/


















































































































































Текст
ВИНТОВЫЕ ЭВОЛЬВЕНТНЫЕ
ПЕРЕДАЧИ
БИБЛИОТЕКА КОНСТРУКТОРА
Б.А.КУРЛОВ
ВИНТОВЫЕ ЭВОЛЬВЕНТНЫЕ
ПЕРЕДАЧИ
СПРАВОЧНИК
МОСКВА МАШИНОСТРОЕНИ Е 1SB1
ББК 34.445
К93
УДК 621.833.35(031)
Рецензент д-р техн, наук проф. Э. Б. Булгаков
Курлов Б. А.
К93 Винтовые эвольвентные передачи: Справочник. — М :
Машиностроение, 1981. — 176 с., ил. — (Б-ка конструкто-
ра).
55 к.
Содержит данные, необходимые для оптимального выбора начальных па-
раметров, геометрического расчета, проверки условий зацепления, расчета из-
мерительных размеров колес и винтовых эвольвентных передач. Приведенные
в справочнике блок-схемы геометрических расчетов и расчетов линий блоки-
рующих контуров и областей существования позволяет быстро состарить про-
граммы машинного расчета.
Включает материалы по расшифровке винтовых эвольвентных передач и
данные для расчета параметров зацепления при шевинговании и зубохонин-
говании.
Для инженеров-конструкторов.
31302-011
К - --- --- 11-81. 2702000000
038(01)-81
ББК 34.445
6П5.3
И Б № 2720
Борис Андреевич Курлов
ВИНТОВЫЕ ЭВОЛЬВЕНТНЫЕ ПЕРЕДАЧИ
Редактор Л. П. Рыжова, Г. Н. Сидорова
Художественный редактор С. С. Водчиц
Технический редактор Т. С. Старых
Корректоры В. Е. Блохина и Л. Л. Георгиевская
Обложка художника Е. В. Бекетова_______________________________________________
Сдано в набор 23.10.80. Подписано в печать 17.08.81. Т-23620. Формат 60х90’Лв.
Бумага типографская № 2. Гарнитура литературная. Печать высокая. Усл. печ. л. 11,0.
Уч,-изд, л, 11,33. Тираж 19 700 экз. Заказ 2297. Цена 55 к.____________________
Издательство «Машиностроение», 107076, Москва, Б-76, Стромынский пер., 4_______
Московская типография № 4 Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
129011, Москва, Б. Переяславская, 46
© Издательство «Машиностроение», 1981 г.
ВВЕДЕНИЕ
Постоянное совершенствование и усложнение машин и механизмов тре-
бует все более широкого использования разнообразных пространственных
передач на пересекающихся и перекрещивающихся осях. Первые образуют
группу конических передач, вторые — гиперболоидных.
Как известно из курсов теории механизмов и машин [3,' 4], классифика-
ция передач на цилиндрические; конические и гиперболоидные основывается
на форме их аксоидных поверхностей — поверхностей, образуемых враще-
нием мгновенных осей относительного движения колес передачи вокруг осей
этих колес. В цилиндрических передачах аксоидные поверхности — обка-
тывающиеся один по другому начальные цилиндры; в конических — два
начальных конуса, в гиперболоидных — два обкатывающихся и одновре-
менно скользящих один по другому двуполостных гиперболоида вращения.
Из гиперболоидных передач наибольшее распространение имеют червяч-
ные с цилиндрическими червяками, винтовые, глобоидные, гипоидные и спи-
роидные.
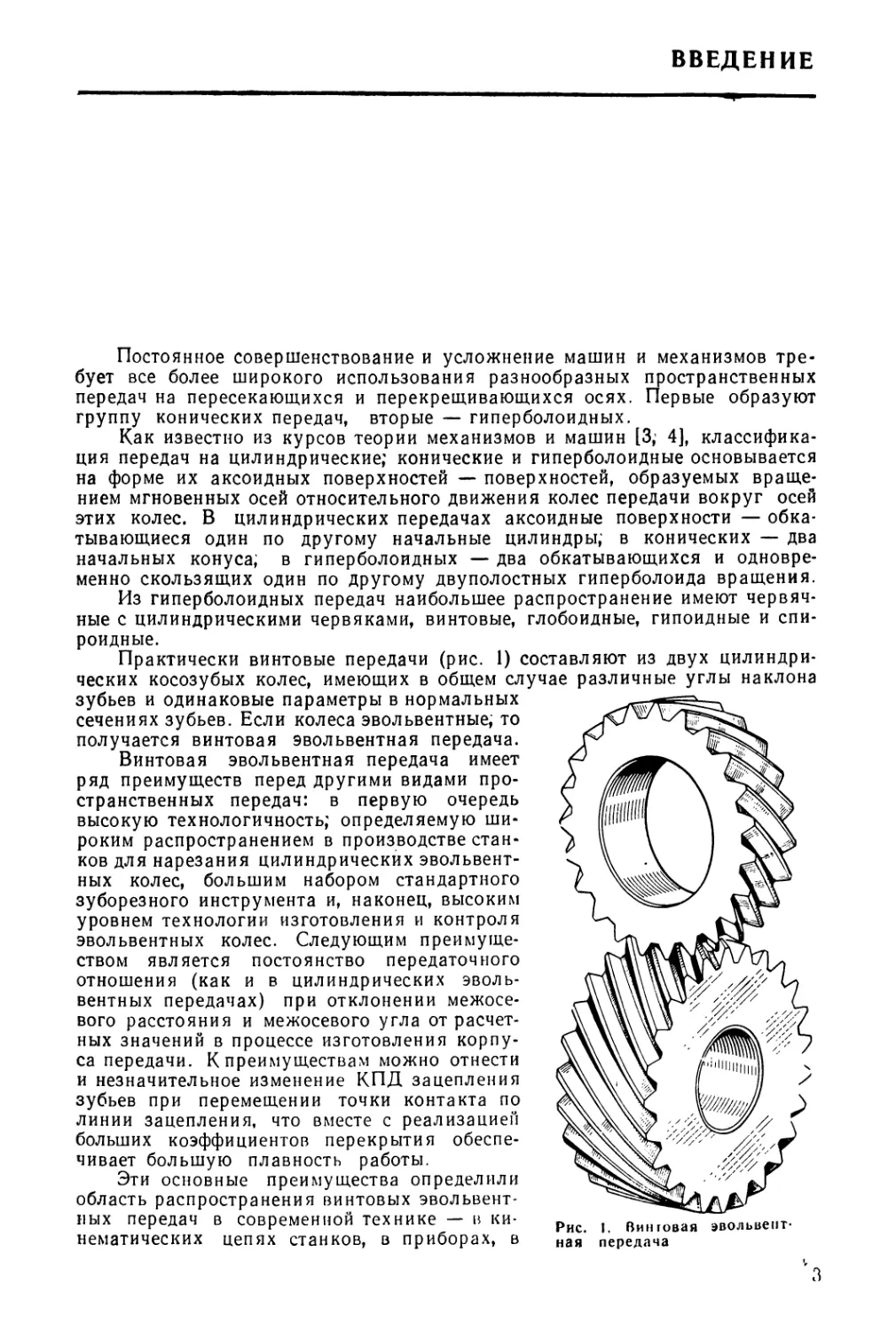
Практически винтовые передачи (рис. 1) составляют из двух цилиндри-
ческих косозубых колес, имеющих в общем случае различные углы наклона
зубьев и одинаковые параметры в нормальных
сечениях зубьев. Если колеса эвольвентные, то
получается винтовая эвольвентная передача.
Винтовая эвольвентная передача имеет
ряд преимуществ перед другими видами про-
странственных передач: в первую очередь
высокую технологичность; определяемую ши-
роким распространением в производстве стан-
ков для нарезания цилиндрических эвольвент-
ных колес, большим набором стандартного
зуборезного инструмента и, наконец, высоким
уровнем технологии изготовления и контроля
эвольвентных колес. Следующим преимуще-
ством является постоянство передаточного
отношения (как и в цилиндрических эволь-
вентных передачах) при отклонении межосе-
вого расстояния и межосевого угла от расчет-
ных значений в процессе изготовления корпу-
са передачи. К преимуществам можно отнести
и незначительное изменение КПД зацепления
зубьев при перемещении точки контакта по
линии зацепления, что вместе с реализацией
больших коэффициентов перекрытия обеспе-
чивает большую плавность работы.
Эти основные преимущества определили
область распространения винтовых эвольвент-
ных передач в современной технике — в ки-
нематических цепях станков, в приборах, в
различных сепараторах, в киносъемочной и кинопроекционной аппарату-
ре. Использование винтовых эвольвентных передач в некоторых силовых
приводах показывает возможность их применения при достаточно больших
напряжениях в зоне контакта зубьев.
Винтовые эвольвентные передачи могли бы использоваться более ши-
роко, однако нерешенность многих вопросов геометрии препятствует этому.
Не разработаны до конца вопросы кинематики относительного движения
зубьев, вопросы статики и динамики при перемещении контактной точки
по линии зацепления. Отсутствуют рекомендации по выбору'начальных па-
раметров. Нет разработок по влиянию смещений исходных контуров колео
на качественные показатели передач.
Решению некоторых из названных и других задач геометрии винтовых
эвольвентных передач посвящен предлагаемый читателю справочник.
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
П — центр приведения относительного движения зубьев; полюо за-
цепления винтовой передачи;
aw — межосевое расстояние передачи;
а — длина полуоси контактного эллипса (большой);
^12 — полное относительное ускорение контактирующих точек зубьев
колес передачи;
аК' ак-
— проекции относительного ускорения на оси 77т, /7s, /7п;
bw — расчетная ширина колес передачи;
b — длина полуоси контактного эллипса (малой);
f — коэффициент трения скольжения зубьев передачи;
К — полная (гауссова) кривизна эвольвентного геликоида в задан-
ной точке;
k — коэффициент трения качения между зубьями передачи;
М1(2) — моменты, прикладываемые к колесам передачи;
Мтверч —момент трения верчения между зубьями;
Qi2(2i) — нормальное усилие в точке контакта зубьев;
Р() — наибольшее контактное давление между зубьями передачи;
rdi(2) — радиусы основных цилиндров колес;
гк1(2) — радиусы контактирующих на линии зацепления точек зубьев
колес передачи;
гю1(2) — радиусы начальных цилиндров колес;
^оу1(2) — радиусы начальных цилиндров колес «центральных» передач?
и — передаточное отношение передачи;
V12 — вектор полной относительной линейной скорости в точке кон-
__ такта зубьев передачи;
^Н2) —векторы скоростей точек зубьев колес передачи, совпадающих
с полюсом П\
—векторы относительной скорости зубьев в полюсе /7;
Ъ — проекции вектора относительной скорости контактирующих
точек зубьев на оси /7т, /7s;
Xi(2) — коэффициенты смещения исходного контура колес;
*1(2). 7/1(2).
— системы прямоугольных координат; связанных с колесами
Zi и z2;
gl(2) — коэффициенты толщины зубьев колес; не связанных с исходным
контуром;
ctai(2) — углы профиля на вершинах зубьев колес;
aw — нормальный угол зацепления передачи;
au?ti(2) — торцовые углы зацепления колес передачи;
аК1(2) “ Углы ПР°ФИЛЯ зубьев в контактирующих точках;
5
Pbi(’) — углы наклона зубьев на основных цилиндрах колес;
₽iri(2) — углы наклона зубьев на начальных цилиндрах колес;
Т1(2) — углы между вектором Q12 и осями колес;
Д — угол между векторами й12 и V^2;
6 — величина сближения (контактной деформации) зубьев колес под
нагрузкой;
е — коэффициент перекрытия передачи;
т|* — условный КПД зацепления;
61(2) — угол между большой осью контактного эллипса и главным на-
правлением эвольвентного геликоида зуба в точке контакта;
ц — коэффициент, определяющий несовпадение начальных и дели-
тельных цилиндров передачи;
v — угол между главными направлениями эвольвентных геликоидов
в контактной точке;
рэ — радиус кривизны эвольвенты в заданной точке;
Рп(2) ~ главный радиус кривизны эвольвентного геликоида в заданной
точке;
S — межосевой угол передачи;
pZr — главный приведенный радиус кривизны соприкасающихся в за-
_ данной точке эвольвентных геликоидов;
ф1(2) — векторы угловых скоростей колес передачи; .
Qi2 — вектор относительной угловой скорости вращения колес пере-
дачи;
т п _
Qs — проекции вектора ^12 на оси /7т, Пп, FIs.
Основные индексы
а — отнесенный к вершине зуба колеса;
b — отнесенный к основному цилиндру колеса;
f — отнесенный к цилиндру впадин колеса;
i — отнесенный к первому колесу — 1, и ко второму — 2;
k — отнесенный к контактной точке;
I — отнесенный к граничной точке эвольвентной поверхности зуба колеса;
о — отнесенный к инструменту при обработке зубьев колес;
р — отнесенный к концу активного участка профиля зуба;
w — отнесенный к начальному цилиндру колеса;
у — отнесенный к произвольному цилиндру колеса;
t—отнесённый к торцу колеса.
Глава 1
ОСНОВЫ ТЕОРИИ
ГИПЕРБОЛОИДНЫХ ПЕРЕДАЧ
ОТНОСИТЕЛЬНОЕ ВИНТОВОЕ ДВИЖЕНИЕ ЗУБЬЕВ КОЛЕС,
АКСОИДНЫЕ И НАЧАЛЬНЫЕ ПОВЕРХНОСТИ ПЕРЕДАЧИ
Винтовые передачи являются частным случаем гиперболоидных передач^
оси колес в которых перекрещиваются в пространстве.
Основные вопросы относительного движения колес гиперболоидных
передач нашли отражение в работах В. А. Гавриленко [10, 11] и других ис-
следователей. Знание относительного движения колес позволяет решить во-
просы об аксоидах передачи, о выборе начальных поверхностей,' подготовить
материал для определения некоторых качественных показателей работы пе-
редачи: скоростей и ускорений скольжения зубьев; потери на трение в кон-
тактной точке и др.
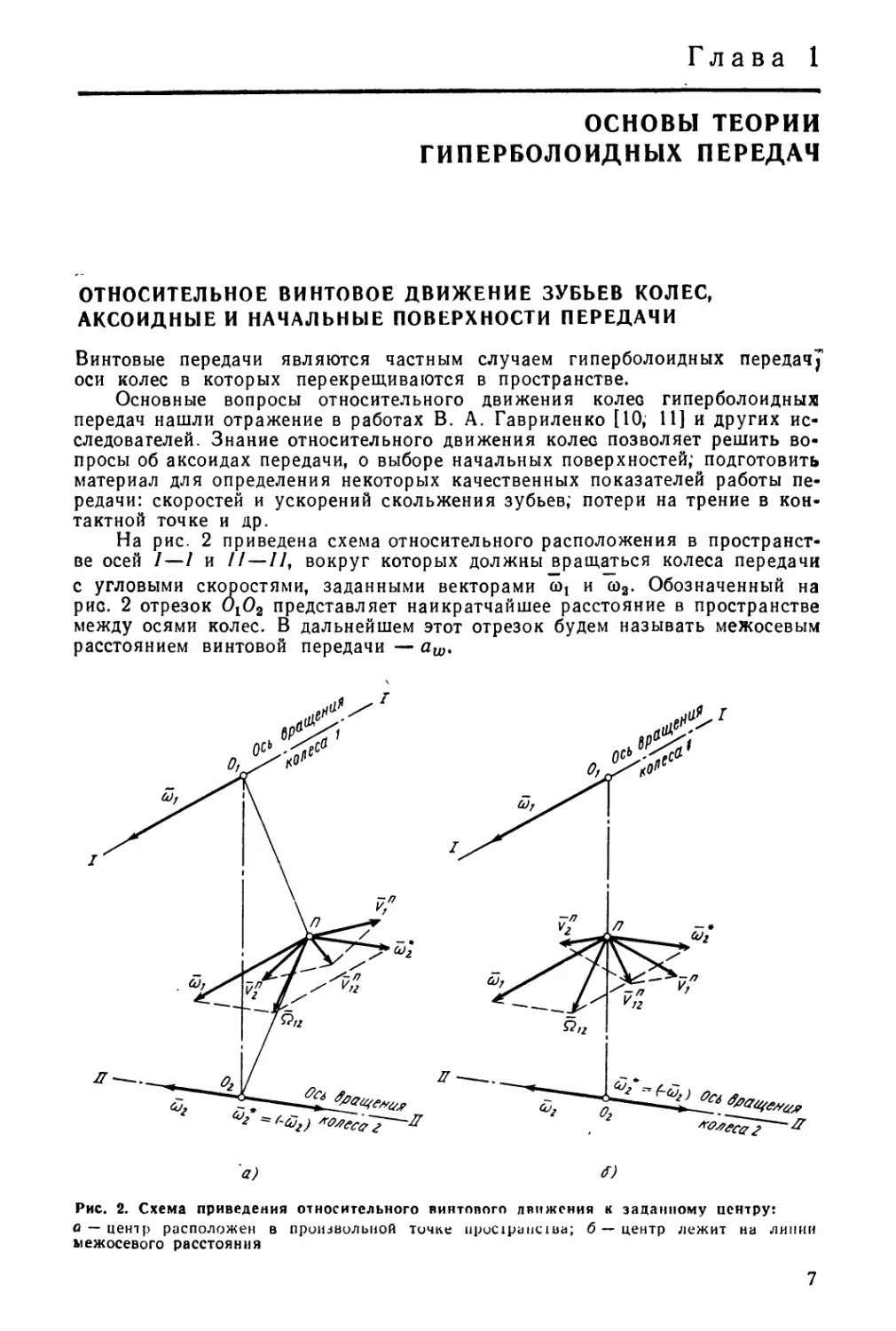
На рис. 2 приведена схема относительного расположения в пространст-
ве осей /—/ и //—//, вокруг которых должны вращаться колеса передачи
с угловыми скоростями, заданными векторами (Oj и со2. Обозначенный на
рис. 2 отрезок OtO2 представляет наикратчайшее расстояние в пространстве
между осями колес. В дальнейшем этот отрезок будем называть межосевым
расстоянием винтовой передачи — aw.
Рис. 2. Схема приведения относительного винтового движения к заданному центру:
о — центр расположен в произвольной точке нроС1ранс1ва; б — центр лежит на линии
межосевого расстояния
7
Рис. 3. Относительные угловые и линейные скорости в центре приведения винтовой пере-
дачи
Воспользовавшись методом «обращения» движения, «остановим» колесо;
вращающееся вокруг оси 11—//, придав всей передаче угловую скорость
(Ог = — ^2- При этом первое колесо начнет вращаться одновременно вокруг
осей /—/ и II—II с угловыми скоростями <х>! и со2» второе колесо станет
неподвижным.
Как известно из теоретической механики [6, 12 и др.], такое вращение
вокруг двух перекрещивающихся осей можно привести к одному «винтовому»
движению вокруг произвольно выбранного центра приведения П (на
рис. 2; а центр П лежит в произвольной точке пространства, на рис. 2, б —
на линии межосевого расстояния OiO2). Результатом такого приведения явля-
ется главный вектор относительного вращения Q12 и главный вектор отно-
сительного скольжения в центре приведения У^2. Вектор й12 определяет-
ся как сумма
Q12 = (01 +» (О
а вектор
где
V?=(\nx7ai-, V^=6Tn хй?. (2)
Для винтовых передач центр приведения относительного движения колес
выбирают на линии межосевого расстояния 0г02\ тогда векторы, приклады-
ваемые к точке П (рис. 2, б), оказываются лежащими в одной плоскости, пер-
пендикулярной к оси (\02.
Как следует из выражения (1), вектор Q12 остается постоянным (инва-
риантным) при изменении положения центра приведения П. На рис. 3 по-
казаны векторные параллелограммы сох, со J; Q12 и У1/, У^2 в плоскости,
перпендикулярной к линии межосевого расстояния при произвольном выбо-
ре точки П.
Обозначив угол между векторами со* и coj — S (межосевой угол пере-
дачи) и введя углы ух и у2 между со^ — Q12 и со* — получим из соотноше-
ния углов в косоугольных треугольниках
(Qi____sin у2
(□г sin Yj
8
С учетом . ' ,
V1 + ?2 = S
после преобразования получим
. sin S
tg Vi = —:---—;
и + cos S
?2 = S—У1 (3)
ИЛИ
и sin S
gV2= 1 +ucosX ’
где и = — пепелаточное отношение.
о2
Для ортогональных передач (S = ± 0,5л) '
tg?i =““’I tgy2 = u. (4)
Модули векторов Qia и :
Qi2 =(Di cos Yj + со2 cos y2j (5)
Qt2 = “|До2 +<oj +2(0! co2 cos S;
v" ='/v{12 + Vn2 + 2V1n vnCos(n-S) . (6)
Тяк тгятг для винтовой передачи Vf1 = (о/ц,г-; где rwi = Of/7; (rwl +
+ rW2 = uw), то после преобразования получим
="|/(ГUH Wl)2 + (rW2 W2)2 2Гцл Гц) 2. (01 (о2 cos S, J7)
^12 = ^101(01810(3^1+ гц)2 со2 sin Р102•
Для ортогональных передач (S = ± 0,5л) зависимости (5) и (7) при-
нимают вид ________
Q12 = “l/оц2+ о)2; (5а)
У[\ = У(гил <*>i)2 + (rW2 (о2)2« (7а)
Часто зависимости (5а) удобнее иметь в виде
Qi2 = (о2 *|/и2 + 2 и cos S + i J (56)
при S = ± 0,5л ____
Qi2 =(о2 Я/^2+ 1 •
Угол Д между векторами Qi2 и который оказывает большое влия-
ние на качественные показатели передачи, определяют по рис. 3 при выборе
положения точки П (радиуса rWi) из зависимости
Д = Рил — Yi
или
rWi(n2 + 2u cosZ+Q—g^d +u cos ?)
tg A =------------------—-----------------; (8)
aw и sin 1
для ортогональных передач
x x г«и(и2 + 1) — Clio
tg Д =-----------------.
9
Углы, которые образует вектор скорости относительного скольжения
У^2 с осями колес, могут быть найдены по формулам
Рин=У1~1“Д; ^iu2==^—Pun* (9)
В дальнейшем вместо вычисления угла А в большинстве расчетов ис-
пользуется прямая связь между радиусом rwl и углом Р^:
гwl и (a(V —гц?]) cos S
gPua= (йш-r^sin 2
(10)
и
sin S tg Pun + cos S
= «+cosS + sinStgfJu,1 :
I'w- — ? W1*
Для ортогональных передач
R Ги}1 U
tg Pun —
aU) f (VI
(11)
(Юа)
(Па)
и
aw tg Pun t
Г1£1 = I *. □ »
aU) и
u+tgfJun '
Как уже указывалось; вектор Q12 не зависит от выбора центра приведе-
(точка Z7), а вектор УР2 изменяется с переносом точки Z7. Скорость же
НИЯ
относительного скольжения в значительной степени определяет КПД за-
цепления, его сопротивляемость заеданию, износу и т. д. Это требует на-
хождения такого положения центра приведения, которое соответствует ми-
нимальному значению скорости относительного скольжения.
Воспользовавшись методом определения экстремума функции [5]
d^2
найдем начальные радиусы гЮ1; обеспечивающие минимальную
скорость скольжения в полюсе,
* aw (1 +u cos S)
f w 1 =---------------
и2 -\-2u cos 2 -j- l
для ортогональной передачи
(12)
* Qw
rw\ = —-----
После подстановки этих значений в зависимости (10) и (Юа) получим
углы Роу 1, дающие минимальную скорость скольжения в полюсе*
. д* sin S
tg Роу 1 =-;----
u + cos
(13)
для ортогональной передачи
ж о* 1
tg Роу 1 =---
U
10
Полученные формулы показывают совпадение углов с углами ур
Поэтому минимальное значение скорости относительного скольжения полу-
чается при совпадении направлений векторов Q12 и И^2. В теоретической ме-
ханике [6, 12] линию совпадающих векторов Q12 и называют центральной
осью качения-скольжения. В дальнейшем винтовые передачи, приводимые
к центральной оси качения-скольжения, будем называть центральными, пе-
редачи с rwi < Fw\ — доцентренными, передачи с rwl > r&i — зацентрен-
ными.
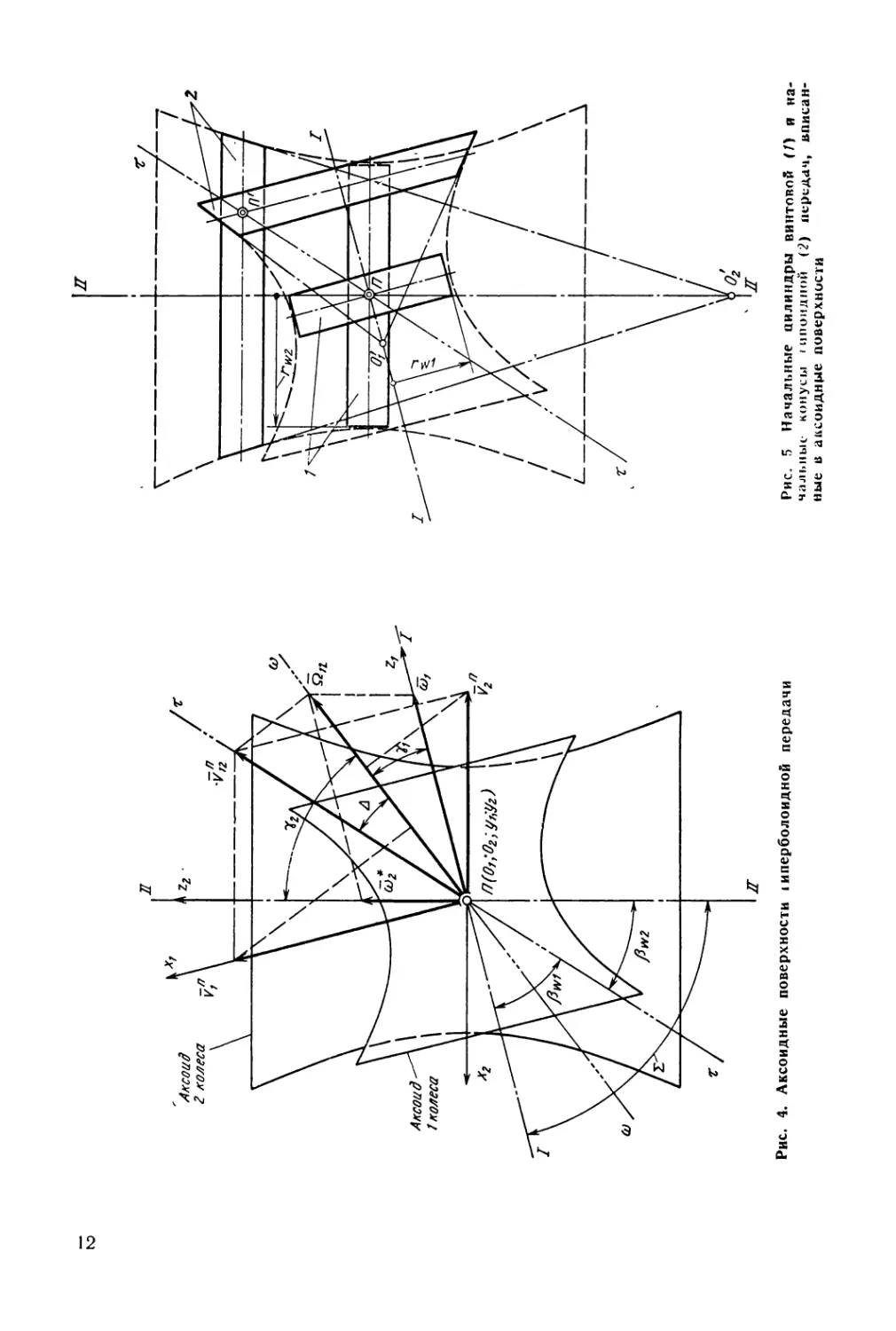
Определение в пространстве линии относительного скольжения ко-
лес позволяет получить две аксоидные поверхности как в цилиндрических
и конических передачах. При вращении линии (т—т) (рис. 4) вокруг
осей кблес получим два гиперболоида вращения, соприкасающихся вдоль ли-
нии т — т. Это и есть аксоидные поверхности передач. Так как выбор точки
П произволен, то конструктор имеет огромные возможности менять качест-
венные показатели передачи за счет смещения полюса приведения.
Если ввести системы координат х-^у^ связанные о колесами (рис. 4),
и при этом оси Zj направить вдоль векторов сох и со*, а О^у^ — вдоль линии
OlO2t можно получить уравнения аксоидов колес:
Х1 , yt _ _р
rwi Т rw\ ('•u4/tgPu,l)2
(14)
rw2 rw2 < ru)2^g Ри>г)2
Как и в других видах передач, аксоидные поверхности позволяют по-
лучить начальные поверхности винтовой передачи, обеспечивающие техно-
логические возможности изготовления реальных колес.
На рис. 5 показаны два возможных случая начальных поверхностей. Пер-
вый, когда в «горловины» гиперболоидов вписаны цилиндры 1 радиусами
rwi и rW2, касающиеся один другого в одной точке /7; второй, когда на про-
извольном расстоянии от линии межосевого расстояния в гиперболоиды впи-
саны два конуса 2, касающиеся один другого в одной точке П'. В первом слу-
чае получают начальные поверхности винтовых передач, во втором — ги-
поидных.
Задавшись начальными поверхностями винтовой передачи, можно полу-
чить сопряженные поверхности зубьев различными методами: методом отыс-
кания огибающей семейства заданных поверхностей Ft (х^у^ = 0 зуба пер-
вого колеса в относительном движении колес; методом X. И. Гохмана; оп-
ределяющим линию контакта и огибающей поверхности; кинематическим
методом. Любым из этих методов определяется уравнение F2 (^2{/22г) = О
поверхности зуба второго колеса. Эти методы разобраны в курсах диффе-
ренциальной геометрии [20 и др.], в работах Н. И. Колчина [13], В. А. Гав-
риленко [10, И] и других исследователей.
Теоретический способ получения сопряженных поверхностей зубьев
винтовой эвольвентной передачи во многом аналогичен способу получения
поверхностей зубьев цилиндрических прямозубых и косозубых передач;
показанных на рис. 6 и рис. 7, когда при заданном межосевом расстоянии
aw выбирают угол зацепления для прямозубой и для косозубой пе-
редачи, под этим углом проводят образующую полость Q, касательную одно-
временно к обоим основным цилиндрам колес. На образующей плоскости на-
мечают прямую П—П (рис. 6) для прямозубых передач, параллельную осям
колес; П — К (рис. 7) для косозубых передач, образующую углы Р& с ося-
ми колес. При обкатке без скольжения плоскости Q последовательно по ос-
новному цилиндру первого колеса, а затем второго колеса прямая П—П
(или П—К) образует две взаимоогибающие эвольвентные поверхности:
в первом случае цилиндрические, во втором — винтовые (эвольвентные ге.
11
ьо
п
Рис. 5 Начальные цилиндры винтовой (/) и на-
чальные конусы ।нпоидной (2) передач, вписан-
ные в аксоиднце поверхности
Рис. 6. Схема зацепления цилиндрической прямозубой эвольвентной пе-
редачи
__ Рис. 7. Схема зацепления цилиндрической косозубой эвольвентной пере»
оо дачи
ликоиды). Эти поверхности касаются одна другой вдоль общей образующей
П—П или П — К.
Аналогично можно образовать две взаимоогибаемые эвольвентные по-
верхности винтовой передачи, передачи на перекрещивающихся осях. Вы-
бирают произвольный центр приведения — полюс зацепления (по аналогии
с плоскими передачами) — точку П. Это позволяет, как указывалось; одно-
значно определить векторы У1а и V\n2. Очевидно, что в любой момент зацеп-
Рис. 8. Схема образования взаимоогибаемых эвольвентных
геликоидов винтовой передачи
лення скорость относительного скольжения должна быть общей каса-
тельной к соприкасающимся поверхностям зубьев. Поэтому плоскость ///
(рис. 8), проведенная нормально к вектору V\n2, будет нормальной плоскостью
одновременно к обеим поверхностям соприкасающихся зубьев в полюсе П.
На рис 7 эта плоскость представлена следом N—N пересечения с плоско-
стью, касательной к начальным цилиндрам.
14
Как и в цилиндрических передачах, задается угол зацепления aw. В вин*
товой передаче (рис. 8) — это угол, который образуете полюсной плоскостью
П общую нормаль к зубьям п—п, лежащую в нормальной плоскости III.
Определив положение общей нормали п—п, можно провести плоскости 1
и //, включающие в себя нормаль п—и и параллельные осям колес 1—1 и
2—2. Кратчайшее расстояние от осей колес до плоскостей 1 и 11 определяют
радиусы и гьг основных цилиндров колес передачи. Точки и Л/2 —
точки касания общей нормали с основными цилиндрами колес. Общая нор-
ма ль образует с торцовыми плоскостями колес С^ПNltl и O2F1N2i2 углы
Рм и Рь2 наклона эвольвентных геликоидов на основных цилиндрах. Если
через точку П провести плоскость О, составляющую с общей нормалью
угол 90°, то это будет плоскость, касающаяся зубьев обоих колес одновремен-
но. В то же время плоскость О является рабочей плоскостью зуба инструмен-
тальной рейки, обкат которой вокруг оси колес образует два сопряженных
эвольвентных геликоида. На рис. 8 показаны две сопряженные в полосе
эвольвенты Btll и В2П.
Основная расчетная схема винтового эвольвентного зацепления приве-
дена на рис. 9, а и б. Положение общей нормали Д\/У2 по отношению к зуб-
чатым венцам колес показано на рис. 9, а, расчетная схема — на рис. 9, б,
представляющая собой продолжение и детализацию рис. 8. Во-первых, на
рис. 9, б показаны векторные параллелограммы угловых и линейных отно-
сительных скоростей и углы которые векторы Q12 и V\n2 образуют
с осями колес. Полюсная плоскость представлена на рис. 9, б многоуголь-
никами /7А/^2 Плоскость, касательная к ос-
новному цилиндру первого колеса,’ — nNltiN1 и /7М2ПЛ/2; плоскость,
касательная к основному цилиндру второго колеса, —^N1N1i2 и IlN2N2t2.
Заштрихованные плоскости nNltl и
(/7Л^2Л^2) представляют собой две торцовые плоскости колес, прохо-
дящие через линию межосевого расстояния передачи ОХО2. Точки Wf и
N2 — точки касания общей нормали п—п с основными цилиндрами. На
рис. 9, б показаны следующие величины: aw — межосевое расстояние пере-
дачи, расстояние между точками и О2, rwi — расстояние между полю-
сом передачи и точками Ох и О2 радиусы начальных цилиндров. Из по-
строений рис. 9, б видно, что ширина колес в винтовой эвольвентной пере-
даче определяется наклоном линии к осям колес, поэтому отрезки
Л\/Уш; и N2^2t2f ^2^211 определяют предельную ширину колес,
обозначенную на рисунке 0,56?, и 0,56 /. На рис. 9, б показаны углы 2;
Ть Тг» Рил и Ри>2 как на векторных параллелограммах,’ так и между линиями на
полюсной плоскости. Показаны торцовые углы зацепления awu и углы ,
которые образуют торцы колес с общей нормалью Л^Л^. Наконец, на рис. 9, б
приведены правые системы координат и x2y2z2, связанные с колесами
передачи, и системы xyz и тп$, связанные с полюсом передачи П. Кроме того;
на рисунке показаны точки Рг и Р2 и их проекции на торцы колес Рщ;
Plt2i P2t2 и эти точки определяют активный участок линии NiN2; ко-
торый отсекается цилиндрами вершин колес.
Показанные построения основной схемы позволяют провести все гео-
метрические расчеты и преобразования и служат основой кинематического
и силового расчетов зацепления.
Как и в цилиндрических эвольвентных передачах [11; 25, 26 и др.],'
общая нормаль Л\М2 является геометрическим местом точек контакта зу-
бьев — линией зацепления.
Общая расчетная схема винтового эвольвентного зацепления, приведен-
ная на рис. 9, а и б, позволяет определить главные геометрические соотноше-
ния эвольвентных геликоидов при заданных а^, (3^, Рц^; и rw2.
Углы наклона зубьев на основных цилиндрах
sin Pti == cos aw sin •
15
о
Рис. 9. Основная расчетная схема зацепле-
ния двух эвольвентных геликоидов винто-
вой передачи:
а — положение общей нормали относитель-
но колес передачи; б — основные построе-
ния
или
cospbf = cos aw l/tg2au>+ cos2^ » (15)
или L
n cos(3wf
cos рь/ = cos aw-------,
cos aU)ti
где торцовые углы зацепления через принятый нормальный угол зацепления
определяют как
„ tg
= . (16)
cos $wi
Радиусы основных цилиндров эвольвентных геликоидов
fLOfCOSp^f
гы = , ... - '17)
Vtg2 aw + cos2 $wi
rbt=rWi cos awti. (18)
Зависимости (15)—(18) позволяют в дальнейшем получить формулы, оп-
ределяющие остальные геометрические соотношения винтовой эвольвентной
передачи
ОТНОСИТЕЛЬНЫЕ СКОРОСТИ И УСКОРЕНИЯ
ЗУБЬЕВ ПЕРЕДАЧИ В КОНТАКТНОЙ ТОЧКЕ
Скорости относительного движения в контактной точке в значительной сте-
пени определяют работоспособное состояние передачи, ее долговечность;
склонность к заеданию, «сваривание» зубьев и др
Зависимости (5)—(7) определяют величины векторов й12 и У^- Для
исследования относительного движения зубьев целесообразно ввести систе-
му координат ins (рис. 9, б и 10). Ось Пп направляют по линии общей норма-
ли к рабочим поверхностям геликоидов, ось Пт — по линии, касательной
к геликоидам, совпадающей с вектором скорости У^2. Ось Пз — нормаль
к плоскости пПт.
Выбранная система координат позволяет разложить вектор й12. Ве-
личины проекций (см. рис. 10) следующие:
QT = Ql2cosA, (19)
= Qi2 sin Д cos aw, (20)
Qs =Q12 sin Д sin (21)
Проекции и Qs определяют относительное качение поверхностей
геликоидов в контактной точке. Проекция йп; направленная вдоль общей
нормали в контактной точке, определяет относительное верчение зубьев.
Относительное верчение зубьев в значительной степени изменяет кинемати-
ческую характеристику на фактической площадке контакта зубьев, появляю-
щейся под рабочей нагрузкой.
В произвольно выбранной точке контакта К, лежащей на общей нор-
мали NtN2 на расстоянии ПК = / от полюса, относительная скорость скла-
дывается как геометрическая сумма скорости У^2 и скорости относитель-
ного скольжения, обусловленной наличием проекций угловой скорости от-
носительного качения йх и Qs. Расстояние Z — положительно в направлении
оси Пп.
Проекция относительной скорости по рис. 10 определяется как
У/<12= йс х ПК •
17
Алгебраическое выражение этой скорости
VSK]2 = 4. (22)
Проекция относительной скорости
Ухк[2=аьхПК
или
V)<12= — ZQS. (23)
Полная скорость относительного движения в контактной точке
Рис. 10. Относительные скорости в точках контакта чип ипритных геликоидов по линии
зацепления
18
Если контактная точка выбрана в полюсе, V12 =
В случае, когда контактную точку принимают лежащей до полюса па
участке Л^/7, в формулы (22), (23) необходимо размер Z подставить с отрица-
тельным знаком; для заполюсного положения точки на участке ПМ2 —
с положительным.
_ Для дальнейших исследований необходимо учесть направление вектора
V12, которое определяется углом %. Угол % можно определить из выражения
. VK12
tgx= р-П , „г
V12T VK12
(25)
в которое величины проекций скорости и подставляют со сво-
ими знаками.
Представляет интерес определение скорости движения контактной точ-
ки вдоль общей нормали NrN2 и изменение составляющей относительной
скорости V12, лежащей в плоскости, касательной к соприкасающимся рабо-
чим поверхностям геликоидов.
Скорость движения контактной точки вдоль общей нормали можно
определить, воспользовавшись общим правилом определения скорости точ-
ки вращающегося тела [6]:
V — со X г,
где г — радиус-вектор; проведенный из точки; взятой на оси вращения;
до рассматриваемой точки. Для контактных точек первого и второго гелико-
идов можно записать:
=C0i X OiK>
, . (26)
X Ог ТС>
здесь со2 ~ вектор истинной скорости вращения второго геликоида.
Представив радиус-векторы О1К и 02К как векторные суммы
оГк = (\П + ПК'>
б7к=6Гл+пк
и подставив эти выражения в зависимости (26), получим
Vizi = X П -|- COj X ПК*
__> (27)
Vд- д = со^. х 77 -j- о)2 X // ТС •
—
Так как вторые слагаемые в формулах (27) содержат вектор ПК на-
правленный вдоль общей нормали го эти слагаемые не могут дать
проекций на нормаль. Поэтому величины проекций V^\ и П<2 определяют-
ся векторными произведениями со, X OJI, в которых векторы со, и 0^//
взаимно перпендикулярны и отрезки О^П являются радиксами начальны;,
цилиндров передачи. С учетом зависимости (2)
й, хгл/7 = Г!1;
-г.
CU2 X 0^2 П = — V 2*»
Рис. 11. Схема угловых и линейных скоростей, контактирующих па линии зацепления
точек зубьев
Векторы Vf1 и (— У^1) нормальны к линии межосевого расстояния
(см. рис. 9, б) и лежат в полюсной плоскости П (см. рис. 8).
На рис. 11 показана схема взаимного расположения векторов colf (— со2),’
У^1; (— УГ) для случая произвольного выбора полюса П на линии меж-
осевого расстояния; где линия т—т — направление оси /7т, совпадающей
с вектором Ухп2 — направлением линии общей касательной к поверхностям
соприкасающихся геликоидов; W—N — проекция общей нормали к сопри-
касающимся геликоидам NrN2 на полюсную плоскость П. Как показано на
рис 9, б линия NrN2 составляет угол aw с полюсной плоскостью П.
Совершенно очевидно, что для обеспечения непрерывного контакта
поверхностей эвольвентных геликоидов, т. е. для возможности передачи
движения от первого колеса ко второму, необходимо, чтобы проекции ско-
ростей контактной точки на линию /Vj/V^ а следовательно, и на линию N—N
были одинаковы:
^1 = ^2. (29)
Как показано на рис. 11,
C0SPlUli ^N2~ COS Pu;2«
Подставив в эти выражения значения yf1 и У^1, получим важнейшее со-
отношение между начальными радиусами и углами наклона зубьев на на-
чальных цилиндрах в винтовой эвольвентной передаче, определяющее со-
пряженность соприкасающихся геликоидов:
=И; (30,
rwi COS PlOl
здесь и = — передаточное отношение передачи.
Скорость движения контактной точки вдоль общей нормали п—п яв-
ляется проекцией скорости VN на линию п—п и остается постоянной:
У л = (Dj I'wi COS Pu, I COS ОСц) • (31)
20
Составляющая скорости относительного движения, касательная к со-
прикасающимся геликоидам, в общем случае имеет три составляющих век-
тора (см. рис. 10):
^12 — УГг -Н7к 12 + vk 12-
Слагаемый вектор Vtn2 остается постоянным в любом положении кон-
тактной точки на линии Л\М2» векторы же и V^l2 изменяются про-
порционально расстоянию / от полюса П до контактной точки.
Обозначив сумму векторов V^12 и V^l2 через и учитывая, что
слагаемые векторы взаимно перпендикулярны, получим выражение для оп-
ределения величины
12 = 1/1 —sin2 Д cos2 aw .
(31а)
В полюсе П вектор Равен нулю. При переходе точки К через полюс
вектор 1^12 поворачивается, поворачивая при этом весь вектор относи-
тельной скорости У12 (см рис. Ю).
Для нахождения относительного ускорения контактирующих зубьев в
точке контакта К наиболее рационально воспользоваться определением ус-
корений точек и К2, принадлежащих колесам 1 и 2 в проекциях на оси
ths Приняв постоянной угловую скорость сох = const, увидим, что ускоре-
ние точек Ki определяется векторным произведением (6 и др.]
аК/ Х У К г
(32)
Воспользовавшись методом определения векторного произведения [6,
12 и др ], можно получить проекции а^£-, ® зависимость (32) сле-
дует подставить:
со] =«! cos Рид; со'] = —СО] sin Рц,, cos aw\ со] = —СО] sin рил sin
со] = — co2 cos рш2; й)2 = —co2 sin рш cos cos2 = — co2 sin pu>2 sin aw\ 1/^!=»
==CO] (ги?, I sin У-ц)) sin Рил» V/<1 == ?w\ cos Pun cos czu>,
= (r w\ si n cc w — I) cos Рил; (rw> H- si i a w) sin Pun J ^/<2 =
— C02 wi COS Pu?2 COS г/-ц)\ 2 — VO- Sin i) COS Pu>2 •
Эти значения получены с помощью рис. 9, б и 10, на которых показаны все
системы координат.
Если учесть правило теоретической механики (6, 12 и др.] по определе-
лению относительных ускорений
^ОТН — ---^2
то можно получить проекции вектора относительного ускорения контактной
точки на координатные оси:
а^12 с= /(со? sin Pun cos pun + col sin Pun cos Pw2) cos aw\
aKi2 = “"(°i fun) sin aw^-l (co? cos2 pwl —
—co? cos2 pw2) cos2 схц,;
12 == rw 1 +“2 w2) cos 0&U? ~~‘I (^1 sin2 Pun
—ю2 sin2 Pun? sin aw cos aw.
(33)
21
Полное относительное ускорение в контактной точке
(аК I а) +(аК12) +(aKi2)2» (34)
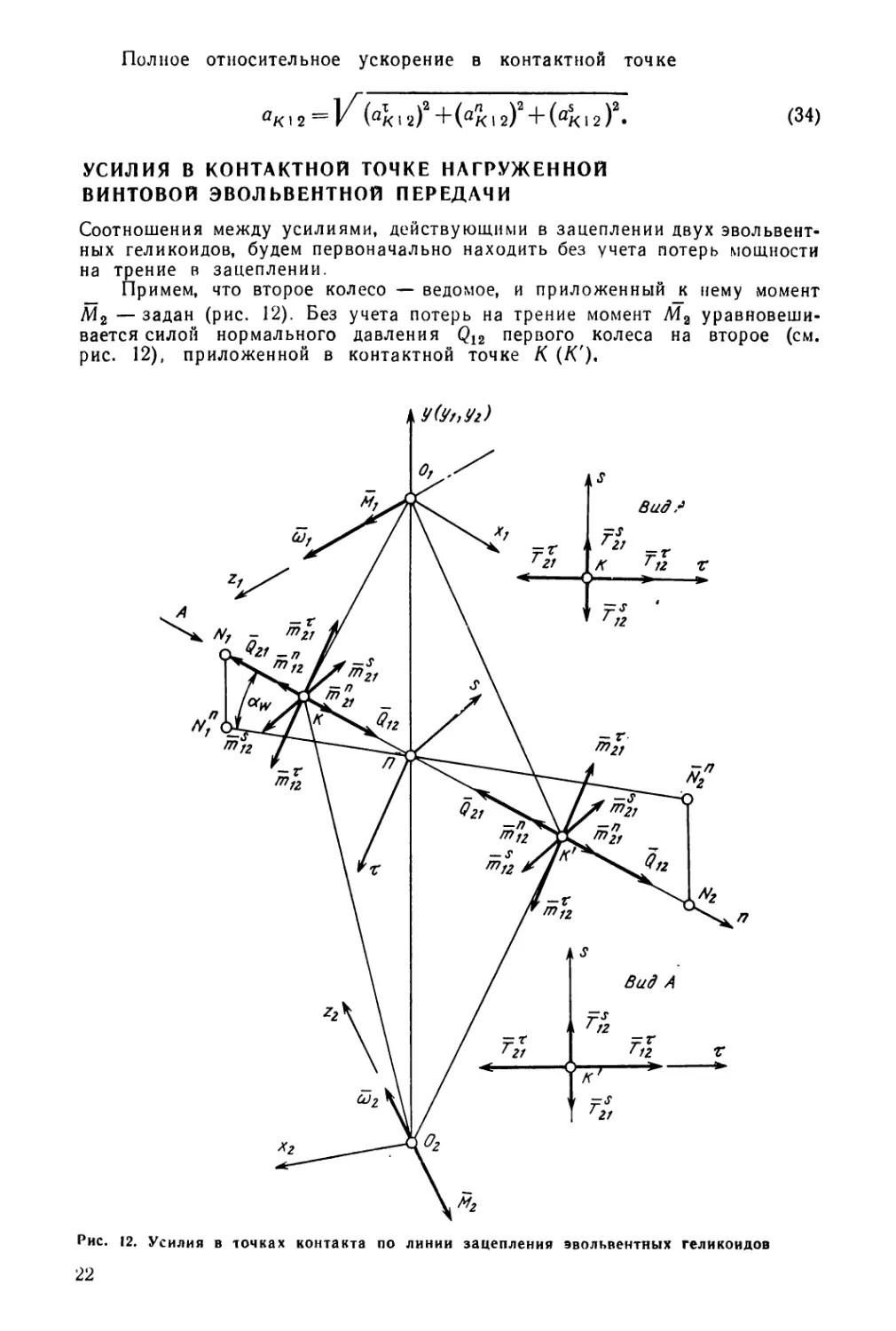
УСИЛИЯ В КОНТАКТНОЙ ТОЧКЕ НАГРУЖЕННОЙ
ВИНТОВОЙ ЭВОЛЬВЕНТНОЙ ПЕРЕДАЧИ
Соотношения между усилиями, действующими в зацеплении двух эвольвент-
ных геликоидов, будем первоначально находить без учета потерь мощности
на трение в зацеплении.
Примем, что второе колесо — ведомое, и приложенный к нему момент
А42 — задан (рис. 12). Без учета потерь на трение момент М2 уравновеши-
вается силой нормального давления Q12 первого колеса на второе (см.
рис. 12), приложенной в контактной точке К (К').
Рис. 12. Усилия в точках контакта по
линии зацепления эвольвентных геликоидов
22
Запишем уравнение равновесия моментов всех сил, приложенных ко
второму колесу, относительно оси О2 г2:
-M2 + Mz2(Q12)=0. (35)
Задавшись произвольным положением контактной точки на оси Пп
и применив известные из теории матриц преобразования координат [5, 6;
20], получим
— М2 4“Q12 ГW2 COS ССц) COS = 0,
откуда
412 — О • ' '
Гw2 COS сХц; COS Pipj
После подстановки значений Р&2 и rbz из выражений (15) и (17)
<2и = -----. (36а)
rb2 cos
Аналогично после преобразований получим моменты сил относительно
осей О2х2 и О2у2 для второго колеса
Мх2 = —М2 tg ,37
Л^2=0.
Сила Qi2 определяет силу Q2i воздействия второго колеса на первое.
Составим уравнения равновесия первого колеса
Mi = Q2i rwi cos aw cospuH, (38)
или
Mi = Q2i r&i cos Pbi.
Подставив Qi2 из уравнения (36a), получим
. . M2 /QQ\
M^------- (ЗУ)
и
уравнение статики винтовой эвольвентной передачи без учета потерь на
трение.
Как и для второго колеса;
МЯ1= tg рш1; М^=0. (40)
Осевые Stt2 и распорные силы 7\2; действующие на колеса; определяют
по зависимостям
51 =+Q2L cos ссц, sin = 4-Q21 sin aw't
5. = — Qi2 cos aw sin Л = —Q12 sin aw.
Для получения силовых соотношений в зацеплении с учетом потерь на
трение во все уравнения статики необходимо ввести силы относительного
трения и моменты относительного трения, возникающие в контактной точ-
ке за счет относительного движения контактирующих поверхностей.
Наличие скорости относительно скольжения У12 (21) приводит к появ-
лению силы трения скольжения.
^1 2 ( 21 1 “ IQ1 2 ( 2 1 ) »
где f — коэффициент трения скольжения зубьев.
Скорость относительного качения Й* 2 (2i) создает момент трения ка-
чения
П11.2 < 21 > — kQ1 > (21)» (
Где k — коэффициент трения качения, зависящий от материала зубьев.
23
Скорость относительного верчения Q^2 (20 создает момент тремия вер-
чения
т12 (21) верч = ^ Q12 rat)» (44)
где Г — приведенный коэффициент трения верчения (см. с. 30). В первом
приближении можно принять коэффициенты г и k постоянными; их вели-
чины определяются экспериментально.
Воспользовавшись проекциями скоростей относительного скольжения
К12 (21) и относительной угловой скорости Q12 (21) на оси координат тп$;
можно записать проекции векторов Т12(21) и mi2 (21) на оси пропорциональ-
но проекциям скорости:
^12 ( 2 1 ) “ /Q1 2 (21) cos XI
^12 (21) = — fQl 2 ( 2 1) sin X’
mi« (2i) = ^Qi2 (2D cos A; (45)
ms12 (2D=^Q12 (21) sin Asin aw;
mi 2 (21) = — ff Qi 2 (2D si nA cos
После преобразования получим
Q12 = Л^2/{Гц>2 [cos aw cos £u,2 — f (sin Pn>2 cos %—sin aw cos sin X)] +
+ lf (sin aw sin [3w2 cos %—cos pw2 sin %)-—& (sin2 aw sin (3W2 sin A +
cos pw2 cos A) — f' cos2 aw sin pw2 sin A}. (46)
Если в полученную зависимость подставить коэффициенты трения; рав-
ные нулю; то формула (46) преобразуется в уравнение (36).
Осевая сила; действующая на второе колесо,
5. = —Qi2 [cos aw sin /(cos pw2 cos x + sin aw sin pw2 sin x)]. (47)
Распорная сила второго колеса
Т2= —Q12 [sin aw + f cos aw sin xJ. (48)
Моменты относительно осей O2x2 и O2y2
Mx2 = —Q12 [rW2 cos aw sin Pw2 —rw2 f (cos Pu>2 cos x+sin aw sin sin %] +
+ If (sin aw cos Pu,2 cos x+sin pw2 sin x)—^ (sin $w2 cos Д +
4-sin2 aw cos Pun sin A)—f/ cos2 aw cos pu>2 sin A]; (49)
My2 = Qi2 [If cos aw cos y — (k — f) sin aw cos aw sin А]. (50)
Как и для второго колеса, записав проекции всех еил и моментов на
осп х^у^; для первого колеса получим
Mi = (?2i {''ipi [cos aw cos pwl + f (sin Pun cos x + sin aw cos Pun sin x)J+
+ If (cos pwl sinx + sin aw sin P^i cos x) —Ze (sina aw sin Pun sin A—
— cos Рим cos A) — /' cos2 nw sin Pun sin A); (51)
Si = Q2i [cos aw sin рш1—/(cos Pun cos x + sin aw sin Pun sin x)]; (52)
^i=Q‘n (sin aw + fcosaw sin x); (53)
^xi= —Q21 [^101 cos ocw sin Pun —гun f (cos Pun + sinocu? sin Pun sin x)““
— If (sin aw cos Pun cos x+sin Pun sinX) + fc(sin Pun cos A —
— sin2 aw cos Pun sin A) — /' cos2 aw cos Pun sin A]; (54)
A1£/1 = Q2i [If cos aw cos x + (^—f') sin cos aw sin А]. (55)
24
КРИВИЗНЫ, НОРМАЛЬНЫЕ НАПРЯЖЕНИЯ
И ПЯТНО КОНТАКТА В ТОЧКЕ СОПРИКОСНОВЕНИЯ
ЭВОЛЬВЕНТНЫХ ГЕЛИКОИДОВ ПОД НАГРУЗКОЙ
Как известно из дифференциальной геометрии [20 и др.]; полная или гаус-
сова кривизна в произвольной точке поверхности определяется зависимостью
К=К' К" =
LN—M2
EG—F* ’
(56)
где К' — кривизна в первом главном нормальном сечении; К" — кривиз-
на во втором главном нормальном сечении поверхности; L; У; М — ко-
эффициенты второй квадратичной формы; Е; G, F — коэффициенты Гаусса
первой квадратичной формы.
Так как поверхности эвольвентных геликоидов; рассматриваемые в
настоящей работе, относят к открытым, линейчатым, развертывающимся вин-
товым поверхностям, у которых одно из главных нормальных сечений всег-
да прямая (см. с. 15), то полная кривизна геликоида в любой точке всегда
равна нулю К = 0 (К' == 0). Это позволяет сделать вывод, что любая точка
эвольвентного геликоида —точка «параболическая» [20 и др.]. Индикатрис-
са Дюпена для такой точки представляется двумя сопряженными прямыми,
параллельными главному нормальному сечению поверхности в рассматривае-
мой точке.
Таким образом, контакт поверхностей двух сопряженных эвольвентных
геликоидов на линии зацепления может быть представлен контактом двух
цилиндрических параболоидов, оси которых расположены под углом v
друг к другу (v — угол между первыми главными нормальными сечениями
геликоидов в точке контакта), а радиусы кривизны равны радиусам кривиз-
ны вторых главных нормальных сечений геликоидов в контактной точке
рг7^ и рг/^2 (рис. 13). Так как угол v образован двумя главными направле-
ниями, имеющими кривизны равные нулю, то его можно представить как
угол между линиями пересечения соприкасающихся эвольвентных гелико-
идов с плоскостями, проведенными из контактной точки касательно к основ-
ным цилиндрам колес. Ввиду того, что эти линии по методу образования со-
пряженных поверхностей нормальны линии зацепления (см. Рис- 8
и рис. 9, 6), угол v —это угол между касательными плоскостями lull
на рис. 8 или плоскостями NiFINin и на рис. 9, б. Такое представ-
ление угла v позволяет достаточно просто определить его методами анали-
тической геометрии как угол между единичными нормальными векторами
и /У2 к плоскостям lull
сиз v — . XY* f
IWtl-lA/J
Записав проекции единичных векторов и N2 на оси координат xyz,
полу чнм
cos S4~cos2aU) sin pwl sinpw2
cos v = — ......—----— — . (oo)
V1 —sin2 Рцл cos2 aw V1 —sin2 cos2 aw
Кривизна эвольвентного геликоида во втором главном нормальном сече-
нии К" определяется радиусом кривизны эвольвенты в торцовой плоскости,
нормальной к оси колеса.
Радиус кривизны эвольвенты в произвольной точке В определяется
(рис. 14), как известно из теории эвольвентных цилиндрических передач
[10, 11, 16, 25 и др.], зависимостью
= (59)
25
где гь — радиус основного цилиндра; аэ — угол давления в точке В на
эвольвенте; фа — угол развернутости в точке В; 0Э = tg аэ — аэ — эволь-
вентнып угол в точке В
Воспользовавшись теоремой Менье из дифференциальной геометрии [20];
получим
к„_ C0SPb
Рэ
(60)
или
tg «э
cos Рь
На основной схеме эвольвентной винтовой передачи (см рис. 9, б) глав-
ные радиусы кривизны рг1 и рг2 соприкасающихся геликоидов в точке К
контакта, лежащей на линии зацепления и проходящей через полюс
передачи — точку /7, определяются отрезками KNr и КМ2 линии зацепления.
Приняв, как и ранее, расстояние от полюса П до точки контакта К вдоль
оси ПК = /, несложно найти уравнение связи углов с величиной /.
Вывод формул сделан по рис. 9, 61
tg«/<l = tgawtl +---------cospbl; (61)
rbl
tg =tg CCwt2 — COS Pb2«
r&2
Тогда
rbi tg aw/i
P«'= cosfe, +,;
(62)
Pr№ =
ГЪ2 tg (X>wt2
cos Рь,
В формулах (61) и (62), как и раньше; положительные значения 7 отсчи-
тываются от точки П вправо к точке N2.
Рис. 13. Заменяющие цилиндриче-
ские параболоиды и точке контакта
эвольвеитных геликоидов
Рис. 14. Радиус кривизны рв эволь-
венты в произвольной точке торцо-
вого сечения эвольвентного гелико-
ида
26
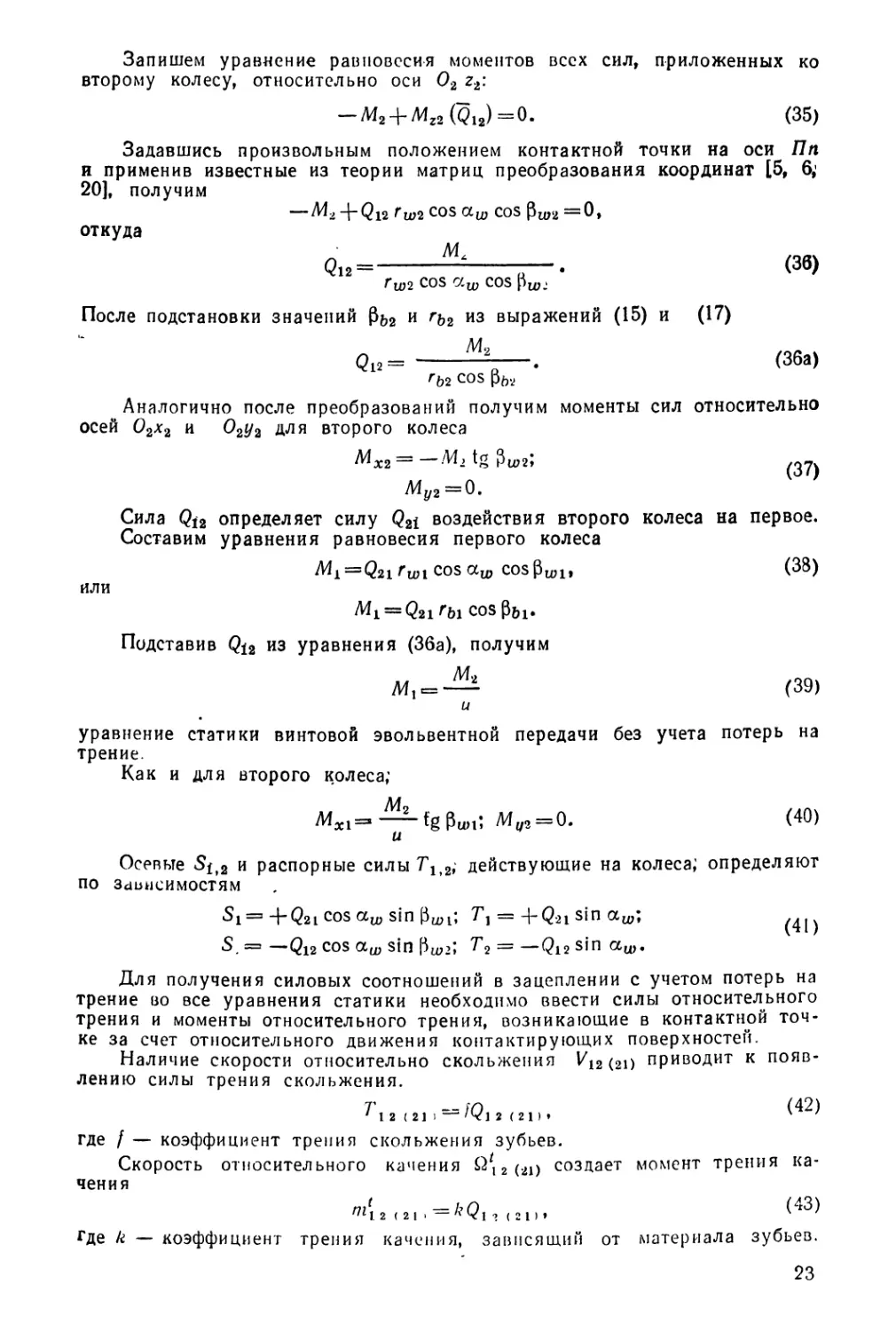
Сумма главных кривизн соприкасающихся поверхностей в точке контакта
^ЕГ=^Г1 + ^Г2
позволяет определить главный приведенный радиус кривизны соприкасаю-
щихся геликоидов в точке контакта
РЕг = Рг/< 1 РгК2/(Рг/<1 +*°г/<2)» (63)
величина которого в большой степени влияет на контактные напряжения;
возникающие под нагрузкой, а через них на работоспособность и долговеч-
ность передачи.
Применим основные вопросы контактной задачи теории упругости к опре-
делению характеристик контакта двух эвольвентных геликоидов под заданной
нагрузкой, выполненных из упругих материалов. При выводе расчетных за-
висимостей автор использовал материал трудов [1; 17, 19, 22 и др.].
Известно, что площадка контакта двух упругих тел под нагрузкой пред-
ставляет собой эллипс (рис. 15, б), а контактные напряжения — аппликаты
в общем случае трехосного эллипсоида, построенного на контактном эллип-
се Максимальное давление р0 соответствует максимальной аппликате в цент-
ре контактного эллипса (рис. 15, а) На рис. 15 у*х*р — система координат,'
связанная с контактным эллипсом; гг — первое главное направление в кон-
тактной точке /(.
Воспользовавшись методом расчета, приведенным в работе [19] для об-
щего случая контактирующих поверхностей тел под нагрузкой, можно за-
писать зависимости для определения:
наибольшего контактного напряжения между зубьями
(64)
длины большой полуоси эллипса контакта
3 / 3 й-
а=п« 1/ V Ф12 Т-------------------------------- ’ (65)
V 2 Чг
длины малой полуоси контактного эллипса
27
сближения (контактной деформации) зубьев под нагрузкой
9
"б
2
(67)
здесь Q12 — нормальное усилие в точке контакта; определяемое из уравне-
ния (46); - главная приведенная кривизна в точке контакта соприкасаю-
щихся геликоидов, определяемая из зависимости
°гК1+Рг№
Л 2г —
РгК1 Рг/<2
(68)
Главные радиусы кривизны рг/<1 и ргЛ-2 находят по формуле (62); т) — упру-
гая постоянная материала соприкасающихся зубьев;
Р1,2 ~ коэффициенты Пуассона для материалов зубьев; F1t2 — модули упру-
гости этих материалов; nat nbt пр; — расчетные коэффициенты, определяе-
мые по табл. 1 или из приведенных ниже приближенных зависимостей по гео-
метрическому параметру соприкасающихся поверхностей
А КРгК1 Н-РгК2 + 2РгК I !’|-К2 cos 2v /ГП1
Л =-------------------------------, (69)
(PrKi +Ргкг)
где v — угол между первыми главными нормальными направлениями эволь-
вентных геликоидов в точке контакта, определяемый зависимостью (5b):
па = 227,840 Л5 — 598.381Л5 4- 599.032Л4 — 281,375Л3 + 62.6778Л2 -
— .4.94781Л + 1,13397; (70)
пь = — 6,37032А’+ 16.3363Л5 — (6,0277Л” + 7.20149Л3 — 1.31227Л2 —
- 0,52040Л + 0,996547; (71)
Пр = — 10,4927Л5 + 26.9974Л5 — 26.6843Л4 + 12.3365Л8 — 2,91177Л2 +
+ 0,238417Л + 0,994394; (72)
пь = — 12.5707Л5 + 32.3347Л5 — 31,9780Л'+ 14.8132Л3 — 3,46148Л2 +
+ 0,288160Л+ 0,993200. (73)
Для некоторых исследований необходимо определить ориентацию кон-
тактного эллипса относительно главного направления на зубе. Угол 0;
(см рис. 15) между большой осью контактного эллипса и главным направле-
нием на поверхности геликоида для первого геликоида
РгК2 + Рг/<1 cos2v
COS 20J = --- -------------------------------
VРгК1 4“Рг/<2 + 2РгК1 РгК2 Cos 2v
для второго геликоида
(74)
РгК1+РгК2С0*^
cos 202 = -- --- —
V^PpKl 4“РгК2 + 2РгК 1 Рг/<2 cos
28
1. Коэффициенты па, пъ, nPt п6
Л па пъ пр
0,01923 1,013 0,9873 0,9999 0,9999
0,03949 1,027 0,9742 0,9997 0,9997
0,06087 1,042 0,9606 0,9992 0,9992
0,08350 1,058 0,9465 0,9985 0,9985
0,1075 1,076 0,9318 0,9974 0,9974
0,1330 1,095 0,9165 0,9960 0,9960
0,1602 1,117 0,9005 0,9942 0,9942
0,1894 1,141 0,8837 0,9919 0,9919
0,2207 1,168 0,8660 0,9890 0,9889
0,2545 1,198 0,8472 0,9853 0,9852
0,2913 1,233 0,8271 0,9805 0,9804
0,3314 1,274 0,8056 0,9746 0,9744
0,3755 1,322 0,7822 0,9669 0,9667
0,4245 1,381 0,7565 0,9571 0,9566
0,4795 1,456 0,7278 0,9440 0,9432
0,4914 1,473 0,7216 0,9409 0,9400
0,5036 1,491 0,7152 0,9376 0,9366
0,5161 1,511 0,7086 0,9340 0,9329
0,5291 1,532 0,7019 0,9302 0,9290
0,5423 1,554 0,6949 0,9262 0,9248
0,5560 1,578 0,6876 0,9219 0,9203
0,5702 1,603 0,6801 0,9172 0,9155
0,5848 1,631 0,6723 0,9121 0,9102
0,5999 1,660 0,6642 0,9067 0,9045
0,6155 1,693 0,6557 0,9008 0,8983
0,6317' 1,729 0,6468 0,8944 0,8916
0,6486 1,768 0,6374 0,8873 0,8841
0,6662 1,812 0,6276 0,8766 0,8759
0,6845 1,861 0,6171 0,8710 0,8668
0,7037 1,916 0,6059 0,8614 0,8566
0,7238 1,979 0,5938 0,8507 0,8451
0,7449 2,053 0,5808 0,8386 0,8320
0,7673 2,141 0,5665 0,8246 0,8168
0,7911 2,248 0,5505 0,8082 0,7990
0,8166 2,381 0,5325 0,7887 0,7775
0,8300 2,463 0,5224 0,7774 0,7650
0,8441 2,557 0,5114 0,7647 0,7509
0,8587 2,669 0,4993 0,7504 0,7349
0,8741 2,805 0,4858 0,7338 0,7163
0,8904 2,975 0,4704 0,7144 0,6943
0,9077 3,199 0,4524 0,6909 0,6675
0,9113 3,253 0,4484 0,6856 0,6613
0,9150 3,311 0,4442 0,6799 0,6549
0,9187 3,373 0,4398 0,6740 0,6481
0,9225 3,441 0,4352 0,6678 0,6409
0,9264 3,514 0,4304 0,6612 0,6333
0,9303 3,594 0,4253 0,6542 0,6251
0,9342 3,683 0,4199 0,6467 0,6164
0,9383 3,781 0,4142 0,6387 0,6071
0,9425 3,890 0,4080 0,6300 0,5970
29
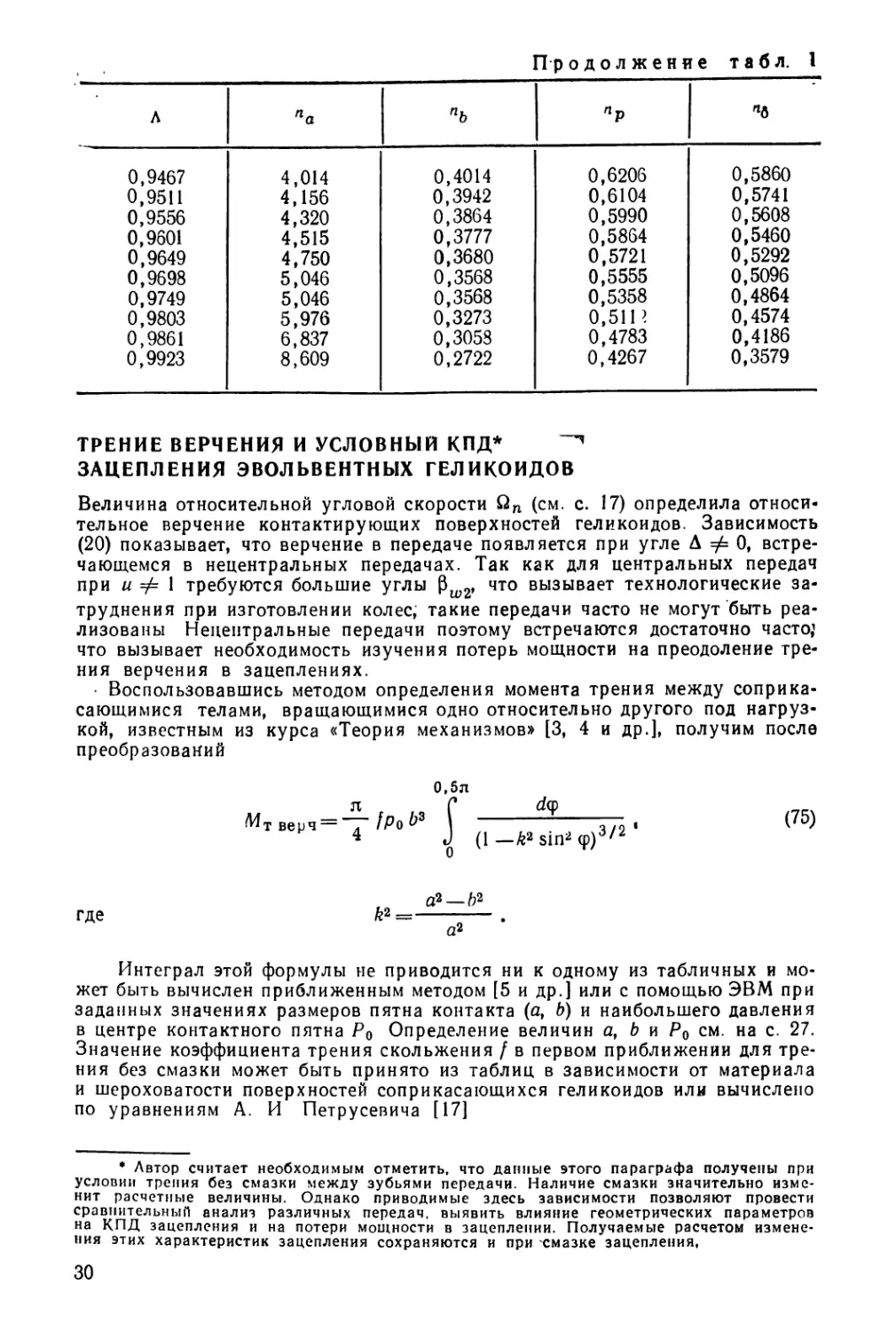
Пр одолжение табл. I
А па пъ пР
0,9467 4,014 0,4014 0,6206 0,5860
0,9511 4,156 0,3942 0,6104 0,5741
0,9556 4,320 0,3864 0,5990 0,5608
0,9601 4,515 0,3777 0,5864 0,5460
0,9649 4,750 0,3680 0,5721 0,5292
0,9698 5,046 0,3568 0,5555 0,5096
0,9749 5,046 0,3568 0,5358 0,4864
0,9803 5,976 0,3273 0,511? 0,4574
0,9861 6,837 0,3058 0,4783 0,4186
0,9923 8,609 0,2722 0,4267 0,3579
ТРЕНИЕ ВЕРЧЕНИЯ И УСЛОВНЫЙ КПД*
ЗАЦЕПЛЕНИЯ ЭВОЛЬВЕНТНЫХ ГЕЛИКОИДОВ
Величина относительной угловой скорости Qn (см. с. 17) определила относи-
тельное верчение контактирующих поверхностей геликоидов. Зависимость
(20) показывает, что верчение в передаче появляется при угле А #= 0, встре-
чающемся в нецентральных передачах. Так как для центральных передач
при и 1 требуются большие углы ₽w2, что вызывает технологические за-
труднения при изготовлении колес, такие передачи часто не могут быть реа-
лизованы Нецентральные передачи поэтому встречаются достаточно часто;
что вызывает необходимость изучения потерь мощности на преодоление тре-
ния верчения в зацеплениях.
• Воспользовавшись методом определения момента трения между соприка-
сающимися телами, вращающимися одно относительно другого под нагруз-
кой, известным из курса «Теория механизмов» [3, 4 и др.], получим после
преобразований
0,5л
л . Г dq
Мтверч== д /Ро^ I з/2 *
4 J (1 — k2 sin2 ф)3'2
(75)
где
Интеграл этой формулы не приводится ни к одному из табличных и мо-
жет быть вычислен приближенным методом [5 и др.] или с помощью ЭВМ при
заданных значениях размеров пятна контакта (а, Ь) и наибольшего давления
в центре контактного пятна Ро Определение величин а, b и Ро см. на с. 27.
Значение коэффициента трения скольжения f в первом приближении для тре-
ния без смазки может быть принято из таблиц в зависимости от материала
и шероховатости поверхностей соприкасающихся геликоидов или вычислено
по уравнениям А. И Петрусевича [17]
* Автор считает необходимым отметить, что данные этого параграфа получены при
условии трения без смазки между зубьями передачи. Наличие смазки значительно изме-
нит расчетные величины. Однако приводимые здесь зависимости позволяют провести
сравнительный анализ различных передач, выявить влияние геометрических параметров
на КПД зацепления и на потери мощности в зацеплении. Получаемые расчетом измене-
ния этих характеристик зацепления сохраняются и при смазке зацепления,
30
Найденные значения относительных скоростей в контактной точке и сил
трения в относительном движении позволяют подсчитать потери мощности на
преодоление сил трения в зацеплении эвольвентных геликоидов;
==Л/Т CK-|-/VT кач + ^т веря» (76)
где мощность трения скольжения
СК =/Q12 (77)
мощность трения качения
Ka4 = ^Qi2 (78)
п мощность трения верчения
верч — верч (79)
Значение величины /VT дает возможность определить методами ТММ
(теории механизмов и машин) [3, 4 и др ] мгновенное значение КПД зацепле-
ния эвольвентных геликоидов, который в дальнейшем будем называть ус-
ловным КПД зацепления11
здесь Л/вм — мощность на ведомом звене винтового зацепления, практически
всегда — на втором колесе;
^ВМ—М2(02» (81)
Зависимость (80) можно преобразовать к виду
п* = —— . (82)
1 1+’|5
где ф = — мгновенный коэффициент потерь винтового эвольвент-
ного зацепления;
Ф— (fQw ^12 +^Qi2 j/Q? 4~ + Мт верч ^n)/(M2 w2). (83)
Условный КПД зацепления т]*, как очевидно из предыдущего материала;
определяется в каждый момент зацепления при фиксированных значениях
коэффициентов / и /г, которые, в свою очередь, не могут оставаться постоянны-
ми, так как в каждой контактной точке изменяются скорости относительного
скольжения, главные приведенные радиусы кривизны, контактные площадки
и контактные давления. Кроме того, анализ формулы (75) показывает, что
момент Мт Верч может быть определен только при известных Ро; а и 6, которые
находят методом, приведенным на с. 27, через нормальную действующую в
зацеплении силу Q12. Сила же Q12 сама зависит от момента Л4Т Верч- Поэтому
при решении практических задач, в первом приближении; силу Q12 опреде-
ляют; принимая Л4твеРч=0. Если требуется большая точность расчета;
то в курсе ТММ [3, 4 и др.] предлагается находить Q12 методом последова-
тельного приближения, считая в каждом следующем приближении Л4Т верч =
= const и равным значению, полученному в предыдущем приближении. Од-
нако; как показывают проведенные расчеты; уже второе приближение изме-
няет величину Q12 и КГЩ т]* не более чем на 2—3%, что сопоставимо с точ-
ностью самого расчета. Это дает право сделать вывод, чтов подавляющем боль-
шинстве расчетов при определении силы Q12 можно принять Мтверч=0.
Момент Mi,’ прикладываемый к первому колесу, с учетом потерь мощности
на трение;
Mi = —7
UX]*
(84)
1 Так как в расчетах принимается, что коэффициенты f и £ остаются постоянными
во всех точках линии зацепления, ю получаемое значение КПД является приближенным.
31
ВЫБОР НАЧАЛЬНЫХ ПАРАМЕТРОВ ЗАЦЕПЛЕНИЯ.
ХАРАКТЕР КОНТАКТА ПОВЕРХНОСТЕЙ
ЭВОЛЬВЕНТНЫХ ГЕЛИКОИДОВ
Выбор межосевого угла S. Межосевой угол; в большой степени определяемый
конструкцией узла проектируемой передачи, значительно влияет на все экс-
плуатационные и геометрические характеристики зацепления.
В табл. 2 и 3 приведены классификация и схемы начальных поверхно-
стей правых и левых винтовых эвольвентных передач, имеющих различные
углы S и Все передачи, приведенные в таблицах, имеют одинаковые пара-
метры: о)] = 10с-1; « = 1;5; aw = 100 мм. Правыми передачами бу-
дем называть передачи, относительное движение колес в которых при-
водится к правому винту, т. е. угол между векторами Q12 и V^2—острый.
У левых передач угол между указанными векторами—тупой. Все пе-
редачи, имеющие угол между осями 0° < S < 180°, являются правыми;
передачи с углом 0° > S>(— 180°)— левыми.
Анализ приведенных схем и расчеты показывают, что винтовые
передачи обладают свойством симметрии как по кинематике относи-
тельного движения так и по геометрии.
Графики изменения угловой скорости относительного движения
колес винтовой передачи Q12 при изменении межосевого угла S при-
ведены на рис. 16. Графики построены при постоянном значении (Ор
Наибольшие значения QJ2 имеют правые и левые передачи в зоне S, близкой
к 0°; наименьшие — в зоне, близкой к 180°. При этом чем ближе переда-
точное число и к единице, тем более
резко меняется Ql2 с изменением S.
Графики, приведенные на рис.
17, построены для и = 1; 2; 3; 4 при
(о1 = const и t7UJ=const Сравнение
рис 17, а, С и в показывает, что уве-
личение yiла S ведет к увеличению
скорости . Наиболее резкое уве-
личение имеют передачи с,/=1.
На всех графиках рис. 17 проведена
линия 01, соединяющая минимумы
линий ИД ['рафики рис. 17, а, б, в
подтверждают зависимость (13), по
которой следует, что минимум ско-
рости ИД имеет место при =
= Yi
Анализ графиков (см. рис. 1о и
17) позволяет сделать следующие
рекомендации к выбору угла S.
1. Для получения минимальных
угловых скоростей относительного
движения колес передачи Q12 жела-
тельно угол S приближать к 180°;
так как при этом Qi2 имеет ми-
нимум.
2. Для получения минималь-
ной скорости относительного сколь-
жения зубьев передачи 1/Д в полю-
се желательно выбирать угол S в
области, близкой к 0°.
Выбор угла наклона зуба перво*
го колеса на начальном цилиндре
₽lpi« Относительные скорости и уско-
Рис. 16. Графики изменения относительной
угловой скорости винтовой передачи Ql2 в
зависимости от изменения межосевого уг-
32
10 2. КляггнгЬикяпис пппрых винтовых эвольвентных передач для различных значений углов S
Р’оу 1 0^Г<0.5л £ = 0.5л (ортогональные) 0,5л<Е<л
Передачи осевые | Vi ч v f 7 \^- \ - j Л х \jrг 5* Передача осуществима при | cos X |< и < | cos 21
V ьС» пр tri у
'^'v; "<
пр Пр j
Пз ээцзч I дэагезы з Ры < Ъ 7^*2 /X. Передача осуществима при и < Р№1 < Yj Передача осуществима при 1 и < I cos X |
м /"^Ss?lv5
Передача до осевые Рш1=0 Пр '/^ £ гп^ Ах 21 jlP ,? 5 - Т/П- . 6Ь Передано 11СОС5 щес ГЬИМа Передача нессущесгьома
7
0 < 2 < 0,-5 л
Передачи заосевые Р^1 — 2 /7р V" 1 а - СWa к£>> | а, \й_ -V V2
Передачи заосевые ° V," X а X /С \ X \у\7 \2<г tf-SxA ^>й; 1
Передачи заосевые
>Yi
Обозчяпепп я: По — правое колесо: Л в — левое колесо: О
Продолжение табл. 2
2 = 0^5 л (ортогональные) • »-5 л < 2 < л
йп V4* Л д V" nP r vn V12 -^w2 \W7YaN \ —<L2 /чА - \ -<rZZ%^2A np \7/ ^\\ ^1 XP" пр
Передача неосуществима Передача неосуществима
Передача осуществима при условии у! < < 0,5 л Передача осущесчвима при условии и < | cos 2 |
—колесо пппмозубое
ьэ з Классификация левых винтовых эвольвентных передач для различных значений углов S
Продолжение табл. 3
S=—0,5 л (ортогональные) — л < Z < — 0,5 л
Передача неосуществима 11ередача неосуществима
Продолжение табл. 3
1=—0,5 л (ортогональные) —л < S <— 0,5 л
й, \ \ й/2 Передача неосуществима Передача неосуществима
\ 2. Передача осущестпима при условии —0,эл<рсе;1 < Yj Передача осуществима при условии и < | соъ £ 1
Рис. 17. Графики изменения
относительной скорости ско-
льжения иР2 зубьев в по-
люсе в зависимости от изме-
нения угла |3wi для разных
межосевых углов:
о — S в 30°; б — X в 60°; ь
2=90°
38
рения в контактной точке (см. с. 17) в значительной степени зависят от
выбора угла Рил Наименьшую величину относительной скорости дают
центральные передачи, имеющие рш/ = У/.
В предыдущем параграфе было показано, что контактные давления при
прочих равных условиях в основном определяются значениями приведен-
ных главных кривизн радиусов pZr в контактной точке. Поэтому геометри-
ческое обеспечение pSr max — один из важнейших вопросов гарантии высоко-
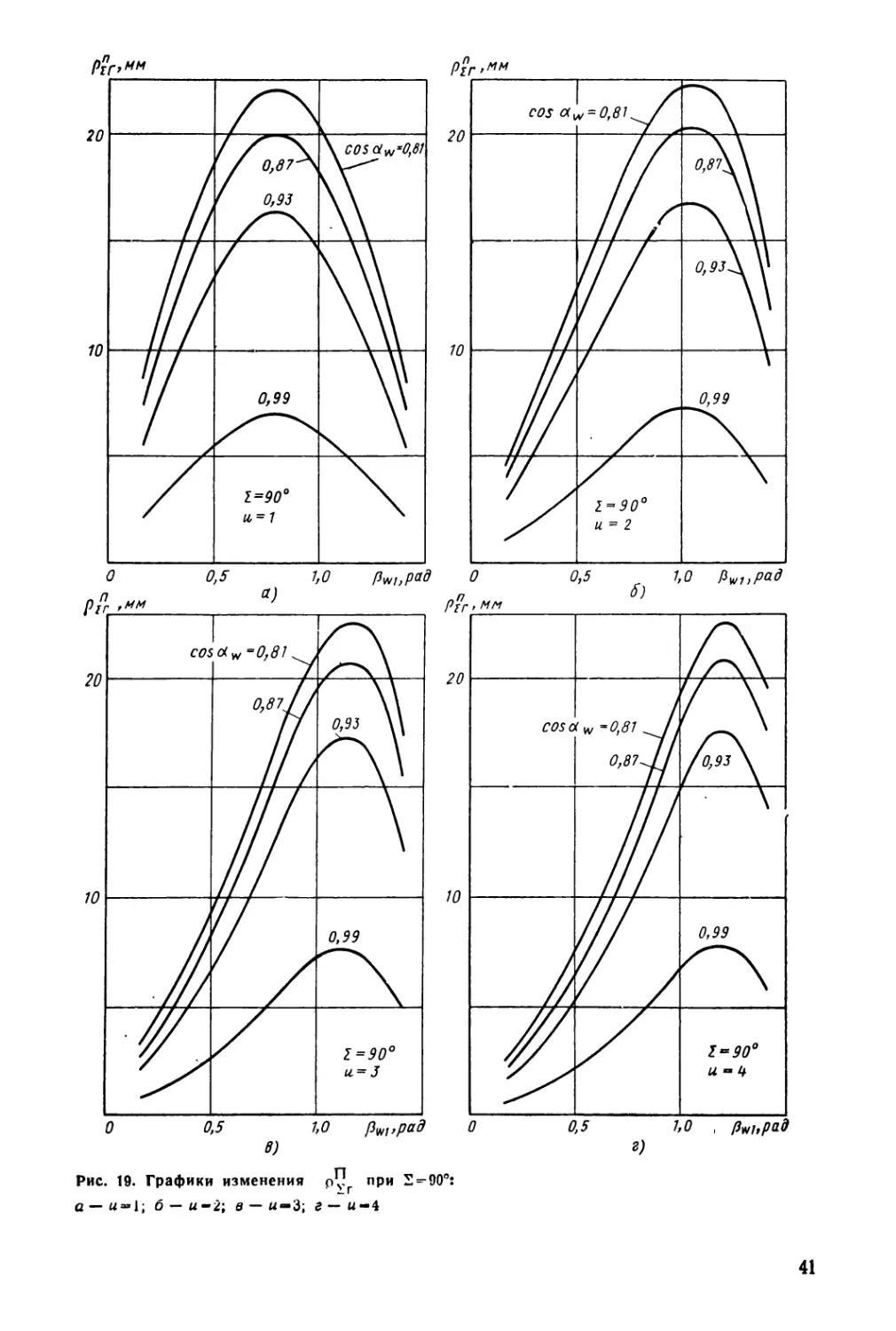
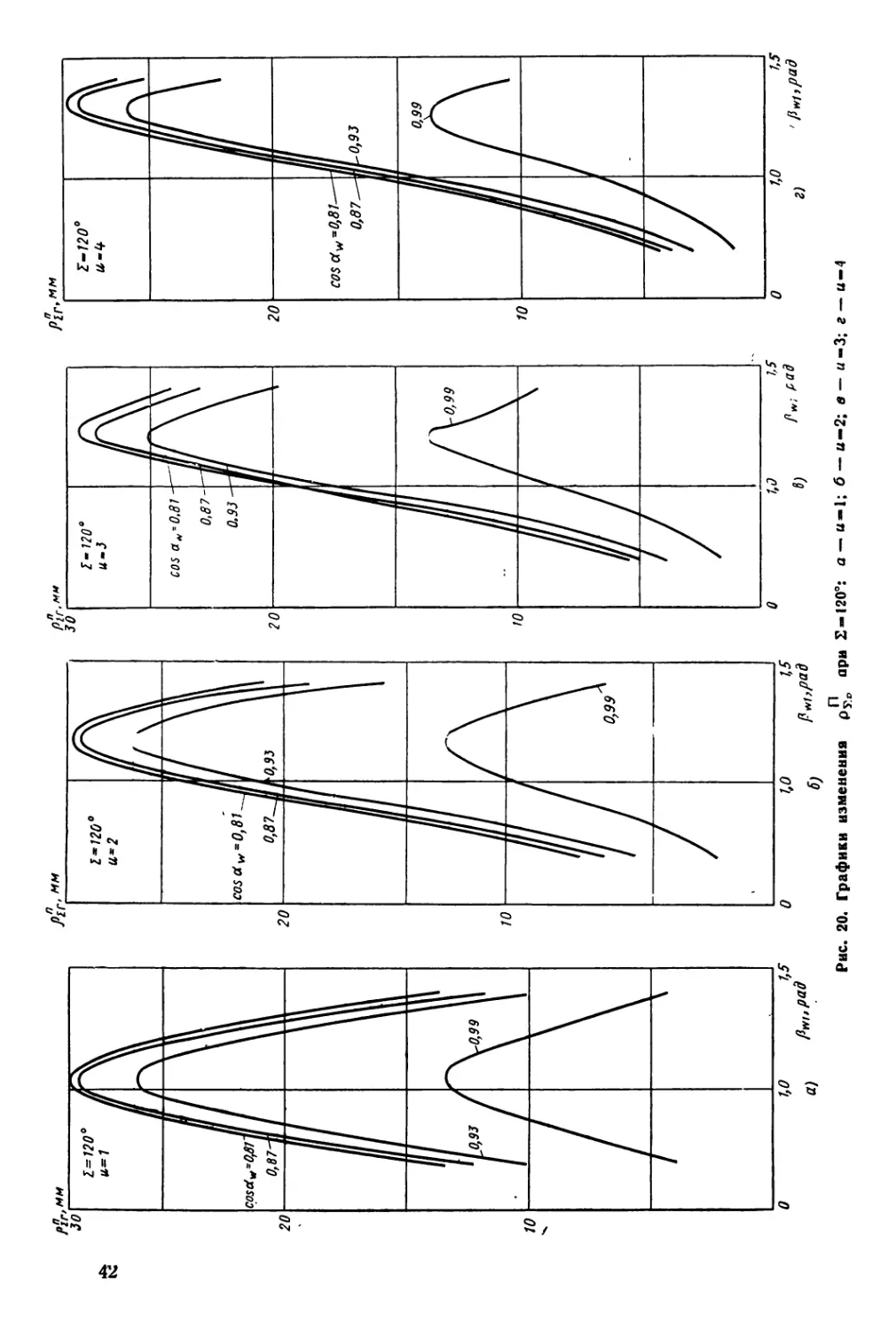
качественной винтовой эвольвентной передачи Графики, приведенные на
рис. 18—20, показывают изменение р£г при различных углах 2, передаточ-
ных числах и, для разных углов зацепления а1О при постоянном межосевом
расстоянии aw.
Первый вывод, который можно сделать при анализе графиков, заключа-
ется в том, что все функции р£г имеют ярко выраженные максимумы. Увели-
чение угла 2 уменьшает рабочий диапазон углов р^л и вместе с тем дает рез-
кие перепады значений р£г. Поэтому даже незначительный отход от мак-
симума приводит к большому уменьшению р^г и к увеличению контактных
давлений. Графики, показанные на рис. 21; позволяют с достаточной степенью
точности определить для различных углов 2 углы обеспечивающие зна-
чения Р?гтах- Графики (рис. 21) показывают, что выбор угла Рил при условии
минимальной скорости только для передач с и = 1 дает Реттах- При
и^\ углы Рип, дающие >{2 min и Psrmax- не совпадают.
Величина нормального давления QI2 между зубьями определяет потери
мощности на все виды трения. Поэтому уменьшение Q12 способствует повыше-
нию долговечности передачи. На рис. 22 приведены графики, показывающие
изменение нормальных давлений в полюсе для зацеплений с 2 = 30°;
передаточными числами и = 1 -г 4, постоянным межосевым расстоянием
aw при изменении угла Рил- Графики построены для cos =0,81; 0,87;
0,93; 0,99 (рис. 22) и показывают, что зависимости Q1na=/(Ptri) имеют
ясно выраженный минимум С достаточной для практики точностью можно
воспользоваться определением минимума функции = f (р^), представ-
ленной формулой (36), где потери мощности на трение отсутствуют.
По методу определения экстремума функции [5] найдем зависимость для
углов Рил, обеспечивающих минимум
и -4- cos 2
sin 2 tg3 pwl + 2 cos 2 tg* Puh + —— tg рш1 - и = 0, (85)
для ортогональных передач
= arctg (Vи ) . (86)
Уравнение (85), решенное методом Ньютона [5]; дало возможность по-
строить серию графиков (рис. 23), позволяющих определить углы Рш1; даю-
щие минимум силы давления между зубьями, для передач о различными
межосевыми углами 2 и передаточными числами и.
Практический интерес представляет угол P^i? обеспечивающий мини-
мальное значение произведения (Q^V^). После подстановки значений
и из формул (7) и (36) и преобразований получаем
(Q?2 У12) = ~ ~ № Pwi "1"
COS ССцу
Найдем производную по углу Рил от функции (87) и; приравняв ее нулю^
получим, что минимум произведения (Q^^Vz) достигается при равенстве
Рил = Ри?2 Для любого угла 2.
39
Рис. 18. Графики изменения приведенного главного радиуса кривизны р^, в полюсе вин-
товой эвольвентной передачи в зависимости от изменения yiaa и угла зацепления
<iw при 2=60° для различных передаточных отношений:
а —и = 1; б — а-2; в — а=3; г — и = 4
40
РгГ’"М
Рис. 19. Графики изменения ру при 2=^90°:
с — и»1; б —и-2; в — и-3; г—и-4
41
Рис. 20. Графики изменения рУо ари S — 12O0: а —u —1; б — и—2; e-w-З; г —и—4
Рис. 21. Графики для определе-
ния углов (3u>i, обеспечивающих
максимальный приведении^ ра-
диус кривизны передачи в полю-
П
се PZp
Рис. 22. Графики изменения кон-
тактного усилия в полюсе
винтовой эвольвентноЙ передачи
с 2 = 30 в зависимости от изме-
нения угла (3wi для различных
значений передаточных отноше-
ний и и углов зацепления аш
Следующий параметр оказывающий большое влияние на долговечность
передачи, — это максимальные контактные нормальные напряжения на кон-
тактной площадке зубьев под нагрузкой —Ро, которые определяются за-
висимостью (64), полученной методами теории упругости. Исследование этой
функции принятыми математическими методами затруднительно, так как ко-
эффициент пр задается таблицей или приближенной зависимостью (72).
Поэтому анализ проведен путем расчета на ЭВМ серий передач с углами
S = 30е 4- 150° и = 1 4- 4 при различных углах ptul.
Графики, позволяющие определить углы Рид для каждого S,’ гаранти-
рующие минимальное значение Pj1 контактных напряжений в полюсе, при-
ведены на рис. 24.
Аналогично, на ЭВМ получен график, показанный на рис. 25, определяю-
щий углы Рид, дающие минимум комплексного параметра (Pj1 V™’26)
в полюсе. Этот параметр, полученный по «роликовой аналогии» [23], позво-
ляет оценить склонность передачи к заеданию и устойчивость зубьев к изно-
су
В зависимости от условий работы и требований, предъявляемых к пере-
дачам, долговечность передачи может обеспечиваться при значениях р^г тах —
максимальных приведенных главных радиусах кривизны; при минималь-
ных контактных усилиях между зубьями под нагрузкой Q^2 min; при мак-
симальном значении условного КПД передачи Лплах- графикам, изобра-
женным на рис. 26, 27 и 28, можно выбрать углы Рид,' обеспечивающие выпол-
нение указанных условий для передач с различными межосевыми углами S.
43
Рис. 23. Графики для определения уг-
лов Рм?|, обеспечивающих в передаче
минимальное контактное усилие
без уче1а потерь на трение
Рис. 24. Графики для определения углов
fltri, обеспечивающих в передаче минималь-
ные контактные давления в полюсе
Для наилучшего представления характера контакта винтовых эвольвент-
пых геликоидов рассмотрим сечение соприкасающихся эвольвентных гели-
коидов заданной плоскостью На рис. 29 представлено сечение геликоидов,
контактирующих в полюсе П, полюсной плоскостью, нормальной к линии меж-
осевого расстояния (плоскость П на рис. 8) На рис. 29, а показан характер
контакта в передачах с и — 1; линии /—1 соответствуют углу зацепления
аи = 15°, линии .2—2 — = 30°; т—т — общая касательная к зубьям ге-
ликоидов в полюсе П. На рис. 29, б показан характер контакта в передаче
с и = 3 и alv = 30°. Построения выполнены для ортогональных передач
с aw = 100 мм и углами = у,-.
Винтовые эвольвентные передачи имеют достаточно большие площадки
контакта зубьев колес под нагрузкой; рис. 29, а и б дают еще одно основа-
ние для такого утверждения, как так величины расхождений зубьев от ли-
нии т—т имеют тот же Порядок, что и величины б — сближения зубьев под
наIрузкон
иис. 26 Графики для определения
углов рИ|. гарантирующих в пере-
даче максимальные приведенные ра-
диусы кривизны в полюсе Pvpniax
в широком диапазоне 51 лов S
Рис. 25. Графики для определения уг-
лов Рил, обеспечивающих в передаче
минимальный комплексный параметр
износа и заедания зубьев в полюсе пе-
редачи |Р0 J
44
Рис. 27. Графики для определения
углов 0wi, обеспечивающих в пере-
даче минимальные контактные уси-
лия между зубьями в полюсе
Qj2min с учетом потерь на трение
Рис. 28. Графики для определения уг-
лов Риц. обеспечивающих в передаче
максимальные условные КПД в полю-
се ^тах
в зацеплении
Все сказанное позволяет сделать вывод о принципиальной возможности
использования винтовых эвольвентных передач в качестве силовых элемен-
тов механизмов, работающих при небольших скоростях.
В заключение необходимо отметить сложность относительного движения
зубьев с учетом появления контактного эллипса под нагрузкой. Схема отно-
сительных скоростей в предельных точках по линии зацепления для переда-
чи показана на рис. 30. Точка Ki лежит вблизи точки точка К2 — вблизи
точки N2 линии зацепления. В любой точке, не совпадающей с полюсом, ско-
рость V12 складывается из слагаемых V^2, VSK12, V^12. Кроме того, для пе-
редач нецентральных #= у,) имеет место верчение зубьев, т. е. относи-
Рис. 29. Характер контакта зубьев винтовой эвольвентной передачи — сечение зубьев,
контактирующих в полюсе, полюсной плоскостью:
а — ортогональной передачи аш —100 мм; Риц-450; / — ««); 2 = а-3; б — ортогональной
передачи ow-100 мм; Риц-18°,43; «-3 —
45
тельный поворот их в пределах пятна контакта. На рис. 30 направление вер-
чения показано стрелкой (Q"2) Вот такая сложная и изменяющаяся кинема-
тика относительного движения, с учетом изменяющегося контактного дав-
ления при перемещении точки контакта по линии зацепления, создает за-
труднения для образования масляного слоя между зубьями под нагрузкой.
Все это требует специальных антизадирных смазок для силовых винтовых
эвольвентных передач.
Следует заметить, что стремление увеличить пятно контакта для нецент-
ральной винтовой передачи может привести к ухудшению условий смазки
зубьев за счет существенного влияния верчения зубьев на стационарность
масляного слоя между зубьями.
Пример 1. Провести анализ кинематики относительного движения в
точке контакта двух эвольвентных геликоидов; определить изменение вели-
чины контактного усилия между поверхностями, характер изменения приве-
денного радиуса кривизны в точках контакта, контактных напряжений, сбли-
жений поверхностей под нагрузкой, изменение момента трения относительно-
го верчения поверхностей, условного КПД зацепления и потребного из ус-
ловия равновесия момента, прикладываемого к ведущему колесу, при пере-
мещении точки контакта по линии зацепления геликоидов.
Анализируемая передача имеет параметры: aw = 100 мм; 2 = 60°;
и = 2; (Di = 10 с-1; aw = arccos 0,87 = 29,541°; М2 = 200 даН • мм.
Колесо изготовлено из стали 40, имеющей Е1 = 2,2 • 10б МПа, = 0,3;
колесо г2 = из текстолита ПТ К, для которого Е2 = 7 . 103 МПа, р2 = 0,2.
Анализ проведем для трех вариантов передач с углами наклона зубьев
геликоидов:
а) = Yj —- передача осевая;
б) = Pw2 — передача заосевая,
в) PW1 = 0; Pty2 = S — передача доосевая.
Рис. 30. Относительные скорости и пятна контакта зубьев винтовой передачи под нагруз-
кой в различных точках линии зацепления
46
Х'Рад
Рис. 31. Графики изменения
скорости относительного
скольжения Vl2 и ее состав-
ляющих V ]2 и v 12’ а так-
же угла у отклонения полной
скорости скольжения V12 от
скорости скольжения в по-
-П
люсе 119 по линии зацепле-
ния для различных углов
3wi:
а—3w(=Vb <5—fiwi = f3u>2
в — (3wie0;
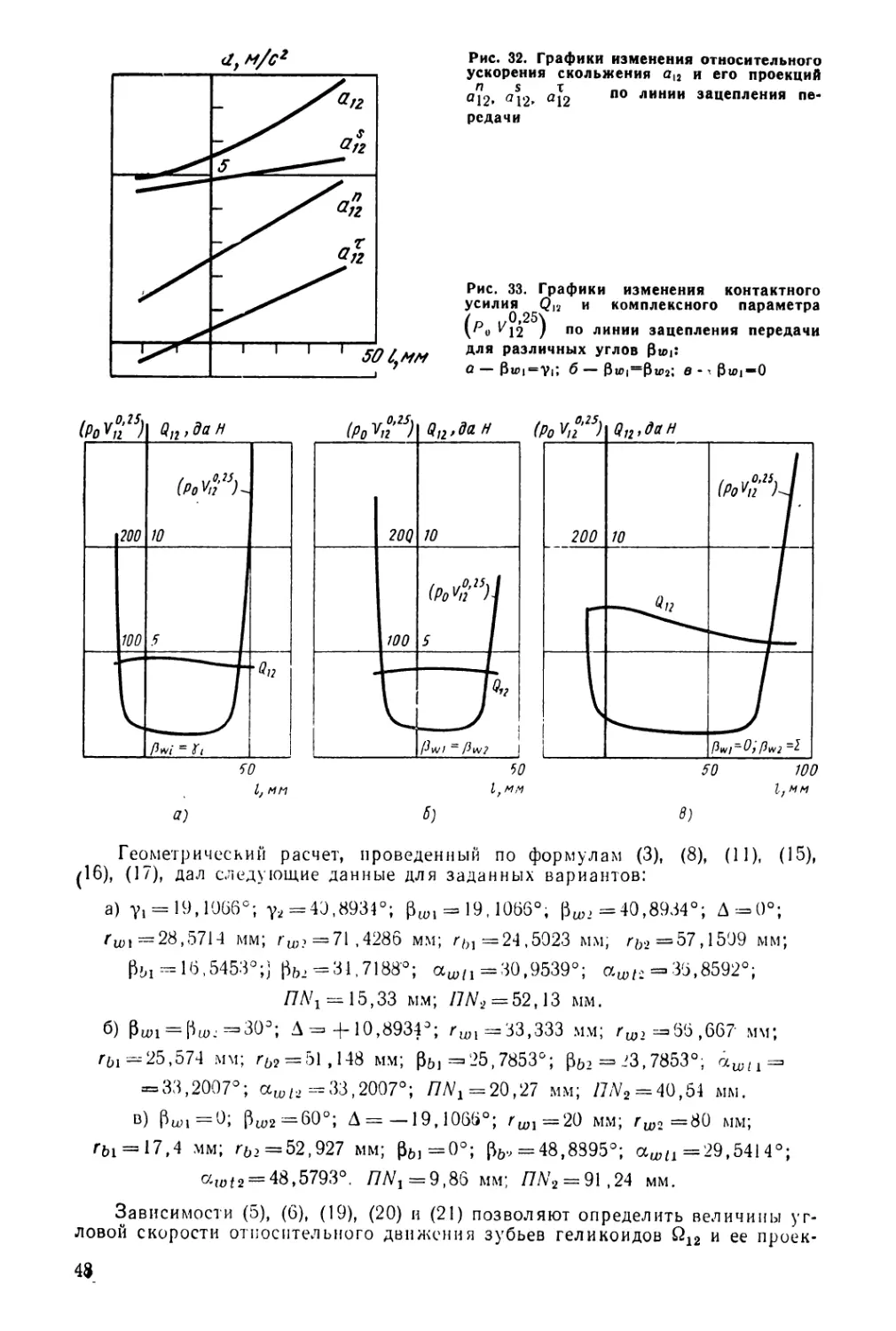
Рис. 32. Графики изменения относительного
ускорения скольжения а12 и его проекций
а?2» °Г2- а12 п0 линии зацепления пе-
редачи
Рис. 33. Графики изменения контактного
усилия Q|2 и комплексного параметра
(о |/0’25\
V o v 12 / по линии зацепления передачи
для различных углов Зюп
а — 3wj=Vb б—(3wi=(3w2; e-’Pwi—O
а) 6) в)
Геометрический расчет, проведенный по формулам (3), (8), (11), (15),
^16), (17), дал следующие данные для заданных вариантов:
a) Y1 = 19,1066°; =40,8934°; рш1 = 19,1066°, [3^, = 40,8934°; Д=0°;
Гц)} =28,5714 мм; гш?=71,4286 мм; =24,5023 мм, Г[г2 =57,1509 мм;
Р^ = 16,5453°;’ рь, = 31,7188°; awll =30,9539°; = 35,8592°;
/7А/1 = 15,33 мм; I7N2 =52,13 мм.
б) Рим = Рш: =30°; Д = 4- 10,8934°; гШ1 =33,333 мм; гш2 =55,667 мм;
=25,574 мм; ^ = 51,148 мм; р^ = 25,7853°; pb2 = 23,7853°; awU =
= 33,2007°; awl2 =33,2007°; П!^ =20,27 мм; /7А6> = 40,54 мм.
в) Рич=0; Ри>2—60°; Д = —19,1066°; rfZ,1=20 мм; rw2 =80 мм;
Пи = 17,4 мм; гЬ2 =52,927 мм; рЬ] =0°; рь., = 48,8895°; =29,541 4°;
aivt2 — 48,5793°, /7А4=9,86 мм; /7М2 = 91 ,24 мм.
Зависимости (5), (6), (19), (20) и (21) позволяют определить величины уг-
ловой скорости относительного движения зубьев геликоидов Q12 и ее проек-
48
ции на оси координат ths и скорости относительного скольжения вг ттоягосе
уП. Для каждого варианта получаем:
a) й12 = 13,23 с-1; Йт = 13,23 с~‘; Qs=0; Qn=0; lz72=0,327 м/с.
б) й12 = 13,23 с-1; Йх = 12,99 с-1; Й6 = 1,23 с-1; Qn = 2,18 с~‘;
V" =0,333 м/с.
в) Й12 = 13,23 с-1; йт = 12,5 с-’; Qs = —2,13 с“'; Йп = —3,77 с-1;
1^2 =0,346 м/с.
Воспользовавшись формулами (22), (23) и (24), определим для разных рас-
стояний I от полюса до точки контакта по линии зацепления К проекции ско-
рости скольжения Vs12, Р12 и полную скорость скольжения V12. Все эти рас-
четы, как и все последующие, проводились на ЭВМ Результаты расчетов
представлены в виде графиков на рис. 31, а—в. Одновременно на этих рисун-
ках представлены графики изменения угла %, определяемого по зависимости
(25). Анализ графиков показывает, что полная скорость относительного сколь-
жения V12 незначительно изменяется при изменении угла который влияет
на положение минимума этой скорости на линии зацепления
По формулам (33) и (34) найдем проекции относительного ускорения в точ-
ках контакта а\2, ani2; а\ 2 и полное относительное ускорение а12. Графики из-
менения этих ускорений при перемещении контактной точки по линии зацеп-
ления для передачи по варианту б показаны на рис. 32. Характер изменения
полного ускорения и его проекций для передач по вариантам а и б аналогичен
графикам, приведенным на рис. 32.
Рис. 34. Графики изменения приведенного радиуса кривизны pv , максимальных контакт-
ных давлений Р,< и сближений зубьев Под нагрузкой по линии зацепления передачи для
разных (Зги,:
и — (3 гс j ~‘Т ।; б — (3 ic t - (3 u i.: в — р « । — 0
49
Рис. 35. Размеры и расположение контактного
эллипса в разных точках линии зацепления
Зависимость (46) позволяет
определить характер изменения
усилия Q12 в точке контакта по
линии зацепления. Расчет прове-
дем без учета потерь на трение
верчения, т. е. примем /' = 0.
Остальные силы трения скольже-
ния и качения зубьев в расчете
учтены. Результаты расчетов по-
казаны на рис. 33, а—в. На гра-
фиках видна большая зависимость
контактного усилия Q12 от угла
Pwl. Наименьшие значения Q12
получаются при варианте б пере-
дачи — Plci = PW2- Так как кон-
тактное давление определяет ве-
личины сил трения, а они, в свою
очередь, характеризуют износ и
склонность передачи к заеданию,
то вариант б передачи наиболее
предпочтителен-.
Величины приведенных радиу-
сов кривизны р2г поверхностей
соприкасающихся эвольвентных
геликоидов в точке контакта по
линии зацепления определим по
формулам (63) и (62). Характер
их изменения показан на рис. 34, а — в. Зависимости р£г = Д (/) имеют
четко выраженный максимум, положение которого зависит от выбора угла
Pwl. Очевидно, что при / = tlNt контактная точка К (см. рис. 9, б) совпа-
дает с крайними точками линии зацепления и /V2, в которых р2г = 0.
Рис. 36. Графики изменения условного КПД зацепления т|*, потребного момента веду-
щего колеса при постоянном значении момента М2, приложенного к ведомому колесу,
и момента трения верчения Мт верч между зубьями по линии зацепления передачи для
разных углов (Зюн
а — Pwi~Vi; б — Pwi = Pu>2; в — Pwi = 0
50
Формулы (64)—(67) определяют наибольшее контактное напряжение Р();
длины полуосей контактного эллипса и и b и сближение 6 зубьев эвольвентных
геликоидов под нагрузкой. Входящие в указанные формулы величины вы-
числяют по зависимостям (58), (68) — (73) Представление о характере изме-
нения напряжений Ро и сближений 6 по линии зацепления дают кривые
рис. 34, а — в. Эти зависимости имеют практически одинаковый характер.
По мере приближения к точкам Л\ и Л/2 (см рис. 9, а) обе кривые стремятся к
бесконечности. С достаточной степенью точности можно считать, что макси-
мум кривой р2р = Д (/) совпадает с минимумом кривой Ро = f2 (/).
На рис. 35 показана схема изменения размеров и расположения контакт-
ного эллипса при перемещении контактной точки по линии зацепления для
варианта б передачи. Вблизи точек /Vt и Л/2 (см рис. 9, б) контактный эллипс
уменьшается до точки. Наибольшие величины полуосей эллипс имеет в по-
люсной зоне. Большая ось эллипса поворачивается при перемещении точки
по линии зацепления относительно главного направления на зубе первого
колеса,угол 0 меняется от 0° в точке Л/2 до 32° в точке (см. рис. 9,6).
Кривые изменения комплексного параметра (Ро^? 225 )» который по
Д. Н. Решетову характеризует износостойкость и сопротивляемость передачи
заеданию [23], приведены на рис. 33, а—в. Эти линии практически совпада-
ют с кривыми Ро = /2 (/) и 6 = /3 (/). Все они в точках Nr и Л/2 дают бесконеч-
ные значения функций. Очевидно, что приближение к точкам и Л/2 в реаль-
ных передачах может дать весьма большие износи или заклинивание зубьев.
Зависимости Л4Т верч = (/), которые получены решением интеграла
(75) на ЭВМ методом Симпсона, показаны на рис. 36, бив. Для осевой пе-
редачи, в которой отсутствует верчение зубьев, Мтверч = 0. Величина Л4Тверч
в большой степени зависит от угла Pwl; наименьшие значения Мт верч име-
ют неосевые передачи с pwj = Р^г-
Кривые изменения условного КПД зацепления т|* и момента, приклады-
ваемого к первому колесу из условия равновесия передачи с учетом потерь
на трение в зацеплении Л4Ь приведены на рис. 36, а, б и в. Эти кривые рассчи-
таны по формулам (82) — (83) с учетом всех видов трения, в том числе и тре-
ния верчения зубьев. Условный КПД т|* зацепления зависит от изменения уг-
ла Рол, достигая максимума в передачах с P^i = рц>а.
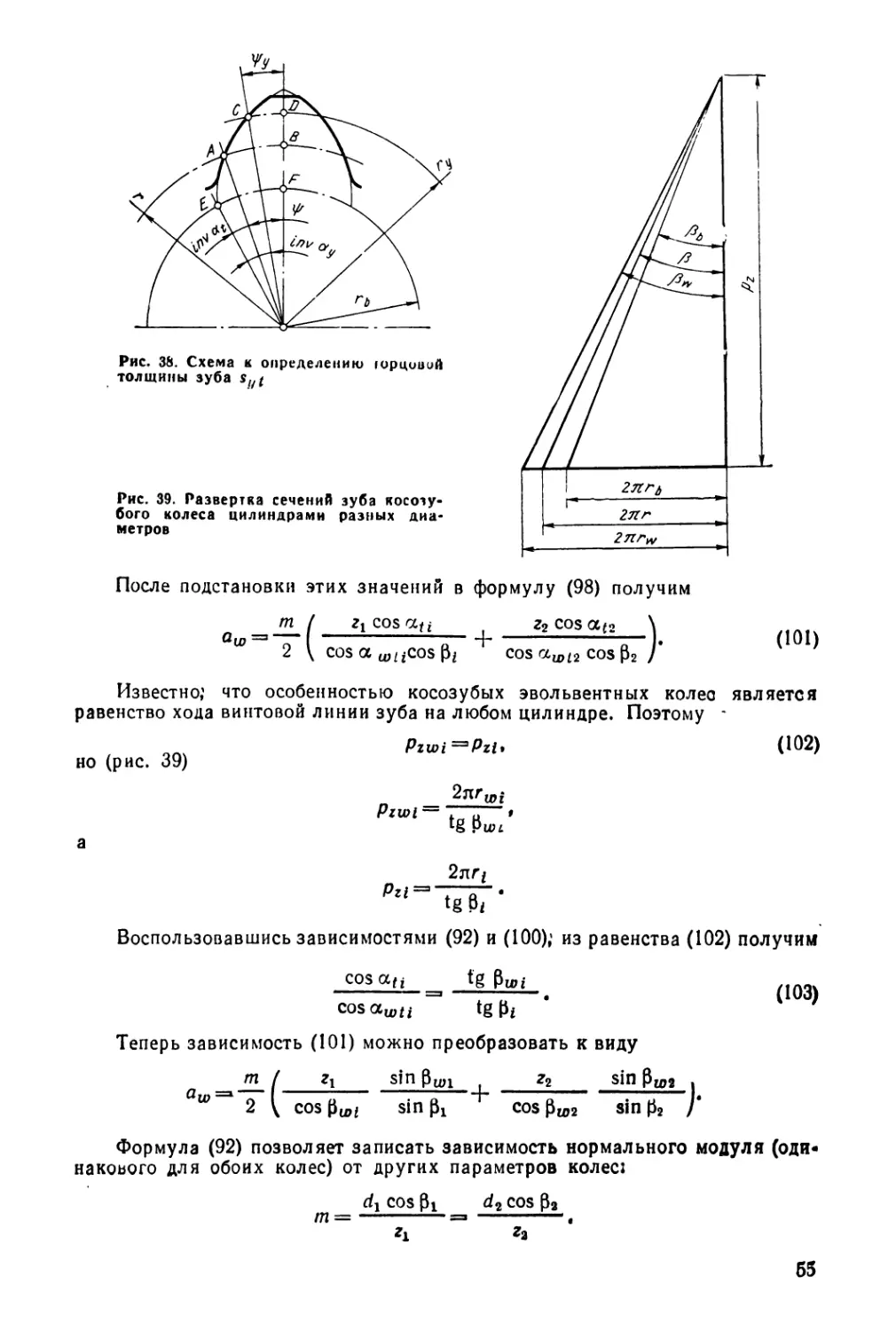
Глава 2
ГЕОМЕТРИЯ ВИНТОВОЙ ЭВОЛЬВЕНТНОЙ
ПЕРЕДАЧИ СО СТАНДАРТНЫМИ ПАРАМЕТРАМИ
ИСХОДНОГО КОНТУРА
Требования взаимозаменяемости зубчатых колес в машинах; а также необ-
ходимость обеспечения наименьшей стоимости изготовления колес и в еди-
ничном и в мелкосерийном производстве, привели к появлению теоретическо-
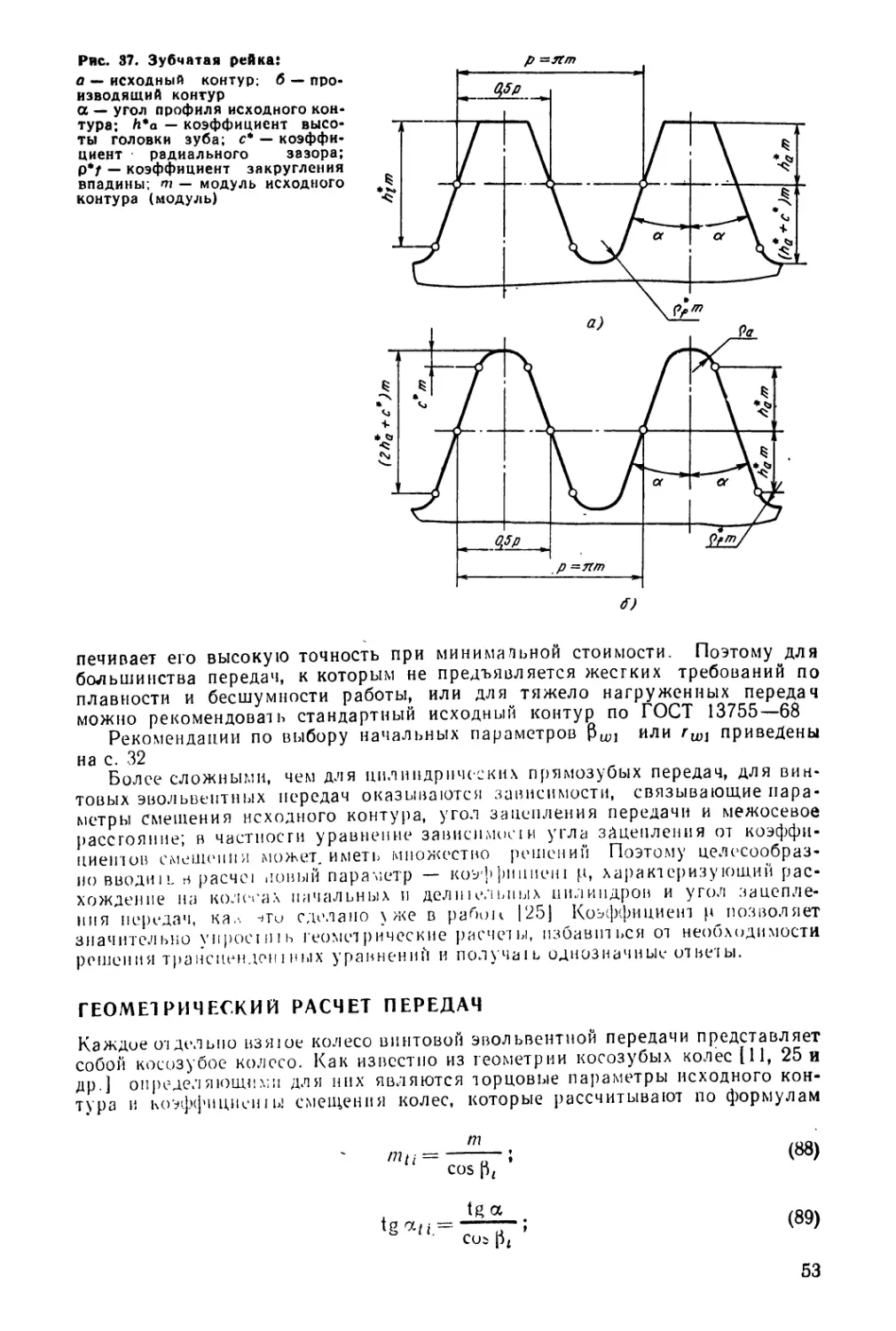
го исходного контура. Исходный контур зубчатой рейки по ГОСТ 13755—68
изображен на рис. 37, а. Модули определены по ГОСТ 9563—60.
ГОСТ 13755—68 регламентирует следующие значения коэффициентов:
ha = 1,0; с* = 0,25; (0,30; 0,35); h*i = 2,0; а = 20°.
Теоретический исходный производящий контур (исходная производящая
рейка), который отличается от исходного контура увеличенной высотой зуба
на величину с*т и возможным появлением скругления ра вершины зуба, по-
казан на рис. 37, б. ГОСТ 13755—68 допускает для колес, нарезанных долбя-
ками, и мелкомодульных (т < 1 мм) коэффициенты са == 0,30 и 0,35.
Реальный производящий контур рейки может иметь толщину зуба по де-
лительной прямой S 0,5 пт и не иметь радиуса ро.
Необходимо отметить, что исходный контур по ГОСТ 13755—68 не может
обеспечить эксплуатационных требований, предъявляемых к некоторым пере-
дачам. Поэтому для винтовых, как и для цилиндрических эвольвептных пере-
дач [9], приходится использовать исходные контуры с углами а _ 14°30';
17°30' и т. п. В винтовых передачах переход на нестандартные углы а вызы-
вается в' основном необходимостью получения наибольших коэффициентов
перекрытия для обеспечения повышенной плавности и бесшумности работы.
ВЫБОР ИСХОДНЫХ ПАРАМЕТРОВ
ДЛЯ ГЕОМЕТРИЧЕСКОГО РАСЧЕТА ПЕРЕДАЧИ
Исходными параметрами винтовой эвольвентной передачи, определяющими ее
геометрию, являются: межосевой угол S; межосевое расстояние aw (величи-
на aw может быть и незаданной в начале расчета); передаточное отношение и\
параметры исходного контура a, ha, с*, А/, р£; начальные параметры (3^ или
rwl\ параметры, определяющие положение производящих контуров относи-
тельно нарезаемых колес.
Для большинства передач угол S бывает жестко задан конструкцией ма-
шины. В случае возможности выбора угла S следует воспользоваться реко-
мендациями, данными на с. 32.
Передаточное отношение и передачи определяется обычно кинематикой
механизма; если имеется возможность выбора, то следует и принимать близ-
ким к единице, так как передачи с и 1 при оптимальных начальных пара-
метрах обеспечивают технологичность изготовления колес.
Вместе с передачами, имеющими исходный контур по ГОСТ 13755—68,-
в практике приборостроения используют передачи с углами а = 14°30';
17°30'; передачи с углами а > 20° практического применения не имеют.
Стандартный исходный контур позволяет пользоваться стандартным инстру-
ментом, изготовляемым на специальных инструментальных заводах, что обес-
52
Ряс. 37. Зубчатая рейка:
а — исходный контур; б — про-
изводящий контур
а — угол профиля исходного кон-
тура; /г*а — коэффициент высо-
ты головки зуба; с* — коэффи-
циент радиального зазора;
р*/ — коэффициент закругления
впадины; т — модуль исходного
контура (модуль)
(?)
печивает его высокую точность при минимальной стоимости. Поэтому для
большинства передач, к которым не предъявляется жестких требований по
плавности и бесшумности работы, или для тяжело нагруженных передач
можно рекомендовать стандартный исходный контур по ГОСТ 13755—68
Рекомендации по выбору начальных параметров или rWI приведены
на с. 32
Более сложными, чем для цилиндрических прямозубых передач, для вин-
товых эвольвентных передач оказываются зависимости, связывающие пара-
метры смешения исходного контура, угол зацепления передачи и межосевое
расстояние; в частности уравнение зависимое!и угла зацепления от коэффи-
циентов смешения может, иметь множество решений Поэтому целесообраз-
но вводил, в расче! новый параметр — коэфриниен! р, характеризующий рас-
хождение на колесах начальных и дели юл иных цилиндров и угол зацепле-
ния передач, кал ->ти сделано \ же в рабов |25] Коэффициент р позволяет
значительно упросынь геометрические расчеты, избавиться от необходимости
решения трансиендон i ных уравнении и получат однозначные ответы.
ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ ПЕРЕДАЧ
Каждое отдельно взяюе колесо винтовой эвольвентпой передачи представляет
собой косозубое колесо. Как известно из геометрии косозубых колес [11, 25 и
др.] определяющим!! для них являются торцовые параметры исходного кон-
тура и коэффициент! смещения колес, которые рассчитывают по формулам
<89>
СО5 р,
53
h*at, = h*a cos hUi = h* cos Pn CU=C* cos ₽Z> (90)
xtl = xi cos Pil (91)
здесь a, ha, hi , c* — нормальные параметры исходного контура; т — нор-
мальный модуль колес; Х} — нормальный коэффициент смещения колес; Р, —
угол наклона зуба колеса на делительном цилиндре. Так как в большинстве
передач углы Pi и оказываются неравными; параметры an; hatt\ hut}
cti и хц для колес оказываются разными.
Далее размеры колес могут быть найдены по следующим зависимостям
известным из литературы [11, 25 и др.]:
диаметры делительных окружностей
mzi
cos Pj
(92)
диаметры основных окружностей
mzt
dbi — Q
COS 0/
cos atl;
(93)
диаметры окружностей впадин для колес; нарезанных реечным инстру-
ментом \
tTIZj / \
(94)
толщины зубьев по делительным окружностям на торцах колес
л т
Sii= 2 cos Р; +2*iwtgau; (95)
толщину зуба на окружности произвольного диаметра на торцах колес
легко вывести по рис. 38:
(л 2х^ tg a \*
+----------+inva(j — inv ayilj (96)
здесь inv а/г = tg ati — a(i; inv ay; = tg ayZ — ayi; ayi — угол давле-
ния на заданном диаметре колеса;
&Ъ t
cosayi= — t (97)
dyl
На основной расчетной схеме (см. рис. 9, б) показано; что межосевое рас-
стояние aw определяется суммой радиусов начальных цилиндров;
aw—(98)
Свойства эвольвенты позволяют записать
ГЫ
rwt — ~ (99)
cosa^
или; с учетом формулы (93);
т Zi cos a? •
rwi=— --1--. (100)
2 cos awЦ • cos Р/
1 Так как в винтовых передачах колеса, нарезанные долбяками, практически не ис-
пользуются, их геометрия в справочнике не рассматривается,
54 .
Рис. 38. Схема к определению горцивий
толщины зуба sf/t
Рис. 39. Развертка сечений зуба косозу-
бого колеса цилиндрами разных диа-
метров
После подстановки этих значений в формулу (98) получим
tn / cos uti Z<1 cos otfa
2 \ cos a to/fCos cos cos p2
(Ю1)
Известно; что особенностью косозубых эвольвентных колес является
равенство хода винтовой линии зуба на любом цилиндре. Поэтому -
Pzwi^Pzb (Ю2)
но (рис. 39)
a
— 777 »
tg Pu?4
2nri
Pzt= f n □ •
tg Pi
Воспользовавшись зависимостями (92) и (100); из равенства (102) получим
cosat, _ tg
созашП- = tgfo ’
Теперь зависимость (101) можно преобразовать к виду
т ( гг sin рщ г2 sin Рша .
2 \ cos р^ sin Pi cos рш2 sin р2 /
Формула (92) позволяет записать зависимость нормального модуля (оди
накового для обоих колес) от других параметров колес:
cos pi d2 cos pa
tn =--------=------------- •
?! ?2
(ЮЗ)
65
Зависимость (102) позволяет получить соотношение
sin р2 sin Ри>* (Ю4)
равенство
(Ю5)
(Ю6)
т f zr
aw = “7Г” I о
cos Pun
подставив которое в предыдущую формулу; получим
^wi COS Pun sin Pi ^102 COS Pur2
sin Рид %2
Согласно формуле (30)
dy>2 COS pu;j? ^2
^un COS Pun
Подставив эту зависимость в формулу (104), получим
sin рг sin р2
sin Рид sin Риг2
Обозначим
sin Р;
р =-----------------------------.
sin рид
Формула (101) примет вид
?2
COS рШ2
Представим еще одно выражение для коэффициента ft. Основная схема
(см. рис. 9) дает соотношение
tgaw = tgau,/rcospun-. (107)
Формулы (89), (103) и (105) позволяют записать
sin pi = ц sin Рид-; (108)
tg a
tga"=Tzhr; (I09>
COS Pl
tgPi /inn ч
cosawu=cosati ——--------. (109а)
tg Pwi
Преобразовав их последовательно и подставив в уравнение (105), получим
cos aw
cos a
(HO)
Зависимости (105) и (НО) позволяют сформулировать геометрический
смысл коэффициента Ц как характеризующего несовпадение начальных и дели-
тельных цилиндров колес винтовой эвольвентной передачи. При совпадении
этих цилиндров у, = 1 ; если начальные цилиндры больше делительных;
р < 1, если меньше, р > 1.
Правильный выбор коэффициента р обеспечивает долговечность пере-
дачи.
Формула (106) позволяет записать зависимость для определения радиусов
начальных цилиндров передачи
mzt
rwi— п D
2р, cos Рид
(Н1)
56
(112)
(113)
(Н4)
Соотношение между коэффициентами смещения колес х^ и х2 и углом
зацепления винтовой эвольвентной передачи aw, а через него с межосевым
расстоянием aw; так же как и в цилиндрических эвольвентных передачах,
определяется из условия беззазорного (без бокового зазора) зацепления зубь-
ев. Очевидно, что для такого зацепления сумма нормальных толщин зубьев
по начальным цилиндрам должна быть равна нормальному шагу зубьев по
начальным цилиндрам:
Pwn —swm~\~swn2i
здесь
2л 'wi а
Pwn — z COS рwi;
$wni — $wti COs
Величина swti может быть найдена по зависимости (96).
Подставив значения pwn и swni в формулу (112), после несложных пре-
образований получим основную расчетную зависимость винтовой эвольвент-
ном передачи
х1 + х2 = (г1 (invaw4 —inv ам) + г> (inv — inv -zf2)|/(2 tg a), (115)
связывающую нормальные коэффициенты смещения колес с торцовыми уг-
лами зацепления колес awti и углом профиля исходного контура а. Углы
atl находят по формуле (89), углы awfi — по формуле (107) или (109а).
Обозначим правую часть формулы (115), остающуюся постоянной при
заданном ц — U,
U = [zl (inv awn-inv an) + z2 (inv awi2 — inv a/2)]/(2 tg a) (116)
и получим
Х1+х2 = Ц. (115а)
Анализ зависимости (115) показывает, что однозначного решения этого
трансцендентного уравнения относительно заданных коэффициентов х1 и
х2 не может быть. Поэтому в отличие от цилиндрических эвольвентных пере-
дач геометрический расчет винтовых эвольвентных передач преобразован так}
что выбор коэффициента Ц определяет углы aw; aivfh a[h постоянную Ц
и сумму коэффициентов смещения колес (хх + х2).
Диаметры окружностей вершин колес dai могут быть рассчитаны по-раз-
ному. Наибольшее распространение получили два способа расчета dai: рас-
чет при сохранении постоянной высоты зуба равной высоте зуба исходного
контура при изменении коэффициентов смещения и расчет при сохранении
постоянной величины радиального зазора равной стандартной величине с*т.
Для первого способа
+2 m (/?*+%,),
цля второго способа
da} 2 = %aw— df2,i —2с* т. (117^
Как и для цилиндрических передач, первый способ расчета da[ исполь-
зуют чрезвычайно редко, так как изменение коэффициентов Х[ приводит к
быстрому уменьшению радиальных зазоров и к появлению интерференции.
Поэтому в дальнейшем во всех расчетах будет использоваться только
зторой способ и для расчета диаметров dai — формула (117).
Как известно [11; 25 др.], геометрический расчет цилиндрических;
эвольвентных передач заканчивается определением параметров тц,
*ati, cti; xti; dit dbi, dfi, dail sti, aw. Однако для винтовых эвольвентных
1ередач определяют еще минимальную расчетную ширину зубчатых колес —
)wi. Это объясняется особенностью зацепления эвольвентных геликоидов.
57
Рис. 40. Схема к определе-
нию расчетной ширины ко-
лес винтовой эвольвентной
передачи:
а — проекция линии зацепле-
ния передачи на полюсную
плоскость; б — вид на пере-
дачу вдоль линии межосево-
го расстояния
б)
По рис. 9, б и рис. 40 можно определить расчетную ширину колес. На
рис. 40, а представлена расчетная схема, на которой приведена полюсная
плоскость П (см. рис. 9, б) со всеми линиями и точками, спроектированными
на нее. Теоретически максимальная ширина колес; как показано на рис. 9, б
и рис. 40, а, определяется точками Л/х и N2 линии зацепления, лежащими на
основных цилиндрах колес. Обозначим теоретически максимальные ширины
колес Ь* и 6J, соответствующие удвоенным отрезкам N2N2tl и
NtN2l2,
b* =2гш1 sin awti fg Рьь
... „ . sin₽61
b* =2rw2 sin awt2 -----------|
* COS Pb2
. . (118.
^2 =2r 102 sin (Zipf2
n . sin Рьз
^2 — 2rSin O&10/1 “ ,
a cos ры
58
Расчетная ширина колес bw^ bwi] определяемая радиусами цилиндров
вершин колес гО1-; находится из рис. 9, б и 40 по положению крайних точек
и Р2 на линии зацепления A\A/2 (на рис. 40 показаны Р1П и Р2П — проек-
ции точек Р± иР2 на полюсную плоскость П). При этом точка Pi определяется
пересечением цилиндра вершины второго колеса с линией /V2; точка Р2—
пересечением цилиндра вершины первого колеса с линией N}N2.
З^ная радиусы rai\ можно определить отрезки на торцах колес (см. рис. 9,
Р1/2 ^212 —ГЪ- tg аа2*»
^i/i =^1 tg с<а1;
PlN2t2 = Г’Ь2 tg ctwtz'i
^^i/i=rditg &wii»
Тогда отрезки ПР1 и ПР2 на линии зацепления выразятся как
nPi=rb2 (tgaO2 — tg a^J/cos
ПР2=гЬ1 (tg aal —tg au,n)/cos pbl.
Теперь рабочие ширины колес bwi и b&i можно найти как проекции от-
резков IlPi и ПР2 на оси колес (см. рис. 9, би 40, а);
bWL = 2rb2 (tg ао2—tg awt2) sin ₽bL/cos pb2;
bW{ (tgaal — tga^n) tgpbi; (119)
bw2 = 2rbl (tg aal —tg awtl) sin Рьг/cos Ры;
bW2 ~^rb2 (tg cxO2 tg aw(2) tg Pt>2•
На рабочие чертежи колес выносят bt и b2 (рис. 40, б), выбранные из не-
равенств bi bwl и dj > bwCf b2 bW2 и b2 > bW2. Это делается для об-
легчения сборки передачи, когда полюс зацепления помещается в середине
ширины колес.
Углы aai можно подсчитать по формуле (97).
Уменьшение ширины колес менее расчетных значений [по формулам
(119)], как будет показано дальше, снижает коэффициент перекрытия переда-
чи.
ПРОВЕРКИ ГЕОМЕТРИИ КОЛЕС
И КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ ПЕРЕДАЧИ
К обязательным геометрическим проверкам эвольвентных передач, в том числе1
и винтовых, относится: проверка на отсутствие заострения зубьев и проверка
на отсутствие подрезания зубьев.
Практически «острыми» зубьями принято считать [25 и др.] такие, у кото-
рых торцовая толщина на поверхности вершины оказывается меньше, чем
sat min- Для колес с зубьями, твердость которых постоянна по всему объему;
mln = 0,25 для поверхностно термообработанных зубьев sal min =
= 0,4 Условие отсутствия заострения выражается неравенством
satt > sat min; (120)
)десь
, [ л , 2xi tg a , . . \ /1O1V
Sa(i=4il------------------Hinv"/,-invaaiJ (121)
/ заостренных зубьев могут быть поломаны вершины при работе, это особен-
ю опасно для винтовых передач.
59
Подрезание зубьев — явление, приводящее к срезанию эвольвентного
участка в нижней части зуба в зоне, близкой к переходной кривой — «вык-
ружке», соединяющей эвольвенту с основанием впадины. Подрезание —
следствие проникновения прямолинейного участка зуба инструментальной
рейки внутрь основного цилиндра нарезаемого колеса [25 и др.], что приво-
дит к вырезанию части эвольвенты при выходе зуба рейки из зацепления с на-
резаемым зубом колеса. Подрезание характерно для колес с малым числом
зубьев, не имеющих необходимого смещения исходного контура, но может
иметь место у любого колеса, если коэффициент смещения выбран меньше ми-
нимального Xi mjn.
Положение прямолинейного участка зуба рейки относительно зуба на-
резанного колеса определяется точкой L (рис. 41) перехода эвольвенты в вы-
кружку, угол давления в которой находится по рис. 41:
4(ft’+c*— р’ -Xi)cospf
tg ац = tg a 11 —------ - ----------
Zi sin 2а/ j
(122)
Для колес, выкружка которых окончательно обрабатывается червячной
фрезой, с* = ра; тогда зависимость несколько упрощается:
4(Ао —o)cosPi
tgai;=tga(;--------- ——------. (122а)
Zi sin 2a/ j
При проектировании некоторых винтовых передач приходится исполь-
зовать колеса с малым числом зубьев; тогда возникает необходимость нахож-
дения минимального коэффициента смещения, исключающего подрез колеса.
В этом случае
г/sin2 а/
7 min - a- oC0s|3
(123)
Условие отсутствия подреза определяется неравенствами
а/, > 0;
i nihi-
(124)
Рис. 41. Схема к определению переходной
точки 01 эвольвенты к переходной кривой
на торце колеса
Теоретически подрез зубьев в
вшиовок эвольвент ной передаче
становится опасным в случае, koi да
он снижает коэффициент перекры-
тья, при срезании части активного
эвольвентного профиля зуба \ его
основания. С точки зрения прочно-
сти зубьев на изгиб подрез менее
опасен Однако доста!очная слож-
ность определения положения точки
пересечения подрезающей выкружки
с рабочей эвольвентой в косозу-
бых колесах и зависимость ее поло-
жения от смещения инструмента при
нарезании не позволяют допускать
подрезанные зубья для работы в
винтовых эвольвентных передачах.
Поэтому условия (124) являются
обязательными.
К показателям геометрического
качества работы винтовой передачи
можно отнести: коэффициент пере-
60
крытия; наличие или отсутствие интерференции; коэффициент скольжения
зубьев; приведенный главный радиус по лини зацепления
Коэффициент перекрытия — важнейший показатель качества работы лю-
бой передачи, во многом определяющий ее плавность и бесшумность и влия-
ющий на долговечность и износостойкость зубьев и многие другие параметры.
Снижение коэффициента перекрытия ниже минимального значения делает
передачу неработоспособной. Поэтому проверка коэффициента перекрытия в
спроектированной передаче обязательна.
Коэффициент перекрытия 8, характеризующий одновременность работы
нескольких пар зубьев в зацеплении, может быть определен с помощью основ-
ной схемы зацепления (см. рис. 9, б) как отношение длины активного участ-
ка линии зацепления Р^Р2 к нормальному основному шагу зубьев рьп-
Рх Р1
8 =------.
Pbn
Нормальный основной шаг косозубого эвольвентного колеса находится
из выражения
Pbn — C°S pfrf.
Учтя, что PjP2 = Р^П + и подставив выражения для РХП и ПР2
со с. 59 в зависимость для определения 8, после преобразования получаем
основную формулу, по которой находится величина коэффициента перекры-
тия винтовой эвольвентной передачи:
8
2л
*1 (tg ад1 —tgczu;/1) z2 (tg ад2 —tg awt2)
cos2 |3Ь) cos2 |3bz
(125)
здесь углы aai определяются из зависимости (97), углы uwti — из зависимо-
сти (107) и углы fibi — из зависимости (15).
Наименьшее значение 8т|П по опыту эксплуатации передач равно 1,2.
Если в цилиндрических эвольвентных передачах при высоких степенях точ-
ности величину 8min уменьшают до 1,1—1,15, то для винтовых эвольвентных
передач такое снижение недопустимо, так как в отличие от цилиндрических
передач винтовые передачи имеют значительные контактные деформации
зубьев под нагрузками, которые вместе с ошибками основных шагов крьти
и изгибной деформацией зубьев могут привести к ударам при пересопряже-
ниях. Поэтому предельная величина коэффициента перекрытия
е > 1,2. (126)
Коэффициент перекрытия зависит от параметров исходного контура и ко-
эффициентов ц и Xi передачи.
Интерференция зубьев в зацеплении. Интерференцией принято называть
пересечение эвольвентного участка зуба одного колеса выкружкой (переход-
ной поверхностью) другого колеса. Зацепление зубьев при наличии интерфе-
ренции на ножке зуба второго колеса показано на рис. 42. В этом случае ко-
нечная точка активного участка зуба второго колеса Р2 оказывается лежащей
на выкружке колеса в точке Р™. Обкат зубьев ниже точки /2—границы эволь-
вентного участка до точки Р^ — это обкат двух невзаимоогибаемых поверх-
ностей, при котором величина передаточного числа и не остается постоянной.
Интерференция в зацеплении всегда ведет к увеличению угловой скорости ве-
домого звена со2 при постоянной скорости cot, если не наступает заклинива-
ния зубьев за счет полной выборки боковых зазоров в зацеплении. Интерфе-
ренция зубьев совершенно недопустима в передачах, так как при работе пере-
дачи она приводит к быстрому износу зубьев и снижению их изгибной
61
Рис. 42. Интерференция зубьев эвольвент-
ной передачи
прочности; с другой стороны, резкое
увеличение скорости со2 создает по-
стоянный удар в зацеплении каждо-
го зуба; это вместе с резким увеличе-
нием нагрузки на зубья, снижением
долговечности передачи создает зна-
чительный шум в передаче. Закли-
нивание же зубьев при работе почти
всегда ведет к поломке вершины
зуба одного из колес.
На рис. 42 показано, что интер-
ференция зубьев наступает тогда,
когда расчетная точка распола-
гается по эвольвентному профилю
ниже граничной точки // на колесе;
при этом точка Р™ контакта зубьев
лежит на переходной кривой. Поэ-
тому условием отсутствия интерфе-
ренции на колесах является
ар/>ап, (127)
гарантирующее положение точки Pt
по эвольвенте —выше точки //. Угол
а.ц определяется выражением (122).
Угол api может быть определен
с помощью основной схемы зацеп-
ления (см. рис. 9, б):
. „ Pin
tg aPi = 1
ГЬ1
. N t2 Рщ
tg <ХР2 = •
Г&2
Числители этих дробей можно представить путем последовательных пре-
образований по схеме (см. рис. 9) выражениями
/Via = /7—------(Pi/г
COS Pb2
COS
P2t^ = ^2t2 П“ (P2tl
COS Pft!
В эти выражения входят отрезки; которые можно найти по основной схеме
как
П = гЬ1 tgawn; N2t2 П = гЪ2 tg awf2;
Pif2 N9t2 = rb2 tg aa2; P2fl /Vm = rbitg aal.
Подставив эти значения в предыдущие выражения, получим
Г£2 COS Pbl
tg ар1 =tg «wfi—-------—7— (tgaa. —tg a^2);
rbl COS Pb2
rbl COS Pb2
®g aP2 = tg aWt2 — ----—T— (tg aai — tg awtx).
rb2 COS Pbi
Воспользовавшись зависимостями (15), (17) и (30), получим
rb2__________________________zz COS flb!
Г&1 COS Pb2
62
Окончательно формулы для определения углов apz- принимают вид
COS fr,!
cos Pb -
tg aPi —tg awn —
zi
i 4. 2i
tgaP2 = tgau,fz ——
(tg «Q2 — tgawf2);
cos |3Ь2
cos fJbl
(tg — tgawZl).
(128)
2
(129)
Иногда множитель в формулах (128) целесообразно заменить на тождест-
венный ему
c°s (Зь1 2 \2 / cos а/2. 1 СС6 ^1.2
cos ₽£2, 1 / \ COS аИ,2 cos ^2,1
Так как винтовые эвольвентные передачи имеют скорость относительного
скольжения зубьев У12; складывающуюся из скорости продольного скольже-
ния V\2 и скорости поперечного скольжения Vsl2 [см. зависимость (24)],
целесообразно рассмотреть два коэффициента скольжения, соответствующие
продольному и поперечному скольжению зубьев в контактной точке,
и определяемые зависимостями
для первого колеса и
^2
V'<>= .г
, И2
v'<l=V
VKA
(130)
г
vb, =----
"^2
(131)
VK2 =
2L
uVK2
для второго колеса.
В формулах (131) передаточное отношение и учитывает: что яубья второ-
го колеса в и раз меньше участвуют в зацеплении
Расчетные формулы из зависимостей (130)—(131) получают после подста-
новки в них значений и V^i
Vщ =вЗд X 0}
где
о*к=о?п+пк.
Представив векторные произведения как определители; получаем проекции
=coi (fwi + l sinaw) sin рш1;
V^2 = ^2 (гю2 ”Ь 1 sin оСю) sin Pto2 J
VK l=“l <r (Г1 sin аш4-/) cos рш1!
=s ^2 U>2 Si П ОС(р /) COS Р ц)2 «
63
Теперь зависимости (130) и (131) можно привести к виду
VK1 и sin Рии+гюг sin — I (и cos Yi + cos у2) sin Д sin aw]/a X
X (rwl + l sin aw) sin pwl;;
vsK| =/ (u cos 71 +cos Ya) cos Д/u (rwl sin aw + /)cos P^ii (132)
v^2 = [ru?1 usin Рил + rw2 sin pw2 — I (u cos Yi + cos у2) sin Д sin aw]/(rw2 +
+ /81пац,)81пРц,а;
vsK2 =1 (w cos Y! +cos y2) cos&/(rw2 sin aw —I) cos Рц,2*
В момент контакта зубьев в полюсе П коэффициенты исчезают, а
коэффициенты Vkj с учетом формулы (30) приводятся к виду
,т *8
tg Plyj
vt _ I _i_ te Pw-.. _
’ v«2n-
(133)
Для некоторых расчетов удобно преобразовать
sin S
(и cos Yi+cos Y2) =---------------------------- 5
• sin Yi
Угол А вычисляют по зависимости (8), угол Yi — по зависимости (3).
Предельные длины отрезков I — ПК определяются пересечением линии
зацепления A/j ЛА2 (см рис. 9) с цилиндрами вершины колес. В принятой на
рис. 9 схеме координат ths получим предельные значения /min = — ПР} и
},пах == + /7Р2; далее, воспользовавшись выводом формул (119), получим
. ГЪ2 .
^min-----n (tg aa2 tgalt-/2);
cos Pb2
(134
^пах ““ n (^ — tg Ct^/i).
cos Р/Л
Следующим в«пeiiшим показателем качества передачи, определяющим
величины контактных давлений, а через них износ поверхностей з\бьев.
склонность передачи к заклиниванию и т. д.; является приведенный главный
радиус кривизны в контактной точке. Величину р21 находят для любого
момента контакта но линии зацепления по формуле (63). Зависимости (61) и
(62) позволяют определить значения pr/<) и рг/^2 главных радиусов кривизны
соприкасающихся поверхностей зубьев в контактной точке.
Характер изменения коэффициентов и для зацепления винтовых
эвольвентных геликоидов с параметрами X = 45е, aw = 100 мм, и = 2,
cos aw = 0,9. рш1 = PlG2==22,5° показан на рис. 43. Здесь размер I занимает
практически весь теоретический отрезок AzjAz2 линии зацепления. Из рис 43
видно, что коэффициенты продольного скольжения меняются незначи-
тельно от величины у* ±= 2 в полюсе П. Величина же коэффициента
меняется (с учетом знака) в три раза, проходя через 0 в полюсе П. Вместе
с тем коэффициенты у^г остаются меньше коэффициентов v^-.
Заметное влияние на долговечность винтовых эвольвентных передач ока-
зывает изменение положения рабочего участка линии зацепления относитель-
но полюса зацепления На рис. 9 это отрезок Р^Р2 Два варианта расположе-
ния полюса П на активном участке линии зацепления дано на рис. 44. Ла-
рис. 44, а показан полюс в зоне дв) парного зацепления у основания зуба пер-
64
Рис. 43. Графики изменения коэффици-
ентов скольжения vT и v« по линии
зацепления передачи aw —100 мм; S —
«45°; u=2; 0wi-0w2; aw-arccos0,9
Рис. 44. Схема расположения полюса пере-
дачи в разных зонах линии зацепления
(Р\М.} и Р2М] — зоны двупарного зацепле-
ния, М1Л/2 —• зона однопарного зацепления)
вого колеса, на рис. 44, б — в зоне двупарного зацепления у основания зуба
второго колеса. Глубина проникновения полюса в двупарную зону характе-
ризуется отрезком о/п. Величину коэффициента 6 принимают при проектиро-
вании передачи. Рис. 44 позволяет определить положение точек и Р2 при
выборе положения полюса в той или иной зоне линии зацепления. Если по-
люс П расположить в двупарной зоне у основания зуба первого колеса; то
можно записать
ПР,=рЬп + &гп.
Из основной схемы зацепления (см. рис. 9; б) с учетом того, что
tg aoi =
Рщ Nlti
ГЪ1
после преобразования получим
2л 6m
tg«ai=tgau>fi+-----cos2Pbi +---сосры, (135)
Если желательно полюс П расположить в двупарнои зоне у основания
зуба второго колеса, то
ПР^рьп + Ьт.
Тогда
2л 6m
tg с*а2 — tg + cos3 Pb2 + cos P&2* (136)
z- rb2
В некоторых случаях целесообразно полюс П разместить на границе ак-
тивного участка линии зацепления в точках Р^ или Р2; тогда
tg aai = tg CLwn't
(137)
3 Зак. 2297
при i = 1 полюс лежит на вершине зуба первого колеса и зуб первого колеса
состоит из одной ножки; при i — 2 полюс лежит на вершине зуба второго ко-
леса и зуб второго колеса состоит из одной ножки.
Величина аа/ позволяет определить диаметр
, dbt
что; в свою очередь; дает возможность; воспользовавшись формулами (92),
(94), (115а) и (117), определить х±.
При расположении полюса в двупарной зоне у основания зуба перво-
го колеса
X1=sZ(_fc^_A*+-^-cos₽,; 038)
2m 2
при расположении полюса в двупарной зоне у основания зуба второго колеса
2аш—Zi
*1“——-----+Л;-— cos (139)
zm z
В дальнейшем; передачи; в которых рабочий отрезок линии зацепления
Р1₽2 расположен между точками Л\/7, т. е. аа1 <Cawtv будем называть до-
полюсными; передачи, в которых отрезок РгР2 расположен между точками
/7А/2, т. е. аа2 —заполюсными.
Для винтовых эвольвентных передач смещение полюса по линии зацеп-
ления представляется важным, так как в большинстве случаев материалы
колес различны и их выбирают из условия получения наилучших антифрик-
ционных свойств. Это; например; сталь — бронза, сталь — полиамид, сталь—
текстолит и т. д. Такие сочетания приводят к резко разному противостоянию
зубьев колес износу, задирам и т. д.; т. е. к снижению долговечности пере-
дачи в целом. Смещение полюса позволяет усилить слабое колесо как увели-
чением радиусов кривизны его зубьев, так и увеличением площади основания
зубьев. Первое уменьшает износ зубьев слабого колеса, второе — усиливает
изломную прочность его зубьев. Здесь нужно иметь в виду следующее: износ
зубьев зависит не только от радиусов кривизны рг^ слабого колеса, но и от
значения р2г; определяемого по формуле (63), который имеет максимум при
изменении положения точки П на участке PiP2- Переход за линию максимума
р£г приводит к новому увеличению износа колес уже при больших рг$ сла-
бого колеса.
ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ
ВИНТОВЫХ ЭВОЛЬВЕНТНЫХ ПЕРЕДАЧ
С ПОМОЩЬЮ БЛОКИРУЮЩИХ КОНТУРОВ
Геометрически правильная винтовая эвольвентная передача (как и все дру-
гие типы передач) может быть выполнена только при соблюдении следующих
качественных показателей: отсутствии заострения и подрезании зубьев, при
отсутствии интерференции и при выполнении условия е > emin. Кроме
того, при проектировании передач возникает ряд специфических требований —
получение максимально возможного угла зацепления aw или максимально
возможного коэффициента перекрытия в; получение максимального приведен-
ного главного радиуса кривизны передачи при выбранном угле зацепления;
смещение полюса зацепления в заданную зону линии зацепления и т. д. Все
это вызывает необходимость расчета большого числа вариантов по принимае-
мым параметрам р и jq; что влечет за собой значительные затраты времени на
проектирование качественных винтовых эвольвентных передач.
Очевидно, что геометрический расчет винтовых передач значительно
упростится, если разработать; как и для цилиндрических передач [25 и др.],'
66
систему «блокирующих контуров», определяющих возможные границы выбора
«сходных параметров проектирования передач.
Блокирующий контур строят для заданных чисел зубьев колес передачи
*1 — г, при выбранных значениях начальных параметров — рЮ2, т. е.
для заданного межосевого угла S. Наиболее рациональными для геометричес-
кого расчета исходными параметрами (см. с. 53) для винтовой передачи яв-
ляются коэффициенты у и jq. Кроме прочих преимуществ; построение блоки-
рующего контура в системе координату—худает возможность ориентировоч-
ной оценки прочностных характеристик передачи; так как коэффициент у од-
нозначно определяет угол зацепления аш [см. формулу (ПО)]; от которого
зависят контактные напряжения; а через них долговечность передачи.
Анализ зависимостей (121), (122), (125), и (128) позволяет записать урав-
нения
М1*=Л(н. *i); «а»=/:'2(н. *1);
. ail=/'a (ц, *1); аи (н. *1); 1
«а. Л
e°f6(y, *i);
аР1 = Л»(у, *1); аР2 = /?7 (У, *1). X
Функции Ff — Fi при построении в системе координат у; х& Fj (J =
= 1-г7) представляют собой поверхности; поэтому; в конечном счете; задача
по оптимальному проектированию винтовой эвольвентной передачи сводит-
ся к определению максимумов; минимумов или определенных значений
функции Ft — F? и соответствующих им значений у; х^.
При исследовании любой функции в первую очередь необходимо опре-
делить область ее существования по аргументам. Параметр у определяется
зависимостью (110), и так как угол aw > 0; получаем границу
максимального значения у. В практике современного зубонарезания исполь-
зуют углы профиля исходного контура а в диапазоне от 14°30' до 22*30';
поэтому принято максималщюе значение у = 1;03. Теоретически можно при-
нять, что угол aw max = 0,5 л; тогда нижней границей параметра у будет
у « 0.
Теоретическими границами коэффициента хь переход за которые приво-
дит к разрыву функций Flt Fa, Fh; F6; F^; являются условия
dai 3=3
и
при этом первое условие дает значение Хцтигь а второе — х1тах. После подста-
новки значений dai и dbi из формул (117) и (93) и преобразования получим
*1 mto °' а а О + cos + Ц —(~+Ьа ) » (140)
2 COS р2 \ tn ]
*1 таха(“^“ + ^а ) — Q U + cos ocfl); (141)1
\ т а / 2 cos Pi
здесь Ц—величина, определяемая зависимостью (116). Формулы (140) и
(141) получены при условии обеспечения стандартного радиального зазора ,
с*т в зацеплении.
3*
67 ,
Переход за границы ц; xlmin и х1тах приводит к разрывам функций; а
при ^использовании ЭВМ — к остановке машины. Поэтому исследование фун-
кций F± — Fi необходимо вести в найденном диапазоне р- и хх.
Рассмотрим функцию Ft (|х, хх). «Седловидная» поверхность (рис. 45)
Sat\ □= Fx (ц; Xi) построена для винтовой передачи с параметрами 2= 90°;
zx =24; z2 = 25, = РШ2 = 45°. Диапазон изменения ц : 1,03 > р, >
> 0,95; диапазон xf. от xlmih до ххтах- Для удобства в дальнейших иссле-
дованиях используют не торцовую толщину зуба sa^x первого колеса по ок-
ружности вершин, а относительную толщину
*
sai=~
mtl
(142)
так как mtl меняется с изменением коэффициента |х согласно формуле (88).
Для построения граничных линий блокирующего контура необходимо
провести изолинии постоянных значений sai на поверхности Ft (ц, хх), а
затем и их проекции на плоскость блокирующего контура р- — хх. Проекции
изолиний на плоскость блокирующего контура в его «рабочей» зоне для Sai =
0,1; 0,2; 0,3; 0,4; 0,5; 0; 6; 0,7; 0,8; 0,9; 1;0 на видимой стороне поверхности по-
казаны на рис. 46.
Аналогичную поверхность sa2 = Fa (М7 *i) можно построить в системе
координат sa2, Ц, хх. На рис. 47 показаны проекции изолиний sa2 на плос-
кость блокирующего контура.
После выбора требуемых значений Sai и Sa2 имеется возможность нанес-
ти границы блокирующего контура по толщинам зубьев колес на поверх-
ностях вершин.
Рис. 4Б. Поверхность, описываемая уравнением sfli => f (ц, xt) изменения
ной толщины зуба по цилиндру вершин первого колеса передачи при и^шспсппи коэффи-
циентов Ц И Х|
68
Аналогично можно исследовать функции Г3 и Г4 углов ац от парамет-
ров р и xt. Для практических применений необходимо определить лишь зна-
чения хх, соответствующие для каждого р условиям = 0. Эти значения
определены формулой (123) и выражением
г = Г1 П43.
Х‘ (“г2=0) -U~ha+ 2cosfJ2 * (143)
Величины Ц; определяются однозначно с выбором ц; и для каж-
дого значения ц можно найти определенные xlmin и х1(а* =0). Граничные
линии = 0 и а/g = 0 показаны на рис. 48; переход за эти границы при-
водит к появлению подреза на колесах.
Наиболее важным качественным показателем передачи является ее ко-
эффициент перекрытия е. Функция Fo (ц, хх) представляет в системе коорди-
нат р — X] поверхность; на рис. 49 приведены проекции изолиний е этой по-
верхности на плоскость блокирующего контура. Изолинии представляют
собой замкнутые на значении |imax линии; теоретически минимальное значе-
ние 8 = 1 представляется максимальным «овалом», охватывающим все ос-
тальные. Увеличение 8 ведет к уменьшению «овала» изолинии. Максимальные
значения 8 находятся в зоне максимальных ц или минимальных углов зацеп-
ления aw, с увеличением которых 8 уменьшается. Кроме изолиний 8, на плос-
кость блокирующего контура следует нанести линию, определяющую smax,
при каждом значении ц. Такая линия позволяет конструктору проектиро-
вать передачу с гарантированно максимальным значением етах при выбран-
ном ц.
Для определения условия получения етах при заданном ц необходимо
продифференцировать по х± функцию (125) и приравнять нулю полученные
выражения. При этом следует учитывать, что заданное значение ц делает ве-
личины awti и Рьг постоянными при изменении х^.
1
ez =±Г_21__________!________
л L cos2 Pbi dfci sin ocai cos2 Pba db2sinaO2
69
откуда, воспользовавшись соотношениями (30), (105), (107), после упрощений
получим
sinaa2^cos рЬ1, —
sin аа1 cos
На поле блокирующего контура желательно нанести; кроме граничной
изолинии е = 1,2, изолинию е = 2,0, если она попадает в реальную зону
контура.
Функции Fq (р,; xi) и (р; *i) определяют поверхности; показывающие
зависимость углов api от параметров р и xt. Для нахождения границ контура
необходимо выявить значения xf, соответствующие условиям
Приравняв tgapf [см. зависимость (128)] и tg ац [см. зависимость (122а)],’
получим
tg «и
4(ha~*1) cos Pl
о =isawti—
zt sin 2an
«2 /cos Pbl\2 .
--- ----7- (tg «02 —tg awl^
Zi \COS pb2/
Рис. 49. Изолинии в—const и ланиа вшах на поле
блокирующего контура
Рис. 48. Изолинии an—0 — границы
подреза зубьев — на поле блокиру-
ющего контура
70
Углы ац, Рг-; ^u)ti ПРИ выборе р определяются однозначно.
Найдем
что очевидно из уравнения (97).
Воспользовавшись формулами (117); (94); (115а); уравнения (145) можно
привести к виду
At х/ — 2Bixi + Ci-Qt (145)
где
А л R 9F Г п ( dbia Y ,
Л1,2=4— ------“------ | £>1,2™ ^1,2—Ь1,2 14,2 ( “Т:--- 1 1
\ £1,2 / \ £1,2 /
,2? ,а , п 4 С05 Pl.'
/ oi»r z1|2 sin 2aU|2
4,1 \l COS flfri,2 \a
4,2 )\ COS0b2>1 )
^1,2 = tg au;fl,2 + £1,2 tg С^ш/2,1-tg a^1>2 +^1,2 Л.2 =
™ 2ciy)
4,.
COS P1)2
4-2Л*.
Решение уравнения (146) дает по два вещественных корня:
(ар1=аг1) =(В1 ± Т/(в? — Лх Сг) )/Лх;
___________ (147)
*1 («р2=“/а)='^ (^2 ± — А2 Сг) )/А3.
Коэффициенты Д^; В;; С[ и Ц имеют определенное значение для каждого
принятого р, поэтому имеется возможность построить на поле блокирующего
контура линии; соответствующие уравнениям (147) и отделяющие границы
интерференции (рис. 50).
Линии ар1 = ац показывают границы по интерференции на ножке пер-
вого колеса; линии ар2 = а^2 — на ножке второго колеса. Заштрихованные
области — зоны, в которых имеет место интерференция. В зонах 7, 77, 777 на
рис. 50 гарантированы передачи; свободные от интерференции, в зоне IV
имеет место интерференция на ножке первого колеса; в зоне V — на ножке
второго колеса, а в зоне VI — одновременная интерференция на ножках обо-
их колес. Нужно отметить; что линии аР1 = аг1 пересекаются в точке с ко-
ординатами р = 1; Xi = ha, линии aP2 = a^2 — в точке с координатами
ц = 1; хх = — ha.
Предложенная система координат р — хх блокирующего контура отли-
чается от принятой для цилиндрических передач [25 и др.], где все линии
контура построены в системе хх —х2. Уравнение (115а) дает возможность
построить изолинии х * ; соответствующие каждому принятому конкретно-
. тт 1<хг)
му значению х£. Для практического определения значения х2; соответствую-
щего заданным Xj и р; достаточно на поле контура нанести линию x1(Xj=310)t
дающую значение xlf’ при котором х2 = 0 для заданного р (рис. 51). Для при-
мера здесь приведены две точки: лежащая ниже линии х2 = 0, и А42, ле-
жащая выше этой линии. Для точки Мг коэффициенты смещения хх = + 0,8;
ха = + 1,06; для точки М2 — соответственно = 2; х2 == — 0,9. При этом
71
Рис. 50. Границы интерференции на
зубе первого колеса api=ah и на зубе
второго колеса ap2=ai2 на поле блоки-
рующего контура
Рис. 5L Линия значений коэффициента
при которых коэффициент х2=0, ЛИ-
НИЯ х2» 0 и схема расчета значений
и х2 для различных * чей к ля блоки-
рующего контура
хх отмеряют от оси абсцисс до точки М; а х2 от линии х2 = 0 до точки М12
по той же вертикали. Ниже линии х2 = О значения х2 положительны; выше—
отрицательны. Таким образом; блокирующий контур; построенный в пря-
моугольной системе координат р — х^; можно рассматривать как контур;
построенный в сложной «прямо-криволинейной» системе координат хг —х2.
Выбранная система р — х* координат блокирующего контура позволяет
построить некоторые линии показателей качества винтовой эвольвентной
передачи. Как указывалось ранее, смещение активного участка линии зацеп-
ления РхР2 относительно полюса П или; как принято говорить; «перенос»
полюса в заданную зону активного участка; способствует уменьшению изно-
са зубьев. На блокирующий контур можно нанести линии
гарантирующие расположение полюса в начале зоны двухпарного зацепления
— точке Mi (см. рис. 44); и линии
aai иаиШ»
гарантирующие расположение полюса на границе активного участка линии
зацепления — точки Pj (см. рис. 44), т. е. на окружностях вершин колес.
Располагая (см. рис. 44) полюс П в точке а затем в точке Ма; и под-
ставляя значение
РЬп — 2Я Ь‘ cos , (148)
г1
получим
/V1.»
Р 2,1 —
tg awtl,2
COS р1|2
2л
72
Теперь из основной расчетной схемы получим
^aiа rbi
, 2л
awti-i------cos рь/1
zi I
(14©)
Зная гп^ с помощью формул (93) и (117) можно найти коэффициенты смеви-
ния xlit обеспечивающие положение полюса в точке Л!*!
тгг
x4Ml)’aaw- 2cos*Pj +h*-ra2i
(150)
х\ (M?)='’al —«ш + ^—ГГ— Й* + Д.
£: СО о р2
Значения aw; и Ц определяются однозначно для заданного pj можно най-
ти величины коэффициентов х1(Л1) и построить кривые aM1 = аш и аМ2 =я
= aw на поле блокирующего контура (рис. 52).
Разместив полюс в граничных точках активного участка линии за-
цепления, получим
тогда
cos
1 I £. л '°2
(Pl) 2cosPx a cosawt2
(151)
rbi
Ki(Ps) COSa,M
На рис. 52 нанесены линии
apl = aw и ap2 = aw; проходя-
щие через точки p = 1; =
«=1 -\-ha и p = 1; Xi = — ha кон-
тура и отделяющие зоны полюс-
ного и внеполюсного зацепления.
В зоне / у всех передач полюс П
расположен в зоне однопарного
зацепления; в зоне II полюс ле-
жит в зоне двухпарного закреп-
ления на ножке первого колеса;
в зоне III — в зоне двухпарного
зацепления на ножке второго ко-
леса; в зоне IV полюс располо-
жен ниже активного участка зуба
первого колеса (здесь имеют место
«заполюсные» передачи); в зоне
V полюс лежит ниже активного
участка »у(5а второго колеса (пе-
редачи в этой зоне принято назы-
вать «дополюсными»). Если мыс-
ленно нанести линии api = aw
на рис. 50;'то видно; что они про-
водят по заштрихованным зонам
+
Рис. 52. Границы расположения полюса в
разных зонах линии зацепления передачи
на поле блокирующего контура
, тг2
“w+ 2cosp;
73
/V; И и VI; поэтому на поле
блокирующего контура их на-
носить нецелесообразно.
Главный приведенный ра-
диус кривизны р2рв точке кон-
такта соприкасающихся эволь-
вентных геликоидов является
важнейшим параметром каче-
ства передачи (см. гл. 1). Вос-
пользуемся формулой (63) и
определим максимум р2р для
фиксированного значения р;
т- е- (РгК1 + Р1-/С2) = const>
Приравняв производную
Pzr(prKl) нУлю» получим,’ что
Рис. 53. Схема к определению значений rt, при
которых обеспечивается pVnn,ov при фиксиро-
ХГ Шал
ванном коэффициенте ц
максимум р2р соответствует по-
ложению контактной точки в середине теоретической линии зацепления
(точка А на рис. 53). Так как при работе передачи р2г меняется с изменением
положения контактной точки на линии зацепления; необходимо для получения
текущих значений рХг, близких к PZrmax; расположить активный участок
линии зацепления PjPg симметрично относительно точки А; т. е. выполнить
условия
P2=/V2 Pt.
Представив отрезки и NzPi (см. рис. 9) через проекции
и A^2f2^ii2, получим соотношение
tg «а2
fbi cos Рьа
г^2 cos |3bi
tg аа1,
(152)
позволяющее определить значение коэффициента х& гарантирующее сим-
метричное относительно точки А расположение активного участка линии за-
цепления, т. е. максимальные величины pSr max.
Выбор коэффициентов хх с приведенной на рис. 54 линии Р1гтах Дает
для каждой величины ц значения р2г; менее всего отличающиеся от PsPmax
во время работы передачи.
Аналогичным путем на поле контура можно нанести любые другие линии
качественных Показателей; однако линии етах, Р2ртах» = аш яв‘
ляются важнейшими.
Блокирующий контур для передачи, имеющей 2 = 90°; гх = 24; г2 =
= 25; рш1 = РшЯ = 45°; построен на рис. 55; параметры исходного контура
— по ГОСТ 13756—68.
На контуре следует отметить безусловные границы ац = 0; ац =
= aph е = 1,2; переход за которые делает передачу неработоспособной; и
условные границы sat = const, незначительный переход за которые возможен.
Безусловные границы на контуре выделены жирными линиями, условные —
тонкими. Изображаются только те безусловные границы, которые жестко
лимитируют поле контура.
Так как на поле контура наносится много линий, в альбоме блокирующих
контуров все линии будут обозначены номерами и других обозначений не будет:
1 — в = 1;2; 1а — 8 = 2*, 2 — интерференции на первом колесе — ар1 ==
= ос/ь 3 — интерференции на втором колесе — аР2 = oqa; 4 — подреза пер-
вого колеса — afl = 0; 5 — подреза второго колеса — 0Чя = 9; 6 — Sai =
= 0,25; 6 а—ss 0,40; 7 ~ == 0*25; 7а = 9,40; 8 1
19 — етах; 11 pSi шах; 12 — хя = 0.
74 '
Рис. 55. Пример блокирующего конту-
ра передачи г(-24, г2—25, flwr рш»—45°’
В приложении I приведен альбом блокирующих контуров для наиболее
распространенных ортогональных передач S = 90°; альбом построен для
передач аЗх=6, 9; 12; 18, 24; 27; 36; 48 и передаточными числами и = 1; 1,^5;
2; 3. Контуры построены для трех вариантов углов наклона (tg Pwl = JJ*
и tg РШ2 = “)♦ (tg Pwf = tg Pwa = 1)1 (tg Piot = u и tg ₽u)2 =
Первый вариант обеспечивает минимальные значения второй — минимум
(Qiв ^Ui)» третий — дает одинаковые диаметры dwi колес.
При выборе коэффициентов р; ортогональных передач; у которых
гь' и; рШ1 отличаются от представленных в альбоме; необходимо восполь-
зоваться методом линейной интерполяции.
Анализ блокирующих контуров показывает; что линии двух наиболее
важных качественных показателей передачи 8 „ и р„ совпадают толь-
□ л max "Р max
ко в передачах; гдезх = з2 и рШ1 = рша; т. е. такие передачи можно выполнять
с одновременным совпадением максимального коэффициента перекрытия с
максимально возможным приведенным радиусом кривизны, что обеспечивает
высокую плавность работы о наименьшими контактными напряжениями Ро»
при этом имеет место и минимальное значение скорости относительно сколь-
жения зубьев Все это; в свою очередь; гарантирует наибольшую долго-
вечность передачи. Чем больше передаточное отношение и передачи, тем боль-
ше расходятся линии ®тах и PjPmax; в этом случае можно гарантировать
только отдельные оптимальные качественные показатели в зависимости от
требований; предъявляемых к проектируемой передаче.
Так как не представляется возможным поместить в справочнике блоки-
рующие контуры для всех возможных межосевых углов S чисел зубьев
колес Zi; за и разнообразных ршх; в работе приведены блок-схемы программ
для ЭВМ; с помощью которых легко составить программы расчетов всех ли-
ний блокирующего контура для любых S; zt; и параметров исходного кон-
тура (рис. 56—65)в
75
Блок-схемы программ геометрического расчета винтовых эвольвентных
передач по наиболее часто встречающимся исходным параметрам расчета
приведены на рис. 66 и 67.
Пример 2. Спроектировать винтовую эвольвентную ортогональную пере-
дачу с параметрами т = 2 мм; = 6; » 6; =з ршй a 45Qf получив
наибольший коэффициент перекрытия.
Исходный контур принять стандартным по ГОСТ 13755—68.
По блокирующему контуру для заданных условий принимаем р =
= 0;984; Xi = 0,14.
Геометрический расчет по формулам; приведенным в настоящей главе;
дал следующие параметры колес: aw == 17; 246 мм; = 22°;383; Pj =
s= р2 = 44°,09; dbi = db2 = 14,90 мм; dr «= d2 = 16,71 мм; x2 = 0;1453;
stl = 4,66 mm; $/2=4,67 mm; dfj == 12,27 мм; df2 = 12,29 мм; dal « 21;20 мм;
da2 == 21,23 mm; Br > 5,56 мм B2 > 5,56 мм; sati = 0,73 мм; sat2 = 0,73
Рис 56 Йяок-окема расчета программы линии emax на блокирующем контуре 1
76
xr-a^hf^zjcosp,-o,5dbl, a* =
=arccos (dbl/(2aw~ z2 /cosfibz + 2h* +
^Zx^-Zlf^fz^ya^-tya^Wcosp^
^(z2igaKt2 Щ cospn ))г/(2 Jf)~e*
x= 0,fj(0,5db1 ~ 0,5db2+ 0,5z2/cosp2 ~
-O,5z,/cospj + Ц),Х2,ааьс*а2, £, У
X=X,+yiX*-X,)l(y-y**>
♦
y=y-dy
Рис. 57. Блок-схема программы расчета линии е» con st блокирующего контура
мм; 8 = 1,44; tg аг1 = — 0,004; tg аР1 = 0,151; tg о^2 = — 0,0007; tgaP2=
= 0,153.
Колеса передачи находятся на грани подреза.
Пример 3. Для передачи; имеющей те же параметры; что и в примере 2;
получить наибольший угол зацепления при максимально достижимом
значении коэффициента перекрытия 8.
По контуру принимаем координаты точки пересечения линии 1 и 10:
р = 0,948; Xi = 0,5. Тогда: aw = 17,*90 мм; aw = 27°,’022; = ра =
= 42°;093; d^ = db2 = 14,519 мм; di = d2 = 16,17 мм; х2 = 0,52; stl ==
= 5,21 мм; S/2 = 5,26 мм; d^ = 13,17 мм; dj2 = 13;26 мм; dal =
= 21,55 мм; da2 = 21,63 мм; Bj > 4,51 мм; В2 > 4,51 мм; satl = 0;73 мм;
sa/a = 0,72 мм; 8 = 1,20; tg ац = 0,1777; tg аР1 = 0,3381; tg ai2 = 0,1908;
tg ара = 0,3459.
•77
co
Рис. ЗД. Блок-схема программы расчета линии
блокирующего контура
Рис. чо Вппк-схема программы расчета лнниа ар2™ай
о а д>ацс1 о контура
Рис. 60. Блок-схема программы расчета линии $Jj=eonst блокирующего контура
79
Рис. 61. Блок схема программы расчета линии s^2=const блокирующего контура
80
Пример 4. Спроектировать ортого-
нальную винтовую эвольвентную передачу
с параметрами т = 1 мм; = 24; z2 = 48
при условии получения наименьшего зна-
чения имеющую наибольший
угол зацепления аш при максимально
достижимом в; исходный контур — стан-
дартный.
Первое условие выполняется при
Puji = pw2 = 45°. Для выполнения вто-
рого условия на блокирующем контуре
выбираем точку пересечения линий 10 и
3; = 0,978; х* = 0,52.
Получаем следующие размеры: aw =
= 52;06 мм; aw = 23°217; рх = р2 =
= 43;753°; dkf=29,672 мм; db2=59,344 мм;
di = 33; 23 мм; d2 = 66,45 мм; х2 =
= 1;875; 8ц = 2,699 мм; St2 = 4,064 мм;
dfi = 31;77 мм; dy2 = 67,70 мм; dal =
= 35,91 мм; da2 = 71,85 мм; >3,85 мм;
В2 > 3;85 мм; = 0,91 мм; sat2 =
= 0;76 мм; е = 1;5; tga^ = 0,4320;
tgani = 0,455; tg aZ2 = 0,5694; tgap2 =
= 0,5690.
Пример 5. Для передачи из примера 4
выбрать значения р и при условии по-
лучения наибольшей толщины зуба перво-
го колеса, изготовляемого из полиамида;
и толщины зуба второго колеса; изго-
товляемого из стали; не менее sai 2 mjn =
= 0,25 mt2.
Примем из блокирующего контура
|li = 0,996; Xj = 2,28, получим: aw =
= 51; 116 мм; aw = 20,620°, р, = р2 =
= 44,771°; dbl = 30,083 мм; db2 =
= 60,166 мм; df = 33; 81 мм; d2 = 67,61 мм;
Рис. 62. Блок-схема программы '
расчета линий о^1(2 блокирую-
щего контура
х2 = — 1,867; Sa = 4,55 мм; sj2=0,30 мм; d^ =35,87 мм; df2 = 61,38 мм;
dal = 40,35 мм; da2 = 65,87 мм; Bt > 9,61 мм; В2 > 9,61 мм; sa/i =
= 0,258 мм; saf2 = 0,793 мм; 8 = 1,28; tg ац = 0,6992; tg ар1 = 0,7055;
tg aZ2 = 0,3038; tg аР2 = 0,3512.
Пример 6. Вписать ортогональную передачу = 24, z2 = 50 в межосе-
вое расстояние aw = 105 мм, получить при этом наименьшее значение
Для выполнения последнего условия необходимо; чтобы tg PW1 =—; tgPW2=w;
откуда Рин = 26,565°; pW2 = 63,435 °.
Приняв Рпред ~ Ь найдем по формуле (106) тппед= 1,51475 мм.
По ГОСТ 9563—60 принимаем т = 1;5 мм; тогда р. = 0,99. По ближайшему
блокирующему контуру для р, = 0,99 примем = — 0,12; что приближает
передачу к линии 8тах («10»). При расчете получим: о&ц, = 21,519°; Рх =
= 26,279°; Р2 = 62,311°; dbl = 37,201 мм; db2 = 128,065 мм; dt = 40,15 мм;
d2 = 161,40 мм; х2 = 3,06; = 2,482 мм; Sf2 = 12,261 мм; d/i =
= 36,04 мм; df2 = 166,83 мм; dai = 42,47 мм; da2 = 173,27 мм; Bi >
> 4,’31 мм; В2 > 8,65 мм; sau = 0,88 мм; sat2 = 0,82 мм; 8 = 1,68, tg ац =
= 0,1658; tgapl = 0,1868; tga/2 = 0,8622; tg ар2 = 0,8620.
Приведенные данные показывают; что рассчитанная передача геометри-
чески вполне пригодна.
81
Pile. вЗ. Блок-схема программы расчета линия Роршах влок,гРУ1во,<т* *<*пурк
82
00
<
Рис. 64. Блок-схёма программы расчета линий aMi=atiiv
блокирующего контура
Рис. 65. Блок-схема программы
расчета линии х2=0 блокирую-
щего контура
Рис. 66. Блок-схема программы геометриче-
скою расчета и расчета качественных по-
казателей винтовой эвольвентной передачи
Рис. 67. Блок-схема программы геометрического расчета н расчета качественных показа-
телей винтовой эвольвентной передачи при заданном аи>
Глава 3
ГЕОМЕТРИЯ ВИНТОВОЙ ЭВОЛЬВЕНТНОЙ
ПЕРЕДАЧИ, НЕСВЯЗАННОЙ
С ПАРАМЕТРАМИ ИСХОДНОГО КОНТУРА
Традиционная связь геометрии зубчатой передачи с инструментом; в которой
инструмент является определяющим звеном, абсолютно оправдала и оправ-
дывает себя. Именно эта связь позволила провести стандартизацию геомет-
рии передач и инструмента и на этой основе добиться высокого качества и на-
дежности передач. Широкое распространение блокирующих контуров цилинд-
рических эвольвентных передач, позволяющих значительно повысить
их качественные показатели; еще более закрепило ведущую роль инструмен-
та в проектировании зубчатых передач.
В то же время бурное развитие техники, ведущее ко все большей энер-
гоемкости машин и к передаче все больших мощностей в уменьшающихся объ-
емах механизмов при постоянном возрастании рабочих скоростей машин; тре-
бовало непрерывного повышения качественных показателей зубчатых пере-
дач. Наряду с использованием новых материалов для изготовления колес
встала задача по совершенствованию геометрии передачи; что чаще всего ока-
зывается наиболее дешевым способом повышения качества передачи. Совер-
шенствование зуборезных станков и инструментов позволило производству
решать все более сложные технологические задачи. Уже много лет в ответст-
венных высоконапряженных передачах используются нестандартные исход-
ные контуры [9]. Наконец, в 1968 г. Э. Б. Булгаков предложил способ обра-
зования цилиндрической эвольвентной передачи, не связанной с исходным
контуром [7,8], в «обобщающих параметрах». В таких передачах геометрия
инструмента зависит от геометрии передачи; в самом общем случае для
изготовления каждого колеса передачи требуется отдельный инструмент.
Отказ от превосходства технологии над геометрией передачи, отказ ог
исходного контура позволил впервые определить предельные геометрические
возможности передач и использовать их в машинах. Важнейшими геометри-
ческими преимуществами передач, не связанных с исходным контуром, яв-
ляются: во-первых; получение коэффициентов перекрытия больше двух; во-
вторых; получение передач с большими углами зацепления —aw > 36° при
удовлетворительных значениях коэффициента перекрытия. Именно эти два
важнейших преимущества новых передач перед традиционными обеспечива-
ют их применение в экстремальных условиях работы механизмов; когда тре-
буется обеспечение максимально возможной нагрузочной способности; ми-
нимальных массы и габаритов передачи, максимальной плавности и бесшум-
ности работы зацепления; снижения динамических нагрузок и т. д.
Так как передачи; не связанные с исходным контуром; требуют специ-
альных инструментов; они оказываются более дорогими; поэтому их при-
менение целесообразно в особо ответственных механизмах и в массовом про-
изводстве машин; когда стоимость изготовления одной передачи не имеет
принципиального значения.
РАЦИОНАЛЬНЫЙ ВЫБОР ИСХОДНЫХ ПАРАМЕТРОВ
ДЛЯ ГЕОМЕТРИЧЕСКОГО ПРОЕКТИРОВАНИЯ ПЕРЕДАЧ \
Важнейшие геометрические ; кинематические и прочностные характеристи-
ки винтовой эвольвентной зубчатой передачи определяются следующими
основными параметрами: %; з* 2; aw; dal и da2. Эти параметры вместе с
материалом колес определяют во многом прочность и долговечность переда-
чи; они же определяют ее качественные показатели.
Диаметры цилиндров впадин d^; df2; переходные поверхности и тол-
щины зубьев колес играют второстепенную роль в геометрии передачи; так
как определяют прочность зубьев на изгиб и боковой зазор в передаче. В
свою очередь, межосевое расстояние aw't межосевой угол 2 и угол зацепле-
ния aw однозначно определяют диаметры основных цилиндров передачи d^;
db2 и связаны с торцовыми толщинами зубьев колес syt2. Диаметры
цилиндров вершин dal и da2 могут быть заданы по-разному.
Названные основные параметры передачи могут быть получены с помо-
щью различных сочетаний исходных данных. Э. Б. Булгаков предложил
в качестве таких параметров принять [8J: fa; 0^ 62 и фиксированные
относительные толщины зубьев на цилиндрах вершин та1 и та2. В этом слу-
чае
8U1, 4-
j 2=arccos —------,
“Д1,2
где 2 — диаметры; на которых пересекаются эвольвенты левой и правой
сторон зубьев.
Как показано на рис. 68; углы профиля на диаметрах 4Д1 а однозначно
определяют толщины зубьев и Sb/2; которые позволяют рассчитать aw;
aw и все остальные размеры колес цилиндрической прямозубой передачи.
Наиболее целесообразно принять в качестве одного из исходных па-
раметров расчета винтовой эвольвентной передачи ее угол зацепления aw.
Вторым параметром, определяющим габаритные размеры передачи, можно
принять либо диаметр d^, как у Э. Б. Булгакова, либо межосевое расстояние
awi которое в первом случае является
Рис. 68. Схема расчета коэффициента тол-
щины зуба 9С
86
производным. Если задан d^ то при
определении aw винтовой эвольвент-
ной передачи используются сложные
расчетные уравнения; поэтому вы-
бор aw в качестве исходного пара-
метра предпочтительнее. Кроме то-
го; межосевое расстояние aw винто-
вой эвольвентной передачи опреде-
ляет в основном ее долговечность;
способность противостоять износу и
заеданию. Принятые исходные па-
раметры aw; aw вместе с заданными
211 2; Pun И Plus полностью опре-
деляют геометрию двух сопряжен-
ных эвольвентных геликоидов вин-
товой передачи.
Последний исходный параметр
должен определить толщины зубцов
колес передачи. Это может быть ли-
бо угол профиля aQ на вершине од-
ного из колес, либо угол профиля О
на вершине «острого* зубца [8fe либо
торцовая толщина зубца одного из
колес на произвольном диаметре
При любом расчете нужно фиксиро-
вать толщины зубцов по вершинам.
Рис. 69. Форм] я i -лодржение зубцов на торце колеса при разных коэффициентах тол-
щины я. 5ьев:
а— 9[<1; б — ЭЕ“1« • —ЭЕ — схема взаимною расположения зубцов о ЭЕ ЭЕ
$ -Зит, д.
Наиболее простые расчетные зависимости в винтовой эвольвентной пере-
даче получаются при задании угловой толщины зубьев колеса zlf относи-
тельной к угловому шагу зубьев; обозначаемой далее ЭЕГ
Таким образом; параметры zt; z2; 2; aw; (РШ2) и ЭЕх принимаются
исходными, которые полностью определяют геометрию «острых» зубцов
колес винтовой эвольвентной передачи. Зубцы, в отличие от зубьев; не име-
ют сформированного основания впадины. Окончательно геометрия впадины
определяется после расчета параметров инструмента для нарезания колеса.
Коэффициент толщины зубьев
(153)
позволяет оценить характер зубцов. При ЭЕ = 1 разноименные эвольвенты
соседних зубцов пересекаются на основном цилиндре (рис. 69), при ЭЕ < I
между зубцами имеется расстояние на основном цилиндре, при ЭЕ > 1 зуб-
цы накладываются один на другой и точка пересечения эвольвент лежит вы*
87
me основного цилиндра. При 0 < ЭЕ < 1 зубцы занимают первый ряд;
ближайший к основному цилиндру; при 1 < ЭЕ < 2 зубцы лежат во втором
ряду, при 2 < ЭЕ < 3 — в третьем; и т. д. Таким образом; если задан ко-
эффициент ЭС; конструктор имеет наглядное представление о характере зуб-
цов [8]. Кроме того; очевидно; что при проектировании желательно не при-
ближаться к целым значениям ЭЕ (1; 2; 5; так как при этих значениях
«острая» впадина значительно затрудняет формирование плавного закруг-
ления.
Рис. 68 позволяет установить связь коэффициента ЭЕ^ с углом профиля
аа зуба на окружности вершины колеса. Предельно возможное очертание
эвольвентной части зуба на торце ограничено криволинейным треугольником
CFE с вершиной F — точкой пересечения эвольвент, Из построений очевид-
но соотношение
фь; = —“invaf ; (164)
аь
здесь ар — угол профиля в точке /V
Тогда, с учетом (153)
ЭЕг=—invaF/ . (153а)
Полученная зависимость связывает обобщающие параметры [8] с исходными
параметрами винтовой эвольвентной передачи настоящей работы:
inv 0«=»— ЭЕ.
z
Так как острый зуб не может воспринимать нагрузку вершиной; обусло-
вим толщины зубьев на вершинах satt; как в работе [8]. Связь между толщи-
ной sati и угловой толщиной уа можно определить по рис, 68:
^sat i 2s.ati
У al =—J----= --------cos ac
dai “bi
Из равенства углов ^.COA и DOB получим
Можем записать
inv ao<=%t(—O,6vbjl
или, с учетом зависимостей (153) и (154);
inv aoi =— $E(------- cos aal.
“Ы
Преобразовав (156); получим
cr i• t Satt \
*/<=— |invccaH----------cosaaf|.
n \ “b, I
В уравнениях (155), (156) и (157) использовано сиидношение
dbt
dai = • •
cos aat
(155)
(156)
(167)
(168)
Трансцендентные уравнения (156) и (157) связывают величины диамет-
ров цилиндров вершин dai с коэффициентами толщин зубьев ЭЕ/,* при этом
уравнение (157) решается просто при заданных а уравнение (156) может
быть решено только методом последовательных поиближений. В работе [8]
88
предложено упрощение,1 когда при проектировании принимается заданным
отношение
Sail
dbi
с точностью до cos ао$ « 1 можно записать
л
inv ааг=—maii
г1
Zi
—(inv aal+mai)
Л
(156a)
(157a)
Целесообразнее провести другое упрощение. Несколько преобразовав
зависимость (93), запишем
&Ы atnwn cos
где mwn — условный торцовый модуль колеса, рассчитанный через шаг
колеса по начальному цилиндру;
i
— Pwti
Л
Практика эксплуатации зубчатых передач определила предпочтитель.
ные толщины зубьев колес по цилиндрам вершины, связав их с модулем пе-
редачи san = Sai mwtt\ где sai — коэффициент; зависящий от материала и
термической обработки колес. Для стальных колес с малой твердостью ми-
нимальное значение коэффициента sai = 0,25; для термически обработанных
колес Sai == 0,4; пластмассовые колеса имеют Sal > 0,4. Подставив выра-
жения для йы и sati в формулы (156) и (157), получим после сокращений
. Л sai.
invaaf =—---------------
zi Ъ
cr Zi (' _L.Sai
EG = — inv aai +----------
Л \ Zi
COS aai .
COS j
cos aai
cos awli
„ cos aO;
Если принять ———------
K COS awti
1; то получим; как и в работе [8];
. Л „ sai
inv aai=———
er г‘ I , S® I
%t =— mv aai+----------- .
JT \ z i J
(1566)
(1576)
Анализ областей существования показал, что максимальный торцовый
угол зацепления для ортогональных винтовых эвольвентных передач
max ~ 46°; при этом угол aamax » 48°. При таких данных получим от-
cos aaf
ношение --------«0,97; что подтверждает большую точность расчетных
cos awti
зависимостей (1566) и (1576).
Так как весь расчет геометрии передач; не связанных с исходным кон-
туром; строится на выборе значений коэффициентов ЭЕ/ колес, то погрешно-
сти упрощений в зависимости (1566) оказывают влияние на величины диа-
метров цилиндров вершин dai; уменьшая их истинное значение по сравнению
с теоретическим из формулы (156)< Получаемые при этом качественные по-
89
кавятели реальной передачи практически бливки к расчетным, так как по-
лученное округление приводит к погрешности при определении величины
inv aab (2-г4)10”4, что изменяет угол aai не более чем на 1'—2Z.
В дальнейшем расчете, особенно при проверке качества зацепления;
потребуется знание положения точки Н (рис. 69) пересечения эвольвент со-
седних зубцов при ЭЕ/ > 1. Из построений очевидна зависимость
л
invaB2 = —(9С/-1). (159)
Наконец; воспользовавшись формулой (15); найдем зависимость между уг-
лами наклона зубьев колес на начальных и основных цилиндрах
cos aw =
sin $bi
sin Pwt
(160)
ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ ПЕРЕДАЧИ
Исходными параметрами геометрического расчета передачи, не связан-
ной в исходным контуром, как говорилось в предыдущем параграфе, явля-
ются 2j, Z2, Оц), 2, Ptul, И ЭЕр
При заданных исходных параметрах передачи найдем связь между ко-
эффициентами 9Е1 и 9Еа. Согласно рис. 70 можно записать зависимость для
торцов колес
Swti^rwi (фьн —invctu,//). (161)
Нормальные толщины зубьев по начальным цилиндрам определяют по фор-
муле
swni aSwti cos
Как и в традиционных передачах; расчет ведется при условии отсутст-
вия бокового зазора в зацеплении, что требует соблюдения равенства
Pwm = swm + swn2i подставив в которое значения pwni и swni и преобразо-
вав, получим основное уравнение беззазорного зацепления эвольвентных
винтовых передач с заданными толщинами зубьев по торцам основных ци-
линдров
Ч фь 11+*2 фь 12в л+*i i nv aw u+22 1 nv aw 12. (162)
Рис. 70. Схема расчета величины sw^
90
Воспользовавшись зависимостью
(153), получим после преобразова-
ния
inv ашП +
+ Z2 inv awt2)/n. (163)
При фиксированном значении
правая часть уравнения (163) посто-
янна. Обозначим
Ц* = 1 + Ui inv awti +
+ z9 inv аш/2)/л; (164)
тогда можно записать
9Е!+9Е2 = Ц*. (163а)
Зависимости (163) и (163а) поз-
воляют определить коэффициент 9l2
по заданным исходным параметрам.
По уравнениям (1566) можно подсчитать углы aai колес, а по ним найти
радиусы цилиндров вершин
ГЪ1
га1=3 » •
COS с/. ai
при этом в расчете для каждого колеса можно принять разные значения sj,
что позволяет проектировать передачи с колесами; выполненными из разно-
родных материалов.
Последний геометрический размер колес; который необходимо опреде-
лить, — радиус окружности впадин г^. Теоретически наибольшее значение
диаметров впадин получав! ся при нулевом радиальном зазоре (с = 0):
rF2 max ~ flu?“ral«
Для винтовой эвольвентной передачи практически любой радиус
< r/i max приемлем для создания зацепления, так как уменьшение ради-
ального зазора или даже его полное отсутствие не препятствует размещению
масла между зубьями. Опыт эксплуатации передач показывает целесообраз-
ность сохранения в передачах радиального зазора, равного четверти глубины
захода зубьев в зацепление:
с = 0,25 (ral + ra2 — aw). (166)
Приняв это значение зазора, получим
г м = 1,25^ — 1,25га2 — 0,25ral j г ’
г/2 = 1,25яи, — 1,25га1 — 0,25га2«
Формулы (167) дают рекомендуемое значение г//; окончательного опре-
деляют при расчете параметров инструмента для нарезания колес.
Все расчеты колес передач, не связанных с исходным контуром, ведутся
при ширинах колес, равных или превышающих расчетные значения bw^ оп-
ределяемые по уравнениям (119).
Для удобства проведения геометрического расчета передачи расчетные
формулы объединены в «Сводном бланке».
Сводный бланк геометрического расчета передач,
нс связанных с исходным контуром
Исходная величина < Обозначение Формула
Межосевое расстояние Задается условиями работоспособ- ности передач-
Межосевой угол 2 Задан конструкцией механизма
Угол наклона зуба на Рил Выбирается по рекомендациям
начальном цилиндре ко- с, 32
леса
Угол наклона зуба на Рил Pw>=2 Pwl
начальном цилиндре ко- леса г2
Относительные толщи- 8а* Принимаются конструктором по
ны зубьев на цилиндрах условиям работы и особенностям ко-
вершин лес •
Косинус угла зацеп- cos aw Выбирается из ^областей существо-
ления вания! по условиям, работы передачи
91
Продолжение
Исходная величина Обозначение Формула
I Коэффициент толщины зубьев колеса Выбирается из «областей существо- вания» по условиям работы передачи
Углы наклона зубьев на основных цилиндрах вс arc sin [(cos aw) X sin pwJ
колес Углы зацепления на торцах колес i ^wti ай,»=arc tg [(tg aw]/cos
Радиусы начальных r W1 cos S-f-(sin S) tg PW1
цилиндров колес rWt^aw (i+cosS + (sin2)tgpu)i 1 г W2 =fl!W — rWl
Радиусы основных ци- линдров ГЫ rbic=rwi cos awtl
Постоянная величина Ц* Ц* = 1 + (zti nv awti+z2i nv a 2)/n
Коэффициент толщины зубьев колеса г2 % p. to в 1*
Углы профиля на ци- линдрах вершины колес Vai 71 cr Sal inv aa/ = — Zi Zi
Радиусы цилиндров вершин r al rbi COS aai
Торцовые толщины зубьев колес по дугам основных цилиндров Радиусы впадин колес; Sbtl ndbt Sbti = ' ^4 Zi
максимальные rfim^x = aw ra2*i f/2ma№ aw~ ral
рекомендуемые rfl Гу1 = 1,25 йц) — 1, 25гд2 0.25гд1| Гу2 = 1,25 l,25ral 0,25га2
Расчетные ширины ко- лес bwl sin Рьх &u>i = 2rb2(t'gaaa-tgatci2) X ? COS РЬ2 ^1 = 2rbl (tg «al — tg awtl) tg p6l; sin (tg aal—tg a^i) X ; cos pbl bw\ ==2гьг (tg ^wii) tgPb2
ПРОВЕРКИ ГЕОМЕТРИИ КОЛЕС
И КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ ПЕРЕДАЧИ
При геометрическом расчете передачи; не связанной с исходным контуром;
не требуется проверки зубьев колес на отсутствие заострения и подрезания.
Первая проверка отпадает, так как исходные данные для проектирования
включают в себя относительные толщины sai на вершинах зубьев. Подреза-
ния зубьев всегда можно избежать при правильном расчете параметров
инструмента для нарезания зубьев заданного профиля.
Из проверок качественных показателей остаются проверки на отсутствие
интерференции и коэффициента перекрытия.
Так как при проектировании инструмента всегда имеется возможность
задать положение точек перехода эвольвентных поверхностей в переходные;
92
то интерференция в таких передачах может появиться только в случае, когда
активный участок вершины зуба одного колеса окажется ниже начала эволь-
венты другого колеса.
Положение точек Pi и Р2 на зубьях колес можно найти из уравнений
(128).
Условия отсутствия интерференции api > 0 позволяют получить зави-
симости
♦ zx / cospb> \2
tgaa2“— ------а-- tga^i + tgau^;
Z2 \ COS pbi j
*. z2 / cos P&1 \2
fgaai =— “ZTZ— tga^^ + tga^H,
zx V cos pb2 J
(168)
при фиксированных параметрах pW2 и cos aw определяющие диаметры
daP на которых начинается интерференция на ножках зубьев колес. Опре-
деленные по формулам (168) углы aai позволяют подсчитать по формуле
(1576) коэффициенты 9Е* и 9Е*>’ ПРИ которых api = 0.
Основная расчетная схема (см. рис. 9, б) позволяет определить коэффи-
фициент перекрытия передачи е.
Как и для передач с обусловленным исходным контуром, минимальный
коэффициент перекрытия передачи должен удовлетворять условию
1 Г (tgaaX —tg
2л [ cos2 pbi
(tgaQ2 —tgaw<2)
cos2 Pb2
ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ ПЕРЕДАЧ
С ПОМОЩЬЮ ОБЛАСТЕЙ СУЩЕСТВОВАНИЯ
Как и для передач с заданным исходным контуром; в этом случае можно
записать уравнения, связывающие параметры cos aw и 9ЕХ с геометрическими
характеристиками колес и качественными показателями работы передачи
e = Fx (cos aw, 9CX);
a*! =F2 (cosato, 9^);
a’2=F3(cos aw, 9Ei),
позволяющие построить область существования винтовой эвольвентной пе-
редачи, однозначно определяющую предельно возможные границы геометри-
ческого проектирования передачи с заданными zx; z2; pL0X и РШ2 при фиксиро-
ванных Sai.
Области существования строят для каждой пары чисел зубьев гх—z2 и
заданных углов колес на начальных цилиндрах ршх, рШ2 в системе координат
cos aw — 9ЕХ. Выбор системы cos aw — 9£х обусловлен, как и в передачах
и заданным исходным контуром, возможностью получения максимальной
информации с области для расчетчика и необходимостью наибольшей связи
геометрии с прочностью, которая достигается определением на области угла
зацепления aw.
Серия изолиний 8 = const в системе координат cos aw —9ЕХ показана
на рис. 71; там же дана линия етах; на которой каждому фиксированному
значению cos aw соответствует коэффициент 9£х; дающий максимум функции
е = Fx (cos aw; 9£х).
На рис. 72 показаны линии api = 0, переход за которые влево приводит
к появлению в передачах интерференции; недопустимой в винтовых эвольвент-
ных передачах; как и в других видах передач.
t 93
Рис. 71. Изолинии e=const и линия етахпри заданном угле на поле области суще-
ствования передачи
Кроме этих линий; на поле области существования можно нанести линии;
определяющие некоторые качественные показатели передачи: линию р£г тах>
которая обеспечивает максимальные значения приведенного главного ра-
диуса кривизны в пределах рабочего участка линии зацепления Р^Р2 (см.
рис. 61), линии и aMi = awti; которые обеспечивают расположе-
ше лол юса зацепления в первом случае на вершине зуба колес и za, во вто-
рам — на границе одноларного зацепления. Так же как и на блокирующие
контуры, целесообразно нанести на поле области существования линии 9С2 =
» 0. Все названные линии представлены на рис. 73.
Полностью область существования винтовой эвольвентной передачи о
параметрами Zj =»= 24; za = 25; = 45°; = Sa2 = 0,25 показана
на рис. 74. Для сравнения на поле области нанесен блокирующий контур,
условно отображенный по одинаковым торцовым толщинам зъц и углам aw.
Сравнение области и контура условно из-за разных подходов к расчету пере-
дач. Тем не менее оно хорошо показывает, какие широкие неиспользованные
геометрические возможности открывает отказ от детерминации геометрии пе-
редачи инструментом.
Наиболее важные преимущества; получаемые при отказе от исходных
контуров в винтовых эвольвентных передачах, можно сформулировать так:
1. Возможность получения больших коэффициентов перекрытия е > 2,5,
что позволяет проектировать передачи с высокой плавностью и бесшумноетью
работы, а при достаточной податливости зубьев и высокую нагрузочную спо-
собность за счет многопарного зацепления.
2. Возможность получения значительных углов зацепления передач
> 30°), которые обеспечивают высокие нагрузочные способности передач
при минимальных габаритах.
3. Практически впервые открывается возможность проектировать пере-
дачи с наперед заданными геометрическими характеристиками; зависящими
только от параметров соприкасающихся эвольвентных геликоидов и свобод-
ных от ограничений, вносимых инструментом.
Все сказанное определяет сферу использования передач; не связанных а
исходным контуром. Во-первых; — это весьма ответственные; высоконапря-
женные передачи, требующие экстремальных качественных показателей.
&4
Рис. 72. Границы интерференции сХр^ =0 и линия а^г тах на области существования пере-
дачи
Во-вторых, — это передачи машин массового производства; для которых
стоимость изготовления специального инструмента не является определяющим
фактором. Вместе с тем для передач массового производства требуется мак-
симально высокое качество; гарантирующее надежность; низкую материало-
емкость и другие важнейшие показатели.
Как и для передач с заданным исходным контуром; построен альбом об-
ластей существования для наиболее распространенных ортогональных пере-
дач, помещенный в приложении II.
Чрезвычайное разнообразие чисел зубьев колес zr и Z& межосевых углов
2 не может быть охвачено приведенным альбомом областей существования;
поэтому на рис. 75—80 показаны блок-схемы программ расчета линий об-
ластей существования; которые легко могут быть реализованы в рабочие
программы для ЭВМ. Эти программы дают возможность построить область
существования в кратчайший срок для любых заданных Sai.
В качестве справочного материала помещена блок-схема «программы-
процедуры» вычисления угла профиля а по известной функции inv а (рис. 81):
алгоритм решения задачи несколько отличается от предложенного в работе
[21, но дает чрезвычайно быстрое решение методом Ньютона с любой задан-
ной точностью.
Комплект блок-схем, программ заканчивается блок-схемой программы
геометрического расчета винтовой эвольвентной передачи; не связанной с
исходным контуром* (рис. 82). Эта программа помещена для сокращения вре-
мени проектирования; так как ручной расчет винтовых передач весьма тру-
доемок.
Пример 7. В этом и последующих примерах приняты данные; совпадаю-
щие или близкие к данным, примеров геометрического расчета, приведенным
в примерах гл.2.
Ортогональную передачу — г? — имеющую =- = 45°, впи-
сать в межосевое расстояние aw = 17,256 мм при условии получения етах.
95
Рис. 73. Линии aai=awti' aMi=awti и линия ^=0 и схема расчета
значений 961 и 9Е2 на области существования передачи
Рис. 74.. Область существования винтовой эвольвентной
передачи Zi=24, z2=25, 0wi = pw2=45ot = s^2 = 0,25
с отображенным на ней блокирующим контуром передачи
с Лд=1, а = 20°
Рис. 75. Блок-схема программы расчета линии етах на области существования передачи
4 Зай. 2297
97
дачи7®’ Блок <:хема "РО'Раммы расчета линии e-const на области существования пере-
981
Рис. 77. Блок-схема программы расчета линий арь8=0 на области существовании передачи
Из области существования получаем: cos = 0,932; = 0,6. Гео-
метрический расчет дает следующие результаты: rwi = 8,623 мм; rW2 =а
= 8,623 мм; гЬ1 = 7;556 мм; rb2 = 7,-556 мм; Р61 = рб2 == 41,’225°; *$2 =»
= 0,58; га1 = 11,29 мм; га2 = 11,21 мм; е = 1,858; = Ва > 7,41 mmj
аР1 = ар2 = 0,5°; aw = 21,251°.
Пример 8. Для передачи о данными из примера 7 получить шах и впи-
саться при этом в межосевое расстояние aw = 17;9 мм/
По области существования принимаем cos = 0,844; = 0,82. Тог-
да получим следующие результаты: aw = 32,435°; rwl = rW2 == 8,95 мм)
rbl = rb2 = 6,657 мм; pfn = P&2 = 36,641°; 9E2 = 0,816; ral = 10,941 mmj
ra2 = 10,925 mm; e = 1,2; apl = 26,38°; ap2 = 26,24°; = B2 > 4,02 мм.
Пример 9. Передачу с = 24; г2 = 48; S = 90° вписать в межосевов
расстояние aw = 50 мм при следующих условиях: a) б) шаж
при етах.
Для выполнения условия а) по рекомендациям гл. 1 получим p^i =>
= рш2 = 45°. Для условия б) из области существования примем cos
= 0,813; = 2,02,
4*
09
Pi*fbP»2 t$al > $02
2
cos aw=0,99
flbir&tvti4 r
Lc (rKi sinaKti )/casPbh
C=(rblcosPb2>/(rb2co5flbl)l5-'n,-<s*i-s*2)^'r(Hi
g=tgaa2-ctgaah
4-|y|
Д 4 0,0001
Hem
ам-oiai +yaQi/<y0-y)
2t(tgo(ai o(aj +satl7.')l*
3
/
^^^aZtnai^
Программа inva
h=<r'b,tgatl)/cospbh
lz=(rbttgaal)/cos flu,
£-=ztq,+l2-Lrl~l>/(2'nTlll!:ospb,) ,
aa2max = °C Уо = Щ У a? mat
&ai~ awti
invaai=(B-z, (.iga^a,,)^
cos aw=cos 0,01
Hem
1
Программа inva
aQ1 = ot
Рис. 78. Блок-схема программы расчет линии PvrnaAHa области существования пере-
дачи
100
Рис. 79. Блок-схема программы расчета линий aai=awH
на области существования передачи
Рис. 80. Блок-схема программы Рис. R1. Блок-схема программы
расчета линии на области inv а расчета угла а по заданной
существования передачи , величине inv a
3
1
Да
invaH,
Программа invа
°<xi=a> Гю-Гы/созам
%п>
Да
1пуо(„2
Программа inva
7
2
ГН1 >гн1
гт ~гы
rti2~rbZ
3
4
Рис. 82. Блок-схема программы геометрическою расчета винтовой эвольвентной передачи,
не связанной с исходным контурам
102
Результаты расчета: гт = 16,67 мм; гШ2 = 33,33 мм; гЬ1 = 11 710 мм-
гЬ2 = 23;419 мм; 0Ь1 = 35,091°; рб2 = 35,091°; aj = 35,61$; 9£, = 4 046-
Гм = 17,-201 мм; гаг = 34,581 мм; в = 1,2; ар1 = 40,882°; <хИ2 = 44 408°:
= ва> 2,42. ₽г ’
Пример 10. Передачу в данными из примера 9 спроектировать так, что-
бы получить максимальное значение 9£lmax для предельного увеличения
толщины зубьев колеса гг; выполненного из полимерного материала.
Из области существования получим: cos = 0,84; 9ЕХ = 2,44.
Размеры колес: rwl = 16,67 мм; rwt = 33,33 мм; гЬ1 == 12,305 мм; rho =
= 24,611 мм; рЬ1 = = 36,660°; 91, = 2,531; га1 = 18,981 мм;
= 32,862 мм; 8 = 1,202; ссрХ = 44,152°; оср2 = 38,062°; = В2 > 4,74 мм.
Пример 11. Передачу с гх = 24; г2 = 50 вписать в межосевое расстоя-
ние aw = 105 мм при двух условиях: а) обеспечить aw max при smax; б) обес-
печить 8 = 2 при возможно большем тах. Обе передачи должны быть вы-
полнены для углов на начальных цилиндрах tg (Зшх = tg = и,
что обеспечивает по рекомендациям гл. 1. mIn,
С ближайшей области существования получим:
для условия а) — cos = 0,81; 9ЕХ = 1,1;
для условия б) — cos = 0,892; 9ЕХ = 0,52.
Геометрический расчет передачи для условия а) дал результаты: rwl =
= 19,662 мм; rW2 = 85,338 мм; = 15,330 мм; г^2 = 43,782 мм; Р^х =
= 20,519°; = 46,906°; 9Е2 = 11,068; га1 = 19,835 мм; га2 = 87,846 мм;
е = 1,21; арх = 28,505°; ар? = 59,064°; Вх > 2,98 мм; (32 > 6,216 мм.
Для условия б): rwl = 19,662 мм; гШ2 =. 85,338 мм; = 17,140 мм;
гЬ2 = 55,416 мм; 0Ьх = 22,706°; fo2 = 53,529°; 9Е2 = 5,749; га1 = 19,923 мм;
га2 = 88,871 мм; 8 = 1,998; арХ = 8,386°; ар2 = 49,358°; Вх > 5,948 мм;
В2 = 12,392 мм.
РАСЧЕТ ПАРАМЕТРОВ ИНСТРУМЕНТА
ДЛЯ НАРЕЗАНИЯ КОЛЕС ПЕРЕДАЧ,
НЕ СВЯЗАННЫХ С ИСХОДНЫМ КОНТУРОМ
В результате геометрического расчета винтовой эвольвентной передачи по-
лучаются следующие размеры колес: гы, rab rft> “Фы- Э™ размеры
позволяют построить зубцы колес (зубья для которых не построена впади-
на), а по ним подобрать параметры инструментальной зубчатой рейки для
нарезания каждого отдельного колеса из пары.
Для примера на рис. 83 показаны зубцы двух колес сгх = 24, взятые
из пар ортогональных передач.
Точки Р на рис. 83 являются граничными точками активных участков
профилей зубьев; точки F определяют положение рекомендуемого радиуса
Гу; точки Fmax — предельно максимальное положение радиуса /у maxi точка
Н является точкой пересечения эвольвент соседних зубьев. Все построения
выполнены на торцах колес.
Необходимость большого разнообразия углов наклона зубьев в колесах
винтовых передач делает нецелесообразным использование долбяков.
Подбор параметров инструмента можно вести по двум направлениям:
исходя из полной индивидуальности проектируемого инструмента или неко-
торой привязки параметров инструмента к существующей технологии инст-
рументального производства.
В первом случае задают радиус начальной станочной окружности на-
резаемого колеса rWQ, по нему определяют все остальные параметры, инстру-
мента и производят проверку его пригодности для нарезания колеса. Во-вто-
ром — принимается угол профиля производящей рейки в ее нормальном се-
чении ашо из имеющегося ряда углов реек в инструментальном производст-
ве.
103
Рис. 83. Профили зубцов колеса z 24 с параметрами:
о— Zj—24; z2—25; fJu>/=45°; awe200 мм; cos aw—0,960; 9^—0,710; 9£o “0,753; 6 —» =24j
z2-25; Pw/-45°; flw=200 мм; cos Qw-0,817; 9(i“2,08; 9£2—2,253
Если расчет начат по второму методу ; то; воспользовавшись зависимо-
стями (16), (97) и
Ig₽№0=— ‘бРш, (169)
rw
можно получить формулу; связывающую принятый угол а^0 о радиусом на-
чальной производственной окружности колеса:
Г — Г&
/ \2
tg czu?0 tg Pu; )
(170)
После определения rWQ угол aWQt находят по формуле (97). Весь дальней-
ший расчет сводится к обеспечению нарезания эвольвентной поверхности зу-
бьев от вершины до выбранной на профиле зуба колеса точки L перехода
эвольвенты в «выкружку» на торце колеса и обеспечения заданного радиуса
впадин колеса г/.
Положение точки L на профиле определяется положением точки Р —
конца активного участка профиля зуба, найденной в геометрическом расче-
те передачи по формулам (128) Для гарантии отсутствия интерференции по-
сле образования впадины при нарезании рекомендуется принимать
«(шах = «(--О'--г (171)
104
Рис. 84. Схема определения
размеров зуба производящей
инструментальной рейки для
нарезания колеса с заданны»
ми Of и
а — торцовая схема зацепле*
ния колеса с рейкой в мо-
мент формирования точки L3
б — торцовое сечение зуба
производящей рейки; в —
нормальное сечение зуба
производящей рейки
Найти основные линейные размеры инструментальной рейки позволяет
рис. 84. Высоту прямолинейного участка зуба инструмента определяют по
рис. 84; ai
^a=rb(tgaWOi — tgcQ) sin аш0*. (172)
Этот размер должен быть всегда меньше предельно возможной высоты; полу-
чаемой пересечением боковых граней зуба рейки. Торцовое сечение зуба рей-
ки (рис. 84; б)
max =0> 5s0( tg аш0<; (173)
здесь толщина зуба инструмента по начальной прямой sOf равна ширине впа-
дины между зубьями на торце колеса по дуге начальной станочной окружно-
сти радиуса rWQ. После некоторых преобразований из формулы (161) получим
So/ = “ ” (1 —«57) 4“2гню inv ос^о^1. (174)
Торцовый шаг инструментальной рейки pWot> равный торцовому шагу
нарезаемого колеса на окружности радиуса rWQ;
2^rw0
Pwot —
г
(175)
1 Очевидно, что формулы (173) и (171) сопадают с аналогичными зависимостями ра-
боты [8], так как и здесь и там определяются торцовые параметры реечного инструмента
для нарезания цилиндрического эвольвентного колеса,
103
Если Латах окажется меньше Ла; следует принять меньший rw0.
Минимальная высота зуба инструмента должна обеепечивать размеще-
ние цилиндра вершин колеса во впадине между зубьями инструмента Тог-
да высота ножки зуба инструмента Н должна быть больше высоты головки
зу($а нарезаемого колеса в обработке:
Н > (176)
Необходимо отметить еще один важный параметр инструмента — мини-
мальную длину рейки в торцовом сечении нарезаемого колеса LT. Длина LT
должна обеспечить нарезание зуба по всей его высоте от точки L до вершины
зуба; тогда
LT ™ 2гь (tg Лд— tg cos cLwot • (177)
где ao — угол давления эвольвенты на вершине зуба колеса; определяемый
по формуле (97).
Нормальные размеры инструментальной рейки определяют до зависи-
мостям
tg tg CLwot COS PwO>
PwoB Pwot c®8 Pwol (178)
z s0n “Sot COS pwo*
Закругление вершины зуба инструментальной рейки должно обеспечи-
вать плавное округление впадины между зубьями колеса. Наиболее целесо-
образно поэтому провести полное скругление вершины зуба инструмента
радиусом р, как это показано на рис. 84; б; по зависимости
(179)
(180)
ради-
(181)
(182)
Высота скругленного участка зуба инструмента при этом
с0 = р (1— sin aWQ).
Такой расчет радиуса гарантирует в передаче положительный
альный зазор, величину которого можно определить по формулам
С1 “ aW — ГО2 — Г/1J
С2== Оц)— —Г/21
здесь
г 0,01 — (^ai + cj);
Г/2 а ГW02 -(Лд2 + ^а) •
Если в передаче по условиям работы необходимо найти рекомендованный
радиальный зазор с = 0,25 hw, для получения которого радиусы впадин оп-
ределяют по уравнениям (167), то в большинстве случаев плавного закруг-
ления зуба инструмента одним радиусом добиться невозможно; закругление
делается составным.
Для получения рекомендованного зазора размер /iamax должен удовлет-
ворять условию
ha max > rwo — r(183)
здесь г/ находится по уравнениям (167).
Пример 12. Для обработки колес (зубцы их показаны на рис. 83; а и
б) определить параметры инструментальных реек.
Случай а. Размеры колеса: rwl = 97,959 мм; awfl = 24,9304°; rbl =
= 88,831 мм; га1 = 107,376 мм; га2 = 112,'204 мм; тах = 87;795 мм3
/д = 82,90 мм; ар1 = 13,2027°.
Примем ашо = 14,5°; aZ1 = 0; тогда получаем rWQ = 94;386 мм; aW0/ =
= 19,756°; = 43,936°; ha = 10,784 мм; = 9,875 мм; Аатах =
= 13,747 мм; rWQ - rt = 11,486 мм.
106
hgmax^ "
(8,Ш)](5,62)
Рис. 85. Профили производящей инструментальной рейки!
а и б — торцовый и нормальный для нарезания колеса z-24, *2,08: в я а—» торцовый
в нормальный для нарезания колеса г*24, -0,710
107
При выборе угла = 0° учитывалось; что расстояние между точками
Р и F на профиле зубца велико (см. рис. 83; а), поэтому чрезвычайно трудно
осуществить скругление зуба инструмента, так как при = ар имеем ha =
= 3,74 мм.
При заданном размере (ha -f- с) == (rWQ — rfi полный радиус скругления
вершины инструмента
Р = 1 : ♦ и о*1/
1 —sin
где
^а^отах — (r wo — rf)* (185)
Для нашего примера р = 0,765, высота скругленного участка зуба рей-
ки с = 0,566; тогда истинный размер ha = 16,02 мм, что больше; чем перво-
начально принятый при а/ = 0, на величину б, 136 мм; которой можно пре-
небречь.
Результаты всех построений приведены на рис. 85.
Случай б. Геометрический расчет передачи дал следующие размеры
нарезаемого колеса: rwl = 97,9591 мм; cx>wti = awt2 в 44;947°; =
= 69,3316 мм; го1 = 102,5842 мм; га2 = 107;9550 мм; f/lmax = 92,045 мм;
ар1 = 41,365°.
Задаемся начальным станочным радиусом колеса; равным начальному
радиусу колеса в передаче rWQ = 97,9691 мм; тогда « 44;947°. Исполь-
зование начального радиуса колеса в передаче в качестве начального станоч-
ного радиуса позволяет для обоих колес передачи получить одинаковые тор-
цовые инструментальные рейки, что упрощает расчеты, а при одинаковых
углах наклона зубьев по начальным цилиндрам колес дает одинаковые и нор-
мальные сечения инструментальных реек по шагу и углу профиля для обо-
их колес передачи.
Примем ац = ар1; получим ha = 5,76 мм; sQt = 16,218 мм; Аатах я
= 8,124 мм; Pwot == 25,646 мм; == 35,214 ; вод —- 11,468 мм; Pwon
= 18,1342 мм; р = 2,042 мм; с = 0,865 мм.
Результаты всех расчетов и построения показаны на рис. 85; а и б.
Использование полученной рейки для нарезания колеса даст =э
= 91,334 мм, при котором радиальный зазор составит q = 0,711 мм.
Глава 4
ОСОБЕННОСТИ КОНТРОЛЯ, РАСШИФРОВКИ
И ДРУГИЕ ВОПРОСЫ
•ТЕХНОЛОГИИ И КОНСТРУИРОВАНИЯ
ВИНТОВЫХ ЭВОЛЬВЕНТНЫХ ПЕРЕДАЧ
НЕКОТОРЫЕ ВОПРОСЫ КОНТРОЛЯ
ВИНТОВОЙ ЭВОЛЬВЕНТНОЙ ПЕРЕДАЧИ
Зубчатые колеса винтовой эвольвентной передачи чаще всего имеют боль-
шие углы наклона зубьев Рьг-; это создает некоторые трудности при контро-
ле толщины зубьев. Во-первых; необходимо отметить; что при значительных
углах наклона зубьев р^^ широко распространенные формулы для опреде-
ления размеров; настраивающих кромочный зубомер [25], основанные на
замене реального колеса условным колесом с числом зубьев
дают заметные погрешности. Во-вторых; большие углы рь$ затрудняют ис-
пользование роликов и проволочек при измерении толщины зубьев колес из-
за их значительного покачивания во впадине. В-третьих; расчетные зави-
симости необходимо привести к виду; удобному как для колес со стандартным
исходным контуром; так и для колес в обобщающих параметрах.
Размеры для настройки кромочного зубомера. Для колес с достаточно
крупным зубом толщину зуба можно проверить с помощью кромочного зубо-
мера (ЗИМ-16, БВ-5016К; БВ-5017К и др.).
Основная расчетная схема для определения размеров sy хорд и hy хорд
кромочного зубомера, которые определяют измеряемую хорду на цилиндре
выбранного радиуса гу\ приведены на рис. 86. Хорда $у ХОрд на рис. 86 пред-
ставляется хордой; стягивающей дугу винтовой линии АВ; проведенной
нормально к боковым сторонам зубьев измеряемого колеса с левой и правой
стороны одновременно. Из построений рис. 86 очевидна зависимость
sj, юрд=Kad"2+bd"2;
-здесь размер BD определяют по развертке цилиндра радиуса гу)
BD = syi sin $у cos ,
хорду AD
AD = 2гу sin (уу хорд) •
В этих зависимостях
syt — %гу
Sbt
2гъ
— invoty
(187)
где Sbt — торцовая толщина зуба по дуге основного цилиндра; определяе-
мая по уравнениям (96) или (153); inv ау — инволюта угла давления на
окружности радиуса гу, определяемая по углу ау по формуле (97).
Угол у у хорд определяют по рис. 87х
SpfCOS2^
У у хорд = ^7
(188)
109,
После подстановки формула для определения sy хорд принимает вид
Sy хорд = V\syf sin Ру cos Ру)2 + (2г у sin У у хорд)2* (189)
Размер hy хорд находят по рис. 87:
^у хорд ="га—ryC0SYy хорд* (190)
Полученные зависимости являются математически точными.
Без учета биения зубчатого венца размер хорды sy хорд должен быть про-
ставлен на чертеже в виде
—
Sy хорд — (&SM~8s),
где отклонения As^ и 6s подсчитывают по приближенной зависимости
ds= [sp/ (sin Ру)2 -pry sin 2уу хорд! dsyt cos2 |3у; (191)
Sy хорд
здесь принимается ds = &sM при dsyt = As^; ds = 6s при dsyt = 8syt. В
формуле (191) отброшен член, содержащий dfiy — отклонение угла наклона
зубьев, как малый по сравнению с остальными.
Величина dsyt может быть вычислена через заданную величину боково-
го зазора по линии зацепления передачи, отнесенного к рассчитываемому ко-
лесу Cbn-
В свою очередь; пределы изменения зазора сьп могут быть определены по
ГОСТ 16532—70 [24]. -
s
110
Рис. 87. Схема расчета длины обшей нормали косозубого колеса
Длина общей нормали. Торцовую длину общей нормали при любом числе
шагов п, укладывающихся в размер,
Wt =^min t -\~пры
можно определить по рис. 87.
Подставив в эту зависимость длину IFmin которая равна торцовой тол-
щине зуба по дуге основного цилиндра и выражение для р^, получим
Wt=Sbt + ~^b" п. (193)
На рис. 87 показано, что измеряемую длину общей нормали можно опреде-
лить как
U7 = /sb( + -^-n'jcosPb. (194)
\ 2 /
Половина торцовой длины общей нормали, отнесенная к радиусу основ-
ного цилиндра, определяет тангенс угла давления в точке контакта инстру-
мента с зубьями колеса при симметричном относительно зуба или впадины
расположении общей нормали
2гь г
(195)
111
Так как на зубе реального колеса точки контакта могут лежать только в преде-
лах эвольвентного участка зуба от точки L до вершины; имеется возможность
определить предельные величины п числа впадин; попадающих в длину общей
нормали:
z Sbt
Лтах= I Ч? аа
л \ 2гь
г Л sbt \
Лт1п= (tgaz— )•
л \ 2гъ /
Формулы (196) позволяют записать неравенство
Лщах п > Лт1п»
определяющее выбор п.
Из рис. 87 можно получить зависимость
b > № sin Р&,
показывающую возможность измерения длины обшей нормали при заданной
ширине колеса.
Отклонения длины общей нормали определяются величиной потребного
нормального бокового зазора с&п:
dW^cbn- (197)
Размер по шарикам1. Измерение размера по шарикам дает наиболее
точный результат замеров толщины зубьев как в производственных; так и в
лабораторных условиях. Размер по шарикам всегда следует предпочитать
размеру по роликам, так как ролик при значительных углах Р& неустойчив
во впадине измеряемого колеса. Это может привести к появлению брака из-
за неправильного замера.
Торцовое сечение измеряемого колеса плоскостью, проходящей через
центр измерительного шарика в точку D в момент измерения, изображенное
на рис. 88, позволяет записать равенство
л
, invaD+—= v4-i|)b(.
подставив в него значения
о котором говорилось на с. 88, и
D
у=---------
2гь cos Рь
которое очевидно из рис. 88. Учтя при этом; что AD = ab; получим
sbt I D я
inv aD = —-----Г —-— ------------
и аь db cos рь г
Угол aD определяет радиус
Р Гь
cos aD *
(198)
1 Приводимый здесь вывод аналогичен выводу, данному в работах [25, 26 и др.]«
112
Рис. 88. Схема расчета размера по шарикам при контроле толщины зубьев косозубого
колеса
Тогда измеряемый размер поверх шариков; положенных в противоположные
по диаметру впадины в одной торцовой плоскости;
Л1 = ——1-0,
COS aD
или ' (199)
М = ——— cos + D.
cos aD 2г
Вторую формулу используют при нечетном числе зубьев колеса.
Отклонения размера по шарикам без учета биения зубчатого венца
cos Mnao •' (200)
При нечетном числе зубьев правую часть равенства (200) следует умножить
л
на множитель cos
ОСОБЕННОСТИ РАСШИФРОВКИ
ВИНТОВЫХ ЭВОЛЬВЕНТНЫХ ПЕРЕДАЧ
Винтовую эвольвентную передачу составляют из двух косозубых эвольвент-
ных колес. Методики расшифровки таких колес достаточно полно изложены
в работе [15]. Однако необходимость точного определения начальных пара-
метров передачи; определяющих качественные показатели ее работы; требует
проведения специальных расчетов при расшифровке.
113
Результатом обмера колес и корпуса передачи должны быть следующей
параметры: межосевое расстояние aw; межосевой угол S; диаметры основных
цилиндров колес гы\ углы наклона зубьев колес Ры на основных цилиндрах;
толщины зубьев колес на торцах основных цилиндров диаметры вершин
колес диаметры цилиндров впадин колес d^. Для ответственных пере-
дач с помощью эвольвентомеров определяют положения точек L/ перехода
эвольвентных поверхностей в переходные поверхности у основания зубьев.
Правильность расшифровки основных параметров проверяют зависи-
мостью
cos Рь2
Пи cos Pbi 9
(201)
которая следует из равенства нормальных основных шагов
Pbnl ^Pbnl*
Формула (160) позволяет записать
u л sin 6м
sinpwf =----L-. (202)
cos aw '
Параметр cos aw одинаков на обоих колесах.
t Для всех передач имеет место равенство
PlO2 -------------------------------- PlDl»
воспользовавшись которым; получаем уравнение
sin pw2₽sm 2 cos pwl—cos 2 sin pwl.
Подставив в него формулу (202); найдем
/(sin Рьг + cos 2 sin Pin)2
---:--——---------- + sin2 pbl.
1203)
Величина cos aw определяет углы наклона зубьев на начальных ци-
линдрах по формуле (202), а по ним — радиусы начальных цилиндров
r wi^rbi
tgPwi
tgpb/
(204)
Последняя зависимость следует из постоянства осевого шага колеса на лю-
бом его диаметре.
Точность расшифровки начальных параметров проверяется соблюдением
равенства
*2 rW2 COS PW2
— = ---------й—• (205)
Z1 rW1 COS Pun
Для решения задач расшифровки уравнение беззазорного зацепления
(162) удобнее привести к виду
sbtl . sbt2 . ,
*i -— + г2 -—— n = zx inv ашц + г2 invaw/2.
zrb2
Если учесть; что.
sbnt
&Ы1 =-------------------------------
cos pbf
соотношение (201) можно записать в виде
: ? о— (S6ni + Sbrn) — Л — inv awll+г2 fnv awls; (206)
2rbl COS Pbl
114
Входящие в это уравнение нормальные основные толщины зубьев $ьп> —
теоретические величины, рассчитанные для беззазорного зацепления. В ре-
альной передаче всегда имеется нормальный боковой зазор сЬп. Зависимость
(206) можно преобразовать для определения этого зазора:
оьп = 2гЬ1 cos inv awtl + 2rb> cos pb2 inv awl2 — sbnl — sbn2. (207)
Для решения полученного уравнения углы awti можно определить по
формуле
f'bi
cos . (268)
r wl
Все остальные расчеты при расшифровке ведутся по методикам работы
[ 15].
Следует отметить два основных требования к расшифровке винтовой
эвольвентной передачи. Во-первых, необходимость точного определения ра-
диусов rbi; поэтому наиболее предпочтительно использовать эвольвентоме-
ры или другие равные по точности методы измерений. Во-вторых, требуется с
максимальной точностью измерять углы наклона зубьев; для чего необходи-
мо использовать ходомеры, приборы для контроля осевого шага, волномеры
или специальные приборы [24].
Можно рекомендовать несколько формул, удобных для расчетов при рас-
шифровке:
zPbn tc Ру
sinpb =-------------j
2nry
___________ZPbn t
2л cos Рь ’
2лгь
lsbn=>W ——-— n cos Рь;
в этих формулах pbn — измеренная величина нормального основного
гу — радиус цилиндра; на котором измеряется угол Р^.
НЕКОТОРЫЕ РАСЧЕТЫ, СВЯЗАННЫЕ
С ОПРЕДЕЛЕНИЕМ НАЧАЛЬНЫХ СТАНОЧНЫХ ПАРАМЕТРОВ
ЗАЦЕПЛЕНИЯ ШЕВЕРА ИЛИ ЗУБЧАТОГО ХОНА
С ОБРАБАТЫВАЕМЫМ КОЛЕСОМ
Одна из сложных задач при расчете станочного зацепления зубчатого
ра или хона с обрабатываемым колесом — определение станочного межосе-
вого угла So и станочного межосевого расстояния aWQ. Здесь необходимо иметь
в виду; что несоответствие параметров станочного зацепления So и aWQ рас-
четным значениям приведет к увеличению отклонений эвольвентных профи-
лей зубьев от теоретических и, как следствие, ухудшению сопряженности ко-
лес в работе. Результатом этого может быть повышение неравномерности в
работе передачи, повышение уровня шума, снижение долговечности переда-
чи.
Для определения параметров So; awo станочного зацепления необходи-
мо с чертежей колес и инструмента или путем замера и расшифровки, как это
показано на с. 113—115, получить следующие данные: z, zQ; rb; rb0, pb, £d0;
sbn; Sbno- Здесь индекс «о» отнесен к инструменту. Кроме того; технолог дол-
жен определить метод обработки — односторонний или двусторонний. Для
односторонней обработки необходимо задаться величиной зазора сЬпо в за-
цеплении. Величина сЬп0 должна компенсировать погрешности в профиле и
направлении зубьев. Односторонний способ обработки дает ббльшую точ-
ность по сравнению с двусторонним. При двустороннем способе обработки
принимается cbnQ = 0,
(209)
(210)
(211)
шага;
шеве-
115
Рис. 89. Блок-схема программы расчета параметров станочного зацепления при шевин-
ювании и хонинговании зубьев эвольвентных колес
При выборе шевера или хона необходимо соблюсти равенство нормаль-
ных основных шагов колеса и инструмента, т. е. выполнить условия (201).
Расчет ведут методом последовательных приближений по параметру
COS
Блок-схема программы расчета параметров станочного зацепления при-
ведена на рис. 89.
Найденные параметры So и awo позволяют провести проверки примени-
мости выбранного инструмента для обработки заданного колеса.
1. Проверку отсутствия упора вершин зубьев инструмента во впадину
колеса по неравенству
116
2. Проверку обработки профиля зуба колеса ниже заданной точки актив-
ного профил-я зуба по условию
аг < ар;
здесь
г г го ( cos
tgaz = tgaw/—— —— (tgaa0—(212)
2 \COS Pbo/
aa0 — угол давления на поверхности вершин инструмента; ар — угол дав-
ления в конце активного участка зуба обрабатываемого колеса; определяемый
по формуле (128).
3. Для станков; не имеющих одновременного принудительного враще-
ния инструмента и обрабатываемого колеса; следует проверить коэффициент
перекрытия в станочном зацеплении; который не должен быть меньше е0 >
> 1,2:
1 Г z (tg «a —tg «wt> , го (tg«au —tgawto) ]
e° 2л [ COS» Pb COS2 Pbo J
Если одна из проверок не выполняется; необходимо выбрать или спро-
ектировать новый инструмент.
НЕКОТОРЫЕ РЕКОМЕНДАЦИИ ПО ПРОВЕРКЕ
ИЗНОСОСТОЙКОСТИ ВИНТОВОЙ ЭВОЛЬВЕНТНОЙ ПЕРЕДАЧИ1
Большинство современных винтовых передач используются в качестве
(214)
Большинство современных винтовых передач используются в качестве кине-
матических; не имеющих значительных нагрузок. Поэтому чаше всего наибо-
лее опасным для них является износ рабочих поверхностей.
На основании обработки результатов экспериментов Д. Н. Решетовым
[23] получена зависимость, из которой можно найти допускаемую по усло-
виям износа нормальную силу Ризн, действующую между зубьями.
Зависимости; приведенные на с. 22, позволили преобразовать формулу
для Ризн и получить уравнение, определяющее предельный момент, который
. можно приложить к ведомому колесу передачи к
лл я sin Рин tg2 Рил
«я ₽„,+«)• х
2 cos Ри>, (tg Ри>14-Ц) +ц>1 Ощ
X Q /4. Q I \ I I'' 1 ’
COS Ри>1 (tg Ри>1 -f-a) -1-0)! aw
или определить величину действующих условных напряжений и сравнить их
G допускаемыми:
8aw“3 C0S«W Sin pwl tg2 pwl
мг (tgPwi+«)5
X 2 cos Pun (tg Рш14~ц) + Ю1 aw < 1/[K]
COS Pwi(tg Pun+u)
r Величина допускаемых условных напряжений [К] может быть взята из
г табл. 50 работы [23].
Более детальный расчет винтовых эвольвентных передач на износ, зае-
дание и т. д. можно осуществить по методу А. И. Петрусевича [17].
Вместе с тем проблема расчета винтовых эвольвентных передач на обес-
печение работоспособности при различных условиях далеко еще не решена,
она требует больших теоретических и экспериментальных исследований.
(215)
1 Автор получил расчетные зависимости аналитически, обработав материал рабо-
ты [23]. Поэтому рекомендации настоящего параграфа можно рассматривать как весьма
условные, дающие, однако, общее направление в оценке сравнительной износостойкости
передач, '
Приложения
ПРИЛОЖЕНИЕ I
Альбом блокирующих контуров для 2 = 90°
(исходный контур по ГОСТ 13755—68)
и 2, Zv и Zi гг
1 6 1 24
1,6 2 6 9 12 1,5 2 24 36 48
3 18 3 72
1 9 1 27
1,5 2 9 18 1,5 2 27 54
3 27 3 81
1 12 1 36
1,5 2 12 18 24 1,5 2 36 54 72
3 36 3 81
1 18 1 48
1,5 2 18 27 36 1,5 2 48 72 96
3 54 3 144
Обозначение линий блокирующего контура;
1— 8 = 1,2
1а — е = 2
2—интерференции на первом колесе
3 —интерференции на втором колесе
4 — подреза первого колеса
5—подреза второго колеса
б—=0,25
63 — 5^=0,40
7-s;2 = 0,25
7а—s*2 = 0,40
8 аМ1 =
118
9 aAfg =aWt2
10 8raax
H P^rniBX
12 —x2 = 0
Ptu2 = 45*
zz = ^; z2~9
~ty~j w2~^
119
121
122
2
7
L »L
126
127
7а 7
128
5 Зак, 2297
tg₽wl = Y’ ^^2 = “
tgftw=1,5
, zt=l2; гг=24
tgfiwr0,5i tgfiWz=2
tgftwt=0,5; tgftwz =
141
14?
Xf I 12 9
6 Зак. 2297
145
ПРИЛОЖЕНИЕ II
Альбом областей существования
ортогональных винтовых передач
и г. г а и 21 гг
1 6 1 24
1,5 2 6 9 12 1,5 2 24 36 48
3 18 3 72
I 9 1 27
1,5 2 9 18 1,5 2 27 54
3 27 3 81
1 12 1 36
1,5 2 12 18 24 1,5 2 36 54 72
3 36 3 81
1 18 1 48
1,5 2 18 27 36 1,5 2 48 72 96
3 54 3 144
Обозначение линий областей существования;
1 —е=1,2
1а — е = 2
8-^ = 0^
9-«Л/2 = %,(2
10 — £тах
11 max
12 —ЭС2 = 0
13 — 0Са1 = (%ш1
14 — 0СО2 = &Wt2
15 оср2 — О
16—ар1 =0
146
Pun = Рц>2 — 45°
COSOL jy
cosaw
6*
147
16
12
148
149
150
TO SOO
COSCt#
13 8
154
mvsoj t
я
/4 9
cosaw
*TOS0;>
cosaw
(38
tg₽wi = l/«. tg₽uu = U
GQSaw
COSOl*
Cosaw
159
C ?S С( w
160
cos а»
J 62
COSO-w
162
164
cosaw
itg Pun — и» tgpt02=l/u
169
* «п
CQSQCw
cosaw
74 1G
COS ОС W
13 8,
CDS
12 9 1Ь ю
Ъ!Л
Ы U SI
СПИСОК ЛИТЕРАТУРЫ
1. Амензаде Ю. А. Теория упругости. М.: Высшая школа, 1976, 272 с.
2. Андрющенко В. М. Математические таблицы для проектирования
зубчатых передач. М.: Машиностроение, 1974, 438 с.
3. Артоболевский И. И. Теория механизмов и машин. М.: Наука, 1975.
638 с.
4. Баранов Г. Г. Курс теории механизмов и машин. М.: Машиностроение,
1967. 508 с.
5. Бронштейн И. Н., Семендяев К. А. Справочник по математике. М.:
Гостехиздат, 1954, 680 с.
6. Бухгольц Н. Н. Основной курс теоретической механики. Ч. 1 М.:
Наука, 1969. 467 с.
7. Булгаков Э. Б. Зубчатые передачи с улучшенными свойствами. Обоб-
щающая теория и проектирование. М.: Машиностроение, 1974. 264 с.
8. Булгаков Э. Б., Васина Л. М. Эвольвентные передачи в обобщающих
параметрах. Справочник. М.: Машиностроение, 1978. 174 с.
9. Булгаков Э. Б. Зубчатые передачи модифицированного исходного
контура. М.: Машгиз, 1962 100 с.
10. Гавриленко В. А. Зубчатые передачи в машиностроении. М.: Маш-
гиз. 1962. 531 с.
11. Гавриленко В. А. Основы теории эвольвентных передач. М.: Маши-
ностроение, 1969. 431 с.
12. Жуковский Н. Е. Теоретическая механика. 5-е изд. М.: Московское
техническое училище, 1915. 358 с.
13. Колчин Н. И. Аналитический расчет плоских и пространственных
зацеплений. М.: Машгиз, 1949, 210 с.
14. Кудрявцев В. Н. Зубчатые передачи. Л.: Машгиз, 1957, 263 с.
15. Курлов Б. А. Расшифровка цилиндрических и конических зубчатых
передач. М.: Машиностроение, 1972. 132 с.
16. Люкшин В. С. Теория винтовых поверхностей в проектировании ре-
жущих инструментов. М.: Машиностроение, 1968. 371 с.
17. Петрусевич А. И. Зубчатые передачи. Червячные и винтовые
передачи. Справочник. Т. 3. Детали машин. М.: Машиностроение, 1969, с.
217—259.
18. Производство зубчатых колес: Справочник/Под ред. Б. А. Тайца,
М.: Машиностроение, 1975. 728 с.
19. Расчеты на прочность в машиностроении: Справочник. Т.З/Под ред.
С. Д. Пономарева. М.: Машгиз, 1958. 1118 с.
20. Рашевский П. К. Курс дифференциальной геометрии. М.: Гостех-
издат, 1965, 420 с.
21. Ремезова Н. Е. Экспериментальное исследование винтовых зубчатых
передач с помощью роликовой аналогии. — Вестник машиностроения, 1959,
№9, с. 11—13.
22. Решетов Д. Н. Фрикционные передачи и вариаторы: Справочник.
Т.З. Детали машин. М.: Машиностроение, 1969. 424—455 с.
23. Решетов Д. Н. Детали машин. М.: Машиностроение, 1974. 655 с.
24. Тайц Б. А. Точность зубчатых колес. М.: Машиностроение, 1972.
367 с.
25. Справочник по геометрическому расчету эвольвентных зубчатых и
червячных передач/Т. П. Болотовская, И. А. Болотовский, Г. С. Бочаров и
др. Под ред. И. А. Болотовского. М.: Машгиз, 1963. 471 с.
26. Цилиндрические эвольвентные зубчатые передачи внешнего зацеп-
ления. Расчет геометрии: Справочное пособие/И. А. Болотовский, Б. И. Гу-
рьев, В. Э. Смирнов, Б. И. Шендерей, М.: Машиностроение, 1977. 157 с.
27. Цилиндрические эвольвентные зубчатые передачи внутреннего
зацепления. Расчет геометрических параметров: Справочное пособие/И. А.
Болотовский Б. И. Гурьев, В. Э. Смирнов, Б. И. Шендерей. М.; Машино-
строение, 1977, 192 с.
175
А ВЛ^И « €
Введение.................................................... 3
Принятые обозначения........................................... 5
Глава 1. Основы теории гиперболоидных передач................... 7
Относительное винтовое движение зубьев колес, аксиодные и началь-
ные поверхности передачи........................ . ........,. 7
Относительные скорости и ускорения зубьев передачи в контактной
точке....................................................... 17
Усилия в контактной точке нагруженной винтовой эвольвентной
передачи ...............'.....................................22
Кривизны, нормальные напряжения и пятно контакта в точке со-
прикосновения эвольвентных геликоидов под нагрузкой...........25
Трение верчения и условный КПД зацепления эвольвентных гели-
коидов .......................................................30
Выбор начальных параметров зацепления. Характер контакта по-
верхностей эвольвентных геликоидов............................32
Глава 2. Геометрия винтовой эвольвентной передачи со стандарт-
ными параметрами исходного контура ............................ 52
Выбор исходных параметров для геометрического расчета передачи 52
Геометрический расчет передач ............................... 53
Проверки геометрии колес и качественных показателей передачи 59
Геометрический расчет винтовых эвольвентных передач с помощью
блокирующих контуров..........................................65
Глава 3. Геометрия винтовой эвольвентной передачи, не связанной
с параметрами исходного контура ............................... 85
Рациональный выбор исходных параметров для геометрического
проектирования передач.................................... . 85
Геометрический расчет передачи ......................... .... 90
Проверки геометрии колес и качественных показателей передачи . 92
Геометрический расчет передач с помощью областей существова-
ния ..............................................."..........93
Расчет параметров инструмента для нарезания колес передач, не
связанных с исходным контуром................................103
Глава 4. Особенности контроля, расшифровки и другие вопросы
технологии и конструирования винтовых эвольвентных передач . . 109
Некоторые вопросы контроля винтовой эвольвентной передачи .109
Особенности расшифровки винтовых эвольвентных передач . . . .113
Некоторые расчеты, связанные с определением начальных станоч-
ных параметров зацепления шевера или зубчатого хона с обра-
батываемым колесом.............................................115
Некоторые рекомендации по проверке износостойкости винтовой
эвольвентной передачи........................................117
Приложение I. Альбом блокирующих контуров для 2 = 90°
(исходный контур по ГОСТ 13755—68) ......................... 118
Рин = Pw2 = 45°, tg = 1/и; tgpw2 = u, tg рш2=1 /и
Приложение II. Альбом областей существования ортогональ-
ных винтовых передач.........................................146
= Рш2 =45°, tg Ptoi = 1 /и\ tgpu,2 = tt, tg[3Wl=M; tgpu,2=l/w
Список литературы..............................................175