/















































































































































































































Текст
Ю. в. Алексеев, А. П. Богословский, Е. М. Певзнер,
А. А, Рабинович, А. Г, Яуре.КРАНОВОЕЭЛЕКТРООБОРУДОВАНИЕСправочникПод редакцией канд. техн. наук А. А. РАБИНОВИЧАМОСКВА «Э Н Е Р Г И Я» 1979
ББК 31.291
К 785ГДК 621.873:621,313.13(03)Крановое электрооборудование: Справочник/
К 78 'Алексеев Ю. В., Богословский А. П., Певзнер Е. М.
и др.; Под ред. А. А. Рабиновича. — М.: Энергия,
1979. — 240 с., ил.В пер.: 2 р.Б справочнике содержится информация по всем видам кранового
электрооборудования, находящегося в производстве, определяются пер¬
спективы развития основных типов машин и аппаратов, приводятся
методы выбора и использования электрооборудования для разнообраз¬
ных условий эксплуатации, технические характеристики типовых комп¬
лектов электроприводов и рекомендации по применению этих комплек¬
тов для различных видов краковых механизмов. Значительное BHHMa.>
нне уделяется иовым методам расчета электромеханических характе¬
ристик.Справояник предназначен для инженерно-технических работников,
связанных с конструированием и »/спользованием крановых машин в
промышленности, строительстве и на транспорте. Он может быть так¬
же по.аезеи студентам вузов соответствующих специальностей.• 30307-308 ББК 31.291
98_79 2302030000051(01)-79 6П2.1.081ф Издательство «Энергия», 1979
ПРЕДИСЛОВИЕКрановое оборудование является одним из основ¬
ных средств комплексной механизации всех отраслей
народного хозяйства. Расширение отрасли машиностро¬
ения, занимающейся производством грузоподъемных
машин, является важным направлением развития на¬
родного хозяйства для решения поставленной XXV
съездом КПСС задачи всемерного сокращения и ликви¬
дации тяжелого ручного труда. В настоящее время гру¬
зоподъемные машины выпускаются большим числом
заводов во многих отраслях народного хозяйства и эти
машины используются практически во всех сферах на¬
родного хозяйства: при добыче полезных ископаемых,
в металлургии, машиностроении, строительстве, на
транспорте и др.Подавляющее большинство грузоподъемных ма¬
шин, изготовляемых отечественной промышленностью,
имеет электрический привод основных рабочих меха¬
низмов и поэтому эффективность действия этих машин
в значительной степени зависит от качественных пока¬
зателей используемого кранового электрооборудования.
Электропривод большинства грузояодъемных машин ха¬
рактеризуется повторно-кратковременным режимом ра¬
боты при большой частоте включений, широком диапа¬
зоне регулирования скорости и постоянно возникающих
значительных перегрузках при разгоне и торможении
механизмов. Особые условия использования электропри¬
вода в грузоподъемных машинах явились основой для
создания специальных серий электрических двигателей
и аппаратов кранового исполнения. В настоящее время
крановое электрооборудование имеет в своем составе
серии крановых электродвигателей переменного и посто¬
янного тока, серии силовых и магнитных контроллеров,
командоаппаратов, кнопочных постов, конечных выклю¬
чателей, тормозных электромагнитов и электрогидрав-
лических толкателей, пускотормозных резисторов и ряд
других аппаратов, комплектующих различные кррновые
электроприводы.В крановом электроприводе начали довольно ши¬
роко применяться различные системы тиристорного
регулирования и дистанционного управления по радио¬
каналу или одному проводу.Для обеспечения механизированной транспорти¬
ровки ферромагнитных материалов промышленностью
изготавливается две серии грузоподъемных электро*
магнитов.1*Производство кранового электрооборудования ста¬
ло одной из важнейших отраслей электротехнической
промышленности. При этом использованием и эксплуа¬
тацией кранового электрооборудования занимаются де¬
сятки проектно-конструкторских организаций и сотни
предприятий различных отраслей народного хозяйства,
следовательно, особую значимость приобретает выпуск
систематизированной информационно-технической лите¬
ратуры, охватывающей все стороны использования и
эксплуатации электрооборудования грузоподъемных ма-
шиь^Крановому электрооборудованию за последнее де¬
сятилетие было посвящено несколько учебных пособий,
а также ряд монографий с упором на отдельные спе¬
циальные вопросы. При всех достоинствах этих книг
они в основном предназначались либо для обучения,
либо для специалистов-конструкторов. Между тем для
проведения практических ивженериых расчетов в на¬
стоящее время созданы и внедрены в практику новые
прогрессивные и доступные для широкого круга работ¬
ников методы проектирования большинства крановых
электроприводов, отражающие современные направле¬
ния оптимизации систем и их технико-экономического
обоснования.Предлагаемый читателям справочник по крановому
электрооборудованию обобщает многолетний опыт, на¬
копленный специалистами промышленности в области
создания, использования и эксплуатации электроприво¬
дов грузоподъемных механизмов.В книге приведены ряд новых методов расчета
отдельных элементов электроприводов, а также обоб¬
щенная методика выбора приводных электродвигателей
с учетом особенностей принятых систем управления.
Большая часть материалов справочника публикуется
впервые и обобщает многолетний опыт авторов по со¬
зданию крановых электроприводов, а также опыт ин¬
ститута ВНИИПТмаш и краностроительных заводов по
использованию электрооборудования в современном
краностроении.Авторы полагают, что использование рекомендаций,
приведенных в справочнике, позволит читателям при¬
близиться к оптимальным решениям при проектирова¬
нии кранового электропривода и избежать ошибок, ко¬
торые, к сожалению, еще имеют место при проектиро¬
вании без надлежащего учета особенностей использо*
ванда.кранового оборудования.
предисловие •Работа между авторами была распределена следу¬
ющим образом: Ю. В. Алексеевым написаны разд. 2 и
§ 6-2, А. П. Богословским — разд. 3 и 4 (кроме § 4*6),
§ 7-1—7-3, 10-1, 10-2, Е. М. Певзнером — разд. 8, § 4-G,
7-4—7-8, 9-1—9-3; 10-3, А. Г. Яуре — разд. 1 и 5, §6-1 и
7-9. Общее редактирование кеиги осуществлено канд.
техн. наук А. А. Рабиновичем.Авторы выражают благодарность канд^ тех. наук
Л. Б. Масандилову за ценные советы и больщую работу
по редактированию рукописи.Все замечания и пожелания но содержанию книги
следует направлять в адрес издательства «Энергия»:
113114, Москва, М-114, Шлюзовая наб., 10.Авторы
РАЗДЕЛ ПЕРВЫЙУСЛОВИЯ РАБОТЫ И ОБЩИЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТРООБОРУДОВАНИЯ ГРУЗОПОДЪЕМНЫХ МАШИНМ. ГРУЗОПОДЪЕМНЫЕ МАШИНЫа) Назначение, классифика1;и1^
и основные определенияПеремещение грузов, связанное с грузоподъемными
операциями, во всех отраслях народного хозяйства, ка
транспорте и в строительстис осуществляется разнооб¬
разными грузоподъемными машинами.Грузоподъемные машины служат для погрузочно-
разгрузочных работ, перемещения грузов в технологи¬
ческой цепи производства или строительства и выпол¬
нения ремонтно-монтажных работ с крупногабаритными
агрегатами. Грузоподъемные машины с электрическими
приводами имеют чрезвычайно широкий диапазон ис¬
пользования, что характеризуется интервалом мощно¬
стей приводов от сотен ватт до 1000 кВт. В перспек¬
тиве мощности крановых механизмов могут дойти до
1500—2500 кВт.По назначению разнообразные грузоподъемные ма¬
шины можно объединить в три группы:1) универсальные грузоподъемные машины — кра¬
ны, лебедки, тали, служащие для подъема и перемеще¬
ния различных грузов при помощи крюкового под¬
веса на грузовом тросе;2) грузоподъемные машины для выполнения опре¬
деленных технологических операций в промышленно¬
сти, на транспорте и в строительстве;3) краны для выполнения строительных, монтаж¬
ных и ремонтных работ, связанных с перемещением мат
шинного оборудования.В свою очередь, по условиям работы грузоподъем¬
ные машины могут быть условно разделены на следу¬
ющие группы:1) машины универсального назначения, используе¬
мые для работы в помещениях при повторно-кратковре¬
менном режиме и средней продолжительности работы
до 16 ч в сутки;2) машины универсального назначения, ‘используе¬
мые для работы в помещениях при повторно-кратковре¬
менном режиме и средней продолжительности работы
от 8 до 24 ч в сутки;3) машины для выполнения определенных техноло¬
гических операций, используемые как в помещениях, так
и на открытом воздухе при повторно-кратковременном
режиме и продолжительностью работы до 24 ч в сутки;4) машины для выполнения разовых и эпизодичес¬
ких грузоподъемных операций, используемые в кратко¬
временных и в повторно-кратковременных режимах с
общим годовым числом часов работы не более 500.Универсальные грузоподъемные машины изготавли¬
ваются с учетом различных условий использования ио
нагрузке и времени работы, интенсивности проведения
операций, степени ответственности операций и в связиIс этим могут быть дополнительно отнесены к несколь¬
зким усредненным категориям использования.Механизмы для выполнения определенных техноло¬
гических операций, а также механизмы для эпизодичес¬
кой работы имеют вполне определенные условия ис¬
пользования соответственно их назначению. С целью
систематизации всего многообразия режимов работы
грузоподъемных машин Госгортехнадзор установил сле¬
дующие категории режимов работы механизмов с ма¬
шинным приводом; легкий —Л; средний — С; тяже¬
лый— Т; весьма тяжелый — ВТ. Определение этих ре¬
жимов работы производится согласно табл. 1-1.Таблица 1-1
Режимы работы мехдиизмо» грузоподъемных машин3ё\0SФ (L>
&с йсреднее допускаемое использо¬
вание механизма. §Л s:
к о
ф srlig(LI X
(O CDg.|ж 0.4)
^ ¥ B-
H О опо грузо¬
подъем¬
ности /Cj,pпо времениа течение
годав течение
сутокЛ0.25—1,0Нерегулярная редкая15—25До 6025работас0.750.50.332560254012025т0,75—1,01,00,6640120404024040ВТ1,01.01,060300456060045Ряд кранов, предназначенных для технологических
комплексов, в последнее время проектируется для ис¬
пользования при более сложных режимах работы элек¬
тропривода по сравнению с режимом ВТ, определяемым
действующей классификацией Госгортехнадзора. Этот
режим характеризуется продолжительностью включения
до ПВ=100% при числе включений в час 600 и выше.
Для этих случаев вводится новая категория режима:
особо тяжелый — ОТ. В настоящее время подготавли¬
вается стандарт, предусматривающий пять категорий
режимов, включая режим ОТ. С учетом этого в соответ¬
ствующих разделах справочника приводятся рекомен¬
дации по использованию электрооборудования для пяти
категорий режимов, включая режим ОТ.Для основных параметров грузоподъемных машин
принята следующая терминология;грузоподъемность крана Qh, Т — масса максималь¬
ного поднимаемого груза вместе с массой грузозахват¬
ных приспособлений и устройств без массы' крюковой
подвески;
6Условия работы и характеристики электрооборудования грузоподъемных машин[Разд. 1коэф4шциент использования крана по-грузоподъемности
Ктр — Qcp/Qflt
где Qcp “ среднее значение массы поднимаемого груза
за смену;коэффициент годового использования механизма
число дней работы механизма в году365 ’Таблица 1-2Минимальные скорос¥я переработки грузов в допустимые
интервалы средних ускорений/Сгкоэффициент суточного использования механизма
число часов работы механизма в сутки
24Продолжительность включения при повторно-крат¬
ковременном режиме работы — отношение времени
включения электродвигателя к общему времени цикла,
%. При регулярно повторяющихся циклах (механизмы,
используемые в технологических процессах) расчетнай
продолжительность включения определяется соотноше¬
ниемПВр «(1 — №пауз/3б00) 100%, (Ы)где Л? — производительность крана при номинальной
грузоподъемности, определяемая числом циклов в час;
We — время паузы в работе за один цикл, с.При регулярно повторяющихся циклах производи-^
тельнлстью называется наибольшее число циклов пере¬
грузки номинального груза за 1 ч при известной рас¬
четной траектории перемещения грузов и заданной па¬
узе. Поскольку большинство крановых механизмов вы*,
полняет нерегулярные операции, то произведение
заменяется усредненной суммой времени пауз /пауз за1 ч работы при условии, что время непрерывного вклю¬
чения или паузы не превышает 300 с, т. е. при среднем
числе включений в час свыше 6 (при времени цикла
10 мин).Под числом включений в час понимается среднее
число разгонов механизмов до номинальной скорости
перемещения механизма и последующей остановки по¬
сле каждого разгона. Фактически продолжительность
включения может изменяться в пределах от О до 100%.
Значения номинальных продолжительностей включения
ПВв для механизмов и электродвигателей стандартизи¬
рованы и равны 15, 25, 40, 60, 100% при времени цик¬
ла не свыше 600 с.В цикл работы грузоподъемной машины входят опе¬
рации, полностью завершающие процесс перемещения
по заданной траектории одного груза или завершающие
одну технологическую операцию.Номинальной скоростью механизма м/с, приня¬
то называть установившуюся скорость перемещения но¬
минального груза (или механизма с грузом) при рас¬
четных номинальных нагрузках.Средним ускорением (или замедлением) механизма
а«, м/с^, принято называть среднее ускорение за время
разгона от неподвижного состояния до номинальной ско¬
рости (или торможения от номинальной скорости до
полной остановки).ан = »н/^п. (1-2)где in — время пуска (или торможения), с.Допустимые значения средних ускорений крановых
механизмов приведены в табл. 1-2.Диапазон регулирования грузоподъемного механиз¬
ма есть отношение максимальной скорости механизма
VuHKc к устойчивой наименьшей скорости перемещения
Имин номинального груза при расчетных параметрах воз¬
действий внешней среды. Например, диапазон регули¬
рования 3: 1 обозначает, что минимальная скорость в
3 раза меньше максимальной.Интервалы■ ^1 >..средних уско¬о о.
к *-Uiрений, м/с*^ WГрузовыё операцииISW S
го щ5 о5i|к к яД 0,01§ о sл i
ill
iieI2 ^
я CJ USgsК .e'-S,а: Sк «sas4) О
S сВ сборочных цехах маши¬0,060,080,20.2—0,350.3-0.4ностроительных предприя¬тийПри сборке крупногабарит¬
ных узлов (судостроение.0,020,030,10,10.1—0,2строительство) массой свы¬ше 20 тПри сборке и монтаже ме¬0,010,020,060,10,l--0,2ханизмов с высокой точно¬стьюВ гражданском строитель¬0,080Д50,150,4—0.60,5-0,6стве при массе грузов до12 тВ гражданском и промыш¬0.050,10.10,3-jO,40,3—0.4ленном стронтельстве примассе грузов свыше 12 т0,030,1С взрывоопасными грузами0,040.10.1—0,2С жидким металлом0,030.040,10,30.10.15—0.2С контейнерами массой до0,120,12<0,5—0,60,4-0,610 тС контейнерами массой свы¬0,070,070,20,5-0,60,4—0,6ше 1C тПерегрузка штучных грузов0,200,250,30,6—0,80,5—0,7•массой до 10 тПерегрузка штучных гру¬0,120,150,20,4—0,50,4—0,6зов массой свыше 10 тПерегрузка насыпных гру¬— 0,21,00,6-0.8зов гоёйферомШтабелерами на механизи¬0.070,070,120,4—0,50.4-0,6рованных складахПерегрузка металлопроката0,12—0,30,3—0.40,4—0,6грузоподъемными магнита¬миб) Основные технические характеристики
грузоподъемных машинГрузоподъемность кранов и других подъемных ма¬
шин регламентирована ГОСТ 1575-75; 0,2—0, 25—0, 32—О, 4—0, 5—0, 63—0, 8—1—1, 25—1, 6—2—2, 5—3, 2—4—
5—6, 3—8—10—12, 5—16—20—25—32—40—50—63—80
100—125—160—200—250—320—400—500—630—800—
1000 т. Естественно, что машины с определенной номи¬
нальной грузоподъемностью в практике эксплуатации
могут поднимать грузы, имеющие широкий диапазон
масс, но в пределах данной номинальной грузоподъем¬
ности.У специализированных кранов средние массы подни¬
маемых грузов близки к номинальной грузоподъемно¬
сти. Для универсальных кранов средние массы переме¬
щаемых грузов составляют около 50% номинальной
грузоподъемности, причем только 10—15% всех подъ¬
емов осуществляются с грузами, массы которых близки
к номинальным.Скорости перемещения грузов определяют произ¬
водительность и мощность механизмов и выбираются с
учетом эффективности выполнения грузоподъемных опе¬
раций, т. е. получения необходимого времени операции
при наименьшей первоначальной стоимости механизмов
крана. Выбор оптимальной скорости является важной
задачей, необходимое решение которой может быть най¬
дено только на основе учета факторов производитель¬
ности, затрат энергии, возможности и эффективности
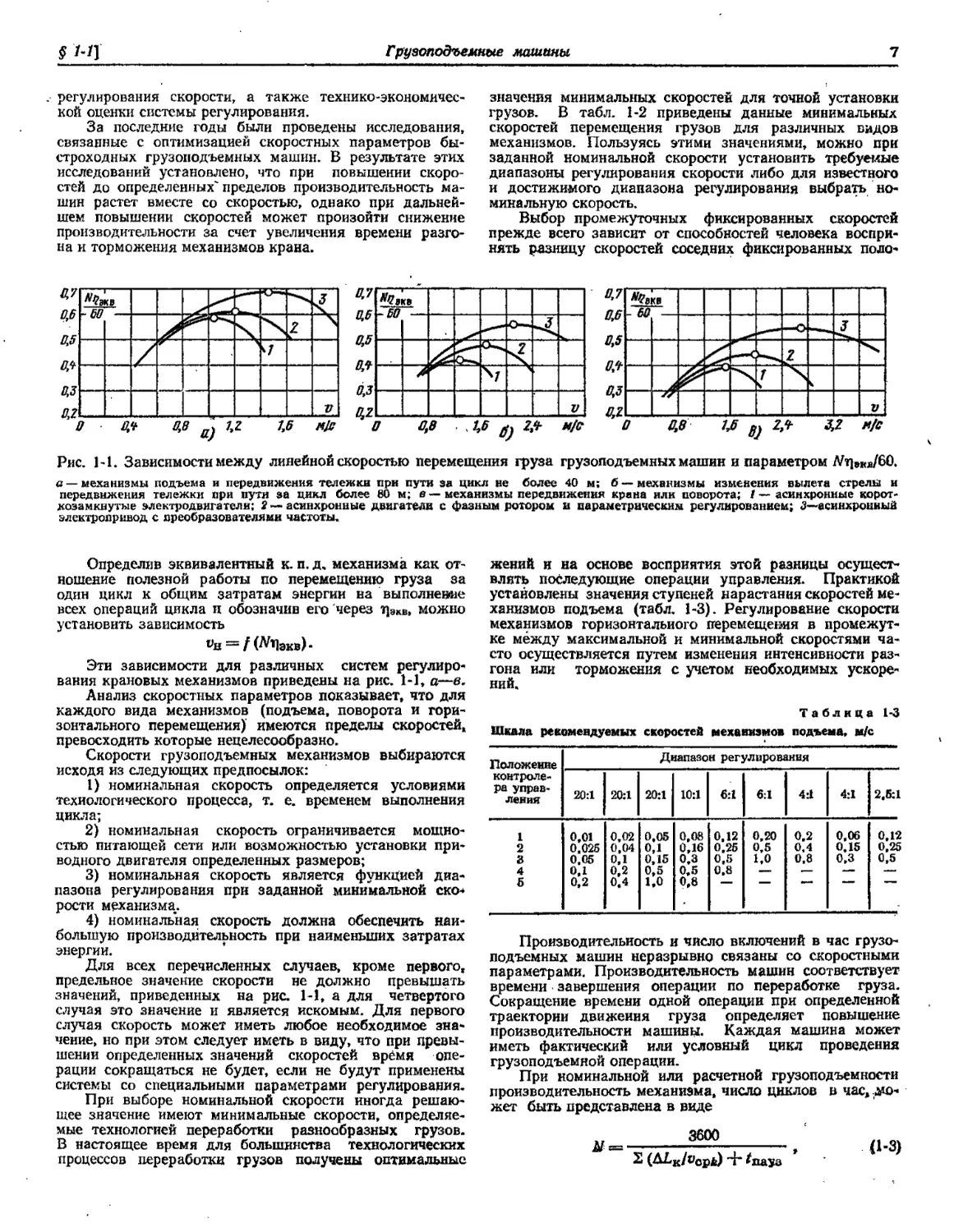
§ />/1грузоподъемные маминырегулирования скорости, а также технико-зкономичес-
кой оценки системы регулирования.За последние годы были проведены исследования,
связанные с оптимизацией скоростных параметров бы¬
строходных грузоподъемных машин. В результате этих
исследований установлено, что при повышении скоро¬
стей до определенных'пределов производительность ма¬
шин растет вместе со скоростью, однако при дальней¬
шем повышении скоростей может произойти снижение
производительности за счет увеличения времени разго¬
на и торможения механизмов крана.значения минимальных скоростей для точной установки
грузов. В табл. 1-2 приведены данные минимальных
скоростей перемещения грузов для различных видов
механизмов. Пользуясь этими значениями, можно при
заданной номинальной скорости установить требуемые
диапазоны регулирования скорости либо для известного
и достижимого диапазона регулирования выбрав но¬
минальную скорость.Выбор промежуточных фиксированных скоростей
прежде всего зависит от способностей человека воспри¬
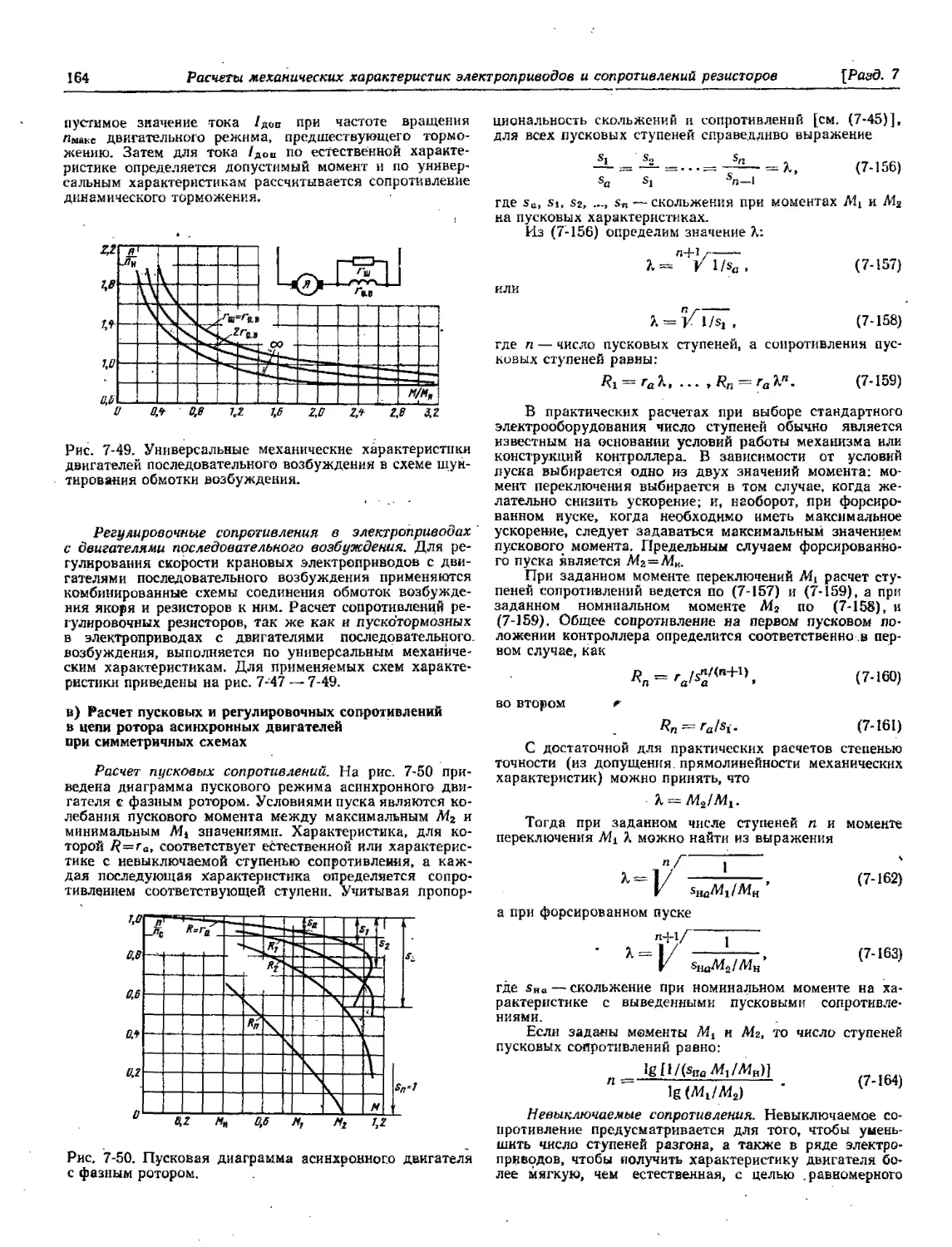
нять разницу скоростей соседних фиксированных подо-0,8 иЯД ■0,БВ,50,3вл—ОJч,... >'^7“ >4N1\\кVJ7V0,в , %Б Zfi- М/е0,6 1JS gj 2,4- 3,2 М/СРис. Ы. Зависимости между линейной скоростью перемещения груза грузоподъемных машин и параметром A^Tiw,a/60.а — механизмы подъема и передвижения тележки при пути за цикл не более 40 м; б — механизмы изменения вылета стрелы и
передвижения тележки при пути за цикл более 80 м; в — механизмы передвижения крина или поворота; i — асинхронные корот¬
козамкнутые электродвигатели; 2 — асинхронные двнгвтелн с фазным ротором и параметрическим регулированием; <3—всинхроцный
электропривод с преобразователями частоты.Определив эквивалентный к. п. д, механизма как от¬
ношение полезной работы по перемещению груза за
один цикл к общим затратам энергии на выполневие
всех операций цикла н обозначив его через т}экв, можно
установить зависимость% = /(Л^1]экв)-Эти зависимости для различных систем регулиро¬
вания крановых механизмов приведены на рис. 1-1, а~в.Анализ скоростных параметров показывает, что для
каждого вида механизмов (подъема, поворота и гори¬
зонтального перемещения) имеются пределы скоростей,
превосходить которые нецелесообразно.Скорости грузоподъемных механизмов выбираются
исходя из следующих предпосылок:1) номинальная скорость определяется условиями
технологического процесса, т. е, временем выполнения
цикла;2) номинальная скорость ограничивается мощно¬
стью питающей сети или возможностью установки при¬
водного двигателя определенных размеров;3) номинальная скорость является функцией диа¬
пазона регулирования при заданной минимальной ско¬
рости механизма.4) номинальная скорость должна обеспечить наи¬
большую производительность при наименьших затратах
энергии.Для всех перечисленных случаев, кроме первого,
предельное значение скорости не должно превышать
значений, приведенных на рис. 1-1. а для четвертого
случая это значение и является искомым. Для первого
случая скорость может иметь любое необходимое зна¬
чение, но при этом следует иметь в виду, что при превы¬
шении определенных значений скоростей время опе¬
рации сокращаться не будет, если не будут применены
системы со специальными параметрами регулирования.При выборе номинальной скорости иногда решаю¬
щее значение имеют минимальные скорости, определяе¬
мые технологией переработки разнообразных грузов.
В настоящее время для большинства технологических
процессов переработай грузов получены оптимальныежений и на основе восприятия этой разницы осущест¬
влять последующие операции управления. Практикой
установлены значения ступеней нарастания скоростей ме¬
ханизмов подъема (табл. 1-3). Регулирование скорости
механизмов горизонтального перемещешя в промежут¬
ке между максимальной и минимальной скоростями ча¬
сто осуществляется путем изменения интенсивности раз¬
гона или торможения с учетом необходимых ускоре¬
ний.Таблица 1-3
Шкала рекомевдуеных скоростей механизмов подъема, м/сДиапазон регулированияконтроле¬
ра управ¬
ления20:120:120:110:16:16:14:14:12.5:110.010,020.050,080,120.200.20,060,1220,0260,040,10.160.250.50,40.150.25г0.050,10,150.30,51,00.80.30,540,10,20.50.50.8————£0,20.41.00,8Производительность и число включений в час грузо¬
подъемных машин неразрывно связаны со скоростными
параметрами. Производительность машин соответствует
времени завершения операции по переработке груза.
Сокращение времени одной операции при определенной
траектории движения груза определяет повышение
производительности машины. Каждая машина может
иметь фактический или условный цикл проведения
грузоподъемной операции.При номинальной или расчетной грузоподъемности
производительность механизма, число циклов в час, дш-
жет быть представлена в видеМ:360021 (Д1>к/<'ор£) 4“ ^nasa0-3)
Условия работы и характеристики электрооборудования грузоподъемных машин[Разд. Iгде — значение k-й составляющей перемещения
груза в пределах одного цикла, м; Vq^u — средняя ско¬
рость, м/с; taays — время пауз для захвата и освобож¬
дения груза, с.Под полным циклом грузоподъемной операции сле¬
дует иметь в виду застроповку груза, выбирание сла¬
бины каната, подъем груза и его перемещение в необ¬
ходимую точку, спуск и установку груза, расстроповку
и обратное перемещение для начала новой операции.
При этом механизмы грузоподъемного устройства имеют
минимально необходимое обязательное число в1^люче-
ний. Однако по разным причинам в течение цикла опе-
рат^ производит еще ряд дополнительных включений,
связанных с несовершенством системы регулирования,
колебаниями груза на гибкой подвеске, недостаточным
опытом управления и т.п. Количество таких дополни¬
тельных включений может в 2—4 раза, превысить число
необходимых включений.Важной задачей разработки высокоэффективных
грузоподъемных машин является приближение факти¬
ческого числа включений к минимально необходимому.
В настоящее время наиболее качественные системы ре¬
гулирования .позволяют обеспечить выполнение опера¬
ций со средним числом включении лишь в 1,5 раза
большим минимально необходимого, в то время как
наиболее массовые системы параметрического регули¬
рования требуют до 20—30 включений на один цикл
перемещения груза, что в 5—6 раз превышает мини-
мальйо необходимое число включений.Число включений в час у различных механизмов
может составлять от 40—60 при режиме Л; до 500—
600 — для режима ВТ. При создании и освоении про¬
изводства систем управления, обеспечивающих устой--
чивые скорости с широким диапазоном их изменения,
происходит общая тенденция снижения числа включе¬
ний механизмов при одновременном повышении произ¬
водительности перегрузочных работ.в) Обобщенные показатели нагрузок
грузоподъемных машинЕсли грузоподъемность и скорости машин являют¬
ся основными показателями, характеризующими их по¬
требительские свойства, то показателями, характери¬
зующими интенсивность работы грузоподъемных машин,Таблица 1-4
Интенсивность работы грузоподъемных механизмовПродолжение табл. 1-4Вид грузопод'ьемной
машиныПодъемМостовые краны общего
назначения;подвесные монтажныекрюковые при скоро¬
сти подъема до 0,1 м/скрюковые при скоро¬
сти подъема до 0.1—
0.2 ы/скрюковые при скоро¬
сти подъема свыше
0.2 м/сгрейферные, магнит¬
ные и магнитно-грей¬
ферныеЛитейные краны10000,2—0,5
15000,2—0,4
15000.4—0,8
30000.8—1,3
30000,9—1,5
15000,1—0.2Передви¬жениетележкиПере¬движе¬ниекранаь Sag Sg.о Z и иS S «и° _ я л1-1 ж * S-6000,1—0.3
1000
0,1—0,25
1000
0,3—0,5
2000
0.5—0,92000
0,5—0,87500.16000.1—0.3
1000
0,1—0,25
10000.3—0,5
20000.5—0,6
200010,S—0,8
7000.1Вид грузоподъемной
машиныПодъемПередви¬жениетележкиПередви¬жениекрана« h а
о 5 я <1/со о.Sm S
Ся ggТехнологические краны
металлургического про¬
изводства (стрипперные,
колсдцевые. мульдозаеа-
лочные)4000300025008000,7—1,60.4—0,80.4—0,80,2—0,4Козловые краны:
крюковыегрейферныеремонтныеПере1'ружатели рудно-
угольные10006006000,1—0.3
15000,1—0,2
8000,1—0.2
8000,4—0.8
1500,2—0.4
1000.2—0,4
1000,0550000.0540000,0310003,02,00,5Перегружатели контей¬
нерныеБашенные строительные
краны:200015005001,01000.51000.250100грузоподъемностью
свыше 12 т0.1500.11000.2ISO0,1100грузоподъемностью
до 12 т0.20,10.10.11000200100200Д Jrl4vC^0.10,2кие0,30,2Портальные краны;150501000,010.02монтажные0,0230005001000перегрузочные крю¬—0.05-0,15000.3—0,4
1200ковые0,5—0,8
3000грейферные0,05—0,1П Я0,6—1,0
1000300Судовые перегрузочные—0,25краны0,6Строительные стреловые3001000,1поворотные краны
Штабелеры механизиро¬0.1130050010000.1ванных складов0,20.1Кабельные краны:монтажные1501000.020,02перегрузочные грей¬10001000ферныеперегрузочные крю-
ковые0.2—0,3
10000,2—0,3
1000Плавучие краны:грейферные перегру¬
зочные0,2—0,3
15000.2—0,36000,2—0..Ч0,1—0,2монтажные крюковые1501001500,020,020,02Примечание. В числитсле укалаио среднегодовое чис¬
ло часов работы, в знаменателе — среднегодовое число вклю¬
чений механизмов ь долях от 10° циклов.
Крановое электрооборудованиеТаблица 1-5Рекомендуемые категории режимов грузоподъемных машин
и их электроприводо⧫а£Персдви.жениетележки(тали)«(Cl.тТип крановоаKS3mто4
UXл0Jняо>:
S ш
о fi
к СГ
о о
PQ с£« gлCSоSсяIIоКisVXX1USоcf(UCl.<UСнолошосяч(L><хнонфчаиМостовые краны общего
назначения:подвесные монтажныеСсссС—'крюковые при скорости
главного подъема:до 0,1 м/сЛлл—л——0.1—0,2 м/сссс“с——свыше 0,2 м/стсс—т—_грейферныеВТВТВТТВТ——магнитныеВТВТВТтВТ——магкитно-грейфсрныЕВТВТВТВТВТ——Магнитные краны металлур¬ВТВТ—ВТ——гического производстваЛитейные мостовые кранытссст——Специальные мостовые кра¬
ны:ВТдля раздевания слитковВТТ—т——(стрилперные)колодцевыеВТсВТ—тт—ковочныеТтТсс——закалочныетСтт—мульдозавалочныеВТ_ВТВТВТ—Козловые краны;крюковыессс—с——грейферныеттТт——ремонтныеллл~л—~строительио-монтажяыелслслПcpeгpyжaтeл:^:угольно-рудные грейфер¬ВТВТВТ—л—__ныеконтейнерные
Башенные строительныет—Т—с—лкраны;грузоподъемностью;лсвыше 12 тл ллдо 12 тс—л лллтехнологическиет—G—л. СсПортальные краны;монтажныелс лссперегрузочные крюковыет. лттперегрузочные грейфер¬ВТВТ лттныеСудовые перегрузочные кра¬т Сссны и лебедкиСтроительные стреловые по¬с —ллворотные краныШтэбелеры механизирован¬т—с т——ных складов
Кабельные краны:монтажныел л л __перегрузочные грейфеР'т—Т—л——ныеперегрузочные крюковыес—с—л——Плавучие краны;грейферные перегрузоч¬ВТ————ттныелллсмонтажные крюковые
тяжелые крюковыессссссЯВЛЯЮТСЯ степень загрузки механизмов в течение суток
и года, а также среднее число включений.Ориентировочные данные о числе часов работы а
течение года для различных крановых механизмов
приведены в табл. 1-4. Там же указаны возможные
пределы изменения числа включений за год для этих
механизмов при различных системах управления и раз¬
личных диапазонах регулирования, причем меньшие
значения частот включения относятся к системам со
стабильными минимальными скоростями и условиями
регулирования согласно табл. 1-3. Верхние пределы чи¬
сел включений относятся к системам, где получение-
необходимых минимальных скоростей связано с непре¬
рывным ручным регулированием средней скорости пе¬
ремещения и отсутствует достаточное количество про¬
межуточных скоростей.основе данных по степени загрузки различных
механизмов, кранов, скоростных параметров и условий
их использования в эксплуатации согласно правилам
Госгортехнадзора ряд механизмов может быть отнесен
к соответствующим классификационным показателям
использования. В табл. 1-5 приведены рекомендуемые
категории обобщенных режимов работы грузоподъемных
механизмов.1-2. КРАНОВОЕ ЭЛЕКТРООБОРУДОВАНИЕ.
ОСНОВНЫЕ УСЛОВИЯ ИСПОЛЬЗОВАНИЯ
И ЭКСПЛУАТАЦИИа) Условия эксплуатации3 отличие от электрооборудования, используемого
в производственных помещениях н в основном изолиро*
ванного от агрессивных сред, краны могут быть уставо- и
влены не только в помещениях, но и на открытом воз¬
духе. При установке в помещениях многие краны на¬
ходятся непосредственно над линиями технологических
механизмов, в среде с повышенными температурами,
высокой концентрацией ныли, наличием в воздухе сла¬
бых кислот и щелочей (например, в металлургическом и
химическом производствах). Некоторые краны в про-
дессе эксплуатации передвигаются из отапливаемого
помещения на открытый воздух и обратно. При этом на
изоляционных поверхностях возможна конденсация
влаги, которая в смеси с производстзекной пылью мо¬
жет значительно снижать качество поверхностной изо¬
ляции токоведущих частей. Эта же конденсированная
влага в смеси с пылью усиливает коррозию металли¬
ческих поверхностей.Конечно, совокупность перечисленных крайних ус¬
ловий эксплуатации маловероятна, одиако, учитывая,
что большинство конкретных ограничений заранее пре¬
дусмотреть невозможно, крановое электрооборудованив-
в максимальной степени должно быть приспособлено для
эксплуатации при следующих внешних воздействиях:1) температура окружающей среды изменяется от
—40 до +40° С. В металлургических цехах интервал из¬
менения температур окружающей среды составляет от
—10 до +50° С;2) относительная влажность воздуха характеризу¬
ется средним уровнем в 90% при температуре окружа¬
ющей среды +25° С;3) осаждение пыли (в том числе токопроводящей)
из воздуха 5 г/м2 в сутки;4) осаждение паров кислот из воздуха 500 мг/м^ в
сутки;5) механические воздействия (вибрация и удары),
вызванные передвижением механизмов, характеризуют¬
ся интервалом частот 1—50 Гц и ускорением 5 м/с^;
одиночные повторяющиеся удары характеризуются ус¬
корением до 30 м/с2.
!0Условия работы и характеристики электрооборудования грузоподъемных машин{Разд. IЗащита одектрооборудовавня от воздействий внешней средыТаблица 1-6Наименование электро'
оборудования, распола¬
гаемого на кранеМеханизмы, работающие на
открытом воздухе, катего¬
рия 1ОМ1(откры¬тыепалу¬бы)Т1У1ХЛ1Механн^ы, работающие в помещении, категория 2Т2Металлургическое,
химическое произ¬
водство. произ¬
водство
с высокой концен¬
трацией пылиОслады н общепро'
мышленное
производствоУ2. ХЛ2Металлургическое,
химическое произ¬
водство. произ¬
водство с высо¬
кой концентра¬
цией пылиСклад я и общепро¬
мышленное про¬
изводствоЭлектродвигателя
Аппаратура на откры¬
тых частях крана
Аппаратура в кабине
управленияКожухи для защиты
аопаратуры, устанавли¬
ваемой непосредственно
на механизмах (кроме
ящиков резисторов)Кожухи для защиты
ящиков резисторовАппаратура в специаль¬
ных аппаратных поме¬
щенияхIPS6IP56IP441Р56IP56IP65IP55IP33IP44IP33IP44IP44IP331Р44IP33IP44IP33IP44IP23Защита ие требуетсяIP44IP44IP441Р44IP43IP23IP23Защита не
требуетсяIP44IP44IP44IP4JIP43IP23IP23Защита не
требуетсяЗащита не требуется
Защита не требуетсяЭти условия характерны для кранового электро¬
оборудования общего назначения категорий размещенияУ1 и У2 по классификации согласно ГОСТ 15150-69.При использовании кранового электрооборудования
только в странах с тропическим климатом, т.е. для ка*
тегорий размещения Т1 и Т2, значения температур и
влажности будут следующими:1) температура окружающей среды изменяется от
+5 до +45° С. В металлургических цехах интервал из*
менения температур — от +10 до +50“ С;2) относительная влажность воздуха характеризу-т
ется средним уровнем 95% при +35* С с периодическим
выпадением росы.При использовании кранового электрооборудования
специально в зонах холодного климата, т, е. для кате¬
горий размещения ХЛ1 и ХЛ2, интервалы изменения
температуры от —60 до +40° С. Для предохранения от
воздействий внешней среды крановое электрооборудо¬
вание должно быть либо само достаточно защищенным,
либо размещаться в кожухах с необходимой степенью
защиты.Степени защиты от воздействий внешней среды ус¬
тановлены ГОСТ 14254-69 и ГОСТ 17494-72.При размещении электрооборудования на кранах и
других грузоподъемных машинах следует обеспечивать
степени защиты согласно табл. 1-6.Особые условия использования электрооборудования
на кранах регламентированы «Правилами устройства и
безопасной эксплуатации грузоподъемных кранов», вве¬
денными в действие в 1970 г,б) Общие рекомендации по проектированию
и установке электрооборудования на кранахЭлектрооборудование, устанавливаемое на кранах,
с учетом специфики его эксплуатации должно иметь
повышенную механическую прочность, быть устойчивым
к различным перегрузкам и в то же время быть пре¬
дельно простым при обслуживании и ремонте. По меха¬
нической прочности крановое электрооборудование
должно отвечать требованиям категории М4 по
ГОСТ 16962-71.На основе многолетней практики эксплуатации кра-
жувого электрооборудования выработаны следующие
общие требования к нему.1, Расстояние между находящимися под напряже¬
нием частями с разными потенциалами, а также между
частями, находящимися под напряжением, и заземлен¬
ными металлическими частями выбирается в соответст¬
вии с табл. 1-7-Таблица 1-7
Изоляционные расстояния в крановсм электрооборудованииРасстояние, мм, в зависимости
от напряженияоборудованияпо воздухуго поверхностидо 60 в]1 61—500 Вдо 60 В61—500 ВЭлектрические машины,
распределительные и
комплектные устройства614820Злектрические аппараты
н тиристорные устройст¬
ва (кроме раствора кон¬
тактов)614818Установочная арматура38410Блоки электроники, име¬
ющие защиту от пыли36482. Весь стационарный внутренний монтаж электри¬
ческого оборудования должен выполняться медным
многожильным проводом сечением не менее 1,5 мм».3. При монтаже контактов, размыкающих цепи по¬
стоянного тока, они должны возвышаться над пластмас¬
совыми деталями (отстоять от них) не менее чем на
6 мм.4. Сопротивление изоляции электрооборудования
между фазами (полюсами) и относительно заземленных
частей должно быть не ниже указанных в табл. Ь8.5. Электрическая прочность изоляции электрических
машин должна быть ие ниже 1800 В, а трансформато¬
ров и аппаратуры не ниже 1500 В.6. По коррозионной стойкости электрооборудование
категорий У1, У2, ХЛ1, ХЛ2 принадлежит к средней
группе СЗ; электрооборудование категории Т1, Т2, ОМ1
принадлежит к жесткой группе ЖЗ. Толщина гальва¬
нических покрытий для меди и ее' сплавов должна
быть не ниже 9 мкм для обеих групп. Толщина цинко-
§/-<?]Питание крановых электроприводов -и -обеспечение мектробевопасностиМСопротивление изоляцииТаблица 1-8Характеристики выводных зажимовТ а б л и ц а 1-9Наименование электрообору*
дованияЭлектрические машины
Трансформаторы
Грузоподъемные магниты
Отдельный аппарат
Комплектное устройствоМинимальное сопротивление
изоляции при ^р^,р=к20°С и
носительной влажности не вшой
86%. мОмпри монтажев холод¬
ном со¬
стоянииБ.О6,010.010,02,0В нагретом
состоянии2.02,01.03.01.0при экс¬
плуатацииперед на¬
чалом ра¬
боты1.02,00.31,00.5ваний стальных деталей должна составлять 15 мкм для
группы СЗ и 20 мкм для группы ЖЗ. При кадмирова¬
нии толщина покрытия может быть снижена на 20—
30%.7. Для обеспечения достаточной надежности кон¬
такта электрических цепей все контактные соединения
должны иметь устройства, предохраняющие от самоот-
винчивания, а также относительно высокие контактные
нажатия; нажатие на медные контакты главных цепей0,2—0,3 Н на i А номинального тока; нажатие на се¬
ребряные контакты 0,1—0,15 Н на 1 А номинального то¬
ка, но. не менее 1,5 Н на контакт.8. Контрольные лампы, измерительные устройства,
катушки напряжения аппаратов должны иметь защиту
от коротких замыканий или устройства, ограничиваю¬
щие ток короткого замыкания. Эти приборы могут не
иметь своих устройств защиты, если защита предыду¬
щей ступени питания рассчитана на ток не более 25 А.9. ПрЕ оперативных размыканиях цепей постоян¬
ного тока с индуктивностью максимальное напряжение
в цепи не должно превышать 1400 В.10. При установке электрооборудования в высоко¬
горных условиях оно может применяться в обычном
конструктивном исполнении до высот 4000 м над уров¬
нем моря при снижении нагрузок на 12% на каждые
1000 м подъема сверх первой тысячи метров над уров¬
нем моря. При высотах над уровнем моря свыше
2000 м номинальное напряжение должно быть не выше
380 В.И. Комплектные устройства, устанавливаемые на
подвижных частях кранов, должны крепиться не менее
чем в двух точках в нижней части и двух точках в
верхней части с тем, чтобы обеспечить равномерную на¬
грузку на рамы прн ускорениях и замедлениях.12. Оболочки аппаратов и комплектных устройств
должны иметь такую конструкцию, которая позволяет,
при открытых крышках (дверях) обеспечить доступ ко
всем токопереходам с одной (лицевой) стороны. От¬
крывание крышек (дверей) должно осуществляться
без инструмента или,- в крайнем случае, с помощью от¬
верток.13. Максимальная высота комплектных устройств,
устанавливаемых на кранах, должна быть не более
1800 мм.14. Нажатие, обеспечивающее контактные соедине¬
ния в аппаратах, не должно передаваться через изоля¬
цию, в том числе изоляционные монтажные доски. Ис¬
ключение составляют: фарфор, стеатит, кордиерит. Кон¬
струкции катушек и токоподвода к ним должны быть
такими, чтобы усилие от соединительных проводов не
передавалось на витки катушки.1016254063103160250400630Интервал
сечений под¬
водимых про¬
водов, мы*1—2,51—41.5-6.02.5—10
4—16
е—25
10—50
25—95
70—ISO120—2X120160-2X185Форма головки винтов
и болтовЦилиндрическая со шли¬
цемЦилиндрическая или
шестигранная со шлицем
То жеШестигранная со шлицем
Шестигранная без шлица
То жеРазмеры
резьбы, ммМ3М4М4М5MSМбМбМ8М10М12М16М5MSМ5М5МбМбМбМ8тшМ815. Выводные зажимы аппаратов и комплектных
устройств должны иметь параметры согласно табл. Ь9.16. Электрооборудование краиов электролитических
цехов, рассчитанных на подъем деталей, находящихся
под напряжением до 800 В, должно иметь дополнитель¬
ные ступени изоляции по отношению к конструкциям
кранов, находящимся под напряжением.17. Металлические маховики н ручки должны быть
электрически соединены с заземленными частями аппа¬
ратов. Допускается электрическое соединение осущест¬
влять через металлические подшипниковые сочленения.18. Установку аппаратов в комплектных устройст¬
вах, предназначенных для эксплуатации в условиях по¬
вышенной запыленности, рекомендуется осуществлять
на изоляционных досках с тем, чтобы снизить вероят¬
ность перекрытий между аппаратами в эксплуатации.
Материал изоляционных досок не должен поддерживать
горения.19. Основные стандарты, используемые для крано¬
вого электрооборудования;Электрооборудование. Основные понятия E95JРяд номинальных мощностей электрических ГОСТ 12135>-74
машин мРяд линейных размеров ГОСТ 6^-69Электрические машины ГОСТ 1Ю-74Электрические аппараты ГОСТ 12434-^Исполнения для различных климатических ГОСТ 15150-69
районов. Категории и условия эксплуатации
Механические н климатические воздействия ГОСТ 14зд2-Л
Условия эксплуатации в части механических ГОСТ 17516-72
н климатических воздействийУсловия эксплуатации в части климатических ГОСТ 15543-70
воздействий • _ гг -тОбщие технические требования к изделиям, ГОСТ 17412-72
эксплуатирующимся в холодном климатеОбщие технические требования к изделиям, ГОСТ 15963-70
эксплуатирующимся в тропикахСтепени защиты оболочек аппаратов ^^Q^T 14И4-е9Подвесные краны ГОСТ 78^-73Крюковые опорные краны 5оБашенные строительные краны ГОСТ 13w-68. Самоходные стреловые краны ГОСТ 9622-72Степени защиты оболочек электрических ма- ^ ГОСТ 17494-72
шинУсловные обозначения в электрических схемах ГОСТ 2.721-74ГОСТ 2.728-74
ГОСТ 2.755-741-3. ПИТАНИЕ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
И ОБЕСПЕЧЕНИЕ ЭЛЕКТРОБЕЗОПАСНОСТИа) Питающие сети и качество электроэнергииГрузоподъемные машины в большинстве своем яв¬
ляются устройствами, от надежности работы которых
зависит нормальный ход производства, поэтому в се-
12Условия работы и характеристики электрооборудования грузоподъемных машин[Разд. 1ответствии с ПУЭ электроприводы кранов относятся к
категории потребителей не ниже второй, для которой
перерыв питания допускается только на время пере¬
ключения питания с основной сети на резервную. Ряд
кранов, такие, как литейные, перегрузочные для опе¬
раций со взрывоопасными, ядовитыми или радиоактив¬
ными грузами, и некоторые другие относятся к прием¬
никам первой категории, которые должны обеспечивать¬
ся питанием от двух независимых источников, при этом
перерыв питания может быть допущен только на вре¬
мя автоматического ввода резервного питания.•Крановые электроприводы могут получать питание
от трехфазных сетей переменного тока промышленного
предприятия или от специальных единых общезаводских
сетей постоянного тока. Основным напряжением для
питания крановых механизмов является напряжение
380 В для переменного тока 50Гц и 220 В для постоян¬
ного тока. Наряду с этими напряжениями по согласо¬
ванию с изготовителями крановое электрооборудование
может изготавливаться для следующих нестандартных
напряжений;1) постоянный ток 440 В;2) переменный трехфазный ток: 220 В, 50 Гц;
380 В, 60 Гц; 440 В, 60 Гц; 415 В. 60 Гц; 415 В, 50 Гц;
500 В, 50 Гц.На напряжение свыше 440 В постоянного тока и
500 В переменного тока крановое электрооборудование
не изготавливается. В перспективе намечается исполь¬
зование для питания крупных кранов напряжения
660 В, 50 Гц.Качество электроэнергии переменного тока опреде¬
лено ГОСТ 13109-67. Допуск на отклонение частот от
номинального значения составляет ±0,2 Гц. Допусти¬
мые колебания напряжения сети, предназначенной для
питания электроприводов, от —5% до +10%.Несимметрия фазных напряжений в трехфазной
сети допускается в пределах до 2% номинального зна¬
чения. Несинусоидальность формы кривой напряжения
за счет высших гармоник не должна превышать 5%
действующего значения напряжения основной частоты.Питание грузоподъемных машин с электроприво¬
дом весьма разнообразно как в отношении источников
питания, так и числа потребителей, получающих пита¬
ние от одной линии. Наименьшие мощности питающих
сетей имеют место для строительных кранов, наиболь¬
шие — в питающих сетях кранов металлургического и
химического производства, а также на машинострои¬
тельных заводах тяжелого машиностроения. В связи с
универсальностью использования большинства грузо¬
подъемных машин общего назначения при конструи¬
ровании электрооборудования приняты следующие до¬
пущения:1) мощности питающих сетей для строительных ба¬
шенных кранов жилищного строительства не превыша¬
ют 500 кВ-А;2) мощности питающих сетей для мостовых и коз¬
ловых кранов общего назначения, портальных кранов
составляют 500—1600 кВ-А;3) мощности питающих сетей судовых грузоподъ¬
емных механизмов не превышают 2000 кВ-А;4) мбщностн питающих сетей кранов металлурги¬
ческого производства и перегружателей могут дости¬
гать 5000 кВ-А.Под мощностью питающих сетей подразумевается
установленная мощность трансформатора и генератора
на линии, питающей кран.б) Токи короткого замыканияНадежная работа кранового электрооборудования
во многом зависит от устойчивости всех элементов
разветвлен^гвй сети питания крановых электроприводовк токам короткого замыкания (к. з,). Вероятность к. з.
в цепях и элементах электрооборудования кранов зна¬
чительно выше, чем у стационарных механизмов, ввиду
того, что краны при работе создают вибрацию, ударные
сотрясения и ускорения, которых нет у стационарных
установок. Расположение крановых механизмов в верх¬
ней части зданий, где концентрация пыли и газов зна¬
чительно выше, чем в специальных электротехнических
помещениях, также ухудшает условия эксплуатации. С
учетом этих обстоятельств электрооборудование кранов
должно быть в целом устойчиво к последствиям воз¬
можных к. 3, в пределах электрической сети крана.Токи к. 3. в стационарных сетях определяются в
основном параметрами сверхпереходных индуктивных
сопротивлений питающих источников и электрических
машин потребителей. Для крановых механизмов с
большим числом токоиереходов, стальными троллеями
или относительно длинными питающими кабелями токи
к. 3. в значительной мере определяются активными со¬
противлениями этих элементов.Фазный ток к. 3,, А, в пределах электрической сети
переменного тока кранового механизма к концу вто¬
рого периода, т. е. при /к.з = 0,04 с, с достаточной для
практики точностью может быть определен по фор¬
муле100(1-4)где /к — номинальный длительный ток кабеля в сети,
где произошло к. з.. А; Р — мощность трансформатора
(или генератора) питающего сеть, кВ-А.Ударный ток к. 3. в момент времени ^к.з —0,01 с
может составлять 150—200% тока к. з., определенного
по (1-4). Для обеспечения стойкости к к. з. аппаратура
должна иметь электродинамическую стойкость в пре¬
делах тока к. 3. по (1-4) и односекундную термическую
стойкость к токам, составляющим не менее 40% тока,
определенного по (1-4). Защитное устройство на линии
питающей кран, должно быть рассчитано на отключение
тока к. 3., а защита на кране, срабатывающая в течение
времени, превышающем 0,06 с, должна быть рассчитана
па отключение тока, составляющего 60% значения, оп¬
ределенного по (1-4).Монтажные провода в электрической аппаратуре,
а также все провода внешнего монтажа в пределах
механизма должны выбираться, исходя из наибольших
возможных в эксплуатации токов в получасовом мак¬
симуме нагрузок данного участка электрической цепи.
Эти нагрузки должны приниматься как длительные для
монтажных проводов и кабельных сетей. Учитывая, что
крановые электроприводы эксплуатируются в повтор-
но-кратковременном режиме, медные провода и кабели
сечением 10 мм^ и более и алюминиевые сечением 16 мм^
и более могут быть нагружены током, в k раз больше
номинального;0,875V mi Ш(1-5)где ПВ — относительная продолжительность включения,
%■При температурах окружающей среды, превышаю¬
щих +25° С, допустимая нагрузка проводов и кабелей
с резиновой изоляцией снижается до следующих значе¬
ний:При + 40°С Л.76/дПри -f- 45°С 0-66/^При + бО'-С - . . . 0,547дПри + 55°С 0,30/„
f f-4]Система управления крановым электроприводом13Общую защиту крановых электроустановок при
суммарной мощности электродвигателей до 250 кВт на
переменном токе и 150 кВт на постоянном токе следует
осуществлять автоматическими выключателями серии
А3700. Для особо мощ1шх кранов с токами в питающих
линиях 1000 А и выше в качестве защитных устройств
следует использовать воздушные выключатели АМ8~
ДМ 15.В отдельных цепях электроприводов при сечении
отходящих проводов до 2,5 мм^ можно применять ус¬
тановочные автоматы АП50, АК63, АСТ25 с отключаю¬
щей способностью не ниже J200 А. Поскольку двигате¬
ли электрогидравлических толкателей тормозов получа¬
ют питание от сравнительно мощных сетей, они должшл
иметь индивидуальную защиту с помощью автоматиче¬
ских выключателей АКбЗ, АСТ25.При выборе уставки электромагнитного расцепителя
защитного автомата в цепях электроприводов перемен¬
ного тока нужно учитывать его быстродействие. Совре¬
менные автоматы срабатывают в течение первого пе¬
риода, поэтому они могут реагировать на апериодиче¬
скую составляющую пускового тока асиихроиного
электродвигателя. С учетом отстройки от апериодиче¬
ской составляющей пускового тока и допустимых раз¬
бросов пускового тока ток отсечки электромагнитного
расцепителя автомата необходимо иметь равным;■^ср^ J >8/п,дв (!■&)где /п.я-в '— расчетное значение пускового тока наи¬
большего по мощности двигатели, защищаемого автома¬
том: /с.дв “ статические токи нагрузки двигателей дру¬
гих механизмов в установившемся режиме^ т — число
электроприводов крана,1-4. СИСТЕМЫ УПРАВЛЕНИЯ
КРАНОВЫМ ЭЛЕКТРОПРИВОДОМа) Основные определенияПод системой управления электроприводом в даль¬
нейшем будем подразумевать комплекс, состоящий из
преобразователя электрической энергии (если таковой
имеется), аппаратуры управления для коммутации тока
в цепи электродвигателя, органа ручного управления
или автоматического (программного) контроля, органа
скоростного, путевого или иного контроля, а также
элементов защиты злектрооборудовання и механизма,
действующих в конечном счете на устройства отклю¬
чения электропривода.Все электрические цепи подразделяются на:{) главные цепи, через которые проходит основной
поток энергии электропривода, а также осуществляется
питание грузоподъемных магнитов;2) цепи возбуждения, через которые проходит ток
возбуждения электрических машин постоянного тока,
синхронных электрических машин перемсшюго Twta или
элек'громагнитов тормозных устройств, а также ток
двигателей электрогидравлических толкателей;3) цепи управления, по которым осуществляется
подача команд к коммутационным устройствам глав¬
ных цепей и цепей возбуждения от органов управле¬
ния. В цепях управления осуществляется также опре¬
деленная последовательность выполнения команд и пе¬
реключений но заранее заданной программе;4) цепи сигнализации, которые передают оператору
или контролирующему устройству информацию о со¬
стоянии коммутирующих элементов главных цепей и
цепей управления или о значениях конкретных пара¬
метров электропривода и механизма.В крановых электроприводах применяют электро-
машинные и статические преобразователи электрическойэнергии. В электромашинных преобразователях две (или
более) электрические машины преобразуют электро¬
энергию, потребляемую от питающей сети, в электро¬
энергию с регулируемыми параметрами (напряжение,
частота, ток). В статических преобразователях преобра¬
зование электрической энергии осуществляется путем
бесконтактной коммутации цепей постоянного пли пе¬
ременного тока с помощью управляемых и неуправля¬
емых полупроводниковых приборов.Аппаратура управления электроприводом является
комплексом, включающим контактные и бесконтактные
устройства коммутации в цепях электродвигателя, пре¬
образователей энергии и управления, а также элементы
защиты электрических цепей.Всю контактную аппаратуру в кра»овом электро¬
приводе можно разделить на две группы:1) управление осуществляется непосредственно
оператором или исполнительным механизмом (контрол¬
леры, конечные выключатели);2) с приводом контактов от электромагнитного
устройства (контакторы и реле).Если контактные коммутационные элементы аппа¬
рата с непосредственным ручным приводом предназна¬
чаются для коммутации цепей главного тока, то такое
устройство называется галоеьш кулачковым контрол-^
лером, а если эти эJюмeнты служат для коммутации це¬
пей управления, то такой аппарат называется командо-
к-отроллером. Если контактные коммутационные эле¬
менты приводятся в действие через связь с механизмом,
то такие аппараты называются конечными или путевы¬
ми выключателями.Последовательность замыкания и размыкания кон¬
тактов, приводимых в действие от вала с кулачковыми
шайбами, в функции угла поворота вала, шзывается
диаграммой включений. Диаграмма включений, изобра¬
женная в виде таблицы, называется таблицей включеншЬ
Несколько контакторов и реле, а также различные уст¬
ройства защиты, объединенные в законченное комплект¬
ное устройство для управления электроприводом, име¬
нуются магнитными контроллерами.6) Классификация систем управленияСистемы управления крановыми механизмами Ьт-
носятся к категории устройств, находящихся под не¬
прерывным контролем оператора, т, е. в этих системах
выбор момента начала операции, скоростных парамет¬
ров и момента окончания операции осуществляется ли¬
цом, управляющим механизмом. В свою очередь систе¬
ма управления должна обеспечивать необходимую по¬
следовательность переключений для реализации желае¬
мых скоростных параметров, предотвратить при этом
недопустимые перегрузки и обеспечить необходимую
защиту.Вес многообразие различных систем управления мо¬
жет быть разделено на следующие группы.По способу управления:1) управляемые непосредственно силовыми кулач¬
ковыми контроллерами, где весь процесс управления,
включая выбор необходимых ускорений, осуществля¬
ется исключительно оператором;2) управляемые кнопочными постами, где возмож¬
ности управления ограничены конструктивными осо-
беигюстями поста;3) управляемые сложным комплектным устройст¬
вом {магнитным контроллером с использованием преоб¬
разователя энергии или без него). В этом случае опе¬
ратор выбирает только необходимые скорости, а про¬
цессы разгона, торможения и необходимые промежу¬
точные переключения осуществляются автоматически.По условиям регулирования:1) с регулированием скорости ниже номинальной;
uУслсвкл работы « характеристики электрооборудования грузоподъемных машин\Разд. 12) с регулированием скорости выше номинальной н
ниже номинальной;3) с регулированием ускорения и замедления.Параметры регулирования систем управления не¬
разрывно связаны с регулировочными свойствами при¬
водных электродвигателей.В крановом электроприводе используется четыре
типа электродвигателей:1) электродвигатели постоянного тока с последова¬
тельным или независимым возбуждением. Они допуска¬
ют регулирование скорости, ускорений и замедлений
путем регулирования подводимого к якорю двигателя
напряжения и тока возбуждения.2) асинхронные электродвигатели переменного тока
с фазным ротором. Они позволяют осуществлять регу¬
лирование скорости, ускорения и замедления, в частно¬
сти, путем введения в цепь ротора резисторов;3) асинхронные электродвигатели переменного то¬
ка с короткозамкнутым ротором. При постоянной ча¬
стоте сети они имеют практически постоянную частоту
вращения, а при регулируемой частоте сети допускают
регулирование частоты вращения соответственно изме¬
нению частоты преобразователя;4) асинхронные электродвигатели переменного тока
с короткозамкнутым ротором и двумя или тремя об¬
мотками на статоре с разным числом полюсов. Они до¬
пускают регулирование скорости соответственно измене¬
нию числа пар полюсов обмоток. Для этих двигателей
по конструктивным особенностям наибольший возмож¬
ный диапазон регулирования 6:1 при постоянной частоте.В соответствии с приведенной классификацией в
крановом электроприводе существуют и используются
следующие системы управления.Системы непосредственного управления с помощью
силовых кулачковых контроллеров. Наиболее распрост¬
раненной в крановом электроприводе является система
управления ш основе использования силовых кулачко¬
вых контроллеров.Управление электродвигателями постоянного тока
осуществляется кулачковыми контроллерами, имеющи¬
ми различные схемы соответственно их назначению.Для механизмов подъема применяется несиммет¬
ричная схема контроллера с потевдиомётрическим
включением якоря двигателя на положениях спуска, а
для механизмов передвижения используется симметрич¬
ная схема контроллера с последовательно включенными
сопротивлениями (К—Д).Управление асинхронными электродвигателями пе¬
ременного тока с фазным ротором осуществляется ку¬
лачковыми контроллерами, имеющими однотипную кон¬
струкцию и различные схемы включения (К-АДФ).Контроллеры осуществляют коммутацию обмоток
статора, а также коммутацию ступеней сопротивлений
в цепи ротора.Все контроллеры переменного тока позволяют осу¬
ществлять регулирование скорости электродвигателей с
фазным ротором в диапазоне 2,5:1 за счет введения в
цепь • ротора регулировочных ступеней сопротивлений.Основная йбласть применения силовых кулачковых
контроллеров — управление наиболее простыми элект¬
роприводами легкого и среднего режимов работы с
диапазоном регулирования скорости не более 3:1 и
небольшим числом включений в час.Системы управления крановыми электроприводами
с использованием магнитных контроллеров. Эти системы
применяются для установок прстоянного (МК-Д) и пе¬
ременного (WK-АДФ) токов. В этих системах исполь¬
зуются различные устройства регулирования скорости с
релейно-контакторнымн схемами включения обмоток
электродвигателей и резисторов.В составе магнитных контролле?)ов для комму¬
тации цепей применяются контакторы с электромагнит¬ным приводом постоянного и переменного токов, элект¬
ромагнитные реле напряжения, времени и тока, рези¬
сторы, полупроводниковые выпрямители и другие уст¬
ройства коммутации и управления. Операции по уп¬
равлению в этих системах осуществляются с помощью
командоконтроллеров.Выбор магнитных контроллеров осуществляется с
З^етом рода тока питающей сети и типа кранового ме¬
ханизма, мощности при заданных режимах крана, усло¬
вий эксплуатации, реализаций необходимого диапазона
регулирования скорости.Ограничением применения магнитных контроллеров,
как правило, является реализуемый с их помощью диа¬
пазон регулирования с учетом имеющейся системы пи¬
тания.Применение более сложных систем с электрома-
шинными или статическими преобразователями энергии
определяется более высокими требованиями к условиям
регулирования или ограничениями, связанными с си¬
стемами питания.Система переменного тока с тиристорным регулято¬
ром напряжения. Через тиристорный регулятор напря¬
жения получает питание обмотка статора асинхронного
электродвигателя с фазным ротором (ТРН-АДФ). Эта
система занимает промежуточное положение между
МК-АДФ и системами с более сложными преобразо¬
вателями энергии. При автоматическом регулировании
напряжения с обратной связью по скорости система
ТРН-АДФ позволяет достигнуть регулирования скоро¬
сти в диапазоне 10:1, но при этом в системе необходимо
иметь тахометрический контроль частоты вращения со
всеми связанными с этим неудобствами (передача через
троллеи маломощных сигналов). Такие системы могут
эффективно использоваться для механизмов горизон¬
тального перемещения с относительно высокими i значе¬
ниями моментов инерции движущихся частей, когда
применение электродвигателя с фазным ротором почти
неизбежно. При использовании в системах ТРН-АДФ
тиристорных регуляторов напряжения появляется воз¬
можность бестоковой коммутации статорных обмоток
электродвигателей, что значительно повышает срок
службы и износостойкость электроприводов. Основным
недостатком системы является применение тахометри:
ческого контроля скорости, а также необходимость в
высококвалифицированном обслуживании блоков элек¬
троники регуляторов.Система генератор—двигатель. Система Г—Д из
всех систем с электромашинными преобразователями
энергии получила наибольшее распространение в крано¬
вых электроприводах. Среди систем управления, обла¬
дающих высокими регулировочными свойствами, систе¬
ма Г—Д до недавнего времени являлась наиболее эф¬
фективной для обеспечения широкого диапазона регули¬
рования при всех условиях нагрузки кранового элект¬
ропривода.В крановом электроприводе сложилось несколько
типовых решений, используемых, как правило, для
крупных и ответственных установок, каковыми яв.т1яют-
ся рудво-угольные перегружатели, крупные монтажные
краны, плавучие 1фаны. 'Система Г—Д состоит из электродвигателя посто¬
янного тока, получающего питание от генератора посто¬
янного тока с регулируемым напряжением. Электро¬
двигатель имеет независимое возбуждение с регулиру¬
емым током возбуждения, благодаря чему в системе
осуществляется двухзонное регулирование скорости: в
сторону уменьшения путем изменения напряжения гене¬
ратора и в сторону увеличения путем уменьшения тока
возбуждения двигателя. Широкий диапазон регули¬
рования может обеспечиваться без применения тахо-
генераторов или иных устройств контроля ско¬
рости.
§1-4]Системы управления крановым электроприводом15Управление электроприводом по системе Г—Д осу-
щестБЛяется путем изменения значения и направления^;:
тока возбуждения генератора. Применяются два типа ^
систем управления:1) с релейно-контакторным регулированием в цепях
возбуждения электрических машин;2) с бесконтактным регулированием токов возбуж¬
дения при помощи магнитных усилителей или тири¬
сторных регуляторов.По способу питания главной цепи системы управ¬
ления также имеют два исполнения:1) с постоянно замкнутой главной цепью, когда
якорь электродвигателя постоянно соединен с якорем
генератора;2) система с коммутируемой главной цепью, когда
от одного генератора поочередно могут получать питание
несколько электродвигателей, отключаемых и подключае-
мык с помощью контакторов при равенстве нулю напря¬
жения генератора.Системы Г—Д обладают хорошими регулировочны¬
ми характеристиками, сравнительно невысокой стоимо¬
стью и высоким уровнем срока службы. Однако при их
применении необходимо размещать в стесненных поме¬
щениях крановых установок вращающиеся преобразова¬
тельные агрегаты, что является основным условием, ог-?аничивающим их применение. Кроме Того, системы
—Д требуют регулярного обслуживания и повышен¬
ных затрат на профилактический уход.Системы с тиристорными преобразователями напря¬
жения и двигателями постоянного тока. Система ТП—Д
является весьма близким аналогом системы Г—Д, где
вместо электромашинного преобразователя постоянного
тока используется тиристорное устройство, представ¬
ляющее собой один или два выпрямителя с регулируе¬
мым напряжением за счет изменения угла открытия ти¬
ристоров, Поскольку регулируемый выпрямитель может
проводить ток только в одном направлении, то крано¬
вые системы с ТП имеют три исполнения:1) с реверсивным выпрямительным устройством, в
котором используются два встречно-включенных вы¬
прямителя. Якорь электродвигателя получает питание
от одного выпрямителя и работает в режиме потреб¬
ления энергии при угле регулирования до 90" или в
режиме рекуперации при противоположном направле¬
нии вращения и угле регулирования свыше 90°. При
питании от второго выпрямителя осуществляются так¬
же два режима, но при противоположном направлении
тока, благодаря чему обеспечивается работа во всех
четырех квадрантах механических характеристик;2) с одним выпрямительным устройством, в кото¬
ром для изменения' направления тока используется
контактный реверс главной цепи. Такое переключение
осуществляется автоматически без тока, как только
напряжение на якоре электродвигателя становится
выше напряжения, создаваемого выпрямителем, или по
команде оператора при закрытом выпрямителе;3) с одним выпрямительным устройством, которое
обеспечивает работу электродвигателя в режимах по¬
требления энергий и рекуперации при изменении на¬
правления вращения (I и IV квадранты). Для обеспе¬
чения работы во П и П1 квадрантах производится из¬
менение направления тока в обмотке возбуждения
электродвигателя.Первая система является наиболее универсальной,
но в то же время она требует наибольших габаритов
преобразователя. Наиболее эффективно использование
этой системы для мощности двигателя 100—300 кВт.
Вторая система имеет наименьшие массогабаритные
показатели, но возможность ее применения ограничи¬
вается конструктивными параметрами контактного
переключающего устройства при мощности электродви¬гателя не более 100 кВт, Третья система обладает ря¬
дом недостатков, связанных с необходимостью ревер¬
сирования тока в обмотке возбуждения, и применя¬
ется Б основном для мощных электроприводов (мощно¬
стью выше 300 кВт), имеющих малое число включений
в час (крупные литейные краны).Во всех системах ТП—Д применяется ..устройство
для регулирования тока в обмотке возбуждения элект¬
родвигателя.Системы ТП—Д обладают хорошими регулировоч¬
ными свойствами. При диапазоне регулирования 8:1 они
не требуют применения тахогенераторов для контроля
скорости, однако они являются относительно сложными
агрегатами с высокой стоимостью единицы установлен¬
ной мощности и требуют квалифицированного обслу¬
живания. Недостатком системы ТП—Д является ухуд¬
шение ими качества электроэнергии в сети, особенно при
маломощных источниках питания. При питании от ис¬
точника мощностью менее 3007о мощности электродви¬
гателя возникающие при этом помехи могут превысить
допустимый уровень.Системы управления с тиристорными преобразовав
телями частоты. В крановых электроприводах начи¬
нают использоваться системы с тиристорными преобра¬
зователями частоты, что позволяет при применении
асинхронных электродвигателей с короткозамкнутым
ротором получить большой диапазон регулирования я
добиться высоких динамических показателей электро¬
привода {ТПЧ—АД), Тиристорные преобразователи ча¬
стоты инверторного типа, обеспечивающие плавное ре¬
гулирование частоты в интервале 5—70 Гц, являются
весьма сложными устройствами, которые пока не нашли
большого применения в крановом электроприводе. Ти¬
ристорные преобразователи частоты с непосредственной
связью относительно просты по схеме и конструктивному
исполнению, однако могут быть использованы для
формирования напряжевия регулируемой частоты пе¬
ременного тока только в интервале 3—20 Гц при пита¬
нии от сети промышленной частоты. В связи с этой
особенностью преобразователи частоты с непосредст¬
венной связью используются в трех вариантах:1) системы с диапазоном регулирования 4:1 для
механизмов горизонтального передвижения кранов пу¬
тем непосредственного питания через преобразователи
частоты с непосредственной связью асинхронных корот¬
козамкнутых двигателей (ПЧН—^АД);2) системы с высоким и особо высоким диапазоном
регулирования, когда обмотки двухскоростного корот¬
козамкнутого асинхронного электродвигателя имеют
смешанное питание от сети с частотой 50 Гц и от пре¬
образователя частоты (ПЧН—АДП), При этом макси¬
мальный диапазон регулирования 60:1;3) системы с высокими динамическими показате¬
лями, когда обмотка статора С числом пар полюсов 4
двухскоростного асинхронного электродвигателя с чис¬
лом полюсов 4/6 получает питание от преобразо¬
вателя частоты, благодаря чему до частоты вращения
500 об/мин осуществляется плавное увеличение скорос¬
ти, затем дальнейшее увеличение скорости происходит
в две ступени до 1000—1500 об/мин (ПЧН—АДП). Та¬
кая система обладает наименьшей массой на единицу
мощности из всех известных систем с диапазоном ре¬
гулирования скорости около 8:1.Применение систем с преобразователями частоты
является единственно возможным для крановых меха¬
низмов, работающих в условиях, где невозможен до¬
ступ для обслуживания (агрессивные и радиоактивные
среды).При диапазоне регулирования скорости более вы¬
соком, чем 20:1, применение систем с преобразователя¬
ми частоты является практически единственно возмож¬
ным, так как все другие системы при этих диапазонах
IBУсловия работы и характеристики электрооборудования грузоподъемных машин\Разд. 1Сравнительные техннческйе данные различных систем влектролриводовТ а б л н ц а 1-10Показатели систем электроприводовСеть переменного токаАсинхронный электродвигатель
с фазным роторомАсинхронный коротко¬
замкнутый электро¬
двигательАсинхронный двухскоростной
короткозамкнутый электрод
двигатель8Условное наименование системы
Диапазон мощностей, кВт
Диапазон регулирования скорости
(ниже номинальной)Диапазон регулирования скорости
(выше номинальной)GC* п1 , выраженное в долях^максот значения варианта К—АДФ
Вероятность безотказной работы
за 6 месВозможность работы без обслужи¬
вания и наблюдения
Возможность дистанционного уп-
1>авленияДопустимое число включений {до
наибольшей скорости)
Электрическая износостойкость в
долях от 10* циклов
Эксплуатационное обслуживаниеУсловия наладкиК-АДФ2—302,5:11.00,9НетНет1200.3МК-АДФ
2—180
4:1; 6:10.90.9НетЕсть6001.0Электромонтером
средней квалификацииНаладаи не требуетТРН—АДФ
2—180
10:10,90,85НетЕсть60010Электро¬механикомвысокойкацииСложнаяналадкаК-АД
2—IS
1:11.00.92ЕстьНет1200,3Электро¬монтеромсреднейквалифи¬кацииНаладки
не требуетПЧИ-АД40—8010-Л2:10.40,8ЕстьЕсть120020Электро¬механикомвысокойквалифи¬кацииСложнаяналадкаМК-АДП2—406:11,50,95ЕстьНет3000,3--1,0Электро¬монтеромсреднейквалифи¬кацииНаладки
не требуетПЧН-АДП
2-80
8:11.00.9ЕстьЕсть«Ю1.0ПЧН-АДП
20—00
60:11»50,9ЕстьЕсть1201,0Электромехаником
высокой квалификацийСложная яаладааПродолжение табл. 1-10Показатели систем электроприводовСеть постоянного токаЭлектродвигатель постоянного тока110 11 И12 j1 13 i1 14 11 kSУсловное наименование системыМК-ДГ—Дтп—дТП—дк~дМК-Д3—180Диапазон мощностей, кВт3—15020—18050—100100—2003—16Диапазон регулирования скорости6:110:110:110:14:16:1(ниже номинальной)Диапазон регулирования скорости2,5:12,6:12,5:12.5:12:12,5:1(выше номинальной)CD* п1— . выраженное в долях^макс0.850,850.850,850.850.85от значения варианта К—АДФВероятность безотказной работы0.920,920,850.880,880,9за 6 месВозможность работы без обслужи¬
вания и наблюденияНетНетНе®НетНетНетВозможность днстанцвовного уп¬
равленияДопустимое число включений (до
наибольшей скорости)ЕстьЕстьЕстьЕстьНетЕсть60012006001200120600Электрическая износостойкость в1,02.020200.31,0долях от 10^ цикловЭксплуатационное обслуживаниеЭлектромонтером среднейЭлектромеханиками высокс^Электромонтерами среднейквали()икацииквалификацииквалификацииУсловия наладкиНаладки неНаладкаС<^ожк^я наладкаНаладки не требуеттребуетпростаятребуют применения тахометрического контроля скоро¬
сти, что для крановых механизмов неприемлемо. Не¬
достатками системы являются относительно высокая
стоимость, сложная первоначальная наладка и необхо¬
димость квалифицированного обслуживания, а также
передача в сеть помех.Сравнительные технические данные различных си*
стем электроприводов приведены а табл. 1-10.в) Перспективные требования к системам управления
электроприводами грузоподъемных машинНаряду с обязательными требованиями, вытекаю¬
щими из правил Госгортехнадзора и ПУЭ, на основе
опыта эксплуатации и перспектив развития систем уп¬
равления ниже приведены требования, рекомендуемые
к реализации при разработке новых систем.
Системы управления крановым электроприводом171. При выключенном электроприводе подъема (на
нулевом положении) должен существовать контур ди¬
намического торможения, обеспечивающий в случае
выхода из строя механического тормоза медленное
опускание груза. {Это требование, давно безусловно
реализуемое в системах постоянного тока, является
перспективным и для систем переменного тока.)2. На первых положениях подъема двигатель дол¬
жен развивать такой пусковой момент, чтобы исключа¬
лась возможность спуска номинального груза при на¬
пряжении питающей сети 90% номинального и в то же
время желательная минимальная скорость составляла
при наименьшей нагрузке не более 30% номинального
значения,3. При перемещении рукоятки командоконтрол-
лера в направлении снижения скорости последняя не
должна повышаться даже кратковременно. Это в пер-
вую очередь относится к переключению с первого поло¬
жения в нулевое, когда запаздывание механического
торможения не должно приводить к повышению малой
скорости спуска.4. Система электрического торможения должна
иметь необходимый запас, обеспечивающий надежное
'Замедление груза, равного 125% номинального, при на¬
пряжении питающей сети 90% номинального., 5. Движение груза должно происходить только в
направлении, устанавливаемом командоаппаратом, да¬
же при неисправностях в схеме, В последнем случае груз
может оставаться неподвижным.6. Скорость перемещения грузов для электропри¬
вода переменного тока рекомендуется иметь на 30%
выше, чем для электропривода постоянного тока при
одинаковых условиях использования механизмов.7. Положениям малой и посадочной скоростей дол¬
жны соответствовать скорости, мало изменяющиеся от
нагрузки, с тем, чтобы оператор мог, не наблюдая за
грузом, обеспечить его безопасную (точную) посадку и
подъем.8. Для механизмов горизонтального перемещения
наряду с регулированием интенсивности разгона и тор¬
можения (регулирования вращающего момента) жела¬
тельно иметь не менее чем по одному положению ми¬
нимальной скорости, мало изменяющейся в зависимости
от нагрузки, для обеспечения точной остановки или
«доводки> механизма, а также успокоения раскачки
грузов.9. Управление механизмом желательно иметь с по¬
мощью только одного рычага управления с тем, чтобы
крановщик не отвлекался на поиски различных допол¬
нительных рукояток (или кнопок). Это требование от¬
носится также и к грейферным механизмам. Управление
горизонтальным передвижением желательно сосредото¬
чить в одной рукоятке, объединяющей управление
передвижением моста и тележки или поворота и
стрелы.Для повышения эффективности управления грей¬
ферными механизмами следует рекомендовать управле¬
ние с помощью одной рукоятки и регулируемого про¬
граммного устройства автоматизированного включения
механизмов.г) Техникб-экономическое обоснование выбора
системы управления для крановых машинВыбор системы управления для крановых механиз¬
мов осуществляется на основе анализа сравнительных
технических данных табл. 1-10, а именно: диапазона
регулирования, способа управления, ресурса (уровня
износостойкости), диапазона возможных мощностей
электроприводов, показателей энергетики и динамики,
а также дополнительных данных, определяющих усло¬
вия эксплуатаций электроприводов.2-839Экономическая оценка систем управления должна
базироваться на принципе минимальных расходов, свя¬
занных с первоначальными затратами, эксплуатацион¬
ными затратами на ремонт, а также затратами энергии,
потребляемой из сети на разгон и торможение крано¬
вых механизмов за период эксплуатации до капиталь¬
ного ремонта (10 лет).Экономическая оценка может быть осуществлена
расчетом по формуле10 (Сип +Ср)Рн5
А Рп (Сдв + Се) + —^(1*7)где А — экономический эффект, руб-; Рн — номинальная
мощность электропривода, кВт; Сдв — стоимость 1 кВт
мощности электродвигателя, *руб,, определяется по
табл. 1-11; Се—стоимость системы управления на1 кВт мощности электропривода, руб., определяется по
табл. Ы1; S — число включений за год работы, опре¬
деляется по табл. 1-4; 5доп — износостойкость системы
(допустимое число включений), определяется по техни¬
ческим данным соответствующих аппаратов; р — коэф¬
фициент, характеризующий потери при пуске, торможе¬
нии и регулировании скорости; (3 = 1,0 — кулачковые н
магнитные контроллеры, управляющие двигателями с
фазным ротором; р=0,8 — кулачковые и магнитные
контроллеры, управляющие электродвигателями посто¬
янного. тока, а также трехскоростные короткозамкнутые
электродвигатели, управляемые магнитными контрол¬
лерами; р=0,4—системы Г—Д, ТП—Д; ТПЧ—^АД;Таблица MfСравнительные экономические данные систекы электроприводовИнтервал мощностей электропривода*
кВтЭлементы электро-лряводов§(МЩgюог1оЙосооа§Сди . руб/кВт:электродвигате¬1207238282625ля постоянноготокас фазным ротором502817151311двух-, тсехскоро-стной коротко-60402825замкнутый. руб/кВт. комп¬лект;аппаратуры сило¬
вого кулачкового10S.53,03.0—_контроллерааппаратуры маг¬нитного контрол¬
лера7540169,07.S6*5питания я управ¬ления системы70423220г-д12022питания и управ¬ления системы5030тп-д2502008032питания и управ¬ления системы16065ПЧИ-АДП—320—аппаратуры управ¬ления системы804532ТРН-АДФ—200
18Крановые злектродвигатет[Разд.у — коэффициент, ^ характеризующий приведенные , мо¬
менты .динерции механизмов: ~ 1,0 ~ механизмы подъ-
■ема, изменения вылета*;стрелы;?5^=="2,5 — механизмы, те¬
лежки, поворота; у0 — механизмы передвиже¬
ния крана; Z — число пусков в час; Т — число часов
работы за год.Расчет производится для'систем, пригодных к при¬
менению, с учетом табл. 1-10.Выбирается система, обладающая наилучшими эко¬
номическими показателями. Если экономические пока¬
затели сравниваемых систем близки (расхождение не
превышает 15%), то производится дополнительная
оценка по массогабаритным показателям и условиям
■размещения электрооборудования. Ориентировочные
локазатели массы различных систем управления при¬
ведены в табл. 1-12.Учитывая, что размещение преобразовательных аг¬
регатов или полупроводниковых преобразователей на
Кранах сопряжено с определенными трудностями, .мо¬
жет оказаться необходимым применить систему, не об¬
ладающую оптимальными экономическими показате¬
лями.Т в б л й ц а 1-1
Сравнятельные показатели массы электроприводовМасса 1 кВт мощности, кг, в интер¬
вале мощностей электроприводов, кВтСистемы крановых
элех^троприводовюсчсчlibого©SоЭIsСистема К—АДФ30201620Система МК—АДФS83521241816Система МК—АДП 423026Система Г~Д10060526252Система ТП—Д, ,80ш364237Система ПЧН—АДП
с диапазоном 1>егули-
рования 1 ; 30—1 : 606S4235Система ПЧН—АДП
с высокими динами¬
ческими показателя¬
ми2520Система ТРН—АДФ 45262820—Система МК—Д7048383736351>АЗ^ДЕЛ ВТОРОЙкрановые электродвигатели2-1. ОБЩИЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
К ЭЛЕКТРИЧЕСКИМ МАШИНАМа) Общие сведения по крановым электродвигателямВ настоящее время выпускаются крановые электро¬
двигатели следующих серий;постоянного тока — серия Д (взамен серии ДП);
асинхронные с фазным ротором — серии MTF, МТН
(взамен серий МТБ, МТМ);асинхронные с короткозамкнутым ротором — серии
MTKF, МТКН (взамен серий МТКВ, МТКМ).В крановых электроприводах наиболее широко
применяются двигатели переменного тока, которые в
количественном отношении составляют около 90%.
Двигатели постоянного тока применяются для приво¬
дов с большим числом включений в час, широким диа¬
пазоном регулирования скорости, с регулированием ско-
'рости вв^рх от номинальной, для работы в системах
Г—Д или ТП-~Д,Масса кранового двигателя постоянного тока закры¬
того исполнения больше массы асинхронного кранового
двигателя с наружной самовентиляцией в 2,2—3 раза при
одинаковых номинальных моментах {рис. 2-1), а массамеди двигателей постоянного тока примерно в 5 раз
больше массы меди двигателей переменного тока. Масса
двигателей с короткозамкнутым ротором обычно на 8%
меньше, чем двигателей с фазным ротором. Масса двух-
скоростного двигателя при данном значении вращаю¬
щего момента примерно на 40% выше одкоскоростного.Маховые моменты двигателей удобно сравнивать попоказателю / GZ)m (рис. 2-2).Стоимости единицы массы двигателей различных
серий также существенно отличаются между собой и
показаны на рис, 2-3. Переход с класса нагревостойко-
сти изоляции F на класс Н повышает стоимость двига¬
теля на 20—50%. Стоимость двигателя с фазным рото¬
ром в 1,3 раза больше стоимости двигателя с корот¬
козамкнутым ротором при одинаковой мощности (мо¬
менте) .Сравнение указанных показателей проводится для
следующих серий двигателей: серии Д, ГОСТ 184-71,
краново-металлургические двигатели постоянного токаРис. 2-Ь Удельная масса электродвигателей в зависимо¬
сти от номинального момента при ПВ=40%.Рис. 2-2. Показатель удельных маховых моментов элект¬
родвигателей Б зависимости от номинального момента
при ПВ=40%4
§2-1Общие технические требования к электрическим машинам19(рис. 2-4, 2-5); серии 2П, ГОСТ 20529-75, двигатели об¬
щего назначения, постоянного тока; серии П, ГОСТ183-74, двигатели общего назначения, постоянного тока
12—15-ГО габаритов; серии МТ ГОСТ 185-70, двигатели0^/лг2.5
2J}1.5
},В
0,5''АР\нткнMTFАМПт 760 гоп 2S0 т sss шмг,Ш JBO ZZ5 2BD 3W S7S ШРис. 2-3. Удельная стоимость электродвигателей в зави¬
симости от высоты оси вращения,краново-металлургические, асинхронные трехфазного то¬
ка (рис. 2-6, 2-7),Приведенные на рис. 2-1—2-3 кривые показывают
преимущество двигателей переменного тока. Однако
возможности регулирования частоты вращения двига¬
телей постоянного тока вверх от номинальной путем
увеличения напряжения до 2Ун (для крановых двига¬
телей) и ослабления поля главных полюсов, а также
значительные допускаемые перегрузки по моменту кра¬
новых двигателей постоянного тока обеспечивают им.
преимущественное перед двигателями переменного тока
применение на ряде приводов.Больщое количество асинхронных двигателей малой
мощности, имеющих специальное конструктивное ис¬
полнение на базе двигателей серий А2, А4 и др., приме¬
няется для электрических талей и кран-балок специ¬
ального исполнения.Судовые электродвигатели постоянного и перемен¬
ного тока подробно описаны в [55] и поэтому в данный
справочник не вошли.Рис. 2-4. Крановый электродвигатель постоянного тока серии Д с неразъемной станиной.Рис. 2*5. Крановый электродвигатель постоянного тока серии Д с разъемной станиной.
2*
20Крановые электродвигатели[Разд. 2Рис, 2-6. Крановый электродвигатель переменного тока серии MTKF ,с короткозамкнутым ротором.Рис, 2-7, Крановый электродвигатель переменного тока серии Д1ТР с фазным ротором.б) Технические требования к электрическим машинамНоминальные данные электрических машин обычно
относятся к окружающей температуре до 40® С, а элект¬
родвигателей переменного тока серии МТН металлурги-
•iecKoro исполнения — температуре до 50“ С.Нсштальныж режимом р^оты электрической ма¬
шины называется такой режим, для которого машина
предназнач№а и который указан в ее паспорте.Продолжительный номинальный режим работы ха¬
рактеризуется временем работы, машшш, достаточным
для достижения практически установившейся темпера¬
туры всех частей электрической машины при неизмен¬
ной внешней нагрузке.Кратковременный номинальный режим характери¬
зуется работой машины при определенной внешней на¬
§^-пОбщие технические требования к электрическим машинам21грузке с определенным временем работы, недостаточ¬
ным для достижения практически установившейся тем¬
пературы машины, после чего следует электрическое
отключение на время, достаточное для охлаждения ма¬
шины до холодного состояния.Повторно-кратковременный номинальный режим
работы характеризуется относительной (в процентах)
продолжительностью включения ПВ, определяемой по
формулеПВirЮОо/о,Лаузгде время работы с неизменной номинальной на¬
грузкой; ^пауз — время паузы.Номинальный режим работы крановой электриче¬
ской машины должен соответствовать одному из сле¬
дующих режимов:1) продолжительному S 1;2) кратковременному S2 с длительностью работы
лри неизменной номинальной нагрузке в течение 10, 30,
60 и 90 мин;3) повторно-кратковременному S3 с ПВ 15, 25, 40
и 60% при продолжительности цикла 10 мин.Номинальные режимы S 1, S 2, S3 являются ос¬
новными.При отклонении напряжения сети от номинального
значения допускается отклонение номинальной мощно¬
сти двигателя в пределах —5-^т-107о-Двигатели переменного тока должны сохранять
номинальную мощность при отклонениях частоты пере¬
менного тока на ±2,5% номинального значения, а при
одновременном отклонении напряжения и частоты от
номинальных значений должны сохранять номинальную
мощность, если сумма абсолютных процентных значе¬
ний этих отклонений не превосходит 10% и каждое из
отклонений не превышает нормы.Электрические машины должны выдерживать в те¬
чение 2 мин повышение частоты вращения на 20% сверх
наибольшей допустимой рабочей частоты вращения (для
крановых двигателей на 10%).Степень искрения электрических машин постоянного
тока оценивается по шкале, приведенной в табл. 2-20 и
на рис. 2-19. При номинальном режиме степень искре¬
ния не должна превышать 1 V2 балла. Предельно до¬
пустимые превышения температуры частей электриче¬
ских машин указаны в табл. 2-4, которая составлена
для машин продолжительного режима работы.Иа многих крановых механизмах с кратковремен¬
ным и повторно-кратковременным режимами работы
двигатели нарабатывают менее 10 ООО ч за срок службы.
В этом случае допустимые превышения температуры
могут быть увеличены (см. ГОСТ 183-74).Изоляция электрических машин относительно кор¬
пуса ' и между обмотками рассчитывается иа испыта¬
тельное напряжение (2t/n+1000) В но не менее
1500 В, в том числе: обмотки крановых двигателей по¬
стоянного тока 1880 В, обмотки статора крановых дви¬
гателей переменного тока 1760 В.Для обмоток фазного ротора асинхронных двига¬
телей, допускающих торможение противовключением,
испытательное напряжение составляет 1000 В плюс че¬
тырехкратное номинальное напряжение вторичной об¬
мотки; для двигателей, не предназначенных для тормо¬
жения противовключением, 1000 Б плюс двукратное
номинальное напряжение вторичной обмотки. Время при¬
ложения испытательного напряжения частоты 50 Гц1 мин.Электрическая прочность мс;-лвитковой изоляции
проверяется в течение 3 мин напряжением, на 30%
превышающим но.минальное.Допустимые отклонения основных показателей элек>
трических машин от номинальных значений указаны в
табл. 2-8.в) Основные особенности крановых электродвигателейПо геометрии активного слоя, степени использова¬
ния материалов, режимам работы, электромеханическим
характеристикам, особенностям теплового режима, кон¬
струкции, а также условиям эксплуатации крановые
двигатели значительно отличаются от двигателей об¬
щепромышленного исполнения.Крановые электродвигатели обычно работают са
значительными перегрз'^зками по отношению к номи¬
нальному моменту, при широком диапазоне регулиро¬
вания частоты вращения, частых пусках и торможениях,
в условиях повышенной влажности, запыленности, виб¬
рации и ударов, поэтому конструкции узлов и деталей
двигателей отличаются высокой прочностью и надеж¬
ностью.Основное исполнение двигателей — закрытое. При
этом технически и экономически целесообразно приме¬
нять изоляционные материалы классов нагревостойко-
сти F и Н с допущением повышенных нагревов отдель¬
ных частей двигателей согласно ГОСТ 183-74.Для снижения расхода энергии при переходных
процессах маховой момент ротора (якоря) выполняется
по возможности минимальным, а номинальная часто¬
та вращения двигателей устанавливается относительно
небольшой. Двухполюсные крановые двигатели пере¬
менного тока не изготавливаются, а мощность четырех¬
полюсных двигателей обычно не превосходит 30 кВт.
Для крановых двигателей постоянного тока среднее
значение номинальной частоты вращения составляет
700 об/мин (тихоходное исполнение) или 1200 об/мин
(быстроходное исполнение).Для обеспечения большой перегрузочной способно¬
сти по моменту магнитный поток двигателей относи¬
тельно велнк. В двигателях постоянного тока с учетом
продолжительного режима включения обмоток парал¬
лельного возбуждения и необходимостью уменьшения
размагничивающего действия реакции якоря отношение
высоты оси вращения к диаметру якоря равно 0,92—1,05 (меньшие значения — для больших машин). Общая
тенденция в электромашиностроении к уменьшению
высоты оси вращения двигателей заданной мощности
привела к тому, что расстояние между пакетом л<елеза
статора и опорной плоскостью лап в двигателях пере¬
менного тока составляет только 12—15% высоты оси
вращения, а в двигателях постоянного тока поперечная
форма станины приближается к квадрату.Значения кратковременной перегрузки по вращаю¬
щему моменту для крановых двигателей постоянного
тока при номинальном напряжении и при трогании с ,
места и частоте вращения не выше 20% номинальной
приведены в табл. 2-21. При этом номинальный момент
соответствует часовому режиму.Для крановых двигателей переменного тока отно¬
шение максимального вращающего момента к номи¬
нальному указано в табл. 2-39.Отношение максимально допустимой рабочей часто¬
ты вращения к номинальной составляет для двигате¬
лей постоянного тока 3,5—4,9; для двигателей перемен¬
ного тока 2,5. Поэтому к сравнительно тихоходным по
номинальной частоте вращения крановым двигателям
предъявляются высокие требования по механической
прочности и долговечности таких важных узлов, как
коллекторы, бандажи обмоток [ютора (якоря), пазо¬
вые клинья, подшипниковые узлы.Получение высокой частота вращения двигателей
псстоянного тока может достигаться как ослаблением
поля, так и повышением напряжения на якоре до_ двой¬
ного номинального. Вместе с другими перечисленными-
22Крановые электродвигатели{Разд. 2факторами.это .усложняет: требования к - коммутации
двигателей,»; изоляции-токоведущих частей, жесткости
конструкциидвигателей. При выборе напряжения для
катушек параллельного возбуждения учитывается воз-
гложность усиления поля, применяемого для двигателей
подъема и ряда других механизмов.В крановых двигателях переменного тока за номи¬
нальный режим принят режим с ПВ = 407о. а в двига-Таблица 2-1Габаритные и установочные размеры влектродвигателей
согласно Публикации 72 МЭКРис. 2-8, Отношение мощности в повторно-кратковремен¬
ном режиме (60 мин) к мощности в кратковременном
режиме для электродвигателей серии Д в зависимости
от номинальной мощности.телях постоянного тока — режим 60 мин (наряду с ре¬
жимом ПВ=40%), поскольку часовой режим предъяв¬
ляет требования к таким важным параметрам двигателя,
как максимальный момент, коммутационная способность
при перегрузках, работа в кратковременных режимах.
При обеспечении заданной перегрузочной способности
по моменту в часовом режиме машина постоянного то¬
ка обеспечивает повышенное значение максимального
момента в повторно-кратковременном режиме при
ПВ==40%. Усредненные соотношения мощностей дви¬
гателей постоянного тока в режиме 60 мин (1 ч) и прн
различных значениях ПВ показаны на рис. 2-8.г) Стандартизация электродвигателейДвигатели постоянного и переменного тока дол¬
жны удовлетворять требованиям стандартов на кон¬
кретные серии, а во всем неоговоренном — ГОСТ 183-74,
который составлен с учетом рекомендаций Совета Эко¬
номической Взаимопомощи (СЭВ) и Международной
электротехнической комиссии (МЭК).Номертипо¬размераРазмеры,ммhЬю^31^10565690713666363100804077171112904578060125100501090S901401005610901125100S1001601126312100L140112S1121901147012112М14011U159132S1322161408912132М178132L203160S16025417810816160М210160L254180S18027920312115180Л1241180L279200S20031822813319200Л(267шиЗОБ225S22535628614919225М31122SL356250S25040631116824250Л13492S0L406280S28045736819024280М419280L4Б731SS315,5084062162831SAf457S1SL508355S35561050025428365МБ60365L630400S40068656028035400М630400/.710Рис. 2-9. Установочно-присоединительные и габаритные
размеры машин.В основе многих стандартов лежит Публикация
МЭК 72, согласно которой:1. Установлена шкала номинальных высот оси вра¬
щения асинхронных машин 56, 63, 71, 80, 90, 100, 112,
132, 160, 180, 200, 225, 250, 280, 315, 355, 400 мм.2. Установочные размеры 6ю, Iw, h\, rfio асинхрон¬
ных машин привязаны к высоте оси вращения h вне
зависимости от мощности машины (рис. 2-9). Для
каждой высоты оси вращения принято три значения
§2-ПОбщие технические требования к электрическим машинам23Размеры конца вала согласно Публикации 72 МЭКТаблица 2-2Размеры конца
вала, ыи162023143016401840194022SO42110551106014065140701408017090170.170ПО210Наибольший
вращающий
момент при
продолжитель¬
ном режиме
работы, Н-мМ,макс0,250,631,252,84,57.18,25141831.550 90125200355450630800100012601600200025002800 4000размера /ю, соответствующих трем длинам станины:
S — для коротких, М — для средних. L — для длинных
машин (табл. 2-1).3. Размеры й\ и h свободного конца вала выбраны
в зависимости от наибольшего вращающего момента для
продолжительного режима работы двигателя перемен¬
ного тока (табл. 2-2).4. Введена единая шкала значений номинальной
мощности электродвигателей по первичному предпочти¬
тельному ряду: 0,37; 0,55; »0,75; 1,1; 1.5; 2,2; 3,7;
5,5; 7,5; И; 15; 18,5; 22; 30; 37; 45; 55; 75;
90; 110; 132; 150; 160; 185; 200; 220; 250 кВт.
Вторичный предпочтительный ряд: 1,8; 3; 4; 6,3; 10;
13; 17; 20; 25; 33; 40; 50; 63; 80; 100; 125 кВт—
может исполУзоваться в случае особой необходимости.5. Изготовитель может выбирать установочные
размеры для асинхронных машин как основу для раз¬
работки серий машин других типов, если нет других
рекомендаций.При создании новых серий машин, в том числе по¬
стоянного тока, большинство изготовителей принимают
во внимание рекомендации МЭК.ГОСТ 18709-73 на установочно-присоединительные
размеры распространяется на высоты оси вращения 56...Таблица 2-3размеры крепятельпых фла1шевВысота оси
вращения
h, ммДиаметр фланца, ммОтверстая для болтовпо отвер¬
стиям для
болтов rfjoпо замкувнеш¬нийЧислоотверстийДваметрмм901002151802504151122652303004151321603002503504191803503004004192004003504508225250590450550819280315600650660824355400740680800824355, 400 мм и учитывает Публикации МЭК 72 и ре¬
комендации СЭВ по стандартизации PC 3030-71, а
ГОСТ 20839-75 распространяется на высоты оси враще¬
ния от 450 до 1000 мм.ГОСТ 13267-73 продолжает шкалу номинальных
высот оси вращения значениями: 450, 475, 500, 560, 630,
710, 800, 900, 1000 мм.Размеры крепительных фланцев по рекомендациям
МЭК, рекомендациям PC 3030-71 и ГОСТ 18709-73 сов¬
падают и приведены для ограниченного диапазона зна¬
чений h в табл. 2-3. Привязка размеров h к размерам
фланца дана для комбинированного крепления маши¬
ны —- на фланце и лапах.Цилиндрические и конические концы валов выби¬
раются соответственно по ГОСТ 12080-66 й ГОСТ
12081-72. В зарубежных стандартах по-разному подхо¬
дят к выбору формы концов валов. Стандарт DIN 42681,
ФРГ, на- двигатели переменного тока для повторно-
кратковременных режимов работы предусматривает
только цилиндрические концы валов по МЭК 72. По
стандарту A1SE» США, для металлургических двигате¬
лей постоянного тока прнн.чмаются только конические
концы валов. Более рационально построены отечествен¬
ные стандарты на крановые двигатели, в которых ци¬
линдрические концы валов применяются для диаметра
до 50 мм включительно и номинальных моментов до
200 Н-м, а начиная с диаметров 65 мм—конические
концы валов. Двигатели общего применения имеют, как
правило, цилиндрические концы валов.Ряд номинальных мощностей по ГОСТ 12139-74 не¬
сколько отличается в начальной части диапазона от
первичного ряда МЭК 72 и имеет 2,2; 3,0; 4,0; 5,5 кВт
и т. д., а для больших мощностей предусматривает 132,
160, 200, 250, 315, 400, 500, 630, 800, 1000 кВт и далее
до 10 000 кВт. Для краново-металлургических двигате¬
лей ГОСТ 12139-74 является рекомендуемым.Номинальные частоты вращения и допускаемые от¬
клонения устанавливаются *для рассматриваемых дви¬
гателей ГОСТ 10683-73, кроме двигателей по ГОСТ184-71.Для двигателей постоянного тока номинальные
значения частот вращения равны: 25, 50, 75, 100, 125, 150,
200, 300, 400, 500, 600, 750, 1000, 1500, 2000.
2200,,3000, 4000 об/мин и более.Двигатели постоянного тока мощностью 110 кВт и
выше, предназначенные для привода механизмов, тре¬
бующих широкого регулирования частоты вращения,
должны иметь номинальную частоту вращения согласно
следующему ряду (нерекомендуемые значения указаны
в скобках): ... 63, (71), 80. (90), 100, 125, 160, 200, 250,
315, 400, 500, 630, 800, 1000, 1250 об/мин. Наибольшие
частоты вращения двигателей постоянного тока также
выбираются из вышеприведенных значений.Синхронная частота вращения асинхронных двига¬
телей однозначно определяется частотой питающего то¬
ка и числом пар полюсов и для частоты 50 Гц составля-
24Крановые электродвигатели[Разд. 2Допустимые ггревышення температуры частей
электрических машин, ®СТаблица 2-4№п/пЧасть машиныНормативныйдокументОбмотка яхоояОбмоткн возбужде¬
ния машин постоян¬
ного тока, компен¬
сационные обмотки
Обмотки машин пере¬
менного тока
Стержневая обмотка
ротора асинхронных
машинСердечники и другие
стальные части, со¬
прикасающиеся с
язолированиымн об¬
мотками .Коллекторы и кон¬
тактные кольцаГОСТ 183-74
ГОСТ 184-71
ГОСТ 183-74
ГОСТ 184-71ГОСТ 183-74
ГОСТ 185-70
ГОСТ 183-74ГОСТ Ш-74ГОСТ 18S-74
ГОСТ 184-71
ГОСТ 185-70Класс нагревостон-
кости изоляции75757080100Ш100105ПО90125120125120125120135100100110105ет ряд: ... 187,5; 250; 300; 375; 500; 600; 750;
1000; 1500; 3000 об/мин.Допустимые превышения температуры машин с
воздушным охлаждением приведены в табл. 2-4, Изме¬
рения превышений температуры в п. 1—4 — методом со¬
противления, а в п. 5, 6 методом термометра. Для крат¬
ковременных номинальных режимов работы допустимые
превышения температуры частей машины могут быть
выше указанных значений на 10° С- Для коллекторов и
контактных колец превышения температур могут быть
также увеличены, если нагрев их изоляции и связанных
с ними обмоток удовлетворяет требованиям табл, 2-4,
повышение температуры не ухудшит коммутацию, по¬
вышенная температура не опасна для паек соединений,
а твердость материала коллектора или колец сохраня¬
ется при воздействии повышенных температур.По методу термометра превышение температуры
наиболее нагретой доступной точки не должно превы¬
шать 80, 90, ПО и 135® С соответственно для изоляции
классов Е, В, F и Н,Температура подшипников качения не должна
превышать 100° С, а для крановых двигателей с клас-.
сом изоляции Н и с нагревостойкой смазкой (типа
ЦИАТИМ-221 или ВНИИНП-220) 120=" С. ДальнейшееТаблица 2-SМетоды охлаждения электрических машинУсловное обозначениеСхема метода охлажденияКраткое обоаначение
первой и второй цифрОпределениеICOOСвободная циркуляция. Сво»
бодная конвекцияПолностью закрытая машина с ох¬
лаждаемым корпусом, без наруж¬
ного вентилятора1С16Вентиляция с помощью
входной трубы. Независи¬
мое вентиляционное устрой¬
ство. установленное на ма«
шинеОткрытая машина, охлаждаемая
вентилятором с приводным двига¬
телем, установленным на машине1С37Вентиляция с помощью
входной и выходной труб.
Независимое отдельное уст¬
ройство подачи хладоагентаОткрытая машина, охлаждается
вентилятором с приводным двига¬
телем. ке установленным на маши¬
неIC41 или IC4Охлаждение внешней по¬
верхности электрической
машины. Самовентиляция ♦Полностью закрытая машина, ох¬
лаждаемая вентилятором, с плос>>
КИМ или ребристым корпусом. Вен¬
тилятор на ротореIC51 или IC5Встроенный охладитель,
использующий окружающую
срсду. СамовентиляцияПолностью закрытая машина, кор^
пус с трубками: внутренний и
внешний вентиляторы
§ 2-1]Общие технические требования к электрическим машинам25повышение рабочей температуры требует применения
подшипников со специальной термообработкой.Методы охлаждения обозначаются согласно публи¬
кации 34-6 МЭК двумя буквами IG с двумя характе¬
ристическими цифрами. Первая цифра обозначает уст¬
ройство системы охлаждения, а вторая — способ под¬
вода энергии для циркуляции хладоагента — воздуха.
Наиболее распространенные методы охлаждения крано¬
вых машин представлены в табл. 2-5. Когда подвод
энергии, необходимой для подачи хладоагекта, соответ¬
ствует характеристической цифре 1 (самовентилирую-
щее устройство, устанавливаемое на валу), то мож¬
но проставлять только первую характеристическую
цифру.Степень защиты оболочек электрических машин от
соприкосиовеиия с токоведущими или. движущими ча¬
стями, находящимися внутри машины, и попадания
твердых посторонних тел внутрь машины и степени
защиты от проникновения воды внутрь машины уста¬
навливается ГОСТ 17494-72, который учитывает реко¬
мендации Публикации МЭК 34-5.В табл. 2-6 степени защиты, применяемые в крано¬
вых двигателях, выделены, а наиболее часто применяе¬
мые степени защиты согласно Публикации МЭК 34-5—
дополнительно подчеркнуты. В новых сериях машин
степень защиты клеммовых коробок обычно повышена.
Например, для двигателя со степенью защиты IP44
клеммовые коробки выполняются со степенью защиты
IP54 или IP55. Для машин со степенью защиты 1Р43
и выше, имеющих насаженный на конец вала внешний
вентилятор, степень защиты кожуха не должна быть
менее IP20, Сливные отверстия в корпусе машины со
степенью защиты IP44 не должны иметь степень защиты
менее IP23.Основные исполнения влектрнческих машин по способу монтажаТаблица 2-6Степенн защиты электрических машина 6 •S’© к RIS К S .Степень защиты от проникновения водыsiiiiо о с о
uS&sS01234б60IPOOIP01__ 11Р101Р11IP12IP13-——21Р20IP21JP22IP23_——3__——IP431Р44——4———“IP54IP55IP56По способу монтажа на механизме или фундавленте
машины могут иметь основные монтажные исполнения,
показанные в табл. 2-7. Машины, имеющие в условном
обозначении третью цифру О, могут работать в любом
положении (графического условного изображения не
имеют). К условным обозначениям формы исполнения
машины прибавляют обозначения формы конца вала:
цилиндрического — Z, конического — К, фланцевого —F
(см. ГОСТ 2479-65).д) Допускаемые отклонения от номинальных значений
параметров электродвигателейДопуски на высоту оси вращения, на отверстия и
их расположение в лапах для крепления электрических
машин, на выступающий конец вала, на сопрягаемыеТаблица 2-7Условное
оСозначение
по ГОСТ
2479-6ЬОбозначение
ряда зару¬
бежных
машинСхематическое
изображение машинОсобенности монтажаОбласть
лрименення
(обозначение
серии машин)М101D3На лапах для крепления к полу, ось вращения горизонтальнаяД. 2П, МТ*
4АMIOD-На лапах для крепления к плоскостк любого положения — по¬
лу, стелке, потолку, наклонной стенке4АМ201ВЗ/В.5На большом фланг;е к вертикальной стенке или на ланах к по¬
лу. Ось вращения вала горизонтальнаяД* 2П, МТ,
4ЛМ202V5/V1WНа большом фланце к полу или на лапах к вертикальной стен¬
ке, ось вращения вала вертикальна», фланец и конец ваяа
чнизуД, МТМ302VI11На большом фланце к полу, ось вращения вала вертикальная,фланец ц конец вала ьнизуД, 4А
26Крановые электродвигатели[Разд. 2Таблица 2-8Допускаемые отклонения показателей машин от номинальных
значенийПродолжение табл. 2-8Л»п/пПараметрКоэффициент полез¬
ного действия (ц)*.
определенный мето¬
дом отдельных по¬
терь:машины до 50 кВт
машины свыше
50 кВтопределенный ме¬
тодом иепосредст-
венной нагрузкиДопускаемое отклоневке—0J5(I—п)
—0,10(1—п)—0,15(1—п)Общие оотери для
машин мощностью,
свыше 50 кВтКоэффициент мощно¬
сти (сов ф) асинхрон¬
ных двигателей**Частота вращения
двигателей постоян¬
ного тока (при но¬
минальной нагрузке
и рабочей температу¬
ре):а) с параллель¬
ным и незави¬
симым возбуж¬
дениемб) с последова¬
тельным йоз-
буждением,
включая испол¬
нение с неболь¬
шой параллель¬
ной стабилизи¬
рующей обмот¬
койв) со смешанным
возбуждением+ 10% П0Л.1НЫХ потерь1—cos ф, но не менее 0,02 ине более 0,07 по абсолютному зна¬
чениюПри отьошени» номинальной мощ¬
ности, Вт, -К номинальной частоте
вращения, '^б/мин;менее 0,67 . . . , * . ±15%от 0,67 до 2,5 ±10%от 2,5 до 10 ±7.5%10 и более ±5%не менее 0,67 ±20%от 0,67 до 2,5 ±15<!от 2,5 до 10 ±10'10 и более * Выбирается между указанными вп. 4 «а» и «б» по согласованию
между изготовителем и потребите¬
лемСкольжение асин¬
хронных двигателей
(при номинальной
нагрузке и рабочей
температуре)Изменение напря-
я^ения генераторов
аостоянного токаНачальный пусковой
ток асинхронных
двигателей с корот¬
козамкнутым ротором
(и оговоренными пу¬
сковыми устройства¬
ми)Изменение частоты
вращения двигателей
постоянного тока с
параллельным или
смешаниьш возбуж¬
дением±20% номинального значения,
знак — относится только к двига¬
телям с повышенным скольжением±20%. но не меиее 2% номиналь¬
ного напряжения4-20% (нижнего предела кет)±20%, но не менее ±2% номиналь-
ной частоты вращенияп/п10а12ПараметрНачальный пуско¬
вой вращающий мо>
мент асинхронных
двигателей с корот-
'козамкыутым рото-
роиМаксимальный вра¬
щающий момент
двигателей перемен¬
ного токаМинимальный вра¬
щающий момент в
процессе пуска асин¬
хронных двигателей
с короткозамкнутым
роторомДопускаемое отклонение-15%-10%^20% (в стандартах или ТУ на от¬
дельные виды машин допускается
устанавливать дополнительно ниж¬
ние предельные наименьшие значе¬
ния минимального вращающего
момента)Момент Ёнерцди±10%• С округлением отклонений до третьей значащей цифры.
*• Допускается значение измеренного cos Ф меньше на
0.02 по сравнения) с нижним пределом при условии, что произ¬
ведение г) cos <р машины не ниже проиэведеиия установленных
значений этих параметров с учетом допускаемых отклонений.размеры крепительного фланца, отверстия и их распо*
ложение на крепительном фланце назначаются по
ГОСТ 8592-71 для нормальной точности исполнения.
Допускаемые отклонения от номинальных значений па¬
раметров машин должны быть не выше значений, ука¬
занных в ГОСТ 183-74 (табл. 2-8).Рис. 2'10. Зависимость номинальной мощности и допусти¬
мой температуры окружающей среды (для сохранения
номинальной мощности машин) от высоты над уровнем
моря для различных классов нагревостойкости изоляции.Мощность и допустимое прееышение температуры
машин указываются при температуре охлаждающей
среды 40“ С и высоте до 1000 м над уровнем моря.
При увеличении высоты выше 1000 м необходимо сни¬
жать номинальную мощность либо понижать.температу¬
ру охлаждающей среды при сохранении номинальной
§2-2]Конструкция крановых электродвигателей27мощности согласно рис. 2-10. Графики построены в за¬
висимости от класса нагревостойкости изоляции для ма¬
шин продолжительного режима работы по нормам
ГОСТ 183-74 и с учетом рекомендаций Публикации МЭК
34-1.При работе с ПВ=40% можно пользоваться кри¬
вой, расположенной выше на один класс (мощность от-\'s\NN7\\N\\\V\ч\ч\>VдРис. 2-11. Изменение номиналь¬
ной мощности электродвигате¬
ля в зависимости от температу¬
ры окружающего воздуха.1 — двигатель постоянного тока па¬
раллельного возбуждения, классы
изоляции F, Н; 2 — двигатель про¬
должительного режима работы пе¬
ременного тока и постоянного то¬
ка последовательного возбуждеиия.
классы изоляции В, F, Н; 3 —дви¬
гатель кратковременного режима
работы постоянного тока парал¬
лельного возбуждения, классы изо¬
ляции F, Н; 4 — двигатель кратко¬
временного режима работы пере¬
менного тока и постоянного тек а
последовательного возбуждения,
клас(;ы изоляция F. Н,носительно растет за счет использования собственной
теплоемкости машины). Для кратковременного режи¬
ма работы 30 мин сдвиг вверх допускается на два клас¬
са. Для кратковременных режимов работы длительно¬
стью 2—10 мин рекомендуется верхняя кривая на рис.
2-10, при этом вопрос коммутации машин посто?1нного
тока подлежит опытной проверке.При температуре охлаждающего воздуха выше
40** С (но не более 60“ С) предельно допускаемые пре¬
вышения температуры, указанные в табл. 2-4, умень¬
шаются на разность между температурой охлаждающей
среды и температурой 40“ С для всех классов изоля¬
ционных материалов. Снижение номинальной мощности
двигателей при этом ориентировочно можно определить
по кривым на рис. 2-11. При температуре охлаждающе¬
го воздуха выше 60“ С допускаемые превышения тем¬
пературы к снижение мощности двигателей согласовы¬
ваются с предприяткем-нзготовителем (пунктирная часть
кривых на рис. 2-11).Допускаемые отклонения сопротивлений обмоток
якорей, роторов н статоров, полюсных катушек и ка¬
тушек тормозов от номинальных значений составляют:
±6% — для прямоугольной меди и круглой меди с
диаметром d более 1,7 мм; ±7% — для d==*0,7-i-l,6 мм;
±8% — для rf«^0,63 мм.За номинальное сопротивление обмоток и катушек
принимается сопротивление при 20“ С. Измерение со-
цротнвлений производится при практически холодном
состоянии обмоток (катушек), т. е. при температуре об¬
моток (катушек), близкой к температуре окружающего
воздуха. При отклонении температуры воздуха от 20“ С
кроме указанных допусков надо учитывать изменение
сопротивлений на ±1% на каждые ±2,5“ С отклонения
температуры воздуха от 20“ С.Допускаемые отклонения сопротивлений могут быть
увеличены до ±10% при следующих условиях:1) если точно известно, что данная обмотка (ка¬
тушка) намотана из надлежащей меди с требуемым
числом витков;2) если при испытании обмоток (катушек) на вит-
ковое замыкание не обнаружено дефектов.Разница между сопротивлениями отдельных фаз
статора (или ротора) не должна превышать 2%.2-2. КОНСТРУКЦИЯ
КРАНОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙа) Особенности конструкциикрановых электродвигателей постоянного тохаСтанина двигателей (см. рис. 2-4 и 2-5) выполня¬
ется стальной сварной или литой. Конфигурация литых
станин в поперечном сечении приближается к квадрату
для лучшего использования внутреннего объема дви¬
гателя. Литые станины разъемные, верхняя и нижняя
половины соединены четырьмя болтами. Стык между,
полустанинами защищен от коррозии смазкой либо
краской. Зазор между полустанинами достаточно мал и
может не учитываться в качестве отдельного участка
магннтопровода при расчете магнитной цепи. Для дви¬
гателей с компенсационной обмоткой разъемная стани¬
на практически не делается. Из соображений техники
безопасности каждое подъемное ухо станины должно
выдерживать с большим запасом полную массу двига¬
теля; допустимое напряжение растяжения от радиаль¬
ной нагрузки находится в пределах 170—240 МПа.
Фланец вертикальных двигателей отливается заодно со
станиной либо приваривается к сварной станине.Сердечник главного полюса набирается ^з штам¬
пованных листов (Ст. 2) толщиной 1,5—2 мм. Цент¬
ральный стальной стержень придает сердечнику жест¬
кость и служит для крепления сердечника к станине.
Ширина стержня составляет около 30% ширины сер¬
дечника полюса. Число крепящих шпилек — от двух до
трех на один полюс, шаг между ними составляет
около 0,3 диаметра якоря. Листы сердечнШса скрепля¬
ются в осевом направлении четырьмя-пятью заклепка¬
ми, усилие спрессовки сердечника с заклепками опре¬
деляют исходя из удельного давления 3—4 МПа-
Иногда применяют вместо заклепок сварку листов
между собой.Сердечник добавочного полюса изготавливается
из сплошной литой или кованой заготовки, иногда из
толстолистовой стали с привернутым наконечником или
со штыревыми выступами для удержания катушки.
Применяются также шихтованные в поперечном напра¬
влении и склепанные сердечники, особенно в двигате¬
лях для систем с питанием от тиристорных преобразо¬
вателей. Диаметр крепящего сердечник болта берется
максимально возможным, составляющим около 75%'
, ширины сердечника. Шаг между болтами обычно такой
же, как у шпилек главного полюса.Болты и шпильки крепления главных и добавочных
полюсов — из стали марки 45, рассчитываются на вос¬
приятие механических и электромагнитных нагрузок
на полюсы с катушками.Ускорение, м/с^, от механических воздействий опре¬
деляется по формулео =.(5+ I000/G)g,где G — масса двигателя, кг; g — ускорение свободного
падения, м/с^; g=I0 м/с^. Принимают а^150 м/с*, при
этом запас прочности болтов по пределу текучести око¬
ло 2.Катушки полюсов наматываются из изолированного
или неизолированного медного провода с асбестовой
изоляцией между витками. Неровности на поверхности
катушки заполняются изоляционной замазкой ддр
улучшения теплоотдачи и лучшей сохранности наруж¬
ной изоляции. Пайка выводов катушек производится
твердым припоем типа ПМФ, пропитка катушек — ва¬
куумно-нагнетательным способом.Суммарная сила прижатия катушки фланцами дол¬
жна примерно в 10 раз превосходить силу тяжести ка¬
тушки.
28Крановые электродвигатели{Разд. 2Стабилизирующая обмотка либо встраивается в ка¬
тушку параллельного возбуждения (двигатели Д12—
Д41), либо выполняется К11бслем, намотанным поверх
катушки (двигатели Д8(16—Д818). В последнем случае
достигается унификация катушек и несколько yjiy4uia-
ется теплоотвод от катушек. Специального закрепле¬
ния кабеля не требуется, так как он расположен в V-
образном междукатушечном пространстве.Сердечник якоря изготавливается из штампованных
листов электротехнической горячекатаной стали марки
1213 (Э13) с двойной лакировкой или холоднокатаной
стали марки 2013 (ЭОЗОО) с оксидным покрытием и од¬
нократной лакировкой. Наденшая передача крутящего
момента осуществляется путем тугой посадки листов на
вал. Особо важно выполнить монолитными крайние ли-
сты сердечипка за счет склейки клеем БФ-2 или приме-JluHus^ рс13ьема
станиныРис. 2-12. Схема соединения обмоток электродвигателей Д814--Д818 (на напряжение 220 В. параллельного воз¬
буждения, со стабилизирующей обмоткой) ори выполнении выводных концов (кроме Ш1 — Ш4) двумя параллель¬
но включенными кабелями.Схемы включения полюсных катушек и якоря за¬
висят от вида возбуждекня двигателя, конструкции
станины (разъемной или неразъемной), числа 'щетко¬
держателей. На рис. 2-12 приведен пример схемы соеди¬
нения обмоток. На схеме приняты обозначения:Я\, Я2 — выводные концы обмотки якоря;Д\, Д2—выводные концы обмоток добавочных по¬
люсов;С1, С2 — выводные концы последовательвых обмоток
возбуждения или стабилизирующих обмо¬
ток;Ш1 —им — выводные концы обмоток параллельного
возбуждения;И к К — начало и конец обмотки добавочного по¬
люса;Н\ и /С 1—начало и конец последовательной обмотки
возбуждения;И2 и Д'2 — начало и конец обмотки параллельного
возбуждения;N и S — сердсчвик северного и южного главного по¬
люса;/г и S — сердечник северного и южного добавочного
полюса;О — без обозначения, разъемное соединение
между :|ерхней и нижней частью индукто¬
ра (при разъемной стайине).нения утолщенных крайних листов. Лучшим решением
является сварка пакета крайних листов в среде нейт¬
рального газа.Нажимные шайбы якоря литые из стали марки 25Л
передают частично крутящий момент двигателя, воспри¬
нимают инерционные нагрузки от лобовых частей об¬
моток и осевые нагрузки от сил спрессовки сердечника,
достигающие 1500 кГ1. Поэтому нажимные шайбы дол¬
жны быть достаточно жесткими и прочными, суммарная
ширина ребер между внутренней и наружной втулками
шайбы составляет 5—10% длины окружности якоря.Обмотка якоря выполняется волновой до габарита
Д814 и лягушачьей, в том числе ступенчатой, для габа¬
ритов Д816—Д818. Петлевая обмотка в отечественных
крановых двигателях не применяется, так как при этом
требуется более высокая коллекторная пластина под
уравнительные соединения и возникают затруднения при
пайке или сварке уравнителей. Перспективным являет¬
ся применение прямоугольных эмалированных проводов
марки ПЭТП-200 и других вместо проводов марки
ПСДКТ.Бандажи обмотки якоря из стальной бандажной
проволоки диаметром до 2 мм заменяются в последнее
время иа стеклобандажную ленту марки ЛСБ-Н.Для стеклобандажной ленты толщиной 0,2 мм до¬
пустимое усиление натяжения составляет 600 Н на
10 мм ширины ленты.
^2-ЩКонструкция крановых электрод&агателей29Клиновое кренление пазовой части обмотки якоря
обычню не применяется, так как клин требует большей
глубины паза якоря и несколько ухудшает теплоотвод
с поверхности якоря.Коллектор с корпусом из пластмассы марки АГ-4С
и армирующими стальными кольцами применяется до
диаметра 215 мм, а при больших диаметрах переходят
на сборные коллекторы с манжетами. Торцевой стык
между пластмассой и медью коллекторных пластин за¬
крывают стеклобандажной лентой во избежание замы¬
кания между пластинами в эксплуатации. Испытатель¬
ная частота вращения коллекторов Пк при заданной мак¬
симальной рабочей частоте вращения двигателя Пмакс
равна Пк=1,30«макс—для коллекторов на пластмассе;
/1к~ЗДбПмакс — для коллекторов на манжетах.. Соединение обмотки якоря с коллектором проводит¬
ся либо пайкой тугоплавким припоем ПСр2,5, либо элек¬
тросваркой в среде инертного газа. Метод сварки путем
последовательного обхода всех пластин по спирали, ког¬
да отдельный петушок испытывает только кратковре¬
менный точечный нагрев, обеспечивает высокую на¬
дежность сварного соединения, сохранение межламель-
ной изоляции и твердости коллекторной меди.Балансировка якоря ведется без шпонки на конце
вала, обычно путем приварки балансировочных грузов,
что обеспечивает достаточную точность балансировки
относительно тихоходных крановых двигателей. Данные
по балансировке якорей двигателей серии Д приведены
в табл. 2-9 (Д814—Д818 балансируются статически).Таблица 2-9Параметры, связанные с вибрацией электродвигателей серии ДТаблица 2-10Щетки для электродвигателей серии ДТипдвига¬теляДиа¬метрякоря,ммДлинасер¬деч¬никаякоря,ммМассаякоря,кгДопустимая*
остаточная не¬
уравновешенность
в одной плоскости
исправлениянового ЯКОрЯу
г-смКласс
ви<3рацин
двигателя
по ГОСТ
16921-71Д1213015025154,5Д2116712048304.5Д2216716554404,5Д3121012580607,0Д32210195102757.0Д41245190ISO1207*0Д8062452751()51357^0Д8082803202301507.0Д8103272803452807,0Д8123683155105007,0Д8Н39342066070011.0*Д816423480950100011.0*Д818493480П50140011.0*• Факультативные данные.Вентилятор МОЖНО использовать как деталь для
крепления балансировочного груза. Вена'илятор-мешалка
в закрытом двигателе снижает нагрев якоря лишь на
5—7" G, а полюсных катушек на 3—5° С, поэтому в ря¬
де новых серий вентилятор отсутствует. Двигатель без
вентилятора можно продувать воздухом в любом на¬
правлении.Щеткодержатели литые, куркового типа, имеют ок¬
на для свободного перемещения щеток с суммарным за¬
зором 0,05—0,31 мм в тангенциальном направлении и
0,06—0,55 мм в осевом направлении.Удельное давление на щетку марки ЭГ-14 равно
25—30-103 Па, марки 611 ОМ—12^22-103 Па.Сведения о щетках двигателей серии Д приведены
в табл. 2-10 для двух исполнений двигателей по на-• пряжению; 220 В и 440 В. В графе «номинальное на-Типдвига¬Количество
щеток на
двигательРазмер щеток, ммНоминальное
нажатие на
щетку. Нтеля220 В440 В220 В440 .В220 В440 ВД12410X16X253—4Д212212.5X32X4012,5X32X408—98-9Д224412.5X32X4012,5x32X408-98-9Д314412.5X32X4012,5X32X408—98-9Д324416X32X4016X32X408-98-9ДН8816X32X4016X32X4011—1411—14Д8068816x32x4016X32X4011—1411—14Д8088820X32X40*16X32X4015-1615—16Д810121220X32X4020X32X4016-1516—15Д8128825x50x6412,5X50X6435—2516—12Д814121225X 50x6412.5X60X6435—2516—12лете121225X50X6412,5X50X6435-2516-12Д818161625X50X6412.5x50X6435-2516-12* Воз КОЖЕ о применение щеток 36X32X40.жатие» первая цифра — номинальное нажатие для
новой, вторая цифра — номинальное нажатие для изно¬
шенной щетки. Перспективны щеткодержатели с рулон¬
ной пружиной постоянного нажатия.6) Особенности конструкциикрановых электродвигателей переменного токаСтанина двигателей серии МТ отливается из чугуна
марки 25Л с ребрами для лучшего охлаждения дви¬
гателя, с расположенной наверху клеммовой коробкой
и двумя отверстиями в нижней части станины (с двух
сторон пакета статора) для слива конденсата. В дви¬
гателях новой серии МТ112, МТ132 и МТ160 станины
одинаковы для двух длин пакета статора, глубокий
подшипниковый щит отсутствует и коллекторный люк
выполняется в станине. Таким образом, станина уни¬
фицирована для четырех исполнений каждого габа¬
рита двигателей: с фазным и короткозамкнутым ро¬
тором, с коротким и длинным пакетами статора.Сердечник статора избирается из штампованных
листов электротехнической горячекатаной лакированной
стали марки 1213 {Э13) толщиной 0,5 мм, на малых
габаритах для 132 мм применяется сталь толщиной1,0 мм, В двигателях новой серии МТ и в модернизи¬
рованных двигателях старой серии MTF (Н) применена
холоднокатаная электротехническая сталь марок 2011
или 2013 (ЭОЮО или ЭОЗОО) толщиной 0,5 мм, окси¬
дированная или без дополнительного покрытия на
малых габаритах.Сердечник ротора имеет относительно небольшие
потери в стали, поэтому листы фазных роторов обыч¬
но не лакируются. Обязательно применение шпоночного
соединения с валом ротора. В осевом направлении па¬
кет запирается втулкой, стальной или металлокерами-
ческой. Применение холоднокатаной электротехнической
стали уменьшает возможность изгиба вала после на¬
садки ротора, увеличивает на 3—4% коэффициент за¬
полнения сталью пакета.Обмотку статора для двигателей с /и^250 мм воз¬
можно вести механизированным способом при исполь¬
зовании изоляции необходимой механической прочно¬
сти типа пленкосинтокартон и эмалированного провода
типа ПЭТ200М, способного переносить большое удли¬
нение без повреждения эмали. Двигатели МТ355 (седь¬
мого габарита) имеют жесткие формоваиные катушки
статора, закладываемые в открытые пазы. На осталь¬
ных двигателях пазы полузакрытые.
30Крановые электродвигателиIPaad. 2Обмотка ротора двигателей малой мощности требу¬
ет особых мер по закреплению лобовых частей. Под
внутренним диаметром лобовых частей располагают
изолированное стальное кольцо либо кольцо из стек¬
лопластика, к которому лобовые части привязываются
стеклобандажной лентой. При наличии обмоткодержа-
телей применяют также стеклобандажи. В пазовой части
обмотка закрепляется клином из профильного стекло¬
пластика. Стержневая обмотка ротора применяется на
двигателях МТ355.Для закрепления лобовых частей стержневой об¬
мотки ротора предпочтительно применение стеклобан¬
дажной ленты, которая накладывается почти по всей
ширине лобовых частей и исключает отгиб головок при
высокой частоте вращения.Данные по отдельным геометрическим размерам
статора и ротора двигателей МТ старой и новой серий
приведены в табл. 2-11. Пакет статора с обмоткой дви¬
гателей с фазным и короткозамкнутым ротором уни¬
фицирован. «Просвет» между низом сердечника и опор¬
ной плоскостью лап состаеляет около 15% высоты оси
вращения.Таблица 2-II
Геометрические размеры частей электродвигателей серии МТИсполнениедвигателяО»S сэ
Р( ьЙ «-
iS * SП с; £Ч и
В Xк чCQ Sих с?
д 3а rttc la zЧислопазовстатораротораДлинапакета,ммРазмер£.
2 *
«ыft—■MTF011-6MTF012-6MTF111-6MTF112-6MTF211-6MTF311-6MTF312-6MTF411-6MTF412-6МТН512-6МТН611-6МТН612-6МТН613-6MTF3I1-8MTF312-8MTF411-8MTF412-8МТН511-8МТН512-8МТН611-10МТН612-10МТН613.10МТН711-10МТН712-10МТН713-10MT112L-6MT112LB-6MT132L-6MT132LE-6MT160L-6MT160LB-6МТ200М-6MT200L-6Л1Т225М-6MT2S5L-6MT280S-8'МТ280М-8MT280L-8MT355S-10МТ355М-10MT355L-101821270.3545/36858521,01821270,3546/3612012021.02101480,4036/2711511527,02101480,4036/2715515527,02451700.453G/2T15015037,52802000,5054/3615615640.02802000,5054/3624024040.03272350,Б554/3620520561,63272350.5554/36^028061,53682600,6072/5434034566.04933600,7572/9022022Б68,6.4933600,7572/90300ЗОБ68.54933600.7572/9039039568.52802100.5048/3615615640,0280210О^БО48/S624024040,03272400.5572/4820520561,53272400,5672/4828028061,53682700.6072/4826026566,03682700.6072/4836036566.04933720.8075/902422Б068,54933720,8075/9034235068.54933720,8075/9043744568.561546S1,10105/9031031092.56!54681,10105/9037537592,5615- 4681.10105/9045545592,51911380,4036/27909316.Б1911380,4036/2713513816.62251620,4036/2713613819.52251620.4036/2717017319,5272200O.SO54/3616516824.02722006,5054/3622522824.03492500,5572/5417017325.53492500,5572/5423523825.53922900,6072/5420020529.03922900,6072/5430030529.04933720.7572/8422022533,54933720,7Б72/8430030533.54933720.75-72/8439039533,56154681.10105/9031031060,06154681.10105/9037537660,06154681,10105/9045545560,0Контактные кольца выполняются либо из металло¬
керамики, либо из медных колец. Пластмассовые изо¬
ляционные кольца, расположенные между медными
кольцами, могут быть местом скопления щеточной пыг
ли, и в новых конструкциях дистанционных колец меж¬
ду контактными кольцами кет. Последние удерживают¬
ся в рабочем положении за счет мощного натяга на
изоляционной втулке.Щетки марки Ml располагаются попарно на каж¬
дом кольце. Размеры щеток составляют для габаритов
двигателей: 0,1 и 2—8X12,5X32 мм; 3—10X25X32 мм;
4 и 5—12,5X32X40 мм; 16X40X50 мм; 7—16Х
X50x50 мм.Для снижения нагрева контактных колец двигателей
МТН700 примерно в 2 раза применены щетки марки МГ,.
при этом нагрев обмотки ротора снижается на 5—10° С.Подшипниковый щит литой чугунный имеет отвер¬
стие для запрессовки изолированного пальца щеткодер¬
жателя. Для повышения водозащищенности двигателей
в новой серии МТ предусмотрены плоские люки щет¬
кодержателей. Подшипниковые щиты со стороны при¬
вода имеют два отверстия для контроля воздушного
зазора в собранном двигателе, к бобышкам щита кре¬
пится кожух вентилятора. Вентилятор закрепляется
от проворота шпонкой. При разжимной системе креп¬
ления вентилятора шпонка сохраняется.Клеммовая коробка имеет отверстия для подвода
кабеля справа и слева. Клеммовая рейка в крановых
двигателях не делается по соображениям техники без¬
опасности, так как даже при снятой крышке клеммо-
вой коробки не должно быть возможности касания ого¬
ленных участков силовой сети.На двигателях МТ112—МТ160 крышка клеммовой
коробки объединена с крышкой коллекторного люка.
Двигатели новой серии МТ имеют сальниковые уплотне¬
ния для ввода кабелей.Балансировка роторов двигателей серий MTF и
МТН ведется только для двигателей с особо жесткими
требованиями по вибрации» а в остальных случаяхТаблица 2-12Допустимый уровень вибрации «лектродвигателей серии МТ
с фазвым роторомПримечание. Данные по двигателям серии МТ132—
МТ355 предварительные.Типдвигателя1*CijU• s S О 6»55 _ 5 o9flets??^ О >1 n о E-iЫo8Its sMTF01114404.51.86MTF01217501.86MTF(H)11118552,86 -MTF(H)11222652.86MTF(H)211441307.02,86MTF(H)S11682002,86MTF(H)312842502.86MTF(H)411no3304.56MTF(H)4121303904.56MTHSllleo4804,58МТНБ122006004.58MTH6113109304.510MTH6I238011004,510MTH61346013504,610МТН7П530155011,0*10Л1ТН712605180010MTH7I3Ю0200010♦ Факультативные энечения.
if-2]Конструкция крановых электродвигателей31ротор не балансируется^ так как он состоит из симмет¬
ричных относйтельно оси вращения деталей и узлов.
Данные ло допустимой вибрации двигателей основного
исполнения, а также отдельиые параметры, влияющие
на вибрацию двигателей, приведены в табл. 2-12.Охлаждение основного (закрытого) исполнения
двигателей о^ществляется по системе IC41. В двигате¬
лях с 225 мм применяется также независимая вен¬
тиляция IC16 и IC37, а в ряде зарубежных двигате¬
лей — IC51 {см. табл, 2-5).Двухскоростные двигатели выполняются только с
короткозамкнутым ротором, имеющим одну обмотку по¬
вышенного скольжения. Отдельные исполнения двигате¬
лей не имеют ребер на станине. В ряде двигателей но-
вой серии МТ при относительно большом числе пазов
статора удалось унифицировать железо статора для
односкоростных и двухскоростных двигателей.в) Валы и подшипники крановых электродвигателейВал двигателя рассчитан на передачу максималь¬
ного момента при наиболее тяжелых условиях — зуб¬
чатой шестерне на конце вала. Минимальный диаметр
делительной окружности шестерни D* в зависимости
от диаметра конца вала du мм:Подшипники крановых электродвигателейТаблица 2-132832364050708090100ПО12013014076809095115145165180200220240260290Для шестерни с углом зацепления а$ = 20° давле-
вне на зубЛомакс = 2Л1ма КС/^г COSOs = 2,12Жмакс/^2»где Мм*ко — наибольший вращающий момент, развива¬
емый двигателем.Вал должен быть проверен на прогиб, обусловлен¬
ный силой тяжести ротора, силой Л^мак? и силой одно-
огороннего магнитного притяжения.Для эластичной втулочно-пальцевой муфты ради¬
альное усилие на конец вала определяется по формуле^макс = 0,6Ммакс/^п.где Du — средний диаметр расположения втулок (паль-
цев) муфты.Второй конец, вала кранового двигателя часто ис¬
пользуется дли присоединения тормоза, ыахоэика, та-
хогенератора. При этом допустимая радиальная наг¬
рузка, Н, приведенная к середине длины конца вала,
может быть вычислена по эмпирической формуле
0,4di (4i — в миллиметрах). Диаметр рала под под¬
шипник в крановых двигателях примерно на 12%'
больше диаметра конца вала.Подшипники крановых двигателей имеют раечет-
аую долговечность не менее 10 ООО ч. Шариковые под¬
шипники легкой и средней серии применяются для диа-
метров вала под подшипник 60—70 мм, а при больших
диаметрах переходят на роликовые подшипнржи сред¬
ней узкой серии с одним бортиком на внутреннем коль¬
це. Все подшипники нормального класса точности, с
повышенным радиальным зазором, что особенно важно
для двигателей, работающих в условиях вибрации,
ударов и значительных перепадов температуры между
внутренним и наружным кольцами подшипников (15—
20® С) (табл, 2-13). Широко применяется унифициро¬
ванная система с двумя одинаковыми, незапертыми в
осевом направлении подшипниками. При этом ротор
имеет осевой разбег в зависимости от длины двигате¬
ля 1зо (см. рис. 2-9): 0,6~2,4 мм при /зо<950 мм;
1,2—2,5 мм при /зо=950~1400 мм; 1^5—3,2 мм при
Jjq>1400 мм.ТипОбозначение под¬
шипникаТип двигателяОбозначе¬двигателягоризон¬
тальное ис¬
полнениеверти¬
кальное ис¬
полнениение под¬
шипникаД126030760307MTF011, 01260206Д21, Д2260309G0309MTF(H)1U, 11260208Д31, Д32312312MTF(H)2H70-60309KД41. Д80642 314f 314
t 42 314MTF(H)311, 312
MTF{H)41I, 4126031160314Д80820-42317Л1f 70-417
1 70-32317MTH511. 512
МТН6И, 612, 61320-4261620-42620Д81020-42320М—MTH71I, 712, 71320-42326MД81220-42322ЛМ70-32220-323228226MT112MT132MT16070-6020870-6030970-60311Д81420-42324МMT20070-60314Д81620-42326М70-32620-323268230MT225MT280MT35520-4231620-42320M20-42326MД81820-42328Л1-Угол наклона двигателей относительно продольной
оси ари работе практически не ограничен, необходимо
лишь обратить внимание на возможность слива кон¬
денсата из внутренних полостей двигателей. Для дви¬
гателей с двумя роликовыми подшипниками угол нак¬
лона относительно поперечной оси ограничен 15° и
допустим только для кратковременных и повторно-крат¬
ковременных режимов работы. При продолжитель¬
ных режимах работы такой наклон двигателя снижа¬
ет срок службы подшипников примерно в 2 раза даже
при тщательной и своевременной замене смазки. Угол
наклона до 30° допускается как исключение и только
при кратковременной работе с весьма ограниченным
общим числом рабочих циклов.Частые реверсы, пуски и торможения заметно сни-
Л4ают работоспособность подшипников и могут опре¬
делять их сроки службы. По опытным и эксплуата¬
ционным данным предельное число циклов пуск — тор¬
можение для подшипников можно определить по
рис. 2-13 в зависимости от типа подшипника и внутреи-Рис. 2-13. Предельное число реверсов или циклов пуск —
торможение для подшипников асинхронных крановых
двигателей с короткозамкнутым ротором в зависимости
от диаметра вала под подшипник.i —шариковые подшипивг^и; 2 ~ роликовые цодшндишш.
32'Крановые электродвигатели[Разд. 2Т а Г) л и ц а 2-14Характеристики смазок подшипников крановых
электродвигателейМарка смазкиВНИИНП-220ЦИАТИМ-2211-13ЦИАТИМ-203ГОСТ или ТУ
на смазкуТУ 38-101.475-74
ГОСТ 9433-60
ГОСТ 1631-61
ГОСТ 8773-73Диапазон
рабочей
темпера¬
туры
смазки, °Сь CJе-s»
ё ^
S Е со
£ го Ж
Ь X ^—60 -f 150
—60 ^ +150
—40 +80
—45 -f- +100200200120150Рекомен¬
дуемое
климати¬
ческое
исполнс-
пие дви¬
гателейТ, ХЛ, У
Т. ХЛ, Ууунего диаметра подшипника. Кривые рис. 2-13 относят¬
ся к асинхронным двигателям с короткозамкнутым ро¬
тором. Для двигателей с фазным ротором и роликовы¬
ми подшипниками число циклов может быть увеличена
примерно в 2 раза, а с шариковыми подшипниками —
в 1,5 раза. Для двигателей постоянного тока предельное
число циклов может быть увеличено в 2—4 раза.Рис. 2-14, Сроки замены смазки в зависимости от нара¬
ботки подшипниковых узлов.1 — нагревостойкие смазки типа ВНИИНП-220; 2
ные смазки типа ЫЗ или ЦИАТИМ-203..консйстеит-Подшипниковые токи в крановых двигателях прак¬
тически себя не проявляют, так как наводимая э. д. с.
в подшипниковых узлах менее 1 В, что недостаточно для
пробоя масляной пленки в подшипниках и протекания
подшипниковых токов.Для смазки подшипников крановых двигателей
наиболее предпочтительна марка ВНИИНП-220 с при¬
садкой дисульфита молибдена, снижающей износ под¬
шипников в режиме реверсов. Применяемые марки
смазок указаны в табл. 2-14. Допустимо применение и
других марок смазки, при этом старая смазка должна
быть тщательно удалена. При традиционных конструк¬
циях подшипниковых узлов' срок замены (пополнения)
смазки составляет от 2000 до 4000 ч работы и уточня¬
ется применительно к фактическим условиях эксплуа¬
тации. При малых наработках календарный срок служ¬
бы составляет 5—10 лет, большие сроки .относятся к
малоиспаряемым смазкам типа ЦИАТИМ-221. Пример¬
ное соотношение между сроком замены смазки и на¬
работкой двигателя представлено на рис. 2-14. В слу¬
чае длительных перерывов между заменой смазки реко¬
мендуется проводить выборочную ревизию состояния
подшипниковых узлов.г) Шум и вибрация крановых электродвигателейУчитывая особо прочную н жесткую конструкнию,
большой запас по работоспособности подшипников,
расположение двигателей на большинстве механизмовцне зоны рабочих мест обслуживающего персонала,
кратковременные режимы работы, требования к крано¬
вым электродвигателям по уровню вибрации сдвинуты
на один-лва класса выше основной шкалы ГОСТ I692I-
71, который распространяется на машины массой до
2000 кг.Для машин переменного тока массой свыше 2000 кг
среднеквадратичное значение вибрационной скорости
подшипниковых опор и пакетов статоров не должно
превышать 4,5 мм/с согласно ГОСТ 20815-75. Точность
уравновешивания роторов часто определяет уровень
вибрации собранной машины. Для анения хорошей
коммутации дебаланс якоря двигать.постоянного то¬
ка не должен превышать более чем в 3 раза значении,
приведенного в табл. 2-9.Для роторов двигателей рекомендуется устанавли¬
вать второй класс точности уравновешивания по
ГОСТ 12327-66 (средние по массе роторы), но не при
номинальной, а при максимальной рабочей частоте вра¬
щения. Таким образом нормы допустимой остаточной
неуравновешенности приближаются к нулевому классу
точности при номинальной частоте вращения и обеспе¬
чивается достаточный запас по отношению к требова¬
ниям уровня вибрации готового двигателя.В процессе жсплуатации уровень вибрации двига¬
телей сохраняется достаточно стабильным, если избегать
превышений максимальной частоты врашеиия и следить
за состоянием подшипников. Изменение общего уровня
, вибрации при переходе от синусоидального питания к
несинусоидальному для различных асинхронных двига¬
телей составляет 4—12 дБ. а в режиме несимметрично¬
го питания общий уровень вибрации возрастает иа
■ 2—6 дБ, в зависимости от степени несимметрии (2—
15%).При питании от выпрямителей крановых двигате¬
лей постоянного тока общий уровень вибрации возрас¬
тает на 1—8 дБ, в зависимости от габаритов двигате¬
ля и коэффициента пульсации по току (2—30%).Обычно шум крановых двигателей закрытого ис¬
полнения не лимитирует шум механизма, а для двига¬
телей с независимой вентиляцией определяющим явля¬
ется шум пристроенного вентилятора. Нормы шума за-Та блица 2-15Допустимые значения шума, дБ, по шкале А крановыхэлектродвигателейТипВысота оси вращения h, ымдвшате-ля!12( 132| 160| 180200225250[ 280j1 315S4fl355375тд, дп728181аз8385858590MTF.МТН,MTKF,МТКН7678808085859U90МТ(но-
вая се¬
рия)72787480858590Таблица 2-16Поправки к гигиеническим нормам допустимых эначеннВ
шума, дБ, во АСуммарная длительность
воздействия за смену
(рабочий день)Характер шумашироко¬полосныйтональный
или импульс»
ныйОт 4 до 8 ч0—5От 1 до 4 ч+6+1От 1/4 до 1 ч+12+1От 5 до 15 мин+18Менее S мин+24+19
§ 2 -2}Конструкция крановых электродвиеа^елей33*Таблица 2-17Допуски, посадки и классы шероховатости сопряженных деталей в краиовых влектродвигателвхСопрягаемые части или элементы частей, деталиОтклонение сопрягаемых размеров (отвер*
стве/вал> нли размера деталиСтарое обозначение Новое обозначениеШероховатость сопрягаемы:)^
поверхностей (отверЬтие/вал)
или поверхности ДеталиСтарое I Новое
обозначение | обозЬачеииеСопрягаемые частиЛист якоря — валЛист ротора толщиной 0,5 мм вал
Лист ротора толщиной 1,0 мм — вал
Шайба нажимная — валШайба нажимная при налички дополнительной запорной
ьтулкн — вал XКоллектор нли контактные кольца — валВтулки, запирающие пакет ротора или подшипник .Втулка вентилятора валВентилятор с разжимным креплением — валЩит подшнпииковый — крышка подшипника (постояи-
аый ток)iТо же (переменный ток)Остов —щит подшипниковый (постоянный ток)
Ставина>«щит.подшилннковый (переменный ток)
Станина лист статора (диаметром до 400 мм)То же (диаметром свыше 400 мм)Траверса щеткодержателя подшипниковый щитПалец щеткодержателя — подшипниковый щит ( перемен-
ный ток)А/ПлН,/р6^/V7АД^H,/h6, ~/V7-17А/Наде_/V7-Г/А/ПрН,/г6V6/V7А/н"«,/кбV6/V7v/‘-^Д/ПлН,/рбV6/V7А/ПлHv/p6Vj6/V7А*/ПлНв/р6VS/V67/7А./С,Н|^Ь8V3/V4А/СНт/ЬбV6/V47/‘7Д/С.Нт/Ь9V€/V47/7Нв/т6vS/v67/7Нв/к7V5/S76'•^/7Aj/CН«/Ь6v6/~7/_Н«А6V5/-^■vi~А,/С«Н*/Ы1*V4/V4- '7f 7А,/Пр1,Нв/нётаналогаV4/V5Элех(Ч7ы часJ ей, деталиI.e.Конец вала цилиндрическийГОСТ 8592.71гост 8592,71V7VTo же — коническийГОСТ 12081.72ГОСТ 12081.72V77Шейка вала под шариковый подшипникЫкбve0.8.УТо же — под роликовый подшипниктШбV873-839
^34Крановые электродвигатели{Разд, 2Продолжение табл. 2-17Сопрягаемые части или элементы частей, деталиОтклонение сопрягаемых размеров (отвер¬
стие/вал) или размера деталиСтарое обозначениеНовое обозначениеШероховатость сопрягаемых
поверхностей (отверстие/вал)
или поверхности ДеталиСтарое Новоеобозначение обозначениеВнутреиниЁ диаметр щита сод шариковый подшипникТо же под роликовый подшипникВысота листа главного полюсаВысота главного полюса (после сборки)Высота добавочного полюса (нешихтовакного)
Внутренний диаметр станины код полюсы
Наружный диаметр листа якоря
Наружный диаметр ротора
Внутренний диаметр статора (проточенного)Ширина паза листа сердечника (до сборки) ^Ширина паза листа сердечьика (после сборки)Диаметр коллектора
Диаметр контактных колец
Размер от лап до оси станиныАП+0,2; -СзА
±0.07Аз±0.07SaAs„0.07—0.20—0,50no ГОСТ 8592-71
—0.2Н,h9+0.2; —h9
±0.07
Нэ
±0,07
h7
He
—0,07
—0,20
—0,50
h9no ГОСТ 8Б92-71
—0,2V6V6v4V4V5V5V8V7V412.5/V12.5,V6,3vV6,3.V0.8.V12,5,VКрытых двигателей соответствуют первому классу по
ГОСТ 16372-77, При номинальной частоте вращения
среднее значение шума по шкале А на расстоянии 1 м
от контура двигателя не превышает значений, указан¬
ных в табл. 2-15.Гигиенические нормы допустимых значений шума,
дБ, на рабочих местах равны (с учетом табл. 2-16) :Помещения управления (рабочие комнаты) .....
Кабины наблюдения и дистанционного управления , .То же с речевой связью по телефонуПомещения и участки точной сборки -Постоянные рабочие места в производственных помеще¬
ниях и на территории предприятий6080656585д) Долуски и посадкив крановых электродвигателях к ^Для крановых двигателей характерно применение
посадок с большим натягом, чем это предусматрива¬
ется в двигателях обш;его применения. Эти посадки
определяются предельными нормированными отклоне¬
ниями, которые для основных сопрягаемых деталей
крановых двигателей приведены в табл. 2-17 (система
отверстия). .Там же указаны шероховатости поверхнос¬
тей узлов и деталей.В связи с введенной в странах — членах СЭВ новой
единой системой допусков и посадок (ЕСДП) б табл.
2-17 указаны также посадки, заменяющие посадки по
системе ОСТ, причем поля допусков по системе ОСТ и
по ЕСДП равны или очень близки.2-3. КРАНОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
ПОСТОЯННОГО ТОКАа) Основные соотношения
в электродвигателях постоянного токаСвязь электрических и механических параметров в
машинах постоянного тока описывается выражениями£ = (2-1)
Л1=Сл1Ф/„. (2-2)где п — частота враш;ения электродвигателя, об/мин;
Е — 3. д., с. якоря двигателя, В; /я — ток якоря. А; Ф—-
поток главных полюсов, Вб; М—электромагнитный мо¬
мент двигателя, Н-м; — электрическая .постоянная,
§2^S]Крановые электродвигатели постоянного тока35Св=рЛ//60о; См — механическая постоянная, см =
—pVV/2jic(A/ — число активных проводников обмотки
якоря); р — число пар полюсов; а — число пар парал¬
лельных ветвей обмотки якоря. ’ ■■Мощность на валу двигателя, кВт, выраженная че¬
рез механические параметры:Я2 = Жп/9550; (2-3)выраженная через электрические параметры:(2-4)где Tj — к. п. д. двигателя; U — напряжение двигате¬
ля, В.Из (2-3) и (2-4) следует:М = %,ЪЪи1яц1п. (2-5)Поток Ф создается м. д. с. обмоток возбуждения,
расположенных на главных полюсах. Если на полюсе
размещена одна обмотка, обтекаемая постоянным по
значению током, то магнитный поток машины практи¬
чески постоянен (если пренебречь размагничивающим
действием реакции якоря) и, следовательно, при такой
системе возбуждения„ = (2^,<ра')■pN \ Ф pN_где Гя сопротивление цепи якоря двигателя, Ом, т. е.
зависимость между п w М. будет линейной.Если помимо обмотки независимого возбуждения
есть также и последовательная обмотка, обтекаемая
током главной цепи, то в этом случае поток зависит
от нагрузки. При возбуждении с помощью только одной
последовательной обмотки вращающий момент пропор¬
ционален квадрату тока, частота вращения — обратно
пропорциональна току (при отсутствии насыщения маг¬
нитной цепи), т. е, при ненасыщенной. магнитной сис¬
теме имеет место зависимостьriTtWlVM,(2-7)где k — коэффициент.Полезный магнитный поток двигателя, даже при
постоянной м. д. с. полюсов несколько меняется в зави¬
симости от тока якоря, особенно, при больших токах.
Это явление, называемое размагничивающим действи-
реакции якоря, уменьшает магнитный поток глав¬
ных полюсов. Размагничивающее действие реакции
якоря отражается на характеристиках намагничивания
электрических машин, построенных для' различных зна¬
чений тока якоря. Такие характеристики называются
нагрузочными.Мощность электрической машины, выраженная че¬
рез геометрические размеры, равна:я.60(2-8)где £>я — диаметр якоря, см; 1а — эффективная длина
пакета, см; А — линейная нагрузка. А/см; —индук¬
ция в воздушном зазоре, Тл; tti — коэффициент рас¬
четной полюсной дуги машины (обычно лежит в пре¬
делах 0,60—0,68).Крановые двигатели должны обладать возможно
меньшими значениями момента инерции, чтобы умень¬
шить время и расход энергии при разгоне и торможе¬
нии механизма. Поэтому если в машинах общего при¬
менения /к/Ся=0,6ч-0,9, то в крановых двигателях для
так называемых длинных машин/я =(0,85-1.15) Ля. (2-9)Выполняемые для упрощения изготовления на од¬
ном диаметре короткие машины имеют отношение
3*/я/£>я== 0,64-0,8. Линейная нагрузка якоря Л—260-f-
-f-370 А/см. Допустимое значение фактора нагрева
Л/я для номинальной часовой мощности двигателя с
классом изоляции F и Н показана на рис. 2-15 (клас¬
сы изоляции В и ниже практически в новых двигателях
не применяются). Соответствующие плотности тока,
А/мм^ равны:Для последовательных обмоток возбуждения и для
катушек добавочных полюсов 2,5—3,5Для параллельных обмоток ьозбуждения 1,2—1,6Для стабилнзйоующих обмоток 5,0—6,01500тото1000800вооW0200: ]60 MtLH'1РиРис, 2-15. Зависимость фактора нагрева якоря для изо¬
ляции классов F и Н (в режимах 60 мин и ПВ-=40%) от
номинальной мощности.Сечение межкатушечных соединений и выводных
концов, выполняемых кабелем марки РКГМ, выбира¬
ется по допустимой плотности тока применительно к
двигателям закрытого исполнения.Рекомендуемые значения индукций в магнитной це¬
пи двигателей, Тл;в воздушном зазоре Bq 0,6—0.8В зубцах якорч Bг^/в • 1,7—2^0В главном полюсе В 1,2—1,6Б основании наконечника главного полюса (размерftp—см. рис. 2.16) Вт ... * 2,0—2,2В станине Bg 1,3—1,5В спинке якоря Вд 0,5—1,0Воздушный зазорб л О.ОШя(2-10)с половиной,
принимаетсяокругляется до целого числа или целогоВысота полюса hm предварительно
равной:= (30-ь40) S (2-И)и далее уточняется после расчета магнитной цепи и
размещения на полюсах обмотки возбуждения.Параллельные обмотки рассчитаны на продолжи-
тельный режим работы. Отношение м, д. с. главных
полюсов к м. д. с. реакции якоря двигателя с парал¬
лельным возбуждением должно быть равно;(2-12)При меньших значениях FsfFp.a реализовать норт
мированный максимальный момент двигателей парал>
лельного возбуждения с удовлетворительной коммута¬
цией трудно. С той же цепью уменьшения, влияния
36Краноеые электродвигатели[Разд. 12реакции якоря на ход скоростных характеристик-и по-
вышения реализуемого максимального момента ариме-
няется снециальная форма наконечника главного полю¬
са (рис. 2-16).Для . двигателей смешанного возбуждения, кото¬
рые применяются все реже, отношение м. д. с, парал-Рис. 2-16. Лист сердечника главного полюса,• . ' ' •
лельной и последовательной, обмоток равно примерно
1:1.Для геометрии крановых двигателей характерно
значение отношения (меньшие значения — для боль¬
ших машй»)ЛУ£>я= 1,08^0,94, (2-13)где А—высота оси вращения двигателя;Маховой момент якоря двигателя может быть
предварительно определен по формуле(2-14)где At и 1к — дкамехр и длина рабочей части коллек¬
тора,- м; *1 =3 • 10® и ^2=4,5-10« — коэффициенты, учи¬
тывающие геометрические соотношения и конструктив¬
ные материалы в крановых двигателях.б) Потерн энергии . .и телд|Овые параметры электродвигателейПотери энергии, интенсивность охлаждения и рё-
жим работ]» определяют -мощность конкретной элёктри-
ческой машины. Поэтому важно знать потери и их рас¬
пределение’ по отдельным элементам двигателя.Потери в -стальной пакете якоря ДРсх в значи¬
тельной етепени лимитируют мощноцсть закрытых дви¬
гателей в продолжительном режиме работы, особенно
при высокой частоте вращения. Пересчет потерь для
других режимов работы, если известны номинальные
потери в стали ДРс».н, Вт, проводится по приближен¬
ной формулеF(2-15)где F H —м. д. с. (или ток катушки) главного: по¬
люса в заданном и вомииальном режимах; л и Ае — час¬
тота вращения якоря в заданном и номинальном ре¬
жиме; — для элекхротехническойстали 1213 (Э13),
Ale=0,95 — для электротехннческ(^ стали марки
2013 (ЭОЗОО), вычислен как пропорциональный кйр'
ню квадратному из отношения удельных пшерь для
стал^ 2013 н 12J3, приведенных при /=50 Гц и
= 1 Тл; feac — поправочный коэффициент, его значения
определяются по рис. 2*17.^рмулой (2-15) рекомеадуеуся
отсу«ств1Ш опытных дашшх.Электрические потери в меда якоря, катушек глав¬
ных н добавочных полюсов АР» легко находятся по
произведению квадрата тока на сопротивление (Яг),
если известны обмоточные данные двигателяНоминальные потери в меди относятся к превыше¬
нию температуры обмоток II5° С.Рис. 2-17. Поправочный коэффициент для расчета потерь
в стали.Переходные потери АРщ в месте контакта щеток
с колл№тором равны произведению Д£/щ/я (At/щ —
падение напряжения под щетками, принимается по¬
стоянным и равным 2 В).Механические потери АРмвх на трение щеток, в
подшипниках и на вращение встроенного вентилятора
принимаются пропорциональными частоте вращения
(вентилятор часто отсутствует или же потери на вен¬
тиляцию относительно малы).Добавочные потери АРдос при нагрузке (потери в
меди от пазового поля и коммутационные, а также
увеличение потерь в стали) составляют 1% потребляе¬
мой двигателем мощности в диапазоне токов от нуля
до номинального и пропорциональны квадрату потреб¬
ляемого тока.Потери в обмотке параллельного возбуждения
АРпар условно не включаются в расчет к. п, д., однако
для повторно-кратковременных режимов работы поте¬
ри в этой обмотке существенно сказываются на нагре¬
ве двигателя и общем балансе потерь, поскольку обмот¬
ка возбуждения постоянно подключена к "сети.Потери в стальных бандажах обычно составляют
менее 0,3 Вт/см^ поверхности бандажа и около 10%'
потерь в стальном пакете якоря. В новых двигателях
применяются стеклобандажи, потерь в которых прак¬
тически нет.Коммутационные потери в меди якоря особо учи¬
тываются при значительной высоте проводников обмот¬
ки якоря и большой ;частоте вращения и определяют¬
ся по [27].Распределение потерь в двигателе средней мощнос¬
ти, около 50 кВт, 220 В, параллельного возбуждения,
тихоходного исполнения в режимах ПВ=40%' и
60 мин показано на рис. 2-18. При этом изменение
теплового состояния при кратковременном: повышении
нагрузки двигателя не учитывалось, а распределение
потерь при /я«О определялось с учетом тока холосто¬
го хода; /в соответствует номинальному току при ПВ=.
= 40%, /' — току режима 60 мин. Для двкгах&авб
§ 2ЩКрановые электродё/ШтеЛи noctOftHHoio тока37'меньшей мощности доля потерь АРэ в меди обмоток
увелэтивается.^ Усредненные значения потерь в двигателях серии
Д параллельного возбуждения для режима работы
ПВ—40% приведены в табл. 2-18, причем потери в
стали определены для маркр 121$ (Э13).тшшшвшшт.Рис. 2-18. Распределение потерь в крановом электродви¬
гателе параллельного возбуждения.с — режим 60 мин; б — режим ПВ-=40%.Таблица 2-18Потерн, Вт, в двигателях серии Д параллельного возбуждения,
тнхожодною исполнения при ПВ~40%Д12Д21Д22Д31Д32Д41Д806Д808Д8ШД812Д814Д616Д818'■inill
Ч га
' СВ о
I О.П140230260330350450550700750950100012501500; о с п
goo' R П U4005005107501050115010009701000115014001470155010015021024028045070090013001S00230028003400ь £Ф S
?!
11
g.=sЬ к £60130130■14016025030040055065075010001300asfё I g*йв-%30405080110160170250300380550700850304560851201801902903504206009^1000ё*»: ж
Й Р|!1620865960129S171021902360277035004100560069008100Потери в обмотках катушек последовательного или
смешанного возбуждения и стабилизирующей обмотке
определяются по данным табл. 2-26—2-28,В режиме ПВ=40% удельные суммарные потери на
единицу наружной поверхности закрытого двигатели,
паралжльного возбуждения составляют 600—1000 Вт/м^.
Для кратковременных режимов работы (менее 30 мин)
независимая вентиляция и другие виды охлаждения
малоэффективны, а при особо коротких периодах рабо¬
ты (менее 15 мин) нагрев обмоток^ определяется прак-.
тически только их теплоемкостью и плотностью тока.
Для режимов длительностью 1—3 мин пр^;вышение
температуры медной обмотки равно:(2-16)где7—-плотность тока в обмотке, А/мм^; t — время на¬
хождения под током, мин.Для режима длительностью < —5 мин коэффициент
в знаменателе формулы (2-16) будет 5,5; при L—
— 10 мин — 8,0; при^= 15 мин — 9,5, а при /<1 мин—3,3...Для оценки работы электрических машин в крат¬
ковременных режимах в табл. 2-19 приведены посто-, Т а б л И44в'2-19Постоянные времени нагрева крановых «дектрнческих нашшг
постоянного токаРежим нагревя.Масса мектричёскойПостршшая временимцн' машины, кгнагрева, сео—100600<3-100—300900300—1000 -12001000—4000; 180050—10090010—20100—3001100300—100022001000—40004000' 50—100•200020—60юо^зой2800300—100040001000—4000 -6000янные времени нагрева.-Значение допустимого тока при
кратковременных режимах может- быть ориентировоч¬
но Определено с учетом данных табл. 2-19 по формуле/доц = ■ (2-1V)1-е “где /в — номикальный ток продолжительного режима.А; ^ —время нагрузки,
нагрева, с.. ': про
; * впостоянная временив) Коммутация электрических машинВажнейшим фактором, ограничивающим максималь¬
но допустимый ток, ./максимальный , момент,' диапазон
регулирования частоты вращения за счет увеличения
напряжения и ослабл«1ия магнитного поля, в машинах,
постоянного тока является^ коммутационная способ¬
ность коллектора.Сущность процесса коммутации заключается в пё-
реключении секций обмотки якоря коллекторной маши<
ны из одной даралл^ьной ветви в другую с измене¬
нием, тока в них на .обратный при перемещении коллек¬
тора под щеткой.. Коммутация ' тока прн вращении
якоря вызывает нскрообразоваиие под щетками,, кото¬
рое ведет к обгоранию коллектора и щеток, а, в. неко¬
торых случаях может вызвать круговой огонь. Интен-
сивность- искрообразованйя зависит от ряда парамет¬
ров электрической машины, тщательности йзготрэления
коллектора, подбора марки щетки. и многих других
факторов..Допускаемое биение' коллекторов крановых дви-,
гателей постоянного тока, замеренное на нагретой ма¬
шине, составляет 0,04—0,06 мм. Для холодной маши¬
ны биение коллектора обычно на 0,01—0,02 мм мень¬
ше. Перепад по высоте между соседними, рядом рас¬
положенными коллекторными пластинами не должен
превосходить 2—3 мкм. При условии хорошей комму¬
тации и отсутствии выступания отдельных пластин мо¬
жет быть допущено увеличение указанных пределов
биения на 0,02 мм п}»и диаметре коллектора до 200 мм
и на 0,03' мм при диаметре коллектора свыше 200 мм.Номинальная плотность тока под щеткой для кра¬
новых двигателей выбирается в пределах 8—10 А/см^.
Как правило, щетки- по окружности коллектора рас¬
полагаются со. сдвигом Ъ осевом ^направлении'на 8—
11 Мм, с TteM чтобы обеспечить равномерный износ кол¬
лектора. г- ...1
38Крановые электродвигатели[Разд. 2С учетом значительных перегрузок по току крано¬
вых двигателей применяются щетки обязательно с то-
коведущнми проводами, с номинальной плотностью то¬
ка в токоведущем проводе 4—7 А/мм^, если считать
условно, что весь юк от щетки проходит только по
проводам щетки.При удовлетворительном проектировании и изготов¬
лении узла коллектор — щеткодержатель интенсив*
ность искрообразования можно оценить так называе¬
мым фактором искрения^Фа = С' 40 у(2-18)где Дк — диаметр коллектора, см; Lc — индуктивность
короткозамкнутой секции, Гн; Vk — окружная скорость
коллектора, см/с; — коллекторное деление, см; /щ —
длина щеток одного щеткодержателя, см; ев — реак¬
тивная э. д. с. в короткозамкнутой секции. В; — ком¬
мутирующая э. д. с., создаваемая потоком добавочного
полюса, В; с~1 для петлевой обмотки и волновой с
полным комплектом щеток; с—2 для волновой обмотки
с одним комплектом щеток.На рис. 2-19 показана зона факторов искрения и
приведена шкала степени искрения по ГОСТ 183-74,
а также разработанная на заводе «Динамо» буквенная,
более подробная шкала, обычно применяемая при ис¬
следованиях. Оценка искрения ведется при соблюдении
следующих правил:Таблица 2-20Характеристики искрения^ при коммутацииСтепень искре¬
нияХарактеристика сте¬
пени искрения <«см.
рис. 2-19)Состояние коллектора
и щетокШкалаГОСТ183-74Бук¬веннаяшкала1аСтсутствие искренияОтсутствие почернения
на коллекторе и следов
нагара на щеткахЬОтдельное точечное,
слабое искрение под
небольшой частью
края щеткиеIV.dСлабое искрение под
большей частью края
щеткиПоявление следов почер¬
нения На коллекторе и
следов нагара на щет¬
ках. легко устраняемых
протиранием поверхности
коллектора бензином-еРавномерное точеч¬
ное искрение по
всей длине края щет¬
ки2fйКрупные искры звезд¬
чатого' характера,
твескПоявление следов по¬
чернения на коллекторе
н следов нагара на щет¬
ках. не устраняемых
протиранием поверхно¬
сти коллектора бензином-п3iИскры брызгающе¬
го характера, треск;
значительное искре¬
ние под вс^м краем
щеткиЗначительное почерне¬
ние на коллекторе, не
устраняем(>е протирани¬
ем поверхности коллек¬
тора бензином, а также
подгар и частичное раз¬
рушение щеток-}Местные дуги под
щеткой, языкообраз¬
ные выбросык1все щетки должны_ быть правильно установлены и
притерты;наблюдение ведется за положительной щеткой на
двигателе и отрицательной — на генераторе;оценка степени искрения ведется под сбегающим
краем щетки по шкалам табл. 2-20;' при опасности обгорания щеток наблюдение сна¬
чала проводят при малых нагрузках;все наблюдения ведутся при убывающем токе;
состояние коллектора и щеток проверяют по исте¬
чении времени, необходимого для достижения практи¬
чески установившейся температуры машины {для про¬
должительного номинального режима работы — черезИскрение naff2 ч после начала работы машин мощностью до 100 кВт
и через 4 ч — для машин мощностью 100—300 кВт, для
повторно-кратковременного номинального режима ра- ^
боты —после такой же продолжительности работы в
данном режиме).При номинальном режиме степень искрения долж¬
на быть не выше IV2.Степень искрения 2 допускается только при крат¬
ковременных толчках нагрузки и перегрузки. Степень
искрения 3 допускается только для моментов прямого
включения или реверсирования машин, если при этом
коллектор и щетки остаются в состоянии, пригодном
для дальнейшей работы.Двигатели серии Д исполнений 12—32 при номи¬
нальном напряжении должны в течение 30 с и двига¬
тели исполнений 41, 806—818 в течение 60 с выдержи¬
вать ток, указанный в табл. 2-21, причем искрение на
коллекторе не должно достигать степени искрения 3.Как видно из (2-18), фактор искрения зависит от
квадрата некомпенсированной реактивной э. д. с. ец.
В свою очередь еп в коммутируемой секции пропорци¬
ональна току якоря /я (линейной нагрузке Л), частоте
вращения п, квадрату числа витков суммарной про¬
водимости потоков рассеяния X, зависит от числа и раз¬
меров коллекторных пластин, размеров щеток. Появле¬
ние разности ев—е^ обусловлено насыщением магнитной
цепи добавочного полюса при перегрузках, отстава¬
нием потока добавочных полюсов от тока в неустано-
вившемся режиме и т. д. Таким образом, в фактор ис¬
крения частота вращения входит в третьей степени, а
ток — в степени несколько ниже второй. В неустано-
вившихся режимах на степень искрения электрических
машин влияет также скорость изменения тока и воз-
§^2=ЗГКрановые электродвигатели постоянного тока39Таблица 2-21Кратность максимального момеата и перегрузка по току
двигателей серии ДВид возбужденияКраткость максимального
момента в часовом режимепри номиналь¬
ном напряже¬
нии220 ВПоследователь^ноеСмешанное
Параллельное
стабилизирую¬
щей обмоткой
Параллельное4.03.53.02,7440 В3,202.802,402,15при трогании
с места дви¬
гателей на
номинальное
напряжение220 В,, 440 В5,04,23*Б3,0Отношение
тока при ис¬
пытании на
перегрузку к
номинальному,
соответствую¬
щему часовой
мощности, при
номинальном
Напряжении220 В4,03,42,82.43,23,0з;о2,8440 В2,552.402.402.25никающие перенапряжения на коллекторе и между от¬
дельными пластинами.Поскольку идеальное совпадение ев и е» невозмож¬
но, то в наиболее тяжелых режимах, например в тор¬
мозном режиме двигателя с высокой частотой враще¬
ния н большим током, значение «в не должно оревос-
ходить 10—12 В.Коммутационную устойчивость электрических ма¬
шин целесообразно проверять по следующим соотно¬
шениям:среднему межсегментному напряжению на коллек¬
торе, В,2р£/еср = -^<20; (2-19)максимальному межсегментному напряжению на
коллекторе при уменьшении м. д. с. главных полюсов и
большом токе, В,®макс^1 + 0.45 < 35 ^ 40; (2-20)напряжению на 1 см окружности коллектора для
номинального напряжения с возможностью регулиро¬
вания скорости за счет повышения напряжения. В/см,8макс^макс< 90-^- 100,(2-21)где К — число коллекторных пластин; а — коэффициент
полюсного перекрытия; Fp.H — м. д. с, реакции якоря;
Fb — м. д. с. главных полюсов.Особо важно проверить значение вмакс для электри¬
ческих машин, работающих при напряжении выше 400 В
и сильно ослабленном основном потоке.В переходных режимах длительностью менее 0,1 с
перегрузка двигателей по току может быть увеличена
примерно на 207о. поскольку искажение магнитного поля
в воздушном зазоре, за счет увеличения м. д. с. реакции
якоря не успевает проявиться и заметного усиления иск¬
рения щеток не возникает.г) Работа крановых электродвигателей
постоянного тока при питании их от выпрямителейПитание двигателей постоянного тока от регулируе¬
мых статических выпрямителей на:£0днт все большее
применение.Двигатели серии Д по ГОСТ 184-71 допускают пи¬
тание от регулируемых статических выпрямителей, сое¬
диняемых по трехфазной мостовой схеме, без примене¬
ния сглаживающих реакторов. Экспериментальные ис¬
следования, проведенные при питании от выпрямителей,
позволяют сделать следующие выводы.1. За счет пульсации тока нагрев двигателей возра¬
стает на 2—3% при коэффициенте пульсации тока ki=
= 15%, на 5—7%—при Aj—25%, на 15—22%—при
fe»==35,%, причемki == ({‘макс — *мин)/(^макс 4" ^иин)» (2-22)где ?макс — максимальное значение тока при пульсирую¬
щей нагрузке; i'mhh ~ минимальное значение тока при
пульсирующей н агрузке.дОгоWУ^—уу/%Ш 50 7SРис. 2-20. Связь между ко¬
эффициентами пульсации
напряжения и тока на эле¬
ктродвигателе без примене¬
ния оглаживающего реакто¬
ра.Рис. 2-21. Зависимость
коэффициентов пульса¬
ции напряжения и тока
от нагрузки электродви¬
гателя.Аналогично подсчитывается коэффициент пульсации
напряжения ku.Для наиболее распространенной трехфазной мосто-
во|| схемы уровень пульсаций ниже 5—7% для диапазо¬
на мощностей двигателей от 20 до 200 кВт,, при этом
дополнительный нагрев двигателей можно не учитывать.2- Для двигателей средней мощности, например
Д810 (S5 кБт, 220 В, 282 А, 550 об/мин, параллельное
возбуждение), связь между коэффициентами пульсации
напряжения и тока при питании двигателя от регулируе¬
мого выпрямителя без сглаживающего реактора близка
к линейной н показана на рис. 2-20. Собственная индук¬
тивность двигателя существенно снижает пульсации то¬
ка. Рисунок 2-20 справедлив для мощности преобразо¬
вателя, близкого к мощности двигателя, при номиналь¬
ной нагрузке двигателя. В двигателях меньшей мощно¬
сти (20—50 кВт) индуктивность возрастает и снижение
пульсации тока будет проявляться несколько больше.
В диапазоне мощности 60—200 кВт индуктивность цепи
якоря, включайщей обмотку якоря и добавочных полю¬
сов, меняется несущественно.3. При близких мощностях преобразователя и дви¬
гателя с ростом тока нагрузки коэффициент пульсации
тока резко снижается, как показано на рис. 2-21. Это
благоприятно сказывается на коммутации двигателей
при перегрузках. Для диапазона мощности 20—200 кВт
и относительно редкого случая, когда мощность одного
двигателя в несколько раз меньше мощности регулируе¬
мого выпрямителя, рис. 2-21 также справедлив с учетом
относительно большей индуктивности двигателя малой
мощности.4. С ростом нагрузки на двигатель искрение на
щетках может даже уменьшаться (примерно на 0,5 бал-
4t)Крановые мектро^еигатели v[Разд. 2Та-бляца 2-22''Коммутация двигателей серия Д при питании от выпрячителей. Ориентировочные
значения коэффицие
70В пульсации, %О1627О3575100Коммутация прило шкале
ГОСТ
183-74IV»lVi-22по буквеиноб
шкале (см.
табл. 2-26)Ток начала
искрения1.40/„1,05/„0,35/„О (вео> диа¬
пазон)^да буквенной шкалы) вследствие снижения пульсации
тока.Связь между коэффициентами пульсации тока и
напряжения и коммутацией двигателя средней мощно¬
сти (около 50 кВт) при постоянной нагрузке, превыша¬
ющей в 1,41 раза номинальную, представлена в табл.
2-22, причём в первой строке приведен режим при по-
стоадном т(же, без пульсаций. Там же показан ток на¬
чала искрения, если ток постепенно увеличивать от нуля.5. Шихтованные сердечники добавочных полюсЬЬ
дают улучшение коммутации, примерно на 0,5 балла
^квенной шкалы искрения, при умеренных пульсациях
тока (fti^l6%).При значениях kt*=25~‘3B% применение таких ших¬
тованных сердечников дает улучшение коммутации на
один балл буквенной шкалы.6. Преобразователь следует выбирать, так, чтобы но--
минальное напряжение двигателя было близко или равн&
напряжению верхнего предела регулирования на выходе
преобразователя. Недоиспользование преобразователя
по мощности или напряжению влечет за собой увеличе¬
ние пульсации выходного тока и напряжения, чта отри¬
цательно влияет на коммутацию и нагрев двигателя.
ИсследЬвання, проведенные на двигателях серии 2П при
Питании от преобразователей, показали; что с изменени¬
ем частоты пульсации тока якоря граница искр91ия
практически не меняется. Уменьшение частоты вращения
жоря путем снижения напряжения, когда одновременно
растет переменная составляющая тока якоря, также не
ухудшает искрения щеток даже при отсутствии сглажи¬
вающей индуктивности.При ослаблении поля двигателей с номинальным на¬
пряжением 220 В обеспечивают регулирование до мак¬
симальной частоты вращения с ухудшением коммутации
на одну-две ступени шкалы ГОСТ 183-74 (до степени
искрения 2) при умеренных значениях коэффициента
пульсации по току ft^;^0,2. Для двигателей с номиналь¬
ным напряжением 440 В значения ki должны быть
уменьшены в 1,5—2 раза.Одним из критериев динамических свойств двигате¬
лей может служить допустимая скорость изменения тока
якоря двигателя, которая в системах приводов крановых
механизмов не превосходит J00 /я в секунду. В то же
время по результатам испытаний отечественных и зару¬
бежных двигателей установлены следующие допустимые
значения скорости изменения тока якоря:Для двигателей с полностью швхтованяым маг-
нитопроводом добавочных полюсов и бескаркас¬
ными катушками добавочны}^ полюсов - . , ,Для двигателей с компенсационной обмоткой . . 260/„Для двигателей без компенсационной обмотки с
шихтованными сердечниками добавочных полю- *toe • 200/дДля двигателей без свециальньк мер по улучше¬
нию коммутации . . .100—200/„При пониженном напряжении скорость нарастания
тока в якоре двигателя может быть увеличена До
(300—900) /н в секунду в зависимости от номинальной
мощности и конструктивного исполнения.Из приведенных материалов следует, что применение
специальных мер по улучшению динамических свойств
двигателей по скорости изменения тока требуется только
для особо быстродействующих систем приводов, обычно
не свойственных крановым механизмам,д) Серия Д электродвигателей постоянного тока
крановых и металлургическихДвигатели серии Д соответствуют ГОСТ 184-71 с
учетом изменения^ № 2, оформленного в 1979 г. Серия
построена на десяти диаметрах, имеет тринадцать испол¬
нений ао основным размерам, причем три исполнения
ижеют по две длины.Двигатели предназначены для работы в электропри¬
водах грузоподъемных машин, в том числе металлурги¬
ческих. Для механизмов с большим числом включений
(до 2000 в час) с целью повышения динамических пока¬
зателей привода и уменьшения расхода энергии на раз¬
гон якоря разработаны тихоходные двигатели всех ис¬
полнений с относительно невысокой частотой вращения.
Для( механизмов с числом, включений примерно до 300 в
час предусмотрены быстроходные двигатели исполнений
Д21—Д808, имеющие номинальную частоту вращения
на 3&—557о большую, чем двигатели первого типа. Дви¬
гатели характеризуются повышенной кратностью пуско¬
вых и максимальных моментов и широким диапазоном
регулирования скорости.Двигатели серии Д изготавливаются на номинальное
напряжение 220 В (все 20 исполнений) и^на напряжение
440 В (с ограничениями по исполнениям). Двигате.^:и
^ изготавливаются с- последовательным, смешанным, па¬
раллельным возбуждением и параллельным со стабили¬
зирующей обмоткой возбуждением. По способу монтажа
и расположению вала основное исполнение — форма
MI01. Кроме того, могут быть заказаны двигатели фор¬
мы М202—-до исполнения 32 включительно, формы
М201 — до исполнения 808 включительно, формы
М302 — все исполнения двигателей (см. таб,!. 2-7), Дви¬
гатели вертикального исполнения имеют в обозначении
букву В, например ДВ 32.Степень защиты от внешних воздействий закрытых
двигателейIP22, двигателей с принудительной венти¬
ляцией (без крышек)—IP20. Поставка двигателей про¬
изводится с установленными крый1камн на Ькнах входа
и выхода воздуха, поэтому двигатели закрытого испол¬
нения с естественным охлаждением (исполнение IC00)
и защищенного нсполнения с принудительной вентиля¬
цией (исполнение 1C 16) взаимозаменяемы (см.
табл. 2-5).Станины двигателей до исполнения 808 неразъем¬
ные, а начиная с исполнения 810 — разъемные. В двига¬
телях применена изоляция только с классом нагрево-
стойкости Н, . 'Номинальными данными закрытых двигателей явля¬
ются данные режима 60 мин, а защищенных двигателей
с независимой вентиляцией (продуваемых) — продолжи¬
тельного режима (ПВ —100%). Значения номинальной
мощности, частоты вращения, а также номинального то¬
ка и м^симального момента (при номинальном напря¬
жении) двигателей на напряжение 220 В приведены
в табл. 2-23, двигателей на 440 В — в табл. 2-24. Макси¬
мальная допустимая частота вращения для двигателей
на 220 и 440 В одинакова. В табл. 2-25 приведены допу¬
стимые нагрузки двигателей исполнения ICOO в режи¬
мах ПВ=15, 25, 40, 60 и 100%.Максимальный момент двигателей при нмлинальном
напряжении и ПВ=40% практически не меняется при
§ткрановые электродвигатели постоянного тока41Технические данные двигателей серии Д ва напряжение 220 ВТ а <5 л н ц э 2-232SШМощность в
режиме 60 мин
(закрытый)
или ПВ=100%
(продувае¬
мый). кВтНоминальный ток. частота вращения, максимальный мбмент при возбужденииtK х
Q 1 SIlls«3 5. 0
» S «вjls|последо ватель»омсмешанномпараллельном со ста¬
билизирующей обмот¬
койпараллельномv*|п, об/минМ, Н мvMи, об/мня|М. Н-м/3. А|,п, об/мин|М, Н-М/^, А jn, о6/ыин|М. Н-мТихоходные двигатели-Д122,516,011008615,011757114.6‘ 11406314*6'1180543600Д214,528.090019127,0106014326,0100012826,010301133600Д226.036.585027034,0103019133,0107016133, а11001373600Д318.046,580038244.587030744,082028044.08402453600Д3212,069.067567566.078051465.074046665,07704023300Д4116,089.065093086.570076586,0670 ■. 68686,06905983000Д80622,0120,05751 420116.06501 130116,0635981116,0650 ,8722600Д80837,0200,0525'2 650192,05752160192,05651 860192,057516652300Д81055,0294,05004 210285.0,550ЗЭОО282,05402880282,05602 5502200Д81275,0390.04756 030385.05154в5038Q,0. SW4 26Q3?0,05153 7201900Д814110,0565,04609 100555,06007 350550,0®0в550.0'500 ■5 6801700Д816150,0766.045012 750750.048010 400745.04709120745,04808 04016fl0Д818185,0935,041017 150926,043514 400920.044012 050920Л)45010 6001500Быстроходные двигателиД215,533,01200. 17631,5145012731,01400113■ 31.01440983600Д228.046,0120025644,0139019343.5146015743..Б1610■1373600Д3112.068,0110041265,0128031364,01310•.25664.013602253600Д3218,098.0960. 71595.01100548.94,0. Л40 . .45t,94,011903823300Д4124,0130,0970940126.Q1120716124.01060648124.0iloo5593000Д80632,0170,09001320165.09801090165,0980930165*010008232600Д80847,0248,07202 450240.08001 960238,07701.716238.0800ISIO2300Технические данные электродвигателей cetWH Д на напряжепие 440 ВТаблица 2-24e;Мощность вНоминальные ток, частота вращения, максимальный момент при возбуждении<e. 2
4режиме 60 мин
(закрытый)
или ПВ=д100%
(продувае¬
мый), кВ«ПоследовательвонСмешанномПараллельном со стаби¬
лизирующей обмоткойПараллельном&H/jj, А 1 п, об/мнн 1 М, Н*м. /ц, А 1 п, об/мни 1 Af. Н^м/д, А. 1 п. об/мйн 1 М, Н-м/д. А ^ п. об/мин |Af. Н мтгД31Д41Д808Д810Д812Д814Д816Д818Тихоходные двигатели4,013.0105011612,512408612.012007612,01220686.719,580026520,084021319.086017619,087515715,043.066069640,071056540.069549040,071043637,0100,0525215098.0550180096,0565147096,0-67S1320( 55,0145.05103280—— 141,05502250141.0.560201070.0180,05004260_, 176.06103130176,0S202750ПО.О280.0460' 7300 ._ 273,04905150273,05004510150.0380,0, 4609810 ■ „370,0480 '7150370,04906320185.0467.041013 700——460,04409600.460,04508480Быстроходные двигателиД227,020,51180181020.0141013219.5142011319,5146098Д3217,047,0970534046.01100,415,45.0'1150'33845,01190294Д80632,085.090010 75083.095090082.0980743Р2.01000657Технические данные алектродяигателей серии ДТаблица 2-25Мошность. ток, частота вращения, максимальный момент приПВ=15%ПВ=25%ПВ=40%, ПВ=60%ПВ=100%□30,"<а::еSУ£>Ое0.®<■ZаS^ ,
-С. %
0,“<h1сXX5■ н^ .
о!”<ZSS
i ■«га,"< 'S*■о«гД12Д21Д22Напряжение 220 В, во:;буждение леследорательное
Тихоходные двигатели3,4258003,0199602.4151150862.11213001.485,3357804,5289003.62210401913.119.11801.8117,0447706,0- 368504,8289702704.22411002,615то16301S20
42Крановые электродвигатели[Разд. 2продолжение табл. 2-25Мощность, ток, частота вращения, максимальный момент приПВ=15%ПВ=25%ПВ=40%Q-<ПВ=60%ПВ=100%Д31Д32Д41Д806.Д808Д810Д812Д814Д816Д81810,014.520,026.5
- 39,060,079,0111,0140.0187.0628511514721032041S5707109406005805305054904704704604158,512,017.022.032.049.064.087.0109.0152.05068941181702553304455507607706756305205105005104456,89,513.017.024.035.047.070.085.0
106,0395371921251R2242356430530900760730640615610560550540500382
675
930
1 420
2650
4 210
6 020
9 100
12 750
17 1505,6.8,511,5-14.019.029.037.046.057.073.03246627310015019023529037010008107807007006206156407005753.5
4.76.58.511.517.021.527.032.045.0202635466290115140170240Быстроходные двигателиД21Д22Д31Д32Д41Д8066,69.S14.521,028,036.050.0415783116155190260107010806809208908707058,012,017.023.0
29,640.0334667921241552101200120011001000970940770^ 4.46.59.5
13,5
18,0
23*0
30,02637537296120155134013001190ПОО1060101085017626541271594013752450.3,75,58,011»015.0
19,525.022314458801051301S20148013501250117010609402.03,24.56.59.012.0
15,0131825364865Напряжение 220 В, возбуждение параллельное со стабилизацией* и без стабилизации^Тихоходные двигатели3,62311003.01811002,4141200572.01112301.11290Д121140ИЗО123057127061330Д215,23298010204,52698010103,62110601080103902.916110011201.6911601170Д227,241107011206,033103010604,826112011501271083,62011401120. 2,0121200122010.5608108,5478006.8378502306,4298703,017910Д31850840880201910940Д3214.58274078012,065730760617708003733197,5397908004,0S2810815Д4119,010566016,08566013,0707005499,5507205.5• 30. 740700680720476730745Д80624.513068020,010469516,08470076512,0627056*53571069570S710677715720/Д80837.019060530.015061022^0112620145017,0856259,5506356256306301295635640Д61050,025558059540,020558559529,Ь1485906002160191022,511559060012,06559560SД812 -. 65,533553553*527054038,0192555319028,5 :14556016,0855655455505652795570575Д814100,049554080*0395Б4555,0280550481038,519655020,51105555505Б5560427D560566Д816125,062052597,0480Б2570,0350625687047.024053024.0130М55355355356030540545Д818165,0820460130*0-65046083,0415460902558,0■29246532,016647047014704707950475480Быстроходные ^двигатели1370^14609015001550Д2!6,83914205-,5’31■14004,4251500783,41915202.012157014801430151012715201580Д2210.05615608,04414906*5 .3415701085,02815502,5151600
§2-3]Крановые электродвигатели постоятого тока43Продолжение табл. 2-25Мощность, ток, частота вращения, максимальный момент приПВ=15%ПВ^25%ПВ=40%ПВ=60%ПВ=100%Д31Д32Д41Д806Д808Д21Д31Д41Д808Д810Д812Д814Д816Д818Д22Д32Д80615.020.027.033.043.04.78.219.039.060.0
76.01П.0140.0187.08210614017022016265510516020028535547013201390118012301090116010501060гао82590070060050S49047547046041512,016.022,027,535,0648411414017513001350ИЗО118010601110105010608008259,513.0
17,521.0
26.051689111013413602061420181119036312403041120520116044610507261060643810132582511757,010,013.015.019.03852688096Напряжение 440 В. возбуждение последовательное
Тихоходные двигатели4.07.0
16,032.049.062.0
87,5109.0152.01321458512716022327538010507706605606205155005104453,1'5,212.524.035.045.066.0
85.0100,010163563911151682152501230900760615610590565540515116255
696
2 1603 2904 270
7 310
9S1013 7302.64,311,019.029.035.046.057.073.014305075901171451851410144012001240ИЗО11701050106081583013509708107006206256407005754.05.57.08.510.0Ь52,56.011.517.020.527.532.045.0Быстроходные двигателиНапряжение 440 В, возбуждение параллельное со стабилизгцией' и без стабилизации®Тихоходные двигатели22304047571450148012401260',115011701050106082583551800,91190171090319004576055S23709008510001207508,42610507.02011805,61713001814,51414202,5.819,75696016,044105012,634120053510,02813205,71736,09587029.57794023,0601010108019,552106012.032I9C017201280Д211512004,01211903,1101280618131013904,7122012101300542,513201.2413 95Д31268457.020830 ■1589014213■ 9009358,68658505.29101284.39102.27840Д4118.05068515,0 .4067012,5347103929,0247255,0147407006807203487307456056106201128625635Д80837,09562530,07563022,056630103017.0436359,525■ 640Д81050,012758040,010258529,074590171522.55759012,03359559559560015106006055405455602350565570Д81263.016055051,013055536,092570206027.07057515,041. 580Д814100,024654019654555,0138550387038.59855020,55555555080,0555560338056056SД816125,0310525•52570.0175ЕЗОБ4С047,0120_53024,06553553597,02405355404760"б40645Д818165,0410460130,032546083.0205460' 721058.014646532.083470470, 4704706380475480Быстроходные двигатели148014201510901S201580Д229.02515307.02014605,6161550784.01215402,071590
44Крановые-электродвигатели[Разд. 2Продолжение табл. 2-25Мощность, ток, частота вращения, максимаЖныЙ момент лриПВ=15%<■ ЯПВ=25%ПВ=40%<.ЯПВ=60%ПВ=1 00%SД32Д806Д12Д21Д22Д31Д32Д41Д806Д808Д21тД31Д32Д41Д806Д808Д21Д31Д41Д22Д3219.033.0з.е5.57,010.515.020.0
26,0
39,06,810.014,520,029.035.049.04.98,520,08.718,5518523354J6184112140200•39,5680108151182-2501R2656255412001250105010601040100010608107407006506001390Пззо125010701080980.816,11408007001380ИЗО15.0,27,5• 5,04.5
, 6,08.5
12,0
16,0
21,0
31,0S.58,0-|2.016.023.029.0
43.54.07.0
16.07.015.04070116012001050106012,021,032551200124010501060270235677610I-9.015,0Напряжение 2’0 В, возбуждение смешанное
Тихоходные двигатели1S273448668711016032456585120160222Ибо108010508б08007206756252.4
3.6
4,8'
6.89.513.017.024.014212737517088124123011401120910840740730650Быстроходн ые defi?m ела1470.14001310114011201020830.4.46.5
9,5.13.018.023.030.025365166951181521550147513601200116010608606714018129249072610502000122181298522680100019002,02.93.9
5,5
7,710.0П.519,03.65.07.510.014.517.5
22,0Напряжение 440' В, возбуждение смешанное
Тихоходные двигатели13214420■4012408507203,2 -
, 5.3
13^0 ;1016351310-.900740Быстроходные двигатели145012005.511,515301260822005401263222,5.4,310.64.39.0' Частота вращения и момент указаны в числителй.* Частота вращения и момент указаны в .знаменателе.254012401260105010605,08,515241270128010501060и13301.2714601712101.71014002211502,2131250299603.2171040418804,52493052770fi.O32800607507.54077510067011,0606902016302.11217502815603,01716804114304.02415205512306.03213107511908,545 ,124091100010,055ИЗО11588013.070900814001.35161(1139402,48100028\7606.0178001316002.3817302613104.5151390переходе на другие значения, ПВ, поскольку для после¬
довательного возбуждения максимальны^ момент огра¬
ничивается в основном коммутацией двигателей, а для
параллельного возбуждения при длительном включении
катушек возбуждения нагрев их и, следовательно, м. д. с.
мало зависят от прочих потерь в двигателе. Усредненная
зависимость между мощностью двигателей в режиме
60 мин и повторно-кратковременных режимах при раз¬
личных ПВ показана на рис. 2-8.Ток двигателя исполнения ICOO в режиме 30 мин со¬
ставляет около 120% тока в режиме 60 мин. Ток двига¬
теля исполнения IC16 в режимах, отличных от ПБ =
= 100%, равен: при ПВ==60% приблизительно 125®/о.
при ПВ-40%~150%, при ПВ=25%—190% така ре¬
жима ПВ = 100%, приведенного в табл. 2-23 и 2-24. Мощ¬
ность и частота вращения указанных режимов работы
двигателей могут быть определены из рабочих характе¬
ристик.Двигатели выполняются с двумя концами вала,
каждый ,из которых'может быть использован как лри-
водной, или с одним концом вала. - расположенным со
стороны, противоположной коллектору.' Максимально
допустимые диаметры делительной окружности шестер¬ни на конце вала при зубчатой передаче указаны в
разд. 2'2, в. Второй конец вала и (по заказу) выводные
концы двигателя снабжаются защитными кожухами.
Выводные концы расположены слева, если смотреть со
стороны коллектора.Параллельные обмотки возбуждения (при парал¬
лельном и смешанном возбуждении) рассчитаны на про¬
должительную работу, т. е. могут не отключаться во
время остановки двигателя. Обмотки параллельного воз¬
буждения двигателей состоят из двух групп, рассчитан¬
ных для включения на напряжение 220 иди ПО В1 При
включении на 220 В группы соединяются последователь¬
но, на НОВ — параллельно, на 440 В — последовательно
я включаются также последовательно добавочные рези¬
сторы. Добавочные резисторы поставляются комплектно
с двигателем при указании об этом в заказе.Схемы соединений частей двигателей и обозначения
выводных концов приведены на рис. 2-12.Двигатели рассчитаны на регулирование частоты
вращения путем ослабления магнитного потока или по¬
вышения напряжения на якоре. Двигатели с параллель¬
ным возбуждением и со стабилизирующей обмоткой до¬
пускают увеличение номинальной частоты вращения в
^2-31Крановые длектробвигатели псстоянноео тока452 раза (тихоходные со стабилизирующей обмоткой в2,5 раза) путем уменьшения тока возбуждения или за
счет уменьшения тока возбуждения только й одной груп¬
пе катушек. При этой увеличенной' частоте вращения
максимальный вращающий момент не должен превы¬
шать 0,8 номинального — для двигателей на 220 В и
0,64 — для двигателей на 440 В.Ряс. 2-22. Перегру¬
зочная способность
электродвигателей се¬
рии Д в зависимости
от напряжения.1 — для двигателей на
220 В: 2 —для двигате*
лей На 440 В.Способ увеличения частоты вращения путем умень¬
шения тока в одной группе по сравнению с уменьшением
тока возбуждения в обеих группах ка^шек дает более
стабильную форму механической характеристики, но при¬
меним только для двигателей, имеющих волновую об¬
мотку якоря.Тихоход^^ые и быстроходные двигатели на 220 В с
параллельным возбуждением и параллельным возбужде¬
нием со стабилизирующей обмоткой, за исключениемдвигателей, соединяемых последовательно, допускают
увеличение номинальной частоты вращения в 2 ра^а пу¬
тем повышения приложенного напряжения. При этой
увеличенной частоте врашения и полном возбуждений
максимальный момент не должен превышать 1,5 номи¬
нального.На рис. 2-22 показана обобщенная зависимость до¬
пустимой перегрузки по току (по отношению к номи¬
нальному току при ПВ=^40%) в зависимости от прило¬
женного напряжения для двигателей на напряжение 220
и 440 Б с учетом некоторого запаса в коммутационном
отношёнии, необходимого для реализации максимальных
моментов. Двигатели с параллельным возбуждением и
параллельным возбуждением со стабилизирующей рб-
моткой допускают указанное выше увеличение номи¬
нальной qactOTb вращения частично путем уменьшения
тока возбуждения и частично путем повышения напря¬
жения.Двигатели всех систем возбуждения допускают в
двигательном и генераторном режимах увеличение ча¬
стоты вращения до максимальной (см. табл. 2-23). Ток
при этом не должен превышать 0,7 номинального значе¬
ния для тихоходных двигателей и 1,2 номинального —
для быстроходных.Основные размеры двигателей, значения маховых
моментов и массы даны в подписи к рис. 2-23.Данные обмоток двигателей на напряжение 220 и
440 В приведены в табл. 2-26—2-28. Все двигатели име¬
ют по четыре главных и четыре добавочн^^х полюса.
Двигатели параллельного возбуждения и параллельного
со стабилизирующей обмоткой имеют одинаковые ка¬
тушки параллельного возбуждения. Сопротивления об¬
моток даны при темпер iarype 20° С, Конкретное исполне-Рис. 2-23. Основные размеры и масса электродвигателей серии Д.hliРазмер, ммс.теоо«ЖL»Q«4*10ь„dtагсЛоinh•Д128280185160281960220561115,06441603231300.2.Д2110300215185-3519• 80 194665170.5774Ш3732000.5Д2210300215185351980 239710170.58191803732250,6Д31143902502255026110 250752173,08962254533101,2 •Д32390 :260• 2255026 *iПО 320822173,0*ЮО2264533651.7Д4116430305255653210570299910209.010502505085403.2Д80616420305260653210570533930165,01073250508635'4.0Д8082047633529080-32130, 906281047159.012062805628858,0Д810225204803209032 •130906601114178.01276315635125014,6Д81225570510350100351651207241220172.013983406У0177028,0Д81428636545385120421651208131362200,015433757^2224041.0Д81628686570410130422001508901502212,01714400810286065.0Д81832760620460140482001509901679201,01792450• 9103745Ив.О
Рис. 2>24. Нагрузочные характеристики электродвигателей,
а—Д805; б —Д808; в —Д8Ш; в —Д812; д-Д814} е —Д816; Ж-Д818.
^2-S]Крановые электродвигатели постоянного тока47Таблица 2-26Данные обмоток электродвигателей серии Д псследовательного возбужденпяТипдвигателяЧисло
активных
проводни¬
ков якоряЧислопарал¬лельныхветвейякоряСопротивле¬
ние обмотки
якоря. ОмЧисло
витков на
Добавоч¬
ный полюсСопротивле¬
ние обмоткн
добавочных
полюсов. ОмЧисло
витков па
главный
полюсСопротивле¬
ние последо¬
вательной
обмотки. ОмНоминальный
магнитный
поток на по¬
люс, 10—2 ggМагнитный
поток яа
полюс в режи¬
ме nB=i40%,
10—2 gg ^Д12.Д21Д22Д31Д32Д41Д806Д808Д810Д812Д814Д816Д818Д21Д22Д31Д32Д41Д806Д808Д21Д31Д41Д808Д810Д812Д814Д816Д818Д22Д32Д806990920696738-5584923722782342106085045046905224923723102462101,13000,66000,37000,32500,20000,11000,06750,03400,02340,01400,00790,00590,00390,35600.20200,13800,08500,04700,03100.0185Напряжение 220 В
Тихоходные двигатели75Vs7357554136272117IS119100,50000,28000,19600^09300,08000.05100,04100,02000,01220,00900,00500,00320.0027Быстроходные двигатели544439282318160,17500,12000.05600,03600,02500,0160О.ОПО839282674840363024211512И9263673940
26
24Напряжение 440 Б
Тихоходные двигателиБыстроходные двигатели0.59000,28000,26000,11100,09720,04900,05200,03100,01600,01030,00660.00450,00320,28000,19000,П100,05000,04900,02800,02000,4660.6200.8960,9361,4501,8002.700
3.9605.0606.0208.700
10,990
Х1,9300,6570,8901,0101,6401.960
2,7203.96016102 '2,40001271,40002101,80000,608147621,67001200,46001420,63000,92589420,4750740,2200760,24001,770'55620,0136400.0740600,01354.03046820,0940340,0450480,06005,01041820.0650290,0340400,03905,81031020,0325230.0190290,02408.60050480.0219190,0125240,017510,64050480.0160190,0096220,012612,00010442-1,1500840,54001400,96000,88573820,3900550.1440820.26501,62049220,1290350,0680500,09902,7300,4540,5680*8280*8591,3401,6502.500
3,5304,3105,2807.500
9,260
9,7700,6140,8500,9501,4701,8502,4803*4700,5530,8531,5803,5904,3405,0107,3809,3209,8200,8361,3602,490ние двигателей может отличаться от данных табл. 2-26^
2-28, например, числом витков и диаметров провода ка¬
тушки параллельного возбуждения.Нагрузочные характеристики, т. е. зависимость маг¬
нитного потока от м. д. с. главных полюсов (ампер-вит¬
ков возбуждения), при постоянных токах якоря пред¬
ставлены на рис. 2-24 для двигателей Д806—
Д818. Двигатели Д12 — Д41 не отличаются но характе¬
ристикам от двигателей ДП12 —ДП41, по которым име¬
ются сведения в литературе и каталогах. Нагрузочные
характеристики и данные обмоток позволяют определить
параметры двигателей при- регулировании частоты вра¬
щения путем изменения напряжения на якоре и усиле¬
нием или ослаблением поля, определить добавочное со¬
противление в цепи параллельной обмотки двигателя для
частоты вращения, отличной от номинальной, и пр.Двигатели смешанного возбуждения' исполнения
Д810 — Д818 практически не* применяются, поэтому све¬
дения по ним не приводятся. Уменьшенное по сравнению
с двигателями серии ДП влияние реакции якоря на ходскоростных характеристик двигателей Д810^Д818,
также наличие двигателей параллельного возбуждения
со стабилизнрующ[ей обмоткой способствуют сокраще¬
нию применения двигателей смешанного возбуждения.Двигатели тропического исполнения имеют номи¬
нальную мощность на 7,5% ниже по сравнению с ука* ^
занной в табл. 2-23, 2-24 с учетом повышения темпера-;
туры окружающей среды до 45^^ С. В процессе нзготов-1
ления якори двигателей проходят дополнительную про- •'
питку с обязательной последующей окраской эмалью;
лобовых частей. Щетки тропического исполнения имеют ]
луженые провода. Для подшипников двигателей клима-|
тических исполнений Т и ХЛ применяется смазка марок ’
ВНИИНП-220 или ЦИАТИМ-221, уплотнения коллек-'
торных люков выполняются из резины марки НО-68 или
фетра, пропитг?нного антисептическим составом.Отделка наружных поверхностей тропических дш-.
гателей проводится с грунтовкой и окраской нагрево¬
стойкой эмалью, заводская табличка - выполняется из
латуни.
Таблица 2-27Данные обмоток электродвигателей смешанного возбуждения серии Д'ТипдвигателяЧиспо витков
ыа полюс по>
следователь-
ной обмоткиСопротивле*
ние последо¬
вательной
обмотки. ОмЧисло витков
на полюс
параллельной
, обмоткиСопрот11вле*
ние параллелЬ’
ной обмотки,
ОмНоминальный
ток параллель»
ной обмотки, АНоминальный
uarHFiTHbift
поток на
полюс. Ю""®
ВбТок парал<
лельБой об»
мотки в режи¬
ме ПВ=40%, АМагйитный
поток да полюо
в режиме
ПВ=40%,
!0-^ ВбНапряжение 220 В
Тихоходные двигателиНапряжение 440 В
Тихоходные двигатели^ Данные оймоток якорч и добавочннх полюсов см. табл. 2-26.Д1224'Л0.135020004960,390,4690,860,454 ’ ' ;Д2118V,0,072018502280,800,5600,730,540 iД22„ 187*0,067016202060,870,7740,780,750Д31187,0,035$■16001401(250,8891,12.0,871 IД32.10!/.0,018013701321,351,320i»201,260Д41. 90,016017001281.35IJ201.201.660Д806120,014518001691*04'"'2,4700,902,250Д8080.01051200672,603,7702,253,440!Быстроходные двиеателпД21187*0,072018502280.800,5760,730.5S4Д22187,0,067016202060,87"0,8040,78 .0.776Д31187*^ 0,035816001401,250,^61,120,855Д32107,о.юшо13701321*351*4701,201,380Д4г90,016017001281,351,7501*201,730Д80690,00951800Ш1,042,5400*902,400Д808С0.005712СЮ672,603,6802,253,500Д21477,0,50018502280.800,5540,730.548Д31387i0*17416001401,250,9041,120,876Д41190,05817001281,351*7001(201,660Быстрвходные двигателиД22307,0,23016202060,870,7300,780*744Д32217,0.071J370132li351.420- 1*201,360
Крановые электродвигатели перементго тока49Таблица 2-28Данные обмоток электродвигателей параллельного я параллельного со стабилизирующей обноткой
возбуждения серии Д (для якоря и добавочных полюсов см. табл. 2-26)Параллельное возбуждениеПараллельное возбужденве со стабилвзирукнцей
обмоткойЧисло
витков на
лолюс па¬
раллельной
обмоткиСопротив¬
ление па¬
раллельной
обмотки.
ОмНоминалЬ”
ный ток
параллель¬
ной обмот¬
ки, АНоминаль¬
ный маг-, БИТНЫЙПОТОК на
полюс,
10—^ ВбТок парал¬
лельной
обмотки
, в режиме
ПВ=40%, АМагнит-
ный поток
на полюс
в режиме
ПВ=40%,
10-^ ВбЧисло
витков на
полюс ста-
билвзв-
; рующей
I обмоткиСопротЕвле-
нне стабили¬
зирующей
обмотки. ОмНоминальный
магнитный
поток на по->
люс ИГ-2 ВбМагнитшЙ
поток на полюс
в режиме
ПВ=40%,
itr-^ ВбД12Д21Д22Д31Д32Д41Д806Д808Д810Д812Д814Д816Д818Д21Д22Д31Д32Д41Д806Д808Д814Д22Д32Д806Напряженне 220 В
Тихоходные двигатели1800260,00,7000,4760,650,4600,04200,4901790142.01,2000,5841.000,5800,0260: 0,6001480130,01,3500,7541,180.7414V*0,01900,7721870120.01.4500*9331.250,9094V.0,01200,952147094.01,8501*3501,621,330-iv.0,00861,400148070,02,5001,7602.20j1,72030,00371.810140065,02,7002,5002,30*2,34020,00462,550125044,43.9303,8103.403,58020,00373,860150046.23.9004,760. 3,254.50020,00414,820135034.45,3005,7104,305,36010,00235,880130034.05.5008,2204,407.52010,00188,330114026.47.10010,3605,609.50010,001110,520121022,28,260пдоо6,7010,90010,001011,280Быстроходные двигателиНапряжеияе 440 В
Тихоходные двигатели17901421,200',5801,000,5600,02600.58918701201.450,889.1,250.88547а0,01200.9031480702,50^ 1.7202,201,72030,00371,7501250443,933,8603,403,61020.00373,9101500463,904,7103,234*520ЭО.ОПО4,7701350345,305,7204,306,3602.0,00565,8201300345,508,1004,407,40020,00678,2201140267,1010,2306,609*48020.003210,4001210228,2611*1606»7010,90020,0037,11.350Быстроходные веагатела14801301,350,7731,180,7451470 ■941,851,3801,^1,3601400652,702,Б302,302,4302 “0^01900*00860.00460^7941,4302,68017901421.2000,5901.000,580РД0,02600.60414801301,3500,757,1.180,7434*А0.01900.:78Я18701201.4500.8341.250,812• 4%0,01200,8651470941,8501,3701.621,3400,00861,4201480702,5001,8102,20. 1,74030.00371.8701400652.7002.5Й02,302,42020,00462,5801250443.9303,7203,403,68020,00373,8500,-4690.5880,7590,9381.3801.7602,3703,6404,-560S.44Q7,6209,66011,0600,5740,7690,8421.4001,8002,4403.7300,5700.9031,7403.6704,6905,4507,5109,64011*1200,764'1,4002.450Срок службы двигателей серии Д“20 лет. Всроз?т-
ность безотказной работы при доверительной вероятно¬
сти 0,8 составляет 0,98 при трех годах эксплуатации и
0,92 при пятнадцати годах эксплуатации.2-4. КРАНОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
ПЕРЕМЕННОГО ТОКАа) Основные соотношения параметров
для асинхронных электродвигателейОсновные соотношения параметров для асинхронных
двигателей можно получить из схемы замещения асин^
хронного двигателя, приведенной на рис. 2-25,а, где4-83Sобозначено: п, Гг и го активные сопротивления фазы
обмотки статора, обмотки ротора (приведенное к стато¬
ру) и намагничивающей цепи; Xi. х\ и лсо — индуктивные
сопротивления рассеяния статора, ротора (приведенное
к статору) и сопротивление взаимной индукции.Построение круговой диаграммы упрощается, если
цепь намагничивания условно отнести к первичным вы¬
водам. Из нескольких способов преофазования схемы
замещения метод М. П- Костенко наиболее точно отра¬
жает первоначальную схему замещения. В преобразован¬
ной схеме замещения (рис. 2-25,6) ток вторичной цепи
l\ является геометрической разностью первичного токаи ток намагничивания h (при s*
замещения. •=0) основной схемы
50Крановые электродвигатели[Разд. 2Выражение полного эквивалентного сопротивления
главной цепи будет иметь вид:1\Г1 + 01S /■f j -f x'2Ha рис. 2-26 показано построение диаграммы.
Треугольник холостого хода ОО'т строится по
ранее найденным значениям, причемЛиния центра круговой диаграммы строится под
(2-23) углом 2 я):, который может быть также найден из форму-
где Oi — первичный коэффициент рассеяния, ai=l++ 2i/zo; tg2ij5 — тангенс угла поворота линии центра.tg 2il) гь; 2 tgij)=2 ri/{ajj +ло) i s — скольжение двигателя^7 „ , /itg2il? = 2/оГ1/£/ф-(2-28)XjxiVza).%■o-rП+Гв
Xj+XgКtnРис. 2-25. Т-образная схема замещения асинхронного эле¬
ктродвигателя (а) и преобразованная схема замещенияДиаметр круговой диаграммыгде 4 = +Обычно fj весьма мало по сравнению с Хо, поэтому
для двигателей мощностью свыше 5 кВт отношением
t\}xa можно пренебречь. При повороте осей координат
окружности круговой диаграммы главной цепи на угол2 г|) против часовой стрелки на этот же угол поворачива¬
ются по отношению к вектору напряжения фазы Ч/ф все
линии и отрезки круговой диаграммы. Угол наклона ли¬
нии моментов к линии центра определяется по формулеtg ct^ = tg,+ r\fXQ(2-25)Угол наклона линии полезной
центра вычисляется из выражениямощности к линии(2-26)tgot^ = tgгде +Если пренебречь выражением r\fxo, то формулы
(2-25) и (2-26) примут вид:Для построения круговой диаграммы определяются
значения основных ее отрезков: тока холостого хода /о,
активной составляющей тока холостого хода /оа и диа¬
метра круговой диаграммы Da- Длина отрезка в милли¬
метрах определяется делением соответствующего пара*
метра, выраженного в амперах, на масштаб токов ма
(А/мм), Активная составляющая тока холостого хода
определяется по формуле ^ -/ос —т1</фгде ДРст потери в стали статора, Вт; mi—число фаз.(2-24) Рис. 2-26. Построение круговой диаграммы.Радиус круговой -диаграммы
. О'О"5'/’Линия электромагнитных моментов проводится под уг¬
лом «5=0= к линии центра, а линия полезной мощности
проводится из той же точки О' под углом «8=1 к линии
центра.Согласно круговой диаграмме отрезок а6 соответст¬
вует максимальному моменту; cd — пусковому моменту;
е/ — полезной мощности и механическим потерям; fg —
потерям в роторе; отрезок eg, проводимый перпендику¬
лярно линии центра,— электромагнитному моменту; еЛ,
проводимый перпендикулярно оси абсцисс,— забираемой
из сети активной мощности (для двигательного режима
и режима торможения противовключением).Масштаб мощности, Вт/мм,т.масштаб моментов, Ц*м/мм,(2-27)где «с *—синхронная частота вращения.Определение основных данных двигателя и построе¬
ние механических характеристик по круговым диаграм¬
мам осуществл51ются в такой последовательности. Точку
на окружности круговой диаграммы, соответствующую
заданной полезной мощности Ра, определяют следую¬
щим образом. На перпендикуляре к линии центра от ли¬
нии мощности откладывается отрезок, равный с учетом
добавочных потерь:kq = {Р^ + + 0.005Р^)/тр . (2-29)Через точку k параллельно линии мощности прово¬
дится прямая до пересечения с окружностью круговой
диаграммы. Точка пересечения в и будет искомой точ¬
кой. Затем графическим путем определяют ток статора,
А, приведенный ток ротора. А, и cos ф:/, со8ф = еЛ/0е.
§2^Крановые электродвигатели переменного тока51Далее аналитическим путем находят все остальные па¬
раметры: потребляемая из сети мощностьР\ — h cos ф;электрические иотери в обмотке статораэлектрические потери в обмотке роторадобавочные потери^'РдоС ~ ® >005РiX
коэффициент полезного действияДРэ1- + ^Рэ2 + ^Рст + АРмех + 0,005PiPiДействительный ток ротора^ko6i(2-30)(2-31)где Wu tW2, feo6i и *об2*^ числа витков и обмоточные ко¬
эффициенты обмоток статора и ротора.Скольжение определяется по формулеS = (ДРэг + ДРщ)/(Р2 + &Рв2 + ^Рт). (2-32)где переходные потери в щеточном контакте ДРщ=
= 1,2/2, Вт, определяются по действительному значению
тока фазного ротора, А.Момент на валу двигателя, Н*м,(2-33)где Рг мощность на валу, кВт; п — частота вращения,
об/мин,« = ■60/(1 — S) = Пс (1 — S),здесь р—-число пар полюсов; f — частота, Гц.Скольжение можно также определять графически по
круговой диаграмме. Для этого на окружности круговой
диаграммы (рис, 2>2б) произвольно выбирают хочку —
полюс р, которую лучами соедин£гют с точкой холостого
хода 0\ точкой короткого замыкания с и с точкой I,
где скольжение равно бесконечности. Параллельно ли¬
нии, соединяющей pel, проводят линию, отрезок кото¬
рой, заключенный между 0> и рс, делят на десять рав¬
ных частей. Этот отрезок является шкалой скольжения
в процентах. Для нахождения скольжения достаточно
соединить линией искомую точку на круговой диаграмме
и точку р. Например, для точки а скольжение равно
17%.Максимальный (критический) момент, Н*м, опреде¬
ляется из выраженият[/|р(2-34)замещения; обмоточный коэффициент ^oci обычно равен
0,8—0,88.Поток двигателя может быть найден из выраженияФ =Уф—Jin4,44/^16061(2-35)Выражение расчетной (внутренней) мощности асин¬
хронного двигателя в зависимости от геометричесю{х
размеров имеет вид:р. _ . ВЧпАВ^ . (2-36)60 V2где D — внутренний диаметр статора, см; эффектив¬
ная длина пакета, см; А — линейная нагрузка, А/см;
Bq —индукция в воздушном зазоре, Тл,Расчетная (внутренняя) мощность двигателя выра¬
жается также в видеPi = Ps/Oiil cos qp,(2-37)где cfi — первичный коэффициент рассеяния, для одно¬
скоростных двигателей лежит в пределах 1,03—1,07.Значения к. п. д, приводятся в каталогах на двига¬
тели.Коэффициент мощности 'крановых двигателей обыч¬
но лежит в пределах 0,68—0,78, в среднем 0,72 для дви¬
гателей с фазным ротором и 0,76 — с короткозамк¬
нутым.Магнитная индукция в воздушном зазоре в крано¬
вых двигателях значительно выше, чем в двигателях об¬
щего применения, и находится в пределах 0,8—0,95 Тл.Значения фактора нагрева AJo. для крановых двига¬
телей: 2500—^3000 для статора с классом изоляции F,
2800—^3400 для статора с классом изоляции Н; 1050—
1250 и И50—1350 для ротора с классом изоляции
Ри Н.Линейная нагрузка статора по мере роста внутрен¬
него диаметра увеличивается с 300 до 400 А/см для ста*
тора и со 170 до 300 А/см для ротора, а плотность тока
в обмотке с классом изоляции Н равна 11—8 А/мм^ для
статора и 8—6 А/мм^ для ротора при ПВ=40% при
внешней самовентиляции; для двигателей с классом изо¬
ляции F соответствующие значения уменьшаются на
10—15%.При выбранном стандартизированном внешнем диа¬
метре Ол статора определяют внутренний диаметр ста¬
тора D из соотношения D=Dslk.Значения коэффициента k в зависимости от числа
полюсов Чр лежат в следующих пределах:2р46810к,1,59—1,561,43—1,401,39—1,331.33—1,30где -Ь Jfj/Jfjj + «2-Мощность двигателя, кВт, потребляемая из сети,
вычисляется по формулеPi ят/1Ф/ш|*об1С05ф, .где Ф —■ магнитный поток двигателя, Вб; cos ф=/?экв/-гэкв;
Rsat и 2вив — активное и полное сопротивления схемн4*»Окончательный выбор длины и внутреннего диамет¬
ра статора определяется отношением X=UID, которое
составляет 0,75—1,25.б) Потери энергиии тепловые параметры электродвигателейПотери энергии в электродвигателе определяют
расход энергии и к. п. д. двигателя, от распределения по¬
терь в двигателе зависит нагрев его различных частей.
52Крановые электродвигатели1Разд. 2Электрические потери, Вт, в обмотке статора(2-38)Потери, Вт, в обмотке ротора определяются по од¬
ной из формул:(2-39)
(2-40)(2-41)2^2;2*АР:Mtlr.SЭ29,55.где /г =“ действительный ток фазы трехфазного рото¬
ра, А; Га — действительное актирное сопротивление фа¬
зы трехфазного ротора. Ом; 1*2 —приведенный ток ро¬
тора, А; г2 — приведенное сопротивление фазы рото¬
ра, Ом,Потери по (2'41) включают переходные потери в
щеточном контакте для двигателей с фазным ротором,
которые можно подсчитать по отдельной фор>1улеДРщ = 3.0»4/2 = 1,2/а. (2-42)Добавочные потери, Вт, принимают равными 0,5%
потребляемой из сети мощности:ДРдоС ® »005Р J',Потери, Вт, в стали статора на перемагничивание и
вихревые токи практически не зависят от нагрузки дви¬
гателя:ДРст ” ДРста "4" ДРстэ»где(2-43)ДРСТ2(2-44)здесь feo и ^0 — коэффициенты, зависящие от характера
обработки стали; pi.o — удельные потери в стали при1,0 Тл, Вт/кг; Ва и Вг — индукция в ярме и зубцах ста-
тора, Тл; Go, и Ог —масса ярма и зубцов статора, кг;
/ — частота перемагничйвания; Гц.Потерями’в стали ротора пренебрегают.Механические потери (на трение в подшипниках и
щеток о кольца, вентиляционные потери) берутся обыч-80 %Ряс. 2-27. Распределение потерь в крановом асинхрон¬
ном двигателе в зависимости от крутящего момеаха.но на основании опыта по подобным машинам и также
практически не зависят от нагрузки двигател*^.На рис. 2-27 показано распределение потерь в за-
ВИСИМ9СТИ от момента в двигателе с фазным ротором
мощностью около 30 кВт, При этом условно принима-
лось, что изменения сопротивления обмоток при кратко¬
временном изменении нагрузки не происходит, в том чис¬
ле при холостом ходе двигателя. В двигателях меньшей
мощности несколько возрастает доля электрических и
механических потерь, в двигателях большей мощности
при общем росте к. п. д. доля потерь в стали уменьша¬
ется.Усредненные значения потерь в двигателях серии
MTF и МТН для ПВ==40% приведены в табл, 2-29, по¬
тери в стали даны для марки 1213 (Э13).Таблица 2-29Потеря в электродйнгателях серий MTF и МТН при ПВ»40%
(Д.1Я номинальной нагрузки) ~Типдвигателя4<j s
sr gПотери
в стали,
ВтПотерн
в меди
статора.
ВтПотерн
в меди
ротора,
ВтМехани¬ческиепотерн,ВтMTF01110053521560MTF01214051527560MTF(H)111MTF(H)112180755415150250990525160МТР(Н)2Пс340875510180MTF(H)311MTF<H)31264106252005401240655220MTF(H)4117501490800360MTF(H)412MTH5129701440665380145024801970500MTF(H)311320112064018QMTF(H)3125201S50785200MTF(H)41l863013Б068Б280 •MTF(H)41284020301050300MTH51195025501120350MTH512119024301610360МТН6ПMTH612■MTH613МТНП1MTH712МТШ1310137019502270166023602950339036604240320032303410199022402490272025402570400400400100010001000При ПВ=40% удельные суммарные потери на еди¬
ницу наружной поверхности закрытого обдуваемого
двигателя с короткозамкнутым ротором составляют око¬
ло 3000 Вт/м*, а двигателя с фазным ротором — на 15%
меньше.При кратковременных режимах работы (менее
30 мин) превышение температуры, ‘‘С, ^авноа
для меди обмотки статораА.280и(2-45)где плотность тока, А/мм*; t — время нахождения
под током, с; k’ — находится по рис. 2-28; k"—\—для
однообмоточных двигателей; ^"=0,75 — для двигателей
с двумя обмотками из провода марки ПСДК, ПСДКТ н
т. п.; А"=0,65~для двигателей с двумя обмотками из
эмалированного провода марки ПЭТ 200 и т. п.,
для меди обмотки короткозамкнутого ротора= (2*46)■аЗ'коэффициент Теплоотдачи (рис. 2-29)j
§2^4]Крановые электродвигатели переменное тот53А2 ~ ^Ms^Ms о ,7тста ^ст ^ста»(2-47)здесь тм2 — масса меди обмотки короткозамкнутого ро¬
тора,, кг; гМст2 — масса стального пакета ротора, кг; со¬
отношения между общей массой ротора (см. табл. ^2-12) и ее составляющими: тоба—(0,054-0,03)/Иг для
алюминиевого сплава, /Пстз—0,8/П2; Сст — теплоемкость
стали, 475 Дж/{кг-®С); Сыг — теплоемкость материалаРис. 2-28. Значения коэффици¬
ента k'.Рис, 2-29. Значения коэффици- Рис. 2-30. Знатения
ента А^^для короткозамкнуто* коэффициента koT2,
го ротора при различных тепло¬
емкостях Аг двигателей.[для меди или латуни 390 •Дж/(кг-°С), для алюминие¬
вого сплава 880 Дж/(кг*°С)]; Астг—коэффициент,
учитывающий влияние стали в процессе нагрева
(рис. 2-30)., Значения 0мз не рекомендуется допускать выше
220® С.Постоянные времени нагрева Т обмоток статора и.
ротора 1закрытых двигателей близки между собой иТаблица 2-30Постоянные времени нагрева закрытых обдуваемых крановых
электродвигателей переменного токаРежим нагрева,Масса электро¬Постоянная вреиениминдвигателя, кгнагрева, с50—100200100—220300<3220—600500.600—200080050—100600100—220100010—20220—6001600600-2000270050—1001000100—220' 180020—60220—6003000600—20004800сильно зависят, от внешнего обдува двигателей. Значе¬
ния Т приведены в табл. 2-30 для закрытых обдуваемых
двигателей. Без внешнего обдува значения Т уменьша¬
ются в 2,5—3 раза.'в) Работа крановых
короткозамкнутых электродвигателей
в системах частотного регулированияСоотношения между основными габаритными раз*
мерами двигателей определяются главным образом ре¬
жимом работы Электроприводов и в мейьшей степени
методом регулирования, поэтому серию двигателей для
частотного регулирования целесообразно строить с со¬
хранением основных соотношений, принятых для машин
повторно-кратковременного и кратковременного режи¬
мов работы и обычных методов регулирования. Сниже¬
ние потерь в двигателях при частотном регулировании,
особенно в переходных режимах, и возможность значи¬
тельного увеличения максимального момента позволяют
переходить на большие номинальные частоты, вращения
и получить наилучшие массогабарнтные показатели. Так,
в системах только с частотным регулированием (ЧР)
удельная масса двигателя составляет около 10 кг/кВт,
т. е. почти в 2 раза меньше, чем у полюсно-пёреключа-
емого двигателя. Тот же показатель для двухскоростных
двигателей в системе комбинированного управления с зо*
ной частотного регулирования (КЧР) (см. разд. 10) со¬
ставляет около 14 кг/кВт.Исходя из оптимизации по минимуму потерь для
злектрощ)нводов повторно-кратковременного режима
работы S3 и по обеспечению максимума момента (регу¬
лирование по постоянству потока) для приводов кратко¬
временного режима S2, следует выделить следующие
особенности двигателей для систем ЧР;1) при режиме работы S3 оптимальная частота вра¬
щения двигателей составляет 1900—1800 об/мин для
легкого и среднего режимов, снижаясь до 1000—
600 об/мин для тяжелого режима работы и больших
приведенных моментов инерции;2) при режиме работы S3 четырехполюсного двига¬
теля с преооразователями инверторного типа оптималь¬
ная частота питания составляет 50—60 Гц, двигатели
должны быть работоспособны при повышении частоты в
1,5—2 раза и номинальном напряжении при соответству¬
ющем снижении нагрузки; для приводов с преобразова¬
телями непосредственного типа выходная частота не пре¬
вышает 25 Гц при частоте сети 50 Гц, поэтому целесооб¬
разно в ряде случаев применять двигатели с 2 р=2; для
режимов работы- 52 выбираются двигатели с 2р—4 и
2р=6;3) для си<^тем ЧР обмотка ротора двигателя выпол»
няется медной с целью получения минимального сколь¬
жения и снижения потерь;4) воэможио выполнение двигателей на нестандарт¬
ное напряжение, соответствующее .выходному напряже¬
нию преобразойателя частоты;5) использование активных частей двигателей мож¬
но повысить, например, увеличением индукции в воз¬
душном зазоре на 20—25% путем повышения напряже¬
ния на стандартном двигателе; при этом эквивалентный
к. п. д. двигателя повышается, а для улучшения cos ф
напряжение на двигателе должно обеспечиваться при
минимальном угле открывания тиристоров преобразова¬
теля;6) снижение индуктивности рассеивания ротора за
счет открытия пазов, отказа от скоса пазов и пр. уве¬
личивает перегрузочную способность двигателей и в це¬
лом приводит к снижению потерь в стали;7) для режима работы 82 двигатели большой мощ¬
ности в ряде случаев выполняют в шестифазном. испо^1-
54Крановые электродвигатели\Разд, 2нении, что позволяет оптимально решить вопросы по¬
строения преобразователей.Особенности двигателей для систем КЧР:1) оптимальное разграничение зон регулирования
позволяет увеличить мощность асинхронных двигателей
в 1,5—1,8 раза при сохранении габаритов;2)' увеличение мощности требует соответствующего
увеличения объема обмоток машины;.3) при полюсно-переключаемом исполнении соотно*
шения числа полюсов обмоток статора выбираются исхо¬
дя из максимального использования меди обмоток с уче¬
том режима работы привода; наличие зоны частотного
регулирования позволяет исключить тихоходную обмот¬
ку (в многоскоростных двигателях), значительно сни¬
зить потери в зоне малы^г скоростей и увеличить снима¬
емую мощность.Технические данные ряда разработанных двигателей
для систем ЧР и КЧР приведены в табл. 2-31.Таблица 2-31Технические данные электродвигателей для систем
частотного регулированияТипдвига¬теляМАП521Л5АП423МАП622Орд©S60I 50
I 50I 50
{ 50
I 2050.010.03.552.030.08.6Is1440141044513806902100,930.860*540,930,690.80108023521588210508341000цз4055034075ЧНА »о S’«Isa2.40,86.0г) Серии MTF и МТН асинхронных крановых
и металлургических электродвигателейКрановые двигатели с классом нагревостойкости F
обозначаются буквами MTF (с фазным ротором) я
MTKF (с короткозамкнутым ротором). Металлургиче¬
ские двигатели с классом на!ревостойкости Н обознача¬
ются МТН или МТКН (соответственно с фазным или ко¬
роткозамкнутым ротором).Двигатели серий MTF, MTKF й МТН, МТКН срот-
ветствуют ГОСТ 185-70 с учетом изменений № 1 и 2,
оформленных в 1972 и 1975 гг. Серии построены на вось¬
ми диаметрах, имеют семнадцать исполнений с фазным
ротором й одиннадцать — с короткозамкнутым ротором.
Двигатели- характеризуются повышенной перегрузочной
способностью, большими пусковыми моментами при
сравнительно небольших пусковых токах, малым време¬
нем рйзгона.Основное конструктивное исполнение — горизонталь¬
ное на лапах с одним концом вала (М101). По заказу
двигатели могут выполняться с двумя одинаковыми
концами вала. Двигатели нулевого, первого, второго и
третьего габаритов имеют также исполнения М301 и
М302, двигатели четвертого и пятого габаритов — ис¬
полнения М201 и М202.Коробка выводов статорной обмотки расположена
на верхней части станины и имеет с левой и правой сто¬
роны по одному отверстию для ввода питающих кабе^
лей. Выводные концы обмотки статора имеют кабельные
наконечники для присоединения кабелей питающей се¬
ти. Двигатели на одно напряжение (500, 440 и 400 В)имеют обмотку статора, соединенную в звезду, и три вы-
зодных конца с ббозначениями С1, С2, СЗ. Двигатели на
два напряжения (380/220 и 415/240 В) имеют обмотку
статора с шестью выводными концами, обозначенными
по фазам начало—конец: первая фаза С1—С4, вторая
С2—С5, третья СЗ—Сб; обмотка может соединяться в
звезду или треугольник.Двигатели присоединяются к механизму муфтой или
зубчатой передачей. Минимально допустимый диаметр
делительной окружности шестерни, насаженной на конец
вала, указан в разд. 2-2, в.Двигатели MTF и MTKF изготавливаются климати¬
ческого исполнения У, категории 2; двигатели МТН и
МТКН — климатического исполнения У, Т и ХЛ, катего¬
рии 2. По заказу потребителя двигатели с горизонталь¬
ным валом изготавливаются категории размещения 1 по
ГОСТ 15150-69.Двигатели всех габаритов изготовляются в закры¬
том обдуваемом исполнении со степенью защиты IP44.
Кроме того, двигатели с фазным ротором пятого—седь¬
мого габаритов имеют защищенное исполнение с незави¬
симой вентиляцией.Двигатели изготавливаются на частоту 50 Гц и на¬
пряжения 380/220 и 500 В. Для поставки на экспорт
двигатели МТН и МТКН выпускают также на частоту
50 Гц и напряжения 400 и 415/240 В и на 60 Гц, 380/220
и 440 В. Двигатели на частоту сети 50 Гц могут,' как
правило, включаться в сеть 60 Гц. Частота вращения
при этом увеличивается на 207о. Если напряжение сети
60 Гц выше На 20% напряжения сети 50 Гц, то номи¬
нальная мощность двигателя может быть увеличена на
10—15%. Кратности пусковых моментов и пусковы:х то¬
ков приближенно можно считать неизменными. Если
номинальное напряжение сети с частотой 60 Гц равно
номинальному напряжению сети частоты 50 Гц, то по¬
вышать номинальную мощность нельзя. В' этом случае
номинальный момент и значения кратности максималь¬
ного момента, пускового момента и пускового тока по¬
нижаются соответственно- отношени!® частот 50/60, т. е.
до 83%,При колебаниях напряжения сети от номинального
значения в пределах от —5 до -1-10% двигатели должны
сохранять номинальную мощность, однако вследствие
значительных насыщений магнитной цепи двигателей их
не рекомендуется применять для ПВ = 1бО%.Основным номинальным режимом является повтор¬
но-кратковременный с продолжительностью В1мючения
ПВ —407о- В табл. 2-32—,2-35 приведены данные при
ПВ = 15, 25, 40, 60%—для крановых двигателей и 25,
40, 60, 100% —для металлургических двигателей, а так¬
же технические данные кратковременных режимов 30 и
60 мин. Продолжительность рабочего цикла в повторно¬
кратковременных режимах работы принята равной
10 мин,В табл. 2-36 указаны требования по охлаждению
продуваемых двигателей.Механические характеристики двигателей на напря¬
жение 380 В и частоту 50 Гц приведены в каталоге
01.06.01-74.При переходе отводного напряжения к другому (или
другой частоте) возможны расхождения номинальных
данных отдельных исполнений двигателей от приведен¬
ных в табл. 2-32 — 2-35. В частности, на ±57о могут от¬
личаться значения напряжений и токов ротора. Среднее
значение тока холостого хода двигателей может состав¬
лять более 70% номинального, указанного в табл. 2-32—
2-35. Максимальное значение тска холостого хода мо¬
жет отличаться на ±10% от среднего значения. Поэто¬
му наличие значительной реактивной составляющей TO^ta
должно учитываться при питании двигателей от ав¬
тономных источников питания с ограниченной мощ¬
ностью. . -
§2-4]Крановые электродвигатели переменного тока55Таблица 2-32Технические данные крановых электродвигателей серии MTF с фазным ротором, 50 Гц, 220/3S0 и 500 ВТнпдвигателяМощность на валу, кВт, приd
fO ^cd ОIsо аго 0)3" 㧧.
Н с&•о«сЯ.<яаоьоо,ьS ^ 6
|||“
II si1-Sgо lySsi|IIU&0О ^О SIs’ 12ЙюечIIСОп5?оТГК03СИс -а:£SSS£оMTF011.62,01.71.41.2■1,41,28008508859107.1
5,9
5,35.10,78
0,72
0,65
■ 0,5955.060.061.560.516.512,09.17,5116390,08551MTF012-63,1\2,12,21.7^2lT778584089092010,4
8,9
. 7*6
7.00,780,740,680,5758.062.064.064.018,515,0И,58.4144560,11558MTF111-64.54,13,52,8^52,886087089592012,911,710,49,10,81
0.79
0,73 .
0.6566,068,070.072.021,018,715,011,5176 .8S0,19576MTF112-66,55,85,0•^0бГо4,089591593095017,516,014,413,20,780,740,700,6272.0
74,0-75.074.021,819.0
15,712.02161370,27088MTF211-610,5*9,07,5б7отГб6,089591595094527.524.021.018.50,780,740.700.6374.077.077.078.030.025.0
19,8
15,5256.1910,460120MTF311-614,013.011.09,011.09,092593594596037.034.530.528.00,760.740,690,63' 75.577.079.077.056.051.042.034.01723140,900170MTF812-619,517.515,012^01М12.094595095596546.542.538.034.00,800,770,730,6680,081,082,081,061,054.046.036.02194711,250210MTF411-630,027,022,018.022,018,094595596597069,564.055.049.00,800,770.730.6782,083.0
83,583.086,077.060.0
49,02336382,000280MTF412-640.036,030.02^080,025,096096597097594.086.075.070.00,770,750,710,6584,084.585.583.5100,088,073.061.02559322,700345MTF3H-8; 10.59.0. 7,56*07^56,066568069571029.0
25,61
22,821.00J80,740,680.6071.072.073.072.032.026.0
21,0
16,02452651,100170MTF312-815.013,011,08,21U08,2680695/0572037.5
■ 34,030.5
27,00,800,760,710,6176.076.577.075.563.053.043.032.0165422^ 1,550210MTF4H-822,018,015.013,018,015,068570071071556.0
46,742.0
38,50,76
0*73
- 0,67
0,6378.080.0
81,0
81,076.059.0
48.842.02065692,150280MTF412-830,026.022,018,026.022,070571572073078.5
71,0
65,059.50,710,680,630,5681.082,082,081,080.568,057.046.02488Si3,000345
56Крановые электродвигатели[Разв. 2Техйнческяе данные крановш влектродянгателей серия МТКГ с короткозамкнутым ротором, 60 Гц, 220/380 я SOO ВТаблица 2-33
§ 2>4] .Крановые электродвигатели переменного токаS7Технические данные металлургических электродпигат«;1сА серии МТН с ^фазным ротором, 50 Гц,Таблица 2-34
220/380, 240/415, 400 И боо' В,ТвпдвигателяМощность на валу, кВт, приX
а Сцо S
со а>-' о. *«ОS о.
Н с©■8SSсгс<
d
О.
g
а
^ 'S •“ аX в- р.Ж 2 О
0» § нА 2SййхЦ11is"?iiiu<аIIг?ЮсчIIшС1С§IIшСSCQС*SXооi .
Sмтнт-6З.Б3,02,52,03,02,587089592094011,610,59,89,20,720,670,600,6264.065.065.063.016.513.210,88,5176830,1976МТНП2>65,3^53,63,04^5зГб88591093094515,313,912.612,10,760.710,640.5869.069.068.0
65,019.0
15.6
12,210.02031180.2783МТН2П-68,2тГо5,64,2- 7,05^^6900.62094095524,622.5
21,Б19.50.700,640,560.4772.073.072.069.023,019,514,710.?2361960,46120МТН311 -613,011.0М7,011,0_ м92594095596535,031,5'28.526.50,74
0.69
0,63 :
0.5576.078.076.073.0. 51,0
42 0
34,0
25,51723140,90170МТН312-617.Б16,012,09,015.012.0946950960.96543.038.534.531.50.770.730.660.S780,081.080,576.054.046.036.0
26,52194711.25210МТН4П-627,022,018.014,022.018?095096096597565.0
ББ.550.046.00,770,730,670,6782,082.5
82.080.577.060.049.038.02366382.00280МТН412-636,0зоГо25,018,030,0
1 25,095596597098087.076.069.560.50,750,710,650,5583.584.584.082.088,073.061.0
42,02559322,70345MTH6I2-6 •65,055,044,033,065,056^0955960970■980137,0
• 120,099.085.00.820,790.760,6788.088,089*088.0130.0106.0
86.0
63.034016304.ЮШМТНбП-б85.075,058,0-т-45,085,075^0940950960970175.0154.0127.0107.00.860.850.800.7486,087.087.086.0204.0180.0140.0108.02701261013, to810МТН612-6112958060112^ ■95096096597Б225.0193.0171.0140.00.86-
0 ,85
0 .81
0,7588,0'88,088,087,0207.0176.0148.0111.0366358016.50930МТН613-614011894ТО140П8955960965970278.0237.0198.0164.00.860,840,800.7389.090.090.089.0190.0160.0
128,095,0473466020,401100МТНЗП-89,06.0 ■7,56,067569070571Б26,123.4
21,319.50,74
0,68
0,60 '
0,5070.571.5
71,069.526,021,016.012,02452651*101,170 ,
sЁ-к1iI•V*1слI05Ie>§1СЛsIAI11015оОS5оKi00■ ?
09ios1111' ' ' Й! i 1 8IMSMIS1 1 1 ё;NIKM ! ^1 M'S1 1ПВ=25%11§1• ' g!1 1 g!1 1 S{1[ 1 81M Й1№511 11 i l$iI 1 Sf 1^iS<ПВ=40%1igi !1 § 1 11 $1 11 SI I1 SI 11^111 SI I1 ^МISMISM1.-11ПВ=СО%iгgt 1 !SI 11I iё1,1 11 1gsl 11• Й1 Мoo II 1SMIS! I 1Я111ПВ=100%гё,1 1 1 §I 1 ia1 1 'йIMS1 ! 1 3■IMS1 \ \t\\1ЖII Isl1 is;illgl:о миння"§1 f|lI'SI1 l|lI 11 1 S)M ^1\ 1 Siilм ё1I Si 11 ^11I-::' I60 минiiii1888S§Siliaii^lig25S5gОСЛООW WCnS§s§s85Si§ ел8оЧастота вра¬
щения, рб/минilil
ООО ОOOOO^ Ю to)oSo! o>^
о o'o оо о о очiSSi .оЪ’оо^одайооООО®SSSgЪЪоо????ooooooooйёйй
OJOOO о”осл oViТок статора
при 380 В, Аoooo22S3ooooaaVsip ОООsisssООО оакййooooop О ОаЬззгooooSS2Soooo88§йЬ| -ooooftSSSooooasbapop о68S$3?cos ф'cn со остOIO OJW8§Я“®01 О СЛ СПЯ“Я^ооооо о о о§SgS2SЪ'о оЪooooS28SgOoooagggо o"cn Viwo о о2SS4
00*0 0К. п. д., %ooooOOOOо о о ом V)■ oooVggggSoooogg2Sо о о оЯ.“Я^ООО о£i£3£2ooooss&gggoooorPPPCn’oODOgjsfea©ОООТок ротора, Аi• §Ssi'1Щ• siiНапряжение
между коль¬
цами ротора.3оI1i03gII11Максималь¬
ный момент,
Н-мg8СП8tU8Й88*8СПVjо4k.ёoi8K)5*Маховой МО’
мент ротора,
кг-м*1■■ I11II .Is1iКЭгМасса двига¬
теля, кг
§ 2-4]Крановые электродвигатели переменного тока59Таблица 2-25Технические данные металлургических электродвигателей серии МТКН с короткозамкнутым ротором, 50 Гц, 220/380, 240/415,400 и 500 ВТипдвигателяМощность на валу, кВт, приXatци «и
S’о. ,о CQта о
1-00
о соН се-оог?ciсi яЧ 1)S'S Xi!-О а;ciIfО&&ОgaS g E
•S 2i ^< X :c2кшEf ^SSi1СоIIИЗс.§IIшсо01
ш
СSо<г>SXSоtoМТКН111-63.53,02,5Т.о^02,589091093094510.59.58.88,30.750.700,630,5567.5
68,0
68.065.59796320,1870МТКНП2-65,34,53.6г',04.53,687590092594014,012,711.510.60,810,750,660,6071.071.572.071.5155154500,2680МТКН2П-68,27,05,64^27,05.687589592094023,220,818.516.50,750,700,620,53. 71,573.074.073.0226216880*44noМТКН311-613,011,09,07.011,09,089591093094532,328.525.5
23.20,800.760,690.6176.577.577.6
75.03833731300,85ШМТКН312-617,515,012.09.015,012.091593094596040.536.031.528.00,820,780,710.6180,081.081.080,05895792051,20195МТКН411-627,022,018.014,022^0islo91593595096061.051.0
45,640.0■0,830,790.730.6581.082.582.581.57657062751.90255МТКН412-636,030.025,018.0зоГо25,092093595096581,070.0
62.554.00.820.780,730,8282.583.5
83,081.59819323802,5531SМТКН311-89.07,5м4,5^56^67069070571524,021,819,918,20,770,710,620,5174.073.573.573.0324314951,10165МТКН312-813,011,08,26,011.08^269070071072031,829.026.0
24,30,790,740,630,4978.578.076.076.55004611501*55195МТКН411-818151310151368069570571545.040.0
36*533.00*770*710,670,5878.5
80,0
81,079.56576381852,15255МТКН412-8262218131869070071072066,060,0Б4.049,00,750.690,630,5280,080.5
80,077.69819322953,00315MTKHS11-834282318342868069570571579.067.057.049.00,820,770,730,6780,083.084.0
84.0,112811283364,30440MTKH5I2-84537312545ЭТ680695705715104,087.076.064.00,810,780.J40.7081.0
83,0 ,
8^0
8б:о147013904605^70640
60KpitHOBM -эАетродвиеателиТаблица 2-36Данвые по охлажде1тю металаургаческнх «лектродввгатедей
серая МТН с незаввсниой вентиляцией <ородуваемцх)
с фазным ротором, ПВ—100%Продолжение табл. 2-36Тш1 двигателяКоличество, проду¬
ваемого воздуха.
hVubhСтатический напор,
ПаMTH51I124Б0Л1ТНБ1214850МТНбИ17400мтаб1220ббОТип двигателяКоличество проду¬
ваемого воздуха.
mVmhhСтатический иапор,
ПаМТН613237S0МТН7Х128350МТН71234500МТН71340700Таблица 2-37Обиоточные данвые 8дев1родвнгателей серий МТР а МТН-li^5 S
сг о^11V5кis11
и SТип обыоткв' g
в)
се
С
Очо»O's>.1«
с кОй
«1 пп|§S£3!
С аа
I Biл оis
^ ^CSXпla• ||Шаг обмотки
по пазамк<=sS CQ
«СВ оСц асmОP.p:e-laк
i c”й)Уagg' -MTFOltОдвослойио-двухслойиая4S44— •*-.44*. 22**1_8- 2—7;
9—'15С(0.862,204,200Статор,2р=6MTF012MTFlIlMTFH2MTF211Однослойно-двухслойная
Однослойная
»Однослойно-двухслойная453636453232483622“32*, 16**.32
24
18*. 9**1—8; 2—7;9—15
1—8; 2—7
> ]__8; 2—7
1„8; 2—7;9 15Ql.OOC!l,20Ql,04Ql,302,403,504,256.102,8501,5200.9300,550MTF311MTF312MTF411MTF412Однослойная»Однослойно-двухслойная
Двухслойная5454545433
23
443432336112322*. П**
171—10
1—10
1—9; 2—8
1—8Eil,20Si,40Cll.20q1,406,10
7,60
10,00
12.100,3400,2300,1400,091Статор,MTF311MTF312MTF4UMTF412Однослойная кояцеитрЕ*ческаяТо жеОднослойная»487272334430422
2 .
2222433! 22
15
211—8; 2—71—8; 2—7
1—10
1—10Sl.30Sl.12iai.30
si.126.Й8.0210,8012,900,5600,3100,2350,132Фазныйротор,2/7—6MTFOllMTF012MTFlllMTF112MTF211MTF311MTF312MTF4UMTF412Одкослойно-двухслойнаяТо жеОднослойно-двухслойная
То жеОднослойно-двухслойная
То же
>■>3636 .27273636363636181644403232424251*2224223333181622*. 11**
22*. 10**
16
8
21
21
171—8; 2—7
1—8; 2—7
1—6; 2—5
1—6; 2—5
1—8; 2—7
1—8; 2г-7
]_-8; 2—7
1„8; 2—7
1—8; 2—7eil.30
IS 1.35
t^l.l2511.25
E(1,40
q1,45511.25
tSil,50
ial,401,761,752,703.60
4,90
5,40
6,309.60
12,100,5400,5400,4400,3600,3530,0770,0760.0540,040ФазныйpOTOpj2р=8мтрзпMTF312MTF4liMTF412Однослойно-двухслойнаяТо жеОднослойно'двухллос-костнаяТо-же3636484332
30
393323342216* 8**
30*. 15**
13И1—6; 2—5
1—6; 2—5
1—8; 2—71—8; 2—7 ]"■■■■■si.40
Si.SO
E)l,30Si.454.906,759,00.10,600,3300,0800.0820,068Статор,2р=вMTHlllМТНП2MTH211MTH311MTH312MTH411MTH412Однослойная>Однослойно-двухслойнаяОднослойная»Однослойно-двухслойная
Двухслойная3636455454S45432
2534*.32*»33
23
4434232“з(3
■ 632
25
17*, 8**112322*. 11**
171—8; 2—7
1—8; 2—7
1-8; 2—7;
9—15
1—10
1—10
1—9; 2—8
1—8Si.16S.1.35q1,20QI.20
(Sl,40
К 1.166*1.353,103.705.306. JO
7,209.30
11.20•1,6801,1500,6000.360
. 0,230
0.149
0.097MTH311Однослойная концентрв-4833233 .1—8; 2—7CJl.25e.oo0,610Статор,2р=8MTH312MTH411MTH412MTH511MTH512ческая
То жеОднослойнаяТо же лДвухслойная4872727272443042443222' 2
2
22244422152144321—8; 2—7
1—10
1—10
1—8
1—9f5l,08t;1.25«1,12t-'l.ie&1.407,50
8.70
12.60
14,10
18, CO0.330
0,266
0,131
0,1J7 ■
0,074
KpoHOffbie электрод&игатели переменного тока.61i *
5=’«л к
^ ? й•£ВСтатор,2р=10Фазныйротор,2р=6Продолжение табл. 2-37MTH6UМТН612МТН613МТН7ПМТН712MTH7I3МТШПМТНП2МТН211МТН311МТН312МТН4ИМТН412Тыа обмоткиДвухслойнаяОднослойно-двухслойная
То жеОднослойно-двухслойная
То жеt I757575105105105Ф ю
V о
и «4485442121016g-x3с X27273636363636224028324263514854426Б422*, 11**
20*. 10**
14
8
21
21
17Шаг обмотки
по пазам1—71—71—71—91—91—9П 1—6; 2—5
1—6; 2—5
1*_8; 2—7
, 1—S; 2—7
1_8; 2—7
•1—8- -2—7
1—8; 2—7§.= S
сххV ^п н5il.40^1.30Ql.602,5X3.752,8X4.001,8X3,75tSl,40
01,16
Sl.30
Ы1,45
Й1.25
(Э1.25
Si.35SiЫ24,1029.00
34.7057.0073.0087.002,163,004.10.6,306,2010.0012,00о0,0610.0430.0300,0190.0140.0120,5600,4400,3440,0820.0760.0520.043Фазныйротор,2р=8Фазныйротор,2р=10МТН311МТН312МТН411МТН412МТН511МТН512ОднослоД но-двухслойна я
То жеОднослойно-двухплос¬
костная
То же36364848484832
30
3933
36
3016*. 8**
30*. IS**1112101—S; 2—5
1—6; 2—5
1—8; 2—71—8; 2—7
1—8; 2—7
1—8; .2—7Q1.40Sil,45?il,30G!l.45tJl,45C51,56MTH611MTH612MTH6I3MTH711MTH712MTH713Двухслойная стержневая
To же9090909090901-rlO
1—10
I—10
I—10
1—10
1—102,63X10,02,63X10,02,63X10.03,05X16.83.05X16,83,05X16.84,906.308.3010,6011,9014,0019.4023.4027.2048.20
54,70
65,00* ОСмотка однослойная.
•• Обмотка двухслойная.0,3300.0870,0830,0690,0730«06S0,0200.0240,0270,0120,0140,015Таблица 2-3SОсновные размеры влектродвигателей серий МТК и МТКН
с короткозамкнутым роторомТипдвигателяMTKF011MTKFW2mtk;f(H)11iMTKF(U)112MTKF{H)211MTKF(H)3!1MTKF(H)312MTKF(H)411MTKF(H)412MTKH511MTKH512Размерымы118118134134157180180211211236236lao, мм416451485525586637712749824865965/м. мм4855205746147067.4982489997410151115Масса, кр47537080110155195255315400600Таблица 2-39
Кратность максимального момента двигателей серии МТМощность, кВ»Номинальная крат¬
ность ммссимального
моментаФааный роторКороткозамкнутыйроторДо 52,3С»ьше 5 до 10До 82,5■Свшве 10Свыше 82,8'Таблица 2-40Расчетные данные электродвигателей MTF с фазным ротором.
50 Гц, 380/220 ВТипдвигателяMTF011-6MTF012-6MTFlll-eMTFH2-6MTF211-6MTF311-6MTF312r6MTF311-8MTF312-8MTF411-6MTF412.6
MTF4U.8
MTF4I2.fi ,Статор4,906,129,6512,3014,3523.2038,1021,4029.80
40.0051.8029.80
.49,600,1660,1400,1250,1050,0850.0920,0650,1140,0880.0770,0690,0830.080-&t;
„ о5,7803,6302,100Г.2800*7550.4800,2680,8000,4500,1970,1240,3270,1823.6002.6102,4601.7401.0500.6450,3341.0800,6660,2870,1970.5300.3131.0871.075i>wi.fleo1,0701,0731,0611,1231,0991,0551,0491,0771.076Ротор0,7700.7460,6000,5000,4850,1110,1070.4550,1300,076-0,0550,1170,0950,5660,5900,7600,9050,8550,2410,2440,7750.2900*2360,1730,2600,2319.066.06
3,92
2,56
1*924,202,661.993,502,371,962,942.03
62Крановые электродвигатели[Раэд 2Рис. 2-31. Основные размеры электродвигателей серии MTF н МТН с фазным ротором.Размеры, ммдвигателяb.hIxh^10hiUMTF01181802302811231,0030260ISO200615,5132585MTF01281802302811231.0030260 190240550.5127620МТР(Н)111102202903513238.0034280 190240583,5140673МТР{Н)112102202903S13238,0034280;235285623,5135713MTF(H)2ll122453204016043,00385110' 243306700.5150820MTF(H)311142803505018053.Я)444110 260320748,0155860MTF(H)312142803506018053,50444110 320380823.0170935MTF(H)411183304406522564.88530140105325395877,01751027MTF(H)412183304406522564,88530140105420480952,516S1102МТНоП20380SOO7025070.385801401053104001014,02511164MTH512203805ВД7025070.385801401053904801114,02711264MTH61125■ 5206509031590.757701701303454461152,02561335MTH612255206509031590,757701701304455461252,02661435MTH613255206509031590,757701701306406401347,02561530MTH711• 32640790110400110,^933210165440-5801423,03231645MTH712■ 32640790110400110.889332101655106501493,03231715MTH71332640790110■«Ю110.889332101655907301573,03231796Обмоточные данные двигателей серий MTF(H) по
ГОСТ 185-70 приведены в табл. 2-11 и 2-37. Для дви¬
гателей MTF применяется круглый обмоточный'проводРис, 2'32. Отношение номинальной мощности двигателя
к номинальной мощности при ПВ —40% в зависимости
от ПВ.марки ПЭТ155, для двигателей МТН нулевого—четвер¬
того габаритов ~ марки ПЭТ180 или ПЭТ200, а МТН
пятого-шестого габаритов — марки ПСДК. Для обмотки
статора двигателей МТН700 с открытыми пазами при¬
меняются жесткие формованные катушки из прямоуголь¬
ного провода марки ПСДК, а для стержневой обмотки
роторов МТН700 — профильная медь. Допускается на¬
мотка катушек из параллельных проводов, отличающих¬
ся на одну-две ступени по диаметру, для обеспечения
заданного среднего сечения провода, например, вместо
двух параллельных проводов диаметром 1,25 берут один
провод диаметром 1,20 и один—диаметром 1,30 и
наматывают их как параллельные.Конкретные исполнения двигателей могут иметь об-
моточные данные, отличающиеся от указанных в
табл. 2-37.Статорные обмотку двигателей на 380/220 Б изго¬
тавливаются с соединением фаз звезда — треугольник,
обмотки электродвигателей на напряжение 500 Б соеди¬
няются в звезду (их обмоточные данные здесь не при¬
водятся. Роторные обмотки всех исполнений соединяются
в звезду.Основные размеры двигателей с фазным ротором
приведены на рис 2-31, Часть размеров двигателей с ко¬
роткозамкнутым ротором дана в табл. 2-38, остальные
размеры могут быть взяты по рис. 2-3L Кратность мак¬
симального момента при ПВ=40% двигателей приведена
в табл. 2-39.
§2-4]Крановые электродвигатели переменного тока63Таблица 2-41
Расчетные техвическве данные электродвигателей МТН
с фазным ротором, 50 Гц, 220/380 ВТиодвигателяСтаторМТШ11-6МТН112-6МТН2И.6МТН311-6МТНЭ12-6МТН311-8МТН312-8МТН411-6МТН412-6МТН411-8МТН412-8Л1ТН511.8МТН512-8МТН512-6МТН6П-6МТН612-6МТН613-6MTH6U-10МТН612-10МТН613-10МТН711-10МТН712-10МТН713-109,6511,2519.0
23,2034.4021.4029.8039.7051.8029.80
4Й,6047.4053.1055.0072.00
107,50
126,0078.1088.70
120,00155.00183.00247.000,1250,1250,1120,0950,0920,1230,1030,0800,0710,0860,0840,0700.0800.0680,0520,0500,072О.08О0,0600,0600,0420.0440,042feoW Р■e-t;«о■&РоторСЯ•0.2,2501.6700,8350,5100,3370,8750,5100.2190,1330,3520,2020,1640,1030,0650,0490,0230,0200.0860,0600,0420,02550,0202€,01352,4301.8800,880-0,6450,4311.0800,6660,2710,1970.5070.3130,2320,1720,1610,1330,0900,0640,1800,1360,1020.0780,0640,0481.1171.0701,0801.073
1.072
1,1231,0991.052
1,0491.074
1,0761.0521,0401,0841.1041,0461.0781,0681.058
1,0601.058
1,055
1,0570,7750,5050,4660,1240,1250,4400,1320,0800,0590,1250.1020,1240,0910,0500,0280,0330,0380,0270,0330.0380,0170,0190,0210,8290,9050,6660,2410,2540J750,2900,2330,1730,2450.2310*4480,3560,1970,0960,0650,0500,1760,1330,0990,07?0,0910,1091ЯSXсх^й с <U
5 о гж и >>3,922,892,184.20
2,66
1,993,502.371.962.96
2,03
1,65U421.211.381.000.803,722,101,261,741,210.78В табл. 2-40 и 2-41 приведены расчетные данные для
крановых электродвигателей с фазным- ротором серий
MTF и МТН, в табл. 2-42 и 2-43 — для электродвигате-
лей с короткозамкнутым ротором серий MTKF и
МТКН.Таблица 2-43Расчетные технические ланные электродвигателей MTKfl
с короткозамкнутым ротором, 50 Гц, 220/380 ВСтаторРоторКоэффи-i
циент при-<
веденияСОПрОТНЕ-леыий (без
учета Oi),
10*Типдвигателя/о фазы
при
380 Б, АCOS<p^г* фазыв нагре¬
том сос¬
тоянии.
ОмX* фазы.
ОмMTKHI11-67,30,6502,3402,7604,590МТКН112-68,80,5902,1702.0602,580МТКН211-614,40,600. 1.4000,8801,250МТКН311-619,30,7250.8000,5550,740МТКН312-630,30,7150.4780,3560,359МТКН311-816,40,7971,0100.6451,335МТКН312-827.70,7640,6400,4200,615МТКН411-630,80,6510,3280.3460,319МТКН412-641,50,6200.2360,2500,173МТКН411-825,50,6720,5070,4090,597МТКН412-843,30.6550,3230,2700,293МТКН511-838,80,5100,3070,4640.386МТКН612-845,00,5000,2370j3660,226Примечания:
табл. 2-41.1. Значения ГиХи собфлOt — CM,2. Двигатели на 440 В, 60 Гц имеют те же данные, кроме
значений xi и которые должны быть увеличены на 20%.3. Двигатели на 400 и 415 В, 50 Гц имеют те же данные,
кроме значений /о. которые должны быть увеличены на 6% для
400 В н на 9% — для 416 В.Таблица 2-42Расчетные данные электродвигателей MTKF с короткозамкнутым
ротором, 50 Гц, 380/220 ВТипдвигателяСтаторРоторКоэффи¬
циент при¬
ведения
сопротив¬
лений (без
учета/о фазы
при 380 В,
Аcosq)^фазыв нагре¬
том сос¬
тоянии.
Омдг'фазы,ОмAtkF011-6' 4.170,877*4503,1708,670MTKF012-65,300,855,3802,3204,600MTKFlll-67,300,652,3402,7604.590MTKF112-69,600,592,1702,0602,580MTKF211-611,650,711,6201,020 .1,445MTKF311-619,300.710,8000,6550,740MTKF312-629,800,720,4770,3560,359MTKF311-816.400,771,010Ь 0,6451.335MTKF312-827,700.730,6400,4200,615MTKF411-631.300,620,3270,3480,319MTKF412-642,100,620,2360,2510,173MTKF411-825,400,650,5030,4090,596MTKF412-843,300,630,3250,2780,293Примечание. Значения Гь хи cos фс, Oi~cm. табл. 2-40.Зависимости отношения мощности двигателя к мощ¬
ности двигателя при ПВ=40% от ПВ показаны на
рис. 2-32,Климатические исполнения Т и ХЛ имеют только
двигатели МТН.д) Новая серия 4МТ асинхронных крановых
и металлургических электродвигателейНачало производства двигателей новой серии 4МТ
намечено на 1979—1982 гЛ Основные принципы построе¬
ния новой серии: соответствие установочно-присоедини¬
тельных размеров требованиям ГОСТ, СЭВ и МЭК (см.
табл. 2-1—2-3);увеличение мощности двигателей при данной вы-
соте оси вращения, расширение шкалы мощностей до
200 кВт;введение четырехполюсного исполнения;
вероятность безотказной работы в течение гарантий¬
ного срока должна быть не менее 0,96 для двигателей
кранового исполнения и 0,98 — для двигателей металлур¬
гического исполнения;средний срок службы двигателей — 20 лет;
применение новых материалов — холоднокатаной
электротехнической стали, изоляционных материалов
на базе синтетических пленок и фенилоновой бумаги,
эмалированных проводов повышенной стойкости
и др.;снижение шума и вибраций двигателей;• расширение шкалы мощностей восьмиполюсных
двигателей до 200 кВт (вместо 90 кВт на старой
серии);улучшение энергетических показателей двигателей;
технически возможная унификация двигателей с
двигателями серии 4А;повышение степени защиты двигателей до IP54 для
клеммовой коробки при IP44 для двигателя в целом,
введение сальниковых уплотнений для ввода кабелей в
64Крйновые электродвигатели[Разд. 2Таблица 2-44Продолжение табл., 2-44'Технические данные двигателей серии 4МТТип двигателяМощность, кВт, при ПВ=40%
н 2р числе пар полюсовНаружный
диаметр ста¬
тора, мм2рг±4 1 2pss:62;»=82p«slO4MT112L4MT112LB3,755,502,203.75——1914MT132L4MT132LB7*S0U.OO5,SO
7.Б0-2254MT160L4MT160LB-11,015,07,511,0— ■272Тип двигателя Мощность, кВт, при ПВ=40%
и 2р числе пар полюсовНаружный
диаметр ста¬
тора, мм2р=4 j 2р==62р—8 j 2р=Ю4MT200L4MT200LB—22,0'30.015.022.0-3494МТ22БМ^T225L—37,0Бб.О30.037.0—392'4MT280S4МТ280М4MT280L-75,0110,055.075.090.045.055.075.04934MT355S4МТ355М4MT355L--132.0160.0
200,0110.0132.0160.0615ТехивчесЕие давные ивогосЕОростных крановых «лёк^родвигатедейТаблица 2-45Тип двигателяЧисло .
полюсовМощ¬
ность, кВтРежимр«)отыга. %Частотавращения,об/мннЛииеАиы&
ток стато¬
ра при
380 В. АПусковой
ток при
380 в. АПусковоймомент,Н-мМакси¬мальныймомент,Н-мМаховоймоментротора,КР-М*Массадвигателя.КРМТКН211»6/12S '6122,21,04015930 '
4156,85,4281152495д490,25НО , 'МТКН311.6/166К3,5ы4015920,3059,39.04214856998690.46155МТКН312-6/166166,01.8401S92530514,012^370221421031621080*67195МТКН411-6/166167,5 ^
2,44015930эоо17,514^093251961672151671,20255611*040940 '27,0145353383МТКН412-6/16163,51529520,0 ,37226' 2261,60315616«04092538,0195422490МТКН511-6/20аз;3,41523525.0403143142.30430622,04092549,0265630690МТКН512-6/20204,51522333,5524704703*2053044,025138510,047,06373MTRF211-4/1212153957,312,552520,1910047,025137012,560,0108 ■108MTKF410-4/24240,8152009,212,284850,99240410,025136020,0100.0176176MTKF411-4/24‘■241,21516513,418,21181180,99250415,025136529,5160,0240285MTKF412-2/24241.5. 1517513,819.01471451,85300422,025139541 iO250,0392432MTKF611-4/24242.01517520*026,02252362,30410430,025141557.5395,0540667MTKF611-4/8/24815.01569038,4176.05405894.45595243.71516530,543;0363363.445,025140590,0560,0697981MTKF612-4/8/24820,016,68751,5220.06087065,5071024—1619440.260,0530532
§2-4]Крановые электродвигатели переменного тока65Расчетные технические данные двухскорсстнмх электродвигателей МТКН на 220 иди 380 В, 50 ГцТаблица 2-46Тип двигателяЧислополюсовСтатор/„ фазы
при 380 В,
Аcos <р0г, фазы в на¬
гретом состоя¬
нии, ОмXt фазы.
Омо,Роторг2 фазы
в нагретом
состояннн.
Омфазы.ОмКоофф«1р1ент приве¬
дения сойротивлекйй
(без учета Oj). 10*МТКН2116125,034.720,1290,1882,2305.0004,198.651,0601,2303,1110,901,7806.3002.6619,80мткнзп6166,038,750,1080,3221,2405.0502,985,861,0891,3002.229,700,8723.5401,3917.45МТХН3229.4011.400,1030.2700,7303,2&)1,804,241,0801.28S1,396.870,5402.6100.628.S5МТКН4И10,0013,10О 095
0.208О,6Б03.2001.132.901,0501.1700,995,360,6072,1400,638.ШМТКН41261617,5017,900,0930,2380,3452,5250,682,261.0581,1800,6043,8340,2921,6700,284,61клеммовую коробку л к контактным кольцам; примене¬
ние плоских крышек с болтовым креплением на люках
контактных колец; введение резиновых уплотнений на
съемных крышках;увеличение прочности валов двигателей 4МТ112,
4МТ132 и фланцев двигателей 4МТП2, 4МТ132, 4МТ160;автоматизация и механизация основных технологи¬
ческих процессов изготовления двигателей, в том числе
намотки статоров двигателей 4МТ112—4МТ225;введение постоянного по значению напряжения меЖ*
ду контактными кольцами L'h~240±10% В для двига¬
телей 4МТ132—4МТ200; для двигателей 4МТ225
г.<300 В по условиям самовозбуждения двигателя в ре¬
жиме динамического торможения. Исключение состав¬
ляют двигатели 4MTU2, у которых 1/к=200 В, и мапш-
ны большой мощности, где эти условия не могут быть
выполнены.В обозначении двигателей введена высота оси вра¬
щения.Наименование, исполнение по длине, значения числа
пар полюсов, МОЩНОС7Т1, наружного диаметра пакетов
статора приведены в табл. 2-44.Установочно-присоединительные размеры двигате¬
лей при заданной высоте оси вращения соответствуют
табл. 2-1.Значение мощности при режимах работы, отличаю¬
щихся от приведенной в табл. 2-44, могут быть взяты по
рис. 2-32. Представленная .saBHCHMOCTb построена путем
обобщения данных отечественных и зарубежных серий
двигателей. Значения для двигателей с различным чис¬
лом пар полюсов представлены сплошными линиями, от¬
клонение мощности конкретных машин от средних зна¬
чений составляет ± (5-н 10) % и находится в заштрихо¬
ванной зоне.Маховой момент ротора, кг-м®, можно определить
, по приближенным формулам:для короткозамкнутого ротора^ 0А9ОЮа;для-фазного роторагде D—-диаметр ротора, см;: Ge~^-масса рото¬
ра, кг. • • '5—S39е) Многоскоростные крановые электродвигателиМногоскоростные крановые электродвигатели пред¬
назначены в основном для работы в повторно-кратко¬
временном режиме с частыми пусками и торможениями.
Шкала мощностей на меньшем числе полюсов, как пра¬
вило, ' соответствует основной шкале односкоростных
двигателей. Мощности на малой частоте вращения уста¬
новлены исходя из постоянства номинального момента.
У трехскоростных двигателей на самой малой частоте
вращения часто указывают не мощность, а только значе¬
ния номинальных моментов. Таким образом, двигатели
построены по принципу регулирования при постоянном
моменте, т. е. с реализацией наибольшей мощности на
наибольшей частоте вращения.В табл. 2-45'приведены технические данные шюго-
скоростных электродвигателей. Номинальные данные
двигателей определены из условия, что пуск происходит
при наличии на валу статического момента, равного но¬
минальному; время разгона при пусках входит в общую
продолжительность включения. Двигатели выполняются
с независимыми статорными обмотками, что позволяет
относительно легко получать з^аданное сочетание чисел
полюсов.В схемах электропривода двигатели могут иметь не¬
зависимое и последовательное соединение обмоток. По¬
следовательное соединение обмоток при большой и ма¬
лых частотах вращения позволяет ограничить макси¬
мальный генераторный момент при переходе с большой
частоты вращения на малую, а также непрерывно по¬
давать напряжение на двигатель при переходе с одной
частоты вращения на другую. При последовательном
соединении двух обмоток необходимо, чтобы двигатель
имел одно направление вращения при раздельной рг^оте
на каждой обмотке. При включении в сеть одной из об¬
моток вторая обмотка может быть замкнута накс^зотко,В табл. 2-46 приведены расчетные парамешы двух¬
скоростных асинхронных двигателей серии МТКН.ж) Двигатели общего назначения
яа кравовшх мехаяшмахДля талей, грузоподъемных лебедок и крзн-балок
широко применяются двигатели общего назначения,
C'f975 г, натато внедрение асинхронных’-короткозамкЕ^-
66Крановые электродвигатели[Разд. 2тых двигателей серии 4А по ГОСТ 19523-74, предназ¬
наченных для продолжительного режима работы S1.
Диапазон мощностей двигателей при синхронных часто¬
тах вращения 3000, 1500, 1000, 750, 600 и 500 об/мин
составляет 0,06—315 кВт. Двигатели рассчитаны на но>
минальные напряжения 220/380 я 380/660 В, шесть вы*
водных концов обмотки статора выведены в клеммную
коробку.Двигатели с высотой оси вращения 50—132 мм име¬
ют изоляцию класса нагревостойкости В, с высотой оси
вращения 160—355 мм — класса F. Степень защиты дви¬
гателей IP44. Типоразмеры и основные параметры за¬
крытых обдуваемых двигателей, применяемых на крано¬
вых механизмах, приведены в табл. 2-47.В обозначение двигателя входит размер по длине
станииы S, М или L, длина сердечника статора А или В,
число пар полюсов 2, 4, 6. Установочные и присоедини¬
тельные размеры приняты согласно табл. 2-1 —2-3, габа¬
ритные размеры и масса двигателей приведены в табл.2-48 (сн. рис. 2-33).Таблица 2-47
Технические данные ряда электродвигателей серив 4АТип двигателяОтношение к
номинальному
моментуCSfcп3S 9
К *о о
к U
« о
Е XSo
ё о*3- о лгз о
S с SСинхронная частота вращения 1500 об{мин4А71А2УЗ4А71В2УЗ4А80А2УЗ4А80В2УЗ4А90Ь2УЗ4А1{ЮБ2УЗ4А100Ь2УЗ4А112М2УЗ4А132М2УЗ4А16052УЗ4А160М2УЗ4A180S2V34А180М2УЗСинхронная частота вращения об1мин4А71А4УЗ0,5570,50,702,24А71В4УЗ0.7572,00,732.24А80А4УЗ1.175,00,812.24А80А4УЗ1,577.00.830,832,24А90Ь4УЗ2.280,02.24А1С054УЗ3,082,00,832.24А100Ь4УЗ4,084,00,842,24АП2М4УЗ5,585.50,852,24А13254УЗ7.587,50.862,24А132М4УЗ11,087.50,872,24А16054УЗ15,088,50.882,24А160М4УЗ18,589,50,882,24А18054УЗ22,090,00,902.24Л180Л14УЗ30,090,50,902.22,02,02.02,02,02,02.02.02.02,01.41.41.41.41,61,61.61.61.61,61.61,61,61,61.01.01.01,0Синхронная частота вращения J000 об1мин0,7577,00,872,22.01.21.177,50,872.22.01,21,581,00,852.22,01,22,283,00,872,22,01,23,084,50,882,22,01,24,086.50,892.22.01.25,587,50,912,22.01.27,587,50,882,22,01,011.088,00,902,21.61.015,088.00.912,21.41,018,588,50.922,21*41.022.088,50,912.21.41.030,090.00.922.21.41,06.55.56.56.56.57.57.57.57.57.57.57.5
7 64.54.55.05.06.06.56.57.07.57.57.07.07.07.04А80Л6УЗ0,7569,00,742,22.01,64.04А80веУЗ1.174,00,742.22,01,64.04А90Ь6УЗ1.575,00.742,22.01.65,54A100L6y32,281,00,732,22,01,65.54А112МА6УЗ3,081,00,762,22,01,66,04А112МВ6УЗ4,082.00.812,22.01,66,0^.А13256УЗ5.585,00,802,22.01,67.04Л132М6УЗ7.585,50,812,22.01,67,04A160SSy311,086,00.862,01,21,06,04А160М6УЗ15.087,50,872.01.21.06,04А180М6УЗ18.588.00.872.01.21.06.0Таблица 2-48Габаритные размеры и масса ряда двигателей серии 4А
исполнения М100ТипдвигателяГабаритные размеры, ммМасса, кгdso1и4А711917028533020115,14Л80А2218630035221817.44А80В2218632037221820,44A90L2420835040224328,74A100S2823536242726336,04A100L2823639245726342,04А112М3226045253431056.04A132S3830248056035077,04А132М3830253061035093,04A160S48*358624737430135.0*4А160М48*358667780430160,0*4A180S55*410662778470175,0*4А180МБ5«410702818470195.0*• Для двигателей с числом полюсов 4 и 6.Средний расчетный срок службы двигателей — не
менее 15 лет при наработке не более 40 000 ч, вероят¬
ность безотказной работы — не менее 0,9 при 10 000 ч
наработки.Для привода механизмов, отличающихся большой
инерционностью в момент пуска, применяются закрытые
обдуваемые двигатели серии 4А с повышенным пуско¬
вым моментом по ГОСТ 20818-75, Степень защиты дви¬
гателей IP44. Типоразмеры и основные параметры этих
двигателей указаны в табл. 2-49.Т а б л и ц а 2-49Технические данные электродвигателей серии 4А с повышенным
пусковым моментомТипоразмердвигателя1а5“Отаощениеначального9чП«Гпусковогоta Е-л ёз3тока к но¬S ^(иминально¬Э £
||сS-•>оUмуОтношение к
номинальному
моментуligsi|•Г ^ 53ggISII.1iiСинхроЩвая частота вращения 1500 об1мин4АР16034УЗ4АР160М4УЗ4АР18054УЗ4АР180М4УЗ4АР200М4УЗ4АР200Ь4УЗ4АР225М4УЗ4AP250S4V34АР250М4УЗ15,087.50.872,337,52,01.62,218,588,50,872,337,52.01,62,222,090,00,872.667,52.01.62,230,090.00.872,667,52,01.62.237.091.00,882,007,52,01,62,245,092,00,882,007.52,0 ■1.62.255,092,50,881,667,02.01.62.275.093.00,871,667,52.01.62,290,093,00,881,667,52,01,62,2Синхронная частота вращения JO0O об/мин4АР16086УЗ4АР160М6УЗ4АР180М6УЗ4АР200М6УЗ4АР200Ь6УЗ4АР225М6УЗ4АР25086УЗ4АР250М6УЗ11.085,50,832.57,02,01,615.087,50.832,57,02,01.618,587,00.803,06.02.01.622,090,50,852,56,52,01,630,090,50,862,56,52,01,637,090.50,842,07,02,01.645,091,50,822,06.52,01,655,091.50,832,06.52,01,62.22.22,22,22.22,22.22.2Синхронная частота вращения 750 об1мин4АР16058УЗ7,586,00,752,666,01,81,52,04АР160М8УЗ11,087,00,752,666.01,81.52,04АР180М8УЗ15,086,50.772,665,51,81,52.04АР200М8УЗ18.588,00,782,665,51,81,52,04АР200Ь8УЗ22,088,50,802,665,51,81.52,04АР225М8УЗ30,0ад,о0.802,005.51,81,52.04АР25038УЗ37,090,00.722.005,51,81.52,04ДР250М8УЗ45,090.50,762.005,51.В1.52,0
§3-1]Общие сведения и требования к аппаратуре67Рис. 2-33. Основные размеры двигателей серии ВКр ис¬
полнения М101.Тип дви¬
гателяВКр63А4ВКр63В4BKp7iA4ВКр71В4BKPS0B6BKP90L6BKP100L6ВКрП2МА6ВКр112МВ6BKP132S6ВКр132М6BKpl80S6ВКр180М6ВКр200М6BKp200L6ВКр225М8BKp225L8Размеры, мм15815815815815817017024024024024034034034034041041025225230230235235241041043043048048046046048348553563071282082082085510501100115011901300135015.9208228228208205258258258258285390400465465612512540540.590590660660Масса.КР40.541.644.045.062.0
95.0115.0148.0154.0196.0206.0345.0375.0445.0470.0620.0
700^9Размеры и масса двигателей принимаются согласно
ГОСТ 19523-74.На базе взрывозащищенных электродвигателей В,
ВР разработаны крановые асинхронные двигатели ВКр
с электромагнитным тормозом. Двигатели отнесены ло
взрывобезопасности к категориям 1, 2, 3 и группам вос¬пламеняемости Ti—Т4, степень защиты от внешних воз¬
действий IP54. Двигатели выполнены без вентилятора
наружного обдува, имеют две коробки выводов —для
обмотки статора и для катушек тормоза. Технические
данные двигателей приведены в табл. 2-50, установоч¬
ные и присоединительные размеры для соответствующей
высоты оси вращения приняты по табл. 2-1—2-3, прочие
размеры и масса двигателей указаны на рис, 2-33.Отношение момента тормоза к номинальному момен¬
ту двигателя равно 1,5, гарантированное число срабаты¬
вания тормоза — НС менее 250 ООО включений.Конструктивные исполиения двигателей M10I и
М441.Таблица 2-50
Технические данные электродвигателей серии ВКрТил дпн-
гателяюЙ
и
£
1
. 1ЯSSCJVD
- ОS R= S
~ з:
о CJ.■г я.осо1=5и ^§5 -pqaкнЕСФ6 SЬКЗ^ ОS а?
ж S ^W о SдноО § SОтношение к но¬
минальному
моменту£о
gfeg
.с m tщга ><9Ж с SоI-.оS2нpS 5
S ФК S
X о
S Sg
• к<иII|еg о
S гаВКр63А40,2515003,05.51.81,22,2. .БКр63В40.3715003.05,51,22,2’ВКр71А40,551500( г1е3,05.51,81.22,2ВКр71В4 ,0,751500бол 663.05,51,81.22,2ВКрЙОБб1,11000JW2,54.51,71.22.0ВКр90Ьб1,5100001»и2.55.02,01,22,3ВКрЮОЬб2,2100010UlAfi2,55,52.01.22,4ВКр112МА63,010001302.56.02,01.42,7ВКр112МВ64,0юоо902.56,02,01,42.7BKpI32S65,51000802,56.22,21,42.7ВКр132М67,510002.56.S2,41.42,7BKpieose11,010003,0S.52,5■ 2,5BKpisoj^e15,01000■ lie3,05.52.52,5ВКрЭО'Оллй18.51000более3,05,52.5 2,5BT<p?00L622,01000603,05,52,5 2.5BKp225MS30,07503,05.52.5 2,5BKp22SL837,07503,05.52,52.5РАЗДЕЛ ТРЕТИИКОНТАКТНАЯ АППАРАТУРА ДЛЯ УПРАВЛЕНИЯ КРАНОВЫМИ
ЭЛЕКТРОПРИВОДАМИ3-1. ОБЩИЕ СВЕДЕНИЯ И ТРЕБОВАНИЯ
К аппаратуре
а) Назначение и классификацияЭлектрическими контактными аппаратами называ¬
ются электротехнические устройства, предназначенные
для коммутации изменения параметров электрических
цепей. Они классифицируются по принципу действия,
назначению и выполняемым функциям.По принципу действия различают электромагнитные,
индукционные, тепловые и контактно-механические ап¬
параты, По назначению и выполняемым функциям они
делятся на две группы:1) аппараты, осуществляющие оперативное управ¬
ление электроприводами путем выполнения определен¬
ных операций включения, отключения в цепях главного
тока и цепях управления;2) аппараты, выполняющие функции защиты, конт¬
роля и сигнализации,5*К первой группе относятся командоаппараты (ко-
мандоконтроллеры, путевые выключатели, выключатели
управления и другие аналогичные аппараты), реле, кон¬
такторы, магнитные пускатели, силовые контроллеры
ручного управления, магнитные контроллеры, комплект¬
ные устройства и т. д. Ко второй группе относятся авто¬
матические выключатели, предохранители, конечные вы*
ключатели, реле зашиты и контроля и др.Некоторые из перечисленных аппаратов, например
реле, контакторы, пускатели, могут выполнять обе ука¬
занные функции.б) Особенности процессов коммутации
в цепях переменного и постоянного токаХарактерной особенностью переменного тока явля¬
ется то, что через каждые полпериода он становится
равным нулю. Б момент размыкания контактов, соот¬
ветствующий первому nepexozty тока через нуль, между
контактами почти мгновенно восстанавливается так на¬
68Контактная аппаратура для управления крановыми электроприводами[Разд. 3зываемая начальная диэлектрическая прочность. С даль¬
нейшим увеличением расстояния между разомкнутыми
контактами электрическая прочность возрастает значи¬
тельно медленнее. Для обеспечения гашения дуги пере¬
менного тока необходимо, чтобы восстанавливающая
прочность дугового промежутка в любой момент време¬
ни была выше восстанавливающегося напряжения на
контактах. Условие гашения дуги переменного тока обес¬
печивается при выполнении неравенствап >ul sin <е УК2.|0"(0,04/я+У /)(( —0.3)где п — число последовательных разрывов при коммута¬
ции; С/нноминальное напряжение. В; ф—угол сдвига
между током и напряжением; f — частота сети, Гц;
/н — номинальный ток контактора. А; I — длина столба
дуги, см. Длина дуги (без устройств дугогашения) на¬
ходится в пределах 1,2—0,4 см.Для переменного тока напряжением до 500 В вклю¬
чительно с активной нагрузкой ,в цепи или до 220 В
включительно с небольшой индуктивной нагрузкой при
одном разрыве на полюс дуга надежно гаснет при рас¬
творе контактов от 0,5 мм независимо от значения от¬
ключаемого тока вплоть до 600 А. В диапазоне токов от
10 до 200 А для надежного гашения дуги требуется
раствор контактов 5—7 мм. В момеит отключения ин¬
дуктивной HaipysKH с напряжением 3^ и 500 В дуга
имеет наибольшую длительность горения при токах око¬
ло 50 А. Раствор контактов более 8 мм не оказывает
влияния на длительность горения дуги.Коммутационные аппараты постоянного тока долж¬
ны иметь более сложные и громоздкие дугогасительные
устройства, так как гасить дугу постоянного тока, осо¬
бенно при индуктивной нагрузке, значительно труднее.
Необходимый растшр контактов в коммутационных
аппаратах постоянного тока эюисит от значений отклю¬
чаемого тока, напряжения на контактах, индуктивности
цепи. Кроме того, существенное влияние на гашение ока¬
зывают конструктивные особенности дугогасительных
камер и устройств.Токи, при которых дуга горит более 0,1 с, обычно
называются критическими- Наиболее надежное гашение
дуги в аппаратах постоянного тока обеспечивается при
поперечном магнитном поле, создаваемом последователь¬
ной дугогасительной катушкой.В аппаратах, коммутирующих токи до 10 А с ин¬
дуктивной нагрузкой, иногда целесообразно использо¬
вать постоянные магниты для гашения дуги, однако
этот метод применим только в том случае, когда ток на
контактах не меняет. ы]аправлення. Оптимальный раствор
контактов при наличии последовательности дугогаси¬
тельной катушки — 8—9 мм. Дальнейшее увеличение
раствора не оказывает ощутимого влиянии на улучше¬
ние дугогашения.е)'Включение и отключеияе двигателейВ процессе пуска асинхронного короткозамкнутого
двигателя ток в течение первой nojryeo^HS может в 1,4—
1,6 раза превысить расчетный пусковой ток двигателя.
Таким образом, амплитудное значение первого полупе-
рнода может достигать 14—t5-KpaTHoro значения номи¬
нального эффективного тока дмгателя. Такие значения
токов вызывают относительно большие электродинами-
чес1сие усилия, действующие в направления размыкания
контактов. Одновременно ири включении, контактов про¬
исходит их вибрация, вызванная соударением. Продол¬
жительность вибрации К4^тактов составляет 0,001—
0;004 с, т. е. при виб^адии происходит'два-три размыка¬ния цепи с током 3—6 /н. Значительно меньшие токи
включают контакты при луске асинхронных двигателей
с фазным ротором. Пусковой ток адесь ограничивается
в пределах до 2,5—3,0 /я. Зн-ачения токов отключении
при вибрации контактов лежат в тех же пределах.В контактных цепях постоянного тока при включе¬
нии нагрузки ток нарастает по экспоненте i~(l —— стремясь в пределе к значению 2.5—3,0 /н,поэтому при вибрации контактов может происходить
размыкание цепи с током, который изменяется в широ¬
ких пределах вплоть до указанных.В процессе размыкания цепи двигателей, вращаю¬
щихся с номинальной частотой вращения, ток принимает
значение, определяемое нагрузкой, и не может быть на¬
много больше номинального, а напряжение, восстанав¬
ливающееся на контактах, равно разности напряжения
сети и э. д. с., индуцированной в обмотках двигателя,
т. е. в течение первого периода размыкания эта разность
равна 10—15% номинального напряжения. На постоян¬
ном токе восстанавливающееся нанряжение к моменту
размыкания контактов равно падению напряжения в
обмотках двигателя, т. е. тоже составляет 7—15% но¬
минального напряжения.Работа контактной системы при включении двигате¬
ля и его отключении после разгона до номинальной ча¬
стоты вращения соответствует легкому режиму работы,
так как ток при отключении, как правило, не превышает
номинального, а восстанавливающееся на контактах нап¬
ряжение составляет 10—15% номинального напряже¬
ния сети.Работа контактной системы при включении затормо*
женного двигателя и отключении двигателя также в за¬
торможенном состоянии или при частоте вращения,
близкой к нулю, соответствует тяжелому режиму работы,г) Износостойкость контактных системПри наличии дугогашения износ контактов во вре-
м^я размыкания зависит от напряженности магнитного
поля дугогашения, которая должна быть не ниже
80 А/м. На износ контактов во время размыкания суще¬
ственное влияние оказывает скорость их размыкания: он
повышается с ростом скорости размыкания контактов и
увеличением раствора контактов. Износ контактов при
включении зависит прежде всего от времени вибрации
контактов, скорости нарастания тока и механических
воздействий на замыкающиеся контакты (удар, прити¬
рание). Например, при уменьшении времени вибрации
контактов от 0,005 до 0,0005 с износ контактов, включа¬
ющих ток, равный 7 In, уменьшается в 10 раз. При вре¬
мени вибрации менее 0,0005 с вибрация контактов прак¬
тически не сказывается на износе. Необходимо учесть,
что амплитуда вибрации контактов значительно возра¬
стает при увеличении мощности включаюи^его уст¬
ройства.При коммутации контактами цепей постоянного то¬
ка, особенно с индуктивностью, контакты изнашиваются
в-основном при отключении цепи. В общем виде износ
контактов (уменьшение массы- контактов, кг) определя¬
ется выражениемт = кк 10~^^.где — коэффициент, характеризующий качество мате¬
риала контакта; п —число размыканий; / — размыкае¬
мый ток при индуктивной нагрузке, А.Серебряные и сереброникелевые контакты имеют на¬
илучшие показатели в диапазоне токов до 100 А
=3-^8), Контакты из композиции серебро — окись кад¬
мия и из кадмиевой меди имеют наилучшие показатели в
диапазоне токов 80—300 А (Лк=4-ь8). Медные и медно-
графитовые контакты целесообразно использовать при
токах 200—800 А (Ак~8~10). Для токов свыше 2000 А
§3-1]Общие, сведения и требования к аппаратуре69рекомендуется применять серебровольфрамовые контак¬
тыПри размыкании цени с увеличением напряжения
износ возрастает: в ценных постоянного тока—пропорци¬
онально напряжению; в цепях переменного тока — про¬
порционально квадрату напряжения. Опыт показывает,
что в интервале 20—2000 включений в час износ контак¬
тов от числа включений практически не зависит,д) Работа контактных систем
в повторно'кратковременном режимеВ повторно-кратковременном режиме нагрев контак¬
тов складывается из нагрева от протекающего тока и
нагрева от коммутации этого тока. Нормируемым темпе¬
ратурным режимом контактов является продолжитель¬
ный, поэтому при повторно-кратковременном режиме
ток, протекающий через контакты, может быть опреде¬
лен по формулеN600где — ток при заданной относительной продолжитель¬
ности включенми; /доЕ — допустимый длительный ток
контактов; е — относительная продолжительность вклю¬
чении контак1-ов в цикле работы; k — коэффициент нал-
ряжении (А=1 на постоянном токе до 220 В и перемен¬
ном токе до 380 В; й=1,4 на постоянном токе, свыше
220 В и переменном токе свыше 380 В>; N — число от¬
ключений в час.е) Иажатие на контакты в электрических аппаратахОптимальное нажатие на контакты является одним
из важнейших параметров, определяющих размеры аппа¬
ратов- и их коммутационно-износные характеристики. От
нажатия на контакты и жесткости пружины зависит
продолжительность вибрации при включении, а также
условия приваривания. Рекомендуемые значения нажа¬
тий на контакты приведены в табл. 3-1.Таблица 3-1Рекомендуемые значения нажатий на контактыТип аппаратаСеребряные
и металлоке¬
рамические
контактыМедныеконтактыНажатие. ^ Н/Аначаль¬ноеконеч¬ноеначаль¬ноеконеч¬ноеРеле постоянного и переменно¬
го тикаКонтактгры постоянного тока
Контакторы переменного тока
Вспомогательные контакты кии-
тактаров3—5е—8Ш~123—S4—6*10—1214—174—610—1515—2020—2521—25* Но не мепее 0,2 Н/А на контакт.ж) Основные параметры электрических аппаратовЭлектрические контактные аппараты, применяемые
в крановых приводах, характеризуются следующими ос¬
новными параметрами: допустимым превышением тем¬
пературы тоЕоведущих частей и смежных изоляционных
частей при номинальном режиме, сопротивлением изоля¬ции в холодном, и нагретом состоянии,, термической я ди-
намичбеской стойкостью изделия, электрической тгроч-
ностью изоляции, допустимым числом включений в час,
механической и электрической износостойкостью, комму¬
тационной способностью.Допустимое превышение температуры токоведущих
и смежных изоляционных частей над температурой ок¬
ружающей среды при номинальном режиме аппаратов
определяется при установившемся режиме (продолжи¬
тельном, прерывисто-продолжительном, повторно-кратко¬
временном или кратковременном).Значения допустимого превышения температуры ча¬
стей аппаратов приведены в табл. 3-2.Таблица 3-2
Допустимые превышеняя температуры частей аппаратовДопустимое превышение
температуры частей аппара-
тов при +40°С окружающей
среды, °С, в режимеНагменовавне <iacTefl аппаратовпродолжи¬тельномпрерывисто-
продолжи¬
тельном,
повторно-
кратковремен¬
ном и кратко^
времевномКоммутирующие контакты глав¬
ной цепи:
медные5565с накладками из серебра илиТемпература ограничиваетсяметаллокерамикиыагревостойкостью соседнихчастей, но не более 200°Смассивные скользящие с на¬80toкладками ив серебра или ме-
таллокерам икикоммутяруюшие контакты80SOвспомогательноЯ цепи с на
кладками из серебраВинтовые и болтовые контакт¬
ные соединения:из меди Я ее сплавов, алю¬5555миния и его сплавов без за¬
щитных покрытий
то же с защитным покрыти¬6365ем (кадмирование, иикелиро-
> вание, цинкование, лужение)
то же с серебряным защит9595иым покрытиемгибкие соединения из меди6565МногослоЁные катушки при из¬
мерении по методу сопротивле¬
ния классов изоляции:А6585Е80100В90110F115135Н140160Рукоятки и маховички:
металлические1515пластмассовыеas25Сопротивление изоляции аппаратов фиксируется
между токоведущими частями разной полярности и меж¬
ду токоведущимн частями и заземленным корпусом.
Сопротивление изоляции отдельного аппарата в состоя¬
нии поставки должно быть не ниже 10 МОм, а в усло¬
виях эксплуатации-—не ниже 1,0 МОм. Сопротивление
изоляции устройства, включающее несколько аппаратов
(например, магнитный контроллер), должно быть соот¬
ветственно не ниже 2,0 и 0,5 МОм.Термическая стойкость аппарата определяется про¬
хождением в течение 1 с через его токоведущие части,
находящиеся в рабочем положении, предельного тока, не
пКонтактная аппаратура для управления крановыми электроприводами[Разд. 3вызывающего остаточных деформаций, которые опреде¬
ляют надежность контактных переходов, стойкость изо¬
ляционных и токоведущих деталей. Термическая стой¬
кость, как правиле, характеризуется прохождением то¬
ка, равного 10 /н.Электродинамическая стойкость аппарата определя¬
ется прохождением через аппарат, находящийся во вклю¬
ченном положении в течение 0,1 с тока с предельным
значением, не вызывающим перемещения токоведущих
частей, сваривания контактов или их разрыва. Для кра¬
новой аппаратуры, кроме устройств защиты, ток электро¬
динамической стойкости составляет 18—22 /в. Для уст¬
ройств защиты он должен быть не ниже 120% пре¬
дельной коммутационной способности аппарата.Электрическая прочность изоляции крановой аппа¬
ратуры проверяется переменным синусоидальным током
частотой 50 Гц для подтверждения наличия надлежащих
запасов прочности в изоляции при возможных перенап¬
ряжениях сети. Электрическая прочность изоляции про¬
веряется между токоведущими частями и корпусом, а
также между токоеедущими частями разной полярностиТаблица 3-3Испытательное напряжение
электрических аппаратовНоминальное
напряжение
по изоляции, ВДо 24Свыше 24 до 60
Свыше 60 до 300
Свыше 300 До 660Таблица 3-4Классификация аппаратов
по допустимогяу числу
включений в часИ спытательное
напряжение
(действующее
значение). В500100020002500Классаппа¬ратаДопустимое число
включений в час,
не более0.33011203300101200303600и разомкнутыми контактами. Аппаратура должна вы¬
держивать в течение 1 мин испытательное напряжение,
указанное в табл. 3-3.Наибольшее допустимое число включений в час
в повторно-кратковременном режиме определяет класс
прибора. Данные по наибольшему допустимому числу
включений в час в зависимости от класса приведены в
табл. 3-4.Механическая износостойкость характеризует аппа¬
раты, имеющие движущиеся части, и определяется чис¬
лом циклов включение — отключение В—О без тока в
коммутируемой цепи. По уровню механической износо¬
стойкости крановая коммутационная аппаратура (в за¬
висимости от исполнения и назначения) выполняется на
одно из следующих значений числа циклов стандартизо¬
ванного ряда: 0,1; 0,3; 1,0; 1,6; 3,0; 6,3; 10; 16 и 30 млн.
циклов В—О.Автоматические выключатели, рубильники, различ¬
ные неоперативные выключатели относятся к классу 0,3
по допустимому числу включений в час и имеют меха¬
ническую износостойкость до 0,1 млн. циклов. Кулачко¬
вые контроллеры, а также некоторые исполнения элек¬
тромагнитных контакторов и реле, применяемых для ме¬
ханизмов легкого и среднего режимов работы, относятся
к классу 3 и могут иметь механическую износостойкость
до 3 млн. циклов В—О.Для электроприводов механизмов тяжелого и весь¬
ма тяжелого режимов работы следует применять кон¬
такторы и реле не ниже 3-го класса и с механической
износостойкостью не ниже 10 млн. циклов.Электрическая износостойкость характеризуется до¬
пустимым числом циклов В—О токов, имеющих место в
нормальных условиях эксплуатации. Электрическая из¬
носостойкость для- аппаратов со сменными контакта.ми
определяется периодом до смены контактов и составля¬
ет 8—15% механической износостойкости для контакто¬
ров и кулачковых контроллеров и 15% —для реле, кно¬
пок вспомогательных контактов контакторов. Для аппа¬
ратов с несменными контактами электрическая износо¬
стойкость равна механической.Коммутационная способность контактных аппаратов
хаоактесизует возможность включения и размыкания це-Таблица 3-5Условия коммутации главных контактов в цепях переменного токас;Режим нормальных коммутацийРежим редких коммутацийс: S
к ж
р.Характер нагрузкиНоминаль¬
ный рабо¬ВключениеОтключениеВключениеОтключение£еи-чий ток,
А///«COS ф///„и/и^cos фи/и^cos Ф///ни/и^cos фЛС-1Практически
безындукцион¬
ная нагрузка>10110.95110.95I.S1.10.951,51,10,95АС-2Пуск электро¬
двигателей с фа¬
зовым ротором,
торможение про-
тивовключением>102,510,652.510,6541,10.6541,10.65ЛС-3Пуск электро¬
двигателей с ко¬
роткозамкнутым
ротором, отклю¬<17610,6510,170.65101.10.6581.1o.esчение вращаю¬
щихся электро¬
двигателей>17610.3510.170.35101.‘10.3581,10,35АС-4Пуск электро¬
двигателей с ко-
ротк 03 а мкн утым
ротором, отклю¬
чение неподвиж¬
ных или медлен¬<17610,65610.65121.10,65101.10,65но вращающихся
электродвнгате-
.чей, торможение
противовключе-
нием>17610.35610.35101,10.3581.10,35
Общие сведения и требования к аппаратуре71Таблица 3-6Условия коммутации главных контактов в цепях постоянного токаХарактер нагрузкиРежим нормальных коммутацийВключение///UfU^LIR,мсОтключениеL/R.мсРежим редких коммутацийВключениеL/R,мсОт1{лю^ениеI/hL/R,мсДС-1ДС-2ДС-3ДС-4ДС-5Практически безындукци-
оннея нагрузка
Пуск электродвигателей
постоянного тока с парал¬
лельным возбуждением и
отключение вращающегося
двигателя
Пуск электродвигателей
параллельного возбуждения,
отключение неподвижных
или медленно вращающихся
двигателей, торможение
прстнвовключением
Пуск двигателей последо¬
вательного возбуждения и
отключение вращающихся
двигателей
Пуск двигателей последо¬
вательного возбуждения,
отключение неподвижных
или медленно вращающихся
двигателей, торможение
' протнвовключением12.52.52.52.57.57.5112,52,510.10,317,5107,51.11.11.11,12,52,515151.11.11.12.51515ПИ как с определенными параметрами нагрузок в обыч¬
ном расчетном режиме, называемом нормальным, так и
при повышенных параметрах нагрузки в режиме, назы¬
ваемом предельным (режим редких коммутаций). В свя¬
зи с этим различают нормальную коммутационную спо¬
собность в цикле В—О, предельную коммутационную
способность в цикле В—0 и предельный ток включения
в цикле В—О. Коммутация главных цепей электропри¬
водов происходит в широком диапазоне значений токов,
напряжений и параметров электрических цепей.Все многообразие нагрузок, коммутируемых контак¬
тами в главной цепи крановых электроприводов, стан¬
дартизовано и объединено в девять групп, соответству¬
ющих типовым условиям работы электропривода; четы¬
ре группы для цепей переменного тока и пять групп для
цепей постоянного тока. Группы переменного тока обоз¬
начаются индексом АС, группы постоянного тока — ин¬
дексом ДС.В табл. 3-5 и 3-6 приведены условия коммутации в
цепях соответственно переменного и постоянного тока.
В таблицах приняты следующие условные обозначения:
/ — ток. включаемый и отключаемый контактами; /н —
номинальный ток контактов; U — напряжение, восста¬
навливающееся после полного размыкания контактов;
Vb — номинальное рабочее напряжение; значению cosУсловия коммутации вспомогательных контактовсоответствует сдвиг фаз в отключаемой цепи перед раз¬
мыканием контактов; L/R — отношение индуктивности
цепи к ее сопротивлению.Требования к коммутационной способности вспомо¬
гательных контактов контакторов, реле, командоконт-
роллеров, кнопок, выключателей и других контактных
элементов в цепях управления приведены в табл. 3-7.В технических даштых соответствующих аппаратов
номинальные токи и коммутационная способность при
нормированной электрической износостойкости указаны
с учетом их использования при условиях, указанных в
табл. 3-5 — 3-7.При практическом использовании контактных аппа¬
ратов в реальных схемах условия нагрузки, как правило.
Не совпадают с нормативными параметрами, поэтому
расчет коммутационной износостойкости главных кон¬
тактов следует вести с учетом разных условий ком¬
мутации. Рекомендации по расчету приведены в
§ 3-5, е.Вспомогательные контакты различных типов при ис¬
пользовании в конкретных схемах должны рассчиты¬
ваться на коммутационную износостойкость с учетом по¬
правочного коэффициента■/доп " -^нТаблица 3-7Режим нормальных коммутадийРежим редких коммутацийРодВключениеОтключениеВключениеОтключениетока///ии/и^COS фL/R,с///„£//!/„cosL/R.с1/1^и/и^cos фL/R.Си/и^cos фL/R,сПере¬менный1010.7-110,4-111.10,7-111.10,7-Посто¬янный110,05110,051.11.10,051.11.10,05
72Контактная annapargpa для управления крановыми электроприводами[Разд. 3Значения коэффициента а приведены ниже.Постоянный токИзносостой¬
кость J.0 млн.
цикловL/R, с0,05 I 0,1 0,22204403805001,00,60,70,40,40,2Износостой¬
кость 2 млн.
цикловL/R. с0.05 0,1 I 0,20.60.40,50.250.250.12Переменный токИзносостой¬
кость 1 млн.
цикловС05ф0,4 0,21,01.00.8Износостой¬
кость 2 млн.
цикловcos ф0,4 I 0,20.70,60,40,80,80,50,50,350.253-2. СИЛОВЫЕ КУЛАЧКОВЫЕ КОНТРОЛЛЕРЫа) Назначение, конструкция и технические данныеСиловые кулачковые контроллеры относятся к кате¬
гории аппаратов ручного управления. Они предназнача¬
ются для непосредственного управления двигателями по¬
стоянного и переменного тока различных грузоподъем¬
ных машин.Простота конструкции и безотказность в работе, а
также минимально возможные габариты относительно
сложного коммутационного устройства предопределили
широкое распространение силовых кулачковых контрол¬
леров для электроприводов кранов с невысокими требо¬
ваниями по износостойкости.В крановых электроприводах используются конт¬
роллеры серий ККТ 60А и КВ 100, габаритные и уста¬
новочные размеры которых приведены соответственно
на рис. 3-1 и 3-2. Первые предназначены для управления
асинхронными двигателями, вторые — для управления
двигателями постоянного тока. Контроллеры указанных
серий выполняют все функции, связанные с коммутацией
главной цепи двигателя и цепей управления. Что касает¬
ся защит-нулевой, нулевой блокировки, максимальной и
путевой, то они осуществляются с помощью специальных
устройств (см, § 6-1).Контроллеры серий ККТ 60А и КВ 100 изготавлива¬
ются в защищенном корпусе с крышкой со степенью за¬
щиты IP33 (ККТ 60А) н IP44 (КВ 100). Привод кулач¬
ковых контроллеров КВ J00 осуществляется с помощью
маховичка, а контроллеров ККТ 60А с помощью руко¬
ятки. Усилие на рукоятке не более 50 Н, на маховичке
не более 70 Н. Контроллеры рассчитаны для установки
на горизонтальной плоскости лапами вниз, на вертикаль-050077Жда66г$?Рис. 3-2, Габаритные размеры кулачковых конт-
роллеров серии КВ 100.ной плоскости — рукояткой или маховичком вверх. Ос¬
новой конструкции контроллеров кулачкового типа яв¬
ляется блок коммутационных элементов с кулачковом
валом, размещаемых в алюминиевом (ККТ 60А) и сталь¬
ном (КВ 100) корпусах. Крышки выполняются из алю¬
миниевых сплавов. Максимальное число контактных эле¬
ментов—12, При этом предусматривается двухрядное
расположение элементов — по шесть в каждом ряду.Основные конструктивные решения, принятые для
крановых кулачковых контроллеров, видны из рис. 3-3,
на котором показан общий вид наиболее широко при¬
меняемого кулачкового контроллера серии ККТ- 60А.
У контроллеров этой серии коммутационные элементы
размещаются на двух пластмассовых рейках 6, Привод
элементов осуществляется с помощью кулачковых шайб,
смонтированных на барабане 5. Каждая из шайб управ¬
ляет одновременно двумя кулачковыми элементами, раз¬
мещенными на двух рейках. Кулачковые шайбы имеют
определенный профиль для создания необходимой по¬
следовательности коммутации пары контактных элемен¬
тов. Поворот кулачкового барабана производится руко¬
яткой 4. Главные контакты 2 контроллера выполнены
из меди. Неподвижные контакты укреплены непосредст¬
венно на пластмассовых рейках, а подвижные контакты
установлены на контактных рычагах 3 с шарнирно-пру-
жинной связью между рычагом и контактом. Электри¬
ческая связь подвижных контактов с выводными зажи'
мами осуществляется через гибкое соединение I.При набегании гребня кулачковой шайбы на ролик
контактного рычага последний поворачивается и контак¬
ты размыкаются. Наоборот, при сходе ролика с гребня
шайбы рычаг под действием возвратной пружины пере¬
водит контакты в замкнутое состояние. Такая система
обеспечивает высокую надежность коммутации, посколь¬
ку даже при приваривании главных контактов они ме¬
ханически открываются при повороте вала барабана.
Профиль гребня кулачковых шайб и устройства фикси¬
рования рабочих положений вала контроллера (состоит
из храповика и фиксатора) обеспечивают эффективную
установку вала в рабочие положения контроллера и
исключение такого положения главных контактов, когда
они не имеют определенного коммутационного состоя11ия.Угол поворота вала и размеры кулачковых шайб
выбраны с таким расчетом, чтобы при предельном изно¬
се данжущихся элементов и возможных производствен¬
ных допусках сохранилась заданная программа замыка¬
ния контактов. Угол поворота вала между двумя фикси¬
рованными положениями имеет следующие значения':13,0® для условий, когда обеспечиваются полное раз¬
мыкание контактов одного элемента и полное замыкание
контактов другого элемента;18,5® между нулевым (соответствует нерабочему со¬
стоянию двигателя) и рабочими положениями для обес¬
печения определенной последовательности размыкания
контактов;26“ для условнй, когда между двумя рабочими по¬
ложениями долхчно быть гарантировано одновременное
включение контактен двух элементов, из которых один
размыкает, а другой замыкает контакты.Коммутация тока контактами контроллера естест¬
венная, без дугогасительных устройств. Для предотвра¬
щения перебросов дуги между элементами нри размыка¬
нии больших токов с внутренней стороны крышки конт¬
роллера укреплены камеры, отделяющие коммутацион¬
ные зоны элементов друг от друга.В отличие от контроллеров ККТ 60А, у которых ис¬
пользуется моноблочная конструкция коммутационныхэлементов, контроллеры постоянного тока серли КВ 1
имеют индивидуальные элементы, закрепляемые на ме¬
таллических рейках. Принцип действия элементов ком¬
мутации аналогичен рассмотренному. Однако для гашения
дуги при размыкании цепи постоянного тока в конт¬
роллерах КВ 1 предусматриваются узлы электромагнит¬
ного дугогашения на каждом из элементов, коммутиру¬
ющих ток главной цепи, У.злы дугогашення, аналогичные
соответствующим узлам электромагнитных контакторов,
состоят из электромагнитной системы (катушки и маг-
нитопровода) и дугогасительной камеры. Последняя по¬
мимо гашения дуги выполняет также функцию защит¬
ных перегородок, предотвращающих переброс дуги на
корпус или другие токоведущие части. Контакты глав¬
ной цепи выполняются не медными, как в ККТ 60А, а
металлокерамическим-и нз комво.знции серебро — окись
кадмия. Кулачковые контроллеры ККТ 60А и КВ I вы¬
полняются с коммутационными элементами главного то¬
ка па номинальный ток 63 А. Кроме того, имеются ку¬
лачковые элементы для коммутации цепей управления.Основные технические данные кулачковых элемен¬
тов контроллеров приведены в табл. 3-8.В табл. 3-9 приводятся основные технические дан¬
ные изготавливаемых промышленностью контроллеров
серий ККТ 60А и КВ 1. Номинальной мощностью конт¬
роллера является мощность управляемого нм двигателя
при номинальном наврАжеиин и номинальном токе, от¬
несенном к режиму работы ПВ=40'% при общей про¬
должительности каждого цикла не более 4 мин.Кулачковые контроллеры постоянного тока выпол¬
няются в двух модификациях — КВ 1-01 и КВ 1-02. Пер¬
вый из них используется для управлсшгя электродвига¬
телями постоянно}'© тока серии ДП и Д последователь¬
ного, смешанного и параллельного возбуждении меха¬
низмов горизонтального передвижения, а второй — для
управления двигателями последовательного возбуждения
механизмов подъема.При управлении контроллерами КВ 1-02 и КВ 1-01
может быть реализован диапазон регулирования скоро¬
сти 5:1. Область применения *онтро.плеров КВ 1-01 и
КВ 1-02 — краны легкого и среднего режимов- работы.
74Контактная аппаратура для управления крановыми электроприводами[Разд. 3Основные данные кулачковых элементовТ а б л и U а 3'8Назяатсиие кулачко¬
вых элементовНоминаль¬
ный ток.Максимальный
ток включения,
АМаксимальный ток
отключения. А, при
напряжении силовой
цепиТок дина¬
мическойНоминальный ток
отключения. АРасчетное напряже¬
ние отключения, ВА, при
ПВ=100%Посто¬янныйперемен¬ныйПостоян¬
ный 220В
при
L/R=O.QocПеремен¬
ный. 50 Гц,
380 В при
cos ф=0,5и терми¬
ческой
стойкостиПостоян¬
ный 220В
приL/R=0,05cПеремен¬
ный, 50 Гц,
380 В при
cos ф—0,5Постоян¬
ный токПеремен¬
ный токЭлементы гласного
тока контроллера
КВ 163300600300600900100-110Элементы вспомога¬
тельного тока без ду-
гогашения контрол¬
леров КВ 11050500.7100,55,0220380Элементы главного
тока контроллеров
ККТ 60А ,63200200900100380Основные технические данные контроллеров ККТ 60А и КВ 1Таблица 3-9Тип контроллераИсполнениедвигателяНазначениеконтроллеровМаксимальное
число рабочих
положений^ <0 о2 о § р.|§2^§
S сз1 2 S IIR с; я аз
ж а; Е' Ь С.Ток, А при
ПВ=40%1§|
5 5s<L1СЭ
= ?
§ юtr яli-iо J wН 5 О^ 5
о e-s|SoЙао<jгаcf ¥ о«си5 U ияга с 5
sumf- &s|ly о;а.онос.ККТ 61ААсинхронный
с фазным рото¬
ромДля одиодвига-
тельных приводов
всех типов меха¬
низмов556310050100502001001203001515ККТ 62А с ревер¬
сором ДР 160То жеДля двухдвига¬
тельных приводов
механизмов пере¬
движения5563100100502001001203001515ККТ 68А с ревер'
сором ДР 160То жеДля однодБига-
тельных приводов
всех типов меха¬
низмов5563-150753001501203001515ККТ 65А с маг-
нитннм контрол¬
лером ТРД 160То жеДля однодвига¬
тельных приводов
механизмов подъ¬
ема35 .631005010050200100120300 ■1515ККТ 69А с ревер¬
сором ДР 160 и
магнитным кон¬
троллером
ТРД 160Асинхронный
с фазным рото¬
ромДля однодвига¬
тельных приводов
механизма подъ¬
ема55i63-150753001501203001515ККТ 63ААсинхронный с
короткозамкну¬
тым роторомДля однодвига¬
тельных приводов
всех типов меха¬
низмов1I637535-2001001203001515КВ 1-01Двигатель посто¬
янного тока по¬
следовательного,
смешанного и па¬
раллельного воз¬
бужденийДля одяодвига-
тельных приводов
механизмов пере¬
движения666380200120145КВ 1-02Двигатель посто¬
янного тока по¬
следовательного
возбужденияДля одиодвига-
тельиых приводов
механизмов подъ¬
ема556380—200120145
§ 3-2]Силовые кулачковые контроллеры75Основными исполнениями кулачковых контроллеров
переменного тока являются контроллеры для управле¬
ния асинхронными двигателями с фазным ротором се¬
рии MTF (МТН). Контроллеры ККТ61А и ККТ68А
применяются на механизмах подъема и передвижения,
а контроллер ККТ 62А, управляющий двумя двигателя¬
ми,— на механизмах передвижения. Указанные исполне¬
ния контроллеров позволяют в зоне больших нагрузок
осуществлять регулирование скорости электродвигателей
в диапазоне 2,5:1 за счет введения в цепь ротора регу¬
лировочных ступеней резисторов. Получить такой диа¬
пазон в зоне малых нагрузок представляется возможным
только при толчковой работе {многократное переключе¬
ние с рабочего на нулевое положение и обратно), что
является одним из недостатков этих контроллеров.Контроллеры ККТ 61 А, КК^Т 62А и ККТ 68А реко¬
мендуется применять для тихоходных кранов малой и
средней грузоподъемности легкого и среднего режимов
работы с невысокими требованиями к диапазону регу¬
лирования скорости и точности остановки,В серии контроллеров переменного тока предусмот¬
рены исполнения ККТ 65А и ККТ 69А (предназначаются
только для механизмов подъема) с улучшенными регу¬
лировочными и энергетическими показателями. Контрол¬
леры ККТ 65А и ККТ 69А, выполняемые с использова¬
нием принципа динамического торможения с самовоз¬
буждением, обеспечивают устойчивый диапазон регули¬
рования скорости 8:1. Указанные исполнения
применяются вместе с магнитным контроллером ТРД 160,
предназначенным для получения режима динамического
торможения. Кулачковые контроллеры ККТ 65А и
ККТ 69А обеспечивают заданный диапазон регулирова¬
ния скорости без применения толчкового режима рабо¬
ты, поэтому управление ими несколько проще и удобнее,
чем контроллерами ККТ 61А и ККТ 68А, Контроллеры
ККТ 65А и ККТ 69А могут быть рекомендованы для
кранов легкого, среднего, а также тяжелого режимов
работы с большими скоростями подъема и спуска, а так¬
же с более жесткими требованиями к точности оста¬
новки.Для управления одностгоростными короткозамкнуты¬
ми двигателями серии MTKF (МТКН) механизмов подъ¬
ема и передвижения, находят применение кулачковые
контроллеры типа ККТ 63А. Функции управления этим
контроллером сводятся к включению и отключению дви*
гателя без регулирования его частоты вращения,б) Износостойкость силовых кулачковых контроллеровКонтроллеры серий КВ 1 и ККТ 60А имеют механи¬
ческую износостойкость 2,5-108 циклов перевода из ну¬
левого в крайнее положение и обратно. Электрическая
износостойкость контроллеров КВ 1 составляет ЫО®
циклов перевода из нулевого в крайнее рабочее положе¬
ние и обратно при коммутации токов двигателей, ука¬
занных в табл. 3-9. При снижении этих токов в преде¬
лах 50 и 30% коммутационная износостойкость состав¬
ляет соответственно 3*10® и 5-10® циклов.Контроллеры переменного тока серии ККТ 60А име¬
ют электрическую износостойкость несколько выше, чем
контроллеры серии КВ 100, что определяется лучшими
условиями коммутации на переменном токе. Кроме того,
у контроллеров переменного тока отсутствуют критиче¬
ские токи во всем рабочем диапазоне от нуля до мак¬
симальных токов перегрузки. У контроллеров же посто¬
янного тока имеются критические токи главной цепи в
интервале от 1 до 8 А при напряжении между разомк¬
нутыми контактами выше 150 В. Этот фактор также
улучшает параметры электрической износостойкости
контроллеров переменного тока. Электрическая износо¬
стойкость кулачковых контроллеров ККТ 60А при раз¬личных условиях использования характеризуется данны¬
ми табл. 3-9.в) Особенности выбора кулачковых контроллеровСиловые крановые кулачковые контроллеры по воз¬
можностям коммутационных элементов при редких ком¬
мутациях рассчитаны на управление двигателями пере¬
менного тока мощностью до 30 кВт и постоянного тока
до 20 кВт. Дальнейший рост мощностей приводит к не¬
допустимому увеличению габаритов контроллеров и со¬
ответственно усилий в органах ручного управления.Для расширения верхнего предела мощностей управ¬
ляемых двигателей в серии контроллеров ККТ бОА
предусмотрены исполнения контроллеров ККТ 68А и
ККТ 69А, применяемых вместе с реверсором типа ДР 160
на номинальный ток 160 А. Увеличение мощности здесь
достигается как за счет контакторного реверсора, имею¬
щего гораздо большую коммутационную способность,
чем контакты контроллера, так и за счет включения ре¬
зисторов в цепи ротора в две параллельные группы. Та¬
кое включение позволяет снизить ток в контактах конт¬
роллера до 60% номинального тока роторной обмотки.
В результате максимальная мощность двигателей,
управляемых контроллерами ККТ 68А и ККТ 69А, воз¬
растает до 50—60 кВт. На такие же пределы мощностей ■
рассчитаны контроллеры ККТ 62А, которые предназна¬
чаются для управления двумя двигателями, В этом ис¬
полнении коммутация роторных цепей каждого двигате¬
ля осуществляется контактами контроллера, а цепей ста¬
тора двух двигателей — одним реверсором типа ДР 160,При выборе кулачковых контроллеров для крановых
механизмов следует учитывать, что предельная мощ¬
ность кулачкового контроллера меняется в зависимости
от режима работы механизма и определяется в основ¬
ном износостойкостью коммутационных контактных эле¬
ментов контроллера, В свою очередь возможности кон-Таблица 3-10предельные мощности кулачковых контроллеров по условиям
(Мектрической износостойкостиПредельные значения мощностей, кВт,
при режимахТипНапряже¬СГконтрол¬лерание сети. ВЛдо 60
включений
в час%
о §
«я д1
о ^о§=-« « м=вяsi«сеККТ 61А22024201585380403020107ККТ 65А22024201813103804030221815ККТ 62А2202X152X122ХШ2X73802X252X202X122X10—ККТ 68А220, 3806050301510ККТ 69А220, 3806050352520ККТ 63А220, 38015-—--220252015КВ 1-01,
КВ 1-024402518Ш
76Контактная аппаратура для управления крановыми электроприводами[Разд. 3тактных элементов в повторно-кратковременном режи¬
ме определяются условиями и режимом коммутации
цепей двигателя. Исходя из указанных факторов, выбор
кулачкового контроллера необходимо производить та¬
ким образом, чтобы даже при единичных включениях
максимальные тсжи. коммутируемые контроллером, не
превышали соответствующих значений, приведенных в
табл. 3-9.При повышении числа включений контроллера дол¬
жны учитываться условия электрической износостойко¬
сти контактных элементов при ааданных условиях экс¬
плуатации,В табл. 3-10 приводятся значения предельных мощ¬
ностей двигателей, управляемых кулачковыми контрол¬
лерами, при различных режимах работы крановых ме¬
ханизмов.При выборе контроллеров для управления коротко-
замкнутыми двигателями следует учитывать, что эти
контроллеры могут быть использованы только в элек¬
троприводах механизмов легкого режима работы.3-3. КОМАНДОКОНТРОЛЛЕРЫа) Назначение и классификацияКомандоконтроллеры являются аппаратами ручнбго
управления. Они предназначены для дистанционногоуправления крановыми механизмами и рассчитаны для
коммутации катушек электромагнитных аппаратов (кон¬
такторов и реле), цепей управления преобразовательных
устройств, регуляторов и других аналогичных нагрузок.
Командоконтроллеры могут встраиваться в кресло кра¬
новщика, пульт управления, а также устанавливаться са¬
мостоятельно, Во всех этих случаях должна быть обес¬
печена степень зашиты IP20.Различают два вида крановых командоконтролле-
ров: командоконтроллеры на основе контактных элемен¬
тов и на основе бесконтактных элементов (сельсиновые
ком андоконтроллер ы).б) Контактные командоконтроллерыКонтактные командоконтроллеры являются много¬
ценными аппаратами с заданной программой дамыкания
и размыкания контактов при повороте приводного вала
вручную или через механический природ. В крановых
электроприводах находят применение комаидоконтрол-
леры серии КП 1000, Б табл. 3-11 приведены основные
технические данные контроллеров этой серии.Общий вид командоконтроллера серии КП 1000 по¬
казан на рис. -3-4, Конструкция контроллера предусмат¬
ривает двухрядное размещение контактов на двух кон¬
тактных рейках 6, Одна кула'7к0вая шайба 4 приводит
в действие пару контактных элементов на противопо-Рнг. 3-4. Общий вид командоконтроллера серии КП 1000,«^^сиовиые технические данные контроллеров серим КП 1000Таблица 3-11Исполнсннекомаидо-контрол-лера}?азяачениеМаксимальный коммутационный
ток при индуктивной нагрузке, АТок отератявной коммута¬
ции. АТок про¬
должи¬
тельного
режима,
АЭлектри¬
ческая из¬
носостой¬
кость, 10**
циклов
В-ОМеханиче¬
ская н.чно-
состой-
кость, 10''
цшспов
Б-ОМчгса,-кглостоянный при
£/«<0.05сперемен¬
ный при
со5ф>0,4постоян¬
ный при
напряже¬
нии 220 В
ЬШ=^0,01спеременный при
cos ф—0.3ПО В220 В440 ВДо 500 В220 В380 ВКП 1200Для индиви¬
дуальной
установки2.51.50,5100.7321015/,оКП МОО
КП 150»
КП 1600
КП IVCK)Для установ¬
ки в пределах
кресла кра¬
новщика2,51,50,5100.73210157,6i
§3-3]к ошндоконтроллерыРис. 3-5. Габаритные раз¬
меры коыандоконтролле-
l/a КП 1200.гвя-4'ложений рукоятки, ПодеоН проводов к командакоктрол-
леру осуществляется через отверстие в дне корпуса. Ко-
мандоконтроллеры имеют различные исполнения при¬
водных рукояток, что )юзволяет размещать в пределах
кресла крановщика до шести командоконтроллеров.Предусмотрены следующие исполнеиня командокон-
троллеров: с нормальной рукояткой (КП 1200), удли¬
ненной (КП 1400, КП 1500, КП 1600, КП 1700), с рукоят¬
кой для грейферного привода (КП 1200Д), удлиненной
для грейферного привода (КП 1600Д), с нормальной ру¬
кояткой н самовозвратом ее в нулевое положение
(КП 1200С). Габаритные размеры командоконтроллеров
с нормальной (КП 1200) и удлиненной (КП 1400) руко¬
ятками приведены на рис. 3-5 и 3-6.Таблица 3-12Рис. ,3-6. Габаритные раз¬
меры комаидоконтролле*
ра КП 1400. ...ложных рейках. Контактные элементы имеют мостико-
вые контакты 5 с серебряными напайками, что обеспе¬
чивает надежный контакт в цепях управления при ма¬
лых коммутируемых токах и напряжениях. Корпус 2 н
крышка } командоконтроллера изготавливаются из алю¬
миниевых сплавов. Степень защищеиностн IP21. Рабочие
и рулевое полоэкепия кулачкового барабана фиксируют¬
ся с помощью храповикового ycтpo^йcтвa фиксатора 3,
причем н-а фиксаторе имеются также упоры крайних во-
78Контактная аппаратура для управления крановыми электроприводами{Разд. 3Таблица 3-13
Исполнения контроллеров по таблицам включения контактовКоманлоконтроллеры с удлиненной рукояткой пред¬
назначены для встраивания в кресло крановщика. Руко>
ятка здесь связана с кулачковым барабаном через ку¬
лисный привод, смонтированный на командоконтролле-
ре. Такой привод дает возможность уменьшить угол
поворота рукоятки до 25°, что важно с точки зрения
удобства обслуживания нескольких командоконтролле-
ров, встраиваемых в кресло. Для контроллеров с нор¬
мальной рукояткой максимальный угол поворота со¬
ставляет 72° при числе положений 5—О—5 и 18,5° при
числе положений 1—О—1.Усилие на рукоятке командоконтроллера не превы¬
шает 50 Н.Числоположе¬нийТип командоконтрол¬
лера0CQ1йк
о то1ЛIIс? А
?|5я-§оЯз-№ таблиц замыкания
контактов согласно
табл. 3-12КП 320144121, 2. 4. 7. 17, 24. 30, 33, 47,
48. 49. 4КП 120355121, 2, 3. 4, 5. 6, 7, 8. 26. 1,4.3КП 120444121, 50, 49, 30, 17, 2. 51, 3, 52,
47, 33, 7КП 12051161.1. 4, 3,4,3КП 1210. КП 16103361, 2. 4, 3. 5. 6КП 121355121. 2, 4, 3. 4. 3, 22, 21, 6.
5. 7,8КП 121444 '111. 2. 4, 3, 4. 3, 5, 6, 7,
1, 26КП 121545121. 2, 3, 10, 11, 12. 4, 16,17, 39. 35, 36КП 121955121. 2. 3, 10, 11, 12. 4, 16,58. 39, 35. 36КП 122055121. 2, 4, 3, 10, 3. 43, 11, 59,
60, 61, 25КП 122155121, 2, 4, 3, 10. 3. 32, 60,
61, 44, 46, 34КП 1222. КП 1422.
КП 1522
КП 12232423612г. 2, 5, 4, 3, I1, 2, 4. 47, 4. 3, 47, 30, 27,6, 49, 65КП 1226, КП 1526,
КП 1726КП 1227. КП 17274343661. 5. 3, 4. 6, 7
1, 41. 4. 3, 6, 31КП 12283362. 3, 23. 4. 23, 26КП 1230. КП 1230С11101, 2, 4, 3, 4. 3, 20, Ш, 1, 20КП 1266, КП 1466,
КП 1566. КП 166G.
КП 17665512(4)1. 2, 4. 3КП 1451, КП 165144121. 65, 37. 32, 18, 2, 66, 4,
67, 39, 27. 7КП 1452, КП 1652.
КП 176244121. 2, 39, 3, 3, 54, 64, 18, 37,
32. 27, 7КП 1211Д44121, 2, 37. 32, 6. 33, 39, 53.
39, 67. 4. 3КП12Г2Д44121. 2. 47, 55. 47. 56, 49, 68.
24. 57, 3, 4КП 1654Д43121. 2. 4, 3. 31, 32, 39. 40, 27,
4, 22, 19КП 1657Д33121, 2, 3, 4, 16. 30, 47. 15, 39.
3. 21, 29КП 1664Д54121. 2, 31, 9, 39. 14, 13. 28,
40, 38, 42, 13КП 1665Д43121. 2. 16. 62. 47, 6. 27. 63.
15. 26, 45, 27Порядок замыкания контактов командоконтроллеров
определяется профилем шайб кулачкового барабана.
§3-3]Командоконт роллеры79В табл. 3-12 приведены возможные таблицы комбинаций
замыканий контроллеров командоконтроллеров, а в
табл. 3-13 указаны применяемые конкретные исполнения
командоконтроллеров и соответствующие им таблицы
замыканий контактов.При необходимости можно заказать командоконт-
роллеры с непрофилированными кулачковыми шайбами
(КП 1266, КП 1466, КП 1566, КП 1666, КП 1766) и уста¬
новить желаемый порядок замыкания контактов, выпи¬
лив профиль шайб по шаблону, прилагаемому к коман-
доконтроллеру.в) Сельсинные командоконтроллерыСельсйнные командоконтроллеры, предназначены в
основном для управления крановыми электроприводами,
построенными на базе бесконтактных систем регулиро¬
вания, а также для управления грузоподъемными маг¬
нитами. В сельсинных командоконтроллерах в завнсимо-Рис. 3-7. Схема включения сельси¬
на в командоаппарате с выходом
переменного тока.сти от положения рукоятки непрерывно меняется сигнал
выходного напряжения. В крановых электроприводах
находят применение командоконтроллеры типа КП<800,
построенные на основе контроллеров серии КП 1000.Контроллеры КП 1800 выполняются с выходом на
постоянном и переменном токе. Для осушествления ну¬
левой защиты, а также построения различных вариантов
схем электроприводов в сельсинных командоконтролле¬
рах предусматривается до шести контактных элемен¬
тов, коммутационная способность и электрическая
износостойкость которых соответствует данным
табл. 3-11.Контактные элементы имеют общий привод от вала
с кулачковыми шайбами, связанный с ротором сельсина.
Число фиксированных положений — до пяти в каждую
сторону- Сельсинные командоконтроллеры типа КП 1800
имеют такие же массу и габариты, что и контроллеры
серии КП 1200.В сельсинных командоконтроллерах типа КП 1800
применен бесконтактный сельсин типа БД 404А, работа¬
ющий в режиме поворотного трансформатора. Схема
включения сельсина в командоконтроллере с выходом на
переменном токе приведена на рис. 3-7. Однофазная ста¬
торная обмотка (выводы ci—Сг) подключается к сети
переменного тока частотой 50 Гц и напряжениемilO^ 1W напряжение на выходе коман-Выход I15%доконтроллера (выводы р\~-Рз)при угле поворота ро¬
тора сельсина на 60° составляет 43 В. Ток, по¬
требляемый командоконтроллером, не превышает 0,44 А
при потребляемой мощности 15 Вт.Схема включения сельсинного командоконтроллера
с выходом на постоянном токе приведена на рис. 3-8.
Схемой предусматривается два выхода — / и Я. В каче¬
стве нагрузки здесь могут быть использованы, в частно¬
сти, обмотки управления магнитных усилителей. Выход/
(выводы с и Ь) формируется разностью линейных на¬
пряжений Ui—Us, создаваемой обмотками pi—рз через
полупроводниковые выпрямители и Вз. Падение на¬
пряжения в балластных сопротивления* Rm и Шун*Рис. 3-8. Схема сельсинного командоконтроллера с вы¬
ходом постоянного тока.ОМУ1, ОМУ2 — обмотки управления магнитного усилителя.тируемых емкостями Ci и Сг, имеют разные полярности
(рис. 3-9,а), благодаря чему на нулевом положении ко¬
мандоконтроллера напряжение выхода равно нулю.
Выпрямители Вя и В4 обеспечивают зону нечувствитель¬
ности в нулевом положении. Выходные характеристики
командоконтроллера приведены на рис. 3-9,6. Напря¬
жение на выходе 7, как видно из рисун^са, обращается в
нуль при углах поворота ф=0, 90 и 270®.С точки зрения нагрева обмоток более предпочти¬
тельны углы поворота 90 и 270° (в этом случае напря¬
жение U2 средней фазы сельсина равно нулю).Напряжение выхода II представляет собой выпрям¬
ленное линейное напряжение между первой и третьей
фазами сельсина. Два выхода сельсинного командокон¬
троллера используются, как правило, в электроприводах
с двигателями постоянного тока. На выход сельсина
здесь обычно подключается магнитный усилитель малой— ■1^3;,2
П Dи\уГ/X■ч/■ЛV\TOff\В,00 Zуги ^0 6,и 80
У/то"\/- ft Q>71 ь?■"а)ВыхоВЛП D4- 'ВыховЖ\//Выход!19W0 а0 6i
Sbixt7д10 20/0ъ(7 ^0 й7 аотв°^ 1/,&
- Г,7б)Рис. 3-9. Выходные характеристики сельсинного комац-
доконтроллера*
80Контактная аппаратура для управления крановыми электроприводами[Разд. 3мощности, который насыщается при углах поворота
сельсина 25—3(г, в то время как максимальный угол
поворота командоконтроллера составляет 65—70”. При
углах ф>254-30® выход / насыщенного промежуточно¬
го магнитного усилителя обеспечивает поддержание не¬
изменного напряжения преобразователя, питающего
якорь двигателя, а выход II позволяет в необходимых
пределах ослаблять поле двигателя.3 4. ПУЛЬТЫ УПРАВЛЕНИЯСогласно правилам Гостехнадзора все вновь проек¬
тируемые и строящиеся краны с целью удобства управ¬
ления их механизмами должны оснащаться малогаба¬
ритными пультами управления, В настоящее время име¬
ется несколько разновидностей таких пультов. Как пра¬
вило, все они конструктивно компонуются вместе с
креслом крановщика и имеют помимо органов управле¬
ния ме:ханизмами крана также аппараты контроля и сиг¬
нализации.Одним из исполнений, получившим наибольшее при*
менение на кранах, является пульт управления типа
ДКЮ-Sl, предназначенный для непосредственного н дис¬
танционного управления крановыми электродвигателями
переменного тока серии MTF и МТН. Этот пульт пред¬
ставляет собой комплектное устройство, рассчитанное на
управление четырьмя механизмами крапа. Он состоит из
двух (правой и левой) колонок с вмонтированной аппа¬
ратурой и креслом крановщика, расположенного между
колонками. Габаритные и установочные размеры пульта
показаны на рис, 3-10^ Масса пульта 100 кг. Пульт вы¬
полняется со степенью защиты IP40. Рабочее положение
пульта вертикальное с креплением на горизонтальной
плоскости.В каждую колонку пульта (рис. 3-П) встраива¬
ются: два или один кулачковых контроллера 1; две на¬
жимные кнопки 2, каждая с одним замыкающим и од¬
ним размыкающим контактами на длительный ток б А;
четыре сигнальные лампош^и 3, На колонках устанав¬
ливаются также: на правой — телефонный аппарат 4,
на левой — вольтметр с переключателем 5 для контро¬
ля напряжения в каждой фазе, амперметр (трансфор-00Ш ;0-т й?еиРис. 3-10. Габаритные размеры пульта управления.Рис. З'П. Размещение эхектроаипэратуры на пульте
управления.матор тока в состав пульта не входит), трансформатор
напряжения для питания сигнальных ламп. В зависит
мости от назначения пульты имеют исполнения, отли¬
чающиеся количеством и электрическими схемами кон¬
троллеров, наличием ка определе1игой колонке пульта
спаренного (одна рукоятка на два контроллера) или
раздельного (каждый контроллер управляется своей
рукояткой) привода с оби^м разъемным запором.Кулачковые контроллеры, встраиваемые в пульт,
имеют до 12 кулачковых элементов при максимальном
числе позиций 5—0—5 и выполняются с таблицей за¬
мыкания элементов по схемам, аналогичным схемам ку¬
лачковых контроллеров ККТ 61 А, ККТ 62А и ККТ 68А
(см. § 3-2). При этом реализуются следующие мощно¬
сти в режиме ПВ-=407о и напряжении 380 В: 7,5 кВт
при работе по схеме ККТ 61 А, 15 кВт по схеме ККТ
68А, 2X7,5 кВт по схеме ККТ 62А.Пульты, работающие по схемам контроллеров ККТ
62А и ККТ'68А, должны комплектоваться контактор¬
ным реверсором на 160 А, из расчета одного реверсора
на каждый из контроллеров. При дистанционном управ¬
лении кулачковые контроллеры могут иметь таблицы
замыкания контактов, так же как и для командокон-
троллеров КП 1000 (см. § 3-3). Контакты контроллеров
пульта рассчитаны на ток 35 А в режиме ПВ=40%.Коммутационная способность этих контактов при
^шдуктивной нагрузке с постоянной времени не более
0,05 с (на постоянном токе) и с коэффициентом
мощности ие менее 0,4 (на переменном токе) со¬
ставляет: ^Гок включения. А:переменный пря напряжении до ЗЙО В 7Sпостоянный при напряжении до 220 В 26Ток отключеняя. А:переменный при напряжении до 380 В 35постоянный при напряжекиях;ПО В 2,я220 В 1,5Электрическая износостойкость контактов контрол¬
леров пульта составляет:при работе в качестве силового кулачкового конт¬
роллера на переменном токе — не менее 5-10® циклов
В—О с числом включений в час до 250;при работе в качестве командоконтроллера на пе¬
ременном токе с нагрузкой не более ША—ЫО^ цик¬
лов В—О с числом включений в час до 600; при рабо¬
те в качестве командоконтроллера на постоянном токе
и коммутации токов, вдвое меньших токов, оговорен-
§3-5]Электромагнитные контакторы81ных ранее, — 5*10® циклов В—О с числом включений
в час до 600.Механическая износостойкость контактов контрол¬
леров пульта не менее 2,5*10® циклов В—О3-5. ЭЛЕКТРОМАГНИТНЫЕ КОНТАКТОРЫа) Классификация и назначениеКонтакторы используются в системах управления
крановыми электроприводами для осуществления ком¬
мутации тока в главных цепях при дистанционном
управлении. В крановом электроприводе применяются
контакторы только с электромагнитным приводом.Общие технические требования к контакторам
сформулированы в ГОСТ 11206—77. Высокий уровень
требований по числу включений, необходимость исклю¬
чительно надежной коммутации цепей при различных
нагрузках предопределили применение в крановых
здектроприводах контакторов 3-го и 10-го классов по
допустимому числу включений с механической износо'
стойкостью не ниже 3 млн. циклов и рассчитанных для
коммутации по категориям АС'2—АС-4 (переменный
ток) и ДС-2—ДС-5 (постоянный ток).В соответствии со шкалой номинальных токов в
крановых электроприводах переменного тока использу¬
ются шесть величии контакторов, имеющих следующие
номинальные токи: Ш, 25. 63, 160, 250, 400 А. На по¬
стоянном токе используются пять величин контакторов,
имеющие номинальные токи: 63, 100, 160, 250, 630 А.
Контакторы на токи меньше 63 А могут быть рекомен¬
дованы для использования в цепях управления или
в цепях, где токи короткого замыкания ограничены со¬
противлением монтажных проводов и не превышают
10—20-кратного значения номинальных токов этих ап¬
паратов, Для коммутации в главных цепях предпочти¬
тельным является применение контакторов с номиналь¬
ными токами 63 А и выше.Контакторы, применяемые в крановых электропри¬
водах, выполняются для эксплуатации в условиях уме¬ренного (У), тропического (Т) и холодного (ХЛ) кли*
мата. Степень защиты — IP00,б) Контакторы серий КПВ 600, КТПВ 600Контакторы серии КПВ 600 предназначены для
коммутацнн главных цепей электроприводов постоянно¬
го тока, Контакторы этой серии имеют два исполнения:
с одним замыкающим главным контактом (КПЗ 600)
на номинальные токи 100, 160, 250 и 630 А; с одним
размыкающим главным контактом (КПВ 620) на но¬
минальные токи 160 и 250 А. Первые из них рассчита¬
ны для работы в цепях с напряжением 220 В. При не¬
частых срабатываниях (до 150 в час) контакторы при¬
годны для работы при напряжении 440 В, Контакторы
с замыкающими контактами на номинальные токи 250
и 630 А при.редких срабатываниях могут быть исполь¬
зованы в системах электроприводов постоянного тока
с вращающимися или статическим^ преобразователями
при напряжении* до 600 В,Контакторы КПВ 620 предназначены в основном
для шунтирования обмотки якоря двигателя постоян¬
ного тока при динамическом торможении и рассчитаны
на коммутацию цепей с напряжением до 220 В.Контакторы серии КТПВ 600 являются модифика¬
цией серии КПВ 600 н предназначаются для работы
в силовых цепях переменного тока при напряжении до
380 В с частотой 50 и 60 Гц или в цепях постоянного
тока при напряжении до 220 В. В цепях постоянного
тока эти контакторы пригодны в основном только в ка¬
честве реверсивных контакторов. При этом необходимо,
чтобы последовательно с контактами реверсивных кон¬
такторов были включены главные контакты линейного
контактора. Контакторы серии КТПВ выполняются с
двумя замыкающими главными контактами.Основные технические данные контакторов серии
КПВ 600 и КТПВ 600 приведены в табл. 3-14 и 3-15.
Данные по контакторам КТПВ 600 относятся к усло¬
виям их работы в цепях переменного тока.На рис. 3-12 по1сазана конструкция' контакторд
КПВ с одним замыкающим главным контактом. Кон¬
тактор состоит из основной скобы магнитопровода 4,Основные технические данные ковтакторов постоянного тока серий КПВ в КПДТаблица 3-14Тип контак¬
тораТок, АёВ"м«SЕГ1§S.3*Износостой¬
кость. Ю"
циклов в—ОСобствен*
ное время
срабаты»
вааня, с(-ИкВВоЧислоН ИСПОЛ.*невиеглавянхконтактовSgV р
" SC4 Н
U аiS§№ ИО га
t-Щ О5 ®SГабаритные
размерв, ммяс2«ж?оSрежим нор¬
мальных ком¬
мутацийрежим редких
коммутацийс:геidо№ВкмоS^электриче¬ская1аS■кс.аа(.1Оо3mкаа:э-В)¥S2 к
feg№RЯ0
g1§ к
f- к
о S<1>
ё =к« sаS(Zк в;
ь а
а а4eg'а X1|%sа"1КПВ 602100250ICO1000100012002010,080^30,0730145,5ISO220240КПВ 6031604001601600160012002010.080.160,1240148,5195260285КПВ 6042506252502500250012002010.080.280.12501 413,519530S360КПВ 6056301570630630,06300120020I0,070,370.23701—430^0235415500КПВ 62316016016032032060010 0.050,090,1240 138,5150250295КПВ 62425025025050050060010—0.05,0.10,1650 1314153305375КПД ПОЕ2560252502501200101 0.10,07181 21,69014216ЙКПД пш631606363063012001010.050.120.08261—24П514219SКПД 121Е631606363063012001010,050.120.08262 25130142195КПД 131Е63160636306306006,310*040,120,0826112513014219SКПДЗ 111Е636363120120.6006.3—0.040,120,0826 124115142195КПД ПЗЕ160400160160016001200-1010.040,20,15341—26,6109185358КПДЗ ПЗЕ1601601603203206006*3 0.030,20,1534 12.6.6109173358КПД П4Е25062025025002S0012001010.040,30,2371_29123213385КПДЗ 114Е2502502505005006006,30.030.30,2371291232133856-839
82Контактная аппаратура для управления крановыми электроприводами[Разд. 3Таблица 3-15Осноеные тсхпическле данные контакторов переменного гока серий КТП, КТПВ и пускателей П 6, ПМЕ, ПАЕТипконтактораТок. АРежим нор¬
мальных ком¬
мутацийРежим редких
коммутацийИзносостойкость,
10® циклов В—Оэлектриче¬ская;Собственное
время сраба¬
тывания, с* X^ яё|
к чл <Ц
ч ЬЕ ”
gigО< 03 {-Габаритные раз¬
меры, ммКТПВ 621
КТПВ 622
КТПВ 623
КТПВ 624
КТП 121Е
П 6-100ПМЕ 200
ПАЕ 3006310016025063102540380600960150038060ISO28063100160250631025406301000160025006301002Б04005008001280200050080200320120012001200120012001200600600202020201010Б50,50,50.10,10,10.10,080,050,030,030,150,140,220,380,120,01—0.0250,010.050,050.090.10.250.080,01-0.0250.010.0330405070264—66—825-357.59.5
14,02950,561,32,219019519524013064901202402402803451428511812026027532042019574102125на котором закреплены контактная система с непо¬
движным контактом 2 и узлом дугогашения 1, а также
сердечник электромагнита с катушкой 6 и узел вспомо¬
гательных контактов. Подвижной контакт расположен
на якоре магнитопровода 5. Главные контакты выпол¬
няются с металлокерамкческими вставками. Якорь по¬
ворачивается на призматических опорах основной ско¬
бы под действием электромагниту 6, Контакт связан
с якорем через контактодержатель 3 и может переме¬
щаться, поворачиваясь относительно точки опоры.'у щРис. 3-12. Общий вид контактора постоянадго тока-типа
КПВбОЗ. •Фиксация подвижного контакта в начальном положе¬
нии осуществляется с помощью контактной пружины 7.При повороте якоря под действием электромагнита
подвижный контакт приходит в соприкосновение с не¬
подвижным, пружина контакта сжимается. После каса¬
ния контактов вплоть до полного включения нажатие
на контакты определяется усилием, развиваемым кон¬
тактной пружиной. При отключении электромагнита
якорь под действием собственной массы и усилия от¬
ключающей пружины возвращается в исходное положе¬
ние. В контакторах с замыкающими главными контак¬
тами якорь при отключении втягивающей катушки
возвращается в исходное положение под действием
пружины. Возникающая при расхождении контактов
электрическая дуга под действием электромагнитных
сил дугогасительного устройства (дугогасительная ка¬
тушка включена последовательно с главными контак¬
тами) гасится в пределах дугогасительной камеры.Контакторы серии КПВ и КТПВ выполняются:
с передним и задним присоединением проводов главной
цепи и с передним присоединением проводов цепи
гуправления. Контакторы изготавливаются как с изоля-
дионной плитой, к которой они крепятся, так и без нее,
если они предназначены для монтажа на панелях. Втя¬
гивающие катушки контакторов выполняются на номи¬
нальное напряжение 110 и 220 В постоянного тока.
В контакторах КПВ 605 и КТПВ 624 параллельно втя¬
гивающей катушке вю1ючается разрядный резистор,
потребляющий мощность около 10 Вт. Наличие рези¬
стора резко снижает перенапряжения, возникающие
в катушке при ее отключении.Контакторы с замыкающими главными контактами
могут быть выполнены с двумя замыкающими вспомо¬
гательными контактами.Контакторы КВП 620 выполняются с одним замы¬
кающим и двумя размыкающими вспомогательными
контактами. Все контакторы допускают переборку
вспомогательных контактов, при этом число размыкаю-
щих контактов должно быть не более двух.Контакторы одной величины с замыкающими глав¬
ными контактами могут быть попарно механически
сблокированы, что исключает возможность их одновре¬
менного включения. Контакторы КПВ 600 предназнача¬
ются в основном для категории применения ДС-3 и
ДС-5, контакторы КТПВ 600 —для категорий приме¬
нения АС-3 и ■ АС-4. Данные по электрической износо-
стрйкости,-лраведенные в табл. 3-14 и 3-15,- даны для
§3-5]Электромагнитные контакторы83режимов нормальных коммутаций при номинальных ра¬
бочих токах, равных номинальным токам контакторов,
и при напрял4ении главной цепи до 220 В (КПВ) и до
380 В (КТПБ), Контакторы КПВ 620 допускают ра¬
боту в режиме редких коммутаций — при 110% homh"-
нального напряжения. При этом контакторы выдержи¬
вают количество циклов В—О не менее 50 за время
пребывания контактов во включенном состоянии в пре¬
делах от 0,1 до 1 с и интервалами между включениями
не менее 10 с.Электрическая износостойкость контакторов КПВ
600 с замыкающими главными контактами при напря¬
жении 440 В составляет 1,2* 10® циклов В—О (катего¬
рии применения ДС-2, ДС-4) и не более 1*10* циклов
(категории применения ДС-3, ДС-5).Номинальный ток вспомогательных контактов 10 А.
Коммутационная способность вспомогательных контак¬
тов при индуктивной нагрузке с коэффициентом мощ¬
ности не менее 0,4 (переменный ток) и постоянной вре¬
мени не более 0,05 с (постоянный ток) приведена
в табл. 3-16. Электрическая износостойкость вспомога¬
тельных контактов при токах, указанных в табл. 3-16,
равна 3-10* циклов В—О. При коммутации токов,
вдвое меньших номинальных, электрическая износостой¬
кость составляет не менее 1*10® циклов В—О.Таблица 3-16Коммутарйояяая способность вспомогательных контактов
контакторовРод токаПостоянныйПеременныйПостоянныйПеременныйНоминаль¬
ный ток
продол¬
житель¬
ного
режима, А10106Напряже¬
ние, В1102203S0ПО220380Включа¬
емый ток,
А2525Ш101030Отключа¬
емый ток,
А2,51,0100,40.23в) Контакторы серий КПД 100Е, КТП 100ЕКонтакторы серии КПД ЮОЕ предназначены для
коммутирования главных цепей и цепей управления
электроприводов .постоянного тока напряжением до
220 В. Контакторы КТП ЮОЕ предназначены для ком¬
мутирования цепей переменного тока напряжением до
380 В, Серия контакторов КПД ЮОЕ охватывает четы¬
ре величины по номинальному току: нулевая — 25 А;
I — 63 А; П1 — 160 А; IV — 250 А.Контакторы серии КТП ЮОЕ имеют одно исполне¬
ние с номинальным током 63 А,Основные технические данные контакторов серии
КПД ЮОЕ приведены в табл. 3-14, контакторов КТП
ЮОЕ в табл. 3-15.На рис, 3-13 показан общий вид контактора КПД
121Е.Контакторы КПД ЮОЕ и КТП ЮОЕ выполняются
в виде моноблочной конструкции. Третья и четвертая
величины контакторов КПД изготавливаются, как пра¬
вило, на изоляционном основании. Рабочее положение
контакторов — на вертикальной плоскости,, камерами
вверх. Внешнее присоединение проводов к контакто¬
рам— переднее. Контакторы имеют магнитную систему
клапанного типа, главные контакты пальцевого типа с
металлокерамическими накладками, вспомогательные
контакты мостикового типа. Поворот якоря осущест¬
вляется на призме.Контакторы снабжены дугогасительной системой
с электромагнитным гашением и камерой, имеющей
6*Рис. 3-13. Общий вид контактора типа КПД 121Е.зигзагообразную щель. Контакторы серив КПД ЮОЕ
помимо дугогасительных катушек, рассчитанных на но¬
минальные токи контакторов, могут иметь исполнения
катушек на токи 2,5; 5 и 10 А (КПД 110); 5. 10, 25 А
(контакторы I величины), 100 А (коптакторы П1 вели¬
чины).Контакты с дугогасительными катушками на токи
2,5; 5; 10 и 25 А используются, как правило, для ком¬
мутации индуктивных цепей (обмотки возбуждения
машин постоянного тока, катушки тормозных магнитов
и Т-Д.), Особенностью работы контактов в таких цепях
является наличие зоны критических токов, которая ле¬
жит в пределах примерно от 1 до 2 А для контактов
с катушкой на 10 А и от 1 до 5 А для контактов с ка¬
тушкой на 25 А при напряжении 220 В. При напряже¬
ниях до ПО В зона критических токов уменьшается.Критические токи практически отсутствуют в кон¬
тактах с дугогасительными катушками на 2,5 и 5,0 А.
Для исключения зоны критических токов при использо¬
вании контактов на 10 и 25 А необходимо обеспеч.чвать
двухполюсный разрыв коммутируемой цепи, что дости¬
гается последовательным включением двух контактов.Втягивающие катушки контакторов серий КПД
и КТП выполняются на напряжение 110 н 220 В посто¬
янного тока. Максимальное количество вспомогатель¬
ных контактов — два в любом сочетании, кроме контак¬
торов КПД 110Е, которые исполняются только с одним
замыкающим и одним размыкающим контактами или
без них. Контакторы одной величиньг (кроме нулевой)
с замыкающими контактами могут быть попарно меха¬
нически сблокированы.Контакторы серии КПД нулевой величины пред¬
назначаются для категорий применения ДС-2 и ДС-4,
контакторы остальных величин этой серии — для кате¬
горий ДС-3, ДС-5. Контакторы серии КТП ЮОЕ пред¬
назначены для категорий применения АС-3 и АС-4,Механическая и электрическая износостойкость
главных контактов приведена в табл, 3-14 и 3-15.Электрическая износостойкость главных контактов
контакторов КПД ЮОЕ, используемых в индуктивных
цепях обмоток возбуждения, тормозных магнитов
других аналогичных нагрузок в режиме коммутации
номинальных токов (определяется по номинальному то¬
ку дугогасительной катушки) при напряжении до
220 В, составляет 3-10^ циклов В—^О. Контакторы
с размыкающим главным контактом рассчит]ываются
на режим редких коммутаций двукратного номинально- ’
84Контактная аппаратура для управления крановыми электроприводами\Разд. 3■го тока при llOVo номинального напряжения. При этом
контакторы выдерживают количество циклов Б—О не
менее 50 за время пребывания во BKJa04eHH0M положе¬
нии в пределах от 0,1 до 1 си интервалами между
включениями не менее 30 с. •Коммутационная способность и электрическая из¬
носостойкость вспомогательных контактов такие же,
как и у контакторов серии КПВ 600.г) Контакторы серий КТ вООО, КТП 6000, КТ 64
и КТП 64Контакторы серий КТ и КТП предназначены для
коммутации главных цепей электроприводов переменно¬
го тока с номинальным напряжением 380 В и частотой
50 и 60 Гц.Контакторы серии КТ выполняются с втягивающи¬
ми катушками переменного тока на номинальные на¬
пряжения; 36, 110, 127, 220 и 380 В. Контакторы серии
КТП выполняются с втягивающими катушками посто¬
янного тока на номинальные напряжения: 24, 48, 110
и 220 В. Рабочее положение контакторов соответствует
креплению их на вертикальной плоскости. Внешнее при¬
соединение проводов главной цепи — переднее и заднее.Серии контакторов КТ и КТП, применяемые в кра¬
новых электроприводах, охватывают четыре величины
на номинальные токи 100, 160, 250 и 400 А. По числузамыкающих главных контактов контакторы выполня¬
ются с двумя, тремя и четырьмя контактами. Контак¬
торы КТ 64 и КТП 64 с четырьмя контактами не при¬
меняются.исс:Овные техн1тческие данные контакторов серий
КТ 11 КТП приведены в табл. 3-17.На рис, 3-14 показан общий • вид контактора
КТ 6013 с тремя главными замыкающими контактами.
Все исполнения контакторов разработаны на одних и
тех же конструктивных принципах.Контакторы имеют шихтованный магнитопровод 7
переменного тока поворотного типа. Магнитопровод
связан с главным валом 6 контактора, закреплен1гым
на двух опорах 2. На валу размещаются контактные
рычаги 4 н подвижные контакты. В контакторах на
номинальные токи 100, 160 и 250 А валы выполнены
из пластмассы, на токи 400 и 630 А — из металла. Узлы
неподвижных контактов 6, включающие контактную си¬
стему, выводные зажимы и дугогасительную систему,
монтируются на металлической рейке J, которая в свою
очередь является основанием контактора. У двухполюс¬
ных и трехполюсных контакторов электромагнит распо¬
лагается сбоку, а у четырехполюсных контакторов по¬
середине, между двумя полюсами. Узел вспомогатель¬
ных конч'актов 3 располагается ка стороне, противопо¬
ложной приводному устройству. Контакторы имеютТаблица 3-17Основные технические данные контакторов переменного тока КТ и КТПТок, АИзносостой¬
кость, 10®
циклов В—ОСобственное
время сраба¬
тывания, саО%Габаритные раз¬
меры. ммТип контроллерарежим
нормаль¬
ных ком¬
мутацийрежим
редких
комму¬
таций ■{jgэлектри¬ческаягпЁ5Ссошi§й3Масса, кгЙЙ3SXв1к£§■а1ЯS1кЕаФсгSчаgEGOJorSЧf-o1gD*sофVX£LgoS1<11goattкSiС-£всека;IT1rtgI-оS5gfjЕЗ”|i
2 О2 X
1 2j£
< н1JS1-оок3одлинаЭкСиX3тооо3аКТ 6012. (КТ 6013)
КТП 6012 (КТП 6013)10060010010008001200101510,070.040.022(3)4506,1 (7.2)
9.7 (10.9)38038<)177223■209209КТ 6014
КТП 6014,804808080064060050,50,030,040,02444508.212.7480480177223209209КТ 6022 (КТ 6023)
КТП 6022 (КТП 6023)160960160160012801200101510,060,04о.ой2(3)4506,1 (7.2)
9.7 (10.И)380380177223216216КТ 6024
КТП 6024120720120tm96060050.50.030,040,0244508.812.7480480177223216216КТ 6032 (КТ 6033)
КТП 6032 (КТП 6033)25015002502500200012001010,060.0370,0252(3)411614,5 (18)
20 (23,5)480480198276245240КТ 6034 ■
КТП 60341609601601600128060050.50<<й-0,0370,0254418022,5285S0580198276245240ДТ 6042 (КТ 6043)
КТП 6042 (КТП 6043)4002«Ю400400032<Ю60012005Ш0.S10.03О.Об0.0232(3)432034 (41)
32.5 (39,5)4») (580)
480 (580)280375293293;КТ 6044
КТП 6044280168028028002240ISO6001,21.20,030,060.023443204546,578078«280375293293XT 64-аЮО (КТ 64 3130)
-КТП 64-3120 (КТП
'«4-3150)Ш6Шtoo100080&'1200t2000Ю№5
5.I10.040,02-> (3)
- (3)44-13.2 (17,9)380326270К.Т^-3320 (КТ 64-3330)
>КТП-64-^320 (КТП
^-3330)1609601«0160012801200i■2000Ю1655110.040.022(3)•2(3)4413.2 (17.9)380326270;ЖТ^-ЖаО (КТ 64-3530)
^И“64-3520 (КТП
64-3530).250^15002S02SOO^2000-;.1200.2ПОО10W55110,0370,0252 (3)
2 (3)44-26,5 (36)
32 (41.5)450395295КТ 64-3720 (КТП 64-О/30)
КТП 64-3720 (КТП
64-3730)4002400-100 i400Ch.3200:' «Ю
12005ШS5110.060.0232 (3)
2<3)44-Й5 (72)
6S (80)480 (580)445330
^5-51Электромагнитные контакторы85Рис. 3*14. Общий вид контактора типа КТ 6013.мощную дугогасительную систему с электромагнитным
гашением. Главные контакты контакторов пальцевого
типа.По исполнению вспомогательных контактов контак¬
торы могут изготовляться с двумя замыкающими и.
двумя размыкающими контактами, допускающими в
условиях эксплуатации перестановку их с замыкающих
на размыкающие и наоборот, а также получение лю¬
бого числа замыкающих вспомогательных контактов в
пределах общего количества и до 50% размыкающих
контактов. Контакторы одной величины, установленные
друг над другом, могут быть попарно механически
сблокированы между собой. Контакторы серии КТП
отличаются от КТ только электромагнитной системой,
которая у КТП выполняется на постоянном токе.Контакторы серий КТ 64 и КТП 64 являются мо¬
дификацией контакторов соответственно КТ 6000 и
КТП 6000 и отличаются наличием дополнительных
полупроводниковых блоков, обеспечивающих высокую
коммутационную износостойкость и сводящих к мини¬
муму затраты на эксплуатацию.Г91■КЦ/г [_:□sat63ZС:|Л,ГрРис; 3-15. Схема бестоковой коммутации в одиой фазе
контактора.Принцип работы контакторов серий КТ 64 и КТП 64
виден из рис. 3-15. Параллельно главному контакту
контактора подключается полупроводниковый блок,
имеющий два тиристора Г/ и Т2, включенных встречно¬параллельно. Управление тиристоров осуществляется
при помощи трансформаторов тока и блоков управления
БУ} и БУ2. При размыкании контактов контактора или
при их отбросе во время замыкания трансформатор
Тр дает' импульс на открывание тиристоров Т/ и Г2,
которые шунтируют воздушный контактный промежу¬
ток и обеспечивают размыкание контактов, без протека¬
ния тока. После размыкания контактов и прохождения
тока через нуль тиристоры отключаются, так как в это
время трансформатор Тр не подает отпирающего им¬
пульса. В промежутках между коммутациями при лю¬
бом токе нагрузки в пределах допустимых токов тири¬
сторы мшунтированы контактами контактора. По кате¬
гории основного применения контакторы КТ и КТП
предназначены для категорий АС-3 и АС-4,Данные по электрической износостойкости, приве¬
денные в табл. 3-17, даны для режимов нормальных
коммутаций. Номинальный ток вспомогательных кон¬
тактов составляет 10 А. Коммутационная способность
и электрическая износостойкость вспомогательных кон¬
тактов такие же, как и у контакторов КПВ 600 и
КПД 100Е,д) Пускатели ПМЕ, ПАЕ, П6Пускатели серий ПМЕ, ПАЕ, П 6 предназнач:ены
для коммутирования главных цепей и цепей управления
электроприводов переменного тока (для кран-балок,
талей и других грузоподъемных машин) напряжением
до 500 В и частотой 50 и 60 Гц в сетях с относительно
небольшими токами короткого замыкания. Магнитные
пускатели могут быть использованы также для комму¬
тации катушек тормозных магнитов и обмоток двига¬
телей гидротолкателей тормозов. Пускатели на номи¬
нальные токи до 25 А целесообразно также применять
и в качестве промежуточных контакторов в сложных
схемах электроприводов. В последнем случае в наилуч¬
шей степени реализуются возможности пускателей с
точки зрения их механической и электрической износо¬
стойкости.В крановых электроприводах наибольшее примене¬
ние получили исполнения пускателей П 6-100 на 10 А,
ПМЕ 200 на 25 А и ПАЕ 300 на 40 А. Номинальные
86Контактная аппаратура для управления крановыми электроприводами[Разд. 3токи пускателей указаны при напряжении 380 В. При
напряжении 500 В номинальные токи снижаются до
значений; 6 А (П 6-100), 14 А (ПМЕ 200) и 26 А
(ПАЕ 300).Основные технические данные пускателей указан¬
ных исполнений приведены в табл. 3-15. Пускатели на
номинальные токи 10 и 25 А имеют прягкоходовую
Ш-образную магнитную систему и мостиковые главные
контакты без специального устройства дугогашения.
Магнитные пускатели на 40 А имеют поворотную маг¬
нитную систему, мостиковые контакты и дугогаше-
ние — с применением деионных решеток.Установка пускателей предусматривается на верти¬
кальной плоскости с передним присоединением провод¬
ников.Пускатели всех типов выполняются с тремя глав¬
ными замыкающими контакта.ми.Исполнение вспомогательных контактов; один за-
мыкающий (П 6-100), два замыкающих и два размыка¬
ющих (ПМЕ, ПАЕ).Вспомогательные контакты пускателей рассчитаны
на номинальное напряжение сети переменного тока
500 В частотой 50 Гц и сети .постоянного тока до
220 В.Номинальный ток вспомогательных контактов про¬
должительного режима 6 А (ПМЕ и ПАЕ) и 10 А
(П 6-100). Коммутационная способность вспомогатель¬
ных контактов приведена в табл. 3-16.Втягивающие катушки пускателей выполняются на
номинальные напряжения 24, 36, 48, 110, 127, 220, 380,
500 В переменного тока. Механическая износостойкость
пускателей составляет 5-10® циклов В—О (ПМЕ и
ПАЕ) и 10-10® циклов (П 6-100). Пускатели всех ти¬
пов рассчитаны для работы в категории применения
АС-3. Допускается также работа в категории примене¬
ния АС-4.В табл. 3-15 приведены данные по электриче¬
ской износостойкости для нормальных режимов комму¬
тации.При работе в категории применения АС-3 в режи¬
ме редких коммутаций пускатели выдерживают без
смены главных контактов не менее &0 коммутационных
циклов В—О при интервалах между циклами 10 с.Электрическая износостойкость пускателей катего¬
рии применения АС-4 при коммутации вдвое меньших
токов, чем указано в табл. 3-15, в режимах нормаль¬
ных коммутаций составляет 0,2*10® (ПАЕ, ПМЕ) и
0,3-106 (п 6-100).Электрическая износостойкость вспомогательных
контактов при коммутации токов (см. табл. 3-16) со¬
ставляет не менее ЫО^ циклов, при коммутации вдвое
больших токов, чем указано в табл, 3-16, составляет
0,2 *10® циклов.е) Рекомендации по выбору контакторовВыбор контакторов для использования в качестве
оперативных коммутационных элементов в сложных
комплектных устройствах управления осуществляется
по условиям обеспечения необходимой коммутационной
способности, теплового режима и уровня электрической
износостойкости.Для крановых электроприводов легкого режима ра¬
боты, а также для электроприводов, работающих эпи¬
зодически в кратковременном режиме длительностью не
более 15 мин, выбор контакторов производится исклю¬
чительно по пусковому току электродвигателя, который
.должен быть не более номинального тока включения
выбираемого контактора.В электроприводах продолжительного режима с
редкими включениями (контакторы защитных панелей
и т.п.) выбор контактора производится по номинально¬му току продолжительного режима и проверяется по
номинальному току включения, который должен быть
не выше наибольшего значения пускового тока дви¬
гателя.Наибольшую сложность представляет выбор кон¬
такторов для электроприводов грузоподъемных машид
с большой частотой включений и условиями коммута¬
ции, постоянно изменяющимися даже в процессе одной
грузовой операции. Для этих электроприводов выбор
контакторов осуществляется по номинальному току
включения и проверяется на обеспечение необходимого
уровня электрической износостойкости.Условия коммутации главных цепей крановых элек¬
троприводов весьма разнообразны и, как правило, не
соответствуют нормированным стандартами режимам
коммутаций АС-3, АС-4, ДС-2, ДС-3, ДС-4 и ДС-5.
В повторяющихся циклах грузовых операций можно
различить коммутации, связанные с включением непо¬
движных двигателей, отключением вращающихся дви¬
гателей, отключением двигателей в процессе пусков
(при пусковом токе) и, наконец, включением и отклю¬
чением электродвигателя для выполнения операций с
малыми скоростями.Если число включений неподвижного двигателя и
отключение вращающегося двигателя в основном соот¬
ветствует числу операций в пределах одного цикла по
переработке грузов, то число включений для регулиро¬
вания скорости может меняться в очень широких пре¬
делах, поскольку оно зависит от регулировочных
свойств электропривода. При широком диапазоне регу¬
лирования дополнительных включений может вообще
не быть, а при низких регулировочных свойствах систе¬
мы оператор вынужден методом толчковых включений
обеспечивать необходимые малые скорости перемеще¬
ния груза.Таким образом, в общем числе коммутаций глав¬
ных цепей определенные доли приходятся на комму¬
тации при вполне .определенных условиях, которые
можно заранее предвидеть. К ним относятся;1) включение электродвигателя при пусковом то¬
ке In'.2) отключение вращающегося электродвигателя при
расчетном токе нагрузки /р;3) отключение электродвигателя в процессе пуска
при токе 0,8 ^п;4) включение и отключение неподвижного электро¬
двигателя при токе, близком к расчетному току нагруз¬
ки /р, для обеспечения толчкового регулирования.Так как каждая из этих коммутационных операций
характеризуется своими параметрами износостойкости
коммутационного аппарата, то для установления фак¬
тического уровня износостойкости аппарата в системе
электропривода необходимо учесть их влияние в ком¬
плексе с применяемыми в крановом электроприводе си¬
стемами управления.С учетом сказанного усредненное значение номи¬
нального тока наиболее распространенной в крановых
электроприводах группы контакторов с механической
износостойкостью, равной 10 млн. циклов В—О, в зави¬
симости от заданной электрической износостойкости
может'быть определена по формулеki *31 — Л, — Лаh+Угде /р — расчетный наибольший ток переключения при
ступенчатом разгоне; ЛГр — значение электрической из¬
носостойкости; Л?н — нормированная электрическая из¬
§ 3-6]Реле87Таблица 3-18Параметры для определения электрической износостойкостиПараметрыПараметрич еское
релейно-контакторное
регулированне. тормо¬
жение противо-
включениемПараметрическое
релейно-контакторное
регулирование,
динамическое тормо¬
жениеКороткозамкнутые
односкоростныс и
двухскоростныс
асинхронные электро¬
двигателиАппаратура в
системах с тирис¬
торными преоб¬
разователямиИмпульсное регу¬
лированне в ро¬
торных цепях
асинхронных
электродвигателейСистемы Г—ДНаибольший3:18:16:120:110:120:1диапазон регу¬
лирования
Ах0,650,350000А,0,300.60,9510.951носостойкость для режимов, близких к расчетным;
Ai — доля числа включений с током включения /р в об-
тем числе циклов В—О; Лз — доля числа отключений
с током отключения /р в общем числе циклов В—О
прп напряжении 0.1 Vh') ki — износостойкость при вклю¬
чении тока /р; kz — износостойкость при отключении
тока /р и напряжении [/н; — износостойкость прпвых электроприводов является такой, при котором
пусковой ток составляет 3 /р. Для этого режима номи¬
нальный ток контакторов будет равен:где N—выраженная в относительных единицах элек¬
трическая износостойкость.о Р,27,0Рис. 3-16. Кривые изменения электрической износостой¬
кости контакторов постоянного тока.включении пускового тока; ki, — износостойкость при
отключении тока /р и напряжении 0,1 f/н; — износо¬
стойкость при отключении 80% пускового тока и на¬
пряжении 0,5 t/н-Коэффициенты k\—ks, для систем постоянного тока
определяются по кривым на рис. 3-16, а для систем
переменного тока — по кривым на рис. 3-17 для соот¬
ветствующих значении токов в долях номинального.Значения At н Аг в зависимости от типа системы
управления могут быть приняты согласно табл. 3-18.
Нормированную электрическую износостойкость следу¬
ет брать для условий, близких к расчетным.По приведенной выше формуле могут быть опреде-
jiCHbi значения номинальных токов контакторов при раз¬
личных условиях их использования. Наиболее харак¬
терным режимом работы контакторов в схемах крано-D.Z O/t 0,5 0,8 7,0 1,2 7,f 7,6Рис. 3-17. Кривые изменения электрической износостой-
кости контакторов переменного тока.Принимая соответственно электрическую износо¬
стойкость контакторов для режимов С. Т, ВТ равной
0,5; 1,0; 2,0 млн. циклов, получаем, что номинальный
ток контакторов должен быть не ниже 0,72; 1,14 и 1,8
расчетного тока электродвигателя.3-6. РЕЛЕа) Классификация и назначениеРеле предназначаются для применения в электро¬
приводах постоянного и переменного тока для выпол*
нения функций управления, контроля и защиты.По назначению реле делятся на следующие виды:
времени, напряжения, промежуточные, тока, тепловые.
Все виды реле (кроме тепловых), применяемые в кра¬
новых электроприводах, электромагнитного типа..
S8Контактная аппаратура для управления крановыми электроприводами[Разд. 3Реле времени выполняются с электромагнитной си¬
стемой постоянного тока и используются в цепях управ¬
ления электроприводов для реализации заданных ин¬
тервалов времени между подачей импульса на размы¬
кание катушки и переключением контактов реле.Реле напряжения изготовляются с электромагнит¬
ной системой постоянного тока н применяются в основ¬
ном в узлах защиты от перерыва питания или недопу¬
стимого снижения напряжения. Реле срабатывает и от¬
падает в определенных интервалах изменения подве¬
денного напряжения. Разновидностью реле напряжения
являются нулевые реле, у которых задается только на¬
пряжение срабатывания, а отключение гарантируется
при полном исчезновении напряжения. Реле напряже-,
ния используется также и в качестве реле контроля'
параметров, например скорости (реле ограничения ско¬
рости) в электроприводах постоянного тока, когда ка¬
тушка реле включается на зажимы якоря двигателя.
В отдельных случаях требуется, чтобы реле не только
срабатывало, но и отпадало при определенных значе¬
ниях напряжения, т. е. имело определенный коэффи¬
циент возврата (отношение напряжения отпадания к
напряжению срабатывания), ^Выпускаемые промышленностью реле напряжения,
как правило, имеют низкий коэффициент возврата в
пределах 0,2—0,3. Для его увеличения может быть при¬
менена схема форсировки, когда включение реле осу¬
ществляется при непосредственном питании катушки от
сети, а затем последовательно с катушкой с помощью
собственных размыкающих контактов вводится доба¬
вочный резистор, снижающий напряжение на катушке
реле. При такой схеме значение коэффициента возврата
может быть поднято до 0,75.^ Реле промежуточные, являющиеся разновидностью
реле напряжения, предназначаются: для передачи
команд от низковольтных органов управления к аппа¬
ратам основной цепи управления; для формирования
различных команд управления; для усиления и размно¬
жения сигналов команд; для установки в выходных це¬
пях блоков полупроводниковых преобразовательных
устройств. Промежуточные реле рассчитываются наработу в интервале напряжений 75—105% номиналь¬
ного напряжения катушки.Реле тока делятся на две группы; реле контроля
тока и реле максимального тока.Реле максимального т<жа нред»азначены для защи¬
ты электроприводов. Данные по исполнениям макси¬
мальных реле, используемых в защитных панелях, да¬
ны в § 6-1.Реле контроля тока используются, как правило, для
контроля различных цепей с точки зрения их исправно¬
сти и функционирования. Примерами таких узлов яв¬
ляются главные цепи двигателей постоянного тока и их
цепи возбуждения, цепи питания обмоток тормозов
и т.д. Реле, контролирующие цепи возбуждения, назы¬
ваются также реле обрыва поля. Реле контроля тока
выполняются с последовательными катушками, которые
включаются в контролируемые цепи. Контакты этих рс^
ле включаются или в цепь нулевой защиты, или в цепи
аппаратов, обеспечивающих отключение привода. Реле
срабатывают (включаются) при прохождении заданно¬
го расчетного тока и отпадают при прекращении тока.Тепловые реле рассмотрены в § 6-1.Общие технические требования ко всем видам реле
сформулированы в ГОСТ 8250-71.Изготовляемые промышленностью реде выполняют¬
ся для условий работы, умеренного тропического
(Т) и холодного (ХЛ) климата. Степень защиты ре¬
ле 1Р00.б) Реле серий РЭВ 800 и РЭВ 80Реле серий РЭВ 800 и РЭВ 80, выполняемые с
электромагнитной системой постоянного тока, применя¬
ются в качестве реле времени, тока, напряжения и
промежуточных. Контакты этих реле могут быть вклю¬
чены в цепи управления электроприводов постоянного
и переменного тока. Номинальное напряжение цепи
контактов 110—380 В. Основные технические данные
реле РЭВ 800 и РЭВ 80 приведены в табл. 3-19.Реле имеют блочную конструкцию. При этом сбор¬
ка и регулировка их производятся до установки на
комплектное устройство. Рабочее положение — верти¬Таблица 3-19Основные технические данные, реле серив РЭВ 80, РЭВ 800, РЭ9 570 и РЭ б'/ОТип релеРелеЧисло кон- ‘
тактовПределы регулирования выдерж¬
ки времени, с приНапряжение
(ток) втяги*
вания, % но¬
минального
напряжения
(тока)Масса,кгГабаритные размеры, ммэамв-кающнхразмы¬кающихотключениикатушкизакорачиваниикатушкиширинаглуби¬навысотаРЭВ 811Времени1I0,25—1,00,4—1.5603,5ПО180190РЭВ 812»110,8—2.50.9—2.8603.5110180190РЭВ 8131I2.0—3.52,2—3.8003,5ПО58(1190РЭВ 814»113,0—5,03,8—5.5СО3.SПО180!Я0РЭВ 815&220,25—0.60.4—0.0603.5150180200РЭВ 816V20.5—1.50.6—1.7<iO3,5150180200РЭВ 817221,2—2,51.3—2,7603,5150180200РЭВ 818222,0_3.S2.2—3.8603.5150180200РЭВ 821Напряжения11 25Ч-Й03.5ПО180190РЭВ 822Промежуточное11— 653.5ПО180190РЭВ 82ftПагфяжения*J2— 35—80;!.5150180200РЭВ 826Промежуточ кое22——65;!,Г>150(80200РЭВ 830МинимальноеГ1—--30-;-803.5ПО*180190РЭВ 81Времени 10,15—1,00,25—1,3601.565140(30РЭВ 84Напряжения1———30—601.565140130РЭВ 86Минимальное1 30—801,565140130РЭВ 570Максимальное11—.— -70—3002.5ПО—1Р0100170—1——70—3002,5ПО—ISO10(1140РЭ БЖ)Максимальное170—200■ 2,0110—190130V2b* При номинальных токах 0,5—63 А, 130 мм—при номинальных токах 60—100 А.
§3-6]Реле89кальное, контактами вниз (РЭВ 80) н вверх (РЭВ 800).
Реле пригодны для монтажа как на изоляционных, так
и на металлических плитах или рейках. Присоединение
внешних проводов к контактам и катушкам — пе¬
реднее.Неподвижная часть магнитоировода реле выполне¬
на из двух отдельных деталей— сердечника и угольни¬
ка. Поворотный якорь клапанного типа. На якоре
укреплена колодка с подвижными контактами. Узел не¬
подвижных контактов крепится на магнитопроводе.
В зависимости от установки, принятой при монтаже, ре¬
ле РЭВ 800 могут иметь два или три перестраиваю¬
щихся вспомогательных контакта.Реле Бремени выполняются с выдержкой времени,
получаемой или отключением втягивающей катушки
или шунтированием ее при отключении от источника
питания. Выдержка времени обеспечивается за счет
наведения вихревых токов в алюминиевых или медных
съемных демпферах, надеваемых на сердечник магни-
топровода. Реле типов РЭВ 81, РЭВ 811 и РЭВ 815
изготавливаются без съемных демпферов (демпфером
служит алюминиевое основание реле). Регулирование
времени отпадания якоря производится двумя способа¬
ми: грубо — толщиной прокладки из немагнитного ма¬
териала между якорем и сердечником, более точно —
натяжением пружины. Для увеличения выдержки вре¬
мени следует применять более тонкую прокладку и
ослаблять натяжение пружины.Собственное время замыкания замыкающих контак¬
тов реле времени и время подготовки реле, измеренные
при холодном состоянии реле и номинальном напряже¬
нии, составляют соответственно не более 0,3 и 0,9 с
(РЭВ 800) и 0,1-с и 0,35 с (РЭВ 80).Собственное время втягивания реле напряжения,
тока и промежуточных равно не более 0,2 с (РЭВ 800)
и 0,1 с (РЭВ 80). Собственное время отпадания состав¬
ляет не более 0,25 с (РЭВ 800) и 0,15 с (РЭВ 80).
Точность срабатывания всех реле ±107о ири окружаю¬
щей температуре 20±5°С.Для реле времени точность сраба-гавания может
быть получена при условии, что напряжение, прило¬
женное к катушке, будет не менее 60% номинального.
Напряжение (ток), при котором якорь реле отпадает,
лежит в пределах 20—35% напряжения (тока) сраба*
тывання.Коэффициент возврата реле не нормируется. Для
реле РЭВ 800 он равен ориентировочно 0,3.Реле времени, напряжения и промежуточные вы¬
полняются с втягивающими катушками на номинальное
напряжение 12, 24, 48, 110 и 220 В постоянного тока.
В системах постоянного тока катушки реле получают
питание от общих выводов цепи управления, а в систе*
мах Переменного тока — через групповые или'индиви¬
дуальные выпрямители. Мощность катушек: 25 Вт
(РЭВ 800), 20 Вт (РЭВ 81) и 16 Вт. (РЭВ 84).Реле контроля тока, которые используются в основ¬
ном как реле минимального тока, изготавливаются с
втягивающими катушками на номинальные токи; 0,6;
1; 1,6; 2,5; 4; 6; 10; 16; 25; 63; 100 А (РЭВ 800) и 0,6:
1; 1,6; 2,5; 4 А (РЭВ 86).По условиям электродинамической и термической
стойкостей втягивающие кату1Пки тока обеспечивают
протекание 10-кратного номинального тока катушки
в течение 0,5'с. Номинальный ток контактов реле 10 А.Коммутационная способность контактов при индук¬
тивной нагрузке с коэффициентом мощности не менее
0,4 (при переменном токе) и постоянной времени не
более 0,05 с (при постоянном токе) приведена в табл.3-20. Для реле РЭВ 81, РЭВ 86 и РЭВ 800 коммута¬
ционная способность нормальная, а для реле РЭВ 84
повышенная.Таблица 3-20коммутационная способность контактов реле в режиме редких
коммутацийКоммутационнаяспособностьконтактовВключаемый ток, АОтключаемый ток, Апере¬менный380Впостоянныйпере-постоянныйнов220ВMeBiibiA380Вшв220ВПовышенная10050501052Нормальная1002525102,61Пониженная '110,6Og-3Механическая износостойкость всех исполнений
составляет до 10-10* циклов Б—О при максимально
допустимом числе включений, равном 1200 в час.Электрическая износостойкость контактов реле в
режиме нормальных коммутаций (табл. 3-21) рав«а
1-10*^ циклов В—О, в режиме повышенных коммута¬
ций 0,4-10* циклов. Электрическая износостойкость ре¬
ле РЭВ 800 при коммутации цепей с током 0,25 А при
напряжении 220 В постоянного тока и постоянной вре¬
мени 0,1 с составляет 2,5-10® циклов В—О.Таблица 3-21Режимы коммутации контактов релеРежимкоммутацииБклюяаемый ток, АОтключаемый <гок, Апере-меявый380 Впостоянныйпере-мевный380Впостоянный1 нов220 ВшвшйПовышенный2Б2.512,52,51Нормальный251,250,52,51.250.5Пониженный0.60.30,60,3в) Реле серий РЭВ 570 и РЭ 570Реле РЭВ 570 и РЭ 570 электромагнитного типа.
Первые применяются в электроприводах постоянного
тока в качестве реле максимального тока мгновенного
действия, вторые— в электроприводах перемеяяого то¬
ка в качестве реле максимального тока для защиты
двигателей от перегрузки. Реле РЭВ 570 и РЭ 570 мо¬
гут быть использованы также в сложных схемах элек¬
троприводов в качестве реле контроля тока. Конструк¬
тивно принципы построения реле РЭВ 570 и РЭ 570
близки реле РЭВ 800. Основные технические данные
реле приведены в табл. 3-19. Втягивающие катушки
реле иоюлняются ва тсжи: 0,6; 1; 1,6; 2,5; 4; 6; 10;
16; 25; 40; 63; 100; 160; 250; 320; 400 и 630 А.Динамическая н термическая устойчивость втяги¬
вающих катушек такая же, как и у катушек реле
РЭВ 800.Способ присоединения внешних проводов к катуш¬
кам на ток до 63 А — передний, свыше 63 А — перед¬
ний и задний.Рабочее положение в пространстве — на вертикаль¬
ной плоскости контактами вниз.Реле РЭВ 570 имеют следующие исполнения: с
самовозвратом, с ручным возвратом (с защелкой) и с
электромагнитным возвратом. Номинальное напряже¬
ние катушек электромагнитного возврата ПО и 220 В
постоянного тока. Коэффициент возврата реле РЭ 570—
не менее 0,65, реле РЭВ 570 — не нормируется. Собст¬
венное время срабатывания реле РЭВ 570 и РЭ 570
не более 0,05 с. Точность срабатывания реле состав¬
ляет ± 10%.Номинальный ток контактов реле 10 А. Номиналь¬
ное напряжение цепи контактов U0—380 В.
90Контактная аппаратура для управления крановыми электроприводами[Разд. 3Коммутационная способность контактов (см.
табл. 3-21) у реле РЭВ 570 нормальная, у реле
РЭ 570— пониженная.Электрическая износостойкость реле РЭ 570—
ЫО® циклов В—О (в режиме пониженных коммута¬
ций), реле РЭВ 570—ЫО'^ циклов (в режиме нормаль¬
ных коммутаций).Механическая износостойкость реле составляет
ЫО* циклов (РЭВ 570) и 4*10® циклов (РЭ 570) при
максимальном числе включений в час соответственно
150 (РЭВ 570) й 600 (РЭ 570).3-7. М.\ГНИТНЫЕ КОНТРОЛЛЕРЫа) Назначение, классификация,
особенности конструкцииМагнитные контроллеры представляют собой слож¬
ные комплектные коммутационные устройства для уп¬
равления крановыми электроприводами. В магнитных
контроллерах коммутация главных цепей осуществля¬
ется с помощью контакторов с электромагнитным при¬
водом. По схеме магнитные контроллеры представля¬
ют собой комплектные устройства, обеспечивающие оп¬
ределенную программу переключений в главных цепях
при соответствующей подаче команд в цепи управле¬
ния.Команды управления подаются командоконтролле-
рами или кнопочными постами. Магнитные контроллеры
предназначаются для пуска, регулирования скорости,
торможения и отключения двигателей краново-метал¬
лургических серий переменного (асинхронных с фаз¬
ным и короткозамкнутым ротором) и постоянного
тока.По сравнению с силовыми кулачковыми контрол¬
лерами магнитные контроллеры имеют целый ряд пре¬
имуществ. К ним можно отнести следующие:1) для управления магнитными контроллерами не¬
зависимо от мощности двигателя применяются коман-
доконтроллеры, требующие малой затраты энергии со
стороны оператора;2) кулачковые контроллеры, как правило, распола¬
гаются в кабине управления около оператора. При на¬
личии в кабине нескольких таких контроллеров разме¬
ры кабины возрастают, рабочее место оператора ста¬
новится неудобным, обзор рабочего пространства со¬
кращается. При управлении магнитными контроллерами
в кабине размещаются, как правило, только малогаба¬
ритные командоконтроллсры, которые в большинстве
случаев встраиваются в кресло крановщика или уста¬
навливаются на специальном пульте управления. Это
позволяет уменьшить кабину крановщика и максималь¬
но увеличить обзор рабочего пространства;3) срок службы магнитных контроллеров при оди¬
наковых нагрузках в несколько раз выше, чем кулач¬
ковых контроллеров, в связи с тем, что коммутация в
силовой цепи осуществляется с помощью электромаг¬
нитных контакторов:4) при помощи магнитных контроллеров обеспечи¬
вается автоматизация пуска н торможения, что позво¬
ляет повысить производительность крановых механиз¬
мов даже без увеличения мощности приводного дви¬
гателя и упрощает работу оператора. При равных воз¬
можностях использования кулачковых и магнитных
контроллеров применение магнитных контролле^в яв¬
ляется целесообразным для механизмов, имеющих высо¬
кую производительность и соответственно повышенное
число включений в час;5) магнитные контроллеры обладают значитель¬
ной коммутационной способностью. В предельном
случае магнитный контроллер размыкает ток до 1000%номинального и в то же время может пропустить этот
ток в течение I с, что определяет достаточную терми¬
ческую стойкость на время срабатывания зашиты.Изготавливаемые промышленностью кранозые маг¬
нитные контроллеры объединяются в две группы: маг¬
нитные контроллеры кранов общего назначения, маг¬
нитные контроллеры кранов металлургического про¬
изводства.Для повышения надежности и износостойкости в
магнитных контроллерах переменного тока металлурги¬
ческого исполнения цепи управления, включая катуш¬
ки контакторов, выполняются на постоянном токе. Для
питания цепей управления постоянным током пользу¬
ются отдельным источником в виде статического или
вращающегося преобразователя.По конструктивным признакам магнитные контрол¬
леры подразделяются на две группы:1) с аппаратурой, монтируемой на стальных кар¬
касах (каркасно-реечная конструкция);2) с аппаратурой, монтируемой на изоляционных
досках (панельная конструкция).Размеры магнитных контроллеров, расстановка ап¬
паратуры, размещение зажимов и другие конструктив¬
ные особенности определяются условиями компоновки
контроллеров на кране и удобством их обслуживания.
Установка магнитных контроллеров в кабине управле¬
ния возможна только в отдельных случаях. Обычным
местом для них являются фермы моста, что определя¬
ет их предельный размер по высоте, который не дол¬
жен в этом случае превосходить 1,7 м. По ширине
магнитные контроллеры могут состоять из нескольких
полотен, устанавливаемых на одной раме. Имеется так¬
же конструкция магнитных контроллеров переменного
тока, которые изготавливаются не на вертикальных,
как обычно, а на горизонтальных рамах, приспособ¬
ленных для встройки в ниши балок кранов (балочная
конструкция).Магнитные контроллеры изготавливаются в от¬
крытом исполнении со степенью защиты IPOO,Защита магнитных контроллеров на кранах дол¬
жна производиться в соответствии с рекомендациями,
данными в разд. 1.Все современные конструкции магнитных контрол¬
леров имеют обслуживание с одной (передней) сторо¬
ны, Что позволяет получить минимальную площадь зо¬
ны обслуживания.Магнитные контроллеры каркасно-реечной конст¬
рукции имеют одну ступень изоляции между токове¬
дущими частями и корпусом. Такие изделия использу¬
ются для кранов общего назначения, работающих, на
открытом воздухе или в обычных производственных
помещениях. Магнитные контроллеры панельной конст¬
рукции имеют две ступени изоляции и используются в
основном для кранов металлургического производства
и других производств с большой концентрацией токо¬
проводящей пыли.В магнитных контроллерах всех типов шины и
часть монтажных проводов располагаются с задней
стороны рамы или досок, но все болтовые соединения
с аппаратами осуществляются со стороны обслужива¬
ния.Внешние провода главных цепей в магнитных конт
роллерах каркасно-реечной конструкции присоединяют
ся непосредственно к выводам соответствующих аппа
ратов, а в магнитных .контроллерах панельной конст
рукции имеются специальные выводы главной цепи
Для обеспечения обслуживания панельных конструк
ций с одной стороны применяются поворотные рамы
Рама с аппаратами может поворачиваться на 90° вок
руг вертикальной оси. После поворота рамы задняя
сторона панелей становится доступной для осмотра и
ремонта и сохраняется доступ к лицевой стороне.
§3-7]Магнитные контроллеры91При токах до 60 А все соединения главной цепи
между аппаратами выполняются проводами, при токах
свыше 60 А соединения выполняют шинами. Шины мо¬
гут быть медными или алюминиевыми, однако алюми¬
ний. используемый для шин, должен быть жестким, а
болтовые соединения должны достаточно часто подтя¬
гиваться.Изоляционные панели могут выполняться из асбес¬
тоцементных плит, пропитанных в битумном составе,
или стеклотекстолитовых плит. Внешние провода цепей
управления присоединяются к наборным рейкам, име¬
ющим маркировку и винтовые зажимы внешнего и
внутреннего монтажа. Монтаж цепей управления осу¬
ществляется многожильным проводом, причем для маг¬
нитных контроллеров общего назначения может при¬
меняться провод с полихлорвиниловой изоляцией, а для
магнитных контроллеров металлургического исполне¬
ния предпочтительно применение провода с нагрево¬
стойкой изоляцией (ПАЛ 180, РКГМ и др.). Провода
внутреннего монтажа крепят к каркасам, выполнен¬
ным иу стальных прутов, изолированных хлорвиниловы¬
ми трубками или лентами. Для укладки проводов внут¬
реннего монтажа применяются также пластмассовые
короба, укрепленные на рамах и досках магнитных конт¬
роллеров.Магнитные контроллеры изготавливаются для ра¬
боты как в условиях умеренного, так и тропического
климата. При этом контроллеры тропического испол¬
нения допускают нагрузку, примерно на 257о меньшую
по сравнению с однотипными контроллерами нормаль¬
ного исполнения.Механическая и электрическая износостойкость маг¬
нитных контроллеров определяется износостойкостью
применяемых в них электромагнитных контакторов
главной цепи.Выбор магнитных контроллеров для крановых ме¬
ханизмов определяется режимом работы механизма и
зависит от параметров износостойкости коммутацион¬
ной аппаратуры (контакторов), методика определения
которых приведена в § 3-5, е.Магнитные контроллеры должны быть рассчитаны
на коммутацию наибольших допустимых значений то¬
ка включения, а номинальный ток их /н должен быть
равен или больше расчетного тока двигателя при за-,
данных условиях эксплуатации и заданных режимах
работы механизма, т. е.Таблица 3-22-Значения коэффициента k для различных типов и исполнений
магнитных контроллеровЗначение коэффициента k в режимах§ЛС1ВТОТТипконтрол¬лера50>hugsiя й
§1Й U55“ий U5?о«го я§1^ ч <я
3“ гаgs2 о
® в§12 «0
АО ЛСМаЯ
—I К§1я
§ ^ш Sк ВТТА, ТСА3800,750,81,01.21.52,0ТА, ТСА5000,91,01.2 —К. КС3800,71.01,11,31.62*0ТСД3800,750,81,01.2 —,кед380 1,01.11,3 КСДБ380— 1.01.01.21,31.5и, ПС2200,750,81,01.21.42,0 П. ПС4400,91,01.21,52.0 ТС, ТН,3800.81,0_ ——ТСНКБК3800.80,91,0---где k—коэффициент, учитывающий режим работы ме¬
ханизма (число включений, продолжительность вклю¬
чения).Номинальный и наибольший допустимые токи маг¬
нитных контроллеров приведены в табл. 3-23—3-25.Значения коэффициента k для различных исполне¬
ний магнитных контроллеров даны в табл. 3-22.'б) Магнитные контроллеры переменного тока
серий ТА, ТСА и К, КСМагнитные контроллеры серий ТА, ТСА и К, КС
предназначены для управления крановыми асинхрон¬
ными двигателями с фазным ротором серий МТ, МТН
и применяются: К и КС в крановых электроприводах
металлургического производства, работающих в лег¬
ком (Л), среднем (С), тяжелом (Т), весьма тяжелом
(ВТ) и особо тяжелом (ОТ) режимах; ТА и ТСА — в
электроприводах кранов общего назначения легкого
(Л) и среднего (С) режимов работы.Контроллеры серий ТСА и КС используются в элек¬
троприводах механизмов подъема, а также механиз¬
мов грейфера; контроллеры серий ТА и К ~ в основ¬
ном в электроприводах механизмов горизонтального пе¬
редвижения (поворот, передвижение моста крана и те-,
лежки).Главная цепь контроллеров выполняется на напря¬
жение 220 или 380 В переменного тока. Цепь управле¬
ния — на постоянном токе напряжением 220 В (кон¬
троллеры К и КС) и на переменном токе напряжением,
равным напряжению главной цепи (контроллеры ТА
и ТСА).Все контроллеры изготавливаются в открытом ис¬
полнении (IP00) для умеренного (нормальное исполне¬
ние) и тропического (тропическое исполнение) климата
категории размещения 3. Рабочее положение контролле¬
ров — вертикальное, обслуживание с передней стороны.Основные технические данные магнитных контрол¬
леров Серий К, КС и ТА, ТСА нормального исполнения
приведены в табл. 3-23.Магнитные контроллеры К, КС, ТА, ТАЗ, ТСА,
ТСАЗ предназначены для управления одним двигате¬
лем, контроллеры ДК, ДКС и ДТА — двумя двигате¬
лями одновременно. Двухдвигательные (дуплексные)
магнитные контроллеры могут обеспечивать кратковре¬
менную работу привода на одном двигателе.Магнитные контроллеры типов ДК 61 и ДТА 161
применяются только в комплекте с контроллерами соот¬
ветственно ДК 62 и ДТА 160 или ДТА 162. При этом
в четырехдвигательном приводе применяется по одному
контроллеру ДК 61 и ДТА 161; в шестидвигательном —
по два контроллера ДК 61 и ДТА 161,Серки магнитных контроллеров ТА, ТСА и К, КС
имеют несколько исполнений, отличающихся мощностью
управляемых двигателей, которая в свою очередь опре¬
деляется величиной встраиваемых в магнитные контрол¬
леры контакторов.Магнитные контроллеры выполняются на номиналь¬
ные токи контакторов; 63, 160, 250 А (К); 160 А (ТА);
160, 250, 400 А (КС); 160, 250 А (ТСА),В качестве контакторов в магнитных контроллерах
применяются — контакторы серии КТ 6000 в ТА и ТСА
(в магнитных контроллерах ДТА 161 в роторной цепи
используются четырехполюсные контакторы серии
КТ 6000); С2рий КТП 6000 (в статоре) и КТПВ 600
(в роторе) в КС 400; серии КТП 100 в К 60 и серии
КТПВ 600 в К 160 и К 250.Магнитные контроллеры каждой величины имеют
несколько исполнений, отличающихся напряжением
главной цепи, токами катушек реле максимальной за¬
щиты. Все исполнения контроллеров обеспечивают ав¬
томатический пуск (в фу,нкции времени), реверсирова-
92Контактная аппаратура для управления крановыми электроприводами[Раза. 5Осаоввые технические данные магнитных контроллеров серий К, КС, ТА, ТСАТаблица 3-23Типконтрол¬лераРежим работы
механизмовНазначение4 •£5 ёS *-
Ев;gi<Наиболь¬
ший до-
пустииыЯ
ток вклю¬
чения, АКоличе¬
ство уп¬
равляе¬
мых. дви¬
гателейМасса,Габаритные размеры, ммширинаглуои-К63К160К250ДК63ДК61ДК621К160КС160КС250КС400ДКС160Д^^С250Механизмы передвижения
со встроенной защитойТ, ВТ для кранов
металлургического
производстваМеханизмы подъема
встроенной защитой631602506363631602502507001100250250250700110011
124; 62213523531520015021545062070010002X700100079010D07ОТ+10да900+2X7001602S04001602507001100170070011002604005005609001000700+790700-4-1000900+10001000+2X790375430470375375375430440430470Ь20430440152015201520}5201S2U15201520152015201520152015201520ТА161ДТА160ДТА161ДТА162ТА3160ТСА161ТСА3160ТСА3250Л, С для кранов об¬
щего назначенияМеханизмы передвижения
без защитыМеханизмы передвижения с
защитойМеханизмы подъема без за¬
щитыМеханизмы подъема со
встроенной защитой1601601601601601601602507007007007007007007001100124: 6
1
111111055107140110150145550tiSOS006502X4002X4002X400500+40040040040040040040040040017001700170017001700170017001700ние, торможение и ступенчатое регулирование скорости,
которое осуществляется путем изменения сопротивлв”
ння резисторов в фазах ротора.Диапазон регулирования скорости при управлении
магнитными контроллерами не превышает 3: !—4: 1.
Указанный диапазон, так же как и при управлении си¬
ловыми кулачковыми контроллерами серии ККТ 60А,
реализуется в основном за счет толчковой работы (пе¬
реключение командоконтроллера из одного положения
в другое). Толчковый режим работы несколько ухудша¬
ет условия эксплуатации, увеличивает износ коммута-днонной аппаратуры, снижает производительность ра¬
боты крана, утомляет крановщика и ухудшает энерге¬
тические показатели электропривода.Все контроллеры серий К, КС, а также контролле¬
ры ТСАЗ 160, ТСАЗ 250, ТАЗ 160 обеспечивают нуле¬
вую, максимальную и конечную защиты. В магнитных
контроллерах К 63, ДК 61, ДК 62, ДК 63 не устанав¬
ливаются электромагниты максимальных реле. Они по¬
ставляются отдельно по индивидуальному заказу в за¬
висимости от мощности и напряжения управляемых
двигателей.Таблица 3-24Основные техничесвие данные магнитных коатроллероп серяЯ ТСД. КСДБТипконтроллераРежим работы
механизмовНазначениеНоми¬
нальный
ток, АНаиболь¬
ший до¬
пустимый
ток вклю¬
чения. АКоличе¬
ство уп¬
равляемых
двигате¬
лейМасса,кгГабаритные размеры,
ммшири¬наглу¬бинавысо¬таТСД160Л, С, Т для крав ОБ
общего назначенияМеханизм подъема без за¬
щиты16070011608003151700Механизм подъема с за¬
щитойTCieQМеханизм подъема без
блоков динамического тор¬
можения и без защиты1607001754003151700ТСД250ТСД400Механизм подъема с защи¬
той2504ШПО)1700I1300SlXiIU502O0U3254001701)1700КСДБ160КСДБ250КСДБ400Т, ВТ для кранов ме¬
таллургического . про¬
изводстваМеханизмы подъема со
встроенной защитой (на дос¬
ках)1602Бв400700110017001г1550/ООlOKj2X8002X10002X1000fi40t>4(J64U152015201520
§3-7]Магнитные контроллеры93Магнитные контроллеры ТСА 161, а также все ти¬
пы контроллеров ТА и ДТА не обеспечивают макси¬
мальной и нулевой защит. Эти контроллеры могут быть
использованы только вместе с защитными панелями
ПЗКБ 160 и ПЗКБ 400,в) Магнитные контроллеры переменного тока
серий ТСД и КСДБКонтроллеры серий ТСД и КСДБ предназначены
для управления крановыми асинхронными двигателями
с фазным ротором серий МТН, MTF. Эти контроллеры
должны в перспективе полностью заменить контроллеры
серий КС и ТСА, По сравнению с последними контрол¬
леры ТСД и КСДБ обеспечивают: повышение произво¬
дительности KpairoBbix механизмов на 20—30% путем
реализации устойчивого регулирования скорости в диа¬
пазоне 8 ; 1, повышение не мекее чем в 1,3 раза ресур¬
са работы крановых магнитных контроллеров, улучше¬
ние энергетических показателей крановых электроприво¬
дов за счет снижения расхода энергии на 15—20%,
Указанные достоинства получены путем использования
принципа динамического торможения с самовозбужде¬
нием и применением тиристорных коммутаторов в си¬
ловой цепи..Основные технические данные магнитных контрол¬
леров серий КСДБ и ТСД приведены в табл. 3-24.Магнитные контроллеры изготавливаются с цепью
упра1зления на постоянном токе {ТСД 400 и КСДБ),
с цепью управления на переменном токе (ТСД 160
и ТСД 250).Напряжение силовой цепи для всех контроллеров
380 В, 50 Гц.Магнитные контроллеры ТСД, выполняемые с мон¬
тажом аппаратов на стальных каркасах (каркасно¬
реечная конструкция), предназначены для кранов об¬
щего назначения легкого, среднего и тяжелого режимов
работы.Контроллеры КСДБ предусмотрены с монтажом
аппаратов на изоляционных досках с нагревостойкой
изоляцией.Основные технические данные контроллеров серий П и ПСМагнитные контроллеры в пределах каждой серии
имеют несколько типоисполнений, отличающихся номи¬
нальным током контакторов силовой цепи. В качестве
силовых контакторов используются контакторы КТ 6000
и КТП 6000 в контроллерах ТСД и контакторы
КТПВ 600 в контроллерах КСДБ.В контроллерах КСДБ для повышения износостой¬
кости контакторов в цепи статора и ротора включены
силовые тиристорные блоки, обеспечивающие бестоко-
вую коммутацию силовых цепей.Магнитные контроллеры с цепями управления на
постоянном токе имеют максимальную защиту. Конт¬
роллеры с цепями управления на переменном токе вы^-
полняются как с защитой, так и без нее. В последнем
случае защита осуществляется общекрановой защитной
панелью. В магнитных контроллерах с защитой уста*
навливаются механизмы максимальных реле. Катушки
реле входят в комплект магнитного контроллера и по¬
ставляются отдельно в зависимости от мощности двк»
гателя.г) Магнитные контроллеры постоянного тока
серий П и ПСМагнитные контроллеры серии П и ПС предназна¬
чены для управления электродвигателями постоянного,
тока серий ДП и Д последовательного возбуждени!я
и применяются в приводах крановых механизмов режи>
мов работы Л, С, Т, ВТ и ОТ при наличии сети посто¬
янного тока.Контроллеры серии П используются в электропри¬
водах механизмов горизонтального передвижения, се¬
рии ПС — в электроприводах механизмов подъема.
В конструктивном отношении магнитные контроллеры
серии П и ПС выполняются' в двух модификациях:
с установкой аппаратов на металлических рейках (при¬
меняются на кранах общего назначения) и с устаров-
кой на изоляционных досках (применяются в основном
на кранах металлургического производства). Магнит¬
ные контроллеры изготавливаются в открытом исполне¬
нии (степень защиты IP00) для умеренного и тропичёс-Таблица 3-25Тнлконтрол¬лераРежим работыИсполнениеНазначениеНоми¬
нальный
ток, АМакси¬
мально
допусти¬
мый ток
включе¬
ния, АКоличе¬
ство уп¬
равляемых
двигате¬
лейМасса,кгГабаритные размеры,
ммшири¬наглу¬бинавысо¬таП16016045011177003601700П250Механизмы гори¬■ 25080011707903901700ДП63зонтального пере¬63Ш2807003401700ДП160движения1604502210600—7003601700ДП-250Л. С. Т, ВТ дляКаркасно-роеч-25080023102X7903901700кранов общего иа-Г1С160значения“ая конструкцил16045011207003601700ЛС250Механизмы подъ¬25080011707903901700ДПС160ема16045021722X7003601700ДПС25025080022152X7903901700П16016045011507003601700П2Б02S080012307903901700П630Механизмы гори¬6302000141010006301700дш«озонтального пере¬1604502280600—700360170(»ДП250движения250Ш24002X7903901700ДП630Л, С, Т. ВТ для,630200025602X1000630, 1700кранов мета.члур-На иэоляцкоя'гнческого произ¬ных доскахПСЛЙОводства1604601175700360птПС25и25080012007903901700ПС630Механизмы подь-63020001350КЮО6301700ДПС1«>ема16045022602X7003601700ДЛС25025080024302X7903901700ДПС6Ш)630200027802X1000630-1700
94Полупроводниковые преобразователи и регуляторы[Разд. 4кого климата. Категория размещения 3. Обслуживание
контроллеров с передней стороны, рабочее положение —
вертикальное.Основные технические данные контроллеров серии
П и ПС для умеренного климата приведены в табл.3-25. Контроллеры серии П и ПС выполняются на на¬
пряжение силовой цепи 220 В. Контроллеры на изоля¬
ционных досках имеют также исполнения на 440 В.
Однако использование кх допускается только при зна¬
чительно меньших нагрузках. Напряжение цепи управ¬
ления для всех контроллеров 220 В постоянного тока,
что обусловливается прежде всего условиями надежно¬
сти и безопасности обслуживания.По номинальному току контакторов силовой цепи
магнитные контроллеры выполняются на 63, 160, 250и 630 А. В качестве силовых контакторов используются
контакторы серии КПВ 600 в К0т»р©‘ллерах каркасно¬
реечной конструкции и серии КПД 100 в контроллерах
на изоляционных досках.Для управления двумя двигателями предусмотрены
контроллеры типа ДП (для механизмов передвижения)
и ДПС (для механизмов подъема). Допускается кратко¬
временная работа с одним электродвигателем, для чего
на контроллерах установлены переключатели. Работа
в этом режиме возможна только как аварийная (разо¬
вый спуск груза).Все контроллеры постоянного тока обеспечивают
пуск, реверсирование, торможение, устойчивый диапазон
регулирования скорости 4 ; 1—5 ; 1 и имеют максималь¬
ную и нулевую защиты.РАЗДЕЛ ЧЕТВЕРТЫЙПОЛУПРОВОДНИКОВЫЕ ПРЕОБРАЗОВАТЕЛИ И РЕГУЛЯТОРЫ4-1. ОБЩИЕ ПОЛОЖЕНИЯВ крановых электроприводах все более широкое
применение получают устройства с использованием по¬
лупроводниковых элементов. С помощью таких уст¬
ройств представляется возможным создать принци¬
пиально новые системы электроприводов, отличающиеся
более высокими качественными показателями, чем элек¬
троприводы, выполненные на основе релейно-контактор¬
ной аппаратуры. В настоящее время для крановых
приводов отечественной промышленностью налажено
серийное производство полупроводниковых преобразова¬
телей постоянного тока, преобразователей частоты и по¬
лупроводниковых регуляторов напряжения переменного
тока. Силовая часть этих преобразователей и регулято¬
ров выполнена на основе применения полупроводнико¬
вых диодов и тиристоров. Принципы построения и ос¬
новные технические данные указанных видов устройств
рассмотрены в последующих параграфах данного раз¬
дела.4-2. ТИРИСТОРНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯТиристорные регуляторы напряжения представляют
собой устройства, предназначенные для регулирования
частоты вращения и момента асинхронных двигателей.
Регулирование частоты вращения и момента произво¬
дится за счет изменения напряжения, подводимого к
статору, и осуществляется изменением угла открытия
тиристоров. Такой способ управления асинхронным дви¬
гателем получил название фазового управления. Этот
способ является разновидностью параметрического
(амплитудного) управления.Тиристорные регуляторы напряжения могут выпол¬
няться как с замкнутой, так и с разомкнутой системой
регулирования. Регуляторы с разомкнутой системой не
обеспечивают удовлетворительного качества процесса
регулирования частоты вращения. Основное их назна¬
чение— регулирование момента для получения нужно¬
го режима работы привода в динамических процессах.Тиристорные регуляторы с замкнутой системой ре¬
гулирования используются, как правило, с отрицатель¬
ной обратной связью по скорости, что позволяет иметь
достаточно жесткие механические характеристики при¬
вода в зоне малых частот вращения.Наиболее эффективно использование тиристорных
регуляторов для регулирования частоты вращения и
момента асинхронных Двигателей с фазным ротором.а) Силовые цепи тиристорных регуляторовНа рис. 4-1, а—д показаны возможные схемы
включения выпрямительных элементов регулятора в
одной фазе. Наиболее распространенной из них являет¬
ся схема на рис, 471,0. Она может быть использована
при любой схеме соединения обмоток статора. Допу¬
стимый ток через нагрузку (действующее значение) в
этой схеме в режиме непрерывного тока равен:я/н < /т./2где /т — допустимое среднее значение тока через тири¬
стор.Максимальное прямое и обратное напряжения ти¬
ристораksaal^2 t/g,где Азап — коэффициент запаса, выбираемый с учетом
возможных коммутационных перенапряжений в схеме;
Uc—действующее значение линейного напряжения
сети.-м-чо--лIю ТIРис. 4-1. Схемы силовых цепей тиристорных регуляторов
напряжения.
§4-2]Тиристорные регуляторы напряжения95В схеме на рис. 4-1,6 имеется только один тири¬
стор, включенный в диагональ моста из неуправляемых
диодов. Соотношение между токами нагрузки и тири¬
стора для этой схемы имеет вид;2V2~/т.Неуправляемые диоды выбираются на ток вдвое
меньший, чем для тиристора. Максимальное прямое на¬
пряжение на тиристоре^запОбратное напряжение на тиристоре близко к нулю.Схема на рис. 4-1,6 имеет некоторые отличия от
схемы на рис. 4-1, о по построению системы управле¬
ния. В схеме на рис. 4-1, а управляющие импульсы на
каждый из тиристоров должны следовать с частотой
питающей сети. В схеме на рис. 4-1,6 частота импуль¬
сов управления вдвое больше.Схема на рис. 4-1, в, состоящая из двух тиристоров
и двух диодов, по возможности управления, загрузке
по току и максимальному прямому напряжению тири¬
сторов аналогична схеме на рис. 4-1, а.Обратное напряжение в этой схеме из-за шунтиру¬
ющего действия диода близко к нулю.Схема на рис. 4-1, г по току и максимальному пря¬
мому и обратному напряжению тиристоров аналогична
схеме на рис. 4-1, а. Схема на рис. 4-1, г отличается от
рассмотренных требованиями к системе управления по
обеспечению необходимого диапазона изменения угла
регулирования а тиристоров. Если угол а отсчитывать
от нуля фазного напряжения, то для схем на рис.4-1,0—в справедливо соотношение <р<са<с150°, где
Ф — фазовый угол нагрузки. Для схемы на рис. 4-1, г
аналогичное соотношение приобретает вид; ф<Са<210°.Необходимость увеличения диапазона изменения
^?:ла а усложняет систему управления тиристорами.
СхеЬга на рис. 4-1, й может быть применена при вклю¬
чении обмоток статора в звезду без нулевого провода
и в треугольник с включением выпрямительных элемен¬
тов в линейные провода. Область применения указан¬
ной схемы ограничена нереверсивными, а также ревер¬
сивными электроприводами с контактным реверсом.Схема на рис. 4-1, д по своим свойств^к аналогич¬
на схеме на рис. 4-1, о. Ток симисфора здесь равен току
нагрузки, а частота импульсов управления равна двой¬
ной частоте питающего напряжения. Недостаток схемы
на симисторах — значительно меньше, чем у обычных
тиристоров, допустимые значения du}dt и dijdt.Для тиристорных регуляторов наиболее рациональ¬
на схема на рис, 4-1, а с двумя встречно-параллельно
включенными тиристорами.Силовые схемы регуляторов выполняются с встреч¬
но-параллельно включенными тиристорами во всех трех
фазах (симметричная трехфазная схема), в двух и од¬
ной фазах двигателя, как показано на рис. 4-1, е, зус и з
соответственно.В регуляторах, применяемых в крановых электро¬
приводах, наибольшее распространение получила сим¬
метричная схема включения, показанная на рис. 4-1, е,
которая характеризуется наименьшими потерями от
высших гармонических токов. Более высокие значения
потерь в схемах с четырьмя и двумя тиристорами опре¬
деляются несимметрией напряжения в фазах двигателя.б) Основные технические данные
тиристорных регуляторов серии РСТТиристорные регуляторы серии РСТ представляют
собой устройства для изменения (по заданному закону)
напряжения, подводимого к статору асинхронного дви¬гателя с фазным ротором. Тиристорные регуляторы се¬
рии РСТ выполняются по симметричной" трехфазной
схеме включения (рис. 4-1, е). Применение регуляторов
указанной серии в крановых электроприводах позволя¬
ет осуществлять регулирование частоты вращения в
диапазоне 10:1 и регулирование момента двигателя в
динамических режимах при пуске и торможении.Тиристорные регуляторы серии РСТ выполняются
на длительные токи 100, 160 и 320 А (максимальные
токи соответственно 200, 320 и 640 А) и напряжение
220 и 380 Б переменного тока. Регулятор представляет
собой собранные на общей раме три силовых блока (по
числу фаз встречно-параллельно включенных тиристо¬
ров), блок датчиков тока и блок автоматики. В сило¬
вых блоках используются таблеточные тиристоры с
охладителями из тянутого алюминиевого профиля.
Охлаждение воздушное — естественное. Блок автомати¬
ки— единый для всех исполнений регуляторов. Тири¬
сторные регуляторы выполнены со степенью защиты
IP00 и предназначены для установки на стандартные
рамы магнитных контроллеров типа ТТЗ, которые по
конструкции аналогичны контроллерам серий ТЛ и ТСА
(см. § 3-7), Габаритные размеры и масса регуляторов
серии РСТ указаны в табл. 4-1.Таблица 4-1Габаритные размеры и масса регуляторов напряжения
серии РСТТипрегулятораГабаритные размеры, ммМасса, кгширинаглубина 1[ высотаРСТ110600305905102РСТ2Ш600365975120РСТ3106004501380215В магнитных контроллерах ТТЗ установлены кон¬
такторы направления для реверсирования двигателя,
контакторы роторной цепи и другие релейно-контакт¬
ные элементы электропривода, осуществляющие связь
командоконтроллера с тиристорным регулятором.
Структура построения системы управления регулятора
видна из функциональной схемы электропривода, пока¬
занной на рис. 4-2. Трехфазный симметричный тири¬
сторный блок Т управляется системой фазового управ¬
ления СФУ. С помощью командоконтроллера КК в ре¬
гуляторе производится изменение задания скорости
БЗС. Через блок БЗС в функции времени осуществля¬
ется управление контактором ускорения /СУ2 в цепи
ротора. Разность сигналов задания и тахогенератора
ТГ усиливается усилителями У/ и УЗ, К выходу усили¬
теля УЗ подключено логическое релейное устройство,
имеющее два устойчивых состояния: одно соответствует
включению контактора направления вперед КВ, вто¬
рое — включению контактора направления назад /СЯ.Одновременно с изменением состояния логического
устройства реверсируется сигнал в цепи управления РУ.
Сигнал с согласующего усилителя У2 суммируется
с сигналом задержанной обратной связи по току ста¬
тора двигателя, который поступает с блока токоограни-
чения ТО ч подается на вход СФУ, На блок логики БЛ
воздействует также сигнал с блока датчиков тока ДТ
и блока наличия тока НТ, запрещающий переключение
контакторов направления под током. Блоком БЛ осу¬
ществляется также нелинейная коррекция системы ста¬
билизации частоты вращения для обеспечения устойчи¬
вости работы привода. Регуляторы могут быть исполь¬
зованы в электроприводах механизмов подъема и пере¬
движения.Регуляторы серии РСТ выполнены с системой
ограничения тока. Уровень токоограничения для защи¬
ты тиристоров от перегрузок и для ограничения мо¬
96Полупроводниковые преобразователи и регуляторы[Разд, 4мента двигателя в динамических режимах плавно из¬
меняется от 0,65 до 1,5 номинального тока регулятора,
уровень токоограыичения для максималыю-токовой за¬
щиты— от 0,9 до. 2,0 номинального тока регулятора.
Широкий диапазон изменения уставок защиты обеспе¬
чивает работу регулятора одного типоразмера с двига¬
телями, отличающимися по мощности примерно в2 раза.4-3. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВВ крановых асинхронных электроприводах использу¬
ются два типа преобразователей частоты: с непосредст¬
венной связью (ПЧН) и с промежуточным звеном по¬
стоянного тока инверторного типа (ПЧИ),При этом можно выделить два основных направле¬
ния использования указанных преобразователей; в си¬
стемах с высокими требованиями к диапазону регулиро¬
вания, в которых преобразователи обеспечивают частот¬
ное регулирование только в зоне малых скоростей, и в
электроприводах высокопроизводительных крановых ме¬
ханизмов с применением только частот1юго регулирова¬
ния (в том числе и в зоне скоростей выше номинальной),
обеспечивающего возможность выбора оптимального ре¬
жима работы механизма при высоком уровне реализа-
дии )^тано елейной мощности,а) Преобразователи частоты с непосредственной связьюПринцип действия, силовые схемы, В ПЧН напря¬
жение выходной частоты формируется из отрезков си¬
нусоид питающего напряжения, как это показано на
рис, 4-3 для одной фазы с активной нагрузкой. Каждая
фаза ПЧН состоит из двух встречно-включенных групп
вентилей, формирующих полуволны напряжения на на¬
грузке. Частота выходного напряжения определяется
длительностью промежутков времени пропускания тока
обеими группами, а гашение вентилей происходит в мо¬
мент смены полярности на них. Вследствие этого частота
на выходе ПЧН ниже частоты питающего напряжения.
Регулирование напряжения осуществляется изменением
угла открывания вентилей.В ПЧН сравнительно просто решается вопрос обес-.
печения режима рекуперативного торможения и цирк^
ляции реактивной энергии путем соответстр'т, 'его
управления прямой и обратной группами венти Ipi
этом возможно как совместное, так и раздельное , .Трав¬
ление группами. Применение совместного управления,
как в преобразователях постоянного тока, приводит к
возникновению уравнительных токов и к необходимости
введения в силовую схему уравнительных реакторов для
снижения указанных токов. Реализация раздельного
управлег схемах ПЧН сопряжена со значительными
трудное' т' i требует примене^1ия датчиков тока.Для использования простых силовых схем без лиш¬
них реакторных элементов н упрощения схемы управле¬
ния в ПЧН для крановых электроприводов используется
программное управление, при котором заранее задаются
фиксированные значения времени работы каждой из
групп в выпрямительном и инверторном режимах и пау¬
за между подачей импульсов на тиристоры обеих групп./СЛ — командоконтроллер; ТГ — хахогенератор; КЛ. КВ — кон¬
такторы каправлення; БЗС — блок задания скорости; БЛ — блок
логики; У/. У2. УЗ — усилители; СФУ — система фазового управ¬
ления; Д7' —датчик тока; ИТ — блок наличия тока; ГО —блок
токоограничения; МТ — блок защиты; /СУ/, КУ2 — контакторы
ускорения; КЛ — линейный контактор: Р — рубильник.Чувствительность системы наличия тока составляет5-—10 А действующего значения тсжа в фазе. В регу¬
ляторе предуевйотрены также защиты: нулевая, от ком¬
мутационных перенапряжений, от исчезновения тока
хотя бы в одикй из фаз (блоки НТ и МТ), от помех
радиоприему. Быстродействующими плавкими предохра¬
нителями типа ПНБ 5М осуществляется защита от то¬
ков короткого замыкания.Рис. .4-3. Формирование кривой выходного
ПЧН.напряженйя
Тиристорные npeo6paao6uTf(Au частоты97-4аш .-tf -tfРис. 4-4, Схемы ПЧНа— нулевая схема с 18 тиристорами; б — мостовая схема с 18 тиристорами; Гр — тргасформатор: Р —реактор; ЯС~ развер¬
нутая схема подклю>1ення тйрвсторов в одной фазе.Силовые схемы ПЧН выполняются в соответствии
с предъявляемыми к ним требованиями по мощности,
верхнему пределу выходной частоты и особенной-ям по¬
строения системы электропривода (см. разд, 10). При
этом серийно выпускаемые промышленностью ПЧН вы-
1/Ьлня»'1гся по нулевой или мостовой схемам на 18 тири¬
стор.' Первая из этих схем имеет наиболее простую
cxeM’j управления, однако в связи с наличием нулевого
провода она требует специального согласующего транс¬
форматора, который одновременно выполняет функции
токоограннчения в аварийных режимах.В ПЧН мостового типа значительно усложняется
схема управления, однако отпадает нео^^Ердимость в
трансформаторе, а для токоограничениэяк .меняется
входной реактор. Для систем большой moi исполь¬зуются ПЧН мостового типа на 36 тиристорах. Однако
серийно такие ПЧН промышленностью не выпускаются.
Силовые,, схемы ПЧН, выпускаемые промышленностью,
приведены на рис. 4-4. Схемы регулирования ПЧН свя¬
заны с построением электроприводов и рассматривают¬
ся в разд. 10,Выходные характеристики ПЧН. Выходная частота
ПЧН /г связана с частотой питающего напряжения при
отсутствии паузы между работой анодной и катодной
групп вентилей соотношениемт2(п—1) + т(4-1)где п — число выпрямленных полуволн основной частоты
в кривой выходного напряжения; т — число тактов вы¬
прямления,В соответствии с (4-1) для трехфазного ПЧН по ну¬
левой схеме (л=3; т~3) /2=0,4 /, а для ПЧН мостово¬
го- типа (п=3; т=6) f2=0,6fi. Из (4-1) также видно,
что при отсутствии указанной паузы выходная частота
является дискретной ввдичиной зависимой от от и «.Кривая выходного напряжения ПЧН в общем слу¬
чае имеет сложную форму, зависящую от принятого ви¬
да модуляции, угла, открывания вентилей о, соотноше-
7—839ния между входной и выходной частотами, числа тактов
m выпрямлшня; числа фаз. источника питания, характе¬
ра и параметров нагрузки. В выпускаемых промышлен¬
ностью ПНЧ модуляция осуществляется по наиболее
простой в реализации прямоугольной модуляции. В этом
случае действующее значение выходного напряжения
ПЧН определяется выраженнеьг2.71иад —{/1фС05Фпаузsin — [cos а — (i/g* -f Ur^)],m(4-2)где £/1ф—действующее значение питающего напряже¬
ния; <рпа]?з — угол, соответствующий времени паузы на
частоте выхода; £/f*=(I-^os у)/2; Ur* — относительное
падение напряжения соответственно в индуктивных и ак¬
тивных сопротивленийх ПЧН; v — угол коммутации вен¬
тилей.Действующее знаадййе первой гармоники фазного
выходного напряженЛ НПЧVTUiA XXsin2птcos 2а(4-3)Действующие значения первых ■ гармоник входного
тока НПЧ и тока /24, нагрузки связаны меж'ду собой
приближенной формулой '4т ', л/2фя?sin — /1Ф cos 9 cos а.т(4-4)а действующее значение тока нагрузки определяетсявыражением V^2 m . я , .■^2д ~ 3' Sin _ -^1ф ^mXcosa2 1—ехр(-я 1 + ехр(—nctgqj)nctg<p) , г tg<p .(4-5)
98Полупроводниковые преобразователи и регуляторы{Pasd, 4б) Преобразователи частотысо звеном постоянного тока инверторного типаПринцип действие, силовые схемы ПЧИ. Основным
узлом Б ПЧИ рассматриваемого типа является автоном¬
ный инвертор (АИ), который преобразует выпрямленное'
напряжение в трехфазное напряжение регулируемой ча¬
стоты. Несмотря на большое разнообразие трехфазных
тиристорных инверторов, все они строятся на основе
трехфазной мостовой схемы включения тиристоров. Пре¬
образование постоянного напряжения питания в трех¬
фазное напряжение необходимой частоты осуществляет¬
ся переключением с заданной частотой и определенной
последовательностью тиристоров в плечах моста. Не¬
отъемлемой частью тиристорных инверторов являются
устройства принудительной коммутации, предназначен¬
ные для запирания тиристоров.В соответствии с требованиями, предъявляемыми к
электроприводам с рассматриваемыми типами преобра¬
зователей, последние должны обеспечивать глубокое
двухзонное регулирование скорости, режим рекуператив¬
ного торможения с передачей энергии в сеть, формиро¬
вание требуемых механических характеристик. Наиболее
полно указанным требованиям удовлетворяют схемы
ПЧИ, представленные на рис. 4-5. На рис. 4-5, а показа¬
на схема ПЧИ с АИ напряжения, по которой построены
выпускаемые промышленностью ПЧИ, В состав ПЧИ
входят АИ с группой вентилей прямого ПТ и обратного
ОТ токов, управляемый выпрямитель УВ с LC-фильтром
и ведомый ВИ инвертор. Выпрямитель осуществляет ре¬
гулирование напряжения ПЧИ. а ведомый инвертор
обеспечивает пропуск реактивной и активной энергии
двигателя в питающую сеть. Автономный инвертор соб¬
ран по наиболее простой схеме с междуфазовой комму¬
тацией тиристоров при законе коммутации и от¬
дельным источником подзаряда коммутирующих конден¬
саторов. Область применения таких ПЧИ вследствие их
сложности — электроприводы мощностью от 50 кВт и
выше.На рис. 4-5, 6 представлена схема ПЧИ с АИ тока,
который находится в стадии промышленного освоения.
Преобразователь имеет помимо АИ только У В С. L-филь-
тром большой индуктивности, и, как видно из схемы, его
силовая схема намного проще ПЧИ с АИ напряжения,
соответственно ниже масса и габариты ПЧИ. Однако
такой ПЧИ может работать только в замкнутой системе
частотно-токового управления. При этом разработанные
в настоящее время схемы требуют наличия датчиков
скольжения, что значительно снижает надежность элект¬
ропривода. Следует также отметить, что в ПЧИ с АИ
напряжения в отличие от ПЧИ с^АИ тока возможнасовмещение в одном реакторе функций фильтра и токо-
ограничения, поэтому преимущества ПЧИ с АИ тока по
массогабаритным показателям с ростом мощности элект¬
ропривода снижаются и областью их применения для
крановых' систем являются электроприводы мощностью
от 25 до 80 кВт.Выходные характеристики ПЧИ. Для приведенной
выше схемы ПЧИ с АИ напряжения при законе комму¬
тации Y“120° характерным является зависимость фор¬
мы выходного напряжения от параметров нагрузки. При
этом справедливы следующие соотношения между на¬
пряжением постоянного тока Ud на входе АИ и фазным
(Уф напряжением двигателя:/Г kuUa;я(4-6)=я ”^/^2 — 5 cos -f VTsin 5vj. ; (4-7)40 — 5Vi=tg(plna — 2(4-8)
(4-9)где Vi — угол одновременной работы вентилей прямой и
обратной групп, зависящий от угла ф нагрузки и изме¬
няющийся в пределах a<Yi<Ji/3. При cos9<i0,55 сог¬
ласно (4-7) ku—\, а при cos(p=0 ku= V^3/2,Фазный ток двигателя определяется выражением/ф —f/ф/гф, (4-10)где гф — сопротивление фазы схемы замещения двига¬
теля, а постоянный ток на входе АИ и фазный ток дви¬
гателя без учета влияния высших гармоник связаны со-'
отношениемId ~ —^icosq).я(4-11)Для ПЧИ с АИ тока справедливы следующие соот¬
ношения: '=г — f/ф COS (р;:/^ = ^-/б'{/фС0£Э +СРf/ф (cos S — COS ~ 2 fd Ха,(4-12)(4-13)(4-1Рис. 4-5. Схемы ПЧИ.а—с инвертором напряжения; б —с инвертором тока; УВ— управляемый выпрямитель; ЛЯ — автономный инвертор; ПТ и ОТ—
Группы векти/:ей прямого и обратного токов; 1ф. Сф—реактор и конденсатор фильтра; Вй —ведомый инвертор, ЛС —датчик
скольжения; Ф/7 — функциональный преобразователь; БУВ — блок уаравления выпрямителем.
Тиргюторные преобразователи постоянного тока991ф=-/б(4-15)/ф = (/ф/гф» (4-16)где Ха — индуктивное сопротивление анодной цепи; р —
угол опережения открытия вентилей; б — угол отключе¬
ния инвертора, отсчитываемый от момента окончания
коммутации тока до изменения полярности напряжения
на вентиле.Несинусоидальность кривой выходного напряжения
ПЧИ приводит к возяикновению высших гармонических
токов. При этом мгновенное значение тока двигателя
может быть предстарлено выражением,к>\где — первая гармоника тока двигателя, аОО’— сумм,а токов высших гармоник; ^=2лЫ >к>1/г — частота выходного напряжения .Сумма токов высших гармоник, определяется пара¬
метрами схемы замещения двигателя в режиме коротко¬
го замыкания и может быть найдена разложением в ряд
кривой выходного напряжения. Высшие гармонические
напряжения и тока практически не оказывают влияния
на среднее значение электромагнитного момента маши¬
ны, однако увеличивают на 10—12% потери в двигателе.в) Технические данные лреобразоват|ьпей частоты
для крановых ^ектроприводовДля крановых электроприводов промышленностью
выпускаются ПЧН мощностью 16, 40 и 80 кВт типа ТТС,
обеспечивающие управление асинхронными двигателями
мощностью от 2 до 80 кВт, и ПЧН с АИ напряжения
для электроприводов мощностью от 50 до 80 кВт типаПЧИ. В стадии промышленного освоения находятся
ПЧИ с АИ Тока для электроприводов мощностью 25—
60 кВт. Преобразователи частоты обеспечивают плавный
частотный пуск, торможение и реверс двигателей.Преобразователи ТТС 16 и ТТС 40 выполнены по
нулевой схеме, а ТТС 80 —по мостовой схеме на 18 ти¬
ристорах. Преобразователь ТТС 80 может работать в
режиме бестокового коммутатора. Преобразователи ти¬
па ПЧИ выполнены по рассмотренным выше схемам.Технические данные преобразователей приведены в
табл. 4-2.4-4. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
ПОСТОЯННОГО ТОКАТиристорным преобразователем постоянного тока
(ТП) является устройство для преобразования перемен¬
ного тока в постоянный с регулированием по заданному
закону выходных параметров (тока и напряжения). Ти^
ристорные преобразователи предназначаются для пита¬
ния якорных цепей двигателей и их обмоток возбуж¬
дения. ,Преобразователи состоят из следующих основных
узлов: трансформатора или токоограничивающего реак¬
тора на стороне переменного тока, выпрямительных бло¬
ков, сглаживающих реакторов, элементов сйстемы управ¬
ления, защиты и сигнализации. Трансформатор осущест¬
вляет согласование входного и выходного напряжений
преобразователя и (так же, как и токоограничивающий
реактор) ограничение тока короткого, замыкания во
входных цепях. Сглаживающие реакторы предназнача¬
ются для сглаживания пульсаций выпрямленных напря¬
жения и тока. Реакторы не предусматриваются, если ин¬
дуктивность нагрузки достаточна для ограничения ‘пуль¬
саций в заданных пределах.Применение ТП постоянного тока позволяет реали¬
зовать практически те же характеристики электроприво¬
да, что и при использовании вращающихся преобразова¬техннческне данные преобразователей частоты для крановых электроприводовТаблица 4-2Типпреобра¬зователяСхема преобразо-
]?ателяДиапазок иамененияТок, АСостав комплектаГ абарнтные
размеры (вы¬
сотах шири¬
нах глубина),
ммМасса,кгпервой гар¬
моники капря*
хсеиия, Ввыходной
частоты, Гцв режиме
ПВ=40%макси¬мальныйТТС80ПЧН по мостовой
схеме25—230 с вы¬
ходом на на-
пряжение
сети '2—30 с выхо¬
дом на часто¬
ту сети180360Силовой шкаф
с блоками уп¬
равления1615X770X365117SX770X3551155X770X292270175120ТГС40
ТГС16 ■ПЧН по нулевой
схеме25-1S03—2013563270135ПЧИ80ПЧИ с АИ напря¬
женияt20—340S—SO под
нагрузкой;5—75 иа хо¬
лостых ходах180360Силовой ижаф;
шкаф управления;
шкаф защиты;
реактор1615X770X3651615X770X3651155X770X295685X675X50037027012055ПЧИ60ПЧИ с АИ тока135270Силовой шкаф с
блоками управ¬
ления; реактор
фильтра1615X770X3658<=5Х675Х50030085пчизо63135Силовой шкаф с
блоками управ¬
ления: реактор
фильтра1175X770X355
685><675X50017055Примечание. Цифры в обозначении типа преобразователей ТТС обозначают потребляемую мощность при его вомя<
нальных выходных параметрах, а в обоэначевии преобразователей ПЧИ —его выходную мощность в режиме ПВ=>40%.7*
МОПолупроводниковые преобразователи и регуляторы[Разд. Ателей в системах Г — Д, т. е. регулировать в широких
пределах частоту вращения и момент двигателя, полу¬
чать специальные механические характеристики и нуж¬
ный характер протекания переходных процессов при пу¬
ске, торможении, реверсе и т. д. Однако по сравнению
с вращающимися статические преобразователи имеют,
целый , ряд известных преимуществ, поэтому в новых
разработках крановых электроприводов предпочтение от¬
дается статическим преобразователям. Тиристорные пре¬
образователи постоянного тока наиболее перспективны
для применения в электроприводах крановых механиз¬
мов мощностью свыще 50—100 кВт и механизмов, где
требуется получение специальных характеристик приво¬
да в статических и динамических режимах.а) Схемы выпрямления, принципы построения
силовых целей преобразователейТиристорные преобразователи выполняются с одно¬
фазными и многофазными схемами выпрямления,
В табл. 4-3 приведены некоторые расчетные соотноше¬
ния основных схем выпрямления. Одна из таких схем
показана на рис. 4-6, о. Регулирование выпрямленного
напряжения Vd и том 1а производится путем измене¬
ния угла управления а. На рис. 4-6, б~д для примера
показан характер изменения токов и напряжений в
трехфазной нулевой схеме выпрямления при активно¬индуктивной яагрузке {L<f=oo). Показанный на диа¬
граммах угол Y (угол коммутации), характеризует пе¬
риод времени, в течение которого ток протекает одно¬
временно по двум тиристорам. Зависимость среднего
значения выпря.мленного напряжения Ua от угла регу¬
лирования а называется регулировочной характери¬
стикой.В табл. 4-3 даны законы изменения этого напряже¬
ния в режимах прерывистого и непрерывного токов.
В приведенных зависимостях Vdo — среднее выпрямлен¬
ное напряжение при <х=0.Для нулевых схем это напряжение определяется из
выражения/2t/smРис. 4-6. Трехфазная нулевая схема (а) и диаграммы из¬
менения тока и напряжения в выпрямительном (б", в) и
инверторном (г, d) режимах. ' ^где m — число фаз вторичной обмотки трансформатора;‘ — действующее значение фазового напряжения вто¬
ричной обмотки трансформатора.Для мостовых схем l/do в 2 раза выше, так как эти
схемы эквивалектны последовательному включению
двух нулевых схем.Однофазные схемы выпрямления используются, как
правило, в цепях с относительно большими индуктив¬
ными сопротивлениями. Это цепи независимых обмоток
возбуждения двигателей, а также якорные цепи двига¬
телей небольшой мощности (до 10—15 кВт). Много¬
фазные схемы используются в основном для питания
якорных цепей двигателей мощностью свыше 15—
20 кВт и реже для питания обмоток возбуждения. По
сравнению с однофазными многофазные схемы выпрям¬
ления имеют целый' ряд преимуществ. Основными из
них являются: меньшие пульсации выпрямленного на¬
пряжения и тока, лучшее использование трансформато¬
ра и тиристоров, симметричная нагрузка фаз питающей
сети.В ТП постоянного тока, предназначенных для кра¬
новых приводов мощностью свыше 20 кВт, наиболее
оправдано применение трехфазной мостовой схемы. Это
обусловлено хорошим использованием трансформатора
и тиристоров, низким уровнем пульсаций выпрямленно¬
го напряжения и тока, а также простотой схемы и кон¬
струкции трансформатора. Известным достоинством
трехфазной мостовой схемы является и то, что она'мо¬
жет быть выполнена не с трансформаторной связью,
а с токоогр^ничиваюЩим реактором, габариты которого
существенно меньше габаритов трансформатора.В трехфазной нулевой схеме условия использова¬
ния трансформатора при обычно применяемыд группах
соединения ** Д/а хуже из-за наличия постоян¬
ной составляющей потока. Это приводит к увеличению
сечения магнитопровода и, следовательно, расчетной
мощности трансформатора- Для исключения постоян¬
ной составляющей потока применяют соединение вто¬
ричных обмоток трансформатора в «зигзаг», что также
несколько увеличивает расчетную мощность. Увели¬
ченный уровень, пульсаций выпрямленного напряжения
вме1сте с отмеченным выше недостатком ограничивает
использование трехфазной нулевой схемы.Шестифазная схема с уравнительным реактором
целесообразна при использовании ее на низкое напря¬
жение и большой ток, так как в этой схеме нагрузочный
ток протекает параллельно., а не носледовательно через
два диода, как в трехфазной мостовой схеме. Недостат-^
ком этой схемы является наличие уравнительного реак-^
тора, имеющего типовую мощность около 70% выпрям¬
ленной номинальной мощности. Кроме того, в шести-
фазных' схемах используется довольно сложная кон¬
струкция трансформатора.Схемы выпрямления на тиристорах обеспечивают
работу- в двух режимах — выпрямительном. н инвертор-
§ 4^]Тиристорные преббразователи^поетоянного тока#01Расчетные сооткоше(^ия для основных схем выпрямленияТаблица 4-3СхемаЗакон регулирования напряженияАктивная нагрузкаИндук-тВБнаянагрузканепрерывныйрежимпрерывистый режимсоiSiiЗНеI- о з;
1 «У =) й*1s S« a, »XЗначение коэффициентов токаo>PIЬ 4>*u г:трансформатора<u<u2|
&«
t- и
'■ PJ e»i'L*illss|о'ёяДвухфазная ну¬
левая (однофазная
двухполупериод-
ная)'doОднофазная сим¬
метричная мосто¬
ваяТрехфазная ну-
лёвая1 -Ь cos ct
2(/^„cosa
при а < л/6аоVT1 + sin «при а> п/6Трехфззная сим¬
метричная мосто¬
ваяШестифаэная с
уравнительным ре¬
акторомt/^„cosaпри а < я/3'da1 + sinлпри а > —
3t/^gcgsa0.93,140.50,7070,91,571,172,341,172.091.0450,50,330,7070.580.332,090,1670,580,291,00.7071.00,820,820,707I.O0,560.820,291,341.111,3451,461.04S1,26НОМ. При работе в инверторном режиме энергия из цепи
нагрузки передается в питающую сеть, т. е.’ в противо¬
положном направлении по сравнению с выпрямитель¬
ным режимом, поэтому при инвертировании ток и э.,д. с.обмотки трансформатора направлены встречно, а при
выпрямлении — согласно. Источником тока в режиме
инвертирования является э. д. с. нагрузки (машины
постоянного тока, индуктивности), которая должна пре-Рис. 4-7. Рис, 4-8.Рис. 4-7. Встречно-параллельная схема включения вентильных групп.УР/—УР4 — уравнительные реакторы; РТ — токоограйичивающий реактор; СР — сглаживающий ребктор.
Рис. 4-8. Схема нереверсивного ТП для цепей обмоток возбуждения двигателей.
102Полупроводниковые преобразователи и регуляторы[Разд. 4вышать напряжение инвертора. Перевод ТП из выпря¬
мительного режима в инверторный достигается измене¬
нием полярности э. д. с. нагрузки и увеличением угла
ес выше я/2 при индуктивной нагрузке-Для обеспечения режима инвертирования необхо¬
димо, чтобы закрывающийся очередной тиристор успел
восстановить свои запирающие свойства, пока на нем
имеется отрицательное напряжение, т. е. в пределах
угла (рис. 4-6, в). Если это не произойдет, то закры¬
вающийся тиристор может снова открыться, так как
к нему прикладывается прямое напряжение. Это приве¬
дет к опрокидыванию инвертора, при котором возник¬
нет аварийный ток, поскольку э. д. с. машины постоян*
ного тока и трансформатора совпадут по направлению.
Для исключения опрокидывания необходимо, чтобы вы¬
полнялось условиеР_у=Т}3>б,где б — угол восстановления запирающих свойств ти¬
ристора; р=л —а — угол опережения инвертора.Силовые схемы ТП, предназначенных для питания
якорных цепей двигателей, выполняются как в неревер¬
сивном (одна выпрямительная группа тиристоров), так
и в реверсивном (две выпрямительные группы) испол¬
нениях. Нереверсивные исполнения ТП, обеспечиваю*
щих одностороннюю проводимость, позволяют работать
в двигательном и генераторном режимах только при
одном направлении момента двигателя. Для изменения
направления момента требуется или изменить направ¬
ление тока якоря при неизменном направлении потока
возбуждения, или изменить направлений потока воз¬
буждения при сохранении направления тока якоря.Реверсивные ТП имеют несколько разновидностей
схем силовой цепи. Наибольшее распространение полу¬
чила схема с встречно-параллельным прдключением к
одной вторичной обмотке трансформатора двух вен¬
тильных групп (рис, 4-7). Такая схема может быть вы¬
полнена и без индивидуального трансформатора с пи¬
танием тиристорных групп от общей сети переменного
тока через анодные токоограничивающие реакторы РТ,
Переход на реакторный вариант значительно сокращает
размеры ТП и снижает его стоимость.Тиристорные преобразователи для цепей обмоток
возбуждения двигателей выполняются в основном в не-
реверсивном Исполнении. На рис. 4-8, а показана одна
из применяемых схем включения выпрямительных эле¬
ментов. Схема позволяет в широких пределах изменять
ток возбуждения двигателя. Минимальное значение то¬
ка имеет место, когда тиристоры Т1 и Т2 закрыты, а
максимальное, когда он)^ открыты. На рис. 4-8, б, г по¬
казан характер изменения выпрямленного ^напряжения
для этих двух состояний тиристоров, а на рис. 4-8, в
для состояния, когда 0<а<180°.б) Способы управления реверсивными
тиристорными преобразователямиВ реверсивных ТП применяются два основных
способа управления вентильными группами — совмест¬
ный и раздельный, В свою очередь совместное управле¬
ние выполняется согласованным и несогласованным.
При согласованном управлении отпирающие импульсы
подаются на обе группы вентилей таким образом, что-
-бы средние значения выпрямленного напряжения у
обеих групп были равны между собой. Это обеспечи¬
вается при условии где Og и — углы
регулирования выпрямительной и инверторной групп.
При несогласованном управлении среднее значение на¬
пряжения инверторной группы превышает напряжение
выпрямительной группы. Это достигается при условии,
если ct 3 ^ 180°.Мгновенное значение напряжений групп при сов¬
местном управлении не равны друг другу во все момен¬
ты времени, вследствие чего в замкнутом контуре (или
контурах), образуемых тиристорными группами и обмот¬
ками трансформатора, течет уравнительный ток, для
ограничения которого в цепь ТП включаются уравни¬
тельные реакторы УР1—УР4 (см. рис. 4-7). Реакторы
включают в контур уравнительного тока по одному или
по два на группу, причем, их индуктивность выбирает¬
ся такой, чтобы уравнительный ток не превышал 10%
номинального тока нагрузки. При включении токоогра¬
ничивающих реакторов по два на группу они выпол¬
няются насыщающимися при протекании тока нагрузки.
Например, при работе группы В насыщаются реакторы
УР1 и УР2, а реакторы УРЗ и УР4 остаются ненасы¬
щенными и ограничивают уравнительный ток. Если
реакторы включаются по одному на группу (УР1 и
УРЗ), то они выполняются ненасыщающимися при про¬
текании тока нагрузки.Преобразов0тели с несогласованным управлением
имеют меньшие габариты реакторов, чем при согласо¬
ванном управлении. Однако при несогласованном управ¬
лении снижается диапазон допустимых углов регулиро¬
вания, что приводит к худшему использованию тран¬
сформатора и уменьшению коэффициента мощности
установки. Одновременно нарушается линейность регу¬
лировочных и скоростных характеристик электроприво¬
да. Для полного исключения уравнительных токов
используется раздельное управление вентильными груп¬
пами.Раздельное управление заключается в том, что
управляющие импульсы подаются только на ту Группу,
которая в данный момент должна работать. На вентили
неработающей группы управляющие импульсы не по¬
даются. Для изменения режима работы ТП использует¬
ся специальное переключающее устройство, которое при
равенстве нулю тока ТП сначала снимает управляю¬
щие импульсы с ранее работающей группы, а затем
после небольшой паузы (5—10 мс) подает управляющие
импульсы на другую группу. При раздельном управле¬
нии нет необходимости включения уравнительных реак¬
торов в цепи отдельных групп вентилей, возможно пол¬
ное использование трансформатора, снижается вероят¬
ность опрокидывания инвертора вследствие уменьшения
времени работы ТП в инверторном режиме, уменьшают¬
ся потери энергии и соответственно увеличивается
к. п. д. электропривода из-за отсутствия уравнительных
токов. Однако раздельное управление предъявляет вы¬
сокие требования к надежности устройств для блокиро¬
вания управляющих импульсов. Сбой в работе блоки¬
рующих устройств и появление управляющих импуль¬
сов на нерабочей группе тиристоров приводят к внут¬
реннему короткому замыканию в ТП, так как
уравнительный ток между группами этом случае огра¬
ничен только реактансом обмоток трансформатора и
достигает недопустимо большого значения.В крановых электроприводах наибольшее распро¬
странение получили ТП с раздельным управлением.в) Основные технические данные
тиристорных преобразователей постоянного тока
серий АТК и АТРКДля крановых электроприводов изготавливаются
ТП постоянного тока серии АТК (нереверсивное испол¬
нение) и серии АТРК (реверсивное исполнение). Пре¬
образователи этих* серий обеспечивают пуск двигателей
с ограничением пускового момента, регулирование ча¬
стоты вращения двигателя изменением напряжения иа
якоре и тока возбуждения, реверс и электри>}еское тор¬
можение с отдачей энергии в сеть.
§ 4-41Тиристорные преобразователи постоянного така103Таблица 4-4Основные технические данные тиристорных преобразователей серий АТК и АТРКТип преобра-
■ зователяцк ёшIIIкд.а ^SC ^
||ё5.0.R1^1cts яшПё§|Ыга % г)S S SBS м 0)IIIКв .S ё«S %
X (x^o§•§g-Sffli|t
к S йК. п. д.
не менееcostp
не менееМасса*кгГ абаритные
размеры
преобразо¬
вателя, ммТип силового
трансформа¬
тораАТК100/230АТК100/460АТК160/230АТК160/460АТК250/230АТК250/4602304602304602304601001001601602502502002003203205005000—10011510101025102525-1650,850,870,860,870,910,940,810,830,830,840.840,859002000X750X1700ТСЗР-40/0,5ТСЗР-63/0,5ТСЗР-100/0,5АТРК100/230АТРК100/460АТРК160/230АТРК160/460АТРК250/230АТРК250/460ЛТРК500/230АТРК500/460230460230^460230460230460100100160160250250500500200200320320500БОО10001000100—0—
1002301554—3300,850,870,860,8Г0,910,940,940,950,810,830,830.840,840,850,850,87480510480510520600800X750X1700ТСЗР-40/0,5ТСЗР-63/0,5ТСЗР-100/0,510002000X 750X1700ТСЗП-200/0,7Основные технические данные ТП серий АТК и
АТРК приведены в табл. 4-4.Тиристорные преобразователи серий АТК и АТРК
выполняются на выпрямленные токи 100, 160, 250 и
500 А (только АТРК) и напряжения 230 и 460 В. Пи-
тание ТП производится от сети переменного тока напря¬
жением 380 В частотой 50 Гц через индивидуальные• трансформаторы (при выпрямленном напряжении
230 В) или анодные токоограничивающие реакторы (при
выпрямленном напряжении 460 В).В ТП применены тиристоры типа ТЛ 250. Охлажде-
ние тиристоров — естественное воздушное. Схема вы¬
прямления— трехфазная. В зависимости от тока ТП ис¬
пользуются несколько параллельно включенных тири>
сторов; один — на токи 100 и 160 А, два — на 250 А и
четыре — на 500 А Вентильный мост конструктивно
собран из блоков с шестью тиристорами, которые вклю¬
чаются в схему через разъемы. Тиристорные группы в
реверсивных ТП включены по встречно-параллельной
схеме. Управление группами раздельное.Тиристорные преобразователи всех исполнений
имеют встроенный регулируемый источник возбуждения
(РИВ). В РИВ предусмотрена возможность осущест¬
вления зависимого регулирования тока возбуждения
двигателя от тока в его якорной цепи в сторону ослаб¬
ления поля. Кроме того, РИВ позволяет усилить поле
возбуждения примерно в 1,5 раза. Силовая схема РИВ
состоит из двух однофазных выпрямительных мостов —
рабочего и аварийного (см. схему на рис. 4-8, а). Ава¬
рийный мост выполнен На диодах и подключен через
трансформатор к питающей сети; рабочий однофазный,
несимметричный мост подсоединен непосредственно к
сети. Аварийный мост обеспечивает минимальное напря¬
жение (25 В в ТП серии АТК и 54 В в серии АТРК) на
выходе возбудителя при исчезновении импульсов и за¬
тирании рабочего моста.Функциональная схема реверсивного ТП серии
АТРК показана на рис. 4-9.’ Аналогичное построение
имеет функциональная схема и с нереверсивным ТП се¬
рии АТК. Управление тиристорами в ТП осуществляет¬
ся многоканальной системой "фазового управления СФУ^
выполняемой по «вертикальному» принципу.В реверсивных ТП имеется одна система фазового
управления на две группы тиристоров. Для переключе¬
ния выхода системы управления с одной тиристорной
группы на другую предусматривается специальный ком¬
мутатор импульсов К. Сигналы на СФУ поступают от
суммирующих магнитных усилителей СМУР и СМУРВ.Задающее напряжение Уз подается на обмотки
управления магнитных усилителей в зависимости от
положения командоаппарата и состояния логического
переключающего устройства ЛПУ (только на СМУР),
Для получения требуемых механических характеристик
и необходимого характера изменения переходных про¬
цессов на входы усилителей СМУР могут быть поданы
сигналы обратных связей по напряжению, току, скорости
и другим параметрам. В частности, в рассматриваемой
схеме предусмотрены обратная связь по напряжению
ТП для получения необходимой жесткости механиче¬
ских характеристик и обратная связь по току {БТО —
блок токовой отсечки) для ограничения' моментов при
пусках и торможениях. Предусмотрена также обратная
связь по току якоря двигателя, воздействующая на
вход СМУРВ, чем обеспечивается необходимый харак¬
тер изменения потока возбуждения машины.Суммирующий магнитный усилитель СМУЛ пред¬
назначен для управления логическим переключающим
устройством ЛПУ, обеспечивающим переключение групп
тиристоров или контактов реверсора в якорной Цепи
(в элек'^оприводах с нереверсивным ТП) в бестоковую
паузу. Суммирующий магнитный усилитель формирует
двухполярный сигнал, пропорциональный разности за¬
дающего сигнала управления и сигнала обратной связи,
который в свою очередь пропорционален напряжению,
снимаемому непосредственно с двигателя;ду = С/д —С/дв. *Логическое переключающее устройство ЛПУ вы¬
полнено на базе триггера. Состояние этого устройства
определяется его входным сигналом д^U и сигналом,
пропорциональным выпрямленному току ТП. Положи¬
тельное значение AU переключает ЛПУ в положение,
соответствующее, работе одной группы тиристоров, от-
рицательыо&«— друг<^ группы,
104Полупроводниковые преобразователи и регуляторы[Разд. 4Рис. 4-9. Функциональная схема тнрис^брного электропривода.Д —двигатель; TpJ, — трансформаторы; РГ-м>еч»торытокоограничивающне: — автоматические выключатели: ОВД^параллельная обмотка возбуждения двигателя; 777?'^ трансформатор постоянного тока; ГГ — трансферы агор тока; Л —полупро¬
водниковый переключатель; £Т0 — блок токовой отсечки; КК — командоконтроллер; СФУ, СФУ£ — системы фазового управления:
СЛ1УР, СЛ^УРВ, СМУЛ — суммирующие магнитное усилителн соответственно ТП, РИВ и ЛЯУ; ЛЯУ — логическое переключающее'
устройство: КД — контактор динамического торможения.В нереверсивных ТП ЛПУ обеспечивает переклю¬
чение реверсора, обусловливая тем самым работу ТП в
выпрямительном или инв^торном режиме. При исчез-
новении &.U состояние ЛПУ не изменяется. Если ток
ТП Id не равен нулю, то ЛПУ находится в одном из
двух состояний и переключение его невозможно даже
при смене знака At/., Сигнал о наличии тока в цепи,
нагрузки ТП поступает в ЛПУ с датчика нулевого тока
ТПТ, в качестве которого используется трансформатор
постоянного тока.Система регулирования преобразователей серий
АТК и' АТРК выполнена с использованием высоко¬
частотных суммирующих магнитных усилитеЛей СМУР,
СМУРВ, СМУЛ. Суммирующий магнитный усилитель
регулирования СМУР (в реверсивных ТП) состоит из
;1вух.нереверсивных магнитных усилителей, работающих
порознь и имеющих характеристики, прцведеииые на
рис. 4-10, а. Сигналы с выходов магнитных усилителей
подаются на ход СФУ поочередно, в зависимости от
того, какая группа" силовых тиристоров подключена к
нагрузке. Суммируюиоге магнитные усилителиа также СМУР в нереверсивных ТП выполняются с од¬
ним нереверсивным магнитным усилителем. Регулиро¬
вочная характеристика СМУР в этом случае аналогич¬
на характеристике одного усилителя (рис. 4-10, а).Регулировочные характеристики СМУРВ показаны
на рис. 4-10, б.Суммирующий магнитный усилитель СМУЛ состоит
из двух нереверсивных магнитных усилителей, включен¬
ных между собой по дифференциальной схеме, образуя
один реверсивный магнитный усилитель. Регулировоч¬
ные характеристики СМУЛ показаны на рис. 4-10, в.На рис. 4-10, а—в /з и /о.с. — токи соответственно
в задающей обмотке и обмотках обратной связи усили¬
телей. Хотя СМУЛ и СМУР получают задающее напря¬
жение и напряжение обратной связи от общих источни¬
ков, настройка у них разная. Суммирующий магнитный
усилитель настраивается таким образом, чтобы при
установившейся скорости напряжение на выходе СМУЛ
было равно нулю. В СМУР выходное напряжение
зависит от задающего сигнала и сигнала обратной
связи.
§ 5-/}Классификация тормрзо^^ и вьфор п^мрзтгх устройствтДля защиты от токов короткого замыкания в ТП
предусмотрены автоматический выключатель — АВ1^ на
входе и АВ2— в цепи нагрузки (см. рис. 4-9).ff Л■ J 30У /X
/\ \
j \Ло
а Лпв20-J -Z4 и 12 3 /#ЛТиристорные преобразователя серий АТК и АТРК
выполнены в виде шкафа с односгоронним обслужива¬
нием. Степень защиты IP20. Силовая часть ТП и систе¬
ма управления ,имеют блочную конструкцию. Блоки
системы управлейия расположены в выемных кассетах.
В рабочих положениях блоки фиксируются стопорными
винтами.Приборы, контроля, выпрямленного напряжения и
сигнализация расположены ка двери шкафа.Тиристорные преобразователи на 460 В комплек¬
туются токобграиичивающим реактором, который уста¬
навливается внутри шкафа. Силовой трансформатор
(только в исполнёЦии на 230 В) устанавливается вне
шкафа. /Преобразователя, на 500 А в случае необходимости
могут поставляться также с фильтровым реактором (на
стороне нагрузки) типа ФРОС-500/0,5 Т, располагаемым
вне шкафа.Рис. 4-10. Регулировочные характеристики СМУР (а),
СМУРВ (б), ему Л (е).7 —"характернстякн магнитных усилителей без введения - огра¬
ничений; //^характеристики на выходе,, блока входного устрой-РАЗДЕЛ пятыйПРИВОДЫ ТОРМОЗНЫХ УСТРОЙСТВ5-1. КЛАССИФИКАЦИЯ ТОРМОЗОВ
и ВЫБОР ПАРАМЕТРОВ ТОРМОЗНЫХ УСТРОЙСТВа) Классификация тормозных^устройствКрановый механизм должен иметь устройство для
его остановки в заданном положении или огравичения
пути тор^южения при выбеге после отключения привод*
ного электродвигателя*. Такими устройствами являются
тормоза, обеспечивающие остановку механизма крана
за счет сил трения между вращающимся шкивом (или
диском) и неподвижной тормозной поверхностью, свя¬
занной с механизмом.Существует «много разнообразных конструкций тор¬
мозных устройств с фрикционными элементами дисково¬
го типа (дисковые тормоза), коническими поверхностями
торможения (конические тормоза) и с цилиндрическими
поверхностями торможения, которые в свою очередь
делятся на колодочные тормоза и ленточные тормоза.Дисковая система торможения применяется q тех
случаях, когда тормоз является частью приводного
электродвигателя, при этом габарит тормоза опреде¬
ляется размерами электродвигателя. Такие тормоза мр-
гут эффективно работать при тормрзных моментах от
30 До 1000 Н-м.Конические тормозные устройства находят приме¬
нение в специальных механизмах небольшой мощности
при тормозных моментах до 50 Н-м. ,Наибольшее распространение для большинства кра¬
новых механизмов находят колодочные тормоза. Эти
тормоза используются для механиз1>1бв, где необходи¬
мые тормозные моменты могут достигать 15 000. Н*м.. Для .тормозов, создающих тормозные. моменты свы¬
ше 10 000 Н-м, применяются ленточные тормозные
устройства.-• Исключение составляют механизмы передвижения кранов
со скоростью движения не более 0,5 м/с.Мехави<1ескйе тормоза фрикционного действия- мо¬
гут иметь два конструктивных исполнения:1) нормально разомкнутый тормоз, когда тормоз¬
ные. поверхности не соприкасаются между собой при
отсутствии внешней силы и торможение происходит
путем приложения внешней силы от привода тор¬
моза;2) нормально замкнутый тормоз, когда тормозные
поверхности соприкасаются между собой с необходимым
давлением при отсутствии внешней силы от привода за
счет силч сжатия пружины или рычажно-грузового ус-. тройства. Освобождение такого тормоза происходит
под действием его привода, преодолевающего действие
пружин или груза.Все перечисленные тормоза могут иметь привод, вы¬
полняющий работу, равного произведению силы, необхо¬
димой для создания тормозного эффекта, на путь пере¬
мещения поверхности трения, достаточный для выпол¬
нения гарантированной операции (торможения или рас-
тормаживания).Тормоза на-Кранах могут быть с непосредственным
воздействием оператора (ручные или ножные) и с ме¬
ханическим приводом.В настоящее время в большинстве крановых тормо¬
зов с механическим приводом используются либо элек-
■ тромагииты, либо электрогидравлические толкатели и
только мощные ленточные тормоза имеют гидравли¬
ческие или моторные приводы.Приводы тормозов могут иметь два исполнения:
короткоходовой, у которого рабочий ход равен или бли¬
зок к пути перемещения тормозных поверхностей, и
длинноходовой, у которого рабочий ход в нескофко раз
больше пути перемещения тормозных поверхностей.
Естественно, что усилия, развиваемые приводами корот¬
коходовых тормозов, должны быть одного порядка с
суммарным усилием, действующим на фрикционные по¬
верхности, а'усилие длинноходовых приводов может
быть настолько меньше необходимого усилия торможе-
106Приводы тормозных устройств{Раад. 510 4Рис. 5-1, Колодочный тормоз серии ТКТГ с длинноходо-
вьш приводом.Рис. 5-2. Колодочный тормоз серии ТКТ с короткоходо¬
вым приводом.Рис. 5-3. Колодочный тормоз серии ТКП с .короткоходо-
вым приводом^.ния, насколько ход привода тормоза больше возни¬
кающего зазора между фрикционными поверхно-
сЛми,б) Конструкции тормозовНа рис. 5-1 представлен общий вид колодочного
тормоза серии ТКТГ с длинноходовым приводом от
гидротолкателя, а на рис. 5-2 — общий вид колодочно¬
го тормоза ТКТ с короткоходовым приводом от элек¬
тромагнита переменного тока.Основными узлами колодочных тормозов являют¬
ся: 1 ~ стальной тормозной шкив, поверхность которо¬
го образует с чугунными колодками 2 фрикционную па¬
ру; колодки имеют приклепанные фрикционные обклад¬
ки 3 из асбобакелитовой ленты типа ЭМ1. Колодки
шарнирно укреплены на рычагах 4. В свою очередь ры¬
чаги шарнирно укреплены на подставке тормоза 5.
У тормоза с длинноходовым приводом (рис, 5-1) рычаги
соединены между собой тягой 6 через верхний при¬
водной рычаг 7. Приводной рычаг под действием, пру¬
жин 8, поворачиваясь против часовой стрелки, при по¬
мощи тяги сдвигает рычаги, прижимая колодки к шки¬
ву. Таким образом сжатые пружины передают на фрик¬
ционные поверхности необходимое усилце. Привод этого
тормоза 9, поворачивая верхний рычаг по часовой
стрелке, разжимает колодки.У короткоходовых тормозов (рис. 5-2) пружина 8
размещена между рычагами 4. При этом один ее торец
опирается на скобу, связанную с рычагом 4, а другой
торец — на гайку, навернутую на тягу б, проходящую
внутри пружины. Сжатая пружина стягивает рычаги
и прижимает колодки к шкиву, создавая необходи¬
мое усилие торможения. Привод тормоза 9, воздей¬
ствуя непосредственно на одну из тяг, разжимает
рычаги.Регулировка тормозного усилия осуществляется
гайкой W. Равномерность отхода колодок регулирует¬
ся болтом 11. Эти тормоза широко применяются на раз¬
личных крановых механизмах с диаметрами тормозных
шкивов до 300 мм.На рис, 5-3 показаны более крупные колодочные
тормоза с короткоходовым приводом постоянного тока
серии ТКП. Принцип их действия и конструкция ана¬
логичны рассмотренным выше.Иную конструкцию имеют дисковые тормоза, яв¬
ляющиеся частью конструкции приводного электродви¬
гателя. В отличие от колодочных тормозов, конструкции
которых в большинстве своем идентичны, дисковые
тормоза имеют разнообразные конструктивные испол¬
нения.На рис. 5-4 представлен общий вид конструкции
многодискового тормоза серии ТМТ, пристраиваемого
к электродвигателям переменного тока. Тормоз снаб¬
жен прямоходовым приводом переменного токр, состоя¬
щим из шести электромагнитов, расположенных на
едином магнитопроводе в виде тороида. Фрикционны¬
ми поверхностями снабжены несколько дисков, укреп¬
ленных на шлицевой втулке вала двигателя, и сопри¬
касающихся со стальными неподвижными дисками. Уси¬
лие торможения создается центральной пружиной,
передающей усилие якорю электромагнита. Аналогич¬
ную конструкцию имеют дисковые тормоза постоянного
тока серии ТДП. В зарубежАой практике дисковые тор¬
моза снабжаются одним вращающимся диском, что вво¬
дит определенные ограничения по обеспечению надеж-
. ного торможения с любой скорости.Все описанные выше тормоза относятся к системам
нормального замкнутого типа.Нормально разомкнутые тормоза используются в
крановых механизмах, как правило, для регулирования
тормозных усилий при замедлении, наприм^, ^ меха-
Классификация торжозрв и вы&ор тормозных устройств107В-БРис. 5'4. Дисковый тормоз серии ТМТ.низмов поворота портальных кранов, или создания на
некоторое время определенного постоянного усилия,
действующего против вращающего момента приводного
электродвигателя. Такие тормоза в большинстве слу*
чаев имеют непосредственный привод от усилия рук
или ног оператора. Их. конструктивное исполнение мало
отличается от конструкций колодочных тормозов. Элек^
трические приводы к таким тормозам применяются до¬
вольно редко и пока не имеют типовых конструктивных
решений.в) Исходные параметры тормозовВ грузоподъемных машинах тормоз является важ¬
нейшим элементом, обеспечивающим безопасность экс¬
плуатации, поэтому наиболее важные условия выбора,
установки и функционирования тормозов регламентиро-
ваны действующими правилами—безопасной эксплуата¬
ции кранов, утвержденных Госгортехнадзором. В со¬
ответствии с этими правилами каждый подъемный ме¬
ханизм грузоподъемной машины Должен снабжаться
нормально замкнутым тормозом, расположенным на та¬
ком участке кинематической схемы, который имеет не
разъегугную под нагрузкой связь с выходным валом пере¬
даточного механизма. Подъемные механизмы, которые
служат для перемещения жидкого металла или взры¬
воопасных грузов, должны иметь два нормально замк¬
нутых независимых тормоза. При этом наличие в ки¬
нематической цепи двух тормозов обязательно для двух¬
двигательных механизмов при аварийном механическом
отключении одного из двигателей.Основным параметром тормоза является гарантиро*
ванно развиваемый им тормозной момент. Тормозной
момент тормоза определяется усилием на измеритель¬
ном рычаге, при котором начинается проскальзывание
шкива или дисков тормоза.Согласно правилам Госгортехнадзора каждый из
установленных на механизме механических тормозовдолжен удерживать груз, составляющий 125% номи¬
нального, при его остановке только с помощью этого
тормоза. С учетом того, что коэффициент трения асбе¬
стовых материалов может меняться в зависимости от
температуры поверхности до 30%, тормоз в холодном
состоянии должен развивать тормозной момент, состав¬
ляющий 150% номинального, т. е. коэффициент запаса
тормозного момента должен быть не ниже 1,5 расчетно¬
го момента, который определяется формулой^т.р —94 OOOQh ^’н 'П
Ян.Т(5-1)где Мт.р — расчетный момент тормоза, Н-м; Qh — но¬
минальная грузоподъемность (т) у механизмов подъема
или макбимальное тяговое усилие в канате лебедки ме¬
ханизма стрелы; ин—номинальная скорость подъема
или скорость каната лебедки стрелы, м/с; Пн.т — номи¬
нальная частота вращения тормозного шкива, соот¬
ветствующая скорости vn, об/мин; т] — к. п. д. механиз¬
ма для номинальной нагрузки.С учетом режимов работы механизмов различного
назначения тормозные моменты тормозов должны быть
равны:Жт = ^з.т Afq._p, (5-2)где йэ.т — коэффициент запаса тормоза (табл. 5-1).Тормозной момент тормозов, устанавливаемых на
механизмах горизонтального перемещения, определяется
исходя из условий обеспечения удержания механизма
при наибольших возможных внешних статических
нагрузках (ветре, уклоне и т. п.) с. учетом заданного
максимального выбега механизма при остановке и вы¬
ражается следующим образом:Мт.р^^общ ^н.т
76,55(5-3)
108Приводы тормозных t/cfpodcre[Разд. 5'Таблица 5-1Коэффициенты запаса тормозовРежимЛегкий Л
Средний С
Тяжелый Т
Весьма тяжелый ВТ
и особо тяжелый ОТМеханизмы подъемаодин тормоз два тормоза1.5
1.7S
2,02.51.251.251.251.25Мезганизм
изменения
вылета стрелы1.51.51.51.5Прямечаняя: 1. При двух тормозах на каждом при*
воде и двух приводах и более у механизма коэффициент за¬
паса каждого тормоза должен быть не менее 1.1.2. Если применяются два тормоза и б15леб, то заПас тор¬
можения устанавливается в предположеяия, что весь груз удер¬
живается одним тормозом.где Мс.макс — максимальный момент статической на¬
грузки, де^^ствующий в направлении движения, Н-м;
т] — к. п. д. механизма; СО^общ — суммарный маховой
момент механизма с грузом, приведенный к валу тормо*
за, кг-м'^ Ун — номинальная' скорость горизонтального
перемещения, м/с; S—допустимый выбег после начала
торможения, м.Тормозной момент тормоза определяется по (5-2)
при йэ-т= 1,25.Для предотвращения буксования механизмов, пе¬
редвигающихся по рельсам, момент тормоза не должен
превышать значения, oпpeдeJ!lЯ€мoгo выражениемМ,.„а„с < 16 ООО , (5.4)Лягде п« —отношение числа (тормозящихся) ведущих ко¬
лес к общему числу колес опор; G —масса перемещав-'
мого механизма (без груза), т. ,С учетом, (5-3) и (5-4) максимальный выбег от на-
чала торможения механизма горизонтального переме-
^щения с достаточной степенью точности может быть
определен по формуле20пу^ т]G(5-5)G+Qгде Q — масса поднимаемого груза, т.Исходя из (5-5) при заданных параметрах выбега
S и скоростей перемещения механизма Ун, 1можно уста¬
новить необходимое "гасло ведущих колес, снабженных
тормозами.При применении нормально разомкнутых тормозов
для механизмов горизонтального перемещения условия
выбора тормозного момента аналогичГЯм.Важным параметром, определяющим работоспособ¬
ность тормоза, является соответствие егр режима рабо¬
ты фактической продолжительнЪсти включения. Привод
нормально замкнутого тормоза в течение всего времени
работы механизма должен быть включен. Таким обра¬
зом, должно соблюдаться соответствие по времени
включения и режиму работы между приводным элек¬
тродвигателем и тормозом. Это относится к тем меха¬
низмам, у которых наложение тормоза происходит одно¬
временно с отключением электродвигателя.У ряда механизмов, имеющих свободный выбег
после отключения электродвигателя, наложение тормо¬
за должно происходить только при срабатывании защи¬
ты или по команде оператора-крановщика. Приводы
таких тормозов должны быть рассчитаны на продолжи¬
тельное в!слючение. В табл. 5-2 приведены рекомендуе'Таблица 5-2
Рекомендуемые режимы работы приводов тормозовНаименованиеМеханизмы подъема крюковых
крановМеханизмы подъема грейфер¬
ных крановМеханизмы изменения вылета
стрелыМеханизмы поворота порталь¬
ных крановМеханизмы поворота стреловых
кранов, в том числе самоход¬
ныхМеханизмы горизонтального пе¬
редвижения мостовых и козло¬
вых кранов и перегружателей
со свободным выбегом
Механизмы горизонтального пе¬
ремещения кранов с точной
остановкойМеханизмы передвижения ба-
шенчых и портальных крановПродолжительность включе¬
ния при режиме работы
механизма, %ЛСтВТОТ25*404060100-—6010010025254040_100100100100—2525.40--100100100100-25*4040. 40-252525-* Привод должен допускать
чеиие 30 мин.непрерывное включение в те-мые значения продолжительности включения приводов
тормозов для различных крановых ,механизмов.Приводы тормозов переменного тока, гидротолка¬
тели, а также приводы тормозов постоянного тока па¬
раллельного возбуждения при рекомендованных в
табл. 5-2 продолжительностях включения должны обес¬
печивать тяговые усилия, достаточные для растормажи-
вания при питающем напряжении не менее 85% номи¬
нального в установившемся тепловом режиме.При применении приводов тормозов постоянного
тока последовательного возбуждения необходимо учи¬
тывать, что растормаживание механизма должно
происходить на первых рабочих положениях схем управ¬
ления крановыми электроприводами, т. е. при токах,
составляющих 40—60% номинального тока катушки
тормоза при расчетном ПВ, поэтому при выборе при¬
водов тормозов последовательного возбуждения необ¬
ходимо определить номинальный ток катушки, исполь¬
зуя данные табл. 5-2, а усилия привода тормоза устано¬
вить с учетом минимального тока включения тормоза,
составляющего 40—60% номинального тока катушки.г) Выбор тормоза и его привода
для кранового механизмаКак указано в п. «в», к нормально замкнутому тор¬
мозу кранового механизма предъявляется требование
реализации необходимого тормозного момента при за¬
данном режиме работы привода, поэтому при выборе
тормозов к крановым механизмам прежде всего' опре¬
деляются необходимый тормозной момент и имеющиеся
ограничения предельных значений этого момента.Для электроприводов, получающих питание от сети
постоянного тока, а также по системе Г~Д и от ТП
постоянного тока, как правило, следует применять тор¬
моза с коротеоходовым приводом постоянного тока. Этот
тип привода обеспечивает наименьшее время срабаты¬
вания (для систем постоянного тока), что является
важным качественным показателем тормозного устрой¬
ства. Короткоходовой привод постоянного тока имеет
наилучшие показатели по износостойкости среди всех
видов приводов тормозов и поэтому он должен иметь
§5-ПКлассификация тормозов и выбор тормозных устройств109предпочтение перед любыми другими видами приводов.
Применение длиннох.одового привода посд-оявного тока,
имеющего время срабатывания, доходящее до 2 с у
крупных соленоидных электромагнитов, может быть до¬
пущено только для тихоходных механизмов со скоростя¬
ми подъема до 0,2 м/с и скоростями горизонтального
передвижения до 0,5 м/с, а также в качестве остановоч¬
ных тормозов механизмов, не имеющих ограничения пу*
ти. перемещения, например механизмов передвижения
автокранов и т. п.Для электроприводов, получающих питание от се¬
тей переменного тока, имеются различные варианты при¬
менения приводов тормозов. При применении цепей
управления на постоянном токе с питанием от общего
выпрямителя предпочтительным является использование
тормоза с короткоходовым приводом постоянного тока.
Однако, необходимо иметь в виду, что время срабатыва¬
ния тормозов с приводом постоянного тока составляет
в среднем около 0,5 с, и это должно учитываться в об¬
щей схеме электропривода, так как при отключении
электропривода подъема возможна просадка груза.В наиболее* распространенных электроприводах пе¬
ременного тока могут быть применены тормоза с приво¬
дами переменного тока.При диаметре тормозных шкивов 100 мм предпоч»
тигельным является короткоходовой привод с помощью
электромагнита переменного тока. При диаметре шкква
до 160—200 мм наряду с короткоходовым приводом от
электромагнита может быть рекомендован длиннохо¬
довой привод от электрогидравлического толкателя. При,
диаметре шкива 300 мм и более обычно применяют
электрргидравлические толкатели.Короткоходовые электромагнитные лриводы для
тормозов со шкивом свыше 200, мм не обладают необ¬
ходимой износостойкостью и в практике применения не
находят.Длинноходовые приводы тормозов с электромагни¬
тами переменного тока находят применение на практике.
Однако, учитывая их сравнительно невысокую износо¬
стойкость, использование таких приводов может быть
рекомендовано лишь при небольшом числе торможений
в час (не белее 60 в час). /В табл. 5-3 приведены наиболее общие технические'
данные приводных механизмов тормозов, позволяющие
оценить их эффективность для различных условий экс¬
плуатации.Сравнительные данные приводных механизмов тормозовТипоразмер тормоза и привод к нему, выбранные по
режиму работы, моменту и характеристикам привода,
не требует дальнейших проверок при применении для
крановых механизмов легкого й среднего режима рабо¬
ты при числе торможений в час не более 150. Это в рав¬
ной степени относится и к дисковым тормозам, при¬
строенным к электродвигателям, при номинальной час-
тоте-вращёния начала торможения 1000 об/мин. . ^ .Для механизмов тяжелого режима работы при
числе торможений, превышающем 150 в час, и особен1
но для быстроходных механизмов, имеющих повышен¬
ные моменты инерции движущихся масс, а также для
механизмов, у которых частота вращения начала тор¬
можения составляет 1500 об/мни и более, необходима
дополнительная проверка теплового, режима тормозных
поверхностей.Теплоотдача при торможениях осуществляется со
всех поверхностей тормозного шкива и колодок, но при
этом более интенсивный нагрев происходит в зоне тор¬
мозных колодок. По результатам экспериментов уста¬
новлено,. что при сложном характере нагрева в качестве
расчетной теплоотдающей поверхности можно принять,
наружную поверхность тормозного шкива. Максималь¬
ная рабочая температура фрикционных поверхностей,
при торможении не должна превышать 150° С, так как
при большей температуре резко падает коэффициент
трения поверхностей. Этой температуре соответствует
теплоотдача с поверхности периодически вращающегося
шкива (около 0,3 Вт/см^).При стабильной геометрии тормозных элементов
допустимая мощность потерь на трение, Вт, которая мо¬
жет быть рассеяна колодочными тормозами при темпе¬
ратуре т^150“С, можно определить по формулеАЯлоо 360D (10D -Ь 1), (5-6)где D — диаметр тормрзного шкива, м.. .В свою очередь, действительная мощность потерь
при торможениц, Вт, с Помощью механических тормозов
определяется формулбй2Ч0«Д2XМч -f- Л^с.макс ~ Л1с_макс(57)Т а в л и ц а 5-3Системы приводовПостоянный токПеременный токПараметрКороткоходовойприводДлннноходовойприводVКо[юткоходовойприводДлинноходовой приводс прямоходрйым
электромагнитомс соленоидным
электромагнитомС однофазным
Поворотным
электромагнитомС трехфазным
прямоходовым
электромагнитомС электрогидрав-
лическн!^ тоЛ15а*■ телемДиаметры шкивов колодочных тормо¬
зов, ммВремя включения (растормаживанив), сIPO—800100—600100—200300-600100—8000.3—1,0l.S^.OДо 0,05ч0.1—0.50,4—1,5Время отключения (затормаживания), с0,2—0.5О.Б-1.00,06—0,20,3—1.2Максимальное число включений в час1200600300—120700Износостойкость (механическая). 10®
циклов В—О '51«2O.-l—1,0'2;—5Вероятность безотказной работы за
1 год эксплуатации (6000 часов ра¬
боты)0,990,97' 0.950,950,85Степень защиты от внешних воздейст¬
вийГР44IP00; IPSSIP00IP441Р55Удельная стоимость привода, руб/(Н-м)0,82.00,31.01.0Интервал температур окружающей—50 - -f 50—40 ^ -f45_50.H--f50—40 ч- 4-4Б—15 - +S0среды. X'—40 -f 15
noПриводы тормозных устройств[Разд. 5где СО^общ — суммарный маховой момент всех эле¬
ментов системы, приведенный к валу тормоза, кг-м^;
Па — номинальная частота вращения, об/мин; Nt — чис¬
ло торможений в час при повторно-кратковременном
режиме, равное для режима С—150; для режима Т—‘
300; для режима ВТ — 300—600; для режима ОТ —
600—900 торможений в час; Д — диапазон регулирова¬
ния системы электропривода, характеризующий, с ка¬
кой средней частоты вращения начинается торможение;
Мт — номинальный момент тормоза, Н-м; Мс.макс —
наибольший момент статической нагрузки, Н-м.Значение фактически рассеиваемой мощности, опре¬
деленной по^ {5-7), должно быть ниже допустимой мощ¬
ности, вычисленной согласно (5-6). При несоблюдении
этого условия необходимо либо увеличить размер тор¬
моза, либо снизить скорость начала торможения, т. е.
обеспечить повышение диапазона регулирования. При¬
веденный выше тепловой расчет относится к открытым
тормозам. Допустимая мощность закрытого тормоза мо¬
жет быть меньше приведенной на 25—50%.При применении пристроенных к двигателю диско¬
вых тормозов их тепловая проверка обязательна, так
как теплоотдача дисковых тормозов (благодаря осо¬
бенностям их конструкции) не превышает 0,2 Вт/см®,
Данные по допустимым значениям рассеиваемой мощ¬
ности дисковых тормозов приведены в [55] и ката¬
логах.пример. Выбрать тормоза для механизма передвиже¬
ния тележки контейнерного перегружателя для следующих
условт(й: \Режим работы ....... i . ТЧисло включений в час 300Число осей . 1 2Число ведущих осей 2Число тормозов . 2Масса тележки * . 20 тМасса груза ; . . в . . . 40 тСкорость тележки 2 м»сКоэффициент полезного действия передачи . . . 0,88Номинальная частота вращения шкива тормоза ^ 1000 об/минДиапазон регулирования 5:1Маховая масса, приведенная к валу шкива тор¬
моза 50 КГ‘МЗМаксимально допустимый выбег при срабатыва-^НИН защиты БмП^1тание приводного электродвягатепя тележки осуществ¬
ляется от ТП постоянного тока. Момент статическЪЙ нагрузки,
приведенный к валу каждого из тормозов (двигателей), 60 Н-м.
Определяем расчетный тормозной момент по (5-3):"т.р = «СМ.К= 1- + -= 60-0,88* +С.М8КС50-2.100076,5-5: 309,5 Н-м.По (5-2) определяем необходимый тормозной момент тормо¬
за. полагая ftg ,j,“l,25:^^т.р *з.т = 30^-1*25* 386Н-м.Максимально допустимый момент сцепления с рельсами со¬
гласно (5-4) равен:М.т.макс< 15 ООО15 000-1-2.20-0.88
ХООО= 530 Н-м.Таким образом, момент должен находиться в пределах
386—530 Н-м.Учитывая тяжелый режим работы и наличие цепи питания
постоянного тока (тиристорный электропривод), выбираем тор¬
моз типа ТКП 300 со шкивом 0=0,300 м. с короткохояовым при¬
водом постоянного тока пря режиме работы ПВ=40%. Тормоз
может иметь тормозные моменты й диапазоне 300—500 Н*м.Осуществляем тепловую проведку выбранного, тормоза.Допустимая мощность рассеяния потерь торможения со- '
гласно (6-6) равна:ДРдОп = 350 (10£) + !)£) = 350 (3 + I) 0.3 = 420 Вт.При заданном диапазоне регулирования мощность потерь
при торможениа по (5-7) составит;0,38Cd2^ rfi N
общ --2-10» £)»Г Л /+Ж,с.макс0.38-50.1000»-300 / 386 ^ 3862-109-5* 1з86 + 60 386т "'с.макс
= 467 Вт,В связи с имеющим место перегревом необходимо обеспе¬
чить Либо повышение диапазона регулирования до 6:1, либо
применить тормоз следующего размера — ТКП 400, но при этом
минимальный, тормозной момент будет близок к предельному
моменту, обеспечивающему сцепление.5-2. ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ
ПОСТОЯННОГО ТОКАа) Короткоходовые электромагниты
для тормозов серии ТКПОдним из наиболее надежных и универсальных
приводов крановых тормозов являются короткоходо¬
вые электромагниты постоянного тока. Для тормозов с
диаметром шкива 100, 200 и 300 мм применяются
электромагниты серии МП. представляющие собойРис. 5-5. Электромагниты серии МП.ТипГабаритные размеры.ммМасса.КРDtЛзL,МП 1017014126132321359МП 201ПО1817017818020МП 3011402421422322036
^•5.2]Тормозные электромагниты постоянного тока!1!Таблица 5-4Техннческие данные тормозов серии ТКП с электромагнитами серив МПсамостоятельную конструкцию с прямоходовым переме¬
щением якоря до 4,5 мм.Общий вид электромагнита серии МП показан на
рис. 5-5. Для более крупных тормозов с диаметрами
шкива от 400 до 800 мм магнитопровод электромагни¬
та с поворотным якорем представляет собой часть ме¬
ханической конструкции тормоза. В магнитопровод
вкладывается катушка, представляющая собой само¬
стоятельное изделие в виде тороида, заформованного
эпоксидным компаундом (рис. 5—6). Общий вид тор¬
моза показан на рис. 5-3.Электромагниты МП, а также электромагнитная
часть тормозов ТКП имеют степень защиты от внеш¬
них воздействий IP44, кроме выводов которые дол>р-
ны защищаться путем установки на тормозе соответст¬
вующей переходной коробки.Технические данные тормозов серии ТКП с приво¬
дом от электромагнитов МП приведены в табл. 5-4,
а технические данные тормозов ТКП 400—ТКП 800 и
их электромагнитов приведены в табл. 5—5. 'Габаритные размеры серийных тормозов ТКП и
ТК показаны на рис. 5—7, 5—8.Гарантированное растормаживание обеспечивает¬
ся при 80% нсминального напряжения и нагретой ка¬
тушке для электромагнитов параллельного возбужде¬
ния и при токах 60 или 40% номинального тока катуш¬
ки для электромагнитов последовательного возбуждения.
Катушки электромагнитов параллельного возбужде¬ния серии МП выпускаются на напряжение НО или
220 В соответственно для режимов ПВ-25, 40 и 100%.
Катушки тормозов ТКП имеют только одно исполне¬
ние: 110 В, ПВ-25%- Для других режимов и напряже¬
ний последовательно с катушкой должен включаться
резистор.Для ускорения срабатывания электромагнитов МП
катушки их следует включать через добавочный резис¬
тор, применяя катушку НОВ для сети 220 и 440 В.
Дальнейшее снижение времени срабатывания может
быть достигнуто за счет форсировки, т. е, кратковре¬
менного включения электромагнита на двукратное на¬
пряжение. Ориентировочное время срабатывания
электромагнитов МП и ТКП приведено в табл. 5-6- С
целью снижения времени отпадания электромагниты
не имеют разрядных резисторов, и их катушки рассчи¬
таны на возникаюшие при отключении перенапряжения.
Номинальные токи катушек электромагнитов МП и
ТКП последовательного возбуждения приведены в
табл. 5—7.£сли при использовании электромагнита последо¬
вательного возбуждения минимальный ток электропри¬
вода окажется меньше значения, указанного в
табл. 5—7, то следует учесть, что при сниженном токе
для обеспечения уверенного растормаживания необхо¬
димо снизить усилие пружины и тормозной момент
пропорционально снижению тока по отношений к ука¬
занному в таблицах значению. При этом минималь¬
щПриводы тормозных устройств[Разд, 5ный ток электропривода должен соответствовать воз¬
можному, снижению напряжения сети до 85% номи¬
нального.Все. типы электромагнитов МП и ТКП могут
быть изготовлены в исполнении У2, Т2, ХЛ2.Тормоза серии ТКП с короткоходовыми электро¬
магнитами постоянного тока обладают .наивысшей, на¬
дежностью среди всех типов колодочных тормозов
благодаря высокой надежности и износостойкости их
электромагнитных приводов и достаточному запасу хо¬
да, компенсирующему износ колодок. При правильном
выборе и хорошей профилактике может быть реально
достигнут показатель надежрости приводов тормозов
0,99 за год эксплуатации.Износостойкость электромагнитов, равная 5-10®циклов В—О, несколько выше износостойкости осталь¬
ных элементов конструкции тормоза, что также позво¬
ляет рассчитывать на' высокую надежность конструк¬
ции в целом. Тормоза ТКП могут устанавливаться как
В- нормальном положении, т. е. с горизонтальной осью
шкива, так и с вертикальной осью шкива.В настоящее время ведутся работы по повышению
износостойкости электромагнитов МП до Ю-10® цик¬
лов В—О и улучшению корпусной изоляции катушек,
что позволит довести срок службы электромагнитов
без ремонта до выработки полного ресурса крановым
механизмом.Недостатками электромагнитов Являются относи¬
тельно высокое время срабатывания (в основном для
крупных тормозов), необходимость иметь источник пи-Таблица 5-5Технические даяние тормозов серий ТКП 400—ТКП 800Данные тормозаДанные электромагнитовТипДиаметр
шкива, ммРасчетный
?од, ммМакси¬
мальный
зсод. ммТормозноймомент,Н-мПараллельное возбуждениеПоследовательное возбуждениеРежимработы,пв. %Тяговоеусилие,НПотребля¬
емая мощ¬
ность, ВтРежимработы.пв.%Тяговое
усилие прн
60%/д. Н, Тяговое
усилие
при токе
40% /д. НТКП 4004001,53150025'9600850259600' —120040*7800600407800-Б501003600ЗБ5403700ТКП 5005001,73.5!25002512 9009602512 900-19004098006904098001000“_40, _54008501004500 •395--ТКП 6006002.04,050002521 50012602521500’ -35604015 20089040 .15 200—2050—- '-40-12 00015501006SOO520-i-ТКП 7007002,24.580002529 40017702529 400д.57504021 10012904021 1003250—--4012 000280010010300750~--■ ТКП 8008002,55,012 5002540 30023202540 300—9100■ ^29 40016804029 400• _5050—--40 . ,—16 200440010014 100S65-—-П р и ы еч
ТКП БОО—12,6а н н е. Потребляемая мощность относится иавряжеЕию
Ом. ТКП 600—9.6 Ом. ТКП 700-«,8 Ом, ТКП 800—5,2 Ом.ИО В. Сопротивление катушек; ТКП 400—14.2 Ом.
§5-2]Тормозные электромагниты постоянного тока113Таблица 5-6Вр^мя срабатывания электромагнитов серии МП и тормозов
серии ТКПТипэлектрома¬
гнита и
тормозаМП 101
МП 201
МП 301
ТКП 400
ТКП 500
ТКП 600
ТКП 700
ТКП 8000,250,40.51.3
1.8
2.02.3
2,50.150,^150,350.81.31.41.51.60.10,150,250,50,60.70.91,00.10.150*250,30,3 .0,40,50,6Время включения, с'8SStfi XF л59 йта л л
>Л О
О SSi О
3 рV ts ос форси¬
ровкойвремя отпадания, с• <у ,pog1ёё2
_ с О cfl5 5 * bfi
к X о
с: № h- к ь^ “ IX X №
CXS.O.с: £ с:0.20.30,50.60.6Рис. 5-6. Массогабарнтные размеры катушек тормозов
серии ТКП.Таблица 5-7Номянальныг токи катушек последовательного возбуждения
электромагнитов серии МП и тормозов серии ТКПТипНоминальный ток. А[ТипНоминальный ток, Лэлектрома¬
гнита и
тормозаПВ=25%ПВ=40%электрома¬
гнита и
^рмозаПВ=25%ПБ=40%, МП 20113.020.0
32,0
50.010.3
15,8'25.3
39,5ТКП 5001Б6245383123193302МП 30141.552.065.081.597.5119.0163.0
194.5
226* 32.841.051.464.477.094.0129.0
153.5179.0ТКП 600162233395490600'l28184312 .387475234185ТКП 400751081495985,6118ТКП 700556910705438720555179208268141164
212 1ТКП 800460У)50363830ТипГабаритные размеры, мммотормозаВ,В*И,D,О*АоZ ^
S кТКП 4001,5105909428716123016ТКП 5001.5125958636618630027ТКП 6001,61581008842822136038,5ТКП 7001.5188ПО140W8850425643552ТКП .8001,5220125165*8857231150081Для катушек последовательного возбуждения.Рис. 5-7. Массогабаритные размеры тормозов серий ТКП и ТК
с диаметром шкива до 300 мм.ТипГабаритные размеры, ммсоUоZ аАЯFRЕSКLбС 1 hDdТКТ100ТКП100336352239274208224300130132110401253781001001311,315,8ГКТ200ГКП200ТКТ200/100ГКП200/100548543475498407437395415333327260272400177178
130
1321756019541001702001837.541.0
25.430.0ТКТЗОО/200ГКПЗОО/200ТКПЗОО6756707155775656053954004355601781772232508027551502403002278.5
75,094.5тания постоянного тока и тяжелые условия коммута¬
ции цепей крупных тормозов. Поэтому для коммута¬
ции цепей тормозов ТКП 400—ТКП 800 целесообразно
применять специальные контакторы с дутвгаситель-
ными .катушками, рассчитанными на токи 5—25 А, на-
8—839пример контакторы КПД 111, КПД 121. Необходимо
иметь также в виду, что в связи с возрастанием уси¬
лия электромагнита по мере движения якоря Проис¬
ходит удар якоря о магнитопровод прн растсрмажи-
вании тормоза. ,
!Т4Приводы тормозных устройств[Разд. 5Рис. 5-8. Массогабаритные размеры тормозов ТКП с ди¬
аметром шкива свыше 300 мм.ТипТКП400ТКП500ТКП600ТКП700ТКП800Габаритные размеры, мм948110713V2145816285206407808901020355450520612560649749830937Н М66082395311081255180200250290330780915109012151420170205250305350300375450505585320400475550600257379670S661355Рис. 5-9. Электромагнит серии КМП-б) Длинноходовые тормозные электромагниты
постоянного токаДлинноходовые тормозные электромагниты пос¬
тоянного тока имеют тяговую характеристику с прак¬
тически постоянным усилием в течение всего времени
хода якоря, что позволяет осуществлять плавное рас-
тормажнвание. Сравнительно медленный рабочий ход
затормаживания, который к тому же может регули¬
роваться в известных пределах, позволяет осуществ¬
лять плавное торможение с постепенным нарастанием
тормозного момента- Такие условия могут быть ис¬
пользованы для особо ответственных крановых меха¬
низмов горизонтального передвижения с малыми ско¬
ростями движения.В связи с развитием систем регулирования крано¬
вых электроприводов, обеспечивающих необходимую
плавность разгона и торможения практически до пол¬
ной остановки, постепенно изчезает необходимость в
применении длинноходовых электромагнитов постоян¬
ного тока, поэтому совершенствование конструкций
этих электромагнитов направлено в основном на уни¬
фикацию узлов и уменьшение числа исполнений, В
настоящее время изготовляются две серии длнннохо-
довых электромагнитов постоянного тока соленоидно¬
го типа: электромагниты серий КМП со степенью за¬
щиты от внешних воздействий IPOO в исполнении У2
' и электромагниты ВМ со степенью защиты от внеш¬
них воздействий IP55 в исполнениях У1, Т1, ХЛ1. На
рис. 5-9 приведен общий вид электромагнита КМП.Серия электромагнитов КМП включает в себя
три габарита. МагНитопровод выполнен из литого кор¬
пуса, закрываемого крышкой. В корпус вставлена ка¬
тушка; внутри катушки по направляющей латунной
гильзе движется якорь. Пара якорь — крышка исполь¬
зуется как воздушный демпфер для смягчения ударов
при включении и дЛя регулирования времени отклю¬
чения. Якорь не имеет упора против движения вниз,
и это движение ограничивается констр>т<цией тормо¬
за. Б корпусе у электромагнитов КМП прорезаны
вентиляционные отверстия, а выводы от катушки рас¬
положены на открытом клеммнике.В отличие от электромагнитов КМП у электро¬
магнитов ВМ корпус полностью закрыт, а выводы
располагаются в верхней части корпуса, закрытой
второй крышкой. При отключении катушек электро¬
магнитов имеют место значительные перенапряжения,
поэтому электромагниты КМП и ВМ снабжены разряд¬
ными резисторами. У магнитов КМП они укреплены
снаружи и закрыты легким кожухом. У магнитой ВМ
разрядные резисторы расположены в верхней части
корпуса там же, где и выводные зажимы. Электромаг¬
ниты изготовляются для напряжения НО и 220 В.Технические данные электромагнитов КМП при¬
ведены в табл. 5-8, а габаритные размеры электромаг¬
нитов показаны на рис. 5-10. Износостойкость элект¬
ромагнитов ВЛ1 и КМП невысокая и составляет 1-10*
циклов В—О при слабом демпфировании, но может
быть повышение до 2-10® при усилении демпфировав
f 5-2]Тормозные электромагниты постоянного тока115Таблица 5-8Технические данные электромагнитов серии КМПДанные тормоза•VДанные электромагнитаДиаметр
шкива, ммМаксимальный
ход привода
колодок, ^ммТормозной
момент, Н’МТипХодякоря,ммМасса
якоря, кгРежим
работы,
ПВ, %Тяговое
усилие
с учетом
веса яко¬
ря, НПотребля¬
емая мощ¬
ность, ВтВремя
втягива¬
ния. сВремяотпадания#с2003160КМП 2■ 401,5251153000,40.1ПО408019050100357540041БООКМП 4807253706501,50,31200403004505001001201706004,55000КМП 612023,525100015002,50,5350040720950>1600100330375Рис. 5-10. Массогабаритные размеры электромагнитов
КМП.Габаритные размеры, шТипi1И,О,Я»LВ,КМП 21083512250134103КМП 4124504371336022412095КМП 6130755942150033015195ЛроВолжениеTmiГабаритные размеры, ммМасса,кгD,И,Я*С,С*КМП 21043415КМП 4ПО220341180№5045КМП 61702204002609070150ния и соответствующем увеличении времени ррабаты-
вания.Выбирая дликноходовые электромагниты, следует
учитывать, что при сдвпадении направления силы тя¬
жести с направлением движений якоря суммарное
усилие при растормаживании повышается соответст¬
венно массе якоря электромагнита.в) Устройства питания электромагнитов
постоянного токаПри питании электромагнитов постоянного тока
непосредственно от сети постоянного тока их включе¬
ние производится аппаратами управления электропри¬
водом, а защита цепей электромагнитов производится
общими предохранителями или автоматическими вык¬
лючателями цепей управления. При применении фор-
-■ J-
116Приводы тормозных устройств[Разд. 5сировки для снижения времени срабатывания время
фо^ировки должно быть не более 0,3 с для электро¬
магнитов МП, BMI2 и BMI3; 0,6 с — для катушек
электромагнитов ТКП, ВМ14 и КМПЧ; 1;0 с для элек¬
тромагнитов КМП 6 и ВМ 15.В том случае, когда электромагниты постоянного
тока типов МП 100—МП 300, ВМ 11—ВМ 13, КМП 2
используются для питания от сети переменного тока,
могут быть применены типовые однополупериодд^е4=Рис. 5-11. Схемы выпрямителя
BCKLвыпрямнтели типа ВСК 1, обеспечивающие выпрям¬
ленное напряжение 220 В постоянного тока при пи¬
тании от сети 380 В переменного тока или выпрям¬
ленное напряжение ПО В при питании от сети пере¬
менного тока 220 В за счет включения параллельно
катушке электромагнита конденсатора определенной
емкости.Рис. 5*12, Схема питания электромагнитов постоянного
тока с форсировкой.Схема выпрямителя ВСК 1 приведена на рис. 5-11.
Кремниевый диод В рассчитан на ток до 3 А. Груп¬
па конденсаторов С типа МБГО 2-600 емкостью
от 6 до 14 мкФ обеспечивает выходные параметры,
соответствующие условиям питания электромагнитов. '
Питание крупных тормозных электромагнитов типа
ТКП 400—ТКП 800, ВМ 14, ВМ 15, КМП 4, КМП 6
может осуществляться либо от общего источника пи¬
тания вспомогательных цепей .постоянного тока, либо
от сети переменного тока по схеме, приведенной на
на рис. 5-12. В этой схеме В — двухполуттериодный вы¬
прямитель, собранный на кремниевые диоЛах В 2-256-го —7-го классов, контактор К типа КПД 111 с тяго-
i вой катушкой 220 В и дугогасртельной катушкой
f lOA н реле РФ типа РЭВ 816 с катушкой на ток 2,5;‘ 5 или 10 А в зависимости от типа электромагнита.Контакт РТ осуществляет управление процессом
включения или отключения тормоза, действуя от схемы
электропривода. Резисторы R1 и R2 рассчитываются для
, обеспечения необходимого режима нагрузки и форси¬
ровки. В частности, резистор R1 по значению и мощно¬
сти выбирается равным сопротивлению и мощности ка¬
тушки электромагнита, а сопротивление резистора R2
ограничивает ток при определенных режимах работы.Типы и значения добавочных резисторов или ящи¬
ков резисторов, включаемых последовательно с катуш¬
ками электромагнитов МП и ТКП при питании от се¬
тей постоянного тока, приведены в табл. 5-9. При пи¬
тании по схеме на рис. 5-12 в случае номинального на¬пряжения на катушке 110 В сопротивление резистора
RJ выбирают по табл. 5-9. сопротивление. Ом, и мощ¬
ность, Вт, резистора R2 рассчитывают по формулам(5-8УVPxP^R2 =25Р^Р251]R2.(5-9)где Vc — напряжение сети переменного тока; Рга —
мощность катушки электромагнита при режиме работы
ПВ = 25%: Рх — мощность электромагнита в заданном
режи.ме.На основании многолетней практики установлено,
что.специальная защита цепей электромагнитов МП 100
—МП 300 при питании от выпрямителей ВСК 1 не тре¬
буется. При питании крупных электромагнитов от вы¬
прямительных устройств, в том числе по схеме на
рис. 5-12, необходимо осуществлять защиту цепей
электромагнита с помощью автоматического выклю¬
чателя типа АК 63 на ток, составляющий не более
130% номинального тока электромагнита. При этом
один из полюсов автоматического выключателя ис¬
пользуется в цепи нулевой блокировки электропривода.Ко времени издания справочника намечается освое¬
ние производства комплектного устройства для пнта-Таблица 5-9Технические данные добавочных резисторов к электромагнитам
м тормозам постоянного токаеX
' X
U(9Xо1-*11- Жоi”.w ва ёк к
с R<9 О
= £а1о<*1с’“о
1 •|1S ^i:-г «
|1
М н
р
и иТип ящика
резисторовКаталожный
номер ящика
резисторовМП 1012201006000.35ПЭВ 100>S70*,.ЧП 2012201003000.7ПЭВ 100-150*. 2шт.—МП 3012201002001.0ПЭВ 100-65*. 3 шт.ПО4064,62ТД:7Б0.020-10ТКППО100203.02ТД.7Б0.020-24002202520,76.0НФ ПА2ТД.750,е20-222040304.62ТД.750.020-2220.10060-3.02ТД.750.020-91104055.02ТД.750.020-10ТКП110100183,22ТД.750.020-2500ио2517,67.0НФ ПА2ТД.760.020-222040305.02ТД,750.020-22201G0553,22ТД.750.020-2ПО.4047,0'2ТД,750.030-10ТКП110100144.52ТД-750.020-2£002202513,69.0НФ ПА2ТД.760.020.92204020,27.02ТД.7£0.020-222010040,54,52ТД.750.020-2110402.5510,02ТД.760.020Л0ТКППО1009,357,02ТД.750.020-2700220259.512,5НФ ПА2ТД.750.020-102204014,310,02ТД,750.020-922010027.67.02ТД.760.020.2ПО402.012,02ТД.750.020-10ТКППО1007.358,02ТД,750.020-2800220258.015,0НФ ПА2ТД.750.020-102204012.212.02ТД.750.020-1022010024 ’8.02ТД.750.020-10• Резисторы ПЭВ 100 рекомендуется устанавливать на ас--
боцементных панелях толщиной 15—:.’0 мм.
§5-3]Тормозные электромагниты переменного тока117ния от 3 до 8 электромагнитов постоянного тока одно¬
го крана по схеме на рис. 5-12, что позволит значи*
тельно поднять надежность устройств питания
электромагнитов за счет более качественного и комп¬
лектного монтажа и эффективной защиты как самих
тормозов, так и проводов, идущих по крану к этим ус¬
тройствам.5-3. ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ
ПЕРЕМЕННОГО ТОКАа) КорЬткоходрвые тормозные электромагниты
переменного токаОдним из самых распространенных' приводов кра¬
новых тормозов являгОтся короткоходовые электромаг¬
ниты переменного тока. Только в 1975 г. отечествен-Рис. 5-13. Электромагниты МО 100.ными заводами изготовлено свыше 160000 тормозных
электромагнитов переменного тока, что составило око¬
ло 65%' объема производства' всех типов тормозных
приводов-В настоящее время промышленностью изготавли¬
ваются короткоходовые электромагниты с однофазным
питанием переменного тока двух типов: МО 100 для
тормозов со шкивами диаметром 100 и 200 мм в ис¬
полнении У2, Т2 и ХЛ2 и МО 200— для тормозов со
шкивами диаметром 200 мм в исполнении У2, ХЛ2.
Электромагниты имеют шихтованный магнитопровод
из электротехнической стали и поворотный якорь, ко¬
торый при включении электромагнита нажимает на
приводной шток тормоза, обеспечивая расторма-
живание.Катушка электромагнита укреплена на неподвиж¬
ной части магнитопровода. Катушка имеет пластмас¬
совый каркас и намотана из алюминиевого эмалиро¬
ванного провода.Общий вид и габариты электромагнитов МО 100
приведены на рис, 5—13, Электромагниты используют
в качестве привода унифицированных тормозов ТК, га¬
баритные размеры которых приведены на рис. 5-7-
Тормоза могут устанавливаться как нормально, т. е, с
горизонтальной осью шкива, так и с вертикальной
осью шкива.Технические данные тормозов ТК и их электромаг¬
нитных приводов приведены в табл. 5—10.Из-за отсутствия демпфера при включении элект¬
ромагнитов возникает сильный удар якоря о магнито¬
провод,. передающийся на элементы крепления элект¬
ромагнита и ось якоря, С увеличением размеров маг¬
нита усилия настолько возрастают, что не могут быть
обеспечены надлежащая прочность и износостойкость
магнита. Последнее обстоятельство ограничивает воз¬
можность применения короткоходовых электромагни¬
тов переменного тока только для тормозбв со шкива¬
ми до 200 мм.Электромагнит МО 100Б является наиболее надеж¬
ным из этой группы. Его износостойкость составляет
до 2,5* 10® циклов В—О. Электромагнит МО 200Б
имеет несколько более низкую износостойкость — доТаблица 5-10‘Tc^HR.qKKtue: данные тормоаов серия ТКТ с приводом от электромагнитов серии МОДанные тормозаДанные электромагнитаТипДиаметршкива,ммТормозноймомент.НмТип электро¬
магнитаРежимработы,ПВ=%Кажущаяся мощ¬
ность, В-АПотребля¬
емая мощ-
иость., Вт.Момент .
электро¬
магнита.
НмУголповоротаякоряМомент от
веса якоря
электро¬
магнита,
Н-мв момент
включенияво вклю-
чеквом со¬
стоянииТКТ 10010020МО 100Б4020004001405,57®30'0,5111001100190703.00.SТКТ 100/20020040МО 100Б4020004001405.5'7 ”30*. 0,5221001100190'703,00,5ТКТ 200200160МО 200Б4068001350450 ,405^30'3,6801004000650225203.6ТКТ 200/300300240МО 200Б4068001350450405°30'3.6120 .1004000650225203.6 U-
118Приводы тормозных устройств[Разд. 5Таблица 5<11Технические данные электромагннтоз серии КМ Т.Данные тормозаДанные электромагнитаДиам ет р.
шкива, м мТормозноймомент,Н-мТипТяговоеусилие,НМассаякоря,кгМакси¬
маль¬
ный
ход, ммДопусти¬
мое число
включе¬
ний в часВремявклю¬чения.Времяотклю¬чения,сПолная мощность. В-Апри вклю¬
ченииво вклю¬
ченном
состоянииПотребля¬
емая мощ
ность, БтИзносо¬
стойкость,
10* циклов
Б-О30040050060045013Ш20004000КМТ ЗА
КМТ 4А
КМТ 6А
КМТ 7А3507001150140012,52446525050608040Ц3002502000,10,20,30,50,150,250,40,622S00
38 000
85 000
140 00070019003000440012040060075010,80,60,41,5-10® циклов. Электромагниты МО допускают в час
до 600 включений, однако, учитывая их ограниченную
ИЗНОСОСТОЙКОСТЬ, применение этого вида привода сле¬
дует ограничивать случаями, когда число включений не
более 300 в час для электромагнитов МО 100Б и не
более 150 в час для электромагнитов МО 200Б. При.
Э1:их режимах работы и колебаниях напряжения сети,
ие выходящих за пределы 85—105% номинального,
электромагниты имеют вероятность безотказной рабо¬
ты около 0,95 за один год эксплуатации. Собствен¬
ное время включения электромагнитов около 0,03 с,
время отпадания — 0,02 с, cos ф — около 0,35.Катушки электромагнитов имеют исполнения на
напряжение 220 и 380 В и частоту 50 Гц; при этом
для каждого из напряжений имеются исполнения для
режимов работы ПВ=40% и ПВ=100%. Для исполь¬
зования при напряжениях 440 В, 60 Гц или 380 В, 60 Гц
необходимо применять специальные исполнения элект¬
ромагнитов.б) Длиниоходовые тормозные электромагниты
11еременного токаДлинЬоходовые электромагниты, переменного тока в
настоящее время изготавливаются в основном для комп¬
лектования механизмов, находящихся в эксплуатации, а
также в механизмах с небольшим числом включений в
час. Длиниоходовые электромагниты применяются также
в беспружинных тормозах с высокой степенью надежно¬
сти торможения, например для крупных пассажирских
лифтов, эскалаторов и т. п.Длинноходовые электромагниты переменного тока
имеют прямоходовую конструкцию магнитопроеода с
Ш-образным шихтованным магнитопроводом, на кото¬
ром расположены три катушки, включенные в звезду или
треугольник.Электромагнит помещен в чугунный корпус. В ниж¬
ней части корпуса размещен пневматический демпфер,
обеспечивающий регулирование усилия демпфирования.
Электромагниты этого типа представляют собой серию
КМТ, состоящую из четыре^ типоразмеров. Общий вид
электромагнита показан на рис. 5-14. Техничеоше дан¬
ные электромагнитов в сочетании с параметрами тормо¬
зов при питании от сети 50 Гц приведены в табл. 5-11.
Габаритные размеры электромагнитов серии КМТ даны
на рис. 5-15. Электромагниты изготавливаются в испол¬
нениях У2 и Т2.Пусковой ток электромагнита определяется по фор¬
муле^ — ^п.эиШсгде Sn.sM — полная пусковая мощность, В-А; £/о^ ли¬
нейное напряжение сети, В.Рис. 5-14. Электромагнит серии КМТ. .Учитывая, что значение cos ф при включении элект¬
ромагнита лежит в пределах 0,1—0,15, контактор для
включения электромагнита необходимо выбирать с не-
которым запасом, т. е. ток включения контактора дол¬
жен быть в 2 раза больше пускового тока электромагни¬
та. Например, для управления электромагнитом КМТ 7А
необходим контактор с номинальным током 100 А.Вероятность безотказной работы электромагнита
при правильно отрегулированном демпфере составляет
около 0,95 за год эксплуатации.
§5-4]Электрогидравлтеские толкателиП9Рис.^5-15. Массогабаритные размены электромагнитовТипкмт ЗА
кмт 4А
КМТ 6
кмт 7Габаритные размеры, мм150180220220Сг346450580580100180160.160D,1417•2222D214017022022030405060140178210230ПродолжениеТипГабаритные размеры, ммМасса,КРИ,И,ЦКМТ ЗА1033753330037645КМТ 4А1242270040049086КМТ 650482835520640183КМТ 750572980520640213При использовании электромагнитов для сетей с ча¬
стотой 60 Гц или при .напряжениях 440, 415 В необходи¬
мо применение специальных исполнений катушек.5-4. ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ ТОЛКАТЕЛИЭлектрогидравлический толкатель представляет со¬
бой комплектное устройство (внутренняя полость кото¬
рого залита маслом), включающее электродвигатель,
центробежный насос и гндроцилиндр с поршнем. Послед¬
ний обеспечивает поступательное движение штока с оп¬
ределенным усилием при вращении колеса насоса с по¬
мощью электродвигателя. Общий вид электрогидравли-
ческого толкателя приведен на рис, 5-16.Изготавливаемые в настоящее время серийно одно-
штоковые электрогидр а влические толкатели с тяговыми
усилиями от 160 до 800 Н подобны друг другу и отли¬
чаются лишь отдельными конструктивными элементами.
Как видно из рис, 5-16, в нижней половине электрогид-
равлического толкателя размещен асинхронный корот¬
козамкнутый электродвигатель, на вал которого наса-Рис. 5-16. Электрогидравлический толкатель.Электромагниты переменного тока обладают рядом
недостатков, главными из которых являются:1) относительно малая износостойкость, достаточная
лишь для тормозов малого размера;2) сильные удары при включении, не полностью
амортизируемые даже специальными демпфирующими
устройствами;3) значительные токи включения, в 7—30 раз превы¬
шающие значение номинального тока в замкнутом со¬
стоянии;4) быстрый и трудно контролируемый выход из
строя катушки при случайном заедании системы в разом¬
кнутом состоянии.В связи с этим уже много лет назад было цачато
широкое внедрение для привода крановых тормозов
длинноходовых электрогидр авлических толкателей.жено колесо цейтробежного насоса. При вращении вала
электродвигателя давление, развивающееся в наполнен¬
ной маслом камере насоса, перемещает поршень со што¬
ком вверх до тех пор, пока не откроются каналы в ци¬
линдре и масло будет перетекать в нижнюю часть. Весь
прибор герметизирован уплотнениями, а обмотка элект¬
родвигателя пропитана маслостойкими лаками. Более
мощные двухштоковые электрогидравлические толкатели
состоят из тех же основных элементов, существенным
отличием их конструкции является верхнее расположе¬
ние электродвигателя и вынужденное поэтому примше-
ние двух штоков.Электродвигатели толкателей имеют обмотки на на¬
пряжение 220 или 380 В при частоте 50 Гц. Специальные
исполнения толкателей изготавливаются для сетей с ад-
стотой 60 Гц и напряжением 440 или 415 В, -
коПриводы тормозных устройств{Разд. 5Технические данные тормозов ТКТГ с приводом от влектрогидравлнческнх толкателейТаблица 6-12Данные тормозаДанные электрогидравлического толкателяТипДиаметр
шкива, мыОтходколо¬док,ммТормозноймомент,НмТнпУсилие
подъе¬
ма, НХодштока,ммвремяподъе¬маштока,сВремя
опус¬
кания
штока,
сМощ¬ностьдвига¬теля,кВтЧастотавращения,об/мннТок дви¬
гателя при
380 В. АОбъемрабочейЖидкости,лТТ 160
ТКТГ 200М
ТКТГ зоом
ТКТГ 400М
ТКТГ ЙЮМ
ТКТГ 600
ТКТГ 700
ТКТГ 8001602003004005006007001,21.21.5
1.81.5
1,8
1.81.5100
300
800
150Р
2500
бООО
8000
12 500ТЭГ 16—2М
ТЭГ 25М
ТГМ 50
ТГМ 80
ТГМ 80
Т 160Б
Т 160Б
Т 160Б16025050080080016001600160025325050БО60901400,350,350.50,55.0.60,851.051.50,280,30.370.370,40.750.951,20.110,110,20,20.20.40,40,4285028602850285028502800280028000.460,460,70.70.71.31.31.31.4
1,83.55.05.07.57.57.5Электрогидравлические толкатели рассчитаны на
продолжительное непрерывное включение ч допускают
при этом до 100 включений в час. При снижении ПВ до
60% толкатели допускают 700' включений в час.Технические данные тормозов серии ТКТГ с приво¬
дом от элёктрогидравлических толкателей приведены в
табл. 5-12. Габаритные размеры тормозов приведены на
рис. 5-17. Тормоза могут устанавливаться только с го¬
ризонтальной осью шкива. Габаритные размеры электоо-
гидравлических толкателей приведены на рис. 5-18. 06-
.щее максимальное время, подъема и опускания штока
толкателя приведено в табл. 5-12. При этом у одношто-
ковых толкателей около 0,1 с тфи подъеме затрачивается
на разгон электродвигателя. Остальное время идет на
движение штока. При опускании штока около 0,2 с идет
на снижение давления при неподвижном штоке,* а ос¬
тальное время затрачивается на движение штока. Та¬
ким образом, при сокращений пути движения штока об*
щее время подъема и опускания штока может быть
снижено на время, пропорциональное изменению длины
хода, но подготовительное время при этом сохраняется.
Снижение противодействующего усилия на шток вдвое
также сокращает вдвое время движения штока при сох¬
ранении подготовительного времени.У двухштоковых толкателей Т 160Б постоянная со¬
ставляющая времени подъема равна 0,2 с и постоянная
составляющая времени опускания — 0,4 ci В остальномсоотношения те же, что и для одноштоковых толкателей.
Нормальное положение электрогидравлического толка''
теля — вертикальное штоком вверх. При этом допуска¬
ется наклон при работе в любую сторону на 15—^20°.Важнейшим элементом обеспечения надежной рабо¬
ты электрогидравлнческих толкателей является примене¬
ние масляного наполнения необходимой чистоты и соот¬
ветствующего сорта. При отгрузке с завода-нзго'
товителя толкатели заполняются трансформаторным
маслом по ГОСТ‘982-68, которое обеспечивает нормаль¬
ную эксплуатацию при температурах окружающей сре¬
ды от —15 до +50® С, Для эксплуатации толкателей при
температурах от —40 до +15“ С должно применяться
масло АМГ-10 согласно ГОСТ 6794-75. Электрогидрав¬
лические толкатели не могут эксплуатироваться без пе¬
риодической смены масла при катего|)ии размещения
У2, они также непгагодны для категории ХЛ2. Эксплуа¬
тация в категории Т2 допускается.Износостойкость толкателей в основном определяет¬
ся целостностью уплотнения и состоянием подшипников.Срок службы электрогидравлических толкателей со¬
ставляет 10 лет при числе циклов В— О около 4-10*.
Однако при этом требуются контроль и замена уплотне¬
ний, а также регулярный контроль чистоты масла и его
объема.Показатель надежности электрогидравлических тол¬
кателей колеблется в весьма широких пределах от 0,93Габаритные размеры, ммТипАСDFНhТКТГ 20062290154200387411170.ТКТГ 300771140-227300486526240ТКТГ 400967180240400582635350ТКТГ 5001202200 ■2405007427934С0ТкТГ 6001428240268600 ,868 .- 945475 -ТкТГ 70015822802687009571083 '550ТкТГ 800183732026880011421216600ПродолжениеРис. 5-17. Массогабаритные размеры тормозов
серии ТКТГ.ТипГабаритные, размеры, ммМасса,кг« 1LМ0RSТКТГ 20018015856,538061517549ТКТГ 3Q08042170625092ТКТГ 40090212101,5575960170178ТКТГ 500100250112,56551115205 i248ТКТГ 600Ш322136.57151300.260435ТкТГ 700150358156.58301456305.605ТкТГ 800180374J76.5I0J5i1710i350840
§ е-г]Аппаратура защиты121ТипТЭГ 16М
ТЭГ 25 \\
ТЭГ 50
ТЭГ 80ТипТЭГ I6M
ТЭГ 25М
ТЭГ 50
ТЭГ tsoГабаритные размеры, ммЯМ27530038045066758197667590107102121117117ПродолжениеГабаритные
размеры, мм40x560x560X560X512А.
12 А,
16А,
16А,Масса.КР10
11 .
32
41,5Рис. 5-18. Массогабаритные размеры электрогидравли-
ческих толкателей.нри эксплуатации в. категории УЗ и постоянной положи¬
тельной температуре и нормальной влажности до 0,85
за один год эксплуатации на открытом воздухе (в кате¬
гории У2). Наиболее предпочтительными условиями экс¬
плуатации электрогидр а влических толкателей является
категория УЗ или ТЗ. ,Поскольку о^гновным рабочим элементом электро-
гидравлйческих толкателей является короткозамкнутый
электродвигатель, то обеспечение его надежной работы
может быть достигнуто только при надлежащей защнте.
Наиболее опасным для толкателя режимом является об¬
рыв одной фазы, произошедший перед включением. При
однофазном включении электродвигатель будет стоять
под током, что в результате перегрева может привести
к возгоранию масла, поэтому при применении толкателей
каждый из них необходимо защищать либо автоматиче¬
скими выключателями с мгновенной и тепловой защитой,
либо защитой в двух фазах тепловыми реле, причем но¬
минальный ток тепловой защиты должен быть не более
1,2 номинального тока электрогидравлического тол¬
кателя.В настоящее время завершается модернизация элек-
трогндравлнческих толкателей, которая снимет огра¬
ничения по смене масла в зависимости от сезона, а так¬
же значительно улучшит надежность уплотнений. Мож¬
но ожидать, что показатель надежности модернизиро¬
ванных электрогидравлических толкателей достирнет
значений около 0,92 и тогда их применение для многих
механизмов станет предпочтительным.РАЗДЕЛ ШЕСТОЙАППАРАТУРА ЗАЩИТЫ И КОНТРОЛЯ. ГРУЗОПОДЪЕМНЫЕ ЭЛЕКТРОМАГНИТЫ6*1. АППАРАТУРА ЗАЩИТЫа) ОбШне условия защиты электрооборудования
на кранах от аварийных ситуацийПо своему назначению, специфике работы и конст¬
руктивным особенностям грузоподъемные краны Лтио-
сятся к категории оборудования, имеющего повышенную
опасность, что объясняется самим процессом работы
этих механизмов на площадках и в, помещениях, где од¬
новременно находятся люди и ценное оборудование.Общие требования n(j безопасности работы кранов и
кранового электрооборудования сформулированы в пер¬
вом разделе в соответствии с «Правилами устройства и
безопасной эксплуата11ни грузоподъемных кранов» и
«Правилами устройства электроустановок».Все электрооборудование, располагаемое в кабинах
управления кранами, снабжается заземленными метал¬
лическими кожухами или должно быть полностью закры¬
то от возможности прикосновения к токоведущим ча¬
стям. В кабине управления также должен находиться
аппарат, обеспечивающий непосредственное или дистан¬
ционное отключение всех питающих кабельных трасс,
проведенных по крану, за исключением вводных уст¬
ройств. Выход на площадки крана, где расположены не
защищенное кожухами электрооборудование, токопод-
воды или троллеи тележки, может осуществляться толь¬
ко через двери и люки, имеющие блокировку, от¬
ключающую питание всех источников электроэнергии
крана. •Участок главных троллеев, главные токоприемники
и токовводы, остающиеся под напряжением при отклю¬
чений всей внутрикрановой разводки,, должны иметь
надежное ограждение от случайного прикосновения кним. Это ограждение должно иметь замок с индивиду¬
альным ключом.Ремонт и осмотр токовводов может осуществлять¬
ся только при отключении питания главных троллеев
или общего вводного устройства, расположенного вне
крана. Цели несколько кранов питаются.от общецеховых
троллеев, то предусматривается ремонтный участок, где
может быть осуществлено отключение троллеев без пере¬
рыва питания остальных кранов.Краны являются движущимися установками и под¬
вержены вибрациям и ударам в процессе движения, по¬
этому возможность* повреждения кабелей и проводов на
кранах относительно выше, чем при йх стационарной
прокладке. Кроме того, на ряде кранов токопереход на
движущиеся части осуществляется с помощью гибких
шланговых кабелей, повреждение которых полностью
исключить невозможно. С учетом этого первой задачей
защиты является защита электрооборудования на кра>
нах от токов к. з. (см. § 1-3).Токи к. 3. в отдельных цепях в пределах .крана бу¬
дут тем меньше, чем меньше сечения монтажных прово¬
дов этих цепей и меньше размеры различных токопере*
ходов и токоразъемов. Максимальные токи к. а. в цепях
управлёния при сечении проводов 2,5 мм^ составляют
1200—2500 А- При этом для защиты цепей возможно
применение предохранителей серий ПР на токи 6—20 А
или любых видов автоматических выключателей АП 50,
АК 63, ACT 25 и т. п. Токи к. з.. А, в цепях электродви*
гателей ориентировочно можно определить .по формуле•^к.з.д = ^к.з.ф (6*1)где /к.а.ф—ток короткого замыкания в фазе питающей,
линии через 0,04 с; Sa — сечение провода в рассматри¬
ваемой цепи, мм^.
122Аппаратура защиты и контроля. Грузоподъемные электромагниты[Разд. 6Так как ток к, э. не должен до его отключения раз¬
рушать коммутационный аппарат, находящийся в дан¬
ной цепи, то необходимо при выборе аппаратов и сече¬
ний проводов соблюдать определенные Соотношения,
обеспечивающие термическую стойкость аппарата. Пола¬
гая, что термическая стойкость большинства аппаратов,
применяемых в крановом электроприводе, составляет
10/а в течение 1 с, то соотношение между максималь¬
ным допустимым сечением провода, мм^ и номинальным
током аппарата должно быть следующим;Таблица 6^1Допустимые нагрузки на провода и кабели с резиновой
изоляцией при 45° Сгде In — номинальный ток аппарата. А,Последнее соотношение показывает, что при воз¬
можных токах к. 3. на фидере более 8000 А аппараты на
25 А устанавливать недопустимо по термической стойко¬
сти. Аппараты на токи 63 А могут использоваться толь¬
ко при сечениях кабеля ке более 6 мм^, а аппараты на
ток 100 А — при сечениях кабеля не более 16 мм*.При возможных токах к. з. 12 ООО А (предельных
для кранов) аппараты на токи 63 А могут использовать¬
ся только при сечениях кабеля не более 4 мм^ т. е. при
номинальных токах до 30 А. Аппараты на ток 100 А мо¬
гут использоваться при сечениях кабеля не более Ю мм®,
т. е. при номинальных токах до 60 А. Таким образом,
для ^ранов, получающих питание от фидеров особо боль¬
шой мощности, необходимо либо устанавливать аппара¬
ты на токи не ниже 100—160 А, либо ограничивать се¬
чения проводов к этим аппаратам с целью снижения
возможных токов к. 3.Защита кабельной сети крана от токов к. з. осущест¬
вляется с помощью реле максимального тока мгновенно¬
го действия, а при необходимости может осуществлять¬
ся установочными автоматами.Защита проводов от токов к. з. осложняется .боль- <
шим интервалом мощностей электродвигателей механиз¬
мов в пределах одного крана. В соответствии с прави¬
лами устройства электроустановок защитные аппараты
должны быть рассчитаны на ток срабатывания не выше
450% продолжительного тока защищаемой цепи. Этими
же правилами для проводов и кабелей, работающих с
повторно-кратковременной нагрузкой, допустимей по
нагреву ток определяется выражением0,875'пв"У ПВ/100(6-2)где /пв > — номинальные токи кабеля в повторно-
кратковременном и продолжительном ре^:имах работы.При ПВ=40% Iyiq =1,4 In. Таким образом, крат¬
ность уставки защиты к допустимому току провода (ка-.
беля) должна быть не выше 450/1,4=320% тока в режи¬
ме 40% ПВ. Допускаемые нагрузки на провода и кабели
в пределах крана при температуре окружающей среды
4^ С приведены в табл. 6-1.Крановые электроприводы имеют следующие основ¬
ные типы защитных устройств:максимальную защиту для отключения электропри¬
вода от сети при возникновении в защищаемой цепи не¬
допустимых токов;нулевую защиту для отключения электропривода
при прекращении или перерыве подачи питания от ис¬
точника электроэнергии. Разновидностью нулевой защи¬
ты является нулевая блокировка, исключающая самоза-
пуск электродвигателя при восстановлении питания на
подводящей линии, если орган управления находится в
рабочем положении^ сз »а о
.X а
о
3* о.бвТок продолжи¬
тельного ре¬
жима, АToK режима,
ПВ=40%61-^.3
о н
к я■Е &Я шsi
rt 0)
а £О н|s«X P.Sisit« та: S
о 0)
Ь воо о
2Ё-О <1) cd
S.10
tt ев оOS»оь fSg.X лt- 2 Юо
!-i •£ оifо S'ra
cc5 <й о
о !s! иои ,о о^ л.9 с
и ш СЗо. я оН BS ю1.5141419196320602.519192626852575424243333108329663131434314040120105050696819063196166660957624080240258970120100315100300351158616812039012537650148107205150485160480 V7018312025016854020060095218151300210675200600120254178350250800250750150294210410300940320960185334244460340’ 11004001200240396290550410" 13004001200конечную защиту для предотвращения перемещения
движущихся конструкций сверх определенных допусти¬
мых границ.Важной задачей системы защиты является пре¬
дотвращение у всех типов электроприводов крановых
механизмов недопустимых перегрузок, связанных с не¬
исправностью схем управления, заклиниванием механиз¬
мов, обрывом цепи тормоза и т. п. В этом отличие тре¬
бований к защите от перегрузок крановых электропри¬
водов от защиты от перегрузок для электроприводов
продолжительных режимов. В связи с неопределенно¬
стью нагрузки крановых механизмов, меняющимися тем¬
пами нагрева двигателей, их работой в условиях чаетых
пусков и. торможений не представляется возможным да¬
же ставить задачу защиты электроприводов от тепловых
перегрузок. Единственным условием предотвращения
тепловых перегрузок кранового электрооборудования яв¬
ляется его правильный выбор с учетом заранее рассчи¬
танных любых возможных в эксплуатации режимов ра¬
боты, Таким образом, защита от перегрузок сводится к
контролю пускового тока при ступенчатом пуске и защи¬
те от заклинивания короткозамкнутых двигателей или
электроприводов с токовой отсечкой. При правильно
организованном пуске электропривода со ступенчатым
разгоном пусковой ток не должен превышать 220—
240% тока, соответствующего расчетному значению.С учетом необходимого запа^^а на разброс как пус¬
кового тока, так и уставки 'максимального реле послед-
няя^должна рыть рассчитана на сраоатыванйе"'при'токе
около 250% расчетного^ который может быть равен или
меньше тока электродвигателя в режиме ПВ=40%.Согласно изложенному на реле максимального тока
в системе крановых электроприводов возлагается две
функции: защита от токов к. з. проводов (кабелей) в
каждом полюсе на постоянном токе и в каждой фазе на
переменном токе, а также защита от перегрузок, для
обеспечения которой достаточно включить реле в один из
полюсов или одну из фйз.В соответствии с правилами Госгортёхнадзора эле¬
ктроприводы кранов должны иметь нулевую блокиров¬
ку, т. е. при перерыве питания электропривод должен
отключаться, а- его повторное включение ^возможно
только после возвращения органа управления в нулевое
положение. Это требование не распространяется ка си¬
§61]Аппаратура защиты123стемы кнопочного управления с пола, имеющие кнопки
с самовозвратом.Наличие нулевой блокировки исключает самозапуск
электроприводов кранов, а также исключает повторное
включение при срабатывании различных защит.Защита от обрыва фазы на кранах не применяется.
Анализ возможных последствий обрыва фазы вне крана
и приемлемой системы защиты от обрыва фазы показал,
что, с одной стороны, в настоящее время нет удовлетво¬
рительного технического решения по применению надеж¬
ного, дешевого и простого аппарата контроля напряже¬
ния на фазах, а с другой стороны, обрыв фазы в преде¬
лах крана и вне его маловероятен в связи с тем, что
применение плавких предохранителей в главной цепи в
настоящее время не практикуется.Новые системы динамического торможения, приме¬
няемые взамен торможения методом противовключения,
сводят к минимуму опасность падения груза при обрыве
фазы,6) Реле защиты от перегрузок
в крановом электроприводеДля защиты цепей кранового электрооборудования
от перегрузок применяется электромагнитное реле мгно¬
венного действия типа РЭО 401. Эти реле могут исполь¬
зоваться как в цепях переменного, так и постояйного
тока. Реле имеет два конструктивных исполнения. На
рис. 6-1 показан общий вид реле РЭО 401.Реле состоит из двух основных узлов: электромагни¬
та 2 и размыкающего вспомогательного контакта 1. Ка¬
тушка электромагнита 3 расположена на трубке 4, в
которой свободно перемещается якорь 5. Положение яко¬
ря в трубке регулируется по высоте и определяет значе¬
ние тока срабатывания реле. При возрастании тока в ка¬
тушке выше тока срабатывания якорь поднимается вверх
и через толкатель контактного узла размыкает контакты.
Во втором исполнении электромагниты реле в количест¬
ве от двух до четырех штук крепятся на общем основа¬
нии, имеющем также общую скобу, передающую усилия
любого отдельного якоря электромагнита - к вспомога¬
тельному контакту, установленному на основании. Та¬
ким образом, в этом исполнении несколько электромаг¬
нитов воздействуют на один вспомогательный контакт.
После отключения тока возврат якоря происходит под
действием собственного веса. Реле имеет один размыка*
ющий вспомогательный контакт. Вспомогательный кон¬
такт рассчитан на коммутацию переменного тока доТаблица 6-2Технические данные реле РЭО 401Каталожный номерТок катушки, АПределы
регулиро¬
вания, АВыводыкатуш¬киРеле РЭО 401Электромаг¬
нит РЭО 401J||2ТД.304.0Э6-26ТД.237.004-1320480420—1280М122ТД.304 0Э6-46ТД.237.004-2250375325—1000М122ТД.304.096-66ТД.237.004-316024Q210—640М102ТД.304.096-86ТД.237.004-4100ISO130—400М82ТД.304.096-10 '639582—262М82ТД.304.096-126ТД .237,004-6406052—160Мб2ТД.304.096-146ТД.237.004-7253833—100Мб2ТД.304.096-16162421—64Мб2ТД.304.096-186ТД.23Т.004-9101513—40Мб2ТД.304.Ш6-206ТД.237.004-10698—24Мб2ТД.304.096-22—466,2—16МбРис. 6-i, Общий ВИД реле РЭО 401,10 А при напряжении 380 В и cos<p=0.4 или на комму¬
тацию постоянного тока 1 А при 220 В и L/i?=0,05.Технические данные реле серии РЭ 401 приведены
в табл. 6-2. Катушки реле на токи свыше 40 А выполне¬
ны из неизолированной меди. Выводы этих катушек
расположены на специальной изоляционной панели. Ка¬
тушки на токи до 40 А — изолированные. При выборе
реле для установки в. комплектных устройствах следует
рукободствоваться допустимой нагрузкой катушки в ре¬
жиме ПВ = 40% и диапазоном срабатывания с учетом
необходимых уставок отключения.Реле РЭО 401 могут выполнять свои функции ори
условии, что пусковой ток электропривода меньше, чем
ток заторможенного электродвигателя при включении
его на номинальное напряжение, т. е. защита коротко-
замкнутых электродвигателей и электроприводов с от¬
сечкой тока с помощью реле РЭО 401 невозможна. За¬
щита таких электродвигателей должна выполняться с
помощью тепловых температурно-токовых реле серии
ТРТ, Реле ТРТ имеют пять габаритов в интервале токов
от 1,75 до 550 А. Реле всех типов заключены в пласт¬
массовый кожух и различаются формой реагирующего
теплового элемента, наличием дополнительного нагрева¬
теля и размерами выводов. Реле пятого габарита смон¬
тировано на трансформаторе тока. В качестве реагиру¬
ющего теплового элемента реле используется биметалл
инварсталь, обтекаемый током и дополнительно подогре¬
ваемый нагревателем. Реле имеет один размыкающий
контакт, рассчитанный на коммутацию переменного тока
10 А, 380 В при cos q)=0,4 н постоянного тока 0,5 А,
220 В при £//г=0,05 с.Технические данные реле ТРТ приведены в табл. 6-3.
Временные характеристики реле серии ТРТ показаны на
рис. 6-2. Реле не срабатывает при токе 110% номиналь¬
ного в продолжительном режиме. При токе 135% номи¬
нального реле срабатывает за время 5—20 мин. При то¬
ке 600% номинального реле срабатывает за время от 3
до 15 с. Имеющийся на реле регулятор позволяет регу¬
лировать номинальный ток уставки в пределах ±15%.
Возврат контактов реле во включенное состояние проис¬
ходит через 1—3 мин после отключения тока. При выбо¬
ре реле следует руководствоваться условиями: 1) сред¬
неквадратичный ток защищаемой цепи должен быть не
выше номинального тока нагревателя; 2) при трех пус¬
ках подряд реле не должно срабатывать; 3) время сра¬
батывания при пусковом токе не должно быть выше до¬
пустимого времени стоянки электродвигателя под током
в этом режиме.При пользовании временной хара1й'еристикой сра¬
батывания реле ТРТ следует учитывать, что возможные
фактические отклонения тока срабатывания около >
±20%^тока уставки.
124Аппаратура защиты и контроля. Грузоподъемные электромагниты[Разд. 6Таблица 6-3
Технические данные температурно-токовых реле ТРТiffп1,752.53.5
Б.О7.09.011.514.5
18,0
22
28
'35
45-sc S'!й; о cs I3 и о *|s|s« X si^5|iSSSТРТ m
TPTJ12
TPT113
ТРТИ4
TPT116
TPT121
TPT122
TPT131
TPT132
TPT133
TPT134
TPT135
TPT1361111111.52.54.06.0
10.0
10,0
16,0567190110140155190230285360450550Наныень шее сече¬
ные подводящего
проводникаП1к)воАа.мм*ТРТ137
ТРТ138
ТРТ139
ТРТ141
ТРТХ42
ТРТ151
ТРТ152
ТРТ! 53
ТРТ154
ТРТ1Б5
ТРТ156
ТРТ15716252535507095шины.Мм20x220X220X230X330x44SX445X4Приыечавия? 1. Потребляемые мощности пря проте^
камлн номинального тока:Ток. А1,75—11,511—90110—140115—550Мощность, Вх4—68—1313—1862. Размеры реле (высотах ширинах глубина)Ток, А Размеры, ми1,75—90110—140>140120X 30X100
160X36X100
180X60X175в) Защитные панелиВ соответствии с требованиями Госгортехнадзора
каждый кран должен оборудоваться устройством, пред-,
назначенным для подачи питания к электроприводам
механизмов й его отключения, причем включение, т. е.Рис. 6-2. Временные.характеристики реле серии ТРТ.подача питания, может осуществляться после отпирания
включающего устройства с помощью индивидуального
ключа-марки. В свою очередь ключ не может 6utb вынут
без^ В1?шрлнения операции отключения. Такая блокировка
позволяет гарантировать приведение крана в пригодное
к действию состояние только лицом, имеющим право на
управление краном.На всех типах кранов с электроприводом, кроме
строительных башенных кранов, индивидуальный ключ-
марка применяется в защитной панели. У строительных
башенных кранов указанный ключ используется для бло-Т а б л н ц а 6-4Технические данные защитных панелей'ТипКаталожныйКомерНапряжение,ВНоминалышЁ
ток продол¬
жительного
режима, ЛСуммарный
номинальный
ток двигате¬
лей. АЧисло макси¬
мальных реле
РЭ0 4ШНазначениеМаксимальный
коммутацион¬
ный ток, АЗТД.660.046.1220Магнитные и кулач¬
ковые контроллерыПЗКБ 160ЗТД.660.046.22608Кулачковые контрол¬
леры. 1600ЗТД.660.046.3luuМагнитные и кулач-
, ковые контроллерыЗТД.660.046.4OQUКулачковые контрол¬
лерыПЗКБ 400ЗТД.660.047.1^ 220400680gМагнитные и кулач¬3600ЗТД.660.047.3380ковые контроллерыППЗБ 160ЗТД.664.120.1220160■ 2604Магнитные и кулач¬1600ЗТД.664.120.2440ковые- контроллеры
Аппаратура защиты1257/7- /■Контакты каитроллераВ ^ К12
^шшт тг-« <40 Ч» Ы-,ajWКВЛКонтактыкомандокотроллеров“°N: ?s:—лкл9■<гшг“"SrS схему ^-
гледмых цшй-ЗПs\v5/7 зп гпКВ1Плв цепь чйШтных
коитрвллароЬS)Рис. 6-3. Схема цепей управ.чения защитных панелей.с ~ при управлении кулачковыми контроллерами; б — при управлении магнитными койтролдер«1Ми: Г—Я — главный подъем. Г—
С —главный спуск- В—Я — вспомогательный подъем: В—С — вспомогательный спуск; Г—Л —тележка вперед: Т"—Я —тележка
назад: В-'Мост вперед; М—Я —мост назад; /Я—ЗЯ — предохранители:^/fS — кнопка «возврат»; /СЛ —контакт люка; АВ~
аварийный выключатель; Л — линейный контактор: Л1Р/. JWP2 — jiouTaKTw максимальных реле; КВВ. ABW — конечные выключа*
тели; ЯЯ — переключатель проверки; К(2 — нулевые контакты контроллеров.кирования главного рубильника (или автомата) в шкафу
литания башенного крана, к которому подк.чючен гибкий
кабель питания.Защитная панель крана является комплектным уст¬
ройством, в котором расположен общий рубильник пита¬
ния крана (или группы механизмов), линейный контак¬
тор для обеспечения нулевой защиты и размыкания цепи
при срабатывании нулевой защиты, предохранители це¬
пи управления, комплект максимальных реле, а также
кнопка и пакетный переключатель, используемый в це¬
пях управления.Большинство кранов комплектуется защитными па¬
нелями трех типов:ППЗБ 160 — для кранов, получающих питание от
сети постоянного тока;ПЗКБ 160 ;И ПЗКБ 400— для кранов, получающих
питание от сети переменного тока.Технические данные защитных панелей приведены в
табл. 6-4. Схема цепей управления защитных панелей
показана на рис. 6-3.В зависимости от общей мощности электроприводов
механизмов крана защитные панели используются либо
для питания всех электродвигателей через свои главные
цепи (в пределах максимальных токов, указанных в
табл. 6-4), либо через защитную панель получает пита¬
ние только группа электродвигателей, а наиболее мощ¬
ный электропривод, имеющий собственный узел защиты,получает питание непосредственно от вводного фидера
Крана. Но при этом через защитную панель должна ио-
.лучать питание либо его цепь управления целиком (маг¬
нитные контроллеры ТСАЗ 250 и магнитные контролле¬
ры постоянного тока), либо только нулевое реле магнит¬
ных контроллеров серии К и КС. При таких способах
включения обеспечивается функция блокирования при
помощи защитной панели, даже если через нее и не про¬
ходит питание главных цепей.Основным назначением защитной панели (помимо
функции включения) является обеспечение максималь¬
ной и нулевой защиты электроприводов, управляемых
при помощи кулачковых контроллеров или магнитных
контроллеррв, не имеющих своих устройств защиты. На
схеме рис. 6-3, а и б- показано включение цепей управле¬
ния соответсхвенно кулачковых и магнитных контролле¬
ров. При перегрузке или частичном коротком замыкании
контакты группового максимального реле размыкают
цепь катушки контактора Л, который отключает от сети
все двигатели, получающие питание через панель, а так¬
же двигатели, цепи управления которых включены через
панель. При срабатывании аппаратов конечной защиты
/(ВВ, КВп, блокировки люка КЛ или аварийного вык¬
лючателя АВ также происходит отключение линейного
контактора. Включение линейного контактора возможно
при возвращении всех контроллеров в нулевое положе*
ние и нажатии блокировочной кнрпки КВ (нулевая бл^
кировка), . -
шАппаратура защиты и контроля. Грузопбдъемные электромагниты[Разд. “65h7Рис. 6-4, Крановая защитная панель ПЗКБ 160.Конструктивно защитная панель представляет собой
металлический шкаф с установленными в нем на задней
стенке аппаратами и соответствующим монтажом. Шкаф
закрыт дверью, на которую навешивается замбк. Рукоят¬
ка рубильника главной цепи и привод кнопки выведены
наружу. Блок-замок, описанный выше, осуществляет
блокировку рубилы^йка главной цепи. В защитной пане¬
ли установлены только основания и вспомогательные
контакты максимальных реле с приводными скобами, а
также приложен комплект шин для выполнения заказчи¬
ком необходимых соединений между катушками макси-
мальиых реле и контактором Л. Электромагниты реле
РЭО 401 поставляются отдельно, так как их комплекта-
1|^ия осуществляется заказчиком в соответствии с кон¬
кретными параметрами крака,Общий вид зайштной панели ПЗКБ 160 с габарит¬
ными размерами приведен на рис. 6'4.г) Выбор максимальных реле и схемы их. включения
в защитных панеляхмощности) из числа обслужи¬
ваемых данным общим реле.
Значения /уст приведены в
табл. 6-1; /общ — ток, на кото¬
рый настраивается реле в об¬
щей фазе двигателей.Ток /общ находится по
формуле' ^общ == 2,5/я.б,м “Н ^Н1 "Ь(6-3)где /н-б-м — номинальный ток
двигателя наибольшей мощно-
сти из числа защищаемых об¬
щими реле; /яь /нг — номи¬
нальные токи остальных дви¬
гателей из числа защищаемых
общими реле (одновременная
работа четырех двигателей ма¬
ловероятна).Ток /общ может лежать в
пределах между уставками то¬
ков двух реле. При этом надо
выбрать реле, имеющее боль¬
ший продолжительный ток.Выбор схемы производит¬
ся, исходя из возможности
объединения нескольких дви¬
гателей , под общие блок-реле
(при условии защиты проводов,
подходящих к Двигателю наи¬
меньшей мощности из числа
объединяемых) с учетом меха¬
низмов, которые обслуживают
объединяемые двигатели. На
коротких расстояниях выгоднее
увеличивать сечение проводов,
чем добавлять реле в схему.Рекомендуется увеличивать
также сечение проводов, если
группирование подключения
двигателей к одному реле ведет к увеличению числа
троллеев или колец кольцевых токоприемников.В случае, если общие блок-реле не защищают про¬
вода, необходимо выделить двигатели максимальной или
минимальной мощности для подключения к соответству¬
ющему реле. При этом общие блок-реле могут защитить
провода оставшихся двигателей, так как:1) применение для двигателя максимальной мощно¬
сти отдельного реле защиты значительно уменьшает/в.б.»;2) применение для двигателей минимальной мощно¬
сти отдельного реле защиты уменьшает разницу сечений
оставшихся проводов.Если два двигателя одновременно имеют наиболь¬
ший 5?ли наименьший ток, то выделять реле для защиты
одного из них не имеет смысла, их следует объединить в
соответствующие группы.Чтобы защитить двигатели от перегрузки» достаточ- /•-'''^Рёле для отдельных электродвигателей выбираютсяно иметь электромагнитное реле в Здной фазе каждого
двигателя. В остальные фазы реле ставятся только для/
защиты проводов, поэтому появляется возможностьТ
объединения двух фаз двигателей мод общие реле. Эта
возможность проверяется по следующей формуле;/общ ^уст»где /уст — ток уставки максимальной защиты кабеля ми- 'согласно их мощности и напряжению и настраиваютсяна ток срабатывания, равный 2,5-кратному расчётному^
току номинальной нагрузки для ПВ^40%.Существует большое количество схем включения ка¬
тушек реле в защитных панелях (свыше пятнадцати).которые базируются на различных комбинациях исполь-
;^'Зования от пяти до восьми электромагнитов реле и оди¬
наковых шин и перемычек, входящих в комплект защит-
ним альнрго сечения (идущего к двигателю минимальной ' йой панели.
K)W8?!шёей№шёi£т:о4^112нg® Й Э c”5 !я•“«OKbi G ■ тз
®E о
5 0 2
s-S «ic йй
XJa я «n> J3 fjIB H £.s”1о 2
3|1'li|i•? я•S’.Р"1Кё5п>»i1X(DXSыSЕ9g0»SР)ноQа ч ^
к » ф
а g ><1*sgя cr
rt
“Оs'"5 c>Ё я?s?X£SSвiОS0»® 3 51*
2 *ё=тз5^S о
-оЯирд:окXп»s aа:л-HоNnно*лS V|Sо с>W м ■
to F
тз ас-
2 Е3»«поВа
S .
S
)ая>Ь)гSZс»»чоОi| ■is"Oa: оS C5
so “ti о
(р »
С оSSЛ> ей
g-O3“во Е
й •“
Р D>
а ^
■о W
« Е3»□ч?Xtpо3=*пюг»“1оv>tИ-юн-1.Эi1н-1+слtн-Допуск на поло¬
жение лывейкн,
мм111ёсдо1111Передаточное
число передачиЮ1^VJkк>4№г»П>^ (V2 о
л 1
«•о2Q 0001 1соооwоо 'гSГSСкорость движе¬
нии механизма,
м/ынн1118IOiОоa>8058§Число
в часвключений11S:&СЛ.IfcСП1^Степень защиты
от внешней средыo>о’оОооОSо‘оВключаемый
ток, Аъ01ОоSоОоооПеременный
до 500 ВоSоЫосдо01слСП' :СП*СГ1СП01сло
1Я 'fiлtaпSе:ьэfj ic
ояъяэ»оo>ойолW'оо-siОС5-«JорViо*vjюоСВнSослоVоVоV_рюоОVоVорVрOJЭлектрическаяизносостойкость?9§9оооо>9?'оциклов В—ОСлояъ5ъОVоСляооОо??Механическая
в зносостойкосп»,
циклов В—Оtoю-- ^э-кокоIn5ю*окэЧисло цепейJ=>оо<ор>со*иtC^5JOМасса,кгЪс"слоо03С1сослVj*d№9>СПca4EФк5se:X*13ss. П 1MP3 '(ШtMPZ.{I( i-n»P03ZMPIырогглШ1}<es-oir^-^hSn-O'.f -torsj\
шАппаратура защиты и контроля. Грузоподъемные электромагниты[Раад. €На рис. 6-5 приведены три наиболее часто используе¬
мые схемы включения электромагнитов реле для управ-
ления кранами с тремя или четырьмя механизмами.При применении для отдельных механизмов кранов
короткозамкнутых электродвигателей вместо электро¬
магнитов РЭО 401 могут быть установлены тепловые
реле ТРТ. При этом вспомогательные контакты тепловых
реле следует включить последовательно с вспомогатель¬
ными контактами электромагнитных реле.д> Ограничение предельных положений перемещенияЗащита от перехрда механизмами предельных поло<
женнй осуществляется конечными и путевыми выключа*
телями. Эта зшцита обязательна к применению для всех
механизмов подъема и механизмов: передвижения ба-
шейных, портальных и козловых кранов, а также для
механизмов горизонтального перемещения других кра¬
нов со скоростями перемещения свыше 0,5 м/с. Отечест¬
венной промышленностью изготавливаются конечные вы¬
ключатели только для коммутации цепей управления,
поэтому контакты конечных выключателей включены ли¬
бо в цепь катушки жйейяого контактора защитной па-'
нели, либо в цепь нулевой защиты магнитных контролле¬
ров. Кроме того, контакты конечных выключателей мо¬
гут включаться в цепи сигнализации. Конструктивные
схемы различных рычажных конечных выключателей
приведены на рис. 6-6.Технические данные конечных выключателей приве¬
дены в табл. 6-5,Рычажные конечные выключатели могут иметь пе¬
рестраиваемую таблицу замыкания каждого из контак-Рис. 6-7. Габариты ко¬
нечных выключателей
КУ 701.тов в соответствии с данными на рис. 6-6. Шпиндельные
.конечные выключатели имеют регулируемую диаграмму
замыкания контактов в интервале 15—270“ поворота
кулачковой шайбы. Для механизмов с малыми выбегами
целесообразно применять выключатели с самовозвратом,
а для механизмов с большим выбегом выключатели с
фиксированными положениями включения — отключения.
Устанавливая конечные выключатели рычажного типа,
следует выдерживать допуски на положение линейки,Рис. 6-6. Конструктивные схемы различных рычажных
выключателей. - '
§ 6^2]Грузоподъемные эАёктромагнШ^129воздействующей на рычаг выключателя. После срабаты»
вания выключателя под действием линейки должно быть
обеспечено дальнейшее ее движение на длину возмож¬
ного выбега. Место установки выключателя выбирается
с учетом обеспечения безопасного выбега механизма пос-
ле срабатывания защиты. Ориентировочно выбег 5, м,
механизмов может быть установлен, исходя из следую¬
щих соотношений;- для механизмов подъема 5—(0.5-b0,7)i^^;для механизмов тележки (0,4-;-0,6)ч2;для механизмов поворота и передвижения- крана
S=(0.6-^0,8)w'';В этих выражениях v — максимальная линейная
скорость движения механизма, м/с.Габаритные размеры конечных выключателей КУ701
показаны на рис. 6-7, а конечных выключателей
КУ 703 — на рис. 6-8. Конечные выключатели использу¬
ются также в схемах для программного управления
электроприводами в функции пути, для предотвращения
наезда одного механизма на другой и в качестве аппара¬
та защиты от недопустимых перекосов конструкций,е) Ограничение перегрузки
конструктивных элементов кранаОграничение грузоподъемности является одним из
важных элементов обеспечения надежной работы кранов.
Как правило, электропривод подъема способен создать
вращающие моменты, при которых масса поднимаемого
груза может быть значительно выше расчетной грузо-
прдъемности, поэтому для ряда кранов, где в эксплуата¬
ции возможна перегрузка по массе поднимаемого груза,
должны применяться ограничители грузоподъемности.
Так, на всех строительных башенных кранах примейение
таких ограничителей обязательно. При использовании на
крюковых мостовых кранах грузоподъемных электромаг¬
нитов также необходимо применение ограничителей гру-
зопод^ьемности. В большинстве конструкций ограничите¬
лей грузоподъемности они в конечном счете воздейству¬
ют на конечный выключатель рычажного типа, контакты
которрго включены в цепь защиты электропривода подъ¬
ема. У стреловых кранов контакты выключателя ограни¬
чителя грузоподъемности должны воздействовать на це¬
пи защиты как электропривода подъема, так и электро¬
привода стрелы.Крупные мостовые и козловые краны, перегружате¬
ли и другие аналогичные грузоподъемные машины, как
правило, имеют отдельные приводы передвижения, меха¬
нически между собой не, связанные. При движении та¬
ких механизмов за счет неравномерности распределения
нагрузок и неточности изготовления отдельных элемен¬
тов одна сторона сооружения может отставать от дру-,.
гой, т. е. образуется так называемый «перекос». Краны
разных конструкций допускают определенные зна.чения
перекосов.Если возможный в эксплуатации перекос может пре-
вышать допустимый для данной конструкции, то необхо¬
димо иметь устройство контроля перекосов, а в схемах
электропривода должны присутствовать соответствую¬
щие элементы для выравнивания положения моста. В
качестве измерительных устройств перекоса ис1юльзуют-
ся либо механические датчики, воздействующие на ры¬
чаги конечных выключателей, либо сельсины-датчики на
каждом из механизмов, связанные с дифференциальным
сельсином-приемником, который при суммарной оп¬
ределенной разнице сигналов сельсирных датчиков воз¬
действует на выключатель ограничения перекоса. Для
выравнивания положения мостов кранов после отключе¬
ния ограничителя перекосов в схеме электропривода
должна предусматриваться возможность кнопочного уп¬
равления для выключения отдельно одного из приводовмеханизма передвижения, 9—8396-2. ГРУЗОПОДЪЕМНЫЕ ЭЛЕКТРОМАГНИТЫа) Основные технические характеристики
ЭЛ ектромагнито вГрузоподъемные электромагниты предназна4еиы для
захвата, удержания и транспортировки грузов ий ферро¬
магнитных материалов. Грузоподъемные электромагни¬
ты постоянного тока выполняются на номинальное нап¬
ряжение 220 или 110 В, а при питании от встроенных
батарей ^ на 24 В и рассчитаны на колебания Напряже¬
ния сети от 0,85 до 1.05 номинального и номинальную
продолжительность включения ПВ«=50ч-70% при рабо¬
те с холодным rpyiaoM. Возможно применение )ЬлектрО'
магнитов при работе с грузами, имеющими температуру
до 500—бЬи“С (с обязательным снижением гр^^зопоДЪ-
емиости). Поэтому класс нагревостойкости йзоЛяции
грузоподъемных электромагнитов F или Н и 10лько в
двухполюсных электромагнитах применяется Изоляция
классов Б, или F., Расчетное время одного цикла работы в повторно¬
кратковременном режиме с ПВ=50% не более 10 мин.
Если nb>50®/of то напряжение на катушке электромаг¬
нита снижают во избежание чрезмерного нагрева. При
этом подъемная сила электромагнита уменьшится. До¬
пустимое рабочее напряжение на катушке элек1громагяв*
та при увеличении продолжительности включения опре*
деляется по-формулеиДОСf ПВф/ГШв(6-4)где ПВф и ПВн —фактическое и номинальное значения
продолжительности включения; t/н — номинальное нап¬
ряжение электромагнита.Температурный коэффициент увеличения сопротив¬
ления на 1“ С нагрева составляет для меди и алюминия
а=0,004 При этом различают два значения потреб¬
ляемой мощности электромагнитом—з холодном и го¬
рячем состояниях. Потребляемая мощность в обоих слу¬
чаях о(^ределяется двумя составляющими: мощностью
электромагнита и мощностью параллельно включенного
. разрядного сопротивления.Рабочей грузоподъемностью электромагнита счита¬
ется максимально возможная масса гладкой холодной
стальной плиты (при нагретой катушке электромагнита),
поднимаемой электромагнитом. Грузоподъемность элект¬
ромагнита изменяется в 50—70 раз в зависимости от
формы, размеров, материала и раскладки груза.Грузоподъемность электромагнита выражается фор¬
мулой Максвелла для электромагнитной силы:F=-IQia ф8lOis (/ю)2(6-5)где р—подъемная сила, Н; Ф —магнитный поток, Вб;
jxs) — м. д. с. катушки электромагнита, А; S — площадь
соприкосновения груза с полюсами электромагнита, м*;
Лв — магнитное сопротивление воздушных участков пути
магнитного потока, м (при р = /?м — магнитное со¬
противление металлических участков пути магнитного
потока.Если вместо сплошной плиты поднимать стружку,
то магнитное сопротивление резко возрастает и грузо¬
подъемность Е относительных едини!^ дадает со 100 дО'
J 5—2%. Если принять грузоподъемность при подъеме
сплошной плиты круглого-электромагнита за-100%, то
шАппаратура защиты и контроля. Грузоподъемные электромагниты[Разд. 6грузоподъемность для других, наиболее характерных гру¬
зов составит, %:Копровый шар (электромагьнт со специальными тюлюсами) Трубы, бруски, рельсы Копровый шар (стандартный электромагиит) . . .Стал^>ные листы и полосы CKpah стальной (тяжелые куски) Чушки (машинное литье) Чушки (литье в земдю), скрап стальной (средние кускиСкрап чугунный (средние куски) Стружка стальная размельченная Скрап стальной (мелкйе куски), стружка чугунная
Стружка стальная неразмельченная .60504075432.5
21.5Масса обмоток электромагнита составляет около
12,5% массы электромагнита при , медной обмотке и
10% — при алюминиевой.Грузоподъемные электромагниты изготавливаются
круглыми и прямоугольными, а также в виде различных
специальных форм.Круглые электромагниты предназначены для сталь¬
ных и чугунных грузов относительно небольших разме¬
ров или неопределенной формы: плит, болванок, различ¬
ного скрапа, чугунных чушек, стружки, пакетов^ рулон¬
ной стали и т. п. Оки используются также для подъема
бойных шаров, которые при падении дробят крупный
чугунный металлолом.Прямоугольные электромагниты предназначены для.
стальных и чугунных длинномерных грузов; рельсов, ба¬
лок, стального проката круглого, прямоугольного и дру¬
гих профилей, труб, листовой стали и т. п, В зависимости
от длины грузов применяют два и более прямоугольных
магнита, подвешенных на одной траверсе крана. Элект-
рбмагнйтами любых типов можно проводить кантование
листов, слябов и других грузов.Анализ отечественных и зарубежных конструкций
электромагнитов, показывает, что геометрические соот¬
ношения основных размеров в, различных сериях элект¬
ромагнитов близки; Например, для круглых электромаг¬
нитов отношение высоты к диаметру составляет 0,2—0,3, а отношение внутреннего диаметра полюса к внеш¬
нему равно 0,26—0,36.Основной показатель грузоподъемности электромаг¬
нитов— коэффициент отношения грузоподъемности эле¬
ктромагнита к его массе Кг.о. У круглых магнитов с
медной обмоткой Кг.9=6-т-16, а у прямоугольных Кг.в—
—54-26 (при подъеме плиты). При алюминиевой обмот¬
ке круглые магниты имеют Лг.в=13-~26, прямоугольные
имеют Кг.в=25ч-43. Таким образом, для подъема мас¬
сивных грузов с плоской ровной поверхностью целесооб¬
разнее применять прямоугольные магниты. Круглые маг¬
ниты эффективнее использовать для поднятия скрапа,
чувдек, стружки и т. п.Электромагниты, у которых в процессе работы по¬
люсные башмаки подвергаются сильному износу, изго¬
тавливают с болтовым соединением частей магнитопро-
вода. Применение алюминиевой обмотки с наружной ок¬
сидной пленкой снижает массу электромагнита, на 15—
20%, но при этом повышается расход электроэнергии на
30%, поэтому применение таких электромагнитов огра-‘
ничено.Вес поднимаемого груза на единицу плош;адй элект¬
ромагнита составляет 7—16 Н/см^. Удельная потребляе¬
мая мощность на единицу веса поднимаемого груза на¬
ходится в пределах 2—7 Вт/Н, а в ряде случаев для
электромагнитов с малой грузоподъемностью она сни¬
жается до 1—2 Вт/Н.Электромагниты со встроенным питанием от батарей
потребляют в среднем 0,4—1,2 Вт/Н. Они надежны и
безопасны в эксплуатации, но имеют ограниченную про¬
должительность непрерывной работы и увеличенную
массу, а_ также неудобны в обслуживании.б) Электромагниты серий М и ЛМЭлектромагниты постоянного тока серий М и ПМ
соответствуют ГОСТ 10130-74. Они предназначены для
работы во невзрывоопасной окружающей среде и высоте
над уровнем моря не более 2000 м, имеют степень защи¬
ты IP34. Номинальное напряжение 220 В, режим работы
ПВ:^50% при'работе с холодным грузом. Допускается
работа при ПВ более 50%, а также с грузами,, имеющи¬
ми температуру до 500° С, при условии соответствующе¬
го снижения напряжения на катушке электромагнита.Таблица 6-6
Технические данные электромагнитов серий М и ПМТипэлектро¬магнитаНоминаль¬
ный ток
катушки. АГрузоподъемность, кг, при грузе(болванка
или плитачугун
в чуш¬
кахскрапсталь¬нойструж¬касталь¬наябойныйшарМ22В10,5600020020080М42В32,516 000■600600200 М62В56,520 00018001800600__М40Б32,5 10 ОООПМ 15Б10,5-7000 —ПМ.25Б20,014 000————Технические данные электромагнитов приведены в
табл. 6-6, причем ток соответствует нагретой катушке, а
грузоподъемность — холодному грузу. Обмоточные дан¬
ные катушек указаны в табл. 6-7.Таблица 6-7Обмоточные данные катушек электромагнитовПараметры катушкиМарка провода
Размер голого прово¬
да; ммЧисло витков
Сопротивление при
20“ С, Ом
Масса меди, кг
Число секций
Число витков в сек¬
цииТолщина и ширина
межвитковой изоля¬
ции, ымТип электромагнитаМ 22ВМ 42В,
М 40Б-М 62ВПМ 15БПМ 2оБпсдЛММЛММПСДЛММ/1,5Х0,5X251,23X251.8Х0,4X22X3.1SХ3,362600148816622322115213.504,492,6814,007,28155361127024029014628'26003722771161144 0.2Х0,ЗХ,0.2X23Х2б,5Х26.5Конструкция н основные размеры электромагнитов
показаны на рис. 6-9 и 6-10. 'Корпус отливается из малоуглеродистой стали 25Л
и имеет относительно высокую магнитную проницае¬
мость. Внутри корпуса находится катушка, которая сни¬
зу закреплена стальной шайбой толпшной 2—3 мм, при¬
варенной к корпусу.Обмотка состоит из одной или нескольких секций,
пропитанных нагревостойкой эмалью. Витки обмотки из
медной ленты изолированы друг от друга асбестовой бу¬
магой. Секции соединены последовательно. Обмотка
электромагнита расклинивается по, внутреннему и на¬
ружному диаметру относительно корпуса. Применяемые
в электромагнитах изоляционные материалы имеют класс
нагревостойкости не ниже F.С наружной части катушка защищена от ударов о
груз толстой стальной немагнитной шайбой (плитой). В
круглых магнитах немагнитная шайба удерживается при
помощи дугообразных стальных полос, приваренных к
корпусу, а в прямоугольных — внутренним полюсом.
§6-2]Грузоподъемные э/^ктромагнаты131закрепленным болтами на корпусе, и профильной план¬
кой, приваренной снизу к корпусу. Круглый электромаг¬
нит М 40Б для подъема бойкого шара выполняется с
центральной выемной частью полюса и выступающим
наконечником магнитной системы по наружному пери¬
метру электромагнита; наконечник приварен к корпусу
и образует с выемной частью полюса в зоне прилегания
к грузу сферическую поверхность. После сборки катушки
все пустоты в корпусе заливают нагревостойкой полнме-
ризующейся массой для повышения механической и
электрической прочности катушки и улучшения отвода
тепла от катушки.Рис. 6-9. Круглые грузоподъемные электромагниты.ТипГабаритные размеры, ммМасса,KFАБВГДЕЖ' ИМ 22В785 .82532527522517510035550М 42В11701120325275300250160451Ю0М 40Б11501110325275300250150451600.-М 62В16501335440390480250150453300Коробка выводов защищена от механических пов¬
реждений массивны'м стальным литым кожухом. Внутри
кожуха находятся изоляционная крышка, закрывающая
выводные концы катушки, и болт заземления. Питающий
кабель вводится в коробку выводов через резиновую
втулку и дополнительно закрепляется на входе клицей.Подвеска круглых электромагнитов осуществляется
посредством цепи, состоящей из трех элементов (смы¬
чек), закрепленных в проушинах корпуса. Смычки вы¬
полнены таким образом, чтобы предотвратить закручи¬
вание и обеспечить строго , горизонтальное положение
подвешенного электромагнита, уменьшить истирание от-Таблица 6-8Грузоподъемность электромагнитов при различных видая грузовТипэлектро¬магнитаКоличество
электромаг¬
нитов, рабо¬
тающих на
одном кранеВид грузаРазмеры груза, ммПоднимаемоеколичество.шт.Масса груза, кг1 шт.общаяМ 42В1Изложницы1.<12 500 1Стальные пробки для изло^киицS3 330. высота <^100<166410001Листы60X2000X60001Б650—2>5X1400X45001126027602»12X1800X 73003126037502>26X1250X7400<3190057004>6X1300X12000875060004>8X1600X120005120060004>10X1950X120004185074004>12X2500X12000326508500h\ 62В1Обрезки блюмов с температуров —■ _Примерно 90X110X 230<12—2 00011 4&VОбрезки рельсовМелкие8001Рулоны стали с температурой 300®С42Я30100001Прессованные пакеты—310003000ПМ 15Б1Листы ’6Х1СООХ17БОвее1 683.1•»6X1400X420042801 leo1ч14X1000X60002660J 3020 '1>100X1000X4000132001Квадрат450X 450X450017200ПМ 25Б1Блюмы с температурой 200° С300X300X450043200Г2 8№1Блюмы с температурой 200* С270X270x4500S270018 5001Слибы108Х1010X42003ЗбОО ■10 800ПМ 15Б1Слябы112X760X42005280014 0002Рельсы Р-50Длина 12 5001062562502Рельсы Р-65Длина 12 500981373002Рельсы Р-75Длина 12 500793865762Листы7X1800X7000107007000ЧКв£|дратыi 65X65 X60002120042004Рельсы Р-50 с температурой 500'“ С' Длина 25 ООО10125012 5004Рельсы Р-65 с температурой 600° СДлина 25 ООО91625 .14 60041Рельсы Р-75 с температурой 500“ СДлина 25 ООО718ге .13 150
132.Аппаратура защиты и контроля. Грузоподъемные электромагниты[Разд. 6Рис, 6-10. Прямоугольные грузоподъемные электромаг-
ниты. - . . . - ТипОМ 15Б
ПМ 25БРазмеры, мм1100-'1700"В,64066040042й490510Д6S0
670 :Масса,КР73576S1SOO2400дельных звеньев. Для подвески прямоугольных электро*
магнитов служит коромысло с отверстием для зацепле¬
ния на траверсе крана. .,Устройства для подвески алектромагнитор рассчита¬
ны на максимальную грузоиодъемнасть с учетом собст¬
венной массы электромагнита и требуемого коэффициен-.
та запаса прочности. На кольце цепи электромагнита на¬
носятся-клеймо отдела, технического контроля,^ аомер
протокола испытаний цеаи и год выпуска*. Грузоподъем¬
ность электромагнитов зависит от характера груза
(табл. 6-8),.’ 'Неправильное использование' электромагнитов, без
учёта" их подъемной силы может привести к поврежде¬
нию металлоконструкций и механизмо»в кранов."Расчетный срок службы'электромагнитов составляет
10 лет и может несколько изменяться в зависимости от
конкретных условий эксплуатации. В течение расчетного
срока службы вероятность безотказной работы не менее
0,94 при доверительной вероятности ОД Переход на
сплошной литой корпус в прямоугольных электромагни¬
тах вместо сборного с торцевыми крышками существен¬
но повысил надежность и реальный срок службы элект¬
ромагнитов. В эксплуатации необходимо соблюдать оп¬
ределенные правила, обеспечивающие продление срока
службы электромагнитов.Для ограничения чрезмерного превышения темпера¬
туры катушки относительная продолжительность вклю¬
чения не,-Должна превосходить 50%., так как повышен¬
ный нагрев увеличивает сопротивление обмотки н сни¬
жает грузопод^ъемнрсть, уменьшает срок службы изоля¬
ции. Нагрев катушки электромагнита можно определить
по току, который при напряжении 220 В и превышении
температуры 150“ С ие должен быть меньше значений,
ук<1заниых ниже:М 22Б 10 АМ 42Б,' м 40Б ..... 31 АМ 62Б . . 53 А■' ПМ 15 10 АПМ 2SA ..... i . . i ..... . 19 АК чрезмерному нагреву обмотки приводят также
преждевременное включение электромагнита и задерж¬
ка. его отключения, а также работа с горячими гру¬
зами.Для снижения механических нагрузок, воздейству¬
ющих на электромагнит и изоляцию обмотки, не сле¬
дует бросать его на груз, использовать для выравни¬
вания стопы слябов и других крупных стальных бол¬
ванок, включать до касания с грузом, что исключает
подскок груза и удар его об электромагнит.После включения электромагнита необходимо сде¬
лать некоторую выдержку до его перемещения, так как
нарастание магнитного потока происходит за время от
2,5—3 с для электромагнитов М 22Б до 10—12 с — для
электромагнитов М 62Б при работе на сплошной мас¬
сивной болванке. На скрапе время нарастания потока
сокращается примерно вдвое, поскольку магнитное
сопротивление увеличивается, а поток падает.При обрыве кабеля или цепи разрядных резисто¬
ров перенапряжения на обмотке электромагнита дости¬
гают 5000 В, "поэтому необходимы профилактические
меры по обеспечению надежной работы цепи разрядных
сопротивлений, схемы управления и целостности пита¬
ющего кабеля.Сопротивление изоляции электромагнита относитель¬
но его корпуса не должно быть менее Ю МОм в хо¬
лодном состоянии и 0,6 МОм в нагретом состоянии.
Испытательное напряжение нового электромагнита
3000 В переменного тока частотой 50 Гц в‘ течецие
1 мин,в,) Управление и питание электромагнитовГрузоподъемные электромагниты имеют ^большую
индуктивность, поэтому ДЛИ быстрого и полного сбро¬
са -груза, а также для ограничения перенапряжения до
значения не более 2 кВ применяются специальные, схе¬
мы и аппаратура управления. Электромагниты получа¬
ют. напряжение от двигатель-генераторной или выпря¬
мительной установки. Принципиальные схемы управле¬
ния при питании электромагнитов от сети постоянного
тока приведена на рис. 6-11, а и б.Управление электромагнитом по указанной схеме
производится следующим образом. При включении ко-
маидоконтроллера К подается напряжение на контак¬
тор намагничивания В, замыкающие контакты которого
подключают электромагнит к сети. При этом по катуш¬
ке М электромагнита протекает номинальный ток, а,па-
раллельно включенное разрядное сопротивление, {Pi—
Р4,_ Р4—РЗ и РЗ—Р2) обтекается током меньшего зна¬
чения. Катушка контактора И. включенная между точ¬
ками б и 7, не обтекается током вследствие наличия
последовательно включенного размыкающего вспомога¬
тельного контакта В, разомкнутого при включенном
контакторе В.При отключении командоконтроллера К размыка¬
ются замыкающие контакты контактора В, электромаг¬
нит кратковременно отключается и автоматически
включается, иа обратную полярность, а после отпада¬
ния груза электромагнит окончательно отключается от
источника питания. Такое включение электромагнита
обеспечивает размагничивание груза, что способствует
быстрому его отпаданию.Автоматическое действие при отключении электро¬
магнита обеспечивается главным образом работой кон¬
тактора размагничивания И. Напряжение на зажимах
катушки контактора И определяется падением напря¬
жения на участках сопротивлений 6^Р4 и Р4—7. При
отключении электромагнита' сто ток не исчезает мгыо-
в.енно, а замыкается через цепочку разрядных сопротив¬
лений., Сопротлвления участков 6~Р4 и Р4—7 подоб¬
раны таким образом, что после отключения командо-
Грузоподъемные электролшгниты133т WРис. 6-П, принципиальные схемы управления магнитными контроллерами ПМС 50 (а) и ПМС 1’50 (б) для подъем¬
ных электромагнитов,в или iB, 2В — двухполюсный контактор намагничивания йли две однополюсных; W — двухполюсной кдвтактор разыагнн«ив«-
ния; /Р —рубильник: 1П. гЯ >-предохранители силовой цеии и цепи упрввлеиия; ~ командоконтроллер; — электромагнит;
Р1—Р4, Р4—РЗ и РЗ—Р2 — разрядные солротивления.контроллера К и замыкан11я размыкающего контакта
В включается контактор- И. После включения контак¬
тора Н замыкаются его силовые контакты н электро¬
магнит подключается к сети. При этом направление
тока в катушке электромагнита и в сопротивлении6—Р4, включенном последовательно с катушкой, с з'е-
чением времени изменяется на обратное. Изменение
направления тока на участке сопротивления 6—Р4 про¬
исходит с предварительным снижением предыдущего
противоположно направленного тока до нуля. При
нуле тока на участке 6—Р4 контактор И удерживает¬
ся во включенном состоянии, так как для этого доста-
точно падения напряжения на участке Р4—7 (на участ¬
ке 6—Р4 падение напряжения при этом равно нулю).При изменении направления тока на участке
контактор Н отключается, так как его катушка ока¬
зывается включенной на разность падений напряжений
на участках 6—Р4 и Р4—7. Отключение контактора//
происходит при достижении током размагничивания ве¬
личины, равной 10—207о^ рабочего тока холодной ка¬
тушки электромагнита, т.' е. практически после размаг¬
ничивания и отпадания груза. Отключаясь, контактор
И отключает от сети катушку электромагнита, которая
остается замкнутой на разрядное сопротивление. Это
облегчает условия разрыва дуги контактором и снижа¬
ет перенапряжение, увеличивая срок службы изоляции
катушки. Размыкающий вспомогательный контакт кон¬
тактора В (в цепи катушки контактора Н) исключает
одновременную работу обоих контакторов.Схема позволяет регулировать время размагничи¬
вания, что можно осуществить передвижением хому¬
тов сопротивлений, т. е, изменением значений сопро¬
тивлений участков 6~Р4 и Р4~7. Вместе с тем это
время автоматически регулируется в зависимости от
вида поднимаемого груза. При большей массе груггЬ
магнитная проводимость его больше, что приводит к
увеличению постоянной времени электромагнита и тем
самым к увеличению времени размагничивания. При
малой массе груза время размагничивания уменьша¬
ется. ■ - . - -По описанной схеме изготавливаются магнитные
контооллеры типов ПМС 50, ПМС 150, ПМС50Т и
ПМС 150Т, характеристики которых указаны вТаблица €-9Магнитные контроллеры для управления влектромагнитами .
н максяйальиая мощность, потребляемая эдеЕтронагннтамиТип электро¬
магнитаКоличествоодновременновключенныхэлектромаг¬нитовТнп магнит¬
ного контрол¬
лераМощность, по¬
требляемая
электромагни¬
тами, кВт1*4.0М 22В2ПМС 508,4311,84 ,15.4М 42В1ПМС 5012,2М 4QB,112.2М 42В2ПМС 15024,4.336'0М 62В1ПМС 15021,5I4,0ПМ 15Б2ПМС 508,4311,8415,4ПМ 15Б5ПМС 15024.4-ПМ 25Б1ПМС 508,221S.0ПМ 25Б3ПМС 15023.9430.2536,0
тАппаратура защиты и контроля. Грузоподъемные электромагниты[Разд, €Рис, 6-12; Схема питания грузоподъемного электромагнита на кране при наличии сети переменного тока./—асинхронный электродвигатель; 2 —генератор шстоянвого тока; 3 — магнитный пускатель; 4 —кнопка управления; Л—регуля¬
тор возбуждения; б—командоконтроллер; 7—магнитный контроллер: й ™ грузоподъемный электромагнит.табл. 6-9. Там же приведена максимальная мощность,
потребляемая электромагнитами и разрядными сопро¬
тивлениями.Большинство кранов с грузоподъемными электро¬
магнитами питаются от сети переменного тока, поэто¬
му для электромагнитов постоянного тока необходимо
использовать двнгатель-генераторную или выпрямитель¬
ную установку. На рис. 6-12 показана схема питания
грузоподъемного электромагнита от двигатель-генера¬
торной' установки. Защита генератора от токов к. з. в
кабеле, питающем электромагнит, осуществляется реле
напряжения типа РЭВ 84,Замена вращающйхся преобразователей статичес¬
кими позволяет снизить капитальные затраты, массу
электрооборудования и эксплуатационные расходы.
Магнитный контроллер типа. ПСМ 80 в комплекте с
сельсинным командоконтроллером КП 1818 дает воз¬
можность регулировать грузоподъемность. Это имеет
большое значение при работах, связанных с отделкой,
сортировкой, мдркировкой и транспортированием лис¬
тового железа на металлургических заводах, а также
на различных складах и базах. Основные технические
данные комплекта электрооборудования для магнитов
с регулированием грузоподъемности:Напряжение питания при частоте БО Гц, В
Выпрямленное номинальное напряжение, В
Номинальный выпрямленный ток, А . , .Мощность, кВт Режим работы, ПВ Диапазон регулирования тока нагрузки .3802208017,650%На рис. 6-13 показана схема магнитного контрол¬
лера ПСМ 80 со статическим управляемым преобразо¬
вателем. Преобразователь выполнен по бестравсфор-
маторной трехфазной двухполупериодной схеме с од¬
ним тиристором и разрядном диодом. Регулирование
тока осуществляется изменением выходного напряже¬
ния преобразователя за счет изменения угла открыва¬
ния тиристора. Угол открывания тиристора зависит от
задающего сигнала, который плавно регулируется в
широких пределах сельсинным командоконтроллером.В блоке питания I используется трехобмоточный
трансформатор. Обмогка 36 В служит' для питания ре¬
лейных элементов, с обмотки 115 В снимается на¬
пряжение возбуждения сельсина командоконтроллера.
В блок питания входит однофазный выпрямительный
мост Д7—Д10, на выходе которого установлены стаби¬
литроны Ст1—СтЗ я балластный резистор R2. Стабили¬
зированное напряжение питания релейного элемента■16,4 В снимается со стабилитронов Ст2 и СтЗ. При этом
через резистор R3 и базу транзистора Т1 протекает в
прямом направлении ток, открывающий транзистор. Со
стабилитрона Cfl подается отрицательное смещение
(—5,6 В) на базу транзистора Т2 для запирания его
при открытом транзисторе Т1.Блок задания II состоит из се^1ьсина, входящего в
сельсинный командоконтроллер, и однофазного выпря¬
мительного моста Д11—Д14. На вход моста подается
линейное напряжение ротора сельсина, изменяющееся
при его повороте относительно статора. Поворот рото¬
ра осуществляется рукояткой СКК. На выходе моста
получается изменяющееся выпрямленное напряжение,
пропорционально которому изменяется и выходной ток,
протекающий при открытом транзисторе TI через его
базу и резистор R6. Релейный элемент собран на двух
транзисторах типа п-р~п., Для обеспечения фазового режима регулирования
в схеме предусмотрен источник пилообразного напря¬
жения, представляющий собой цепочку RC, которая
шунтируется тиристором Т. Пока тиристор закрыт, про¬
исходит заряд конденсаторов С<, Cg. Когда тиристор Т
открывается, происходит быстрый разряд конденсато¬
ров. Пилообразный ток протекает через резистор RI3^
базу транзистора Т1.Сельсинный командоконтроллер имеет одно фикси¬
рованное положение (нулевое) и обеспечивает затор¬
моженное состояние в любом промежуточном положе¬
нии рукоятки управления. При этом каждому поло¬
жению ротора сельсина соответствует определенное зна¬
чение тока электромагнита. На позициях регулирова¬
ния схема с достаточной точностью поддерживает сред¬
нее значение тока электромагнита при нагреве его ка¬
тушки. Допустимые отклонения тока для холодной и
горячей катушки не превышают 10%, а максимальное
значение тока для нагретой катушки не превышает
каталожного' значения тока более чем на Ь%. При коле¬
баниях напряжения питающей сети в пределах (0,85—
1,05) £/в изменение тока электромагнита не выходит за
указанные пределы.Силовая схема коммутации на стороне постоянно¬
го тока содержит: двухполюсные контакторы для пря¬
мого КВ и обратного ЛЯ.включений электромагнита;
два реле времени РВ и РП для управления процессом
размагничивания электромагнита при отключении, раз¬
рядные резисторы R19—R22 для ограничения перена¬
пряжения, возникающего при отключении электромагни¬
та; диод Д4 для уменьшения мощности разрядных ре¬
зисторов.
Рис. 6-13. Схема регулирования грузоподъемности электромагнита./ — блок питания; //— блок задания; /// — релейный элемент; /(г'—силовая схема; — резисторы; С/—СЛ — конденсато¬ры; Ш — шунт; ВА ~ выключатель автоматические; Д1—Д16 — диоды; КВ и Kff — контакторы прямого и обратного включений
электромагнита (намагничивания и размагничивания); РВ и РЯ — реле времени для управления процессом размагничивания;
Пр!—Пр4 — предохранители; Сс — сельснй контроллера; Сг1—СтЗ — стабилитроны; Т — тиристор; TJ. Т2 транзисторы; JpJ —
трансформатор; ЭМ. ~ »лехтромагнит грузоподъемный; СКК ~ сельснниый комввдоховтроллер, tПри обрыве кабеля, питающего электромагнит, не¬
обходимо отключить рубильник или автоматический
выключатель магнитного контроллера. Находиться под
краном с работающим электромагнитом категорически
запрещено. Осмотр и замена аппаратов должны произ¬водиться прн отключенном вводном рубильнике крана.
Все электрические аппараты должны быть надежно, за¬
землены. Особое внимание следует обращать , на зазем¬
ление электромагнита. Болт заземления в коробке
электромагнита соединяют с заземляющим болтомТехнические данные электромагнитов новой серииТаблица 6-10Типэлектро¬магнитеГрузоподъемность, тПотребляемая мощ¬
ность, кВтТис оСмоткн маг¬
нита, АПостоянная вре¬
мени, сЙи U 2
S <и а Я|£ё|
S в о "•||к
3 <в« тIIк*з:gо»<11сS.XUовчсз о.5|«в
А О1|1се Sё« 3
So^ £О* Xя
о к49 О
со нЙ оМ 025.51.80,251,84' 1,268,35,30,560,3514,8520190М 1210.13.50,802,861.56,12,88,10,880,5615,2650405М 2223.57,00,754,502.8220.412,81,520.9616,5800710М 4244,716,00.95'9,265,9042.126,63.282.0817.112002500М 62В65,0-20,02,0014.008,7863,540.24,903,1217,5160046S0М 62ВМ71,522,02.5018.80.11,8085,053,47.304,Б518,816005500М 82105.045.03.20.24,1015.40110,570,218,8011.9037,520009800
136Расчеты механических характеристик электроприводов и сопротивлений резисторов [Раз5. 7шкафа магнитного контроллера. Соединение осущестг
вляется олной из жил трех жильного питающего кабе¬
ля. В остальном при эксплуатации электрооборудова¬
ния следует руководствоваться общими правилами бе-
зопасности обслуживания электроустановок.г) Электромагниты новой серииСогласно анализу условий эксплуатации и запро¬
сам отраслей промышленности диапазон грузоподъем¬
ности семи типоразмеров круглых электромагнитов но¬вой серии расширен до 1,8—45 т' (вместо 6—-20 т на
старой серии), за номинальный режим работы принят
режим ПВ —60% (вместо ПВ = 50%). Одновременна с
рациональным построением ряда электромагнитов и обес¬
печением улучшенных тяювых характеристик при ми¬
нимальных расходах активных материалов и эксплуата¬
ционных затратах повышены надежность и долговеч¬
ность, уменьшена трудоемкость изготовления.В табл. 6-10 приведены технические данные элек¬
тромагнитов новой серии.РАЗДЕЛ СЕДЬМОЙРАСЧЕТЫ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДОВ
И СОПРОТИВЛЕНИЙ РЕЗИСТОРОВ7-1. РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКАРабота электропривода характеризуетсй в первую
очередь механической характеристикой, двигателя w =
=/(Л1) или n=f{M). Для двигателя постоянного тока
также часто используют электромеханические характе¬
ристики (0=/(/н) или п=1{1я), которые называются
скоростными характеристиками. Здесь со, п, /я» М — со¬
ответственно угловая скорость, чаЪтота вращения, ток
якоря и момент двигателя. Расчет механических ха¬
рактеристик можно производить как в абсолютных,
так и в, относительных единицах. Для двигателей по¬
стоянного тока наибольшее распространение получил
расчет характеристик в относительных единицах.'При расчетах в относительных единицах за базис¬
ные величины принимают номинальные данные двига¬
теля /н, М„, Un, «н. Иногда в качестве базисных при¬
нимают величины, отличающиеся от номинальных (на¬
пример, момент статической нагрузки). Величины, вы¬
ражаемые в относительных единицах, в дальнейшем
будут-обозначаться со знаком *.Сопротивления главной цепи в относительных, еди¬
ницах определяют в долях номинального сопротивле¬
ния. Под номинальным понимают такое сопротивление
цепи якоря, которое при неподвижном якоре и номи¬
нальном расчетном напряжении U„ обусловливает но-
минальньй ток в якоре:Лн = ^я/^н*Сопротивление цепи якоря складывается из внут-
реннего и внешнего сопротивлений. Значения внутрен¬
него сопротивления двигателей серий ДП и Д в долях
номинального при ПВ=25% приведены в табл. 7-1. В
графе гя* указано сопротивление якоря и дополни¬
тельных полюсов двигателей^ а в графе Гд, — сопротив¬
ление последовательной обмотки возбуждения двига-Таблица 7-1Сопротивления обмоток двигателцИсполнениеТип двигателя''я*5S S яд|1и «ii*IIIТихоходные двига¬
телиД.П12, ДП21.
ДП22ДП31, ДП32
ДП41, ДП42
ДП52ДПС2. ДП72
ДП82. ДП920,090,07Q.050,030.0250*020,0350*0220,0180.0210.0160,010,0080,0045Быстроходные деига.ДП21, ДП220*06-0,030,008телнДП31, ДП320,040,025ДП41, ДП42ДП52ДП82А0,030,0220,D140,0170.0160.010,0055Тихоходные двигате¬. Д8060.0430,022лиД808, Д810, Д8120.0260,014_Д814, Д816. Д8180,0160,009—Быстроходные двига¬Д806 ’0,0250,014_телиД8080,02—Рис. 7-1. Типовая схема включения двигателя постоянно¬
го тока, ■ .телей. ^Сопротивленце стабилизирующих обмоток дви¬
гателей параллельного возбуждения настолько мало,,
что им можно пренебречь. При расчете типовых харак¬
теристик для группы двигателей сопротивление обмо¬
ток следует определя1ь как среднее арифметическое от
значений, приведенных в соответствующих строкак
табл. 7-1.Расчет механических характеристик двигателей в
относительных единицах представлен ниже в виде уни¬
версального метода. Этот метод пригоден для различ¬
ных способов возбуждения и соединения обмоток.В общем случае схема включения двигателя изоб¬
ражена на рис, 7-1. на котором поЕсазаны три вариан¬
та (7, 2, 3) включения последовательной обмотки воз¬
буждения. Токи в этих обмотках обозначены через/п2. /из.Параллельная обмотка возбуждения в общем слу¬
чае получает питание от независимого источника с на¬
пряжением и».
§ 7- ПРасчет механических характеристик электродвигателей постоянного тока137При расчете механических характеристик, как пра¬
вило, известны: схема включения последовательной об¬
мотки, сопротивления последовательной и шунтирующей
цепей Rb и /?ш, напряжение источника питания цепи
якоря (главной цепи) м. д. с. параллельной обмот¬
ки возбуждения и соотношение между м. д. с. последо¬
вательной и параллельной обмоток при номинальной
нагрузке.Напряжение t/r может иметь независимое от на¬
грузки значение t/r=const (сеть постоянного тока). В
случае применения вращающихся или статических пре¬
образователей энергии задается внешняя характеристи¬
ка этих преобразователей С/г=[(/) (/ — ток нагрузки)
Методика расчета внешних характеристик приведена в
'§ 7-2 и 7-3.Магнитодвижущая сила главных полюсов двига¬
теля определяется суммарным действием обмоток воз¬
буждения, расположенных на этих полюсах. Посколь¬
ку номинальная м. д. с., принятая за базисную, скла¬
дывается из м. д. с, обмотки параллельного возбужде¬
ния и м, д. с. последовательной или стабилизирующей
обмотки, то можно принять, что м. д, с, обмотки па¬
раллельного возбуждения Fnap* в относительных еди¬
ницах будет составлять: 0,7 для двигателей серии ДП
и Д смешанного возбуждения тихоходных и 0,65 для
быстроходных; для двигателей серий ДП и Д .парал¬
лельного возбуждения 0,9,Соответственно на долю обмотки последователь¬
ного возбуждения или стабилизирующей будет прихо¬
диться остальная часть м. д. с. Учитывая, что эта
часть соответствует значению м. д. с. при протекании
номинального тока, то для любых значений тока м. д. с.
последовательной обмотки можно выразить в’ виде
следующих формул:для двигателей серии ДП и Д смешанного возбуж¬
дения тихоходного исполнения-Рл*-0,3/п*: {7-1)для тех же двигателей быстроходного исполненияfn*--0,35/n,, (7-2)где /п* — ток, протекающий по последовательной об¬
мотке;для двигателей параллельного возбуждения со
стабилизирующей обмоткрй серии ДП - и Дfn*=0,l/n^, (7-.3)Полная м. д. с, главных полюсов выражается в ви¬
де алгебраической суммы м. д. с- последовательной и
параллельной обмоток:+ (7-4)В некоторых случаях для реализации повышенных
(пониженных) частот вращения двигателей м. д. с. па¬
раллельной обмотки берется меньше (больше) номи¬
нальной. При этом м. д. с. последовательной и стаби¬
лизирующей, обмоток подсчитываются по (7-1)—
(7-3).Общий метод расчета механической характеристи¬
ки двигателей постоянного тока в рассматриваемой схе¬
ме (рис. 7-i) включения заключается в нахождении за¬
висимостей (/в*) и /п* “/(/я*) и последующем пе¬
реходе к зависимости п*—/(М*).Зависимость тока в последователь^1ой обмотке от
тока якоря двигателя для схемы, приведенной на
рис. 7-1, устанавливают по одному из следующих урав¬
нений^П.Еf/r —+ /я(7-5)(7-6)(7-7)каждое из которых справедливо при наличии последо¬
вательной обмотки возбуждения только в одной, цепи.Соответственно зависимость э. д. с. от тока якоря
определяют по одной из следующих зависнм'бстеи:£i - ~~г- ^я(^?П“Ь^п) „ , /-, л»^2 — 7^ ; ; ^ (7-9)t/r (^тЧ-г„)-/„г„. (7-10)“Ь “ЬЧ^тоту, вращения п. при заданном токе якоря в«-
числяют по формуле' л =где Ф — М8ГНИТНБ1Й поток двигателя; Се — коэффици¬
ент пропорциональности.Для получения уравнений в относительных едини¬
цах введем следующие базисные величины:«н; /б = ^н; Фб — Фн;Используя соотношенияС£ Ф„ п„ = (/,^дв*и ягде Гдя”^я+Гп; По — частота вращения идеального хо¬
лостого хода, можно записать выражениев котором обозначеноПри этом формулу для определения частоты вра¬
щения в относительных единицах запишем в. видеп = Е !ср Ф — £ /Ф (1 — г )^ Ф ф * \ ДВ«/или, так как в относительных единицах ,Ф* = (£■//!)*,(7-12)• (£/n)*(l-WМагнитный поток Ф« для соответствующего тока
якоря при известной м. д. с. главных полюсов (f*==
Ufnjpw+fn.) определяют по универсальным нагрузоч¬
ным характеристикам. Нагрузочной характеристикой
называется зависимость (£/n)* = /(F.) при постоянном
токе якоря /я*. TiaK как форма нагрузочных характе¬
ристик завксйт от тока якоря, то они изображаются в
виде семейства кривых, построенных при различных
значениях /я. Характеристика при /я=0 является кри¬
вой намагничивания двигателя.На рис.' 7-2 показаны универсальные характерис¬
тики двигателей серий ДП и Д. Характеристики изоб¬
ражены в относительных единицах. За базисные величи-
ны приняты номинальная м. д. с. главных полюсов
двигателя при /7В=25%, и номинальное значение по¬
тока Ф главных полюсов при протекании по . якорго
двигателя номинального тока /я для ЯВ—25% в нап¬
равлении, соответствующем двигательному режиму. Ти¬
повые нагрузочные характеристики соотвегствуют дей¬
ствительным нагрузочным характеристикам конкрет-
шлх' двигат1елей серий ДП и Д, отличаясь от характе¬
ристик, полученных на основе опыта, на 2—3%'.
138Расчеты механических характеристик электроприводов и сопротивлений резисторов[Pasd. 7Электромагнитный момент двигателя, Н*м, опре¬
деляют по формулегде См— коэффициент пропорциональности.Вращающий момент на валу двигателя отличает¬
ся от электромагнитного на значение, определяемое, ме¬
ханическими потерями и потерями в железе якоря. Та¬
ким образом, момент на валу двигателя может быть
представлен в следующем виде;. (7-13)где ЛР —потери на трение; ДРст —потери в стали;
ku — коэффициент пропорциональности.„ » . * , * “Ь ст*Параметр определяют покривым, выражающим зависимость AAI*=>=f{£/n). при
мзличных постоянных значениях частоты вращения я,,
Такие кривые, построенные в относительных единицах,
показаны на рис. 7-3. Пользуясь этими кривыми, не¬
трудно найти момент ДМ, при различных потоках глав¬
ных полюсов и частотах вращения. Коэффициент про¬
порциональности См можно, определить, исходя из сле¬
дующих соображений, при базисных токе, потоке и час¬
тоте вращения, момент на валу двигателя также дол¬
жен быть равен базисному (номинальному). Следова¬
тельно, пользуясь (7-13), можно написать, что при
Л1дв=^С = МнДР* + АЯст*1 — слг«Определив по рис. 7*3 значение ДЛГ. для (£/л)*=
= 1 и п, = 1, а именно ДМ,=0,03, найдем Сдг,:^Л1* = 1+0.03= 1,03.'Окончательно формула для определения моментов
на валу имеет вид;Л1лв* = 1,03/я* (£М)* - ДМ*. (7-14)Рассмотренный метод может быть применен и для
расчета характеристик в абролютных единицах. Одна¬
ко при расчетах в абсолютных единицах необходимо
иметь нагрузочную характеристику данного двигате¬
ля, построенную в абсолютных единицах. Такие харак¬
теристики не всегда известны и поэтому можно реко¬мендовать их построение с помощью универсальных на¬
грузочных характеристик.Для того чтобы построить нагрузочные характерис¬
тики в абсолютных единипах в виде зависимости Е]п=
^f(F), следует поток в относительных единицах {EJn)*Рис. 7-3. Зависимости AM»=f(Eln)^,.перевести в размерную величину Е/п, пользуясь фор¬
мулойЕ/л = (Е/п). <' , (7-15)Янгде (Ffn)* — поток главных полюсов в относительных
единицах (см, рис. 7-2); In, Пн — номинальные данные
двигателя при Uu, ^дв и /"дв* — сопротивления главной
цепи двигателя в абсолютных и относительных едини¬
цах.За базисную" ве.тачину м. д. с. F принимается но¬
минальное значение м. д. с. для данного двигателя.Значения ДМ можно брать из соответствующих
кривых, получаемых на основе испытаний машин. При
отсутствии таких кривых можно рекомендовать вычис¬
ление момента на валу двигателя, Н-м, по следующей
формуле:М = 9,55/я Е}п — [4,22 (Е/п)2 0,245Л'Гн], (7-16)
где Aia — номинальный момент при Л В—25%.7-2. РАСЧЕТ ВНЕШНИХ ХАРАКТЕРИСТИК
ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКАВ ряде крановых электроприводов для питания ’
двигателей постоянного тока применяются системы, с
питанием от индивидуальных генераторов с одной, дву¬
мя или тремя обмотками возбуждения (системы Г—Д).
Форма механических характеристик электропривода в
системе Г—Д при постоянном потоке двигателя, как
§7^2]Расчет внешних'характеристик генераторов Ьостоянного тока(39правило, определяется внешней характеристикой гене¬
ратора Ur^fih), зависящей в свою очередь от закона
изменения его м. д. с. возбуждения.а) Внешние характеристики трехобмоточного генератораТрехобмоточный ■ генератор имеет три обмотки воз¬
буждения: независимую, параллельную (самовозбуж¬
дения) и последовательную. Схема включения обмоток'
генератора в системе электропривода показана наРис. 7-4. Схема вклю¬
чения обмоток трех-
.обмоточного генера¬
тора.рис. 7-4. Генератор вращается двигателем ДГ с посто¬
янной частотой вращения пт-I Внешняя характеристика генератора определяется
в1ЛражениемUp —Ер — (^я^г “Ь ^п.г)> (7-17)где £г — э. д. с. генератора; Гя.т — сопротивление обмо¬
ток якоря и добавочных полюсов; /г — ток нагрузки ге¬
нератора; Гп.г ~ сопротивление последовательной об¬
мотки возбуждения генератора.В свою очередь Et определяется по формуле^ I pJV _= —-^Фп„На основании этой формулы и характеристики
намагничивания 0—f{F) генератора строится зависи¬
мость £r=/(jF) в режиме холостого хода. При расчете
внешних характеристик генератора влияние реакции
якоря не учитывается. Пренебрежение ее действием не
вносит существенной ошибки в расчеты.Электродвижущая сила генератора при работе на
нагрузку опредёляется результирующей м. д. с. воз¬
буждения F:F = F1103 ± Fc — fn == ^нез ± /с (7-18)где Рвеа, Fct Fn И Юнеэ. гУс, — м, д, С. И числа витков
обмотки независимого возбуждения, параллельной об¬
мотки (самовозбуждения) и последовательной обмотки.Обмотка последовательного возбу^йдения, включен¬
ная встречно независимой обмотке, предназначена для
ограничения э. д. с. генератора и, следовательно, умень¬
шения скорости двигателя при увеличении нагрузки.
Такое включение соответствует, как правило, двига¬
тельному режиму работы двигателя Д.Обмотка параллельного возбуждения включается
встречно или согласно с независимой обмоткой, что оп¬
ределяется требованием получения необходимой жест¬
кости внешней характеристики генератора, определяе¬
мой производной dJrIdUr.При идеальном холостом ходе (/п=0) результиру¬
ющая м. д. с. определяетря действием только двух об¬
моток — независимой и параллельной:^0 ~ ^нез ± ^со — ^нез ± (7-19)где /со — ток в обмотке самовозбуждения при холос¬
том ходе.С увеличением тока нагрузки In растет разм!агничи-
ваюшее действие последовательной обмотки [см.
(7-18)]. Одновременно уменьшается м. д. с. обмотки
самовозбуждения, так как понижается напряжение на
ее выводах. Это приводит к уменьшению э. д. с. гене¬
ратора, а следовательно, и скорости двигателя Д. По
достижении током нагрузки тока стопорения (тока ко¬
роткого замыкания) /« происходит полная остановка
двигателя.Для крановых электроприводов ток стопорения при
стоянке двигателя выбирается равным не более 2/н ге¬
нератора. При изменении направления тока /п генера¬
тор начинает работать двигателем, а двигатель, вра¬
щающий генератор, генератором, отдавая энергию в
сеть. Результирующая м. д. с. для этого случая запи¬
шется в видеF — ^нез ± Fa = /дез с^'нез ± /с (7-20)С увеличением тока нагрузки 1в растет намагничи¬
вающее действие последовательной обмотки. Одновре¬
менно увеличивается м. д. с. обмотки-самовозбуждения
вследствие увеличения напряжения на ее зажимах. В
результате э. д. с. генератора возрастает.б) Методика расчета внешних характеристикРасчет внешней характеристики генератора наибо¬
лее просто осуществляется графическим методом. Рас¬
чет характеристик для двух случаев: 1) F=Fse9'hFcdt
±Fj, (рис. 7-5); 2) fees—/^c±Fn (рис. 7-6) прово¬
дится в такой последовательности.Рис. 7-5. Построение внешней характеристики генерато¬
ра для F~Fat3+Fc4^Fa.1. Из условий работы системы задаются: значени¬
ем э. д. с. генератора Ео, соответствующим частоте вра¬
щения идеального холостого хода двигателя, и значе¬
нием тока стопорения /к.2. По характеристике намагничивания E—f{F), по¬
строенной в первом квадранте, определяют м. л с. Fo
(соответствует э. д. с. Ео). .
шРасчеты механических характеристик электроприводов и сопротивлений резисторов(Разд. 73. Заданное значение тока стопорения откладыва¬
ют влево по оси абсцисс, а э. д. с. генератора при этом
токе £к — по оси ординат в соответствии с выражени¬
ем(^я.г + ^дв + ^п)> (7-21)где Гя.г и Гдв — сопротивление якорных цепей соответ¬
ственно генератора и двигателя; г» — сопротивление
последовательной обмотки генератора.Рнс. 7-6. Построение внешней характеристики генерато¬
ра для ft=FBe» — fc=F Fa.4^ Значение Як сносят в точку т характеристики
намагничивания. Отрезок 1т определяет м. д, с. гене-f)aropa при токе 1к, равную jpM-^FHea—5. По значениям Ео, Fo, Fk, /к, £« определяют
м. д. с. обмотки самовозбуждения Fco:Р _ (^0 ~~ ~ «O'»в. Определяют м. д. с. независимой обмотки воз¬
буждения, (7*23)и её знйченне откладывают по оси F — отрезок Оа.-7. Из точки а Проводят прямую аЕо,- характеризу¬
ющую сопротибление цепи обмотки самовозбуждения,
и прямую ak, характеризующую падение напряжения в
цепи якоря генератора /п(гя.г+^п). Наклон прямой ak
определяётся угловым коэффициентом tgy:tg V = /я (^я.г + Гл)/1п Wn = (Гя.г + rn)/Wa. (7-24)Построение прямой ak необходимо для учета раз¬
магничивающего (намагничивающего) действия после¬
довательной обмотки и учёга уменьшения (увеличения)
м^ д. с., обмотки самовозбужде^1ия при понижений (по¬
вышении) напряжения на зажимах этой обмрткй за
счет падения напряжения *ь(Гя.г4-Гп)- Действительно,
при каком-то токе /*i отрезок aci определит /щШп, а
отрезок аiCj — падение напряжения /п1(гя.г4'Гп).8. Из точки m проводят прямую, параллельную
вольт-амперной характеристике контура обмотки само-^
возбуждения аЕо до пересечения в точке Пк с прямой'
ak. Через точку о* пройодят линйЮ, параллеЛьйую оси
ординат, которая определит на оси абсцисс отрезок,
представляющий м. д. с. обмотки параллельного воз-
буждення FcK при токе стопорения /*.9. На оси ординат в соответствующем масштабе
откладывают' ток стопорения /к и chocjit на вертикаль,
проведенную через точку Ок. Получающуюся при этом
точку bk соединяют прямой с трчкой а на оси абсцисс.
Для определения. э. д. с. генератора при токе Int его
значение откладывают на оси ординат, пр,сводят пря¬
мую, параллельную оси абсцисс до пересечения с пря-Рис. 7-7, Вид характеристики Ег=^(/щ) в зависимости
от соотношения углов аир.мой bkU в точке Ь\. На оси абсцисс находят отрезок
аси определяющий размагничивающую м.~ д. с. после¬
довательной обмотки, при токе /щ. Значение э, д, с.
Erl находим, проведя из точки oi пересечения верти¬
кали biCi с прямой ak линию а^Еп, параллельную вольт-
амперной характеристике контура обмотки параллель-
ногЬ возбуя4дения.Аналогично описанному определяют Ер для дру¬
гих значений тока /о. Найденные значения э. д. с. пе¬
реносят во второй Квадрант при положительных значе¬
ниях тока /р и в первый при отрицательных. Если че¬
рез начало координат провести прямую £=/п(^я,г+/’пЬ
характеризующую падение напряжения в цепи якоря
генератора, то разность соответствующих ординат кри¬
вой £’г=/(/п) и прямой £=/п-(гя-г + ^п) определит внеш¬
нюю характеристику генератора Ur = f{lu). Одновремен¬
но разность соответствующих ординат кривой £г=
=/(/л) и прямей £=/п(/'я.г+Гп+^яв) определит зави¬
симость э, д. с. двигателя £дв=/(/п).Форма внешней характеристики генератора зависит
от соотношения двух углов: а, характеризующего нак¬
лон начальной части характеристики холостого хода, и
Р, определяемого характеристикой цепн параллельной
обмотки. Изложенная методика позволяет произвести
построение для любых соотношений углов: а<Р; а—
а>р. В последнем случае точка ан на прямой ak ока¬
зывается слеща от характеристики холостого хода. Ес¬
ли а>Э, то получается кривая Ег=Ц1в), напоминающая
внешнюю характеристику генератора с параллельной
обмоткой, не обеспечивающую устойчивую работу.На рис. 7-7 дла иллюстрации приведены aaBHtn-
мости Яг=/(/п) при а<р (кривая /), при а=р (кри¬
вая 2) и при «>Э (кривая 5).Расчет внеи'ннх характеристик генератора не ме¬
няется и при измененной м. д. с. последовательной об¬
мотки (которая в этом случае шунтируется резистором
Rn). Меняется только выражение (7-22) для определе¬
ния м- д. с. Fco:'о (fc-fK,WnЕо “Ь(7-25)■^^меньшенне м, д. с. последовательной обмотки при
неизменных значениях м. д. с. других обмоток приво¬
дит к увеличению тока стопорения h.
§ 7-ЗГРасчет внешних характеристик управляемых ■ бы^рямителейт-Внешние характеристики двух- и однообмоточных
генераторовРасчет внешних характеристик двухобмоточных ге-
нЕраторой (с независимой и ггоследойательнои обмот¬
ками) упрощается по сравнению с расчетом характе¬
ристик трехобмоточного генератора, поскольку исклю¬
чается обмотка параллельного возбуждения. После по¬
строения характеристики E=f{F), определения м. д. с.
независимой обмотки Р„ез (по заданному значению £о)
и построения прямой Ь^а (прямая afe в этом случае не
строится) порядок расчета внешних характеристик ос¬
тается таким же, как и для трехобмоточного генера¬
тора.Расчет внешних характеристик генераторов с неза¬
висимым возбуждением производится на основе извест¬
ных кривых намагничивания ®=/(f), которые пере¬
страиваются в кривые £=/{/'). Каждому значению тока
возбуждения генератора I^ — Flw соответствует опре¬
деленное 3HaiicHne его э. д. с. н, следовательно, своя
внешняя характеристика. Для расчета внешней харак-
терпстикн задаются значением э. д. с. холостого хода
генератора Ло-Напряжение генератора при изменении тока на¬
грузки /г будет изменяться согласно выражению
—Еа±1тГг,.т, где Гп.т — сопротивление якорной цепи ге¬
нератора. Знак + относится к случаю, когда генератор
переходит в двигательный режим работы. Внешние ха^
рактерпстики имеют линейный характер.Применяя для питания обмотки возбуждения спе¬
циальный источник с регулируемым напряжением (маг¬
нитный усилитель или ТП), можно получить практичес¬
ки любую форму внешней характеристики генератора.7-3. РАСЧЕТ ВНЕШНИХ ХАРАКТЕРИСТИК
УПРАВЛЯЕМЫХ СТАТИЧЕСКИХ ВЫПРЯМИТЕЛЕЙа) Общие положенияРасчет механических характеристик n=f(Af) элек¬
тродвигателей постоянного тока, получающих ттитанне
от ТП, заключается в основном в определении внеш¬
них характеристик ТП, т. е. зависимостей среднего
значения выпрямленного напряжения от среднего зна¬
чения выпрямленного тока Ud=f{Id). Для ТП сущест¬
вует семейство внешних характеристик, соответствую¬
щих различным углам регулирования гс.Внешние характерр1стнки ТП можно разделить на
две зоны:непрерывного и прерывистого тока. ' Соотношение
между этими зонами меняется в ■ зависимости от схемы
построения ТП, числа фаз, угла а, характера нагруз¬
ки (^наличие в ней э. д. с., а также пассивных элемеИтов
цепи — омического сопротивления, индуктивности). Ди¬
аграммы напряжения и тока ТП в указанных двух ре-
гйимах показаны на рис. 7-8 применительно к трех¬
фазной нулевой схеме выпрямления.б) Внешние характеристики в зоне непрерывного токаВ общем виде зависимость выпрямленного напря¬
жения от тока нагрузки в зоне непрерывного тока оп¬
ределяется выражениемUd = f/ffo cos а Т Af/нп Т
! ут \ОСТ2л4л /Id,где r/(fo — максимальное выпрямленное натгряжение- ^ л гг ^преобразователя при а= 0: ^ sin —^ ;чк ■ т , ■Рпс, 7-8. Трехфазная нулевая (а) ,с\ема выпрямления
ТП и диаграммы напряжения и тока в непрерывном \б),
граничном (в), граничном при минимально' возможном
угле регулирования (г) и прерывистом (d) режимах.At/во— паден!1е напряжейия в вентилях^ у—У>’ОЛ'ком¬
мутации, характеризующий процесс переключения вен¬
тилей, когда в проводящем состоянии оказываются две
фазы преобразователя; т — число фаз выпрямителя или
тактов (пульсаций) выпрямленного напряжения за
цикл; юо —угловая, частота питающего - напряжения;— амплитудное значение фазного .напряжения. на
выходе вторичной обмотки трансформатора; — ак¬
тивное сопротивление фазы трансформатора, анодных
делителей и соединительных проводов; Хф — индуктив¬
ность. фазы, учитывающей рассеяние трансформатора,
делителей тока и индуктивность соединительных про¬
водов. В (7-26) зиак — относится к выирямнтел1^аму,
а знак -I- к инверторному режимам работы- ТП- !Угол коммутации \ определяется, из • вырансенияcos а — cos (<2 + Y)' =(7-27)Так-как \тол коммутации зависит от тока, TTI ,7d,
то внешняя характеристика ТП является, по существу
нелинейной. Однако учитывая, чю относительное зна¬
чение невелико по сравнению с индуктивным соп,-
тротивлением~—а также то; что, как правило,
2л4л,(7-26) г можно без ущерба для точности . распетатпользоваться ^трощенним выражением
142Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7mВыражение;;—проявляет себя как эквивалент-
2я .ное активное сопротивление ТП, несмотря на то что
сопротивление носит индуктивный характер. Физи¬
чески это объясняется тем, что наличие индуктивнос¬
тей Ьф в фазах приводит в результате перекрытия вен¬
тилей к уменьшению среднего значения напряжения
ТП, что восприни?иается внешней цепью как результат
падения напряжения на некотором актнвнб^м сопро¬
тивлении, находящемся внутри ТП. В соответствии с
(7-28) внешние характеристики ТП Ud=f{id) при а=
=const представляют собой прямые , линии (7-9, о).Однако линейный вид характеристик во всем диа¬
пазоне нагрузок (от холостого хода до короткого за¬
мыкания) свойствен только однофазным выпрямителям.
На рис. 7-9,6 показаны внешние характернстикн одно¬
фазной двухполуперкодной схемы со средней точкой.
Для трехфазных зке схем наклон внешних характерис¬
тик остается практически неизменным, пока угол ком¬
мутации не достигнет некоторого критического значе¬
ния. Для трехфазной мостовой схемы таким утлом яв-
•ляе1Ч:я у~л}Ъ, который получается обычно при наг-
>узке, в несколько раз превышающей номинальную.
IpH дальнейшем увеличении тока меняется характер
коммутации, и внешняя характеристика приобретает
вид характерх^стики, изображенной на рис. 7-9, в. На
характеристиках рис. 7-9 ток по oai абсцисс отклады¬
вается в долях тока к. з.Уравнение (7-27) справедливо лишь в диапазоне
изменения угла регулирования, для которого имеет
место неравенство/х<я —(V + 6),где б —угол запаса при инвертировании^ соответству¬
ющий времени полного восстановления ‘ запирающих
свойств вентиля после его закрытия и учитывающий
наиболее возможное значение асимметрии импульсов
управления.Максимальное значение угла регулирования, при ко¬
тором еще возможно безопасное инвертирование, равно:®макс = ^ — (Т + 6) ■Предельный режим инвертирования при этом ха¬
рактеризуется выражениемт(7-29)связывающим при заданном 6t/^ и /d.Внешние характеристики управляемых выпрямите¬
лей вследствие увеличенного падения напряжения, выз¬
ванного главным образом Индуктивным падением на¬
пряжения в трансформаторе или реакторах, имеют
больший наклон (меньшую жесткость) по сравнениюс хгфактеристиками системы Г
э ависимого возбуждения).Д (с генератором не-*в) Внешние характе1)истики 'в зоне прерывистого тока. Внешние характеристики ТП значительно изменя¬
ются в зоне прерывистых токов. Прерывистый ток по¬
является при относительно малых нагрузках, когда!из-
за ограниченной индуктпвности нагрузки невозможно
поддержать непрерывный ток. Диаграммы напряже¬
ния и тока ТП в режиме прерывистого тока показаны
на р^ис. 7-8, д,В интервале 2я/т—'К (где % — длительность прово¬
дящего состояния вентиля), ток на выходе равен ну¬
лю, а мгновенное напряжение на выводах ТП стано¬
вится равным э. д. с нагрузки.Если принять К за расчетный параметр, то внешняя
характеристика ТП в зоне прерывистых токов описы¬
вается двумя уравнениямиsin + а — — sin(7-30)f/rfo ‘ ' - Ятл <0о (t + 1ф)sinsinmX1 —X(7-31)При Id, стремящемся к нулю, Ug стремится к оп¬
ределенному пределу. При а^л/т этот предел равен
амплитуде вторичного напряжения трансформа¬
тора, а при ct.'>nfm — значению мгновенного напря¬
жения в момент отпирания вентиля.Между режимами непрерывного и прерывистого
токов существует граничный режим, когда Я,=2л/т.
При подстановке этого значения Я. в (7-30) и (7-31)
получаем:^drp ~ ^do ^0® ® (7'32)irfrp — .j . , ^ 11 ctg 1 . (7-33)
' (L + 1ф) \ m m )Полученные выражения представляют собой урав-
' нения эллипса, дуга которого является геометрическим
местом точек внешней характеристики. Формула (7-33)
справедлива лишь в определенном диапазоне измене¬
ния угла управления а, зависящем от числа фаз ТП.
При некотором минимальном значении угла «мив.гр
напряжение Ua. оказывается равным мгновенному фаз¬
ному напряжению вентиля, вступающего в работу
(рис. 7-8,г). При значениях углов, меньших амив.гр,
возможен лишь прерывистый режим тока.ISО)Bd/OiD1 пV0,sOd*(jHS)\^ п\fir-б)Jitfe{W 0,5 1офл}Рис. 7-9. Внешние характеристики ТП.а — зависимость ^{IIв выпрямительном режиме; б—зависимость однофазной двухполупе-рнодыой схемы со средней точкой; в ~ зависимость ”■/трехфазной ыостовой схемы.
§7^3]Расчет внешних характеристик управляемых выпрямителейИЗДля ТП с разным числом фаз амин,гр=32°30' при
т-2; 20°40' при т=3; Ю^Об при т—6.г) Методы расчета внешних характеристик
в зоне прерывистого 1!|)каРасчет внешних характеристик ТП аналитическим
путем по (7-30) и (7-31) сложен, поскольку требует
знания параметра Л, являющегося функцией угла уп¬
равления а и параметров цепи нагрузки. Более прос¬
тым является графоаналитический метод расчета, ос¬
нованный на использовании универсальных характерис¬тик ТП, построенных для раз¬личных углов управления а. На рис, 7-10—7-12 дается
семейство этих характеристик для ТП с т — 2; 3 и 6.Расчет внешней характеристики при заданном угле
регулирования а и известных параметрах i и /.ф про¬
изводится путем перерасчета соответствующей харак-
(L + U \тернстикиUa= /^фтВ зависимость Ua—=/(/d).Рассмотренная выше методика расчета внешних
характеристик ТП составлена из допущения, что Hai -
рузка имеет чисто индуктивней характер. Такое допу¬
щение вполне приемлемо, поскольку в реальных ти¬
ристорных приводах активное сопротивление нагрузки
относительно невелико. При необходимости учета ак¬
тивной составляющей сопротивления нагрузки расчет
внешних характеристик можно произвести другим ме¬
тодом, базирующимся на H3BecfHbix результатах анали¬
за однополупериодной схемы, к которой приводится
ш-фазный ТП в режиме прерывистых токов. •На основе этого анализа составлены уравнения для
выпрямленного напряжения Ua и тока Idi- (а— g^,ctge_ I
— sinm■ +Цфтт tgeЯШ(, (L -f- ^ф) L 2sinm%-b-f-e(7-34)■sin+2 2 УЯ Ua(7-35)2где 0 — фазовый угол контура нагрузки, определяемый
выражениемtgQ~fO(fL/kn-Уравнения (7-34) и (7-35) определяют в параметри¬
ческой форме семейство внешних характеристик ТП,
т. е. зависимость Ud~f{U) при различных а. Парамет--ЦБ^бРис, 7-10. Номограмшл для внешних характеристик ТП
в зоне прерывистых токов при т=2-г,оBJBZS0,5алйХ-0.1Уа,S.8ZсС°V0 11Wч'(КШЧ-30л\DMdZ№ iV\Sч \о,т§I60 !Л\\\N\о,тв1175 '\\Sч,>,лчL*iда г\\NЛрт ^ 0\кий.0,‘ч--о,тв10575\\JXV\/-0ЛГ25по60 ,\-0,58П135W\чV\/-о,тн-15030 'Рис. 7-11. Номограммы для расчета внешних характери¬
стик ТП в зоне прерывистых токов при /и=3.ром является %. Для определенной нагрузки угол 0 по¬
стоянен и (/d и /d являются функциями а и Я,. С другой
стороны, при заданной длительности импульса тока % Vd
и /<г являются функциями только а. При постоянных 6
и Я как напряжение Vd, так и ток Id можно представить
как сумму двух синусоид одного и того же аргумента
а, и.меющих различную амплитуду и различный фазовый
сдвиг. Сложив их, можно получить параметрическзто си¬
стему из двух простых уравнений, которые и будут оп¬
ределять семейство внешних характеристик ТП:== ^фт D si п (а — я/т 4- я/2 + ф^;); (7-36)тЦфт(а-^
\ т(7-37)где D — составляющая амплитуды напряжения:
cos вctg еЯх, — составляющая амплитуды тока:= tg 0 XXsin'2 1 ,2^4XDsin cosг) =(7-39)
144Расчеты механических характеристик электроприводов и сопротивлений резисторов[РОЗ&.7qjtr — фазовый угол сдвига напряжения:(7-40)Ряс. 7'12. Номограммы для расчета внешних характе¬
ристик ТП в зоне прерывистых токов при т=#=6.■*а9В.80.70,6«fV_пя9d*S>jв,-да60-35- ЯлА
//,1* ^ 1Г ' 1" 1
tиЛР А7 Лг/г1,й,^to ‘01”*7^0,1\L 1 - ■>Рис. 7-13. Зависимости D, (fu, (pi—f(k) при различных
tg6.ф/ — фазовый угол сдвига тока, соответствующий бы-
р а жени го. % D%sin^5Шфуtgqp/^ к COS —DX(7-41)• cos фу' — Z>i,~ - tp^ «._н- - ф^.Рис. 7-14. Зависимости Hb—fCk) при различных tg0.Зависимости Д фи, Ни <pi от Я, при различных tg6
показаны на рис. 7-13 и 7-14.Для построения внешних характеристик следует за¬
даться различными величинами % в пределах от О до
Ягр. Для каждого значения Я на рис. 7-13 и 7-14 опре¬
деляются D, фи, Яьу Ф/. Далее при подстановке различ¬
ных а в (7-36), (7-37) находятся точки внешних харак¬
теристик.Для отыскания точек, соответствующих границе об¬
ласти прерывистых токов, необходимо значения D, Нь,
4>v, ф1 определить для Хгр=2я/т.В случае tg 0->оо система уравнений, определяющих
границу области прерывистых токов, принимает вид
(7-32) и (7-33),7-4. РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
В КОНТАКТОРНО-КОНТРОЛЛЕРНЫХ СИСТЕМАХ
ПАРАМЕТРИЧЕСКОГО РЕГУЛИРОВАНИЯа) Общие вопросыМетоды параметрического регулирования являются
традиционными и применяются наиболее широко в кра¬
новых электроприводах. К этим методам относятся ре¬
гулирование изменением сопротивлений в цепи ротора
двигателей с контактными кольцами и в цепи статора
короткозамкнутых двигателей по симметричным и не-
х^имметричным схемам, симметричное и несимметричное
регулирование питающего напряжения, а также регули¬
рование изменением числа пар полюсов.Наиболее существенным недостатком' параметриче¬
ских методов регулирования (за исключением' регулиро¬
вания изменением числа пар полюсов) является то, что
при их использовании вся энергия скольжения выделя¬
ется в виде потерь в электроприводе. При применении
короткозамкнутых электродвигателей все лотерн вы^де-^
ляются непосредственно в обмотках ротора,’ что требует*
§ 7-лРасчет механических характеристик двигателей ё контакторяо-контроллерных систещх145'увеличения Габаритов электродвигателей при расшире-
ИШ! диапазона регулирования частоты вращения. Поэто¬
му в основном в таких системах применяются двигатели
с фазным ротором. Прп этом большая часть потерь вы¬
деляется в пускорегулировочных резисторах. Однако и
в случае асинхронного короткозамкнутого двигателя
электроприводы с параметрическими методами регули¬
рования применяются достаточно широко для крановых
механизмов, особенно для легкого режима работы. Это
в первую очередь относится к электроприводам с по-
люсно-перёключаемымн машинами, обладающими наи¬
лучшими энергетическими показателями из систем рас¬
сматриваемого типа.б) Расчет механических характеристик двигателей
с фазным ротором при введении симметричных
сопротивлений в роторную цепь 'Включение сопротивлений в роторную цепь показано
на рис, 7-15,0. Расчет механических характеристик мо¬
жет выполняться несколькими способами. При уточнен¬
ном способе используется следующая формула для ме¬
ханических характеристик асинхронной машины:2-f оM = Mj, — , (7-42)s/Sk + %/s + 9- Из этого выражения следует, что при постоянном
значении тока ротора /2 момент асинхронного двигате¬
ля const и не зависит от сопротивления цепп рото¬
ра и скольжения.Если известна естественная характеристика, то рас¬
чет искусственных реостатных характеристик может
быть выполнен, просто путем пересчета скодьжений при
одинаковых моментах-двигателя- по выражению.Sft — Se(7-45)где 5й и 5в *—скольжения на искусственной-и-естествен¬
ной характеристиках . при одинаковом . моменте двига¬
теля. - ■ ■Согласно (7-45) прй одинаковых моментах скольже¬
ние пропорцирмльно полным сопротивлен11ям линииротора. . ' . ^ ,При приблдже^ном способе расчет рабочего (линей¬
ного) участка, механической харёктернстики выполняет¬
ся по выраженикхМЛ(7-46)где Mr и Sk “ критические значения момента и скойьже*
НИИ двигателя; 7=2-^Sh; Ri 0 /?2 — активные сояро-тивленне цепи статора и приведенное сопротивление це¬
ли ротора, причем /?2 = /"г Ч* ^2д (^2доб приведенное
к статору добавочное сопротивление фазы ротора).Критические скольжения для естественной и искус¬
ственной реостатной характеристик связаны между со¬
бой соотношениемR5к.е • (7*43)Момент двигателя с приведенным током ротора свя¬
зан следующей зависимостью:где. R-2B-rr^^l V^3/2h — номинальное
свпрот-ивление ротора.,' определяемоеэ. д. с, между кольцами: неподвижно¬
го разомкнутого ротора W его номи-
нальньш tOKOM^ - г
г Согласно (7:46): при . номиналь¬
ной MoiieHte"Al:i=ijVifH .s^R^/R2h, '(7-47)
а при /?2д=0 и М~Мя' м-Ы&п.. :.(т-48)т. е. при номинальном моменте сколь¬
жение равно долям полного активно¬
го сопротивления линий ротора, при¬
мем для. двигателя с закороченными
колшами ;скдда равно долямактивного сопротивления' обмотки
ротора., Для многократных расчетов ме^
панических характеристик удобно
пользоваться универсальными харак¬
теристиками. Такие характеристики
строятся по формуле (7-42), которую
можно nepeniicatb в видеМ -2-f оРн'с. 7-15. Универсальные
механические характери¬
стики асинхронных дви¬
гателей с введекным^!
сопротивлениями в цепь
ротора.а —схема включения; б —
характеристики.М.s/SkHtSk/s + <7гдсхв=Л'1Ч-а:2*1о-аз9Универсальные зависимости МШк~!(Фк) для раз¬
личных параметров <7 приведены на рис. 7-15,6. Меха¬
нические , характеристики s=/(Af) - при использовании
кривых на риЬ. 7-15,6 рассчитываются по выражениямs^=(s/Sk)Sk;- М = (М/Мк) 2Йк, (7-50)
где 5к определяется формулой? (7-43).Значение критического сколья^ня Sr.c на естествен¬
ной характеристике можно определиад».^ до параметрам
двигателя или, пользуясь значением Перегрузочной спо¬
собности Ям=Мк/Л1н, по формулеW-'Jl-(7-51)
146Расчеты механтеских характеристик электроприводов и сопротивлений резисторов [Разд. 7Знаки + и — относятся соответственно к двигатель¬
ному и генераторному режимам. При 9=^0V = ■ (7-52)в) Механические характеристики
при несимметричных сопротивлениях
в цепи ротораНесимметричное включение резисторов в цепь рото¬
ра асинхронного двигателя применяется для увеличения
числа пусковых характеристик пра ограниченном числе
коммутирующих контактов, например, при управленииг) Механические характеристики
асинхронных короткозамкнутых двигателей
при введении симметричных сопротивлений
в цепь статораРасчет выполняется путем пересчета известных есте¬
ственных характеристик для момента Ale, тоКа статора
he и COS (ре двигателя в зависимости от частоты враще-
•ния ротора или скольжения s (рис. 7-17,а).Для заданной частоты вращения вычисляются со¬
противления схемы замещения двигателя, соответству¬
ющие естественной характеристике^ — /■е = геС08фе; = ^gsin «Рс- (7-54)Рис. 7-16. Механические характеристики асинхронного-
двигателя при несимметричных сопротивлениях в роторе./ — суммарная; 2 — для прямой последовательности; 3~для
обратной последовауельности.от силового контроллера. В этом случае на каждой по¬
зиции контроллера выводится сопротивление только в
одной фазе. Несимметричные токи, вызванные неравны¬
ми сопротивлениями, могут быть разложены на состав¬
ляющие прямой и обратной последовательности. Магни¬
тодвижущая сила прямой последовательности вращается
в пространстве с синхронной угловой скоростью <Опр=
= сос, а обратной — со скоростью (Ообр=<йс(1—2s). Эти
м. д. с. создают свои вращающие моменты, алгебраиче¬
ская igyMMa которых определяет суммарный момент дви¬
гателя.На рис. 7-16 показаны примерные характеристики
асинхронного двигателя при большой несимметрии ро¬
торных сопротивлений, ^ри которой появляются провал
момента на суммарной* характеристике при скольжении
S—0,5.'Провал момента растет при увеличении несим-
метрии.Точный расчет механических характеристик с учетом
провала момента весьма сложен. Учитывая, что в при¬
меняемых схемах неси-мметрия сопротивлений в роторе
принимается небольшой, с достаточной для практики
точностью характеристики могут рассчитываться для
эквивалентных симметричных сопротивлений в роторе.
Под эквивалентным сопротивлением понимается сим¬
метричное сопротивление, дающее такие же тепловые
потери, как и несимметричные. Это сопротивление равно:„ "I" Rb Rcгде На, Rb, Rc ~ несимметричные сопротивления в фаз-,
ныл цепях ротора.По значению RaKB ведется расчет характеристик со¬
гласно изложенному в § 7-4, б.Рис. 7-17. Механические характеристики асинхронного
короткозамкнутого двигателя МТКН 312-6 с внешними
добавочными сопротивлениями в цепи статора (ПВв =
= 400/о).а — характеристики; б — схема включения резисторов; / —
3-cos<p„-/(s);S'^cosДалее определяют суммарные сопротивления двига¬теля^1доб»У ” V ^ •(7-65)где /?1дос и Хгдоб — добавочные активное и индуктивное
сопротивления.Расчет искомых параметров для искусственных ха¬
рактеристик выполняют по формуламАи = ^ф.н/^ul (7-56)cps Фи = RttlZni (7-57)= (7-М)В крановых электроприводах обычно используются
только активные добавочные сопротивления Схе¬ма включения добавочных резисторов показана на рис.
7-17,6. При этом в расчетах следует принимать дс1дов=0.Очень важным вопросом для рассматриваемого спо¬
соба регулирования является определение допустимых
нагрузок короткозамкнутого двигателя при изменении
скорости, поскольку потери скольжения здесь выделяют¬
ся полностью в машине.Из формулыМдоп S ПВр/ПВн = Мл 5н.е (7-59)допустимый момент, соответствующий, продолжитель¬
ности включения при регулировании ПВр, составляет;Л1дод — МаЮс —
ОсПВнПВп-(7-60)
§ 7-4]Расчет механических характеристик двигателей в контакторно-контроллерных системах147где ©с и сов — угловые синхронная и номинальная ско¬
рости.На рис. 7-18 построены зависимости Л1дов(я) для
двигателя с Sk.c—0,07 при ПВр=5» 10, 15, 25%,
рассчитанные по (7-60). Характеристики показывают,
что диапазон регулирования при номинальном моментеРис. 7-18. Зависимости допустимого момента асинхрон¬
ного короткозамкнутого двигателя от частоты вращения
(ПВн=40%).J — естественная характерастика; 2—5 — зависимости
ш прр Вр-5, 10. 15, 25%.И при введении сопротивлений в цепь статора коротко-
замкнутой машины, даже с учетом малых значений ПВр
не превышает 1,2—1,3.д) Механические характеристики
асинхронного короткозамкнутого двигателя
при несимметричном включении сопротивленийНесимметричное включение резисторов в цепь стато¬
ра— простейший способ ограничения моментов коротко-,
замкнутых электродвигателей. Он широко используется
для механизмов кранов небольшой грузоподъемности и
ненапряженного режима работы.Наиболее часто применяется включение сопротивле¬
ний в одну из фаз статора (рис. 7-19). Несимметрия со¬
противлений приводит к несимметричной системе напря-Рис. 7-19. Схема включения
асинхронного двигателя с внеш¬
ним сопротивлением в одной
фазе статора.жений на зажимах двигателя, определяющей составляю-
щие момента прямой и обратной последовательности.
Напряжения прямой и обратной последовательностей
рассчитываются по выражениямУпр ^обр + 3 Уд^пр Уобр “Ь 3 Уд(7-61)(7-62)где Упр и Уо(5р — прямая и обратная лроводимости, оп¬
ределяемые по схеме замещения при скольжениях соот-
ветствеиио 5 и 2—s; Уд=1//-д — проводимость добавоч-ного сопротивления; а^в
10*с ^етом зависимостей (7-61) и (7-62) выражение
для момента имеет вид:Л1.Уобр + ЗУд^е.обрУпр 4" ^обр + ЗУдУпр + Уобр + ЗУд(7-63)где MafMe — отношение моментов на естественной и ис¬
кусственной характеристиках при одинаковых частотах
вращения; Мб.обрШе — отношение момента от обратной
последовательности напряжений (при Uh-ф) к моменту
на естественной характеристике при одинаковых часто¬
тах вращения.Для расчетов по (7-63) необходимо выполнить гео-
мотрическое сложение проводимостей посредством по¬
строения круговой диаграммы для двигателя.Для практических целей расчет механических харак¬
теристик можно выполнить, не прибегая к графическим
построениям. При этом момент определяется по формуле1-fcos фМ,.1 +(7-64)С05фгде cos ф — коэффициент мощности при заданном сколь¬
жении.Для построения механических характеристик следу¬
ет для заданных значений скольжений определить по
естественной характеристике соответствующие им зна¬
чения токов и cos ф и найти полное сопротивление дви¬
гателя г=—— . Затем по найденным значениям zVTi,и cos <р и известном Гд по (7-64) определяются моменты.Следует отметить, что использование двигателей при
несимметричном включении сопротивлений хуже, чем
при си1у{метричном. Например, в режиме стоянки с оди¬
наковым пусковым моментом допустимое время включе¬
ния двигателя с сопротивлением в одной фазе в 2—2,5
раза меньше, чем при симметричном включении сопро¬
тивлений во все три фазы статора.е) Механические характеристики
при изменении питающего напряжения
в симметричном режимеПри регулировании скорости асинхронного двигате¬
ля изменением напряжения остается справедливым
выражение (7-59), определяющее по условиям нагре¬
ва ограничение по диапазону регулирования для корот¬
козамкнутых двигателей, поэтому такое регулирование
находит практическое применение тол1^о для электро¬
двигателей с фазным ротором, где основная часть
потерь скольжения выделяется в добавочных сопротив¬
лениях ротора.Изменение напряжения асинхронного двигателя
приводит к изменению критического ^ момента, тогда
как критическое скольжение остается постоянным,
поэтому в электроприводах рассматриваемый метод ре¬
гулирования применяется в замкну^лх системах управ¬
лений с тиристорными регуляторами напряжения или
магнитными усилителями, Расчет механических характе¬
ристик таких электроприводов дан в § 7—6. Здесь же
рассматривается влияние на характеристики асинхрон¬
ных машин колебания напряжения питающей сети, что
характерно для условий эксплуатации крановых элек¬
троприводов.
148Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7Мбмент, развиваемый двигателем, при любом значе¬
нии скольжения пропорционален квадрату приложен¬
ного напряженияI ^^н.ф /(7-65)здесь t/фь 1/ф2; t/фз — векторы фазных напряжений не¬
симметричной системы; ’^'’=0,5—/0,866—единич¬
ный вектор.Момент, развиваемый двигателем, р^вен:А^к-пр (2 -|-9) ^к.пбр (2 ~г ф Л1 =а ток ротора двигателя пропорционален напряжению“Ь “Ь я s)/Sk (2--~s) д.Рис. 7-20. Механические характеристики асинхронного
двига-^ля МТН312'6 при изменении напряжения пита--
иия (ПВн-40%).? —естественная; 2 и З—при напряжениях 0,7-и 0,85 номиналь'
ного; ^— допустимый момент при ПВр=5%.При одинаковом моменте нагрузки на рабочем
участке механических характеристик скольжение и ток
ротора могут быть найдены по следующим приближен¬
ным соотношениям:1 ■ V% '~77~г 777 » (7-67)'2и(7-68)Крутизна характеристик возрастает при понижении
напряжения. Механические характеристику, рассчитан¬
ные для двигателя МТКН312-6 при напряжениях 0,85
и 0,7 номинального, приведены на рис. 7-20, ' там же
показана кривая ЛГдоп. рассчитанная по (7-S9) для
ЯВр=0,05Ввиду того что во всех промышленных сетях всегда
имеет место падение напряжения, для обеспечения на¬
дежной работы двигателя требуется проверка его выбо¬
ра по условиям обеспечения пускового режима. Это
особенно важно для электроприводов с короткозамк¬
нутыми двигателями.ж) Механические характеристики
при несимметрии питающих напряженийРаечет характеристик при несимметрии питающих
«апряжений выполняется методом симметричных состав¬
ляющих-Составляющая прямой последовательности напряже¬
ний равна:. Г/ф1 + с^/ф2 + а®^/фз . „Unr> = Zсост-авляюшая обратной последовательности '
t/ф! + с^^/ф2 + а(/ф8^Обр "о *(7-70)где Мк.ир и Мл.обр — критические моменты от прямой и
обратной составляющих напряжений, определяемые
выражениями; ' ■ ,Мк.ир - (ипр/и„,ф)^; (7-72)Л1к.обр = AfK (f/обр/^н.ф)'^; (7-73)Mtc — критический момент двигателя на естественной
характеристике.В практических расчетах приходится иметь дело с
линейными напряжениями, поэтому при использовании
(7-69) — (7-73) 'необходимо предварительно определить
напряжения для отдельных последовательностей. Такое
определение проще всего выполняется с помощью графи¬
ческих построений, нриведенных на рис. 7-21.Пусть С1С2С3 — треугольник линейных напряжений. На
одном из отрезков, выражающих линейные напряжения,
строятся два равносторонних треугольника ЛСзСг и
ВСвСг. При этом значение актора СИ в соответствую-
шем масштабе равно: K<^t/np, а для вектора BCi
V^Uo6v.3) Однофазное включение обмоток статора
асинхронных двигателейНесмотря на низкие энергетические показателя,
однофазное включение широко применяется в крановыг
подъемных механизмах для регулирования частоты
вращения двигателей с фазным ротором. Схема вклю¬
чения обмоток двигателя приведена на рис. 7-22, а. При
таком подключении симметричные составляющие линей¬
ных напряжений прямой и обратной последовательно¬
стей одинаковы и равны UnlV^- Механические характе»
ристики рассчитываются по зависимостям (7-71) — (7-73),
' Форма механических характеристик изменяется при
введении добавочных резисторов в цепь ротора двига¬
теля. На рис. 7-22, а показаны характеристики для слу¬
чая включения в ротор значительных добавочных
сопротивлений.При отсутствии добавочных сопротивлений большая
часть механической характеристики имеет положитель¬
ную жесткость, как показано на рис. 7-22, б, , поэтому
однофазное, включение для короткозамкнутых машин в
крановых электроприводах не применяется,, однако, оно
может иметь место при обрыве одной из фаз статора.
Двигатель может работать на устойчивой части механи-
§ 7-4]Расчет механических характеристик двигателей- в контакторно-контроллерных системах149ческой характеристики, если момент нагрузки не пре¬
вышает критической. Однако при этом значительно
увеличится фазный ток машины:(7-74)2цр + 2обргде гдр и гобр — эквивалентные сопротивления схемы
замещения при скольжениях s и 2—s соответственно.Рис. 7-22. Механические характеристики асинхронных
двигателей при однофазном включении.а-—для двигателя с фазныы ротором; б —при обрыве фазы
к<ор<й'козамкнутого двигателя.Учитывая, что_прй симметричном трехфазном напряже¬
нии гпр и то, что гобр мало, можно заключить,
что при одинаковой частоте вращения ток в однофазном
режиме увеличивается примерно в 1^3 раз по сравне¬
нию с трехфазным. Однако при неизменном моменте ста¬
тической нагрузки в случае обрыва фазы скольжение
увеличивается, что приводит к снижению гпр, поэтому в
однофазном режиме при одинаковом моменте фазный
ток по сравнению с трехфазным режимом возрастает
в 1,75— 1,85 раза-и) Регулирование скорости
переключением числа полюсов асинхронных
короткозамкнутых двигателей' При использовании многоскоростных двигателей
осуществляется ступенчатое регулирование частоты
вращения.Для двух независимых обмоток статора таких дви¬
гателей установлены связи между различными пока¬
зателями их ^>аботы.Соотношение индукций в воздушном зазоре двига¬
теля при числах пар полюсов Pi и рг равно;Лл (7-75) ^2^0б2^62здесь tO], Юз, fecci, ^обг', Щг, Щг — соответственно числа
■витков, значения обмоточных коэффициентов и фазного
напряжения для обмоток с числом пар полюсов pivpz-
Соотношение критических моментов-■/ д(7-76)Соотношение намагничивающих токов (при прене¬
брежении насыщения железа машины)/«fВ.61обг/о2Соотношение токов короткого замыканияЫ.К.(7-77)(7-78)Из приведенных соотношений следует, что при оди¬
наковых индукциях перегрузочная способность машины
обратно пропорцисйальна числу полюсов, а при одина¬
ковой перегрузочной способности индукции должны
быть пропорциональны корню квадратному из отноше¬
ния числа полюсов обмоток. Намагничивающий ток про¬
порционален числу'пар полюсов.Для получений нужных соотношений перегрузочной
способности я cos ф необходимо подбирать соотношение
индукций обмоток, что достигается изменением фазного
напряжения (соединение обмоток звездой или треуголь¬
ником) или числа витков (путем соединения отдельных
частей обмоток последовательно или параллельно).В крановых электроприводах для получения одина¬
ковой перегрузочной способности на разных обмотках
регулирование осуществляется при постоянстве момен¬
та. При этом применяются или отдельные обмотки или
полюсио-переключаемые обмотки с переключением по
схеме ЛЛМ или ЛЛ/Л-Схема Л Л/А применяется при соотношении чисел
пар полюсов 12/24, а схема ЛЛ/Л—для соотношений
4/8 и 6/12. Схема ЛЛ/Д является схемой с постоянной
мощностью! Однако вследствие большого сопротивле¬
ния обмотки для малой скорости критические моменты
при различных числах пар полюсов близки между со¬
бой. В схеме Л Л/Л обеспечивается постоянство пере¬
грузочной способности на разных обмотках.Максимальный диапазон регулирования, обеспечи¬
ваемый переклтрчением числа пар полюсов, составляет
6; 1 при использовании независимых обмоток.к) Последоват^ьнре соединение обмоток
двухскоростного двигателяПоследовательное соединение отдельных обмоток
статора многоСкоростиых двигателей применяется для
ограничения максимального момента тихоходной обмот¬
ки в генераторном режиме при переходе на понижен¬
ную скорость. При этом предотвращается также перерыв
питания двигателя в схемаз^ контроллерного управле¬
ния.Расчет механических характеристик может быть
выполнен на основе метода наложения при пренебреже¬
нии изменением насыщения машины по параметрам
схемы замещения или естественным характеристикам.'При расчете по параметрам схе?лы замещения опре¬
деляются активные и индуктивные сопротивления тихо¬
ходной (быстроходной) обмоток двигателя по формулам^т(б) — '’1т(б>*^От(б)■*^От(б) ■*^2т(6)
1. ^Т(б) (■%т(б) “Ь^2т(б))"2т(б)'^2т(б)"т(б)2т(б>)(7-79)
150 Расчеты механических характеристик электроприводов и сопротивлений резисторов [Разд. 7 ^J ^^^ +^От(б)
^От(б) + ^1т(б)■’^От(б)11 +^т(б) (^От(б) +^2т(б))
^2т(б)(7-80)и общее госщ суммарное сопротивление последовательно
соединенных- обмоток^общ = У (/?б + + (^б + • (7-81)Следует иметь в виду, что в генераторном режиме
/?т(б) имеет отрицательное значение, а в двигательном —
положительное. По гоощ определяем ток, протекающий
по обмоткам/ = С/ф/гобщ. (7-82)Моменты двигателя для каждой из обмоток рассчи¬
тываем по формуламМт.п = Мг.е (///т)^;Л^б.и = Мбл(///б)*.(7-83)(7-84)где Мт.е и Мб.е {/т И /б) моменты (токи) на естест¬
венной ха^)актеристике при заданной скорости при
использовании тихоходной и быстроходной обмоток, ■
Общий момент двигателя равен алгебраической сум¬
ме рассчитанных моментов.Пр9 наличии естественных характеристик (/, совф
и Ж в функции 5) расчет выполняется значительно про¬
ще. При заданных скоростях определяются сопротивле--
ния для тихоходной (быстроходной) обмотки двигателя
по формуле^т(б) — ^ф/^т(б).(7-85)Активные и индуктивные сопротивления тихоходной
(быстроходной) обмотки рассчитываются по выраже¬
ниямМб)^т(б)= г,‘т(б)т(б)cos (Рг(б):.1(7-86)Дальнейший расчет выполняется по (7-81) —(7-84).На рис. 7-23 приведена механическая характеристика
(кривая 5) кранового двигателя МТКНЗ12-4/12 при
последовательном включении его обмоток. Механиче¬
ская характеристика имеет провал момента в зоне
синхронной частоты вращения двигателя для быстро¬
ходной обмотки, поскольку эта обмотка является по
отношению к тихоходной последовательно включенным
переменным сопротивлением, имеющим максимальное
значений при указанной частоте вращения. Наличие
провала недопустимо для механизмов с отрицательным
моментом на' -валу. Для устранения провала быстро¬
ходная обмотка шунтируется внешним активным сопро¬
тивлением.При расчете характеристик с шунтйруЮщим сопро¬
тивлением определяется ток /сум, соответствующий 'гре-
буемому суммарному моменту Мсуы:'сумЛ/уткfit-fit}V>//iTvu)S//SS.7tУ\/' г Ь ■ ■/~ fUvuч/ялпс001/оии17ПП\ >5-/тГ|Рис. 7-23; Механические характеристики двигателя
МТКН312-4/12 при последовательном соединении об¬
моток./ — естественная характеристика двигателя иа тихоходной об¬
мотке; 2 —то же на быстроходной; 3 —при последовательном
соединении Обмоток; 4 — при шунтвровании быстроходной об¬
мотки активным сопротивлениемуИ шунтирующее сопротивление= -R,. (7-88)По значению определяются эквивалентные со¬
противления двигателей для заданных значений ча¬
стот вращений;о _П ,Y У'экв —лх-t- ^ . о :-L'экв ~ "^экв' (7-91)сум/Мт.е 'т.в(7-87)Далее расчеты выполняются по (7-81)—(7-84)>На рис. 7-23 показана характеристика 4, рассчи¬
танная из условия обеспечения при синхронной частоте
вращения быстроходной обмотки 7Йсум=0,5 Мт-н.7-6. РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
В РЕЖИМЕ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯа) Общие понятия. Схемы динамического торможенияДинамическое торможение асинхронного двигателя
возникает, если в обмотку статора подается постоянный
ток, а ротор вращается за счет механической энергии,
поступающей со стороны вала от пбстороннего источ¬
ника, либо за счет собственного запаса кинетической
энергии. Тормозной момент образуется в результате
взаимодействия неподвижного потока машины с током,
вызванным этим потоком, во вращающемся роторе:
Возможны две системы построения схем динами-
ческо^’о торможения: 1) е питанием от отдельного ис¬
точника постоянаого тока (рис. 7-24,а); 2) по схемам
§7-5]Расчет механических характеристик двигателей в режиме динамическогю торможения151Таблица 7*2Рис. 7-24. Схемы динамического торможения^л~с питанием от отдельного источника; 6— в режиме само¬
возбуждения.динамического торможения с самовозбуждением
(рис. 7-24, б).Схемы с питанием от отдельного источника хорошо
известны и применяются для управления двигателями
с фазным или с короткозамкнутым ротором. Динамиче¬
ское торможение с самовозбуждением основано на пи¬
тании статора машины от выпрямленного напряжения
ротора и, следовательно, может быть применено только
для регулирования скорости двигателей с фазным ро¬
тором. От обычной схемы динамического торможения
система с самовозбуждением выгодно отличается отсут¬
ствием понизительного трансформатора, а также авто¬
матической зависимостью тока возбуждения от нагруз¬
ки электродвигателя. Для крановых электроприводов,
характеризуемых широким диапазоном изменения на¬
грузок, это имеет особо важное значение. Однако эти
системы имеют ряд особенностей, которые затрудняют
их применение в некоторых случаях.Расчет систем динами'1еского торможения зависит
от схем соединения фаз статора. Возможные варианты
едем соединения фаз статора Приведены в табл. 7-2.
Указанные схемы могут быть разделены на две группы;1) несимметричные, в которых токи, протекающие
по фазным обмоткам, не равны по значению или’ не
одинаковы по направлению (схемы 1—5 и S);2) симметричные, в которых токи, протекающие по
обмоткам, равны по значению и одинаковы по направ¬
лению (схемы 6 и 7у.Эти группы схем создают принципиально разные по
результирующему действию м. д. с. в воздушном зазоре
машины. В несимметричных схемах основное поле соз¬
дается суммой первых гармоник м. д. с.. а в симмет¬
ричных — суммой третьих гармоник. Для двигателей с
фазным ротором симметричные схемы не могут быть
применены, так как обмотка фазного ротора не рассчи¬
тана на поле третьих гармоник.5) Основные соотношения для расчете механических
характеристик динамического торможениеРасчет характеристик динамического торможения
производится при использовании понятия эквивалентно¬
го тока-Уэкв, м. д. с. которого равна м. д. с.‘, создава¬
емой постоянным током /пост, протекающим по обмот¬
кам двигателя. Соотношения между указанными токами
(коэффициенты эквивалентности) для 1-й и 3-й гармо-Схемы соединения обмоток статора и коэффициенты
эквивалентностиСхема'9КВЗ^эквз^пост0,470,8160,940,710,470,1Б70,1570,3131.41
152Расчеты механических характеристик электроприводов и сопротивлений резисторов [Разд. 7Продолжение табл. 7-2СхемаЛосг'^эквалU41в) Расчет механических характеристик
динамического торможения асинхронного двигателя
при питании его обмоток от отдельного источника
по несимметричным схемам включенияТочный расчет механических характеристик дннз*
мического торможения может быть произведен только
при наличии .кривой намагничивания машины. Универ¬
сальная кривая намагничивания крановых машин при¬
ведена на рис. 7-25. Ниже приводится графоаналитиче-Рис. 7-25. Универсальная кривая намагничивания крано>
вых машин.ник поля приведены в табл. 7-2. Значения момента рас¬
считываются по формулеМ = . (7-92)Ос ^ ^ Sгде S—{пДос; то — число фаз ротора.Отметим, что в формулах данного параграфа s
везде выражает относительную частоту вращения. При¬
веденный ток ротора согласно векторной диаграмме то¬
ков для схемы замещения асинхронного, двигателя
равен:^2 — . (7-93)Отсюда расчетная формула для момента принимаетвид:М =2 4в4^2/^'Шг, I“с[№/5)^ + (^0+4Г](7-94)Согласно (7-94) критический момент и критическое
скольжение равны:(7-95)
(7-96)При постояшюм значении Хо (без учета насыщения
машины) использование выражений (7-94) — (7-96) по¬
зволяет получить для механической характеристики ди-
"намического торможения* формулу, аналогичную (7-42).Однако в отличие, от обычной схемы включения ди-
ттамическое торможение асинхронной машины характе¬
ризуется значительным изменением магнитного потока,
что обязательно должно быть учтено при расчете ха¬
рактеристик. как это показано ниже.ский метод расчета характеристик. Расчет выполняется
в следующей последовательности:1) задаются значения тока намагничивания в от¬
носительных единицах /о* —/оДон, где /ов — ток холос¬
того хода в двигательном режиме при номинальном на¬
пряжении;2) по универсальной кривой намагничивания £* =г / f » г~ ^Ф-R= f(/o*) находятся значения £* — и Хд^ ——-—,^ф.н »о* 'пнгде ЕфШф в — отношение э. д. с. фазы статора к ее но¬
минальному значению;3) для принятого значения постоянного тока и вы¬
бранной сз^емы подключения статора к сети постоянного
тока определяются значения тока /айв согласно
табл. 7-2;4) вычисляются значения R^s по выражению .(7-98)5) рассчитываются значения тока ротора по (7-93)
н момента по (7-94), а также частоты вращения для
принятого сопротйВчЧения ротора по выражениюп ^2
= —(7-99)"с R^lsРасчет удобно выполнять, записывая результаты
указанных вычислении в таблицу.Для приближенного построения механических ха¬
рактеристик можно использовать зависимости (7-97),
при этом входящие в указанную зависимость значения
М„ и Sk в соответствии с усредненными эксперимен¬
тальными данными могут быть определены для крановых
двигателей по выpaжe^wжм_ . 2^8^/э^в£он)1_ ,^Ф.н{0Н_ ., 1+0,5О5/экв//он «с •0,580,4«он^ф.п(7-101)
#7-5] Расчет механических характеристик двигателей в режиме динамического тормбжения 153Ниже будет также приведен метод расчета харак¬
теристик динамического торможения по универсальным
кривым для случая регулирования тока /экв в функции
тока ротора, частным случаем, которого является рас¬
сматриваемый режим при /eKB=const.г) Расчет характеристик асинхронных короткозамкнутых
двцгателей лри симметричных схемах
динамического торможенияПри, применении симметричных схем магнитное по¬
ле создается в основном суммой третьих гармоник ре¬
зультирующей м. д. с. Точный расчет механических ха¬
рактеристик в этом случае может быть выполнен ана¬
логично изложенному для 1-й гармоники поля по па¬
раметрам двигателя, рассчитанным для 3-й гармоники
ноля. Однако определение указанных параметров может
быть произведено только по конструктивным данным
машин. Поэтому для расчета симметричных схем ди¬
намического торможения целесообразно применить при-
ближен11ый аналитический метод с использованием
(7-97). При этом максимальный момент от 3-й гармо¬
ники поля рассчитывается по формуле^кз " (^обз/^обх)^ ^кг» (7-102)где Mxi — максимальный момент от 1-й гармоники, оп¬
ределяемый по (7-100) для схемы 2 табл. 7,-2; ko6t и
Аоба—обмоточные коэффициенты для 1-й и 3-й гармо-
»нк магнитного поля. Критическое скольжение вычис¬
ляется согласно выражению(7-103)Графическая зависимость коэффициента кн приве¬
дена на рис. 7-26.SJО 1 Z 3 ^ SРис. 7-26. Зависимость коэффициента Ак от тока намаг¬
ничивания, ,ЛРис. 7-27. Механические характеристики двигателя
МТКН 312-4/12 в режиме динамического торможения
для симметричной и несимметричной схем включения. — при несимметричной схемь; при симыетрич-ндЯ сле.-ие (ПВ^,*40%).Поскольку Аобз значительно меньше, чем Aoci, то
максимальный, тормозной’момент, развиваемый двигате¬
лем в симметричных схемах динамического торможе¬
ния, значительно меньше, чем в схемах несимметрично¬
го соединения обмоток. Однако тормозной эффект в
начальный период торможения при переходе от естест¬
венной характеристики на тормозную может быть вы¬
ше, поскольку критическое скольжение 5кз зиачительно
больше Skj. На рис. 7-27 приведены механические ха¬
рактеристики двигателя М.ТКН312-4/12, рассчитанные
для симметричной и Несимметричной схем соединения
быстроходной обмотки, которые иллюстрируют изло¬
женные выше положения.д) Расчет механических характеристик
асинхронных двигателей с фазным ротором
в режиме динамического торможения
с самовозбуждением по универсальным кривым
(метод завода «Динамо»)Для получения универсальных зависимостей между
параметрами двигателя расчетные соотношения пред¬
ставляются в относительных единицах. При этом за ба¬
зисные напряжения, ток статора и приведенный ток ро¬
тора, момент и скольжение принимаютсяVq~ Eq — /од л^он! (7-104)/б-/он; (7-105)(7-106)(7-107)"бC учетом указанных соотношений и схемы замеще¬
ния асинхронного двигателя Можно записать следую¬
щие зависимости между основными параметрами маши¬
ны;/‘и = [^1 + iZ ^о*+24 .Vл-1Фо¬гле X.(7-108)(7-109)(7-110)£ =По (7-108)—(7-110) и универсальной кривой на¬
магничивания крановых машин на рис. 7-28 и 7-29 для
схемы на рис. 7-24,6 построены универсальные графи¬
ческие зависимости ==f(s*)] /i*=/(s*), на основании
которых рассчитываются кривые с пара¬метрической зависимостью от М^, приведенные на
рис. 7-30. В схеме самовозбуждения токи статора и
ротора связаны соотношением2*эвд(7-1П)где In* ток подпитки двигателя от внешнего источ¬
ника; AojtB — коэффициент приведения постоянного тока
возбуждения, ■ подводимого к статору, к эквивалентному
но м. д. с. трехфаз»ому току (см. табл, 7-2);krj — 1соэффнциснт приведения тока ротораficxк току статора; kcx — коэффициент схе.мы выпрямления,
для трехфазной мостовой схемы Агсх~0,815; kr — ко¬
эффициент трансформации двигателя от статора к ро¬
тору;^ ^п-с — коэффициент, определяемый схемой под¬
ключения выпрямительного моста; для обычш приме¬
няемой потенциометрической схемы на рис. 7-24, б
164Расчеты механических характеристик элекгроприводов и сопротивлений резисторов \Pnsd.-7Рис. 7-28. Универсальные зависимости /2*—/(®») Для
крановых двигателей.Рис.'7-30. Универсальные зависимости
крановых двигателей;Рис. 7-29. Универсальные завнсимости /i*=/(s*) для
крановых двигателей.Ап.с—Гс H/(/’n.c-f^t)r причем Г1—сопротивление фазы
статора; Гп-с — внешнее сопротивление роторной цепи,
параллельно которой включен выпрямительный мостI А„.с== 0,85^0,92.Совместное решение графических зависимостей
И зависимости (7-111), являющейся уравне¬
нием прямой линии, позволяет определить значения
Л1. =/(/.*) и 4 =f(/2*) И по НИМ значения 5*=
==/(Л1*).Значения s и М. необходимые для построения ме¬
ханических характеристик, определяются из выраженийздесь^2 = h + «лос + "■ А.С + Г, .(7-114)—значение ступени сопротивления в линии ротора;
Г1 Ап.еАо— дополнительной сопротивление цепи по¬
стоянного тока, приведенное к цепи переменного тока;
kv — коэффициент, учитывающий потери напряжения в
выпрямительном мосте при коммутации, В прак1ических
расчетах зависимость Аи=/(/*) может быть принята
линейной0,075(7.П5)где /(J2 и /d2B ~ выпрямленный ток ротора и его номи¬
нальное значение.Приведенная методика позволяет выполнить расчет
характеристик и в схемах с источником постоянного то¬
ка. При этом следует принять /1,—const.(7-112)(7-113)Рис. 7-31. Механические характеристики . двигателя
МТН412-6 в режимах динамического торможения. в схемах питания от отдельного нсточиика;—X—X—X в режиме самовозбуждения,
§7^6]Расчет механических характеристик двигателей в тиристорном электроприводе.155• На рас. 7-31 приведены механические характеристи¬
ки двигателя МТН412-6 в обычной схеме динамического
торможения лри /экв//о~2 и в режиме самовозбуждения
при одинаковых сопротивлениях в цепях ротора.е) Особенности работы асинхронного двигателя
в режиме динамического торможения
с самовозбуждениемКак видно из рис. 7-30, для введения двигателя в
режим самовозбуждения нужно осуществить пересече¬
ние лрямой /з* —/(Л*), определяемой принятой схемой
электропривода, и кривых Л1.), характерныхдля асинхронного двигателя. Кривые /2# —fih»; Мп)
при заданном М и s*->0 и, следовательно, /2^ ^оо, как
следует из (7-109), асимптотически приближаются к
кривой, определяемой зависимостью ,h* — h* V ^ •(7-116)Сопоставляя (7-111) и (7-116), можно получить в
аналитическом виде условие самовозбуждения асинхрон¬
ной машины в режиме динамического торможения без
подпитки от постороннего источника:(7-U7)Коэффициент fee может быть назван коэффициен¬
том самовозбуждаемости машины.Если условие (7-117) не выполняется, необходимо
обеспечивать подпитку двигателя от отдельного источ¬
ника постоянного тока. Минимальный ток подпитки оп¬
ределяется требуемым максимальным моментом и мо¬
жет быть найден путем нанесения на графики
(рис. 7-30) /2» =/(/i*, Л1*) прямой Ьс, проходящей па¬
раллельно прямой Оа с уравнением /3* =А*/йс, и явля¬
ющейся касательной к кривой ^f.) для тре¬
буемого значения момента М». Отрезок ОЬ ‘в масштабе
равен току подпитки /ц,. Ток подпитки при заданных
значениях Л1, и принятой схемы электропривода опре¬
деляется коэффициентом трансформации kt.На рис. 7-32 построен график зависимости /оДон»
“/(**)» рассчитанной для крановых двигателей при
Л1*=2,5. По найденному значению том /п может быть
рассчитана схема узла подпитки. Следует отметить, что
даже в случае выполнения условия самовозбуждения
для обеспечения устойчивой работы электропривода в
установившихся режимах следует сохранить узел под-
аитки. При этом ток подпитй! может составлять 3—
5% номинального тока дв^1г'атеяя."Л*0.ВОЛвк-/он-а,е~B,Z
- DАhn\\\/\//Xв,е 1,0 %г vt 7,6ts2fi z,zРис. 7-32. Зависимости тока подпитки и параметра /Зд.
от коэффициента трансформации асинхронного двига¬
теля.Электроприводы в режиме динамического торможе¬
ния с самовозбуждением имеют сравнительно высокие
показатели регулирования скоростей. Отношение но¬
минальной скорости подъема груза к минимальной ско¬
рости его спуска при одинаковом моменте нагрузки оп¬
ределяется степенью возбуждаемости машины и может
быть найдено из выраженияОд = !/5=1/з*5б^£)д^/5б, (7-118)где — диапазон регулирования при динамическом
торможении; £)д.—l/s„Зависимость £)д^ в функции коэффициента транс¬
формации для крановых машин также построена на
рис. 7-32.7-6. РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
АСИНХРОННЫХ ДВИГАТЕЛЕЙ В СИСТЕМАХ
ТИРИСТОРНОГО ЭЛЕКТРОПРИВОДА '
а) Общие вопросыКак будет показано в разд. 10, для крановых элект¬
роприводов промышленностью выпускаются тиристорные
системы частотного и фазового управления. В ряде слу¬
чаев применяется также система импульсного регулиро¬
вания сопротивления в цепи ротора двигателя. Системы
фазового и импульсного управления как системы пара¬
метрического регулирования, имеющие повышенные по¬
тери при регулировании, применяются только для управ¬
ления двигателями с фазным ротором. Электроприводы
с частотным управлением в основном применяются для
управления короткозамкнутыми двигателями, однако' в
определенных условиях оказывается целесообразным их
применение для обеспечения малых и посадочных скоро¬
стей в электроприводах с электродвигателями с фазным
ротором. Примером могут служить электроприводы, в
которых малогабаритные ПЧ со стабильными выходны¬
ми значениями частоты и напряжения используются как
источники питания двигателей сложных крановых комп¬
лексов для получения устойчивой малой скорости во всех
четырех квадрантах работы электропривода-Рассмотрим расчет характеристик асинхронных дви¬
гателей в системах тиристорного электропривода, нашед¬
ших практическое применение для крановых механизмов,б) Расчет характеристик асинхронных двигателей
в системе частотного регулированияОбщие понятия и основные соотношения. При час¬
тотном управлении осуществляется регулирование ско¬
рости асинхронных двигателей посредством изменения
частоты и амплитуды питающего напряжения. Соотно¬
шения между изменениями указанных параметров опре¬
деляются законом частотного управления, выбор кото¬
рого производится для конкретного электропривода из
условий получения требуемых характеристик и возмож¬
ностей реализации его системой управления.Частотное регулирование по сравнению с другими
способами имеет ряд важных преимуществ: регулирова¬
ние производится при малых потерях скольжения, воз¬
можно плавное изменение скорости и формирование не¬
обходимых механических характеристик и, что особенно
существенно, обеспечивается возможность использова¬
ния в регулируемых электроприводу короткозамкнутых
асинхронных машин. Для частотного регулирования
электропривод должен кроме двигателя иметь ПЧ.Для анализа свойств асинхронного двигателя при
частотном регулировании применяют Т-образную схему
замещения (рис, 7-33). При этом используютс;! три ос¬
новных относительных параметра; частоты a^/t/fu,; аб¬
солютного скольжения р=Да)/шс.н=/г//1н н напряжения
Расчеты механических характеристик электроприводов и сопротивлений резисторов [Разд. Т<?-сXiCC£r£zSzCCК?ССи.р
лРис. 7-33. Схема замещения асинхронного двигателя при
частотном управлении.'У=С/ф/£/ф.н. Здесь /j, fiH и /2 — частоты соответственно
питающего напряжения, номинальная и тока ротора;,
Дю/Qc.h — отношение абсолютного скольжения к син¬
хронной скорости при частоте /ih; t/ф.в — действу¬
ющие значения фазного напряжения питания и номи¬
нальное.Основные зависимости, характеризующие работу
двигаталя, определяются из схемы замещения и имеют
вид;Л[ =<^с.нXX/?0(7-120)X^2 = ^ф.нVX
I/(7-Ш)1НXf 2г, —а(7-122)s = p/a. - (7-123)Выражение момента через поток можно представитьв видеМ‘^с.н + ^-2 )(7-124)в этих выражениях принято: ’ v
й = /-1 (I -{- Та);■ с — Л{,т; d «=e=l+Ti,(7-125)Ti -{- Та -{- T1T2; Cl = 4,44ш1*обг: Ti *=T2 =- 4/^0=^2 = f-2 + ^2д*Для короткозамкнутых машин R2 =Г2 •Механическая характеристика описывается выраже¬
нием '(7-119). Частота вращения пересчитывается при
этом по формуле30« = «С.Н (а - Р) = Пс.н (а ~ Р). (7-126)31Таким образом, момент двигателя является функ-
цией трех параметров а; р и -у- В общем случае напря¬
жение регулируется в функции частоты и нагрузки, т. е.
y—f{a‘, р). При этом критическое скольжение опреде¬
лится приравниванием нулю частотной производной
дМ/д^, в соответствии с чем из (7-119) следует;дШ, Р)арарарY(a: Р)-0.(7-127)гдев ^22г^а + (62 4- с«а2) + (d* _j_(7-128)Я,РВ частном случае у не зависия- от р и критическое
скольжение определится из уравненияdiW/dP (а; p)/dp = 0. (7-129)Механические характеристики, так же как и выра*
жения для критических момента и скольжения, опреде¬
ляются законом- частотного управления по конкретной
зависимости y—f{ai р).Законы частотного управления и определяемые ими
особенности работы асинхронных двигателей. Законы
частотного управления можно разделить на. три основ¬
ные группы:1) управление напряжением только в функции час¬
тоты 1ю заданной зависимости \-fia)',2) непрерывное управление напряжением в функции
частоты и параметра скольжения: y—f(a\ р), обеспечи¬
вающее компенсацию падения напряжения в сопротив¬
лениях статора. Частным случаем такого управления яв¬
ляется поддержание постоянства магнитного потока;3) оптимальное управление по минимуму потерь, то¬
ка или других параметров асинхронного двигателя.Управление по оптимальным законам может быть
обеспечено только при учете нелинейности кривой на¬
магничивания машины и управлении напряжением в
функции трех параметров: частоты; параметра скольже¬
ния и момента нагрузки: £/=/(а; р; ji).Наиболее простым для реализации является управ¬
ление y==fia.). Из (7-127) при у^Ца.) можно опреде¬
лить выражения для критического момента и сколь¬
жения:/и, У1 ф.н2о)г1rja ±V {Ь^ + (d“ + е2«2)(7-130)Pj, = ± ]/(d" + (7' 131)
§7-6]Расчет механических характеристик двигателей в тиристорном электроприводе157Знак + относится к двигательному режиму, — к ге¬
нераторному.Основным недостатком регулирования какследует из (7-130) и (7-131), является отрицательное
влияние активного сопротивления статора на характе¬
ристики двигателя при ионижснин частоты, приводящее
к снижению максимального момента и потери устойчи¬
вости работы двигателя на малых частотах.Рис. 7-34, Механические характеррстики асинхронного
двигателя МТКН412-6 при частотном управлении.. На рис. 7-34 построены механические характеристи¬
ки .М=др) кранового двигателя МТКН412-6, рассчи¬
танные по (7'119) для частот 6, 20 и 50 Гц (кривые 1,2 и-5) при пропорциональном регулировании v = «-
Регулирование Р) дает более широкие воз¬можности для обеспечения большого диапазона регули¬
рования. Благодаря непрерывной компенсации падения
напряжения на сопротивлениях статора перегрузочная
способность двигателя может сохраняться независимой
от частоты. Наиболее благоприятным является регулиро¬
вание по закону ®=const (с полной компенсацией паде¬
ния напряжения на активном и индуктивном сопротив¬
лениях статора). Выражение для механических харак-
те|У.1стик при этом записывается в видет, и.1Я2Ф(7-132)(7-133)(7-134):.н [я' + х\] {d^ -f е^}а критические момент и скольжение равны
^ ^Ф.н/2^с.н ^2;Анализ приведенных зависимостей показывает, что
прц управлении с компенсацией падения напряжения на
сопротивлениях статора:1) критический момент, абсолютное скольжение и
токи двигателя не зависят от частоты пгттающего напря¬
жения;2) механические характеристики параллельны (кри¬
тические момент и параметр абсолютного скольжения
постоянны во всем диапазоне регулирования);3) управление по закону U~f{a; р), н особенно
Ф=const, позволяет обеспечить увеличение критическогомомента двигателя по сравнению с моментом на есх^ст-
венной характеристике.На рис. 7-34. помимо механических характеристик
при управлении по закону {У=^'(а) построены характе¬
ристики при компенсации падения напряжения на актив¬
ных сопротивлениях статора н при управлении ®=const,
иллюстрирующие изложенные положения (соответствен¬
но кривые 4 а 5),Управление по законам минимума потерь или тока
двигателя обеспечивает максимальное использование
кранового двигателя, однако наиболее сложно в реали¬
зации, поэтому для крановых механизмов такое управ¬
ление обычно осуществляется не во всей зоне регулиро¬
вания, а . в наиболее характерных режимах работы.Расчет механических характеристик с учетом насы¬
щения. Расчет механических характеристик по (7-119)
без учета насыщения двигате.ия может привести к боль¬
шим погрешностям, особенно в зонеНиже приводится разрЬботанная на заводе «Дина¬
мо» методика .расчета механических характеристик acnit-
хронного двигателя в системе частотного регулирования
с учётом нелинейности кривой намагничивания по уни¬
версальным номограммам.При использовании базисных величин, введенных в
§ 7-5,^, для частотно-регулируемой асинхронной маши¬
ны можно написать следующие выражения:^экв»а?а(7-135)В О*, М) + С(Р*. fO. (7-136)гдеА = г1;ВI (l(7.137)здесь = 4 = V— Р*" Р/Рн-в соответствии с (7-136) эквивалентное сопротивле¬
ние гекв. является функцией параметра абсолютного
скольжения момента двигателя и частоты питающего
напряжения. Универсальные зависимости fi=/(f3,; Л/»)Рис. 7-35, Универсальные номограммы зависимостей
крановы.ч электродвигателей.
158Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7и С=/(Р*; М.) для крановых двигателей с параметром
М, построены на рис. 7-35 и 7-36. При их использовании
расчет механических характеристик сводится к совмест¬
ному графическому решеиию зависимости [/*“ /(а; р).
определяющей закон частотного управления, и зависи¬
мости (7-135). Для построения зависимости (7-135) оп¬
ределяется гаив* по универсальным номограммам дляРис. 7-36. Универсальные номограммы зависимостей
С=П^,;М.}.7//.?10OJSOfiDJ0.60,50,40,S\\\\\\\\л\S,Vчкч\\\\Ч\чSчVч1\\чSчS.%\V\\ЧSV\'\\кч\\Ч'чк\\ЧSV\чN\\чуч\Я7S'\чHi1^"Рис. 7-37. Универсальные номограммы зависимостей
£-/(Р,; М.).В—f(P*; и С=/(р*; М») и проводятся вычисления
по (7-135). Необходимые универсальные зависимости
для £.=/(р., М,) приведены на рис, 7-37, а /i*=/(p*,-
Л1.) — на рис. 7-29.в) Расчет механических характеристик
асинхронного двигателя в системе
с тиристорным регулятором напряженияВ системе на рис. 7-38, а регулирование напряжения
двигателя осуществляется путем изменения угла а от¬
крывания вентилей. Регулированию а от- О до 150° соот¬
ветствует изменение напряжения на двигателе от номи-гармоники напряжения на выходе регулятора напряже¬
ния от углов а и «р (б) .кального до нуля. При таком способе регулирования
кривая выходного наиряжения имеет сложную форму и
содержит помимо первой все нечетные (и не кратные
трем)^ гармонические составляющие. Однако амплитуды
высших гармс^ирческих составляющих напряжения неве¬
лики и практйч:ески не оказывают влияния на развива¬
емый двигателем момент. \ ,Расчет механических характеристик, если пренебречь
сопротивлением тиристорного регулятора, может быть
йыполнеи по выражениям, приведенным в § 7-4, е, при
наличии зависимостей для выходного напряжения регу¬
лятора. Указанное напряжение является функцией угла
открывания вентилей и угла нагрузки ф. Для определе¬
ния угла ф двигатель представляется активно-индуктив¬
ной схемой, соответствующей схеме замещения с выне¬
сенным контуром намагничивания. При этом угол ф оп¬
ределяется выражениемф = arctg~r =arctg , ^ о . > »^дв.экв RiR^/XqS +^2^8■ (7-138)где Хдв.экв и /?дв.8кв *— эквивалентные активное и индук¬
тивное сопротивления фазы двигателя при скольжении
S, определяемые схемой замещения асинхронного двига¬
теля.Зависимости С^ф/С/ф.н=/(ф; а) для симметричного
тиристорного регулятора напряжения приведены на
рис. 7-38, б.Таким образом, для построения механических ха¬
рактеристик необходимо для ряда значений скольжений
S найти соответствующий им момент на естественной ха¬
рактеристике и угол ф. Затем по ф при заданном а сле¬
дует определить по графикам на рис. 7-38 напряжение
на выходе регулятора и рассчитать момент по (7-65).г) Импульсное регулирование тока ротора
асинхронных двигателейЭтот метод регулирований! является nepcneKTHBHUsf
для ‘Крановых электроприводов, так как позволяет до¬
§7-7]Расчёт характеристик электроприводов при совмещении методов регулированияГ59статочно просто совместить свойства традиционных си¬
стем управления двигателями с фазным ротором и до*
стоинствами динамического торможения с самовозбуж¬
дением, В то же время применение указанного метода
регулирования позволяет в замкнутых системах без при¬
менения датчиков скорости получать жесткие характе¬
ристики и ограничения по моменту. Недостатком рас-Рис. 7-39. Принципиальная схема и механические харак¬
теристики электропривода с импульсным регулировани¬
ем тока ротора асинхронных двигателей.с —схема; б ~ механические характеристики (ПВц“40%); КД1
я КД2 — контакторы, включающиеся в двигательном режиме;
КТ — контактор, включающийся, в режиме динамического тор-
«ожеыия с самоЕОэбуждеыием.сматриваемых систем является необходимость узла кон¬
денсаторной коммутации тиристоров и повышенибге тре¬
бования к полупроводниковым Вентилям.На рис. 7-39, а и б приведена принципиальная схе¬
ма силовой части электропривода с импульсным регу¬
лированием тока ротора асинхронного двигателя и ме¬
ханические характеристики 1 и 2 в разомкнутой системе.
Регулирование осуществляется посредством поперемен¬
ного закорачивания и введения сопротивления Гдов, вы¬
полняемого тиристором Т, Если ,бы роторная цепь двига*
теля была безындуктивной, то двигатель попеременно
разгонялся по характеристике 1 (при включении тирис¬
тора), соответствующей сопротивлению Го и замедлялся
по характеристике 2 (при выключении тиристора), соот¬
ветствующей сопротивлению гоЧ-<^доо- В режиме дина¬
мического торможения с самовозбуждением (характе¬
ристика У и 2') силовая цепь замыкается на обмотку
статора двигателя.Приведенные на рис. 7-39 хаарктеристики 3 п 3'
представляют собой характеристики в замкнутой систе¬
ме электропривода.Расчет характеристик выполняется по формулам
§ 7-4 при регулировании в режимах двигательном и
противовключения и по формулам § 7-5 в режиме дина¬
мического торможения с самовозбуждением.При этом приведение сопротивления контура посто¬
янного тока к цепи ротора выполняется по соотношению{7-139)где kv — определяется по (7-115).Сопротивление контура постоянного тока с учетом
влияния электромагнитных процессов, вызванных им¬
пульсным управлением тока, определяется выр.ажениемг пост = Го ^доб (1 — YI) « (7-140)где у — скважность включения тиристора; | — параметр,
зависящий от тока нагрузки, частоты коммутации и по¬
строения узла коммутации; в практических расчетах
можно принять 'Описанная здесь методика расчета дает практиче¬
ски приемлемую точность расчетов для асинхронных ма¬
шин крановой серии. л7-7. РАСЧЕТ ХАРАКТЕРИСТИК
АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ
ПРИ СОВМЕЩЕНИИ РАЗЛИЧНЫХ МЕТОДОВ
РЕГУЛИРОВАНИЯа) Общие вопросыПомимо рассмотренных в дредыдущих параграфах
методов регулирования скорости асинхронных двигате¬
лей в крановых электроприводах широко применяется
совмещение различных методов регулирования отдель¬
ных элементов электропривода для получения требу¬
емых характеристик. Применение такого регулирования
в ряде случаев оказывается экономически более эффек¬
тивным, чем использование, например, тиристорных элек¬
троприводов, особенно учитывая вопросы их эксплуата¬
ции. Не приводя все возможные варианты построения
электроприводов с совмещением различных методов ре¬
гулирования, рассмотрим тЛлько наиболее широко при¬
меняемые, к которым относятся: двухдвигательные элек¬
троприводы; электроприводы при питании ротора от
‘внешнего выпрямителя; двухтоковые системы питания
короткоа^амкнутых двигателей.б) Двухдвигательные электроприводы
с общим мосаническим валомТакие электроприводы находят широкое применение
для крановых механизмов благодаря ряду достоинств,
к которым относятся; возможность регулирования ско¬
ростей и момента при большом диапазоне регулирова¬
ния, снижение суммарного момента инерции системы по
сравнению с однодвигательным электроприводом той же
мощности, возможность создания систем большой мощ¬
ности при использовании серийных машин, упрощение в
ряде случаев кинематической схемы крана и др."Регулирование скоростей и моментов основано на
принципе сложения механических характеристик. Харак¬
терными примерами использования указанного принци¬
па являются электроприводы, схемы и механические ха¬
рактеристики которых .приведены на рис. 7-40. Двухдви¬
гательный электропривод по схеме на рис; 7-40, а со¬
стоит из тормозной машины вихревого типа ТМ, имею¬
щей механическую характеристику /, V (в IV квадранте)
и основой асинхронной машины М с фазным ротором,
работающей на характеристике 2 (или 2') в двигатель¬
ном режиме с большим сопротивлением в цепи ротора.
Суммарные характеристики 3 и 3' позволяют получить
стабильную посадочную скорость в зоне моментов от
0,2Ма до Мв и установочную скорость при подъеме гру¬
за. В электроприводе по схеме на ри?. 7-40,6 аналогич¬
ные характеристики достигаются путем суммирования
характеристики Г динамического торможения основной
машины с минимальным сопротивлением в цепи ротора
и естественной характеристики 2' 24-полюсной асин¬
хронной машины. Такие системы применяются для ме¬
ханизмов подъема башенных кранов.Возможны и другие различные реализации двухдви¬
гательных электроприводов для получения необходимых
регулировочных характеристик.При создании двух- или многодвигательных элек¬
троприводов во многих случаях возникает задача (из-за
отсутствия серийных машин достаточной мощности) рас¬
160Расчеты механических характеристик'^ электроприводов и сопротивлений резисторов[РаЬд. 7пределения суммарной нагрузкй между отдельными дви¬
гателями. Эти вопросы наиболее просто решаются гра¬
фическим путем. На рис. 7-41 показано распределение
нагрузок между двумя асннхронными двигателями, ме¬
ханические характеристики которых на рабочих участ¬
ках ил1еют разную жесткость. Двигатель с более мягкой
механической характеристикой оказывается нагруженным' 'W—ПЧ-Г—“ ‘ 1/Sлг.0V\\_ \74 '>1В)JJ7'-Ujir-1/'{N^7жл0:чJ.O.if///Рис. 7-40. Схемы и характеристики двухдвйгательных
электроприводов.а —с вихревым тормозом; б со вспоивгательной 24-пряюсноВ
асинхронной йашиной; в н г — механвческне характеристики.регулируемых электроприводов (например, для частотно-
управляемых) возможно неравенство частот вращения
холостого хода. При этом нагрузки распределяются, в
соответствии с выражениямил^1 = р1(«с1-ш + л1ст/р);(7-142)где <йс1 и Ос2 — синхронные угловые скорости двига¬
телей.Если принять (Oo2<<Uci, то вторая машина может
перейти в режим генераторного торможения приЛ^ст<где C0c = «ciPl/P + G>c2P2/P-Это означает, что первый двигатель преодолевает не
только момент сопротивления привода, но н тормозной
момент второго двигателя, поэтому при проектировании
таких электроприводов нужно принимать специальные
меры для выравнивания нагрузок.в) Механические характеристики
асинхронного двигателя с фазным ротором
в Системе с питанием ротора
от внешнего выпрямителяРассматриваемые системы в настоящее время нахо¬
дят Применение для электроприводов механизмов пере¬
движения крановых механизмов благодаря возможно¬
сти при относительно простой силовой схеме получить
достаточно большой диапазон регулирования скоростей.
Схема электропривода приведена на рис. 7-42, а. Нали¬
чие двух нерегулируемых мостов позволяет обеспечить
регулирование только в двигательном режиме (первыйменьше.-Это можёт иривестн к превышению температу¬
ры выходу из строя второго двигателя.■ Если характеристики двигателей принять лрямолиг
нейными; -то, учптывйя равенство скоростей холортрго
хода асинхронных приводов & .обычных схемах регули¬
рования, можно показать, что нагрузки машины распре-Рис. 7-41. Механические характеристики двухдвигатель-
ного электропривода с- распределением нагрузок.дёляютея пропордйойалькй жесткостям их механических
х&ра1с1ге|)нстик: . ,(7-141)где Рь р2 и р — жесткости механических характеристик
1\ 2 \1 результирующей; All, Mz и Me® — моменты двига¬
телей и статический.''Для таких "электроприводов вопросы выравнивания
мощности решаются относительно просто путем перехо¬
да на более мягКйе мехайические характеристики. ДляJL3 ZAZВ,6 0,8 7,0 1,2
6}Рис. 7-42. Схема (а) и механиче
ские харак«ристики электропри
вода с питанием ротора асннхрон'
ного двигателя МТН412-6 от внеш¬
него выпрямителя с трансформато¬
ром 380/220 В (6)./—в обычной схеме включения с Raoc't~
2 ** 3~с питанием от выпрями¬
теля соответственно с R д'ост'^** ^ ^ПОСТ~'^П' '^доби третий квадранты) и в режиме противовключения. По-
луч1аем‘ые при этом механические характеристики, рассчи¬
танные для двигателя МТН412-б, приведены на рис,
7-42,6. Недостатком системы являются повышенные но-
тери, поскольку в сопротивлениях Rtoct и Лдоб выделя¬
ются не только потери скольжения, но и потери энергии
от внешнего источника питания. Характерными'точками
§7-7]Расчет характеристик электроприводов при совмещении методов регулирования161механических характеристик, определяющими парамет¬
ры электропривода, являются частота вращения
=Пс.и(1—So) при Л1=0 и пусковой момент Ма при п—0;
скольжение S(f определяется выралсением^ тр. л /?пост
^24 (^доб "i* ^пост)(7-143)где U-tp.n — линейное напряжение вторичной обмотки
трансформатора; Ягв—э. д. с, на кольцах неподвижного
ротора при номинальном напряжении на статоре.Для снижения потерь в системе вторичное напряже¬
ние трансформатора должно подбираться из условия
^^тр.л»£гн; При выполнений указанного условия в точ¬
ке «я=0 выпрямитель питания запирается и ток двига¬
теля полностью идет на создание момента. Момент Ма,
Н-м, при этом равен:Мп = 2,86(0,5/? постН"^2)^0(7-144)соответственно). Постоянный ток определяет характери¬
стику динамического торможения (кривая 5). Результи*
рующая характеристика 4 имеет жесткий участок в об¬
ласти низких скоростей.Для получения рассматриваемого способа управ¬
ления могут быть использованы симметричйые и несим¬
метричные схемы. В симметричных схемах в каждой изздесь kv — коэффициент, учитывающий потери напряже¬
ния в выпрямительном мосту при коммутации тока ро¬
тора, рассчитывается по (7-И5); ki —коэффициент, учи¬
тывающий несинусоидальность тока в -цепи мостов,, ко*,
торый можно принять равным 0,95.Однако выполнение условия С/тр.л^Яга не всегда
возможно. В этом случае момент двигателя оказывается
меньше рассчитанного по (7-144), Расчет остальных то¬
чек механических характеристик выполняется в следую-
шей последовательности. Зададимся напряжением Уамт
на сопротивлении и найдем ток /пост:^ПОСТ ~ ^^ПОСТ/^ЯОСТ‘ (7-145)Определим ток, протекающий по добавочному со¬
противлению,^доС ~ (^тр. л ^пост) ^^до(5 *где Лежи=1,35 для трехфазной мостовой схемы.Найдем ток на выходе выпрямительного моста
ротора^р.пост = ^пост — -^доб» (7-147)по которому рассчитываютс^г токи ротора= Voci-
где ftcxi—0,816 —для трехфазной мостовой схемы.Рассчитаем сопротивление цепи ротораЗная /2, можно определить моменты по естественной
характеристике двигателя или по (7-44) (см. § 7-4).
Скольжение рассчитываем по (7-45).В ряде случаев при построении двухдвигательных
приводов соблюдается условие 2Esa^Ua и трансформа¬
тор в узле источника питания может быть исключен.Проведенная методика расчета справедлива для
асинхронных машин крановой серии.г) Механические характеристики
асинхронного короткозамкнутого двигателя
при питании от двух источниковРассматриваемый способ управления основан на
совместном питании обмоток асинхронного двигателя
постоянным током и трехфазным переменным током об¬
ратной последовательности. Трехфазная система токов
приводит к созданию двигательного момента в нормаль¬
ном режиме работы асинхронной машины или при сни¬
жении напряжения питания (кривые 1 л 2 на рис. 7-43
11-839Рис. 7-43. Механические характеристики асинхронного
короткозамкнутого'двига1еля в схемах двухтокового пи¬
тания.фаз двигателя текут равные и одинаковое по направле-
НИ19 постоянные и переменные токи. В несимметричных
схемах это условие не соблюдается, и работа двигателя
сопровождается вибрациями, поэтому практическое при¬
менение находят только симметричные схемы, что и
обусловливает построение таких систем только с корот¬
козамкнутыми двигателями.Схемы получения ползучих скоростей при двухтоко¬
вом питании делятся на схемы без отдельного источника
питания (рис. 7-44, а—в) и с отдельными источником
постоянного тока (рис. 7-44, г—d), причем на схеме
рве- 7-44, д показано управление двухскоростным дви¬
гателем с раздельными статорными обмотками. Расчет
характеристик сводится к построению отдельных состав¬
ляющих моментов к последующему их суммированию.
В схемах без источника постоянного тока ток в обмот¬
ке статора определяется выражением+ “CQSOi)/-f — cos2w/^ +4 3 /(7-150)где Iml — максимальное значение тока в цепи вентиля;
/п»2 — максимальное значение тока в цепи активного со¬
противления звезды; ф — угол сдвига фаз между тока¬
ми /«i и Imi.В соответствии с (7-150) составляющая динамиче¬
ского торможения определяется постоянным током
Imifn и может быть рассчитана по формулам § 7-6. Ос¬
новная составляющая вращающегося поля создается си¬
стемой трехфазных токов cos <й^+/«2 cos(ci)/—if).Кроме того, трехфазная система токов удвоенной
2/»jiчастоты “— соз2сй/ создает момент противовключе-
Зяния.. Указанные составляющие рассчитываются по фор¬
мулам § 7-4.В схемах с отдельным источником питания расчет
выполняется непосредственно по токам режимов дина¬
мического торможения в трехфазиого питания е доба¬
вочными резисторами в цели статора.
162Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 77^. РАСЧЕТ СТУПЕ«ЕЙ СОПРОТИВЛЕНИЙ
В ГЛАВНЫХ ЦЕПЯХ ЭЛЕКТРОПРИВОДОВ
С ПАРАМЕТРИЧЕСКИМ РЕГУЛИРОВАНИЕМ
а) Общие вопросыПолучение механических характеристик электропри¬
водов постоянного и переменного тока при параметриче¬
ском регулировании достигается за счет введения сопро¬
тивлений в цепи обмоток двигателей. Для крановых
электроприводов практическое применение имеют схемы
с использованием только активных сопротивлений.В настоящем параграфе рассматриваются методы
расчета пусковых, тормозных и регулировочных сопро¬
тивлений для получения требуемых механических ха¬
рактеристик электропривода. Рассматриваемые методы
расчетов необходимы при проектировании новых типов
электроприводов и аппаратуры управления для них. Од¬
нако часто при разработке крановых электроприводов
возникают задачи, заключающиеся не в создании новых
типов электрооборудования, а в выборе типового комп¬
лекта элект1юпривода, поставляемого й^хектропромыш-
ленностью.Расчет ступеней сопротивлений при этом значитель¬
но упрощается и выполняется по таблицам разбивки со¬
противлений, рекомендуемым заводами — изготовителя¬
ми серийного электрооборудования применительно к ти¬
повым схемам контроллеров в соответствии с режимами
работы электропривода. Методы выполнения указанных
расчетов приводятся в § 7-9. В разделах настоящего
параграфа не рассматривается также выбор резисторов
по тепловому режиму. Соответствующие расчеты при
этом увязаны с компоновкой элементов резисторов в от¬
дельные конструкции и также рассматриваются в §7*9.б) Расчет лускорегулировочных сопротивление
электроприводов с двигателями п<(стоянного тока
последовательного возбужденияРасчет пусковых сопротивлений. Пусковые сопро¬
тивления для двигателей последовательного возбужде¬
ния наиболее просто выбираются при помощи семейства
универсальных характеристик, которые приведены на
рис. 7-45. По характеристикам для крановых двигателей
при ПВ=25% определяют необходимую диаграмму пус¬
ка, исходя из относительн1з1х значений максимального
момента и момента переключения, числа ступеней пуска,
момента статической нагрузки, как это показано, напри¬
мер, построением на рис. 7-45. Сопротивлёния, соответ¬
ствующие пусковым характеристикам, равны:/? = г*— Гдв, (7-151)где г#.— сопротивление цеин якоря fe относительных еди¬
ницах.По универсальным характеристикам, пользуясь фор¬
мулой (7-151), можно также легко определить сопротив¬
ления предварительных ступеней, соответствующих не
большим значениям моментов, необходимых для выбор¬
ки слабины тросов и натягов в механизмах.Сопротивления ступеней противовключения. Полное
сопротивление цепи якоря на характеристике противо¬
включения рассчитывается по формуле^np = (t'^H + £'MaKc)/^flont (7-152)а сопротивление ступени противовключения<^с.пр ~ — (^дв “Ь ^п)» (7-153)где — суммарное сопротивление пусковых ступеней,
рассчитанное по условиям пуска.
§7-8]Расчет ступеней сопротивлений в главных цепях электроприводов163В (7-152) /дол определяется из условия ограничения
тока допустимым значением при максимально возможной
для привода частоте вращения «макс в двигательном ре¬
жиме, предшествующем режиму противовключения.Значение £макс, соответствующее принятому /доп и
Пышс, равно;^макс= (£■/ п)дои Имакс» (7-154)где (£//г)доп определяется по универсальной кривой на¬
магничивания на рис. 7-2 или из равенства> (£^/л)доп = — ^доп /^дв)/«е. (7-155)RSBssissBa№S5B!S^isasss^i^Рис. 7-45. Универсальные механические характеристики
двигателей последовательного возбуждения.по предварительно найденной из естественной характе¬
ристики скорости Пе, соответствующей току /доп. Рас¬
чет сопротивлений противовключения может быть такжепГ('Г'г IKS 1-hsРис. 7-46.- Универсальные механические характеристики
двигателей последовательного возбуждения в режиме
динамического торможения с самовозбужденйем (ири
ПВя=257о),11*выполнен с помощью ушверсажэных характеристик из
рис. 7-45, путем выбора необходимой характеристики.Расчет сопротивлений динамического торможения.
Для крановых электроприводов'^ с двигателями последо¬
вательного возбуждения применяется только динамиче¬
ское торможение с самовозбуждением. Расчет сопротив¬
лений выполняется при помощи универсальных харак¬
теристик динамического торможения с самовозбужде¬
нием, приведенных на рис. 7-46. При этом сначала, так
же как для режима противовключения* определяется до-Рис. 7-47. Универсальные механические характеристики
двигателей последовательного возбуждения в схеме шун¬
тирования якоря и обмотки возбуждения.Рис. 7-48. Универсальные механические характеристики
двигателей последовательного возбуждения в схеме
шунтирования »коря. ^
164Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7нустимое значение тока /доп при частоте вращения
Лмакс двигательного режима, предшествующего тормо¬
жению. Затем для тока /доп по естественной характе¬
ристике определяется допустимый момент и по универ¬
сальным характеристикам рассчитывается сопротивление
динамического торможения.0^ УЛ 1,6 Z,D zjt Z,S 3.ZРис. 7-49. Универсальные механические характеристики
двигателей последовательного возбуждения в схеме шун¬
тирования обмотки возбуждения.Регулировочные сопротивления в электроприводах
с двигателями последовательного возбуждения. Для ре¬
гулирования скорости крановых электроприводов с дви¬
гателями последовательного возбуждения применяются
комбинированные схемы соединения обмоток возбужде¬
ния якоря и резисторов к ним. Расчет сопротивлений ре¬
гулировочных резисторов, так же как и пускотормозных
в электроприводах с двигателями последовательного,
возбуждения, выполняется по универсальным механиче¬
ским характеристикам. Для применяемых схем характе¬
ристики приведены на рис. 7-47 — 7-49.в) Расчет пусковых и регулировочных сопротивлений
в цепи ротора асинхронных двигателей
ири симметричных схемахРасчет пусковых сопротивлений. На рис. 7-50 при¬
ведена диаграмма пускового режима асинхронного дви¬
гателя е фазным ротором. Условиями пуска являются ко¬
лебания пускового момента между максимальным Mz и
минимальным М* значениями. Характеристика, для ко¬
торой Н=Га, соответствует естественной или характерис¬
тике с невыключаемой ступенью сопротивления, а каж¬
дая последующая характеристика определяется сопро¬
тивлением соответствующей ступени. Учитывая пропор-Рис, 7-50. Пусковая диаграмма асинхронного двигателя
с фазным ротором.циональность скольжений и сопротивлений [см. (7-45)],
для всех пусковых ступеней справедливо выражение_ ^2 (7-156)Sjгде Sq, Si, S2, —, Sn — скольжения при моментах Ali и Ala
на пусковых характеристиках.Из (7-156) определим значениеп-\~1 / г.- VUSa.(7-157)или(7-158)где п — число пусковых ступеней, а сопротивления пус¬
ковых ступеней равны; (7-159)В практических расчетах при выборе стандартного
электрооборудования число ступеней обычно является
известным на основании условий работы механизма или
конструкций контроллера. В зависимости от условий
луска выбирается одно из двух значений момента: мо¬
мент переключения выбирается в том случае, когда же¬
лательно снизить ускорение; и, наоборот, при форсиро¬
ванном пуске, когда необходимо иметь максимальное
ускорение, следует задаваться максимальным значением
пускового момента. Предельным случаем форсированно¬
го пуска является Мг=^Мк.При заданном моменте переключений Mi расчет сту¬
пеней сопротивлений ведется по (7-157) и (7-159), а при
заданном номинальном моменте Mq по (7-158), и
(7-159). Общее сопротивление на первом пусковом ло-
ложснин контроллера определится соответственно в пер¬
вом случае, как(7-160)во второмRn--Га/Si. (7-161)С достаточной для практических расчетов степенью
точности (из допущения, прямолинейности механических
характеристик) можно принять, чтоТогда при заданном числе ступеней п и моменте
переключения М± Л можно найти из выражениях^у(7-162)а при форсированном пуске1' , (7-163)У SnaMJMn ^ ■'где Sho — скольжение при номинальном моменте на ха¬
рактеристике с выведенными пусковыми сопротивле¬
ниями.Если заданы мементы Afj и Мг, то число ступеней
пусковых сопротивлений равно:Иевыклюнаемые сопротивления. Невыключаемое со¬
противление предусматривается для того, чтобы умень¬
шить число ступеней разгона, а также в ряде электро¬
приводов, чтобы получить характеристику двигателя бо¬
лее мягкую, чем естественная, с целью .равномерного
§ 7-8]Расчет ступеней сопротивлений, в главных цепях электроприводов165распределения нагрузок в многодвигательных системах,
ослабления динамических усилий в механизме или других.
целей. Расчет сопротивлений пусковых резисторов при
наличии невыключаемого резистора выполняется по при¬
веденным выше формулам, при этом сопротивление г„
принимается равным сумме сопротивлений ротора и не-
выключаемой ступени. Увеличение скольжения при новой
характеристике сближает пределы колебаний пускового
момента и делает пуск более плавным, так что введение
невыключаемого сопротивления равноценно в этом отно¬
шении увеличению числа пусковых ступеней.Сопротивление ступеней противовключения. Механи¬
ческие характеристики при противовключении рассчиты¬
ваются так же, как и для двигательного режима. При
этом скольжение больше единицы. Если задана точка
на характеристике противовключения (Мпр, Snp), то со¬
противление, обеспечивающее эту характеристику, равно= (7-165)где So — скольжение двигательного режима с выведен¬
ными сопротивлениями, соответствующее моменту Мпр-
Обычно для крановых механизмов сопротивление
противовключения рассчитывается из условия ограниче¬
ния момента значением 2Мп при переходе от номиналь¬
ного режима или режима холостого хода на тормозной
режим. В этом случае характеристике противовключе¬
ния соответствует сопротгивлениеСопротивление, соответствующее требуемой харак¬
теристике в режиме рекуперативного торможения. Меха¬
нические характеристики рекуперативного торможения
и двигательного режима при допущении их прямрлиией-
ности симметричны относительно оси ординат и линии,
проходящей параллельно оси абсцисс через точку син¬
хронной частоты вращения, поэтому сопротивление,
обеспечивающее сверхсиихронную частоту вращения п
при нагрузке, которой соответствует частота вращение
Па на естественной характеристике, равно:R = Гал —Пс(7-166)Пс — Паг) Расчет пусковых и регулировочных сопротивлений
в цепи ротора асинхронных двигателей
в несимметричных режимахНесимметрия сопротивлений в фазах ротбра. Как
было сказано в § 7-1, е, три неравных сопротивления в
фазах Ra, Rb и Rc эквивалентны трем равным ситямет-
ричным сопротивлениям /?8кв, которые можно вычислить
по формулег» “Ь~ + + '
Таким образом, при расчете несимметричных сопро¬
тивлений сначала производится расчет эквивалентных
симметричных сопротивлений, как это бьию показано
раньше, а затем определяются сопротивления отдельных
фаз. Для обеспечения пусковой диаграммы на рис. 7-50
при соотношении пусковых моментов из трехсопротивлений фаз среднее принимается равным эквива¬
лентному, а меньшее и большее—соответственно в 7,
раз меньше и больше среднего. При выполнении указан¬
ных условий на каждом поло;*сенин контроллера мень¬
шее сопротивление равно симметричному предыдущему,
а большее — симметричному последующему. После за¬
мыкания очередного контакта большее сопротивление
уменьшается, меньшее сопротивление предыдущей сту¬
пени становится средним, а среднее — большим, при
этом эквивалентное сопротивление изменяется в нуж¬
ном соотношении к.Сопротивление режима однофазного включения. Ре*
жим однофазного торможения в крановых магнитных
контроллерах используется для получения пониженных
скоростей при спуске малых грузов. При этом во избе¬
жание увеличения скорости в режиме перевода привода *
с двигательного режима в тормозной необходимо, чтобы
моменту спуска номинального груза соответствовала
скорость не выше номинальной. Этим условием опреде¬
ляется верхний предел сопротивления цепи ротора дви¬
гателя. Нижний предел определяется ростом токов в
фазах двигателя при снижении сопротивлений. Расчеты
показывают, что сопротивление в роторе двигателя в ре¬
жиме однофазного включения должно быть в пределах
0,65—0,55/?н- В серийных крановых контроллерах рас¬
четное сопротивление в рассматриваемом режиме состав¬
ляетд) Расчет добавочных сопротивлений в цепи статора
асинхронных короткозамкнутых двигателейСимметричное включение сопротивлений. В электро¬
приводах с короткозамкнутыми асинхронными двнгате-
, лями сопротивление в цепи статора обычно применяется
для обеспечения требуемых пусковых режимов. При
этом ограничиваемыми величинами являются пусковой
ток или пусковой момент. Если необходимо имеТь значе¬
ние пускового тока, составляющего часть а пускового
токз в естественной схеме включения, то добавочное ак¬
тивное сопротивление определяется выраженииГдоб = V (гк/а)3 — Хк —(7-168)где Zk, Гк VI Хк — полное, активное и индуктивное сопро¬
тивления двигателя в режиме короткого замыкания.Расчет активного сопротивления, ограничивающего
в ц раз пусковой момент двигателя, выполняется по вы¬
ражению(7-169)Приведем также выражения для расчета индуктив^
ных сопротивлений в случае применения ограничитель¬
ных реакторов дли снижения пускового тока и момента:|^до6 У '‘к,‘=-■тГ''ДОб(7-170)(7-171)Для серийных крановых контроллеров принята ти¬
повая разбив1^а сопротивлений в долях номинального со¬
противления статора Rni — VcfV^^^u где 1т — номи¬
нальный трк статора.Однофазное включение сопротивлений. Основное на¬
значение однофазного включения сопротивлений — огра¬
ничение пускового момента (или же ограничение пуско¬
вого тока) значением момента на искусственной харак¬
теристике Мп.и.Добавочное сопротивление, соответствующее сниже¬
нию пускового момента в р, раз по сравнению со значе¬
нием пускового момента Мп.е на естественной характе¬
ристике, определяется по выражению'лоб1 — 2fi
2ixcos (Рк ++.Vi;^'cos^ Фк “f(7-172)
Г66Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7Расчетная формула для определения добавочного
сопротивления, соответствующего снижению пускового
тока в а раз, имеет вид;380а— =/п.. у '4“ ^2 (/"доб/^^к) ЧРн ^(7-173)По (7-172) и (7-173) на рис. 7*51 построены зави¬
симости Гдос/2к=Др,) и а=/(р) при различных созфк
в режиме к. з. Эти кривые nosBOjjHroT определить пуско-Лн/4»Сопротивления короткого вамБПсашя для срянятого двига<
теля равны;380■ 2.83^0и:1,73.19,6-4
■*К “ *к ~ 2,83-0iS98i=: 1,69 Ом;Гд = Zjj cos фJJ = 2*83*0,802^ 2,27Юм.Тогда для схемы трехфазного включения добавочное сопро¬
тивление, пусковой ток и условная пусковая мощность резисто'
ров составят:"П.ИУТ V(0,99 + 2,^27)* + 1.69®
Р =3/2Э.9 А:_/2 г ^=3-59.9^-0,99= 10 659 Вт.
у п.и добДля схемы включения сопротивления в одну фазу по кри¬
вым рис. 7-51 при ц—0.5ЭЗ Н созЧ>д=0,802 находим ''доб/^к
^п.и/^п.с“®>^®' Отсюда искомое пусковое сопротивление и ток
через него:''доб = ~ — ~УТгELeУТ 19,5.4Vh *= ** 0^73-4-19,5 = 56,9 А.Условная пусковая мощность сопротивленияР г = 56,9^-2,25« 7294,9 Вт.I У п,в уе) Расчет сопротивления динамического торможения
асинхронных двигателей с фазным роторомСопротивления для систем динамического тормо-
жения с незав^имым возбуждением. Расчет добайоч-
ных сопротивлений в цепи ротора двигателя для дина¬
мического. торможения проще всего производить путем
.выбора рациональной Механической характеристики из
семейства универсальных характеристик и определения
по ней наряду с током возбуждения и добавочного со¬
противления в цепи ротора.Рис. 7-51. Кривые зависимостей относительного сопротив¬
ления и пускового тока от пускового момента при вклю-
“ чении сопротивлений в одну фазу статора короткозамк<
нутого двигателя.вые сопротивления и токи в фазе статора с добавочны¬
ми сопротивлениями в одной фазе.Следует отметить, что мощность резисторов в схеме
однофазного включения примерно в 1,5 раза меньше,
чем в схеме* симметричного трехфазного включения, что
видно из примера расчета.Пример расчета. Рассчитать внешнее пусковое ак-
i тивное сопротивление, обеспечивающее пусковой момент
==1,5ЛГд в схемах трехфззного в однофазного включения для
привода механизма передвижения тележци кранэ с двигателем
MKTF211-6, имеющим следующие техиическае данные:и^ = 380В: = 7.5 кВт; ПВ=*40%; Пд = 880 об/мин;/jH=19,5A: JVf^ = 2.63JW^: соЗф^^==*0,803.Отпошеиие пусковых момеитов ва вскусствеиш^ и естест¬
венной характеристиках'тУ ил///-//с—.¥52/i/ку\61✓2Чг-N<- чЛ^'/L1.0550,3562У1ЬS1 ^
еU5<ti))]I1/YXу//кУМ'/•I ьазвулYУ//.///у—7#-
/\/X.//////////4//‘Рис. 7-52. Универсальные механические характеристики
крановых двигателей с фазным ротором i? режиме дина¬
мического торможения с отдельным источником питания.■ — при /„//о"3; — при /п^/о=-2,5; -0—0- при/д//о*2; «-Х-Х- - при /п//в*1,Б.На рис. 7-52 приведены универсальные механические
характеристики крановых двигателей, рассчитанные по
методике § 7-5.Изменение формы механических характеристик
оказывает существенное влияние на Бремя и путь тор¬
можения. Для количественной оценки этого на рис. 7-53
приведены графики указанных параметров, рассчитан¬
ные по характеристикам »а рис. 7-52 в функции сопро¬
тивления ступени динамического торможения и относи¬
тельного момента статической нагрузки. Согласно
рис. 7-53 на,иболее благоприятными по указанным пара¬
метрам являются характеристикис/?доб= (0,2-г0,4)/?’нХ
Х^(4йЛ|*—I), причем меньший предел соответствует
§ 7-9]Резисторы для-главных цепей электроприводов167меньшему времени торможения, а больший — меньшему
тормозному пути. Поскольку время и путь торможения
зависят как от формы механической характеристики,
так и от момента статической нагрузки, то при пост¬
роении схем электропривода механизмов подъема не¬
обходимо иметь минимум хотя бы две характеристики
торможения: для торможения под нагрузкой не ме¬
нее 0,7 номинальной (что соответствует/?ноб —— (l,8-^I,6)^?в) и другую для холостого хода (при
/?доб ” (0,3—0,5) /?н) -Оф DJB W 1,1 tfi-Рис. 7-53. Зависимость времени и пути торможения от
сопротивления (при динамическом торможении) и мо¬
мента статической нагрузки.Для механизмов передвижения, у которых момент
статической нагрузки значительно меньше номинального,
можно ограничиться одной ступенью с сопротивлением
0,4если не стоит вопрос об обеспечении плавного—■9■••—<IIКг-«апS1ч!X. 5^ ^ ^U___1 ПРис. 7-54, Универсальные механические характеристики
крановых двигателей с фазным ротором в режиме дина¬
мического торможения с самовозбуждением. при *^-1,8: оря -0—0—0 ~ 1,4; >3.торможения. Однако в большинстве случаев для ука¬
занных механизмов наиболее важными являются именно
вопросы плавного торможения, поэтому и здесь жела¬
тельным является обеспечение двухступенчатого тор¬
можения, так же как для подъемных механизмов.Расчет сопротивлений для получения нужных ско¬
ростей при регулировании выполняется непосредственно
по универсальным характеристикам.Сопротивления для систем динамического тормо¬
жения с самовозбуждением. Механические характери¬
стики асинхронного двигателя в рассматриваемом ре¬
жиме зависят как от сопротивлений в роторе, так и
от степени возбуждаемости машины. Однако в отличиеот обычного динамического торможения характеристи¬
ки привода в режиме торможения с самовозбуждением
являются весьма жесткими, поэтому для ограничения
динамических условий .в приводе и механизме число сту¬
пеней сопротивлений при самовозбуждении должно быть
не менее трех—^четырех.Расчет ступмей сопротивлений выполняется по
универсальным механическим характеристикам крано¬
вых асинхронных электродвигателей, приведенным на
рис. 7-54. Характеристики построены по методике, при¬
веденной в § 7*5, в параметрической зависимости от
■коэффициента самовозбуждаемости машины kc. По уни¬
версальным характеристикам выбирается наиболее бла¬
гоприятная диаграмма торможения с необходимым чис¬
лом ступеней при заданном моменте статической на¬
грузки.7-9. РЕЗИСТОРЫ ДЛЯ ГЛАВНЫХ ЦЕПЕЙ
ЭЛЕКТРОПРИВОДОВа) Общие сведенияАктивные д(^авочные резисторы в электрических
цепях, применяемые для формирования необходимых
пускотормозных режимов и регулирования, коь^понуют-
ся в отдельные самостоятельные конструкций. Если
резисторы состоят из нескольких самостоятельных кон-
структивйых частей, объединенных в общее устройство,
то каждая из этих частей называется резисторным
элементом, а весь комплект, включ^ающий резисторные
элементы и представляющий собой законченное устрой¬
ство — резисторным ящиком.Резисторы (отдельные элементы и комплектные
устройства) характеризуются следующими- параметра¬
ми;1) активным,-сопротивлением, Ом5/? = р//5, (7-174)где р — удельное сопротивление активного материала
резистора, Om-mmVm; I — общая длина проводника из
активного материала, м; s — площадь сечения провод¬
ника, мм®;2) максимальным превышением температуры Ту ак-
, т'ивного материала в' установившемся режиме над тем¬
пературой окружающей среды при прохождении по
резистору токаТу = QM = Я(7-175)где Q —количество теплоты, выделяющейся в актив-''
ном материале резистора за I с; Л — теплоотдача, т. е.
количество теплоты, отдаваемое телом с его поверхно¬
сти в 1 с при разнице температур между телом и окру¬
жающей средой 1“С; / — ток, проходящий по провод¬
нику, А;3) мощностью резистора в установившемся режи¬
ме, Вт, т. е. количеством теплоты, отдаваемым за ! с
при предельно допустимом превышений, температурырезистора Тмакс:(7-176)где /у — ток,, протекающий по резистору. А, и опре¬
деляющий количество теплоты за 1 с, равное Q, Дж.В реальных условиях резисторы включаются не
только продолжительно, но также кратковременно и
повторно-кратковременно, В условиях равномерного во
времеви нагрева превышение температуры резисторов
изменяется-по следующему закону;(7-177)
168Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7где t — время нагрева, с; то — превышение температуры
в начале нагрева; Т — постоянная времени нагрева, с.Постоянная времени нагрева равна:T^CIA, (7-178)где С — теплоемкость тела, т. е. количество теплоты,
необходимое для изменения температуры тела на 1°С.Постоянная времени нагрева численно равна време¬
ни, в течение которого тело нагревается до температуры
Ту при отсутствии отдачи тепла в окружающую среду,
т. е. при Л = 0.При нагреве от начального значения То=0 до уста¬
новившегося значения Ту постоянная времени нагрева Т
соответствует отрезку времени, в течение которого пре¬
вышение температуры составит 0,63 Ту. Необходимо от¬
метить, что у реальных резисторов постоянная времени
Т, определенная условием вагрева до установившегося
состояния при кратковременных нагревах в течение
10—60 с будет несколько меньше в связи с тем, что не
все элементы резистора будут нагреваться равномерно.Введем обозначения:/кр — ток кратковременного режима, вызывающий за
время t превышение температуры, равное ту; — ток
повторно-кратковременного режима, вызывающий при
относительной продолжительности включения е и вре¬
мени цикла /—60 с превышение температуры е —
относительная продолжительность включения, равная
отношению времени протекания тока /у по резистору в
течение цикла ко времени цикла:Значения токов /кр и /g можно определить из вы¬
ражений:_ ^-60/Г(7-179)(7-180)1_е-ео8/гЕсли постоянная времени Г значительно больше
времени включения резистора при повторно-кратковре¬
менном режиме, то формула (7-180) упрощается и при¬
нимает вид: = (7-181)Для резисторов практикой и действующими нюр-
мативами установлены следующие стандар1изированные
продолжительности включения;1) кратковременный режим — 10, 20, 30 с, 1, 3,5 мин;2) повторно-кратковременный режим при длитель¬
ности цикла 60 с, ПВ = 6,25;- 8,8; 12,5; 17,7; 25;
35; 50 и 70%.Р>ис. 7-55. Коэффициенты перегрузки резисторов при
кратковременной работе.Рис. 7-56. Коэффициенты перегрузки резисторов при по¬
вторно-кратковременной работе (время работы равно
1 мин).Значения ■коэффициентов перегрузки по току для
ставдартизированных кратковременного —/кр//у и по¬
втор но-кратковременного feg “/g //у режимов при раз¬
личных постоянных времени приведены на рис. 7-55 и7-56.б) Конструкция и технические данные элементов
и яшйков резисторовЭлементы ‘ резисторов имеют разнообразные конст¬
руктивные исполнения. К настоящему времени в кра¬
новых электроприводах применяются элементы рези¬
сторов трех конструктивных исполнений: ' ^1) резисторы с рассеиваемой мощностью 25—150 Вт
типа ПЭВ, Соответствующие ГОСТ 6513-75, представ¬
ляют собой фарфоровые цилиндры, на которые навита
нихромовая проволока, после чего цилиндр покрыт
нагревостойкой стекловидной эмалью, они могут иметь
сопротивления от 1 до 30 ООО Ом;2) резисторы с рассеиваемой мощностью 250^
400 Вт в виде плоских элементов; на металлическом
держателе надеты фарфоровые изоляторы — «наездни¬
ки», на которые навита констаитановая, фехралевая
или нихромовая проволока диаметром от 0,5 ,до 1,6 m^i;
они могут иметь сопротивление от 96 до 0,7 Ом; ', 3) резисторы с рассеиваемой , мощностью 850—
1000 Вт из фехралевой ленты размерами от 0,8X6 мм
до 1,6X15 мм, намотанной на ребро. Лента в виде спи¬
рали надета на фарфоровые изоляторы — «наездники»,
опирающиеся ва металлический держатель коробчатого
сечения. Общий вид ленточного резистора показан на.
§ 7-9]Резисторы для главных цепей электроприводов169рис. 7-57. Выводы от активного материала трубчатых
резисторов припаяны тугоплавким припоем. Выводы от
проволочных резисторов с открытой навнвкои выпол¬
нены в виде петель из активного материала. Выводы к
ленточным резисторам приварены латунным припоем к
ленте.Элементы резисторов не рассчитаны для непосред¬
ственного крепления к заземленным металлическим ча-Т а б л н ц а 7-4
Нормы превышения температуры частей резисторовДопустимое превышение температуры.
®С, в режимахЧасти элементов
резисторов и их
огражденийпрерывисто-продолжи¬тельном(ПВ=100%)кратковремен¬
ном. повтор¬
но-кратковре¬
менномкратковре-менном,аварийномАктивный материал:
фехраль350400600HJixpoM3S0400600констайтан250300—Фа рфоровые изол я -300320320торы *Выводные зажимы200250400на элементах
Выводные зажимы607080внешнего монтажа
Кожух12013(> Ограждения, доступ¬505050ные для прикоснове¬
нияВоздух. выходящий100ICO100за 0|'раждения' Указаны средние значения.Рис. 7-57. Ленточный резисторный элемент.стям п поэтому при их установке в комплектные уст¬
ройства (ящики) необходимо применить вторую сту¬
пень изоляции. Резисторы, собранные в комплектные
устройства — ящики, рассчитаны на эксплуатацию при
потенциале по отношению к заземленным частям до
800 В. Проволочные резисторы могут использоваться
при частоте переменного тока или импульсов постоянно¬
го тока до 1000 Гц, а ленточные резисторы — при ча¬
стоте, ие превышающей 100 Гц.Таблица 7-3
физико-технические данные активных материалов резисторовНаименованиеХимический состав, %о&.соо1р
cf к Е>. “о3' .
я н
лкви аf£ra 5 S
5 К rxipillФехральFe (70—80); Сг (10—15);
А1 (10-15)N1 (87): Сг (11):
Мп(2)Ni (61): Сг (15);Fe (20); Мп (4)1.180,00008■ 850Нихром А0,870.00017930Нихром В1ДЗ0,000171000КонстаитанСи (60); Ni (40)
Си (62); Ni (18):
Zn (20)0,48—0,0000:i500Ннкелиы0.420,0003. 200РеотанCii (53,4); N1 (25.3):
Zn (16,8); Fe (4.5)0,47,0.00041200Данные активных материалов резисторов приведе¬
ны в табл. 7-3. Хотя активные материалы допускают
весьма высокие рабочие температуры, использование
этих температур в конкретных конструкциях нежела¬
тельно в связи с тем, что может привести к растрески¬
ванию соприкасающихся с ними фарфоровых деталей,
местным недопустимым перегревам стыков в контакт¬
ных соединениях и повышению пожароопасности конст¬
рукций, расположенных рядом.Допустимые нормы превышейий температуры от¬
дельных элементов резисторов даны в табл. 7-4,Технические данные элементов резисторов проволоч¬
ного типа из константановой проволоки приведены в
табл. 7-5.Технические данные элементов резисторов ленточ¬
ного типа указаны в табл. 7-6.Элементы компонуются в ящики реаисторов. Каж¬
дый стандартный ящик резисторов вмещает до пяти
ленточных элементов либо до одиннадцати проволоч¬
ных элементов. Ящики с ленточными резисторами
(рис. 7-58) имеют наименование НФ 1А, ящики с про¬
волочными резисторами имеют наименование НФ И А
(при использовании фехралевой проволоки) или НК' IA
(при использовании константановой проволоки).Элементы в ящйкё монтируются на индивидуаль¬
ных фарфоровых изоляторах. На таких же изоляторах
монтируются выводные зажимы. Конструктивно ящик
представляет собой две металлические боковины, сое¬
диненные между собой тремя стальными рейками П-об-
разйого профиля. Hai двух рейках крепятся элементы,
третья рейка несет на себе выводные зажимы.Рис. 7-58, Ящики резисторов ленточного типа.
170Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7Таблица 7-5Технические данные проволочных копстантаяовых влемевтов резисторовJyfe 8ле-
ыевтаДлитель¬
ный ток, АПостоян¬
ная вре¬
меня. сТок повторно-кратко-
временного режима,
А, при ПВ12,5% 25% 35%Ток кратковременного режи¬
ма, А0,5 мин 1,0 мин3 минСопротив¬
ление, ОмСопротивление ступеней
элемента. ОмЛ Б В F12345678
9101112131415161718
191.72,02,32.63,03.84.65.7
6,6
7.27.6
8^69.6
12.013.014.016.0
17,0
19*070120ПО100200100180200210210280150ISO1601501502804,04.96.57.59,81214.617.0
18.520.0
23,0
26
31
34
38
4045.7
37.Б3.03.5^75,Б7.08.6
10
121314
16
19
22
24
26
28,5
32
362,53.34.0
4,76.07.4
9,01011121416192122.Б2427.5312,93.7ё7б
6.0
7,4
11,1
11,1
16,2
18,3
20,6
25
30 ^
26,6
32
36
40,5
49
602,22,84,24.65.6
8,5
8,4
1213.214.518.2
22
17,823.5
26
29
3643.51,82.1зГо3.24.2
6.86.3
8,2
9,09.811.8
1413.2
16
1819.323.3
2S96684S3727,8181285.8
6.04.43.52.8
1,95
1,45
1.26
1.1
0,9
0,76,94.51.6
1,0 •
0,7
0,62
0,S5
0,43
0,34
0.49
0,36
0,32
0,28
0,23
0,187.04.51.5
!.0
0,7
0,62
0,55
0,43
0,34
0,^
0,36
0.32
0,28
0,23
0,1813,99.03.02.0
1.5
1,25
1.1. 0.9
0,72
0,97
0,73
0,62
0.54
0,44
0,346,04,02,92,52.21.741.4 ,Таблица 7-6Техняческяе давны)? ленточные алемеитов резисторов12S1|II«S1II'Ток повторио-кратко-
врененного режима,
А, при ПВТ<№ кратковременного ,
режима, А§ЁёСопротивление ступеней эле¬
мента с двумя промежуточ¬
ными выводами. ОмСопротивление сту¬
пеней с одним про¬
межуточным выво¬
дом. Ом12,5%25%35%0,5 мин1 м^ян3 минАБВА£I26510730521S1813352451560,0780,01950,03350,02150,02150,0370,0230,0550,0410,0230,037236591255181J1523072231400,110,02680,04820,02140,02140,05180,03050,06950,04120,03050,051837621S1521282551851160.150,040.0720,0320,0320,0780,0460.1040,0720.0460,078433064181128107228165102'-0,230,0620,1120.0520.0520,1180,0650,1650,1120,0650,118£2706415210791172125980«310,0810,1520,070,070,1580,0880,2220,1520,0880,158635046'12891761651207410,410,10,2020.1020,1020.2080,1060,3040,2020,1060,208724039107766411886550,60,145:0,2950,150,150,3050,1560,4550,2950,1550,3058220339164549670450,820,20,4040.3040,3040.4160,2120,6080.4040,2120,4169140297654466750341,090,2850,5330,2480,2480,5570,310,780,5330,310.55710170246446: 396145301,380,3330,6780,3450;3450,7020,3581,020,678■0.358
0.702 •11500762151521283152261380,1540,040,0750,0350.0350.0790,0440Д10,0750;0440,079
§ 7-9]Резисторы для главных цепей электроприводов171Ящики типа НФ 1А на токи 51—228 А имеют от
четырех до шести выводных зажимов. Те же ящики на
токи 36—41 А имеют от шести до восьми зажимов.
Проволочные ящики сопротивлений НФ ПА или НК 1А
имеют до одиннадцати выводных зажимов. Для наибо;
лее распространенных электроприводов выпускаютсяВотВ. подРис. 7-59; Массогабаритные размеры ящиков сопротив¬
лений.* Тип
^щикаРаз¬
мер Я,
ммМае- 1
са,КР {1 Тип ящикаРаз¬
мер. Я
ммМас¬са,кгНФ 1А20025НК 1А; НФ ПА20022НФ 2А400 ■50НК 2А; НФ 22А400,44НФ ЗА60075НК ЗА600-66комплекты ящиков, соединенные между^ собой, н имею¬
щие общую схему соединение. Два ящика, соединен¬
ных между ^ой, обозначаются НФ 2А илиНФ22А
(НК2А); три ящика обозначаются как. НФЗА или
НФ'ЗЗА (НКЗА).Габаритные размеры ящиков приведены »а рис.7-59.
Некоторые исполнения ящиков резисторов, использу¬
емые на открытом воздухе, изготовляются в защитных
кожухах со степеньяо защиты от внешних воздействий
1Р42. Такие ящики имеют обозначение БФ 1А, БФ2А,
БФ ЗА, БФ 4А. Если в' ящиках открытого исполнения
полностью используется мощность максимального числа
устанавливаемых там элементов, то в ящиках с защит¬
ными кожухами рассеиваемая мощность снижается от
15 до 40% в зависимости от размеров ящиков {боль-
шее снижение мощности имеет место для .большего
размера ящика).При установке ящиков резисторов необходимо
обеспечить хороший естественный теплоотвод. Для это¬
го между полом и первым ящиком должно быть рас¬
стояние не менее 100 мм. При установке одного ящика
над другим через каждые три этажа следует также ос¬
тавлять свободный промежуток 50—70 мм.Технические требования к резисторам и ящикам
резисторов приведены в ГОСТ 4870-69, который рас¬
пространяется на все типы ящиков резисторов главного
тока. Основным отличием резисторов кранового испол¬
нения является их использование при высоких значени¬
ях часто повторяющихся перегрузок по току. Учиты¬
вая эти особенности, отдельные токоведущие детали,
например выводы, внутренний соединительный монтаж,
выполняют из меди более массивными, чтобы предотвра¬
тить местные перегревы этих узлов при перегрузках.Все конструктивные исполнения ящиков резисторов
разбиваются на две группы: нормализованные ящики
универсального назначения и специальные ящики, за¬
ранее рассчитанные на использование в определенной
схеме электропривода для определенных мощностей
электродвигателей с учетом их . выходных параметров.В табл. 7-7 и 7-8 приведены технические характе¬
ристики нормализованных ящиков резисторов типов
НФ1АиНФ1!А.Используя нормализованные ящики резисторов,
можно получить требуемые параметры к разным схе¬
мам электроприводов. Это позволяет проектировщику
электропривода использовать готовые стандартизиро¬
ванные комплектующие изделия.Выводные зажимы нормализованных ящиков рези¬
сторов не маркированы, поскольку все ступени ящиков
имеют приблизительно равные сопротивления. Если не¬
обходимо в пределах одного ящика произвести электри-
TiecKoe разделение ступеней, то достаточно снять соот¬
ветствующую перемычку между этими ступенями. Не¬
обходимые значения ступеней сопротивлений резисторов
комплектуются путем последовательного, параллельного
и последовательно-параллельвоЕо- соеяинеаия ступеней
стандартных ящиков резисторов.в) Расчет я выбора резисторовдля типовых крановых электроприводовПри расчете я выборе резисторов в наиболее ши¬
роко применяемых системах парамётрического контакт¬
ного регулирования одновременно решаются'^ве задащи'1) достижение требуемого уровня регулирования и
ускорения электропривода, т. е. реализация необходи¬
мых механических характеристик;2) обеспечение соответствия теплового режима ре¬
зистора режиму работы двигателя и электропривода
крана в целом.Для выполнения первого условия определяются
значения ступеней сопротивлений, соответствующие по¬
лучению необходимых абсолютных значений пусковых
моментов электродвигателя.Для выполнения второго условия = необходимо оп¬
ределить соответствующую рассеиваемую мощность ре¬
зистора в целом (выбрать режим продолжительности
включения при этой рассеиваемой мощности и устано¬
вить необходимую нагрузку отдельных ступеней рези¬
сторов).Типовые механические характеристики крановых
электроприводов переменного и постоянного тока, как
правило, рассчитываются и строятся в относительных
единицах, что позволяет при сохраненйи необходимых
параметров регулирования использовать эти характери¬
стики для различных случаев нагрузки. Механическим
характеристикам, построенным в относительных едини¬
цах, соответствуют и разбивки отделмых ступеней ре¬
зистора также в относительных единицах.Таким образом, для получения необходимых меха¬
нических характеристик достаточно установить соответ¬
ствующие базисные значения, принятые за 100%, по
которым затем находятся абсолютные значения сопро¬
тивлений ступеней и ведется дальнейший расчет. -
!72Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд, 7Таблица 7-7Нормализованные ящики резисторов типа НФ 1АКаталожный номер
ящикаДлитель¬
ный ток, АПостоянная
времени, сОбщее сопро¬
тивление, ОмСопротивление ступеней. ОмЧисло1—22—3 11 3-44—55—6выводов*0,02150,0170,0170,02150*019640,0260,02150,02150,0260,0285640,0420,03450,03450,0420,038640,06350.06350.06350,06350,06356,40,0790,0790,0790,0790,079640,0960.0960,0960,096 '•0,0966 '
40,1560,1560,1560,1560,156_6_40,2560,2560,2560,2560.256640,320,320,320,320,3264> т0,40,40,40,40.4Оте *0,4550,4770.4770,4550.4S560,60,5960.596 •0,60.6862ТД,754,054-012ТД.754.0Б4-022ТД.754.054-032ТД.754.054-042ТД.754.054-052ТД.754.054-062ТД.754.054-072ТД.754.0Б4-082ТД.7Б4.054-092ТД.754.054-102ТД.764.054-11**2ТД.754.054-12**«228204165127114102826457514136265365330330270365300330270350240.2200*0960,1180,190,3180.3950,480.781,28^1,62,03,14,0• В чвслнтеле указано общее число выводов; в знаменателе — число
•• Сопротивление ступеиеб 6—7—0,477 Ом; 7—8—0,31 Ом.
Сопротивление ступеней 5—7—0,596 Ом; 7—S—0,4 Ом,выводов, снабженных медными башиаканя.Таблица 7-8Нормализованные ящики резисторов типа НФ ПАКаталожный но¬
мер ящика§1Цшgisо с к«о®о2 " -
с S s.Quo43 c; сIp7 A «42ТД.750.020-3526.87*16110,6S122ТД.750.020-3621.811.0111.0122ТД,750.020-3717.716,0111.4—1,5122ТД.750.020-3815,023.1U2.1122ТД,750.020-3018,428.6112,612Для механизмов подъема за базисный момент
^100%* принимается момент статической нагрузки
при подъеме номинального груза.Для механизмов горизонтального передвижения за
базисный момент Н-м, принимается момент,необходимый для обеспечения требуемого ускорения.При заданном среднем ускорении а, м/с®, время раз¬
гона, с, <=Гн/а. При этом время разгона не должно
превышать 5,5 с, т. е. при малых заданных ускорениях
сопротивления необходимо рассчитывать исходя из пре¬
дельных ускорений, возможных по условиям пуска; в
цротквном случае двигатель окажется в неоптимальных
условиях по режимам пускаЛ<100% = "./68,a +MJ\,8, (7-182)где GE^i^ —общий маховой момент электропривода,
приведенный к валу электродвигателя, кг.*м®; Afc — мо¬
мент статической нагрузки, Н*м; п„ — частота вращения
электродвигателя, соответствующая скорости об/мин.Полагая, что в интервале моментов на валу элект¬
родвигателей постоянного и переменного тока от 0,5 до
1,3 номинального момент приб.цизительно пропорциона¬
лен току ротора или якоря, можно определить ток ре¬
зисторов, А, соответствующий базисному режиму, при¬
нятому за 100%;Л0054 = ■ Р-183)Определение номинальных сопротивлений для асин>
хроивых двигателей с фазным ротором и номинальных
сопротивлении в цепи двигателей постоянного тока
даны выше.Сопротивления ступеней, Ом, определяются из вы¬
ражения^ступ = ^н^%/100,где — сопротивление ступени, %.Для типовых схем крановых электроприводов раз¬
бивка ступеней сопротивления в процентах номиналь¬
ного приведена в табл. 7-9, 7-10.Среднее значение нагрузки резисторов крановых,
электроприводов не может быть однозначно установле¬
но в связи с тем, что режим работы как электроприво¬
да, так и резисторов весьма неопределенный, завис»-
§7’9]Резисторы для главных цепей электроприводов173Таблица 7-9Сопротявлення и токи ступеней для влектрспрнводов
с кулачковыми и магнитными контроллерами переменного токаСтупениKVfla4но¬Магнитные контроллерывый конт¬
роллер
ККТ 68АТок ротора <160 АТок ротора >160 АТА. К 1ТСА, КСТА. К 1ТСА. КС955814Р1—Р45483835059311010Р4—Р735 <595960P7—P7J 35¥■41)2020Р72—РЮ35505917Р1—РЦ2976РП—РМ17,54027Р10-^Р13—42SD1207614686P13—PI6—214235427272Р16—Р19——30304239Р4—Р10———42502423' Р1—Р7——5942’ 10092P7—PI3-■ 3026• Примечания: I. Сопротивления (числитель) и токи
(знаменатель) ступенеЯ указаны в процентах (юмннальных зна>
чений.2. Для магнитных контроллеров сопротивления даны s рас¬
чете на одну фазу.3. При управлеявв кулачковым контроллером ККТ61А со¬
противления и токи ступеней: Р/--Р5—26/59; 170/19;75/19; 9/59; Р4—Р52—87/35; 35/35;РЗ-Р5—61/50.щиЙ ОТ МНОГИХ случайных факторов. Поэтому в прак¬
тике принято устанавливать нагрузки резисторов с уче¬
том основных классификационных режимов работы кра¬
нов и коэффициентов, характеризующих средние усло¬
вия регулирования, потери в пускотормозных режимах
и предполагаемое максимальное число пусков. На базе
общей теории определения нагрузок и выбора крановых
электродвигателей (см. § 8-2, 8-3) средняя мощность
рассеяния кранового резистора в схемах постоянного
и переменного тока с торможением методом противо-
включения, а также в тиристорных системах с регули¬
рованием напряжения определяются по выражении)аРе^тЛэкв'Пдв('Пдв — 'Пэкв) +О ’Пдв) ( ^ Ер) (^1экв.б Лэкв)
ЛвК£,6Таблица ?-ШСопротивления и токи ступеней для электроприводов
с кулачковыми и магнитными контроллерами постоянного токаСтупениКулачковые кон¬
троллерыМагнитные контроллерыКБ 101КВ 1в2П63, П160.
П250, П400,
П600ПС160, ПС250,
ПС400, ПСбООPOJ—PJ10164230Р1—Р2183010010042303050Р2—РЗ2260264242374250РЗ—Р420402225503750Р4--Р51627153050465944PS—P61418—594650Р6—Р7, —30.Р6—Р06~. 10
46“-4030P7—PS■■ ——135126Р4—Р66039Р5—Р7_Y—\ —641Р8—Р9 22 .33PJO—PJJ__——4528Примечание. Сопротивления (числитель) и токи (зна¬
менатель) ступеней указаны в процентах номинальных значений.средняя мощность рассеяния кранового резистора в
схемах переменного тока с динамическим торможениемаРс( 1 ,25 Т]дв Г)дкв 0,25 "Пэнв Т)дв) +(7-185)Лвкв Т1дв(I 'Пдв) (1“Ьво) (Лэкв.б ’Пэкв)(7-184)“ПэкВ-бгде Рст — мощность статической нагрузки, кВт; —
коэффициент нагрузки, определяется по табл. 8-4 в за-
висимости от режима работы механизма краиа; eq —
фактическая относительная продолжительность включе¬
ния; а — коэффициент использования (а=13 для ме¬
таллургических механизмов, а=1 для прочих механиз¬
мов); т^дв — номинальный к. п. д. электродвигателя;
Лакв — к. п. д. электропривода, определяется по графи¬
кам на рис. 8-11; г]вкв-б — базисный к. п. д. электропри¬
вода (см. табл. 8-4); ka — коэффициент использования
в системе электропривода ka—l для систем переменно¬
го тока и постоянного тока (механизмы передвижения),
Аа=0,5 для систем постоянного тока (механизмы оодъ-
ема).
174Расчеты механических характеристик электроприводов и сопротивлений резисторов[Разд. 7Относительные значения нагрузок ступеней рези¬
сторов типовых схем крановых электроприводов уста-
новлены на основе опыта эксплуатации и приведены в
табл. 7-9, 7-10. Отметим, что приведенные значения на¬
грузок ступеней резисторов могут быть рекомендованы
и при проектировании. ;Номинальные продолжительности включения рези¬
сторов принимаются следующими;для механизмов режима Л —ПВ=25%,
для механизмов режимов С и Т при числе включе¬
ний до !50 в час — ПВ=40%.для механизмов режима Т (при числе включений
свыше 150 в час) и режимов ВТ--ПВ=60%.
для механизмов режима ОТ—ПВ — 100%.
Расчетный ток продолжительного режима резисто¬
ра, А, определяется по формуле1,Ы0^^Я(7-186)где — относительное сопротивление ступени, %, по
табл. 7-9 или 7-10; —относительный ток нагрузки
ступени сопротивления, %, определяемый по табл. 7-9
или 7-10.Ток продолжительной нагрузки ступени резистора
определяется из выражения‘ступ/р/%/100.(7-187)Таким образом, в результате расчета установлены
основные параметры ступеней сопротивлений /^ст^о и
/отуп при продолжительном режиме. Далее по данным
табл. 7*7 и 7-8 выбираются ковкретные типы ящиков и
схемы вх соединений.Учитывая, что резисторы имеют постоянные време>
ни нагрева значительно меньшие, чем постоянные време¬
ни электродвигателей, выбирая их, необходимо произ¬
водить проверку возможности кратковременной работы
при максимальных нагрузках. Резисторы для электро¬
приводов механизмов подъема необходимо проверять
на возможность работы в течение 130 с при токе
т. е. при токе ртатической нагрузки. Резисторы для
' электропрвводов механизмов передвижения необходимо
проверять навключенневтетенне 30 с при токе 1,3/|qo%>
т. е. при токе, соответствующем с'реднему значению при
четырех пусках подряд длительностью 7,5 с. Для ме-
ханизы<№' режима Л и С, как правило, расчет и выбор
ящиков следует вести исходя из обеспечения кратко;
временного режима, так как он всегда будет наиболее
тяжелым.При подборе ящиков резисторов может оказаться,
что фактические значения ступеней сопротивлений бу¬
дут отличаться от расчетных. Максимальные рекомен¬
дуемые отклонения фактических значений от расчетных
приведены в табл. 7-И. При этом следует учесть, что
производственный допуск на суммарное сопротивлениеТаблица 7-11Допустимые отклонешя сооротнвлеввй реэвсторов
от расчетных значенийНаименованиеОбщее сон^тивленнс
Невыключзеыое сопротивле-
знеСтевень противовключения
Пускотормозные ступениРасчетное
suaqeiflie, %Допуск иа откло¬
нение от расчета+80—150554—10502060—10010105—10302010—30201530—БО‘2010резистора составляет ±10% его расчетного значений, а
производствшный допуск на ' отдельные ступени соста¬
вляет до ± 15% их расчетного значения.г) Пример расчета по выбору резистора
для кранового электроприводаДля электоопривода механизма передвижения тележки ме¬
таллургического крара весьма тяжелого режима работы со ско¬
ростью 1.0 м/с и ускорением 0i5 м/с* вибран электродвкгятель
переменного тока МТН 612-10 мощностью 50 кВт. частота вра¬
щения 573 об/мик, ПВ=60%. Напряжение между кольцами ро¬
тора 223 В. Тех ротора 140 А. Управляется магнитным контрол¬
лером 'К160. Число пусков в час 300. Суммарный маховой мо¬
мент. приведённый к валу электродвигателя, 82 кг-м*. Момент
статической нагрузки 230 Н-м.Для заданных параметров ускоренн)Г определяем:
врс.<ия разгонаi = v„;a = 1,0/6,5 = 2 с;•100% - “*^общ ^ 82.573/68,8.2 + 230/1,8 =-= 470 Н-м;
расчетный ток резистораЛОО% = ^100% = 140-470.573/9550.50-^ 79 А;номинальное сопротивление== Л00% = 223/УТ.79 1,62 ОМ.Согласно табл. 7-fi для магнитного контроллера К160 нахо¬
дим разбивку ступеней сопротивлений й определяем сопротив¬
ление каждого резистора (в oi^KOfi фазе):Обозначение ступениР1—Р4Р4—Р7P7—P7JPJ0—PI3PJ3-P16Общееступ*5102040Ш196R, Ом0.0810.1620,324,0,6501,943,157Находвм расчетную мощность резистора (в трех фазах) по
формуле(^дв ^эке)'т "экв ‘'дв
~ *‘дв) (^ ^о) (^&кЕ.б ~ %кв)9.69550230.573955018.7 kBv.‘Опреаеляем по табл. 8-4 параметры для условий режима
BJ; частота включений фактическая 300 в час, приведенная:300GZ)2.общ= 300821,2.21
»5вкв.б==0.76;' ^экВ ~ согласно ряс, 8-11:р J.3-13,7Р 0.75.0,63-0,87
(1 — 0,87) (1 + 0,6) <0.76 — 0,63){0,87 — 0,53) 4-= 21 кВт.0.763На одну фазу приходится 21/3—7 кВт.Определяем расчетный ток резистора по (7-186). Токовые
нагрузки /»/ по ступеням берем из табл. 7-9;ПР., 2/2;1,1-1011.71.62-195(83». 5+59*-3(Н'42*. 40+21»-120)‘96 А.
§7^У\Резисторы для главных цепей электроприводов175Значения расчетных токов ло ступеням:Обозначение ступени^ступ’ ^I, АPJ—P48380P4—P7I6957P10—PI34240,0P13—PJ62120,0XZLгf,871—ГF16FJ30,311т п пF71Таблица 7-12В соответствии с таблицей нормализовзяных ящиков рези¬
сторов НФ 1А выбираем для ступеней Р10—Р16 ящик
2ТД.754.054.П, имеющий длительный ток 41 А и сощ)отивленне
3,1 Ом. Для ступеней Р1—Р71 выбираем ящик 2ТД.764.054.07,
имеющий длительный ток 82 А и сопротивление 0,78 Ом.• Схема включения одной фазы резистора приведена на
рис. 7-60.Рис. 7-60. Схемы соединения ящиков резисторов.в результате расчета составляем итоговую табл. 7-12.'Учитывая, что отклонение фактических значений сопфотив*
лений от расчетных ве превышает допустимых значений, а на>
^узки по току ступеней резисторов имеют запас, резистор вы¬
бран правильно. Проверки по кратковременному режиму не про¬
изводим, так как расчетный TOfi 1100% ”96 А близок к длитель<
ному току пусковых ступеней. Аналогичным способом могут
быть рассчитаны резисторы для других краиовых электроорв*
водов«д) Специальные резисторы
для крановых электродвигателейИз примера расчета следует, что резисторы, скомп¬
лектованные из нормализованных ящиков, как правило,
имеют значительный запас по нагрузке, а следователь*О. о
я
т&гсзо ерасчетныепараметрыФактиче¬
ские пара¬
метры^ Й -Гillip
±; о ь
О и оSнg-UйсоаС,О0#СР1—Р45830.081'■ 80,00,07882—3,02• Р4—Р710590,16257,00,15682—4,044P7—P7I20590,32467,00,31282—4.044Р10—Р1340420,6540,00,76541+182Р13—Р1612021'1,9420,01,8741—3,5100Всего“*3.1573*1814-1,0но, и более значительные габариты. В среднем резис¬
торы, скомплектованные из нормализованных ящиков,
имеют габариты на 15—25% больше, чем если бы ре¬
зистор специально конструировался для соответствующе¬
го электропривода. Это объясняется тем, что в норма¬
лизованных . ящиках все ступени имеют одинаковый до¬
пустимый ток, тогда как фактическая нагрузка разных
ступеней различная, но ящик приходится выбирать по
наибольшей нагрузке.Для наиболее распространенных электроприводов
крановых механизмов, составляющих свыше 80% объ¬
ема производства, разработаны и поставляются специ-'
альные исполнения ящиков резисторов, рассчитанные
применительно к определенному типу электродвигателя
(или мощности), под определенную схему управлениян
на. один из стандартизованных режимов работы.Таблица 7-13Резисторы к крановым аяеятроприводам постояноого тока для механизмов режимов работы Л, С,
Т при номинальной продолжительности включения. аЛЁК-фодвигателя ПВ—40% в числе пусков в час
кулачковых контроллеров до 1Бв, а магнитных к1нпроллеров — до 300Расчетная
нагрузка
Двигате¬
ля, кВтТип кулач¬
кового кон¬
троллераК&твложвый
номер рези¬
стораТип ре-!
зистораТип кулач¬
кового кон¬
троллераКаталожный
номер рези¬
стораТип рези¬
стораТип магнит¬
ного контрол¬
лераКаталожный
номер рези¬
стораТип рези¬
стора<2,8Кб 101 длямеханизмов^ТД,750.020-31НФ НАКВ 102 для
механизмов2ТД.750.0а0-75НФ ПАП. ДП для
механизмов2,8—4,0передвиже¬ния2ТД.7Б0.02О-74НФ ПАподъема2ТД.760.020-76НФ ПАпередвиже¬ния2ТД750.020.78НФ ПА4.0-5.62ТД.760.020-73НФ ПА2ТД.7Б0.020-77НФ ПА2ГД.750.020-79НФ ПА5,6—8,0НФ 2А•2ТД.7б0,020-86НФ ПА2ТД.7М.О55-20НФ 2А8,0—102ТД.754.055.28НФ 2А10^132ТД.764.055-02НФ2А2ТД.750.056-06НФ 2А2ТД.754.055-2ЭНФ 2А13—172ТД.764.0ББ-04НФ 2А2ТД.750.055.08НФ 2А2ТД.754.0Б5-30НФ 2А17—202ТД.7Б4.055-05НФ 2А——2ТД.754.055-31НФ 2Л ^20—24———2ТД.754.057-51НФ ЗА24—28———-2ТД.754.057-52НФ ЗА24—ЗЗ’—-■ _j2ТД.754.057-бЗНФЗА
176Статика, динамика и энергетика крановых электроприводов. Выбор двигателей[Раза. 8Резисторы для режимов ОТ подбираются из стан¬
дартных ящиков.В табл. 7-13 приведены технические данные резис¬
торов к крановым электроприводам постоянного тока
при номинальной продолжительности включения элект¬
родвигателя до 40%. Для всех остальных электроприво¬
дов с мощностью электродвигателей, выше указанных
в табл.' 7-13, применяются нормализоэанные ящики ре¬
зисторов.Рекомендации по применению нормализованных
ящиков приведены в каталогах. Однако для электропри¬
водов тяжелого режима работы с большой частотой
включений более целесообразно выбор резисторов вести
по описанной выше методике. Это позволяет обеспечить
наилучшие условия разгона и торможения электродвига¬
теля конкретного электропривода.РАЗДЕЛ ВОСЬМОЙСТАТИКА, ДИНАМИКА И ЭНЕРГЕТИКА КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ.
ВЫБОР ДВИГАТЕЛЕЙ8-1. СТАТИКА И ДИНАМИКА
КРАНОВЫХ ЭЛЕКТРОПРИВОДОВа) Определение статических и расчетныж нагрузокМомент статической нагрузки двигателя определяет¬
ся приведенными к его валу силами полезных и вредных
сопротивлений. Соответственно статическая мощность
механизма с учетом потерь в его звеньях определяет
статическую мощность нагрузки двигателя. Обязатель¬
ным условием правильного расчета крановых электро¬
приводов является учет нагрузок двигателя в переход¬
ных режимах. Указанные нагрузки характеризуются
расчетным моментом на валу двигателя и соответству¬
ющей ему расчетной мощностью, под которыми понима¬
ются значения названных параметров, определяющие вы¬
бор двигателя п© условиям, обеспечения нормального
пуска.Ниже приводятся расчетные формулы для опреде¬
ления нагрузок двигателей механизмов крана.Механизм подъема. Статическая мощность на валу
двигателя механизма подъема крана и подъемной ле¬
бедки грейфера, кВт,Яст = 9,81Сун/Л, (8-1)где Q —масса груза с подвеской, т; t»a — номинальная
скорость подъема груза, м/с; т]—к. п. д. механизма с
блоками.Максимальная статическая мощность двигателя за¬
мыкающей лебедки наполненного грейфера массой Q.
кВт,^ ст.макс == 19 Qoh/л . (8*2)Расчетная мощность двигателя подъемной лебедки
Рр = Р ст.макс (8-3)и замыкания грейфераjPp — 0,5 Р сФ,мвкс* (8-4)Механизмы^ передвижения моста или тележки кра¬
на. Нагрузка на привод механизма передвижения в об¬
щем случае складывается из трения в ходрвых частях
на прямолинейном пути, дополнительного трения на кри¬
волинейном участке пути, сил сопротивлений на уклонах
и составляющей от силы давления ветра. Определяемая
этими нагрузками мощность на валу двигателя, кВт, со¬
ставляет:ст(8-5)9,81 (UG Ч- го + G sin у -f Лр^8^) у„где С — масса перемещаемых частей крана, т; fo — при¬
веденный к диаметру колеса коэффициент трения; / —коэффициент, зависящий от конструкции колеса и ха¬
рактеристик подкранового пути; у — угол уклона пути;
рь — расчетное удельное давление ветра, т/м*; 5» — на¬
ветренная площадь поверхности перемещаемых частей
крёна и груза, перпендикулярная к напряжению ветра,
м^; Он — номинальная скорость передвижения кра¬
на, м/с.Выполнение расчетов по (8-5) требует знания кон¬
структивных данных механизмов. В практических расче¬
тах можно приближенно принять (при отсутствии вет¬
ровой нагрузки) удельное сопротивление движению рав¬
ным 80 И на тонну массы перемещаемой конструкции
(при качении колес по рельсам и подшипниках качения,
а также нормальном состоянии подкранового пути).Б этом случае статическая мощность на валу дви¬
гателя определится следующими приближенными выра¬
жениями:при передвижении в помещенииЯст = «3-ЬС)он/Шл;(8*6)при передвижении на открытых площадках и рас¬
четной скорости ветра 20 м/сст.максQ+G100,5(Q+G)2/3Vn.(8-7)Расчетная мощность при условии кратностл макси¬
мального момента двигателя 2^Мл составляет:Рр-о.б7«г+о)-^+^’‘в(8-8)где Рстстатическая мощность, определяемая по (8-6)
или (8*7); ta — время пуска.Время пуска обычно составляет не менее 1 с и не
более 8 с. Среднее расчетное время пуска может быть
принято равным 4 с.Механизм поворота. Нагрузка на привод механизма
поворота складывается из трения в опорах механизма,
ветровой нагрузки и нагрузки, связанной с креном,
В практических расчетах можно принять удельное со¬
противление движению (без ветра) при расчете привода
механизма поворота равным 65 Н на тонну массы. Исхо*'
дя из этого условия максимальную статическую мощ¬
ность при скорости ветра 20 м/с и отсутствии крена оп¬
ределяют выражениемст.макс —9,6т1Q+G120.5(Q+0,5G)2'^(8-9)где Ли.к — частота
стрелы, м.вращения крана, об/мин; I — вылет
§8^1]Статика и динамика краноеых электроприводовтМаксимальная статическая мощность при скорости
ветра 20 м/с и крене 5® составляет:1ПцлCT.Majic9,6т] 122Q+G4-0.5 (Q+0,50)2/2(8-10)Расчетная мощность электропривода определяется
рри условии кратности максимального момента 2М^ и с
учетом того, что среднее значение нагрузки при noBojpoTe
составляет около 0,8 максимального значения. При этомPp = 0,54(0,5Q+ G)(8-U)92/„ 2,2Механизм изменения вылета стрелы. В зависимости
от конструкции крана при работе механизма изменения
вылета стрелы груз может совершать или только го¬
ризонтальное перемещение, или же наряду с горизон¬
тальным еще и вертикальное перемещение.Максимальная статическая мощность электроприво¬
да, кВт, в случае только горизонтального перемещения
груза массой Q, т, составляет:•^ст.макс = (8-12)где максимальная скорость горизонтального пере¬мещения груза, м/с. Когда горизонтальное перемещение
сопровождается одновременным подъемом груза, макси¬
мальная статическая мощность определяется выраже¬
ниемQ■^ст.макс = ^ (t'n.r "Ь 50Рн,в)»
5т1(8-13)где 1»н.в — вертикальная составляющая скорости переме¬
щения груза.Расчетная мощность электропривода механизма из-
ме1^ения вылета стрелы, кВт, равна максимальной ста¬
тической мощности== ^’ст.макс* (8-14)По найденной мощности момент нагрузки на валу
двигателя, Н-м, определяется по формулеЖ = 9550^, (8-15)пгде « — частота вращения двигателя, об/мин.Момент на валу двигателя может быть определен
непосредственно, если известно усилие сопротивления пе¬
ремещения ft Н, по формулеЛ1 = 9,5Б—, (8-16)ЧП6) Учет изменения к. п. д. механизма
при расчете нагрузкиКоэффициент полезного действия механизма опре- ‘
деляется суммой постоянных и переменных потерь и яв¬
ляется функцией нагрузки, уменьшаясь с ее снижением,
поэтому для пользования приведенными выше зависи¬
мостями необходимо иметь значения к. п. д. для проме¬
жуточных нагрузок. Такие зависимости 'п=/(Л1/Л(и)
приведены на рис, 8-1.Рис. 8-1. Зависимости к. п,.д. передач в функции от за¬
грузки.Момент иа валу двигателя при промежуточной на¬
грузке может быть рассчитан по формулеМ.(Лп.п -f* Лн) + (I — Чн)Л1 = Л1в— — . (8-17)1 -f- ku,uгде Л1/Л1н — отношение текущего значения нагрузки к
номинальной; йп.п — коэффициент, определяющий долю
переменных потерь в механизме при номинальной на¬
грузке.При передаче энергии от рабочего органа к двигате¬
лю, что имеет место в тормозном режиме, момент двига¬
теля, Н*м, рассчитывается по выражению(2ч - 1) ^ , (8-18)1+*п.пгде — к, п, д, при нагрузке М в двигательном режиме.Таблица 8*1Значения к. п. д. и коэффициентов различных типов передач крановых механизмовЗначения к. п. д. и коэффиаиентов Для механизмовНаиыенование узла^ .Лебедаи с канатными
барабанамиМеханизмы дередви-
жевия тележек и
мостовМеханизмы поворотаЧв*п.пЧн 1*п.пУзел блока канатной передачи0,98—0,9910,981_Канатоукладчнк барабана0.981————Шестеренчатый двухступенчатый редуктор и открытая передача0,75—0,80,90.7—0,80,850.78—0,820,9Шестеренчатый ■ редуктор трехступенчатый или планетарный
двухступенчатый0,8—0.840,90,76—0.820,9-0,82—0,860.9' Червячяая передача, несайоторыозящаяся0J0,850,65-0,70.850.650.85Червячная передача самотормозящаяся0.36—0,470,60,42—Oj 50*50,37—0,480.512—839
178Статика, динамика и энергетика крановых электроприводов. Выбор двигателей[Разд. 8Ориентировочные значения номинальных к. п. д. для
различных передач и соответствующие им значения ко¬
эффициентов k[f.u приведены в табл. 8-1.Поскольку цикл кранового механизма включает его
движения как под нагрузкой, так и вхолостую, то ориен¬
тировочно можно принять, что среднеквадратичная на¬
грузка: при т]н=0,8 составляет 60% расчетной, при т]в~
*=0»7—55% и при т)в—0,6—50^,в) Моменты инерции. Расчет времени
переходных режимов. УскоренияУравнение движения электропривода при постоян¬
ном моменте инерции имеет вид:,do) GD* dn(8-19)Рис. 8-2. Зависимости ^дo=f(A^c/Л^e) для электроприво¬
дов с короткозамкнутыми асинхронными двигателями. разг(}н;. -ч WO ториожеше.e?y U.2S О 0,ZS 0,5 0,75 1,0 1,25 1,5Рис. 8-3. Зависимости /до=?(Мс/А/н) для электроприво¬
дов с асинхронными двигателями с фазным ротором.Приведение вращающихся частей осуществляется по
формуле(8-21)где —маховой момент вращающихся масс; i —передаточное отношение.Приведение поступательно движущихся масс выпол¬
няется по выражению(8-22)где I» — скорость,, м/мин, а Q — грузоподъемность, т.Полный приведенный, к валу двигателя маховой мо¬
мент всех вращающихся 'и поступательно движущихся
масс пр11вода и. груза рассчитывается по формуле+101(8-23)где I — момент инерции системы, приведенный к валу
двигателя, кг-м^; — приведенный маховой момент
системы, кг*м*, причем(8-20)где коэффициент ^вр учитывает маховой момент враща¬
ющихся частей. Авр=1Д—1,25; — маховой момент
двигателя.В соответствии с (8-19) время протекания динамиче¬
ского режима пуска или торможения электропривода, с,
определяется выражениемп.GP838,2‘конdnМ~ Мст’(8-24)или, если параметры выразить в относительных едини¬
цах,"кон*dn.дГ ^«4=J Afc-Гм/Ыпгде"кон*(8-25)(8-26)Tii~GD^n^постоянного"аач*Гм — электромеханическая постоянная:/38,2 Л1н; й.=п/«н — для электроприводов
тока; Гм=0£>2Лс/38,2Л1н; «.—«/«с—для электроприво¬
дов переменного тока Мсг*'=»Мс^{Мн.Время переходного режима согласно (8-24) пропор¬
ционально электромеханической постоянной системы
Т’м и времени ^дo, определяемому при заданном моменте
статической нагрузки механическими характеристиками
электропривода.На рис. 8-2—8-4 представлены графики зависимо¬стей •dn^Мс,!М,рассчитанные при различ¬ных значениях Мс^/Мя для разгона и торможения
крановых электроприводов по типовым механическим
характеристикам, позволяющие в соответствии с (8-25)
найти времена переходных режимов.В регулируемых электроприводах задача определе¬
ния времени переходного режима значительно упроща¬
ется,. ес4и процессы пуска или торможения протекают
при постоянстве момента двигателя или постоянстве ди¬
намического момента. При этом в соответствии с (8-25)/г^кон* Янач«!М(8-27)R*— разгон: — — — торможение.где Мд*—Ммакс* — Л^ст».
§s-nСтатика и динамика крановых электроприеодое179Рис. 8-4. Зависимости 1я,о=!Щс/М^) для электроприво¬
дов с двигателями постоянного тока последовательного
возбуждения.— разгон до номинальной скорости; —разгон дофактической скорости; торможение.Рис. 8-5. Зависимости ^до*>/(Мс/Л1в) для систем с посто¬
янным максимальным моментом при пуске (сплошные
линии) и торможении (пунктирные линии).В первом случае #д, как и для рассмотренных выше
систем, является функцией момента статической на¬
грузки.Зависимость ^до= 1/(Ммакс* — Л1ст*) приведена на
рис. 8-5,Во втором случае /д не- зависит от статической иа^
грузки и пускотормозные режимы привода протекают
при постоянных усх^орениях.Приведенные выше расчетные и графические зависи-
мссти определяют полное время протекания пусковых
или тормозных режимов при разгоне привода до номи¬
нальной скорости. Если разгон ведется не до номи¬
нальной скорости, то время переходного режима можно
оценить, имея в виду, что при использовании типовых
магнитных контроллеров привод достигает скорости
0,6 «я приблизительно за время, равное 1/3 времени пу¬
ска, и скорости 0,9 Пн за время, равное 2/3 времени
пуска.npri расчете времени пуска в случае применения
двигателей последовательного возбуждения следует раз¬
личать время разгона до номинальной скорости (на рис.8-4 сплошные линии), и время разгона .до фактической
рабочей скорости, соответствующей нагрузке, меньшей
номинальной (на рис. 8-4 штрихпунктарные линии).Время торможения на рис. 8-2—8-5 рассчитывалось
от действия только электрического торможения (без на¬
ложения тормоза). При совмещении электрического и
механического торможения, указанное время должно
12*быть снижено в соответствий со значениями тормозных
моментов двигателя и тормоза.Время переходных режимов имеет важное значение
для расчета крановых электроприводов и определения
производительности крановых механизмов. Его значение
определяется допустимыми ускорениями (замедления¬
ми), которые выбираются исходя из технологических
требований и возможностей крана. Верхние пределы
ускорений ограничиваются сцеплением колес с рельсами,
раскачиванием груза, динамическими усилиями в .звень¬
ях механизма (см. § 8-1,5), а также допустимыми мо¬
ментами двигателя. Значения ускорения, которые удов¬
летворяют технологическим требованиям, пред5.явля-
емым к крану, зависят от характера груза, назначения
крана, его скоростных параметров и пути перемещения
груза.Рост требований к производительности обусловли¬
вает необходимость увеличения ускорений. С другой сто¬
роны, мощность выбранного двигателя должна быть
достаточной для обеспечения необходимого- ускорения,
иначе двигатель попадает в недопустимые условия по
нагреванию. Увеличение времени работы двигателя с на¬
грузкой, близкой к максимальной, приводит к быстрому
выходу двигателя из строя. Практически время пуска
находится в пределах от 1 до 8 с.При применении силовых контроллеров продолжи¬
тельность пуска и соответствующее ему ускорение во
многом зависит от крановщика. Продолжительность пу¬
ска, предусмотренная типовыми конструкциями контрол¬
леров, составляет 4—б с. Однако в ряде случаев указан¬
ное время может оказаться недостаточным и необходимо
принять специальные контроллеры. Средние значения
ускорений соответствуют указанным временам пуска и
для различных типов крановых механизмов приведены
в табл. 1'2, Они составляют для механизмов передвиже¬
ния 0,3—0,4 м/с^, а для некоторых механизмов могут
достигать 0,6м/с2 и выше- Для механизмов подъема пе¬
регрузочных кранов ускорения могут достигать значе¬
ний 1-1,5 и/сКПри торможении замедления превышают в 1,3—
1,6 раза указанные выше значения ускорений.Следует различать значения средних ускорений (за¬
медлений), определяемые по формуле<^ср==%/^д» (8-28)и мгновенных ускорений, определяемых выражением
(8-19). Максимальное значение ускорения соответствует
максимальному динамическому моменту и при пуске
равно;38,2t»(?i.n—Л/мнн*)Л1н /о 00\
; (б--^:у)с;макс.пGD%при торможении максимальное замедление
38,2у (Лт ^макс*)
GD«rtСмакс.т(8-30)где — отношение максимально возможногомомента при пуске или торможении к номинальному мо¬
менту двигателя; А1цив* и — соответственно ми¬
нимальная относительная нагрузка механизма при пуске
и максимально возможная при торможении.Значения мгновенных ускорений могут значительно
превосходить приведенные в табл. 1-2 значения средних
ускорений.г) Вопросы влияния электропривода
на работу механизмов в переходных режимахЗадачи увеличения производительности крановых
механизмов приводят к росту их скоростных napaHetpoB
и необходимости сокращения длительности протекания
180Статика,^ динамика и энергетика крановых электроприводов. Выбор двигателей[Разд. 8пускотормозных режимов. Однако следствием увеличе¬
ния скоростных параметров и ускорений могут явиться
значительные перегрузки в звеньях механизмов, возник¬
новение упругих колебаний системы^, а также раскачива¬
ние груза. Поэтому учет влияния указанных факторов
при проектировании крановых систем имеет важное зна¬
чение.Нагрузки в механизмах вертикального перемещения
груза. Рассмотрим максимальные усилия, возникающие
в тросе в двух крайних случаях: при ограниченном, . но
постоянном пусковом моменте двигателя и при идеально
жесткой механической характеристике электропривода.
Такое сравнение позволит сделать выводы о целесооб¬
разности и необходимых пределах регулирования пуско¬
вого момента. При допущении постоянства пускового
момента и линейном законе изменения удлинения троса
максимальное усилие в тросе определяется выражениеммаксШдвAt>o Едт^
QH(>-ГПь угадв/(8-33)где ^макс — максимальное усилие в тросе;Мю —0,105 —пусковой момент, приведенный к
vinусилию в тросе; те=тгртдв/(/Пгр+/Пдв)—масса эле¬
ментов системы, вращающихся со скоростью двигателя,
приведенная к грузу; ffirp — масса груза; Шд»—приве¬
денная маСса ротора двигателя, равная Шдв=/яв(о'/о)“;
/дв — момент инерции двигателя; £ — модуль упругости
троса; 9 —сечение троса; г— длина троса между бара¬
баном и грузом; Qp — вес груза; —начальная раз¬
ность между скоростями грузового барабана и груза.При жесткой механической характеристике электро¬
привода выражение для максимального усилия в тросе
имеет вид:маисИз сравнения выражений (8*31) при ограничении
пусково1‘о момента моментом, равным статическому мо¬
менту, и (8-32) следует:мансMfflic при Мр = ЯрI(8-33)Для обычных грузоподъемных механизмов отноше¬
ние thrplm^^ не превышает 0,2 и максимальная нагрузка
в грузовом канате за счет введения ограничения пуско*
вого момента может быть снижена не более чем на 10%.
Только для ряда грузоподъемных механизмов, имеющих
уравновешенную систему, таких, как лифты, /Пгр/тдв
значительно больше указанного, и снижение макси¬
мального усилия может быть более значительным, до
25-30%.Кардинальным средством снижения ударных (мак¬
симальных) усилий является снижение приращения ско¬
рости, т. е. обеспечение характеристик, пересекающих
ось ординат при скоростях, ниже синхронной.Выражение для определения минимальной скорости
может быть получено из (8-32), если в него подставить
обычные для грузоподъемных механизмов значения
тдв//Пгр, Qjr/9 нill£:zS£._,4 з_^При наименьшей практически реализуемой длине
троса 5 м и допустимой кратности увеличения нагрузки
в тросе, равной 2,5, минимальная скорость подъема со¬
ставляет 0,25 м/с.Максимальное усилие при торможении определяется
выражением2{Mp±QAгде знак плюс относится к торможению^ при подъеме
груза, а минус — при его спуске. Максимальное усилие
при торможении во время подъема намного выше, чем
во время спуска для одинаковых усилий Мр. Это объ¬
ясняется тем, что при торможении во время подъема
возможно ослабление канатов в момент остановки, вы¬
зывающее свободное падение груза. Для предотвра¬
щения недопустимых ударов при торможении необходи¬
мо, чтобы замедление не превышало ускорения свобод¬
ного падения g. Скорость, соответствующая максималь¬
ному ослаблению канатов, равна;Qp + Мр я
»К0Й = %ач - (8-35)+ ^гр у СШзгде Рнач — начальная скорость торможения; с — жест¬
кость каната.Ударные нагрузки в механизмах горизонтального
пережи^ения. Ударные нагрузки и меры по их ограни¬
чению для рассматриваемых механизмов зависят от
характера протекания переходных процессов в системе,
определяемого частотой собственных колебаний. Для
механизмов, период собственных колебаний которых
находится в пределах 0,006—0,4 с, максимальные уси¬
лия в звеньях механизма практически не* зависят
от характера возмущающей силы, поэтому уьйньшение
пускового или тормозного момента в пускотормозных
режимах не сказывается на максимальных перегрузках.Максимальные усилия в звеньях механизмов пере¬
мещения и поворота определяются при разгоне по
формулеf + !^as— +макстдв + т.трШгр'' (/Ядв+Шгр}»При торможении^Рр/Йдв ^ГР ^ДВ “1“ ^Гр(8.37,где Шгр “ масса поступательно движущихся элементов
механизма; тдв—эквивалентная масса ротора двига¬
теля и элементов, вращающихся на его валу; W — со¬
противление движению.Наибольшие усилия при разгоне и торможении
механизмов горизонтального перемещения, рассчитан¬
ные по (8-36) и (8-37), приведены в табл. 8-2.Для механизмов с Шгр'ХПд^в максимальное усилие
может быть принято равным(8-38)здесь 2—коэффициент динамичности k. В случае ис¬
пользования тормозов с гидротолкателями значение k
может быть принято равным 1,5. Для систем, период
собственных колебаний которых соизмерим со време-,
нем переходного -режима, нагрузка в элементах меха¬
низмов может быть снижена путем использования мяг>
кой механической характеристики. Для таких систем
§'8-ПСтатика п динамика крановых электроприводовТаблица .8-2Максимальные усилия в механизмах горизонтального
передвижения крановНаименованиеМеханизм пере¬
движения тележки
Механизм пере¬
движения моста
Механизм пово¬
рота0,580,730,7150,8550,930,1620,4550,430,710,86максiMpпри разгоне при торможении1,511,691,671,841,921,351,591.561,781.891,241,691,652,072,291,201,571,541,892,08максимальное усилие в переходных режимах определя¬
ется выражением/Игр(8-ЗЭ)/Лдв j~ ^ГрКоэффициент к зависит от соотношения между пе¬
риодом собственных колебаний системы Т и электроме¬
ханической постоянной времени привода Тм- Эта зависи¬
мость приведена па рис. 8-6, Период собственных коле¬
банийТ—JsKsfpiгде /экв '^дв/гр/(/дв"{“/гр) 5 /дв и /грмассам тдв и гпгр.(8-40),соответствуют7,S7,t0,6\\V •0,1 ■ Zif 0,6 !},$Рис. 8-6. -Зависимость коэффициента динамичности от
параметров электропривода и механизма.Электромеханическая постоянная времени
= (>^дв Ч" *^гр)(8-41)где Юх и Мнач угловая скорость идеального холостого
хода и' начальный момент двигателя в переходном ре¬
жиме.При TITm = 0 согласно рис. 8-6 ft—2.Так как механизмы передвижения и поворота об¬
ладают большим моментом инерции, то при выборе за¬
зоров в передачах могут иметь место значительные уда*
ры. Для устранения недопустимых ударов в механизме
необходимо, чтобы электропривод обеспечивал отдель¬
ную механическую характеристику с небольшим пуско¬
вым моментом.Распределение перегрузок вдоль кинематической це¬
пи механизма. Максимальные нагрузки в -отдельных
звеньях механизма уменьшаются с удаленней! от узлаприложения возмущающего усилия вследствие расхода
энергии на разгон (торможение) маховых масс отдель¬
ных звеньев и потерь в них. Относительный момент пе¬
регрузки - вдоль кинематической цепи отдельного звена
механизма можно рассчитать по выражению■>2Л^з&*=^ст.зв# 4" (Л1макс+—Л1ст.зв*)GDGD(8-42)где iWcT,3B* —,^какс.зв/Л1н; при¬веденный к валу двигателя маховой момент части систе>
мы (звена), следующей за валом, для которого опре¬
деляется перегрузка; GD\ — суммарный приведенный к
валу двигателя маховый момент системы.Таким образом, перегрузка, отнесенная к номиналь¬
ному моменту двигателя, падает вдоль кинематической
оси тем быстрее, чем меньше загрузка механизма. Пе¬
регрузка растет с увеличением момента, развиваемого
двигателем, и зависит от распределения приведенных
маховых масс по звеньям механизмов, В тех случаях,
когда приняты значительные рабочие скорости, массы
перемещаемого груза и тележки играют существенную
роль в общем бала^юе кинематической энергии, и умень¬
шение кратности перегрузки момента вдоль кинемати¬
ческой оси незначительно, поэтому опасность поломки
при пуске будет не только на первой зубчатой переда¬
че, но и на последующих. При малых рабочих скоро¬
стях и больших передаточных отношениях влияние пе¬
ремещаемого груза и тележки по сравнению с момен¬
том инерции ротора незначительно.Раскачивание груза. В процессе пуска и торможе¬
ния механизмов передвижения и поворота кранов возни¬
кают колебания подвешенного на канате груза. Раска¬
чивание отрицательно сказывается на производительно¬
сти и других эксплуатационных показателях крановых
устройств. В тех случаях, когда время разгона привода
значительно меньше периода колебаний груза, а момент
двигателя постоянен, то период колебаний определяет¬
ся зависимостью х,.T^2nV7Jg,(8-43)где I—высота подвеса груза.Обозначим через 1>нач и Окои — начальную и конеч¬
ную скорости точки подвеса. Максимальное отклонение
груза от вертикали соответствует переходу сразу на
большую скорость (инач=0):Д^макс = ^kou’ViJb'Минимальное отклонение имеет
“0,5Uko«!(8-44)
место при &нач=Л^-мин = 0,71 U|iOH(8-45}Таким образом, амплитуда раскачивания зависит в
основном от приращения скорости, и наиболее простым
способом ее уменьшения является снижение абсолют¬
ного значения скорости иди увеличение числа ступеней
разгона и торможения. Следует отметить, что на рас¬
качивание практически не влияет снижение пускового
или тормозного момента, так как время, в течение ко¬
торого происходит ускорение точки подвеса, в большин¬
стве случаев не может быть доведено до полупериода
раскачивания груза. Наиболее прЬстым способом га¬
шения раскачивания . груза в разомкнутых системах
управления является обеспечение приращения скорости
через интервал времени Г/2. Для этого процесс разгона
или торможения разбивается на четное число ступе¬
ней и на каждой ступени обеспечивается посредством
реле времени задержка, равная указанному интервалу.
182Статика, динамика и энергетика крановых электроприводов. Выбор двигателей[Рард. 8При таком способе к концу переходного режима про¬
цесс раскачивания ликвидируется. Однако, поскольку пе¬
риод колебаний зарвснт от_высоты точки подвеса, пол¬
ностью избежать раскачивания груза не удается. Кро¬
ме того, если уже раскачивание началось, то ликвиди¬
ровать его таким способом невозможно. В замкнутых
системах регулирования затухание процесса раскачива¬
ния груза достигается применением различных обратных
связей, однако необходимость специальных датчиков
значительно усложняет систему электропривода. Сле¬
дует также отметить, что раскачка приводит к коле¬
баниям нагрузки и к уееличецию потерь в электропри¬
воде,Рассмотренные факторы: перегрузка механизмов,
раскачивание груза, а также в некоторых случаях про-
скальзование колее определяют вышеприведенные огра'>
ничения на значения допустимых ускорений.8-2. энергетикаКРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
И их ПРОИЗВОДИТЕЛЬНОСТЬ.ОПТИМИЗАЦИЯ ПАРАМЕТРОВ
КРАНОВЫХ МЕХАНИЗМОВ
НА ОСНОВЕ УЧЕТА ПОТЕРЬ ЭНЕРГИИ
ПРИ РЕГУЛИРОВАНИИа) Потери энергии в крановых электроприводахОсобенностью энергетики крановых электроприво¬
дов является необходимость учета потерь ’ энергии, вы¬
деляемых в системе при пусках и торможениях, и со¬
ставляющих значительную долю в обшем балансе по¬
терь электропривода. Другой особенностью являются
повышенные в крановых двигателях по сравнению с
двигателями продолжительного режима постоянные по¬
тери.Потери Лсум, выделяемые в электроприводе, можцр
разделить на постоянные потери >4цост, переменные по--
тери, обусловленные разгоном и торможением маховых
масс Лд (динамические) и переменные потери, опре¬
деляемые статической нагрузкой и временем цикла Лс
(статические), т. е.Лцум “ Лцост + Лд "1~ Лс - (6-46)Рассмотрим, как определяются потерн для различ¬
ных крановых электроприводов.Крановые электроприводы переменного тока с пара¬
метрическим регулированием. Потерн экергии в рото¬
ре асинхронного двигателя за одни пуск под нагр1узкой
равны;GD^nl365Ms ds
М— Мст(8-47)илил-GD^ К
365 2СМ^г (s~Sc) ds365 J М —Мст9,55(8-48)При этом первая составляющая представляет собой
динамические потерн энергии Лдо при разгоне маховых
масс системы вхолостую до Пс‘, вторая — дополнитель¬
ные динамические потери из-за наличия статической на¬
грузки и третья составляющая —статические потери.В (8-47) и (8-48) ,5с — скольжеше двигателя, соот-
ветствуюшее статическому моменту на естественной ха¬
рактеристике. Сумма первой и второй составляющих
равна динамическим потерям в приводе за один пуск
и может быть представлена выражением ■GD2 «с ,\ ^ 3g5 2 (^ “ ^с) " (8^49)где Ад-V-отношение динамических потерь под нагрузкой
к динамическим потерям на холостом ходу. Значение
Ад зависит от механических характеристик привода н
момента статической нагрузки.Мощность потерь в меди статора ЛРэ1 асинхронной
машины связаны с потерями в роторе ДРаг соотноше¬
ниемгдеV = 4(i+2^(8-50)(8-51)^ijp коэффициент приведения потерь, который для ко¬
ротко замкнутых машин в системах параметрического
регулирования определяется только параметрами маши¬
ны, а для двигателей с фазным ротором соотношени¬
ями между сопротивлениями цепей ротора и статора
машины и, следовательно, механическими характери¬
стиками электропривода: /о и £)„—ток холостого хода
и диаметр круговой диаграммы асинхронного двигате¬
ля; ДЯэо — потери в обмотке статора от тока намагни¬
чивания, которые являются одной из составляющих по¬
стоянных потерь ДРпоот:пост ” Д-^ст “Ь Д'Рмех Д^доб Н” эо> (8-52)здесь Л^^ст, АРмех и ДРдоб — соответственно потери в
стали, механические и добавочные.‘Заменяя значения отдельных составляющих потерь
энергии в выражении (8-46), можно на основании соот¬
ношений (8-48), {8'49) и (8-51) написать следующую
зависимость для расчета суммарных потерь в электро¬
приводах с параметрическим регулированием асинхрон¬
ных двигателей в грузовом цикле;, ^ctSc^c ," 9,55 ир.ст ^ц+ Лдо(8-53)*д Апр.д»где и — соответственно время цикла и время ра¬
боты электропривода с различными моментами стати¬
ческой нагрузки Мст на отдельных участках грузового
цикла; Апр.от и Апр.д — коэффициенты приведения по¬
терь в статических и динамических режимах, соответ¬
ствующие моменту JWct; Ад—коэффициент динамичес¬
ких потерь, соответствующий моменту Met', е и г — от¬
носительная продолжительность включения и число
включений электропривода в грузовом цикле.Выражение (8-53) может быть приведено к видуЛу —эквивалентный момент+ (8-54)Гцв /статической на-где Мвкв.сг
грузки.Для электроприводов с многоскоростнымн двигате¬
лями при fn-ступенчатом пуске и торможении динами¬
ческие пестери значительно снижаются и определяются
следующим выражением:до2Ад.пх +/Псц — ПсЛA«oJi ^0 JЙД.П2
§8-2]Энергетика электроприводов. Оптимитция параметров крановых механизмов183/«с “ «с т-1т-1 “”с т~2^д.оо/ — пQс т—11^1 +«с+, , /Деа —«ОхУ,+*' ■' + ) -^д.т1\ /(S-55)где Пс, Пси Пс т~1—синхронные частоты вращения на
быстроходной и других обмотках двигателей; Ад.щ, ...Ад.п№-1, Йд.по, Ад.тга-ь ^B.Tl — коэффициенты ДИ-
намических потерь на соответствующих обмотках деИ'
гателя при пусках и тор.можениях.где \^dajdt — относительное ускорение поля двигате-
'ля; / — момент инерции привода, приведенный к валу
двигателя.Потери энергии в роторе двигателя в переходном
режиме составляют;л = ^в.,.„ , (8-57)365'макс «'максстгде Рмакс — параметр абсолютного скольжения, соответ¬
ствующий Мма«в по механическим ;характеристикам элек¬
тропривода; «рок и а«ач — значения конечной и началь¬
ной относительной ' частот питающего напряжения;
Лс.в — синхронная частота вращения, соответствующая<Xnt~LРис. 8-7. Зависимости коэффициентом динамических по¬
терь для электроприводов при параметрическом регули¬
ровании. асинхронный дриг^тель с короткозамкнутым ротчромг„ асинхронный двигатель с фазным pgjoppm.Для выполнения расчетов по (8-64) и (8-55) на
рис. 8-7 приведены зависимости k;^=f{Мсг/Мм^кс), пря¬
чем для асинхронных двигателей с короткозамкнутым
ротором Ммакс=Мк, а для асинхронных двигателей с
фазным ротором за Ммакс следует принимать макси¬
мальный момент пусковой или тормозной диаграмм пе¬
реходного режима.Значение Адр.ст, для короткозамкнутых машин рас¬
считывается по параметрам схемы замещения в соответ¬
ствии с (8-51), так же рассчитываются значения Апр.рт
для двигателей с фазным ротором. Однако вместо г2
следует принимать J?2 ^ учетом регулировочных сопро¬
тивлений в цепях ротора. Значения коэффициента Ацр.д
определяются сопротивлениями в роторе в пускотор¬
мозных режимах и, следовательно, механическими х'а*
рактеристиками электропривода, являясь функцией мак¬
симального момента и числа пускртормозных ступе¬
ней. Значения <^пр.д/йпр,ст=/(М„акс) при различном чи¬
сле ступеней приведены на рис. 8-8.Частотно-регулируемые электроприводь1. При ча¬
стотном регулировании для механизмов с постоянным
моментом статической нагрузки (к каким относятся кра¬
новые механизмы) в переходвых режимах оптимальным
является управление с поддержанием постоянного аб¬
солютного скольжения. Момент двигателя при таком
управлении постоянен, он меньше, чем удвоенный мо¬
мент статической нагрузки, а частота вращения, часто¬
та и напряжение питания изменяются во времени по
линейному закону. Момент двигателя в переходном
режиме при этом равен:= + (8-56)Рис, 8-8. Зависимости йпр.д/Алр.с для электроприводов с
асинхронными двигателями с фазным ротором.Как и при параметрическом регулировании, потери
в роторе двигателя в переходном режиме могут быть
разделены на потери динамических режимоэ (разгона
или торможения маховых масс) системы:CD у (а,адр <*нач) о^ зббТй(8-58)и статические потери за время переходного режима; Лс Мст Эст ’ (8-59)^ст.пер9,55Выражение (8-58) при Ад = 1 определяет потери в
роторе двигателя при его разгоне или торможении без
нагрузки с постоянным и равным по значению номиналь¬
ному динамическим моментом. Коэффициент Ад опреде¬
ляет дополнительные динамические потери из-за наличия
статической нагрузки и может быть рассчитан по выра¬
жению_ (Рмакс/^н) (Рст/Рн) (g-бО)^ Л^макс* -Мстц:которое можно представить в виде, ^ . •^СТ*«д — ЛмаксМ.(8-61)где Ямэ-кс =-Ломакс/Л1н>Графически выражение (8-61) показано на рис. 8-9.
Расчет суммарных потерь за цикл в системе частот¬
ного регулирования выполняется по формуле, аналогич¬
ной (8-54):I ^ЭКВ.СТ Рэкв ^С.н , I9:55''^ ЙПР.ЭКВТ-ЛР.t-n Ё8,(8-62)при этом коэффициент определяется в соответствии
с.(8-51).
мf^aruKa, динамика и штергеткл краносых SAextponpueodoe. ^ыбор двигателей8Термин «постоянные потери» для частотно-регули¬
руемых двигателей означает, что эти потерн не зависят
от нагрузки, однако они не являются постоянными в
прямом смысле, поскольку меняется частота нитающего
Напряжения и, кроме того, при оптимальном управлении0,5 /.<7Рис. 8-9. Зависимость ко¬
эффициентом динамиче*
ских потерь для асин¬
хронных двигателей в си¬
стеме частотного регули¬
рования.производится регулирование потока. Мощность потерь в
стали при частотном регулировании рассчитывается по
выражениюМпс.п *ст
^Рст 7-Р +(8-63Jгде постоянный коэффициент потерь в стали.Электроприводы постоянного тока. Потери в элект¬
роприводе постоянного тока в переходном режиме опре*
деляются выражением®кон*»2liм1 f (м*. cfw*(8-64)нач*где ©нач., Окон* — начальная и конечные относительные
скорости разгона (тсфможения) электродвигателя; М* —
=Ж/Л?н, Л1с1.—Мс/ЛГв, О).—<o/wb, ЦМ*, (О*)—функция,
обратно пропорциональная потоку машины при задан¬
ных значениях момента, скорости и известной схеме
подключении, двигателя; — эквивалентное активное
сопротивление, зависит от схемы электропривода. При
управлении от преобразователя Нжш равно сумме внут¬
ренних сопротивлений двигателя и источника питания.Как и для электроприводов переменного тока, поте¬
ри переходных режимов могут быть разделены на дина¬
мические потери разгона маховых масс системы и стати¬
ческую составляющую потерь. При этом динамические
потери определяются выражением/2А '= Т г R Ь
‘‘м^н^экв^д»(8-65)/1/%иУгУ///гУ0,6,///L-^3//А///’ к 11 R/г—/и/;кff С/N>1=^7Лв?-U6 1 -7,2 1 I 11,вРис; 8-10. Зависимость коэффициентов динамических
потерь для электроприводов постоянного тока. — разгон; хорможеине.а потери, вызванные статической нагрузкой в грузовом
цикле, Щ)гут быть рассчитаны следующим образом:'^СТ ^ ^B^SKB.C» ^экв.ст* ^экв.ст (8-66)где Макв.ст* эквивалентный момент статической наг¬
рузки; /aKB.cf (Af.to.) соответствует Мэкв.ст*; /?вкв.ст —
сопротивление ва характеристике статического режима.Коэффициент зависит от момента нагрузки, фор¬
мы механических характеристик электропривода и пре¬
делов изменения скорости. Графики зависимостей йд=з
~f(Aco*, Л1от*) для различных состояний электроприво-
да, рассчитанные по типовым механическим характери¬
стикам, приведены на рис. 8-10,Общие потери определяются зависимостью (S-46),б) Эквивалентный к. п. д. крановых электроприводо»Энергетические свойства кранового электропривода
характеризуются эквивалентным к. п. д. т^акв, определяе-
мым как отношение полезной, работы перемещения гру¬
за к потребляемой,электроприводом энергии за цикл или
з4 определенный промежуток времени.При условии полного использования двигателя и
при выборе в качестве расчетного промежутка времени
1 ч т)эка определяется выражением„ — 3600е,|Рдв.нгде Рдв.н — номинальная мощность двигателя при номи¬
нальной относительной продолжительности включения
2а: —суммарные потери энергии в электроприводе.Путем расчета отдельных составляющих потерь в
статике, динамике и при регулировании в соответствии с
методами, рассмотренными в предыдущем разделе, и при
условии, что относительная продолжительность включе¬
ния кранового механизма ео соответствует указанному
выше значению ен двигателя при расчете составляющей
постоянных потерь, выражение для г^акв преобразовыва¬
ется к виду‘Пэкв = 1/(я + 6г); (8-68)здесь а = ]/т)эка.с — относительные потери (по отношению
к Рд.дв) В статических режимах при номинальных скоро¬
стях и регулировании, определяемые эквивалентной на¬
грузкой двигателя и соотношениями между продолжи¬
тельностями включения: общей во и при регулировании
8р; Т1ЭИВ.6 — к. п, д. привода при числе включений 2=0;
Ьг — относительные потери в системе в пускотормозных
режимах; г — число включений в час.^ Для а к Ь справедливы следующие соотношенияз« = 1+<?ер/8„ + т(1 — бр/ен); (8-6 9‘)г? = (А —т^д)/3б00ен, (8-70)где т и (7 — соответственно отношение мощности потерь
в электроприводе в режимах номинальных скоростей и
регулирования к номинальной мощности двигателя, учи¬
тывающие эквивалентную нагрузку привода; k — экви¬
валентный коэффициент потерь в системе при пусках и
торможениях, отнесенный к одному включению,
время пускотормозных режимов, приведенное к одному
включению.Согласно (8-6^) т)экв не зависит от продолжительно¬
сти включения привода ео, что является следствием при¬
нятого выше допущения равенства ео = еп при учете со*
ставляющей постоянных потерь. В общем случае указан¬
ное равенство не выполняется. Тем самым г)экв не учиты¬
вает зависимость постоянных потерь от продолжитель¬
ности включении; действительное значение г|акв ниже
расчетной при ео>-ен и выше при еоСен. Это необходи¬
мо иметь в виду при расчетах с использованием 1]аив
S S-2\Энергетика электроприводов. Оптимизация параметров крановых механизмовт(см. § 8-3). Эквивалентный к. п. д. зависит от вр в слу¬
чае неравенства потерь при регулировании потерям на
естественных характеристиках привода дфт. Зависи¬
мость т^экв от 8р представляет собой прямую линию, на!^-
лон которой определяется соотношением между указан-бао доо woo 1Z00 тоGDIl,2GDЛв•)ДЛЯ различныхРис, 8-П.,Графики т^экв—?электроприводов. ,J — с двухскоростными короткозамкнутыми двигателями ' при
гр=-=4/24; 2 —с параметрическим регулированием двигателей
с фазным ротором при наличии торможения протавовключени-
ем; 3—с трекскоростными короткозамкнутыми двигателями при
2р~4/8/24; 4 —с параметрическим регулированием двигателей
с фазным ротором при динамическом торможении; с парамет¬
рическим регулированием двигателей постоянного тока; с одно-
скоростными короткозамкнутыми двигателями при 5 —стрЁхскоростными короткозамкнутыми двигателями при
—6/12/24; в —с регулированием двухскоростных короткозамкну*
тых двигателей при наличии зоны частотного регулирования
для 2;^=4/6: 7 — с тиристорным электроприводом постоянного
тока; в>^с частотным регулированием односкоростными корот<
козамкнутыми двигателями.ными потерями. При равействе указанных потерь q=m
и не зависит от Вр. Значения а и й, а следовательно,
и т]энв полностью определяются структурой кранового
электропривода и применяемыми при этом методами ре¬
гулирования. Зависимости к^акв от числа включений и
приведенных к валу двигателя маховых масс систем
/ GDI 'Лэкв — f\^,2 GDIпри базовом значениида /8р==0,05 для основных типов применяемых крановых си¬
стем электропривода приведены на рис. 8-11.Характеризуя потери в электроприводе, эквивалент¬
ный к. п. д. позволяет дать количественную оценку энер¬
гетических свойств крановых электроприводов. Зависи-/ GDV ^мости TlaKB = /\l.2eDljпоказывают:1. Эквивалентный к. п. д. наиболее массовых элект¬
роприводов с параметрическим регулированием сопро¬
тивления в цепи ротора асинхронных двигателей с фаз¬
ным ротором и тормозными режимами противовключе-
ния находится на весьма низком уровне, составляя 60—
65% для режима работы С (режимы работы см. § 8-3)
и снижаясь до 45—55% для систем режима работы Т.2. Улучшения энергетических свойств электроприво¬
дов с параметрическим регулированием можно добитьсяформированием тормозных режимов при использовании
регулируемого динамического торможения, что позволяет
увеличить эквивалентный к.п.д. на 10—12%.3. Наиболее высокие энергетйческие показатели име¬
ют системы с преобразователями энергии и особен^ю ча-
стотно-регулируемые электроприводы с односкоростными
асинхронными двигателями с короткозамкнутым рото¬
ром. Благодаря оптимальному регулированию в статиче¬
ских и динамических режимах и сниженик^ маховых
масс приводного двигателя такие системы имеют к. п. д.
0,9—0,85 во всех практически используемых режимах
кранового электропривода.Эквивалентный к., п. д. кранового электропривода на¬
ряду с обеспечиваемой им производительностью меха¬
низма является основным показателем эффективности
использования крановых систем.в) производительность крановых механизмов.
Определение параметров крановых механизмов
на основе оптимизации знергетических
и регулировочных свойств электроприводаПроизводительность кранового механизма опреде¬
ляется максимально возможным числом операций, вы¬
полняемых механизмом в единицу времени. Производи¬
тельность принято выражать числом циклов в час. При
заданной технологии выполнения грузовых работ и из¬
вестной траектории перемещения груза число циклов в
час полностью определяется средней скоростью v^p пе¬
ремещения груза и равно;~г *паузгде L — длина пути, проходимого крюком за цикл;
We —время пауз.Средняя скорость зависит от ряда параметров, ос¬
новными Из которых являются максимальная скорост‘ь
механизма (номинальная скорость), плавность регули¬
рования (число промежуточных скоростей), длитель¬
ность протекания переходных режимов и число включе¬
ний привода за цикл, а также время работы привода на
промежуточных скоростях, В свою очередь число вклю¬
чений привода в цикле гц до полной скорости также
определяется технологическими факторами и регулиро¬
вочными свойствами электропривода, диапазоном и
плавностью 'регулирования, жесткостью механических
характеристик.Таким образом, при известной технологии отношение
средней скорости перемещения к номинальной является
показателем регулировочных свойств электропривода.
Расчет значений гц и Уср может быть выполнен по эмпи¬
рическим формулам, полученным на основании обработ¬
ки статистических данных работы крановых механизмов.
Число пусков/ 3 —2,8% —60V-V VnОн++1+0,02^^^°Онсредняя скоростьt/cp = — «яkj 3t>HН1-0,25]/\ V Д у Ат /(8-72)(8-73)где Ду/Ун — максимальный относительный перепад ско¬
рости между двумя соседними механическими характери¬
стиками электропривода (показатель статической плав-
186Сгатака, динамика и энергетика крановых SAeKfponpueodoe. Выбор двигателей[Разд. 8ности регулирования); Н — путь перемещения груза в
составе грузовой траектории; г* — число технологиче¬
ских включений привода в цикле; третий член в формуле
(8-72) определяет число включений привода в процессе
доводочных операций, пересчитанное по эквивалентному
времени переходных режимов к включению до полной
скорости; р —жесткость доводочной механической ха¬
рактеристики, — длительность протекания пере-мощности электропривода. Умножив обе части (8-74) на
номинальную грузоподъемность для механизма подъема
или на статическую нагрузку Qct.h для механизма пере¬
движения, получим:Рпол — f ст.н)»1'Д® -^пол ~ 'Пзкв Уср Ост.н; Рст.н ^ Qct.h-(8-75)н/мцнРис. 8-12. Зависимости VcT,!vn=f{VB),1 — контакторно-контроллерные системы параметрического ре¬
гулирования при торможении протйвовключёнием: 2 — системы
с трехскоростнымн двигателями; 3 — контакторно-контроллерные
системы параметрического регулирования при динамическом
торможении; 4 — системы с двухскоростньши двигателями и
частотным регулированием скорости в зове до 5 —фазо-импульсное регулирование; 6 — тиристорные электроприво¬
ды постоянного тока и асинхронные с частотным управЯеннем.Рис. 8-13. Зависимости Pnofl=f(Яств)-/ — контакторнО-контроллеряый системы параметрического ре¬
гулирования при тормо№^!к«и противовклгочеиием; 2 —системы
с трехскоростнымн Дйягателями-; 3 — контакторно-контроллерные
системы параметрического регулирования при дииамиЧескйм
торможении; 4—фазовое регулирование; 5 — импульсное регу¬
лирование; 5 —CHcteMH с двухскоросткыми двигателями и ча¬
стотным регулированием скорости в зоне до 0,4Яцц^,; 7—алект-
ропрнвод йостояиного тока с ТП; 5 —частотное регулирование
односксростными короткозамкнутыми двигателями.ходных режимов, приведенная к одному . включению;
kr — коэффициент, характеризуемый технологическими
особенностями выполнения грузовых операций."На рис. 8-12 приведены графики Уср/^в^Поя)» рас¬
считанные для производительных крановых перегрузоч¬
ных механизмов. Эти зависимости наглядно иллюстри¬
руют влияние регулировочных свойств системы электро¬
привода на практически реализуемые скоростные - пара¬
метры кранового механизма. Чем хуже регулировочные
свойства электропривода, тем большим является влияние
переходных режимов на время грузового цикла из-за
увеличения числа включений. Вследствие этого рост
Производительности с увеличением скорости механизма
замедляется. В то же время пропорционально скорости
увеличиваются мощность и маховой момент двигателя.
Увеличение момента инерции и общее увеличение чисгла
включений ведет к резкому повышению динамических по¬
терь в системе, поэтому показателем эффективности кра¬
новых электроприводов является обеспечение максимума
производительности при Минимальных затратах энергии.
Такая постановка задачи приводит к определению мак¬
симума функциональных зависимостей^^Т1экв — / {%) »(8-74)которые могут быть рассчитаны совместным решением
(8-68) для-Панв и (8-71) ~ (8-73) для числа циклов,
средней скорости и числа включений.Вопрос выбора оптимальных по критерию' макси¬
мальной эффективности скоростей крановых механизмов
рассматривался в разд. 1, где на рис. 1-1 приведены гра¬
фические зависимости, рассчитанные в соответствии с
изложенными методами по (8-74). Определение опти¬
мальных параметров крановых механизмов можно рас¬
смотреть также с позиций реализации установленнойВ результате оптимальная с точки зрения получений
максимальной производительности при минимальных по¬
терях энергии скорость грузового механизма определит¬
ся по значению установочной мощности электропривода,
при которой реализуемая, мощность достигает мак¬
симума.Зависимости Рпол=/(Рст.н), рассчитанные для кра¬
новых перегрузочных механизмов с различными систе¬
мами электропривода^ приведены на рис. 8-13.Характеристики Рпол~? (^^ст.н) могут рассматри¬
ваться как обобщенный критерий сравнения крановых
электроприводов при их выборе для конкретных типов
крановых механизмов. Эти характеристики показывают,
что увеличение эффективности использования крановых
систем возможно только на основе улучшения энергети¬
ческих и регулировочных свойств электроприводов.8-3. ВЫБОР КРАНОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ.
определение ПАРАМЕТРОВ
ЭЛЕКТРОПРИВОДОВа)/Режимы работы крановых электроприводовДля подавляющего большинства крановых механиз¬
мов условия работы не могут быть заранее заданы. Ус¬
ловия, определяющие выбор всех элементов конструкции
крана, в том числе й его электрооборудования, объеди¬
няются понятием: режима, работы. В это понятие входкт;
полная продолжительность включения, продолжитель¬
ность включения при регулировании, число пусков, коэф¬
фициент усредненной статической нагрузки, а также
такие показатели, как годовое и суточное использование
крана, степень его ответственности, температурные усло¬
вия эксплуатации и другвд параметры. Все многообра¬
зие режимов работы крановых механизмов - сводится к
^8-3]Выбор крановых электродвигателей. . Определение параметров aneKfponpueodoe187Пяти режимам: к легкому — Л, среднему — С, тяжело¬
му—Т, весьма тяжелому — ВТ и особо тяжелому —ОТ
(см. разд. 1).Одйако не все из вышеперечисленных параметров в
равной мере определяют выбор крайовог'о элeкfpooбopy-
дования: одни из них должны непосредственно учиты¬
ваться в расчетах, другие необходимо учитывать лишь
при определении соответствующих запасов прочности.
Более того, не все из параметров, непосредственно опре¬
деляющих расчет конструктивных узлов крана, в равной
степени относятся к расчету его электропривода. Для
расчета кранового электрооборудования исходными яв-*
ляются следующие параметры:Полная .относительная продолжительность "включе¬
ния электропривода во, определяемая как отношение
времени включения электропривода ко всему временй'
рабочего цикла: ^^0 ” ^вкл/^ц ~ ПВд/ЮО; ’ (8-76)относительная продолжительность включения при регу¬
лировании8р = /р//ц = ПВр/100. (8-77)Эквивалентное за единицу времени (час) число г
включений двигателя определяется как число включений
электродвигателя до полной скорости, эквивалентное по
нагреву реальному числу включений под нагрузкой
Л1ст.экв=^эквМст.н, где коэффициент эквивалентной ста¬
тической нагрузки йэив представляет собой отношение
среднеэквнвалентного момента статической нагрузки к
номинальному.Значения указанных параметров, нормализованные
в соответствии с разделением режимов работы по дей¬
ствующим нормативным документам, а также опреде¬
ляемые ими расчетные коэффициенты, необходимые для
выбора исполнительного двигателя, приводятся в
§ 8-3, б.Основой выбора режима работы крана- и его элект¬
рооборудования является квалифицированный, базирую¬
щийся на вероятностно-статистических данных учет всех
особенностей эксплуатации отдельных групп крановых
механизмов,и их назначения в общем технологическом
процессе производства.Отнесение электрооборудования крана к тому , или
иному режиму работы является исходным при расчете
всех элементов кранового электропривода, а соответст¬
вие указанного режима фактическому — непременное
условие надежной работы крана. Последующей задачей
является расчет и выбор электрооборудования по ожи¬
даемому режиму работы.б) Выбор двигателей крановых механизмов
по методу завода «Динамо»При выборе двигателей для крановых электроприво¬
дов наиболее сложным является расч^'г их мощности по
условиям теплового режима. Вследствие неопределенно¬
сти режима работы специфические особенности крано¬
вых машин, как машин закрытого исполнения, характе¬
ризуемых повышенными постоянными потерями и изме¬
нением условий вентиляции при регулировании, приво¬
дят к большим погрешностям при расчете теплового ре¬
жима двигателя по общепринятым методам эквивалент¬
ного тока или момента. Эти методы являются достовер¬
ными только тогда, когда фактическая продолжитель¬
ность включения равна номинальной,, а число включений
и энергия постоянных потерь в цикле соответствует но¬
минальным расчетным параметрам. Постоянные потери
непосредственно определяются продолжительностью
включения, и их учет особенно важен, для закрытых не^
обдуваемых машин, поскольку для вентилируемых ма¬
шин при увеличении продолжительности включения од¬новременно с pDCtoM йостоянных trorepb улучшаются ус¬
ловия охлаждения. Анализ данных Закрытых необдувае-
мых электродвигателей показывает, что при увеличении
продолжительности включения в 2 раза по отношению
к номинальной (40%) мощность машины сникается в
2,5—5 раз, тогда как расчет по среднеквадрат^ному
току показывает снижение мощности tO^bKo в раза.Ниже излагается разработанный на заводе «Дина¬
мо» метод выбора мощности крановых электродвигате¬
лей, учитывающий, с одной стороны, параметры режима
работы крановых систем, а с другой — энергетические
свойства конкретных систем регулирования [66]. Пос¬
леднее очень важно в связи с широким применением
новых типов крановых электроприводов, имеющих суще¬
ственно отличные от традиционных энергетические пока¬
затели.В основе метода лежит использование эквивалентно¬
го к. п. д., являющегося, как показано ранее, показателем
энергетических свойств системы регулирования и опре¬
деляющего потери энергии в электроприводе. Графики/ ЛГ.2 \зависимостей Лэкв = f\рис. 8-11. при значениях z\,2QD%,.2GDi\,2GDприведены набольшеДВуказанных при построении графиков Т1экв рассчитывается
по формуле’laKB.e1-F(^экв.б ^экв)(6-78)ДВПоскольку при параметрическом регулирований эк¬
вивалентный к. п. д. определяет динамические потери
энергии не Только в двигателе, но и в пускорегулирую¬
щих сопротивлениях и, кроме того^ значение к. п. д. оп¬
ределяется при базисных значениях относительных про¬
должительностей включения—полной 8о = 8н и при ре¬
гулировании 8р, То расчетная формула выбора двигате¬
лей должна учитывать указанные факторы. Наиболее
сложной задачей является учет изменения соотношений
между постоянными и переменными потерями и условий
вентиляции при еофвв. Ее решение в общем случае не
представляется возможным, так как указанные факторы
зависят не только от параметров режима работы, но и
от конструктийных особенностей двигателей. Поэтому их
учет целесообразно осуществлять посредством экспери¬
ментально полученных зависимостей коэффициента ко,
определяющего изменение Допустимой мощности потерь
в функции фактической продолжительности включения
Go. Зависимости ко~!{во) приведены на рис. 8-14.Для электродвигателей постоянного тока необходи¬
мо учесть также зависимость постоянных потерь двига¬
теля от питающего напряжения в системах управления с
преобразователями. Эта зависимость в соответствии с
экспериментальными данными может быть учтена посред-ством коэффициента ku —•' (/я(1+во/*н)Степень влияния динамических потерь на нагрев ма¬
шины учитывается коэффициентом кд,.ц- Значения k^.n
могут быть найдены по отношению пусковой и номиналь¬
ной мощностей и составляют йд.п = 4 для систем с мно¬
госкоростными двигателями и йд.п —1,25 для остальных
типов электроприводов.Несоответствие базового значения продолжительно¬
сти .включения при регулировании 8р.б и действительно-
шСтагака, динамика и энергетика крановых влектроприводов. Выбор двигателей[Разд. 8го 8р- достаточно просто учитывается коэффициентом кр,
рассчитываемым по формулеЯр — Яп
Ян(Sp — вр.р).(8-79)где <7н и соответственно мощности потерь в номи¬
нальном режиме и при регулировании (см. § 8-2,^).Рис. 8-14. Зависимости &о=/(8о) для различных кра¬
новых двигателей.7 ~ невентилнруемые; 2 —для двигателей постоянного тока; 3 —
вентилируемые тихоходные; 4 — вентилируемые быстроходные
(серии MTF и МТН); 5— вентилируемые быстроходные (серия
ШкП).В случае равенства потерь Яр—Яа йр=1.,При нера-
венстве потерь в практических расчетах коэффициент kp ,
можно рассчитать по выражению • ,^р = 1-1,2(8р-ер.б). (8^80)С учетом вышеуказанного расчетная формула для
определения мощности кранового двигателя по усло¬
виям теплового режима имеет вид:^ЭКВ ^3 "Пэкв-б V 4i^nknP с.^ЭКВ.б ^Д.П (^ЭКВ.б 'Чэкв)]где определен выше для электроприводов пЬстрянно-
го тока и равен единице для электроприводов перемен¬ного тока; йз= 1-7-1,35--коэффициент, учитывающий за¬
кладываемый запас при проектировании электропривода
и определяемый требованиями к его надежности.В табл. 8-3 приведены входящие в (8-81) значения
параметров ео, Аэкв, ер, ёв и эквивалентного по теплово¬му режиму числа включений г'=2GDi1,2GDнормализо-Двванные в соответствии с принятым разделением режи¬
мов работы по степени напряженности. Заменяя множи¬
тель при Рст.н в (8-81) коэффициентом кт, получаем вы¬
ражение для определения мощности двигателя в виде^н.т ^ ^ст,н/^т* (8-82)По нормализованным параметрам режимов и зави¬
симостям (8-81) и (8-82) рассчитаны и приведены в
табл. 8-4 значения коэффициентов определяющих вы¬
бор двигателей по тепловому режиму для всех практиче¬
ски применяемых систем электропривода. Коэффициенты
kt приведены отдельно для механизмов подъема и пере-GDiдвижения со значениями< 2 И 5 соответст¬венно и механизмов передвижения со зйачениями
G£>| V>5.I.20DI,Выбранный двигатель должен быть проверен по ус¬
ловиям обеспечения надежного пуска. Таким образом,
выб{ф двигателя можно разделить на три этапа. На пер¬
вом этапе производится предварительный выбор двига¬
теля по (8-82) для принятой системы электропривода и
известного режима работы. Исходными данными при
этом являются значения статической мощности н пара¬
метры режима работы, определяющие по табл. 8-4 зна¬
чения коэффициента кт. На втором этапе выбранный
двигатель проверяют по (8-81), Входящие в указанную
^тормулу коэффициенты определяются параметрами ре¬
жима работы и выбранной системой, электропривода, а
■Пакв рассчитывается по (8-78). Наконец, проиаводится
проверка выбранного дго1гателя на обеспечение пусково¬
го режима по зависимости•Ломакс ^ ^з.м (^ст.макс 4“ Л1д),(8-83)где ЛТст.макс — максимально возможный момент стати¬
ческой нагрузки, приведенный к валу двигателя; Мд
динамический момент, определяемый из условия обеспе¬
чения необходимого ускорения; М макс максимально
допустимый момент двигателя; йз.м—коэффициент запа¬
са по моменту; Аз.м= I,l-j-l,2., ТаЬ’ляца 8-3Значения расчетных коэффициентов в зависимости-от предполагаемого режима работы и маховых uaicc'механизмовПараметры режимов работы для механизмовРежимыработыподъема при GD|,yi,2 передвижения и поворота
GD%h,2 GD‘^ < 5передвижения и поворота при GD^ j\ 2 GD'L>Sдв«о^экв®Рh2f*8о*'экв^3Z*Л0,250,60.51да0.260,60,051900С0,400,750,07511500,400.750,07511500Т0.400,750,11300—6000,400,750,113000—45€0ВТ0.600,80.1251,15—1,25600-12000,600,80,1251,15—1,254500—6000ОТ>0,600,90,151,3—1,35600—1200. >0,600.90,1251.3—1,354500—S000
§8^3]Выбор крановых электродвигателей. Определение параметров. электроприводов189Значения коэффициентов к- для выбора двигателей различных систем электроприводаТаблица ^4Наименование’^экв.б*Д.пПодъем при GDy 1,2 < 2jпередвижение я Поворот приCD% /1,2 GD^ <5 для режимов
JU/ Двл I с I т 1ВТотПередвижение и поворот при
GD^j\,2 для режимовВТОТ'Двухскоростной двигатель при 2р“4/24
Трехскоростной двигатель при 2р“4®24
Одиоскоростной двигатель при 2 р—б
Трехскоростной двигатель при 2 р=6/12/24
Двигатель с фезным ротором при тормо¬
жении противовключением
Двигатель с фазным ротором при динами¬
ческом торможенииДвухскоростной двигатель при 2 р=4/6 с
неполной зоной частотного регулирования
Односкоростной двигатель в системе ча¬
стотного регулирования
Тиригторный алектропривод постоянного
токаЭлектропривод постоянного тока с пара
метрическим регулированием0,830,830,830,810,760,810.90,940,940,8144 .441.251.251.251.251.251.250.71.3
1,351.41.451.5
1,41.45
220,9511.11,21.3
1.151.31.3
1,250,550,650,750,96*.111»1б1,151,10,20,30.50,750,9ОД1.050,850.80.450.550,460.70,50,450,20.250.750.90.55IjlS1*41.250,650.850,21.110,850,350,50,85
0,75 ,
0,50,20,30,70,50.30,10,20,450,30,15Если предварительно выбранный двигатель не удов¬
летворяет условияк (8-81) или (8-83), следует принять
двигатель большей мощности и проводить повторную
проверку правильности его выбора.в) примеры расчета - ; ч 'Для мостового крана типа 8ВТ-М режима работы ВТ вы¬
брать двигатели механизмов подъема и передвижения моста.
На кране применен электропривод с параметрическим регулиро¬
ванием сопротивления ротора асинхронного двигателя с фазным
ротором и торможением противовключением.1. Выбор двигателя механизма подъема. Данные механиз¬
ма: грузоподъемность 8000 кг. масса подвески 230 кг, скорость
подъема 16,8 м/мин. максимальнай статическая мощность при
подъеме груза Р^^‘=27 кВт, число включений z=400 вкл/ч, ча¬
стота вращения вала двигателя 700—750 об/мин, маховой момент
механизма и груза, приведенный к валу двигателя, 2,1 кг•м^
ускорение груза 0=1.5 м/с*.В соответствии с исходными данными по режиму работы
и принятой системой электропривода из табл. 8-4 находим зна¬
чение коэффициента ft,j,”0,75. Мощность для предварительного
выбора двигателя составляет согласно формуле (8-82)^н.т > ‘^ст''*т = 2*- ^Выбираем двигатель МТН 512-8, имеющий Яи“37ПБ„ = 40%;кВт:‘дв.н705 об/мин; =4,3 кг-м».ДВПроверка двигателя на обеспечение теплового режима про*
изводится по (8-81). При этом согласно табл. 8-3 8о“0,6: =oKd“0.8; 8p=0.125i значение Лдкв.б-®^” принятой систе¬мы регулирования (см. табл. 8-4) составляет 0.76.Эквивалентный к. п. д. определяем по графику на рис. 8-11при-1*CDt1 ,2G£)2
ДВ. = 4004,3+ 2.1
1,2-4,3Коэффициент йо-1Л2 при So =-0,6 согласно рис. 8-14; kp
находим по (8-80)А-р = ! — 1,2 (0,125 — 0,05) ^ 0.91,Согласно <8-81) имеем:0,8.1,15-0,76 Уо.6/0.4-1•27 36,9 кВт.0,91.1,12 10,76—1,25 (0,76 — 0,64))Условие выбора двигателя по тепловому режиму выпол¬
няется.Проверим двигатель по условиям обеспечения пуска (8-83):МмаксЭ5.5-28.73 4,3+ 2,170638.2705-6018.81,5| = 1169 Н-м.По катядюгу следовательно, двигательудовлетворяет условиям пуска.2. Выбор двигателя механизма передвижения моста. Дан¬
ные механизма: Р^,^*-5,79 кВт; z«-300 вкл/ч; 0“133 м/мин; л™-900 4-930 об/мин; GD^^^-32,3 кг-м*; а=0.6 м/с^Коэффициент в соответствии с данными табл, 8-4 ра¬
вен 0,3. Тогда мощность для предварительного выбора двига^*
теляРд^ = 5.79/0,3 = 19,3 кВт.Выбирается двигатель МТН 4П-6, имеющий данные:«22 кВт при ПВд-40%; Идв.н“9б0 об/мин; OD^^'^2 кг’М*.Проверяем двигатель на обеспечение теплового режима по
(8-81>. При этом согласно табл. 8-3 8в=0,6; -0,8; feg--1,15;
%кв.б *“0,76; Е р—0,125; fep —0,91. Согласно рис. 8-14 *о-1Д2.
По графику рис. 8-11 и формуле (8-78) при1,2Gd2ДВ30032,3 + 2
1,2-24288 определяем%RB "*0,285. Тогда [см, (8-81)1
< „ 0,8.1.15-0,76 1^0,б/0,40.91-1,12 [0,76 - 1.2S (0,76 — 0,285)]
= 29,4 кВт > Pjj..5.79 =Выбранный двигатель по тепловому режиму не проходит.
Выбираем двигатель следующей величины МТН 412-6, име¬
ющий данные: ^*^30 кВт при 03^ “40%; об/мин;00^_’2,7 кг-м».ДвПри этом г ■0£)|1»2Gd2ДВ1,2.2,70.32;0,8-1.15-0,76 >^0.6/0,4ДВ.Я.Т 0,91.1.12 10,76 — 1,25 (0,76--0,32) j
= 23.4 кВт.■5.79:Двигатель обеЬяечивает условия теплового режима, Про*
веряем двигатель на обеспечение пуска. о/' ®5,5-5,79 . , 32,3 + 2.7 965-60^ 1,2 I ■- Т макс ^ 9g5 38 2 133= 360,6 Н-М,Vчто меньше максимального момента машины, т, е. двигатель
выбран правильно.
190Статика, динймика и энергетика крановых электроприводов. Выбор двигателей[Разд. 8г) Проверка выбора электродвигателей
механизмов передвижения на обеспечение запаса
по сцеплениюЭлектропривод механизмов перемещения должен
быть проверен по запасу сцепления при пуске и тор¬
можении для наиболее неблагоприятных условий ра¬
боты. В соответствии с данными выбранного по уело*
вирм теплового режима и пуска двигателя
определяется время пуска и торможения в предполо¬
жении линейного изменения скорости и без учета жест¬
кости подвеса:t^ =1.2(00^, + С0^,)п
38,2 (Л1д ± УИст) ^кр ^макс 0,105ftTl (Мд ± Мст) *(8.84)где Умакс — максимальная скорость механизма пере¬
движения; Т1 — к. п. д. механизма. Знак «—» относится
к пуску, —к торможению.При проверке запаса сцепления при пуске прове¬
ряется выполнение условияи ^пр (Щ) + /омии)\^ « i „ /аак\«сц.п — '~Ъ 11ГТ ^ (8-о5)^с.макс "Ггде Flip — нагрузка на приводные колеса; |Ло=0,12-?-
-7*0,15 — коэффициент сцепления ходового колеса с
рельсом; /омин — минимальное значение приведенного к
диаметру колеса коэффициента трения; Fc ,какс — макси¬
мальное усилие сопротивления при движении против
ветра и против уклона; — сила инерции массы Kpai-
на, Н:— ^кр^макс/^д- (8-86)Далее проверяется условие отсутствия буксова¬
ния при тормо^кении:*.ц.т = > 1.1 ^ 1,2. (8-87)■гд—/*с.мингде f с мин — минимальное усилие сопротивления при
движении механизмад) Некоторые частные случаи
проверки выбора двигателейМетоды проверки выбора двигателей на обеспе-
чение максимальной производительности^ В ряде слу¬
чаев работы крановых механизмов известна техноло¬
гия выполнения грузовых операций и можно рассчи¬
тать возможную по рабочим скоростям производитель¬
ность грузового устройства. Проверка выбранного
, двигателя при этом должна показать, что допустимая
производительность, определяемая потерями в двига¬
теле, больше возможной производительности во всех
предельных режимах работы кранового механизма.
Методы расчета возможной производительности рас¬
сматривались в § 8-2, в. Расчет допустимой производи¬
тельности осуществляется в следующей последователь¬
ности:1) определяется действительная продолжитель¬
ность включения электропривода^^пауз/3600, (8-88)где Мъвозможное число циклов в час, рассчитыва¬
емое по (8-71); ^пауэ —время пауз;2) в соответствии с приведенным в § 8-2 разделени¬
ем потерь вычисляются постоянные потери и потери,
вызванные эквивалентной статической нагрузкой(■Л QOO тЛ с 2о»3) находятся динамические потери Ад;4) рассчитываются допустимые для двигателя
потери при номинальной относительной продолжи¬
тельности включения бн с учетом условий вентиляцииЛо^дои8п,’5) определяется допустимое число циклов по
формулеN^О^ДОП ■^ст gftдоа —(8-89)Определение допустимого числа циклов электро¬
приводов с асинхронными короткозамкнутыми двига¬
телями, Учитывая,' что между потерями в меди ротора
и статора двигателей с короткозамкнутым ротором
существует прямая пропорциональность (см. 8-50),
можно более просто выполнять расчеты тепловых ре¬
жимов по цепи ротора.Допустимое число циклов при этом определяется
по формуле(Л^н — Л1э,4В,ст SsKB.CT^o) 25,8* 10® „«n^доп— ' "f ГГГТ'о(*,/2)СВ^л|4дгде Мэкв.ст и 5экв.ст — момент эквивалентной статичес¬
кой нагрузки и соответствующее ему скольжение;
ki —среднее число включений электропривода за один
цикл, определяемое по формулам § 8-2.Для электроприводов с многоскоростными асин¬
хронными двигателями необходимо учитывать сниже¬
ние динамичес1шх потерь при ступенчатом разгоне и
торможении двигателя в соответствии с (8-55).В практических расчетах при определении допусти¬
мой производительности электроприводов с трехскорост-
нымй двигателями можно использовать формулуN-ДОИ —^экв.от^экв.ст^о) 25,8» 10^(8-91)и для электроприводов с двухскоростными двигателями
(Л^я% 8н ^0 ““ Л^экв.ст ^экв.ст ®о) 25,8* 10®NдопПсПс(8-92)где Яс — синхронная частота вращения быстроходной
обмотки.Учет температуры окружающей среды а условий
высокогорья. Номинальная мощность двигателей нор¬
мируется для температуры окружающего воздуха
до 40° С- Если температура воздуха превышает 40° С,
то в приведенные выше расчетные формулы, определя¬
ющие выбор кранового двигателя, нужно ввести соот¬
ветствующую поправку, повышающую его мощность.
Точный расчет такой поправки сложен. В качестве
.приближенного решения заводом «Динамо» рекоменду¬
ется учитывать температуру окружающего воздуха,
увеличивая мощность выбираемого двигателя на 1%
при превышении температуры на ГС. Например, на
кранах металлургических предприятий рабочая темпе¬
ратура может достигать 70° С, при этом мощность дви¬
гателя следует увеличить на 30%.Учет условий высокогорья необходим для вентили¬
руемых машин. В соответствии с опытом эксплуата¬
ции можно рекомендовать учитывать условия высоко¬
горья путем снижения мощности двигателя на 10% на
S 9-1] Электроприводы с регулированием сопротивления в роторе асинхронных двигателей 191каждые 1000 м увеличения высоты над уровнем моря,
сверх первой тысячи. Работосиособность двигателей
при высоте 4000 м не гарантируется.Предельные нагрузки двигателей крановых тект-
роприводов. Максимально допустимая нагрузка кра¬
новых двигателей лимитируется рядом условий. Они
определяются как механическими свойствами двигате¬
лей, так и резким увеличением нагрева машин при зна¬
чительном превышении номинальных нагрузок. Пере¬
грузочные свойства двигателей переменного тока харак¬
теризуются критическим моментом с учетом возмож¬
ного снижения напряжения ритания, а для двигателей
постоянного тока — условиями коммутации- Быстрое
повышение температуры обмоток при перегрузках
объясняется двумя причинами: при нагрузках, близких
к максимальным, лотери в меди возрастают от момен¬
та в зависимости большей квадратичной; при кратко¬
временном выделении в обмотках большого количест¬
ва теплоты теплопередача от обмотки к стали сердеч¬
ника затруднена, что снижает постоянную времени
нагрева обмотки. Например, при номинальной нагрузке
температура обмоток статора и ротора машин переменно¬
го тока повышается со скоростью около 0,2'’ С/с, что
соответствует колебаниям температуры около 30° С втечение стандартного 10-минутного испытательного
цикла, а при нагрузке 0,8 максимальной нарастание
температуры обмоток увеличивается в 30 раз.В то же время кратковременные перегрузки незна¬
чительно сказываются на эквивалентной нагрузке.
Указанные обстоятельства могут иметь особенно сущест-
йенное значение при прямых пусках асинхронных ко-
, роткозамкнутых двигателей, развивающих максималь¬
ные моменты при каждом пуске.При больших маховых массах механизмов (GD| >
^20С1)дв) для перегрева обмоток могут быть доста¬
точными два — четыре пуска, следующих непосредствен¬
но один за другим, даже если эквивалентная нагрузка
в цикле не превышает допустимого значения. С учетом
перечисленных факторов не рекомендуется превышать
средний пусковой момент двигателя переменного тока
выше 1,7 номинального значения и двукратного номи¬
нального момента для двигателей постоянного тока,
при этом максимальный (пиковый) момент при пара¬
метрическом пуске не должен превышать 2,5 Ма для
асинхронных маший и 3 Мя — для двигателей постоян¬
ного тока.РАЗДЕЛ ДЕВЯТЫЙТИПОВЫЕ КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С КОНТАКТОРНО-КОНТРОЛЛЕРНЫМИ СИСТЕМАМИ УПРАВЛЕНИЯ9-1. ЭЛЕКТРОПРИВОДЫ
С РЕГУЛИРОВАНИЕМ СОПРОТИВЛЕНИЯ
В ЦЕПИ РОТОРА АСИНХРОННЫХ ДВИГАТЕЛЕЙ
И ТОРМОЖЕНИЕМ ПРОТИВОВКЛЮЧЕНИЕМа) Особенности построения электроприводов.Область примененияЭлектроприводы с регулированием сопротивления
в цепи ротора благодаря простоте реализации приме¬
няемого метода регулирования скорости нашли наибо¬
лее широкое применение в крановых системах и сейчас
составляют основную часть находящихся в эксплуата¬
ции и выпускаемых промышленностью электроприводов.Комплектные электроприводы включают в себя си¬
стемы с силовыми кулачковыми контроллерами и маг¬
нитными контроллерами с целями управления на пере¬
менном (контакторы КТ 6000) и постоянном (контакто¬
ры КТПВ 600 и КТО 6000) токе. Такое построение рядов
электроприводов позволяет в каждом конкретном слу¬
чае осуществить выбор наиболее приемлемой системы
с учетом условий эксплуатации, предъявляемых требо¬
ваний по автоматизации управления, масс, габаритов и
стоимости. Ряды электроприводов включают в себя все
типы крановых двигателей с фазным ротором серии MTF
и МТН для диапазона мощностей от 1,2 до 200 кВт и
строятся отдельно для механизмов подъема и передви¬
жения крановых устройств.Комплект электропривода для рассматриваемой
системы регулирования полностью определяется типом
двигателя, допускаемой мощностью статической нагруз¬
ки для механизмов подъема и мощностью переключения
для механизмов передвижения в зависимости от режи¬
ма работы, пускорегулирующими резисторами (соответ¬
ствующими требуемым механическим характеристикам
электропривода с учетом условий формирования пусков
и торможений), а также типом контроллеров с учетомзависимости их коммутационной способности я из¬
носостойкости от параметров режима работы. Важным
, является также выбор максимальной защиты электро¬
привода, которая должна контролировать правильность
протекания пускотормозных режимов системы. Вся
остальная аппаратура (кольцевые токоприемники, кон¬
цевые выключатели, аппаратура ввода питания и т, д.),
устанавливаемая на кране, относится к общекрановому
электрооборудованию и не определяет особенности ком¬
плекта электропривода. Вопросы определения мощности
двигателя, допустимой нагрузки Коммутационной аппа¬
ратуры и расчета пускорегулирующих резисторов рас¬
сматривались в предыдущих разделах.В соответствии с изложенным здесь будут приведе¬
ны таблицы с параметрами конкретных электроприводов.Электроприводы с силовыми кулачковыми контрол¬
лерами предназначены для механизмов режимов рабо¬
ты Л и С, хотя в ряде случаев при условии значитель¬
ного снижения мощности статической нагрузки могут
применяться и для режима Т. Мощность управляемых
силовыми контроллерами двигателей в режиме Л не
превышает 30 кВт (при ПВ=40%) при применении ку¬
лачковых контроллеров ККТ 61 и ККТ 62 и 45 кВт для
кулачковых контроллеров ККТ 68 с магнитным ревер¬
сом, По схемному использованию и механическим харак¬
теристикам электроприводы механизма подъема и пе¬
редвижения полностью идентичны, за исключением сис¬
тем с контроллерами ККТ 62, предназначенных для
двухдвигательных электроприводов механизмов перед¬
вижения. Особенностью этих систем является осущест¬
вление тормозных режимов на характеристиках проти-
вовключения. Спуск груза в режиме рекуперативного
торможения возможен только на сверхсинхронных ско¬
ростях.Электроприводы с магнитными контроллерами ох¬
ватывают диапазон номинальных мощностей двигателей
от 11 до 180 кВт для механизмов подъема и от 3,5
до 100 кВт для механизмов передвижения. Для их по¬
192Типовые крановые электроприводы с контакторно-контроллерным управлением[Ра^д- 9строения используются 13 типов магиитных контролле¬
ров с цепями управления переменного тока и номиналь¬
ными токами контакторов 160 и 250 А серий Т и ТСА
и 14 типов контроллеров с цепями управления постоян¬
ного тока и номинальными токами контакторов 60, 160,
250 и 400 А типов К н КСПрименение двух модификаций (по типам питания
катушек контакторов) магнитных контроллеров не свя¬
зано с особенностями построения электроприводов, а
определяется условиями эксплуатации. Магнитные кон¬
троллеры типа К и КС предназначены для крановых
механизмов металлургического п;роизводства, работаю¬
щих в условиях повышенных температур, и запылен¬
ности, и отличаются от контроллеров Т и ТСА не толь¬
ко типом применяемых контакторов, но и рядом конст¬
руктивных особенностей, рассмотренных подробно в
§ 3-7.Повышенные требования к краново-металлургическо¬
му электрооборудованию определили и некоторые осо¬
бенности построения схем контроллеров К и КС по срав¬
нению с контроллерами Т и ТСА. К ним относятся при¬
менение индивидуальной защиты для металлургических
контроллеров, в то время как для панелей Т я ТСА• основной является схема без элементов защиты с при*
менением общей для всего крана защитной панели,
обеспечение работы крана при выходе из строя одного
или нескольких двигателей в двух или, многодвигатель-
ных электроприводах при ' управлении от сдвоенных
контроллеров в ряд других схемных особенностей, рас¬
смотренных ниже.Применение для магнитных и кулачковых контрол¬
леров принципиально одинаковых методов регулирова¬
ния скорости и осуществления тормозных режимов дви¬
гателей определяют малые отличия регулировочных я
энергетических показателей электроприводов. Для них
характерным является отсутствие устойчивых поса¬
дочных и промежуточных скоростей и большие потеря
при регулировании. G целью повышения диапазона ре¬
гулирования скоростей в магнитных контроллерах
подъема (ТСА и КС) обеспечивается режим однофазно¬
го торможения для спуска легких грузов. В целом диа¬
пазон регулирования скоростей рассматриваемых элек¬
троприводов не превышает 2,5:1 для систем с кулачко¬
выми контроллерами и 3,5:1 для систем с магнитными
контроллерами. Увеличение диапазона регулирования для
систем с магнитными контроллерами достигается не
только применением режима однофазного торможения,
но и автоматизацией по времени режимов пуска и тор¬
можения.Ниже рассматриваются типовые схемы электропри¬
водов с силовымй и магнитными контроллерами для
механизмов подъема и передвижения и проводятся таб¬
лицы рядов их комплектных электроприводов.Несмотря на указанные выше недостатки рассмат¬
риваемых электроприводов, в настоящее время они при¬
меняются на большинстве механизмов мостовых, коз¬
ловых, портальных и перегрузочных кранов, в механиз¬
мах передвижения башенных, контейнерных и других
кранов. Однако следует отметить, что во многих случаях
эти системы не удовлетворяют предъявляемым к ним
требованиям и по мере более широкого промышленного
освоения крановых электроприводов других типов, опи¬
санных ниже, область применения рассматриваемых
электроприводов будет постоянно сокращаться.б) Схемы электроприводовСхемы и механические характеристики электропри¬
водов с силовыми кулачковыми контроллерами типа
ККТ 61А, ККТ 62А, ККТ 68А. Принципиальные схемы
контроллеров ККТ 61А, ККТ 62А и ККТ 68А приведе¬
ны соответственно на рис; 9-1—9-3. На схемах части,относящиеся к кулачковым контроллерам, обведены
штрихпунктирными линиями. Типовые механические
характеристики для всех исполнений контроллеров по*
казаны на рис. 9-4 (номера характеристик соответствуют
положениям контроллера).Рис, 9-1. Схема кулачкового контроллера ККТ 6IA.Все контроллеры имеют по пять фиксированных ра¬
бочих положений для каждого направления движения
н одно фиксированное нулевое положение. Контролле¬
ры обеспечивают ступенчатый пуск, ступенчатое регу¬
лирование скорости, реверс и торможение. Регулирова¬
ние скорости по ступеням осуществляется путем изме¬
нения сопротивления в цепн ротора. Контроллеры имеют
одинаковые диаграммы контактов для обоих направле¬
ний вращения двигателя.Включение электродвигателя и изменение направ¬
ления его вращения производится или кулачковыми эле¬
ментами К2, К.4, КО, Жз (ККТ 61 А) или механически и
электрически сблокированными между собой контакто¬
рами КВ и КН реверсора, которые коммутируют и из¬
меняют последовательность чередования двух фаз об¬
моток статора. Контакторы реверса управляются соот¬
ветствующими контактами кулачковых контроллеров
К1, КЗ в ККТ 68А и К5, К? в ККТ 62А. Коммутирова¬
ние ступеней резисторов ротора осуществляется контак¬
тами К7, К9—К12 в ККТ 61А; К2—К4, Кб, К8—К10,
К12 в ККТ 62А и К2, К4 Кб, KS—K12 в ККТ 68А. При
этом в контроллерах ККТ 61А и ККТ 62А коммутация
ступеней резисторов выполняется по несимметричной, а
в контроллерах ККТ 68А — по симметричной схемам.Для остановки двигателя йосле его отключения от
сети предусмотрен тормоз с приводом от злектромаг-
ннтов ТМ, которые включены на выводы статора. Кон¬
такты цепи управления Ю, КЗ, К5 (рис. 9-1 и 9-3), а
также контакты К/, К7 (рис. 9-2) используются для
обеспечения нулевой, максимальной (реле РМ) и ко¬
нечной (выключатели ВКН, ВКВ) защит, которые воз¬
действуют на линейный контактор КЛ защитной пане¬
ли ПЗ КБ. В цепь катушки, контактора КЛ (схема на
рис.!ЭЛ) включаются контакты кнопки выключения
§ 5-7] , Электроприводы с регулированием сопротивления в роторе асинхронных двигателей193КНВ, аварийного выключателя АВ п контакты блоки¬
ровки люка КБЛ.Кулачковые контроллеры ККТ 61 А, ККТ 62А и
ККТ 68А отличает невысокое качество регулирования
скорости двигателя. Действительно, пониженная ско-Рис. 9-2. Схема кулачкового контроллера ККТ 6^А.Рис. 9^. Схема кулачкового контроллера ККТ 68А.рость двигателя может быть реализована только ирн
работе в I и III квадрантах на характеристиках 1 н 2
(рис. 9-4) при достаточно больших моментах нагрузки.
Пониженные скорости при меньших нагрузках, а также
при работе в генераторном режиме (II и IV квадранты)
могут быть получены только путем переключений
контроллера с одной цозиции на другую (изменением
13-в39сопротивлений)’ и периодическим накладыванием меха¬
нического тормоза при постановке контроллера в ну¬
левое положение. Качество такого регулирования опре¬
деляется количеством необходимых переключений для
получения средней скорости перемещения груза. Коли-7ffff60wZD. a1=:>>•Si.чS1чч\\\SчЛ\\“ч, NNS/V\VN\\\>V\/1лдSч\/\шЛ\\/>WB20D300 %Рис. Э'4. Типовые механические характеристики электро¬
приводов с контроллерами ККТ 61 А, ККТ 62А и
ККТ 68А. Характеристики^реализуются при следующих
значениях ступеней резисторов (в процентах ^номиналь¬
ного сопротивления двигателя): Р1 — Р5—26; Р5~
Р61—170; Р61—Р6-^7Ъ; Р2 — Р4~^\ Р4 — Р62—87;
Р62 — Рб—35; Р5 — Р6—61 (контроллеры ККТ 61А и
ККТ 62А); Р/ — Р4—9; Р4 — Р7—31; Р7 — Р7/-60;
Р71—Р10—Л0; Р/~РД^17; Р/7—Р/4--76 (конт¬
роллеры ККТ 68А).чество переключений зависит от моментов, развивае¬
мых двигателем и механическим тормозом. Момент тор¬
моза постоянен, а момент двигателя может быть выбран
включением необходимых ступеней резисторов. При
этом определяющим является начальный пусковой мо¬
мент двигателя, от которого зависит количество перек¬
лючений. Циклическую работу контроллера следует
учитывать при выборе механических характеристик и, в
ч:астности, характеристики первого положения. Так, для
механизмов подъема, где требуется получить посадоч¬
ные скорости при спуске, желательно уменьшать на¬
чальный пусковой момент, поскольку это может при¬
вести к некоторому снижению числа переключений конт¬
роллера.С другой стороны, чрезмерное снижение начального
момента может привести к опусканию тяжелых грузов
на позициях подъема и возникновению чрезмерных ско¬
ростей при его спуске. Для исключения этого необхо¬
димо, чтобы начальный пусковой момент на первой ха¬
рактеристике контроллера был не меньше 70% ЛГж. За
100% момента на характеристиках рис. 9-4 принят мо¬
мент двигателя MTF, МТН при ПВ«40%. В случае прИ'
менения (для механизмов подъема) двигателей при
ПВ—25% начальный пусковой момент на характеристи¬
ке 1 (в целях исключения опускания груза на положе¬
нии подъема) должен быть увеличен до 100% Мп, на
характеристике 2 —до 165% Мш (см, характеристику 3,
показанную пунктиром). Увеличение момента достигает¬
ся за счет уменьшения сопротивлений соответствующих
ступеней резисторов (устанавливаются перемычки Р6—
Р61 и Р6-~-Р62 в контроллерах ККТ 61 А, ККТ 62А и
перемычки Р71—Р10, Р82—Р10 и Р93—Р10 в контрол¬
лерах ККТ 68А).Для механизмов перадвижения выбор начального
пускового момента на характеристике i опред^яется
в основном необходимыми параме?грамй- дскорешя' ^
194Типовые крановые электроприводы с контакторно-контроллерным управлением[Разд. 9то|>може1гая при противовключении. Исходя из этого
начальный пусковой момент двигателя должен быть
минимальным и лежать в пределах 50—70% Mr.Приведенные на рис. 9-4 механические характери¬
стики являются универсальными, рассчитанными для
механизмов как подъема, так и передвижения, и яв¬
ляются общими для всех исполнений контроллеров. Не¬
которая несущественная разница заключается только в
том, что в отличие от ККТ 61А в контроллерах
ККТ 62А и ККТ 68А на последнем положении преду¬
смотрены невыключаемые ступени резисторов. Включе¬
ние иевыключаемых ступеней резисторов в контролле¬
рах ККТ 6SA определяется условиями обеспечения
нормального пуска и вызвано тем, что указанные конт¬
роллеры управляют двигателями большей мощно¬
сти (имеют меньшие значения скольжений), чем
ККТ 61А и ККТ 62А. Включение иевыключаемых сту¬
пеней резисторов в контроллерах ККТ 62А вызвано
ограниченностью числа кулачковых элементов.Схемы электроприводов с магнитными контроллера^
ми серии ТС А, ТС АЗ. КС, ДКС. Различие между пере¬
численными контроллерами заключается в системе пи¬
тания цепей управления. Цепи управления контроллеров
ТСА и ТСАЗ выполнены на переменном токе, а КС и
ДКС на постоянном.На рис. 9-5 — 9-7 приведены типовые принципиаль¬
ные схемы магнятн^^ контроллеров соответственно ТСА,
ТСАЗ и КС. По построению схемы двухдвигательных
(дуплексных) контроллеров типа ДКС аналогичны опи¬
санным схемам контроллеров механизмов передвижениятипа ДК. В контроллерах ДКС используются индиви¬
дуальные реверсоры для каждого из двигателей. Конт¬
роллеры КС и ТСА по схеме имеют исполнения для
обычных крюковых и грейферных кранов, дуплексные
контроллеры только для кранов с крюком.Типовые механические характеристики контролле¬
ров для крюковых и грейферных кранов показаны на
рис. 9-8. В них за 100% приняты: момент статической
нагрузки и синхронная скорость двигателя. Для грей¬
ферных кранов характеристики, на спуске обозначены
индексом «f’». ‘ *Схемы всех магнитных контроллеров обеспечивают
автоматический разгон, реверсирование, торможение и
ступенчатое регулирование скорости; Управление осу¬
ществляется с помощью командоконтроллеров, имею¬
щих по четыре фиксированных рабочих положения
подъема и спуска. На положениях подъема пуск и регу¬
лирование скорости осуществляется изменением сопро¬
тивлений резисторов, включенных в цепь обмотки ро¬
тора электродвигателя.Первое положение, на котором реализуется мини¬
мальный пусковой момент, служит для выбора слаби¬
ны троса и подъема малых грузов на пониженной ско¬
рости (характеристика 1П). Подъем с малой скоростью
тяжелых грузов производится на втором положенйи
(характеристика 2П). На третьем положении осуществ¬
ляется первая ступень разгона электродвигателя (ха¬
рактеристика ЗП), причем пусковой ток на этом поло¬
жении меньше тока уставки максимальных реле. Послед¬
ние две ступени пуска осуществляются автоматически
§9^1]Электроприводы с регулированием сопротивления в роторе 'асинхронных двигателей195р. и, у, V'Р19т0^......ко- -кич-кяКТKlHРис. 9-6. Типовая схема магнитного контроллера ТСАЗ.под контролем реле времени РУ/, РУ2, характеристика
4П (контроллеры КС) н РУ1, РБ (контроллеры ТСА
и ТСАЗ). На положениях спуска обеспечивается регу¬
лирование скорости двигателя в режимах: противовклю-
ченвя на первом и втором положениях (характеристики
1C и 2С) и однофазного торможения на третьем поло¬
жении (характеристика ЗС). На четвертом положении,
на котором все ступени резисторов выведены, произво¬
дится спуск грузов с наибольшей скоррстъю (характе¬
ристика 4С). Первое и второе положения используются
в основном для получения малых скоростей спуска гру¬
зов, близких к номинальному.Ступени резисторов в цепи ротора выводятся с по¬
мощью контакторов ускорения КУ^-~КУ4 и контакто¬
ра противовключения КП.Режим однофазного торможения (характеристика
ЗС) предназначен для получения малых скоростей при
спуске легких грузов. Испольауя положения противо¬
включения и однофазного торможения, можно регу¬
лировать скорость спуска различных грузов (путем пе¬
реключения рукоятки комаидоконтроллера между
третьим, вторым и первым положениями) в пределах
диапазона 4: Г ~ 3:1. Спуск с малой скоростью грузов,
не преодолевающих трение в механизме, осуществляет¬
ся путем переключения между третьим и четвертым по¬
ложениями. Во избежание подъема груза на положе¬
ниях торможения противовключением двигатель при
прямом ходе комаидоконтроллера включается толькона третьем положении однофазного торможения, когда
подъем груза исключен.Схема однофазного торможения собирается при
включении контакторов КО, КН (контроллеры ТСА и
ТСАЗ) и КВ2, КН2 (контроллеры КС) в цепи статора
и контактора ускорения КУ1 в цепи ротора. Для исклю¬
чения одновременного включения контакторы однофаз¬
ного торможения КО и противовключения КП, направ-
ления КВ2 и а также контакторы направления КИ
и КВ соответственно попарно механически сблокирова¬
ны. В контроллерах с цепью управления на переменном
токе эти контакторы сблокированы еще и электрически.
При установке заведомо тяжелых грузов с тем, чтобы
не получилось недопустимо большой скорости на
третьем положении, можно сразу обеспечить включение
первого или второго положения спуска, нажав педаль
спуска тяжелых грузов Я77. vВо всех схемах магнитных контроллеров предусмот¬
рено (с помощью контактора КТ) включение электро¬
магнитного тормоза ТМ для обеспечения механического
торможения до полной остановки. При этом в схемах
магнитных контроллеров КС дрпускается применение
тормозных магнитов переменного и постоянного тока.
В последнем случае выполняется форсировка включения
тормоза, осуществляемая контактором KTJ и реле Р.Т.
Реле РТ настраивается на срабатывание при токе, рав¬
ном номинальному току холодной катушки электромаг¬
нита тормоза при ПВ~25%. npii переводе рукоятей
Рис. 9-7. Типовая схема магнитного контроллера КС.командоконтроллера с положений спуска в нулевое по¬
ложение (при нажатой педали на первом и втором по¬
ложениях) или с четвертого (или третьего) положения
спуска в нулевое, первое или второе положения (педаль
//Я —не нажата) обеспечивается наряду с механиче¬
ским и электрическое торможение в течение времени,
определяемого выдержкой времени реле РБ. На это вре¬
мя собирается схема, соответствующая второму поло¬
жению спуска.Во избежание чрезмерных скоростей в аварийных
режимах выдержка времени реле РБ должна быть не
более 0,5 с. Для получения торможения (прн ненажатой
педали НП), соответствующего второму положению
спуска, в схемах контроллеров КС (кроме КС 400,
ДКС 160 и ДКС 250) предусмотрено включение в цепькатушки контактора КП размыкающих контактов нож¬
ного выключателя НП. Совмещение механического и
электрического торможени^! повышает надежность и
исключает просадку гртеа.В отличие от КС 160 и КС 250 контроллеры КС 400
имеют исполнение, в котором питание цепей управления
производится от сети переменного тока через отдель¬
ный выпрямительный блок. Это исполнение предусмат¬
ривает применение тормозов только переменного тока
(в схеме исключено реле РТ). Контроллеры КСД 400
такого исполнения не имеют. В контроллерах КС 400
для разгрузки контактов командоконтроллера комму-
т-ация цепей управления производится электромагнитны¬
ми реле постоянного тока, устанавливаемыми в отдель¬
ном магиитиом контроллере открытого исполнения типа.
§Электроприводы с регулированием сопротивления 9 роторе асинхронных двигателей197БПК (масса 90 кг, габаритные размеры 636 Х345Х
XI010 мм). Контакты же команде контроллера комму¬
тируют маломощные цепи катушек этих реле. Катушки
контакторов статора в контроллерах КС 400 (для уско¬
рения включения контакторов) соединены последова¬
тельно с резисторами.Схемы магнитных контроллеров КС и ТСА грейфер¬
ного исполнения выполнены на тех же принципах, чтоРис. 9-8, Механические характеристики электроприводов
механизмов подъема с магнитными контроллерами КС
н ТСА. Характеристики реализуются при следующих
значениях ступеней резисторов (в процентах номиналь¬
ного сопротивления двигателя): Р1~Р4~Ь\ Р4~~Р7~
10; Р7~Р}0 — 20\ PW-P13 ~^27\ Р13-Р16—
Р16—Р1Э -~72 'ч при параллельно включенных роторных
резисторах — Р1—Р4 — 14; Р4—РЮ — 39; PJ0—-PJ6 —
36; Р16—Р19 ~ 72; Р1—Р7 — 23; P7—PJ3 — 92. Данные
указаны на одну фазу. 'и рассмотренные схемы контроллеров, предназначен¬
ных для кранов с крюковой подвеской. Основные отли¬
чия заключаются в следующем: в грейферном исполне-
; ниич(так же как и в ТСАЗ 250) нет режима однофазно¬
го торможения; на магнитном контроллере привода за¬
мыкающей лебедки предусмотрен режим силового
спуска (четвертое положение командоконтроллера—
см. характеристику -^С*' на рис. 9-8) с полностью вве¬
денными в цепь ротора пусковыми ступенями резисто¬
ров; контроллеры замыкающей и поддерживающей ле¬
бедок сблокированы с помощью реле PH, что исклю¬
чает возможность работы одним приводом в случае
отключения нулевой защиты на другом. ^В контроллерах на номинальный ток 400 А для сни¬
жения нагрузки в контактах контакторов цепи ротора
предусмотрено параллельное включение резисторов.
Такое же включение предусматривается также и в
контроллерах на 250 А в случае, если нагрузка превы¬
шает допустимую для контакторов ротора, которые во
всех типах магнитных контроллеров используются на
нрминальный ток 160 А.В магнитных контроллерах ТСА предусмотрена ко¬
нечная защита. Максимальная и нулевая защиты выве¬
дены на защитную панель. В контроллерах ТСАЗ и КС
предусматривается нулевая, максимальная и конечная
защиты. Максимальная защита, выполняемая реле РМ,
настраивается на срабатывание при токе 250% номи-
нального в контроллерах без однофазного торможения
и при токе 270% — в контроллерах с однофазным тор¬
можением. Большее значение уставки вызвано повыше¬
нием тока, потребляемого двигателем при однофазном
торможении.В контроллерах КС узел нулевой защиты выполнен
на переменном токе (реле PH получает питание от си¬
ловой цепи). Для обеспечения нулевой защиты в случае
исчезновения напряжения постоянного тока в цепи
управления катушка реле PH под^учает питание через
замыкающие' контакты реле ускорения РУ1 и РУ2. Ко¬
нечная защита, осуществляемая выключателями ВКВ
и ВКН, выполнена таким образом, что срабатывание
конечного выключателя одного направления не пре¬
пятствует движению механизма в противоположном
направлении.Контакты аппаратов с выводами 101—103 (только
в контроллерах с защитой) предназначены для цепей
сигнализации.Схемы электроприводов с магнитными контролле¬
рами серии ТА, ДТА, К и ДК. Разница между пе{)ечис-
леиными контроллерами заключается только в схемах
управления, выполняемых на постоянном (К и ДК) и
переменном (ТА и ДТА) токе.На рис. 9-9 и 9-10 приведены типовые принципиаль¬
ные схемы магнитных контроллеров типов К и ТА.Схемы выполнены симметричными для обоих на¬
правлений движения. Количество фиксированных по¬
ложений в каждую сторону равно четырем. Схе“мы обес¬
печивают автоматический пуск, реверсирование, тормо¬
жение и ступёнчатое регулирование скорости за счет
изменения значений сопротивлений резисторов в ротор¬
ной цепи. Разгон в обоих направлениях производится
в четыре ступени (предусмот1)ены контакторы КП.КУ2. КУЗ), а в контроллерах, управляющих двигателя¬
ми небольшой мощности (к 63 и исполнение ТА 161 на
мощности до iso кВт), количество ступеней разгона рав>
но трем (контакторы КП, КУ1 и КУ2),Механические характеристики для указанных испол-
пений магнитных контроллеров приведены на рис. 9-11.
В характеристиках за 100% момента принят номиналь¬
ный момент двигателей MTF, МТН в режиме ПВ = 40%,
за 100% скорости — синхронная скорость двигателя.
Для контроллеров К 63 и ТА 161 на малые мощности'
двигателей характеристика 4а соответствует последне¬
му, фиксированному положению контроллера. Механи¬
ческие характеристики (так же как и при управлении
силовыми кулачковыми контроллерами ККТ бОА) рас¬
считаны из условий обеспечения необходимых парамет¬
ров ускорения привода при пуске и торможении в режи¬
ме противовключения'. Для обеспечения нормального
пуска в схемах всех магнитных контроллеров преду- i
сматриваются невыключаемые ступени резисторов в це¬
пи ротора. При этом относительное значение сопротив¬
лений этих резисторов несколько больше в контролле¬
рах с тремя ступенями разгона.При движении с неподвижного состояния на пер¬
вом положении разгона осуществляется задержка на
время срабатывания промежуточного реле РБ (в кон¬
троллерах серии Т) и реле противовключения РП, Даль¬
нейший разгон осуществляется под контролем реле
ускорений РУ} и РУ2. При этом реле РУ1 обеспечивает
переход на характеристики, соответствующие третьему
и четвертому положениям контроллера. Выдержки вре¬
мени реле при отпадании якоря, определяющие интен¬
сивность ускорения, лежат в пределах 0,4—2,5 с.
Рис. 9-9, Типовая схема магнитного контроллера К.Схемы допускают свободный выбег в нулевом по¬
ложении командоконтроллера или торможение с по¬
мощью электромагнитного тормоза ТМ. Для остановки
механизма при схеме со свободным выбегом необходи¬
мо переключать командоконтроллер в противоположное
направление движения, при этом независимо от поло¬
жения рукоятки командоконтроллера собирается схема
первого положения (отключается реле РЛ) и происхо¬
дить торможение в режиме противовключения. Задерж¬
ка на режиме противовключения осуществляется с по¬
мощью реле РП, которое срабатывает при скорости
движения в тормозном режиме, близкой к нулю. После
остановки механизма возможен разгон в противополож¬
ном направлении. Таким образом, в процессе оператив¬
ного торможения механический тормоз не участвует.
Для осуществления торможения в режиме противовклю¬
чения катушка реле РП включается на разность вы¬
прямленных напряжений; постоянного — со стороны не¬
зависимого источника и переменного — со стороны ро¬
тора.Реле срабатывает, когда напряжение со стороны
независимого источника превысит на определенное зна¬
чение напряжение со стороны ротора, т. е. при скольже¬ниях ротора от 1,0 до номинального при пуске и при
скольжении от 1,3 до 1,0 в режиме противовключения.
Использование торможения противовключением на¬
ряду со свободным выбегом позволяет осуществить
плавную остановку механизма без рывков, связанных с
наложением механических тормозов. Механический тор¬
моз вступает в действие, только при срабатывании лю¬
бого из видов защиты — максимальной, нулевой, конеч¬
ной или при отключении аварийной кнопкц КА. Для по¬
лучения схемы без свободного выбега необходимо про¬
извести следующие переключения: тормозной магнит
ТМ переменного тока присоединить непосредственно к
выводам статора двигателя; катушки контакторов тор¬
моза КТ и КТ1 отключить, для чего снять перемычки
7—Я 9-11 (схема на рис, 9-10) Hjl9—46—23 (схема
на рис, 9-9); контакты конечной защиты ВКИ и ВКВ
шунтировать размыкающими контактами контакторов
направления/CS и/СЯ (показаны пунктиром).При соответствующих. переключениях в схеме кон¬
троллеров серии К возможно использование вместо
тормоза переменного тока тормоза постоянного тока.
В этом случае для ускорения его включения преду¬
смотрена форсировка, осуществляемая с пОмощьго кон¬
Рис. 9-10. Типовая схема магнитных контроллеров ТА и ТАЗ.тактора КТ1 и реле РТ. Реле РТ регулируется таким
образом, что оно срабатывает при номинальном токе
холодной катушки электромагнита ТМ при ПВ=25%,На рйс. 9-9 показан вариант схемы роторной цепи с
параллельным включением резисторов для снижения
тока в контактах контакторов, коммутирующих эти це¬
пи. Такая схема включения применяется в контролле¬
рах К 250.Аналогично схеме ТА 160 построена схема магнит¬
ного контроллера ТАЗ 160 с защитой. В этом контрол¬
лере по сравнению с ТА 160 добавляются: рубильник
главной цепи Р1, максимальное реле РМ и линейный
контактор КЛ. Узел силовой цепи управления с указан¬
ными аппаратами показан на рис. 9-10 (обведен пунктир¬
ной линией).Б схему управления взодятся следующие измене¬
ния: размыкающие контакты реле РМ включаются в
цепь катушки нулевого реле PH, последовательно с ка¬тушкой контактора КЛ включаются замыкающие кон¬
такты контакторов направления КВ и КН. Во всех
схемах магнитных контроллеров ТА и К контакторы
направления КВ и КН механически между собой сбло¬
кированы, что исключает их одновременное включение.
В контроллерах ТА предусмотрена также и электриче¬
ская блокировка между этими контакторами.Схемы двухдвигательных (дуплексных) контролле¬
ров типа ДТА и ДК по построению выполняются ана¬
логично рассмотренным схемам контроллеров ти¬
па ТА и К.На рис. 9-12, а показана принципиальная схема
магнитного контроллера ДК 63, в которой предусмотре¬
ны общие реверсивные контакторы в цепи статоров
обоих двигателей. С общим реверсором выполняются
и контроллеры ДТА 160. Контроллеры ДК 160 и
ДК 250 имеют независимые реверсивные контакторы для-
каждого из двигателей.
шТиповые крановые электроприводы с контакторно-кЬнтроллерным. управлтием[Яаз9. 9Рис. 9-II. Механические характеристики электроприво¬
дов с магнитными контроллерами К и ТА. Характерис¬
тики реализуются при следующих значениях ступеней
резисторов (в процентах номинального сопротивления
двигателя): Р1—Р4 — 5; Р4—Р7—10; Р7—Р10 — 20;
Р/0—/^/5—40; Р/5—Р/6—120; для контроллеоов К63
161 (при мощности двигателей до 30 кВт) преду¬
сматривается разбивка: Pi—Р4—15; Р4—Р7 — 20;
Р7~~Р}0 — 40; Р10—PIS — 120^ Данные- указаны на од-,
ну фазу.Рис. 9-12. Схема магнитного контроллера ДК 63.^ 6)1. I
§9-q94eKrp<fnpueodu с регулированием сопротивления в роторш асинхронных двигателейтВо всех указанных магнитных контроллерах, кроме
ДТА 160, в котором в роторных цепях используются не
по два контактора, а по одному четырехполюсного ис¬
полнения, катушки контакторов ,одного назначения
включаются параллельно друг другу. Для возможности
кратковременной работы привода в случае выхода из
строя одного из двигателей предусматривается пе¬
реключатель ЛУ на три цепи (переключается узел ре>
ле РП и реле PH) э контроллерах с общим реверсором
к пять цепей (переключаются узлы реле РП, нулевой
ващйты и тормозных магнитов переменного тока) в кон¬
троллерах с раздельными реверсорами.Контроллеры ДК 62 н ДТА 162 с кнопочным упра¬
влением имеют такое же построение главной цепи и
цепи управления, как и контроллеры соответственно
ДК 6^ и ДТА 160. Отличие заключается в том, что при
кнопочном управлении не применяется режим торможе¬
ния противовключением под контролем реле РП. Поэ¬
тому в контроллерах ДК 62 и ДТА 162 нет необходи¬
мости в применении переключателя ПУ, КонтроллерыДК 61 и ДТА 161, применяемые для укомплектован*
многодвигательных приводов (при числе двигателей
больше двух и кратном двум), имеют силовую цепь, пол*
ностью аналогичную силовым Цепям контроллеров соот¬
ветственно ДК 63 и ДТА 160.На рис. 9-12, 6 показана схема управления контрол¬
лера ДК 61. Такая же схема и для ДТА 161. Для обе¬
спечения функционирования многодвигательного приво¬
да необходимо, чтобы выводы цепи управления магшгг-
ных контроллеров ДК 61 (ДТА 161) были соединены
с одноименными выводами контроллеров ДК 63
(ДТА 160) или ДК 62 (ДТА 162). При этом количество
контроллеров ДК 61 (ДТА 161), которые могут быть
подключены к основной схеме, определяется допусти¬
мой нагрузкой реверсоров контроллеров ДК 63, ДК 62’
и ДТА 160, ДТА 162, выполняемых на номинальные то¬
ки 63 А (ДК 63 и ДК 62) и на 160 А (ДТА 160,
ДТА 162 и модификации ДК 63 и ДК 62, у которых в
роторной цепи использованы^ контакторы на 63 А),Комплекты »лектропроводов при управлении от кулачковых контроллеров типа ККТ 61А и ККТ 62Лf «бааяк ^-1Тип двигателяМощность статической на¬
грузки Р^, кВт, для меха¬
низма подъема в режимах
работаМощность статической нагрузки,,
переключениядля механизмов передвижения
S режимах работыПускорегулирующие резисторыЛСТЛСТТипКаталожный номерКоли¬чествоMTFOM-S---1,12,00,91,70,51,4МФ ПА
илиНК 1А■ #2ТД.750.020-11
. 2ТД.750.024-011IMTF012-6---1.653,11,452,70,752,2MTFm-6MTH1U-6-~2,64,52,3
, 4,11,25 ‘
3,5MTF1I2-6MTHU2^3,756.53,25.8h755НФ ПА
или
НК 1А2ТД, 750,020-91
2ТД.750.024-0211MTF211-6MTF311-8МТН211-6МТН311-810,89,07.15.610.64,89,02,67,5НФ ПА
или
НК 1А2ТД.750.020-72 '
2ТД.750.024-0211МТРЗП-6MTF312-8MTH3U-6МТН312-826,013^210,’58,314,07,213.03,911,0НФ IA
НФ ПА
или
НФ 2А2ТД ,754.054-17
2ТД .752.020-882ТД.754.055-371i1MTF312-6MTF4U~8МТН312-6МТН411.82U718,0112■И19,59,817,55.312,0НФ IA
НФ НА
«ли
НФ 2А2ТД.754.054-16
2ТД.754.020-122ТД.754.055-3711IMTF4I1-6MTF412-8MTH41I-6МТН412-832^0- .~16,530.014,327,0>НФ 1А
НФ ПА
или
НФ.2А2ТД.754.054-192ТД.754.020-152ТД.754.055-36111MTF4I2-6МТН412-636,0-22,536,0--НФ 2А2ТД.754.055-361.9 ККТ 6IA н ККТ 62 гредета.л.кы соответственно на от. 9.1чясло,„к„. р.з„ст„ро.. MTF.HHU-a . ре««»в Т . W
202Типовые крановые электроприводы с контакторно-контроллерным управлением[Разд. 9Таблица 9-2Комплекты электроприводов при управлении от кулачковых контроллеров типа ККТ 68А с реверсором ТР 160Тип двигателяМощность статиче¬
ской нагрузки Рр,
кВт, для механшма
подъема в режимах
работыМощности статиче¬
ской нагрузкй и пере¬
ключениякВт, для механизмов
передви:з4ения в ре¬
жимах работыПускорегулирующие резисторыЛСТЛСТТипКаталожный номерКоли¬чествоСхема соединенийMTF4I2-6Л1ТН412-6МТН51Ь843,53628,622,540,019.530,010,630НФ 1А2ТД.754.054-11
2ТД.754.054-1233Отд. 362,649MTH5I2-853,5453527.549.534.045.012,837,0НФ 1А2ТД.754.054. U
2ТД .754,054-1233Отд, 362.649МТН512-6806652---НФ 1А2ТД.754.0&4Ч26Отд. 363.755MTH61I-1065. 5442,533,758,329,253,015,745,0НФ ЗА2ТД-,754.057,181-Примечание. Схемы электроприводов показаны на рис. 9-3; механические характеристики — на рис. 9-4-.Контроллеры серии ТА имеют нулевую защиту (ре*
ле PH) и конечную, осуществляемую выключателями
ВКВ и ВКЯ, Максимальная защита в этих контролле¬
рах вынесена на защитную панель. Контроллеры се¬
рии, К и ТАЗ имеют нулевую, максимальную и конеч¬
ную защиты. Максимальная защита настраивается на
срабатывание при токе, равном 250% , номинального.Схемы всех магнитных 'контроллеров с защитой обе¬
спечивают возможность световой сигнализации о рабо¬
те приводов. С этой целью в маз|^итных контроллерах
предусмотрены замыкающие контакты реле РП (выво¬
ды 101—103); предназначенные для коммутирования
цепей сигнализации.в) Таблицы основных технических данных
комплектных электроприводовТехнические данные электроприводов с силовыми
кулачковыми контроллерами приведены в табл. 9-1
и 9-2. В табл. 9-3—9-6 привед-ены данные комплектных
электроприводов механизмов подъема, а в табл. 9-7 —
аппаратуры управления к ним; в табл. 9-8—9-10 приве¬
дены данные электроприводов механизмов передвиже¬
ния при управлении от магнитных контроллеров, а в
табл. 9-11—аппаратуры управления к ним. Для элек¬
троприводов с кулачковыми контроллерами значения
мощностей статической нагрузки и переключения рас¬
считаны только для режимов Л, С и Т, поскольку при¬
менение их в других режимах работы недопустимо.
Для этих систем во всех указанных режимах работы
используется один и тот же комплект пускорегулирую¬
щих резисторов. Однако резисторы имеют специальную
ступень, которая выводится при их использовании в ре¬
жимах Л и С. Благодаря этому значительно снижается
количество типов резисторов для этих систем. С этой же
целью для систем с магнитными контроллерами в режи¬
мах работы Л и С, ВТ и ОТ также используются одина¬
ковые комплекты резисторов, соответствующие мощ¬
ностям двигателей при ПВ = 25 и 60%, а для режима
Т—ПВ=40%.В случаях комплектации резисторов стандартными
ящиками в таблицах приведены номера схем их соеди¬
нения. Каталожный номер пускорегулирующих рези¬
сторов включает в себя одиннадцать знаков. При этомпервые шесть знаков 2ТД.754, являются общими и в
табл. 9-3—9-6, 9-9, 9-10 не приведены, остальные пять
знаков, зависящих от параметров резисторов, изменяют¬
ся и приведены в табл. 9-3—9-6, 9-9, 9-10. Номер схемы
соединений резисторов включает в себя девять знаков,
при этом первые шесть, знаков ОТД.362. являются об¬
щими и в таблицах не приведены. Сами схемы соедине¬
ния приведены в каталогах на крановые пускорегули¬
рующие резисторы.Как было сказано выше, магнитные контроллеры
выполняются по схемам с защитой от токов перегрузки
или же эта защита вынесена на отдельную защитную
панель, так же как и при построении схем с силовыми
кулачковыми контроллерами. При этом настройка мак¬
симальных реле зависит от режима работы и состав¬
ляет 2,5 /н25 для режимов Л; 2,3/в25“^ Для режима С;
2,5/я4о — для режима Т; 2,5/нбо и 2,3/нео — соответ¬
ственно для режимов ВТ и ОТ, где /из5. и /нво но¬
минальные токи двигателя для режимов ПВ=25, 40
и 60%. Остальные пояснения к таблицам даны в приме¬
чаниях к ним.Следует отметить, что в последнее время для ком¬
плектации крановых электроприводов выпускаются
пульты управления, а также устройства дистанционнрго
управления по радиоканалам. В этих случаях состав
комплекта изменяется по сравнению с приведенным в
таблицах.9'2. ЭЛЕКТРОПРИВОДЫ МЕХАНИЗМОВ ПОДЪЕМА
С ДИНАМИЧЕСКИМ ТОРМОЖЕНИЕМ
ДВИГАТЕЛЕИ С ФАЗНЫМ РОТОРОМ
а) Особенности построения электроприводов.Область примененияПрименение динамического торможения вместо тор¬
можения противовключением в электроприводах с регу¬
лированием сопротивления в цепи ротора двигателей,
рассмотренных в § 9-1, позволяет значительно улучшить
их регулировочные и энергетические показатели. При
этом наиболее целесообразным оказалось применение
§9^2]Электроприводы механизмов подъема с динамическим торможением двигателей203Таблица 9-3Комплекты электроприводов механизмов подъема при управлении от магиитн^х контроллеров на токи др 90 АМощности стзтической нагрузки Р^, пускдрегулирующие резисторы тп крановых двигателей а различных режимах работыа11V0.0)^ да»|SSof-Ha. SSi-?3III1*®CO COif^.SsПуско регулирую¬
щие резисторы9SS ао°?
2 2}^
СО;ssS со%ш:а<L>пн1S
S 2(ОООи ^12
а,ПускорегулирующиерезисторыкSн1СЧш 2в; ЮЖаПу скор егу л и ру юш и е
резисторык1акН CS
«g
bf-
a, SПускорегулирующиерезисторыТип1§Й SошУ*и<vЯР*оТип12|0рнUX1* '
§
■ё
иCTJgИОТиц«аLн ^
й|ов;S'я§ол .
S
%
ОТип=к2а:§н Si
!§ мSноSUg§101
ойол16.021,832,040,0054-083НФ 4А058-201НФ 4А058-20137НФ 1А054-113507с13,218,026,436,0054-121054-06341,0НФ 1А054-08054-1033749054-083054-121т10,414,2НФ ЗА057.60121,028,6НФ 4А058.201 35,0НФ 1А054-113507054-121ВТ8,211.216,522,8054-09327,7054-093НФ ЗА037-681НФ 1А505НФ 1А50525,0НФ 4А058-201 от5,06,810,013,5054-12416,5054-124Примечание. Мощности статической нагрузки двигателей МТН512-8 в режимах Л и С и МТН512-6 в режимах Л, С, Т и
ВТ указаны по предельному току магнитного контроллера.< Т а б л и ц а 9-4Комплекты sJteKTponpHBOAOB механизмов подъема при упразлении от магннтных контроллеров на токи от 90 до 200 ЛМощности статической нагрузки Р^, пускорегулирующие резисторы для крановых двигателей в различных режимах работыCR
- ^ш 2“ж
о, SПускорегулирую¬
щие резисторыТипй -«н
Q. SПускорегулирукЗ-
щне резисторыТипpf оцона. SПускорегулирую¬
щие резисторыТшЙПускорегулирую¬
щие резисторыТипМ
оЬ
Q- ?Пускорегулирую-
щне резисторыТип53.545,0054-06054-07054-П84180,066,0054-07054-08054-0975165.054.0054-06054-07054-0975698,093.5054-05054-06054-07740,84.075.0054-06054-06054-0774062,0054-06057-07054-1124942,5054-05054-07054-0926671,0054-05054-07054-0930957,0054-06054-07054-08заВТот41,5058-2038.025.0054-06054-08054-1030456.034.0054-03054-05054-06054-0929945.030.0054-05054-06054-09236Примечание. Мощность статичесной нагрузки двигателя МТН611-6 в режиме Л указана но предельному току магнитного
контроллера.
204Типовые крановые электроприводы с контакторно'контроляерным управлением[Ра^, 9Таблица 9*5Комплекты электроприводов механизмов подъема при управлении от магнитных контроллеровна токи от 200 до 320 А (при ограннченш тока ротора до 280 А)Мощности статической нагрузки Р„, пускорегулнрующие резисторы для крановых двигателей в различных режимах работыс!^ XРПускорегулирую¬
щие резисторыо5 ®«ищ ^5- ч?
Р SПускорегулирую -
щие резисторыхл соцПускорегулирую¬
щие резисторы3Sое? Q,сз О]IIо я.U5(QРС О
К со5sК^"1Пускорегулирую¬
щие резисторы>!ЯSS§ D.Я ®
*Пускорегулирую *
щие резисторы«3XО
й “■
™ <у
« оЬй к109,0054-05054-06054-07740135,5120,0054-06054-08054-09719109.0054-06054-08054-09719169,0148,0054-03064-05054-06054-07054-09760ПО.О054-02054-03054-04054-06054-0775290,0054-02054-06054-06054-07054-0953971,0054-04054-06054-08054-10310110,0054-04054-06054^07054-08054-1076195,0054-03054-04054-05054-07054-08576ВТОТ71.542.6054-04054-06054-08054-1031056.034.0054-07054-08054-0930681,048,5054-04054-07054-08054-09054-1176275.045.0054-03054-05054-06054-09539П р И м е ч а И И е.'Мощность двигателя МТН711-Ш в режимах работы Л и С указана по предельному току магнитного конт¬
роллера и может быть у5вел,ичена до значений соответственно 145 и 110 кВт при применении для коммутации роторных цепей
контакторов на 250 А.Таблица 9-6Комплекты электроприводов механизмов подъема при управлении от ,»ai нитных контроллеров
яа токи от 320 А до 430 А (при огравйчевяи тока ротора до 280 А)Мощности статической нагрузкд Р_, пускорегулирующие резисторы для крановых двигателей в различных режимах работыРежимработыР^, кВт, для
двигателя •
МТН712-10Пускорегулирующие резисторы£> L* 1т п стПускорегулирующие резисторыТипКаталожныйномерКоличе¬ствоСхемасоединений^ Q» К1>Т, АЛпдвигателяМТН713-10ТипКаталожныйномерКоличе¬ствоСхемасоединенийЛ140,0054-013170,0054-023054-033054-036НФ 1А054-049753НФ 1А054-049, 754С140,0054-053054-053 ■054-07а054-07.- 3054-033054-033054^043054-043> т118,5НФ 1А054-056577 ,152.0НФ ]А054-059578054-073054-073054-08 .3054-083ВТ93,5054-03395,0054-023054-053НФ 1А054-053578054-063054-073НФ 1А299054-093от56,5054-066_ ■054-092 ,Примечание. Мощности статической нагрузки двигателей MTH7I2-IC в режимах работы Л и С и МТН713-10 в режимах
Л, С и ВТ указаны по предельному току магнитного контроллера. Мощность даигателя МТН712-10 в режимах Л и С мд^кет
быть увеличена до 155 и 18!) кВт, а двигателя МТН713-10 в тех же режимгх —до 190 и Й20 кВт при применении для коммутации
роторных цепей контакторов на 250 А.
§9-2]Электроприводы механизмов подъема с динамическим торможением двигателей205Аппаратура управления комплектных электроприводов механизмов подъемаТаблица 9-7Исполнение
по токуИсполнение
по схемеРод тока цепи
управленияТип магнит¬
ного контрол¬
лераМеханизм с крюкомМеханизм с грейферомКаталожный
номер магнитного
контроллераТип команде^
контроллераКаталожный
номер магнитного
контроллераТип командо-
контроллераДо 90 АБез защитыПеременныйТСА 161ЗТД.622.018-06КП 1263ЗТД.622.018-08КП 1211 Д.
КП 1212 ДС защитойТСАЗ 160ЗТД.622.010-11КП 1263-ЗТД.622.010-11КП 1211 Д,
КП 1212 ДПостоянныйКС 160
ДКС 160ЗТД .627.076-16
ЗТД.627.076-22КП 1264 МТЗТД.627.076-16
ЗТД.627.076-22КП 1211 ДМТ,
КП 1212 ДМТОт 90
до 200 АБез защитыПеременныйТСА 161ЗТД.622.018-06КП 1263ЗТД.622.018-08КП 1211 Д, ■
КП 1212 ДС защитойТСАЗ 160ЗТД.622.010-10КП 1263ЗТД,622.010-10КП 1211 Д.
КП 1212 ДПостоянныйКС 160
ДКС 160ЗТД.627.076-13
ЗТД.627.079-23КП 1264 МТЗТД.627.076-13
ЗТД.627,079-23КП 1211 ДМТ.
КП 1212 ДМТОт 200
до 320С защитойПеременныйТСАЗ 250ЗТД.622.017-15КП 1265’ЗТД.622.017-15КП 1211 Д,
КП 1212 ДПостоянныйКС 250
ДКС 250ЗТД.627.077-14ЗТД.627.080-22КП 1264 МТЗТД.627,077-14
ЗТД.627.080-22КП 1211 ДМТ,
КП 1212 ДМТОт 320
До 430 А
(при огра¬
ничении
тока
ротора
до 280 А)С защитойПитание от вы¬
прямителяКС 400 ■ЗТД.«27.078.17КП 1264 МТЗТД.627.078-17КП 1211 ДМТПостоянныйКС 400
ДКС 400ЗТД.627.078.12ЗТД.627.095.12-КП 1264 МТЗТД.627.078-12
ЗТД.627.095-12КП 1211 ДМТк1римечання: 1. схемы магнитных контполлеров показаны на рпе. 9-5—3-7» механические характеристики на ряс. 9-8.
2, Управление магнитными контроллерами КС 400 и ДКС 400 от командоконтроллеров производится через промежуточныеWблоки БКП.Комплекты электроприводов механизмов передвижепня при управлении от магнитных кон^оллеров на токи до 75 АТаблица 9-8Мощности статической нагрузки Р^, кВт, и переключения кВт, пускорегулирующие резисторы для крановых двигателейв различных режимах работыа5^с/^пертелейдвига-Пускорегулирующие резисторытелейПускорегулирующие резисторыОCQР.м<i>(0 00^^00<О рО 00toccZжшliiiТипКаталожный номер3*иSeIIннньЯ ^ ^
ньнн^ТипКаталожный номер1|л2,63,85,68,311,316,54.52,36,53,310,54.9НФ 22А2ТД.750.021-09114,07,219,59,830,014,3НФ 4А2ТД.754.058-021К04.15,89.0'■ 13,017,527,0т12,51.82.6НФ 22А2ТД.750.021-0313,95,67,7НФ 11АVf ЯМ2ТД.750.020-182ТД.750.020-19-U яи11А3»55.07,5НК 2А2ТД.750.025-01111*015„022,0rliiliX,НФ ЗА• ИЛИ2ТД.754.057-Б81ВТОТ0,7 .1,01.5НФ 22А
или
НК 2А2ТД.750.021-042ТД.760.025-02112,23,04,4НФ22 А
илн
НК 2А2ТД.750.021-05
илн2ТД.760.025-033.00,364^40,56.60,75.10,0ы13,21,519,82,2112.84.06.09,012,018,0
206 Типовые крановые электроприводы с контакторно^кднтроАлврнын управлением [Равд. 9Комплекты элекгроприводов механизмов передвижения при управлении от магнитныхкоцтролдеров на токн от 90 до 2С0 А •Таблица 9-9Мощности статической нагрузки Рд, кВт. и переключения кВт, пускорегулирующие резисторы д;ш крановыхдвигателей в различных режимахS <о
22к 5л'? 2
5-SxО.ПускорегулирующиерезисторыТипЙ *ПускорегулиругощиерезисторыТипSо яX
оН
й. Й-ПускорегулиругощиерезисторыТипч а«3 ^Н &СЧ о« оOf 'фсяa,“SПускг,регулирующие
резисторыТип■5I.^ 0JиX SО ж22.540.019.536.0НФ 4А058-0227.549.524.045.0НФ 4А058-0233,758.329,253,0НФ 1А054-03054-06054-1075745.077.039.070.0НФ 1А054-05054-07054-1175810,530,0НФ ЗА057-1912,8'37,0НФ 1А054-08054-12ВТОТ6.027.53.025.0НФ ЗА057-677,434.0
3.731.0НФ 1А054-09054-1250615,745,0НФ 1А054-05054-0830521.0).0НФ 1А054-0S054-123189.0^,64,536,012,053,0054-06.3054-073НФ 1А318НФ 1А054-08•3319034.1226,0054-12148,0Таблица 9-ШКомплекты электроприводов механ^ 200Таблица Э-11Annapaiypa управления комплектных электроприводов
механизмов передвиженияпр21 упрдр<1<с
до 320 А;ппп VM1 ть»а ■«КаталожныйТипМощности статической нагруз
Pjjgp, кВт, пускорегулиру!
двигателей в различи)ки Рд, кВт, и переключения
ошие резисторы крановых
ь1х режимах работы§ ®оШ ИSC я u|gS£iо я о a> яS SB 0.;JCLТипномер магнит¬
ного контрол¬
леракомандо-контрол¬лераС9и»& ОПускорегулируюшне
. реаисторы2« S, Пускорегулйрую(цне
резисторыТА 161
ДТА 160ЗТД .621.013-02
ЗТД.621.014-04КП 122615 ^аZXSьок «в,НТип1' №1оиБеззащитыПеремен¬ныйДТА 162
ДТА 161ЗТД,621.015-04
ЗТД.621,016-04Кнопочноеуправлениея5* кТипSRОч лС9Ь «Ф£чV<и ЕР<
0, Rа,(Uг§V SДо 90 АТАЗ 160ЗТД,621,010-04КП 1226(Xо«X 4)о аix;К 63ЗТД.627.037-04
ЗТД ,627.04 5-02КП 1226 МТ56.099.0С за¬
щитойПостоян-ДК 63л<054-03054-0633759.57,0054-01054-0463763ныиДК 62ЗТД.627.О48-04Кнопочноеуправление48,590,01054-073110,0g054-05054-0663ДК 61ЗТД,627.047-01С054-111ТА 161
ДТА 161ЗТД.621,009-02
ЗТД.621,014-04КП 1226Т26.775,0<еОб4'07054-08ЛСл! 1 933131935,0100,0<©05^-03054-05054-06054-07336о608Or 90
до 200АБеззащитыПеремен¬ныйДТА 162
ДТА 161ЗТД ,621.015-04
ЗТД ,621,016-04КнопочноеуправлениекЖо■ТАЗ 160ЗТД .627.010-02КП 1226ВТ15.066.0<©054-07330720,088,010,080,0;<&X054-03054-06054-11331321С за ¬
щитойПостоян¬ныйК 160
ДК 160ЗТД.627.072-02
ЗТД.627.074-02КП 1226 МТот60,0054-123От200А
до 320АПостоян¬ныйК 250'
ДК 260ЗТД.627.073-02ЗТД.627.075-04КП Ш6ключения двигателя МТН711-10 в режимах Л и С указаны по
предельному току магнитного контроллера и могут быть увели¬
чены соответственно по статической мощности до значений 65
и 78 кВт и по мощности пзреключения до значений 65 и 75 кВт
при применении для коммутации роторных цепей контакторов
на 250 А.Примечания; !. Магнитный контроллер ДТА 161 кои-
плектуется только с магнитными контроллерами ДТА 160 или
ДТА 162, а ДК 61 с магнитными контроллерами ДК 63 или
ДК 62.2. Схемы магнитных контроллеров показаны ка рис. 9-9^
9-10 и 9-12, а механические характеристики — на рис. 9-11.
§9^2]Электроприводы механизмов подъема с динамическим торможением двигателей207Таблица 9-12Комплекты электроприводов механизмов пддъемапри управлении кулачковыми контроллерами типа ККТ 69с реверсором ТР 160 и магнитным контроллером ТРД »60ТипдвигателяМощность стати¬
ческой нагрузки
Рд, кВт, Б pe^tH-
ме работыMTF412-6МТН412-6MTHS11-8МТН512-8МТН512-645,055.482.539.048.0
71,533,040,660,5Пускорегулирующие резисторыТипНФ 1А
НФ ПАНФ 1А
НК 1А
НФ 1А
НК 1АКаталожный Коли-
номер честЕО2ТД 754.054-87
2ТД 754,048-032ТД 754.054-92
2ТД 750.024-47
2ТД 754.054-93
2ТД 750.024-47Примечание. Схема электроприводов представлена на
рис. 9-14, механические характеристики — ка рис. 9-15.Таблица 9-13Комплекты длектроприводов механизмов подъемапри управлении кулачковыми контроллерами типа ККТ 65А имагнитными контроллерами ТРД 1вОТипдвигателяМощность стати¬
ческой нагрузки
Яд, кВт, при
режимах работыПускорегулирующие резисторыЛсТТипКаталожныйномерКоли¬чествоMTF2II.6MTF311.8МТН2Ц-6MTH3U-811*29,78,2НФ ПА
или
НК 1А2ТД.750.020-992ТД.750.034-4811MTF311-6MTF312-8МТНЗП-6МТН312^16,514,312,1НФ 1А
НФ НА2ТД.754.054-902ТД.754.048-081MTF312-6MTF411-8MTH3I2-6МТН4П-822,219,512,0НФ IA
НФ ПА2ТД ,754.054-86
2ТД .750.020-111iМТР4П-6MTF412-8MTH411-6МТН412-833,0--НФ 1А
НФ ПА
или
НК 1А2ТД.754.054-90
2ТД.754.048-082ТД.750.024-46111MTF412-6МТН412-6МТН5П-836,0--НФ 1А
НФ ПА2ТД. 754.054-87
2ТД.754.048-0311Примечания: 1. Схема электроприводов представлена
на рис. 9-13, механические характеристики — на рис, 9-14.2. Мощность статической иагрузки двигателей MTF(H)312-6
и MTF(H)4Il-8 в режиме Т и двигателей МТР(Н)412-6 в режиме
Л указана по предельному току контроллера.При построении указанных электроприводов режима ди¬
намического торможения с самовозбуждением.Принципы построения ряда электроприводов анало¬
гичны описанным в предыдущем параграфе, однако рас*
сматриваемые электроприводы выполняются только для
подъемных механизмов, поскольку, как известно, при¬
менение динамического торможения для получения по*
нижениых скоростей более эффективно при активном
моменте статической нагрузки.Полностью идентичным рассмотренному ранее яв¬
ляется построение ряда электроприводов по диапазону
мощностей, разделению их между силовыми и магнит¬
ными контроллерами с учетом режимов работы и соста¬
ву комплекта, хотя использование двигателей по допу¬
стимой статической нагрузке выше благодаря лучшим
энергетическим свойствам применяемого метода тормо¬
жения.Однако имеется ряд существенных особеннрстей,
вызванных применением динамического торможения и
приводящих к усложнению схем электроприводов:1) обмотка ротора двигателя должна быть замкнута
на трехфазный выпрямительный мост;2) необходим источник для подпитки обмотки ста¬
тора постоянным током. Ток подпитки, а следовательно,
мощность и построение блока подпитки зависят от па¬
раметров цепи ротора (см. § 7-5);3) необходимо обеспечить контроль наличия тока
подпитки и работы силовых вентилей выпрямительного
моста;4) должен быть обеспечен автоматический разгон
электропривода на характеристиках двигательного
режима (в П1 квадранте) при работе в направлении
спуска груза, поскольку при малых нагрузках двигатель
может не разогнаться на характеристиках динамического
торможения;5) коммутация роторных цепей может осущест-
влятьс5^ как на стороне переменного, так к на стороне
выпрямленного тока {за мостом). Однако в последнем
случае применение контакторов с приводом на перемен¬
ном токе недопустимо. При коммутации роторных цепей
на стороне переменного тока в симметричных схемах
необходимо применение трехполюсных контакторов.Указанные 'особенности приводят к следующим от¬
личиям построения электроприводов с динамическим
торможением от систем с противовключением:1) электроприводы с кулачковыми контроллерами
комплектуются дополнительным магнитным контролле¬
ром ТРД 160, на котором установлены силовые венти¬
ли и релейно-контакторная аппаратура, обеспечивающие
работу системы с учетом указанных особенностей;2) системы с магнитными контроллерами выпол¬
няются в двух исполнениях: с цепями управления пе¬
ременного тока типа ТСД и контакторами КТ 6000 д.ая
грузоподъемных механизмов, для режимов работы Л,
С, Т; с цепями управления постоянного тока КСДБ
для механизмов режима работы ВТ (в основном грей¬
ферные механизмы) на основе контакторов с бестоковой
коммутацией типа КТП. Применение бестоковой ком¬
мутации позволяет увеличить износостойкость контак¬
тов контроллеров.Разделение схем по исполнению защиты такое же,
как для систем с противовключением, однако для всех
типов магнитных контроллеров с защитой завод-изго¬
товитель не устанавливает катушки максимальных реле.
Диапазон регулирования скоростей электроприводов с
силовыми контроллерами составляет выше 4:1, а для
систем с магнитными контроллерами свыше 8:1.Следует отметить, что благодаря наличию устойчи¬
вых посадочных скоростей в. таких электроприводах
значительно снижается число включений привода при
Осуществлении доводочных операций и тем самым сни¬
жается напряженность режима его работы.
208Типовые- крановые электроприводы, с контакторн0‘контроллерным управлением[Разд. 9Область применения рассматриваемых электропри¬
водов— подъемные механизмы крановых устройств, на
которых в настоящее время используются системы с
противовключением, за исключением тех случаев, когда
применение более сложных систем оказывается не эф¬
фективным и не вызывается предъябляемыми к ним
требованиями, ' . ■б) Схемы электроприводов “Схемы кулачковых контроллеров ККТ 65А и
ККТ 69А. Принципиальные схемы контроллеров
ККТ 65А и ККТ 69А приведены соответственно на
рис, 943 и 9-14, а механические характеристики на
рис. 9-15.Контроллеры ККТ 65А и ККТ 69А обеспечивают
ступенчатый пуск^ ступенчатое регулирование скорости,реверс и торможение. Контроллеры имеют по пять
(ККТ 65А) и четыре (ККТ 69А) фиксированных поло¬
жения для каждого направления движения и одно фик¬
сированное нулевое положение. На рис. 9-15 характе¬
ристики для ККТ 69А обозначаются индексами со штри¬
хом. Включение цепи управления производится кнопка¬
ми включения КнВ.Регулирование скорости по ступеням осуществляет¬
ся: в сторону подъема (так же как и в контроллерах
ККТ 61 А) путем простого изменения сопротивления
резисторов в цепи ротора, в сторону спуска —путем
изменения сопротивления в цепи ротора двигателя, ра¬
ботающего в режиме динамического торможения с са¬
мовозбуждением.Принцип динамического торможения с самовозбу¬
ждением основан на подключении статора электродви-J!S:КнВIКГzoРКТ-O''KS8KBКЛPKfl РШ PM2 r-i/ГУГас//lil1K7-cr^-Ы I па:»/k9pyКСП“M-PKTПобьемСлуск 154327/70/2J45К1К9syXЛ сКЗr?SKttSкчXXKSXXXXXXКбк?XXл оКЗXXXК10УXкпоXкпXжРис. 9-13. Схема кулачкового контроллера ККТ 65 А,
§9-2]Электроприводы механизмов подъема с динамическим торможением двигателей209№ПодъемаОпус к327п1Z3К1XKZXXXXКЗк5'МБК7XК8К9 ,K1DКПK1ZРис. 9-14, Схема кулачкового контроллера ККТ 69 А.14—839
210Типовые крановые электроприводы, е контакторно-контроллерным управлением, [Разд. 9гателя к выпрямленному напряжению ротора. От обыч¬
ной схемы динамического торможения система с само-
^ возбуждением отличается автоматической зависимостью
""тока возбуждения от нагрузки Электродвигателя, а так¬
же отсутствием понизительного трансформатора.Электроприводы, выполненные с применением кон¬
троллеров ККТ 65А и ККТ 69А, отличаются сравнитель¬
но высокими энергетическими аоказателями, посколькуРис, 9-15. Механические характеристики электромиво-
дов с кулачковыми контроллерами ККТ 65А и ККТбЭА.
Характеристики реализуются при следующих значениях
ступеней резисторов (в процентах номинального сопро¬
тивления двигателя^: для ККТ 65А — Р1—Р4, Р2—Р5,
Р3—Р6~\0‘ Р4~Р7\ Р5—PS —30; Р7—Р10, P8—PI0, Р9~~Р 10 —60 (контроллер ККТ 65А);
PI—P4. Р2—Р5, P3^P6~J6; PI—PIO, P2—PU,
P3—P12 — 4Q; Р4-Р7, Р5—Р8. Pff—РР —30; Р7—Р13,
Р8—Р13, Р9—Р13 — 74 {контроллер ККТ 69А).в режиме динамического торможения с самовозбужде¬
нием из сети потребляется незначительная энергия.
В первую очередь это относится к контроллеру ККТ 65А,
у коггорого для обеспечения начального подмагничива-
ния электродвигателя требуется ток подпитки, равный
3—5% номинального тока двигателя, В контроллерах
ККТ 69А ток подпитки составляет 25—30% номиналь¬
ного. Это вызвано тем, что указанные контроллеры при¬
меняются для управления двигателями серии MTF,
МТН большей мощности, отличающихся худШ1ей способ¬
ностью самовозбуждаться.В схеме контроллера ККТ 65А для повышения на¬
дежности работы привода начальное подмагничиванне
производится на нулевом положении контроллера при
включенном линейном контакторе /СЛ защитной пане¬
ли ПЗКБ. Выпрямленный ток подпитки протекает по це¬
пи: фаза Л2, контакты контактора /(Д (выводы 20) и
цепь катушки реле РКТ. Реле РКТ предназначено для
контроля тока в контуре подпитки. В схеме контроллера
ККТ 69А узел с реле РКТ, введенный в силовую цепь
двигателя, отключается на нулевом положении контак¬
тором КД в целях снижения потерь в контуре подпитки.Отключеаие контактора происходит не сразу, а с
выдержкой времени, определяемой реле РУ. Такая за¬
держка требуется для обеспечения динамического тор¬
можения при остановке привода.Схема узла динамического торможения выполнена
с последовательным соединением выпрямительного мо¬
ста и пускорегулировочных резисторов, которые вклю¬
чены на стороне переменного тока.Особенностью схемы узла динамического торможе¬
ния является потенциометрическое включение выпрями¬
тельного моста с пускорегулировочными резисторами,
при котором входное сопротивление моста на порядок
ниже сопротивлений нерегулируемых ступеней резисто¬
ров Р10—Р7. Р8, Р9 (ККТ 65А) и Р13-Р7, Р8, Р9
(ККТ 69А). Благодаря этому» с одной стороны, контур
переменного тока замкнут на всех положениях, что
значительно повышает' надежность системы, а с дру¬
гой — достигается постоянство коэффициента компаун¬
дирования, равного отношению тока возбуждения (то¬
ка подпитки) к току ротора.Применение узла динамического торможения с са¬
мовозбуждением позволяет получить достаточно жест¬
кие механические характеристики на спуске, обеспечи¬
вающие устойчивые посадочные скорости, что является
важным достоинством применительно к механизмам
подъема кранов. Режим динамического торможения
реализуется на всех положениях спуска, кроме послед¬
него, на котором двигатель работает от сети с невы-
ключаемыми ступенями резисторов в цепи ротора, не¬
обходимость в которых определяется условиями обес¬
печения нормальных пусков при заданном числе сту¬
пеней.. Особенностью построения схем электроприводов на
положениях подъема является наличие промежуточно¬
го нефиксированного положения Я между нулевым и
первым положениями, предусмотренное для исключе¬
ния состояния, при котором мотут быть одновременно
отключены контакторы КД и КСЯ, что опасно, по¬
скольку при отсутствии вращающего момента двигате¬
ля возможно падекие груза. Для исключения этого
состояния схемы требуется, чтобы контакт К7 при пе¬
реводе контроллера из нулевого в первое положение
замыкался раньше, чем разомкнется контакт К5. Кон¬
такторы КД и КСП электрически и механически сбло¬
кированы между собой, чтобы предотвратить возмож¬
ность короткого замыкания в случае их одновременно¬
го включения.Отличие между контроллерами ККТ 65А и ККТ
69А заключается только в том, что в контроллерах
К^Т 69А в целях возможности управления двигателя-
мк большей мощности включение двигателя и измене¬
ние направления его вращения осуществляется не кон¬
тактами контроллера, как в ККТ 65А (контакты К2^
К4, Кб, К8), а контакторами /СВ и КН реверсора
ДР 160. С этой'же целью в контроллере ККТ 69А пре¬
дусмотрено включение роторных ступеней резисторов
в две параллельные группы, что потребовало, однако,
использования в цепи ротора шести контактных элемен¬
тов {К7—К12) вместо трех {К10~К12) в контроллере
ККТ 65А. А это предопределило в свою очередь (учи¬
тывая ограниченное количество кулачковых элементов)
уменьшение числа положений в контроллере ККТ 69А.Определенным достоинством контроллеров ККТ 65А
в ККТ 69А перед контроллерами ККТ 61 А, ККТ 62А
и ККТ 68А является то, что они допускают автомати¬
ческий разгон двигателя при постановке контроллера
из нулевого сразу в крайние положения. В этом случае
осуществляется двухступенчатый разгон — сначала по
характеристике Л (рис. 9-15), затем, после включения
с выдержкой времени контактора /СУ —по характери-
стйке, соответствующей крайним положениям.
Рис. 9-16. Схема магнитного контроллера ТСД для самовозбуждаемых электродвигателей.Кулачковые контроллеры ККТ 65А и ККТ 69А
применяются вместе с защитной панелью ПЗКБ, обес¬
печивающей нулевую (контактор КЛ), Максимальную
(реле РМ) и конечную (выключатель В/С5) защиты.
Для осуществления режима динамического торможения
с самовозбуждением предусмотрен магнитный контролт
лер ТРД 160, в который входят следующие аппараты:
контакторы КД, КСП, КУ и реле РУ, РКТ. В этом же
контроллере размещается реле контроля диодов РКД,
которое срабатывает в случае пробоя любого диода
выпрямительного блока ротора.Схемы магнитных контроллеров серий ТС Дм\4*КСДБ. Схемы магнитных контроллеров серий ТСД
и КСДБ выполнены, так же как и схемы силовых
кулачковых контроллеров типов ККТ 65А и ККТ
69А, при использовании динамического торможения с
самовозбуждением. На рис. 9-1б;а и 9-17 показаны ти¬
повые схемы магнитных контроллеров ТСД 160. Конт¬
роллеры ТСД 250 отличаются только включением сту*
пеней резисторов в роторной цепи (рис. 9-16,6).Схемы магнитных контроллеров КСДБ по прин¬
ципу построения аналогичны схемам контроллеров
ТСД, Отличие заключается в схемах управления, кото¬
рые в КСДБ выполняются на постоянном токе.
212Типовые крановые электроприводы с контакторно-контроллерным управлением[Разд. 9РМ,1" ,1" ,1"
□ сЬ'ергГ\ки-{>f■Khагг -ПРис. 9-17. Схема магнитного контроллера ТСД для не самовозбгуждаемых электродвигателей.а также в типах используемых контакторов. Определен¬
ные особеннгости имеет и схема магнитных контроллеров
КС ДБ, вызванные спецификой работы этих контролле¬
ров в электроприводах грейферных механизмов, для
которых они в основном и предназначены. Схемы конт¬
роллеров КСДБ построены на использовании контак*
торов с бездуговой коммутацией, существенно повыша¬
ющих электрическую износостойкость контроллеров.Схемы на рис. 9-,16, а и 9-17 отличаются друг от
друга узлом подпитки обмоток статора в режиме ди¬
намического торможения, что определяется неодинако¬
вой способностью двигателей различных исполнений
самовозбуждаться. Схема на рис. 9-17 предусматривает
больший ток подпитки (для несамовозбуждаемых
^электродвигателей), чем схема рис. 9-16,а (для само-
.'возбуждаемых электродвигателей).Механические характеристики электроприводов с
контроллерами ТСД приведены на рис. 9-18. За ба¬
зисные величины здесь приняты номинальный момент
и синхронная скорость двигателя.Контроллеры ТСД и КСДБ обеспечивают сту-
, пенчатый, пуск, ступенчатое регулирование скорости,
реверс и торможение. Управление осуществляется от
, команде контроллера, имеющего по четыре фиксирован¬ных положения в каждую сторону движения. Схемы
1выполняются несимметричными. Регулирование скоро¬
сти при движении в сторону Подъем осуществляется
путём изменения сопротивления ступеней резисторов
в роторной цепи, при движении в ‘сторону Спуск — пу¬
тем , переключения тех же ступеней резисторов, что
и на подъеме, но- только в режиме динамического тор¬
можения с самовозбуждением. Как при подъеме, так
и при спуске предусматривается автоматический разгон
под контролем реле ускорений РУ1, РУ2 и РУЗ (харак¬
теристики 4'П и 2'С). Контроль разгона при подъеме
п]^изводится реле РУ1 и РУ2, начиная с положения
ЗП, Реле РУЗ в этом режиме не функционирует (в цепь
катушки реле включены замыкающие контакты кон¬
тактора направления КН),Режим динамического торможения реализуется на
всех положениях спуска, кроме последнего, на котором
двигатель работает от сети с невыключаемыми ступе¬
нями резисторов в цепи ротора. На первом положении
спуска все ступени резисторов, кроме невыключаемрго,
выведены из цепи ротора (включены контакторы уско¬
рения КУ2, КУЗ, КУ4).На положениях 2С и ЗС для увеличения скорости
в цепь ротора вводятся ступени резисторов — отключа¬
§9-3]Электроприводы постоянного гока с параметртестт регулированием213ются контакюры КУЗ и КУ4 на положении два ’И
КУ2 — на положении три. При, лереходе - с ..третьего на
четвертое положение включаются контактор К.У^ и под
.контролем реле ускорений РУ1—РУЗ контакторы
КУ2—КУ4. Такой порядок включения требуется для
обеспечения разгона при малых грузах, не способных
преодолевать силы трения в механизме. При постановке
командоконтроллера сразу в крайнее положение спускаРис, 9-18. Механические характеристики электроприво¬
дов с магнитными контроллерами ТСД. Характеристики
-реализуются при следующих значениях ступеней резис¬
торов (в процентах номинального сопротивления двига¬
теля): Р1~Р4 — Ъ\ Р4~Р7—Щ P7—P10 — 2Q-, Р10~^
Р13 — 27\ Р13—Р16~7&. Данные указаны на одну фазу.проиЕВОдится разгон аналогично разгону при переводе
контроллера из третьего на четвертое положение.Схемами магнитных контроллеров предусмотрено
торможение с помощью электромагнитного тормоза
ТМ, цепь катушки которого коммутируется контакто¬
ром КТ.При торможении с подъема торможение начинает¬
ся сразу после постановки командоконтроллера в нуле¬
вое положение.При торможении со спуска действие тормоза ТМ
задерживается на выдержку времени реле РБ. В тече¬
ние этого Бремени осуществляется электродинамическое
торможение (включен контур подпитки).Контур динамического торможения собирается при
включении контактора; КД, который электрически сбло¬
кирован с контактором КСП и с контакторами направ¬
ления КВ и КН, а также механически сблокирован с
контактором КСП (для исключения к. з. в силовой це-
. пи в случае одновременного включения контакторов
КД ^ КСП, КН или КВ). Для обеспечения начального
подмагничивания электродвигателя в режиме динами¬
ческого торможения предусматривается подпитка об¬
моток статора выпрямленным током от сети по одно-
полупериодной схеме. В схеме на рис. 9-16, где требу¬
ется малый ток подпитки (около 3% номинального),
собирается такой контур: фаза Л1, контакты контак¬
тора КД, резистор R2, катушка реле РКТ, фаза- Л2.В целях надёжности контур подпитки включается на
нулевом положении контроллера. Реле РКТ осущест¬
вляет контроль наличия тока в контуре подпитки.В схеме на рис. 9-17, где ток подпитки значительно
больше (около. 30% номинального), узел с реле РКТ
введен в силовую цепь двигателя и из-за сравнительно
больших потерь, выделяемых в резисторе R2, собира¬
ется ..только на- рабочих положениях спуска (контактор
динамического торможения КД отключается на нуле¬
вом положении)!- При этом отключение контактора КД
происходит не сразу,. а с выдержкой времени, опреде¬
ляемой реле РБ. Выдержка времени необходима для
обеспечения динамического торможения.Схемы магнитньгх'' контроллеров- обеспечивают ну¬
левую (реле PH), максимальную (реле РЫ) и конеч¬
ную (выключатели ВКВ и ВКН) защиты. Предусмат¬
ривается также защита от пробоя любого из диодов
выпрямительного моста в цепи ротора. Указанная за¬
щита выполняется с „помощью реле РКД, срабатываю¬
щим при наличии пробоя диода моста только при от¬
ключенном контакторе КД.в) Технические данные комплектных электроприводовВ настоящее время комплектные ряды типовых
электроприводов рассматриваемого типа разработаны
только при управлении от кулачковых контроллеров.
Технические дапные указанных электроприводов приве¬
дены в табл. 9-10 и 9-11. Так же как и для систем
с противовключением, мощности статических нагрузок
для систем с кулачковыми контроллерами рассчитаны
толр>ко для режимцр Л, С и Т, аналогично же рассчи¬
тываются в зависимости от режимов работы пускоре¬
гулировочные резисторы.Технические 'данные комплектных электроприводов
с магнитными контроллерами будут рассчитаны по ме¬
ре их освоения прюмишленностью.9-3. ЭЛ ЕКТРаПРЛВОДЫ ПОСТОЯ НЙОГО ТОКА
с ПАРАМЕТРИЧЕСКИМ РЕГУЛИРОВАНИЕМа) Особенности построения электроприводов.Область примененияДостоинства рассматриваемых систем (простота
реализации, небрльшие массогабаритные размеры аппа¬
ратуры управления,, относительно высокие регулировоч¬
ные и энергетические показателида также высокие на¬
дежностные показатели коммутационной аппаратуры
постояннс|^.о тока) определяют их достаточно широкое
примененне, прйчём^ в первую очередь для механизмов
режимов работы Т и ВТ в условиях, т^еталлургического
производства;' Однако эти электроприводы в отдельных
слу'*эях применяются и для общепромышленных крано¬
вых механ_из1м0в, в том числе работающих в режимах
Л и С при' электроснабжении на постоянном • токе.
В соответствии с этим имеются две модификации маг¬
нитных контроллеров: исполнение на досках для ме¬
таллургического производства . и реечное — для обще¬
промышленных механизмов.Комплектный ряд электроприводов включает в се¬
бя системы с магнитными и силовыми контроллерами
отдельно для механизмов подъема и передвижения-при
управлении двигателями постоянного тока последова¬
тельного возбуждения серииД всех исполнений мощ¬
ностью от 2,4 до 106 кВт (по номиналу двигателей
в режиме ПВ = 40%).Ряд электроприводов с силовыми контроллерами
типа КВ 1 ограничен мощностью 9,5 кВт, определя-емой
особенностями коммутации цепей постоянного тока
указанными аппаратами, и применяется только для
механизмов 'легкого и среднего режимов работы.- Элек¬
троприводы" с'магнитными контроллерами рассчитаны
214Типовые крановые электроприводы с гюнтакторпо-контроллертш управлением ’ [Разд, 9для всех режимов работы. Для их построения исполь¬
зуются шесть исполнений магнитных контроллеров для
механизмов подъема типов ПС (для сдвоенных ДПС)
с контакторами на 160, 250 и 630 А и семь исполнений
контроллеров для механизмов передвижения П (ДП)
с контакторами на 63, 160, 250 и 630 А, Все электро¬
приводы с магнитными конч^оллерами имеют индиви¬
дуальную защиту, а для систем с силовыми контролле*
рами необходимо применение отдельной защитной па-
нели.В электроприводах подъемных механизмов тормоз¬
ные режимы осуществляются в режиме динамического
торможения и на характшистиках потенциометрическо¬
го включения якоря и оомотки возбуждения электро¬
двигателя. При этом на характеристиках каждого по¬
ложения спуска имеются участки, на которых возможен
силовой спуск крюка и легких грузов, и участки для
тормозного спуска грузов. Управление электроприво¬
дом передвижения осуществляется по обычной ревер¬
сивной схеме с противоаключением, в которой регули¬
рование скорости производится изменением сопротивле¬
ния в якорной цепи. .Особенностями рассматриваемых электроприводов
являются возможность регулирования скорости в зоне
выше номинальной и большак кратность максимального
момента, ограничиваемого только условиями коммута¬
ции машины.Диапазон регулирования скоростей в рассматривае¬
мых электроприводах 6:1 при работе с номинальными
грузами и 12:1 при работе с малыми грузами.Комплектные ряды электроприводов постоянного
тока строятся по тем же принципам; что и для систем
с асинхронными двигателями. Однако в связи с ограни¬
ченным объемом справочника таблицы их технических
данных не приводятся, а данные пускорегулируюаднх
резисторов приведены в § 7-9.б) Схемы электроприводовСхемы кулачковых контроллеров KBI 01 и КВ102.
Принципиальные схемы контроллеров КВ1 01 и КВ1 02
приведены на рис. 9-19 и 9-20, а соответствующие ме¬
ханические характеристики показаны на рис. 9-21
Н 9-22.Контроллеры КВ1 01 и КВ1 02 предусматривают
ступенчатый пуск, ступенчатое регулирование скорости,
реверс и торможение. Контроллеры имеют по пять
(KBi 02) и по шесть (KBI 01) фиксированных положе¬
ний для каждого направления движения и одно фикси¬
рованное нулевое положение.Контроллеры КВ1 01, предназначенные для меха¬
низмов передвижения кранов, применяются в основном
для управления двигателями последовательного и реже
смешанного и параллельного возбуждений.Кулачковые контроллеры КВ1 02, предназначенные
для механизмов подъема, применяются исключительно
для управления двигателями последовательного возбуж¬
дения. Это объясняется тем, что двигатели последова¬
тельного возбуждения имеют большую перегрузочную
способность, благоприятную естественную Механическую
характеристику на подъеме, при' котором имеет место
автоматическое повышение скорости при операциях с
легкими грузами и ненагруженным крюком. Кроме то¬
го, схема управления с такими двигателями позволяет
получить, надежное электрическое торможение и требу¬
ет минимального числа треллеев для подвода тока.Однако естественная механическая характеристика
двигателей последовательного возбуждения не пригод¬
на для условий работы привода в сторону спуска гру¬
за (отсутствует автоматический переход из двигатель¬
ного в генераторный режим). Для возможности работы
привода в указанном режиме приходится создавать
искусственные: механические характеристики, получае¬
Рис. 9-20. Схема кулачкового контроллера КВ1 02.мые путем включения якоря и обмотки последователь¬
ного возбуждения по известной потенциометрической
схеме. Эта схема позволяет также реализовать устой¬
чивые, малые посадочные скорости (см. характеристику
1C на рис. 9-22), Потенциометрическая схема применя¬
ется на всех положениях спуска. По мере перевода
контроллера с нулевого на последующие положения
спуска осуществляется последовательное увеличение
сопротивлений в цепи обмотки возбуждения (ослабля¬
ется поле двигателя) и уменьшение сопротивлений в
цепи якоря (увеличивается напряжение на его зажи¬
мах), чем достигается увеличение скорости двигателя;
На положениях подъема регулирование Скорости про¬
изводится путем простого изменения сопротивлений в
цепи якоря двигателя.Кулачковые контроллеры КВ1 01 в отличие от
КВ1 02 имеют симметричную диаграмму замыкания
кулачковых элементов для обоих направлений движе-Рис. 9-21. Механические характеристики электропривода
с контроллером КВ1 01. Характеристики реализуются
при следующих значениях ступеней резисторов (в про¬
центах номинального сопротивления двигателя)-: Р1 —
— 18; Р2—РЗ — 22; РЗ—Р4 ~~ 20; Р4—Р5 — 16;
Р5—Р6—14; Я1-Р8---40.няя. На йерёом положении контроллера для получения
малой скорости предусматривается схема с шунтирова¬
нием якоря резисторами. При этом двигатель подклю¬
чается к сети через' пусковые ступени резисторов
Р1—Р6, а параллельно якорю включаются резисторы
Я1~^Р8, : На последующих положениях резисторы
Я/—PS отключаются (контактом ЮЗ) к регулирова¬
ние скорости производится также, как и на положе¬
ниях подтека! в контроллерах КВ1 02.На нулевом положении контроллеров КВ1 01 и
KBI 02 двигатель отключается от сети и затормажива¬
ется механическим тормозом с электромагнитами по¬
следовательного ТМ2 или параллельного TMI возбуж¬
дений. Катушка электромагнита ТМ2 включается после¬
довательно, с обмоткой возбуждения ПО В двигателя.
При этом в контроллерах KBI 02 необходимо снять
перемычку С2—Р6. Цепи катушек тормозов ТМ1 ком¬
мутируются контактами контакторов КП1 (КП2) в
КВ1 01 ч КПЗ в I^Bl 02. Управление этими контакто¬
рами осуществляется с помощью контактов КЗ в кон¬
троллере КВ1 01 и К2, К.4 в контроллере КВ 1 02.В контроллерах КВ1 02 наряду с механическим
предусматривается электрическое торможение с само¬
возбуждением. При этом якорь двигателя замкнут вме¬
сте с последовательной обмоткой возбуждения на со¬
противления Р7—Р8, что увеличивает надежность ра¬
боты привода, поскольку даже при неисправности
механического тормоза будет происходить не падение
груза, а спуск его с малой скоростью, соответствующей
характернстике нулевого положения (рис. 9-22).- при выборе ступеней сопротивлений резисторов
главной .цепи ■ следует иметь в виду, что их значение
определяется не только необходимыми механическими
характерис1иками, но и током в цепи последовательно
включенных обмотки возбуждения и тормоза. Это ока¬
зывает влияние на выбор сопротивлений, которые
должны обеспечить ток в цепи тормоза, необходимый
216Типовые крановые электроприводы с контакторно^контроллерным управлением[Разд. 9Рис. 9-22. Механические, характеристики электропри¬
вода с контроллером КВ1 02. Характеристики реализу¬
ются при следующих значениях/ Ступеней резисторов
(в процентах номинального сопротивления двигателя):
Р1~Р2~ 30-, Р2—РЗ — 60; РЗ~~Р4~40-, Р4—Р5— 27;
р5-^рб — \д^-,р7—р8~г0.для его надежного срабатывания и удержания вклю¬
ченным во всех положениях контроллера.Контроллеры КВ 1 01 и KBI 02 применяются ймёсте
с защитной панелью ППЗБ 150, в которой размещают¬
ся контакторы ЛЯ/ (механизм’переД1вижения тележки),
КП2 (механизм передвижения моста), КПЗ (механизм
подъема) и общий для всех механизмов линейный кон¬
тактор /СЛО. В таком сочетании обеспечивается нуле¬
вая (контактором КЛО), максимальная (реле РЛз) и
конечная (выключателями ВКВ п ВЛ’Я) защиты.Схемы магнитных контроллеров серий П, ДЙ, ПС
и ДПС. Магнитные контроллеры постоянного тока
выполняются по двум основным схемам: . схеме на
рис. 9-23 (контроллеры серии П’для механизмов гори¬
зонтального передвижения) и схеме на рис. 9-24 (конт¬
роллеры серии ПС для механизмов подъема). Схемы
дуплексных магнитных контроллеров ДП и ДПС по
построению полностью аналогичны схемам соответ¬
ствующих контроллеров П и ПС. Особенностью их
является наличие переключателя в силовой цепи, позво¬
ляющего продолжать работу на одном двигателе в
случае выхода из строя другого. ‘ -Схемы магнитных контроллеров . постоянного тока
обеспечивают пуск, реверсирование, торможение и сту¬
пенчатое регулирование скорости. Контроллеры П и
ДП имеют симметричное построение схем для каждого
направления вращения. Число фиксированных рабочих
аолбжешй у контроллеров этой еерии —до четыре наТГТР^^ТПТРис. 9-23, Схема магнитного контроллера П 160.каждую сторону. Исключение составляют контроллеры
типов ДП 250, ДП 630 и П 630, у которых соответ¬
ственно по пять и. по три фиксированных положения.Механические характеристики контроллеров серии
П и ДП показаны на рис. 9-25. Контроллеры этой се¬
рии позволяют получить плавное нарастание момента
в процессе пуска, при переводе рукоятки командоконт-
роллера из одного положения в следуЕОщее или авто¬
матически при переводе контроллера сразу на послед¬
нее положение. Контроль разгона производится реле
РУ1, РУ2 н РУЗ, начиная со второго положени^(ха-
рактеристнка 5').Для получения плавного торможения при переводе
рукоятки командоконтроллера из крайних положений
в первое предусматривается шунтирование якоря (ха¬
рактеристика 1® —включены контакторы КТ2 и КП),
дальнейщее торможение до полной остановки произво¬
дится в режиме противовключения (путем перевода
Командоконтроллера на положения противоположного
направления) под контролем реле РПВ и РПН, пред¬
отвращающими выведение ступеней резисторов в цепи
якоря почти до полной остановки двигателя. Торможе¬
ние в режиме противовключения осуществ;(яется на
характеристике Ш (отключены контакторы КУ1—КУЗ
и К/7).Тормоз ГМ в рабочих режимах .не участвует и на¬
кладывается только в аварийных режимах при сраба-
ты.вании защиты или при отключении кнопки КА.
§9-3]Электроприводы ■ по^тбяяноео тока с параМетраческим регулированием217Шунтирование якоря на первом положении преду¬
сматривается во всех контроллерах Я и ЦП, кроме
контроллеров типа П 630, схема которого выполняется
также без свободного выбега на нулевом положении
командоконтродлера. Все остальные типы контроллеровРис, 9-24. Схема магнитного контроллера ПС 160.серии П и ДП имеют исполнения как со свободным
выбегом (без наложения тормоза), так и без него. При
применении магнитного контроллера без свободного
выбега необходимо снять перемычку 14-15 и поставить
перемычку 2—3.Схемы контроллеров серии П предусмрривают
включение тормозных электромагнитов 9 катушками
как последовательного, так и параллельного возбужде¬
ния. Исключением являются контроллеры типа 630,
который рассчитаны на применение тормозных электро¬
магнитов только с катушками последовательного воз¬
буждения и контроллеры серии ДП, рассчитанные на
применение тормозных электромагнитов с катушками
параллельного возбуждения.Из двух указанных исполнений тормозных электро-
магнитов более предпочтительно применение исполне¬
ний с катушкой параллельного возбуждения, поскольку
схемы с катушками последовательного возбуждения
могут быть использованы только в режиме без свобод¬
ного выбега.Схемы с . тормозной катудпкой-параллельного воз¬
буждения во избежание уменьшения тормозного усилия
выполнены с форсировкой включения тормоза. Форси¬
ровка осуществляется контактором КТI и реле ЯТ.
Выдержка времени реле РТ выбирается из условия ра¬
боты в режиме свободного выбега и должна быть не
менее 1,5 с. Для контроллеров без свободного выбега
выдержка времени должна быть минимальной, доста-Рис. 9-25. Механические характеристики электроприво¬
дов с магнитными контроллерами Д и ДП. Характерис¬
тики реалцзущтся при следующих ступенях резисторов
(в процентах номинального сопротивления д1эигателя):
Р1—Р2 — 100; Р2—РЗ — 26; РЗ—Р4 — 22; Р4^Р5 — 15;
Р6—Р7 — Ъ0 (контроллеры П 160, ПгбО, П 630. ДП 63,
ДП 160); Р1—Р2 — !00; Р2—РЗ — 26; РЗ—Р4 ~ 17;
Р4—Р5 — 11; Р5—Р6 — 9; Р7—Р8 — 50 (контроллеры
ДП250 И ДП630).Рис. 9-26i Механические характеристики электроприво¬
дов с магнитными контроллерами ПС и ДПС. Характе¬
ристики реализуются при следугош,их значениях ступе-'
ней резисторов (в процентах номинального сопротийе-
ния двигателя): Р1~Р2-— 100; РЯ-^РЗ—42; РЗ—Р4 —
25; Р4—Р5 — 30\ Р4—Р6 — 60; Р5—Р7 ~ 6; Р8~Р9 ~
22; —45 iPtO—Pil — ^Q; Р12 — Pil^^~-для Т{Ьн;тройлеров ПС 630). - •
218Крановые электроприводы с бесконтактными системами управления[Разд. ,10точной для срабатыйания тормозных электромагнитов;.
В тех случаях, где требуется фиксированная остановка
крана, предусматриваются два тормоза: один аварий¬
ный, обеспечивающий надежное торможение, второй
подтормаживающий, не дающий резких замедлений, но
фиксирующий кран в данном месте.Магнитные койтроллеры серии ПС выполняются
по несимметричной схеме с чйсл.ом фиксированных по-;
ложений, равным четырем на подъем и пяти — на спуск.
В контроллерах ДПС на подъеме предусматривается
йять фиксированных положений для выхода на послед¬
нюю характеристику при работе, одного из двух двига¬
телей. Механические характеристики магнитных конт¬
роллеров серии ПС показаны на рис. 9-26,Первое положение подъема, на котором яредусмат-
ривается шунтирование якОря, служит для выбирания
слабины троса и подъема с малой скоростью легких
грузов. На последующих положениях подъема происхо¬
дит разгон электродвигателя и регулирование скорости
при различных нагрузках. Управлениё разгоном ;рсу-^
ществляется реле времени РУ1, РУ2 и РУЗ.В нулевом положении электродвигатель механичес¬
ки заторможен. ОДновременно в главной цепи собр^ана
схема динамического т1^можения через замыкающие
контакты контактора КТ2, что определяет безотказное
торможение и движение с малой скоростью, даже ейли
вышел из строя механический тормоз.На положениях спуска последовательная обмотка
электродвигателя включается параллельно якорю через
добавочный резистор, причем сопротивление в цепи по¬
следовательной обмотки постепенно увеличивается, а
в цепи якоря уменьшается. Благодаря этому напряже¬
ние на зажимах якоря увеличивается, а м^д. с. обмртки
возбуждения уи^еньшается, что приводит к увеличению;
скорости спуска грузов. При резком переводе рукоятки
командоконтроллера на пятое положение спуска проис¬
ходит последовательный переход с характеристики
на характеристику 5С', затем на характеристику SC,
что вызывается запаздыванием отключения' контактора
КУ1 на выдержку времени РУ/, после чего размыкает¬
ся контактор КУ1 и реле РУ2 включает контактор КЛ2.На пятом положении спуска в цепи остаются вклю¬
ченными резисторы Р8—Р9, наличие которых позволяет
получить дополнительное питание (подпитку) обмотки
последовательного возбуждения, когда двигатель рабо¬
тает в генераторном режиме при наличии груза.Для ограничения тормозны.х токов в схеме преду¬
смотрен контроль торможения с помощью реле времени
РТ, выдержка времени которого выбирается в пределах
0,8-;i,0 с.В кoвtpoллepax ПС и ДПС с напряжением главной
цепи 440 В на первом положении подъема для ограни¬
чения тока якоря двигателя в процессе торможения
(при переводе рукоятки командоконтроллера на первое
' положение подъема) включается ступень резисторов с
большим сопротивлением, чем в испрлнениях контролле¬
ров на 220 В (в контроллерах на 220 В отсутствуют
контактор КТЗ и ступень резисторов Р13—Р9).В контроллерах ПС 630 предусматривается парал-
. лельное включение резисторов в шунтирующей якорь
. цепи, что-вызвано применением в этой цепи контакторов
на номинальный ток 250 А.Магнитные контроллеры постоянного тока обеспе¬
чивают максимальную (реле РМ1, РМ2), нулевую (ре¬
ле PH) и конечную защиты. Максимальное реле нас¬
траивается на срабатывание при 225—250% номиналь¬
ного тока двигателя. Конечная защита выполняется
выключателями ВКВ и ВКН.В схемах контроллеров для механизмов передвиже¬
ния осуществляется шунтирование конечных выключа¬
телей. (для повышения надежности работы узла ко.неч-
ной защиты при свободном выбеге) с помощью замы¬
кающих контактов реле противовключения РПВ й РПН,
которые включаются при полностью собранной схеме.
В этих схемах предусмотрено также шунтирование ко¬
нечных выключателей контактами реле РТ, что вызвано
необходимостью отключения реле PH в нулевом поло¬
жении при отключ^ном конечном выключателе ВКВ
кш ВКН. Кроме того, такое включение дает возмож¬
ность продолжатаг'движение механизма крана после сра¬
батывания конеч!ной защиты с пониженной скоростью
(соответствует первому поло>{^ению) в течение времени,
определяемого выдержкой времени реле РТ.РАЗДЕЛ ДЕСЯТЫЙ ~КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С БЕСКОНТАКТНЫМИ СИСТЕМАМИ УПРАВЛЕНИЯ10-1. КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ
ПОСТОЯННОГО ТОКАа) Общие вопросы построения ряда клановых
электроприводов с тиристорными преобр1азователями
постоянного токаТиристорные электроприводы постоянного тока цо
своим характеристикам в наибольшей степени удовлет¬
воряют требованиям, предъявляемым к механизмам
кранов. Однако применение их становится оправданным
лишь только для мощных крановых механизмов
(от 50 кВт и выше), а также в тех случаях, когда т'ре-
буется реализовать требуемые динамические, характе¬
ристики, большой диапазон регулирования . скорости
(свыше 10:1) и специальные механические характери¬
стики привода. Наиболее целесообразно применение ти¬
ристорных электроприводов для механизмов ^ крупных
плавучих, портальных, строиэельных, монтажн|1х^ кра¬нов, перегружателей (угольно-рудных, морских, при¬
чальных и речных), кранов металлургического производ¬
ства (литейных, закалочных, разливочных) и других
хрузоподъемных комплексов. Мощности электроприво¬
дов; которые требуются для этих крановых комплексов,
могут достигать 400—600 кВт и более на один механизм., . Основные технические данные некоторых типовых
комплектных крановых электроприводов с ТП приве¬
дены в табл. 10-1, Указанные электроприводы строятся
на базе ТП серий АТК и АТРК, технические характери-
. стики на которые даются в § 4-4, и двигателей постоян¬
ного тока серии Д. При этом возможны системы с нере¬
версивным исполнением ХП и контактным реверсором
.в главной цепи двигателей и системы с реверсивным ТП.
Первые предназначаются, как лравило, для механизмов
кра«ов мощностью до 100 кВт. Это объясняется тем,
что при больших мощностях возрастает время переклю¬
чения контактного реверсора, что отрицательно сказыг
вается на динамических характеристиках привода. Элек¬
троприводы с нереверсивным ТП рекомендуется приме-
§ lO-l]Крановые алекгроприводы с тиристорными преобрйэоватеАят постоянного тока519Комплекты электроприводов врановых механизмов с тиристорньпня преобразовдтелямв постоянного токаТаблица Ш-1Грузоподъемное устройствоНазвание кранаМеханизмы кранаДвигательй Vу аХтhПреобразова¬тельТипМагнитннЙ контроллерТипГабаритныеразмеры(ширина.глубина,высота),ммКоман-До-кш-Трол-лерТипПуско-ре¬
гулирую¬
щие рези"
сторыТипi<3Башенный кран
для высотного
строительстваПодъемДП 726725540220АТК250/230П 93А700Х 380Х
Х1451150кп1200НФ 1АМолернизирот
ванный башенный
кран для высот¬
ного строятельст-ПодъемД 8169525540440АТРК250/460птсзоо500Х315ХХ170085КП1200НФ 1АМонтажный стро¬
ительный кран
для высотного
строительстваПодъемД 812502S565220АТК250/230П 93А700Х380ХX14S1150КП1200НФ UРудно-уголЬныйперегружательЗамыкающая ле¬
бедка грейфераПодъемная ле¬
бедка грейфераД 818Д 818185185100100450450220АТРК500/4Й)АТРК500/460ПС 630ПС 6301000Х 750Х
Х15201000Х750ХХ1620ПередвижениетележкиД 8181S5100450220АТРК500/460ДП 630(2Х1000)ХX7SOX1520КП 1200
КП 1200НФ ПА
НФ IAНФ ПА
НФ 1АКП 1200НФ НА
НФ 1АРечной многоце¬
левой контейнер¬
ный перегружа-.
тельПодъемПередвижениетележкиД 81055100550Д 311210013602202+2АТРК250/460220АТРК250/460ДПС 250ДП 250КП1200НФ 1АКП 1200 НФ 1Анять при числе включений не более 300 в час. Неревер¬
сивные ТП находят примейение в электроприводах
механизмов подъема мощных строительных башенных
кранов, где число включений не превышает 60 в час.
Они могут быть использованы также и для монтажных
кранов.При мощности привода свыше 100 кВт следует йри*
менять реверсивные ТП. Поскольку максймальная мощ¬
ность реверсивных ТП серии АТРК равна 250 кВт, а
потребная мощность для целого ряда крановых меха¬
низмов превышает это значение, то возникает необхо¬
димость применения нескольких реверсивных ТП на
один механизм. Используют комплект преобразовате¬
ля, состоящий из двух параллельно включенных ТП ти*
па АТРК 500 и выполненный с одной общей системой
управления.Тиристорные электроприводы в зависимости от на¬
значения и исполнения крановых меха-низмов могут быгь
ОДНО' и многодвигательными. Многодвягательиые при¬
воды находят применение для механизмов передвиже¬
ния, а также механизмов подъема большой мощности.
Источником питания ТП является сеть переменного то¬
ка напряжением 380 В. В некоторых случаях при боль¬
шой мощности приводов, когда токоподвод с помощьюкабельного барабана из-за большого сечения кабелей
затруднен» представляется более целесообразным пи¬
тание производить от сети с напряж!ением 6 или 10 кВ.б) Схемы электроприводовПо построению схемы электроприводов с неревер¬
сивным и реверсивным ТП близки друг к другу. Разни¬
ца только в том, что в системе с реверсивным ТП
несколько проще релейно-контакторная часть схемы,
элементы которой обеспечивают взаимодействие ТП с
управляющим органом (командоконтроллером). Кроме
того, реверс переключением групп тиристоров делает
привод гораздо более быстродействующим- по сравне¬
нию с электроприводом с нереверсивным ТП и контакт¬
ным реверсом в цепи якоря. Малое время переключения
позволяет получить несколько лучшие характеристики
при пуске, торможении и реверсе, что особенно важно
для механизмов подъема, для которых время бестоко-
вой паузы при переходе.ТП из одного режима в другой
должно быть по возможности минимальным.В крановых электроприводах с ТП используются
два способа регулирования скорости: 1) изменением
напряжения, подводимого к якорю двигателя, 2) изме¬
нением тока в обмотке возбуждения, В большинстве
220Кранозыв' электроприводы с бесконтактными системами управления{Разд. WРис. 10-1. Схема з^1ектропривода механизма подъема с нереверсивным тиристорным преобразователем.• ОВД— параллельная обмотка возбуждения двнт ателя; Тр/,7р2 ~ трансформаторы: бГО —блок токовой отсечки; ТПТ ^
трансформатор постоянного тока; 7’Г—трансформатор 'Тока;СФУ, СФУВ —системы фазового управления; Л/7У — логическое
переключающее устройство: FP —релейный элемент для переключения контакторов направлеыня КВ а КН.крановых электроприводов на.ходят применение!., оба
способа (двухзонное регулирование), в основном для
электроприводов механизмов подъема. Для механиз¬
мов: передвижения, а также отдельных, механизмов
подъема (например, в перегружателях) регулирование
скорости осуществляется только за счет изменения на¬
пряжения двигателя. При этом в электроприводах с
'^вухзонным регулированием, а также в. электроприво¬
дах механизмов передвижения двигатели и ,.ТП выби¬
раются на одно и то же номинальное напряжение.
Регулирование скорости выше номинальной (на меха¬
низмах подъема) осуществляется здесь изменением
магнитного потока двигателя. В электроприводах ме¬
ханизмов подъема с регулированием скорости только
напряжением . двигатель.- выбирается на напряжение
вдвое мень.шее, чем номинальное напряжение .ТП, с т£м
чтобы реализовать .повышенные ;Скорости . .(выше, номи,-
налънои) в зоне малых нагрузок. Однако такое регу¬лирование имеет определенный недостаток, поскольку
оно сопряжено с уменьшением коэффициента мощнос¬
ти cos ф, что отрицательно сказывается на питающей
сети.Принципы построения схемы электропривода с
двухзонным регулированием, выполненной .примени¬
тельно к механизмам подъема, показаны на рис. 10-1,
а механические характеристики этого привода —на
рис. 10-2.Управление электроприводом осуществляется ко-
мандоконтроллером 1(К, имеющим по пять фиксиро-
ванных рабочих положений «подъем» и «спуск» и од¬
но нз^певое нерабочее положение.На первом положении командоконтроллера вклю¬
чаются . контакты реверсора {КВ или КН), pacTopMii-
живается электромагнитный тормоз и на задающие
обмотки суммирующих магнитных усилителей регули¬
рования СМУР (03 СМУР) и логики СМУЛ (03
§ ^0-2]Крановые электроприводы с тиристорными регуляторами напряжения22!СМУЛ) подается напряжение. На последующих по-
^ложениях командоконтроллера увеличивается напря¬
жение на задающей обмотке СМУР, вследствие чего
возрастает напряжение ТП и скорость двигателя. На
пятом положении подъема (5/7) включается задающая
обмотка суммирующего магнитного усилителя регули¬
рования СМУРВ {03 СМУРВ) возбудителя РИВ, и
тем самым производится ослабление поля двигателя.Рис. 10-2. Механические характеристики тиристорного
электропривода механизма подъема.При этом степень ослабления поля благодаря действию
обмотки обратной связи (ОС СМУРВ) зависит от то^
ка якорной цепи, вследствие чего механическая харак¬
теристика привода получается близкой по форме к
характеристике с постоянной мошностью. Для быстро¬
го спуска крюка или легких грузов на пятом положе¬
нии Спуск (5С) также ослабляется поле двигателя.
Однако ослабление поля разрешается только для спус¬
ка легких грузов. При большой же их массе двигатель
автоматически переходит на характеристику, соответ¬
ствующую положению 4С при полном поле. Перевод
на эту характеристику осуществляется под контролем
дифференциального реле РРЭ, срабатывающим при
определенном токе нагрузки и воздействующим на ре¬
ле РПЗ, контакты которого включены в цепь обмотки
03 СМУР,При постановке командоконтроллера из любого ра*
бочего положения в нулевое осуществляется электри¬
ческое торможение в пределах времени, определяемого
выдержкой времени реле РВ и РВВ или РВИ, через
замыкающие контакты которых производится подпит¬
ка соответственно катушек контакторов реверсора
{КВ или К.Щ и реле направления РП1 \я.т'РП2\ Од¬
новременно с электрическим торможением происходит
торможение электромагнитным тормозом ТМ (отклю¬
чаются контакты контакторов К.Т1 и КТ2),В схеме электропривода предусмотрена цепь ди¬
намического торможения, включаемая при работе при¬
вода в сторону спуска. Наличие такой цепи в неко-
торой мере ухудшает энергетические показатели при¬
вода. Однако она позволяет несколько сократить число
переключений контакторов реверсора при спуске лег¬
ких грузов. Одновременно с этим цепь динамического
торможения улучшает работу электропривода в. режимеспуска груза при переключениях реверсора, уменьшая
изменение скорости двигателя за время переключения.
Кроме того, динамическое торможение повышает на¬
дежность работы привода и крана в целом, поскольку
в случае каких-либо неисправностей в ТП или в цепи
двигателя груз будет не падать, а опускаться со ско¬
ростью, соответствующей характеристике динамического
торможения. Помимо указанного способа включения ре¬
зисторы динамического торможения могут включаться
только в нулевом положении и в случае срабатывания
какой-либо защиты. Такой вариант, нашедший, в част¬
ности, применение в электроприводах с реверсивным ТП,
требует меньшей мощности резисторов динамического
торможения. iВ схеме электропривода предусматриваются следу¬
ющие виды защиты: нулевая (реле PH), максимальная
(реле РМ), защита от обрыва поля (реле РОП), защи¬
та от токов короткого замыкания и перегрузки по току
(автоматические выключатели АВ1, Ав2, АВЗ), защи¬
та от чрезмерного повышения скорости (реле РКС), ко¬
нечная защита (выключатель ВКВ).Электроприводы с регулированием скорости толь¬
ко напряжением, подводимым к двигателю, несколько
проше, чем по рассмотренной схеме, поскольку отсутст¬
вует необходимость в регулировании потока возбужде¬
ния машины. Электроприводы с ТП могут выполнять¬
ся и миогодвйгательными. В этом случае принципы по¬
строения остаются такими же, как и при управлении
одним двигателем.10-2. КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
ПЕРЕМЕННОГО ТОКА
G ТИРИСТОРНЫМИ РЕГУЛЯТОРАМИ
НАПРЯЖЕНИЯа) Общие вопросы построения
ряда крановых электроприводов
с тиристор«ыми регуляторами напряженияВсе большее распространение для крановых меха¬
низмов находят системы электроприводов с тиристорны¬
ми регуляторами напряжения (ТРИ), обеспечивающими
регулирование частоты вращения за счет изменения на¬
пряжения двигателя при постоянной частоте этого на¬
пряжения. Электроприводы с таким регулированием пер-
спективны‘ для тех механизмов кранов, где требуется
регулирование скорости в диапазоне до 10: I с обеспече¬
нием стабильных посадочных скоростей и где в то же
время нет необходимости в повышенных скоростях пе¬
ремещения легких грузов. Это в первую, очередь меха¬
низмы мостовых, портальных, козловых кранов, кранов-
штабёлеров и т. д. Поскольку скольжение является
функцией подводимого к статору напряжения и зависит
от активного сопротивлен'йя роторной цепи, то регули¬
рование частоты вращения в системах с ТРИ может быть
выполнено двумя способами: за счет регулирования под¬
водимого напряжения со стороны статора при иостоян^
ных параметрах роторной цепи и за счет регулирования
тока ротора при постоянном напряжении статора.Наиболее предпочтительной системой для крановых
электроприводов является система регулирования напря¬
жения, подводимого к статору, при постоянных параметр
рах роторной цепи. КранОвые электроприводы с такой
системой регулирования выполняются на базе ТРИ се¬
рии РСТ, данные по которым приведены в § 4-2.Основные технические данные типовых комплект¬
ных электроприводов с регуляторами РСТ и асинхрон¬
ными двигателями с фазным ротором серии MTF, МТН
приведены в табл. 10-2. Ряд приводов охватывает мощ¬
ности двигателей от 1,7 до 125 кВт. Все электроприво¬
ды выполнены с контакторным реверсором в цепй. ста*
222Крановые электроприводи с бесконтактными систеяищи управления{Разд. 10Таблица 10-2Комплекты электроприводов крановых механизмов переменного тока с тиристорными регуляторами напряженияДвигательМагнитный контроллерРезисторыНаименованиеМеханизм№SсаЧо ЬГабарит¬
ные раз¬
меры. ммSь0
ч>
3*.а1Количество
на один дви¬
гатель, шт.крановкранаТипЛt-Xв1«аIISc, t., ТипТип ре¬
гулятораРо(J-3д«0{XВ(S£а<о>1чЛОТипКонтейнерныеКозловыеМТНбИ-10МТН612-104560ТТЗ 160УЗPCX 310nh1000475200810МостовыеПортальныеМонтажныеПодъемМТН613-10МТН711-10МТН712-10751001251: ТТЗ 250УЗ ■РСТ 31017001100+4004753001НФ 1А121618МостовыеКозловыеКонтейнерныеКраны-штабеле-РЫПередвижениекранаМТН2П-6МТН311-8МТН311-6МГН312-6МТН312-8МТН411-877,3111115152.4, 6ТТЗ 160УЗРСТ 21017001000+4004752001НФ 1А3МТН4П-6МТН412-822224V’ 1ГКонтейнерныеМонтажныеМостовыеПередвижениетележкиМТН611-10МТН612-104560ТТЗ 160УЗРСТ 210 •170010004752001НФ 1А810мтнбгз-ЮМТН711-Ю751001ТТЗ 250УЗРСТ 31017001100+40047530012IffПортальныеМонтажныеПоворотМТН5П-8МТН512-8МТН6П-10MTH6I2-I0283745601ТТЗ 160УЗРСТ 2101700100047S2001НФ 1А4• б
8
10ПортальныеВылет стрелыМТН4И.6 ,МТН412-8МТН412-62222301ТГЗ 160V3РСТ 210170010004752001НФ 1А4Примечания; 1. Мощности двигателей указаны в режиме ПВ»40%.2. Для управления электропрнводами применяфтся кЬмандоконтроллеры типа КП 1200.тора.- Коммутация контактов реверсора бестоковая^ что
является одним из достоинств рассматриваемых приво¬
дов. Исполнения электроприводов с крнтакторным ревер¬
сом являются более простыми по сравнению с йлектро-
приводами с бесконтактным реверсором.Для получения устойчивых малых посадочных ско-
ростей предусмотрена отрицательная обратная связь*по
скорости, осуществляемая с помоий>ю т^хогеНёратора
типа TMF ЗОП. Помимо регулирования скорости ра^
смат5риваемые электроприводы обеспечивают также ре-
гул^вание момента двигателя при пуске и торможе¬
нии. Регулирование скорости эд момента осуществляет-
сяе7во всех четырех квадрантах. Э<го делает привод
унтаерсальным, пригодным как для механизмов подъ¬
ема, ТЭК и для механизмов передвижения. Для мехй-
низмов иередвижения\ отдельных кранов указанная сис¬
тема электропривода может быть выполнена в упро¬
щенном виде, особенно в тех случаях, когда требуемые
cKt^ocTHwe характеристики привода необходимо реа-
лнзомть, регулируя момент двигатейя. В этом с;^чае
обратаая связь: до- скорсюти лйе; требуется, Цр^тавляё^- ‘ся также целесообразным в некоторых случаях исполь-
зобать ретуляторы с встречно-параллельно включенны¬
ми тиристорами только в двух или даже в одной фазах.
Уменьшение количества тиристоров здесь приводит од¬
новременно н к упрощению схемы управлёнйя. Однако
Электроприводы с такими (^гуляторами имеют худшие
энергетйческяе показатели, что и ограничивает их при¬
менение.б) Схемы электроприводов
с тиристорными регуляторами напряженияЭлектроприводы с ТРН находят применение для
механизмов подъема и передвижения кранов. На?йс, 10-3 показана типовая схема электропривода с
PH ' для механизмов подъема. Такой же вид будет
иметь схема и для механизмов передвижения. Имеют¬
ся только некоторые отличия в построении схемы уп¬
равления. Типовые механические характеристики ука¬
занных приводов показаны на рис. 10-4. Пунктирные
ЛИНИИ относятся к характеристикам механизмов перед-
виженяя^ Для механизмов- оередвижевмя с числом двн-
Рис. 10-3, Типовая схема электропривода MexaHHSMa-noflbewa с тнрнсторйьш регулятором напряжения.гателей, равным или кратным двум, принцип построе¬
ния системы управления электроприводами остается
таким же, как и при одном двигателе. Силовая схема
таких электроприводов (рис. 10-5) выполняется, как
правило, с одним ТРН и с одним тахогенератором. Ро¬
торные цепи двигателей независимые.Управление электроприводом осуществляете^ ко-
мандоконтроллером КК, имеющим по три и четыре
фиксированных положения соответственно для спуска
и подъема. Для механизмов передвижения использу¬
ется симметричная схема с-четырьмя фиксированными
положениями для каждого «направления движения. От
ксмандоконтроллера задающие сигналы управления по¬
даются на блок задания скорости (S3C). Разность
сигналов задания и тахогенератора ГГ, проходя через
усилители У1 и У2, поступает на вход системы фазово¬
го управления СФУ, формирующей импульсы управле^
ния включением тиристоров ТРН, задавая угол управ¬
ления, определяющий напряжение на обмотках статора.
Это напряжение меняется в зависимости от 1ЮЛожения
командоконтроллера и момента нагрузки на валу
двигателя.Наличие обратной связи по скорости, предусмат-
риваемой на всех положениях контроллера, кроме на¬
ибольшей скорости на подъеме и спуске, позволяет по¬
лучить достаточно жесткие мехадические характе^я^с-
тики двигателя»Реверс двигателя производится с помощью кон¬
такторов направления КВ и КИ, сблокированных меж¬
ду собой механически и электрически. Контакторы КВ
И КИ включаются соответственно реле PI71 -и РПЗ в80-ВО1ПВОзпжтzooРчс, Ю-4. TanoBiae механически х^актери^ки элект-
ропрнвода'с-’т'иристорным регулятором напряжения,
224Крановые шектроприэоды с-бесконтактными системами управленияЮзависимости от состояния логического устройства БЛ.
При этом контактор КВ включен при работе в I и IV, а
КН во II и III квадрантах механических характерис¬
тик. Переключение контакторов направления, происхо¬
дящее при изменении режима работы (переход из дви¬
гательного в генераторный режим и наоборот), осу¬
ществляется при отсутствии тока в силовой .цепи под
контролем датчика тока НТ.Рис,л10-5, Схема силовой" цепи двухдвнгателькогб элек¬
тропривода механизма передвижения.ТМ1,^ТМ2 — тормозные электромагниты; КВ, КИ ~~ контакторы
нялравления; KJ7 — линейный коитакхор: ТГ ~~ тахогенератор;
1КУ1, 2КУ1^ 1-КУ2, 2КУ2 — контакторы ускорения.Для-снижения потерь в двигателе в схеме предус¬
мотрены две ступени резисторов. Первая ступень вклю¬
чается на положениях 1П, 1C, 2С, вторая на положе¬
ниях 217 н ЗП. На последних положениях контроллера
_ (4/7, ЗС) сигнал с тахогенератора не подводится в сис¬
тему, управления, и тиристоры полностью открыты.
Ступени резисторов в роторной цепи шунтируются кон¬
такторами ускорения КУ1 и КУ2, н двигатель разви¬
вает скорость, соответствующую характеристике с не-
выключаемыми , резисторами, сопротивление которых
может меняться в зависимости от типа двигателя., Для получения плавного разгона (при переходе на
положения ЗП и 4IJ) и торможения при переходе с
большой скорости на малую в схеме предусмотрено ог¬
раничение моментов в динамических режимах, выпол¬
няемое с помощью блока токовой отсечки ТО, сигнал
с которого поступает на систему фазового управле¬
ния СФУ.Управление контактором тормознога электромаг¬
нита /СГ производится реле РЛ2 под контролем блока
слежения за током (МТ). Контактор КТ включается
при наличии тока во всех трех фазах двигателя и от-
клйтается (на рабочих положениях командоконтролле-
ра)^с выдержкой времени при исчезновении тока хотя
бы в одной из фаз статора. Выдержка времени-долж¬
на быть достаточной для переключения контакторовнаправления, вызванное изменением режима работы
двигателя. . ^ ■Контактор ускорения КУ2 управления реле, РП4,
катушка которого включена на выход блока-задания
скорости 53С. Контактор ускорения /(У/ включается
непосредственно контактами командоконтроллера.-.Схемы электроприводов как механизмов подъема,
так и передвижения предусматривают электри»?еское
торможение при переводе командоконтроллера в нуле--
вое положение, а также при- переходе с большой ско¬
рости на малую. Во всех этих случаях производится,
как правило, переключение контакторов ■ направления
(если двигатель работал в I или III квадрантах) и тор¬
можение по характеристике противовключения, соот--
ветствующей первому положению. На нулевом положе¬
нии по истечении выдержки времени (реле РП}, РП2
и РПЗ отключаются с запаздыванием) накладывается
механический тормоз ТМ.Для механизмов подъема схема электропривода
может быть выполнена и без электрического торможе¬
ния на подъеме. В этом случае при постановке контрол¬
лера в нулевое положение!» или в положение меньшей
скорости остается включенным контактор направления
КВ, а торможение осуществляется' под действием веса
самого груза и механического тормоза ТМ (в нулевом
положении), накладываемого с выдержкой времени.
Для получения такого режима предусматривается реле-
времени РВ1, через замыкающие контакты которого
получает питание катушка контактора КВ. Достоинст¬
вом схемы- является уменьшение количества переключе¬
ний кЪнтакторов направления, недостатком — увеличе¬
ние времени торможения легких грузов.Для надежной работы привода в схеме предусмот¬
рено реле времени РВ2, включаемое на всех рабочих
положениях контроллера. Это реле отключает на нуле-'
вом положении контактор КЛ »«случае неисправности
(залипания) контактов одного из промежуточных рёле
РП1, РП2 нлк РПЗ.Электропривод имеет защиты: нулеву1б, максималь-^
но-токовую, конечную (ограничение хода), защиту ти¬
ристоров от перенапряжений и токов к. з.Максимально-токовая и нулевая защиты выполня¬
ются блоком МТ регулятора, воздействующим через ре¬
ле РП5 на цепь линейного контактора /С-Я, который 6
Свою очередь также выполняет роль нулевой защитны.
Конечная защита осуществляется выключателями-
и ВКН.10-3. КРАНОВЫЕ ЧАСТОТНО-РЕГУЛИРУЕМЫЕ
ЭЛЕКТРОПРИВОДЫа) Общие вопросы построения ряда электроприводов
с частотным регулированиемКрановые частотно-регулируемые электроприводы
включают в себя системы с полюсно-переключаемыми
асинхронными короткозамкнутыми двигателями и ПЧН
и. системы с односкоростными короткозамкнутыми дви¬
гателями с управлением в зависимости от зоны,регу¬
лирования от ПЧИ или ПЧН.Построение рассматриваемых электропривсщов вы¬
полняется в соответствии с данными оптимизации их
параметров по принципу минимума потерь энергии в
переходных режимах. Применение ПЧН в системе е
полюсно-переключаемыми двигателями позволяет зна¬
чительно увеличить мощность двигателя в тех же га^
баритах при одновременвом увеличении диапазона ре¬
гулирования скоростей электропривода. В. таких снсте-
мах^<50существляется комбинированное управление мно'-
госкоростных двигателей с зоной частотного ^peгyлиpD-
в^ия, причем в-нижней'3оне-'скоростей^ущеет»ляе'гея
крановые частотно-регулируемые электроприводы225частотное регулирование, а в верхней производятся пе¬
ревод питания двигателя на напряжение сети и пере¬
ключение обмоток с разными числами пар полюсов.
Соотношение между указанными двумя зонами регули¬
рования должно определяться напряженностью режима
работы.Энергетически напряженные системы должны вы,
полняться с максимально возможной зоной частотного
регулирования, т. е. с регулированием от ПЧН, питаю¬
щего быстроходную обмотку двигателя. При этом в за¬
висимости от числа включений привода синхронная ча¬
стота вращения быстроходной обмотки составляет 1000
или 1500 об/мин. Регулирование от ПЧН тихоходной об¬
мотки применяется только для систем с диапазоном
регулирования скоростей выше 10 : 1.Электроприводы с комбинированным частотным ре¬
гулированием выполняются по двум основным вариан¬
там. В первом варианте ПЧН выполняет только функ¬
ции регулирования скорости в нижней зоне. В этом
случае мощность двиг^ателя Рдв значительно превосхо¬
дит 'мощность ПЧН в соответствии с выражением(10-1)где Лоб и Дпчи соответственно диапазоны регулиро¬
вания скоростей общий и обеспечиваемый только ПЧН;
причемгде Лр=рс/Ят“ диапазон регулирования, обеспечивае¬
мый переключением числа пар полюсов ръ и рт быстро¬
ходной и тихоходвой обмоток; /i/fsMaKc отношение
частоты питающего напряжения к максимальной выход¬
ной частоте ПЧН.С учетом (10-1) и (10-2) выходная мощность ПЧН
равна;ЛмаиХДВh До *т е. составляет 0,1—0,3 мощности двигателя при Лобщ—
= (6-J-15):LБлагодаря этому в рассматриваемом варианте по¬
строения электропривода целесообразно применение
ПЧН, выполненного по наиболее простой нулевой схеме
с согласующим трансформатором. По такой схеме вы¬
полнены ПЧН типа ТТС 16 и ТТС 40. Однако при этом
значительно усложняется схема электропривода, в ко¬
торой необходимые переключения выполняются контак¬
торами (см. § 10-3, в). Поэтому для систем с повы¬
шенными требованиями к коммутационной’ аппаратуре
применяются электроприводы с совмещением на ПЧН
функций частотного регулирования и бестокового ком¬
мутатора. Мощность ПЧН при этом равна . мощности
двигателя. Для снижения массы и габаритов системы
связь ПЧН с сетью осуществляется через токоограни¬
чивающие реакторы, а ПЧН выгголняется по мостовой
схеме (ТТС 80), Таким образом, упрощение силовой
контакторной схемы электропривода достигается за
счет усложнения схемы ПЧН.Следует также отметить, что в ряде Случаев целе¬
сообразно использовать электропривод по системе ком¬
бинированного частотно-параметрического регулирова¬
ния асинхронных двигателей с фазным ротором. При
этом ПЧН является источником питания низкой часто¬
ты и обеспечивает получение малых доводочных ско¬
ростей нескольких механизмов крана. Во всех схемах
комбинированного управления к системе регулирования
ПЧН предъявляется только требование стабилизации
15-839напряжения, заданного одновременно с частотой коман-^
доаппаратом электропривода.Электроприводы только с частотным регулировани¬
ем и односкоростными короткозамкнутыми двигателями
в зависимости от требуемых скоростей, мощности и ди¬
апазона регулирования выполняются или с ПЧН, со¬
бранными по нулевой или мостовой схемам, или' с ПЧИ.
Электроприводы с ПЧН и четырехполюсной машиной
обеспечивают зону частотного регулирования с макси¬
мальной скоростью в пределах от 600 до 900 об/.мин в
зависимости от схемы ПЧН. Поэтому такие электро¬
приводы целесообразно применять для механизмов пе¬
редвижения с большими маховыми массами, а также
для подъемных механизмов тяжелого режима работы.Применение электроприводов с ПЧИ позволяет
обеспечить требуемые скорости, а также р'егулирование
в зоне скоростей выше номинальной. В таких системах
достигается максимальное использование габаритной
мощности двигателя, однако сложноср ПЧИ ограни¬
чивает их область применения, В системах только с
частотным управлением на систему регулирования пре¬
образователя возлагаются сложные функции регулиро¬
вания напряжения и частоты по требуемому закону и
с целью оптимизации режима работы электропривода.б) Схемы электроприводовВ соответствии с рассмотренными принципами по¬
строения частотно-регулируемых электроприводов типо¬
выми для крановых систем с ПЧН являются схемы ком¬
бинированного управления двухскоростным или трех-
скоростным двигателем, в которых ПЧН выполняет
только функции регулирования; схема управления
двухскоростным двигателем с совмещением на ПЧН
функций, регулирования и бесконтактного коммутатора
и схема управления односкоростным двигателем от n4ii
или ПЧИ с полной зоной частотного регулирования.Схема комбинированного электропривода с двух¬
скоростным. или трехскоростным двигателем. Схема
электропривода с двухскоростным двигателем приве- -
дена на рис, 10-6, а механические характеристикуна '
рис. 10-7 (сплошные линии).Для увеличения диапазона регулирования частоты
вращения и получения максимальной зоны частотного'
регулирования в схеме выполняется поочередное под¬
ключение ПЧН к тихоходной обмотке (характеристикиiC) и быстроходной обмотке (характеристики 2Я,
2С и ЗП, ЗС). Характеристики 4П, 4С vi 517, 5С обес¬
печиваются при подключении к сети тихоходной и быст¬
роходной обмоток соответственно.При управлении двигателем с соотношением чисел
пар полюсов 4/6, для которого,, построены механические
характеристики на рис. 10-7, Лиапазов регулирования
составляет 15 : I. Схема обеспечивает частотный пуск и
торможение при работе двигателя от ПЧН, а также
двухступенчатый разгон и торможение при переходе на
естественную характеристику. Для реализации такого
многопозиционного регулирования в схеме примене¬
но двухступенчатое управление от командоконтролдера .
через промежуточный релейный блок. При этом упра¬
вление реверсированием двигателя при работе от сети,
осуществляется реле РВ и PH, включающим контакто¬
ры направления КВ и КН, а реле Р2—Р5 управляют
переключением скоростей.Коммутация силовых цепей двигателя осуществля¬
ется контакторами скорости Kd тя КС2, г. частотное
регулирование -- с помощью реле РС1—РСЗ. Примене¬
ние релейного блока позволяет исключать перерыв пи¬
тания двигателя при переключении силовых цепей н
осуществить контроль за разгоном и торможением по
позициям. При^ этом в случае неисправности любого,
аппарата, управляющего скоростью^. двигатель не пере-.
ходит на следующую позицию,
226Крановые электроприводы с бесконтактными системами управления[Разд. ЮРве. 10-6. Схема комбинированного электропривода механизма подъема с двухскоростным двигателем и поочеред¬
ным управлением его обмоток от ПИН. /нулевое с выдержкой времени 1,5 с; РКН — реле контроля напряжеггня; Р7/—РТ4 — реле тепловые; Тр—трансформатор; ДжОГ —
выключатель ограничения грузоподъемностн; ВкВ, ВкЯ — конечные выключатели; ВкУ«—выключатель управления; К4—KIS—кон-
такторы комавдоконтроллера; диоды; регулировочные радисторы; £УЯ—блок уаравления дреобразоватеяем.
§ fO^S]Крановые частотно-регулируемые электроприводы227Реверс в зоне частотного регулирования осущест-
вляется H3MeHCHjieM порядка коммутации тиристоров
ПЧН по сигналу от реле РСВ и РСН. Узел управления
регулированием частоты в напряжения ПЧН является
типовым для систем комбинированного управления с
ПЧН и осуществляется реле РСВ, РСН и РС2, РСЗ.
Указанные реле переключают цепи резисторов
собранных по потецциометрическим схемам, причем цепи
из диодов Д образуют логическую схему ИЛИ (вклю¬
чение последующей цепи исключает предыдущую).. Время разгона' и торможения электропривода в
зоне частотного регулирования задается задатчиком
темпа ПЧН, а вне этой зоны соответствующими реле
времени. Время наложения тормоза после частотного
торможения контролируется реле РВ2. При этом тор¬
моз накладывается при и^инимальной частоте ПЧНРис. 10-7. Механические характеристики комбинирован¬
ного электропривода с двух- и трехскоростным коротко-
замкнутым двигателем.— двухекоростяой двигатель при 2 р—4/6: —стрехскоростным дш1гателсм при 2 р» 4/6/12.Таблица 10-3Комплекты частотно-регулируемых электроприводов механизмов подъем^Мощность статичес¬
кой нагрузки двига¬
телей, кВт, в режиме
работыДанные преобразователяДанные панелей
управленияКан£ ■Параметры ^лектроприводаТип Двигателя
!ЛсТВТОТТипСвязь с питающей
сетью -Габариты01cd1Макси¬мальнаясинхроннаячастота^вращения,об/минДиапазонрегулиро¬ванияскоростиЗона частотно¬
го регули-
ронания отно¬
сительно
номинальной
скоростиМТКН622-490,081,071,565.043,6ПЧИ 801175X770X 355•МТКН621-470.062,555,550,533,8ПЧИ60Токоогравйчива-1175X 770X35SКБС1S00*10:1>0,1—1,5ювднй реактор225015:1МТКН422-440,035,831,829,019,3ПЧИ 301155X770X292■■МТКН622-4/680,0i68,557,040,025*0ТТС80Токоограничива¬
ющий веактор1175X770X355150015:1-0^(165-0,4ТТС40Трансформатор
S~25 кВ-А1615X 770X366
1175X 770X355МТКН621-4/660,051,543,030,219,5ТТС80Токоограннчива*
ющий реактоо1175X 770X355150015:10,065-0,4ТТС40Трансформатор
5=16 кВ.А1175X770X3551175X770X355МТКН622.6/860,054,547,943,529,0ТТС80Тохоогравнчива-
ющий реактор1175ХЛ0Х355КП 1200100012:1'0,075-0.4ТТС40Трансформатор
5-25 кВ.А1615X 770X365
1175X 770X 355МТКН622-4/6/1255.045,039,227.317,6ТТС40Трансформатор
5-16 кВ.А1615X 770X365
1175X770X355150030:10,033-0*135МТКН521-4/645,037,032,222.414,5ТТС40Трансформатор
5-16 кВ.А1615X 770X3651ИЮ ■15:10.065-0,4МТКН422-4/630,024,621,415,09,7ТТС40Трансформатор
S-.JO кВ А1175X770X355150015:1\ 0,065—0,4М* В числителе указаны скоростные параметры под яАгрузкой, а в знаменателе — на холостом ходу.15*
Рнс. 10-8. Схемы электропривода механизма подъема с двухскоростным двигателем и совмацении на ПЧН функ¬
ции бестокового коммутатора. Обозначения те же, что я? на рис. 10-6.раньше, чем снижается соответствующее этой частоте
напряжение, что позволяет исключить просадку груза
при работе привода на спуск груза.Узел защиты схемы типовой с воздействием аппа¬
ратов защиты на нулевое реле РВН.Схема управления трехскоростным двигателем вы¬
полняется аналогично рассмотренной. Однако посколь*
ку в таких приводах основной задачей является расши¬
рение диапазона регулирования скоростей, зона частот¬
ного регулирования ограничена управлением только
тихоходной обмотки машины. Соответствующие этому
механические характеристики электропривода при упра¬
влении трехскоростным двигателем с соотношением парполюсов обмоток 4/6/12 показаны на рис. 10-7 пунктир¬
ными линиями.Схема электропривода при совмещении на ПИЧ
функций бестокового коммутатора. Схема электропри¬
вода, представленная на рис. 10-8, обеспечивает харак¬
теристики, аналогичные рассмотренным выше (на рис.10-7 —- сплошные линии). Однако, благодаря совмеще¬
нию на ПЧН функций бестокового коммутатора силовая
часть схемы значительно проще вышерассмотренной.
При этом в схеме отсутствуют контакторы направления,
поскольку реверс осуществляется тиристорами ПЧН, а
также контакторы, выполняющие подключение обмоток
двигателя на напряжение сети. Как было сказано ПЧН
Рйс. 10-9. Схемы управления двух скоростным, двигателем с полной зоной частотного регулирования.' ’РВ! — реле времени с выдержкой 2—2,5 с; РВН — реле нулевое с выдержкой 4—4,5 с; ВБ1, ВБ2 — диоды; К4—К13 -*■ контакты
командохонтроллера; R1—R18 —■ регулировочные резисторы; остальные обозкачення те же, что и на ркс. 10-6.
230Крановые электроприводы с бесконтактныт системами управления[Разд. WТаблица 10-4Комплекты qacTOTHo-регуяируемых электроприводов механизмов передвиженияМощность статичес¬
кой нагрузки двига¬
теля. кВт, в режиме
работыДанные преобразова¬
теляДанные панелей
управленияТипкоман-Пара.метры электроприводаТип Двигателя\%ЛСТВТОТТипСвязь с питаю¬
щей сетьюГабаритыДО-конт-рол-лераМакси¬мальнаясннхроннаячастотавращениядвигателя,об/минДиапазонрегулиро¬ванияскоростиЗона частот¬
ного регулиро¬
вания относи¬
тельно номи¬
нальной
скоростиМТКН622-450,047,537,030,419,5Токоограничива*
ющий реактор1175X 770X 355900 6:10,165—1МТКН621-440,038,029,624,315,7ТТС 801175X 770X 335МТКН521-425.022,818.515,29.8Трансформатор
S-25 кВ А1155 X 770X292. 6006:10,165—1МТКН422-4.16,015,0П,-89,76,2Трансформатор
S-16 кВ-А1155X 770X 292U.МТКН62Ь6/830,027,323,821,714,5ТТС 40Трансформатор
S-25 кВ-А1 1615X 770X365-КП 12С0100012;1»0.075—0.4МТКН422-6/823,020, &18,316,711,2Трансформатор
S-IO кВ А1175X 770X355МТКН422-4/12^10,05,0---(Трансформатор
S-5 кВ-А1175X770X355МТКН321-4/127.53.0---ТТС 10Трансформатор
S=2'5 кВ-А1155X 770X 292, 150030:10.033—0,4МТКН221-4/124,02.0--Трансформатор
S-.1.5 кВ-А1155 X 770 X 292в таких схемах выполняется по мостовой схеме с то-
коограничивающики реакторами.Построение схемы аналогично изложенному, а
именно: управление двухступенчатое, через блок реле
Р2—Р5, реверс по команде от реле РСВ, PCН, выбор
скорости через реле РС2—РС4, время частотного пус¬
ка и торможения задается задатчиком темпа ПЧН, а
вне зоны частотного регулирования — реле времени.
Типовым является узел регулирования частоты и на¬
пряжения ПЧН (на схеме не показан), а также узел
защиты.Схема управления двухскоростным двигателем с ча¬
стотным регулированием. Такие схемы в соответствии
с изложенным применяются для механизмов, оптималь¬
ная частота вращения приводных двигателей которых
составляет 600—900 об/мин. Обычно эти механизмы пе¬
редвижения с большими приведенными маховыми мас¬
сами.Система дает, высокую плавность регулирования,
что является весьма важным для механизмов передви¬
жения. Применение двухскоростного двигателя обеспе¬
чивает увеличение диапазона регулирования привода.
При этом отсутствие переключения двигателя .на сетьзначительно упрощает систему. Схема приведена на
рис. 10-9. В схеме отсутствует промежуточный релейный
блок управления, а управление скоростью осуществля¬
ется непосредственно с помощью реле скорости PCI—
РС5, обеспечивающими пять регулировочных характери¬
стик. Эти же реле управляют контакторами переключе¬
ния обмоток двигателя (контакторы КС1 и КС2). Ре¬
верс осуществляется по сигналу от реле РСВ и РСН.
В сх,еме на рис, 10-9 реализуются частотный пусй и тор^
можение, контролируемые задатчиком темпа. Узлы уп¬
равления ПЧН и защиты электропривода — типовые,в) Основные техничАкие данные
комплектных крановых электроприводов
с частотным регулированиемТехнические данные крановых ч^стотно-регулируе-
мых электроприводов приведены в табл. 10-3 и 10-4
соответственно для механизмов подъема и передвиже¬
ния. Электроприводы выполняются на мощиости от 2
до 90 кВт и построены на основе использования ПЧН и
ПЧИ, параметры которых приведены в табл. 4-2.
§ ^0-3]Список литературы231СПИСОК Л ИТЕРАТУРЫ], Андреев В. П., Сабинин Ю. А. Основы электро¬
привода. М.—Л.: Госэнергоиздат, 1963.2. Архангельский В. И. Бесконтактные схемы упра¬
вления электроприводами реверсивных прокатных ста¬
нов. М.: Госэнергоиздат, I960.3. Александров М. П. Подъемно-транспортные ма¬
шины. М.: Высшая школа, 1963.4. Башарин А. В., Голубев Ф. Н., Кепперман В. Г.
Примеры расчетов автоматизированного электропривода.
М.: Энергия, 1971.5. Борисов Ю. М., Соколов М. М. Электрооборудо¬
вание подъемно-транспортных машин. М.: Мащинострое>
кие, 1971.6. Бруфман С. С., Трофимов Н. А. Тиристорные пе¬
реключатели переменного тока. М.: Энергия, 1969.7. Буйлов А, Я. Основы электроаппаратостроения.
М.—Л.: Госэнергоиздат, 1946.8. Булгаков А. А. Частотное управление асинхрон¬
ными электродвигателями. М.: Наука, 1966.. 9. Верник А. Б. Мостовые краны большой грузо¬
подъемности. М.: Машгиз, 1956.10. Вешеневский С. Н. Характеристики двигателей в
электроприводе. М.: Энергия, 1977.И. Виноградов Н. В., Горяйнов Ф, А., Сергеев П. С.
Проектирование электрических машин. М.: Энергия, 1970.12. Герасимяк Р. П., Параил Б. А. Электроприводы
крановых механизмов. М.: Энергия, 1970. а13. Голован А. Т. Основы электропривода. М.—Л.;
Госэнергоиздат, 1959,14. Гольд^нберг Л. М. Основы импульсной техники.
М.: Связьйздат, 1963. i15. Дранников В. Г., Звягин И. Е. Автоматизирован¬
ный электропривод подъемно-транспортных машин. М.:
Высшая школа, 1973.16. Егоров К. А. Автоматизация управления подъем-
ными и перегрузочными машинами и установками. М.;
Резной транспорт, 1960./17. Ерофеев Н. И. Предохранительные й сигнализа¬
ционные устройства кранов. М.: Машиностроение,
1970.18. Жиц М. 3. Переходные процессы в машинах по>
стоянного тока. М.; Энергия, 1974.19. Зерцалов А. И., Певзнер Б. И. Краны-штабеле-
ры. М.: Машиностроение, 1968.20. Завод «Динамо» в борьбе за технический про¬
гресс. М.: Информстандартэлектро, 1967.21. Киф^р Л. Г., Абрамович И. И. Грузоподъемные
машины. М.: Машгиз, 1957.22. Ключев В. И., Терехов В- М. Электропривод и
автоматизация общепромышленных механизмов. М.: Изд.
МЭИ^ 1971,23. Ключев В. И. Ограничение динамических нагру¬
зок электропривода. М.: Энергия, 1971.24. Куницкий Н. П. Электрооборудование подъем*
но-транспортных сооружений. М.; Машги^, 1942.25. Ланг А. Г., Мазовер И. С., Майзель В. С. Пор¬
тальные краны. М.—Л.: Машгиз, 1962.26. Костенко М. П., Пиотровский Л. М. Электричес¬
кие машины. Ч. 1. Л.; Энергия, 1972.27. Костенко М. П. Электрические- машину. Специ¬
альная часть. М.: Госэнергоиздат, 1951,28. Лифшиц М. Электрические машины. Т. ПТ.
ОНТИ, 1936.29. Краново-металлургические электродвигателй/Ба-
талов Н. М., Белый В. А., Иоффе А. Б. и др. М.: Энер¬
гия, 1967.30. Мейстель А. М. Динамическое торможение
приводов с асинхронны'мй двигателями. М.: Энергия,
1967,31. Марков А. П. Эксплуатация электроприводов па¬
лубных механизмов. М.;, Транспорт, 1976.32. Мышкин В. Г. Автомобильные краны. М.: Ма¬
шиностроение, 1967.33. Нежданов В. Т., Нежданов И. Б. Аппараты низ¬
кого напряжения. М.; ЦНИИЭП, 1961.34. Основы автоматизированного электропривода/
Чиликин М. Г., Соколов М. М., Терехов Б. М., Шинян-
ский А. Б. М.: Энергия, 1974.35. Петров Г- Н. Электрические машины. Ч. I. М.:
Энергия, 1974, Ч. И. М.—Л.: Госэнергоиздат, 1963.Ч. ИI, М.: Энергия, 1968.36. Петров И, И., Мейстель А. М. Специальные ре¬
жимы работы асинхронного электропривода. М.: Энер¬
гия, 1968.37. Певзнер Е. М., Шукалов В, Ф., Яуре А. Г. При¬
менение частотно-регулируемого электропривода в судо¬
вых грузоподъемных механизмах. — Электротехника,1970, №2.38. Правила технической эксплуатации электроуста¬
новок потребителя. Киев: Пром1Нь, 1970.39. Правила устройства и безопасной эксплуатации
грузоподъемных кранов. М.: Недра, 1970.40. Правила устройства и безопасной эксплуатации
лифтов. М.: Госгортехиздат, 1961,41. Правила устройства электроустановок, М.г Энер¬
гия, 1966.42. Преображенский В. И., Зимин Е. Н. Силовые
кремниевый вентили. М.; Энергия, 1971,43. Сандлер А. С., Гусяцкий Ю. М. Тиристорные ин¬
верторы -с широтно-импульсной модуляцией. М.: Энер¬
гия, 1968.44. Сандлер А. С., Сарбатов Р. С. Частотное управ¬
ление асинхронными двигателями. М.: Энергия, 1966.45. Свечарник А. В. Сельсины и их применение в си¬
стемах автоматизации производственных процессов. М.*-^
Л.: Госэнергоиздат, 1962.46. Ситник Н.Х, Силовая полупроводниковая тех¬
ника. М.: Энергия, 1968.47. Смехов А. А. Оптимальное управление перегру-
-зочными процессами. М.: Машиностроение, I966i48. Соколов М. М., Масандилов Л. Б. Измерение ди¬
намических моментов в электроприводах переменного
тока. М.: Энергия, 1975.49. Соколов"' М. М. Автоматизированный электро¬
232Список литературыпривод общепромышленных механизмов. М.: Энергия,
1976.50. Соколов М. М. Электрооборудование общепро¬
мышленных механизмов. М,: Энергия, 1969.51. Слежановский О. В, Реверсивный электропривод
постоянного тока. М.: Металлургия, 1^67,52. Справочник по кранам/Под ред. А. И. Дукель-
ского. Т. 1, 2. Л.: Машиностроение, 1971.53. Справочник судового электротехника. Под ред.
Г. И. Китаенко. Т. 1—3. Л.: Судостроение, 1975.54. Справочник по наладке электроустановок и
электроавтоматики. Киев: Наукова думка, 1972.55. Судовые электроприводы/Богословский А. П.,
Певзнер Е. М.,^ Фрейдзон И. Р., Яуре А. Г. Справо«шик.
Т. 1, 2. Л.; Судостроение, 1975.56. Таев И. С. Электрическая дуга в аппаратах низ¬
кого напряжения. М.: Энергия, 1965.57. Тиристоры (Технический справочник). Пер. с
англ./Под ред. В. А. Лабунцова и др. М,: Энергия,1971.58. Чебовский О. Г., Моисеев Л. Г., Сахаров Ю. Б.Силовые полупроводниковые приборы. Справочник. М.:
Энергия, 1975.59. Чиликин М. Г. Общий курс электропривода. М.:
Энергия, 1971.60. Шипилло В. П. Автоматизированный вентильный
электропривод. М.: Энергия, 1969.61. Шубенко В. Д., Браславский И. Д. Тиристорный
асинхронный электропривод с фазовым управлением. М.:
Энергия, 1972.62. Электрическое оборудование кранов/Под ред.
А. А. Рабиновича и М. М. Синайского. М.: Госэнергоиз-
дат, 1963.63. Электротехнический справочник. М.: Энергия.1972.64. Яуре А. Г. Крановая электрическая аппаратура,
М.: Энергия, 1974.65. Яуре А. Г., Богословский А. П., Певзнер Е. М,Электроприводы судовых грузоподъемных механизмов.
Л.; Судостроение, 1971.66. Яуре А, Г. и др. Выбор кранового электродви¬
гателя с учетом режима работы и системы электропри¬
вода.— Электротехника, 1977. № 9, с, 3—7.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬАсинхронные электродвигатели 20, 54, 63, 66
Биение коллектора 37Вероятность безотказной работы систем управления 16 электродвигателей 49, 63^ электромагнитов 132 'Взрывозащищенные асинхронные электродвигатели 67
Вибрация электродвигателей 29, 32
Внешние характеристики генераторов постоянного тока
138,139,140
Время переходных режимов 39, 178
Выбег механизма при торможении 108Грузоподъемность крана 6— электромагнита 129, 131
Грузоподъемные электромагниты 130
Двухдвигательные электроприводы 159
Двухтоковое питание 161Диаметр делительной окружности шестерни на валу
двигателя 31Диапазон регулирования скорости 6, 7, 19, 21
Динамическое торможение с самовозбуждением 75, 93,
150,153,208,211
Дисковый тормоз 107
Допускаемые изменения тока якоря 40— отклонения от номинальных значений 12, 21, 26, 54,
174Допуски и посадки 33Законы частотного регулирования 155, 156
Защитная панель переменного тдка 124
постоянного тока 125Изменение питающего напряжения и частоты 21, 26, 54
Исполнения по способу монтажа электродвигателей 21,40, 54, 67Категории применения коммутационной аппаратуры 70,71 :Качество электроэнергии 11, 12Колодочные тормоза переменного тока 113, 117, 120 постоянного тока 111, 112Командоконтроллеры 76Коммутационная способность ко({тактных элементов 70
Коммутация электродвигателей 21, 37, 40
Конечные выключатели 127, 128
Контакторы переменного тока 81, 83, 84— постоянного тока 81, 83
Коэффициент динамических потерь 182
~ приведения потерь 182— эквивалентной статической нагрузки 187Круговая диаграмма асинхронного электродвигателя 50
Кулачковые контроллеры переменного тока 74, 192
постоянного тока 74, 214Магнитные контроллеры для управления грузоподъем¬
ными электромагнитами 133
механизмов передвижения 91, 93, 197, 216Магнитные контроллеры механизмов подъема 91, 93,
194,217 'С динамическим торможением 93, 213— пускатели 82Максимальная защита 125, 126, 202
Максимальное реле 123
Материалы активных резисторов 169
Маховой момент ротора (якоря) 18, 36, 45, 57, 65
Механическая износостойкость контактных элементов‘70
Механические характеристики асинхронных электродзИ'
гателей в режимах динамического торможения 150 Q системах импульсного регулирования 159 параметрического регулирования 144 — фазового регулираания 158 ^ —частотного регулирования 155Момент вращающий .максимальный 34, 51 номинальный 23, 41, 57, 59, 61, 64“Г пусковой 59, 64Мощность рассеяния резистора 167Нагревостойкость изоляции 24
Напряжение испытательное 21, 70— между коллекторными пластинами 39— номинальное 12, 40, 54, 129
Несимметрия выходного напряжения 12, 148— сопротивления в цепи ротора 146, 165
статора 147, 165Номограммы износостойкости контакторов 87
Нулевая блокировка 123Обмоточные данные электродвигателей 30, 47, 60 электромагнитов грузоподъемных 130Однофазное включение обмоток статора асинхронных
электродвигателей 148
Относительная продолжительность включения 6, 21, 40,62, 129Охлаждение электрических машин 24, 40, 54, 60Переключение числа пар полюсов электродвигателей 15,
149Подшипники электродвигателей 31
Потери в электродвигателях 36, 37, 52— энергии в электроприводах динамические 182 . — переменные 182, 198 постоянные 182 статические 182Постоянная времени нагрева резисторов 168 — электродвигателей 37, 53Превышение температуры (допустимое) частей электри¬
ческих машин 24
аппаратов 149Преобразователи частоты инверторного типа 98
Продолжительность включения 5, 6, 21, 54, 186— — при регулировании 129, 186
Производительность механизмов кранов 12, Л 6, 185
Пульты управления кранами 80
Пускорегулировочные резисторы 167Путевые выключатели 127Размеры электродвигателей установочно-присоединит^*
ные 22, 45, 62, 66
234■ Предметный указательРаскачивание груза 181Расчетный вращающий момент, расчетная мощность 23,35, 51. 176Режим работы механизмов 5, 186 , - ^ электродвигателей 20, 22Резисторы 167
Ротор 30 -Симметричные сопротивления в цепи ротора 145, 164 ^ — статора 146, 165Системы управления электроприводами 13
Скорости механизмов 6, 7, 8, 186
Сложение механических характеристик 159
Смазка подшипников электродвигателей 32
Сопротивление резистора 167
Средняя скорость перемещения 7^ 8, 186
Срок службы аппаратуры 68— — электродвигателей 40, 63
Статическая мощность 176
Статический момент нагрузки 176Степени защиты электродвигателей 25, 40, 54, 65Температурно-токовое реле 123
Тиристорный преобразователь частоты 99— регулятор напряжения 95, 222
Ток короткого замыкания 12— перегрузки электродвигателя 39, 45
Тормозное устройствоТормозной момент тормоза 107Тормозные электромагниты переменного тока 117— —г постоянного тока 110, 111Ударные нагрузки 170
Условия эксплуатации 9, 21, 130
Ускорение 6, 179Фактор искрения 38— нагрева 35,'51Характеристики искрения при коммутации 38— механические 136—■ нагрузочные электродвигатели 46— холостого хода 46Частота вращения максимальная 21, 23, 41
“ — номинальная 23, 41, 57Шум электродвигателей 32Щетки электродвигателей 29, 30Эквивалентное число включений 187
Эквивалентный к. п. д. электропривода 184
Экономическая оценка систем управления 17
Электрогидравлическне толкатели 119
Электродвигатели постоянного тока 19, 40
Электромагнитные реле переменного тока 88, 89
—■ — постоянного тока 88, 89Электромагниты грузоподъемные прямоугольные 130Якорь электродвигателя 29, 47
Ящики резисторов 169
СОДЕРЖАНИЕ\ Стр.Предисловие . , • « . # * « i . . • . • » 3Раздел первый. Условия работы и общие техни¬
ческие характеристики электрооборудования грузо¬
подъемных машин . . 51-1. Грузоподъемные машины . . i > * • i * 5а) Назначение, классификация и основныеопределения , . . . .5б) Основные техническйе характеристики гру-зоподъемиых машин 6в) Обобщенные . показатели .нагрузок грузо¬
подъемных машин » . . , . , » , 8
1-2. Крановое электрооборудование. Основные ус¬
ловия использования и эксплуатации . ; 9а) Условия эксплуатации ®б) Общие рекомендации по проектированиюи установке электрооборудования на кранах 10ЬЗ. Питание крановых электроприводов и обеспе¬
чение электробезопасности . . . . , ... 11а) Питающие сети и качество электроэнергии Иб) Токи короткого замыкания , , , . . , 121-4. Системы управления крановым электроприводом 13а) Основные определения 13б) Классификация систем управления , * » 13в) Перспективные требования к системам
управления электроприводами грузоподъем¬
ных машин . 16г) Технико-экономическое обоснование выбора
снсте14Ы управления для крановых машин 17Раздел второй. Крановые электродвигатели 182-1. Общие технические требования к электриче¬
ским машинам 18а) Общие сведения по крановым электродви¬
гателям . ; 18б) Технические требования к электрическим
машинам 20в) Основные особенности крановых электро¬
двигателей 21г) Стандартизация электродвигателей .... 22д) Допускаемые отклонения от номинальных
значений параметров электродвигателей 252*2. Конструкция крановых электродвигателей . 27а) Особенности конструкции крановых элек¬
тродвигателей постоянного тока .... 27б) Особенности конструкции крановых электро¬
двигателей переменного тока 29в) Валы и подшипники крановых электродви¬
гателей 31г) Шум а вибрация крановых электродвига¬
телей 32д) Допуски и посадки в крановых электро- ;
двигателях 342-3. Крановые электродвигатели постоянного тока 34а) Основные соотношения в электродвигате¬
лях постоянного тока 34Стр.б) Потери энергии и тепловые параметры
электродвигателей 36в) Коммуникация электрических машин . . 37г) Работа крановых электродвигателей по¬
стоянного тока при питании их от выпря¬
мителей . , 39д) Серия Д электродвигателей постоянного' тока крановых й металлургических ... 402-4. Крановые электродвйгатели переменного тока 49а) Основные соотношения .параметров для
асинхронных электродвигателей .... 49,б) Потери энергии и тепловые параметры
электродвигателей 51в) Работа крановых короткозамкнутых элекг
тродвигателей в системах частотного регу¬
лирования . . ..... . . . . 53г) Серии MTF и МТН асинхронных крановыхи металлургических электродвигателей' . 54д> Новая серия 4МТ асинхронных крановых
и металлургических электродвигателей . 63е) Многоскоростные крановые электродвига¬
тели 65ж) Двигатели общего назначения на крановых
механизмах . , <1 65Раздел третий. Контактная аппаратура дляуправления крановыми электропривода^ми 673-1. Общие сведения и требования к аппаратуре . 67а) Назначение и классификация » . . . * 67б) Особенности процессов коммутации I в
цепях переменного и постоянного тока . « 67в) Включение и отключение двигателей < « 68г) Износостойкость контактных систем ... 68д) Работа контактных систем в поворотно-
кратковременном режиме ....... 69е) Нажатие на контакты в электрических ап»
паратах 69ж) Основные параметры электрических аппа¬
ратов . . t * « « « ««•«•« 693-2. Силовые кулачковые контроллеры . • . . . 72а) Назначение, конструкция и технические
данные 72б) Износостойкость силовых кулачковых
контроллеров ........... 75в) Особенности выбора кулачковых койтрол-
леров 753-3. Команде контроллеры 76а) Назначение и классификация ..... 7вб) Контактные командоконтроллеры , . « 76в) Сельсинные командоконтроллеры . < , . 793-4. Пульты управления . ^ • 803-5. Электромагнитные контакторы » i * , . » Ыа) Классификация и назначение , . . . ♦ 81б) Контакторы серии КПВ 600, КТПВ 600 , 81в) Контакторы серий КПД ЮОЕ, J^Tfl 100Е , 83
236СодержаниеСтр.г) Контакторы серий КТ 6000, КТП 6000, КТ 64и КТП 64 . . . . . . . . . . . . . 84д) Пускатели ПМЕ, ПАЕ, П6 85е) Рекомендации по выбору контакторов . . 863-6. Реле 87а) Классификация и назначение , . ♦ . * 87б) Реле серий РЭВ 800 и РЭВ 80 ..... 88в) Реле серий РЭВ 570 и РЭ 570 . * . . , 893-7. Магнитные контроллеры . . , , . . . . 90а) Назначение, классификация, особенности
констр^^кции . , . . 90б) Магнитные контроллеры переменного тока
серий ТА, ТСА и К, КС ...... . 91в) Магнитные контроллеры переменного токасерий ТСД и КСДБ . . ... . 93г) Магнитные контроллеры постоянного тока
серий П и ПС 93Раздел четвертйй. Полупроводниковые преобра¬
зователи и регуляторы 944-1, Общие положения ^944-2, Тиристорные регуляторы напряжения » , . 94а) Силовые цепи тиристорных регуляторов 94б) Основные технические данные тиристорных
регуляторов серии РСТ 954-3. Тиристорные преобразователи частоты длякрановых электроприводов 96а) Преобразователи частоты с непосредствен¬
ной связью 96б) Преобразователи частоты со звеном по¬
стоянного тока инверторного типа . . . 98в) Технические данные преобразователей ча¬
стоты для крановых электроприводов . . 994-4. Тиристорные преобразователи постоянного тока 99а) Схемы выпрямления, принципы построения
силовых цепей преобразователей .... 100б) Способы управления реверсивными тирис¬
торными преобразователями ...... 102в) Основные технические данные тиристорных
преобразователей постоянного тока серий
АТК и АТРК . 102Раздел пятый.Приводы тормозных устройств 1055-1. Классификация тормозов и выбор параметровтормозных устройств 105а) Классификация тормозных устройств . 105б) Конструкции тормозов 106в) Исходные параметры тормозов ... . 107г) Выбор тормоза и его привода для крано¬
вого механизма J085-2. Тормозные электромагниты постоянного тока 110а) Короткоходовые электромагниты для тор¬
мозов серии ТКП . . . . ПОб) Длинноходовые тормозные электромагниты
постоянного токд 114в) Устройства питания . электромагнитов по¬
стоянного тока . > > • . . . . . . . 1155-3. Тормозные электромагниты переменного тока 117а) Короткоходовые тормозные электромагниты
переменного тока ........... 117б) Длийноходовые тормрзные электромагниты
переменного тока . / . . . . , . . , 1185-4. Электрогидравлические толкатели ., , . , . 119Раздел шестой. Аппаратура защиты и контроля.Грузоподъемные электромагниты , . , , . 1216-1. Аппаратура защиты. » . • , , * , , , « , 121а) Общие условия защиты электрооборудова
ния на кранах от аварийных ситуацийб) Реле защиты от перегрузок в крановом
электроприводе . . * . . . * * ■в) Защитные панели . . .......• г) Выбор максимальных реле и схемы ихвключения в защитных панелях , , .д) Ограничение предельных положений пере
мещения . . . . . .е) Ограничение перегрузки конструктивных
элементов крана .... , . * ■, <6-2. Грузоподъемные электромагниты . . , ,а) Основные технические характеристики
электром'агнитов , ... ..... .б) Электромагниты серий jM и ПМ . . ,в) Управление и питание электромагнитовг) Электромагниты новой серии , , , »Стр.121123124126128129129129130
132
136Раздел седьмой. Расчеты механических ха¬
рактеристик электроприводов и соп{Н)тивлемий
резисторов i , * . ,, , , , . * . . . . 1367-1. Расчет механических характеристик эле»гро- \двигателей постоянного тока . . Л ., . . . 1367-2. Расчет внешни^ характеристик генераторовпостоянного тока . - . . 138а) Внешние характеристики трехобмоточного
генератора . . . . ^ . . ...... 139б) Методика расчета внешних характеристик 139в) Внешние характеристики двух- и однообмо-
точйых генераторов . . . . ... . 1417-3. Расчет внешних характеристик управляемыхстатических выпрямителей , . . • * < #141а) Общие положения . . . . . . ... . 141б) Внешние характеристики в зоне непреркв-
ного тока . . . ^ . ... . • . . 141в) Внешние характеристики в зоне прерывйсто-г6 тока ... . ’ . . . 142г) Методы расчета внешних характеристикв зоне прерывистого тока . . . . . . 1437-4. Расчет механических характеристик асинхрон¬
ных двигателей в контакторио-контроллериых
системах параметрического , регулирования , 144а) Общие положения , . . 144б) Расчет механических характеристик двига¬
телей с фазным ротором при введении сим¬
метричных сопротивлений в роторную цепь 145в) Механические характеристики при несим¬
метричных сопротивлениях в цепи ротора 146г) Механические характеристики асинхронных
короткозамкнутых двигателей- при введе¬
нии симметричных сопротивлений в цепь
статрра . . . . . .... . . . . 146д) Механические характеристики асинхронного
короткозамкнутого двигателя при несим¬
метричном включении сопротивлений . . 147е) Механические характеристики при измене¬
нии питающего напряжения в симметрич¬
ном режиме i . ... 147ж) Механические характеристики при несим-
метрии питаюп1их напряжений ./ . . .148з) Однофазное включение обмоток статора
асинхронных двигателей 148и) Регулирование скорости переключением
числа полюсов асинхронных короткозам¬
кнутых двигателей . . . 149к) Последовательное соединение обмоток
двухскоростного двигателя • > > * * * 149
Содержание237стр.7-5. Расчет механических характеристик асинхрон*
ных двигателей в режиме динамического
.торможения . . .. . . . . . . . . . . 150а)_ Общие понятия. Схемы динамического
торможения . . . . . . . . . . . . 150б) Основные соотношения для расчета меха¬
нических характеристик динамического•торможения . . , , . . . . . ... 151в) Расчет механических характеристик дина¬
мического торможения асинхронного дйига-, теля при питании его обмоток от отдель¬
ного источника по несимметричным
схемам включения . . . 152г) Расчет характеристик асинхронных коротко-
' ■ замкнутых двигателей при симметричныхсхемах динамического торможения . . . 153д) Расчет механических характеристик асин¬
хронных двигателей с фазным ротором в
режиме динамического торможения с само¬
возбуждением по универсальным кривым
(метод завода «Динамо») . . . . , . . 153■е) Особенности работы асинхронного двига¬
теля в режиме динамического торможения
с самовозбул<дением ........ 1557-6. Расчет механических характеристик асинхрон¬
ных , двигателей в система;с тиристорного
электропривода . , , , , , , , . , . . 155а) Общие вопросы , * . 155б) Расчет характеристик асинхронных двига¬
телей в системе частотного регулирования 155в) Расчет механических характеристик-i асин¬
хронного двигателя в системе с тиристор¬
ным регулятором напряжения . . ^ . . 158т) Ийпульсное регулирование тока jjOTopa
асинхронных двигателей . . . , . . 1597-7, Расчет характеристик асинхронных эжктро-
приводов лри совмещении различных методов
регулирования ; . . 159а) Общие вопросы 159б) Двухдвигательные электроприводы с Ъбщим
механическим валом • i* • 159в) Механические характеристики асинхрон¬
ного двигателя х фазным ротором в; сйсте-
ме с питанием ротора от внешнего выпря¬
мителя ....... 160г) Механические характеристики асинхронного
, короткозамкнутого двигателя при питанииот двух источников 1617-8. Расчет ступеней сопротивлений в главных це*
пях электроприводов с параметрическим регу-
лированием . . . , , , . , * , . , , 162а) Общие вопросы , . . , , . . « . 162б) Расчет пускорегулировочных сопротивлений
электроприводов с двигателями постоян-'
ного тока последовательного возбуждения 162в) Расчет пусковых и регулировочных сопро¬
тивлений в цепи ротора асинхронных дви¬
гателей при симметричных схемах “ . . . 164г) Расчет пусковых и регулировочных сопро¬
тивлений в цепи ротора асинхронных дви¬
гателей в несимметричных режимах . . 165д) Расчет добавочных сопротивлений в цепи
статора асинхронных короткозамкнутых
двигателей ....... 165е) Расчет сопротивления динамического тор¬
можения асинхронных двигателей с фаз- .
ным ротором . . , , 1667-9. Резисторы для главных цепей электроприводов 167стр.а) Общие сведения . . . . . . ... . 167б) Конструкция ц технические данные элемен¬
тов и ящиков резисторов 168в) Расчет и выбор резисторов для типовых
крановых электроприводов ...... 171г) . Пример расчета по выбору резистора длякранового электропривода 174д) Специальные резисторы для крановых элек¬
тродвигателей . . . , - . 175Раздел восьмой. Статика, динамика и энергетика
крановых электроприводов. Выбор двигателей 1768-1. Статика и динамика .крановых электроприводов 176а). Определение статических и расчетных на*
грузок . . .... 176б) Учет изменения к. п. д. механизма при рас*
чете нагрузки . 177в) Моменты инерции. Расчет времени переход-' ных режимов.-Ускорения ....... 178г) Вопросы влияния электропривода на работу
механизмов в переходных режимах . . . 1798-2. Энергетика крановых электроприводов и их
производительность. Оптимизация параметров
крановых механизмов на,основе учета потерь
энергии при регулировании 182а) Потери энергии з крановых электроприво¬
дах . . . . . . ... 182б) Эквивалентный к. п. д. крановых электро¬
приводов ... . . . . , . . . . . 184в) Производительность крановых механизмов.
Определение параметров крановых механиз¬
мов на основе оптимизации энергетическихи регулировочных свойств электропривода 1858-3, Выбор крановых электродвигателей. Определе¬
ние параметров электроприводов . . , . . 186а) Режимы работы крановых электроприводов 186б) Выбор двигателей крановых механизмовпо методу завода «Динамо» . , , , \ 187в) Примеры расчета 189г) Проверка выбора электродвигателей меха¬
низмов передвижения на обеспечение запа¬
са по сцеплению . . . . . . . . . . 190д) Некоторые частные случаи проверки вы¬
бора двигателей 190Раздел девятый. Типовые крановые электропри¬
воды с контакторно-контроллерными системами уп¬
равления * . 1919-1. Электроприводы с регулированием сопротивле
ния в цепи ротора асинхронных двигателей
и торможением противовключением . .а) Особенности построения электроприводов
Область применения б) Схемы электроприводов ......, в) Таблицы основных технических данныхкомплектных электроприводов ....9-2. Электроприводы механизмов пф^ъема с дина
мическим торможением двигателей с фазным
ротором . . , . . . ... . . .а) Особенности построения, электроприводов
Область применения ’ , .б) Схемы электроприводов . . . . . .в) Технические данные комплектных электро
приводов 9-3. Электроприводы постоянного тока с параметрическим регулированием а) Особенности построения электроприводов
Область применения .191191192202202202208213213213
238Содержаниестр.. . . , . . 214
Раздел десятый. Крановые электроприводы с бес-б) Схемы электроприводовконтактными системамиуправления10-1. Крановые электроприводы с тиристорными
преобразователями постоянного тока . . .а) Общие вопросы построения ряда крановых
электроприводсУв с тиристорными преобра¬
зователями постоянного тока . , , . .б) Схемы электроприводов .10-2. Крановые электроприводы переменного токас тиристорными регуляторами напряжения ,а) Общие вопросы построения ряда крановых
электроприводов с тиристорными регулято¬
рами напряжения .218218218219221222- стр.б) Схемы электроприводов с тиристорными
регуляторами напряжения ...... 22210-3.- Крановые частотно-регулируемые электро¬
приводы . '. . . . . 224а) Общие вопросы построения ряда элек-
тооприводов с частотным регулнровд^нием 224б) Схемы электроприводов ....... 225в) Основные технические данные комплектных
крановых электроприводов с частотным
регулированием 230Список литературы . . J
Предметный указатель .231233
ЮРИИ ВЛАДИМИРОВИЧ АЛЕКСЕЕВ
АЛЕКСАНДР ПЕТРОВИЧ БОГОСЛОВСКИЙ
ЕФИМ МАРКОВИЧ ПЕВЗНЕР ,АРОН АБРАМОВИЧ РАБИНОВИЧ
АНДРЕЙ ГЕОРГИЕВИЧ ЯУРЕКРАНОВОЕ ЭЛЕКТРООБОРУДОВАНИЕ. СПРАВОЧНИКРедактор Л. Б> Масандилов
Редактор издательства Л. А. Решмина
Переплет художника А. М. Кувшинникова
Технический редактор И. П. Собакина
Корректор И. А. Володяева
ИБ№1707Сдано в набор 28.12.78. Подписано в. печать 23.07.79, Т-13164. Формат
84X108Vi6. Бумага типографская № Гарн. шрифта литературная.
Печать высокая. Ус.1. иеч. л. 25,2, Уч.-иэд. л. 35,3. Тираж 40 ООО экз.
Заказ 839. Цена 2 р.Издательство <Энергия», 113114, Москва, М-114, Шлюзовая наб., 10Владимирская типография «Союзполиграфпрома* при Государственном
кол(Итете СССР по делам издательств, полиграфии и кыижыой торговли
бООоОО, г. Владимир, Октябрьский проспект, д. 7