алгоритмов при их верификации и валидации.
Структуризация позволяет также выделить унифицированные
алгоритмические конструкции, которые могут быть многократно использованы
как в одном, так и в нескольких проектах.
Принципы структуризации функциональных алгоритмов приведены далее.
Результатом структуризации алгоритмов является библиотека
структурированных функциональных алгоритмов и техническая документация на
данные алгоритмы.
Использование унифицированных функциональных алгоритмов,
отработанных и апробированных в других проектах, значительно сокращает
количество ошибок в ПМО на момент его сдачи в эксплуатацию.
РИС-технология, которую применяют для автономной верификации
программных модулей функциональных алгоритмов, базируется на использовании
тестовой (эталонной) информации, получаемой от генератора тестов - программы-
аналога, разрабатываемой независимым коллективом программистов. РИС-
технология обеспечивает максимальную полноту тестирования программных
модулей функциональных алгоритмов, обладает высокими диагностическими
возможностями, однако не обеспечивает проверку модулей в условиях, максимально
приближенных к условиям их реальной эксплуатации и, как следствие, не выявляет
ошибок, которые носят системный (комплексный) характер.
ЗИС-технологию верификации и валидации ПМО применяют на уровне
режимов функционирования СУ, информационно связанных с математическими
моделями объектов управления и контроля. Она обеспечивает интеграционное и
системное тестирование данных компонентов ПМО в условиях, максимально
приближенных к условиям их реальной эксплуатации, позволяет обнаружить
системные ошибки, однако имеет ограниченные (по сравнению с РИС-
технологией) диагностические возможности при верификации и валидации
функциональных алгоритмов.
Максимальная эффективность верификации и валидации ПМО может быть
достигнута с помощью полномасштабного использования РИС- и ЗИС-
технологий. Однако при этом значительно возрастает трудоемкость разработки
ПМО БЦВМ и ЦВМ СК.
Использование сборочной технологии проектирования ПМО обеспечивает
требуемый уровень верификации и валидации ПМО БЦВМ и ЦВМ СК и
одновременно снижает трудоемкость его разработки благодаря следующим
факторам:
- включению в состав ПМО БЦВМ и ЦВМ СК программных модулей
функциональных алгоритмов, отработанных в составе генератора тестов;
170
- исключению этапа автономной верификации программных модулей
функциональных алгоритмов с использованием РИС-технологии и
смещения центра тяжести в сторону ЗИС-технологии.
Сборочная технология проектирования позволяет начать верификацию и
валидацию ПМО с этапа интеграционного и системного тестирования режимов с
применением ЗИС-технологии, а РИС-технологию использовать только в
исключительных случаях при появлении затруднений с диагностикой
обнаруженных в ПМО ошибок.
Применение сборочной технологии возможно только в том случае, если
программисты-разработчики генератора тестов и программисты-разработчики
ПМО БЦВМ (ЦВМ СК) используют один и тот же язык программирования.
Верификацию и валидацию ПМО БЦВМ и ЦВМ СК с реальной аппаратурой
СУ проводят на уровне программных модулей режимов и пакетов режимов и
обеспечивают интеграционное и системное тестирование ПМО совместно с
реальными датчиками и исполнительными органами СУ.
"Локальная" надежность программ предстартовой подготовки и управления
полетом подтверждается методом "электронного пуска" данных программ с
полетным заданием, рассчитанным для конкретного запуска PH [4, 5, 6].
Структуризация алгоритмов СУ
Принципы структуризации функциональных алгоритмов, рассматриваемые в
настоящем разделе, распространяются на все уровни ПМО:
- функциональные алгоритмы;
- процессы;
- - подрежимы (типовые участки);
- режимы.
Результатом структуризации алгоритмов СУ является документация,
содержащая структурированные функциональные алгоритмы, процессы и
подрежимы (типовые участки).
Эта документация является основой для проектирования динамических
спецификаций режимов и динамических схем информационных потоков.
Для создания (построения) алгоритмов более высокого уровня должны
использоваться блоки алгоритмов нижних уровней (процедур).
Так, для создания (построения) алгоритмов процессов, подрежимов и
режимов должны применяться блоки функциональных алгоритмов, полученные в
результате их структуризации.
В основу структуризации алгоритмов должны быть положены следующие
принципы:
- обеспечения (поддержки) стандартного интерфейса между отдельными
блоками алгоритмов;
171
- упрощения внутренней логики функциональных алгоритмов благодаря
использованию при проектировании функциональных алгоритмов
возможностей ОС и исключения дублирования функций ОС в логической
структуре функциональных алгоритмов;
- минимизации числа внутренних блоков (маршрутов) функциональных
алгоритмов, переключаемых по временным и функциональным меткам;
- выделения в функциональных алгоритмах унифицированных
(стандартных) блоков;
- выделения в режимах типовых (стандартных) участков;
- структуризации функциональных алгоритмов с использованием трех
базовых конструкций: простая вычислительная конструкция (рис. 3.3),
альтернатива (рис. 3.4) и итерация (рис. 3.5);
- исключения в циклах операторов, не зависящих от состояния счетчика
циклов;
- наличия циклов с ограниченным количеством (не более 50) операторов;
- исключения модификации индекса в цикле "for” (за исключением
операций его увеличения или уменьшения);
- исключения неестественного выхода (т. е. переходы и возвраты) из цикла;
- использования количества уровней (вложенности) любой условной
конструкции не более 4;
- применения операций, содержащих не более одной точки возврата;
- использования операторов выбора (’’switch" на языке С и т.п.) с полным
перечислением всех возможностей выбора;
- повышения роли и эффективности независимого (автономного)
тестирования блоков функциональных алгоритмов. Блоки
функциональных алгоритмов, протестированные независимо (автономно),
не должны требовать полномасштабного тестирования после их
включения в сборку [2, 3].
Рисунок 3.3 - Простая вычислительная конструкция
Рисунок 3.4 - Альтернатива
HZHZZHZh
Рисунок 3.5 - Итерация
172
3.2 Этапы верификации и валидации ПМО БЦВМ и ЦВМ СК.
Задачи и содержание этапов верификации и валидации ПМО.
Планы верификации и валидации ПМО
В общем случае верификацию и валидацию прикладного ПМО БЦВМ СУ и
ЦВМ СК конкретного проекта СУ PH выполняют за пять этапов:
1-й этап - независимое автономное тестирование программных модулей
структурированных функциональных алгоритмов;
2-й этап - автономное тестирование программных модулей
структурированных функциональных алгоритмов и программных модулей
режимов совместно с системным ПМО БЦВМ (ЦВМ СК);
3-й этап - интеграционное и системное тестирование программных модулей
подрежимов (типовых участков) и программных модулей режимов в целом с
математическими моделями объектов управления и контроля;
4-й этап — интеграционное и системное тестирование программных модулей
режимов с реальными датчиками и исполнительными органами СУ;
5-й этап - ’’электронные пуски” программного модуля режима управления
полетом с данными на пуск (полетное задание, систематические составляющие
погрешностей датчиков СУ и т.п.), выбранными для конкретного пуска PH (КА).
Работы 1-3-го и 5-го этапов выполняют на фазе детального проектирования
(ДП-фаза) на БЦВМ (ЦВМ СК), входящей в состав специализированного
рабочего места АРМ-П - автоматизированного рабочего места программиста
(исследовательский стенд). Работа 4-го этапа выполняется на ДП-фазе на БЦВМ
(ЦВМ СК), входящей в состав комплексного стенда, содержащего полный состав
аппаратуры СУ PH (КА) и аппаратуры стартового комплекса.
Совокупность работ, выполняемых на 1-4-м этапах, обеспечивает полную
верификацию программного продукта, его лабораторно-отработочные испытания
на исследовательском (ЛОИ-ИС) и комплексном (ЛОИ-К) стендах и его
готовность к валидации - приемосдаточным испытаниям ПМО совместно с
заказчиком на исследовательском (СОИ-ИС) и комплексном (СОИ-К) стендах.
При валидации ПМО полностью или частично повторяются работы 3-го и 4-
го этапов.
Завершающими работами при валидации являются работы
5-го этапа.
Валидацию ПМО проводят на фазе передачи ПМО в эксплуатацию (ПЭ-фаза)
[1].
Назначение этапов верификации и валидации ПМО
При независимом автономном тестировании программный модуль при его
исполнении не связан по управлению и информации с другими модулями,
входящими в состав режима (подрежима, процесса), и с операционной системой
БЦВМ (ЦВМ СК). На вход модуля подается тестовая информация, полученная от
генератора тестов, а результаты его работы оценивают по формальным
173
критериям путем сравнения с результатами его выполнения в составе генератора
тестов.
Основными задачами этапа независимого автономного тестирования
является проверка программных модулей по всем алгоритмическим маршрутам и
формирование библиотеки структурированных программных модулей. Объем
тестов должен назначаться исходя из необходимости выполнения данного
требования.
При независимом автономном тестировании программный модуль работает
вне шкалы реального времени.
При автономном тестировании совместно с системным ПМО БЦВМ (ЦВМ
СК) программный модуль работает в составе сборки с другими модулями,
входящими в состав режима (подрежима, процесса). Включение модуля
проводится ОС БЦВМ (ЦВМ СК), его входные информационные связи разорваны
и заменены тестовой информацией, полученной от генератора тестов. Оценка
результатов работы программных модулей на данном этапе выполняется
аналогично этапу независимого автономного тестирования.
Основной задачей данного этапа является проверка интерфейса программных
модулей функциональных алгоритмов с операционной системой БЦВМ (ЦВМ
СК) и отработка алгоритмов и программ динамических спецификаций. Объем
тестов, которые должен поступить от генератора тестов для выполнения работ
данного этапа, определяется сложностью динамической спецификации режима
(подрежима) и назначается разработчиками алгоритмов динамических
спецификаций и разработчиками функциональных алгоритмов.
При автономном тестировании совместно с системным ПМО БЦВМ (ЦВМ
СК) программный модуль может работать в реальном либо псевдореальном
времени.
Интеграционное и системное тестирование с математическими моделями
объектов управления и контроля обеспечивает максимальное приближение
условий тестирования программных модулей к условиям их реальной
эксплуатации.
Интеграционное тестирование - это проверка правильности реализации
потоков управления и потоков данных во всех конфигурациях проекта ПМО.
Системное тестирование - проверка правильности реализации в проекте всех
требований к ПМО, определенных на ТПО-фазе.
Тестирование проводится в среде разработки и в среде эксплуатации ПМО.
Интеграционное и системное тестирование с математическими моделями
объектов управления и контроля выполняются на уровне модулей подрежимов и
режимов в целом.
Выбор объема тестов и оценка результатов работы программных модулей на
данном этапе осуществляются по физическим критериям путем проверки
правильности реализации требований технического задания на систему
управления [6, 4, 1].
Основные задачи 4-го этапа верификации и валидации:
174
- проверка интерфейса программных модулей режимов (подрежимов) с
реальными датчиками и исполнительными органами СУ;
- тестирование драйверов обмена в условиях их реальной эксплуатации;
- проверка полярностей в трактах системы стабилизации и СУОС;
— проверка графа переходов между режимами в каждом эксплуатационном
пакете режимов.
Интеграционное и системное тестирование с реальными датчиками и
исполнительными органами СУ проводится на уровне программных модулей
режимов и пакетов режимов.
Работы данного этапа выполняют на БЦВМ (ЦВМ СК) в составе
комплексного стенда (полный состав аппаратуры СУ). Программные модули
режимов работают в реальном масштабе времени.
При выполнении работ данного этапа генератор тестов должен обеспечивать
выдачу технологических настроек алгоритмов для проведения комплексных
испытаний и программы проверки полярностей в трактах системы стабилизации
и СУОС. В соответствии с этим на данном этапе обычно используют два
комплекта технологических настроек алгоритмов - комплект настроек для
проведения комплексных испытаний и комплект настроек для проверки
полярностей в трактах системы стабилизации и СУОС.
Проверка графа переходов между режимами во всех эксплуатационных
пакетах режимов выполняется при отработке инструкции по эксплуатации PH
(КА).
Технология выполнения верификации и валидации каждого режима,
входящего в состав ПМО БЦВМ и ЦВМ СК, зависит от его сложности и либо
требует выполнения всех пяти этапов, либо имеет сокращенный объем благодаря
отсутствию некоторых этапов, например этапа интеграционного и системного
тестирования с математическими моделями объектов управления и контроля. К
первой категории программ относятся такие программы, как программа
управления полетом, программа предстартовой подготовки и программы
калибровок датчиков и исполнительных органов СУ, ко второй - большинство
программ электроиспытаний аппаратуры СУ.
Верификация и валидация системного ПМО
Отдельно следует выделить этап верификации и валидации системного ПМО
БЦВМ, ЦВМ СК и технологических систем поддержки проектирования
прикладного ПМО БЦВМ, ЦВМ СК.
Системное ПМО БЦВМ и ЦВМ СК и технологические системы поддержки
проектирования прикладного ПМО БЦВМ, ЦВМ СК являются
унифицированными компонентами ПМО, их разрабатывают одновременно с
БЦВМ (ЦВМ СК) и используют во всех проектах, в которых применяют данную
БЦВМ (ЦВМ СК).
В связи с этим верификация и валидация системного ПМО БЦВМ, ЦВМ СК и
технологических систем поддержки проектирования прикладного ПМО БЦВМ, ЦВМ
175
СК сводятся к проверке соответствия возможностей данных систем требованиям к
прикладному ПМО конкретного проекта СУ PH (КА) и СК.
Верификация и валидация системного ПМО БЦВМ, ЦВМ СК и
технологических систем поддержки проектирования прикладного ПМО БЦВМ,
ЦВМ СК выполняются на специализированной контрольной задаче,
разрабатываемой для каждого проекта. Контрольная задача - это обобщенная
модель режимов прикладного ПМО конкретного проекта, ориентированная на
данный проект ПМО и учитывающая весь спектр требований, предъявляемых к
прикладному ПМО конкретного проекта [6, 4].
План верификации и валидации ПМО
План верификации и валидации ПМО должен содержать следующие
разделы:
- объект верификации и валидации;
- цель верификации и валидации;
- требования к программе;
- требования к программной документации;
- средства и порядок верификации и валидации;
- методы верификации и валидации.
В разделе ’’Объект верификации и валидации" указывают наименование,
область применения и обозначение испытуемой программы.
В разделе "Цель верификации и валидации" описывают цель проведения
испытаний.
В разделе "Требования к программе" указывают требования, подлежащие
проверке во время испытаний и заданные в техническом задании на программу.
В разделе "Требования к программной документации" описывают состав
программной документации, предъявляемой на испытания.
В разделе "Средства и порядок верификации и валидации” указывают
технические и программные средства, используемые во время испытаний, а
также порядок проведения испытаний.
В разделе "Методы верификации и валидации" приводят описания
используемых методов испытаний. Методы испытаний включают в себя
описания проверок с указанием результатов проведения испытаний(перечня
тестовых примеров, контрольных распечаток тестовых примеров и т.п.) [7].
3.3 Верификация ПМО по формальным критериям в разомкнутой
схеме исследовательского стенда (РИС-технология)
Независимое автономное тестирование программных модулей
структурированных функциональных алгоритмов (1-й этап) и автономное
тестирование программных модулей структурированных функциональных
алгоритмов совместно с системным ПМО БЦВМ и ЦВМ СК (2-й этап)
176
базируются на РИС-технологии. В этой технологии применяют тестовую
(эталонную) информацию, получаемую от генератора тестов - программы-
аналога, разрабатываемую независимым коллективом программистов.
Используют два варианта РИС-технологии - статическую и динамическую.
Статическую РИС-технологию применяют для верификации как отдельных
модулей, входящих в состав режимов, так и режимов в целом.
При использовании статической РИС-технологии генератор тестов
формирует и записывает в базу данных контрольный пример (КП-РИС),
состоящий из следующих файлов:
- унифицированный файл настроек режима управления и модели режима
управления (файл настроек РУ, МРУ) - полетное задание,
систематические составляющие погрешностей датчиков и
исполнительных органов и т.д.;
- файл входной информации верифицируемого режима или программного
модуля, входящего в состав верифицируемого режима, для каждого такта
решения в пределах диапазонов работы, заданных в динамической
спецификации;
- файл результатов работы верифицируемого режима или программного
модуля, входящего в состав верифицируемого режима, для каждого такта
решения (файл РМРУ) в пределах диапазонов работы, заданных в
динамической спецификации.
Информационные связи генератора тестов и верифицируемого режима (или
программного модуля, входящего в состав верифицируемого режима) для
статической РИС-технологии, показаны на рис. 3.6.
Верифицируемый режим или программный модуль, входящий в состав
верифицируемого режима, запускается системой комплексной динамической
отработки. При работе верифицируемого режима используют файл настроек РУ,
МРУ и файл ВхИ. При работе программного модуля, входящего в состав
верифицируемого режима, применяют файл РМРУ и файл ВхИ. Программный
модуль при запуске формирует и записывает в базу данных результаты их работы
(файл РРУ).
Оценку результатов работы и диагностику верифицируемого режима или
программного модуля выполняют с помощью процедур статической обработки по
формальным критериям, путем анализа и сопоставления файлов РМРУ и РРУ.
Типовой состав диагностических процедур статической обработки
результатов запуска верифицируемых программных модулей по формальным
критериям приведен в подразд. 3.6.
177
ГЕНЕРАТОР ТЕСТОВ
Рисунок 3.6 - Информационные связи генератора тестов и
верифицируемого программного модуля для статической
РИС-технологии
Сокращения к рис.3.6 - 3.8:
АРМ-П - автоматизированное рабочее место программиста
(исследовательский стенд);
ВхИ - входная информация;
МОУ - модель объекта управления;
МРУ - модель режима управления;
РМРУ - результаты ’’электронного пуска’’ МРУ;
РРУ - результаты "электронного пуска" РУ;
РУ - режим управления;
УК - управляющий кадр МОУ.
178
При использовании динамической РИС-технологии генератор тестов
формирует и записывает в базу данных контрольный пример (КП-РИС),
содержащий унифицированный файл настроек алгоритмов режима управления и
модели режима управления (файл настроек РУ, МРУ) - полетное задание,
систематические составляющие погрешностей датчиков и исполнительных
органов и т.д.
Информационные связи генератора тестов и верифицируемого режима для
динамической РИС-технологии показаны на рис. 3.7.
Динамическую РИС-технологию применяют для верификации режимов в
целом.
При использовании динамической РИС-технологии генератор тестов и
верифицируемый режим работают параллельно. Верифицируемый режим
запускается системой комплексной динамической отработки. При работе
верифицируемого режима используют файл настроек РУ, МРУ и кадры ВхИ;,
формируемые генератором тестов в каждом базовом такте.
Оценку результатов работы верифицируемого режима выполняют в каждом
такте путем сопоставления кадров РМРУ, и РРУ; с помощью процедур
динамической обработки по формальным критериям.
Работы данного этапа выполняют на БЦВМ (ЦВМ СК) в составе
автоматизированного рабочего места программиста (АРМ-П). Тестируемые
программные модули при запуске исполняют в псевдореальном времени [5].
3.4 Верификация и валидация ПМО по физическим критериям
с математическими моделями объектов управления в замкнутой
схеме исследовательского стенда (ЗИС-технология)
Интеграционное и системное тестирование программных модулей
подрежимов (типовых участков) и программных модулей режимов в целом с
математическими моделями объектов управления и контроля (3-й этап)
базируется на ЗИС-технологии.
При использовании ЗИС-технологии генераторов тестов формирует и
записывает в базу данных контрольный пример (КП-ЗИС), состоящий из
следующих файлов:
179
- унифицированный файл настроек алгоритмов режима управления и модели
режима управления (файл настроек РУ, МРУ) - полетное задание,
систематические составляющие погрешностей датчиков и т.п.;
- файл настроек математической модели объекта управления (контроля) —
файл настроек МОУ.
Рисунок 3.7 - Информационные связи генератора тестов
и верифицируемого программного модуля для динамической
РИС-технологии
180
Файл настроек математических моделей объектов управления включает в себя
исходные данные, необходимые для интегрирования уравнений движения PH:
- номинальные массово-инерционные характеристики PH с учетом их изменения в
полете;
- номинальные аэродинамические характеристики PH;
- номинальные характеристики тяги двигателей и параметров их установки;
- отклонения характеристик PH от номинальных значений.
Информационные связи генератора тестов, тестируемого режима
(подрежима) и процедур статической обработки по физическим критериям
показаны на рис. 3.8.
Количество комплектов настроек алгоритмов и настроек математических
моделей объектов управления и контроля, на которых проводится тестирование,
определяется разработчиками функциональных алгоритмов и должно обеспечивать
моделирование всей совокупности реальных условий работы тестируемых программ.
ЗИС-технологию применяют для верификации и валидации режимов в целом.
Тестируемый режим запускается системой комплексной динамической
отработки, при его работе используют файл настроек РУ, МРУ и файл настроек
МОУ. Тестируемый режим при запуске работает совместно с моделью объекта
аналогично генератору тестов и формирует и записывает в базу данных файл
результатов работы (файл РРУ).
Оценку результатов работы выполняют с помощью процедур статической
обработки файла РРУ по физическим критериям.
Типовой состав процедур статической обработки результатов запуска
верифицируемых программных модулей по физическим критериям приведен в
подразд. 3.6.
Работы данного этапа выполняются на БЦВМ (ЦВМ СК) в составе
автоматизированного рабочего места программиста (АРМ-П). Тестируемые
программные модули при запуске исполняются в псевдореальном времени [6].
Завершающим работу данного этапа является "электронный пуск" программы
управления полетом с полетным заданием, выбранным для штатного пуска PH (КА).
Назначение данного этапа ~ подтверждение "локальной" надежности программы
управления полетом [6].
181
ГЕНЕРАТОР ТЕСТОВ
Рисунок 3.8 - Информационные связи генератора тестов и
верифицируемого программного модуля для ЗИС-технологии
182
3.5 Верификация и валидация ПМО с реальной
аппаратурой СУ и СК
Для верификации и валидации ПМО с реальной аппаратурой СУ и СК
генератор тестов формирует и записывает в базу данных два контрольных
примера:
- контрольный пример, состоящий из файла настроек алгоритмов режима
управления для проведения комплексных испытаний (файл настроек КИ);
- контрольный пример, состоящий из файла настроек алгоритмов режима
управления для проведения частной программы проверки полярностей
автомата стабилизации и СУОС (файл настроек Ч1111ПАС).
Запуск верифицируемого режима проводит НППА ПУП, а при его работе
используют файл настроек КИ (ЧПППАС).
Оценку результатов работы верифицируемого режима осуществляют с
помощью процедур обработки штатной телеметрической информации.
Работы данного этапа проводят на БЦВМ (ЦВМ СК) в составе комплексного
стенда. Тестирование осуществляется в реальном времени [6].
3.6 Программно-аппаратные комплексы для верификации
и валидации ПМО. Структура и задачи программно-аппаратных
комплексов
Верификация и валидация ПМО БЦВМ и ЦВМ СК поддерживаются
следующими технологическими аппаратными и программными средствами.
Аппаратные средства:
- персональные ЭВМ;
- автоматизированные рабочие места программиста (АРМ-П) -
исследовательские стенды;
- стенд с реальной аппаратурой СУ и СК - комплексные стенды.
Программные средства:
- система комплексной динамической отладки ПМО БЦВМ и ЦВМ СК
(СКДО);
183
- диагностические процедуры автоматизированной обработки результатов
исполнения тестируемых модулей ПМО по формальным и физическим
критериям;
- система автоматизированного анализа результатов ’’электронных пусков"
программ на АРМ-П [6, 4].
С помощью персональных ЭВМ поддерживают следующие виды работ по
верификации и валидации ПМО БЦВМ СУ и ЦВМ СК:
- разработку системного ПМО БЦВМ (ЦВМ СК) или построение требуемой
для конкретного проекта конфигурации системного ПМО (в случае
использования коммерческого системного ПМО);
- разработку СКДО или построение требуемой для конкретного проекта
конфигурации СКДО (в случае использования коммерческого СКДО);
- разработку контрольной задачи для верификации и валидации системного
ПМО и СКДО;
- разработку программ-генераторов тестов (контрольных примеров) и
отработку функциональных алгоритмов в составе генератора тестов;
- разработку программ функциональных алгоритмов для БЦВМ (ЦВМ СК)
или настройку программных модулей функциональных алгоритмов,
входящих в состав генератора тестов, на ОС БЦВМ (ЦВМ СК) - при
использовании сборочной технологии;
- программирование динамических спецификаций режимов (подрежимов);
- трансляцию программ в объектные коды, редактирование, исправление
синтаксических и семантических ошибок, выявляемых транслятором;
- формирование библиотеки модулей структурированных алгоритмов и
запись ее в БД проекта СУ. Выделение модулей ПМО, которые могут
быть рекомендованы для использования в последующих проектах;
- сборку конфигураций ПМО в соответствии с планом управления
конфигурациями.
Исправление ошибок в программах, выявляемых сборщиком:
- запись в базу данных проекта СУ сборки каждой конфигурации ПМО;
- генерацию тестов (контрольных примеров) для верификации и валидации
программ БЦВМ и ЦВМ СК в разомкнутой и замкнутой схемах;
- оперативную обработку телеметрической информации при работе ПМО в
местах эксплуатации и результатов "электронных пусков" программ с
математическими моделями объектов управления и контроля.
184
Автоматизированное рабочее место программиста - АРМ-П
В состав АРМ-П входят следующие аппаратные средства:
- БЦВМ СУ (ЦВМ СК);
- технологическая инструментальная ПЭВМ (автономная или, при
необходимости, включаемая ЛВС проекта);
- технологический адаптер, обеспечивающий обмен между БЦВМ (ЦВМ
СК) и инструментальной ПЭВМ через параллельный и последовательный
порты, выдачу в БЦВМ управляющих сигналов СБРОС и ПУСК.
Типовая структура АРМ-П и внешний вид АРМ-П показаны на рис. 3.9 и 3.10
соответственно.
В состав технологических программных средств АРМ-П входят:
- системное ПМО БЦВМ (ЦВМ СК) штатное прикладное программное
обеспечение конкретного проекта СУ (СК);
- контрольная задача для верификации (входного контроля) системного
ПМО БЦВМ (ЦВМ СК);
- средства автоматизации программирования функциональных алгоритмов
и динамических спецификаций;
- система комплексной динамической отработки ПМО БЦВМ и ЦВМ СК
(СКДО);
- диалоговые средства работы с отрабатываемой программой;
- библиотека процедур автоматизированной обработки, отображения и
документирования результатов запуска верифицируемых программных
модулей при работе в РИС- и ЗИС-технологиях.
АРМ-П обеспечивает:
- верификацию (входной контроль) системного ПМО БЦВМ (ЦВМ СК) и
СКДО на контрольной задаче;
- формирование файла настроек СКДО на отрабатываемый программный
модуль (функциональный алгоритм, подрежим, режим, пакет режимов) и
вид тестирования (автономное, интеграционное, системное);
- настройку СКДО на отрабатываемый программный модуль и вид
тестирования в соответствии с файлом настроек;
- формирование пусковых файлов тестируемого программного модуля;
- независимое автономное тестирование программных модулей
структурированных функциональных алгоритмов;
185
- автономное тестирование программных модулей структурированных
функциональных алгоритмов совместно с системным ПМО БЦВМ (ЦВМ
СК);
- интеграционное и системное тестирование программных модулей
подрежимов (типовых участков) и программных модулей режимов в
целом с математическими моделями объектов управления и контроля;
К инструментальной ЭВМ АРМ - П
Рисунок 3.9 — Структурная схема автоматизированного рабочего
места программиста
186
- ’’электронные пуски" программного модуля режима управления полетом с
математической моделью объекта управления и настройками алгоритмов
(полетное задание, систематические составляющие погрешностей датчиков и
исполнительных органов СУ и т.п.), выбранными для конкретного пуска PH;
- валидацию всех конфигураций ПМО, передаваемых заказчику
(пользователю), на тестах приемки, состав и технические параметры
которых определены в "Плане верификации и валидации для ПЭ-фазы";
- отработку коррекций ПМО по результатам его валидации или по
требованию заказчика (пользователя).
Рисунок 3.10 - Автоматизированное рабочее место программиста
Сокращения к рис. 3.9:
АРМ-П - автоматизированное рабочее место программиста
(исследовательский стенд);
БСТК - бортовая система телеконтроля;
Вх - входы;
КМО - канал мультиплексного обмена по магистрали 1553В;
МУ - магистральный усилитель;
ОЗУ - оперативное запоминающее устройство;
ОМК - оборудование обмена между каналами БЦВМ (ЦВМ СК);
ПЗУ - постоянное запоминающее устройство БЦВМ (ЦВМ СК);
Рг - регистры;
РЗЦ - регистр запуска БЦВМ (ЦВМ СК);
РК - релейный контейнер;
187
РУК - регистр управления коммутатором, подключающим АРМ-П к каналам А, В, С БЦВМ (ЦВМ СК);
св служба времени;
СК - стартовый комплекс;
СТК - система телеконтроля;
ЦВМ - цифровая вычислительная машина;
ЭВМ - электронная вычислительная машина.
Комплексный стенд
Комплексный стенд - это программно-аппаратный комплекс,
предназначенный для отработки совместного функционирования штатных
аппаратных и программных средств СУ и СК.
В состав комплексного стенда входят:
- БЦВМ и ЦВМ СК;
- УВВ БЦВМ и УВВ ЦВМ СК;
- аппаратура каналов связи вычислительных средств СУ и СК;
- датчики и исполнительные органы СУ и СК;
- система телеметрии;
- система электропитания;
- кабельная сеть;
- технологическая инструментальная ПЭВМ;
- канал связи инструментальной ПЭВМ с БЦВМ СУ и ЦВМ СК.
Т иповая структура комплексного стенда показана на рис. 3.11. Сокращения к
рис. 3.11:
ККП — комплекс командных приборов;
КМО — канал мультиплексного обмена;
БЦВМ — бортовая цифровая вычислительная машина;
ЦВМ — цифровая вычислительная машина;
Д — датчики;
ИО — исполнительные органы;
БТСК - бортовая система телеконтроля;
УВВ — устройство ввода-вывода;
УОБР — устройство обработки;
ЦВМ СК — цифровая вычислительная машина стартового комплекса;
НППА СК — наземная проверочно-пусковая аппаратура стартового
комплекса;
НСТК — наземная система телеконтроля;
НППА — наземная проверочно-пусковая аппаратура пункта
ПУП управления пуском;
ЛВС — локальная вычислительная сеть;
РК — резервный канал;
РСУ управляющая рабочая станция;
ок — основной канал.
188
00
40
ЛВС Ethernet
Рисунок 3.11- Структурная схема комплексного стенда
Состав технологических программных средств комплексного стенда
аналогичен составу программных средств АРМ-П.
Комплексный стенд обеспечивает:
- отработку драйверов обмена БЦВМ СУ и ЦВМ СК с реальными
абонентами;
- интетрационное и системное тестирование программных модулей
режимов калибровок датчиков и исполнительных органов СУ с
реальными датчиками и исполнительными органами;
- интеграционное и системное тестирование программных модулей
режимов электроиспытаний аппаратуры СУ и СК;
- интеграционное и системное тестирование программы режимов
предстартовой подготовки и управления полетом с реальными датчиками
и исполнительными органами СУ (комплексных испытаний программы
управления полетом, проверка полярностей трактов систем стабилизации
и СУОС);
- интеграционное и системное тестирование всех эксплуатационных
вариантов пакетов режимов;
- валидацию всех конфигураций ПМО, передаваемых заказчику
(пользователю), на тестах приемки, состав и технические параметры
которых определены в ’’Плане верификации и валидации для ПЭ-фазы";
- отработку коррекций ПМО по результатам его валидации или по
требованию заказчика (пользователя).
Система комплексной динамической отработки ПМО
Функции системы комплексной динамической отработки ПМО БЦВМ и
ЦВМ СК при верификации и валидации ПМО БЦВМ и ЦВМ СК в РИС- и ЗИС-
технологиях:
- прием от генератора тестов и запись в базу данных файлов, входящих в
состав КП-РИС и КП-ЗИС;
- формирование и запись в БД файлов словарей параметров, необходимых
для работы в РИС- и ЗИС-технологиях;
- формирование и запись в БД файлов настроек инструментальной и
программной сред АРМ-П на конкретный проект СУ и СК и конкретную
программу режима в рамках проекта СУ (СК);
- установка аппаратуры АРМ-П в исходное состояние;
190
- настройка аппаратной и программной среды АРМ-П на конкретный
проект СУ и СК и конкретную программу режима в рамках проекта СУ
(СК);
- запуск верифицируемой (валидируемой) программы режима или
автономного программного модуля в реальном или псевдореальном
времени;
- управление МОУ в составе СКДО;
- формирование кадров результатов работы верифицируемой программы в
процессе ее исполнения (кадры РУ1) и их запись в файл РУ;
- установка контрольных точек в верифицируемой программе;
- поддержка диалога программиста с верифицируемой программой;
- покомандный режим выполнения верифицируемой программы;
- формирование и запись в БД проекта файла стартового (начального)
состояния ОЗУ БЦВМ (ЦВМ СК) для любого заранее заданного момента
циклограммы верифицируемого режима;
- установка стартового (начального) состояния ОЗУ перед запуском
верифицируемой программы из БД проекта;
- обеспечение информационного интерфейса и управляющего интерфейса
верифицируемой программы режима с математической моделью объекта
управления или контроля;
- формирование файлов результатов работы математической моделью
объекта управления или контроля и запись их в БД проекта;
- фиксация координат переполнения базовых тактов в процессе выполнения
верифицируемой программы;
- динамическая обработка кадров РУ1 и МРУ1 в процессе выполнения
программы при использовании динамической РИС-гехнологии.
Типовой состав диагностических процедур автоматизированной обработки
результатов выполнения тестируемых модулей ПМО по формальным критериям:
- допусковый контроль параметров тестируемого программного модуля с
выдачей полной информации о каждом параметре (значение, допуск,
результат сравнения с тестовым значением, погрешность);
- допусковый контроль с выдачей информации только о параметрах,
значения которых выходят за пределы допуска;
- построение графиков изменения контролируемых параметров во времени;
- построение графиков изменения погрешностей контролируемых
параметров во времени;
- выдача обобщенных результатов тестирования на серии тестов (покрытие
диапазона изменения параметров, покрытие алгоритмических маршрутов
и т.п.);
- выдача программных трасс.
191
Процедуры обработки по формальным критериям используют для обработки
результатов автономного тестирования программных модулей в РИС.
Типовой состав диагностических процедур автоматизированной обработки
результатов выполнения тестируемых модулей ПМО по физическим критериям:
- контроль времен выдачи основных функциональных команд (разделение
ступеней, сброс обтекателя, отделение КА и т.д.);
- контроль параметров орбиты (радиусы апогея и перигея, наклонение,
период обращения, угол наклона вектора скорости);
- контроль рассогласования по углам рыскания, тангажа и вращения в
моменты выдачи основных базовых команд;
- контроль рассогласования по нормальной и боковой составляющим
кажущейся скорости в моменты выдачи основных базовых команд;
- контроль вариаций терминальных параметров, обусловленных
погрешностями управления;
- контроль загруженности базового такта решения управляющих
алгоритмов.
Состав и технические характеристики процедур обработки по физическим
критериям в значительной степени определяются техническими
характеристиками конкретной СУ. В связи с этим в состав программных
технологических средств поддержки выполнения работ жизненного цикла ПМО
вводится оболочка, обеспечивающая возможность оперативного подключения
процедур обработки, разрабатываемых для конкретной СУ.
Процедуры обработки по физическим критериям используют для обработки
результатов системного и интеграционного тестирования программных модулей
и электронных пусков в ЗИС.
Результаты работы всех процедур обработки по формальным и физическим
критериям могут записываться в БД проекта СУ, выдаваться на видеотерминал,
принтер, плоттер.
Типовая система автоматизированного анализа результатов
91электронных пусков" программы управления полетом на АРМ-П
Основные функции типовой системы автоматизированного анализа
результатов "электронных пусков" программы управления полетом на АРМ-П
при валидации ПМО БЦВМ в ЗИС-технологии:
- автоматический потактовый контроль результатов работы систем
наведения, стабилизации;
— автоматический контроль циклограммы выдачи временных команд;
192
- автоматический контроль загрузки базового такта программы управления
полетом;
- фиксация координат переполнения разрядной сетки БЦВМ;
- вывод на экран монитора инструментальной ЦВМ АРМ-П информации,
отображающей процесс управления полетом и результаты "электронного
пуска" в темпе решения программы управления полетом и после ее
завершения;
- формирование и запись в БД проекта протокола результатов
"электронного пуска".
Типовая система автоматизированного анализа результатов "электронных
пусков" контролирует следующие параметры программы управления полетом:
По системе наведения:
- ограничения на время выдачи базовых функциональных команд,
приведенные в инструкции по расчету полетного задания;
- ограничения на временные метки программных функций, приведенные в
инструкции по расчету полетного задания;
- величины отклонений времени выдачи базовых функциональных команд
при "электронном пуске" на АРМ-П от времени выдачи данных команд
при "электронном пуске" на генераторе тестов;
- величину вариаций параметров орбиты КА, обусловленную
погрешностями управления.
По системе стабилизации:
- параметры углового движения;
- параметры системы регулирования центра масс PH;
- управляющие сигналы на исполнительные органы.
По циклограмме выдачи временных команд:
- факт формирования всех временных команд, "присоединенных" к каждой
базовой команде;
- ограничения на время выдачи команд, обусловленные аппаратными
решениями, заложенными в СУ (например, включение и выключение
коммутаторов);
- совпадение моментов. времени выдачи команд с их эталонными
значениями.
Протокол результатов "электронного пуска", формируемый системой
автоматизированного анализа результатов "электронных пусков", содержит
следующие данные:
- донесения о выявленных "ненормах" контролируемых параметров с
указанием конкретных имен параметров и интервала времени, в котором
зафиксирована аномалия;
- донесение, содержащее интегральную оценку результатов проверки
программы управления полетом и полетного задания методом
’’электронного пуска".
193
3.7 Система автоматизированного контроля и анализа
результатов испытаний в технологическом процессе отработки СУ
3.7.1 Постановка задачи
Вследствие того, что сложность систем управления все возрастает как в
аппаратном, так и в программно-алгоритмического обеспечения, разработчики
оказались перед проблемой качественной отработки систем управления объектов
ракетно-космической техники.
Вообще говоря, вопросам обеспечения качества систем критического
назначения, к каковым относятся и объекты ракетно-космической техники,
посвящено значительное количество научных трудов и монографий. Изучением
данной проблемы заняты целые коллективы квалифицированных специалистов.
Однако большинство существующих рекомендаций и методик носит скорее
научно-методический, чем конкретный практический характер. При этом,
безусловно, речь не идет о государственных и отраслевых стандартах в области
обеспечения качества, важность и необходимость которых не подлежит
сомнению.
Вместе с тем существует один из важнейших аспектов обеспечения
качества систем, который в силу ряда и объективных, и субъективных причин не
получил должного отражения в существующих методических рекомендациях.
Речь идет о контроле результатов испытаний. Как правило, если система
достаточно сложна и в процессе анализа задействована большая группа
специалистов, организация системного анализа результатов представляет собой
серьезную проблему. Это связано, в первую очередь, с разнообразием
контролируемых подсистем и сложностью существующей технологии отработки.
Контроль результатов испытаний является важнейшим этапом этой технологии,
от его тщательности и точности зависит успешность процесса создания системы.
Существует немало примеров, когда из-за небрежности или халатности в
процессе контроля результатов испытаний систем возникали аварийные
ситуации, приводившие к потерям времени, средств, а иногда к катастрофе,
особенно при пусках PH.
Одним из наиболее опасных факторов при контроле результатов испытаний
является «человеческий фактор». Даже при использовании сложной
многоуровневой системы контроля, если в ее контур «включен» человек, то этот
фактор может быть источником ошибок. Единственным решением в данном
случае является создание автоматизированной системы, которая позволит
максимально допустимо (а желательно полностью) снять с человека функции
контроля.
Кроме того, при пусках КА в процессе их функционирования могут
возникнуть аварийные ситуации, которые достаточно часто парируются
группами специалистов, находящихся в ЦУПе и на предприятии-разработчике
СУ. Использование системы автоматизированного контроля и анализа
результатов испытаний (САКАРИ) в этих ситуациях позволяет быстрее и
194
качественнее реагировать на такого типа нештатные ситуации, которые могут
возникнуть при полете КА.
Таким образом, на основании всего изложенного выше можно сделать
вывод, что разработка САКАРИ является приемлемым решением проблемы
повышения качества отработки объектов ракетно-космической техники.
3.7.2 Основное назначение и выполняемые функции
При создании системы первоочередной задачей является определение
основного назначения и функций, которые должна реализовывать
разрабатываемая система. От правильной постановки задачи на разработку
напрямую зависит эффективность такой системы, как компонента общей
технологии.
Как следует из названия, основным назначением системы является анализ
результатов испытаний бортового программного обеспечения и аппаратуры СУ
PH на исследовательском, комплексных и испытательных стендах, а также при
летно-конструкторских испытаниях в соответствии с принятыми методиками.
Под анализом в данном случае понимается получение экспресс-результата
успешности испытания за максимально короткое время. Более подробно о
технологии анализа будет сказано в подразд. 3.7.5. Другим не менее важным
назначением системы является исключение пресловутого «человеческого
фактора» при анализе значительного объема цифровой и аналоговой
информации. До настоящего времени такой анализ проводился непосредственно
разработчиком и, как правило, без использования каких-либо инструментальных
средств. Сейчас кажется очевидным решение переложить задачу анализа
информации на ПЭВМ. Такой подход позволяет автоматизировать рутинные
процессы, требующие повышенного внимания и ответственности. В такой
постановке разработчик осуществляет анализ лишь интегрального признака и на
основании этой информации принимает окончательное решение об успешности
испытания. При этом важно отметить, что система не дает готовых
рекомендаций, а лишь информирует разработчика о «браке» в той или иной
подсистеме.
В принципе анализу должны подвергаться абсолютно все характеристики
СУ PH и во всех режимах. Однако подобный подход чреват неоправданной
сложностью и громоздкостью системы анализа. Поэтому, поскольку речь идет об
экспресс-анализе, можно выделить некоторые интегральные характеристики,
которые позволяют оценить результат испытаний и сделать заключение об
успешности испытания. Кроме непосредственно анализа, система должна
обеспечивать ряд сервисных функций, таких, как, например, выдача заключения,
хранения информации, обмен с базой данных (БД) и.т.д. Все перечисленное выше
нашло отражение в следующем перечне функций:
- анализ корректности формирования циклограммы полета;
- анализ работы систем навигации, наведения и стабилизации;
195
— анализ работы подсистем СУ, например подсистем аппаратуры
потребителя спутниковой навигационной системы, передачи
телеметрической информации и др.;
- анализ результатов теста основной работы аппаратуры СУ;
- анализ результатов испытаний «Проверка уровней индустриальных
радиопомех, создаваемых прибором при функционировании»;
- выдача комплексного заключения о результатах испытаний в виде
протоколов;
- хранение эталонов, допусков и результатов испытаний в БД;
- другие сервисные функции.
Приведенный перечень функций описывает только «верхний уровень»
системы и может быть расширен при необходимости.
3.7.3 Структура системы
Структура системы существенно зависит от принятой технологии отработки
СУ PH. Рассмотрим структуру применительно к классической технологии,
принятой в отечественной промышленности, в рамках которой отработка
проводится последовательно на исследовательских и комплексном стендах. В
связи с необходимостью обеспечения полного охвата системой контроля всего
процесса отработки была принята следующая структура системы:
- блок анализа функционирования СУ в схеме автоматизированной системы
генерации контрольных примеров (АСКП) «Блок-АСКП»;
- блок анализа функционирования СУ в схеме исследовательского стенда
(ИС) «Блок-ИС»;
- блок анализа функционирования СУ в схеме комплексного стенда (КС)
«Блок-КС»;
- блок анализа корректности формирования циклограммы аппаратных
команд «Блок-АЦ»;
- блок анализа функционирования подсистем СУ «Блок-ПСУ»;
- блок оценки результатов теста основной работы «Методика 1»;
- блок генерации протоколов испытаний и обработки результатов испытаний
с использованием БД «САКАРИ». Вид испытаний «Проверка уровней
индустриальных радиопомех, создаваемых прибором при
функционировании» «Методика 2»;
- БД хранения результатов испытаний, протоколов анализа, эталонных
результатов и допусков;
- блок обработки и записи телеметрической информации в БД «Блок-ТМ».
Структура САКАРИ показана на рис. 3.12. Рассмотрим назначение каждого
блока подсистемы.
196
«Блок-АСКП» предназначен для анализа функционирования
математической модели бортовой программы на ПЭВМ рабочего места
разработчиков алгоритмов систем наведения, навигации и стабилизации
посредством моделирования полета PH от момента пуска до момента
выключения СУ и позволяет решать следующие задачи:
- расчет эталонов и допусков для анализа на последующих стадиях
испытаний;
- расчет полетного задания (ПЗ) для всех принятых траекторий пуска PH;
- анализ корректности принятых подходов и их реализации в виде модели
алгоритмов систем наведения, навигации и стабилизации на всех участках
полета;
- автоматический допусковый контроль времён выработки функциональных
команд и меток для всех вариантов ПЗ на всех участках полета;
- автоматический допусковый контроль точности выведения полезной
нагрузки на требуемые орбиты;
- автоматический допусковый контроль параметров углового движения,
параметров системы регулирования движения центра масс PH и
управляющих сигналов на исполнительные органы;
- формирование протокола, включающего в себя информацию о времени
начала моделирования управляемого полёта, номере варианта ПЗ, времени
последней корректировки ПЗ и исходных данных, обнаруженных
аномальных фактических значениях контролируемых параметров.
Рисунок 3.12 - Структура САКАРИ
197
«Блок-ИС» предназначен для анализа результатов испытания бортовой
программы на исследовательском стенде посредством сравнения их с
эталонными значениями и допусками и позволяет решать следующие задачи:
- автоматический допусковый контроль времён выработки функциональных
команд и меток для всех вариантов ПЗ на всех участках полета;
- автоматический потактовый допусковый контроль параметров углового
движения, параметров системы регулирования движения центра масс PH и
управляющих сигналов на исполнительные органы;
— автоматический допусковый контроль точности выведения полезной
нагрузки на требуемые орбиты;
- формирование протокола, включающего в себя информацию о времени
начала моделирования управляемого полёта, номере варианта ПЗ, времени
последней корректировки ПЗ и ИД, обнаруженных аномальных
фактических значениях контролируемых параметров.
«Блок-КС» предназначен для анализа результатов испытания бортовой
программы в части систем наведения, навигации и стабилизации на комплексном
стенде посредством сравнения их с эталонными значениями и допусками и
позволяет решать следующие задачи:
- контроль моментов времени выдачи функциональных команд;
- допусковый контроль параметров системы регулирования углового
движения, движения центра масс PH и управляющих сигналов на
исполнительные органы;
- сквозная проверка полярности управляющего тракта;
- формирование протокола, содержащего результаты анализа;
- хранение результатов испытаний на комплексном стенде, эталонных
результатов и допусков в БД.
«Блок-АЦ» работает в составе автоматизированной системы комплексного
тестирования в двух режимах: после испытания, с использованием файла
телеметрической информации и в процессе испытания в схеме комплексного
стенда, где происходит потактовый перехват телеметрического кадра на
инструментальный персональный компьютер для его обработки в процессе
полета, и позволяет решать следующие задачи:
- контроль выдачи и снятия временных команд;
- выдача значений функциональных команд и функциональных меток;
- контроль прохождения всех присоединенных команд;
- контроль качества работы системы начальной выставки и калибровки
бесплатформенной инерциальной навигационной системы (БИНС);
- контроль точностной готовности БИНС;
- проверка функционирования приборов аппаратуры потребителя
спутниковой навигационной системы (АП СНС) на участках набора
готовности АП СНС, предстартовой подготовки и основной работы;
- анализ работы системы управления расходом топлива (СУРТ);
198
- формирование протокола циклограммы полета на экран и в текстовые
файлы.
«Блок-ПСУ» предназначен для анализа функционирования аппаратуры СУ
в различных режимах при работе на комплексном стенде и позволяет решать
следующие задачи:
- анализ функционирования аппаратуры потребителя спутниковой
навигационной системы;
- анализ функционирования телеметрического согласующего устройства;
— анализ функционирования бортовой системы телеконтроля.
«Методика №1» предназначена для хранения, накопления, обработки
результатов испытаний и генерации отчетной документации, имеющей форму,
предусмотренную стандартом предприятия при испытании «Проверка уровней
индустриальных радиопомех, создаваемых прибором при функционировании».
«Методика №2» предназначена для контроля работоспособности БЦВК в
режиме ОР.
«БД» предназначена для централизованного хранения, отображения и
обработки телеметрической информации, полученной в результате испытаний на
исследовательских и комплексных стендах, и предоставляет пользователю доступ
к данным с любого рабочего места, подключённого к локальной сети
предприятия.
«Блок-ТМ» предназначен для формирования кадров телеметрической
информации (ТМИ), дешифровки и анализа всех параметров из этих кадров, а
также оцифровки аналоговой и релейной информации, полученной в результате
испытания бортовой программы на комплексном стенде.
На базе приведенной структуры была разработана архитектура
программно-алгоритмического комплекса, реализующего все перечисленные
функции. Технология взаимодействия блоков системы описана в подрад. 3.7.6
«Технология анализа результатов испытаний».
3.7.4 Программная реализация системы
Система была реализована в виде программно-алгоритмического комплекса
(ПАК) «САКАРИ». Каждый блок системы реализован в виде автономных пакетов
программного обеспечения. Интеграция отдельных блоков осуществляется
посредством использования единой БД проекта. Номенклатура программного
обеспечения (ПО) соответствует структуре системы и имеет вид:
- ПО «Блок-АСКП»;
- ПО «Блок-ИС»;
- ПО «Блок-КС»;
199
- ПО «Блок-АЦ»;
- ПО «Блок-ПСУ»;
- ПО «Блок оценки результатов теста основной работы (Методика №1)»;
- ПО «Блок генерации протоколов испытаний и обработки результатов
испытаний с использованием БД «САКАРИ». Вид испытаний «Проверка
уровней индустриальных радиопомех, создаваемых прибором при
функционировании» (Методика №2)»;
- БД хранения результатов испытаний, протоколов анализа, эталонных
результатов и допусков;
- ПО «Блок-ТМ».
3.7.5 Информационная поддержка системы
В процессе создания и экспериментальной отработки ПАК был разработан
пакет документов, объединенный под общим названием «Техническое описание
программно-алгоритмического комплекса «САКАРИ», который включает в свой
состав следующие документы:
- «Техническое описание программно-алгоритмического комплекса
«САКАРИ»;
- «Программное обеспечение Блок-АСКП»;
- «Программное обеспечение Блок-ИС»;
- «Программное обеспечение Блок-КС»;
- «Программное обеспечение Блок-АЦ»;
— «Программное обеспечение Блок-ПСУ»;
- «Методика оценки результатов теста основной работы»;
- «Методика генерации протоколов испытаний и обработки результатов
испытаний с использованием БД «САКАРИ». Вид испытаний «Проверка
уровней индустриальных радиопомех, создаваемых прибором при
функционировании»;
- «База данных»;
- «Программное обеспечение Блок-ТМ».
3.7.6 Технология анализа результатов испытаний
Под технологией анализа результатов испытаний понимается
последовательное задействование автономных пакетов ПО и методик, описанных
в подразд. 3.7.4.
Непосредственно анализ заключается в сравнении результатов испытаний
на исследовательском, комплексных и испытательных стендах, получаемых из
БД, с эталонами и допусками, хранящимися в общей БД проекта или локальных
БД разработчиков.
Контроль осуществляется на совпадение, диапазон и полярность.
Результатом работы ПАК являются протоколы, содержащие полную
200
информацию об объекте анализа, включая индикацию всех точек контроля с
указанием признака «норма/не норма». В случае формирования признака
«не норма», осуществляется фиксация момента времени и места предполагаемого
«брака».
Сравнение осуществляется как в отдельных программных продуктах,
входящих в состав данного комплекса, так и средствами самой БД. Такой подход
принят из соображений технической целесообразности и реализуемости.
Перед проведением испытаний на исследовательских и комплексном
стендах обязательно проводится моделирование работы алгоритмов СУ в схеме
АСКП. Это позволяет отладить алгоритмы СУ, используя их модель и
математическую модель движения PH, реализованную в ПЭВМ, и выбрать
полетное задание. Полученные результаты моделирования помещаются в БД в
качестве эталонов. Такой подход позволяет существенно снизить затраты на
эксплуатацию дорогостоящего оборудования стендовой базы предприятия. Затем
отработанные алгоритмы передаются в подразделение бортовых программистов
СУ, которые осуществляют разработку непосредственно бортового
программного кода (на базе исходных алгоритмов) в формате, приемлемом для
бортового компьютера.
Поясним схему функционирования «САКАРИ» на примере проведения
отдельного испытания в схемах ИС и КС.
Сначала опишем подробно работу в схеме ИС. Упрощенная
функциональная схема исследовательского стенда показана на рис. 3.13.
Основным отличием ИС от КС является наличие в его схеме ПЭВМ, благодаря
чему имеется возможность анализа результата как в темпе счета, так и после его
завершения.
Рисунок 3.13 - Упрощенная функциональная схема
исследовательского стенда
ИС
Все испытания, проводимые в схеме ИС, регламентируются специальным
документом «Программа отработки бортового ПО в схеме ИС». Данный
документ содержит подробную информацию о том, какие испытания и в каких
режимах проводить. Каждое испытание называется «цикл» и определяется
идентификатором. Кроме того, документ содержит четкое определение
ответственных за анализ результатов испытаний.
После того, как бортовое программное обеспечение разработано, собрано и
установлено на ИС в строгом соответствии с «Программой отработки бортового
ПО в схеме ИС», начинается процесс отработки бортового ПО:
201
- испытатели проводят цикл на ИС, при этом в темпе счета осуществляется
контроль выбранных параметров, характеризующих корректность
прохождения испытания, с использованием ПО Блок-ИС и Блок-АЦ,
например, циклограммы полета;
- по завершении цикла ПО Блок-ИС и Блок-АЦ автоматически генерируют
протоколы анализа;
- на основе специализированного ПО, аналогичного штатному Блок-ТМ в
части формирования телеметрического кадра, результаты испытания
записываются в БД;
- на основе встроенных функций СУБД осуществляется информирование
разработчиков, ответственных за анализ результатов, о проведении цикла.
- разработчики, получившие уведомление, анализируют результаты
испытания, используя ПО контроля, и формируют протоколы анализа
(частные заключения);
- полученные протоколы анализа помещаются в БД;
- по мере получения протоколов анализа от всех ответственных
разработчиков на основе встроенных функций СУБД формируется общее
заключение по циклу с указанием результатов анализа по контролируемым
подсистемам (норма/не норма).
Аналогично опишем подробно работу в схеме КС. Упрощенная
функциональная схема комплексного стенда показана на рис. 3.14. Как отмечалось
ранее, в схеме стенда отсутствует ПЭВМ, вследствие чего анализ результатов
испытания может осуществляться только после завершения испытания.
Сервисная ПЭВМ
станции
обработки ТМИ
Рисунок 3.14 - Упрощенная функциональная схема
комплексного стенда
202
Аналогично изложенному выше все испытания, проводимые в схеме КС,
регламентируются специальным документом «Программа отработки бортового
ПО совместно с бортовой аппаратурой СУ в схеме КС». Этот документ содержит
подробную информацию о том, какие испытания и в каких режимах проводить.
Каждое испытание называется «цикл» и определяется идентификатором. Кроме
того, документ содержит четкое определение ответственных за анализ
результатов испытаний.
После того, как бортовое программное обеспечение разработано, собрано и
установлено на КС, в строгом соответствии с «Программой отработки бортового
ПО совместно с бортовой аппаратурой СУ в схеме КС» начинается процесс
отработки бортового ПО совместно с бортовой аппаратурой СУ:
- испытатели проводят цикл на КС, результаты испытания в виде
телеметрического кадра по штатной технологии записываются на ПЭВМ;
- на основе ПО «Блок-ТМ» (установленного на сервисной ПЭВМ станции
обработки ТМИ) телеметрическая информация обрабатывается (при
необходимости оцифровывается) и записывается БД;
- встроенные функции СУБД осуществляют информирование разработчиков,
ответственных за анализ результатов, о проведении цикла;
- разработчики, получившие уведомление, анализируют результаты
испытания, используя ПО контроля, и формируют протоколы анализа
(частные заключения);
- полученные протоколы анализа помещаются в БД;
- по мере получения протоколов анализа от всех ответственных
разработчиков на основе встроенных функций СУБД формируется общее
заключение по циклу с указанием результатов анализа по контролируемым
подсистемам (норма/не норма).
Функциональная схема отработки бортового программного обеспечения в
схемах ИС и КС с использованием САКАРИ показана на рис.3.15.
3.7Л Форма представления результатов работы САКАРИ
Результатами работы САКАРИ для каждой записи (цикла) являются:
- полная оцифрованная информация телеметрического кадра конкретной
записи (цикла), доступная для анализа или считывания с рабочей ПЭВМ
разработчика;
- набор протоколов (частных заключений) результатов анализа по
подсистемам СУ для конкретной записи (цикла);
- общее заключение по конкретной записи (циклу).
203
Рисунок 3.15 - Функциональная схема отработки бортового ПО
с использованием САКАРИ
Общий формат протокола результатов анализа по подсистемам СУ для
конкретной записи (цикла) имеет вид:
<Наименование проекта>
Протокол автоматизированной оценки
функционирования Наименование подсистемы>
ВРЕМЯ запуска программы обработки: 09:13:20 3 АВГУСТА 2011
Режим <Номер > Цикл <Номер > Запись <Номер > <Дата проведения >
Программа №<Номер >
Цикл П°<Номер >
ТПЗ < Номер >
Перечень контролируемых параметров
Интегральный признак по подсистеме
<Норма/Не норма >
204
Полный формат общего заключения по конкретной записи (циклу) имеет
вид:
Наименование проекта>
Протокол автоматизированной оценки
функционирования Наименование ппдыстемы>
ВРЕМЯ запуска программы обработки: 09:13:20 3 АВГУСТА 2011
Резким Номер > Цикл Номер > Запись Номер > <Дата проведения >
Программа ПзНомер >
Цикл №<Номгр >
7713 Номер >
Перечень контролируемых параметров
Интегральный признак по подсистеме
Норма/Не норма >
<Норма/Не норма >
3.7.8 Особенности использования БД
Как видно, из предыдущих разделов, БД является одной из ключевых
составляющих системы. БД предназначена для централизованного хранения,
отображения и обработки телеметрической информации, полученной в
результате испытаний на исследовательских и комплексных стендах, а также
обеспечивает пользователю доступ к данным с любого рабочего места,
подключённого к информационной сети предприятия.
Соответственно сформулированному назначению можно выделить
следующие функции:
- упорядоченное хранение результатов испытаний в виде связанных
массивов данных (в том числе цифровой, аналоговой и сигнальной
информации);
- хранение результатов анализа и служебной информации для каждого
тестового варианта;
- обеспечение доступа к результатам испытания для их записи, считывания
или ручной коррекции (при необходимости);
— возможность импорта или экспорта отдельных массивов данных или
протоколов анализа для обеспечения обмена между отдельными
разработчиками;
- проведение сравнительного анализа результатов анализа средствами СУБД
с одновременным формированием протокола анализа;
205
- оповещение пользователей об обновлении информации (посредством
почтовой службы).
3.7.9 Заключение
САКАРИ решает задачу автоматизированного анализа результатов
испытаний бортового программного обеспечения и аппаратуры СУ на
исследовательском, комплексных и испытательных стендах в соответствии с
принятыми методиками посредством автоматизации рутинных проверок.
Использование данной системы позволяет существенно повысить качество
отработки элементов СУ путем минимизации влияния «человеческого фактора»,
а также получить значительную экономию времени на анализ результатов без
какого-либо ущерба для качества проверок.
Таким образом, можно заключить, что использование САКАРИ или
подобной ей системы анализа является необходимым условием обеспечения
высокого качества отработки СУ объектов РКТ.
3.8 Особенности технических требований и этапы сопровождения при
натурных испытаниях и эксплуатации ПМО БЦВМ КА
Основной особенностью ПМО является необходимость его сопровождения
после вывода на орбиту при проведении натурных испытаний и эксплуатации,
что должно учитываться в технических требованиях к ПМО:
- обеспечение предоставления информации для анализа, передаваемой по
радиоканалу «борт - Земля», и оперативный анализ информации в
реальном времени при проведении сеанса связи с КА, анализ информации
не в реальном времени, а после окончания сеанса связи;
- обеспечение проведения корректировки и модернизации алгоритмов,
программного обеспечения и полетного задания по радиоканалу «Земля -
борт». Задействование новой версии ПО и ПЗ осуществляется по
командам управления «Земля - борт» и по ПЗ;
- обеспечение изменения программы полета посредством ввода из центра
управления полетом (ЦУП) нового полетного задания по командной
радиолинии «Земля - борт»;
- изменение программы полета посредством программных и оперативных
команд управления, передаваемых по командной радиолинии «Земля -
борт» и из ЦУП;
- обеспечение ввода и контроля ввода массивов ПЗ, командной
информации, изменения и замены ПМО для обеспечения работы СУ и
полезной нагрузки, а также передачи информационных массивов полезной
нагрузки (к примеру, сообщений электронной почты);
- обеспечение требований к надежности сопровождения при натурных
испытаниях и эксплуатации. На время срока испытаний и эксплуатации
должны поддерживаться аппаратные и программные средства
206
исследовательского и комплексного стендов для моделирования и
определения идентификации отказов;
выполнение работ, направленных на создание ПМО, в соответствии с
требованиями, специфицированными в стандартах по разработке
космических систем;
обеспечение управления движением центра масс КА, а также ориентацией
и стабилизацией, управления работой смежных подсистем и полезной
нагрузки КА на основе полетного задания, бортовых алгоритмов и
командной информации;
обеспечение передачи потоков данных (интерфейса) между абонентами
СУ, смежными подсистемами и полезной нагрузкой КА (диспетчеризация
бортовой сети и работа с абонентами сети);
формирование и выдача функциональных команд управления или команд
управления по результатам декодирования командной информации (КИ),
принимаемой по радиоканалу «Земля - борт». Команды управления
выдаются по времени, задаваемому временной шкалой кода, или
исполняются немедленно (например, функциональные команды);
обеспечение ведения бортовой шкалы времени (БШВ) в соответствии с
UTC (всемирное декодированное время) и ее коррекция по информации
приемника GPS или по линии «Земля - борт» средствами ЦУП;
обеспечение многоразового повторного включения-выключения системы
управления КА;
обеспечение конфигурирования рабочей схемы из резервных каналов
БЦВК, приборов СУ, подсистем и полезной нагрузки КА по результатам
контроля функционирования;
обеспечение передачи функционально или по командам, передаваемым по
радиолинии «Земля - борт», информации из ведущего канала в ведомый
массивов БШВ, ПЗ, КИ при переключении каналов резервирования
БЦВМ;
обеспечение приема, декодирования и записи в память (по
технологическому каналу) массивов ПЗ, КИ, ПО БЦВМ СУ, смежных
подсистем и полезной нагрузки КА на Земле (космический комплекс) при
подготовке спутника к запуску, их хранение после снятия электропитания
и использование при орбитальном полете;
поддержка процессов функционирования смежных подсистем и полезной
нагрузки КА путем снабжения необходимой информацией;
сбор от подсистем и полезной нагрузки КА пакетов ТМ-информации, ее
запоминание с последующей передачей этой информации в сеансах связи
ЦПУ в аппаратуру связной подсистемы спутника в реальном масштабе
времени;
реализация мер по защите ПМО. При одноканальной реализации БЦВМ
программное обеспечение хранится в двух копиях - основной и
резервной.
207
Особенности состава ПМО БЦВМ КА
Особенностью состава ПМО БЦВМ КА является наличие следующих
алгоритмов и программ:
- управление и поддержка функционирования смежных подсистем и
полезной нагрузки;
- прием, декодирование и контроль массивов данных, принимаемых по
линии «Земля - борт»;
- передача и кодирование массивов данных, передаваемых по линии «борт -
Земля»;
- организация передачи потоков данных между абонентами СУ, смежных
подсистем и полезной нагрузки.
Этап сопровождения ПМО БЦВМ при натурных
испытаниях и эксплуатации КА
После передачи в эксплуатацию встроенная система управления становится
недоступной для физического контакта. Но сохраняется возможность после
вывода КА на орбиту контролировать, поддерживать и модифицировать СУ с
помощью дистанционного управления по линии «борт - Земля». Данные работы
должны проводиться без перерыва программы полета КА, а при невозможности
выполнения данного требования длительность перерыва программы полета
должна быть сведена к минимуму.
Опыт проведения натурных испытаний и эксплуатации систем управления
КА при орбитальном полете наглядно показал необходимость модернизации
алгоритмов и программного обеспечения в процессе полета для решения
следующих задач:
- улучшения точностных характеристик СУ КА, зависящих от степени
знания динамических характеристик объекта управления, которые уточняются в
процессе проведения натурных испытаний. Эти уточнения могут появиться как
со стороны командных приборов, отдельных систем, аппаратных средств, так и
объекта в целом вследствие различия характеристик математической модели
объекта управления и характеристик реального объекта управления;
- адаптации к неисправностям аппаратуры СУ и других систем КА, а также к
ошибкам ПМО, не выявленным в процессе его наземной верификации и
валидации;
- улучшения эксплуатационных характеристик КА в целом.
Современные СУ КА поддерживают два способа реализации перечисленных
задач:
- уточнение параметров полетного задания;
- модернизация системы управления КА посредством изменения алгоритмов
системы управления и ПМО.
208
Модернизация СУ КА в процессе полета реализуется встроенными
системами модификации ПМО:
- системой полной замены версии программы на борту (СЗПО);
- системой динамической коррекции бортовой программы (СДКП), при этом
СДКП в отличие от СЗПО не заменяет версию программы, обеспечивая
локальную коррекцию только требуемых программных модулей.
В современных СУ КА используют следующие варианты размещения
программ и данных в памяти ЗУ БЦВМ и варианты их выполнения:
- программа хранится в одном или двух экземплярах и выполняется из ПЗУ
или ППЗУ, переменные программы и массивы хранятся в ОЗУ;
- программа хранится в одном или двух экземплярах в ПЗУ, ППЗУ, а
выполняется из ОЗУ БЦВМ.
Варианты схем резервирования БЦВМ, используемые в современных СУ КА:
- трехканальная с аппаратным или программно-аппаратным
мажоритированием;
- двухканальная (дублированная) с «холодным» или «горячим»
резервированием каналов.
Внесение изменений ПМО ЭВМ проводится через массив изменения
программ (МИП) и поддерживается следующими техническими средствами:
- канал передачи информации между наземным оборудованием ЦУП и
бортовым оборудованием (командная радиолиния - КРЛ),
обеспечивающим запись МИП в ЗУ БЦВМ;
- бортовое оборудование, обеспечивающее хранение МИП при выключении
питания БЦВМ. При отсутствии в составе БЦВМ энергонезависимого ЗУ
ввод МИП по КРЛ повторяется после каждого выключения-включения
БЦВМ СУ;
- программно-аппаратные средства для записи, хранения и ввода МИП в
БЦВМ при всех видах испытаний;
- инструментальные технологические программные средства,
обеспечивающие создание МИП, запись на носитель, контроль носителя,
создание копий с МИП и их контроль.
Для использования СЗПО необходимо наличие в БЦВМ двух копий
программ. При выполнении одной программы вводится вторая, и после проверки
правильности ее ввода осуществляется переход на новую программу. После этого
средствами вновь введенной программы проводится ввод и замена или перепись
новой программы на место первой копии.
Реализация коррекции программно-алгоритмического обеспечения системой
динамической коррекции программ выполняется либо чисто программными
средствами, либо, при их наличии, программно-аппаратными посредством
передачи на борт массива изменения программ (МИП).
Внесение изменений средствами системы СДКП может оказаться
единственно возможным в случае, если объектная программа хранится в ППЗУ
и/или ПЗУ БЦВМ в одном экземпляре и выполняется из этого ЗУ.
209
Функции, реализуемые системой СДКП:
- подготовка МИП наземными средствами;
- поддержка ввода и контроль МИП при записи его в ОЗУ БЦВМ;
- перепись МИП из ОЗУ БЦВМ в ППЗУ в целях его сохранности при
выключении питания и при переходе на другой канал резервирования, а
также контроль записи. При наличии двух копий ПО запись МИП
выполняется в обе копии ПО. При двухканальном резервировании МИП
переписывается во второй комплект БЦВМ.
СДКП реализует несколько типов коррекции ПАО:
- замена исполняемого программного модуля на новый;
- замена некоторых компонентов программного модуля на новые
программные компоненты или введение новых дополнительных;
- введение одного или нескольких новых модулей.
Замена разработанного программного модуля новым реализуется либо
заменой старого указателя в каталоге на указатель нового модуля (в этом случае
модуль размещается на новое место памяти БЦВМ), либо заменой старого текста
модуля на новый без изменения адреса его расположения.
При замене некоторых компонентов программного модуля на новый текст
возможно несколько вариантов:
- текст вставки не превышает длины модуля, и она размещается в пределах
длины тела модуля;
- текст вставки превышает длину корректируемого модуля. В этом случае
текст вставки размещается за пределами модуля.
При наличии программно-аппаратных средств задача реализации перехода на
вставку нового текста значительно облегчается и появляется гибкость в выполнении.
В этом случае адреса в точках модуля, где необходимо перейти на вставку,
записываются заранее в регистр адреса индикации совпадения. При выполнении
команды по данному адресу возникает прерывание, по которому вызывается
программа обработки прерывания, в результате реализации которой дальнейшее
выполнение программы модуля переходит на вставку. По завершении работы вставки
управление передается на выполнение программы модуля.
Модификация ПМО БЦВМ средствами системы СДКП путем передачи на борт
МИП может использоваться и до начала проведения натурных испытаний КА. Это
диктуется экономическими требованиями или сроками проведения работ, так как
внесение изменений в ПО средствами СДКП более оперативное как в подготовке
изменения, так и в проведении его испытания, а также времени передачи на борт.
При сопровождении КА после вывода его на орбиту возникает также задача
изменения программы полета, которое диктуется режимами эксплуатации, а
также результатами анализа информации, полученной при проведении
моделирования, или при необходимости парирования различных нештатных
ситуаций, возникающих на борту КА.
210
Изменение программы полета может потребоваться также при угрозе
возникновения соударения с инородными телами (например, «космическим
мусором») для поддержания требуемых параметров орбиты или точки стояния
КА на геостационарной орбите.
3.9 Технология подготовки и контроля полетных заданий СУ
Полетное задание СУ представляет собой совокупность массивов
информационных и логических параметров, предназначенных для реализации
заданной суточной программы полета, как при штатном функционировании СУ,
так и при парировании нештатных ситуаций, возникающих в ходе полета [8].
Рассмотрим типовую структуру и состав ПЗ на примере ПЗ СУ ФГБ "Заря”
МКС "Альфа”.
По своему функциональному назначению весь объем ПЗ системы управления
ФГБ разделен на консервативную часть (группы А, Б, В, Г, Д, Е, Ж) и
оперативную часть (группа 3), включающие в себя:
- настроечные параметры системы наведения и стабилизации (группы А, Б,
В);
- формулярные данные номенклатуры командных приборов и
исполнительных органов (группы Г и Д);
- параметры, характеризующие техническое состояние командных
приборов и исполнительных органов (группа Ж и Е);
- параметры, обеспечивающие задействование и реализацию режимов СУ в
соо гветствии с запланированной суточной программой полета (группа 3).
Формат хранения ПЗ СУ в ОЗУ БЦВМ - 16-разрядные двоичные слова, в
которые упакованы физические и кодовые параметры ПЗ СУ.
В процессе предстартовой подготовки в БЦВМ СУ ФГБ вводятся все группы
ПЗ СУ. При штатном функционировании СУ в полете на борт вводится только
оперативная группа 3 ПЗ, при нештатном функционировании могут вводиться все
группы ПЗ.
ПЗ на технологических этапах разработки СУ,
Математический стенд
На этапе математического моделирования определяется состав параметров
ПЗ и диапазоны их возможных значений. Проводят моделирование процессов
управления в целях выбора рабочего диапазона вариаций параметров ПЗ и
выбора дискретности их представления, обеспечивающие функционирование СУ
211
во всех эксплуатационных режимах её работы с требуемой точностью.
Формируют исходные данные для контроля параметров ПЗ в АО расчета ПЗ.
Выбирают значения параметров стартового ПЗ (СПЗ). Согласовывают
численные значения параметров унифицированных алгоритмов. Принимают
решение по логическим признакам ПЗ, определяющих основные варианты
работы динамических алгоритмов и виды алгоритмического контроля.
Далее рассчитывают значения параметров технологических массивов ПЗ для
проведения наземных испытаний СУ (КС, КИС, ТП); моделируют циклограммы
проверочных связок.
Разрабатывают АО и ПО расчета и контроля параметров ПЗ СУ.
Исследовательский стенд
На данном этапе проводят испытания ПАО в каждом из режимов ОР на ИС в
схеме РИС по КП во всём диапазоне возможных значений каждого параметра ПЗ.
Ввод ПЗ осуществляется с помощью массива ИД с проквантованными
параметрами ПЗ. Для подготовки массива ИД используется ПО сектора-
разработчика МО расчета ПЗ.
Испытания ПАО динамических режимов на ИС в схеме ЗИС проводятся с
параметрами СПЗ в два этапа - ЛОИзис и СОИзнс. ПЗ вводится массивом ИД
каждого из испытуемых режимов.
Испытания ПАО на ИС в схеме ’’Электронный пуск” (ЭлП) проводятся с ПЗ,
обеспечивающими выполнение запланированных работ связкой режимов СУ.
Расчет ПЗ осуществляется по ИД, соответствующим физическим значениям его
параметров, средствами МО расчета ПЗ. Ввод ПЗ реализуется или массивом ИД,
или средствами входной информации (массивы ВИ).
КС, КИС
Отрабатывается технология ввода ПЗ с задействованием реальной
аппаратуры СУ, отрабатываются ТПЗ проверочных связок и ПО расчета ТПЗ.
Подготовка клетной эксплуатации
Процесс подготовки к летной эксплуатации также описан на примере СУ
ФГБ ’’Заря” МКС ’’Альфа".
Для расчета и контроля ПЗ СУ в ЦУП-М по исходным данным НПП
«Хартрон-Аркос» разрабатывают специальное математическое обеспечение.
212
Исходными данными для разработки специального математического
обеспечения расчета и контроля ПЗ СУ являются:
- "Перечень параметров ПЗ СУ", в котором указывается номенклатура
параметров ПЗ СУ и их характеристики;
- "Алгоритм расчета и контроля параметров ПЗ СУ";
- контрольные примеры для отработки ПО расчета и контроля ПЗ;
- программа приемосдаточных испытаний.
ГО направляет в НПП «Хартрон-Аркос» СПЗ в полном составе. НШ1
«Хартрон-Аркос» моделирует полет с полученным СПЗ в схеме ЭлП и
согласовывает СПЗ.
Описанный процесс подготовки к летной эксплуатации в части ПЗ показан в
виде схемы рис. 3.16.
Рисунок 3.16 - Процесс подготовки ПЗ к летной эксплуатации
213
Контроль расчета ПЗ на этапе летной эксплуатации
Расчет и контроль ПЗ СУ выполняются оперативной группой управления
(ОГУ) ЦУП-М. Исходными данными для расчета являются утвержденная
суточная программа полета и результаты анализа функционирования СУ,
проводимые в группе анализа ОГУ. Для повышения надежности и качества
управления КА между ЦУП-М и НЛП «Хартрон-Аркос» должен быть включен
канал информационного обмена.
Основной задачей проведения работ с использованием указанного канала
является контроль расчета и согласование ПЗ СУ. Для этого из ЦУП-М в НПП
«Хартрон-Аркос» по каналу информационного обмена передаются в
согласованном виде:
- исходные данные для расчета ПЗ;
- массивы 32-разрядных слов рассчитанного ПЗ.
В Н1Ш «Хартрон-Аркос» проводится:
- анализ исходных данных для расчета ПЗ;
- моделирование полета КА с рассчитанным ПЗ в схеме ЭлП;
- расчет ПЗ на вычислительных средствах НАШ «Хартрон-Аркос»;
- сравнение массивов 32-разрядных слов ПЗ (включая контрольные суммы
групп ПЗ);
- формирование и передача в ЦУП-М квитанции с результатами анализа
исходных данных и сравнения массивов 32-разрядных слов рассчитанного
ПЗ.
Рассчитанное в ЦУП-М ПЗ до ввода в СУ передается на математический
стенд АРМ ЦУП-М, на котором происходит отработка ПЗ при моделировании
полета КА в запланированной связке режимов согласованной суточной
программы полета.
Рассчитанное ПЗ СУ в виде 32-разрядных двоичных слов передается на НИП
ввода и вводится на борт по командной радиолинии. Контроль ввода
осуществляется по контрольным суммам.
Описанная технология контроля расчета ПЗ на этапе летной эксплуатации
показана в виде схемы рис. 3.17.
Выполнение всех этапов испытаний обеспечивает проверку:
- наземного МО расчета и конгроля ПЗ;
- бортового ПАО приема и контроля ПЗ;
- выполнения внешних команд, поступающих в СУ;
214
- выполнения запланированных задач с подготовленным ПЗ.
Важными вопросами работы с ПЗ на этапе летной эксплуатации являются:
- безусловное соблюдение правил ввода ПЗ с НИП на борт КА;
- обеспечение достаточности контроля реализации команд, выдаваемых СУ.
Рисунок 3.17 - Технология контроля расчета ПЗ на этапе летной
эксплуатации
215
Библиографический список
1. СТП 523.2-382-99. Программное обеспечение встроенных ЭВМ. Фазы
жизненного цикла. Состав работ и документов каждой фазы. - X.: НЛП
«Хартрон-Аркос», 1999. - 14 с.
2. Виленкин, С.Я. Математическое обеспечение управляющих
вычислительных машин [Текст] / С.Я. Виленкин, Э.А. Трахтенгерц. - М.:
Энергия, 1972. - 325 с.
3. Липаев, В.В. Математическое обеспечение управляющих ЦВМ [Текст] / В.В.
Липаев, К.К. Колин, Л.А. Серебровский. - М.: Сов. радио, 1972. - 230 с.
4. Отладка систем управляющих алгоритмов ЦВМ реального времени [Текст]
/ В.В. Липаев, Л.А. Фидловский, В.В. Филиппович и др. - М.: Сов. радио,
1974.-258 с.
5. Майерс, Г. Надежность программного обеспечения [Текст] / Г. Майерс. -
М.:Мир, 1980.-128 с.
6. Динамическая отработка программного обеспечения БЦВМ СУ объектов
ракетно-космической техники [Текст] / Я.Е. Айзенберг, Ю.М. Златкин, В.П.
Каменев и др. - К.: Космическая наука и технология-1997 - Т.З, №1-2. -
712 с.
7. ГОСТ 19.301-79 Программа и методика испытаний. - М.: Изд-во
стандартов, 1979. - 15 с.
8. СТП 523.2-475-2004. Стандарт предприятия. Система управления
качеством. Технологическое полетное задание системы управления
космического аппарата. Порядок разработки, верификации и поставки. - X.:
НПП «Хартрон-Аркос», 2004. - 16 с.
216
4 ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА АППАРАТУРЫ СИСТЕМ
УПРАВЛЕНИЯ
4.1 Цели и задачи экспериментальной отработки
аппаратуры СУ
Выше была описана технология отработки программного обеспечения
бортовых и наземных цифровых вычислительных машин системы управления
ракетно-космических объектов.
Большинство вопросов, связанных с экспериментальной отработкой, подробно
оговорено различными нормативными документами - положениями, стандартами,
решениями, нормами. Действующий в отрасли стандарт [1] все проводимые
испытания подразделяет на исследовательские, предварительные, приёмочные и др.
Основным документом, определяющим объём отработки, этапы испытаний и
отчетную документацию, является комплексная программа экспериментальной
отработки (КПЭО). Данная программа разрабатывается предприятием-
разработчиком объекта испытаний. КПЭО - это организационно-плановый
документ, в котором развивают и уточняют содержание мероприятий программы
обеспечения надежности (ПОН), а также определяют перечень, объём, этапы и
порядок проведения экспериментальной отработки. Экспериментальная
отработка - это работы, выполняемые при моделировании на моделях, макетах,
опытных образцах в целях обеспечения функционирования системы управления в
соответствии с требованиями технического задания, определения запасов её
работоспособности, включая работы по математическому обеспечению
автоматизированных систем и вычислительных машин, отработке
технологических процессов [2].
Исходными документами при разработке КПЭО являются: техническое
задание, аванпроект, эскизный проект, программа обеспечения надежности.
Основная цель разработки КПЭО - установление объёма и последовательности
экспериментальной отработки. В КПЭО указывают, что явилось основанием для
ее разработки, приводят сведения о целях и задачах проводимой отработки,
объектах отработки, указывают организации-исполнители, приводят
необходимый объём испытаний.
При разработке КПЭО исходят из того, что основной объём
экспериментальной отработки должен быть выполнен в наземных условиях до
начала натурных (летных) испытаний. На этапе НИ проводят только те работы,
которые в наземных условиях технически невыполнимы или экономически
нецелесообразны. При планировании видов, объёмов и условий проведения
испытаний необходимо учитывать требования международных правовых
ограничений по сокращению натурных испытаний ракетной техники.
217
КПЭО состоит из следующих разделов:
- общие положения;
- объекты экспериментальной отработки;
- этапы, порядок и содержание экспериментальной отработки;
- контрольные мероприятия;
- организационно-техническое и метрологическое обеспечение
экспериментальной отработки;
- перечень программ и методик.
КПЭО разрабатывается испытательным подразделением и согласовывается
со всеми заинтересованными подразделениями предприятия, заказчиком и
головной организацией.
Рассмотрим категории испытаний, которым подвергается аппаратура СУ при
проведении опытно-конструкторских работ.
Исследовательские испытания
Исследовательские испытания представляют собой лабораторные
(отработочные) испытания (ЛОИ) опытных образцов аппаратуры. ЛОИ проводит
разработчик с участием заинтересованных подразделений (конструкторского,
испытательного, надежности и др.). Цель ЛОИ: проверить и отработать
аппаратуру на соответствие требованиям, установленным в техническом задании.
ЛОИ подразделяют на следующие:
- лабораторные (отработочные) испытания автономные - ЛОИ-а, когда
проводят испытания прибора автономно, как правило, с помощью
автономных рабочих мест (КИП). При этом не отрабатывают
взаимодействие с другими приборами системы;
- лабораторные (отработочные) испытания комплексные - в составе
комплексного стенда (ЛОИ-к);
- лабораторные (отработочные) испытания - в составе аналогово-цифрового
комплекса (цк).
По результатам, полученным при ЛОИ, проводят корректировку КД.
Предварительные испытания
Предварительным испытаниям подвергают опытные образцы аппаратуры,
доработанные по КД, откорректированной по результатам ЛОИ.
Предварительные испытания проводит испытательное подразделение
совместно с ПЗ при участии разработчика, конструкторских подразделений и
подразделения надежности.
218
Цель предварительных испытаний - выполнить предварительную оценку
соответствия опытных образцов требованиям ТЗ, а также определить готовность
образцов к приёмочным испытаниям.
Предварительные испытания включают в себя:
- совместные испытания автономные (СОИ-а);
- совместные испытания в составе комплексного стенда системы управления
(СОИ-к);
- совместные испытания алгоритмов и программ в составе аналогово-
цифрового комплекса (СОИ-ацк).
Приёмосдаточные испытания
Приёмосдаточные испытания (ПСИ) проводят в целях проверки
изготовленной аппаратуры на соответствие конструкторской документации. ПСИ
выполняют изготовитель аппаратуры и представитель заказчика.
Приёмочные испытания
Приёмочные испытания представляют собой контрольные испытания
опытных образцов, опытных партий продукции или изделий единичного
производства, проводимые соответственно в целях решения вопроса о
целесообразности постановки этой продукции на производство и (или)
использования по назначению.
Очень редко испытания осуществляют на реальном объекте.
Как правило, для проведения испытаний используют опытные образцы
приборов и системы управления в целом.
Стандартом [1] предусмотрено, что опытный образец - это изделие,
изготовленное по разработанной конструкторской документации для проверки
его соответствия техническому заданию, проверки конструктивных решений,
определения необходимости последующей корректировки документации.
Обычно предусматривается изготовление нескольких комплектов
аппаратуры, специально предназначенных для проведения различных испытаний.
Назначение комплектов определяется специальным решением организации-
разработчика.
Пример назначения комплектов приведен в табл. 4.1.
Из таблицы видно, что комплекты аппаратуры с первого по четвертый
предназначены для проведения исследовательских и предварительных
испытаний, пятый комплект предназначен для технологического КА, на котором
будут выполняться так называемые ЭРТИ - электро-, радиотепловые испытания,
комплекты 6 и 7 предназначены для проведения натурных, т. е. летных
219
испытаний. Комплект 8 предназначен для периодических испытаний (ПИ), а
комплект 9 - для типовых испытаний (ТИ).
Таблица 4.1 - Назначение комплектов
Номер комплекта Назначе- ние Вид приемки
1 ЛОИ-а отк
2 ЛОИ-к отк
3 СОИ-а ПЗ
4 СОИ-к ПЗ
5 ЭРТИ ПЗ
6 1НИ ПЗ
7 2НИ ПЗ
8 пи ПЗ
9 ТИ ПЗ
Вид приемки ”ОТК" означает, что продукция подвергается предъявительским
испытаниям службой технического контроля (СТК) предприятия-изготовителя и
предназначена для проведения исследовательских испытании (ЛОИ-а и ЛОИ-к).
Вид приемки "ПЗ" означает, что продукция подвергается предъявительским
испытаниям службой технического контроля предприятия-изготовителя и
приемосдаточным испытаниям представителями заказчика и предназначена для
проведения предварительных испытаний (СОИ-а, СОИ-к), периодических
испытаний (ПИ), типовых испытаний (ТИ) и поставки продукции в места
эксплуатации. Разумеется, количество и назначение комплектов,
предназначенных для проведения испытаний, может существенно отличаться от
приведенного выше. Например, для проведения ЛОИ и СОИ вместо четырех
может быть запланировано изготовление двух или даже одного комплекта, могут
вводиться другие виды испытаний. Всё зависит от назначения заказа, требуемой
срочности его разработки и, главным образом, от выделенного финансирования.
Аппаратуру, предназначенную для проведения испытаний в головной
организации вместе с оформленными формулярами, упаковывают в тару и
отправляют по назначению. Дальнейшие испытания проводят на контрольно-
испытательной станции головной организации, а также на технической и
стартовой позициях космодрома. Завершающий этап испытаний - летные
(натурные) испытания. Прежде чем перейти к более подробному рассмотрению
категорий испытаний, проводимых при экспериментальной отработке
аппаратуры, необходимо отметить следующее. На начальном этапе развития
ракетно-космической техники для отработки и испытаний применяли аппаратуру
с ручным управлением. Вручную в соответствии с заранее разработанной
временной диаграммой проверки (так называемой циклограммой) задавали
режимы работы, возмущающие воздействия, реакцию аппаратуры
контролировали визуально путем считывания показаний различных индикаторов
220
с записью результатов от руки. Недостатки такого метода работы очевидны.
Результаты проверок здесь во многом зависят от квалификации операторов,
выполняющих проверки, темп работы определяется скоростью реакции человека,
не исключены субъективные ошибки.
Поэтому вполне объяснимо стремление разработчиков аппаратуры
максимально автоматизировать процесс испытаний, тем более, что
распространение цифровых вычислительных машин, а в последние десятилетия и
микропроцессорной техники предоставляет широкие возможности для этого. По
мере рассмотрения проводимых испытаний будем останавливаться и на
используемых для этого устройствах, чаще всего автоматических.
Всё изложенное здесь справедливо при выполнении работ по заказам
Украины и стран СНГ. В случае разработки систем управления для других
государств заказчик может потребовать выполнения работ по другим стандартам,
например, международным или своего государства. В этом случае порядок работ
может существенно отличаться от изложенного здесь.
4.2 Автономные лабораторно-отработочные испытания (ЛОИ-а)
Экспериментальная отработка как отдельных элементов систем управления
объектов РКТ, так и систем управления в целом отличается большим
многообразием, которое вызвано сложностью процессов создания и эксплуатации
объектов РКТ. На всех этапах жизненного цикла объекты РКТ постоянно
подвергаются различным испытаниям. Одними из первых в ряду
экспериментальной отработки стоят лабораторно-отработочные испытания,
которые являются составной частью исследовательских испытаний.
Лабораторно-отработочные испытания автономные (ЛОИ-а), проводящиеся
на опытных образцах аппаратуры, предназначены для определения степени
соответствия аппаратуры требованиям технического задания, режимов
применения электрорадиоизделий условиям эксплуатации аппаратуры. Согласно
определению (ГОСТ 16504-81), лабораторными называют испытания объекта,
проводимые в лабораторных условиях на рабочем месте. Автономность
заключается в том, что объект испытаний не подключен к смежным приборам
или системам.
ЛОИ-а организуют и проводят разработчики аппаратуры в целях
определения или оценки показателей качества функционирования испытуемого
объекта в определенных условиях его использования, выбора наилучших
режимов применения объекта или наилучших характеристик свойств объекта,
сравнения множества вариантов реализации объекта при проектировании и
аттестации, отбора существенных факторов, влияющих на показатели качества
функционирования объекта.
Порядок проведения ЛОИ-а и объем выполняемых испытаний оговорены
действующими в отрасли нормативными документами (ДСТУ 3442-96 и др.).
Перечень контролируемых параметров при испытаниях с обязательным
221
включением требований технических условий (ТУ) определяет разработчик
аппаратуры. Испытания ЛОИ-а проводят, как правило, в два этапа.
На первом этапе испытаний:
- определяют соответствие параметров опытного образца требованиям ТЗ на
разработку аппаратуры и требованиям конструкторской документации;
~ проверяют режимы применения электрорадиоизделий и их соответствие
требованиям технических условий (напряжения, токи, температура);
- выявляют элементы аппаратуры, наиболее чувствительные к воздействию
внешних дестабилизирующих факторов по критериям, изложенным в ТЗ;
- уточняют габаритные и компоновочные характеристики.
На втором этапе выявляют запасы прочности (работоспособности)
аппаратуры при превышении уровней воздействующих факторов, а также при
неблагоприятном сочетании нескольких факторов.
Документация
В каждом конкретном случае объем испытаний определяется программой
ЛОИ-а, выпускаемой разработчиком прибора на основе нормативной
документации (Государственные стандарты, стандарты предприятий и пр.).
Программа ЛОИ-а должна содержать следующие разделы, в которых
указываются:
- объект испытаний, код и номера опытных образцов, обозначение,
назначение и особенности аппаратуры;
- цель испытаний;
- общие положения с указанием перечня документов, на основании которых
выполняют испытания, мест и сроков проведения, организации, участников
испытаний, перечня представляемых на испытания документов;
- объем испытаний с приведением перечня этапов, количественные и
качественные характеристики, подлежащие оценке, последовательность
испытаний с указанием соответствующих методик и стандартов;
— условия и порядок проведения испытаний;
- материально-техническое обеспечение испытаний;
- метрологическое обеспечение испытаний;
- методы испытаний;
- обработка, анализ и оценка результатов испытаний;
- отчетность.
Выбор тестируемых параметров и оборудования
Экспериментальная отработка прибора обычно начинается задолго до ЛОИ-
а. В самом начале проектирования разработчик отрабатывает отдельные узлы
прибора или прибор на моделях или действующих макетах. Современная техника
позволяет проводить проектирование приборов без использования физической
222
среды, моделируя функционирование узлов на ПЭВМ по специальным
методикам и программам с последующим подтверждением расчетов
электрических схем (параметров ЭРИ), а также временных диаграмм работы
узлов, правильность их расчета в соответствии с ТЗ.
Параллельно с разработкой прибора выполняют выбор и при необходимости
создают испытательное оборудование для тестирования, отладки и регулировки в
процессе изготовления. Испытательное оборудование, обычно называемое
контрольно-измерительными пультами (КИП), должно заменить приборы, с
которыми взаимодействует испытываемый прибор, т.е. позволять формировать
сигналы, которые являются для испытуемого прибора входными, и воспринимать
выходные сигналы прибора.
Лабораторная проверка узлов, блоков и устройств на макетах и их
экспериментальная отладка являются также неотъемлемой частью разработки
технических условий (ТУ) эксплуатации. Проведение экспериментальных работ
требует наличия хорошо оснащенной лабораторной базы и квалифицированного
состава испытателей. Объем экспериментальных работ во многом определяется
тем, в какой мере при разработке аппаратуры и ТУ используют расчетные
методы. По мере совершенствования расчетных методов и внедрения машинного
проектирования объем экспериментальных работ, связанных с разработкой ТУ,
уменьшается.
Применение типовых электронных блоков приводит к тому, что их входные
сигналы и нагрузки на выходах изменяются в достаточно широких пределах
допуска от номинального. Электрические схемы блоков и приборов должны быть
работоспособными при наиболее неблагоприятных условиях на входе и выходе.
Только при выполнении этих условий можно обеспечить надежное
функционирование проектируемой системы и функциональную
взаимозаменяемость отдельных элементов схем, узлов, блоков. Слишком
большой запас нежелателен, так как он требует применения более дорогостоящих
высококачественных элементов и сопутствующих накладных расходов.
Установление технически обоснованных требований к электрическим сигналам
электронных блоков и допусков на эти сигналы с учетом разброса характеристик
электроэлементов, входящих в состав блоков, а также колебаний питающих
напряжений обеспечивает как нормальное функционирование электронных
устройств, так и функциональную взаимозаменяемость входящих в их состав
блоков.
Отладку и тестирование прибора и отдельных узлов ведут непрерывно в
течение всего срока изготовления. Отрегулированные и проверенные узлы
монтируют в модель прибора вне корпуса на технологическом приспособлении и
тестируют по всем электрическим и информационным параметрам ТУ. Сигналы
для проверки блоков выбирают в соответствии с принципиальными схемами
блоков и интерфейсов связи. Требования к параметрам сигналов удобно
представлять в виде таблиц. Таблицы составляют раздельно для входных,
выходных и двунаправленных магистральных сигналов. Указывают допустимые
пределы колебаний питающих напряжений от их номинальных значений, при
223
которых блоки должны нормально функционировать. При нормальном
завершении автономных проверок на КИП прибор окончательно монтируют в
корпус, затем проходит приемосдаточные испытания (ПСИ) на соответствие
требованиям ТУ. Из прошедших ПСИ приборов выбирают образцы для
проведения дальнейших испытаний (ЛОИ, СОИ и др.).
ЛОИ-а проводят на выбранном изделии в такой тематической
последовательности:
а) испытания на соответствие ТЗ электрических параметров;
б) испытания на функционирование при различных параметрах входных
воздействий;
в) испытания на тепловые воздействия;
г) испытания на надежность работы.
Тестовое оборудование и метрологическое обеспечение
При проведении ЛОИ-а выполняют большой объем разнообразных
испытаний, что требует соответствующего оборудования. Параметры
электрических сигналов электронных блоков проверяют на КИП и специальных
испытательных стендах. Типовые электронные блоки проверяют в динамическом
режиме. Потенциальные и импульсно-потенциальные типовые электронные
блоки проверяют также и в статическом режиме. При разработке испытательных
стендов целесообразно предусматривать возможность проводить проверку на
одном стенде всех или по крайней мере нескольких типов блоков, входящих в
состав аппаратуры прибора. В состав КИП и испытательных стендов обычно
входят блок формирования входных сигналов для проверяемых блоков; система
коммутации, позволяющая использовать рабочее место для проверки блоков
различных типов в соответствующих' для них режимах; блоки питания и
регистрирующее оборудование.
Блок формирования входных сигналов включает в себя задающий генератор
входных сигналов, систему согласующих и формирующих схем (модель внешней
среды) и выполняется на типовых электронных блоках и узлах, используемых в
смежных системах. Требования к параметрам выходных сигналов блока
формирования аналогичны требованиям к параметрам входных сигналов
проверяемых блоков. Если входные сигналы проверяемых блоков могут быть как
положительными, так и отрицательными, то блок формирования сигналов
должен иметь сигналы обеих полярностей. Частоты и амплитуды входных
сигналов электронных блоков различных типов, как правило, различны, и,
следовательно, в блоке формирования должна быть предусмотрена возможность
регулировки частоты и амплитуды подаваемых импульсов. Иногда от блока
формирования требуется возможность выработки одиночных импульсов.
В качестве управляющей и контролирующей базы современных
испытательных стендов и КИП применяют ПЭВМ или рабочие станции,
224
например, фирм ADVANTECH или OCTAGON SYSTEMS. Широкий выбор
периферийных карт расширения позволяет смоделировать набор различных
входных и выходных сигналов на готовых модулях, а при необходимости
благодаря открытой архитектуре ПЭВМ разработать уникальные модули со
специфическими интерфейсами, определенными в ТУ. Учитывая, что
современное измерительное и регистрирующее оборудование (осциллографы,
частотомеры, комбинированные цифровые измерители и пр.) имеет стандартные
интерфейсы связи (RS232c(COM), USB и др.), можно непосредственно
регистрировать результаты в автоматическом режиме. Дополнение программной
среды управления картами расширения, программными модулями чтения с
аппаратуры регистрации позволяет при этом автоматизировать процесс
испытаний объекта контроля с детальным протоколированием результатов во
времени. Структура КИП показана на рис. 4.1, а рабочее место испытателя - на
рис. 4.2.
Измерительная аппаратура, используемая при ЛОИ-а, должна быть
калибрована в соответствии с требованиями действующих нормативных
документов, опломбирована и снабжена документацией, подтверждающей
пригодность к эксплуатации.
Рисунок 4.1- Структурная схема испытаний
на гармоническую или широкополосную случайные вибрации
На рис. 4.1 обозначено:
1 - задающий генератор;
2 - усилитель мощности;
3 - вибростол;
4 - объект испытаний;
5 - виброизмерительный преобразователь;
6 - усилитель заряда;
7 - согласующее устройство;
8 - регистрирующее и анализирующее
устройство.
225
Рисунок 4.2 - Рабочее место испытателя
Стадии
1. Испытания на соответствие ТЗ по электрическим параметрам начинается с
замеров параметров по цепям питания и вычисления мощности потребления
прибора, а если есть указание в программе ЛОИ-а, то и других компонентов.
Проводят также замеры электрических параметров по составным компонентам
прибора и блоков в целях контроля правильности применения ЭРИ. Для особых
случаев (обычно блоков аналоговых схем) составляют карты рабочих режимов
ЭРИ, по которым оценивают правильность использования и эксплуатационные
запасы для каждого из элементов.
2. При испытаниях на функционирование подтверждается правильность
реакции на задаваемую на вход тестовую последовательность сигналов.
Проводится проверка на соответствие ТЗ при варьировании параметров тестового
сигнала, а также тестирование выходных реакций прибора при изменении в
пределах ТЗ характеристик нагрузки. Подтверждается стабильность выходных
параметров функционирования при номинальном напряжении питания, а также
при крайних допустимых его значениях.
3. Испытания на температурные воздействия преследуют подтверждение на
соответствие требованиям ТЗ как к устойчивому функционированию прибора в
целом, так и к отсутствию отклонений в параметрах выходных сигналов при
колебании температуры окружающей среды. Основные испытания проводят при
наличии камер тепла и холода на рабочем месте в лаборатории.
4. Надежность функционирования прибора характеризуется количеством
отказов за единицу времени и оценивается по времени безотказной работы.
Испытание начинается после завершения этапа изготовления прибора и
проводится в течение всего цикла испытаний. Время нормального
функционирования выбранного для ЛОИ-а образца при выполнении всех этапов
испытаний фиксируют, суммируют и учитывают при условии отсутствия отказов
226
в приборе за время испытаний. При необходимости подтверждения повышенных
показателей времени безотказной работы существуют методики ускоренных
испытаний с функционированием прибора под воздействием сочетания не менее
чем двух неблагоприятных факторов, вызывающих ускоренное старение ЭРИ
(обычно повышенное напряжение питания и крайняя верхняя допустимая
температура окружающей среды), с последующим пересчетом для нормальных
условий эксплуатации.
Суммарное время наработки должно быть не менее, чем оговоренное в
программе ЛОИ-а.
Документирование результатов и отчетность
Все результаты, полученные при испытаниях, заносят в специальный журнал
испытаний и заверяют подписями специалистов, ответственных за испытания.
Результаты, полученные с регистрацией замеров, учитывают в журнале
испытаний и сохраняют.
При возникновении неисправностей в работе испытуемого прибора
анализируют полученные замечания и принимают решение по устранению
дефектов. В случае необходимости доработки прибора разработчик выпускает
извещение на доработку, испытания приостанавливают, прибор возвращают на
завод-изготовитель для устранения выявленных дефектов (в отдельных случаях
возможно продолжение испытаний). После доработки прибора пункт программы,
в котором получено замечание, обязательно повторяется.
ЛОИ-а считаются законченными, когда по всем пунктам программы
испытаний параметры опытного образца прибора соответствуют требованиям ТЗ
на разработку аппаратуры и требованиям конструкторской документации. По
результатам ЛОИ-а разработчик прибора выпускает технический отчет.
В отчете приводят выводы о результатах анализа испытаний, рекомендации
по дальнейшему повышению качества и надежности аппаратуры, указывают, что
аппаратура допускается к следующему виду испытаний. Отчет заверяется
подписями специалистов, ответственных за испытания.
Прибор, прошедший ЛОИ-а, обычно используют для дальнейшей отработки
системы.
4.3 Совместные отработочные испытания автономные
4.3.1 Назначение и организация испытаний
Совместные отработочные испытания автономные являются составной
частью предварительных испытаний, предшествующих приемочным
(государственным) испытаниям.
СОИ-а организовывает и проводит испытательное подразделение в целях
определения характеристик прибора и предварительной оценки на соответствие
227
требованиям технического задания на разработку аппаратуры и технических
условий на прибор.
Аппаратуру испытывают автономно, без подключения к смежным
приборам или системам. Проверку работоспособности аппаратуры осуществляют
на автономных рабочих местах, специально разработанных для проверки данных
приборов.
Аппаратура, подвергающаяся испытаниям, должна иметь в формулярах,
паспортах и других сопроводительных документах заключение о ее пригодности
к проведению СОИ-а.
СОИ-а проводят на опытных образцах аппаратуры, принятых службой
контроля качества. Испытания проводят в соответствии с программой испытаний.
В каждом конкретном случае объем испытаний определяется программой
СОИ-а, выпускаемой разработчиком и конструктором прибора на основе
нормативной документации (Государственные стандарты, стандарты
предприятий и другие нормативные документы). Программа СОИ-а должна
содержать следующие разделы:
- объект испытаний, в котором указывают код и номера опытных образцов
прибора, обозначение, назначение и особенности аппаратуры;
- цель испытаний: конкретные цели и задания, которые должны быть
достигнуты и решены в процессе испытаний;
- общие положения с указанием перечня документов, на основании которых
выполняют испытания, место их проведения, организации, участвующие в
испытаниях, перечня предоставляемых на испытания документов;
- объем испытаний: перечень этапов испытаний и проверок, а также
количественные и качественные характеристики, подлежащие оценке;
последовательность испытаний с указанием методик или со ссылками на
соответствующие методики по стандарту;
- материально-техническое и метрологическое обеспечение испытаний:
перечисление материалов, технических средств, документации, перечень
средств измерений и оборудования, сроки проверки с отметками в
свидетельствах и аттестатах, подтверждающие их пригодность к
эксплуатации с указанием классов точности, погрешностей;
- методы проведения испытаний: содержание и последовательность
операций при проведении определенного вида испытаний;
- обработка, анализ и оценка результатов испытаний: способы обработки
информации с указанием их места в процессе обработки; объем исходных
данных, необходимых для оценки результатов испытаний; способы
сравнения полученных данных с требованиями (эталонами), заданными в
программе испытаний; критерии, при выполнении которых испытываемый
228
прибор считается выдержавшим испытания;
- отчетность: приводят требования к объему сведении, подлежащих
отражению в протоколе испытаний ( см. подразд. 4.9.3).
4.3.2 Основные направления проведения СОИ-а
Для обеспечения высокой эксплуатационной надежности приборов и их
элементов требуется тщательная проверка их на воздействие механических и
климатических нагрузок, возникающих в процессе эксплуатации и их
транспортирования.
Такая проверка обеспечивается проведением испытаний на воздействие
вибрации, механических ударов, линейных ускорений, имитации
транспортирования, акустического шума, повышенной и пониженной
температур, повышенной относительной влажности и др.
4.3.2.1 Электрические испытания
При электрических испытаниях выполняют измерение сопротивления
изоляции в электроустановках и кабельных линиях.
Электрические испытания:
- проверка электрического сопротивления изоляции;
- измерение тока, потребляемого прибором, и расчет мощности;
- проверка функционирования в нормальных климатических условиях при
номинальном и крайних значениях напряжения первичного питания;
- испытание на помехоустойчивость по цепи первичного питания;
- анализ и оценка принятых мер по защите от перепутывания соединителей;
- проверка работоспособности при имитации возможных схемных
неисправностей, проверка глубины и точности диагностики отказов;
- испытание на 100 % гарантийную наработку;
- определение запасов работоспособности по первичному питающему
напряжению;
- проверка времени непрерывной работы.
4.3.2.2 Испытания на механические воздействия
Испытания на механические воздействия:
- контроль массы;
229
- испытание на герметичность;
- испытание по обнаружению резонансов конструкции прибора;
- испытание на прочность и устойчивость при воздействии синусоидальной и
широкополосной случайной вибраций;
- испытание на прочность и устойчивость при воздействии механических
ударов;
- испытание на прочность и устойчивость при воздействии линейного
ускорения;
- испытание на прочность и устойчивость при воздействии акустического
шума;
- испытание на прочность при транспортировании в упакованном виде.
4.3.2.3 Испытания на климатические воздействия
Испытания на климатические воздействия:
- испытание на воздействие повышенной температуры среды;
- испытание на воздействие пониженной температуры среды;
- испытание на воздействие изменения температуры среды;
- испытание на воздействие повышенной влажности;
- испытание по определению тепловых режимов ЭРИ (электро-, радио-
изделия) внутри аппаратуры;
- испытание на воздействие повышенной температуры среды и пониженного
атмосферного давления;
- испытание на воздействие пониженного атмосферного давления;
- испытание на воздействие пониженного атмосферного давления при
авиатранспортировании.
4.3.3 Материально-техническое и метрологическое обеспечение
СОИ-а
Каждый из перечисленных видов в подразд. 4.3.2 испытаний проводится на
специальных стендах и в климатических камерах; одни из них имитируют
условия для испытуемых приборов, близкие к эксплуатационным, другие же
дают возможность проводить с испытуемыми приборами исследования.
Типовое испытательное механическое, климатическое оборудование и
средства измерительной техники приведены в табл. 4.2, 4.3, 4.4 соответственно.
Данное оборудование и средства измерительной техники, используемые
при проведении СОИ-а, должны периодически проходить государственный
метрологический контроль и иметь отметку с датой последней проверки.
230
Таблица 4.2 — Испытательное оборудование для проведения испытаний на
механическое воздействие
Наименование испытания Тип обору- дования Вес прибора Диапазон частот (диапазон изменения 1исла ударов в минуту) Максимальная амплетуда перемещения (максимальная высота падения стола Максимальное ускорение (уровень звукового давления)
Испытание по обнаружению резонансов конструкции изделия. Испытание на прочность и устойчивость при воздействии синусоидальной и широкополосной случайной вибраций (43.4.3, 43.4.4, 4.3.4.5)1 Вибро- установка электро- динами- ческая до 100 кг 5...2500Гц 10 мм от 96 до 588 м/с2 (в зависимости от веса изделия)
Испытание на прочность и устойчивость при воздействии механических ударов. Испытание на прочность при транспортировании в упакованном виде (43.4.6, 43.4.7, 43.4.8) Ударный стенд 400 кг 17...180 уд/мин 18.. 30 мм от 882 до 4900 м/с2 (в зависимости от веса изделия)
Испытание на прочность и устойчивость при воздействии линейного ускорения (43.4.9, 4.3.4.10) Центри- фуга 130 кг - - 245 м/с2
Испытание на прочность и устойчивость при воздействии акустического шума (43.4.11,4.3.4.12) Акусти- ческая установка 100... 10000 Гц - до 150 дБ
1 Указаны разделы, в которых описаны виды испытаний с участием данного
оборудования
231
Таблица 4.3 - Испытательное оборудование для проведения испытаний на
климатическое воздействие
Наименование испытания Тип камеры Диапазон температур (точность поддержания) Диапазон относитель- ной влажности (точность поддержания) Диа- пазон давле- ний, мм рт.ст.
Испытание на воздействие повышенной (пониженной) температуры среды (4.3.4.13) Камера тепла, холода -70°С...+120°С (±3°С) - -
Испытание на воздействие повышенной влажности (4.3.4.15) Камера влаги до 70°С 10... 98% (±2%) -
Испытание на воздействие изменяющейся температуры среды (4.3.4.14) Камера тепла, холода -70°С...+120°С (±3°С) - -
Испытание на прочность при транспортировании авиационным транспортом (4.3.4.19) Термобаро- камера -60°С...+120°С (±2°С) - 760... ...1,5
Испытание на воздействие пониженного атмосферного давления (4.3.4.18) Вакуумная камера от НУ до +50°С до 1x10 3
Таблица 4.4 - Средства измерительной техники
Название СИТ Название измеряемого параметра Основные технические характеристики
Милливольтметр Переменное напряжение Диапазон измерения переменного напряжения - 100 мкВ...300 В; частота- 0,5 Гц.. .500 кГц; погрешность - 1 %
Осциллограф запоминающий цифровой Измерение и определение формы сигналов с запоминанием Диапазон напряжения - 2 мВ.. .5 В; диапазон длительности - 5нс/дел....50 с/дел.; полоса пропускания - 60 МГц
232
Окончание табл. 4.4
Название СИТ Название измеряемого параметра Основные технические характеристики
Самописец Регистрация сигнала на бумажную ленту Диапазон частот - 2 Гц... .. .200 кГц; скорость записи - 0, 0003... 10 мм/с
Вибропреобразователь Напряжение, пропорциональное ускорению Диапазон частот -1... 14000 Гц; погрешность - 5%; динамический диапазон - 29400 м/с; погрешность - 5 %
Усилитель Усилитель сигнала Полоса пропускания - 0,3 Гц... 100 кГц; выходное сопротивление - > 1 Ом
Шумомер Напряжение, пропорциональное уровню звукового давления Диапазон частот - 2.. .70000 Гц; погрешность -1 дБ; динамический диапазон - 15... 155 дБ; погрешность - ± 1 дБ
Набор октавных фильтров Напряжение, пропорциональное уровню звукового давления Диапазон частот - 22.. .45000 Гц; 11 октавных фильтров; средние частоты - 31,5 - 63 — 125 — 250 - 500 - 1000 -2000 - 4000 - 8000 - 16000-31500 Гц; погрешность - 0,5 дБ
Микрофон Уровень звукового давления Диапазон измерения частот - 20.. .20000 Гц; уровень звукового давления - 42... 160 дБ
Измеритель сопротивления изоляции Сопротивление изоляции Испытательное напряжение (постоянное) от 500 до 10000В; пределы измерений 30...600ГОм; погрешность измерении ±5%
Установка пробойная Прочность изоляции Испытания изоляции переменным (0,1.. .5,0кВ, шаг 5В) и постоянным (0,1.. .6,0 кВ, шаг 5В) напряжением; погрешность измерений ±5%
Комплекс регистрации температуры Температура Диапазон от -40 °C до +100°С; абсолютная погрешность ±0,5°С в диапазоне от -10°С до + 85 °C и ± 2°С в остальных диапазонах рабочих температур
233
4.3.4 Методы проведения испытаний
4.3.4.1 Контроль массы
Контроль массы проводится методом взвешивания на весах при первом
получении прибора на испытания. Масса прибора не должна превышать
допустимое значение по ТУ на прибор. Это важный показатель при испытаниях
на климатические воздействия, так как в зависимости от массы определяется
время выдержки в климатических камерах (см.подразд. 4.3.4.13).
4.3.4.2 Испытание на герметичность
Испытание на герметичность проводят в целях проверки способности
корпуса прибора не допускать проникновения воздуха или воды в прибор.
В прибор, размещенный в камере, через штуцер, ввинченный вместо
влагопатрона, нагнетают воздух или азот, создавая избыточное давление внутри
прибора. Давление внутри прибора контролируется по манометру в течение
определенного времени. Величину избыточного давления, время выдержки и
величину падения давления указывают в ТУ или ПИ на прибор. Например, для
прибора БИНС избыточное давление - 1,2 кг/см2, время выдержки - 30 мин,
падение давления - не более 3% (0,036 кг/см2).
4.3.4.3 Испытание по обнаружению резонансов конструкции
Испытание по обнаружению резонансов конструкции прибора проводят
для определения резонансных частот конструкции или его составных частей и
конструктивных элементов. Результаты испытаний используют при анализе и
устранении причин отказов и повреждений, обнаруженных при механических
испытаниях.
Прибор подвергают испытанию в выключенном состоянии поочередно в
трех взаимно перпендикулярных положениях на вибростенде.
Испытание проводят методом фиксированных частот, который применяют:
- при необходимости определения резонансных частот при установившихся
значениях амплитуды;
- при испытании только на механическом вибростенде, когда собственные
частоты приспособления для крепления прибора на вибростенде находятся
в испытуемом диапазоне частот и могут исказить результаты испытаний.
Обнаружение резонансов конструкции прибора проводят и методом
плавного изменения частоты синусоидальной вибрации в диапазоне частот от 10
до 2500 Гц со скоростью не выше 1 октавы в минуту. Амплитуду ускорения
задаваемой синусоидальной вибрации поддерживают постоянной и проверяют с
помощью вибропреобразователя, установленного в контрольной точке около
места крепления аппаратуры к приспособлению.
При заданных частотах определяют значения амплитуд ускорений
вибрации с помощью вибропреобразователей, установленных на конструктивных
элементах, выбранных конструктором и указанных в ПИ, а также амплитудно-
частотную характеристику.
Прибор считают выдержавшим испытания:
234
- если при воздействии вибрации в диапазоне частот до 25...40 Гц у прибора
без амортизации отсутствует увеличение в три раза и более амплитуды
ускорения отдельных составных частей и конструктивных элементов
прибора по сравнению с амплитудой ускорения, заданной в контрольной
точке около места его крепления;
- после испытаний не наблюдается механических повреждений и ослабления
креплений, а электрические параметры сохраняют свое значение в
требуемых пределах.
4.3.4.4 Испытание на прочность при воздействии
синусоидальной вибрации
Испытание на прочность при воздействии синусоидальной вибрации
проводят с целью проверить способность прибора противостоять разрушающему
действию синусоидальной вибрации и сохранять значения параметров после ее
воздействия в пределах, указанных в ТУ на прибор и ПИ.
Структурная схема испытаний при воздействии синусоидальной вибрации
показана на рис. 4.2.
Перед испытаниями прибор закрепляют в крепежных приспособлениях,
обеспечивающих передачу механических воздействий к испытуемым приборам с
минимальными искажениями. Прибор, имеющий собственные амортизаторы,
должен быть закреплен на амортизаторах.
Испытания проводят при воздействии синусоидальной вибрации в трех
взаимно перпендикулярных направлениях по отношению к прибору при
непрерывном изменении частот.
При этом общая продолжительность воздействия синусоидальной вибрации
поровну распределена между направлениями воздействия.
Испытательный режим устанавливают в контрольной точке по показаниям
рабочих средств измерений со следующими допускаемыми отклонениями:
амплитуда перемещения ±15 %; амплитуда ускорения ±15 %.
При испытаниях на вибрационные воздействия контрольную точку
выбирают в одном из следующих мест:
- на платформе стенда рядом с одной из точек крепления прибора, если
последнее закреплено непосредственно на платформе;
- на крепежном приспособлении, если прибор закреплен на приспособлении;
- рядом с точкой крепления амортизатора, если прибор закреплен на
собственных амортизаторах.
После окончания испытания проводят внешний осмотр и проверку
работоспособности прибора.
Работоспособность прибора в режиме основной работы проверяется в
соответствии с согласованной методикой по результатам отклонения
навигационных параметров в навигационной стартовой системе координат от
номинальных значений.
Критерием оценки является попадание указанного отклонения в рамки
235
допусков, рассчитываемых по результатам статистического моделирования
задачи навигации на Земле.
Пример зависимости AY(t) и допуски БИНС показан на рис.4.3.
Рисунок 4.3 - Зависимость AY(t) и допуски при испытании бесплатформенной
инерциальной навигационной системы при воздействии синусоидальной вибрации:
1,2- зависимости AY(t) для первого и второго испытаний; 3, 4 - допуски
Из графиков видно, что БИНС первое испытание выдержал, так как
зависимость AY(t) не достигла величины допуска за время воздействия 1800 с, а
второе испытание - нет, так как зависимость AY(t) превысила величину допуска
за время воздействия 1800 с.
4.3.4.5 Испытание на устойчивость при воздействии синусоидальной или
широкополосной случайной вибрации
Испытание на устойчивость при воздействии синусоидальной или
широкополосной случайной вибраций проводят в целях проверки способности
прибора выполнять функции и сохранять значения параметров в пределах,
указанных в ТУ на прибор и ПИ, в условиях воздействия синусоидальной или
широкополосной случайной вибрации в заданных режимах.
Примечание: широкополосная случайная вибрация — понятие, которое
основывается на спектральной плотности ускорения, выраженной в единицах
«ускорение в квадрате, деленная на частоту ((м/с2)2/Гц»; СПУ определяет закон
изменения в пределах частотного диапазона и по существу выражает среднюю
236
мощность, заключенную в частотном диапазоне шириной 1 Гц.
Скорость изменения частоты при воздействии синусоидальной вибрации
устанавливается равной одной-двум октавам в минуту. При этом скорость
изменения частоты должна быть максимальной, но достаточной для обеспечения
контроля необходимых параметров.
В диапазоне частот ниже частоты перехода поддерживают постоянную
амплитуду перемещения, а выше частоты перехода - постоянную амплитуду
ускорения. Во время воздействия синусоидальной вибрации проверяют
работоспособность прибора по документации, указанной в ТУ на прибор и ПИ.
Пример проверки на работоспособность прибора аналогичен показанному на
рис.4.3.
В заданном диапазоне частот определяют значения амплитуд ускорений
вибрации с помощью вибропреобразователей, установленных на конструктивных
элементах, выбранных конструктором и указанных в ПИ. Пример записи
виброускорений показан на рис.4.4,4.5.
Продолжительность воздействия вибрации при широкополосной случайной
вибрации в каждом направлении воздействия определяется временем проверки
работоспособности прибора.
Испытательный режим устанавливают в контрольной точке по показаниям
рабочих средств измерений со следующими допускаемыми отклонениями:
среднеквадратическое значение ускорения ±2 дБ; спектральная плотность
ускорения ±6 дБ, в табл. 4.5 приведен пример режима нагружения при испытании
на воздействие широкополосной случайной вибрации.
Прибор считается выдержавшим испытание, если при воздействии вибрации в
заданном диапазоне частот и ускорений не наблюдается механических повреждений
и ослабления креплений, а основные параметры в течение всего времени испытаний
сохраняют свое значение в требуемых пределах.
Таблица 4.5 - Режим нагружения при испытании на воздействие
широкополосной случайной вибрации
Частота, Гц Режимы нагружения, (м/с2)2/Гц
20...40 0,016...0,017
40...80 0,017...0,020
80... 160 0,020...0,070
160...320 0,070...0,12
320...640 0,12
640... 1280 0,12
1280...2000 0,10...0,12
Среднеквадратическое значение, g 14,6
237
« -г £ •
Рисунок 4.4 - Вибрационные ускорения. Положение «X»
238
А, мм
Рисунок 4.5 - Вибрационные ускорения. Положение «Y»
239
4.3.4.6 Испытание на прочность при воздействии механических ударов
Испытания на ударную прочность проводят в целях проверки способности
прибора противостоять разрушающему действию механических ударов
многократного действия с амплитудой ускорения согласно ПИ.
Структурная схема испытаний на воздействие механических ударов
показана на рис.4.6.
Рисунок 4.6 - Структурная схема испытаний на воздействие механических ударов:
1 - пульт управления;
2 - объект испытаний;
3 — ударный стенд;
4 - виброизмерительный преобразователь;
5 - усилитель заряда;
6 - регистрирующее устройство
Значение пикового ударного ускорения и общее число ударов выбирают в
зависимости от степени жесткости и указывают в ТУ на прибор и ПИ.
Рисунок 4.7 - Расположение прибора на ударном стенде
240
Длительность действия ударного ускорения выбирают в зависимости от
значения низшей резонансной частоты прибора и указывают в ТУ на прибор и
ПИ. Форма импульса ударного ускорения должна быть близкой к
полусинусоиде.
Испытательный режим устанавливают в контрольной точке по показаниям
рабочих средств измерений.
Испытание проводят путем воздействия механических ударов
многократного действия поочередно в каждом из трех взаимно
перпендикулярных направлениях по отношению к прибору.
После окончания испытаний проводят внешний осмотр прибора в целях
выявления механических повреждений и проверку электричесю1х параметров на
соответствие требованиям ТУ.
4.3.4.7 Испытание на устойчивость при воздействии механических ударов
Испытание на устойчивость при воздействии механических ударов
многократного и одиночного действия проводят в целях проверки способности
приборов выполнять свои функции и сохранять параметры в пределах значений,
указанных в ТУ на прибор, в условиях воздействия механических ударов
многократного и одиночного действия.
Испытание проводят путем воздействия механических ударов поочередно в
каждом из двух противоположных направлений по трем взаимно
перпендикулярным осям прибора под электрической нагрузкой, характер,
параметры и методы контроля которой указывают в ТУ на прибор и ПИ.
Параметры ударного импульса и количество ударов устанавливают согласно
требованиям в ТУ на прибор и ПИ. Испытательный режим устанавливают в
контрольной точке по показаниям рабочих средств измерений со следующими
отклонениями: амплитуда ускорения в контрольной точке - ±20 %; допускаемое
отклонение по числу ударов - ±5%; частота следования ударов - от 40 до 80 в
минуту; длительность ударного импульса - от 2 до 20 мс.
После окончания испытаний проводят внешний осмотр прибора в целях
выявления механических повреждений и проверки работоспособности прибора.
Пример проверки на работоспособность прибора аналогичен показанному на
рис.4.3.
4.3.4.8 Испытание на прочность при транспортировании прибора
в штатной таре
Испытание на прочность при транспортировании прибора в штатной таре
проводят в целях проверки прибора и штатной тары сохранять внешний вид и
работоспособность после воздействия ударных нагрузок многократного действия
соответствующим условиям транспортирования.
Испытание проводят методом воздействия многократных ударов на ударных
стендах, имитирующих транспортирование. Положение и способ крепления
прибора в штатной таре и на стенде указывают в ТУ на прибор и ПИ.
Пример расположения прибора на ударном стенде при транспортировании
показан на рис.4.8.
241
Рисунок 4.8 - Расположение прибора на ударном стенде
при транспортировании в упакованном виде
Параметры испытательных режимов (пиковое ударное ускорение,
длительность ударного импульса, количество ударов, частота следования ударов)
указаны в подразд.4.3.4.7. Значения параметров испытательных режимов следует
выдерживать в местах крепления транспортной тары прибора к платформе
стенда.
Прибор, масса и габаритные размеры которого не позволяют проводить
стендовые испытания, испытывают путем его транспортировки на
соответствующем виде транспорта по специальным испытательным трассам или
по наиболее характерным для данного вида транспорта трассам, по нормам и
методам, указанным в ТЗ и (или) ТУ на прибор.
После испытания проводят внешний осмотр прибора и транспортной тары в
целях выявления возможных механических повреждений или ослабления
крепления. После проведения необходимых работ (распаковка и подключение
прибора к рабочему месту) проверяют электрические параметры прибора на
соответствие требованиям ТУ.
4.3.4.9 Испытание на прочность при воздействии линейного ускорения
Испытание на прочность при воздействии линейного ускорения проводят в
целях проверки способности прибора противостоять разрушающему действию
линейного ускорения, а также для проверки структурной прочности прибора в
процессе производства.
Испытанию подвергают приборы в выключенном состоянии, поочередно в
трех взаимно перпендикулярных положениях, в положительном и отрицательном
направлениях, на центрифуге.
Общий вид центрифуги показан на рис.4.9.
242
Рисунок 4.9 - Общий вид центрифуги
Велечину ускорения устанавливают относительно геометрического центра
или центра масс прибора с учетом того, что это значение не должно отличаться
более чем на 10% от ускорений в других точках прибора, если иное не оговорено
в ПИ. Продолжительность испытания указывают в ПИ, а требуемое значение
ускорения определяется формулой
n = 3007(a/R), (4.1)
где п - обороты платформы, мин;
а - заданное линейное ускорение, g;
g - ускорение свободного падения, м/с2;
R - радиус вращения расстояния в сантиметрах от оси центрифуги до
центра тяжести или геометрического центра прибора, м.
После испытаний проводят внешний осмотр прибора в целях выявления
возможных механических повреждений или ослабления крепления. После
выполнения необходимых работ (подключения прибора к рабочему месту)
проверяют электрические параметры прибора на соответствие требованиям ТУ.
Прибор считается выдержавшим испытание, если при внешнем осмотре не
обнаружено механических повреждений и ослабления креплений, а параметры
прибора после испытаний находятся в требуемых пределах.
4.3.4.10 Испытание на устойчивость при воздействии линейного ускорения
На центрифуге испытанию подвергают прибор во включенном состоянии,
поочередно в трех взаимно перпендикулярных положениях, в положительном и
отрицательном направлениях.
Значения ускорения и время испытания определяют так же, как и в
подразд.4.3.4.9.
Во время испытаний проверяют работоспособность прибора. Пример
243
проверки на работоспособность прибора аналогичен показанному на рис.4.3.
После испытаний проводят внешний осмотр прибора в целях выявления
возможных механических повреждений или ослабления крепления и проверяют
работоспособность прибора.
Прибор считается выдержавшим испытание, если при внешнем осмотре не
обнаружено механических повреждений и ослабления креплений, а
работоспособность прибора во время и после испытаний соответствует
требованиям ТУ.
4.3.4.11 Испытание на прочность при воздействии акустического шума
Испытание на прочность при воздействии акустического шума проводят
методом воздействия на прибор случайного акустического шума в целях
определения способности прибора выполнять свои функции в пределах норм,
указанных в ТУ на прибор и ПИ, после воздействия акустического шума.
Крепление прибора или приспособлений с прибором проводят в рабочей
зоне камеры на эластичных растяжках. Резонансная частота подвески не должна
превышать 25 Гц. Резонансная частота приспособления, если оно применяется,
должна быть не ниже 15 кГц.
Испытания проводят путем воздействия акустического шума в диапазоне
частот 20...20000 Гц, при этом общий уровень звукового давления указывают в
ТУ на прибор и ПИ.
После испытаний осуществляют внешний осмотр прибора в целях
выявления возможных механических повреждений и проверяют
работоспособность прибора. Пример проверки на работоспособность прибора
аналогичен показанному на рис.4.3.
Прибор считается выдержавшим испытание, если при внешнем осмотре не
обнаружено механических повреждений и рабочее состояние прибора после
испытаний соответствует требованиям ТУ.
4.3.4.12 Испытание на устойчивость при воздействии
акустического шума
Испытание на устойчивость при воздействии акустического шума проводят
в целях определения способности прибора выполнять свои функции и сохранять
свои параметры в пределах норм, указанных в стандартах и ТУ на прибор и ПИ, в
условиях воздействия акустического шума.
Крепления прибора и проведение испытаний аналогичны описанным в
подразд. 4.3.4.11.
Во время воздействия акустического шума проверяют работоспособность
прибора на соответствие требованиям ТУ на прибор. Пример проверки на
работоспособность прибора аналогичен показанному на рис.4.3.
После испытаний проводят внешний осмотр прибора в целях выявления
возможных механических повреждений и проверяют работоспособность прибора.
Прибор считается выдержавшим испытание, если при внешнем осмотре не
обнаружено механических повреждений и прибор сохраняет свою
работоспособность во время и после испытаний.
244
4.3.4.13 Испытание на воздействие повышенной (пониженной) температуры
среды
Данный метод позволяет проводить испытание на воздействие верхнего
(нижнего) значения температуры среды при эксплуатации в целях проверки
способности ТС выполнять требуемые функции и сохранять свои параметры в
пределах значений, указанных в НД на ТС во время и после воздействия верхнего
(нижнего) значения температуры среды.
Пример расположения прибора в климатической камере на воздействие
повышенной (пониженной) температуры среды показан на рис.4.10.
Рисунок 4.10 - Расположение прибора в климатической камере на
воздействие повышенной (пониженной) температуры и повышенной влажности
Перед началом испытания проводят визуальный осмотр ТС.
ТС помещают в камеру таким образом, чтобы была обеспечена циркуляция
воздуха, и проверяют параметры, указанные в НД на прибор и ПИ.
Температуру в камере повышают (понижают) до заданной, и ТС в
обесточенном состоянии выдерживают в течение времени, установленного в НД
на прибор и ПИ.
Время выдержки при верхнем (нижнем) значении температуры среды
должно быть достаточным для установления теплового равновесия по всему
объему и выбирается из ряда 10, 30 мин; 1, 2, 3, 4, 6, 8, 10 ч в зависимости от
массы ТС:
2ч- при массе прибора не более 2 кг;
3 ч- « « от 2... 10 кг;
4ч- « « от 10...20 кг;
245
6 ч-
8ч-
10ч —
« « от 20...50 кг;
« « от 50... 100 кг;
« « от 100...300 кг.
Примечание: тепловое равновесие - состояние прибора, при котором его
температура изменяется не более чем на 3°С в течение заданного времени.
По окончании выдержки при заданной температуре проводят проверку
параметров.
Прибор извлекают из камеры и выдерживают в нормальных климатических
условиях в течение времени, установленного в НД на ТС и ПИ, после чего
проверяют параметры, указанные в НД на ТС и ПИ, а также выполняют
визуальный осмотр.
Прибор считается выдержавшим испытание:
- если измеренные параметры во время и после испытания соответствовали
требованиям НД на ТС;
- при визуальном осмотре после испытании не обнаружено отклонений от НД
на ТС.
4.3.4.14 Испытание на воздействие изменяющейся температуры среды
Данный метод позволяет проводить испытание на воздействие изменения
температуры среды в целях проверки способности ТС выполнять свои функции и
сохранять свои параметры в пределах значений, указанных в НД на ТС после
испытания на воздействие изменения температуры среды.
Пример расположения прибора в климатической камере на воздействие
изменяющейся температуры среды показан на рис. 4.10.
В зависимости от назначения и условий эксплуатации ТС, а также их
конструктивных особенностей испытания проводят одним из следующих
способов:
- испытание ТС, которые в условиях эксплуатации подвергаются резким
изменениям температуры;
- испытание ТС, которые в условиях эксплуатации подвергаются медленным
изменениям температуры;
- комбинированный метод для испытаний электротехнических
тепловыделяющих ТС, подвергающихся при эксплуатации медленным
изменениям температуры и предназначенных для работы вне помещений с
искусственно регулируемыми климатическими условиями.
Перед началом испытания проводят визуальный осмотр ТС.
ТС помещают в камеру в упакованном виде или без упаковки в соответствии
с требованиями, указанными в ТУ на ТС и ПИ, и подвергают воздействию трех
циклов, следующих друг за другом.
Каждый цикл состоит из следующих этапов:
- ТС помещают в камеру холода, температуру в которой заранее доводят до
пониженной предельной, и выдерживают при этой температуре в
зависимости от веса ТС (с учетом веса упаковки, если ТС проходят
246
испытания в упакованном виде);
- после выдержки в камере холода ТС переносят в камеру тепла, температуру
в которой заранее доводят до повышенной предельной температуры, и
выдерживают при этой температуре в зависимости от веса ТС (с учетом
веса упаковки, если ТС проходят испытания в упакованном виде).
Время выдержки при предельных значениях нижней и верхней температур
среды должно быть достаточным для установления теплового равновесия по
всему объему и выбирается в зависимости от массы ТС:
2ч- при массе прибора не более 2 кг;
3 ч- « « от 2...10кг;
4 ч- « « от 10...20 кг;
6 ч- « « от 20...50 кг;
8 ч- « « от 50... 100 кг;
10 ч- « « от 100...300 кг.
Время переноса ТС из камеры в камеру должно быть не более трех минут,
конкретное время переноса устанавливают в НД на ТС и ПИ.
По окончании последнего цикла ТС извлекают из камеры и выдерживают в
нормальных климатических условиях в течение времени, установленного в НД на
ТС и ПИ, после чего проводят проверку параметров, указанных в НД на ТС и ПИ,
а также визуальный осмотр.
Прибор считается выдержавшим испытание:
- если измеренные параметры после испытания соответствовали
требованиям НД на ТС;
- при визуальном осмотре после испытании не обнаружено отклонений от
НД на ТС.
4.3.4.15 Испытание на воздействие повышенной влажности
Данный метод позволяет проводить испытание на воздействие влажности в
целях проверки способности ТС выполнять требуемые функции и сохранять
свои параметры в пределах значений, указанных в НД на ТС, в условиях и после
длительного воздействия влажности.
Пример расположения прибора в климатической камере на воздействие
повышенной влажности показан на рис. 4.10.
Перед началом испытания выполняют визуальный осмотр ТС.
Испытание ТС проводят в камере влажности, которая должна обеспечивать
испытательный режим с отклонениями по относительной влажности - ± 3 %, по
температуре - 2°С. Конструкция камеры не должна допускать, чтобы
конденсированная вода попадала со стенок и потолка камеры на испытываемые
ТС.
В испытываемых ТС должны быть защищены от коррозии места для
присоединения других механизмов, стыковочные разъемы, а также те места,
которые защищают в процессе эксплуатации.
ТС испытывают без электрической нагрузки, если иное не оговорено в НД на
ТС.
247
Общую продолжительность испытаний (количество циклов) и верхнее
значение температуры выбирают в зависимости от исполнения и категории ТС,
при этом продолжительность одного цикла должна составлять 24 часа.
В случае технической необходимости при проведении длительных (10 суток
и более) испытаний допускаются перерывы в испытаниях (без изъятия прибора из
камеры) не более двух суток за весь период испытаний, при этом время перерыва
не включается в продолжительность испытаний.
Проверку работоспособности ТС проводят в конце последнего цикла
испытаний в соответствии с НД на ТС. Пример проверки на работоспособность
прибора аналогичен показанному на рис. 4.3.
Не изменяя режим в камере, проверяют электрическое сопротивление
изоляции и электрическую прочность изоляции ТС между токоведущими цепями,
а также между токоведущими цепями и корпусом, которые указывают в НД на
ТС.
После воздействия влажности ТС извлекают из камеры и выдерживают в
нормальных климатических условиях в течение времени, установленного в НД на
ТС и ПИ, после чего проводят проверку параметров, указанных в НД на ТС и ПИ,
а также визуальный осмотр.
Прибор считается выдержавшим испытание при условии:
- если измеренные параметры во время и после испытания соответствовали
требованиям НД на ТС;
- электрическое сопротивление изоляции соответствует требованиям НД на
ТС;
- электрическая изоляция ТС между токоведущими цепями, а также между
токоведущими цепями и корпусом выдерживает испытательное напряжение
без пробоя и поверхностного перекрытия;
- при визуальном осмотре после испытания не обнаружено отклонений от
НД на ТС.
4.3.4.16 Испытание по определению тепловых режимов ЭРИ
внутри аппаратуры
Испытание на определение тепловых режимов ЭРИ внутри аппаратуры
проводят в камере тепла.
Графики изменения тепловых режимов ЭРИ в процессе тепловых
испытаний показаны на рис. 4.11.
Проводят визуальный осмотр и измерение параметров прибора.
Прибор с установленными термодагчиками устанавливают в камеру в
соответствии с требованиями, указанными в стандартах и ТУ на прибор и ПИ. На
прибор подают номинальную или, если указано в стандартах и ТУ на прибор и
ПИ, максимальную электрическую нагрузку или ток, соответствующий
повышенной рабочей температуре. Характер, значение, вид и методы контроля
нагрузки, а также, при необходимости, время нахождения прибора под нагрузкой
устанавливают в стандартах и ТУ на прибор и ПИ.
Температуру в камере регулируют таким образом, чтобы температура
248
соответствовала повышенной рабочей температуре.
В процессе проведения испытания в камере поддерживается температура
согласно требованиям ПИ.
Рисунок 4.11 - Определение теплового режима на примере испытания блока
инерциальной навигационной системы: 1-7 - точки контроля температуры
Значение температуры контролируемого участка устанавливают в
стандартах и ТУ на прибор и ПИ.
Время испытания соответствует времени выходу на стационарный режим и
времени работы на стационарном режиме или времени достижения допустимых
температур в контролируемых точках по ТУ на ЭРИ.
Периодичность замера температур - 5 минут в течение первых 30 минут и
далее через 15 минут до конца испытания.
Измеренные температуры в процессе испытания сравнивают с
допустимыми по ТУ. Прибор следует считать достигшим теплового равновесия
после его включения, если изменение температур в контролируемых точках не
превышает 1°С в течение 15 минут.
По завершении испытания прибор и камеру выключают. После чего прибор
извлекают из камеры, выдерживают в нормальных условиях в течение 6 часов.
Затем проверяют его функционирование и измеряют сопротивление изоляции в
нормальных условиях. После выполняют визуальный осмотр прибора. Прибор
считается выдержавшим испытание при условии:
- если измеренные параметры во время и после испытания соответствовали
249
требованиям НД на ТС;
- при визуальном осмотре после испытания не обнаружено отклонений от
НД на ТС.
4,3.4.17 Испытание на воздействие повышенной температуры среды и
пониженного атмосферного давления
Испытание на воздействие повышенной температуры среды и пониженного
атмосферного давления проводят в целях проверки способности прибора
выполнять свои функции в условиях атмосферного пониженного давления.
Испытания осуществляют в термобарокамере, которая должна
обеспечивать испытательный режим.
Прибор выдерживают в нормальных климатических условиях испытаний в
течение времени, указанного в стандартах и ТУ на прибор и ПИ.
Далее проводят визуальный осмотр и измерение параметров прибора.
Прибор помещают в термобарокамеру и устанавливают температуру,
равную повышенной рабочей температуре среды, указанной в стандартах и ТУ на
прибор. В обесточенном состоянии прибор выдерживают в течение времени,
установленного в НД и ПИ.
Затем давление понижают до значения 10'3 мм рт. ст., соответствующего
указанному в стандартах и ТУ на прибор и ПИ. Температуру в термобарокамере
поддерживают путем управления устройством для нагрева прибора. На прибор
подают электрическую нагрузку, характер, значение, точность поддержания и
метод контроля которой указывают в стандартах и ТУ на прибор и ПИ и
проверяют параметры, зависящие от нагрева прибора, указанные в стандартах и
ТУ на прибор и ПИ.
Прибор выдерживают до достижения теплового равновесия в течение
времени, указанного в стандартах и ТУ на прибор и ПИ, контролируя при этом
температуру нагрева прибора.
По окончании выдержки давление в термобарокамере плавно повышают до
нормального от 84 до 106 кПа (от 630 до 800 мм рт. ст.) и прибор извлекают из
термобарокамеры.
Прибор выдерживают в нормальных климатических условиях испытаний в
течение времени, указанного в стандартах и ТУ на прибор и ПИ.
Проводят визуальный осмотр и измерение параметров прибора.
Прибор считается выдержавшим испытание при условии:
- если измеренные параметры во время и после испытания соответствовали
требованиям НД на ТС;
- при визуальном осмотре после испытания не обнаружено отклонений от
НД на ТС.
4.3.4.18 Испытание на воздействие пониженного
атмосферного давления
Испытание на воздействие пониженного давления проводят в целях
проверки способности прибора выполнять свои функции в условиях
пониженного атмосферного давления.
250
Испытание проводят при нормальной или повышенной и (или) пониженной
температуре. Температура (нормальная повышенная и (или) пониженная) и ее
конкретные значения при испытании должны быть указаны в ПИ и Т*У на прибор.
Прибор в герметичном состоянии помещают в барокамеру, температура в
которой заранее доведена до 40°С ( или другой температуры согласно ПИ) и
выдерживают при этой температуре в течение времени в зависимости от массы
ТС (подразд. 4.3.4.13). После выдержки при заданной температуре давление в
камере понижается до 10‘3 мм рт.ст. (или другого давления согласно ПИ). При
этом температуру в камере не контролируют.
Прибор во включенном состоянии выдерживают при заданном давлении в
течение 1 ч, если иное время не указано в ПИ и ТУ на прибор, после чего
измеряют его параметры.
Прибор выключают, и давление в камере повышают до нормального. В
камере устанавливают нормальную температуру. При этой температуре прибор
выдерживают до тех пор, пока аппаратура по всему объему не примет
температуру окружающей среды. Прибор извлекают из камеры, осматривают и
измеряют параметры.
Прибор считается выдержавшим испытание при условии:
- если измеренные параметры во время и после испытания соответствовали
требованиям НД на ТС;
- при визуальном осмотре после испытания не обнаружено отклонений от
НД на ТС.
4.3.4.19 Испытание на воздействие пониженного атмосферного давления
при авиатранспортировании
Испытание на воздействие пониженного давления при
авиатранспортировании проводят для проверки способности аппаратуры и (или)
ее упаковки выдерживать воздействие пониженного атмосферного давления при
транспортировании в негерметизированных кабинах и отсеках летательного
аппарата. Этому виду испытаний подвергают приборы, в состав которых входят
герметизированные узлы и приборы, наполненные жидкостью, газовые и
масляные системы, а также приборы, перевозимые в упаковке.
Прибор, проверенный по необходимым параметрам на соответствие
требованиям, установленным в ПИ и ТУ, размещают в' упаковке,
предназначенной для транспортирования, и устанавливают в термобарокамере.
Температуру в камере понижают до минус 50°С и выдерживают прибор
при этой температуре в течение времени, необходимого для ее охлаждения по
всему объему, но не менее 2 ч.
Давление в камере понижают до 90 мм рт. ст. или до значения, указанного в
ПИ и ТУ, и поддерживают на этом уровне в течение 1 ч, если другое время не
оговорено в ПИ и ТУ. При этом температуру не контролируют. Давление, а затем
и температуру в камере повышают до нормальных значений, после прибор
извлекают из камеры.
Прибор, который должен работать сразу после авиатранспортирования,
251
включают и выдерживают во включенном состоянии в течение 3 ч или в течение
времени, оговоренного в ПИ и ТУ. Через каждые 30-60 мин или через интервалы
времени, указанные в ПИ и ТУ, проверяют работоспособность аппаратуры и
осматривают ее. Пример проверки на работоспособность прибора аналогичен
показанному на рис.4.3.
Прибор, который не должен работать сразу после авиатранспортирования,
выдерживают в упаковке или без нее в выключенном состоянии в нормальных
условиях в течение времени, оговоренного в ПИ и ТУ, но не менее 2 ч. После
этого проводят внешний осмотр прибора и измеряют его параметры.
Прибор считается выдержавшим испытание при условии:
- если измеренные параметры после испытания соответствовали
требованиям НД на ТС;
- при визуальном осмотре после испытания не обнаружено отклонений от
НД на ТС.
4.3.4.20 Испытания изоляции
Требования к изоляции распространяются на электрические цепи приборов,
доступ к которым возможен без вскрытия (демонтажа) прибора.
Испытания изоляции следует проводить в такой последовательности:
1) измерение электрического сопротивления;
2) испытания электрической прочности.
Электрическое сопротивление изоляции электрических цепей следует
проверять приборами постоянного тока с погрешностью измерений не более 20%.
Показания отсчитывают по истечении одной минуты после подачи
испытательного напряжения.
Электрическое сопротивление изоляции прибора, входящее в состав
средств вычислительной техники и имеющих свои ТУ, следует проверять с
учетом актов (протоколов) испытаний этих приборов.
Электрическую прочность изоляции СВТ между токоведущими цепями, а
также между токоведущими цепями и корпусом следует проверять с помощью
испытательной установки переменного тока частотой 50 Гц. Погрешность
измерения испытательного напряжения не должна превышать 5 %.
Перед проверкой электрические цепи, содержащие полупроводниковые
приборы, следует отключать.
Испытательное напряжение следует подавать с нуля.
Напряжение до испытательного увеличивают плавно за время не менее
10 с или ступенями, не превышающими 10 % испытательного напряжения.
Изоляцию следует выдерживать под полным испытательным напряжением в
течение одной минуты.
Если для контроля изоляции одной минуты недостаточно, время указывают
в ТУ или программе испытаний на конкретные СВТ.
Электрическую прочность изоляции отдельных блоков и электрических
цепей (монтажных жгутов) следует проверять предварительно до установки в
аппаратуру.
252
Во время проверки не должно быть пробоя и поверхностного перекрытия
изоляции (разряда) и после проверки СВТ должны сохранять работоспособность.
Пример проверки на работоспособность прибора аналогичен показанному на
рис.4.2.
4.3.4.21 Измерение тока, потребляемого прибором, и расчет мощности
Измерение тока, потребляемого прибором, проводят в нормальных
условиях.
По результатам замеров рассчитывают мощность, потребляемую прибором,
по формуле
Рпотр = ^пит * ^потр > (4.2)
где Ппит - значение напряжения питания, В;
1потр - ток потребления, А.
Прибор считается выдержавшим испытание, если вычисленное значение
мощности потребления прибора соответствует требованию, оговоренному в ПИ
и ТУ.
4.3.5 Документирование результатов и отчетность
Все результаты, полученные при испытаниях, заносят в специальный
журнал испытаний и заверяют подписями специалистов, ответственных за
испытания. Результаты, полученные с регистрацией замеров, учитывают также в
журнале испытаний.
При возникновении неисправностей в работе испытуемого прибора
анализируют полученные замечания и принимают решение по их устранению. В
случае необходимости доработки прибора разработчик выпускает извещение на
доработку, испытания приостанавливаются, прибор возвращается на завод-
изготовитель для устранения выявленных замечаний (в отдельных случаях
возможно продолжение испытаний). После доработки прибора пункт программы,
относительно которого получено замечание, обязательно повторяют.
СОИ-а считают законченными, когда по всем пунктам программы
параметры опытного образца прибора соответствуют требованиям ТЗ на
разработку аппаратуры и требованиям конструкторской документации. По
результатам СОИ-а подразделение, проводившее испытание прибора, выпускает
технический отчет.
В отчете приводят выводы по результатам анализа испытаний,
рекомендации по дальнейшему повышению качества и надежности аппаратуры,
указывают, что аппаратура допускается к следующему виду испытаний.
Прибор, прошедший СОИ-а, в дальнейшем обычно используют в качестве
инженерной модели при дальнейшей отработке системы.
253
4.4 Лабораторно-отработочные испытания системы управления и её
аппаратуры в составе комплексного стенда (ЛОИ-к)
Лабораторно-отработочные испытания аппаратуры системы управления и
ПМО в составе комплексного стенда (ЛОИ-к) относятся к категории
исследовательских испытаний.
Целью проведения ЛОИ-к является проверка и отработка аппаратуры на
соответствие требованиям, установленным в техническом задании. При этом
проверяют работоспособность аппаратуры и ПМО при взаимодействии со
смежными системами или их эквивалентами. При ЛОИ-к проводят следующие
виды испытаний:
- испытание на соответствие энергетических показателей
требованиям конструкторской документации;
- испытание аппаратуры на работоспособность при номинальных
напряжениях электропитания и его изменениях;
- проверка параметров аппаратуры на соответствие требованиям ТЗ;
- проверка тепловых режимов ЭРИ в составе аппаратуры;
- проверка резервирования аппаратуры;
- испытания аппаратуры при возможных схемных неисправностях;
- испытание на помехозащищенность и помехоустойчивость;
- проверка правильности взаимодействия аппаратуры со смежными
системами в эксплуатационных режимах;
- проверка времени проведения регламентного контроля и времени
предпусковой подготовки;
- проверка на безопасность эксплуатации аппаратуры;
- проверка эксплуатационных характеристик;
- проверка защищенности от несанкционированного пуска и
предпосылки несанкционированного пуска;
- проверка правильности алгоритмов, заложенных в бортовом
цифровом вычислительном комплексе.
Здесь рассмотрены цели проведения ЛОИ-к так, как это определяет ДСТУ
В3442-96.
Из приведенного перечня работ следует, что на этапе ЛОИ-к выполняют
отработку аппаратуры системы управления и ПМО БЦВК.
254
Лабораторно-отработочные испытания на комплексном стенде проводят по
программам ЛОИ-к. Эти программы выпускают и согласовывают разработчики
аппаратуры и программно-математического обеспечения. Структура программы
ЛОИ-к аналогична структуре программы .
ЛОИ-к проводит испытательное подразделение при участии разработчиков и
комплексного подразделения.
Рассмотрим более подробно структуру стенда и, в частности, комплексного
стенда. В словаре иностранных слов находим среди прочих следующее
пояснение: "Стенд - от английского stand - установка или участок цеха для
испытания приборов, оборудования". На наш взгляд, определение очень удачное,
хотя, конечно, требующее дополнений и пояснении. Итак, комплексный стенд -
это место, где впервые объединяются все компоненты системы управления и
смежных систем - приборы, кабельная сегь, исполнительные элементы,
программно-математическое обеспечение.
Типовая структурная схема комплексного стенда, на котором проводят
отработку аппаратуры и ПМО системы управления, показана на рис. 4.12.
Рисунок 4.12 - Структурная схема комплексного стенда СУ КА
255
На рис. 4.12 обозначено:
Бортовая аппаратура СУ:
БЦВМ - бортовая цифровая вычислительная машина;
УВВ - устройство ввода-вывода;
БРП - блок распределения питания;
УМ - усилитель мощности;
СТИ - система телеметрических измерений;
ККП - комплект командных приборов;
ДВУС - датчик вектора угловых скоростей;
ПОС - прибор ориентации на Солнце;
АИС - астроизмерительная система;
ИП - источник питания бортовой аппаратуры;
ИО - исполнительные органы СУ КА.
Контрольно-проверочная аппаратура:
ЦВМ - цифровая вычислительная машина;
УС - устройство согласования;
ИП - источник питания КПА;
ИО - исполнительные органы СУ КА.
Технологическая аппаратура:
НОЗУ - наладочное оперативное запоминающее устройство;
ПКУ - пульт контроля и управления БЦВМ;
ЭДУ - эквивалент двигательной установки;
ЭПС - эквивалент пиротехнических средств.
На стенде имеется бортовая аппаратура СУ (рис. 4.13, 4.14), КПА, которая
задает режимы проверок (рис. 4.15, 4.16), источники питания бортовой и
контрольно-проверочной аппаратуры (рис. 4.17) и ряд устройств, составляющих
технологическую аппаратуру (рис. 4.18, 4.19). Обычно аппаратуру стенда
монтируют на специальных стеллажах.
На переднем плане рис. 4.13 - стеллажи с бортовой аппаратурой СУОС.
Видны силовые гироскопы, предназначенные для разворотов КА, приборы
ориентации на Солнце, приборы ориентации на Землю, вычислительные
устройства, статические преобразователи тока. Справа видны стойки КПА.
Стенд включает в себя четыре БЦВМ, четыре УВВ для обмена с абонентами,
блок коммутации и распределения питания, устройство контроля
работоспособности и выбора оптимальной конфигурации аппаратуры при
возникновении отказов.
Каждая стойка обеспечивает подачу на аппаратуру постоянного напряжения
24.. .34 В при токе до 120 А.
256
На комплексном стенде стремятся обеспечить работу бортовой аппаратуры в
режимах и условиях, близких к реальному полету, хотя обычно это связано со
значительными трудностями. Так, например, чтобы получить информацию от
датчиков угловой скорости, приходится использовать специальные поворотные
столы, позволяющие задавать вращение вокруг одной, двух или трех осей.
Добиться реальных условий работы для других приборов еще сложнее. Так,
например, весьма затруднительно обеспечить работу астрономической
измерительной системы по реальному звездному небу. Поэтому при отработке
аппаратуры широко используют различные имитаторы, как встроенные в прибор,
так и внешние.
Рисунок 4.14 — Бортовой цифровой вычислительный
комплекс микроспутника
257
Рисунок 4.15 - Стойки КПА и технологическая аппаратура
Рисунок 4.16 - КПА микроспутника
258
Рисунок 4.17- Источники питания комплексного стенда
В состав бортовой аппаратуры КС входит также телеметрическая станция
для сбора и передачи телеметрической информации.
Остановимся на функциях, выполняемых контрольно-проверочной
аппаратурой. Контрольно-проверочная аппаратура, как правило, имеет в своем
составе цифровую вычислительную машину, реализующую алгоритмы проверок
аппаратуры, и устройства, служащие для сопряжения между собой приборов
бортовой и наземной аппаратуры. В состав КПА также входят устройства,
служащие для управления имитаторами в целях задания возмущающих
воздействий. При проведении проверок бортовая и контрольно-проверочная
аппаратура обмениваются между собой по линиям связи потоками цифровой
информации, релейными и аналоговыми сигналами. К технологической
аппаратуре относят также НОЗУ - наладочное оперативное запоминающее
устройство БЦВМ (рис.4.18). В центре - стойка НОЗУ, на переднем плане -
БЦВМ и согласующие устройства, пульт контроля и управления БЦВМ (ПКУ) и
различные имитаторы.
259
Рисунок 4.18 - Технологическая аппаратура комплексного стенда
Рисунок 4.19 - Универсальный малогабаритный кабельный разъединитель
260
Необходимость использования НОЗУ вызвана тем, что программа БЦВМ
хранится в ПЗУ, не допускающем оперативного изменения программы, что
необходимо при отработке. Поэтому отработку программы вначале выполняют
на НОЗУ, и только после ее завершения записывают ("прошивают”) в ПЗУ. В
последнее время появились энергонезависимые запоминающие устройства,
позволяющие длительно хранить информацию и в то же время оперативно её
изменять. В таком случае НОЗУ может отсутствовать. ПКУ дает возможность в
случае необходимости вмешиваться в вычислительный процесс БЦВМ,
например, переводить машину в пошаговый режим работы, задавать различные
остановы, контролировать состояние регистров и т. п.
Добавим, что совершенно необходимым устройством на КС является так
называемый УМКР - универсальный малогабаритный кабельный разъединитель,
позволяющий включаться в расстыковку соединителей между прибором и
кабельной сетью (или соединителей кабельной сети) и провести подключение
измерительных приборов к необходимым цепям, разрывать цепи и выполнять
всевозможные коммутации (рис. 4.19).
УМКР используют и при проведении работ, связанных с поиском
неисправностей в других местах эксплуатации.
Эквиваленты двигательной установки обычно включают в себя различные
электромеханические устройства двигательной установки - клапаны,
электроприводы, датчики давления и т. п. Естественно, использование на КС
двигательной установки нецелесообразно, вполне можно обойтись упомянутыми
узлами.
Большинство PH и КА несут на своём борту различные пиротехнические
средства - пиропатроны, пироболты, воспламенители. С их помощью выполняют
однократные операции, например, разделение ступеней ракеты-носителя, поджиг
однократно запускаемого двигателя, раскрытие солнечных батарей и т. п. За
исключением специальных случаев, пиросредства на комплексном стенде не
используют, а применяют их эквиваленты.
При проведении отработки на КС бортовая аппаратура обычно получает
питание от стендовых источников. Это вызвано тем, чго штатные источники
питания очень часто являются источниками однократного пользования,
например, ампульные батареи.
Комплексные стенды создают на этапе рабочего проектирования и
используют для экспериментальной отработки в течение всего времени
эксплуатации заказа.
Кратко рассмотрим процесс создания КС. Вначале испытательное
подразделение на основе исходных данных комплексного, теоретического и
других подразделений разрабатывает ТЗ на комплексный стенд. На основе ТЗ
разрабатывают проектную и другую необходимую документацию, подбирают
или строят помещение, изготавливают и закупают необходимую аппаратуру и
оснастку, после чего приступают к монтажу стенда.
По завершении монтажа приступают к вводу стенда в эксплуатацию. Для
этого, как правило, разрабатывают программу ввода стенда в эксплуатацию,
261
иначе называемую программой первого включения. Основное назначение этой
программы - не допустить выхода из строя аппаратуры при первом включении
из-за возможных ошибок в кабельной сети и приборах, неправильной подачи
полярностей питания и т. п. После устранения всех замечаний, полученных при
работах по этой программе, на комплексный стенд оформляют паспорт и стенд
считают пригодным для отработки.
Как правило, отработку аппаратуры и ПМО ведут одновременно, и в этом
случае стоящая перед отработчиками задача напоминает одно уравнение со
многими неизвестными.
Рассмотрим, как создается наземное программно-алгоритмическое
обеспечение.
ПАО делят на две группы - ПАО автономных проверок приборов и ПАО
комплексных проверок.
В состав ПАО автономных проверок входят программы проверок отдельных
приборов или групп приборов, близких по функциональному назначению, - так
называемые связки (имеются в виду связки алгоритмов).
В качестве примера приведем ’’набор” связок, предназначенных для проверки
приборов космического аппарата.
СВ 101 - включение питания наземной аппаратуры;
СВ 102 - выключение питания наземной аппаратуры;
СВ201 - включение питания бортовой аппаратуры;
СВ202 - выключение питания бортовой аппаратуры;
СВ203 - приведение в исходное состояние и контроль исходного
состояния коммутационных элементов, установленных в приборах системы
управления;
СВ204 - проверка бортового коммутатора;
СВ205 - проверка прибора распределения питания;
СВ301 - проверка включения ЦВК;
СВ302 - проверка функционирования ЦВК;
СВ401 - проверка функционирования прибора ориентации на Солнце;
СВ402 - проверка функционирования прибора ориентации на Землю;
СВ403 - проверка функционирования астроизмерительной системы;
СВ501 - проверка функционирования двигателя маховика;
СВ502 - проверка функционирования прибора управления двигателями
ориентации;
СВ601 - проверка обмена с системой управления бортовым комплексом;
СВ602 - проверка обмена с радиотехнической системой управления и
контроля.
Из приведенного выше видно, что проверочные связки здесь объединены в
группы в зависимости от функционального назначения проверяемых приборов.
Программы связок разрабатывают таким образом, чтобы были проверены все
команды и сигналы, вырабатываемые прибором, и все каналы цифрового
информационного обмена. Как известно, в бортовых системах управления в
целях повышения надежности используют резервирование - дублирование или
262
троирование. В связках должно проверяться функционирование аппаратуры с
учетом резервирования. При отсутствии отказов программа связки формирует
сообщение, содержащее наименование связки, наименование проверяемого
прибора и сообщение о результатах проверки. При обнаружении неисправности
программа проверки должна формировать сообщение о характере неисправности.
Необходимо, чтобы формирование этих сообщений также было проверено при
отработке. Следовательно, аппаратура должна позволять имитировать
неисправности. Имитация неисправности может задаваться программно. Но чаще
неисправности имитируют, разрывая действующие цепи или образуя ненужные
цепи на УМКР, установленных на соединителях приборов.
Все сообщения отражаются на мониторе ЦВМ КПА. Из полученных
сообщений составляют так называемый протокол испытаний, который может
быть распечатан и использован для документирования результатов испытаний
или анализа обнаруженных неисправностей.
Рассмотрим примерную структуру ПАО комплексных проверок системы
управления КА. Система управления КА в процессе основной работы должна
реализовывать следующие режимы работы:
- включение СУ;
- построение солнечной ориентации;
- построение ориентации на Землю;
- построение ориентации в инерциальной системе координат;
- ориентация КА для коррекции орбиты;
- выключение СУ.
Для обеспечения возможности проверки работы СУ в каждом из этих
режимов КПА должна реализовать так называемые режимы сопровождения. Для
каждого бортового режима разрабатывают режим сопровождения.
Программы связок и режимов могут' объединяться в так называемые
комплексы функционирования СУ.
Из совокупности приборных связок обычно образуется комплекс (сеанс)
автономных испытаний, а из режимов сопровождения - один или несколько
сеансов комплексных испытаний.
При проведении КИ регистрируют параметры СУ с помощью системы
телеизмерений. Анализ полученных результатов ведут по протоколам испытаний
и информации, полученной при записи с помощью системы телеизмерений.
Выше была рассмотрена структура КС космического аппарата и работы,
выполняемые в процессе проведения ЛОИ-к.
Структура комплексного стенда ракеты-носителя, которая несколько
отличается от описанной выше, показана на рис. 4.20.
263
Рисунок 4.20 - Структура комплексного стенда СУ PH
В состав КС СУ ракеты-носителя входят:
- аппаратура управления, предназначенная для включения питания, задания
необходимого режима работы системы управления, контроля состояния ракетно-
космического комплекса, документирования результатов проведения заданного
режима и аварийного прекращения при необходимости любого режима СУ;
- наземная система управления, предназначенная для управления заданным
режимом работы СУ, контроля за состоянием, выдачи команд в наземные
системы стартового комплекса и передачи данных в бортовую систему
управления и аппаратуру управления о ходе данного режима работы при
регламентных проверках СУ, подготовке к пуску и пуске PH;
- бортовая система управления, предназначенная для выполнения задач,
стоящих перед ракетой-носителем во всех режимах работы СУ, включая
имитацию режима полета на комплексном стенде;
- аппаратура смежных систем или её эквиваленты, такие, как приборы
системы стабилизации, автоматики двигательной установки, системы
опорожнения баков, пневмогидросистемы, электропневмоклапаны,
пиротехнические элементы, рулевые приводы;
- технологическая аппаратура, предназначенная для автоматизации
процесса отработки, контроля параметров вычислительного процесса в бортовой
цифровой вычислительной машине и отображения информации при отработке
режимов СУ;
264
- аппаратура телеметрической системы ракеты, предназначенная для сбора и
передачи в наземный измерительный комплекс информации о ходе
вычислительного процесса в БЦВМ СУ, а также состояния всех систем ракетного
комплекса;
- аппаратура системы питания, предназначенная для обеспечения
аппаратуры комплексного стенда всеми видами питающих напряжений.
Рассмотрим организацию работ на комплексном стенде. Вначале, используя
КПЭО и директивные графики работ по заказу, испытательное подразделение
разрабатывает график проведения ЛОИ-к аппаратуры и ПАО по заказу. График
определяет последовательность и время проведения отработки аппаратуры и
ПАО. Отработку на стенде ведут специалисты испытательного подразделения.
Группа специалистов, выполняющая работу, состоит из начальника смены и
нескольких инженерно-технических работников. Работы выполняют в
соответствии со сменным заданием, записанным в специальном журнале. В
другом журнале, обычно называемом бортовым, регистрируют выполняемые
работы и их результаты. В этом же журнале записывают заключения
разработчиков о проведенных испытаниях и решения по устранению полученных
замечаний. Для устранения замечаний имеется специальный журнал.
Отработка системы бортового электропитания и системы управления
элементами автоматики и пироэлементами PH (далее по тексту - система АПС)
состоит из следующих этапов:
а) этап лабораторных отработочных испытаний комплексных (ЛОИ-к);
б) этап совместных отработочных испытаний комплексных (СОИ-к).
На первом этапе ЛОИ-к разрабатываются программы отработки режимов
(ПОР):
а) контроля разобщенности шин системы АПС первой, второй и третьей
ступеней (КРШ АПС);
б) проверки системы АПС первой, второй и третьей ступеней (ОШ АПС);
в) проверки схем образования шин системы АПС первой, второй и третьей
ступеней (АПС);
г) проверки системы электропитания первой, второй и третьей ступеней
(СЭП).
Целью ЛОИ-к является проверка правильности взаимодействия аппаратуры
СУ и программно-алгоритмического обеспечения (ПАО) на комплексном стенде
(КС) СУ в указанных выше режимах.
ПОРы содержат требования по объему, условиям проведения, материально-
техническому обеспечению, методические указания по проведению испытаний на
КС.
Объем испытаний определяет характер (по НОРМЕ и НЕ НОРМЕ) и
последовательность (очередность) проведения испытаний:
а) проведение режима по НОРМЕ;
б) проведение режима по НЕ НОРМЕ;
265
в) проведение чистового цикла по НОРМЕ.
ЛОИ-к проводятся в нормальных климатических условиях с обязательным
соблюдением правил техники безопасности. При выполнении испытании помимо
ПОРов руководствуются инструкцией по работе на КС, функциональными
схемами, алгоритмическим описанием режимов.
Материально-техническое обеспечение определяет тип, количество,
характеристики средств измерений (при необходимости использования
последних), количество малогабаритных контактных разъединителей (МКР) при
проведении режимов по НОРМЕ и НЕ НОРМЕ.
Методические указания определяют тип схемы КС, в которой проводятся
испытания (дистанционные проверки (ДПр) или комплексные испытания (КИ)),
состояние эквивалента бортовых источников электропитания (положение
"Включено” соответствует штатным аккумуляторным бортовым батареям),
способ задания режима с лицевой панели рабочей станции управления (РСУ),
наименования, последовательность сообщений, выдаваемых на экран РСУ в
процессе и по окончании режима по НОРМЕ. При отработке режима по НЕ
НОРМЕ тип схемы КС, состояние эквивалента бортовых источников
электропитания, способ задания режима также, как и при испытаниях по НОРМЕ.
Дополнительно определяются способы имитации неисправности:
а) установка (исключение) перемычек на МКРах при проверках системы
АПС и СЭП. Таким образом имитируется связь шин АПС между собой, с
корпусом, шиной +ПЗ, минусом СУ в режиме КРШ АПС, имитируется
отсутствие либо ложное наличие команды по тому или иному каналу,
выдаваемой из ВУО (УВВ) в РК на ДП образования шин системы АПС в режиме
ОШ АПС, в РК на ДП и силовые реле в режиме проверки СЭП и при проверке
схем электрического задействования реле и сигнализаторов давления в режиме
АПС;
б) исключение (отстыковка) перемычек, имитирующих ПЭ и ЭПК во всех
схемах управления указанными ИЭ, в режиме АПС.
Помимо сообщений, выдаваемых на экран РСУ при отработке режима по
НЕ НОРМЕ, в базу данных РСУ записывается словарь параметров, содержащий:
а) коды неисправных приборов (ВУО (УВВ) и РК либо только РК);
б) номер фазы (проверки) режима, соответствующий проверяемой схеме по
сводной таблице проверок режима;
в) номер цикла проверки, позволяющий определить несправный узел в
проверяемой схеме (см.пункт б) - канал выдачи команды - ВУО (УВВ) или
приема - РК;
г) состояние регистра входного (МПР), отличное от эталонного, при
проверке схем электрического задействования реле и сигнализаторов давления
системы АПС и проверке состояния ДП и силовых реле в режиме проверки СЭП;
266
д) значение переменной, определяющей состояние контрольных точек
УКАПС при проверках схем управления ПЭ и ЭПК, при КРШ АПС и ОШ АПС;
е) признак необходимости выключения электропитания СУ при НЕ НОРМЕ
режима.
По результатам испытаний выпускается акт или отчет.
Когда все работы, предусмотренные программами ЛОИ-к аппаратуры и
ПАО, выполнены и оформлены соответствующие отчетные документы, ЛОИ-к
считаются завершенными. На этом исследовательские испытания заканчиваются,
и их положительные результаты являются основанием для допуска аппаратуры и
ПАО к предварительным испытаниям.
4.5 Совместные испытания аппаратуры и ПМО СУ в составе комплексного
стенда
Совместные испытания аппаратуры и ПМО СУ относятся к категории
предварительных испытаний.
Совместные отработочные испытания комплексные (СОИ-к) - это работы,
которые проводят в схеме комплексного стенда, где смонтирована штатная
аппаратура системы управления соответствующего объекта ракетно-космической
техники, а также наземный комплекс проверочной аппаратуры (КПА).
Аппаратура, входящая в состав КПА, выполняющая функции других систем,
называется каналом замещения.
Комплексный стенд, на котором проводят СОИ-к, должен быть
укомплектован аппаратурой с приемкой ПЗ и аттестован заказчиком для
проведения СОИ-к.
По завершении исследовательских испытаний (ЛОИ-к) разработчики ПАО
выпускают программы СОИ-к штатного программного обеспечения:
- наземного программного обеспечения:
- для проверочных приборных программ (’’связок”);
- для режимов сопровождения;
- программы СОИ-к штатного бортового программного
обеспечения:
- для программ режимов основной работы (ОР);
- для комплекса или связок программ режимов основной работы.
СОИ-к аппаратуры проводят на полностью отработанном и принятом
заказчиком штатном программно-математическом обеспечении, реализующем
штатное взаимодействие всех приборов, которые входят в состав системы
управления.
Целью СОИ-к является подтверждение:
267
-работоспособности аппаратуры в составе схемы комплексного стенда
системы управления при взаимодействии со смежными системами или их
эквивалентами;
-безопасности эксплуатации аппаратуры;
-защищенности от несанкционированного пуска и предпосылок
несанкционированного пуска;
-эксплуатационных параметров и характеристик.
Для надежной оценки правильности взаимодействия аппаратуры и ПМО
необходимо предъявить представителю заказчика реальные команды управления,
действующие в системе в заданные моменты времени, и обеспечить измерение
параметров этих команд.
Команды управления и их параметры предъявляют с помощью средств
измерений. Все средства измерений должны быть допущены к СОИ-к, т.е.
опломбированы, поверены метрологической организацией, и в паспортах должна
быть запись о сроке следующей поверки, который обязательно должен быть
позже срока испытаний.
Результаты измерений необходимо зафиксировать в журнале результатов
СОИ-к и сравнить с данными, приведенными в техническом задании (ТЗ) на
разработку конкретного прибора или системы управления, с учетом погрешности
измерений и допустимых отклонений измеряемых параметров и на этой основе
вынести суждение о правильности функционирования СУ и ее подсистем.
После сравнения с ТЗ результаты измерений и испытаний заверяют
подписями испытателя, разработчика и представителя заказчика.
СОИ-к проводит испытательное подразделение совместно с разработчиками
и с представителем заказчика.
Команды управления регистрируют только в кабельной сети между
приборами СУ.
Различают:
- релейные команды, формируемые кратковременными или длительными
срабатываниями различных реле;
- цифровые команды, действующие в информационных магистралях
бортового вычислительного комплекса;
- команды в цепях питания аппаратуры СУ, выполняющие коммутации шин
питания и подачу питания на конкретную подсистему или прибор.
При регистрации команд проводят измерения их параметров, которые заданы
вТЗ.
Важным является условие измерений команд в схеме КС с учетом линий
связи, т.е. кабельной сети. Всегда учитывают направления команд. Если команды
входные, то измерения проводят на входе прибора. Если команды выходные, то
измерения проводят после линии связи, т.е. на входе того прибора-абонента, куда
направлена команда.
268
Таким образом, учитывают влияние снижений амплитуд команд и изменений
их параметров, вносимых кабельной сетью на входе прибора - абонента СУ.
Кроме параметров команд с допусками, оговоренными в программе
испытаний, проводят измерения момента времени появления начала команды от
начала работы программного комплекса.
Все указанные условия должны обязательно приводиться в программах
испытаний.
Объем СОИ-к определен и приведен в специальном нормативном документе
[3] ’’Виды и программы испытаний”, в том числе:
1. Испытания на соответствие энергетических показателей аппаратуры
требованиям конструкторской документации. Энергетические показатели
определяют при максимальных значениях напряжения на входе электропитания
системы управления и при наличии в схеме комплексного стенда всех
потребителей, подключенных к данной шине электропитания в предусмотренных
режимах работы.
2. Испытания аппаратуры на работоспособность при номинальном
напряжении электропитания и его изменении. Испытания проводят проверкой
функционирования аппаратуры в самом энергозагруженном режиме с большим
количеством включений-выключений потребителей. Их выполняют при
номинальном, минимальном и максимальном напряжениях электропитания на
входе системы управления, вырабатываемой системой энергоснабжения.
3. Проверка параметров аппаратуры на соответствие требованиям ТЗ и ТУ.
Проверку параметров аппаратуры проводят выборочно, в зависимости от
требований программ испытаний и результатов ранее проведенных автономных
испытаний аппаратуры. Обычно используют минимальный перечень
контролируемых параметров, который позволяет максимально достоверно
оценить работоспособность аппаратуры и выдать заключение о пригодности
аппаратуры для дальнейших испытаний.
4. Проверка тепловых режимов работы ЭРИ в составе аппаратуры. Тепловые
режимы также проверяют выборочно с учетом требований программ и результатов
ранее выполненных автономных испытаний аппаратуры в части температур нагрева
ЭРИ. При этом выбирают те ЭРИ, режимы работы которых нельзя или
нецелесообразно проводить при автономных испытаниях. При. тепловых
испытаниях устанавливают режим функционирования, соответствующий наиболее
тяжелым условиям работы ЭРИ для данной аппаратуры. Если необходимо
многократное повторение какого-либо цикла работы аппаратуры, то при
достижении установившегося значения температуры внутри аппаратуры проверка
температуры перегрева может быть прекращена.
5. Проверка резервирования аппаратуры. Испытания проводят, отключая
резервированные каналы и проверяя работоспособность аппаратуры после их
отключения.
6. Испытание аппаратуры при возможных схемных неисправностях. Перечень
возможных схемных неисправностей составляют с учетом принятых мер
обеспечения надежности и согласовывают с разработчиками аппаратуры,
269
участвующими в испытаниях. Для имитации неисправностей выбирают те
элементы, которые находятся в узлах взаимосвязи одних приборов с другими, а
также те неисправности, которые не имитировались при автономных испытаниях.
7. Испытание на помехоустойчивость и помехозащищенность. Испытания
проводят при функционировании в самом энергозагруженном режиме работы
системы управления с большим числом включений-выключений
энергопотребителей. При этом в информационных магистралях бортовой
вычислительной аппаратуры измеряют параметры помех от переключений
работающей аппаратуры. Оценивают уровень этих помех по сравнению с
уровнями полезных цифровых сигналов.
Проводят также испытания на электромагнитную совместимость (ЭМС), при
которых аппаратура системы управления подвергается воздействию различных
электромагнитных помех с параметрами, оговоренными в программе испытаний
и в ТЗ. При воздействии на аппаратуру системы управления в разные моменты
времени различных электромагнитных помех анализируют правильность ее
функционирования. Измеряют также параметры излучений работающей
аппаратурой на различных частотах, указанных в ТЗ на систему.
8. Проверка правильности взаимодействия аппаратуры со смежными
системами в эксплуатационных режимах. В схеме комплексного стенда, как
правило, смежные системы объекта управления отсутствуют. Вместо них
используют аппаратуру каналов замещения, размещенную, как указывалось
ранее, в наземной аппаратуре КПА.
При этих испытаниях аппаратура системы управления взаимодействует с
каналами замещения. Проводят оценку правильности обмена информацией
аппаратуры системы управления во всех предусмотренных программой
испытаний режимах с каналами замещения.
9. Проверка на безопасность эксплуатации аппаратуры. Данные испытания
позволяют оценить безопасность эксплуатации аппаратуры в схеме комплексного
стенда при ошибочных действиях оператора как для аппаратуры, так и для
человека.
10. Проверка эксплуатационных характеристик. На основе проведенных
испытаний анализируют соответствие разработанных и полученных при
испытаниях эксплуатационных характеристик аппаратуры системы управления.
11. Проверка правильности алгоритмов, заложенных в цифровом
вычислительном комплексе. Правильность работы алгоритмов оценивают по
результатам анализа печатной, контрольно-регистрационной и телеметрической
информации работы аппаратуры во всех эксплуатационных режимах без
введения в аппаратуру неисправностей, а затем и при введении в аппаратуру
характерных отказов.
При организации СОИ-к испытательное подразделение на основе исходных
данных от разработчиков приборов и подсистем выпускает программу
испытаний. В исходных данных указывают объем испытаний конкретного
прибора или подсистемы, какие команды и их параметры необходимо подвергать
270
контролю, время прохождения команд или токовых включений от
соответствующих баз отсчета.
Кроме перечисленного в исходных данных указывают цепи и номера
контактов ’’общего” и ’’сигнального” для подключения средств измерений, а
также тип средства измерений, его относительную погрешность или класс
точности, с которыми разработчик допускает измерения того или иного
параметра, а также приводят методические указания и схемы измерений.
Перечень контролируемых команд и их параметры должны быть
минимизированными и вместе с этим определять полную пригодность
аппаратуры системы управления к дальнейшим испытаниям и работам. На основе
контроля реальных команд управления, действующих в системе, подтверждается
правильность заложенных в приборы схемно-конструкторских решений и
правильность работы алгоритмов. Контроль качества производства аппаратуры в
задачи СОИ-к не входит. Поэтому в основном все измерения проводят в одном из
трех (или двух, если система двухканальная) каналов каждого прибора.
Исключениями являются измерения времени рассогласования прохождения
команд в разных каналах. Эти измерения в двух или трех каналах прибора или
подсистемы проводят одновременно. Измерять все параметры, приведенные в ТЗ
на прибор или систему, нецелесообразно и неоправданно дорого. Необходимо
учитывать опыт при испытаниях иных систем управлений, данные, полученные в
ходе исследовательских автономных и комплексных испытаний, а также
результаты работы проверенных алгоритмов и команд на этапах ЛОИ-к, СОИ-а.
Оптимальным является выполнение условий необходимости и достаточности.
В некоторых случаях по согласованию с представительством заказчика в схеме
комплексного стенда вместо штатных программ режимов основной работы и
сопровождения могут применяться штатные проверочные приборные программы.
Эти штатные проверочные программы называют приборными ’’связками", которые
обеспечивают в схеме комплексного стенда проверку функционирования
конкретного прибора при взаимодействии с другими приборами.
Испытательное подразделение на основе таких исходных данных оценивает
время, необходимое для организации и проведения испытаний, разрабатывает и
выпускает график проведения СОИ-к.
В графике должны быть указаны все объекты испытаний, программы и
отчеты, ответственные подразделения, а также время начала и окончания
испытаний.
Этот график утверждается всеми руководителями разработки аппаратуры и
программно-математического обеспечения, а также главным конструктором заказа.
График согласовывают также с представительством заказчика и их
руководителем.
Разработчики и испытатели составляют программы СОИ-к для приборов или
подсистем. Составленные программы согласовывают со всеми разработчиками, с
которыми данный прибор или подсистема в процессе испытаний
взаимодействует, с разработчиками программно-математического обеспечения и
с представителем заказчика.
271
Программы СОИ-к аппаратуры имеют две разновидности:
1. Системные программы:
- общая программа СОИ-к на систему управления конкретного объекта
РКТ. Программа включает в себя полный объем СОИ-к на всю
систему, полный перечень программно-математического обеспечения,
подвергаемого испытаниям и предъявляемого представительству
заказчика, полный перечень всех программ СОИ-к на все приборы и
подсистемы системы управления, перечень смежных систем объекта
управления, которые будут проходить подобные испытания (называемые
стыковочными) в схеме контрольно-испытательной станции (КИС),
которая находится в организации головного разработчика PH или КА;
- программа СОИ-к энергетических показателей системы управления;
— программа СОИ-к на помехоустойчивость и помехозащищенность
системы управления (включая работы по ЭМС).
2. Приборные программы:
- программы СОИ-к на приборы бортового вычислительного комплекса;
- программы СОИ-к на командные приборы (комплекс гироприборов,
датчики Солнца, Земли, звезд);
- программы СОИ-к на исполнительные и коммутационные приборы
(автоматика пиротехнических средств, автоматика управления двигателями
стабилизации и причаливания, блок коммутации, блок распределения
питания, стабилизированный преобразователь тока и т.д.).
Все программы СОИ-к утверждаются главным конструктором и
согласовываются с руководителем представительства заказчика.
Программы содержат следующие разделы:
Объект испытаний
Объект испытаний содержит код аппаратуры и составных частей, их
обозначения, количество опытных образцов, назначение и особенности
аппаратуры, вид приемки.
Цель испытаний
В разделе указывают конкретные цели и задачи, которые должны быть
достигнуты и решены в процессе испытаний.
Общие положения
Раздел содержит перечень руководящих документов, на основании
которых проводят испытания, указывают место и продолжительность
испытаний, а также организации и предприятия-разработчики и
представительство заказчика, участвующие в испытаниях.
272
Объем испытаний
Раздел включает в себя перечень этапов испытаний, а также количественные
и качественные характеристики, подлежащие оценке, указывают конкретный
перечень задач, оценок и проверок, которые следует осуществить в определенной
последовательности при испытаниях для подтверждения выполнения требований
ТЗ (ТТЗ) со ссылками на соответствующие методики испытаний, в том числе на
разделы в методических указаниях программы.
Условия и порядок проведения испытаний
В разделе указывают наименование подразделения, где проводят испытания,
распределение обязанностей среди участников, меры безопасности,
дополнительные необходимые указания и мероприятия.
Материально-техническое обеспечение
В разделе указывают необходимый при проведении испытаний перечень
материалов, технических средств и документации.
Метрологическое обеспечение
В разделе приводят перечень необходимых средств измерений (СИ) с
указанием их относительной погрешности или класса точности, порядок
подготовки аппаратуры и СИ к измерениям, порядок проведения измерений,
порядок обработки результатов измерений.
Методические указания
В данном разделе приводят разъяснения о проведении каждого испытания в
соответствии с объемом и учетом последовательности необходимых действий и
операций.
Отчетность
В разделе указывают срок выпуска отчета СОИ-к и конкретное
подразделение, которое является ответственным за его выпуск.
273
Отчеты по испытаниям содержат следующие разделы:
Общая часть. В разделе указывают наименование испытаний, место, где они
были проведены, участников испытаний, применяемую испытательную и
измерительную аппаратуру.
Результаты испытаний. В данном разделе указывают последовательность,
условия, режимы и методики проведения испытаний, результаты по каждому
виду с кратким заключением, обнаруженные отказы и анализ их причин,
принятые меры по устранению недостатков, а также необходимость
дополнительных испытаний для проверки эффективности принятых мер, при
необходимости указывают общее время работы аппаратуры.
Выводы. В разделе приводят выводы на основе анализа результатов
испытаний и соответствия параметров аппаратуры требованиям ТУ, указывают
эффективность выполнения мероприятий по устранению дефектов аппаратуры,
подтвержденных повторными испытаниями, и предоставляют рекомендации по
дальнейшему повышению качества и надежности аппаратуры.
Заключение. В разделе указывают наименование аппаратуры, наименование
предприятия-изготовителя, вид приемки, количество испытуемых образцов с
указанием заводских номеров, наименование проведенных испытаний,
наименование программы испытаний, заключение о соответствии параметров
требованиям ТЗ и ТУ, а также пригодность аппаратуры к следующим видам
испытаний.
В случаях несоответствия каких-либо параметров аппаратуры СУ PH или КА
требованиям ТЗ или КД, несоответствия программного обеспечения
алгоритмическому описанию или выхода из строя аппаратуры испытания могут
быть прерваны или прекращены. Все случаи несоответствий фиксируют в
журнале результатов СОИ-к. Прерывание испытаний и срок возобновления
определяют разработчики совместно с представительством заказчика.
Разработчики анализируют выявленное несоответствие и по согласованию с
представительством заказчика принимают решение либо об уточнении методики
испытаний или измерений, либо о коррекции документации (программы
испытаний, ТЗ или КД), либо о доработке прибора или подсистемы. После
реализации принятого решения испытания или измерения повторяют.
274
Если работы по подтверждению параметров взаимодействия СУ со
смежными системами при СОИ-к в схеме КС были выполнены с их каналами
замещения, то эти работы повторяют на КИС при взаимодействии СУ с
реальными смежными системами с участием представителей разработчиков и
заказчиков по каждой системе. Программу стыковочных испытаний по исходным
данным от разработчиков всех систем составляет головная организация, где, как
правило, находится КИС. Эту программу согласовывают с представителем
заказчика по каждой системе, подвергаемой стыковочным испытаниям. Отчет по
стыковочным испытаниям также выпускает головная организация.
Таким образом, в ходе проведения СОИ-к выполняют отработку не только
аппаратуры, но и эксплуатационной и конструкторской документации.
После того, как предварительные испытания завершены и документация
откорректирована по их результатам, комиссия, созданная на предприятии-
разработчике, принимает решение о присвоении документации литеры ”0”
(опытное производство). Присвоенная литера определяет стадию отработки
документации. Вся аппаратура, поставляемая в Головную организацию, должна
изготавливаться по такой документации. По мере прохождения дальнейших
испытаний документации присваивают литеру более высокого уровня - ”01”.
При положительных результатах СОИ-к авторы программы испытаний
(разработчики или испытатели) выпускают отчет о проведенных СОИ-к прибора,
подсистемы или системы, подтверждающий выполнение объема,
предусмотренного программой, содержащий оценку результатов испытаний и
заключение о пригодности объекта испытаний к дальнейшим
электроиспытаниям, например на КИС или ТК.
Отработка АПС и СЭП при СОИк состоит из этапов:
а) разработка программ отработки режимов в меньшем объеме по сравнению
с ЛОИ-к. Объем определяется разработчиком ПОР;
б) разработка программы проверки адресации ПЭ в группах одновременного
срабатывания в режиме ДПр;
в) разработка программы измерения токов обтекания ПЭ, наиболее
удаленных от РК в группах одновременного срабатывания в режиме КИ;
г) разработка программы и методики испытаний системы электропитания в
режиме КИ.
Порядок отработки режимов по пункту «а» полностью соответствует ЛОИ-к.
Проверка адресации по пункту «б» проводится в следующем порядке:
1) во всех группах одновременного срабатывания оставляется по одному ПЭ;
2) проводится режим АПС по НОРМЕ;
3) перед проведением второго цикла первые ПЭ отстыковываются, а ПЭ
устанавливаются (по одному в каждой группе) на посадочные места вторых
ПЭ;
4) проводится режим АПС по норме;
5) далее - аналогично пунктам 1 и 2. Максимальное число циклов режимов
АПС соответствует максимальному числу ПЭ в группе (группах)
275
одновременного срабатывания. Например, в группе 8 ПЭ - значит,
максимальное число циклов - 8.
Измерение токов по пункту «в» проводится при номинальных значениях
величины напряжения электропитания пиротехнического фидера Uhom=28,0 В и
величины сопротивления (Rhom=4,OOm - для ПЭ типа ПДО). К примеру,
измеренная величина напряжения на ПЭ (Uno) составляет 5,0В. Тогда величина
гока через ПЭ составляет
1ГО =-^-=^2®- = 125 А.
RH0M 4,00м
Согласно ПДО.ОООТУ 1пэ=1—15А. Таким образом, величина тока в 1,25А
достаточна для нормального срабатывания ПЭ. Через ПЭ, менее удаленные от
РК, ток будет еще выше за счет меньшего падения напряжения в КЛС на участке
РК-ПЭ.
По результатам испытаний выпускается отчет.
Целью испытаний по пункту «г» является проверка следующих параметров
электропитания:
- на зажимах бортовых батарей;
- на шинах электропитания СУ;
- на входах приборов-потребителей.
Испытаниям подвергается штатный комплект бортовой аппаратуры СУ со
штатными комплектами кабелей с использованием штатных бортовых батарей.
Перед испытаниями со штатными бортовыми батареями проводится
проверочный цикл, в котором вместо батарей устанавливаются эквиваленты
бортовых батарей (бортовых источников электропитания).
Испытания проводятся с осциллографированием значений токов нагрузки
бортовых батарей, напряжения электропитания на входах силовых коммутаторов
питания, а также бортовых приборов-потребителей в течение всего времени
работы системы управления.
Для осциллографирования токов нагрузки батарей в расстыковку
соединителей бортовых батарей подключаются кабель-вставки с шунтами. В
шунтах все цепи по шинам «+» выводятся к каналам регистратора сигналов
(осциллографу), а цепи по шине «минус» проложены один к одному.
Для замера напряжения к соединителям бортовой аппаратуры подклю-
чаются унифицированные малогабаритные контактные разъединители
(УМКРы), в которых по одной цепи «+» и «минус» выводятся к каналам
регистратора сигналов.
Для замера напряжения на входах приборов-потребителей одного типа,
например электрогидроприводов, достаточно выбрать кабельные линии,
имеющие максимальную длину связей.
276
После проведения испытаний анализируют результаты на соответствие
значений параметров электропитания бортовой аппаратуры СУ требованиям ТЗ
на приборы, на аппаратуру в целом и выпускается отчет.
СОИ-к завершает предварительные испытания. Их положительные
результаты являются основанием для допуска опытного образца аппаратуры к
приемочным испытаниям.
4.6 Приёмосдаточные испытания аппаратуры СУ
В данном разделе рассматривают цели и задачи приёмосдаточных испытаний
изготавливаемой продукции.
Введем следующие определения:
- приемосдаточные испытания - контрольные испытания
продукции при приемочном контроле в целях проверки на соответствие
техническим условиям или стандартам (ГОСТ 16504);
- приемочный контроль - контроль продукции, по результатам
которого принимают решение о ее пригодности к поставкам и/или
использованию (ГОСТ 16504);
- продукция - результат процесса (ДСТУ ISO-9000).
Примечание: к термину "продукция" относятся употребляемые в
нормативной и технической документации термины: "аппаратура", "образец",
"прибор", а также другие конкретные наименования видов продукции.
Как отмечалось в предыдущих разделах, продукция, создаваемая и
поставляемая предприятием, в процессе разработки, изготовления и поставки
заказчику должна подвергаться испытаниям в соответствии с нормативными
документами для каждого вида продукции, техническими заданиями,
техническими условиями, конструкторской документацией, технической
документацией и контрактами.
Объем и порядок проведения испытаний продукции конкретного заказа
(проекта) определяют с учетом требований к ней, ее новизны и сложности,
характера выполняемых предприятием работ по заказу, кооперации при
разработке, изготовлении и поставке продукции и отражают в программах и
методиках испытаний, технических условиях, КД, ТД и инструкциях. .
Для проверки соответствия аппаратуры СУ требованиям технических
условий устанавливают следующие виды испытаний:
- приемосдаточные испытания;
- периодические испытания;
- типовые испытания.
Предприятие-изготовитель, впервые приступившее к изготовлению
аппаратуры, должно проводить испытания на установочной серии (на одном или
двух комплектах аппаратуры).
Необходимость и объём испытаний установочной серии аппаратуры
определяются решением руководителя предприятия-изготовителя аппаратуры,
277
согласованным с руководителем предприятия-разработчика аппаратуры и
начальником представительства заказчика (ПЗ).
Необходимость периодических и типовых испытаний и сроки их проведения
определяют после принятия решения о серийном производстве аппаратуры.
В данном разделе рассмотрены заключительные операции при изготовлении
продукции на заводе-изготовителе - приемосдаточные испытания (ПСИ),
которые проводят для проверки соответствия каждого экземпляра продукции
требованиям ТУ, КД и ТД, в соответствии с требованиями, установленными в
ГОСТ В 15.307, ГОСТ В 15.210 и правилах УРКТ-01.01.
Испытания прибора выполняет представитель заказчика с участием
представителя службы технического контроля (СТК) предприятия-изготовителя
силами и средствами предприятия-изготовителя на испытательной аппаратуре и
оборудовании, на которые имеется документация, подтверждающая их
исправность.
ПСИ продукции проводят в два этапа:
- проверку выполняют на заводе-изготовителе;
- в схеме КС проверяется функционирование аппаратуры в целях
подтверждения ее соответствия техническим и эксплуатационным
характеристикам определяемым ТЗ на систему и ТУ в том случае, если это
предусмотрено в ТУ, с реальной нагрузкой.
Правила приемки, методы испытаний, условия и объём проведения ПСИ
аппаратуры указывают в общих технических условиях (ОТУ) на бортовую и
наземную аппаратуру СУ и ТУ на отдельные приборы и комплекты кабелей.
Рассмотрим принцип построения ТУ, состав и требования к изготовлению
продукции.
Как правило, ТУ включают в себя следующие разделы:
1. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
1.1. Общие технические требования:
- соответствие продукции требованиям общих технических
условий;
- соответствие продукции требованиям отраслевых стандартов
(ОСТ).
1.2. Специальные технические требования к следующим характеристикам:
- габаритно-массовым характеристикам (ГМХ);
- надежности;
- точности решения целевой задачи;
- вибрационной, тепловой стойкости и другим условиям
эксплуатации;
- транспортировке;
- эксплуатационные;
278
- суммарному времени наработки электрорадиоизделий;
- электротермотренировке (ЭТТ);
- технологическому процессу изготовления;
- проверкам ЭРИ;
- функционированию.
1.3. Основные параметры и характеристики:
- соответствие сборочным чертежам;
- соответствие габаритных и установочных размеров;
- сохранение электрических параметров при функционировании,
во время и после воздействия режимов, оговоренных в ОТУ
(вибрационных нагрузок, климатических и других механических
воздействий);
- соответствие требуемым параметрам электрического
сопротивления изоляции;
- гарантийный ресурс.
1.4. Комплектность.
1.5. Маркировка.
1.6. Упаковка.
2. ТРЕБОВАНИЯ БЕЗОПАСНОСТИ:
- к безопасности при проведении измерений электрических
параметров по ГОСТ 12.3.019 "Система стандартов безопасности труда.
Испытания и измерения электрические. Общие требования безопасности";
- к защите полупроводниковых приборов и интегральных
микросхем от статического электричества в соответствии с ОСТ 92-1615.
3. ПРАВИЛА ПРИЕМКИ:
- виды испытаний (приемосдаточные, периодические, типовые);
- порядок осуществления материально-технического и
метрологического обеспечения испытаний;
- порядок предъявления для испытаний;
- требования к результатам испытаний;
- требования к испытаниям на стенде или аналоге изделия;
- требования к средствам измерительной техники;
- требования к порядку проведения, объему и последовательности для
каждого вида испытаний продукции.
4. МЕТОДЫ ИСПЫТАНИЙ:
- конкретные действия по проведению испытаний в необходимом объёме.
279
5. ТРАНСПОРТИРОВАНИЕ И ХРАНЕНИЕ:
- требования к хранению, расконсервации, консервации и
транспортированию;
- требования к периодичности перепроверки электрических
параметров изделия на соответствие техническим условиям.
6. УКАЗАНИЯ ПО ЭКСПЛУАТАЦИИ:
- требования к эксплуатации изделия в соответствии с общими
техническими условиями;
— требования к защите изделия от воздействия статического
электричества при монтаже и эксплуатации изделия.
7. ГАРАНТИИ ПОСТАВЩИКА (ИЗГОТОВИТЕЛЯ):
— гарантирование предприятием-изготовителем соответствия
качества изделия требованиям настоящих технических условий при
соблюдении потребителем условий и правил хранения и
транспортирования;
- установление гарантийного срока.
Так как в данном разделе рассматривают только процедуру проведения
приемосдаточных испытаний, приведем пример правил приемки,
регламентированных разделами 3 и 4 ТУ ГОСТ В15.307, ГОСТ В15.210 (см.
Приложение).
Типовой пример организации приемосдаточных испытаний приведен для
одного конкретного прибора, и в зависимости от особенностей конкретной
аппаратуры в ТУ могут быть внесены изменения, сокращения или дополнения
объёма и последовательности испытаний.
Необходимо только добавить следующее. Все проверки прибора за
исключением проверки на функционирование в схеме КС выполняют в цехе-
изготовителе.
Рассмотрим заключительную операцию ПСИ - функционирование в схеме
комплексного стенда.
Проверку на функционирование в составе комплексного стенда предприятия-
разработчика аппаратуры СУ и НППО (КПА) проводят в целях подтверждения
соответствия технических и эксплуатационных характеристик СУ и НППО
(КПА) требованиям ТЗ, ТУ в том случае, если это предусмотрено в ТУ.
До начала функционирования в составе комплексного стенда разрабатывают
и согласовывают с ПЗ инструкцию по работе на комплексном стенде заказа и
’’Программу-методику” испытаний комплекта (отдельных приборов).
Испытания аппаратуры СУ PH (КА) и Н111Ю (КПА) на комплексном стенде
предприятия-разработчика заказа проводят в два этапа:
- цикл технического контроля (ТК) аппаратуры СУ PH (КА), НППО (КПА);
- цикл испытаний аппаратуры СУ PH (КА), НППО (КПА) с ПЗ.
280
Испытания аппаратуры СУ PH (КА), НППО (КПА) осуществляет
испытательное подразделение, отвечающее за оценку телеметрических
параметров СУ PH (КА), с участием службы контроля качества предприятия-
разработчика, ПЗ и, при необходимости, разработчиков в соответствии с
инструкцией по работе на комплексном стенде заказа и объёмом, оговоренным в
"Программе-методике” испытаний комплекта (отдельных приборов).
Результаты проведения этапов (циклов) испытаний аппаратуры СУ PH (КА),
Н1111О (КПА) заносят в журнал учета работ и заверяют подписями лиц,
выполнявших испытания и участвовавших в них.
После завершения проверок функционирования по циклу ТК с
положительными результатами испытательное подразделение:
делает отметку в формулярах о проведении цикла ТК;
- выпускает акты завершения цикла ТК и готовности КС к
проведению цикла ПСИ (с ПЗ);
- выпускает формулировки заключений главного конструктора
(ГК) и ПЗ о годности использования аппаратуры СУ PH (КА), НППО
(КПА) и носителей информации (перфолента, магнитная лента, CD-R) по
назначению;
- указывает требуемый гарантийный срок эксплуатации (в
заключении ГК);
- предъявляет аппаратуру представительству заказчика.
Все результаты испытаний аппаратуры СУ PH (КА), НППО (КПА) заносят в
журнал приемосдаточных испытаний и заверяют подписями лиц, проводивших
испытания.
При выявлении несоответствия полученных результатов испытаний
аппаратуры СУ PH (КА), НППО (КПА) в процессе выполнения ПСИ
представитель ПЗ останавливает испытания предъявленной продукции для
проведения мероприятий по локализации и устранению причины возникновения
данного несоответствия.
В случае обнаружения неисправности предъявленной продукции аппаратура
возвращается на предприятие-изготовитель для ремонта.
Ремонт отказавшей аппаратуры, изготовленной предприятием-
изготовителем, проводят в два этапа:
- поиск и локализация неисправности по программе,
составленной разработчиками аппаратуры и согласованной с ПЗ;
- ремонт по утвержденному генеральным директором
предприятия-изготовителя и согласованному с ПЗ графику планово-
диспетчерского отдела (ПДО) цехом-изготовителем.
После завершения ремонта аппаратуру возвращают на комплексный стенд
для повторного проведения приёмосдаточных испытаний.
Испытания аппаратуры СУ PH (КА), НППО (КПА) считаются завершенными
после записи представителем заказчика в журнале приемосдаточных испытаний
разрешения об отключении из схемы КС предъявляемой аппаратуры и занесения
281
необходимых записей в формуляры.
Из рассмотренного нами принципа построения ТУ и примера организации
приемосдаточных испытаний для одного конкретного прибора следует, что
изготовление продукции - сложный организационно-производственный процесс,
включающий в себя разработку различной конструкторской документации,
проведение различных видов испытаний на отдельных рабочих местах,
обеспечивающих максимальный уровень автоматизации, полноту проведения
испытаний и достоверность полученных результатов.
Отдельные рабочие места для выполнения ПСИ создаются на предприятии-
изготовителе и предприятии-разработчике и предназначены для испытаний
изготовленной продукции представителями заказчика.
Отдельные рабочие места (КИПы) на предприятии-изготовителе
представляют собой аналоги рабочих мест для проверки и регулировки
продукции при изготовлении, укомплектованы учтенной документацией и
учтённым программным обеспечением и находятся под постоянным контролем
представителей заказчика.
Отдельные рабочие места (комплексные стенды) на предприятии-
разработчике являются аналогами комплексных стендов для проведения
лабораторно-отработочных испытаний, собраны из принятой ПЗ аппаратуры,
укомплектованы учтенной документацией и учтённым программным
обеспечением и находятся под постоянным контролем представителей заказчика.
4.7 Испытания на контрольно-испытательных станциях
После завершения испытаний (исследовательских, предварительных,
приёмосдаточных) аппаратуры и ПАО на предприятии-разработчике системы
управления в соответствии с КПЭО (комплексной программой
экспериментальной отработки) система управления подвергается испытаниям на
контрольно-испытательной станции (КИС).
Контрольно-испытательная станция (КИС) создается в головной организации
и предназначена для отработки взаимодействия систем PH (КА), проверки
выполнения целевой задачи, отработки эксплуатационной документации,
проверки PH (КА) перед натурными испытаниями.
На КИС устанавливают:
- собранное изделие PH (КА);
- наземные проверочные комплексы всех систем изделия;
- системы автономного электропитания изделия;
- наземные проверочные комплексы для автономных проверок
систем вне изделия;
- пневмосистемы, обеспечивающие подачу воздуха, азота или
гелия с требуемым давлением;
- оборудование, обеспечивающее входной контроль аппаратуры
изделия и наземных проверочных комплексов.
282
На контрольно-испытательной станции предусмотрены следующие этапы
испытаний системы управления:
- автономные испытания аппаратуры вне изделия с помощью
АВК (аппаратуры входного контроля);
- автономные испытания системы управления (вне изделия и в
составе изделия);
- комплексные испытания системы управления в составе изделия;
- испытания системы управления по частным программам.
Следует отметить, что на первом этапе испытания аппаратуры вне изделия с
помощью АВК испытаниям подвергается вся поступающая на КИС аппаратура,
предназначенная для эксплуатации в составе изделия и наземной контрольно-
проверочной аппаратуры (наземного проверочно-пускового оборудования).
После получения положительных результатов входного контроля на АВК
проводят монтаж изделия и наземной контрольно-проверочной аппаратуры
(наземного проверочно-пускового оборудования).
Наземная контрольно-проверочная аппаратура (наземное проверочно-
пусковое оборудование) вводится в эксплуатацию и проходит испытания в
автономном режиме функционирования в соответствии с инструкцией по
эксплуатации на данную аппаратуру. Ввод в эксплуатацию осуществляет
предприятие-разработчик данной аппаратуры.
После получения положительных результатов функционирования и
оформления акта ввода в эксплуатацию проводят стыковку наземной контрольно-
проверочной аппаратуры (наземного проверочно-пускового оборудования) и
системы управления для последующих этапов испытаний (автономных,
комплексных и по частным программам).
На всех этапах испытаний на КИС выполняют отработку эксплуатационной
документации (ЭД).
При этом проверяют:
- необходимость и достаточность эксплуатационных документов;
- правильность изложения материала, достаточность
приведенных указаний;
- удобство работы с документацией при эксплуатации;
- возможность практического выполнения работ в
последовательности, определяемой ЭД, с применением указанных в ней
инструментов, приспособлений, контрольно-измерительных приборов;
- достаточность мер, обеспечивающих безопасность
эксплуатации;
- рациональность последовательности выполнения работ;
- правильность приведенных значений контролируемых
параметров.
В процессе отработки ЭД особое внимание уделяется достаточности
указаний по предотвращению опасных или аварийных ситуаций при отказах,
несанкционированном снятии электропитания, ошибочных действиях оператора.
283
Состав ЭД, поставленной на КИС, определяют в соответствии с ведомостью
эксплуатационной документации (ВЭД).
Для каждого этапа испытаний головная организация разрабатывает графики
выполнения работ. Предприятия-разработчики систем обеспечивают своими
представителями проведение работ на КИС и сопровождение испытаний на КС
(анализ результатов моделирования выявленных нештатных ситуаций,
возникших при работе СУ PH (КА), моделирования методов парирования
нештатных ситуаций при работе СУ PH (КА) на этапе сопровождения).
Телеметрические параметры, полученные в процессе испытаний, должны
быть обработаны и проанализированы на соответствие ’’Методике оценки ТМИ”
подразделением, отвечающим за оценку ТМИ.
Переход к последующему этапу испытаний осуществляют по завершении
предыдущего этапа с положительными результатами и наличии отчетных
документов.
Автономные испытания вне изделия с помощью
аппаратуры входного контроля
В данном разделе рассмотрен первый этап испытаний на КИС - автономные
испытания вне изделия с помощью аппаратуры входного контроля.
В соответствии с ГОСТ 16504 входной контроль - это контроль продукции
поставщика, поступающей к потребителю или заказчику и предназначаемой для
использования при изготовлении, ремонте или эксплуатации продукции.
Для обеспечения выполнения данных работ предприятие-разработчик
аппаратуры разрабатывает и поставляет на КИС аппаратуру входного контроля,
программное обеспечение и эксплутационную документацию. В основном
аппаратура входного контроля представляет собой контрольно-измерительные
приборы (КИПы), аналогичные КИПам, используемым на заводе-изготовителе, в
полном виде или с исключением каких-либо функций, необходимых только при
изготовлении продукции. Для подтверждения работоспособности КИП в его
составе обычно имеется технологический прибор, аналогичный подвергаемому
входному контролю.
Для выполнения работ входного контроля и обеспечения регламентных
проверок продукции на КИС создают специальные лаборатории.
Аппаратуру входного контроля используют на КИС для таких целей:
- проверки работоспособности поступающей продукции;
- подтверждения отказов аппаратуры, обнаруженных в процессе
дальнейших испытаний СУ;
- технического обслуживания (регламента) аппаратуры,
находящейся на хранении.
Входной контроль продукции проводят в целях предотвращения
использования при испытаниях продукции, не соответствующей требованиям
конструкторской документации, стандартам, техническим условиям, договорам
(контрактам) на поставку продукции.
284
Основные задачи входного контроля:
- проверка наличия сопроводительной документации,
удостоверяющей качество и комплектность продукции;
- контроль соответствия качества и комплектности продукции
требованиям конструкторской и нормативной документации.
К входному контролю допускается поступившая с сопроводительной
документацией, оформленной в установленном порядке, продукция с видом
приемки, соответствующим КД и контракту.
При входном контроле всей продукции проводят:
- проверку сопроводительной документации;
- визуальный контроль отсутствия механических повреждений
корпуса, лакокрасочных покрытий и контактных полей соединителей;
- проверку комплектности;
- проверку функционирования продукции.
После завершения испытаний аппаратуры и ПАО на предприятии-разработчике
системы управления разработчик аппаратуры создает ЭД (документацию по
эксплуатации) на АВК, в соответствии с которой предприятие-изготовитель
изготавливает данную продукцию для поставки в головную организацию в
установленном порядке и в оговоренные графиками сроки.
Первоначальную поставку на КИС комплектов АВК (аппаратуры входного
контроля) проводят до поставки первых комплектов бортовой и контрольно-
проверочной аппаратуры.
Поступающие на КИС комплекты АВК монтируют в специально выделенных
помещениях и вводят в эксплуатацию. По результатам ввода в эксплуатацию
оформляют соответствующие акты. Ввод в эксплуатацию осуществляет
предприятие-разработчик данной аппаратуры.
Аппаратуру, входящую в состав СУ, разработанную и изготовленную
смежными предприятиями, поставляют на КИС по отдельным прямым договорам
без проверки в составе КС предприятия-разработчика системы управления.
Входной контроль данной про.цукции проводят в соответствии с ее
эксплуатационной документацией.
На основе поставленной эксплуатационной документации головная
организация разрабатывает инструкцию по входному контролю бортовой и
наземной аппаратуры системы управления.
Вся аппаратура (наземная проверочная аппаратура, бортовая аппаратура и
комплекты кабельных сетей), поступающая на КИС, подвергается входному
контролю.
При положительных результатах входного контроля продукцию передают
для монтажа изделия и наземной проверочной аппаратуры КИС.
В случае получения отказа какого-либо прибора вызывают представителя
предприятия-разработчика, оформляют СОН (сообщение о неисправности) и
данный прибор возвращают на предприятие-изготовитель для ремонта. После
ремонта на предприятии-изготовителе прибор возвращают на КИС и подвергают
285
повторному входному контролю. Для монтажа изделия и наземной проверочной
аппаратуры КИС используют прибор из состава ЗИП.
В процессе автономных и комплексных испытаний продукции в составе
изделия возможно обнаружение неисправностей, при этом наземное проверочное
программное обеспечение СУ локализует отказ и формирует соответствующее
сообщение об отказе аппаратуры с достоверностью до одного — двух смежных
приборов. В соответствии с инструкцией по работе на КИС подтверждение отказа
и дефектацию приборов проводят на АВК по инструкции входного контроля.
При подтверждении отказа прибора на АВК оформляют СОН (сообщение о
неисправности) и данную продукцию возвращают на предприятие-изготовитель
для ремонта. После ремонта на предприятии-изготовителе продукцию
возвращают на КИС и подвергают повторному входному контролю.
При положительных результатах входного контроля продукцию передают
для установки в изделие или наземную проверочную аппаратуру КИС.
Аппаратура, поставленная на КИС и не установленная в бортовую или
наземную аппаратуру, находится на хранении в составе ЗИП и в соответствии с
ЭД проходит периодические регламентные проверки на АВК по инструкции
входного контроля.
При положительных результатах входного контроля продукцию возвращают
на хранение в составе ЗИП.
При отрицательных результатах входного контроля продукции оформляют
СОН (сообщение о неисправности), и ее возвращают на предприятие-
изготовитель для ремонта. После ремонта на предприятии-изготовителе
продукцию возвращают на КИС и подвергают повторному входному контролю.
Автономные испытания системы управления на КИС
В данном разделе рассмотрен второй этап испытаний на КИС - автономные
испытания системы управления.
Для PH комплексная программа экспериментальной отработки (КПЭО)
может не предусматривать проведение автономных испытаний системы
управления.
Целью автономных испытаний системы управления является проверка ее
характеристик (на соответствие технической документации) и функционирования
в автоматическом режиме средствами и с помощью программного обеспечения
наземной проверочной аппаратуры данной системы.
При автономных испытаниях системы управления выполняют следующие
виды работ:
- стыковочные испытания с системой сбора телеметрической
информации;
- автономные испытания системы управления.
286
Для обеспечения проведения автономных испытаний головная организация
разрабатывает и согласовывает со смежными организациями следующие
документы:
- программу-методику автономных испытаний системы
управления;
— программу стыковочных испытаний системы управления со
смежными системами;
- методику оценки ТМИ системы управления при автономных
испытаниях.
На КИС предусматривают проведение двух видов автономных испытаний
системы управления:
- вне изделия;
- в составе изделия.
Для каждого вида испытаний создают отдельное рабочее место (стенд),
включающий в себя наземную проверочную и бортовую аппаратуру, аппаратуру
ТМИ, наземные источники питания, комплекты кабелей (штатные и
технологические).
Рабочее место автономных испытаний системы управления вне изделия по
составу аппаратуры во многом аналогично КС и предназначено для таких целей:
- отработки эксплугационной документации;
- проверки бортового и наземного ПАО;
- проведения стыковочных испытаний с системой
телеметрического контроля;
- проведения дополнительных исследований аппаратуры для
выяснения причин возникновения нештатных ситуаций при комплексных
испытаниях.
На данном рабочем месте аппаратуру системы управления устанавливают на
технологическом оборудовании, а также предусматривают возможность
использования НОЗУ и ПКУ.
Рабочее место автономных испытаний системы управления в составе изделия
предназначено для проверки аппаратуры системы управления, установленной на
штатные места изделия. Данное рабочее место используют и для комплексных
испытаний системы управления в составе изделия.
Рассмотрим состав рабочего места для проведения АИ и КИ. Как правило,
это зал, в котором на специальном приспособлении на рельсовом ходу
монтируют КА (PH). Приспособление позволяет поворачивать КА (PH) вокруг
одной или двух осей, транспортировать его из помещения, в котором проводят
сборку, в зал испытаний, а также в другие помещения в соответствии с
технологическим циклом.
Наземную испытательную аппаратуру систем КА (PH) размещают в
смежных помещениях и соединяют с КА (PH) с помощью кабельной сети. Длины
кабельных линий связи могут доходить до 100 м и более, поэтому некоторые
устройства сопряжения могут располагаться в непосредственной близости к КА.
287
К КА также пристыковывают коммуникации - трубопроводы, подающие
различные газы, воздуховоды системы охлаждения, насадки для антенных
устройств и т. д.
Помещения, в которых размещают испытательную аппаратуру, имеют окна
для наблюдения за ходом испытаний или оборудуются системами служебного
телевидения.
Приспособления, на которых устанавливают КА (PH), перемещают с
помощью электропривода, а в случае тяжелых КА (PH) - с помощью внешней
тяги, например тепловоза. В случае легких КА используют приспособления,
имеющие обрезиненные колеса и перемещаемые вручную.
Программа-методика автономных испытаний системы управления,
разрабатываемая ГО на основании ИД, определяет:
- объект испытаний;
- цель испытаний;
- общие положения по проведению испытаний (порядок
распаковки аппаратуры, домаркировка соединителей, указания по
подключению аппаратуры для проведения различных видов автономных
испытаний);
- объём и методику испытаний;
- последовательность проведения испытаний;
- порядок работы с технологической аппаратурой;
- условия проведения испытаний;
- правила оценки результатов испытаний;
- правила подсчета ресурса приборов;
- требования по безопасности труда;
- материально-техническое обеспечение;
- отчетность;
- действия оператора при возникновении аварийной ситуации
(под аварийной ситуацией понимают сбой или отказ в работе аппаратно-
программных средств наземной проверочной аппаратуры во время
проведения испытаний, блокирующий как проведение текущей проверки,
так и автоматический запуск парирующих действий, а также ситуацию,
требующую экстренного прекращения проверочного цикла и выключения
аппаратуры в целях обеспечения безопасности).
Автономные испытания системы управления проводят в следующем объёме:
- приведение в исходное состояние и проверка стыковки
наземной контрольно-проверочной аппаратуры (наземного проверочно-
пускового оборудования) и аппаратуры системы управления;
— проверка разобщенных цепей аппаратуры системы управления;
- включение и контроль включения аппаратуры системы
управления;
- проверка напряжения питания аппаратуры системы управления;
288
- проверка работы приборов системы управления (ЦБК,
’’командных” приборов, исполнительных органов) с учетом
резервирования;
- проверка правильности совместного функционирования
аппаратуры системы управления;
- проверка оборудования (с учетом резервирования) системы
управления, обеспечивающего взаимодействие со смежными системами;
- проверка бортового ПАО, обеспечивающего штатное
функционирование системы управления в режимах основной работы (ОР);
- проверка наземного ПАО, обеспечивающего наземную
отработку системы управления;
- проверка выходных устройств связи с другими системами;
- проверка функционирования системы управления в режимах
основной работы.
Методически для обеспечения проверок работоспособности программно-
аппаратных средств, приборов системы управления и правильности совместного
функционирования аппаратуры системы управления применяют проверки в
’’связках” и ’’проверочных режимах". Используемые проверки в "связках” и
"проверочных режимах” были отработаны на КС (см. подразд. 4.2, 4.3).
Функционирование системы контролируют в сеансах проверок АИ
(автономные испытания), называемых "комплексами" или КПР (комплексными
программами работы). В каждом "комплексе" реализуется определенный набор
"связок" и "проверочных режимов” в соответствии со штатной логикой работы
системы управления.
В каждом "проверочном режиме" предусмотрены циклы включений, в
которых проводят:
- проверку системы по имитационным сигналам с командных
приборов;
- ввод технологических полетных заданий (ТПЗ),
технологических массивов изменения программы (ТМИЛ),
технологических массивов уставок (ТМУС), технологических массивов
астросистемы (ТМАС), технологических массивов самопроверки (ТСП).
Задание информации (имитационных сигналов) с командных приборов
осуществляют с помощью навесных и встроенных блоков имитации командных
приборов. Имитационные сигналы на датчики моментов ГИВУС
(гироскопического измерителя вектора угловых скоростей) задают от наземной
проверочной аппаратуры системы управления. Имитацию обмена по цифровым
каналам связи аппаратуры УИВК (управляющий информационно-
вычислительный комплекс) изделия с аппаратурой системы управления
осуществляют имитатором канала обмена, соответствующего штатному каналу
связи по параметрам обмена с аппаратурой системы управления.
Проверку выходов системы управления на систему телеметрического
контроля проводят при АИ вне изделия.
289
Контроль функционирования системы управления обеспечивается наземной
проверочной аппаратурой данной системы.
Наземная проверочная аппаратура позволяет:
— проверить на обесточенной аппаратуре цепи питания;
- приводить в исходное состояние и контролировать исходное
состояние наземной и бортовой аппаратуры;
— управлять источниками питания и контролировать состояние
источников питания наземной и бортовой аппаратуры;
- контролировать напряжение шин питания;
- принимать и выдавать релейные сигналы на аппаратуру
системы управления;
- обеспечить задание токов в любом сочетании значений и
направлений обтекания для прибора ГИВУС;
- проводить обмен цифровой информацией между наземной и
бортовой аппаратурой системы управления.
При испытаниях на КИС с помощью наземной проверочной аппаратуры
контролируют техническое состояние и диагностируют неисправности составных
частей системы управления с помощью программных средств.
При АИ системы управления питание бортовой аппаратуры обеспечивается
от наземного источника питания. Напряжение питания на входе в систему
управления контролирует наземная проверочная аппаратура.
Оценку результатов проверок АИ системы управления осуществляют по
данным индикации и регистрации наземной проверочной аппаратуры и анализу
ТМИ.
Комплексные испытания в составе изделия
В данном разделе рассмотрен третий этап испытаний на КИС - комплексные
испытания системы управления в составе КА (PH).
Комплексные испытания систем управления КА и PH с учетом возможного
отсутствия автономных испытаний в составе изделия отличаются по составу и
объёму проверок, поэтому будут рассматриваться раздельно.
Целью комплексных испытаний системы управления является
подтверждение её работоспособности в штатной схеме КА (PH) при
взаимодействии с реальными системами и агрегатами.
Объём комплексных испытаний аппаратуры СУ на КИС в составе КА (PH)
определяется комплексной программной экспериментальной отработкой для
каждого конкретного типа PH или КА в соответствии с требованиями ТЗ.
Комплексные испытания системы управления в составе КА включают в себя:
- стыковочные испытания системы управления со смежными
системами (исключая испытания, выполненные на этапе автономных
испытаний системы управления);
290
- комплексные испытания приборов и БКС в составе
разобранного изделия (КИРИ);
- комплексные испытания приборов и БКС в составе собранного
изделия (КИСИ);
- проверку полярностей системы стабилизации и ориентации КА;
- испытания на электромагнитную совместимость.
Объём комплексных испытаний системы управления КА в целом аналогичен
выполняемому при проведении автономных испытаний в составе изделия.
Отличием выполнения проверки функционирования системы управления в
режимах основной работы (ОР) является то, что для проведения КИ
разрабатывают и отрабатывают на КС отдельные ’’комплексы”, реализующие
"проверочные режимы” для проверки совместного функционирования всех
систем КА. Циклограммы проведения "проверочных режимов" разрабатывают в
соответствии со штатной логикой работы КА при выполнении основных режимов
работы и обеспечивают приближение к реальным условиям функционирования
изделия.
В процессе проведения КИ подтверждают полноту и степень отработки
комплектов КД, ЭД, ТД и определяют техническую готовность системы
управления для дальнейших испытаний.
Для обеспечения проведения комплексных испытаний головная организация
разрабатывает и согласовывает со смежными организациями следующие
документы:
- программу-методику комплексных испытаний системы
управления;
- программу стыковочных испытаний системы управления со
смежными системами;
- руководства для операторов каждой системы изделия по
последовательности и объёму выполняемых действий при комплексных
испытаниях;
- методики оценки ТМИ системы управления при комплексных
испытаниях в составе изделия.
Выполнение проверок, включение и эксплуатацию систем проводят по
командам, передаваемым по голосовой связи от руководителя работ.
При проведении КИРИ аппаратура системы управления установлена на
штатные места изделия, соединена штатной кабельной сетью, при этом
обеспечивается доступ ко всей аппаратуре.
Одним из видов КИРИ являются испытания по частной программе проверки
полярности системы стабилизации, выполняемые с установкой командных
приборов (КП) и исполнительных органов (ИО) на технологические
приспособления.
При проведении КИСИ аппаратура в составе изделия установлена на
штатные места, изделие полностью собрано и герметично закрыто.
291
Для комплексных испытаний аппаратуры СУ в составе PH на КИС
устанавливают:
- ракету-носитель, собранную на заводе-изготовителе;
- систему прицеливания;
- систему дистанционного управления (СДУ);
- систему автономного электроиспытания (САЭ);
- систему регистрации и обработки данных телеметрической
информации;
- оборудование, обеспечивающее предварительную запись
информации в приборы системы хранения данных;
- эквиваленты технологических систем пусковой установки и PH;
- эквиваленты автоматики пиросредств;
- гидросистему, обеспечивающую подачу жидкости к приборам
СУ, требующим дополнительного охлаждения;
- пневмосистему, обеспечивающую вытеснение жидкости из
контуров охлаждения.
Для проведения работ КИС укомплектовывают:
- кабелями-удлинителями для стыковки отдельно
устанавливаемых системы прицеливания и гиростабилизированной
платформы;
- кабелями-удлинителями для стыковки PH с отдельно
расположенным отсеком головной части, предназначенным для установки
полезной нагрузки (КА);
- поворотным столом и подставками для отдельных систем и
сборок.
Перед испытаниями на КИС проводят:
- входной контроль аппаратуры СУ;
- проверку БКС, НКС и элементов автоматики.
При входном контроле аппаратуру СУ подвергают внешнему осмотру для
выявления внешних повреждений, проверке сопроводительной документации,
наличия и целостности пломб.
Проверку БКС, НКС и электрической части элементов автоматики PH после
монтажа в цехе сборки осуществляют специально разработанной проверочной
аппаратурой в соответствии с требованиями программно-методической
документации.
При этом на PH проверяют:
- наличие всех цепей БКС и НКС;
- разобщённость цепей кабельной сети друг с другом и
’’корпусом" PH;
- величину сопротивления обмоток элементов автоматики;
- целостность цепей пироэлементов.
При проведении указанных проверок кабельную сеть к приборам СУ не
подключают.
292
Объём комплексных испытаний аппаратуры СУ на КИС в составе PH
определяется комплексной программной экспериментальной отработкой для
каждого конкретного типа PH в соответствии с требованиями ТЗ.
Основной объём комплексных испытаний аппаратуры СУ на КИС в составе
PH:
- электроиспытания - проверка правильности взаимодействия
аппаратуры СУ со смежными системами в эксплуатационных режимах;
- проверка полярностей систем стабилизации и ориентации PH;
- проверка неадресной стыковки разъёмов приборов;
- испытания на электромагнитную совместимость.
По согласованию с заказчиком объём испытаний аппаратуры может быть
изменён с учётом требований ТЗ.
При комплексных испытаниях в составе PH на КИС головного предприятия-
изготовителя PH определён следующий порядок испытаний аппаратуры СУ:
- поставка аппаратуры, предназначенной для отработки в составе
PH, разрешается только после успешного завершения запланированных
КПЭО предшествующих испытаний с выпуском соответствующих
отчётов (актов). В исключительных случаях поставка аппаратуры для этих
испытаний разрешается по заключению главного конструктора
поставляемой аппаратуры, согласованному с заказчиком, с последующим
оформлением отчёта;
- к испытаниям в составе PH допускается аппаратура СУ,
изготовленная (доработанная) по КД с литерой "О”, откорректированной
по результатам ранее проведенных испытаний, прошедшая
приёмосдаточные испытания, принятая ОТК и ПЗ, при наличии
положительных заключений предприятий-разработчиков и Заказчика (ПЗ)
о допуске аппаратуры к испытаниям;
- испытания аппаратуры в составе PH на КИС проводит Головное
предприятие-разработчик PH совместно с предприятием-разработчиком
аппаратуры и ПЗ в объёме инструкций и программ, разрабатываемых этим
Головным предприятием;
- испытания аппаратуры на КИС в составе PH проводят с
использованием аттестованного технологического оборудования,
обеспечивающего максимальную автоматизацию испытаний и анализ
полученных результатов;
- при обнаружении неисправностей или отказов в процессе
испытаний дефектные приборы рекламируют в установленном порядке в
соответствии с действующим ГОСТ, заменяют на исправные из состава
ЗИП или доработанные на основании актов исследования приборов.
Отказавшие на КИС приборы СУ снимают и направляют на заводы-
изготовители аппаратуры для исследования и ремонта в установленном порядке:
- допускается проводить доработку аппаратуры на месте силами
представителя предприятия-разработчика прибора при наличии
293
с оответствующей доверенности на право выполнения работ с
обязательной отметкой в формуляре (паспорте);
- управление электропроверками осуществляют с помощью
аппаратуры системы дистанционного управления, входящей в состав
оборудования КИС;
- результаты электропроверок аппаратуры СУ при проведении
проверочных режимов и режима КИ анализируют с использованием
средств приёма, регистрации и отработки телеметрической информации и
автоматической регистрации информации на ленте печатающего
устройства, входящего в систему С ДУ;
- по результатам завершения комплексных испытаний на КИС,
проведенных в объёме КПЭО, выпускают соответствующие отчёты по
каждому виду испытаний.
После проведения всех видов испытаний и выполнения заключительных
операций изделие (PH) направляют на технический комплекс космодрома в
соответствии с принятой схемой транспортировки.
Испытания по частным программам
Комплексная программа экспериментальной отработки системы управления
предусматривает в процессе испытаний на КИС проведение различных
дополнительных проверок, выполнять которые невозможно или нецелесообразно
при экспериментальной отработке на предприятии-разработчике.
В основном предусматривается проведение:
- проверки полярностей системы стабилизации и ориентации;
- испытаний на электромагнитную совместимость в составе
собранного изделия с включенными радиосредствами;
- испытаний на устойчивость к разрядам статического электричества в
составе изделия;
-гидравлических и тепловых испытаний для проверки этих режимов
работы при штатной эксплуатации.
При модернизации системы управления могут предусматриваться для вновь
вводимых приборов дополнительные испытания, например гидравлические,
тепловые, испытания на ЭМС.
Для каждого вида работ головная организация разрабатывает и
согласовывает с заинтересованными сторонами специальные программы.
Полярности системы стабилизации и ориентации проверяют для проверки
таких параметров:
294
- сквозной полярности системы стабилизации КА в целях
подтверждения правильности работы тракта "комплекс командных
приборов (ККП) - исполнительные органы (ИО)”;
— полярностей тракта автомата стабилизации PH;
- полярностей тракта расчета кажущейся скорости PH.
При испытаниях командные приборы, датчики устанавливают на
технологические устройства, обеспечивающие формирование возмущающих
воздействий на чувствительных элементах. Исполнительные органы
устанавливают на технологических устройствах, позволяющих контролировать
величину и направление выдаваемого управляющего воздействия системы
управления для парирования возмущающих воздействий, сформированных на
чувствительных элементах.
Испытания на электромагнитную совместимость, на устойчивость к разрядам
статического электричества, гидравлические и тепловые испытания относятся к
разряду специспытаний. Принципы проведения таких испытаний подробно
изложены в предыдущих разделах.
На КИС возможно выполнение дополнительных, не предусмотренных
КПЭО, испытаний по частным программам, например для парирования
нештатных ситуаций, выявленных при работе СУ на автономных и комплексных
испытаниях. Для проведения данных работ предприятие-разработчик системы
управления моделирует выявленные нештатные ситуации на комплексном
стенде, разрабатывает методы парирования и составляет программу выполнения
работ на КИС по устранению нештатной ситуации.
4.8 Испытания на ТК и СК
После завершения всех предусмотренных программами испытаний на
заводах-изготовителях PH и КА транспортируют на космодром или полигон, т.е.
место, откуда будут запускаться PH и КА.
Транспортирование обычно выполняют в специально оборудованных вагонах
железнодорожным или воздушным транспортом. После транспортирования
проводят испытания для проверки работоспособности PH и КА.
Для осуществления испытаний и подготовки к пуску на полигоне
оборудуются так называемые технические комплексы (ТК), которые
располагаются в специальных сооружениях, называемых монтажно-
испытательными корпусами (МИКи).
Состав оборудования ТК во многом совпадает с составом оборудования
КИС. Для PH и КА, как правило, оборудуют отдельные МИКи. Объем проверок,
проводимых на ТК, определяется отдельной программой испытаний КА (PH) на
295
ТК и обычно совпадает с объёмом КИ, выполняемым на КИС. Основная задача
проверок, проводимых на ТК, - убедиться, что при транспортировке PH и КА их
работоспособность не нарушена.
В отдельных случаях в целях снижения затрат работы на ТК, направленные
на проверку непилотируемых космических аппаратов (КА), могут не
выполняться. В таких случаях после завершения комплексных испытаний на
КИС проводят транспортные испытания изделия в целях подготовки к
транспортировке на ТК. После этого изделие возвращают на КИС для проведения
испытаний на ТК.
После выполнения необходимого объема работ, связанных с подтверждением
работоспособности PH и КА в отдельности, осуществляют их стыковку.
Стыковку PH и КА проводят либо в МИКе ракеты-носителя, либо в специальном
МИКе (рис. 4.21, 4.22). После стыковки проверяют связи между системами PH и
КА.
После завершения проверок собранное изделие (PH и КА) транспортируют с
помощью специальной транспортной машины на стартовый комплекс. На
стартовом комплексе проводят:
- установку PH в стартовое положение;
- заключительные проверки систем управления PH и КА;
- заключительные проверки систем телеметрической
информации и радиосвязи;
- выставление и приведение в рабочее состояние
гироскопических платформ систем управления PH и КА;
- заправку PH и КА компонентами топлива;
- заправку систем PH и КА жидкостями и сжатыми газами;
- старт.
С момента отрыва PH от стартового стола начинается этап летных (натурных)
испытаний PH и КА. Наземная же отработка на этом не заканчивается и обычно
продолжается в течение всего времени эксплуатации заказа.
4.9 Специспытания аппаратуры СУ РКТ
В процессе проведения испытаний и эксплуатации изделий РКТ на всех
этапах их жизненного цикла аппаратура СУ функционирует совместно с
аппаратурой других подсистем. К таким подсистемам относятся
радиотехнические системы связи, телеметрических измерений, спутниковой
навигации и т.д. Поэтому на самых ранних этапах изготовления и испытаний
аппаратуры СУ целесообразна проверка электромагнитной совместимости всех
систем, находящихся на конкретном изделии.
296
В реальных условиях как при комплексной наземной отработке, так и при
эксплуатации в точке расположения любого конкретного прибора аппаратуры СУ
действует большое число различного рода излучений, создаваемых приборами
СУ и смежными системами. Учет данных излучений возможен только с помощью
методов теории вероятности и математической статистики.
Рисунок 4.21 - Ракета-носитель в МИКе
Рисунок 4.22 — Монтаж космического аппарата на ракету-носитель
297
Следующим фактором, влияющим на работоспособность аппаратуры СУ,
является электростатический разряд, который может быть обусловлен как
природными явлениями (например, молнией), так и воздействием
обслуживающего персонала. Проверка работоспособности аппаратуры СУ при
воздействии на нее электростатического разряда является неотъемлемой частью
экспериментальной отработки.
К бортовой аппаратуре СУ, учитывая специфику ее эксплуатации,
предъявляют дополнительное требование на устойчивость к воздействию
излучений естественных радиационных поясов земли (ЕРПЗ). Данное
воздействие характеризуется значениями интегральных поглощенных доз
протонного и электронного излучений ЕРПЗ и определяется исходя из
параметров орбиты ЛА; срока активного функционирования ЛА; защитных
свойств элементов конструкции ЛА; взаимного экранирования блоков
аппаратуры внутри конкретного ЛА.
Таким образом, цель проведения специспытаний аппаратуры СУ РКТ:
- проверка электромагнитной совместимости всех
радиоэлектронных систем реального ЛА;
- проверка устойчивости аппаратуры СУ к воздействию
электростатического разряда;
- оценка работоспособности аппаратуры СУ при воздействии
протонного и электронного излучений ЕРПЗ.
4.9.1 Испытания аппаратуры СУ РКТ на электромагнитную совместимость
Электромагнитная совместимость технических средств - способность
технических средств функционировать с заданным качеством в заданной
электромагнитной обстановке и не создавать недопустимых электромагнитных
помех другим техническим средствам.
Примечание: 1) электромагнитная обстановка— совокупность
электромагнитных явлений, процессов в заданной области пространства,
частотном и временном диапазонах; 2) электромагнитная помеха -
электромагнитное явление, процесс, которые снижают или могут снизить
качество функционирования технических средств.
298
4.9.1.1 Помехоустойчивость аппаратуры СУ РКТ
Требования к помехоустойчивости аппаратуры определяются
электромагнитной обстановкой в местах ее установки на объекте РКТ. В
настоящее время международные стандарты регламентируют основные
характеристики ЭМП, воздействующих на аппаратуру объектов РКТ.
Требования стандартов учитывают основные физические процессы,
создающие ЭМП:
- грозовые разряды;
- трибоэлектрические процессы;
- процессы воздействия мощных радиопередающих средств;
- электростатические процессы, вызванные накоплением электрического
заряда на объекте РКТ.
ЭМП, вызванные перечисленными выше процессами, делят на
кондуктивные и излучаемые. Кондуктивные помехи носят характер тока,
текущего по проводящим элементам конструкции аппаратуры: корпусам,
экранам и проводникам кабельных линий связи (КЛС). Излучаемые помехи носят
характер электромагнитных полей, воздействующих непосредственно на прибор
и КЛС.
Примечание: 1) кондуктивные электромагнитные помехи- явление,
процесс, при котором помеха распространяется от источника кондуктивным
путем в проводящей среде; проводящей средой могут быть сигнальные цепи
ввода-вывода, цепи электропитания, экраны, заземлители; 2) излучаемые
электромагнитные помехи - явление, процесс, при котором энергия излучается
источником в пространство в виде электромагнитных волн.
Международные стандарты определяют амплитудно-временную форму
электромагнитных помех, а также методы проведения испытаний.
К кондуктивным ЭМП относятся:
- модулированные гармонические колебания (в диапазоне частот
Af = 10 кГц...200 МГц);
- наносекундные импульсные помехи (длительностью 30 нс с частотой
следования f = 30 Гц);
- затухающие колебания (в диапазоне частот Af - 10 кГц... 100 МГц).
Излучаемые ЭМП - это модулированные гармонические колебания в
диапазоне частот Af = 2 МГц.. .40 ГГц.
В основу методов испытаний аппаратуры на воздействие ЭМП положен
принцип имитации ЭМП, трансформированных на канале источника, канал
распространения, рецептор (аппаратура СУ РКТ). Процедура испытаний
заключается в том, что на входы работающей аппаратуры подаются импульсы от
стандартного испытательного генератора и при этом контролируется
правильность работы аппаратуры: отсутствие ложных срабатываний,
«зависания», перезагрузки и физического ее повреждения.
Порядок проведения испытаний аппаратуры на воздействие ЭМП:
299
Первый этап. Собирается рабочее место испытаний, состоящее из
генератора помех, устройства ввода помех в аппаратуру, эквивалента сети,
пробников регистрации помех, испытываемого прибора и контрольно-
измерительной аппаратуры.
Второй этап. Проверяется функционирование аппаратуры в схеме рабочего
места.
Третий этап. Имитируется ЭМП, воздействующая на аппаратуру.
Контрольно-измерительной аппаратурой регистрируется работоспособность
аппаратуры в момент и после воздействия помехи.
Расположение аппаратуры на рабочем месте при испытаниях на
устойчивость к воздействию излучаемых электромагнитных помех показано на
рис. 4.23.
Генератор
Усилитель мощности
Рисунок 4.23 - Расположение аппаратуры на рабочем месте
при испытаниях на устойчивость к воздействию излучаемых
электромагнитных помех
При проведении данного вида испытаний используемая аппаратура имеет
различное функциональное назначение:
- экранированная камера обеспечивает экранировку объекта испытаний от
внешних электромагнитных факторов;
300
- антенна излучает энергию электромагнитного поля необходимых
амплитудно-временных параметров. При проведении испытаний используется
набор антенн, перекрывающих диапазон частот Af= 2 МГц ... 40 ГГц. Например,
вдиапазоне частот Af= 1...18 ГГц может быть использована рупорная антенна;
- генератор помех создает помехи необходимой амплитудно-временной
формы. Форма колебательного процесса (модулированный радиочастотный
сигнал) на выходе генератора при проведении испытаний на устойчивость к
воздействию излучаемых электромагнитных помех показана на рис. 4.24;
U, В
Рисунок 4.24 - Форма колебательного процесса
- усилитель мощности создает необходимую мощность (от 20 до 100 Вт),
подводимую к антенне;
- КИП обеспечивает необходимый режим функционирования объекта
испытаний и регистрацию процесса влияния помех на работоспособность объекта
испытаний;
На рис. 4.25 повказана зависимость g(t) при тестовой проверке
работоспособности аппаратуры бесплатформешюй инерциальной навигационной
системы во время воздействия электромагнитных помех.
Критериальным параметром для оценки обработанных результатов
испытаний в данном случае являются измерения величины ускорения свободного
падения g, численные значения которых не должны превысить g = 9,815 м/с2 во
время воздействия электромагнитных помех.
301
Рисунок 4.25 — Зависимость g(t) при тестовой проверке
работоспособности аппаратуры
Анализируя рис. 4.25, можно сделать вывод, что в некоторые моменты времени
наблюдается превышение величины g = 9,815 м/с2, что свидетельствует о нарушении
функционирования аппаратуры и необходимости ее доработки.
Расположение аппаратуры на рабочем месте при проведении испытаний на
устойчивость к воздействию кондуктивных ЭМП показано на рис. 4.26.
При проведении испытаний аппаратура, показанная на рис. 4.26, имеет
следующее функциональное назначение:
- генератор помех создает помехи необходимой амплитудно-временной
формы. Форма испытательного наносекундного импульса, имитируемого
генератором помех при испытаниях аппаратуры на устойчивость к воздействию
наносекундных импульсных помех, показана на рис. 4.27;
- устройство развязки-связи осуществляет электрическую связь между
генератором помех и испытуемым оборудованием, а также развязку между ними
и сетью питания, не допуская таким образом влияния генерируемых помех на
цепи питания объекта испытаний;
302
- эквивалент сети выполняет функцию заграждающего фильтра для помех
в сеть питания;
- КИП обеспечивает необходимый режим функционирования объекта
испытаний и регистрацию процесса влияния помех на работоспособность объекта
испытаний. Состав и функции КИП зависят от функционального назначения
объекта испытаний.
Проверка работоспособности аппаратуры при воздействии кондуктивных
помех аналогична проверке работоспособности при испытаниях на устойчивость
к воздействию излучаемых электромагнитных помех.
В качестве примера на рис. 4.28, 4.29, «а» и «б» приведены фрагменты
рабочего места при проведении испытаний на устойчивость к воздействию помех.
Сеть питания
КИП
Рисунок 4.26 - Расположение аппаратуры на рабочем месте
при проведении испытаний на устойчивость
к воздействию кондуктивных ЭМП
Генератор помех
303
Рисунок 4.27 - Форма испытательного наносекундного импульса
Рисунок 4.28 - Фрагмент рабочего места при проведении испытании
на устойчивость к воздействию кондуктивных помех
304
a
б
Рисунок 4.29 - Фрагмент рабочего места при проведении испытаний на
устойчивость к воздействию модулированных гармонических колебаний: а -
вертикальная поляризация антенны; б - горизонтальная поляризация антенны
Типовое испытательное оборудование и средства измерительной техники,
используемые при проведении испытаний на ЭМС, приведены в табл. 4.6.
305
Таблица 4.6 - Типовое испытательное оборудование и средства измерительной
________техники, используемые при проведении испытаний на ЭМС_______
Наименование оборудования Наименование вида испытаний Основные технические характеристики
Экранированная камера Устойчивость к воздействию радиационных электромагнитных помех Эффективность экранирования - > 30 дБ Диапазон частот - 0,01... 1000 МГц
Измерение уровней напряженности поля радиопомех, создаваемых аппаратурой при функционировании
Генератор помех Устойчивость к воздействию наносекундных импульсных помех Амплитуда импульсов - 0,5...4 кВ Выходное сопротивление - 50 Ом Длительность импульса - 30 нс Длительность переднего фронта -2 нс Частота следования импульсов - 30 Гц
Генератор сигналов Устойчивость к воздействию модулированных гармонических колебаний Диапазон частот &f= 2 МГц...40 ГГц. Частота модуляции - 1 кГц. Глубина модуляции - 80%
Генератор помех Устойчивость к воздействию затухающих колебаний Амплитуда импульсов - 0,5...5 кВ Диапазон частот Af= 10 кГц... 100 МГц. Внутреннее сопротивление - 12 Ом. Степень затухания - 60%
Измеритель радиопомех Измерение уровней индустриальных радиопомех (напряжение радиопомех) Диапазон измерения: -20 ...+ 125 дб/мкВ Диапазон частот: 9 кГц...30 МГц
Измеритель радиопомех Измерение уровней индустриальных радиопомех (напряженность поля радиопомех) Диапазон измерения: 0 ...125 дб/мкВ Диапазон частот: 26 ...1000 МГц
Анализатор спектра Измерение уровней индустриальных радиопомех Диапазон измерения до 18 ГГц
306
Окончание табл. 4.6
Наименование оборудования Наименование вида испытаний Основные технические характеристики
1 2 3
Эквивалент сети Измерение уровней напряжения радиопомех Частота 0,15.. .30 МГц Ток нагружения меньше 10 А
Измерительные антенны Измерение уровней индустриальных радиопомех Диапазон измерения напряженности поля: 0,009 МГц... 18 ГГц
4.9.1.2 Помехоэмиссия аппаратуры СУ РКТ
Помехоэмиссия- генерирование источником помехи электромагнитной
энергии, которая может излучаться в пространство или распространяться
кондуктивным путем.
ЭМП, создаваемые аппаратурой, занимают особое место среди других
непреднамеренных помех. Большинство из них характеризуется сплошным
спектром в диапазоне радиочастот от 9 кГц до 18 ГГц.
В соответствии со стандартами этот вид помех называется
индустриальными радиопомехами.
Примечание: индустриальные радиопомехи- электромагнитные помехи,
создаваемые техническими средствами. К индустриальным помехам не относятся
помехи, создаваемые излучениями выходных трактов радиопередатчиков.
Процедура испытаний включает в себя:
- измерения уровней напряжения и токов кондуктивных радиопомех
(U, дБ (мкВ)), создаваемых аппаратурой при функционировании;
- измерения уровней напряженности поля радиопомех (Е, дБ (мкВ/м)),
создаваемых аппаратурой при функционировании.
В основе методов испытания аппаратуры (источников ИРП) лежат методы
измерения напряжений и токов кондуктивных помех в диапазоне частот от 9 кГц
до 100 МГц, а также параметров, характеризующих электромагнитное поле помех
в диапазоне частот от 9 кГц до 18 ГГц.
Процедуры методик измерения ИРП определяются нормативными
документами (ГОСТ, ДСТУ, MIL Std 461). Основными этапами методик
испытаний являются:
Первый этап. Сборка рабочего места измерения, состоящего из следующего
оборудования:
- датчики тока, напряжения и напряженности поля;
- измеритель радиопомех;
- оборудование, определяющее электромагнитные условия измерений;
- испытуемые приборы;
- контрольно-измерительная аппаратура обеспечения реального
функционирования испытуемого прибора.
307
Места размещения оборудования регламентируются стандартами для
конкретного вида аппаратуры. Расположение аппаратуры при испытаниях по
измерению уровней напряжения радиопомех показано на рис. 4.30, при
измерении уровней напряженности поля радиопомех - на рис. 4.31.
Эквивалент сети
Объект
испытаний
Измеритель помех
КИП
Рисунок 4.30 -Аппаратура измерения уровней напряжения радиопомех,
создаваемых при функционировании
Оборудование, используемое при испытаниях по измерению уровней
напряжения радиопомех, имеет различное функциональное назначение:
- эквивалент сети создает необходимую измерительную среду и
согласовывает вход измерителей радиопомех с полным сопротивлением цепи
питания;
- КИП обеспечивает необходимый режим функционирования объекта
испытаний;
- измеритель помех используется для измерения уровней напряжения
создаваемых радиопомех. В качестве измерителя помех должен использоваться
прибор с техническими характеристиками (диапазон измерения напряжения,
диапазон частот), позволяющими провести измерения в диапазоне частот от
9 кГц до 100 МГц.
308
кип
Измеритель помех
Рисунок 4.31 -Аппаратура измерения уровней напряженности поля радиопомех,
излучаемого при функционировании
Оборудование, используемое при измерении уровней напряженности поля
радиопомех, излучаемых аппаратурой, выполняет следующие функции:
- экранированная камера обеспечивает экранировку объекта испытаний от
влияния внешних электромагнитных факторов;
- антенна соединена с измерителем помех, используется для измерения
уровней напряженности излучаемого электромагнитного поля;
- измеритель помех определяет уровни напряженности поля излучаемых
радиопомех. В качестве измерителя помех должен использоваться прибор с
техническими характеристиками (диапазон измерения, диапазон частот),
позволяющими провести измерения в диапазоне частот от 9 кГц до 18 ГГц;
- КИП используется для обеспечения необходимого режима
функционирования объекта испытаний.
Второй этап. Включают в работу испытуемый прибор в условиях рабочего
места. Устанавливают режим функционирования прибора с максимальными
уровнями создаваемых помех.
Третий этап. Проведение измерений уровней ИРП, создаваемых прибором
в требуемом диапазоне частот.
Четвертый этап. Анализ и обработка результатов измерений и сравнение с
допустимыми нормами уровней ИРП на испытуемый прибор.
По окончании испытаний измеренные уровни ИРП анализируются,
обрабатываются с учетом технических особенностей используемого при
испытаниях оборудования.
309
В частности, при обработке результатов уровней напряжения радиопомех к
измеренным на каждой частоте значениям напряжения добавляется величина
коэффициента затухания эквивалента сети и измерительного кабеля. Величина
данного коэффициента зависит от типа используемого эквивалента сети,
приведена в технической документации эквивалента сети.
При обработке результатов испытаний по измерению уровней
напряженности поля радиопомех учитывают коэффициенты затухания
используемых при испытаниях антенн, которые добавляют к измеренным
значениям. Коэффициенты затухания антенн приведены в технической
документации на антенны.
Порядок обработки результатов при проведении измерений уровней ИРП
описан в подразд. 4.9.3.
Обработанные результаты измерений сравнивают с допустимыми уровнями
индустриальных радиопомех, заданных в техническом задании на разработку
аппаратуры. Результаты испытаний считаются положительными, если
измеренные уровни ИРП не превышают нормированных значений во всем
диапазоне частот.
4.9.1.3 Испытания элементов аппаратуры на радиационную
стойкость
Испытания на радиационную стойкость проводят на моделирующих
установках, которые представляют собой источники радиационных воздействий,
имеющие единую или близкую физическую природу и характеристики с
радиационными факторами, воздействующими на изделия РКТ в реальных
условиях эксплуатации. Моделирование воздействия излучений ядерных
энергетических установок осуществляют на исследовательских ядерных
реакторах различного типа, работающих в специальных режимах. Большинство
таких реакторов являются реакторами на тепловых нейтронах, что приводит к
большой наведенной радиоактивности на испытуемых элементах аппаратуры и
затрудняет работу с ними.
В отдельных случаях испытания проводят с использованием имитирующей
установки. В имитирующих установках используют источники воздействий
различной физической природы, обеспечивающие адекватное проявление и
моделирование в элементах аппаратуры доминирующих эффектов, вызываемых
воздействием радиационных факторов в реальных условиях эксплуатации
изделий РКТ. Имитационные испытания проводят, когда отсутствуют
соответствующие моделирующие установки, а также при отработке методик
испытаний в части выбора параметров- критериев стойкости аппаратуры,
режимов и условий испытаний, при проверке применяемых технологических,
конструктивно-топологических, схемотехнических и функциональных решений,
направленных на снижение радиационной чувствительности аппаратуры.
Воздействие электронной составляющей излучения космического
пространства моделируют с помощью ускорителей электронов или бета-
установок с закрытыми радионуклеидными источниками, среди которых
310
наиболее подходящими для моделирования являются источники на основе
изотопа стронция 90, иттрия 90 со средней энергией в диапазоне 0,7... 1,1 МэВ.
Энергетический спектр электронного излучения космического
пространства отличается от спектра радионуклеидного источника и не имеет
ничего общего с моноэнергией электронного ускорителя. Эти различия
учитывают в методиках испытаний введением соответствующих коэффициентов,
эквивалентных воздействию указанных излучений. Большинство ускорителей
электронов работает в импульсном режиме, т.е. при плотности потока электронов
в импульсе, на несколько порядков превышающей плотность потока электронов в
космическом пространстве, что может сказаться на результатах испытаний
некоторых элементов аппаратуры.
Воздействие протонной составляющей излучения космического
пространства на элементы аппаратуры моделируют с помощью ускорителей
протонов. При этом необходимо учитывать отличия энергетических спектров
протонов космического пространства от моноэнергии ускорителя протонов и
большую разницу в плотностях потоков излучения, так как ускорители протонов,
как и электронов, работают в импульсном режиме. Воздействие тяжелых
заряженных частиц космического пространства моделируют с помощью
ускорителей тяжелых ионов или облучением осколками деления калифорния 252,
которые имеют средние энергии 103 и 79 МэВ.
Возникновение структурных нарушений в элементах аппаратуры при
воздействии электронов и протонов космического пространства можно
имитировать с помощью a-излучения закрытых радионуклеидных источников.
Наиболее подходящими являются источники на основе плутония 238, в которых
за счет а-распада возникают частицы с энергией ионов 5 МэВ, имеющие пробег в
кремнии 20 - 25 мин, т.е. способны проникать в активные области большинства
полупроводниковых элементов аппаратуры. Однако в этих случаях испытания
следует проводить на полупроводниковых элементах с удаленной верхней
крышкой корпуса полупроводникового элемента.
При экспериментальных исследованиях аппаратура облучается
специальными радиационными источниками, например, на основе Со60. В
процессе проведения испытаний с помощью КИП контролируется
работоспособность объекта испытаний. В результате испытаний определяется
доза облучения, к которой устойчива испытуемая аппаратура.
Нормы испытаний на воздействие электронного и протонного излучения
космического пространства кроме учета относительной эффективности,
связанной с различной энергией излучения моделирующей установки и
реального спектра излучений в космическом пространстве, должны учитывать
ослабление потока электронов и протонов элементами конструкции корпуса
прибора. Данное ослабление учитывается путем расчета ослабления плотности
спектра излучения при прохождении корпуса изделия РКТ, корпуса приборов,
элементов конструкции приборов и т.п., вплоть до полупроводниковых
элементов приборов.
311
В случае, если нет возможности экспериментального подтверждения
требований по радиационной стойкости, проводят расчетную оценку.
Метод расчетной оценки основывается на определении количественных
показателей радиационной стойкости аппаратуры к воздействию ионизирующего
излучения космического пространства. Оценку проводят с применением
элементного метода, а также данных по результатам радиационных испытаний
элементов, функционально законченных узлов, материалов и проводов на
моделирующих установках (МУ) ИИ.
Критериями выполнения аппаратурой требований ТЗ по радиационной
стойкости к воздействию ИИ КП являются значения коэффициентов запаса
аппаратуры, определяемые согласно выражениям:
К3аае = Дест ДеТЗ » (4-3)
^зап.р — Дрст / Д рТЗ • (4-4)
где Кзапе, Кзап р - коэффициенты запаса аппаратуры по стойкости к
воздействию электронного и протонного излучений, соответственно;
Дест’ Дрст “ показатели стойкости аппаратуры к воздействию электронного и
протонного излучений, соответственно;
Детз» Дртз “ требования ТЗ на аппаратуру по стойкости к воздействию
электронного и протонного излучений, соответственно.
Условием соответствия аппаратуры заданным требованиям ТЗ по
стойкости к воздействию ИИ КП являются значения коэффициентов запаса
(Кзапе, Кзапф), удовлетворяющие согласно нормативной документации
соотношениям:
Кзап.е — Ю ?
Кзап.р
при этом экспериментальное подтверждение радиационной стойкости
аппаратуры на МУ ИИ не требуется.
При значениях коэффициентов запаса, обеспечивающих выполнение
неравенств
1<Кзапе <10, 1<Кзапр<10
следует, что аппаратура обеспечивает выполнение требований ТЗ по
радиационной стойкости к воздействию ИИ КП, при этом требуется
экспериментальное подтверждение стойкости аппаратуры (критичного узла,
блока, фрагмента кабеля) на МУ ИИ,
При значениях коэффициентов запаса, обеспечивающих выполнение
неравенств
1^зап.е < 1 ’ Кзап.р < 19
следует, что аппаратура не соответствует требованиям ТЗ по радиационной
стойкости и подлежит доработке в установленном порядке.
312
Пример использования расчетного метода оценки радиационной стойкости
для двух элементов
Предположим, что согласно требованиям ТЗ аппаратура должна
обеспечивать требуемые характеристики во время и после воздействия
ионизирующих излучений космического пространства с параметрами:
ДеТЗ =6,6х103 рад; ДрТЗ =1,4хЮ3 рад.
Допускается проводить оценку радиационной стойкости к суммарной дозе
(Д - Total Dose) электронного и протонного ионизирующего излучения
3 3
Д = Де ТЗ+ДрТЗ- Для рассматриваемого случая Д = 6,6x10 + 1,4x10 =
= 8,Ох1О3 рад.
В результате анализа экспериментальных данных было установлено
следующее:
- элемент AD590KH (термодатчик) устойчив к воздействию дозы
облучения Д1 = 20 х 103рад (Total Dose);
- элемент AD9764ARU (D/А Converter ) устойчив к воздействию дозы
а
облучения Д2 = 75 х 10 рад (Total Dose).
Экспериментальные значения стойкости данных элементов к поглощенной
3 3
дозе (Д1 =20x10 рад и Д2 = 75x10 рад) превышают значения уровня
а
поглощенной дозы, заданной в требованиях ТЗ (Д = 8,0x10 рад). На основании
этого можно сделать вывод о правильности выбора данных двух элементов в
качестве комплектующих изделия.
Коэффициент запаса стойкости элемента AD590KH:
Кзап = 20 • 103 рад/8 • 103 рад = 2,5.
Коэффициент запаса стойкости элемента AD590KH:
Кзап = 75 • 103 рад/8 • 103 рад « 9,4.
Коэффициенты запаса обоих элементов удовлетворяют требованиям
1<Кзап <10.
На основании полученных результатов можно сделать вывод о том, что
данные элементы соответствуют требованиям ТЗ. Заключение о необходимости
экспериментального подтверждения требований ТЗ приведенными выше
элементами можно дать после детального анализа всей номенклатуры элементов,
используемых в данном приборе и определении критичных элементов,
определяющих нормальное функционирование аппаратуры.
313
4.9.3 Накопление, обработка и хранение информации о результатах
испытаний
4.9.3.1 Анализ требований по автоматизации регистрации и хранения
результатов испытаний
Результаты испытаний регистрируют в журналах регистрации испытаний,
кроме того, в целях автоматизированного формирования протоколов испытаний
регистрация результатов проводится в электронном виде с помощью
автоматизированной системы ввода и хранения данных согласно нормативным
документам. АС ВХД является частью «Базы данных системы
автоматизированного комплексного анализа результатов испытаний ».
Ядром АС ВХД является база данных.
При проектировании структуры БД была учтена специфика анализа
первичных данных для формирования протоколов испытаний, например, по
направлениям: механические и климатические воздействия, ЭМС, радиационная
стойкость. Согласно ДСТУ ISO/IEC 17025:2006 результаты испытаний
необходимо регистрировать в протоколах испытаний, и они должны содержать
всю необходимую для толкования результатов испытания информацию, а также
всю информацию, которая необходима для используемого метода испытаний.
Форма протоколов испытаний АС ВХД разрабатывается с учетом требований
ДСТУ ISO/IEC 17025:2006 и содержит поля для внесения всех необходимых
данных, которые должны быть отражены в протоколах.
При разработке АС ВХД в базе данных учтена необходимость хранения
информации о пользователях, а также права и доступ на создание и
редактирование протоколов испытаний.
В структуре БД, показанной на рис. 4.32, реализованы требования по
регистрации и хранению данных для отражения в протоколах испытаний.
Ниже приведено назначение таблиц БД.
Таблица «Протокол» содержит базовую информацию о каждом протоколе,
например номер протокола, обозначение и характеристику объекта испытаний,
цель испытаний, дату, место и условия проведения испытаний.
Таблица «Сертификат аккредитации» содержит информацию о номере
аттестата аккредитации, дате выдачи и сроке действия.
Таблица «Основание» содержит информацию об основании для проведения
работ по испытаниям (номер договора, номер решения органа по сертификации
на проведение сертификационных испытаний).
Таблица «Объект испытаний» содержит информацию о наименовании
объекта испытаний, количестве образцов, заводском (серийном) номере.
Таблица «Представители сторонней организации» содержит информацию о
сотрудниках сторонних организаций, принимавших участие в проведении
испытаний.
Таблица «Пользователь» содержит информацию об именах пользователей и
кодах доступа к БД.
Таблица «Права пользователя» содержит информацию о категории прав
пользователей. Категория «администратор» включает в себя все функции
314
системы АС ВХД. Категория «испытатель» содержит функции создания и
редактирования протоколов. Категория «метролог» включает в себя функции
создания и редактирования видов испытаний, испытательного и измерительного
оборудования, а также нормативных документов.
Таблица «Испытатель» описывает взаимосвязь пользователя и категорий
испытаний.
Таблица «Испытатель, проводивший испытания» содержит информацию об
испытателях, проводивших испытания, результаты которых приведены в данном
протоколе.
Таблица «Испытательное оборудование» содержит информацию о
наименовании испытательного оборудования, средств измерительной техники, их
заводских (серийных), инвентарных номерах, датах аттестации (метрологической
поверки), а также погрешности измерений.
Таблица «Категория испытаний» содержит наименования проводимых
испытательным центром категорий испытаний: на электромагнитную
совместимость, на радиационную стойкость, электробезопасность, на
механические и климатические воздействия.
Таблица «Вид испытаний» содержит информацию о наименовании вида
испытаний и его взаимосвязь с категорией испытаний.
Описанные в 4.9.1.1, 4.9.1.2 виды испытаний относятся к категории
«ЭМС», описанные в 4.9.1.3 - к категории «радиационная стойкость», описанные
в 4.3.2.1 - к категории «ЭБ», описанные в 4.3.2.2- к категории «механические
воздействия», описанные в 4.3.2.3 - к категории «климатические воздействия».
Таблица «Нормативная документация» содержит обозначение,
наименование нормативной документации (ДСТУ, ГОСТ и т.д.) на
испытываемую продукцию и метод испытаний.
Таблица «Испытание» описывает взаимосвязь вида испытаний и
нормативной документации.
Таблица «Результаты испытаний» содержит информацию о полученных
результатах по виду испытания конкретного объекта. В одном протоколе могу!'
быть приведены результаты нескольких видов испытаний, относящиеся к одной
категории, и только для одного и того же объекта испытаний.
Взаимосвязь таблиц БД осуществляется путем регистрации срязи между
первичными и внешними ключами, запланированными при конструировании
таблиц.
Связь задает отношение между полями таблиц, имеющими одинаковые по
смыслу значения, например, между первичным ключом одной таблицы и
внешним ключом другой таблицы. Связи создаются на уровне базы данных (в
этом случае возможна поддержка ссылочной целостности данных). Связи на
уровне базы данных являются постоянными связями и актуальны при любых
действиях, выполняемых с таблицами.
315
Протокол
ProtocoIJd Certificatejd Protocol_number Protocol-date T est_category-id Object_group-name Purpose Description_object В usiness_makerJd Business-CustomerJd Reason-typejd Reason-description Certificate-decision Statement-number ldentification_number Test_date Reaiization_date Location Condition Код протокола Код сертификата Номер протокола £Й®-ория Й8№ВВьнВ₽гной группы Цель Характеристика объекта Ш»даа:изготовитег,я (ВДЖания Описание основания Решение органа по сертификации Номер акта Номер идентификации Дата проведения испытаний Дата получения образцов Место проведения испытаний Условия проведения испытаний
Сертификат аккредитации
Certificate_id Certificate_number Certificate_start_date Certificate_end_date Код сертификата Номер аттестата Дата получения Дата окончания
Предприятие-изготовитель
Bustness_maker_id Name Adress Telephone Fax Mail Director Represent Код изготовителя Наименование Адрес Телефон Факс Е mail Руководитель Представитель
Основание
ReasonjtypeJd Name Код основания Договор или гарантийное письмо
Представители сторонней организации
Representative_out_organ_id ProtocoIJd Name Post Код сотрудника сторонней организации Код протокола Ф.И.О. Должность
Предприятие-заказчик
Business-Customerjd Name Adress Telephone Fax Mail Director Represent Код заказчика Наименование Адрес Телефон Факс Email Руководитель Представитель
Испытатель, проводивший испытания
Selectedjesterjd ProtocoIJd Testerjd Код категории испытателя Код протокола Код испытателя
Объект испытаний
Test_objectJd ProtocoIJd Production_name Designation Count Factory_number Код продукции Код протокола Название продукции Обозначение Количество образцов Заводской (серийный) номер
Испытатель
Testerjd App-user_id Test_category Jd Код испытателя Код пользователя Код категории испытания
Категория испытаний
Test_categoryJd Name г\ид kui ширин испытания Название категории
Права пользователя
Rolejd Name Код прав пользователя Название категории
2 0
•л
Пользователь
App_userjd Login PWD Name Post Код пользователя Логин Пароль Имя пользователя Должность пользователя
Привязка пользователя к категории испытаний и правам доступа
App_user_role Ji nk_ic App_user_id Test_categoryJd Rolejd Код связи доступа Код пользователя Код категории испытания Код прав пользователя
Рисунок 4.32 - Структуры БД регистрации и хранения данных для отражения в
протоколах испытаний.
316
Испытание
Test_id Protocoljd Requirementjd Method id ND_additional_R ND_additional_M Point_R Point M Testjypejd Код испытания Код протокола Код НД на испытываемую продукции Код НДна метод испытания ТУ или ТЗ на продукцию ТУ или ТЗ на методику испытаний Пункты Пункты Код вида испытания
Результаты испытаний
Result id TestJdT Condition Receive_result Store OotionR Код результата Код испытания Режим Полученные результаты Определитель для ЭМС Запас
Нормативный документ в привязке к виду испытаний
Normative documentjd Test_typejd State_standardjd Код нормативного документа Код вида испытаний Код НД на испытываемую продукцию или методику испытаний
Нооматив ная документация
State_StandardJd Name Код НД на испытываемую продукцию или методику испытаний Наименование НД
Вид испытаний
Test_type_id Test_category_id Description_kind Код вида испытаний Код категории испытания Описание вида испытаний
Привязка испытательного оборудования к испытанию
Equipment-for_testjd Test equipment id Testld Код испытательного оборудования Код оборудования Код испытания
Привязка испытательного оборудования к виду испытаний
Test_equipment_link_id Test_type_id Т est_equipment_id Код связи оборудования Код вида испытаний Код испытательного оборудования
Испытательное оборудование
Test equipmentidjd Equipment_name Factory_number Investor-number Metrological verification 1 nstrumentafibn_test Fault Код испытательного оборудования Название оборудования Заводской (серийный) номер Инвентарный номер Метрологическая поверка Испытательное оборудование или измерения Погрешность
Рисунок 4.32 - Продолжение
В структуре БД были использованы связи двух видов: один-ко-многим
(one-to-many) и многие-ко-многим (many-to-many).
Один-ко-многим (one-to-many). В этом случае каждой записи таблицы А
может соответствовать много записей таблицы Б (или ни одной). В свою очередь,
каждой записи таблицы Б соответствует в точности одна запись таблицы А.
Таблица А в такой связи называется главной, а таблица Б — связанной или
317
подчиненной (например, связь между таблицами «Протокол» и «Испытание»,
«Испытание» и «Результаты»),
Многие-ко-многим (many-to-many). Многим записям из таблицы А может
соответствовать много записей из таблицы Б (и наоборот). Такая связь была
организована с помощью третьей вспомогательной таблицы, в которой с каждым
первичным ключом из таблицы А сопоставлен первичный ключ из таблицы Б. По
сути, связь типа многие-ко-многим (many-to-many) представляет собой две связи
типа один-ко-многим (one-to-many). При этом таблицы А и Б расположены со
стороны один (one), а вспомогательная таблица — со стороны многие (many).
Примером связи многие-ко-многим (many-to-many) является связь между
таблицами «Вид испытаний» и «Нормативная документация», организованная с
помощью таблицы «Нормативный документ в привязке к виду испытаний».
4.9.3.2 Алгоритмическое описание обработки результатов
испытании
Обработка результатов испытаний может происходить как программно
(путем обработки результатов испытаний и сравнения с эталонами), так и в виде
ведения журналов испытаний (например, фиксации повреждений корпуса
испытуемой аппаратуры при механических испытаниях). Наиболее важным
является алгоритмическое обеспечение обработки результатов испытаний по
виду - измерение уровней излучаемых радиопомех, создаваемых прибором при
функционировании, описанном в 4.9.1.2.
В процессе испытаний на радиопомехи устанавливают соответствие
порождаемых помех и эталонных (нормируемых) значений требованиям на
различных частотах измерений.
Статистическое значение радиопомех в децибелах вычисляется на каждой
контрольной частоте по формуле (4.5) и не должно превышать нормируемое
значение радиопомех, а все сопутствующие вычисления осуществляются
следующим образом:
A = X + k-S, (4.5)
— 1 п
Х = ~ЁХ1> (4.6)
ni=0
Ji п --------2
—rS(xi-X) - (4-7)
n-1i=l
п । —I
d.-Ud--------
n ------2
JS(xi-X)
fl rd_____
I n
где A - статистическое значение радиопомех, дБ;
X - выборочное среднее значение результатов измерений напряжения
(4-8)
318
(напряженности поля) радиопомех, дБ. Вычисляется по формуле (4.6);
к - коэффициент, зависящий от количества испытанных устройств;
S - выборочное среднеквадратическое отклонение, дБ. Вычисляется по
формуле (4.7);
п - количество испытанных устройств;
Xj - значения измерений напряжения (напряженности поля) радиопомех.
При обработке результатов испытаний в соответствии с ГОСТ 16842
производится проверка нормальности закона распределения случайных
погрешностей по формуле (4.8).
Результаты испытаний можно считать распределенными нормально, если
0,7304< d < 0,9001 (согласно ГОСТ 8.207 приложения 1).
Введенные данные обрабатываются в программе путем реализации
алгоритма, описанного на рис. 4.33.
На рис. 4.33 введены следующие обозначения:
Т - массив значений частот, на которых проводились измерения;
Xj - снятые показания излучаемых радиопомех;
kt - коэффициент усиления антенны;
k к - коэффициент затухания кабеля;
Xj - показания излучаемых радиопомех с учетом коэффициентов
затухания кабеля и/или коэффициентов усиления антенн;
А л - нормируемое значение радиопомех;
п - число испытанных устройств;
s - количество частот, на которых проводятся измерения;
S - среднеквадратическое отклонение;
t, i - счетчики;
а - доверительная вероятность;
Кд - допускаемое число устройств, у которых значение радиопомех
превышает нормируемое;
К - коэффициент, зависящий от числа устройств;
X - конечные результаты измерений;
X - выборочное среднее значение результатов измерений;
Xpj - нормируемое значение радиопомех для случая, когда число
испытанных устройств меньше трех;
А - статистическое значение радиопомех;
Атах _ максимальное статистическое значение радиопомех;
Ащахн “ нормируемое значение радиопомех для частоты, на которой
наблюдается максимальное превышение;
^шах _ частота, на которой наблюдается максимальное превышение;
Трг) - начальная частота, на которой наблюдается превышение;
'Ррг2 - конечная частота, на которой наблюдается превышение;
Res - массив, содержащий конечные выводы по каждой частоте.
319
Начало
| Вид испытания |
Ввод Ф - массив значений частот, на которых проводились измерения; х( - снятые показания ИРП; kt-
коэффициент усиления антенны; к^- коэффициент затухания кабеля; X,- показания ИРП с учетом
коэффициентов затухания кабеля и/или коэффициентов усиления антенн; Ан-нормируемое
значение радиопомех; п - число испытанных устройств; s - количество частот, на которых
проводятся измерения
Коэффициент кк определяется:
для напряженности поля радиопомех - в
зависимости от типа используемой
антенны и частоты;
' V——I для напряжения радиопомех - при
X^xj + kfc+kt использовании NNB101 + STV301 =+6 дБ,
1-------------1 K1MR 1 ГМ * QMV _ 11 = +1R лК
NNB 101 + SMV-11 =+16 дБ
Нет
^Хн-ЗдБ
V-1;
Нет
Да
е&.1 =true
Нет
| Rest:=
F^’l
, т
| Res,:=false |
Нет
Вывод результатов. 'Измеренные значения превышают нормируемые в
диапазоне частот of ‘до’ . 'Максимальное превышение наблюдается на
частоте’ , где измеренное значение’ АтВХ ‘при нормируемом’ Атахн-
Конец
Рисунок 4.33 - Алгоритм обработки результатов при проверке уровней
излучаемых радиопомех, создаваемых при функционировании
После программной обработки на основе описанных выше алгоритмов
измеренных результатов испытаний получают статистическое значение
радиопомех и проводится автоматическое сравнение полученных результатов с
320
эталонными значениями. Формируются также графики полученных результатов,
показанные на рис. 4.34.
Описание ПО приведено в следующем разделе.
Рисунок 4.34 - Результаты испытаний при измерении уровней напряженности
поля радиопомех, создаваемых при функционировании
4.9.3.3 Описание работы программного обеспечения АС ВХД
Программное обеспечение АС ВХД реализовано в виде web-приложения.
После авторизации пользователю предоставляется возможность создать новый
протокол либо изменить и сгенерировать уже существующий.
Для быстрого поиска необходимого протокола список протоколов
упорядочен по дате создания протоколов, а также отображены категории
испытаний (рис. 4.35).
Выход Список протоколов
Номер протокола Дата созданпЕ Категория
119.13.060.01:09 15-01-2009 Механика - климатика
7.13060:09 20-01-2009 Механика - климатика
36.13060.02:09 30-03-2009 ЭМС Й
89.13060.01:09 24-07-2009 Механика - климатика
94.13060:09 03-09-2009 ЭМС Й й
116.13060.02:09 16-09-2009 ЭМС i-Я
115.13060.02:09 16-09-2009 ЭМС kkj М
120.13.060.01:09 27-09-2009 Механика - климатика
126.13060.01:09 29-09-2009 Механика - климатика
41:13060:11 11-04-2011 Функциональная безопасность ЬА Чгу
37.13060.02 11-04-2011 ЭМС из
40.13060:11 11-04-2011 Функциональная безопасность Й ё: «Й
39.13060:11 11-04-2011 Функциональная безопасность Й
42.13060:11 12-04-2011 Функциональная безопасность Й&ЭИ
43.13060.02:11 13-04-2011 ЭМС й©^
45.13060:11 14-04-2011 ЭМС
44.13060:11 14-04-2011 ЭМС йё*^£
46.13060:11 18-04-2011 Функциональная безопасность й
47:13060:11 21-04-2011 Функциональная безопасность ЙчЕ^Э&
Л овый , протокол.
Рисунок 4.35 - Страница, содержащая список протоколов
321
Страница, содержащая общую форму для внесения необходимой
информации для формирования протокола испытании, показана на рис. 4.36.
В блоке «Введите характеристику объекта» вводятся наименование
объекта, его обозначение, заводской и инвентарный номера, для однозначной
идентификации испытуемого объекта.
РОЛЬЗО¥35ель; Дцмннистрзтор!
Выход =
Главное меню
|СПИСОК ГфОТОКОЛОВ
Выберше аттестат эккредшацнп
i 2ТЭ69 ....................
Введите дату протокола* |
Выберше категорию
Введите характеристику объекта11
; Функциональная безопасность
Выберите тип испытаний
типовых испытаний
Введите основание1
Решение органа сертификации
Введите номер акта Введите номер акта иденптфикатпт
—......—...... .................................
Введите номер протокола
Введите цепь пспьпания* (вводить после слова
ТРЕБОВАНИЯМ)
Наименование программы методики испытания*
Дополнительное соглашение
Дата получения образцов ‘
Введите даты проведения испытании1
Место проведения испытания1
Условие проведения испытания'
поля для обязательного ввода
< Назад Вперед >
Рисунок 4.36 - Страница формирования протикила испытаний
322
Из списка испытаний выбирают вид испытания, из списка испытательного
оборудования — необходимое испытательное оборудование, а также нормативные
документы, используемые при проведении данного вида испытаний (рис. 4.37).
При необходимости предусмотрена возможность ввода дополнительного
испытательного оборудования.
Выберите вод испытания ?!
Проверка устойчивости к импульсным магнитным полям .* Ч/ '
Выберите иормэшвшлй документ (в часш треб оьаяпdr методики пквпаний) ?
.ДСТУ йЁЩстепень жеспшста 4) 4?
Введите дополнхгтельное НД Введите пункты НД |
Выберите нормативны! документ (в части требовяанг'методики пслыташн)
ДСТУ 262Е (степень жесткости 4) т •
Введите дополнительное НД Введите пункты НД
Выберите оборудование доя этого вода ноьпяння
_ Наименование и тип Пспольтуется; ! устройства Заводской номер Пнвгапгарш>йт номер Срок действия ? Погрешность аттестата
= Установка злопромлпяпного ? поля У ЭМП 1 0Р021 28.05.2012 0.00:00 5 < 10 Ч
Добавить, гювое иельгтатальноеоб^дсванме
Сохранить испытание .Отмена >
Рисунок 4.37 - Экранная форма используемых нормативных документов при
проведении испытания
Результат испытания отображается в протоколе испытаний согласно
принятой форме. Открытие сгенерированного протокола и сохранение его после
внесения необходимых данных проводятся с помощью окна, показанного ниже
на рис. 4.38.
Загрузка файла П|ипокол_£б. 13060 03 15.08 Л0
Имя:
Тип:
Источник:
Протокол _66.13.. ._3MC.doc (56 КБ)
Документ Microsoft Office Word 97...
172.18,8.127
Открыть в:
ШЙ Microsoft Office Word
Запомнить выбор и не спрашивать в дальнейшем
Открыть » Сохранить Я Отмена
првегсс
Рисунок 4.38 - Окно сохранения/открытия сгенерированного протокола
Результат испытания отображается в протоколе испытаний согласно
принятой форме. Пример протокола испытаний приведен в приложении А.
323
4.10 Летные испытания
Цели и задачи лётных испытаний
Цель этапа лётных испытаний ракеты-носителя или космического аппарата
объекта в части экспериментальной отработки СУ:
- подтверждение выполнения функциональных задач СУ;
- оценка функционирования СУ в реальных условиях полёта;
- подтверждение реализованных в СУ принципов управления
объектом и методов контроля функционирования СУ;
- проверка соответствия фактических характеристик объекта
расчётным и уточнение исходных данных на проектирование;
- отработка эксплуатационной документации.
Подтверждение выполнения функциональных задач СУ
К функциональным задачам СУ PH относятся:
- выведение PH с космическим аппаратом на заданную орбиту с
требуемыми параметрами по наклону, высоте в перигее, апогее, периоду
обращения вокруг Земли;
- отделение КА от PH с обеспечением требуемых начальных
условий автономного полёта космического аппарата.
Функциональные задачи системы управления КА зависят от назначения
аппарата и могут отличаться друг от друга.
К функциональной задаче СУ спутников связи и дистанционного
зондирования Земли относится управление движением вокруг центра масс
объекта, обеспечивающее функционирование подсистем и полезной нагрузки
аппарата (транспондеров связи, оптических и радиотехнических систем
наблюдения за поверхностью Земли).
К функциональной задаче СУ космических аппаратов типа целевых модулей
орбитальных станций (модули "Квант”, "Квант-2", "Кристалл", "Спектр",
"Природа" орбитального комплекса "Мир"; модуль "Заря” МКС "Альфа")
относится управление движением, решающее задачу сближения и причаливания
к кооперируемому объекту.
Оценка функционирования СУ в реальных условиях полета
Одной из основных задач лётных испытаний является получение данных о
функционировании СУ. Для достижения этой цели привлекают средства
внепшетраекторных и телеметрических измерений, включающие в себя бортовую
аппаратуру сбора, хранения и передачи данных на Землю и аппаратуру приёма,
размещённую на наземных измерительных пунктах (НИПах).
324
Работа СУ PH от момента старта и до момента отделения КА или разгонного
блока (РБ), длящаяся до 10 мин, проходит в зоне видимости НИПов, что
позволяет принимать информацию о состоянии СУ в полном объёме и в реальном
масштабе времени.
В отличие от PH орбитальный полёт КА или разгонного блока в основном
проходит вне зон видимости, а приём телеметрической информации возможен
только в зонах видимости НИЛ. Время приёма информации одним НИПом
измеряется несколькими минутами. Для обеспечения надёжного приёма ТМИ в
течение 10-25 мин НИПы размещаются по траектории движения КА с
перекрытием зон видимости.
С учетом того, что СУ КА, как правило, функционирует непрерывно,
возникает необходимость решать задачу сохранения телеметрической
информации на борту КА при полёте вне зон видимости НИПов и передавать
текущую и сохранённую ТМИ за виток в зоне видимости.
Анализ результатов функционирования можно разделить на два этапа:
- оперативный - заключается в визуальном анализе на экране
мониторов значений основных параметров СУ в темпе приёма ТМИ в
сеансе связи с КА. Форма представления информации на экранах; схема
состояния элементов СУ, графики изменения динамических параметров,
физические значения параметров движения КА, граф-схема режимов
работы СУ и др.;
- детальный - заключается в анализе функционирования СУ по
ТМИ как сеанса связи, так и вне его. Анализ проводят после сеанса связи с
КА по формам представления на экранах информационных мониторов, на
графиках и в виде таблиц.
Одной из основных задач, решаемых на этапе лётных испытаний, является
проверка функционирования СУ во всех режимах её работы. Для решения данной
задачи в программе испытаний предусматривают тестирование режимов перед их
штатным использованием.
Задача тестовых включений - проверка функционирования приборного
состава СУ в данном режиме заключается в проверке:
- функционирования исполнительных органов;
- функционирования смежных систем или полезных нагрузок КА;
- динамических характеристик объекта в режиме.
Например, для автоматических функциональных модулей орбитального
комплекса "Мир", функционально-грузового блока ’’Заря” Международной
космической станции "Альфа" проводили тестирование режимов:
- "Коррекция орбиты", при которых оценивали работу двигателей
коррекции;
- "Сближение и причаливание" с проверкой функционирования
радиотехнической системы измерения параметров относительного
движения "Курс".
На всех стадиях этапа ЛИ объекта, а особенно на первых витках особое
внимание уделяют анализу функционирования элементов СУ:
325
- приборов СУ (БЦВК, блоков автоматики и др.);
- командных приборов с учётом резервирования датчиков
угловой скорости, приборов ориентации на Землю и Солнце,
астроизмерительных приборов;
- исполнительных органов.
При нештатном функционировании элементов СУ определяют рабочую
конфигурацию СУ и конфигурацию, задаваемую в составе ПЗ.
Анализ функционирования СУ полезной нагрузки или смежных систем
проводят по результатам тестовых включений. При этом по результатам теста
оценивают работоспособность аппаратуры, определяют основные комплекты,
которые будут включены при штатной работе либо по полётному заданию, либо
по командам ЦУПа.
Подтверждение реализованных в СУ принципов управления и методов
автоматического контроля функционирования
Подтверждение реализованных принципов управления заключается в анализе
выполнения законов управления движением.
В бортовом программно-алгоритмическом обеспечении СУ реализован
автоматический контроль выполнения выбранных законов управления,
предусматривающий контроль превышения таких параметров:
- допустимого рассогласования между параметром управления и
его программным значением;
~ допустимой скорости изменения параметра управления;
- допустимой продолжительности включения исполнительных
органов и др.
Превышение значений заданных критериев контроля в процессе полёта
вызывает необходимость ликвидации PH.
Превышение значений заданных критериев контроля для СУ космических
аппаратов приводит либо к переходу СУ в режим функциональных проверок,
либо к выключению СУ. Последующий анализ, выполняемый центром
управления полётом, позволяет организовать работу СУ с парированием причин,
приведших к выключению СУ.
Проверка соответствия фактических характеристик объекта расчётным
характеристикам и уточнение исходных данных на проектирование СУ
К расчётным характеристикам объекта управления, используемым в СУ для
решения задач управления, относятся:
- эффективность исполнительных органов и величины
возмущающих моментов;
- массово-инерционные характеристики на различных этапах
полёта (координаты центра масс относительно связанной системы
координат, масса, моменты инерции);
326
- аэродинамические характеристики объекта;
- упругие характеристики объекта.
Анализ соответствия фактических характеристик объекта расчётным
характеристикам, которые проводят по данным ТМ-информации, позволяет
оценить их соответствие исходным данным на проектирование СУ.
На этапе лётных испытаний объекта решают следующие задачи
экспериментальной отработки СУ:
- получение, обработка и анализ результатов функционирования
СУ в формате телеметрической информации;
- анализ функционирования элементов СУ и смежных подсистем
в предусмотренных режимах;
- оценка динамических характеристик объекта управления;
- отработка технологии управления КА (подготовка исходных
данных, расчёт и отработка на наземных средствах, ввод на борт
управляющей информации);
- анализ соответствия математических моделей командных
приборов и исполнительных органов, используемых на этапе наземной
отработки СУ, реальному функционированию их в полёте;
- анализ выполнения СУ требований технического задания.
Оценка динамических характеристик объекта управления
Проверку динамических характеристик объекта проводят для оценки реакции
объекта на управляющие воздействия от исполнительных органов. Эту работу
выполняют после первых сеансов связи. Анализ проводят по ТМ-данным
командных приборов и исполнительных органов. При этом оценивают:
- ускорения, создаваемые исполнительными органами;
- величины управляющих и возмущающих моментов;
- частоты, амплитуды и коэффициенты затухания упругих
колебаний объекта в местах установки командных приборов.
Результаты анализа сравнивают с исходными данными по динамической
схеме объекта, их можно уточнить в настройках СУ по ПЗ.
Отработка технологии управления КА
Существующие технологии управления КА как автоматическими целевыми
модулями, так и спутниками разных типов базируются на принципах командного
управления из ЦУПа. Передача командной информации для СУ определяет
последовательность выполнения поставленных задач.
Командное управление предусматривает этапы:
- подготовку исходных данных;
- расчёт массивов, вводимых на борт объекта;
- отработку массивов управления на наземных средствах;
327
- ввод массивов на борт.
Подготовка исходных данных начинается с разработки программы полёта
объекта (долговременной, на несколько суток), где детально представлено
взаимодействие наземного сегмента управления и всех бортовых систем объекта.
Для разработки программ используют данные радиоконтроля орбиты КА,
расчётные времена зон видимости НИПов. В соответствии с программой полёта
определяют необходимые массивы управляющей информации: баллистические
исходные данные динамических режимов работы СУ, последовательность
команд управления работой подсистем объекта и др.
Расчёт массивов управления проводится СПО на вычислительных средствах
ЦУПа или в организациях-разработчиках подсистем.
Виды массивов:
полётные задания, уставки работы СУ;
- пакеты телеуправления, содержащие коды команд управления
подсистемами объекта;
- пакеты программного обеспечения, содержащие коды
коррекции или версии ПО подсистем.
Для обеспечения надёжности выполнения программы полёта массивы
управления проходят контроль на наземных средствах отработки.
Отработке массивов управления подвергают:
- полётные задания - на стендах математического
моделирования, которые могут находиться как в организациях -
разработчиках СУ, так и в ЦУПе;
- пакеты телеуправления - на комплексных стендах в
организациях - разработчиках СУ и КА;
- пакеты программного обеспечения - на стендах организаций -
разработчиков подсистем.
Массивы управления вводят на борт по командной радиолинии связи с
объектом. Массивы управления передаются на НИПы, оборудованные
аппаратурой командной радиолинии перед началом работы по суточной
программе полёта. Вводят в ’’зонах видимости" НИПов в соответствии с
программой полёта. Массивы на НИПы передаются по выделенным каналам
связи средствами наземного сегмента управления.
Технология управления КА предусматривает оперативное управление с
помощью разовых команд. Необходимость выдачи разовой команды
определяется ЦУПом, оперативно передаётся на НИП, в "зоне видимости"
которого находится объект, и выдаётся по командной радиолинии.
328
Полигонный измерительный комплекс
Полигонный измерительный комплекс (ПИК) представляет собой
совокупность аппаратных и программных средств, обеспечивающих получение
информации о функционировании ракеты-носителя и ее СУ на участке выведения
космического аппарата с помощью средств внепшетраекторных и
телеметрических измерений, привлекаемых для решения перечисленных выше
задач.
Основные задачи полигонного измерительного комплекса состоят в
следующем:
- прием телеметрической информации (ТМИ) о
функционировании всех систем PH и КА;
- определение кинематических параметров движения PH по
информации средств внешнетраекторных измерений (ВТИ);
- сбор информации со всех наземных измерительных пунктов;
- обработка информации с представлением результатов
обработки на средства визуального отображения и твердые копии;
- анализ функционирования PH и КА на участке выведения;
- обеспечение взаимодействия с центром управления полета КА.
Пункты приема информации НИП размещают на полигоне запуска PH и по
всей трассе полета.
Вычислительный центр ПИК размещают на полигоне запуска PH. Все
наземные измерительные пункты соединены с вычислительным центром
полигона широкополосными линиями связи (ШЛС), обеспечивающими передачу
полных потоков телеметрической и траекторной информации. ШЛС могут быть
реализованы с использованием как кабельных линий связи, так и спутников
связи.
Кинематические параметры движения PH определяются аппаратурой типа
"Кама” и ’’Вега”.
Прием и регистрация телеметрической информации PH осуществляется
аппаратурой типа ПР А - МК.
Прием и регистрация телеметрической информации КА выполняются
аппаратурой типа МА9-МКТ.
В состав аппаратуры приема и регистрации ТМИ входят устройства
отображения информации в виде графиков.
Обработка и анализ всех видов информации осуществляются
вычислительным центром полигона.
329
Радиотехнические многопараметрические системы высокоточных
измерений параметров траекторий движущихся объектов
Радиотехнические многопараметрические системы высокоточных измерений
параметров траектории движущихся объектов - направление прикладной науки и
техники, обеспечивающее отработку систем управления ракет-носителей,
космических аппаратов и других летательных аппаратов в процессе их летных
испытаний. В НИИ Радиотехнических Измерений (НИИ РИ) создан ряд систем
внешнетраекторных измерений, в том числе и высокоточные фазометрические
системы траекторных измерений типа ’’Вега”.
Задачей траекторных измерений является определение в реальном масштабе
времени текущих координат объекта и их производных, необходимых для
анализа результатов работы автономной системы управления. Сопоставляя
измеренные с помощью средств ВТИ кинематические параметры траектории
(компоненты векторов скорости и положения объекта управления) с их
значениями, полученными по данным инерциальной навигационной системы,
можно сделать вывод о качестве работы СУ в полете.
С самого начала развития управляемых ракет в Советском Союзе
(с 1945 г.) наряду с оптическими приборами начали разрабатываться и
применяться радиотехнические устройства и системы для измерения траекторий
движения. Интерес к радиотехническим системам возник по причине
независимости результатов измерений и их работоспособности от погоды,
значительно большей тогда (в 50-х годах), чем у оптических систем, точности,
большей дальности действия, удобства обработки измерений и передачи их
потребителю по линиям связи.
Первая радиосистема траекторных измерений была разработана ОКБ
Московского энергетического института (ОКБ МЭИ) в 1951 г. Система
представляла собой модифицированный радиолокатор орудийной наводки ”Луч”,
работавший с активным ответчиком, установленным на ракете.
Дальнейшее развитие радиосистем траекторных измерений, базирующихся
на использовании радиолокаторов с активным ответчиком, в том же ОКБ МЭИ
велось на основе модификации радиолокационной станции "Кама" и создания
импульсного ответчика "Рубин". В 1960 г. был введён в эксплуатацию
полигонный автоматизированный измерительный комплекс (АИК) из нескольких
таких станций, размещённых по обе стороны испытательной трассы полета МБР
в районе полигона "Байконур" и разнесённых друг от друга на десятки и сотни
километров, что обеспечивало возможность довольно точно проводить измерения
параметров траектории движения межконтинентальных ракет и тем самым
достаточно точно обеспечивать интегральную оценку качества работы системы
управления. Автоматизированный измерительный комплекс обеспечил также
удовлетворительное прогнозирование точек падения изделий при аномальных и
аварийных пусках.
330
Радиолокационные станции "Кама-Е"
Станции "Кама-Е" совместно с ИЦМ (информационно-цифровой машиной)
’’Темп-Г' являются измерительным средством в составе траекторных
измерительных комплексов космодромов ’’Байконур", "Плесецк" и "Капустин
Яр".
Станция "Кама-Е" обеспечивает точное измерение максимальной дальности
при погрешности ~ 50 м (2,7с) и грубое измерение двух угловых координат при
погрешности ~ 4° (2,7с).
Наклонная дальность измеряется импульсным методом. Станция состоит из
передающего, приемного, регистрирующего устройств и систем автоматического
сопровождения ракеты по дальности и угловым координатам.
Наземная аппаратура станции работает совместно с бортовым
приемопередатчиком, обеспечивающим одновременные измерения несколькими
станциями "Кама-Е".
Измеряемая информация станции с помощью ИЦМ "Темп-Г' может
автоматически передаваться в линии связи с вычислительным центром полигона.
Основным методом определения координат ракеты по данным измерений
станций "Кама-Е" является совместная обработка наклонных дальностей,
измеренных из нескольких наземных пунктов, разнесенных на значительное
расстояние друг от друга и расположенных вдоль трассы полета.
Для определения координат ракеты указанным методом необходимо
использовать, по меньшей мере, три измерительных пункта. Однако для того,
чтобы обеспечить необходимые точности определения координат, требуется
большое число пунктов, расположенных вдоль трассы полета. Например, в
составе измерительного комплекса космодрома "Байконур" для обеспечения
измерений на активном и части пассивного участка траектории баллистических
ракет используют станции "Кама-Е" в восьми измерительных пунктах,
разнесенных на ~ 800 км вдоль трассы полета.
Компоненты вектора скорости ракеты станциями не измеряются, а
определяются в вычислительном центре полигона численным
дифференцированием координат, полученных наземными измерительными
пунктами, размещенными по трассе полета.
Точность определения компонентов вектора скорости оказывается низкой, в
особенности в наиболее важные моменты времени — моменты времени выдачи
системой управления команд "Предварительная", "Главная", "Отделение".
Предельные ошибки определения координат и скорости ракеты по
измеренным станциями "Кама-Е" наклонным дальностям для изделия
Р-14 составляют:
- на интервале времени полета от 100 до 150 с ~ 50 м для
координат и для скорости ~ 15 м/с;
331
- на интервале времени полета от 150 до 200 с ~ 90 м для
координат и для скорости ~ 24 м/с.
Такая точность определения компонентов вектора положения и скорости
оказалась недостаточной для отработки точностных характеристик
разрабатываемых и перспективных СУ ракет-носителей. Поэтому возникла
необходимость в создании более точных систем ВТИ.
Достоинством станции ”Кама-Е" является автоматизация получения и
передачи информации в вычислительный центр с помощью информационной
машины ”Темп-1”.
Система "ВЕГА"
Проектирование системы ’’Вега” было начато коллективом разработчиков,
входивших в состав ОКБ-692 (позже КБ ’’Электроприборостроение”) в январе
1961 г.
Основные технические особенности проектировавшейся системы вытекали из
опыта, приобретенного при эксплуатации предыдущих систем, и это, прежде всего:
- построение системы в сантиметровом диапазоне радиоволн,
благодаря чему сводятся к минимуму ионосферные ошибки измерений, а
также ошибки вследствие влияния земной поверхности и выхлопной
струи ракетных двигателей;
- использование для измерения скоростных параметров
доплеровского метода;
- применение для определения угловых параметров
радиоинтерферометрического (на несущей частоте) метода измерений
разностей фаз сигналов объекта, принимаемых несколькими приёмными
устройствами, размещёнными на поверхности Земли.
В свою очередь, применение сантиметрового диапазона радиоволн
потребовало использования узконаправленных следящих антенн (рис. 4.39) для
обеспечения необходимого превышения сигнала над шумом в радиолиниях
Земля-борт и борт-Земля при ограничении массы и, как следствие, ограниченной
чувствительности и мощности бортового доплеровского ответчика.
Последующую обработку результатов измерений в целях получения
параметров движения объекта в стартовой системе координат ведут после
окончания сеанса измерений в два этапа:
332
на первом этапе определяют параметры движения в местной системе
координат с центром в первом приёмном пункте системы;
на втором этапе эти параметры движения передаются по линиям связи в ВЦ
полигона и там уже пересчитываются в стартовую систему координат.
Такой порядок был установлен по причине необходимости оперативного
анализа измерений на Земле в удобной форме и из соображений секретности.
Рисунок 4.39 - Антенны РЛС дальней космической связи
Первый комплект системы "Вега'1 был изготовлен и поставлен на Капустино-
Ярский полигон Ракетных Войск летом 1966 г. Система обеспечила точные
измерения участка движения головной части и позволила совместно с другими
средствами оценить работу системы управления.
В 1967 г. на полигоне "Байконур” была подготовлена к испытаниям ракета
8К69. В ее испытаниях участвовала система "Вега”, обеспечившая измерения
333
активного участка траектории. В том же году был поставлен комплект системы
"Вега" на Плесецкий полигон, и к лету 1968 г. он был подготовлен к измерениям.
Рисунок 4.40 - Один из въездов на космодром «Байконур»
С 1968 г. все три полигона ракетных войск получили в качестве основного
средства траекторных измерений систему "Вега".
Система "Вега-АП"
Радиотехническая многоцелевая система измерения параметров движения
ракет и определения координат точек падения отделяющихся частей (система
"Вега-АП") разработана в начале 70-х годов.
Система позволяет определять:
- элементы траектории на активном и в начале пассивного
участков полета при летных испытаниях ракет;
- элементы траектории на нисходящей части пассивного участка;
- параметры среднеопытных траекторий.
334
Система ’’Вега-АП" обеспечивает одновременные измерения шести
параметров движения пяти контролируемых объектов с привязкой результатов
измерений к единому времени. При этом измеряют:
- наклонную дальность R;
- направляющие косинусы относительно двух взаимно
перпендикулярных базисов cos(9x и cos0z;
- радиальную скорость R;
- скорости изменения направляющих косинусов относительно
двух взаимно перпендикулярных базисов cos(9x и cos(9z;
- моменты времени приема сигналов исполнения команд или
других разовых сигналов.
Минимальный шаг выдачи результатов измерений ~ 0,25 с.
Максимальные пшрешности измерения параметров траектории при
углах места контролируемого объекта р >15° и времени наблюдения 2 с для
первого канала (канала повышенной точности измерений) не превышают
следующих величин:
- по наклонной дальности 8 R < 20 м;
- по направляющим косинусам 8 cos® < 3 х 10"6;
- по радиальной скорости 8 R < 1,0 см / с;
- по скорости изменения направляющих косинусов
8 cos(9xz <5х10~8с"1;
- по временной привязке моментов приема разовых сигналов
8 t <0,5мс.
Указанные погрешности включают в себя как максимальные случайные
отклонения (2.7 ст), так и ошибки учета систематических поправок.
Работоспособность системы сохраняется и при углах места менее 15° (до 5°), но
при этом точность измерений несколько снижается.
Для остальных четырех каналов погрешности измерения радиальной
скорости и наклонной дальности такие же, как и в первом канале, а погрешности
измерения направляющих косинусов и скоростей их изменения примерно на
порядок ниже, чем в первом (точном) канале.
В стартовой прямоугольной системе координат система "Вега-АП"
обеспечивает определение параметров траектории с точностью:
- по составляющим координат (10 ... 20) м;
- по составляющим вектора скорости (1 ... 5) см/с.
335
Ошибки оперативного прогнозирования координат точки падения
отделяющихся частей при стрельбе на дальность до 12000 км как по дальности,
так и по боковому отклонению не превышает 0,2 км.
Время подготовки аппаратуры наземного пункта к измерениям не превышает
двух часов. Проверка аппаратуры наземного пункта перед сеансом измерений
автоматизирована, и ее продолжительность составляет 5 мин. Время проверки
бортовой аппаратуры на стартовой позиции составляет 30 мин.
Результаты прогнозирования координат точек падения отделяющихся частей
выдаются не позже, чем через 15 мин после окончания измерений.
Продолжительность обработки информации одного измерительного канала,
полученной в течение сеанса измерений длительностью 10 мин, составляет в
среднем (1,5 ... 2) часа.
Масса бортового передатчика составляет для ранних образцов не более 8 кг,
а для образцов поздних модификаций - до 1 кг.
Система ’’Вега-АП” была первой системой в СССР подобного типа и прямых
отечественных аналогов не имеет. Она выгодно отличается от других средств
траекторных измерений, эксплуатируемых на полигонах. Система позволяет:
- реализовать высокую точность измерений;
- обеспечить многопараметричность измерений и одновременное
определение координат и составляющих вектора скорости ракеты;
- разместить наземные измерительные средства на ограниченной
площади;
- автоматизировать процесс измерений с высокой степенью.
Опыт эксплуатации аналогичных систем, а также материалы зарубежных
исследований подтверждают, что создание радиотехнических систем контроля
траектории, обладающих высокой помехоустойчивостью и нечувствительностью
к влиянию газовой струи двигателя, возможно лишь в сантиметровом диапазоне
длин волн. Наиболее точные оценки самых ответственных параметров движения
- скоростных, могут быть получены при использовании гармонического
запросного сигнала. Поэтому система ”Вега-АП” спроектирована как система с
непрерывным излучением в четырехсантиметровом диапазоне длин волн.
Применение непрерывного излучения данного диапазона радиоволн дало
возможность создать малогабаритные и достаточно экономичные бортовые
ретрансляторы.
336
С помощью системы "Вега-АП" измеряют одним измерительным пунктом
полный набор параметров элементов траектории X, Y, Z, vX, vY, vZ с их
привязкой к шкале единого времени. Измеряемые параметры выбраны так, чтобы
требуемая высокая точность достигалась простыми и эффективными
техническими средствами.
В основу измерений положен фазовый метод, позволяющий обеспечить
высокую точность и выдержать однородную структуру аппаратуры элементов
системы.
Радиальная скорость измеряется по доплеровскому смещению несущей
частоты в четырехсантиметровом диапазоне длин волн.
Высокая точность определения угловых координат достигается путем
фазовых измерений с помощью многошкальных интерферометров на той же
несущей частоте. Для измерения скорости изменения направляющих косинусов
используют два болыпебазных интерферометра четырехсантиметрового
диапазона с горизонтальными взаимно перпендикулярными базисами. И только
для определения наклонной дальности несущая частота периодически
кратковременно модулируется по фазе.
В состав системы входят:
- наземный измерительный пункт;
- бортовые приемопередатчики и их контрольно-измерительная
аппаратура.
Схема размещения сооружений и элементов антенного поля показана
на рис. 4.41.
В состав основной аппаратуры наземного пункта входят:
~ хронирующее устройство;
- передатчик;
- пятиканальные приемные устройства трактов измерения
радиальной дальности и скорости;
- семь пятиканальных приемных устройств трактов измерения
направляющих косинусов и скорости их изменения;
- два приемника канала повышенной точности измерения
скорости изменения направляющих косинусов;
- аппаратура системы обработки информации;
- пеленгатор системы автоматического сопровождения.
337
600
Д2
Рисунок 4.41 - Размещение сооружений и элементов антенного поля системы
"Вега-АП"
Хронирующее устройство является синтезатором всех необходимых частот,
используемых для формирования запросных сигналов трактов измерения
скорости и дальности и формирования опорных и гетеродинных сигналов,
счетных сеток и т.д. Его сигналы синхронизируют работу отдельных устройств
системы друг с другом.
Наземное передающее устройство предназначено для умножения опорной
частоты, получения фазомодулированного сигнала измерения дальности, а также
для получения запросного сигнала необходимой мощности.
Запросный сигнал излучается параболической передающей антенной в
пространство в направлении на испытываемые объекты, где принимается
бортовыми приемопередатчиками, установленными на каждом из них. Для
различения ответных сигналов в системе применен частотный метод. Каждый из
бортовых приемопередатчиков когерентно преобразует принятый сигнал в
ответный, отличающийся по частоте от запросного, с коэффициентом
преобразования, соответствующим номеру используемого измерительного канала.
Ретранслированный сигнал первого измерительного канала, распространяясь в
обратном направлении, принимается антенной следящего пеленгатора,
управляющего наведением остальных антенн. Тем самым обеспечивается прием
всех ретранслированных сигналов. После выделения приемными устройствами
информационные сигналы вводятся в аппаратуру системы обработки информации и
используются для определения измеряемых параметров.
В комплекс сооружений наземного измерительного пункта системы входят
центральные сооружения и два дальних вынесенных пункта.
338
Базовые оси наземного пункта ориентируются относительно направления
полета произвольно.
Центральные сооружения наземного измерительного пункта располагаются
на горизонтальном участке местности площадью около
1 кв. км. В состав сооружений входят:
- главное аппаратное здание (№ 8);
— вынесенные приемные пункты (№ 1, 2, 3, 4, 5, 6, 7);
- следящий пеленгатор (№ 9);
- центральная юстировочная башня (№ 77);
- вынесенные юстировочные мачты (№ 102, 103, 104, 105);
- опоры для геодезических инструментов (№ 16, 17);
- дизель-генераторная подстанция (№ 20);
- экраны антенного поля.
Главное аппаратное здание (два этажа общей площадью около 2000 кв. м)
находится в центральной части измерительного пункта. Основные площади в нем
заняты аппаратными помещениями, в которых размещены приемопередающая
аппаратура, система обработки информации, приборы управления, система
энергопитания, вентиляционное оборудование и щитовые энергообеспечения.
В верхней части здания размещена антенна передатчика, установленная на
самостоятельном фундаменте.
В помещении, где установлена аппаратура системы обработки информации,
и в главном аппаратном зале с помощью кондиционеров поддерживается
температура 21 °C ± 3°С при относительной влажности до 70%. В остальных
помещениях поддерживается температура
25°С ± 10°С при относительной влажности 65 ± 15%.
В здании расположены лаборатория и класс для обучения обслуживающего
персонала и военнослужащих, а также мастерская и помещения для хранения
ЗИЛа.
Волноводные и кабельные линии, соединяющие главное аппаратное здание с
вынесенными приемными пунктами и следящим пеленгатором, проложены в
заглубленных в грунт каналах полного профиля - потернах. Основные
сооружения связаны между собой автомобильными дорогами с твердым
покрытием.
Юстировочные башни служат для точного определения размеров
измерительных базисов и величин аппаратурных фазовых сдвигов. Центральная
юстировочная башня расположена примерно на равном расстоянии от
вынесенных пунктов 4, 5, 6 и 7, а четыре другие юстировочные башни - на
расстоянии около 300 м от приемного пункта №1 в направлениях базисных
линий. Для того, чтобы при юстировке (определении аппаратурных фазовых
задержек в измерительных каналах) исключить взаимное затенение антенн,
юстировочные башни № 102, 103, 104 и 105 смещены относительно базисных
линий на расстояние около 30 м.
339
Для устранения влияния подстилающей поверхности на точность проведения
юстировок между вынесенными пунктами № 1,2, 3, 4, 5 следящим пеленгатором и
юстировочными башнями установлено 22 экрана высотой 1,75 м и шириной 6 м.
При проектировании и строительстве капитальных сооружений
измерительного пункта особое внимание было уделено стабильности
геометрических размеров интерферометров. Это нашло свое отражение в
конструкции вынесенных приемных пунктов системы. Аналогичные
конструктивные меры были приняты и для стабилизации центров юстировочных
башен и опор для геодезических инструментов. Кроме этих мер через
определенный регламентом период времени проводят периодические измерения
длин измерительных базисов высокоточными светодальномерными приборами.
Коэффициент усиления антенн вынесенных пунктов № 1, 2, 3, 4, 5, 6, 7, Д2,
ДЗ равен 104. Достаточная равномерность фазовой характеристики в центре
диаграммы направленности сохраняется в пределах ± 20 угл. мин, и эта величина
обуславливает необходимую точность наведения антенн на объект.
Коэффициенты усиления антенн передающего устройства и пеленгатора
равны 3,3x103 и 4x103 соответственно.
Следящий пеленгатор помимо основной антенны содержит добавочную
антенну подавления боковых лепестков, представляющую собой
четырехрупорную решетку с волноводно-щелевой схемой преобразования.
Высокие требования, предъявляемые к стабильности фазовых сдвигов,
вносимых соединительными кабелями и волноводными линиями, а также
фазометрической аппаратурой, определили ряд технических решений при
проектировании коммуникаций и главного аппаратного здания.
В потернах предусмотрено поддержание стабильной температуры воздуха,
что обеспечивает постоянство длин волноводных линий и, следовательно,
определенное постоянство фазовых сдвигов. Для этого волноводные линии к
пунктам 1, 2, 3, 4 и 5 выполнены одинаковой длины с точностью 50 мм.
Автоматические дегидраторы, установленные в главном аппаратном здании,
поддерживают внутри волноводов избыточное давление (0,12...0,15) атм,
защищая их полость от проникновения влаги.
Опыт эксплуатации наземных измерительных пунктов в различных
географических районах страны подтвердил правильность инженерно-
технических решений. Так, стабильность положений антенных устройств на
практике оказалась выше стабильности стандартных геодезических базисных
линий.
Аппаратура наземного измерительного пункта состоит:
- из передающего устройства и аппаратуры формирования
гетеродинных и опорных сигналов;
- приемной аппаратуры;
- следящего пеленгатора;
- системы обработки информации;
- устройств управления и автоматизации системы контроля;
340
- источников питания и энергоснабжения.
Задачи, решаемые системой обработки информации, включают в себя
вычисления, связанные с интегрированием дифференциальных уравнений
движения при прогнозировании точки падения головной части ракеты, пересчет
результатов обработки из системы координат наземного измерительного пункта в
Гринвичскую систему координат, раскрытие неоднозначности многошкальных
дальномерных и угломерных измерений, ввод корректирующих поправок,
учитывающих параметры среды распространения радиосигналов, и фактические
(измеренные перед сеансом измерений) характеристики аппаратуры (в т.ч. и
бортовой) и т.п.
Поскольку в состав наземного измерительного пункта системы входит
сложный комплекс аппаратуры, средства управления, контроля и юстировки
обеспечивают предельную автоматизацию управления станцией в части
проверок, включения, проведения сеанса измерений, выключения и отработки
нештатных ситуаций. Разработанная аппаратура управления обеспечивает
проведение всех операций автоматически с документальной отчетностью о
состоянии аппаратуры системы. При проверках имитируется сигнал бортового
ответчика в различных режимах полета. При проверке вся аппаратура системы
работает в режиме, отличающемся от реального только отсутствием слежения
антенн за объектом.
Аппаратуру управления антеннами также проверяют, но по отдельной
программе в наиболее тяжелом режиме обнаружения и захвата цели.
Автоматизация процессов проверочных и юстировочных работ позволила при
оценке работоспособности системы снизить трудоемкость, сократить
продолжительность проверок и исключить влияние субъективных факторов.
При размещении аппаратуры системы учтены соображения удобства
обслуживания и сокращения межплощадных коммутаций. Основной объем
аппаратуры сосредоточен в главном аппаратном здании. В нем расположены
основная часть приемной аппаратуры и аппаратуры следящего пеленгатора,
приборы формирования гетеродинных и опорных сигналов, электропитания и
управления передающим устройством, а также аппаратура контроля и
управления комплексом. Аппаратуру обработки информации, выдачи
информации в каналы связи, аппаратуру связи и приемный пункт системы
единого времени размещают в отдельных помещениях главного аппаратного
здания. Конечные усилители мощности СВЧ, входящие в передатчик, первый
гетеродин, система охлаждения клистронов и эквивалент передающей антенны
расположены в отдельном необслуживаемом (в ходе сеанса измерений)
экранированном помещении. На всех вынесенных пунктах установлено по две
стойки - приемная и следящего привода.
Бортовая аппаратура состоит из приемопередатчика и антенно-волноводного
устройства. Бортовой приемопередатчик предназначен для приема запросного
сигнала, преобразования его по частоте и ретрансляции преобразованного сигнала
на наземный пункт. Чувствительность приемника составляет около 85 дБ/мВт, а
мощность сигнала на выходе передатчика - не менее 2 Вт.
341
Антенно-волноводное устройство разрабатывают применительно к
конкретному типу испытываемого объекта с учетом взаимного расположения
наземного измерительного пункта, точки старта и траектории ракеты.
Формирование необходимых диаграмм направленности, обеспечивающих
надежную радиосвязь на активном и начале пассивного участка траектории,
можно осуществить с помощью рупорных, диско-конических или щелевых
антенн, имеющих небольшую массу, малое аэродинамическое сопротивление и
простую технологию изготовления. Размеры таких антенн относительно
невелики — их раскрыв составляет около 50*50 мм2, а глубина - около 80 мм. Для
некоторых ракет, имеющих сложную программу полета, требуется применять
несколько рупорных антенн, установленных у нижних срезов ракеты и в отсеках
ракеты, соединенных с приемопередатчиком разветвленным волноводным
трактом.
Принципы измерения параметров движения системой "Вега”
1. Измерение наклонной дальности
В системе предусмотрено измерение наклонной дальности R до объекта
измерений пятью выносными пунктами (ВП100, ДВП2, ДВПЗ, ДВП4, ДВП5).
Наклонная дальность определяется фазовым методом. Для этого используют
фазовую модуляцию несущей частоты радиосигнала последовательно пятью
частотами. При этом формируются пять дальномерных шкал, согласование
которых проводят при последующей обработке принятой информации. Частоты
модуляции выбраны из условия обеспечения заданной точности измерения и
однозначности определения дальности. Дальность до /-го (/ = ВП100, Д2 ... Д5)
выносного пункта определяют путем измерения сдвига фаз между
модулирующими колебаниями сигнала, излучаемого передающей антенной
ВП81, и принимаемого /-м выносным пунктом. Этот сдвиг фаз пропорционален
наклонной дальности
где R8j - расстояние от передающей антенны 81 до объекта измерений;
R.- расстояние от изделия до /-го выносного пункта;
fm- частота модуляции; С - скорость распространения радиоволн.
При этом каждая модулирующая частота образует точную шкалу, а
разностные частоты образуют четыре
промежуточные шкалы, самая грубая из которых ( имеет диапазон
однозначности ~ 400 км. Если реальная дальность превышает эту величину, то
однозначные (грубые) значения дальности определяют из расчетной траектории.
2. Измерение радиальной скорости
342
Радиальную скорость R. измеряют в каждом цикле измерений (Тц ~ 30 мс)
путем выделения доплеровского сдвига несущей частоты непрерывного сигнала,
излучаемого наземным передатчиком и ретранслируемым бортовым
приемоотвегчиком.
Наземный приемник ВП100 принимает ретранслируемый сигнал, который
получает доплеровский сдвиг частоты при распространении сигнала по
радиолинии "Земля - Борт" и "Борт - Земля". Этот сдвиг частоты
где f3 - частота запросного сигнала;
к - коэффициент преобразования частоты в бортовом приемоотвегчике;
С - скорость распространения радиоволн.
Доплеровская частота, пропорциональная радиальной скорости, переносится
на частоту подставки Бпод =573кГц, что позволяет определить знак радиальной
скорости и обеспечить заданную точность измерения. Частота подставки выбрана
больше возможного максимального доплеровского сдвига частоты.
3. Измерение направляющих косинусов
Направляющие косинусы (cos 0Х, cos 0Z ) вычисляют в каждом цикле
измерений (Тц~30 мс) путем выделения разности фаз несущей частоты
непрерывного высокочастотного сигнала, приходящего от бортового
приемоотвегчика к двум парам антенн, образующим две взаимно
перпендикулярные базы.
Фазовый сдвиг между сигналами, принятыми на две разнесенные антенны,
определяется уравнением
2я
<р=~г ч>
X-
от изделия до антенных устройств
где q =Rj - Rj = Dtj • cos (9;
Rj, Rj - расстояния
i,j(i = l,j = 2...7, 61, 71, 91, 100);
Dij - величина базы, образованной приемными антеннами; Л - длина волны
ответного сигнала.
Таким образом,
cos# = —
2л
Л
D..
и
343
Для обеспечения заданной точности измерения направляющих косинусов
выбраны базы величиной 660 м. Устранение неопределенности осуществляется
многобазовым методом.
Величины баз, образующих промежуточные шкалы, выбраны из условий
надежного раскрытия неоднозначности.
Однозначное (грубое) определение направляющих косинусов проводится
следящим пеленгатором, который также осуществляет наведение всех антенн
системы.
Угломерные шкалы согласовывают при обработке информации.
4. Измерение скорости изменения направляющих косинусов
Скорость изменения направляющих косинусов (cos <9Х, cos 0z ) измеряют в
каждом цикле (Тц -30 мс) путем выделения разности F доплеровских сдвигов
несущей частоты непрерывного высокочастотного сигнала, приходящего от
бортового приемоответчика к двум парам антенн, образующим две взаимно
перпендикулярные базы.
Для обеспечения требуемой точности измерения скорости изменения
направляющих косинусов используют базы величиной 12 км.
Основные характеристики систем траекторных
измерений типа "Вега"
1. Система траекторных измерений обеспечивает:
- определение параметров траектории на активном и в начале
пассивного участка полета ракеты;
- вычисление параметров траектории активного участка полета
возвращаемых космических аппаратов;
- оперативное определение координат точек приземления
возвращаемых космических аппаратов и координат точки выключения
двигателей ракет.
2. Система траекторных измерений имеет следующие характеристики:
- дальность действия до (2500 ... 3500) км;
- рабочая длина волны 3,9 см;
- диапазоны измерений:
- наклонная дальность R 30.. .3500 км;
- направляющие косинусы cos <9x,cos (9Z -1...+ 1;
— радиальная скорость -8,2...+8,2 км/с;
- скорости изменения направляющих
косинусов cos (9Х, cos <9Z от- 0,0223 до +0,0223 1/с;
- количество одновременно измеряемых объектов до 5.
344
Система траекторных измерений ’’Вега" при использовании ее в составе
полигонного траекторного измерительного комплекса обеспечивает определение
параметров движения ракеты с точностью:
— по координатам (10 ... 20) м;
— по составляющим вектора скорости (1 ... 5) см/с;
- предельная погрешность привязки результатов измерений к местной
шкале СЕВ до 10 мкс.
Период выдачи результатов измерений - от 0,25 с.
Вычислительный центр полигона
Обработку и анализ результатов измерений средствами систем ВТИ и ТМИ
проводят в вычислительном центре полигона.
Основные задачи вычислительного центра:
- оперативная обработка телеметрической информации в реальном
масштабе времени с предоставлением результатов обработки на
средства визуального отображения всем группам анализа, участвующим
в оценке функционирования всех систем PH и КА на участке
выведения;
- обработка в реальном масштабе времени информации траекторных
измерений с выдачей результатов обработки на средства визуального
отображения;
- проведение полной обработки телеметрической информации.
Структурная схема вычислительного центра показана на рис. 4.42.
ВЦ полигона оснащается следующей аппаратурой:
- приемной частью радиотелеметрической станции (РТС);
- аппаратурой приема и регистрации телеметрической информации на
магнитные носители (ПРА-МК, МА9-МКТ);
- аппаратурой приема информации из широкополосных линий связи;
- коммутационной аппаратурой;
- адаптерами связи аппаратуры приема ТМИ и ВТИ с ПЭВМ;
- локальной вычислительной сетью (ЛВС).
В состав ЛВС входят:
- рабочее место (РМ) приема ТМИ;
— рабочее место приема ВТИ;
- сервер;
- рабочие места обработки ТМИ подсистем PH и КА;
- рабочее место обработки ВТИ;
- средства отображения и документирования результатов обработки.
345
Рисунок 4.42 - Структурная схема вычислительного центра
Все рабочие места приема, обработки и регистрации ТМИ построены на базе
ПЭВМ. ТМИ и ВТИ вводятся в ПЭВМ с использованием адаптеров связи (АС),
осуществляющих аппаратную и информационную стыковку аппаратуры приема
ТМИ (ВТИ) с ПЭВМ.
Программное обеспечение, размещаемое на вычислительных средствах ВЦ,
решает следующие задачи:
1. ПО реального времени:
- прием, формирование и запись ТМИ;
- прием, формирование и запись информации ВТИ;
- проверка качества поступающей информации с отбраковкой или
маркировкой сбойных кадров;
- запись информации на сервер ЛВС;
- чтение информации с сервера;
- идентификация режимов работы РТС - "Непосредственная передача
(НП)", "Воспроизведение прямое (ВПпр)", "Воспроизведение обратное
(ВПобр)";
- оперативная обработка ТМИ в псевдореальном времени (в темпе
записи информации на сервер);
— оперативная обработка информации ВТИ.
2. ПО обработки информации после сеанса связи:
- формирование единых носителей информации;
- полная обработка информации для углубленного анализа
функционирования всех подсистем PH и КА.
346
Целью оперативной обработки является предоставление информации для
оценки состояния подсистемы PH и КА (дальше по тексту "Системы управления
(СУ)") в темпе поступления информации.
В ходе проведения оперативной обработки обеспечивается решение
следующих задач:
- чтение информации с сервера;
- идентификация режимов работы системы управления;
- формирование физических значений параметров;
- формирование логических суждений, отражающих работу СУ, по
заложенным в алгоритмах критериям во всех режимах работы СУ;
- автоматическое изменение алгоритмов анализа и формуляров
отображения при изменении режима функционирования СУ;
- отображение результатов обработки и анализа на экран дисплея;
- запоминание результатов оперативной обработки для последующего
просмотра, документирования и архивирования;
- привязка результатов обработки к тактовому времени цифрового
вычислительного комплекса (ЦБК) СУ и времени СЕВ (Система
единого времени).
В ходе проведения полной обработки информации обеспечивается решение
следующих задач:
- чтение информации с сервера;
- дешифровка полного объема информации;
- построение графиков;
- проведение баллистических расчетов в интересах определения
параметров траектории и оценки точностных характеристик СУ.
Дешифровка информации служит для получения значений параметров в
физических величинах в заданном формате.
В ходе дешифровки осуществляется:
- формирование результатов обработки цифровых, сигнальных и
аналоговых параметров в виде таблиц со свободной компоновкой.
Таблицы компонуются в процессе проведения цикла обработки.
Количество параметров в таблице ограничено размерами экрана. Для
вывода результатов обработки используют двоичный, восьмеричный,
шестнадцатеричный и десятичный (с фиксированной точкой и в
экспоненциальном виде) форматы. Форматы представления параметров
выбирают на этапе формирования базы данных параметров для
обработки;
- накопление отмеченной на экране информации для последующего
хранения, редактирования, построения графиков, выдачи на печать и
т.д.;
- управление просмотром информации с помощью команд:
"Прекратить просмотр", "Продолжить просмотр";
- просмотр параметров при выдаче информации в виде кадров;
347
- обработка параметров по заранее сформированным наборам,
создание наборов параметров и их запоминание в библиотеке наборов;
- обработка параметров на заданных интервалах времени, определение
новых интервалов обработки и их запоминание в библиотеке
интервалов;
- временная привязка результатов обработки по выбору оператора к
времени СЕВ, тактовому времени СУ и номеру кадров;
- оперативное изменение исходных данных для обработки параметров
(формат выдачи, масштаб и т. д.) на данный сеанс обработки без
запоминания в базе данных.
Графики строятся или по исходному файлу информации, или по файлу
обработанных физических величин. На экран дисплея одновременно выводится
до шести графиков. Пользователь может вывести любой из них или все графики
на весь экран дисплея и печать. С клавиатуры ПЭВМ задается интервал
изменения аргумента, возможность построения графика в зависимости от
выбранного аргумента (тактов БЦВМ, бортового времени, функционального
параметра).
Наземный комплекс управления
Основным принципом управления космического аппарата является
выполнение целевой задачи КА. При управлении пилотируемых КА основной
задачей управления полета является обеспечение безопасности экипажа КА.
Для выполнения этого требования необходимо обеспечить получение полных
потоков телеметрической информации с КА на всех этапах полета и возможность
оперативного вмешательства в функционирование КА путем выдачи на борт КА
управляющих воздействий. При необходимости система телеизмерений КА
должна иметь возможность собирать, хранить и ретранслировать информацию о
состоянии бортовых систем КА, формируемых в отсутствие радиовидимости.
Наземный комплекс управления (НКУ) КА, обеспечивающий выполнение
данных требований, должен содержать в своем составе центр управления
полетами (ЦУП) и наземные, включая плавучие, измерительные пункты.
Наземные и плавучие измерительные пункты (ИП) должны быть размещены на
поверхности Земли таким образом, чтобы зоны видимости ИП перекрывали по
возможности всю траекторию полета КА.
Для сопровождения полета на стендах математического моделирования
систем КА в состав НКУ должны быть включены предприятия-разработчики КА
и систем КА.
348
Все измерительные пункты должны быть соединены с центром управления
полетом широкополосными линиями связи, обеспечивающими передачу полных
потоков телеметрической и командной информации.
Рабочее место группы анализа в Национальном центре управления и
испытания космических средств показано на рис. 4.43.
Рисунок 4.43 - В центре управления полетами
Основные задачи, решаемые центром управления полетами (ЦУП):
- сбор телеметрической информации о функционировании КА со всех
измерительных пунктов;
- обработка информации с представлением результатов обработки на
средства визуального отображения и твердые копии;
- анализ функционирования КА;
- определение траектории движения КА и проведение баллистических
расчетов при разработке программы полета;
- разработка программы полета КА;
- отработка разработанной программы полета на стендах
математического моделирования центра управления полетом с
привлечением предприятий-разработчиков КА и систем КА;
- формирование управляющих воздействий (полетное задание, разовые
команды ...) и передача их на измерительные (командные) пункты для
последующей передачи на борт КА;
349
- контроль передачи управляющих воздействий на борт КА.
Структура рабочих мест центра управления полетами показана на рис. 4.44.
НИП(КП) НИП НИЛ
Рисунок 4.44 - Структура рабочих мест центра управления полетами
Все рабочие места приема, обработки и регистрации ТМИ построены на базе
ПЭВМ. ТМИ и ВТИ вводятся в ПЭВМ с использованием адаптеров связи (АС),
осуществляющих аппаратную и информационную стыковку аппаратуры приема
ТМИ (ВТИ) с ПЭВМ.
Вычислительный комплекс центра управления полетами
Основные задачи вычислительного комплекса:
- оперативная обработка телеметрической информации в реальном
масштабе времени с предоставлением результатов обработки всем
группам оперативного управления;
- формирование справочной информации для групп управления с
выдачей информации на средства визуального отображения и твердые
копии;
- полная обработка телеметрической информации;
- баллистические расчеты;
- расчеты при разработке долгосрочных и оперативных программ
полета;
— моделирование параметров движения КА при разработке программы
полета, отработка программы полета;
— передача команд управления на борт КА;
— организация взаимодействия всех вычислительных средств
наземного комплекса управления.
350
Программно-математическое обеспечение обработки
и анализа ТМИ в ЦУИ
Программно-математическое обеспечение обработки и анализа ТМИ в ЦУП
предназначено для решения следующих задач:
- формирование конфигурации алгоритмов анализа и наборов
параметров;
- прием и запись ТМИ в архив;
- проведение оперативного анализа ТМИ с выдачей результатов
анализа на средства отображения;
- обработка ТМИ по заранее сформированным наборам параметров с
выдачей результатов обработки в виде таблиц и графиков;
- передача результатов обработки по телефонному каналу связи в
заинтересованные организации.
При оперативном анализе ТМИ на экран дисплея выводится следующая
информация:
- наименование подсистемы КА;
- время работы подсистемы КА и текущее время - ТАКТ 2112
ВРЕМЯ 02:29:31,00;
- режим работы системы управления - Режим ПСО-3 мод.2 (Режим
поддержания солнечной ориентации);
- режим работы радиотелеметрической станции - НП 50Гц;
- участок работы системы управления КА - УЧАСТОК
АСТРОКОРРЕКЦИИ;
- информация о норме функционирования работы СУ
ФУНКЦИОНИРОВАНИЕ СУОС НОРМА;
- информация о задействованных приборах - ЗАДЕЙСТВ. БУМ ДМ1-
О ДМ2-О ДМЗ-О.СГК1 ВУ1 ДВ1;
- информация об отказах приборов - ОТКАЗ ПАИС1;
- физические значения наиболее информативных параметров.
Здесь:
БУМ - блок усилителей мощности;
ДМ 1-0 - двигатель - маховик основной;
СГК1 - силовой гироскопический комплекс;
ПАИС1 - прецизионная астроизмерительная система;
ПСИгр - угол ориентации КА относительно одной из осей.
Ниже в качестве примера приведена форма отображения результатов
оперативного анализа ТМИ системы управления КА ’’Аркон" в режиме
солнечной ориентации:
351
СИСТЕМА 17М836 ТАКТ 2112 ВРЕМЯ 02:29:31,00
Режим ПСО-3 мод.2 (НП 50Гц) УЧАСТОК АСТРОКОРРЕКЦИИ
ФУНКЦИОНИРОВАНИЕ СУОС НОРМА
СОХР.ПЗ НОРМА УХОД ГИВУС ОПРЕДЕЛЕН
АСТРОКОРРЕКЦИЯ ПО ПАИС И ПОС ЗАДЕЙСТВ.ГИВ БЭО ПАИС 23
ПОС 23 СПТ13
ЗАДЕЙСТВ. БУМ ДМ1 -О ДМ2-0 ДМ3-О ПАИС1 ПОИСК ОР В
ЗАДАН.ЗОНЕ
ЗАДЕЙСТВ.СГК1 ВУ1 ДВ1 СГК2 ВУ1 ДВ1 ПАИСП ПОИСК ОР В
ЗАДАН.ЗОНЕ
ЗАДЕЙСТВ.СГКЗ ВУ1 ДВ1 СГК4 ВУ1 ДВ1
НЕИНФОРМ. ПОС
ОТКАЗ ПАИС1
ЦВК РАБОТОСПОСОБЕН.
Организация и планирование работ в ЦУП
Для организации и планирования работ по управлению полетом
космических летательных аппаратов в ЦУП создается Главная оперативная
группа управления (ГОГУ).
Основными функциями ГОГУ являются:
1. Подготовка персонала к управлению полетом космического аппарата и
проведение комплексных тренировок в предстартовый период.
2. Осуществление централизованного управления полетом КА после
отделения его от ракеты-носителя.
3. Организация, координация работ по взаимодействию с наземным
комплексом управления.
4. Оценка динамических характеристик КА в ходе его полета на
околоземной орбите.
5. Организация работ по управлению КА в случае возникновения в ходе
полета КА нештатных ситуаций.
Процесс оперативного управления полетом КА носит циклический характер
и состоит из следующих технологических операций:
- долгосрочное планирование по управлению КА, планирование и
разработка суточных программ полета;
- разработка программ сеансов связи с КА и плана задействования
средств НКУ;
- выполнение плана полета КА, включая его реализацию персоналом
ГОГУ и средствами;
- формирование управляющих воздействий (глобальные целеуказания,
целеуказания, полетные задания, разовые команды и т.д.) и передача их
на наземные измерительные пункты НКУ для последующего ввода их
на борт космического аппарата;
352
— контролирование выполнения программы полета КА на основании
оперативного анализа состояния систем КА, проведенного по
результатам обработки телеметрической информации;
- регистрация основных параметров состояния КА;
- решение баллистических задач и обеспечение ГОГУ баллистико-
навигационной информацией;
— принятие решений по дальнейшему управлению полетом КА.
В случае возникновения нерасчетной ситуации (НС) на борту КА или в
контуре наземного управления и после ее идентификации оперативное
управление КА осуществляется на основании рекомендаций, связанных с
парированием НС, выдаваемых специалистами группы анализа ГОГУ.
Комплексная задача оперативного управления полетом КА разделена на
отдельные задачи, решение которых возлагается на функциональные группы ГОГУ.
Каждая функциональная группа разделена на несколько смен и возглавляется
руководителем группы. Общее руководство управлением КА возлагается на
руководителя полетом.
В состав ГОГУ входят следующие функциональные группы:
1. Группа планирования, функциональными задачами которой являются:
- подготовка, согласование и выпуск “Общего плана полета КА” и
“Детального плана полета КА” с учетом оперативной полетной
обстановки;
- подготовка и согласование исходных данных для разработки плана
взаимодействия средств НКУ, спутниковых и наземных каналов связи;
- контроль выполнения программы полета КА, подготовка материалов
для выпуска оперативных отчетов.
2. Группа реализации программы полета и расчета командно-
программной информации, функциональными задачами которой являются:
- разработка программы сеанса связи на текущие сутки полета в
соответствии с “Детальным планом”;
- расчет информационных массивов (глобальные целеуказания,
целеуказания, полетные задания), определение разовых команд для
управления и подготовка для последующего ввода их на борт КА;
— обеспечение и контроль готовности средств НКУ и проведение
сеансов связи с КА;
- выдача предложений по выполнению программы полета в случае
возникновения нерасчетных ситуаций.
3. Группа анализа работы бортовых систем, функциональными задачами
которой являются:
- оперативный контроль выполнения суточной программы полета КА;
— анализ работы, регистрация и прогнозирование технического
состояния бортовых систем КА;
353
- анализ телеметрической информации, поступающей с борта КА,
распознавание отказов бортовой аппаратуры и возникающих
нерасчетных ситуаций, разработка и выдача рекомендаций по их
парированию;
- выдача предложений на использование бортовой аппаратуры на
последующие сутки полета КА;
- учет расхода топлива, электроэнергии на борту и анализ наработки
приборов и агрегатов различных систем КА.
4. Баллистическая координационная группа, функциональными задачами
которой являются:
- выдача состояния баллистико-навигационной обстановки полета КА
при штатном выполнении программы полета и при возникновении
нерасчетных ситуаций;
- контроль поступающей информации о траекторных измерениях;
- определение и выдача в группу реализации программы полета
исходных данных для расчета командно-программной информации.
Контроль состояния, диагностика и управление
конфигурацией бортовых систем и аппаратуры КА
Успешное выполнение целевых задач, возложенных на КА, во многом
зависит от надежности функционирования бортовых систем и аппаратуры КА.
Поэтому одной из основных задач ЦУП является контроль состояния и
диагностика бортовых систем и аппаратуры КА.
Информация, необходимая для реализаций этой задачи, формируется
непосредственно на борту КА и передается на наземные пункты приёма
информации по каналам телеметрического контроля.
Для обеспечения требуемой надежности функционирования бортовых систем
и аппаратуры КА в ЦУП проводится:
- оценка бортовых систем и аппаратуры КА;
- выявление особенностей их функционирования в реальных условиях
эксплуатации;
- локализация неисправностей и управления конфигурацией бортовых
систем и аппаратуры в целях поддержания работоспособности КА;
- разработка и реализация технических мероприятий по улучшению
эксплуатационных характеристик бортовых систем и аппаратуры КА,
устранение причин их нерасчётного функционирования, поддержанию
нормальных условий эксплуатации.
Под управлением конфигурацией понимают реализацию переключений
бортовых систем и аппаратуры КА на резервные, работоспособные комплекты
или каналы.
Изменение конфигурации бортовых систем и аппаратуры КА может
проводиться:
354
- оперативно средствами СУ;
- по ПЗ путём перевода на борт КА в сеансах связи настроечных
параметров и признаков, характеризующих конфигурацию
используемых комплектов или каналов бортовых систем и аппаратуры;
- по разовым командам, передаваемым на борт наземными средствами
в сеансах связи с КА.
Организация управления движением КА
Эффективность применения космических аппаратов существенно зависит
от качества управления ими. Определяющим направлением повышения
эффективности управления движением КА является развитие и
совершенствование автономных систем управления движением КА. Повышение
степени автономности управления движением КА позволяет существенно
улучшить эксплуатационные характеристики КА.
Функции автономной системы управления движением следующие:
1. Планирование и выработка программ управления движением в
соответствии с глобальными целеуказаниями.
2. Расчёт оптимальных управляющих воздействий.
3. Реализация программы управления.
4. Контроль выполнения программы управления.
Другие возможные способы управления движением КА по степени
автономности занимают промежуточное положение между управлением по разовым
командам и управлением по глобальным целеуказаниям. В зависимости от
распределения функций между ЦУП и автономной системой управления
движением КА в части получения и обработки баллистико-навигационной
информации, последующего планирования и выработки программы управления
движением различают следующие методы управления КА:
- управление по целеуказаниям;
- командно-программное управление.
В обоих методах можно выделить два способа управления движением КА:
1. Управление по целеуказаниям:
- управление на уровне отдельных этапов полёта по глобальным
целеуказаниям;
- управление по целеуказаниям на уровне реализации частных задач
полёта.
2. Командно-программное управление:
355
- управление по минимуму уставочной информации на уровне реализации
частных задач полёта;
- управление по полному объему командной и уставочной информации.
При любом из способов управления движением КА командная и
уставочная информация преобразуется в конечном счете, в базовое полётное
задание (ПЗ), по которому собственно и организуется выполнение
запланированной программы полёта.
Управление движением КА по глобальным целеуказаниям
Управление по глобальным целеуказаниям является высшим уровнем
автономного управления движением КА.
Под глобальным целеуказанием понимается директива (код целеуказания)
на выполнение отдельного законченного этапа полёта КА. В состав глобального
целеуказания может включаться информационная часть, содержащая:
- информацию, характеризующую конечную цель реализуемого этапа полёта
(например, координаты точки пространства, в которую должен быть
переведен КА, и соответствующий момент времени);
- информацию, которая не может быть получена в общем случае автономно с
помощью бортовых средств КА (например, параметры орбиты другого КА).
Ориентировочный перечень и краткие характеристики глобальных
целеуказаний применительно к задачам, решаемым космическими аппаратами
различного назначения, приведены в табл. 4.7.
Полная программа полёта выполняется путем последовательного задания
ряда глобальных целеуказаний. Каждое последующее глобальное целеуказание
следует после реализации предыдущего. Планирование и определение
программы управления движением, преобразование её в базовое ПЗ проводится
на борту КА в пределах заданного целеуказания. Реализация выработанной
программы управления движением КА осуществляется в соответствии с базовым
ПЗ. Для обеспечения требуемой точности решения целевых задач периодически
корректируется выработанная программа управления движением КА после
уточнения баллистико-навигационной информации.
Управление движением КА по глобальным целеуказаниям обеспечивает
период полностью автономного функционирования КА от нескольких дней до
нескольких месяцев. Длительность периода автономного управления движением
КА зависит от типа конкретной задачи, поставленной перед КА.
356
Таблица 4.7 - Краткие характеристики глобальных целеуказаний
№ п/п Глобальные целеуказания Содержание автономной программы управления движением КА Информационная часть целеуказаний
1 Проведение специальных работ Определение стратегии спецработ, программы и уставочных параметров углового движения КА, формирование уставочно- информационного массива для спецаппаратуры КА Вид специальных работ, номера или координаты объектов наблюдений, продолжительность работ, их специфика
2 Автономная стыковка с другими КА Определение параметров фазирования (количества, моментов выдачи и параметров корректирующих импульсов скорости) для входа в зону захвата информационных систем двух КА, момента входа в зону захвата, исходных данных для реализации сближения, причаливания и стыковки Параметры орбиты КА, с которым осуществляется стыковка
3 Выход в заданную точку в заданное время Определение количества, моментов выдачи и параметров корректирующего импульса для выхода в заданную точку Координаты требуемой точки и момент времени выхода в требуемую точку
4 Поддержание параметров орбиты (геостационар- ной, солнечно- синхронной и Г.д.) Определение параметров предельного цикла коррекции орбиты с нулевым средним отклонением от заданной высоты орбиты Параметры требуемой орбиты
5 Обеспечение автономного спуска возвращаемого аппарата (ВА) Определение параметров фазирования для выхода в зону отделения ВА, параметров тормозного импульса для спуска ВА Координаты или номер центра полигона посадки
6 Автономный спуск КА Определение параметров фазирования для выхода в зону спуска КА, определение момента выдачи, параметров тормозного импульса Координаты центра (номер)района потопления
357
Управление движением КА по глобальным целеуказаниям может
использоваться для управления движением КА, имеющего на борту
высокоточную систему автономной навигации (САН) и высокопроизводительный
бортовой вычислительный комплекс. Практическое использование этого метода
управления движением требует решения ряда проблемных вопросов, среди
которых, в частности, можно отметить проблему обеспечения достаточной
гибкости управления при возникновении нерасчётных ситуаций в полёте.
Управление движением по глобальным целеуказаниям может оказаться
недостаточно эффективным при проведении спецработ, если возникнет
необходимость проведения специальных работ относительно незапланированных
ориентиров (объектов) наблюдений, и, как следствие, необходимость передачи их
характеристик на борт КА. В подобных случаях целесообразно переходить на
более низкие уровни управления движением КА.
Управление движением КА по целеуказаниям
В данном варианте управления целеуказание представляет собой директиву
на выполнение отдельной частной задачи полёта. В состав целеуказания может
входить информационная часть, содержащая необходимую количественную
характеристику выполняемой задачи и данные, автономное определение которых
на борту КА не представляется возможным.
Управление по целеуказаниям обеспечивает период полного автономного
управления движением КА от одних до нескольких суток. Программа полёта
реализуется путем последовательного задания целеуказаний. Для увеличения
периода автономного управления движением КА целесообразно задавать
одновременно несколько целеуказаний, охватывающих один или несколько
функционально законченных участков полёта. В процессе реализации программы
полёта может проводиться ее корректировка после автономного уточнения
баллистико-навигационной информации.
Ориентировочный перечень целеуказаний для КА различного назначения и
их характеристики приведены в табл. 4.8.
Как и в предыдущем случае, для реализации управления движением КА по
целеуказаниям требуется система автономной навигации и достаточно
производительная бортовая цифровая вычислительная машина. Использование
дублирующих функциональных задач или введение дополнительных
целеуказаний на решение частных задач полёта могут обеспечить требуемую
гибкость управления при возникновении нерасчётных ситуаций.
358
Таблица 4.8 - Перечень целеуказаний и их характеристики
№ п/п Целеуказания Содержание автономной программы управления движением КА Информационный состав целеуказаний
1 Проведение специальных работ Определение параметров углового движения. Задание моментов начала и кодов функциональных задач (режимов функционирования системы управления) Координаты объектов наблюдений
2 Выход в заданную точку пространства Определение момента выдачи и параметров корректирующего импульса скорости. Задание моментов начала и кодов режимов соответствующей последовательности режимов Координаты требуемой точки и момент времени выхода в требуемую точку
3 Формирование орбиты Определение момента выдачи и параметров двух корректирующих импульсов скорости. Задание моментов начала и кодов режимов соответствующей последовательности режимов Требуемая высота перигея и апогея, положение перигея в пространстве
4 Выход в зону захвата информацион- ной системы Определение момента выдачи и параметров двух корректирующих импульсов скорости. Определение момента времени входа в зону захвата, уставок для реализации сближения и стыковки. Задание моментов начала и кодов режимов соответствующей последовательности режимов Параметры орбиты кооперируемого объекта (другого КА)
5 Обеспечение условий для отделения ВА Определение параметров ориентации КА. Задание моментов начала и кодов режимов Координаты центра или номер полигона посадки, момент отделения ВА
6 Коррекция высоты перигея Определение момента выдачи и параметров корректирующего импульса скорости. Задание моментов начала и кодов режимов соответствующей последовательности режимов Требуемая высота перигея
359
Продолжение табл. 4.8
№ п/п Целеуказания Содержание автономной программы управления движением КА Информационный состав целеуказаний
7 Коррекция высоты апогея Определение момента выдачи и параметров корректирующего импульса скорости. Задание моментов начала и кодов режимов соответствующей последовательности режимов Требуемая высота апогея
8 Коррекция наклона орбиты Определение момента выдачи и параметров корректирующего импульса скорости. Задание моментов начала и кодов режимов соответствующей последовательности режимов Требуемое наклонение орбиты
9 Построение и поддержание требуемой ориентации Задание моментов начала и кодов режимов построения и поддержания требуемой ориентации, признака типа ориентации (на Землю, Солнце и др.) Время начала выполнения задачи
Управление движением КА по минимуму уставочной информации
Управление движением КА по минимальному объему уставочной
информации представляет собой управление по полётному заданию. Полётное
задание содержит директивы на выполнение частных задач полёта и
минимальный объем уставочной информации, необходимой для реализации этих
задач. По составу частных задач полёта, объему информационной части
управление по минимальному объему уставочной информации аналогично
управлению движением КА по целеуказаниям. Принципиальное отличие между
ними заключается в том, что в рассматриваемом случае уставочная информация и
баллистико-навигационное обеспечение формируются центром управления
полётами.
При управлении по минимуму уставочной информации программа полёта
выполняется путем последовательного задания ПЗ после реализации
предыдущего ПЗ. После ввода ПЗ на борт КА и анализа кодов директив
отдельные функциональные задачи (режимы функционирования СУ)
объединяются в единую логическую последовательность.
Управление движением КА по полному объему уставочной
информации (по базовому ПЗ)
Управление движением КА по базовому ПЗ осуществляется на уровне
выполнения последовательности отдельных функциональных задач (режимов
360
функционирования системы управления). Базовое ПЗ содержит: полный объем
режимов СУ, необходимый для решения запланированных задач полёта и полный
объем уставочной информации. Период автономного управления движением КА
по базовому ПЗ определяется составом функциональных задач, временем и
требуемой точностью их реализации и может составлять несколько суток.
Преобразование программы управления движением КА к форме базового
ПЗ, навигационное обеспечение полёта, контроль выполнения программы
осуществляются центром управления полётами.
Организация функционирования системы управления
по полётному заданию
Базовое полетное задание СУ является формой представления программы
управления движением КА в виде логической последовательности
функциональных задач (режимов функционирования СУ), наполненной полным
объемом уставочной информации, необходимой для их реализации. В состав
базового ПЗ могут также входить признаки, определяющие состояние СУ, ее
приборов и аппаратуры, настроечные значения параметров подсистем СУ.
Для удобства ввода, использования и контроля сохранности ПЗ на борту
КА базовое ПЗ разделяется на несколько групп. Базовое ПЗ может содержать как
консервативные группы, состав и объем которых постоянен, так и оперативные
группы (состав и объем групп переменный). Общее количество групп в составе
базового ПЗ зависит от функциональных особенностей КА, спектра решаемых им
целевых задач и полного объема ПЗ.
Не нарушая общности изложения, разделим условно базовое ПЗ на три
группы: две консервативные и одну оперативную.
Первая консервативная группа содержит настроечные параметры СУОС,
изменение которых устраняет нерасчетные ситуации, обусловленные отличием
динамических характеристик КА от расчетных.
В состав второй группы входят настроечные параметры отдельных
подсистем СУ, приборов и аппаратуры КА, а также признаки, характеризующие
их состояние и конфигурацию (использование основных или резервных каналов и
комплектов).
Оперативная группа содержит:
- параметры, позволяющие организовать работу СУ по базовому ПЗ и
установить базу отсчета бортового времени;
- параметры, позволяющие реализовать режимы работы СУ в требуемой
последовательности;
- уставочную информацию, необходимую для выполнения режимов СУ.
Состав и объем оперативной группы зависит:
- от типа конкретной задачи, реализуемой планируемой
последовательностью глобальных целеуказаний (при управлении
движением КА по глобальным целеуказаниям);
361
- типа и состава целеуказаний, охватывающих один или несколько
участков полета КА (при управлении движением КА по целеуказаниям);
- типа и состава директив, а также минимального объема уставочной
информации (при управлении движением КА по минимальному объему
уставочной информации);
- содержания запланированной программы полета (при управлении
движением КА по полному объему уставочной информации - базовому
ПЗ).
Ввод на борт КА консервативных групп базового ПЗ проводится в процессе
предстартовой подготовки КА независимо от способа управления движением КА.
Первая группа параметров переводится на борт в случае необходимости
устранения возникших на борту КА нерасчетных ситуаций. Вторая группа
параметров переводится на борт КА, если в результате бортового и (или)
наземного контроля состояния СУ и ее подсистем, приборов или аппаратуры КА
появилась необходимость изменить их конфигурацию.
При управлении движением КА по полному объему уставочной
информации оперативные группы базового ПЗ вводится на борт КА в
соответствии с запланированной программой полета. Во всех других вариантах
управления оперативная группы базового ПЗ рассчитывают непосредственно на
борту КА. Исходной информацией для ее расчета являются:
- коды и информационная часть глобальных целеуказаний КА (при
управлении движением КА по глобальным целеуказаниям);
- коды и информационная часть целеуказаний КА (при управлении
движением КА по целеуказаниям);
- коды директив и минимальный объем уставочной информациии (при
управлении движением КА по минимальному объему уставочной
информациии).
Для выполнения заданной программы полета во времени на борту КА
организуется база отсчета и расчет бортового времени. Режимы
функционирования СУ задействуются в последовательности, задаваемой в
оперативной группе базового ПЗ. Для реализации каждого режима определяется
момент начала его функционирования, код и порядковый номер следования, а
также уставочная информация, необходимая для выполнения динамических
операций режима.
В случае возникновения нерасчетных ситуаций, требующих реализации
последовательностей режимов, не предусмотренных рассмотренными выше
способами управления движением КА, осуществляется переход на управление по
разовым командам.
362
Организация управления по разовым командам
Разовые команды предназначены для оперативного управления СУ. С
помощью разовых команд осуществляется включение режимов СУ, проводится
переключение резервных приборов, парируются возможные нештатные
ситуации.
При разработке оперативной программы управления на сеанс связи
перечень возможных команд должен быть определен заранее. Выдача таких
команд осуществляется по распоряжению сменного руководителя полетом.
При управлении СУ возможно использование так называемых РК-ПЗ.
Данные разовые команды предназначены для запуска стандартной связки
режимов СУ, реализующей задачу закрутки КА, дозакрутки или индикации
угловых скоростей. Все характеристики данной связки режимов определены на
этапе разработки СУ.
Массив изменения программ
Если по результатам анализа функционирования СУ в полете были
выявлены особенности функционирования СУ или элементов СУ, которые могут
повлиять на безопасность полета и которые не были учтены при разработке СУ,
можно осуществить коррекцию программного обеспечения СУ с помощью
массива изменения программ.
Разработка МИП проводится разработчиком СУ. Все технические решения,
использованные при разработке МИП, проходят отработку на стендах
разработчика СУ. Ввод МИП на борт КА осуществляется по схеме, идентичной
схеме ввода полетного задания.
4.11 Принципы организации телеметрического контроля
процесса испытаний подсистем КА
Основная задача системы телеметрических измерений - предоставление
информации для подтверждения работоспособности и тактико-технических
характеристик (ТТХ) подсистем на всех этапах наземных испытаний и в полете.
Эту задачу решают при обработке и анализе массивов, полученных штатными
средствами приема ТМИ.
Принципы организации телеметрического контроля
подсистем КА
По способу формирования телеметрическую информацию СУ условно
можно разделить на приборную и цифровую ТМИ. Приборная ТМИ формируется
встроенными в аппаратуру СУ согласующими устройствами. Аналоговые
параметры приводятся к диапазону 0...6.2 В, сигнальные параметры
формируются или замыканием (размыканием) сухих контактов реле, или
высоким (низким ) уровнем напряжения.
363
Цифровая ТМИ формируется алгоритмами основной работы СУ и выдается в
радиотелеметрическую станцию (РТС) кадрами по 64 (128)
шестнадцатиразрядных слова через блок согласования телеметрического кадра
(БСТК).
Цифровую ТМИ подразделяют на такие составляющие:
- текущую ТМИ;
- разовые кадры ’’Отчет СУ”;
- разовые кадры оперативного запоминающего устройства (ОЗУ).
Текущая ТМИ формируется в каждом такте работы бортовой цифровой
вычислительной машиной СУ в виде кадров, содержащих 64 (128)
шестнадцатиразрядных слова. Учитывая то, что перечень задач, решаемых в
одном режиме работы СУ, отличается от перечня задач, решаемых в других
режимах, наполнение кадров в режимах различно. В соответствии со
сложившейся практикой в кадрах выдается вся входная информация БЦВМ
(информация, формируемая командными приборами СУ и смежными системами)
и вся выходная информация БЦВМ (управляющие сигналы на исполнительные
органы, информация в смежные системы). Кроме того, в кадре выдаются
признаки, характеризующие состояние приборов и информация, позволяющая
идентифицировать текущее состояние СУ.
Разовые кадры "Отчет СУ" предназначены для выдачи параметров,
формируемых алгоритмами обработки бортовой информации (АОБИ). Задача
АОБИ решается во всех динамических режимах СУ. Алгоритмы формируют
обобщенные параметры, характеризующие работу СУ за весь режим в целом
(значения динамических параметров на начало и конец режима, максимальные
значения параметров, наработка приборов СУ в режиме и т.д.). При переходе из
одного режима работы СУ в другой информация данного режима в виде кадра
записывается в массив разовых кадров (МРК). Объем памяти МРК позволяет
записать четыре режимных кадра и два ресурсных кадра. Ресурсные кадры
записываются в МРК по разовой команде "Считывание кадров АОБИ".
Разовые кадры "Отчет СУ" содержат следующую информацию:
- режим работы СУ;
- информацию о выполнении задач режима;
- перечень приборов, отказ которых зафиксирован в данном режиме;
- максимальные значения углов, угловых скоростей, кинетических
моментов силовых гироскопов и время их формирования;
~ длительность работы двигателей в каждом из каналов;
- значения наиболее информативных признаков.
Разовые кадры ОЗУ содержат информацию для поиска причин нештатного
функционирования СУ. Выдача разовых кадров (РК) осуществляется по
командам. При получении одной команды на Землю передается 1 Кб
информации.
364
Телеметрический контроль подсистемы на этапе
проведения испытаний на комплексном стенде
предприятия-разработчика
Телеметрический контроль подсистемы КА на этапе проведения испытаний
на комплексном стенде предприятия-разработчика выполняют в четыре этапа:
1-й этап. Для оперативного контроля состояния подсистемы в процессе
проведения испытаний ТМИ подсистемы регистрируется в контрольно-
проверочной аппаратуре (КПА), где обрабатывается и отображается в
необходимом объеме на мнемосхеме оператора средствами программно-
математического обеспечения обработки ТМИ.
2-й этап. По окончании 1-го этапа испытаний осуществляют лабораторно-
отработочные испытания подсистемы, при которых выполняют полную
обработку ТМИ каждой подсистемы КА по заранее заданным критериям с
выдачей протокола испытаний. Протокол детального анализа функционирования
одной из подсистем (модуля телеметрии (МТ)) приведен ниже. Протокол
содержит следующую информацию:
- наименование режима функционирования МТ;
- параметры рабочей конфигурации МТ;
- процесс выдачи и исполнения команд управления МТ;
- процесс функционирования МТ в каждом из заданных режимов;
- процесс переключения комплектов резервирования.
Послесеансный анализ ЦТМ МТ 23.11.06 г.
по ТМ04402.123 от 03.11.06г
RTIME
297 Режим ПДП : ОР Сеанс связи SS=1
2 М = 60 N = 5
11 ПОУО: УПОСК
10 Ком.<НВ> по началу сеанса связи выдана в МТ по норме
Состояние МТ: ПИ1 НВ
3 Задействован МКК-О МТ
3 Есть ответ на запрос PING
6 Считывание ДТМИ из МТ Норма
300 ИК175 выдана в МТ по норме
*******----------------- R_time=365
12 Режим ПДП : ТВ
******* |2 Ответ на запрос PING получен от МКК-О при 3-м запросе
15 Режим ПДП : ВКЛ Вне сеанса связи SS=O
10 Ком.<ВОСПР> выдана в МТ по норме
10 Воспроизведение ТМИ
Состояние МТ: ПИ1 ЗАП
365
5 Норма записи ТМК ТВ
16 5 Запись ТМИ : НОРМА- Т ПДП АУРК;
17 5 Коэффициент прореживания 1
44 Режим ПДП : ОР
57 11 ПОУО: УПОСК
5 Запись ТМИ : НОРМА - Т ПДП АУРК ПОУО;
5 Коэффициент прореживания 12
*******------------------ R time=285
12 Режим ПДП : ТВ
******* |2 Ответ на запрос PING получен от МКК-О при 3-м запросе
15 Режим ПДП : ВКЛ Вне сеанса связи SS=O
5 Норма записи ТМК ТВ
16 5 Запись ТМИ : НОРМА - Т ПДП АУРК
18 5 Коэффициент прореживания 1
33 5 Коэффициент прореживания 3
34 5 Коэффициент прореживания 1
44 Режим ПДП : ОР
57 11 ПОУО: УПОСК
5 Запись ТМИ : НОРМА - Т ПДП АУРК ПОУО;
5 Коэффициент прореживания 12
416-----------Конец ЗАП: R_time=273
Режим ПДП : ОР Сеанс связи SS=1
10 Ком.<НВ> по окончании <ВОСПР> выдана в МТ по норме
Состояние МТ: ПИ1 НВ
419 6 Считывание ДТМИ из МТ Норма
979 ИК182 выдана в МТ по норме
Состояние МТ: ПИ1 НВ "О"ЗУ
1041 ИК183 выдана в МТ по норме
Состояние МТ: ПИ1 НВ "О"ЗУ Откл.реж.МТ
1045 3 Выключен МКК-0 МТ
3 Задействован МКК-Р МТ
1046 6 DSRS MT : БРАК: ответ не получен в течение 1 мс
1047 Состояние МТ: ПИ1 ЗАП "О"ЗУ
3 Задержка выдачи запроса PING
1052 3 Нет ответа на запрос PING
1053 3 Нет ответа на запрос PING
1054 3 Есть ответ на запрос PING
1056 ИК175 выдана в МТ по норме
Состояние МТ: ПИ1 НВ "О"ЗУ
1059 6 Считывание ДТМИ из МТ Норма
1061 ИК172 выдана в МТ по норме
Состояние МТ: ПИЗ НВ "О"ЗУ
1066 ИК170 выдана в МТ по норме
Состояние МТ: ПИ1 НВ "О"ЗУ
366
1151 ИК182 выдана в МТ по норме
1185 ИК176 выдана в МТ по норме
Состояние МТ: ПИ1 ЗАП ”О"ЗУ
1185 Конец ТМИ
3-й этап. Для приемосдаточных испытаний (ПСИ) подсистем КА на
комплексном стенде разрабатывают "Методику оценки ТМИ тгри проведении
комплексных испытаний", которая должна содержать ограниченный объем
наиболее информативных параметров, позволяющих комплексно оценить
правильность совместного функционирования ПАО и аппаратуры, их эталонные
значения на выбранных интервалах функционирования подсистемы. Данная
"Методика..." входит в состав эксплуатационной документации КА.
4-й этап. Для нештатного функционирования подсистемы КА при
испытаниях проводят полный анализ информации. При этом используют ПАО
представления полного объема параметров, формируемого подсистемой, в
физических величинах в виде таблиц со свободной компоновкой параметров.
Телеметрический контроль подсистемы КА на этапе
проведения летных испытаний
При проведении летных испытаний телеметрическую информацию
используют для решения следующих задач:
- оценка функционирования подсистемы в интересах оперативного
управления КА;
- подтверждение выполнения требований, заложенных в техническом
задании на подсистему;
- поиск причин неисправностей при нештатном функционировании
КА.
Для оценки функционирования подсистемы применяют программы
оперативного анализа ТМИ, работающие в реальном масштабе времени и
формирующие на рабочем месте оператора логические суждения, которые
позволяют оценить работу подсистемы в целом и сформировать итоговый
протокол сеанса связи на основе полученной ТМИ.
Для подтверждения выполнения требований, заложенных в ТЗ,
разрабатывают специальные методики анализа НИ, содержащие перечень
параметров, участки контроля и описания процедур контроля. На основе данной
методики при необходимости разрабатывают соответствующее ПМО.
Во время поиска причин неисправностей при нештатном функционировании
подсистемы КА используют ПМО представления полного объема параметров,
формируемого подсистемой, в физических величинах в виде таблиц со свободной
компоновкой параметров.
367
Система сбора и обработки ТМИ
на предприятии-разработчике системы управления
Задачу сбора и обработки ТМИ на предприятии-разработчике СУ решают с
использованием программно-аппаратного комплекса (ПАК) на базе системы
приема и регистрации телеметрической информации ЛИТОН-3.
Программно-аппаратный комплекс предназначен для решения следующих
задач:
- ввод ТМ-информации в ПЭВМ из аппаратуры МА- 9 МКТ;
- выделение информации СУ из общего потока ТМИ;
- запись ТМИ СУ в память ПЭВМ;
- проведение полной обработки ТМИ СУ, отображение и
документирование результатов обработки;
- передачу обработанной информации абонентам по телефонным
каналам связи (ТЛФ).
Структурная схема ПАК
ПАК создают на базе универсальной системы приема и регистрации
телеметрической информации ЛИТОН-3. Структурная схема ПАК показана на
рис. 4.45.
Назначение элементов ПАК
Система ЛИТОН-3 обеспечивает решение следующих задач:
- прием ТМ-информации из аппаратуры МА- 9МКТ;
- запись ТМ-информации на видеомагнитофон;
- выдача информации в локальную вычислительную сеть.
Рабочее место оператора (РМО) предназначено для обработки ТМ-
информации. На РМО решают следующие задачи:
чтение информации в сервере ЛВС;
выбор ТМ- информации СУ из кадра ТМИ;
формирование при необходимости архива ТМИ;
полная обработка ТМИ СУ с представлением результатов
обработки в виде таблиц и графиков, запоминание таблиц на жестком
368
диске и документирование, при необходимости, результатов обработки на
твердых копиях;
- передача результатов обработки по телефонной линии связи на
удаленные РМО.
ТЛФ
Рисунок 4.45 - Структурная схема программно-аппаратного комплекса
Для получения и обработки ТМИ в помещениях, не охваченных ЛВС,
создают удаленное рабочее место оператора. Прием ТМИ на данном РМО
осуществляется по телефонной линии связи.
На удаленном рабочем месте оператора решают следующие задачи:
- получение результатов обработки по ТЛФ;
- архивирование и документирование результатов обработки.
Библиографический список
1. ГОСТ 19.30J-79. Программа и методика испытаний. - М.: Изд-во
стандартов, 1979. - 15 с.
2. ДСТУ В 3443-96. Комплексная программа экспериментальной отработки.
-К.: Изд-во стандартов, 1996. - 34 с.
3. ДСТУ В 3442-96. Виды и программы испытаний. - К.: Изд-во стандартов,
1996. - 32 с.
4. Могрова, А.О. Обеспечение стойкости аппаратуры связи к
ионизирующим и электромагнитным излучениям [Текст] / А.О. Могрова, А.З.
Чепиженко. - М.: Радио и связь, 1988. - 283 с.
369
5 ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА
ОТКАЗОУСТОЙЧИВЫХ СИСТЕМ
УПРАВЛЕНИЯ
5.1 Основные понятия и положения отказоустойчивости
Современные системы управления объектов РКТ представляют собой по
сути большие, сложные и многофункциональные комплексы, объединяющие
значительное количество разнотипных функциональных блоков, подсистем и их
связей, эксплуатирующихся в экстремальных условиях. Существенная
масштабность и уникальность этих систем обуславливают уязвимость их к
действию таких дестабилизирующих факторов функционирования, как
различные поломки, неисправности, сбои, а в общем - отказы [1, 2, 3].
Аварии и катастрофы в космонавтике - это прежде всего вызов творческой
инженерной мысли, а также культуре проектирования РКТ и, в частности,
культуре разработки СУ РКТ. Все эги аномалии свидетельствуют о неполном
совершенстве создаваемых технических объектов, а следовательно, таких их
компонентов, как системы управления. Основная причина несовершенства -
низкий “интеллектуальный уровень” СУ в отношении дестабилизирующих
факторов - отказов. Эффективный путь парирования отказов - придание СУ
свойства отказоустойчивости. Под отказоустойчивостью понимают
способность СУ восстанавливать качество управления после появления отказов.
Реализация этого свойства возможна с использованием как известных принципов
дублирования, мажоритирования, подстройки, так и новых принципов
построения СУ. Одной из продуктивных идей, позаимствованных специалистами
у природы, является самоорганизация. В любом процессе самоорганизации
можно выделить атрибуты: формирование цели, анализ состояний и принятие
управленческих решений. Такие же атрибуты присущи интеллектуальной
деятельности человека в сложных, непредвиденных, т.е. в неопределенных,
условиях.
Анализ функций классических замкнутых СУ объектами и процессами с
точки зрения самоорганизации показывает, что все названные атрибуты
существуют, но уровень выполняемых ими функций очень низкий. Так, цель
формируется, как правило, по известному алгоритму и представляет собой
временную функцию задающего воздействия на СУ. Состояние анализируется с
помощью сумматора или сравнивающего устройства, которые выявляют только
отклонение сигнала обратной связи от задающего воздействия. Решение,
связанное с уменьшением отклонения, принимается обычно по простым, заранее
заданным алгоритмам, формирующим управляющее воздействие на
исполнительные органы СУ. Если посмотреть на эволюцию функций СУ от
регуляторов А. Ромелли, Ж. Понселе, Дж. Уатта, И. Ползунова до современных
адаптивных СУ, то очевидна тенденция неуклонного повышения
интеллектуальных свойств СУ. Такая тенденция вызвана возрастающими
370
требованиями к качеству функционирования СУ, а также неуклонно
расширяющимся спектром функциональных задач.
Известные традиционные подходы к построению адаптивных систем не
позволяют в большинстве случаев обеспечить эффективную отказоустойчивость
систем, поэтому актуален поиск новых подходов, в частности, с использованием
идеи самоорганизации. Первая теоретическая работа в этом направлении
выполнена Beard [4]. В последующем этот подход развивался также в работах
Yang [5], Patton [6], А. Кулика [7-10] и др. Отдельные аспекты этого подхода
получили развитие в работах Isermann [11], Huang Chien [12] и др. Проблематика
обеспечения отказоустойчивости СУ посредством самоорганизации
представляется относительно новой и актуальной как в теоретическом, так и в
прикладном планах. Приведем основные понятия и определения, используемые в
данной области знаний.
Состояние, которое характеризуется в определенный момент времени, при
определенных условиях внешней среды значениями параметров, установленной
технической документацией на объект, называется техническим состоянием
объекта. Исследование объекта в целях определения его состояния называется
техническим диагностированием, или диагностированием. Для осуществления
диагностирования объекта на всех этапах жизненного цикла формируется
комплекс взаимосвязанных моделей, правил, методов, алгоритмов и средств,
называемый диагностическим обеспечением. Целью диагностирования является
определение технического состояния объекта, т.е. получение диагноза. Изделие
и его составные части, подлежащие диагностированию, называются объектом
диагностирования.
Работоспособное состояние — это состояние объекта, при котором значения
всех параметров, характеризующих способность выполнять заданные функции,
соответствуют требованиям нормативно-технической и (или) конструкторской
документации.
Отказ — событие, заключающееся в нарушении работоспособности объекта,
обусловленное низкой надежностью элементов и связей, неправильной
эксплуатацией, вредным влиянием среды и другими причинами.
Особенность современного подхода к проектированию СУ заключается в
рассмотрении системы с отказом как одного из возможных ее состояний.
В теории надежности отказы рассматривают как вероятностные события,
следовательно, для оперирования такими событиями используют инструментарий
теории вероятностей и определяют параметры объекта: наработку на отказ,
наработку между отказами и т.п. Однако для определения причины отказа и
парирования его влияния на СУ теория вероятностей не располагает
подходящими инструментальными средствами. Поэтому введем следующие
понятия:
Вид отказа - описание конкретного физического проявления отказа. Для
систем управления рассматривают виды отказов датчиков, сервоприводов и виды
отказов объекта управления - например, обрыв сигнального провода датчика
угловой скорости; положительный дрейф нуля датчика углового положения;
371
выход из строя датчика угла; потеря 20% площади солнечных панелей
космического объекта и т.п.
Класс отказа - это подмножество видов отказов, проявляющих себя
идентично на доступных измерениях. Например, обрывы питающих и
сигнальных проводов гироскопических датчиков характеризуются постоянством
выходных сигналов, дрейфы нуля датчиков отражаются в смещении статических
характеристик.
Место отказа - это конструктивно законченная часть объекта
диагностирования, в которой появился конкретный вид отказа.
Введенные характеристики отказов можно рассматривать как
неопределенные события. Неопределенность обусловлена моментом появления
отказа, местом его возникновения, принадлежностью к классу и виду отказа.
Все известные способы и методы обеспечения отказоустойчивости СУ
можно классифицировать по используемым принципам на три таких обобщенных
подхода — структурный, алгоритмический и системный.
Использование принципа структурной избыточности лежит в основе
структурного подхода. Согласно этому подходу исходную СУ, содержащую
только функционально необходимые элементы и связи, дополняют новыми
элементами и связями. Ряд способов заключается в использовании постоянного
или статического резервирования. Широко применяемым способом является
мажоритарное резервирование. Структурная избыточность может вводиться с
помощью дополнительных контуров сигнальной и параметрической подстроек
основной СУ.
Алгоритмический подход заключается в использовании принципа
компенсации. При этом разрабатываются такие алгоритмы обработки
измерительной информации и формирования управляющих воздействий, которые
обеспечат сохранение работоспособности СУ при возникновении любых отказов
из заданного множества. Особенность алгоритмического подхода заключается в
рассмотрении только полных перемежающихся однократных отказов, а также в
использовании знаний о моменте времени и месте появления отказа для выбора
алгоритмов формирования оценки вектора измерительной информации или
управляющих воздействий. Построение отказоустойчивых алгоритмов получения
оценочных значений векторов измерений приведено в работе [10].
Системный подход к обеспечению отказоустойчивости СУ характеризуется
применением принципов самоорганизации для поддержания работоспособности
системы при возможных видах отказов функциональных элементов. Системный
подход базируется на декомпозиции процесса обеспечения отказоустойчивости
на два этапа и переходе от пассивных способов обеспечения отказоустойчивости
к активным. В системном подходе к обеспечению отказоустойчивости
раскрывается целостность СУ и ее механизмов, выявляется многообразие типов
связей в СУ для использования этих знаний при обеспечении диагностирования и
восстановления работоспособности.
Такой подход позволяет активно парировать появляющиеся виды отказов,
используя при этом все возможные избыточные ресурсы, что не предполагается
372
при использовании первых двух подходов. Следовательно, под активной
отказоустойчивостью СУ понимают ее способность диагностировать и
восстанавливать работоспособность при появлении видов отказов из заданного
множества.
Особенность системного подхода к обеспечению активной
отказоустойчивости СУ представим концептуально. В основу положено пять
принципов: первый - использование единого подхода к обеспечению активной
отказоустойчивости компонентов и в целом СУ на всех этапах их жизненного
цикла; второй - трехуровневая иерархия обеспечения активной
отказоустойчивости; третий - проектирование компонентов и СУ как объектов
диагностирования и восстановления работоспособности; четвертый - глубокое
диагностирование работоспособности; пятый - гибкое восстановление
работоспособности.
Использование первого принципа даёт возможность унифицировать
технологию и средства обеспечения отказоустойчивости, что позволяет
исключить процесс накопления ошибок, недоработок и других аномалий на
этапах проектирования и производства, приводящих к нештатным ситуациям СУ
в полёте. Реализация второго принципа приводит к декомпозиции средств
обеспечения отказоустойчивости на уровни блоков, системы и надсистемы. Из
всего множества возможных и критичных для СУ видов отказов D = {di}J1
выбираются виды отказов d. е Dj с D, которые могут быть парированы на уровне
функциональных компонентов СУ: блоков датчиков, сервоприводов,
регуляторов. Подмножество D, формируется исходя из имеющегося объема
элементной и алгоритмической избыточности. Для системного уровня
формируется подмножество видов отказов D2 a. D, парируемых с помощью
средств системной избыточности. На третьем, надсистемном уровне парируются
виды отказов из подмножества D3 с D с помощью внесистемных средств
избыточности, таких, как, например, переход на ручное управление техническим
объектом, аварийная остановка объекта, изменение режима функционирования
объекта и др.
Внедрение третьего принципа даёт возможность на всех этапах
проектирования аномальные состояния объектов включать во множество
наблюдаемых и управляемых состояний и обеспечивать сбалансированность
глубины диагностирования с объёмами избыточных ресурсов восстановления
работоспособности.
Принцип глубокого диагностирования заключается в определении
конкретных видов отказов cL, i = l,q на основании доступных измерений.
Глубокое диагностирование осуществляется на каждом уровне обеспечения
отказоустойчивости. Глубокое диагностирование реализуется с помощью
сигнально-параметрического подхода [15]. Суть подхода заключается в
комплексном решении ряда задач, показанных на рис. 5.1.
373
Ядро проблемы глубокого диагностирования состоит из четырех
взаимосвязанных задач: 1) обнаружение отказа; 2) поиск места отказа;
3) установление класса отказа; 4) определение вида отказа. Для каждой из этих
задач строятся исходя из возможных нештатных ситуаций посредством выбора
как прямых, так и косвенных диагностических признаков конкретные
диагностические модели.
Рисунок 5.1- Структуризация проблемы глубокого
диагностирования
Диагностические модели - это новые классы математических моделей,
связывающие косвенные сигнальные признаки с прямыми параметрическими
признаками видов отказов.
Суть принципа гибкого парирования последствий видов отказов состоит в
формировании для каждого вида (в ряде случаев, возможно, и нескольких видов
отказов) всех возможных вариантов парирования конкретной нештатной
ситуации на основе имеющихся резервных средств. Для каждого варианта
устанавливается относительный приоритет, необходимый для формирования
адаптивной процедуры использования соответствующих элементов
374
избыточности из подмножества R, = {грг2,...,гк}. Процедуры парирования
формируются исходя из принципа действия объекта диагностирования,
особенностей его поведения в нештатных режимах и с использованием
диагностических моделей, а также с учетом объема и характера ресурсов
избыточности.
На рис. 5.2 показана совокупность задач гибкого парирования последствий
видов отказов.
Рисунок 5.2 - Структуризация проблемы гибкого
парирования последствий отказов
Использование описанных принципов приводит к новой структуре СУ,
укрупненная блок-схема которой изображена на рис. 5.3.
375
ОТКАЗЫ ОТКАЗЫ
ОТКАЗЫ
Рисунок 5.3 - Блок-схема отказоустойчивой СУ
На первом, элементном уровне обобщенная отказоустойчивая СУ состоит из
объекта управления, датчиков (Д), сервоприводов (С) и регулятора (Р),
включающих в себя средства диагностирования (СД) и парирования (СП) видов
отказов. На втором, системном уровне проводятся процедуры диагностирования
всей СУ, а также парирование видов отказов с помощью системных средств.
Кроме того, с элементного уровня при исчерпании ресурсов избыточности
результаты диагностирования передаются на второй уровень. На надсистемном
уровне диагностируется качество функционирования нижних уровней и
парируются аварийные ситуации с помощью имеющихся средств.
5.2 Методология обеспечения отказоустойчивости систем управления
При создании аэрокосмической техники разрабатываются и используются
многочисленные информационные технологии и аппаратные средства для
обеспечения отказоустойчивости. С 60-х годов прошлого столетия начались
интенсивные исследования, связанные с созданием методов проектирования СУ,
способных парировать возможные нештатные режимы функционирования. В
376
основу этих методов был положен принцип избыточности аппаратных средств и
их экспериментальной отработки. Затем начались научные исследования,
направленные на изучение потенциальных возможностей мажоритарных
способов парирования последствий отказов.
Ужесточающиеся ограничения по массово-габаритным, энергетическим и
ценовым характеристикам СУ, с одной стороны, а также расширяющиеся
возможности цифровой обработки информации, с другой, привели к
необходимости поиска новых альтернативных аппаратно-алгоритмических
подходов к парированию нештатных режимов функционирования СУ. Этот
период характеризуется созданием конструктивных технических решений на
основе новых научных и методологических достижений по обеспечению
отказоустойчивости аппаратно-программных средств СУ РКТ, формируется
новое научное направление, связанное с активной отказоустойчивостью СУ.
Анализ известных подходов к обеспечению отказоустойчивости СУ [16] с
позиции установления общих закономерностей технологии проектирования
позволил выявить наиболее характерные взаимосвязанные этапы.
Этап 1. Изучение объекта исследования. На основе изучения назначения,
принципа действия, условий функционирования, требований к
работоспособности формируют различные модели - вербальные, графические,
математические, машинные. Получают для номинального режима статические,
временные и частотные характеристики как для функциональных элементов, так
и для всей системы в целом. Выявляют потенциально аварийные компоненты,
элементы, фрагменты системы, существенно влияющие на работоспособность.
Исследуют влияние их видов отказов на характер функционирования и
показатели работоспособности. Определяют возможные дополнительные
ресурсы для восстановления работоспособности СУ.
Этап 2. Формирование множества видов отказов. Отказоустойчивость СУ не
может быть обеспечена для несчетного множества видов отказов, а также для
счетного множества большой мощности, поэтому требуется сформировать в
результате различных компромиссов рациональное диагностируемое и
парируемое множество видов отказов. Здесь же устанавливают и все свойства
видов отказов, связанные со степенью влияния на работоспособность, с
характером возникновения, проявления и т.п. Такое формирование множества
видов отказов избавляет от необходимости заниматься вообще «всем, что может
отказать», а следовательно, позволяет сформировать конструктивные пути
эффективного достижения отказоустойчивости.
Этап 3. Построение математических и машинных моделей для нештатных
режимов СУ. На этом этапе для сформированного множества видов отказов
определяют соответствующие признаки, однозначно их характеризующие, и
устанавливают возможные диапазоны их изменения. После параметризации
видов отказов строятся формальные - диагностические модели потенциально
аварийных элементов, компонентов, фрагментов и всей системы в целом для
заданного множества видов отказов. Методология моделирования нештатных
режимов функционирования СУ такая же, как и при моделировании
377
номинальных режимов. Полученные диагностические модели исследуют на
диагностируемость, означающую возможность однозначного установления по
доступным измерению косвенным сигнальным признакам соответствующих
прямых параметрических признаков отказов.
Этап 4. Выбор количественных критериев отказоустойчивости. Для
количественной оценки уровня отказоустойчивости разработанной СУ, а также
для структурного и параметрического синтеза нечувствительной, инвариантной к
отказам системы выбирают соответствующие критерии. Это один из сложных
этапов, в меньшей степени поддающийся формализации. При выборе критериев
большое значение имеет накопленный опыт, знания о назначении СУ и
требованиях к ее работоспособности, традиции проектирования и целый ряд
других факторов. Как правило, на начальных этапах разработки (аванпроект и
эскизный) выбирают один приоритетный критерий, а на последующих этапах его
дополняют другими - второстепенными критериями. В большинстве случаев в
качестве основных количественных характеристик обычно выбирают функции
А.М. Ляпунова на параметризованном множестве видов отказов, интегральные
квадратичные функционалы от векторов переменных состояния и управления,
средний терминальный риск, характеризующий взвешенный по вероятностям
проявления отказов риск промаха СУ при выполнении своих функций,
среднеквадратическое значение ошибки функционирования системы,
минимальное количество отказов, при которых система сохраняет
работоспособность, надежность функционирования отказоустойчивой СУ.
Этап 5. Разработка алгоритмов диагностирования. Назначение алгоритмов
диагностирования заключается в получении полного диагноза, что означает
обнаружение любого вида отказа, нахождение места его возникновения, а также в
определении его характеристик, необходимых для процедур восстановления
работоспособности СУ. При разработке алгоритмов должны быть согласованы
объемы требуемой информации от объекта диагностирования и восстановления,
режима его функционирования, структура и циклограмма получаемой
информации и ряд других вопросов, связанных с практической реализацией
алгоритмов диагностирования для конкретной СУ. Качество функционирования
алгоритмов диагностирования оценивают по критериям точности, достоверности
и оперативности выявления видов отказов.
Этап 6. Синтез алгоритмов восстановления работоспособности. Исходя из
возможных избыточных ресурсов (аппаратуры, вычислительных мощностей
БЦВК, подстраиваемых параметров, времени, протяженности рабочего участка,
характеристик элементов и других факторов) определяют способы управления и
формируют алгоритмы восстановления работоспособности СУ. Алгоритмы
восстановления запускаются после получения полного диагноза. Функция
алгоритмов восстановления заключается в переводе СУ из неработоспособного
состояния в работоспособное или безопасный останов с выдачей информации о
причине нештатной ситуации.
Этап 7. Оценка показателей отказоустойчивости. Получить оценки
функциональных возможностей и качественных характеристик разработанной
378
системы в замкнутой форме не представляется возможным. Это влечет за собой
необходимость проведения аналитического моделирования, машинного
имитационного моделирования или их комбинации, по результатам которых
формируются оценки отказоустойчивости изделия с помощью выбранных
критериев. Например, если в качестве критерия отказоустойчивости выбрано
какое-то минимальное выдерживаемое системой число отказов, то при анализе
отказоустойчивости необходимо доказать, что система сохраняет
работоспособность для любых отказов, в совокупности не превышающих
заданного числа. Таким образом, на этом этапе проверяют соответствие системы
всем предъявляемым требованиям и критериям. При появлении несоответствий
анализируют их причины и устраняют их путем возвращения к
соответствующему этапу методологии и осуществления требуемой доработки.
5.3 Диагностические модели систем управления
Для формального описания нештатных режимов СУ используют различные
диагностические модели (ДМ). ДМ позволяют описывать причинно-
следственные связи возможных аварий, формировать подходы к
диагностированию и восстановлению работоспособности СУ, оценивать
возможность обнаружения видов отказов, поиска места их возникновения,
установления класса. Использование ДМ дает возможность целенаправленно
выбрать косвенные диагностические признаки СУ и сформировать алгоритмы
решения соответствующих задач диагностирования, а также обоснованно
выбрать функциональный критерий отказоустойчивости всей системы.
Диагностические модели по сути своей представляют собой новый
специфичный для СУ класс вербальных, графических, математических и
машинных моделей. ДМ отражают с помощью соответствующих формальных
инструментальных средств причинно-следственные связи нештатных режимов
СУ. Построение различных по видам и по форме ДМ является трудоемким
итерационным процессом, связанным с многочисленными экспериментально-
теоретическими исследованиями и отработками. Методики построения ДМ
базируются на методиках построения традиционных управленческих вербальных,
графических, математических и машинных моделей СУ [13]. Далее рассмотрим
только специфические особенности ДМ - принципы построения взаимосвязанной
совокупности машинных моделей, отражающих нештатные, аварийные режимы
функционирования СУ. При разработке диагностического обеспечения СУ в той
или иной степени приходится решать следующие основные задачи:
1) обнаружение отказов; 2) поиск места отказа; 3) установление класса;
4) определение вида отказа. Каждая из таких задач обладает специфичностью как
в постановке, так и в используемых методах решения. В связи с этим при
решении каждой задачи используют свой тип машинных диагностических
моделей (МДМ), отражающих особенности только данной вычислительной
задачи. Причем такие МДМ связаны между собой иерархической схемой, в
которой на верхнем уровне находятся МДМ для обнаружения отказов, на
379
среднем уровне располагаются МДМ для поиска места отказа, а на третьем
уровне - МДМ для решения задачи установления класса.
Построение иерархии МДМ начинается с моделей третьего уровня. Для
этого в соответствии с методологией изучают объект исследования - конкретную
СУ (первый этап), затем на втором этапе формируют множество потенциально
возможных физических видов отказов СУ. Это множество видов отказов
определяют в результате исследовательской работы, связанной с анализом
надёжностных характеристик СУ, опыта эксплуатации подобных СУ и
используемых функциональных элементов, агрегатов, блоков, подсистем,
возможных ресурсов для восстановления работоспособности и других
характеристик. Здесь же выявляют и возможные типы отказов по таким
признакам, как степень влияния на работоспособность СУ, характер проявления,
связь с другими отказами, частота проявления, характер возникновения. В
конечном итоге формируют множество физических видов отказов, по отношению
к которым система должна быть отказоустойчивой.
В целях более конкретного изложения принципов построения иерархии
МДМ введем для v -го функционального элемента СУ следующее обозначение
этого множества:
Dv={d„d2,...,dq}, (5.1)
где dj - i-й физический вид отказа. Например, для гироскопического датчика
угла dj - уменьшение чувствительности до 5%; d2 - уменьшение
чувствительности до 10%; d3 - уход рамки гироскопа на 0,5°; d4 - обрыв
сигнального провода и др.
Рассмотрим особенности формирования уравнений МДМ для задачи
установления класса. Классы возможных видов отказов формируются в
результате параметризации множества Dv для каждого функционального
элемента, блока, подсистемы, т.е. для каждой конструктивно законченной части
СУ. При этом возможны ситуации, когда для нескольких элементов множества
Dv удается найти один параметр, характеризующий особенности целого класса
видов отказов. В ряде случаев 3dj, dj е Dv, для которых можно выбрать
параметр, характеризующий данный класс. Итак, в результате параметризации
формируют множество параметров классов
А = {а1,а2,...,ап}, Уа^с^]. (5.2)
Здесь [aj - вещественное интервальное число, т.е. интервал множества
возможных значений; т| < q.
На этапе эскизного проектирования в ряде случаев номинальные, штатные
режимы функционирования СУ можно описывать относительно рабочей точки в
линеаризованных представлениях. Подобное описание применимо и для
нештатных режимов, вызванных отказами. Поэтому состояние v -го
функционального элемента СУ, возмущенного относительно номинального
380
движения, опишем в канонической наблюдаемой форме [14] с помощью
следующей машинной системы уравнений:
x(k+l)=A,x(k)+B1u(k);
у (к) = С;Х (к) + D,u (к) + F]; х (к0) = х0,
где х(к) - Vj-мерный вектор состояния аварийного функционального элемента,
x(k)eXV|; u(k) - v2-мерный вектор управляющих воздействий
функционального элемента, u(k)eUVl; у(k) - v3-мерный вектор измерений,
y(k)eYV3; ApBpCpFj - матрицы коэффициентов соответствующих
размерностей; к = 0,1,2,... . Машинная диагностическая ML-модель [15] для i-ro
класса отказов описывается в виде
2\x(k + l) = G1Ax + |"A{Ix(k) + Bau(k)l А^ ;
г ; (5.4)
Ay(k) = CAx(k) + [Da.u(k) + Fa. J Aa4; Ax(k0) = x0 ,
где Ax(k) = x(k)-x(k),x(k) - оценочное значение вектора состояния,
полученное с помощью фильтра Люенбергера; А^В^, D^, - матрицы
чувствительности по параметру оц; Аа( = -aiH, aiH - номинальное значение
параметра класса.
Для решения задачи поиска места отказа формируют множество параметров,
однозначно характеризующих элементы, компоненты, блоки или фрагменты СУ,
обеспеченные ресурсами по восстановлению ее работоспособности.
Сформировав такое множество
в = {₽1,₽2,...,рх}, V₽f €[₽,], i = lj, (5.5)
строят линеаризованную машинную модель СУ для всех доступных измерений в
классе конечно-разностных уравнений в канонической наблюдаемой форме
x(k+l)=A2x(k)+B2u(k);
y(k)=C2x(k); x(k0)=x0,
здесь x(k) - п-мерный вектор состояния аварийной СУ, x(k)eXn; u(k)-r-
мерный вектор управляющих воздействий СУ, u(k)eUr; у(k)-1-мерный
вектор измерений со всех контрольных точек, y(k) g Y1; А2,В2,С2 - матрицы
соответствующих размерностей.
Машинная диагностическая ML-модель для i-ro параметра описывается
такими уравнениями:
Ax(k+l)=G2Ax(k)+[Ap x(k)+Bp u(k)]APi;
Ay(k)=C2Ax(k); Ax(k0)=x0,
здесь Api =pj -р^, PiH - номинальное значение i-ro параметра; Ар. и Вр. -
матрицы частных производных матриц А2, В2 по параметру pj;
381
Ду(к) = у(к)-Сх(к), х(к) - люенбергеровская оценка вектора состояния
системы.
МДМ для решения задачи обнаружения отказов строят с использованием
множества параметров у, характеризующих влияние отказов из заданного для СУ
множества D = UDv на доступные измерению выходные сигналы. Выбирают
V
минимально возможное число параметров, позволяющих отразить качественное
влияние всех потенциальных возможных отказов на компоненты вектора
выходного сигнала системы. В результате такого выбора получают
Г = {Yi.Y2>— >Yg}> Ti = (5-8)
Используя эти параметры и знания о СУ, строят каноническую математическую
модель в наблюдаемой форме следующего вида:
х(к+1) = А3х(к) + В}и(к);
у(к) = С3х(к); х(ка) = Хо,
где х(к) - п-мерный вектор состояния аварийной системы, х(к) еXn; и(к)- г-
мерный вектор управления, u(k)eUT; у (к)- m-мерный вектор доступных
измерений системы, y(k)e Ym; А3, В3, С3 - матрицы соответствующих
размерностей.
При использовании для воспроизведения эталонного поведения СУ
фильтра Д. Люенбергера в такой форме:
x(k+l) = Gx(k) + Ky(k) + Bu(k);
y(k) = Cx(k); x(k0)=O,
где x(k) - п-мерная оценка вектора состояния системы; G,K,B,C - матрицы
фильтра соответствующих размерностей, машинная диагностическая ML-модель
для i-ro параметра будет описываться следующими уравнениями:
Ax(k+1) =GAx(k) + [Атх(к) +Вти(к)]дУ1;
Ду(к) = СДх(к); Дх(к0)=х0,
здесь Дх(к) = х(к)-х(к); Ау, Ву. - матрицы коэффициентов чувствительности
матриц А3,В3 по параметру У,; Ду, = У, ~У1П, У1Н - номинальное значение
параметра.
МДМ для решения задачи обнаружения отказов может быть построена
другим способом экспериментально-аналитических исследований. Для
линеаризуемой СУ с известной структурой машинной математической модели
строят для штатных режимов функционирования посредством параметрической
идентификации модели вида
x(k+l) = Ax(k) + Bu(k);
y(k) = Cx(k); x(ko) = O.
382
Полученные значения матриц А,ВиС , а также значения входа и (к) и
выхода у (к) используют для воспроизведения текущих значений оценки у (к) с
помощью фильтра Д. Люенбергера . Затем имитируют в реальной, полунатурной
или машинной СУ проявление физических видов отказов из множества D и
полученные значения сигналов обрабатывают по следующему правилу:
Ay(k) = у(к)-у(к), Vk, кеТ;
Sh.=
1 при ^|ДуДк)|>8^;
к
° при Е|дУ1(к)|<51о; VkeT;j=l,m,
(5-13)
где Т- множество дискретных значений моментов времени, соответствующих
интервалу наблюдения; АуДк) - величина j-й координаты вектора Ду(k); 5jo -
пороговое значение допустимого изменения j -й координаты.
Полученные значения переменной Sd позволяют отобразить результаты
исследований с помощью таблицы влияния отказов (ТВО), представляющей
собой наиболее распространенную разновидность логических диагностических
моделей (табл. 5.1). ТВО формируется как для тестового режима
функционирования СУ, когда подаются специально организованные
управляющие воздействия и (к), так и для функционального режима при подаче
рабочих воздействий u(k).
Таким образом, с помощью ТВО удаётся отразить качественную связь
видов отказов dpi=l,q с косвенным признаком АуДк)л=1,т в соответствующих
режимах функционирования СУ.
Таблица 5.1 - Общий вид логической диагностической модели
dj Признаки Ay/k)
дУ|(к) ду2(к) ... ДУп>(к) '
d. Su ... Slm
d2 S21 ^22 ... S2m
...
dq Sq. S,2 ... Sqm
Минимизация ТВО с помощью известных процедур [15, 16] позволяет
сформировать минимальные совокупности признаков Ау^к), обеспечивающих
однозначное решение соответствующей диагностической задачи.
383
5.4 Критерии диагностируемости
Отказ в СУ - это неопределенное событие по моменту появления и месту
возникновения и принадлежности к классу. Для оценки принципиальной
возможности определения по косвенным доступным измерениям таких
характеристик отказов, как момент появления, место и класс, используют
критерии диагностируемости.
Диагностируемость — это свойство СУ, характеризующее возможность
однозначного установления в ней факта наличия соответствующего прямого
признака любого отказа из заданного множества по доступным наблюдению
косвенным признакам в течение конечного интервала времени.
В зависимости от основных задач диагностирования, а также иерархических
уровней МДМ будем рассматривать критерии диагностируемости появления
отказов, их места и класса. Диагностируемость зависит от структуры СУ, т.е.
способа соединения функциональных элементов и путей распространения
информации об отказах, а также от сигнальных свойств, т.е. количества и
качества информации в измеряемых сигналах, вызванных соответствующими
воздействиями. В связи с этим для оценки возможности установления факта
наличия соответствующего прямого признака отказа используют критерии
структурной и сигнальной диагностируемости. Следует отметить, что критерии
будем рассматривать в малом, для так называемых «малых» отказов,
характеризующихся изменением как прямых, так и косвенных признаков вблизи
окрестности их номинальных значений. Процессы, происходящие в СУ при
«малых» отказах, описываются ранее рассмотренными соответствующими
машинными диагностическими ML-моделями. Выводы, полученные
относительно диагностируемости для малых отказов, в ряде практических
случаев справедливы и для больших отказов.
Критерии диагностируемости появления отказов
Для оценки диагностируемости аварийной СУ относительно появления
отказов сформируем исходя из МДМ (5.11) соответствующую матрицу Р ,
включающую в себя матрицы коэффициентов чувствительности по параметру
PT.=[ATi в/] (5.14)
и составной вектор сигналов
V7<T(k)=[x(k) U(k)]> (5Л5>
где т - символ транспонирования.
Критерий структурной диагностируемости. Система управления
структурно диагностируема в малом относительно появления отказов, если
составная матрица Рт & 0, Vi, i = 1 ,ц.
384
Итак, для оценки структурных свойств требуется сформировать все
матрицы Р , i = 1, ц и провести качественный анализ их коэффициентов. Если
система структурно диагностируема, то ей будут соответствовать матрицы
i = l’H •
Критерий сигнальной диагностируемости. Система управления
сигнально диагностируема в малом относительно появления отказов, если
3 u(k)e Ur и 3 к, кеТ, то |Ду^к)|^ 8io, V i, i = 1,р.
Вектор Ду^к) формируется из системы уравнений (5.11) при условии
полной структурной диагностируемости, а именно:
Дх(к + l)=GAx(k) + Р;ЛДУ1;
Ду(к) = СДх(к), Дх(к0) = 0.
Следовательно, критерий сигнальной диагностируемости позволяет установить
возможность обнаружения отказов при u(k)eUr. Если Дх(к0) = хо^О, то
выполнение условия |Ду^к)|>3|0 проверяют после исчезновения ошибки в
начальном состоянии, т.е. после окончания переходного процесса в МДМ (5.16).
Критерии диагностируемости места отказа
Введем в рассмотрение такие характеристики для МДМ (5.7):
МР1=[аР1 bJ (5.17)
и составной вектор
v?,(k) = [x(k) U(k)]- (518)
Приведем в терминах этих характеристик соответствующие критерии
диагностируемости для однократных отказов.
Критерий структурной диагностируемости. Система управления
структурно диагностируема в малом относительно места отказов, если
матрицы Мр , i = 1,X линейно независимы во всех попарных сочетаниях.
Матрицы структурно диагностируемой системы обозначим как Mj, i = 1, X.
Критерий сигнальной диагностируемости. Система управления
сигнально диагностируема в малом относительно места отказов, если
3 u(k) g Ur такое, что векторы Mj vp. (k), i = 1, X линейно независимы во всех
попарных сочетаниях.
„ - л. А,(Х-1 ) „
Количество сочетании вычисляют по формуле С£=—*•——Приведенные
критерии справедливы и для «больших» отказов, т.е. в большом, если векторы
385
Mp vp (к) имеют в попарных сочетаниях различную структуру, а также если
структура векторов в каком-то сочетании одинакова, но параметры Pi и Pj
входят линейно в выражения коэффициентов матриц системы (5.6).
Критерии диагностируемое™ класса отказов
Для ML-модели, описывающей i-й класс отказов (5.4), введем матрицу Ка ,
характеризующую структурные свойства, в такой форме:
Га„ в„ о!
К == ’ * (5.19)
L° D<. FJ
и составной вектор
w*(k) = [x(k) u(k) 1]. (5.20)
Тогда для однократных отказов справедливы следующие критерии.
Критерий структурной диагностируемости. Подсистема управления
структурно диагностируема в малом относительно класса отказов, если
матрицы , i = 1, г| линейно независимы во всех попарных сочетаниях.
Обозначим матрицы структурно диагностируемой подсистемы как К* и
перейдем к анализу сигнальных свойств.
Критерий сигнальной диагностируемости. Подсистема управления
сигнально диагностируема в малом, если 3u(k)eUV2 такое, что векторы
wa. (k), i =1, т] линейно независимы во всех попарных сочетаниях.
Сформированные критерии для малых отказов справедливы и для больших
в тех случаях, когда векторы wo. (к) имеют различную структуру, а также
при одинаковой структуре векторов с параметрами ар линейно входящими в
элементы матриц системы.
Рассмотренные критерии диагностируемости появления отказов, места,
класса отказов позволяют не только установить возможность однозначного
определения соответствующих признаков отказов при заданных условиях. Так,
критерии структурной диагностируемости дают возможность установить,
сколько и каких контрольных точек требуется для обеспечения структурной
диагностируемости СУ или ее фрагментов в результате анализа линейно
зависимых попарных сочетаний составных матриц. Критерии сигнальной
диагностируемости позволяют выбирать режим диагностирования
(функциональный, тестовый или комбинированный), а также формировать закон
изменения управляющего воздействия, обеспечивающий сигнальную
диагностируемость.
386
5.5 Критерии функциональной отказоустойчивости
Работоспособность СУ характеризуется выполнением ряда требований,
например, по запасам устойчивости, времени переходного процесса, точности и
др. Отказ в СУ приводит к нарушению ее работоспособности, а следовательно, к
изменению характеристик работоспособности. Для обеспечения
отказоустойчивости спроектированная СУ должна обладать способностью
восстанавливать свою работоспособность при появлении отказов из заданного
множества. Восстановить работоспособность означает в буквальном смысле
«вернуть» характеристики в диапазоны, соответствующие нормальному
функционированию СУ, посредством сигнальной или (и) параметрической
подстроек, замены полностью отказавших элементов, блоков или подсистем
исправными, использования вместо сигналов отказавших функциональных
датчиков восстановленных оценочных значений, перехода на другие алгоритмы
управления, применения ряда других дополнительных ресурсов.
В теории автоматического управления наряду с упомянутыми
характеристиками работоспособности широко используют, особенно в задачах
синтеза, обобщенные характеристики, критерии работоспособности в форме
квадратичных и интегральных функционалов. Применение таких функционалов
позволяет аналитически формировать оптимальную структуру алгоритмов
управления, обеспечивающих наилучшее значение критериев.
Рассмотрим такие особенности МДМ, используемых в задаче обнаружения
отказов, которые применимы для решения задачи восстановления
работоспособности на системном уровне и для обоснования выбора критерия
отказоустойчивости. Предположим, что в СУ произошел один отказ или
несколько, которые могут быть парированы на системном уровне. Пусть эта
аномалия характеризуется параметром Yj, тогда машинная диагностическая ML-
модель описывается следующим образом:
Ax(k+1) =GAx(k) +Аух(к)Ду; + Ву.и(к)Дур
Ду(к)=САх(к); Дх(к0)=х0.
(5.21)
Преобразуем эти уравнения к виду
Ay(k+l)=CGAx(k)+C[Ari Bj
В силу того, что матрица G может быть выбрана диагональной с
одинаковыми собственными значениями, а матрица С в канонической
наблюдаемой форме имеет коэффициенты 0 или 1, первое слагаемое можно
представить в такой форме: GAy(k), здесь G' - диагональная матрица с теми же
собственными значениями, но dimG'=(mxm). Во втором слагаемом обозначим
матрицу c[Ayi Ву.]=Ц и введем вектор сигналов (5.15). Тогда с учетом
новых обозначений
387
Ду (к+1) = G'Ay(k) +LtvTi (к) Ay,, Ау(к0) = у0. (5.22)
По сути это уравнение описывает отклонения возмущенного движения СУ
относительно эталонного поведения, воспроизводимого фильтром
Д. Люенбергера (5.10). Возмущенное движение вызвано отказом или отказами,
характеризуемыми Ду,. Возмущающее воздействие на СУ в данном случае
описывается произведением v (к)Дуг Матрица L определяет направления
передачи и величину возмущающего воздействия. Матрица G' характеризует
собственную динамику процесса получения отклонений возмущенного
движения. В терминах этой модели задача восстановления работоспособности
СУ состоит в том, чтобы устранить отклонения Ау(к), т.е. обеспечить
выполнение условия НтДу(к)=0 при к->оо. С точки зрения теории
устойчивости СУ выполнение такого условия означает асимптотическую
устойчивость движения скорректированной системы относительно ее эталонной
модели.
Для устранения отклонения Ду (к), вызванного возмущением vy (k)Ayi3
требуются соответствующие устройства автоматической стабилизации,
выполняющие сигнальную, параметрическую подстройки или реконфигурацию
структуры на основании отклонения Ду (к). В общем случае контур такого
восстановления работоспособности описывается уравнениями
Ay(k+l)=G'Ay(k)+LrF[o(k)];
o(k+l) =o(k)+4'(k)T0,
где F^cr(k)] — вектор нелинейных функций устройства стабилизации; о(к) -
вектор управляющих воздействий стабилизатора; Т(к) - вектор формирования
управляющих воздействий; То - период квантования. Вектор F[o(k)J отражает
ограниченные возможности восстановления и описывает функции
соответствующих устройств.
При использовании сигнальной подстройки для восстановления
работоспособности функция описывает алгоритм устройства, генерирующего
дополнительный сигнал к управляющему воздействию и (к). При
параметрической подстройке F[o(k)] описывает закон изменения
подстраиваемого параметра. Если выполняется реконфигурация алгоритмов или
аппаратуры, то F[o(k)J описывает функции соответствующих коммутаторов,
отключающих отказавшие элементы и подключающих резервные. При
использовании уравнений (5.23) для формирования управляющих воздействий
о (к) в целях обеспечения асимптотического убывания к нулю вектора
отклонений Ду (к) наиболее приемлем второй метод Ляпунова [17].
Таким образом, более естественно и целесообразно для синтеза контуров
восстановления работоспособности СУ, а также для оценки качества
388
(5.23)
функционирования отказоустойчивой системы использовать критерий в форме
функций Ляпунова
v[Ay(k)] = AyT(k)QAy(k);
V[Ay(k)] = ||Ду(к)||,
где Q - симметричная, положительная матрица; ||Ду(к)|| - норма вектора Ду(к).
Эти функции по сути своей характеризуют устойчивость системы к
сигнальным и параметрическим возмущениям, описывающим действия отказов
из заданного множества. В связи с этим функции Ляпунова можно в полной мере
использовать в качестве критериев функциональной отказоустойчивости СУ.
5.6 Обобщенная функциональная схема первого уровня отказоустойчивой
системы стабилизации КА
В соответствии с блок-схемой отказоустойчивости СУ (рис. 5.3)
рассмотрим для решения задачи стабилизации углового положения КА
функциональную схему, отражающую в общем виде особенности первого -
элементного уровня обеспечения отказоустойчивости.
Рисунок 5.4 - Обобщенная функциональная схема
элементного уровня отказоустойчивости СУ
На КА действуют: вектор возмущающих моментов MB(t), вектор
управляющих моментов M(t). Реакция КА отражается с помощью параметров
углового движения относительно его центра масс, представленных вектором
<p(t) е {3(t),\|/(t)y(t)}. Блок отказоустойчивых датчиков (БОД) обеспечивает
преобразование вектора <p(t) в оценочные значения вектора напряжений датчиков
ид(кТ0), полученные в условиях появления видов отказов из множества Dr
ид(кТ0) преобразуется в БЦВМ в управляющий машинный векторный сигнал
389
UM(kT0). С помощью ЦАП дискретный сигнал UM(kT0) экстраполируется в
векторный управляющий сигнал Uy(t). Итак, в устройстве автоматической
стабилизации (УАС) вектор напряжений ид(кТ0) преобразуется в соответствии с
программой стабилизации КА и при появлении видов отказов из множества D2 в
вектор управляющих воздействий на блок отказоустойчивых сервоприводов
(БОС). В этом блоке на основании Uy(t) и в условиях возникновения видов
отказов из множества D3 формируются управляющие моменты M(t),
компенсирующие последствия и действия возмущающих моментов. Объект
автоматической стабилизации (ОАС) в совокупности с УАС реализуют принцип
управления по отклонению и принцип обеспечения активной отказоустойчивости
первого уровня.
Рассмотрим основные функции, реализующие свойство активной
отказоустойчивости блоков ОАС. Начнем с БОДа. В целях конструктивного
представления функциональных особенностей блока декомпозируем его по
каналам угловой стабилизации и опишем один из возможных вариантов
фрагмента для канала тангажа (рис. 5.5).
Рисунок 5.5 - Функциональная схема фрагмента БОДа
для канала тангажа
Здесь используется функциональная и структурная избыточность датчиков:
. , X d9(t)
функциональная - в силу связи 3(t)=—’ а стРУктУРная - с помощью двух
ДУСов. Напряжения с датчиков, оцифрованные АЦП, поступают на
соответствующие элементы ИВО4,1=1,3, выполняющие функцию имитации
видов отказов по командам с генератора видов отказов (ТВО). HBOf совместно с
ГВО осуществляют по определенным сценариям, задаваемым с верхнего уровня
управления командой СДкТо), деформацию, искажение номинальных сигналов с
датчиков в аварийные, возмущенные, соответствующие конкретному виду отказа
390
di из множества D|. Возмущенные сигналы далее поступают в функциональный
элемент диагностирования видов отказов (ДВО), где выявляется по косвенным
признакам причина аварийной ситуации и формируется оценка характеристик
конкретного вида отказа ДВО включается в работу по команде С2(кТ0).
Результаты диагностирования - диагноз d, поступает на элемент, выполняющий
функцию восстановления сигналов (ВС), где в соответствии с диагнозом
корректируется искаженный видом отказа сигнал и получаются оценочные
значения Us(kT0) и Щ(кТ0). Сигнал с ДВО С3(кТ0) - это сообщения на
верхний уровень управления функциональным и техническим состоянием
отказоустойчивой СУ. Встроенные в функциональную схему элементы ИВО; и
ГВО используют на всех стендах поэтапной экспериментальной обработки
отказоустойчивых систем стабилизации, а в штатном режиме полета их не
применяют.
Рассмотрим основные функциональные особенности БОСа на примере
таких сервоприводов в канале тангажа, как двигатели-маховики без
функциональной подсистемы разгрузки маховиков.
Рисунок 5.6 - Функциональная схема фрагмента БОСа
для канала тангажа
В представленной функциональной схеме (рис. 5.6) используют с
усилителями мощности и датчиками основной двигатель-маховик (ДМ) и
структурно избыточный двигатель-маховик (ДМР), работающий в холодном или
горячем резерве, создающие для КА соответственно вращающие моменты M(t)
и Mp(t). Напряжения U0) (tj и 17^(1), характеризующие угловые скорости
вращающихся частей сервопривода, после АЦП в цифровой форме иШ](кТ0) и
иш (кТ0) поступают на элементы имитации видов отказов ИВО., 1== 1, 2. Здесь
в соответствии со сценариями, задаваемыми сигналом С,(кТ0), и по командам с
391
генератора видов отказов (ГВО) формируются сигналы возмущенного движения
сервоприводов -UWi(kT0) и Ош(кТс). Эти сигналы наряду с управляющими
машинными сигналами - UMi(kT0) и UM2(kT0) и командой С2(кТ0)
отрабатываются по соответствующим алгоритмам в функциональном элементе
ДВО. Результат обработки представляет собой диагноз в форме оценок
характеристик текущего вида отказа dj , поступающего в следующий
функциональный элемент, выполняющий процедуру восстановления
работоспособности (ВР) двигателей-маховиков. Соответствующие сообщения о
функциональном и техническом состояниях сервоприводов с помощью сигнала
С3(кТ0) подаются на следующий уровень управления. В элементе ВР
формируется в зависимости от dj и имеющихся в текущий момент времени
избыточных ресурсов такая процедура парирования вида отказа di5 чтобы
обеспечить восстановление работоспособности отказавшего ДМ до
необходимого уровня функционального качества, т.е. приложить к КА требуемый
управляющий суммарный момент M(t) +Mp(t), обеспечивающий компенсацию
действия возмущающего момента.
Функциональные элементы ГВО и ИВО, используют на всех стадиях
экспериментальной отработки математических, программных и аппаратных
средств отказоустойчивых систем стабилизации. В полете эти элементы в
штатных режимах не применяют.
5.7 Диагностическое обеспечение фрагмента БОДа
Диагностическое обеспечение
включает в себя модели, методы,
алгоритмы, процедуры и средства
диагностирования. Рассмотрим
конфигурацию датчиков, показанную на рис
5.5. Сигналы датчиков связаны на линейных
участках статических характеристик такими
соотношениями:
U8(t)=K83(t);
u*,(t)=Kd,a(0; (5-25)
Рисунок 5.7 - Типовая статическая U^2 (t)=K^(t); teT,
характеристика датчиков где к3,к^ и к^2- коэффициенты передачи
датчиков; Т - период измерения.
Зависимость выходного напряжения от входного сигнала можно представить
следующей статической характеристикой, справедливой как для ДУ, так и для
ДУСов (рис. 5.7). Входной сигнал X 3|, а выходной U? gU^, .
392
Напряжения насыщения Umax и Umin, а также значения входного сигнала Хпшх и
lmin отражают диапазоны функционирования датчика. Наклон характеристики
определяется коэффициентом передачи кх.
Опыт эксплуатации датчиков и анализ их функциональных и надежностных
свойств позволяют сформировать для каждого датчика множество характерных
видов отказа, например, таких, как показаны на рис.5.8.
Рисунок. 5.8 - Статические характеристики датчиков при различных
видах отказа
Опишем представленные виды отказа. Вид отказа d, - дрейф нуля
положительный устранимый, если U01 <U0, например, UO=1B (рис. 5.8, а, 1); d2
- дрейф нуля отрицательный устранимый, если U02 > -Uo (рис. 5.8, а, 2); d3 -
дрейф нуля положительный неустранимый, если U01 > Uo (рис. 5.8, а, 1); d4 -
дрейф нуля отрицательный неустранимый, если U02 < -Uo (рис. 5.8, а, 2); d5 -
уменьшение коэффициента передачи датчика (рис. 5.8, б, 2); d6 — переориентация
или смена фаз гиромотора (рис. 5.8, б, 3); d7 - обрыв сигнального провода
датчика (рис. 5.8, в, 1); d8 - обрыв отрицательного провода питания (рис. 5.8, в,
2); d9 - обрыв положительного провода питания (рис. 5.8, в, 3); d]0 -
неизвестный вид отказа.
Каждому физическому виду отказа di5i=l,9 ставится в соответствие
диагностический параметр аг Так, виды отказов dp..., d4описываются
параметром Uo, виды отказов d5 и d6 характеризуются параметром кх, а видам
отказа d7, d8 и d9 соответствует постоянство выходного напряжения Ux = const.
С учетом введенных параметров видов отказа уравнения возмущенного движения
датчиков примут такой вид:
uB(t)=Ka»(t)+u:;
U41(t)=K^(t) +Ut (5.26)
МО =М(0 +иГ; teT.
393
где Ua(t), Uaj(t) и Ua2(t) - выходные напряжения аварийных датчиков;
кэ, к^ и к^2 - текущие коэффициенты передачи датчиков; Ua, Ual и UjJ2 -
текущие величины дрейфов для каждого датчика. В результате изучения свойств
аварийных датчиков и опыта их эксплуатации используют при разработке
диагностического обеспечения следующие рабочие гипотезы:
- в текущий момент времени отказывает лишь один датчик;
- причиной отказавшего датчика является один вид отказа;
- другие виды отказа в период измерения Т не появляются;
- характер изменения входных сигналов &(t) и 9(t) обеспечивает выявление
любого вида отказа из заданного подмножества DJ = {dp...,dl0}; DJ czDt;
- виды отказа появляются независимо один от другого;
- параметры видов отказа существенно не изменяются на интервале
измерения Т.
Представим уравнение (5.26) в векторно-матричной форме для дискретного
времени, опустив для упрощения записи период квантования То.
и8(к) U41(k) Ujk) = *3 0 0 । 1 —« О -ф о» W Э(к) + ’и09' и9' ; кеК, (5.27)
или в сокращенной форме -
ид(к) = D9(k)+F; кеК, (5.28)
где К - множество измерений.
Сформированные МДМ позволяют разработать с помощью сигнально-
параметрического подхода [15] взаимосвязанную совокупность алгоритмов
диагностирования представленного фрагмента БОДа для канала тангажа. Эта
совокупность включает в себя: алгоритмы обнаружения отказа, алгоритмы
поиска отказавшего датчика, алгоритмы установления класса отказа и алгоритмы
определения конкретного вида отказа. Рассмотрим особенности
алгоритмического и программного обеспечения основных задач
диагностирования БОДа для канала тангажа и специфику их экспериментальной
отработки.
Алгоритмическое обеспечение обнаружения отказа
В цифровой векторно-матричной форме уравнения (5.25) для номинального
режима описываются следующим образом:
‘и9(к)] Гкэ
ujk) = О
о
K(k)J
КЭ1
О
Кд
кеК.
(5-29)
О
О
О
W.
?(k)J’
32 _
394
Применив процедуру приведения измерений датчиков ко входу и формулу
численного дифференцирования Эйлера, сформируем следующие алгебраические
соотношения для возмущенного состояния датчиков;
Д9(к) = U8(k+0-U8(k) _1|ЛЙ) А(к)~
' kvT0 2[ к4, к^2
80 =тахяом|дЭ(к)|.
(5.30)
Из полученных соотношений формируется такой двузначный предикат;
Zo = S2{|дЗ(к)|>80}; к = hN. (5.31)
Предикат вычисляют N раз, и в результате вычисления в каждой точке будет
значение 0 или 1. Счетчик No подсчитывает количество единиц, т.е. точек, в
которых «отказ обнаружен». После N проведенных сравнений осуществляется
окончательное «обнаружение» отказа, если No > N • р0, здесь р0 - коэффициент
доверия, позволяющий отбросить «ложные» измерения, «нулевые» точки,
игнорировать погрешности, случайные воздействия и другие факторы.
Итак, для обнаружения отказа в фрагменте БОДа необходимо;
1. Сформировать массив разностей Д3(к), к= 1, N, N =——для
т0
номинального режима функционирования датчиков и вычислить 50 и р0.
2. Занести полученные значения допуска и коэффициента доверия в файл БД и в
дальнейшем использовать для обнаружения отказа.
3. Сформировать разности Д3(к), k = l,N из текущих значений напряжений в
соответствии с формулой (5.30).
4. Вычислить для каждой точки k = l,N предикат (5.31), подсчитав количество
единиц с помощью счетчика No.
5. Сравнить содержимое счетчика No с произведением общего числа измерений
на коэффициент р0 и сообщить один из возможных диагнозов; а) обнаружен
отказ; б) датчики функционируют нормально. Этапы 1 и 2 выполняются один
раз, и в дальнейшем процедура обнаружения начинается с этапа 3.
Схематично алгоритм обнаружения отказа для БОДа показан на рис. 5.9.
Программное обеспечение обнаружения отказа создается на основе
разработанных алгоритмов. Отладка алгоритмов и программного обеспечения
осуществляется с использованием стандартных средств отладки и первоначально
выполняется на файлах данных, полученных с помощью имитационного модуля
БОДа для всех номинальных и аварийных режимов. После этой отладки
алгоритмов и программ переходят к отладке на стендах БОДа. Отказ может
обнаружиться на стенде в пакетном и оперативном режимах. В первом случае
данные со стенда записываются в файл и обрабатываются так же, как
395
имитируемые напряжения. Рекомендуется записывать информацию в файл
только в установившихся режимах, т.е. когда отказ уже произошел, до начала
периода измерения Т, а не в сам период.
Рисунок 5.9 - Алгоритм обнаружения отказа в канале тангажа
Во втором, «оперативном» режиме данные небольшими порциями,
например, 10-20 точек, обрабатываются через равные промежутки времени
(например, через 1 секунду), в том числе и в переходном режиме, где диагноз
может быть недостоверным. Если на следующих итерациях диагноз
подтверждается, то он принимается как окончательный.
Для проведения отладки в оперативном режиме рекомендуется заранее
спланировать эксперимент с учетом рабочих гипотез. Для этого имитируемые на
стенде виды отказа должны разделяться хотя бы одним периодом нормального
функционирования датчиков. Характер входного сигнала прокачки датчиков
должен обеспечивать сигнальную диагностируемость, т.е. возможность
396
обнаруживать отказ и выявлять их нормальное функционирование.
Последующая отладка БОДа проводится в замкнутом контуре в совокупности с
другими функциональными элементами (рис. 5.4) как в номинальных, так и
аварийных режимах функционирования отказоустойчивой СУ.
Алгоритмическое обеспечение поиска отказавшего датчика
Следующей основной задачей после обнаружения отказа в БОДе в
соответствии с рис. 5.1 является задача поиска места, или в конкретной
терминологии - поиска отказавшего датчика. Инструментальные средства
сигнально-параметрического подхода к диагностированию систем управления
[15] позволяют аналитически синтезировать математическое обеспечение
процесса поиска [18], с помощью которого формируются алгоритмы поиска
отказавшего датчика. Опишем особенности этого процесса, воспользовавшись
результатами синтеза. Система уравнений для возмущенного отказами состояния
датчиков описывается следующим образом:
Я(к)
Э>(к) =
42(к)
1
кз
О
[U9(k)
и», (к)
К(к)
(5.32)
где 3(к), &i(k) и Эг(к) - оценочные значения входных сигналов датчиков,
представляющие собой признаки отказавшего датчика. Для обеспечения
сравнимости этих признаков с помощью процедуры численного интегрирования
S'i(k) и Зг(к) по формуле прямоугольников получим такие выражения:
i(k+l)=ii(k)+Toi(k);
£2(кН)=32(к)ГГ0&>(к); k = i?N.
(533)
Более точных оценок можно достичь с помощью процедуры численного
интегрирования по методу трапеций
^2(kH)^2(k)+^&2(k+l)+fh(k)]; к = 1, N.
(5.34)
В соответствии с гипотезой однократности отказа процедура поиска
представима с помощью дихотомического фрагмента (рис. 5.10), где Др i = 1, 3 -
соответствующий датчик; Z, и Z2 - предикаты.
Исходные данные для предикатов описываются уравнениями
397
ZI(k)=S2{|&(k)-^(k)|<81);
Z2(k)=sJ|9(k)-&(k)|<82)
k=l,N;
5>=1^(kM*(k)|;
32=max|$(k)-32(k)|.
(5.35)
Очевидно, что каждый предикат вычисляется N раз. Результат вычисления
в каждый момент к будет представлен значением 1 или 0. Количество «1»
подсчитывается счетчиками N, или N2 соответственно. Предикаты
формируются следующим образом:
Z1=S2{Nl&pIN}; Z2=S2(N2>p2N}, (5.36)
где р1 и р2 - коэффициенты доверия, позволяющие отбросить ложные
измерения, «нулевые точки», игнорировать нулевые результаты диагноза,
погрешности и случайные воздействия на измерения. Графически алгоритм
поиска отказавшего датчика показан на рис. 5.11.
Рисунок 5.11- Алгоритм поиска отказавшего датчика
в канале тангажа
398
Рисунок 5.11 - Окончание
Программное обеспечение поиска места отказа разрабатывается на основе
информационного и алгоритмического обеспечения. Первоначальная отладка
осуществляется с использованием файлов данных, полученных с помощью
программного имитационного номинального модуля и аварийных режимов
функционирования датчиков.
Окончательная отладка проводится на натурном и гибридном стендах как
в автономном, так и в оперативном режимах. Под автономным понимается режим
получения данных со стенда с занесением их в файл и последующей работой с
файлом. Оперативный режим предполагает поиск отказавшего датчика при
стендовых испытаниях в реальном масштабе времени. Задача поиска места отказа
в датчиках решается при положительном решении задачи обнаружения и
является необходимым этапом диагностирования для окончательного выявления
физических причин отказа. Стендовая отладка программ поиска осуществляется
в комплексе с ПО обнаружения отказа.
399
Алгоритмическое обеспечение установления класса отказа
После выявления отказавшего датчика в соответствии с сигнально-
параметрическим подходом к диагностированию (рис. 5.1) требуется снять
неопределенность, вызванную классом отказа. Для каждого датчика (рис. 5.5)
сформированы такие классы отказа: 1) обрывы; 2) дрейфы; 3) изменения
коэффициента передачи.
Класс отказа «обрывы» объединяет виды отказа, связанные с отсутствием
питания и выходного сигнала (рис. 5.8, в). Прямым диагностическим признаком
этого класса служит условие: Ux(k) ~ const, k=l,N.
Класс отказа «дрейфы» включает в себя все виды отказа, приводящие к
смещению статической характеристики по оси ординат и характеризуемые
прямым диагностическим признаком - параметром Uj, X е Si,&2} (рис. 5.8, а).
Класс отказа «изменение коэффициента передачи» состоит из таких видов
отказа, как переориентация, уменьшение коэффициента передачи (рис. 5.8, б).
Характеризуется этот класс прямым диагностическим признаком
kx, Xg^S, Si,&21.
Так как любой обрыв характеризуется постоянством выходного
напряжения:Ux(к) ® const, то Uk(k)®Uk(k+l)®...»Ux(k+m). Поэтому текущий
признак Z3 (к) описывается следующим предикатным уравнением:
Z3(k) = S2{|ux(k)-Ux(k + m)|<83}; k=l,N - m. (5.37)
Класс «дрейфы» описывается такой МДМ:
AUK(k)=U,; k=l?N, (5.38)
следовательно, косвенным диагностическим признаком этого класса служит
условие AU} (k)» AUX (к + 1) ~~ AUk (к + m). Поэтому дихотомический
признак такого класса Z4 (к) будет описываться предикатным уравнением
Z4(k) =S2{|AUjk)-AU3l(k + m)| <S4}; k=l,N - m. (5.39)
Класс, связанный с изменением параметра к2, описывается следующей
МДМ:
AUx(k) =Ак31А((к); Хе{з,3i,S2}; k=l,N. (5.40)
Исходя из этой МДМ модели исправного датчика и условий
реализуемости формируется текущий признак Z5(k) в форме
Z5(k) =S2{|AUx(k)Ux(k+m)-AUx(k + m)AUx(k)| <5S};
(5.41)
k= l.N - m.
400
Значения допусков 53,64 и 65 формируются в номинальном режиме
функционирования посредством вычисления максимальных значений модулей
соответствующих разностей, находящихся под символом предиката.
Для формирования интегральных признаков Z3, Z4 и Z5 используют
счетчики N3...N5, подсчитывающие количество срабатываний соответствующего
условия. Окончательно устанавливается класс отказа посредством сопоставления
результатов счета с числом доверительных измерений:
Z3=S2{N, >p,(N — m)} ;хбр”‘“>>’
Z.-S,(N.>P<(N-m)} (5'42)
Z5 = S;{Ns > ps(N - m)}
Фрагмент алгоритма установления класса отказа показан на рис. 5.12.
401
«Обрывы»
( ОСТАНОВ )
Рисунок 5.12 - Окончание
402
Стендовая отладка ПО установления класса отказа осуществляется после
отладки его на основе имитационного модуля. Стендовая отладка может
выполняться в автономном и оперативном режимах с использованием
стандартных средств отладки для всех номинальных и аварийных режимов
функционирования датчиков.
Алгоритмическое обеспечение определения вида отказа
строится с
разрешается
алгоритмов
определить
Алгоритм вычисления неизвестных признаков вида Дб^
использованием соответствующих МДМ. Уравнение модели
относительно неизвестного признака Ad. После разработки
получения оценочных значений признаков отказов требуется
диапазоны изменения оценок признаков Adi? i = l,p , соответствующие
компенсируемым и некомпенсируемым видам отказа. В результате для каждого
оценочного значения Ас^ устанавливают подмножество значений ,
характеризующих компенсируемый вид отказа, и подмножество Г12,
соответствующее некомпенсируемому виду отказа.
Для подмножества введем нижнее значение d“ = inf и верхнее
значение d® = sup . Тогда двузначные предикаты
/ а- [1, если Aa. > d„;
S2(Adi-d?) = < J
' * |0, если Дс^< d”;
S,(a; - AS,
' J [О, если A^> d®
будут характеризовать расположение Ad относительно границ . Используя
эти предикаты, можно записать правила определения компенсируемого вида
отказа с помощью булева уравнения
VH = S2(d® -Adj Л S2(Aa( - d“).
Для подмножества £2* введем нижнее d” и верхнее d®
соответствующие двузначные предикаты
Л Л ,н\ [1, если Aa. >d”;
S2(Aai-d“) = P J *2’
' ' [0, если Adj <d£;
„ / ,и 11, если Ad. < d”;
S2(d® - Adj) - < * *2’
' ' |o, если Aaf> d®,
тогда правило некомпенсируемого вида отказа можно записать так:
Vi2=S2(Aa( -d”)AS2(d® -Да).
(5.43)
(5.44)
значения и
(5-45)
(5.46)
Для видов отказа из класса «обрывы» фрагмент дихотомического дерева
определения вида возникшего отказа показан на рис. 5.13.
403
1
Рисунок 5.13 - Фрагмент дихотомического дерева
Предикаты Z6(k), Z7(k) и Z8(k) формируются аналогично предикатам
установления класса отказа. Так, Z6(k) описывается следующей формулой:
Z6(k) = S2{|ux(k)|^6)
1 - есть «обрыв сигнального провода»;
О - нет.
(5.47)
Предикаты Z7 (к) и Zs (к) содержат величину напряжения
Umax и пороги 67, 58.
Z, (к) = S2 [|U7 (к) - игом|<57}
1 - есть «обрыв отрицательного
провода»;
О - нет.
насыщения
(5.48)
Z8(k)=S2{|U2(k)
1 - есть «обрыв положительного (5.49)
провода»;
О - нет.
Фрагмент дихотомического дерева для определения видов отказа из класса
«дрейфы» показан на рис. 5.14.
Рисунок 5.14- Фрагмент дихотомического дерева
определения видов отказа из класса «дрейфы»
404
Для формирования предикатов Z9, Z10hZu возникает необходимость
вычисления среднего значения разностного сигнала
ди1(к)=и1(к) -их(к);
I n (5.50)
o:-sgiu>(k);
Z9 (к) = S2 > U^} 1 “ есть «положительный (5.51)
1 неустранимый дрейф»;
0- нет.
Zlo (к) = S2 (uj < - 1 ” есть «отрицательный (5.52)
1 J неустранимый дрейф»;
0 - нет.
Zw(k) = S2{Зп <йд <U*mJ 1 -есть «положительный (5.53)
устранимый дрейф»;
0 - нет.
Рассмотрим фрагмент дихотомического дерева для определения вида
отказа из класса «изменение кх» (рис. 5.15).
Рисунок 5.15 - Фрагмент дихотомического дерева
определения видов отказа из класса «изменение к?»
Вид отказа «переориентация» характеризуется изменением знака
коэффициента передачи на противоположный. Исходя из этого предикат Zl2
Z12 S2{|kx кк|<8
выглядит следующим образом:
1 - ’’переориентация”;
0-нет.
(5.54)
Здесь к« - номинальное значение коэффициента передачи датчика; кх - оценка
его текущего значения, полученная следующим образом:
кх = ~Хкх(к). (5.55)
п к=1
Устранимое и неустранимое изменения коэффициента передачи
различимы благодаря пороговому значению Дк““ изменения кх относительно
номинального к”. Порог Лк^ выбирается с учетом паспортных характеристик
405
датчиков, результатов экспериментальных исследований и имеющихся в
распоряжении разработчика аппаратных и программных средств компенсации
изменения коэффициентов передачи.
Предикат Z13 описывается такой формулой:
ui _ U - "устранимое изменение к,”;
кх-к“ кДкГ} (5.56)
1 '0 - "неустранимое изменение к/’.
На основе описанного выше математического обеспечения разрабатывают
соответствующие алгоритмы, используемые на последнем этапе
диагностирования - выявлении конкретной физической причины отказа.
Для предикатов Z6(k)...Z8(k) вводятся счетчики N6(k)...N8(k)
срабатываний условий. Окончательно определяют вид обрыва путем
сопоставления результатов счетчиков с общим числом измерений N на основе
коэффициентов доверия р6...р8 соответственно:
, 1-"обрыв сигнального провода";
Z6=S2{N6>p6N}
О - нет.
( . 1-"обрыв отрицательного провода";
z7 =s2n7 >p7n) (5-5/)
О - нет.
, > 1 - "обрыв положительного провода";
Z8=S2{N8>p8N}
О-нет.
Фрагмент алгоритма определения вида обрыва показан на рис. 5.16.
Рисунок 5.16 - Фрагмент алгоритма определения вида обрыва
406
1
нет (0)
Рисунок 5.16 - Окончание
407
Алгоритм определения вида дрейфа показан на рис. 5.17.
Вычислить Ох (к)
Вычислить Д Ux ( к)
S:=S+AUx(k)
-------- да(1)
к:=к+1 р—-<<k<N
нст(О)
да (О
Г
Дрейф положительным
неустранимый
нет (0)
I
да(1)
Дрейф отрицательный
неустранимый
нет(0)
да(1)
Дрейф положительный
устранимый
нет (0)
Дрейф отрицательный
устранимый
^останов")
Рисунок 5.17 - Фрагмент алгоритма определения вида дрейфа
Для определения вида отказа из класса «изменение к?» структура
алгоритма выглядит следующим образом:
408
Рисунок 5.18- Фрагмент алгоритма определения вида изменения кх
Полное дихотомическое дерево глубокого диагностирования видов отказов
датчиков показано на рис. 5.19.
409
Рисунок 5.19 - Полное дихотомическое дерево глубокого диагностирования видов отказов датчиков
в канале тангажа
На основе разработанных алгоритмов определения видов отказа создается
ПО, отладка которого проводится в комплексе с программами обнаружения
отказа, поиска отказавшего датчика, определения класса. Отладка, как ранее было
описано, проходит в два этапа: на первом в качестве исходных данных
используют файлы с данными, полученными на имитационном модуле датчиков;
на втором - на стендовом выполняется отладка как в пакетном, так и
оперативном режимах.
5.8 Восстановление сигналов датчиков
Проектирование алгоритмов и программ восстановления сигналов
отказавших датчиков заключается в разработке процедур гибкого использования
имеющейся на борту КА избыточности: 1) приборной (2 ДУСа);
. . ч dS(t)
2) функциональной (&(t) = —^~^); 3) алгоритмической (средства сигнального и
параметрического исправления возмущенных измерений).
Восстановление сигналов отказавших датчиков посредством управления
описанными ресурсами осуществляется в соответствии с уравнением
восстановления сигналов
Ux(k) = P,Ux(k) + p2Ui + рзи\ (к); к е К, (5.58)
здесь Pj - параметры восстановления, позволяющие выполнять следующие
подстройки: Pj - параметрическую; р2 - сигнальную и р3 - подключение
исправного датчика; Ux(k) - восстановленный сигнал с отказавшего датчика; Ug
- оценочное значение дрейфа аварийного датчика; U\(k) - оценочное значение
сигнала, полученное с других исправных датчиков.
Рассмотрим возможности восстановления сигнала для конкретных видов
отказа. Если происходит отказ из класса дрейфов в датчике угла и величина Ug
вычисляется при диагностировании вида отказа как «дрейф положительный
устранимый», то измерения датчика угла восстанавливаются вычитанием из
U3(k) величины оценки UJ. При этом параметры восстановления принимают
следующие значения: pj = 1; р2 = -1; р3 =0, тогда
U9(k)=U,(k) - Uj; ksK. (5.59)
При уменьшении коэффициента передачи ДУСа к. на 20% сигнал этого
l)i
датчика восстанавливается соответствующей деформацией его выходного
сигнала. Для этого случая р} = 1,25; р2 = 0; р3 = 0. Тогда
иДк) = 1,25 иДк); кеК. (5.60)
При различных видах обрывов, например, в датчике угла, восстановление
этого сигнала осуществляется так:
411
p,=0;p2=0;p3 = l; U’8(k) = V8(k - 1) + ^Uj,(k -1).
Ks
При этом U’8 (к) U8 (к), тогда окончательно
U8(k) = U8(k - 1) +Tob-UM(k -1). (5.61)
Ks
Аналогично формируются сценарии для всех видов отказов и
определяются для уравнения (5.58) его структура и параметры, обеспечивающие
желаемое восстановление сигналов отказавших датчиков. Полученные таким
образом алгоритмы служат основой для разработки соответствующего
программного обеспечения для восстановления сигналов датчиков.
Отладка алгоритмов и программ первоначально проводится на файлах
имитационных данных всех видов отказов. После завершения этого этапа
переходят к отладке на стендах, где выявляются и устраняются оставшиеся
ошибки. Последующая отладка выполняется в замкнутом контуре системы
стабилизации как в номинальных, так и аварийных режимах функционирования
первого уровня отказоустойчивой СУ.
5.9 Лабораторные учебно-исследовательские стенды
Для обучения студентов, магистров и аспирантов практическим навыкам
эскизного проектирования, а также принципам и технологии экспериментальной
отработки классических и отказоустойчивых систем управления ОРКТ
применяют целый ряд оригинальных лабораторных стендов и комплексов.
Кафедра систем управления летательных аппаратов располагает
современными лабораториями, которые используют как для учебной работы, так
и для научно-исследовательской деятельности. Первой базовой лабораторией
Рисунок 5.20 - Общий вид лаборатории автоматического управления
412
Принципиальная новизна этой лаборатории заключается, во-первых, в
оснащении ее десятью идентичными по компоновке универсальными
лабораторными стендами, что позволило проводить лабораторные занятия по
фронтальному принципу. Во-вторых, в разработке стенда реализован принцип
полунатурного моделирования непрерывных и дискретных систем
автоматического управления. В-третьих, состав функциональных элементов,
наборное поле и средства коммутации стенда позволяют эффективно проводить
исследования как типовых, так и оригинальных функциональных схем
автоматического управления, в частности отказоустойчивого управления.
Стенд для проведения исследований состоит из двух частей: аналоговой и
цифровой. В аналоговую часть входят аналоговая вычислительная машина МН-7
и электромеханический блок с усилителем мощности. Цифровая часть включает в
себя компоненты аналоговой, сопряженной с персональным компьютером.
Общий вид универсального лабораторного стенда показан на рис. 5.21.
Рисунок 5.21 - Общий вид универсального лабораторного стенда
Назначение, функциональные возможности универсального
лабораторного стенда и технология проведения экспериментальных
исследований описаны в учебном пособии [26].
Новая лаборатория исполнительных устройств и сервоприводов с 2005
года находится в активной эксплуатации.
413
Рисунок 5.22 — Общий вид лаборатории исполнительных устройств
и сервоприводов
414
Универсальный лабораторный стенд предназначен для таких целей:
1) экспериментального исследования различных типов рулевых машин и
сервоприводов (электромеханических, электрогидравлических и
электропневматических); 2) полунатурного моделирования СУ с реальными
рулевыми машинами и сервоприводами в контуре управления;
3) экспериментальной отработки отказоустойчивого обеспечения рулевых
машин и сервоприводов. На стенде размещены такие рулевые машины: 1 -
электрогидравлическая; 2 — электропневматическая; 3 - электромеханическая. В
левой части стенда размещен генератор низких частот 4, предназначенный для
формирования периодических сигналов разной амплитуды и формы
(синусоидальной, в виде меандра и пилообразной); часы 5, выполняющие
функцию программируемого измерителя времени. Справа находится электронно-
лучевой индикатор 6 и пульт управления стендом 7, позволяющий формировать
режимы работы стенда. В центральной части стенда размещен компьютер 8,
выполняющий обработку поступающих цифровых сигналов, их визуализацию,
имитацию динамики ЛА и ряд других вспомогательных функций.
Энергетическое обеспечение стенда осуществляется источником 9. Устройство
сопряжения аналоговой части стенда 10 с цифровой размещено в нижней части
стенда.
Технология экспериментальных исследований СУ с помощью
универсального стенда описана в работе [19].
Принципиально новая лаборатория проектирования систем управления
была введена в эксплуатацию в 2005 году.
Рисунок 5.24 - Общий вид лаборатории
проектирования систем управления
В основу работы лаборатории положена концепция полунатурного
моделирования систем управления ЛА (рис. 5.25).
415
Рисунок 5.25 - Функциональная схема концепции
полунатурного моделирования
Для большей выразительности элементы верхней части схемы показаны
как строгие прямоугольники, элементы нижней части схемы представлены как
прямоугольники со скругленными углами. Степень скругления отражает факт
степени соответствия моделируемого функционального элемента физическому
оригиналу. Концепция построения стенда включает в себя многовариантную
реализацию структуры цифровой СУ.
Моделирование ОУ и элементов СУ проводят как на основе
электромеханического блока, так и на аналоговой вычислительной машине.
Основным средством реализации алгоритмов классического управления, а также
отказоустойчивого управления в составе стенда является цифровой контроллер.
Управляющие программы для микроконтроллера формируют на
инструментальной ПЭВМ в составе стенда с использованием технологии
визуального программирования. Кроме того, инструментальную ПЭВМ
применяют для задания текущих параметров алгоритмов управления и
отображения контролируемых значений в реальном времени.
Контроллеры исследовательских стендов объединены в локальную сеть на
основе одной ПЭВМ, что позволяет осуществлять централизованную загрузку
управляющих программ и сбор данных о ходе экспериментов.
На рис. 5.26 показана структура одного из всего комплекса
исследовательского стенда.
416
Рисунок 5.26 - Структура универсального исследовательского стенда
Функциональная схема контроллера изображена на рис. 5.27.
Рисунок 5.27 - Функциональная схема микропроцессорного контроллера в
составе исследовательского стенда
417
В структуре исследовательского стенда предусмотрено взаимодействие
контроллера, АВМ и элементов электромеханического блока, что позволяет
проводить исследования цифровых СУ объектами, описываемыми
математическими моделями высокого порядка. Реализована также возможность
использования электромеханического блока совместно с моделью, набранной на
АВМ.
Состав программного обеспечения исследовательского стенда и
размещения программных компонентов представлены в табл. 5.2.
Таблица 5.2 - Состав программного обеспечения исследовательского стенда
Название компонента Функции компонента Размещение
Среда разработки алго- ритмов и конфигуриро- вания стенда IDE-430 (редактор схем алго- ритмов, генератор кон- фигурационной програм- мы, драйвер сетевого обмена, модуль отображе- ния данных) Формирование схем алго- ритмов управления, выбор принципов управления ЭД, генерация конфигурационной программы для контроллера, загрузка конфигурационной программы в контроллер, отображение данных от контроллера Инструментальная ПЭВМ в составе стенда
Системная программа MONITOR (интерпрета- тор конфигурационной программы, библиотека алгоритмических блоков, драйвер сетевого обмена) Интерпретация конфигурацион- ной программы и реализация алгоритмов управления, ком- мутация элементов стенда, поддержка сетевого обмена с ПЭВМ Flash-память микроконтролле- ра ATmegal6 в составе контроллера стенда
Конфигурационная программа пользователя Формализованное описание алгоритмов управления и нагружения, заданных пользователем в виде схем алгоритмов в среде IDE-430 Формирование - на инструментальной ПЭВМ Размещение - оперативная память микроконтроллера ATmegal6 в составе контроллера стенда Реализация (выполнение путем интерпретации через библиотеку алгоритмических блоков) - на контроллере в составе стенда
Функциональные элементы и связи программного обеспечения
исследовательского стенда показаны на рис. 5.28.
418
Однократная загрузка
через интерфейс SPT
Контроллер
стенда
Многократная
загрузка через
интерфейсы
RS-232 / RS-485
{ Конфигурационная 1 Память
программа I данных
Рисунок 5.28 - Структура программного обеспечения
исследовательского стенда
В состав лабораторного комплекса входит пять исследовательских
стендов, в каждом из которых размещен контроллер. Связь всех контроллеров с
ПЭВМ реализована на основе промышленного стандарта сетевой связи RS-485.
Это позволяет подключить все контроллеры к единому COM-порту ПЭВМ,
обеспечив при этом раздельный доступ к каждому контроллеру со стороны
ПЭВМ. Для подключения сети RS-485 к COM-порту применен адаптер
419
интерфейса RS-485/RS-232. Топология локальной сети контроллеров- общая
шина (рис. 5.29).
Рисунок 5.29 - Топология локальной сети лабораторного комплекса
Совокупность исследовательских стендов представляет собой
функционально-развитой аналого-цифровой лабораторный комплекс.
Технология разработки, исследования и экспериментальной отработки
различных моделей классических и отказоустойчивых СУ с помощью описанного
лабораторного комплекса подробно представлена в работе [20].
Для разработки и исследования новых подходов и аппаратно-программных
средств отказоустойчивого управления КА на кафедре созданы и
эксплуатируются исследовательские стенды. На рис. 5.30 показан измерительный
блок с избыточным количеством линейных акселерометров, сопряженный с
микропроцессорным блоком, обеспечивающим отказоустойчивость
Рисунок 5.30 - Общий вид исследовательского стенда
отказоустойчивой БИНС
420
Исследование и отработку функциональной схемы фрагмента БОДА для
канала тангажа (рис.5.5) проводят с помощью стенда, показанного на рис, 531.
Рисунок 531 - Общий вид стенда для исследования БОДа
На рис. 532 изображена функциональная схема исследовательского
стенда. В процессе экспериментальных исследований имитировались все ранее
описанные виды отказов, приводящие к деформации статических характеристик,
а следовательно, к изменению функциональных свойств датчиков. С помощью
стенда отрабатывалась технология экспериментальной отладки алгоритмов и
программ диагностирования видов отказов и восстановления сигналов. На
рис. 534 показаны результаты экспериментальной отработки для трех видов
отказов: обрыв положительного провода питания для ДУ, дрейф нуля для ДУС1 и
уменьшение коэффициента передачи для ДУС2.
421
Рисунок 5.32 - Функциональная схема стенда для исследования БОДа
422
Вероятность отказа ДУ: 1 ДО (отказ Вероятность отказа ДУС1: ОДО Г~ отказ Вероятность отказа ДУС2: ОДО Г" отказ
Классы отказе®: Видыотказов: __
ДУ, класс обрыв: ОДО Р отказ ДУС1, класс обрыв: ОДО Г” отказ ДУС2, класс обрыв: ОДО Г* отказ -230,00 Р + питания 1“ -питания Г" сигнал 0,00 Г" + питания Г" - питания Г~ сигнал 0,00 Г + питания П - питания Г“ сигнал
ДУ, класс дрейф: 0,00 Г* отказ ДУС1, класс дрейф: 0,00 Г* отказ ДУС2, класс дрейф: 0,00 Г** отказ 0,00 Г + устран Г -устран Г" + неустран J” -неустран. 0,00 Г” + устран Г~ - устран Г" + неустран П - неустран. 0.00 Г* + устран Г - устран Г" + неустран Г" - неустран
ДУ, класс коэф.: 0,00 Г“ отказ ДУС1, класс коэф.: 0,00 Г~ отказ ДУС2, класс коэф.: 0.00 Г* отказ 0,00 Г коэф. Г" переориентация 0,00 Г коэф. Г переориентация 0,(Ю Г коэф. Г~ переориентация
Отказ ДУ, обрыв провода питания (+), диагностирование
Рисунок 5.33 - Продолжение
423
Отказ ДУ, обрыв провода питания (+), восстановление
Отказ ДУСь неустранимый дрейф нуля
Рисунок 5.33 - Продолжение
424
Вероятность отказа ДУ: 0.00 Г~ отказ Вероятность отказа ДУ С1: 1,00 Р отказ Вероятность отказа ДУС2: 0,00 Г" отказ
Классы отказов: Виды отказов*
ДУ, класс обрыв: 0,00 Г* отказ ДУ СТ, класс обрыв; 0,27 Г* отказ ДУС2, класс обрыв: 0,00 Г* отказ •60,32 П ♦ питания Г* - питания Г~ кигнаН -1,31 Г* +питания Г -питания Г~ сигнал 0,00 Г + питания Г -питания Г* сигнал
ДУ, класс дрейф: 86.14 Г" отказ ДУСТ, класс дрейф: 0,55 р отказ ДУС2, класс дрейф: 0,00 Г* отказ 45.60 Г* + устран С -устран. Г* + неустран. Г~ -неустран. -10.01 Г" + устран. Г - устран. Г" + неустран. Р -неустран. 0,00 Г + устран Р -устран. Г" + неустран П -неустран.
ДУ, класс коэф.: 0,44 Г“ отказ ДУСТ, класс коэф.: 0,00 Г” отказ ДУС2, класс козф.: 0,00 Г” отказ 0,55 Г~ коэф. Г переориентация 0,00 Г* коэф. П переориентация 0.00 Г” коэф. Г" переориентация
Отказ ДУСь неустранимый дрейф нуля, диагностирование
Отказ ДУСь неустранимый дрейф нуля, восстановление
Рисунок 5.33 - Продолжение
425
iSoSk-ipaa.
Отказ ДУС2, уменьшение коэффициента передачи
Вероятность отказа ДУ: 0,00 П отказ
Вероятность отказа ДУ И: 0,00 Г~ отказ Вероятность отказа ДУС2:1,00 F? отказ
Классы отказов: Виды отказов:
ДУ, класс обрыв: 0,00 Г~ отказ -60.32 Г + питания П - питания Г~ ^сигнал
ДУСТ, класс обрыв: 0.00 Г* отказ 30.00 Г + питания П -питания Г сигнал
ДУС2, класс обрыв: 0,21 Г отказ 4,74 Г” < питания Г” - питания Г“ сигнал
ДУ, класс дрейф: 86,14 Г отказ 49,60 П + устран Г” -устран. Г + неустран Г - неустран.
ДУСТ, класс дрейф: 3,29 Г" отказ 21,01 Г * устран Г -устран. Г~ + неустран Г" ~ неустран.
ДУС2, класс дрейф: 1,15 Г отказ -5.05 Г" + устран Г -устран Г + неустран Г -неустран.
ДУ, класс коэф.: 0,44 Г’ отказ 0.55 Г" коэф. Г переориентация
ДУСТ, класс коэф.: 0,88 Г отказ 3,36 Г КОЭФ. Г" переориентация
ДУС2, класс коэф.: 0,06 К? отказ 0,48 р КОЭФ. Г" переориентация
Отказ ДУС2, уменьшение коэффициента передачи,
диагностирование
Рисунок 5.33 - Продолжение
426
Отказ ДУС2, уменьшение коэффициента передачи, восстановление
Рисунок 5.33 - Окончание
Для исследования моделей и методов обеспечения активной
отказоустойчивости объекта автоматической ориентации и стабилизации (ОАОС) в
лаборатории кафедры разработан специализированный аппаратно-программный
комплекс (АПК), позволяющий осуществлять экспериментальные исследования
процессов управления ОАОС с избыточным количеством ДМ и ДУ С в
номинальном и нештатных режимах работы. Внешний вид АПК показан на
рис. 5.34.
Рисунок 5.34 - Общий вид АПК для исследования моделей и методов
обеспечения активной отказоустойчивости ОАОС с ДМ
427
АПК состоит из следующих элементов: платформы с минимально-избыточными
БДМ, Б ДУ С и датчиками углового положения (ДУ), закрепленной в кардановом
подвесе (КП), УАУ и ПК со специализированным программным обеспечением (ПО).
УАУ построено на базе однокристальных микроконтроллеров семейств AVR и ARM7
и включает в себя: периферийный микроконтроллерный модуль (ПММ),
предназначенный для преобразования сигналов с ДУС, ДС и ДУ в цифровой код, а
также генерацию управляющих сигналов на ИМ; управляющий микроконтроллерный
модуль (УММ), осуществляющий обмен данными с ПК и реализующий процедуры
управления движением платформы, диагностирования и парирования отказов ОАОС;
УМ, обеспечивающие преобразование и усиление управляющих сигналов (рис.535).
M.(t)
Рисунок 5.35 - Функциональная схема
аппаратной части комплекса
ПО комплекса включает в себя ПО нижнего уровня, обеспечивающее
выполнение в УММ и ПММ разработанных процедур управления и обеспечения
активной отказоустойчивости, а также ПО верхнего уровня, предназначенное для
обмена информацией с УАУ, задания режимов работы системы, визуализации и
хранения результатов исследований (рис. 5.36).
428
uw
lift.
;w
ЧОЙ
J-"-
“ : I i I i : J • - J | ? : { : * : ;Лл: !-;;tr:it?j;::gf-j,
ЧЛ1H W 1___________F
Tut-LiJ4..i4Z|Z.? Й
OTP
ЕЙ
ъ-*м-
ft.’dU Jg ’ £K|
нт в
иесгояртсд _______ gttccoreaa I
jiioi (УН, _ J ~ •^»^.»ф.в^ад*шЛ'М “ “tJ
• iwtortasM, ~! ’ ~ оцяа^шдвя.
{закфачомям* ea мель :£.;}'' ”
» J ” "• * в ф , > >4., . ..
• Ъ :;ад«;
jttlft;'
’ axw-
• ОвГ
“'В'Ег-Б г
Н ч
>£Ж
9 Щ gfe ft: ft ~Ц lllzbiil ик if мма|
:;wr
*ЖЧ>:*ГС.7 ^ЙиПЗД
rj^rr • .jrJ-£f
•wW. Jer s I?»»;: .;;#*»
m- •
U’ft -I
000
i i ;Ч i H i ] ! ....... H
J'd-iji -i-j i УЙ.11И 06 ~мйу ййа <
Рисунок 5.36 - Экранная форма ПО верхнего уровня
KiiMM
-..i®
4?
Имитация видов отказов в АПК осуществляется как аппаратным, так и
программным способом. При этом изменения параметров имитируются путем
изменения напряжений питания, создания нагрузки на элементы, а также
искажения входных и выходных сигналов.
В процессе экспериментальных исследований на разработанном АПК в
режимах стабилизации и ориентации платформы осуществлялась имитация
видов отказов из рассматриваемого множества и исследовалось их влияние на
отклонение движения ОАОС от номинального. На рис. 5.37 - 5.40 представлены
графики, отражающие поведение ОАОС без отказоустойчивости и со свойством
активной отказоустойчивости. На рисунках введены следующие обозначения
моментов времени: to- введения отказа; tog - обнаружение отказа; tK -
завершение диагностирования; tc - начало парирования сигнальной
подстройкой; tp - начало парирования реконфигурацией аппаратуры; tB -
завершение процедуры парирования отказа.
429
Рисунок 5.37 - Влияние обрыва управляющего провода четвертого ДМ
на параметры движения ОАОС: отклонения угловых положений объекта (а),
изменения показателей качества функционирования (б)
Рисунок 5.38 - Угловые скорости вращения ДМ и выходы
оценочной модели в системе с активной отказоустойчивостью при обрыве
четвертого ДМ
430
Рисунок 5.39 - Влияние уменьшения осевого момента инерции объекта
на его параметры движения: отклонения угловых положений объекта (а), изменения
показателей качества функционирования ОАОС (б)
Рисунок 5.40 - Влияние уменьшения коэффициента передачи ДУС
на параметры движения объекта: отклонения угловых положении объекта (а),
изменения показателей качества функционирования (б)
Как видно из графиков, в ОАОС без активной отказоустойчивости при
введении видов отказов платформа отклоняется от заданного режима ориентации,
а также возникают колебания относительно заданной траектории поворота. В
ОАОС со свойством активной отказоустойчивости платформа после завершения
431
процедур диагностирования и в начале парирования отказа асимптотически
стремится к номинальной траектории движения.
Показатели, характеризующие качесгво работы подсистем обеспечения
активной отказоустойчивости при введении видов отказов из рассматриваемого
множества, приведены в табл. 5.3.
Таблица 5.3 - Результаты исследования отказоустойчивого ОАОС
Виды отказов Время обнаружения отказа, с Время диагности- рования, с Время восстано- вления, с
Уменьшение на 30 % 0.05 0.17 1.49
Увеличение Mci на 40 % 0.05 0.17 1.03
Увеличение т, на 35 % 0.1 0.22 1.04
Уменьшение Kui на 25 % 0.03 0.15 2.15
Уменьшение на 20% 0.04 0.16 1.22
Положительный дрейф УМ и . =0.3 В ум1о 0.05 0.17 1.37
Отрицательный дрейф ДС идав =-40рад/мин 0.03 0.15 1.79
Уменьшение к. на 30% 0.04 0.37 1.12
Уменьшение к,. на 25% 0.035 0.57 0.95
Положительный дрейф ДУ С ий =4рад/мин 0.042 0.47 1.15
Отрицательный дрейф ДУ С =-7рад/мин 0.051 0.39 1.41
Уменьшение осевого момента инерции на 20% 0.121 0.73 1.78
Обрыв ДМл 0.32 0.95 1.54
Короткое замыкание выхода yMi 0.12 0.21 1.65
Пробой положительного плеча УМ, 0.09 0.24 1.74
Обрыв ДС, 0.085 0.17 0.54
Обрыв ДУС] 0.056 0.19 0.94
432
5.10 Конфигурации контроллера для отказоустойчивой системы управления
При проектировании контроллеров и бортовых вычислительных
комплексов для отказоустойчивых систем управления возможны два подхода:
1. Использование контроллера традиционной архитектуры (без аппаратной
избыточности вычислительного ядра). Аппаратные и программные ресурсы
такого контроллера учитывают структурную и функциональную избыточность
оборудования системы управления, т.е. избыточность датчиков и
исполнительных устройств.
2. Применение бортовой вычислительной системы (БВС) с
многопроцессорной архитектурой, самодиагностированием и реконфигурацией
аппаратных и программных средств.
При построении отказоустойчивых бортовых систем управления для КА
одним из важных критериев является функциональная безопасность (ФБ). В
отличие от понятия надежности в характеристиках ФБ учитываются только те
отказы, которые отражаются на безопасности системы и техническом состоянии
объекта управления в целом. Таким образом, понятие ФБ позволяет
анализировать только самые критичные отказы. В международном стандарте IEC
61508 сформулированы требования к ФБ информационно-управляющих систем.
Особенности расчета архитектуры традиционных контроллеров для
отказоустойчивых систем управления
В случае использования контроллера без аппаратной избыточности
вычислительного ядра отказоустойчивая система управления проектируется на
основе предположения, что контроллер является наиболее надежным элементом
системы. Такое предположение связано со следующим:
- контроллер построен на элементах цифровой схемотехники; вероятность
отказов в таких элементах значительно ниже, чем в аналоговых устройствах -
датчиках, усилителях и преобразователях, исполнительных механизмах;
- контроллер выполняет алгоритмы диагностирования блоков системы
управления и алгоритмы восстановления работоспособности системы, т.е.
должен быть более надежным, чем элементы, которые он контролирует.
Типовая обобщенная структура системы управления с контроллером
традиционной конфигурации (однопроцессорная система) показана на рис. 5.41.
433
Сигналы
состояния
объекта управления
Блок АЦП
Таймеры
Задающие _
воздействия
Данные
'управления Цифровой контроллер (регулятор)
Порзы
сетевой связи
Блок ЦДЛ
Усплителыю-
согласующис
элементы
Усидителыю-
согласующие
элементы
Усилительио-
согласуютпие
элементы
Усилительно-
согласующие
элементы
Цифровые
порты ввода
Блок
обработки
прерываний
Смсшеишая} Процессор |
ШУР , __________
Память
программ
Алгоритм
управления.
Задающие
воздействия
Блок ШИМ
Битовые датчики
Датчики
с цифровым
выходом
Дагшгси с
частотным
выходом
Аналоговые
датчики
Память
данных
Данные
процесса
управления
Объект
управления
Цифровые
порты
вывода
Сигналы
управления
объектом
Исполнительные
устройства
с битовым
управлением
Усилителыю-
согласующие
элементы
Шаговые двигатели
Исполнителыше
устройства
с аналоговым
управлением
Усилительно-
согласующие
элемент
Усилитеяьпо-
согласующие
элементы
Объект автоматического управления
Рисунок 5.41 - Типовая функциональная схема системы управления
с контроллером традиционной конфигурации
На основе анализа структуры отказоустойчивых блоков измерителей и
блоков исполнительных устройств можно сформулировать требования к набору
входных и выходных сигналов цифрового контроллера, который будет выполнять
основные алгоритмы управления подвижным объектом, алгоритмы
диагностирования и восстановления его работоспособности.
Количество входов контроллера для приема сигналов от основных
датчиков, которые измеряют параметры движения объекта управления:
Nab - количество датчиков с аналоговым выходом;
NPB - количество датчиков с импульсным выходом;
NDB — количество датчиков с цифровым выходом.
Количество входов контроллера для приема сигналов от избыточных
датчиков, которые измеряют параметры движения объекта управления, но
установлены по дополнительным измерительным осям:
naa _ количество дополнительных датчиков с аналоговым выходом;
Npa - количество дополнительных датчиков с импульсным выходом;
Nda - количество дополнительных датчиков с цифровым выходом.
Наиболее известным подходом является использование двух
дополнительных датчиков по каждой измерительной оси (т.е. всего по три
датчика на каждый параметр). При обработке информации с датчиков
выполняется мажоритирование (выбор достоверных сигналов по принципу «два
из трех»). Этот метод диагностирования давно известен, но является очень
434
затратным. В таком случае, например, = 214^ или общее количество
датчиков с аналоговым выходом NA = 3NAB.
Датчики с цифровым выходом в виде последовательного кода можно
подключать к общей информационной шине, например I2C, SPI, One-Wire (кроме
интерфейса RS-232). В этом случае NDA -1 независимо от фактического
количества датчиков.
Во многих современных датчиках, например в MEMS, предусмотрен режим
самотестирования. Этот режим обычно активируется дискретным сигналом от
контроллера. Для формирования таких сигналов нужно предусмотреть выходные
битовые порты:
MST - количество выходных битовых портов контроллера для
формирования сигналов самотестирования датчиков.
Если датчик в режиме самотестирования выдает битовый сигнал - признак
нормальной работы (или признак аварии), то этот сигнал следует принять в
контроллер. Для приема этих битовых сигналов необходимо выделить линии
входных портов:
NST - количество входных битовых портов для получения сигналов
нормальной работы (или аварии) датчиков.
Некоторые типы датчиков содержат подсистему встроенного контроля
температуры. Эта подсистема формирует выходной аналоговый сигнал. В этом
случае в контроллере необходимы дополнительные входные аналоговые линии:
Nat - количество входных аналоговых линий для сигналов температурного
контроля. Эти сигналы необходимо принимать как от основных, так и от
дополнительных датчиков.
Количество выходов контроллера для формирования сигналов для
основных исполнительных устройств, которые влияют на параметры движения
объекта управления:
Мдд - количество исполнительных устройств с аналоговым входом;
Мрв - количество исполнительных устройств с импульсным входом;
MDB - количество исполнительных устройств с цифровым входом.
В некоторых типах систем управления возможно наличие избыточных
исполнительных устройств (например, в маховичных системах угловой
ориентации и стабилизации). Тогда в контроллере нужно иметь дополнительные
выходные сигналы для этих устройств (additional actuators):
- количество дополнительных исполнительных устройств с
аналоговым входом;
МРА - количество исполнительных устройств с импульсным входом;
MDA - количество исполнительных устройств с цифровым входом.
Для диагностирования исполнительных устройств в их структуру
добавляют контрольные точки, например:
- обратная связь по положению выходного механизма;
- контрольная точка на сумматоре;
435
- контрольная точка на выходе усилителя мощности.
В этом случае в структуре контроллера нужно иметь такие входные
сигналы аналогового типа:
Nafb — количество входных аналоговых линий для сигналов обратной связи
по положению выходного механизма исполнительного устройства. Этот сигнал
нужно получать как от основных, так и от дополнительных исполнительных
устройств;
Nas - количество входных аналоговых линий для сигналов от сумматора в
составе исполнительного устройства (сервопривода);
NAAn>p — количество входных аналоговых линий для сигналов, полученных с
выхода усилителя мощности в составе сервопривода.
Заметим, что сигнал обратной связи по положению выходного механизма
исполнительного устройства может быть сформирован импульсным датчиком,
например, энкодером. Тогда потребуются входы для импульсных сигналов Npre.
Кроме того, в составе отказоустойчивой системы управления должны быть
сигналы контроля р источников питания Power Supply units (как правило,
аналоговые):
NapS “ количество аналоговых входных сигналов контроля источников
питания.
В структуре контроллера обычно имеется коммуникационный порт
последовательного типа (UART, I2C) для обмена данными с другими бортовыми
подсистемами и получения задающих воздействий.
Таким образом, полное количество входных сигналов цифрового
контроллера для отказоустойчивой системы управления составляет:
- по аналоговым входам:
Na = NAb + N ад + NAf + Nafb + Nas + NAAinp + Naps 5 (5-62)
по входам для импульсных (в том числе битовых) сигналов:
Np = NPB + NPA + Npra +NST; (5.63)
- по входам для цифровых сигналов (количество параллельных цифровых
портов или размер пакета на информационной шине):
Nd=Ndb+Nda. (5.64)
Полное количество выходных сигналов цифрового контроллера для
отказоустойчивой системы управления составляет:
- для аналоговых сигналов:
МА=МАВ+МАА; (5.65)
- для импульсных сигналов:
Мр = Мрв + МРА + MST; (5.66)
- для цифровых сигналов (количество параллельных цифровых портов или
размер пакета на информационной шине):
MD=MDB + MDA. (5.67)
436
Это влияет не только на количество входных и выходных портов или
каналов преобразования сигналов, но и на дополнительные ячейки оперативной
памяти для хранения принятых значений сигналов (с учетом входного формата с
преобразователей).
При анализе вычислительных ресурсов контроллера обязательно нужно
учитывать затраты времени на получение информации от дополнительных
датчиков и выполнение процедур диагностирования и восстановления.
Обозначим:
Tdsi - затраты времени на диагностирование z-го датчика (включая время на
процедуру опроса АЦП по соответствующему каналу или выполнение
цикла самодиагностирования);
Т&1- период выполнения задачи диагностирования /-го датчика.
В зависимости от степени ответственности данного блока системы
управления и расчетной надежности оборудования можно реализовать формулу
= п То, где То - период дискретности основной задачи управления, п - целое
число.
Тогда относительные затраты времени на диагностирование i-ro датчика
составят:
Уая=^’ЮО%. (5.68)
*dsi
Аналогично могут быть определены затраты времени на диагностирование
оборудования исполнительных устройств (для j-го устройства):
^,Т^иУ^=^-Ю0%. (5.69)
Принципы построения отказоустойчивых бортовых вычислительных
систем
В состав современной отказоустойчивой бортовой вычислительной
системы (ВВС) входят [43]:
- вычислительное ядро (ВЯ), которое выполняет задачи для различных подсистем
КЛА, включающее в себя:
- композицию множества однородных вычислительных блоков (ВБ),
реализованных как микроконтроллеры или ядра ПЛИС (PLM);
- устройства коммутации потоков данных;
- сеть обмена информацией между ними;
- модули сопряжения с датчиками;
- модули сопряжения с исполнительными устройствами.
Обобщенная структура современной отказоустойчивой ВВС
централизованного типа показана на рис.5.42.
437
Рисунок 5.42 - Архитектура отказоустойчивой БВС
централизованного типа
При тестировании ВБ принимают во внимание следующие факторы:
SIni- входной поток данных i-го ВБ;
SOut । - выходной поток данных i-ro ВБ;
Aj- алгоритмическая и программная реализация действий ВБ по обработке
данных;
TAi- оценочное время выполнения вычислительной задачи А;.
Рассмотрим основные способы тестирования ВБ.
1. Параллельное выполнение основной программы управления какой-либо
подсистемой КЛА при одинаковой программной реализации алгоритмов на трех
идентичных ВБ с последующим сравнением результатов; в этом случае
реализуют мажоритарную схему выбора работоспособных ВБ и достоверных
данных для управления исполнительными механизмами. Алгоритмические
условия диагностирования следующие:
- ВБ компонуются по три устройства на одну задачу: i = 1,2,3;
- входные потоки одинаковы : Sb] = = SIn3;
- условием работоспособности каждой пары блоков является
so«i 3}, i* j.
2. Выполнение набора п тестовых задач с заранее известными входными
и выходными S^k наборами данных, к = п; такая задача может
выполняться с большим периодом Тт > То; этот метод используют для
438
тестирования отказавших ВБ в целях выявления причин и мест отказа. Условие
работоспособности - совпадение фактического выходного набора данных S^h
тестового набора S^k.
3. Параллельное выполнение основной программы управления какой-либо
подсистемой КЛА на двух вычислительных блоках при одинаковой или
различной алгоритмической и программной реализации на каждом из них
(например, путем использования различных областей памяти для размещения
обрабатываемых данных). Метод служит для оперативного поиска и выявления
потенциально отказавшего ВБ в данной паре ВБ, когда для реализации
мажоритарного сравнения недостаточно свободных ВБ. Параметры
использования метода:
SInI = SIn2; А, * А2; условие работоспособности S^, = SOut2.
В процессе диагностирования вычислительной системы могут
одновременно использоваться все названные подходы, поскольку первый и
третий позволяют динамически учитывать текущую загрузку вычислителя, а
второй служит для более глубокого диагностирования.
5.11 Интеллектуальные компьютерные обучающие системы
Проектирование и экспериментальная отработка СУ КЛА требуют
привлечения квалифицированных инженеров, обладающих определенным
набором знаний и умений, развитыми творческими способностями, а также
практическим опытом, которые приобретаются и закрепляются во время
обучения в школе, вузе и впоследствии на производстве. Как свидетельствует
мировой опыт, от знаний и умений инженеров зависят не только стоимость,
сроки и качество доводки технических изделий, но и, во многих случаях,
сохранность окружающей среды и даже человеческих жизней [27-28].
Несмотря на то, что в Украине и в мире подготовлено немало
высококлассных специалистов, главных конструкторов сложных технических
изделий, в том числе для ракетно-космической промышленности, о массовой
подготовке таких инженеров речь пока не идет. И если первой причиной можно
назвать недостаточную мотивацию студентов, то второй причиной - не
отвечающую современным реалиям эффективность традиционного массового,
классно-группового обучения при наличии одного преподавателя и 20 студентов.
Для выявления возможностей повышения эффективности обучения
студентов рассмотрим вначале особенности их традиционной подготовки с
позиций управления обучением. Такой взгляд характерен и для известных своими
прогрессивными научно-практическими результатами ученых в области
педагогики и психологии Л.Н. Ланды [29], И.С. Якиманской [30],
Н.Ф. Талызиной [31] и других.
Действительно, педагогический процесс можно рассматривать как
разновидность процесса управления. В нем есть управляемая система - студенты
и управляющая система - преподаватель. Целями преподавателя, помимо
439
воспитательных целей, являются полноценное и прочное усвоение студентами
определенных знаний и умений, развитие их творческих способностей, обучение
рациональным приемам познавательной деятельности. В процессе управления
осуществляется передача информации от преподавателя к студентам и, наоборот:
от студентов к преподавателю. Преподаватель должен посредством этой
информации вызвать такую деятельность студентов, которая приведет к
формированию у них качеств, соответствующих поставленным целям. При этом
как преподаватель, так и студенты работают под влиянием внешних воздействий,
в том числе дестабилизирующих, возмущающих факторов. Естественно, что
одним из центральных звеньев такой СУ должна служить постоянная обратная
связь, которая показывает преподавателю, каковы же результаты его воздействий
на студентов.
Вместе с общими характеристиками, присущими разнородным СУ, здесь
есть определенная специфика. Так, студент является одновременно и объектом, и
субъектом управления, т.е. самоуправляемой системой, поскольку обладает
собственной активностью, способен самостоятельно вырабатывать и достигать
свои цели.
С точки зрения эффективного процесса управления обучением должны
присутствовать:
1) компетентный преподаватель, не только хорошо знающий содержание
излагаемого предмета, методику преподавания, но и обладающий
психологическими знаниями, позволяющими формировать учебную деятельность
с учетом умственного развития, индивидуальных и возрастных особенностей
студентов;
2) точно заданная цель преподавателя как управляющей системы;
3) точно заданная программа управления;
4) оперативная и полная информация о состоянии управляемой системы, о
происходящих в ней изменениях и процессах;
5) адаптация преподавателя к студентам.
Запишем эти требования формально в виде пятерки
R = (Т, G, Р, I, А). (5.70)
Что касается первого требования, то в настоящее время оно тоже не всегда
и не везде выполняется. Причины тому разные, в том числе недостаточное
материальное обеспечение преподавателей в Украине, приведшее к тому, что
перспективная молодежь не остается в вузах после окончания.
В то же время даже при наличии преподавателя-профессионала массовое,
классно-групповое обучение не удовлетворяет последним четырем требованиям.
Если второе и третье не удовлетворяются из-за недостатков педагогической
науки, то причина невозможности выполнения остальных кроется в самой
организации массового, классно-группового обучения [29].
Таким образом, основное противоречие массового, классно-группового
обучения заключается в следующем. Чтобы эффективно учить, требуется
значительно увеличить потоки информации от студентов к преподавателю и от
преподавателя к студентам. В то же время малейшее увеличение поступающей
440
информации от студентов к преподавателю делает невозможным ее восприятие и
переработку.
Итак, в традиционной схеме обучения в условиях классно-группового
обучения указанное выше противоречие не разрешимо. Не устраняет
противоречия и в настоящее время модное дистанционное обучение, в том числе
с использованием широко распространенной системы управления курсами
Moodle, поскольку кроме уже существующих проблем добавляются новые,
связанные с тем, что преподаватель находится на расстоянии от студентов и не
имеет возможности наблюдать их психофизиологические состояния.
Выходом из сложившейся ситуации может стать разработка и внедрение в
помощь преподавателю интеллектуальных компьютерных обучающих программ
(ИКОП).
История создания и внедрения ИКОП насчитывает уже более пятидесяти
лет. К настоящему времени созданы, внедрены и широко представлены в
научной, технической и педагогической литературе такие известные
интеллектуальные системы, как SOPHIE, Guidon, WEST, Algebra Cognitive Tutor,
SQLTutor, Teppa Математика, SHERLOCK, Andes и др. Каждая из этих систем в
той или иной мере приближается к удовлетворению требований.
Вместе с тем указанные выше программы не могут быть расширенными до
новых предметных областей, поскольку являются закрытыми для сторонних
разработчиков или созданными исключительно для одной предметной области,
являются несовместимыми и, следовательно, лишь частично, но не системно
могут применяться к обучению инженеров.
Помимо того, в литературе нет доказательств того, что интеллектуальные
функции какой-либо из существующих ИКОП позволили полностью решить
проблему недостаточной эффективности приобретения знаний и умений даже в
рамках одной предметной области или для одного множества задач.
Следовательно, это открывает дороги новым исследователям, желающим
испытать себя в разработке и внедрении новых ИКОП.
Для создания интеллектуальных ИКОП, обучающих инженерным знаниям
и умениям, необходимо на основании изучения передового мирового опыта в
области педагогики, психологии, физиологии, практического обучения
математическим, физическим и техническим наукам, компьютерного обучения и
возможностей информационных технологий сформировать методологическую
базу в виде совокупности взаимосвязанных современных и перспективных
принципов, моделей и методов поддержки компьютерного обучения инженеров.
Как и в работах А.М. Довгялло и его последователей [32], авторы в
дальнейшем будут исповедовать заданный подход, т.е. обучение решению задач.
Кроме того, при последующем изложении термин «задача» будет применяться
лишь в смысле расчетной задачи, поскольку не все решаемые студентами задачи
могут быть проверены посредством ИКОП. Например, не проверяемыми могут
быть задачи на доказательство, поскольку на основании теоремы К. Геделя о
неполноте компьютер не способен определить, истинно либо ложно утверждение,
если оно выходит за рамки аксиоматики [33].
441
Так как в результате обучения предмету посредством ИКОП у каждого
студента должны сформироваться определенные компоненты знаний и умении, а
также связи между ними (наследование, агрегация, использование,
инстанцирование), то введем ряд дополнительных понятий. Назовем
совокупность таких компонентов и связей между ними сетями компонентов
знаний и умений (КЗУ).
Пусть из некоторой сети КЗУ, которую назовем А, выделена некоторая
совокупность S КЗУ и связей между ними, причем множество КЗУ совокупности
S является подмножеством КЗУ сети А, а множество связей совокупности S
является подмножеством связей сети А. Тогда выделенную совокупность S
назовем подсетью сети А, а сеть А по отношению к подсети S назовем агрегатной
сетью. Сложность первого рода сети КЗУ определим как сумму количества ее
КЗУ и количества связей между ними.
Сложность второго рода сети КЗУ определяется как сумма сложностей
каждого КЗУ плюс сумма сложностей связей между ними. В свою очередь,
сложность каждого КЗУ может определяться либо на основании экспертной
оценки КЗУ в целом, либо на основании суммы экспертных оценок сложности,
входящих в него знаний и умений.
Очевидно также, что любая подсеть КЗУ сама является сетью КЗУ. Кроме
того, понятно, что тривиальная сеть состоит всего из одного КЗУ.
Принципы:
1. Принцип системности моделей студентов. Зачастую студент переходит
из курса на курс, от преподавателя к преподавателю, не полностью овладев
необходимыми для продолжения учебы знаниями и умениями, что
исключительно важно как раз для подготовки современных инженеров. Для
экономии временных и денежных затрат на такое не слишком эффективное
обучение одним из перспективных инструментов может стать компьютерная
модель студента, сопровождающая его на протяжении всего процесса обучения и
постоянно обновляющаяся в зависимости от его успехов или неудач. Такая
модель должна формироваться объективной ИКОП и быть доступной в режиме
чтения как для преподавателей, так и для студентов.
2. Принцип системности моделей задач. Еще более значительной экономии
денежных средств и времени можно достичь путем использования компьютерных
моделей задач так, чтобы преподаватель, готовящийся прочесть некоторый курс
для студентов, смог опереться на хранящиеся в моделях предыдущих задач,
решаемых студентами, целевые компоненты знаний и умений, а также на
соответствующие им пройденные и усвоенные или плохо усвоенные студентами
компоненты знаний и умений, хранящиеся в моделях студентов.
3. Принцип диагностирования знаний и умений. В соответствии с этим
принципом в моделях задач должны храниться диагностические модели для
наиболее типичных ошибок студентов [34], а также связанный с ними
обучающий материал. Кроме того, модели задач должны быть открытыми для
внесения новых диагностических моделей, полученных, например, путем Data
Mining.
442
4. Принцип вероятностной оценки знаний и умений студента. Даже если
студент правильно ввел данные в некоторый элемент ввода экранной формы
ИКОП, существует вероятность того, что он угадал или подсмотрел (так
называемый guess). Кроме того, если студент ввел данные неправильно, это
могло быть сделано из-за невнимательности (так называемый slip). Отсюда
следует то, что в модели студента могут быть сделаны только вероятностные
допущения относительно знаний или умений студента.
5. Принцип возможности ведения диалога ИКОП со студентом. Студент
должен иметь возможность не только пользоваться подсказками ИКОП, но и
задавать ей вопросы и получать ответы на некотором естественном языке.
6. Принцип своевременной адаптации. Эффект от обучения будет
наибольшим, когда каждый студент по каждому элементарному компоненту сети
КЗУ или подсети КЗУ своевременно и адаптивно получит задающую и
корректирующую обучающую информацию, что приведет к повышению уровня
владения данным элементарным компонентом сети КЗУ или подсетью КЗУ. В
данном контексте «адаптивно» означает то, что из всех возможных альтернатив
для конкретного студента выбирают рациональную исходя из всего прошлого
опыта его обучения.
7. Принцип перехода между задачами. Для любого студента перед
переходом к задачам с некоторой сетью А КЗУ необходимо добиться
устойчивого решения существующих в ИКОП задач с подсетями S сети А КЗУ.
Другими словами, если студент не научился решать относительно простые
задачи, то он не сможет решать и более сложные, составные задачи.
8. Принцип покрытия класса задач. В соответствии с этим принципом после
решения частных задач в ИКОП студент должен там, где это возможно,
продемонстрировать программе знание алгоритма для решения всего класса
задач. Здесь уместно оттолкнуться от аналогии с нейронной сетью, которая
обучается на решении частных задач, но при этом не дает гарантии решения
других задач этого же класса. Знание общего для класса задач алгоритма
студентами такую гарантию дать может.
9. Принцип сетевой ориентированности ИКОП
Большинство из известных и перечисленных выше ИКОП ориентировано
на работу в автономном, а не в сетевом режиме. Недостатки автономных
приложений можно рассматривать с двух позиций: 1) недостатки, характерные
для автономного ПО; 2) недостатки, характерные для автономной ИКОП.
Недостатки, характерные для автономного ПО, включают в себя:
а) неудобства как для разработчиков, так и для пользователей, связанные с
обновлением и распространением такого ПО;
б) зависимость производительности ПО от ресурсов конкретного
компьютера, на котором она выполняется;
в) невозможность использования дополнительного интеллекта, такого, как,
например, Semantic-web и др.
Недостатки, характерные для автономной ИКОП, в основном связаны с
отсутствием возможности использования технологий Educational Data Mining
443
посредством анализа хранилища данных с информацией обо всех пользователях
и их действиях в ИКОП для выполнения следующего:
а) исследования того, как студенты обучаются посредством ИКОП, и
формулирования новых гипотез;
б) уточнения и настройки моделей студентов;
в) адаптации со стороны ИКОП к студентам, не только психологической,
но и физиологической;
г) создания новых диагностических моделей и др.
Исходя из сказанного перспективные ИКОП - это прежде всего сетевые
ИКОП. Более того, в настоящее время графические возможности для создания
Интернет-клиента, который загружается в обычном унифицированном броузере
на компьютере, ноутбуке, планшете, смартфоне и других устройствах, уже
достигли уровня автономных приложений благодаря таким технологиям, как
Microsoft Silver light, Adobe Flash, HTML 5, CSS 3, Java Applets, поэтому еще
большая перспектива, соответственно, у Интернет-ИКОП.
Рассмотрим ряд моделей и методов, полученных авторами в соответствии с
представленными выше принципами и внедренных в составе ИКОП.
Диагностические модели
Рассмотрим особенности построения интеллектуальных компьютерных
программ обучения экспериментальной отработке отказоустойчивых СУ на
примере системы, обучающей построению частотных характеристик ОУ и СУ.
Пусть A(s) = ansn+an.lsn‘1+...+а0 и B(s) = bmsm+bm.1sn1'1+-+Ь0 -
полиномы, причем а; и bj задаются в формате с плавающей точкой при точности
до h знаков после запятой, а; gR, b} gR, i = 0,n, j = 0,m.
Тогда передаточная функция объекта исследования W(s) может быть
представлена следующим образом:
W(s) = ^. (5.71)
A(s)
Необходимо построить частотные характеристики данного объекта.
Для перехода к частотным характеристикам следует осуществить замену
s—>jco. (5.72)
Тогда
W(je,)=TFT (573)
A(j<o)
Представим комплексную передаточную функцию в форме
W(jw)=U(w)+jV(w). (5.74)
Для получения комплексной передаточной функции в этой форме
необходимо избавиться от иррациональности в знаменателе, для чего следует
умножить числитель и знаменатель передаточной функции на выражение,
сопряженное со знаменателем:
444
W,_(j<o)=£^xA^, (5.75)
A(j<b) A (jco)
где A*(co) - комплексное число, сопряженное co знаменателем.
Зависимости для построения частотных характеристик:
- амплитудно-частотной характеристики (АЧХ):
A(<o)=4/U(®)2+V(co)2; (5.76)
- фазово-частотной характеристики (ФЧХ):
<p(<o)=arctg^^; (5.77)
U(<o)
- амплитудно-фазово-частотной характеристики:
W(jco)=U(<o)+jV(co). (5.78)
Таким образом, для решения задачи построения частотных характеристик
обучаемый должен выполнить следующие действия:
- осуществить переход от оператора преобразования Лапласа к мнимой
переменной;
- избавиться от иррациональности в знаменателе;
- преобразовать передаточную функцию к виду (5.74);
- определить зависимости (5.76) — (5.78) для построения частотных
характеристик;
- построить частотные характеристики согласно полученным зависимостям.
В целях определения наиболее распространенных ошибок, допускаемых
обучаемыми при решении задачи построения частотных характеристик объекта
исследования, был проведен эксперимент, в котором участвовало 42 студента,
обучающихся по специальности «Системы управления и автоматика».
Обучаемые получили задание построить частотные характеристики объекта по
заданной передаточной функции данного объекта.
Пример задания, выданного в ходе эксперимента, - передаточная функция
3s+4
объекта управления имеет вид W(s)=~r-------------. Необходимо построить
s +2s +3s+4
частотные характеристики (АЧХ, ФЧХ и АФЧХ) данного объекта управления.
Контрольной группе были выданы задания трех степеней сложности
передаточной функции объекта:
- в числителе - полином 1-го порядка, в знаменателе - полином
2-го порядка;
- в числителе - полином 1-го порядка, в знаменателе - полином
3-го порядка;
- в числителе - полином 2-го порядка, в знаменателе - полином
3-го порядка.
Требуемая точность вычислений составляла четыре знака после запятой.
Для выявления всех ошибок, допускаемых обучаемыми, проверка работы
не прекращалась после обнаружения совершенной ими ошибки.
В результате обработки экспериментальных данных было найдено 95
445
ошибок, которые были сгруппированы по классам. Полученные классы ошибок
приведены в табл. 5.4.
Таблица 5.4 - Классы ошибок, допущенных студентами при построении
частотных характеристик
Класс ошибки Количество ошибок Удельный вес ошибки, %
Незнание условия физической реализуемости объекта управления 4 4,2
Потеря знака при вычислении 8 8,42
Ошибка при перемножении полиномов 21 22,1
Пропуск удвоенного произведения при возведении выражения в квадрат 5 5,26
Запись одинарного вместо удвоенного произведения при возведении выражения в квадрат 5 5,26
Ошибки при возведении мнимой единицы в п-ю степень 3 3,16
Коэффициент при мнимой части, содержащий мнимую единицу 24 25,26
Ошибка при разделении действительной и мнимой частей 2 2,1
Незнание зависимостей для построения характеристик 4 4,2
Отрицательная частота 2 2,1
Ошибки записи данных 8 8,4
Ошибки округления 5 5,26
Другие 4 4,2
Рассмотрим каждый из приведенных в таблице классов на примере
построения частотных характеристик для объекта с передаточной функцией
W(s) =-----5—-----. (5.79)
' 0,ls2 + 2s + 3
Концептуальная ошибка «Незнание условия физической реализуемости
объекта» может быть допущена при записи передаточной функции объекта, когда
порядок числителя передаточной функции больше порядка знаменателя. Такой
объект нельзя реализовать на данном этапе развития техники. Например,
обучаемый получает передаточную функцию
2s3
W(s) =----------------------------------------
0,1s2 + 2s 4-3
Класс «Потеря знака при вычислении» - распространенная ошибка,
446
(5.80)
связанная с невнимательностью при проведении вычислений. Например, при
переходе к частоте обучаемый получает передаточную функцию
2
W(»=^-—---------. (5.81)
-со -2jco + 3
Тогда графическая модель ошибки будет выглядеть следующим образом:
Здесь ДМ - множество диагностических моделей.
Класс «Ошибка при перемножении полиномов» включает в себя ошибки,
допущенные при умножении числителя и знаменателя дроби на выражение,
сопряженное со знаменателем (пропуск члена полинома, ошибка при работе, со
степенями, потеря знака и т.д.). Для точного диагностирования вида ошибки
необходима дополнительная информация, полученная посредством пошагового
прохождения данного этапа.
Классы «Пропуск удвоенного произведения при возведении выражения в
квадрат» и «Запись одинарного вместо удвоенного произведения при возведении
выражения в квадрат» связаны с концептуальной ошибкой - незнанием формул
сокращенного умножения.
Одно из возможных мест возникновения данных ошибок - умножение
числителя и знаменателя дроби на сопряженное со знаменателем выражение,
когда в знаменателе находится разность квадратов. Например,
W(jffl) = —5—?------.
-со +2jco + 3
При пропуске удвоенного произведения
..... . 2 -<o2-2jco+3 -2co2-4jco+6 -2co2-4jco+6
W(jCp) =--------------;--------=---z------------- =----.
-co + 2jco+3 —co^ —2jco + 3 (-co2+3)"-(2jco)2 co + 4co+9
При записи одинарного произведения вместо удвоенного
2 -cd2-2jco+3 _ -2cp2-4jco+6 -2co2-4jco+6
-co2+2jco+3 -co2-2jco+3 (-co2 +3)2-(2jco)2 cd4+co2 + 9
Тогда графическая модель ошибки будет выглядеть следующим образом.
При пропуске удвоенного произведения
447
При записи одинарного вместо удвоенного произведения
- 2 со2 - 4j(D+6
со4-2б)2 + 9
2 -a)2-2j(o+3
-со2 + 2jco+3 -<o2-2jco+3
Эталонная модель
Диагноз»
Запись одинарного
- -2(0 -4j(o+6
W(j©)=— -j—г—-
(0 +GT +9
произведения вместо
удвоенного
Ошибки при возведении мнимой единицы в л-ю степень связаны с
незнанием или забыванием того, что мнимая единица равна корню из единицы.
2
Например, W(jco) = ----------.
со ч- 2jco + 3
Графическая модель ошибки:
_____Диагноз______
Ошибка при
возведении мнимой
единицы во 2-ю
степень
Ошибка «Коэффициент при мнимой части, содержащий мнимую единицу»,
связана с тем, что при вычислении мнимой части передаточной функции
полученный коэффициент при мнимой части содержит мнимую единицу. В
результате допущенной ошибки при вычислении выражений для построения
характеристик обучаемый не избавляется от иррациональности. Например,
обучаемый вычислил
-2аг + 6 ... ч —4ja>
= ---------; v(co) = —---.
со - 2со +9 со4 - 2сг + 9
Тогда графическая модель ошибки:
448
“2ш2 - 4jco + 6
->W(jco)=------------
(О4 - 2со2 + 9
Гт/ x -2q2 + 6
©4-2<o2 + 9’
V(co) = "4t0----;
co4-2(d2 + 9
W(jco) = U(co) + jV(co)
Эталонная модель
► дм
Гт/ . -2©2 + 6 . -4j<o
g)4-2o)2+9,V ° со4-2®2+9
Диагноз
Коэффициент при
мнимой части,
содержащий
мнимую единицу
частей - замена
Например, обучаемый вычислил
Ошибка при разделении действительной и мнимой
действительной и мнимой частей.
. -4<о __z . -2со2+6
U((o) = —; V((d) = .
cd4-2cd2 + 9 co4-2g)2+9
Тогда графическая модель ошибки:
Класс «Незнание зависимостей для построения характеристик» включает в
себя концептуальные ошибки при вычислении выражений для АЧХ и ФЧХ:
- в выражении для АЧХ: пропуск корня, пропуск квадрата при
действительной или мнимой части;
- в выражении для ФЧХ - ошибка в аргументе функции арктангенс, потеря
знака функции арктангенс.
тт - - АГ \ /-4<о-2<в2 + 6
Например, обучаемый вычислил А(со) = ч—------------
V о -2со +9
Тогда графическая модель ошибки:
449
Класс «Отрицательная частота» связан с нахождением А(со) и для
отрицательного значения частоты. Частота может принимать нулевое значение
(постоянный сигнал) или положительное значение (синусоидальный сигнал).
Ошибки записи данных включают в себя транскрипцию символов,
добавление и пропуск символов.
Ошибки округления связаны с неправильным использованием правил
округления, когда ошибка допускается в последнем разряде. Другие ошибки —
ошибки, причина которых не установлена.
Рассмотрим диагностические модели для определения ошибок каждого
класса.
Диагностическая модель для определения ошибки класса «Невыполнение
условия физической реализуемости объекта» (если исходные данные задаются
обучаемым)
n > m. (5.82)
Диагностическая модель для определения ошибок класса «Потеря знака
при вычислении»
f(x,h) = -f(x,h). (5.83)
Диагностическая модель для определения ошибок класса «Ошибки при
возведении мнимой единицы в п -ю степень»
((deg(bi) mod2 о 0) a (b. g R)) v ((deg(bs) mod2 = 0) л (Ь< g I)), (5.84)
где deg(bj - степень аргумента i -го члена характеристического полинома
B(s).
Введем вспомогательную функцию r_f(x,h), которая будет представлять
по правилам округления любое действительное число х в формате с плавающей
запятой с точностью до h знаков после запятой:
r_f(x.h) = (-1)* • (Zo + z, 10’1 + z2 IO’2 +... + zh • KT") • 10p, (5.85)
где zb g {0,1,...,9}, t g {1,2}, p - целое число, причем (z0 > 0) ® (Vbzb = 0).
Тогда диагностическая модель для определения ошибок класса «Пропуск
удвоенного произведения при возведении выражения в квадрат» имеет вид:
x = r_f(a2 + p2,h), (5.86)
где аир- слагаемые, сумма которых возводится в квадрат.
Диагностическая модель для определения ошибок класса «Запись
одинарного вместо удвоенного произведения при возведении выражения в
квадрат»
x = r_f(a2+dp + 02,h)> (5.87)
где аир- слагаемые, сумма которых возводится в квадрат.
Диагностическая модель при почленном перемножении полиномов без
приведения подобных для определения ошибок класса «Потеря члена полинома»
I {к0,к, кь}|<|{к0,к1,-,кШ2}1> (5-88)
450
где kj - коэффициент при i-м члене эталонного полинома; к. -
коэффициент при i-м члене введенного полинома; b — количество членов
эталонного полинома; m2 - количество членов полинома, введенного
обучаемым.
Диагностическая модель для определения ошибок класса «Коэффициент
при мнимой части содержит мнимую единицу»
r_f(V,h) = r_f(jV,h). (5.89)
Диагностическая модель для определения ошибок класса «Ошибки при
разделении действительной и мнимой частей» будет выглядеть как
(U = V)a(V = U), (5.90)
где W = U(w) + jV(w) - требуемая форма записи комплексного
числа W.
Диагностическая модель для определения ошибок класса «Незнание
зависимостей для построения характеристик»:
-для АЧХ:
А = r_f(U2 + V2,h) - пропуск корня;
А = r_f(-Vu +V2 ,h) - пропуск квадрата действительной части;
A = r_f(VU? + V,h) - пропуск квадрата мнимой части;
-дляФЧХ:
ф = r_f(arctg^-,h) - замена действительной и мнимой частей;
ф = r_f(arctg U,h) - пропуск знаменателя в аргументе;
ф - r_f(arctg V,h) - замена действительной и мнимой частей и пропуск
знаменателя в аргументе;
ф = r_f(-arctg^,h) - потеря знака при функции арктангенс.
Диагностическая модель для определения ошибки класса «Отрицательная
частота»
(3i (i е (0,оо)) л (®t < 0)). (5.91)
Следует отметить, что одновременно может получиться несколько
диагнозов, например, если при возведении в квадрат одночлена j® обучаемый
получает ответ со2, - это может быть как потеря знака, так и ошибка возведения
мнимой единицы в n-ю степень j2 = 1.
Метод автоматической проверки правильности построенного
учащимся алгоритма
Рассмотрим суть излагаемого метода на примере подпрограммы, сигнатура
которой включает в себя кортеж арности neNU {0/ параметров
451
s(xl: type xl; x2: type_x2...; xn: typexn): type s, (5.92)
где xl3x2,..., xn - входные параметры типов type_xl, type_x2..., type_xn;
type s - тип результирующего значения подпрограммы.
Пусть практическая задача, требующая алгоритмического решения,
описывается четверкой
Task=(Descr, Req_Input, Req_Output, Tests), (5.93)
где Descr - вербальная постановка задачи, состоящая из набора строк;
Req_Input=(typeJ 1 ;type_i2;.. .;type_in) - (5.94)
требования к типам входных параметров;
Req_Output=(type_s) - (5.95)
требования к типу выходного параметра;
Tests={tl=(ivll: type_xl, ivl2: type_x2,...,ivln: type_xn, ovl: type s),...,
tk=(ivkl: type_xl, ivk2: type_x2,...,ivkn: type xn, ovk: type_s)} -
(5.96)
множество мощности k кортежей, каждый из которых представляет собой
тест, состоящий из конкретных значений входных параметров и значения
выходного параметра.
Тогда необходимое условие того, что подпрограмма s является решением
задачи Task выполняется тогда и только тогда, когда выполняется
Vti G Tests: s(II(i4.]>ivj2> ^t,) = ovj. (5.97)
Очевидно, что для сложных подпрограмм практически невозможна
проверка на всевозможных значениях входных параметров, поэтому для
разумной уверенности в достижении достаточного условия используют
различные методы, например, разбивают диапазоны значений на классы
эквивалентности, с особой тщательностью проверяют граничные значения, в том
числе за пределами диапазона и т.д.
Утверждение 5.1. Пусть некоторая подпрограмма
sl(il: type il; i2: type_i2...; in: type in): typeo представлена в виде кортежа
арности z, zeN строк, т.е. sl=(sll,sl2,...,slz) и является решением некоторой
задачи вида (2). Тогда можно составить Y,YcN, Y»1 подпрограмм s’j, не
эквивалентных sin друг другу, но являющихся решениями этой же задачи.
Доказательство этого утверждения очевидно из того факта, что во всякую
подпрограмму можно добавить некоторую переменную или оператор, не
влияющие на результат вычисления. Вместе с тем необходимость такого
утверждения вызвана другим интуитивно понятным фактом: различных
вариантов решения одной и той же задачи существует столько, сколько
привлечено программистов. Отсюда для проверки правильности подпрограммы,
составленной студентом, необходимо сравнить результаты ее выполнения с
результатами выполнения эталонной программы, составленной педагогом, при
достаточно большом к.
Схема метода изображена в виде его графической модели на рис. 5.43.
452
Рисунок 5.43 - Схема метода автоматической проверки алгоритмов
учащихся
Метод нечеткого сравнения алгоритмов на основе абстрактных
синтаксических деревьев
Перспективным методом при обучении алгоритмам является сопоставление
алгоритма, написанного студентом, с эталонным алгоритмом, хранящимся в
системе, в целях выявления различий для превращения их в обучающую
последовательность. Согласно утверждению 5.1 таких эталонных алгоритмов
может быть больше одного. Следовательно, необходим метод, позволяющий
находить наиболее близкий эталонный алгоритм, максимально похожий на
студенческий алгоритм. Ясно, что речь должна идти о сравнении не наборов
строк, а структурированных представлений алгоритмов. В этом смысле наиболее
подходящим является представление алгоритма в виде абстрактного
синтаксического дерева.
В обобщенном виде постановка задачи 31 имеет следующий вид.
Пусть задано расстояние 5 между объектами некоторого класса С1, которое
удовлетворяет условиям:
453
8(X, Y) > 0 - неотрицательность;
8(Х,Х) = 0-свойство нуля;
‘ 8(X,Y) = £(Y,X)-симметричность; (5.98)
8(X,Z) < 8(Х, Y) + 8(Y,Z)-неравенство
треугольника.
Пусть дан некий объект rt класса С1 и набор объектов ET=(eti,et2,...,etn)
этого же класса. Необходимо найти все et, из набора ЕТ, такие, что расстояние 5
между eti и rt не больше некоторого заданного натурального числа X.
Формально требуется найти множество ETS = {etsl,ets2,...,etsl}, такое, что
Vetsi g ETS с ЕТ:8(etsi,rt) <Х,Х g N,1 <n.
Предлагаемый метод решения Ml состоит из двух шагов.
1-й шаг. Из набора ЕТ случайно выбираются к элементов оро2,...,ок,
(к<п). Эти элементы в последующем ассоциируются с к осями к-мерного
евклидова пространства Ек. После этого каждому элементу et, из набора ЕТ
ставится в соответствие точка Ек, координаты которой равны расстояниям до
осей, т.е. P(eti)j = 8(eti,oj),i = l,n, j = l,k.
2-й шаг. Объекту rt также ставится в соответствие в Ек точка с
координатами P(rt)j =8(rt,oj),j = 1,к. На этом шаге расстояния рассчитываются
лишь между rt и объектами, соответствующие точки которых расположены
близко в Ек к точке P(rt).
Для определения близко расположенных точек в евклидовом пространстве
введем необходимые условия похожести объектов X, Y и Z класса С1.
Утверждение 5.2. Для заданных объектов X, Y и Z класса С1, расстояние
между которыми 8 удовлетворяет условиям (5.98), выполняется
VX,Y,Z 8(X,Y) >| 8(X,Z) - 8(Z,Y) |.
Утверждение 5.3. Для заданных объектов et и etкласса С1, расстояние
между которыми 8 удовлетворяет условиям (5.98) и не превышает некоторый
порог X, точки P(etj) и P(etj) пространства Ек, соответствующие исходным
объектам по методу Ml, удалены в Ек друг от друга на расстояние не более чем
Хл/к, т.е. ViVj i 8(eti,etJ) < к: р(Р(е^),Р(е^)) < Хл/к .
Утверждение 5.4. Для заданных объектов etj и et5 класса С1, расстояние
между которыми 8 удовлетворяет условиям (5.98) и не превышает некоторый
порог X, согласно методу Ml точка P(etj) размещается в Ек в пределах
гиперкуба с центром в точке P(et) и стороной длиной 2Х.
Утверждение 5.5. Для заданных объектов etj и etj класса С1, расстояние
между которыми 8 удовлетворяет условиям (5.98) и не превышает некоторый
порог X, согласно методу Ml абсолютное значение разности расстояний от точек
454
P(etj) и P(etj) до начала координат в Ек не превышает Х\/к, т.е.
|p(P(eti),O)-p(P(et.),O)|<X>/k .
Утверждение 5.6. Пусть u,weR и u,w>0. Тогда из [u]^w следует
[u]<[w], где [u],[w] — целые части чисел и и w соответственно.
Утверждение 5.7. Пусть u,v,w € R и u,v,w > 0. Тогда из | u - v |< w следует
| [и] ~[v] |< [w] +1, где [u],[v],[w] - целые части чисел u, v и w соответственно.
Определение 5.1. Размером объекта et класса С1 назовем количество
составляющих его элементов. Введем также обозначение размера - etB-.
Например, если etj - строка «дом», то etj =3 - длина строки; если et( - дерево,
показанное на рис. 5.44, то etj =7 - количество его вершин.
Рисунок 5.44 - Пример дерева как объекта класса С1
Утверждение 5.8. Если абсолютное значение разности размеров объектов
etj и etj класса С/, расстояние между которыми 5 удовлетворяет условиям (1),
больше X, то и расстояние между этими объектами больше X, т.е.
(|et. - etj| > X) => (6(etj ,etj) > X).
Доказательство данного утверждения очевидно и следует из факта, что для
того, чтобы превратить объект etj в объект etj или наоборот, необходимо
выполнить как минимум (Х + 1)-ю операцию удаления составляющих объект
элементов.
Рассмотрим теперь более подробно суть метода Ml с учетом доказанных
необходимых условии похожести объектов.
1. На 1-м шаге после случайного выбора из набора ET к объектов-осей и
вычисления координат точек P(etj) также вычисляем расстояния в Ек от точек
P(etj) до начала координат: р(Р(е0,О) = ^Р(е1Д2 +... + P(etj)k2 . Кроме того,
образуем хэш-структуру данных D распределения расстояний в Ек от точек
P(et) до начала координат. Для этого введем множество
Т = {[p(P(etJ,0)],[p(P(et2),0)],,..,[p(P(etn),0)]} = {Vl,v2>. ,.,Vz},z < n, где
[p(P(etj),O)] обозначает целую часть от р(Р(е^),0). Поставим в соответствие
455
каждому у, g Т множество целых чисел (индексов исходных объектов с
расстоянием до начала координат, равным у.), т.е.
JNDi={indil,indi2,...,mdiw}. При этом выполняется следующее условие:
Vqe{l,...,w}indiq g {l,...,n},p(P(etind^),O) = . Теперь перейдем непосредственно к
построению хэш-структуры D. Воспользовавшись вспомогательными
множествами присвоим Dvq=mdiq. Таким образом, строка Dxjr содержит
индексы исходных объектов, для которых целая часть расстояния в Ек до начала
координат равна
2. На 2-м шаге искомого объекта it находим строку D с индексом
[p(P(rt),O)]. После этого согласно утверждениям 5.5 и 5.7 просматриваем
ближайшие к ней строки D с индексами из множества
Tl={[p(P(rt),O)]-pJk]-l, [p(P(rt),O)]-[XVk],...> [p(P(rt),O)]-l, [p(P(rt),O)],
[p(P(rt),O)] + l,...,[p(P(rt),O)] + [X^'],[p(P(rO>O)] + [XVk] + i}= ={Vl1,Vl2„..,Vlv},
причем ?1c T,v<z.
Затем при просмотре элементов строки D с индексом т.е. Dyl ,
выполним дальнейшее отсеивание “кандидатов” в похожие объекты: во-первых,
путем проверки условия, сформулированного в утверждении 5.8, а во-вторых,
проверяя условие из утверждения 5.4: лежит ли точка P(etD
) в гиперкубе,
построенном с центром в точке P(rt) и стороной 2Х. Наконец, если P(et
Dvl
* tq
находится в пределах заданного гиперкуба, то вычисляем расстояние между
объектами it и etn , т.е. 8(rt,etn ).
DVl«q Vtq'
Рассмотрим первый случай, когда объекты класса С1 - ш-арные
упорядоченные деревья, m е N.
Тогда постановка задачи будет выглядеть следующим образом.
Пусть дано дерево rt и набор деревьев ET=(eti,et2,...,etn). Необходимо найти
все деревья etj из набора ЕТ, такие, что расстояние между et, и rt не больше
некоторого заданного натурального числа 1.
В этом случае возможен выбор одной из нескольких метрик 8. В качестве
альтернатив могут быть рассмотрены такие метрики, как метрика, используемая в
работе [40], и метрика из работ [41,42].
Различия двух указанных выше метрик заключаются в наборе допустимых
операций редактирования деревьев: в каждой метрике допустимы операции
переименования, удаления и вставки узлов дерева, причем в первой метрике
последние две операции могут применяться только к листьям деревьев, т.е. к
вершинам, не имеющий потомков, а во второй метрике эти две операции могут
применяться к любым узлам.
Опишем более подробно суть операций вставки и удаления узлов
деревьев для второй метрики.
456
Операция вставки делает некоторые или все потомки узла-родителя
для вставляемого узла потомками вставляемого узла. Для операции удаления
характерно следующее: все потомки удаляемого узла становятся потомками его
родительского узла.
Рассмотрим ряд примеров.
Пример 5.1. Пусть заданы два упорядоченных бинарных дерева X и Y,
изображенные на рис. 5.45 и 5.46.
Рисунок 5.45 - Упорядоченное Рисунок 5.46 - Упорядоченное
бинарное дерево X бинарное дерево Y
Тогда расстояние редактирования между X и Y по метрике Selkow [40]
равно шести. Минимальный набор операций редактирования для преобразования
X в Y будет включать в себя следующие операции :
1) замена наименования «а» узла с индексом 0 на наименование «Ь»;
2) вставка левым дочерним узлом к узлу с индексом 1 узла «d»;
3) замена наименования «Ь» узла с индексом 1 на наименование «с»;
4) удаление узла «е» с индексом 4 как потомка узла с индексом 2;
5) удаление узла «d» с индексом 3 как потомка узла с индексом 2;
6) замена наименования «с» узла с индексом 2 на наименование «е».
Для метрики, используемой в работах Tai, Zhang и Shasha [41,42],
расстояние редактирования между X и Y будет равно 1, а для преобразования из
X в Y необходимо совершить операцию удаления узла «а» с индексом 0.
Пример 5.2. Пусть заданы два упорядоченных тернарных дерева XI и Y1,
Рисунок 5.47 - Упорядоченное
тернарное дерево XI
Рисунок 5.48 — Упорядоченное
тернарное дерево Y1
Тогда по метрике Selkow [40] расстояние редактирования между XI и Y1
равно шести. Минимальный набор операций редактирования для преобразования
XI в Y1 - это следующие операции:
457
1) вставка правым дочерним узлом к узлу с индексом 0 узла «Ь»;
2) вставка левым дочерним узлом к узлу с индексом 0 узла «а»;
3) вставка левым дочерним узлом к вновь вставленному узлу «а»
узла «Ъ»;
4) удаление узла «Ь» с индексом 4 как потомка узла с индексом 1;
5) удаление узла «Ь» с индексом 3 как потомка узла с индексом 2;
6) удаление узла «а» с индексом 2 как потомка узла с индексом 1.
Для второй метрики расстояние редактирования между XI и Y1 будет равно
двум, а для преобразования из XI в Y1 необходимо совершить такие операции:
1) удаление узла «а» с индексом 0;
2) вставка узла «а» как потомка узла «а» с индексом 1 и родителя узла
«Ъ» с индексом 4.
Как видно из приведенных примеров, большая похожесть деревьев
достигается при использовании второй метрики. В то же время критерии выбора
метрики должны определяться исходя из конкретной практической задачи.
2-й случай. Объекты класса С1 - суть строки. Для этого случая ряд задач и
их решений с использованием расстояния Левенштейна - минимального
количества операций редактирования строки для преобразования ее в другую
строку, а также задачи и решения для поиска похожих наборов строк
рассмотрены в работах [38,39].
Экспериментальные исследования разработанного метода проводили для
метрики Tai, Zhang и Shasha. Для сравнения результатов был выбран метод,
описанный в работе [35]. Кроме того, в метод этих ясе авторов было добавлено
условие, сформулированное в утверждении 5.8, которое предназначено для
отсечения ряда расчетов «дорогого» расстояния редактирования деревьев.
Для случайно сгенерированных деревьев в каждом методе из общего
времени выполнения второго этапа поиска было исключено время, затрачиваемое
на расчет расстояний редактирования. Результаты экспериментальных
исследований для исходного списка из 10, 100 и 1000 деревьев показаны на рис.
5.49-5.51.
2.6*10*5-
2.4*10*5
2.2*10*5
2.0*10*5
l.S*IO*5
1.6*10*5
1.4*10*5
1.2’10*5
1.0*10*5
8.0*10*4
6.0’10*4
4.0*10*4
Рисунок 5.49 - Результаты экспериментальных исследований
трех методов для исходного списка из 10 деревьев
458
Рисунок 5.50 - Результаты экспериментальных исследований
трех методов для исходного списка из 100 деревьев
Рисунок 5.51 - Результаты экспериментальных исследований
трех методов для исходного списка из 1000 деревьев
К настоящему времени на кафедре систем управления летательных
аппаратов Национального аэрокосмического университета им. Н.Е. Жуковского
«ХАИ» создан и успешно эксплуатируется целый ряд интеллектуальных
компьютерных обучающих систем, в том числе ИКОП для обучения
линеаризации, вычислению корней характеристических уравнений, построению
переходных процессов СУ, построению частотных характеристик ОУ и СУ,
экспериментальному определению параметров передаточных функций ОУ,
преобразованию структурных схем СУ, языку структурированных запросов к
базам данных SQL. Соответствующие экранные формы показаны на рис. 5.52-
5.53.
Как показали проведенные эксперименты, ИКОП действительно помогают
в обучении благодаря четкому и структурированному представлению о том, что
должны делать учащиеся при решении задач с помощью диагностических
моделей, определяющих проблемные места в знаниях и умениях, посредством
адаптированного выбора индивидуальной последовательности обучения.
459
Рисунок 5. 52 - Экранные формы интеллектуальных
компьютерных обучающих программ
460
Библиографический список
1. Кулик, А.С. Автоматизация диагностирования систем управления
летательных аппаратов [Текст]: учеб, пособие / А.С. Кулик. - X.: Харьк.
авиац. ин-т, 1994. - 61 с.
2. Харченко, В.С. Анализ рисков аварий для ракетно-космической техники:
эволюция причин и тенденций [Текст] / В.С. Харченко, В.В. Скляр,
О.М. Тарасюк // Радюелектронш i комп’ютерш системи. - 2003. - №3. -
С. 135-149.
3. Железняков, А.Б. Взлетая, падала ракета... [Текст] / А.Б. Железняков. -
СПб.: Система, 2003. - 220 с.
4. Beard, R.V. Failure Accommodation in Linear Systems Through Self -
Reorganization [Text] / R.V. Beard // Ph. D. Thesis - MIT, Cambridge, 1971. -
364 p.
5. Yang, Y.Y. Sensor Fault Tolerant Control and its Application [Text] / Y.Y. Yang
// SAFEPROCESS ’91 / IFAC / IMACS Symp. Baden-Baden, Sept. 10-13. -
1991.-Vol. l.-P. 55-58.
6. Patton, P.I. Robustness issues in Fault - Tolerant Control [Text] / P.I. Patton 11
Proc. Intern. Conf, on Fault Diagnosis (TOOLDIAG ’93). - Vol. 3. - Toulouse. -
1993.-P. 1080- 1103.
7. Кулик, А.С. Синтез систем, приспосабливающихся к изменению
параметров элементов и их отказам [Текст]:/ А.С. Кулик, В.Г. Рубанов,
Ю.Н. Соколов И Автоматика и телемеханика. - 1978. - №1. - С. 96 - 107.
8. Kulik, A.S. Synthesis Fault - Tolerant Dynamic Control Systems With Fault
Identification [Text] I A.S. Kulik // Problems of Control and Information Theory.
- 1989. -№2. -P. 43-54.
9. Kulik, A.S. Fault Diagnosis in Dynamic Systems via Signal - Parametric
Approach [Text] / A.S. Kulik // SAFEPROCESS ’91 / IFAC / IMACS Symp.
Baden-Baden, Sept. 10-13. - 1991. - Vol. l.-P. 157 - 162.
10. Кулик, A.C. Системное обеспечение отказоустойчивости блока
гироскопических датчиков [Текст] / А.С. Кулик, А.П. Козий // Электронное
моделирование. - 1995. - Т. 17, №6. - С. 28 - 33.
11. Isermann, R. Start Actuators [Text] / R. Isennann, H. Keller, U. Raab // Proc.
Intern. Conf, on Fault Diagnosis // TOOLDIAG’93. Toulouse, France. - 1993. -
Vol.l -P. 117-126.
12. Huang, Chier Y. Analysis and Simulation of Control Distributor Concept for a
Control - Reconfigurable Aircraft [Text] / Y. Huang Chier // AIAA Cruid., Nav.
and Contr. Conf., Minneapolis, Minn. Collect. Techn. Pap. Pt. 2. - 1998. - P.
726-735.
13. Кулик, A.C. Основы моделирования систем [Текст]: учеб, пособие /
А.С. Кулик. - X.: Харьк. авиац. ин-т, 1998. - 95 с.
14. Андреев, Ю.Н. Управление конечномерными линейными объектами
[Текст] / Ю.Н. Андреев. - М.: Наука, 1976. - 424 с.
15. Кулик, А.С. Сигнально-параметрическое диагностирование систем
управления [Текст] / А.С. Кулик. - X.: Гос. аэрокосм, ун-т «ХАИ»: Бизнес
Информ, 2000. - 260 с.
461
16. Кулик, А.С. Обеспечение отказоустойчивости систем управления: учеб,
пособие [Текст] / А.С. Кулик. - X.: Харьк. авиац. ин-т, 1991. - 90 с.
17. Кунцевич, В.М. Синтез систем автоматического управления с помощью
функций Ляпунова [Текст] / В.М. Кунцевич, М.М. Лычак. - М.: Наука,
1977.-400 с.
18. Кулик, А.С. Стендовое компьютерное диагностирование блока
гироскопических датчиков [Текст] / А.С. Кулик, А.Н. Козий,
Н.П. Отраднова. - X.: Харьк. авиац. ин-т, 1995. - 63 с.
19. Ф1рсов, С.М. Експериментальне дослщження статичных i динам!чних
характеристик рульових машин i сервопривод!в систем управлшня [Текст] /
С.М. Ф1рсов. - X.: Нац. аерокосм. ун-т «Харк. ав!ац. ш-т», 2007. - 100 с.
20. Проектирование систем автоматического управления с использованием
метода полунатурного моделирования[Текст]: учеб, пособие [Текст] /
А.С. Кулик, В.Г. Джулгаков, О.И. Гавриленко и др. - X.: Нац. аэрокосм,
ун-т «Харьк. авиац. ин-т», 2007. - 100 с.
21. Кулик, А.С. Содержание задач по обеспечению отказоустойчивости,
решаемых в процессе разработки системы управления угловым движением
космического летательного аппарата [Текст] / А.С. Кулик, О.А. Лученко,
О.И. Гавриленко// Радюелектрошка. 1нформатика. Управлшня. - 2005. -
№1.-С. 154-161.
22. Лученко, О.А. Обеспечение активной отказоустойчивости технических
систем [Текст] / О.А. Лученко, А.С. Кулик, О.И. Гавриленко //
Радюелектронш i комп’ютерш системы. - 2004. - №5(17). - С. 41 - 47.
23. Гавриленко, О.И. Оптимальная система стабилизации космического
аппарата с электромаховичными исполнительными органами [Текст] /
О.И. Гавриленко, О.В. Резникова, О.А. Лученко // Авиационно-космическая
техника и технология. - 2006. - №6(32). - С. 24 - 34.
24. Лученко, О.А. Разработка программных имитаторов отказов для отработки
аварийных режимов работы систем управления космических летательных
аппаратов [Текст] / О.А. Лученко, О.И. Гавриленко // Компьютерное
моделирование и интеллектуальные системы: сб. науч. тр. - Запорожье:
Запорожск. нац. техн, ун-т, 2007. - С. 220 - 226.
25. Гавриленко, О.И. Исследование диагностического обеспечения для
системы стабилизации космического летательного аппарата [Текст] /
О.И. Гавриленко, О.А. Лученко, О.В. Резникова // Радюелектронш i
комп’ютерш системы. - 2007. - №7(26). - С. 134 - 139.
26. Теория автоматического управления [Текст]: учеб, пособие / А.С. Кулик,
С.Н. Пасичник, О.И. Гавриленко, Е.В. Мирная. - X.: Нац. аэрокосм, ун-т
«Харьк. авиац. ин-т», 2006. - 85 с.
27. Leveson, N. An Investigation of the Therac-25 Accidents [Text] /N. Leveson,
C. Turner // Computer. - 1993. - Vol. 26, №.7. - P. 18 - 41.
28. Lions J. L. et al. ARIANE 5 Flight 501 Failure, Report by
the Inquiry Board // Paris, July 19, 1996. Available at
www.csrin.esa.int/htdocs/tidc/Press/Press96/ariane5rep.html.
29. Ланда, Л.Н. Кибернетика и проблемы программированного обучения
[Текст]/ Л.Н. Ланда. - М.: Знание, 1970. - 66 с.
462
30. Якиманская, И.С. Развивающее обучение [Текст] / И.С. Якиманская. -
М.:Педагогика, 1979. - 144 с.
31. Талызина, Н.Ф. Управление процессом усвоения знаний [Текст] /
Н.Ф. Талызина. - М.:Изд-во МГУ, 1975. - 320 с.
32. /В.Д. Рынгач, М.А. Краснов, А.Ф. Лысиков, А.А. Мазурук
Автоматизированные системы для обучения программированию.
Проектирование и реализация [Текст] / под ред. А.М. Довгялло. - Кишинев,
Штиинца, 1989. - 162 с.
33. Godel, Kurt, Uber formal unentscheidbare Satze der Principia Mathematica und
verwandter Systeme, I. Monatshefte fur Mathematik und Physik. - 38, 1931.-
P. 173-198.
34. Kulik, A. Diagnostic models of intelligent tutor system for teaching skills to
solve algebraic equations [Text] / A. Kulik, A. Chukhray, M. Chukhray //
International Journal of Emerging Technologies in Learning - 2007. -Vol. 2. -
№ 1, http ://www. i-jet.org.
35. Bustos, B. Pivot selection techniques for proximity searching in metric spaces
[Text] / B. Bustos , G. Navarro , E.Chavez // Pattern Recognition Letters. - Vol.
24, Issue 14.-2003.-8 p.
36. Batko, M. Building a web-scale image similarity search system [Text] /М. Batko,
F Falchi, C. Lucchese and others. Multimedia Tools and Applications. - 2010. -
Vol. 47, Num. 3. - P. 599-629.
37. Zezula, P. Similarity search: the metric space approach [Text] / P.Zezula ;
GAmato, V. Dohnal, M. Batko, Springer (Advances in database systems., -
New York, 2006. - 220 p.
38. Чухрай, А.Г. Метод быстрого поиска “похожих” кортежей реляционного
отношения [Текст] / А.Г. Чухрай // Радюелектронш i комп’ютерш системи .
- Х.:ХА1. - 2003. - Вил. 2.- С. 64 - 69.
39. Kulik, A. Similar strings detecting methods [Text] / A.Kulik, A. Chukhray,
A. Zavgorodniy// In Proceedings of the East-West Fuzzy Colloquium, Zittau,
Germany, IPM. - 2005. - P.38-47
40. Selkow, S.M.. The tree-to-tree editing problem [Text] / S.M. Selkow. Information
Processing Leters. - 1977. - Vol. 6, No.6. - P.I84-186.
41. Tai, K.C. The tree-to-tree correction problem [Text] / KC.Tai // Journal of the
ACM. - 1979. - Vol. 26, Issue 3.- P. 422^133.
42. Zhang, K. Simple fast algorithms for the editing distance between trees and
related problems [Text] / K. Zhang, D. Shasha, Society for Industrial and
Applied Mathematics Journal on Computing. - 1989. - Vol. 18, No. 6. - P. 1245
- 1262.
43. Безопасность критических инфраструктур: математические и инженерные
методы анализа и обеспечения [Текст]: / Под ред. Харченко В.С. -
Министерство образования и науки Украины, Национальный
аэрокосмический университет им. Н.Е. Жуковского «ХАИ», 2011-641 с.
463
Послесловие
В настоящей книге изложена технология экспериментальной отработки
современных систем управления ракет-носителей и космических аппаратов
различного назначения на всех этапах их жизненного цикла от технического
задания на разработку до сдачи заказчику.
В представленных материалах подробно рассмотрены проблемные вопросы,
методы, способы и технические средства экспериментальной отработки как
неотъемлемого этапа проектирования систем управления. Показано, что
экспериментальная отработка начинается уже на этапах аванпроекта,
предэскизного и эскизного проектирования, где основной ее объем посвящен
отработке программно-математического обеспечения и автономных лабораторно-
отработочных испытаний макетов приборов СУ.
Комплексные испытания СУ в целом как завершающий этап наземных
испытаний проводятся на уникальных стендах полунатурного и натурного
моделирования.
Завершается многоэтапный процесс экспериментальной отработки СУ
летными испытаниями, в процессе которых подтверждаются заданные тактико-
технические и эксплуатационные характеристики СУ.
Авторский коллектив специалистов по разработке систем управления PH и
КА, а также сотрудников Национального аэрокосмического университета,
создавший эту книгу, хотел бы обратить внимание читателей на проблему,
которая явно не обозначена при изложении материалов книги, именуемую
"человеческим фактором’’, в то же время являющуюся чрезвычайно важной
составляющей процесса проектирования.
В подтверждение этого стоит привести слова летчика и писателя Антуана де
Сент-Экзюпери: ’’Величие всякого ремесла, быть может, в том и состоит, что оно
объединяет людей, ибо ничего нет в мире драгоценнее уз, соединяющих человека
с человеком. Человек - всего лишь узел отношений. И только отношения важны
для человека”.
Эти слова Великого человека- были взяты эпиграфом к книге
о многолетней деятельности H111I «Хартрон-Аркос», направленной на создание
СУ PH и КА различного назначения за период 1959 - 2007 гг.
Коллектив специалистов и руководителей НПП «Хартрон-Аркос», который
создавал системы управления различных, в том числе уникальных, объектов РКТ,
таких, как МБР 15Al 8М, известной в мире под названием "Сатана”, мощнейшей
PH "Энергия", КА ТКС, ТКМ "Аркон", PH "Днепр” и ряда других объектов
ракетно-космической техники, имел и имеет высочайшую квалификацию.
Сложившиеся творческие и человеческие отношения между сотрудниками
позволяют решать государственные задачи с нужным качеством и в заданные
сроки.
В заключение авторы хотели бы пожелать молодым специалистам, которые
будут читать эту книгу, приобрести не только необходимые знания, но и
дружеские, уважительные отношения, объединяющие разработчиков в
творческий коллектив единомышленников.
464
Приложение
Так как в Приложении рассмотрено только проведение приемосдаточных
испытаний, приведем пример правил приёмки (разд. 3 ТУ) и методов испытаний
(разд. 4 ТУ), определяемый в технических условиях.
3. ПРАВИЛА ПРИЕМКИ
3.1 Правила приемки прибора определяются настоящими ТУ в
соответствии с общими техническими условиями (ОТУ), разд. 2.
3.1.1 Для проверки соответствия прибора требованиям технических
условий устанавливаются следующие виды испытаний:
- приемосдаточные испытания;
- периодические испытания;
- типовые испытания.
3.1.2 При проведении испытаний и приемки приборов на
предприятии-изготовителе материально-техническое и метрологическое
обеспечение (необходимая документация, справочные материалы, рабочие места,
средства испытаний и контроля, расходные материалы и др.), а также выделение
обслуживающего персонала, транспортных средств и прочее осуществляет
предприятие-изготовитель.
При проведении испытаний в организациях заказчика или
промышленности материально-техническое, метрологическое и бытовое
обеспечение, выделение обслуживающего персонала, транспортных средств и
прочее осуществляют указанные организации и предприятие-изготовитель по
согласованным решениям (заключенным договорам).
3.1.3 ПСИ прибора проводит представитель заказчика с участием
представителя СТК предприятия-изготовителя силами и средствами
предприятия-изготовителя на испытательной аппаратуре и оборудовании, на
которые имеется документация, подтверждающая их исправность.
3.1.4 Все экземпляры прибора, предъявляемые для испытаний,
должны быть отрегулированы и приняты СТК предприятия-изготовителя в
объеме приемосдаточных испытаний. Результаты приемки СТК должны быть
занесены в протоколы предъявительских испытаний.
3.1.5 Результаты испытаний считают положительными, прибор -
выдержавшим испытания, если прибор испытан в полном объеме и
последовательности, которые установлены в настоящих технических условиях
для проводимой категории испытаний, и соответствует всем требованиям
настоящих технических условий, проверяемых при этих испытаниях.
3.1.6 Результаты испытаний считают отрицательными, а прибор - не
выдержавшим испытания, если будет обнаружено несоответствие прибора хотя
бы одному требованию, установленному в настоящих технических условиях для
проводимой категории испытаний.
465
3.1.7 Основанием для принятия решения о приемке приборов
являются положительные результаты приемосдаточных испытаний, а также
положительные результаты предшествующих периодических испытаний,
проведенных в установленные сроки.
3.1.8 Приборы, предназначенные для работы совместно с другими
приборами, должны испытываться на стенде или аналоге изделия, в которые
должны устанавливать испытываемый прибор вместе с другими приборами или
их эквивалентами, если другой порядок не оговорен в настоящих технических
условиях.
3.1.9 В процессе испытаний запрещается подстраивать, регулировать
прибор, подтягивать крепежные изделия.
3.1.10 Средства измерительной техники должны быть поверены
(калиброваны) в соответствии с требованиями действующих нормативных
документов, опломбированы и снабжены документацией, подтверждающей их
пригодность к эксплуатации.
3.1.11 Предприятие-изготовитель обеспечивает:
- равномерное, в течение месяца, поступление приборов для
испытаний;
- соблюдение правил техники безопасности;
- соблюдение режима проведения работ.
3.2 Приемосдаточные испытания.
3.2.1 Приемосдаточные испытания проводят в целях проверки
соответствия каждого прибора требованиям настоящих технических условий в
объеме приемосдаточных испытаний.
3.2.2 Приборы для приемосдаточных испытаний должны
предъявляться поштучно, комплектно.
3.2.3 Все приборы должны быть подвергнуты приемосдаточным
испытаниям в полном объеме настоящих технических условий.
3.2.4 Объем и последовательность приемосдаточных испытаний
приведены в табл. П. 1 настоящих технических условий.
3.2.5 О готовности приборов к приемосдаточным испытаниям
предприятие-изготовитель уведомляет представителя заказчика извещением,
оформленным в соответствии с ГОСТ В 15.307-77, приложение 4, форма 1.
Примечание: при одновременном поштучном предъявлении нескольких
приборов допускается оформлять одно извещение.
3.2.6 Одновременно с приборами должны быть предъявлены
протоколы предъявительских испытании, проводившихся СТК, оформленные
согласно ГОСТ В 15.307-77, приложение 4, форма 4. Результаты
приемосдаточных испытаний отражают в протоколах, оформляемых согласно
ГОСТ В 15.307-77, приложение 4, форма 5.
3.2.7 Если при приемосдаточных испытаниях будет обнаружено
несоответствие прибора хотя бы одному требованию технических условий или
конструкторской документации, то прибор считается не выдержавшим
466
приемосдаточные испытания и должен быть возвращен предприятию-
изготовителю для анализа причин дефектов, их устранения и повторной проверки
прибора СТК.
3.2.8 При обнаружении самоустраняющихся отказов прибор должен
быть возвращен предприятию-изготовителю для анализа, выявления и
устранения причины самоустраняющихся отказов. Работа по анализу, выявлению
и устранению причины самоустранившихся отказов должна проводиться в
соответствии с инструкцией, определяющей рекомендуемый объем работ с
рекламированными приборами. Дальнейшую приемку прибора можно
возобновить только после устранения их причин. Если анализ однозначно не
выявляет причину появления самоустранившихся отказов, то прибор, в котором
они были обнаружены, поставке не подлежит.
3.2.9 По результатам приемки представитель заказчика должен дать
заключение на оборотной стороне извещения согласно ГОСТ В 15.307-77,
приложение 4, форма 1.
При возврате прибора представитель заказчика должен составить
заключение с изложением причин возврата и ознакомить с ним представителя
СТК.
3.2.10 Возвращенный представителем заказчика прибор допускается
вторично предъявлять на приемосдаточные испытания после анализа причин
дефектов, их устранения и повторной проверки СТК.
Таблица П. 1 - ПРИЕМОСДАТОЧНЫЕ ИСПЫТАНИЯ
Вид испытания Номер пункта
техническихтребований методов испытаний
466225.036 ТУ ОТУ 466225.03 6 ТУ ОТУ
1. Проверка комплектности, конструкции прибора и составных частей на соответствие КД, включая проверку габаритных и установочных размеров 1.1.1 1.3.1 1.4.1 1.2.4 1.6 4.3 3.2
2. Испытания прибора на воздействие вибрации на фиксированной частоте 1.3.2 1.4.1.4 4.10 3.8.1
3. Проверка материалов конструкции, ЭРИ, при- мененных составных частей, качества сборки и маркировки 1.1.1 1.1.2 1.2.4 1.2.7 1.5.2 4.4
4. Проверка качества электрического монтажа 1.3.1 1.3.12 1.7.2 4.5 3.4
467
Окончание табл. П. 1
Вид испытания Номер пункта
технических требований методов испытаний
466225.036 ТУ ОТУ 466225.03 6 ТУ ОТУ
технических/требований методов испытаний
5. Проверка электрического сопротивления изоляции и сопротивления сообщаю- щихся цепей 1.3.3 1.3.14 4.6 3.6
6. Проверка параметров и функционирования прибора в нормальных климатичес- ких условиях при номиналь- ных значениях питающего напряжения 1.2.8 1.2.1 1.2.2 4.7 3.7
7. Испытание прибора на воздействие пониженной температуры среды при крайнем нижнем значении питающего напряжения 1.2.8 1.4.5.4 4.8 3.10
8. Испытание прибора на воздействие повышенной температуры среды при крайнем верхнем значении питающего напряжения 1.2.8 1.4.5.4 4.9 3.10
9. Проверка на отсутствие посторонних, свободно перемещающихся предме- тов в приборе 1.2.5 1.3.18 4.11 3.21
10. Проверка массы прибора 1.3.6 1.2.4 4.12 3.18
11. Проверка на функци- онирование в схеме КС 1.2.6 4.14 3.22
3.2.11 Приемка возвращенного прибора представителем заказчика
может быть возобновлена только после предъявления извещения, оформленного
согласно ГОСТ В 15.307-77, приложение 4, форма 1. На извещении при
повторном предъявлении должна быть надпись ВТОРИЧНОЕ. Вторичное
извещение для приемки должно быть подписано руководителем предприятия-
изготовителя и начальником СТК. К извещению должен быть приложен акт об
анализе дефектов, их устранении и повторной проверки СТК с указанием причин
дефектов и мер, принятых по их предотвращению. Перечень мероприятий по
устранению и предупреждению дефектов должен быть согласован с
468
представителем заказчика. Форма акта - в соответствии с ГОСТ В 15.307-77,
приложение 4, форма 3.
3.2.12 Количество предъявлений прибора не должно превышать двух.
3.2.13 Испытания и приемку приборов приостанавливают:
- если прибор, предъявлявшийся дважды на приемку, не выдержал
испытаний;
- если предельный процент возврата приборов превышает 11% от
общего количества предъявленных на приемку в течение месяца
приборов, равного десяти и более приборов;
- если предельный процент возврата равен двум приборам при
предъявлении в течение месяца менее десяти приборов.
3.2.14 Повторные приемосдаточные испытания прибора,
возвращенные представителем заказчика, проводят в полном объеме
приемосдаточных испытаний. Представителю заказчика предоставляется право
начинать повторные приемосдаточные испытания с пункта несоответствия и
продолжать затем по всем требованиям настоящих технических условий, по
которым испытания еще не проводились.
Если причиной дефекта прибора является отказ ЭРИ, представитель
заказчика может проводить повторные испытания только по тем пунктам
технических условий на прибор, по которым выявлены несоответствия прибора
установленным требованиям, которые могли повлиять на возникновение
несоответствий и по которым испытания не проводились.
3.2.15 Прибор, не выдержавший повторных испытаний,
забраковывают и изолируют от годных. Испытания и приемку приборов,
изготовленных по той же технологической и нормативно-технической
документации, что и прибор, не выдержавший повторных испытаний, или
приборы, окончательно забракованные при двух последовательных первичных
предъявлениях, приостанавливают.
Решение об использовании повторно возвращенного прибора принимают
представитель заказчика и руководитель предприятия-изготовителя (главный
инженер).
Решение о возобновлении приемосдаточных испытаний и приемки прибора
принимают представитель заказчика и руководитель предприятия-изготовителя
после проведения согласованных с представителем заказчика мероприятий.
3.2.16 На прибор, принятый СТК и представителем заказчика, должны
быть поставлены их клейма и пломбы в местах, предусмотренных в чертежах, и
сделаны соответствующие записи в формуляре.
3.2.17 Принятым считается прибор, если он:
- выдержал испытания, установленные в настоящих технических
условиях;
- укомплектован и упакован;
— опломбирован представителем СТК и представителем заказчика;
- сдан на ответственное хранение предприятию-изготовителю.
469
4. МЕТОДЫ ИСПЫТАНИЙ
4,1 Все проверки и испытания прибора, если иное не оговорено особо,
следует проводить в нормальных климатических условиях:
~ температура окружающей среды - (25± 10)°С;
- относительная влажность - 45... 80%;
- атмосферное давление - 84,0... 106,7кПа (630.. .800 мм рт.ст.).
Примечание: при температуре свыше 30°С относительная влажность не
должна превышать 70%.
Допускается не проводить измерения электрических параметров прибора в
нормальных климатических условиях перед новым видом испыганий, используя
результаты измерений, полученные после окончания предшествующего
испытания, если время между этими испытаниями не превышает 24 часа.
4.2 При проведении проверок и испытаний допустимые отклонения
значений воздействующих факторов должны быть:
- температура ±3°С;
- относительная влажность ±3%;
- частота вибрации ±2Гц (для частот не более 50Гц), ±3% - для частот
свыше 50Гц;
- ускорение при вибрации ±20%;
- ускорение линейное (центробежное) ±10%;
- ускорение при ударах ±20%.
Допустимая погрешность измерения параметров прибора не более:
- массы ±1%;
- времени ±10%;
- сопротивления изоляции разобщенных цепей - не более ±15%.
4.3 Проверку прибора по п.1 табл. П. 1 настоящих ТУ проводят согласно
спецификации на прибор. Габаритно-установочные размеры измеряют с
погрешностью не более ±30% от допустимых отклонений, указанных в
сборочном чертеже на прибор, по соответствующему технологическому
процессу.
4.4 Проверку прибора на соответствие п.З табл. П. 1 настоящих
технических условий проводят в процессе производства на деталях, сборочных
единицах и готовом приборе внешним осмотром на соответствие их требованиям
действующей конструкторской документации. При внешнем осмотре прибор
проверяют на отсутствие механических повреждений и коррозии, целостность
лакокрасочных покрытий, качество сборки, монтажа и маркировки.
4.5 Проверку качества электромонтажа согласно п.4 табл. П. 1 настоящих
ТУ проводят внешним осмотром. При внешнем осмотре следует проверить:
качество паек; отсутствие повреждения изоляции проводов; соответствие
электрической общей схеме прибора, электромонтажным схемам жгутов и ячеек,
входящих в прибор.
4.6 Проверку электрического сопротивления сообщающихся и
сопротивления изоляции разобщенных цепей по п.5 табл. П. 1 настоящих ТУ
проводят при напряжении постоянного тока не более 6 В по методике, указанной
470
в инструкции по регулировке прибора. Перечень сообщающихся и разобщенных
цепей приведен в инструкции по регулировке прибора.
4.7 Проверку параметров и функционирования прибора в нормальных
климатических условиях при напряжении питания (27+0,5) В по п.6 табл. П. 1
настоящих ТУ проводят в соответствии с инструкцией по регулировке прибора.
4.8 Для проверки прибора на воздействие пониженной температуры
согласно п.7 табл. П. 1 настоящих ТУ необходимо:
— в нормальных климатических условиях поместить прибор в камеру
холода;
- понизить температуру в камере до минус 5°С и выдержать прибор
при этой температуре не менее четырех часов без подачи
напряжения питания;
- проверить функционирование и электрические параметры согласно
инструкции по регулировке прибора при напряжении питания
(24+0,5)В.
Прибор считается выдержавшим испытания, если во время пребывания в
камере холода он нормально функционировал и его электрические параметры
находились в пределах норм, указанных в инструкции по регулировке прибора.
4.9 Для проверки прибора на воздействие повышенной температуры
согласно п.8 табл. П. 1 настоящих технических условий необходимо:
- в нормальных климатических условиях поместить прибор в камеру
тепла;
- повысить температуру в камере тепла до плюс 50° С и выдержать
прибор при этой температуре не менее четырех часов без подачи
напряжения питания;
- проверить функционирование и электрические параметры согласно
инструкции по регулировке прибора при напряжении питания
(32±0,5)В.
Примечание: испытания проводят один раз СТК совместно с
представителем заказчика или по согласованию с представителем заказчика
проводит СТК, а результаты испытаний предъявляют представителю заказчика.
4.10 Проверить прибор на соответствие п. 1.3.2 настоящих технических
условий (механические и климатические воздействия, транспортирование) в
соответствии с общими техническими условиями (ОТУ), раздел 3 «Методы
испытаний». При этом параметры и функционирование в нормальных
климатических условиях до и после проведения испытаний проверяют согласно
инструкции по регулировке прибора разд. 5 при напряжении питания (27+0,5)В, а
электрическое сопротивление изоляции разобщенных цепей - на соответствие
п. 1.3.3 настоящих технических условий.
Проверку на воздействие вибрации на фиксированной частоте по п. 2 табл.
П. 1 настоящих ТУ проводят на вибрационном стенде в положении,
перпендикулярном плоскости прибора, на частоте (23±2)Гц при ускорении
(19,6+0...3,9) м/с2 [(2+0...0,4)] g. Продолжительность испытания прибора
составляет 30 минут, погрешность измерения - +1 минута.
471
При проверке прочности и устойчивости при механических воздействиях
прибор необходимо закреплять в технологическое приспособление в
соответствии со штатным креплением.
Перед испытанием следует провести внешний осмотр и проверку прибора в
нормальных климатических условиях согласно п.4.7.
Во время испытания на виброустойчивость нужно выполнить проверку
прибора в соответствии с инструкцией по регулировке прибора на каждом
поддиапазоне частот. По окончании испытания следует снять крышку и провести
внешний осмотр прибора на обнаружение механических повреждений,
отсутствие инородных тел и на целостность монтажа, закрыть крышку, проверить
прибор согласно пи. 4.6 и 4.7 настоящих ТУ.
Испытанию на ударную прочность и прочность при воздействии линейных
нагрузок прибор необходимо подвергать в обесточенном состоянии.
При проверке воздействия циклического изменения температур время
выдержки прибора в камере холода и тепла составляет шесть часов, а в
нормальных климатических условиях после проведения трех циклов - не менее
шести часов.
При проверке влагоустойчивости прибор в климатическую камеру
устанавливают без упаковки. Во время испытания следует проверить
функционирование и параметры согласно инструкции по регулировке прибора
при напряжении питания (27±1)В и сопротивление изоляции разобщенных цепей
по п,4.6 настоящих технических условий. Сопротивление изоляции должно быть
не менее 1М0м. Время выдержки в нормальных условиях после извлечения
прибора из камеры влаги - не менее 10 часов.
4.11 Проверку прибора на соответствие п.9 табл. П. 1 (отсутствие
посторонних, свободно перемещающихся предметов) настоящих технических
условий проводят по технологическому процессу, разработанному на
предприятии-изготовителе и согласованному с представителем заказчика.
4.12 Проверку прибора на соответствие и. 10 табл. П. 1 (масса) настоящих
технических условий проводят путем взвешивания на весах, обеспечивающих
допустимую погрешность взвешивания не более ±1%.
4.13 Необходимо проверить прибор на соответствие п.1.3.5 (назначенный
ресурс) настоящих технических условий по специальной программе. При
проведении испытания на ресурс учитывать наработку прибора при всех
предшествующих испытаниях.
4.14 Необходимо проверить прибор на соответствие п. 11 табл. П. 1
(проверка функционирования в схеме комплексного стенда) в объеме и
последовательности инструкции по работе на комплексном стенде.
4.15 Контрольную разборку прибора на соответствие п. 1.3.1 настоящих
технических условий проводят по методикам, разработанным на предприятии-
изготовителе и согласованным с представителем заказчика.
472
Навчальне видання
За загальною редакщею
Алексеева Юр1я Сергшовича, Златюна Юр1я Михайловича,
Кривцова Володимира Сташславовича, Кулика Анатолия Степановича,
Чумаченка Валентина 1вановича
ПРОЕКТУВАННЯ СИСТЕМ УПРАВЛШНЯ
OB'CKTIB PAKETHO-KOCMIHHOi ТЕХН1КИ
ТомЗ
ЕКСПЕРЕМЕНТАЛЬНЕ ВКДПРАЦЮВАННЯ СИСТЕМ УПРАВЛШНЯ
ОББСКТ1В PAKETHO-KOCMIHHOi ТЕХШКИ
(Росшською мовою)
Видання друге, перероблене та доповнене
Редактор Т.Г. Кардаш
Комп’ютерний наб!р:
А.А. Мартинкж, О.Д, Панайотова,
Н.В. Плавинська
Комп'ютерний дизайн i верстка: О.Д. Кривоносова
Формат 60x84 1/8. Пагйр офс. №2. Офс. друк
Ум. друк арк. 26,3. Обл.-вид. арк. 23,6. Наклад 500 пр.
Замовлення 67. Цша вшьна
Нащональний аерокосм1чний университет им. М.€. Жуковськ'ого
«Хар к i в с ь к и й а в i а ц i й н и й i н с т и т у т»
61070, Харк1в-70, вул. Чкалова, 17
http://www.khai.edu
ЕИддруковано ФОП Лисенко 1.Б.
61070, Харюв- 70, вул. Чкалова 17, моторний корпус, к. 147
Свщоцтво про внесения суб’екта видавничо!' справи до державного реестру видавщв,
виго^вниюв i розповсюджуБач}в видавничо’1 продукцп ДК №2607 вщ 11.09.06 р.