/

































































































































Автор: Шалымов Р.В. Ткаченко А.Н. Ларионов Д.Ю.
Теги: физика механика учебное пособие аналитическая механика
ISBN: 000-0-0000-0000-0
Год: 2022




Текст
МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный электротехнический
университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Учебное пособие
Санкт-Петербург
Издательство СПбГЭТУ «ЛЭТИ»
2022
УДК 42
ББК АБВГД
А42
Авторы: Шалымов Р. В., Ткаченко А. Н., Ларионов Д. Ю.
А42 Аналитическая механика: учеб. пособие. СПб.: Изд-во СПбГЭТУ
«ЛЭТИ», 2022. 100500 с.
ISBN 000-0-0000-0000-0
Рассмотрены основные понятия и физические величины, используемые при получении дифференциальных уравнений движения механических
систем. Значительное внимание уделено статическим и квазистатическим
задачам, в частности — условиям равновесия механических систем и методу кинетостатики.
Пособие содержит теоретические сведения и формульные описания, а
также примеры, иллюстрирующие их применение к решению механических задач.
Предназначено для бакалавров и магистров, обучающихся по направлению «Приборостроение», для подготовки к занятиям по дисциплинам
«Аналитическая механика», «Математические модели навигационных приборов».
УДК 42
ББК АБВГД
Рецензенты: филиал АО «Корпорация «Комета» — «НПЦ ОЭКН» (канд.
техн. наук Д. Н. Еськов), техн. директор ООО «Инертех», кандидат технических наук П. А. Иванов.
Утверждено
редакционно-издательским советом университета
в качестве учебного пособия
ISBN 000-0-0000-0000-0
© СПбГЭТУ «ЛЭТИ», 2022
ВВЕДЕНИЕ
Аналитическая механика изучает задачи движения механических систем с большим числом степеней свободы. Еe изучение предполагает
рассмотрение различных способов получения математических моделей
нелинейных и линеаризованных систем, формируя тем самым базу для
их расчeта и анализа движения. Помимо этого, значимой частью курса
аналитической механики является изучение методов задания ориентации
в пространстве, включая описание конечных поворотов с использованием
различных параметров ориентации.
Изучение курса аналитической механики, а значит и настоящего
учебного пособия, предполагает знание ранее освоенных дисциплин «Теоретическая механика», «Математический анализ», «Алгебра и геометрия».
Полученные знания в дальнейшем могут быть востребованы при изучении
математических моделей навигационных приборов.
Настоящее учебное пособие содержит разделы, позволяющие ознакомиться с основными положениями аналитической механики: получить
понимание подхода к формальному описанию механической системы и основных методов описания еe состояния. Кратко рассматриваются вводимые
в рамках теоретической механики физические величины и формулы, а также приводятся некоторые подходы к решению задач статики и динамики
механических систем, описываются некоторые методы составления дифференциальных уравнений их движения.
Следует отметить, что настоящее пособие не содержит в себе информацию об использовании уравнений Лагранжа и Гамильтона, а также
описание способов задания ориентации тел в пространстве. Изучение этих
материалов предлагается осуществить с использованием других учебных
пособий: [Лурье], [методичка Динамика], [учебник Яблонского по теоретической механике], [Бранец, Шмыглевский], [наше УП Разработка и анализ
математической модели гироскопического прибора для систем автономной
навигации и управления].
3
1. ОСНОВНЫЕ ПОНЯТИЯ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1.1. Связи
Материальная (механическая) система рассматривается как совокупность материальных точек.
Устройства, осуществляющие зависимость между величинами, определяющими положения и скорости точек системы, называются связями.
Наличие связей приводит к выполнению этих зависимостей при движении системы независимо от того, какими являются действующие на систему
силы и начальные условия движения системы.
Система, на точки которой наложены связи, называется несвободной
системой (все механизмы). При отсутствии связей система называется свободной (например, солнечная система, стая птиц, воздушная среда).
Формальная запись связи в общем случае представляет из себя функциональную зависимость от радиусов-векторов (координат) и скоростей точек,
а также времени, которая соотносится с нулeм (может быть больше, меньше
или равна ему), характеризуя тем самым тип ограничений, накладываемых
связью. Примерный вид такой формальной записи представлен ниже:
#» #»
𝑓λ ( #»
𝑟𝑖 , #»
𝑟𝑛 , 𝒱 𝑖 , 𝒱 𝑛 , 𝑡) = 0,
где 𝑖 = 1 . . . 𝑛 — количество точек, λ = 1 . . . 𝑆 — количество связей, #»
𝑟 — ра#»
диус-вектор точки, 𝒱 — скорость точки, t — время.
Связи можно классифицировать по различным признакам.
Наиболее важное значение имеют порционные или голономные связи.
Голономная связь — механическая связь, налагающая ограничения только на
положения (или перемещения) точек и тел системы.
Связи, в уравнения которых помимо координат входят скорости, называются кинематическими (неголономными).
Связи называются стационарными (склерономными), если время 𝑡 не
входит в явном виде в уравнение связи.
Связи, в уравнение которых в явном виде входит время 𝑡, называются
нестационарными (реономными).
4
Связи, уравнения которых записываются равенствами, называются двусторонними (удерживающими).
Связи, уравнения которых записываются неравенствами, называются
односторонними (неудерживающими).
В качестве примера голономной связи можно рассмотреть маятник,
представляющий собой тело (принимаемое за материальную точку), подвешенное к неподвижной опоре. В такой системе будут иметься связи,
определяемые самой опорой (неподвижность верхней точки подвеса), и
связь, определяемая типом подвеса.
Если подвес будет реализован в виде жeсткого стержня, то связь окажет
ограничение только на координаты конца маятника (т. е. будет голономной);
еe длина не будет меняться во времени (т. е. она будет стационарной), а
расстояние от конца стержня до точки подвеса не сможет меняться ни в
большую, ни в меньшую сторону (т. е. связь будет двусторонней). Формальная запись связей такого типа будет иметь вид:
𝑓λ ( #»
𝑟𝑖 ) = 0,
где 𝑖 = 1 . . . 𝑛 — количество точек, λ = 1 . . . 𝑆 — количество связей, #»
𝑟𝑖 —
радиус-вектор точки.
Если подвес реализовать в виде нити, то из перечисленных выше характеристик изменится только одна: расстояние от конца нити до точки подвеса
в этом случае не может быть больше, чем длина нити (если принять еe
нерастяжимой), но может быть меньше этой длины (т. е. связь станет односторонней, сохранив остальные характеристики). Формальная запись связей
такого типа будет иметь вид:
𝑓λ ( #»
𝑟𝑖 ) ⩽ 0,
где 𝑖 = 1 . . . 𝑛 — количество точек, λ = 1 . . . 𝑆 — количество связей, #»
𝑟𝑖 —
радиус-вектор точки.
Если же пойти ещe дальше и поместить в месте крепления нити
протяжное устройство (по типу лебeдки), которое по заданному закону с
течением времени будет вытравливать или, наоборот, приотпускать нить,
изменяя тем самым длину маятника, то ограничение на координаты конца
5
маятника будет непосредственно зависеть от времени (связь станет нестационарной).
𝑓λ ( #»
𝑟𝑖 , 𝑡) ⩽ 0,
где 𝑖 = 1 . . . 𝑛 — количество точек, λ = 1 . . . 𝑆 — количество связей, #»
𝑟 —
𝑖
радиус-вектор точки, t — время.
Перечисленные ситуации проиллюстрированы на рис. 1.1–1.3, соответственно.
Рис. 1.1. Пример голономных связей
#»
#»
#»
OA — жeсткий стержень; OA = 𝑙 = const; 𝑙 = 𝑥 𝑖 + 𝑦 𝑗 ;
𝑙2 = 𝑥2 + 𝑦 2 =⇒ 𝑥2 + 𝑦 2 − 𝑙2 = 0 =⇒ голономная стационарная связь (удерживающая).
Рис. 1.2. Пример голономных связей
OA — нитка; OA = 𝑙; 𝑥2 + 𝑦 2 ⩽ 𝑙2 ; 𝑥2 + 𝑦 2 − 𝑙2 ⩽ 0 =⇒ голономная стационарная связь
(неудерживающая).
Связи, накладывающие ограничения на скорости точек, можно рассмотреть на примере движения твeрдого тела, катящегося по горизонтальной плоскости без проскальзывания (см. рис. 1.4). Для центра масс
катящегося колеса будет постоянной вертикальная координата, а его горизонтальная скорость будет ограничена произведением угловой скорости на
расстояние от центра масс до мгновенного центра скоростей (точки контакта тела и поверхности). Последняя связь называется интегрируемой (т. е.
она сводится к голономной связи, вносящей ограничение на координаты: горизонтальная координата цента масс связана с углом поворота тела вокруг
6
Рис. 1.3. Пример голономных связей
𝒱 = const; OA = 𝑙(𝑡) = 𝑙0 + 𝒱𝑡; 𝑥2 + 𝑦 2 = (𝑙0 + 𝒱𝑡)2 =⇒ голономная нестационарная
связь.
мгновенного центра скоростей через расстояние от цента масс до мгновенного центра скоростей). Однако если рассмотреть вместо колеса шар,
катящийся по поверхности, то условие нулевой скорости в точке контакта
шара и поверхности не может быть сведено к ограничениям в координатах
точек, т. к. центр масс шара может двигаться не прямолинейно. В этом случае связь является неголономной: это кинематическая связь, не сводящаяся
к геометрической.
Формальная запись связей такого типа будет иметь вид:
#» #»
𝑓λ ( #»
𝑟𝑖 , #»
𝑟𝑛 , 𝒱 𝑖 , 𝒱 𝑛 , 𝑡) = 0,
где 𝑖 = 1 . . . 𝑛 — количество точек, λ = 1 . . . 𝑆 — количество связей.
Рис. 1.4. Дополнительный пример: твeрдое тело, катящееся по поверхности, не допускающей проскальзывания
∫︀
∫︀
𝑦𝒞 = const; 𝑥𝒞 = ω|𝒫𝒞|𝑑𝑡 = 𝒱𝒞 𝑑𝑡 — это интегрируемая функция, приводящая к
голономной.
7
1.2. Обобщeнные координаты
Обобщeнными координатами называются независимые между собой
параметры, однозначно определяющие положение системы в пространстве.
Обозначаются 𝑞.
Минимальное количество обобщeнных координат для системы, подчинeнной голономным связям, называется числом степеней свободы системы.
Рис. 1.5.
Определить число степеней свободы можно с использованием следующего выражения: 𝑘 = 3𝑛 − 𝑆, где 𝑛 — количество точек системы; 𝑆 —
количество связей, наложенных на точки системы; 𝑘 — число степеней свободы.
𝑘 = 3 · 2 − (3 + 1 + 1) = 1
Точка 𝑂 закреплена
𝑙 = const
𝑧𝐴 = 0
𝑞 = φ(𝑡).
Для случая, изображeнного на рис. 1.5 (стержень с шарнирным закреплением одного из концов), число степеней свободы определяется по
приведeнной ниже формуле. Механическая система состоит из двух точек и
их подвижность ограничена пятью связями: три связи обеспечивают неподвижность шарнира 𝑂 (его координата постоянна по каждой из осей), одна
связь ограничивает расстояние между точками (оно равно длине стержня),
и ещe одна связь ограничивает подвижность свободного края стержня 𝐴
плоскостью xOy (его координата 𝑧𝐴 постоянна и равна 0). Т. к. все связи в
примере голономные, то минимально необходимое число обобщeнных координат совпадeт с числом степеней свободы и будет равно единице. За
8
обобщeнную координату в этом случае можно взять угол поворота стержня
вокруг оси шарнира 𝑂.
Обобщeнные координаты могут быть декартовыми и криволинейными.
При составлении уравнения движения часть обобщeнных координат могут
быть линейными, а часть — угловыми. Всe определяется удобством решения конкретной задачи. В общем случае обобщeнные координаты могут
зависеть от декартовых координат.
𝑞𝑗 = 𝑞𝑗 (𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖 , 𝑡), где 𝑗 = 1 . . . 𝑘, 𝑘 — число степеней свободы;
𝑖 = 1 . . . 𝑛 — число точек системы. Тогда верно и обратное: декартовы координаты являются функциями обобщeнных координат
𝑥𝑖 = 𝑥𝑖 (𝑞1 . . . 𝑞𝑘 , 𝑡);
𝑦𝑖 = 𝑦𝑖 (𝑞1 . . . 𝑞𝑘 , 𝑡);
𝑧𝑖 = 𝑧𝑖 (𝑞1 . . . 𝑞𝑘 , 𝑡),
где 𝑖 = 1 . . . 𝑛. Тогда радиус-вектор может быть записан как
#»
#»
#»
#»
𝑟𝑖 = 𝑥𝑖 𝑖 + 𝑦𝑖 𝑗 + 𝑧𝑖 𝑘 = #»
𝑟𝑖 (𝑞1 . . . 𝑞𝑘 , 𝑡).
(1.1)
Если все связи, наложенные на систему, являются стационарными, то
запись для радиуса-вектора примет вид
#»
𝑟 = #»
𝑟 (𝑞 . . . 𝑞 ).
𝑖
1
𝑖
𝑘
Рассмотрим пример в виде стержня, подвешенного как плоский маятник (см. рис. 1.6). Расстояние между точками 𝑂 и 𝐴 будет неизменным и
равным модулю радиуса-вектора: OA = 𝑟 = const. В качестве обобщeнной
координаты выберем угол поворота стержня вокруг оси цилиндрического
шарнира 𝑂, отсчитываемый от оси 𝑦: 𝑞 = φ. Тогда радиус-вектор точки 𝐴 и
еe декартовы координаты могут быть выражены как функции обобщeнной
координаты через проекции радиуса-вектора на оси 𝑥 и 𝑦, а обобщeнная координата может быть представлена как арктангенс отношения координат
точки 𝐴:
#»
#»
#»
#»
#»
𝑟 = 𝑥 𝑖 + 𝑦 𝑗 = [𝑟 sin φ] 𝑖 + [𝑟 cos φ] 𝑗
𝑥
𝑥
=⇒ φ = arctg .
𝑦
𝑦
Следует также отдельно отметить, что обобщeнные координаты являются функциями времени 𝑞(𝑡).
tg φ =
9
Рис. 1.6.
1.3. Обобщeнные скорости
Производные по времени от обобщeнных координат называются обобщeнными скоростями. Рассмотрим радиус-вектор точки 𝑖, являющийся
функцией двух обобщeнных координат (для двух степеней свободы) и
времени. Скорость, являющаяся, по определению, полной производной от
радиуса-вектора, будет тогда иметь следующий вид:
#»
𝑟𝑖 = #»
𝑟𝑖 (𝑞1 , 𝑞2 , 𝑡)
𝜕 #»
𝑟𝑖
𝜕 #»
𝑟𝑖
𝜕 #»
𝑟𝑖
𝑑 #»
𝑟𝑖
#»
#»
˙
= 𝑟𝑖 =
𝑞˙1 +
𝑞˙2 +
.
𝒱𝑖 =
𝑑𝑡
𝜕𝑞1
𝜕𝑞2
𝜕𝑡
Обобщая для числа степеней свободы 𝑘:
𝑘
∑︁
𝜕 #»
𝑟𝑖
𝜕 #»
𝑟𝑖
#»
𝒱𝑖 =
𝑞˙𝑗 +
.
𝜕𝑞𝑗
𝜕𝑡
𝑗=1
В том случае, когда точки системы подвержены стационарным связям:
#»
𝑟𝑖 = #»
𝑟𝑖 (𝑞1 , 𝑞𝑘 )
𝑘
∑︁
𝜕 #»
𝑟𝑖
#»
𝒱𝑖 =
𝑞˙ .
𝜕𝑞𝑗 𝑗
𝑗=1
1.4. Виртуальные перемещения
Пусть радиус-вектор имеет вид
#»
𝑟𝑖 = #»
𝑟𝑖 (𝑞1 , 𝑞𝑘 ; 𝑡),
10
тогда действительное перемещение (как полный дифференциал) будет определяться формулой
𝑑 #»
𝑟𝑖 =
𝜕 #»
𝑟𝑖
𝑑𝑞𝑗 +
𝑑𝑡.
𝜕𝑞𝑗
𝜕𝑡
𝑘
∑︁
𝜕 #»
𝑟𝑖
𝑗=1
Виртуальное перемещение — мысленное бесконечно малое перемещение, допускаемое наложенными на систему в данный момент связями (т. е.
виртуальное перемещение определяется при фиксированном времени). Другое название — возможное перемещение. Обозначается δ #»
𝑟𝑖 .
δ #»
𝑟𝑖 =
𝑘
∑︁
𝜕 #»
𝑟𝑖
𝑗=1
𝜕𝑞𝑗
δ𝑞𝑗
— виртуальные перемещения для стационарных и нестационарных систем.
Виртуальное перемещение δ #»
𝑟 является изохромной вариацией радиуса-вектора 𝑟, т. е. его полным дифференциалом при фиксированном
времени 𝑡 = const.
δ #»
𝑟𝑖 = #»
𝑟𝑖 (𝑞1 + δ𝑞1 , . . . , 𝑞𝑛 + δ𝑞𝑛 , 𝑡) − #»
𝑟𝑖 (𝑞1 , . . . , 𝑞𝑛 , 𝑡) =
𝑘
∑︁
𝜕𝑟𝑖
𝑗=1
𝜕𝑞𝑗
δ𝑞𝑗 ,
где δ𝑞𝑗 — виртуальное перемещение обобщeнной координаты; δ #»
𝑟𝑖 — виртуальное изменение радиуса-вектора.
Виртуальное перемещение определяется только наложенными на систему в данный момент времени связями (связи фиксируются). Они не
осуществляются =⇒ не требуется ни силы, ни времени.
Действительное перемещение 𝑑 #»
𝑟𝑖 определяется наложенными на систему связями, приложенными к точкам системы в данный момент времени
силами, требуют времени (выполняются за промежуток времени Δ𝑡).
В качестве примера, на основе которого можно сравнить действительные и виртуальные перемещения, рассмотрим закреплeнный в виде
маятника стержень (см. рис. 1.7 для виртуального и рис. 1.8 для действительного перемещения). В случае действительного перемещения его нужно
«осуществить», т. е. приложить силу, которая приведeт к этому перемещению, и потратить на это перемещение промежуток времени. Тогда точка
11
на конце маятника переместится в строго определeнное положение 𝑑 #»
𝑟,
определяемое наложенной связью: если связь стационарная (маятник —
стержень), то она останется на расстоянии 𝑟; а если связь меняет свою
длину, то точка не только переместится за счeт разворота маятника по
обобщeнной координате φ, но и за малый отрезок времени сама связь
увеличится или уменьшится, обеспечив таким образом дополнительное
приращение вектора 𝑑 #»
𝑟 вдоль отрезка OA.
В случае же виртуального перемещения оно «не осуществляется», т. е.
перемещение нами только воображается (не требуется ни время, ни сила).
Виртуальное перемещение ограничивается только существующей в текущий момент времени связью (т. е. связь как бы замораживается во времени,
и даже нестационарная связь не меняет своих параметров). При этом фиксируются возможности точки 𝐴 к перемещению вокруг точки 𝑂, а их две:
поворот стержня либо по часовой, либо против часовой стрелки (и то, и
другое допускается связями). Оба этих перемещения являются виртуальными или возможными.
Рис. 1.7.
Рис. 1.8.
𝑟 и действительное перемещение 𝑑 #»
𝑟 — векВозможное перемещение δ #»
торы.
Для стационарных голономных связей виртуальные перемещения ничем не отличаются от элементарных действительных перемещений в
смысле формул, по которым они определяются.
Для нестационарных систем элементарные перемещения не принадлежат к классу виртуальных.
12
Рассмотрим далее несколько примеров по определению связи между
виртуальным изменением радиуса-вектора и виртуальными перемещениями
по обобщeнным координатам.
Для случая закреплeнного в виде маятника стержня (см. рис. 1.9), взяв в
качестве обобщeнной координаты угол его поворота вокруг цилиндрического шарнира в точке 𝑂, осуществим изохронную вариацию по приведeнной
ранее формуле. В итоге будем иметь
OA = const = 𝑙
#»
#»
#»
𝑟 = [𝑙 sin φ] 𝑖 + [𝑙 cos φ] 𝑗
#»
#»
δ #»
𝑟 = {[𝑙 cos φ] 𝑖 + [−𝑙 sin φ] 𝑗 }δφ
Рис. 1.9.
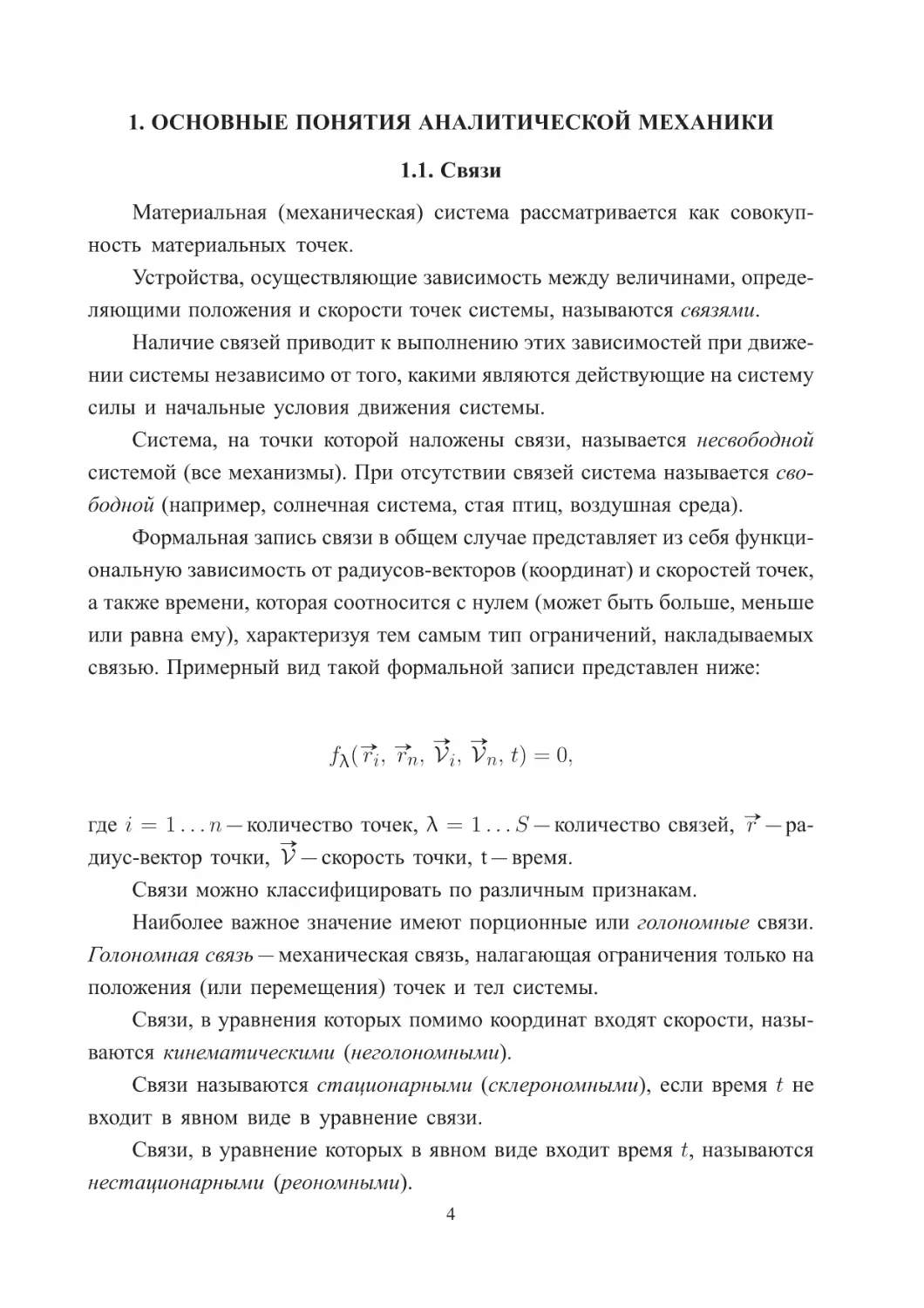
Для случая двухзвенного маятника, состоящего из двух шарнирно соединeнных стержней OA и AB (система, имеющая две степени свободы),
рассмотрим два варианта задания обобщeнных координат.
Первый вариант: 𝑞1 = φ (угол, отсчитываемый вокруг оси 𝑂 от нижнего вертикального до текущего положения звена OA), 𝑞2 = ψ (угол,
отсчитываемый вокруг оси 𝐴 от нижнего вертикального до текущего положения звена AB ) (см. рис. 1.10).
Второй вариант: 𝑞1 = α (угол, отсчитываемый вокруг оси 𝑂 от нижнего
вертикального до текущего положения звена OA), 𝑞2 = β (угол, отсчитываемый вокруг оси 𝐴 от прямой, содержащей звено OA, до текущего
положения звена AB ) (см. рис. 1.11).
13
𝑗 = 1,2
OA = 𝑙1 = const
AB = 𝑙2 = const
𝑞1 = φ;
𝑞2 = ψ
#»
#»
#»
𝑟𝐴 = [𝑙1 sin φ] 𝑖 + [𝑙1 cos φ] 𝑗
#»
#»
𝑟𝐵 = [𝑙1 sin φ + 𝑙2 sin ψ] 𝑖 +
#»
+ [𝑙1 cos φ + 𝑙2 cos ψ] 𝑗
Рис. 1.10.
#»
#»
δ #»
𝑟𝐴 ={[𝑙 cos φ] 𝑖 + [−𝑙 sin φ] 𝑗 }δφ
#»
#»
δ #»
𝑟𝐵 ={[𝑙1 cos φ] 𝑖 + [−𝑙1 sin φ] 𝑗 }δφ +
#»
#»
+ {[𝑙2 cos ψ] 𝑖 + [−𝑙2 sin ψ] 𝑗 }δψ =
#»
= [𝑙1 cos φ · δφ + 𝑙2 cos ψ · δψ] 𝑖 +
#»
+ [−𝑙1 sin φ · δφ − 𝑙2 sin ψ · δψ] 𝑗
#»
#»
𝑟𝐴 =[𝑙1 sin α] 𝑖 + [𝑙1 cos α] 𝑗
#»
𝑟𝐵 =[𝑙1 sin α + 𝑙2 sin(α + β)] 𝑖 +
#»
+ [𝑙1 cos α + 𝑙2 cos(α + β)] 𝑗
𝑞1 = α
𝑞2 = β
#»
δ 𝑟𝐵 = {[𝑙1 cos α + 𝑙2 cos(α + β)]δα +
#»
+ 𝑙2 cos(α + β)δβ} 𝑖 +
{[−𝑙1 sin α − 𝑙2 sin(α + β)]δα −
#»
− 𝑙2 sin(α + β)δβ} 𝑗 .
Рис. 1.11.
Изохронная вариация для радиуса-вектора точки 𝐴 будет иметь вид,
аналогичный примеру с однозвенным маятником. А вот виртуальные изменения радиуса-вектора точки 𝐵, найденные для разных вариантов выбора
задания обобщeнных координат, будут существенно отличаться. Различие в
сложности получаемых выражений, заметное даже на таком простом примере, говорит о необходимости разумно подходить к выбору обобщeнных
координат, особенно при описании сложных систем с большим числом степеней свободы: важно не усложнить себе дальнейшие расчeты уже на этом
первом шаге анализа механизма.
14
2. КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТОЧКИ ПРИ
РАЗЛИЧНОМ ВЫБОРЕ ОБОБЩEННЫХ КООРДИНАТ
Движение материального объекта или системы считается заданным, если в любой момент времени можно определить положение любой точки
системы или объекта относительно выбранной системы отсчeта.
Положение материальных объектов и систем определяется обобщeнными координатами, среди которых, наряду с декартовыми, используются
и криволинейные координаты.
Системы координат могут быть расклассифицированы по количеству
осей (плоские и пространственные) и типу используемых координат (количеству криволинейных из числа используемых координат) в соответствии
с рис. 2.1. Если все координаты линейные, то система координат называется декартовой; если одна из трeх координат является криволинейной,
то система координат называется цилиндрической (в плоском варианте —
полярной); если две из трeх координат являются криволинейными, то система координат называется сферической. Декартовы системы координат делят
также на правые и левые по взаимному направлению осей. Правой системой координат называют такую, для которой из конца третьей оси (𝑧) можно
наблюдать поворот от первой (𝑥) ко второй (𝑦) оси происходящим против
часовой стрелки. Система координат с другим (тоже ортогональным) положением осей называется левой (аналогичный поворот там будет выглядеть
происходящим по часовой стрелке).
Декартовы прямоугольные СК
Декартовы прямоугольные СК
в пространстве
Левые
Криволинейные СК
Декартовы прямоугольные СК
на плоскости
Полярные СК
Цилиндрические СК
Сферические СК
Правые
Рис. 2.1. Полярная СК — плоская, а цилиндрическая и сферическая СК — объeмные.
15
2.1. Криволинейные координаты точки
2.1.1. Координаты линии, оси, поверхности
Положение точки относительно любой системы отсчeта однозначно
определяется тремя обобщeнными координатами 𝑞1 , 𝑞2 , 𝑞3 .
Радиус-вектор некоторой точки 𝑀 относительно выбранного полюса 𝑂
(см. рис. 2.2) будет являться функцией декартовых координат; в то же время
он может быть задан и криволинейными обобщeнными координатами (как
было показано в (1.1)).
#»
#»
#»
#»
𝑟 = #»
𝑟 (𝑡) = 𝑥 𝑖 + 𝑦 𝑗 + 𝑧 𝑘 = #»
𝑟 (𝑞1 , 𝑞2 , 𝑞3 ).
(2.1)
Рис. 2.2.
В координатах выражение (2.1) может быть представлено как:
⎧
⎪
⎪
⎨𝑥 = 𝑥(𝑞1 , 𝑞2 , 𝑞3 )
𝑦 = 𝑦(𝑞1 , 𝑞2 , 𝑞3 )
⎪
⎪
⎩ 𝑧 = 𝑧(𝑞 , 𝑞 , 𝑞 )
1
2
3
⎧
⎪
⎪
⎨𝑞1 = 𝑞1 (𝑥, 𝑦, 𝑧)
𝑞2 = 𝑞2 (𝑥, 𝑦, 𝑧)
⎪
⎪
⎩𝑞 = 𝑞 (𝑥, 𝑦, 𝑧).
3
3
Пусть некоторая точка 𝑀𝑂 определяется обобщeнными координатами
𝑞1 , 𝑞2 , 𝑞3 . Тогда изменение в (2.1) только одной координаты 𝑞𝑗 при фиксированных двух других координатах определит кривую, проходящую через
точку 𝑀𝑂 . Эта кривая называется координатной линией и обозначается (𝑞𝑗 ).
16
Тогда линия (𝑞1 ) представляет собой #»
𝑟 = #»
𝑟 (𝑞1 ; 𝑞2 = const; 𝑞3 =
const); линия (𝑞2 ) представляет собой #»
𝑟 = #»
𝑟 (𝑞1 = const; 𝑞2 ; 𝑞3 = const);
линия (𝑞3 ) представляет собой #»
𝑟 = #»
𝑟 (𝑞1 = const; 𝑞2 = const; 𝑞3 ).
Пример координатных линий — геодезические (φ, λ, ℎ) — меридианы и
параллели.
Касательные к координатным линиям в сторону возрастания соответствующих координат называются координатными осями.
Тогда, если (𝑞1 ), (𝑞2 ), (𝑞3 ) — координатные линии, то [𝑞1 ], [𝑞2 ], [𝑞3 ] —
координатные оси.
Координатными поверхностями называются поверхности, получаемые
при изменении двух координат и одной фиксированной координате в (2.1).
Тогда поверхность (𝑞1 , 𝑞2 ) представляет собой #»
𝑟 = #»
𝑟 (𝑞1 ; 𝑞2 ; 𝑞3 =
𝑟 = #»
𝑟 (𝑞1 ; 𝑞2 = const; 𝑞3 );
const); поверхность (𝑞1 , 𝑞3 ) представляет собой #»
#»
#»
поверхность (𝑞2 , 𝑞3 ) представляет собой 𝑟 = 𝑟 (𝑞1 = const; 𝑞2 ; 𝑞3 ).
Касательные плоскости к координатным поверхностям в точке 𝑀𝑂 называются координатными плоскостями.
Из определения следует, что координатные линии (𝑞1 ), (𝑞2 ) лежат на
координатной поверхности (𝑞1 , 𝑞2 ); координатные линии (𝑞1 ), (𝑞3 ) — на
координатной поверхности (𝑞1 , 𝑞3 ); координатные линии (𝑞2 ), (𝑞3 ) — на координатной поверхности (𝑞2 , 𝑞3 ).
Координатные оси лежат в соответствующих координатных плоскостях
(в соответствии с приведeнными выше определениями).
Пример: для декартовой системы координат координатные поверхности (только одна координата константна) — плоскости, параллельные
координатным плоскостям (см. рис. 2.3); координатные линии (только одна координата неконстантна) — прямые, параллельные координатным осям
(см. рис. 2.4).
Логика построения координатных линий и поверхностей для декартовой системы координат очевидна. Цилиндрическая же и сферическая
системы координат требуют отдельного рассмотрения.
17
Рис. 2.4.
Рис. 2.3.
2.1.2. Цилиндрическая, полярная и сферическая системы координат
Цилиндрическая и сферическая системы координат являются ортогональными, т. е. их координатные оси [𝑞1 ], [𝑞2 ], [𝑞3 ] взаимно ортогональны.
Цилиндрическая система координат: положение точки 𝑀 определяется тремя координатами: 𝑞1 = φ; 𝑞2 = ρ; 𝑞3 = 𝑦 (см. рис. 2.5).
Рис. 2.5.
В соответствии с рис. 2.5 координатная линия (φ) представляет собой дугу окружности BMC при обобщeнных координатах ρ, 𝑦 = const;
координатная линия (ρ) представляет собой прямую AM при обобщeнных
координатах φ, 𝑦 = const; координатная линия (𝑦) представляет собой прямую 𝑀1 𝑀 при обобщeнных координатах φ, ρ = const. Координатные оси,
касательные к перечисленным координатным осям, указаны на рис. 2.5 в
квадратных скобках. При этом следует отметить, что для линейных обобщeнных координат ρ и 𝑦 координатные оси направлены вдоль координатных
линий, как и для декартовой системы координат (касательной к прямой линии в точке является сама эта прямая линия).
Координатными поверхностями в этом случае являются:
(φ, 𝑦): ρ = const — цилиндрическая поверхность (давшая название системе
18
координат), образующая которой параллельна оси декартовой СК 𝑦𝑔 ;
(𝑦, ρ): φ = const — вертикальная плоскость 𝐴𝑀 𝑀1 , перпендикулярная [φ]
(координатная ось [φ] является еe нормалью);
(φ, ρ): 𝑦 = const — горизонтальная плоскость 𝐴𝐵𝐶, перпендикулярная 𝑦.
Полярная система координат на плоскости является частным случаем
цилиндрической системы координат при 𝑦 = 0; 𝑞1 = φ; 𝑞2 = ρ (см. рис. 2.6).
Рис. 2.6.
Рис. 2.7. ШРВ: исправление на рисунке [лямбду] поднять в точку M
Если цилиндрическая система координат содержит только одну угловую координату, то сферическая система координат имеет уже только одну
линейную координату. Рассмотрим еe на примере задания географической
системы координат.
Представим Землю в виде сферы (см. рис. 2.7). Зададим центр системы
координат 𝑂 как центр Земли, а обобщeнные координаты как: 𝑞1 = λ — географическая долгота; 𝑞2 = φ — географическая широта; 𝑞3 = 𝑟 — расстояние
от центра Земли. При этом 𝑟 = 𝑅 + ℎ, где 𝑅 = 6371 км — радиус Земли,
ℎ — высота над уровнем моря.
При таком выборе обобщeнных координат местоположение, например,
Санкт-Петербурга может быть определено как: φ = 59°57′ ≈ 60° северной
широты; λ = 30°19′ ≈ 30° восточной долготы; 𝑟 = 1...5 м.
Для рассматриваемого случая координатные линии будут представлять
собой:
(λ): φ, 𝑟 = const — окружность радиуса ρ = 𝑟 cos φ (в горизонте) — параллель;
19
(φ): λ, 𝑟 = const — окружность радиуса 𝑟 (в вертикальной плоскости) — меридиан;
(𝑟): φ, λ = const — прямая линия, проходящая через центр 𝑂.
Меридианы и параллели также называют геодезическими линиями.
Координатные поверхности в этом случае будут представлять собой:
(φ, 𝑟): λ = const — вертикальная плоскость (содержит два меридиана)
(λ, 𝑟): φ = const — коническая поверхность (раствор конуса 180° − 2φ)
(φ, λ): 𝑟 = const — сферическая поверхность (давшая название системе координат).
2.2. Коэффициенты Ляме
С использованием коэффициентов Ляме (альтернативные варианты написания на русском языке: Лямэ, Ламе, Ламэ) могут быть определены
величины базисных векторов криволинейных координат. Кроме того, они
могут быть использованы при определении скоростей и ускорений точек.
Своe название они получили по имени французского математика, физика
и инженера Габриеля Ляме (1795–1870 гг.), который разработал (в 1833 г.)
общую теорию криволинейных координат и ввeл (в 1859 г.) эти коэффициенты.
Пусть #»
𝑒 1 , #»
𝑒 2 , #»
𝑒 3 — орты координатных осей криволинейной системы
координат. Рассмотрим (см. рис. 2.8) движение точки 𝑀 вдоль координатной линии.
Рис. 2.8.
На рис. 2.8 обозначены: 𝑀1 , 𝑀2 — последовательно занимаемые точкой 𝑀 положения на координатной линии (𝑞𝑗 ); #»
𝑟 — радиус-вектор точки 𝑀 ;
#»
𝑒 𝑗 — базисный вектор, направленный в сторону возрастания соответствую𝜕 #»
𝑟 — производная от радиуса-вектора
щей криволинейной координаты 𝑞𝑗 ; 𝜕𝑞
𝑗
20
по скалярному аргументу — вектор, лежащий на касательной к траектории
и сонаправленный с #»
𝑒 𝑗 , т. е. представляющий собой
⃒ #» ⃒
⃒ 𝜕 𝑟 ⃒ #»
𝜕 #»
𝑟
⃒ 𝑒 𝑗.
= ⃒⃒
𝜕𝑞𝑗
𝜕𝑞𝑗 ⃒
С учeтом представления радиуса-вектора как функции трeх декартовых координат
#»
#»
#»
#»
𝑟 = 𝑥 𝑖 +𝑦𝑗 +𝑧𝑘,
можно записать модуль его изменения по обобщeнной координате 𝑞𝑗
в виде:
⃒ #» ⃒ √︃(︂
)︂2 (︂
)︂2 (︂
)︂2
⃒𝜕 𝑟 ⃒
𝜕𝑥
𝜕𝑦
𝜕𝑧
⃒
⃒
+
+
= ℋ𝑗
⃒ 𝜕𝑞 ⃒ =
𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗
𝑗
— эта величина и называется коэффициентом Ляме.
Тогда для каждой обобщeнной координаты может быть записано:
𝜕 #»
𝑟
1 𝜕 #»
𝑟
#»
#»
= ℋ𝑗 𝑒 𝑗 =⇒ 𝑒 𝑗 =
𝜕𝑞𝑗
ℋ𝑗 𝜕𝑞𝑗
Для ортогональных систем координат скалярное произведение разноимeнных ортов равно нулю: #»
𝑒 𝑖 #»
𝑒 𝑗 = 0 (𝑖, 𝑗 = 1, 3, 𝑖 ̸= 𝑗), вследствие чего
полный дифференциал дуги будет определяться всего 3 коэффициентами
Ляме (недиагональные составляющие метрического тензора обращаются в
ноль — см. [А.И. Лурье, стр.800]).
2.3. Определение скорости с использованием коэффициентов Ляме
Для случая трeхмерной системы координат радиус-вектор точки является функцией 3 обобщeнных координат:
#»
𝑟 = #»
𝑟 (𝑞1 , 𝑞2 , 𝑞3 ).
Тогда скорость точки (по определению являющаяся полной производной от радиуса-вектора по времени) представляет собой:
3
∑︁
𝜕 #»
𝑟
𝜕 #»
𝑟
𝜕 #»
𝑟
𝜕 #»
𝑟
#» #»
˙
𝒱 = 𝑟 =
𝑞˙𝑗 =
𝑞˙1 +
𝑞˙2 +
𝑞˙ ,
𝜕𝑞𝑗
𝜕𝑞1
𝜕𝑞2
𝜕𝑞3 3
𝑗=1
21
где 𝑞˙𝑗 — скорость изменения обобщeнной координаты 𝑞𝑗 .
Используя запись
⃒ #» ⃒
⃒𝜕 𝑟 ⃒
⃒,
ℋ𝑗 = ⃒⃒
𝜕𝑞𝑗 ⃒
можно переписать выражение для скорости в следующем виде:
#»
𝒱 = ℋ1 𝑞˙1 #»
𝑒 1 + ℋ2 𝑞˙2 #»
𝑒 2 + ℋ3 𝑞˙3 #»
𝑒 3 = 𝒱𝑞1 #»
𝑒 1 + 𝒱𝑞2 #»
𝑒 2 + 𝒱𝑞3 #»
𝑒 3,
где 𝒱𝑞1 = ℋ1 𝑞˙1 , 𝒱𝑞2 = ℋ2 𝑞˙2 , 𝒱𝑞3 = ℋ3 𝑞˙3 — скорость в проекциях на соответствующие обобщeнные координаты.
2.4. Определение ускорения с использованием коэффициентов Ляме
С использованием полученного в разд. 2.2 выражения для базисного
вектора
𝑟
1 𝜕 #»
#»
,
𝑒𝑗 =
ℋ𝑗 𝜕𝑞𝑗
выражение для ускорения точки по обобщeнной координате 𝑞𝑗 может быть
получено следующим образом:
[︃ #»
]︃
#»
#»
1 𝑑𝒱 𝜕 𝑟
#»
˙ 1 𝜕𝑟
𝑎 #»
𝑒𝑗 = 𝒱
𝑎𝑞𝑗 = #»
=
.
ℋ𝑗 𝜕𝑞𝑗
ℋ𝑗 𝑑𝑡 𝜕𝑞𝑗
Для представления этого выражения в удобной для дальнейшего
использования форме потребуется провести ряд промежуточных преобразований, изложенных далее.
Сначала рассмотрим следующее вспомогательное соотношение:
[︂
]︂
#»
𝑑 #» 𝜕 #»
𝑟
𝑑 𝒱 𝜕 #»
𝑟
𝑟
#» 𝑑 𝜕 #»
𝒱
=
+𝒱
, откуда
𝑑𝑡
𝜕𝑞𝑗
𝑑𝑡 𝜕𝑞𝑗
𝑑𝑡 𝜕𝑞𝑗
(2.2)
]︂
[︂
#»
𝑑 𝒱 𝜕 #»
𝑟
𝑑 #» 𝜕 #»
𝑟
𝑟
#» 𝑑 𝜕 #»
=
𝒱
−𝒱
.
𝑑𝑡 𝜕𝑞𝑗
𝑑𝑡
𝜕𝑞𝑗
𝑑𝑡 𝜕𝑞𝑗
Записанное соотношение позволяет раскрыть выражение в квадратных
скобках в формуле для 𝑎𝑞𝑗 в виде разности дух компонент, каждая из которых требует дальнейшего преобразования. Эти преобразования можно
22
осуществить с использованием тождеств Лагранжа (альтернативный вариант написания на русском языке: Лягранж), названных так по имени
французского математика, астронома и механика Жозефа Луи Лагранжа
(1786–1813 гг.), являющегося автором классического трактата «Аналитическая механика» (1788 г.):
#»
𝜕 #»
𝑟
𝜕𝒱
=
𝜕 𝑞˙𝑗
𝜕𝑞𝑗
— I тождество Лагранжа;
(︂
)︂
#»
𝑑 𝜕 #»
𝑟
𝜕𝒱
=
𝑑𝑡 𝜕𝑞𝑗
𝜕𝑞𝑗
— II тождество Лагранжа.
Докажем эти тождества. Рассмотрим I тождество Лагранжа для обобщeнной координаты 𝑞1 . Последовательно раскроем скорость как полную
производную по времени от радиуса-вектора, осуществим дифференцирование радиуса-вектора по времени как сложной функции (от трeх обобщeнных
координат), а затем возьмeм частную производную по 𝑞˙1 . Каждое из трeх
дифференцируемых слагаемых представляет собой произведение, поэтому
по правилу взятия производной от произведения даст по два слагаемых. Из
всех шести оказавшихся в числителях итоговых слагаемых величин только сама 𝑞˙1 не даст нулевое значение при дифференцировании по 𝑞˙1 (а даст
единицу), т. к. радиус-вектор не зависит от скоростей, а скорости изменения обобщeнных координат взаимно независимы. В итоге получим то, что
и требовалось доказать для обобщeнной координаты 𝑞1 :
#»
𝑟 = #»
𝑟 (𝑞1 , 𝑞2 , 𝑞3 )
(︂
)︂
(︂
)︂
#»
𝜕𝒱
𝜕 𝑑 #»
𝑟
𝜕 𝜕 #»
𝑟
𝜕 #»
𝑟
𝜕 #»
𝑟
=
=
𝑞˙ +
𝑞˙ +
𝑞˙ =
𝜕 𝑞˙1
𝜕 𝑞˙1 𝑑𝑡
𝜕 𝑞˙1 𝜕𝑞1 1 𝜕𝑞2 2 𝜕𝑞3 3
𝜕 2 #»
𝑟
𝜕 #»
𝑟 𝜕 𝑞˙1
𝜕 2 #»
𝑟
𝜕 #»
𝑟 𝜕 𝑞˙2
𝜕 2 #»
𝑟
𝜕 #»
𝑟 𝜕 𝑞˙3
𝜕 #»
𝑟
=
𝑞˙1 +
+
𝑞˙2 +
+
𝑞˙3 +
=
,
𝜕 𝑞˙1 𝜕𝑞1
𝜕𝑞1 𝜕 𝑞˙1 𝜕 𝑞˙1 𝜕𝑞2
𝜕𝑞2 𝜕 𝑞˙1 𝜕 𝑞˙1 𝜕𝑞3
𝜕𝑞3 𝜕 𝑞˙1
𝜕𝑞1
⏟ ⏞
⏟ ⏞
⏟ ⏞
⏟ ⏞
⏟ ⏞
⏟ ⏞
=0, т. к. #»
𝑟=
̸ #»
𝑟 (𝑞˙1 )
=1
=0
=0
обобщeнные скорости не зависят друг от друга
23
=0
=0
Аналогичные действия можно произвести для 𝑞2 и 𝑞3 . Обобщив результат,
можно утверждать, что I тождество Лагранжа доказано:
#»
𝜕 #»
𝑟
𝜕𝒱
=
.
𝜕 𝑞˙𝑗
𝜕𝑞𝑗
Рассмотрим II тождество Лагранжа. Сначала преобразуем левую часть
тождества. Для этого осуществим дифференцирование радиуса-вектора по
времени как сложной функции (от трeх обобщeнных координат):
)︂
(︂
𝜕 2 #»
𝑟
𝑑 𝜕 #»
𝜕 2 #»
𝑟
𝜕 2 #»
𝑟
𝑟
=
𝑞˙1 +
𝑞˙2 +
𝑞˙ .
(2.3)
𝑑𝑡 𝜕𝑞𝑗
𝜕𝑞1 𝜕𝑞𝑗
𝜕𝑞2 𝜕𝑞𝑗
𝜕𝑞3 𝜕𝑞𝑗 3
Затем преобразуем правую часть тождества. Последовательно раскроем скорость как полную производную по времени от радиуса-вектора,
осуществим дифференцирование радиуса-вектора по времени как сложной
функции (от трeх обобщeнных координат), а затем возьмeм частную производную по 𝑞𝑗 . Каждое из трeх дифференцируемых слагаемых представляет
собой произведение, поэтому по правилу взятия производной от произведения даст по два слагаемых. Из шести итоговых слагаемых три окажутся
равными нулю, по причине независимости скоростей изменения обобщeнных координат от самих обобщeнных координат:
)︂
)︂
(︂
(︂
#»
𝜕𝒱
𝜕 𝑑 #»
𝜕 𝜕 #»
𝜕 #»
𝑟
𝜕 #»
𝑟
𝑟
𝑟
=
=
𝑞˙ +
𝑞˙ +
𝑞˙ =
𝜕𝑞𝑗
𝜕𝑞𝑗 𝑑𝑡
𝜕𝑞𝑗 𝜕𝑞1 1 𝜕𝑞2 2 𝜕𝑞3 3
𝜕 2 #»
𝑟
𝜕 2 #»
𝑟
𝜕 2 #»
𝑟
=
𝑞˙1 +
𝑞˙2 +
𝑞˙ +
𝜕𝑞𝑗 𝜕𝑞1
𝜕𝑞𝑗 𝜕𝑞2
𝜕𝑞𝑗 𝜕𝑞3 3
𝑟 𝜕 𝑞˙1 𝜕 #»
𝑟 𝜕 𝑞˙2 𝜕 #»
𝑟 𝜕 𝑞˙3
𝜕 #»
+
+
+
𝜕𝑞1 𝜕𝑞𝑗 𝜕𝑞2 𝜕𝑞𝑗 𝜕𝑞3 𝜕𝑞𝑗
⏟
⏞
(2.4)
=0, т. к. обобщeнные координаты и обобщeнные скорости независимы
Левая часть II тождества Лагранжа (2.3) равна правой части II тождества Лагранжа (2.4), следовательно,
(︂
)︂
#»
𝑑 𝜕 #»
𝜕𝒱
𝑟
=
𝑑𝑡 𝜕𝑞𝑗
𝜕𝑞𝑗
— II тождество Лагранжа доказано.
24
Теперь поочерeдно рассмотрим слагаемые из выражения (2.2).
Первое слагаемое из (2.2) может быть преобразовано с использованием
I тождества Лагранжа и занесения скорости под знак дифференциала:
По I тождеству Лагранжа
[︃
[︂
]︂
[︂
(︂
)︂]︂
#» ]︃
𝑑 #» 𝜕 #»
𝑟
𝑑 #» 𝜕 𝒱
𝑑 𝜕 1 #»2
𝑑 𝜕𝒯
𝒱
𝒱
𝒱
=
=
=
,
𝑑𝑡
𝜕𝑞𝑗
𝑑𝑡
𝜕 𝑞˙𝑗
𝑑𝑡 𝜕 𝑞˙𝑗 2
𝑑𝑡 𝜕 𝑞˙𝑗
(2.5)
#»
где 𝒯 = 12 𝒱 2 .
Второе слагаемое из (2.2) может быть преобразовано с использованием
II тождества Лагранжа и занесения скорости под знак дифференциала:
(︂
)︂
[︂
]︂
#»
𝜕 1 #»2
𝜕𝒯
𝑟
#» 𝜕 𝒱
#» 𝑑 𝜕 #»
=𝒱
=
𝒱 =
.
𝒱
𝑑𝑡 𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗 2
𝜕𝑞𝑗
по II тождеству Лагранжа
Тогда выражение (2.2) примет вид:
[︃ #»
]︃
𝑑 𝒱 𝜕 #»
𝜕𝒯
𝑟
𝑑 𝜕𝒯
−
,
=
𝑑𝑡 𝜕𝑞𝑗
𝑑𝑡 𝜕 𝑞˙𝑗 𝜕𝑞𝑗
а значит, ускорение точки по обобщeнной координате 𝑞𝑗 окончательно примет вид:
[︂
]︂
1 𝑑 𝜕𝒯
𝜕𝒯
𝑎𝑞 𝑗 =
−
,
ℋ𝑗 𝑑𝑡 𝜕 𝑞˙𝑗 𝜕𝑞𝑗
где 𝒯 = 21 𝒱 2 .
2.5. Получение кинематических характеристик точки в
криволинейных системах координат
Для получения выражений для скорости и ускорения в криволинейной
системе координат используем ранее полученные соотношения:
√︃(︂
)︂
(︂
)︂
(︂
)︂
𝜕𝑥 2
𝜕𝑦 2
𝜕𝑧 2
ℋ𝑗 =
+
+
𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗
𝒱𝑞𝑗 = ℋ𝑗 𝑞˙𝑗
25
[︂
]︂
1 𝑑 𝜕𝒯
𝜕𝒯
,
𝑎𝑞 𝑗 =
−
ℋ𝑗 𝑑𝑡 𝜕 𝑞˙𝑗 𝜕𝑞𝑗
где 𝒯 = 21 𝒱 2 .
2.5.1. Для декартовой системы координат
Обобщeнные координаты и скорости их изменения для декартовой системы координат имеют вид:
𝑞1 = 𝑥
𝑞˙1 = 𝑥˙
𝑞2 = 𝑦
𝑞˙2 = 𝑦˙
𝑞3 = 𝑧
𝑞˙3 = 𝑧˙
Тогда, в соответствии с записанными ранее выражениями, коэффициенты Ляме окажутся равными единицам, а проекции скоростей на
координатные оси окажутся равными скоростям изменения соответствующих обобщeнных координат:
⎧
√︃
(︂ )︂2 (︂ )︂2 (︂ )︂2
⎪
⎧
⎪
𝜕𝑦
𝜕𝑧
𝜕𝑥
⎪
⎪
⎪
+
+
=1
⎪
⎪
⎨ℋ𝑥 =
⎨𝒱𝑥 = 𝑥˙
𝜕𝑥
𝜕𝑥
𝜕𝑥
=⇒ 𝒱𝑦 = 𝑦˙
⎪
⎪
ℋ
=
1
⎪
⎪
𝑦
⎪
⎩ 𝒱 = 𝑧.
⎪
˙
⎪
𝑧
⎩ℋ = 1
𝑧
В этом случае:
]︁
1 [︁ 2
2
2
𝒯 = 𝑥˙ + 𝑦˙ + 𝑧˙ ,
2
а значит, составляющие выражения для 𝑎𝑞𝑥 примут вид:
𝜕𝒯
= 0 (зависит только от 𝑥)
˙
𝜕𝑥
𝑑 𝜕𝒯
𝑑
= 𝑥˙ = 𝑥¨ =⇒ 𝑎𝑥 = 𝑥¨.
𝑑𝑡 𝜕 𝑥˙
𝑑𝑡
Аналогично 𝑎𝑦 = 𝑦¨ и 𝑎𝑧 = 𝑧¨.
Полученные для декартовой системы координат выражения подтверждают корректность схемы получения кинематических характеристик с
использованием коэффициентов Ляме. Проделаем те же действия далее для
менее очевидных случаев.
26
2.5.2. Полярная система координат
Обобщeнные координаты для полярной системы координат имеют вид:
𝑞1 = φ;
𝑞2 = ρ.
Сопоставим их для некоторой точки 𝑀 с декартовыми координатами
на рис. 2.9.
Рис. 2.9.
ρ = | #»
𝑟 | — длина радиуса-вектора; φ — угол между радиусом-вектором
и положительным направлением оси 𝑥. Проекция вектора скорости на координатную ось [ρ]: 𝒱рад — радиальная скорость. Проекция вектора скорости
на координатную ось [φ]: 𝒱транс — трансверсальная (поперечная) скорость.
Исходя из приведeнного рисунка, соотношение между декартовыми и полярными координатами имеет вид:
𝑥 = ρ cos φ
𝑦 = ρ sin φ.
Тогда можно записать выражения для коэффициентов Ляме полярной
системы координат, а также для введeнных выше составляющих вектора
27
скорости:
𝑥 = ρ cos φ
√︃
(︂
ℋφ =
𝑦 = ρ sin φ
)︂
)︂
(︂
√︁
𝜕𝑥 2
𝜕𝑦 2
+
= ρ2 sin2 φ + ρ2 cos2 φ = ρ
𝜕φ
𝜕φ
ℋρ = 1
𝒱φ = ℋφ 𝑞˙1 = ρφ̇ — трансверсальная скорость
𝒱ρ = ℋρ 𝑞˙2 = 1ρ̇ = ρ̇ — радиальная скорость
𝒱 2 = ρ̇2 + ρ2 φ̇2 .
Для определения 𝑎φ , 𝑎ρ определим параметр 𝒯 и проведeм его дифференцирование по приведeнной в начале параграфа формуле:
]︁
1 [︁ 2
2
2
𝒯 = ρ̇ + ρ φ̇
2
𝜕𝒯
=0
𝜕φ
𝜕𝒯
= ρ2 φ̇
𝜕 φ̇
𝜕𝒯
= ρφ̇2
𝜕ρ
𝜕𝒯
= ρ̇
𝜕 ρ̇
В итоге будут получены следующие выражения для трансверсальной и
радиальной составляющих ускорения точки:
𝑑 𝜕𝒯
𝑑 (︁ 2 )︁
𝑑 𝜕𝒯
=
ρ φ̇ = 2ρρ̇φ̇ + ρ2 φ̈
= ρ̈
𝑑𝑡 𝜕 φ̇
𝑑𝑡
𝑑𝑡 𝜕 ρ̇
)︁
1 (︁
𝑎φ =
2ρρ̇φ̇ + ρ2 φ̈ = 2ρ̇φ̇ + ρφ̈
𝑎ρ = ρ̈ − ρφ̇2
ρ
28
2.5.3. Цилиндрическая система координат
Обобщeнные координаты для цилиндрической системы координат и их
связь с декартовыми координатами, в соответствии с рис. 2.10, имеют вид:
⎧
⎪
⎪
⎨𝑞1 = φ
𝑞2 = ρ
⎪
⎪
⎩𝑞 = 𝑦
3
⎧
⎪
⎪
⎨𝑥 = ρ sin φ
𝑦=𝑦
⎪
⎪
⎩ 𝑧 = ρ cos φ
Рис. 2.10.
Тогда можно записать выражения для коэффициентов Ляме цилиндрической системы координат, а также для составляющих вектора скорости:
√︃
⎧
(︂
(︂
(︂
)︂
)︂
)︂
⎪
𝜕𝑥 2
𝜕𝑦 2
𝜕𝑧 2
⎪
⎪
⎪
ℋφ =
+
+
=φ
⎪
⎪
𝜕φ
𝜕φ
𝜕φ
⎪
⎨
ℋρ = 1
⎪
√︃
⎪
⎪
(︂ )︂2 (︂ )︂2 (︂ )︂2
⎪
⎪
𝜕𝑥
𝜕𝑦
𝜕𝑧
⎪
⎪
+
+
=1
⎩ ℋ𝑦 =
𝜕𝑦
𝜕𝑦
𝜕𝑦
⎧
⎪
⎪
⎨𝒱φ = ρφ̇
𝒱ρ = ρ̇
⎪
⎪
⎩ 𝒱 = 𝑦˙
𝑦
𝒱 2 = (ρφ̇)2 + (ρ̇)2 + (𝑦)
˙ 2
29
Для определения 𝑎φ , 𝑎ρ , 𝑎𝑦 определим параметр 𝒯 и, проведя его
дифференцирование по приведeнной в начале параграфа формуле, получим
выражения для составляющих ускорения точки:
1
𝒯 = {(ρφ̇)2 + (ρ̇)2 + (𝑦)
˙ 2 }.
2
⎧
⎪
⎪
⎪
⎪
⎪
⎨
𝜕𝒯
=0
𝜕φ
𝜕𝒯
1
= 2ρ2 φ̇ = ρ2 φ̇
𝜕 φ̇
2
⎪
⎪
⎪
⎪
⎪
⎩ 𝑑 (ρ2 φ̇) = 2ρρ̇φ̇ + ρ2 φ̈
𝑑𝑡 ]︂
⎧
[︂
1 𝑑 2
1
⎪
⎪
⎪
𝑎φ =
(ρ φ̇) = (2ρρ̇φ̇ + ρ2 φ̈) = 2ρ̇φ̇ + φ̈ρ
⎪
⎪
ρ 𝑑𝑡
ρ
⎪
⎨
12 2
𝑑
(
ρ̇)
−
φ̇ ρ = ρ̈ − φ̇2 ρ
𝑎
=
ρ
⎪
⎪
𝑑𝑡
2
⎪
⎪
⎪
𝑑
⎪
⎩ 𝑎𝑦 = 𝑦˙ − 0 = 𝑦¨
𝑑𝑡
2.5.4. Сферическая система координат
Обобщeнные координаты для сферической системы координат имеют
вид:
⎧
⎪
⎪
⎨𝑞1 = λ
𝑞2 = φ
⎪
⎪
⎩𝑞 = ρ
3
Сопоставим их для некоторой точки с декартовыми координатами
на рис. 2.11.
| #»
𝑟| = ρ
30
Рис. 2.11. φ — угол между проекцией радиуса-вектора на плоскость 𝑥𝑧 и положительным
направлением оси 𝑥; λ — угол между радиусом-вектором и плоскостью 𝑥𝑧.
⎧
⎪
⎪
⎨𝑞1 = λ
𝑞2 = φ
⎪
⎪
⎩𝑞 = ρ
3
⎧
⎪
⎪
⎨𝑥 = ρ cos φ sin λ
𝑦 = ρ sin φ
⎪
⎪
⎩ 𝑧 = ρ cos φ cos λ
Тогда можно записать выражения для коэффициентов Ляме сферической системы координат, а также для составляющих вектора скорости и
параметра 𝒯 :
√︁
⎧
⎪
⎪
ℋ = ρ2 cos2 φ cos2 λ + ρ2 cos2 φ sin2 λ = ρ cos φ
⎪
⎨ λ √︁
ℋφ = ρ2 sin2 φ sin2 λ + ρ2 cos2 φ + ρ2 sin2 φ cos2 λ = ρ
⎪
⎪
⎪
⎩
ℋρ = 1
⎧
⎪
⎪
⎨ 𝒱λ = ρ cos φλ̇
𝒱φ = ρφ̇
⎪
⎪
⎩ 𝒱 = ρ̇
ρ
𝒱 2 = (λ̇ρ cos φ)2 + (ρφ̇)2 + (ρ̇)2
1
𝒯 = {λ̇2 ρ2 cos2 φ + ρ2 φ̇2 + ρ̇2 }
2
31
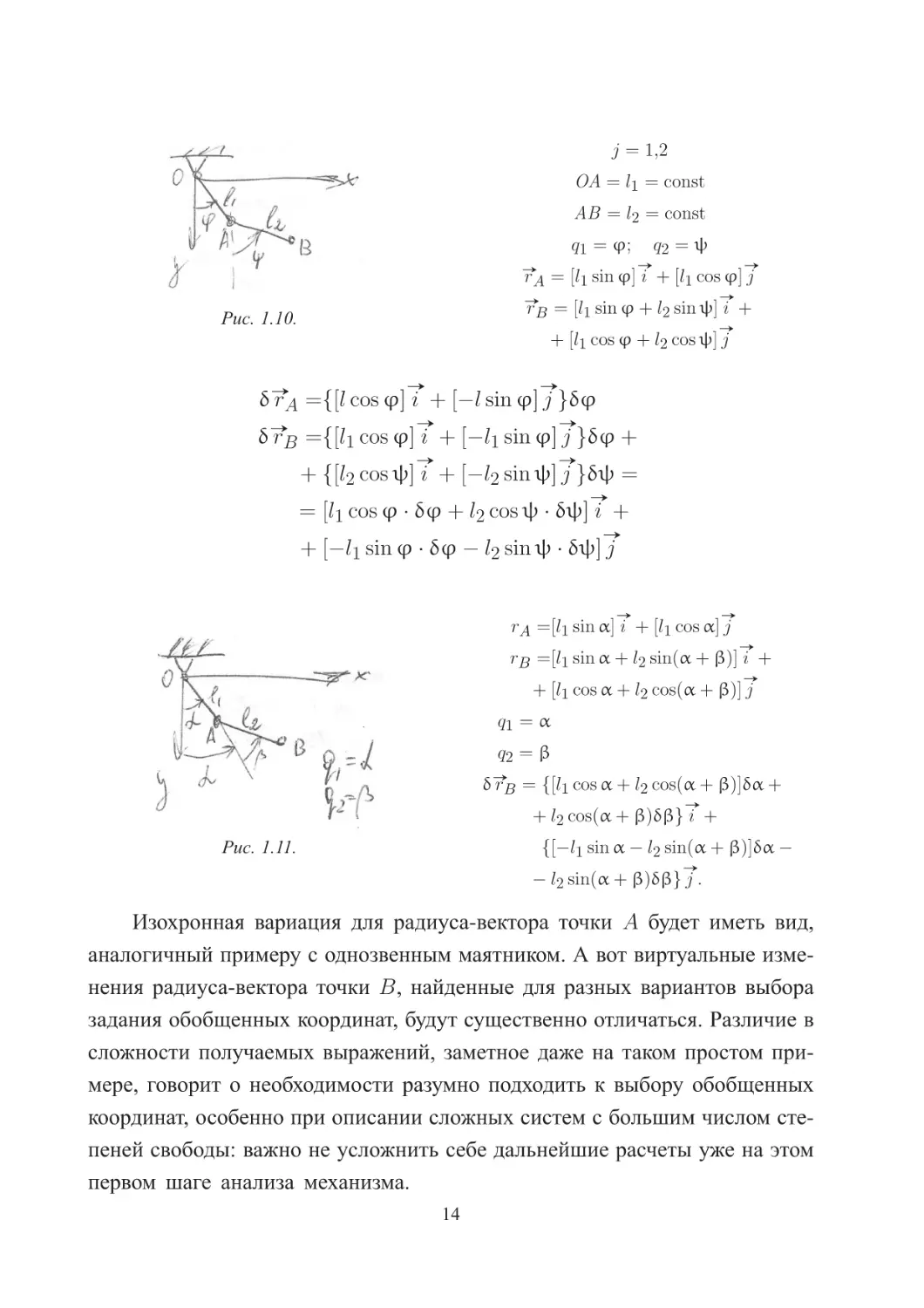
Для определения 𝑎λ проведeм его дифференцирование по приведeнной
в начале параграфа формуле:
𝜕𝒯
=0
𝜕λ
𝜕𝒯
= λ̇ρ2 cos2 φ
𝜕 λ̇
𝑑 𝜕𝒯
= λ̈ρ2 cos2 φ + λ̇2ρρ̇ cos2 φ + λ̇ρ2 2 cos φ(− sin φ)φ̇
𝑑𝑡 𝜕 λ̇
𝑎λ = λ̈ρ cos φ + 2λ̇ρ̇ cos φ − 2λ̇ρ sin φφ̇
Для определения 𝑎φ проведeм его дифференцирование по приведeнной
в начале параграфа формуле:
𝜕𝒯
= λ̇2 ρ2 cos φ(− sin φ)
𝜕φ
𝜕𝒯
= ρ2 φ̇
𝜕 φ̇
𝑑 𝜕𝒯
= 2ρρ̇φ̇ + ρ2 φ̈
𝑑𝑡 𝜕 φ̇
𝑎φ = 2ρ̇φ̇ + ρφ̈ + λ̇2 ρ cos φ sin φ
Для определения 𝑎ρ проведeм его дифференцирование по приведeнной
в начале параграфа формуле:
𝜕𝒯
= λ̇2 ρ cos2 φ + ρφ̇2
𝜕ρ
𝜕𝒯
= ρ̇
𝜕 ρ̇
𝑑 𝜕𝒯
= ρ̈
𝑑𝑡 𝜕 ρ̇
𝑎ρ = ρ̈ − λ̇2 ρ cos2 φ − ρφ̇2
3. ОСНОВНОЕ УРАВНЕНИЕ ДИНАМИКИ И ДИНАМИЧЕСКИЕ
УРАВНЕНИЯ ЭЙЛЕРА
Если механизм отклонить от положения равновесия, то под действием
заданных сил он придeт в движение. Для исследования движения ме32
ханических систем необходимо составить дифференциальные уравнения
движения.
Дифференциальные уравнения движения твeрдых тел и механических
систем могут быть получены с использованием различных методов. В основе каждого из таких методов лежит некоторая теорема или принцип
динамики.
Выбор метода, как правило, определяется удобством вычислений в
каждом конкретном случае. Среди основных методов, применяемых для
получения уравнений движения, можно выделить [Боронахин А. М., Подгорная Л. Н., Ткаченко А. Н., Шалымов Р. В. Разработка и анализ
математической модели гироскопического прибора для систем автономной
навигации и управления: Учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ»,
2017. 48 с.]: совместное использование основного уравнения динамики
и динамических уравнений Эйлера, принцип Даламбера (объединeнный
принцип Германа—Эйлера—Даламбера) для сил и моментов сил, уравнения Лагранжа II рода или канонические уравнения механики. Независимо
от используемого метода получения дифференциальных уравнений движения механической системы, необходимо определить для неe число степеней
свободы и выбрать обобщeнные координаты (см. глав. 1), соответствующие
этим степеням свободы. От выбора обобщeнных координат напрямую зависит сложность вычислений.
3.1. Центр масс системы
Рассмотрим механическую систему, состоящую из точек 𝑀𝑖 (𝑖 = 1, 𝑛,
где 𝑛 — количество точек системы), имеющих массы 𝑚𝑖 . Расположение этих
точек может быть задано радиусами-векторами 𝑟𝑖 по отношению к произвольно выбранной условно неподвижной системе координат (см. рис. 3.1).
Для заданной таким образом системы может быть определено местоположение центра масс — как для системы с дискретным (через сумму), так и для
системы с непрерывным (через интеграл) распределением масс по объeму.
33
Рис. 3.1.
Центр масс системы — это точка, радиус-вектор которой определяется
следующим образом:
∑︀
∑︀
#»
𝑚𝑖 #»
𝑟𝑖
𝑚
𝑟
𝑖
𝑖
#»
𝑖
𝑖
=
=
𝑟𝑐 = ∑︀
𝑚
𝑚
𝑖
𝑖
1
𝑟2 + · · · + 𝑚𝑖 #»
𝑟𝑖 + · · · + 𝑚𝑛 #»
𝑟𝑛 ] =
𝑟1 + 𝑚2 #»
= [𝑚1 #»
⏞
𝑚⏟
𝑖=1,𝑛,
=
1
𝑚
∫︁
где 𝑛 — кол-во точек системы
#»
𝑟 𝑑𝑚
𝑚
где 𝑚 — масса системы.
В координатной записи выражение для центра масс примет вид:
⎧
∑︀
∫︁
𝑚
𝑥
1
⎪
𝑖
𝑖
⎪
𝑥𝑐 =
=
𝑥 𝑑𝑚
⎪
⎪
⎪
𝑚
𝑚
⎪
⎪
𝑚
⎪
⎪
∑︀
∫︁
⎪
⎨
𝑚𝑖 𝑦𝑖
1
𝑦 𝑑𝑚
𝑦𝑐 =
=
𝑚
𝑚
⎪
⎪
𝑚
⎪
∑︀
⎪
∫︁
⎪
⎪
𝑚
𝑧
1
⎪
𝑖
𝑖
⎪
𝑧𝑐 =
=
𝑧 𝑑𝑚
⎪
⎪
𝑚
𝑚
⎩
𝑚
Следует отметить, что встречающиеся в литературе понятия центр
масс системы и центр инерции синонимичны, в то время как понятие центра тяжести имеет принципиальное отличие. Точка, в которой находится
центр масс системы, является еe центром тяжести, только если система находится в поле действия силы тяжести.
34
3.2. Основное уравнение динамики
Из кинематики известно, что в общем случае движение твeрдого тела может быть представлено как совокупность поступательного движения
вместе с некоторой точкой, принятой за полюс (при решении задач динамики за полюс обычно принимают центр масс тела 𝐶), и вращательного
движения вокруг этого полюса, как вокруг неподвижной точки [Тарг С. М.
Краткий курс теоретической механики: учебник для втузов. М.: Высш. шк.,
2001]. Исходя из вышесказанного, уравнения движения тел, входящих в состав механической системы, могут быть получены с использованием двух
теорем (см. разд. 3.9): о движении центра масс (рассмотрим ниже) и об
изменении кинетического момента (см. раздел. 3.6–3.8), характеризующих
поступательную и вращательную составляющие движения, соответственно.
Основное уравнение динамики (второй закон Ньютона) гласит, что
ускорение материальной точки пропорционально приложенной к ней силе и
имеет одинаковое с ней направление. Обобщив этот закон для тела, получим
выражение, называемое теоремой о движении центра масс [Яблонский А.
А. Курс теоретической механики: учеб. пособие: Ч. 2. ДИНАМИКА, изд. 3,
испр. и доп. М.: Высшая школа, 1966]:
#»
𝑚 #»
𝑎 𝒞 = ℱ𝐸,
#»
где ℱ 𝐸 — главный вектор внешних сил, действующих на тело; 𝑚 — масса
тела; #»
𝑎 𝒞 — ускорение центра масс тела.
Или, в проекциях на неподвижные декартовы оси 𝑂𝑋𝑔 𝑌𝑔 𝑍𝑔 :
𝑚¨
𝑥𝑔𝒞 = ℱ𝑥𝐸𝑔 ,
𝑚¨
𝑦𝑔𝒞 = ℱ𝑦𝐸𝑔 ,
𝑚¨
𝑧𝑔𝒞 = ℱ𝑧𝐸𝑔 ,
где ℱ𝑥𝐸𝑔 , ℱ𝑦𝐸𝑔 , ℱ𝑧𝐸𝑔 — проекции главного вектора внешних сил на оси декартовой системы координат; 𝑥¨𝑔𝒞 , 𝑦¨𝑔𝒞 , 𝑧¨𝑔𝒞 — проекции ускорения центра масс
на оси декартовой системы координат.
35
3.3. Моменты инерции
Физический смысл момента инерции: характеризует распределение
масс по телу в выбранной системе отсчeта.
Обозначается как 𝒥 или ℐ. Измеряется в кг · м2 .
Момент инерции является мерой инертности тела во вращательном
движении. Аналогом моменту инерции при поступательном движении является масса тела.
3.3.1. Полярные, осевые, центробежные моменты инерции. Радиус
инерции
Момент инерции относительно точки 𝑂 (полюса) — полярный момент
инерции. Для дискретного набора масс его формула имеет вид:
𝒥𝑂 =
∑︁
𝑖
𝑚𝑖 𝑟𝑖2 =
∑︁
𝑚𝑖 (𝑥2𝑖 + 𝑦𝑖2 + 𝑧𝑖2 )
𝑖
, где 𝑖 — номер точки; 𝑚𝑖 — масса 𝑖-й точки; 𝑟𝑖 — расстояние от 𝑖-й точки до
полюса 𝑂 (см. рис. 3.2); 𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖 — координаты 𝑖-й точки в системе координат с началом в полюсе 𝑂.
Для протяжeнных объектов (с непрерывным распределением массы):
∫︁
∫︁
2
𝒥𝑂 = 𝑟 𝑑𝑚 = [𝑥2 + 𝑦 2 + 𝑥2 ] 𝑑𝑚
𝑚
𝑚
𝒥𝑂 > 0 всегда, если тело существует (имеет ненулевые массу и размеры).
Рис. 3.3.
Рис. 3.2.
Осевой момент инерции — момент инерции относительно неподвижной
оси.
36
Пусть дана ось 𝑙 и точка 𝑀𝑖 . 𝑙𝑖 — расстояние между точкой 𝑀𝑖 и осью
𝑙 (см. рис. 3.2). Тогда осевой момент инерции:
∫︁
∑︁
𝒥𝑙 =
𝑚𝑖 𝑙𝑖2 = 𝑙2 𝑑𝑚
𝑖
𝑚
𝒥𝑙 > 0 всегда, если тело имеет ненулевые массу и размер (относительно оси 𝑙).
Для стрежня, приведeнного на рис. 3.3, 𝒥𝑥 = 0. Причиной является
понятие стержня (принятая при решении механических задач абстракция):
стрежень — это цилиндр, высота которого настолько больше диаметра, что
диаметр считается равным нулю. Т. е. стержень, изображeнный на рис. 3.3,
имеет нулевые удаления своих точек от изображeнной оси 𝑥, а значит — и
нулевой момент инерции относительно этой оси.
В общем виде в декартовых координатах осевые моменты инерции
имеют вид:
∫︁
∫︁
⎧
⎪
𝒥𝑥 = 𝑙𝑥2 𝑑𝑚 = (𝑦 2 + 𝑧 2 ) 𝑑𝑚
⎪
⎪
⎪
⎪
⎪
𝑚
𝑚
⎪
⎪
∫︁
⎪
⎨
𝒥𝑦 = (𝑥2 + 𝑧 2 ) 𝑑𝑚
⎪
⎪
𝑚
⎪
∫︁
⎪
⎪
⎪
2
2
⎪
⎪
⎪
⎩ 𝒥𝑧 = (𝑥 + 𝑦 ) 𝑑𝑚
𝑚
Можно заметить, что их сумма окажется связана с полярным моментом
инерции относительно начала используемой системы координат:
∫︁
𝒥𝑥 + 𝒥𝑦 + 𝒥𝑧 = 2 (𝑥2 + 𝑦 2 + 𝑧 2 ) 𝑑𝑚 = 2𝒥𝑂
⏞
⏟
𝑚
𝒥𝑂 =
𝑟2
𝒥𝑥 + 𝒥𝑦 + 𝒥𝑧
2
Отсюда следует, что при повороте системы координат OXYZ в положение 𝑂𝑋1 𝑌1 𝑍1 (см. рис. 3.4), полярный момент инерции 𝒥𝑂 останется
неизменным.
37
Рис. 3.4.
1
1
𝒥𝑂 = (𝒥𝑥 + 𝒥𝑦 + 𝒥𝑧 ) = (𝒥𝑥1 + 𝒥𝑦1 + 𝒥𝑧1 ),
2
2
т. е. сумма осевых моментов инерции не зависит от разворота декартовой
системы координат (инвариантна относительно положения этих осей).
Центробежными моментами инерции по отношению к осям прямоугольной декартовой системы координат называются величины, определяемые следующими выражениями:
∫︁
⎧
⎪
⎪
𝒥𝑥𝑦 = 𝑥𝑦 𝑑𝑚 = 𝒥𝑦𝑥
⎪
⎪
⎪
⎪
𝑚
⎪
⎪
∫︁
⎪
⎨
𝒥𝑥𝑧 = 𝑥𝑧 𝑑𝑚 = 𝒥𝑧𝑥
⎪
⎪
𝑚
⎪
∫︁
⎪
⎪
⎪
⎪
⎪
⎪
⎩ 𝒥𝑦𝑧 = 𝑦𝑧 𝑑𝑚 = 𝒥𝑧𝑦
𝑚
Они (в отличие от полярных и осевых моментов инерции) могут иметь любой знак.
Если тело существует (имеет ненулевые размеры и массу), то ни
осевые, ни полярные моменты инерции не могут быть равны нулю. Центробежные моменты инерции могут быть равны нулю.
На практике нередко используется понятие радиус инерции — величина,
характеризующая расстояние, на котором должна быть расположена точка,
масса которой равна массе тела, для того чтобы момент инерции точки относительно оси был равен моменту инерции тела относительно этой же оси.
∫︀
𝒥𝑙 = 𝑚 𝑙2 𝑑𝑚 — момент инерции тела.
38
Рис. 3.5.
𝒥𝑙 = 𝑚𝑖2𝑙 — момент инерции точки. 𝑚 — масса тела/точки. 𝑖𝑙 =
√︁
𝒥𝑙
𝑚 —
радиус инерции.
Радиус инерции измеряется в единицах длины: [𝑖𝑙 ] = [м].
3.3.2. Моменты инерции относительно параллельных осей и
относительно произвольной оси
Момент инерции относительно параллельной оси определяется теоремой Штейнера (Гюйгенса—Штейнера).
Рис. 3.6.
Рис. 3.7.
Задача ставится следующим образом. Пусть имеется тело массой 𝑚.
Момент инерции этого тела относительно оси 𝑦𝑐 , проходящей через его
центр масс, известен и равен 𝒥𝑦𝑐 . На расстоянии 𝑑 от оси 𝑦𝑐 располагается
параллельная ей ось 𝑦. Требуется определить момент инерции 𝒥𝑦 относительно этой оси. Опустив доказательство [Яблонский или Тарг], будем
иметь:
𝒥𝑦 = 𝒥𝑦𝑐 + 𝑚𝑑2
Это выражение и именуется теоремой Гюйгенса—Штейнера.
39
Рассмотрим другую полезную для определения моментов инерции
теорему. Пусть имеется тело, осевые и центробежные моменты инерции
которого относительно некоторой системы координат OXYZ известны. 𝒥𝑥 ,
𝒥𝑦 , 𝒥𝑧 — осевые моменты инерции.
𝒥𝑥𝑦 , 𝒥𝑥𝑧 , 𝒥𝑦𝑧 — центробежные моменты инерции. Требуется определить момент инерции этого тела по отношению к оси 𝑙, проходящей через начало
координат 𝑂 и направленной под углом α к оси 𝑥, β к оси 𝑦 и γ к оси 𝑧
(см. рис. 3.7). Опустив доказательство [Яблонский или Тарг], будем иметь:
𝒥𝑙 = 𝒥𝑥 cos2 α + 𝒥𝑦 cos2 β + 𝒥𝑧 cos2 γ −
− 2𝒥𝑥𝑦 cos α cos β − 2𝒥𝑥𝑧 cos α cos γ −
− 2𝒥𝑦𝑧 cos β cos γ.
3.3.3. Тензор инерции. Главные и главные центральные оси инерции
Тензором инерции называется матрица 3 × 3, содержащая осевые и
центробежные моменты инерции тела в следующем порядке:
⎤
⎡
𝒥𝑥 −𝒥𝑥𝑦 −𝒥𝑥𝑧
[︁ ]︁
⎥
⎢
𝒥 = ⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
Т. о. на главной диагонали — осевые моменты инерции 𝒥𝑥,𝑦,𝑧 > 0, остальные — центробежные:
𝒥𝑥𝑦 = 𝒥𝑦𝑥
𝒥𝑥𝑧 = 𝒥𝑧𝑥
𝒥𝑦𝑧 = 𝒥𝑧𝑦 ,
могут иметь любой знак.
Тензор инерции характеризует инертные свойства тела при вращении
относительно любой оси.
При дискретном распределении массы по телу тензор инерции имеет вид:
⎡∑︀
⎤
∑︀
∑︀
2
2
− 𝑖 𝑚𝑖 𝑥𝑖 𝑦𝑖
− 𝑖 𝑚𝑖 𝑥𝑖 𝑧𝑖
𝑖 (𝑦 + 𝑧𝑖 )
𝑖𝑚
∑︀ 𝑖
∑︀
∑︀
⎥
⎢
2 + 𝑧2)
𝒥 = ⎣ − 𝑖 𝑚𝑖 𝑥𝑖 𝑦𝑖
𝑚
(𝑥
−
𝑚𝑖 𝑦𝑖 𝑧𝑖 ⎦
𝑖 𝑖
𝑖
𝑖
𝑖
∑︀
∑︀
∑︀
2
2
− 𝑖 𝑚𝑖 𝑥𝑖 𝑧𝑖
− 𝑖 𝑚𝑖 𝑧𝑖 𝑦𝑖
𝑖 𝑚𝑖 (𝑥𝑖 + 𝑦𝑖 )
40
Пусть 𝑥𝑔 , 𝑦𝑔 , 𝑧𝑔 — условно неподвижные оси, а 𝑥, 𝑦, 𝑧 — связанные оси
(см. рис. 3.8). Тензор инерции в связанных осях является постоянным тензором, т. е. элементы тензора инерции в осях, связанных с телом, останутся
постоянными при всех случаях движения твeрдого тела.
Рис. 3.8.
Запишем радиус-вектор относительно условно неподвижного базиса:
#»
#»
#»
#»
𝑟 = 𝑥𝑔 𝑖𝑔 + 𝑦𝑔 𝑗𝑔 + 𝑧𝑔 𝑘𝑔 ;
⎡ ⎤
⎡ ⎤
𝑥
𝑥𝑔
⎢ ⎥
⎢ ⎥
⎣𝑦 ⎦ = [𝐴] ⎣ 𝑦𝑔 ⎦
𝑧𝑔
𝑧
Для перевода координат в связанный базис потребуется умножить их
вектор-столбец слева на матрицу перехода:
#»
𝑟 |𝑒#»1 = [𝐴] #»
𝑟 | #»
𝑒
— радиус-вектор в системе координат 𝑒#»1 выражен через радиус-вектор в
базисе #»
𝑒 с использованием матрицы перехода [𝐴]. Для тензора инерции
пересчeт из опорного базиса в связанный будет осуществляться по другой
формуле (по правилу преобразования тензоров):
T
[𝒥]|𝑒#»1 = [𝐴] [𝒥]| #»
𝑒 [𝐴]
— подобное преобразование тензоров.
В зависимости от выбранных осей тензор инерции будет приобретать
различный вид. Рассмотрим эти случаи.
В теле всегда существуют главные оси инерции (как правило, они связаны с особенностями симметрии тела). Центробежные моменты инерции
41
относительно главных осей равны нулю, а тензор инерции относительно
этих осей принимает диагональный вид:
⎡
⎤
𝒥𝑥 0 0
⎢
⎥
[𝒥] = ⎣ 0 𝒥𝑦 0 ⎦
0 0 𝒥𝑧
Диагональные элементы в этом случае называются главными моментами
инерции.
Главными центральными осями называются главные оси инерции, начало которых совпадает с центром масс тела. В этом случае центробежные
моменты инерции равны нулю:
𝒥𝑥𝑦 = 𝒥𝑥𝑧 = 𝒥𝑦𝑧 = 0,
а осевые моменты инерции имеют минимальное значение. Тензор инерции
по-прежнему будет представлять собой диагональную матрицу:
⎡
⎤
𝒥𝑥𝑐 0
0
⎢
⎥
[𝒥] = ⎣ 0 𝒥𝑦𝑐 0 ⎦
0
0 𝒥𝑧𝑐
При этом следует отметить, что тензор инерции в главных осях инерции всегда будет содержать бо́льшие величины, чем тензор инерции в
главных центральных осях инерции (в соответствии с теоремой Штейнера):
⎡
⎤
𝒥𝑥𝑐 + 𝑚𝑙𝑥2 𝑐
0
0
⎢
⎥
[𝒥]|𝑒#гл» = ⎣
0
𝒥𝑦𝑐 + 𝑚𝑙𝑦2𝑐
0
⎦,
0
0
𝒥𝑧𝑐 + 𝑚𝑙𝑧2𝑐
где 𝑒гл — базис главных осей инерции; 𝑥𝑐 , 𝑦𝑐 , 𝑧𝑐 — главные центральные оси
инерции; 𝑙𝑥𝑐 , 𝑙𝑦𝑐 , 𝑙𝑧𝑐 — расстояние между соответствующими главными и
главными центральными осями инерции; 𝑚 — масса тела.
Можно считать, что моменты инерции относительно главных центральных осей являются объективной характеристикой тела (т. к. не может быть
моментов инерции меньше, чем главные центральные моменты инерции
𝒥𝑥𝑐 , 𝒥𝑦𝑐 , 𝒥𝑧𝑐 ).
42
Следует отметить, что главных осей в теле может быть сколько угодно,
центральных осей в теле может быть сколько угодно, но главные центральные оси — единственные.
Рассмотрим пример, иллюстрирующий разницу между тензорами
инерции, записанными в разных базисах.
Пусть тело является неподвижным и с ним связан базис 𝑒#»𝑔 (оси 𝑥𝑔 , 𝑦𝑔 ,
𝑧𝑔 ). Относительно тела и неподвижного базиса 𝑒#»𝑔 разворачивается связанный базис #»
𝑒 (оси XYZ ) на угол тангажа (θ), как это указано на рис. 3.9.
Рис. 3.9.
В соответствии с правилом преобразования тензоров:
T
[𝒥]| #»
𝑒 = [𝐴θ ] [𝒥]|𝑒#»𝑔 [𝐴θ ]
Матрицу преобразования [𝐴θ ] можно получить как матрицу направляющих косинусов для указанного поворота:
⎤⎡ ⎤
⎡ ⎤ ⎡
𝑥
cos[ˆ︁
𝑥, 𝑥𝑔 ] cos[𝑥,
̂︂
𝑦𝑔 ] cos[𝑥,
̂︂
𝑧𝑔 ]
𝑥𝑔
⎥⎢ ⎥
⎢ ⎥ ⎢
̂︂
𝑥𝑔 ] cos[𝑦,
̂︂
𝑦𝑔 ] cos[𝑦,
̂︂
𝑧𝑔 ]⎦ ⎣ 𝑦𝑔 ⎦ .
⎣𝑦 ⎦ = ⎣cos[𝑦,
cos[𝑧,
̂︂
𝑥𝑔 ] cos[𝑧,
̂︂
𝑦𝑔 ] cos[𝑧,
̂︂
𝑧𝑔 ]
𝑧𝑔
𝑧
Подставляя угол поворота, будем иметь:
⎡
⎤
cos θ sin θ 0
⎢
⎥
[𝐴θ ] = ⎣− sin θ cos θ 0⎦ .
0
0 1
43
Тогда выражение для преобразования тензора инерции примет вид:
⎡
⎤⎡
⎤⎡
⎤
cos θ sin θ 0
𝒥𝑥 −𝒥𝑥𝑦 −𝒥𝑥𝑧
cos θ − sin θ 0
⎢
⎥⎢
⎥⎢
⎥
[𝒥]| #»
𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ sin θ cos θ 0⎦
𝑒 = ⎣− sin θ cos θ 0⎦ ⎣−𝒥𝑦𝑥
0
0 1
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
0
0
1
Рассмотрим частный случай. Пусть центробежные моменты инерции
равны нулю (т. е. связанные с телом оси 𝑥𝑔 , 𝑦𝑔 , 𝑧𝑔 являются его главными
осями инерции). Тогда тензор инерции примет диагональный вид, и после
перемножения матриц получим:
⎡
⎤⎡
⎤⎡
⎤
cos θ sin θ 0 𝒥𝑥 0 0
cos θ − sin θ 0
⎢
⎥⎢
⎥⎢
⎥
[𝒥]| #»
𝑒 = ⎣− sin θ cos θ 0⎦ ⎣ 0 𝒥𝑦 0 ⎦ ⎣ sin θ cos θ 0⎦ =
0
0 1
0 0 𝒥𝑧
0
0
1
⎤
⎤⎡
⎡
cos θ sin θ 0 𝒥𝑥 cos θ −𝒥𝑥 sin θ 0
⎥
⎥⎢
⎢
.
= ⎣− sin θ cos θ 0⎦ ⎣ 𝒥𝑦 sin θ 𝒥𝑦 cos θ 0 ⎦ =
0
0
𝒥𝑧
0
0 1
⎤
⎡
𝒥𝑥 cos2 θ + 𝒥𝑦 sin2 θ
−𝒥𝑥 cos θ sin θ + 𝒥𝑦 cos θ sin θ 0
⎥
⎢
= ⎣−𝒥𝑥 cos θ sin θ + 𝒥𝑦 cos θ sin θ
𝒥𝑥 sin2 θ + 𝒥𝑦 cos2 θ
0⎦
0
0
𝒥𝑧
В итоговом тензоре только по одной строке и одному столбцу будут иметь нулевые недиагональные элементы (т. е. центробежные моменты
инерции относительно оси 𝑧 будут равны нулю). Таким образом, только
ось 𝑧 (вокруг которой происходил разворот) останется главной (т. к. ось 𝑧
по-прежнему совпадает с главной осью 𝑧𝑔 ). Остальные моменты инерции
изменились (появились два ненулевых центробежных момента инерции, а
также изменились два оставшихся осевых момента инерции). Т. е. Оси 𝑥 и
𝑦 перестали быть главными.
3.4. Моменты инерции некоторых тел
Рассмотрим моменты инерции простейших тел, наиболее востребованных при решении задач. Каждое из них представляет собой некоторую
абстракцию.
Стержень — это цилиндр с равномерно распределeнной по нему массой, высота которого настолько больше диаметра, что диаметр считается
44
равным нулю. Введeнные на рис. 3.10 системы координат: 𝑋𝐶 𝑌𝐶 𝑍𝐶 — с
началом в центре масс стержня (его геометрическом центре); 𝑋1 𝑌1 𝑍1 — с
началом на краю стержня (параллельные соответствующим центральным
осям). Длину стержня обозначим за 𝑙. Тогда некоторые моменты инерции
для рассматриваемого объекта могут быть определены по приведeнным рядом с рисунком формулам.
𝒥𝑥𝑐 = 0
1
𝑚𝑙2
12
1
𝒥𝑦1 = 𝒥𝑧1 = 𝑚𝑙2
3
𝒥𝑦𝑐 = 𝒥𝑧𝑐 =
Рис. 3.10.
Диск — это цилиндр, высота которого настолько меньше диаметра, что
еe можно считать нулевой, т. е. круг, равномерно заполненный материалом.
Введeнные на рис. 3.11 координатные оси: 𝑧𝐶 — с началом в центре масс
диска (его геометрическом центре); 𝑧1 — с началом на краю диска (параллельная центральной оси). Радиус диска обозначим за 𝑟. Тогда некоторые
моменты инерции для рассматриваемого объекта могут быть определены
по приведeнным рядом с рисунком формулам.
1
𝒥𝑧𝑐 = 𝑚𝑟2
2
3 2
𝑧1 ‖ 𝑧𝑐 : 𝒥𝑧1 = 𝑚𝑟
2
Рис. 3.11.
Однородное кольцо — диск с отверстием такого рода, что разность между наружным и внутренним диаметрами этой фигуры настолько меньше еe
диаметра, что еe можно считать нулевой, т. е. окружность (линия) с равномерно распределeнным по ней материалом (диск, всю массу которого
раздвинули на максимальное возможное расстояние в данном объeме, т. е.
на его «контур»). Введeнные на рис. 3.12 координатные оси: 𝑧𝐶 — с началом
в центре масс кольца (его геометрическом центре); 𝑧1 — с началом на краю
45
кольца (параллельная центральной оси). Радиус кольца обозначим за 𝑟. Тогда некоторые моменты инерции для рассматриваемого объекта могут быть
определены по приведeнным рядом с рисунком формулам.
𝒥𝑧𝑐 = 𝑚𝑟2
𝑧1 ‖ 𝑧𝑐 : 𝒥𝑧1 = 2𝑚𝑟2
Рис. 3.12.
Следует обратить внимание на то, что центральный момент инерции
кольца вдвое больше центрального момента инерции диска (при одинаковых массе и радиусе). Это связано с разным распределением массы внутри
круга: в кольце она вся сосредоточена на максимальном расстоянии от центральной оси.
3.5. Опытное определение осевых моментов инерции
На практике далеко не всегда получается представить реальные тела
механизма как совокупность простейших тел, моменты инерции которых
известны или легко вычисляются путeм интегрирования. В этом случае моменты инерции обычно определяют опытным путeм. Известно несколько
способов опытного определения моментов инерции [Яблонский А.А. «Курс
ТМ и II Дин.», §82. + УП "основы гироскопической техники"], но все они
основаны на наблюдении вращения тела с последующей оценкой его инертности в этом вращении.
3.5.1. Метод качаний
Метод качаний требует для своего использования предварительно
определить положение центра масс исследуемого тела, что обычно не представляет большой сложности. Пусть имеется тело массой 𝑚 произвольной
формы, для которого требуется найти момент инерции 𝒥𝑧 относительно
некоторой оси 𝑧, находящейся на расстоянии 𝑑 от центра масс тела (точки
46
𝐶). Требуется шарнирно подвесить тело таким образом, чтобы обеспечить
возможность качаний вокруг требуемой оси (см. рис. 3.13).
Рис. 3.13.
Угол качаний обозначим как φ. При обеспечении такого начального
отклонения, что в течение всего времени качания φ — малый угол (⩽ 5°), в
дальнейших вычислениях с достаточной точностью можно ограничиться заменой тригонометрических функций от угла φ их разложениями до первых
2
членов ряда Тейлора: sin φ ≈ tg φ = φ; cos φ ≈ 1 − φ2 .
Дифференциальное уравнение качаний вокруг оси 𝑧 может быть пред𝐸
ставлено уравнением: 𝒥𝑧 φ̈ = ℳ𝐸
𝑧 , где ℳ𝑧 — главный момент внешних сил,
приложенный относительно оси 𝑧. Главный момент внешних сил представляет собой векторное произведение радиуса-вектора, проведeнного от оси
(или полюса) к точке приложения главного вектора внешних сил на сам
главный вектор внешних сил:
#»
#»
ℳ𝑧𝐸 = #»
𝑟 × ℱ𝐸
#» #»
ˆ︁
ℳ𝐸
𝑧 = ℱ𝑟 sin[ ℱ, 𝑟 ]
В первом приближении (пренебрегая трением), после отклонения тела
от положения равновесия единственной действующей на него силой будет
#»
сила тяжести, приложенная к центру масс тела (обозначена 𝒢 на рис. 3.13).
Тогда выражение для момента силы примет вид:
ℳ𝐸
𝑧 = −𝑚𝑔𝑑 sin φ = −𝑚𝑔𝑑φ
Знак момента определяется правилом векторного произведения.
Для определения момента инерции требуется отклонить тело от положения равновесия на малый угол. Начавшееся движение (при условии
47
хорошо выполненного подвеса) в первом приближении можно считать
незатухающими колебаниями (в течение нескольких первых периодов колебаний). Тогда дифференциальное уравнение движения может быть записано
в канонической форме: φ̈ + 𝑘 2 φ = 0, где (в соответствии с приведeн−ℳ𝐸 /φ
𝑧
= 𝑚𝑔𝑑
ными выше выражениями) 𝑘 2 =
𝒥𝑧
𝒥𝑧 ; 𝑘 — круговая частота
собственных незатухающих колебаний (численно равна количеству колебаний, которое совершается в системе за 2π секунд). Период этих колебаний
может быть измерен (как правило, на нескольких первых колебаниях с
последующим усреднением). Учитывая связь периода и круговой частоты
собственных незатухающих колебаний, можно выразить искомый момент
инерции через измеренный период:
𝑚𝑔𝑑
2π
; 𝒥𝑧 = 𝒯 2 2 [кг · м2 ].
𝒯
4π
В случае, когда требуется определить момент инерции относительно
центра масс 𝒥𝑧𝑐 , потребуется применение теоремы Штейнера:
𝒯 𝑘 = 2π =⇒ 𝑘 =
𝒥𝑧 = 𝒥𝑧𝑐 + 𝑚𝑑2
[︂ 2
]︂
𝒯2
𝒯
2
2
𝒥𝑧𝑐 = 𝒥𝑧 − 𝑚𝑑 = 2 𝑚𝑔𝑑 − 𝑚𝑑 = 𝑚𝑑
𝑔−𝑑
4π
4π2
3.5.2. Метод крутильных колебаний
Метод крутильных колебаний требует для своего использования наличия эталонного тела (момент инерции которого известен заранее, либо
легко определим).
Пусть имеется тело произвольной формы, для которого требуется найти момент инерции 𝒥𝑦 относительно некоторой оси 𝑦. Требуется подвесить
тело на торсионе (в качестве такового может выступать, например, кусок
проволоки) таким образом, чтобы обеспечить возможность крутильных колебаний вокруг требуемой оси (см. рис. 3.14).
Жeсткость торсиона считается неизвестной: 𝒞торсиона = 𝒞 [Н · м/рад] —
коэффициент жeсткости пружины (характеризует момент силы, который
нужно приложить к торсиону, чтобы закрутить его на 1 рад).
Для возникновения крутильных колебаний тело требуется повернуть
на некоторый угол φ вокруг торсиона (оси 𝑦) относительно положения
48
Рис. 3.15.
Рис. 3.14.
равновесия. Начавшееся движение (при условии хорошо выполненного подвеса) в первом приближении можно считать незатухающими колебаниями
(в течение нескольких первых периодов колебаний). Дифференциальное
уравнение крутильных колебаний вокруг оси 𝑦 может быть представлено
уравнением:
𝒥𝑦 φ̈ = ℳупругих сил ,
где ℳупругих сил = −𝒞φ (направлен противоположно закручиванию);
𝒥𝑦 φ̈ = −𝒞φ. Тогда дифференциальное уравнение движения может быть
записано в канонической форме:
φ̈ + 𝑘 2 φ = 0,
где 𝑘 2 = 𝒥𝒞 (𝑘 — круговая частота собственных колебаний). Период этих
𝑦
колебаний может быть измерен (как правило, на нескольких первых колебаниях с последующим усреднением). Учитывая связь периода и круговой
частоты собственных незатухающих колебаний, можно выразить искомый
момент инерции через измеренный период:
𝒯 𝑘 = 2π
2π
𝒯 =
𝑘
4π2 𝒥𝑦
2
𝒯 =
𝒞
2
𝒯 𝒞
.
𝒥𝑦 =
4π2
Напрямую использовать полученную формулу обычно не получается,
вследствие неизвестности значения 𝒞. Для решения этой проблемы используется эталонное тело, момент инерции которого известен (𝒥эт ). С этим
49
телом проводят абсолютно аналогичный эксперимент (см. рис. 3.15). Тогда
для эталонного тела может быть получена зависимость:
𝒞
, а значит,
𝒥эт
2
𝑘эт
𝒯2
𝒥эт
𝑘2
=⇒ 𝒥𝑦 = 2 𝒥эт = 2 𝒥эт .
=
2
𝒥𝑦
𝑘
𝑘эт
𝒯эт
2 =
𝑘эт
Таким образом, после измерения периодов крутильных колебаний исследуемого и эталонного тел становится возможным определить момент
инерции исследуемого тела, при условии знания момента инерции эталонного тела и соответствия проводимых для них экспериментов.
3.6. Кинетический момент твeрдого тела. Теорема об изменении
кинетического момента
Рассмотрим произвольную точку 𝑀𝑖 некоторого тела по отношению к
условно неподвижной системе координат XYZ (см. рис. 3.16). Обозначим
#»
за #»
𝑟𝑖 радиус-вектор точки, а за 𝒱 𝑖 еe скорость.
Рис. 3.16.
Тогда кинетический момент точки 𝑀𝑖 относительно полюса (начала
отсчeта введeнной системы координат) будет иметь вид:
#»
#»
#»
#» × #»
𝐿 𝑂 = #»
𝑟𝑖 × 𝑘𝑖 = #»
𝑟𝑖 × 𝑚𝑖 𝒱 𝑖 = #»
𝑟𝑖 × (ω
𝑟𝑖 )𝑚𝑖
𝑖
#»
#» — угловая скорость ради𝑘 𝑖 — количество движения, 𝑚𝑖 — масса точки, ω
𝑖
#»
#»
уса-вектора 𝑟𝑖 , 𝐿 — момент количества движения (кинетический момент,
момент импульса, угловой момент, орбитальный момент).
50
Обобщая на тело, представляемое дискретным набором точек, будем
иметь:
𝑛
∑︁
#»
# » × #»
#»
𝐿𝑂 =
𝑟𝑖 × (ω
𝑟𝑖 )𝑚𝑖 ,
𝑖
𝑖 = 1, 𝑛,
𝑖=1
где 𝑛 — число точек, составляющих тело.
Для непрерывного распределения массы по телу потребуется перейти
от суммы к интегралу:
#»
𝐿𝑂 =
∫︁
#» × #»
#»
𝑟 × (ω
𝑟 ) 𝑑𝑚.
𝑚
Перейдeм к матричной форме записи (через проекции составляю#»
щих уравнение векторов). Вектор 𝐿 𝑂 будет представляться в этом случае
вектор-столбцом, а векторные произведения должны быть раскрыты как
произведение кососимметрической матрицы (левый множитель векторного
произведения) на вектор-столбец (правый множитель векторного
̂︀ произведения). Обозначается кососимметрическая матрица галочкой ( ) над еe
буквенным обозначением. По главной диагонали кососимметрической матрицы будут располагаться нулевые элементы. Остальные еe элементы будут
симметричны относительно главной диагонали с точностью до знака.
⎡ ⎤
𝐿𝑥
∫︁ ̂︁{︁ ̂︁ }︁
⎢ ⎥
[𝐿] = ⎣𝐿𝑦 ⎦ = [𝑟] [ω][𝑟] 𝑑𝑚
𝑚
𝐿𝑧
Раскроем матричное выражение, последовательно перемножим входящие в него матрицы справа налево, а затем перегруппируем результат:
51
⎡ ⎤
⎡
⎤ ⎧⎡
⎤ ⎡ ⎤⎫
𝐿𝑥
0 −𝑧 𝑦 ⎪
0
−ω
ω
𝑥 ⎪
∫︁
𝑧
𝑦
⎨
⎬
⎢ ⎥
⎢
⎥ ⎢
⎥⎢ ⎥
𝑑𝑚 ⎣ 𝑧
0 −𝑥⎦ ⎣ ω𝑧
0 −ω𝑥 ⎦ ⎣𝑦 ⎦ =
⎣𝐿𝑦 ⎦ =
⎪
⎪
⎩
⎭
𝑚
𝐿𝑧
−𝑦 𝑥 0
−ω𝑦 ω𝑥
0
𝑧
⎡
⎤⎡
⎤
0 −𝑧 𝑦
−ω𝑧 𝑦 + ω𝑦 𝑧
∫︁
⎢
⎥⎢
⎥
𝑑𝑚 ⎣ 𝑧
=
0 −𝑥⎦ ⎣ ω𝑧 𝑥 − ω𝑥 𝑧 ⎦ =
𝑚
−𝑦 𝑥 0
−ω𝑦 𝑥 + ω𝑥 𝑦
⎡
⎤
−ω𝑧 𝑥𝑧 + ω𝑥 𝑧 2 − ω𝑦 𝑥𝑦 + ω𝑥 𝑦 2
∫︁
⎢
⎥
=
𝑑𝑚 ⎣−ω𝑧 𝑧𝑦 + ω𝑦 𝑧 2 + ω𝑦 𝑥2 − ω𝑥 𝑥𝑦 ⎦ =
𝑚
ω𝑧 𝑦 2 − ω𝑦 𝑧𝑦 + ω𝑧 𝑥2 − ω𝑥 𝑥𝑧
⎡
⎤⎡ ⎤
𝑧 2 + 𝑦 2 −𝑥𝑦
−𝑥𝑧
ω𝑥
∫︁
⎢
⎥
⎢
⎥
=
𝑑𝑚 ⎣ −𝑥𝑦 𝑥2 + 𝑧 2 −𝑧𝑦 ⎦ ⎣ω𝑦 ⎦ .
𝑚
−𝑥𝑧
−𝑧𝑦 𝑦 2 + 𝑥2
ω𝑧
Интегралы по массе от элементов первой матрицы в полученном
выражении очевидно будут представлять из себя моменты инерции
(см. разд. 3.3.1): осевые по главной диагонали и центробежные вне еe.
Тогда выражение для кинетического момента примет вид:
⎤⎡ ⎤
⎤ ⎡
𝒥𝑥
−𝒥𝑥𝑦 −𝒥𝑥𝑧
ω𝑥
𝐿𝑥
[︁ ]︁ [︁ ]︁ [︁ ]︁
⎥⎢ ⎥
⎢ ⎥ ⎢
𝒥𝑦
−𝒥𝑦𝑧 ⎦ ⎣ω𝑦 ⎦ =⇒ 𝐿 = 𝒥 ω ,
⎣𝐿𝑦 ⎦ = ⎣ − 𝒥𝑦𝑥
− 𝒥𝑧𝑥 − 𝒥𝑧𝑦 𝒥𝑧
ω𝑧
𝐿𝑧
⎡
где 𝒥 — тензор инерции (см. разд. 3.3.3).
В векторно-матричном виде полученное выражение для кинетического
момента примет вид:
[︁
]︁
[︁
]︁
#» #» #»
#» #» #»
𝑒 ]T [𝐿] = [ #»
𝑒 ]T [𝒥][ω].
𝑖 𝑗 𝑘 [𝐿] = 𝑖 𝑗 𝑘 [𝒥][ω] =⇒ [ #»
52
В главных центральных осях инерции будем иметь:
⎧⎡
⎤ ⎡ ⎤⎫
⎪
𝒥
0
0
ω𝑥 ⎪
⎬
[︁
]︁ ⎨ 𝑥
#»
#» #» #»
⎢
⎥⎢ ⎥
𝐿𝑂 = 𝑖 𝑗 𝑘
⎣ 0 𝒥𝑦 0 ⎦ ⎣ ω 𝑦 ⎦ =
⎪
⎪
⎭
⎩
0 0 𝒥𝑧
ω𝑧
⎡
⎤
𝒥
ω
𝑥 𝑥
[︁
]︁
#» #» #» ⎢
⎥
= 𝑖 𝑗 𝑘 ⎣ 𝒥𝑦 ω𝑦 ⎦ =
𝒥𝑧 ω𝑧
#»
#»
#»
= (𝒥𝑥 ω𝑥 ) 𝑖 + (𝒥𝑦 ω𝑦 ) 𝑗 + (𝒥𝑧 ω𝑧 ) 𝑘 .
⏟ ⏞
⏟ ⏞
⏟ ⏞
𝐿𝑥
𝐿𝑦
𝐿𝑧
3.7. Теорема об изменении момента количества движения
(кинетического момента)
Теорема об изменении кинетического момента является одной из основных теорем динамики. Фактически это аналог теоремы о движении
центра масс (обобщение второго закона Ньютона — см. разд. 3.2) для вращательного движения. Производная по времени от вектора кинетического
момента твeрдого тела, определeнного относительно некоторого центра 𝑂,
геометрически равна главному моменту внешних сил, приложенных к телу, и определeнному относительно того же центра 𝑂 (см. доказательство,
например, в [Яблонский А.А. «Курс ТМ и II Дин.», §162]).
#»
# »𝐸
˙
𝐿 𝑂 = ℳ𝑂
,
# »𝐸
— вектор главного момента внешних сил, приложенных к телу.
где ℳ𝑂
3.8. Вывод динамических уравнений Эйлера
С использованием динамических уравнений Эйлера могут быть получены дифференциальные уравнения сферического движения твeрдого тела.
Динамические уравнения Эйлера получаются с использованием теоремы
об изменении кинетического момента:
#»
# »𝐸
˙
𝐿 𝑂 = ℳ𝑂
.
Обозначим как 𝑂𝑋𝑔 𝑌𝑔 𝑍𝑔 условно-неподвижную систему координат;
как OXYZ — связанную систему координат (см. рис. 3.17).
53
Рис. 3.17.
Тогда кинетический момент (с учeтом полученных в разд. 3.6 выражений) имеет вид:
#»⃒⃒
𝐿 ⃒ #» = [𝑒#»𝑔 ]T [𝒥]|𝑒#»𝑔 [ω]|𝑒#»𝑔 ,
𝑒𝑔
где [𝒥]|𝑒#»𝑔 — тензор инерции в условно-неподвижной системе координат;
является переменным тензором (его элементы не являются постоянными
величинами). Вспомним, что только элементы тензора инерции, определeнные в связанных осях, будут постоянными (см. разд. 3.3.3).
При дифференцировании вектора кинетического момента используем
правило Бура, формализующее дифференцирование вектора в подвижной
системе координат. Проиллюстрируем правило Бура на примере радиуса-вектора. Очевидно, что, вне зависимости от того в каком базисе он
рассматривается, вектор останется неизменным:
#»
𝑟 |𝑒#»𝑔 = #»
𝑟 | #»
𝑒 .
Абсолютная производная этого вектора будет представлять собой сумму локальной (относительной) и конвективной (переносной) производной.
Локальная производная (первое слагаемое в выражении ниже) показывает,
как меняется вектор по отношению к подвижной системе координат, которая при этом считается условно неподвижной. Конвективная производная
(второе слагаемое в выражении ниже) показывает, как меняется радиус-вектор в результате вращения подвижной системы координат.
⃒
# » × #»
#»
˙𝑟 ⃒⃒ = 𝑟˙ #»
𝑒 +ω
𝑟
𝑒
#»
𝑒𝑔
54
Применив формулу Бура к вектору кинетического момента, будем
иметь:
*
#»
#»
#»
˙
#» × 𝐿
𝐿𝑂 = 𝐿 + ω
𝑂,
*
#»
где 𝐿 — локальная производная вектора кинетического момента, ω — угловая скорость тела (связанного базиса).
Подставляя в формулу теоремы об изменении кинетического момента
выражения для производной кинетического момента, будем иметь:
*
#»
#»
# »𝐸
#» × 𝐿
𝐿 +ω
=
ℳ
𝑂
𝑂.
Кинетический момент в матричной форме может быть представлен как:
[𝐿] = [𝒥][ω].
Тогда можно представить полученное из теоремы об изменении кинетического момента выражение в матричной
̂︁ форме следующим образом:
˙ = {[𝒥][ω]}· = [𝒥][ω̇] + [ω]{[𝒥][ω]} = [ℳ𝐸 ].
[𝐿]
Раскрывая матричную запись, будем иметь:
⎤⎡ ⎤
⎡
𝒥𝑥 −𝒥𝑥𝑦 −𝒥𝑥𝑧
ω̇𝑥
⎥⎢ ⎥
⎢
⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ω̇𝑦 ⎦ +
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
ω̇𝑧
⎤ ⎡ ⎤⎫ ⎡ ⎤
⎤ ⎧⎡
⎡
𝑀𝑥
ω𝑥 ⎪
𝒥
−𝒥
−𝒥
0 −ω𝑧 ω𝑦 ⎪
𝑥
𝑥𝑦
𝑥𝑧
⎬
⎨
⎥⎢ ⎥
⎢ ⎥
⎥ ⎢
⎢
+ ⎣ ω𝑧
0 −ω𝑥 ⎦ ⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ ω𝑦 ⎦ = ⎣𝑀𝑦 ⎦ .
⎪
⎪
⎭
⎩
𝑀𝑧
−ω𝑦 ω𝑥
0
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
ω𝑧
Эта запись является динамическими уравнениями Эйлера (в матричной форме) в подвижных осях, где в качестве осей инерции выбраны оси,
расположенные в теле произвольным образом.
Обычно в инженерных задачах используются главные или главные центральные оси инерции, в которых тензор инерции — диагональная матрица.
В этом случае выражение значительно упрощается и принимает в матричной форме следующий вид:
⎡
⎤⎡ ⎤ ⎡
⎤⎡
⎤ ⎡ ⎤
𝒥𝑥 0 0
ω̇𝑥
0 −ω𝑧 ω𝑦
𝒥𝑥 ω𝑥
𝑀𝑥
⎥ ⎢ ⎥
⎢
⎥⎢ ⎥ ⎢
⎥⎢
0 −ω𝑥 ⎦ ⎣ 𝒥𝑦 ω𝑦 ⎦ = ⎣𝑀𝑦 ⎦ .
⎣ 0 𝒥𝑦 0 ⎦ ⎣ω̇𝑦 ⎦ + ⎣ ω𝑧
0 0 𝒥𝑧
ω̇𝑧
−ω𝑦 ω𝑥
0
𝒥𝑧 ω 𝑧
𝑀𝑧
55
Тогда в скалярной форме получим:
⎧
⎪
⎪
⎨𝒥𝑥 ω̇𝑥 + ω𝑦 ω𝑧 (𝒥𝑧 − 𝒥𝑦 ) = 𝑀𝑥
𝒥𝑦 ω̇𝑦 + ω𝑧 ω𝑥 (𝒥𝑥 − 𝒥𝑧 ) = 𝑀𝑦 .
⎪
⎪
⎩𝒥 ω̇ + ω ω (𝒥 − 𝒥 ) = 𝑀
𝑧
𝑧
𝑦
𝑥
𝑦
𝑥
𝑧
Это динамические уравнения Эйлера, отнесeнные к главным или главным центральным осям инерции тела, где 𝒥𝑥 , 𝒥𝑦 , 𝒥𝑧 — осевые моменты
инерции относительно главных или главных центральных осей инерции,
определeнные в связанных осях; ω𝑥 , ω𝑦 , ω𝑧 — проекции угловой скорости
связанной системы координат на собственные оси; 𝑀𝑥 , 𝑀𝑦 , 𝑀𝑧 — проекции
главного момента внешних сил на оси связанной системы координат.
⎧
⎪
⎪
⎨ω𝑥 = γ̇ + ψ̇ sin θ
ω𝑦 = ψ̇ cos γ cos θ + θ̇ sin γ
⎪
⎪
⎩ ω = −ψ̇ sin γ cos θ + θ̇ cos γ
𝑧
Это угловая скорость связанной системы координат для случая, когда
положение связанной системы координат относительно неподвижной определяется углами рысканья ψ, тангажа θ и крена γ. Сам вид уравнений не
зависит от выбора углов Эйлера.
Динамические уравнения Эйлера широко применялись при составлении математических моделей навигационных приборов, пока им на смену
не пришли уравнения Лагранжа II рода, достоинством которых является
удобство применения с ЭВМ.
3.9. Дифференциальные уравнения движения твeрдого тела для
различных видов движения
В общем случае движение твeрдого тела представляется как поступательное движение вместе с некоторой точкой, выбранной за полюс, и
вращательное движение вокруг этого полюса. Твeрдое тело в этом случае
имеет шесть степеней свободы. Три из них соответствуют поступательной,
три — вращательной составляющей движения. Выберем в качестве обобщeнных координат декартовы координаты точки, принятой за полюс (как
правило — центр масс) и углы Эйлера (последовательные повороты вокруг
56
соответствующих координатных осей).
𝑞1 = 𝑥
𝑞4 = ψ
𝑞2 = 𝑦
𝑞5 = θ
𝑞3 = 𝑧
𝑞6 = γ.
В этом случае дифференциальные уравнения движения твeрдого тела
могут быть описаны системой, состоящей из проекций теоремы об изменении центра масс и уравнений Эйлера на декартовы оси:
⎧
𝑚¨
𝑥𝑐 = 𝐹𝑥
⎪
⎪
⎪
⎪
⎪
⎪
𝑚¨
𝑦𝑐 = 𝐹 𝑦
⎪
⎪
⎪
⎪
⎨ 𝑚¨
𝑧𝑐 = 𝐹𝑧
⎪
𝒥𝑥𝑐 ω̇𝑥𝑐 + ω𝑦𝑐 ω𝑧𝑐 (𝒥𝑧𝑐 − 𝒥𝑦𝑐 ) = 𝑀𝑥
⎪
⎪
⎪
⎪
⎪
⎪
𝒥𝑦𝑐 ω̇𝑦𝑐 + ω𝑥𝑐 ω𝑧𝑐 (𝒥𝑥𝑐 − 𝒥𝑧𝑐 ) = 𝑀𝑦
⎪
⎪
⎪
⎩
𝒥𝑧𝑐 ω̇𝑧𝑐 + ω𝑥𝑐 ω𝑦𝑐 (𝒥𝑦𝑐 − 𝒥𝑥𝑐 ) = 𝑀𝑧 .
Ниже рассмотрим дифференциальные уравнения для других видов движения.
3.9.1. Поступательное движение
Дифференциальные уравнения поступательного движения могут быть
получены с использованием теоремы о движении центра масс механической системы: центр масс механической системы движется как точка, в
которой сосредоточена вся масса системы. Условие поступательного дви#» = 0.
жения: ω
Тогда дифференциальные уравнения поступательного движения твeрдого тела можно записать как:
⎧
⎪
𝑥𝑐 = 𝐹𝑥𝐸
⎪
⎨𝑚¨
𝑚¨
𝑦𝑐 = 𝐹𝑦𝐸
⎪
⎪
⎩ 𝑚¨
𝑧 = 𝐹 𝐸,
𝑐
𝑧
где ℱ𝑥𝐸 , ℱ𝑦𝐸 , ℱ𝑧𝐸 — проекции главного вектора внешних сил на декартовы
оси, 𝑚 — масса тела.
57
Так как все точки твeрдого тела при поступательном движении движутся одинаково, то вместо центра масс (𝐶) можно взять любую точку
твeрдого тела (𝑖):
⎧
⎪
𝑥𝑖 = 𝐹𝑥𝐸
⎪
⎨𝑚¨
𝑚¨
𝑦𝑖 = 𝐹𝑦𝐸
⎪
⎪
⎩ 𝑚¨
𝑧 = 𝐹 𝐸.
𝑖
𝑧
3.9.2. Вращательное движение вокруг неподвижной оси
Рассмотрим в качестве оси вращения 𝑥 (см. рис. 3.18).
Рис. 3.18.
Рис. 3.19.
Условиями такого движения будут:
ω𝑦 = ω𝑧 = 0
ω𝑥 ̸= 0.
Тогда будем иметь:
𝒥𝑥 ω̇𝑥 = ℳ𝐸
𝑥
𝒥 φ̈ = ℳ𝐸 ,
где 𝒥 — осевой момент инерции тела относительно оси вращения, φ — угол
поворота вокруг оси вращения, ℳ𝐸 — проекция момента внешних сил на
ось вращения.
3.9.3. Плоскопараллельное движение
За полюс всегда рекомендуется брать центр масс. Условиями движения
в этом случае будут:
𝑧𝑐 = 0;
ω𝑥 = 0;
ω𝑦 = 0;
58
ω𝑧 ̸= 0;
𝑥𝑐 ̸= 0;
𝑦𝑐 ̸= 0.
Тогда получим дифференциальные уравнения движения в виде:
}︃
𝑥: 𝑚¨
𝑥𝑐 = 𝐹𝑥
— поступательная составляющая
𝑦: 𝑚¨
𝑦𝑐 = 𝐹 𝑦
φ: 𝒥𝑧𝑐 φ̈ = ℳ𝐸
𝑧 — вращательная составляющая.
3.9.4. Сферическое движение
Чаще всего осуществляется относительно главных центральных осей
инерции.
В этом случае дифференциальными уравнениями движения твeрдого
тела здесь являются динамические уравнения Эйлера в виде:
⎧
⎪
⎪
⎨𝒥𝑥𝑐 ω̇𝑥𝑐 + ω𝑦𝑐 ω𝑧𝑐 (𝒥𝑧𝑐 − 𝒥𝑦𝑐 ) = ℳ𝑥
𝒥𝑦𝑐 ω̇𝑦𝑐 + ω𝑥𝑐 ω𝑧𝑐 (𝒥𝑥𝑐 − 𝒥𝑧𝑐 ) = ℳ𝑦 .
⎪
⎪
⎩𝒥 ω̇ + ω ω (𝒥 − 𝒥 ) = ℳ
𝑧𝑐
𝑧𝑐
𝑥𝑐
𝑦𝑐
𝑦𝑐
𝑥𝑐
𝑧
4. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ
4.1. Кинетическая энергия системы материальных точек (теорема
Кeнига)
Кинетическая энергия точки представляет собой: 𝒯 = 12 𝑚𝒱 2 , где 𝑚 —
масса точки, 𝒱 — абсолютная скорость точки.
Обобщением для системы материальных точек (см. рис. 4.1, где 𝑀𝑖 —
𝑖-я точка, 𝒞 — центр масс системы) служит теорема Кeнига: кинетическая
энергия системы материальных точек равна сумме энергии поступательного движения центра масс и кинетической энергии системы в еe
вращательном движении относительно центра масс.
Рис. 4.1.
59
Формульно эта теорема записывается так:
∑︁ 1
1
2
2
𝑚𝑖 𝒱[𝑐]𝑀
,
𝒯 = 𝑚𝒱𝑐 +
𝑖
2
2
𝑖
∑︀
где 𝑚 =
𝑖 𝑚𝑖 — масса системы, 𝑚𝑖 — масса точки, 𝒱𝒞 — скорость центра
масс, 𝒱[𝒞]𝑀𝑖 — скорость точек 𝑖 относительно центра масс.
4.2. Кинетическая энергия твeрдого тела в общем случае движения
Записав формулу из предыдущего параграфа для случая непрерывно
распределeнной по телу массы (переход от суммы по точкам к интегралу
по массе) и записав относительную скорость (скорость за счeт вращения
вокруг центра масс) через векторное произведение угловой скорости на радиус-вектор (т. н. формула Эйлера) будем иметь:
1
1
𝒯 = 𝑚𝒱𝑐2 +
2
2
∫︁
#» × #»
(ω
𝑟 )2 𝑑𝑚
𝑚
Отдельно рассмотрим квадрат векторного произведения угловой скорости на радиус-вектор. Для этого перейдeм к матричной форме записи:
{︁ ̂︁ }︁2
#» × #»
(ω
𝑟 )2 =⇒ [ω][𝑟]
Произведение кососимметрической матрицы проекций угловой скорости на вектор-столбец координат даст:
⎤
⎤⎡ ⎤ ⎡
0 −ω𝑧 ω𝑦
𝑥
ω𝑦 𝑧 − ω𝑧 𝑦
⎥
⎢
⎥⎢ ⎥ ⎢
[ω][𝑟] = ⎣ ω𝑧
0 −ω𝑥 ⎦ ⎣ 𝑦 ⎦ = ⎣ω𝑧 𝑥 − ω𝑥 𝑧 ⎦
ω𝑥 𝑦 − ω𝑦 𝑥
−ω𝑦 ω𝑥
0
𝑧
⎡
̂︁
Под взятием получившегося выражения в квадрат подразумевается запись скалярного произведения вектора с самим собой, записываемая в
матричной форме, как произведение вектора-строки (транспонированного
60
вектора-столбца) на вектор-столбец, что при перемножении даст скаляр:
⎧⎡
⎤⎫2
⎪
⎪
ω
𝑧
−
ω
𝑦
𝑦
𝑧
⎨
⎬
⎢
⎥
=
⎣ ω𝑧 𝑥 − ω𝑥 𝑧 ⎦
⎪
⎪
⎩
⎭
ω𝑥 𝑦 − ω𝑦 𝑥
⎡
⎤
[︁
]︁ ω𝑦 𝑧 − ω𝑧 𝑦
⎢
⎥
= ω𝑦 𝑧 − ω𝑧 𝑦 ω𝑧 𝑥 − ω𝑥 𝑧 ω𝑥 𝑦 − ω𝑦 𝑥 ⎣ ω𝑧 𝑥 − ω𝑥 𝑧 ⎦ =
ω𝑥 𝑦 − ω𝑦 𝑥
= (ω𝑦 𝑧 − ω𝑧 𝑦)2 + (ω𝑧 𝑥 − ω𝑥 𝑧)2 + (ω𝑥 𝑦 − ω𝑦 𝑥)2 =
= ω2𝑦 𝑧 2 + ω2𝑧 𝑦 2 − 2𝑧𝑦ω𝑧 ω𝑦 +
+ ω2𝑧 𝑥2 + ω2𝑥 𝑧 2 − 2𝑧𝑥ω𝑧 ω𝑥 +
+ ω2𝑥 𝑦 2 + ω2𝑦 𝑥2 − 2𝑥𝑦ω𝑥 ω𝑦 =
= ω2𝑥 (𝑧 2 + 𝑦 2 ) + ω2𝑦 (𝑧 2 + 𝑥2 ) + ω2𝑧 (𝑦 2 + 𝑥2 ) −
− 2𝑥𝑦ω𝑥 ω𝑦 − 2𝑥𝑧ω𝑥 ω𝑧 − 2𝑧𝑦ω𝑧 ω𝑦 .
Подставив получившийся скаляр в исходную формулу, с учeтом того,
что сумма квадратов двух координат равна квадрату расстояния до третьей
координатной оси (𝑙𝑥 , 𝑙𝑦 , 𝑙𝑧 — расстояния до осей 𝑥, 𝑦, 𝑧 соответственно),
запишем:
1
𝒯 = 𝑚𝒱𝑐2 +
2
1
+
2
∫︁
{︀ 2 2
}︀
𝑙𝑥 ω𝑥 + 𝑙𝑦2 ω2𝑦 + 𝑙𝑧2 ω2𝑧 − 2(𝑥𝑦ω𝑥 ω𝑦 + 𝑥𝑧ω𝑥 ω𝑧 + 𝑦𝑧ω𝑦 ω𝑧 ) 𝑑𝑚.
𝑚
С учeтом независимости угловой скорости от массы интегрирование
этого выражения сведeтся к интегрированию расстояний по массе (распределения массы по объeму тела), что будет соответствовать моментам
инерции — осевым для слагаемых с 𝑙𝑥 , 𝑙𝑦 , 𝑙𝑧 , и центробежным для слагаемых, содержащих произведения координат (см. разд. 3.3.1):
1
1 [︀
𝒯 = 𝑚𝒱𝑐2 + 𝒥𝑥 ω2𝑥 + 𝒥𝑦 ω2𝑦 + 𝒥𝑧 ω2𝑧 −
2
2
]︀
− 2𝒥𝑥𝑦 ω𝑥 ω𝑦 − 2𝒥𝑥𝑧 ω𝑥 ω𝑧 − 2𝒥𝑦𝑧 ω𝑦 ω𝑧 .
61
Выражение в скобках может быть также представлено через матричное
произведение с использованием тензора инерции в таком виде:
⎡
⎤⎡ ⎤
𝒥
−𝒥
−𝒥
ω𝑥
𝑥
𝑥𝑦
𝑥𝑧
[︁
]︁
1
1
⎢
⎥⎢ ⎥
𝒯 = 𝑚𝒱𝑐2 +
ω𝑥 ω𝑦 ω𝑧 ⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ ω𝑦 ⎦ ,
2
2
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
ω𝑧
или, что то же самое (самая краткая форма записи):
вращательное движение вокруг центра масс, принятого за полюс
⏟
⏞
1
1
𝒯 = 𝑚𝒱𝑐2 + [ω]T [𝒥][ω]
2
⏟2 ⏞
поступательное движение с полюсом
— кинетическая энергия твeрдого тела в общем случае движения; 𝒱𝒞 — абсолютная скорость центра масс; ω — проекции абсолютной угловой скорости
на оси связанной системы координат; 𝒥 — тензор инерции.
4.3. Кинетическая энергия твeрдого тела при различных случаях его
движения
Формула для кинетической энергии тела в общем случае его движения была получена в предыдущем параграфе. Для других типов движения
выражения могут быть получены из неe с учeтом их особенностей — ограничений на свободу движения (связей) по сравнению с общим случаем
движения.
4.3.1. Поступательное движение
Условием поступательного движения является неизменность ориентации тела в процессе движения. Благодаря этому в формуле для кинетической энергии будет отсутствовать составляющая, связанная с вращением
(второе слагаемое ранее полученной формулы). А так как все точки тела
в этом случае будут двигаться одинаково, то вместо скорости центра масс
может быть использована скорость любой точки тела:
1
1
ω = 0 =⇒ 𝒯 = 𝑚𝒱𝑐2 = 𝑚𝒱𝑖 ,
2
2
где 𝑖 — любая точка твeрдого тела.
62
4.3.2. Вращательное движение вокруг неподвижной оси
Условием вращательного движения является наличие одной неподвижной оси, вокруг которой осуществляется поворот тела (угловые скорости по
другим осям равны нулю, перемещение тела вдоль этой оси отсутствует).
Пусть вращение происходит вокруг оси 𝑧:
ω𝑥 = ω𝑦 = 0
𝑧𝒞 = const.
При перечисленных ограничениях выражение для кинетической энергии в общем случае движения примет вид:
⎡
⎤⎡ ⎤
𝒥
−𝒥
−𝒥
0
𝑥𝒞
𝑥𝒞 𝑦 𝒞
𝑥𝒞 𝑧𝒞
[︁
]︁
)︀
1
1 (︀ 2
⎥
⎢
⎥
⎢
𝒯 = 𝑚 𝑥˙ 𝑐 + 𝑦˙ 𝑐2 +
𝒥𝑦𝒞
−𝒥𝑦𝒞 𝑧𝒞 ⎦ ⎣ 0 ⎦ =
0 0 ω𝑧 ⎣−𝒥𝑦𝒞 𝑥𝒞
2
2
ω𝑧
−𝒥𝑧𝒞 𝑥𝒞 −𝒥𝑧𝒞 𝑦𝒞
𝒥𝑧𝒞
⎤
⎡
[︁
]︁ −𝒥𝑥𝑐 𝑧𝑐 ω𝑧
1
1
⎥
⎢
= 𝑚𝒱𝑐2 +
0 0 ω𝑧 ⎣ −𝒥𝑦𝑐 𝑧𝑐 ω𝑧 ⎦ .
2
2
𝒥𝑧𝑐 ω𝑧
В силу того, что движение представляет собой вращение вокруг оси,
то скорость точки может быть представлена как произведение угловой скорости на расстояние от точки до оси вращения (𝑙𝑧𝒞 ).
1
1
𝒯 = 𝑚ω2𝑧 𝑙𝑧2𝒞 + 𝒥𝑧𝒞 ω2𝑧 =
2
2
(︀
)︀
1
= ω2𝑧 𝑚𝑙𝑧2𝒞 + 𝒥𝑧𝒞 .
2
Выражение в скобках в соответствии с теоремой Штейнера представляет собой момент инерции, находящийся на расстоянии 𝑙𝑧𝒞 от оси,
проходящей через центр масс, т. е.:
1
𝒯 = ω2𝑧 𝒥𝑧 ,
2
где 𝒥𝑧 — момент инерции относительно оси вращения, которая совсем не
обязательно проходит через центр масс.
63
4.3.3. Плоское движение
Плоским или плоско-параллельным движением называется движение,
при котором все точки твeрдого тела движутся во взаимно параллельных
плоскостях, параллельных некоторой неподвижной плоскости. Пусть движение осуществляется в плоскости 𝑥𝑦 (см. рис. 4.2). Обозначим за 𝒞 центр
масс тела, а за 𝒫 — его мгновенный центр скоростей [ссылка на Яблонского
или Тарга про МЦС].
Рис. 4.2.
Тогда условиями движения будут ω𝑥 = ω𝑦 = 0, 𝑧˙𝒞 = 0. В этом случае
формула для кинетической энергии примет вид:
1
1
𝒯 = 𝑚𝒱𝒞2 + 𝒥𝑧𝒞 ω2 .
2
2
Воспользуемся понятием мгновенного центра скоростей для преобразования этого выражения. Скорость любой точки плоско движущегося тела
равна произведению его угловой скорости на расстояние от точки до мгновенного центра скоростей:
1
1
𝒯 = 𝑚ω2𝑧 |𝒫𝒞|2 + 𝒥𝑧𝑐 ω2𝑧 =
2
2
]︁
1 2 [︁
2
= ω𝑧 𝑚|𝒫𝒞| + 𝒥𝑧𝑐 .
2
Выражение в скобках в соответствии с теоремой Штейнера представляет собой момент инерции, находящийся на расстоянии |𝒫𝒞| от оси
проходящей через центр масс, т. е.:
1
𝒯 = ω2𝑧 𝒥𝑧𝒫 ,
2
64
где 𝒥𝑧𝒫 — момент инерции относительно оси, проходящей через мгновенный центр скоростей. Из получившегося выражения можно сделать вывод,
что плоское движение может быть представлено как вращательное вокруг
мгновенной оси, проходящей через мгновенный центр скоростей и ортогональной плоскости движения.
4.3.4. Сферическое движение
Сферическим называется вращательное движение вокруг одной неподвижной точки. Возможны два случая: когда неподвижная точка совпадает
и не совпадает с центром масс тела. В любом из этих случаев формула для
кинетической энергии сферического движения будет ограничиваться вторым слагаемым из выражения, полученного для общего случая движения.
Отличия будут заключаться в тензоре инерции.
Первый случай: неподвижная точка совпадает с центром масс.
1
𝒯 = [ω]T [𝒥𝒞 ][ω],
2
где [𝒥𝒞 ] — тензор инерции относительно связанной системы координат, начало которой совпадает с центром масс.
Второй случай: неподвижная точка 𝑂 не совпадает с центром масс.
1
𝒯 = [ω]T [𝒥𝑂 ][ω],
2
где [𝒥𝑂 ] — тензор инерции в связанных осях, начало которых совпадает с
некоторой точкой 𝑂. Моменты инерции пересчитываются (с использованием теоремы Штейнера).
4.3.5. Кинетическая энергия твeрдого тела в общем случае движения в
главных центральных осях инерции
В случае использования главных центральных осей инерции тензор
инерции примет диагональный вид, а осевые моменты инерции будут иметь
65
минимальные величины. Формула, полученная в разд. 4.4, примет вид:
⎡
⎤⎡
⎤
𝒥
0
0
ω
𝑥
𝑥
𝑐
𝑐
]︁
1
1 [︁
⎢
⎥⎢
⎥
2
𝒯 = 𝑚𝒱𝑐 +
ω𝑥𝑐 ω𝑦𝑐 ω𝑧𝑐 ⎣ 0 𝒥𝑦𝑐 0 ⎦ ⎣ ω𝑦𝑐 ⎦ =
2
2
0
0 𝒥𝑧𝑐
ω𝑧𝑐
]︁
1
1 [︁
2
2
2
2
= 𝑚𝒱𝑐 + 𝒥𝑥𝑐 ω𝑥𝑐 + 𝒥𝑦𝑐 ω𝑦𝑐 + 𝒥𝑧𝑐 ω𝑧𝑐 .
2
2
Полученное выражение является удобным (из-за своей скалярной формы)
для определения кинетической энергии твeрдого тела в общем случае движения, когда в качестве осей инерции выбраны главные центральные оси.
4.4. Определение кинетической энергии многомассовой системы
Нередко в процессе решения механических задач (например, при поиске уравнений движения механической системы) является необходимым
определить кинетическую энергию механизма в целом. В этом случае
требуется сначала определить кинетическую энергию каждого из звеньев, входящих в состав механизма (всего, что имеет ненулевую массу и
движется), а затем — вычислить алгебраическую сумму всех найденных кинетических энергий.
Ниже, в качестве примера, рассмотрим задачу на определение закона
движения механизма. В рамках настоящего параграфа ограничимся лишь
поиском кинетической энергии механической системы, оставив остальные
этапы решения этой задачи за его границами.
Имеется плоский механизм, изображeнный на рис. 4.3, движется под
действием силы тяжести элементов, силы упругости пружины, силы сопро#»
тивления демпфера и постоянной силы ℱ. Сила сопротивления демпфера
пропорциональна скорости, т. е. в демпфере действует вязкое трение. Другими силами трения (например, в шарнирах и направляющих) пренебрегаем.
Элементы механизма — однородные твeрдые тела, представляющие собой: 𝐵 — однородный каток; 𝐾 — однородное кольцо; 𝐷, 𝐸 — материальные
точки; 𝐴𝐾, 𝐵𝐸 — тонкие однородные стержни.
Известны массы тел: 𝑚𝐵𝐸 , 𝑚𝐴𝐾 , 𝑚𝐸 , 𝑚𝐷 , 𝑚𝐾 , 𝑚𝐵 — массы тел 𝐵𝐸,
𝐴𝐾, 𝐸, 𝐷, 𝐾, 𝐵, соответственно; а также их размеры: 𝐴𝐾 = 3𝑙, 𝑂𝐴 = 𝑙,
66
Рис. 4.3.
𝑂𝐾 = 2𝑙, 𝐸𝐷 = 𝐴𝐵 = 𝐴𝐷 = 𝑙, 𝐵𝐸 = 3𝑙 — длины соответствующих
отрезков, и 𝑟𝐵 , 𝑟𝐾 — радиусы соответствующих катков.
Равнодействующая сил тяжести каждого элемента приложена в центре
масс. Точкой приложения силы сопротивления считается поршень, движущийся в цилиндре. Точкой приложения силы упругости пружины считается
#»
центр катка 𝐵. Постоянная сила ℱ приложена к звену 𝐵𝐸 в точке 𝑃
(расположенной по центру отрезка 𝐴𝐵) под углом θ по отношению к горизонтальной оси.
Обозначим также: β — коэффициент вязкого трения в демпфере; 𝑙0 —
длина недеформированной пружины. Пружина считаются недеформированной при φ = 0 (угол поворота звена 𝐴𝐾 по отношению к горизонтальной
оси: см. рис. 4.3).
Для удобства дальнейших вычислений введeм декартову систему координат 𝑂𝑥𝑦 (см. рис. 4.3).
По условию задачи требуется определить:
1) Положение равновесия механизма под действием заданной системы
сил;
2) Закон малых движений механизма около положения равновесия при
заданных условиях;
3) Закон движения механизма при заданных начальных условиях.
67
Для определения уравнения движения могут быть применены различные подходы. Одним из них является использование уравнения Лагранжа
II рода.
Это уравнение имеет вид:
𝜕𝒯
𝑑 𝜕𝒯
−
= 𝒬𝑗 ,
𝑑𝑡 𝜕 𝑞˙𝑗 𝜕𝑞𝑗
где 𝑗 = 1, 𝑘; 𝑘 — число степеней свободы системы; 𝑞𝑗 — обобщeнная координата; 𝑞˙𝑗 — скорость изменения обобщeнной координаты (обобщeнная
скорость); 𝒯 — кинетическая энергия системы; 𝒬𝑗 — обобщeнная сила (действующая по обобщeнной координате 𝑞𝑗 ).
Для применения уравнения Лагранжа II рода первым делом необходимо определить число степеней свободы механической системы. В
рассматриваемой задаче при перемещении любого из звеньев изменят положение и остальные тела механизма (т. к. трение в шарнирных соединениях
отсутствует, касание дисков 𝐵 и 𝐾 — без проскальзывания), и наоборот —
если зафиксировать 𝐴𝐾, больше ничего в механизме не двинется. Таким
образом, система имеет только одну степень свободы: 𝑗 = 𝑘 = 1.
Следующим шагом является выбор обобщeнных координат. Их количество должно совпадать с числом степеней свободы (система подчинена
голономным связям — см. глав. 1). Для рассматриваемого механизма необходимо выбрать одну обобщeнную координату 𝑞. В качестве таковой удобно
взять угол поворота кривошипа 𝐴𝐾, отсчитываемый от горизонтальной оси
против хода часовой стрелки, если смотреть на плоскость чертежа (обозначен на рис. 4.3 как φ):
𝑞 = φ𝐴𝐾 = φ.
Как видно из формулы уравнения Лагранжа II рода, для вычисления его
левой части (проведения дифференцирования по схеме Лагранжа) теперь
необходимо определить кинетическую энергию анализируемого механизма:
𝒯 =
𝑚
∑︁
𝑖=1
68
𝒯𝑖 ,
где 𝑖 = 1, 𝑚 — количество элементов, входящих в систему. Тогда для анализируемого механизма будем иметь:
𝒯 = 𝒯𝐴𝐾 + 𝒯𝐵𝐸 + 𝒯𝐵 + 𝒯𝐾 + 𝒯𝐷 + 𝒯𝐸 .
Получение кинетической энергии каждого из звеньев следует проводить после определения вида движения, используя затем соответствующую
формулу из разд. 4.3.
Тело 𝐴𝐾 совершает вращательное движение вокруг неподвижной оси
(проходящей через точку 𝑂 и ортогональной плоскости рисунка). В этом
случае кинетическая энергия звена может быть найдена по формуле:
1
𝒯𝐴𝐾 = 𝒥𝐴𝐾 𝑂 ω2𝐴𝐾 .
2
Определим физические величины, входящие в это выражение. Сразу
же оговоримся, что все кинематические характеристики необходимо будет
здесь и далее выразить через обобщeнную координату и скорость еe изменения (уравнение Лагранжа предполагает дифференцирование именно по
этим переменным). Раз угол поворота тела 𝐴𝐾 выбран обобщeнной координатой, то очевидно:
ω𝐴𝐾 = φ̇.
Далее требуется определить момент инерции звена 𝐴𝐾 относительно
его оси вращения (𝑂). С этой целью воспользуемся теоремой Штейнера,
с учeтом того, что центр масс тела 𝒞𝐴𝐾 находится в его геометрическом
центре (на расстоянии 2𝑙 от оси 𝑂):
(𝐴𝐾)
𝑂𝐶
⏞ ⏟
⏞ ⏟
1
1
𝒥𝐴𝐾 𝑂 = 𝒥𝐴𝐾 𝑐 + 𝑚𝐴𝐾 𝑑2 = 𝑚𝐴𝐾 ( 3𝑙 )2 + 𝑚𝐴𝐾 ( 𝑙 )2 =
.
12
2
(︂
)︂
1
9
+
=
𝑚𝐴𝐾 𝑙2 = 𝑚𝐴𝐾 𝑙2
12 4
Окончательно выражение для кинетической энергии звена 𝐴𝐾 примет
вид:
1
𝒯𝐴𝐾 = 𝑚𝐴𝐾 𝑙2 φ̇2 .
2
69
Тело 𝐵𝐸 совершает плоское движение, т. е. поступательно движется
вместе с точкой, принятой за полюс (𝒞𝐵𝐸 ) и вращается вокруг оси, проходящей через этот полюс:
1
1
𝒯𝐵𝐸 = 𝑚𝐵𝐸 𝒱𝑐2𝐵𝐸 + 𝒥𝐵𝐸 𝑐 ω2𝐵𝐸 .
2
2
Момент инерции тела 𝐵𝐸 имеет вид:
𝒥𝐵𝐸 𝑐 =
1
3
1
𝑚𝐵𝐸 (𝐵𝐸)2 = 𝑔𝑙2 𝑚𝐵𝐸 = 𝑚𝐵𝐸 𝑙2 .
12
12
4
Для определения кинематических характеристик плоско движущегося
тела требуется найти его мгновенный центр скоростей: 𝒫𝐵𝐸 (см. рис. 4.3).
Местоположение 𝒫𝐵𝐸 соответствует точке пересечения перпендикуляров к
скоростям точек тела 𝐵𝐸. Зная, что центр масс катка 𝐵 движется строго
горизонтально на постоянной высоте от оси 𝑥, можно провести перпендикуляр к этому направлению (из точки 𝐵) вертикально вверх. В то же время
точка 𝐷 (ползунок) движется исключительно вдоль вертикальной оси 𝑦, а
значит, перпендикуляр к еe скорости будет горизонтальной линией. На пересечении этих прямых и окажется искомая точка 𝒫𝐵𝐸 .
Рассмотрим скорость точки 𝐴. Эта точка с одной стороны принадлежит телу 𝐴𝐾, а с другой — телу 𝐵𝐸. Значит, выражения для еe скорости,
записанные через характеристики движения каждого из этих тел, должны
оказаться равны.
𝒱𝐴 = ω𝐵𝐸 [𝐴𝑃𝐵𝐸 ] = ω𝐴𝐾 [𝑂𝐴].
Из рисунка видно, что расстояние от точки 𝐴 до точек 𝑂 и 𝒫𝐵𝐸 равны (являются половинами диагонали прямоугольника): 𝐴𝒫𝐵𝐸 = 𝑂𝐴. Тогда
из равенства приведeнных выражений для скорости точки 𝐴 будем иметь:
ω𝐵𝐸 = ω𝐴𝐾 = φ̇.
Далее требуется найти скорость полюса (центра масс 𝒞𝐵𝐸 ). 𝒞𝐵𝐸 находится в его геометрическом центре звена 𝐵𝐸 (посередине между точками
𝐷 и 𝐴). Определим декартовы координаты этой точки (еe проекции на оси,
70
выраженные через обобщeнную координату) и скорости их изменения (полные производные по времени от координат):
1
𝑥𝑐𝐵𝐸 = 𝑙 cos φ
2
3
𝑦𝑐𝐵𝐸 = 𝑙 sin φ
2
1
𝑥˙ 𝑐𝐵𝐸 = − 𝑙 sin φφ̇
2
3
𝑦˙ 𝑐𝐵𝐸 = 𝑙 cos φφ̇
2
При дифференцировании следует помнить, что обобщeнная координата
φ сама является функцией времени (а значит, дифференцируются сложные
функции).
Квадрат скорости точки 𝒞𝐵𝐸 может быть определeн как сумма квадратов еe ортогональных составляющих (𝑥˙ 𝒞𝐵𝐸 и 𝑦˙ 𝒞𝐵𝐸 ):
𝒱𝑐2𝐵𝐸 = 𝑥˙ 2𝑐𝐵𝐸 + 𝑦˙ 𝑐2𝐵𝐸 =
)︂
(︂
9
1 2
2
2
2
sin φ + cos φ =
= 𝑙 φ̇
4
4
)︁
𝑙2 φ̇2 (︁ 2
2
sin φ + 9 cos φ =
=
4
)︁
𝑙2 φ̇2 (︁ 2
2
2
=
sin φ + cos φ + 8 cos φ =
4 (︂
)︂
1
= φ̇2 𝑙2
+ 2 cos2 φ
4
Окончательно выражение для кинетической энергии звена 𝐵𝐸 примет
вид:
(︂
)︂
1
1
13
𝒯𝐵𝐸 = 𝑚𝐵𝐸 φ̇2 𝑙2
+ 2 cos2 φ +
𝑚 𝑙2 φ̇2 =
2
4
2 4 𝐵𝐸
(︂
)︂
1
1
3
2
2
= 𝑚𝐵𝐸 𝑙
+ 2 cos φ +
φ̇2 =
2
4
4
(︁
)︁
1
= 𝑚𝐵𝐸 𝑙2 1 + 2 cos2 φ φ̇2 .
2
Тело 𝐵 совершает плоское движение, т. е. поступательно движется вместе с точкой, принятой за полюс (𝒞𝐵 ) и вращается вокруг оси, проходящей
71
через этот полюс:
1
1
𝒯𝐵 = 𝑚𝐵 𝒱𝑐2𝐵 + 𝒥𝐵𝑐 ω2𝐵 .
2
2
Мгновенный центр скоростей катящегося тела расположен (при отсутствии проскальзывания) в точке его контакта с поверхностью, по которой
оно катится (точка 𝒫𝐵 на рис. 4.3). Тогда угловую скорость звена можно
найти как:
ω𝐵 =
𝒱𝑐𝐵
−2𝑙 sin φφ̇
=
.
𝑃𝐵 𝐶 𝐵
𝑟𝐵
Момент инерции, а также координаты и скорость центра масс тела
определяются аналогично предыдущему звену:
1
2 𝑥˙
𝒥𝐵𝑐 = 𝑚𝐵 𝑟𝐵
𝑐𝐵 = −2𝑙 sin φφ̇
2
𝑦˙ 𝑐𝐵 = 0
𝒱𝑐2𝐵 = 4𝑙2 sin2 φφ̇2 .
Окончательно выражение для кинетической энергии звена 𝐵 примет
вид:
1
1 1
4𝑙2 sin2 φφ̇2
2
2
2
2
=
𝒯𝐵 = 𝑚𝐵 4𝑙 sin φφ̇ + · 𝑚𝐵 𝑟𝐵
2
2
2 2
𝑟𝐵
1
= 𝑚𝐵 𝑙2 (4 sin2 φ + 2 sin2 φ)φ̇2 =
2
1
= 𝑚𝐵 𝑙2 (6 sin2 φ)φ̇2 .
2
Тело 𝐾 совершает плоское движение, т.е. поступательно движется вместе с точкой принятой за полюс (𝐶𝐾 ) и вращается вокруг оси, проходящей
через этот полюс:
1
1
𝒯𝐾 = 𝑚𝐾 𝒱𝑐2𝐾 + 𝒥𝐾𝑐 ω2𝐾 .
2
2
72
Определение составляющих в формуле для кинетической энергии осуществляется аналогичным образом с телом 𝐵 (оба — катки):
1
1
𝒯𝐾 = 𝑚𝐾 𝒱𝑐2𝐾 + 𝒥𝐾𝑐 ω2𝐾
2
2
𝑥𝑐𝐾 = −2𝑙 cos φ
𝑦𝑐𝐾 = −2𝑙 sin φ
𝑥˙ 𝑐𝐾 = 2𝑙 sin φφ̇
𝑦˙ 𝑐𝐾 = −2𝑙 cos φφ̇
𝒱𝑐2𝐾 = 4𝑙2 sin2 φφ̇2 + 4𝑙2 cos2 φφ̇2 = 4𝑙2 φ̇2
2
𝒥𝐾𝑐 = 𝑚𝐾 𝑟𝐾
𝒱𝑐𝐾
2𝑙φ̇
=
ω𝐾 =
𝑃𝐾 𝐶 𝐾
𝑟𝐾
1
𝒯𝐾 = 𝑚𝐾 4𝑙2 φ̇2 +
2
1
4𝑙2 φ̇2
2
+ 𝑚𝐾 𝑟𝐾 2 =
2
𝑟𝐾
1
= 𝑚𝐾 𝑙2 {4 + 4}φ̇2 =
2
1
= 𝑚𝐾 𝑙2 8φ̇2 .
2
Ползунок 𝐷 можно в рамках решения задачи рассматривать как материальную точку (тело, размеры которого в рамках решения задачи
несущественны). Тогда видом движения 𝐷 будет прямолинейное движение точки, и для вычисления кинетической энергии этого звена потребуется
лишь определить скорость точки:
1
2
𝒯𝐷 = 𝑚𝐷 𝒱𝐷
2
𝑥𝐷 = 0
𝑦𝐷 = 2𝑙 sin φ
𝑥˙ 𝐷 = 0
𝑦˙ 𝐷 = +2𝑙 cos φφ̇
2 = 4𝑙2 cos2 φφ̇2
𝒱𝐷
1
𝒯𝐷 = 𝑚𝐷 𝑙2 {4 cos2 φ}φ̇2 .
2
73
Тело 𝐸 также можно принять за материальную точку; только двигаться
она будет криволинейно, что, однако не скажется на формуле для кинетической энергии:
1
2
𝒯𝐸 = 𝑚𝐸 𝒱𝐸
2
𝑥𝐸 = −𝑙 cos φ
𝑦𝐸 = 3𝑙 sin φ
𝑥˙ 𝐸 = 𝑙 sin φφ̇
𝑦˙ 𝐸 = 3𝑙 cos φφ̇
2 = 𝑙2 sin2 φφ̇2 + 9𝑙2 cos2 φφ̇2 =
𝒱𝐸
(︁
)︁
2
2
= 𝑙 1 + 8 cos φ φ̇2
1
𝒯𝐸 = 𝑚𝐸 𝑙2 {1 + 8 cos2 φ}φ̇2 .
2
Подставив найденные кинетические энергии звеньев, запишем кинетическую энергию всей механической системы:
1
𝒯 = 𝑚𝐴𝐾 𝑙2 φ̇2 +
2
(︁
)︁
1
2
2
+ 𝑚𝐵𝐸 𝑙 1 + 2 cos φ φ̇2 +
2
1
+ 𝑚𝐵 𝑙2 6 sin2 φφ̇2 +
2
1
+ 𝑚𝐷 𝑙2 4 cos2 φφ̇2 +
2
1
+ 𝑚𝐸 𝑙2 {1 + 8 cos2 φ}φ̇2 +
2
1
+ 𝑚𝐾 𝑙2 8φ̇2 =
2
1
= φ̇2 {𝑚𝐴𝐾 𝑙2 + 𝑚𝐵𝐸 𝑙2 (1 + 2 cos2 φ) + 𝑚𝐵 𝑙2 6 sin2 φ +
2
+ 𝑚𝐷 𝑙2 4 cos2 φ + 𝑚𝐸 𝑙2 (1 + 8 cos2 φ) + 𝑚𝐾 𝑙2 8}.
Полученное выражение можно представить в виде краткой записи через кинетическую энергию одного эквивалентного тела, вращающегося со
скоростью φ̇. Момент инерции такого тела называется приведeнным моментом инерции. Обозначим его как 𝐴(φ) и представим для удобства
74
дальнейшего дифференцирования по схеме Лагранжа в следующем виде:
1
𝒯 = 𝐴(φ)φ̇2
2
𝐴(φ) = 𝐴1 + 𝐴2 sin2 φ + 𝐴3 cos2 φ
𝐴1 = 𝑚𝐴𝐾 𝑙2 + 𝑚𝐵𝐸 𝑙2 + 𝑚𝐸 𝑙2 + 8𝑚𝐾 𝑙2 =
= 𝑙2 (𝑚𝐴𝐾 + 𝑚𝐵𝐸 + 𝑚𝐸 + 8𝑚𝐾 ) = . . .
𝐴2 = 6𝑙2 𝑚𝐵
𝐴3 = 2𝑚𝐵𝐸 𝑙2 + 4𝑚𝐷 𝑙2 + 8𝑚𝐸 𝑙2 = 𝑙2 (2𝑚𝐵𝐸 + 4𝑚𝐷 + 8𝑚𝐸 ).
Следующим шагом при решении подобных задач должно стать определение правой части уравнения Лагранжа II рода (обобщeнной силы), о чeм
и пойдeт речь в следующей главе.
5. ОБОБЩEННЫЕ СИЛЫ
5.1. Элементарная и полная работа силы
Работа ищется на перемещении точки приложения силы. Элементарная
работа силы определяется как скалярное произведение силы на элементарное перемещение точки еe приложения:
#»
#»
ˆ︂
𝑑𝒜 = ℱ𝑑 #»
𝑟 = ℱ𝑑𝑟 cos[ ℱ, 𝑑 #»
𝑟 ].
Также элементарная работа может быть выражена через импульс силы,
путeм перехода от элементарного перемещения к скорости за элементарный
промежуток времени:
𝑟
#»
#» 𝑑 #»
𝒱 =
=⇒ 𝑑 #»
𝑟 = 𝒱 𝑑𝑡
𝑑𝑡
#» #»
#» #»
#» #»
ˆ︁
𝑑𝒜 = ℱ 𝒱 𝑑𝑡 = 𝑆 𝒱 = 𝑆𝒱 cos[ 𝑆 , 𝒱 ],
#»
#»
где ℱ𝑑𝑡 = 𝑆 — импульс силы.
Раскрывая силу и элементарное перемещение в проекциях на декартову систему координат, можно получить элементарную работу в следующем
75
виде:
#»}︃
#»
#»
#»
𝐹 = 𝐹 𝑥 𝑖 + 𝐹𝑦 𝑗 + 𝐹𝑧 𝑘
=⇒
#»
#»
#»
𝑑 #»
𝑟 = 𝑑𝑥 𝑖 + 𝑑𝑦 𝑗 + 𝑑𝑧 𝑘
#»
𝑑𝐴 = 𝐹 𝑑 #»
𝑟 = 𝐹𝑥 𝑑𝑥 + 𝐹𝑦 𝑑𝑦 + 𝐹𝑧 𝑑𝑧 — элементарная работа.
Переход от элементарной работы к работе на перемещении из положения I в положение II предполагает интегрирование на этом перемещении:
∫︁II
𝐴I →II =
[𝐹𝑥 𝑑𝑥 + 𝐹𝑦 𝑑𝑦 + 𝐹𝑧 𝑑𝑧] — полная работа.
I
Альтернативная запись для полной работы:
∫︁II
𝐴I →II =
#» #»
𝐹 𝒱 𝑑𝑡.
I
Также в аналитической механике нередко используют понятие виртуальной работы (т. е. работы, которая бы совершилась на заданном
виртуальном перемещении):
#»
δ𝐴 = 𝐹 δ #»
𝑟 = 𝐹𝑥 δ𝑥 + 𝐹𝑦 δ𝑦 + 𝐹𝑧 δ𝑧,
где δ #»
𝑟 — виртуальное перемещение точки приложения силы.
Из определения элементарной и полной работы на конечном перемещении следует:
1) Работа равнодействующей силы на любом перемещении равна алгебраической сумме работ сил, составляющих равнодействующую силу на
этом же перемещении.
2) Работа силы на полном перемещении равна сумме работ этой же
силы на составляющих этого перемещения, на которые произвольным образом разбито это перемещение.
3) Мощность силы оценивается работой, которую сила может произвести в единицу времени (изменением работы силы, отнесeнным к единице
времени).
𝑟
𝑑𝐴
#» 𝑑 #»
#» #»
=𝐹
= 𝐹 𝒱 = [𝐹𝑥 𝒱𝑥 + 𝐹𝑦 𝒱𝑦 + 𝐹𝑧 𝒱𝑧 ].
𝑁=
𝑑𝑡
𝑑𝑡
76
5.2. Работа некоторых сил
5.2.1. Работа силы тяжести
Пусть под действием силы тяжести точка 𝑀 перемещается из положения 𝑀I в положение 𝑀II . Введeм декартову систему координат, как это
указано на рис. 5.1 (сила тяжести 𝒢 направлена вдоль оси 𝑦 вниз).
Рис. 5.1.
Тогда выражение для виртуальной работы из предыдущего параграфа
примет вид:
δ𝒜𝒢 = [0]δ𝑥 + [−𝑚𝑔]δ𝑦 + [0]δ𝑧
δ𝐴𝐺 = −𝑚𝑔δ𝑦,
где 𝑚 — масса точки, 𝑔 — ускорение свободного падения.
Полная работа на всeм перемещении может быть получена путeм интегрирования по вертикальной координате:
∫︁𝑦2
−𝑚𝑔𝑑𝑦 = −𝑚𝑔(𝑦2 − 𝑦1 ).
𝐴I →II =
𝑦1
Из полученного выражения следует, что сила тяжести — потенциальная; еe
работа не зависит от траектории и определяется разностью вертикальных
координат. 𝐴𝐺 > 0 на спуске, 𝐴𝐺 < 0 на подъeме.
5.2.2. Работа силы сухого трения (трения скольжения, Кулонова
трения)
Рассмотрим тело, перемещающееся по неподвижной шероховатой поверхности так, что между контактирующими частями тела и поверхности
77
действует сухое трение. Пусть поверхность расположена под углом α к
горизонту. Свяжем с поверхностью систему координат так, как это изображено на рис. 5.2.
Рис. 5.2.
Сила трения, действующая на тело, будет определяться известной формулой:
ℱтрен = 𝑓 𝑁,
где 𝑓 = const > 0 — коэффициент сухого трения (коэффициент трения
скольжения, коэффициент Кулонова трения).
Раскрыв силу реакции опоры (как реакцию на вертикальную проекцию
силы тяжести тела) получим:
ℱтрен = 𝑚𝑔𝑓 cos α.
Следует также отметить, что сила трения по своей природе всегда направлена против движения тела:
#»
#»
ℱтрен ↑↓ 𝒱 .
Это значит, что вне зависимости от направления движения тела по поверхности сила трения будет совершать над ним отрицательную работу.
Проинтегрировав записанное выше выражение для силы трения по перемещению тела (изменению координаты 𝑥, в соответствии с рис. 5.2), будем
иметь:
#»
𝐴ℱ
трен
∫︁𝑥2
−𝑚𝑔𝑓 cos α𝑑𝑥 = −𝑚𝑔𝑓 cos α(𝑥2 − 𝑥1 ).
=
𝑥1
78
Т. к. 𝑥2 > 𝑥1 , то, ожидаемо,
#»
𝐴ℱ
трен
< 0.
Удобно представить работу силы сухого трения как
∑︁
#»
𝐴ℱ
= −𝑚𝑔𝑓 cos α
|Δ𝑆𝑖 |,
трен
𝑖
где Δ𝑆𝑖 — перемещение точки приложения силы на отрезке движения без
смены направления движения.
Таким образом, заметно, что работа силы трения определяется не
только начальным и конечным положением тела (его перемещением), но
и формой траектории движения тела, принятого за материальную точку
(пройденным телом путeм), т. е. является непотенциальной силой.
5.2.3. Работа упругих сил
Рассмотрим материальную точку, расположенную на конце пружины.
Другой конец пружины неподвижно закрепим. Введeм в закреплeнном конце пружины декартову систему координат. Пусть пружина деформируется
(растягивается/сжимается) вдоль некоторого направления 𝑙, не совпадающего ни с одной из введeнных координат, как это показано на рис. 5.3.
Рис. 5.3.
Тогда сила, действующая со стороны пружины на точку, будет определяться законом Гука:
#»
𝐹 = −𝒞δ #»
𝑟,
79
где 𝒞 — коэффициент жeсткости, Δ #»
𝑟 — приращение радиуса-вектора точки
приложения силы (деформация пружины).
[𝒞] = [Н/м].
𝒞 — сила, которую нужно приложить для деформации пружины на единицу
длины (всегда положительна).
#»
Δ #»
𝑟 = #»
𝑟 − 𝑙0 ,
#»
где 𝑙0 = #»
𝑟 | 𝐹#»=0 , #»
𝑟 — радиус-вектор точки приложения силы (текущая координата), 𝑙0 — длина недеформированной пружины.
Виртуальная работа будет определяться как произведение силы упругости пружины на виртуальное перемещение материальной точки, к которой
она приложена:
δ𝒜 = −𝒞 #»
𝑟 δ #»
𝑟.
Полная работа силы упругости на перемещении точки еe приложения
из положения I в положение II может быть получена следующим образом:
#»
⃒ #»
𝑟 2 − 𝑙0
⃒
1
=
𝐴I →II = − 𝒞𝑟2 ⃒⃒
#»
#»
2
𝑟 1 − 𝑙0
[︁
]︁
1
2
2
#»
#»
#»
#»
= − 𝒞 ( 𝑟2 − 𝑟 | 𝐹#»=0 ) − ( 𝑟1 − 𝑟 | 𝐹#»=0 ) =
2
]︁
1 [︁ #»2
2
2
2
#»
#»
#»
#»
#»
#»
#»
= − 𝒞 𝑟2 − 2 𝑟2 𝑟 | 𝐹#»=0 +
(
𝑟 |𝐹#»=0 ) − 𝑟1 + 2 𝑟1 𝑟 | 𝐹#»=0 −
(
𝑟 |𝐹#»=0 ) =
2
1
𝑟 ( #»
𝑟1 − #»
𝑟2 )}.
= − 𝒞{𝑟22 − 𝑟12 + 2 #»
2
[︁
]︁2
#»
#»
#»
#»
1
Если 𝑟1 = 𝑟 | 𝐹#»=0 , то 𝐴I →II = − 2 𝒞 𝑟2 − 𝑟 | 𝐹#»=0 .
𝑟 | #» = 0, то 𝐴
𝑟 2 , где #»
𝑟 — полная дефорЕсли ещe и #»
= − 1 𝒞 #»
𝐹 =0
I →II
2
2
2
мация пружины.
Т. к. сила упругости определяется деформацией (т. е. начальным и конечным положениями), то она является потенциальной силой.
5.2.4. Работа момента сил трения качения
Причиной возникновения момента трения качения является неточечный контакт тела и поверхности, по которой оно катится. Область, возникающую вследствие деформации контактирующих поверхностей, обычно
80
называют пятном контакта. Вследствие наличия этой области появляется
плечо, на которое смещается сила реакции опоры по отношению к линии,
проходящей через центр масс тела (при горизонтальном качении — линии
действия силы тяжести). Образовавшаяся таким образом пара сил (тяжести
и реакции опоры) и создаст момент сопротивления качению, именуемый
«момент трения качения». Величина, выступающая в качестве плеча, на
котором будет действовать сила реакции опоры, окажется равной радиусу
пятна контакта (в предположении, что оно имеет вид круга). Она обозначается δ и называется коэффициентом трения качения (см. рис. 5.4).
δ = const = [м].
В случае, когда тело катится по поверхности, расположенной под углом α к плоскости горизонта (см. рис. 5.5), момент трения качения примет
следующий вид:
𝑀тр. кач. = δ𝑚𝑔 cos α,
, где 𝑚 — масса тела, 𝑔 — ускорение свободного падения.
Рис. 5.5.
Рис. 5.4.
Работа на перемещении катящегося тела потребует интегрирования момента сопротивления по углу поворота тела φ при его качении:
𝒜𝑀тр. кач.
∫︁φ2
= − δ𝑚𝑔 cos α 𝑑φ =
φ1
= −δ𝑚𝑔 cos α(φ2 − φ1 ).
Следует отметить, что, так же как и для работы силы трения скольжения, для работы момента трения качения всегда справедливо 𝐴𝑀тр. кач. < 0.
81
Полученное для момента сопротивления качению выражение может
быть преобразовано для удобства использования: переход от угла поворота
к перемещению центра масс при качении. Для этого рассмотрим следующие промежуточные преобразования:
⎫
𝒱𝑐 = φ̇𝑅⎬
𝑑𝑥𝑐 ⎭ =⇒ 𝑑𝑥𝑐 = 𝒱𝑐 𝑑𝑡 = φ̇𝑅𝑑𝑡,
𝒱𝑐 =
𝑑𝑡
где 𝒱𝑐 — скорость центра масс тела; 𝑅 — радиус катящегося тела; 𝑥𝑐 — координата центра масс тела вдоль поверхности (см. рис. 5.5).
Проинтегрировав полученное выражение, получим:
𝑆
⏞ ⏟𝑐
𝑆𝑐
𝑥2 − 𝑥1 = φ𝑅 =⇒ φ =
𝑅
, где 𝑆𝑐 — перемещение центра масс.
Используя полученную связь между углом поворота и перемещением
центра масс, запишем рабочую формулу для вычисления работы момента
трения качения:
δ
𝐴𝑀тр. кач. = − 𝑚𝑔 cos α𝑆𝑐 .
𝑅
5.2.5. Работа момента упругих сил
Момент упругих сил возникает, когда вместо линейной пружины
используется спиральная пружина, сопротивляющаяся деформации по углу (увеличению или уменьшению угла закрутки), как это изображено
на рис. 5.6.
Формулы для момента упругих сил и его работы для этого случая будут
совпадать с формулами для линейной пружины при замене соответствующих линейных физических величин на угловые.
Коэффициент жeсткости такой пружины численно равен моменту, который нужно приложить к пружине, чтобы деформировать еe на 1 рад.
[𝑘] = [Н · м/рад]
Тогда момент упругих сил определяется выражением 𝑀 = −𝑘φ, где
φ — угол закрутки пружины, а его работу можно получить интегрированием
82
Рис. 5.6.
по углу закрутки пружины:
∫︁φ2
1
𝐴 = − 𝑘φ 𝑑φ = − 𝑘(φ22 − φ21 )
2
φ1
Знак работы момента упругих сил определяется направлением деформации пружины. Если деформация от положения равновесия, то 𝐴 < 0.
Если в сторону положения равновесия, то 𝐴 > 0.
5.2.6. Работа силы вязкого трения
Сила вязкого трения относится к классу диссипативных сил и представляет собой силу сопротивления вязкой среды (например, характеризует
движение при наличии смазки). В механических схемах часто относится к отдельно выносимому звену — демпферу. Силы такого рода прямо
пропорционально зависят от скорости (для сил аэродинамического и гидродинамического сопротивления при движении в газе или жидкости появится
пропорциональность квадрату скорости). Сила вязкого трения всегда направлена против вектора скорости движения тела и имеет вид
#»
#»
𝐹 = −α 𝒱 ,
#»
где 𝒱 — скорость тела, α = const > 0 — коэффициент вязкого трения, коэффициент силы сопротивления. [α] = [кг/с] = [Н · с/м]
Тогда виртуальная работа силы вязкого трения имеет вид: δ𝐴 =
#»
−α 𝑟˙ δ #»
𝑟 — эта работа всегда отрицательна.
83
5.3. Работа сил, приложенных к твeрдому телу
Пусть нам дано твeрдое тело и условно-неподвижная система координат XYZ . Рассмотрим общий случай движения этого твeрдого тела
(см. рис. 5.7). Движение этого тела может быть представлено как движение вместе с некоторой точкой, принятой за полюс (выберем точку 𝑂), и
движение относительно этого полюса.
Рис. 5.7.
Рассмотрим движение произвольной точки 𝑀 , принадлежащей телу.
Местоположение точки 𝑀 относительно выбранного полюса 𝑂 определяется радиусом-вектором #»
𝑟:
# »
# »
#»
𝑟 = 𝑂𝑀 =⇒ | #»
𝑟 | = |𝑂𝑀 |.
Положение точки 𝑀 относительно начала введeнной системы координат может быть описано двумя способами — либо как радиус-вектор
относительно этого начала ( #»
𝑟𝑀 ), либо как сумма радиуса-вектора полюса
относительно того же начала ( #»
𝑟𝑂 ) и ранее введeнного радиуса-вектора #»
𝑟:
#»
𝑟𝑀 = #»
𝑟𝑂 + #»
𝑟.
По аналогии можно представить скорость точки 𝑀 как скорость полюса 𝑂 и скорость точки 𝑀 относительно полюса 𝑂 (за счeт вращения
вокруг полюса):
#»
#»
# »
#» × 𝑂𝑀
𝒱𝑀 = 𝒱𝑂 + ω
.
84
Раскрыв линейные скорости как производные от радиусов-векторов,
можно получить связь между соответствующими элементарными перемещениями точек:
𝑑 #»
𝑟𝑂 #» # »
𝑑 #»
𝑟𝑀
=
+ ω × 𝑂𝑀
𝑑𝑡
𝑑𝑡
# »
#» × 𝑂𝑀
𝑑 #»
𝑟𝑀 = 𝑑 #»
𝑟𝑂 + ω
𝑑𝑡.
#»
Учитывая, что элементарная работа силы ℱ на перемещении 𝑑 #»
𝑟𝑀
является скалярным произведением этих величин, и подставив вместо элементарного перемещения полученное для него выше выражение, будем
иметь:
#»
# »
#» × 𝑂𝑀
𝑑𝐴 = 𝐹 [𝑑 #»
𝑟𝑂 + ω
𝑑𝑡]
#» #»
#» #» # »
𝑑𝐴 = 𝐹 𝑑 𝑟𝑂 + 𝐹 ω × 𝑂𝑀 𝑑𝑡.
Второе слагаемое в полученном выражении представляет собой смешанное произведение (последовательно осуществлeнные скалярное и векторное перемножения); а в смешанном произведении допустимо круговое
смещение множителей:
#» #» # »
𝐹ω
× 𝑂𝑀 𝑑𝑡
# » #»
#»𝑂𝑀
ω
× 𝐹 𝑑𝑡.
# » #»
Фигурирующее в этом выражении векторное произведение 𝑂𝑀 × 𝐹
#»
является моментом силы 𝐹 относительно полюса 𝑂:
#»
# » #»
#» 𝑀
𝑑𝐴 = 𝐹 𝑑 #»
𝑟𝑂 + ω𝑑𝑡
𝑂 ( 𝐹 ).
Раскроем скалярное произведение угловой скорости на момент силы и
учтeм, что угловая скорость является производной от угла поворота тела:
# » #»
#»
# » #»
#» 𝑀
#» ˆ︂
ω𝑑𝑡
𝑂 ( 𝐹 ) = ω𝑀𝑂 ( 𝐹 )𝑑𝑡 cos[ω, 𝑀𝑂 ( 𝐹 )]
𝑑φ
ω=
𝑑𝑡
#»
#»
# » #»
#»
#»
#» ˆ︂
𝑑𝐴 = 𝐹 𝑑 #»
𝑟𝑂 + 𝑀𝑂 ( 𝐹 ) cos[ω,
𝑀𝑂 ( 𝐹 )]𝑑φ = 𝐹 𝑑 #»
𝑟𝑂 + 𝑀ω ( 𝐹 )𝑑φ,
85
#»
где 𝑀ω ( 𝐹 ) — момент сил относительно мгновенной оси вращения тела
# » #»
(проекция 𝑀𝑂 ( 𝐹 ) на ось вращения); 𝑑φ — элементарный угол поворота тела относительно оси ω.
Переходя от точки к телу, проведeм суммирование по 𝑚 точкам:
𝐸 — главный момент внешних сил
𝑀ω
𝑑𝐴 =
𝑚
∑︁
#»
𝑟𝑂 +
𝐹𝑖 𝑑 #»
⏞
𝑚
∑︁
⏟
#»
𝑀ω ( ℱ𝑖 ) 𝑑φ
𝑖=1
𝑖=1
#»
𝐹 𝐸 — главный вектор внешних сил
⏟ ⏞
Окончательно будем иметь:
#»
𝐸 𝑑φ.
𝑑𝐴 = 𝐹 𝐸 𝑑 #»
𝑟𝑂 + 𝑀ω
Элементарная работа внешних сил, приложенных к свободному твeрдому телу, в общем случае его движения равна сумме элементарных работ их
главного вектора на перемещении точки его приложения (полюса) и главного момента этих сил относительно мгновенной оси, проходящей через
полюс, на элементарном угле поворота тела вокруг этой оси.
Далее рассмотрим вид, к которому преобразуется это выражение для
частных случаев движения твeрдого тела.
5.3.1. Работа сил при поступательном движении
При поступательном движении тело не меняет своей ориентации, поэтому второе слагаемое из общей формулы будет равно нулю:
#»
𝑑𝐴 = 𝐹 𝐸 𝑑 #»
𝑟𝑂 .
5.3.2. Работа сил при вращательном движении вокруг неподвижной оси
При вращательном движении, напротив, нулю будет равно первое слагаемое в общей формуле (к вращению приводит лишь момент силы).
Направим вдоль оси вращения тела декартову ось 𝑧. Тогда:
ω𝑥 = ω𝑦 = 0
ω𝑧 ̸= 0
𝐸 𝑑φ =⇒ 𝑑𝐴 = 𝑀 𝐸 𝑑φ,
𝑑𝐴 = 𝑀ω
𝑧
86
где 𝑀𝑧𝐸 — момент сил, приложенный относительно оси вращения тела (вместо мгновенной оси присутствует неподвижная ось вращения 𝑧).
5.3.3. Работа сил при плоском движении
Пусть вращение происходит в плоскости 𝑌 𝑂𝑋. Тогда
ω𝑥 = ω𝑦 = 0
ω𝑧 ̸= 0.
За полюс лучше брать центр масс. Тогда формула для элементарной
работы силы будет иметь вид:
#»
𝑑𝐴 = 𝐹 𝐸 𝑑 #»
𝑟𝑐 + 𝑀𝑧𝐸𝑐 𝑑φ.
5.3.4. Работа сил при сферическом движении
В случае вращения вокруг неподвижной точки формула для элементарной работы будет полностью определяться вторым слагаемым общего
выражения:
𝐸 𝑑φ,
𝑑𝐴 = 𝑀ω
где ω — мгновенная ось вращения.
5.4. Потенциальное силовое поле и силовая функция
Часть пространства, в которой на каждую точку действует сила, зависящая от координаты этой точки и времени, называется силовым полем.
Если сила зависит только от координат точки, то это поле называется
стационарным силовым полем.
Введeм силовую функцию:
𝒰 = 𝒰( #»
𝑟 , 𝑡).
Стационарная силовая функция:
𝒰 = 𝒰( #»
𝑟 ).
Тогда силы, действующие на точку, определяются следующим образом:
87
𝐹𝑥 =
𝜕𝒰
;
𝜕𝑥
𝐹𝑦 =
𝜕𝒰
;
𝜕𝑦
𝐹𝑧 =
𝜕𝒰
.
𝜕𝑧
Элементарная работа в соответствии с этим представлением может
быть записана в следующем виде:
𝑑𝐴 = 𝐹𝑥 𝑑𝑥 + 𝐹𝑦 𝑑𝑦 + 𝐹𝑧 𝑑𝑧
𝜕𝒰
𝜕𝒰
𝜕𝒰
𝑑𝐴 =
𝑑𝑥 +
𝑑𝑦 +
𝑑𝑧.
𝜕𝑥
𝜕𝑦
𝜕𝑧
Стационарное силовое поле называется потенциальным, если работа
сил поля, действующего на механическую систему, не зависит от формы
траектории еe точек и определяется только их начальным и конечным положениями:
𝑑𝐴 = 𝑑𝒰 =⇒ 𝐴 = 𝒰 − 𝒰𝑂 ,
где 𝒰𝑂 = const.
Такие силы — потенциальные или консервативные.
5.5. Потенциальная энергия
В случае потенциального силового поля наряду с силовой функцией 𝒰
вводится другая функция, характеризующая запас энергии в данной точке
поля. Эта функция называется потенциальной энергией в данной точке и
обозначается Π.
Потенциальная энергия равна работе силы при перемещении точки
приложения силы из конечного (текущего) положения в начальное.
Π = 𝐴II →I
Π = −𝐴I →II
Π = 𝒰𝑂 − 𝒰.
Работа потенциальной силы не зависит от траектории, по которой перемещается точка приложения силы (по замкнутому контуру она равна нулю).
Следует ответить, что для потенциальных сил (т. е. в отсутствии диссипации энергии) полная механическая энергия системы 𝒯 + Π = const.
88
Потенциальная энергия зависит от того, от какого уровня производится отсчeт: Π = Π( #»
𝑟 ). Она принимается равной нулю для некоторой
конфигурации тел в пространстве, выбор которой определяется удобством
дальнейших вычислений.
Основной физический смысл имеет не само значение потенциальной
энергии, а еe изменение. Если кинетическая энергия может быть определена
для одного отдельного тела, то потенциальная энергия всегда характеризует,
как минимум, 2 тела, или положение тела во внешнем поле.
Кинетическая энергия характеризуется скоростью, потенциальная —
взаиморасположением тел.
5.6. Определение обобщeнных сил
Виртуальная работа системы сил, приложенных к системе материальных точек, может быть записана как
𝑛
∑︁
#»
𝐹𝑖 δ #»
𝑟𝑖 ,
δ𝐴 =
𝑖=1
#»
где 𝐹𝑖 — сила, приложенная к точке 𝑖; δ #»
𝑟𝑖 — виртуальное перемещение точки
приложения силы.
Вспомним, что виртуальное перемещение представляет собой
δ #»
𝑟𝑖 =
𝑘
∑︁
𝜕 #»
𝑟𝑖
𝑗=1
𝜕𝑞𝑗
δ𝑞𝑗 ,
где 𝑘 — число степеней свободы механической системы.
Подставив и учтя независимость переменных суммирования 𝑖 и 𝑗, получим:
𝑛
𝑘
∑︁
𝑟𝑖
#» ∑︁ 𝜕 #»
δ𝐴 =
𝐹𝑖
δ𝑞 =
𝜕𝑞𝑗 𝑗
𝑖=1
𝑗=1
]︃
[︃
𝑘 ∑︁
𝑛
∑︁
𝜕𝑥
𝜕𝑦
𝜕𝑧
=
𝐹𝑖𝑥 𝑖 δ𝑞𝑗 + 𝐹𝑖𝑦 𝑖 δ𝑞𝑗 + 𝐹𝑖𝑧 𝑖 δ𝑞𝑗 =
𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗
𝑗=1 𝑖=1
[︃ 𝑛
]︃
𝑘 ∑︁
𝑘
#»
∑︁
∑︁
#» 𝜕 𝑟𝑖
=
𝐹𝑖
δ𝑞𝑗 =
𝒬𝑗 δ𝑞𝑗 ,
𝜕𝑞𝑗
𝑗=1 𝑖=1
𝑗=1
89
∑︀𝑛 #» 𝜕 #»
𝑟𝑖
где 𝒬𝑗 =
𝑖=1 𝐹𝑖 𝜕𝑞𝑗 — обобщeнная сила — коэффициент, стоящий в выражении для виртуальной работы при соответствующем виртуальном
перемещении по обобщeнной координате δ𝑞𝑗 .
Размерность 𝒬𝑗 определяется размерностью обобщeнных координат.
δ𝐴 = 𝒬δ𝑞 =⇒ [𝒬] =
[δ𝐴] [Дж]
=
[δ𝑞]
[. . .]
При [δ𝑞] = [м], [𝒬] = [Н]; при [δ𝑞] = [рад], [𝒬] = [Н · м].
5.7. Способы вычисления обобщeнных сил
Существует несколько способов вычисления обобщeнных сил.
Напрямую по формуле, записанной в предыдущем параграфе:
]︂
𝑛
𝑛 [︂
∑︁
𝑟𝑖 ∑︁
𝜕𝑥𝑖
𝜕𝑦𝑖
𝜕𝑧𝑖
#» 𝜕 #»
𝒬𝑗 =
𝐹𝑖
=
𝐹𝑖𝑥
+ 𝐹𝑖𝑦
+ 𝐹𝑖𝑧
.
𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗
𝑖=1
𝑖=1
По определению (обобщeнная сила равна отношению виртуальной работы, вычисленной для перемещения по обобщeнной координате 𝑞𝑗 , к
самому виртуальному перемещению по этой обобщeнной координате):
)︁⃒
(︁∑︀
𝑛 #» #» ⃒
𝑖=1 𝐹𝑖 δ 𝑟𝑖 ⃒𝑞
δ𝐴𝑞𝑗
𝑗
=
, δ𝑞𝑗 ̸= 0.
𝒬𝑗 =
δ𝑞𝑗
δ𝑞𝑗
Для потенциальных сил обобщeнная сила может быть определена через
силовую функцию или потенциальную энергию:
𝒬𝑗 =
𝜕𝒰
𝜕Π
=−
,
𝜕𝑞𝑗
𝜕𝑞𝑗
где Π — потенциальная энергия системы. Для диссипативных сил — через
диссипативную функцию Рэлея, что будет подробнее рассмотрено в следующем параграфе.
5.8. Диссипативная функция
Пусть на механическую систему действуют диссипативные силы вида:
#»
#»
𝐹 = −α 𝒱 = −α #»
𝑟˙ ,
90
где α — коэффициент вязкого (жидкого) трения.
Тогда виртуальная работа для 𝑖-й точки с учeтом характера силы и формулы для виртуального перемещения примет вид:
]︂
𝑘 [︂
𝑘
∑︁
𝑟𝑖
𝑟𝑖
#» 𝜕 #»
#» #»
#» #»
#» ∑︁ 𝜕 #»
δ𝑞 = −
α 𝒱𝑖
δ𝑞 .
δ𝐴𝑖 = 𝐹𝑖 δ 𝑟𝑖 = −α 𝒱 𝑖 δ 𝑟𝑖 = −α 𝒱 𝑖
𝜕𝑞𝑗 𝑗
𝜕𝑞𝑗 𝑗
𝑗=1
𝑗=1
С использованием I тождества Лагранжа (доказательство I тождества
Лагранжа см. в разд. 2.4) перейдeм от производной радиуса-вектора по
обобщeнной координате к производной от скорости по обобщeнной ско#»
рости, а затем занесeм α 𝒱 𝑖 под знак дифференциала:
#»
𝜕 #»
𝑟𝑖
𝜕 𝒱𝑖
=
𝜕𝑞𝑗
𝜕 𝑞˙𝑗
[︃
]︃
[︂
]︂
#»
𝑘
𝑘
∑︁
∑︁
𝜕 1 #»2
#» 𝜕 𝒱 𝑖
δ𝐴𝑖 = −
α 𝒱𝑖
δ𝑞𝑗 = −
α 𝒱 𝑖 δ𝑞𝑗 .
𝜕 𝑞˙𝑗
𝜕 𝑞˙𝑗 2
𝑗=1
𝑗=1
#»
Обозначим выражение в скобках: Φ = 12 α 𝒱 2 — диссипативная функция
Рэлея для одной точки. Обобщим для механической системы из 𝑛 точек:
∑︀
#»
Φ = 𝑛𝑖=1 12 α𝑖 𝒱 𝑖2 — диссипативная функция Рэлея для множества 𝑖 точек.
Тогда обобщeнная сила от диссипативных воздействий может быть
найдена по следующей формуле:
𝜕Φ
𝒬Φ
=
−
.
𝑗
𝜕 𝑞˙𝑗
Обобщeнная сила в системе, в которой действуют потенциальные силы,
непотенциальные силы и диссипативные силы (особый класс непотенциальных сил) определяется как
(︃ 𝑛 )︃
(︃ 𝑛
)︃
(︃ 𝑛
)︃
∑︁
∑︁
∑︁
𝒬𝑖 = 𝒬𝑖
Π + 𝒬𝑖
𝐹𝑖 + 𝒬𝑖
Φ𝑖 .
𝑖=1
𝑖=1
𝑖=1
6. ОПРЕДЕЛЕНИЕ ОБОБЩEННОЙ СИЛЫ В СИСТЕМЕ,
НАХОДЯЩЕЙСЯ ПОД ДЕЙСТВИЕМ ПОТЕНЦИАЛЬНЫХ,
ДИССИПАТИВНЫХ И НЕПОТЕНЦИАЛЬНЫХ СИЛ
Рассмотрим механическую систему, изображeнную на рис. 4.3. Постановкой задачи, описанной в разд. 4.4, является определение уравнения
91
движения этой системы. Для этого предлагается использовать уравнение
Лагранжа II рода:
𝜕𝒯
𝑑 𝜕𝒯
−
= 𝒬𝑗 ,
𝑑𝑡 𝜕 𝑞˙𝑗 𝜕𝑞𝑗
𝑗 = 1, 𝑘,
где 𝑘 — число степеней свободы механизма.
В разд. 4.4 был подробно рассмотрен поиск кинетической энергии
системы для приведeнного случая. Однако для применения уравнения
Лагранжа II рода требуется вычислить также обобщeнную силу (правая
сторона уравнения). Ниже рассмотрим два способа, которыми это удобно
сделать.
6.1. Определение обобщeнной силы с использованием виртуальной
работы
Первым является универсальный способ поиска обобщeнной силы по
определению:
δ𝐴𝑗 = 𝒬𝑗 δ𝑞𝑗 ,
где δ𝑞𝑗 — виртуальное перемещение точки приложения силы; δ𝐴𝑖 — виртуальная работа.
δ𝐴 .
В рассматриваемом случае 𝑘 = 1, 𝑞 = φ𝑂𝐴 = φ; тогда 𝒬 = δφ
Искомая виртуальная работа равна сумме виртуальных работ всех сил,
приложенных (в соответствии с описанием в разд. 4.4) к системе:
δ𝐴 = δ𝐴 𝒢#»
𝐴𝐾
+ δ𝐴 𝒢#»
𝐵𝐸
+ δ𝐴 𝒢#» + δ𝐴 𝒢#» +
𝐵
𝐷
+ δ𝐴 𝒢#» + δ𝐴 𝒢#» + δ𝐴 𝐹#»
𝐾
𝐸
пруж.
+ δ𝐴 𝐹#»
демпф.
+ δ𝐴 𝐹#» ,
где δ𝐴 𝒢#» — виртуальная работа силы тяжести 𝑖-го звена; δ𝐴 𝐹#»
— виртупруж.
𝑖
альная работа силы упругости пружины; δ𝐴 𝐹#»
— виртуальная работа
демпф.
силы вязкого трения в демпфере; δ𝐴 𝐹#» — виртуальная работа заданной постоянной силы.
Точки приложения и направления действия указанных сил приведены
на рис. 6.1.
92
Рис. 6.1.
6.1.1. Определение исходных выражений элементарных работ сил
От положения, указанного на рис. 6.1, в указанном направлении изменения обобщeнной координаты 𝑞 = φ, задаeтся виртуальное перемещение
δ𝑞 = δφ.
Рабочая формула для поиска работы 𝑖-й силы:
#»
𝑟𝑖 ,
δ𝐴𝐹#» = 𝐹𝑖 δ #»
𝑖
где δ #»
𝑟𝑖 — виртуальное перемещение точки приложения силы 𝐹𝑖 .
Тогда для заданной системы сил, с учeтом точек их приложения, будем иметь:
δ𝐴 𝒢#»
𝐴𝐾
δ𝐴 𝒢#»
𝐵𝐸
δ𝐴 𝒢#»
𝐵
δ𝐴 𝒢#»
𝐷
δ𝐴 𝒢#»
𝐾
#»
= 𝒢 𝐴𝐾 δ #»
𝑟 𝑐𝐴𝐾
#»
= 𝒢 𝐵𝐸 δ #»
𝑟 𝑐𝐵𝐸
#»
= 𝒢 𝐵 δ #»
𝑟 𝑐𝐵
#»
= 𝒢 𝐷 δ #»
𝑟𝐷
#»
= 𝒢 𝐾 δ #»
𝑟 𝑐𝐾
#»
δ𝐴 𝒢#» = 𝒢 𝐸 δ #»
𝑟𝐸
𝐸
#»
δ𝐴 𝐹#» = 𝐹 δ #»
𝑟𝑃
#»
δ𝐴 𝐹#»
= 𝐹 пруж. δ #»
𝑟 𝑐𝐵
пруж.
#»
δ𝐴 𝐹#»
= ℱтрен δ #»
𝑟𝐷
демпф.
93
6.1.2. Определение радиусов-векторов 𝑟⃗𝑖 точек приложения сил
В общем виде радиус-вектор точки приложения силы может быть представлен как произведение его проекций (координат точки), умноженных
на соответствующие орты координатных осей. Проекции при этом должны быть выражены через обобщeнную координату. Следует отметить, что
поиск координат точек требуется также для определения кинетических
энергий ряда звеньев (см. разд. 4.4), поэтому при единовременном решении всей задачи можно сразу определить их для всех интересующих точек.
#»
#»
#»
𝑟 𝑖 = [𝑥𝑖 ] 𝑖 + [𝑦𝑖 ] 𝑗
]︁ #» [︁ 1
]︁ #»
[︁ 1
#»
𝑟 𝑐𝐴𝐾 = − 𝑙 cos φ 𝑖 + − 𝑙 sin φ 𝑗
[︁ 1 2
]︁ #» [︁ 3 2 ]︁ #»
#»
𝑟 𝑐𝐵𝐸 = 𝑙 cos φ 𝑖 + 𝑙 sin φ 𝑗
2
2
#»
#»
#»
𝑟 𝑐𝐵 = [2𝑙 cos φ] 𝑖 + [0] 𝑗
#»
#»
#»
𝑟 𝐷 = [0] 𝑖 + [2𝑙 sin φ] 𝑗
[︁
]︁ #» [︁
]︁ #»
#»
𝑟 𝐸 = −𝑙 cos φ 𝑖 + 3𝑙 sin φ 𝑗
[︁
]︁ #» [︁
]︁ #»
#»
𝑟 𝑐𝐾 = −2𝑙 cos φ 𝑖 + −2𝑙 sin φ 𝑗
[︁ 3
]︁ #» [︁ 1
]︁ #»
#»
𝑟 𝑃 = 𝑙 cos φ 𝑖 + 𝑙 sin φ 𝑗 .
2
2
6.1.3. Определение виртуальных перемещений точек приложения сил
В общем случае виртуальное перемещение точки приложения силы определяется путeм взятия частных производных от координат точек
(проекций радиуса-вектора) по обобщeнной координате с последующим
умножением на еe виртуальное изменение:
{︁[︂ 𝜕𝑥 ]︂ #» [︂ 𝜕𝑦 ]︂ #»}︁
𝑖
𝑖
𝑖 +
𝑗 δφ
𝜕φ
𝜕φ
{︁[︁ 1
]︁ #» [︁ 1
]︁ #»}︁
#»
δ 𝑟 𝑐𝐴𝐾 =
𝑙 sin φ 𝑖 + − 𝑙 cos φ 𝑗 δφ
2
{︁[︁ 1
]︁ #» [︁ 23
]︁ #»}︁
#»
δ 𝑟 𝑐𝐵𝐸 = − 𝑙 sin φ 𝑖 + 𝑙 cos φ 𝑗 δφ
{︁[︁ 2
]︁ #» [︁ 2]︁ #»}︁
δ #»
𝑟 𝑐𝐵 = −2𝑙 sin φ 𝑖 + 0 𝑗 δφ
δ #»
𝑟𝑖 =
94
{︁[︁ ]︁ #» [︁
]︁ #»}︁
0 𝑖 + 2𝑙 cos φ 𝑗 δφ
{︁[︁
]︁ #» [︁
]︁ #»}︁
= 𝑙 sin φ 𝑖 + 3𝑙 cos φ 𝑗 δφ
{︁[︁
]︁ #» [︁
]︁ #»}︁
= 2𝑙 sin φ 𝑖 + −2𝑙 cos φ 𝑗 δφ
{︁[︁ 3
]︁ #» [︁ 1
]︁ #»}︁
= − 𝑙 sin φ 𝑖 + 𝑙 cos φ 𝑗 δφ.
2
2
δ #»
𝑟𝐷 =
δ #»
𝑟𝐸
δ #»
𝑟 𝑐𝐾
δ #»
𝑟𝑃
6.1.4. Определение векторов сил
Каждый вектор силы представляется в виде проекций на декартовы
оси, умноженных на соответствующие орты координатных осей:
#»
#»
#»
𝐹𝑖 = [𝐹𝑖𝑥 ] 𝑖 + [𝐹𝑖𝑦 ] 𝑗
#»
#»
#»
𝒢 𝐴𝐾 = [0] 𝑖 + [−𝑚𝐴𝐾 𝑔] 𝑗
#»
#»
#»
𝒢 𝐸 = [0] 𝑖 + [−𝑚𝐸 𝑔] 𝑗
#»
#»
#»
𝒢 𝐵𝐸 = [0] 𝑖 + [−𝑚𝐵𝐸 𝑔] 𝑗
#»
#»
#»
𝒢 𝐾 = [0] 𝑖 + [−𝑚𝐾 𝑔] 𝑗
#»
#»
#»
𝒢 𝐵 = [0] 𝑖 + [−𝑚𝐵 𝑔] 𝑗
#»
#»
#»
𝒢 𝐷 = [0] 𝑖 + [−𝑚𝐷 𝑔] 𝑗
⃒
[︀
]︀ #»
#»
#»
𝐹 пруж. = −𝒞 𝑥𝑐𝐵 − 𝑥𝑐𝐵 ⃒𝐹 =0 𝑖 = −𝒞[2𝑙 cos φ − 2𝑙 cos 0] 𝑖
#»
#»
#»
ℱтрен = −β𝑦˙𝐷 𝑗 = −β[2𝑙 cos φφ̇] 𝑗
#»
#»
#»
𝐹 = [𝐹 cos θ] 𝑖 + [𝐹 sin θ] 𝑗 .
Проекция оказывается отрицательной, если сила направлена против
оси, на которую проецируется (например, в даном случае — проекции всех
сил тяжестей на ось 𝑦). Следует обратить внимание, что в выражении
для силы упругости пружины на коэффициент жeсткости умножается деформация пружины. Т. е. следует учесть не только текущую координату
точки приложения силы, но и координату недеформированного состояния пружины (в нашем случае по условию задачи соответствует значению
φ = 0). Выражение для силы вязкого трения в демпфере определяется произведением коэффициента вязкого трения β на скорость движения точки
приложения этой силы. Единственной силой в рамках анализируемого механизма, имеющей ненулевые проекции на обе координатные оси, является
95
#»
постоянная сила 𝐹 , направленная по условиям задачи под углом θ к плоскости горизонта (см. рис. 6.1).
6.1.5. Определение виртуальных работ сил, выраженных через
обобщeнные координаты и скорости
Виртуальные работы получим подстановкой значений проекций сил и
виртуальных перемещений по координатам точек их приложения:
δ𝐴𝑖 = 𝐹𝑖𝑥 δ𝑥𝑖 + 𝐹𝑖𝑦 δ𝑦𝑖
}︁
{︁ 1
𝑚𝐴𝐾 𝑙𝑔 cos φ δφ
δ𝐴 𝒢#» =
𝐴𝐾
}︁
{︁ 2 3
#»
δ𝐴 𝒢
= − 𝑚𝐵𝐸 𝑙𝑔 cos φ δφ
𝐵𝐸
2
δ𝐴 𝒢#» = 0
𝐵
{︁
}︁
δ𝐴 𝒢#» = −2𝑚𝐷 𝑙𝑔 cos φ δφ
𝐷
{︁
}︁
#»
δ𝐴 𝒢 = −3𝑚𝐸 𝑙𝑔 cos φ δφ
𝐸
{︁
}︁
δ𝐴 𝒢#» = 2𝑚𝐾 𝑙𝑔 cos φ δφ
𝐾
{︁
}︁
2
#»
δ𝐴 𝐹
= 4𝑙 𝒞 sin φ[cos φ − cos 0] δφ =
пруж.
{︁
}︁
2
2
= 2𝑙 𝒞 sin(2φ) − 4𝑙 𝒞 sin φ δφ
{︁
}︁
2
2
#»
δ𝐴 ℱ
= −β4𝑙 cos φφ̇ δφ
трен
]︁ [︁ 1
]︁}︁
{︁[︁ 3
δ𝐴 𝐹#» = − 𝑙𝐹 sin φ cos θ + 𝑙𝐹 sin θ cos φ δφ.
2
2
Отрицательное значение виртуальной работы означает, что сила сопротивляется движению, положительное — способствует движению.
96
6.1.6. Определение обобщeнной силы
Полная виртуальная работа определяется алгебраической суммой работ всех сил:
3
𝑚𝐴𝐾 𝑙𝑔 cos φ − 𝑚𝐵𝐸 𝑙𝑔 cos φ −
2
2
− 2𝑚𝐷 𝑙𝑔 cos φ − 3𝑚𝐸 𝑙𝑔 cos φ + 2𝑚𝐾 𝑙𝑔 cos φ + 2𝒞𝑙2 sin(2φ) −
3
− 4𝒞𝑙2 cos 0 sin φ − 4β𝑙2 cos2 φφ̇ − 𝑙𝐹 sin φ cos θ +
2
]︁
1
+ 𝑙𝐹 sin θ cos φ δφ = 𝒬δφ.
2
δ𝐴 =
[︁ 1
Коэффициент в полученном выражении перед виртуальным изменением обобщeнной координаты является искомой обобщeнной силой.
Для удобства дальнейшего использования следует представить обобщeнную силу, сгруппировав слагаемые, умножаемые на одинаковые функции от обобщeнной координаты:
δ𝐴
δφ
𝒬 = 𝒞1 sin φ + 𝒞2 cos φ + 𝒞3 sin(2φ) + 𝒞4 φ̇ sin2 φ + 𝒞5 φ̇ cos2 φ.
𝒬=
Коэффициенты 𝒞1 , 𝒞5 будут составлены величинами, в рамках решения
данной задачи считающимися постоянными:
3
𝒞1 = −4𝒞𝑙2 − 𝑙𝐹 cos θ
2
[︁ 1
]︁ 1
3
𝒞2 = 𝑙𝑔 𝑚𝐴𝐾 − 𝑚𝐵𝐸 − 2𝑚𝐷 − 3𝑚𝐸 + 2𝑚𝐾 + 𝑙𝐹 sin θ
2
2
2
2
𝒞3 = 2𝒞𝑙
𝒞4 = 0
𝒞5 = −4β𝑙2 .
Коэффициент 𝒞4 оказался равным нулю, т. к. демпфер расположен
вдоль вертикальной оси. Если бы он, наоборот, обеспечивал бы сопротивление при движении вдоль горизонтальной оси, то равным нулю оказался
бы уже коэффициент 𝒞5 .
97
6.2. Определение обобщeнной силы с использованием специальных
формул для разных типов воздействий
В отличие от первого разобранного способа, в данном случае требуется
предварительно разделить воздействия на типы (потенциальные, непотенциальные, диссипативные), чтобы затем для каждого из них использовать
соответствующую формулу для поиска обобщeнной силы.
Потенциальные силы: сила упругости пружины, силы тяжести звеньев;
#»
Непотенциальные силы: 𝐹 (приложенная в точке 𝑃 );
#»
Диссипативные силы: 𝐹 демпф. .
Итоговую обобщeнную силу можно найти путeм суммирования обобщeнных сил по всем типам воздействий:
𝒬 = 𝒬непотенц. + 𝒬потенц. + 𝒬диссипат.
Обобщeнная сила от потенциальных воздействий может быть определена как производная от потенциальной энергии по обобщeнной координате, взятая с обратным знаком:
𝒬потенц. = −
𝜕Π
.
𝜕φ
Потенциальная энергия при этом представляет собой алгебраическую
сумму потенциальных энергий звеньев в поле силы тяжести и потенциальной энергии пружины:
∑︁
#»
Π=
Π𝑖 = Π𝐴𝐾 + Π𝐵𝐸 + Π𝐵 + Π𝐸 + Π𝐾 + Π𝐷 + Π ℱ
.
трен
𝑖
За нулевой уровень потенциальной энергии силы тяжести выбирается
ось 𝑂𝑋. Рабочие формулы для вычисления потенциальных энергий имеют вид:
⎧
⎪
Π 𝒢#» = 𝑚𝑖 𝑔𝑦𝑐𝑖
⎨
𝑖
]︁2
1 [︁
⎪
⎩Π #»
= 𝒞 𝑥𝐵 − 𝑥𝐵 |𝐹пруж. =0 ,
𝐹 пруж.
2
где 𝑐𝑖 — центр масс 𝑖-го звена, 𝑦𝑐𝑖 — вертикальная координата точки приложения силы тяжести (центра масс), 𝑥𝐵 — координата свободного конца
пружины.
98
Тогда потенциальные энергии будут иметь вид:
)︂
(︂
1
Π𝐴𝐾 = 𝑚𝐴𝐾 𝑔 − 𝑙 sin φ
2
(︂
)︂
3
Π𝐵𝐸 = 𝑚𝐵𝐸 𝑔 𝑙 sin φ
2
Π𝐵 = 𝑚𝐵 𝑔(0)
Π𝐸 = 𝑚𝐸 𝑔(3𝑙 sin φ)
Π𝐷 = 𝑚𝐷 𝑔(2𝑙 sin φ)
Π𝐾 = 𝑚𝐾 𝑔(−2𝑙 sin φ)
1
Π 𝐹#»
= 𝒞[2𝑙 cos φ − 2𝑙 cos 0]2 .
пруж.
2
Просуммировав, получим полную потенциальную энергию системы:
(︂
)︂
1
3
Π = 𝑔𝑙 − 𝑚𝐴𝐾 + 𝑚𝐵𝐸 + 3𝑚𝐸 + 2𝑚𝐷 − 2𝑚𝐾 sin φ +
2
2
+ 2𝒞𝑙2 (cos φ − 1)2 .
Тогда обобщeнная сила от потенциальных воздействий имеет вид:
(︂
)︂
1
3
𝜕Π
= −𝑔𝑙 − 𝑚𝐴𝐾 + 𝑚𝐵𝐸 + 3𝑚𝐸 + 2𝑚𝐷 − 2𝑚𝐾 cos φ −
𝒬потенц. = −
𝜕φ
2
2
− 2𝒞𝑙2 2(cos φ − cos 0)(− sin φ)
(︂
)︂
1
3
= 𝑔𝑙 𝑚𝐴𝐾 − 𝑚𝐵𝐸 − 3𝑚𝐸 − 2𝑚𝐷 + 2𝑚𝐾 cos φ + 2𝒞𝑙2 sin(2φ)
2
2
Определение обобщeнной силы от диссипативных воздействий осуществляется по формуле:
𝒬диссипат. = −
𝜕Φ
.
𝜕 φ̇
Запишем диссипативную функцию Рэлея с учeтом скорости движения
демпфера 𝑦˙𝐷 :
1
1
Φ = β𝑦˙𝐷 2 = β4𝑙2 cos2 φφ̇2 ,
2
2
где β — коэффициент вязкого трения.
99
Тогда обобщeнная сила от диссипативных воздействий примет вид:
1
𝒬диссипат. = − β4𝑙2 cos2 φ2φ̇ = −4β𝑙2 cos2 φφ̇.
2
К непотенциальным воздействиям относятся те, что не попали в
#»
предыдущие две группы. В рассматриваемом случае это только сила 𝐹 ,
приложенная в точке 𝑃 . Обобщeнную силу от этой силы находят по той
же универсальной формуле, что была использована в предыдущем способе
вычисления обобщeнных сил:
δ𝐴 𝐹#»
.
𝒬=
δφ
Результат еe вычисления очевидно будет таким же, поэтому повторять его
не будем.
Итоговая обобщeнная сила, определeнная как сумма найденных обобщeнных сил от потенциальных, диссипативных и непотенциальных воздействий, окажется полностью совпадающей с найденной первым способом,
что и следовало ожидать.
7. УСЛОВИЯ РАВНОВЕСИЯ И ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
СИСТЕМЫ
7.1. Идеальные связи
Идеальные связи — связи, работа которых на любом виртуальном перемещении равна нулю. Обычно к идеальным связям относятся связи без
трения. Для идеальной связи справедливо:
#»
#»
ˆ︂
𝑟 = 𝐹 δ𝑟 cos[ ℱ, δ #»
𝑟 ] = 0.
δ𝒜 = ℱδ #»
Примеры идеальных связей:
1) абсолютно твeрдое тело (δ #»
𝑟 точек внутри тела равны нулю);
2) абсолютно гладкая поверхность;
3) шарнир без трения;
4) гибкая нерастяжимая нить;
5) шероховатая поверхность для катков, катящихся по ней без скольжения при отсутствии трения качения (у катка с поверхностью имеется
точечный контакт).
100
7.2. Реакции связей. Принцип освобождаемости от связей
Принцип освобождаемости от связей гласит, что несвободное твeрдое
тело можно рассматривать как свободное, на которое, кроме задаваемых
сил, действуют силы реакции связей [Яблонский, Ч1, параграф 3, стр. 12].
Принцип освобождаемости от связей позволяет отдельно рассмотреть часть
механизма. Для этого находящиеся на границе анализируемого фрагмента
системы связи заменяются их реакциями. Тогда реакции связей вводят в
класс активных сил, т. е. нужно считать их задаваемыми силами при дальнейшем решении задачи.
Примеры применения принципа освобождаемости от связей приведены
на рис. 7.1, 7.2.
Рис. 7.2.
Рис. 7.1.
На рис. 7.1 представлена материальная точка, закреплeнная на нити,
другой конец которой шарнирно закреплeн. Таким образом, конструкция
представляет собой маятник. Пусть описанная механическая система находится в поле силы тяжести. Тогда при отклонении материальной точки на
некоторый угол от положения равновесия она под действием силы тяжести
начнeт движение в сторону положения равновесия. Обеспечит направление
движения связь в виде нерастяжимой нити. Если требуется отдельно рассмотреть движение материальной точки, то, в соответствии с принципом
освобождаемости от связей, необходимо анализировать еe с приложенной
(помимо силы тяжести) силой натяжения нити (силой реакции связей). Действие суперпозиции этих сил обеспечит в текущий момент времени такое
же движение материальной точки, которое она совершила бы в составе маятника.
На рис. 7.2 представлено тело, перемещающееся вверх по неподвижной
наклонной плоскости. Механическая система находится в поле силы тяжести. На тело со стороны плоскости действует сила сухого трения. Чтобы
101
рассмотреть тело отдельно от поверхности, по которой оно перемещается, необходимо (как и в предыдущем случае) заменить связь еe реакцией. В
данном случае это будет сила реакции опоры. Под действием изображeнной
группы сил тело, так же как и в предыдущем случае, сохранит движение,
аналогичное его движению в составе системы.
Примерами часто встречающихся в задачах связей являются шарнирные соединения. Среди них можно выделить плоский цилиндрический (на
неподвижной опоре и на катках) и сферический шарниры.
Плоский цилиндрический шарнир на неподвижной опоре даeт закреплeнному на нeм телу вращательную степень свободы вокруг своей оси.
Возникающая в этом случае в шарнире реакция (которую необходимо учитывать при избавлении от него при помощи принципа освобождаемости от
связей) будет произвольным образом направлена в плоскости шарнира, как
это показано на рис. 7.3.
Плоский цилиндрический шарнир на катках позволяет (в отличие от
шарнира на неподвижной опоре) ещe и горизонтально передвигаться по поверхности (вдоль одной из осей в плоскости шарнира). Возникающая в этом
случае в шарнире реакция (которую необходимо учитывать при избавлении
от него при помощи принципа освобождаемости от связей) будет направлена строго по вертикальной оси (второй оси в плоскости шарнира), как это
показано на рис. 7.4.
Рис. 7.4. Цилиндрический шарнир на катках
Рис. 7.3. Плоский цилиндрический шарнир
Сферический шарнир на неподвижной опоре даeт закреплeнному на
нeм телу вращательные степени свободы вокруг неподвижной точки (по
трeм осям). Возникающая в этом случае в шарнире реакция (которую
необходимо учитывать при избавлении от него при помощи принципа освобождаемости от связей) будет направлена произвольным образом, как это
показано на рис. 7.5.
102
Ещe одним распространeнным способом фиксации тел в механизмах
является использование заделки. В этом случае один из концов тела (часто стержня) закрепляется внутри неподвижной ортогональной его сечению
плоскости, как это указано на рис. 7.6. Возникающие в этом случае в заделке реакции не ограничиваются произвольно направленной в пространстве
силой. К ней добавляется момент реакции, произвольно направленный относительно точки заделки 𝐴.
Рис. 7.5. Сферический шарнир
Рис. 7.6. Заделка
7.3. Принцип виртуальных перемещений
С использованием принципа виртуальных перемещений могут быть
определены условия равновесия механических систем.
Равновесие — такое положение системы, в котором система будет находиться всe время, если в начальный момент времени она находилась в этом
положении и скорости всех еe точек были равны нулю.
Условием равновесия системы в статике является выражение:
𝑛
𝑚
∑︁
∑︁
#»
#»
ℛλ ,
ℱ𝑖 +
𝑖=1
λ=1
#»
где ℱ𝑖 — внешние силы, приложенные к точкам системы,
#»
ℛλ — силы реакций связей, наложенных на точки системы,
𝑖 = 1, 𝑛 — количество сил, приложенных к точкам системы,
λ = 1, 𝑚 — количество связей, наложенных на точки системы.
Воспользовавшись принципом освобождаемости от связей, заменим их
реакциями, а реакции запишем, как активные силы. Тогда условием статиче#»
ского равновесия станет равенство нулю суммы всех активных сил: ℱ = 0,
103
#»
где ℱ — главный вектор сил (отличается от равнодействующей, которая обязательно приложена к физической точке тела; см. пример совпадения и
отличия этих понятий на рис. 7.7, 7.8).
Рис. 7.8.
Рис. 7.7.
В случае, когда в системе действуют моменты, уравнение статического
равновесия примет вид:
𝑛
∑︁
𝑖=1
𝑛
∑︁
#»
# »
#»
ℳ𝑂 (ℛλ ) = 0 =⇒ ℳ𝑂 = 0.
ℳ𝑂 ( ℱ𝑖 ) +
𝑖=1
Принцип виртуальных перемещений позволяет найти положение равновесия для динамической, подвижной системы. Формулируется этот
принцип следующим образом: для того, чтобы механическая система,
подчинeнная идеальным стационарным двусторонним связям при нулевых
начальных скоростях точек этой системы, находилась в состоянии покоя
и равновесия, необходимо и достаточно, чтобы сумма виртуальных работ
всех сил, приложенных к точкам системы, на любом виртуальном перемещении из указанного положения равнялась нулю.
Определяется положение относительного равновесия:
𝑛
∑︁
#»
δ𝒜 =
ℱ𝑖 δ #»
𝑟𝑖 = 0,
𝑖=1
где 𝑖 = 1, 𝑛 — количество точек в системе, к которым приложена сила.
7.4. Условие равновесия системы
Раскроем в выражении для виртуальной работы активных сил виртуальное изменение радиуса-вектора, с последующим выделением обобщeн104
ной силы.
]︃
[︃ 𝑛
𝑛
𝑛
𝑘
𝑘
∑︁
∑︁
∑︁ #» 𝜕 #»
𝑟𝑖
𝑟𝑖
#» #» ∑︁ #» ∑︁ 𝜕 #»
δ𝑞𝑗 .
δ𝒜 =
ℱ𝑖 δ 𝑟𝑖 =
ℱ𝑖
δ𝑞 =
ℱ𝑖
𝜕𝑞𝑗 𝑗
𝜕𝑞𝑗
𝑖=1
𝑖=1
𝑗=1
𝑗=1 𝑖=1
⏞
⏟
𝒬𝑗
Тогда принцип виртуальных перемещений может быть записан как
δ𝒜 =
𝑘
∑︁
𝒬𝑗 δ𝑞𝑗 = 0,
𝑗=1
где δ𝑞𝑗 — ненулевые виртуальные изменения по обобщeнным координатам.
Обобщeнные координаты независимы, следовательно, δ𝑞𝑗 также независимы.
Пусть δ𝑞1 ̸= 0, а δ𝑞2 , δ𝑞𝑘 = 0; тогда из предыдущего выражения получим:
δ𝒜 = 𝒬1 δ𝑞1 = 0 =⇒ 𝒬1 = 0.
Отсюда, с учeтом независимости виртуальных перемещений по обобщeнным координатам, следует, что чтобы система при нулевых начальных
условиях была в положении равновесия, необходимо и достаточно, чтобы
каждая обобщeнная сила была равна нулю.
7.5. Определение положения равновесия системы, находящейся под
действием заданной системы сил
Рассмотрим задачу получения уравнения движения механической системы, частично разобранную в разд. 4.4 и глав. 6. В числе прочего в
ней требуется определить положение равновесия механической системы,
находящейся под действием заданной системы сил. Проделаем это, воспользовавшись полученным в предыдущем параграфе утверждением: чтобы
система при нулевых начальных условиях была в положении равновесия,
необходимо и достаточно, чтобы каждая обобщeнная сила была равна
нулю. В данном случае имеется только одна обобщeнная координата φ и
только одна соответствующая ей обобщeнная сила 𝒬φ . Выражение для
обобщeнной силы было получено в глав. 6:
𝒬 = 𝒞1 sin φ + 𝒞2 cos φ + 𝒞3 sin(2φ) + 𝒞4 φ̇ sin2 φ + 𝒞5 φ̇ cos2 φ.
105
При значении обобщeнной координаты, соответствующем положению
равновесия системы (φ = φ* ), скорости и ускорения в системе должны
отсутствовать, а обобщeнная сила равняться нулю:
𝒬|φ=φ* = 0
φ̇=0
φ̈=0
𝒬 = 𝒞1 sin φ* + 𝒞2 cos φ* + 𝒞3 sin(2φ* ) = 0.
Уравнение решается относительно φ, находятся значения φ* , соответствующие положениям равновесия (может быть несколько).
Требуемое к решению относительно φ* уравнение имеет вид
𝒞1 sin φ* + 𝒞2 cos φ* + 𝒞3 sin(2φ* ) = 0.
С учeтом раскрытия синуса двойного угла и тригонометрических тождеств, позволяющих перейти от синуса и косинуса к тангенсу половинного
угла, имеем:
1 − tg2 φ2*
2 tg φ2* 1 − tg2 φ2*
2 tg φ2*
+ 𝒞2
+ 𝒞3 2
= 0.
𝒞1
1 + tg2 φ2*
1 + tg2 φ2*
1 + tg2 φ2* 1 + tg2 φ2*
Обозначим tg φ2* за 𝑥 и домножим это выражение на (1 + 𝑥2 )2 . Будем иметь:
𝒞1 2𝑥(1 + 𝑥2 ) + 𝒞2 (1 − 𝑥2 )(1 + 𝑥2 ) + 𝒞3 22𝑥(1 − 𝑥2 ) = 0.
Раскроем скобки:
2 −X𝒞
2
4
3
XX
2𝒞1 𝑥 + 2𝒞1 𝑥3 + 𝒞2 +X𝒞X2X
𝑥X
2 𝑥X − 𝒞2 𝑥 + 4𝒞3 𝑥 − 4𝒞3 𝑥 = 0.
X
X
Сгруппируем по степеням 𝑥:
𝑥4 (−𝒞2 ) + 𝑥3 (2𝒞1 − 4𝒞3 ) + 𝑥(2𝒞1 + 4𝒞3 ) + 𝒞2 = 0.
Уравнение 4-ой степени будет иметь 4 корня: 𝑥1 , 𝑥2 , 𝑥3 , 𝑥4 . Вспомнив,
что 𝑥 = tg φ2* , можно найти корни φ*1 , φ*2 , φ*3 , φ*4 как
φ*1,2,3,4 = 2 arctg 𝑥1,2,3,4 .
106
Следует учесть, что положения равновесия могут быть как устойчивыми, так и неустойчивыми. Примером устойчивого положения равновесия
может служить шарик в ямке: при отклонении шарика от дна ямки он, после
того как его отпустят, вернeтся в еe нижнюю точку — в устойчивое положение равновесия. Примером неустойчивого положения равновесия может
служить шарик на холмике: при отклонении шарика от вершины холмика он, после того как его отпустят, не вернeтся в его верхнюю точку — в
неустойчивое положение равновесия. Определить устойчивость найденного
положения равновесия
можно по следующим соотношениям:
⃒
𝜕𝒬 ⃒
< 0 — устойчивое равновесие;
φ* = φ*1 , 𝜕 φ ⃒
⃒φ=φ*
⃒
φ* = φ*2 , 𝜕𝒬
> 0 — неустойчивое равновесие.
𝜕φ ⃒
φ=φ*
⃒
𝜕𝒬 ⃒⃒
= 𝒞1 cos φ* − 𝒞2 sin φ* + 2𝒞3 cos(2φ* ).
𝜕φ ⃒φ=φ*
7.6. Определение реакции опор с использованием принципа
виртуальных перемещений
Рассмотрим несколько задач, иллюстрирующих применение принципа виртуальных перемещений для поиска реакций в опорах механических
конструкций.
7.6.1. Задача «шарнирная арка»
Пусть имеется система, изображeнная на рис. 7.9, состоящая из двух
одинаковых полуарок, скреплeнных между собой шарнирно (в точке 𝐶).
Нижние концы образованной ими арки опираются на плоские цилиндрические шарниры на неподвижной опоре (в точках 𝐴 и 𝐵). Высоту конструкции
(она же радиус внутренней окружности арки) обозначим ℎ. Вертикально
сверху на систему действуют постоянные силы 𝑃1 и 𝑃2 . Каждая из сил приложена посередине между краем арки и еe серединой (точкой 𝐶): 𝑃1 слева,
а 𝑃2 справа. Расстояния от силы до края или центра арки обозначим 𝑙.
Считая 𝑃1 , 𝑃2 , 𝑙 и ℎ заданными определим реакцию опоры в точке 𝐴
(𝑅𝐴 ) с использованием принципа виртуальных перемещений.
107
Рис. 7.10.
Рис. 7.9.
Изображeнный на рис. 7.9 механизм не имеет степеней свободы (неподвижен, при условии что его части являются твeрдыми телами). Для
того чтобы использовать принцип виртуальных перемещений, необходимо
освободить конструкцию от связи. Для этого используем принцип освобождаемости от связи: мысленно отбросим связь (опору 𝐴) и заменим еe
реакцией. Следует отметить, что в механизме при этом ничего не изменится: он по-прежнему должен будет остаться неподвижным, что будет
обеспечиваться силой реакции связи. Однако в новом состоянии он получит
возможности к движению, что позволит использовать принцип виртуальных
(возможных) перемещений, исходящих из условия его нахождения в положении равновесия.
За счeт освобождения от связи система получит две степени свободы. Введeм соответствующие им обобщeнные координаты: 𝑞1 = α, 𝑞2 = β
(см. рис. 7.10).
Следует отметить, что в соответствии с принципом виртуальных перемещений изображeнная на рис. 7.10 система будет находиться в положении
равновесия при условии, что обобщeнные силы по двум еe обобщeнным
координатам окажутся равными нулю: 𝒬α = 0, 𝒬β = 0. Ниже последовательно проанализируем оба приведeнных условия. Для поиска обобщeнной
силы по заданной обобщeнной координате определим виртуальную работу
по соответствующей координате и поделим еe на виртуальное перемещение
по этой координате.
Сначала определим виртуальную работу по координате α. В этом случае нас не интересует движение по координате β, поэтому «замораживаем»
связь по β, что эквивалентно смене шарнира на заделку в опоре 𝐵, как
108
это указано на рис. 7.11. Для удобства здесь и далее представим реакцию
Рис. 7.11.
Рис. 7.12.
связи в точке 𝐴, как суперпозицию горизонтальной (𝑋𝐴 ) и вертикальной
(𝑌𝐴 ) реакций.
Тогда виртуальное перемещение будет ненулевым только по одной
обобщeнной координате: δα ̸= 0; δβ = 0.
Работу на перемещении δα будут совершать три силы:
δ𝒜α = δ𝒜𝑃1 + δ𝒜𝑌𝐴 + δ𝒜𝑋𝐴 .
Каждая из этих сил создаст момент силы, направленный либо в сторону указанного на рис. 7.11 изменения обобщeнной координаты (тогда он
записывается положительным), либо в противоположную сторону (тогда он
записывается отрицательным). Каждый из этих моментов определяется как
произведение силы на плечо до оси 𝑧1 , проходящей через точку 𝐶 и ортогональной плоскости рис. 7.11.
#»
δ𝒜𝑃1 = ℳ𝑧1 (𝑃1 )δα =⇒ δ𝒜𝑃1 = (−𝑃1 𝑙)δα
#»
δ𝒜𝑌𝐴 = ℳ𝑧1 (𝑌𝐴 )δα =⇒ δ𝒜𝑌𝐴 = (𝑌𝐴 2𝑙)δα
# »
δ𝒜𝑋𝐴 = ℳ𝑧1 (𝑋𝐴 )δα =⇒ δ𝒜𝑋𝐴 = (−𝑋𝐴 ℎ)δα.
Итоговое выражение для виртуальной работы будет получено путeм
алгебраического суммирования виртуальных работ отдельных сил:
δ𝒜α = (−𝑃1 𝑙 + 𝑌𝐴 2𝑙 − 𝑋𝐴 ℎ)δα.
Выражение в скобках представляет собой обобщeнную силу по координате δα и, в соответствии с условиями равновесия системы, должно быть
109
равно нулю:
−𝑃1 𝑙 + 𝑌𝐴 2𝑙 − 𝑋𝐴 ℎ = 0.
Затем аналогичным образом определим виртуальную работу по координате β. В этом случае нас не интересует движение по координате α, поэтому
«замораживаем» связь по α, что эквивалентно смене шарнира на сварку в
точке 𝐶, как это указано на рис. 7.12. Тогда виртуальное перемещение будет
ненулевым только по одной обобщeнной координате: δα = 0; δβ ̸= 0.
Работу на перемещении δα будут совершать четыре силы:
δ𝒜β = δ𝒜𝑃1 + δ𝒜𝑃2 + δ𝒜𝑋𝐴 + δ𝒜𝑌𝐴 .
Каждая из этих сил создаст момент силы, знак которого определяется
аналогично уже рассмотренному для координаты α случаю (только теперь
нас интересует направление β). Каждый из этих моментов определяется
как произведение силы на плечо до оси 𝑧1 , проходящей через точку 𝐵 и
ортогональной плоскости рис. 7.12.
δ𝒜𝑃1 = ℳ𝑧1 (𝑃1 )δβ = (−3𝑙𝑃1 )δβ
δ𝒜𝑃2 = ℳ𝑧1 (𝑃2 )δβ = (−𝑙𝑃2 )δβ
δ𝒜𝑋𝐴 = ℳ𝑧1 (𝑋𝐴 )δβ = 0 (сила 𝑋𝐴 проходит через 𝑧1 )
δ𝒜𝑌𝐴 = ℳ𝑧1 (𝑌𝐴 )δβ = (4𝑙𝑌𝐴 )δβ.
Итоговое выражение для виртуальной работы будет получено путeм
алгебраического суммирования виртуальных работ отдельных сил:
δ𝒜β = (−3𝑙𝑃1 − 𝑙𝑃2 + 4𝑙𝑌𝐴 )δβ = 0.
Выражение в скобках представляет собой обобщeнную силу по координате δβ и, в соответствии с условиями равновесия системы, должно быть
равно нулю:
−3𝑙𝑃1 − 𝑙𝑃2 + 4𝑙𝑌𝐴 = 0.
Из рассмотренных условий равновесия анализируемой системы получены два уравнения:
−𝑃1 𝑙 + 𝑌𝐴 2𝑙 − 𝑋𝐴 ℎ = 0
−3𝑙𝑃1 − 𝑙𝑃2 + 4𝑙𝑌𝐴 = 0.
110
Из второго уравнения можно напрямую определить реакцию по вертикальной оси:
𝑌𝐴 =
1
3𝑃1 + 𝑃2
= (3𝑃1 + 𝑃2 ).
4
4
Подставив 𝑌𝐴 в первое уравнение, найдeм реакцию по горизонтальной оси:
2𝑙𝑌𝐴 − 𝑙𝑃1
𝑋𝐴 =
ℎ
(︂
)︂
1 1
𝑙(3𝑃1 + 𝑃2 ) − 𝑙𝑃1 =
𝑋𝐴 =
ℎ 2
(︂
)︂
1 1
1
𝑙
=
𝑙𝑃1 + 𝑙𝑃2 = (𝑃1 + 𝑃2 ).
ℎ 2
2
2ℎ
Таким образом, искомая реакция опоры 𝑅𝐴 определена как суперпозиция еe ортогональных составляющих:
𝑙
(𝑃 + 𝑃2 )
2ℎ 1
1
𝑌𝐴 = (3𝑃1 + 𝑃2 ).
4
𝑋𝐴 =
7.6.2. Задача «балка на опорах»
Пусть имеется система, состоящая из трeх последовательно шарнирно
скреплeнных (в точках 𝐵 и 𝐷) стержней, изображeнная на рис. 7.13. Правый конец этой составной балки заделан в точке 𝐸. Левый конец левого
стержня (точка 𝐴) и центр среднего стержня (точка 𝐶) опираются на цилиндрические шарнирные опоры на катках. Размеры стержней 𝐴𝐵 и 𝐷𝐸
совпадают и равны 2𝑙. Размер стержня 𝐵𝐷 составляет 4𝑙. На конструкцию действуют силы 𝑃1 (приложена посередине между точками 𝐴 и 𝐵), 𝑃2
(приложена посередине между точками 𝐵 и 𝐶), 𝑃3 (приложена посередине
между точками 𝐶 и 𝐷), 𝑃4 (приложена посередине между точками 𝐷 и 𝐸).
Все перечисленные силы постоянны и равны 𝑃 .
Считая 𝑃 и 𝑙 заданными, определим реакции опоры 𝐴 (𝑅𝐴 ), опоры 𝐶
(𝑅𝐶 ) и заделки 𝐸 (т. е. силу реакции 𝑅𝐸 и момент реакции 𝑀𝐸 ) с использованием принципа виртуальных перемещений.
111
Рис. 7.13.
Следует отметить, что в изображeнной ситуации силы реакции (𝑅𝐴 ,
𝑅𝐶 , 𝑅𝐸 ) будут направлены вертикально вверх, а момент реакции (𝑀𝐸 ) —
вокруг оси, проходящей через точку 𝐸 и ортогональной плоскости рисунка.
Изображeнный на рис. 7.13 механизм не имеет степеней свободы
(неподвижен, при условии что его части являются твeрдыми телами). Для
того чтобы использовать принцип виртуальных перемещений, необходимо
освободить конструкцию от связи. Для этого используем принцип освобождаемости от связи: мысленно отбросим связь (опору 𝐴) и заменим еe
реакцией, а заделку в точке 𝐸 заменим на неподвижный цилиндрический
шарнир. Следует отметить, что в механизме при этом ничего не изменится: он по-прежнему должен будет остаться неподвижным, что будет
обеспечиваться силой реакции связи. Однако в новом состоянии он получит
возможности к движению, что позволит использовать принцип виртуальных
(возможных) перемещений, исходящих из условия его нахождения в положении равновесия.
За счeт освобождения от связи система получит три степени свободы. Введeм соответствующие им обобщeнные координаты: 𝑞1 = α
(см. рис. 7.14), 𝑞2 = β (см. рис. 7.15), 𝑞3 = γ (см. рис. 7.16).
Следует отметить, что в соответствии с принципом виртуальных перемещений освобождeнная от части связей система будет находиться в
положении равновесия при условии, что обобщeнные силы по двум еe обобщeнным координатам окажутся равными нулю: 𝒬α = 0, 𝒬β = 0, 𝒬γ = 0.
Ниже последовательно проанализируем оба приведeнных условия.
112
Для поиска обобщeнной силы по заданной обобщeнной координате
определим виртуальную работу по соответствующей координате и поделим
еe на виртуальное перемещение по этой координате. Сначала определим
виртуальную работу по координате α. В этом случае нас не интересует движение по координатам β и γ, поэтому «замораживаем» связи по ним, что
эквивалентно смене шарнира на заделку в опоре 𝐸 и введению единого
(сварного) стержня между точками 𝐵 и 𝐸, как это указано на рис. 7.14.
Рис. 7.14.
Тогда, воспользовавшись соображениями, аналогичными предыдущей
задаче, определим реакцию 𝑅𝐴 , которая в соответствии с принципом виртуальных перемещений уравновесит анализируемую систему:
δ𝒜α = δ𝒜𝑃1 + δ𝒜𝑋𝐴 + δ𝒜𝑌𝐴
δ𝒜𝑃1 = [−𝑃 𝑙]δα
δ𝒜𝑋𝐴 = 0δα
δ𝒜𝑌𝐴 = [𝑌𝐴 2𝑙]δα
δ𝒜α = [−𝑃 𝑙 + 𝑌𝐴 2𝑙]δ𝒜
𝒬α = −𝑃 𝑙 + 𝑌𝐴 2𝑙 = 0 =⇒ 𝑌𝐴 =
𝑃𝑙
1
= 𝑃
2𝑙
2
1
𝑅𝐴 = 𝑃.
2
Затем определим виртуальную работу по координате β. В этом случае
нас не интересует движение по координатам α и γ, поэтому «замораживаем» связи по ним, что эквивалентно смене шарнира на заделку в опоре
𝐸 и введению единого (сварного) стержня между точками 𝐴 и 𝐷, как это
указано на рис. 7.15.
Тогда, вновь воспользовавшись ранее разобранным подходом, определим реакцию 𝑅𝐶 , которая в соответствии с принципом виртуальных
113
Рис. 7.15.
перемещений уравновесит анализируемую систему:
δ𝒜β = δ𝒜𝑅𝐴 + δ𝒜𝑃1 + δ𝒜𝑃2 + δ𝒜𝑃3 + δ𝒜𝑅𝐶
]︁
[︁ 1
δ𝒜β = 𝑃 6𝑙 − 𝑃 5𝑙 − 𝑃 3𝑙 − 𝑃 𝑙 + 𝑅𝐶 2𝑙 δβ
2
𝒬β = 0
−6𝑃 𝑙 + 2𝑅𝐶 𝑙 = 0
𝑅𝐶 = 3𝑃.
Затем определим виртуальную работу по координате γ. В этом случае
нас не интересует движение по координатам α и β, поэтому «замораживаем» связи по ним, что эквивалентно введению единого (сварного) стержня
между точками 𝐴 и 𝐸, как это указано на рис. 7.16.
Рис. 7.16.
Тогда, вновь воспользовавшись ранее разобранным подходом, определим реакцию 𝑀𝐸 , которая в соответствии с принципом виртуальных
перемещений уравновесит анализируемую систему:
[︁ 1
]︁
δ𝒜γ = 𝑃 8𝑙 − 𝑃 7𝑙 − 𝑃 5𝑙 + 3𝑃 4𝑙 − 𝑃 3𝑙 − 𝑃 𝑙 + ℳ𝐸 δγ
2
𝒬γ = 0
ℳ𝐸 = 0.
114
Из рассмотренных выше ситуаций невозможным оказалось определить
только реакцию 𝑅𝐸 . Для еe вычисления проанализируем альтернативно изменeнную с использованием принципа освобождаемости от связей систему:
полностью удалим заделку в точке 𝐸, оставив правый конец балки свободным, как это указано на рис. 7.17.
Рис. 7.17.
За счeт освобождения от связи система получит одну степень свободы. Введeм соответствующую ей обобщeнную координату: 𝑞4 = θ
(см. рис. 7.17).
Тогда, вновь воспользовавшись ранее разобранным подходом, определим реакцию 𝑅𝐸 , которая в соответствии с принципом виртуальных
перемещений уравновесит анализируемую систему:
δ𝒜θ = [−𝑃 𝑙 + 𝑌𝐸 2𝑙]δθ
1
𝑌𝐸 = 𝑃 = 𝑅𝐸 .
2
7.6.3. Задача «трeхшарнирная система»
Пусть имеется система, состоящая из трeх шарнирно скреплeнных (в
точках 𝐵 и 𝐶) стержней, изображeнная на рис. 7.18. Стержни 𝐴𝐵 и 𝐶𝐷
расположены вертикально. Стержень 𝐵𝐶 соединяет их. Длину стержня 𝐴𝐵
обозначим ℎ; тогда длина стержня 𝐶𝐷 будет 2ℎ. К центрам стержней 𝐵𝐶 и
𝐶𝐷 приложены постоянные горизонтальные силы 𝑃1 и 𝑃2 , соответственно.
Вертикальная стойка 𝐴𝐵 защемлена в сечении 𝐴. Стержень 𝐶𝐷 закреплeн
на неподвижном цилиндрическом шарнире в точке 𝐷.
Определим горизонтальную составляющую реакции в сечении 𝐴.
115
Рис. 7.18.
Рис. 7.19.
Для этого, по аналогии с предыдущими задачами, отбрасываем связь,
препятствующую горизонтальному смещению точки 𝐴, т. е. заменим заделку на цилиндрический шарнир на катках (см. рис. 7.19). При этом
зафиксируем дополнительно появившиеся степени свободы: заменим шарниры в точках 𝐴 и 𝐵 на сварочное соединение. Тогда система будет иметь
только одну степень свободы. Введeм соответствующую ей обобщeнную
координату φ и еe виртуальное изменение δφ.
В этом случае в первом приближении можно посчитать часть механизма 𝐴𝐵𝐶 движущейся поступательно влево (в силу малости виртуального
перемещения δφ дуга, описываемая точкой 𝐶, совпадeт с линейным
перемещением δ #»
𝑟𝐶 ). Тогда виртуальные перемещения точек поступательно движущегося фрагмента механизма будут равны. С использованием
принципа виртуальных перемещений (действуя аналогично предыдущим
задачам) получим искомую реакцию:
|δ #»
𝑟𝐴 | = |δ #»
𝑟𝐵 | = |δ #»
𝑟1 | = |δ #»
𝑟𝐶 |
#»
#
»
#
»
𝑅 𝐴𝑥 δ #»
𝑟𝐴 + 𝑃1 δ #»
𝑟1 + 𝑃2 δ #»
𝑟2 = 0
|δ #»
𝑟 | = 2ℎδφ
𝐶
|δ #»
𝑟2 | = ℎδφ
(︀
)︀
𝑅𝐴𝑥 2ℎ + 𝑃1 2ℎ + 𝑃2ℎ δφ = 0
𝑃
𝑅𝐴𝑥 = −𝑃1 − 2 .
2
116
7.7. Метод кинетостатики. Принцип Даламбера. Основное уравнение
динамики
Основное уравнение динамики движущейся материальной точки в соответствии со вторым законом Ньютона можно записать как:
#» #»
𝑚 #»
𝑎 = ℱ + ℛ,
#»
где 𝑚 = const, #»
𝑎 — абсолютное ускорение, ℱ — равнодействующая актив#»
ных сил, ℛ — равнодействующая сил реакций связей.
Это выражение может быть переписано в следующей форме:
#» #» #» #»
ℱ +ℛ + Φ = 0,
#»
где Φ = −𝑚 #»
𝑎 — Даламберова сила инерции (или просто сила инерции).
Приведeнное выражение носит название «принцип Даламбера» и гласит: в любой момент времени движения точки геометрическая сумма
задаваемых сил, сил реакций связей и сил инерции равна нулю.
Расчeт силы инерции связан с получением абсолютного ускорения.
Обычно используется его координатное представление или разбиение на
переносную, относительную и Кориолисову составляющие:
[︁ #»
[︀
]︀
#»]︁
#»
#»
#»
Φ = −𝑚 𝑎 = −𝑚 𝑥¨ 𝑖 + 𝑦¨ 𝑗 + 𝑧¨ 𝑘 = −𝑚 #»
𝑎 + #»
𝑎 + #»
𝑎
,
𝑒
𝑟
Кор
где
#»
𝑎 — абсолютное ускорение;
#»
𝑎 𝑒 — переносное ускорение (ускорение той точки связанной системы координат, в которой в данный момент времени находится точка);
#»
𝑎 𝑟 — относительное ускорение (ускорение точки по отношению к связанной
системе координат, которая при этом считается неподвижной);
#»
𝑎 Кор — Кориолисово ускорение (мера взаимного влияния переносного и относительного движений).
Переходя от точки к несвободной системе, необходимо осуществить
суммирование по всем еe точкам. Для механической системы принцип Даламбера справедлив и для моментов:
⎧ ∑︁ #» #» ∑︁ #» # » ∑︁ #» #»
𝑟𝑖 × ℱ𝑖 +
𝑟𝑖 × ℛ𝑖 +
𝑟𝑖 × Φ 𝑖 = 0
⎪
⎪
⎨
𝑖
𝑖
∑︁
∑︁ # »𝑖 ∑︁ #»
#»
⎪
ℱ𝑖 +
ℛ𝑖 +
Φ 𝑖 = 0.
⎪
⎩
𝑖
𝑖
𝑖
117
Соответственно, для моментов принцип Даламбера формулируется так:
в любой момент времени движения геометрическая сумма моментов активных сил, моментов реакций связей и моментов сил инерции равна нулю.
Геометрическое суммирование по всем точкам даст вместо каждой суммы
главный вектор (сил или моментов сил).
Тогда, в соответствии с уравнениями равновесия геометрической статики:
{︃
#» #» #»
ℱ +ℛ = 0
# » #»
# » #»
#»
ℳ𝑂 ( ℱ) + ℳ𝑂 (ℛ) = 0
, можно сформулировать имеющие аналогичную форму условия равновесия
движущихся систем. Поскольку они относятся к подвижным объектам, но
сформулированы как для неподвижных, то они получили названия уравнений кинетостатики. В любой момент времени геометрическая сумма
главных векторов сил равна нулю:
#» #» #» #»
ℱ +ℛ + Φ = 0.
В любой момент времени геометрическая сумма главных моментов активных сил, сил реакции связей и сил инерции равна нулю:
# » #»
# » #»
# » #»
#»
ℳ𝑂 ( ℱ) + ℳ𝑂 (ℛ) + ℳ𝑂 ( Φ) = 0 .
7.8. Определение сил инерции и моментов сил инерции для различных
случаев движения твeрдого тела
7.8.1. Общий случай движения твeрдого тела
Главный вектор сил инерции может быть записан через сумму сил
инерции всех точек тела, а в случае непрерывного распределения массы
по телу — через интеграл.
∫︁
∑︁
#»
Φ=−
𝑚𝑖 #»
𝑎 𝑖 = − #»
𝑎 𝑑𝑚.
𝑖
𝑚
Вспомним выражение для центра масс (см. разд. 3.1):
∑︀ #»
∑︀ #»
𝑚𝑖 𝑟𝑖
𝑚
𝑟
#»
.
𝑟𝑐 = ∑︀ 𝑖 𝑖 =
𝑚𝑖
𝑚
118
Вынося производную за знак суммы (это справедливо, т. к. масса считается независимой от времени) и применив выражение для центра масс,
можно получить:
𝑑2 ∑︁ #»
𝑑2 #»
#»
𝑎 𝑐.
Φ=− 2
𝑟𝑖 𝑚𝑖 = − 2 𝑚 𝑟𝑐 = −𝑚 #»
𝑑𝑡
𝑑𝑡
𝑖
#»
Таким образом, Φ = −𝑚 #»
𝑎 𝑐 , где 𝑚 — масса тела, #»
𝑎 𝑐 — абсолютное ускорение центра масс.
Вспомним теорему об изменении кинетического момента:
#»
# » #»
˙
𝐿 𝑂 = ℳ𝑂 ( ℱ).
Тогда уравнение кинетостатики для моментов сил (при условии введения
сил реакций связи в класс активных сил) может быть записано как:
#»
# » #»
˙
𝐿 𝑂 + ℳ𝑂 ( Φ) = 0.
В соответствии с формулой Бура производная от вектора кинетического
момента может быть представлена как:
*
#»
#»
#»
˙
#» × 𝐿
.
𝐿𝑂 =
𝐿𝑂
+ ω
⏟ ⏞
⏟ ⏞ 𝑂
относительная
(локальная)
производная
переносная
(конвективная)
производная
Учтeм также, что кинетический момент в матричной форме может быть
представлен как произведение тензора инерции на вектор-столбец проекций
угловой скорости тела:
[𝐿𝑂 ] = [𝒥][ω].
С учeтом этих выражений получим следующую запись в матричной
форме:
̂︀
}︀
{︀
#»
[ℳ𝑐 ( Φ)] = − [𝒥][ε] + [ω]·[𝒥][ω]
[Φ] = −𝑚[𝑎𝑐 ],
где [ε] — вектор-столбец проекций углового ускорения тела. Полученное выражение для момента сил инерции должно соответствовать формуле для
силы инерции (в качестве полюса должен быть взят центр масс тела, т. е.
моменты инерции выражены в центральных осях).
119
7.8.2. Поступательное движение
В соответствии с условиями поступательного движения тело не меняет
своей ориентации, поэтому полученные для общего случая движения формулы приобретают вид:
ω=ε=0
#»
Φ = −𝑚 #»
𝑎𝑐
# » #»
ℳ𝑐 ( Φ) = 0.
7.8.3. Вращательное движение вокруг неподвижной оси
Пусть центр масс тела не лежит на оси вращения 𝑦, как это изображено на рис. 7.20.
Рис. 7.20.
Вращение по осям 𝑥 и 𝑧 отсутствует:
ω𝑥 = ω𝑧 = ω̇𝑥 = ω̇𝑧 = 0.
Ускорение центра масс тела в этом случае можно представить как суперпозицию его вращательного и осестремительного ускорений:
вр
#»
𝑎 𝑐 = #»
ε × #»
𝑟𝑐
#» × (ω
#» × #»
#»
𝑎 ос = ω
𝑟 )
𝑐
вр
#»
𝑎 𝑐 ⊥ #»
𝑎 𝑐ос
вр
#»
𝑎 𝑐 = #»
𝑎 𝑐 + #»
𝑎 𝑐ос .
120
𝑐
Тогда сила инерции может быть записана как:
#»
вр
#» × (ω
#» × #»
Φ = −𝑚 #»
𝑎 𝑐 = −𝑚[ #»
𝑎 𝑐 + #»
𝑎 𝑐ос ] = −𝑚[ #»
ε × #»
𝑟𝑐 + ω
𝑟𝑐 )],
или в матричной форме:
̂︀ ̂︀
}︀
{︀ ̂︀
[Φ] = −𝑚 [ε][𝑟𝑐 ] + [ω]([ω][𝑟𝑐 ])
[Φ] =
⎧⎡
⎤⎡ ⎤ ⎡
⎤ ⎛⎡
⎤ ⎡ ⎤⎞⎫
⎪
⎪
0
0
ε
𝑥
0
0
ω
0
0
ω
𝑥𝑐
𝑦
𝑐
𝑦
𝑦
⎨
⎬
⎢
⎥⎢ ⎥ ⎢
⎥ ⎜⎢
⎥ ⎢ ⎥⎟
= −𝑚 ⎣ 0 0 0 ⎦ ⎣ 𝑦𝑐 ⎦ + ⎣ 0 0 0 ⎦ ⎝⎣ 0 0 0 ⎦ ⎣ 𝑦𝑐 ⎦⎠ =
⎪
⎪
⎩
⎭
−ε𝑦 0 0
𝑧𝑐
−ω𝑦 0 0
−ω𝑦 0 0
𝑧𝑐
⎧⎡
⎤ ⎡
⎤⎫
2
⎪
−ω𝑦 𝑥𝑐 ⎪
⎨ 𝑧𝑐 ε𝑦
⎬
⎢
⎥ ⎢
⎥
= −𝑚 ⎣ 0 ⎦ + ⎣ 0 ⎦ .
⎪
⎪
⎩
⎭
−𝑥𝑐 ε𝑦
−ω2𝑦 𝑧𝑐
Подставив в выражение для момента сил инерции проекции угловых
скоростей и ускорений (нулевые по осям 𝑥 и 𝑧), будем иметь:
⎧⎡
⎤⎡ ⎤
⎪
𝒥
−𝒥
−𝒥
0
𝑥
𝑥𝑦
𝑥𝑧
⎨
[︁
#» ]︁
⎢
⎥⎢ ⎥
ℳ( Φ) = − ⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ε𝑦 ⎦ +
⎪
⎩
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
0
⎡
⎤ ⎛⎡
⎤ ⎡ ⎤⎞⎫
⎪
0 0 ω𝑦
𝒥𝑥 −𝒥𝑥𝑦 −𝒥𝑥𝑧
0
⎬
⎢
⎥ ⎜⎢
⎥ ⎢ ⎥⎟
+ ⎣ 0 0 0 ⎦ ⎝⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ω𝑦 ⎦⎠ =
⎪
⎭
−ω𝑦 0 0
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
0
⎧⎡
⎤ ⎡
⎤⎫
2 ⎪
⎪
−𝒥
ε
−𝒥
ω
𝑥𝑦 𝑦
𝑧𝑦 𝑦 ⎬
⎨
⎢
⎥ ⎢
⎥
= − ⎣ 𝒥𝑦 ε𝑦 ⎦ + ⎣
0
⎦ .
⎪
⎪
⎭
⎩
−𝒥𝑧𝑦 ε𝑦
𝒥𝑥𝑦 ω2𝑦
Если ось вращения — главная ось инерции, то выражение для момента
сил инерции значительно упростится (за счeт равенства нулю центробежных моментов инерции):
⎧⎡
⎤ ⎡
⎤⎫
⎡
⎤
2
⎪
⎪
𝑧
ε
−ω
𝑥
0
𝑐
𝑦
𝑐
𝑦
⎨
⎬ [︁
[︁ ]︁
#» ]︁
⎢
⎥ ⎢
⎥
⎢
⎥
Φ = −𝑚 ⎣ 0 ⎦ + ⎣ 0 ⎦ ;
ℳ( Φ) = − ⎣𝒥𝑦 ε𝑦 ⎦ .
⎪
⎪
⎩
⎭
−𝑥𝑐 ε𝑦
−ω2𝑦 𝑧𝑐
0
121
Если ось вращения — главная центральная ось инерции, сила инерции
окажется нулевой (центр масс лежит на оси вращения):
⎡
[︁ ]︁
Φ = 0;
⎤
0
[︁
#» ]︁
⎢
⎥
ℳ( Φ) = − ⎣𝒥𝑦 ε𝑦 ⎦ .
0
7.8.4. Плоское движение
Пусть тело, изображeнное на рис. 7.21, движется плоско таким образом, что:
ω𝑥 = ω𝑦 = 0;
𝑧𝑐 = 0;
ε𝑦 = ε𝑥 = 0;
ω𝑧 ̸= 0;
ε𝑧 ̸= 0.
Рис. 7.21.
Пусть 𝑧𝑐 — главная центральная ось инерции.
Тогда сила инерции может быть представлена в виде:
[︁ #»
#»
#»]︁
#»
Φ = −𝑚 𝑎 𝑐 = −𝑚 𝑥¨𝑐 𝑖 + 𝑦¨𝑐 𝑗 ;
122
⎡
⎤
𝑚¨
𝑥
𝑐
[︁ ]︁
⎢
⎥
Φ = − ⎣ 𝑚¨
𝑦𝑐 ⎦ .
0
Подставив условия движения в выражение для момента сил инерции,
будем иметь:
⎧⎡
⎤⎡ ⎤
⎪
𝒥
−𝒥
0
0
𝑥
𝑥𝑦
⎨
[︁
#» ]︁
⎢
⎥⎢ ⎥
ℳ𝑧 ( Φ) = − ⎣−𝒥𝑦𝑥 𝒥𝑦
0 ⎦⎣ 0 ⎦ +
⎪
⎩
0
0
𝒥𝑧
ε𝑧
⎡
⎤⎡
⎤ ⎡ ⎤⎫
⎡
⎤
0 −ω𝑧 0
𝒥𝑥 −𝒥𝑥𝑦 0
0 ⎪
0
⎬
⎢
⎥⎢
⎥⎢ ⎥
⎢
⎥
+ ⎣ω𝑧
0 0⎦ ⎣−𝒥𝑦𝑥 𝒥𝑦
0 ⎦⎣ 0 ⎦ = −⎣ 0 ⎦
⎪
⎭
0
0 0
0
0
𝒥𝑧
ω𝑧
𝒥 𝑧 ε𝑧
#»
ℳ𝑧 ( Φ) = −𝒥𝑧𝑐 ε𝑧 .
7.8.5. Сферическое движение
Обычно на практике в качестве осей инерции выбираются главные центральные оси. Тогда:
#»
Φ=0
⎧⎡
⎤⎡ ⎤
⎪
𝒥
0
0
ε𝑥
⎨ 𝑥
[︁
#» ]︁
⎢
⎥⎢ ⎥
ℳ( Φ) = − ⎣ 0 𝒥𝑦 0 ⎦ ⎣ε𝑦 ⎦ +
⎪
⎩
0 0 𝒥𝑧
ε𝑧
⎤ ⎡ ⎤⎞⎫
⎡
⎤ ⎛⎡
⎪
𝒥𝑥 0 0
ω𝑥
0 −ω𝑧 ω𝑦
⎬
⎥ ⎢ ⎥⎟
⎢
⎥ ⎜⎢
+ ⎣ ω𝑧
0 −ω𝑥 ⎦ ⎝⎣ 0 𝒥𝑦 0 ⎦ ⎣ω𝑦 ⎦⎠ =
⎪
⎭
0 0 𝒥𝑧
ω𝑧
−ω𝑦 ω𝑥
0
⎧⎡
⎤ ⎡
⎤⎫
⎪
ω𝑧 ω𝑦 (𝒥𝑧 − 𝒥𝑦 ) ⎪
⎨ 𝒥 𝑥 ε𝑥
⎬
⎢
⎥ ⎢
⎥
= − ⎣ 𝒥𝑦 ε𝑦 ⎦ + ⎣ω𝑥 ω𝑧 (𝒥𝑥 − 𝒥𝑧 )⎦ .
⎪
⎪
⎩
⎭
𝒥𝑧 ε𝑧
ω𝑦 ω𝑥 (𝒥𝑦 − 𝒥𝑥 )
123
Если же оси инерции выбраны произвольным образом, то момент сил
инерции будет иметь общий вид:
⎧⎡
⎤⎡ ⎤
⎪
𝒥
−𝒥
−𝒥
ε𝑥
𝑥
𝑥𝑦
𝑥𝑧
⎨
[︁
#» ]︁
⎢
⎥⎢ ⎥
ℳ( Φ) = − ⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ε𝑦 ⎦ +
⎪
⎩
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
ε𝑧
⎡
⎤⎡
⎤ ⎡ ⎤⎫
0 −ω𝑧 ω𝑦
𝒥𝑥 −𝒥𝑥𝑦 −𝒥𝑥𝑧
ω𝑥 ⎪
⎬
⎢
⎥⎢
⎥⎢ ⎥
+ ⎣ ω𝑧
0 −ω𝑥 ⎦ ⎣−𝒥𝑦𝑥 𝒥𝑦 −𝒥𝑦𝑧 ⎦ ⎣ω𝑦 ⎦ .
⎪
⎭
−ω𝑦 ω𝑥
0
−𝒥𝑧𝑥 −𝒥𝑧𝑦 𝒥𝑧
ω𝑧
Если центр масс тела не совпадает с неподвижной точкой, относительно которой происходит вращение (см. рис. 7.22), то сила инерции окажется
ненулевой.
Рис. 7.22.
Рис. 7.23.
Следует отметить, что ускорение центра масс в этом случае (так же
как и для вращательного движения вокруг неподвижной оси) состоит из
осестремительной и вращательной составляющих. Отличие состоит в том,
что при сферическом движении они, в общем случае, не ортогональны друг
другу (см. рис. 7.23):
вр
#» × (ω
#» × #»
#»
𝑎 𝑐 = #»
𝑎 𝑐ос + #»
𝑎𝑐 = ω
𝑟𝑐 ) + #»
ε × #»
𝑟𝑐 ;
вр
#»
𝑎 𝑐ос ⊥ #»
𝑎𝑐 .
Осестремительное ускорение будет направлено по перпендикуляру к
вектору угловой скорости (𝑙ω ):
#»
#» × 𝒱
#»
𝑎 ос = ω
;
#»
#»
ˆ︁
ˆ︁
#»
#»
𝑎ос = ω𝒱 sin[ω,
𝒱 ] = ωω𝑟𝑐 sin[ω,
𝒱 ] = ω2 𝑙ω .
124
Вращательное ускорение будет направлено ортогонально перпендикуляру к
вектору углового ускорения (𝑙ε ):
#»
𝑎 вр = #»
ε × #»
𝑟;
#»
𝑎вр = ε𝑟 sin[ ˆ︁
ε , #»
𝑟 ] = ε𝑙ε .
Тогда сила инерции будет иметь вид:
#»
#»
Φ = −𝑚 #»
𝑎 =⇒ Φ = −𝑚[ #»
𝑎 ос + #»
𝑎 вр ]
[︁ ]︁ [︁
]︁ [︁
]︁
ос
вр
+ Φ
Φ = Φ
[︁ ]︁
[︁
]︁
Φ = −𝑚 ω2 𝑙ω + −𝑚[ε𝑙ε ].
7.9. Реакции опор при вращении твeрдого тела вокруг неподвижной
оси
Пусть имеется тело, закреплeнное на неподвижной оси (см. рис. 7.24).
Центр масс тела не лежит на оси его вращения. На вращающееся тело
действует сила тяжести (считается приложенной к центру масс). Требуется определить реакции, возникающие в опоре 𝐴 (подпятник) 𝑋𝐴 , 𝑌𝐴 , 𝑍𝐴
и в опоре 𝐵 (подшипник) 𝑋𝐵 , 𝑍𝐵 при вращении тела. Опоры 𝐴 и 𝐵 разнесены на расстояние ℎ.
Рис. 7.24.
125
Воспользуемся принципом Даламбера:
#» #» #» #»
ℱ +ℛ+Φ = 0
# » #»
# » #»
# » #»
#»
ℳ𝑂 ( ℱ) + ℳ𝑂 (ℛ) + ℳ𝑂 ( Φ) = 0 ,
#»
где ℱ — внешняя сила, ℛ — сила реакции связи.
Представив уравнения в координатной форме и раскрыв силы инерции
и моменты сил инерции в соответствии с разд. 7.8.3, получим выражения:
𝑥: ℱ𝑥 + 𝑋𝐴 + 𝑋𝐵 + 𝑚ω2𝑦 𝑥𝑐 − 𝑚𝑧𝑐 ε𝑦 = 0
𝑦: ℱ𝑦 + 𝑌𝐴 = 0
𝑧: ℱ𝑧 + 𝑍𝐴 + 𝑍𝐵 + 𝑚ω2𝑦 𝑧𝑐 + 𝑚𝑥𝑐 ε𝑦 = 0
#»
𝑥: ℳ𝑥 ( ℱ) + 𝑍𝐵 ℎ + 𝒥𝑥𝑦 ε𝑦 + 𝒥𝑧𝑦 ω2𝑦 = 0
#»
𝑦: ℳ𝑦 ( ℱ) − 𝒥𝑦 ε𝑦 = 0
#»
𝑧: ℳ𝑧 ( ℱ) − 𝑋𝐵 ℎ + 𝒥𝑧𝑦 ε𝑦 − 𝒥𝑥𝑦 ω2𝑦 = 0.
В получившихся уравнениях выделенная часть слева представляет собой уравнения статической уравновешенности (если их приравнять нулю):
ℱ𝑥 + 𝑋𝐴 + 𝑋𝐵 − 𝑚ε𝑦 𝑧𝑐 + 𝑚ω2𝑦 𝑥𝑐 = 0
ℱ𝑦 + 𝑌 𝐴 = 0
ℱ𝑧 + 𝑍𝐴 + 𝑍𝐵 + 𝑚ω2𝑦 𝑧𝑐 + 𝑚𝑥𝑐 ε𝑦 = 0
#»
ℳ𝑥 ( ℱ) + 𝑍𝐵 ℎ + 𝒥𝑥𝑦 ε𝑦 + 𝒥𝑧𝑦 ω2𝑦 = 0
#»
ℳ𝑦 ( ℱ) − 𝒥𝑦 ε𝑦 = 0
#»
ℳ𝑧 ( ℱ) − 𝑋𝐵 ℎ + 𝒥𝑧𝑦 ε𝑦 − 𝒥𝑥𝑦 ω2𝑦 = 0.
если бы вращение отсутствовало
Рассмотрим внешние воздействия на анализируемую систему — сила
тяжести и еe момент относительно полюса 𝐴:
#» #»
#»
ℱ = 𝒢 = −𝑚𝑔 𝑗
#»
ℳ𝐴 = #»
𝑟𝑐 × 𝒢
⎡
⎤⎡
⎤ ⎡
⎤
̂︂
0
−𝑧
𝑦
0
𝑧
𝑚𝑔
𝑐
𝑐
𝑐
[︁ ]︁ [︁ ]︁ [︁ ]︁
⎢
⎥⎢
⎥ ⎢
⎥
ℳ = #»
𝑟𝑐 𝒢 = ⎣ 𝑧𝑐
0 −𝑥𝑐 ⎦ ⎣−𝑚𝑔 ⎦ = ⎣ 0 ⎦ .
−𝑦𝑐 𝑥𝑐
0
0
−𝑥𝑐 𝑚𝑔
126
Подставляя перечисленные воздействия в ранее полученную систему
уравнений, будем иметь:
⎧
⎪
𝑋𝐴 + 𝑋𝐵 − 𝑚ε𝑦 𝑧𝑐 + 𝑚ω2𝑦 𝑥𝑐 = 0
⎪
⎪
⎪
⎪
⎪
−𝑚𝑔 + 𝑌𝐴 = 0
⎪
⎪
⎪
⎪
⎨
𝑍 + 𝑍 + 𝑚ω2 𝑧 + 𝑚𝑥 ε = 0
𝑐 𝑦
𝑚𝑔𝑧𝑐 + 𝑍𝐵 ℎ + 𝒥𝑥𝑦 ε𝑦 + 𝒥𝑧𝑦 ω2𝑦 = 0
𝐴
𝐵
𝑦 𝑐
⎪
⎪
⎪
⎪
⎪
#»
⎪
⎪
ℳ𝑦 ( ℱ) = 𝒥𝑦 ε𝑦
⎪
⎪
⎪
⎩
−𝑚𝑔𝑥𝑐 − 𝑋𝐵 ℎ + 𝒥𝑧𝑦 ε𝑦 − 𝒥𝑥𝑦 ω2𝑦 = 0,
#»
где ℳ𝑦 ( ℱ) — внешний активный момент, приводящий систему в движение.
Обычно стараются сделать так, чтобы центр тяжести лежал на оси вра#»
щающегося тела (например, гиромотора): #»
𝑟𝑐 = 𝑦𝑐 𝑗 . Тогда ряд слагаемых в
приведeнных уравнениях окажутся нулевыми:
−𝑚ε𝑦 𝑧𝑐 + 𝑚ω2𝑦 𝑥𝑐 = 0
𝑚ω2𝑦 𝑧𝑐 + 𝑚𝑥𝑐 ε𝑦 = 0
𝑚𝑔𝑧𝑐 = 0
−𝑚𝑔𝑥𝑐 = 0.
В этом случае искомые реакции опор будут иметь вид:
⎧
⎪
𝑋𝐴 = −𝑋𝐵
⎪
⎪
⎪
⎪
⎪
⎪
𝑌𝐴 = 𝑚𝑔
⎪
⎪
⎪
⎨
𝑍𝐴 = −𝑍𝐵
]︁
⎪
1 [︁
⎪
2
⎪
𝑍𝐵 = − 𝒥𝑥𝑦 ε𝑦 + 𝒥𝑧𝑦 ω𝑦
⎪
⎪
⎪
⎪
[︁ℎ
]︁
⎪
⎪
1
2
⎪
⎩𝑋𝐵 = 𝒥𝑧𝑦 ε𝑦 − 𝒥𝑥𝑦 ω𝑦 .
ℎ
Часто встречается ситуация, когда центр масс не лежит на оси вращения тела, но в качестве осей выбраны главные оси инерции. В этом случае
центробежные моменты инерции будут равны нулю. Тогда вновь ряд слагаемых в приведeнных уравнениях окажутся нулевыми:
𝒥𝑥𝑦 ε𝑦 + 𝒥𝑧𝑦 ω2𝑦 = 0
𝒥𝑧𝑦 ε𝑦 − 𝒥𝑥𝑦 ω2𝑦 = 0.
127
В этом случае искомые реакции опор будут иметь вид:
⎧
⎪
𝑌𝐴
⎪
⎪
⎪
⎪
⎪
⎪
⎪
𝑍𝐵
⎪
⎪
⎪
⎨
𝑋𝐵
⎪
⎪
⎪
⎪
⎪
𝑋𝐴
⎪
⎪
⎪
⎪
⎪
⎪
⎩ 𝑍𝐴
= 𝑚𝑔
1
= (−𝑚𝑔𝑧𝑐 )
ℎ
1
= (−𝑚𝑔𝑥𝑐 )
ℎ (︁
)︁
𝑔
2
= 𝑚𝑥𝑐
− ω𝑦 + 𝑚ε𝑦 𝑧𝑐
(︁ 𝑔ℎ
)︁
2
= 𝑚𝑧𝑐
− ω𝑦 − 𝑚𝑥𝑐 ε𝑦 .
ℎ
Если тело вращается вокруг оси с постоянной угловой скоростью, то
итоговые выражения для реакций опор ещe несколько упростятся:
⎧
⎪
𝑌𝐴
⎪
⎪
⎪
⎪
⎪
⎪
⎪
𝑍𝐵
⎪
⎪
⎪
⎨
𝑋𝐵
⎪
⎪
⎪
⎪
⎪
𝑋𝐴
⎪
⎪
⎪
⎪
⎪
⎪
⎩ 𝑍𝐴
= 𝑚𝑔
1
= (−𝑚𝑔𝑧𝑐 )
ℎ
1
= (−𝑚𝑔𝑥𝑐 )
ℎ (︁
)︁
𝑔
2
− ω𝑦
= 𝑚𝑥𝑐
(︁ 𝑔ℎ
)︁
2
− ω𝑦 .
= 𝑚𝑧𝑐
ℎ
7.10. Общее уравнение динамики
Назначение: с использованием общего уравнения динамики могут быть
получены дифференциальные уравнения движения механических систем.
#»
В основе — II закон Ньютона: 𝑚 #»
𝑎 = ℱ.
Общее уравнение динамики ещe называют объединeнным принципом
Даламбера—Лагранжа.
Принцип Даламбера для 𝑖-й точки имеет вид:
#»
# » #»
ℱ𝑖 + ℛ𝑖 + Φ 𝑖 = 0,
#»
где 𝑖 = 1, 𝑛, 𝑛 — количество точек системы; ℱ𝑖 — внешние (активные) силы;
[︀
]︀
#»
#»
ℛ𝑖 — силы реакции связи; Φ 𝑖 = −𝑚 #»
𝑎 𝑖 = −𝑚 #»
𝑎 𝑒 + #»
𝑎 𝑟 + #»
𝑎 Кор — Даламберовы силы (силы инерции); #»
𝑎 𝑖 — абсолютное ускорение точки.
128
Тогда общее уравнение динамики может быть получено переходом от
сил к их виртуальным работам:
Виртуальные работы
⏞
⏟
⏞
⏟
⏞
⏟
𝑛
𝑛
𝑛
∑︁ #»
∑︁ # »
∑︁ #»
ℱ𝑖 δ #»
𝑟𝑖 +
ℛ𝑖 δ #»
𝑟𝑖 +
Φ 𝑖 δ #»
𝑟𝑖 = 0.
𝑖=1
𝑖=1
𝑖=1
Обычно общее уравнение динамики применяется при идеальных связях. Тогда (из определения идеальных связей):
𝑛
∑︁
#»
ℛ𝑖 δ #»
𝑟𝑖 = 0.
𝑖=1
Общее уравнение динамики примет вид:
𝑛
𝑛
∑︁
#» #» ∑︁ #» #»
ℱ𝑖 δ 𝑟𝑖 +
Φ 𝑖 δ 𝑟𝑖 = 0.
𝑖=1
𝑖=1
С учeтом формулы для виртуального перемещения, получим выражение для
обобщeнных сил:
δ #»
𝑟𝑖 =
𝑘
∑︁
𝜕 #»
𝑟𝑖
𝜕𝑞𝑗
δ𝑞𝑗 ,
𝑘 — число степеней свободы
𝑗=1
[︃ 𝑛
𝑘 ∑︁
∑︁
]︃
𝑛
#»
#»
∑︁
#» 𝜕 𝑟
#» 𝜕 𝑟
ℱ𝑖 𝑖 +
Φ 𝑖 𝑖 δ𝑞𝑗 = 0.
𝜕𝑞𝑗
𝜕𝑞𝑗
𝑖=1
𝑗=1 𝑖=1
⏟
⏞
𝒬𝑗 +𝒬Φ
𝑗 =0
Если связи неидеальны, то с использованием принципа освобождаемости от связей их переводят в задаваемые силы ℱ𝑖 . Тогда уравнение в
обобщeнных силах примет тот же вид:
[︃ 𝑛
]︃
𝑘 ∑︁
𝑛
𝑛
#»
#»
#»
∑︁
∑︁
∑︁
#» 𝜕 𝑟
# »𝜕 𝑟
#» 𝜕 𝑟
ℱ𝑖 𝑖 +
ℛ𝑖 𝑖 +
Φ 𝑖 𝑖 δ𝑞𝑗 = 0
𝜕𝑞𝑗
𝜕𝑞𝑗
𝜕𝑞𝑗
𝑗=1 𝑖=1
𝑖=1
𝑖=1
⏟
⏞
⏟
⏞
𝒬𝑗
𝒬Φ
𝑗
𝒬𝑗 + 𝒬Φ
𝑗 = 0.
129
Таким образом, объединeнный принцип Даламбера—Лагранжа может
быть сформулирован в следующей форме: в любой момент времени движения механической системы сумма виртуальных работ всех активных сил и
сил инерции равна нулю:
𝑘 [︁
]︁
∑︁
Φ
𝒬𝑗 + 𝒬𝑗 δ𝑞𝑗 = 0.
𝑗=1
Или, суммируя по точкам системы (𝑖 = 1, 𝑛), к которым приложены
силы, с последующим разложением в декартовой системе координат:
𝑛
𝑛
∑︁
∑︁
[︀
]︀
#»
#
»
¨
( ℱ𝑖 −𝑚𝑖 𝑟𝑖 )δ𝑟𝑖 = 0
(ℱ𝑖𝑥 − 𝑚𝑖 𝑥¨𝑖 )δ𝑥𝑖 + (ℱ𝑖𝑦 − 𝑚𝑖 𝑦¨𝑖 )δ𝑦𝑖 + (ℱ𝑖𝑧 − 𝑚𝑖 𝑧¨𝑖 )δ𝑧𝑖 = 0.
𝑖=1
𝑖=1
7.11. Виртуальная работа сил инерции
7.11.1. Поступательное движение
Тело не меняет своей ориентации, поэтому работа будет определяться
только произведением силы на виртуальное перемещение точки еe приложения:
#»
#» = Φδ #»
δ𝒜 Φ
𝑟 = −𝑚 #»
𝑎 𝑐 δ #»
𝑟𝑐 = −𝑚 #»
𝑎 𝑖 δ #»
𝑟𝑖 .
При поступательном движении можно использовать любую точку твeрдого тела (𝑖).
7.11.2. Вращательное движение
При вращательном движении у тела отсутствуют поступательные степени свободы. Виртуальная работа силы инерции будет определяться через
момент силы инерции (или производную от кинетического момента с
учeтом знака), умноженный на виртуальное приращение угла поворота:
#» = −ℒ˙𝑦 δφ = −𝒥𝑦 εδφ,
δ𝒜 Φ
где φ — угол поворота тела вокруг оси вращения, ε — угловое ускорение.
7.11.3. Плоское движение
Пусть движение осуществляется в плоскости 𝑥𝑧. Виртуальная работа
будет представлять сумму поступательной и вращательной составляющих.
130
За полюс принимается центр масс тела.
#» = −𝑚 #»
δ𝒜 Φ
𝑎 𝑐 δ #»
𝑟𝑐 − 𝒥𝑦𝑐 εδφ.
7.11.4. Сферическое движение
При сферическом движении вращение происходит вокруг неподвижной
точки, т. е. в общем случае есть составляющие по всем трeм декартовым
осям. Поэтому формула приобретает матричный вид:
[︁ ]︁ [︁ ]︁
δ𝒜 = − 𝒥 ε δφ,
где φ — пространственный угол.
При определении виртуальных работ при сферическом движении обычно используют аппарат вектора конечного поворота [ссылка на какой-нибудь
источник по ВКП].
7.12. Использование общего уравнения динамики для определения
характеристик механической системы
7.12.1. Задача «полиспаст»
К изображeнной на рис. 7.25 системе блоков подвешены грузы массами
𝑀1 = 10 кг, 𝑀2 = 8 кг. Механизм находится в поле силы тяжести. Тела
считаются твeрдыми, нити нерастяжимыми, а блоки невесомыми. Трение
в шарнирах отсутствует. Необходимо определить ускорение груза 2 (¨
𝑦2 ) и
силу натяжения нити (𝑇 ).
Введeм систему координат (направим ось 𝑦 на рис. 7.25 вниз). Обозначим на рисунке направления ускорений и виртуальных перемещений тел, а
также активных сил и сил инерции. Т. к. до решения задачи сложно определить направление движения тел в механизме, то выберем его произвольным
образом: предположим, что тело 1, как имеющее большую массу, будет двигаться вниз, а тело 2 — наверх. Тогда ускорение и виртуальное перемещение
тела 1 будут направлены вниз, а его сила инерции вверх. Для тела 2 получится наоборот: ускорение и виртуальное перемещение направлены вниз,
а сила инерции вверх. Единственная активная сила в задаче — сила тяжести — будет направлена вниз для каждого из тел. Также обозначим силу
131
натяжения нити, действующую от тела 2 вверх (эта сила является силой
реакции связи).
Рис. 7.25.
Определение искомой величины ускорения тела 2 осуществим с использованием общего уравнения динамики (принципа Даламбера—Лагранжа):
#»
#»
#»
#»
( 𝒢 + Φ )δ #»
𝑦 + ( 𝒢 + Φ )δ #»
𝑦 = 0.
1
1
1
2
2
2
Следует отметить, что в полученном выражении составляющие, связанные
#»
с силой натяжения нити ( 𝑇 δ #»
𝑦 ), не учитываются, т. к. работа идеальных
связей равна нулю.
Запишем каждую из присутствующих в общем уравнении динамики
сил:
#»
𝒢 1 = 𝑀1 #»
𝑔
#»
𝒢 2 = 𝑀2 #»
𝑔
#»
#»
Φ 1 = −𝑀1 𝑦¨1
#»
#»
Φ 2 = −𝑀2 𝑦¨2 .
Тогда в проекции на ось 𝑦 (с учeтом направления ускорений и виртуальных перемещений) принцип Даламбера—Лагранжа примет вид:
(𝑀1 𝑔 − 𝑀1 𝑦¨1 )δ𝑦1 + (𝑀2 𝑔 + 𝑀2 𝑦¨2 )(−δ𝑦1 ) = 0.
132
В записанном уравнении присутствуют два виртуальных перемещения,
связанных с двумя введeнными обобщeнными координатами (𝑦1 и 𝑦2 ), в то
время как у механизма присутствует всего одна степень свободы. Значит,
обобщeнные координаты, а следовательно — и их виртуальные изменения,
могут быть выражены друг через друга.
Чтобы получить их соотношение, проанализируем скорости разных
точек механизма. Обозначим за 𝒱 скорость тела 2. Оно движется поступательно вместе с той частью нити, что спускается к нему с блока 2. Значит,
скорость на ободе блока 2 также будет равна 𝒱. Следовательно, и скорость
той части нити, которая спускается с другой стороны этого блока, также
равна 𝒱. Тогда скорость крайней правой точки блока 1 — также 𝒱. Блок 1
не имеет закреплeнной оси вращения и совершает плоское движение. Его
мгновенным центром скоростей является точка соприкосновения с вертикальной нитью слева (он как будто катится по меняющей длину опоре).
Тогда скорость центра масс блока 1, а значит и груза 1, будет в два раза
меньше 𝒱 (соотношение между скоростями точек плоского тела определяется отношением расстояний до мгновенного центра скоростей). Это же
соотношение будет справедливо и для величин ускорений и виртуальных
перемещений 1 и 2 тел:
δ𝑦
𝑦¨
𝒱
=⇒ δ𝑦1 = 2 ; 𝑦¨1 = 2 .
𝒱 𝑐1 =
2
2
2
Подставив полученные соотношения кинематических характеристик в
общее уравнение динамики, получим:
(︂
)︂(︂ )︂
)︀
(︀
𝑦¨2
δ𝑦2
= 0 =⇒
𝑀1 𝑔 − 𝑀1
+ (𝑀2 𝑔 + 𝑀2 𝑦¨2 ) −
δ𝑦
2
2
2
𝑀1 𝑔 𝑀1 𝑦¨2
−
− 𝑀2 𝑔 − 𝑀2 𝑦¨2 = 0 =⇒
2
4
𝑀1
− 𝑀2
𝑦¨2 = 𝑔 𝑀2
=⇒
1 +𝑀
2
4
10 − 8
−3
2
𝑦¨2 = 9,81 10
= 9,81
≈ −2,8 м/с2 .
10,5
4 +8
Рассчитанное значение ускорения тела 2 оказалось отрицательным. Это
означает, что первоначальное предположение о движении этого тела вверх
было ошибочным. Таким образом, тело 2 движется вниз, а тело 1 — вверх.
133
Определение искомой величины силы натяжения нити осуществим с
использованием принципа Даламбера:
#»
#»
#»
𝒢 2 + Φ 2 + 𝑇 = 0.
Осуществив проецирование на ось 𝑦, будем иметь (здесь уже учитываем
реальное направление движения, полученное выше):
𝑀2 𝑔 − 𝑀2 𝑦¨2 − 𝑇 = 0 =⇒
𝑇 = 𝑀2 (𝑔 − 𝑦¨2 ) =⇒
𝑇 = 8(9,81 − 2,8) = 56,08 Н.
7.12.2. Задача «двухступенчатый шкив»
Два груза массами 𝑀1 и 𝑀2 подвешены на двух гибких нерастяжимых
нитях, которые навeрнуты на барабаны с радиусами 𝑟1 и 𝑟2 , имеющие общую ось (см. рис. 7.26). Грузы движутся под влиянием силы тяжести. Нити
считаются нерастяжимыми, следовательно, виртуальная работа сил натяжения нитей будет равна нулю. Трением в механизме пренебрегаем.
Рис. 7.26.
Требуется определить угловое ускорение ε барабанов, пренебрегая их
массами и массой нитей.
134
Введeм систему координат (ось 𝑦 направим вниз). Покажем на рисунке
#» #»
ускорения грузов 𝑦¨1 и 𝑦¨2 , считая, что 𝑀2 меньше. Покажем активные силы 𝒢1 и 𝒢2 . Силы инерции противоположны по направлению ускорениям
соответствующих тел.
Выразим возможные перемещения грузов и их координаты через обобщeнную координату (угол φ поворота двухступенчатого шкива):
δ𝑦1 = 𝑟1 δφ
δ𝑦2 = 𝑟2 δφ
𝑦1 = 𝒞1 + 𝑟1 φ
𝑦2 = 𝒞2 + 𝑟2 φ.
Тогда ускорения могут быть получены дифференцированием выражений для координат:
𝑦¨1 = 𝑟1 φ̈ = 𝑟1 ε
𝑦¨2 = 𝑟2 φ̈ = 𝑟2 ε.
Запишем общее уравнение динамики для анализируемого случая:
(𝒢1 + 𝑀1 𝑦¨1 )(−δ𝑦1 ) + (𝒢2 − 𝑀2 𝑦¨2 )δ𝑦2 = 0.
Подставив полученные соотношения для кинематических характеристик, будем иметь:
−(𝑀1 𝑔 + 𝑀1 𝑟1 ε)𝑟1 δφ + (𝑀2 𝑔 − 𝑀2 𝑟2 ε)𝑟2 δφ = 0
−ε(𝑀1 𝑟12 + 𝑀2 𝑟22 ) + 𝑔(𝑀2 𝑟2 − 𝑀1 𝑟1 ) = 0
𝑀 𝑟 − 𝑀1 𝑟1
.
ε = 𝑔 2 22
𝑀1 𝑟2 + 𝑀2 𝑟22
7.12.3. Задача «кабестан»
Вал кабестана (механизма для передвижения грузов) радиуса 𝑟 приво#»
дится в движение постоянным вращающим моментом 𝑀 , приложенным к
рукоятке 𝐴𝐵. Определить ускорение груза 𝐶 массой 𝑚, если коэффициент
трения скольжения о горизонтальную плоскость — 𝑓 .
Массой каната и кабестана пренебречь.
135
Рис. 7.27.
Введeм систему координат (ось 𝑥 направим влево). Канат накручивается на вал кабестана; таким образом, груз двигается влево вдоль оси 𝑥.
Обозначим угол поворота кабестана как φ.
Тогда общее уравнение динамики для рассматриваемого случая примет вид:
)︀
(︀
− ℱтрен + 𝑚¨
𝑥𝑐 δ𝑥𝑐 + 𝑀 δφ = 0.
Для вращательного движения вала кабестана справедливым будет уравнение Эйлера, говорящее о равенстве скорости точки на ободе кабестана
произведению угловой скорости его вращения на расстояние от оси до точки (радиус вала). Аналогичным образом окажутся связаны виртуальные
перемещения δ𝑥𝑐 и δφ:
δ𝑥𝑐 = 𝑟δφ.
Раскроем силу трения как произведение силы реакции опоры на коэффициент трения:
ℱтрен = 𝑁 𝑓 = 𝑚𝑔𝑓.
Подставив полученные соотношения в общее уравнение динамики,
найдeм искомое:
−(𝑚𝑔𝑓 + 𝑚¨
𝑥𝑐 )𝑟δφ + 𝑀 δφ = 0
𝑀 − 𝑚𝑔𝑓 𝑟
𝑥¨𝑐 =
.
𝑚𝑟
136
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. ОСНОВНЫЕ ПОНЯТИЯ АНАЛИТИЧЕСКОЙ МЕХАНИКИ . . . .
1.1. Связи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Обобщeнные координаты . . . . . . . . . . . . . . . . . . . . .
1.3. Обобщeнные скорости . . . . . . . . . . . . . . . . . . . . . . .
1.4. Виртуальные перемещения . . . . . . . . . . . . . . . . . . . .
2. КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТОЧКИ ПРИ
РАЗЛИЧНОМ ВЫБОРЕ ОБОБЩEННЫХ КООРДИНАТ . . . . . .
2.1. Криволинейные координаты точки . . . . . . . . . . . . . . . .
2.2. Коэффициенты Ляме . . . . . . . . . . . . . . . . . . . . . . .
2.3. Определение скорости с использованием коэффициентов Ляме
2.4. Определение ускорения с использованием коэффициентов
Ляме . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5. Получение кинематических характеристик точки в
криволинейных системах координат . . . . . . . . . . . . . . .
3. ОСНОВНОЕ УРАВНЕНИЕ ДИНАМИКИ И ДИНАМИЧЕСКИЕ
УРАВНЕНИЯ ЭЙЛЕРА . . . . . . . . . . . . . . . . . . . . . . . . .
3.1. Центр масс системы . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Основное уравнение динамики . . . . . . . . . . . . . . . . . .
3.3. Моменты инерции . . . . . . . . . . . . . . . . . . . . . . . . .
3.4. Моменты инерции некоторых тел . . . . . . . . . . . . . . . .
3.5. Опытное определение осевых моментов инерции . . . . . . .
3.6. Кинетический момент твeрдого тела. Теорема об изменении
кинетического момента . . . . . . . . . . . . . . . . . . . . . .
3.7. Теорема об изменении момента количества движения
(кинетического момента) . . . . . . . . . . . . . . . . . . . . .
3.8. Вывод динамических уравнений Эйлера . . . . . . . . . . . .
3.9. Дифференциальные уравнения движения твeрдого тела для
различных видов движения . . . . . . . . . . . . . . . . . . . .
4. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ . . . . . . . . . . . . . . . . . . . . .
4.1. Кинетическая энергия системы материальных точек
(теорема Кeнига) . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2. Кинетическая энергия твeрдого тела в общем случае движения
137
3
4
4
8
10
10
15
16
20
21
22
25
32
33
35
36
44
46
50
53
53
56
59
59
60
4.3. Кинетическая энергия твeрдого тела при различных случаях
его движения . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4. Определение кинетической энергии многомассовой системы
5. ОБОБЩEННЫЕ СИЛЫ . . . . . . . . . . . . . . . . . . . . . . . .
5.1. Элементарная и полная работа силы . . . . . . . . . . . . . .
5.2. Работа некоторых сил . . . . . . . . . . . . . . . . . . . . . .
5.3. Работа сил, приложенных к твeрдому телу . . . . . . . . . .
5.4. Потенциальное силовое поле и силовая функция . . . . . . .
5.5. Потенциальная энергия . . . . . . . . . . . . . . . . . . . . .
5.6. Определение обобщeнных сил . . . . . . . . . . . . . . . . .
5.7. Способы вычисления обобщeнных сил . . . . . . . . . . . .
5.8. Диссипативная функция . . . . . . . . . . . . . . . . . . . . .
6. ОПРЕДЕЛЕНИЕ ОБОБЩEННОЙ СИЛЫ В СИСТЕМЕ,
НАХОДЯЩЕЙСЯ ПОД ДЕЙСТВИЕМ ПОТЕНЦИАЛЬНЫХ,
ДИССИПАТИВНЫХ И НЕПОТЕНЦИАЛЬНЫХ СИЛ . . . . . . .
6.1. Определение обобщeнной силы с использованием
виртуальной работы . . . . . . . . . . . . . . . . . . . . . . .
6.2. Определение обобщeнной силы с использованием
специальных формул для разных типов воздействий . . . .
7. УСЛОВИЯ РАВНОВЕСИЯ И ОБЩЕЕ УРАВНЕНИЕ
ДИНАМИКИ СИСТЕМЫ . . . . . . . . . . . . . . . . . . . . . . .
7.1. Идеальные связи . . . . . . . . . . . . . . . . . . . . . . . . .
7.2. Реакции связей. Принцип освобождаемости от связей . . . .
7.3. Принцип виртуальных перемещений . . . . . . . . . . . . .
7.4. Условие равновесия системы . . . . . . . . . . . . . . . . . .
7.5. Определение положения равновесия системы, находящейся
под действием заданной системы сил . . . . . . . . . . . . .
7.6. Определение реакции опор с использованием принципа
виртуальных перемещений . . . . . . . . . . . . . . . . . . .
7.7. Метод кинетостатики. Принцип Даламбера. Основное
уравнение динамики . . . . . . . . . . . . . . . . . . . . . . .
7.8. Определение сил инерции и моментов сил инерции для
различных случаев движения твeрдого тела . . . . . . . . .
7.9. Реакции опор при вращении твeрдого тела вокруг
неподвижной оси . . . . . . . . . . . . . . . . . . . . . . . .
138
.
.
.
.
.
.
.
.
.
.
.
62
66
75
75
77
84
87
88
89
90
90
.
91
.
92
.
98
.
.
.
.
.
100
100
101
103
104
. 105
. 107
. 117
. 118
. 125
7.10. Общее уравнение динамики . . . . . . . . . . . . . . . . . . . 128
7.11. Виртуальная работа сил инерции . . . . . . . . . . . . . . . . . 130
7.12. Использование общего уравнения динамики для
определения характеристик механической системы . . . . . . 131
139
Шалымов Роман Вадимович
Ткаченко Анна Николаевна
Ларионов Даниил Юрьевич
Аналитическая механика
Учебное пособие
Редактор М. Б. Шишкова
Подписано в печать
. Формат 60×84 1/16.
Бумага офсетная. Печать цифровая. Печ. л. 4,0.
Гарнитура «Times New Roman». Тираж 9000 экз. Заказ
Издательство СПбГЭТУ «ЛЭТИ»
197376, С.-Петербург, ул. Проф. Попова, 5
.